/














































































































































































































































































Текст
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ
И. Е. КАЗАКОВ, В. М. АРТЕМЬЕВ, В. А. БУХАЛ ЕВ
АНАЛИЗ СИСТЕМ
СЛУЧАЙНОЙ СТРУКТУРЫ
МОСКВА
11ЛДАТЕЛЬСКАЯ ФИРМА
«ФИ л ТТК О-М АТЕМ АТ И Mix: 1ч А Я Л11 ТЕР АТУР А»
ВО «НАУКА»
1 0 0 р
ББК 32.81
К14
УДК 681.5
Серия «Теоретические основы
технической кибернетики» издается с 1965 года
Казаков И. Е., Артемьев В. М., Б у х а л е в В. А. Анализ сис¬
тем случайной структуры.—М.: Физматлит. 1993 — 272 с.— (Теор. основы
техн. кибернетики).—ISBN 5-02-014595-5.
Систематически излагаются задачи вероятностного анализа систем со*
случайной сменой структуры в пространстве состояний. Общей основой ана¬
лиза является теория марковских процессов и последовательностей. Смена
структуры системы в процессе ее функционирования интерпретируется как*
дискретный марковский процесс с конечным числом состояний. Рассматри¬
ваются задачи анализа систем с возможными нарушениями, перерывами?
информации, переменной структурой управления, в режиме разделения
времени управления, со случайным периодом квантования.
Для студентов и аспирантов, а также для специалистов в области ки¬
бернетики и информатики.
Табл. 2. Ил. 75. Библиогр. 78 назв.
Рецензент
доктор технических наук Б. Г. Доступов
Научное издание
КАЗАКОВ Игорь Ефимович
АРТЕМЬЕВ Валентин Михайлович
БУХ АЛЕВ Вадим Алексеевич
АНАЛИЗ СИСТЕМ СЛУЧАЙНОЙ СТРУКТУРЫ
Серия «Теоретические основы технической кибернетики», вып. 93
Заведующий редакцией Л. А. Русаков
Редактор ГО. Г. Гуревич
Художественный редактор Г. М. Коровина
Технический редактор И. Ш. Аксельрод
Корректоры О. А. Бутусова, Т. С. Вайсберг
ИБ АГ„ 41242
Сдано в набор 08.01.92. Подписано к печати 14.07.93. Формат 60 X 90/16.
Бумага тип. № 2. Гарнитура обыкновенная. Печать высокая. Уел.
печ. л. 17. Уел. кр.-отт. 17. Уч.-изд. л. 19.35. Тираж 3000 экз. За¬
каз X» 30. С — 052.
Издательская фирма «Физико-математическая литература БО «Наука»
117071 Москва В-71, Ленинский проспект, 15
Новосибирская типография ВО «Наука»
630077 г. Новосибирск-77, Станиславского, 25
к 1402060000-052 Е„з
053(02)-93
ISBN 5-02-014595-5
Без объявл.
©И. Е. Казаков, В. М. Артемьев. В. А. Бухалев, 1993
ОГЛАВЛЕНИЕ
[Предисловие . . . . 6
[Введение . . . . 7
Г л а в а 1. Математические модели систем со случайной структурой 10
§ 1.1. Системы со случайной структурой 10
§ 1.2. Стохастические уравнения систем 13
§ 1.3. Классификация систем 16
§ 1.4. Задачи и методы анализа 17
Г л а в а 2. Стохастические процессы в системах со случайной струк¬
турой 20
§ 2.1. Эволюция вектора состояния системы как марковский про¬
цесс 20
§ 2.2. Марковский разрывный стохастический процесс .... 25
§ 2.3. Марковская разрывная стохастическая последовательность 29
§ 2.4. Локальные характеристики марковских разрывных процессов 30
§ 2.5. Дискретный марковский процесс смены структуры . . 34
§ 2.6. Дискретный условный марковский процесс смены структуры
с распределенными переходами 38
§ 2.7. Дискретный условный марковский процесс смены структуры
с сосредоточенными переходами 40
Т л а в а 3. Уравнения для вероятностных характеристик в системах
со случайной структурой 42
§ 3.1. Уравнение Фоккера — Планка — Колмогорова для многомер¬
ного марковского процесса 42
3 3.2. Уравнение Пугачева для многомерного марковского про¬
цесса 45
§ 3.3. Функции плотности вероятности разрывных процессов при
распределенных переходах 46
§ 3.4. Функции плотности вероятности разрывных процессов при
сосредоточенных переходах . 52
§ 3.5. Функции поглощения и восстановления 57
§ 3.6. Обобщенные уравнения Фоккера — Планка — Колмогорова 62
Я 3.7. Обобщенные уравнения Пугачева ....... 64
$ 3.8. Уравнения для вероятностей состояний 65
§ 3.9. Условные обобщенные уравнения для функций плотно¬
стей вероятностей 67
§ 3.10. Уравнения для вероятностных моментов 70
§ 3.11. Общие рекуррентные формулы для вероятностных характе¬
ристик дискретных систем 79
Т л л в а 4. Приближенные методы анализа систем со случайной
структурой 82
§ АЛ. Основы приближенных методов 82
§ 4.2. Двухмоментная параметрическая аппроксимация плотнос¬
тей вероятностей 84
§ 4.3. Системы с ус лонной марко не кой структурой . . . 88
§ 4.4. Непрерывные системы с марковской структурой ... 91
§ 4.Г». Дискретные системы 96
§ 4.6. Дискретные системы с аддптивно-мул ьтнпликатшшыми
возмущениями 100
4.6.10 Нелинейная система с условной марковской структурой
(100). 4.6.2. Линейная система с условной марковской структу¬
рой (101). 4.6.3. Линейная система с марковской структурой (102).
§ 4.7. Устойчивость непрерывных систем 104
$ 4.8. Устойчивость дискретных систем 107
§ 4.9. Выбор и преобразования множества состояний структуры 108
§ 4.10. Способы определения интенсивностей переходов . . ИЗ
Г л а в а 5. Динамические системы в условиях марковских скачкооб¬
разных входных воздействий 119
§ 5.1. Виды внешних марковских скачкообразных воздействии . 119
§ 5.2. Действие скачкообразного аддитивного белого шума на ли¬
нейные системы 121
4.2.1. Непрерывная система (121). 4.2.2. Дискретная система (123).
§ 5.3. Действие на линейные системы аддитивных марковских
скачкообразных сигналов 125'
5.3.1. Непрерывная система (125). 5.3.2. Дискретная система (126).
5.3.3. «Симметричный» скачкообразный входной сигнал (129).
§ 5.4. Сглаживание случайного двоичного сигнала апериодическим
звеном 131
5.4.1. Закон распределения выходного сигнала (131). 5.4.2. Вероятно¬
сти состояний структуры п моменты выходного сигнала (137).
§ 5.5. Сглаживание случайного двоичного сигнала дискретным
инерционным фильтром 140'
5.5.1. Закон распределения выходного сигнала (140). 5.5.2. Вероят¬
ности состояний структуры и моменты выходного сигнала (141).
Глава 6. Марковские системы с распределенной скачкообразной сме¬
ной структуры 145
§ 6.1. Мультиструктура марковских систем . 145
§ 6.2. Вероятности состояний в системах с отказами . . . . 146
§ 6.3. Вероятностные характеристики! фазовых координат в систе¬
мах с отказами 149
§ 6.4. Вероятности состояний в системах с нарушениями п вос¬
становлением 153
§ 6.5. Вероятностные характеристики фазовых координат в си¬
стемах с нарушениями и восстановлением 155
§ 6.6. Двухструктурная марковская система с переменными ре¬
жимами управления 158
§ 6.7. Комбинированная система самонаведения 162
Глава 7. Системы с условной марковской структурой . . . 171
§ 7.1. Статистическая зависимость структуры от фазовых коорди¬
нат 171
§ 7.2. Закон распределения выходного сигнала нелинейной систе¬
мы с условной марковской структурой 173'
§ 7.3. Сглаживание случайного двоичного сигнала нелинейным
инерционным фильтром 175
7.3.1. Интенсивности переходов состояний структуры (175). 7.3.2,
Стационарное распределение выходного сигнала (178).
§ 7.4. Системы с немарковской структурой, заданной случайными
интенсивностями переходов 184
Глава 8. Марковские системы с сосредоточенной скачкообразной
сменой структуры 192
§ 8.1. Мультиструктура систем с сосредоточенными переходами 192'
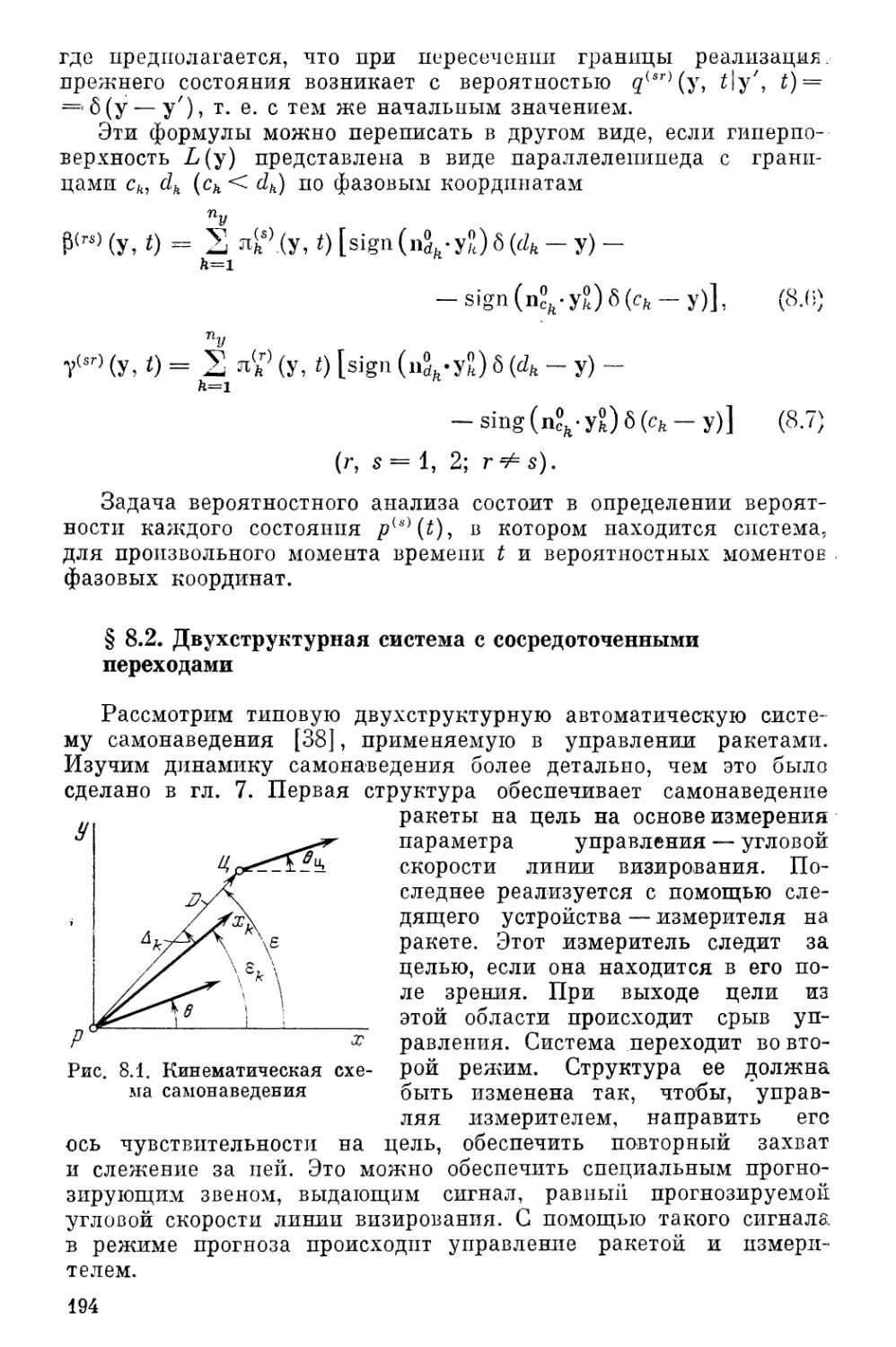
§ 8.2. Двухструктурная система с сосредоточенными переходами 194
§ 8.3. Вероятностный анализ двухструктурной системы . . . 198
§ 8.4. Системы с переменной структурой управления .... 205
4
§ 8.5. Вероятностный анализ систем с переменной структурой уп¬
равления 208
§ 8.6. Статистическая линеаризация г|э-ячепки 212
§ 8.7. Система с одним звеном переменной структуры управления 216
§ 8.8. Система с N — 1 звеном переменной структуры управления 225
Глава 9. Управление системами с разделением времени . . . 228
§ 9.1. Уравнение для плотности вероятности выходных координат 228
§ 9.2. Уравнения для вероятностных моментов 233
§ 9.3. Анализ влияния степени приоритета па качество управления 237
Глава 10. Системы со случайным периодом квантования . „ 245
§ 10.1. Уравнения систем со случайным периодом квантования . 245
§ 10.2. Уравнения Колмогорова — Феллера ....... 247
§ 10.3. Уравнения для плотностей вероятности ..... 254
§ 10.4. Уравнения вероятностных моментов систем с- амплитудной
модуляцией 260
§ 10.5. Уравнения систем с амплитудной модуляцией .... 263
§ 10.6. Уравнения вероятностных моментов систем с частотной
модуляцией 265
Послесловие . . .... ... 267
Список литературы . . . . . 268
ПРЕДИСЛОВИЕ
Предлагаемая читателю книга относится к статистической ди¬
намике управляемых систем. Формирование этой теории началось
в середине нашего столетия. Она продолжает развиваться и со¬
вершенствоваться, охватывая новые сложные объекты и процес¬
сы. Среди таких объектов важное значение приобретают системы
со случайными скачкообразными изменениями параметров и
структуры в процессе функционирования, связанными с влияни¬
ем внутренних факторов, присущих системе, или внешних, обу-
сло пленных воздействием среды.
Динамические системы, свойства которых скачкообразно из¬
меняются в случайные моменты времени, называются системами
со случайными изменениями структуры (ССС). Простейшими из
них являются системы со скачкообразно изменяющимися пара¬
метрами. Задачи в таких объектах начали изучаться в 60-е годы
в статистической динамике управляемых систем, а близкие к ним
задачи о срыве слежения или достижения границ стохастическим
процессом — в статистической радиотехнике.
Развитие статистической динамики систем со случайными из¬
менениями структуры отражено в публикациях последних 20 лет.
К ним, в частности, относятся монографии [4, 28, 30]. Эти рабо¬
ты отражают состояние аналитической теории систем со случай¬
ной структурой на определенных временных этапах. В настоящее
время, в связи с дальнейшим развитием таких систем, возникла
необходимость систематизированного рассмотрения трех разделов
теории систем со случайной структурой: анализа, оценивания,
оптимизации. Данная книга содержит изложение состояния сов¬
ременного анализа систем со случайными изменениями
структуры.
П'нига снабжена значительным числом примеров и конкрет¬
ных частных задач, более детально раскрывающих существо из¬
лагаемой теории и возможности использования ЭВМ. Перечень
литературы включает источники, на которые даны ссылки в кни¬
ге, и не претендует на полную библиографию по данному
вопросу.
Общая редакция книги проведена И. Е. Казаковым.
Авторы признательны рецензенту профессору Б. Г. Доступову
за полезные рекомендации при подготовке рукописи к изданию.
ВВЕДЕНИЕ
Современный научно-технический прогресс, развитие вычисли¬
тельной техники открывают широкие возможности для автомати¬
зации сложных динамических систем и процессов в них в усло¬
виях целенаправленного изменения структуры или их парамет¬
рической и структурной неопределенности. Принято различать
стационарную и нестационарную, параметрическую и структур¬
ную неопределенности [29, 40] объектов управления и систем
в целом.
Стационарная неопределенность не изменяется в процессе
функционирования — система имеет неопределенные постоянные
параметры и структуру. Стационарная неопределенность практи¬
чески встречается во всех динамических системах, так как иссле¬
дователь или разработчик их не имеет точной информации о ре¬
альных параметрах объектов управления, а иногда и его струк¬
туры. Система функционирует и выполняет свою задачу, по ее
динамика и конечный результат зависят от конкретных значений
случайных параметров и структуры, которые они имеют в кон¬
кретных ситуациях. Эти случайные параметры и структура могут
быть подчинены определенным статистическим закономерностям
или принимать минимальные или максимальные значения. К мо¬
менту начала функционирования системы эти параметры и струк¬
тура могут принять определенные значения и вид на дискретном
или континуальном множестве и далее не изменяться. Особен¬
ностью таких динамических систем являются параметрическая и
структурная неопределенности в начальный момент, не изменяю¬
щиеся в процессе функционирования, и стохастичность самого*
процесса при действии случайных сигналов и помех.
Нестационарная параметрическая и структурная неопределен¬
ности состоят в изменении их в процессе функционирования сис¬
темы. Наибольший практический интерес здесь представляет
класс систем и задач, в которых параметрическая и структурная
неопределенности возникают дискретно вследствие резкого вне¬
запного изменения условий, внешних воздействий в процессе
функционирования. Системы и задачи с нестационарными неоп¬
ределенностями являются более общими, чем со стационарными
неопределенностями, так как наряду со случайной неопределен¬
ностью параметров и структур в последних имеет место скачко-
Т
образная смена структуры в процессе функционирования. Осо¬
бенностью нестационарных динамических систем являются скач¬
кообразно спонтанно изменяющиеся параметрическая и структур¬
ная неопределенности в процессе функционирования при дейст¬
вии случайных сигналов и помех.
К исследованию таких динамических систем приводит боль¬
шой круг практических задач из различных областей пауки и
техники. Задачи со стационарной параметрической и структурной
неопределенностями стали изучаться сравнительно давно при
идентификации параметров и структур, т. е. при оценке конкрет¬
ных их реализаций в заданной динамической системе. Позже ста¬
ли изучаться задачи, в которых неизвестные параметры в систе¬
ме имеют статистический характер, подчинены некоторому ста¬
ционарному распределению. Наиболее полно ото направление ис¬
следований изложено в [40].
Если стационарная параметрическая неопределенность такова,
'что известен только диапазон изменения и неизвестно распреде¬
лен не, то такие задачи эффективно решаются путем использова¬
ния гарантирующего (минимаксного) подхода, при котором не¬
определенные факторы задаются предельными значениями на не¬
котором доверительном множестве. Достаточно полное представ¬
ление об этом подходе применительно к динамическим системам
можно получить из [44].
Задачи с нестационарной параметрической и структурной не¬
определенностями стали интенсивно изучаться сравнительно не¬
давно. Простейшими системами такого класса являются системы
со скачкообразными изменениями параметров [2, 3, 11, 46, 47,
50, 55, 58 и др.]. 13 статистической радиотехнике близкие к этим
задачи о срыве слежения и о достижении стохастическим процес¬
сом границы рассматривались в работах [48, 64, 65, 66, 76 и др.].
Впервые систематическое изложение таких задач и методов их
анализа дано в [4, 5, 12, 27, 28]. Достаточно подробный пере¬
чень исследований задач с нестационарной параметрической и
стр у кт урной и еопре д ел ен иостями, подчиняющимися ст атистиче -
екпм закономерностям, приведен в [29]. Динамические системы
с нестационарной параметрической и структурной неопределенно¬
стями получили название систем со случайно изменяющейся
структурой. Исследование таких систем можно проводить с по¬
мощью имитационного моделирования или на основе аналитиче¬
ской- теории, оперирующей уравнениями для вероятностных ха¬
рактеристик. Построить достаточно общую аналитическую теорию
систем со случайной структурой удалось лишь па основе спе¬
циального подкласса марковских процессов со случайной струк¬
турой (разрывных марковских процессов) с поглощением и вос¬
становлением реализаций. В этой теории обобщаются свойства
из юстыых кусочно-непрерывных марковских процессов и процес¬
сов с непрерывными и дискретными компонентами. Это обобще¬
ние позволило сформулировать и решить ряд новых задач из
класса спетом со случайным изменением структуры, а также по-
$
лучить некоторые известные результаты, но более общим
способом.
К настоящему времени теория динамических стохастических
систем со случайным изменением структуры получила дальней¬
шее развитие. Развиты общие аналитические методы анализа,
основанные на решении уравнений для функций распределения
вероятности, а также приближенные методы анализа систем со
случайной структурой. В данной книге дается единый общий
аналитический метод статистического анализа динамических сто¬
хастических систем со случайно изменяющейся структурой, раз¬
витый авторами. Общий метод анализа систем со случайными
скачкообразными изменениями структуры развит на основе рас¬
смотрения их динамики в пространстве состояний и интегриро¬
вания обобщенных уравнений Фоккера — Планка — Колмогоро¬
ва для функций плотности вероятности. Приближенные методы
основаны на анализе уравнений для вероятностных моментов
фазовых координат системы и уравнений для вероятностей со¬
стояний (структур), в которых находится система.
Следует отметить, что задачи исследования систем со случай¬
ной структурой сложнее соответствующих задач для систем с не¬
изменяемой структурой. Это обусловлено тем, что возникает до¬
полнительный случайный фактор изменения структуры системы,
что можно интерпретировать как дополнительное случайное диск¬
ретное воздействие на систему. Успешное исследование таких си¬
стем должно базироваться на широком использовании средств
вычислительной техники.
Глава 1
МАТЕМАТИЧЕСКИЕ МОДЕЛИ СИСТЕМ
СО СЛУЧАЙНОЙ СТРУКТУРОЙ
§ 1.1. Системы со случайной структурой
В современной технике, ряде отраслей науки и в научных
исследованиях, связанных с моделированием сложных явлении и
процессов управления, широкое распространение приобретают
динамические системы со случайными изменениями условий функ¬
ционирования (ситуационной обстановки) и возмущений, приво¬
дящими к внезапному изменению структуры в целом — к струк¬
турной неопределенности. Укажем некоторые задачи, решение
которых приводит к необходимости применения динамических си¬
стем со случайными внезапными скачкообразными изменениями
структуры в процессе их функционирования. К ним прежде всего
следует отнести задачу автоматизации управления системой, име¬
ющей на неперекрывающихся временных интервалах различные
режимы работы и разные структуры (например, энергосистема
с подключением и выключением потребителей в случайные мо¬
менты времени). Другим примером служит летательный аппарат
с автоматической или полуавтоматической системой управления,
обеспечивающей различные режимы полета и наведения (раз¬
личные траектории полета и их смену на случайных последова¬
тельных интервалах времени).
Одной из важнейших задач в управлении полетом летатель¬
ных аппаратов, в технике связи, навигации судов, робототехнике
и в других технических отраслях является задача поиска сигна¬
ла (источника сигнала) и его сопровождения (слежения за па¬
раметрами сигнала). Эта задача комплексная, так как содержит
два этапа: поиска (распознавания) сигнала и управления. Каж¬
дый из этих этапов требует различных технических устройств
для решения конкретной части задачи и, следовательно, приво¬
дит к различным структурам. Вместе с тем необходимость авто¬
матизации всего процесса распознавания и управления заставля¬
ет объединить эти различные подсистемы в единую систему
с двумя структурами. Включение (или переключение) каждой из
подсистем должно производиться автоматически в зависимости от
случайного состояния, в котором находится вся система в целом
(наличие сигнала или его отсутствие). Рассмотренная задача —
простейшая, она приводит к необходимости иметь автоматиче¬
скую систему, состоящую из двух подсистем с различными струк¬
турами, назначение которой состоит в обеспечении слея^ения за
10
сигналом или источником сигнала при наличии помех, возмож¬
ных нарушений регулярного процесса сопровождения, потерь
сигнала вследствие непредвиденных причин.
Естественным обобщением являются системы со многими де¬
терминированными структурами (мулътиструктурные Системы),
переходы в которых совершаются в случайные моменты времени,
зависящие пли не зависящие от состояния. К подобной комп¬
лексной автоматической системе приводит также задача управле¬
ния технологическим процессом, в котором возможны несколько
режимов, зависящих от состояния или внешних условий.
Случайное резкое изменение режима функционирования ди¬
намической системы в случайные моменты времени может про¬
исходить вследствие параметрических нарушений (отказов) в от¬
дельных блоках, выхода некоторых параметров из поля допуска,
а также вследствие ограничений фазовых координат.
В современной технике широкое применение находят дина¬
мические системы с ЦВМ в контуре управления. Функциониро¬
вание ЦВМ может сопровождаться сбоями при реализации вы¬
числительных операций с последующим восстановлением задан¬
ного алгоритма. На интервале сбоя в ЦВМ реализуется другой
вычислительный алгоритм. Это соответствует изменению струк¬
туры системы. После восстановления алгоритма вычислений си¬
стема переходит в прежнюю структуру.
Случайные перерывы информации в случайные моменты вре¬
мени вследствие непреднамеренных и преднамеренных действий
внешней среды, приводящие к перерывам управления или к раз¬
личным управлениям на случайных неперекрывающихся интер¬
валах времени, также приводят к смене структуры системы.
Процесс распознавания полезного сигнала на фоне скачкообраз¬
но изменяющихся помех можно интерпретировать как изменение
структуры измерителя, входящего в автоматическую систему. За¬
дача комплексирования различных измерителей при сложной ин¬
формационной обстановке функционирующего объекта управле¬
ния реализуется с помощью смены структур блока измерителей
в автоматической системе. Наконец, управление различными си¬
стемами от одной управляющей ЦВМ в прерывистом режиме на
случайных или регулярных интервалах времени относится к рас¬
сматриваемому кругу задач. ■
Перечисленные задачи имеют широкое распространение и
важное практическое значение на современной стадии автомати¬
зации процессов управления. Они возникают в различных отрас¬
лях техники, в физике, химии, экономике, экологии, медицине,
социологии и других отраслях науки. Характерными особенностя¬
ми таких задач и соответствующих динамических систем явля¬
ются: структурная неопределенность — смена структуры в слу¬
чайные моменты времени в процессе функционирования — и сто-
хаотичность процессов в них. Обе эти особенности являются объ¬
ективными характеристиками процесса функционирования слож¬
ных динамических систем. Они получили название динамических
14
стохастических систем со случайной сменой структуры, или си¬
стем со случайной структурой. Частным видом таких динамиче¬
ских систем являются так называемые бинарные системы [19],
в которых рассматриваются детерминированные специально орга¬
низованные процессы целенаправленного изменения структуры,
в том числе и скачкообразного.
Стохастичность и структурная неопределенность рассматри¬
ваемых задач и динамических систем создают трудности их ис¬
следования и использования. Трудности эти характеризуются
большим объемом перерабатываемой информации для полного
описания вследствие стохастичности процессов и неопределенно¬
сти структуры и континуальной неопределенностью структуры
системы. Поэтому важно прежде всего определить класс динами¬
ческих систем и их подходящую физическую модель, чтобы мож¬
но было составить математическое описание ее функциониро¬
вания.
Среди указанных задач и систем важное практическое значе¬
ние и применение имеют такие, которые характеризуются не
континуумом, а счетным конечным множеством детерминирован¬
ных структур со случайными моментами времени смены их. Та¬
кие системы на случайных неперекрывающихся интервалах вре¬
мени имеют определенную детерминированную структуру. Смена
структур происходит скачкообразно в случайные моменты време¬
ни под воздействием внешних возмущений, смены обстановки
или в зависимости от значений некоторых фазовых координат и
их комбинаций. Этот класс динамических систем со случайными
скачкообразными изменениями структуры и представляет пред¬
мет развиваемой авторами теории. В соответствии с предметом
исследования такая теория получила название теории динамиче¬
ских систем со случайной сменой структуры. В дальнейшем
в книге будем использовать более короткий термин: теория си¬
стем со случайной структурой.
Назначение, конструкция и принцип устройства рассматривае¬
мых систем различны, но главной особенностью их является рез¬
кое внезапное скачкообразное изменение параметров, включение
новых звеньев, изменение структуры в случайные моменты вре¬
мени в процессе функционирования. Итак, физическая модель
класса систем со случайной структурой следующая:
— система состоит из звеньев различной или однородной фи¬
зической природы, в ней происходит целенаправленный процесс
управления;
— система динамическая, т. е. ее фазовые координаты состоя¬
ния изменяются с течением времени;
— система стохастическая, так как входные сигналы и возму¬
щения являются непрерывными или непрерывнозначными слу¬
чайными функциями времени, а время изменяется непрерывно
или дискретно;
— структура системы в целом или отдельных ее звеньев и
значения параметров скачкообразно изменяются по случайному
12
•закону в случайные моменты времени, зависящие или не завися¬
щие от фазовых координат состояния, т. е. система скачком пере¬
ходит от одной структуры к другой;
— состояния пли структуры, в которых может находиться ди¬
намическая система, являются детерминированными;
— число структур, в которых может находиться система,
счетно и конечно.
К подобного типа физической модели можно привести боль¬
шинство перечисленных выше задач и систем при соответствую¬
щих допущениях, вытекающих из физического смысла рассмат¬
риваемых задач. Теперь можно приступить к составлению мате¬
матической модели системы со случайной структурой.
§ 1,2. Стохастические уравнения систем
Теория исследования систем со случайной структурой должна
базироваться на их адекватной математической модели. Матема¬
тической моделью динамической системы является ее оператор,
или уравнения, характеризующие протекающие в ней процессы
преобразования информации и управления.
Широко распространенными моделями, применяемыми в ин¬
женерной практике и научных исследованиях, служат системы
с сосредоточенными параметрами. Поведение таких систем ха¬
рактеризуется обыкновенными дифференциальными уравнениями
и функциональными зависимостями. Для описания функциониро¬
вания систем с распределенными параметрами используют диф¬
ференциальные уравнения в частных производных.
В данной книге будут рассматриваться математические моде¬
ли систем с сосредоточенными параметрами. В современной тео¬
рии управления применяют различные способы математического
описания систем. Линейные стационарные системы описываются
с помощью передаточных функций и частотных характеристик
или с помощью весовых функций. Нелинейные и линейные не¬
стационарные системы — с помощью дифференциальных или
разностных уравнений, разрешенных относительно первых произ¬
водных или разностей. Последний способ представляет собой
математическое описание системы в фазовом пространстве или
пространстве состояний. Он удобен при моделировании с по¬
мощью ЦВМ. Мы будем использовать преимущественно этот спо¬
соб математического описания функционирования, дающий воз¬
можность развить единый подход к анализу систем различного
назначения с использованием вычислительных машин.
В типичных условиях любая динамическая система находится
под действием случайных управляющих сигналов и возмущений.
Следовательно, ее состояние в любой момент времени является
случайным и при описании в фазовом пространстве состояний
характеризуется стохастическим вектором у (£) размерности щ
с компонентами ул (t), y9(t), . ., ynv(t). Такой вектор будем пони-
13
мать как вектор-столбец или как транспонированный вектор-
строку у т(£).
Систему со случайной структурой удобно характеризовать но¬
мером структуры s(£)=l, п и вектором состояния У(0- Вектор-*
у(£) может быть непрерывным случайным процессом или диск¬
ретной случайной непрерывнозначной последовательностью, диск¬
ретной цепью или дискретным процессом [64, 66]; номер s(t) —
случайным дискретным скалярным процессом, принимающим
значения на конечном счетном множестве 1, п. В некоторых за¬
дачах дискретный процесс s(t) удобно считать ?гв-мерным векто¬
ром s(£) = [%(£) ,. . Sns(*)]T- Каждый компонент s*(£) этого-
вектора принимает значения st =■ 1, щ. От векторного процесса
s (t) можно перейти к скалярному с числом значений s(t)= 1. п
«з
при/г = 2 щ.В дальнейшем изложении векторную трактовку s(£)
г=1
будем каждый раз особо оговаривать.
Достаточно общая математическая модель динамической не¬
прерывной нелинейной стохастической системы со случайной
структурой имеет вид уравнения Коши [4, 12, 28]
y = a<s)(y, *)+В(,)(у, *)u + F(s)(y, f)I, у(«о) = Уо, (1.1)
где у(£)— непрерывный ^-мерный вектор; a(s)(y, t)—вектор;
B(s) (у, t), F(s) (у, t) — матрицы с компонентами — функциями
вектора у(£); и — детерминированная ?ги-мерная векторная функ¬
ция времени или фазовых координат (вектор управления);
с(£)—7гу-мерный вектор центрированного гауссовского белого
шума с матрицей интенсивностей G(t) и корреляционной функ-
цией вида К%(t, t')= G(£)6(£ — £'); б(t — t')—функция Дирака;
s = 1, п — номер (индекс) структуры; п — число детерминиро¬
ванных структур.
Уравнение (1.1), в которое входит вектор белых шумов, на¬
зывается стохастическим. При его интегрировании возникают так
называемые стохастические интегралы от произведения функции
фазового вектора у (£) и белого шума £(£). В зависимости от спо¬
соба их вычисления появляются различные трактовки и назва¬
ния соответствующих интегралов. Наиболее употребительные из
них — несимметризованный интеграл Ито и симметризованный
Стратоновича. В зависимости от этих определений уравнение
(1.1) имеет аналогичное им название [54, 61].
Начальное состояние системы задается случайным вектором
у о с компонентами у10, . . уПу о и заданной функцией плотности
вероятности /(уо, £о) или числовыми характеристиками — момен¬
тами начального распределения.
К канонической форме (1.1) можно преобразовать уравнения
динамических систем практически различными способами в зави¬
симости от типа исходных уравнений и характера случайных воз¬
мущении, как, например, показано в [32, 42].
14
Для линейных систем уравнение (1.1) принимает вид
y=Aw(t)y+BM(t)u + FM{t)%(t), у(М=Уо, (1.2)
•до A(s)(0- B(s,(i), F(s)(t)— заданные матрицы.
В современной технике и научных исследованиях широкое
>аспространение имеют дискретные системы, к которым относят-
я системы с цифровыми вычислительными машинами в контуре
шравления. В дискретных системах квантуются временной ин¬
тервал и величина сигнала.
В цифровом устройстве квантование осуществляется вычисли¬
тельной машиной. При большом числе уровней квантуемого сиг-
зала, т. е. при большом числе разрядов вычислительного устрой¬
ства, дискретностью по уровню можно пренебречь. Тогда цифро¬
вая система приводится к импульсной с непрерывным или не-
трерывнозначным выходом. Будем предполагать, что интервал
дискретности по времени в цифровых системах Тп = At достаточ¬
но мал, и за это время система практически не изменяет струк¬
туру? так как вероятности переходов пропорциональны Д£.
В частности, это всегда соблюдается при переходе от непрерыв¬
ных уравнений (1.1), (1.2) к разностным (рекуррентным) с по¬
мощью любого метода численного интегрирования.
Такая дискретная система в каждой s-ii структуре может
быть охарактеризована каноническим рекуррентным стохастиче¬
ским уравнением вида [32]
у (к + 1) =■ y(&) + a(s) (у. /с) + B(s) (у, fc)u(&) + F(e) (у, k)t(k)
~ (1-3)
{к = 0, 1, 2, ...; 5 = 1, п), у(0) = у0,
где у (к) — дискретная непрерывнозначная 72^-мерная последова¬
тельность; £(&)—вектор центрированного дискретного гауссов¬
ского белого шума с корреляционной матрицей G (к) и матрицей
корреляционных функций К§(&, h)=G(k)6kh; Skh — функция
Кронекера; s(k) — дискретная последовательность — цепь.
Для линейной системы векторно-матричное рекуррентное сто¬
хастическое уравнение принимает вид
у (к -г 1) = У (&) + A(s) (к) у (к) + B(s) (к)п(к) + F(s) (к) £, (к)
(1.4)
(А = 0, 1, 2. ...; s=>i~n).
Уравнение (1.4) можно записать в другом виде, если ввести
обозначения Ф(5) (&, к + 1) = I (к) + A(s) (к), I (к) — единичная
матрица:
у (к ~г 1) = Фго (к, к+ l)y(fc) + B(w)(ft)u(fc) + F(e)(A)|(fe)
(1.5)
(к = 0, 1, 2. ...; s = 1, п),
где Ф{8)(к. к-г 1)— переходная матрица состояния.
Наряду с рассмотренными системами с малым интервалом
дискретности по времени Тп существуют еще такие, у которых
15
интервал квантования по времени большой н даже неравномер¬
ный. На этом интервале система может изменить структуру. Для
таких дискретных систем с непрерывнозначным вектором фазо¬
вых координат у(к) рекуррентное нелинейное уравнение примем
в общей форме
у(А+1)-ф[у(А), s(*+l), s(k), %(к), к + 1 ], (1.6)
где ф(-)—нелинейная детерминированная векторная функция;
s(k)—щ-мерный вектор индекса структуры — дискретная цепь;
£(к)—дискретный центрированный гауссовский вектор бело¬
го шума.
Выписанные уравнения примем в качестве математических
моделей динамических стохастических систем со случайной
структурой, рассматриваемых в данной книге. Таким образом, ди¬
намическая система со случайной структурой характеризуется
номером детерминированных структур s(t), число которых п^
и непрерывным или непрерывнозначиым ^-мерным вектором со¬
стояния у (t) пли у (/с) в каждой структуре. Будем в дальнейшем
характеризовать систему со случайной структурой расширенным
вектором состояния [ут, s]T, у которого пу компонентов являются
фазовыми координатами, а один дискретный компонент указыва¬
ет номер структуры.
§ 1.3. Классификация систем
Общим признаком классификации систем со случайной струк¬
турой является характер связи процессов s(t) (номера структу¬
ры) и фазового вектора состояния у(t), где t может быть непре¬
рывным или дискретным: tK = kTn. По этому признаку различают
системы с независимой и с зависимой от вектора у(t) структу¬
рой. Процесс s(t) влияет на у(t), так как при смене номера s
происходит прерывание функционирования отдельных подсистем
и подключение других. Обратное влияние не обязательно может
иметь место. Если протекание процесса s(t) смены структур за¬
висит только от времени и не зависит от фазового вектора у(£),
то такие системы называются системами с независимой случай¬
ной структурой. Очевидно, что для таких систем статистические
свойства процесса s(t) могут изучаться независимо, а основные
особенности определяются влиянием s(t) на у(£).
В системах с зависимой случайной структурой существует
взаимное влияние и зависимость процессов s(t) и у(£). Особен¬
ность заключается в характере влияния у(£) на s(t), для которо¬
го рассматриваются два типа зависимости. В первом это влияние
проявляется статистически, т. е. моменты перехода из одного со¬
стояния в другое случайным образом зависят от изменения фазо¬
вых координат подсистем. Переходы от одной структуры к дру¬
гой и наоборот могут происходить при любых значениях у (£), но
с различной вероятностью. Системы, обладающие подобными
свойствами, называются системами с распределенными перехода-
16
ми. Во втором типе зависимости моменты переходов могут быть,
функционально связаны с ходом изменения фазовых координат,
т. е. переходы происходят в те моменты времени, когда процесс
достигает определенных пороговых значений или границ (гипер¬
поверхностей). Такие системы называются системами с сосредо¬
точенными переходами.
Таким образом, динамические системы со случайной структу¬
рой разделяются на три типа: с независимой случайной структу¬
рой, с зависимой случайной структурой при распределенных пе¬
реходах в пространстве вектора у (it) и с зависимой случайной
структурой при сосредоточенных переходах на гпперйлоскостях
переключения в пространстве векторов у (I). Два последних типа
являются системами со случайной структурой, зависящей от зна¬
чений фазовых координат процесса.
§ 1.4. Задачи и методы анализа
Задачи вероятностного анализа систем со случайно]'! структу¬
рой разнообразны. Это оценка вероятности нахождения системы
в каждом из возможных состояний и времени перехода из одного
в другое, определение распределения или вероятностных число¬
вых характеристик всех или части фазовых, координат, оценка
точности воспроизведения или преобразования заданных сигна¬
лов в присутствии помех, исследование устойчивости и точности
процессов управления при действии случайных возмущений.
Перечисленные задачи могут решаться с целыо оценки каче¬
ства функционирования системы при заданных параметрах или
с целыо выбора наивыгоднейших параметров, удовлетворяющих
определенным критериям. При этом для систем различного на¬
значения те или иные задачи приобретают основное значение,
а другие являются второстепенными. Так, для системы поиска и
слежения оценка вероятности нахождения ее в каждом из воз¬
можных состояний является важной. Представляют интерес
оценки зависимости этих вероятностей от уровня помех, значе¬
ний параметров системы. Для систем с возможными нарушения¬
ми (с отказами) важными задачами являются те, где оценивает¬
ся точность работы, точность воспроизведения заданных сигна¬
лов, устойчивость. Для систем управления с перестраиваемой
структурой — точность, устойчивость, степень влияния помех, по¬
мехоустойчивость.
Основными числовыми вероятностными оценками являются
начальные и центральные моменты фазовых координат: первый
начальный момент — вектор математического ожидания m(£) =
='Af[y(£)] и второй центральный момент — матрица корреляци¬
онных моментов (корреляционная матрица)*) Q(t) =
= M[{y(t)—m(t)}{y(t)—m(£)}T], а также матрица корреляци¬
онных функций К (t, t') = М [ (у0 (£)• у°т(£'))]. Второй начальный
*) Применяется также термин ковариационная матрица.
2 и. К Казаков и др.
17
момент связан с т(£) и 0(£) формулой
х2(О = т(ОтТ(О+0(О='Ф(О- (1.7)
Более полными числовыми характеристиками являются веро¬
ятностные начальные моменты высших порядков
*А (*) = М
(/г — й-1-Ь ... -р h = 1, 2,
(1.8)
Оценка точности системы базируется на определении закона
распределения фазовых координат. Ошибкой системы называется
разность между выходной переменной г/г(£) на каждом выходе и
требуемым теоретическим значением этой переменной yiT(t) на
том же выходе:
М*)= УЛ*)— Уь(*) (й e 1, щ). (1.9)
В векторной форме формула для ошибки системы имеет вид
8(*) = уО — Уг((), (1.10)
где у(I)—вектор фазовых координат системы: yT(t)—вектор тре¬
буемых фазовых координат.
Основная задача оценки точности системы со случайной
структурой состоит в определении вектора математического ожи¬
дания me(t) и корреляционной матрицы 0е(£) ошибки. Иногда
точность характеризуется скалярной величиной — квадратичной
формой
Tie (t) = Ше (t) Гте (t) 4- tr [Г0£ С)], (1.11)
где заданная матрица Г часто выбирается диагональной с едини¬
цами в первых к столбцах и нулями в остальных.
Анализ устойчивости является важной составной частью более
общей задачи оценки качества автоматических систем. Понятие
об устойчивости связано с рассмотрением движений системы при
различных условиях функционирования. В детерминированной
теории существуют различные виды устойчивости. Например,
различают устойчивость локальную и в целом неасимптотиче¬
скую, асимптотическую, абсолютную и т. д. Еще большее разно¬
образие возникает при изучении стохастической устойчивости.
В настоящее время не существует универсальных методов иссле¬
дования устойчивости стохастических систем. Поэтому эти зада¬
чи решаются применительно к конкретной системе с использова¬
нием различных математических приемов. В теории устойчивости
детерминированных систем широкое применение находят первый
метод Ляпунова, основанный на непосредственном изучении
свойств решений дифференциальных или разностных уравнений,
и второй метод Ляпунова, основанный на построении функций,
обладающих определенными свойствами и гарантирующих устой¬
чивость изучаемой системы. Соответствующее обобщение методов
18
Ляпунова для стохастических систем дает возможность изучать
стохастическую устойчивость на основании анализа реализаций
процессов и их вероятностных характеристик [54, 61, 62].
Анализ стохастических систем со случайной структурой осно¬
вывается на определении функций плотности вероятности распре¬
деления их фазовых координат. Методы получения уравнений,
определяющих эти функции, хорошо разработаны, но должны
быть обобщены на системы со случайной структурой. Методы ре¬
шения этих уравнений достаточно трудоемки, и практически
способы точного решения нелинейных систем малоэффективны.
Поэтому большое значение в приложениях к инженерной
практике имеет корреляционная теория, базирующаяся на анали¬
зе моментных характеристик. Методы и результаты этой теории
широко используются в книге.
2*
Г л а в а 2
СТОХАСТИЧЕСКИЕ ПРОЦЕССЫ В СИСТЕМАХ
СО СЛУЧАЙНОЙ СТРУКТУРОЙ
§ 2.1. Эволюция вектора состояния системы
как марковский процесс
Состояние и эволюция динамической системы со случайной
структурой, как было показано в предыдущей главе, полностью
определяются каноническими уравнениями (1.1), (1.2) при не¬
прерывном и уравнениями (1.3) —(1.5) при дискретном их опи¬
сании и законом изменения номера структуры. Вектор состояния
}'(/), определяемый уравнениями (1.1), (1.4) в каждой структу¬
ре. представляет собой многомерный марковский случайный про¬
цесс [17]. Доказательство марковости вектора у(£) при фиксиро¬
вании s основывается на рассмотрении интеграла, например,
уравнения (1.1) для двух моментов времени t и t + At. Из урав¬
нения (1.1) вытекает следующая формула, связывающая значе¬
ния интеграла уравнения для моментов времени t и t + Д/:
у (t -f At) = у (t) [а<5> (у. t) + B(s) (у, t) a] At -1-
н- f T(s) (у, т) с (т) dr + о (At). (2.1)
t
Так как §(£) является белым гауссовским шумом и статисти¬
чески не зависит от значений £(т) и у(т) при т<£, то значение
вектора y(t + At) в момент времени t ■+ At зависит только от
у (it). Отсюда следует, что условная плотность вероятности рас¬
пределения вектора у(t) при фиксированном s относительно лю¬
бой совокупности случайных векторных величин y(£i), ..у(бч)
при t\ < U < . . . < tK < t не зависит от этих значений и совпа¬
дает с условной плотностью вероятности относительно величины
У С), т. о.
J[y(t+At), sly (О, У Ск)! У (М. s]=~f[y(t + At), s\y(t), s].
(2.2)
По определению, такой случайный процесс является марков¬
ским, а каждая его фазовая координата представляет собой ком¬
понент многомерного марковского процесса. Векторное уравнение
(1.1) при фиксированном s представляет собой математическую
модель марковского многомерного непрерывного процесса. Такое
же утверждение относится и к уравнению (1.2).
■20
Аналогичные рассуждения можно провести для стохастиче-
’Civiix рекуррентп ых уравнений (1.3) — (1.6). характеризующих
эволюцию вектора состояния дискретной (импульсной или циф¬
ре .ni) системы. Действительно, рекуррентное уравнение (1.3)
яри фиксированном s выражает вектор у(/с+1) в момент АН-1
через вектор у {к) па предыдущем числе и вектор дискретного
бел то шума £(/v) в момент времени к. Из этого следует, что зна¬
чение у(А + 1) на шаге А; + 1 зависит только от у (А;), т. е. от
-значения вектора состояния на предыдущем шаге, и не зависит
от прошлых значений до шага к. Белый шум с, {к) статистически
не зависит от значений шума на предыдущих шагах от 0 до
.к — 1. Следовательно, рассматриваемый векторный дискретный
пролесс, определенный уравнением (J .3), является марковской
непрерывной или дискретной последовательностью (марковской
цепыо). Такое же утверждение справедливо относительно моде¬
лей (1.-1). (1.5).
Таким образом, математическим моделям (1.1), (1.2) и
(1.3) — (1.6) динамических систем со случайной структурой при
фиксированном номере соответствуют марковские процессы у (/)
или последовательности у (А;). Для полного описания всей сово¬
купности этих процессов при случайном значении номера струк¬
туры необходимо охарактеризовать дискретный процесс s(t), слу¬
чайными реализациями которого являются номера структуры
■£=•1, п. В результате для совместного описания эволюции дина¬
мической системы со случайной структурой приходим к стохасти¬
ческому процессу, состоящему из непрерывного или непрерывно¬
значного действительного случайного вектора у (£) и дискретного
скаляра s(t): [у’ЧО? 5(Ч]Т* Особенностью такого случайного про¬
цесса является то, что на неперекрывающихся временных интер¬
валах существуют процессы у{s){t), соответствующие 5-й структу¬
ре системы и ее уравнениям, а смена этих интервалов времени
происходит скачкообразно в случайные моменты времени, опреде¬
ляемые процессом s(t).
По существу, рассматриваемый случайный процесс можно ин¬
терпретировать как кусочно-непрерывный (непрерывнозначный),
состоящий из отрезков векторных марковских процессов одинако¬
вом или разной размерности с заданными вероятностными харак¬
теристиками. Для его построения следует взять совокупность
указанных марковских процессов, присвоив им номера от 1 до п,
и последовательность моментов времени tk (к ==• 1, 2, ...). На
каждом из неперекрывающихся интервалов времени tk+1 — tk
имеет место процесс у{s) (t). Момент времени tk внезапного вклю¬
чения процесса уls)(0 случаен и представляет собой дискретный
скалярный процесс s(t) смены номера структуры, подчиненный
определенным статистическим закономерностям. Получающийся
в результате стохастический процесс целесообразно выделить в
специальный подкласс и назвать процессом со случайной сменой
структуры или, более коротко, процессом со случайной структу¬
рой. Такие стохастические процессы могут имел, различную фи-
21
зичоскую природу и вероятностные характеристики, но главной
их особенностью является скачкообразное изменение структуры
в случайные моменты времени при переходе из одного состояния
в другое в соответствии с изменением s(t).
Случайный дискретный процесс s(t) может быть произволь¬
ным пемарковским, марковским или условным марковским, зави¬
сящим от вектора у(£). В этой книге будем считать s(t) дискрет-
Стохастические марковсЕше процессы
оо
44
дым марковским и в общем случае условным марковским процес¬
сом. Такой дискретный процесс s(t) соответствует многим физи¬
ческим моделям систем со случайной структурой, рассмотренных
в предыдущей главе.
В табл. 2.1 дана классификация стохастических марковских
процессов, встречающихся в системах автоматического управле¬
ния. В табл. 2.2 выделен подкласс марковских процессов со слу¬
чайной структурой, характеризующийся тем, что изменение вре¬
мени дополнительно квантуется случайным временным интерва-
Таблица 2.2
Стохастические марковские разрывные процессы со случайной струк¬
турой
Аргумент Пространство
Вид процесса y(t)
Название процесса
н/д
Д/Д
д/д
Н/Д
н
д
н
д
у\
\/ -I'VSV; \,Ч'р
I v ! ?
|ДлД*У,1',»л
ЛЬ
Уъ
ль
ль=тп дт
ik
M-Th AT
кТп
%
АЬ
ЕЕ
АТ
Разрывный процесс
Разрывная цепь
Разрывная последо¬
вательность
Разрывный дискрет¬
ный процесс
Н — непрерывный процесс; Д — дискретный; At — Ти—шаг дискретности
по времени; Ah — шаг дискретности по уровню; А Т — вторичный интервал
дискретности разрывного процесса (неперекрывающиеся интервалы).
лом, определяемым процессом s(t). Рассматриваемые марковские
процессы со случайной структурой являются принципиально раз¬
рывными вследствие вторичного квантования аргумента со слу¬
чайной длительностью А Т. На этих неперекрывающихся времен¬
ных интервалах существуют разные марковюкие процессы.
23
Внутри введенного подкласса стохастических марковских про¬
цессов со случайной структурой целесообразно рассмотреть более^
точную классификацию, разделив их на четыре типа:
— марковский разрывный процесс, имеющий только случай¬
ное квантование по времени А1\ но непрерывные значения внут¬
ри каждого интервала;
s(t)
!
I
; ;
! i !
АТ, ; лтг \atz\ata
-*Т*—>
\ATk\ t
Рис. 2.1. Дискретный процесс
— марковская разрывная цепь, имеющая первичное детерми¬
нированное квантование по времени At = Тп, вторичное случай¬
ное квантование АТ и дискретные значения процесса;
s(k)
П ~ГН Ч Г'1 I 1 П
п-1 j—■—— —
— марковская разрывная последовательность, имеющая пер¬
вичное дискретное квантование по времени Тп, вторичное случай¬
ное квантование по времени АТ и непрерывные значения
процесса;
— марковский разрывный дискретный процесс, имеющий слу¬
чайное квантование по времени АТ и дискретные значения
процесса.
В развиваемой теории систем со случайной структурой нашли
применение и изучаются два первых типа марковских процессов
Н\
Рис. 2.2. Дискретная цепь
24
со случайном структурой с непрерывными значениями вектора
у {}), которые соответствуют динамическим системам, рассмотрен¬
ном. выше, в том числе и с ЦВМ. в контуре управления.
Дискретный процесс s(t), рассматриваемый далее, является
дискретным процессом, квантованным по уровню при непрерыв¬
ном времени, либо дискретной цепью при квантовании по уровню
и по времени (рис. 2.1, 2.2).
Теперь можно уточнить классификацию систем со случайной
структурой, данную в § 1.3: рассмотренные три типа систем суть
■■системы с марковской независимой структурой, системы с услов¬
ной марковской структурой при распределенных переходах, си¬
стемы с условной марковской структурой при сосредоточенных
переходах.
2.2. Марковский разрывный стохастический процесс
Марковский разрывный стохастический процесс [ут(И ДОГ
является кусочно-непрерывным с непрерывными значениями
камерного вектора у(£) тта неперекрывающнхся случайных вре¬
менных интервалах АТ и дискретного скаляра s (t). Согласно тео¬
реме Колмогорова [35] он полностью характеризуется конечно¬
мерными согласованными функциями распределения на интерва¬
лах постоянства s(t)
[Hi (Ю У\1' •••• */i Цтп) £/i?n |
FmfyOj). y(fm); 4-]=:Вер • • • • • ;-ч
'Упу (Ц) Упу\ч • • • , Упу \*т) <С Упут)
(2.3)
при т — 00 и фиксированном s. Теоретико-вероятностное описа¬
ние случайного процесса основывается на задании совместных
согласованных функций распределения Fm(y(t\), ..., у(tm); s)
для конечного числа значений аргумента t. Разрывный процесс
[yr(0, s (0 ] ' ]ФИ непрерывном векторном компоненте у (t) с до¬
статочно гладкими реализациями полностью определяется также
к о; I е ч I [ о м е р н ыми ф у п кци я м и п л о т н о ст 11 в сроят но ст и
nT'WTm
О
fra [V (tj, .... у (tmy. sl = г in, ~:m/ ; (2.4)
(>y ПуПг
при фиксированном s. Функции /' m[y(/i)? ..у (tm)] s] и
y(h), • • •: y(/,n); s) связаны между собой формулой
F т I У (Ц)- • • • , У (^??г)' $] —
Уд о У(1т)
= j J /ш |у (t]), . . ., у (/m)i s] dy (Ц) • • • dy (tm). (2.o)
ОС ОС
Если векторный процесс у (I) в последовательные моменты
времени /г, ..tm~i принимает значения v(£i), ..уЦт-i), то
25
для оценки вероятности вектора у (tm) в момент tm > tm~] приме*
няется условная функция плотности вероятности /(у (£**);■
sly(ii), y(£m-i); s}. Безусловная fm[y(ti), ..., y(fm); s] к
условная f[y(tm); sly(ii), ..y(im-i); s] функции плотности ве-
роятности связаны на основании теоремы умножения вероятно¬
стей соотношением
/т[у(*1), У Cm) ; s] =
='/[yCi); s]f\y(t2); sly(*i); s]...f[y(tm); sly(£j), ..y(£m_1);s]f.
(2.6)
где введено обозначение /i[y(£i); .9] =• /[у(^i); s] — первая функ¬
ция плотности вероятности.
Для марковского процесса у(£), согласно определению, спра¬
ведлива формула
/[УCm); slyCi). •••» y(*m-i); s]e/[y(*»); sly(tm-i); s]. (2.7)
Тогда соотношение (2.6) для марковского процесса принимает
вид
/m[yCl), •••> У Cm); «] =
= /[уСО; *]/1уС2); *1у(*0; s]--./[yCm); sly(tm-i); *]. (2.8J
Следовательно, для рассматриваемого марковского разрывного
процесса распределение вероятности полностью определяется дву¬
мя функциями: первой функцией плотности вероятности
/(У(0; s) 11 условной функцией /[у'(О; s]» называемой
плотностью вероятности перехода. Функции s]^0 и
/[у'(£'); 51у(0; s]^0 в дальнейшем будем записывать также
в форме /(у, s, £) и /(у', s, t'\у, s, t).
Если множество значений компонентов векторного процесса
принадлежит бесконечному ?гу-мерному пространству, а множест¬
во реализаций скаляра s(t) счетно-конечно, то должны выпол¬
няться условия
п 00
2 ' f(y,s,t)dy = 1, (2.9)
S=1 —оо
П 00
2 j f(y',s,t')\y,s,t)dy'=l. (2.10)
S—1 —OQ
Интеграл по всему фазовому пространству от функции /(у, 5, t)
обозначим через p{s)(t)\
00
P(s)(t)= j f(y,s,t)dy. (2.11)
— 00
Выражение (2.11) есть вероятность того, что процесс находится
в 5-м состоянии, или вероятность 5-й структуры. С учетом (2.11)
первую функцию плотности вероятности и плотности вероятно¬
ге
стя перехода разрывного марковского процесса представим в виде
/(У, *, t) = pM(t)-r>(у, t), (2.12)
/(У, *, *ly', = у, t|y', t'), (2.13)
где /(s)(y, t), fs)(у, £|y', tf)—условные функции плотности ве¬
роятности при заданном 5.
Условная функция плотности вероятности /(у, £, sly', t', s)
векторного процесса при совпадении моментов времени t' = t на
основании нормировки обращается в 6-функцию Дирака
/(У, s, t\j', s, 0 = 6(i/ — у').
Плотность вероятности перехода /(у, s. t21у*, s, t\) разрывного
марковского процесса удовлетворяет интегральному уравнению
Смолуховского — Колмогорова — Чепмена при t\ < t' < t2 [28, 66]
./(у, s, t, I у*, s, 0) =
oo
= f /(y, S, 01уЯ *')/(y\ s, *'|y*, s, 0) (2.14)
— oo
а первая функция плотности вероятности /(у, s, t)—соот¬
ношению
ОС
/(у. s,t)= ( /(у\ s, f)/(y, М| у', MiMy', (2.15)
— оо
являющимся следствием теоремы полной вероятности.
Столь я^е полным описанием рассматриваемого разрывного
марковского процесса являются характеристические функции. По
определению, они имеют вид
оо
j e^yf(y,s,t)dy, (2.1G)
— оо
оо
j е^тУ/(у, s. t\ у', s,t')dy. (2.17)
— ОС
Характеристическая функция мояшт быть выражена через веро¬
ятностные начальные моменты рассматриваемого разрывного слу¬
чайного процесса. Для этого в формулах (2.16) и (2.17) функ¬
цию ехр [Д/у] представим бесконечным рядом. В результате
долучим
Пу Пу
.? (X, s,t) = 1 -г 2 ihMs [Уи (ОJ -I- У i2XPXmMs [yh (t) ут (/)] -f
k=i * k,m=1
ny
+ 4- 2 ^ (0 (0 ^ (01 + • • ■. (2-18)
h,m,r= l
27
Tty
+ IT ]£ ^hKiMs \Ук (О Ут (О | У (0) = у*]
+ ж 2 ЫьККМ, ГУи (О Ут (О г/, (О I у (0) = у*I -h • - •, (2.19)
й,т,7-=1
где Ms [y/t (f) !/,n (;)...]= j г/h (t) Ут (t) (y, -s', О йг/ — начальные
моменты; M s\yh (t) ym (I) ... \ y (1г) = у*] = j yk (t) ym(t) ... f (y. s.
моменты;
— oo
t\y*$, t)dy — условные начальные моменты процесса.
Рассматриваемый разрывный марковский процесс с непрерыв¬
ными компонентами вектора состояния полностью описывается
локальными характеристиками, которые связаны со свойством не¬
прерывности марковского процесса при фиксированном s [17. 35,
68, 69, 73]. Под локальными характеристиками понимаются ус¬
ловные математические ожидания, а также условные корреляци¬
онные моменты приращений компонентов yh(t) при изменении
аргумента t на малый интервал At. Для марковского кусочна-не¬
прерывного процесса при фиксированном s эти локальные харак¬
теристики следующие:
Лт-ъ ) (у, t) = Ms [{ук (t + Щ — yh (I)} | у. .<?, t\ = (у, t) \t о (\t).
Ami? (у, О = М8 {{у к (t + АО — У к (0} {У г (l J- АО — Ут (0} X 0 =
где yh(t + At) — yh(t) = Ayh(t); Ms [•] — операция математическо¬
го ожидания приращений по всем переменным при фи к с про лш-
зии D(s)(y, t); о(Д£)—величины высшего порядка малости, чем
At. Вектор a(s)(y, t) и матрица D(5) (у, t) являются непрерыюны-
мн функциями вместе со своими производными при фиксирован¬
ном s. По определению, они могут быть вычислены по формулам
= Dj£)(y,0At + o(,\0. (-.20)
Am(kL (У, 0 = АС [{г/h (t - А/) — ук (0} {Уг (t А/,) — у,. (I)}
X {Ут (t АО — Ут (011 У- 'X 0 = о (АО,
ном векторе y(t) и номере структуры s; a[s) (у, 0—компоненты
вектора сноса а(а) (у, t); Dp* (у, t)— компоненты матрицы диффу-
(2.21)
(2.22)
28
где Л у(/■) = у(t + At)—у(/)—приращение вектора у(t) па ин¬
тервале At.
Условные моменты приращения выше второго имеют порядок
малости о (At) в соответствии с определением непрерывного мар¬
ковского процесса [17, 35]. Поэтому их предельные значения при
At 0 равны нулю. Локальные характеристики ос(?)(у, t) л
D('°(y, t) полностью определяют дифференциальные уравнения,
из которых могут быть получены функции плотности вероятно¬
сти /(у. 5, t) и /(у, 5, £|у7, s, t'), как будет показано в гл. 3.
§ 2.3. Марковская разрывная стохастическая
последовательность
Кусочно-непрерывнозначная последовательность, пли разрыв¬
ная случайная последовательность [ут(/с), s(&)]T с непрерывны¬
ми значениями действительного щгмерного вектора у (it) и диск¬
ретного скаляра s(k), согласно теореме Колмогорова [35]. пол¬
ностью характеризуется конечномерными согласованными функ¬
циями распределения
[//i ^Упч ■ • • У\ (кт) < У т
Fm |у (Ч), .. -, у (/,•„,); s| = Вер • • ; • • • •; *
I Упу (A’l) <С Упу[, • - - , Упу\Ут) Упу\т
(2.23)
при: т оо и фиксированном s. Теоретико-вероятностное описа¬
ние такого процесса базируется на задании совместных согласо¬
ванных функций распределения Fm(y(k\), .... у(кт), s) для ко¬
нечного числа значений аргумента tk = kTn (к =• 1, т). При не-
прерывнозпачном векторном компоненте у (к) с достаточно глад¬
кими реализациями рассматриваемая стохастическая разрывная
последовательность [ут(/с), s]T полностью определяется конечно¬
мерными функциями плотности вероятности
<) >у ' П!:т IV (кЛ v (к )\ 5|
0и to •
J1V • • • ’ иупут
Не повторяя записи и выкладок предыдущего параграфа, отме¬
тим, что все определения и формулы (2.5) — (2.19), касающиеся:
непрерывного марковского многомерного процесса, распространя¬
ются на Гсу-мерную непрерывнозначную последовательность слу¬
чайной структуры, если в них положить ti = ki71n (i = 1, т).
Марковская разрывная последовательность может быть пол¬
ностью определена локальными условными моментами прираще-
V С I
аий компонентов вектора у {к) за малый интервал квантования
TD = A t:
(у, h) = Ms \{ук (h -f 1) — yk (/?)} | y, s, h] =
= Tna(ks)(y,h) + Tno(Tn),
Amff (у, Л) = Ms [{pft (Л 1) — yh(h)} {yr(h 4-1) — yT(h)} | y, 5, /г.] =
= TnD$ (у. /г) - 7 no (fn), (2.25)
Ml'hrm (V. Л) = '
= Ms|{fc(A J-1) — г/л (Л)} {*/< О -r 1) — Ут{Щ}{ут{1г -f 1) —
Ут О)} I Vj 4 h\ — 1 nO (7"n)-
Условные моменты приращений первого и второго порядков
за малый интервал времени Тп представляют собой приращение
вектора сноса Aa(s)(y, h) и диффузионной матрицы AD(S) (у, h):
Да(в)(у, А)=ЛГ[Ду(Л)|у, s, Л] = Тиа{8) (у, Л), (2.26)
ДВ(8) (у, й) = ЛГ[Ду(Л)Дут(й)|у, 5, /г] =TnD(s)(y, h)
(h = 0, 1. 2, ...), (2.27)
где Ay(h) = у (ft + 1)— у (/г).
Условные моменты приращений степени выше второй имеют
порядок малости меньше Т2и. Поэтому практически ими пренебре¬
гают. Следовательно, ограничиваясь двумя моментами прираще¬
нии, имеем приближенную характеристику случайной марковской
разрывной последовательности. Если интервал дискретности Тя
большой, то следует учитывать локальные характеристики более
высокого порядка. Кроме того, на большом интервале возрастает
вероятность смены структуры. Тогда локальные характеристики,
вычисляемые при постоянстве s, не подходят для описания диск¬
ретного процесса. Необходимо использовать функции распре¬
деления.
§ 2.4. Локальные характеристики марковских
разрывных процессов
Для многомерного марковского непрерывного процесса в каж¬
дом 5-м состоянии локальными характеристиками являются век¬
тор сноса а{$) (у, t) с компонентами o4s) (у, t) и матрица диффу¬
зии D(,s) (у, t) с компонентами D$ (у, t). Вектор сноса и матри¬
ца диффузии для марковского многомерного процесса, описывае¬
мого дифференциальным уравнением (1.1), выражаются через
его правую часть. Вычислим их. используя формулы (2.21),
(2.22) и уравнение (1.1).
Для получения приращения Ду(£) проинтегрируем уравнение
(1.1) в интервале t,t + At и представим результат интегрирования
.30
в виде
t+M
А У (0 = j [a(s) (у, т) 4- B(s) (у, т) и (т)] dx +
1' F's) (у, т) | (т) dx. (2.28)
В выражении (2.28) выделен интеграл от подынтегральной слу¬
чайной функции, содержащей белый шум. Такой интеграл назы¬
вается стохастическим. Для него существуют различные опреде¬
ления и соответствующие вычислительные процедуры [54, 61,
62, 74]. Наиболее распространенными являются две формы: не¬
си мметризо ванная Ито [74] и симметризованная Стратоновича
[61]. В несимметризованной форме Ито случайная функция
F(5)(y, t) и белый шум £(£) для одного и того же момента вре¬
мени независимы, по определению интеграла [54, 61, 74], и по¬
этому математическое ожидание интеграла равно нулю. В сим-
метризованном представлении стохастического интеграла в фор¬
ме Стратоновича F(s)(y, t) и %{t). зависимы и математическое
ожидание интеграла не равно нулю.
Для первого не стохастического интеграла (2.28) при малом
At можно применить теорему о среднем. Тогда запишем (2.28)
в виде
Ay С) = [**> (у, t) - B(s) (у, t)«(t)] At -!- j F(s) (у, т) I (t) dx. (2.29>
Рассмотрим обе формы представления стохастического интег¬
рала. Полагая стохастический интеграл в (2.29) представленным:
в несимметризованной форме, подставим его в (2.21), (2.22)..
После применения операции математического ожидания при фик¬
сированных у(£), s{t) и переходе к пределу при At 0 получим
для вектора сноса ct(s)(y, t) и матрицы диффузии D(s)(y, t) в не¬
симметризованной форме следующие формулы:
где М5[Ш1У, *1 = 0, ЛПК«)Г(*')1У, t) = G(t)6(t-t')-, G(t) —
матрица интенсивностей гауссовского белого шума £(£)•
Для симметризованного стохастического интеграла вычисле¬
ние среднего значения значительно сложнее, так как функции
FU)(y, t) и §(£) зависимы между собой. Однако доказано, что
при вычислении симметризованных стохастических интегралов
справедливы обычные правила интегрирования и дифференциро¬
вания [54, 61, 62]. Этим утверждением можно воспользоваться
для организации вычислений симметризованных стохастических
интегралов. Такое утверждение формально справедливо только
’ (у. t) = а« (у, t) -!- B(s) (у, t) и,
D*} (у, = t)G(t) F(s)T(y, t).
3i
по отношению к симметризованным стохастическим интегралам.
