/

























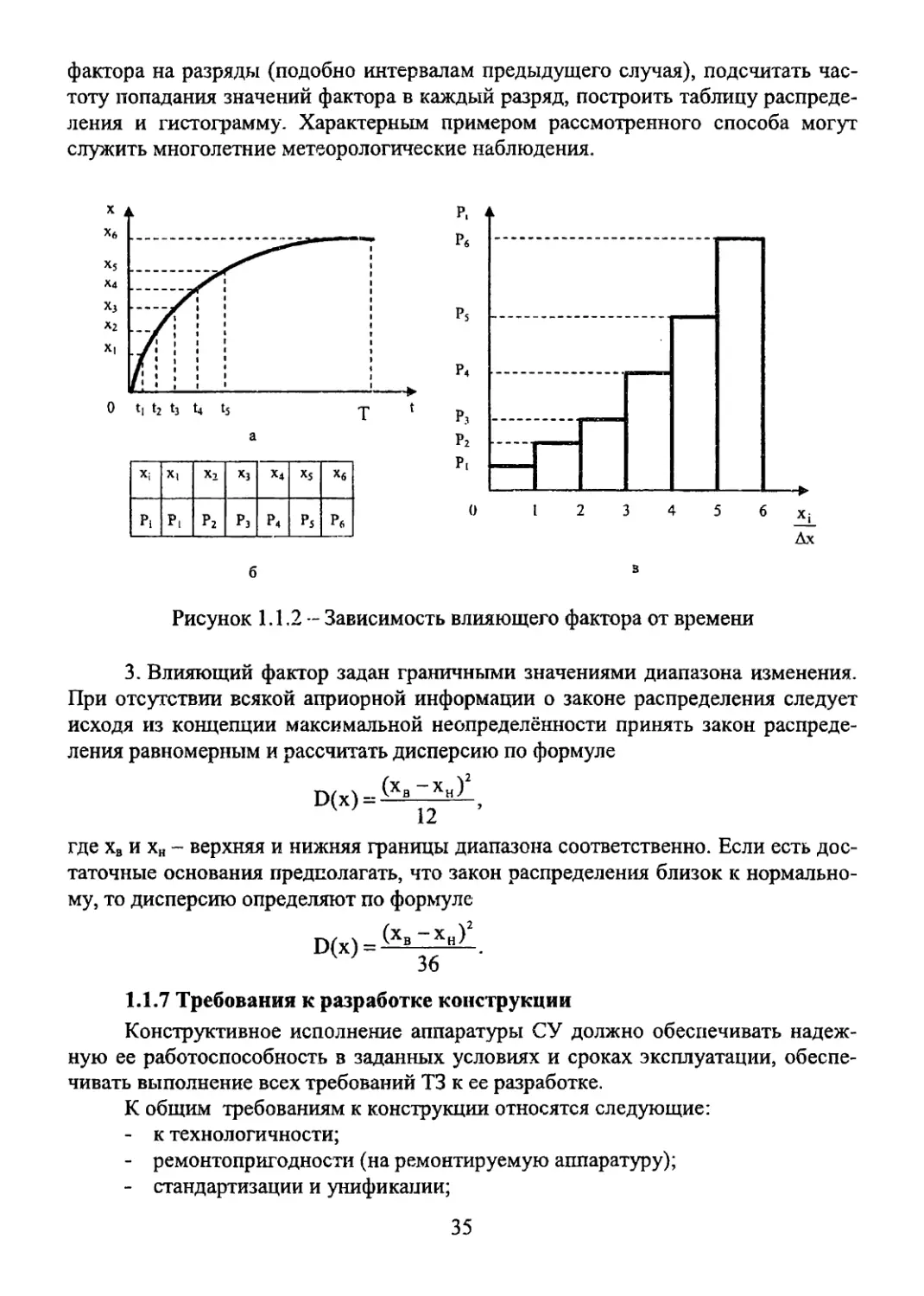






















































































































































































































































































































































































































































































Текст
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ,
МОЛОДЕЖИ И СПОРТА УКРАИНЫ
Институт инновационных технологий и содержания образования
Национальный аэрокосмический университет им. Н.Е. Жуковского
«Харьковский авиационный институт»
Научно-производственное предприятие «Хартрон-Аркос»
ПРОЕКТИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
ОБЪЕКТОВ РАКЕТНО-КОСМИЧЕСКОЙ
ТЕХНИКИ
Том 2
ПРОЕКТИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
КОСМИЧЕСКИХ АППАРАТОВ И МОДУЛЕЙ
ОРБИТАЛЬНЫХ СТАНЦИЙ
Учебник
Утверждено Министерством образования и науки,
молодежи и спорта Украины в качестве учебника
для студентов высших учебных заведений,
обучающихся по направлению «Авионика»
Харьков «ХАИ» 2012
УДК 629.7.05.01:004.9 (075.8)
П79
Розглянуто основы! принципи проектування систем управлшня коскячних апарапв i
транспортних модултв орб!тальних станцш. Описано вимоги до систем управлшня та вихщш
дан! щодо проектування, командно-вим!рювальних прилад!в, виконавчих органш,
математичних моделей, що використовуються. Наведено принципи побудови основных
динам!чних режимов систем управлшня, засоби розроблення алгоритм!чного та програмного
забезпечення бортових обчислювальних машин, способы забезпечення надшност! систем
управлшня косм!чних апарат!в р!зного призначення.
Для докторант!в, асшрантв, мапстргв i студентгв, як! навчаються за напрямом
«Авюнжа».
Авторский коллектив: Ю.С. Алексеев, Е.В. Белоус, Г.В. Беляев, В.П. Бойко,
Е.П. Гуслистая, ЕЛ. Демидов, В.И. Емельянов, О.Ю. Златкин, Ю.М. Златкин, В.И. Иванов,
В.Д. Кожухов, С.А. Ковалев, Н.А. Коршунов, Л.П. Кравец, В.С. Кривцов, Ю.А. Кузнецов,
А.С. Кулик, О.А. Лабазов, А.Е. Лукьянович, А.А. Лысенко, Л.В. Мангушина, Н.Ф. Меховской,
В.В. Окунев, В.В. Олейник, С.В. Олейник, В.М. Остапенко, В.Н. Полтавская, АВ. Сербин,
Е.П. Середа, А:А. Столяр, Л.Н. Срапьян, А.А. Сумцов, В.И. Фотин, А.В. Христий,
АВ. Чумаченко, В.И. Чумаченко, Ю.Б. Юрченко
Под общей редакцией Ю.С. Алексеева, Ю.М. Златкина, В.С. Кривцова, А.С. Кулика,
В.И. Чумаченко
Рецензенты:д-р техн, наук, проф. В.М. Свищ,
д-р техн, наук, проф. А.В. Збруцкий,
д-р техн, наук, проф, А.Н. Петренко
П 79 Проектирование систем управления объектов ракетно-космической техники. Т. 2.
Проектирование систем управления космических аппаратов и модулей орбитальных
станций [Текст]: учебник / Ю.С. Алексеев, Е.В. Белоус, Г.В. Беляев и дрУ
под общ. ред. Ю.С. Алексеева, Ю.М. Златкина, В.С. Кривцова, АС. Кулика, В.И. Чумаченко. - X.:
Нац. аэрокосм, ун-т «Харьк. авиац. ин-т», НПП Хартрон-Аркос, 2012.-680 с.
ISBN 978-906-622-268-9
Рассмотрены основные принципы проектирования систем управления космических
аппаратов и транспортных модулей орбитальных станций. Описаны требования к системам
управления и исходные данные на проектирование, командно-измерительные приборы,
исполнительные органы, используемые математические модели. Приведены принципы
построения основных динамических режимов систем управления, средства разработки
алгоритмического и программного обеспечения борговых вычислительных машин, способы
обеспечения надежности систем управления космических аппаратов различного назначения.
Для докторантов, аспирантов, магистров и студентов, обучающихся по направлению
«Авионика».
Ил. 185. Табл. 94. Библиогр.: 179 назв.
УДК 629.7.05.01:004.9(075.8)
Гриф присвоен Министерством образования и науки, молодежи и спорта Украины
(письмо № 1/11-18660 от 03.12.12 г.)
ISBN 978-906-622-268-9
© Авторский коллектив, 2012
© Национальный аэрокосмический университет
им. Н.Е. Жуковского «Харьковский авиационный
институт», НПП «Хартрон-Аркос», 2012
ОГЛАВЛЕНИЕ
СПИСОК СОКРАЩЕНИЙ.................................................13
ПРЕДИСЛОВИЕ.......................................................19
ВВЕДЕНИЕ........................................................ 20
1 ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА РАЗРАБОТКУ СИСТЕМЫ УПРАВЛЕНИЯ.
НАЗНАЧЕНИЕ И ОСНОВНЫЕ ТРЕБОВАНИЯ................................ 22
1.1 Тактико-технические требования................................22
1.1.1 Состав системы управления КА................................22
1.1.2 Общие технические требования к СУ...........................23
1.1.3 Требования к точностным и динамическим характеристикам СУ...24
1.1.4 Требования к интерфейсам СУ.................................26
1.1.5 Требования к надежности.....................................27
1.1.6 Требования по эксплуатации..................................28
1.1.6.1 Виды основных влияющих факторов...........................29
1.1.6.2 Основные способы задания характеристик условий эксплуатации.......33
1.1.7 Требования к разработке конструкции........................ 35
1.2 Специальные требования........................................38
Библиографический список к разделу 1............................ 40
2 ИСХОДНЫЕ ДАННЫЕ РАЗРАБОТЧИКА КА ДЛЯ ПРОЕКТИРОВАНИЯ
СИСТЕМЫ УПРАВЛЕНИЯ................................................41
2.1 Основные характеристики КА....................................41
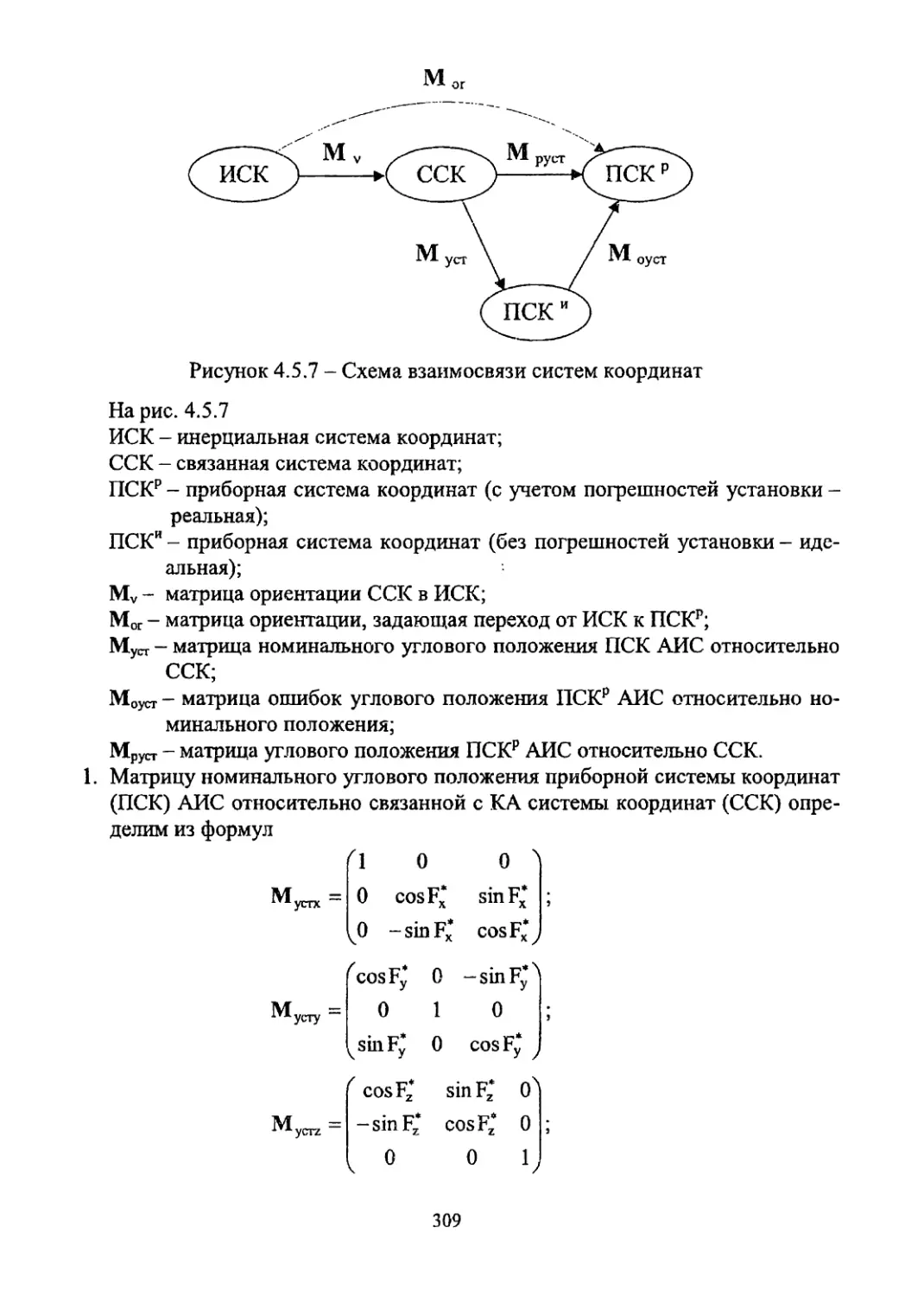
2.1.1 Используемые системы координат..............................41
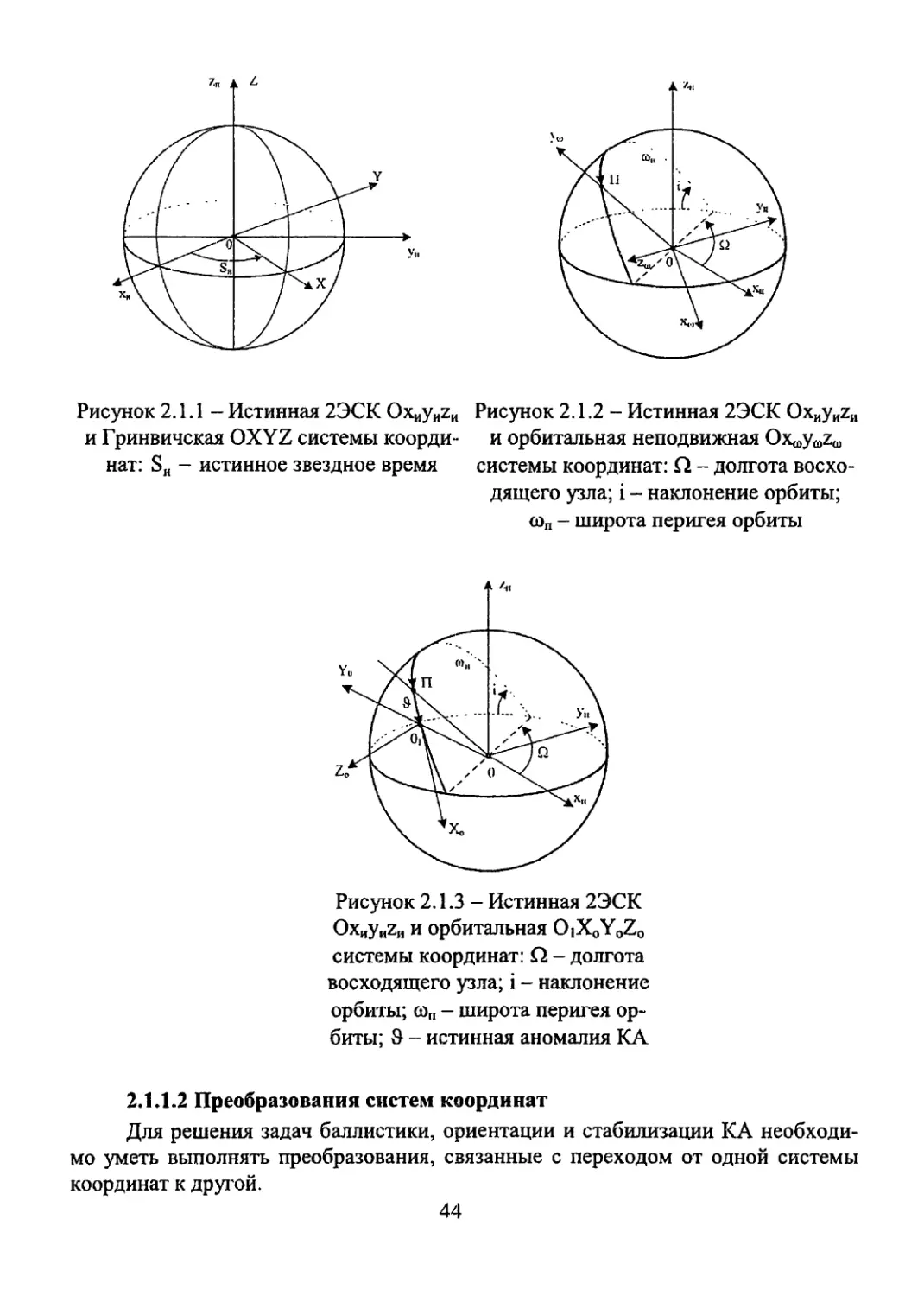
2.1.1.1 Основные системы координат задач баллистики и ориентации КА.......41
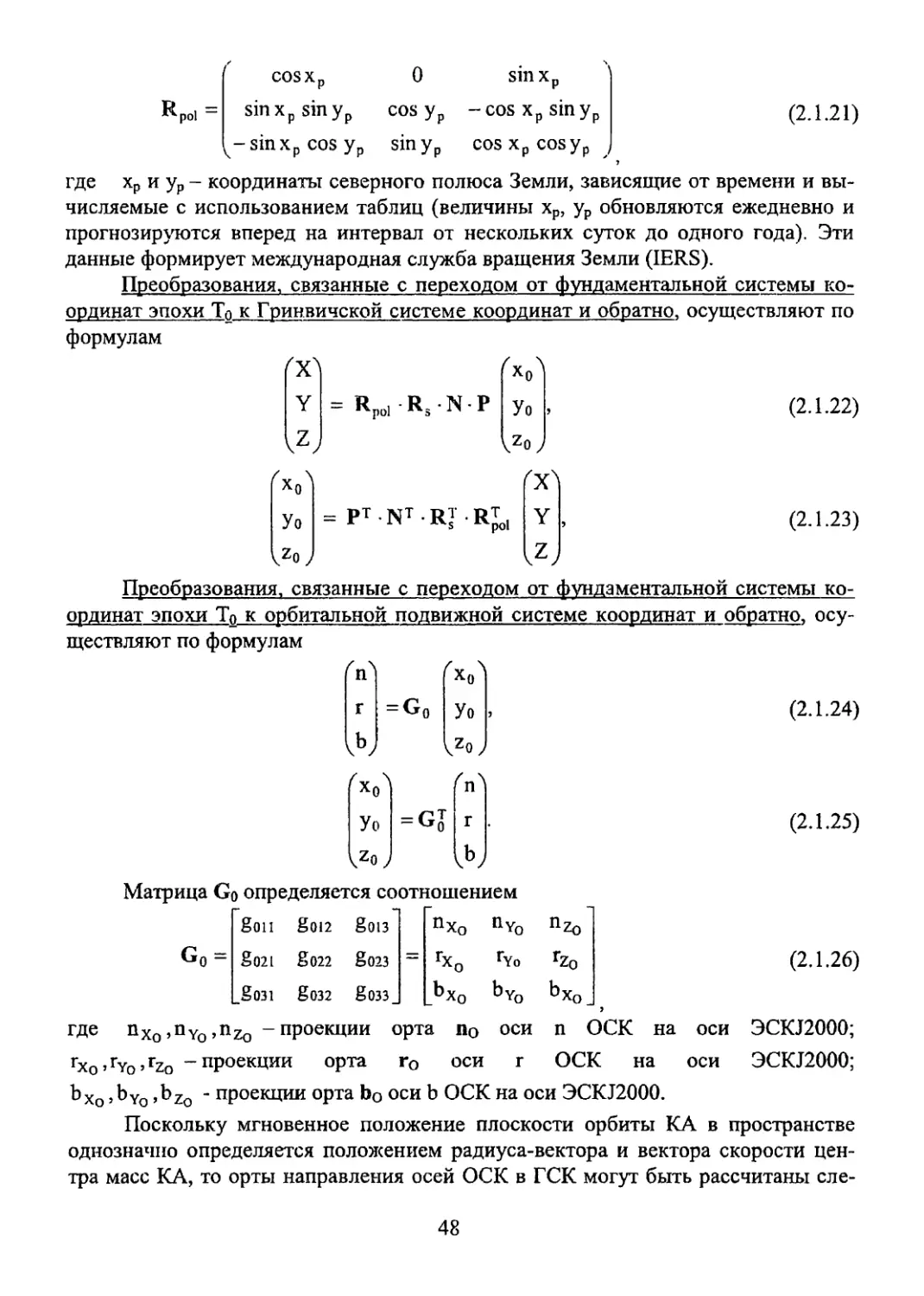
2.1.1.2 Преобразования систем координат...................................44
2.1.2 Конструктивно-компоновочная схема КА. Схема расположения двигателей.52
2.1.3 Массово-инерционные характеристики КА...............................60
2.1.4 Управляющие силы и моменты, действующие на КА...............62
2.1.4.1 Реактивные двигатели для управления движением центра масс КА......62
2.1.4.2 Исполнительные оршш дтыуправлеггия движеьтиек! КА относительно центра масс.. 63
2.1.4.2.1 Реактивные двигатели ориентации и стабилизации..........63
2.1.4.2.2 Силовой гироскопический комплекс..................... 67
2.1.4.2.3 Двигатели-маховики................................... 72
2.1.4.2.4 Электромагнитные катушки (магнитные исполнительные органы)......73
2.1.5 Возмущающие силы и моменты, действующие на КА...............75
2.1.5.1 Внешние возмущения........................................75
2.1.5.1.1 Гравитационный момент. Характеристики гравитационных полей планет...75
2.1.5.1.2 Аэродинамический момент. Характеристики плотности атмосферы Земли..80
2.1.5.1.3 Магнитный момент........................................84
2.1.5.1.4 Момент сил солнечной радиации...........................85
2.1.5.2. Внутренние возмущения....................................86
2.1.6 Динамические уравнения движения центра масс КА..............88
2.1.7 Динамические уравнения движения КА относительно центра масс.........90
2.1.7.1 Уравнения движения КА относительно центра масс при управлении реак-
3
тивными двигателями...................................................90
2.1.7.2 Уравнения движения КА относительно центра масс при управлении сило-
выми гироскопами и двигателями-маховиками.............................91
2.1.8 Уравнения движения КА с учетом колебаний упругих элементов конструкции.92
2.1.9 Уравнения движения КА с учетом колебаний жидкости в баках.......94
2.1.10 Особенности динамических схем крупногабаритных орбитальных комплексов 97
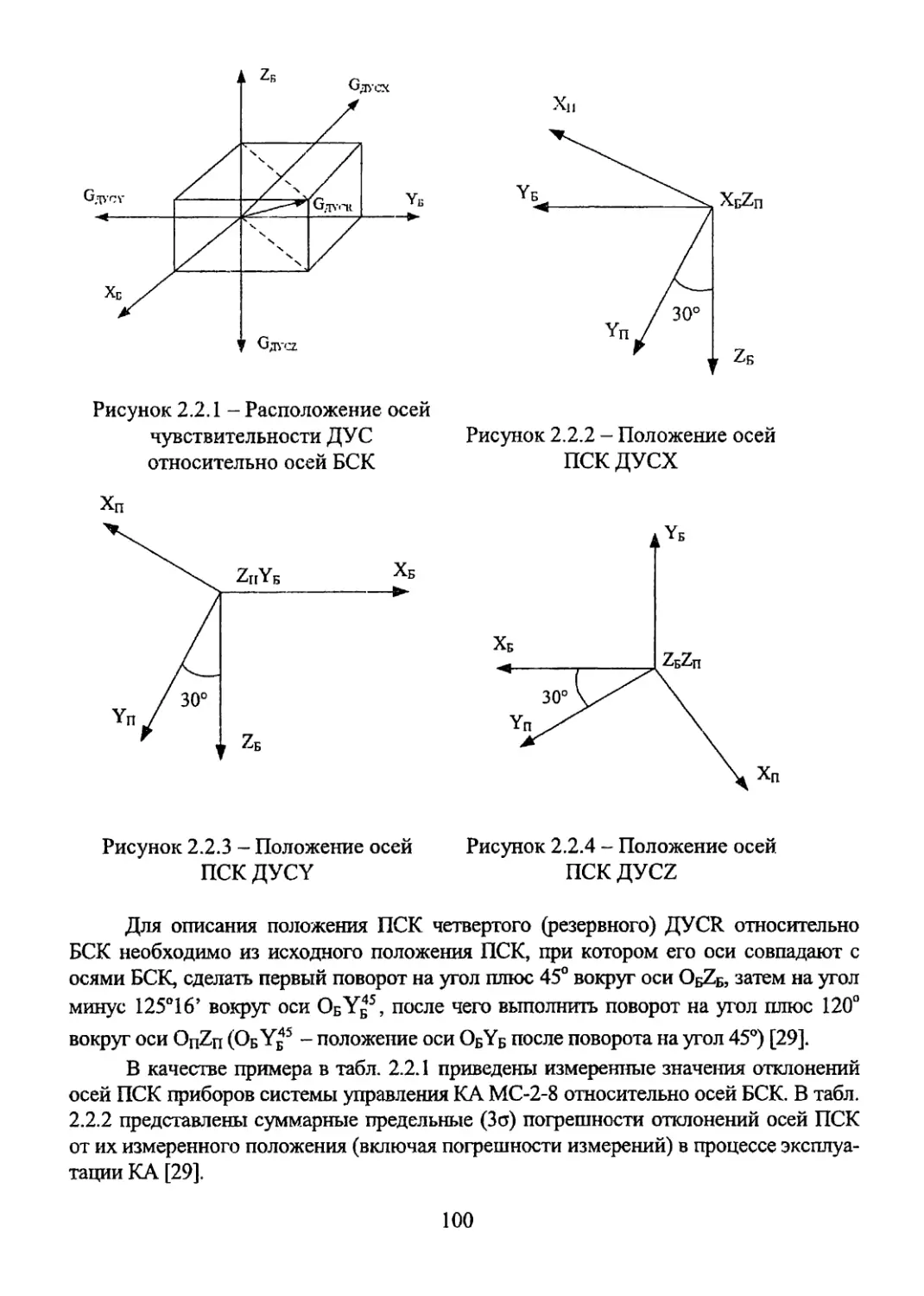
2.2 Исходные данные по установке командно-измерительных приборов.....98
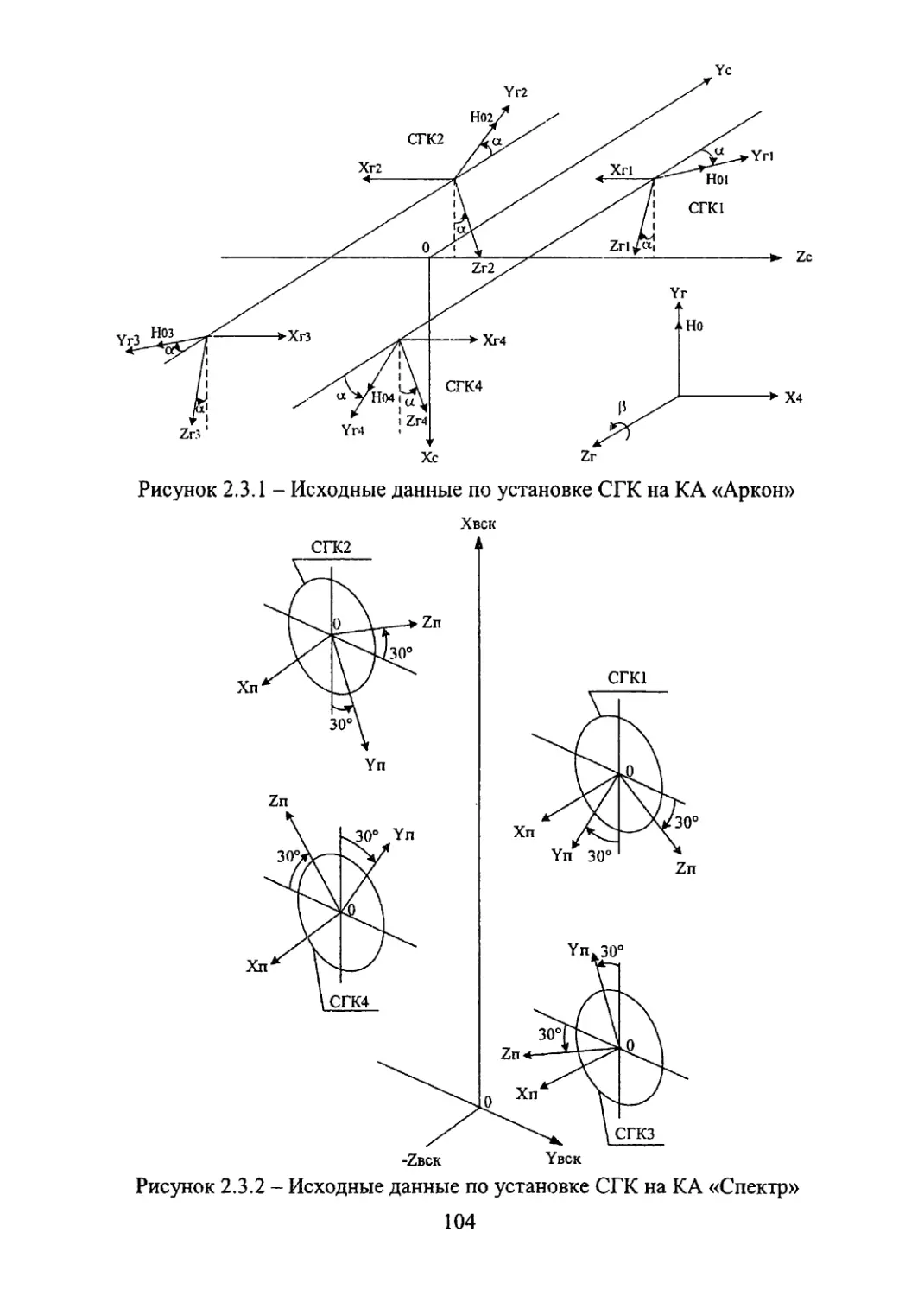
2.3 Исходные данные по установке силовых гироскопов и двигателей-маховиков... 103
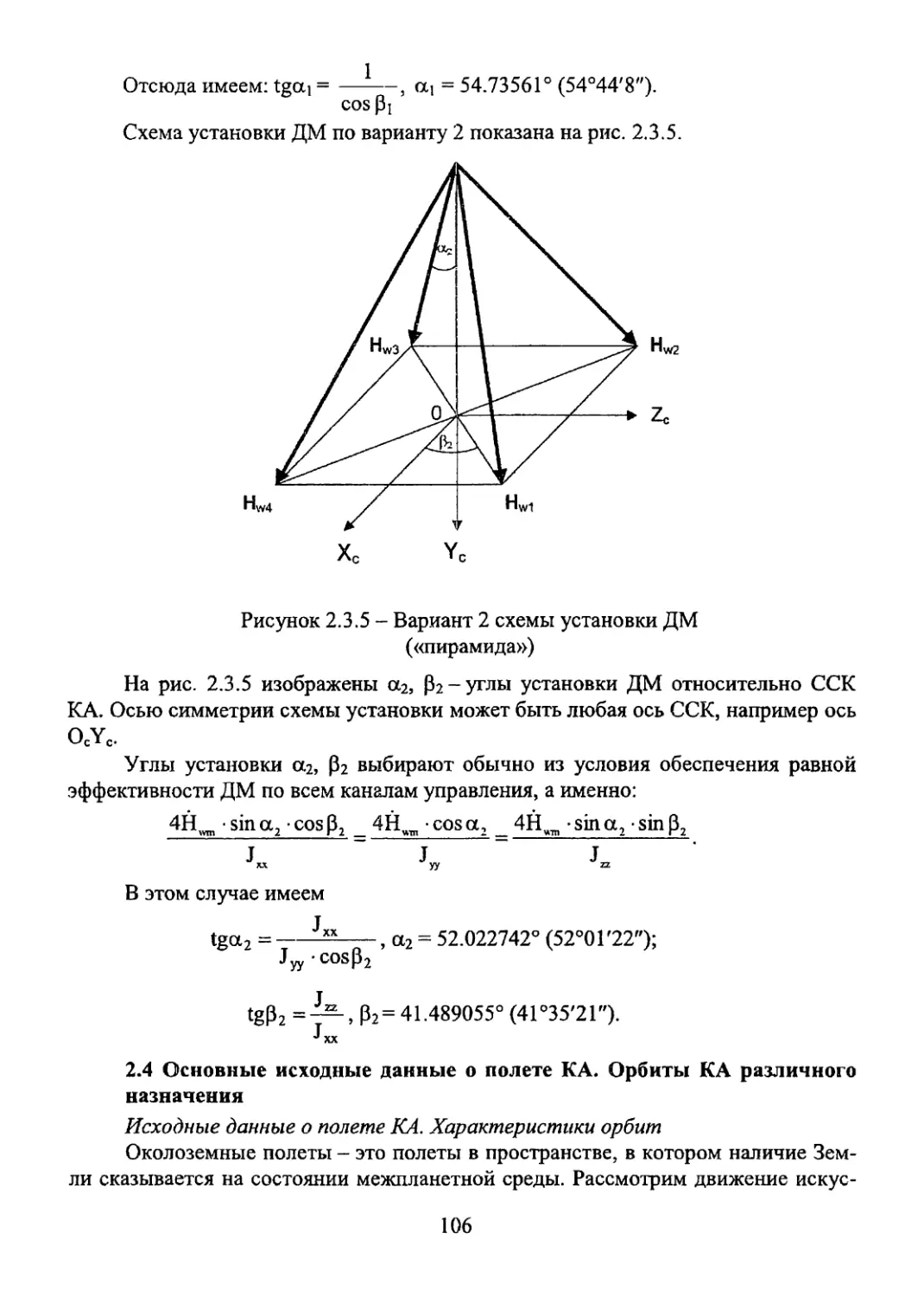
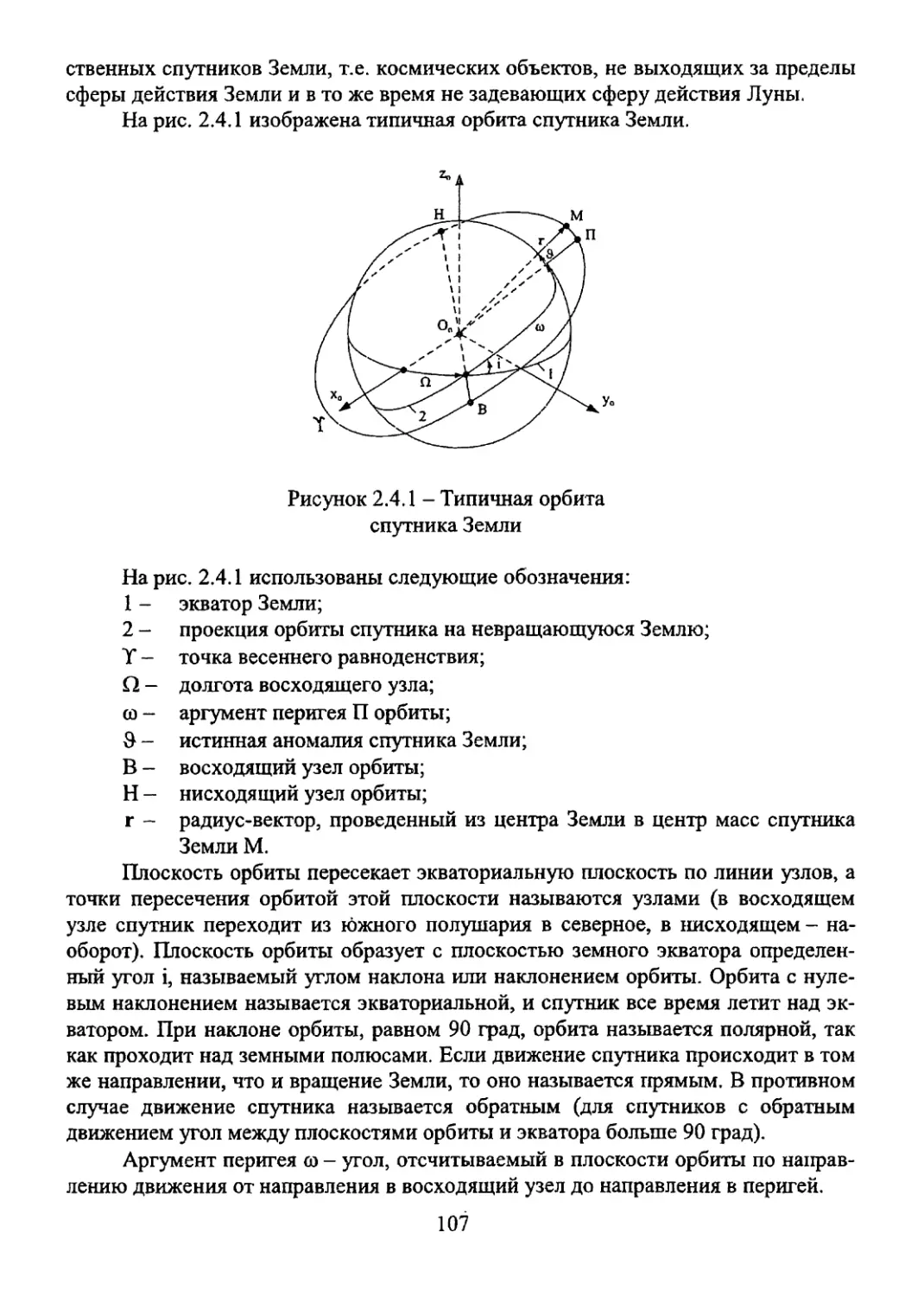
2.4 Основные исходные данные о полете КА. Орбиты КА различного назначения.. 106
2.5 Системы отсчета времени, календари................................112
2.5.1 Характеристики основных шкал времени, используемых для астродинами-
ческих расчетов......................................................112
2.5.2 Юлианский и григорианский календари............................114
Библиографический список к разделу 2.................................114
3 АНАЛИЗ ТЕХНИЧЕСКОГО ЗАДАНИЯ И ИСХОДНЫХ ДАННЫХ В ЦЕЛЯХ
ВЫРАБОТКИ ТЕХНИЧЕСКИХ РЕШЕНИЙ ПО ПРОЕКТИРОВАНИЮ СУ....................117
3.1 Анализ технического задания и исходных данных.....................117
3.1.1 Анализ динамической схемы КА....................................117
3.1.1.1 Анализ управляемости..........................................117
3.1.1.2 Анализ влияния упругих элементов. Понижение порядка уравнений движения КА .118
3.1.1,3 Анализ динамических нагрузок, возникающих в упругих элементах кон-
струкции КА..........................................................119
3.1.1.4 Анализ влияния колебаний жидкости в баках....................120
3.1.2 Анализ точностных и динамических характеристик СУ...............121
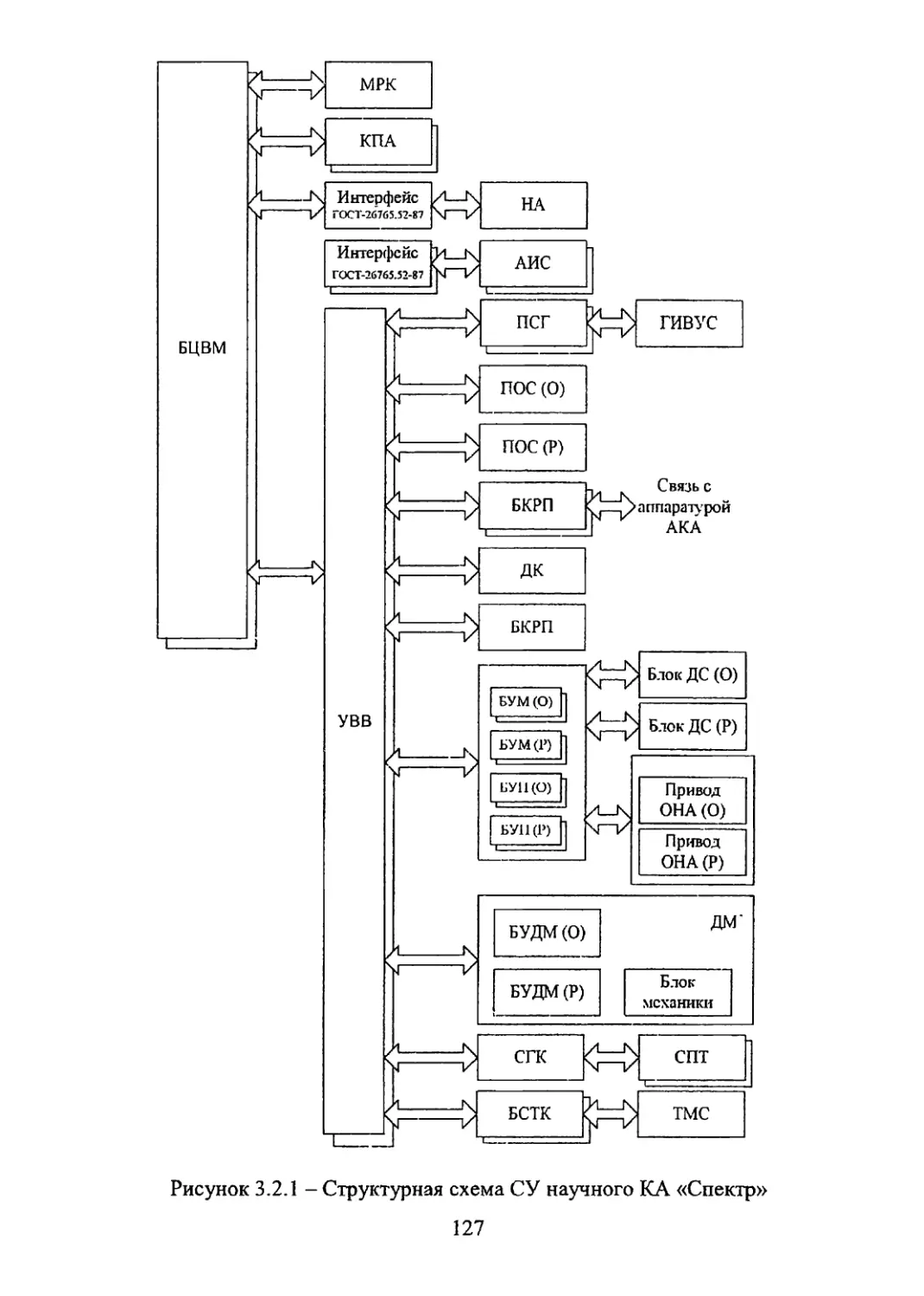
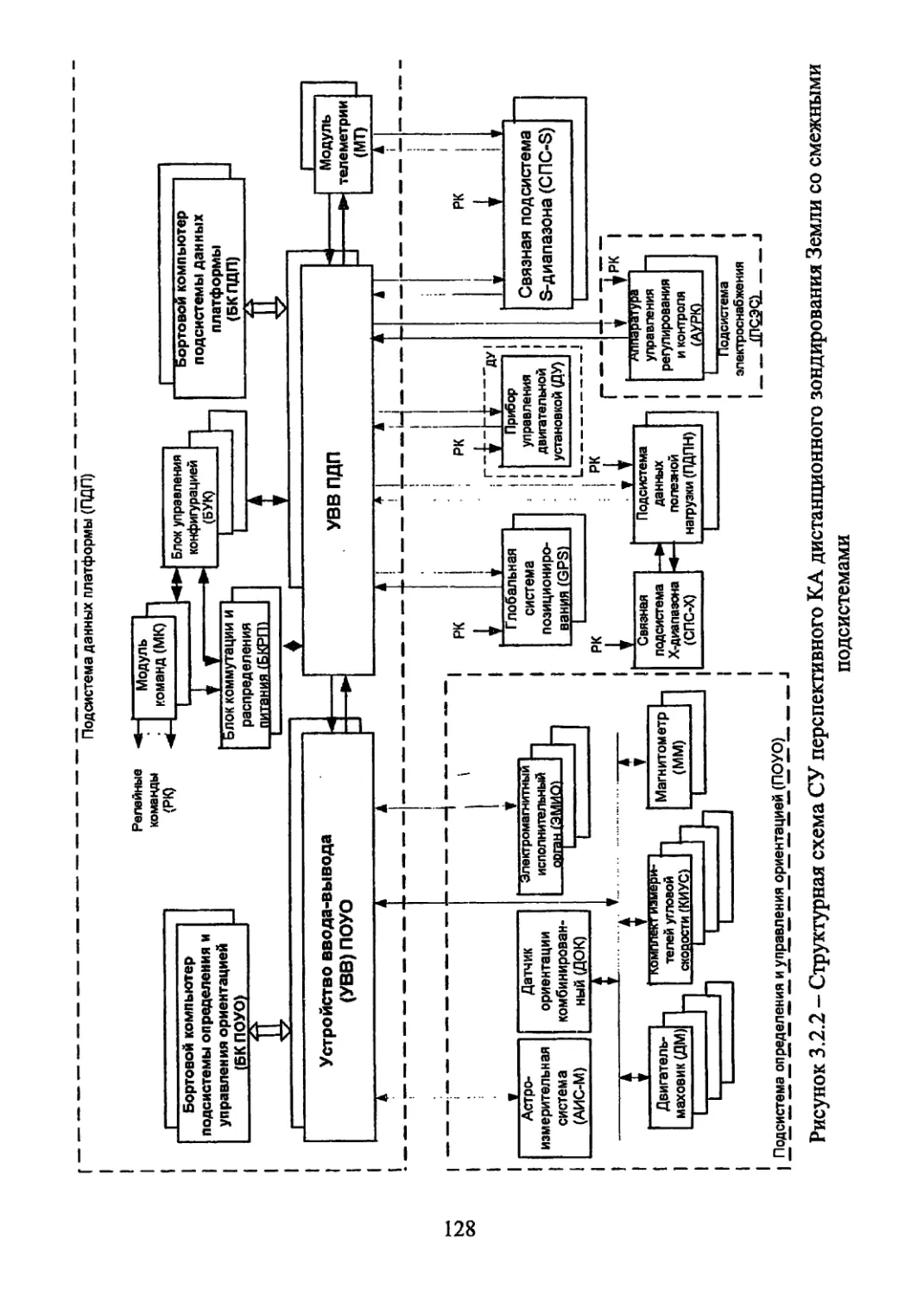
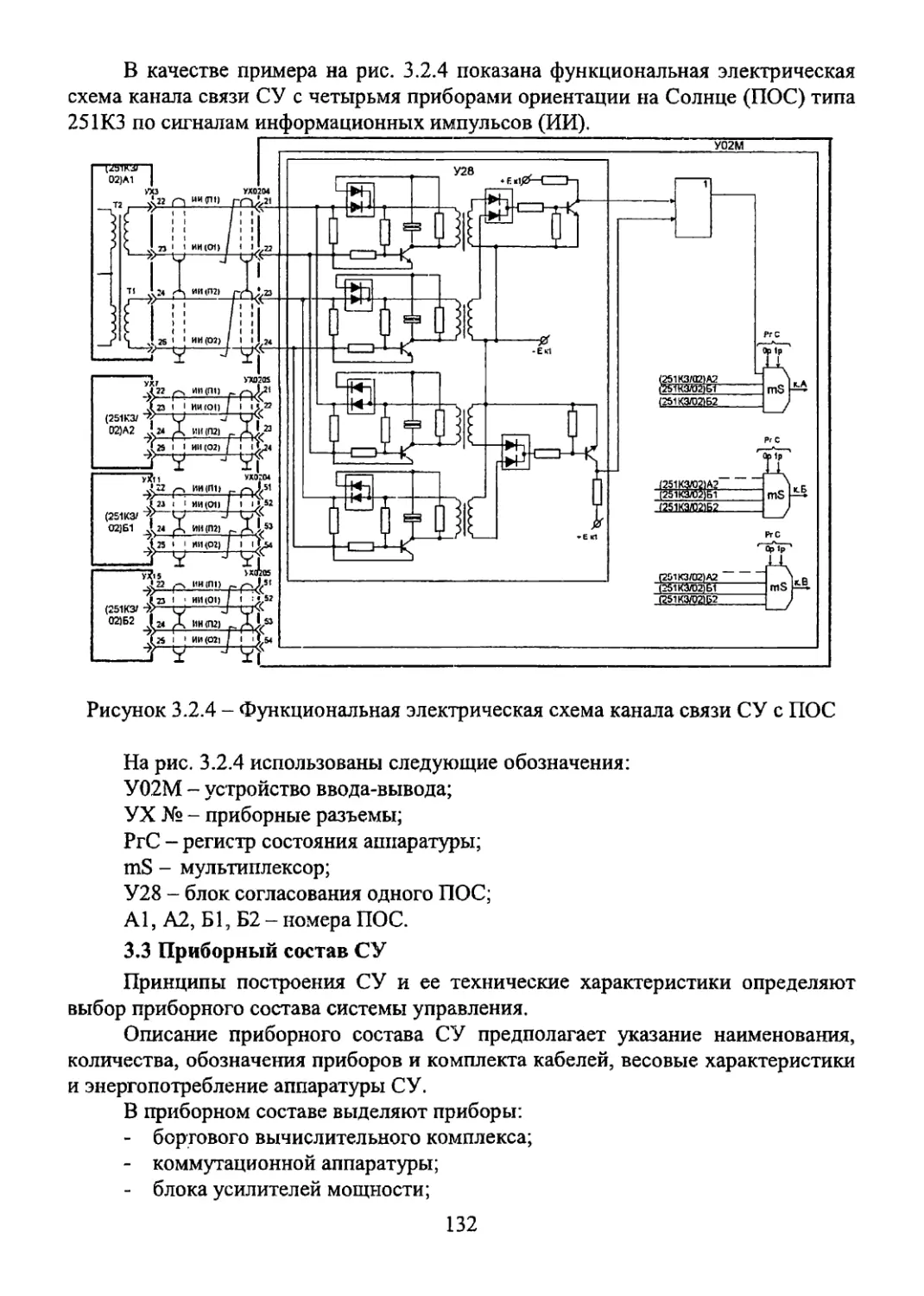
3.2 Разработка структурной и функциональных схем СУ..................125
3.3 Приборный состав СУ............................................ 132
3.4 Требования к командно-измерительным приборам....................133
3.4.1 Измеритель угловой скорости на базе поплавкового гироскопа (гиро-
скопический измеритель вектора угловой скорости - ГИВУС).............133
3.4.2 Измеритель угловой скорости на базе волоконно-оптического гироскопа.. 142
3.4.3 Блок акселерометров............................................148
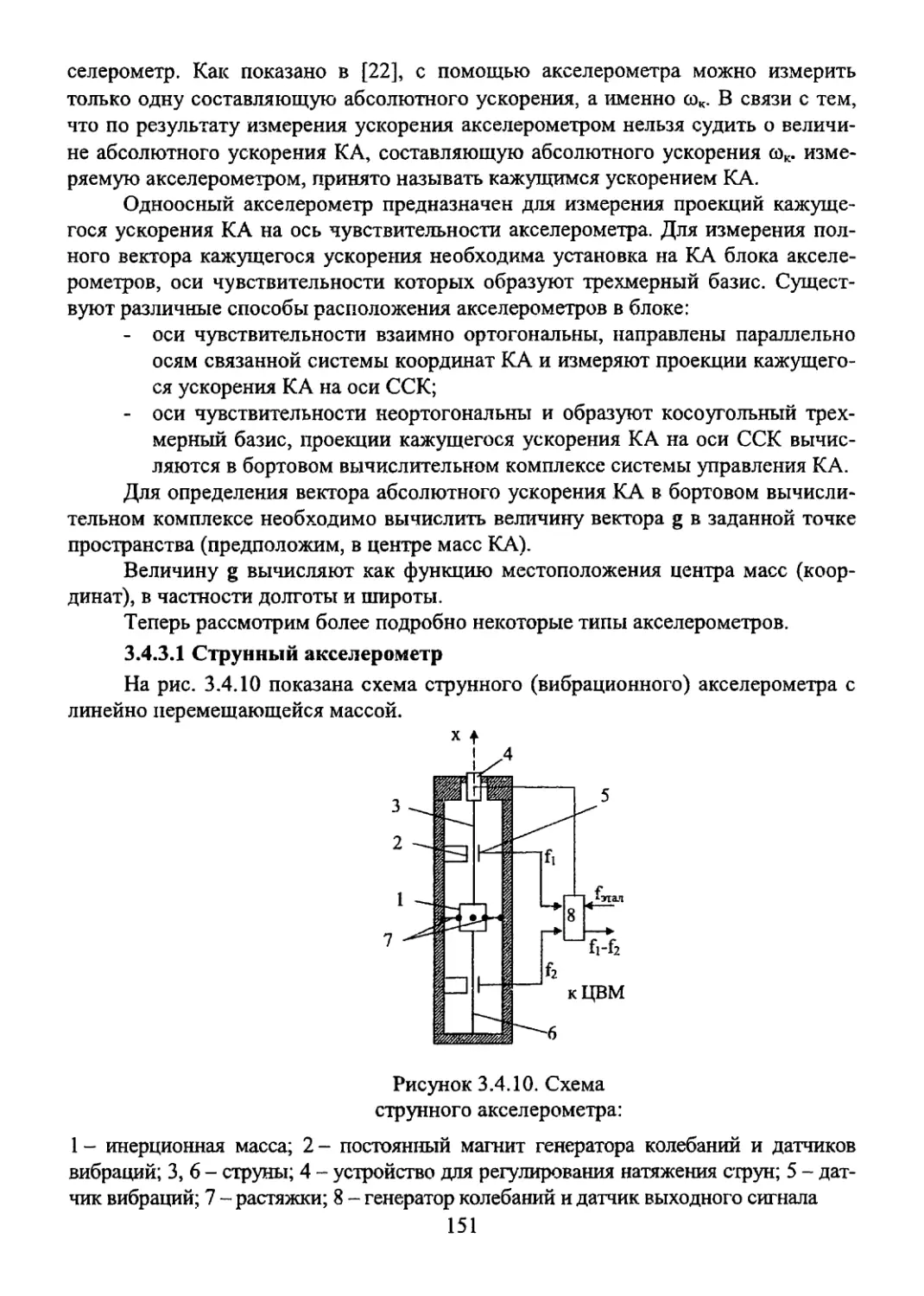
3.4.3.1 Струнный акселерометр........................................151
3.4.3.2 Маятниковый акселерометр.....................................154
3.4.4 Солнечные датчики..............................................158
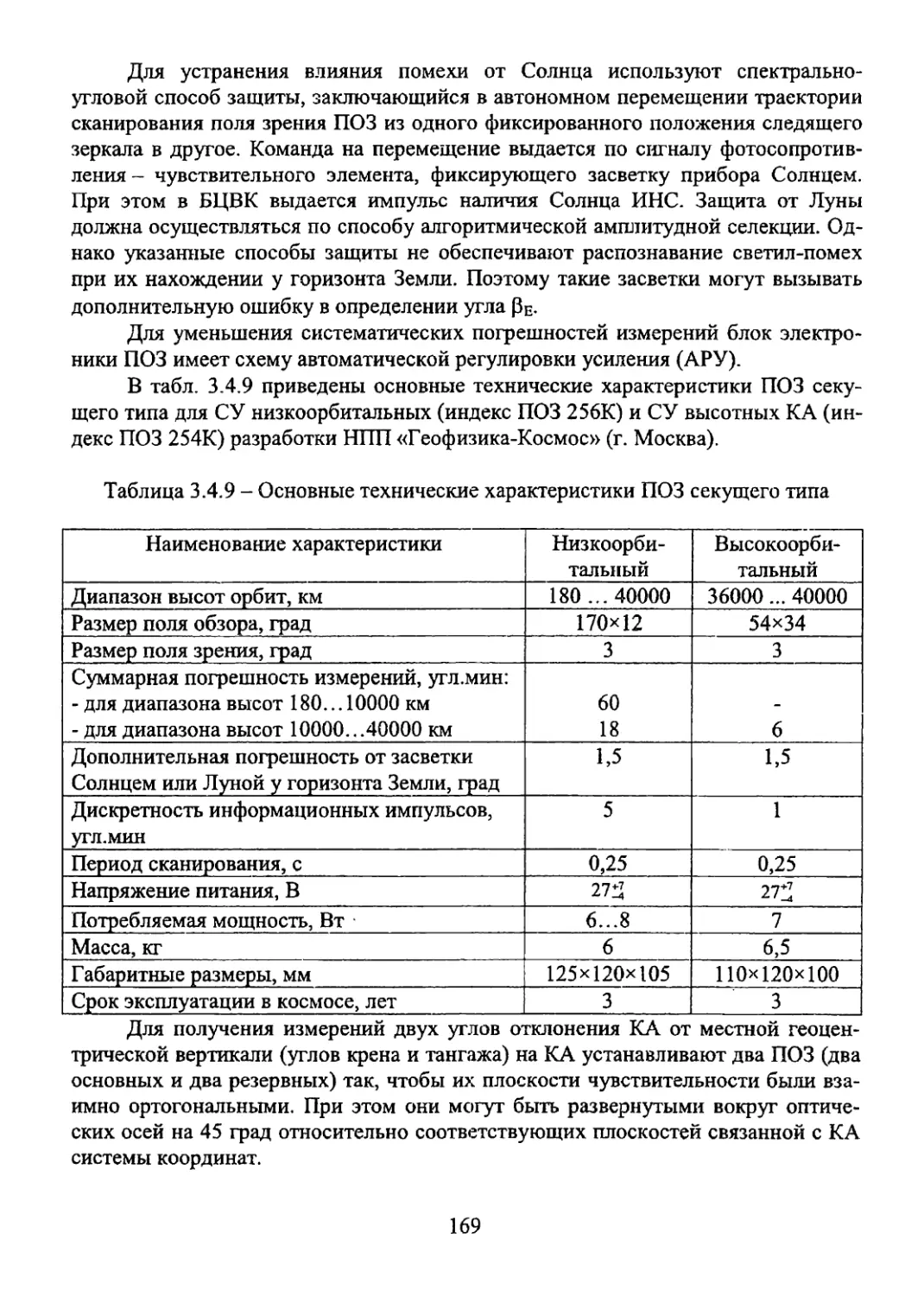
3.4.4.1 Прибор ориентации на Солнце сканирующего типа................159
3.4.4.2 Статические измерители угловых координат Солнца..............162
3.4.5 Инфракрасные построители местной вертикали.....................164
3.4.5.1 Построители местной вертикали с круговым сканированием.......165
3.4.5.2 Приборы ориентации на Землю секущего типа.................. 167
3.4.6 Звездный датчик ориентации на одну звезду.................... 170
3.4.7 Звездный датчик ориентации по i руппе звезд (астроизмерительная система - АИС) ..174
3.4.7.1 Назначение, состав и принцип действия........................174
3.4.7.2 Основные технические требования..............................176
3.4.7.3 Требования к точностным характеристикам......................176
4
3.4.7.4 Схемы установки на КА..................................... 177
3.4.7.5 Требования к условиям эксплуатации........................ 178
3.4.7.6 Общие технические требования............................ 179
3.4.7.7 Математическое обеспечение АИС. Звездный каталог............179
3.4.7.7.1 Разработка звёздного каталога........... ‘...............180
3.4.7.7.2 Определение средних координат звёзд. Оценка точности звёздного каталога.. 182
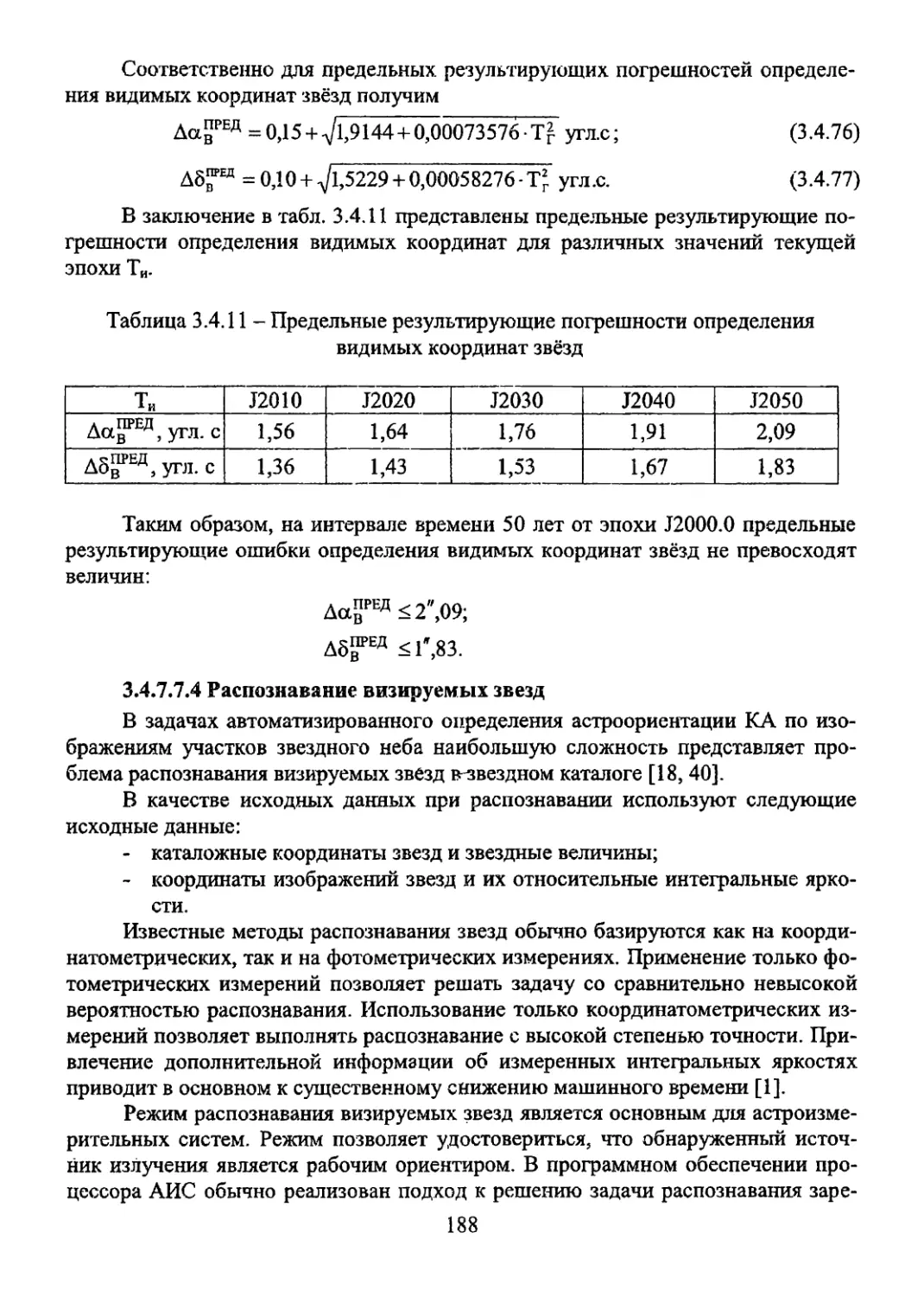
3.4.7.7.3 Определение видимых координат звёзд. Оценка погрешности расчёта
видимых координат звёзд...................................,.........185
3.4.7.7.4 Распознавание визируемых звезд............................188
3.4.7.7.5 Определение ориентации....................................189
3.4.7.8. Характеристики современных астродатчиков...................191
3.4.8 Бесплатформенный астроииерциальный блок.......................195
3.4.8.1 Назначение, состав и принцип действия.......................195
3.4.8.2 Основные технические требования.............................197
3.4.8.3 Общие технические требования............................... 198
3.4.9 Требования к условиям эксплуатации приборов системы управления КА..203
3.4.9.1 Механические воздействия....................................203
3.4.9.2 Акустические нагрузки.......................................205
3.4.9.3 Угловые движения изделия....................................206
3.4.9.4 Климатические условия на старте и в полете..................207
3.4.9.5 Ионизирующие излучения космического пространства............207
3.4.9.6 Условия проведения наземных испытаний и хранения............207
3.4.9.7 Требования по транспортабельности...........................207
3.4.10 Использование аппаратуры потребителей спутниковых радионавигационных
систем (АП СРНС) в системах управления КА...........................208
3.4.10.1 Характеристики глобальных навигационных спутниковых систем.208
3.4.10.2 Аппаратура потребителей СРНС.............................. 210
3.4.10.3 Определение параметров движения КА системой автономной навига-
ции, оснащенной АП СРНС.............................................211
3.4.10.4 Дифференциальный режим функционирования АП СРНС............212
Библиографический список к разделу 3................................213
4 ПРОЕКТИРОВАНИЕ ПОДСИСТЕМ СУ КОСМИЧЕСКИХ АППАРАТОВ ...216
4.1 Баллистико-навигационное обеспечение КА....................... 216
4.1.1 Структура и состав баллистико-навигационного обеспечения......216
4.1.2 Наземное баллистико-навигационное обеспечение.................217
4.1.3 Бортовое навигационное обеспечение КА....................... 218
4.1.4 Алгоритмы системы определения навигационной информации........219
4.1.4.1 Алгоритм экстраполяции параметров движения центра масс КА...219
4.1.4.2 Алгоритм определения гелиоцентрических координат Земли......221
4.1.4.3 Алгоритм определения геоцентрических координат Луны.........222
4.1.4.4 Алгоритм формирования признака нахождения КА в тени Земли или Луны....224
4.1.4.5 Алгоритм расчёта направляющих косинусов и угловой скорости лилии визиро-
вания «КА - объект наблюдений», направляющих косинусов Солнца, Земли и Луны.. .228
4.1.4.6 Алгоритм вычисления нормированной гелиоцентрической скорости КА ...230
5
4.2 Системы навигации околоземных КА................................231
4.2.1 Требования к системе навигации околоземных КА..................231
4.2.2 Общие принципы формирования параметров движения центра масс около-
земных КА...........................................................233
4.2.2.1 Способы прогнозирования параметров движения центра масс околоземных КА.234
4.2.2.2 Интегрированные системы автономной навигации околоземных КА__235
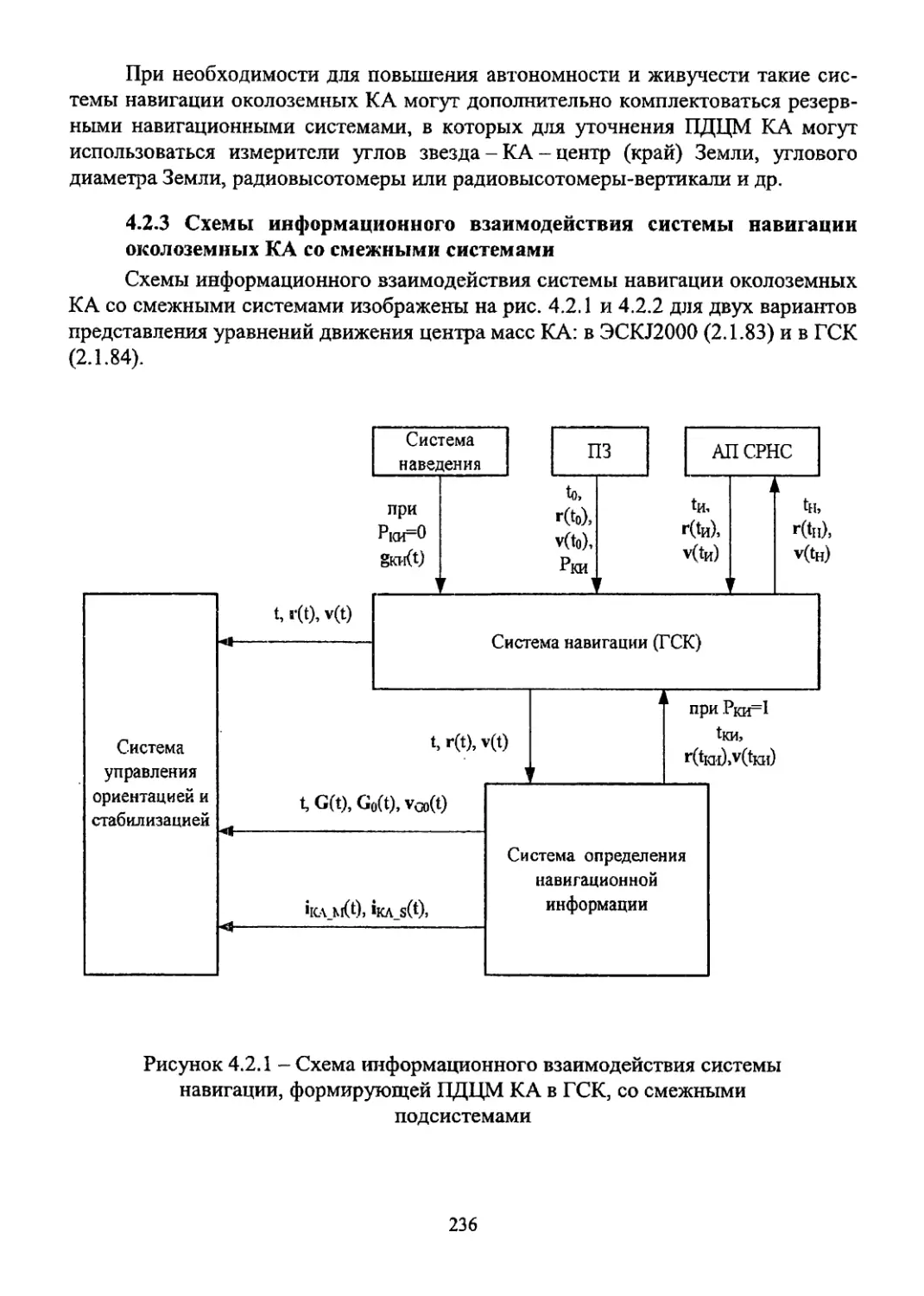
4.2.3 Схемы информационного взаимодействия системы навигации околоземных
КА со смежными системами............................................236
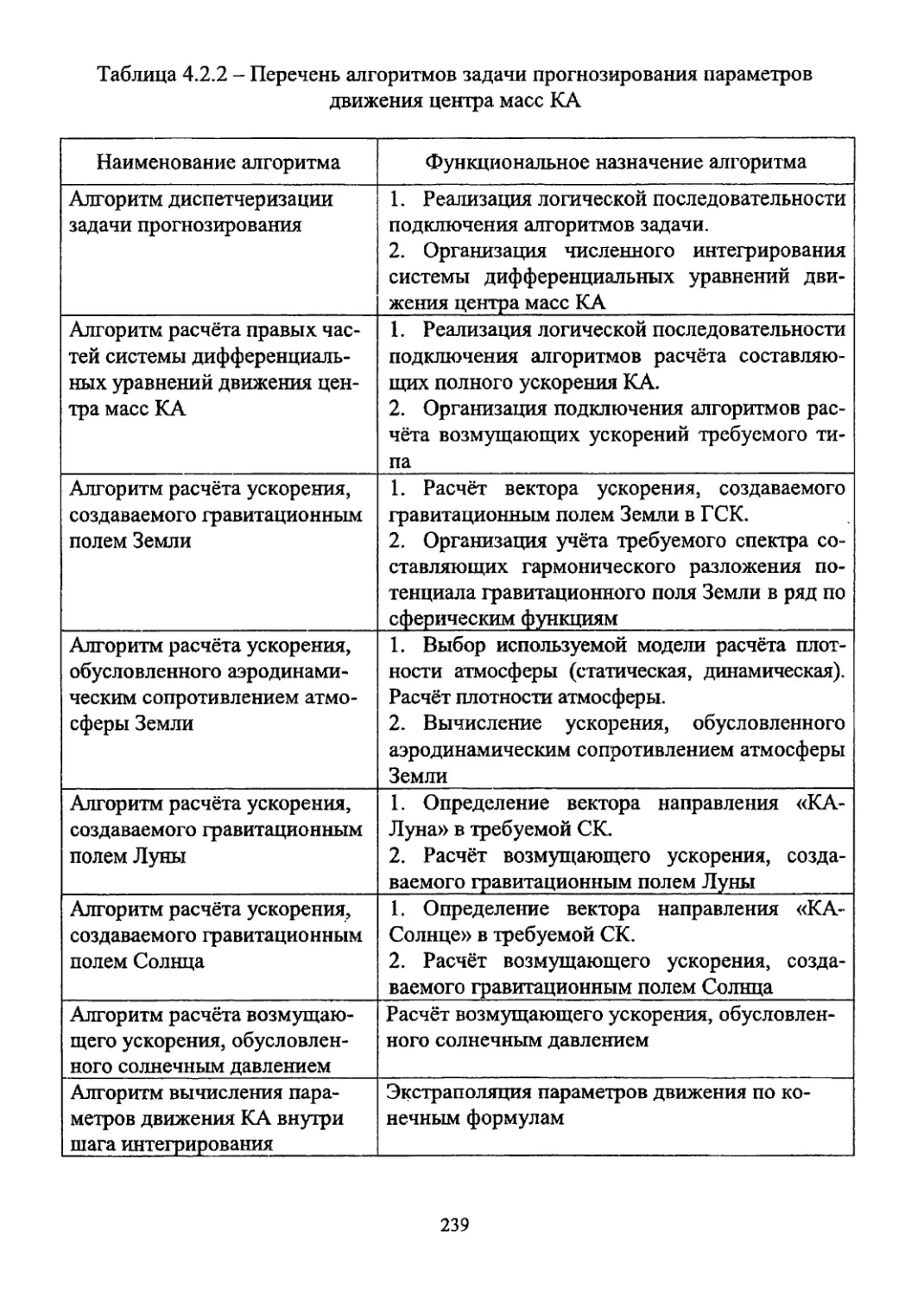
4.2.4 Алгоритмическое обеспечение системы навигации..................238
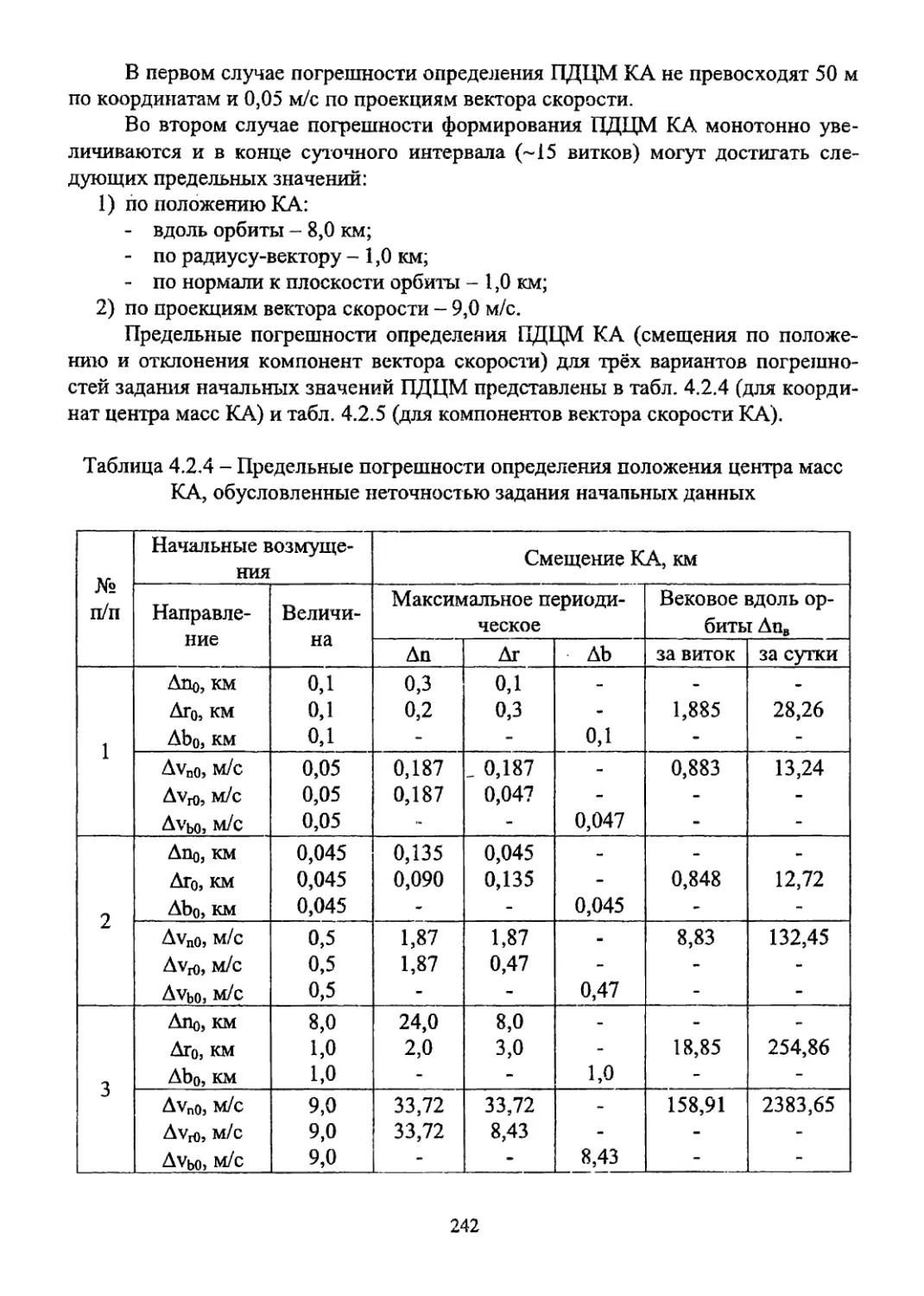
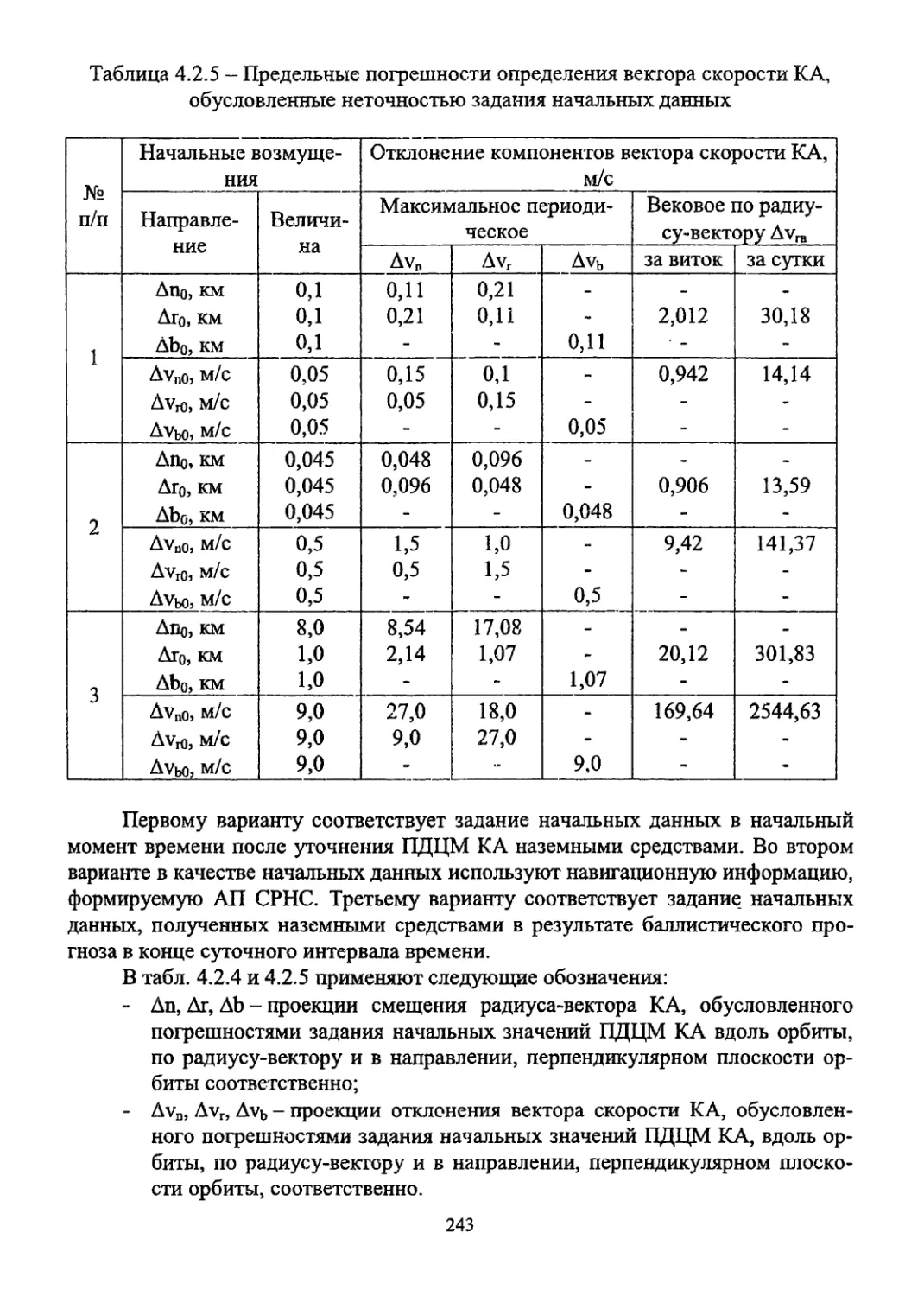
4.2.5 Анализ точности системы навигации околоземных КА..............241
4.2.5.1 Оценка влияния погрешностей задания начальных условий на точность
прогнозирования параметров движения центра масс околоземных КА......241
4.2.5.2 Анализ влияния различных возмущающих факторов на точность прогно-
зирования параметров движения центра масс околоземного КА...........244
4.3 Системы навигации межпланетных КА...............................244