Преобразуем стохастический интеграл, входящий в (2.31), к бо¬
лее простым интегралам, вычисление которых не представляет
трудностей. Для простоты и наглядности выкладки проведем в
координатной форме. Для компонента приращения Дyv{t) фор¬
мула (2.31) принимает вид
Ayv (I) =
вр'* (у. 0 + 2 В($ (у, 0т(0 At -!-
i=l
Пу <+М
+ 2 ' *$(у,т)£,(т)<*т {р = йщ). (2.32)
i = l t
На малом интервале t < т < t + At представим функцию
(у, т) рядом в окрестности точки (у, t) с точностью до ли¬
нейного члена малости Д£, применив линеаризацию, если функ¬
ция дифференцируема, или статистическую линеаризацию, если
она недифференцируема. Предполагая функцию FpV (у, t) диф¬
ференцируемой, имеем
F$ (у, т) = F*# (у, 0 + 2 —^ JdVi + [ dt'- (2-33)
3=1 3 t t
Дифференциал di/j получим из уравнения (1.1) в виде
Пу Пу
dyj = 14S) (у, 0 + 2 Bjq (у. 013я (0 г 2 Ffq (у, 0 lq (01*. (2.34)
<7=1 *=1
Подставляя последовательно (2.34) в (2.33) и в (2.32), получим
[■
Пу
AyP{t) = I йр5) (у, 0 + 2 5^ (У, о <+ (0 I А*
’]
+ 2 р (У» 0 J li (Т) dr 3 1ILjr | ^ (Т) | dT "I"
i=i I *t t L t J
nv г+лг г т/
+ 2 ° j fSi CO ( (У, т') +
j=i J} L i \
+ 2 (>3 T') M (O)
\ / + Д7
(у. о f
oVj
j li (t) J lq CO F$ (y, t') dY
dx
(2.35)
Q,J=1 ' f L t
'Вычислим условное математическое ожидание приращения при
-32
фиксированных s, у, t:
М [А^р | S, у, Ц — |7?) (у, t) + 2^ Bpi (У, О Щ (0 j At 4-
+ 4Аг 2 у.*)- (2.36)
*,j,5=l ;
Разделив правую и левую части (2.36) на Д£ и устремив Д£ -►* 07
получим
ПУ
«р5) (у» О = аР) (у. 0 + 2 B<pi (у, о к, («) j-
*=1
Т1у ^ ^
+ Ф 2 %(0^}(У, О (p=Mi;s=M). (2.37)
Но последний член в (2.37) представляет собой р-й компонент
матрицы-столбца [54]
-г[ШТр(8)(У’ 0G(<)F(s>T(x, 0
х=у
Следовательно, для вектора сноса ais) (у, t) в симметризованной
форме получим
а(<0 (У, 0 = a(s) (у, 0 + B(s) (у, t) u (f) -f
+ -г[ШТр(5)(у’ *)°<*> F(S>T(X- *>
(s = l,n). (2.38)
x=y
Вычислим условное математическое ожидание второго момен¬
та приращений Az/PAz/fe, используя формулу (2.25):
Пу
M№ypkyk\s,y,t}= 2 F+(y, (У, 0G»r(0A^+ o(Ai).
i,r= 1
Разделив правую и левую части этой формулы на At и устре¬
мив At 0, получим компонент матрицы диффузии
Dpl(y,t)= 2 Bpi (у, t) Bkr (у, t) Gir (t) (p,k= t,nv;s = l1n).
i,r= 1
(2.39)
В матричной форме формула (2,39) принимает вид
D(s)(у, £) = F(s)(y, t)G(t)F(s)T(y? 0 (5 = 17^). (2.40)
Таким образом, матрицы диффузии в симметризованной и пе-
симметризованиой формах совпадают, а формулы для вектора
сноса различные. Следует заметить, что использование стоха¬
стических интегралов и дифференциалов в форме Ито с после-
3 и. Е. Казаков и др. 33
дующим преобразованием к симметризоваипой форме приводит
к' тем же результатам.
Для многомерной непрерывнозначпой марковской разрывной
последовательности, описываемой уравнением (1.3). локальные
характеристики Лсс':о(у, к) и AD(s)(y, к) при малом интервале
дискретности вычисляются по формулам (2.26) и (2.27). Под¬
ставляя в эти формулы Ау (к) из (1.3), получим при интерпре¬
тации стохастического интеграла в симметризоваипой форме
Aa(i) (у, к) Тп \ a<s> (у, к) + B(s) (у, к) и (/с)] +
1 (2.41)
х=У
+ ТТ [(£)Тр<8) к) G W F<5)T ^ Л>
AD<*'(y, к) — Ти [F<f! (у, k)G(k)F^(y, к)} h = T7n)
и в несимметризовашшй форме
А<х(Д (у, к) = Тл [*<«> (у, к) + B(s) (у, к) и (к)],
A DO (у, к) = Т„F(s) (у, к) G (к) F(S)T (у, к).
§ 2.5. Дискретный марковский процесс смены структуры
Дискретная функция s(£) независимой распределенной смеггы
структуры (состояния) представляет собой скалярный дискрет¬
ный случайный процесс. При непрерывном изменении времени
этот процесс скачкообразно в случайные моменты времени tt
(i= 1, 2, ...) может принимать любые значения натурального
ряда чисел s= 1. п. Число структур конечно и равно п, а смена
их происходит по случайному закону. На рис. 2.1 изображен та¬
кой процесс. Из физической сущности случайного процесса s(t)
смены состояний вытекает, что он обладает свойством ординар¬
ности и отсутствием последействия. Это означает, что за бесконеч¬
но малый интервал времени At вероятность смены состояния
более одного раза является малой величиной о(At) порядка не
ниже (А/)2. Такое предположение вполне оправдано, так как оно
учитывает инерционность перехода, всегда имеющую место в ре¬
альных физических процессах. Такой процесс является дискрет¬
ным марковским и имеет иуассоновский закон распределения,
моментов скачка (смены структуры).
Дискретный марковский скалярный процесс s(t) характери¬
зуется вероятностью p(s) (t) состояния и вероятностью p8k(t\t')
перехода из состояния к в состояние 5:
р(.ч, i) = pls)(t)=Bep[s(t) = s, <],
34
p,k(s, t\k, i') = Bep [s(<) = s, !'].
Вероятность перехода удовлетворяет уравнению Маркова, ко¬
торое для процесса s(t) принимает вид
V,
p(sh) (s, t I /ь i0) = 2 P(sr) (s, t + At I r, 0 p(rft) (r, 11 k, £0),
r=l
f>*0? A£>0. (2.43)
Но для ординарных марковских процессов вероятности перехо¬
дов при малых временных интервалах At выражаются через
функции интенсивностей xisk)(t), нредставдляющие собой произ¬
водные по времени от вероятностей переходов. Так, вероятность
того, что система останется в состоянии s, следующая:
рм (s, t + At\s, t)= I — v{ss) (t)At-t-o(At). (2.44)
Вероятность перехода в состояние г из состояния s и из г
в ,s* за малый интервал времени At выражается так:
p(rs) (г. £+A£|s, t) = v(rs) (t) At + о (At) (r¥=s),
(2.45)
p(sr’’(s, t + At\r, t) — v(sr) (t) At 4- o(At) (r¥=s).
Все интенсивности x{rs) (t) ^0, т. e. неотрицательны по физи¬
ческому смыслу. Вероятности переходов p{rs) (г., t\s7 t') нормиро¬
ваны к единице при р{Г5) (г, t\s, t') ^=0:
п п
2 P(rs) ('■, t\s, t') —■ 1. 2p(*r)(s.t|r,i')=l. (2.46)
S = l 7 = 1
Кроме того, справедливы условия
P{sr) (s, t\r, t) = b,r, p[rs)(r, *|s, t) = 6rs,
где 6rs — функция Кронекера.
На основании (2.46) для (2.44), (2.45) получим
п
V<ss>(*)= 2 v(rs){t). (2.47)
r=i^s
Подставляя формулы (2.44) и (2.45) в правую часть уравнения
(2.43) и переходя к пределу при At 0, получим прямые урав¬
нения Колмогорова для вероятности перехода из состояния к
в состояние 5:
^ pW (s, 11 к, t0) = — v(“> (<) (s, 11 /г, g -i-
2 v<sr> (t) p<rfc>(r, * I к, g (A, s = 1, n), (2.48)
r=l^S
Уравнения системы (2.48) липейны и имеют единственное
нетривиальное решение, определяющее вероятность перехода для
дискретного марковского процесса s(t) при заданных у(ЗГ) (t)
и заданных начальных условиях. Для дискретного марковского
3* 35
процесса s(t) наряду с (2.48) справедлива также обратная си¬
стема уравнений Колмогорова. Для ее получения следует за¬
писать уравнение Маркова (2.43), выбрав промежуточный мо¬
мент времени to-г At близким к начальному to. После преобразо¬
ваний, аналогичных тем, которые были проведены при выводе
уравнений (2.48), получим обратную или сопряженную систему
уравнений
Л- р<*> (Л к | к. g = vw (g р<«м g 11 к, g -
0
n
- 2 vW(gpC»)(r.i|fe,g (s.k = T7n), (2.49)
которая при p(*r!(s, t\r, t) = 8sr имеет однозначное решение.
Дискретный процесс s(t) однороден, если вероятности пере¬
ходов p{!iT)(s, t\r, to) зависят только от времени % = t — £0,
т. е. p{sr)(s, t\r, to) = p{sr) (sir, т). Для однородного процесса ин¬
тенсивности переходов v(sr) (t) = const, а уравнения (2.48), (2.49)
принимают вид
~ p(sh) (S | к, l) = — \iss)p(sk) | д_
n
2 v(sr)p(sk) I ki T) (Д = ТЛг). (2.50)
r=l-rS
Если существует установившийся режим для рассматривав-'
мого марковского дискретного процесса, то предельные значения
вероятностей переходов р{ку) определяются из системы алгебраи¬
ческих уравнений
п п
_ vm)p(*k) 2 V<»’>p<fh> = 0, 2/)И=1. (2.51)
Г— 1 -■ S Г—1
Для дискретного марковского процесса s[t). имеющего п ди-
скретпых значений, вероятность состояния можно определить по
формуле
Р(%) (0 - 2 /'('° (А-. g P(s,t) О, £| Л\ /„). (2.52)
h=i
Вероятность состояния p{s) (t) также удовлетворяет дифференци¬
альному уравнению, которое получается следующим образом.
Умножим уравнения (2.48) на p(k) (tp) = p{h) (к, to) и просумми¬
руем по всем состояниям к = Е п:
п
р('° (о g p{s'h) е. ^ I о g =
- - v<“> (0 2 P<« (к, g pl’M g 11 A-, g -L
ft==x
-к. .2 v(sr)(o 2 p(,° gp(rh)eoi*«<o) 6= (2-53>
■ h—l
36
Меняя местами дифференцирование по t и суммирование по
к и упитывая формулы (2.47) и (2.52), из (2.53) получаем
уравнения Колмогорова
п
A p(s) (/) — — \,(ss) (Д) p{S) v(.4-r) (f.) p(r) (£) (,<? r_-_z 1. 72)
r=l^S
(2.54)
при начальном условии p(s) (Z0) — //0S) (5 — 1, n).
Установившиеся равновесные значения вероятностей р(- рас¬
сматриваемого дискретного процесса при t сю получаются из
(2.54) приравниванием пулю производных:
77 71
— -v(ss)p(s) - j- У \?(sr)p(r) = о? 2 v(,'s) v<ss\ (2.55)
r=l=£s r=l^s
n
Уравнения (2.54) при 5 = 1, тг, 2 p(s) 1 полностью онреде-
s=l
ляют установившееся значение р{8\ если заданы v(sr) (г, s= 1, п).
Дискретный процесс s(k) смены структуры может представ¬
лять собой скалярную дискретную марковскую простую цепь
(см. рис. 2.2). Такая интерпретация имеет место, если система
описывается разностными или итерационными уравнениями с
числом дискретности по времени Тп: (:к = кТп (к = 0, 1, 2, ...).
Такой процесс также характеризуется двумя вероятностями: со¬
стояния р{8) (к) и перехода p{sk) (s, h\k, I) (h, 1 = 0, 1, 2, ...). Для
этих вероятностей справедливы уравнение (2.43), формулы
(2.44) и (2.45), а также (2.46) и (2.47), которые должны быть
записаны соответственно для моментов времени th=-kTп (к =
= 0,1,2,...).
Вместо дифференциальных уравнений (2.46), (2.49), (2.50),
(2.54) могут быть использованы итерационные формулы для оп¬
ределения р{3) (к) н p{fh) (s, h\k, /), которые получаются путем
их дискретизации методом Эйлера или выводятся непосредствен¬
но. В последнем случае надо воспользоваться уравнением Мар¬
кова (2.43) и формулами (2.44), (2.45). В частности, уравнение
для p{s) (h) имеет вид
п
/><«> (ft - 1) = /Я) (ft) - v(;s) (ft) Р(«) (к) + 2 (ft) pV) (/,)
r=i^s
(2.56)
Итерационное уравнение для puh) (s, h\k, l) следующее:
pW (s, ft + 11 ft, Z) = p<sM (.?, ft j ft, Z) - v(**° (я, ft | ft, Z) --
+ 2 \Tr,(ft)p(r">(r, ft|ft, Z) (s, ft = l7«). (2.57)
В формулах (2.56) и (2.57) введено обозначение
vi?r> (*)■= rnv("-) (ft).
37
§ 2.6. Дискретный условный марковский процесс
смены структуры с распределенными переходами
Для динамической системы с распределенными зависимыми
от ее состояния переходами от одной структуры к другой слу¬
чайный дискретный процесс s(t) должен учитывать статистиче¬
скую зависимость между процессом у(t) и моментом скачка.
Предполагается, что взаимодействие между ними не обладает
последействием. Это выражается в том. что статистические ха¬
рактеристики процесса s(t) смены состояния в произвольный
момент времени I зависят от характеристик процесса y(t) в тот
же момент времени и не зависят от предыдущего характера его
изменения. Указанное предположение приводит к тому, что мо¬
менты времени смены состояний должны подчиняться определен¬
ным закономерностям. Это, конечно, накладывает ограпичегшя
на возможности применения теории марковских процессов со
случайной структурой для описания некоторых реальных ситуа¬
ций. В ряде задач практическим выходом из этого затруднения
может быть расширение размерности состояний (структур)
процесса.
Таким образом, возникает представление об условном марков¬
ском дискретном процессе s(l) с интенсивностями перехода
v(s/i)(y, зависящими от вектора фазовых координат в данный
момент времени у (t). Зависимость интенсивности переходов
\{sk> (у, t) от v(/) может иметь различный характер. Она опре¬
деляется физическим существом задачи.
Рассмотренный в предыдущем параграфе дискретный процесс
s(t) с независимой пуассоиовской сменой структуры является
частным случаем условного марковского процесса с распределен¬
ными переходами при v(4r)(y, t) = v(*r) (t).
Условный марковский дискретный процесс s(t) имеет тот же
вид, что и представленный па рис. 2.1, и может быть описан ус¬
ловными вероятностями состояния и перехода из состояния к
в состояние s при фиксированном у (t)
p(s, ^IУ) = /У ° (/1 у) = Вер [.?(*)= *1у].
pi$h)(s, t\k, t\ y)=Bep [s(t) = s\s(t') = k, у].
Для условных вероятностей pisk) (>s\ t1 к, t\ у) перехода также
справедливо уравнение Маркова типа (2.43)
р(s, t -j- /St | к, £0, v)
п
= 2 [><,r) (s, I !- м\ /\ t, y)p'rh) (г. t\ h\tn, у), (2.58)
V=l^S
t>to, /St >0.
Условные вероятности переходов для малых временных ин¬
тервалов А£ можно представить через условные интенсивности
38
переходов v{hs)(y, t) в следующей форме:
p(ss)(s, t + At\s, 2, y) = 1 - v(es)(y, t)At + o(At),
p{rs) (r, t + At\s, t, y) = v(rs)(y, 2)Д2 + о(Д2), (2.59)
/?(sr)(s, 2 + Д2К, 5. y)=v(sr)(y, t) At + o(At).
Все условные интенсивности переходов v(sr) (г/. 2)^0, а веро¬
ятности переходов при r, 5 = 1, п и фиксированном у нормиро¬
ваны к единице. В силу сказанного справедлива формула
п
V<«’(y.t): -. 2 v<">(y, /). (2.GO)
7— 1/S
Подставляя формулы (2.59) в уравнение (2.58) и переходя к
пределу при Д£ ->■ 0, полупим обобщенное уравнение Колмогорова
для условных вероятностей переходов при фиксированном to
dp(sh) (5, 11 к, f(), у)
с/i
= — (у. t) pW (5. 11 k, 20, y) +
+ 2 v<«r>(y, t)phkHr,t\k. t0, y) (s, k = i, n). (2.61)
Для дискретного условного марковского процесса 5(2), имею¬
щего п значений, условную вероятность состояния $(1) можно
определить по формуле
п
P(s) (t I у) = 2 P{ti) (11V) pW (s, 11 к, V y) (.S' - ТТЛ). (2.62)
fe=l
Условная вероятность состояния />(s)(2!v) удовлетворяет диф¬
ференциальному уравнению, которое получается из (2.61), если
умножить его на p{h) (to, у) и просуммировать по всех! к = 1, /?.
В результате также получим обобщенное уравнение Колмогорова
для условной вероятности ды(2 1у) при фиксированном у (2)
h
^ = — v<^) (v, t) (I | у) -1- 2 v(s/-) (у, 0 //') (г | у)
r=i?$
и - ГГ//) (2.63)
при начальном условии (G> | #и) /'о>-
Безусловная вероятность состояния (структуры) р{>:) (2) выра¬
жается формулой через p(i)(t\y):
00 п
pU) (I) = \ p's) (t I у) /(у. t) dy, / (у, t) - 2 /(У, О- (2.(Г|)
-оо s==l
Молено и другим путем получить уравнение для непосредствен¬
ного определения вероятности состояния p{s) (t). Это будет пока¬
зано в следующей главе.
39
Для дискретной условной марковской цени: s(h), имеющей
вид, показанный на рис. 2.2, справедливы обобщенные итераци¬
онные формулы тина (2.об) и (2.67). записанные относительно
p{s)(h\у) и pish)(s, ft + 11ft, Z, у) при v'’;o(y, ft) (ft =0. 1, 2, ...):
(.s-, ft -f 1 | ft, /, y) /;W (.<?, ft | ft, /, y)
_p«*>(s.A|A, Z,y) I (у, A) +
Г -1/5
П
+ 2 v£r) (y- h) P{sh) И л I A, /, y) (.S' - Un). (2.65)
r=ly^S
p(s) 0- -I-1 - y) = p(s) (h I y) — z>(s) ОI y) 2 '■ * ” (у. Л) +
r= 1^8
П
-!- 2 V(,*r)(y, А)//’>(А|У) (a- - 1ГЙ). (2.66)
r=i=^s
Здесь введено обозначение v*r) (у, ft) — 7П\,(*^ (у, ft).
Безусловная вероятность состояния pi3*(h) может быть опре¬
делена из соотношения
°° п
/><»> (Л) - j И' (А I у)/(у, A) dy, /(у. А) --- 2 /(у, О- (2.67)
ОО S -= 1
В следующей главе будет получена другая рекуррентпая фор¬
мула для определения p{s) (h), более приемлемая для проведения
вычислений, так как определение p(i>(h) связано с параллель¬
ны м в ычи с л е пи е м / (у, ft).
§ 2.7. Дискретный условный марковский процесс
смены структуры с сосредоточенными переходами
В динамических системах со случайной структурой с сосре¬
доточенными переходами случайный дискретный процесс s(t)
также будем предполагать условным марковским с конечным
числом состояний п. Однако здесь взаимодействие между реали¬
зациями процесса y(t) и моментом смены структуры имеет функ¬
циональный характер, т, е. смена состояния s па состояние г
происходит при достижении вектором у (t) некоторой границы
y(rs). Марковский процесс смены структуры в данном случае мо¬
жет быть описан условной функцией интенсивности переходов
v(r4)(y. z/(rs), Z), зависящей от вектора фазовых координат y(t)
и Виктора y(rs\ характеризующего границу. Вид функции
■V(r*4y, y{rs\ t) зависит от конкретной границы y{rs) фазового про¬
странства и характера перехода (полная, частичная сметта струк¬
туры, на жесткой границе или в области). Наиболее типичный
вариант такого процесса — полная смена состояния па границе y[rs),
т. е. полное поглощение реализаций предыдущего процесса.
40
В следующей главе будут рассмотрены вероятностные характери¬
стики изучаемых процессов и определен конкретный вид функций
v(re) (y, yirs\ t).
При известной интенсивности перехода v(,s) (у, y{TS), t) ди¬
скретного условного марковского процесса s(t), имеющего тот
же вид, что и на рис. 2.1, полностью справедливы математиче¬
ские выкладки предыдущего параграфа с заменой v(rs) (у, t) па
v(rs) (У> y(rs\ t) • В результате условные функции вероятности со¬
стояния p{s) (t, у) и перехода p{sh)(s, t\k, fo, у) при фиксирован¬
ном y(t) определяются из уравнений
- 5—L = _ р(*ю (Si 11 к, t0, у) ^ v(«) (у, г/<"\ t) -f
h
+ 2 v<sr) (v, г/<5г>. /) /><"<> (r, it | A\ t0, y) (.v, A: = 1, re), (2.08)
r=i^s
rfp(-)^--l y-) = - p(s) (< I y) 2 v(rs) (y* y(rs)’ 0
r=i^-s
n
-!- 2 v<"> (y, p(sr\ t) p(r) (/1 y) (s= i, n). (2.09)
r=\MS
Для определения p{s) (t) можно использовать формулу (2.64).
Для дискретной условной марковской цепи s(h) соответствен¬
но имеют место формулы
р<*к> (a, h -j- 11 к, t, у) = Рм (a, h | к, I, у) -
— (s. h IA\ ?. у) 2 v*s) (у, i/'rs), A) -i-
r=l=^s
+ 2 (у, Л) рО-ft» (г, ЛI fe, Z. y), (2.70)
r=l^S
pO) (h + 11 y) = p(5> (h | y) — p<s> (A. | y) £ v*5) (у, y(rs), /<) -r
r=l^S
+ 2 visr) (y, A)p(r) (A | y) (s, /< = 1, «). (2.71)
r = ly£s
Для определения /?(s)(&) служит формула (2.67).
Поскольку для определения p{s) (t) и p{s) (h) требуется зиапие
/(у, s, £), то приведенные формулы неудобны. В следующей гла¬
ве будут рассмотрены уравнения для определения функций
/(у. s, t) и /(а)(у, £) и получены уравнения для определения
р(6)(£), а также рекуррентные формулы для p{s) (h).
41
Глава 3
УРАВНЕНИЯ ДЛЯ ВЕРОЯТНОСТНЫХ ХАРАКТЕРИСТИК
В СИСТЕМАХ СО СЛУЧАЙНОЙ СТРУКТУРОЙ
§ 3.1. Уравнение Фоккера — Планка — Колмогорова
для многомерного марковского процесса
Многомерный (векторный) марковский процесс, который опи¬
сывает динамику стохастической системы типа (1.1) при фикси¬
рованном s, т. е. без смены структуры, полностью характеризу¬
ется двумя функциями распределения: функцией плотности ве¬
роятности распределения вектора у(t) фазовых координат при
фиксированном моменте времени /(у. /) и функцией плотности
вероятности перехода из фиксированной фазовой точки у* в мо¬
мент t\ в любую другую фазовую точку у в момент /: /(у, t\y*, 11).
Эти функции плотности вероятности удовлетворяют уравнению
Фоккера — Планка — Колмогорова, которое может быть записа¬
но в различной форме. Приведем эти уравнения без вывода, ко¬
торый можно найти, например, в [32, 66].
Так, уравнение для функции /(у, £|у*. 1{) имеет вид
где а (у, t) — вектор сноса; D(y, £) —матрица диффузии; Vy =
= grady — вектор-столбец по компонентам у. Решение этого урав¬
нения должно быть неотрицательной нормированной к единице
функцией в бесконечной области и удовлетворять начальному
условию
/(у, fily*, *i) = 8(y-y*)- (3-2)
Это решение при /(±°°, tly*, £i) = 0 и начальном условии (3.2)
называется фундаментальным решением многомерной задачи Ко¬
ши для уравнения (3.1).
Уравнение (3.1) можно записать также в другой форме:
*/(У- ЧУ*, *,)
— Vy|a(y, t)/(у, 11 у*, «Л -;-
-г -f VJ{ VTv [DT (y. i) / (y. 11 y*, fj] 1T, (3.1)
dt
2
<?/(У, 1 1 y*i tx)
= — Vy[a(y, t)f(y, t |y*, tj\ Jr
+ 4 tr (У. О / (У, 11 у*, <!)]}, (3.3)
dt
где tr — след матрицы.
42
Наконец, употребительна из-за краткости написания еще сле¬
дующая форма [23, 27. 50, 77):
(3.4)
где
П (у, 11 у*, 1г) = а (у, t)/ (у.. /1 у*, <i) —
-Т^[»т(у, 0/(У. 0 У*, 0)]Г
— вектор плотности потока вероятности /(у, £|у*, £)) перехода,
a div - VJ.
Для функции /(у, t) уравнения имеют вид (3.4), но должны
интегрироваться при другом начальном условии. Запишем урав¬
нение для функции /(у, t):
= - VI [а(у, t)J<у, /)] - 4 v’v Ц* [DT(y, 0/(у. 0])Т. (3.5)
Начальное условие при интегрировании уравнения (3.5) должно
быть задано в форме начальной функции плотности вероятности
/(Уо, М- Уравнение (3.5) можно записать также в форме
Щг1 = -- Vpa(y, t)j(у, 01 4- tr I^VpD(y, 0/(у. Oil (3.6)
В дальнейшем будет использована более короткая форма записи:
<Ч 4; ' ’ = — div Л (У, 0, (3-7)
где
л (у, t) = а (у. 0/(У- 0-4- lVHDT(y, 0/(У> 0]Г- (3.8)
Правая часть в (3.7) интерпретируется, как дивергенция век¬
тора я (у, t) плотности потока вероятности распределения фазо¬
вых координат. Вектор л (у, t) плотности потока вероятности опи¬
сывает количество вероятности, проходящей в направлении этого
вектора в единицу времени. Каждый компонент л*(у, t) этого
вектора характеризует количество вероятности, проходящей в по¬
ложительном направлении координаты ук ?гу-мерного простран¬
ства в единицу времени через единицу поверхности. Компоненты
л*(г/, t) имеют вид
Я* (У, 0 = a/i (у, 0 j (у, 0-4- И (у, 0/(У- 01Г, (3.9)
где ДДу, £) — /с-я строка матрицы D(y, t).
Приведем еще часто употребляющуюся форму записи урав¬
нения Фоккера — Планка — Колмогорова:
Ц^ = -2-£-м.1)Пу,т +
h—1
ПУ 9
+ Т,21«§^|й‘(У-')/(У.1)1. (3-10)
43
где ah(y, t) — компоненты вектора сноса а (у, t): DM{у, t) — ком¬
поненты матрицы диффузии D(y, I).
Отметим, что знание функций плотности вероятности пере¬
хода /(у, £ly*, t\) и плотности вероятности /(у*, t\) дает возмож¬
ность определить функцию /(у, t) по формуле
со
/ (У, t) = j* / (у, г | у*, tj / (у*. dy*. (3.11)
— оо
Кроме того, плотность вероятности перехода векторного не¬
прерывного марковского процесса удовлетворяет интегральному
уравнению Смолуховского — Колмогорова — Чепмена при t\ <
< I' < t
оо
/(уЛ|у*Лх)= j /(г/л|у'. 0/(y'^'|yVi)dy'- O.12)
— 00
Для непрерывнозиачной марковской последовательности (ди¬
скретного марковского процесса с непрерывными значениями
вектора у (к) фазовых координат) функции /(у, h) и f{y,h\y*,k)
определяются с помощью приближенных рекуррентных процедур
[28]. Так, уравнение (3.1) может быть представлено в виде
/(у, л- + 1|у*,*0 =
= 1 (у, h I у*, к) — % [Да (у, h) / (у, h | у*, к)] +
+ 4 V» [AI>T(y, h)f(у. h | у*, к)}}\ (3.13)
где Да (у, h) — приращение вектора сноса; AD(y, h) — прираще¬
ние матрицы диффузии на шаге At = T„.
Приращения вектора сноса Да (у, h) = Tna(у, h) и матрицы
диффузии AD(y, h) = rnD(y, h) могут быть определены также по
формулам [32]
Да(у, h) — М [{у (h + 1) — у (h)} iy, h],
AD (у. h) = M[{y{h+l)-y(h)}{y(h+l)-y{h)y\y. h\.
Правая часть этих выражений может быть записана также
в другом виде, если воспользоваться обозначениями, принятыми
в (3.3), (3.4) и (3.6), (3.7).
Рекуррентные формулы (3.12), (3.13) являются дискретными
аналогами уравнений (3.1) и (3.5) соответственно при дискре¬
тизации времени. Этими формулами можно пользоваться при
организации вычислений функций распределения после дискре¬
тизации правой части уравнения (1.1) по переменным (i =
= 1, пу). По существу, следует применить стандартную програм¬
му численного интегрирования уравнения (3.1) или (3.5) в част¬
ных производных.
44
§ 3.2. Уравнение Пугачева для многомерного
марковского процесса
Многомерный векторный марковский процесс полностью опи¬
сывается заданием двух характеристических функций
8 (К 0 = j е^Ту/(у, t)dy,
—оо
сю
8 (У 11 у*, *x) = | eixTyf (v, 11 у*, tj) dy.
(3.14)
Эти характеристические функции многомерного марковского про¬
цесса удовлетворяют иптегродифференциалыюму уравнению Пу¬
гачева [52, 54]. Для характеристической функции перехода
g(X, £ly*, t\) это уравнение следующее:
11 у*, гг)
dt
ои
-я
4-OD(у, О Я,-!- if? а(у. I)
где л — вектор-столбец переменных характеристической функции.
Уравнение (3.15) следует интегрировать при начальном условии
8 (К 11 У*, О) - е*тУ*.
Аналогичное уравнение существует для первой характеристи¬
ческой функции g()w, t):
dg{%
r-^= I i — J (у, t) l У if?a (y, t)
dt
при начальном условии
ei?*Ty/(у, t)dy (3.16)
8 {К t0) = j / (У, to)eixTy dy. Иптегродиф-
ференциальные уравнения для характеристических функций в
ряде задач удобнее, так как при их применении не требуется
дифференцируемости функций а (у, t) и D(y, t).
Для непрерывнозначной марковской последовательности спра¬
ведливы итерационные формулы, определяющие характеристиче¬
ские функции
g (У h + 11 у*, Г) = g (к, h I у*, I) -f
1
е*тЧ(У, h I У*. (3.17)
т J —j ATAD(y, h) X -[- iX1 Аа (у. /;)
— ОО
g(l, h + 1) = g(k, h) -г
ОО
+ j [- 4- ^AD (у, h) % iA.TДа (у, /*)] e»-Tyf (у, h) dy. (3.18)
45
§ 3.3. Функции плотности вероятности разрывных
процессов при распределенных переходах
В динамических системах со случайной структурой с рас¬
пределенными переходами смена состояния происходит в любой
случайный момент времени во всем фазовом пространстве.. Как
было показано в гл. 2, в таких системах смена структуры описы¬
вается дискретным процессом s(t) или дискретной цепью s(k)
с интенсивностями переходов, зависящими или не зависящими
от фазовых координат. Это системы с независимой марковской
и условной марковской распределенной сменой структуры.
Многомерный марковский разрывный процесс [ут(£)> 5(0]\
описывающий динамику системы (1.1) с учетом смены струк¬
туры, характеризуется фупкциями распределения плотности ве¬
роятности /(у, s, t) и плотности вероятности перехода /(у, s7
£ly*, s, £i). Получим дифференциальные уравнения, которым
удовлетворяют эти функции для разрывного процесса с распре¬
деленными переходами.
Рассматриваемый марковский разрывный процесс (1.1) в со¬
ответствии с определениями гл. 2 состоит из отрезков обычных
марковских процессов на интервалах постоянства s(t). На этих
неперекрывающихся интервалах при фиксированном s справед¬
ливы уравнения Фоккера — Планка — Колмогорова для функций
распределения плотностей вероятностей. Запишем такое уравне¬
ние для переходной функции плотности вероятности
/(у, s, £ly*, s, fi) при s = const в форме (3.1):
*' *■—[а<5> (у, t) | / (у, s, 11 у*, s, ^)] -Ь
н- -fvJ w S, у]Г. (3.19)
Для малых интервалов времени At = t[ — t с точностью до
малых величин порядка не менее чем (Л£)2 уравнение (3.19)
представим следующим образом:
/(у, S, 1г + Af|y*, s, tj) = б (у — у*) — AiV£[a<s>(y*, *1)6 (у — y*)j —
+ ± AiVj [DWT(y*, t,) 6 (y - y*)]P, (3.20)
где S(y-y*) = /(y, s, iily*, s, 11).
На малом интервале At = t—t\ поведение рассматриваемого
процесса со случайной структурой с учетом ее смены может быть
различным. Часть реализаций процесса на этом интервале оста¬
ется непрерывной и сохраняется, другая часть прекращает су¬
ществование в связи с изменением состояния (структуры систе¬
мы), и, наконец, существуют реализации, возникшие вновь
в связи с обратным переходом из других состояний (рис. 3.1).
В соответствии с дискретным марковским процессом s(t), опи¬
санным в § 2.5 и 2.6 и характеризующим независимую пуассо-
46
5i ов с кую и, следовательно, марковскую, а также условную мар¬
ковскую смену структуры, вероятность перехода процесса у (О
на интервале At из состояния s в состояние г характеризуется
выражениями (2.44) и (2.59). Следует учесть еще, что реализа¬
ции случайного процесса прн пере¬
ходе из состояния г в s могут в
новой структуре иметь начальные
условия у (£)? отличные от зна¬
чений y(t\) в прежней структуре.
Пусть известна условная плот¬
ность вероятности q{sr) (у, t|у', t\),
отображающая закон распреде¬
ления вероятности процесса у (t)
в момент t в состоянии s(t) при
условии, что в момент t\ реализа¬
ция процесса была y(£i) в состоя¬
нии г. Тогда вероятность перехода
процесса у (t) на интервале At из
состояния г в s с учетом распределения начальных условий
в новом состоянии вместо (2.44) и (2.59) запишем з форме
Л('"г)(^ Ц+АЛг, ti)cj{sr)(y, ti + Atly', t[) =•
= Atv{sr) (у7, ti)q(*r)(y, t\ + At\y\ £,) + o(Ac). (3.21)
Вероятность того, что процесс y(t) остается з прежнем со¬
стоянии, в соответствии с (2.45), (2.47) и (2.59), (2.60) запи¬
шем в виде
Рис. 3.1. Процесс с распределен¬
ными переходами
(s, h — At | s, £x) = 1 — A£ 2 v(rS) (y'? h) + 0 (At:. (3.22)
r=l^s
Вероятность обратного перехода из состояния s з состояние г
за интервал времени At можно записать в форме, аналогичной
(3.21);
piTS) (г, t\ ~Ь А£ I s, £i) = vlrs) (у, £i) A£-f о(Дг).
(3.23)
Рассмотрим теперь изменение плотности вероятности /(у. s, t)
процесса со случайной структурой за малый интервал времени
At = t—t\ с учетом переходов из одного состояния в другое и
обратно. В соответствии с (3.11) и с учетом (3.21) — (3.23) за¬
пишем: связь между /(у, s, t), /(у*, s, 11):
:(У,М) = j i | y*, s, (s, «| -s, c/y3*
— oo
n 00
J /(y\ s, ii)p(sr)(s7 t\r, «!> g<sr) (У, t\ У', h)dyr.
+ 2
r=l^s __e
(3.24)
47
Подставив выражения для р{У¥) и p(sr) из (3.22) и (3.23), получим
/(у- S, 0= J Ку*, s, 0)/(У, s, 11 у*, s, fj)
r=J
dy* +
Yl ^
+ Ы 2 ) /(y\ r, /,) V 'r; (у', *i)g(sr) (у, г | у', ?j)dy' + о (At).
r=I^S
(3.25)
Первое слагаемое в выражении (3.25) характеризует эволюцию
плотности вероятности только за счет реализаций, остающихся
в 5-м состоянии, т. е. без изменения структуры. Остальные сла¬
гаемые определяют те изменения плотности вероятности, кото¬
рые обусловлены переходами из всех других в 5-е состояние.
Преобразуем выражение (3.25), подставив в него из (3.20)
значение переходной плотности вероятности /(у, s, £ly*, s, t\)
при фиксированном 5. После выполнения операций интегриро¬
вания с учетом 6-функции Дирака получим
/ (У, М) = / (у, s, fj) — AtVl 1а<£) (у, *,) / (у, s, ij] -f
П
+ 4-AfVj {V;[D(*)T(y, *,)/(У, S, h)]V- д< 2 v(r,)(y^ 0)/(У, s> *1) +
r=ly^S
n 00
-r At 2 ' ^(5Г) (У', Ш(У\ '% 0)?(5r) (У, 0у\ h)dy'+0 (Д0
r=]^S_oc
(5 = 1, Tl). (3.26)
Вычтем из правой и левой частей (3.26) функцию /(у, 5, £i)
и разделим на At, после чего перейдем к пределу при Д£->-0.
Предполагая существование предела
Jim —s’ t} ”/(у’ Л'- 0) _ дИХ±А±Л
Д*-»0
At
dt
получим следующие уравнения:
■Ну;‘' ” = - v; и» (у, о / (у, s, i)j +
+ 4v;iv;[Dw,<y,<)/<y,M)]r- 2
r=l^S
v(rs) (У, t)f{у, s, i) -
— j v<«-) (y', 0 / (y', r, 0 ?(Sr- (y, 11 y', t) dy'l (s = 1, n). (3.27)
— oo
Система уравнений (3.27) представляет собой обобщенные
уравнения Фоккера— Планка — Колмогорова для марковского
разрывного процесса с распределенными переходами. Все урав¬
нения связаны между собой за счет наличия взаимных перехо¬
дов, характеризуемых функциями v(rs) (у, t) и v(*r)(y, t).
48
Эти уравпепия можно записать также в более короткой форме:
r=l^S
v(rs) (у, t) / (у, s, t)
(s = 1,tz), (3.28)
где л (у, s, t) = а<*)(у, 0 / (у, М) — fVj [D(s)T(y, I) f (у, s, г)]Г-
Последнее выражение представляет собой вектор плотности по¬
тока вероятности /(у, 5, £) при фиксированном 5. Уравнения
(3.28) следует рассматривать при заданных начальных условиях:
/(уо, s, to) и грапичпых /(±°°, s, 0 = 0.
При независимой марковской смене структур, т. е. при пуас-
соновских переходах, не зависящих от фазовых координат с ин¬
тенсивностями переходов v(rs)(£), v(sr)(£), уравнения (3.27) при¬
нимают вид
df (У, t)
— (у, s,t)~ ^
dt
t=i^s
v<«) (/.)/(у, s, t) —
— v<sr> (t) j /(y', r, t) q^ (y, £|y', t) dv'
(s = i,n), (3.29)
где условная функция плотности вероятности восстановления
реализаций qisr) (v, £|у', it) нормирована к единице.
Вид функции g(sr) определяется физическим содержанием за¬
дачи и характеризует начальные условия при восстановлении
процесса в s-м состоянии при переходе из r-го состояния. Могут
иметь место различные условия восстановления, определяемые
функциями q{ST). В частности, если
?(!Г) (У, fly', f) = 5(y-y'), (3.30)
то восстановление точное («я^есткое»), т. е. конечные условия
процесса в r-м состоянии совпадают с начальными в s-м состоя¬
нии (рис. 3.2).
Если условная плотность восстановления
<7<£г,(у, fly', f) = 6(y-T<s)(f)), (3.31)
то имеют место несвязанные условия восстановления. При вос¬
становлении процесс всегда начинается с заданной функции вре¬
мени Ч(5)(£) (рис. 3.3).
Если условная плотность вероятности не зависит от преды¬
дущего состояния
g(sr)(y, fly', f) = <P(s)(y), (3.32)
то имеет место общий случай процесса с несвязанными усло¬
виями восстановления.
4 и. Е. Казаков и др. 49
В общем случае условная функция qf*r)(y, fly', t) может
иметь произвольный закон распределения фазового вектора у(i)
в состоянии s при заданном у'(f) в состоянии г.
Аналогично тому, как было получено обобщенное уравнение
для функции /(у, s, f), выводится уравнение для функции
У
/V
Рис. 3.2. Точное восстановление
реализаций
Рис. 3.3. Несвязанные условия восста¬
новления
/(У, s, fly', 5, t'). Для этого надо воспользоваться уравнением
(3.11) и для малого интервала времени Af = f —fi при
записать связь между /(у, s, fly', s, t') и /(v*, 5, fily', 5, f')
с учетом смены структуры:
оо
/(У, S, О у'. 0=j /(У*, S, *i|y',s, *i)
x / (у- s, г|у*, s, tt)
1 — At 2 v(rs> (У*, *i)
r=l=^S
dv* 4-
-Г A* 2 ] /(y*, X i'| y', s, t) (y*, fj) X
r=l^S -oo
X g(,sr) (y, f I y*, fx) dy* -f O (Af). (3.33)
Подставим в правую часть формулы (3.33) из (3.20) выра¬
жение для /(у, 5, fly*, s, fi) при фиксированном 5 и выполним
интегрирование с учетом 6-функции Дирака 6(у —у*). В резуль¬
тате получим
/(У, Ml у', ^ 0 = /( У» h\y'i s> п —
— AfVy [a(s) (у, fx) / (у, 5, fx | y\ s, t.')\ -jr
+ 4_А^(УДВ(8)т(у, 0 / (y, s, ^ | y', s, f) ]}T-
— At 2 v<«) (y, ^)/(y, s, <i|y\M') +
r=l^S
71 7
+ A< 2 1 v(sr) (y*. *i)/(y*» h\ y'. s, О X
r==l7^S OO
X <7<s,) (у, «11 y*, tx) dy* + о (At). (3.34)
50
Вычтем из правой и левой частей уравнения (3.33) функцию
/(у, s, £ily', s, £'). разделим результат на Д£ и перейдем к пре¬
делу при At 0. В пределе получим
*/<У» *Ц1У-л£'.0 = _ (у, s,t\y',s, ?) -
п ( ~
— 2 v(ra) (у, о/(у, *, *|у', s, t')— J vw (у*, г) х
>•=1^ I -00
X/(у*, Г, 11 у', S, f)g<sr> (у, г I у*, t)dy*\ (s = t,n); (3.35)
где
л (У, «, * 1 У', О = a(s)(y, О /(У, s, t\y’,s,t') — .
__^(VJ[D<s)T(y, г)/(у, s, *|у', s, *')])’. (3.36)
Уравнения (3.35) следует рассматривать при начальных ус¬
ловиях /(у, s, £|у', 5, ^) = б (у — у') и граничных /(±°°, 5, Z|y\
5, £') = 0.
Для систем с независимой сменой структуры при пуассонов-
ском процессе s(t) из (3.35) получаем
А/(У> *1у', t') _
Ot
= — v£i(y, s, t |y',s, *')— 2
T—l^S
v<™> (0/(y, S, t |y\ s, <') —
— v<"> (t) j /(y*, r, 11 y', s, r)2(sr) (y, t\y*, t')dy*
(s = 1, re).
(3.37)
Для функций /(v, 5, /с) и /(у, 5, fely', 5, Z) в дискретных си¬
стемах со случайной структурой, подчиняющихся уравнениям
(1.3), которые описывают марковскую разрывную последователь¬
ность при распределенных переходах, справедливы рекуррент¬
ные процедуры. Так, для /(у, s, к) в соответствии с (3.27) ре¬
куррентная формула следующая:
/(у, S, к+ i) = / (у, 5, к) — V^Ajt (у, s, к) —
- 2 гп
r=l^S
v(rs) (у, к) i(у, s, к)
— j v<"-> (у*, к) /(у*, г, /с) gr<s,’)(у, АI у*, /с) dy*
— оо J
(й; = 0, 1, 2, ...; 5 = 1, га).
4*
(3.38)
51
..Диалогичная рекуррентная формула справедлива для
У (у, S, к | у', s, I):
у (у, s, к + 11 у', s, I) = /(у, s, к | у', s, I) —
71
r=.l^S
V(rs) (У, О /(у, S, Л-1 у', S, I) —
— j v<sr) (у, А') / (у, s, А’ | у', s, I) qW (у, к | у*. A) dy* (s = 1, n),
сю
(3.39)
где Ал (у, 5, к) = Тп л (у, 5, &) и Ал (у, 5, Аг[ у', 5, I) =
= Гпл(у. 5, /Ну', 5, Z) — приращения векторов плотности потока
вероятностей / (у, s, /с) и /(у, s, /Ну', .9, Z) соответственно.
§ 3.4. Функции плотности вероятности разрывных
процессов при сосредоточенных переходах
В процессах с сосредоточенными переходами смена состоя¬
ний связана с достижением реализациями y(Z) границ некоторой
области в фазовом пространстве. Схематически такой процесс по¬
казан на рис. 3.4, где граница между состояниями 5 и г обозна¬
чена детерминированной функцией y{rs) (t).
Будем основываться на предположении, что смена структур
па границе описывается условным марковским процессом s(t)
с вероятностями переходов, за¬
висящими от фазовых коорди¬
нат, расположенных на некото¬
рой граничной гиперплоскости.
Выведем уравнение для функ¬
ции плотности вероятности
/(у, 5, t) рассматриваемого мар¬
ковского разрывного процесса
с сосредоточенными пере¬
ходами.
Рассматриваемый марков¬
ский процесс, описываемый
уравнением (1.1) на интерва¬
лах постоянства s(Z), является обычным случайным непрерыв¬
ным процессом. На этом интервале для процесса у (t) справедли¬
во уравнение Фоккера—Планка — Колмогорова. Запишем его
для функции /(у, 6', t) при s = const в форме (3.7)
Щ±Л = -^уП( y,s,t). (3.40)
Рассмотрим малый интервал времени At = t — t\. На этом ин¬
тервале с точностью до величин более высокого порядка мало¬
Рис. 3.4, Процесс с сосредоточенны¬
ми переходами
52
сти чем Дt представим уравнение (3.40) в конечно-разностном
виде
/(у, 0 = / (у, Sr *1) — AtWln (у, s,t) + o(At). (3,41)
Изучим процесс смены структуры на малом интервале At.
Часть реализаций процесса у(£) остается непрерывной, а часть
достигает границы y{rs) (t) — у (I) = 0, и процесс переходит в новое
состояние. Наконец, возможен обратный переход реализаций
процесса у (t) из других состояний. Важно отметить, что здесь,
в отличие от распределенных переходов, смена состояний про¬
исходит только на границе y(rs)(t). Строго говоря, если реализа¬
ция процесса у (t) достигает границы y(rs) (t), то за время Дt она
пересечет этот уровень бесконечное число раз. Это связано с тем,
что реализация марковского процесса является функцией недиф¬
ференцируемой и имеет весьма изрезанный вид. Поэтому опреде¬
лять факт перехода в другое состояние по единичному пересе¬
чению уровня yirs) (t) нельзя, так как в этом случае процесс пере¬
хода будет неординарным. Вследствие этого, так же как и при
распределенных переходах, приходим к интегральным характе¬
ристикам оценки факта пересечения границы за конечный малый
интервал времени At. Это оправдывается инерционностью физи¬
ческих систем в режиме смены состояний. Интегральной характе¬
ристикой является вероятность пересечения уровня y'rs)(t). т. е.
перехода из состояния s в состояние г.
Определим вероятность смены состояния 5 на состояние г за
время Д£, которую обозначим p{rs) (t). Эта вероятность есть ве¬
роятность пересечения уровня y{rs) (t) или перехода процесса в
другое состояние за время At, она соответствует вероятности пер¬
вого выхода процесса за границу y{rs) (t) па этом интервале. Пусть
в момент времени t\<t плотность вероятности в 5-м состоянии
была /(у, 5, 11). а вероятность нахождения процесса в этом со¬
стоянии, т. е. до уровня y{rs){t), следующая:
yW
P(5)Ci)= j /(Y,s,t)dy. (3.42)
— оо
Примем, что область существования процесса у (П в состоянии s
лежит в пределах от — оо до y{rs) (t). Граница yirS! {t\) является
поглощающей для процесса в 5-м состоянии. Вследствие Этого
плотность вероятности и плотность потока вероятности л (у, 5, t)
при нахождении у в области с состоянием г равны нулю. Исполь¬
зуя формулу (3.42) и интегрируя уравнение (3.41) в пределах
от — оо до y{rs) (ti), определим вероятность перехода p(rs) (t) из
состояния 5 в состояние г за время Дt = t — t\:
y(rs)
p(rs) (Д) = p(s) ф _ p(s) (t — At) = — At j Vjn (y, 5, t) dy. (3.43)
—oo
Полученная вероятность перехода пропорциональна At. Это под¬
53
тверждает сделанное ранее предположение оо ординарности пе¬
реходов.
Поскольку в г-м состоянии вектор плотности потока вероят¬
ности л (у, г, ?.) равен пулю, то на границе y{rs) (t) этот вектор
испытывает скачок. Следовательно, его надо представить так:
я (у, S, I) 1 (у<«) — у) =
= [му, s, 0 i (уГ — Ух) • • • %(у, t) — ynJ]T, (3.44)
1Ыг°-уО={^ yi^yt; i(y(rs)—y) =|
10, г/i > г/i I
где
lb yi<yir5), л.л—!1, yT.s'
k0. VGS.
Выражение для V3n (у, 5, t) на основании (3.44) принимает вид
VjJ[n(y, s, 1)1 (y<r!'> — у)] =
= (Кк (У- s. О) 1 (У{ту> — У)' ■ (п«- я (У, s, О) б (У(ге) — У), (3.45)
где п". — единичный вектор внешней нормали к поверхности p(rs),
а (п,°г.-я(у, s, i)) — скалярное произведение векторов:
71У
(n*s• я (у. s. /)) 6 (i/<ri> — у) = 2 (у, s, *) б (г/1Г5) — г/i). (3.46);
г=1
Теперь с учетом (3.45) формулу (3.43) можно переписать, рас¬
ширив интервал интегрирования до бесконечности:
ос
рО» (/) = _ м J [v£ji (у. s, t) 1 (г/О5) _ у)] dy —
— ос
оо
— At j (п?»-я(у, s, г)) б (г/(г8) — y)dy. (3.47)
— оо
Первый интеграл в (3.47) равен нулю, так как при уг = ±-оо вы-
ражение [я (уи .г/(_х, уи yi+1, уПу, s, = 0, что
доказывается прямым вычислением:
ОС Пу оо
j [v£h(v, s, 0Hy(rs) — y)]^y = 2 j t11 (у, s,t)]y.=±QO dy& = 0,
— OO * 1 —oo
где dyW = dyx... dyidyi+1 ... dyUy.
Следовательно, вероятность перехода процесса из состояния s
в состояние г при сосредоточенном переходе определяется фор¬
мулой
p(rs) (*) = _ Д* (п°в.;гф<г*>, 5, t)).
Вероятность перехода при сосредоточенных переходах про¬
порциональна вектору плотности потока вероятности. Таким сб-
54
разом, с учетом смены структуры на границе у
(гз)
уравнение
(3.41) для системы со случайной структурой принимает вид
/(У, t) = f(Y,s,t — At) — Ai(v£n(у, s, t)) 1 (у '4- — y) —
— At (п?,-я (y, s, t)) 8 (p<rs> — у) + о (At). (3 .48)
Рассмотрим теперь марковский разрывный процесс с сосредо¬
точенными переходами общего вида. По определению, данному
ранее, этот процесс состоит из отрезков непрерывных или непре¬
рывнозначных марковских процессов и имеет сосредоточенные
скачки переходов из одного состояния в другое и обратно на
границе областей их существования.
На основании выражения (3.48) для общего вида марковско¬
го разрывного процесса с сосредоточенными переходами запишем
конечно-разностное уравнение для первой функции плотности ве¬
роятности /(у, s, t) на малом интервале времени At с учетом
прямых и обратных переходов реализаций:
/ (у, А*, 1) = /(>-. S, t - At) — At (yin (у, s, t)) 1 (y<r>> — y) —
— At 2 (пм-л (у, s, t))8(y^
X) ■
r=l^S
n ^
2 J (n?r • л (у, Г, t)) б (у— у) д(*г> (у, 11 y\ t) dy'
(s= 1, n).
(3.40
Второй член в правой части (3.49) учитывает переход из s-ro
состояния в любое г-е, третий — обратные переходы из каждого
r-го в s-e состояние.
Вычтем из левой и правой частей (3.49) /(у, s, t — At), раз¬
делим на Д£ и перейдем к пределу при At — 0. В результате по¬
лучим: обобщенное уравнение Фоккера — Планка — Колмогорова
для плотностей вероятности разрывного марковского процесса с
сосредоточенными переходами:
6/(у, *, ?1 = _утя(у> S) t)_
dt
- 2
T=ly^S
(п®5-я(у, s, t))8 (p(rs) — y) —
— j (п°г.л(у\ г, i))6(p<sr> — y')g(sr)(y, t[y',t)dy'
(s = 1, n),
(3.50)
где принято, что существует предел
/(у, S, 0 — / (у. s> 1 — At)
]im
дг-*о
At
df (у, s, t)
Л •
55
У первого слагаемого в правой части формулы (3.50) опущен
множитель l(z/(rs) — у), так как процесс рассматривается в об¬
ласти существования реализаций состояния ,s\ где функция
1(»(гв)-у) = 1.
Аналогичным путем получается обобщенное уравнение для
плотности вероятности перехода /(у, s, £|у', s, Г) с учетом со¬
средоточенных переходов
■'> _ - (у, М|у%*. О -
(п?8-л(у, S, Чу', S, i'))S(l/(rs) — у) —
— j (n®r-л (у*, г, Чу', M'))8(y(sr) — y*)g(sr) (у, Чу*, О^у*
— со
(5 - 17Й). (3.51)
Начальные условия для уравнений (3.50) должны быть заданы
в виде /(уо, 5, £о) (5 = 1, гс). Для уравнений (3.51) начальные
условия имеют вид б (у — у7) (5 = 1, п).
Граничные условия для функций /(у, s, £) и /(у. s, £|у', я, £')
нулевые при у = ±оо.
Для дискретных систем, описываемых уравнениями (1.3), при
сосредоточенных переходах уравнения (3.50) и (3.51) имеют ре-;
курреитпую форму и характеризуют эволюцию плотностей веро¬
ятностей марковских разрывных последовательностей у(&).
Функция плотности вероятности такой последовательности с уче¬
том смены структуры определяется по формулам
/(У, *, к -г 1) = / (у, 5, к) — УуДл (у. s, t) —
_ У т
Zj 1 п
r=l^s
(п«-я(у, s, Jc))6(yW — у)
— j (n?r- я (у', г, /г)) б (у<sr> — y')g(sr) (у, /с | у', О dy'
— оо
(5=17»; А = 0, 1,2, ...). (3.52)
Для функции плотности вероятности перехода последователь¬
ности у (к) справедливы такие рекуррентные формулы:
/(у, S, * + 1 I у', 5, /) = /(у, s, к I у', 5, 1) — VTyAn (у, s, /с | у', s, i) —
(n?s-n(y, s, к I у', s, Z))6(j/(rs) — у) —
j (п®г-я(у*, г, /Чу', s, l))b(y(sr) —y*)g(sr) (у, /сIу*, k)dy*
-ОО
(8 = 17я; А = 0, 1, 2, ...). (3.53)
]
56
К динамическим системам со случайной структурой с сосре¬
доточенными переходами относятся также такие, у которых сме¬
на структуры происходит под воздействием сигнала логико-ди¬
намического блока. В логико-динамическом блоке компоненты
вектора состояния у (t) взаимодействуют друг с другом и выра¬
батывается сигнал переключения данной структуры па другу го
в соответствии с заданной логикой протекания процесса. При
этом переключение происходит всегда при достижении реализа¬
циями процесса некоторой границы или порога, формируемых
в процессе функционирования системы [6].
§ 3.5. Функции поглощения и восстановления
Удобной интерпретацией рассматриваемых марковских раз¬
рывных процессов [yT(£)i s(t) ]т в системах со случайной сменой
структуры является модель с поглощением и восстановлением
реализаций. Такая модель состоит в том, что в некоторый слу¬
чайный момент времени реализации одного процесса исчезают,
а возникают реализации другого процесса или восстанавливаются
прежние [4, 28]. Если в каждом состоянии функционирование
системы характеризуется некоторым непрерывным или дискрет¬
ным случайным процессом у(£), то переключение из одного со¬
стояния в другое (смену структур) можно рассматривать как
поглощение реализаций данного состояния, а включение преды¬
дущего — как восстановление. Указанные переходы могут совер¬
шаться в случайные моменты времени по закону изменения дис¬
кретного процесса s(t). Такой скачкообразный переход, как уже
указывалось, может совершаться во всей фазовой области изме¬
нения переменных, в заданной области или па граничных гипер¬
поверхностях. т. е. при достижении: фазовыми координатами .не¬
которых значений (границ). В сущности, эта модель развивает
широко используемое представление о поглощающих или отра¬
жающих границах (экранах). Кроме поглощающих и отражаю¬
щих границ вводятся еще области поглощения; могут иметь ме¬
сто случаи, когда вся область существования процесса одновре¬
менно является и областью частичного поглощения реализаций...
Отличие заключается также в том, что вместо случайного про¬
цесса в заданных границах рассматривается процесс в бесконеч¬
ной'области, по с областями поглощения и восстановления реа¬
лизаций при пулевых граничных условиях в бесконечности.
Модель марковского случайного процесса у(t) с поглощением
и восстановлением реализаций в соответствии с законом изме¬
нения процесса s(t) позволяет развить единый подход к решению
ряда важных практических задач с распределенными и сосредо¬
точенными сменами структур. На каждом пеперекрывающемся
временном интервале существуют реализации определенного про¬
цесса. В случайные моменты времени отти прекращают существо¬
вание (поглощаются), но возникают скачком новые реализации
57
другого процесса со своими начальными условиями, может быть,
отличными от конечных предыдущего состояния.
Введем локальные функции поглощения [}(у, 5, t) и восста¬
новления V (у, 5, t) реализаций марковского разрывного процесса
в уравнениях (3.28) при распределенных и в уравнениях (3.50)
ври сосредоточенных переходах. С учетом формулы (2/12) эти
функции можно записать в общей форме для рассматриваемых,
систем случайной структуры в .s-м состоянии
(Чу. = 2 Pwmin)(y,t), (3.5/1)
т= 1 y^.s
2 р(г)(0т(,г)(у. О, 0-55)
7—l^s
где р{т) (t) — вероятности состояний, в которых находится
система; г, 5 = 1. п; j>(rs)(y, t), J(sr) (у. t) — компоненты функций
поглощения и восстановления.
Компоненты функций поглощения и восстановления при рас¬
пределенных переходах имеют вид (3.28):
Prs)(y, t) = Vri>(y, t)fS) (у, t),
(3.50
T(,r) (у. Ч~= ) vlf''} (у'. О /(,) (у'; 0 9(sr) (у, 0 у'’ 0 ЙУ'
(5, г = J, /г; г ^ 5).
Компоненты функций поглощения и восстановления при сосре¬
доточенных переходах имеют вид (3.50):
Р1г#)(у,«) = (п?4-я<г;(у, о)б(г/(Г5) — у),
г О-57)
T(lf) (у, 7) = j (н“ • (у. 0) 6 (у(гг) —у')g(,r) (у. 71 у'. О dy'
(г, s = 1, п; Г =5= s),
где
•■п"0 (у. 7) = тф- ^ (>з ^ 0 == a(s) (у. О /(4) (у. *) —
Г (О
- -f 1 v* 1°(5)т (у-*>7(0 <у> *>] 'т е = lT«). (з.58>
Введенные функции р(у, .s, t) имеют смысл поглощения
5-го состояния или стока вероятности, а функции 7 (у, .s, t) — вос¬
становления 5-го состояния или истока вероятности в точке у
в момент t. При распределенных переходах поглощение и вос¬
становление реализаций происходит во всей области существо¬
вания процесса с условными интенсивностями поглощения
■v(TS)(y, t) и восстановления v(sr)(y, t). Локальные функции по¬
глощения и восстановления при распределенных переходах про¬
порциональны плотности потока вероятности процесса.
58
При сосредоточенных переходах поглощение к восстановлению
реализации случайного процесса происходит на некоторой гра¬
нице (пу — 1)-мерной гиперповерхности y(ril (t) — у (t) = О, разде¬
ляющей Ну-мерпую область фазового пространства. Локальные
функции поглощения и восстановления при сосредоточенных
переходах пропорциональны плотности потока вероятности про¬
цесса. Это имеет место, например, в задачах типа срыва управ¬
ления, в задачах захвата информационного сигнала, в некоторых
задачах надежности и других. Гиперповерхность, по существу.,
является поглощающим экраном — границей, на которой проис¬
ходит поглощение п восстановление реализаций марковских
процессов.
В конкретных задачах в качестве гиперповерхности может
быть гиперсфера с центром, смещенным относительно начала
координат. Тогда уравнение это/'! гиперповерхности следующее:
где г*— координаты центра гиперсферы. В некоторых задачах
удобно гиперповерхность — границу смены структур процесса
представить в виде поверхности щ-мерного параллелепипеда с
боковыми плоскостями, перпендикулярными к координатным осям
фазовых переменных системы. Тогда гиперповерхность можно
задать координатами граней с,., dh гиперпараллелепипеда по каж¬
дой фазовой координате ук. Формула (3.56) в этом случае примет
вид
где nск, nd.h— орты внешних нормалей к граням гиперпараллеле
нипеда; у£ — орт положительного направления фазовой коорди¬
наты г/h. Функции 4(sr)(y, t) (3.57) также запишем в виде
Характерными являются также задачи, в которых захват ин¬
формационного сигнала происходит в некоторой области w..
Обычно такой областью является моле чувствительности прибора
или устройства отображения информации. При попадании реали¬
заций процесса в эту область захват происходит не мгновенно
Реализации процесса могут покидать эту область. Чем больше
реализаций процесса могут попадать в эту область и чем дли¬
S (1Г* - ГА)2 - Д2 = о,
тельнее время пребывания их в ней, тем увереннее обеспечива¬
ется захват сигнала, т. е. поглощение реализаций. Целесообразно
в этих задачах принять функцию поглощения в виде
п
Р(У,М) 2 С (у) v(,s) (у, *)/(У,«. t), (3.61)
r=l^S
где
fl, у^ н\;
(о, yero (s = l,re),
а функцию восстановления — в виде
„ ос
Т(У>М) = 2 ) с (у) v<8'-)(y', t)/(}■', г. t)q(‘r>(y, t \у. t)dy'
Г=1=^ Joe
(s=J7n). (3.62)
Как следует из изложенного, функции поглощения и восста¬
новления реализаций для всех рассмотренных марковских раз¬
рывных процессов могут быть записаны в общей форме.
Общая форма записи функций поглощения и восстановления
реализаций удобна в том отношении, что уравнения (3.28) и
(3.50), а также (3.29), (3.38), (3.51), (3.52) можно рассматри¬
вать в бесконечной области фазового пространства с учетом ну¬
левых граничных условий в бесконечности. Функции поглощения
и восстановления автоматически учитывают смену структуры
системы во всем фазовом пространстве или на поглощающих и
отражающих границах. Аналогичные функции поглощения и вос¬
становления реализаций случайных процессов в системах со слу¬
чайной структурой можно ввести для условных вероятностей
переходов /(у, s, tiy*, *9, £*). Формулы (3.54) — (3.58) сохраняют
вид с заменой функций /(5) (у, t) на /(s)(у, £|у*, £*) и п{8) (у, t)
на я(в)(у, £|у*, £*). Рассматриваемые функции поглощения и.вос¬
становления являются локальными, так как характеризуют .со¬
ответствующие процессы в точке с координатами у(t) или на
границе yirs}.
Функции поглощения и восстановления реализаций дают воз¬
можность рассмотреть круг практических задач, решаемых с
помощью прикладной теории марковских случайных процессов.
Учет функций поглощения и восстановления реализаций случай¬
ных .процессов приводит к изменению количественных характе¬
ристик оценок вероятностей, но не изменяет физической сущности
рассматриваемого процесса, т. е. не нарушает свойств марковости.
Последнее следует из локального характера функций поглоще¬
ния и восстановления.
Компоненты локальных функций поглощения и восстановле¬
ния м.ожно представить в виде матричных функций В* (у, t) и
60
Г* (у, t). Матричная функция поглощения В* (у, t) имеет вид.
ГР(11) (у, О ... Р(1П) (у, 0]
B*(v. t) =--= (3.63)
LP(nl)(y, t) ... p<nn)(y,f)J
Диагональные элементы l6(ss) (у, t) матрицы В* (у, I) выражаются
через элементы соответствующего столбца формулами
X(SS)
(>\ t)
. \]
r=lj£s
Р<Г8)(уЛ) (« = !,«)•
(3.64)
Это вытекает из формул (2.60), (3.54) для распределенных пере¬
ходов. Аналогичное утверждение можно доказать для сосредото¬
ченных переходов.
Матричная функция восстановления Г* (у, t) следующая:
Г* (4\ t) =
Y(n) (у, t) ..
.. Y(ln> (у, t) ~
Л(П1)(У. О •'
.. т(пп)(у, t).
(3.65)
Диагональные элементы ^{ss) (у, I) матрицы Г* (у, t) выражаются
через псдиагопальные элементы строки:
у-(у. 0
V
т(5,)(уЛ) 0 = 1,0-
(3.66)
Структура матриц поглощения и восстановления характе¬
ризует направления и интенсивности переходов. Так, если у
матриц (3.63), (3.65) отличны от нуля (кроме диагональных)
только элементы, прилежащие к диагонали, то возможны взаим¬
ные переходы между ближайшими структурами 5, s + 1 и s -г 1, з
или s— 1, s и s, s— 1 с разностью в один номер. Если матрицы
Рис. 3.5. Процесс с распределенным
поглощением реализации
Рис. 3.G. Процесс с сосредоюченньш
поглощением реализаций
поглощения и .восстановления треугольные, то возможны одно¬
направленные переходы в направлении возрастания или убывания
номера состояния. Например, если у матрицы (3.63) отличны от
нуля компоненты верхнего треугольника, а у матрицы (3.65) —
компоненты иижпего треугольника, то переходы совершаются
только в направлении увеличения номера состояния. Если мат¬
61
рица (3.63j является нижней треугольно]! с компонентами, от¬
личными от нуля, а матрица (3.65)—верхней треугольной с
компонентами, отличными от нуля, то в системе возможны пере¬
ходы с уменьшением номера со¬
стоя пия.
Для матриц В* (у, t) и Г* (у, t)
справедливо следующее соотношение
при q{ST) (у, fly', г) = б(у-у'):
В*(У* t) = Г*т(у, t). (3.67)
Важным классом являются слу-
tf tz t3 ... t чайные процессы только с поглогце-
Рис. 3.7. Ветвящийся процесс нием реализаций. Для этих процес¬
сов Г* (у, /) = 0. Реализации таких
процессов либо вследствие распределенных (рис. 3.5), либо
вследствие сосредоточенных (рис. 3.6) переходов прекращают
существование в случайные моменты времени. Противоположным
классом являются ветвящиеся марковские процессы. Для них
матрица В* (у, £) = 0. Имеется порождающий марковский про¬
цесс, в случайные моменты времени появляются новые ветви
этого процесса, которые продолжают развиваться как марковские
процессы (рис. 3.7).
§ 3.6. Обобщенные уравнения
Фоккера — Планка — Колмогорова
В предыдущих параграфах были получены обобщенные урав¬
нения Фоккера — Планка — Колмогорова для разрывных марков¬
ских процессов с распределенными н сосредоточенными перехо¬
дами на основании рассмотрения характера переходов между
состояниями. Эти же уравнения можно получить другим, более
общим способом, исходя из закона сохранения вероятности, но
с учетом функций поглощения и восстановления. Такой способ
вывода уравнений не требует детализации характера процесса и
поэтому может быть применен к произвольным процессам со
случайной структурой [4, 28].
Рассмотрим п Гсу-мерных фазовых пространств, каждое из
которых соответствует определенной 5-й структуре случайного
процесса у(£) мультиструктурной системы. Для произвольного
5-го фазового пространства возьмем точку у= . .., Упу]т. Окру¬
жим эту точку замкнутой поверхностью AS (у) с достаточно ма¬
лым объемом Аи(у). Пусть плотность потока вероятности рас¬
сматриваемого случайного процесса в 5-й структуре характери¬
зуется вектором я (у, 5, t). Вычислим количество вероятности,
выходящей из объема Аи(у) через поверхность AS (у) за малый
интервал времени At, по формуле
— ДI ф (п°-л(у, 5, t))dS, (3.68)
AS(y)
где п°—орт внешней нормали к поверхности Д5(у).
62
Предположим, что во всей тгу-мерной области или в ее части
имеются истоки вероятности — поглощения реализаций и истоки
вероятности — восстановления реализаций процесса. Они харак¬
теризуются локальными функциями поглощения [}(у, 5, t) и вос¬
становления у (у, s. I). В силу этого в объеме Av(y) каждой 5-й
структуры существует еще поток поглощения вероятности за
время At. равный
{-Му, S. 0+Т(у, s> t)]Av(y)At. (3.69)
Поток (3.68) из объема Ду(у) через поверхность. Д5(у) и по¬
ток поглощения (3.69) в этом объеме вызывают изменение веро¬
ятности за интервал времени At, которое можно оценить так:
ЛМу)[/(У, s, t + At)-f(y, s, t)]. (3.70)
По закону сохранения вероятности изменение вероятности в
объеме Ду(у) (3.70) равно сумме количества вероятности, выхо¬
дящей через поверхность (3.68), и поглощенной в этом объеме
(3.69):
Av (у) [/ (у, 5, t ~ At) — / (у, 5, *)] =
= — At (j) (п°-л(\\ 5, t))dS [— (3(у, 5, t) -[- у (у, s. /)] Av(y)At
ту)
dt
где
(.s* = 1, п). (->.71)
Разделив равенство (3.71) на AtAu(y) и перейдя к пределу при
At 0, Ду(у)-*0, получим обобщенное уравнение Фоккера —
Планка — Колмогорова
df <У’ *’ *- = — div л (у. .s', t) — Р (у, .s\ t) -f v (y, *, t) (s = 1, n),
(3.72)
lim f (y’ *’ * +— f (y, *• <) _ df (y, s, t)
д"о дг “ <Jl ’
ф (»°-л(у, s, l))dS
—— div л (y, .s', /).
Av(yHo Af(y)
Уравнение (3.72) должно интегрироваться при заданной на¬
чальной функции плотности вероятности в момент времени to
./ (Уо, 's', 0 = VoS) (Уо)
и нулевых граничных условиях в бесконечности при у = ±со
/(±°°, S, 0=0.
Аналогичные уравнения имеют место для функции плотности
вероятности переходов /(у, 5, Ну*, s, t\). Для их получения сле¬
дует повторить все изложенные рассуждения и преобразования
применительно к функции /(у, s, £|у*, 5, t\) и соответствующему
63
вектору плотности условного потока вероятности перехода
л (у, s, £ly*, s, t\). Эти обобщенные уравнения следующие:
р(у, S, Ду*, S. £i), 7 (у, S, t\у*. 5, ^)— функции ПОГЛОЩвНИЯ И
восстановления, аналогичные рассмотренным ранее функциям
Э (У, s, t), Y (у, s,t)_, но с заменой /(у, s, f) на /(у, s, if| у*.?, ^).
Уравнения (8.73) следует интегрировать при начальном ус¬
ловии
Для разрывных марковских процессов уравнения (3.72) и
(3.73) полностью определяют все их вероятностные характе¬
ристики.
§ 3.7. Обобщенные уравнения Пугачева
Многомерный разрывный марковский процесс также пол¬
ностью характеризуется двумя характеристическими функциями
,д(/\7 s, t) и g(X, s, £|у*, 5, t\). Для этих характеристических функ¬
ций можно непосредственно вывести обобщенные уравне¬
ния Пугачева или получить их преобразованием Фурье из
(3.72) и (3.73).
Применим преобразование Фурье, умножив (3.72) на ехр(^Пу)
и проинтегрировав в бесконечной области векторной перемен¬
ной у:
Для /дальнейшего преобразования этого равенства воспользуемся
формулой векторного анализа
6пхту div л (у. .**. /) = с!iv [eixT*n (у, .9, £)] — я (у, s, t) grady
64
— Р (у. 11 У*, s, h) У (у, s. 11 У*, s, tx) (s = 1, п), (3.73)
где
Л (у, s, 11 у*, s, tj) = а<*> (у, t) 1 (у, s, 11 у*, s, —
/(У, s, iily*, s, 10 = 6(у-у*)
и при нулевых граничных условиях
/( + оо, S, fly*, S, t1)= 0.
ОО
— оо
со
\ е°-т>' div я (у, .■?, t) dy — \ [f5 (у, s, i) — у (у, s, «)] dy
— оо
— оо
а также выражением
оо
g(l, s,t) = j ei^T5'/(у, s. t) dy.
—oc
После преобразований, с учетом выписанных формул п уравне¬
ния (3.29) для л(5)(у, £), получим обобщенные уравнения Пу¬
гачева
t)
dt
= j* (у, t) 1~ >/D(s) (у, t) X eikT*f(y, 5, t) dx —
—oo
oo
— \ eix-Ty[P(y. 5, t) — y(y, S, f)] dy (s = 1, n). (3.74)
— oo
Начальное условие для уравнении (3.71) также получается пре¬
образованием Фурье начального условия для /(ус» s, £о) ='фо(Уо):
ОС
g(Ks,t0)= j eilTy0\p0 (у0) dy0.
—ос
Аналогичные уравнения имеют место для g(X, s, t\y*, s, £i),
но с начальным условием g(X. s, t± \ y*, s, П) —
Характеристические функции равны единице при л = 0:
g(0, s, t)=i. g(0, s, fly* s, ti) = i.
Уравнение (3.74) удобно использовать при недифференцируе¬
мых функциях cc(s)(y, t) и D(s)(y, t). Кроме того, оно является
дифференциальным уравнением первого порядка относительно
фазовых координат у, что также имеет определенные преиму¬
щества при организации вычислений.
§ 3.8. Уравнения для вероятностей состояний
Функция плотности вероятности /(у, s, t) характеризует рас¬
пределение фазовых координат у (£) и вероятность структуры
s(t). Интеграл от /(у, s, t) по всей области изменения у(^) пред¬
ставляет собой вероятность состояния (структуры) p{s) (t) в мо¬
мент i
со
p{s)(t) = j /(у, S, t)dy. (3.75)
X!
«(s) ,
Получим для функции p(s) (t) дифференциальное уравнение.
Для этого проинтегрируем правую и левую части уравнения
(3.72) по у в бесконечной области с учетом формулы (3.75):
оо оо
P(s) (0 = — ( div л (у г s- 0 dY — J ГР (у, s, t) — у (у, s, t)] dy
II. Е. Казакоз к др. 65
Так как первый интеграл равен нулю в силу доказанного в § 3.5,
то уравнение (3.76) принимает вид
Формулы (3.78) выражают потоки поглощения и восстановления
вероятностей. Они характеризуют общую интенсивность погло¬
щения и восстановления вероятности в единицу времени в со¬
стоянии s.
Уравнения (3.77) и формулы (3.78) целесообразно преобра¬
зовать с учетом формул (3.52) и (2.13) к виду
щения и восстановления реализаций стохастического процесса
при переходе из состояния s в состояние г и обратно из г в s. Их
можно интерпретировать как интенсивности смены структуры
при взаимных переходах.
Уравнения (3.77) для вероятностей состояний с учетом (3.79),
(3.80) принимают вид
В частном случае при распределенных независимых перехо-
дах, когда Р(г5)(У> t) = v(rs) (t)fs> (у, t) и 4(sr)(y, t) =
= vUr) (t)fr) (у, t), при q{sr) (у, 11 у*, t) — 6( у —у*) и в соответст¬
вии с (3.80) Pps) (<) = V(rs) (i), y(pr) (t) = V<sp (г). Уравнения (3.81)
переходят в уравнения Колмогорова (2.54).
Уравнения (3.81) определяют не только вероятности состоя¬
ний процесса. Они могут служить также для определения функ¬
ции fs{t) плотности вероятности распределения времени перехода
из s-ro состояния:
функции плотности вероятности /s(£) существенно положитель¬
ны, а производные р{$) могут быть отрицательными при умень¬
шении вероятности состояния.
GG
р<*> = — (t) + (t) (S = 1, п),
(3.77)
где
оо
Рр * (0 = J Р (У, 5, t) dy, у^ (?) = j у (у, j. i) dy. (3.78)
— оо
T=l^s
п
— оо
оо
Г=1^5
(0 = J 7('г) (у, 0 dy. (3.80)
— оо
Величины PpS)(0 и Ург) (0 характеризуют интенсивность погло-
п
(s=l, п). (3.81)
Учитывая (3.77), запишем (3.82)’ в следующем виде:
■fs (t) = 2 [p(r) {t)Vpr)(t) — p(s) (t) (t)] sign p(s) (t) (s = 1, re). (3.83)
r=l^S
Используя формулы (3.83). можно определить числовые вероят¬
ностные характеристики времени перехода процесса из каждого
(s)
s-ro состояния — математические ожидания mt и дисперсии
D(ts):
ГУО оо
niiS) = j т/s (т) dx, Dts) = [ (т — m^Yfs (т) dx, (3.84)
—со —оо
где fs(х) можно представить в виде
Д{ т) = 1р(,)(т)1.
Для дискретных импульсных систем, поведение которых при
фиксированном s описывается разностными уравнениями типа
(1.3) — (1.5). вероятность состояния вычисляется на основании
рекуррентной процедуры. Эта зависимость вытекает из уравне¬
ния (3.72), которое предварительно представим так:
/(у, к+ 1) = /(у, 5, k)-T*divn(y, s, к)-
-Гп[Ну, 5, к) + Тп*(у, 5, к) (5 = 1, п] к — 0, 1, 2, ...)’, (3.85);
где /(у, 5, /ъ)—функция плотности вероятности разрывной мар-
ков-ской последовательности [ут(&), $(к)]т.
Интегрируя левую и правую части (3.85) по у во всем интер¬
вале его изменения от -до со, получим
,р<*> (к +1) = ро(к) - тп 2 у*(к)р™(щ -pi*(к) ург)(/о]
Г=1#з
(й = 0, 1, **.; 5 = 1, п). (3.86)
§ 3.9. Условные обобщенные уравнения
для функций плотностей вероятностей
Обобщенные уравнения Фоккера — Планка — Колмогорова
целесообразно записать также для условных плотностей вероят¬
ностей fs) (у, t) для каждого s=l, п. Для этого воспользуемся
уравнениями (3.72) и формулами (2.12), (3.54). Подставляя
(2.12) в (3.72), получим
dfM^' t] (0 = - pW (0 div я<*> (у, t) - рЫ (t) /(s) (у, t) -
— 2 lP(s) (0 §(rs) (У, t) — (г) y<-sr> (y, 01 (s = 1, n), (3.87)
r=1^3
где
Л(.) (У) t) = ф) (J- t) ,(«> (y> f) - 4- {VS [D(S>T (у, 0 /<*> (y, 0] ]T. (3.88)
5* C7
Разделив правую и левую части уравнения на p{s) (t), получим
условные нормированные обобщенные уравнения Фоккера —
Планка — Колмогорова
at = “div я<5) г) ~ /(S) (У- ~
п
V
л-1
T=l^s
Л, 4\ Р(г)(0
ГДу, 0-
Р(4)(0
(у. 0
(s=l,n). (3.89)
Используя (3.81), уравнения (3.89) запишем в виде
('/(s)(y. t)
dt
— div (у, t) =
2 [p(rs)(y,0-S77 7(sr)(y,o]
r=i^-s P \4 J
n
V
r=l^s _
r(«) ^ ' (0 „<«>•) m
{1)~7^Р)Ъ {t)
P’( y,t), (s = 'l,re). (3.90)
Эти уравнения необходимо интегрировать совместно с (3.81) и
формулами (3.80) для заданных функций P(r5)(y, t) и 'Y(sr; (у, t)
при начальных f(s> (уо, О), p{s) (tо) (5=1, к) и граничных
/‘в) (±°°, 0=0 условиях.
Аналогичные уравнения имеют место для функции
/(£)(у> *1у'. * ):
■df(S) (Y’/f |у>< П = - div л<*> (у, 11 у', I’) -
- 2 [р05ЧуЛ1у\О-4^у<5г)(у, Ну', oV
r=i-^s L ^ J
r=l7^S
/(S) (у, 11 y\ t') (s = 1, re). (3.91)
Начальные условия при интегрировании этих уравнений
/<s)(уо, to\y', U) = 8(у0 — у'), а граничные fs)(±°t\y\ t') = 0..
При интегрировании уравнений (3.91) совместно с (3.81) сле¬
дует учесть формулы для [l(r5;(y, t\у\ £'), 7(5Г)(У» О 11 Ф°Р“
мулы
со оо
РГ (0 = j P(,’s) (У, 11 У'- П dy, Тр7> (0 = f (у, 11 у', Г) dy.
Нормированные обобщенные уравнения Пугачева для g(s] (к, t)
и g{s) (X, t\y\ t') могут быть получены, если умножить уравнения
(3.90) или (3.91) на ехр [Хгу] и проинтегрировать по у в беско¬
нечных пределах.
68
r(s)
В частности, уравнения для характеристических функций
(Я, t) имеют вид
gg(s) а
dt
со
dl = J [*ята<*> (у, «) - ± }JD(S) (у, t) я] e^yf] (у, г) dy -
71 г-
— 2 j eUTy Р(г,) (УЛ) - 4^7? Y(*r) (уЛ)
r=iy:S
<*У +
r=l^S
(г)
(s = M). (3.92)
Совместное интегрирование уравнений (3.92) и (3.81) при на¬
чальных условиях g{$) (Я, £о) и p{s) {to) (s = 1, тг) в общем случае
возможно только численное.
В дискретных импульсных системах, характеризуемых мар¬
ковской непрерывнозначной последовательностью в каждой струк¬
туре s, аналогом нормированных обобщенных уравнений Фокке-
ра — Планка — Колмогорова являются рекуррентные соотно¬
шения
/(5) (у, к + 1) = fs) (у, Я) — Та div (у, t)
- 2 Тп Р(м)(уД0-^>г)(уЛ)
р \К)
+
-ь 2 т*
T=l^s
f(s) (У, О (s=l,n). (3.93)
Эти формулы совместно с (3.86) представляют замкнутую си¬
стему рекуррентных соотношений, из которых определяются
/(5)(у, к) и p(s) (к) при к = 0, 1, 2, ... Аналогичный вычислитель¬
ный алгоритм имеет место для функции /(s)(y, fcly*, к).
Такие же обобщенные рекуррентные формулы могут быть по¬
лучены для характеристических функций g{s) (к, к):
gW {к, к 1) = (Я, к) 4-
со
+ Тп J [гЯта<*> (Я, Я) - 4 ЯТБ(5) (у, Я) я] e^/w (У, *) -
— ос
71
~ 2 ^ jj е^У р<«)(У|Я)-^|у<“-ЧУД-)
T=1^s
(Я)
dy
f 2 2’П[^(Я
7'=1^S L
Р<г) (Я) ^(sr)
P(s) (Я)
^YpSr)W
g(s> (Я, Я) (s = 1, re). (3.94)
69
§ 3.10. Уравнения для вероятностных моментов
Уравнения (3.72) или (3.90) служат для определения функ¬
ций плотностей вероятностей /(у, s, t) или /(s)(у, t). Их интегри¬
рование в аналитическом виде возможно только в простейших
случаях. Для численного интегрирования разработаны специаль¬
ные методы, но они связаны с большим объемом вычислений.
Несколько проще интегрирование уравнения для характеристи¬
ческих функций. Но для получения функции плотности вероят¬
ности необходимо еще дополнительно выполнить преобразование
Фурье.
Во многих практических задачах достаточную информацию о
процессах дают вероятностные моменты, для которых на основа¬
нии (3.72) или (3.90) можно получить дифференциальные урав¬
нения. Предварительно запишем формулу, выражающую безус¬
ловный начальный момент любого порядка через функцию
/(У, s, t):
п “
«лС) =2 J Uh(y)f(y,s,t)dy, (3.95)
где
Uh(y) = i/1i...ynvv (h1 + ... + hny = h; h = 1,2,...).
Формулу (3.95) можно представить также в виде
иА (*) = 2 х45) (0 pW (t) (ft = 1,2,...), (3.96)
S=1
где y^\t)— условные начальные моменты фазового вектора:
оо
ytf (t) = J uh (у) fs) (у, t) dy (s = ГДг; ft = 1,2,...). (3.97)
—oo
Дифференциальные уравнения для моментов (г) получим,
если умножим левую и правую части (3.72) на Uh(\), проинтег¬
рируем по у п просуммируем по s:
71 7.
хЛ = — 2 J Uh (у) div л (у, s, *) dy —
S=1 _
— 2 j ^л (y) [p (y, S, 0 — V (y, S, *)] <^y (/I = 1, 2, 3, ...). (3.98)
Преобразуем правую часть вырая^ения (3.98) с учетом фор¬
мулы (3.93) и формул
£/ft(y)div:x(y, 5, = div [*Л(у)я(у, s, f)] -ят(у, s, i)grad, Uh(y),
(3.99)
j div [С7Л(у) я (у, 5, f)]dy = 0.
70
Формула (3.99) является следствием нулевых граничных усло¬
вий вида
я (У. 0 = 0. (3.100)
Для доказательства второй формулы (3.99) запишем этот интег¬
рал в виде
j div [Uh (у) л (у, s, t)\ dy =
оо П7. / ОО
= J 21J 4[г7л(у)я(у’'5-'<)]й4^(г!)’
ОО ^ = 1 ' ОО /
где
dyW = dy1 .. •.dyk—\dykjrl ... йуПу.
Вычислим интегралы по yk в последней формуле, используя
формулу (3.100). В результате получим
ОО 71,,
, ?/
j div [Uh (у) л (у, s, 0] dy = f У {[С/Л (у) д (у, 5, dyM=0,
— ОО
так как выражения в фигурных скобках равны нулю.
С учетом формулы (3.99) уравнение (3.98) принимает вид
п г
= 2 J Лт (у, S, 0 gradyL'/, (у) dy —
S=1 _
71
- X f t^A (у) IP (У, S, *) - 7 (У, dy (h = 1, 2, 3, ...).
*=1 -со
(3.101)
Для первого начального момента — вектора математического ожи¬
дания x\(t)= m(t) из (3.101) имеем
n f » «; ]
m = Д j j (у, s, f) gradyy dy — J у [0 (у, s, t) — у (у, s, <)] dy|.
(3.102)
Для второго начального момента v.2(t)=<&(t) из (3.101) получаем
” \ 7
Ф = 2 ) лт (У, s, t) gradyyyTdy —
s=l (_vre
— j УУТ № (У, s, t) — у (у, s, *)] dy . (3.103)
— oo j
Уравнения (3.101) можно записать в другой форме, если вос¬
пользоваться выражениями (3.54), (3.55) для функций р(у, s, t)
71
— 2-2 \ Uh(у) [pW (t) P(rs) (у, t) — pw (t) Y^) (y, *)] dy. (3.104)
5=1 T=1^S
Начальные условия при интегрировании этих уравнений суть
Хл,(*о) хЛ0 == 1, 2, ...).
Для условных начальных моментов х^^), определяемых фор¬
мулами (3.97), можно получить дифференциальные уравнения,
если умножить левую и правую части (3.90) на Uh(у) и проин¬
тегрировать по у в бесконечной области:
Д5)= J п(*>т(у, f)gradj,C/T/l(y)dy —
П ~
“ 2 J ^(У)
r=l^=S
P(rs)(y, 0
_££дц<")(у. t)
(i)
dy-f
n r
2 k
ra=l^S L
м«-Й?Г(о
(s)
y-h
(s = 1, n: /г = 1,2,...).
(3.105)
Аналогичные уравнения имеют место для безусловных r|,,(i)
и условных т)д) (<) центральных моментов:
(0=2 \ Uh (у — т) / (у, s, 0 dy,
s=i-0
<S) ,
£ГЛ(У — m) = (yx — ?n1)"i • • • (уПу - mr,y)hn,J,
Uh (y — mW) = {if! — m[s))hi ...{уПу —
^h = hi -j- ho -f- ... -j- huy] h = 2,3. .. .
(3.106)
Для получения уравнений, определяющих эти центральные
моменты, следует правую и левую части (3.72) или (3.90) умно¬
жить на С//г(у — ш), затем для т]Л проинтегрировать по у и про¬
суммировать по S-, а для T]/iS) только проинтегрировать по у.
Б результате после преобразований получим
п ~
?1Л = 2 j (У, s, 0 gradyUh (у — m) dy —
s=l-o
— 2 I uh (y — m) [f, (y, s,t) — y (y, s, f)] dy {h = 2,3,...),
«=1 -00
(3.107)
OO
11Л '’ = j ^(S)T (У, t) gradVUh (y — m«) dy —
— oo
n 5X5 Г -I
- 2 f uh (У - m(5)) Р(Г5) (У.*) - Д77777 v(sr) (У. *) dy +
r=l^sJio L P КЧ J
+ 2 |ppS)C) —7i77^T(sr)(o]4s) (s=l,n; A = 2, 3, ...).
T=ly£s L P \г) J
(3.108)
Между моментами цн и т)/^ существуют более сложные связи,
чем (3.96). Далее запишем эти выражения для конкретных мо¬
ментов.
Полученные системы уравнений для r\h, являются
бесконечными и, следовательно, незамкнутыми. Для практиче¬
ского использования их следует ограничиться определенным по¬
рядком вычисляемого момента и тем самым уменьшить число
уравнении. На этом основаны приближенные методы исследова¬
ния, которые будут рассмотрены в гл. 4.
Для безусловной корреляционной матрицы, т. е. второго
центрального момента г]2(£) = 0(£)? получаем уравнение
71
0 = 2 J (У, t) grad„ (у — ш) (у — m)Tdy —
5 = 1-00
п со
— 2 Иу — т) (у — П1)т IP (у, S, *) — Y (у. * л)] <*У- (3.109)
s = l -'со
Соответственно для условных моментов m(s) (t) \ 0(3)(£) = x(2s)
и 0(s) (t) = ц(2S) имеем уравнения
со
m« = j л(«)т (у, t) grady у dy —
— oo
П °° г -I
— 2 V (y — m<s)) P(rS) (у» 0 —1^7777 y(ST) (У> *) dy
r=l#sXoo L p (4 J
(3.110)
73
Ф(8> = j n<s>T (у. t) grad;, (yyT) dy —
—oo
П
- 2 j (уут-Фи>)
Р(Г5) (УЛ)-^Т^7(,Г)(У, i)
r=ij£s
oo
©(s) = i n<s> (y, t) grady (y — m(s)) (y — mW)Tdy —
dy, (3.111)
• 5 [(y — mW)(y — mW)T — 0(s)]
r=i^s _'M
P(rs) (У, t) -
■ P ■»(«•) (y t)
p‘»v)
dy (s=i,n). (3.112)
Между моментами m(t), m(s)(f), Ф(t), <I>u,(f)', @(t), 0U)(t)'
существуют зависимости вида
П П
m (t) = 2 P(s) (0 m(3) (О? [Ф(0 = 2p(s) (*) Ф(3) (О? (3.113)
3=1 Ь S=1
Ф(£) = 0 (£) -(- in (£) mT (£). Ф(Ю(£)= 0(s)(£) -f m(s) (*) m<s>T (*),
(3.114)
® (Q = 2 p(s) (*) {0(s) (0 -г [m(s) (t) — m (t) (m(s) (0 — m (*)]T1.
(3.115)
Оценка точности системы базируется на понятии ошибки си¬
стемы
в(*) = У(0-У»(0. (3.116)
где Ут(*>—теоретическое значение фазового вектора системы.
Для вероятностных моментов ошибки г справедливы формулы,
аналогичные (3.111) — (3.113):
?1
m8(t) = 2
S=1 (3.117)
©e (t) = ,2 P(s) (t) (0(e5) (t) -Г [rn(es) (f) — m£ (t)] [mis5 (t) — (t)YI,
S = 1
где
me (t) = M [e (t) ], 0e (t) = M{ [e (t) - m£ (t) ][e{t)- me (t)}T}.
При детерминированном векторе ут(0 математическое ожи¬
дание вектора те(£) и дисперсионная матрица 0е(£). ошибки си¬
стемы связаны формулами
п
те (<) = 2 P(s) С) m(s) (t) — ут («), (3.118)
S = 1
■ е8 = е. (З.И9)
74
Численное решение дифференциальных уравнений (3.102) —^
(3.112) практически реализуется на цифровых вычислительных
машинах. Вычислительные процедуры организуются на основе
какого-либо приближенного дискретного способа записи интег¬
рала, для чего предварительно производится дискретизация диф¬
ференциального уравнения. Возможность реализации такой про¬
цедуры (сходимость вычислительного процесса) зависит от шага
дискретизации Тп. В ряде задач шаг дискретизации следует брать
малым. При его увеличении вычислительный процесс может
стать расходящимся. С другой стороны, при очень малом шаге
дискретности может накапливаться арифметическая ошибка. Это
обстоятельство надо иметь в виду.
Дальнейшие преобразования уравнений для моментов связа¬
ны с типом исходных дифференциальных уравнений системы и
видом функций распределения /(у, s, t) и /(5)(у, t), а также с
характером процесса смены структуры. Для линейных дифферен¬
циальных уравнений системы (1.2) и распределенных условных
марковских переходов смены структур функции плотности ве¬
роятности /(5)(у, t) можно принять гауссовскими. Они зависят
от двух моментов: вектора m(s)(£) п матрицы 0(s)(£) (s=l, п).
Уравнения для этих моментов (3.110) п (3.112) можно преобра¬
зовать следующим образом. Для линейной системы (1.2) вектор
сноса а{3) (у, t) и матрица диффузии D(s) (у, t) в соответствии с
формулами (2.38), (2.40) следующие:
a(s)(y, t) = AM(t)y + Ws)(t)u(t),
D‘s)(y, t) = FM(t)G(t)¥MT(t).
Условный вектор плотности потока вероятности д(в) (у, t) на
основании формул (3.29) и (3.88) принимает вид
л<«> (у, t) = [A(s) (t) у -г B(s) (t) u] /(s) (у, t) -
“ 4 tF<S) (*) G W F(S)TW ^ (У* 0]. (3-121)
Полагая условные функции
у, t] у*, t) = б (у-у*),
подставляя л(5)(у. t) в правую часть уравнения (3.110) и учи¬
тывая (3.54), (3.55) и (3.81), получаем
m<*> = A(s) (t) m<s> -г Вw (t) u (<) -
71 1* Г
— 2 I (у— m(s))
r=l^s L
v<«> (У, t) fs)(y, t)- v(-)(y, t) fr)(y, t)
Pw(t)
dy
(3.122)
(s = l, n).
75
Аналогично преобразуются уравнения для матриц 0(5) (t):
000 = А(.) ф 00) 0(»)А(«>х ф + F« Q щ F(s)T щ _
п
— 2 1 [(у — rn(s))(y — т(*))т — e(s)]x
r=l#S
X v(") (у, t) /(s) (у. f) - vC-> (y, i) /(r) (y, t) dy (s = ITT).
I' \г)
(3.123)
К уравнениям (3.122), (3.123) следует присоединить еще (3.81),
которое представим в виде
n(s)
—рм 2 J
v(rs) (У) f) /s) (у, t) —
?’=l^s —оо
nO)
~ ^v(sr) (у. *) /(г) (У. *)
dy (s=l,n). (3.124)
Система уравнений (3.122) — (3.124) замкнута и интегриру¬
ется при начальных условиях
m(s) Со), 0(s) (У, рм (У, 2 PW (У = 1 (s = О).
S=1
В частном случае при пуассоновском процессе смены состоя¬
ний, т. е. при v(er)(y, t) = v{sr)(t) и v(rs)(y, t) = v{rs)(t), из (3.123)
и (3.124) получаем
m(s) = д(в) ф m(s) _L_ g(*) ф ц _
- 2
r=l^S
v(sr) (t)
p(r) w
p(s) (t)
(m(s) — mM)
(s = l,re), (3.125)
0(o = A(«) 0c«) + @(«>AW* (j) _l p<*) (q g (t) F(S)T (0 —
n ( (r) )
— 2 v(sr) о [0<s) -0(r) - (m(r) - m(s)) (m(r) - m(s))T]
r=i^s ^ P S (0 '
(s = lTii), (3.126)
a (3.124) принимает вид уравнения Колмогорова (2.54) :
п п
рМ-^-рМ 2 V<")(t)-f 2 p(r)v<sr> Ц = ГДг). (3.127)
r=l^S r=l=^S
Из формул (3.95) и (3.106) можно получить начальные и
центральные взвешенные вероятностные моменты фазовых ко¬
ординат, если воспользоваться выражением их через функции
76
/(у, $, t). Так. из (3.95) имеем
Xft (0 = 2 у/Р (0 (h = 1,2,3,...), (3.128)
S = 1
где
со
'Л5>(0 = j (у)/(у, S, ОО = 1, «)- (3.129)
—оо
В частности, из (3.129) при h = 1 получаем начальный взвешен¬
ный момент первого порядка уд) (£) = p(s)(Z):
оо
,H(S)(0 = j у/(у, s, *)<*У (s = 1, и)* (3.130)
—оо
Из формулы (3.106) получаем
ЧА(*)= Ур/Эо (Л = 2,3,...), (3.131)
5=1
где
оо
Р(р (г) = j Uh (у — I»(s)) / (у, S, г) dy (s = 1, re). (3.132)
— оо
Из (3.132) при h = 2 получаем центральный взвешенный мо¬
мент второго порядка:
оо
Q(s)(i)= J (y_m«)(y —m(s>)T/(y, s, *)dy (s = l,re). (3.133)
— oo
Дифференцируя (3.130) частным образом no t, получим
оо
•lW= Jy3/(y f)dy. (3.134)
— оо
TT /о ло/\ (У’ 0
Подставляя в правую часть (о.134) выражение для ^
из (3.72), получим систему уравнений
оо
= j Ят (у. s, г) grady у dy —
— ОО
оо
— j y[P(y, М) —Y(y. М)1<*у (s = 1, re). (3.135)
-—оо
Дифференцируя (3.133) частным образом по £, получим
оо
Q(s) = j (у - т<!>) (у;- т<5>)Т df (у^' t] dy. (3.136)
—эо
77
df (.У, s, t)
Подставляя в правую часть (3.136) выражение для gt
из (3.72), получим
оо
Q(s) = j лт (у, 5, t) grady (у — liiW) (у — m<s))T dy -
— J (У — m<*>) (У — m<s>)T $ (у, s,t) — y (у, s, t)] dy (5 = 1, n).
CO
(3.137)
Второй начальный взвешенный момент в виде матрицы
получается в форме
оо
Y(s) (t) = j уут/ (у, 5, t) dy. (3.138)
— 00
Для матрицы Wis) можно получить следующие дифференциаль¬
ные уравнения:
оо
Y(f° = J лт (у, s, t) gradyy ут dy —
— 00
00
— j У Ут IP (у, s,t) — y (у, S, г)) ^у. (3.139)
— оо
Между безусловными моментами m(t), Ф(£), 0(0 и р(д)Г
TF(S)(£), Q{s) (t) существуют зависимости
m(0=S|iW(i), Ф(0 = 2т<*)(0,
£=1 £ = 1
(3.140)
0 (t) = 2 (t) -г f(s) (t) р(5)т (о] ~ m (0 тТ (0-
6—1
Взвешенные моменты ti(s)(£), Tr(s)(i), Q(s)(£) и нормирован¬
ные моменты m{s)(t), Фи)(£), ©{s) (t) связаны между собой зави¬
симостями
f(s) (t) = pis} (0m(s) (0» (0 = p(s} {t)®(s) (t),
(3.141)
Q<->(f) = p(e> (*)©<*>(*).
Дальнейшие преобразования уравнений для взвешенных мо¬
ментов связаны с типом исходных уравнений и видом функции
/(у, s, t) и производятся аналогично тому, как это показано для
нормированных моментов.
Для дискретных систем, поведение которых характеризуется
кепрерывнозиачиой последовательностью в каждой структуре s
ы описывается уравнениями (1.3) или (1.4), вероятностные мо¬
78
менты определяются из соответствующих рекуррентных формул..
Они могут быть получены на основании рекуррентных соотноше¬
ний (8.93) или путем дискретизации выписанных в данном па¬
раграфе уравнении для вероятностных моментов.
§ 3.11. Общие рекуррентные формулы для вероятностных
характеристик дискретных систем
Динамика дискретных стохастических систем с.о случайной
сменой структуры, описываемых уравнениями (1.3) — (1..6), при
произвольном (не малом) интервале дискретности Тп является
более сложной, так как на одном интервале дискретности струк¬
тура может измениться. Для таких систем с непрерывнозыачнок
.векторной последовательностью у (Л) нетрудно получить рекур¬
рентную формулу, с помощью которой можно определить функ¬
цию плотности вероятности. Вывод такой зависимости основы¬
вается на рассмотрений разностного уравнения общего вида
(1.6). Уравнение (1.6) можно рассматривать для каждого интер¬
вала дискретности как функциональную зависимость между зна¬
чениями последовательностей у(/г). g(A) и у(А-Ь1) при извест¬
ных структурах системы. Перепишем его в следующем виде:
где введены обозначения для номера структуры в моменты к и
к+ 1: s(A) = r, s(A-rl)=s (А = 0, 1, ...). В частных случаях
структура системы за период дискретности может не изменяться.
Бри фиксированных у(А) = х, s, г, А-г 1, к правая часть
(3.142) является функцией с (А). Тогда на основании этой функ¬
циональной зависимости при известном законе распределения
§(А) находим условную функцию плотности вероятности вектора
у(А+1) = у при фиксированных х, s, г, А + 1, к [54]. т. е. функ¬
цию вероятности перехода от х к у:
где Ъ ==> фр(х, с, г, §, к + 1? А)^ уР(к+ 1), р = 1, щ, к) —
закон распределения вектора с (А). Интеграл в (3.143) распрост¬
ранен по всем значениям компонентов вектора, при которых вы¬
полняются соотношения, записанные внизу знака интеграла.
Теперь на основании теоремы полной вероятности запишем
формулу для безусловной функции плотности вероятности
/(у, 5, А+1) в момент к -f 1 с учетом вероятности смены струк¬
туры за рассматриваемый дискретный интервал:
у (А 4-1) = <р(у (А), s, г, |(Л), А* -г 1, А), (3.142)
/и (у, /*+1 i X, $, г, к) =
Jd/s (i,A-)d I, (3.143)
/(у, S, к + 1) = 2 j /(X, Г, к) /п (у, к + 11 х, s, г, к) X
X q;>r) к + 11 г, к, x)dx (к = О, I, (3.144)
79
где qoS1\s, к — 1 | г, к, х) —условная функция вероятности смены
структуры.
Формулы (3.143) и (3.144) определяют расчетную итера¬
ционную процедуру для вычисления безусловной функции плот¬
ности вероятности /(у, s, &+1) марковской непрерывиозиачной
последовательности при заданном, как правило, гауссовском за¬
коне распределения дискретного белого шума \{к). Вероятность
s-й структуры дискретной системы может быть вычислена, если
выражение (3.144) проинтегрировать по переменной у:
Условные функции плотности вероятности /(5) (у,к + 1) теперь
следующие:
В частном случае одноструктурной системы (s = 1) эти фор¬
мулы принимают следующий вид итерационной зависимости:
Для линейной одноструктурной системы, описываемой урав¬
нением (1.4), формула (3.147) принимает вид
где Ъ = х(к) + А(к)х(к)+В(к)и(к) + ¥(к)с(к)<у(к + 1).
Для рассматриваемой системы формулу (3.146) можно пре¬
образовать п получить функцию плотности вероятности в явном
виде, так как при гауссовском законе распределения к)
плотность вероятности /п (у, к+ 1, х. к) ташке гауссовская. В этом
случае имеем
1 1 —ОС L — °°
где Ъ =фР(х, 1, к)<ур(к + 1), к = 0, 1, 2, ...
со
/ (У, к - 1) = j / (х, к) J dF% (%. к) dx, (3.148)
со
dx, (3.149)
где
Л = |Н(*)|; H = F(A)es(A)FT(fc);
A* = [у (А; + 1) — m(/c + 1) ] ТН [у (А + 1) — m(A + 1) ];
ш (к + 1) = [I + А(к)х(к)+ B(fc)u(A)]F_! (к).
80
На основании полученных рекуррентных формул для безуслов¬
ных функций распределения разрывных марковских последова¬
тельностей можно вычислить вероятностные моменты вектора
состояния системы. Так, вектор математического ожидания фа¬
зовых координат системы в каждой структуре s определяется по
следующей рекуррентной формуле:
Матрица корреляционных моментов 0и)(/с+1) для каждой s-й
структуры определяется по формулам
Формула (3.144) — рекурреитпая, связывающая плотности ве¬
роятности вектора состояния системы на (&+1)-м шаге счета с
плотностью вероятности этого вектора на к-м шаге. Она является
дискретным аналогом обобщенного уравнения Фоккера — План¬
ка— Колмогорова (3.72). При численных расчетах в (3.144)
интегрирование заменяется суммированием. Условная плотность
вероятности перехода /п(*) в (3.144) находится аналитическими
или численными методами с помощью формул (3.143) или дру¬
гих известных формул для закона распределения функции слу¬
чайных аргументов.
В инженерных расчетах пользоваться формулой (3.144) не¬
удобно, ибо она в большинстве случаев не дает никаких преиму¬
ществ по сравнению с методом статистических испытаний на
имитационной математической модели. Однако аналогично* не¬
прерывному анализу эта формула служит основой для вывода
более простых, хотя и приближенных рекуррентных формул (ре¬
куррентных уравнений), определяющих вероятности состояний
структуры и моменты фазовых координат (3.145), (3.150),
(3.151). Для того чтобы воспользоваться этими итерационными
формулами, необходимо знать функцию /(у, s, t) на каждом ша¬
ге. Это реализуется в приближенных методах вычислений, изла¬
гаемых в следующей главе, с помощью аппроксимации /(у, s, t),
функцией заданного вида.
''•=1 -оо L-CO
х (s) п. , 9оТ) (s> к -'г 11 г, К х)dx dy. - (3.150)
Р \Л’ в
со
j / (х, Г, к) /п (у, А* -г 1 I X, s, г, к) X
— оо
(3.151)
ii! л а в a 4
ПРИБЛИЖЕННЫЕ МЕТОДЫ АНАЛИЗА СИСТЕМ
СО СЛУЧАЙНОЙ СТРУКТУРОЙ
§ 4.1. Основы приближенных методов
Как показано в гл. 3, для системы со случайной структурой,
заданной стохастическими дифференциальными уравнениями,
задача отыскания закона распределения вектора состояния сво¬
дится к решению обобщенных дифференциальных уравнений Фок-
кера—Планка — Колмогорова (3.72) или обобщенных интегро-
дифференциальных уравнений Пугачева (3.74).
Даже численные решения этих уравнений, не говоря уже об
аналитических решениях, вызывают значительные трудности.
Поэтому в научной литературе, ориентированной на прикладные
задачи, много внимания уделяется приближенным методам ре¬
шения [4, 28, 32].
Наибольшее распространение в прикладных исследованиях
получили метод статистических испытаний, метод линеаризации
по Тейлору и метод статистической линеаризации [31].
Достоинствами первого метода являются универсальность и
гибкость по отношению к изменениям исходной модели, недостат¬
ками— большое время счета вследствие необходимости повторе¬
ния опытов, трудность генерации устойчивых исходных случай¬
ных последовательностей, сложность оценки точности получен¬
ного результата и др.
Второй метод основан на линеаризации нелинейных функций
путем аппроксимации их конечными отрезками многомерных ря¬
дов Тейлора, составленными только из линейных членов. Этот
метод позволяет найти вектор математического ожидания и мат¬
рицу корреляционных моментов фазовых координат, не зная их
закона распределения и не делая никаких предположений о его
виде. При этом имеют место наименьший порядок уравнений и
наиболее простые выражения для коэффициентов по сравнению
с другими приближенными методами (за исключением, разуме¬
ется, метода статистических испытаний).
Третий метод — метод статистической линеаризации [24, 31] —1
близок ко второму методу и дает аналогичные по структуре урав¬
нения для первых двух вероятностных моментов. Выражения для
коэффициентов здесь сложнее и зависят от закона распределе¬
ния, который предполагается гауссовским. Однако это усложнение
оправдывает себя при анализе систем, содержащих существеп-
82
лые нелинейности и подверженных сильным случайным возму¬
щениям. Например, метод тейлоровской линеаризации может
давать неплохие результаты при анализе работы радиоэлектрон¬
ной системы в условиях естественных помех невысокого уровня.
Но в условиях радиопротиводействия необходимо учитывать
совместное прохождение через нелинейные звенья полезного сиг¬
нала и помехи, близких между собой по мощности. В этом случае
метод линеаризации по Тейлору заметно уступает в точности
методу статистической линеаризации.
Последний метод относится к группе методов параметриче¬
ской аппроксимации.
Большинство приближенных методов основано на аппрокси¬
мации неизвестной плотности вероятности или характеристиче¬
ской функции отрезком некоторого функционального ряда, что
позволяет перейти к более простым уравнениям для членов это¬
го ряда. Так, например, аппроксимация условных плотностей
вероятностей отрезками многомерных рядов Грама — Шарлье
дает замкнутую систему обыкновенных дифференциальных урав¬
нений для условных вероятностных моментов [13], а аппрокси¬
мация отрезками многомерных рядов Эджворта — аналогичную
систему уравнений для условных семиинвариантов [32].
Приближенный метод решения, основанный на разложении
плотности вероятности в ряд по ортогональным функциям, из¬
ложен в [32]. Этот метод аппроксимации обеспечивает совпаде¬
ние фактической и приближенной плотностей вероятностей с
точностью до законов распределения отдельных фазовых коорди¬
нат и их взаимных корреляционных моментов.
Аппроксимация условных плотностей вероятностей линейными
композициями гауссовских плотностей положена в основу мето¬
да. предложенного в [68].
Рассмотренные методы анализа, основанные на параметриче¬
ской аппроксимации, позволяют приближенно найти закон рас¬
пределения вектора состояния или вероятностные моменты выс¬
шего порядка. Однако широкого распространения в практике при
определении законов распределения эти методы не получили.
С ростом порядка исходной модели резко возрастают порядок и
сложность уравнений для вероятностных моментов высших по¬
рядков.
Из приближенных методов анализа наименьший порядок
уравнений для моментов дают методы двухмомептиой. параметри¬
ческой аппроксимации (в частности, метод статистической линеа¬
ризации). Параметрическая аппроксимация состоит в замене
искомых условных плотностей вероятностей /(5) (у, t) известными
функциями, зависящими лишь от первых двух условных момен¬
тов m(s) (t) и 0(s) (t).
Снижение порядка уравнений вызывает потерю точности вы¬
числений. Однако в условиях недостоверной априорной инфор¬
мации этот недостаток зачастую мало влияет на окончательную
точность результатов.
0* 83
Более серьезным недостатком, присущим всем приближенным
методам анализа, за исключением метода статистических испы¬
таний, является то, что изменение порядка исходной модели
вызывает существенное изменение уравнении для вероятностных
характеристик.
Тем не менее в задачах анализа числовых вероятностных ха¬
рактеристик стохастических процессов в динамических системах
методы двухмоментной аппроксимации в состоянии успешно кон¬
курировать с методом статистических испытании. Это наглядно
проявляется, например, в экономии времени расчетов при авто¬
матизации программирования и заданной точности получения
оценок.
Случайный скачкообразный характер процессов, протекающих
в системах со случайно изменяющейся структурой, заставляет
отдать предпочтение методу двухмоментной аппроксимации [12,
13, 72] перед методом тейлоровской линеаризации. Последний,
как уже было сказано, хорош только при небольших флуктуа¬
циях фазовых координат относительно своих не очень резко из¬
меняющихся средних значений. Являясь локальным методом
линеаризации, он принципиально не учитывает свойства нели¬
нейности в целом. Метод двухмоментной аппроксимации, в част-
ности статистической линеаризации, принципиально дает возмож¬
ность учесть особенности нелинейности при больших флуктуациях
фазовых координат в силу своей нелокалъности.
Другой конкурентоспособный метод — метод статистических
испытаний — не имеет существенный преимуществ при исследо¬
вании данных систем и поэтому в дальнейшем не рассматри¬
вается.
§ 4.2. Двухмоментная параметрическая
аппроксимация плотностей вероятностей
Как сказано в предыдущем параграфе, приближенные методы
анализа динамических стохастических систем со случайной струк¬
турой основываются на исследовании вероятностных моментов
фазовых координат, т. е. числовых характеристик стохастических
процессов. Уравнения для этих моментов любого порядка в об¬
щем виде были получены в § 3.10 на основании использования
(3.72) для плотности вероятности /(у, s, t) плп из уравнения
(3.74) для характеристической функции g(X. s, t). Рассмотрим
более подробно уравнения для безусловных вектора математиче¬
ского ожидания т(£), матрицы корреляционных моментов 0(£)
и вероятностей состояний p{s) (t) [12, 13, 72].
Напомним формулы, связывающие вероятностные моменты
фазовых координат, вероятности состояний и плотность вероятно¬
сти / (у, 5, t):
оо со
pW (t) = \ / (у, s, t) dy, m(?) (t) = J y/(s) (y, t) dy.
84
fs) (у- О = / (у, 0 !•'” (*), rn (*) = 2 m(s) CO P(s) (0•
S = 1
oo
0<S) (0 = j 1У — ni'-3) (if)] [y — m<s) (0V'fs) (у, 0 dY’ (4.1)
— CO
n
9 (0 = 2 [0(S) (0 т m(s) (<0m(s)T №] P(s) (0 111 (0 mT (O’
S=1
Дифференцируя no t левые н правые части формул (4.1) и
подставляя в полученные выражения правую часть уравнения
(3.72), получим (аргумент t у всех функций здесь и далее
опущен):
рМ = — 2 PpSVs) -Г 2 Yp”Vr) (S = 1, п), (4.2)
7't^S Гу
m(s> = «<?> - 2 (&$) -f m-1 2 Y^Vr\ ,, о,
r=£s ry^s
6(s) = + Am)T -f DpS) - 2 B^rs) + (p^)-1 2 Г(es Vr\
r^S v=£s
где
CO oo
Рр°Д j P(rs)(y)dy; Tpr)A j Y(sr)(y)dy;
—oo —oo
oo oo
ap!)A J a(i) (У) /(s) (У) dy; D£°A j D(s) (y) /(s) (y) dy;
—OO —oo
oo oo
P(irtS)A j P(rs4y) (y — m(i)) dy; у(тГ) A j у(зг> (y) (y — m«) dy;
— OO —CO
oo
A^A j a($) (y) (y — m(s))T /(s) (y) dy;
— oo
30
B(e"; a j §(r5) (y) [(y — mf3)) (y — m(s>)T — 0(s)] dy; (4.4)
—oo
oo
Г0Г'А f Y'sr) (y) [(y — m(s>) (y — mfs))T — 0(s)] dy;
2a 2 (r, s = 1, n; s=£r).
ГуА$ T=l=£s
Уравнения (4.3) интегрируются при начальных условиях, оп¬
ределяемых по формулам (4.1) на основании известных /(у, 5, to).
Для того чтобы система уравнений (4.3) была замкнутой, не¬
обходимо аппроксимировать неизвестные условные плотности ве¬
роятностей f(s) (у. t) известными функциями, параметрически зави-
35
сящимп только от первых двух искомых моментов m!s)(t) и в(в)(£)„.
Эти функции должны удовлетворять условию нормировки, а ин¬
тегралы (4.4), зависящие от них, должны выражаться через эле¬
ментарные или табулированные функции.
Например, во многих случаях для аппроксимации удобно ис¬
пользовать многомерное нормальное распределение или усеченное
нормальное распределение. Это объясняется двумя причинами:
эффектом «нормализации» законов распределения в инерционных
динамических системах высокого порядка н относительной просто¬
той получаемых уравнений [31]. Могут быть использованы и та¬
кие известные однопараметрические и двухпараметрические не¬
прерывные распределения, как бета-распределение (и его частные
случаи: равномерное, степенное, закон арксинуса), гамма-распре¬
деление (и его частные случаи: показательное, показательно сте¬
пенное, /^-распределение, закон Эрланга), распределение Стыо-
дента (^распределение), распределения Симпсона, Релея, Мак¬
свелла, Парето, логистическое распределение и F-распредедение.
Возможно использование и дискретных распределений, например
биномиального, геометрического, Паскаля, Пуассона, равномерно¬
го и др.
Параметры этих непрерывных п дискретных распределений
связаны с их моментами простыми алгебраическими формулами.
При численном решении уравнений (4.3) на ЭВМ может на¬
блюдаться ухудшение их устойчивости при малых значениях ве¬
роятностей р{8\ стоящих в знаменателях последних членов пра¬
вых частей. Во избежание этого приходится уменьшать величину
шага счета, что приводит к увеличению времени вычислений п
накопленной ошибки машинной арифметики.
Другой способ повышения устойчивости при численном инте-
трировании состоит в преобразовании уравнений (4.3) путем за¬
мены переменных
После такой замены уравнения (4.2), (4.3) принимают следую-
щий вид:
p(s) =m(s)p(s), Q(s) =.0(s)p(s).
(4.5)
тфз Tz^S
Ps) = 4VS) - p(s) 2 + 2
(4.6)
где
oo
oo
i Crs) (у) уВу, тГд j 7(sr)(y)^y,!
— oo
— oo
80
оо
^ А ) (у) (У — m(s)) (у — m(s>)T dy,
— оо
(4.7)
Г[Г' ^ ] y(sr) (У) (У — m(s)) (У —■ m(s))T dy.
— оо
Сопоставление (4.4) и (4.7) показывает, что между ними су¬
ществует связь в виде
Т<Г> = 7£г) + T'sr)m^),.
B^rs) = B^s) j- pprs)0(s), rL5r) = r^sr) + 7p r>0(s). (4,8)
Правые части уравнения (4.6) содержат операцию деления на
р{$) лишь под знаком функции р£в), ур7), aps), р[Г\ y(^r), Am -
Bqs), ГйГ), зависящих от m(s) и 0(s). Последние на основании
(4.5) выражаются через ц(5) и 0(s) формулами
m(s) = u(57p(s), ©(s) = Q(s)/p(s). (4.9)
Таким образом, приближенный анализ системы со случайной
структурой может быть проведен путем решения системы обык¬
новенных нелинейных дифференциальных уравнений (4.3) для
вероятностей состояний структуры р{8) условных математических
ожиданий вектора фазовых координат m(s) и условных матриц
корреляционных моментов 0(s) (s = 1, п) при фиксированных
состояниях структуры.
Безусловные математическое ожидание ш и матрица корреля¬
ционных моментов © находятся по формулам (4.2).
Вероятностные коэффициенты РР&), ypr), а(р5), p^s), B(es\
Г©г), Am, определяемые формулами (4.4), зависят от пара¬
метров условных плотностей вероятностей jf(s)(y, t). Эти парамет¬
ры являются известными алгебраическими функциями искомых
переменных m(5), 0(s) в зависимости от применяемой аппроксима¬
ции функций fs) (у, t).
На рис. 4.1 приведена струтстурная схема алгоритма определе¬
ния вероятностных характеристик систем со случайной структу¬
рой. Она дает наглядное представление о составе и внутренних
связях алгоритма определения вероятностных характеристик..
В частности, видно, что алгоритм определения вероятностных
коэффициентов 6 является нелинейной жесткой обратной связью.,
которая перекрестно соединяет между собой алгоритмы определе¬
ния вероятностей и условных моментов 1—3 и замыкает весь
алгоритм в целом.
Аппроксимирующие двухпараметрические законы распределе¬
ния выбираются на основании априорных данных, получаемых
экспериментальным путем или при помощи имитационных моде¬
лей. Удачный выбор закона распределения или множества за-ко-
87
боб во многом зависит от инженерной интуиции и опыта иссле¬
дователя.
Для отыскания наиболее предпочтительного закона распреде¬
ления из выбранного множества можно применить известные ме¬
тоды математической статистики.
При численном решении на ЭВМ удобной формой записи урав¬
нений может оказаться система (4.5) — (4.7) для взвешенных
Рис. 4.1. Схема алгоритма определения вероятностных характеристик со¬
стояния нелинейной системы со случайной структурой: 1—3 — алгоритмы
определения вероятностей и условных моментов (4.3); 4, 5—алгоритмы
определения безусловных моментов (4.2); 6 — алгоритм определения веро¬
ятностных коэффициентов (4.4); символ * означает блочный вектор, сос¬
тавленный из соответствующих условных переменных (т* — блочный век-
иор с элементами m(s), 0* — блочный вектор с элементами 0(s> и т. д., где
s = 1, п)
моментов jli(5) = p(s)m(s), Q(s) =• p(s)0(s), т. e. моментов, взятых с
весом р{3). Разностные уравнения, соответствующие (4.6). менее
чувствительны к величине шага счета и поэтому более устойчивы,
чем их аналоги, соответствующие уравнениям (4.3).
§ 4.3. Системы с условной марковской структурой
Для систем с условной марковской структурой функции погло¬
щения P(rs)(y> t) и восстановления 7(вг)(у, t) выражаются через
условные интенсивности переходов структуры v(rs) (у, t) к
,v(srJ(y, t) формулами (3.56) и при q{sr)6 (у* — у) имеют вид
ГЧУ. i) = v<~>(у, t)/(s>(У, t), (410,
Чиг)(У, it) =■ v<sr) (у, t)/(r) (у, t). ’
Поэтому выражения (4.4) для коэффициентов УрГ\ $кт\
У(т \ Bqs), Гег) принимают вид
оо
ЙГ'Ал’^А j v<rs> (у)/(s) (у) dy,
— оо
со
ург) сvpг) = f v(sr) (у)/(г) (у)
2p£,Av<l,) a f 2v(-)(y)(y-mW)/(s)(y)dy,
г 7^.S К со r^S
(4.11)
Tmr) A v^r' A j v<"> (у) (у — m«) fr) (у) dy,
— оо
со
2 Bes) A N©' A j1 2 v(rs) (у) [(у — т<5)) (у — т(3))Т — 0(,i)] f(s) (у) dy,
—оо T=j£s
СО
Г^Т) A N©r) A j yW (у) [(у _ mW) (у _ m(s))T _ 0(0] ^Г) (у) dy
— ОО
(S, Г= 1, 72).
Выражения для коэффициентов apS), D£°, остаются преж¬
ними и определяются выражениями (4.4).
В соответствии с (4.1.1) уравнения (4.2) и (4.3) для вероят¬
ностных характеристик запишем в форме
p(s) = _ 2 v^r3)p(s) -г 2 ^(рг)р(г),
r=^s r=^s
m(.) = 0£> _ (p(.))-1 2 vCVr), (4.12)
r^s
e(S> = Am} -f Am,T Dp ' - N©5) + (p(«))-i 2 N&V'>
r^s
(5 = 1, 72).
Если для аппроксимации fs) (у, t) выбрано гауссовское .рас¬
пределение, то часть выражений (4.11) упрощается вследствие
того, что
Остальные вероятностные коэффициенты, определяемые выра¬
жениями (4.11), в ряде практических задач при использовании
гауссовской аппроксимации могут быть найдены по формулам
для коэффициентов статистической линеаризации типовых нели¬
нейностей. Эти формулы приведены, например, в [24, 53].
Структурная схема алгоритма остается такой же, как в общем
случае (см. рис. 4.1). Структура алгоритмов 1—5 также не изме¬
няется. Изменяется лишь алгоритм 6 определения вероятностных
коэффициентов, которые вычисляются по формулам (4.11) и (4.4).
Заменой переменных jli(s) = p{s)m{s\ Q(s) =.р(5)0(,5> можно изба¬
виться от операции деления в явной форме на р($) в правых ча¬
стях уравнений (4.12). Как будет показано далее, это помогает
при реализации, моделировании и анализе алгоритмов. Уравнения
для взвешенных вероятностных моментов li(s) ii Q{s) и p(s) имеют
вид
рм = — 2 v(ps)p(s) -f S'Vp’V’0,
Гф5 T^S
= apVs) — 2 v[rVs) + 2 v[ir)P(r\ (4.14)
r^S r^s
Q<5) = (a£} + AmT-f Dg>) pW - N + 2 Ng Vr\
r#s
где
00 oo
vgrs)A j v(rs)(y)yfs)(y)dy, vgr)A J v<sr)(y)y/(r)(y)dy,
— OO — oo
oo
Nqs) A f 2 v<™> (y) (y — mW) (у — m(s))T /(s) (y) dy, (4.15)
oo
Nar) A \ v(sr> (y) (y — m<s)) (y — mf!))T fr) (y) dy.
— OO
Коэффициенты (4.15) и (4.11) связаны между собой выра¬
жениями
V™ = v™+v™mw, v<r> = v<T> + v<fr)mw,
= n(0s) + Ngr)= Ngr)-b vj,sr)e(,) (4.16)
(r, 5 = 1, 7l\ Г Ф s).
Для вычисления коэффициентов уравнений (4.14) удобнее
пользоваться выражениями (4.11) и (4.16), поскольку они проще
выражений (4.15).
90
§ 4.4. Непрерывные системы с марковской структурой
Для систем с марковской структурой интенсивности переходов
не зависят от фазовых координат: v(sr)(y, t)= v(sr) (t) (s. г = 1тгс;
s^r). Это обстоятельство заметно упрощает уравнения (4.12)
для вероятностных характеристик, которые принимают следую¬
щий вид:
p's) = — p's) 2 v(JS} + 2v(sr)р(r\
7*т»=о 7*7= S
пй5) = apS) -f (p(5))_1 2 v<sr)p(r) (m(r) — (4.17)
©(s)= A^ + A.;n)T-S- D« + (pM)-i 2 X
y r^s
X [e^ _ ©<s> 4- (m(r) _ m(.;) (m(D _ m(s))Tj (s =
Обыкновенные линейные дифференциальные уравнения для
вероятностей состояний р{3> в (4.17)—это известные уравнения
Колмогорова, не связанные с остальными уравнениями (4.17),
поскольку коэффициенты v{sr) (t) не зависят от m(s), :0(s).
Уравнения для математических ожиданий и корреляционных
моментов также существенно упростились по сравнению с (4.12).
Однако эти уравнения по-прежнему остаются нелинейными, так
как коэффициенты ар\ Ат и DpS) для нелинейной функции
<p(s)(y, t) определяются выражениями (4.4) и при двухмоментной
аппроксимации условных плотностей /(5) (у, t) будут зависеть от
m<*>(*), 0(s)(£).
Рассмотрим один практически важный класс систем со слу¬
чайной структурой. Пусть имеется линейная динамическая систе¬
ма с марковской структурой. В каждом из состояний структуры
система описывается линейными стохастическими дифференциаль¬
ными уравнениями, содержащими аддитивные и мультипликатив¬
ные белые шумы:
у = A(s) (t)у + В<-> (f )u(f) + [F(s) (t) + g(s) (0yT] s (t)
__ (4.18)
(5 = 1, n).
Эта система линейна по отношению к выходному сигналу у,
что можно наглядно показать, переписав уравнение (4.18) в виде
У - [A(s)(0+ g(s)(0 Iх (t) ] У + B(s) (t) u (t) + F(e) (t) I (t).
Отсюда видно, что линейная система подвергается как аддитив¬
ным (входным) возмущениям F(s) (£)£(£), так и мультипликатив¬
ным (параметрическим) возмущениям g(s) (£)%т(£).
91
Коэффициенты сноса и диффузии для этой системы согласно
общим выражениям (2.38), (2.40) определяются формулами
a(i) (У, 0 = А(5) (t) у + B(s) (t) u (t) -f
+ 4- g(s) (9 tr {[F(s) (t) -f g<s> (t) yT] G (f)l,
(4.19)
D<*> (y,. t) = [F“> (t) + g(s) (t)yT] G(i) [F<*> (t) + g<*> (t) yT]\
Подставляя (4.19) в (4.4), получаем выражения (аргумент t
опущен для простоты записи)
= A(SWS) B(s)u -f- g(s) tr [(F(i>) -J- g(s)m(,)T) G].
Ar^ = (A(s) -f ^ g(s)g'(s)TGj 0(s), (4.20)
Dw = (p<*) g^)m(S)T) g (F(s) -f g(*)m<s)T)T g<*>g<4>T tr (G €»(s)).
Уравнения (4.17) при этом принимают вид
p(s) r= p(S) 2 \’Й'5) '\7(sr)^)(r)?
r^S
m<4> = A(*W4> + B(s)u + 4sW tr t(FfS> ~ g(s)m<s>T)G] -f
“г (P(5))_1 2 (m(r> —
r^s
e'° = ^A(s) -f 4-g(s)g<5)TGj 0(s) + 0(s) ^A<s) + 4- g(s)g<s)TGjT -f '4‘21^
+ (F(s) + g(s)m«T) G(F(S) + g(s)m(s>T)T 4- g(s)g(s)T tr (G0(s)) 4-
4- (p(s))-1 2 V<sr>p(r> [0(r) — 0(s) -p (m(r) — m^)) (m(r) — m^4)T]
r^s
(s= 1, n).
Другим вариантом (с более сложной зависимостью между у(£)
и £(£)) линейной системы с марковской структурой и аддитивно-
мультипликативными возмущениями является система
y = A(s)(0y + B(s)(0u(0+ [F(s)(0+H(s)T(*)y]s(0, (4.22)
где Н{s)T(t)— блочный 72у-мерный вектор-строка, к-й элемент кото¬
рого есть квадратная матрица порядка пн\ %(t)—яентри-
рованный гауссовский белый шум с единичной матрицей интен¬
сивностей.
Коэффициенты сноса и диффузии для этой системы согласно
(2.38), (2.40) определяются выраяхениями
K(s) (у, t) = A(s) (t) у B(s) («) u (t) -b ая' (у, t), ^
B,s) (y, t) = [F(s) (0 H(s) (t) y] [F(s) (t) -f H(s) (t) y]T, (4-23)
92
где а(ц (у, t) — вектор, i-й элемент которого равен0,5 tr{H(ij*(r) х
X [H(S)T(£) у -l F(6) (£)]); H(i)* —квадратная матрица порядка пНг
ld-ш элемент которой равен iZ-му элементу матрицы НЙ: =
тт(5)
— nk{il).
Подставляя (4.2.3) в (4.4), получаем выражения (аргумент t
опущен)
аР = A(s)m(s) -j- B(s)u -f- аяр,
Am} = A(s)0(5) -f Agm, (4.24)
Dp} = (F('s) - H(s)Tm(,s))(F(s) + H'e)Tm<e>)T + Н(в)т0ОТв>,
где «яр— вектор, i-й элемент которого равен -y-tr
-j-F(s))J; Ант—’ матрица, ij-й элемент которой равен
2 tr(H(i)*H(s)T0(/)) (0jS) — у-й столбец матрицы 0(s)).
Уравнения (4.17) для этого случая имеют вид
p(s) — — p(s) ^ \4rs) 2
m(s) _ A(s)m(s) __ B(s)u -j- аяр + (p(s))—1 2 v(s/’)p<r) (щй’)— m(s'),
r?- S
ew = A(s)e<s) -!- e(s)A(s)T + a^ + ай£ + (4,25)
-f H(i)T0(>)H(i) -r (F(s) H(s)Tm<s>)(F(5) + H(4)Tm(*0T +
-f- (p^)~~ У v(5,0p(r) [0(,) — 0(i) -f- (m<r> — m(s)) (m(’) — m(s))T]
(s = 1, n).
При отсутствии мультипликативных возмущений (gU) (£) = 0,
H(Sj(0— 0) уравнения (4.21), (4.25) упрощаются:
p(s) = — p(s) У y(rs) -j- ,y(sr)p(r)^
r-p-s r^~s
m(s) = A(SWS) -j- B(5)u -j- (p(5))_1 2 (m6r) — m^), (4.26)
Ty^S
q(s) = A(s)0(s) -r 0(S)A(S)T -L F(s)GF(s)t —
-j- {р^)~г 2 v(f/,)p(r) [0(r) — 0(s) -j- (m(r) — m(5)) (m(r) — m(->)T]
(5-1, /г).
Для повышения устойчивости решений уравнений (4.21),
(4.25), (4.26) и сокращения времени счета при численном инте¬
грировании целесообразно избавиться от операции деления на ры.
Дело в том, что при уменьшении p{s) снижается степень устойчи¬
вости разностных уравнений, соответствующих системам уразне-
93
ний (4.21), (4.25), (4.26). Кроме того, операция деления — самая
трудоемкая из четырех элементарных операций, используемых
б ЭВМ.
Перейдя к взвешенным моментам
оо оо
И(5)Л j y/(y>s)^y, 4го0 A j УУТ/(У, s)dy, (4.27)
— со —оо
для системы (4.18) получаем следующие уравнения для вероят¬
ностных характеристик:
p(s) = _ p(s) 2 4''5> -f 2 v(sr)p<r\
r=£s гфз
£<»> = A(s)j.i(s) p^B^'u 4- 4- g(s) tr [(F( V3) 7 g<V*)T) G] -
— }i(s) 2v(rs) 2 v<s?>|.i<r>
¥(s) = ^A(s) + ~ g(s)g<s>TGj 4(s) + 4(s) ^A(s) + -2 g(s)g<s)TGjT +^-28^
4 g's>g«T tr (G4(s>) + pMF(s)GF(s)T 4
A-[F(s)G + -f Itr(F(s)G) jLl(s)g(s)T _j_
g(sys)T JF^')G + -L I tr (F(S)G)]T +
4 B(S)U,U(S>T -f }i(5)uTB(s)T ■ 4(s) 2 v<rs> + 2 v(sr>4(r) (s - ГГЙ),
r^s r^s
© = Ф - mmT, Ф = 2 4/(s\ m = 2 ,u(s>. (4-29)
s=l S=1
Для системы (4.22) аналогичные характеристики определяют¬
ся уравнениями
р(*) = — pU) ^ v(rs) -f 2 v(sr)p(r),
Гу£ s r=^s
jx(s) = A(s)ili/s) -j- B(b u + a*ip — p,(s) 2 v(rs) + 2 V'sr>[A<r),
Гт«=3 r=?=s
= A(s)4(s) 4 4(S)A(S)T 4 A*im 4 A^)T 4 h(s)t4(s)H(3) 4
4 pWF(s)F(s)T 4 F(V*)THW 4 H<SVS>F(5) 4 Fh + Fh)t 4
+ B(s)ujBs)T -j- p(s)uB(s)T — 2 v(rs) + 2 (5=1, ?i),
Ty^S r^s
*(s) . » 1 , Tvw(s\*
где aHp — вектор, i-и элемент которого равен — tr [H(ij К
X (H(s) V5) + F(s)p(s) )]; Адт — матрица, ij-ii элемент которой ра¬
вен -2-tr (H(ij*H(s)TTFjS)) (lFjS) —/-й столбец матрицы 4F(S))„
При отсутствии мультипликативных возмущений (g(s)(;};=Gr
Н(1 (/) = 0) из (4.28) следует
=. — p(s^ \(rs) _L ^ y(sr)p(r) ^
тфз тфв
p,(fi) — -j- pWB{s)u — p/s) 2 v('/s) + 2
Гф S Тф 6
(A 31)
^,-(5) _ _|_ \jr(-S)^(5)T p(s)F(S)GF(S)T -1- L'’
+ B(s\i;.i(s)T -f ji<*)uTB(s)T — Y(s) 2 v<™> - 2 v(s'^F(r) (s = ТД7 ,
гфэ 'гфз
n v
0 = Ф — mmT, Ф = 2 xIrls\ m = 2 tLl(s). (4.32)-
s=l S—1
Весьма важным свойством рассмотренных в настоящей! пара¬
графе линейных систем с марковской структурой являет с л сле¬
дующее. Линейные дифференциальные уравнения для вероят¬
ностных характеристик (4.21), (4.25), (4.26), (4.28), (4.30) н
Рис. 4.2. Схема алгоритма определения вероятностных характеристик со¬
стояния линейной системы с марковской случайной структурой
(4.31) не зависят от условных плотностей вероятностей /(5)(у<, 0 п
точны при любых законах распределения у(£о), s(to), ь(0*
Можно, однако, показать (см. § 5.4), что даже при гауссовских
распределениях у (to) и £(t) pi при отсутствии мультипликатив¬
ных возмущений (g(s) (t) = 0, H(s) (t) = 0) плотности вероятностей
j{$) (у, t) и /(у, t) не будут гауссовскими (в отличие от линейных
систем с детерминированной структурой п аддитивными гауссов¬
скими возмущениями).
На рис. 4.2, 4.3 приведены структурные схемы алгоритмов
определения вероятностных характеристик для линейной системы
с марковской структурой и аддитивными возмущениями (уравне¬
ния (4.26) и (4.31)). Через N обозначена матрица интенсивно¬
стей переходов v(sr) (s, г = 1, п\ s¥*r).
Каждый из алгоритмов состоит из трех замкнутых систем ли¬
нейных дифференциальных уравнений: для p[s\ m(s) и для ©U)
(s = l, п) либо для p{s), цы, 4/(s). Характерной особенностью
Рис. 4.3. Схема алгоритма определения вероятностных характеристик со¬
стояния линейной системы с марковской случайной структурой
является отсутствие обратных связей между этими тремя замкну¬
тыми системами; p(s) не зависит от m(s), 0(s) (или от ku(s), Чг('}),
a m[i) не зависит от 0(s) (ku(s) не зависит от Ч/(5)).
§ 4.5. Дискретные системы
В большинстве практических задач алгоритмы анализа систем
со случайной структурой решаются численными методами на
ЦВМ. Поэтому они должны быть представлены в дискретной
форме. Наиболее простой способ получения дискретных алгорит¬
мов для непрерывных систем состоит в приближенной замене
дифференциальных уравнений для вероятностных характеристик
/(у, с, £), g(K, s, £), m(s)(£), 0(s)(£), p{s) (t) уравнениями в конеч¬
ных разностях. На этом основаны все методы численного интегри¬
рования дифференциальных уравнений. Эти методы реализуются
с помощью стандартных программ и не имеют никаких особен¬
ностей для систем со случайной структурой.
Недостаток данного подхода — сильная зависимость точности
и устойчивости алгоритмов от величины шага счета At. Обычно
минимальное значение шага определяется ограничениями на вре¬
мя счета и допустимой накопленной ошибкой машинной ариф¬
метики, а максимальное значение шага — требуемой точностью
вычислений при обеспечении устойчивости решений.
Решения системы дифференциальных уравнений, устойчивые з
непрерывном виде, могут потерять устойчивость при дискретном
счете в том случае, например, когда переменная покидает область
своих значений. Так, по определению, диагональные члены мат-
96
риц корреляционных моментов 0(s) (дисперсии фазовых коорди¬
нат) должны быть неотрицательными, а вероятности должны
лежать в пределах от нуля до единицы. Если в процессе счета
эти условия нарушаются, уравпеыия теряют устойчивость.
Дискретные алгоритмы, устойчивость которых не зависит (или
мало зависит) от величины шага At, можно вывести, основываясь
на дискретной модели системы, заданной стохастическими раз¬
ностными уравнениями.
Рассмотрим общий вид рекуррентного уравнения, описываю¬
щего динамику дискретной системы со случайной структурой
(1.6). В § 3.11 для такой системы было получено рекуррентное
уравнение (-3.144) для плотности вероятности /[у (к), s(k), fcj
вектора состояния системы. Там же приведены общие уравнения
для вероятностных моментов.
Как отмечалось в § 3.11, рекуррентное уравнение (3.144) для
плотности вероятности вектора состояния системы f[y{k), s(k), к]
может служить основой для вывода приближенных рекуррентных
уравнений для вероятностей состояний структуры и моментов
фазовых координат. В отличие от разностных уравнений, полу¬
чаемых из дифференциальных уравнений путем разложения по At,
эти рекуррентные уравнения устойчивы относительно шага сче¬
та At.
Это важно при реализации алгоритмов на ЭВМ, имеющих не¬
высокое быстродействие, особенно при реализации на управляю¬
щих ЭВМ, работающих в темпе управляемых ими процессов. По¬
лучим приближенные алгоритмы для вычисления вероятностей
состояний p{i) (к) и вероятностных моментов ш(а)(А;), @(3) (к) рас¬
сматриваемой дискретной системы со случайной структурой, ди¬
намика которой описывается разностным уравнением (1.6). Для
вывода этих алгоритмов воспользуемся уравнением (3.144), запи¬
сав его в форме
/ (у, s, fc + 1) = 5 \ /п (У, * + 1 I X, S, г, к) X
оо
—оо
^ И. Е. Казаков и др.
97.
m(s) (к 1) - - [p(i) (к 1)]~1 2 p(r) (A) \ q(sr) (x, к -L 1, к) X
r—1 —oo
oo
F> (x, k) dx j y/n (y, А -г 11 X, s, r, A) dy, (4.34).'
— ОС
n T
0(*:) (A* -|- 1)^ [/?<s)(/r-|--1)'| 1 2 T(r) W i tf(sr) (x? ^ 1, Ц X
r=l -oo
oo
/(г) (x, A") dx ( [y — m<s) (h + l)j [y — m<s> (k-\- 1)]T
— oc
>: /п (У, к 1 I X, s, /•. /.•) dy (s = 1, n),
где Я (x. /г) i=/(у (/,•), A|.s(A)).
Выполним интегрирование по у в правых частях (4.34). Преж¬
де всего введем следующие обозначения:
т!"> (х, к -\- i, к) ± М [у, к + 11 х, s, г, к] Д
= М [у (к -j- 1), к- Ь 11 у (к), л (А + 1), s (7с), /с],
Ф<"> (х, 0 /с 4- 1, /с) <р (х, «, г. 1, /с 4- 1, к) =
= Ф [У (A), s(А -И), х (A), t (А), к 4- !, к]
С учетом этих обозначений на основании уравнений дискрет¬
ной системы (1.6) имеем
т{УТ)(х. /с + 1, к) = М [ф(<г) (х, к+ 1, &) Ix, $, г]. (4.35)
Теперь вычислим интегралы в (4.34). Согласно условию- нор¬
мировки плотности вероятности,
ПС
У /п(у. к • • !! X. Л-. ,•./,•) dy 1. (4.31»)
— оо
Далее, его определению, имеем
ОС.
j у/„(у, к 1, /»• I X, .V. Л, k)dx М [у, к -■ 1 |х. s. г, к] =
— ос
± m(^) (X, к -4 1, А). (4.37)
Преобразуем разность у — mu) (/с + 1) к виду
у — m(*г! (х, к+ 1, *)+ra('r)(x, fc+ 1, к) - m{i )(k+ 1).