4.3.1 Методы определения расчётных межпланетных траекторий. Расчёт даты старта.. .244
4.3.2 Принципы функционирования системы автономной навигации на различ-
ных участках межпланетного перелёта.................................253
4.3.3 Интегрированные системы автономной навигации межпланетных КА...257
4.4 Система наведения КА.............................................258
4.4.1 Назначение, задачи и принципы функционирования системы наведения....258
4.4.2 Схема информационного взаимодействия системы наведения КА со смеж-
ными системами......................................................259
4.4.3 Алгоритмическое обеспечение системы наведения.................261
4.4.4 Оценка ожидаемой точности реализации импульсов скорости........262
4.4.4.1 Оценка ожидаемой точности реализации импульсов скорости по направлению ..262
4.4.4.1.1 Состав результирующих погрешностей реализации КИ по направлению...262
4.4.4.1.2 Статистические характеристики результирующих погрешностей реали-
зации КИ по направлению.............................................264
4.4.4.2 Оценка ожидаемой точности реализации импульсов скорости по в еличине.. .266
4.4.4.2.1 Состав результирующей погрешности реализации КИ по величине при выклю-
чении двигателей коррекции по достижении заданного значения кажущейся скорости....266
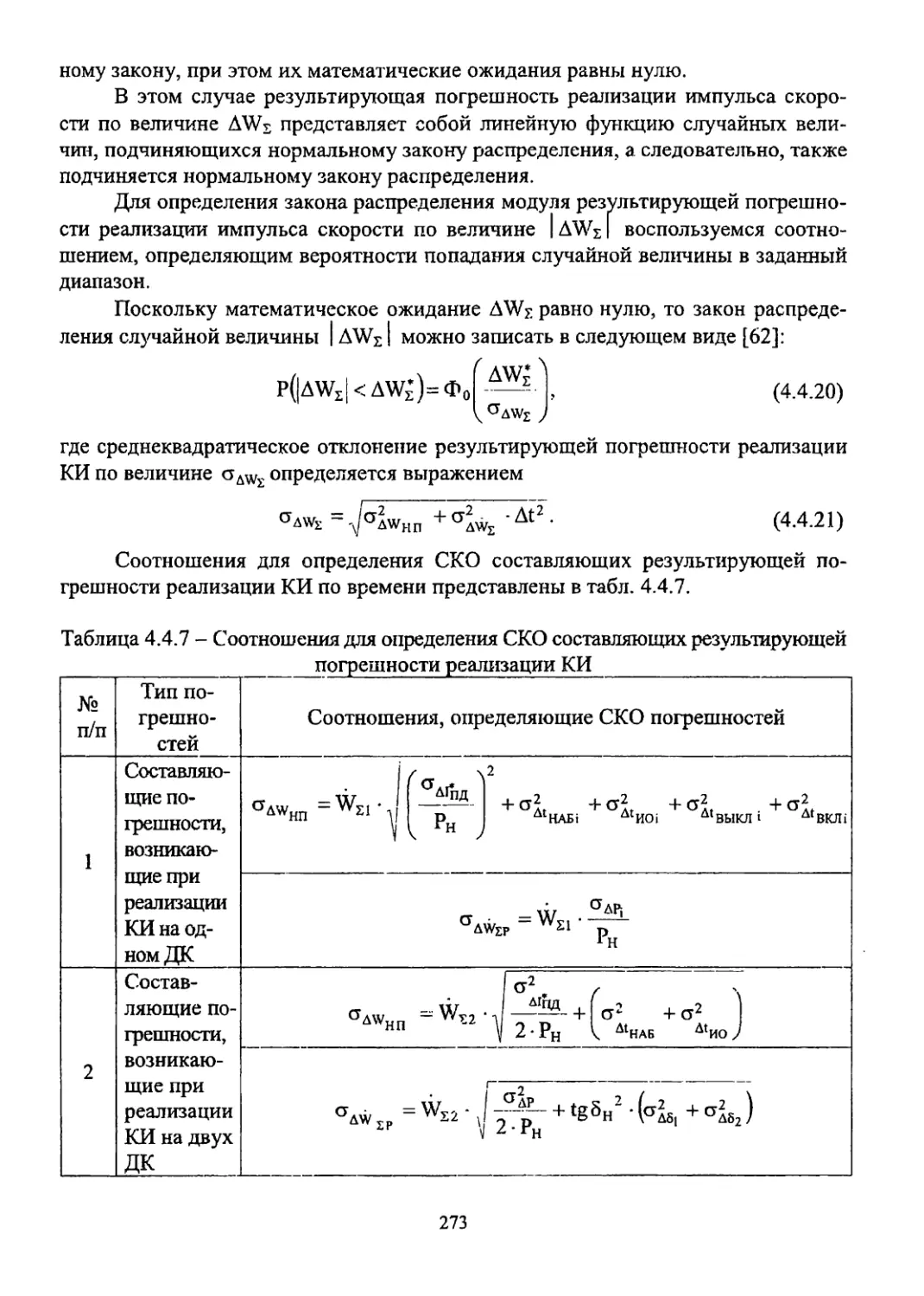
4.4.4.2.2 Статистические характеристики погрешности реализации КИ по
величине при выключении двигателей коррекции по достижении заданного
значения кажущейся скорости.........................................269
4.4.4.2.3 Состав результирующей погрешности реализации КИ по величине
при выключении двигателей по времени................................271
4А4.2.4 Статистические характеристики погрешности реализации КИ по вели-
чине при выключении двигателей по времени...........................272
4.5 Система управления ориентацией и стабилизации (СУОС) КА.........274
4.5.1 Основные технические требования к СУОС........................274
4.5.2 Структурная и функциональная схемы СУОС.......................276
4.5.3 Математические модели объекта управления......................278
4.5.3.1 Кинематические уравнения орбитального движения КА...........278
6
4.5.3.1.1 Формы представления математической модели орбитального движения КА..278
4.5.3.1.2 Возмущающие факторы, оказывающие влияние на орбитальное дви-
жение КА............................................................279
4.5.3.1.3 Математическая модель ускорения, создаваемого гравитационным по-
лем Земли...........................................................280
4.5.3.1.4 Математическая модель возмущающего ускорения, обусловленного вли-
янием атмосферы Земли...............................................282
4.5.3.1.5 Влияние гравитационных полей Луны, Солнца и других планет Солнеч-
ной системы.........................................................284
4.5.3.1.6 Учёт управляющих воздействий при коррекции параметров орбиты КА.... 285
4.5.3.2 Кинематические уравнения вращательного движения КА вокруг центра масс...285
4.5.3.2.1 Параметры ориентации...................................'..285
4.5.3.2.2 Кинематические уравнения вращательного движения КА..........290
4.5.4. Математические модели командно-измерительных приборов СУОС ..294
4.5.4.1 Математическая модель ГИВУС.................................294
4.5.4.2 Математическая модель ВОГ...................................295
4.5.4.3 Математическая модель погрешности БА........................299
4.5.4.4 Математическая модель прибора ориентации на Солнце (ПОС)....301
4.5.4.5 Математическая модель прибора ориентации на Землю (ПОЗ).....302
4.5.4.6 Математическая модель звездного датчика (ЗД) на одну звезду.307
4.5.4,7 Математическая модель астроизмерительной системы (АИС).’....308
4.5.4.8 Математическая модель БАИБ..................................310
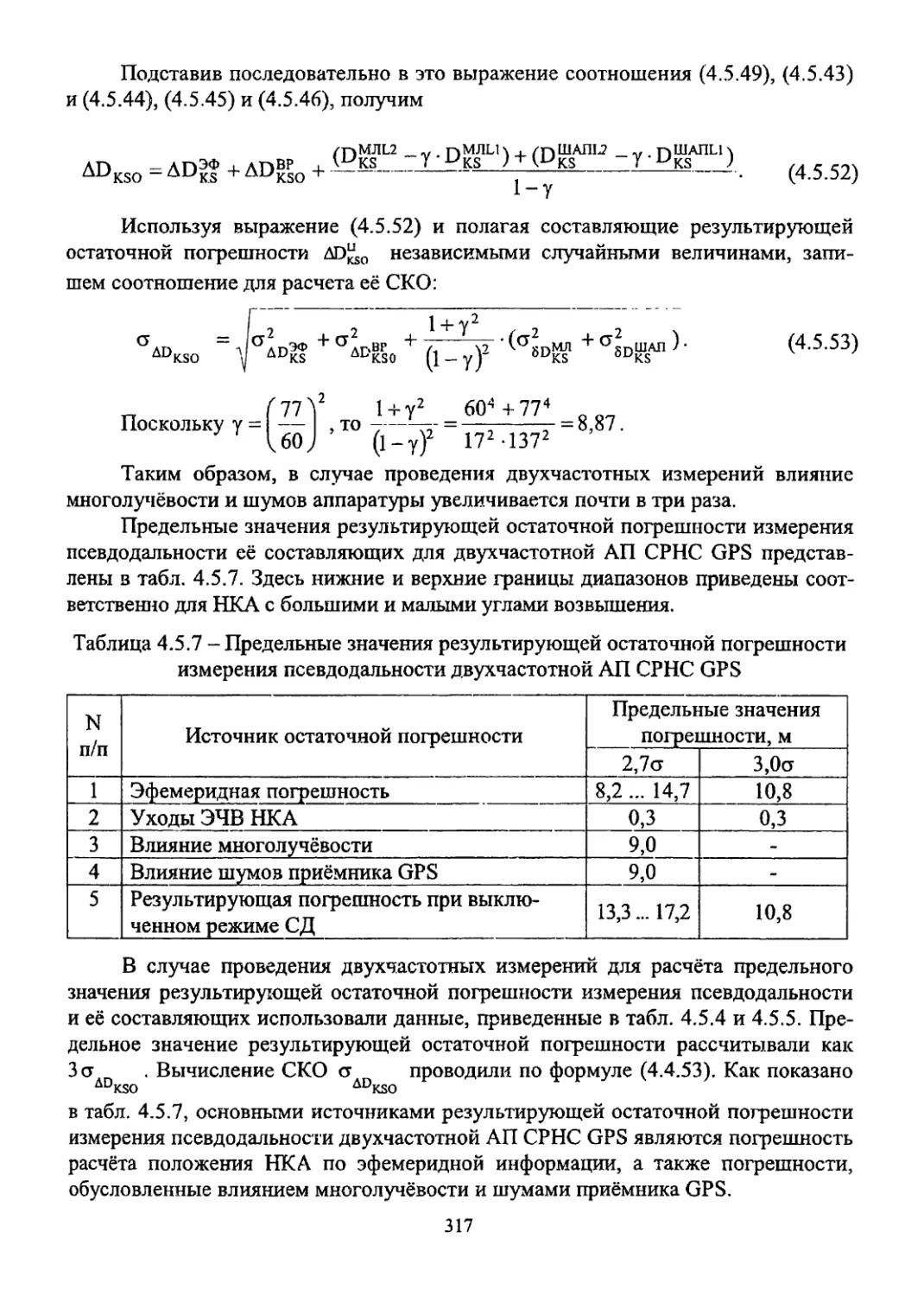
4.5.4.9 Математическая модель погрешности измерений АП СРНС GPS.....316
4.5.4.9.1 Математическая модель погрешности измерений псевдодальности.311
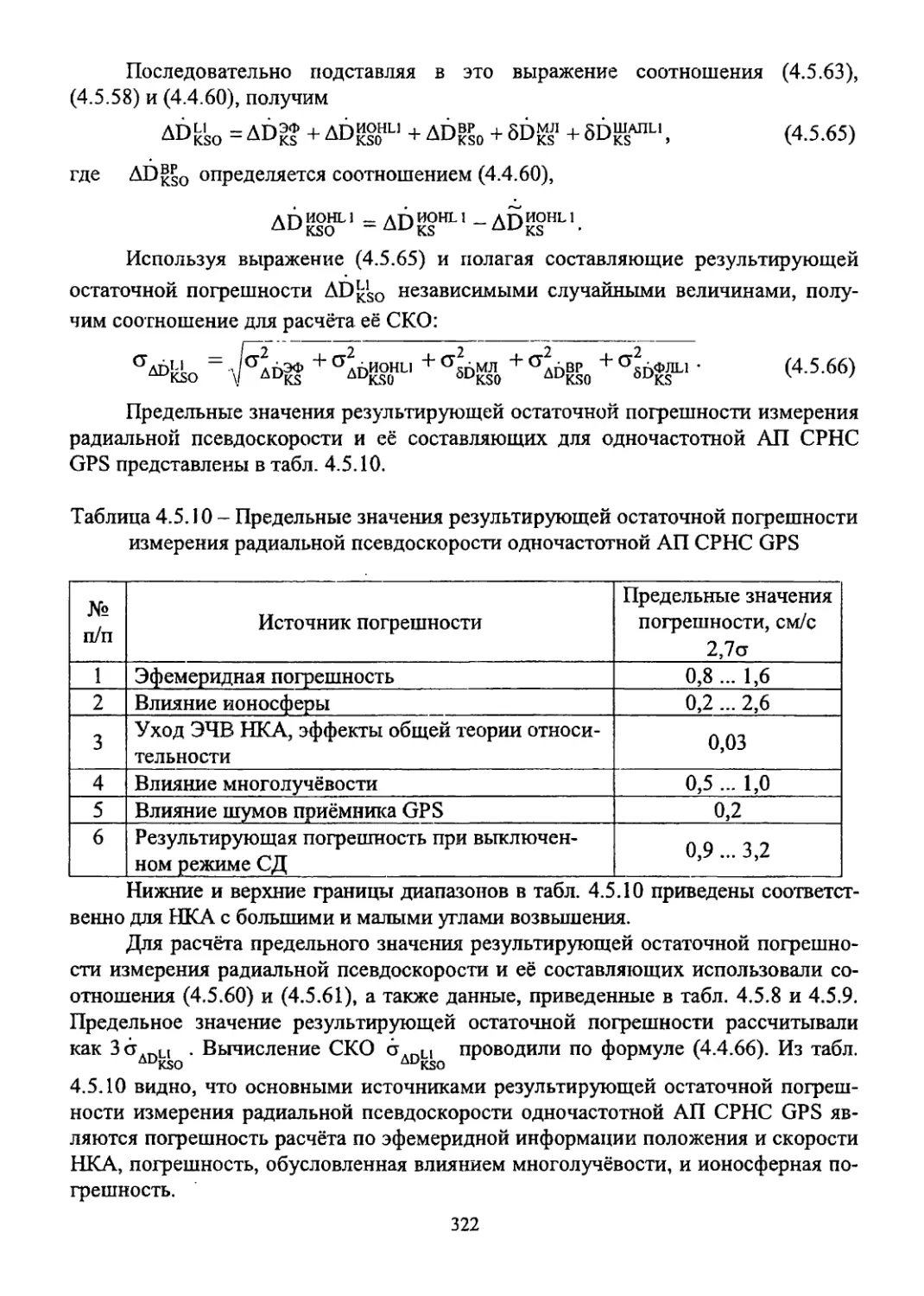
4.5А9.2 Математическая модель погрешности измерений радиальной псевдоскорости. 318
4.5.5 Математические модели исполнительных органов СУОС.............324
4.5.5.1 Математическая модель реактивных двигателей ориентации и стабилизации...324
4.5.5.2 Математическая модель корректирующего импульса линейной скорости
при коррекции параметров орбиты КА..................................326
4.5.5.3 Математическая модель силового гироскопического комплекса.....327
4.5.5.4 Математическая модель двигателей-маховиков..................334
4.5.5.5 Математическая модель электромагнитных катушек................335
4.5.6 Модульный принцип построения структуры математического обеспечения СУОС. 337
4.5.6.1 Модули обработки информации и управления командно-измерительными
приборами...........................................................341
4.5.6.1.1 Оценка угловой скорости КА по измерениям ГИВУС............342
4.5.6.1.2 Обработка информации и управление оптико-электронными прибора-
ми определения ориентации КА........................................348
4.5.6.2 Унифицированный модуль определения ориентации...............349
4.5.6.2.1 Формульные схемы алгоритмов определения ориентации........349
4.5.6.2.2 Алгоритм астрокоррскции...................................351
4.5.6.2.3 Анализ точности алгоритмов определения ориентации эталонными
моделями вращения.................................................. 355
4.5.6.3 Унифицированный модуль управления...........................359
7
4.5.6.3.1 Законы управления ориентацией КА с помощью реактивных двигателей.... 359
4.5.6.3.2 Закон стабилизации КА с помощью реактивных двигателей.......362
4.5.6.3.3 Особенности управления КА с помощью силовых гироскопов......364
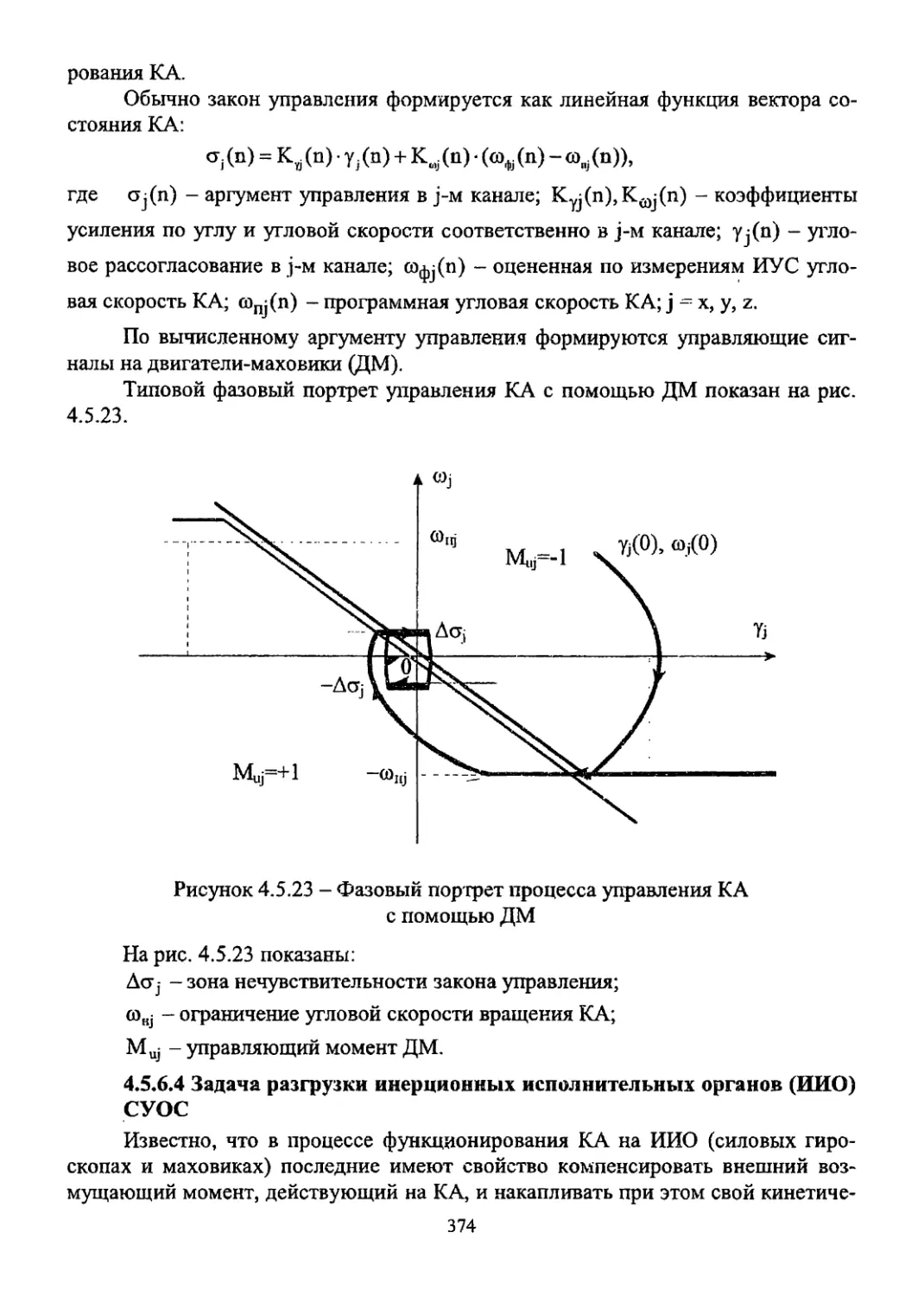
4.5.6.3.4 Управление КА с помощью двигателей-маховиков................373
4.5.6.4 Задача разгрузки инерционных исполнительных органов (ИИО) СУОС ...374
4.5.64.1 Разгрузка силовых гироскопов.................................375
4.5.64.2 Разгрузка двигателей-маховиков...............................378
4.5.6.5 Методы обеспечения надежности систем управления КА............381
4.5.6.5.1 Аппаратные средства обеспечения надежности СУ...............381
45.6.5,2 Математическое обеспечение надежных СУ.......................383
4.5.6.5.3 Обеспечение надежности при сопровождении космических аппаратов в полете .387
4.5.7 Типовые динамические режимы функционирования СУОС КА............388
4.5.7.1 Режим построения одноосной солнечной ориентации...............388
4.5.7.1.1 Назначение и требования к режиму............................388
4.5.7.1.2 Приборный состав СУОС в режиме..............................389
4.5.7.1.3 Принципы построения режима..................................390
4.5.7.14 Моделирование работы СУОС в режиме...........................394
4.5.7.2 Режим построения базовой солнечно-земной ориентации...........398
4.5.7.2.1 Требования к режиму.........................................398
4.5.7.2.2 Приборный состав СУОС в режиме..............................398
4.5.7.2.3 Принципы построения режима..................................399
4.5.7.3 Режим инерциальной ориентации (программных разворотов)........401
4.5.7.3.1 Назначение и требования к режиму............................401
4.5.7.3.2 Приборный состав СУОС в режиме..............................405
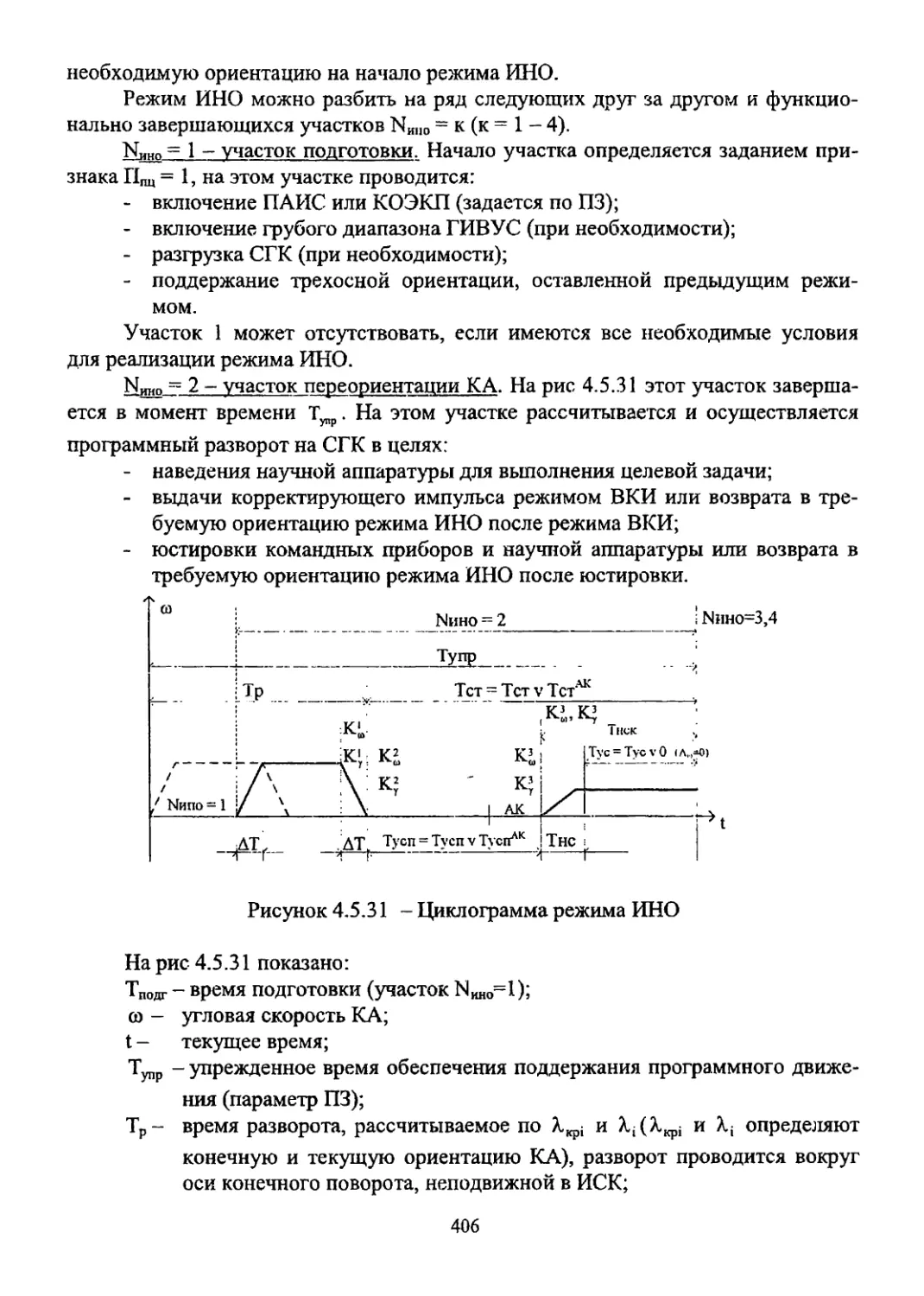
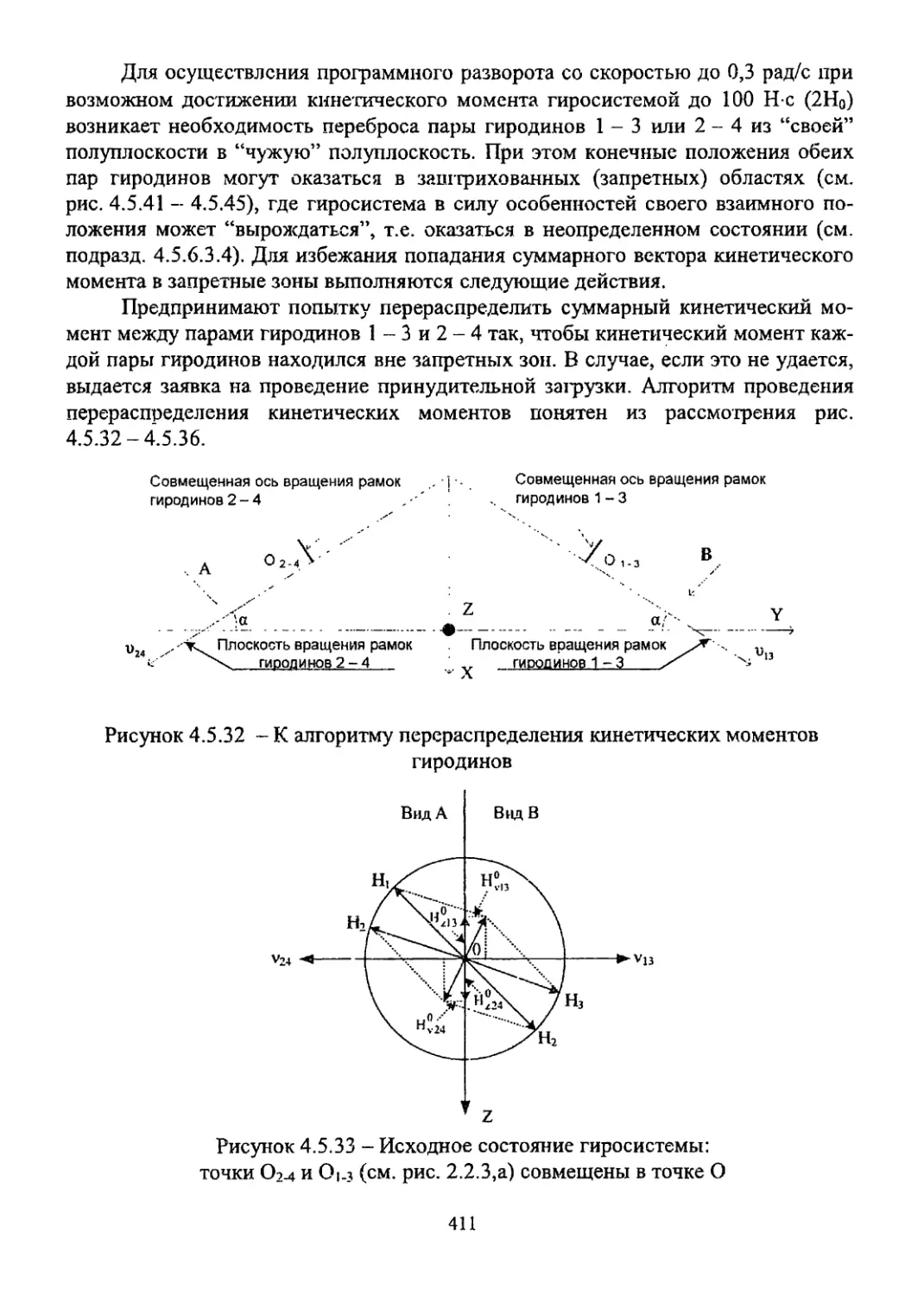
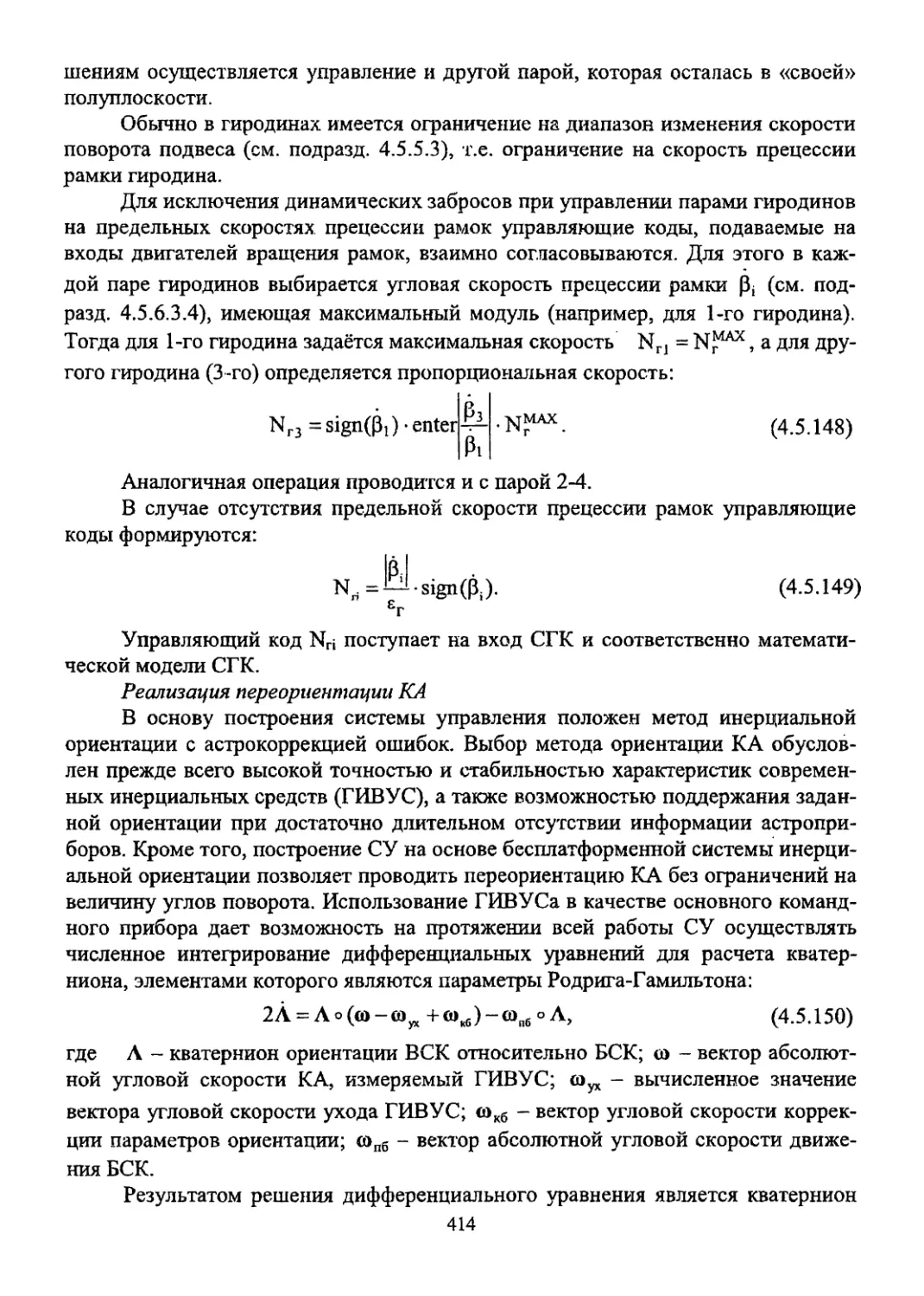
4.5.7.3.3 Принципы построения режима..................................405
4.5.7.3.4 Реализация программного разворота в режиме..................409
4.5.7.3.5 Выбор параметров режима.................................... 418
4.5.7.3.6 Контроль и парирование нештатных ситуаций в режиме..........421
4.5.74 Режим поддержания трехосной солнечной ориентации...............422
4.5.74.1 Требования к режиму..........................................422
4.5.74.2 Приборный состав СУОС в режиме.............................. 422
4.5.74.3 Принципы построения режима...................................423
4.5.74.4 Контроль и парирование нештатных ситуаций в режиме...........424
4.5.7.5 Режим прецизионной ориентации.................................425
4.5.7.5.1 Требования к режиму.........................................425
4.5.7.5.2 Приборный состав СУОС в режиме..............................426
4.5.7.5.3 Принципы построения режима..................................426
4.5.7.6 Режим стабилизации при выдаче корректирующего импульса........427
4.5.7.6.1 Назначение и требования к режиму............................427
4.5.7.6.2 Приборный состав СУОС в режиме..............................428
4.5.7.6.3 Принципы построения режима. Основные формульные схемы алгоритмов ...428
4.5.7.64 Функционирование системы управления в режиме СКР.............429
4.5.7.6.5 контроль и парирование нештатных ситуаций в режиме СКР......432
4.5.7.7 Режим калибровки измерителей угловой скорости.................433
8
4.5.7,7.1 Назначение и требования к режиму.......................; 433
4.5.7.7.2 Приборный состав СУОС в режиме............................ 433
4.5.7.7.3 Принципы построения режима................................ 433
4.5.7.8 Режим тестирования динамической схемы КА.....................436
4.5.7.8.1 Требования к режиму................................. .....436
4.5.7.8.2 Приборный состав СУОС в режиме.................;...........436
4.5.7.8.3 Принципы построения режима.................................437
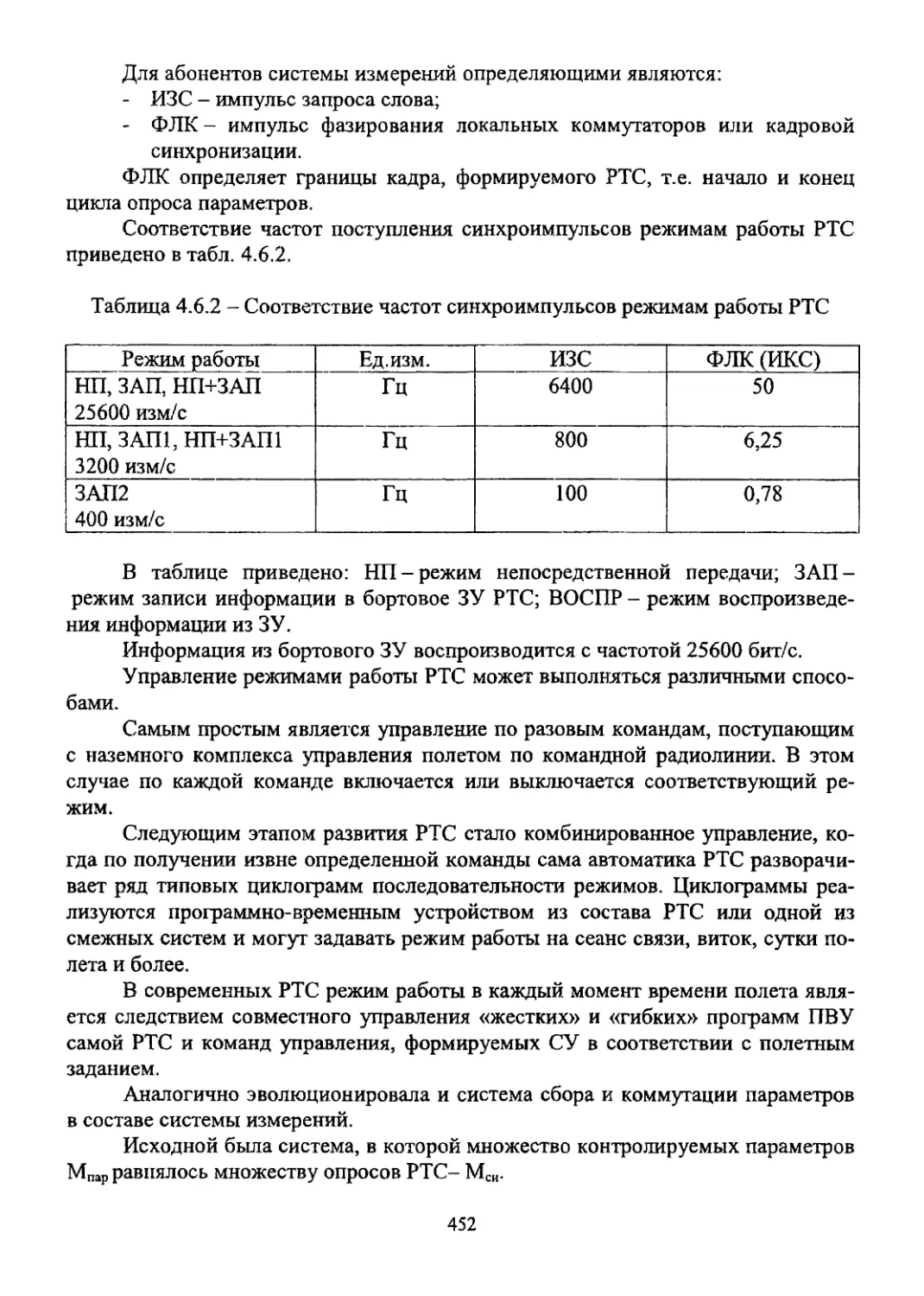
4.6 Система телеметрических измерений.............................. 446
4.6.1 Требования к системе...............................................446
4.6.2 Функциональная схема системы телеметрических измерений.........447
4.6.2.1 Традиционная схема сбора телеметрической информации..........447
4.6.2.2 Структурная схема сбора ТМИ микроспутника..... ................448
4.6.3 Аппаратура системы телеметрических измерений...........;.......451
4.6.3.1 Описание аппаратуры традиционной системы сбора телеметрической
информации КА........................................................451
4.6.3.1.1 Радиотелеметрическая станция...............................451
4.6.3.1.2 Телеметрические согласующие устройства.....................453
4.6.3.1.3 Блок согласования телеметрического кадра...................455
4.6.3.2 Описание аппаратуры системы измерений современного микроспутника.456
4.6.3.2.1 Описание модуля телеметрии (МТ)............................456
4.6.3.2.2 Описание связной подсистемы (СПС)........................ 462
4.6.4 Принципы формирования телеметрической информации.............. 463
4.6.4.1 Определение объема сигнальной и аналоговой ТМИ.............. 463
4.6.4.2 Принципы формирования цифровой ТМИ СУ........................465
Библиографический список к разделу 4.............................. 467
5 ПРОЕКТИРОВАНИЕ ПОДСИСТЕМ СУ ТРАНСПОРТНЫХ МОДУЛЕЙ (ТМ)
ОРБИТАЛЬНЫХ СТАНЦИЙ...................................... ........473
5.1 Требования технического задания к разработке СУ ТМ....:........ 473
5.1.1 Состав СУ ТМ.................;............................ ..473
5.1.2 Требования к назначению СУ ТМ................................ 474
5.2 Структурная и функциональная схемы СУ ТМ.........................477
5.3 Система автономной навигации транспортных модулей................483
5.3.1 Требования к системе навигации.............................. .483
5.3.2 Принципы построения системы автономной навигации транспортных мо-
дулей............................................................... 484
5.3.3 Алгоритмическое обеспечение системы навигации транспортных модулей.485
5.3.4 Оценка степени влияния различных возмущающих факторов на точность
прогнозирования параметров движения центра масс транспортных модулей.486
5.4 Система наведения транспортных модулей...............................489
5.4.1 Назначение, принципы функционирования системы наведения и основ-
ные требования к системе наведения транспортных модулей..............489
5.4.2 Алгоритмическое обеспечение системы наведения. Выбор настроек пара-
метров полетного задания алгоритмов системы наведения ТМ.............489
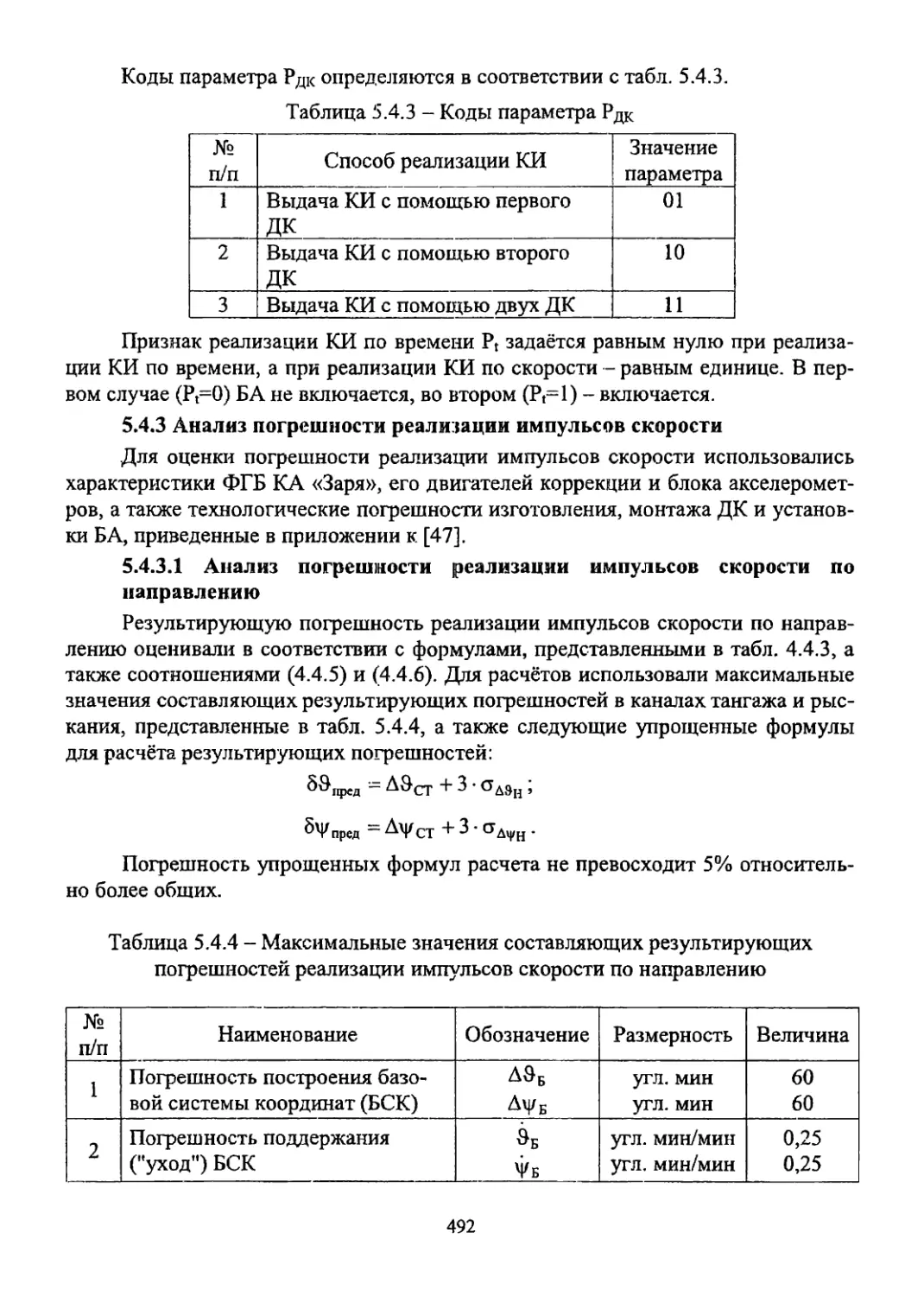
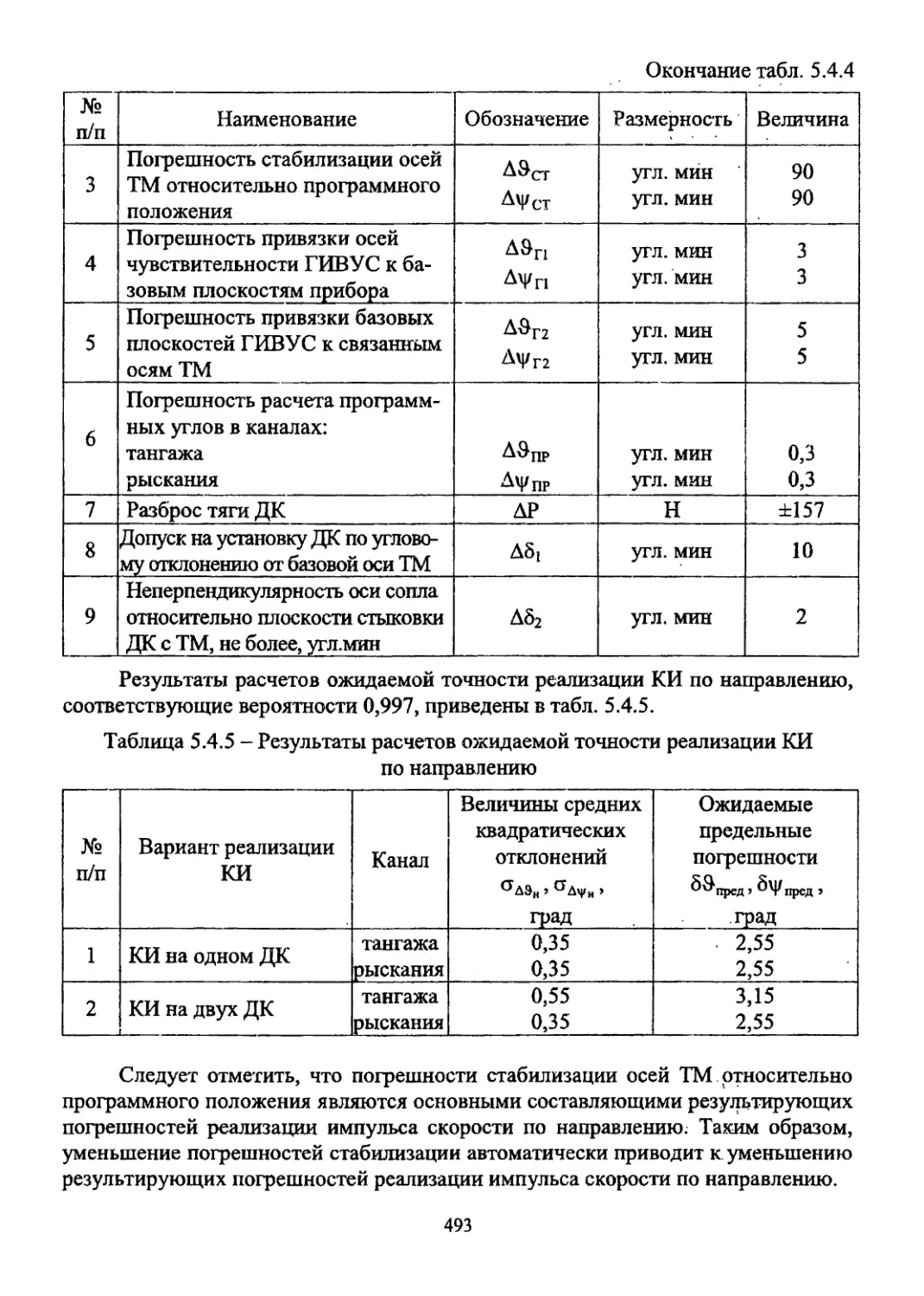
5.4.3 Анализ погрешности реализации импульсов скорости...............492
9
5.4.3.1 Анализ погрешности реализации импульсов скорости по направлению ..492
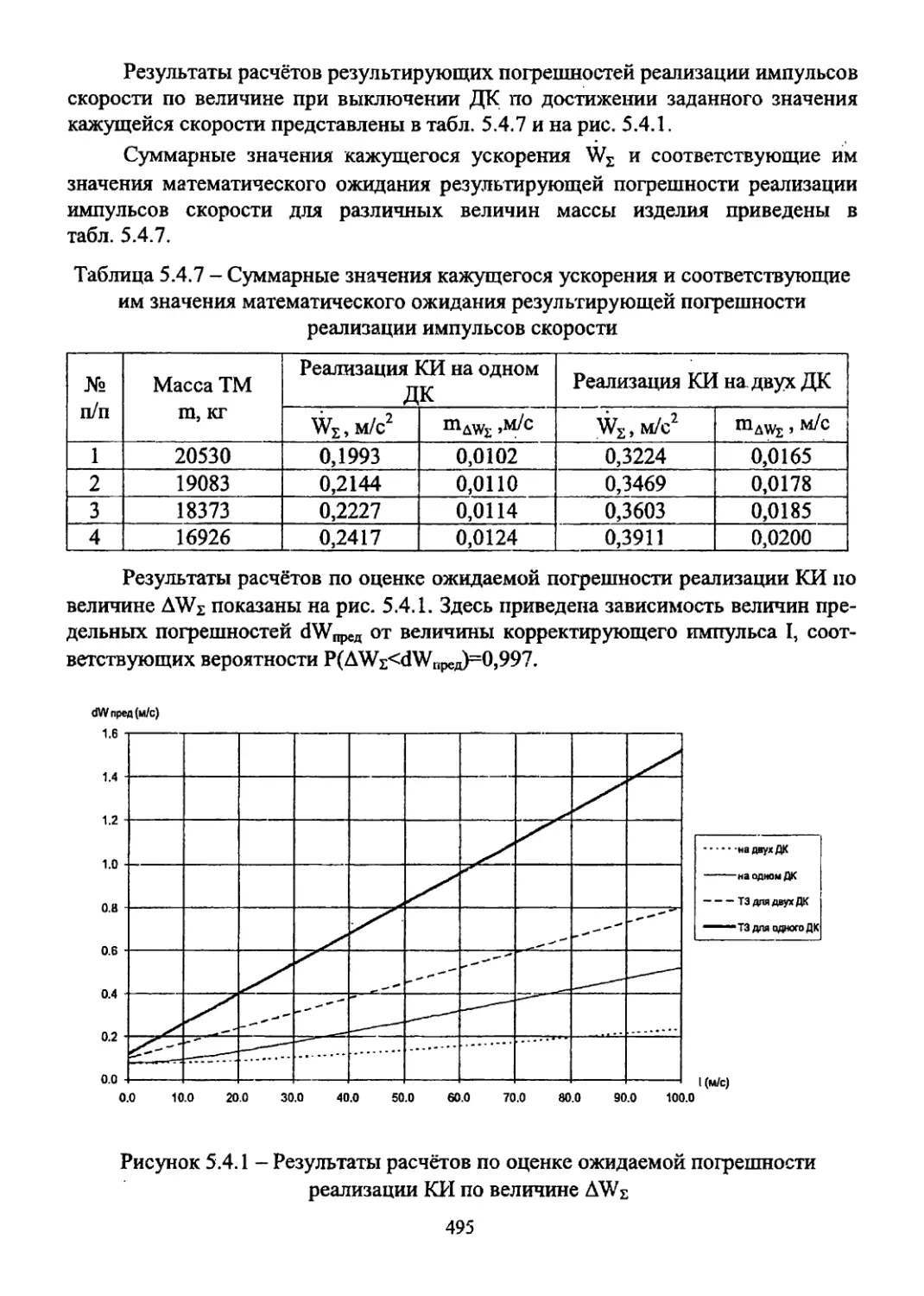
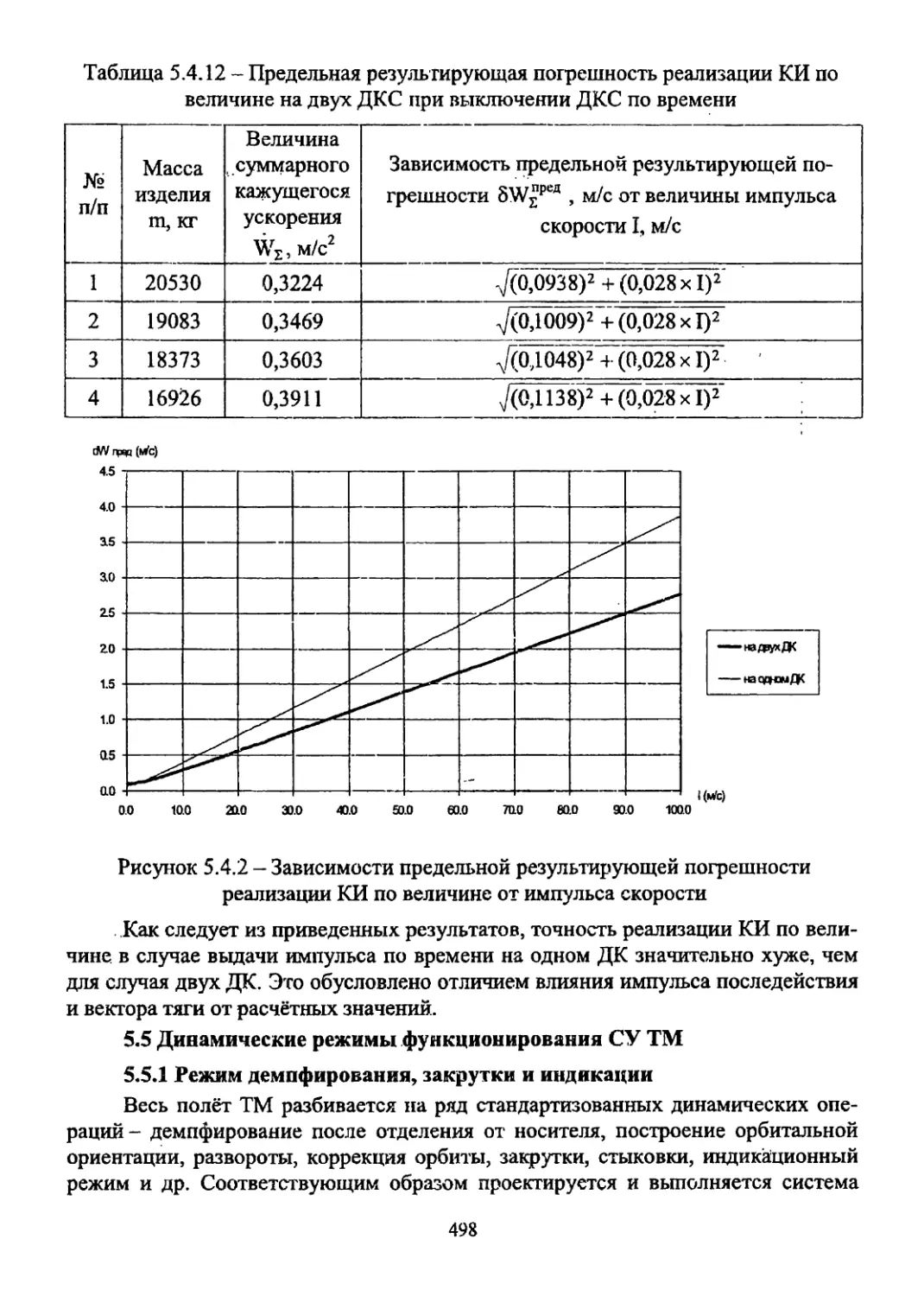
5.4.3.2 Анализ точности реализации импульсов скорости по величине..494
5.5 Динамические режимы функционирования СУ ТМ.....................498
5.5.1 Режим демпфирования, закрутки и индикации....................498
5.5.1.1 Назначение и требования к режиму...........................499
5.5.1.2 Приборный состав СУОС в режиме.............................500
5.5.1.3 Принципы построения режима.................................500
5.5.2 Режим построения базовой ориентации..........................502
5.5.2.1 Назначение и требования к режиму...........................502
5.5.2.2 Приборный состав СУОС в режиме.............................503
5.5.2.3 Принципы построения режима. Основные формульные схемы алгоритмов....503
5.5.2.4 Анализ точности построения базовой ориентации..............507
5.5.2.5 Моделирование работы СУОС в режиме.........................508
5.5.3 Режим выдачи корректирующего импульса........................523
5.5.3.1 Требования к режиму........................................523
5.5.3.2 Приборный состав и принципы построения режима..............524
5.5.4 Режим сближения и причаливания...............................528
5.5.4.1 Назначение и особенности режима........................... 528
5.5.4.2 Требования к режиму, к баллистической траектории сближения и к па-
раметрам относительного движения...................................529
5.5.4.3. Приборный состав СУ в режиме..............................531
5.5.4.4 Информационные системы, используемые в режиме..............532
5.5.4.4.1 Навигационная аппаратура потребителя (НАЛ)...............532
5.5.4А2 Радиотехническая система измерения параметров относительного дви-
жения «Курс-ММ»....................................................533
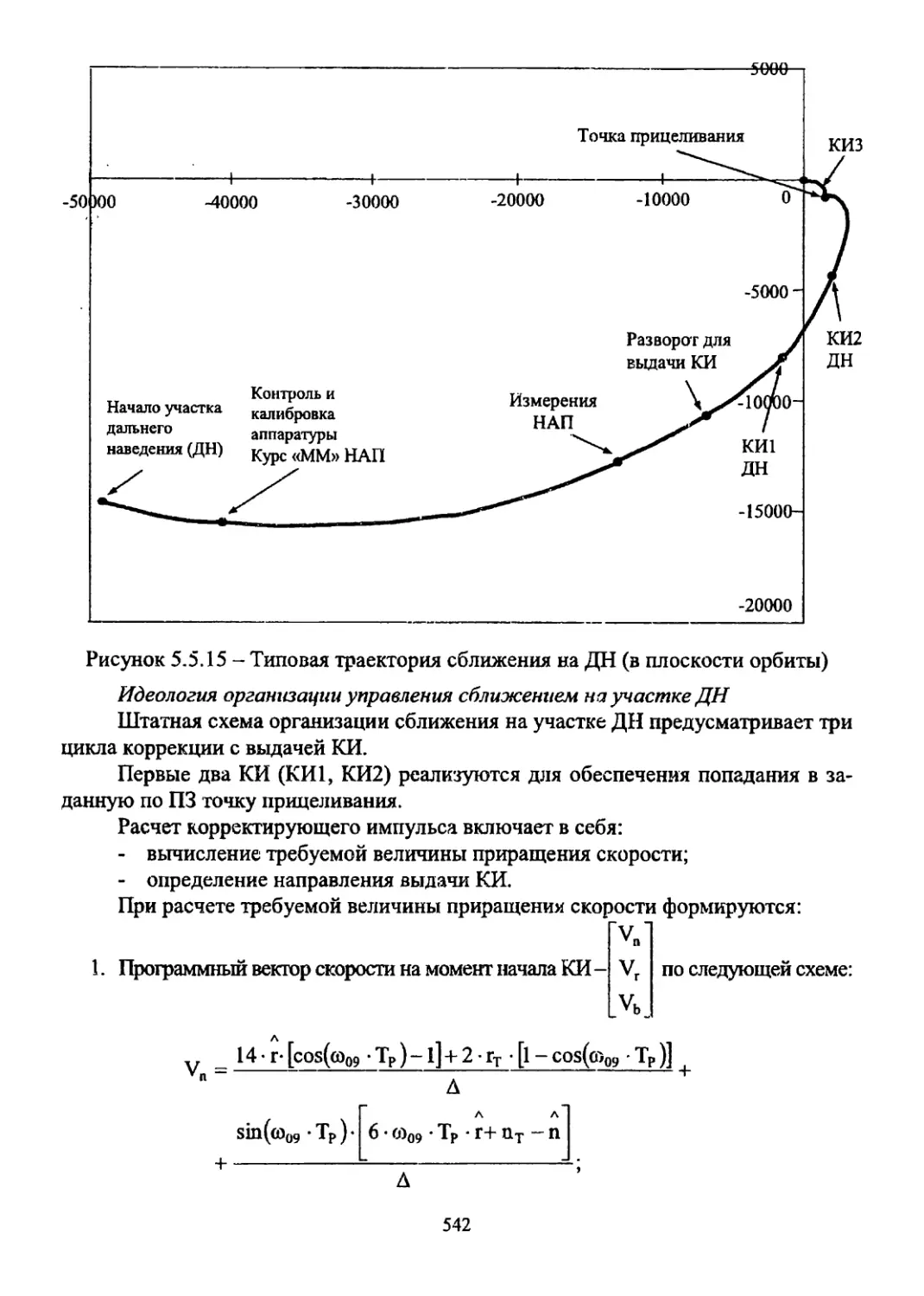
5.5.4.5 Орбитальные маневры. Траектории сближения..................537
5.5.4.6 Схема доступа к кооперируемым объектам.....................538
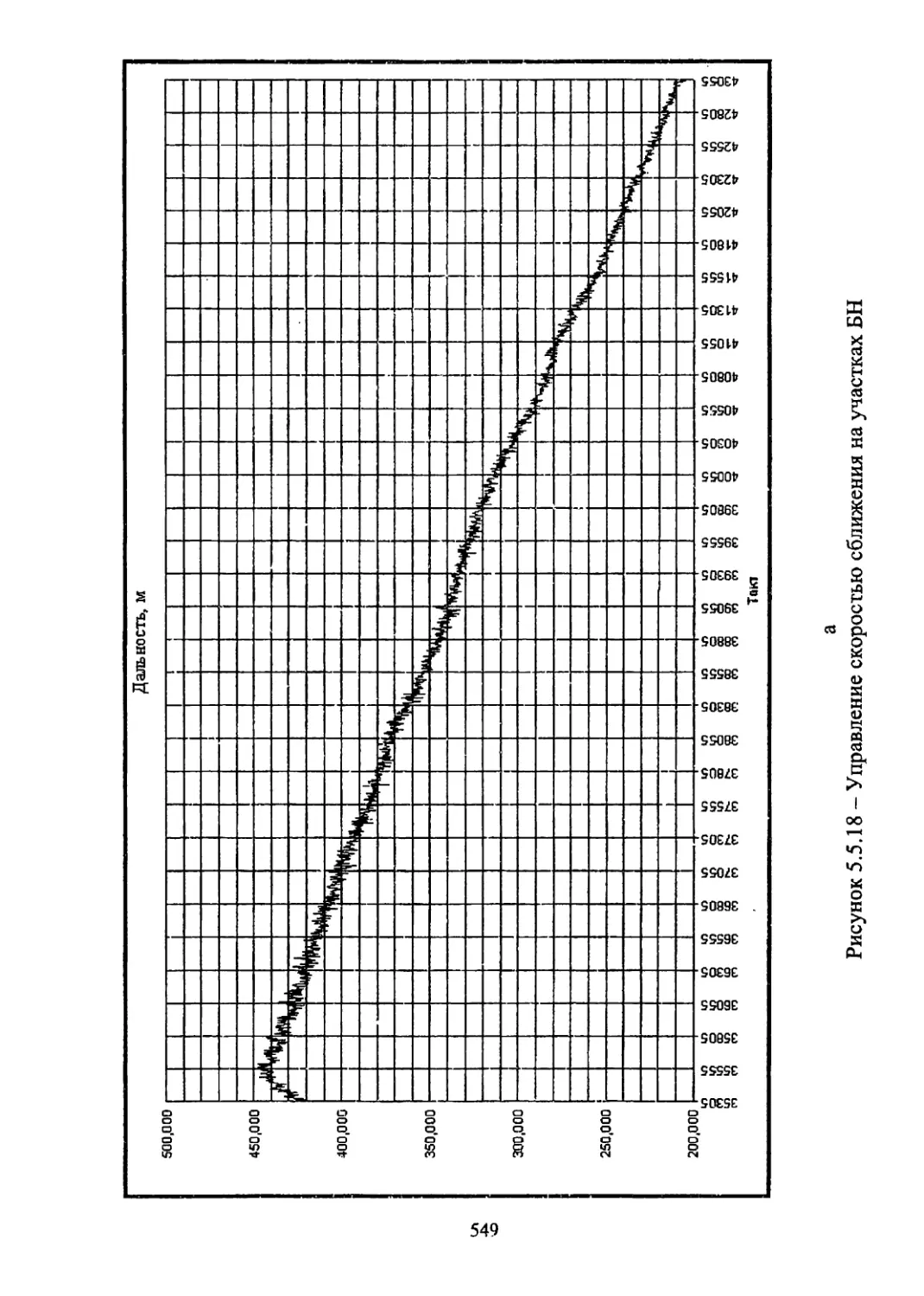
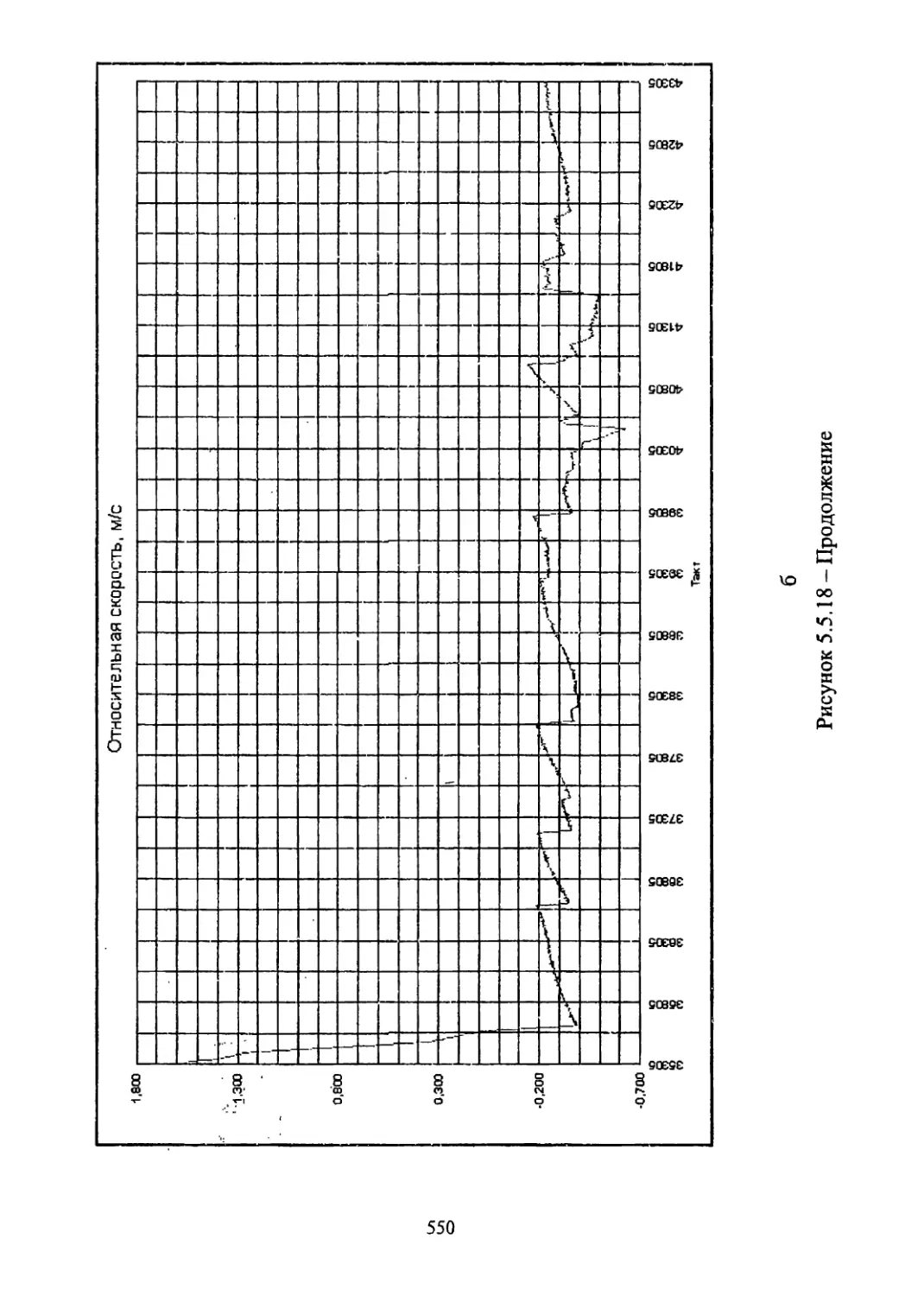
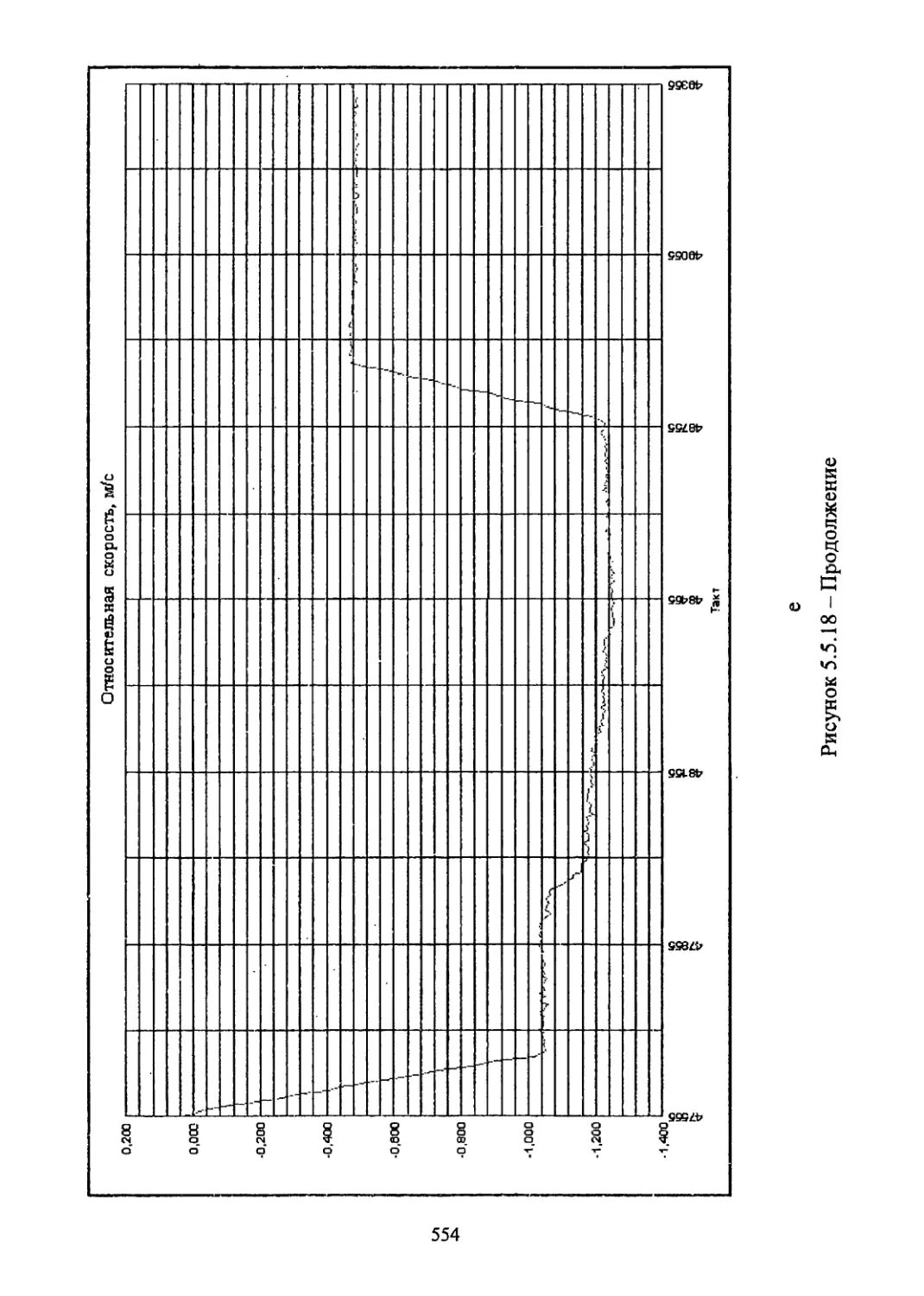
5.5.4.7 Принципы построения управления-на участке дальнего наведения (ДН).54О
5.5.4.8 Особенности выбора прицельной точки для дальнего наведения.545
5.5.4.9 Управление сближением на участке ближнего наведения........545
5.5.4.10 Принципы бортового навигационного обеспечения режима сближения и
причаливания.......................................................557
5.5.4.11 Методы обеспечения безопасности кооперируемых объектов при под-
лете и зависании...................................................561
5.5.4.12 Обеспечение условий для передачи управления аппаратуре телеопера-
торного режима управления (ТОРУ)...................................561
5.5.4.13 Контроль нештатных ситуаций в режиме......................561
5.6 Особенности применения СУ ТМ для управления крупногабаритным орбиталь-