Подставляя ото выражение в (4.34) и учитывая, что на основа¬
нии (4.37)
М{[у —m(er)(x, й+1, А)]1х, 5, г, А*} = О,
98
получаем
CV'
j fy — m(s) (A 1)] [y — m(s> (А — 1)]т/п (у, A -f 1 j x, st г, A) dy •=
= M {{y— m(5r) (x, A: + 1, A-)] [y — m<sr> (x, A* -j- i. A)jT -4
-f- [m(s)(A-fl) — m(>'r'(x,A-!-l,A)||in(s>(A--|-l) —m<'sr>(x,A--j--l, A)]T|x,s,r. A;J =
— 0(sr>(x, A' --[I, k) [m(s>(A: • А* 1) — m(-?r>(x. A* -j- 1, А)! x
X [m(s> (A: -j- 1) - m*er> (z, к 1, A)f, (4.38)
где
в<*г> (x,A+ 1, Ай=М{[у —m(sr)(x, A-fl, A)J(у—m(,sr)(x?A-f-l M)F\xt$}r,k}.
Подставляя (4.36) — (4.38) в (4.34), получаем рекуррентные
уравнения для вероятностных характеристик:
п ^
p(s) (/£ + 1, = 2 /><г> (/.•) j q(sr> (X, к -г 1, к) /М (х, О йх,
1 —оо
п
щ(Д (А; -f- 1) = [p(s) (А* -■!- 1)1-1 2 А(г) (к) (х, А - 1, к) х
г=1
X q(sr) (х, A* -J- 1. А) /(г) (х, A*) dx, (4 .39)
П X
е«о (fc + 1) =(;.(» (А- - 1)j-i 2 Р{г) (к) I {©(ir> (х. к 4-1. /с) н-
^-1 -СО
-- [rn(s)(A-f- 1} — m^sr)(x, к -г 1, k)\\m(s)(k - [)—n\(sr)(x, к -|-1., А)]т} х
X ф5/'> (х, А* ; - 1, А) /(г) (х. A) dx (;> — 1, п)у
где
эо
m<5r) (х. к1, к)= j у/,г (у. А- -!~ 11 х. s, г. к) dy,
— оо
сс
0(sr) (х, A -f 1, А) = 1 fy — nKsr)(x, А-|- 1, А)] |у — m(j*r>(x, A-j -1, A)jT :<
— 30
/г. (У, /;-г i.|x, •?, г, /,) ay.
Условная плотность вероятности перехода /п() определяется
формулой (3.91) или любой другой известной формулой для за¬
кона распределения случайного вектора у(А + 1), связанного де¬
терминированной функциональной зависимостью со случайным
вектором £(А), закон распределения которого известен.
Как будет показано в п. 4.6.1, для систем с аддитивно-мульти¬
пликативными возмущениями находить плотность вероятности
перехода /п( ) не требуется.
Для замыкания системы рекуррентных уравнений (4.39) не¬
обходимо, как и в § 4.2. аппроксимировать неизвестные условные
7* 99
плотности вероятностей: /(г) (х, ft) известными функциями, пара¬
метрически зависящими только от первых двух искомых момен¬
тов in(к). в,т (А'.). Эти функции, как уже говорилось, должны
удовлетворять условию нормировки, а интегралы в (4.39) должны
выражаться через элементарные или табулированные функции..
Что касается выбора аппроксимирующих двухмоментных законов
распределения, то здесь остаются справедливыми все рассуяще-
ния, сделанные в § 4.2 относительно непрерывных систем.
Безусловные вектор математического ожидания т(к) и матри¬
ца корреляционных моментов ©(ft) определяются так же, как и
для непрерывных систем, по формулам (4.3).
Структурная схема дискретного алгоритма может быть пред¬
ставлена в том же виде, что и схема непрерывного' алгоритма
(см. рис. 4.1). Однако дискретные алгоритмы 2—3, 6, описывае¬
мые выражениями (4.39), отличаются от аналогичных непрерыв¬
ных алгоритмов (4.3), (4.4). Роль вероятностных коэффициентов
(блок 6) в дискретном алгоритме играют интегральные члены в
правых частях (4.39).
§ 4.6. Дискретные системы
с аддитивно-мультипликативными возмущениями
4.6.1. Нелинейная система с условной марковской структурой*
Пусть система описывается уравнением
у (к + 1) = а [у (к), $(к+ 1), s (ft), к + 1, к] +
+ F [у (ft), s(k+ 1), s(fc), к + 1, к] % (к) (ft = 0, 1, 2, . . .). (4.40)
На основании (4.40) запишем
Ф(*г)(х, |, ft + 1, ft) = а(5Г) (х, ft+1, ft) +
+ F(sr)(x, ft+1, ft)*(ft), (4.41)
теперь из (4.35), (4.38), (4.41) следует
m<">(x, ft + 1, ft) = а(£Г)(х, ft+1, ft),
0(*r)(x, ft ж 1, ft) = F(sr) (x, ft+ 1, ft)G(ft)F(sr,'r(x. ft + 1, ft),
(4.42)
[mU) (ft + 1) — m,sr) (x, ft + 1, ft) ] [mU) (ft + 1) — {x, ft+1, ft]T =
= [m(4) (ft + 1) — aUr) (x, ft + 1, ft) ] [mU) (ft + 1)— a(‘7' (x, ft+1, ft)]T,
где G(ft)— дисперсия дискретного белого шума *(ft).
Уравнения (4.39) принимают вид
г. оо
&*Цк + l)==fp(s)(A'-'--'l)]~1 2 /><')(/,-) f {[тЩк-'ri)-а<«->(х,А*+1.А-)]х
■=1 -оо
X [mw (/с -!- 1) - «<«•> (ж. А- + 1, А)]т + Fsr> (х, к 1. A) G (А) х
X F(5’)T (х, А-f 1, А)] 9<"> (х, A -f 1, А) /<>•> (х, /с) dx (s = ТГ7г).
Из уравнений алгоритма (4.43) следует, что для дискретной
системы с аддитивно-мультипликативными дискретными белыми
шумами вероятностные характеристики могут быть приближенно
найдены без отыскания условной плотности вероятности пере¬
хода /п(у, к + 1!х, 5, г. к) (в отличие от общего случая (4.39)).
Структурная схема алгоритма остается прежней, лишь упро¬
щается алгоритм определения вероятностных коэффициентов, что
видно из сравнения (4.43) с (4.39).
4.6.2. Линейная система с условной марковской структурой.
Пусть система описывается уравнением
у(/с + 1).= A[s(/c+ 1), s(k). к+ 1, к]у(к) +
+ B[s(k + 1), s(k), ft + 1, &]u(A) +{F[s(/:-f 1), s(k), k+ 1, k] +
+ g[S(A+l), S(k),k+i, А]УЧА)>1 (A) (A — 0, 1, 2, ...). (4.44)
Эта система линейна по отношению к выходному сигналу у (к).
Запишем уравнение (4.44) в таком виде:
у (к + 1) ={А [s (к + 1), 5 (к). к + 1, к] +
+ g[s(/t* + i), &(к), к + 1, к\ |г(к)}у(к) +
+ B[s(fc+ 1). s(k), ft + l, fc]u(fc) +
-f T[s(k + 1), s(k), k+l, k]l(k). (4.45)
Как видно из (4.45), функция g[s(A: + -1), s(k), fc+1, /c]^T(/c)
описывает параметрические (мультипликативные) возмущения,
а функция F[s(fc+1), s(k), к + 1, к] |(А:) — аддитивные возму¬
щения в виде дискретных белых шумов £(&), модулированных
скачкообразными случайными дискретными процессами
&[s(k + l), s(k), к+ 1, к], F [s(k+ 1), s(ft), Н 1, к].
Данная система на основании (4.42) является частным слу¬
чаем системы, рассмотренной в предыдущем параграфе. В соот¬
ветствии с принятыми обозначениями
ф(5г)(х, I, *+ 1, &)=A(")(i+ 1, ft)x+B('r)(ft+l, к) и (к)+
+ [F(er)(A: + 1, *)+g(er,(*+ 1, А:)хт]|(/с), (4.46)
a(sr)(х, к+ 1, к) = А{*г)(к + 1, /c)x + B(sr)(A: + 1, к)и(к). (4.47)
Из (4.47) и (4.42) следует
(х, к + 1, к) = а(*г) (х, к 4- 1, к) =
= A(er)(fc + 1, ft)x + B(‘r)(fc + 1, к)и(к),
0(,г)(х, к + 1, к)=[Р{гг)(к + 1, /c)+g(sr)(& + 1, /c)xT]G(A:)X
X [F(ir)(ft+1, Л:)+ g(sr) (A: + 1, A)xT]T. (4.48)
101
Подставив (1.48) в (4.43), получим
гг °°г
I>v>(!.:+ 1) * 2 Р<п (/•') I <7(sr) (х. А 1>/^> (х, А)о?х,
7-1 -оо
Г
m<*> (4 I- 1) - |/?<*> (4 + I)]-1 £ /?<’■> (4) 1 [ A(,sr) (4-j 1, 4) х -|-
?• 1 2оо
+ В(*г> (А ! 1, A) u (A)] qi'^ (X. A j 1, А) /(-') (х, ft) dx,
(4.49)
оо
0W (А -1-1) (/)<“) (А 1)]-1 2 А(Г) (*) j ([т«>(ft+1)-A(sr)(ft+1,ft)x-
7 ~ 1 OO
— ВЙГ,(А j 1, A)u(A)][m(s> (A -. l)-A(sr)(A ! 1, A)x-B(s')(A-; 1,A)u(fe)]TX
[ F(sr) (A + i. A) -I- g(”'> (A 1. A) xT] G (A) {Ffsr) (A + 1., A) -|-
g(sr) (A j 1, A) xT]T) q(-*r'> (x. A + 1. A) /X) (x. /,) с/х (s - 1, n).
4.6.3. Линейная система с марковской структурой. Рассмотрим
линейную систему с марковской структурой. Вероятности перехо¬
дов марковской структуры ие зависят от фазовых координат:
q[s(k+ 1), 4+ lls(4), у (4), 4] = r/[,9(44- 1), 4+ 11.9(4), 4].
Это частный случай предыдущей системы, для которого имеем
q(*r) (х, 4+ 1, 4) = с[(яг) (4 + 1, 4). Вследствие независимости
q<sr)(k-\r 1, 4) от х уравнения (4.49) упрощаются:
гг
/Л> (A - I 1) = 2 Ф,г) (ft + 1, A) p<r> (ft),
Г 1
? г
ш<*) (А + 1) - [//•<> (A -I- 1)]-1 2 7(,r> (ft 1, ft) F(r> (ft) x
Г 1
X [A(sr) (ft + -1, ft) m<r> (ft) H- B(sr) (ft +1, ft)u(ft)],
(4.50)
11
©<x (A + 1) !/><<> (A + l)!-1 2 <!(xr) (ft -!- 1. ft) A0'* (ft) x
r=-l
[A(sr> (ft-|- 1. ft) ©<r> (A) A1 :r)r (A • 1, ft) X-
: [ m<*> (ft + 1) — A(f,) (ft + 1. ft) nFr> (ft) — B(sr' (ft + I. ft) u (ft) | x
[m(*> (ft + 1) - A(sr> (ft + 1. ft) mX> (ft) - B(sr' (ft I - 1, ft) u (ft)]T +
-j'-[F(*r)(ft-!~ 1, ft)-f-g(sr)(ft -!- 1, ft) m(r>T(ft)]G(ft)x
x [ F(sr) (ft -l- 1, ft) , g<sr> (ft + I, ft) m"')T (A)]T
-r g(sr) (ft + 1, ft) tr[G(ft) (-K'> (ft)| oX-')t(a ; . j . A)) (s - - ITn).
102
При отсутст вии мультигт л пкативных возмущений
(g{'sr) (к + 1. к) = 0) уравнения (4.50) для 0s (к) упрощаются:
п
в<*> (Л- -I-1) |/;'•') (к + !)]-« 2 q^-Цк + 1, к) р<г> (А)
-1
X I Л*''1 (к !. к) 6(,) (Л’) A<s')г (Л: + 1, к) .
-\- [m<*>(A + 1) — AW)(A - j- 1, А) тС) (А) - B<sr) (А- + 1, к) и (к)]
X [т<'> (к + 1) - А(,Т) (к + 1, к) т(') (к) - В(,г) (к + 1, />) и (А)]Т +
+ F{sr\k + 1, к) G (к) F(S')T(A + 1. к)) (.<•■ Т77г). (1.51)
Наиболее удобной формой представления уравнений для со¬
ставления машинных алгоритмов является форма записи, в кото¬
рой отсутствует деление на pis) (к + 1). Такие алгоритмы, как
уже отмечалось в § 4.4, более устойчивы и имеют меньшее время
цикла при счете.
Переходя к переменным
ос оо
[1(S)= \ yf{y,s)dy, Ч'<*> ^ j уут/(у. s)dy,
— оо —оо
получаем из (4.50) систему рекуррентных формул для определе¬
ния вероятностей состояния p{s) и моментов М/(с), ш, 0:
п
р<«) (к+1)= 2 q{sr> (к X 1, к) /./'•) (/>•),
?■=]
п
ц<*>(А -М)-2?(1'С * .*)[A(*r)(A+1 ,/'•)!'<'>(А) + а(г)(А)В<’(A+l,Л')и(А’)],
(4.52)
Y<').(A + 1) =2 Фгг)(к -I- 1. к) |А<4Г)(А 1, k)W(r){k)AUr)r(k-’-i,k)\-
Г=1
+ A(4r)(A + 1 ,А) (А) ит(А)В<*'Д(А-х 1, к) -j - В<*Г>(А~И ,А) X
X и(А)ц<г>т(А)А<*г>т(А-|-1 .к) | fA*> (A)[B(4r) (А !■ ■ 1, к) и (к) ит (к) В(4г) (А- -Г
-J- 1, A) F(sr) (к ' 1. к) G (A) F(sr,T (ft -|- 1. Л-)]},
h П
m (А) - 2 (А). Ф (А) -- 2 Чг(5) (А),
s=--i .-1
0(/:) - cD(к) — in (A) mT(/»■).
Следует отметить ва?кную особенность уравнений для вероят¬
ностных характеристик линейной системы с марковской структу¬
рой. Линейные рекуррентные уравнения(4.50), (4.51).так же как
их непрерывный аналог—линейные дифференциальные уравне¬
ния, не зависят от условных плотностей вероятностей f{s)(y{k),k)
103
и точны при любых законах распределения у (U), 5(0), Н (к).
Однако даже при гауссовских распределениях у(0) и §(/с) и от-
сутствии мультипликативных возмущений (&'(sr) (к + 1, А:) = 0)
условные законы распределения у (к) при фиксированной струк¬
туре s(k) будут негауссовскими.
Структурная схема дискретного алгоритма та же, что и у ана¬
логичного непрерывного алгоритма (см. рис. 4.2): уравнения для
р{8) (к) не зависят от m(s)(/i*) и 0(s) (к) (ц(5; (к), 4/(s)(&)), уравне¬
ния для m(s) (к) (p(s) (к)) не зависят от 0(i) (к) (г]/(5) (к)) и отсут¬
ствует алгоритм определения вероятностных коэффициентов. Ли¬
нейность алгоритма для p(s\ m(s), 0Гл), и.. 4-p(s) облегчает анализ
точности и устойчивости линейных систем с марковской струк¬
турой.
§ 4.7. Устойчивость непрерывных систем
При исследовании устойчивости стохастических систем, к ко¬
торым относятся и системы со случайной структурой, оперируют
понятием «стохастическая устойчивость» [54. 77]. Различают не¬
сколько видов стохастической устойчивости. Инженера в первую
очередь интересует асимптотическая устойчивость в средт-теквад-
ратическом, из которой следует и асимптотическая устойчивость
в среднем [54]. Практически обычно проводится исследование
асимптотической устойчивости по Ляпунову решений: системы
уравнений для корреляционных моментов. Для линейной системы
наличие такой устойчивости гарантирует асимптотическую устой¬
чивость в средмеквадратпческом.
Рассмотрим линейную систему с марковской структурой и
аддитивно-мультипликативными белыми шумами, описываемую
уравнением (4.18).
Вероятностные характеристики этой системы, полученные в
§ 4.4. точно определяются уравнениями (4.21). Из уравнений
(4.21) и рис. 4.2 видно, что в замкнутой системе линейных урав¬
нений для условных корреляционных моментов 0(s) вероятности
состояний структуры р(,) и условные математические ожидания
m(s) являются внешними воздействиями, не зависящими от 0Ы
(5=1, п). Поэтому система уравнений для 0(s) (5 = 1, п) асимп¬
тотически устойчива, если асимптотически устойчива соответ¬
ствующая система линейных однородных уравнений
ё<*> = (а(5> -j- g(‘)g(*)TG ) е«» ем (а(п + Д- g(s)g(s>TG)T +
-j - g(s> tr(G0(s)) g('s)T -j- (p(s))_1 2 v(,sr)/4r> (0(r> — 0(s)) (5 — 1, n),
r^-s
(4.53)
Для того чтобы избавиться от операции деления иа p{s)
(5=1, /2), некоторые из которых в общем случае могут прини-
104
мать весьма малые значения (вплоть до нуля), перейдем к пере-
мен ной ЙИ^0(!У5).
Уравнения (4.53) преобразуются к виду
о<«) = ( а(5) + -|-g<s)g<s)TG)Q(s) -г ^(s) (a(s) -ь 4- g(s)g(il!G)T +
н- g<‘> tr (GQ(,)) g(*)T - £2<*> V v<ra> + 2 v<*r>Q<r> (s =T7»)-1
Ty^S ?'rf
- (4.54)
Из систем уравнении (4.53) и (4.54) исключаются; как обыч¬
но, уравнения для £2^ при i>j (i, j = 1, пу\ 5 = 1, п), поскольку
в силу симметричности матриц Q(s) выполняется £2(^ =
С учетом этого число уравнений (4.54) равно —ппу(пу-\- 1). Эта
система линейных однородных дифференциальных уравнений мо¬
жет быть записана в векторно-матричной форме
х = С(£)х, (4.55)
где х — вектор с компонентами Qif (ц j — 1, пу \ s =- 1, n\ i ^ /);
C(t)— матрица коэффициентов, составленных на основа¬
нии (4.54).
Если A(s), g(s), v(5r\ G — константы, то система (4.55) стацио¬
нарна. Ее устойчивость можно исследовать известными методами,
распространенными на практике. Например, широко используют¬
ся алгебраические критерии Рауса — Гурвица, частотные крите¬
рии Михайлова и Найквиста. Эти методы основаны на анализе
характеристического полинома H(A,) = det(C— XI), где I — еди¬
ничная матрица. Возможно применение и других известных мето¬
дов исследования устойчивости непрерывных линейных стацио¬
нарных систем [52, 53].
При v(sr) = const непрерывная марковская цепь s(t) однород¬
на. Если, кроме того, она оргодична, то, как известно [9], сущест¬
вует предельное (установившееся) распределение вероятностей ее
состояний. Это распределение задается линейным алгебраическим
матричным уравнением, которое получается из (4.21) при p{s) =0
(5 = 1, п):
Np = 0, (4.56)
где N — матрица интенсивностей переходов v(sr); р — вектор ве¬
роятностей р{$) (5, Г = 1, П).
Уравнение (4.56) вместе с нормирующим условием
п
2 р<*> =[1 (4.57)
ь = 1
однозначно определяет установившееся распределение вероят¬
ностей.
105
Можно показать, что если система (4.54) устойчива, то устой¬
чива также и система линейных однородных уравнений для
взвешенных математических ожиданий ku(s) = ,n(-)m(-s):
р(*) = A(sV(s> -i—rng(s) tr (g(-s\u(s)TG) — ku(s) 2 v(rs) ”!"
r-yi'i
-;-2v(s'Vr) (v Т7Й). (4.58)
Уравнения (4.58) получаются из системы линейных неодно¬
родных уравнений (4.28). При устойчивости уравнений для р{8)
из устойчивости для p(s) вытекает устойчивость уравнений для
='\i{s)/p{s), из устойчивости для Q{s> — устойчивость для 0(s)
и на основании (4.1)—устойчивость для 8.
Таким образом, для того чтобы линейная стационарная, систе¬
ма с аддитивно-мульттшликатпвиымгг белыми шумами и случай¬
ной структурой в виде оргоди ческой марковской цени была асимп¬
тотически устойчива в ■средпеквадратическом. необходимо и до¬
статочно, чтобы была устойчива система линейных дифферен¬
циальных уравнений (4.55) с постоянными коэффициентами.
Для систем с переменными параметрами основные рассужде¬
ния относительно устойчивости остаются в силе, за исключением
неприменимости методов Рауса— Гурвица и частотных критериев
устойчивости.
В частном случае, когда мультипликативные (параметриче¬
ские) шумы отсутствуют (g(,s'; = 0), уравнения (4.54) (и. следова¬
тельно, эквивалентные им уравнения (4.55)) упрощаются
Q(s) = A(e)Q<e> Q(S>A(,S)T — Q(,s> 2 v<re> + 2 v<*r>Q<r> (s ---- ГТТг).
/V S r.s
(4.59)
Рассмотрим теперь общий случай нелинейной системы со слу¬
чайной структурой, вероятностные характеристики которой при¬
ближенно описываются нелинейными уравнениями (4.3). Как
известно, для нелинейной системы нельзя и общем случае гово¬
рить об устойчивости в целом, а необходимо исследование устой¬
чивости ее решений в отдельности. В этом состоит отличие от ли¬
нейной системы, для которой устойчивость любого решения озна¬
чает устойчивость всех ее решений и, следовательно, устойчи¬
вость в целом (то же самое справедливо и в отношении неустой¬
чивости) .
Устойчивость решений нелинейпых детерминированных систем
исследуется либо первым, либо вторым методом Ляпунова. Для
исследования устойчивости сложных многомерных систем пред¬
почтительнее использовать первый метод Ляпунова, который, как
известно, сводится к составлению уравнений в вариациях с по¬
следующим применением инженерных методов Рауса—Гурвица,
Пай кг,иста, Михайлова и других методо в.
106
К таким системам относятся, как правило, и системы вида
например, при п = 2, пу = 2 составляет 12 уравнений.
В заключение отметим еще одну особенность. Для линейной
системы с марковской случайной структурой устойчивость или
неустойчивость уравнений для вторых моментов означает устой¬
чивость или неустойчивость стохастической системы в средыеквад-
ратическом. Для нелинейной системы со случайной структурой
устойчивость или неустойчивость решений системы уравнений для
вероятностей и моментов в общем случае не позволяет судить об
устойчивости или неустойчивости решений стохастической систе¬
мы. Зтр утверждение верно для любых стохастических систем и
не зависит от точности приближения уравнений (4.3) для вероят¬
ности ьтх характерист и к.
Тем не менее суждение об устойчивости (так же, как и об ее
точности) на основании исследования уравнений для вероят¬
ностей и первых двух моментов во многих задачах инженерной
практики оправданно и дает достаточную информацию, необходи¬
мую для анализа и проектирования.
§ 4.8. Устойчивость дискретных систем
Все рассуждения, проведенные в отношении непрерывных си¬
стем, справедливы и для дискретных систем. Разница состоит
лишь в том. что анализируемые уравнения имеют другой вид,
а критерии устойчивости — иную формулировку.
Рассмотрим линейную систему с аддитивно-мультипликатив¬
ными дискретными возмущениями и марковской структурой, опи¬
сываемую рекуррентным уравнением (4.44).
Вероятностные характеристики этой системы точно опреде¬
ляются уравнениями (4.50). В замкнутой системе уравнений для
0(s) (5 = 1, п) переменные р{8) и m(s) являются внешними воздей¬
ствиями. Проведя рассуждения, аналогичные изложенным в § 4.7
для непрерывных систем, придем к задаче анализа устойчивости
линейпой однородной системы рекуррентных уравнений, получае¬
мых из (4.50):
X (A(s,) (к + 1, к) 0(r)A(sr)T (к -ь 1, к) -!-
-Ь g<sr) (к -i-1, к) tr [G (к) 0(г> (к)] g<«•>*(& + 1, *)] (s = ГГ»).
(4.60)
g(.г) (1с j5 /с) tr [с (к) Q(r) (к)] g(sr>T (к -I- 1, к)} (.<? = 1, п) (4.61)
107
(4.3), число уравнений которых равно
п
0<s) (к + 1) = [р<*> (к -}-1)]-1 2 q{sr)(k +1, к)Р^(к)х
Уравнения для Q(1) A 0(s)p(s) iia основапии (4.60) имеют вид
71
Q(s) (к -|- 1) = 2 <7(sr) (к + 1, к) {A(sr)(/v ь 1, k)Q(r\k) А<*Г)Т(А+1,А)+
или в векторно-матричной форме
х(к+ 1) = С(А)х(А),
(4.62)
где х(А) — вектор с компонентами Q{f (к) (i, / = 1, пу\ i</; s =
= 1, я); С (А)— матрица коэффициентов, составленных на осно¬
вании (4.61).
Устойчивость системы уравнений (4.62) означает асимптоти¬
ческую устойчивость в среднеквадратическом стохастической си¬
стемы (4.44). Соответственно из неустойчивости системы (4.62)
следует неустойчивость в среднеквадратическом системы (4.44).
Если исходная стохастическая система имеет постоянные ко¬
эффициенты A(sr)(A+l, A) = A(sr), g(sr)(A + l, A)=g(sr), G(A) = G,
а структура системы описывается эргодичоской марковской цепью
с вероятностями переходов p(sr)(A + l. A)==/;(sr), то С(А) = С.
В этом случае устойчивость системы (4.62) можно исследовать
известными методами, основываясь на анализе характеристиче¬
ского полинома H(z) = del (С — zl) [53].
В отношении нелинейных систем со случайной структурой
можно полностью повторить все рассуждения и выводы, проведен¬
ные в § 4.7 относительно аналогичных непрерывных систем. Ве¬
роятности состояний и моменты нелинейной системы (1.6) при¬
ближенно определяются рекуррентными уравнениями (4.34). Ис¬
следование устойчивости заключается в анализе устойчивости
решений этих уравнений известными методами [53].
§ 4.9. Выбор и преобразования множества состояний
структуры
Изменения структуры динамических систем, рассматриваемых
в настоящей книге, описываются марковскими процессами с ко¬
нечным числом состояний. Поэтому множество состояний струк¬
туры образует полную группу несовместных событий. В приклад¬
ных задачах изменения структуры системы обычно обусловлены
(•меной структуры ее подсистем и, в частности, скачками пара¬
метров. Как правило, невозможно простым объединением мно¬
жеств состояний структур подсистем образовать множество со¬
стояний структуры всей системы, удовлетворяющее условию не¬
совместности.
В частности, если какие-нибудь два состояния разных подси¬
стем независимы, то они обязательно совместны. Например, каж¬
дый из двух независимых скачкообразных параметров имеет
состояния, каждое из которых формально (математически) сов¬
местно с любым состоянием другого параметра. Фактически
некоторые состояния могут быть несовместны физически, что ого¬
варивается в условиях задачи. При этом, разумеется, нарушается
независимость параметров.
Рассмотрим процедуру образования множества состояний
структуры. Пусть система со случайной структурой содержит т
408
подсистем со случайной структурой Si, каждая из которых имеет
конечное число состояний (1 = 1,т). На¬
пример, система содержит т случайных скачкообразных парамет-
ров, где i-ж параметр имеет конечное число состояний L (i= 1, т).
Для непрерывной системы каждая структура S,: задается в об¬
щем случае условными функциями поглощения и восстановления
§Гд) (у, si, t) и y[qr) (у, Si, t), которые соответствуют пере¬
ходам из состояния 49) в 4г) и обратно при фиксированном
векторе Si структур всех подсистем, кроме z4i (g, г= 17< U\ q¥=rt
i = 1, т).
Для непрерывной системы с условной марковской структурой
каждая структура S{ задается условными, интенсивностями пере¬
хода v(fjfr)(y, Si, t) при фиксированном si и фиксированном векто¬
ре фазовых координат всей системы у. Для дискретной системы
аналогичной характеристикой служат вероятности переходов
Piqr)(У, sj, к).
Образуем все формально возможные сочетания из состояний
подсистем:
оф . . . со Д 4а)4Р) • • • 5т'\ (4.63)
m
Общее число этих сочетаний равно JJ U. Исключив из их
г=1
числа физически невозможные сочетания и перенумеровав остав¬
шиеся от 1 до п, получим структуру Sen состояниями, образую¬
щими полную группу несовместных событий.
Отметим два свойства характеристик переходов структуры 5.
1. Если два состояния дДрф ... 6 ... со и г Д оф . . . е . . . со, оп¬
ределяемые выражением (4.63), отличаются друг от друга одним
и только одним г-м индексом (6 или е) (смена состояния только
одной i-ж подсистемы), то характеристики переходов определяют¬
ся соотношениями
(3(П7) (у, t) = $еб> (у, ii, t). y(qr) (V, t) = (у. 's,;. t), ^
v<f) (y, t) = vi6e) (y, Si, t), piqn (у, к) = pT’ (V. Si. к I. l' i}
2. Для непрерывных систем с условной марковской и мар¬
ковской структурами любые два состояния q и г. отличающиеся
друг от друга более чем одним индексом в выражении (4.63),
имеют интенсивности взаимных переходов, равные нулю.
Первое свойство вытекает непосредственно из определения
состояний q и г. Второе свойство следует из свойства непрерыв¬
ной марковской цепи, согласно которому вероятность смены со¬
стояния каждой подсистемы на интервале At есть величина по¬
рядка At. Следовательно, вероятность одновременной смены со¬
стояний двух и более подсистем — величина высшего порядка
малости, чем At,
Для дискретных систем второе свойство в общем случае не¬
справедливо, вероятность смены состояний двух и более подси¬
100
стем в течение одного интервала дискретности может заметно
отличаться от нуля.
То же самое можно сказать и в отношении систем с перемен¬
ной структурой. Изменения структуры этих систем, по определе¬
нию, детерминированпо зависят от фазовых координат. Поэтому
может оказаться, что при достижении некоторой переменной
своего граничного значения несколько подсистем одновременно
ска1!ком изменяют свое состояние.
Если исследователя интересуют в конкретней задаче не все
вероятности состояний структуры и соответствующие им услов¬
ные вероятностные моменты, то в целях экономии времени счета
желательно уменьшить число состояний структуры или хотя бы
упростить уравнения. Однако в общем случае этого сделать не
Рис. 4.4. Преобразование множества состояний структуры путем объеди¬
нения группы состояний
удается. Упростить систему уравнений без потери точности ре¬
шения можно только для рассматриваемого ниже частного
случая.
Пусть среди п состояний структуры S имеется п— Z + 4 со¬
стояний (s = Z, п), смена которых не изменяет уравнений для
фазовых координат. Математически это условие записывается
в виде
ф<г)(у, 1, 0 = <P<r)(y, I, О (s, г = *7> г')- (4-65)
Объединив эти п — I + 1 состояний в одно, получаем структу¬
ру Su с числом состояний I = 1, Z). Обозначим интенсивности
переходов структуры Sv через A-(sr)(y, t) (рис. 4.4). Запишем
обобщенные уравнения Фоккера — Планка — Колмогорова для
системы со структурой Sv:
2E^=-24:W(y.«)fofr.«.0] +
г 1
+ “Е" 2 ди° dV \-Dulj (У? О fu (У? О] ~ fu (У» 0 2 } (У* _г
' i,j '1 Г =1^S i
+ 2 ^(sr) (У, t) fu (у, О t) {s = 1, I), (4,66)
r=ly£s
HO
гд^ коэффициенты сноса и диффузии офЗ(у, t), D[j>(y, t) на ос¬
новании (4.44) связаны с аналогичными коэффициентами исход¬
ной системы соотношениями
a(i/s) (У, t) = a(s) (у, t), (у, t) = D(s) (у, t) (s = 1, I — 1),
(4.67)
°ti/) (У, t) = a<3)(y- (У, 0 = £*(S> (У, 0 (s=l, n).
На основании условий задачи имеем
/а(У, s- t) = /(у, s, 0 (s = l,Z —1),
/и(У, *) = 2 /(у, 0, (4.68)
Г=1
/"Чу. 0 - [ДР(оГ! 5 /’"!(0/"(у. 0,
i=i
где
рД(0 = 2 Р(г)(0. (4.69)
Г = 1
Дифференцируя (4.68) по £ и подставляя результаты в (4.66),
путем сравнения коэффициентов при одинаковых /(у, s, £) в по¬
лученных уравнениях и уравнениях (3.72) получаем с учетом
(4.65) выражения для Я(8Г)(у, ():
^(Sr) (У, t) = v(3r) (>ч (5. г = 1, / — 1),
п
я(,,) (у, <)= 2 *"> (у, t) (S = 1Л-1), (4.70)
Т=1
я<?0 (у, *) = [ Дг' (о]-12 v<-> (у. t) р(п (I) (s = 1Л-1).
Г=1
Из формул (4.70) видно, что интенсивности переходов пре¬
образованной структуры Я(яг) (у, /) зависят от вероятностей со¬
стояний исходной структуры pi$) (t) (s = 1, тг).
Нахождение вероятностей p(s)(/j путем интегрирования по у
плотностей /(у, 5, £) не решает поставленной задачи упрощения
уравнения, так как определение /(у, s, £) путем решения (3.72),
как уже отмечалось, весьма трудоемкая задача.
Вероятности pU) (t) приближенно определяются уравнениями
(4.12):
Д.) (г) = - PW (t) 2 ДД (0 + 2 Дг) (t) P(r) (t) (s = TTTfc). (4.71)
Ha основании (4.68) вероятности pty (t) находятся по фон-
мулам.
Pu} (t) = pW (t) (S = ij-ih p{u (t) = 5 P{r) (*). (4.72)
■r = t
111
Вероятностные коэффициенты Vprs)(Z), VpS,)(Z), определяемые
выражениями (4.11), зависят от моментов m(e)(£), @(3) (t). По¬
этому для замыкания системы уравнений для pis) (t) необходимо
дополнить уравнения (4.71) уравнениями моментов. С этой
целыо можно использовать уравнения моментов системы с более
простой структурой Su, поскольку на основании (4.68) имеем
(t) = m(s) (t), Q(u (t) = 0(s) (t) (s = 1, I — 1),
(t) = (t), ©(J} (t) = 0(s) (f) (s = i~n).
Таким образом, к уравнениям (4.71), (4.72) добавляются при¬
ближенные уравнения (4.12) для моментов (аргумент t опущен
для простоты записи):
m[}S) == ОСри — ^т} + (^[Я) *2 ^тГ)Ри\ // 7qv
г=£з
й(8) _ А<*° I A(s)T I At*) I Г ^ л(*7К/г)
&U — Ати "Г Ати ~Г ири — Ае + \Ри ) jLt Ае Рс/ ,
r=£s
где коэффициенты a(pu(t), Amu(t), Dpu(t) определяются выра¬
жениями (4.4), в которые вместо oc(s)(y, t), DU)(y, i) подставля¬
ются аи}(у, t), D^}(y, t), определяемые формулами (4.67), а ко¬
эффициенты km, Я^Г), Aq\ Л©Г) определяются выражениями
(4.11), в которые вместо v(sr)(y, t) подставляются Я(5г)(у, t), оп¬
ределяемые формулами (4.70). Эти коэффициенты зависят от
моментов m(J},
Итак, система приближенных уравнений для определения ве¬
роятностей состояний преобразованной структуры Su с I состоя¬
ниями (I < п) и соответствующих этим состояниям условных
моментов составляется из (4.70) — (4.73) и (4.11).
Порядок этой системы уравнений на 2(72 — Z — 1) меньше по¬
рядка системы уравнений для исходной структуры S. Следует
отметить, что в силу (4.70), (4.71) в ходе решения задачи вы¬
числяются не только интересующие нас p{s) (t) при s = 1, Z, но и
р($) (t) при s = Z, п.
Для систем с марковской структурой интенсивности v(sr) (£)
и, следовательно, X{sr)(t) не зависят от фазовых координат. По¬
этому уравнения (4.73) упрощаются:
mi? = 4’i+ (/>!?)- S x("W(m£'—n8>).
(r^s)
(4.74)
<r#s)
X
b(u — — m^) (m^ — m^)T] (s = 1, I).
Урагзнения (4.71) для вероятностей состояний не зависят
(s) r\(s)
теперь от моментов Ши , 0^ и определяются уравнениями
112
Колмогорова
рМ = _ р(5>2 + 2 v(sr>p«. (4.75)
r=£s r^s
Вероятности Pij{t) по-прежнему находятся по формулам (472),
а интенсивности X{ST) (t) — по формулам (4.70).
Если преобразование S Su состоит из объединения несколь¬
ких групп состояний структуры S в несколько состояний
? 9,9, <°Г°) (°°J) ($Л°) (°3*
: : i ! ! ! !
I
I
I
i I
1 1 !
I I i
666o o 6 -6 6
1 1-1 l к q Зц
Рис. 4.5. Преобразование множества состояний структуры путем несколь¬
ких объединений групп состояний
структуры Su (рис. 4.5), то система уравнений (4.70) — (4.73)
в принципе не изменяется, лишь в соответствии с рис. 4.4 меня¬
ются индексы в (4.70) и (4.72):
^Sr) (у, t) = v(sr) (у. t) (s, г =1,1 — 1),
^(hs)(у, 0=2 v<«> (у, t) (s = l, г — 1),
r=ih
(4.76)
2k
>.{sh) (y, t) = [p(u} (t)]_1 2 v(sr) (y, 0 pW (I) (s = 1, I — 1; k=I7q),
p&(t) = pM(t) (s = i,l-i),
p(u(t)= 2p(r)(0 (h = l,q).
r=ik
Уравнения (4.71) остаются без всякого изменения, а в (4.73)
индекс s изменяется от 1 до q.
§ 4.10. Способы определения интенсивностей переходов
Матрица интенсивностей переходов (для дискретных систем —
вероятностей переходов) является основной характеристикой
структуры. Однако практически найти интенсивности переходов
непросто. Исходные данные для нахождения интенсивностей по¬
лучаются в результате физического эксперимента, полунатурного
или математического моделирования.
Ряд трудностей происходит от того, что имитационная модель
и модель исходная (т. е. та, на основании которой составляются,
уравнения для вероятностных характеристик p{s\ m(s), 0(s)), как*
правило, неодинаковы. Дело в том, что имитационную модель
S П. Е. Казаков и др.
обычно стремятся сделать достаточно полной, а исходную модель
для метода двухмомептиой аппроксимации приходится упрощать.
Рассмотрим некоторые способы нахождения интенсивностей
переходов. Прежде всего необходимо привести в соответствие
множества состояний структур обеих моделей таким образом,
чтобы каждому состоянию структуры упрощенной модели соот¬
ветствовало одно состояние или группа состояний имитационной
модели (см. рис. 4.4).
Первый способ определения интенсивностей основан на при¬
менении формул (4.76). Интенсивности переходов в имитацион¬
ной модели v(5r) (v, t) заданы. Вероятности состояний p{s) (t) опре¬
деляются в результате статистических испытаний имитационной
модели. Если в системе в течение достаточно длительного време¬
ня Т существует стационарное (предельное) распределение веро¬
ятностей, то вероятность p{s) определяется как относительная до¬
ля времени, проведенная структурой в состоянии s:
p(s)=T(s)T-1? (4.77)
где T{s)—часть времени, проведенная в состоянии s за время Т.
В противном случае, когда стационарного режима не сущест¬
вует или он кратковремеиеи, вероятность р(*] (t) определяется
как частота пребывания структуры в состоянии 5. вычисленная
для каждого момента времени из последовательности £,■ е [О, Т\
(т. е. отношение числа пребываний структуры в состоянии 5 в
момент t к общему числу опытов).
Зная v(sr)(y, t), p{s) (t) (s, г = 1, н), находим интенсивности
переходов упрощенной модели Х[$г) (у, t) (s, г=1, q) по форму¬
лам (4.76).
Для натурного или полунатурного моделирования интенсивно¬
сти переходов -v(sr)(y, I) чаще всего неизвестны. Трудно опреде¬
лить интенсивности v(sr) (у, t) и для сложных имитационных мо¬
делей с перемен ной или условной марковской структурой.
Второй способ не требует знания интенсивностей vlsr) (у, t)
для определения интенсивностей X[sr) (у, t) упрощенной модели.
Если эта модель имеет марковскую структуру и, кроме того,
в физической или имитационной модели устанавливается режим,
стационарный относительно распределения вероятностей р{3\ то
интенсивность Vsr) определяется приближенно как величина, об¬
ратная среднему промежутку времени перехода из состояния г
в состояние s [9]:
^8г)=(М[Г(5г)])-1 (S' r = TTq). (4.78)
Формула (4.78) справедлива при допущении, что упрощенная
и имитационная (или физическая) модели эквивалентны в смыс¬
ле равенства математических ожиданий промежутков времени
перехода из одного состояния в другое.
Когда средняя частота переходов сравнительно велика, то
необходимую статистику для определения М[Т{ь,)] можно на¬
брать в одной реализации. В противном случае требуется повто¬
рение опытов.
Если распределение вероятностей состояний структуры ими¬
тационной модели нестационарно, то при выполнении некоторых,
условий можно применить третий способ определения интенсив¬
ностей переходов. Этот способ основан на гипотезе кусочной ста¬
ционарности процесса изменения структуры.
Согласно этой гипотезе время работы системы разбивается на
несколько интервалов А.7\ (i = 1, т), па каждом из которых
предполагается существование режима, стационарного в смысле
вероятностей состояний структуры. Это предположение можно
проверить, прибегнув, например, к методике определения вероят¬
ностей первым способом, описанным выше.
Число интервалов т выбирается как компромисс между точ¬
ностью решения и экономией времени счета. Интервалы Д7\- мо¬
гут быть и не равны между собой, но в любом случае длитель¬
ность интервала Л Г* должна превышать величину максимального
из зафиксированных случайных промежутков времени перехода
2fr):
Л 7'i > max Т\*'\
На основании гипотезы о кусочной стационарности процесса из¬
менения структуры интенсивности %{sr) (t) определяются прибли¬
женно в дискретных точках ti по формуле
K{sr)(ti) = (M[7fr)])-1, (4.79)
где tj — точка, соответствующая середине интервала {i = i,m:
s, г = 1, q).
Если изменение структуры представляет собой процесс суще¬
ственно нестационарный относительно вероятностей состояний
и приближенной количественной характеристикой этого может
служить неравенство
М [7fг)]
>1
(4.80)
и, кроме того, число переходов из г в s за время работы системы
не превышает нескольких единиц, то допущение о кусочной ста¬
ционарности процесса может оказаться слишком грубым.
В этом случае рекомендуется применять четвертый способ
определения интенсивностей переходов, который состоит в сле¬
дующем. Выделим случайные промежутки времени T{sr) перехо¬
да из г в s (рис. 4.6). Сгруппируем их в тп групп по признаку
близости моментов времени начала промежутков tin. Построим
для каждой из этих групп статистическую функцию распреде¬
ления F*^1^ (t) случайной величины T[sr\ Аппроксимируем
8*
115
Fi^s,)(t) функцией F(sr) (t, t<) вида
pi") у ti)-^ ~ 6XP [ф(5Г) ^ ~ (p(S, ) ^J'’ * ^tu
0,
t<tu
(4.81)
(i = 1, m; s, r = 1, g; s Ф r),
где U = M [£<„] (1Ф 1; fi = 0); cpUr) (t) — любая монотонно воз¬
растающая функция, удовлетворяющая условию lim cp(sr) (t) = оо.
t—юо
6*
2
I
I
^2н|
I
-4UUU.
2н
и
Рве. 4.6. Экспериментальное определение интенсивности переходов неодно¬
родной марковской цепи
Закон распределения промежутка ТiS,) вида (4.81) соответ¬
ствует неоднородной марковской цепи с интенсивностью перехода
116
k{sr)(t), определяемой формулой [9]
}_(sr) ф = (t, h) ^ _ F(sr) ^ ^
При этом, как следует из (4.81), (4.82), интенсивиость ЯСзг) (f)
определяется по формуле
)«'>(() = (4.83)
и не зависит от tu что характеризует отсутствие последействия —
основное свойство марковских процессов.
Выражение (4.81) охватывает широкий круг законов распре¬
деления. встречающихся на практике. Им соответствует столь же
обширный класс интенсивностей переходов. Например, для
Ф(5Г) С) = 2 а\?Нп + д#
71=1
имеем неубывающую функцию вида
Я(ет) (<) = 2 па^'Ч71-1,
п=1
а для
N
f (S7') vv _ _
\ 71=1
— невозрастающую функцию вида
Я(ет) (t) = 2 паТЧ71-1 ( 2 а(пЧп + До) ' (N = 1, 2, 3, ...).
71=1 \ 71 = 1 /
На рис. 4.6 приведен пример, в котором
/0,2(4 + 1 Y3 (12, о,6
СГЛ5Г> (0 = In I 2 а\ГЧп -f д,
0,2t + l ’
Таким образом, интенсивности переходов структуры упрощен¬
ной модели, по которой строятся уравнения для вероятностных
характеристик p(s), m(s), ©(s), могут быть найдены из эксперимен¬
та или статистического имитационного моделирования одним из
четырех способов, описанных выше.
Первый способ наиболее универсален. Он годится для ана¬
лиза систем с марковской структурой, с условной марковской
и с переменной структурами. Однако он требует знания интен¬
сивностей переходов имитационной или физической модели, а это
условие на практике далеко не всегда выполняется.
Последние три способа не требуют знания интенсивностей
переходов имитационной или физической модели, но они пред¬
назначены только для определения интенсивностей переходов
марковской системы.
Н7
Исчерпывающей характеристикой переменной структуры яв¬
ляется матрица функций поглощения и восстановления, реализа¬
ций, которая полностью определена заданием уравнений для фа¬
зовых координат.
Наиболее трудно находить интенсивности переходов условной
марковской структуры при неизвестных интенсивностях перехо¬
дов имитационной модели. Универсального способа решения этой
задачи в общем случае нет. Можно рекомендовать применять опи¬
санные выше способы в сочетании с неформализованными так
называемыми инженерными методами исходя из специфики
задачи.
Глава 5
ДИНАМИЧЕСКИЕ СИСТЕМЫ В УСЛОВИЯХ
МАРКОВСКИХ СКАЧКООБРАЗНЫХ
ВХОДНЫХ ВОЗДЕЙСТВИЙ
§ 5.L Виды внешних марковских скачкообразных
воздействий
Уравнения непрерывной нелинейной динамилесной системы
(1.1) можно записать в виде
у = А<*> {;)ф(5) (у) + B(s)(t)u(t) + [F(1’ (t) + g<*> (t)f “r(y)S l(t)
{■>'= СHi, (5.1)
где s(t)— индекс структуры с!гстемы — марковская цель; гр(5) (у)
и я|:(в) (у)—некоторые нелинейные функции у; с (п — векторный
гауссовский белый шум; u(t)— векторпыit детерминированный
входной сигнал.
Уравнение (6.1) можно записать также в виде
•у = A js(*), t]([ [s(t), у] + В [$(*), t]u{t) +
+ {F[s{t), t) + g[s{t), i]i|:T[s(0. УО|(У. (о.2)
Так как марковская цепь s(t), но определению; ле зависит от
вектора фазовых координат у. то функцию s(t) и все функции
Рис. 5.1. Виды марковских скачкообразных воздействий
времени i в (5.2). зависящие от нее. можно рассматривать как
внешние марковские скачкообразные воздействия.
Проиллюстрируем это с помощью структурной схемы (рис. 5.1,
где учтено, что фи')т(у) g (t) = £т(t)\^s) (у)).
119
Преобразуем эту схему к виду, изображенному па рис. 5.2.
Преобразованной схеме соответствуют уравнения вида
у = Аы (г)'ф!'') (у) + v(s) (*)+ £(s) (t) + S(s) (t)tys) (у), (5.3)
где
v<*> (*)= b<*> (г)п (f); t<s) (0 = F(*> Ш (t);
S‘*>(0 = g(,)(0-rw.
Сравнение уравнений (5.2) и (5.3) показывает, что они экви¬
валентны. Следовательно, эквивалентны и соответствующие им
структурные схемы, изображенные на рис. 5.1 и 5.2.
Как видно из рис. 5.2 и уравнений (5.3), функции s(t),
v(e)(£), £(s)(£), A(s)(t), В{s) (t) можно рассматривать как внешние
Рве. 5.2. Представление марковских скачкообразных воздействий в виде
внешних воздействий
марковские скачкообразные воздействия. По способу действия на
систему их можно разделить на аддитивные (входные), мульти¬
пликативные (параметрические) ж функциональные (логические).
Входными воздействиями являются v(s) (t) и £(s)(£). параметри¬
ческими— A{s) (t) и B(s)(£). Логическим (функциональным) воз¬
действием можно считать s(t), но только при наличии функций
<p(s)(y) или ф(5)(у), зависящих от индекса структуры. Если при
изменении s(t) нелинейные функциональные зависимости ср(у)
и \|:(у) не меняются (логика системы детерминирована), то s(t)
мы не будем рассматривать как внешнее логическое воздействие,
поскольку его влияние учитывается в других воздействиях, а не¬
посредственное влияние (через <р(у) и ф(у)) отсутствует.
По вероятностным свойствам внешние воздействия делятся на
два класса: детерминированные сигналы, модулированные мар¬
ковскими скачкообразными процессами, и модулированные таким
же способом белые шумы. К первому классу относятся s(t),
v(s) (t) и A(s)(£), ко второму классу — £(s)(£), Н{8)(t).
Внешним воздействиям можно придать следующий физиче¬
ский смысл. Обычно воздействия v{s) (t) описывают аддитивные
120
управляющие1 сигналы; А ; (I) — параметры системы и мульти¬
пликативные управляющие сигналы; С("’ (/ )— аддитивные широ¬
кополосные (с равномерным спектром в полосе пропускания си¬
стемы) флуктуацпопттые возмущения (включая помехи и ошибки
измерителей), а также — белые шумы, формирующие с помощью
фильтров узкополосные (с неравномерным спектром в полосе про¬
пускания системы) флуктуациопные возмущения; S{s) (t) анало¬
гично £(s)(0 описывают соответствующие параметрические флук-
туационные возмущения; наконец, cpt,s)(y) и ф(:)(у) как функция
$ (t) используются для моделирования случайных скачкообразных
изменений, происходящих в нелинейных функциональных зави¬
симостях под влиянием внешних причин.
Таким образом, формально все системы с марковской струк¬
турой можно рассматривать как системы с внешними случайны¬
ми скачкообразными воздействиями. Для их анализа применимы
методы, изложенные в § 4.4 (непрерывные системы) и в
и. 4.6.2 (дискретные системы).
Однако нз физических соображений параметрическими и
функциональными воздействиями зачастую удобно моделировать
внутренние причины, вызывающие изменение структуры систе¬
мы. А к внешним воздействиям, таким образом, отнести лишь
входные (аддитивные) воздействия.
Линейные системы с марковской структурой, изменения ко¬
торой вызваны входными воздействиями, имеют ряд особенно¬
стей, упрощающих их анализ. Эти системы и рассматриваются
п настоящей главе.
§ 5.2. Действие скачкообразного аддитивного
белого шума па линейные системы
5*2.1. Непрерывная система. Рассмотрим линейную стохасти¬
ческую систему, на вход которой поступают детерминированный
сигнал \(t) = B(t)u(t) и гауссовский белый шум g(t), модули¬
рованный марковским скачкообразным процессом F ы(0, ГД°
,s (t)— марковская цепь с п состояниями:
y = A(t)y + B(t)u(0 + F(,,(f)S(f) (s = i7V). (5.4)
В этом частном случае уравнения для вероятностных момен¬
тов можно упростить без потери точности. Если нас не интере¬
суют условные моменты ш(5) и 0(s), то, учитывая, что справедли¬
вы соотношения
П Т1 П
2 v<sr> =■--- С), 0 = Ф - mmT, Ф - 2 Чг(я), m - 2 ^(s),
s=l s = l s = l
из уравнений (4.26), (4.31) получаем
- - Р<*> 2 v(rs) + 2 v(s,Yr) (s = ЩЦ
T=f-S r-,^s
121
m = Am I3u,
r= Ав BA'1' -f 2 p'f)F<s)GF(s)T.
Все переменные и коэффициенты в (Г).5) в общем случае за¬
висят от ззо аргумент t .по-прежнему будем записывать при по¬
становке задачи и опускать для простоты записи в алгоритмах,
за исключением тех случаев, когда зависимость от времени яеоб-
х (> д им о подчеркн уть.
Пример 5.1. Центрированный белый шум |(t) с интенсив-
востыо G, модулированный случайным телеграфным сигналом
: F(s) (t) со значениями 1 и О,
Л
с[Т)
X
1
Тр+1
t •!
УХ - /iCV
y(t)
Рис. 5.3, Сглаживание скачкообразного
белого шума апериодическим звеном
ми переходов (t) = v,
,(12)
(f) = X
проходит через фильтр низ¬
ких частот — апериодическое
звено с постоянной времени
Т (ртге. 5.3). Телеграфный
сигнал генерируется непре¬
рывной марковской цепью
s(t) с двумя состояния¬
ми, заданной пнтенсивностя-
/21)<
(v, А — const).
Таким образом, средняя дли¬
тельность импульса Т\=\~~],
средняя длительность паузы
Т2 = А-1. Требуется найти
математическое ожидание и
дисперсию выходного сиги а-
ла y(t).
С1 (ст е м а описывает с я
уравнением (5.4), которое в
данном случае имеет вид
у = г-Ч-у +F(‘)(f)lB)l
0 = 1 2),
р(1)( 0)
m (0) =--(), 0(0) = 0„
F(i) = T F{2) = 0.
Р?\
На основании (5.5) математическое ожидание выходного сиг¬
нала равно нулю, а вероятности состояний структуры и диспер¬
сия выходного сигнала определяются уравнениями
/;(а) = — урл) Д- Ар(2)
У°(0) = /)<1),
0 = —2T~lQ + p<-uT~2G,
PW(t) =--- I
0(0) = 0O.
122
Решение этих уравнении имеет вид
'■""(О f/Г - -Й-К5 ,v:>-w --
Vi-к) : v + V
Q, ... v JK р-Ы _j_ Y -(V-H.K , J5_
0 2 a — v — X 2aJ 1 2a — v —■ X 2a7
В (i) =- | v "t ^ ^ 2a,
+ v -I- Я, -- 2a,
где
^ Q л hG л / ( 1) ^ \ ^
a^-тр; p A у д p0
-T — (v-]-k)T- V
(v + X) Г
B установившемся режиме (при t-*■ °°)
_L_ .... (-) _1_ —
v-rV 1 V /,• v+J,2f
Сравнение полученных результатов с известным результатом
прохождения белого шума через апериодическое звено (0 =
= G/2T) показывает, что модуляция аддитивного центрирован¬
ного белого шума марковским телеграфным сигналом приводит
к уменьшению установившейся дисперсии выходного сигнала в
ТхЦТг + Тъ) раз!
5*2.2. Дискретная система. Аналогичная дискретная линейная
система с марковской структурой описывается рекуррентным
уравнением (5/1), в котором g(-)=^ (отсутствуют мультиплика¬
тивные возмущения), а матрицы А(-) и В(-) не зависят от из¬
менений структуры s(k):
у (к + 1) = А(к -f 1, к) у (к) 4- В (к + 1, к)и(к)-\-
+ F[s(*+1), s{k), k + l, к\%{к.) (5.6)
л ри
<7 ИМ- 1), fr • 1 I Л №), У (А1), щ = q is (к 1), к + 1 I-S (А)? к\ Д
Aq('r)(k -| 1,
Если не требуется находить условные момеЕгты m и>(к),
В(я)(к), то в рассматриваемом частном случае уравнения для ве¬
роятностей структуры и безусловных моментов существенно уп¬
рощаются по сравнению с общим случаем. Учитывая соотношения
2 P(,r) = 1, m= 2 // Ф = 2 VF(S).
s 1 S=1 S=L
из уравнений (4.50) — (4.52) получаем
p{s)(/.• -i i) = 2?(s,Vr>(0 (•-■ - Гп),
r=l
m (/.- 1 1) =r= Am (k) + Bu (/.•), (6.7)
© (Ic -j I) *-= A© (&) AT 2 E/(sr)/)(r) (к) F(5r)GF(sr,'r.
3,/—■ 1
123
где
F;s,) Д F [.s’ (к -j- 1). s(k), k+ 1, k); s Д 5 (k -f 1): г Д s (к).
Таким образом, рассмотрела задача прохождения скачкооб¬
разного белого шума через инерционный фильтр первого поряд
ка. Как в непрерывном, так и в дискретном варианте система
уравнений для вероятностей и моментов (5.5) или (5.7) содер¬
жит на 2(72—1) уравнений меньше, чем в общем случае, по¬
скольку для определения безусловных моментов m и 0 не нужно
находить условные моменты m(s), ©(".
Следует также отметить, что уравнения для математического
ожидания m не отличаются от уравнений системы с детермини¬
рованной структурой. Скачкообразный модулирующий сигнал
s(t), вызывающий изменение интенсивности возмущения £(s)(£) =
= F(6) (t)i(t), в дапном случае, как и следовало ожидать, влияет
лишь на матрицу корреляционных моментов 0.
Пример 5.2. На вход стационарного сглаживающего дискрет¬
ного фильтра первого порядка поступает по линии связи после¬
довательность независимых случайных импульсов %(к) с мате¬
матическим ожиданием, равным нулю, и дисперсией G*. В ре¬
зультате помех в линии связи возможны перерывы, которые
описываются однородной дискретной марковской цепью s(k)
с двумя состояниями: 1 и 2. Вероятности переходов цепи:
q(2l)=.qu q(]2) = q2, q{U) = 1 - qU g(22) = i — g2.
Математическая модель этой системы может быть представ¬
лена в виде
у (к + 1) = ау\(к)+ cF(ST)^(k),
где
Fni) = 1; F(2l)=F(l2) = у0?5; ]7(22) — 0;
а, с —const; 0<а<1; с>0.
Требуется найти математическое ожидание ?п(к) и диспер¬
сию Q(k) выходного сигнала у (к).
В силу условий задачи и на основании уравнений (5.7)
m(fc) = 0, а вероятности состояний структуры и дисперсия @(к)
определяются уравнениями
P<»>(fc + l) = (l-?l)p<n(fc)+?2P<2,(fc). ?П,(0) = Уо1),
р™(к)=1-р{и{к),
0(А- + 1) = а2®(к) + с2 [,(1 — q\)pa)(к)+ 0,5дг/>(2) (к) +
+ 0,5gi/j<u(fe)]G*, 0,(0) = 0о.
Исключая из этого уравнения р<2)(к), получаем
/>">(* + l) = (l-g.-g2)F(1)(fe)+g2, ?(|)(0) = />о,
0(& + 1) = a20(fe)+ с2 [ (1 — 0,5gi —0,5дг) />(1) {к) + 0,5дг] G*,
0(0) = ©о.
Г24
Решение этих уравнений имеет вид
где
(1 а (1 — q1 — g2);
G*.
В установившемся режиме (при &->оо) получаем
Нетрудно заметить, что рассмотренная математическая модель,
системы — дискретный аналог непрерывной модели из приме¬
ра 5.1. При решении практических задач зачастую возникает не¬
обходимость преобразований непрерывной модели в дискретную
(например, при цифровом моделировании) и наоборот (напри¬
мер, при аналитическом решении). Поэтому интересно выяснить
соответствие моделей и решений в рассмотренных примерах..
Сравнивая обе задачи, убеждаемся, что математическая мо¬
дель в примере 5.2 может служить дискретным эквивалентом
непрерывной математической модели примера 5.1 при условиях
где At — интервал дискретности.
Подставляя полученные выражения в уравнения модели и
уравнения для вероятностей и моментов, убеждаемся, что эти
уравнения при Д£->0 переходят в соответствующие уравнения
для аналогичной непрерывной системы, рассмотренной в п. 5.2.1.
§ 5.3. Действие на линейные системы аддитивных
марковских скачкообразных сигналов
5.3.1. Непрерывная система. Рассмотрим линейную стохасти¬
ческую систему, на вход которой поступают гауссовский белый
шум £ (t) и детерминированный сигнал u (t), модулированные мар¬
ковскими скачкообразными процессами соответственно F(5)(£) и
425
B(s)(£), где s (/ )-- марковская цепь с п состояниями:
y = A(0y + B<->(f)u(0 + F‘"C)sC) 0=1, п). (5.8)
В этом случае также, если не интересоваться вторыми услов¬
ными моментами, можно без потери точности упростить уравне¬
ния для вероятностей структуры и моментов. Из уравнений
(4.26), (4.32) получаем
'(•О ЛДХ1 (rs) . V (■*'•) (r)
Р = — Р 2j v -г v p \
?• / S Г-/ .s
’ (s) A (O Cs)o(.s) (s) X1 O'-s) i X"1 Csr) 0") ( A \
i.i } Ац /;■ В u — li + 2j v P (y = E n),
r/.S
Ф АФ j- ФАГ -- 2//s)F(*)GF(s)t 2B(s)Ulu(<,T 4- V u(">uTB<s)T, (5'9)
s=L .s n .-,‘ = 1
m ----- 2 P(*\ ® Ф — mmT, m(s) =■-■: р*'м/р'д).
S = 1
Если же исследователя интересуют только р(" и ш, то они
могут быть найдены из системы уравнений
p(s) = - //*> 2 v(rs) 2v(sVr) (.v - Т77г),
V^S 1 •■■/--S
(5.10)
m --- Am -' - 2 p(6)B(s)u.
s==i
5.,3.2. Дискретная система. Аналогичная дискретная линейная
система с марковской структурой описывается уравнением
у (Л + 1) = А(Аг -Н 1, fc)y(fc) + B(*r)(fc + l, к)и(к) +
+ F(6'r) (к 4- 1, к)<(к). (5.11)
Учитывая, что 2 д(м) ^ 1, из системы уравнений (4.52)
по¬
лучаем в данном случае (опуская аргумент к у коэффициентов
А, В, F)
/Om-i)- 2У'¥Г)(0-
»■—1
ц(*> (к -I- 1) 2 pr) [Аи'п (к) г Р{г) (к) пиг>и(к)} ::= ТОО-
Ф(А + 1)- АФАТ 2 Pn[Anir)(k)ur(k)l^ryr-:- (5.12)
+ В' ’и (к) и(,)т (к) Ат //' ■' (/>•) [ B('r) и (к) ит (к) B(sr,T +
-r F(sr)GF(sr)T]l,
U.VI/ v
126
П1 (к) 2 р(в) (А’). <-> (/■•) - Ф (А-) - m (fc) Hi (/г).
I
Так же как и для непрерывной системы, в том случае, к от да
нас интересуют лишь pis> и ш, они определяются еще более про¬
стыми уравнениями
P(S'(b-\- i)- - 2'/(*Vr)(0 (sr Гм).
(5.Щ
ш (/.•-; 1) Am (/,■)-; X q(l>r)p(r)b{sr)u (k).
•S,/—1
Таким образом, система уравнений для определения безуслов¬
ных моментов m и 0 в непрерывном и дискретном вариантах
содержит на п — 1 уравнений меньше, чем в общем случае, по¬
скольку пет необходимости при атом определять вторые условные
моменты 0(л (или Чл')). В отличие от задачи, рассмотренной
в § 5.2, уравнения для m отличаются от соответствующих урав¬
нений для системы с детерминированной структурой.
На изменение корреляционных моментов фазовых координат
влияет скачкообразная модуляция детерминированного сигнала
и белого шума, а на математическое ожидание фазовых коорди¬
нат оказывает влияние лишь скачкообразная модуляция детер-
м и н и р ов а н н ого си гн а л а.
Пример 5.3. Пеленгатор цели, установленный на самонаводя-
щейся ракете, предназначен для измерения угловых координат
самолета (рис. 5.4). Самолет ставит ракете помехи с помощью
Л(т)
Ряс. б.7». Схолга пеленгатора
двух передатчиков, расположенных па концах крыльев, расстоя¬
ние между которыми равно Ь [14]. Передатчики работают попе¬
ременно. Их переключения образуют нуассоновский поток собы¬
тий со средней частотой 2л\ Пеленгатор при атом в каждый
момент времени t может измерять только направление па включен¬
ный передатчик (угол =te„). Однако эти измерения осуществля¬
ются с динамической ошибкой вследствие инерционности пелен¬
гатора, описываемого апериодическим звеном с постоянной вре¬
мени Т. Угол поля зрения пеленгатора ср равен д радиан. Даль¬
ность ракеты до самолета равна D(t), их сближение происходит
с постоянной скоростью и. Требуется найти математическое ожи¬
дание ш(0 и дисперсию 0(0 измеренного пеленгатором угла
с(0 направления па передатчик помех.
Математическая модель задачи может быть записана в виде
г .^(-к-!-е(п)) (.S-K2).
J17
где s(t) — непрерывная марковская цепь с двумя состояниями:
s — 1 — пеленгация первого передатчика помех, s = 2 — пеленга¬
ция второго передатчика помех; ^ {t) = en(t),-: e[P (t) = — eu(t),
eJi) = b/2D(ty
Согласно (5.9), m(t) и 0(£) находятся из уравнений
= — 2vp(1) -f- v, p(2)=l-p(1),
У1' = У (- !'.(1) + P(1) 2u{tl-t)) - V- p<2>),
^ =t{~~ ^ “ ^(2) 2b(t*-t)j + v 0(1' - P<2)),
Ф = А[-ф + ъг^у(^(1>-,(2))],
p( 1) (0) = p0, (0) = (0) = (1 — Po) m(02\
Ф (0) А ф0 = Go + [p0^oT) + (1 + Po) 42)12,
где начальные условия pn, т^\ 0ои параметры b, Z)o, v, v, T
заданы; tn=Do/v — конечный момент времени наведения ракеты,
определяемый из условия D(tH) = 0.
Обозначив — ц(2), аА Г1, $^Ь/2Тъ\ упростим урав-
ния для моментов:
p(i) = -2 vp(1) + v,
m = —am + (2р(1) — 1) p/(fH — t),
{} = — (a + 2v) 0 + ft/ (£„ — t),
Ф = —2аФ + 2£й/ (tn - t),
© = Ф — 7?г2, 7тг(0) A mo = p(1) (0) + p(2) (0).
Решение этих уравнений (при a¥=2v) имеет вид
р( 1) = (Ро - 0,5) -С 0,5, р<2> (t) = 1 - р<1} (0,
и» (<) = То0е-“г (2р0 - 1) pe«’e-2v<» [£ч (- у*н) - Я* (- ут)],
'и
Г* /»~Уи
в (t) да 0ос-2а< -f 2Ре*<« J [Д4 (- №„) - Е< (- Я,и)] Лг,
X
где
у А а — 2v; 1Аа-р 2v; т А^н - £;
^г(л) — интегральная показательная функция.
Анализ полученных формул показывает, что при t ta и
m (/;)-> оо (если ро>0,5) или m (t) —оо (если ро<0) имеет
место © (t) -*■ °°. Это отражает наличие расходящихся случайных
колебаний выходного сигнала пеленгатора (рис. 5.5).
128
На практике этого ие происходит, потому что угол поля зре¬
ния пеленгатора ограничен (ср < я) и на некоторой дальности
Di один из передатчиков выходит из поля зрения, после чего
Рис. 5.5. Входной скачкообразный
и выходной сглаженный сигналы пе¬
ленгатора
случайные колеоания выходного сигнала пеленгатора прекра¬
щаются.
5.3.3. «Симметричный» скачкообразный входной сигнал. В ря¬
де практических задач приходится иметь дело с так называемы¬
ми «симметричными» входными скачкообразными сигналами. Под
этим понимаются некоторые следующие дополнительные усло¬
вия. Для непрерывных систем:
v(sr) (t) = v<s'r'> (/), B(S) (t) ■■= — B(S,)(£) (s, r = 1, 72),
n
v(ss>(oa— 2 v(rs)(0;
r=l^S
(5.14)
для дискретных систем:
g(sr) (г) = q(*'r')(t),
s' A 72 + 1 — S, rf A 72 + 1 — r.
(5.15)
Физический смысл этих условий состоит в том, что каждому
состоянию одной половины множества состояний структуры со¬
ответствует свой «антипод» из другой половины. Вероятности пе¬
реходов «антиподов» равны между собой, а коэффициенты уси¬
ления входного сигнала равны с обратным знаком.
Эти свойства позволяют уменьшить число уравнений для ве¬
роятностных характеристик. Обозначая 6(s) A i6s)
М
(s')
и ис¬
пользуя условия (5.14), для непрерывной системы получаем из
(5.9) уравнения, которые можно записать в виде
п
p(s) = 5 v(sr>p(r)
/4 = 1
I
U,
(s = 1, n),
<s>,
(5.16)
772 = Am + 2 (/j(S) — P(S/))
s=l
И. E. Казаков и др.
129
I
й(4) = A0(s) + (p<s> + p(s')) B(s)u + 2 (v(sr) — v(s'r)) 0(r),
r=i
Ф = АФ -г ФАТ -- 2 PwF(S)GF(S)T + 2 B(s)uO,(s)T -{- 2 0( VB(s't,
S=1 s= l s = i
где
( n 2 — для четных /г,
s=M, l=\( no
((n — l)/2 — для нечетных n:
n
s' A n 1 — s; A — 2 v(rs\
r=l^s
Аналогичные уравнения для дискретной системы получаем:
из (5.12) с учетом условий (5/15):
п
p(s) (к + 1) = 2 q{sr)p{r) (к) (s = 1, п),
)—i
i
ш (к 4- 1) = Ат (к) + 2 (P{r) — P{r,)) (r/<sr)B(sr) + q(s'AВ^'7’)),
S,r=1
I
*&(s) (й +1) = 2 [(g(sr) - g(s'r)) ай(г) +
r=1
+ (pC) -j- P(r,)) fa^B^0 + f/s,’-)B(s'r))], (5.17)>
Ф (k + 1) = АФ (/v) AT +
+ 2 [Aa'(V(g(5r)B(s,') + qU’r)B(s'r)y-u
r= l
+ (g(.r)B(sr> j_ g(.'r)B(*'r)) uf><r)TAT +
+ (P<r) + />(r,)) (g<sr)B(sr) uuTB(sr)T -i- g(s,’-)B(5'r)uuTB(s'r)T)] -f
-r 2 g(sr)F(sr)GF(sr)T (s =171),.
r=l
172/2 — для четных /г,
цтг — 1)/2 — для нечетных п,
где
s' А п + 1 — s; г' Ап + 1 — г.
Сравнение уравнений (5.16) с (5.9) и (5.17) с (5.12) пока¬
зывает, что для нахождения безусловных моментов при действии
«симметричного» сигнала требуется на п/2 меньше уравнений,
чем в общем случае.
Особенно выгодно использовать уравнения (5/16) и (5/17),
когда эти алгоритмы реализуются на управляющих ЭВМ с невы¬
соким быстродействием, и чем больше число состояний структу¬
ры п, тем ощутимее экономия времени счета.
130
Пример 5.4. На вход инерционного фильтра, описываемого
.апериодическим звеном с постоянной времени Г, поступает адди¬
тивная смесь скалярного детерминированного сигнала u(t) и ска¬
лярного белого шума |(£), модулированных марковскими скачко¬
образными процессами B{s) (t) и F(s) (t) соответственно. Эти про¬
цессы генерируются непрерывной марковской цепыо s(t) с тремя
состояниями.
Скачкообразный входной сигнал B{s)(t)u(t) обладает свой¬
ством симметрии, которое выражается в выполнении условий
5(1)(*) = -5(3)(f), B{2)(t) = О,
Л'(“1) (£) = v(23) (£) ? v(31)(£) = v(13)(0> v(12)(f) = v(32)(f).
Составил! уравнения для вероятностных моментов выходного
.сигнала, Согласно (5.16) имеем
з
У> = 2 (s = 1,3), р<2> = 1 — р(» — р<-
г= 1
т = Г-1 [— т + (pW — р<3>)5(1)м],
Ф = Т
—1
- 2Ф -ь 2В(1)иЪ + 2 pM(F(s))2G
0 = ф _ /п2, v<n) А — (v<21> -f v<31>), v<33> А — (v<13> -f V<23>).
В тол! случае, когда система стационарна, можно найти уста-
шов и в тип е с я з н а ч е ни я:
р(1) = „(3) = „(2) = 2v — л
7 7 2v + X’ 7 2v + X’
2'КВи
m = 0, Iе) =
2v + X ’
где
0 = 2 (2vV X) (/Д52“2 Д I*'№ + F^ + (2V - ^11 Gl ’
B^(t)=B; F^(t) = Fs (s = 1, 2);
u(t) = u; *v(21)(£) = v; v(12)(£) = /u.
§ 5.4. Сглаживание случайного двоичного сигнала
апериодическим звеном
5.4.1. Закон распределения выходного сигнала. Расслютрил!
частный случай непрерывной линейной систелш с марковской
структурой, изменения которой соответствуют скачкам входного
случайного двоичного сигнала. Систелха описывается уравнением
у = а(—у + н(5)), а> 0, (5.18)
где s(t) — марковская цепь с двумя состояниями s = 1 и 5 = 2,
Э* 131
заданная интенсивностями переходов v(21)(£)= v. v(12) (t) =
u(s) (t) — случайный двоичный сигнал со значениями и{1) = иir
7.(2) = -
112 (рис. 5.6).
.(s)
,,(S)
У
Г
У и1
а
J
—-*
-и2
Рис, 5.6. Преобразование случайного двоичного сигнала апериодическим.
звеном
Найдем закон распределения выходного сигнала y(t) в уста¬
новившемся режиме (t -+■ оо). В предположении, что стационар¬
ное (установившееся) распределение существует, для совмест¬
ной плотности вероятности выходного сигнала у и индекса струк¬
туры s имеем на основании обобщенного уравнения Фоккера —
Планка — Колмогорова (3.72) при t °°
в (У - “i) -'г О - V) / (у, 1) + Л/ (у, 2) = О,
я (У + Щ) 8f ^’’ 2) + (а — I) / (г/, 2) -j- v/ (г/, 1) = 0.
(5.19)
Исключая из системы уравнений (5.19) переменную /(у, 2);
и используя подстановку х = (у + иг)/(и1 + и2), получаем гипер-
геометрическое уравнение Гаусса
х (х — 1)
д f (аг, 1)
d.z2
-j- [(3 — а — Р) х -г а — 1]
0/(*, 1)
дх
-Ь(1-а-р)/(х,1) = 0, (5.20)
где а A Я/я; Р ^ Л?/я.
Можно показать [33], что уравнение (5.20) эквивалентна
уравнению с разделяющимися переменными
. df(x, 1)
X (х — 1)
дх
[(1 — а — Р) х + ос] / (х, 1) = 0. (5.21)
Аналогично получаем уравнение для f(x, 2)
х(х — 1) + [(1 — а — Р)ж + а — 1] / (ж, 2) = 0. (5.22)
Решая эти уравнения, получаем
f(x, t) = Cixa(t-x)*-\ f{x, 2) = C2Xa~l (1 — xy. (5.23)
Произвольные постоянные Сi, С2 определяются из условий
нормировки
1 1
i f{x, 1 )dx = р(1), i f(x, 2)dx = p(2), (5.24)
где p
132
(i) л(2)
ркг)—установившиеся вероятности состоянии структуры.
Эти вероятности определяются из уравнений Колмогорова
j5(1) = —vp(1) + Ар(2), р{2) = 1 — р{1)
при t -+■ оо. что эквивалентно в данном случае р(1)(°°) = 0. Отсюда
следует
р( 1) = -А_, ^(2) = —v—. (5.25)
v -j- л ’ 1 v 4- X к 1
Подставив (5.25) и (5.23) в (5.24), произведя обратную заме¬
ну переменных у = (щ + U2)x — U2 и учитывая соотношения
j(y, 1 } = р{1)}{1) (у), f(y, 2) = pi2)f(2) (у), найдем установившиеся
условные плотности вероятностей
/1) (г/)= (Ц2 + У)а(ц1 - 0Р-1
(« +« )«+(> Я (а+1, р)’
(2) (“, + Oa_1(“i — г/)р (5.26)
fn(y) = f2)(y) = 0, уш[-и2, щ], ОС, .3 > О,
1КЦИЯ, CI
В (а, Р)
где В (а, 3)—бета-функция, связанная с гамма-фупкцией форму¬
лой
Г (а) Г (Р)
■Г(а + Р) *
Безусловная плотность вероятности на основании равенства
f(y) = f(y, 1)“Ь/(у, 2) определяется формулой
( (и2 + y)a--1 (иг - У)^1
f(y) = (»1 + “2)“+Р-15 (а, Р) ’ У *= “2’ “l]’ (5.27)
(о, у GE [— И2, ^].
Таким образом, условные и безусловное распределения вы¬
ходного сигнала в установившемся режиме являются распреде¬
лениями Пирсона I типа. В частном случае nppi ii\ = 1, 112 = О
распределения (5.26), (5.27) являются бета-распределениями:
AD / л _ vaB -yf~x Л2), V _ у*-1 (1 - у)13
J w“"5(a + 1? р)’ J КУ) 5(a, р + 1)’
1 ^ Д(аТрГ 1 ’ ^ S [°’ 11 ’ (5‘28>
/ш (у) = /(2) О) = / О) = г/ [°. 1], ос, р > о.
В частном случае при щ =■ z/2 = 1 имеем распределение Пир¬
сона н типа:
ad ЛЛ - (I - У)а (1 ~ У)6-1 Л2) ,л _ (1 У)а~1 (1 - г/)13
J \У) 0аубп/л , л оч ’ J \У)
2a+iiB (a-f 1, Р) ’ У > ~ 2а^В (а, р + 1) '
14
/(1> О) = /(2) Ы = / О) = 0, у ё [- 1,11.
/(у) = (1 + У1У,(1~У)Р ^[-1,11, (5.29)
2а+р-1д (<Х) Р) 17 v '
133
Полученные результаты позволяют сделать некоторые важ¬
ные с практической точки зрения выводы. Во-первых, даже в
случае линейной системы с марковской структурой и при гаус¬
совских начальных распределениях условные и безусловные рас¬
пределения фазовых координат в установившемся режиме будут
У
Рис. 5.7. Распределение сглаженного случайного двоичного сигнала по за¬
кону Пирсона I типа
негауссовскими. При определенных значениях параметров эти
распределения могут существенно отличаться от нормального
закона (рис. 5.7).
Во-вторых, распределение Пирсона I типа удобно для двух-
моментной параметрической аппроксимации плотностей в систе¬
мах со случайными скачкообразными входными сигналами. Фор¬
ма кривой распределения Пирсона I типа может изменяться в
широких пределах, что н обусловило широкое применение этого
закона в задачах математической статистики прп сглаживании
эмпирических данных. Как видно из рис. 5.7, вид кривых значи¬
тельно изменяется в зависимости от параметров а А Х/а и
pAv/a, характеризующих отношение спектра входного сигнала
к полосе пропускания апериодического звена и сдвиг распределе¬
ния в сторону одной из границ щ или —ll2.
И. наконец, немаловажно то, что вероятностные моменты рас¬
пределения Пирсона I типа связаны с его параметрами а, [3 про¬
стыми алгебраическими формулами, что упрощает применение
этого закона в практических задачах (эти формулы приведены
в и. 5.4.2).
134
Пример 5.5. Рассмотрим следующую задачу. Известно, что не¬
прерывный стационарный случайный процесс имеет математиче¬
ское ожидание m(t) = 0, корреляционную функцию
к (т) = /s- (ae-vi'l - уе-оЫ),
— у~
где 7 Av-f J», eA4vVv2, и плотность распределения в каждый
момент времени
((1 + у)"—1 (1 — , _ , , .
/(у)= 2a+P-1B(a, Р) ’
10, »ё[-1, 1],
где aA Х/а, Р A v/a, v, Я, a>0.
Требуется построить формирующий фильтр, на вход которого*
поступает случайный двоичный сигнал в виде непрерывной мар¬
ковской цепи.
Для решения поставленной задачи найдем спектральную
плотность выходного сигнала как преобразование Фурье от кор¬
реляционной функции:
оо
Sv(°>)=2^ J £v(T)e-iaxdr =
— оо
/ оо ^
= а£ ( 2л~ I g-vlxlg-ifflx dx —тг~ { е~а
(Г — 7“ \ _оо J
X
«2уе /1 1 \ Vе а*
(а1 — у2)д \у2 + w2 л2 + <*>/ л (у2 + о2) а2 + со2
Как известно,
Sy(w) = £Д(о) |Ф(гсо) I2,
где £|(со)— спектральная плотность входного сигнала; Ф(йв) —
амплитудно-фазовая частотная характеристика формирующего-
фильтра. Отсюда следует, что
s% (со) = ,-ч, ф (ico) = .
} зт (у -}- со ) ' ’ а + ю
Таким образом, формирующий фильтр представляет собой
апериодическое звено с коэффициентом усиления, равным еди¬
нице.
Спектральной плотности S\{(о) соответствует корреляционная
функция
оо
К-. (т) = f S-. (со) еd(о= ее—vlxl = 4vA- „ e-(v-bWiT|_
= w J ' (v-fX)
OO
Спектральную плотность и корреляционную функцию такого ви¬
да могут иметь как диффузионный марковский процесс, так и
135
-a|T|g-icoT dx |_
непрерывная марковская цепь. Однако если в первом случае
плотность вероятности: выходного сигнала отлична от пуля в об¬
ласти ( — °°, °°), то во втором случае она равна пулю вне преде¬
лов некоторой ограниченной области.
Как следует из результатов п. 5.4.1, входной сигнал, генери¬
рующий па выходе апериодического звена выходной сигнал с за¬
данной плотностью f(y), представляет собой случайный двоич¬
ный сигнал — непрерывную марковскую цепь с двумя состоя¬
ниями с, = 1 и | = —1 и интенсивностями переходов v и А. Как
показано в [64], этот процесс имеет корреляционную функцию
К-.{т), приведенную выше.
При моделировании на ЦВМ при малом шаге А/. удовлетворя¬
ющем условиям vA/, АД£<1, генератор сигнала с (i) может быть
Рис. 5.8. Алгоритм генератора случайного двоичного сигнала
построен по следующему алгоритму (рис. (5.8). На каждом ша¬
ге к следует обращение к датчику случайных чисел, распреде¬
ленных равномерно в диапазоне [0, 1]. Значение датчика — слу¬
чайное число х(к)— сравнивается с величиной vA t. если
£(&— 1)=1 (или с величиной АДt, если £>(к— 1) = — 1). Если в
результате сравнения окажется, что x(k)<vAt, то g(/c) присваи¬
вается значение 1. В противном случае ^ (7с) = — 1. Аналогично
£ (к) = —1 при х(к) < ААt, | (к) = 1 при х(к) ^ АДt.
В качестве датчиков случайных чисел используются либо фи¬
зические датчики, либо программные генераторы псевдослучай¬
ных числовых последовательностей. Последние получили более
широкое распространение при использовании современных ЦВМ.
136
Достоинства и недостатки датчиков случайных чисел рассматри¬
ваются в [60].
5.4.2. Вероятности состояний структуры и моменты выходного
сигнала. Для установившегося режима системы, описываемой
уравнением (5.18), моменты выходного сигнала определяются по
формулам
где /(5) {у), }(у) определены выражениями (5.25) — (5.27).
В результате вычислений получаем
Из выражений (5.31) следуют формулы для параметров а и [5:
Зависимости параметров а, [3 от моментов ттг, 0 позволяют
получать замкнутые системы уравнений для вероятностных ха¬
рактеристик (4.3) в случае двухмоментной аппроксимации плот¬
ностей распределениями Пирсона I и II типов.
Для неустановившегося режима не удается получить анали¬
тического решения относительно ]{1){у), }{2)(у, t), f(y, t). Однако
отметим, что система, описываемая уравнением (5.18), относится
к классу линейных систем с марковской структурой. Эти системы
рассмотрены в § 4.4, где показано, что для вероятностей струк¬
туры и моментов выходного сигнала можно составить точные диф-
:) = j yfs)(y)dy, та = \ yf(y)dy,
и.
1 1
©<*>= J (y-mWffs)(y)dy, 0= j (y-mf f(y)dy (s = 1,2),
— U
(5.31)
(a + p 2) (a + P "T* 1)" (“ + P “г 2) (a + P 4-1)2
Q (“l + ^)gP
(a -f- p -f- 1) (a -p p)"
a =
(Ц1 + Ц2) (“2 + "*) _ 1 I U2+nl
(U1 + “2)2 0 J “l + “2 ’
u1 — m
(5.32)
— щ < m < Ui, O<0<
137
ференциальные уравнения в форме Коши, правые части которых
не зависят от законов распределения. Для (5.18) эти уравнения
находятся как частный случай уравнений (4.26) и имеют вид
р(1) = — (v -г Ц р(1) -г К р(2) (t) = 1 — р(1) (г),
= а (— md> + b) f (те<2> — m(D),
m<2> = а (— пг(2> — и2) + - (m.d) — т<2>),
1 (2)
0(D = - 2а0(1> + [0(2) - 0(1) + (m(D - т<2))2], (5.33)
0(2) = _ 2а0(2) -и [0(1)- ©<2>-f-(m(1-' - лг(2))2],
т = -f p^mW,
0 = р(1) [0<D + (m(D)2] J- p(2) [0(2) + (щ(2))2] _ m2.
Как показано в п. 5.3.1, если нас не интересуют условные
дисперсии выходного сигнала, то остальные характеристики
р{1) (t), pi2)(t), mil) (t), m(2)(t), 0(£) можно найти из более
простых уравнений (5.9), которые в данном случае записываются
в виде
р{1) = — (v -Ь Я)р(1) + К, р{2) = 1 — р(1\
р(1) = — (а + v)ju(1) + ^jx(2) + ар{1)щ,
(5.34)
|i(2) = — (а + X) |ы(2) + vp,(1) — ap{{)U2,
Ф = 2а [—Ф + [ut(l)Mi — р(2)Н2],
0 = Ф — т2, т = |ы(1) + |и(2), т{$) = [Li(s)/p(s) = 1,2).
Если нас интересуют только p{s) (t) и га(£), то они находятся
из уравнений (5.10):
pil) = -(\ + k)pa> + k, р(2) = 1-р(1), ^535^
т = —am + a{p{l)ii\ — p{2)U2)
Для установившегося режима из (5.35), в частности, следует
Ы —VU 9 а и —$и
Ш = v + X ‘ = а + р ’
что совпадает с формулой (5.31) для т. Аналогичное совпадение
дает проверка других формул для моментов.
В заключение рассмотрим, как влияет случайный двоичный
сигнал на стохастическую устойчивость системы. Известно, что
138
асимптотическая устойчивость линейной стационарной системы
не зависит от входного сигнала. Это справедливо и для случай¬
ного двоичного сигнала. Математическим подтверждением могут
служить уравнения для безусловных математических ожиданий
и дисперсий:
р<1) =_(*, + П +Х, р<2) = 1
т = — am + а(р(])и\ — pi2)U2), (5.36)
'O' = — (а + v +?i)0 + (к — v)m + a(p{l)m + p{2)U2),
0 = —2a& + a(u\ + 112) [0 + (p{2) — p(]))m],
где 0 A рЧ) — ц(2).
Устойчивость в среднеквадратическом определяется однород¬
ным уравнением 0 = —2а0, а устойчивость в среднем — однород¬
ным уравнением т = —am, которые не зависят от характеристик
входного сигнала.
Пример 5.6. На вход сглаживающего ЙС-фильтра поступает
случайный телеграфный сигнал, который образуется путем пре¬
рывания постоянного сигнала с помощью ключа (рис. 5.9).
Рис. 5.9. Сглаживание случайного телеграфного сигнала инерционной
ЯС-цспочкой
Чередующиеся случайные интервалы замыкания и размыка¬
ния ключа распределены по показательному закону. Среднее
время одного интервала замыкания Т\ = \~К среднее время од¬
ного интервала размыкания Т2 = Аг1.
В начальный момент времени ключ разомкнут, конденсатор
разряжен. Требуется найти математическое ожидание и диспер¬
сию сигнала на выходе фильтра.
По условиям задачи математическая модель исследуемой си¬
стемы описывается уравнением (5.18), где
и\ = 1, U2 = 0, а= 1 /RC,
V(21) =v? VU2)=^ pd)(O) = 0,
m(0) =0, 0(0) =0.
Математическое ожидание и дисперсия выходного сигнала
определяются уравнениями (5.30):
р{1) = — (v + К)р{1) + К, р{2) = 1 — р{1),
|х(1> = — (а + v) [х(1) + Хр(2) + ар°\ р(2) = — (а + X) р(2) + vp(1),
139
Ф = —2аФ + 2 а\л
(и
т
р,ш + р/2), 0 = Ф
га-.
р{[) (0) =0, Р{2){0) = 1, ^>(0) = ц(2)(0) =0, Ф(0) =0.
Полученная система линейных дифференциальных уравнений
с постоянными коэффициентами решается известными методами
аналитически или численно. В частном случае при v = К решение
имеет вид (при а Ф 2v)
рМ (t) = 0,5 (1 - е-**), рЫ (t) = 1 - pd) (t),
2v
т(Л = 0.5 1 ч-- I о
w 'V а — 2v 1 а — 2v
-at
t—2vt
в(<) = 4
i
2 (fl + 2v)
(a2 — av — 6v2) e 2at
(a -j- 2v) (a — 2v)2
8v
2 -(a+2v)«
*-2v£
(a + 2v) (a — 2v)“
В установившемся режиме (при £-*-«>) имеем
а
2 (a — 2vy _
pd) г р(2) = 0,5; т = 0,5; 0
4 (а-\- 2v)’
§ 5.5. Сглаживание случайного двоичного сигнала
дискретным инерционным фильтром
5.5.1. Закон распределения выходного сигнала. Рассмотрим
частный случай дискретной линейной системы с марковской
структурой, изменения которой
,,(s)
I I I!
ТО
соответствуют
Л
щ 1-
изменениям
-и
2 ■
О
Рис. 5.10. Преобразование случайного двоичного дискретного сигнала дис¬
кретным инерционным фильтром
величины входного случайного двоичного сигнала. Система опи¬
сывается уравнением
у(Л + l) = ay(fc)+u(r'(fc), 0 < я < 1, (5.37)
где ikr) (к) =и (s (к) к); r = s(k) — марковская цепь с двумя со¬
стояниями (7' = 1, 2), заданная вероятностями переходов
qCr) ^g(s(k + i)\s(k)) (s, r= 1. 2),
дС22,
д<12)
7(21)
= q, qi:2' = к
и(Т) (к) —случайный двоичный сигнал со значениями и{1) =и\у
/(2)
11 о
— и 2 (рис. 5.10).
Составим уравнения (4.33) для совместной плотности вероят-
шости выходного сигнала у и индекса структуры s. В данной
задаче (с учетом принятых в § 4.5 обозначений у = у(к + 1),
.х=^=у (к)) они имеют вид
оо
Ду, 1, к -I- 1) = (1 —q) j б (у— ах — Uj)f(x, 1, к) dx -|-
— оо
оо
+ 1 J б (у — ах + и2) / (х, 2, к) dxy
— оо
7 (5.38)
.j (у, 2, к + 1) = q J б (у — ах — цх) / (х, 1, к) dx +
—оо
оо
+ (1 — Z) j б (у — ах + w2)/ {х, 2, к) dx,
—оо
тде б(•)— дельта-функция Дирака.
Взяв интегралы в (5.38), получим
f(y, 1, к + 1) = (1 - 7)/(^р, 1, л) + ^(Чг12. 2' *)’
(У \ (* + *. (5-39)
f(y, 2, к + 1) = qf(^-\ 1, к) + (1 - 2, к).
Предполагая, что существует стационарное распределение,
исключим из (5.39) переменную к. Получаем систему двух урав¬
нений относительно двух неизвестных /(г/, 1), /(г/, 2):
Ну. D = (1 - ЦЧР, i) +1 ('4й-2)’
(у— и--, \ (У "г и \ (5.ч0)
/0/, 2) = l) + (1 — 0/(—5-3, 2).
Аналитическое решение этой системы уравнений затрудни¬
тельно, однако, основываясь на результатах предыдущего раздела,
можно предполагать, что законы распределения в установившем¬
ся режиме будут близки к распределениям Пирсона I типа.
Точные выражения для вероятностей состояний структуры
и моментов выходного сигнала мояшо тем не менее получить
из решения обыкновенных разностных уравнений, как это по¬
казано в следующем параграфе.
5.5.2. Вероятности состояний структуры и моменты выходного
сигнала. Для системы, описываемой уравнением (5.37). разност¬
ные уравнения для вероятностей и моментов являются частным
случаем уравнений (4.50). (4.51):
р(1)(К1) = (1 — q —I)р{Х) (к) + I. р{2) (к -г 1) = 1 — р{1) (к + 1),
.m")(k + 1) = [pfl)(*+l)]-l{(l-g)p(1)(*)[am(1)(fe) + щ] +
+ 1р{2) (к) [ат{2) (к) — и^\ },
141
m(2)(A + l) = [p(2,(* + l)]-4gp(I)(*) [атП) (k)+ ux] +
+ (1 -I) p{2) (к) [am(2) (k) - u2]
0(1) (7c + 1) = [/?<!>(* H- 1)]-4(1 - q)p{i)(k) [tt20(1) (ft) +
+ (то(1) (ft + 1) - amU) (к) - u,)2] + lp(2) (к) [a20(2) (ft) +
+ (mil) (k + 1) — am{2) (к) + u2)2] ),
(5.41)
©<2) (ft + 1) = [p^(k+ l)]~4qp([)(k) [a20<»(ft) +
+ (mi2) (k + 1) — ama) (k) — u\)2] +
+ (1 — I)p^ (k) [a20(2) (ft) + (mi2> (ft + 1) - am(2> (k) + u2)2]},
m(k) = p0) (ft)m(1) (k) + pi2) (k)mi2) (ft), ©(ft) = Ф(А;) — m2(k),
Ф(к) =р")(к)Ф")(к) +р^(к)Ф^(к),
ф (•)(*) = 00(A) + (т(,)(к))2:
0=1, 2).
При вычислениях на ЦВМ удобнее воспользоваться более
простой формой уравнений для моментов, в которой отсутствует
деление на p{s)(k + 1). Это уравнения (4.52), которые принимают
здесь такой вид:
р(1)(Л+1) = (i-g-Z)p(i)(A:) +Z, р{2)(к + 1) = l-p(1)(fc + l)„
jbtd) (* + 1) = (1 -q) [ац(1) (к) + p(1)^i] +
+ [ар,(2) (к) — р(2) (к) и2] ?
р(2) (к + 1) = q [ajLi(1) (к) + р(1) (к)щ\ +
+ (1-1) [ар,(2) (к) -р^(к)и2],.
Y(1) (к + 1) = (1 — д) [a2'F(1) (к) Ч- 2ои1ц<1> (к) + (к) ц2] +
+ I [а2¥(2) (к) - 2вигц<»> (к) + рЫ (к) и2], (5.42)
Y(2) (ft + 1) = д [а2^(1) (к) + 2аи1рЫ (к) + p(D (к) и2] +
+ (1 - I) [а2У(2)(к) - 2аи2р<2> (к) + р<2> (ft) и2],
m (ft) = pd> (ft) + ,u<2> (ft), Ф (ft) = Y(1) (k) + W(2) (ft),
0*(ft) =: ф (ft) m2 (ft), =
0(s) W - И*> (Ol2 0 = 1, 2).
PK'} (k)
Если исследователя не интересуют условные дисперсии выход¬
ного сигнала, то вероятностные характеристики можно опреде¬
лить из уравнений (5.12):
р(1)(&+1) = (1 - q-l)pil)(k) +1, р{2)(к+ 1) = 1-р(1)(й+1),
jlx(1) (А: + 1) = (1 — q) [ар,(1) (к) + р{1) (к) щ] + I [ар/2) (к) — р{2) (к) и2],
(5.43)
142
u<2>(*+ i) = q [ajxu) (к) + р(1)(*Ы +
+ (l-i) [a\L™(k) -р^(к)и2],
ф (к + 1) = а2Ф (к) -I- 2а [MlfA(D (к) - u2\iM (к)| + и\р^Щи\р^{к),
т(к) = ц(1)(&) +р(2)(/с), 0(Л) =Ф (к) — т2(к).
И, наконец, если ограничиться нахождением лишь р{5) (к)
и т(к), то их можно определить из уравнении (5.13):
р^(к+ 1) = (i-q-l)p^(k) +I,
р™(к + 1) = 1 -p(i)(fc + l), (5.44)
77i (/с + 1) = am (к) + щр{Х) (к) — u2p{2) (к).
Нетрудно убедиться, что в установившемся режиме т(к + 1) =
= т(к), откуда следует:
/7лЧ илР(1) (к) — и2р(2) (к) _ lu1 — qu2
т\^) i — a ~~ (J + <7) (1 — я) '
Пример 5.7. С командного пункта на дистанционно пилоти¬
руемый летательный аппарат по радиолинии поступает сигнал
управления. Линия связи подвержена помехам, которые приводят
к случайным прерываниям передачи информации, поступающей
на вход фильтра. Передаваемый сигнал представляет собой по¬
следовательность импульсов одинаковой длительности, поступаю¬
щих через одинаковые промежутки времени: и (к) (к = 0, 1,
2,...). Амплитуда импульсов практически постоянна, в течение
времени переходного процесса фильтра и (к) = и, а длительность
импульса пренебрежимо мала по сравнению с этим временем.
Фильтр является дпскретным аналогом апериодического звена.
Вероятности нарушения и восстановления связи равны соот¬
ветственно q и I {q + I < 1).
Требуется найти вероятности исправного и неисправного со¬
стояний линии связи, математическое ожидание и дисперсию
сигнала на выходе фильтра в установившемся режиме.
По условиям задачи математическая модель системы описы¬
вается уравнением (5.37), в котором щ = (1 — а) и, и2 = 0.
Согласно (5.43) искомые характеристики определяются из
уравнений
/,п)(А.+ 1) = (i_9_j)p(i)(fc) +/? р(2)(fc + i) = i — p(2)(fc + 1)т
^n(fc+l) =а[(1-д)[х(1)(й) +hii2)(k)} +
+ (1 - q) ('1 -a)upa)(k),
u(2' (k + 1) =a[q^](k) + (1 — Z)nf2»(&)] + q(i-a)up^(k).
Ф(к + 1)=а2Ф(/с) + 2a(i - a)u^l)(k) + (1 - a)Vp°-'(k).
В установившемся режиме
p(s) (к 4- 1) =p^(k) =p's\
ц(«>(Л + 1)=ц(,)(А) = |*(,) (s = 1, 2), Ф(А + 1)=Ф(А) = Ф,
143
откуда следует:
Pu) = —Т-Т, рЮ = —j-j т — j.i(D -г ц(2) = -4гт
ц-ь чЛ~ i я + *
0 = Ф_?В2== 0 2а (1- а) (g+t)
(q + if \ (I -г о) [1 — а (1 — q — Z)] j
Пример 5.8. Пусть тот же дистанционно пилотируемый лета¬
тельный аппарат совершает маневр в горизонтальной плоскости
в соответствии с командами, поступающими в дискретные мо¬
менты времени к = 0, 1, 2, ... Команда и(к) представляет собой
случайный двоичный сигнал со значениями W и —W.
Вероятность смены знака и (к) в момент к равна q < 0,5.
Боковое ускорение летательного аппарата у (к) связано с ко¬
мандным сигналом разностным уравнением
у(к+ 1) = ау (к) + (1 — а) и (к), 0 < а < 1.
Начальная вероятность того, что гг (0) =W, равна 0,5. Начальное
математическое ожидание ускорения т(0) =W/2, начальная
дисперсия 0(0) =--0. Требуется найти т(к), @(к).
По условиям задачи математическая модель системы описы¬
вается уравнением (5.37), в котором u\ = U2=(i — a)W, l = q*
Согласно (5.44), искомые вероятностные характеристики оп¬
ределяются уравнениями
pM(k+i) = (1 — 2q)р(1) (к) +д, р(2) (к + 1) = 1 - р(1) (к + 1),
т(к + 1) = ат(к) + W(l-a) [р(1) (к) -р{2){к)\,
d(&+l) = a(l — 2g)0(A)+TF(l —а) (1 —2д),
0(/с+ 1) = а2® (к) +2Wa(i-a)'&(k),
р{1) (0)= 0,5, 7?г(0)= 0,51Р, 0(0) =«0,
где О (к) = ц'1) (к) — р(2) (к).
Поскольку начальные условные математические ожидания
ц(1)(0) и ц(2)(0) не заданы, то их можно положить произволь¬
ными, удовлетворяющими условию Ц(1)(0) +ц(2)(0) = 7тг(0).
Поэтому, в частности, можно положить ц(1) (0) = ц(2) (0) =
= 0,577г(0). Тогда 0(0) =0.
Решение разностных уравнений при указанных начальных
условиях дает:
р{])(к) = 0,5(1 — 2q)h + 0,5 [1 —(1 — 2q)h] =0,5, р{2) (к) =0,5,
т(к) =0,5 Wa2,
ft ал - 2а (l-g)(l-2q)W2
UW- (1 -j- а) [1 — а (1 — 2q)\ Х
X (l + [afV-r2q) К1 - ^ ^ - 2q^ + (Д (1 ~ 2q) ~ 1} *4
Установившиеся (при к oo) значения переменных равны:
р«> _ р(» = 0,5, т = о, е- •
Глава 6
МАРКОВСКИЕ СИСТЕМЫ С РАСПРЕДЕЛЕННОЙ
СКАЧКООБРАЗНОЙ СМЕНОЙ СТРУКТУРЫ
§ 6.1. Мультиструктура марковских систем
В этой главе рассматриваются динамические системы с пере¬
менными режимами управления (с переменными структурами),
изменяющимися скачкообразно в случайные моменты времени,
не зависящие от фазовых координат. Эти изменения могут про¬
исходить по разным причинам. Например, как указывалось в
гл. 1, в процессе функционирования могут происходить скачко¬
образные внезапные изменения параметров, отказы элементов
и блоков, сбои в управляющей ЦВМ в контуре управления.
Такие задачи с переменными режимами управления возникают
в системах управления полетом летательных аппаратов, в систе¬
мах промышленного назначения и других автоматах. Такие си¬
стемы по введенной ранее классификации относятся к марковским
с независимым распределением изменения структуры.
В общем случае в марковских системах происходят изменения
структуры с переходом в одно из состояний из числа заданных
детерменированных. Возможны и обратные переходы с восста¬
новлением исходного состояния.
Практический интерес представляют два типа задач. Первый
характерен для динамических систем с отказами или сбоями
без восстановления. Второй имеет место, если в системе мозможно
восстановление предыдущих состояний. Например, временное
прекращение поступления информации с последующим восстанов¬
лением, включение резервной цепи после отказа, устранение сбоя.
Задачи анализа стохастических процессов в таких системах
неоднократно изучались с помощью различных частных методов
[39, 47, 55, 57, 58, 59].
Рассмотрим общий метод, развиваемый в данной монографии,
основанный на применении теории разрывных марковских про¬
цессов с поглощением и восстановлением реализаций, который
предложен в ряде работ авторов [4, 12, 13, 28] и изложен в
гл. 3 п 4.
Исходным моментом при применении развиваемого метода
анализа систем с возможными нарушениями или различными
режимами является определение числа возможных структур и
функций поглощения, а также восстановления, если такие про¬
цессы имеют место, т. е. интенсивностей переходов в указанные
Ю И. Е. Казаков и др. 1^
структуры. Таким образом, система является мультиструктурной,
имеющей п возможных состояний с интенсивностями взаимных
переходов v{rs) (t) (г, 5 = 1, п). Процессы поглощения и вос¬
становления реализаций описываются функциями поглощения
43(rS)(y, t) (3.54) и восстановления Ч(8?)(У> 0 (3.55) при г. s = 1, п.
Отличительной особенностью марковских систем является то,
что вероятности состояний р{3) (I) не зависят от фазовых коорди¬
нат и определяются уравнениями Колмогорова (2.54) или в
форме (3.81). Эти уравнения интегрируются независимо. Тогда,
зная матрицы поглощения В* (у, t) и восстановления Г* (у, t),
можно предварительно полностью оценить вероятности p(s)(0
нахождения системы марковской структуры в каждом из со¬
стояний. После определения p{s) (t) приближенными методами,
изложенными в гл. 4, определяются вероятностные моменты фа¬
зовых координат в каждом из возможных режимов функциониро¬
вания системы. По формулам (3.113) — (3.115) определяются бе¬
зусловные вероятностные моменты фазовых координат.
§ 6.2. Вероятности состояний в системах с отказами
Случайные внезапные изменения параметров не всегда приво¬
дят к полному выходу из строя динамической системы. Вклю¬
чаются резервные элементы или цепи, и система переходит в
другой режим функционирования, который предусмотрен при
ее создании.
Обычно одно из состояний соответствует полному отказу си¬
стемы, а другие — ее исправному функционированию. Перену¬
меровав все структуры в последовательности нарушений от ис¬
правного состояния к состоянию полного отказа, получим п
возможных структур. Переход си¬
стемы из одного состояния функ¬
ционирования в другое совершает¬
ся в направлении увеличения но¬
мера. Направления возможных
случайных переходов системы по¬
казаны на рис. 6.1. Переход в со¬
стояние полного отказа возможен
из любого другого. Из-за случай¬
ности моментов времени появления
отказа смена состояний системы
(переходы) в фазовом пространстве представляет собой случайный
процесс.Физические предпосылки, лежащие в основе рассматривае¬
мой системы, связанные с тем, что переходные вероятности в дан¬
ный момент времени t не зависит от поведения системы до этого
момента, позволяют сделать предположение о марковском харак¬
тере этого процесса.
Динамику системы в каждой из возможных структур 5 будем
характеризовать уравнениями общего вида (1.1) или (1.4) с
Рис. 6.1. Возможные состоянии
системы с нарушениями (отка¬
зами)
146
функциями поглощения Р(ГЛ)(у, t) (3.54) и восстановления:
•y<er)(y, t) (3.55), имеющих вид при q(sr) (у, £|у\ t) = 8(у —у')
pcr)(yi *) =v(r.)(0/(.)(yj 0
(5 = 1, п — 1; г — 5 + 1),
(6.1)
К(вг)(у> 0 ='V(er)(0/(r)(y, 0 (г=1, П - 1; 5 = г+1).
Отличительным свойством этих систем является возможность-
только однонаправленных переходов. Следовательно, матричные
функции поглощения В* (у, t) и восстановления Г*(у, t) имеют’
треугольный отличный: от нуля вид:
Р(11) (у» О
в* (у, О
_Р(П1)(у, О
Y(11) (у, t)
О
Р(пп)(у, 0.
Г* (у, t)
v(m)
(У, *)
О
w(nn)
(у» 0_
Задача вероятностного анализа систем с отказами состоит в
определении вероятности исправного состояния в зависимости от
времени, среднего времени перехода из исправного в неисправное
состояние, а также в оценке точности функционирования, т. е.
вероятностных моментов фазовых координат и ошибки.
Как было показано в гл. 3, при распределенных независимых
переходах вероятности состояний pis) (t) определяется уравне¬
ниями Колмогорова типа (3.81) и не зависят от фазовых коорди¬
нат. В системах с отказами при однонаправленных переходах
эти уравнения следующие:
p(s) = _ p(s) 2 v(rs) (t) ■
r=s+l
s—1
v
p(r)v(sr) (g Pw (g = p^
(?o1)= 1, pf =
(s)
(s=l,re),.
(6.3)
p{on)= 0),
где начальные условия заданы
а функции v(5r) являются заданными интенсивностями пуассонов-
ских переходов.
Уравнения (6.3) легко последовательно интегрируются, по¬
скольку каждое последующее уравнение зависит только от ре¬
шений предыдущих. Интегралы уравнений (6.3) имеют вид
р( 1) (£) = ехр
п г*
— 2 )v(?1) (т)
г= 2 t
10*
(6-4)
147
(£) = exp
n .
— 2 j v(,s) (T) dt
r=S-i-l (
9=1 L
v(s9> (x') ;<
X p(9) (t') exp
n V
2 v<">(o)da
e—c_L 1 ,
r=s+x j
£?T'
(s = 2, n —l), (6.5)
n—i
t
p(n) (£) = 2 I V(nq) (t) (t) Jt.
<7=1 У
(6.6)
Формула (6.4) характеризует вероятность исправного состоя¬
ния системы. Эта вероятность уменьшается с течением времени,
так как в системе происходят нарушения, и она переходит в по¬
следующие указанные со-
Р
стояния. Формулы (6.5)
характеризуют изменение
со временем вероятности
пребывания системы в про¬
межуточных состояниях.
Формула (6.6) дает воз¬
можность оценить изме¬
няющуюся со временем
вероятность конечного не¬
исправного состояния си¬
стемы. Эта функция уве¬
личивается со временем.
Плотность вероятности времени перехода /,(£) из 5-го состоя¬
ния определим по формуле (3.83). При 5 = 1 получаем
Рис. 6.2. Изменение вероятностей состоя¬
ний системы
fi(t) = exp
— 2 \ v(rl) (т) dx
2 (о,
r= 2
(6.7)
а при s = n получаем из (3.83) функцию плотности вероятности
перехода в полностью неисправное состояние
(6.8)
fn(t) = 2 Pir) (t) V(nr) («).
r= l
На рис. 6.2 показан характер изменения этих вероятностей.
Воспользовавшись формулой (6.7), определим математическое
ожидание mt времени потери системой исправного состояния, т. е.
среднее время перехода системы из исправного состояния в
неисправное, и дисперсию Dt этого времени:
mt = 2 ту(г1) (т) exp
r= 2 t
dx,
Dt = 2 \ — ^)2v(rl) (t) exp
r=2 i
2 1 v<rl) (a) da
r—2 i
l0
71 r
2 j (a) da
148
r= 2 t
(6.9)
dx. (6.10)
В ряде задач можно принять допущение о постоянстве ин-
1 тенсинностей (v(sr) = const) переходов на интервалах времени
функционирования системы. Тогда формулы (6.4) — (6.6) прини¬
мают вид
lp(D (t) = exp
р(2) (t) = exp
2
— 2 v(rs)t
r=s4-l
(6.11)
s-1 •
2 \ (t) exp
<7=1 J
— 2 v<rsH
•r=S-f-l
™-l p
p(n) (£) = 2 j P^q) ("0 (s = 1, ii).
9=1
C?T,
(6.12)
(6.13)
Формулы (6.9), (6.10) при постоянных интенсивностях пуассо-
яовских переходов системы в каждую из рассматриваемых струк¬
тур приобретают вид
1 г, 1
mt
Dt =
v(n)
2 v
(п)
(6.14)
Если процесс смены структуры является простой марковской
цепью при дискретном времени с интенсивностями переходов
v(sr)(/c), зависящими от моментов времени th = kTn, то уравнения
.для вероятностей состояния принимают вид
п S—1
р<«>(А) 2 v<«>(*) -f-2 Р<г) (ft) v< "•>(&)
j<‘> (Л+ 1) = /><•>(*)-Уд
P(s' (0) = Ро
r=s-t-i Г=1
(S) Ц =
(6.15)
В формулах (6.4) — (6.6) интегралы следует заменить сумма¬
ми, а формулы (6.14) сохраняют прежний вид.
§ 6.3. Вероятностные характеристики фазовых
координат в системах с отказами
Вероятностные моменты фазовых координат динамической систе¬
мы с отказами определяются из уравнений, полученных в § 3.10.
В гауссовском приближении для нелинейной исходной системы
вида
Y = a<‘>(y,t)+B<‘>(y,t)u + F<‘>(t)t(t), У(*о)=Уо (6.16)
уравнения для условного вектора математического ожидания
m{s) (t) и дисперсионной матрицы ©(s)(f) записаны соответственно
в виде (3.110) и (3.112). Примем во внимание, что для рассмат¬
риваемой системы в соответствии с (2.38), (2.40) вектор сноса
149
a(s)(y, t) и матрица диффузии D(s)(y, t) имеют форму
a(s)(y, t) = а(5) (у, t) + B(s) (у, f)u, ?
D(,)(y, i) = Р(,)(06(0Р(,)-’Й.
Вектор плотности потока вероятности я(5) (у, t) на основании
(3.28), (3.58) с учетом (6.17) имеет следующий вид:
Л(8) (у, 0 = [а(5) (У, t) -Г B(s) (у, t)u ] /(s) (у, t) —
-(l/2)[F<s)(i)G(*) F(s)T (<) Vy/(s) (y, *)]• (6.18)’
Подставляя (6.18) в правую часть (3.110), получаем для
вектора условного математического ожидания m(s) для каждого s
следующие уравнения:
= a(0s) (m(s), ©(s), t) — BqS) (m(s\ 0(s), t) u —
(5 = 1,/г), (6.19)
где
oo
a(0s) (mW, 0(s), t) = j aW (y, t) fs) (y, t) dy,
— 00
00
B<s) (mW, 0(s), t) = j B(s) (y, t) /(s) (y, t) dy.
— 00
Чтобы получить уравнения для дисперсионной матрицы 0(s\.
применим статистическую линеаризацию нелинейной векторной
функции а(8) (у, t) в гауссовском приближении:
а<«> (у, t) = a<s) ( m<5>, 0(s), t) + К£° (mW, 0(s), t) (y - (6.20)
где (m(s), 0(s\ t)—матрица коэффициентов статистической ли-
неаризации [22, 23, 27, 74]. Подставляя (6.18) с использованием
(6.20) в правую часть (3.112), получаем
©<«> = Kf(m(s\ 0<s>, t) ©(s) + 0(s)Ka)T(m(s), 0(s), t) +
П / ^
-f- F(s)(t) G(<) F(s)T(<) — 2 vW(i)^X
r=l^S ' P ' )
x[©(s)— 0(r)— (m<r>— m<s>)T]j (s = lTn). (6.21)
Уравнения (6.19), (6.21) следует рассматривать и интегрировать
совместно с учетом уравнений (6.3) и формул (6.4) — (6.6).
Для определения безусловных вектора математического ожи¬
дания т(£) и матрицы O(t) в любой текущий момент времени
следует воспользоваться формулами (3.113), (3.115). В рассмат¬
риваемой системе с отказами в пределе устанавливается режим,
150
V(sr) (t)
P0)W (щ(-0 _ ш<г))
(*)
когда все р{г) (£ — «>)= 0 (г = 1, п — 1). Для этого момента
Бремени в стационарной системе следует считать все т(г)(°°) =0
и 0(г)(о°) =0 (г = 1, п — 1), а для определения т(п) и 0(п) при
р{п) = 1 из (6.19), (6.21) получаем
а£° (т<»>, ©(п)) + В^п)(т<«>, 0(n)) и = 0, (6.22)
ЗЦп)(т(п\ 0(п))©(”> + 0<и>К<Г)Т(т(’г>, 0(n))+ F(n)GF(,t) = 0.
Из уравнений (6.22) определяются m(n) = m и 0(п) = 0 для
установившегося режима полного отказа системы.
Если динамическая система (1.2) линейна в каждом состоя¬
нии, то уравнения (6.19) и (6.21) не связаны между собой
и имеют вид
п ^ ^
1^(0 = A(s) (t) m<«> + B(s) (t) и- 2 v<sr) (m(s) — m(r))-
r=l^S P (г)
(6.23)
<в(s) = A(s) (t) 0(5) + 0(S)A(S)T (f) -!- F(s) (t) G (t) F(S)T (t) —
71 (r)
- 2 v(5r) о Ew^L [0<s> - 0,r) - (m(r) - m(s)) (m(r) - m(s))T]
r=l^S P (0
(s= 1, n). (6.24)
Для определения pi$) (t) используются уравнения (6.3).
Пример 6.1. Следящая система имеет уравнение
(Тр* + р + к)у = к[х + т],
структуру, изображенную на рис. 6.3, и нулевые начальны з
условия: г/(0) = г/(0) =0.
Система может находиться в четырех состояниях, характери¬
зуемых параметрами к и Т:
1) к = h = 5, Т = Го = 0,1 с; 2) к = ко = 5, Т = Т{ = 0,2 с;
3) Л’ = /ci = 3, Т = То = 0,1 с; 4) к = кх = 3, Т = Ti = 0,2 с.
Первое состояние является исправным. Интенсивности пере¬
ходов v(sr) из r-го состояния в 5-е постоянны и равны v(21) = 0,1;
V31) = 0,2; v(32) = 0,1; v(42) =0,1; v(43) =0,2; v(41) =0,2; остальные
интенсивности равны нулю.
Входная переменная x(t) =
= ао + ait; ао, а\ — постоян¬
ные; ^(t) — белый шум с ин¬
тенсивностью G = 0,1 с-1;
Ж!£(£)] = 0. Для анализа
этой системы воспользуемся
Изложенной теорией. Рис. 6.3. Схема следящей системы
151
к
/
Тр+1
Для определения вероятностей состояния p{s) (t) (5 = 1, 4)
используем уравнения типа (6.3):
pH) = — pd) 2 v('n\
7-2
4
р(2) = — р(2) ^ V<r2) -f- p(Dv(21>,
7—3
pd) (0) = 0,7,
р<»МО) = од,
р(3) = р(3)Л;(43) _|_ р(1)Л;(31) _j_ ^(2)V(32)? р(3)(0) = 0,1,
р(4) = 2 p(rV4r),
Г=1
(0) = од.
Для определения вероятностных моментов фазовых координат
представим уравнение следящей системы в следующей форме.
-.(S)
Рис. 6.4. Графики функции p{s)(t) вероятности
состояний системы с отказами
введя обозначение у = у\\
Ух = г/2, г/х (0) = о,
г/2 = — у г/i — у у* +-f 0е Ч-г/2(°) = 0-
Для вектора математического ожидания m(s)T = [m(1), т(2)|
и ковариантной матрицы
0(s) =
e'n е<*>'
.ei?
(s=l,4)
на основании (6.23) и (6.24) получим уравнения
4 (г)
ш(') = А(!)тМ— ^ vM^(mW-mW) + Fwx,
r=l=^S Р
152
q(s) = A(e)0(s) + ©(*)А(*)т + f(s)gf(6)t —
V
r=l^S
(r) )
v(sr) 'Tij [0(S) - 0(r) - (m<r> - m<*>) (mW - m«)T]
(s= 1
.,4), m(s) (0) .
= 0, 0(3>
(0) =0,
' 0 1 '
■ 0 0 '
A(s) =
к 1
— т — т _
. F(s> =
Л 1
о y
С учетом четырех вариантов для анализа такой следящей
системы со скачкообразными нарушениями параметров необхо¬
димо совместно интегрировать 24 дифференциальных уравнения.
Из них четыре уравнения для вероятностей состояния p(s) (t),
'
\ у*®''
J: 11
■ i /г \
У \
я(1)
911
1
V ! Р O') 1 !
| J11 ! j
t,c
Рис. 6.5. Графики функции (£) Рис. 6.6. Графики функции 0^ (t)
(s)
восемь уравнений для математических ожиданий mi и 12 урав¬
нений для корреляционных моментов 6if фазовых координат.
На рис. 6.4 изображены функции вероятности состояний
.p[S)(t) следящей системы. На рис. 6.5 и 6.6 изображены резуль¬
таты вычислений условных моментов (£), 0nS) (t).
4
Безусловные величины т1 (t) = 2 P(s) (t) m[s) (t) 11 @(S) (t) =
■■= 2 P(s) [0i? + (^iS) — mi)2] рассчитываются по формулам (3.113)
■И (3.115).
§ 6.4. Вероятности состояний в системах
с нарушениями и восстановлением
Если в динамической системе, в частности с отказами не¬
которых элементов или прерыванием информации в процессе
функционирования, возможно восстановление исходного или про-
153
межуточного состояния путем включения резервных элементов
цепей и других мероприятий, то система является мулътиструк-
турной с полноразмерными матричными функциями поглощения
В* (у, t) и восстановления Г*(у,£).
Пусть мулътиструктурная система описывается уравнениями
общего вида (6.16). Достаточно простой и во многих задачах
приемлемый алгоритм расчета вероятностных характеристик такой
мультиструктурной системы можно получить в гауссовском при¬
ближении для функций /(s)(y, t). Этот алгоритм содержит урав¬
нения для вероятностей состояний p{s) (t) типа (3.81) и уравнения
для вероятностных моментов типа (3.110), (3.112). Уравнения
(3.81) для вероятностей состояний р(8) (t) не зависят от фазовых
координат и имеют в данной задаче вид
i(s) =
j(s) s
r—ly^s
v<"*> (t)
r~v£s
/j(')v<sr) (it), p<5> (fn) = p(p. (0.25)
Эти уравнения интегрируются независимо от уравнений для мо¬
ментов. При нестационарных интенсивностях v(sr) (t) эти уравне¬
ния решаются численно с помощью ЦВМ.
Если интенсивности переходов v(sr) постоянны, то может быть
получено аналитическое решение уравнений (6.25), которое пол¬
ностью определяется начальными условиями и корнями харак¬
теристического уравнения
я + 2
—
_ v(1,,)
г= 1
— У
л + 2^’ ••
г= 1
— v<2n)
— V(ni>
— v(n2)
.. л + 2 v<rn)
I—1
-0.
((>.26)
Алгоритм решения этой задачи хорошо разработан, решения
имеют вид
рМ (t) = 2 4V’* {s = !ДЦ, ((5.27)
4.Р определяется из на-
где Хг—корни уравнения (6.26), а
чальных условий (£0) = p{J\
В задачах, в которых можно считать v(sr) = const, возможен
установившийся режим при t = °°. В этом режиме p^s) не за¬
висят от времени. Тогда в уравнениях (6.25) следует положить
p{s) = 0, и для установившегося режима имеем алгебраические
уравнения
2 (р(?-v(r,s)ж = о, 2
T=1^S г=1
1.
(П.28)
154
Разрешим систему уравнений (6.28) относительно p(h) (к =
= 2, /г), выразив их через р(1):
д(Л)
р№) = 1 pW (/,' = 2,/г).
(П.29)
где детерминант А[ имеет вид
д1 =
v<2')
V(31)
v(«-n)
v(ni)
п
- 2 v(2r)
v(32)
vC«-l2)
v(«2)
1 — 1
Х('2П)
v(3n) .. .
Cl
7
1
) v(n n—\
: (6.30)
Aife) — детерминант Ai с замененным к-м столбцом на столбец
п
- 2 v<ir)
7—1
_ VU2)
_ V(1 n—1)
Подставим выражение (6.29) в уравнения (6.28) и разрешим
относительно р{1). В результате получим формулу для р{1):
А,
9(1) ~
д1 + 2 дГ
k=2
(6.31)
Если (6.31) подставить в (6.29), то получим окончательные
формулы для рт (к = 2, п):
р(Ю
А1 + 2 Ai!>
k=2
(к = 2, п).
(6,32)
§ 6.5. Вероятностные характеристики фазовых координат
в системах с нарушениями и восстановлением
Вероятностные характеристики фазовых координат марковской
системы в каждом состоянии могут быть получены из уравне¬
ний § 3.10 пли из соответствующих уравнений гл. 4.
Пусть нелинейная система со случайной структурой описы¬
вается теми же уравнениями (6.16). При гауссовской аппрокси¬
мации функций fs) (у, t) после применения статистической ли¬
неаризации нелинейных зависимостей a(s) (у, Z), B(s) (у, t) по¬
лучим из (3.110) и (3.112) для векторов математического ожн-
155
дания m{s) (t) и дисперсионных матриц 0(s) (t) следующие урав-
неиия:
плотности /(5)( у, £); K(as) — матрица коэффициентов стати¬
стической линеаризации. Решение задачи определения вероят¬
ностных характеристик фазовых координат достигается совмест¬
ным интегрированием уравнений (6.33), (6.34) с учетом (6.25)
при заданных начальных условиях m(s)(£0), 0(s)(£o).
Более полная ступень вероятностного анализа мультиструк-
турной системы достигается на основе применения аппроксимации
многомерных функций fs) (у, t) следующими зависимостями [27]:
где fs) (ifh, t)—одномерная функция плотности вероятности 5-й
менты координат системы. Для определения этих вероятностных
моментов служат уравнения (6.33), (6.34), а для одномерных
функций fs) (yh, t), как показано в [32], можно получить диф¬
ференциальные уравнения. Эти уравнения находятся из (3.87)
после интегрирования левых и правых частей по переменным
уъ ..., yh-u Уь+ъ • • ., Упу кроме переменной yh. В результате
имеем следующие уравнения:
= aoS)(m(s>, 0(s), t) -f B(0S) (m^s\ 0(,<?), t)u.—
r=i^s L
©(S) = К^(т« 0(S\ t)0U) + 0(s)Ka)T(in(s>, 0(S), t) -
где a(0s) = M [a(5) (y, t)], B^ = .1/[B(s) (y, £)] npn гауссовской
fs) (y, ^) = IT/(S)(№, t)x
bp — mf (*)] bq — m'f C)] .
структуры для h-й координаты; rap (t) — математические ожи¬
дания фазовых координат; 0pg (t) — вторьте центральные МО-
Для приближенного интегрирования уравнений (6.36) и ре¬
шения данной задачи применил! метод ортогонального разложения
[25, 32], представив функции /(s) (yhj t) в форме
(Ун, t) = fo\yh, t)+ 2 ais)(?is) (Ун, t) (ft = 1, ny; s = 1, n),
i=3
(6.37)
где
/о° (Ун, t) =
Vzn e$
exp
20$ (0
<?<s> (Ун, t) = t4== # i Ы /bs) (г/л, 0:
/ 0$ (*)
[f/'/iV — 3 (Qftft)2],
Jhh
a(5s) = — 5f [<7ft5 — 10g$9$],
o4s) = yjy- ['/$ — 157Л40ДЛ — 30 (0лл )3];
(6.38)
(6.39)
(6.40)
qnj —. центральные моменты /-го порядка ft-ii переменной;
Hi(yh) — полиномы Чебышева — Эрмита [32].
Центральные моменты определяются из уравнений, ко¬
торые получаются путем умножения (6.36) на (ун — т^УУ и:
интегрирования по переменной yh\
<lhi = j j Ял0 (у, t) (i/Л — m(n}y xdy —
— cc
2 v(sr) (0 Vhj — f (Ун — т^У /о?) (Ун, t) dyh
, / „ J) \ t)
r=\^s
(/ = 3,4. s = l,re). (6.41)
Формулы (6.35), (6.37) —(6.39) п уравнения (6.41), (6.25),
(6.33), (6.34) вместе с формулами для статистических коэффи¬
циентов линеаризации образуют замкнутую систему, представляю¬
щую собой полный алгоритм определения функций плотностей
вероятностей /(5) (у, t) и j{s){yh, t) (h = 1, пу). После определения
этих функций могут быть вычислены уточненные моментные
характеристики фазовых координат динамической системы.
157
§ 6.6. Двухструктурная марковская система
с переменными режимами управления
Широко распространенным и практически важым видом си¬
стемы со случайно перестраиваемой структурой является двух-
структурная, т. е. система с двумя' детерминированными состоя¬
ниями и: распределенными переходами с интенсивностями,
.зависящими только от времени. К ним, например, относятся си¬
стемы, имеющие два возможных состояния: исправное и неис¬
правное (с отказом), и о восстанавливаемое, а также системы со
случайным перерывом и восстановлением информации, необхо¬
димой для управления. В обеих рассматриваемых системах при
отказе пли при случайных перерывах информации, поступающей
в нее но информационному каналу, структура изменяется скачком.
При восстановлении отказываемого элемента или при возобнов¬
лен пи информации система переходит скачком к первоначальной
■структуре.
При вероятностном анализе таких систем практический ин¬
терес представляют оценки первых двух вероятностных моментов
/фазовых координат: вектора математического ожидания и корре¬
ляционной матрицы. Используя эти оценки, можно определить
вероятностные характеристики точности для любой координаты.
Пусть динамика системы в каждом из двух состояний описы¬
вается линейными уравнениями пу-го порядка
у = A(e)(0y + B(e>(0u + F(e)(0M0? У(*о) =Уо (s = 1, 2),
(6.42)
а интенсивности независимых распределенных переходов, из
-состояний (1) в (2) и обратно будут \i2U(t), v(12)(t). Уравнения
Колмогорова (6.25) для этой системы следующие:
pi 1) = _ //1)\-(21) (*) + pi2VV(12) (у р(Л) (у =
(6.43)
= _ р(2)Л.(12) у pi 1)у(21) (у pi2) (у = pi*\
Так как в данном случае р12' = 1 — //''.то уравнения (6.43) можно
представить для одной вероятности рП) (I) в виде
pi 1) = - /ZD [v<i*> (t) + v(2D («)] -- v(w> (t), //T (i„) = p?>. (0.44)
Ре¬
шение уравнения (6.44) следующее:
p(i) (0=1 v(12) (т) exp
Л' (a) da
dji exp
v (a) da
. ((>.45)
где v(o) = v(21) (a) + v(12) (a). Если v(12,= const, v(21) = const, to
p(i) (t) =.= р(0г) exp [— (v<«> - - v(*D) l\ —
V(12)
—- {1 — exp [— (уб12) - у(2]>) *]}. (6.46)
v(21)
.158
В установившемся режиме, если таковой имеет место, в си¬
стеме при t ^ оо вероятности р(1) и р(2) принимают значения
^(12) v<21>
V(12) _j_ v(21) ’ = V(12) _l_ v(21)~ * (6.47)
Для вектора математического ожидания m(s) и корреляцион¬
ной матрицы 0(s) в гауссовском приближении в соответствии
с (6.33) и (6.34) получим следующие уравнения:
т*1) = А(1)тВ) — md) -f v{12)Krr m<2) B(1)u,
pKl) p\l)
(1) (X)
m(2> = A(2)m(2> — v<21) - ni(2> 4- v<21) niB) B(2)u;
1 pv2)-
0(1) = A(1)0(1) -1- 0(1)A(1)T — V<12) — 0(1) -f V<12) — 0(2> 4-
p(U ■ p(l)
-- F(1)GF(1)t + V(12)4^- (m<2> — m<«) (m(2> —m<D)T,
d) d) <6-49)’
0U) = A(2)0(2) + 0(2)A(2)t _ v(21) £^.0(2) + v(2]) 0(1) _
p{2) p(^)
F(2)GF(2)t v(2D^-(m<i> - m<2>) (m<« — m(2>)T..
P
Интегрирование этих уравнений следует производить при на¬
чальных условиях m^, inо2), 0q1\ 0(о2) совместно с уравнениями'
(6,43).
При исследовании мулътиструктурной системы с распределен¬
ными переходами пуассоновского типа предварительно может
быть оценена ее устойчивость в смысле Ляпунова по моментным
характеристикам. Для оценки устойчивости по математическому
ожиданию следует рассмотреть однородные уравнения вида
ni(1> = ( Au) — v(12)^—- ] m(1) v<12) m(2),
V Ра) / Ра) -пч
(6.о0>
/ / 0 \ D(l) \ nU)
ш^2) = ( А( } — v^D ^ J т(2) v<24 т(1).
Если ввести объединенный вектор m размера 2щ + 1 и объеди¬
ненные диагонально-блочные матрицы А и Н размера 2пу X 2пу,
вида
то уравнения (6.50) можно переписать в виде одного векторно-
матричного уравнения
ю=(А + Н)т. (6.51)
Для оденки устойчивости уравнения (6.51) следует применить
условие Рауса — Гурвица к характеристическому уравнению, по¬
лученному из (6.51) при «замораживании» коэффициентов мат¬
рицы Н, зависящих от pil) (t) и p(2)(t):
= 0.
X А±1
-"п
1
С-1
хН
1
Я12
А ТТ
Л12Пу 11 12 Чу
~Л21
“^21
я - я2, -
-я,, .
А
2772/1
_ Я2Пу1
А
гпу2
Я2Пг/2 ■
5 А ТТ
•• *2Пу2Пу 2Пу2Пу
(6.52)
Для оценки устойчивости по корреляционной матрице следует
рассмотреть однородные уравнения вида
0(D = А(1)0(1) 4- 0(1)А(1)Т - vu2) 44 ®(1) - v(12) 44 ©(2)-
р(1) р( 1)
@(2) = А(2)0(2) + 0(2)А(*)Т _ Л,(21) 44" 0(2' -4 V(21)44 0(1)-
р{ 2) р(-)
(6.5.:
Если ввести те же объединенные матрицы А и Н, а также мат-'
~0(1)~
размера 2пу X 2пущ то уравнение (6.53) запишем
рицу 0 =
©(2)
в форме одного
0 = А0 + 0АТ + Н0.
(6.54)
Для оценки устойчивости уравнения (6.54) следует также
применить условие Рауса — Гурвица к характеристическому урав¬
нению, полученному из (6.54) при «замораживании» коэффи¬
циентов той же матрицы Н, зависящих от p(l) (t) и pi2)(t):
— А — Ал
X 2Ап Нп
^21 ^12 ^21
42 21
д-2 А>0-//0,
ТТ А А ТТ
12 "* 12пу 2пу1 12п1
^22/г7, ^2пи2 ^22
„у
X—2А0
Но
ПуЧПу 2Пу2Пу
= 0.
(6.55)
Пример 6.2. Динамическая система с пуассоиовским наруше¬
нием и восстановлением описывается системой двух одномерных
уравнений
у = А(1)у + Fc, у (to) = г/о;
у=А™у + П, y(to)=0.
Интенсивности смены структуры v(12)= const. v(21) = const.
160
Уравнения для вероятностей состояний р(1), р(2) следующие:
р<» = _ p'«v«‘> + P«V“>, р«> (У = р™,
р«> = - Ли + рОу,и, Р<« (У _ Р<=>.
Уравнения для вероятностных моментов — математических
ожиданий т{2) (t) и дисперсий 0(1)(£), 8(2)(£) типа (6.48)
и (6.49) — следующие:
m(1) = A(1)m(1) - v(12) ^ ™(1> + vtl2) ^ пг(2\ т™ (У = то™,
р{1) р\1)
m(2) = A(2W2) — v(21)^(iy т^2) + v(21) m^2) Со) = тао2>»
ёш= 2А(1)е(1) - v(12)44(e(1) - е(2)) j- v(I2) (т<2> - т(1>)2 + лс,
ё») = 2А(2)е(2) - v(21) 4- (е(2) —0(1)) + v(21) (т(1) - т(2))3 + яс,
eu)(g = e(o1), е(2)(у = е<2>.
Для оценки устойчивости по математическому ожиданию со¬
ставим характеристическое уравнение типа (6.52)
_ AW , v(12) Р^_) (% _ А(2) , v(21) _ V(12)V<21) =
0.
Для того чтобы данная система была устойчива, необходимо
согласно критерию Рауса — Гурвица выполнение условий
_ Ас> _ Ат + „сш £'+ „«« > 0|
v'“V!” + f - 4“’ + vM> ( - A1" + 40 > 0-
Д) Д - 1 pC2)
Например, при Л(1) = 1, Л(2) =0, v(12) =0,1, v(2l) =0,05 эти ус¬
ловия всегда выполняются.
Для оценки устойчивости системы по дисперсии составим
характеристическое уравнение типа (6.55)
я _ 2Л(1) + v<12) 44 (к - 2А(2) + v(21) О - v(12)v(21) = 0.
) \ PK~'ir
Для устойчивости системы по дисперсии необходимо согласно
критерию Рауса — Гурвица выполнение условий
-24<‘>- 2А™ н- V11*14|i + Vм 44 > 0,
П - -> ТУ' - ^
_ v(12)v(21)
+ ( _ 2А® + v<“> jg.) ( - 2А<’> + v«« £4-) > 0.
При тех же данных из этих выражений следует, что условия
всегда выполняются..
И И. Е. Казаков и др. 161
§ 6.7. Комбинированная система самонаведения
Рассмотрим две задачи управления полетом летательного ап¬
парата с помощью комбинированной системы самонаведения со
случайной структурой.
Первая задача состоит в совместном исследовании двух по¬
следовательных режимов: 1) неуправляемого полета, зависящего
от случайных начальных условий и нормального ускорения цели
Рис. 6.7. Структурная схема системы самонаведения
Яд, и 2) самонаведения под действием управляющего ускорения
а (рис. 6.7,а), включаемого в случайный момент времени.
Вторая задача состоит в исследовании самонаведения со слу¬
чайными неоднократными перерывами и восстановлениями ин¬
формации, поступающей в координатор цели.
Летательным аппаратом может быть самолет, ракета, косми¬
ческий аппарат [37, 38]. Структурная схема одного канала си¬
стемы самонаведения представлена на рис. 6.7, б, что соответ¬
ствует кинематической схеме самонаведения, приведенной на
рис. 6.7,6!. Уравнения этой системы самонаведения следующие
[43]:
pD = v ц — [v = — v,,
2lV | д
P®v = -JJ <»D T -JJ — JJ-, (O.oG)
a = W (p) [WK (p) o)D + I (01,
где W {p)—передаточная функция летательного аппарата;
Wu(p)—передаточная функция координатора; coD = е— угловая
102
•скорость линии визирования; а, ац — нормальные ускорения ле¬
тательного аппарата и цели; ■£(£) — случайная ошибка измерения
тина белого шума с интенсивностью G.
Качество самонаведения характеризуется величиной промаха
(()
(пролета), текущее значение которого h(t) = ——При на¬
личии помех эта величина является случайной. Поэтому каче¬
ство системы самонаведения обычно оценивается величинами
математического ожидания mh и дисперсии Dh промаха. Для это¬
го надо определить математическое ожидание m^D и диспер¬
сию Двр.
При решении сформулированных задач предположим, что
кц — v = D = —Vr■= const. Тогда из первого уравнения (6.56)’
✓ i \ D
JD (t) =. Dq + Dt = Ц, f 1 — — J, где tK = полное время на¬
ведения (полета): Do — начальная дальность. Примем также ко¬
ординатор цели безынерционным, т. е. WK(p) = 1, а передаточную
функцию летательного аппарата W(p)= ko. При высказанных
предположениях уравнения (6.56) принимают вид
0>D = - СОЯ + £ - Jr £• (б-57)
Перейдем к относительным величинам, для чего введем обо¬
значения
т = ^(0<т<1), * = G0 = G^, Ъч = ац^
s ur tK О
Для безразмерного времени т уравнение (6.57)’ следующее:
У = — У — — Yzrf So (т); ®d (т) = у(т)« (6.58)
где ^(т)— белый шум с единичной интенсивностью..
Текущее значение промаха принимает форму
h{i) = у (г) (1 — т)2. (6.59)
Первая задача. После старта летательный аппарат дви¬
жется некоторое случайное время неуправляемым (режим не¬
управляемого полета). На структурной схеме (см. рис. 6.7,6)
этот режим можно учесть, положив W(р) = ко = 0 или приняв
в уравнении (6.58) к = 0, т. е. контур управления размыкается.
Изменение у{т) в этом режиме будет происходить только под
влиянием ац (будем считать регулярной функцией) и начального
условия. В некоторый случайный момент т ^ 1 начинается ре¬
жим самонаведения, т. е. контур управления замыкается: йо^О.
Момент перехода системы из первого режима во второй будем
считать иуассоновским процессом с интенсивностью перехода
v(21) (т)= v = const. Обратного перехода нет, т. е. v(l2) =0.
11* 103
Уравнение (6.58) перепишем в виде
у = - Л(£)г/ - т^г - (г) (s = 1,2), (6.60)
где
i —2 / л\
(s=1)’ *«_
(s=2);
0 (s = 1),
уж,
Т=\ (* = 2>-
Уравнения Колмогорова (6.43) для вероятностей состояний
в данной задаче следующие:
рП> = —у» (0) = 1, рм = Vp(1), р{2) (0) = 0. (6.61)
Решение уравнений (6.61) таково:
р{]) (т) = e"VT, р(2) (т) = 1 - е~'\ (6.62)
Составим уравнения типа (6.48) и (6.49) для математиче¬
ского ожидания m{s) и дисперсии 0(s) в каждом состоянии:
пУ> = 2 ' *ц
'1 — Т
771
+ yzb:, ™(1) (0) = т0,
т
i (*\ (6.63)
(2) = _ т(2) + ^ £_ (^(i) _ ^(2)^ ^(2) ^ ^
Математическое ожидание процесса у(т) с учетом обоих ре¬
жимов функционирования системы
т=т™р™ + т{2)р{2).
Решение уравнений (6.63) с учетом (6.62) при Ъц = const для
т имеет вид
1
т (т) = mQ
(1
- Т) ve~v f -ГТ-^ dx + (l~ х)-^
з-т„(2_Га)
+
■ dx
а £
1 f е*х ,
+ ( ) т- J ' /^«v
1-т Д““ 2 )
-С-Х)4.-Ч?
dz + 4-(l-T)2e“vx-4-e_vlL (6.64)
где mo — начальное значение математического ожидания процес¬
са у(т); а = 2(к — 2).
164
Математическое ожидание текущего промаха в соответствии
с (6.59) равно
7Ил(т) = 7tt(x) (1 — т)2, 1.
(6.65)
Эта величина равна нулю при то = 0 и неманеврирующей цели,
когда &ц = 0.
Воспользовавшись (6.49), запишем уравнения для дисперсии
0(s) в каждом состоянии:
e(1) = l4^0<1). 0С1) (0) = е0,
е<2> =
> к 2 д(2)
п(1)
(1)
771
(1)
т
(2)
) +
G„
-е(2)(0)=:о. (G.со)
(1 — т )“
Дисперсия переменной у°(т) с учетом обоих режимов равна
0 =(0(1) + ^(1)2) ^(D +(0(2) + 772(2)2) р(2) _ т2.