ным комплексом растущей конфигурации............................. 567
5.6.1 Управление при построении ориентации и угловых маневрах......567
5.6.1.1 Принципы построения и основные формульные схемы алгоритма
углового маневра (программного разворота)..........................567
5.6 Л .2 Квазиоптимальное управление на участках набора и гашения угловой
скорости разворота.................................................574
10
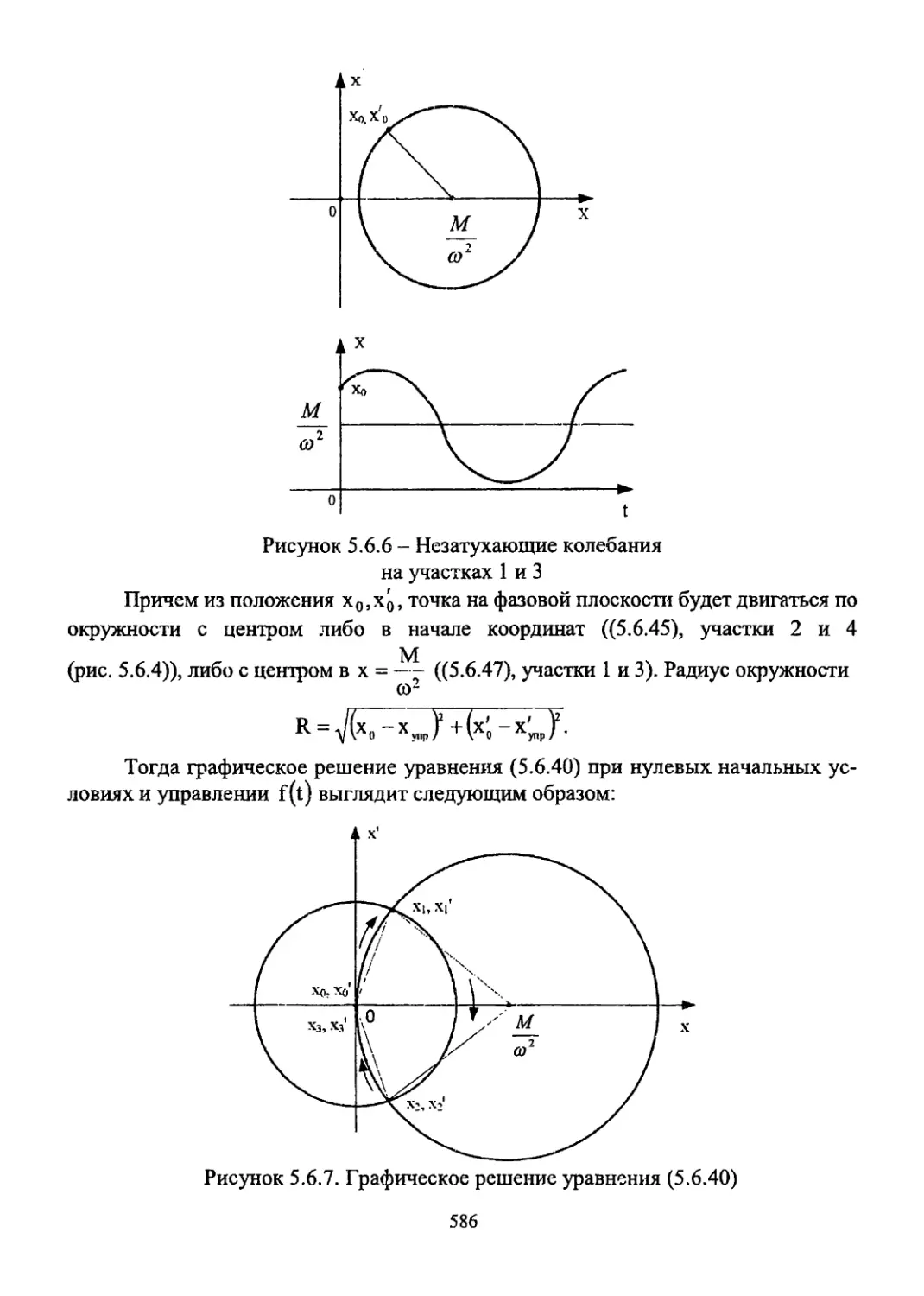
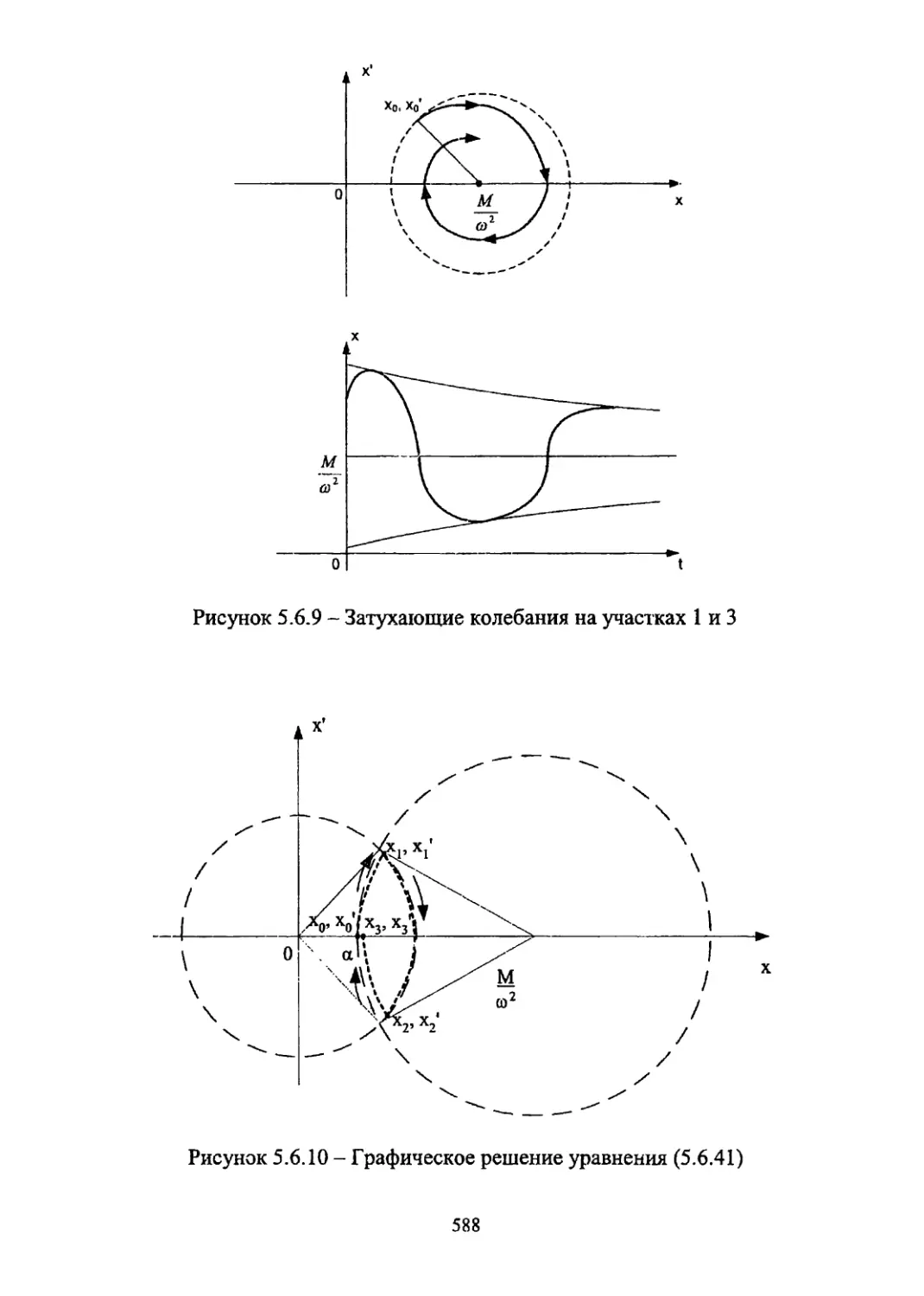
5.6.2 Стабилизация при коррекции орбиты...........................581
5.6.3 Обеспечение экономичного длительного ориентированного полета.590
5.7 Управление при отделении и уводе ТМ от орбитальной станции....591
5.8 Завершение работы с ТМ. Маневр спуска с орбиты.................592
Библиографический список к разделу 5..............................594
6 ИНТЕГРИРОВАННАЯ СРЕДА РАЗРАБОТКИ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
(ПО) БОРТОВЫХ КОМПЬЮТЕРОВ (БК) СУ КОСМИЧЕСКИХ КОМПЛЕКСОВ.... 599
6.1 Методологические и организационные средства производства ПО БК
систем управления КА...............................................599
6.2 Архитектура и средства разработки программного обеспечения....600
6.3 Средства верификации ПО встроенного БК.........................602
6.4 Этапы верификации и валидации ПО БК......................... 606
6.4.1 Задачи и этапы верификации ПО............................. 606
6.4.2 Этапы жизненного цикла создания ПО..........................607
6.4.3 Методы верификации ПО БК....................................609
6.4.4 Критерии оценки ПО требованиям спецификации.................611
6.4.5 Верификация модулей методом тестирования....................613
6.4.6 Интеграционное тестирование модулей в составе проекта.......613
6.4.7 Системные испытания.........................................615
6.4.8 Приемочные испытания .......................................616
6.5 Конфигурация автоматизированного рабочего места (АРМ) инженера-програм-
миста для верификации ПО..........................................617
6.5.1 Подсистема подготовки спецификаций и словарей...............618
6.5.2 Автоматическая подсистема обработки результатов выполнения ПО на кон-
трольных тестах при тестировании ПО на встроенном БК (критерии завершен-
ности тестирования ПО)...........,............................... 618
6.5.3 Верификация ПО средствами системы комплексно-динамического тести-
рования и отладки (СКДО)..........................................620
6.6 Сопровождение ПО БК при натурных испытаниях и эксплуатации КА..621
Библиографический список к разделу 6............................. 624
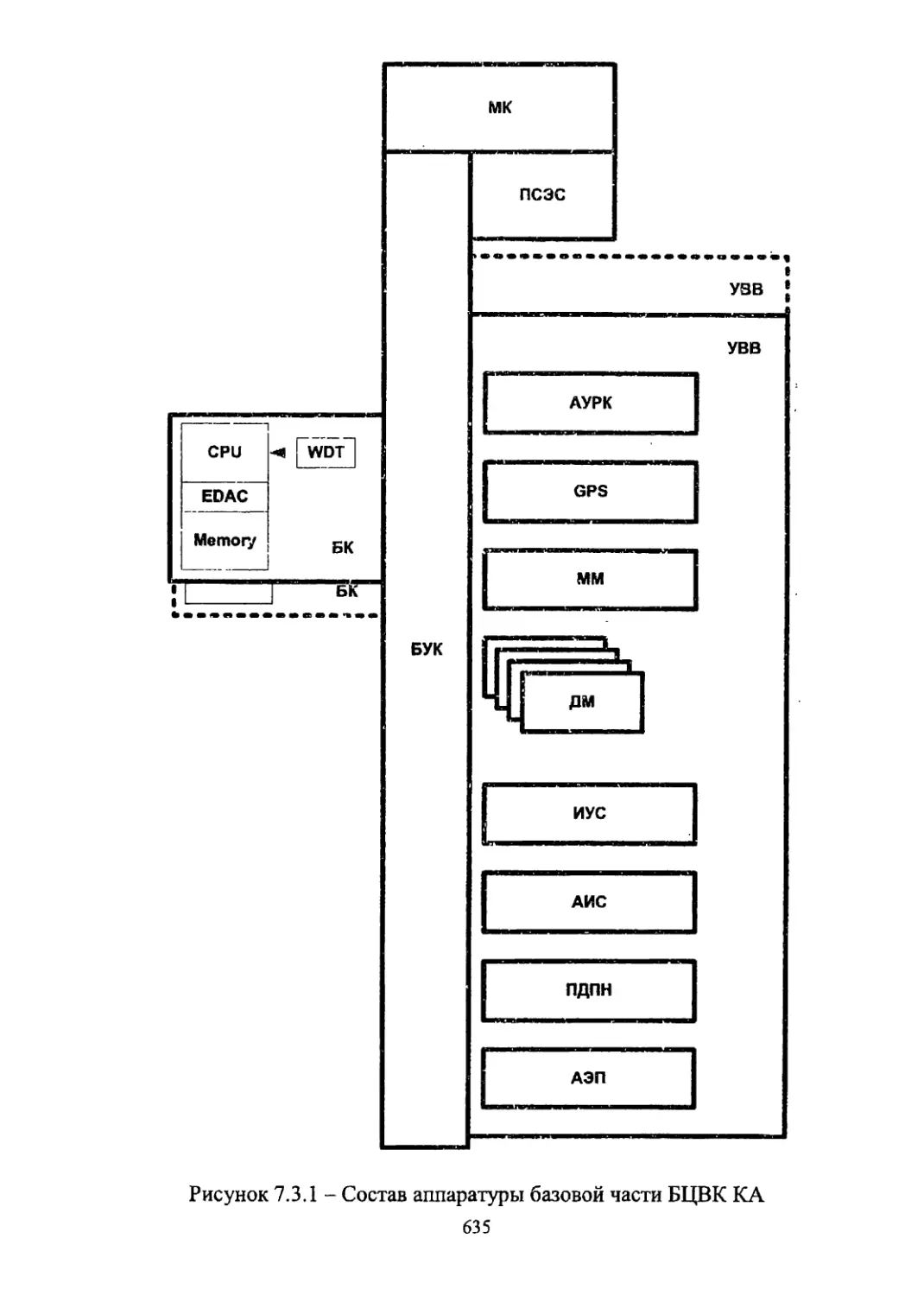
7 ОСОБЕШОСТИПЮЕКТИРОВАНИЯ ЮРТ ОВОЙ АППАРАТУРЫ. ПРИНЦИПЫ
ОБЕСПЕЧЕНИЯ ОТКАЗОУСТОЙЧИВОСТИ БЦВК СИСТЕМ УПРАВЛЕНИЯ КА
С ДЛИТЕЛЬНЫМ СРОКОМ АКТИВНОГО СУЩЕСТВОВАНИЯ....:..................625
7.1 Постановка задачи обеспечения отказоустойчивости БЦВК систем управления КА. 625
7.2 Классификация отказов БЦВК....................................626
7.2.1 Математические модели сбоев.................................627
7.2.2 Влияние сбоев на работу БЦВМ................................630
7.3 Типовая архитектура управляющего БЦВК систем управления КА....632
7.4 Магистрально-модульный принцип построения отказоустойчивых БЦВК. Выбор
элементной базы...................................................636
7.5 Принципы построения сбоеустойчивых БЦВМ.......................638
7.5.1 Требования к аппаратным средствам сбоеустойчивых БЦВМ.......638
7.5.1.1 Блок восстановления...................................... 638
7.5.1.2 Организация памяти состояния системы.......................640
1!
7.5.1.3 Служба реального времени................................. 640
7.5.1.4 Сторожевой таймер.........................................640
7.6 Методы обеспечения надежности передаваемой информации.........641
7.7 Методика расчёта надёжности БЦВК..............................645
7.7.1 Общие положения.............................................645
7.7.1.1 Показатели надежности.....................................645
7.7.2 Методика получения расчетных формул.........................646
7.7.2.1 Использование ССН или СЛСН.....................................646
7.7.2.2 Использование формулы полной вероятности..................647
7.7.3 Методика расчета надежности нерезервированной аппаратуры....648
7.7.3.1 Исходные данные для расчёта показателей надёжности........648
7.7.3.2 Формулы для расчёта показателей надёжности................650
7.7.3.3 Методика нормирования показателей надёжности для составляющих
приборов БЦВК.....................................................660
7.7.3.4 Расчёт надёжности «условно-базового» прибора..............661
7.7.3.5 Выбор «базового» прибора для нормирования надёжности...........661
7.7.3.6 Выбор коэффициентов сложности.............................661
7.7.3.7 Нормирование надёжности на составляющие приборы...........662
7.7.3.8 Нормирование надёжности на приборы, входящие в резервированную группу...664
7.8 Обеспечение надёжности БЦВК в процессе изготовления и эксплуатации.668
7.8.1 Программа обеспечения надёжности............................668
7.8.1.1 Общие требования..........................................668
7.8.1.2 Требования к структуре, оформлению и содержанию ПОН.......670
7.8.2 Квалификационные испытания..................................675
Библиографический список к разделу 7............................. 675
Приложение к подразделу 7.8.1. Методическое обеспечение мероприятий ПОН.676
8 ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ КА И
МОДУЛЕЙ ОРБИТАЛЬНЫХ СТАНЦИЙ............................................677
ПОСЛЕСЛОВИЕ............................................................680
12
СПИСОК СОКРАЩЕНИЙ
АИС - асзроизмерительная система;
АВК - аппаратура входного контроля;
АДУ - автоматика двигательной установки;
АК - астрокоррекция;
AM - астрофизический модуль;
АО - алгоритмическое обеспечение;
АОБИ - алгоритмы обработки бортовой информации;
АОО - алгоритм определения ориентации;
АПСНС - аппаратура потребителя спутниковой навигационной системы;
АП СРНС - аппаратура потребителя спутниковой радионавигационной системы;
АПС - аппаратура пиросредств;
АРМ - автоматизированное рабочее место;
АСН - автономная система навигации;
АЦП - аналогово-цифровой преобразователь;
БА - блок акселерометров;
БАИБ - бесплатформенный астроинерциальный блок;
БД - ближнее действие;
БИНС - бесплатформенная инерциальная навигационная система;
БИРС - бортовая информационно-распределительная система;
БИСО - бесплатформенная инерциальная система ориентации;
БИУС - блок измерителей угловой скорости;
БК - бортовой компьютер;
БКПДП - бортовой компьютер подсистемы данных платформы;
БКПОУО - бортовой компьютер подсистемы определения и управления ориентацией;
БКС - бортовая кабельная сеть;
БН - ближнее наведение;
БНО - баллистико-навигационное обеспечение;
Б НУ - блок начальной установки;
БП - блок питания;
БРП - блок распределения питания;
БСК - базовая система координат;
БСТК - блок согласования телеметрического кадра;
БСЧ - блок спецчастот;
БУК - блок управления конфигурацией;
БУМ - блок усилителей мощности;
БЦВК - бортовой цифровой вычислительный комплекс;
БЦВМ - бортовая цифровая вычислительная машина;
БЭ - блок электроники;
ВА - возвращаемый аппарат;
ВО - верхняя орбита;
ВОГ - волоконно-оптический гироскоп;
ВОСПР - режим воспроизведения ТМИ;
13
BP - волоконный разветвитель;
ВСК - визирная система координат;
ВТ - высокая точность;
ВУ - выходное устройство;
ВУС - выносные устройства связи;
ГБ - гироблок;
ГИВУС — гироскопический измеритель вектора угловой скорости;
ГЛОНАСС - глобальная навигационная спутниковая система;
ГСЕВ - Государственная Система Единого Времени;
ГСК - Гринвичская система координат;
ГЦВ - геоцентрическая вертикаль;
ДД - дальнее действие;
ДК - двигатель коррекции;
ДКС - двигатель коррекции и сближения;
ДМ - двигатель-маховик;
ДМТ - двигатель малой тяги;
ДН - дальнее наведение;
ДП -- деполяризатор;
ДПС - двигатель причаливания и стабилизации;
ДС - двигатель стабилизации;
ДСмт - двигатели стабилизации малой тяги;
ДТМИ - датчиковая телеметрическая информация;
ДТС - двигатель точной стабилизации;
ДУ — датчик угла (по тексту);
ДУ - двигательная установка;
ДУ С - датчик угловой скорости;
ЗАП - режим записи ТМИ;
ЗД — звездный датчик;
ЗИП - запасные инструменты и_приборы;
ЗУ - запоминающее устройство;
ИА - измерительная аппаратура;
ИИО - инерционные исполнительные органы;
ИК - измерительный канал;
ИНО - инерциальная ориентация;
ИО - исполнительный орган;
ИРС - информационно-распределительная система;
ИС - измерительная система;
ИСЗ - искусственный спугник Земли;
ИСК - инерциальная система координат;
ИУС - измеритель угловой скорости;
ИЭ - исполнительный элемент;
КА - космический аппарат;
КАД — коммутатор аналоговых датчиков;
КИ - корректирующий импульс;
КИА - контрольно-испытательная аппаратура;
КИА - контрольно-имитационная аппаратура (по тексту);
14
КИК - командно-измерительный комплекс;
КИС - командно-измерительная система;
КИС - контрольно-испытательная станция (по тексту);
КИУС - комплект измерителей угловой скорости;
КМОП - комплементарная структура металл окисел полупроводника;
КНС - космические навигационные системы;
КО - кооперируемый объект (по тексту);
КО - космический объект;
КОЭКП - комплекс оптико-электронных командных приборов;
КПА - контрольно-проверочная аппаратура;
КПЭО - комплексная программа экспериментальной отработки;
КРЛ - командная радиолиния;
КСД - коммутаторы сигнальных датчиков;
КТ - контрольная точка;
КТПД - коммутатор температурных и потенциометрических датчиков;
ЛВ -- линия визирования;
ЛК - локальный коммутатор;
ЛКИ - летно-конструкторские испытания;
ЛОИ - лабораторные отработочные испытания;
ЛПД - линия передачи данных;
ЛСХ - логическая схема;
МАИС - малогабаритная астроизмерительная система;
МГТ - магнитометр;
МД - малый двигатель;
МИД - моментный исполнительный двигатель;
МИО - магнитные исполнительные органы;
МИОЭ - многофункциональный интегрально-оптический элемент;
МИП - массив изменения программ;
МкК - микроконтроллер;
МКС - международная космическая станция;
МЛМ - многоцелевой лабораторный модуль;
ММ - математическая модель;
ММСГК - математическая модель силового гироскопического комплекса;
МПР - малый порог разгрузки;
МТ - модуль телеметрии;
МЭМС - микроэлектромеханическая система;
НА - научная аппаратура;
НАЛ - навигационная аппаратура потребителя;
НВ - режим непосредственной выдачи ТМИ;
НГО - носовой головной обтекатель;
НКА - навигационный космический аппарат;
НКС - наземная кабельная сеть;
НКУ - наземный комплекс управления;
НО - нижняя орбита;
НП - режим непосредственной передачи ТМИ;
НППИ - наземный пункт приёма информации;
15
НС - наземный сегмент;
НСУ - наземная станция управления;
ОГ - орбитальная группировка;
ОЗУ - оперативное запоминающее устройство;
ОИУС - одноосный измеритель угловой скорости;
ОКШ - основной коммутатор-шифратор;
ОМ - опорная метка;
ОНА - остронаправленная антенна;
ООП - общая область памяти модуля телеметрии;
ОП - опасная продолжительность;
ОР - основная работа;
ОС -- операционная система (по тексту);
ОС - орбитальная станция;
ОСК - орбитальная система координат;
ОФ - ограниченное функционирование;
ПАО - программно-алгоритмическое обеспечение;
ПБО - построение базовой ориентации;
ПБСК - приборно-базовая система координат;
ПВ - приемовычислитель;
ПВУ - программно-временное устройство;
ПГО - приборно-грузовой отсек;
ПДЦМ - параметры движения центра масс;
ПЗ - полетное задание;
ПЗС - прибор с зарядовой связью;
ПЗУ - постоянное запоминающее устройство;
ПИ - программа измерений;
ПК - приборный контейнер;
ПКН - преобразователь «код - напряжение»;
ПМВ - построитель местной вертикали;
ПН - полезная нагрузка;
ПНК - преобразователь «напряжение - код»;
ПО - программное обеспечение;
ПО - прецизионная ориентация (по тексту);
ПОЗ - прибор ориентации на Землю;
ПОН - программа обеспечения надежности;
ПОС - прибор ориентации на Солнце;
ППЗ - прибор Полярной звезды;
ПС - программная ситуация;
ПСК - приборная система координат;
ПСК - программная система координат (по тексту);
ПСО - построение солнечной ориентации;
ПЭ - пироэлемент;
ПЭВМ - персональная электронно-вычислительная машина;
РЕД - редуктор;
РЗ - рабочая звезда;
PH - ракета-носитель;
16
РПО РПР РТС РУ САКАРИ - - режим посекундного опроса; - режим программных разворотов; - радиотелеметрическая система; - рабочий участок; - система автоматизированного контроля и анализа результатов испытаний;
САН СБ СВ СГ СГК СД СЕВ сзк СИ сипод - сит СК скдо ско СКР слд слсн снс сони сон СОСБ СПС сск ссн СТС СУ СУБК СУОД СУОС СхФ СхЭ СЭС тдс тду тз ткп ткс ТМ ТМ тми - система автономной навигации; - солнечная батарея; - спецвычислитель; - силовой гироскоп; - силовой гироскопический комплекс; - солнечный датчик; - Система Единого Времени; - солнцезащитная крышка; - система измерений; - система измерения параметров относительного движения; - система измерения температур; - система координат; - система комплексного динамического тестирования и отладки; - среднеквадратическое отклонение; - стабилизация при выдаче корректирующего импульса; - суперлюминесцентный диод; - структурно-логическая схема надежности; - спутниковая навигационная система; система обеспечения навигационной информации; - специальная область памяти модуля телеметрии; - система ориентации солнечных батарей; - связная подсистема; - связанная система координат; - структурная схема надежности; - система термостатирования; - система управления; - система управления бортовым комплексом; - система управления и обработки данных; - система управления ориентацией и стабилизации; - схема функциональная; - схема электрическая; - система электроснабжения; - тестирование динамической схемы; - тормозная двигательная установка; - техническое задание; - тестовый контрольный пример; - транспортный корабль снабжения; - транспортный модуль (по тексту); - телеметрия; - телеметрическая информация;
17
тмк ТОРУ ТСУ - телеметрический кадр; - телеоператорный режим управления; - телеметрические согласующие устройства;
УВВ - устройство ввода-вывода;
УВК - управляющий вычислительный комплекс;
УИВК — управляющий информационно-вычислительный комплекс;
УКО - упругий крупногабаритный объект;
УСВК - устройство связи вычислительных комплексов;
ФГБ - функционально-грузовой блок;
ФОС - фокусирующая отклоняющая система;
ФПЗС - фотоэлектрический прибор с зарядовой связью;
ФПУ - фотоприемное устройство;
ЦВУ - цифровое вычислительное устройство;
цм - центр масс;
цтми - цифровая телеметрическая информация;
ЦУП - центр управления полетом;
чэ - чувствительный элемент;
шд - шаговый двигатель;
ШИМ - широтно-импульсная модуляция;
эм - электромагнит;
эмио - электромеханические исполнительные органы;
ЭРИ - электрорадио изделия;
эск - экваториальная система координат;
аде - язык динамических спецификаций;
CCSDS - консультативный комитет по космическим системам данных;
cue - ^сегментированный CCSDS-код времени;
СП - спутниковый приемник;
DT - терминальный отладчик;
ECSS - Европейское сообщество по стандартизации космических систем;
ESA - Европейское космическое агентство;
GPS - глобальная система позиционирования;
ID - идентификатор прикладного процесса;
JD - юлианская дата;
SSP - простой последовательный протокол;
TAI - международное атомное время;
TDB - барицентрическое динамическое время;
UT1 - всемирное время среднего Гринвичского меридиана;
UTC - всемирное координированное время.