Решение уравнений (6.66) с учетом (6.62) для 0(т) при
т?г(т)'=0 имеет вид
0(т) = 0о
га+1
dx
I—т
(1 — т)-'.-" + (1 — T)*ve_v f
j _gl
J х ' *
(1 - ту
а -f- 1
dx
1—X
. (6.07)
Дисперсия промаха, принимая во внимание (6.59), вычисля¬
ется по формуле
еЛ = 0(т)(1-т)4, 0^т<1.
(6.68)
Величина интенсивности v скачкообразного перехода из ре¬
жима неуправляемого полета на самонаведение в соответствии
с § 4.10 определяется через тср — среднее относительное время
неуправляемого полета: v = 1/tcp. Подставляя (6.67) в формулу
(6.68), получаем
1 XX
+ (1 - ea+4ve_v J dx
+G(
+
dx
=01(т)+е2(т).
(6. (59)
1G5
Первое слагаемое в (6.69) зависит от Go. второе — от Go.
Удобно оценить точность наведения двумя относительными
функциями
/ б-i (т) /"6. (т)
<7! (т) = у ог2 (т) = у (6.70)
На рис. 6.8 изображены графики, характеризующие точность
самонаведения летательного аппарата в момент относительного
времени т = 0,95, т. е. за 5% времени до конца наведения,
в функции тср. Расчеты выполнены при к = 3 и к= 4 [4]. Так
как тср характеризует длительность неуправляемого полета, то
<3t <э2-Ю*
Рис. 6.8. Точность комбинированной системы самонаведения
приведенные графики позволяют сделать вывод об изменении
промаха за счет этого участка полета. В частности, с ростом тС[)
промах за счет ненулевых начальных условий возрастает, а за
счет помех уменьшается.
Рассмотрим теперь два других противоположных реяшма са¬
монаведения. Предположим, что в момент t = 0 начинается само¬
наведение летательного аппарата, а в случайный момент t <
происходит срыв слежения за целыо в координаторе системы,
н в дальнейшем аппарат движется, как неуправляемый, но под
действием возмущений. На рис. 6.10 срыв слежения представлен
переключателем П, разрывающим цепь слежения.
Обратимся *к уравнению (6.60), но коэффициенты A(s) и GCs)
теперь будут другими:
А«) = | (s = ^ QW = (s = 1)г (б.71>
0 = 2); 1° о = 2)-
Скачкообразный срыв слежения будем считать также пуассонов-
ским с интенсивностью v. Уравнения для вероятностей состояний
будут те же (6.61), а функции р(1)(т) и Р(2) (т) примут вид
(6.62).
106
Используя (6.48) и (6.49), составим уравнения для мателха-
тических ожиданий
,(1)
т"' = — ^—4 т+ Т-^~, тл) (0) = т0,
1 — Т
(2) - (2)
т = т — г- v , .
1 — Т 1 — Т 1 р( 2)
1 — т’
), тм(2) (0) = 0
(6.72)
и уравнения для дисперсий 0(1)(т), 9(2)(т)
еа> = _2* VD+ у -о 0(1)(О) =
1 — Т (1 — Т)
/Со
(1-т)-
О»
Г)(1)
0<2> = ^-те<« 4- V ^(0(1) - е(8)) + vgi(m<« - m<2))2 +
0t2) (0) = 0.
(6.73)
J3l
(1 - xf
Для случая, когда nio = 0, Ъц = 0, т. е. лг{1) = 0, т(2) == О,
безусловная дисперсия 6 (т) = 0(1) (т)р(1) (т) + 0(2) (т)р{2) (т). Ре¬
шение уравнений (6.73) с учетом (6.62) для 0(т) при тгг(т) = 0
имеет вид
9 (т) : е J(1 - т)“<Tvt 4- (1 — T)“4ve~v f za+tevxdx
L i-т
+
+ Go |(1 - т)ае-'
1 Г 1 — (1 — T)a+1
l+a| (i_T)«+i
(1 —t)-4
-4 [1 - (1 - xf
(1 _ TrV j x~evxdx +
vev J xnevxdx
1 — a
1-T
1
(1 T) 4 Л.Л—V J
1 + C6
ve v j яа+4егЛйя|, (6.74)
1-x
где a = 2(k — 2). Подставляя (6.74) в формулу (6.68) получаем
9л (т) = 0О
(1 _ T)“+4e-VT + xe~v f xa+iexxdx +
1-Х J
1+a (1 —т)а
1 1 1 ч
— e~v J x2evxdx -j- e~v j x3exxdx—^ gV J =
1—X 1—X 1—X '
— 91 (T) + 02 (T)«
167
Первое слагаемое зависит от 0о, второе — от Gq. На рис. 6.9
* 1 /0! <т) *
изображены графики функций (т) = I/ —g— и а2 (г) =
1 /"ejw
= у -g— в функции тср — среднего относительного времени до
начала срыва самонаведения. По этим графикам можно оценить
влияние срыва слежения в координаторе на увеличение промаха
самонаведения.
Вторая задача. Самонаведение летательного аппарата на
цель при кратковременных случайных скачкообразных перерывах
слежения в координаторе. Структурная схема системы самона¬
ведения изображена на рис. 6.10, где перерывы слежения (по¬
ступления информации) реализованы с помощью выключения и
Рис. 6.10. Структурная схема системы самонаведения с перерывами инфор¬
мации
включения переключателя П. Предположим, что перерывы ин¬
формации являются пуассоновскими с интенсивностями v(2l) (t)
(t), где индексом 1 отмечено состояние замкнутой системы,
II Л‘
.(12)
а индексом 2 — разомкнутой.
Уравнения процесса самонаведения при тех же предположе¬
ниях Wk(p) = 1, W(p) = ko после перехода к безразмерному
168
времени имеют вид
у = А^ + ^+У-рх1(х), у (0) = у0,
-—- (я = 1) (G.76)
4W = '
1 г
4(s)_J 1—Т ^
4-т (s = 2).
Исследуем зависимость математического ожидания и диспер¬
сии промаха от величин интенсивностей скачкообразных перехо¬
дов при заданных Ъц = const и Go = const.
Уравнения Колмогорова (6.43) при v(12) = const-и v(21)=const
имеют вид
* (1) = v(»iy 1) + vday « р<1> (0) = рЬ\
(6.77)
р(2) = - v(12V2) + v(2V1}7 (0) = р<*\
Уравнения для математических ожиданий 7?г(1)(т), т{2) (т) , со¬
ставленные в соответствии с (6.48), следующие:
•(1) к—2 (1) , (12) /""" (1) (2)4
mKL} — — -А тК1) -4- -7-= vu ' “ттт vт . — nv }),
1 — Т 1 1 — Т р(1) 4 у’
т(2) = j— те<2> + jzn — v(21) JZJ (m(2) ~ (6>78)
т(1) (0) = т£°, т(2) (0) = т(02).
Результаты численного решения уравнений (6.77) и (6.78)
при л?(12) = v(21) = v, т = 0,95, к = 3, различных v и вариантах
Рис. 6.11. Точность самонаведения с перерывами информации (влияние v)
начальных условий р(1) = 0 и р(01} = 1 (р(02) = 1 и р(02)=0) и т{01}~
= т(02) = 0 приведены на рис. 6.11 для математического ожи¬
дания относительного промаха
= 7п(1) (т) р(1) (т) + пг(2) (т) р(2) (т) ^ ^
169
Уравнения для дисперсий 0(1) и 0(2). составленные на осно¬
вании (6.49), при к = 3 и x(12) = v(21) =v следующие:
9,ц = eU)(0)_9™
(6.80)
e(2)=_i_e<*> j- —— v 4S- (0(2) -0(1>). 0(2) (°) = 0»2)-
1 —T (1 — x)“ p{2) 4
На рис. 6.12 приведены результаты численного интегрирова¬
ния уравнений (6.80) при к = 3, v(12) =-v(21) =л?. т = 0,95,
Рис. 6.12. Точность самонаведения с перерывами информации (влияние
помехи)
0о1)= 6j2) = 0 в зависимости от v, = 0 и р^ = 1 для относи¬
тельного среднеквадратического значения промаха
у=- = Y 9(1)р(1) + 9<2)р'2> (1-т)2. (6.81)
Увеличение v соответствует уменьшению среднего времени
тср прерывания информации, т. е. приближению к системе без
перерывов информации (одноструктурная система).
Глава 7
СИСТЕМЫ С УСЛОВНОЙ МАРКОВСКОЙ СТРУКТУРОЙ
§ 7.1. Статистическая зависимость структуры
от фазовых координат
В § 5.1 рассматривалась классификация внешних случайных
скачкообразных воздействий, которые можно представить как из¬
менения марковской структуры.
Марковская структура, напомним, не зависит от фазовых ко¬
ординат системы. Как отмечалось в § 5.1, эти внешние воздей¬
ствия можно разделить на входные, параметрические и функ¬
циональные. Однако мы приняли, что из физических соображений
более удобно к внешним воздействиям отнести лишь входные
(аддитивные) воздействия, а остальные трактовать как из¬
менения внутреннего характера, не зависящие, впрочем, от фа¬
зовых координат.
На самом деле, более распространенным на практике случаем
является зависимость структуры от фазовых координат. Эта зави¬
симость может быть детерминированной или случайной. Детер¬
минированную зависимость имеют так называемые системы с
переменной структурой [20]. Если в системе с переменной струк¬
турой протекают случайные процессы, вызванные случайными
возмущениями или случайными начальными условиями, то в
этой системе могут происходить изменения структуры в случай¬
ные моменты времени при достижении фазовыми координатами
определенных значений пли границ. По терминологии, принятой
в § 2.1, эти изменения называются сосредоточенными пере¬
ходами.
Детерминированную зависимость можно рассматривать как
вырожденный случай — упрощенную модель случайной зависи¬
мости. А система с переменной структурой представляется тогда
как частный случай системы со случайной структурой.
Наиболее общим классом этих систем, рассматриваемым в
данной книге, являются системы с условной марковской структу¬
рой. Их математическое описание и основные свойства дапы
в § 4.3.
Согласно данному там определению, интенсивности v(sr) (у. t)
и вероятности переходов q{sr) (у, k +1, к) зависят от значения
вектора фазовых координат у в текущий момент времени.
Такое математическое описание отражает тот факт, что пара¬
метрические и функциональные случайные скачкообразные воз¬
171
действия в отличие от входных воздействии изменяют свои ве¬
роятностные характеристики в зависимости от значений фазовых
координат для большинства реальных технических систем и фи¬
зических явлений.
}> системах с переменной структурой переходы из одного со¬
стояния структуры в другое происходят при достижении детер¬
минированных границ фазовыми координатами. Условная мар¬
ковская структура лучше учитывает тот факт, что в реальных
системах эти границы очень часто являются случайными.
Эти обстоятельства вызывают необходимость более детального
рассмотрения некоторых особенностей протекания случайных
скачкообразных процессов в системах с условной марковской
структурой.
Напомним, что в настоящей книге в основу приближенных
методов анализа положена двухмоментиая параметрическая ап¬
проксимация. Точность этих методов зависит от того, насколько
аппроксимирующая условная плотность вероятности /(3)(у, I)
близка по форме к истинной плотности.
Как показано в § 5.4, распределение случайного двоичного
сигнала, сглаженного апериодическим звеном, подчиняется за¬
кону Пирсона I типа. Этот важный с практической точки зрения
результат приводит к мысли о том, что в качестве аппроксими¬
рующей плотности целесообразно шире использовать плотность
распределения Пирсона I типа.
В приближенных методах анализа динамических систем с де¬
терминированной структурой обычно используется гауссовская
аппроксимация неизвестных плотностей распределения. Это объ¬
ясняется эффектом нормализации распределений в результате
сглаживания случайных негауссовских процессов. Математиче¬
ским обоснованием эффекта нормализации служит центральная
предельная теорема теории вероятности [36].
Однако в системах со случайными изменениями структуры
и, в частности, при сглаживании случайного двоичного сигнала
условия центральной предельной теоремы могут быть существен¬
но нарушены. Этим объясняется имеющееся значительное откло¬
нение законов распределения от нормального.
Тем более есть основания ожидать, что подобные отклонения
будут наблюдаться в системах с условной марковской структу¬
рой, где переходы из одного состояния в другое неоднородны по
области изменения фазовых координат.
Для изучения этих явлений стоит рассмотреть задачу, доста¬
точно простую, чтобы получить аналитическое решение для за¬
конов распределения, и вместе с тем отражающую основные осо¬
бенности динамических систем с условной марковской структурой:
скачкообразный характер случайных процессов, статистическую
зависимость переходов от значений переменных и сглаживание
процессов инерционными звеньями.
Такая задача рассматривается в следующем параграфе.
172
§ 7.2. Закон распределения выходного сигнала
нелинейной системы с условной марковской структурой
Рассмотрим непрерывную систему первого порядка, описывае¬
мую уравнением
2/ = Ф(а)а/, t) (S = L 2, ЗУ, (7.1)
где s(t)—непрерывная условная марковская цепь с тремя со¬
стояниями, заданная условными интенсивностями переходов
v(sr)(y); в третьем состоянии структуры система нейтральна:
<р(3)(г/, г) = 0.
Найдем условные (при фиксированных состояниях структу¬
ры) и безусловный законы распределения выходного сигнала
y{t) в установившемся режиме. В предположении, что стацио¬
нарное (установившееся) распределение существует, на основа¬
нии уравнений (3.72) при £-> оо запишем уравнения для /(у, s):
-Щ- [ф(1) (у) / (У, 1)1 — 1>(21) (у) + v(31> (у)] / (у, 1)4-
+ ч(12) (у)}(у, 2)4- v<is> (у) f{y, 3) =о,
1¥Чу) / (У, 2)! - Ivd« (у) 4- V<32> (г/)] / (у, 2) +
4- Ч{23) {у) f {у, 3)4-y(21)(y)f(y, 1) =0, (7.2)
— [v(13) (у) 4- ^23> (y)]f(y, 3) 4- v(») (y)f(y, 1) 4- у(32)Ш(у* 2)=0.
Исключая 'аз системы уравнений (7.2) переменные j{y, 2)
и f(y, 3), получаем дифференциальное уравнение для f(y, 1)
2 [ф(1) (у) / (У, 1)] 4- {ф(г) (у) [V»1) (у) 4- 2v(*« (у)1 +
4-ФЙ))Ь’(32)(^) + 2ги2)(^)14-
[у<13) (у) — у<23> (у)] [ф<2) (у) (у) _ ф(1) (у) у(32) | / (у, 1) _ ^
у<13> (у) 4- 'Д23) (У) | Ф(2) (У)
(7.3)
s алгебраические уравнения для f(y, 2). f(y, 3)
f(y,2)=-^pj(y, 1),
Ф1-* {у)
f( ол __ Ф(2) (У) У(31) (У) — Ф(1) (у) (у) * (,, -.4 (7-4)
7 \У 7 I (10) , . (О-Э) , .1 (•?) , . } W 7 /•
|уаз>(у)_,_Лл-.з; (y)]<pU)(y)
Обозначив х{у) Д Ф(1>(у)/(у, 1), перепишем уравнение (7.3)’
в виде
4- F (у) х {у) = 0, (7.5)
173
где
F № = О \ТУ, ? (2Ь ,(tv<31) (у) -г 2v(«) (г/)] ср<2) (у) +
2ц> (у) Фи; (у)1
+ [v(32) (y) + 2v«a) (y)]q>««(ff) +
. Мдз) (у) — У(23) (у)] [у(31) (у) ф(2) (у) — у(32) (у) ф(1) (у)] } п **
V(13) (у) + v(23) (у) у
Уравнение (7.5) решается в квадратурах:
х(у) = с1ехр[— J 7? (г/) <fy], (7.7)
Стационарная плотность вероятности j(y, 1) может суще¬
ствовать не во всей области [—оо9 ос]у а лишь в ее части
и определяется формулой
1 (у, 1) =
Т7Гехр [~ jF(y)dy\> У<^°У,
«pWfcO L J (7.8)
о,
где со — неопределенная постоянная.
Стационарные плотности вероятности /(?/, 2) и /(у, 3) на
основании соотношений (7.4) определяются формулами
ехр[— JV (£)%],
/(y,2)=j 1Ф12)(г/)
10 !/е^/,
( УШ) (У) ф(2) (У) — У(32^ (У) ф(1) (У) р— §F(y)dy Q,
f (г/( 3)) = 0 iv(13} (у) + v(23) (г/)] Ф(1) (у) Ф(2) {у) ’
[о, уШу.
(7.9)
Условные стационарные плотности вероятности находятся из
выражений
со
/(5) (у) = /(у, s)/P{s), P{s) = j f.(y, s)dy (s = 1, 2, 3), (7.10).
— oo
а безусловная стационарная плотность вероятности f(y) на ос¬
новании соотношения f(y) = f(y, 1 )+/(#, 2) + /(у, 3) определя¬
ется формулой
/ Ы = с0 {fv(31) (у) + v(13) (у) -г v<23) (г/)] ф(2> (у) —
— fv<32> (#) + v<13>[(!/) + v«“) (г/)] Ф(1) (у)} X
X {[v<13> {у) + у<23> (у) ф<х) (у) ф(2> (г/)}-1 exp [— j F (у) dy\. (7.11)
174
\ Неопределенная постоянная со находится из условия норми¬
ровки плотности вероятности
\ °°
j' f(y)dy = t. (7.12)
<—ОО
Если интеграл (7.12) существует и при этом f(y)^0. то ста¬
ционарное распределение существует (т. е. при t °о система
находится в установившемся режиме).
Как видно из условий и решения рассмотренной задали, в ее
рамки укладывается немало прикладных задал анализа систем,
упрощенные модели которых могут быть представлены в виде
одномерной стационарной нелинейной системы с‘тремя возмож¬
ными состояниями структуры, в одном из которых система ней¬
тральна. При этом вид нелинейностей и интенсивностей перехо¬
дов, зависящих от выходного сигнала, ограничивается лишь ус¬
ловием существования стационарного (установившегося) распре¬
деления выходного сигнала. Одна из таких задал рассматривается
в следующем параграфе.
§ 7.3. Сглаживание случайного двоичного сигнала
нелинейным инерционным фильтром
7.3.1. Интенсивности переходов состояний структуры. Внесем
ряд изменений в условия задачи, рассмотренной в § 5.4. Допол¬
ним следящую систему, изображенную на рис. 5.6, нелинейной
f/Cs)
,(s)
§
•э.
-1 -1
/
и 1
р
Рис. 7.1. Действие случайного двоичного сигнала на нелинейную следя¬
щую систему со случайной пеленгационной характеристикой
пеленгационной характеристикой со случайными границами
(рис. 7.1, 7.2).
Как видно из рис. 7.2, структура пеленгационной характери¬
стики имеет два возможных состояния: ярфб) — -б и яр(6) = 0. Из¬
менения структуры случайны и характеризуются вероятностями
переходов
р [яр (« + АО = 0 | яр (0 = б («), б (01 = >-(гг) (б) Af =
[0, -62<6<6X,
— J^A*, б1<б<е1, — е.2 < 6 < — б2,
(цдг, б > 6lf б < — е2,
(7.13)
175
р [.-ф (t + М) = 6 (t + At) IФ (f) = 0, 6i(<)] = ^<12) (6) At =
( cd2A£, — 62<6<61,
= I ^lAt, ^ ^1? ^2 ^ ^2»
[O, 5^ — £o, б^е-2,
032 > 0)1,
где At— малый промежуток времени.
Вероятности двух и более переходов из одного состояния в
другое за время At— величины большего порядка малости, чем
At. Интенсивности A(sr) изображены на рис. 7.3.
—L
5 (12)
b>lV
EZ ^2 Sf &
Рис. 7.2. Пеленгационная характе- Рис. 7.3. Интенсивности срыва и вос-
ристика со случайными границами становления слежения
Иными словами, структура пеленгационной характеристики
описывается условной непрерывной марковской цепью с интен¬
сивностями Я(5Г)(6) (s, г = 1, 2; s¥=r), заданными выражениями
(7.13).
Данная модель пеленгационной характеристики неплохо от¬
ражает сущность физических процессов, протекающих в следя¬
щих системах с возможными чередующимися срывами и восста¬
новлениями связи. Она является одной из возможных моделей
наряду с широко распространенной моделью мгновенного захва¬
та и срыва сигнала при достижении им детерминированных
границ.
Входной случайный двоичный сигнал u[s) представляет собой
непрерывную марковскую однородную цепь с состояниями щ
и —и,2, заданную интенсивностями переходов v\ и V2.
Структура системы имеет четыре возможных состояния, обра¬
зующих полную группу несовместных событий:
*<2> = _
и2, г|)(2) = 6;
3) и{3) = и:, nd:(3) = 0; 4) и{4) =—U2, *ф(4)=0.
Для того чтобы воспользоваться результатами предыдущего
параграфа, преобразуем это множество состояний к другому, со¬
стоящему из трех состояний. Объединив третье и четвертое
176
состояния, получим структуру, содержащую три состояния:
\ 5 = 1: и{1) =щ, -ф(1) = 6;
5 = 2: и{1)=—и,2, г|)(2)=6;
5 = 3: я|)(3) = 0.
Найдем интенсивности переходов для преобразованной-структуры.
Согласно результатам § 4.9 эти интенсивности определяются по
,(31)
У'
Uz
А,
(u=at)
~с1 Ь1 и} ZUf-fy 2uf+cf у
,(32)
(U = ~UZ) ,
2 U2 <2^2+ ^2 ^2 ^2 ^2
,Оз)
У/ + У о
С, ^ Щ~^1 ZUj+C, у
„(23)
-Ргыг V «г
Pi Ш! Pi 1). + У,
~U2~С2_ ~и2 + ^2 ~и2 ~^2
иг
,(20
,02)
Рис. 7.4. Интенсивности переходов преобразованной структуры
формулам (4.71), (4.72) и в нашем случае принимают
вид (рис. 7.4)
Vm)(y, t)=Vl, VU2)(y, t) = V2,
[ К, У< — с 1, У> 2ut + Съ
v(3i) (г/, t) = Ux, —Cl <.y<bu 2u1 — b1<y<2u1 + c1,
[0, £>i <Fy < — i>i,
12 п. E. Казаков и др. 177
У
/v0.
t) =
у < — 2щ — c2, у ;
/-x, — 2u2 — c2 с у < — 2и2 + Ь2,
О, — 2и2 + Ь2 <(у < — Ь2,
h<U <^2»
(7.14)
vW(y,t) =
vi + V
®1V2
< У < 2^! — Ь1?
О,
j «УТ
Vi+y
V(23 ){y,t)= ШЛ
0.
— C1 < У < bx, 2^! — &i < у < 2ma -f q,
У ^ У ^ 2ux -f- <T>
— 2w2 -гЪоСуС — b2,
— hcy< C21 — 2M2 — c2 <y<—2u2+b2f
У ^ — 2m2 — c2, у ^ c2,
"Це
<?i A ex — w-ij Ьх Д i/x — fix;
C2 Д C2 ^9) ^2 4^. ^2 — ^1*
7.3.2. Стационарное распределение выходного сигнала. В со¬
ответствии с полученными тремя состояниями структуры урав-'
нение системы можно записать в
виде
(* = 1, 2, ЗУ,
(7.15)’
(21)
к2
А.
у = а(5) (—у + к(в))
где
7(1) =.
=*а:
и{{) = и{;
,(12)
G)~
7 (2)
■ а\ и{2) = —и2;
,(3) =
U\ U П-2.
~'о °0 0
Рис. 7.5. Интенсивности сры¬
ва и восстановления слеже¬
ния для симметричной пелен-
гационнои характеристики
а(3)= О
Отсюда следует
<pcl,(t/, t) = a{—у + щ),
<р(2)(j/, t) = a(—y — U2),
Ф(3>(2/, 0 = 0.
(7.16)
Таким образом, имеем задачу,
рассмотренную в § 7.2, где необхо¬
димо найти закон распределения выходного сигнала системы в
установившемся режиме.
Для того чтобы избежать очевидных, но громоздких выкла¬
док, найдем стационарное распределение для более простого ча¬
стного случая, когда интенсивности 'k(sr) (6) имеют вид, изобра¬
женный на рис. 7.5. Тогда интенсивности v
ITS
(sr)
(у, t), графики
Рис. 7.6. Интенсивности переходов для симметричной пеленгацибнной ха¬
рактеристики
которых изображены на рис. 7.6, определяются формулами
V(21)(j/, t) = V 1, Vil2)(y, t)-=V2,
( к
v(31) (У, *)= (^
'2>
V^2) [у
•o-fc
b1<y<2u1 — bv:
УКьъ У~> 2Mt —6X,
b2<yC—b,
2u0
2i
V, + V,’
у < — 2u2 + &2, i/ > — b2,
7
<C J/
vC2S>(y, t) =
■ 1 ■■ ■» — 2И2 + < У < ~ &2>'
V1 ' 2
®1V1
Vi+V,
> */< — 2^2ь2, у> — ь2,
где
^1 ™ ^2 = ^2 8q.
На основании (7.17) получаем
exp [— j .F (p) dp] = (и, -b y)*(v) (ux — y)P(v>,
(7.18)
где
a, =
a(y), P (y) =
1 / 'Wi
a \Ш1Л'2Т- ‘Vl
«1, Pi, — u2 < У c — b.zf
a2, P,, — b2 <p<6lr
«з, Рз* b1<y^u1;
Vl;
Vi ;
a \C01V2+C02V1
+ ?> = 4 (,^r (7.13)
1 / \u2v2
a. =
з л I r.i Л? 4- frt V ] ’ Рз „
a I Cllv, -f (Drtv.
+ vi •
11 1 2 2
Тогда согласно (7.11) с учетом (7.16) и (7.17) имеем
/ {у)=
_ f с [g (у) 4- h (у) у] (и2 -f p)a(v)-1 (Ul — yfM-1, —и2<у<ии
lо, p< — Щ, y^zult
где
§i
Mvi + vJ
®iv2 + “г'1!
Jl1= ^ (V1 ' Vs)
иг
{§1,
hu
\ёъ
/^2j
u*.
К
+r
я2(-
[
Ш1
®iva
to^-fco^i (“1+M(“l+“2)’
s, + J,’=(vF4
vi + v2 |Ч(в1-У) + Мвг + У) i i
T W2V1 U1 T “2 1
g2=l; hz — O;
■180
S3
= I Г ^o(Vl^-Vi) J_
iL^i+^s '
(?i-y(v.-v2)
«1-1-
(Vi Vi) , Д
_ W1V1 + W2V2 '
со
I
Ui>
(Ш1 + ?*2)(“1+В2);
(7.21)
#3 + "a!/ =
(«1 -r /..,)
Vl + V2 ?-2(Ц1-У)-!-^1(И2 + У) I t'
с — неопределенная постоянная, которая находится из условия
нормирэвки (7.12):
и£
S f(y)dy= 1.
У
Заменой переменной г =—-=v— перейдем к плотности /(г) =
= ;0/)
Получаем
(7.22)
j/(z)dz = l.
о
Здесь
/(z)=c[g(z)— U2h {z)\ (lli 4 ll2)°(z)+|3U)-12“U)-1(l — z)f(z)_1 4
-r й(г) (»i + a2)e(*)+|,(*,z“(*)(l — z)PCv)-i5 0<г< 1,
f(z) = 0. z<0, z>l, (7.23)'
где
«х, Pi- £4 0<z<p,
a(z), P(s), ?(z), h (z) =
a2l Рг- £>2> ^2> P<-^Z<^4l
a3i Рз- £з- *3, g<z<l;
K2 ~ Ь2
1 1 2
(7.24)
Учитывая, что
1 г
j* z®-1 (1 — с)^-1 dz = В (а, {$), J za 1 (1 — 2)!3-1 dz == (a, (5),
о о
где 1?{сс, (i) —бета-функция, а Bt(a, Р) —неполная бета-функция,
найдем с из (7.22) — (7.24) ::
с = !(ёх - ЛхИг) («1 -г u.2fi+h-' Вр (аг, рх) +
+ («1 -г [Bq (a2, р2) - Вр (а2, р2)] +
+ (£з — >huz) («1 + г^Г3+Рз-1 [В (а3, Рз) — 5з(аз, Рз>] +
-Г /'I («i -f Hjf 5р (ах + 1, рх) +
4- М«х 4 п2)аз+Рз[В(0Сз 4 1, рз) _ я9(а3 4 1, Рз)]}-1. (7.25)
181
Плотности f{y, 1), /(г/, 2), /(г/, 3) находятся по формулам
«1 (а2 + y)a(y) (Uj — yf(v)~1
/(У. 1) = С-
/0/, 2) = с ■
(“х + яг) К + “г)
Дх^ + уГ^К-У)^
(®х-ГЯ2)(“х+и2)
/(г/, 3) =
(
(7.26)
М1 (Vx ~Т~ V2) (ц2 + У)”1 Vl- У)
- „А-1
[Я2 (“2 + У) + ЯХ (“Х ~ У)]
(о>х+Я2) + (и^ ~ и2)
- и2< у с —
. Я2 (М2
■у)“2 1
(“х-<2
-1
1 ~ 2
.CQi (v! + У2) (и2 + 2/)
(ц1—У)
— &2<У<Ь1»
Рз-1
I
К + Х2) (“Л + ^’г) К + “2)
f < у < ^1*
По известным /(г/), /(г/, s) (5=1, 2, 3) определяются (см.
гл. 4) вероятности состояний структуры p{s\ условные плотности
/ы (у) и вероятностные моменты первого, второго и, при жела¬
нии, более высоких порядков.
Сравним полученное распределение выходного сигнала (7.20)
с аналогичным распределением (5.27) для линейной системы.
Анализ показывает, что добавление в следящую систему пелен-
гадионной характеристики со случайными границами и случай¬
ными срывами и восстановлениями слежения в области этих
границ приводит к отклонению
распределения от закона Пирсо¬
на I типа. Основная особенность
этого отклонения — увеличение
плотности вероятности выходного
сигнала в центральной части его
области распределения. Это объ¬
ясняется тем, что срывы слеже¬
ния чаще происходят тогда,, когда
выходной сигнал у находится
LXX" приблизительно посередине меж-
а ду двумя крайними значениями
входного сигнала щ и —u2« При
этом сигнал рассогласования находится вблизи границ пеленга-
ционной характеристики ор (б), где вероятность срыва слежения
выше, чем в центральной части ф(8).
Пример 7.1. Пусть изображенная на рис. 7.1 система является
математической моделью следящего радиолокатора, на вход ко¬
торого попеременно со случайными интервалами, распределен¬
ными по экспоненциальному закону с показателем v, поступают
сигналы от двух источников радиоизлучения.
182
Рис. 7.7. Пеленгационная харак- (Т1
теристика следящего радиолока¬
тора
Углы пеленга источников радиоизлучения равны по и —щ.
Пеленгационная характеристика радиолокатора изображена на
рис, 7.7, где бо и —бо характеризуют некоторые условные грани¬
цы, и пределах которых интенсивность срывов слежения равна
Яь за пределами равна Яг. Интенсивность восстановлений сло¬
жения равна (02 в пределах границ [—бо, б] и соi за их преде¬
лами. При этом /,2>Яь (02 >(0i. г^о>бо.
Такое описание упрощенно учитывает нелинейность диаграм¬
мы направленности антенны радиолокатора (наличие основного
высокочувствительного и боковых малочувствительных лепестков
диаграммы направленности), влияние флуктуаций мощности ра¬
диоизлучения и другие случайные факторы.
Найдем закон распределения выходного сигнала у следящего
радиолокационного измерителя угла пеленга в установившемся
режиме слежения для случая, когда
Согласно (7.19) — (7.21) после упрощений с учетом Я2>Я[
приближенно имеем
а постоянная с определяется формулой (7.25), из которой с уче¬
том условия следует
Качественный вид закона распределения показан на рис. 7.8,
Как следует из полученных результатов, ось радиолокатора
•случайным образом колеблется относительно геометрического
Центра излучающих источников в основном в пределах угла
=*=(мо—бо) с редкими выбросами за эти границы в пределах уг¬
ла ±7Л<).
Итак, рассмотрена задача сглаживания случайного двоичного
сигнала нелинейным инерционным фильтром. Фильтр состоит из
(02 = А2 > (01 '= Яр
— и0<у<~и0+69,
<~~ У <~~ U0 ^0i
Щ — бо < У < ио<
I
О,
У < — и0, у>и{
где
и —
а ‘ 1 а
Р)-Яр(Р,Р)],
где 5г(р, р), 5;)(р, Р)— неполные бета-функции:
Bi («, Р) А
(1 — z)$dz, 0<Z<1.
«
пеленгатора с нелинейной характеристикой со случайными гра¬
ницами (см. рис. 7.1, 7.2) и интегратора, охваченных жесткой
обратной связью. Эта задача является частным случае?/ более
общей задачи § 7.2, в рамках которой может быть решен ряд
прикладных задач, математические модели которых могут быть
представлены в виде динамической
нелинейной стационарной системы
первого порядка с условной марков¬
ской структурой, имеющей три со¬
стояния. При этом одно из состоя¬
ний нейтрально (производная выход¬
ного сигнала по времени равна
нулю).
В частности, может быть получен
в аналитической форме закон рас¬
пределения выходного сигнала не¬
линейного фильтра с другими пеленгационными характеристика¬
ми, встречающимися в прикладных задачах.
Однако при решении хотя и близких задач, но выходящих
за рамки постановки § 7.2, приходится использовать приближен¬
ные методы, рассмотренные в гл. 4. Эти методы основаны на
двухмоментной параметрической аппроксимации неизвестных
условных (при фиксированных состояниях структуры) плотно-.
стей вероятностей известными функциями, зависящими от пер¬
вых двух моментов.
Как следует из результатов § 5.4 и 7.3, при анализе динами¬
ческих систем со случайно изменяющейся структурой для ап¬
проксимации целесообразно наряду с нормальным законом ис¬
пользовать закон Пирсона I типа.
§ 7.4. Системы с немарковской структурой, заданной
случайными интенсивностями переходов
До сих пор наиболее общим классом систем, рассматриваемых
в настоящей книге, были системы с условной марковской струк¬
турой. Теория и примеры, изложенные в гл. 4 п 7, показывают,
что, во-первых, условная марковская структура может служить
неплохой моделью для достаточно широкого круга физических
явлений и технических систем, а во-вторых, позволяет приме¬
нять для анализа этих явлений и систем довольно эффективные
методы.
Между тем есть немало практических задач, где немарковские
свойства системы настолько очевидны, что ими нельзя пренебре¬
гать. Таковы, например, многие из стационарных систем мас¬
сового обслуживания, в которых нарушается одно из двух не¬
обходимых условий марковости — пуассоновский поток входных
требований (заявок, вызовов и т. д.) и экспоненциальный закон:
распределения случайного времени обслуживания [9].
Рис. 7.8. Плотность вероятно¬
сти выходного сигнала следя¬
щего радиолокатора
184
Следует отметить, что законы распределения случайных про¬
межутков времени т между переходами из одного состояния
структуры в другое в общем случае могут отличаться от экспо¬
ненциальных. Как показано в § 4.10, для того чтобы структура
была марковской, достаточно, чтобы функция распределения
промежутка времени т = t — to перехода из состояния г в со¬
стояние s имела вид
F{sr) (f, to) = 1 - exp [ф(5г) (to) — Ф(5Г) (t) ]. (7.27)'
Тогда плотность вероятности промежутка времени /(5Г) (£, to)
п интенсивность перехода v(3r) (£) определяются выражениями
/(зг)(*, Ч) = -j-'--exp[ф(«-)(t0) — cp<sr> (t)],
/(5Г)(г’го) *»<">(« (7-28)
v(sr) /Л _ — = Ex \±>.
W I _ f(s') g dt
Таким образом, интенсивность перехода v(ST) (t) зависит от
текущею момента времени. Это указывает на нестационарность
процесса изменения структуры. Однако v(sr)(Z), в отличие от
F{sr) (t, to) и /(sr) (t, to), не зависит от момента to, с которого
начинается промежуток времени т. Это говорит об отсутствии
последействия, что является достаточным признаком марковости
•процесса.
В качестве иллюстрации рассмотрим следующий пример. Срав¬
ним две системы массового обслуживания одинакового назначе¬
ния, но различного устройства. Например, две радиоэлектронные
системы обнаружения. На входы систем поступают простейшие
(т. е. стационарные пуассоновские) потоки сигналов. Обе систе¬
мы одноканальные. Время обработки информации т — промежу¬
ток времени между поступлением сигнала и принятием реше¬
ния — случайная величина. Системы имеют неодинаковые алго¬
ритмы обработки информации и, следовательно, различные
функции распределения величины т:
F^t, у = 1 — ехр[—л(* — у2],
О(Мо) = 1 — ехр [— Я(*2 — fo)],T = t — у
где to — фиксированный момент времени.
Как видно из выражений для F\ и F2, первая система имеет
стационарный алгоритм: ее функция распределения зависит
только от разности t — to = т. Вторая система имеет адаптивный
нестационарный алгоритм: с течением времени t на принятие
решения требуется в среднем все меньше и меньше времени.
Это легко показать, представив функции распределения в виде
F\(x, f) = F:(i)= 1 — ехр(— 1т2),
F2 (т, t) = 1 — ехр [—Ят (21 — т) ].
135
Из этих выражений видно, что при фиксированном т функ¬
ция F\ не зависит от t, a F2 1 при t -*■ °°.
Плотности вероятности, соответствующие Fi(x) и ^(т), име¬
ют вид
/i(^» tQ)=2X(t t0) exp [ А (£ *0)-],
/.2(£, *0) = 2А*exp [— А(/2—J®)].
Отсюда интенсивности обнаружения определяются выражениями
vi (£, ^о) = ^1(т) = 2Ят, \2(t, U) = V2(t) = 2Xt.
Таким образом, разница между системами состоит в следую¬
щем. Первая система — стационарная немарковская (точнее, по-
лумарковская), система с последействием. Поток переходов из
одного режима в другой — стационарный непуассоновскпй. Ин¬
тенсивность перехода из режима обработки информации в «режим
поиска цели лц(т) зависит от времени обработки информации т.
Вторая система — нестационарная марковская, система без
последействия. Поток переходов — нестационарный пуассонов-
ский. Интенсивность перехода V2{t) не зависит от того, сколь¬
ко времени система уже находится в режиме обработки ин¬
формации.
Теория систем массового обслуживания — это одна из обла¬
стей теории марковских процессов, методы которой позволяют
эффективно решать сложные и разнообразные практические за¬
дачи. Поэтому системы массового обслуживания стараются по
возможности описывать марковскими математическими моделями
или моделями, приводимыми к марковским.
То же самое можно сказать о системах со случайной струк¬
турой, которые включают в себя класс систем массового обслу¬
живания.
Для того чтобы воспользоваться математическим аппаратом
теории марковских процессов и, в частности, методами, разви¬
ваемыми в настоящей книге, необходимо систему со случайной
структурой представить в виде динамической системы с условной
марковской структурой.
В большинстве случаев это можно сделать с помощью широ¬
ко распространенного способа, который состоит в расширении
фазового пространства.
Применительно к рассматриваемой задаче этот способ заклю¬
чается в следующем.
Имеется система со случайными изменениями структуры,
у которой интенсивности переходов (или вероятности переходов,
если время дискретно) зависят от случайных параметров r\(t)r
o(t). Эти параметры являются в общем случае случайными про¬
цессами, которые представляют собой вектор фазовых координат
и вектор индексов структуры некоторой динамической системы
со случайно изменяющейся структурой.
486
Математическая постановка задачи описывается выражениями
(для непрерывного времени)
у = <р(у, s, ■§, t), о, у, s, £, t), (7.29)
где у(£)> s(0i КО—как и прежде, векторы соответственно фа¬
зовых координат, индексов структуры и производящих белых шу¬
мов основной системы; т](£), а (О» КО — векторы соответственно
фазовых координат, индексов структуры и производящих белых
шумов формирующего фильтра; ср и yjp — детерминированные
функции времени и своих случайных аргументов.
Изменения структуры s (t) заданы интенсивностями перехо¬
дов v(sr)(r], у, о, £), зависящими от случайных параметров ц.
Изменения структуры a(t) заданы интенсивностями переходов
Я(ар)(т], у, s, t), которые в общем случае также могут зависеть
от фазовых координат фильтра т] и вектора состояния системы
[ут, ST]T.
Как следует из (7.29), система, характеризуемая вектором
i[yT, sT]T, не является марковской. В частности, например, если
^1= т —случайный промежуток времени перехода из одного со¬
стояния в другое, заданный законом распределения, то структу¬
ра s (t) представляет собой полумарковскую цепь [9].
Очевидно, что трудности, связанные с немарковскггми свой¬
ствами системы, легко преодолеть, расширив пространство со¬
стояний путем образования вектора [хт, вт]: хт = [цт, ут], ет =•
= [от, sT]. Получаем систему с условной марковской структурой
х = х(х, г, со, £), (7.30}
где ет —• [от, sT] — индекс структуры расширенной системы, а ют =
^ [£т> 5Т] — вектор -белых шумов.
Интенсивности переходов расширенной системы ц(еб)(х, t),
получаемые из x(sr)(y, rj, t) и Я(ар)(у, ц, t) по правилам, изло¬
женным в § 4.9, зависят от времени и фазовых координат х.
Таким образом, вновь образованная расширенная система
(7.30) имеет условную марковскую структуру, заданную услов¬
но-детерминированными и&-
тенсивностями ц(е’0) (х, t), за¬
висящими от фазовых коор¬
динат х.
К этой системе примени¬
мы все ранее изложенные в
настоящей книге методы
анализа.
Пример 7.2. В состав сле¬
дящей системы входит линия
связи, подвергаемая помехам, которые приводят к перерывам в по¬
ступлении информации (рис. 7.9). Моменты времени нарушения
связи образуют простейший поток с интенсивностью v. В момент
нарушения связи начинает работать алгоритм подавления поме-
л ,
а
У
р -- 1
Р
Рис. 7.9. Следящая система с перерыва¬
ми информации в виде полумарковской
цепи
187
хи, восстанавливающий связь через время т. Случайная величина
т распределена по релеевскому закону с плотностью вероятности
f (х) =2кте~иг. Требуется найти вероятность исправного состоя¬
ния связи р(1)(0» математическое ожидание my(t) и дисперсию
ol(t) выходного сигнала y(t) при известных р(1)(0) = р{^\ пгу(0) =
= туЬ, ау(0) = Оу0.
Таким образом, математическая модель следящей системы
описывается уравнением
у = а{3) {и + £ — у) (5=1, 2), а{])=а, а{2)=0,
где u{t) — детерминированный входной сигнал; \(i) — центриро¬
ванный гауссовский белый шум возмущения с интенсивностью
G; s(t) — полумарковская цепь с двумя состояниями, заданная
интенсивностями переходов v(21)(y, г) и v(12)(y, t).
Интенсивность v(21)(y, t) по условию задачи равна \\ а ин¬
тенсивность vil2)(y, t) находится по формуле
п И*-* о) _ ЯТ) 2Хте-?д2 01-
уШ) (yjt) = 1 - Г=Гр(Т) - =2?-
1- j /(» — *о) d&
Для того чтобы воспользоваться методами анализа, изложен-'
ными в гл. 4, преобразуем постановку задачи следующим об¬
разом. Расширим пространство фазовых координат, образовав
вектор хт = [т, у]. Для новой фазовой координаты х\=*х спра¬
ведливы выражения
Xi = 0, хх (0) = х10, / (х1с) - 2Хх10 ехр ( — Щ0).
В сочетании с заданными
X2 = a{s)(u + l — X2У, Х2 (0) = Х20 (5=1, 2),
аМ = а, = 0, ры (0) = р
М [х20] = 7Пу0, М [(х20 — тУоу ] = е220 = о
V о
получаем линейную систему с условной марковской структурой
х = A(5)x + B(5)u + F(s)| (5 — 1, 2),
0 0
0 —
где xT = [£i, Z2]; B(S)T = F(5)T = [0, aU)]; А ; =
s(t) — условная марковская цепь, заданная условно-детермини¬
рованными интенсивностями переходов v(21) (х, t) = v, v(12)(£)=:
= 2Кх\.
Вероятности состояний структуры и моменты фазовых коор¬
динат этой системы определяются уравнениями (4.12), вероят¬
ностные коэффициенты которых находятся из выражении (4.11).
188
Уравнения (4.12) для данной задачи имеют вид (аргумент
опущен)
pd) = — -f v(p12)p(*\ pW = 1 — ри\
т[г) = — + (p(1))_1 VmVpW,
^2° = — 'ml + (p(1))_1 'm2)P(2) — am^ -r au,
m[2) = — v,(22 + (p(2))_1 v^V1),
^42) = — 'ms + (p(2))-l '’m2)p(l))
0u=- <i + (P,1))-1 NfflpW,
e<j> = - n$2 + (pvy'Nfflp™ - aeiV,.
0<« = - N^g + (p(«)-iAt,,)p(,) - 2fl02V + «2G,
0u = ~ Лтен + (p^)"1^nP(1>,
= - -V& + (р(2))-хЛ&<»,
0^ = -N™ + m-'Nfflpb),
02i = 0и (s = 1,2),
p(i) (0) = p<« m<s) (0) = /7ii0, 0<f (0) = 0yo (3 = 1,2; i, / = 1,2),
oo
m„ = mx = J 2Ят2е-?'х2 dx = ~ ]/"m20 = 7%o>
0
oo
0110 = a? = J (t - mT)2 2/ae-^2 dx = j-^-~),:
0
^120 = 0, 0220 = GVq*
По выражениям (4.11) определим вероятностные коэффици¬
енты, основываясь на предположениях, что условные плотности
вероятности f{s) (х\)— релеевские, а условные плотности
/U)(^2Ui) —гауссовские (s = l, 2).
Основанием для первой гипотезы служит равенство х\ =
= :eio = t, а для второй — линейность и инерционность следящей
системы.
Найдя вероятностные коэффициенты и обозначивт(1)=т^, т(2)^
=4 7n<2), 7/(i)Atп(2г\ у(2)Л=т¥\ f{1) ^0$, Г(2) = Q[\\ 0U>A0<i>,
в(«Ае<1>, у(1)Ае<12), у(2)Ае<22>, хА-тпь у^т2, т = 0и,
© = 012, У = 022» получаем
^(1) = - урш 4- 2Ы»р&\ р(« = 1 — р(1>,
т<1> = [г(2) + т<*> (т<2> - т(1))],
р\1)
У(1) = t0(2) + i(2) (У(2) ~ Уа))] ~ Щ(1) + aut
т(« = — 2ITW + ^ (т<1) - т(2)),
рК-)
у(2) = _2ши+^(у(1)-а,
j(D = 2Я^ | 2 (JT ~:3V^2)r(2) 2Г(2) (т<2) — т'1)) +
т(2) [(Г(2) _ т(1))2 _|_ у(2) _ Та)]},
©(1) = _ а0(1) + 2-20-1 2(я-з^е<2) + Г(2) ^(а) _ у(1))+
+ ©(2) (г(« - т(«) + К2) [(т(2) - т(«) (р(2) _ р(1)) 4- @(2) _ 0(l)]Jt
v (0(1))2 2кр(2) fT(2) (а(2))2
YV - - + -^Г (^г1 +20(2) ^(2) - ^(1)) +
+ т<2) [(р(2) _ р(1))2 _ У(1)]|_ 2aY<l) + a2G,
у(2) — 4(я —3) Хт(2)Г(2) vp(1) j- yd) J,(2) _J_ ^(1) х(2))2],
4 Я р(2)
0{2) = - 4(jI~fL?'f)e(2) +^w[0(1) - 0<2>-Ь(т(1)-г(2))(ра)_р(2))!#
Р
(0(2))2 ^ _^(2) j ^ Vp(D
У<2) = — 2Ы2>
j( 2) I р(2)
т = ^Dpd) -f- т(2)р(2), ту= у = ptDpd) -f- р(2)р(2),
Г = r(1)p(i) + р(2)р(2) + (T(i) _ т(2))2р4)р(2),
0 = 0(1)р(Х) + 0(2)р(2) -U (Т(1) — Т<2>) (р(1) — у(2)) р(1)р(«),
о2 Д у = У(1)р(1) + У(2)р(2) + (р(1) _ J/(2))2 p(l)p(2)t
р(1) (0)= р<2>, *(D (0)=т(2)(0)= 4- /х’
р(1) (0) = р(2) (0) = тпУо, Т<2> (0) = Г(2) (0) = -L (l - -£)•
0(1) (0) = 0(2) (0) = 0, У(1) (0) = У(2) (0) = 0(у2).
Таким образом, динамическая система первого порядка с гю-
лумарковской структурой преобразована в эквивалентную систе¬
му второго порядка с условной марковской структурой.
Одной из фазовых координат этой новой системы по-прежне¬
му является выходной сигнал следящей системы у, другой фазо¬
вой координатой — случайный промежуток времени перерыва
связи т.
Применив метод двухмоментной аппроксимации, где условные
плотности /(5) (т) предполагаются релеевскими, а условные плот¬
ности fs)(y 1т) — нормальными (5 = 1, 2), получаем систему при¬
ближенных дифференциальных уравнений для вероятностей со¬
стояний структуры р{з) (t) (5 = 1, 2), математических ожиданий
т(0> У{Ъ)ч дпс-персий T(t), Y(t) и взаимного корреляционного
момента 0(f)-
Решая численно эти уравнения, получаем искомые y(f), Y (t)..
Глава 8
МАРКОВСКИЕ СИСТЕМЫ С СОСРЕДОТОЧЕННОЙ
СКАЧКООБРАЗНОЙ СМЕНОЙ СТРУКТУРЫ
§ 8Л. Мультиструктура систем с сосредоточенными
переходами
В инженерной практике, навигации, робототехнике возникают
задачи комплексной автоматизации управления на различных
этапах. Каждый из этих этапов может резко отличаться по ха¬
рактеру движения объекта управления и описываться различ¬
ными уравнениями. В частности, некоторые фазовые координаты
объекта управления на разных этапах имеют или должны иметь
значения, принадлежащие определенной области фазового про¬
странства. Автоматизация таких процессов достигается с по¬
мощью комбинированных систем управления. Переход от одной
системы к другой должен совершаться автоматически при попа¬
дании определенных фазовых координат в заданную область.
К рассматриваемым процессам относится, например, слеже¬
ние за источником сигнала специальным следящим устройством.
Фазовая координата, характеризующая положение источника
(объекта), должна находиться в пределах заданной области W.
При выходе из этой области нарушается функционирование си¬
стемы как следящей, срывается процесс слежения. Система пе¬
реходит в другой режим, в котором также должно быть обеспе¬
чено управление, при котором произойдет возврат к первому
состоянию. Автоматизация этих процессов приводит к комбиниро¬
ванной системе, состоящей из двух структур. Аналогичные зада¬
чи возникают в навигации летательных аппаратов при необходи¬
мости обеспечения различных заданных режимов полета, пере¬
ходы в которые совершаются в случайные моменты времени при
достижении некоторыми фазовыми координатами определенных
границ.
Комбинированные системы управления, обеспечивающие ав¬
томатизацию управления и переключения на всех режимах, име¬
ют различную структуру, а их динамика характеризуется урав¬
нениями типа (1.1) или (1.3), в каждой из п возможных
структур.
Мультиструктурные комбинированные автоматические систе¬
мы находят применение при автоматизации научных исследова¬
ний, в космических полетах и в промышленной практике. Среди
мультиструктурных систем важное практическое значение имеют
[92
комбинированные автоматические системы с последовательной
сменой структур. Для них основной задачей является анализ
двухструктурной или двухрежимной системы с сосредоточенны¬
ми переходами. Для такой системы общее уравнение (1.1) запи¬
шем в виде
у — A<s)(y, *)+B(s)(y, f)u + F<s) (у, t)Ut) (S = l, 2),
(8.1)
УОо) = Уо.
Пребывание системы в первой структуре в общем виде' обо-
значим так:
O^t^Tu (8.2)
где Т1 — время функционирования системы в первом состоянии;
W — заданная область фазового пространства. В практических
задачах область W может быть задана в виде прямоугольного
гиперпараллелепипеда и определена векторным неравенством
d < у < с, (8.3)
где d, с — заданные граничные векторные величины. Векторное
неравенство с ^ d следует понимать так, что каждая составляю¬
щая вектора с меньше или больше соответствующей составляю¬
щей вектора d: с{ ^ d{. В ряде задач ограничения на вектор фа¬
зовых координат или его компоненты существуют только с одной
стороны. В таких случаях указывается только одна граница:
у < с или d < у.
Характерной чертой рассматриваемых систем с сосредоточен¬
ными переходами является существование двух режимов работы
или двух структур. Автоматическая система на границе
— у = 0 области W изменяет структуру и переходит в дру¬
гой режим работы. Как показано в гл. 3, при анализе таких си¬
стем полной вероятностной характеристикой являются функции
распределения плотности вероятности /(5) (у, t) и вероятности со¬
стояний p(s) (5=1, 2). Поэтому при анализе необходимо рас¬
сматривать изменения этих вероятностей при переходе границы
yirs) области W. На границе y{rs) происходит поглощение реали¬
заций (сток вероятности) одного состояния и возникновение
(восстановление) реализации (и исток вероятности) другого со¬
стояния. Поглощение и восстановление реализаций описывается
функциями (3.56) или (3.57). В рассматриваемой задаче эти
нормированные функции поглощения и восстановления запишем
в форме
Р(ге) (у. t) =(n?s- Л(*> (у, t)) б (y(rs) — у), (8.4)
Y(sr) (У- t) = (п?г-яД(у, О) б (у('г) — у) (8.5)
(г, s = l, 2; гФ s),
13 и. Е. Казаков и др.
193
где предполагается, что при пересечении границы реализация,
прежнего состояния возникает с вероятностью q{sr) (у, £|у', t) =
=* б (у — у'), т. е. с тем же начальным значением.
Эти формулы можно переписать в другом виде, если гиперпо¬
верхность L(у) представлена в виде параллелепипеда с грани¬
цами ск, clk (ch < dh) по фазовым координатам
пу
P(rs) (у, 0=2 4S).(y, 0 [sign (iidfe-y") б (4 — у) —
h=l
— sign(n2ft-y“)6(cft —у)], (8.(i)
П у
7(sr) (у, 0=2 Лг) (у, 0 [sign (n“ft-y") б (4 — у) —
h=l
— sing(n?ft-yfe)6(cfe —у)] (8.7)
(г, s = 1, 2; r¥=s).
Задача вероятностного анализа состоит в определении вероят¬
ности каящого состояния p{s)(t), в котором находится система,
для произвольного момента времени t и вероятностных моментов
фазовых координат.
§ 8.2. Двухструктурная система с сосредоточенными
переходами
Рассмотрим типовую двухструктурную автоматическую систе¬
му самонаведения [38], применяемую в управлении ракетами.
Изучим динамику самонаведения более детально, чем это было
сделано в гл. 7. Первая структура обеспечивает самонаведение
ракеты на цель на основе измерения
параметра управления — угловой
скорости линии визирования. По¬
следнее реализуется с помощью сле¬
дящего устройства — измерителя на
ракете. Этот измеритель следит за
целью, если она находится в его по¬
ле зрения. При выходе цели из
этой области происходит срыв уп¬
равления. Система переходит вовто-
Рис. 8.1. Кинематическая схе- рой режим. Структура ее должна
ма самонаведения быть изменена так, чтобы, управ¬
ляя измерителем, направить его
ось чувствительности на цель, обеспечить повторный захват
и слежение за ней. Это можно обеспечить специальным прогно¬
зирующим звеном, выдающим сигнал, равный прогнозируемой
угловой скорости линии визирования. С помощью такого сигнала
в режиме прогноза происходит управление ракетой и измери¬
телем.
194
В соответствии с кинематической схемой самонаведения
(рис. 8.1) запишем уравнения движения ракеты в горизонталь¬
ной плоскости при малых углах в — 0 и в — 0Ц в режиме само¬
наведения (первая структура) при v — const, ип =■ const:
D =уц — v, D(0) = Dn,
t
s =_А8_-^-0.!.^г ja:4(T)dT, e(()) = e0,
0
= Mfc, f*(0)= e0, . (8.8)
t
cok = —Jmk—k^-e — k-^- J (T)
о .
Wfc(0)= o>ho,
0 = A-0 (cofc -Ь ж), 0(0) = 0O,
t
&h= w E~ 17® ~'r ~iyt -,L ^ j (t) d%— C0ft, A (0) = 07
0
Ац = 0, (2ц (0) = Ацд.
Здесь ац — случайная величина, характеризующая случайный
постоянный маневр цели и имеющая М [ац] =■ тп\ М [ (ац — тц)2] =
= Оц] zn(t)—центрированный белый шум с интенсивностью С?ц,
характеризующий случайный маневр цели; x(t)—ошибка изме¬
рения угловой скорости линии визирования на цель. Величина
Рис. 8.2. Структурная схема системы самонаведения
Ль =■ в — гк представляет собой рассогласование между направ¬
лением на цель и направлением оси чувствительности пеленгато¬
ра следящего устройства. На рис. 8.2 изображена структурная
схема системы самонаведения, соответствующая уравне¬
ниям (8.8).
13*
195
Величина рассогласования ДА стеснена ограничивающим ус¬
ловием при самонаведении
|Д*1 < 2Д. (8.9)
Если |Д*|>2Д, то следящее устройство теряет цель, система
переходит во второй режим управления по прогнозируемому
Рис. 8.3. Структурная схема системы наведения в автоматическом режиме
прогноза
значению параметра управления — угловой скорости вектора
дальности coft.
Во втором режиме уравнения движения следующие:
D = v ц — v, D(0) = Z)o,
t
е = — А е — -^0 + i + -i- j £ц(т)<2т, е(0) = е0,
О
= £ft(0) = so, (8.10)
t
o>h = — 7Г 0)ft — ~7Г /ro(°ft Zf + 4“ о x^J)dx- c°ft (°) = °>
0 = feo(Oft. 9(0) = e0.
t
Aft = jy £ 2Г ® ~ZT ^ "ZT J *Гц — COft’ (0) = 0»
о
Яц = 0, Нц (0) = #цо*
На рис. 8.3 изображена структурная схема системы наведения
во втором режиме, обеспечивающем траекторный захват цели.
196
Таким образом, рассматриваемая система наведения описы¬
вается нестационарными дифференциальными уравнениями для
шестимерного вектора состояния у с компонентами у i =• в,
г/2 = eft, уз = о>ft, г/4 = б, г/5 = ДЛ, г/6 = яц.
Уравнения (8.8) и (8.10)
можно представить в форме
с учетом введенных ооозначении
y=.A<s)(7)y + F(s)(7)g(7), y(0) = y0 (s = l, 2), (8.11)
где
А(1>(0 =
7)
V
1
0
0
~D
0
D 1
0
0
1
0
0
0
7>
V
к
—к D
0
—k
—k-p
0
D 1
0
0
К
0
0
0
Z>
V
1
“7)
0
-1
D
0
D 1
0
0
0
0
0
0
F(1)(<) =
1
D
0
0
0
0
0
0
0
0
0
к
D
0
0
0
0
0
0
0
*0
0
1
D
0
0
0
0
0
0
0
0
0
т =
J ха (т)
d%
А (2)(0 =
D
" D
0 0
D 0
0 0 _
о о _
ъ
0
1 0 0
2 b+knv
D
F (2)(0
Gz =
~ D
0
—
1
—
0
0
0
~ 1
D
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
D
0
0
0
0
0
0
0
0
0
0
0
Ц
; 0
0
0
0
0
0
0
0
0
0
0
0
0
Gll
0
0
0
0
0
0
G*
0
0
0
0
0
0
0
0
0
0
0
0
0
0
v 1
D 0 D г
ООО
(8.12)
Система (8.11) находится в первом состоянии при —Д < у$ <
< А и во втором состоянии при г/5 ^ —А, г/5 ^ А. К уравнениям
(8.11) следует добавить еще формулу для вычисления текущей
линейной ошибки самонаведения (пролета цели) в картинной
плоскости цели [38]
7 D" • I D D
h= -e = Z)8+ — У0 _ — flj,
D D D 1
(8.13)
197
Эта формула определяет ошибку самонаведения, если в момент
t система управления выключается и ракета и цель далее летят
прямолинейно с дальности D.
Рассматриваемая динамическая двухструктурная система мо¬
жет переходить из одного состояния в другое несколько раз.
§ 8.3. Вероятностный анализ двухструктурной системы
Задача вероятностного анализа автоматической двухструктур-
ыой системы самонаведения состоит в определении вероятности
каждого состояния для произвольного момента времени, средне¬
го времени пребывания в них, а также вероятностных моментов
фазовых координат и ошибки наведения.
Условные функции плотности вероятности /(1)(у, t), /(2)(у, t)
фазовых координат для первого и второго состояний соответст¬
венно определяются из нормированных уравнений типа (3.89):
7—l^S
P(rS) (У, t) — ^3 Y<er) (У. О
--^-/ЙУЛ) (s= 1,2), (8.14)
где векторы плотности потоков вероятности л(ч) (у, t) согласно
(3.58) следующие:
Я (.)(у, t) = «(*)(>', t)f*\у, t)--L {V;[D(e)I(y, о /(s) (>% t)]V. (8.15)
Вектор сноса а(я)(у. t) и матрица диффузии D(s)(y, t) согласно
(8.10), (2.38) и (2.40) для дан¬
ной системы выражаются фор¬
мулами
oc(s'(y, t) = AM(у, t),
D<*>(y, 0 = F(')(0G*.(0F<*,T(0-
©
о
©
0
У////////////Л
о A у5
Рис. 8.4. Область существования
первого и второго состояний (8.16)
Поглощение и восстановление реализаций случайных процес¬
сов происходят только по одной фазовой координате у$ (рис. 8.4).
В соответствии с рис. 8.4 и формулой (8.6) функции поглощения
следующие:
P(rs) (у, t) = л£5) (у, t) [б (Д + уъ) + 6 (Д — уъ)\ (г, s = 1, 2; г ф s).
(8.17)
Если считать, что захват цели осуществляется мгновенно при
попадании у$ на границу области (— Д, Д), то на основании
рис. 8.4 и формулы (8.7) функции восстановления реализаций
498
случайного процесса имеют вид
т<"> (у, t) = П<г> (у, t) (6 (Д -f уь) - б (Д - у3)1
(г, 5= 1, 2; гфе), (8.18)
где (у, t) — компонент вектора плотности потока вероятности
. гто координате у5.
Для вероятностей pw (t) (s = 1, 2) состояний запишем
р( 1) = — р(i)p<,21) (t) + pWy™ (t), i) (tn) = 1.
р<2) = _ р(2)р^) (,) + р(1)?(*1) (0i р(2) (д = 0.
Но так как р{2) = 1 — р(1), то следует вместо двух уравнений
(8.19) рассматривать одно уравнение
р<1) = — р<1) [р<21) (t) -г Ур12) (£)] + $2) (t), р(1) (t0) = 1, (8.20)
гиде
оо ОС
Р(р21) (t) = Y(pU) (0 = f Р(21) (У, t) dy = f 7C21; (y> f) dy?
(8.19)
Pp12’ C) = Yp 2) (0 = f P<12) (У. *) ^У = J Y(12) (У. <) ^У-
—oo —®o
G учетом (8.19) уравнения (8.14) можно записать так:
(у, t)
„(2)
я = — div я<ч (у, () _ рв) (у, <) + тп V™ (У. О +
Р(2> ..(12) ,
,(1)
/(1)(у, 0. (8.21)
¥ ) (у. о = _ div п(2) ^ ^ _ р(12) ^ ^ + т(21) ^ +
dt
Д2)
Р(1) ..(21) ,
,(2)
/(2)(УЛ). (8.22)
Вычислим я|8) (у, г). Для этого рассмотрим выражения
(8.15), (8.16) и матрицы A(s)(£), F(s)(£), G^(i). Из этих выраже¬
ний следует, что компоненты ^s)(y, t) для s = 1, 2 следующие:
,4s)(y, t) = Ais)(t)yfw (у, t)-±GK
dfis) (у, Q а/(5) (у, г)
%i д»8
d/(s) (у, <)
-
(5 = 1,2), (8.23)
ст-де А(ъв) (t) — пятая строка матрицы Ais)(t):
Вычислим мелпчипы и 7pS,)(^)rio формулам (8.21) с уче¬
том (8.17). (8.18) и (8.23). В результате получим
(О = 1 — -27 mi1) — ms1} — 17 m‘1) + ТТ № О, г)
\
2ZT
(г/3, 0 1-,.=д -г ^ fb] (г/о, о |„в—А
(8.24)
V”’О-[-4<’--т•*”-- тг»-
- А” (- -V о] - 5JT С„ [ J-./!■' (г/Г„ () , - Jд г (!,„ ц |„л—4|,
р!,“«) = гГ«>, тГм»Й!1>«,
где (у5, £) — одномерная функция плотности вероятности для
координаты i/s.
Как следует из изложенного, вероятностный анализ рассмат¬
риваемой двухструктурной автоматической комбинированной си¬
стемы состоит в совместном решении уравнений (8.19), (8.22) с
учетом соответствующих формул для входящих в эти уравнения
коэффициентов. В результате можно определить функции плот¬
ности вероятности распределения фазовых координат /U)(y, t) и.
вероятности состояний p{s) (t) (5=1, 2). Кроме того, можно оп¬
ределить также функцию плотности вероятности распределения
времени перехода системы из первого состояния и обратно
Р (О = I— Р™ 0)[Рр21> (О -г Тр12) (Ol+V'W sign//11. (8.25)
Анализ комбинированной системы наведения завершается вы¬
числением вероятностных моментов текущей ошибки (пролета)
в картинной плоскости цели с использованием формулы (8.13).
На основании этой формулы получим вероятностные моменты:
математическое ожидание mh = М [h\ в форме
mh (t) = Dm1 (t) -f- — vm4 (t) — tmQ (t), (8.23)
D D
дисперсию Qh = M[(h — mh)2] в виде
ело = d2qи + ^^2044 -г Щ-1%6 +
D1 D
-j- 2^- vQu — 2^r- tQ19 - 2 ^ vtQJ9, (8.27Ь
D D D2
где
mi = 2 }№m[s) (i= 1, (5);
S=1
Qij = X P(s> [Gi/) + (mУ — nij)] (j, / = 1, f))„
5 = 1
200
Для оценки точности попадания ракеты к цель в формулах
D
(8.2(3), (8.27) следует положить t = tk—t\, где tk = -__ф ;
v 1Ц
Di
tx = ^ _ v ; Di — малая дальность неуправляемого полета, зави¬
сящая от типа системы управления и цели [33, 43].
Изложенный точный алгоритм вероятностного анализа двух¬
структурной системы сложен из-за необходимости интегрирова¬
ния уравнений (8.22) в частных производных. Поэтому практи¬
ческое значение имеют приближенные методы анализа, основан¬
ные на двухмоментной или более полной аппроксимации функ-
щш/'ЛуЛ) [23,321.
В частности, при двухмоментной гауссовской аппроксимации
функций /(s)(y, t) можно записать
/о 1 f (у-т(в))тГе(в)(0]“г(у-/11(в))
-С"' /XT А .
Г (У, 0 = "77=== ехр ~ '
V (2л)ПУ\в^(1)\
(8.28)
Необходимо определить математическое ожидание m{s)(t) век¬
тора у и дисперсионную матрицу 0(s)(£) в первой и второй
структурах. Для этого вместо уравнений (8.22) следует интегри¬
ровать уравнения для m(,s) и 0(s) (s = 1, 2):
dr
(8.29)
0<s> = A(s)(i)0<s)-(- 0(5)A(S)T (0 - X f [(y-mf«))(y-m<«))T_0(*)] x
r~l^s _ oo
W* (У,
pu)
dy F(s) (t) GsF(sVr (0 (5=1, 2).
Подставляя в эти уравнения формулы для p(rs) (у, .£) ny{sr) (у, t).
(г, s = 1, 2) из (8.17), (8.18) и (8.23), приведем их к виду
'во = A(s) (i) 0<s> 4- 0(s>A(s)T
(t) — 2 ) I(y — m(s)) (У — m(s))T —
r=i#s
- 0“’] 2 j
/1 = 1 1
Ag\t)yhr(y,
1 n(') 7А а/(Г> (У> *)
„(<•)
4£(W;(У,«)--
1 n<s> m r7/(S) #)
(s= 1, 2), (8.31)
dyk
X [6 (А + y5) T 8 (A — y5)] dy
где A^k (t) — компоненты пятой строки матрицы A(s) (t); D(bk (t) —
компоненты пятой строки диффузионной матрицы D(s) (t).
Пример 8.1. Линейная система стабилизации находится под
.воздействием сигнала хо = const и гауссовского белого шума с,
с интенсивностью G. Систе¬
ма имеет два детерминиро¬
ванных состояния. В первом
состоянии она имеет струк¬
туру. изображенную на
рис. 8.5, и уравнение функ-
ц.иоштро вания
У
У
Рис. 8.5. Система стабилизации (пер¬
вая структура)
При достижении коорди¬
натой у значения ±До про¬
исходит срыв стабилизации. Система переходит во второе состоя¬
ние поиска со структурой, изображенной на рис. 8.6, л уравне¬
нием вида
1 , хо к ^ , ч
У = - -f-У -r~Y — уё О-
При попадании координаты у в режиме поиска в область
(—А, А) происходит захват сигнала п втягивание (переход) в
^ первое состояние. В началь-
И
Тр +1
'////Л
-А
ттыи момент система нахо¬
дится в первом состоянии
y(to) = yo. Граница А обла¬
сти поиска больше границы
Ао срыва (Д>До). На гра¬
нице ±Ао происходит сосре¬
доточенный переход системы
(срыв стабилизации), а в
области (—А, А) происходит
распределенный переход с
интенсивностью v (у).
Функции поглощения и восстановления реализаций случай¬
ных процессов следующие:
Р<21)(г/, t) = niU(y, t) [&(До — у)+ 8(Ао + у)],
202
Рис. 8.G. Система стабилизации (вторая
структура)
Г2>(г/, t)=v(y)r>(y, t), -A^y^A,
ча2)(у, *) = PU2)(i/, t), 7(21)(г/, 0 = §m){y, t).
Плотности потоков вероятности в дайной задаче на основании
■■■(8.15) следующие:
Я(2) (У, t) = a's> (У, t) fs> (у, t) — -J- ~ G -Щ fs) (y, t).
Коэффициенты сноса a{s){y, t) для рассматриваемых струк¬
тур разные:
а(1) (у, t)
к -и 1
хп
If — —
Г£ у \ rjt
г а(2) (y,t) = —у -'г хь.