18
ПРЕДИСЛОВИЕ
Казалось бы, что многие, если не все, аспекты проектирования систем
управления (СУ) объектов ракетно-космической техники (РКТ) рассмотрены в
первой книге изучаемого Вами, уважаемый читатель, трехтомника по созданию
автономных СУ. Однако многообразие особенностей и специфика проблем,
возникающих при реализации задач синтеза и анализа СУ космических аппаратов
(КА) и модулей орбитальных станций, привели нас к необходимости написать эту
книгу, чтобы изложить и вместе с Вами понять их суть. При общности-подходов
к проектированию СУ объектов РКТ есть очевидные особенности разработки
систем управления КА и модулей орбитальных станций, связанные в основном с
решением принципиально отличных от решаемых СУ PH задач, а также с
длительным полетом КА в космосе при сохранении работоспособности
аппаратуры. На наш взгляд, эти особенности играют очень важную роль при
разработке СУ такого типа объектов.
Необходимо отметить, что модули орбитальных станций по определению
также являются космическими аппаратами, тем не менее, учитывая существенную
специфику в вопросах проектирования СУ данных объектов РКТ, авторы решили
выделить их в отдельный класс и подчеркнуть этот факт в названии книги.
Структура данной книги такая же, как и первой. Она начинается с
представления технического задания (ТЗ) и исходных данных (ИД), выдаваемых
разработчиком КА или модуля орбитальной станции организации-создателю СУ.
Далее излагаются главные вопросы проектирования систем управления КА, к
которым авторы посчитали необходимым отнести:
- использование в полете многообразия управляющих органов и
различных командно-измерительных приборов;
- анализ динамической схемы крупногабаритных орбитальных
комплексов с учетом колебаний упругих элементов конструкции и
топлива в баках;
- автоматическое управление стыковкой модулей при создании
орбитальных станций;
- контроль, диагностика и парирование нештатных ситуаций;
- обеспечение отказоустойчивости бортового цифрового вычислительного
комплекса (БЦВК) системы управления КА при длительных сроках
полета и т.д.
Исследования и представленные результаты изложенных выше проблем,
приведенные в книге, позволяют понять специфику и особенности решения
основных задач, которые стоят перед разработчиком СУ объектов РКТ.
Книга рассчитана на студентов, инженеров, аспирантов, докторантов и
преподавателей дисциплин, связанных с проектированием и анализом работы
систем управления КА и модулей орбитальных станций.
Авторы выражают признательность всем коллегам, которые своим
вниманием, замечаниями, советами помогли появлению этой книги. Особая
признательность - рецензентам книги за ряд полезных замечаний, сделанных ими
при чтении рукописи.
19
ВВЕДЕНИЕ
В книге рассмотрены вопросы проектирования систем управления
космических аппаратов и модулей орбитальных станций от момента получения
технического задания (раздел 1) до решения задач создания программно-
алгоритмического обеспечения бортовых и наземных вычислительных средств,
разработки аппаратуры и необходимых приборов ориентации.
В разделе 2 особое внимание уделено анализу исходных данных,
получаемых от разработчика объекта управления, в целях выработки технических
решений по проектированию СУ, приведено описание исполнительных органов и
командно-измерительных приборов (раздел 3).
В разделе 4 изложены вопросы проектирования различных подсистем СУ
космических аппаратов разработки НПП Хартрон-Аркос, включающих в себя:
- наземное и бортовое баллистико-навигационное обеспечение КА;
- системы навигации околоземных и межпланетных КА;
- системы наведения КА;
- системы управления ориентацией и стабилизации (СУОС) КА с
использованием различных командно-измерительных приборов и
исполнительных органов;
- системы телеметрических измерений.
Представлены принципы проектирования таких основных режимов
функционирования КА:
- построения одноосной и трехосной солнечной ориентации;
- построения базовой солнечно-земной ориентации;
- программных разворотов и стабилизации;
- стабилизации при выдаче корректирующего импульса и др.
Основные моменты проектирования подсистем СУ транспортных модулей
орбитальных станций представлены в разделе 5. Особое место в этой части книги
уделено следующим режимам работы:
- демпфированию, закрутке и индикации, а также контролю и
парированию нештатных ситуаций;
- построению базовой орбитальной ориентации и методам борьбы с
нештатными ситуациями;
- сближению и причаливанию. Важными вопросами в этом режиме
являются орбитальные маневры и расчет траекторий сближения. При
этом подробно изложены принципы построения управления на участке
дальнего наведения, вопросы управления сближением на участке
ближнего наведения, методы обеспечения безопасности
кооперированных объектов при подлете и зависании.
Кроме того, в книге рассмотрены вопросы управления орбитальным
комплексом растущей конфигурации, обеспечения экономичного длительного
ориентированного полета, решения задач стабилизации при коррекции орбиты,
управления, при отделении и уводе модуля от орбитальной станции. Отдельно
рассмотрены проблемы, связанные со спуском возвращаемого аппарата и
завершением работ с орбитальным модулем.
20
В разделе 6 описаны интегрированные средства разработки программного
обеспечения (ПО) бортовых цифровых вычислительных машин (БЦВМ),
верификации ПО методом тестирования и эксплуатации КА.
В дополнение к разделу 5 первой книги «Проектирование систем
управления ракет-носителей» в разделе 7 настоящей книги изложены
особенности проектирования бортовой аппаратуры СУ объектов космического
назначения. Внимание уделено решению задач обеспечения отказоустойчивости
БЦВК систем управления КА с длительным сроком активного существования.
Представлены методические материалы расчёта надёжности БЦВК и
рассмотрены задачи программной поддержки его работоспособности при
эксплуатации.
В процессе изложения материалов книги на ряде примеров показана
реализация основных принципов и методов построения СУ разработки НПП
Хартрон-Аркос различных космических объектов:
- спутников дистанционного зондирования Земли: «Аркон», EgyptSat-1,
МС-2-8;
- КА системы наблюдения за земной поверхностью «Око-1»;
- спутника «Купон» системы связи «Банкир»;
- транспортных модулей орбитального комплекса «Мир»: «Квант-2»,
«Природа», «Спектр», «Кристалл»;
- функционально-грузового блока (ФГБ) «Заря» Международной
космической станции (МКС) «Альфа».
В разделе 8 настоящей книги подчёркнуты основные особенности решения
задачи проектирования систем управления КА и модулей орбитальных станций.
21
1 ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА РАЗРАБОТКУ СИСТЕМЫ
УПРАВЛЕНИЯ. НАЗНАЧЕНИЕ И ОСНОВНЫЕ ТРЕБОВАНИЯ
Техническое задание (ТЗ) является документом, в котором формулируется
постановка задачи разработки, подробно описываются требования к характери-
стикам системы управления. ТЗ состоит из следующих разделов:
- наименование, шифр и основание для выполнения разработки;
- цель выполнения разработки, наименование и индекс образца;
- тактико-технические требования к образцу;
- технико-экономические требования;
- требования по видам обеспечения (метрологическому, программно-
математическому и информационному);
- требования к сырью, материалам и комплектующим изделиям межот-
раслевого применения;
- требования к консервации, упаковке и маркировке;
- требования к учебно-тренировочным средствам;
- специальные требования;
- требования по обеспечению секретности (при необходимости);
- этапы выполнения работ;
- порядок выполнения и приёмки этапов разработки.
В первом томе книги [10] дано описание ТЗ на разработку СУ ракет-
носителей. С учетом этого здесь рассмотрим отдельные разделы ТЗ на разработку
системы управления КА.
1.1 Тактико-технические требования
Данный раздел технического задания на выполнение опытно-
конструкторской разработки системы управления КА является наиболее объем-
ным и включает в себя требования:
- к составу системы управления;
- общим техническим характеристикам;
- точностным и динамическим характеристикам СУ;
- интерфейсам СУ;
- надежности;
- эксплуатации, удобству технического обслуживания, ремонту и хране-
нию;
- эргономике и технической эстетике;
- транспортабельности;
- безопасности и экологической защите;
- стандартизации и унификации;
- технологичности;
- конструкции.
1.1.1 Состав системы управления КА
Состав системы управления определяется:
- приборным составом, весовыми характеристиками и энергопотреблени-
ем аппаратуры СУ;
22
- схемой общей СУ;
- структурой спецификаций СУ, составом документации;
- составом эксплуатационных документов;
- обеспечением надежности.
В приборном составе указывают наименование, количество, обозначение
приборов и комплекта кабелей, весовые характеристики и энергопотребление ап-
паратуры СУ.
На общей схеме приведены подключения друг к другу приборов СУ, связи
со смежными системами КА, связь с контрольно-проверочной аппаратурой. Ука-
зывают также комплекты кабелей, обеспечивающие указанные выше связи СУ.
Структура спецификаций СУ определяет состав и перечень основных кон-
структорских документов (спецификаций) на СУ.
Спецификация на бортовую аппаратуру СУ определяет состав комплекта
бортовой аппаратуры и разработанной документации. Она необходима для изго-
товления, комплектования конструкторских документов и планирования запуска
в производство указанных приборов.
Состав эксплуатационных документов (ЭД) бортовой аппаратуры СУ опре-
деляется их ведомостью. Комплектность ведомости ЭД определяется с учетом
спецификации на бортовую аппаратуру. При этом учитываются условия поставки
ЭД в головную организацию, в эксплуатирующую организацию и центр управле-
ния полетом КА для наземных испытаний, обеспечения пуска КА и летных испы-
таний соответственно.
1.1.2 Общие технические требования к СУ
В данном разделе ТЗ приводят требования к основным физическим харак-
теристикам СУ:
- масса аппаратуры;
- объем или габаритные размеры аппаратуры;
- потребляемая мощность СУ.
В зависимости от типа КА, для которого разрабатывается СУ, в зависимо-
сти от массы КА и от решаемых СУ задач диапазон ограничений на данные ха-
рактеристики может быть очень широким.
Так, для 20-тонного модуля орбитальной станции требования к характери-
стикам СУ составляют следующие величины [12].
Масса СУ не должна превышать:
- масса аппаратуры - 400 кг;
- масса бортовой кабельной сети (БКС)-ЗООкг (обычно уточняется по
результатам разработки).
Среднее энергопотребление СУ в установившемся режиме не должно быть
более 400 Вт.
Максимальная мощность, потребляемая СУ в самом напряженном режиме,
не должна превышать 900 Вт с учетом системы «Курс-A» (радиотехническая сис-
тема измерений, предназначенная для стыковки модуля и станции) и 500 Вт без
системы «Курс-А».
23
Для сравнения приведем требования к подсистеме определения и управле-
ния ориентацией (ПОУО) микроспутника дистанционного зондирования Земли
[И].
Масса ПОУО не должна превышать 16,0 кг (уточняется по результатам со-
гласования габаритных чертежей (ГЧ) на приборы).
Объем аппаратуры ПОУО согласовывается с Головной организацией (раз-
работчиком КА) при согласовании соответствующих габаритных чертежей и
должен быть приведен в документе контроля интерфейсов (ДКИ) ПОУО.
Потребляемая мощность ПОУО не должна превышать: в режиме успокое-
ния и построения солнечной ориентации - 27,6 Вт, в режиме поддержания сол-
нечной ориентации - 27,1 Вт, в режиме программных поворотов - 32,8 Вт, в ре-
жиме построения орбитальной ориентации - 27,1 Вт.
.Максимальная потребляемая мощность ПОУО в нештатных ситуациях
должна быть не более 145,5 Вт в течение времени не более 1 мин.
1.1.3 Требования к точностным и динамическим характеристикам СУ
Для теоретика-разработчика СУ наиболее важным является именно этот
раздел ТЗ.
Так как функционирование системы управления КА разбивается на после-
довательно выполняемые определенные режимы работы, то и в ТЗ удобно требо-
вания к точностным и динамическим характеристикам приводить по каждому
конкретному режиму.
Все режимы работы системы управления КА по функциональному назна-
чению можно разбить на основные и вспомогательные. В основных режимах ре-
шается целевая задача КА, а вспомогательные режимы обеспечивают условия ра-
боты основных режимов. Так, если КА представляет собой спутник дистанцион-
ного зондирования Земли, то основным режимом работы его СУ будет режим
программных разворотов и прецизионной стабилизации при съемке. Такие режи-
мы, как солнечная ориентация, построение орбитальной ориентации и другие,
будут являться вспомогательными.
Если КА представляет собой транспортный модуль орбитальной станции,
то основным режимом СУ будет режим сближения и причаливания, а остальные
режимы, такие, как построение базовой ориентации, выдача корректирующего
импульса и другие, должны обеспечивать подготовку этой целевой операции.
По точностным характеристикам режимы делят на грубые и точные (преци-
зионные).
В ТЗ на СУ в части управления ориентацией и стабилизации (управление
КА вокруг центра масс) предъявляют требования к таким параметрам:
- точности углового положения КА, а именно по точности определения
ориентации и точности ее поддержания, т.е. точности стабилизации;
- точности стабилизации КА по угловой скорости.
В части системы навигации и наведения (управление центром масс КА)
также предъявляются требования по точности определения навигационных пара-
метров, описывающих положение центра масс КА в пространстве (координаты и
24
скорость КА).
Для режима сближения и причаливания КА к орбитальной станции (ОС)
дополнительно предъявляют требования к точности ориентации продольной оси
КА в направлении ОС, требования к кинематическим параметрам относительного
движения стыкуемых объектов на момент их механического контакта.
Под динамическими характеристиками СУ обычно понимают требования к
длительностям режимов и отдельным динамическим операциям в них, например,
требуется, чтобы длительность программного разворота составляла не более за-
данной величины и т.п. По этому критерию можно выделить более или менее бы-
стродействующие СУ.
По расходу рабочего тела (топлива или газа) двигательной установкой или
величине потребляемой энергии электрическими исполнительными органами
может требоваться в ТЗ разработать экономичный режим, который иногда назы-
вают дежурным режимом. Дежурный режим может использоваться в качестве
режима, в который переходит СУ при возникновении нештатных ситуаций.
Обычно к такому типу режимов жестких точностных требований не предъявля-
ют.
Для примера ниже приведены точностные требования к режиму построения
базовой (орбитальной) ориентации (БСК) СУ многоцелевого лабораторного мо-
дуля (МЛМ) международной космической станции «Альфа» [12].
Максимальная ошибка построения БСК (определения СУ углового положе-
ния и направления осей БСК) должна быть +1 град по всем осям.
Ошибка стабилизации связанных осей МЛМ в построенной БСК должна
быть в пределах 5...90 угл.мин по углу и 0,1 град/с по угловой скорости (преду-
сматривается возможность по полетному заданию (ПЗ) расширения амплитуды
стабилизационных колебаний по углу до 10 град для организации экономичных
режимов СУ).
Максимальная величина случайной составляющей скорости “ухода” свя-
занных осей МЛМ относительно построенной базовой ИСК ±0,25 угл. мин/мин.
Продолжительность ориентации связанных осей МЛМ в базовую орби-
тальную систему координат с точностью ±1 град из неориентированного положе-
ния должна быть в интервале 20...80 мин (продолжительность построения ориен-
тации задается полетным заданием).
В режиме выдачи корректирующего импульса (КИ) в целях коррекции ор-
биты точностные требования к СУ МЛМ формулируют в следующем виде [12].
Среднеинтегральная ошибка стабилизации продольной оси МЛМ в направ-
лении выдачи корректирующего импульса (по отношению к построенной базовой
инерциальной системе координат - ИСК) должна составлять 30...90 угл.мин
(реализуется через полетное задание).
Уход направления ИСК в режиме выдачи КИ с использованием информа-
ции измерителя угловой скорости - 0,3Ч, где t - время режима в минутах.
Среднеинтегральная ошибка стабилизации 5уст определяется как интеграл
ошибки угловой стабилизации 5уст за время выдачи КИ ТИ1:
25
где у = у, и - углы рыскания и тангажа.
В пункте требований ТЗ к режиму выдачи КИ приводят также ограничения
на максимальную погрешность реализации приращения кажущейся скорости по
абсолютной величине в интервале 0,2 ... 100 м/с, продолжительность выдачи КИ.
Более подробно требования к точностным и динамическим характеристи-
кам СУ в режимах описаны в разделах 4 и 5 данной книги.
1.1.4 Требования к интерфейсам СУ
В СУ определяются механический, тепловой и электрические интерфейсы.
Механический интерфейс обеспечивает установку СУ на борту КА и ее со-
единение с конструкцией КА.
К механическому интерфейсу предъявляют следующие требования:
- к конструкции приборов СУ на их соответствие габаритному чертежу;
- конструкции узлов крепления приборов СУ на борту КА (обеспечение
проведения сборочных работ с применением стандартного инструмен-
та);
- конструкции приборов СУ для обеспечения удобства доступа к разъе-
мам, удобства их стыковки и расстыковки с применением стандартного
инструмента, удобства монтажа и демонтажа приборов и кабелей СУ;
- мерам, направленным на исключение возможности неадресного под-
ключений разъемов при сборке электрической схемы КА;
- характеристикам механического интерфейса.
Тепловой интерфейс обеспечивает объединение теплового режима работы
СУ с тепловым режимом работы КА.
Требования к тепловому интерфейсу содержат описание рабочих диапазо-
нов температур для приборов и кабелей, размещенных внутри отсеков КА, харак-
теристики теплового интерфейса.
Из электрических интерфейсов используют следующие интерфейсы:
- электропитания;
- включения СУ;
- команд и сигналов управления;
- телеметрического контроля;
- управления исполнительными органами;
- обмена данными.
Интерфейс электропитания обеспечивает прием электроэнергии от системы
электропитания (СЭП) для питания устройств СУ.
В требованиях к интерфейсу электропитания указывают:
- параметры питания на входе СУ;
- условия изменения напряжения питания, при которых СУ должна со-
хранять работоспособность;
26
- меры защиты бортовой сети КА от коротких замыканий и других неис-
правностей, приводящих к устойчивому повышению 'мощности;
- характеристики интерфейса электропитания.
Интерфейс включения СУ обеспечивает прием системой сигналов, по кото-
рым проводится включение СУ. В требованиях к интерфейсу включения указы-
вают вид сигнала, тип линии связи, по которому сигнал выдается.
Интерфейс команд и сигналов управления обеспечивает прием от смежных
систем КА команд и сигналов управления, по которым выполняется изменение
режимов функционирования и отключение СУ. В требованиях к интерфейсу ука-
зывают характеристики и схему приема команд управления.
Интерфейс телеметрического контроля обеспечивает выдачу в бортовую
систему телеметрического контроля информации о состоянии телеметрических
датчиков и согласующих устройств, входящих в состав СУ. В требованиях к ин-
терфейсу приводят характеристики и схемы телеметрических датчиков СУ.
Интерфейс управления исполнительными органами (ИО) обеспечивает
управление включением/выключением и полярностью включения ИО. Требова-
ния к интерфейсу содержат описание сигналов управления, их тип и характери-
стики.
Интерфейсы обмена данными предназначены для таких операции:
- приема измерительной и диагностической информации из приборов СУ;
- выдачи управляющей информации в приборы СУ;
- обмена информацией со смежными системами КА.
В требованиях к интерфейсам обмена данными приводят описание каналов
обмена. Указывают процедуру взаимодействия, схему сопряжения, характери-
стики канала передачи, форматы данных, перечень кодов команд, используемых
при обмене по интерфейсу.
1.13 Требования к надежности
Являясь одной из важнейших систем КА, система управления должна обес-
печивать жесткие требования к своей надежности.
Под надежностью СУ понимают ее свойство сохранять в установленных
пределах, в течение всего срока эксплуатации в заданных условиях, значения
эксплуатационно-технических параметров. В качестве характеристик надежности
СУ приняты безотказность, долговечность и сохраняемость [12].
Высокая надежность СУ обеспечивается применением схемно-
конструктивных решений, структурных и алгоритмических мер.
Схемно-конструктивными мерами, позволяющими уменьшить интенсив-
ность отказов системы, являются:
- применение отработанных схемно-технических и конструктивных ре-
шений;
- использование отработанной технологии изготовления аппаратуры;
- применение электрорадиоизделий (ЭРИ) в облегченных электрических,
механических и тепловых режимах;
- унификация узлов, блоков;
27
- применение входного и диагностического неразрушающего контроля,
технологической тренировки составных частей аппаратуры.
В разрабатываемой аппаратуре используют ЭРИ, наиболее полно обеспечи-
вающие характеристики аппаратуры по электрическим параметрам, габаритно-
массовым характеристикам и надежности.
Для обеспечения надежности СУ применяют структурные меры:
- рациональное использование различных способов резервирования на
уровне приборов, блоков, узлов и элементов (трехканальные схемы ре-
зервирования приборов);
- дублирование приборов при «холодном» резерве и другие структурные
решения.
При эксплуатации СУ предусматривают контроль работоспособности при-
боров, обнаружение неисправного прибора, автоматическое включение и выклю-
чение резервного прибора.
Приведем требования к характеристикам надежности на примере ТЗ на раз-
работку СУ МЛМ [12].
СУ должна обладать следующими характеристиками надежности.
Безотказность:
вероятность безотказной работы СУ при наработке 350 часов на орбите
должна быть не менее 0,99 из расчета трех месяцев эксплуатации.
Долговечность:
назначенный срок службы СУ - восемь лет, из них:
- эксплуатация на контрольно-испытательной станции (КИС), техниче-
ской и стартовой позициях (ТП и СП) - не более двух лет;
- эксплуатация на орбите не более одного года, из них по программе поле-
та - не более трех месяцев.
Назначенный ресурс СУ - 2700 часов, из них:
- наработка СУ при проверках на КИС, ТП и СП - не более 500 часов;
- наработка аппаратуры СУ от момента выведения МЛМ на орбиту до
стыковки с функционально-грузовым блоком (ФГБ) МКС и передачи ос-
татков топлива из МЛМ в баки ФГБ - не более 2200 часов.
. Сохраняемость:
Срок хранения СУ - в штатной таре не более шести лет.
Соответствие полученных значений показателей надежности заданным в ТЗ
оценивают расчетно-экспериментальным методом по методике предприятия-
разработчика СУ.
СУ МЛМ должна сохранять работоспособность при любом единичном от-
казе комплектующего элемента.
1.1.6 Требования по эксплуатации
В процессе эксплуатации (с момента изготовления до старта и автономного
полета на орбите) конструкция космического аппарата с входящими в него сис-
темами подвергается механическим и климатическим воздействиям. Параметры
этих внешних воздействий определяются главным образом характером тех тех-
28
дологических операций, которые предусмотрены программой эксплуатации каж-
дого конкретного аппарата (системы) в период сборки, хранения, транспортиро-
вания, предстартовой подготовки, выведения на орбиту и автономного полета.
Виды основных влияющих факторов
Требования к условиям эксплуатации СУ, в том числе и приборов, установ-
ленных на КА, можно разделить на группы: при испытаниях на заводе-
изготовителе и дальнейшем хранении прибора; при транспортировке прибора (к
местам сборки, испытаний КА и на стартовую позицию); на стартовой позиции;
на участке выведения PH и отделения КА; во время орбитального полета.
Для групп условий эксплуатации, которые предполагают выключенное со-
стояние прибора (транспортировка, стартовая позиция, выведение КА), к прибору
предъявляются требования стойкости к влияющим факторам - после их воздей-
ствия прибор должен включиться и нормально функционировать во время орби-
тального полета. Необходимо, чтобы при воздействии влияющих факторов во
время орбитального полета прибор сохранил заявленные в технических условиях
на прибор точностные и эксплуатационные характеристики.
Виды влияющих факторов во время эксплуатации прибора весьма разнооб-
разны - это механические нагрузки во время испытаний, при транспортировке, на
участке выведения и отделения КА; нестационарные тепловые воздействия; по-
вышенная влажность; невесомость; вакуум; воздействие радиации.
В процессе проектирования обеспечивается устойчивость прибора к воз-
действию заданного комплекса внешних условий. При этом как для успешного
проектирования, так и для подтверждения устойчивости прибора к внешним воз-
действиям в процессе испытаний важное значение имеет правильность и доста-
точная подробность задания характеристик внешних условий в техническом за-
дании, технических условиях, их реализация при проведении испытаний.
Рассмотрим кратко основные влияющие факторы, с которыми приходится
иметь дело при испытаниях и эксплуатации прибора [9].
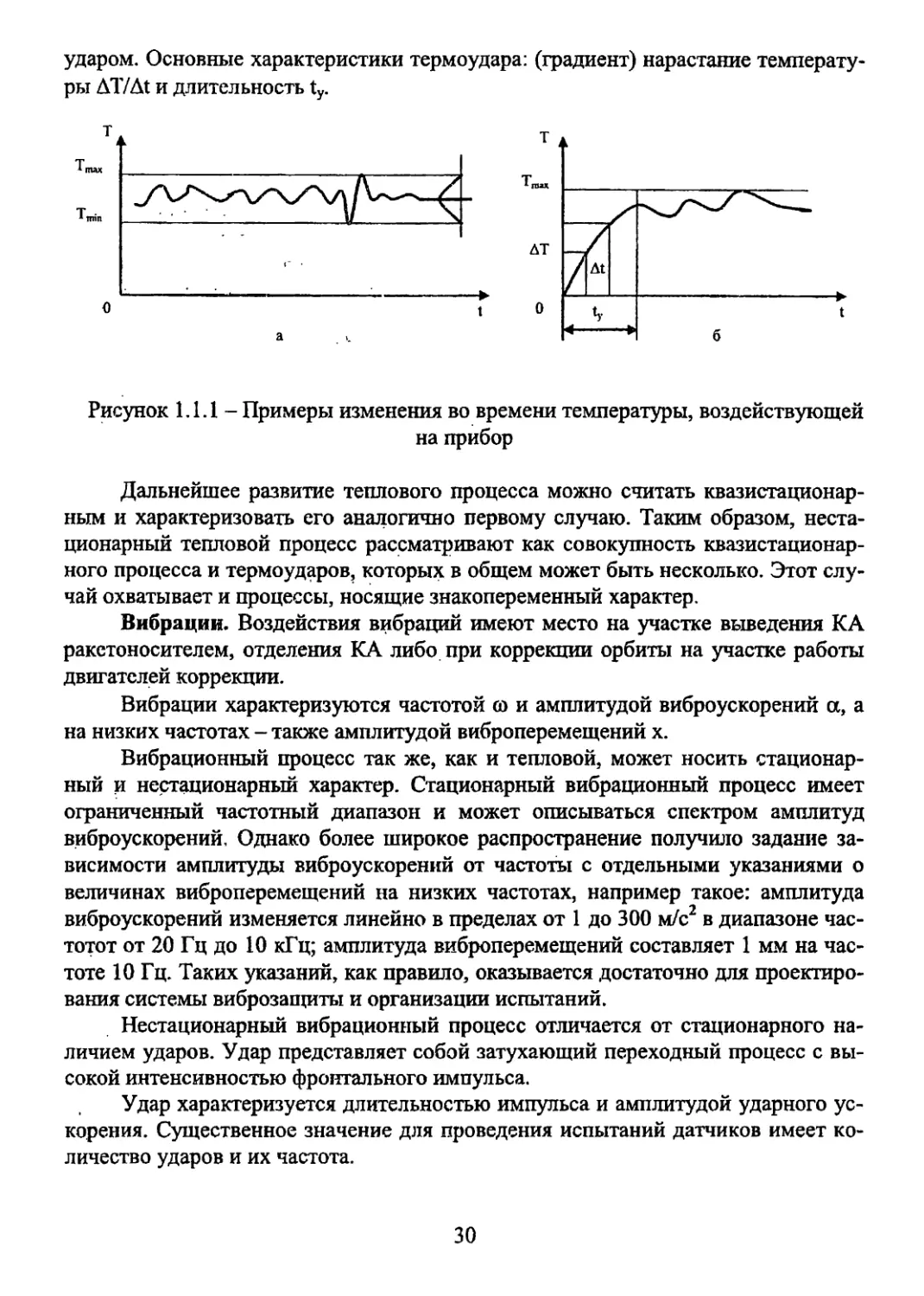
Температура, Температура является одним из основных факторов, влияю-
щих на характеристики приборов.
Исчерпывающим способом описания теплового воздействия на датчик яв-
ляется график изменения температуры во времени в месте его установки. Изме-
нение температуры может носить либо стационарный (рис. 1.1.1, а), либо неста-
ционарный характер (рис. 1.1.1, б).
В первом случае можно построить одномерную плотность распределения
температуры в любой момент времени и оценить параметры распределения, на-
пример среднее значение и дисперсию. При этом можно сказать, что температура
меняется в пределах от Tmjn до Тщах со средним значением Тср и среднеквадрати-
ческим отклонением оср. Такая характеристика теплового воздействия достаточна
для проведения различного рода испытаний.
Во втором случае требуется более подробная характеристика воздействия
температуры. Действительно, начальный участок характеризуется быстрым на-
растанием температуры в течение времени ty. Такое нарастание называют термо-
29
ударом. Основные характеристики термоудара: (градиент) нарастание температу-
ры АТ/At и длительность ty.
Рисунок 1.1.1 - Примеры изменения во времени температуры, воздействующей
на прибор
Дальнейшее развитие теплового процесса можно считать квазистационар-
ным и характеризовать его аналогично первому случаю. Таким образом, неста-
ционарный тепловой процесс рассматривают как совокупность квазистационар-
ного процесса и термоударов, которых в общем может быть несколько. Этот слу-
чай охватывает и процессы, носящие знакопеременный характер.
Вибрации. Воздействия вибраций имеют место на участке выведения КА
ракетоносителем, отделения КА либо при коррекции орбиты на участке работы
двигателей коррекции.
Вибрации характеризуются частотой и амплитудой виброускорений а, а
на низких частотах - также амплитудой виброперемещений х.
Вибрационный процесс так же, как и тепловой, может носить стационар-
ный и нестационарный характер. Стационарный вибрационный процесс имеет
ограниченный частотный диапазон и может описываться спектром амплитуд
виброускорений. Однако более широкое распространение получило задание за-
висимости амплитуды виброускорений от частоты с отдельными указаниями о
величинах виброперемещений на низких частотах, например такое: амплитуда
виброускорений изменяется линейно в пределах от 1 до 300 м/с2 в диапазоне час-
тотот от 20 Гц до 10 кГц; амплитуда виброперемещений составляет 1 мм на час-
тоте 10 Гц. Таких указаний, как правило, оказывается достаточно для проектиро-
вания системы виброзащиты и организации испытаний.
Нестационарный вибрационный процесс отличается от стационарного на-
личием ударов. Удар представляет собой затухающий переходный процесс с вы-
сокой интенсивностью фронтального импульса.
Удар характеризуется длительностью импульса и амплитудой ударного ус-
корения. Существенное значение для проведения испытаний датчиков имеет ко-
личество ударов и их частота.
30
Вибрации вызывают повреждения конструкции в местах сочленения узлов,
обрыв проводников вследствие относительного перемещения, повреждения уста-
лостного характера при продолжительном действии вибраций, перенапряжение
конструкции вследствие приложения больших усилий.
Линейные перегрузки. Имеют место на участке выведения КА ракето-
носителем либо при коррекции орбиты на участке работы двигателей коррекции.
Как правило, задаются по каждой из осей связанной системы координат КА в ви-
де величины перегрузки (в единицах g) и максимального времени действия пере-
грузки.
Уровень акустического давления. Для оценки характеристик эксплуата-
ции приборов в условиях воздействия акустических шумов обычно задают мак-
симальный уровень акустического давления и частотный диапазон звуковых ко-
лебаний. На участке выведения КА на прибор могут действовать акустические
шумы интенсивностью 150 ... 175 дБ и выше.
Влажность. Влажность практически постоянно присутствует в числе ха-
рактеристик комплекса внешних условий. Она задаётся в относительных едини-
цах (процентах) при определённой температуре, например: относительная влаж-
ность 80% при температуре 40°С. Высокая влажность может привести к быстро-
му разрушению электрических и механических элементов прибора, снижению
сопротивления изоляции, электрическому пробою, коррозии металлических эле-
ментов, снижению их механических характеристик. Основные способы защиты
от влажности - герметизация, применение влагостойких покрытий и различного
рода влагопоглотителей.
Пониженное давление. Пониженное давление задаётся в миллиметрах
ртутного столба или в паскалях. В условиях космического пространства прибор
может эксплуатироваться при пониженном давлении, равном 10"6 Па (КУ8 мм рт.
ст.). В условиях пониженного давления происходит выделение газов различными
материалами и резко понижается сопротивление изоляции воздушных промежут-
ков. Основное средство защиты - герметизация.
Колебания напряжения электропитания. Задаются, как правило, гранич-
ными значениями диапазона изменения и характеристиками пульсаций напряже-
ния (амплитуда, частота пульсаций, закон изменения амплитуды пульсаций и т.
д.). Колебания напряжения в той или иной мере оказывают влияние на выходные
характеристики практически всех электронных компонентов прибора, в основном
приводя к изменению их чувствительности. Основное средство защиты - стаби-
лизация напряжения, но при этом прибор должен сохранять свои эксплуатацион-
ные характеристики при граничных значениях диапазона изменения напряжения
электропитания.
Электромагнитные поля. Влияние магнитного поля Земли и других ис-
точников электромагнитного излучения на прибор проявляется в возникновении
паразитных ЭДС, наводимых в катушках индуктивности. Защита от электромаг-
нитных полей, как правило, заключается в использовании проводящих металли-
ческих, материалов для изготовления корпусов (кожухов и т. п.) приборов или в
применении защитных экранов из магнитомягких материалов.
31
С другой стороны, прибор должен быть электромагнитно совместимым с
другими электронными приборами системы управления, т.е. электромагнитное
излучение прибора не должно вызывать нарушений в функционировании других
электронных приборов.
Радиация. Радиация - сложное физическое явление. Это потоки частиц,
электронов, нейтронов, у-излучение и т. д., причём каждые из них обладают энер-
гией. Энергия частиц или у-квантов, проходящая в единицу времени через едини-
цу поверхности, перпендикулярной к излучению, называется интенсивностью из-
лучения. Интенсивность излучения может оцениваться его ионизационной спо-
собностью., определяемой значением поглощенной прибором дозы. Основные ме-
тоды защиты: экранирование слоем материала с высокой плотностью или мощ-
ным магнитным полем.
Ниже приведены величины внешних механических и климатических воз-
действий на КА и систему управления на различных этапах эксплуатации. Вели-
чины воздействий на этапе эксплуатации в составе PH приведены для ракеты-
носителя типа «Днепр».
1. При автономной наземной эксплуатации:
- квазистатические перегрузки при технологических операциях до п=2 (по
линии подъема);
- квазистатические перегрузки (перегрузки, которые изменяются весьма
медленно, так, что динамическая реакция конструкции не существенна)
при транспортировании любым видом транспорта (железнодорожным,
воздушным, морским, автомобильным), п=±3;
г армонические вибрации при транспортировании любым видом транс-
порта, диапазон частот от 0 до 300 Гц с виброускорениями до 5g;
- случайные вибрации при транспортировании любым видом транспорта,
диапазон частот от 0 до 100 Гц со спектральными плотностями мощно-
сти до 0,006 g2/Tn и среднеквадратическим ускорением до 0,18g;
- температурные воздействия от 10 до 35°С (при включенной аппаратуре),
от минус 50°С до плюс 50°С при транспортировке;
- влажность от 50 до 80% при температуре от 15 до 35°С;
- атмосферные воздействия, нормальные условия по ГОСТ 15150;
2. При эксплуатации в составе PH и автономном полете на орбите:
- квазистатические перегрузки при наземной эксплуатации в составе PH
(транспортирование, погрузочные работы, до п=±2), при старте и при
выведении на орбиту, до п=10;
- гармонические (синусоидальные) вибрации при старте и выведении на
орбиту, диапазон частот от 5 до 20 Гц с виброускорением до 1g;
- широкополосные случайные вибрации при старте и выведении на орби-
ту, диапазон частот от 20 до 2000 Гц со спектральными плотностями до
0,035 g2/fn и среднеквадратическим значением ускорения до ~ 7g;
- акустические нагрузки при старте и выведении на орбиту, диапазон час-
тот от 20 до 8000 Гц с уровнем звукового давления до 140 дБ;
32
- виброимпульсные воздействия (удар) при срабатывании пиротехниче-
ских устройств при разделении ступеней PH, сбросе обтекателя, отделе-
нии КА, раскрытии солнечных батарей, диапазон частот от 30 до
5000 Гц со значениями ударного спектра от 5 до 1000g;
- температурные воздействия, температура от минус 10°С до плюс 45°С;
- пониженное атмосферное давление, изменение давления окружающей
среды внутри негерметичного отсека от нормального по ГОСТ 15150 до
110‘9 мм рт. ст.
1Л.6.2 Основные способы задания характеристик условий
эксплуатации
Рассмотрим основные способы задания характеристик условий эксплуата-
ции [9].
1. Наиболее удобной формой задания характеристик влияющего фактора
является закон распределения его значений (функции плотности вероятностей).
Однако на практике конкретное выражение закона распределения задаётся край-
не редко и его следует оценить по другим более доступным характеристикам, при
этом во всех случаях обязательным является задание граничных значений
влияющего фактора.
2. Задание аналитической зависимости изменения влияющего фактора во
времени х = f(t). Выражение для функции плотности вероятностей p(t) в этом
случае можно найти следующим образом. Определяем величину, обратную пер-
вой производной заданной функции f(t), т.е. 1 / f '(t). В полученной формуле время
t выражаем через х. Затем проводим нормирование в диапазоне изменения рас-
сматриваемого фактора. С учётом нормирующего множителя А получаем
Рассмотрим простейший случай линейной зависимости. Пусть x=2t, причём
0 < х < 16. Величина, обратная первой производной, равна 1/2. Выполним норми-
рование
откуда А=1/8.
Выражение для функции плотности будет иметь вид
..11 1
р(х) =------------------------ —.
8 2 16
Следовательно, влияющий фактор распределён по равномерному закону с
постоянной плотностью р(х) = .
Рассмотрим случай нелинейной функции х = 2 Vt. Находим функцию, об-
ратную первой производной:
33
l/x'(t) = Vt.
Выражаем t через x (из исходной зависимости):
t = х2/4.
Подставляем t в выражение для 1 /x'(t):
l/x*(t) = x/2.
Выполним нормирование в диапазоне между нижним хн и верхним хв зна-
чениями влияющего фактора:
откуда
Ав Лн
Учитывая нормирующий множитель А, получаем выражение для функции
плотности вероятностей
2х
Таким образом, плотность вероятностей линейно нарастает при изменении
х от хн до хв.
Математические ожидания и дисперсии находят обычными методами, раз-
работанными теорией вероятностей.
1. Задан график зависимости влияющего фактора во времени (осцилло-
грамма, магнитная запись и т.п.). Для оценки числовых характеристик одномер-
ной плотности распределения в этом случае строим гистограмму, для чего разо-
бьем весь диапазон изменения влияющего фактора на равные интервалы Ах, как
показано на рис. 1.1.2, а. Границы интервалов обозначены О, хь...,хв. Значения
границ интервалов разбиения диапазона влияющего фактора соответствуют мо-
ментам времени О, Ь,...Д5, Т. Далее, считая представителем каждого интервала
разбиения его среднее значение, определяемое как
Xi = Хм + toJ'l,
и оценивая вероятность нахождения значений влияющего фактора в данном ин-
тервале как
строим таблицу распределения (рис. 1.1.2 б) и гистограмму (рис. 1.1.2, в).
Числовые характеристики подсчитываем по данным таблицы (рис. 1.1.2, б),
как для обычного дискретного распределения.
2. Задана таблица значений влияющего фактора, полученная на основе дли-
тельных регулярных наблюдений. Рассматривая данную таблицу как простую
статистическую совокупность, необходимо разбить весь диапазон изменения
34
фактора на разряды (подобно интервалам предыдущего случая), подсчитать час-
тоту попадания значений фактора в каждый разряд, построить таблицу распреде-
ления и гистограмму. Характерным примером рассмотренного способа могут
служить многолетние метеорологические наблюдения.
Xi Xi Xi X3 X4 X5 X6
Pi Pl p2 p3 P4 p5 Рб
Рисунок 1.1.2 - Зависимость влияющего фактора от времени
3. Влияющий фактор задан граничными значениями диапазона изменения.
При отсутствии всякой априорной информации о законе распределения следует
исходя из концепции максимальной неопределённости принять закон распреде-
ления равномерным и рассчитать дисперсию по формуле
. (xfl-xH)2
D(x) = fl
где хв и xH - верхняя и нижняя границы диапазона соответственно. Если есть дос-
таточные основания предполагать, что закон распределения близок к нормально-
му, то дисперсию определяют по формуле
ч (хв-хн)2
D(x) = •
1.1.7 Требования к разработке конструкции
Конструктивное исполнение аппаратуры СУ должно обеспечивать надеж-
ную ее работоспособность в заданных условиях и сроках эксплуатации, обеспе-
чивать выполнение всех требований ТЗ к ее разработке.
К общим требованиям к конструкции относятся следующие:
- к технологичности;
- ремонтопригодности (на ремонтируемую аппаратуру);
- стандартизации и унификации;
35
- консервации, упаковке, расконсервации.
Конструктивные требования к аппаратуре можно условно разделить на две
основные части, которые в целом взаимозаменяемы.
Это требования к конструкции, которые должны обеспечивать ее качест-
венное изготовление, проверку и контроль в производстве и требования, обеспе-
чивающие надежную работоспособность аппаратуры в заданных ТЗ условиях
эксплуатации при механических, климатических и других видах внешних воздей-
ствий.
Для качественного изготовления и выпуска продукции (аппаратуры) к кон-
струкции предъявляют следующие основные требования:
- к технологичности и ремонтопригодности - соответствие номенклатуры
ГОСТ 14.201-83 [3] показателей технологичности конструкции;
- обеспечение широкого применения стандартизированных и унифициро-
ванных деталей и сборочных единиц;
- ограниченное применение номенклатуры специального инструмента и
типоразмеров крепежных изделий;
- создание и применение базовых конструкций;
- соблюдение конструктивных способов единственности сборки;
- взаимозаменяемость составных частей;
- доступность подхода к деталям и сборочным единицам при их ремонте в
производстве.
Требования к ремонтопригодности в эксплуатации распространяются толь-
ко на обслуживаемую ремонтируемую аппаратуру, а в условиях орбитальных по-
летов - на аппаратуру, устанавливаемую в обитаемых космических аппаратах.
Данные требования являются необходимым условием надежного функцио-
нирования аппаратуры.
Кроме того, в ТЗ задаются конструктивные требования, связанные с кон-
кретными условиями эксплуатации и особенностями изделия. К ним относятся
следующие требования:
1. Требования к габаритным размерам и массе.
В общем случае масса аппаратуры должна быть минимальной. Конкретная
масса аппаратуры или минимально допустимая должна быть задана в ТЗ. Кроме
того, необходимо задать максимальную массу отдельных узлов и блоков.
Узлы и блоки массой более 16 кг должны иметь устройство для подъема и
удержания в поднятом положении при монтажных работах.
2. Требования к защите от механических воздействий (вибраций, ударов,
линейных ускорений).
3. Требования к узлам крепления для установки в изделии.
4. Требования к узлам и блокам аппаратуры по исключению неправильной
установки и стыковки соединителей.
Соединители должны иметь ключи, исключающие неадресную стыковку.
5. Требования к способам или системам охлаждения (подогрева, термоста'-
тирования) или их отсутствия.
36
При необходимости параметры системы охлаждения должны быть заданы в
ТЗ на аппаратуру.
Кроме того, должны быть заданы требования к сигнализации о неисправно-
сти, опасных режимах работы или выхода из строя составных частей аппаратуры,
например для обитаемых космических аппаратов.
6. Требования к заземлению и защите аппаратуры от статического электри-
чества.
Аппаратура и ее составные части должны иметь специальные присоедини-
тельные элементы для заземления, которые должны отвечать требованиям, ука-
занным в нормативно-технической документации (НТД), а именно ГОСТ 18714-
81 [4]. Способы и элементы заземления должны обеспечивать постоянство пере-
ходного сопротивления контакта (задаются в эксплуатационной документации).
Максимальное значение переходного сопротивления согласно ГОСТ 19005-
81 [5] должно быть:
600 мкОм - в местах непосредственного соединения деталей между со-
бой;
2000 мкОм - сумма переходного соединения контактов цепи заземления
аппаратуры.
7. Требования к конструкции по обеспечению электромагнитной совмести-
мости: по экранированию, рациональному выполнению электромонтажа, приме-
нению специальных устройств, обеспечивающих надежное заземление аппарату-
ры.
8. Требования к электрической изоляции.
В ТЗ должны быть приведены значения сопротивления изоляции электри-
ческих цепей аппаратуры в зависимости от рабочего напряжения и климатиче-
ских условий (температуры, влажности, т.д.).
9. Требования к материалам и покрытиям.
Материалы и покрытия деталей, узлов, блоков аппаратуры должны быть
выбраны исходя из назначения и условий эксплуатации аппаратуры и соответст-
вовать требованиям, указанным в стандартах на них.
10. Требования к стандартизации и унификации.
Требования к унификации и стандартизации должны быть заданы в ТЗ в
виде количественных показателей: коэффициенты применяемости, повторяе-
мость.
11. Требования к маркировке.
Требования к маркировке должны содержать:
- способы нанесения (гравировка, сеткография, краска);
- место нанесения;
- степень механической прочности;
- состав маркировки.
12. Ряд других требований:
- к защите аппаратуры от воздействия специальных сред;
- эргономике и технической эстетике;
- безопасности;
37
- по метрологическому обеспечению,
и прочие требования, в зависимости от вида и назначения изделия, где бу-
дет применяться разрабатываемая аппаратура.
1.2 Специальные требования
В данном разделе ТЗ приводятся требования:
- по наземной стендовой отработке;
- обеспечению патентной чистоты;
- сохранению коммерческой тайны.
Требования по наземной стендовой отработке
Объем и порядок проведения наземной стендовой отработки, а также пере-
чень объектов и видов испытаний определяются комплексной программой экспе-
риментальной отработки (КПЭО), разрабатываемой в соответствии с принятым
стандартом на этапе разработки рабочей документации.
Указывается, что на комплексном стенде-электроаналоге предприятия-
разработчика СУ должны быть проведены отработка взаимодействия систем КА,
отработка документации для проведения электрических проверок на КИС и ТК.
Требования по обеспечению патентной чистоты
Здесь указывается, что предприятие-разработчик обеспечивает патентную чис-
тоту разрабатываемой системы управления на территории страны-заказчика и само-
стоятельно несет материальную ответственность за нарушение прав третьих лиц.
В случае создания предприятием-разработчиком изобретений, используе-
мых в СУ и защищенных патентами, предприятие-разработчик предоставляет
предприятию-заказчику неисключительную лицензию на весь срок действия па-
тента, причем цена лицензионного соглашения может входить в цену проводи-
мых работ.
Требования по сохранению коммерческой тайны
Для защиты коммерческой информации устанавливают следующие виды
сведений:
“Строго конфиденциально” - для основных сведений, разглашение (утечка)
которых может принести к банкротству или другим тяжелым последствиям для
предприятия;
“Конфиденциально” - для остальных сведений, разглашение (утечка) кото-
рых может существенно повлиять на конкурентоспособность продукции пред-
приятия;
“Доверительно” - для сведений, не относящихся к предыдущим видам
коммерческой тайны, но ограниченных для ознакомления сотрудников предпри-
ятия.
К сведениям, содержащим коммерческую тайну, относятся:
- несекретные перспективные научные, конструкторские технологические
и другие технические решения, по которым принято заключение об их
патентовании;
- сведения о состоянии юридических и финансовых взаимоотношений и
расчетах с организациями кооперации;
38
- состояние разработки и производства изделия;
- сведения о трудозатратах, составе и стоимости используемого оборудо-
вания;
- техническая документация по расчетам и экспериментальной отработке.
Гриф коммерческой тайны определяется разработчиком в каждом конкрет-
ном случае.
Для проведения работ на предприятии-разработчике СУ должен быть издан
приказ Руководителя, который определял бы обязанности работников по сохра-
нению коммерческой тайны. Все работники, заявленные в работах по изделию,
должны быть ознакомлены с данным приказом под расписку.
Приказ Руководителя по сохранению коммерческой тайны должен обязы-
вать каждого сотрудника, допущенного к работе по изделию:
- не разглашать и не передавать третьим лицам сведения, составляющие
коммерческую тайну предприятия, которые ему будут доверены или
станут известны по работе;
- сохранять коммерческую тайну тех предприятий, с которыми имеет де-
ловые отношения предприятие-разработчик СУ;
- не использовать знания коммерческой тайны, относящиеся к работам,
связанным с изделием, для занятия любой деятельностью, которая в ка-
честве конкурентного действия может нанести ущерб предприятию;
- в случае увольнения передать все носители материалов, содержащих
коммерческую тайну (бумажные, магнитные, видео-фотоматериалы, мо-
дели, изделия и др.), руководителю подразделения;
- об утрате или недостаче материалов, содержащих коммерческую тайну,
немедленно сообщить в отдел безопасности предприятия.
По сроку сохранения коммерческой тайны указывают, что договорное обя-
зательство должно храниться в течение, например, двух лет после окончания ра-
бот над изделием.
Что касается размножения документов, хранения, учета и уничтожения,
указывают, что не разрешается размножать конфиденциальные документы, пере-
данные одним предприятием другому без производственной необходимости, свя-
занной с выполнением работ. Все документы, имеющие гриф коммерческой тай-
ны по изделию, должны храниться отдельно и выдаваться только лицам, участ-
вующим в работах.
В этом разделе ТЗ также оговаривается и ответственность за нарушение
коммерческой тайны.
Нарушение требований по защите коммерческой тайны предприятия влечет
за собой административную, гражданско-правовую или иную ответственность в
соответствии с законодательством.
Необходимо, чтобы предприятие-разработчик СУ разработало и согласовало с
предприятием-заказчиком план мероприятий по обеспечению коммерческой тайны.
39
Библиографический список к разделу 1
1. Гаврилов, А.Н. Основы технологии приборостроения [Текст]/
А.Н. Гаврилов. -М.: Высш, шк., 1976. -237 с.
2. Голованов, Ю.В. Несущие конструкции радиоэлектронной аппаратуры
[Текст] / Ю.В. Голованов и др. - М.: Радио и связь, 1988. - 230 с.
3. ГОСТ 14.201-83. Обеспечение технологичности конструкции изделий. Об-
щие требования. - М.: ИПК Изд-во стандартов, 1984. - 18 с.
4. ГОСТ 18714-81. Провода заземления для обеспечения защиты изделий ра-
кетной и ракетно-космической техники от статического электричества.
Технические условия. -М.: Изд-во стандартов, 1998. - 9 с.
5. ГОСТ 19005-81. Средства обеспечения защиты изделий ракетной и ракет-
но-космической техники от статического электричества. Общие требования
к металлизации и заземлению. - М.: Изд-во стандартов, 2009. - 39 с.
6. Инженерный справочник по космической технике [Текст] / под ред.
А.В. Солодова. - 2-е изд., перераб. и доп. - М.: Воениздат, 1977. - 430 с.
7. Космические аппараты [Текст] / под общ. ред. К.П. Феоктистова. - М.:
Воениздат, 1983. - 319 с.
8. Максимов, Г.Ю. Теоретические основы разработки космических аппаратов
[Текст] / Г.Ю. Максимов. - М.: Наука, 1980. - 320 с.
9. Проектирование датчиков для измерения механических величин [Текст] /
под общ. ред. Е.П. Осадчего. - М.: Машиностроение, 1979. - 480 с.
10. Проектирование систем управления объектов ракетно-космической техни-
ки. Проектирование систем управления ракет-носителей [Текст] / Под общ.
ред. Ю.С. Алексеева, Ю.М. Златкина, В.И. Чумаченко и др. - X.: НПП Хар-
трон-Аркос, НАУ им. Н.Е. Жуковского «ХАИ», 2012. - Т. 1. - 578 с.
11. Система “С1ч-2”. Космический аппарат МС-2-8. Техническое задание. Раз-
работка подсистемы определения и управления ориентацией. Ч. 2. Техни-
ческие требования. “С1ч-2”. 12.73467312 ТЗ ч. 2. - Днепропетровск: ГП «КБ
«Южное», 2008.
12. Техническое задание на выполнение составной части опытно-
конструкторской работы «Система управления многоцелевым лаборатор-
ным модулем на базе ФГБ-2». 315-СУ МЛМ-ТЗ. - М.: КБ «Салют» ФГУП
«ГКНПЦ» им. М.В. Хруничева, 2004.
40
2 ИСХОДНЫЕ ДАННЫЕ РАЗРАБОТЧИКА КА ДЛЯ ПРОЕКТИРОВАНИЯ
СИСТЕМЫ УПРАВЛЕНИЯ
2.1 Основные характеристики КА
2.1.1 Используемые системы координат
Изучение движения КА, выполняющих различные миссии в околоземном
пространстве либо осуществляющих межпланетные перелеты, в той или иной
степени связано с двумя проблемами - прогнозированием параметров движения
КА, точным вычислением положения небесных тел на заданные моменты време-
ни и обработкой наблюдений этих объектов [21]. Для правильного решения этих
проблем необходимо знать не только законы движения КА и небесных тел, но и
законы изменения ориентации в пространстве систем координат, относительно
которых происходит рассматриваемое движение. В конечном итоге необходимо
выбрать такую систему координат, в которой уравнения движения КА имеют
наиболее простой вид.
2.1.1.1 Основные системы координат задач баллистики и ориентации
КА
В качестве основных систем координат в задачах баллистики и ориентации
КА используются следующие [12, 20]:
- фундаментальная инерциальная система координат эпохи То
(ЭСКТ2000);
- средняя вторая экваториальная система координат (С2ЭСК) текущей
эпохи t;
- истинная вторая экваториальная система координат (И2ЭСК) текущей
эпохи t;
- Гринвичская система координат (ГСК);
- орбитальная неподвижная система координат (ОНСК);
- орбитальная подвижная система координат (ОПСК);
- орбитальная система координат (ОСК);
- инерциальная система координат (ИСК);
- связанная с КА система координат (ССК);
- приборные системы координат (ИСК).
В качестве эпохи То принята [5] эпоха фундаментального звездного катало-
га FK5 2000 г., январь 1, 12h UT1 (январь 1,5) - эпоха J2000. Эпоха t соответству-
ет моменту времени, к которому отнесены преобразуемые значения координат.
Фундаментальная инерциальная система координат эпохи Тп - прямоуголь-
ная система координат OxoyoZo, имеющая начало О в центре масс Земли.
Ось Охо направлена в среднюю точку весеннего равноденствия эпохи То.
Ось Oz0 направлена по нормали к плоскости среднего экватора эпохи То к
Северному полюсу мира.
Ось Оуо дополняет систему Oxoy0z0 до правой.
Систему координат 3CKJ2000 используют для определения положения в
космическом пространстве КА и различных небесных тел, а также при проведе-
41
нии исследований, которые требуют ориентации КА в заданную точку космиче-
ского пространства.
Средняя 2-я ЭСК эпохи t- прямоугольная система координат Oxtytzt,
имеющая начало О в центре масс Земли.
Ось Охг направлена в среднюю точку весеннего равноденствия эпохи t.
Ось Ozt направлена по нормали к плоскости среднего экватора эпохи t к
Северному полюсу мира.
Ось Oyt дополняет систему Oxtytzt до правой.
Истинная 2-я ЭСК эпохи t- прямоугольная система координат Охиуиги,
имеющая начало О в центре масс Земли.
Ось Охи лежит в плоскости истинного экватора и направлена в истинную
точку весеннего равноденствия эпохи t.
Ось OzH направлена по мгновенной оси вращения Земли в эпоху t в сторону
Северного полюса.
Ось Оуи дополняет систему Охиуиги до правой.
Среднюю и истинную вторые ЭСК эпохи t применяют для пересчета про-
екций векторов из ГСК в ЭСК12000 и обратно.
Гринвичская система координат - прямоугольная система координат
OXYZ, имеющая начало О в центре масс Земли, вращающаяся вместе с Землей.
Ось OZ направлена к Международному условному началу.
Ось ОХ лежит в плоскости среднего Гринвичского меридиана и определяет
положение нуль-пункта принятой системы расчета долготы.
Ось OY дополняет систему OXYZ до правой.
Гринвичскую систему координат используют для вычисления параметров
движения центра масс КА.
Орбитальная неподвижная система координат - прямоугольная система ко-
ординат Ox^yojZto, имеющая начало О в центре масс Земли.
Ось Оуш направлена в точку перигея орбиты.
Охй) лежит в плоскости орбиты КА и направлена в сторону орбитального
движения в перигее.
Ось Ozm дополняет систему Ох^ул до правой.
Ее применяют для решения задач коррекции орбиты, сближения и прича-
ливания КА к орбитальной станции.
Орбитальная подвижная система координат - прямоугольная система коор-
динат Опгь, имеющая начало О в центре масс Земли.
Ось Ог направлена по радиусу-вектору центра масс КА.
Ось Оп лежит в плоскости орбиты КА перпендикулярно оси Ог и направле-
на в сторону движения центра масс КА.
Ось Оь дополняет систему ОпгЪ до правой.
Необходимо отметить, что последовательность осей орбитальной системы
координат (какая из них есть первая, какая вторая и т.д.) у ряда авторов оказыва-
ется различной, часто используется система координат Оть, в которой положение
оси Оь противоположно системе Опгь, а положения двух других осей совпадают.
42
ОПСК применяют для оценки погрешности формирования вектора состоя-
ния центра масс КА в задаче навигации.
Орбитальная система координат - прямоугольная система координат
O^oY^Zo, имеющая начало Oi в центре масс КА.
Ось OiУо направлена по радиусу-вектору центра масс КА.
Ось OiXo лежит в плоскости орбиты КА перпендикулярно оси OiYo и на-
правлена в сторону орбитального движения КА.
Ось OiZo дополняет систему OiXoYoZo до правой.
Оси ОоХо, OoYo и OqZo ОСК соответственно параллельны осям On, Or и Ob
ОПСК. ОСК применяют в задачах ориентации КА, при проведении исследова-
ний, связанных с наблюдениями за поверхностью Земли или других планет.
Инерциальную систему координат используют для проведения исследова-
ний, которые требуют ориентации КА в заданную точку космического простран-
ства. Для околоземных КА в качестве инерциальной системы координат чаще
всего применяют 3CKJ2000 или ОНСК.
Для решения задач ориентации при коррекции орбиты, сближения и прича-
ливания к орбитальной станции используют ИСК, представляющую собой ОСК,
положение осей которой «замораживается» в инерциальном пространстве с неко-
торого фиксированного момента времени.
В общем случае угловое положение КА может быть задано взаимным рас-
положением двух систем координат, направление осей одной из которых уста-
навливает требуемую, а другой - жестко связанную с аппаратом, действительную
ориентацию КА. Первую из этих систем координат принято называть базовой
системой координат (БСК), в качестве которой обычно используют ИСК или
ОСК, вторую - связанной системой координат.
Связанная система координат - прямоугольная система координат
OtXiYiZj, имеющая начало Oi в центре масс КА.
Ось OjXj направлена по продольной оси КА от хвостовой к носовой части.
Ось О^ перпендикулярна плоскости солнечных батарей.
Ось O1Z1 дополняет систему OiXjYiZi до правой.
Положение оси OjYj может быть описано и так: перпендикулярна оси
OjXj, находится в плоскости симметрии КА и направлена к верхней части КА
или части, условно ей соответствующей.
Привязка осей ССК к КА может быть другой. Например, одна из осей мо-
жет быть перпендикулярна плоскости стыковки КА с PH и направлена в сторону
PH, другая ось лежать в плоскости стыковки и направлена в сторону определен-
ной полуплоскости стабилизации.
Приборная система координат - прямоугольная система координат
OnXnYnZn, определяемая опорными поверхностями и характерными конструктив-
ными элементами соответствующего прибора системы управления.
Ниже приведены рисунки некоторых описанных систем координат.
На рис. 2.1.1 Гринвичская OXYZ система координат изображена без учета
изменения положения оси вращения Земли.
43
Рисунок 2.1.1 - Истинная 2ЭСК 0хиуи2и
и Гринвичская OXYZ системы коорди-
нат: SH - истинное звездное время
Рисунок 2.1.2- Истинная 2ЭСК OxHyHz„
и орбитальная неподвижная Ох^у^г^
системы координат: Q - долгота восхо-
дящего узла; i - наклонение орбиты;
соп - широта перигея орбиты
Рисунок 2.1.3 - Истинная 2ЭСК
Охиуигя и орбитальная OiXoYoZo
системы координат: Q - долгота
восходящего узла; i - наклонение
орбиты; соп - широта перигея ор-
биты; S - истинная аномалия КА
2.1 Л.2 Преобразования систем координат
Для решения задач баллистики, ориентации и стабилизации КА необходи-
мо уметь выполнять преобразования, связанные с переходом от одной системы
координат к другой.
44
Преобразования, связанные с переходом от фундаментальной инерциаль-
ной системы координат эпохи Тп к средней 2-й ЭСК эпохи t и обратно, осуществ-
ляют по формулам
'х/ Уг =р У» , (2.1.1)
Л > V
Уо <z0> = рт yt <zu (2.1.2)
где Xt, yt, zt - координаты, определенные в средней 2-й ЭСК эпохи t; х<), у0, z0 -
координаты, определенные в фундаментальной инерциальной системе координат
эпохи То; Р - матрица прецессии, определяющая переход от среднего экватора и
точки усрТо (эпохи То) к среднему экватору и точке у^ (эпохи t), вычисляется по
формулам [5]:
pn = cos(C)cos(z)cosO] -sin(£)sin(z),
р12 = -sin(^)cos(z)cos(01)- cos(C,)sin(z),
р,3 =-СО5(г)8ш(еД
р21 = cos(^)sin(z)cos(0!) + sin(^)cos(z),
P22 = -sm(^)sin(z)cos(6l)+ cos(^)cos(z), (2.1.3)
p23 = -sin(z)sm(01)>
Рз1 =cos(C)sin(0l),
P32=-sinfe)sin(e1),
p33 = cos(Oj
В этих формулах участвуют прецессионные параметры Ньюкома-Андуайе,
которые определяются следующими соотношениями [5]:
С = к?1Т + к?2Т2+к?,Т3,
z = kJIT + kz2T2 + kzJT3, (2.1.4)
91=k,lT + k,2T2 + kejT3.
Значения коэффициентов берут из астрономического ежегодника [5].
Здесь и далее индекс Т означает транспонирование матрицы.
Преобразования, связанные с переходом от средней 2-й ЭСК эпохи t к ис-
тинной 2-й ЭСК эпохи t и обратно, осуществляют по формулам
Уи = N yt
(2Т.5)
45
(2.1.6)
'V
yt
хи
= NT уи ,
kzH>
где хи, уи, z„ - координаты, определенные в истинной 2-й ЭСК эпохи t;
N -матрица нутации в эпоху t, определяется соотношениями:
пи = cosA\|/s,
nJ2 = -sinAys cose0,
n13 = -sinAys sine0,
n2I — cose sinAys,
• n22 = cosecosA\j/s cose0 +sin£sin£0} (2.1.7)
n23 = cose cos Ay s sin£0 - sine cose0,
n3i = sine sin Ay s,
n32 = sine cos Ay s cose0 - cose sinEo,
n33 = sins cos Ay s sinEo 4- cose cose0.
Нутацию в долготе и нутацию в наклоне находят из разложений по средним
элементам орбит Луны и Солнца [5]:
106
Ay = £(Ai +BjT)sin(aljBM +a2iCs 4-a3iD м + a4iAMS 4- a5iQM ), (2.1.8)
i=l
106
Ае = Ж + DiT)cos(a!iBM 4- a2iCs +a3iDM 4-a4iAMs + а51^м)> (2.1.9)
i=l
где - разность средних долгот Луны и Солнца; Вм - средняя аномалия Луны;
Cs - средняя аномалия Солнца; DM - средний аргумент широты Луны; QM -
долгота восходящего узла средней лунной орбиты; Т - время, отсчитываемое от
J2000 до текущего момента времени в юлианских столетиях.
Коэффициенты Ai, В,, Q, Dj, ан, a2j, аз{ и а^ приведены в [5].
Долгота восходящего узла средней лунной орбиты аргумент широты
Луны DM, разность средних долгот Луны и Солнца AMs представляются степен-
ными рядами:
£2м=кП14-кшТу (2.1.10)
DM = kDk] + kDk2 Т, (2.1.11)
Ams = кд1 + кд2 Т (2.1.12)
Средний угол наклона эклиптики к экватору £0 определяется следующим
образом:
e0=kgl4-k£2T (2.1.13)
Преобразования, связанные с переходом от фундаментальной инерциаль-
ной системы координат эпохи Тр к истинной 2-й ЭСК эпохи t и обратно, осуще-
ствляют по формулам
46
(2.1.14)
Уо
<ZO;
= PT-NT
(2.1.15)
Преобразования, связанные с переходом от истинной 2-й ЭСК эпохи t к
Гринвичской системе координат и обратно, проводят по формулам
'X' Y - Rpoi • Rs (t ) хи Уи (2.1.16)
<ZH>
''X''
Уи Y , (2.1.17)
<2,
где X, Y, Z - координаты, определенные в ГСК; RpoI - матрица, учитывающая
смещение положения мгновенного полюса Земли в эпоху t относительно Между-
народного условного начала; Rs - матрица учета суточного вращения Земли.
Матрица Rs определяет положение среднего Гринвичского меридиана от-
носительно истинной экваториальной системы координат текущей эпохи и запи-
сывается в виде
cos S„
Rs= -sinSH
sinSH О
cos SH 0
0 1
(2.1.18)
О
где SM - истинное звездное время (часовой угол истинной точки весеннего рав-
ноденствия, отсчитываемый от Гринвичского меридиана) равно сумме:
SH= So+ Ду cos а, (2.1.19)
где So - среднее звёздное время, определяемое соотношением
So=ksi+ks2Td+ ks3Tm + кздТи» (2.1.20)
Здесь Td - гринвичское время (количество юлианских суток от стандартной эпо-
хи J2000.0 до полуночи текущей эпохи); Тга - интервал времени от полуночи до
текущего момента времени; Ти-всемирное время (UT1) от стандартной эпохи
J2000.0 до текущего момента времени, выраженное в юлианских столетиях.
Значения коэффициентов берут из астрономического ежегодника [5].
Матрица Rpoi характеризует положение мгновенной оси вращения Земли
(истинного Гринвичского меридиана) относительно международного условного
начала, принятого при определении ГСК и вычисляется по формуле
47
о
(2.1.21)
pol
COSXp
sin x p sin у p
-sinXp cos yp
COS ур
sinyp
sinxp
-cos xp sinyp
cosxpcosyp ;
где xp и yp - координаты северного полюса Земли, зависящие от времени и вы-
числяемые с использованием таблиц (величины хр, ур обновляются ежедневно и
прогнозируются вперед на интервал от нескольких суток до одного года). Эти
данные формирует международная служба вращения Земли (IERS).
Преобразования, связанные с переходом от фундаментальной системы ко-
ординат эпохи Тп к Гринвичской системе координат и обратно, осуществляют по
формулам
*о
*0
= Rpoi -Rs-N-P Уо ,
ГхЛ
(2.1.22)
Уо = PT-NT.RT.RT,
<z«>
Преобразования, связанные с переходом от фундаментальной системы ко-
ординат эпохи То к орбитальной подвижной системе координат и обратно, осу-
ществляют по формулам
(tl
(2.1.23)
Хо
Уо
<Z0 у
(2.1.24)
Уо =GJ г
b
kzoj
Матрица Go определяется соотношением
Go =
gon §012 §013
§021 §022 §023
_§031 §032 §033 _
ПХо
Г*о
bx0
где nXo,nYo,nZo - проекции орта по
rxO’rYO’rZo - проекции орта г0 оси
bXo>bYo>bZo
ПУО
rYo
ЬУо
ОСИ
(2.1.25)
(2.1.26)
3CKJ2000;
3CKJ2000;
Hzo
%
bXo J
n OCK на оси
OCK на оси
- проекции орта Ьо оси b ОСК на оси 3CKJ2000.
Поскольку мгновенное положение плоскости орбиты КА в пространстве
однозначно определяется положением радиуса-вектора и вектора скорости цен-
тра масс КА, то орты направления осей ОСК в ГСК могут быть рассчитаны еле-
Z
г
b
48
дующим образом:
(2.1.27)
(2.1.28)
(2.1.29)
где Го - радиус-вектор КА в 3CKJ2000; v0- вектор скорости КА в
3CKJ2000.
Преобразования, связанные с переходом от Гринвичской системы коорди-
нат к орбитальной подвижной системе координат и обратно, осуществляют по
формулам
GP г / = G z , (2.1.30)
Формула для вычислени ’gn g 'x' Y <z> 1Я M 12 = GT атрищ gi3~ [V I >iG < nY nz (2.1.31)
g2l g22 _g31 g32 g23 = g33. rX rY rZ _bx bY bz , (2.1.32)
где nx,nY,nz - проекции орта п оси п ОСК на оси ГСК; rx,rY,rz - проекции
орта г оси г ОСК на оси ГСК; bx,bY,bz - проекции орта b оси b ОСК на оси
ГСК. По аналогии с ЗСК орты направления осей ОСК ваться следующим образом: в ГСК могут рассчиты-
ь 7 НбсХг] |Уа6сНГ1 ’ (2.1.33)
(2.1.34)
(2.1.35)
где г -радиус-вектор КА в ГСК; va6c -вектор абсолютной скорости
КА в ГСК, определяется соотношением
49
vx -to3 Y
Va6c = VX
+ CO3 X
VX
(2.1.36)
где v - вектор скорости KA в 3CKJ2000.
Преобразования, связанные с переходом от истинной 2-й ЭСК эпохи t к ор-
битальной неподвижной системе координат и обратно, осуществляют по форму-
лам
(2.1.37)
(2.1.38)
Уравнения для вычисления матрицы А имеют вид
sin со п О
coscon О
О 1
1
О
О
О О Г cosQ sin fl
cosi sin i • -sinQ cosQ
0
0
1
-sini cosi 0 0
(2.1.39)
-sin Qcosa>ncosi-
-cosQsiii(on
cos con cosQ-
-sinconcosisinQ
-sinQsini
cosQcos<Dncosi~
-sinQsincon
sin£lcoscon +
+ cosQsinconcosi
cos Q sini
cosconsini
sin con sini
-cosi
где Q, i, con - элементы орбиты.
Преобразования, связанные с переходом от орбитальной неподвижной сис-
темы координат к орбитальной подвижной системе координат и обратно, осуще-
ствляют по формулам
Г =в Уш
(2.1.40)
50
уш =ВТ г
4Z“ у <Ь>
(2.1.41)
Формула для вычисления матрицы В имеет вид
cos 9
sin 9
О
- sin 9 О
cos 9 О
О 1
(2.1.42)
где 9 - истинная аномалия КА.
Взаимосвязь систем координат наглядно можно представить в виде ориен-
тированного графа. Например, на рис. 2.1.4 показана взаимосвязь некоторых опи-
санных выше систем координат.
Рисунок 2.1.4- Взаимосвязь систем координат
Оси ОСК движутся параллельно осям ОПСК, и, несмотря на то, что начала
этих координат не совпадают, для перехода от ЭСК12000 к ОСК в задачах ориен-
тации используют матрицу Go, обратно - матрицу GJ.
Переход от истинной 2-й ЭСК эпохи t к ОПСК (ОСК) определяется матри-
цей D, которую, как видно из рис. 2.1.4, вычисляют по формуле
D =В А,
а переход от 3CKJ2000 к ОНСК определяется матрицей С. Матрица С определя-
ется из уравнения
С =А N Р
или по формуле
С=ВТ Go
51
Матрица М перехода от ОПСК (ОСК) к ССК определяется видом кинема-
тических параметров ориентации, описание которых приведено в соответствую-
щем разделе.
2.1.2 Конструктивно-компоновочная схема КА. Схема расположения
двигателей
Компоновочная схема КА определяется его функциональным назначением.
В настоящее время разработано большое количество разнообразных спутников.
Это спутники связи, различные спутники наблюдения как за поверхностью Зем-
ли, так и за другими планетами и объектами Солнечной системы, исследователь-
ские спутники в разных диапазонах спектра измерений, метеоспутники, орби-
тальные станции и транспортные корабли снабжения, навигационные ИСЗ и др.
[1.18].
Обязательный элемент конструкции КА длительного срока активного су-
ществования (а таковыми являются все современные спутники) представляет со-
бой панели солнечных батарей (СБ). Они являются источником электроэнергии
как для систем специального оборудования, выполняющих целевую задачу спут-
ника, так и для системы управления самого КА. Площади и размах панелей сол-
нечных батарей могут достигать значительных величин - 10 ... 15 м (рис. 2.1.5).
Это обычно гибкие конструкции ощутимой массы, и они оказывают замет-
ное влияние на динамику управления.
Целевая аппаратура и оборудование, система электропитания, как правило,
расположены внутри корпуса КА. Особенно существен объем и вес такой аппара-
туры КА у пилотируемых кораблей, так как в этом варианте появляются системы
жизнеобеспечения и необходим дополнительный объем помещений для экипажа.
Практически все КА оснащены различного рода телеметрическими прибо-
рами, приемными и передающими антеннами. Большинство их, как и СБ, явля-
ются упругими элементами и тоже оказывают влияние на динамику процессов
управления.
Для обеспечения выполнения ориентированного полёта КА оснащают не-
обходимыми датчиками ориентации на небесные светила, Землю, гироскопиче-
скими датчиками углового положения, угловой скорости и управляющими орга-
нами.
Используют в основном следующие типы управляющих органов:
- реактивные двигатели многократного включения на сжатом газе или
жидкостно-реактивные, тяга которых образуется выбросом газа или
продуктов сгорания жидкого топлива через сопло;
- электромеханические управляющие органы-маховики или силовые ги-
роскопы;
- электромагнитные катушки, используемые для управления КА или для
разгрузки электромеханических исполнительных органов (ЭМИО). Сфе-
ра применения электромагнитных катушек ограничена высотами до
1600 ... 1800 км, так как напряженность магнитного поля с высотой бы-
стро падает (пропорционально кубу расстояния от Земли) [3].
52
Дополнительные
Рисунок 2.1.5 - Транспортный корабль снабжения
Электромагнитные катушки устанавливают обычно на поверхности корпу-
са КА (три ортогонально расположенные катушки).
Реактивные управляющие двигатели устанавливают на поверхности КА с
тем, чтобы получить максимальный управляющий момент.
Для малых КА управляющие двигатели обычно располагают в одном поясе
(на днище КА), как показано на рис. 2.1.6.
Двигатели 1, 2, 3, 4 используют для создания управляющих моментов во-
круг осей «X» и «Z», двигатели 5, 6 - вокруг оси «У».
Для крупногабаритных КА (транспортные корабли, орбитальные станции)
часто применяют моментную схему, когда управляющий момент создаётся парой
сил (парой двигателей с противоположным направлением тяги и расположенных
по разные стороны относительно центра масс) - рис 2.1.7.
53
Рисунок 2.1.6 - Установка реактивных управляющих двигателей на малых
КА: АТ - управляющие двигатели.
Рисунок 2.1.7 - Установка реактивных управляющих двигателей на
крупногабаритных КА
Так, при включении двигателей 3 и 8 создается управляющий момент во-
круг оси «Z» и отсутствует сила (возмущающая по центру масс) по оси «У»; при
включении двигателей 1 и 3 создаётся момент вокруг оси «X» (тоже без возму-
щения по центру масс). На рис. 2.1.7 показана компоновка ДС для одного из
транспортных кораблей снабжения; ДК - двигатель коррекции орбиты.
При необходимости создать управляющий момент одновременно вокруг
осей X (ДС № 1, 3) и Z (ДС № 3, 8) включается только ДС № 3, так как ДС № 1 и
№ 8 имеют взаимно противоположные значения управляющих моментов и, сле-
довательно, расход рабочего тела по этим ДС будет непроизводительным.
На рис. 2.1.8 изображены общие виды ряда конкретных космических аппаратов.
На рис. 2.1.8, а, б, в показаны КА наблюдения за поверхностью Земли.
54
Первый (а) КА - гравитационно-ориентированный спутник. После выведе-
ния на орбиту раскрывают все выносные элементы (солнечные батареи, антен-
ны), в том числе и металлическая витая в рулон лента с грузом (—15 ... 16 кг) на
свободном конце. Один конец ленты закреплен на корпусе спутника. Лента пред-
варительно напряжена в двух плоскостях. После её освобождения она скручива-
ется в витую трубку, на свободном конце которой укреплён груз. Так образуется
«гантель»- центр масс корпуса спутника- центр масс груза в конце штанги
(трубки) длиной ~12 м; на рисунке груз показан в виде точечной массы. Под дей-
ствием гравитационного поля Земли «гантель» ориентируется по линии «центр
масс спутника - центр массы Земли». Для успокоения колебаний относительно
этого направления на спутнике дополнительно установлен гиродемпфер.
Второй (б) КА - с большой блендой, защищающей от засветок Солнцем ап-
паратуру наблюдения, с остронаправленной антенной и двумя панелями солнеч-
ных батарей; орбита стационарная (-36000 км); управляющие органы - электро-
маховики и ДС на сжатом газе. Наблюдение осуществляется в инфракрасном
диапазоне.
Третий (в) КА - высокоманевренный спутник, наблюдение ведется в опти-
ческом диапазоне с эллиптической орбиты 1400 ... 1600 км; исполнительные ор-
ганы - силовые гироскопы, жидкостные ДС и электромагнитные катушки.
На рис. 2.1.8, г показан КА для изучения Солнца. КА содержит четыре солнеч-
ных батареи, антенны, около 10 научных приборов, управляющие органы - электро-
маховики и три электромагнитные катушки для разгрузки маховиков и резервные ДС
(жидкостные). После первоначального построения ориентации дальнейшее поддер-
жание ориентации выполняется парой «электромаховики-катушки» без расхода ра-
бочего тела только за счёт электроэнергетики от солнечных батарей.
На рис. 2.1.8, д изображен автоматический КА (АКА) научного назначения,
на рис. 2.1.8 е, ж - модули орбитальных станций «Мир» и «Альфа».
На рис. 2.1.9, а - д показаны общий вид и компоновка двигателей и солнеч-
ных батарей функционального грузового блока (ФГБ) «Заря» Международной
космической станции «Альфа», который после автономного полёта (в связке с
американским блоком «Единство») в течение более 600 суток выполнил стыковку
с российским служебным модулем «Звезда», а в дальнейшем к ним пристыкова-
лись другие модули (разработки США, Европы, Японии и других- государств-
участников проекта) [14].
Двигатели 37 и 38 предназначены для коррекции орбиты и стыковки. Дви-
гатели коррекции компонуются так, чтобы линия действия тяги проходила через
центр масс. При заметном отклонении этой линии от центра масс в соответст-
вующих каналах возникает значительный возмущающий момент, на компенса-
цию которого потребуются ресурсы управляющих органов. Остальные: 20 ДПС
(двигатели причаливания и стабилизации тягой -20 кг) и 16 (восемь основных и
восемь резервных) ДТС (двигатели точной стабилизации тягой 1,2 кг). Масса
ФГБ составила -19300 кг.
55
a
KA «Целина»
Наблюдение источников радиоизлучений
Орбиты
• Круговая « 650 км.
Гравитационная ориентация.
Точность ориентации относительно ОСК:
- по крену - не хуже 5°;
- по тангажу и рысканию - не хуже 2 ... 10°;
- по угловой скорости - не хуже 0,02%.
б
КА 71X6
Дистанционное зондирование Земли
Орбиты
• Геостационарная 35800 км
Точность ориентации -8’... 10’.
Точность стабилизации:
- по углу < 3";
- по угловой скорости < 0,0003 7с.
в
КА «Аркон»
Дистанционное зондирование Земли
Орбиты
Апогей - 2700 ... 2900 км;
перигей - 1400 ... 1600 км.
Точность ориентации < 2'.
Точность стабилизации:
- по углу < 3";
- по угловой скорости < 0,0002 7с.
г
КА «АУОС»
Наблюдение за Солнцем
Орбиты
• Круговая - 500.. .600 км
Точность ориентации < 10'.
Точность стабилизации:
- по углу < 3";
- по угловой скорости < 0,005 %.
Л
АК А «Спектр»
Изучение электромагнитного излучения
галактик и звёзд
Орбиты
Апогей- 170000 ... 350000 км;
перигей - 300.. .5000 км
Точность ориентации 0,2 "... 3'.
Точность стабилизации:
- по углу 0,Г'...2,5';
- по угловой скорости < 0,0001 7с.
е
Модули орбитальной станции «Мир»:
• «Квант», «Квант-2», «Кристалл»,
«Спектр», «Природа»;
• стыковка со станцией «Мир»;
• доставка научной аппаратуры, полезных
грузов и топлива;
• служебные модули станции «Мир»;
• круговая орбита 250 ... 550 км.
ж
Модуль «Звря» в составе МКС «Альфа»:
• Управление связкой «Заря» + NODE 1 в
течение 600 суток;
• стыковка с модулем «Звезда» (образование
базовой конфигурации МКС «Альфа»);
• управление движением МКС «Альфа»;
• круговая орбита 250...550 км.
Рисунок 2.1.8- Общие виды КА различного назначения
0 3920
Рисунок 2.1.9 - Общий вид ФГБ «Заря»
57
Рисунок 2.1.9. Продолжение - Схема расположения двигателей. Общий вид сбо-
ку: 1-20 - двигатели причаливания и стабилизации (ДПС); 21-28 - двигатели точ-
ной стабилизации (ДТС); 29-36 - двигатели точной стабилизации (резерв-
ные); 37-38 - двигатели коррекции и стыковки
в
Рисунок 2.1.9. Продолжение - Схема размещения ДПС и ДТС на переход-
ном грузовом отсеке
58
Вид А
нумерация ДПС
дальний пояс
Б-Б
нумерация ДПС
(ДТС не показаны)
360
Г
Рисунок 2.1.9. Продолжение - Схема размещения ДПС
Б-Б
нумерация ДТС
(ближний пояс)
(ДПС не показаны)
III f Y]
Д
Рисунок 2.1.9. Окончание - Схема размещения ДТС
59
Пять аналогичных модулей были использованы при построении советской
пилотируемой орбитальной станции «Мир» («Квант», «Квант-2», «Спектр»,
«Кристалл», «Природа»).
Особое место занимают микроспутники- КА малого объема и массы
(100 ... 150 кг), наноспутники (1 ... 10 кг) и пикоспутники (менее 1 кг) [34]. Осо-
бенности компоновки этих спутников состоят в плотности внутреннего монтажа,
эффективности использования объема. Внешне это конструкции в виде кубов,
цилиндров, призм, шаров. Крупные спутники из этого семейства могут иметь не-
большие солнечные батареи и антенны и выполнять ориентированный полёт (на-
пример, «Egyptsat-1» - спутник, созданный Украиной для Египта).
2.1.3 Массово-инерционные характеристики КА
Массово-инерционные характеристики являются важными данными КА
для оценки его управляемости, исследования динамики процессов управления и
регулирования в процессе проектирования и сопровождения, в период испытаний
и эксплуатации при выполнении целевой задачи КА.
В процессе конструирования конструктор стремится выполнить КА мини-
мально возможной массы и минимально возможных моментов инерции с помо-
щью полной компоновки оборудования. Чем меньше масса, тем меньше затраты
на выведение и коррекцию орбиты, чем меньше моменты, тем меньше затраты на
управление КА в движении вокруг центра масс при выполнении требуемой ори-
ентации.
Несимметрия в распределении масс КА приводит к появлению кроме осе-
вых моментов инерции Jxx, Jyy, Jzz еще и центробежных моментов инерции Jxy, JXZ3
Jyz. Несимметрия в распределении масс оказывает заметное влияние на динамику
процессов регулирования.
В табл. 2.1.1 в качестве примера приведены массово-инерциальные харак-
теристики спутника наблюдения на стационарной орбите, КА средних габарит-
ных размеров и массы. Масса КА составляет -2300 кг.
Таблица 2.1.1 - Моменты инерции спутника наблюдения
Jxx, КГМ2 Jyy, кгм2 Jzz, КГМ2 Jxy, КГМ2 Jxz, КГМ2 Jyz, КГМ2
4554 5410 8282 333 4,7 2,4
Другой пример (табл. 2.1.2) - ФГБ «Заря» в автономном полёте и после
стыковки с модулем США «Единство» (NODE1) для разных фиксированных по-
ложений солнечных батарей. Это пример крупногабаритного КА [14].
60
Таблица 2.1.2- Массово-инерционные характеристики
Участок полета Масса Координаты центра масс Моменты инерции
m X Y Z Jxx Jyy Jzz Jyz Jzx Jxy
кг м кгм2
ФГБ после отделе- ния от PH: 1. СБ закрыты 19340 -3,994 -0,04 0,008 39259 154282 160355 -206 -107 1202
2. СБ открыты исх. II (а=90°), исх. I (а=22,5°), (а=0”) 19340 19340 19340 -3,994 -3,994 -3,994 -0,04 -0,04 -0,04 0,008 0,008 0,008 59836 60380 60473 175129 174586 174492 160398 160398 160398 -206 -206 -206 -107 -107 -107 1202 1426 201
3. ФГБ на момент стыковки с NODE1. СБ открыты исх. II (а=90°), исх. I (а=22,5°), (а=6°) 18870 18870 18870 . -4,01 . -4,01 -4,01 -0,041 -0,041 -0,041 0,008 0,008 0,008 58421 58921 59058 174288 179744 173650 159164 159163 159164 -184 -184 -184 -175 -175 -175 1222 1447 1222
4. ФГБ+NODEl, 30 сутки СБ открыты исх. II (а=90°), исх. I (а=22,5°), (а=0°) 31255 31255 31255 -8,537 -8,537 -8,537 -0,273 -0,273 -0,273 0,005 0,005 0,005 84440 84983 85076 1218629 1218085 1217991 1206616 1206616 1206616 -150 -150 -150,4 486 486,5 486,5 47798 48023 47798
2.1.4 Управляющие силы и моменты, действующие на КА
2.1.4.1 Реактивные двигатели для управления движением центра масс
КА
В процессе космического полета для ряда КА необходимо осуществлять
орбитальные маневры (подъем высоты орбиты, снижение, фазирование орбиты
для кооперируемых КА, коррекции орбиты в целях сохранения ее параметров,
стыковки КА, спуска с орбиты). Для выполнения этих задач КА оснащаются ре-
активными двигателями коррекции. Это двигатели многократных включений-
отключений, работающие на жидком топливе или сжатом газе для малых КА.
Типовая диаграмма набора тяги при включении и спада тяги при отключе-
нии двигателя коррекции показана на рис. 2.1.10.
Рисунок 2.1.10- Диаграмма изменения тяги при работе
двигателя коррекции
Здесь tBIO1, tOTKn - моменты формирования команд на включение и отключение дви-
гателя коррекции соответственно;
твкл -временное запаздывание до начала нарастания тяги от момента
прохождения команды на включение двигателя коррекции;
tpo - время выхода на установившийся уровень тяги;
тотк - временное запаздывание до начала спада тяги от момента прохож-
дения команды на отключение двигателя коррекции;
1пд - импульс последействия.
Так, для двигателя коррекции ФГБ МКС «Альфа» с тягой 417 кгс эти ха-
рактеристики имеют следующие значения:
- ^вкл 0,75 с, tpo 125 с, Тотк 0,5 с,
- суммарное время выхода тяги на режим 90% установившегося уровня
составляет 0,65 ... 2,3 с в зависимости от паузы между включениями дви-
гателя, меньшие значения соответствуют паузам менее 30 мин;
- удельный импульс тяги на установившемся режиме J=298+3 кгс/кг.
При проведении баллистических расчетов при оценке приращения скорости
КА для расчета параметров орбиты участки набора и спада тяги учитываются
62
суммарным импульсом тяги. Для двигателя с тягой 417 кгс значение импульса
выхода на режим 90% от номинала составляет ~180^° кгс-с, импульса последей-
ствия - 68+20 кгс-с.
При сравнении для КА массой ~ 2000 кг на геостационарной орбите двига-
тель коррекции имеет тягу 5 кгс (на сжатом газе). Соответственно врехменные ха-
рактеристики в диаграмме, аналогичной рис. 2.1.10, также имеют меньшие значе-
ния.
Отклонение тяги от номинального направления, погрешности монтажа, из-
менение инерционно-массовых характеристик КА приводят к появлению сущест-
венных возмущающих моментов при работе двигателя коррекции. Их надо учи-
тывать при построении и исследовании системы стабилизации в режиме выдачи
корректирующего импульса.
2.1.4.2 Исполнительные органы для управления движением КА
относительно центра масс
2.1.4.2.1 Реактивные двигатели ориентации и стабилизации
Реактивные исполнительные органы являются наиболее распространённы-
ми в настоящее время на существующих и разрабатываемых космических аппа-
ратах. К реактивным исполнительным органам (ИО) относятся двигатели, соз-
дающие реактивные силы за счёт отброса массы.
Широко используются в космической технике реактивные двигатели, рабо-
чим телом которых является жидкое топливо, второй тип ИО этого класса - реак-
тивные двигатели, работающие на сжатом газе. Для ИО на жидком топливе тяга
создается выбросом с большой скоростью продуктов сгорания топлива из камеры
сгорания через сопло Лаваля, для двигателя на сжатом газе отбрасывается рас-
ширяющийся газ, который через редуктор также подается для ускорения истече-
ния через сопло Лаваля. Чем выше скорость истечения, тем больше тяга.
Тяга реактивного двигателя зависит от расхода массы и скорости исте-
чения рабочего тела VpT:
P = nvVpT, (2.1.43)
или
P = GSJS = GS (2.1.44)
g
„ т vpT
где Gs = gms - весовой секундный расход; Js = —----удельный импульс тяги;
g
ms - массовый секундный расход.
Импульс тяги за некоторое время At определяется формулой
. Jp = P -At = Js -AG. (2.1.45)
При этом, чтобы получить большой импульс с теми же затратами рабочего
тела AG, надо увеличивать скорость его истечения VpT. Это одинаково относится
к обоим типам двигателей.
Управляющие реактивные двигатели - это двигатели многократных вклю-
чений с постоянным уровнем тяги. Характер изменения тяги для одного отд ель-
63
ного включения двигателя показан на рис. 2.1.11 [27].
Рисунок 2.1.11- Характер изменения тяги двигателя
Моменты времени tj и U соответствуют моментам прохождения команд на
включение и отключение двигателя. Открытие или закрытие сечений для прохо-
ждения топлива или сжатого газа обычно выполняются электроклапанами. Тяга
двигателя начинает нарастать после прохождения команды включения, через не-
которое время твкл (запаздывание на включение), необходимое для физического
открытия магистрали в момент t2, а затем происходит нарастание тяги (начинает-
ся процесс горения и расширение продуктов сгорания или сжатого газа). В мо-
мент времени t3 заканчивается набор тяги до максимального установившегося
значения Ро, характерного для данного конкретного двигателя. В момент t* в со-
ответствии с логикой управления проходит команда на отключение двигателя, и
до момента t5 происходит закрытие клапана (тяга не меняется), и только с момен-
та времени t5 начинается плавное снижение тяги условно, до момента t<$.
Время спада тяги, как правило, больше, чем время набора тяги, поскольку
продолжается истечение газа, находящегося в объемах за клапаном и в сопле.
В практике космических полётов был случай, когда удавалось восстановить
ориентацию КА при пустых топливных баках. В этом случае немного топлива ос-
тавалось в полостях топливных магистралей от топливных баков до клапанов.
Теоретически истечение остаточных газов после закрытия электроклапанов
может длиться достаточно долго, и соответственно будет какая-то небольшая
уменьшающаяся тяга. Если при известном времени t5 задаться временем ожида-
ния (—100 t4), то можно вычислить импульс последствия
100t4
*пд= fP(t)dt. (2.1.46)
t5
Хотя теоретически время истечения газов из магистралей после закрытия
клапана может быть бесконечно большим (тяга падает - скорость истечения па-
дает- тяга падает - давление падает...), импульс последействия имеет конечную
64
величину, свою, характерную для каждого двигателя.
По импульсу последействия можно вычислить время эквивалентного им-
пульса, но не с убывающей тягой P(t), а с номинальной Pq. Из равенства импуль-
сов вычисляют время t$, которым определяется продолжительность прямоуголь-
ного импульса номинальной тяги (t^ -15) • Ро:
l00t4
Сб-*5)-Ро= (2.1.47)
В
100t4
fp(t)dt
ИЛИ t6=—--------+ t5.
Ро
На рис. 2.1.12 показан вид автоколебательного режима (при отсутствии
внешних возмущений) в координатах - ’’угловое рассогласование - угловая ско-
рость” (фазовая плоскость).
Рисунок 2.1.12 - Автоколебательный
режим
При достижении угловым рассогласованием (точнее аргументом управле-
ния о = Уст + 0>Ко) величины зоны нечувствительности Ду, определяемой требуе-
мой точностью ориентации, происходит включение ДС на время At. Приращение
угловой скорости Дсо за время этого импульса меняет знак угловой скорости. С
Дсо
угловой скоростью —— уменьшается угловое рассогласование до величины -Ду.
Путь этот проходится за время
2Ау Т
Дш/2 “ 2’
где Т - период автоколебаний.
При cr(t)=—Ду происходит включение ДС противоположной полярности.
Чем меньше Дсо (чем меньше единичный импульс тяги), тем больше период авто-
колебаний (за большее время проходится путь в 2Ду), тем экономичнее система
по расходу рабочего тела.
(2.1.48)
65
В этом случае ДС должны быть способны реализовать минимальный еди-
ничный импульс тяги - так, чтобы только менять знак угловой скорости. При
большем приращении скорости А<о автоколебательный режим будет неэкономич-
ным по расходу рабочего тела.
Минимизировать единичный импульс тяги можно двумя путями: уменьше-
нием всех временных запаздываний или уменьшением тяги Ро. Но уменьшение
тяги нежелательно для других динамических режимов (демпфирования, разворо-
тов, построения ориентации). На практике компромисс часто достигается уста-
новкой на КА двух типов управляющих двигателей - большой и малой тяги. При
этом большая тяга может отличаться от малой в 20 - 40 раз. Так, на функцио-
нальном грузовом блоке «Заря» МКС установлены двигатели точной стабилиза-
ции (ДТС) тягой ~1 кг и двигатели причаливания и стабилизации (ДПС) тягой
40 кг.
У двигателей стабилизации минимальный единичный импульс тяги зависит
от номинального значения тяги в установившемся режиме - чем выше номиналь-
ное значения тяги у двигателя, тем больше значение минимального единичного
импульса. Поэтому при проектировании КА иногда оснащают аппарат двумя ти-
пами двигателей - большой и малой тяги с малым единичным импульсом тяги.
При этом надо выполнять комплексную оценку. Выигрывая в расходе рабочего
тела на двигателях малой тяги в режимах поддержания точной или экономичной
ориентации, надо оценить весовые затраты на введение этих дополнительных
двигателей (сами двигатели, трубопроводы к ним, редукторы и другие элементы).
Второй вариант - один тип двигателей, но с двумя уровнями тяги.
Из всех рассмотренных типов управляющих двигателей жидкостные реак-
тивные двигатели, работающие на двух компонентах топлива (окислитель и го-
рючее), являются наиболее сложными. Для них нужны раздельные емкости, тру-
бопроводы, смешивание в требуемом соотношении компонентов, камеры сгора-
ния. Но у них и самый высокий удельный импульс тяги (самая высокая скорость
истечения продуктов сгорания). Самые простые - двигатели на сжатом газе, но
удельный импульс у них меньше. Промежуточное положение занимают одно-
компонентные жидкостные двигатели.
На рис. 2.1.13 показана принципиальная схема двигательной установки для
варианта однокомпонентных жидкостных двигателей.
При открытии клапанов ДС топливо подается в камеру разложения, где под
действием катализаторов разлагается на газ и пар и разогревается. Расширяясь
через сопло, истекающие газы создают тягу.
При реализации минимального единичного импульса (ДС включается и тут
же отключается, не достигая номинального значения тяги) удельный импульс не-
сколько снижается от значения при номинальной величине тяги.
66
Емкость со сжатым
нейтральным газом
Камеры разложения топлива
Рисунок 2.1.13— Схема двигательной установки для
однокомпонентных жидкостных двигателей
2.1.4.2.2 Силовой гироскопический комплекс
Для управления движением КА относительно центра масс широко исполь-
зуют двухстепенные силовые гироскопы - гиродины. Управляющее воздействие
на корпус КА обусловлено гироскопическим моментом, возникающим при пово-
роте (с помощью момента ш) рамки, содержащей ротор, который вращается с по-
стоянной скоростью [27].
Суммарный кинетический момент G системы тел, связанных с КА, можно
представить в виде двух составляющих кинетических моментов; К - кинетиче-
ский момент вращающегося в пространстве корпуса космического аппарата и Н -
суммарный кинетический момент силового гиростабилизатора.
Используя закон сохранения количества движения и изменяя кинетический
момент силового гиростабилизатора, можно сообщать корпусу КА необходимую
угловую скорость, достаточную для его переориентации.
Основные соотношения, характеризующие работу двухстепенного силового
гироскопа, установленного на КА, в проекциях на его связанные оси можно пред-
ставить через теорему об изменении кинетического момента относительно не-
подвижной (инерциальной) системы координат:
~- = М0, (2.1.49)
at
67
где Н' - кинетический момент твердого тела, вращающегося относительно не-
подвижной точки О в инерциальном пространстве (вектор); М®- главный мо-
мент, действующий на твёрдое тело, относительно неподвижной точки О.
При проектировании обеих частей уравнения на оси подвижной (связанной
с КА) системы координат получаем через локальную производную уравнение ви-
да
^• + шхН = М0, (2.1.50)
at
dH w
где —— локальная производная вектора Н на оси подвижном системы коор-
динат; о - вектор угловой скорости вращения основания СГК относительно под-
вижной системы координат.
Определяя суммарный кинетический момент двухстепенного гироскопа
(рис. 2.1.14) в осях, связанных с самим гироскопом:
Нх Jr
Ну = о,
Нг = о,
Рисунок 2.1.14 - К определению суммарного кинетического
момента двухстепенного гироскопа
и учитывая, что соу = 0, сох == соо, где «о - скорость вращения ротора гироскопа; 0 -
скорость поворота рамки гиродина относительно связанной системы координат.
После умножения вектора Hj на матрицу перехода от системы координат,
связанной с гироскопом, к связанной системе координат, имеем:
Нх = Но * cos0;
Hy = Jr-P;
Hz = -Но ♦ sinp,
а из уравнения (2.1.50) получим управляющий момент:
68
Мх = -Но • sin0( Р - ©у) - cdz • Jr • Р;
Му = Но (со2 • cosp + сох - sinP) + Jr • р;
Mz = -Но • COSp(P- (Dy) — сох • Jr • р,
где Hj (j = х, у, z) - проекции суммарного кинетического момента двухстепен-
ного гиростабилизатора на оси связанной системы координат, Нмс; Jr - момент
инерции гироузла (включая ротор гироскопа), кг-м2; Но - собственный кинетиче-
ский момент гироскопа, Нмс; Р - угол поворота рамки гиродина в плоскости его
прецессии; (Dj - проекции угловой скорости вращения КА на оси ССК, 1/с.
Ввиду медленности прецессионных движений гироузла по сравнению с
собственной скоростью вращения ротора практически можно пренебречь проек-
цией кинетического момента на ось ОХ, так как имеется неравенство |J р |«|Н|.
Тогда соотношения для Hj представляем в виде
Нх = Но • cosP; Ну = 0; Hz = -Но • sinp, (2.1.51)
а управляющий момент, соответственно - в виде
Мх = -Но sinP(P - (Dy),
Му = Но (cdz - cosp + (Dx • sinP), (2.1.52)
Mz = - Ho • cosP(p - (Dy).
Если в системе ориентации происходят интенсивные динамические процес-
сы, которые характеризуются изменениями угла прецессии гиродина р так, что
выполняются неравенства
|Р|»|®х|, |(Оу|, |®z|,
то в выражениях (2.1.52) можно отбросить гироскопические моменты с множите-
лями (Dj:
Мх = -Нор • sinP; Му = 0; Mz = -Hop cosp. (2.1.53)
Таким образом, выражения (2.1.51) и (2.1.53) являются основными при оп-
ределении принципа управления КА с помощью гиродинов.
Современные гиродины имеют неограниченные углы прокачки внешней
рамки
- оо < р < оо, (2.1.54)
что позволяет осуществлять управление КА в широком диапазоне вариации ки-
нетического момента гиросистемы.
Конструктивно гиродин представляет собой механическую систему, со-
стоящую (с точки зрения управления КА) из составных частей:
- гироблока, состоящего из ротора гиродина, который вращается с помо-
щью высокоскоростного электродвигателя, ротор закреплён в рамке, ко-
торая поворачивается с помощью приводного двигателя;
- устройства, измеряющего положение рамки гиродина; поскольку долж-
но выполняться условие (2.1.54), то это устройство должно быть беспро-
водным, обычно для него используют синусно-косинусный вращающий-
ся трансформатор.
69
Анализ выражений (2.1.51) и (2.1.53) показывает, что при расположении
осей гиродина коллинеарно связанным осям КА он быстро теряет управляющие
свойства ввиду вырождения управляющего момента.
Для сохранения управления на КА обычно устанавливают избыточное чис-
ло гиродинов. Простейший способ - установка спаренных двухстепенных гиро-
скопов [32]. Однако при этом существенно увеличивается вес силового гироско-
пического комплекса. Для управления КА оптимальное количество гиродинов -
четыре.
Существует множество способов расположения гиродинов на космическом
аппарате. При этом области вариации кинетических моментов, которые собственно
и определяют управляемость КА в каждом конкретном случае, будут свои. Некото-
рые виды расположения гиродинов на КА, точнее на гирораме, жёстко крепящейся
к несущим конструкциям аппарата, приведены в [30, 32, 33].
Одним из требований СУОС может быть обеспечение переориентации за
минимально короткое время в любую точку инерциального пространства. Так как
управление КА осуществляется изменением суммарного кинетического момента
гиростабилизатора Н, то логично предположить, что для эффективного управле-
ния последним необходимо иметь область вариации кинетического момента, про-
порциональную вектору
Н = Jo,
где Н - вектор кинетического момента гиростабилизатора; J - тензор инерции
КА; со - вектор угловой скорости КА в проекциях на оси ССК.
Обычно для выбора области вариации кинетического момента достаточно
учитывать центральные (осевые) моменты инерции.
Область вариации кинетического момента в этом случае имеет вид некото-
рого эллипсоида. Так, для КА, управление которым осуществлялось СУОС раз-
работки нашего предприятия, общепринятыми были формы аппарата, близкие к
вытянутым цилиндрам в пропорции:
JX«J, Jy«Jz«2J, (2.1.55)
где J - некоторый базовый момент инерции, кг-м2.
Для обеспечения управляемости КА с такими массово-инерционными ха-
рактеристиками была рекомендована конфигурация расположения гиродинов по
схеме «ромб» с углом «раствора» плоскостей прецессии гиродинов а, выбирае-
мым исходя из формы эллипсоида. Такое название схема получила потому, что
оси прецессии гиродинов образуют геометрическую фигуру - ромб. Почему ино-
гда эту схему называют «крыша», ясно из рис. 2.1.15.
Оптимальным для соотношения (2.1.55) оказался угол а=30°.
Собственные кинетические моменты i-ro гиродина (рамка с вращающимся
ротором) могут вращаться в плоскости процессии на угол ±360 град.
Ориентация осей, связанных с гироскопами, определяется разработчиком
конструкции КА. Для определённости покажем один из вариантов такого распо-
ложения.
70
Рисунок 2.1.15 - Установка гиродинов по схеме «ромб»:
V13, v24 - проекции оси ОУС на плоскость прецессии 1-3 и 2-4
гиродинов (ось Ov24 направлена противоположно оси ОУС);
Yri (i = 1 -4) - оси прецессии i-ro гиродина; Hoi - собственные
кинетические моменты i-ro гиродина; а - угол «раствора»
плоскостей прецессии гиродинов;] с (j = х, у, z) - связанные
оси КА
Введём дополнительные оси, исходящие из точки О, перпендикулярные оси
Ozc и лежащие в плоскостях прецессии 1-3 (ось vi3) и 2-4 (ось V24) гиродинов.
Оси OXrj, связанные с каждым гиродином, разместим в исходном состоя-
нии (pi = 0) следующим образом:
- ось ОХ 1-го и 3-го гиродинов направлена по оси V]3;
- ось ОХ 2-го и 4-го гиродинов направлена по оси v24-
В целях обеспечения максимальной области вариации кинетического момента
гиросистемы расположение кинетического момента в исходном состоянии принято
р! =-60°, р2 = 120°, р3 =-120°, р4 = 60°.
С учётом выражения (2.1.51) кинетический момент силового гироскопиче-
ского комплекса определится путём проецирования вектора Н на оси связанной
системы координат:
Нх = sina-Ho (cosPj - cosp2 - cosp3 + cosp4);
Hy= cosa-Ho (cosPi + cosp2 - cosp3 - cosp4); (2.1.56)
Hz = Ho (sinPi + sinp2 - sinp3 - sinp4).
А налогично проектируется и управляющий момент из выражения (2.1.53):
Мх = sina Ho(-sinP] Pi 4- sinp2 р2+ sinp3 р3- sinp4 p4);
Му = cosa-Ho(-smp] * pj - sinp2 • p2 + sinp3 • p3 + sinp4 • p4); (2.1.57)
Mz = H0(cOSpi • Pl + COSp2 • p2 - COSp3 • p3 - C0Sp4 * P4 ).
71
2.1.4.2.3 Двигатели-маховики
Двигатель-маховик - это электромеханическое устройство, содержащее од-
ностепенной гироскопический стабилизатор, закреплённый на корпусе КА.
Одностепенной гироскопический стабилизатор представляет собой ротор
(маховик) с жёстко закрепленной относительно корпуса КА осью вращения, при-
водимый во вращение электродвигателем [27].
При задании угловой скорости вращения маховика <вм его ротор, имеющий
осевой момент инерции JM, накапливает собственный кинетический момент Нм:
HM = JMcoM. (2.1.58)
Диапазон регулирования кинетического момента Нм назначается исходя из
конструктивных соображений изготовления двигателя-маховика, в частности
требования к линейности характеристики вход - выход:
Гтах — Нм > Fmin, (2.1.59)
обычно это диапазон симметричный:
Гтах Гггйп»
где Гтах - максимальный диапазон вариации кинетического момента маховика;
Tmin - минимальный диапазон вариации кинетического момента маховика.
Если в процессе стабилизации необходимо создать отличный от нуля скрытый
кинетический момент (например, поддержание орбитальной угловой скорости), то
диапазон регулирования кинетического момента Нм делают несимметричным.
Область вариации кинетического момента одностепенного гироскопическо-
го стабилизатора представляет собой отрезок прямой линии Гтах - ГпцП, параллель-
ный оси вращения ротора двигателя-маховика.
Уравнение движения одностепенного гироскопического стабилизатора
имеет вид
HM+JM<i) = m, (2.1.60)
где со- проекция угловой скорости вращения основания (места крепления
оси вращения) одноосного гироскопического стабилизатора на ось вращения; m -
полный момент на валу ротора маховика, состоящий из момента, создаваемого
двигателем и полного момента сопротивления:
m = Мэ + Мс,
где Мэ - момент, создаваемый двигателем; Мс - полный момент сопротивления
на оси ротора, состоящий:
- из трения в ходовых подшипниках;
- трения ротора о воздух;
- магнитных потерь в электродвигателе и т. д.
Обычно на практике
Ы»1Ч (2.1.61)
тогда (2.1.60) имеет вид
Нм=ш. (2.1.62)
В общем случае при расположении вектора Нм по оси OZ с КА имеем
Мгх — — Нм * соу; Мгу — Нм • сох, Mrz Нм,
72
а в случае выполнения (2.1.61)
Мгх -Нм • соу; Myy — Нм • сох; Мга ш, (2.1.63)
где coj - проекции угловой скорости вращения КА на оси ССК, j = x,y,z.
Гироскопические моменты Мга, являются вредными при управлении
КА двигателями-маховиками, а момент - пропорционален управляющему
моменту и легко рассчитывается через потребный динамический момент анало-
гично СГК (см. подразд. 4.5.6).
QC = К/Р + КсофН- К£ф; q
CTMj — W (j — X, у, z),
где Jj - центральные моменты инерции КА, кгм2; aCJ - аргумент управления,
1/с2; cMj - потребный динамический момент маховика, Нм; Ку - коэффициент
усиления по стабилизационному углу, 1/с2; К{й- коэффициент усиления по угло-
вой скорости, 1/с; Кс - коэффициент усиления по угловому ускорению; <р - вектор
угловой координаты движения КА относительно центра масс.
Располагая собственную ось вращения двигателей маховиков параллельно
связанным осям КА, получаем
Мх = -шх;
Му = -шу;
Mz = -mz,
где Mj - управляющий момент двигателя-маховика, расположенный по j-й оси,
j=x,y,z.
Гироскопический момент Мг учитывают по зависимости
Мг = Нм х о,
где Нм - кинетический момент маховика по j-й оси; о - вектор угловой скоро-
сти вращения КА.
Для оценки кинетического момента маховика по j-й оси вращения исполь-
зуют тахогенератор, измеряющий угловую скорость вращения ДМ (йм. Выходная
информация, поступающая с тахогенератора в БЦВМ в виде кода, пропорцио-
нального его выходному напряжению, «оцифрована» в размерности кинетическо-
го момента маховика, который определяют по выражению (2.1.58).
2.1.4.2.4 Электромагнитные катушки (магнитные исполнительные
органы)
Рассмотрим основные принципы такого типа управления и назначение
электромагнитов (ЭМ) в составе СУ.
Принцип действия любой магнитной системы управления основан на взаи-
модействии магнитного момента КА с магнитным полем Земли. Момент этого
взаимодействия может быть найден следующим образом [3]:
M = LxB, (2.1.65)
где L - вектор магнитного момента КА; В - вектор индукции магнитного поля Земли.
73
В литературе, связанной с магнитными системами управления, это со-
отношение получило название основного уравнения магнитного управления
[3, 23]. В проекциях на оси связанной с КА системы координат выражение
(2.1.65) принимает вид
Мх = LyBz — LzBy ;
Му =LZBX-LXBZ; (2.1.66)
Mz = LxBy — LyBx.
Рассчитывая величины проекции вектора L и измеряя внешними датчиками
(магнитометрами) величины проекции вектора В, определяют проекции управ-
ляющего момента М.
Штатным образом электромагниты могут использоваться в СУ для созда-
ния управляющих моментов в режиме успокоения КА, первоначальных построи-
тельных режимах и для создания разгружающих моментов электромеханических
исполнительных органов при их наличии в составе СУ.
Величина управляющего момента М в этих случаях должна быть:
- больше величины действующего на КА возмущающего момента;
- достаточной для погашения угловых скоростей КА и построения необ-
ходимой ориентации за требуемое время.
Электромагнитные исполнительные органы, как правило, использующиеся
в СУ, преимущественно бывают двух типов: управляемые дискретно и управляе-
мые постоянно.
Под дискретным управлением ЭМ понимают подачу управляющего тока
постоянной величины в соответствующий канал на требуемое для создания
управляющего момента время.
Под постоянным управлением ЭМ понимают предварительный расчет ве-
личин управляющих токов в каждом ЭМ и задание их в соответствующий канал
управления.
Схема формирования управляющего момента для, например, одной оси КА
показана на рис. 2.1.16.
Рисунок 2.1,16 - Схема формирования
управляющего момента
74
Как следует из (2.1.66), идеальные условия включения ЭМ по i-й оси соот-
ветствуют условию
Bi = 0. (i=x,y,z).
Для того, чтобы при данном значении L создать максимальный момент, не-
обходимо, чтобы
L В = 0.
На современных КА устанавливают, как правило, три ЭМ, как показано на
рис. 2.1.17.
Рисунок 2.1.17- Схема расположения
трех ЭМ на КА
Для каждого КА необходимо рассчитать максимальный момент ЭМ,
имеющего заданную массу, подобрать конструктивные размеры, мощность и ха-
рактеристики материала провода катушек.
Кроме того, необходимо иметь в виду, что для работы ЭМ в состав системы
управления должны входить чувствительные элементы - магнитометры, обеспе-
чивающие постоянное измерение вектора магнитной индукции Земли В.
2.1.5 Возмущающие силы и моменты, действующие на КА
2.1.5.1 Внешние возмущения
2.1.5.1.1 Гравитационный момент. Характеристики гравитационных
полей планет
Гравитационный потенциал Земли
Рассмотрим потенциал поля притяжения Земли. При точном расчете пара-
метров орбиты спутников в качестве хорошего приближения к действительной
поверхности Земли принимают геоид - гипотетическую поверхность, совпадаю-
щую с поверхностью спокойного океана и продолженную под материком. Иногда
в баллистике под геоидом понимают не поверхность, а тело, которое ограничено
поверхностью мирового океана при некотором среднем уровне воды, свободной
от возмущений. Во всех точках геоида потенциал притяжения имеет одно и то же
значение.
75
Потенциал притяжения Земли можно представить в виде разложения по
сферическим функциям [3, 10]:
п
„ Z \ п „
Ц I Г I "
U = — 1 + X — X(Cnm ‘ cos(mL) + dnm • sin(mL))Pmn(sin (p) ,
n=2\ Г у m=0
(2.1.67)
где p - гравитационный параметр Земли; r0 - средний экваториальный радиус
Земли; cnm, dnm- коэффициенты, определяемые из гравиметрических данных, а
также по наблюдениям за движением КА; L - долгота притягивающей точки; <р -
широта притягивающей точки; Pnm(sin<p) - присоединенные функции Лежандра
степени m и порядка п (при ш Ф 0); Pntn(sin(p) - многочлен Лежандра порядка п
(при m - 0).
Возмущающая часть гравитационного потенциала Земли определяется вы-
ражением
UB = U' 4- AU'- (U - р. /г) + AU’,
где AU' - потенциал аномалий силы тяготения Земли; U'- часть потенциала
Земли, которая учитывает несферичность Земли.
Следовательно,
£
г
00 f г V п /
S “ ZACnm * cos(mL) + dnm • sin(mL))Pnm (sincp)
n=2\ ) m=0
4-ди’.
Определенные гармоники в разложении потенциала учитывают: полярное
сжатие Земли, ее асимметрию относительно плоскости экватора, асимметрию
Земли относительно оси вращения. В расчетах учитывают в разложении потен-
циала притяжения несколько первых гармоник. Потенциал аномалий силы тяго-
тения Земли AU’ обычно не учитывают.
Неплохим первым приближением для гравитационного потенциала Земли
может быть выражение [2]
и=^
г
, I2(l-3sin2<p)
2г2
или
(2168)
г 2г
где ц - хравитационный параметр Земли; г - модуль радиуса-вектора КА; 12 -
коэффициент второй зональной гармоники гравитационного потенциала; G = л/2 -
ф- полярное расстояние точки, в которой ищется потенциал, т.е. угол между
осью OZw и радиусом-вектором КА.
Второе слагаемое в формуле (2.1.68) учитывает влияние сжатия Земли на
движение КА.
Гравитационный момент
При исследовании углового движения КА вокруг центра масс потенциал
76
поля притяжения Земли рассматривается как возмущающий гравитационный мо-
мент.
Представим, что в центральном ньютоновом поле находится твердое тело
вытянутой конфигурации, и продольная ось этого тела наклонена на некоторый
угол (отличный от 0 и ти/2) к линии горизонта (рис. 2.1.18) [27].
Рисунок 2.1.18- Твердое тело в
центральном ньютоновом поле
Введем связанную с телом правую систему координат OXoY0Zo с ортами i,
j, к и началом в центре масс тела О, которая совпадает с орбитальной. Соответст-
венно ось ОУо направим по продолжению радиуса-вектора, соединяющего центр
притяжения С с началом О, а ось ОХ0 расположим в мгновенной орбитальной
плоскости.
На элементарные массы тела в точке О и в точке, отстоящей от нее на рас-
стоянии р, вдоль радиусов-векторов этих масс будут действовать силы тяжести,
направленные к центру притяжения. Причем величина силы тяжести во второй
точке будет меньше, чем в точке О, поскольку она находится на большем рас-
стоянии от центра притяжения, вследствие чего возникает момент, который
стремится совместить продольную ось тела с гравитационной вертикалью. Таким
образом, зависимость величины ускорения силы тяжести от расстояния до центра
притяжения и центральность поля тяготения приводят к появлению моментов,
стремящихся повернуть ось тела, связанную с геометрией распределения масс в
нем, в некоторое определенное положение относительно прямой, соединяющей
центр масс тела с центром притяжения.
Найдем выражения для составляющих вектора гравитационного момента
Мгр, действующего на некоторое тело S. Гравитационный момент, действующий
на тело S, будет равен [27]:
M^fpxdG,
S
77
где р - радиус-вектор некоторой элементарной массы материального тела;
dG - вектор силы тяжести, действующей на эту элементарную массу.
Очевидно, что
г2 г
dG = ~g-^-dm.
г г
Здесь g- ускорение силы тяжести на поверхности планеты; г - радиус-
вектор элементарной массы dm относительно центра тяготения С; rg- удаление
поверхности планеты от центра С.
Введя Го - радиус-вектор центра масс тела S относительно С и учитывая,
что | р |« г0, после преобразований запишем
мп> = Jpy(p х j)dm = nr(k |PxPYdm - • fp2PYdm],
ro s ro S s
где ц - гравитационная постоянная планеты, равная grg2.
Проекции гравитационного момента на оси СК OX0Y0Zo будут равны:
М^=-ЗЬО;
го
Mw=0;
м^з-йт,
^0
где D и F - центробежные моменты инерции тела S, определяемые для системы
осей OXoYqZo [27].
Полученные выражения свидетельствуют о том, что вектор гравитационно-
го момента всегда лежит в плоскости местного горизонта. Кроме того, гравита-
ционный момент для тела, главные центральные оси инерции которого в данный
момент времени совпадают с орбитальными осями, равен нулю (так как в этом
случае D=F=0). В частности, гравитационный момент всегда равен нулю для те-
ла, эллипсоид инерции которого является сферой.
В общем случае главные центральные оси инерции тела могут быть повер-
нуты произвольным образом относительно орбитальных осей ориентации. Обо-
значим жестко связанный с телом S триэдр, совпадающий с главными централь-
ными осями инерции, через OXYZ. Угловое положение этого триэдра относи-
тельно орбитальных осей OX0Y0Zo определим матрицей направляющих косину-
сов М = {т^},(] =1,2,3; j = 1,2,3) , задающей переход от системы координат
OX0Y0Zo к системе координат OXYZ. Тогда проекции гравитационного момента
на оси связанной с телом системы координат определятся формулами
=т11Мп)Хо +т|3Мпй;,;
Mnw=m2IM v +т„М v +т„М , ;
П* 21 грХ0 22 rpY0 23 rpZ0 -
М =т31М +mrMniY + т33М .
П52 грл0 rpY0 -»-» rpZu
78
Воспользовавшись известным свойством направляющих косинусов, а также
учитывая, что если триэдр OXYZ совпадает с главными центральными осями
инерции тела, то все его центробежные моменты инерции в этих осях равны ну-
лю, после преобразований для проекций гравитационного момента получим сле-
дующие выражения [27]:
MrpX=34(C-B)m22m32;
го
М„у =3-^(А-С)тцти; (2.1.69)
го
Мф! = 3-у(В - А)т 12т22 >
Го
где А, В, С - главные моменты инерции тела S, определяемые для системы осей
OXYZ.