Нормированные функции плотности вероятности /(1)(у, t) и
/(2)(у, t) удовлетворяют уравнениям типа (8.22):
df(l) (у, t)
dt
= --Щ п(1) (У> г) — P(2l)0, t) + Jjf V(12) (У. *) +
,(2)
^ У/’ г) = --Щ л(2) (у .0 — Р(12) О, О + ^17 Т(21> (у, t) +
+
Р(Р12)С)-^тГ (0
Р(1) ..(21)
(2)
/(2)0, t),
где Pp21)(0. Pp2)(0> Yp21>(0 определяется по формулам
(8.24). Функции р{1) (t) и р{2) (t) находятся из уравнения (8.20):
pi 1) = _ р(Х) (р(*1) (*) + т(12) (0) + т(12) (0? р(1) (g = p(s) =
= 1 — р(1К
Приближенное интегрирование уравнений для плотностей ве¬
роятностей проведем на основании двухмоментной гауссовской
аппроксимации. Функции /(1)(у, t) и fi2)(y, t) запишем в такой
форме:
/(,) (У, t)
1
2я 0Х (t)
exp
20,
, f2)(y,t) =
1
1/2л0.(()
exp
(У-т2)2
20,
Здесь приняты обозначения:
оо ОС
= i yf(1) (у, t) dy, т2 = тЦ/0 = \ yf{2) (у. t) dy,
203
°1 = eu = \ (у — т1 )2 /и) (;У, 0 dy, 02 -= 0(и ==
— оо
оо
= i (y — m2)2f2)(y,t)dy.
Уравнения для вероятностных моментов т\, т2, 0], 02 типа
(3.92), (3.94) принимают следующий вид:
л»1 = — т1 + ^- — Г21
1 ~ Р(1) г _ (в'31’ - v(12) 1 ~ р(1>)та
(1) '12 \ Рр ?Р n(l) lm 1-.
1 . *п
т2 = Y т2 " “ ~y ~ г"
РК
Г)(1 )
р J
12
1-Р
(1) Г21
(в(12) - V(21) р<1) т
\Рр 2’
e- 2(&+l)e ■ i-// _(В(«)_
U1 ~ Т U1 I ^2 U 21 i (!) *12 I Рр
(12)1 - р(1) ■ 0
Yp ,)(1) )°i-
^2 — у 02 + ^2 ^ *12 ~ j _ p(i) S21 1 Рр 1 Ур
(12) .,(21) РШ \ о
где
Г — ( — k+i \- _ ^SL \ ! _L JL. а
21 I J, 0 у л 0 ! 2
1 А’2 А 771, 1 i, ч
/2 о 1 1 у<« (ди; ^
0.
+
.*+1 л а , *о , 1 к2 ,(1)
Л — 7тг \ / А -{— 7тгл
ф —^ -ь ф ' 2
/в*
+v^ie'p
Г"
пг2 +
(Д + »а)3
20„
ехр
(А - т.;,2
*21 = (До- 1 - Ц1 До +^Т-^Г&П A<^mi ' '0)
й- ».
20.,
/ (— А0, «):
/А — 7?гЛ / А -I- 7тг,
Sl, = V0, \Ф [) -■!- Ф ( -у=2
(А~та)г
20„
2 1^1 j
| [А — /тг2
--Ч-
V2H 1
/02
ехр
/0
(А + т2)2
20п
ft(21) _ I А + 1 л . ’ 1 ^ ЛЛ0 W1 1 Д1) / А /Ч :
Рр — I JT—А0-г ^ Г 2 ^2" jj Ч 1
Г
^ 1 I I ‘ (J А К s,
-у—^о-г-у 2"р" ех
1 А2лДо + '»Л/(1)(_до^);
л.(3.2)
Тр = v
.А —7?гл\ /А + 7?г0
ф|тг)+фтг
204
Начальные условия при to = 0 для дифференциальных урав¬
нении следующие: 7?гю, т2о, 0ю, 020-
Выписанные уравнения для rri\, m2, 0ь 02, р(1) были проин¬
тегрированы при х0 = 0; v = l; До = 0,2; А = 0,5; к = 2; Г = 0,5 с
и различных уровнях шума: G =*0,1; 0,5; 0,75.
Начальные условия при интегрировании уравнений приняты
такими: /;(1) = 0,94; пгю = 0; m2о —■ 0; 0ю = 0,01; 020 = 0,0001.
На рис. 8.7 приведены зависимости p{X){t), Q\(t) при раз¬
личных G.
Для этого же примера системы стабилизации были проведе¬
ны вычисления тех же величин с учетом моментов высших по¬
рядков (до шестого) при аппроксимации функций плотностей ве¬
роятностей /(1)(г/, t) и f{2) (у, t) отрезком ортогонального ряда на
основе гауссовского в нулевом приближении [25]. Результаты
расчетов в рассматриваемом случае практически совпадают, что
подтверждает возможность использования гауссовской аппрокси¬
мации.
§ 8.4. Системы с переменной структурой управления
Автоматические системы с переменной структурой управляю¬
щего устройства содержат нелинейные звенья в виде так назы¬
ваемых логических переключающих элементов — я^-ячеек. Эти
нелинейные элементы определяют переменную структуру управ¬
ляющего устройства и обеспечивают специфический характер
процесса управления, называемый скользящим режимом. При
таком режиме движения изображающая точка системы в фазо¬
вом пространстве находится вблизи некоторой гиперплоскости 5,
205
определяемой уравнением [19, 20]
т
2 СгУг = 0, С\ = const, (8.22''
г=1
где iji — фазовые координаты TV-мерной системы, т ^ N — 1.
Логический элемент — ф-ячейка— изображен на рис. 8.8,
Этот элемент скачком изменяет (переключает) коэффициент уси¬
ления в цепи управления. Уравнение ф-ячейки следующее:
7,. ,| (и.0Л \^1гУг-> Уг£'^>{\ /о ‘>о\
г — \г l^ — \l2iyu yigC 0, •°’J/
где lit — выходной управляющий сигнал; г/» = Ф»(р) г/, g = Q(p)ya,
hi, hi — коэффициенты усиления переключаемой цепи управле¬
ния; iji — переключаемый сигнал; g — сигнал переключения:
Рис. 8.8. Элементарная ф-ячейка
БП — блок переключения (реле); Ф*(р) и Q(p)—операторы,
формирующие сигналы уи g. Уравнение (8.33) и структура
ф-ячейки (см. рис. 8.8) выражают тот факт, что в цепи сигнала
коэффициент усиления меняется скачком в тот момент, когда
изменяет знак произведение y{g. Элементарные нелинейные
звенья (ф-ячейки) имеют два входа. На один подается переклю¬
чаемый сигнал, на второй — управляющий. Выходной сигнал
ф-ячейки и управляющего устройства в целом имеет разрывы
первого рода в силу переключения коэффициентов усиления.
Однако для этих элементов характерным является свойство ин¬
вариантности к масштабу входного сигнала:
Ui (1уг) == 1щ(Ух).
Любая система с переменной структурой управляющего уст¬
ройства может быть построена с помощью соответствующего на¬
бора типовых элементарных нелинейных звеньев. На рис. 8.8
изображена одна из общих структурных схем с N — 1 элемен¬
тарным нелинейным звеном [20].
Уравнения функционирования данной системы имеют вид
JV-1
R(p)z = к (и -{- х), и = 2 uj,
3 = 1
Щ = Ь (y,g), Уз = Р}~гУ, (8.34)
y=*f—z, g = Q(p)y,
206
aliP'
(Л-1)
; Q(p)
N
V
СчР'
dt
детерми-
/1=1 V=1
нированный, a x (t) — случайный внешние сигналы.
Все нелинейные звенья, характеризуемые зависимостями
^j(yjg), идентичны и отличаются только коэффициентами уси¬
ления в цепях переключения. Уравнения (8.34) можно записать
Рис. 8.9. Схема системы с N — 1 звеном переменной структуры
также в другой форме, используя представление о фазовом про¬
странстве:
JV-i N
Уг+Ъ U = 2 tv (УуУ), g = X
У г = У »+ь и = z* tv (yvg), g = Zl cvyv-1,
Y=1 v=l
Якг “jy
(8.35)
UN
/1=1
Если я(£)=^(£)—гауссовский белым шум, то уравнения (8.35)
принадлежат к типу (1.1). Если x(t)—небелый шум, то с по¬
мощью уравнений формирующего фильтра, выражая x{t) через
белый шум g(t), уравнения (8.35) также приводятся к (1.1).
Переключение каждого нелинейного элемента, входящего
в рассматриваемую систему, по существу, создает новую струк¬
туру системы. Таким образом, уравнения (8.34) и (8.35) содер¬
жат в обобщенном виде все структуры, свойственные рассматри¬
ваемому техническому устройству. Можно перенумеровать все
структуры и для каждой из них записать систему уравнений.
Из изложенного следует, что рассматриваемая система с пере¬
менной структурой управляющего устройства является мульти-
структурной. Число возможных структур равно п = 2N~l, где
N — 1 — число элементарных гр-ячеек. Можно также рассматри¬
вать данную динамическую систему как имеющую единую струк-
20?
гуру со сложным нелинейным управляющим устройством, обес¬
печивающим нелинейный закон управления.
Движение в системе с переменной структурой управляющего
устройства состоит из этапа вхождения в режим скольжения и
этапа скользящего движения с переключением, когда изобража¬
ющая точка фазовой траектории находится вблизи гиперплоско¬
сти переключения [19, 20]. Если параметры звеньев с перемен¬
ной структурой U1, li2, Сг выбраны таким образом, что выполня¬
ются условия скользящего режима, то движение системы без
возмущений происходит вблизи гиперплоскости S.
При наличии случайных возмущений в рассматриваемых си¬
стемах возможны срывы скользящего режима переключения.
Вместе с тем при наличии случайных возмущений эти системы
способны в основном выполнять свое назначение, но с иным ка¬
чеством. Однако действие помех на системы рассматриваемого
типа, обладающие нелинейностями, проявляется -сложно. С од¬
ной стороны, так же как в линейных системах, они приводят к
дополнительным погрешностям при воспроизведении заданного
сигнала, а с другой стороны, вызывают изменения статистиче¬
ских и динамических свойств системы и могут приводить к па¬
разитным движениям. Так как практически все системы работа¬
ют в условиях помех, то задача вероятностного анализа их
актуальна.
§ 8.5. Вероятностный анализ систем
с переменной структурой управления
Вероятностный анализ систем с переменной структурой уп¬
равления можно проводить на основе развитой теории систем со
случайной сменой структуры. Изменение структуры системы при
этом интерпретируется как полное поглощение реализаций слу¬
чайного процесса, характеризующего предыдущее состояние. Об¬
ратный переход в предыдущее состояние, к предыдущей струк¬
туре можно рассматривать как восстановление реализаций соот¬
ветствующего случайного процесса. Для формального описания
этих процессов перехода воспользуемся функциями поглощения
и восстановления в виде (3.56), (3.57) или матричными функ-
В рассматриваемых системах перестройка структуры происхо¬
дит путем переключения коэффициентов усиления на гипер¬
плоскости S, определяемой уравнением (8.32). Функция погло¬
щения [}(у, s, t) в 5-м состоянии в соответствии с (3.57) имеет
компоненты
Полная функция поглощения в 5-м состоянии следующая:
циями (3.62), (3.64).
(г, s = 1, п; Гфв).
(8.36)
П
Р (у, s,t)= 2 Р(Г5) (у, 0 ри) (0-
(8.37)
7' — 1
208
Полная функция восстановления в $-ы состоянии есть
г.
7 (У. s, t) = 2 f'sr> (У- О />(г) (0 (8.38)
r = l=£s
с компонентами вида
7(,г> (у, г) = (ns°r-rc(r)(y, «))б (ii (8.39)
Матричные функции поглощения pi восстановления в данной за¬
даче полноразмерные и связаны тем же соотношением Г*(у} t) =
= В*1'(у, t).
Функции плотностей вероятностей f(s) (у. t) для рассматри¬
ваемой системы также подчинены условным нормированным
обобгценным уравнениям Фоккера — Планка — Колмогорова типа
(3.89):
8f( af’ = -div л(<) (у. 0 - /(5) (у- о -
п г (r) 1 /т \
— 2 (n?s-r;s'(y, i)) — ^(п?г-л(г)(у, *)) 8 (« = !-«))
r=:#s L р J \i=i J
(8.40)
Вероятность s-ro состояния определяем из уравнений вида
(3.81):
П
’р13) _ _ (S) V ftC-s)
р;гч/> ■ 2 />(ГЧ’Г)(*>, (8.11)
Г= 1^0 7' = 1^S
где
°? / тп \
Рр ° (0 = ] (п«-Лй> (у, о) б I 2 Cji/i dy,
—oo ' i 1 t
Ъ' (*) = J (n®-- л(4) (у, t)) 6 ( 2 CiJ/i) dy.
-00 \i=i I
Выписанные уравнения вместе с формулами для вектора
плотности потока вероятности л(3)(у, t) позволяют провести тео¬
ретико-вероятностный анализ систем с переменной структурой
управления, рассматривая каждую структуру отдельно и взаим¬
ные переходы между ними.
Общий алгоритм решения задачи связан с интегрированием
уравнений в частных производных (8.40). Практическое инже¬
нерное значение имеют приближенные методы, основывающиеся
на аппроксимации функций плотностей вероятности распределе¬
ния фазовых координат, т. е. на их представлении формулами
через ограниченное число вероятностных моментов — как прави¬
ло, двух моментов: вектора математического ожидания и корре-
44 и. К Казакоз и др. 209
ляционной матрицы фазовых координат. Наиболее употреби¬
тельной является гауссовская аппроксимация. Задача при этом
решается с точностью до определения первых двух вероятност¬
ных моментов фазовых координат процесса (c-м. гл. 4). Для со¬
ставления уравнений, определяющих вероятностные моменты
при наличии нелинейностей, широко применяется метод стати¬
стической линеаризации.
Следует отметить, что при линейных объектах управления и
управляющем устройстве, построенном на базе элементарных
ф-ячеек, уравнения, описывающие поведение системы рассматри¬
ваемого типа, в каждом 5-м состоянии линейны. Следовательно,
для их анализа достаточно применения линейной теории, а само
уравнения для моментов являются точными. При таком анализе
из уравнений (8.40) получаем уравнения для вектора математи¬
ческого ожидания m(s) и корреляционной матрицы 0и) в каждой
5-й структуре:
П 1 / m \
— 2 ] У [ (:п" •я<5) (уо)) — ^57 (• Я(г) (у, t)) 5(2) Щг ) dy
7 = 1^5—00 L *J \i=l J
(8.42)
0(s) = j (n,£' (у, t) grad у (y°y°T)) dy —
— OC
71 7» r > , ( m
— 2 J I (n®s--X5)(y, 0) — 777(п* -л(г)(у. о)
T=l=£s .
СгУг X
(f)
> (yVT)dy-^0(s), (8.43)
где y° = у — m(s); 5 = 1, n.
Начальные условия: m{s)(to), <&iS)(io). Уравнения (8.41) —
(8.43) являются замкнутыми и должны интегрироваться сов¬
местно.
При большом числе ф-ячеек в устройстве управления и, сле¬
довательно, при большом числе структур (более двух, т. е. более
одной ф-ячейки) рассматриваемый общий путь анализа громоз¬
док. Здесь возможен другой подход, основывающийся на рас¬
смотрении всей совокупности структур как единой системы с не¬
линейным управляющим устройством, имеющим ф-ячейки пере¬
ключения. Такой подход оправдывается важной особенностью
функционирования рассматриваемых систем. Эта особенность со¬
стоит в том, что при нормальной работе в скользящем режиме
210
переключения на заданной гиперплоскости система попеременно
находится в каждом из возможных состояний малое время. Она
пребывает в колебательном режиме переключения вблизи задан¬
ной гиперплоскости. Поэтому при анализе системы целесообразно
рассматривать ее поведение в целом около этой поверхности
переключения, т. е. рассматривать все структуры как единое
целое.
С этой целыо запишем уравнение для первой безусловной
функции плотности вероятности /(у, t) фазовых координат си¬
стемы, которая связана с условными функциями /(у, s, t) для
каждого состояния формулой
/(У,*)=2/(У,М). (8.44)
S=1
Просуммируем уравнения (8.40) по индексу s. Учитывая
(8.44), получим
п п
= — div 2 л (у> sO) + 2 Р (у, S,t) + y (у, S, г)]- (8.45)
S=1 s = l
С учетом того что
п п
2 П (у, s, 11 = л (у, t), 2 [— Р (у, s, t) + у (у, s, f)] = 0,
а=1 s=i
уравнение (8.45) приобретает форму
Щ1Л = _ div л (у, t), (8.46)
где
N
div л (у, t) = Vjn (у. 0 = 2 sT Лк ^у’
/г=1 к
Компоненты л* (у, I) вектора плотности потока вероятности
л (у, I) имеют вид
N
Пк (у, Г: = «л (У, 0 / (у. t) — 4- 2 ЖГ (у» 9 / (у- 01- (8.47)
" (=i •/г
Компоненты a/t(y, t) вектора сноса и Dkt{у, f) матрицы диф¬
фузии для уравнений (8.35) при х(£)=£(£), т. е. при белом шу¬
ме, следующие:
«ft (у* t) = Уи+! (к = 1, А'Г — 1),
N— 1 IV /о /оV
/ .х V V -W- (o.-io)
(У, t = — 2, 5- Ук i- — и — 2d ГО ’
DNx(y.t) = 1^Gl, Dkl(y,t) = 0 (k,l¥=N), (8.49)
aN
14* 211
Уравнение (8.46) является нелинейным, если учесть форму
лы (8.471 — (8.49). При анализе рассматриваемой системы в це¬
лом как единой нелинейной на основании уравнения (8.46) сле¬
дует воспользоваться статистической линеаризацией ф-ячеек и.
других нелинейностей для составления уравнении относительно
первых двух вероятностных моментов переменных. При таком
анализе мультиструктура системы явно не проявляется. Она
учитывается в специфике нелинейного управляющего устройства.
После статистической линеаризации нелинейностей на основе
двухмоментнои аппроксимации функции /(у, t) и, в частности,
таких специальных нелинейностей, как ф-ячейки. составляются
уравнения для безусловных моментов — компонентов вектора
математического ожидания m и корреляционной матрицы ©„ По¬
лучаемая приближенная система уравнений является замкнутой
л дает возможность получить количественные характеристики,
влияния помех на динамические свойства систем с переменной
структурой управления.
§ 8.6. Статистическая линеаризация ф-ячейки
Нелинейная элементарная ф-ячейка является релейно-муль¬
типликативной. Для дальнейшего изложения перепишем (8.33)
в виде
Oii/i- м-2>о,
и = ) 7 (8.50)
\кУ2~ ?/й/2<о.
Зависимость (8.50) представим в более компактной релейно-
мультипликативной форме [21. 28]:
и = J [*2i *i2 sign (У1У2)] г/1? (8.51)
где
sj2 = h 3“ S21 = ^1 — h-
Формулу (8.51) удобно представить в виде
“ = 4 --4 *'1211111sign У*- (8.52)
Для удобства дальнейших преобразований запишем (S.52) в сле¬
дующей форме:
и "= 4 s^iji ^ 4 *1гф у^ (8-53*
где
<Р(Уь Уй)=' ij/il sign у2.
Таким образом, ф-ячейка является сложным нелинейным эле¬
ментом с двумя входами: преобразуемого основного сигнала у\ и
вспомогательного сигнала г/2- Выходной сигнал имеет две состав¬
ляющих: линейную и нелинейную по преобразуемому сигналу
212
у j. Нелинейность представляет собой мультипликативную функ¬
цию модуля у 1 и сигнатуры у2.
Произведем статистическую линеаризацию этой нелинейности
при случайных входных сигналах у\ и у2.
В силу того, что нелинейность ф(г/ь 1/2) мультипликативная,
следует воспользоваться первым и вторым способами вычисления
параметров статистической линеаризации [24, 25]. Нелинейную
функцию ф(уь У2) (см. (8.53)) представим в виде линеаризован¬
ной зависимости
Ф U/l- У2) — Фо 1“ ^lVl "'I ^*2^2•
(8.54)
Для вычисления параметров статистической линеаризации фо,
к\, к2 используем формулы, приведенные в [25, 32].
Статистическая характеристика фо определяется по формуле
Фо = I ф (Уъ У2) / {Уъ У2) с1У1 dy,,
(8.55)
где f(y 1, у2)—гауссовская функция плотности вероятности.
Коэффициенты усиления к\, к2 в зависимости от способа ста¬
тистической линеаризации определяются по формулам
где
»
1/2
ц sign
io-n /*(2) h{2) —
igll h1 , h1 —
<4
От'
к(1) — |/£'ф ч }1/2 sipn С2) /-(2) — д(?п
Л2 — I ft- М- I Slgfll А 2 г Л2 —
(8.56)
| фь (Ух, У г) / (у и у,) dyx dy2 — Фо;
— ОО
н = ( У
— sign к\2) sign Л’22)
(8.57)
(8.58)
Gy (i,: j = 1, 2)—корреляционный момент связи перемен¬
ных уи У2.
При вычислении <ро и Д, функцию f (yи г/г) приближенно
представим в виде
/Он J/г) =
1
/2я0и
ехр
(У1 - тг)
]/ 2Л0,,
ехр
(//2 — ^2)2
20“
X
1 +
12
М22
■(У1 — mi) (У2 — т2)
X
(8.59)
213
После вычисления соответствующих интегралов в формулах
(8.55), (8.57) получаем [24]
Фо
= 4 /О
11
т ( шл
^ф(- 1
Ф|-Й=\.|-Ф(-*=)< м
11/
7СГИ'Ч7(
2 ‘
0.А., 1 I 2я
где
Da
Ф(2) =
V:
1122
т\ I- Of,,
i t
sKT
u
m.,
22
+
(8.60)
(8.61)
Подставляя выражения (8.60), (8.61) в формулы (8.56), опреде¬
лим статистические коэффициенты усиления:
1 1/2
7.(1) _
1'1 —
+ 1 - т^Фо)р
№
22
1/2
li - 1 +
о
12
/0
11 22
°12
(8.62)
exp
2. 1 I 2
2leu4
/ri2) = 4
/е.
У 2Л022
ф/ mi \ / ”'l ТО2 °И
l/ej VV4 /022 У0И02
l/2jt
ехр
т1
20 J
ехр 7
20,.
При статистической линеаризации мультипликативных нели¬
нейностей целесообразно использовать формулы [24, 25, 31]
*,-■+ i-,=-4(*4”ч-й")-
(8.63)
Окончательно нелинейность тина элементарной ф-ячешш (8.53)
в статистически линеаризованном виде следующая:
U = у521г/, + у ™2. 011, 012, 022) +
+ Y «12*1 (»»1, /»2. 011. ®12. 022> У°1 -i- 4 %2*г (mi. т2. 011. ©И. 02з) Уг-
(8.64)
214
Приближенная зависимость (8.64) может быть применена
также для описания Солее сложных нелинейностей, состоящих
из параллельно включенных яр-ячеек. Выходной сигнал сложной
нелинейности будет равен сумме выражений типа (8.64).
Воспользовавшись полученными формулами, проанализиру¬
ем, как ведет себя элементарное звено переменной структуры
при различных уровнях полезных сигналов и помех. Полезный
сигнал в рассматриваемых системах обычно детерминированный
и составляет основную часть математических ожиданий т\ и
Помеха центрирована или содержит математическое ожидание,
близкое к нулю. Поэтому величины 0ц, 012, 022 характеризуют в
основном действие помехи.
Рассмотрим крайние режимы функционирования при поме¬
хах. Предположим, что выполняются условия, когда отношение
сигнал/шум мало, т. е. величины тj/V0n, тг/У022 являются ма¬
лыми первого порядка.
Тогда
(
1
Ф
1
2
т2
20оо
I /еп) у 2л У в» ’ Щ /е22) УТп у е22
Из формул (8.60) — (8.64) получим с точностью до величин пер¬
вого порядка малости:
1
ти = ■
• -Ь
*12 Уви
л
У«Л
0
12
/022
1/2
V 0П022 /0
4 12
j/9^072 + 012
2022(/V^ + 022)
11 22
2012
"/°U022
1/2 ye
fc)-
(8.65)
y\ +
ii
1 */022
Vi-
(8.66)
Из формул (8.65), (8.66) следует, что нелинейное преобра¬
зование, осуществляемое элементарным нелинейным звеном пе¬
ременной структуры, при малых отношениях сигнал/шум
7?г)/У0з], m2/V022 стало линейным по математическому ожиданию
и по случайным составляющим. При линейной зависимости вы¬
ходного и входного полезных сигналов в управляющем устройст¬
ве отсутствуют условия существования скользящего режима в
рассматриваемой системе [21, 28]. Таким образом, при высоком
уровне шума скользящий режим в системе отсутствует, система
в среднем функционирует как линейная, а устойчивость и точ¬
ность в начале координат могут быть оценены методами линей¬
ной теории.
Другой крайний режим движения существует в системе, ког¬
да отношения сигнал/шум на входе нелинейного элемента вели¬
ки, т. е. т\1 V0ц и mcjУ022 имеют большие значения. На основа¬
нии формул (8.60) — (8.64) для выходного сигнала управления в
215
рассматриваемом режиме получаем [21, 28]
1 1
т„. = 4- — Sj21 mi | Sign m2,
(8.67)
sign^w,) y\. (8.68)
Формула (8.67) повторяет закон управления с переключени¬
ем, т. е. уравнение ф-ячейки, но только для математических
ожиданий. Следовательно, в среднем статистическом здесь сохра¬
няется необходимое условие существования скользящего режима
на гиперплоскости переключения. Скользящий режим в системе
существует, но имеется помеха в управляющем сигнале, пропор¬
циональная помехе в переключаемом сигнале.
Практически важным является также режим работы систе¬
мы, когда помехи малы в канале переключаемого сигнала уь но
велики в канале переключения г/2. Это может быть, например,
тогда, когда переключающий сигнал у2 формируется дифферен¬
цированием сигнала г/ь В рассматриваемом режиме V0n и 612
Малы, У022 велик и т2/У022 мало. На выходе элементарного не¬
линейного звена по формулам (8.60) — (8.64) получаем
Такой режим возможен вблизи гиперплоскости переключения.
В среднем статистическом в системе существует скользящий
режим.
Если рассматриваемое звено переменной структуры является
симметричным, т. е. 1\ =—/2, то при выполнении условия
^2/У022 ~^О получим из (8.69) ти = 0. Это означает, что полез¬
ный сигпал на выходе управляющего звена переменной структу¬
ры равен нулю. Эффективность управления в условиях помех
падает до нуля, и автоматическая система размыкается.
Линеаризованные зависимости для элементарных нелинейных
звеньев переменной структуры, полученные с помощью статисти¬
ческой линеаризации, могут быть использованы при вероятност¬
ном анализе замкнутых систем с перестраиваемым управлением,
работающих в условиях помех.
§ 8.7. Система с одним звеном переменной
структуры управления
Рассмотрим систему достаточно общего вида с одним элемен¬
тарным звеном переменной структуры управления и линейным
объектом. Уравнения функционирования системы с учетом
V0,2 У2я’-
1
(8.69)
216
помех запишем в виде
N-i
Ук = 2 dki (i) у г + hk (t) lk (t) (к = 1, .V - 2),
2 = 1
JV-1
yN-1 = 2 dN_t i (I) г/i + hji-г (t) lN_x (t) — u, (8.71)
2=1
М1У1, J/iJ/JV >0,
“= Ь », 7/» ^-п у^= 2j с»г/ь
1*2^27 */l*/iV<U, j=l
где £*(0 (A: = 1, iV — 1) —гауссовские белые шумы (помехи),
имеющие математические ожидания m,£k(t) и матрицу интенсив¬
ностей (?(£).
Система в начальный момент находится в некотором началь¬
ном состоянии yh(h)=yhO (к => 1, iV — 1), характеризуемом век¬
тором математического ожидания то и корреляционной матри¬
цей @о. Эта система имеет две структуры в соответствии с тем,
что в цепи управления применено одно звено переменной струк¬
туры с двумя значениями коэффициента усиления /] и h. Изме¬
нение структуры системы происходит на гиперповерхности пере¬
ключения, уравнение которой следующее:
JV-1
2 СгУг = 0. (8.72)
2 = 1
Эта гиперплоскость делит фазовое пространство на две области
W\ и JV2 в соответствии с условиями
Л7-1 Лт—1
У1 2 Ciy.i>0, уг 2 Cij/i<0.
2=1 2=1
Используя представление о двух структурах, можно записать
уравнения (8.71) так:
JV-1
Ук = 2 dM (t) Уг -I- hk (t) Ik (t) {к = 1, N — 2),
Г-х (8-73)
yN—i= 2 hj (t) уi -f- hn—x (Z) ёл'_! (Z) — lsyt (s = 1, 2).
2=1
Смена структур происходит при достижении фазовыми коор¬
динатами системы гиперплоскости переключения (8;72). На этой
поверхности происходит поглощение реализаций одного процес¬
са и восстановление другого. Функции поглощения и восстанов¬
ления реализаций случайных процессов для рассматриваемой
системы в соответствии с формулами (8.36), (8.39) следующие:
Р<21) (у, 0 = (п?-я(1) (у, z)) б _2 Cij/ij,
у(12)(у, 0 = (п®-л(2)(у, Z))6 ( 2 йуЛ ^8'74^
Р12(у, 0='Ч12(у> t), 721(у, 0=Р21(у> О,
217
где nj — единичный вектор внешней нормали к Wг, п? — еди¬
ничный вектор внешней нормали к W-2. Очевидно, что = — п”.
Для рассматриваемой двухструктурной системы плотности ве¬
роятностей распределения фазовых координат в каждом состоя¬
нии удовлетворяют уравнениям типа (8,14).
Векторы плотности потоков вероятности выражаются форму¬
лами (8.15) через векторы сноса a(s)(y, t) и матрицы диффузии
D(e)(y, t). Компоненты o4s)(y, t) вектора сноса по координатным
осям в соответствии с уравнениями (8.73) следующие:
N-1
“ft'’ (У. 0 = 2 dhi (t) Уi -г hk (t) mlk (t) (к = 1, N — 2),
Л (8-75)
«w-1 (у, 0=2 dN—i i (0 yi + hN_! (г) me v_ —
i=i
Компоненты (у, £) матрицы диффузия по координатным
осям выражаются формулами
D$ (у, *) - АЛ (г) Ар (*) Gfcp (г) (/с, р = lr iV — 1). (8.76)
Уравнения вероятностей состояний р :;, рГ2; для данной двух¬
структурной системы имеют вид (8.20), где PpS)(^) 11 Тр?)(0
вычисляются по формулам
Рр (0= j (п?-л(г/з., г/г, •( 2 едИ^у,
\ i=l /
ч (8.77)
Тр12) (0 = — | (п?-п(2; (г/ь г/2, .... *Лу))б ( 2
Уравнения (8.73), описывающие функционирование системы
в каждом состоянии, линейные. Ограничимся гауссовским при¬
ближением для функции /(3)(у, t). Тогда следует определить
только вероятностные моменты первого ш(?‘ и второго ©(3) по¬
рядков. Выпишем эти уравнения в координатной форме.
Для компонентов вектора математического ожидания имеют
место следующие уравнения:
IV—1
m|s) = 2 dki m\s) + hkmih —
i—1
r=l^S
*(5)(y, t)
p
p(r) „(г)
N-l \
S| 2
218
(к = 1, N — 2; s —< 1, 2).
Для компонентов корреляционной матрицы уравнения имеют
вид
n-i
Qfep — 2 {duSyi -j- khkpGhp —
i=l
(к, p = i,N — 2; 5 = 1, 2).
Интегрируя уравнения (8.20), (8.78), (8.79) при заданных
начальных условиях, определяем вероятности p(s) и условные
моменты m(hs\ 0^ (s = 1, 2; fc, = 1, N — 1). Безусловные мо¬
менты определяются по формулам (3.95)-—(3.97).
Изложенная процедура статистического анализа дает возмож¬
ность определить вероятностные характеристики системы с пере¬
менной структурой управления. Вероятности р{1) и р{2) оценива¬
ют пребывание системы в первом или втором состоянии. Если
рг,) = р{2) = 1/2, то скользящий режим в системе проявляется
полностью. При нарушении этого условия в ту или другую сто¬
рону скользящий режим в системе не реализуется.
Данную систему можно также рассматривать как однострук-
турную с нелинейным управляющим устройством. Тогда следует
219
(8.80)
уравнения ее движения привести к следующему виду:
JV-1
У к = 2 dkiyi + hklh (к = 1, N — 2),
i=l
JV-1
УN—i = 2 dN-1 iyi + ^iv-iLv-i — и,
i=l
1 1
и = у 521yx + у s121 | sign yN,
N-1
[/Л7 — Cil/i, ^12 "— ^1 — ^2? ^21 ~~ ^1 ~11- ^2*
i=1
Статистическая динамика этой системы описывается функцией
плотности вероятности /(у, £), удовлетворяющей уравнению
(8.46). Приближенное решение этого уравнения, дающее возмож¬
ность проанализировать основные закономерности статистической
динамики и синтезировать помехоустойчивые системы с перемен¬
ной структурой управления, основывается на гауссовской аппрок¬
симации функции /(у, t). Практически указанное приближение
сводится к тому, что в уравнениях (8.80) применяется статисти¬
ческая линеаризация нелинейной функции управления. Затем для
линеаризованной системы составляются уравнения для математи¬
ческих ояшданий и корреляционных моментов переменных.
Воспользовавшись формулой (8.64), произведем статистиче¬
скую линеаризацию нелинейной функции и в уравнениях (8.80).
В результате эти уравнения принимают такую форму:
N-1
У к ~ 2 dfi ill г -f- i
i=i
N~1
Ух-1 = 2 ds-1 iyr\-hN-iiN-i — 2SnlJi—
(8.81)
JV-1
Ух = 2 Ciiji.
i=i
На основании линейных уравнений (8.80) стандартным прие¬
мом получаем соответственно уравнения для математических
ожиданий
N-1 "
mh = 2 dkiirii + 1гкт1 (к = 1, N — 2),
2 = 1
JV-1
mN-1 = У, Ю-l + /ijV-l^lf-l — V SnmI -
i=i г ‘ (8.82)
— “2 S12CPo (mi- 0Ц: 01N, 0JVJv),
JV-1
WijV = 2
220
и для корреляционных моментов
Л-1
0ftp — 2i (dh$ip I dpfoili) ”1” hpfop Gkp (^\ P — !• У
tf-1
iV—1 ^1‘2 t^’l (j^lt 0ц, 0X1» $Nn) 01 N— i 4“
“Г -2(^1» mN, 0n, 0i/у,- 0xx) 02 x-lb
N-ri
QnN = 2 fiCjQij.
Интегрированием этих уравнении при заданных начальных
условиях определяются все вероятностные моменты переменных.
Они дают возможность выявить режимы потери устойчивости по
полезному сигналу, оценить точность работы в условиях помех
и провести полный анализ поведения системы. Конкретные
исследования [21] систем подобного вида показывают, что
случайная высокочастотная помеха снижает эффективность управ¬
ляющего устройства обратно пропорционально отношению сиг¬
нал/шум. Может возникнуть систематическая ошибка из-за срыва
скользящего режима. Установлено также, что наиболее суще¬
ственное влияние оказывают помехи, возникающие з каналах
переключения.
Рассмотрим более подробно простейшую стационарную систе¬
му с одним звеном переменной структуры управления (рис. 8.10),
находящуюся под действием сигнала хо и стационарной случай¬
ной помехи 5(0 со средним значением тг = 0 и спектральной
плотностью St (со). Исследуем поведение системы и оценим вели¬
чину ошибки г/.
Уравнения рассматриваемой системы следующие:
Q(p) —1
Рис. 8.10. Схема системы с одной ар-ячейкой
R(p)z = к (и + £),
и =
hУ, yg>$, Z = Q(p)y<
кУ, У8 <11. y = uo — z’
(8.84)
221
N
N
где R(p) = ^ aiP\ Q(p) = 2 ciP^~1i P = Проанализируем
поведение этой системы вторым методом, т. е. рассматривая обе
структуры как единую систему с нелинейным управляющим
устройством.
Нелинейную функцию и статистически линеаризуем в соответ¬
ствии с формулой (8.64), а исходные уравнения (8.84) запишем
в форме
Предположим, что ио = const, и рассмотрим практически важ¬
ный режим работы системы, когда уровень помехи £ в канале
управления мал, но при формировании сигнала переключения g
за счет дифференцирования уровень шума высок. Для такого ре¬
жима параметры статистической линеаризации определяются
формулами (8.69), (8.70):
Статистически линеаризованные уравнения системы для мате¬
матического ожидания тпу и для у0 принимают вид
Первое из полученных уравнений позволяет оценить устойчи¬
вость и систематическую ошибку системы при наличии помех,
второе и третье определить дисперсию ошибки и дисперсию по¬
мехи в канале переключения. Так, решение тпу = 0 может быть
устойчивым или неустойчивым в зависимости от вида корней ха¬
рактеристического уравнения
При действии помехи £ и сигнала щ устойчивость по матема¬
тическому ожиданию необходимо оценивать на основании
222
R(p)y = -k(u + l) + R (р) и0,
4 1
и = “2" $21? Н 2~512Фо (myi mgi Qyyi +
“1 2~ s12 Pi (mlh mgi ®VVi Qgg) yb +
(8.85)
I ^*2 ( mVi mgl ^yyi ®yg' ®gg) ]i S — Q (P) У.
(8.86)
g°=*Q(p)y°-
R (I) + = 0.
(8.88)
характеристического уравнения
Y 2л0
(8.89)
задавая различные значения ту и Qgg.
Если система при действии помех устойчива, то в установив¬
шемся режиме после завершения переходных процессов для
Рис. 8.11. Схема системы стабилизации переменной структуры
оценки систематической ошибки ту и дисперсии ёуу следует со¬
вместно решить следующую систему уравнений:
Y-Л б ,гц-
т v
1Ц0) н0
Jvv
ЭЧ*
-J
— А'
е« - j
Л (гсо) + + /,•.,<? (i-co)J + /v
- (во)
ks
R (Ш) + i? + fc„<? («в)] + к -51
S|(co)d©, (8.90)
2
“st (o') c/co.
Пример 8.2. Система стабилизации с переменной структурой
управляющего устройства (рис. 8.11) имеет уравения
yi ~ У2» У2 = -а11/\-а2у2 + 1-и,
кУъ УгУз > 0. У3 = с1у1-гс.2у,,
Л*/2, 1Мз<С-
Начальные условия г/i (0) = г/ю, Уг(0) = 0. В уравнениях Ci>0,
Сг>0 и постоянны; h, 12, а\, а2—постоянные коэффициенты;
%(t)— белый шум, имеющий ilf[|(i)] = 0 и интенсивность G.
Рассмотрим систему как двухструктурную. Эти структуры реа¬
лизуются в областях W\ и W2 (рис. 8.12) в соответствии с усло¬
вием г/]£/з>0 или г/1Уз<0.
Если в системе возможен скользящий режим, то он реализу¬
ется вблизи линии переключения
С\У\ + с2у2 = 0.
Граница у, = 0 между областями Wi и W2 при таком движении
является неустойчивой и фазовые траектории от нее отходят
(см. рис. 8.12).
Допустим, что параметры ci, с2, Iь h подобраны так, что в
системе обеспечен скользящий режим движения при отсутствии
возмущений. Нормаль nj к линии переключения имеет проекции
на координатные оси у\sin а и yl cos а.
Запишем выражения для составляющих векторов плотности
потока вероятности для каждой структуры:
n[S) = У2Р} (у, t),
4S) = (— &лУ\ — агУг — ^i) /(5) (У, t) ^ ^ (s = 2)*
Уравнения типа (8.20) для вероятностей состояний следующие:
оо
р(1) = — р(1) j (п?-[я<1)(г/, t) 4- л<2>(р, f)] )б(с1у1 + c2y^dy —
—оо
оо
- j (nl.n^(y,t))6(ciyi + c2y2)dy, pW = l-pb\ р<«(0)=1.
— оо
При гауссовских функциях jM(y, t) (s = l, 2) необходимо
составить уравнения для т<£\ ®ii’> 61*2 • Эти уравнения
224
иа основании (8.78), (8.79) следующие:
, Г 7 / v с2 7 P{S) (s)
m{2s) = а2т2}— lsm[S)— \ h (у2) у2 dy2
,(«)
(s)
-г'"'
- ~ТГ) ^2 7
• / \ \ Г*
0П = 20l2 j h2 (у2) —|-1/2 dy2 — 0^,
02(2S) = _ 2^0^ - 2a
(S)
.0й? + G - J /I (г/2) г/l dy, - 2/J0*2) - ^022 T
0i2S) = 022 — «10U — 0-0012 — /s0u — f h(y„)-j-
y\dy2.
где
h (у,) = I n?-
rd)
Л(2)
'-У 21 У 2
(*=1,2).
Начальные условия при интегрировании этих уравнений долж¬
ны быть заданы для всех переменных.
§ 8.8. Система с N— 1 звеном переменной
структуры управления
Наиболее совершенными являются системы, имеющие в управ¬
ляющем устройстве более одного звена переменной структуры.
Из теории систем с переменной структурой управления [19—21]
следует, что для объекта управления, описываемого уравнением
Лг-го порядка, целесообразно применять управляющее устройство
с 7V — 1 звеном переменной структуры. В системе при этом осу¬
ществляется переключение сигнала ошибки и N — 2 ее произ¬
водных.
Рассмотрим одну из типовых систем с переменной структурой
управления для стационарного объекта iV-ro порядка (рис. 8.9)
[20, 21]. Уравнения, описывающие работу этой системы, в соот¬
ветствии со структурной схемой (см. рис. 8.9) запишем так:
Я(Р)У = — k(u + x) + R(p)f,
N-1
“ = 2 и3 = \ (4iV- + «12 I Уз I sign g), (8.91)
5=1
Уз — р’~*у> g = Q(p)y,
XT. В. Казанов к др. 225
где
N N
R (р) = 2 ajpi-, Q (p) - 2
0=1 0 = 1
S21 = hj Jr hj', si2 = ho — hv стационарная случайная по¬
меха с тх п спектральной плотностью 5ж(со); f(t) — детермини-
рованная функция.
Эта система имеет 2iY_1 структур, и ее анализ как мульти-
структурной системы сложен. Поскольку отличие между струк¬
турами состоит только в различных уравнениях управлений, це¬
лесообразно ее рассматривать как моноструктурную систему со
сложным нелинейным управляющим устройством. При этом бу¬
дем считать, что параметры нелинейных звеньев выбраны из
условия осуществления скользящего движения без помех по ги¬
перплоскости переключения [20]
N
2 СЦУг = 0.
2= 1
Как и для системы с одним звеном переменной структуры,
по причинам, указанным ранее, воспользуемся для приближен¬
ного вероятностного анализа гауссовской аппроксимацией первой
функции плотности вероятности распределения фазовых коорди¬
нат. Применим статистическую линеаризацию нелинейностей и}
и составим уравнения для определения вектора математического
ожидания и корреляционной матрицы фазовых координат
системы.
Для статистической линеаризации нелинейных звеньев вос¬
пользуемся формулой (8.64):
щ = + Ф «иФо; Ob'* Щ, 0ji. fyg, Qgg) +
Н—2~Svi[kij (ffij, m-g, Oji• Qjg, ®gg) y°j + 1*2} (mj- ■ • •? ®gg) ь°]- (8.92)
Подставим выражение (8.92) в первое уравнение (8.91) и,
учитывая обозначение у\ — у, запишем уравнение для математи¬
ческих ожиданий переменных:
N-1
R(p)m 1 = — 4- [4х Щ + Si2<Poj] + R (Р) /- ,Q 0O.
- j=1 (8/do)
mg = Q(p)m\, rrij = pj~xmu
где cpoj зависят от mg1 0jj, 6jg, 6gg и определяются соответству¬
ющими формулами статистической линеаризации, приведенными
в § 8.6.
226
Для центрированных переменных из (8.93) получаем урав¬
нения
2V-1
R (р) У\ 2~ 2 Is2iVj + si2 lhjy°j + ^2jg°] — kx, Xg
g° = Q(p) У°\ У°з = Р5-гУи
где кij, /t'2i зависят от wi, яг*, 0^, 0^, 0№.
Разрешая систему уравнений (8.94) относительно первых
производных от переменной у5 после приведения помехи- x(t)
к белому шуму с помощью формирующего фильтра, получим ка¬
ноническую систему линеаризованных уравнений с белыми шума¬
ми в правых частях типа (8.35). Анализ полученных уравнений
целесообразно вести методом моментов [25, 32] совместно с урав¬
нениями (8.93).
Исследования конкретных систем с переменной структурой
управления, в которых осуществлен скользящий режим вблизи
гиперплоскости переключения, показали, что помехи существен¬
но изменяют характер движения [21, 28]. При высоком уровне
помех происходит срыв скользящего режима. Однако с ростом
отношения сигнал/шум в канале переключения структуры управ¬
ления в системе в среднем статистическом выполняются условия
переключения по математическому ожиданию ошибки. Наиболее
уязвимым к действию помех является канал переключения. Кро¬
ме того, в системе с N — 1 звеном переменной структуры повы¬
шается уровень шумов в переключаемых каналах за счет диф¬
ференцирования.
В общем случае вследствие наличия помех в системе с пере¬
менной структурой управления срывается скользящий режим
переключения на заданной гиперплоскости. Движение системы
при наличии шумов определяется не уравнением гиперплоско¬
сти, а уравнениями статистической динамики (8.93), (8.94).
Для того чтобы динамические свойства системы с перемен¬
ной структурой управления при действии помех были близки к
свойствам той же системы в скользящем режиме без помех, не¬
обходимо обеспечить достаточно большое отношение сигнал/шум
в канале переключения. Это можно осуществить уменьшением
уровня шума в этом канале. Поэтому исследования и .проектиро¬
вание таких систем направлены на разработку способов и уст¬
ройств, обеспечивающих фильтрацию сигналов, подаваемых в
^-ячейки без существенного увеличения запаздывания. Некото¬
рые пути инженерного решения этих вопросов изложены в [21].
Г л а в а 9
УПРАВЛЕНИЕ СИСТЕМАМИ
С РАЗДЕЛЕНИЕМ ВРЕМЕНИ
§ 9Л. Уравнение для плотности вероятности
выходных координат
В условиях ограниченного ресурса средств обработки инфор¬
мации: и числа датчиков возникает необходимость их рациональ¬
ного использования в сложных системах управления. Одним из
таких способов является последовательное использование этих
устройств для поочередного обслуживания объектов. При этом мы
приходим к управлению в режиме разделения времени.
Очевидно, что управление объектами с прерываниями по вре¬
мени, к которым приводит режим разделения, может существенно
отличаться от режима непрерывного управления. При наличии
сложных алгоритмов управления и случайных условиях работы
раздельное управление объектами также может быть случайным.
Исследование вопросов качества управления динамическими объ¬
ектами в режимах разделения времени является задачей, пред¬
ставляющей большой практический интерес, решение которой
возможно в рамках теории динамических систем со случайной
структурой [6].
В § 9.1 рассматриваются методы анализа динамических си¬
стем, работающих в режиме разделения времени, отличающиеся
УРВ
УУ
3 I
1
I
j
I
■
к
с
juj >
- !
I
> (V
L
Рис. 9.1. Структурная схема системы управления автономным режимом
разделения времени: УУ — управляющее устройство; УРВ — устройство уп¬
равления режимом разделения времени; ОУ — объект управления
тем, что закон изменения процесса разделения s(t) не зависит
от хода изменения фазовых координат. Такой режим назовем
разделением времени с автономным управлением.
Структурная схема подобных систем изображена на рис. 9.1,
Устройство управления режимом разделения времени генерирует
228
процесс s(£), имеющий п конечных состояний. При реализации
5-го состояния процесса к 5-му объекту управления подключает¬
ся s-g управляющее устройство.
Автономное управление предполагает, что процесс s(t) форми¬
руется независимо от изменения y(t). Пусть динамика системы
в 5-м состоянии описывается уравнением (1.1) . Все пояснения
относительно этого уравнения давались в § 1.4. Напомним толь¬
ко, что при фиксированном значении s(t) процесс y(t) будет
Рис. 9.2. Реализация процесса.
непрерывным марковским. Ход изменения реализации процессов
y(t) и s(t) показан на рис. 9.2.
Отметим особенности этих процессов, которые будут учиты¬
ваться в дальнейшем. Во-первых, в силу определенных условий
работы часть фазовых координат по интервалам отключения
управления может фиксироваться. Подобный случай для фазовой
координаты у 1 при i-м состоянии процесса y{t) на интервале
от Тг до тj показан на рис. 9.2.
Во-вторых, на интервалах отключения управления возможна
экстраполяция координат, условно показанная для координаты уР
на интервале от xj до хк. Наконец, в-третьих, независимо от со¬
стояния s(t) часть координат продолжает изменяться по тем же
■законам (см. рис. 9.2).
Другая особенность процессов y(t) заключается з тех началь¬
ных условиях, с которых будут начинаться процессы в каждом
из новых состояний системы. Так, на рис. 9.2 для фазовой коор¬
динаты уп показано, что при переходе s(t) в fe-e состояние в
Момент тк значение уп скачкообразно меняется. Учет начальных
Условий является характерным фактором при решении некото¬
рых задач.
223
Зададим начальные условия при переходах из s-ro состояния
в 7-е посредством условной плотности вероятности. Эта функция
определяет, что если в состоянии s координаты системы в мо¬
мент t' равнялись у' (£'), то при изменении в этот момент состоя¬
ния с 5-го на i-e плотность вероятности координат в новом со¬
стоянии будет равняться q{rs) (у, t' ly', t').
В частном случае, когда все координаты остаются непрерыв¬
ными, условная плотность вероятности будет равна функции
9trs) (У) *'ly, у-у'),
где б (у — у7) — многомерный аналог 6-функции.
Рассмотрим методику анализа систем с программным разде¬
лением времени, полагая процесс s(t) марковским с конечным
числом состояний. Хотя такое предположение и накладывает
ограничения на класс рассматриваемых задач, однако выбором
свойств марковского процесса s(t) удается учесть весьма разно¬
образные случаи законов распределения длительности интервалов
включения тех или иных каналов управления.
Сделанное предположение сразу позволяет использовать для
анализа рассматриваемого класса систем аппарат теории систем
со случайной структурой.
Совместные функции плотности вероятности /(у, 5, t) опреде¬
ляются из уравнений (3.72), которые запишем в виде
дн\*'t] = ~ (-^г)Т [a(s) (у.г) / (у. s> 01 -Ь
+^(l)T{(^)T[D(5)T(y’ ^У’s’ ~vis)^^y' s~
71 £°
+ 2 \ / (у', г, t) v<"> (t) qM (у, t\y',t)dy' (s = 1, n), (9.1)
r=l^S _"oo
где введено обозначение v(s) (/) ='V(SS) (t). Для сокращения записи
представим уравнения (9.1) в следующей символической форме:
df (y'dts' t] = — (-^r)Tjt(y> s- *) — Р(у» s’ *)+v(y. s. 0 (s = 1, n),
(9.2)
где
" (у. s, t) = a(s) (y, t) f (y, M) Y t°(S)T ^ 1 ^*)1}T
— вектор плотности потока вероятности;
Р(У, s, i) = v(s,(i)/(у, s, t)
— функция поглощения;
71 ~
у (у ,«,*) = 2 ( f(Y,r, i)v<")(ov*r)(y, t\y’,t)dy
r=l^s 2.00
— функция восстановления.
230
Уравнения (9.1) являются частным случаем обобщенного
уравнения Фоккера — Планка — Колмогорова. Они образуют си¬
стему из п взаимосвязанных уравнений, в совокупности описы¬
вающих эволюцию плотности вероятности вектора фазовых коор¬
динат системы у(t) с учетом закона программного управления
структурой s(t) в режиме разделения времени. Эти уравнения
должны решаться при начальном условии /(уо, s, t0).
Величины PqS) определяют вероятности начальных состояний
системы на момент времени to = 0:
оо
PoS) = f /(Уо, s, 0) ^Уо (s = 1- «)•
*—00
Характерным для уравнений (9.1) является наличие послед¬
них двух слагаемых в правой части, зависящих от статистиче¬
ских свойств и структуры процесса s(t). При сделанных пред¬
положениях этот процесс является марковским с непрерывным
временем и конечным числом состояний п. Вероятности нахож¬
дения такого процесса в каждом из состояний определяются
уравнениями Колмогорова
p(s) — — y(s) (£) p(s)
2 v{sr) (t) p{r)
r=.\^s
(r,s = i.n). (9.3)
Если проинтегрировать обе части всех уравнений (9.1) по
бесконечной области изменения фазовых координат, то получат¬
ся уравнения Колмогорова для вероятностей. Известно, что
свойства марковских процессов с конечным числом состояний
можно отображать посредством
направленных графов (рис. 9.3).
Структура этого графа одно¬
значно определяет структуру по¬
следней суммы в правой части
(9.1). Входящие стрелки каждой
вершины графа соответствуют оп¬
ределенному слагаемому. Выходя¬
щие из вершин графа стрелки оп¬
ределяют структуру суммарной
интенсивности v(s)(£). Таким об¬
разом, при наличии графа состав¬
ление уравнений становится зада¬
чей сравнительно простой.
Уравнения (9.1) и (9.2) обладают одним существенным недо¬
статком: они получены в предположении, что s(£) является мар¬
ковским процессом. При этом условии закон распределения дли¬
тельности интервалов между сменами состояний будет экспонен¬
циальным. Очевидно, что это ограничение далеко не всегда вы¬
полняется. Обобщим рассмотренную методику на более широкий
класс законов распределения длительностей состояний.
Первоначально рассмотрим следующий пример. Пусть s0(t) —
Марковский процесс с конечным числом состоянии (по = 4) и
231
циклическим характером переходов из одного состояния в дру¬
гое. Реализация подобного процесса показана на рис. 9.4, а его
граф—на рис. 9.5, а. На основе So{t) построим процесс s(t) на
два состояния (п = 2). Длительность состояния первого процес¬
са s(t) равна сумме длительностей состояний первого и второго
процессов So(t). Длительность состояния второго процесса s(t)
равна сумме длительностей состояний третьего и четвертого про¬
цессов so(t). Граф этого процесса показан на рис. 9.5, б.,
Очевидно, что s(t) не будет марковским процессом. Закон
распределения длительностей состояний т(5) (5 = 1. 2) для этого
L -
-
i
Г"
I
: i
; i
i
i
“ 1
j
1
. I
Рис. 9.4. Реализация марковского процесса
процесса будет отличаться от экспоненциального. Так, если ин¬
тенсивности переходов процесса so(t) соответственно равны меж¬
ду собой, т. е. v(12)=v(23) и v(34)=v(41), и постоянны, то закон
распределения длительности интервалов будет эрланговским вто¬
рого порядка. Изменяя величины интенсивностей, можно изме¬
нять закон распределения в
пределах от экспоненциального
до эрланговского второго по-
(7Y 3-^0) рядаа*
Теперь поставим задачу з
5 обратном порядке. Пусть закон
изменения режима разделения
времени S\(t) порождается мар-
Ркс, 9.5. I рафы процессов ковским процессом s(t), как
это было показано. Чтобы
получить уравнения для плотностей вероятности, необходимо рас¬
ширить число состояний с по = 2 до по = 4 и записать для этих
состояний четыре уравнения типа (9.2). Введение дополнитель¬
ных состояний позволяет учесть более сложные, чем экспоненци¬
альные, законы распределения длительностей интервалов состоя¬
ний. Расширяя число возможных состояний, можно получать за¬
коны распределения в диапазонах от экспоненциального до эрлан¬
говского любого порядка. Известно, что подобная аппроксимация
ф—”Ф
so
б-—©
а
232
обладает весьма широкими возможностями. Но при этом не надо
забывать, что будет возрастать число совместно решаемых урав¬
нений..
Вернемся к примеру, показанному на рис. 9.4, и отметим одну
особенность. При переходе от первого состояния ко второму в
расширенном пространстве состоянии уравнения системы и не¬
прерывность фазовых координат сохраняются. Это приводит к
тому, что векторы плотности потока тс (у, 1, t) и л ( у, 2, i) будут
иметь одинаковые функции а(1)(у, к) = а{2)(у, t) и D(l)(y, t) =
= D(2)(y, t), а плотность вероятности перехода q(2[) (уIу') =
= 6(у — у'). Эти же условия, в частности, надо иметь в виду и
при переходах из третьего состояния в четвертое.
Таким образом, при достаточно широком классе функций,
определяющих закон изменения режима разделения времени,
статистическое описание динамических систем сводится к сово¬
купности обобщенных уравнений Фоккера — Планка — Колмого¬
рова типа (9.2).
§ 9.2. Уравнения для вероятностных моментов
Как уже пояснялось, по смыслу решаемых задач интеграл
/><*>(*)= f /(y,M)dy, 2 />'•*> = 1 (0.4)
-oo S=1
п функции p'3'(t) имеют смысл вероятности нахождения системы
В S-м состоянии.
Математическим ожиданием взвешенного /с-го компонента век¬
торного процесса y(t) в 5-м состоянии назовем интеграл
сю
P/iS)(0= j Уь1 (У- t) dy, (9.5)
— оо
Как видим из этого определения, математическое ожидание
соответствует совместной плотности вероятности для одного со¬
стояния. Так как плотность вероятности для всех состояний с
учетом их несовместимости равна сумме
/ (у, t) ~ 2 / (у, s, t).
5 = 1
то математическое ожидание к-то компонента для всех состояний
также будет равна сумме
mk(t) ----- 2 0/Д (О-
S= 1
Взвешенным корреляционным моментом компонентов с ин¬
дексами к и I в 5-м состоянии назовем интеграл (см. гл. 3 и 4)
оо
$»’ (0 = 1 (у к — т(иУ)(у1 — t) dy. (9.0)
233
Эти функции соответствуют совместной плотности вероятно
сти для 5-го состояния. С учетом (9.5), (9.6) запишем уравне¬
ния для взвешенных моментов н Qui:
со со
i4° = - j У ft f-^]T лТ (у, s, I) dy - j у$ (у, S, 0 dy +
— со —oo
со
j УиУ (у, s, t) dy (к = 1, ny\ s — 1, n), (9.7).
— CO
ОС
йы = — | (Ук — mk’) (у; — m[s)) ^ J л (y, s, t) dy —
— CO
CO
— .1 (Ук — "4°)(Уг — ni|s))[P(y, s,t) — v(y, s, t)]dy (9.<S)
— CO
(k, I = 1, /гу; s=l, /г).
Преобразуем уравнения (9.7) н (9.8), приняв закон управ¬
ления режимом разделения времени 5(£) марковским процессом
с конечным числом состояний тг, а функции поглощения (i(y7s,/)
и восстановления ц(у, 5, t) в виде
Р (у. S, t) = V«(*)/(y, s, 1),
71 00
v (у, S, t) = 2 i / (y\ t) v(sr) (t) б (у — V ) dy'.
r=l^s _1те
Выполнив интегрирование, для ч(у, s, t) полупим выражение
П
v (у, М)= 2 v^)(i)/(y, г, г).
r=l^S
С учетом результатов интегрирования уравнения моментов
(9.7) и (9.8) принимают следующий вид:
со
иь0 = — J у». (т^)Т л s’ ^— v<5) W ^
— со
Ч- 2 v(*'-)(OpT) (А: - ТДЦ; а - ГДГ), (9.9)
r=l^s
со
Йы =— J (Ул-'Пк})(у1 — miS))(^r)Tjl(>7 *)<*У —
— со
— vfs) (t) OlV 2 v(sr) (0 (»4S) — '«Ц) WS> — '”гг)) P(r) (t) !-
T=1^S
-!- 0$ (0 P(,) (0 (*> I lTra£s - 174). (9.10)
234
Если в каждом 5-м состоянии система описывается линейным
уравнением
у = A(s) (t)у + B(s) (i) u + F(s) (/) % (t), (9.11)
где и(t)— /-мерный вектор регулярных функций; A(s) (i), В(3)(£),
I'is) (t)—матрицы переменных коэффициентов с элементами
bhi(t) И 4ki(t)< то уравнения моментов (9.9) и (9.10)
записываются в дифференциальной форме.
Для этого выполним интегрирование первых слагаемых в пра¬
вых частях уравнений (9.9) и (9.10), выразив в явном виде
вектор плотности потока л (у, 5, t) через парахметры уравнения
системы (9.1). Вектор коэффициентов переноса a(s) (у, t) и мат¬
рица коэффициентов диффузии D(s) (у, t) в этом случае равны:;
ais)(y, t) = A^(t)y(t) + W’>(t)u{t), D(8) (£) = F(e) (у, t)G(t)F'”\t).
Скалярные составляющие вектора а{$) (у, t) и матрицы D(<J(£)
соответственно равны:
= 2 [akl (0 Vl "Г bkiUi], Dui = 2 Фkq (0 Ф/р (0 Gqр (0*
1=1 Q,P= 1
После преобразований уравнения математических ожиданий
линейной системы принимают следующий вид:
№ = 2 [«Й> (0 и1'5> + Ь® (() щ] - г 5 v(-) <«) (9.12)
г=1 r=i^i
(/с = 1, Пу, s = 1, /г),
й# = 2 К’ (0 й!? < (0 й&Ч - ^ -\-
9=1
-4- 2 v(sr} (t) Qfe? + 2 ^(sr> (t) (Х<я) — т\$))(т{1р — m[r))
r=l^S r=iy£s
+ Dtfpto (к, I = TT^J, s = Г7Г). (9.13)
Запишем уравнения моментов (9.12) и (9.13) в матричной
форме. Для этого введем вектор-столбец математических ожида¬
ний размерности пу и матрицу вторых корреляционных моментов
размера щ X пу. Имеем
ц(г5) = A(s) (t) \xi8) + B(s) (t) u - v(s) (t) p,(s) + v(r) (0 ц(Г), (9.14)
Qto ^ a(e)(CQU) + Q(s)A(s)T(0~v(5)Q(s) +v(r)Q(r) -f
+ v(s) (m(s) - m(r)) (m(s) - m(r))y- ~ D(e)p( (9.15)
1'Де
v(s> — 21 v(-sr) (s -- w)-
Г=1^о
235
Прежде всего заметим, что в уравнениях (9.14) и (9.15) пока
еще не использовалось предположение о виде плотности распре¬
деления вероятности. В этом смысле полученные уравнения мо¬
ментов являются точными. Таким образом, анализ линейныч
систем с автономным режимом разделения времени в рамка \
корреляционной теории можно провести точно. Источником по¬
грешностей будет только точность решения уравнений на ЦВМ.
Как будет видно из дальнейших примеров, некоторые задачи
могут быть решены в аналитическом виде. По виду уравнении
(9.14), (9.15) можно высказать некоторые соображения о влия¬
нии режима разделения времени на качество управления. В слу¬
чае управления системой (9.11) без разделения времени уравне¬
ния (9.14) и (9.15) «вырождаются» в известные уравнения
моментов фазовых переменных системы управления с фиксиро¬
ванной структурой:
in = Am + Ви, (9.16)
0 = A0 + 0AT-^D. (9.17;
Уравнения (9.3), (9.14) и (9.15) образуют замкнутую систе¬
му обыкновенных дифференциальных уравнений, совместное ре¬
шение которых позволяет определить математическое ожидание
ц.(°(£) и вторые корреляционные моменты Яи'(£) вектора у.
Система уравнений (9.3) содержит 7г уравнений Колмогорова для
вероятностей состояний p(s) (t) структуры системы управления..
Системы уравнений (9.14) и (9.15) содержат соответственно пп,
.. (s)
и п ——2 уравнении для математических ожидании Ц/* и
вторых корреляционных моментов 0,$ (t) компонентов вектора у.
В отличие от систем с фиксированной структурой в системах
с разделением времени даже в линейном случае уравнения для
вторых корреляционных моментов (9.15) зависят от математиче¬
ских ожиданий, определяемых решением (9.14). Поэтому даже
при отсутствии шумов (g(£)=0) в (9.11), когда матрица D{s) (t)
в (9.15) становится «вырожденной», вектор фазовых переменных
y(t) все равно остается случайной функцией аргумента за счет
переключений структуры системы в случайные моменты времени.
В этом смысле функция s(£), определяющая режим разделе¬
ния времени, играет роль дополнительного возмущающего воздей¬
ствия. В результате оценки, получаемые с помощью уравнений
(9.16) и (9.17) для систем с фиксированной структурой, явля¬
ются верхним пределом оценок для систем с разделением вре¬
мени.
Таким образом, для анализа точности систем управления,
работающих в режиме разделения времени, в рамках корреля¬
ционной теории необходимо решить системы уравнений для ма¬
тематических ожиданий и корреляционных моментов. В общем
случае это удается сделать численными методами. В отдельных
частных случаях решение получается в аналитическом виде.
236
Рассмотрение конкретных задач предполагает их предвари¬
тельную классификацию, которая может осуществляться по раз¬
ным признакам. Для систем, работающих в режиме разделения
времени, в основу классификации желательно положить следую¬
щие два признака, влияющих на качество управления.
Первый признак должен быть связан с характером приори¬
тетов, назначаемых для каждого из объектов управления. С точ¬
ки зрения организации дисциплины обслуживания наличие прио¬
ритета приводит к увеличению времени, отводимого на обслужи¬
вание выделенного объекта. Очевидно, что различие во времени
обслуживания повлияет на качество управления (точность),
поэтому первая группа задач должна касаться вопросов влияния
степени приоритета на качество управления.
В те интервалы времени, когда обслуживание объекта пре¬
кращается, его поведение может быть различным. В простейшем
случае после отключения управляющего устройства объект нахо¬
дится в режиме свободного движения под влиянием начальных
условий, имеющихся в момент отключения управления. В более
сложном варианте движение объекта происходит по некоторой
программе, определяющей экстраполирование координат объекта.
Для этого варианта простейшими случаями экстраполяции будут
запоминание координат на время раз?,пикания управления, линей¬
ная экстраполяция с запоминанием скорости, квадратичная ап¬
проксимация.
Вторы?! признаком классификации задач управления в ре¬
жиме разделения времени может служить характер поведения
объекта на интервалах отсутствия управления.
§ 9.3. Анализ влияния степени приоритета
на качество управления
Напомним, что структурная схема системы управления авто¬
номны?! режимом разделения времени изображена на рис. 9.1,
где процесс s(i) определяет последовательность или дисциплину
обслуживания. Мы условились рассматривать такие задачи,
когда процесс с конечными состояниями является случайны?!
марковским или компонентом марковского процесса.
Приоритет в обслуживании того или иного объекта заключа¬
ется в больше?!, по сравнению с остальными, выделении времени
на обслуживание. При это?! степень приоритета может опреде¬
ляться различными величинами. Так как s(t)—процесс случай¬
ный, то степень приоритета целесообразно оценивать средним
врелтегтем обслуживания. Объекты с большим приоритете?! обла¬
дают больши?! средним временем обслуживания. Такая оценка
удобна и проста с практической точки зрения, однако при этом
и?1еется особенность, которую необходимо учитывать.
Известно, что марковский процесс с конечным числом со¬
стояний определяется не только средним временем пребывания
в каком-либо состоянии, но в общем случае и законом распре¬
деления длительности этого состояния. Поэтому исследование
влияния степени приоритетов па качество управления должно
проводиться с учетом вида закона распределения интервала об¬
служивания.
Для марковского процесса изменение средней длительности
обслуживания может осуществляться двумя путями. Рассмотрим
их па примере, когда s(t) является марковским процессом с ко¬
нечным числом состояний, равным п. Уже отмечалось, что в этом
случае вероятности состояний р{$) (t) (5 = 1, п) определяются
уравнениями Колмогорова
п
р(*) = — v(*) (t) Р^ -f V(Sr) (t) P{r) {s — 1. n),
r=l^S
где v(s) (t) и v(sr) (t) — интенсивности переходов:
n
v(J) (/) = 2 v<*r>(*).
r=iy£s
У процессов такого вида закон распределения длительностей
обслуживания имеет экспоненциальный характер, и среднее вре¬
мя обслуживания 5-го объекта равно ^ср = l/v(sy Отсюда сле¬
дует первая возможность создания приоритета: для изменения
среднего времени обслуживания надо изменять величину интен¬
сивности переходов. При этом закон распределения длительно¬
стей не меняется и остается экспоненциальным.
Понятно, что такой простой способ регулирования степени
приоритета не всегда приемлем из-за вида закона распределения
о о д
Рис. 9.6. Узлы графа состояний
интервала обслуживания. Чтобы учесть более сложные законы,
необходимо использовать второй путь изменения среднего време¬
ни обслуживания.
Структура дисциплины обслуживания, как отмечалось, может
быть отображена с помощью графа. Пример такого графа пока¬
зан на рис. 9.3. Выделим 5-й узел графа состояний (рис. 9.6, а)
с учетом связей с другими узлами. Добавим новое (s + 1) состоя¬
ние, непосредственно связанное только с 5-м состоянием
(рис. 9.6, 6) и имеющее выходные связи 5-го состояния. Пусть в
дополнительном (5 + 1) состоянии уравнения системы сохраня¬
ются такими же, как и в 5-м состоянии. При этом среднее время
нахождения системы в 5-м состоянии увеличится и станет равным
т(с$ = l/v<s> -Ь 1/V(5+1).
Закон распределения суммы двух независимых интервалов
для 5-го и (5 + 1)-го состояний будет композицией двух экспонен-
238
циальыых законов и будет отличаться от экспоненциального.
Так, при yu+!,=y'^ мы получим закон распределения Эрланга
второго порядка, а при различных вариациях vu+1) он будет ме¬
няться в диапазоне от экспоненциального до эрланговского вто¬
рого порядка. Расширяя число дополнительных состояний до
s + А (рис. 9.6. е), можно добиться изменения закона распреде¬
ления в широких пределах от экспоненциального до эрлангов¬
ского (А+1)-го порядка.
Этот способ, называемый способом псевдосостояний, позволяет
сформулировать законы распределения длительности обслужива¬
ния очень широкого класса. Однако следует иметь в виду, что при
Рис. 9.7. Структурная схема системы
этом возрастает число состояний и соответственно число уравне¬
ний моментов. В последующем псевдосостояния будем учитывать
в общем числе состояний, обозначаемых индексом п.
Подводя итоги сказанному, отметим три типа задач, которые
могут возникнуть при анализе влияния степени приоритетов на
качество управления. Первая задача — оценка влияния среднего
времени обслуживания на качество управления при одинаковых
законах распределения интервалов обслуживания (например,
экспоненциальных); вторая — оценка влияния вида закона рас¬
пределения при одинаковых средних значениях обслуживания;
третья — оценка влияния среднего времени и вида закона рас¬
пределения.
Начнем рассмотрение первой задачи на примере системы со
структурной схемой, показанной па рис. 9.7. Пусть имеется п
линейных следящих систем, работающих в режиме разделения
времени так, что обслуживание одной системы приводит к раз¬
мыканию контура управления другими системами в цепи сигнала
рассогласования. Например, такого рода ситуация получается в
системах слежения за несколькими самолетами с помощью одной
радиолокационной станции, имеющей фазированную антенную
решетку.