Таким образом, гравитационный момент, действующий вокруг одной из
осей триэдра OXYZ, зависит от разности моментов инерции относительно двух
других осей.
Для круговой орбиты выражения (2.1.69) могут быть преобразованы к виду
Мгрх = 3cog (Iz - Iy)m22m32,
M.PY = 3cog(Ix - Iz)tn12m32, (2.1.70)
M^z =3a>g(Iy -Ix)mI2m22.
Здесь главные моменты инерции тела обозначены как Ix, Iy, Iz, a (Do - его ор-
битальная угловая скорость.
Характеристики гравитационных полей планет
Математически потенциал гравитационного поля любой планеты может
быть описан формулой, имеющей структуру, аналогичную (2.1.67).
На межпланетных расстояниях Солнце и планеты с большой степенью точ-
ности можно считать материальными точками, а в околопланетном пространстве
неплохим первым приближением для гравитационного потенциала планет может
быть выражение (2.1.68).
Численные значения гравитационного параметра р и коэффициента второй
зональной гармоники гравитационного потенциала 12, используемых при расче-
тах по формуле (2.1.68), для гравитационных полей планет Солнечной системы
приведены в табл. 2.1.3 [2].
Таблица 2.1.3 - Характеристики гравитационных полей
планет Солнечной системы
Планета ц, м7с2 12-106
Солнце 1,330-10м <10
Меркурий 2,170Ю13 - -100
Венера 3,250-1014 —4
79
Окончание табл. 2.1.3
Планета ц, м3/с2 12106
Земля 3,986-Ю14 -1083
Марс 4,300-Ю13 -1959
Юпитер 1,270-Ю17 -14733
Сатурн 3,790-Ю16 -16479
Уран 5,800-Ю15 -3352
Нептун 7,050-Ю15 -3411
Луна 4,900-Ю12 -206
2.1.5.1.2 Аэродинамический момент. Характеристики плотности
атмосферы Земли
При движении с большой скоростью в разреженной атмосфере больших
высот на КА действуют аэродинамические силы и моменты. Первые приводят к
постепенному торможению космического аппарата и, как следствие, к снижению
высоты его орбиты, а вторые - к появлению внешних моментов, которые чаще
рассматривают как возмущающие, но иногда используют в пассивных системах
ориентации как стабилизирующие моменты [12, 23, 27].
Особенностью аэродинамического взаимодействия корпуса космического
аппарата с внешней средой является то, что вследствие малой плотности среды
это взаимодействие близко к картине "бомбардировки” КА отдельными молеку-
лами в отличие от схемы обтекания сплошной средой, принятой в обычной аэро-
динамике.
Аэродинамическая сила, действующая на КА при его движении в атмосфе-
ре, направлена против вектора линейной скорости КА V относительно атмосферы
и пропорциональна скоростному напору [27]
q = |pV2, (2.1.71)
где р - плотность атмосферы в рассматриваемой точке орбиты; V - относи-
тельная скорость тела и среды.
В расчетах учитывают только скорость движения центра масс КА, со-
ставляющей, связанной с вращением КА вокруг центра масс, обычно пренеб-
регают.
Плотность р находят из таблицы стандартной атмосферы для высоты, наи-
более близкой к высоте данной орбиты. Причем величина плотности зависит от
времени орбитальных суток: плотность ночной атмосферы Земли меньше, чем
плотность дневной атмосферы (табл. 2.1.4) [12].
80
Таблица 2.1.4 - Плотность атмосферы Земли
Высота, км Плотность, кг/м3
Дневная Ночная
150 3,087-109 3,670-Ю’9
160 1,752-1О’9 1,899-10’9
170 1,122-10’’ 1,350-10’9
180 7,749-10’10 8,052-Ю’10
190 5,630-Ю’10 6,050-Ю’10
200 4,242-Ю’10 4,О86Ю’10
220 2,600-10’10 2,287-Ю’10
240 1,707-10’10 1,670-Ю’10
260 1,173-Ю’10 8,467-10"
280 8,340-Ю’11 4,450-10’"
300 6,077-Ю’11 3,581-Ю’11
320 4,515-Ю’11 2,405-10’"
340 3,408-Ю’11 1,610-10'"
360 2,605-Ю’11 1,136-10"
380 2,013-Ю’11 8,120-Ю’12
400 1,570-Ю’11 5,606-10’12
600 1,770-Ю'12 2,264-Ю’13
700 6,666-Ю’13 5,054-Ю’14
800 2,619-Ю’13 1,183-Ю’14
900 1,063-Ю’13 2,892-Ю’15
1000 4,433-Ю’14 7,397-Ю’16
1500 8,020-Ю'16 7,105-Ю’17
2000 2,771-Ю’17 4,094-Ю’18
При математическом моделировании плотность воздуха р для заданного
значения высоты орбиты h можно вычислять по формуле [12]
p=poe’vA,
где ро = 1,393 кг/м3 - плотность воздуха на уровне моря; v = 1/7170 м’1 - коэф-
фициент в принятом экспоненциальном законе распределения плотности по вы-
соте.
Элементарная сила, действующая на площадку dS, будет определяться
формулой
V oV2 V
dF = -Cq cos s—dS = -C — cos 8—dS, (2.1.72)
V 2 V v 7
где С - некоторый коэффициент, называемый коэффициентом аэродинамиче-
ского сопротивления, для абсолютно неупругого удара принимают С=2 [27];
81
е - угол между внешней нормалью к элементарной площадке dS и вектором ско-
рости этой площадки относительно внешней среды.
Для 8=0 можно записать следующее выражение для величины аэродина-
мической силы:
F = -C—SM,
2
где SM - площадь миделева сечения - проекция КА на плоскость, перпендику-
лярную направлению скорости полета.
Аэродинамическая сила создает возмущающее касательное ускорение WA,
тормозящее орбитальное движение КА массой m
F nV2
W=- = -c£— SM. (2.1.73)
m 2m
Элементарный аэродинамический момент относительно центра масс опре-
деляется выражением
dMa3p=rxdF, (2.1.74)
где г - радиус-вектор площадки dS, имеющий начало в центре масс тела.
Полный аэродинамический момент
Mop = JrxdF. (2.1.75)
S
В последнем выражении интегрирование проводится по той части поверх-
ности космического аппарата S, которая омывается внешней средой при его дви-
жении.
Пусть космический аппарат имеет форму сферы, при этом его центр масс О
не совпадает с центром сферы А (рис. 2.1.19).
Рисунок 2.1.19 - К вычислению
аэродинамического момента,
действующего на сферический КА
Момент аэродинамических сил относительно центра О в соответствии с
(2.1.75)
= J(rA +rs)xdF= jrA xdF+ frs xdF = -(QxrA), (2.1.76)
s s s
82
где rA - радиус-вектор точки A; rs - радиус-вектор точки S поверхности сфе-
ры, взятый из центра A; Q = JdF - сипа аэродинамического сопротивления.
s
Второй интеграл в выражении (2.1.76) равен нулю в силу симметрии обте-
кания сферы внешней средой. С учетом (2.1.72) получим
V
Q=-CqSM-\
^0
(2.1.77)
Mop=CqSMrAsin<p.
Полученное выражение свидетельствует о том, что при поворотах вокруг
центра масс космический аппарат сферической формы имеет два положения рав-
новесия, соответствующие ф = 0 и ф = л. Если направление отсчета расположения
центра давления относительно центра масс взять по направлению вектора Vo, то
первое положение равновесия характеризуется расположением центра масс за
центром сферы (задняя центровка), а второе - расположением центра масс перед
центром сферы (передняя центровка). Рассматривая изменение аэродинамическо-
го момента в функции угла ф в окрестности положения равновесия, можно запи-
сать
dMa
= CqS г cos ф. (2.1.78)
4ф
Из (2.1.78) следует, что для задней центровки >о? а для передней
<1ф
----- < 0. Знаки приведенных производных свидетельствуют о том, что при зад-
d<p
ней центровке (ф = 0) космический аппарат статически неустойчив (возникаю-
щий момент имеет тот же знак, что и отклонение), а при передней центровке
(ф = л) - устойчив [27].
Из формулы (2.1.77) следует, что если направить связанную с КА ось ОХ
по прямой ОА и сориентировать ее по направлению вектора Vo, то вследствие ра-
венства угла ф нулю аэродинамический момент будет равен нулю.
Для сферы точка А является ее центром и одновременно точкой приложе-
ния равнодействующей аэродинамических сил, действующих на внешнюю по-
верхность. Такую точку называют центром давления. Для тела произвольной
формы тоже можно ввести понятие центра давления как точки пересечения ли-
ний действия равнодействующих аэродинамических сил.
Так как для тела произвольной формы линии действия равнодействующих
аэродинамических сил необязательно пересекаются в одной точке для всех углов
Ф, то можно считать переменным положение центра давления, т. е. гА = гА(ф), и,
следовательно, зависимость аэродинамического момента от угла ф не будет такой
простой, как это описывается формулой (2.1.77).
На рис. 2.1.20 показано тело произвольной формы, на которое действует
83
аэродинамическая сила сопротивления Q, параллельная вектору скорости Vo, ле-
жащему в связанной с телом системы координат плоскости OXY и приложенная
в центре давления А.
Рисунок 2.1.20 - Аэродинамический момент,
действующий на КА произвольной формы
В этом случае вектор аэродинамического момента параллелен оси OZ и оп-
ределяется выражением
MLpz =xAQsin(p2+yAQcos(pz, (2.1.79)
где хА, уА - координаты центра давления А в связанной с телом системе коор-
динат OXYZ; <pz - угол между осью ОХ и вектором скорости Vo.
Из рис. 2.1.19 можно видеть, что смещение центра давления по координате Z на
величину ZA вызывает появление аэродинамических моментов по осям ОХ и О Y:
Маэру = -zAQcos<p2;
Мирх = -zAQsin<pz.
При сложных конфигурациях космических аппаратов расчет аэродинами-
ческих моментов заметно усложняется, приходится учитывать взаимное затене-
ние элементов конструкции, переменность в зависимости от угла поворота омы-
ваемой потоком поверхности £ и т. п. Результаты расчетов, как правило, пред-
ставляются в виде зависимостей коэффициентов аэродинамических моментов от
соответствующих углов, характеризующих ориентацию КА относительно вектора
скорости его центра масс.
2.1.5.1.3 Магнитный момент
Как правило, в конструкцию КА входит много ферромагнитных материа-
лов, включая элементы конструкции, кабельную сеть, радиоэлементы, исполни-
тельные механизмы. Все они обладают способностью к созданию внешнего маг-
нитного поля. Магнитный возмущающий момент Мв для КА образуется в ре-
зультате взаимодействия геомагнитного поля Земли с суммарным магнитным по-
лем КА [3].
Величина этого момента определяется формулой
Мв =DaxB,
84
где Da - вектор эквивалентного магнитного диполя КА; В - вектор индукции
геомагнитного поля.
Выражение для вектора эквивалентного магнитного диполя КА можно
представить в виде
Da = Dmc + Dmh,
где Dmc - вектор магнитного диполя собственной намагниченности КА, обра-
зованный токами и постоянными магнитами в приборах, остаточной намагничен-
ностью элементов конструкции КА; DMh - вектор магнитного диполя, образован-
ный намагничиванием ферромагнитных материалов в геомагнитном поле.
Аналитическое вычисление составляющих Dmc и Dmh в общем случае за-
труднительно. Поэтому для определения их величины проводят специальные ис-
следования на паспортизированных рабочих местах для каждого конкретного КА.
Следует отметить, что вектор индукции геомагнитного поля является
функцией времени вследствие вращения магнитного поля Земли вокруг оси ее
вращения, аномалий магнитного поля Земли, изменения параметров орбиты КА.
2.15.1.4 Момент сил солнечной радиации
Световое давление, связанное с излучением Солнца, может породить силы
и моменты, действующие на космический аппарат, которые необходимо учиты-
вать при исследованиях его динамики.
Величина ре солнечного давления на расстоянии R от Солнца определяется
формулой [3]
Е fR Y
рс=-А М, (2.1.80)
с < R J
где с - скорость света; Ео~ величина потока энергии светового давления на
расстоянии Ro от Солнца.
Обычно в качестве величины Ro берут среднее расстояние от Солнца до ор-
биты Земли.
Взаимодействие светового потока с поверхностью космического аппарата
во многом аналогично взаимодействию молекул разреженной атмосферы Земли с
его корпусом. Это взаимодействие имеет сложную природу, и точные аналитиче-
ские выражения для оценки момента от давления солнечных лучей достаточно
сложны и не пригодны для практических целей.
Момент от светового давления определяется выражением
Мс = Jrxdf,
S
где г - радиус-вектор элементарной площадки dS поверхности КА, имеющий
начало в центре масс КА; S - поверхность КА, освещенная Солнцем; df- элемен-
тарная сила, действующая на площадкубЗ.
Приближенно выражение для момента от солнечного давления для КА сфе-
рической формы можно записать в виде
М =рДгцЛ, (2.1.81)
85
где Sc - площадь проекции освещенной части поверхности космического аппа-
рата на плоскость, перпендикулярную к световому потоку; es - единичный век-
тор направления на Солнце; год - расстояние от центра масс до центра давления.
Структура формулы (2.1.81) совпадает со структурой формулы (2.1.77) для
момента аэродинамических сил. Поэтому выводы о статической устойчивости
КА, связанные со взаимным положением центра масс и центра давления, сделан-
ные при анализе действия аэродинамического момента, могут быть распростра-
нены на случай анализа действия светового момента. Причем эти выводы уже не
связаны с принятой для простоты анализа сферической формой корпуса КА, а но-
сят общий характер.
В уравнениях, описывающих движение центра масс КА, также необходимо
учитывать возмущающее ускорение, вызванное давлением солнечного света.
Давление солнечного света учитывают как добавку Ацс со знаком «-» к постоян-
ной тяготения Солнца цс. Эту величину вычисляют следующим образом [12]:
AHc=PcScA2/m. (2.1.82)
Здесь принимают рс = 4,64x10’6 Н/м2- давление солнечного света на рас-
стоянии в одну астрономическую единицу А = 1,495x10й м (среднее расстояние
Земли от Солнца); m - масса КА.
Кроме рассмотренных выше внешних возмущающих моментов на космиче-
ский аппарат могут действовать и другие внешние моменты, например связанные
с ударами микрометеоритов, с негерметичностью конструкции аппарата и, как
следствие, появления реактивного момента из-за постепенного истекания газа
или жидкости, которыми могут быть заполнены его объемы. Однако обычно эти
моменты оказываются пренебрежимо малыми по сравнению с рассмотренными.
Численное сравнение величин гравитационного, аэродинамического, маг-
нитного моментов и момента сил светового давления показывает, что в зависимо-
сти от конкретных условий полета КА и его формы каждый из них может ока-
заться основным в суммарном внешнем возмущающем моменте, а каким-то мо-
ментом можно пренебречь.
Ориентируясь на средние данные форм современных околоземных КА, от-
метим, что для них до высот орбиты 200 ... 300 км преобладающим является аэ-
родинамический момент, с высот около 400 км - гравитационный, а при удале-
нии от Земли на несколько ее радиусов - момент сил светового давления [27].
2.1.5.2. Внутренние возмущения
При рассмотрении вопроса стабилизации КА могут быть эффективными
возмущающие движение моменты, образующиеся за счет движения тел, находя-
щихся внутри или снаружи КА.
Возникновение возмущающего момента обусловлено изменением момента
импульса (момента количества движения) L внутреннего элемента КА. Момент
импульса - векторная величина, равная векторному произведению импульса тела
на плечо г [9]:
L = [mv-r],
86
где m- масса тела; v- скорость тела; г - радиус-вектор центра масс тела до
центра масс КА.
Второй закон Ньютона для вращательного движения имеет вид
М = J-e,
где М - момент силы; J - момент инерции; е - угловое ускорение.
Но этот же закон можно представить с использованием момента импульса
М = AL/At,
где AL - изменение вектора момента импульса; At - интервал времени.
В конструкцию КА входит множество механизмов и узлов, которые могут
изменять свой момент импульса (т.е. совершать поступательные или вращатель-
ные движения).
Совокупность моментов Li определяет вектор внутреннего момента им-
пульса L для данного КА.
Для замкнутой системы действителен закон сохранения момента импульса
ZLj = const.
Для примера приведем несколько факторов, являющихся источниками
внутренних возмущений:
1. Для некоторых КА для поддержания энергопотребления в заданных преде-
лах необходим поворот солнечных батарей (СБ) при движении по орбите.
Вращением управляет подсистема ориентации СБ. При этом движение СБ
вызывает появление AL и, соответственно, возникновение возмущающего
момента.
2. Многие типы КА имеют выдвигающиеся элементы конструкции: штанго-
вые антенны, выдвижные гравитационные стабилизаторы и пр. Любое пе-
ремещение указанных элементов возмущает движение КА.
3. При выполнении длительных полетов на орбитальных станциях для под-
держания нормальной физической формы космонавтов применяют боль-
шой набор тренажеров: беговые дорожки, нагрузочные элементы и др. В
процессе их использования (с учетом массы космонавта) также появляется
внутренний возмущающий момент.
4. Для записи телеметрической информации (ТМИ) вне зоны видимости на-
земных пунктов и ее воспроизведения при передаче на Землю, как правило,
применяют катушечные магнитофоны. При их работе в процессе записи и
воспроизведения может возникать возмущающий момент.
5. Для сброса информации на наземный измерительный пункт (НИЛ) на КА
могут устанавливать остронаправленные антенны (ОНА) с шаговым приво-
дом. При наведении ОНА на ПИП также возникает возмущающий момент.
6. В конструкции практически любого КА присутствуют постоянно вращаю-
щиеся элементы: гироскопы, гиростабилизаторы, вентиляторы, двигатели-
маховики. Практически каждый имеет дисбаланс своих движущихся час-
тей. Это приводит к периодическому и, как правило, высокочастотному из-
менению Lj. Как следствие появляется соответствующий момент М,.
87
Многие из перечисленных факторов создают очень малые изменения век-
тора момента импульса ALi5 которые существенно не влияют на общую динамику
КА, и их, как правило, в расчетах не учитывают. Однако для прецизионных ре-
жимов стабилизации КА, например, высокоточных спутников дистанционного
зондирования Земли, приходится при синтезе СУ учитывать их влияние.
2.1.6 Динамические уравнения движения центра масс КА
Динамические уравнения движения центра масс КА описывают изменение
параметров движения центра масс (ПДЦМ) КА во времени. Наиболее обобщен-
ной и универсальной формой представления динамики изменения ПДЦМ КА яв-
ляется система дифференциальных уравнений, описывающих зависимость про-
екций полного ускорения КА от координат центра масс КА и их производных.
Она позволяет учитывать широкий спектр возмущающих воздействий, оказы-
вающих существенное влияние на точность определения ПДЦМ КА.
Выбор системы координат, в которой представляются уравнения движения
КА, по сути сводится к выбору между инерциальной ЭСК и ГСК. Другие вариан-
ты (орбитальная система координат, система оскуллирующих элементов орбиты
и др.) менее предпочтительны в силу большей сложности правых частей уравне-
ний движения по сравнению с ЭСК или ГСК.
В инерциальной экваториальной системе координат J2000.0 (3CKJ2000)
система дифференциальных уравнений движения КА представляется следующим
образом:
dr3
—~ = v3;
< dt (2.1.83)
dV3
“ 8э + ёвэ + 8киэ *
I dt
Здесь гэ - геоцентрический радиус-вектор КА в ЭСК12000; v3 - вектор скорости
КА в 3CKJ2000; g3 - вектор ускорения, создаваемого гравитационным полем
Земли в ЭСК12000; g3B - суммарный вектор возмущающих ускорений, обуслов-
ленных действием на КА различных возмущающих факторов (гравитационных
полей Луны, Солнца, солнечного давления и др.) в ЭСК12000; £киэ ~ вектор уско-
рения, создаваемый двигательной установкой (ДУ) КА в процессе выдачи кор-
ректирующего импульса скорости в ЭСК12000.
При описании уравнений движения КА в ГСК необходимо учитывать, что
dv
абсолютное ускорение — должно рассматриваться как сумма относительного ус-
dt
dvr /
корения в неинерциальнои системе координат —-„ переносного (центробеж-
dt
ного) ускорения £цб и кориолисова ускорения gi<op-
В этом случае система дифференциальных уравнений движения КА пред-
ставляется следующим образом:
88
dr,.
—L = vr;
dt
dvr
— = gr+gBr
I at
2киг Shop Sue
(2.1.84)
Здесь rr - геоцентрический радиус-вектор KA в ГСК; vr - вектор скорости КА в
ГСК; gr - вектор ускорения, создаваемого гравитационным полем Земли в ГСК;
gBr - суммарный вектор возмущающих ускорений, обусловленных действием на
КА различных возмущающих факторов в ГСК; gKnr - вектор возмущающих уско-
рений в ГСК, создаваемый ДУ КА в процессе выдачи корректирующего импульса
скорости в ГСК; gKOp3 £ць - векторы кориолисова и центробежного ускорений.
Расчет правых частей дифференциальных уравнений (2.1.83) и (2.1.84) име-
ет существенную особенность, а именно: вычисление вектора ускорения, обу-
словленного влиянием гравитационного поля Земли, проводят в ГСК. Затем осу-
ществляют преобразование вектора гравитационного ускорения в требуемую
систему координат.
Очевидно, что при использовании ГСК преобразование вектора гравитаци-
онного ускорения не требуется. Однако в силу неинерциальности ГСК необходи-
мо дополнительно рассчитывать кориолисово gKop и центробежное gqB ускорения,
определяемые соотношениями
gK0P=2(<a1xvr); (2.1.85)
gw =и,х(®,хгг), (2.1.86)
где Vr - вектор скорости КА в ГСК; (Лз ~ вектор угловой скорости вращения
Земли в ГСК.
Для расчета вектора гравитационного ускорения в ЭСК12000 необходимо:
1. Рассчитать следующие матрицы:
- прецессии Р по формуле (2.1.3);
- нутации N по формуле (2.1.7);
- учета суточного вращения Земли Rs по формуле (2.1.18);
- Rpoi, учитывающую смещение положения мгновенного полюса Земли в эпо-
ху t относительно Международного условного начала по формуле (2.1.21).
2. Преобразовать текущие координаты КА из 3CKJ2000 (г0) в ГСК (гг):
rr=Rp»1Rs N Р r0 (2.1.87)
3. Рассчитать вектор гравитационного ускорения Земли gr (гг).
4. Преобразовать вектор гравитационного ускорения Земли из ГСК в
9CKJ2000:
g0=PT-NT-R^-R;, gr. (2.1.88)
Очевидно, что объем вычислений, затрачиваемый на расчет векторов гг и g0,
значительно больше, чем на расчет векторов gKop и go^. Это обстоятельство необхо-
димо учитывать наряду с другими факторами при выборе системы координат.
89
2.1.7 Динамические уравнения движения КА относительно центра масс
2.1.7.1 Уравнения движения КА относительно центра масс при
управлении реактивными двигателями
Динамические уравнения связывают вектор угловой скорости вращения КА
с моментами сил, действующими на него. Уравнения движения КА относительно
центра масс необходимо рассматривать как движение твёрдого тела относительно
неподвижной точки. Такое движение описывается относительно двух систем ко-
ординат:
- инерциальной (неподвижной) в пространстве системы координат (на-
пример, ЭСК12000);
- подвижной, жестко связанной с твёрдым телом, системы координат
(обычно это ССК).
Для абсолютно твердого тела, не содержащего каких-либо движущихся
масс и имеющего неподвижную точку, справедлива теорема об изменении мо-
мента количества движения (кинетического момента) К [3, 19]:
— = М, (2.1.89)
dt
где К - Jo - вектор кинетического момента твердого тела, где J - матрица мо-
ментов инерции тела (тензор инерции), <о - вектор проекций угловой скорости вра-
щения тела на оси ССК; М - вектор моментов внешних сил, приложенных к телу.
dK „ т^ту. dK
Если —— производная вектора К относительно ИСК, а —— локальная
производная вектора К, вычисляемая в связанном с телом базисе (ССК), вра-
щающемся с абсолютной угловой скоростью со в подвижном базисе (ИСК), то
уравнение (2.1.89) в ССК примет вид
dK dK ~
---=----+ шхК=М,
dt dt
или, опуская знак локальной производной «~», можно записать
^ + ©хК = М. (2.1.90)
В жестко связанной с телом и произвольно в нем расположенной системе
координат OjXiYiZi, имеющей начало в центре масс тела, уравнение (2.1.90) в
скалярном виде может быть представлено следующей системой:
Ха -la - та +(i= -1„)®а +
+ 1„А-<о’) + «>х(1хусо2 -122<ву) = Мх;
Iyyd>y — ” 1ух®х + (1» ~ (2 1 9В
+ 1„А-<в;) + <йу(1у2<их-1хуа»2) = Му;
IA - IzA -1А + 0» ")®А +
+ 1ХУА2 -А) + <ох(1я<ву -1у2сох) = М2,
90
где C0j - проекции вектора абсолютной угловой скорости тела на оси связанной
системы координат O^YjZi; Mj=Mynpj+Mao3Mj; М^М^ - управляющий и
возмущающий моменты в проекциях на оси ССК; Jjj - главные моменты инерции
тела; JXy=Jyx, Jxz^zx, Jyz=Jyz - центробежные моменты инерции тела; j = х, у, z.
Для околоземных КА основными внешними возмущающими моментами
являются гравитационный и аэродинамический моменты. Выражения для них
представлены в соответствующем подразделе.
Моменты инерции образуют тензор инерции тела [27]:
-к
1>у
-I
I,
и вычисляют их как
Ixx = f(y2 + Z2)dtn, Iw = J(z2 + x2)dm, In = J(x2 + y2)dm;
Ixy = fxydm, = jyzdm, = jzxdm,
где x, у, z - координаты элементарной массы dm тела, а интегралы берут по
всей массе тела.
Если оси жестко связанной с телом системы координат O1X1Y1Z1 направить
так, чтобы они совпадали с главными осями инерции, то центробежные моменты
инерции обратятся в нуль и система уравнений (2.1.91) приобретает упрощенный
вид:
Ixwx + (Iz - 1у )юу(oz = Мх;
1усоу + (Ix — Iz)coxcoz ~Му, (2.1.92)
Iz^Z + (1у ~ ^х)®х^у — Mz.
Систему уравнений (2.1.92) называют системой динамических уравнений Эйлера.
2.1.7.2 Уравнения движения КА относительно центра масс при
управлении силовыми гироскопами и двигателями-маховиками
Пусть КА представляет собой жёсткую конструкцию, имеющую неподвижно
закреплённые на ней силовой гироскопический комплекс (СГК) и двигатели-
маховики (ДМ), т.е. КА - абсолютно твердое тело, содержащее движущиеся массы.
Тогда суммарный кинетический момент КА обозначим буквой G и пред-
ставим в виде
G = К + Нм + Нсг = J(0 + Нм + Нсг, (2.1.93)
где J - тензор инерции КА; о - вектор угловой скорости КА в проекции на оси
ССК; Нм - вектор кинетического момента ДМ; Нсг - вектор кинетического мо-
мента СГК.
Подставляя в уравнение (2.1.90) вместо К выражение для G (2.1.93) и учи-
тывая, что Нсг=0, после преобразований получим в скалярной форме
91
Jxx^x ^ху^у ^Х2^г^”Ймх Мх+Мдх,
~ ^ху®х + Jyy<by — Jyz®z + Йну = Му 4" Мду , (2.1.94)
“Jxz^x -Jyz<by -Jzz<b2 +Hmz =MZ +Мда,
где Mx = Mra + Мсгх + ч- М„;
му = MQ. 4- MCi7 4- Мфу + Ммру 4- Мву; (2.1.95)
Mz =Мге 4-Мсге 4-М^ +MMpz +Мм;
Мга = coz(Ky 4-4-Hcry)-coy(Kz 4-+ НСГ2);
= сох (К2 + Нш + ) - <oz (Кх + + На J; (2.1.96)
М. = а>у (Кх 4- Нм< 4- ) - со, (Ку + Н,, 4- Нсгу);
к, =JLcox - Jxycoy — J„coz;
Ку = —J,ycox 4- J^coy - J^co,; (2.1.97)
Kz =-Лх/»х -J^y + ^2;
Mrpj - гравитационный момент, действующий на КА;
MMrj - магнитный момент, действующий на КА;
Мд, - управляющее воздействие на КА, создаваемое двигателями стабилизации;
Maj - управляющее воздействие на КА, создаваемое силовыми гироскопами;
MBj - суммарный возмущающий момент, действующий на КА от других
видов внешних и внутренних возмущений (солнечное давление, воздейст-
вие от подвижных элементов конструкции - антенн, солнечных батарей,
бортовых магнитофонов и т.п.);
j = х, у, z.
2.1.8 Уравнения движения КА с учетом колебаний упругих элементов
конструкции
Уравнения присоединенных упругих элементов КА обычно описывают
дифференциальным уравнением [6, 13, 14]
q„ +e.q, +Ч2Ч. =^(ару.Ру, +арп»Р» +а,.««Л)и< > (2.1.98)
i=l
где qn - обобщенная координата n-го тона упругих колебаний; еп - коэффици-
енты демпфирования; соп- собственные частоты упругих колебаний; ар|Ь - ко-
эффициенты влияния i-ro двигателя стабилизации на упругие колебания n-го тона
в j-м канале; Pjj - тяга i-ro двигателя стабилизации; ut - управляющая функция i-
го двигателя стабилизации; j = х, у, z.
Угловая скорость КА coCi с учетом упругих колебаний формируется сле-
дующим образом:
92
Фсх — ’ ®су “ Фу ^rf^znrnQn > ^cz ~ Фг ^2^упгп9п » (2.1.99)
П=1 П=1 П=1
где f(pnm, fL-n, f^nrn - форма и производные формы n-го тона упругих колеба-
ний в каналах крена, рыскания и тангажа в месте установки ГИВУС.
Ниже приведены уравнения вращательного движения вокруг центра масс КА,
несущего упругие поворотные солнечные батареи, управляемого реактивными двига-
телями стабилизации, двигателями-маховиками и силовыми гироскопами, в виде ди-
намических уравнений и уравнений упругих колебаний некоторых гармоник.
-IxA “IxA - axqiq, sin у, -axq:q2siny: + axriir„ cosy, +
+ ахгЛ cosb + asrurl2 cosy, + a^ cosy2 + a^f,, cosy, +
+ ахгЛ COSb ~ ахчЛ + ахцЛ1 + M* + а*нЛз + ЧЛ +
+ axq,S4s5 + axqsbq56 —
= Mra + M7 - + Mwx;
Iy(by-I>x -I,A 4-a^q, siny, a^cusiny, -a^jcosy, +
+ ауГ21г?1 cosy, -a^f,, cosy, +ayrur22cosy2 -a^r,,cosy, +
+ а^г23cosy2 - a,4f4 -a„r, 4-a+ a^p,. + +
+ a^P21 + a yq,| q5l + ayq52Q52 + aWSJ<bj + ayqjj 454 +
a>4ss4s5 '•’^лЯя ~
= M 4- MOIW - H +M 4- M + M 4- M ;
ry 1 Ay •*-Л<ау 1 1ТХсгг 1 граву x иру АТЛуиру>
ЬЛ - IxA - LA - 2^,41 cosy, -azqjq2 c°sy, - (2.1.100)
-a^L.siny, -aailrI2sinr, -a„nfasiny2 -anurI3smy, -
-a^LjSiny, -a2qjq3 -a4jq4 +azqiiq5, +a2qj!q52 +alqiiq53 +
"* "* ^absq» "^22Чи^3{ —
= M + M0HA — H + M +M 4- M 4-M i
1T>rz ’ XTXz ±xoiz 1 1ТЛсгг ’ lv>rpaez 1 хатрг • XTXjupz>
q, + E„q, + coqiq> - aqiXci>x siny, - a„A cosy, + a„A sin y, =0;
r.i + е,.Л + <4. + at.,A cosy, - ar„A siny, - a, A C0SYi = 0 i
г« + “Г2,г.. + аГ!1Хй, cosy, - ar;i2 co2 siny2 + аГ1|,йу cosy2 = 0;
p» + £p„Pn +®J„p.> +ap,A=°;
q4 + eqA + - aM.A - a,-A = a,4„M¥;
<Ъь+ахП d)v4-a.zfl оь =0,
456 4 56 456 q564 56 xq5l) x yqJ0 у zq$t »
93
где qi,Гц, Р22- обобщенные координаты колебаний упругих элементов:
панелей СБ, балки остронаправленной антенны (ОНА) и др.; ajqi, ..., azq56- коэф-
фициенты взаимовлияния КА и упругих элементов; уь у2 - углы поворота первой
и второй солнечных батарей; Mj0HA- возмущающий момент от привода ОНА;
Hoj - управляющий момент двигателей-маховиков; Mcrj - управляющий момент
силовых гироскопов; Mynpj - управляющий момент реактивных двигателей стаби-
лизации; Му - момент от привода ОНА; j = х, у, z.
Переменные Mrj и К, вычисляют по формулам (2.1.96) и (2.1.97) соответст-
венно.
При математическом описании динамики КА, использующих жидкостные
реактивные двигатели и, соответственно, содержащих топливные баки, необхо-
димо исследовать влияние колебаний топлива в баках на устойчивость процессов
стабилизации космического объекта управления. Решение данной задачи особен-
но существенно при работе СУ на участках выдачи корректирующих орбиту КА
импульсов двигательной установкой.
2.1.9 Уравнения движения КА с учетом колебаний жидкости в баках
Важным фактором, влияющим на устойчивость КА, являются колебания
жидкости топлива в баках. Эти колебания могут оказаться связанными с колеба-
ниями КА как твердого тела и даже с колебаниями упругих элементов, что может
привести к неустойчивости всей системы.
Механическая модель частично заполненного цилиндрического бака
При наличии продольного ускорения, действующего на КА, возможна ими-
тация силового воздействия колеблющейся жидкости на содержащий ее сосуд
механической моделью, состоящей из маятников или из масс, движение которых
стеснено пружинами. Структура и параметры механической модели зависят от
характера переносного движения сосуда, формы сосуда и свойств жидкости [17].
Волновой процесс, возникающий на свободной поверхности жидкости при
движении сосуда, представляется бесчисленным множеством тонов колебаний.
Каждому тону должна соответствовать своя механическая модель. Однако вслед-
ствие незначительного влияния по сравнению с первым тоном высшими тонами
обычно пренебрегают.
Для цилиндрического сосуда, равновесное состояние которого характери-
зуется перпендикулярностью свободной поверхности жидкости к продольной оси
цилиндра, механическая маятниковая модель первого тона колебаний при плос-
ком движении сосуда изображена на рис. 2.1.21.
94
Свободная поверхность
Рисунок 2.1.21 - Механическая
модель колебаний при плоском
движении сосуда
Механическая модель учитывает тот факт, что часть жидкости не соверша-
ет колебаний относительно сосуда. Масса то этой части жидкости жестко связана
со стенками сосуда и имеет момент инерции Iq относительно оси, проходящей че-
рез центр массы то. Напротив, груз mi маятника, представляющего собой под-
вижную часть жидкости, считается лишенным момента инерции, т.е. масса mi
предполагается точечной.
Маятниковая модель построена для идеальной жидкости, т.е. не имеющей
вязкости. При наличии перегородок в сосуде параметры модели жидкости не из-
меняются, а их влияние сводится к большему демпфированию свободных коле-
баний жидкости, что необходимо учитывать в математической модели.
Уравнение движения КА при учете колебаний жидкости
Рассмотрим движение маятника относительно несущего его объекта. Выбе-
рем связанную с указанным объектом систему координат Xiyi так, чтобы ее нача-
ло совпадало с точкой подвеса маятника.
Пусть эта система имеет угловое ускорение Э, а ее начало Oi - линейное
ускорение W (рис. 2.1.22). Угол отклонения маятника обозначим через гр
Если пренебречь влиянием силы тяжести, движение маятника относительно
системы xiyi описывается уравнением
mjLft =L, х^т^-тД/Д (2.1.101)
95
Рассмотрим движение КА, содержащего цилиндрический бак. Будем счи-
тать, что КА имеет продольное ускорение аХ], при этом свободная поверхность
жидкости перпендикулярна оси симметрии.
Пусть 1J - расстояние между точкой подвеса Oi маятника и центром масс
С. Линейное ускорение точки Oj подвеса маятника
W = i - (ах, -1; • S2) + j • (ах| - 1J • Э). (2.1.102)
Рисунок 2.1.22 - К выводу уравнения колебаний жидкости
Уравнение маятника (2.1.101) с учетом (2.1.102), пренебрегая в выражении
членом I* • Я2 второго порядка малости, можно представить как
а 1*
2 ^xl
где of = .
Li
Уравнение колебания жидкости с учетом демпфирования будет иметь такой
окончательный вид:
г, +ег, +<о2г, =yi+^LS, (2.1.103)
где ayi - ускорение КА в поперечной плоскости, обусловленное работой двига-
телей коррекции; coi - частота колебаний жидкости, обусловленная продольным
96
ускорением ах] КА; е - коэффициент демпфирования колебаний жидкости; L] -
длина маятника; 1J1 - расстояние между точкой подвеса Oi и центром масс КА.
Силовое воздействие маятника на КА проявляется в силе натяжения FH ни-
ти маятника, передаваемой на точку подвеса Оь Эта сила дает на поперечную ось
проекцию, за счет которой вокруг центра тяжести объекта возникает момент
(2.1.104)
Таким образом, для учета влияния колебаний жидкости в баке систему ди-
намических уравнений (2.1.100) необходимо дополнить уравнениями колебаний
жидкости (2.1.103) с учетом необходимого количества тонов, а в уравнения мо-
ментов ввести член Мж.
2.1.10 Особенности динамических схем крупногабаритных
орбитальных комплексов
Возрастающие задачи освоения космического пространства, решение ряда
исследовательских и прикладных задач привели к созданию крупногабаритных
орбитальных комплексов, пилотируемых и беспилотных. Первой крупной оби-
таемой орбитальной станцией был советский комплекс «Салют», а затем «Мир».
При полной комплектации комплекс «Мир» состоял из пяти транспортных моду-
лей каждый массой по -20000 кг, пилотируемого корабля «Союз» и грузового
корабля «Прогресс». Для обеспечения функционирования оборудования каждого
из блоков и систем жизнеобеспечения экипажа в длительном полёте необходимо
значительное количество электроэнергии. Поэтому каждый из блоков снабжен
двумя-тремя панелями поворотных солнечных батарей с собственной системой
ориентации.
В настоящее время функционирует международная космическая станция
(МКС) «Альфа». Первым блоком этой станции является функциональный грузо-
вой блок «Заря», аналогичный транспортным модулям орбитальной станции
«Мир» («Квант», «Природа», «Кристалл» и др.).
Создание крупногабаритного орбитального комплекса ведется путем по-
следовательного выведения отдельных модулей и их стыковкой к базовому бло-
ку. При этом орбитальный полет комплекса должен быть ориентированным и
стабилизированным для выполнения экипажем функциональных задач.
Для построения системы ориентации орбитальных блоков необходима аде-
кватная математическая модель блока и комплекса в целом как объекта регули-
рования.
Особенностью математической модели крупногабаритных орбитальных
комплексов являются:
1. Большое число дополнительных степеней свободы, связанное с упругими
свойствами многочисленных панелей солнечных батарей и различных вы-
носных элементов, упругими колебаниями корпуса - длинной конструкци-
ей как в продольном, так и в поперечных направлениях; характеристики
движения в стыковочных узлах. Как следствие система дифференциальных
уравнений углового движения орбитального комплекса имеет очень высо-
97
кий порядок (и > 100).
2. Существенные значения центробежных моментов инерции, вызванные не-
симметричностью орбитального комплекса. Поэтому большую часть ис-
следований приходится выполнять с полномасштабной математической
моделью, без расщепления на отдельные каналы ориентации и стабилиза-
ции.
3. Появление низкочастотных «упругих» тонов, вызванных большими габа-
ритными размерами комплекса. В практике отечественной космонавтики
были две «связки» на орбите космических аппаратов, построенных в одну
линию (в длину) - транспортный корабль снабжения (ТКС) + орбитальная
станция «Салют» + пилотируемые КА «Союз» и «связка» - орбитальная
станция «Салют-7» + ТКС. Общая длина одной из «связок» составила более
30 метров с двумя стыковочными узлами, массой более 45 тонн. Управле-
ние такой протяженной «упругой» линией (более 30 метров) представляло
существенные трудности, особенно при включении маршевых двигателей
для коррекции орбиты.
4. В случае длительного полёта орбитальных блоков возникает необходи-
мость коррекции орбиты, для чего включаются двигатели коррекции. При
этом вследствие отклонения линии действия тяги корректирующего двига-
теля (двигателей) от центра масс орбитального комплекса возникают зна-
чительные возмущающие моменты.
Включение исполнительных органов на парирование этих возмущений вы-
зывает колебательный режим. Задача проектировщика системы стабилизации -
не допустить совпадения частоты включений исполнительных органов с собст-
венными частотами «упругих» осцилляторов в математической модели орби-
тального комплекса.
2.2 Исходные данные по установке командно-измерительных приборов
В специальном разделе ИД приводят схемы установки командно-
измерительных приборов СУ на КА. Здесь же или в отдельном разделе представ-
ляют схемы установки исполнительных органов СУ.
Каждый измерительный прибор, используемый в СУ, имеет собственную
приборную систему координат (ПСК). В ИД приводятся номинальные положения
приборных систем координат относительно некоторой базовой системы коорди-
нат (БСК), связанной с конструкцией платформы КА, и погрешности их угловой
установки относительно номинальных.
Наиболее удобно схемы установки приборов представлять в виде чертежей
или рисунков с указанием углов и их номинальных численных значений, одно-
значно определяющих положение ПСК того или иного прибора в БСК.
Существует множество различных схем установки приборов на КА в зави-
симости от вида приборов и решаемых ими задач. Главная задача командно-
измерительных приборов - обеспечить с высокой надежностью наблюдаемость
системы. Для оптико-электронных приборов необходимо дополнительно учиты-
вать отсутствие возможных затенений их полей обзора элементами конструкции
98
КА, попадание в поле зрения излучений светил-помех, нарушающих светотехни-
ческие условия нормального функционирования приборов.
При выборе числа измерителей угловой скорости и схем их установки на
КА обычно используют минимально избыточные структуры. При меньших габа-
ритно-массовых характеристиках приборов, реализующих такие структуры,
обеспечивается их высокая отказоустойчивость. Предприятие-разработчик может
поставлять измерители угловой скорости в виде моноблока или комплекта, со-
стоящего из нескольких чувствительных элементов. Тогда в ИД приводят схему
установки ПСК комплекта измерителей угловой скорости КА.
В соответствующих подразделах книги при описаниях приборов СУ пред-
ставляют некоторые типовые схемы установки различных приборов.
Ниже для примера показаны схемы установок некоторых приборов систе-
мы управления космического аппарата МС-2-8 системы «С1ч-2».
В соответствии с ИД [29] астроизмерительную систему (АИС) устанавли-
вают так, чтобы в номинальном положении ось ОдисХдис ПСК АИС была парал-
лельна и совпадала по направлению с осью ОбХб БСК, а ось ОдисХдис в номи-
нальном положении составляла угол плюс 49° с осью OEZE БСК. Такая установка
обеспечивает отсутствие засветок АИС Солнцем с учетом того, что КА МС-2-8
функционирует на солнечно-синхронной орбите с наклонением около 98,26°.
Оси ПСК солнечного датчика (СД) расположены относительно осей БСК
КА следующим образом: ось ОсдХсд совпадает по направлению с осью ОБХВ, ось
ОсдУсд - с осью ОБУБ, ось ОСд2Сд - с осью OBZB.
Комплект измерителей угловой скорости (КИУС) содержит четыре иден-
тичных прибора - датчика угловой скорости (ДУС), которые устанавливают на
КА таким образом, чтобы оси чувствительности трех основных ДУ С (ОдУСх>
Сдусу, Сдусг) были параллельны соответствующим осям БСК, а измерительная
ось четвертого резервного прибора (Сдуси) была расположена под равными угла-
ми (54°44’) к осям БСК.
Расположение осей чувствительности ДУ С относительно осей БСК показа-
но на рис. 2.2.1. Оси чувствительности всех ДУС направлены в стороны, проти-
воположные их приборным осям OIXZn.
Начало Оп ПСК прибора расположено в точке пересечения оси Z с поса-
дочной плоскостью прибора, а направление осей ОПХП, OnYn, OnZn совпадает с
направлением соответствующих осей X, Y, Z связанной с прибором системы ко-
ординат.
После установки приборов на КА оси OnZn ПСК ДУСХ, ДУСУ, JJYCZ сов-
падают по направлению с осями ОбХб, ОеУб, OeZb соответственно. Расположение
остальных осей ПСК ДУС относительно БСК показано на рис. 2.2.2, 2.2.3 и 2.2.4.
99
Рисунок 2.2.1 - Расположение осей
чувствительности ДУ С Рисунок 2.2.2 - Положение осей
относительно осей БСК ПСК ДУСХ
Рисунок 2.2.3 - Положение осей Рисунок 2.2.4 - Положение осей
пск дусу пск дусг
Для описания положения ПСК четвертого (резервного) ДУСЯ относительно
БСК необходимо из исходного положения ПСК, при котором его оси совпадают с
осями БСК, сделать первый поворот на угол плюс 45° вокруг оси ObZb, затем на угол
минус 125°16’ вокруг оси ОбУ^5, после чего выполнить поворот на угол плюс 120°
вокруг оси OnZn (Об Yg5 - положение оси ОбУб после поворота на угол 45°) [29].
В качестве примера в табл. 2.2.1 приведены измеренные значения отклонений
осей ПСК приборов системы управления КА МС-2-8 относительно осей БСК. В табл.
2.2.2 представлены суммарные предельные (Зо) погрешности отклонений осей ПСК
от их измеренного положения (включая погрешности измерений) в процессе эксплуа-
тации КА [29].
100
Таблица 2.2.1 - Измеренные значения отклонений осей ПСК относительно
осей БСК
Прибор Отклонение Измеренная величина, угл. мин
ДУСХ Отклонение от параллельности оси, перпендику- лярной посадочной плоскости прибора, относи- тельно плоскости ХбУб. Отклонение от параллельности проекции оси, пер- пендикулярной посадочной плоскости прибора, на плоскости ХбУб относительно оси Хб ^дусх ^дусх =-0,8
ДУСУ Отклонение от параллельности оси, перпендику- лярной посадочной плоскости прибора, относи- тельно плоскости ХбУб. Отклонение от параллельности проекции оси, пер- пендикулярной посадочной плоскости прибора, на плоскость ХбУб относительно оси Уб Бдусу =+8>0 5&CY =-Ю>7
ДУС2 Отклонение от параллельности оси, перпендику- лярной посадочной плоскости прибора, относи- тельно плоскости XbZb. Отклонение от параллельности оси, перпендику- лярной посадочной плоскости прибора, относи- тельно плоскости YBZB ^дусг =+5,5 $дусг =-6,5
ДУСЯ Отклонение от параллельности оси Хп относитель- но плоскости ХбУб- Отклонение от параллельности оси Уп относитель- но плоскости ХбУб- Отклонение от параллельности проекции оси Хп на плоскость ХбУб относительно своего номинального положения v45 8пБ =+2,2 8*/ =0,0 ^дуск =+3,9
СД1 Отклонение от параллельности оси Хдою относи- тельно плоскости ХбУб- Отклонение от параллельности оси Удок1 относи- тельно плоскости ХбУб- Отклонение от параллельности проекции оси Хдою на плоскость ХбУб относительно оси Уб $док1 =~3,3 $док1 =-6,8 $док1 =+8,1
СД2 Отклонение от параллельности оси ХдОк2 относи- тельно плоскости ХбУб- Отклонение от параллельности оси Удокз относи- тельно плоскости ХбУб- Отклонение от параллельности проекции оси Хдою на плоскость ХбУб относительно оси Уб $ДОК2 =-3,6 ^док2 =-8,7 ^ДОК2 = +7,6
Примечание. Предельная (Зо) погрешность установки прибора АИС не
превышает 0,6 угл. мин.
101
Таблица 2.2.2 - Предельные (За) погрешности отклонений осей
ПСК приборов от их измеренного положения
Прибор Угол Отклонения посадочных мест при- боров в процессе эксплуатации КА, включая погрешности измерений, угл. мин
ДУСХ 5уь ±2,48
8Zb ±2,60
ДУСУ ±2,37
8Ze ± 1,70
дусг 5ХБ ±3,14
±4,78
ДУСЯ 8х" ±3,27
8ув5 ±2,40
±2,51
СД1.СД2 <5ХВ ±4,50
5zb
В исходных данных могут приводиться схемы обмеров посадочных мест
для приборов, в результате которых определяют погрешности отклонений осей
ПСК приборов от их номинальных положений. Ниже представлены примеры та-
ких схем обмеров для ДУС2, ДУС4 и СД системы управления КА МС-2-8 [29].
Рисунок 2.2.5 — Схема обмеров
посадочного места ДУС2
Хб45 ДУС4 (Р)
Рисунок 2.2.6 - Схема обмеров
посадочного места ДУС4
102
Рисунок 2.2.7 - Схема обмеров
посадочного места СД
2.3 Исходные данные по установке силовых гироскопов и двигателей-
маховиков
Для разработки системы управления КА разработчик СУОС получает ТЗ,
имеющее множество приложений. Одно из приложений содержит сведения о
конструкции КА в части взаимного расположения связанных осей КА и исполни-
тельных органов- двигателей-маховиков (ДМ) и силового гироскопического
комплекса (СГК).
Место расположения инерциальных исполнительных органов не имеет зна-
чения, так как управление КА с помощью ДМ и СГК проводится путем измене-
ния кинетического момента таких устройств. Поэтому в ИД по установке сило-
вых гироскопов и двигателей-маховиков определяется только угловое положение
связанных осей КА и осей ДМ и СГК.
Ниже приведены примеры исходных данных на расположение систем ко-
ординат блоков СГК КА «Аркон» и «Спектр», установленных по схеме «ромб»
(рис. 2.3.1 и 2.3.2).
На рис. 2.3.3 показана схема расположения ДМ на КА «Купон». При такой
установке оси кинетических моментов ДМ взаимно ортогональны.
Центр масс КА расположен в точке О, центр масс блока ДМ - в точке Oj.
Для обеспечения надежной управляемости КА на ДМ применяют мини-
мально избыточные структуры со следующими вариантами схем установки [24].
Вариант 1. Три основных блока ДМ устанавливают по осям ССК КА. Чет-
вертый (резервный) ДМ устанавливают таким образом, чтобы вектор его кинети-
ческого момента был направлен под равными углами к осям ССК КА.
Вариант 2. Четыре одновременно работающих ДМ устанавливают таким
образом, чтобы векторы их кинетических моментов были направлены из середи-
ны параллелепипеда, грани которого параллельны осям ССК КА, к его верши-
нам, - схема «пирамида».
103
Yc
Рисунок 2.3.1- Исходные данные по установке СГК на КА «Аркон»
Рисунок 2.3.3 - Схема расположения
ДМ на КА «Купон»
Схема установки ДМ по варианту 1 изображена на рис. 2.3.4.
Рисунок 2.3.4 - Вариант 1 схемы установки ДМ
На рис. 2.3.4 показаны:
<xj, Pi ~ углы установки ДМ4 относительно ССК КА, Р] = 45°;
Hwi - Hw4 - векторы кинетических моментов ДМ1-ДМ4.
Угол си определяют из условия одинаковой величины проекций вектора
Hw4 на оси ССК:
Н4х — Н4у — H4z;
Ндх = sin Oil -COS Pj • Hw4J
Н4у = sin at • sin Pi • Hw4;
H4Z= cos ai • Hw4.
105
Отсюда имеем: tgai = —-—, оц = 54.73561° (54°44'8").
cos р!
Схема установки ДМ по варианту 2 показана на рис. 2.3.5.
Рисунок 2.3.5 - Вариант 2 схемы установки ДМ
(«пирамида»)
На рис. 2.3.5 изображены a2, Pi-углы установки ДМ относительно ССК
КА. Осью симметрии схемы установки может быть любая ось ССК, например ось
OCYC.
Углы установки а.2, р2 выбирают обычно из условия обеспечения равной
эффективности ДМ по всем каналам управления, а именно:
4Н^ • sin a2 - cos р2 = 4Нцтп • cos a2 = 4Нцто • sin а2 • sin р2
J J J
XX уу ZZ
В этом случае имеем
tga2 =---, a2 = 52.022742° (52°0Г22");
Jw •COS02
tgp2 =^, р2= 41.489055° (41°35'21").
^ХХ
2.4 Основные исходные данные о полете КА. Орбиты КА различного
назначения
Исходные данные о полете КА. Характеристики орбит
Околоземные полеты - это полеты в пространстве, в котором наличие Зем-
ли сказывается на состоянии межпланетной среды. Рассмотрим движение искус-
106
ственных спутников Земли, т.е. космических объектов, не выходящих за пределы
сферы действия Земли и в то же время не задевающих сферу действия Луны.
На рис. 2.4.1 изображена типичная орбита спутника Земли.
Рисунок 2.4.1 - Типичная орбита
спутника Земли
На рис. 2.4.1 использованы следующие обозначения:
1 - экватор Земли;
2 - проекция орбиты спутника на невращающуюся Землю;
Y - точка весеннего равноденствия;
Q - долгота восходящего узла;
со - аргумент перигея П орбиты;
3 - истинная аномалия спутника Земли;
В - восходящий узел орбиты;
Н - нисходящий узел орбиты;
г - радиус-вектор, проведенный из центра Земли в центр масс спутника
Земли М.
Плоскость орбиты пересекает экваториальную плоскость по линии узлов, а
точки пересечения орбитой этой плоскости называются узлами (в восходящем
узле спутник переходит из южного полушария в северное, в нисходящем - на-
оборот). Плоскость орбиты образует с плоскостью земного экватора определен-
ный угол i, называемый углом наклона или наклонением орбиты. Орбита с нуле-
вым наклонением называется экваториальной, и спутник все время летит над эк-
ватором. При наклоне орбиты, равном 90 град, орбита называется полярной, так
как проходит над земными полюсами. Если движение спутника происходит в том
же направлении, что и вращение Земли, то оно называется прямым. В противном
случае движение спутника называется обратным (для спутников с обратным
движением угол между плоскостями орбиты и экватора больше 90 град).
Аргумент перигея со - угол, отсчитываемый в плоскости орбиты по направ-
лению движения от направления в восходящий узел до направления в перигей.
107
Спутник пролетает только над теми районами земного шара, географиче-
ская широта которых (северная или южная) не больше угла наклона. Из точек,
расположенных севернее или южнее крайних параллелей, спутник можно наблю-
дать, если он пролетает на достаточно большой высоте. Экваториальный спутник
не может быть виден с земных полюсов, как бы высоко ни была расположена его
орбита. Полярный спутник пролетает над всеми широтами. Важными характери-
стиками орбиты спутника являются высота перигея, высота апогея и период об-
ращения спутника, которые наряду с углом наклона плоскости орбиты к плоско-
сти экватора всегда указывают в официальных сообщениях о запусках спутников.
Период обращения для спутника, движущегося по круговой орбите на нулевой
высоте, - 84,4 мин. До высоты 1000 км период увеличивается примерно на 1 мин
через каждые 50 км. Зная высоты апогея и перигея, а также диаметр земного ша-
ра, можно найти среднее расстояние спутника от центра Земли и эксцентриситет
орбиты. Кроме того, важно знать, как расположена орбита в своей плоскости и
как ориентирована плоскость орбиты в пространстве. Последнее указывается так
называемой долготой узла - углом Q между некоторым неизменным направлени-
ем в пространстве (из центра Земли в точку весеннего равноденствия) и линией
узлов.
Участки полета КА. Виды маневрирования на орбите
Рассматривая КА как динамический объект, можно выделить два участка
полёта КА: активный и пассивный. На активном участке полёта КА совершает
управляемое движение, которое реализуется путем включения одного или не-
скольких двигателей коррекции КА. Траектория движения КА на активном уча-
стке в основном определяется тягой двигателей и продолжительностью их вклю-
чения. Обычно активные участки полёта КА занимают относительно малое время
и имеют небольшую продолжительность. На пассивных участках полёта двигате-
ли коррекции КА выключены. Пассивные участки занимают основную часть тра-
ектории КА. Траектория движения КА на пассивных участках полёта зависит
только от внешних сил, действующих на КА.
Управляемое движение КА, в результате которого происходит изменение
орбиты или траектории его полёта, называется маневром. В зависимости от
функционального назначения маневра, выполняемого КА, принято различать [4]:
- маневры межорбитального перехода;
- маневры сближения и причаливания;
- корректирующие маневры;
- маневры входа в атмосферу;
- маневры снижения и посадки.
Под маневром межорбитального перехода понимают такое управляемое
движение, в результате которого КА переходит с начальной орбиты на конечную
орбиту. Маневр межорбитального перехода используют для перевода КА с орби-
ты выведения на рабочую орбиту, на которой реализуются основные целевые за-
дачи КА. Другим примером маневра межорбитального перехода является маневр
старта. Этот тип маневра выполняют при переходе КА с промежуточной (старто-
вой) орбиты на орбиту межпланетного перелета (к Луне, Венере, Марсу и т.д.).
108
Маневры сближения и причаливания используют при управлении движени-
ем одного КА относительно другого. Маневр сближения осуществляют для
уменьшения рассогласований кинематических параметров движения центров
масс космических аппаратов. Реализация маневра причаливания позволяет
уменьшить рассогласование как кинематических параметров движения центров
масс КА, так и угловых параметров их взаимной ориентации.
Для коррекции ошибок действительной траектории КА в целях перехода на
орбиту, близкую к требуемой (расчётной), используют корректирующие манев-
ры. Необходимость выполнения этих маневров в основном обусловлена погреш-
ностями функционирования систем наведения PH и КА.
Маневры входа в атмосферу предназначены для осуществления спуска КА
на поверхность планеты или для погружения его в плотные слои атмосферы и по-
следующего выполнения маневра спуска и посадки. В процессе снижения и по-
садки обеспечивается вывод КА в заданный район и уменьшение скорости КА
для обеспечения безопасной посадки.
Орбиты КА различного назначения
На начальном этапе проектирования возникает необходимость отыскания
относительно простых приближенных зависимостей, позволяющих представить
взаимосвязь кинематических параметров КА и их влияние на траекторию КА.
При изучении движения КА на пассивных участках полёта обычно исходят из
следующих упрощающих предположений [4]:
1. Размеры КА и небесного тела, относительно которого движется КА, пре-
небрежимо малы по сравнению с расстоянием между ними.
2. Масса КА значительно меньше массы небесного тела.
В этом случае можно полагать, что небесное тело и КА притягивают друг
друга как материальные точки по закону Ньютона, и рассматривать движение КА
в поле тяготения небесного тела. Это составляет содержание задачи двух тел.
Наиболее простым приближением пассивного участка полёта КА является невоз-
мущенная кеплерова орбита в задаче двух тел.
Различают следующие виды кеплеровых орбит:
- эллиптическая;
- параболическая;
- гиперболическая.
Частным случаем эллиптической орбиты является круговая орбита. Форма
орбиты характеризуется величиной эксцентриситета (табл. 2.4.1):
L rV f 2 2ц
е- 11 +—- v2—- ,
V К V г )
где г - длина радиуса-вектора КА; v - величина вектора скорости КА; ц -
гравитационный параметр, характеризующий силу притяжения тела, отнесенную
к единице его массы.
109
Таблица 2.4.1 - Форма и эксцентриситет орбиты
Форма орбиты КА Эксцентриситет с Скорость движения КА
Круговая е=0 Г
Эллиптическая 0<е<1 И<у2<2ц г г
Параболическая е=1 2 2И г
Г ипсрболическая е>1 г
На рис. 2.4.2 показаны различные виды кеплеровых орбит в зависимости от
величины космической скорости КА.
Рисунок 2.4.2 - Виды орбит КА
Проектные характеристики рабочих орбит КА определяют на стадии разра-
ботки технического задания на проектирование КА. Тип проектируемой рабочей
орбиты непосредственно связан с целевым назначением КА и с теми задачами
(функциями), которые он должен выполнять в процессе эксплуатации. Основные
характеристики рабочих орбит КА различного назначения представлены в
табл. 2.4.2.
НО
В реальных условиях полёта в околоземном пространстве на движение КА
оказывают влияние различные возмущающие факторы (нецентральность поля тя-
готения Земли, гравитационные поля Луны, Солнца и планет, атмосфера Земли,
солнечная радиация и др.). Степень близости расчётной траектории КА к факти-
ческой обусловливается полнотой учёта и характером влияния различных факто-
ров, возмущающих орбиту КА.