Полагаем, что дисциплина обслуживания s(t) является мар¬
ковским процессом с п конечными состояниями и интенсивно¬
стями переходов v(?r)(£), где г, 5=1, п. При таком задании s(t)
закон распределения длительности интервала обслуживания
23 П)
будет экспоненциальным с-о средним временем
п
= l/v<s>, v<*> -= У, v<ir>.
r=l7^S
Если все объекты имеют одинаковый приоритет, то одинаковы
все времена (?’ср = ^ср), а следовательно, одинаковы интенсив¬
ности переходов (v(s)=v). При наличии приоритета у 5-го объ¬
екта > Тср для всех r¥=s. Чтобы сравнить качество управ¬
ления при наличии приоритетов, положим все системы одинако-
Г/> выми, т. е. их передаточные функция
— «-fT) Wi(p) = W2{p) = ... = W(p). Все харак-
^теристикн как задающих воздействий
v xs(t), так и возмущающих £a(t) также
Рис. 9.8. Граф состоя- полагаем одинаковыми.
нин при п = _ ДрИ этих предположениях точность
слежения будет определяться степенью
приоритета. Чтобы получить конкретные оценки в явном
виде, рассмотрим следующий простой случай. Пусть число
объектов управления п = 2. Граф состояний системы для
этого случая показан на рис. 9.8. Первое состояние соответствует
режиму управления первым объектом, а второе — вторым. Интен¬
сивности переходов обозначим функциями vU2) = v(i) и v(21) = v(2)„
Среднее время управления первым объектом = 1/М1), а сред¬
нее время управления вторым объектом Так как
объекты равноценны, то для исследования возьмем первый из
них. Степень приоритета будем оценивать отношением q= ?ср/
/Т$ = Если q = l, то объекты по времени обслужива-
иия равноценны. Если д>1, то первый объект обладает приори¬
тетом по сравнению со вторым, если же q<-i, то выше приори¬
тет второго объекта. Изучим влияние степени приоритета на
точность управления первым объектом. Пусть передаточная функ¬
ция W(р) = к/p, х\ (t) = at, 51 — белый шум со спектральной ин¬
тенсивностью G1. В первом состоянии, когда идет управление
первым объектом, уравнение системы относительно) ошибки управ¬
ления имеет вид
X1' = /.'Xя + а - klL,
а во втором состоянии — вид
ей = а.
Составим уравнения для взвешенных математических ожида¬
ний и дисперсий ошибки управления в различных состояниях,
для чего воспользуемся общей формой записи уравнений момен¬
тов (9.9) и (9.10). Так, уравнения для математических ожиданий
принимают вид
= — /t*j,i(1I) -j- арМ —
— <7//2) — -j-
240
а уравнения для дисперсий — вид
й[г) = - 2kQ[1) + k*-GlPW - vWQ[l)+ v(s)Qi«+V(« (m[l) - m[2)) p*\
Qi ^ -f- v<1)Q(11) -j- vt1) (wid) — re,^2')2 p>D.
Найдем математическое ожидание и дисперсию ошибки управ¬
ления в установившемся режиме при £ = <», когда [i{s)=0 и
^1^ — 0 (5=1,2). После решения алгебраических уравнений
получаем
kG
”2
„(2) аГср п(2)_й2т(2)[ 1 : fcpM
f*i - 1 + 9» ^ - а ~
Математическое ожидание и дисперсия ошибки в целом для
обоих состояний будут равны суммам:
т1 = j.i(11) + [Л(!2), ех = + Q^2’.
Введем следующие обозначения: 0 = Gvk/2 — дисперсия ошиб-
ки в непрерывной системе; т = а/к — математическое ожидание
т1 /т
10
,,(1) __Лхг(1+ч) o(i) _ kGi
Их , Ui ,
81/дг
0.8
€.6
0.4
0.2
I
к
|\
11
■5а
0 1
's5
го
0}8
0.6
0,4
0.2
c-v
II
II
CM I
Г"
v ,5
I
] - !
1
Рис. 9.9. Графики отношений функций ml/m2 = f(q) и 9i/©2 = f(q)
ошибки в непрерывной системе; б = А:Гер —относительное зна¬
чение коэффициента преобразования.
После всех преобразований можно найти величины:
т, = т
14-<7
1
(14-?)
;], 01 = 0 + m=^(l + TA-).
16 и. Е. Казаков и др.
241
Поменяв все индексы па противоположные, можно найти эти
же величины для второй системы:
_1_ б<7
т0 = т
(1 + д) [l +
(1 + 9П
02 = 0 -L тЧд
ваться
m2i .
1 + tf[L+T+iJ
Влияние приоритета g будет оцениваться отношениями:
ni2s I 6 \
1/
б + (1 + q)
0,
2 + (1 + g)2]’ 02
i+ е
Графики этих отношений в зависимости от величипы q при
разных значениях б и т2/0 показаны на рис. 9.9. В частном
>(t)
x<(t)
^(t)
^ (t)
1
7 (р)
«з (Р)
U'SV
?5(t)
Рззс. 9.10. Система обслуживания
случае, когда б > 1 и б > д, получаем следующие асимптотиче¬
ские оценки:
__ _1_ _ J_
-2 " <Г
С ростом приоритета g ошибки в первой системе резко умень¬
шаются.
Оценим влияние степени приоритета при эрланговском законе
распределения длительности обслуживания второго порядка для си¬
стемы, изображеной на рис. 9.10. f
Чтобы сформулировать этот за¬
кон, рассмотрим граф переходов
состояний, изображенный на
.,/25; v(3*)
h—/£>—KD *07
VM /
f/j-r,
Рис. 9.11. Граф обслуживания Рис. 9.12. Графики законов распре-
деления
242
фис. 9.11. Пусть состояния 1 и 2 соответствуют режиму обслужи¬
вания: первого объекта, а состояния 3 и 4 — режиму обслужива¬
ния -второго объекта. Если интенсивности переходов попарно
равны, т. е. v(l2) =v(23)
до
а v(34) _ v(4d v(2)? то законь1 рас¬
пределения времени оослужи- ,
вания будут эрланговскими 1г 2
второго порядка со средними fJ
значениями
гр{2) __ *
icI) — v(l)’
г( 2)
[ср
2
V<2> '
0,8
0.6
Для сравнения на рис. 9.12
прив ад я т ся гр афики э кспо не н-
циального и эрланговского за- о,4
конов второго порядка с одина¬
ковыми средними значениями^
Коэффициент приоритета пер- °'2
вого объекта относительно вто-
рого q = Т%'/Т[$ = v(*)/vd). Рас-
смотрим зависимость ошибки 7 J ^ 7 ^ у;
управления от этого парамет- рис о дз. Зависимость отпошения
;ра. Стохастические дифферен- дисперсий от параметра q
циальные уравнения первой
системы для четырех возможных-состояний имеют следующий вид:
'l[1} - - ке[1} — е{2) = - ке[2) - k%lt
1
i
1
1
и
in
И
1
1
i
i
!
Н#)
= - Hi,
= -
Полагая математические ожидания ошибок управления рав¬
ными нулю, запишем уравнения для взвешенных дисперсий:
= - 2AQ(11) k2GlPM _ + v<m[2\
Q[2) =;— 2A-Q-2) + kSGtfW - + v(2)Q[3>,
Q{3) = k-GlPW - v<s>Q<9> v(DQ(2),
Q<4> = k-GlPW - v(2)Q[4) + v<*>Q(3).
Общая дисперсия ошибки управления 0l в стационарном ре¬
жиме равна сумме дисперсий:
8 36 , 1
•0J = J- сД2) -J- Q(,3) J- o[4> = e [
(1 + 6) (1 + 4) ‘ qtt + q)
kG
где 0 = —- — дисперсия ошибки в непрерывной системе, а
Поменяв местами индексы, получим выражение для диспер¬
сии ошибки управления второй системы:
0о=0
3 дб
[ (1 + 6) (1 + ?) 1 + 2
В итоге отношение дисперсий имеет вид
1 + 6J
е
1 + [3 (1 + 6) 6 + (1 + д)1д&]
1 + Й 3(1 + 6) 6 +(1 + 0/6) •
График этой зависимости показан на рис. 9.13. В частном случае,
когда б > 1, б > д, формула принимает вид
ei ж
Глава 10
СИСТЕМЫ СО СЛУЧАЙНЫМ
ПЕРИОДОМ КВАНТОВАНИЯ
§ 10.1. Уравнения систем со случайным периодом
квантования
В этой главе рассматриваются методы анализа систем управ¬
ления с сигналами, квантованными в случайные моменты вре¬
мени. По своей методологии системы такого класса близки к
системам со случайной структурой, поэтому их описание вклю¬
чено в настоящую монографию [1, 4, 7].
Рассмотрим системы, поведение которых описывается следую¬
щими стохастическими дифференциальными уравнениями:
Ну Пу
Vi = —ai (У, *) — 2 bij (у, t) vj (у, t) -f 2 ifijlj (г = 1, nv). (10.1)
;=i j=i
Здесь сохранены все обозначения предыдущих глав за исключе¬
нием новых функций Vj(у, t), имеющих следующий смысл. Функ¬
ции v(y, t) являются последовательностями дельта-функций со
случайными моментами появления импульсов, интенсивности сле¬
дования которых зависят от у. Для сохранения марковского ха¬
рактера процесса у(t) моменты появления импульсов у последо¬
вательностей Vf(y, t) и Vj(у, t) будем считать независимыми я
пуассоновскимп с интенсивностями лл(у. t) и л?Ду, t). Вектор всех
дискретных воздействий Vj(y, t) (/ = 1. щ) обозначим символом
v(y, t). Функции bij (у, t), зависящие от времени и фазовых ко¬
ординат, образуют матрицу В (у, t) размера пуХпу. Векторная
функция щ(у, з5), зависящая от фазовых координат и времени,
в дальнейшем обозначается как тгу-мерный вектор а (у, t).
С учетом сделанных обозначений уравнение системы (10.1)’
в векторно-матричной форме записи принимает вид
y = -a(y)-B(y)v(y)+n, (10.2)
где для упрощения дальнейших записей опущена общая зависи¬
мость всех переменных от времени t. Уравнение можно предста¬
вить в виде структурной схемы, изображенной на рис. 10.1, где
канал а (у) отображает наличие непрерывной составляющей,
В (у)—дискретной с амплитудой модуляцией, v (у)—дискрет¬
ной с частотной модуляцией.
245
Полагая В(у)=0, приходим к уравнению
У = —a(y) + F|. (10.3)
При сделанных выше предположениях о том, что !-(£) Явля¬
ется вектором белых шумов, и некоторых дополнительных пред¬
положениях о векторной функции а(у) процесс у(£), описывае¬
мый уравнением (10.3), будет непрерывным марковским. В даль¬
нейшем это уравнение ж
]_
р
y(t)
а (у)
в(Ю
»(</)
Рис. 10.1. Структурная схема системы со
случайным периодом КЕантования
связанные с ним соотно¬
шения из теории непре¬
рывных марковских про¬
цессов будут играть вспо¬
могательную роль.
Чтобы описать поведе¬
ние систем со случайным
квантованием и амплитуд¬
ной модуляцией, надо в
уравнении (10.2) дискрет¬
ные воздействия v(y) по¬
лагать независимыми от
изменения фазовых коор¬
динат v(y) = v. Напомним, что это предположение приводит
к тому, что интенсивности следования дискретных воздействий
становятся независимыми от у и обрывается соответствую¬
щая связь на рис. 10.1. Уравнения систем с амплитудной моду¬
ляцией принимают вид
У = —а (У) — В (у) v + F| (10.4)
или в скалярной форме
п и И/
У г = —Cli (у, t) — 2 bij (у, t) V; {t) 2 ср ij {t) ij (t) ( j = 1, n„).
3 = 1
3 = 1
Исследуя системы с частотной модуляцией, надо полагать
матрицу В(у) = В не зависящей от у (£), а вектор дискретных воз¬
действий v(y), имеющий интенсивности следования импульсов
vj(y, t), зависящим от изменений фазовых координат. Уравнения
таких систем принимают вид
у=-а(у) — Bv(y)-rF§ (10.5)
пли в скалярной форме
Пу Пу
Уг= —Oi (у, t) — 2 bij (t) Vj (у, 0+2 fpij (0 Si (0 0 = 1, «,,)•
3=1
3=1
Структурная схема на рис. 10.1 для этого случая не имеет
обратной связи через блог; В (у).
Хорошо известна та роль, которую играют линейные системы
г. общей теории автоматических систем. Применимость к ним
246
принципа суперпозиции резко упрощает все соотношения и в
ряде случаев позволяет получить точные решения задач. Приме¬
нительно к системам со случайным квантованием строго линей¬
ные задачи могут быть сформулированы только для систем с
амплитудной модуляцией, так как модуляция по частоте уже
сама по себе операция нелинейная. В линейной системе с ампли¬
тудной модуляцией правые части уравнений (10.4) должны быть
линейными относительно фазовых координат, что приводит к си¬
стеме стохастических дифференциальных уравнений вида
Пу Пу Пу
rji = щ (г) — X „u (t) yj (г)—2 2 ьт (t) yh it) Vj (t) +
j=l 3 = 1 /1=1
nv
: 2 'I Д0 fД0 (i=--l,nv), (lO.li)
где Ui(t)—регулярные входные воздействия; cirj{t) и bihj(t) — ре¬
гулярные коэффициенты. Как будет показано в дальнейшем, для
уравнений такого типа удается получить решения в конечном
виде, что имеет большое значение для разработки приближенной
методики исследования нелинейных систем.
Таким образом, уравнения (10.2) — (10.6) описывают поведе¬
ние дискретных систем со случайным квантованием и служат
предметом дальнейшего исследования. Так как рассматриваемые
уравнения являются стохастическими, то нужно условиться о
смысле их интегралов. Применительно к непрерывным уравне¬
ниям (10.3) стохастические интегралы рассматриваем в симмет¬
рированной форме, содержание которой достаточно но,дробно об¬
суждалось в литературе.
§ 10.2. Уравнения Колмогорова — Феллера
Статистическое исследование динамических систем, описывае¬
мых стохастическими дифференциальными уравнениями, как
правило, сводится к нахождению закона распределения фазовых
координат или их вероятностных моментов. Исходными данными
для решения такой: задачи в нашем случае являются уравнения
типа (10.2)—(10.6) и начальные условия к ним в виде плотно¬
стей вероятности начального распределения фазовых координат
/(у. * = 0) = /о(у),
где за начало отсчета принято время t = 0.
При работе системы плотность вероятности изменяется и ста¬
новится функцией времени t. Естественно, что в силу условий
нормировки в любой момент должно выполняться равенство
оо ОС- 1X1
j ... \ / (у, t)dy1 ... dyn = \ f(y,t)dy=l.
— ос — ос —
217
Здесь и в дальнейшем символом j f(y)dy обозначается 7г1/-мерный
интеграл по всем составляющим вектора у от некоторой функции
/(у). В общем случае по исходным данным, о которых говорилось
выше, желательно получить уравнение для плотности вероят¬
ности, решение которого с начальными условиями /о(У) давало бы
функцию /(у, t) для любого момента времени t > 0. Такое урав¬
нение получено и детально исследовано, в частности, для непре¬
рывных систем, описываемых уравнением (10.3)
Если а (у) — непрерывно дифференцируемая детерминирован¬
ная по у функция, удовлетворяющая условию Липшица, а t) —
белый шум, то вектор у(t) будет многомерным непрерывным
марковским процессом с функцией плотности вероятности /(у, t),
удовлетворяющей уравнению Фоккера — Планка — Колмогорова:
/ (У) = - (У) = - vy {а (у) / (у) — 1 [ v;(F (у) GFT (у)) / (у)]т|
Здесь, как было условлено раньше, не показана явная зависи¬
мость от времени всех входящих в (10.7) переменных и функций.
Решение уравнения (10.7) с начальными условиями /о (У) и за¬
данными граничными условиями является искомой функцией
плотности вероятности фазовых координат системы.
При отсутствии поглощающих граничных условий искомая
плотность вероятности /(у, t) удовлетворяет условиям нормировки
и уравнение (10.7) может рассматриваться как уравнение сохра¬
нения вероятности. Запишем его в следующем виде:
Здесь я (у) — вектор плотности потока вероятности с составляю¬
щими вдоль координатных осей
где а*(у, t)—составляющие вектора а(у); <р0(£)— элементы мат¬
рицы F; gPq{t)—элементы матрицы G.
Чтобы пояснить смысл уравнения (10.8) , перейдем к рассмот¬
рению дискретных моментов времени t и t + Д£, где Дt — беско¬
нечно малое приращение независимой переменной. В фазовом
24 S
у = -a(y) + F£.
(10.7)
/(у) = — V£rt(y).
(10.8)
Пу
Пу Пу
щ (У) = — (у) / (у) — у 2 2 2 4>«р (* = 1 ’ nv)’ (10-9)
j=1 -7 р=1 q=1
пространстве системы выделим бесконечно малый объем
Ду = АухАу2 ... АуПу с координатами
Уъ Уг ~т Ауъ у2, у2 -|- Ау2, ..., уПу, уПу -j- АуПу.
Вектор приращений обозначим через
Ay = (Mi, Ду2, •••, ^Упи)\
Дифференциальное уравнение (10.8) в скалярном виде и диск-
ротной форме можно записать в виде равенства
11 у
/ (у, t -f АО — / (у, t) _ г (у 4- Af, <) — Jt* (v, 0
Д£ Zd Ау
г=1 1
что справедливо с точностью до малых величин порядка (ДО2 и
выше. Отсюда находим, что приращение вероятности нахожде¬
ния процесса в объеме Ду = АУ±Ау2 .... АуПу за время At равно
1 (у, t -f At) Ду — / (у, t) Ду =
Пу
= — At 2 щ (у -f Ду, 0 Дг/хДУг ... Ау^Ау^ ... -f
i=l J
я,,\
-f- At 2 щ (У, о Аг/хАг/г ... Л^-хАг/г+х • • - Ayn .
г=1 y
Правая часть этого равенства показывает, что изменение ве¬
роятности в объеме Ду обусловлено потоками вероятности через
его границы с координатами у и у 4 Ду
Pi (У, 0 = Щ (У, t) Ау±Ау2 ... Ауг-±Ау1+1 ... ДуПуУ
Рг (У -Г Ду, t) = Hi (у 4- Ду, t) Ау±Ау2 ... Дг/^Дуц-! ... АуПу.
В результате уравнение Фоккера — Планка — Колмогорова как
уравнение сохранения вероятности для дискретных моментов вре¬
мени' можно записать в виде
Пу Пу
/(у, г-r At) Ау — / (у, «) Ау=—Д*2 Рг(у -Г Ау, f) + А* 2л(у, О-
г=1 i—1
(10.10)
Напомним, что это равенство получено для непрерывных мар¬
ковских процессов, описываемых уравнением (10.3).
Уравнения для систем со случайным квантованием получили
название уравнений Колмогорова — Феллера [7, 69].
Приступим к их выводу, для чего рассмотрим уравнения
Уг = — я-; (у) — 2 v3 (у) + 2 9ySi 0 = (10.11)
j= 1 j = l
249
отличающиеся от уравнений для непрерывных процессов нали¬
чием дискретных воздействий
оо
Т' (У) - 2 Xjkb (t — tjh),
к=—оо
где б(£ — tjk) — дельта-функции с амплитудой х]к, возникающие
в случайные моменты времени tjk. Интенсивности хДу, t)
(j = 1, пу) импульсных последовательностей в общем случае мо¬
гут зависеть от изменения
фазовых координат у (От
что и отображено в запи-
. си Vj(у, £).
Первоначально рас¬
смотрим качественное от¬
личие реализаций процес¬
сор, jji(t) в уравнениях
(10.1) по сравнению с реа-
^ лизациями непрерывных
‘Jk *k+f процессов, о которых гово-
Рис. 10.2. Реализация процесса рилось в начале парагра¬
фа. Так как мы услови¬
лись стохастические интегралы рассматривать в симметрирован¬
ной форме, то каждый дельта-импульс в момент tjh вызовет скач¬
кообразное изменение амплитуды г/Д£) на величину xjk и реали¬
зации примут вид, показанный на рис. 10.2. В промежутках
между моментами появления импульсов функции yi(t) изменя¬
ются по законам, описываемым непрерывными уравнениями
пу
iji{t) = — а*(у. t) -f 2 срij (t) Cj (t) (t = 1, n,,). (10.12)
3 = 1
Таким образом, уравнения со случайным квантованием (10.11)
описывают кусочно-непрерывные марковские процессы со скачка¬
ми в случайные моменты времени tjk.
Чтобы получить уравнения Колмогорова — Феллера, необхо¬
димо наложить ограничения на статистические характеристики
моментов квантования для всех щ последовательностей дискрет¬
ных воздействий хДу. t) (j = 1, пи). Полагаем, что моменты
квантования в каждой из последовательностей статистически не¬
зависимы друг от друга, а внутри каждой из последовательностей
они образуют пуассоновский поток точек. Напомним определе¬
нно этого потока. Для этого возьмем /-ю последовательность мо¬
ментов кваптования и выделим интервал (t. £ + Д£). длитель¬
ность которого бесконечно мала. Для иуассоновского потока ве¬
роятность появления точки на это-м интервале пропорциональна
его длительности и обозначается через хД£)Д£, а вероятность
появления двух и более точек является бесконечно малой вели¬
чиной порядка (Д£)2 и выше.
250
Описанное свойство потока называется ординарностью. Дру¬
гое свойство состоит в независимости вероятностей появления
точек на любых непересекающихся интервалах времени. Указан¬
ные свойства приводят к следующим характеристикам пуассонов-
ского потока: во-первых, если точка выпала на интервал©
(£, t + At), то плотность вероятности интервала т до момента
появления следующей точки равна
/4- т
/.; С, т) = ^ 1 (т)
охр
Ч-т
j* V; (х) dz
dr;
во-вторых, длительности интервалов между моментами появле¬
ния точек статистически независимы. Параметр лу (t) является
средним числом появления точек в единицу времени и называет¬
ся интенсивностью потока. Таким образом, пуассоновский поток
полностью определяется значением интенсивности. Если Vj{t) =
= Vj и будет величиной постоянной, ноток называется однород¬
ным. У однородного потока плотность вероятности длительностей
интервалов между моментами появления точек не зависит от
текущего времени и имеет экспоненциальный характер
Уравнения Колмогорова — Феллера для плотности вероятно¬
сти /(у, t) были получены при условии, что моменты квантова¬
ния образуют пуассоновские потоки точек. Перейдем к нахожде¬
нию этих уравнений.
Вывод уравнений Колмогорова — Феллера использует закон
сохранения вероятности в том виде, как он рассматривался выше
' /'
d+A!j
1
1
1
1
1
1
я ^ 1
1
11
!
1
Ш Ч |
1
1
1
1
1
1
[
Рис. 10.3. Скачкообразный процесс
для непрерывных процессов. Возьмем произвольный момент вре¬
мени т п предположим, что известна плотность вероятности
/(у, т). В соседний момент времени £ = т + Ду плотность вероят¬
ности равна /(у, t). Найдем эти функции. Для этого зафиксируем
интервал изменения фазовых координат на уровнях от у до у +
-г Ду (рис. 10.3). В области ДуAt возможно появление реализа¬
ций трех видов: 1 — непрерывных; 2 — скачкообразно уходящих
из этой области; 3 — скачкообразно приходящих в эту область
из некоторой другой области Ду'Дt. Так как все эти варианты
несовместны, т. е. каждая реализация может относиться только
к одному из перечисленных случаев, то вероятность /(у, t)Aj
попадания процесса в интервал от у до у + At в момент t будет
иметь три слагаемых:
Ну, t) Ду - h (у. t) Ду + U (у, t) Ду -г /3 (у, t) Ду
(Ду = АугАу2 . ..'АуПу), (10.13)
первое из которых определяется непрерывными реализациями,
а второе и третье — скачкообразными (см. рис. 10.3). Определим
эти слагаемые.
Так как уравнения системы (10.11) содержат пу -дискретных
статистически независимых по моментам появления пуассонов-
CKIIX последовательностей Vj(y, t) (/ = 1, пу), то вероятность на¬
личия скачка на интервале At будет равна сумме
2 V,- (т) At.
з=i
Отсюда вероятность того, что реализации останутся непрерывны¬
ми, равна
71 у
1 — 2 vj (ЧД*-
3=1
Изменение вероятности попадания в Ду непрерывных реализа¬
ций, задаваемых уравнениями (10.12), можно получить, ис¬
пользуя уравнение (10.10) с учетом вероятностей скачков. В ре¬
зультате первое слагаемое правой части (10.13) будет равно
h (у, t) Ду =
1—2 ч? (т) Д*
3=1
/(у, т) Ду —
— At 2 Pi (У + Ду, Ч -г Л* IjPi (У, Ч
(10.14)
Перейдем к рассмотрению второго слагаемого выражения
(10.13), зависящего от уходящих из области AyAt скачкообраз¬
ных реализаций (кривая 2 на рис. 10.3). Так как вероятность
Пу
ухода этих реализаций есть At 2 vj(T)> то искомая вероятность
3=1
равна
Пу
/г (У, 0 ДУ = Д* 2 V,- (т) / (у, т) Ду. (10.15)
3=1
252
Прежде чем перейти к рассмотрению третьего слагаемого
(10.13), введем некоторые предположения о характере влияния
амплитуд дельта-импульсов Xjk в уравнениях (10.11) на измене¬
ние реализаций процесса у(£). Пусть в некоторый случайный
момент времени tjk (см. рис. 10.2) произошло квантованпе и ко¬
ордината процесса скачкообразно изменилась от уровня у'[tjk)
до 'значения
У(^а) = У r{tjk)+Xjh,
Будем считать амплитуду скачка случайной, зависящей от вре¬
мени t и первоначальной координаты у'. Это условие можно вы¬
разить путем задания условной плотности вероятности ^(yly', t),
определяющей закон распределения амплитуды 'Процесса у пос¬
ле скачка при условии, что скачок произошел в момент t с уров¬
ня у'. Естественно, что задаваемая функция нормирована по пере¬
менной у, т. е.
оо
J ЧЪ- (у I у', t)dy=l.
—оо
Вид функции условной плотности вероятности определяется ста¬
тистическими свойствами величины zjk и характером ее связи с
ходом изменения процесса у(0-
Теперь вернемся к первоначальной задаче и найдем третье
слагаемое в правой части уравнения (10.13). Из рис. 10.3 видно,
что в область ДуД£ возможны скачки реализаций третьего типа
из любых других областей с координатами у" и у't Ду', где у'
может быть в пределах от —оо до +<». Так как существует щ
независимых пуасс-оновских потоков, определяющих скачки, то
искомая вероятность попадания в область Ду At реализаций
третьего типа будет равна
71,j со
/з(уЛ)Ду = А* 2 f ^(у\ т)^,-(у|у\ т)Ду/(у' т)с2у'. (10.16)
;=i -оо
Подставляя найденные вероятности (10.14) — (10.16) в (10.13),
получаем соотношение
Г nV
Пу
/ (у, 9 Ду =
Й.П.
<1
1
чн
1
/ (у, т) Ду — Дг 2 Pi (у -Г Ду, О -f
i=l
4- Дг 2 pi (у, а — Д* 2 vi (т) / (у, ") Ау +
•7 , i
-г At 2 I V,- (у-, т) x\j (у | у\ т) Ду/(у', т) dy'.
j = 1 -оо
Переходя к пределу при Дг 0, Ду 0, т 1, отбрасывая
члены второго порядка малости, содержащие сомножители типа
,(Д£)2, Д£Ду, учитывая выражение для предельного' перехода и
253
равенства (10.10), получаем интегродифференциальное ура л пе¬
ние Колмогорова — Феллера для плотности вероятности
71 у
Ну, *) = — 2 ni (у.,t) — v (у, t) / (у, г) -'Г
i=l г
Пу оо
+ 2 \ Vj(y',t)'V(y\yrH)Hy',l)dy', (10.17)
j 1 —оо
Пу, f = o) = /0(y),
где
Пу
у (у, 0=2 vi (у. 0
i=l
— суммарная интенсивность квантования. В векторной форме
это уравнение можно .записать в виде
пу °°.
/ (у) = — VJji (у) — V (у) / (у) -ь 2 j У) (у') (у I у' ,0 / (у') dy'.
j 1 —ОО
(10.18)
Составляющие вектора плотности потока вероятности л (у) в
этом уравнении определяются выражением (10.9).
§ 10.3. Уравнения для плотностей вероятности
Полученное в общем виде уравнение Колмогорова — Феллера
(10.18) можно применять для исследования автоматических сис¬
тем со случайным квантованием. Специфика возникающих при
этом задач заключается в различной структуре условных плот¬
ностей вероятности ^(yly7, t). В этом параграфе рассматривают¬
ся различные варианты уравнений лишь при шгуассоновском ха¬
рактере квантования.
Простейшей задачей является исследование непрерывных си¬
стем управления с дискретными воздействиями на входе, ампли¬
туды которых не зависят от изменения фазовых координат y(t).
Стохастические дифференциальные уравнения для этого случая
запишем в следующем виде:1
пу пу
Ух (0 =— ах (у, 0+ 2*« (0 У] (0 + 2 fPij (г) Ь (0 (1 = 1 > nv), (10-19)
3 = 1 3=1
где Xij(t) являются случайными функциями, а остальные обозна¬
чения те же. что и в уравнении (10.5). Если стохастические ин¬
тегралы уравнений (10.19) рассматривать в симметризованыой
форме, то можно считать, что
со
X'ij (t) Vj (t) ==z Xjhb (t tjh)-)
k——oо
где значения амплитуд дельта-импульсов xjh = Xjk =
254
Пусть в общем случае система функций Хц(1) (/, / = 1, пу\
является совокупностью случайных процессов, статистически не¬
зависимой от у(t) и принимающей независимые значения при
всех tjk (к = — оот оо). Сгруппируем эту совокупность следующим
образом: для каждого индекса / (/ = 1, пу) введем вектор воз¬
действий
Xj(t) \Х\j{t) , %nj{t) J r,
одномерную плотность распределения вероятности которого обо¬
значим через /оДх, t).
При сделанных предположениях о свойствах процесса х3(£)’
условная плотность вероятности гр(у1у", t) будет определяться
следующими соображениями. Пусть момент времени t соответ¬
ствует моменту квантования для последовательности vt(£) и к
этому моменту вектор фазовых координат равен Благодаря
воздействию на систему дельта-импульса с амплитудой хД£) вы¬
ходной процесс скачкообразно изменится:
y(*) = y'(f) + x/(0-
Если, вектор ху(£) имеет плотность распределения вероятности
/oj(x, I), то условная плотность вероятности
Л;(у1у', 0=/oi(y-y', t). (10.20)
В результате для систем с дискретными воздействиями на
входе уравнение для плотности вероятности выходных коорди¬
нат можно получить, если в выражение (10.18) подставить со¬
отношение (10.20):
пи “
/(У) = — Vj/(y) - v(y)/(y) -f- 2 j ^-(у')/оУ(у — у')/(у')^у',
j=l -go ■ j
(10.21)
где v^(y) — интенсивность квантования в потоках входных дис¬
кретных воздействий. Ряд задач/ связанных с исследованием
уравнения типа (10.21), решался в статистической радиотехни-
ке [7].
Пусть система со случайным квантованием и выходными ко¬
ординатами у (t) работает следующим образом: в моменты кванто¬
вания tjk выходной процесс вначале мгновенно обнуляется, а за¬
тем восстанавливается с новыми начальными условиями, незави¬
симыми от конечных, существовавших перед моментом кванто¬
вания. В частности, каждый раз восстановление может начи¬
наться с некоторого определенного значения х, как показано на
рис. 10.4 для одного компонента. В общем случае координата
восстановления х может быть случайной с плотностью вероят¬
ности /о(х, t), независимой от y(t). В этом случае функция
условной плотности вероятности
1Ъ'(у!у', 0= /о(Ут t).
255
и (последнее слагаемое в уравнении (10.18) преобразуются еле*
дующим образом:
оо оо
• j v/(y') Tb (У I У) f У) dy' = и 1 (У) J vi (у') / (у') dr - /oj (У) <Vj (у»,
— оо —со
где
оо
<vi (у)> = г \ Vj(y)/(y)dy
— оо
— среднее значение интенсивности квантования. В итоге уравне¬
ние Колмогорова Феллера для плотности вероятности прини¬
мает вид
пу
/ (у) = — v£nt '(у) — V (у) / (у) + 2 (Vj (у)> /0;- (у).
2=1
Если условия восстановления неслучайные, как показано на
рис. 10.4, то
/0;(У)=6(У-Х;).
Теперь обратимся к более интересному для теории автомати¬
ческого управления виду систем со случайным квантованием и
Рис. 10.4. Восстановление процесса
амплитудной модуляцией. Уравнения такой системы имеют вид
Пу Пу
Уг = — fli (у) — 2 Н (у) Vj -J- 2 CpijCj,
2=1 2=1
где Ьц(у, t)— заданные функции фазовых координат у, регуляр¬
но зависящие от времени t. В системах с амплитудной модуля¬
цией, как это пояснялось выше, интенсивности квантования Vj{t)
дискретных воздействии Vj(t) не зависят от у. В соответствии с
принятой схемой в моменты квантования tjh выходной процесс
скачкообразно изменяет свои значения с уровня у% до уровня
Ух = Ух — Ъц (у').
256
Матричную функцию В (у, t) с элементами Ъц{у, t) (г, / = 1, пу)
разобьем на совокупность векторных функций
Му, 0 = [Му, *). Ыу, t),ь»,{у, 0]т (/ = 1Г»Л
путем выделения соответствующих столбцов исходной матрицы.
Тогда в векторной форме записи амплитуда выходного процесса
после скачка равна
у = у' — Му) = е,(у'),
где у'— вектор выходных координат перед моментом квантова¬
ния, а векторная функция ej(у') имеет компоненты
ец(у') = у1 — Ьц(у') (i = ГДу).
При определенном значении у' и заданной фупкции ЬДу')
условная плотность вероятности имеет вид
rti (у I у') = s [у — е,- (y')J =
= б [г/i— е1} (у')] б [у% - e2j (у')] ... б [уПу — enj (у')].
С учетом структуры этой функции и независимости интенсивно¬
сти *Vj от у запишем выражения для последних слагаемых урав¬
нения (10.18):
СО СЛО
Vj J n# (У I У') / (у') йУ' = j 6 [у — ei (у')] / (у') df 0 = 1, «!/)•
— оо —оо
(10.22)
Предположим, что функция ej(y') является монотонной ж су¬
ществует единственное решение векторного уравнения ej(y') = x,
равное
у' = /г,-(х). (10.23)
В (10.22) произведем замену переменных (10.23) с учетом того,
что векторный дифференциал
Л , \^;(Х)
dУ =\ —
д!г. (х)
— якобиан функции (10.23). В результате подстаяов-
йх,
где
dx
ки получаем выражение
оо
j б (у — X) / (hj (х))
ЗА,- (х)
dx = Vj
dh5 (у)
дх
ду
/(М У)).
В итоге общая форма записи уравнения Колмогорова — Феллера
(10.18) для систем с амплитудной модуляцией приводится ,к виду
f (у) = — Vjn (у) — V/ (у) + 2 vi
3=1
пу
где ^(у)’=У-ЬДу), a v(f)= 2 Vj(0.
i=i
^ И. Е. Казаков и др.
dh5 (у)
;
f(h}( у)), (10.24)
257
Если в системе имеет место линейное амплитудное квантова¬
ние, то ее уравнения в соответствии с (10.6) примут вид
пу пу пу
т = — «г (у) — 2 2 bikjyk\'i 4- 2 фу£,- (0 (t = 1, пу).
3=1 к = 1 j=l
В этом случае векторные функции Ь;(у) будут линейными и их
можно записать в виде произведения
ЬДу) = Bjy,
где Bj—матрица размера пуХпу с коэффициентами bikj(t). Век¬
торная функция
С; (У') - у' — bj(y')
также будет линейной:
e;(y') = (I-BJ)y,
где I— единичная матрица. Сумму матриц в правой части равен¬
ства обозначим матрицей Е; = I — Bj, и тогда
<И>') =Е,у = х.
Решая это уравнение, находим вектор
у' - Е“гх,
где Е^"1 — матрица, обратная матрице Е;.
Таким образом, для линейного случая функция (10.23) ста¬
новится линейной относительно х и равной
ЕГ1х = ЬЛх) = (1-В;Г1х.
Так как якобиан линейного преобразования равен определителю
его матрицы
dh.
дх
= |Е71| = 1(1-в,г1|,
то уравнение Колмогорова — Феллера для систем со случайным
пуассоновским квантованием и линейной амплитудной модуляци¬
ей приводится к виду
/ (У) = - (У) - v/j(y) -h 2 Vj I E-11 (10.25)
где Ej = I — Bj.
Переходим к рассмотрению систем с частотной модуляцией,
описываемых уравнениями (10.5)
Пу Пу
Уг = — йг {Уг)'~ 2 Mi (У) + 2 <Pi& ( £ = 1, «у).
; = I э=1
Напомним, что обозначением Vj(y, t) подчеркивается зависимость
интенсивностей Vj(v, t) от переменной у(£). В стохастическом
258
дифференциальном уравнении системы коэффициенты Ъц{1) яв¬
ляются регулярными функциями времени и образуют матрицу
В(£). Выделим /-й столбец этой матрицы и представим его в ви¬
де вектора
bj(0 = [bu(0. МО, b„j(t)]T.
Используя предыдущие рассуждения, можно утверждать, что ес¬
ли перед моментом квантования tjk выходные координаты систе¬
мы равнялись у', то после него они станут равны
У = У'-Ь;,
В результате условную плотность вероятности щ(у.1у0 можно
выразить как функцию
ilj(yly,)= б (у-у' + bj).
С учетом этого последние слагаемые в уравнении Колмогорова —
Феллера (10.17) становятся равными:
со оо
j Vj (у') Tfc (у | у') / (У') dy' = ] V,- (у') 5 (у — у' bj) / (у') dy'.
— оо —оо
Введем замену переменной у' — Ь5 = х с дифференциалом dx =
= dy'. После подстановок получаем
Vj (х -|- bj) 6 (у — х) / (х + bj) dx = Vj (у + bj) / (у + Ь;).
1
В итоге уравнение Колмогорова — Феллера для плотности вероят¬
ности фазовых координат системы со случайным квантованием
и частотной модуляцией принимает вид
j (У) = — (у) — v (у) / (у) + 2 (у + bi) / (у -г bj). (10.26)
j=1
Остается рассмотреть общий случай систем с амплитудной и
частотной модуляциями. Результаты этого легко получаются, если
повторить все рассуждения, проведенные для систем с амплитуд¬
ной модуляцией, но с учетом того, что формула (10.22) должна
быть заменена выражением
оо оо
j Му'Н'(у1у')/(у'Иу' = ] vj(y')S[y — ej (y')]f(y')dy'. (10.27)
—■ оо —оо
Используя в (10.22) замену переменной (10.23) и повторяя
все последующие выкладки применительно к (10.27), приходим
в следующему соотношению:
°Г 0Му)
J v/(y) 6 [у — ej (у)] / (у) dy = vj [hj (у)) -§j- f(h}(у)).
— оо
17* 25&
.уравнение для плотности вероятности как при амплитудной,
так и при частотной модуляции принимает вид
пу
/(у) = — (у) - V (у)/(у) -ь ^ Vj [hj (у)] ^22 /(Му)). (10.28)
J=1
Уравнения (10.24), (10.26) п (10.28) являются основой для ис¬
следования систем со случайным -квантованием.
§ {0.4. Уравнения вероятностных моментов систем
с амплитудной модуляцией
Вероятностные моменты первого и второго порядков опреде¬
ляются из плотности вероятности /(у, t) по формулам
оо
j yif(y,t)dy (i = l,nv), (10.29)
— OO
oo
6ir(t)= J (yi — mi)(yr — mr)f(y,t)dy (i,r=l,ny), (10.30)
— oo
где — математическое ожидание фазовой координаты
a Qir{t) — корреляционный момент (второй центральный момент)
фазовых координат yi{t) и yr(t). При одинаковых индексах r = i
функция 0« = 0г является дисперсией фазовой координаты. Если
ошибка управления входит в число фазовых координат, то урав¬
нения для вероятностных моментов (10.29) и (10.30) достаточны
для решения задач оценки точности управления в рамках корре¬
ляционной теории. В то же время имеются задачи, когда знание
лишь первых двух вероятностных моментов бывает недостаточ¬
ным для суждения о качестве работы системы и приходится оп¬
ределять моменты более высокого порядка. Определение конеч¬
ного числа моментов позволяет аппроксимировать плотность ве¬
роятности /(у, t) в виде ряда, коэффициенты которого зависят
от вероятностных моментов.
Ограничимся рассмотрением уравнении лишь для первых двух
вероятностных моментов (математических ожиданий и корреля¬
ционных моментов), поскольку, как уже говорилось, они широ¬
ко используются для оценки точности, тем более что методика
составления уравнений моментов более высокого порядка анало¬
гична. Ввиду того что рассматриваемый метод является прибли¬
женным, имеются определенные особенности его использования
при анализе систем различного вида, поэтому целесообразно ме¬
тодику анализа изучать отдельно для систем с амплитудцой е
частотной модуляциями. В настоящем параграфе рассматривают¬
ся системы с амплитудной модуляцией и пуассоновским характе¬
ром квантования.
Системы со случайным пуассоновским квантованием и ампли¬
тудной модуляцией описываются уравнениями (10.4), а плотность
2G0
вероятности фазовых координат удовлетворяет уравнению
/ (у) = — Vj-л (у) — г/ (у) -j- 2 Vj / (hj (у)), v = 2 vj.
3 = 1 j = l
Перейдем к составлению уравнений для математических ожи¬
даний, задаваемых соотношением (10.29). Для этого умножим
обе части уравнения Колмогорова—Феллера на у* н проинтег¬
рируем их по всем составляющим вектора у в бесконечных
пределах. С учетом того, что
оо оо оо
J yj(y)dy = mil J УгУуЛ (у) dy = — j Jii(yjdy,
— оо —оо — оо
получаем обыкновенное дифференциальное уравнение для мате¬
матического ожидания тпгй координаты в виде
оо nlt оо
Г /47 - V Г \dhi(y)
пц = J "i (у) dy — xrtii + Vj j Vi |
3=1
f (h} (y)) dy,
где t)—cоставляющая вектора плотности потока вероятно¬
сти, задаваемая формулой (10.9). Совокупность математических
ожиданий всех фазовых координат образует вектор
m(f) = [ml(0, m2(t), ..., mn(t)]T
размерности пи.
Совокупность всех функций
m
и(0 = I Лг {y,t)dy (i = 1, Пу) (10.31)
•образует вектор m'i(t), а совокупность функций
oh, (у)
mzij (t) = j {y))dy (i = i,ny) (10.32)
•образуют группу векторов ni2j(0 (/ = 1, щ)- В итоге уравнения
для математических ожидании в векторной форме имеют вид
пу
m = mi — vm -f- 2 virigj. (10.33)
3 = 1
Найдем уравнения для корреляционных моментов, которые
задаются формулой (10.30). С этой целью домножим обе части
.уравнения (10.24) на произведение (у* — гп{) (уг — шт) н проин¬
тегрируем в бесконечных пределах. Учитывая, что
(Уг — т{) (уг — тг) / (у, t) dy = 0ir (*)»■
j
281
j (Уг — rn) (уГ — тг) Vjn (у, t) dy =
— ОО
оо оо
= — j (у % — т) яг (у, t) dy— j (у, — тг) я i (у, t) dy,
—оо ■—оо
получаем следующую запись уравнений для корреляционных
моментов:
оо оо
0* = \ (Уг — ГПг) яг (у) dy -f j (yr — П1: ) Я» (y)'dy — V0ir +
П 00
+ ^ vi j (У1 — mi) Or _ тт)
3=1 -
(У)
<>У
/(Му))йУ (г, r = 1, Пу).
Матрицу корреляционных моментов Qir(t) (i, r= 1, п;) раз¬
мера riyXriy обозначим буквой . Если дополнительно ввести мат¬
рицу 0 i с элементами
оо ОС
0Цг (0 = j (щ — ГПг) Яг (у, t) dy + j (уr — тг) я4 (у, t) dy
— оо —оо
(i,r=l,riy) (10.34)
ж группу 02j (/ = 1, Пу) с элементами
mr)
ду
/ Oj (у)) dy (i, г = 1, ratjf),
(10.3a)
то уравнения корреляционных моментов в матричной форме при¬
мут вид
e = e;-V0 + 2 v&lj.
3 = 1
(10.36)
Решая дифференциальные уравнения (10.33) и (10.36) с за¬
данными по смыслу задачи начальными условиями, можно найти
математические ожидания и вторые корреляционные моменты
фазовых координат, среди которых находятся математическое
ожидание и дисперсия ошибки управления. Метод интегриро¬
вания уравнений моментов имеет приближенный характер вслед¬
ствие того, что при нахождении функций (10.31), (10.32),
(10.34) и (10.35) надо знать функцию плотности вероятности
/(у, t). А поскольку в процессе решения /(у, t) остается неиз¬
вестной, ее приходится аппроксимировать, используя для этого
приближенные зависимости, определяемые через значения веро¬
ятностных моментов. При анализе точности с учетом только
262
первых двух вероятностных моментов чаще всего используют
гауссовскую аппроксимацию плотности вероятности. В то же
время существуют задачи, когда уравнения моментов удается
записать в замкнутом виде, не прибегая к аппроксимации функ¬
ции п.о от ноет и, и можно говорить о принципиальной возможно¬
сти получения точного решения в рамках корреляционной тео¬
рии. Задачи такого типа связаны с анализом линейных систем с
.амшштудной модуляцией.
§ 10.5. Уравнения систем с амплитудной модуляцией
Линейные системы со случайным квантованием и • амплитуд¬
ной модуляцией описываются уравнениями (10.6). Используем
векторно-матричные обозначения для этих уравнений и совокуп¬
ность регулярных воздействий щ(£) обозначим вектором
«(<) = [МО. МО. • ••• ипуЩг.
Введем матрицу А(£) с элементами а^(г) и группу матриц Bj(t)
с элементами biki(t) (ц к, / =• 1, пу), после чего уравнения (10.6)
можно записать в форме
Пу
у = и — Ау — 2 Bjyy? + Fg.
з=1
Для систем со случайным квантованием и линейной ампли¬
тудной модуляцией уравнение Колмогорова — Феллера опреде¬
ляется выражением (10.25)
nv
/ (у) = - Vjji (у) — V/ (у) + s V,-1 ЕДI / ( Е;_1у).
3=1
где матрица Е, = I — В;, а составляющие вектора плотности по¬
тока вероятности л (у) согласно (10.9) равны
Г пу
Ml. t) - -- I m(t) — 2 ai}
t)
- 32 2 2 (р^ w фл (о sm (о A / чг. t).
j=lp=iq=l 3
Чтобы записать уравнения для математических ожидании,
вначале вычислим интеграл (10.31):
СЮ СЮ Пу оо
тн = | гн(\)с1\ = т | /(у)с/у — 2 ац [ yji (у) dy —
3 = 1
п
Т2 2 2 Wfipgjxi [ ijf 1 (у) dy = Mi — 2 aijmj (i = 1 - n,j).
j=ip=iq=l -oo 3 = 1
(10.37)
Б векторной форме это равенство имеет вид
nil — u — Am.
Интегрируя соотношение (10.32), получаем еще одну
функцию
г Пу'
= J Уi I Ej 11 / (Ej Jy) dy = mi — 2 bikjmk,
—oo fc=l
которая в векторной форме записывается в виде
m2j==(I — B;)m. (10.38)
Подставляя (10.37) и (10.38) в (10.33), получаем следующее
уравнение для вектора математических ожидании:
Пу ! Пу Ч
m = u — Am — 2 VjBjm = u — A + 2 vjBj m. (10.39)
0=1 \ 0=1 J
В результате оказалось, что в линейной системе со случай¬
ным квантованием и амплитудной модуляцией уравнения для
математических ожиданий линейны и автономны, так как не
зависят от других вероятностных моментов.
Чтобы получить уравнения для вторых корреляционных мо¬
ментов, вначале надо проинтегрировать (10.34) и (10.35;. Для
первого из них получаем выражение
оо оо
= j (г/i — Шг) (у) dy + j {ут — mr) (у) dy =
— со
Пу Пу Пу Пу
— 2 ClrjVij 2 “Г 2 S ф-2рфTqgpq*
0=1 0=1 1=14=1
Если все функции Энг(0 (г, г=1, пу) представить матричной
функцией 01, то
01 =■ -А0 - 0АТ + FGFT. (10.40)
Интегрируя уравнения для функций 0irj(O (i, г, ; =• I, пу),
получаем в матричной форме равенство
02,— (I “ В,) (I - Bj)T~r(Bjm) (В,ш)т. (10.41)
Подставляя (10.40) и (10.41) в (10.36), получаем уравнение
для корреляционных моментов
/ пу \ ( пу \ т пу
в = — ( а + 2 vjBj) 0 - 0 (а + 2 vjB,) + Д VjBj +
Пу
+ FGFT 2 V* (Bjm) (B^m)T. (10.42)
;=i
Уравнение (10.42), как и (10.39) для математических ожи¬
даний, линейное, в то же время оно имеет одну характерную
264
особенность — зависимость от функции математического ожида¬
ния т. Таким образом, уравнение для корреляционных момен¬
тов (10.42) односторонне зависит от уравнения для математиче¬
ских ожиданий (10.39) и их приходится решать совместно. На¬
личие связи между уравнениями обусловлено тем, что кванто¬
вание но времени является параметрическим случайным возму¬
щающим воздействием, а поэтому даже при отсутствии внешних
случайных воздействий выходной процесс будет содержать слу¬
чайную составляющую за счет случайного квантования процес¬
сов внутри системы.
§ 4 0.6. Уравнения вероятностных моментов систем
с частотной модуляцией
Перейдем к рассмотрению систем со случайным квантовани¬
ем и частотной модуляцией, описываемых уравнениями (10.5)
у = — а (у) — Bv (у) + Fg.
В этом уравнении, как л раньше, а (у)—непрерывная нелиней¬
ная векторная функция фазовых координат и времени с компо¬
нентами аг(у, t) (£=1, пу), В и F — матричные функции вре¬
мени размера щ X пу с компонентами bi5{t) и фу(£)'.
Вектор дискретных процессов v(y) имеет составляющие
оо
(У? = 2 ^ tjk) (/ = 1?
fc= —ОС
где моменты квантования tjk образуют потоки случайных точек,
Будем: считать случайные потоки с различными индексами /
пуассоЕОвскими, статистически независимыми с интенсивностями
Vj(у, Z). зависящими от фазовых координат и времени. Зависи¬
мость интенсивностей Vj от фазовых координат является резуль¬
татом частотной модуляции и служит источником информации
для организации управления в системе.
Плотность вероятности фазовых координат систем со случай¬
ным квантованием и частотной модуляцией удовлетворяет урав¬
нению (10.26):
пу
/ (у) = — VyJT (у) — V (у) / (у) + 2 V; (у 4- Ъ}) / (у + bj),
3=1
где вектор Ь: = [&ь(£), &2j(0, •••» bnj(£)]T—столбец с индексом
пи
/ матрицы В (t); v (у) = .21 v;(y)— суммарная интенсивность
2=1
квантования всех потоков.
Если можно было бы решить уравнение (10.2-6) с начальным
Условием /о (у) и найти функцию плотности вероятности /(у, t),
то задача статистического анализа систем с частотной модуля-
дней была бы исчерпана. К сожалению, найти такое решение не
удается, поэтому приходится использовать приближенные ме¬
тоды анализа. Как и для систем с амплитудной модуляцией, вос¬
пользуемся методом интегрирования уравнении моментов.
Чтобы получить уравнение для вектора математических ожи¬
даний, умножим обе части уравнения (10.26) на вектор у ж про¬
интегрируем по всей бесконечной области изменения фазовых
координат. После преобразований получим следующее уравне¬
ние для вектора математических ожиданий:
ОО Пу оо
m = j n(y)dy— 2 bj Г Vj(y)/(y)dy. (10.43)
— оо 0 — 1 —ос
Умножая обе части уравнения (10.26) на матрицу
(у — т) (у — т)т и интегрируя, получаем матричное уравнение
для корреляционных моментов
со оо
0 = — j (у — т)тл (у) dy — j (у — m) л (у) dy —
— оо —оо
Пу ОО
— 2 j е (у — т)У (у) / (у) dy —
0 1 —оо
Пу со Пу оо
— 2 ] (у — т) bjvj (у) / (у) dy + 2 bjbJ j Vj (у) / (у) dy. (10.44)
j — 1 —oo j—1 —oo
Уравнения вероятностных моментов (10.43) и (10.44) едет ем:
с частотной модуляцией оказываются сложнее аналогичных
уравнений для систем с амплитудной модуляцией. Главная при¬
чина заключается в нелинейном характере частотной модуляции,
что делает систему принципиально нелинейной. Даже в случае
линейной непрерывной части уравнения вероятностных момен¬
тов остаются нелинейными за счет функциональной зависимости
интенсивностей квантования Vj(y) от фазовых координат. По
физическому смыслу интенсивности квантования не могут быть
отрицательными, поэтому линеаризация функций хДу) может
производиться лишь в ограниченной области изменения пере¬
менных у. В результате статистический анализ систем со слу¬
чайным квантованием и частотной модуляцией по уравнениям
вероятностных моментов можно вести лишь приближенными
способами, главными из которых являются различные методы,
линеаризации.
ПОСЛЕСЛОВИЕ
Задачи автоматизации сложных процессов, приводящие к при¬
менению автоматических систем со случайной сменой структуры,
являются актуальными в современной технике. Эти же проблемы
возникают и в других областях человеческой деятельности, если
математически формализовать протекающие процессы в виде со¬
ответствующих уравнений. Теоретической базой систем со слу¬
чайной сменой структуры в настоящее время служит теория
разрывных марковских случайных процессов. Единственным огра¬
ничением современной теории является марковость дискретного
процесса смены структуры. Дальнейшим развитием общей теории
является распространение ее па полумарковские и немарковские
процессы смены структуры и исследование общих закономерно¬
стей преобразования вероятностных характеристик таких систем.
Важным направлением развития теории систем со случайной
сменой структуры является разработка приближенных методов
и алгоритмов исследования вероятностных характеристик, осно¬
ванных на аппроксимации функций распределения, в частности
с помощью двух вероятностных моментов. Применение такой ап¬
проксимации позволяет получить практически реализуемые алго¬
ритмы анализа, однако нуждается в обосновании областей .при¬
менимости по точности.
Для практического использования изложенной общей теории
и получения рекомендаций по оценке реальных систем со слу¬
чайной сменой структуры необходимы экспериментальные или
теоретические исследования по определению интенсивностей и
условий смены структур, т. е. процесса s(t). Эти исследования
непосредственно связаны с рассмотрением конкретной физиче¬
ской природы системы. Некоторые рекомендации по определению
этих характеристик приведены в 4-й и последующих главах, где
рассматривались конкретные примеры систем.
Важным направлением развития теории и автоматических си¬
стем со случайной структурой является обосиоваиие достаточно
точных алгоритмов их функционирования и построение имитаци¬
онных моделей. Теория и практика построения автоматических
систем со случайной сменой структуры продолжают развиваться.
Теоретические основы современного анализа таких систем и изло¬
жены в данной книге.
267
СПИСОК ЛИТЕРАТУРЫ
1. Артамонов Г. Т., Тюрин В. Д. Анализ информационно-управляющих си¬
стем со случайным интервалом квантования сигналов по времени.—
М.: Энергия, 1977.
2. Артемьев В. М. Статистический анализ систем с обратимой перемен¬
ной структурой Ц Проблемы повышения эффективности систем управ¬
ления.— Минск: Минсвязи, 1971.
3. Артемьев В. М. Уравнения числовых характеристик закона распределе¬
ния фазовых координат систем с необратимой переменной структурой /
Проблемы повышения эффективности систем управления.— Минск:
Минсвязи, 1971.
4. Артемьев В. М. Теория динамических систем со случайными измене¬
ниями структуры.— Минск: Высшейшая школа, 1979.
5. Артемьев В. М. Справочное пособие по методам исследования радио¬
электронных следящих систем.— Минск: Высшая школа, 1984.
6. Артемьев В. М., Ганэ В. А., Степанов В. Л. Управление в системах с раз¬
делением времени.— Минск: Вышейшая школа, 1982.
7. Артемьев В. М., Ивановский А. В. Вероятностный анализ импульсных
систем при случайном законе распределения интервалов квантозания Ц.
Автоматика и вычислительная техника.— 1981.— Выи. 10.
8. Артемьев В. М., Ивановский А. В. Дискретные системы управления со
случайным периодом квантования.— М.: Энергоатомиздат, 1986.
9. Баруча-Рид А. Т. Элементы теории марковских процессов и их прило¬
жения.— М.: Наука, 1969.
10. Бертэн Ж., Риту М., Ружче Ж. Работа ЭВМ с разделением времени —
М.: Наука, 1972.
11. Большаков И. А. Анализ срыва слежения в системах автоматического
регулирования под воздействием флуктуационной помехи Ц Автомата
ка и телемеханика.— 1959.— Т. XV, 12.
12. Бухалев В. А. Анализ точности автоматических систем со случайной
структурой, имеющей два возможных состояния Ц Автоматика и теле¬
механика.— 1975.— № 4.
13. Бухалев В. А. Анализ точности динамических систем со случайной
структурой, описываемой условной марковской цепью Ц Изв. АН СССР.
Техническая кибернетика.— 1976.— № 2.
14. Вакин С. А., Шустов Л. И. Основы радиопротиводействия и радиотехни¬
ческой разведки.— М.: Советское радио, 1986.
15. Горелов Г. В. Нерегулярная дискретизация сигналов.— М.: Радио и
связь, 1983.
16. Джури Э. Импульсные системы автоматического регулирования.— М.:
Физматгиз, 1963.
17. Дуб До/с. Вероятностные процессы.—М.: ИЛ, 1956.
18. Евланов J1. Г., Константинов В. М. Системы со случайными парамет¬
рами.— М.: Наука, 1976.
19. Емельянов С. В. Бинарные системы автоматического управления.— М.:
ИСИ АН СССР, 1983—1984, вып. 1—5.
20. Емельянов С. В., Уткин В. И., Таран В. А., Костылева Н. Е., Шуб лад-
зе А. М., Езеров В. Б., Дубровский Е. Н. Теория систем с переменной
структурой.— М.: Наука, 1970.
21. Жильцов К. К. Приближенные методы расчета систем с переменной
структурой.— М.: Энергия, 1974.
268
22. Жук К. Д., Тимченко А. А., Доленко Т. И. Исследование структур и мо¬
делирование логико-динамических систем.— Киев: Наукова думка, ^075.
23. Казаков II. Е. Приближенный вероятностный анализ точности работы
существенно нелинейных систем Ц Автоматика и телемеханика.— 1956.—
Т. XVII, № 5.
24. Казаков II. Е. Статистические методы проектирования систем управле¬
ния.— М.: Машиностроение, 1969.
25. Казаков II. Е. Статистическая теория систем управления в пространст¬
ве состояний.— М.: Наука, 1975.
26. Казаков II. Е. Вероятностны!! анализ смены режима работы автомати¬
ческой системы Ц Автоматика и телемеханика.— 1977.— № 1.
27. Казаков И. Е. Вероятностный анализ одного класса систем с перемен¬
ной структурой Ц Автоматика и телемеханика.— 1977.— № 3.
28. Казаков И. Е. Статистическая динамика систем с переменной структу¬
рой,— М.: Наука, 1977.
29. Казаков II. Е. Стохастические системы со случайной сменой структу¬
ры Ц Изв. АН СССР. Техническая кибернетика,— 1989.— № 1.
SO. Казаков II. Е., Артемьев В. М. Оптимизация динамических систем: слу¬
чайной структуры.— М.: Наука, 1980.
31. Казаков И. Е., Доступов В. Г. Статистическая динамика нелинейных ав¬
томатических систем.— М.: Физматгиз, 1962.
32. Казаков II. Е., Мальчиков С. В. Анализ стохастических систем в прост¬
ранстве состояний.— М.: Наука, 1983.
S3. Камке Э. Справочник по обыкновенным дифференциальным гтегшепп-
ям.— М.: ИЛ. 1950.
34. Китаев М. 10., Яш ков С. Ф. Распределение условного времени г добыва¬
ния в системе с разделением времени обслуживания Ц Изв. АН СССР.
Техническая кибернетика.— 1978.— № 4.
35. Колмогоров А. II. О статистических методах в теории вероятностей Ц
Успехи математических наук.— 1938.— Вып. 5.
36. Крамер П. Математические методы статистики.— М.: ИЛ, 1949.
37. Красовский А. А. Системы автоматического управления полетом ж их
аналитическое конструирование.— М.: Наука, 1973.
38. Кринецкий Е. И. Системы самонаведения.— М.: Машиностроение, 1970.
39. К уклее Е. А. Вероятностный анализ многорежимной нестационарной ди¬
намической системы Ц Вопросы теории САУ. Вып. 5.— Л.: ЛГУ, 1980.
40. Лайниотис Д. Г. Разделение — единый метод построения адаптивных
систем Ц ТИИЭР.— 1976.— Т. 64, № 8.
41. Левин Б. Р. Теоретические основы статистической радиотехники.—М.:
Советское радио, 1968.
42. Ленине Д. X., Беттин Р. Г. Случайные процессы в задачах автоматиче¬
ского управления.— М.: ИЛ, 1958.
43. Максимов М. В., Горгонов Г. И. Радиоэлектронные системы самонаве¬
дения.— М.: Радио и связь, 1982.
44. Малышев В. В., Кибзун А. И. Анализ и синтез высокоточного управле¬
ния летательными аппаратами.— М.: Машиностроение, 1987.
45. Миддлтон Д. Введение в статистическую теорию радиосвязи.— М.: Со¬
ветское радио, 1962.
46. Мишулина О. А. Анализ линейных систем управления со случайным
скачкообразным изменением параметров Ц Изв. АН СССР. Техническая
кибернетика.— 1968.— № 3.
47. Мишулина О. А. Исследование точности линейных систем автоматиче¬
ского управления со случайными изменениями структуры Ц Изв. АН
СССР. Техническая кибернетика.— 1970.— № 1.
48. Обрезков Т. В., Резевиг В. Д. Метод оценки срыва слежения.— М.: Со¬
ветское радио, 1972.
49. Острем К. Введение в стохастическую теорию управления.— М.: Мир,
1973.
50. Лакшин П. В. Устойчивость дискретных систем со случайной структу¬
рой при постоянно действующих возмущениях Ц Автоматика и телеме-
хапика — 1983.— № 6.
51. Пугачев В. С. Применение теории марковских процессов к анализу точ¬
ности автоматических систем Ц Изв. АН СССР. ОТН. Энергетика и ав¬
томатика.— 1901.— № 3.
52. Пугачев В. С. Теория случайных функций и ее применение к задачам
автоматического управления.— М.: Физматгиз, 1962.
53. Пугачев В. С., Казаков И. Е., Евланов J1. Г. Основы статистической тео¬
рии автоматических систем.— М.: Машиностроение, 1974.
51. Пугачев В. С., Синицын II. II. Стохастические дифференциальные си¬
стемы.— М.: Наука, 1990.
35. Репин В. Г. Анализ одного класса систем со случайно изменяющимися:
параметрами Ц Автоматика и телемеханика.— 1970.— № 6.
36. Системы с разделением времени/Под ред. К. Карплюса.— М.: Мир, 1979.
57. Скляревич А. И. Введение в статистическую динамику систем с воз¬
можными нарушениями.— Рига: Знание, 1973.
58. Скляревич A. IL, Скляревич Ф. К. Линейные системы с возможными
изменениями.— Рига: Знание, 1985.
59. Скляревич А. II., Скляревич Ф. К. Вероятностные модели объектов с
возможными изменениями.— Рига: Знание, 1989.
60. Соболь И. М. Численные методы Монте-Карло.— М.: Наука, 1973.
61. Стратонович Р. Л. Новая форма записи стохастических интегралов и
уравнений Ц Вестник МГУ. Серия математики и механики.— 1964.—
Т. 23. № 3.
62. Стра;гонович Р. Л. Условные марковские процессы и их применение в
теории оптимального управления.— М.: МГУ, 1966.
63. С у орд ер Д. Д. Управление системами при резких изменениях условий Ц
ТИИЭР— 1976.— Т. 64, До 8.
64. Тихонов В. П. Статистическая радиотехника.— М.: Советское радио,
1966.
65. Тихонов В. И. Достижение границ марковским процессом ц Изв. АН
СССР. Радиоэлектроника.— 1972.— Т. 15, № 4.
66. Тихонов В. II., Миронов М. А. Марковские процессы.— М.: Советское
радио, 1977.
67. Ту Ю. Т. Цифровые и импульсные системы автоматического управле¬
ния.— М.: Машиностроение, 1964.
68. Федосов Е. А., Инсаров В. В., Селивохин С. С. Системы управления ко¬
нечным положением в условиях противодействия среды.— М.: Наука,
1989.
69. Феллер В. К теории стохастических процессов Ц Успехи математиче¬
ских наук.— 1938.— Вып. 5.
70. Цыпкин Я. 3. Теория лпнейпых импульсных систем.— М.: Физматгиз,
1963.
71. Bakey G. A., Budle J. М. The effect of random-sampling interval on a
sampling-data models of the human operator. 3rd Annual NASA-Universi-
ty Conference of Manual Control.— Los Angeles, 1967.
72. Bukhalev V. A. The analysis of the accuracy of dynamic systems chan¬
ging their structure in the random time moment Ц Problem of Control and
Information Theory.— 1975.— V. 4(3).
73. Fortet R. Les fonctions aleatoires du type de Marcoff Ц J. Math. Appl.—
1938.—V. 22.
74. Ho K. Stochastic integral Ц Proc. Imp. Acad.— Tokyo.— 1944.— V. 20.
75. Melsa J., Dannenberg K. Stability analysis of randomly digital control
systems Ц Automatica.— London.— 1975.— V. 11.
76. Pawula R. F. Generalisation and extension of the Fokker — Plank — Kol¬
mogorov equations Ц IEEE Transactions of Information Theory.— 1967.—
У. IT-3, No. 3.
77. Robinson V. G., Sworder D. D. A computational algorithm for desiggn of re-
gulatore for linear jump parameter systems Ц IEEE Trans.— 1974.—
AG-19, No. 1.
78. Sworder D. D. Bayes controllers with memor for a linear systeme with
jump parameters Ц IEEE Trans.— 1978.— AES-14, No. 3.
270
ANALYSIS OF SYSTEMS WITH RANDOM STRUCTURE
by I. YE. KAZAKOV, V. M. ARTEMIEV. V. A. BU КII ALEV
Ed. IGOR YE. KAZAKOV
Fizmatlit Publishing Company, Nauka Publishers, Moscow, 1994
Bcadership: Specialists in the theory of automatic control, students stri¬
ding the systems of automatic control.
Summary: This book contains a fundamental and mathematically .rigorous:
presentation of statistical analysis of automatic systems with a sudden ran¬
dom changed structure. This class of mathematical models provides an ade¬
quate and efficient description of random jump processes arising in complex
inultiregime electromechanic and radioelcclronic devices. It enables us lo
describe a flight of aircrafts and other moving objects in an atmosphere with
sharply changed properties or with device failures. And finally, these models
can be effectively used for the description of various physical, chemcat, bio¬
logical and other phenomena with a random sudden change of properties.
The mathematical models of systems possessing a finite number >f deter¬
mined structures with stepwise transitions occurring at random moments of
time are considered and the properties of Markovian intermittent s oclmsi io
processes are formulated. To determine the probabilistic characterчsties of
the processes in these systems, the fundamental generalized Focker — Planck —
Kolmogorov and Pugachev equations are introduced. Approximate methods
of analysis based on the integration of equations for the probabilistic mo¬
ments and structure probabilities are developed.
Some concrete examples of systems with random structure are con¬
sidered.
The book may serve as a fundamental introduction to the statistical theo¬
ry of systems with random structure. The presentation is based on the origi¬
nal results of the authors and contains a systematical description of all the
modern achievements in the field of interest.
Contents: Definitions, classification and mathematical models of a system
with randomly changed structure. Fields of application.
Markovian intermittent stochastic processes in these systems and their
characteristics. Discrete structure changing Markovian process, its properties
and parameters. Probabilistic characteristics of the processes in the systems
with a distributed and a point-like jump change of structure. Absorption and
reconstruction functions. Generalized Focker — Planck — Kolmogorov and Pu¬
gachev equations for the joint probability densities of phase coordinates and
structure. Generalized Pugachev equations for the characteristic functions of
phase coordinates and structure. Equations for the probabilistic moments and
the structure probabilities.
Approximate methods of the probabilistic analysis of systems based on
two-moment parametrization approximation of probability density functions
and statistical linearization. Analysis of dynamical systems in case of Marko¬
vian random jump perturbation. Markovian systems with a distributed inde¬
pendent change of structure. Systems with conditional Markovian change of
structure. Markovian systems with a point-like jump change of structure. Sys¬
tems with a separated time control. Systems with random period of quan¬
tization.
The authors: I. Ye. Kazakov and V. A. Bukhalev (Moscow Aviation Аса-
demy) and A7. M. Artemiev (Institute for Applied Physics, Minsk) are
leading authorities in automatic control and are authors of a series of pa¬
pers and monographs on statistical dynamics of systems with a random
structure.
УВАЖАЕМЫЕ ГОСПОДА!
Настоящая монография авторов
КАЗАКОВА И. Е., АРТЕМЬЕВА В. М.,
БУХАЛЕВА В. А.
гармонично сочетает фундаментальную теорию1
систем случайной структуры
с подробно изложенными примерами
ее практического применения.
Нам представляется перспективным использование
данной теории в области обработки информации в
средствах связи.
Нашей организацией в этом направлении уже се¬
годня ведутся исследования и получены интересные
результаты.
Приглашаем заинтересованных лиц, как физиче¬
ских, так и юридических, как российских, так и ино¬
странных, к совместной работе.
ТОО «ТАНАИС»
ОБЕСПЕЧИТ НАДЕЖНОЙ СВЯЗЬЮ, СИГНАЛИЗАЦИЕЙ
II СРЕДСТВАМИ ТЕХНИЧЕСКОЙ ЗАЩИТЫ
ВАШИ ОФИСЫ,
ПРОИЗВОДСТВЕННЫЕ ПОМЕЩЕНИЯ, СКЛАДЫ,
КВАРТИРЫ И ПРИУСАДЕБНЫЕ ХОЗЯЙСТВА!
Адрес: 125167 Москва, а/я 47,
ул. Красноармейская, д. 2-в
тел. (095) 155-16-04,
(095) 155-11-51
факс. (095) 212-21-61