Таблица 2.4.2 - Основные характеристики рабочих орбит КА
Тип КА Тип орбиты Высота орбиты, км Эксцен- триситет орбиты Накло- нение орбиты, град Период обращения
Спутники связи, спутники широкозонной системы геостационарного допол- нения СРНС GPS Круговая, стацио- нарная - 36 000 0 0 -24 ч
Навигационные спутники СРНС. - ГЛОНАСС; - GPS Круговая 19100 -20000 0 0 64,8 55 11 ч 15 мин 44 с - 12ч
Околоземные космиче- ские станции Около- круто вая 350 ... 500 0,01 51,6 - 93 мин
Метеорологические спут- ники, спутники дистанци- онного зондирования Земли, спутники для про- ведения оптико- электронных наблюдений Круговая, солнечно- синхрон- ная 655 -0 98 -97,6 мин
Астрофизические косми- ческие платформы Эллипти- ческая 500... ... 200000 500 ... ... 300000 2000... ... 70000 0,94 0,96 0,8 51,7 51,5 65 - 4 суток - 7,2 су- ток - 24 ч
Межпланетные траектории КА разделяют на следующие классы:
1. Траектории полета к планете в целях пролёта или посадки на неё без воз-
врата к Земле.
2. Траектории облёта планеты с возвращением к Земле без задержки у планеты.
3. Траектории для осуществления полётов к планетам и обратно с задержкой
у планеты, на её поверхности или на орбите спутника этой планеты.
111
4. Сложные челночные траектории с облетом двух и более планет и маневра-
ми на гелиоцентрическом участке траектории.
2.5 Системы отсчета времени, календари
2.5.1 Характеристики основных шкал времени, используемых
для астродинамических расчетов
Наиболее широко в космической механике используются следующие ос-
новные системы отсчета времени:
- атомное время - TAI;
- среднее солнечное время на меридиане Гринвича - UT1;
- всемирное координированное время - UTC;
- барицентрическое динамическое время - TDB;
- юлианские дни, юлианская дата.
Шкала равномерного атомного времени TAI формируется Международным
бюро времени по данным высокоточных атомных шкал отдельных служб време-
ни. Она отличается почти совершенной равномерностью (может считаться рав-
номерной с точностью до 1О’И с) и не зависит от вращения Земли [31]. Начало
шкалы атомного времени может быть принято произвольным.
За атомную секунду принят промежуток времени, в течение которого про-
исходит 9192631770 колебаний атома цезия. Этот интервал соответствует бари-
центрическому динамическому времени TDB с точностью до10’9 с.
Консультативным комитетом по космическим информационным системам
(CCSDS) рекомендовано [28] использовать бортовую шкалу времени, основан-
ную на несегментированном коде времени CCSDS (CUC). Единицей счета време-
ни CUC является атомная секунда. Началом шкалы времени CUC рекомендована
эпоха 1 января 1958 года, однако могут использоваться и другие эпохи. Такие
шкалы времени являются разновидностями атомной шкалы времени.
Всемирное время UT1 определяется путем вычислений по местному време-
ни, полученному из астрономических наблюдений. Шкала времени UT1 связана с
изменяющейся скоростью вращения Земли и не является равномерной.
Время UT1 используют как аргумент в формулах при определении положе-
ния Гринвичского меридиана в инерциальном пространстве.
Всемирное координированное время (UTC) применяют для формирования
программы сигналов точного времени, которая введена для поддержания син-
хронности часов ведущих служб времени. К шкале времени UTC привязаны ра-
диотехнические и оптические измерения.
Базой для поддержания шкалы времени UTC является атомное время ТАГ
Шкала UTC связана с TAI линейным соотношением
UTC - TAI = s(t-to) + Ъ, (2.5.1)
параметры которого изменяют так, чтобы обеспечить совпадение с точностью до
одной секунды со временем UT1, определяющимся вращением Земли. С января
1961 года (начало использования UTC) до января 1972 года эти изменения затра-
гивали как накопившийся временной сдвиг Ъ, так и масштаб единицы измерения
времени, определяющийся параметром s.
112
Начиная с 1 января 1972 года, значение продолжительности секунды шкалы
UTC установлено равным значению продолжительности атомной секунды, в со-
ответствии с этим значение s установлено равным 0, а величина b изменяется на
целое число секунд при |UTC - UT11 > 0,9 с. Величина b обновляется не чаще од-
ного раза за полугодие (1 января или 1 июля).
Шкала времени UTC связана со шкалой времени UT1 соотношением
UT1=UTC +AUT1. (2.5.2)
Величина AUT1 обновляется ежедневно и прогнозируется вперед на интер-
вал от нескольких суток до одного года. Эти данные выдает международная
служба вращения Земли (IERS). В электронном виде их можно получить по адре-
су:
Ser7@maia.usno.navy.mil или http://maia.usno.navy.mil.
Барицентрическое динамическое время TDB- теоретическое абсолютно
равномерное время, освобожденное от влияния релятивистских поправок, свя-
занных с движением Земли и гравитационными полями Солнца и планет. Его ис-
пользуют как аргумент эфемерид планет и других небесных тел, а также как ар-
гумент дифференциальных уравнений движения.
До появления атомных эталонов времени (1961 г.) наилучшим приближе-
нием шкалы динамического времени служило эфемеридное время ЕТ, построен-
ное по наблюдениям за движением Луны. В настоящее время практически для
всех задач динамики космического полета достаточно точным приближением
TDB может служить шкала атомного времени. Расхождение шкал времени не
превосходит 10’9 с.
Шкала времени TDB связана со шкалой атомного времени соотношением
ТВВ=ТА1+32,184+[релятивистские члены (а) + уход атомных часов (р)]. (2.5.3)
Юлианские дни - это дни, которые непрерывно считают через годы, столе-
тия и тысячелетия от 1 января 4713 г. до н.э. При этом началом каждого юлиан-
ского дня считается средний Гринвичский полдень.
Юлианская дата выражается номером юлианского дня и долей суток, про-
текшей после этого полдня, например, дате 1970 май, 5.725 UTC соответствует
юлианская дата JD 2440712,225.
Система сплошного счета суток была предложена в XVI веке Скалигером и
названа им юлианской, или юлианским периодом. Юлианский период охватывает
7980 лет и начинается в средний гринвичский полдень 4713 г. до н.э. [31].
Юлианские дни удобно использовать при расчетах числа средних солнеч-
ных суток (d), прошедших между двумя далеко отстоящими друг от друга датами
й и t2 (ti<t2). Для этого по таблицам дней юлианского периода [5] находят юлиан-
ские даты JD(ti) и JD(t2), соответствующие заданным датам tj и t2, и вычитают бо-
лее раннюю юлианскую дату JD(tj) из поздней JD(t2):
d= JD(t2)-JD(ti). (2.5.4)
ИЗ
2.5.2 Юлианский и григорианский календари
Календарь - система исчисления больших промежутков времени. В основе
современного календаря лежит тропический год - промежуток времени между
двумя последовательными прохождениями среднего Солнца через точку весенне-
го равноденствия. Тропический год содержит 365,2422 средних солнечных суток,
или 366,2422 звездных суток [22]. Трудность создания календаря возникла еще в
древности в связи с тем, что тропический год и солнечные сутки несоизмеримы,
так как календарный год, естественно, должен содержать целое число суток.
Юлианский календарь введен Юлием Цезарем в 46 г. до н.э. Продолжи-
тельность календарного года принимают равной 365 средних солнечных суток, за
исключением високосных. Продолжительность високосного года равна 366 сред-
них солнечных суток. Юлианский календарь содержит последовательно три года
по 365 суток, за которыми идет один год в 366 суток. В системе юлианского ка-
лендаря високосным считается год, номер которого делится на четыре. Таким об-
разом, средняя продолжительность календарного юлианского года равна 365,25
суток. Юлианский год на 0,0078 суток длиннее тропического года, что дает
ошибку в одни сутки за 128 лет.
Наряду с общепринятой календарной системой счета суток в астрономии и
космической механике широкое применение нашла система григорианского ка-
лендаря. Система григорианского календаря введена в 1582 году и отличается от
юлианской тем, что високосными годами считаются только те столетние годы
(..., 1600, 2000, 2400 и т.д.), число сотен в номере которых делится на четыре.
Этим достигается существенное повышение точности календаря. Средняя про-
должительность григорианского года составляет 365,2425 сугок, что дает накоп-
ление ошибки в одни сутки за 3333 года.
Библиографический список к разделу 2
Г. Александров, Ю.В. Введение в космонавтику [Текст]: учеб, пособие /
Ю.В. Александров. - X.: ХНУ им. В.Н. Каразина, 2009. - 144 с.
2. Александров, Ю.В. Небесная механика [Текст]: учебник/
Ю.В. Александров. - X.: ХНУ им. В.Н. Каразина, 2006. - 228 с.
3. Алексеев, К.Б. Управление космическими летательными аппаратами
[Текст] / К.Б. Алексеев, Г.Г. Бебенин. - М.: Машиностроение, 1974. - 340 с.
4. Алексеев, К.Б. Маневрирование космических аппаратов [Текст] /
К.Б. Алексеев, Г.Г. Бебенин, В.А. Ярошевский. - М.: Машиностроение,
1970.-416 с.
5. Астрономический ежегодник на 2000 г. [Текст]. - М.: Изд-во Института
прикладной астрономии РАН, 1999. - 714 с.
6. Бабаков, И.М. Теория колебаний [Текст] / И.М. Бабаков. - М.: Наука,
1968.-260 с.
7. Бебенин, Г.Г. Системы управления полетом космических аппаратов
[Текст] / Г.Г. Бебенин, Б.С. Скребушевский, Г.А.Соколов. - М.: Машино-
строение, 1978. - 272 с.
114
8. Механика полёта (Общие сведения. Уравнения движения) / Инженерный
справочник [Текст] / С.А. Горбатенко, Э.М. Макашов, Ю.Ф. Полушкин и
др. - М.: Машиностроение, 1969. - 420 с.
9. Детлаф, А.А. Справочник по физике [Текст] / А. А. Детлаф,
Б.М. Яворский. - М.: Наука, 1968. - 940 с.
Ю.Дубошин, Т.Н. Небесная механика: Методы теории движения искусствен-
ных небесных тел [Текст] / Т.Н. Дубошин. - М.: Наука. Гл. редакция физ.-
мат. лит-ры, 1983. -352 с.
Н.Златкш, Ю.М. Особливосп керування М1жнародною косм!чною станщею
’’Альфа" на початковому стат польоту [Текст] / Ю.М. Златкш,
В.П. Ржемовський, Ю.О.Кузнецов// Косм1чна наука i технология. - 2006. -
Т. 12. --№2/3. -С. 3-7.
12 . Инженерный справочник по космической технике [Текст] / под ред.
А.В. Солодова. - изд. 2-е, перераб. и доп. - М.: Воениздат, 1977. - 430 с.
13 .Исходные данные. Изделие ТКМ. Динамическая схема изделия в автоном-
ном полете и в составе связки с орбитальным комплексом. - М.: КБ «Са-
лют», 1987.
14 .Исходные данные. Изделие ФГБ. Динамическая схема изделия в автоном-
ном полете и в составе связки с блоком NODE!. - М.: КБ «Салют», 1995.
15 .Ишлинский, А.Ю. Ориентация, гироскопы и инерциальная навигация
[Текст] / А.Ю. Ишлинский. - М.: Наука, 1976. - 672 с.
16 . Киреев, Н.Г. Элементы систем управления ракет и космических аппаратов
[Текст] / Н.Г. Киреев. - К.: УМК ВО, 1992. - 212 с.
17 .Колесников, К.С. Жидкостная ракета как объект регулирования
[Текст] /К.С. Колесников. - М.: Машиностроение, 1969. - 298 с.
18 .Космические аппараты [Текст] / под общ. ред. К.П. Феоктистова. - М.:
Воениздат, 1983. -319 с.
19 .Лурье, А.И. Аналитическая механика [Текст] / А.И. Лурье. - М.: Физмат-
гиз, 1961.-824 с.
20 .Методические указания. Спутники Земли искусственные. Основные систе-
мы координат для баллистического обеспечения полетов и методика расче-
та звездного времени. РД 50-25645.325-89 [Текст] - М.: Изд-во стандартов,
1990.-21 с.
21 .Механика космического полёта [Текст] / под ред. акад. В.П. Мишина. - М.:
Машиностроение, 1989. -487 с.
22 .Основы теории полета космических аппаратов [Текст] / под ред.
Г.С. Нариманова, М.К. Тихонравова. - М.: Машиностроение, 1972. - 607 с.
23 .Попов, В.И. Системы ориентации и стабилизации космических аппаратов
[Текст] / В.И. Попов. - 2-е изд. - М.: Машиностроение, 1986. - 184 с.
24 . Предложения по модернизации подсистемы определения и управления
ориентацией (ПОУО) спутника МС-2-8. Пояснительная записка. Per. №
ТО-13070/06-МС-2-8-1101-0850. - X.: НПП Хартрон-Аркос, 2006.
25 .Проектирование и экспериментальная отработка систем управления объек-
тов ракетно-космической техники. Проектирование систем управления ра-
115
кет-носителей. Т. 1 [Текст] / под общ. ред. Ю.С. Алексеева, Ю.М. Златкина,
В.И. Чумаченко и др. - X.: НПП Хартрон-Аркос, НАУ им. Н.Е. Жуковского
«ХАИ», 2012. -578 с.
26 .Разыграев, А.П. Основы управления полетом космических аппаратов и ко-
раблей [Текст] / А.П. Разыграев. - М.: Машиностроение, 1977. - 472 с.
27 .Раушенбах, Б.В. Управление ориентацией космических аппаратов [Текст] /
Б.В. Раушенбах, Е.Н. Токарь. - М.: Наука, 1974. - 600 с.
28 .Рекомендации по стандартам космических систем. Формы кода времени
CCSDS 302.О-В-3. - Вашингтон, DC 20546, США, 2002. - 31 с.
29 .Система “С1ч-2”. Космический аппарат МС-2-8. Исходные данные на раз-
работку подсистемы определения и управления ориентацией. Ci4-2.
11.4794.312 ИД. - Днепропетровск: ГП «КБ «Южное», 2010.
ЗО .Сорокин, А.В. Управление избыточным числом силовых гироскопов
[Текст] / А.В. Сорокин // Изв. АН СССР. Механика твердого тела. - № 3,
май-июнь. 1979.
31 . Справочное руководство по небесной механике и астродинамике [Текст] /
под ред. Т.Н. Дубошина. - М.: Наука, 1971. - 584 с.
32 .Токарь, Е.Н. Проблемы управления силовыми гиростабилизаторами
[Текст] / Е.Н. Токарь / АН СССР. Космические исследования. - М.: Нау-
ка. - Т. XVI. - Вып. 2, март - апрель. 1978.
33 .Успенский, В.Б. Теоретические основы гиросилового управления ориента-
цией космического летательного аппарата [Текст]: моногр. - X.: НТУ
”ХПИ”, 2006. - 328 с.
34 . Экспериментальная отработка систем управления объектов ракетно-
космической техники [Текст]: учеб, пособие / под общ. ред. Ю.М. Златкина,
В.С. Кривцова, А.С. Кулика и др. - X.: Нац. аэрокосм, ун-т «Харьк. авиац.
ин-т», НПП Хартрон-Аркос, 2008. - 501 с.
35 .http://arkos.kharkov.ua. Web-сайт НПП Хартрон-Аркос.
116
3 АНАЛИЗ ТЕХНИЧЕСКОГО ЗАДАНИЯ И ИСХОДНЫХ ДАННЫХ
В ЦЕЛЯХ ВЫРАБОТКИ ТЕХНИЧЕСКИХ РЕШЕНИЙ
ПО ПРОЕКТИРОВАНИЮ СУ
3.1 Анализ технического задания и исходных данных
3.1.1 Анализ динамической схемы КА
Динамическая схема КА - это математический образ КА как объекта
управления, под который проектируют систему управления, проверяют её точно-
стные и динамические характеристики. Обычно это система дифференциальных
уравнений, описывающих движение центра масс КА и вокруг центра масс с учё-
том дополнительных степеней свободы, обусловленных подвижностью солнеч-
ных батарей, антенн и других выносных элементов, упругими свойствами корпу-
са и стыковочных узлов, с определением воздействий на КА внешних сил и мо-
ментов.
3.1.1.1 Анализ управляемости
Под управляемостью КА понимают возможность имеющимися на аппарате
управляющими органами выполнить успокоение после отделения от носителя,
переориентацию КА за заданное время, поддержание ориентации в условиях,
действующих на орбите возмущений.
В орбитальном полёте на КА действуют аэродинамические возмущения Ма,
гравитационные Мг, светового давления Мс, моменты от двигательной установки
(при выдаче импульсов коррекции орбиты) Мду [2]. Следовательно, должно вы-
полняться условие
Мущу > п (Maj + Mrj + Mcj + Мду]), (3.1.1)
где j = х, у, z - каналы управления; Mynpj - управляющий момент в j-м канале;
п = 3-5 - коэффициент запаса.
Из условия оперативности выполнения углового маневра оценка MWJ на-
ходится по формуле
где ©pj - угловая скорость разворота в j-м канале; ypj - требуемый угол разворо-
та; Jj - момент инерции в j-м канале; Тр - требуемое из условий оперативности
переориентации время разворота.
Условие быстрого успокоения КА после отделения от ракеты-носителя. Та-
кая задача может возникнуть при необходимости срочной выдачи корректирую-
щего импульса для подъема орбиты в связи с недовыведением в связи с необхо-
димостью раскрытия солнечных батарей и других выносных элементов при необ-
ходимости срочного построения начальной ориентации.
Для изолированного канала движение описывается дифференциальным
уравнением
J — МупР — Мвозм.
117
После интегрирования получим
JACO — (Мугтр — Мвозм)*А1,
где Дсо - изменение угловой скорости под воздействием управляющего момен-
та в течение времени At, отведенного на успокоение; Мвозм - возмущающий мо-
мент, действующий на КА.
Отсюда получаем оценку для управляющего момента при отработке на-
чальных угловых скоростей за допустимое время At
М , 1 (3.1.3)
При существенном отличии моментов инерции (Jxx « .Ти, Jxx « Jyy) и их
больших абсолютных значениях, значительных начальных условиях по угловым
скоростям имеет место «завязка» каналов (система уравнений (2.1.91) под-
разд. 2.1.7.1) и управляющего момента, принятого из условия управляемости
(3.1.3), может оказаться недостаточно. В таких случаях необходимо либо увели-
чить управляющий момент, либо оценить допустимость большего времени успо-
коения и соответственно планировать циклограмму работы КА.
В практике полётов ракеты-носителя «Энергия» на одном из выводимых на
орбиту КА (массой ~90 т) были поставлены дополнительно 16 одноразовых по-
роховых управляющих двигателей в целях гашения угловых скоростей после от-
деления от ракеты за ограниченное время.
3.1.1.2 Анализ влияния упругих элементов. Понижение порядка
уравнений движения КА
Расчётная динамическая схема для КА с упругими элементами, как прави-
ло, имеет очень высокий порядок системы дифференциальных уравнений. Поря-
док системы возрастает при учёте высших тонов упругих колебаний и, при необ-
ходимости, жидкостных осцилляторов. Чем выше порядок системы уравнений,
тем более трудоемки исследования при проектировании и отработке системы
управления - частотный анализ, математическое моделирование, определение
характеристик точности и быстродействия системы. Представляет интерес, на-
пример, оценка влияния отдельных «упругих» осцилляторов в целях определения
возможности неучёта каких-то из них в последующих исследованиях.
Такую оценку удобно выполнить решением дифференциального уравнения
с постоянными коэффициентами для каждого осциллятора и с постоянной правой
частью в виде (подразд. 2.1.8)
q-hcq + orq = арРу,
где Ру - тяга соответствующего двигателя стабилизации.
Решение уравнения имеет вид [5]
4‘г . е . . -‘sinyt А . е . х
q = qoe [cos%t + — smxt] + qoe - — + — 1-е 2 (cosxt + —-smxt ,
2% X co L 2x J
118
X
' 2 £2
со2------
4
Здесь Чо, q0 - начальные условия.
При нулевых начальных условиях по q0, q0 максимальная деформация
имеет место при t = — Т, где Т - период %;
_ 2А _ 2аРРУ
Qmax Г — ~г j
СО СО
(3.1.4)
(3.1.5)
где А = арРу.
Аналогично получается оценка максимального значения скорости по «уп-
ругим» тонам (при t = !4 периода)
. А 2аРР у
Я max ~
со со
По этим соотношениям могут быть выстроены в упорядоченный ряд все
осцилляторы «упругой» динамической схемы по уровню деформации.
С использованием оценки (3.1.5) могут быть оценены составляющие угло-
вой скорости от каждого осциллятора, которые проявляются в показаниях датчи-
ка угловой скорости
m
®max = Ф-г.т + £ f iQjrnax -
j=l
(3.1.6)
Здесь ©max - значение угловой скорости КА, измеряемое датчиком угловой ско-
рости; сотт - угловая скорость КА как твердого тела; f j - производная формы «уп-
ругого» тона в месте установки датчика угловой скорости.
Под знаком суммы собраны составляющие угловой скорости от каждого
тона упругих колебаний.
Выражение (3.1.6) является оценкой «сверху», так как не все тона достига-
ют максимального значения одновременно. Корректнее вычислять отдельные
слагаемые и выстроить их в ряд по степени влияния.
Используя приведенные выше оценки, можно выделить группу осциллято-
ров с существенно меньшим влиянием (на порядок и два-три порядка) и в рабо-
чих исследованиях исключить их из учёта. Таким образом, можно существенно
понизить порядок системы дифференциальных уравнений в математической мо-
дели объекта регулирования, используемой при математическом моделировании
процессов в целях определения устойчивости, точности и качества системы
управления.
3.1.1.3 Анализ динамических нагрузок, возникающих в упругих
элементах конструкции КА
Для системы уравнений движения КА с учётом колебании упругих элемен-
тов конструкции оценки по определению моментов, действующих на узлы креп-
ления солнечных батарей, получаются из соотношений
119
m
M изгиб.из пл. БС — S Aqn *Qn(4»
n=l
М изгиб, в пл. БС 'Qn(O> (3.1.7)
п-1
bV.=ZCv-qn(t),
n=l
где Мизгиб. в пл. бс ~ изгибающие моменты в узлах крепления при колебаниях в
плоскости солнечных батарей; Мизп1б. из пл. бс - изгибающие моменты в узлах креп-
ления при колебаниях из плоскости солнечных батарей; Мкруч - момент кручения
в узлах крепления солнечных батарей; qn(t) - текущее значение прогиба n-го тона
упругих колебаний; Aqn, Bqn, Cqn - коэффициенты влияния n-го тона.
Математическая модель замкнутой системы ориентации и стабилизации,
состоящая из математической модели объекта регулирования, модели датчиков
информации, математической модели исполнительных органов (двигателей ста-
билизации), исследуется во всех эксплуатационных режимах с учётом разбросов
всех параметров. По соотношениям (3.1.7) рассчитывают текущие значения изги-
бающих моментов и сравнивают с допустимыми значениями.
При нарушении прочностных ограничений необходимо либо изменять ре-
жим работы исполнительных органов (уточнить настройки СУОС, ввести фильт-
рацию...), либо решать вопрос упрочнения конструкции.
Аналогично соотношениям (3.1.7) определяют моменты в стыковочных уз-
лах между блоками «связки» космической станции.
3.1.1.4 Анализ влияния колебаний жидкости в баках
Динамическая схема КА как объекта регулирования описывается системой
дифференциальных уравнений (2.1.100), в состав которых входят уравнения ко-
лебаний жидкости в виде (2.1.103).
Анализ устойчивости системы удобно проводить по линеаризованным
уравнениям на основании теорем Ляпунова.
Движение, описываемое системой дифференциальных уравнений с постоян-
ными коэффициентами, будет асимптотически устойчивым, если все корни соответ-
ствующего характеристического уравнения находятся в левой полуплоскости. Вы-
полнение этого условия можно установить с помощью критерия Найквиста и др. [39].
Характеристический полином уравнений возмущённого движения с учётом
колебаний жидкости имеет такое же число корней в правой полуплоскости, как и
характеристический полином уравнений КА как “твёрдого тела". В диапазоне
частот собственных колебаний жидкости амплитудно-частотная характеристика
объекта управления имеет максимумы, характеризующие значительное усиление
входного сигнала, поэтому модуль комплексного передаточного числа разомкну-
той цепи на этих частотах может быть больше единицы: Ао(со)>1. Поэтому для
обеспечения устойчивости необходимо, чтобы фазово-частотная характеристика
автомата стабилизации имела опережение по фазе в диапазоне частот [0, <Оо] - Час-
120
тоту coo нужно выбирать так, чтобы
А(ш) Ao(co)'Ar(co) < 1 при со = со0, (3.1.8)
где Ао(со) - амплитудно-частотная характеристика объекта; Аг(со) - амплитуд-
но-частотная характеристика регулятора.
При наличии близких характерных частот обеспечение фазовой стабилиза-
ции может оказаться невозможным, поскольку на одной частоте может требо-
ваться опережение по фазе, а на другой - запаздывание. В этом случае объект на-
зывают структурно неустойчивым.
Задача стабилизации КА с жидкостными осцилляторами оказывается ещё
более сложной, если в характерис/гическом полиноме появляются дополнитель-
ные положительные корни. Чтобы обеспечить устойчивость, необходимо так
скорректировать динамические свойства объекта, чтобы все корни характеристи-
ческого полинома имели отрицательные вещественные части.
Если обеспечить устойчивость движения КА с помощью фазовой стабили-
зации невозможно, то применяют амплитудную стабилизацию, т.с. чтобы в опре-
делённом диапазоне частот выполнялось условие (3.1.8). В этом случае можно
изменить динамические свойства объекта регулирования с помощью конструк-
тивных мер (изменение геометрии баков, использование перегородок и др.).
3,1.2 Анализ точностных и динамических характеристик СУ
В начале проектирования проводят анализ требований ТЗ по точностным и
динамическим характеристикам СУ в целях, с одной стороны, подтверждения их
практической выполнимости, а с другой стороны - для получения предваритель-
ных аналитических оценок таких важных критериев качества СУ, какими явля-
ются точность и быстродействие.
Анализ точности ориентации и угловой стабилизации
Предельная погрешность определения ориентации осей ССК КА относи-
тельно, например, ИСК состоит из следующих составляющих:
- предельных погрешностей измерений оптико-электронных командно-
измерительных приборов 5И;
- предельных погрешностей обмеров углов установок этих приборов на
КА относительно номинальных положений 8уст;
- отклонений посадочных мест приборов в процессе эксплуатации КА 5Э.
При полете без астрокоррекции в суммарную погрешность бесплатформен-
ной инерциальной системы ориентации войдут дополнительно погрешности, вы-
званные:
- случайным дрейфом измерителей угловой скорости (ИУС) 5СД;
- вычислительным дрейфом алгоритмов определения ориентации 5ВД.
Учитывая, что данные составляющие являются случайными независимыми
величинами, предельную погрешность определения ориентации осей ССК КА
можно вычислить по формуле
Sz = 7^47+з: 4-5^. (3.1.9)
121
(3.1.10)
(3.1.11)
Точность управления по угловому положению складывается из точности
определения ориентации и точности угловой стабилизации. Первая компонента,
как показано выше, в основном зависит от точностных характеристик командных
приборов и нескомпенсированных ошибок их установки на КА.
Вторая компонента в большей степени зависит:
- от логики и параметров закона стабилизации;
- такта счета БЦВМ;
- характеристик исполнительных органов.
Рассмотрим влияние характеристик маховиков на точность стабилизации
КА.
Линеаризованные для малых углов уравнения движения КА вокруг центра
масс в канале записывают в виде (индекс канала опущен)
f JY ~ МупР,
[у - со. _
Тогда ошибку стабилизации можно вычислить по формуле
со2
5 = —,
Y 2m
где со - угловая скорость стабилизации; - эффективность исполни-
тельных органов.
При обработке полученных измерений астроприборов приходится пересчи-
тывать измерения из одной системы координат в другую, при этом также могут
появляться дополнительные погрешности. Рассмотрим это на примере широко-
угольной астроизмерительной системы (АИС), выходной информацией которой
является матрица ориентации приборной системы координат (ПСК) относительно
инерциальной (второй экваториальной) системы координат (ИСК).
Необходимо оценить ошибку определения ориентации ССК относительно
ОСК.
Составляющие суммарных предельных погрешностей ориентации КА по-
лучим, представив взаимосвязь используемых систем координат в виде ориенти-
рованного графа (рис. 3.1.1).
Маис
МОА
Мос
/ПСК \ Мдисуст
^АИС.Г \ССК)
Рисунок 3.1.1- Взаимосвязь
систем координат
122
На рис. 3.1.1 переходы между системами координат заданы соответствую-
щими матрицами направляющих косинусов.
Измерительной информацией АИС является матрица ориентации ПСК
АИС относительно ИСК (матрица Мдис перехода от ИСК к ПСК АИС). Матрицу
Мод ориентации ПСК АИС относительно ОСК определяют как
Мод=МдиС-Мио 1 •
Ошибку определения ориентации ПСК АИС относительно ОСК находят по
формуле
8МОЛ = 7(М°лс • 8М0И )2 + (8МЛИС • М°,)2, (3.1.12)
где Мои=МИо’1; М°дис, М°ои~ номинальные матрицы ориентации; 5Мдис,
5Мои - случайные независимые между собой ошибки матриц ориентации.
Ошибка бМдис представляет собой погрешность измерений АИС ориента-
ции ПСК АИС относительно ИСК. Ошибка 5Мои в основном является функцией
ошибки 5s знания положения центра масс КА в пространстве (на орбите):
8s = 782+82+82.
Для верхней оценки погрешности определения ориентации ПСК АИС от-
носительно ОСК 6о° воспользуемся упрощенной формулой
5s
где бдис - погрешность измерений АИС; 50И =-------погрешность знания по-
г
ложения ОСК в ИСК. Здесь г - модуль радиуса-вектора КА.
В суммарной погрешности измерений АИС также должна быть учтена ди-
намическая ошибка 5ДИН, вызванная запаздыванием Гдис (периодом обновления
информации) в выдаче информации из АИС. Величину этой ошибки можно оце-
нить по формуле
^дин—®ср^АИС>
где (Оср - средняя угловая скорость стабилизации КА.
Так как угловая скорость КА измеряется, а величина периода обновления
информации АИС известна, динамическая ошибка может быть скомпенсирована
как систематическая в алгоритмах обработки информации АИС.
Величину остаточной (нескомпенсированной) составляющей динамической
ошибки 5ДННОсг оценим по формуле
бдиност- «срТ ,
где Т - такт счета алгоритмов компенсации динамической ошибки в БК СУ.
Данная ошибка может быть учтена в расчетах как независимая случайная
составляющая.
Для вычисления ошибки определения ориентации ССК относительно ОСК
5q° , воспользовавшись аналогичной методикой и рис. 3.1.1, запишем
123
М0Б-М ’алсусг-Моа
или
5§° = ~)2 + (8^, (3.1.13)
где 5аисуст~ предельная погрешность обмеров углов установки АИС на КА;
8аисуэ - отклонение посадочного места АИС в процессе эксплуатации КА.
Предельную погрешность ориентации БСК КА относительно ОСК оп-
ределим по формуле
SS=5c0°+5r> (3.1.14)
где 5y - ошибка стабилизации КА.
Анализ точности стабилизации по угловой скорости
Точность стабилизации по угловой скорости в основном определяется:
- точностными характеристиками ИУС (ценой импульса, случайным сме-
щением нулевого сигнала и др.) 8ИУС;
- ошибкой из-за погрешности измерения углового положения чувстви-
тельных элементов ИУС на КА 8ИУСТ;
- ошибкой из-за отклонений посадочных мест ИУС в процессе эксплуата-
ции КА 8ИЭ;
- тактом счета алгоритмов стабилизации;
- характеристиками исполнительных органов (эффективностью, запазды-
ванием в реализации управляющих сигналов, технологическими по-
грешностями изготовления и др.);
- колебаниями упругих элементов КА.
С учетом наиболее существенных составляющих суммарная погрешность
стабилизации КА по угловой скорости может быть вычислена по формуле
8х,., = Кс2 + 5^ + 8Ю2 + 8„, (3.1.15)
где 8т - составляющая, определяемая эффективностью m ИО и запаздыванием
Т на их включение (обычно равным такту счета алгоритмов стабилизации).
Последнюю составляющую определяют как 8ШТ = тТ.
Оценка длительности начальных динамических операций
При одинаковой в трех каналах управления начальной угловой скорости
симметричного КА, возникающей после его отделения от ракеты-носителя, мак-
симальное время гашения угловой скорости потребуется в канале, в котором эф-
фективность исполнительных органов наименьшая.
Время, необходимое на гашение начальной угловой скорости КА, рассчи-
тывают по формуле
гаш“м ’ (3.1.16)
iV1 упрш
где сот - начальная угловая скорость; Jm - момент инерции КА; Мупрт - управ-
ляющий момент; ш - канал с наименьшей эффективностью исполнительных ор-
124
ганов.
Время поиска ориентира легко найти, зная максимальный угол поиска ори-
ентира (определяется размером поля обзора оптико-электронного прибора) и ве-
личину угловой скорости, с которой осуществляется поиск.
Оценка времени программных поворотов
Необходимо определить возможность реализации программных поворотов
КА относительно ОСК на заданный угол за заданное время.
Зная максимальный управляющий момент ИО МупР, можно определить
время переориентации КА в заданное положение с максимальным быстродейст-
вием по формуле
(4-у Л
t=J ™ “ (31-17)
V
где ур - программный угол поворота; I - момент инерции КА.
Иногда требуется решить обратную задачу: определить максимальное зна-
чение программного утла, на который можно развернуть КА за заданное время.
Величина этого угла определяется формулой
М -t2
ypmnx = . (3.1.18)
3.2 Разработка структурной и функциональных схем СУ
При разработке системы управления КА эффективным является структур-
ный подход, в основу которого положен принцип функциональной декомпозиции
(разбиения), при которой структура системы разбивается на функциональные
подсистемы. Функциональная подсистема - это группа функционально связан-
ных элементов нескольких приборов, выполняющих одну целевую задачу. Имен-
но такой подход и соблюдается при разработке конструкторской документации
на СУ.
К конструкторской документации относятся графические и текстовые до-
кументы, которые в отдельности или в совокупности определяют состав и техни-
ческое устройство СУ, содержат необходимые данные для ее разработки или из-
готовления, контроля, приемосдаточных испытаний, эксплуатации и ремонта.
Элементами конструкторской документации являются также различные схе-
мы: структурная, функциональная, общая, принципиальная, электрическая и др.
Схема - это конструкторский документ, на котором показаны в виде услов-
ных изображений или обозначений составные части СУ и связи между ними.
Схемы разрабатываются на следующих стадиях создания СУ:
- технические предложения;
- эскизный проект;
- технический проект,
и входят в рабочую документацию для проектирования и разработки, а также в
основной поставочный комплект конструкторских документов.
Выполняют схемы без соблюдения масштаба, действительное пространст-
125
венное расположение не учитывают или учитывают приближенно. Графические
обозначения элементов (устройств, функциональных групп) и соединяющие их
линии связи располагают на схеме таким образом, чтобы обеспечивать наилуч-
шее представление о структуре изделия и взаимодействии его составных час-
тей [13].
Приборный состав СУ, взаимосвязи приборов изображают в виде структур-
ной схемы.
Структурная схема определяет основные функциональные части аппарату-
ры СУ, их назначение и взаимосвязи. При этом ее основные элементы представ-
ляют в виде графических изображений с применением простых геометрических
фигур. На схеме указывают наименование каждой функциональной части СУ.
Наименование вписывают внутрь геометрической фигуры. На линиях взаимосвя-
зи стрелками указывают направления потоков информации.
Структурную схему разрабатывают при проектировании изделия на стадии,
предшествующей разработке схем других типов, и пользуются ею для общего оз-
накомления с изделием.
В качестве примера на рис. 3.2.1 и 3.2.2 изображены структурные схемы СУ
научного КА «Спектр» и перспективного КА дистанционного зондирования Зем-
ли соответственно.
На рис. 3.2.1 показаны:
БЦВМ - бортовая цифровая вычислительная машина;
МРК - модуль релейных команд;
КПА - контрольно-проверочная аппаратура;
НА - научная аппаратура;
АИС - астроизмерительная система;
ПСГ - прибор согласования ГИВУС;
ПОС - прибор ориентации на Солнце;
БКРП - блок коммутации и распределения питания;
ДК - двигатель коррекции;
БУМ - блок усиления мощности;
БУП - блок управления приводом;
ДС - двигатели стабилизации;
ОНА - остронаправленная антенна;
ДМ - двигатели-маховики;
СГК - силовой гироскопический комплекс;
БСТК - блок согласования телеметрического контроля;
СПТ - статический преобразователь тока;
ТМС - телеметрическая станция;
О - основной;
Р - резервный.
Схема функциональная (СхФ) разъясняет определенные процессы, проте-
кающие в отдельных функциональных цепях или в СУ в целом. Схемами функ-
циональными пользуются для изучения принципов работы изделий, а также при
их наладке, контроле и ремонте.
126
Рисунок 3.2.1 - Структурная схема СУ научного КА «Спектр»
127
Подсистема данных платформы (ПДП)
Бортовой компьютер
подсистемы определения и
управления ориентацией
(БК ПОУО)
Модуль
команд (МК)
Блок управления
конфигурацией
(БУК)
Релейные
команды
(РК)
. У У____________
Блок коммутации и _
распределения
питания (БКРП)
I
Бортовой компьютер
подсистемы данных
платформы
(БК ПДП)
Устройство ввода-вывода
(УВВ) ПОУО
УВВПДП
т
т
т
Модуль
телеметрии
(МТ)
РК
1
РК
РК
Астро-
измерительная
система
(АИС-М)
Датчик
ориентации
комбинирован-
ный (ДОК)
Электромагнитный
исполнительный
ОРГанЦЭМИО)—
Глобальная
система
позициониро-
вания (GPS)
f If ду
Прибор
управления
двигательной
установкой (ДУ)
Связная подсистема
S-диапазона (СПС-S)
РК
РК
т
г
Двигатель-
маховик (ДМ)
кймгттттаыёрй=-|
телей угловой
скорости (КИУС)
Магнитометр —i
(ММ) j
Связная
подсистема —>
Х-диапазона *<—
(СПС-Х)
Подсистема
данных
полезной
нагрузки (ПДПН)
v iPK
Аппаратура—
управления “
регулирования
и контроля
(АУРЮ
Подсистема
электроснабжения |
_____JHQ3QL_________J
Подсистема определения и управления ориентацией (ПОУО)
Рисунок 3.2.2 - Структурная схема СУ перспективного КА дистанционного зондирования Земли со смежными
подсистемами
Для теоретика-разработчика СУ обобщенная функциональная схема явля-
ется удобным инструментом для представления задач, решаемых СУ или ее под-
системами в виде функциональных блоков и связей между ними.
На рис. 3.2.3 показана такая функциональная схема системы управления КА.
Рисунок 3.2.3 - Функциональная схема системы управления КА
На схемах функциональные части СУ изображают простыми геометриче-
скими фигурами и указывают их наименования. Обозначения функциональных
частей располагают в последовательности их функциональных связей. Линии
связи подразделяют на информационные и управляющие. Направление входящих
и выходящих управляющих сигналов и потоков информации указывают на лини-
ях связи стрелками [13],
В процессе разработки функциональных схем должны быть проанализиро-
ваны принятые технические решения по обеспечению:
- выполнения аппаратурой возложенных на неё функций;
129
- полноты функциональных связей между приборами и устройствами бор-
товой и наземной аппаратуры СУ;
- полноты функциональных связей СУ со смежными бортовыми система-
ми КА.
Описание работы функциональных составных частей системы приведено
на функциональных комплексных схемах.
Функциональные комплексные схемы бортовой и наземной аппаратуры
выпускаются в виде комплектов СхФ и включаются в спецификации бортовой и
наземной аппаратуры.
На каждой СхФ со степенью подробности, достаточной для выполнения
анализа работы бортовой и наземной аппаратуры СУ при отработке, испытаниях
и эксплуатации, должна быть раскрыта аппаратура, входящая в состав подсисте-
мы, и кабельные связи между приборами, устройствами (включая все проходные
разъемы, экранирование цепей) до входов/выходов смежных систем - инициато-
ров команд управления.
Связь бортовой аппаратуры СУ с БЦВК показывается на СхФ по принад-
лежности оборудования БЦВК к подсистеме.
В части связи с БЦВК на СхФ показывают входные и выходные устройства
(согласующие элементы с указанием номеров регистров и разрядов).
На СхФ раскрывают принципы резервирования бортовой и наземной аппа-
ратуры, показывают резервные цепи и цепи резервных каналов БКС и НКС.
На СхФ бортовой аппаратуры должны быть раскрыты:
- бортовая аппаратура;
- БКС с указанием индексов и наименований команд (сигналов) приборов
в соответствии с ТЗ или схемой электрической (СхЭ) на них;
- НКС до входных разъемов аппаратуры НА в соответствии с ТЗ на на-
земную аппаратуру;
- сопряжение со смежными системами в части команд (сигналов) управ-
ления, обеспечивающих работу подсистем (прибора, устройства).
На СхФ подготовки и включения питания наземной аппаратуры должны
быть показаны:
- элементы приема, формирования и выдачи команд (сигналов);
- источники питания наземной аппаратуры СУ ТМ (СНЭСТ и т.д.);
- НКС (кроме цепей непосредственной связи НА и бортовой аппаратуры).
На СхФ контрольно-проверочной аппаратуры (КПА) должны быть показа-
ны:
- контроль стыковки КПА с сопрягаемым оборудованием;
- связь КПА с КИК;
- уплотненный канал связи между бортовым и наземным приборами ИРС.
На каждую функциональную подсистему СУ выпускается функциональная
электрическая схема (Э2).
Функциональная электрическая схема предназначена для таких целей:
- анализа работы бортовой и наземной аппаратуры СУ при отработке, ис-
пытаниях и эксплуатации;
130
- анализа совместной работы бортовой аппаратуры СУ со смежными бор-
товыми системами КА;
- контроля правильности сопряжения аппаратуры с бортовой кабельной
сетью (БКС) и наземной кабельной сетью (НКС).
Функциональную электрическую схему бортовой аппаратуры включают в
спецификацию бортовой аппаратуры СУ и делят на подсистемы.
Каждой из подсистем СУ присваивают номер, который используют в обо-
значении схемы Э2 подсистемы.
Состав подсистем СУ может быть следующим:
- подсистема 01. Контроль стыковки аппаратуры СУ;
- подсистема 02. Канал связи машин бортового цифрового вычислитель-
ного комплекса (БЦВК) и КПА;
- подсистема 03. Электропитание аппаратуры. Обеспечение ЦВМ такто-
выми импульсами;
- подсистема 04. Контроль и приведение в исходное состояние приборов
СУ;
- подсистема 05. Включение-отключение ЦВК;
- подсистема 06. Управление электромеханическим исполнительным ор-
ганом (ЭМИО);
- подсистема 071. Канал измерения координат Солнца;
- подсистема 072. Канал измерения угловых скоростей;
- подсистема 08. Канал уплотнения информации блока коммутации и рас-
пределения питания (БКРП);
- подсистема 09. Управление управляющими блоками газореактивной
системы (УБ ГРС);
- подсистема 10. Подсистема сбора телеметрической информации;
- подсистема 11. Бортовой цифровой вычислительный комплекс (БЦВК);
- подсистема 12. Взаимодействие СУ с контуром магнитной разгрузки
(КМР);
- подсистема 13. Канал управления резервом СУ;
- бортовая кабельная сеть (БКС).
На каждой функциональной электрической схеме подсистемы со степенью
подробности, достаточной для выполнения работ, перечисленных выше, описы-
вают:
- бортовую аппаратуру;
- БКС между приборами, включая все проходные соединители, с указани-
ем индексов или наименований команд (сигналов);
- НКС до входных соединителей стоек контрольно-проверочной аппара-
туры (КПА).
На функциональной электрической схеме раскрываются принципы резер-
вирования аппаратуры, в том числе показываются резервные цепи и цепи резерв-
ных каналов БКС и НКС.
131
В качестве примера на рис. 3.2.4 показана функциональная электрическая
схема канала связи СУ с четырьмя приборами ориентации на Солнце (ПОС) типа
251КЗ по сигналам информационных импульсов (ИИ).
У02М
Рисунок 3.2.4 - Функциональная электрическая схема канала связи СУ с ПОС
На рис. 3.2.4 использованы следующие обозначения:
У 02М - устройство ввода-вывода;
УХ № - приборные разъемы;
РгС - регистр состояния аппаратуры;
mS - мультиплексор;
У28 - блок согласования одного ПОС;
Al, А2, Б1, Б2-номера ПОС.
3.3 Приборный состав СУ
Принципы построения СУ и ее технические характеристики определяют
выбор приборного состава системы управления.
Описание приборного состава СУ предполагает указание наименования,
количества, обозначения приборов и комплекта кабелей, весовые характеристики
и энергопотребление аппаратуры СУ.
В приборном составе выделяют приборы:
- бортового вычислительного комплекса;
- коммутационной аппаратуры;
- блока усилителей мощности;
132
- блока согласования телеметрического кадра;
- комплекса командных приборов;
- исполнительных органов;
- блока стандартной частоты;
- комплект кабелей.
В состав командных (командно-измерительных) приборов СУ могут вхо-
дить следующие приборы:
- приборы ориентации на Солнце (солнечные датчики);
- приборы ориентации на Землю;
- астроизмерительные системы (астродатчики);
- измерители угловой скорости (датчики угловой скорости);
- акселерометры;
- магнитометры.
В состав исполнительных органов СУ могут входить:
- двигатели ориентации большой тяги;
- двигатели малой тяги (двигатели стабилизации);
- двигатели коррекции орбиты;
- силовой гироскопический комплекс;
- двигатели-маховики;
- электромагнитные катушки.
Подключение приборов между собой отображается на схеме электрической
общей. Каждая система, устанавливаемая на КА, имеет свою буквенную индек-
сацию. Системе управления, как правило, присваивают индекс «У». В связи с
этим обозначения в СУ на приборах и соединителях принимают с учетом индекса
системы, обозначения соединителя по ЕСКД, номера прибора и номера соедини-
теля на приборе.
Все связи внутри СУ обеспечиваются комплектом кабелей. Кабельная сеть
аппаратуры СУ предназначена для соединения приборов и источников питания
аппаратуры в единую электрическую систему.
Дополнительные требования, выполнение которых необходимо при монта-
же приборов и кабелей системы на КА, указывают в технических требованиях на
схеме общей. Размещение приборов и монтаж кабельной сети проводят в соот-
ветствии с монтажной документацией на СУ.
3.4 Требования к командно-измерительным приборам
3.4.1 Измеритель угловой скорости на базе поплавкового гироскопа
(гироскопический измеритель вектора угловой скорости ~ ГИВУС)
ГИВУС предназначен для измерения интегралов от проекций вектора абсо-
лютной угловой скорости КА на измерительные оси прибора.
Функциональная схема прибора выполнена по принципу резервирования
всех его узловых элементов, включая чувствительные элементы. Задача резерви-
рования решена как путем применения избыточности измерительных каналов
(четыре при необходимых для измерения проекций вектора абсолютной угловой
133
скорости трех), так и схемой установки чувствительных элементов (см. рис.
3.4.1).
Основными системами прибора являются: измерительный канал, система
термостатирования, система электропитания и блок коммутации для управления
режимами работы ГИВУС [22].
Кинематическая схема прибора изображена на рис. 3.4.1.
Рисунок 3.4.1 - Кинематическая схема ГИВУС
134
На рис. 3.4.1 показаны:
OXnynZn - приборная система координат, связанная с установочной и на-
правляющей плоскостями прибора;
П^, Г2£, T3J, T4J - проекции осей чувствительности на установочную
плоскость.
Установочная плоскость прибора - плоскость, касательная к площадкам
опор корпуса (1-я, 2-я опоры имеют точные пазы, 3-я опора - свободная).
Направляющая плоскость прибора - плоскость, перпендикулярная устано-
вочной плоскости прибора и касательная к внутренним поверхностям точных па-
зов 1-й и 2-й опор корпуса прибора.
Ось ОХП перпендикулярна установочной плоскости и направлена в сторону
кожуха прибора.
Ось ОУП перпендикулярна направляющей плоскости и направлена в сторо-
ну свободной опоры.
Ось OZ^ параллельна установочной плоскости и направлена от 2-й опоры к 1-й.
Ориентация приборной системы координат (ПСК) относительно устано-
вочной и направляющей плоскостей прибора показана на рис. 3.4.2.
Рисунок 3.4.2 - Ориентация приборной системы координат ГИВУС
Чувствительным элементом (ЧЭ) измерительного канала является поплав-
ковый двухстепенной гироблок, гироузел которого охвачен электромеханической
обратной связью.
Ориентация ЧЭ( (i = 1,4) относительно ПСК задается с помощью правой ор-
тогональной задающей системы координат rioKioHio (i = 1,4) и реализуется дву-
мя последовательными поворотами на угол вокруг приборной оси ОХП и на
угол ф относительно задающей оси Ki0:
Si = 45°; Э2 = 135°; = 225°; Э4 = 315°; ф = 54°44’ для всех ЧЭ.
Задающие оси Fj (i = 1,4) являются образующими конуса вращения вокруг
135
приборной оси ОХП с углом полураствора ф при вершине и распределены по ос-
нованию конуса с шагом &0 = 90°.
Ось rio - ось чувствительности ЧЭ;
Kio - оси прецессии ЧЭ;
Hio - оси вращения гиромоторов ЧЭ.
Функциональная схема измерительного канала показана на рис. 3.4.3.
Рисунок 3.4.3 - Функциональная схема измерительного канала
Измерительный канал состоит из линейного преобразователя и модулятора. В со-
став линейного преобразователя входят: датчик угла гироблока (ДУ), усилитель-
дискриминатор (УД), усилитель обратной связи (УОС). В состав модулятора входят:
блок электроники (БЭ), стабилизатор тока (СТ), датчик моментов гироблока (ДМ).
Работа системы обратной связи измерительного канала иллюстрируется
схемой, изображенной на рис. 3.4.4.
Рисунок 3.4.4 - Схема работы системы
обратной связи измерительного канала
136
Вращение корпуса гироблока вокруг оси чувствительности X с угловой
скоростью ®вх вызывает под влиянием реакции в опорах появление гироскопиче-
ского момента Мг = Н-<овх, действующего на поплавок вокруг оси чувствительно-
сти. Гироскоп прецессирует, и сигнал, снимаемый с выхода ДУ, пропорциональ-
ный углу поворота е, подается на вход УД, усиливается и преобразуется в элек-
тронных блоках прибора в широтно-импульсно-модулированный ток J, проте-
кающий по обмотке ДМ, что создает компенсирующий момент Мк, противодей-
ствующий гироскопическому моменту Мг.
Выходной информацией измерительного канала является интеграл от Мк:
Де = 1)м,Л, (3.4.1)
Н о
где Де- приращение угла поворота; Н- кинетический момент гироскопа;
т - такт измерения.
В линейном преобразователе системы обратной связи приращение угла по-
ворота преобразуется в напряжение постоянного тока, величина которого про-
порциональна величине приращения, а знак - знаку приращения угла.
В модуляторе происходит преобразование напряжения в широтно-
импульсно-модулированные импульсы управления, которые формируются с так-
том т, равным периоду Тш частоты ШИМ. Далее по импульсам управления моду-
лятор формирует биполярные импульсы широтно-импульсно-модулированного
тока в обмотках датчика моментов, создающего компенсирующий момент Мк.
Количество импульсов пропорционально величине напряжения определя-
ется уравнением
(Г-Г)-Гд
2
(3-4.2)
где £д- частота дискретизации; Н- кинетический момент гироскопа; т+, т -
длительности положительной и отрицательной частей периода Тш.
М,=ЬК„(Т~--, (3.4.3)
или с учетом (3.4.1)
(3.4.4)
где Кдм - коэффициент передачи датчика моментов.
Из (3.4.1), (3.4.4) получаем для величины выходного сигнала
А 2-ГКлм-И
Де =---------,
f.H
при этом цену импульса выходной информации определяем по формуле
(3.4.5)
137
TT 2-J-K
Ц"=~Г^Г- (злб)
Для обеспечения высоких требований по точности и стабильности, предъ-
являемых к ГИВУС, необходимо создание прецизионных тепловых режимов для
чувствительных элементов и стабилизаторов тока, а также отвод излишнего теп-
ла, образовавшегося при работе прибора.
В приборе для обеспечения требуемых тепловых режимов применена двух-
контурная тепловая система, состоящая из индивидуальных систем подогревного
типа для каждого ЧЭ (точность поддержания заданной температуры 0,02 °C) и
защитного контура термостатирования основания прибора (точность поддержа-
ния заданной температуры 0,3 5°С).
Излишнее тепло, образовавшееся при работе прибора, сбрасывается на спе-
циальную охлаждаемую плату, имеющую гарантированный тепловой контакт с
корпусом прибора.
Заданный диапазон температуры охлаждаемой платы (О...±35°С) должен
обеспечиваться внешней тепловой системой КА.
Для защиты от внешних нерегулируемых потоков тепла прибор закрыт не-
сколькими слоями экранно-вакуумной изоляции.
Кроме того, для быстрого вывода прибора в рабочий диапазон температур в
ГИВУС применена система форсированного разогрева для каждого из ИК.
Основные технические требования к ГИВУС типа КИНД34-020 приведены
в табл. 3.4.1.
Таблица 3.4.1 - Основные технические требования к ГИВУС
№ п/п Наименование Единица измере- ния Значе- ние
1 Величина диапазона измеряемых проекций вектора абсолютной угловой скорости 7с ±0,4
2 Максимальное отклонение значения масштабного коэффициента в любом запуске по отношению к паспортизованному значению за срок службы % ±0,1
3 Максимальное отклонение значения нулевого сиг- нала, не зависящего от перегрузки, в любом запуске по отношению к паспортизованному значению за срок службы 7ч ±0,2
4 Изменение среднего значения нулевого сигнала, не зависящего от перегрузки, в двух любых соседних 1000 часовых временных интервалах работы прибо- ра в непрерывном запуске длительностью до 9000 ч 7ч ±0,003
138
Окончание табл. 3.4.1
№ п/п Наименование Единица измере- ния Значе- ние
5 Амплитудно-фазовая частотная характеристика прибора: - собственная частота; - показатель колебательности Гц ед. 8...17 1,1..Л,5
6 Время наступления тепловой готовности прибора от момента подачи электропитания на прибор, не бо- лее мин 60
7 Время наступления функциональной готовности прибора из его тепловой готовности от момента включения ИК, не более мин 20
8 Время наступления точностной готовности прибо- ра из состояния его тепловой готовности от момен- та включения ИК, не более мин 180
9 Энергопотребление прибора, не более: - в процессе форсированного разогрева дли- тельностью до 60 мин - в установившемся тепловом режиме при работе 4 ИК Вт 130 75
10 Назначенный срок службы прибора (срок сохраняе- мости), не более В том числе в составе КА в натурных условиях экс- плуатации лет 15 10
и Назначенный ресурс, не более ч 87600
12 Число включений прибора, не более - 1000
13 Вероятность безотказной работы на назначенный ресурс, не менее - 0,99
14 Масса прибора, не более кг 12
Под режимом тепловой готовности прибора понимают такое его состояние,
при котором за время не более 60 мин от момента подачи питания на систему
термостатирования (СТС) получено информационное сообщение о грубой тепло-
вой готовности хотя бы одного ИК.
Под форсированным разогревом прибора понимают режим работы СТС на
временном интервале от момента подачи питания на СТС до момента наступле-
ния тепловой готовности.
Под установившимся тепловым состоянием прибора понимают такое его
состояние, когда получены информационные сообщения о грубой тепловой го-
товности всех ИК.
139
Под функциональной готовностью прибора понимают готовность ИК к
обеспечению измерений приращений интегралов от проекций угловой скорости
КА с погрешностью нулевого сигнала, не зависящего от перегрузки, не более
0,2 7с по модулю от значения на момент точностной готовности.
Под точностной готовностью прибора понимают готовность ИК к обеспе-
чению измерений приращений интегралов от проекций угловой скорости КА с
требуемой точностью.
Под запуском прибора понимают его работу в режиме точностной готовно-
сти с момента набора точностной готовности до момента отключения ИК.
Собственная частота ИК- частота, при которой фазовый сдвиг между
входным сигналом (абсолютной угловой скоростью КА) и выходным информа-
ционным сигналом составляет минус 90°.
Показатель колебательности - отношение амплитудного значения выходно-
го сигнала к амплитудному значению входного сигнала по частоте.
Случайные погрешности ГИВУС - отклонения точностных параметров от сис-
тематических значений, включающие в себя, в том числе, ошибки определения систе-
матических значений, не должны превышать значений, приведенных в табл. 3.4.2.
Таблица 3.4.2 - Точностные характеристики ГИВУС
№ п/п Наименование Единица измере- ния Значение (За)
1 Случайная составляющая отклонений величины нулевого сигнала, не зависящая от перегрузки, от среднего значения параметра в запуске до 24 ч 7ч 0,003
2 Случайная составляющая отклонений масштаб- ного коэффициента в запуске до трех месяцев по отношению к среднему значению в этом запуске: - при изменении угловой скорости от -0,1 до +0,1 7с - при изменении угловой скорости от - 0,3 до +0,3 7с - при изменении угловой скорости от - 0,4 до +0,4 7с % 0,005 0,006 0,007
3 Отклонения значений углов рассогласования осей чувствительности гироблоков от паспорти- зованных значений за срок службы: - относительно осей приборной системы координат; - по отношению друг к другу угл. с 30 20
140
Принимается, что указанные в таблице слз'чайные погрешности независи-
мы, распределены по нормальному закону.
Перечень паспортизируемых параметров ГИВУС приведен в табл. 3.4.3.
Таблица 3.4.3 - Перечень паспортизируемых параметров ГИВУС
№ п/п Наименование паспортного параметра Размер- ность Диапазон из- менения
1 Систематическая составляющая нулевого сигнала, не зависящая от перегрузки, j-ro ИК град/ч ±3,0
2 Углы отклонения измерительных осей ги- роблоков относительно номинального по- ложения угл. с ± 1800,0
3 Систематическое значение масштабного коэффициента j-ro ИК угл. с/имп - 0,045 ... +0,03
Индивидуальные значения систематических погрешностей каждого образца
прибора должны записываться в паспорт и учитываться в БЦВК.
Систематические паспортизованные погрешности прибора должны ком-
пенсироваться путем их учета в алгоритмах обработки выходной информации
ГИВУС, реализуемых в БЦВК системы управления КА.
Прибор работоспособен при следующих характеристиках электропитания
на его входе:
- диапазон изменения с амплитудным значением пульсаций не более 0,2 В;
- при амплитуде скачков и просадок напряжения ±1,5 В не чаще 1 раза в
секунду с длительностью до 30 мс, при этом напряжение электропитания
остается в пределах 25...29 В.
Прибор работоспособен при воздействии:
- электрических полей с максимальной напряженностью 10 В/м, длитель-
ностью импульсов до 24 О'4 с;
- магнитных полей с максимальной напряженностью 34 О’4 А/м, длитель-
ностью импульсов до 240^ с.
Разряды могут происходить с частотой до 10 Гц в течение нескольких часов
в зависимости от геомагнитной обстановки на орбите.
Прибор работоспособен на КА, находящемся на геостационарной орбите в
течение 10 лет, при воздействии потоков протонов и электронов от излучения
внешнего естественного радиационного пояса Земли и протонного космического
излучения с интегральными спектрами, значения которых приведены в
табл. 3.4.4, и потоками частиц галактических космических лучей, значения кото-
рых представлены в табл. 3.4.5.
141
Таблица 3.4.4 - Параметры воздействия потоков протонов и электронов
Протоны Электроны
Энергия Ер, МэВ Поток частиц Fp, 1/см2 Энергия Ее, МэВ Поток частиц Fe, 1/см2
0,01 5,9-Ю15 0,001 3,6-1017
0,05 4,8-Ю15 0,01 4,4-Ю16
0,5 2,3-1014 0,03 8,2-1015
1,0 8,4-Ю12 0,05 5,5-1015
3,0 2,0-10'° 0,5 1,5-Ю15
10,0 2,0-1010 1,0 3,5-1014
30,0 2,0-Ю10 2,0 1,9-Ю14
50,0 8,7-109 3,0 1,1-Ю'2
100,0 1,6-ю’ 5,0 3,2-109
200,0 1,2-10* 6,0 0
Таблица 3.4.5 - Параметры воздействия потоков частиц галактических
космических лучей
Заряд частицы, Z Поток частиц, 1/см2 Заряд частицы, Z Поток частиц, 1/см2
1 1,2510’ 10 < Z < 14 2,11-Ю6
2 1,58-10s 15 < Z < 19 2,63-Ю5
3<Z<5 3,33-106 20 < Z < 30 7,9 10s
6<Z<9 9,86-106 Z>30 2,0-102
Такие требования к условиям эксплуатации ГИВУС, как механические на-
грузки, климатические факторы и другие, приведены в описании общих требова-
ний к условиям эксплуатации приборов СУ в подразд. 3.4.9.
3.4.2 Измеритель угловой скорости на базе волоконно-оптического
гироскопа
Назначение, состав и принцип действия
Волоконно-оптический гироскоп (ВОГ) предназначен для измерений про-
екции вектора угловой скорости КА или PH на ось чувствительности прибора.
Разработанные приборы с замкнутым контуром обратной связи состоят:
- из источника света - суперлюминесцентного диода (СЛД),
- деполяризатора (ДП),
- фотоприемного устройства (ФПУ),
- одного (в случае одноосного ВОГ) или двух (трехосные ВОГ) волокон-
ных разветвителей (ВР), разделяющих излучение на два или, соответст-
венно, три канала, одного или трех кольцевых интерферометров Саньяка,
- блока электроники.
Кольцевые интерферометры Саньяка состоят из многофункционального
142
интегрально-оптического элемента (МИОЭ) и одного или трех волоконных кон-
туров, представляющих собой катушку оптического волокна с наведенным дву-
лучепреломлением, сохраняющим состояние поляризации излучения, МИОЭ яв-
ляется интегрально-оптической схемой, выполняющей функции Y-разветвителя,
поляризатора и широкополосного электрооптического фазового модулятора /1/.
На рис. 3.4.5 показана схема одноосного ВОГ.
Рисунок 3.4.5 - Схема одноосного ВОГ
Принцип действия волоконно-оптического гироскопа, как и какого-либо
другого оптического гироскопа, например лазерного, основан на эффекте Санья-
ка. По круговому оптическому пути, как показано на рис. 3.4.5, благодаря расще-
пителю луча свет распространяется в двух противоположных направлениях. Если
при этом система находится в покое относительно инерциального пространства,
оба световых луча распространяются встречно по оптическому пути одинаковой
длины. Поэтому при сложении лучей в расщепителе по завершении пути нет фа-
зового сдвига. Однако, когда оптическая система вращается в инерциальном про-
странстве с угловой скоростью О, между световыми волнами возникает разность
фаз. Это явление и называется эффектом Саньяка [43].
Рисунок 3.4.6 - К возникновению эффекта Саньяка
143
Пусть коэффициент преломления на оптическом пути п=1. При радиусе оп-
тического пути R время достижения расщепителя лучей светом, движущимся по
часовой стрелке, выражается как
tr =(27tR + RDtr)/c, (3.4.7)
в противоположном направлении -
t| = (2TtR-RQti)/c,
(3.4.8)
где с -- скорость света.
Из формул (3.1.18) и (3.1.19) разность времени распространения двух све-
товых волн с учетом c»RQ составит
At = tr-t, = ±ф_ q = 4|q. (3.4.9)
С с
Это означает, что появляется разность длины оптических путей
4S
AL = —Q. (3.4.10)
с
или, иначе говоря, разность фаз
4kS
=(3.4.11)
с
Здесь S - площадь, окаймленная оптическим путем; к=2ттА - волновое чис-
ло, где X - длина волны.
Формула (3.4.11) вытекает из формулы (3.4.9) при допущении, что п=1 и
оптический путь имеет круговую форму, но можно доказать, что формула (3.4.11)
является основной для эффекта Саньяка. Она не зависит от формы оптического
пути, положения центра вращения и коэффициента преломления.
В реальных схемах ВОГ круговой оптический контур заменен катушкой из
длинного одномодового оптического волокна, по сути представляющей собой
интерферометр Саньяка.
Разность фаз между двумя световыми волнами, обусловленная эффектом
Саньяка, с учетом формулы (3.4.11) выражается как
. 4kSN 4ttLR
Д\|/ =------Q =--------Q,
с ск
(3.4.12)
где N - число витков в катушке; L - длина волокна; R - радиус катушки.
Следует обратить внимание на то, что в основные формулы не входит ко-
эффициент преломления света в волокне.
Благодаря совершенствованию технологии производства выпускается во-
локно с очень низкими потерями. Чтобы не повредить волокно, его наматывают
на катушку радиусом несколько сантиметров. При этом не наблюдается сколько-
нибудь заметного увеличения потерь. Можно создать сравнительно малогабарит-
ный и высокочувствительный интерферометр Саньяка с катушкой небольшого
радиуса (2...5 см), намотав на нее волокно большой длины. Сформировав опти-
144
мальную оптическую систему, можно измерять с высокой точностью изменения
фазы (в инерциальной навигации - порядка 10'6 рад), а затем из формулы (3.4.12)
определять круговую скорость. Вес это и составляет принцип работы волоконно-
оптического гироскопа.
Основные точностные и технические характеристики
Главными составляющими погрешности волоконно-оптических гироскопов
являются такие:
- дрейф нуля, вызванный изменением температур, магнитными полями
ит.д.;
- стабильность коэффициента преобразования сигнала в напряжение;
- стабильность нулевого сигнала;
- величина шума на выходе прибора.
Точностные характеристики реальных волоконно-оптических гироскопов
ограничиваются различными факторами, поэтому необходимо принимать меры
по их устранению (см. табл. 3.4.6) [43].
Таблица 3.4.6 - Шумовые факторы в волоконно-оптических гироскопах
Шумовой фактор Рекомендуемые меры по снижению шума
Колебания поляризации в оптиче- ском волокне, например, преобразо- вание линейной поляризации в кру- говую в одномодовом волокне Включение на выходе волокна анали- затора для того, чтобы выделить со- ставляющую поляризации одного на- правления
Разность длины оптических путей для световых волн, идущих в про- тивоположных направлениях, при динамической нестабильности спектра источника света Стабилизация спектра источника света
Разность частот волн, идущих по волокну в противоположных на- правлениях, при колебаниях темпе- ратуры Использование двух акустооптических модуляторов или модуляция прямо- угольными импульсами
Неравномерность распределения температуры вдоль волокна Намотка оптического волокна, при ко- торой распределение температуры симметрично относительно середины катушки
Изменение фазы выходного сигнала из-за эффекта Фарадея в волокне под воздействием колебаний маг- нитного поля Земли Магнитное экранирование и использо- вание волокна с сохранением поляри- зации
145
Окончание табл. 3.4.6
Шумовой фактор Рекомендуемые меры по снижению шума
Колебания (в расщепителе луча) от- ношения интенсивности прямого и обратного луча вследствие оптиче- ского эффекта Керра Модуляция излучаемого света прямо- угольными импульсами со скважно- стью 50%; использование широкопо- лосного источника света
Интерференция прямого луча и лу- ча обратного рассеяния Рэлея Фазовая модуляция световой волны; импульсная частотная модуляция ла- зерного излучения; использование слабоинтерферируютцего источника света
В отличие от механических волоконно-оптические гироскопы имеют
структуру статического типа, которая обладает рядом достоинств, основными из
которых являются следующие:
- отсутствие подвижных частей, и, следовательно, устойчивость к ускоре-
ниям;
- простота конструкции;
- короткое время подготовки;
- высокая чувствительность;
- высокая линейность характеристики;
- низкая потребляемая мощность;
- высокая надежность;
- относительно невысокая стоимость.
На рис. 3.4.7 показаны одноосные ВОГ типа ОИУС (одноосный измеритель
угловой скорости), выпускаемые предприятием ООО НИК «Оптолинк» (г. Зеле-
ноград, Россия).
Рисунок 3.4.7 - Волоконно-оптические гироскопы производства
ООО НПК «Оптолинк»
146
Основные характеристики представленных ВОГ приведены в табл. 3.4.7 [9].
Таблица 3.4.7 - Характеристики ВОГ компании ООО НПК «Оптолинк»
Параметр ОИУС- 2000 ОИУС- 1000 ОИУС- 501 ОИУС- 200
Диапазон измеряемых угло- вых скоростей, град/с ±40 ± 100 ±250 ±500
Случайная составляющая смещения нулевого сигнала при фиксированной темпе- ратуре (Зо), град/ч <0,015 <0,1 <0,3 <0,6
Погрешность масштабного коэффициента, % <0,01 <0,01 <0,05 <0,1
Полоса пропускания, Гц 50 100 250 400
Спектральная плотность шума, градЛ/ч <0,001 < 0,003 < 0,005 <0,02
Длина волоконного контура, м 2000 1000 500 200
Масса, кг 1,7 0,8 0,4 0,22
Габаритные размеры, мм 0 250x40 0150x40 0 100x30 0 70x28
Смещение нулевого сигнала в рабочем диапазоне температур -10 ... +50°С
для ВОГ типа ОИУС составляет 0,1 ... 2,0 град/с. Эта составляющая может быть
определена в процессе наземных калибровок и частично скомпенсирована как
систематическая составляющая в математическом обеспечении при обработке
выходного сигнала ВОГ.
Напряжение питания данных ВОГ составляет 5 В, потребляемая мощ-
ность - 5 ... 7 Вт.
Выходным сигналом прибора является цифровой код стандарта RS-485, и
по заявке пользователя он может нести информацию либо об угловой скорости,
либо об угле поворота КА.
Время функциональной готовности прибора составляет 3 с, для достижения
точностной готовности требуется не менее 30 мин.
Схемы установки на КА
Схемы установки ВОГ на КА не отличаются от схем установки измерите-
лей угловой скорости других типов, например, механических поплавковых гиро-
скопов.
Наиболее часто используют такие схемы установки:
- ортогональная «тройка» (3 шт.);
- ортогональная «тройка» с четвертым прибором, ось чувствительности
которого расположена под одинаковыми углами к осям чувствительно-
сти «тройки» (4 шт.);
147
- конусная схема, при которой оси чувствительности приборов распола-
гаются на поверхности конуса вращения (3 ... 6 шт.).
При выборе числа приборов и схемы их установки обычно руководствуют-
ся требованиями надежности и габаритно-массовыми ограничениями на аппара-
туру, входящую в состав системы управления.
ВОГ поставляются разработчикам систем управления и космических аппа-
ратов в виде, как отдельных приборов, так и моноблочной конструкции, содер-
жащей необходимое количество ВОГ, установленных по принятой схеме.
Пример схемы установки ВОГ (ортогональная «тройка» с четвертым при-
бором), принятой для бесплатформенного астроинерциального блока, показан на
рис. 3.4.34.
3.4.3 Блок акселерометров
Акселерометр - измерительное устройство, предназначенное для измерения
ускорения КА.
Акселерометры классифицируют по разным признакам:
- по типу чувствительного элемента (гироскопические, инерциальные). В
системах управления КА применяют акселерометры, которые в качестве
чувствительного элемента используют инерционную массу, поэтому в
настоящем разделе будем рассматривать их устройство и принцип дей-
ствия;
- по виду подвесов инерционной массы (пружинный, с подвесом в под-
шипниках, с гидростатическим и гидродинамическим подвесом и т.д.);
- по характеру движения инерционной массы (с линейно перемещающей-
ся массой, маятниковые);
- по способу измерения силы, уравновешивающей силу, развиваемую
инерциальной массой при воздействии ускорения (пружинные и ком-
пенсационные). В пружинных акселерометрах сила, развиваемая инер-
циальной массой, вызывает упругую деформацию пружины, которая
создает противодействующую силу. Деформация пружины служит ме-
рой измеряемого ускорения и преобразуется в выходной электрический
сигнал. В компенсационных акселерометрах инерционная сила уравно-
вешивается силой, развиваемой магнитоэлектрическим или другим пре-
образователем. Эта сила пропорциональна силе тока, которая и служит
выходным сигналом;
- по виду выходного сигнала (аналоговый или цифровой);
- по характеру зависимости между выходным сигналом и измеряемым ус-
корением (позиционные, когда выходной сигнал пропорционален уско-
рению; однократно интегрирующие, когда выходной сигнал пропорцио-
нален интегралу от ускорения - скорости; двукратно интегрирующие,
когда выходной сигнал пропорционален расстоянию);
- по числу измеряемых компонентов ускорения (одно-, двух-, трехосные).
Двух-, трехосные акселерометры, как правило, эквивалентны двум
148
(трем) одноосным акселерометрам, поэтому далее будем рассматривать
одноосный акселерометр.
Рассмотрим простейшую схему пружинного акселерометра с линейным пе-
ремещением инерционной массы (рис. 3.4.8, а).
а б
Рисунок 3.4.8 -Простейшая схема акселерометра
Чувствительным элементом является инерционная масса ш, которая может
перемещаться относительно корпуса К вдоль линии хх, называемой осью чувст-
вительности акселерометра. Линейному перемещению массы относительно кор-
пуса препятствуют пружины Пр, которые одними своими концами прикреплены
к массе, а другими - к корпусу. Предположим, что инерционная масса и корпус
испытывают одинаковое воздействие внешних сил и находятся в состоянии отно-
сительного покоя. Воображаемую точку ео, в которой находится центр инерцион-
ной массы при этом предположении, назовем точкой начального положения
инерционной массы. В дальнейшем будем считать, что эта точка жестко связана с
корпусом.
Предположим далее, что внешняя сила воздействует только на корпус аксе-
лерометра и вызывает некоторое ускорение движения корпуса вдоль оси чувст-
вительности (рис. 3.4.8, б). При движении корпуса с ускорением инерционная
масса, стремясь сохранить прежнее состояние в инерциальном пространстве,
смещается относительно своего исходного положения в сторону, обратную на-
правлению ускорения. Это приводит к деформации пружин и появлению с их
стороны силы, которая вызывает ускорение самой массы. Когда ускорение массы
становится равным ускорению корпуса, деформация пружин заканчивается и
пружины прикладывают к массе силу, равную произведению массы и ускорения
корпуса акселерометра (согласно второму закону Ньютона).
Величина деформации пружин, или величина смещения инерционной мас-
сы а (что одно и то же) относительно своего исходного положения пропорцио-
нальна величине измеряемого акселерометром ускорения. Смещение а регистри-
руется с помощью датчика перемещений, который показан на рисунках в виде
потенциометрического датчика. Сигнал U, снимаемый с датчика, является вы-
ходным сигналом акселерометра.
Теперь рассмотрим, какое ускорение измеряет акселерометр.
Ускорение КА в инерциальном пространстве возникает в результате сум-
марного воздействия всех внешних сил, действующих на КА. Внешние силы,
149
действующие на КА, делят на гравитационные и негравитационные.
К гравитационным силам относятся силы притяжения аппарата Землей и
небесными телами (Луной, Солнцем и другими). В дальнейшем будем учитывать
только гравитационные силы, обусловленные притяжением Земли.
К силам негравитационного происхождения относятся сила тяги двигателей
КА, аэродинамические силы, действующие на КА.
Пусть центр масс КА находится в точке М (рис. 3.4.9).
Рисунок 3.4.9 - К понятию
о кажущемся ускорении
Положение точки М относительно инерциальной системы координат с на-
чалом S в центре Земли определяется вектором R. Пусть далее на КА действуют
силы Р и G. Сила Р является силой негравитационного происхождения, а сила
G - гравитационной силой, обусловленной притяжением Земли. Тогда согласно
второму закону Ньютона ускорение центра масс КА в инерциальном пространст-
ве определяется равенством
- P + G
Rs =------, (3.4.13)
П1М
где Rs- абсолютное ускорение КА, обусловленное действием всех внешних
сил; ш„ - масса КА.
Силы Р и G, входящие в равенство (3.4.13), отнесены к инерциальной сис-
теме координат. Выражение (3.4.13) можно записать в следующем виде:
to^R^cj'+g, (3.4.14)
здесь ©о = Rs - абсолютное ускорение; (йк = Р/тм - кажущееся ускорение в инер-
циальной системе координат; g = G/mM - гравитационное ускорение в инерциаль-
ной системе координат.
Кажущимся ускорением назовем ускорение КА, созданное силами неграви-
тационного происхождения, т. е. такое ускорение, которое имел бы КА в про-
странстве, где отсутствуют гравитационные силы. Кажущееся ускорение отлича-
ется от абсолютного на величину гравитационного ускорения.
Автономным средством измерения абсолютного ускорения КА является ак-
150
селерометр. Как показано в [22], с помощью акселерометра можно измерить
только одну составляющую абсолютного ускорения, а именно сок. В связи с тем,
что по результату измерения ускорения акселерометром нельзя судить о величи-
не абсолютного ускорения КА, составляющую абсолютного ускорения сок. изме-
ряемую акселерометром, принято называть кажущимся ускорением КА.
Одноосный акселерометр предназначен для измерения проекций кажуще-
гося ускорения КА на ось чувствительности акселерометра. Для измерения пол-
ного вектора кажущегося ускорения необходима установка на КА блока акселе-
рометров, оси чувствительности которых образуют трехмерный базис. Сущест-
вуют различные способы расположения акселерометров в блоке:
- оси чувствительности взаимно ортогональны, направлены параллельно
осям связанной системы координат КА и измеряют проекции кажущего-
ся ускорения КА на оси ССК;
- оси чувствительности неортогональны и образуют косоугольный трех-
мерный базис, проекции кажущегося ускорения КА на оси ССК вычис-
ляются в бортовом вычислительном комплексе системы управления КА.
Для определения вектора абсолютного ускорения КА в бортовом вычисли-
тельном комплексе необходимо вычислить величину вектора g в заданной точке
пространства (предположим, в центре масс КА).
Величину g вычисляют как функцию местоположения центра масс (коор-
динат), в частности долготы и широты.
Теперь рассмотрим более подробно некоторые типы акселерометров.
3.4.3.1 Струнный акселерометр
На рис. 3.4.10 показана схема струнного (вибрационного) акселерометра с
линейно перемещающейся массой.
Рисунок 3.4.10. Схема
струнного акселерометра:
1 - инерционная масса; 2 - постоянный магнит генератора колебаний и датчиков
вибраций; 3, 6 - струны; 4 - устройство для регулирования натяжения струн; 5 - дат-
чик вибраций; 7 - растяжки; 8 - генератор колебаний и датчик выходного сигнала
151
Инерционная масса 1 в этом акселерометре подвешена в корпусе на двух
струнах 3, 6, причем один из концов струны 6 закреплен в корпусе, а один из
концов второй струны 3 прикреплен к устройству 4, регулирующему натяжение
обеих струн. От радиальных перемещений инерциальная масса предохраняется
растяжками 7. Каждая из струн находится в поле постоянных магнитов 2, кроме
того, они подключены к генератору колебаний. При протекании по струнам тока
возникает взаимодействие струн и магнитов, вызывающее поперечное перемеще-
ние струн, которое регистрируется специальными датчиками 5.
Сигнал с этих датчиков подается в автогенератор с положительной обрат-
ной связью 8, а с него - на струны, что обеспечивает непрерывное возбуждение
поперечных колебаний струн.
Частота колебаний каждой струны зависит от их натяжения следующим
образом:
f,2 = f 2 — . F<,_;
ДггцЬ2 Дп^Ь2
(3.4.15)
где Fi и Fz - растягивающие усилия; mj - плотность струны (масса на единицу
длины); L - длина струны.
Движение объекта вдоль оси чувствительности акселерометра с кажущимся
ускорением приведет к появлению силы инерции F„ = т©кх, которая переда-
ется на струны. При этом натяжение одной струны увеличивается на величину
FH
—, а натяжение другой уменьшается на такую же величину, так что
_ m(Do _ тою.
F] = Fo + — --—; F2 = Fo--—, где Fo - начальное натяжение струн (считаем его
одинаковым для обеих струн).
Запишем выражение для разности квадратов частот в соответствии с
(3.4.15):
_2 _2 Fj-F2 m
fi -fi = ~-7=------
1 2 4m,L 4m,L "
Отсюда
f -f m
* 2 "4mIL2(f,+f2) 4
(3.4.16)
(3.4.17)
Таким образом, разность частот fi - fz зависит от ow Чтобы обеспечить по-
, , m
стоянство коэффициента пропорциональности--------------, в акселерометре
4m1L?(f1+f2)
предусмотрена система поддержания постоянства суммарной частоты fi + f2, ко-
торая включает в себя (см. рис. 3.4.10) измерители частот, генератор эталонной
частоты, сравнивающее устройство и регулятор натяжения струн 4. Благодаря
этому разностная частота fi - f2 оказывается пропорциональной кажущемуся ус-
корению ©кх, а суммарное количество импульсов, поступающих с датчика выход-
ного сигнала за какое-то время, пропорционально приращению кажущейся ско-
152
рости Ок* - ип (0) за это время.
Ниже приведены технические характеристики струнного акселерометра ти-
па КИ68-1.
Высокие метрологические характеристики ЧЭ были получены с помощью
оригинальных конструктивно-технологических решений и мер, основными из ко-
торых являются:
- применение пружинного поддержания силы натяжения струны;
- использование в качестве струны специальной детали - вибратора, что
позволило исключить погрешность, вызванную подвижностью струны в
заделках её концов;
- выбор материалов элементов конструкции и режимов их механической,
термической и другой обработки;
- тщательная отработка частотных свойств ЧЭ.
Прибор представляет собой одноосный троированный блок вибрационно-
струнных акселерометров со встроенной электроникой и системой амортизации.
Он включает в себя три струнных измерителя КИ28-7, установленных на основа-
нии, которое с помощью пружин подвеса крепят на плите. На основании уста-
новлены три жидкостных демпфера. Снизу платы с помощью трёх амортизаторов
крепят плату с тремя усилителями-преобразователями. Все элементы смонтиро-
ваны в общем герметизированном корпусе, закрытом колпаком.
Основные характеристики прибора КИ68-1 следующие:
- диапазон измерения, g....................................... ±22
- масштабный коэффициент по каждому из каналов, Гц-с2/м. 25 ± 0,013
- частота выходного сигнала по каждому из каналов, Гц... 16020 ±5,0
- эффективное напряжение синусоидального выходного сигнала
по каждому из каналов, В.................................. 0,36... 1,40
- неперпендикулярность измерительных осей каждого из каналов
относительно базовой плоскости, угл. мин...................... 0±15
- температурный коэффициент масштабного коэффициента, 1/° .. < 2 • 10'5
- температурный коэффициент смещения нуля, g/°C......... <2 10^
- стабильность масштабного коэффициента за 20 лет, %......... 0,001
- разрешающая способность по скорости, м/с.................. 0,00025
- время готовности, с, не более............................... 20
- гарантийный ресурс, ч, не менее............................. 500
- напряжение питания, В................................. 38...43
- потребляемая мощность, Вт, не более......................... 2,7
- габаритные размеры, мм................................ 0 193 х 170
- масса прибора, кг..................................... 4,1 ± 0,15
153
3.4.3.2 Маятниковый акселерометр
Схема позиционного маятникового акселерометра показана на рис 3.4.11.
Рисунок 3.4.11 - Принципиальная схема
маятникового акселерометра
' Он состоит из следующих основных элементов:
- инерционной массы т, выполненной в виде маятника с осью вращения,
фиксированной относительно корпуса;
- устройства обратной связи, состоящего из датчика угла ДУ, датчика мо-
ментов ДМ и усилителя обратной связи УОС;
- датчика выходного сигнала (датчика команд), роль которого в данном
случае выполняет датчик угла ДУ;
- системы подвеса маятника, которая конструктивно может быть оформ-
лена различным образом.
Свяжем с инерционной массой маятникового акселерометра систему коор-
динат Oxyz. Ось х этой системы совпадает с осью вращения маятника. Условимся
называть ее выходной осью. Ось z направлена вдоль плеча 1 маятника и проходит
через его центр масс. Ось у перпендикулярна осям х и z и образует с ними пра-
вую систему координат. Ось у называют осью чувствительности акселерометра.
С корпусом акселерометра свяжем систему координат О^ц^. Ось % этой системы
совпадает с осью вращения маятника. Оси ц и £ выбраны так, чтобы при невоз-
мущенном положении маятника они совпадали с осями у и z соответственно. Ось
г| называют входной осью акселерометра.
Предположим, что корпус акселерометра движется вдоль входной оси с ус-
корением Инерционная масса т, стремясь сохранить свое первоначальное
положение в инерциальном пространстве, смещается относительно корпуса.
Смещение массы сопровождается поворотом маятника (системы координат Oxyz)
относительно корпуса (относительно системы координат O^T]Q на некоторый
угол р (рис. 3.4.12). При этом с датчика угла ДУ (рис. 3.4.11) снимается сигнал U,
который после усиления и преобразования в УОС поступает в виде тока i на
154
управляющие обмотки датчика моментов ДМ. Последний прикладывает к маят-
нику момент, пропорциональный отклонению р. Направление момента такое, что
он препятствует увеличению отклонения р. Отклонение р увеличивается и мо-
мент, создаваемый датчиком моментов ДМ, нарастает до значения, при котором
обеспечивается ускорение движения инерционной массы, равное ускорению
движения корпуса. Угол р или соответствующий ему выходной сигнал U являет-
ся той мерой, по которой судят о величине измеряемого ускорения .
Запишем уравнения движения позиционного маятникового акселерометра.
В качестве исходного примем равенство
Ч=М,,+М„ (3.4.18)
где I - момент инерции маятника относительно оси х; 1сох - проекция абсолютно-
го углового ускорения маятника на ось х; MlIX - момент силы инерции относительно
оси х, обусловленной кажущимся ускорением; Мх- суммарный момент относи-
тельно оси х, действующий на маятник со стороны связи маятника с корпусом.
Представим Мх в следующем виде:
МХ = МО.С + МВ.Т + МВ. (3.4.19)
Здесь Мо.с- момент обратной связи, создаваемый датчиком моментов ДМ; Мв.т-
момент сил вязкого трения; Мв - возмущающий момент (момент сил сухого тре-
ния, сил электромагнитного тяжения и т. д.).
Найдем выражения для этих моментов, кроме выражения для Мв, который
раскрывать не будем.
Момент Мих создается силой инерции, обусловленной кажущимся ускоре-
нием корпуса акселерометра. Для простоты примем, что вся масса маятника со-
средоточена в одной точке рис. (рис. 3.4.13). Пусть кажущееся ускорение имеет
две составляющие: и соК(.. Составляющая <вкп направлена по входной оси ак-
селерометра т|. Составляющая сок; направлена по оси <; корпуса акселерометра и
является боковой составляющей кажущегося ускорения. Эти составляющие уско-
рения вызывают две силы инерции: и т(0К(.. Направления сил инерции по-
казаны на рис. 3.4.13.
Рисунок 3.4.12 - Ориентация СК, свя- Рисунок 3.4.13 - Силы инерции,
занной с маятником, относительно СК, действующие на инерционную массу
связанной с корпусом акселерометра маятникового акселерометра
155
Тогда момент сил инерции
Мнх = т1(сокп cosP + to^ sinP). (3.4.20)
Так как угол р мал (cos Р = 1, sin Р = Р), то
; Р). (3.4.21)
Момент М0.с создается обратной связью, которая включает в себя датчик
угла ДУ (рис. 3.4.11), усилитель обратной связи УОС и датчик моментов ДМ.
Полагая все элементы цепи обратной связи идеальными усилительными звенья-
ми, момент М0.с представляем равенством
Мо.с = - кдкукмр, (3.4.22)
где кд - коэффициент передачи датчика угла, В/рад; ку - коэффициент передачи
усилителя, A/В; км - коэффициент передачи моментов, Нм/А.
Если обозначить
к0.с = клкукм, (3.4.23)
то
М0.с = -к0.ср. (3.4.24)
Здесь Ко с - коэффициент передачи цепи обратной связи позиционного акселеро-
метра, Нм/рад.
Момент Мв т, создаваемый силами вязкого трения, пропорционален угловой
скорости маятника относительно корпуса. Направление момента противополож-
но направлению скорости. Следовательно,
MB, = -f0, (3.4.25)
где f- удельный момент сил вязкого трения, Нмс.
Если в (3.4.13) заменить моменты Мос и Мвт их выражениями (3.4.24) и
(3.4.25), а затем (3.4.19) и (3.4.21) подставить в исходное равенство (3.4.18), то
получим
I<bx =ml(m4+p<Bj3)-Kj)-fjUMB. (3.4.26)
Абсолютное угловое ускорение маятника
<Ь,=0+Ч- (3.4.27)
Здесь (ЬБх - переносное угловое ускорение маятника вокруг оси х; р - относи-
тельное угловое ускорение маятника вокруг оси х.
С учетом (3.4.27) уравнение (3.4.26) приобретает следующий вид:
10 + Ф + к..е₽ = ткй", + М, + П11шх;р - 1<вБх. (3.4.28)
Входящие в правую часть этого уравнения члены mlco^p и 1соБх опустим.
Их учитывают при рассмотрении погрешностей акселерометров. Тогда уравнение
движения позиционного акселерометра принимает вид
I0+fp + Koc|3 = ml«>xn + M,. (3.4.29)
156
В качестве выходного сигнала акселерометра можно использовать как на-
пряжение U на выходе датчика угла (рис. 3.4.11), так и ток i на выходе усилителя.
Оба эти сигнала пропорциональны кажущемуся ускорению. В этом смысле они
идентичны. Однако более предпочтительным является выходной сигнал i, так как
он не требует дополнительного усиления. Только из-за удобства записи в качест-
ве выходного сигнала примем сигнал U. Поскольку U = кд|3, то уравнение (3.4.29)
представим так:
Ш + fU + к0 cU = кд (mko^ + Мз). (3.4.30)
В установившемся режиме и при отсутствии возмущения Мв
и* = —д-т1®к„,
Ко.с
или
(3.4.32)
U^k™^. (3.4.31)
Здесь ктм - масштабный коэффициент позиционного маятникового акселеромет-
ра, В‘С2/м.
С учетом (3.4.23) масштабный коэффициент
ml
кп.м=--- " '
КЛ
Таким образом, напряжение на выходе датчика угла пропорционально ка-
жущемуся ускорению ©юр
Запишем (3.4.30) в изображениях по Лапласу при нулевых начальных усло-
виях
[Ip2 + fp + Ко.с] U (р) = кдт1<вкл(р) + КдМв(р).
Отсюда передаточная функция
ф"(р> = -»=—,
ч,(р) 1р"+Ф+к„
где Фщ (р) - передаточная функция для выходного сигнала U позиционного
маятникового акселерометра при входном воздействии или в другой записи
Ф"(Р) =
К..,м
Т2р2+2Т^р + Г
(3.4.33)
где
т= — ; г—
N Ко.с 2-\/1кО с
Передаточная функция
Ф7р)=_и(р)_ =______S_____.
" М.(р) Ip2+fp + Koc
(3.4.34)
Здесь Фм(р) - передаточная функция для выходного сигнала U позиционного
маятникового акселерометра при входном воздействии Мв.
157
Таким образом, позиционный маятниковый акселерометр является таким
же динамическим звеном, каким является позиционный акселерометр с линейно
перемещающейся инерционной массой. Различие состоит лишь в выражениях для
масштабного коэффициента, постоянной времени и коэффициента затухания.
Основные характеристики маятникового прецизионного акселерометра
следующие:
- диапазон измеряемых ускорений, g......................... ±10
- коэффициент преобразования, не менее, B/g............. 1,0
- порог чувствительности, не более, g................... 1 • 106
- смещение нуля, не более, g..........:................. ±1 • 10'3
- нестабильность коэффициента преобразования, не более, % .. 0,05
- нелинейность характеристики преобразования, не более, %:
- в диапазоне ± 1 g;.................................. 0,1
- в диапазоне ± 10 g;................................. 0,4
- случайная составляющая смещения нуля в запуске за время
16 ч, не более, g........................................ ± 20 • 10'6
- случайная составляющая смещения «нуля» от запуска к за-
пуску в диапазоне температур -50.. .60°С, не более, g.... ± 50 • 10’6
- температурный коэффициент смещения нуля в диапазоне
температур, не более, g/°C............................... 20 • 10'6
- нестабильность коэффициента смещения нуля, не более, %.... 10
- температурный коэффициент крутизны характеристики пре-
образования, не более, 1/°С............................ 30 • 10-6
- нестабильность температурного коэффициента крутизны ха-
рактеристики преобразования, не более, %................. 5
- верхняя частота среза, не менее, Гц................... 50
- чувствительность к линейным ускорениям в направлениях,
перпендикулярных измерительной оси, не более, %.......... 0,1
- номинальное напряжение питания постоянным током, В.... 27
- потребляемая мощность, не более, Вт....................... 1,5
- время готовности, не более, с......................... 5
- габаритные размеры, мм................................ 0 35 х 30
- масса, г.............................................. 75
3.4.4 Солнечные датчики
Солнце является центральным телом Солнечной системы и самым мощным
источником излучения, поэтому оно представляет собой удобный объект для
ориентации и навигации. Солнечные датчики (СД) или приборы ориентации КА
на Солнце (ПОС) сравнительно просты по конструкции и надежны в эксплуата-
ции.
Яркость Солнца в видимых звездных величинах составляет т=-26,72±0,04.
Средний угловой размер Солнца, соответствующий среднему расстоянию
между Землей и Солнцем, т.е. астрономической единице, равен -31'59".
Максимум излучения фотосферы Солнца соответствует длине волны —0,5 мкм.
158
Распределение энергии, излучаемой Солнцем (солнечной радиации), охва-
тывает широкий спектральный диапазон в ультрафиолетовой, видимой и инфра-
красной областях. Для солнечных датчиков наиболее целесообразно использовать
приемники с максимумом чувствительности в видимом спектральном диапазоне.
Поскольку, как уже отмечалось, мощность излучения Солнца достаточно
велика, в качестве приемников лучистой энергии могут быть использованы прак-
тически все виды известных приемников, удовлетворяющих требованиям по чув-
ствительности в видимой области спектра. В частности, германиевые и кремние-
вые фотодиоды, а также фотосопротивления вполне могут быть использованы
при создании рассматриваемых датчиков ориентации.
По функциональному назначению датчики ориентации по Солнцу подраз-
деляют на такие:
- датчики грубой ориентации;
- датчики точной ориентации.
Первые из них предназначены для первоначального поиска, захвата и при-
ведения Солнца в поле зрения датчика точной ориентации. Такое назначение дат-
чика грубой ориентации предопределяет, во-первых, невысокую точность датчи-
ка и, во-вторых, некоторые конструктивные особенности, в частности, большое
поле зрения.
Назначение датчиков точной ориентации - точное наведение одной из свя-
занных осей космического корабля на центр Солнца и выдача информации об уг-
ловом отклонении этой оси в систему, точно автоматически стабилизирующую
корабль в некоторой системе координат, одна из осей которой направлена на
Солнце [41].
По целевому назначению СД подразделяют:
- на приборы для ориентации и стабилизации космического аппарата на
Солнце, т.е. датчики солнечной ориентации;
- приборы для определения пространственного положения Солнца в свя-
занной с КА системе координат, т.е. датчики положения Солнца.
По способу обзора пространства СД делят:
- на датчики сканирующего типа;
- датчики статического типа.
Разработано большое количество СД разного типа. С описанием многих из
них можно ознакомиться в соответствующей литературе [6, 15, 22, 41, 42]. В дан-
ной книге приведены описания СД, используемых в СУ, разрабатываемых в раз-
ное время НПП Хартрон-Аркос.
3.4.4.1 Прибор ориентации на Солнце сканирующего типа
Прибор ориентации на Солнце (индекс прибора 251 КЗ, разработка НПО
«Геофизика-Космос», г. Москва) предназначен для измерения двух углов, опре-
деляющих положение вектора направления на Солнце в приборной системе ко-
ординат ПОС, и выдачи измеренных значений в БЦВК в виде цифровых кодов.
Прибор сканирующего типа, принцип его работы заключается в том, что органи-
зуется круговое сканирование пространства щелевым V-образным растром и
159
синхронно с ним - формирование точных кодовых меток угла поворота [42].
Данный прибор обладает большим полем обзора и достаточно высокой
точностью определения угловых координат Солнца во всем поле обзора.
Обзор космического пространства прибором происходит путем вращения
плоского световода P1Q1Q2P2 вокруг оси OYnoc с периодом Тно. Плоскость свето-
вода наклонена к этой оси на угол у. Положение вектора S «KA-Солнце» в систе-
ме координат OXnocYnocZnoc можно определить, измеряя углы yi и у2 (рис. 3.4.14).
Рисунок 3.4.14 - Схема измерений
ПОС сканирующего типа
Эти углы в виде суммы импульсов NJ и №2 соответственно насчитываются в
УВВ по выходным информационным импульсам ПОС на временном интервале ме-
жду импульсом начала отсчета НО и импульсами фиксации Солнца КС1 и КС2.
На рис. 3.4.15 показана циклограмма формирования информационных им-
пульсов NJ, N| и импульсов их фиксации НО, КС1 и КС2.
о
о
Рисунок 3.4.15 - Циклограмма импульсов
160
Импульс НО на выходе ПОС формируется при пересечении поля зрения
световода оси «-OZnoc», а импульсы КС1 и КС2- при пересечении PiQi и Q2P2
соответственно направления на Солнце. Условием формирования импульса нали-
чия Солнца НС в поле обзора ПОС является появление импульсов КС 1 и КС2 за
время Тно.
В результате, регистрируя угол поворота в момент визирования Солнца
щелями V-растра, получают кодовые отсчеты NJ и которые могут быть пе-
ресчитаны в углы азимута as и возвышения ps в приборной системе координат
[42]:
as = + —^--Ао, р5 =arctg 2sin^p^ ,
где N/ - отсчет угла поворота сканера в момент визирования Солнца первой
щелью; N2S - отсчет угла поворота между моментами визирования Солнца первой
и второй щелями; б5ии - цена дискрета при отсчете углов в угловой мере; Ао=27О°,
Во=18О°- постоянные коэффициенты, соответствующие сдвигу нулей отсчета
датчика угла поворота относительно приборной системы координат; у - полови-
на угла между щелями V-растра.
Прибор ориентации на Солнце выполнен в виде моноблока и состоит из
фотоэлектрического тракта и узла электроники. СД устанавливают снаружи не-
герметичного отсека.
Основные характеристики варианта прибора (типа 251 КЗ), широко приме-
нявшегося в СУ многих КА с большим сроком активного существования, напри-
мер в СУ спутника наблюдения за земной поверхностью «Аркон», следующие:
- поле обзора........................................... 182°><92О
- предельная погрешность................................. 3’
- масса, не более (оптико-механический и электронный блок).. 3,3 кг
- ресурс в течение 15 лет работы на орбите............... ЗЗООО ч
- напряжение питания..................................... 27 В
- потребляемая мощность, не более...................... 9,5 Вт
Прибор может обеспечивать круговое сканирование пространства, т.е.
обеспечить поле обзора 360° *92°, но обычно сторона прибора, обращенная к КА
и им затеняемая, закрывается специальной шторкой.
Если на КА необходимо обеспечить полусферическое поле обзора при по-
иске Солнца, на КА устанавливают соосно два прибора по крестообразной схеме.
Если требуется круговое поле обзора, то устанавливают два прибора с противо-
положно направленными оптическими осями.
Внешний вид ПОС типа 251КЗ показан на рис. 3.4.16.
161
Рисунок 3.4.16 - Внешний вид
ПОС типа251КЗ
Последняя модификация этого прибора, используемая на российских КА, в
том числе на КА системы «ГЛОНАСС», претерпела значительные изменения.
Применение новой элементной базы позволило существенно уменьшить габарит-
ные размеры электронных узлов при одновременном расширении объема выпол-
няемых функций. Благодаря паспортизации систематических составляющих по-
грешности и применению специальных технологических приемов стабилизации
конструкции удалось втрое снизить погрешности прибора.
В результате основные характеристики прибора следующие [41]:
- поле обзора............................................. 180°х90°
- предельная погрешность, не более....................... Г
- масса, не более........................................ 1,6 кг
- ресурс.................................................. 100 000ч
- потребляемая мощность, не более.......................... 4,5 Вт
3.4.4.2 Статические измерители угловых координат Солнца
Хотя сканирующие приборы достигли высокой степени совершенства, в
том числе и по точности, надежности, долговечности, однако получить высокие
характеристики в них удалось с большими трудозатратами на изготовление пре-
цизионных оптических и механических узлов. В последнее время получают рас-
пространение солнечные датчики статического типа.
Солнечный датчик на фотоэлектрических преобразователях
В Украине для спутника ДЗЗ МС-2-8 космической системы «Сin-2» в
ГПНИТИП (г, Харьков) был разработан и прошел летные испытания в качестве
«пассажира» СД нового типа - датчик ориентации комбинированный (ДОК) [6].
Такое название прибор получил в связи с тем, что дополнительно имеет канал
измерения угловой скорости, ЧЭ которого являются микроэлектромеханические
системы (МЭМС). Внешний вид ДОК показан на рис. 3.4.17.
162
Рисунок 3.4.17 — ДОК разработки
ГП НИТИП
Принцип работы датчика основан на том, что с девяти фотопреобразовате-
лей одновременно снимаются токи, которые пропорциональны их освещенности.
Эту информацию обрабатывают, и на выходе получают данные, из которых одно-
значно определяют вектор направления на Солнце либо информацию о том, что
Солнце находится вне поля зрения датчика.
Эффективное поле зрения ДОК не менее 2тг стерадиан, в том числе в двух
взаимно ортогональных плоскостях приборной системы координат ДОК-
-90°х+90°.
Предельная погрешность (За) определения углового положения вектора
направления на Солнце в приборной системе координат не хуже 1,0° по каждому
из двух углов во всем поле зрения. Приборная система координат ДОК реализо-
вана конструкцией посадочного фланца прибора.
Основные характеристики ДОК следующие:
- максимальное время нахождения датчика в режиме включения.. 2 с
- время обновления выходной информации СД, не более..... 250 мс
- масса, не более........................................... 0,1 кг
- габаритные размеры, не более........................... 50*50*50 мм
- потребляемая мощность, не более........................... 2,0 Вт
ДОК функционирует при питании напряжением 21...34 В бортовой сети
постоянного тока.
Интерфейс обмена данными ДОК-БЦВК организован в виде асинхронного
байт-ориентированного канала с электрическими характеристиками симметрич-
ного интерфейса RS-485 по протоколу SSP версии 2.1 [8].
Статические солнечные датчики на основе ПЗС-линеек и ПЗС-матриц
Успехи, достигнутые в фотоприемной технике в конце прошлого столетия, по-
зволили сделать новый качественный шаг в разработке астроприборов. Освоение элек-
тронной промышленностью производства многоэлементных приемников на основе
ПЗС-линеек и ПЗС-матриц создало базу для разработки статических высокоточных
приборов ориентации по Солнцу без механически перемещающихся элементов.
163
В приборах ориентации по Солнцу статического типа могут использоваться
мяогоэлементные приемники, как линейные, так и матричные. Оптические сис-
темы для обоих случаев отличаются мало: и там, и там это щелевая оптика.
Предложено много вариантов приборов ориентации по Солнцу, исполь-
зующих ПЗС-линейки, некоторые из них описаны в литературе, например, [41,
42].
Функционально прибор ориентации по Солнцу с ПЗС-линейкой выглядит
достаточно просто. Он включает в себя оптическую систему в виде щелевого рас-
тра со светофильтром и приемника (ПЗС-линейки), узел управления линейкой,
узел предварительной обработки сигнала и вычислитель.
Основные характеристики одного из СД с ПЗС-линейкой следующие [41]:
- угловое поле............................................. 120° *60°
- погрешность (случайная составляющая), не более............. 3'
- масса, не более............................................ 600 г
- потребляемая мощность...................................... 2 Вт
В табл. 3.4.8 приведены основные характеристики некоторых СД.
Таблица 3.4.8 - Основные характеристики СД
Наименование ха- рактеристики Наименование прибора, производитель
ПОС 251КЗ НПП «Геофи- зика-Космос» г.Москва ДС-1 ики РАН г.Москва НПП КП «Квант» г.Ростов-на- Дону SAS ИТФ Ни- дерланды докгп нитип г.Харьков
Погрешность определения координат, угл. мин 3 1 2 2 10
Размер поля обзора, град 92x181 60x120 90x100 97x97 180x180
Тип прибора сканирующий статический статический статический статический
Чувствительный элемент светочувстви- тельная пластина ПЗС-матрица ПЗС-матрица фотоэлементы фотоэлементы
Габаритные размеры, мм 115x110x160 - - 110x110x28 83x82x75
Срок эксплуатации в космосе, лет 5 15 5 5 5
3.4.5 Инфракрасные построители местной вертикали
Инфракрасные построители местной вертикали (ПМВ) предназначены для
измерения углов отклонения оси КА от местной вертикали планеты или от мест-
ной геоцентрической вертикали, если планетой является Земля.
Местная вертикаль - направление, по которому проходит линия, соеди-
няющая центр масс КА с центром масс небесного тела.
164
ПМВ представляют собой оптико-электронно-механические приборы,
принцип действия которых базируется на использовании собственного инфра-
красного излучения Земли и ее атмосферы. Пренебрегая отличием местной гео-
центрической вертикали от вертикали, которую получают по измерениям инфра-
красных ПМВ, их часто называют построителями местной геоцентрической вер-
тикали. Иногда эти приборы называют просто инфракрасными вертикалями
(ИКВ) или приборами ориентации на Землю (ПОЗ) [22, 41].
Общие принципы определения местной вертикали базируются на измере-
нии угла между направлением на край диска «планета-горизонт», определяемый
как граница «космос-планета», и осями КА в различных точках горизонта. Для
планеты, имеющей правильную сферическую форму, направление местной вер-
тикали будет биссектрисой угла между двумя диаметрально противоположными
точками визируемого горизонта.
Визирование горизонта можно проводить, используя различные части оп-
тического спектра излучения планеты: ультрафиолетовую, видимую, инфракрас-
ную. Чаще используют в ПМВ инфракрасную часть спектра, что и отражается в
названии прибора. При работе в инфракрасном спектральном диапазоне излуче-
ния планеты горизонт определяют по резкому градиенту интенсивности инфра-
красного излучения, существующего при переходе от края диска (или атмосфе-
ры) планеты к космосу. Так как планета имеет примерно постоянную температу-
ру, то градиент не зависит от освещенности планеты. Поэтому инфракрасные
ПМВ работают как на дневной, так и на ночной сторонах Земли.
В настоящее время для ИКВ чаще всего используют измерения в диапазоне
3...12 мкм и 7...30,0 мкм.
Средний угловой диаметр диска Земли, видимого с высоты низкоорбиталь-
ного КА, например 250 км, составляет около 148 град, а с высоты геостационар-
ного КА - 16,0 град.
Существует множество типов инфракрасных построителей местной верти-
кали. Наибольшее распространение получили двухканальиые ПМВ с круговым
сканированием и одноканальные ПОЗ секущего типа.
ПМВ любого типа состоят из оптического блока, механизма сканирования
и блока электроники.
3.4.5.1 Построители местной вертикали с круговым сканированием
Принцип работы ПМВ данного типа заключается в круговом сканировании
мгновенным полем зрения прибора горизонта Земли (рис. 3.4.18, а)). В процессе
сканирования оно описывает в пространстве конус с углом при вершине 50... 150
град. Механизм сканирования представляет собой зеркальную пирамиду, угол
при вершине которой автоматически подстраивается по высоте. Фактически вы-
сокочувствительный приемник инфракрасного излучения прибора принимает из-
лучение не только Земли, но и окружающей ее атмосферы на высотах 6... 16 км
над земной поверхностью [41].
Суть метода определения местной вертикали с помощью кругового скани-
рования можно понять из рис. 3.4.18, б и в.
165
При сканировании мгновенным полем зрения ПМВ поверхности Земли фо-
топриемник прибора получает инфракрасное излучение, которое преобразуется в
напряжение определенного уровня. При сканировании космического пространст-
ва такого излучения фотоприемник не получает, и, соответственно, на его выходе
образуется сигнал нулевого уровня. Выходные сигналы, снимаемые с фотопри-
емника, представляют собой прямоугольные импульсы, следующие с частотой
сканирования. В сравнивающем устройстве по фазе или длительности этих им-
пульсов вырабатывается информация о положении КА.
з
а б в
Рисунок 3.4.18 - Принцип работы ПМВ с круговым сканированием:
2у - угловая величина поля зрения; \|/ - интенсивность излучения на приемнике;
1 - линия горизонта; 2 - Земля; 3 - линия сканирования; 4 - поле зрения;
5 - атмосфера Земли
В СУ транспортных кораблей снабжения станции «Салют» для построения
орбитальной ориентации применяли прибор кругового сканирования ИКВ типа
218К (разработка НПП «Геофизика-Космос», г. Москва).
Данный прибор предназначен для осуществления ориентации космических
аппаратов, вращающихся вокруг Земли по орбитам с диапазоном высот от 200 до
600 км. Конструктивно прибор выполнен в виде герметичного моноблока. При
засветке прибора Солнцем в СУ выдается соответствующий логический признак.
Основные технические характеристики ИКВ типа 218К следующие:
- мгновенное поле зрения основного канала, град.............. 3
- погрешность измерений, угл.мин.......................... 20,0
- потребляемая мощность, Вт................................. 15
- масса, кг................................................. 5,0
- ресурс, лет................................................ 3
Современные ПМВ кругового сканирования имеют улучшенные характе-
ристики по сравнению с приведенными выше.
Например, инфракрасный построитель местной вертикали ПМВ-1 (разработка
НПП КП «Квант», г. Ростов-на-Дону) предназначен для ориентации КА на орбитах
с диапазоном высот от 600 до 1400 км. Конструктивное исполнение - моноблок.
166
При отклонении оси прибора от местной инфракрасной вертикали прибор формиру-
ет и выдает в СУ космического аппарата сигналы, соответствующие углам крена и
тангажа. Автоматическая автоподстройка по высоте позволяет сохранить постоян-
ство выходных характеристик прибора при изменении высоты полета.
Прибор выполнен герметичным. Использована германиевая оптика, просвет-
ленная в рабочем спектральном диапазоне. Применена специальная технология на-
несения покрытий, обеспечивающих стабильный тепловой режим внутри прибора.
Основные технические характеристики ПМВ-1:
- мгновенное поле зрения основного канала, град.... 3
- погрешность измерений, угл.мин........................ 4,5
- потребляемая мощность, Вт............................. 10
- масса, кг............................................ 4,4
- габаритные размеры, мм............................. 0 190x346
- ресурс, лет............................................ 3
3.4.5.2 Приборы ориентации на Землю секущего типа
Механизм сканирования ПОЗ секущего типа обеспечивает колебательное
движение мгновенного поля зрения прибора в плоскости, которая приводом сле-
дящего зеркала может плавно отклоняться относительно оси, ортогональной
плоскости чувствительности ПОЗ на угол +10 град. Кроме того, плоскость скани-
рования зеркала (положение следящего зеркала - ПСЗ) может скачкообразно пе-
реключаться в другое положение, на 6 град относительно первого положения.
Серединная плоскость называется измерительной.
Смещение следящего зеркала выполняется в целях удержания его плоско-
сти сканирования в окрестности диаметра видимого диска Земли при программ-
ном отклонении КА от местной вертикали. Обычно способностью отклонять
плоскость сканирования зеркала обладают приборы ориентации на Землю, пред-
назначенные для использования в СУ высотных КА, например геостационарных.
В ПОЗ для СУ низкоорбитальных КА такое смещение не предусмотрено, но воз-
можность скачкообразного переключения плоскости сканирования зеркала в дру-
гое положение имеется. Кроме того, поскольку низкоорбитальные ПОЗ могут
быть использованы и для высоких орбит, в этих приборах можно по команде из
БЦВК изменять амплитуду сканирования с большой на малую. Поэтому такие
ПОЗ можно назвать универсальными в смысле использования в широком диапа-
зоне высот орбит.
Принцип работы ПОЗ заключается в следующем. При пересечении гори-
зонта оптической осью ПОЗ и сканирования им поверхности Земли напряжение
на выходе приемника излучения возрастает, что используется для формирования
кодово-импульсной информации, поступающей в УВВ. По этой информации в
БЦВК может быть вычислен угол отклонения плоскости чувствительности ПОЗ
от местной вертикали (рис. 3.4.19).
167
Рисунок 3.4.19 - Принцип работы одноканального
ПОЗ секущего типа
Способ вычисления угла отклонения плоскости чувствительности прибора
от местной геоцентрической вертикали Ре ясен из рис. 3.4.19:
РЕ=О,5(ргр2).
Измерение углов pt и р2 происходит путем вычисления в УВВ числа им-
пульсов N t (i=l - 4), выдаваемых кодирующим устройством ПОЗ за интервал
времени, в течение которого мгновенное поле зрения оптической системы совер-
шает движение от левого концевого контакта ЛК - для угла рь или правого - ПК
для угла р2 до линии горизонта Земли по грубому порогу ЛГ2 и точному ЛГ1.
При поиске, захвате и приведении КА к местной вертикали вычисление уг-
ла рЕ ведется по информационным импульсам грубого порога:
K=0,5(N;-N4eC,
а в режиме точной стабилизации КА - по информационным импульсам точного
порога:
P*=O,5(Nf-N2E)8^.
В этих формулах постоянный параметр 8^ представляет собой величину
дискретности информационных импульсов ПОЗ.
168
Для устранения влияния помехи от Солнца используют спектрально-
угловой способ защиты, заключающийся в автономном перемещении траектории
сканирования поля зрения ПОЗ из одного фиксированного положения следящего
зеркала в другое. Команда на перемещение выдается по сигналу фотосопротив-
ления - чувствительного элемента, фиксирующего засветку прибора Солнцем.
При этом в БЦВК выдается импульс наличия Солнца ИНС. Защита от Луны
должна осуществляться по способу алгоритмической амплитудной селекции. Од-
нако указанные способы защиты не обеспечивают распознавание светил-помех
при их нахождении у горизонта Земли. Поэтому такие засветки могут вызывать
дополнительную ошибку в определении угла Ре.
Для уменьшения систематических погрешностей измерений блок электро-
ники ПОЗ имеет схему автоматической регулировки усиления (АРУ).
В табл. 3.4.9 приведены основные технические характеристики ПОЗ секу-
щего типа для СУ низкоорбитальных (индекс ПОЗ 256К) и СУ высотных КА (ин-
декс ПОЗ 254К) разработки НПП «Геофизика-Космос» (г. Москва).
Таблица 3.4.9 - Основные технические характеристики ПОЗ секущего типа
Наименование характеристики Низкоорби- тальный Высокоорби- тальный
Диапазон высот орбит, км 180... 40000 36000... 40000
Размер поля обзора, град 170x12 54x34
Размер поля зрения, град 3 3
Суммарная погрешность измерений, угл.мин: - для диапазона высот 180... 10000 км - для диапазона высот 10000.. .40000 км 60 18 6
Дополнительная погрешность от засветки Солнцем или Луной у горизонта Земли, град 1,5 1,5
Дискретность информационных импульсов, угл.мин 5 1
Период сканирования, с 0,25 0,25
Напряжение питания, В 27^
Потребляемая мощность, Вт 6...8 7
Масса, кг 6 6,5
Габаритные размеры, мм 125x120x105 110x120x100
Срок эксплуатации в космосе, лет 3 3
Для получения измерений двух углов отклонения КА от местной геоцен-
трической вертикали (углов крена и тангажа) на КА устанавливают два ПОЗ (два
основных и два резервных) так, чтобы их плоскости чувствительности были вза-
имно ортогональными. При этом они могут быть развернутыми вокруг оптиче-
ских осей на 45 град относительно соответствующих плоскостей связанной с КА
системы координат.
169
На рис. 3.4.20 показан внешний вид высокоорбитального одноканального
ПОЗ секущего типа.
Рисунок 3.4.20 - Внешний вид
низкоорбитального одноканального
ПОЗ секущего типа
3.4.6 Звездный датчик ориентации на одну звезду
В 70-х годах XX века в связи с новыми разработками в области космиче-
ской техники возникла необходимость создания для систем управления КА
звездного прибора высокой чувствительности и помехозащищенности с подвиж-
ным угловым полем зрения, перемещающимся в больших пределах (до ±90° по
двум осям). Такой астровизирующий прибор был создан в НПО «Геофизика-
Космос» (г. Москва) и получил название «прецизионная астроизмерительная сис-
тема» (ПАИС) [41].
ПАИС предназначена для поиска рабочей звезды, слежения за ней при уг-
ловых маневрах КА в связанной с корпусом прибора системе координат.
Прибор состоит из трех блоков: блока оптического, блока электронного и
солнцезащитной крышки (СЗК). Оптический блок и СЗК размещают на корпусе
КА в открытом космосе, электронный блок - в гермоотсеке КА. В составе данно-
го прибора применен фотоприемник с электронным сканированием - диссектор.
Основной технической задачей, которую необходимо было решить при проекти-
ровании прибора, являлась разработка привода управления подвижным оптиче-
ским блоком, подбор смазки для работы прибора в открытом космосе.
Основные технические требования к ПАИС таковы:
- рабочие звезды- звезды, эквивалентные в фотометрической системе
прибора звездам спектрального класса G2V, имеющим звездную вели-
чину от -0,75га до 3,0т; ‘
- допустимая яркость равномерно мерцающего фона — от 1,0 до 1,6 Кд/м2;
- обеспечение обнаружения в поле зрения звезды с наибольшим блеском,
при этом рабочая звезда должна иметь не менее чем на одну звездную
величину больший блеск, чем другие звезды в поле поиска;
- поле поиска звезды - 3°х3°;
170
- диапазон углов разворота оси визирования по азимуту (а) ±140°, по воз-
вышению (у) от -3° до +85°;
- предельная погрешность измерения координат звезды по углу а не более
(2+3/cosy)', по углу у не более 5';
- допустимая скорость движения основания прибора (КА) относительно
рабочей звезды при поиске - (0,07±0,03) град/с, при слежении - до
0,3 трад/с.
На рис. 3.4.21 - 3.4.23 изображены оптическая, кинематическая и функцио-
нальная схемы прибора.
Рисунок 3.4.21 - Схема оптического блока:
1 - бленда; 2 ~ объектив; 3-5 - плоские зеркала; 6 - диссектор;
7 - бленда СЗК; 8 - диафрагма; 9 - заданный радиус
обметания телеблока
Рисунок 3.4.22 - Кинематическая
схема прибора
171
Рисунок 3.4.23 - Функциональная схема прибора:
ДУ - датчик угла; ШД - шаговый двигатель
Прибор ориентации на одну звезду функционально предназначен для уточ-
нения ранее построенной трехосной ориентации КА (например, солнечно-
земной), поскольку имеет более низкую погрешность измерений.
172
В зависимости от технических требований к точности ориентации конкрет-
ного КА на нем могут быть установлены один или два (рабочая конфигурация)
прибора. В этих случаях опорными ориентирами для высокоточной ориентации
будут являться: Солнце-звезда или звезда-звезда, соответственно рабочей конфи-
гурации. В качестве «холодного» резерва может устанавливаться третий прибор.
Поскольку первоначально предполагается, что грубая ориентации ССК в
ИСК определена, то матрица перехода от ИСК к ССК известна. Из схемы
установки ПАИС на КА известна матрица перехода М^ск от ССК к ПСК ПАИС.
Таким образом, можно определить матрицу перехода М[}^к от ИСК к ПСК:
М^=М™-М£*. (3.4.35)
Координаты и яркости рабочих звезд (РЗ) заданы в астрофизическом ката-
логе. Тогда, если в ИСК направляющие косинусы РЗ определены как
3={3j} (j=x, у, z), то в ПСК эти координаты могут быть вычислены как
Зп =мпск -3
Исходя из 3n={3jn} , j=x, у, z определяют углы азимута а и возвышения у,
необходимые для разворота оптического блока прибора для поиска и захвата тре-
буемой РЗ.
Работа прибора состоит в последовательном выполнении следующих операций.
После включения прибор проводит внутреннее самостоятельное тестирова-
ние и при успешном его завершении переходит в режим ожидания команд управ-
ления от БЦВК.
При задании команды «Поиск» оптический блок прибора разворачивается
на вычисленные углы а и у и начинает электронное сканирование заданного поля
зрения по траектории «стягивающегося квадрата» (рис. 3.4.24).
Рисунок 3.4.24 - Траектория
сканирования
По окончании просмотра поля зрения при обнаружении ориентира требуе-
мой яркости проводится перемещение оптического блока ПАИС на углы Да и Ду
173
в целях перемещения изображения найденной РЗ в центр поля зрения. Поле зре-
ния прибора автоматически уменьшается до минимального, и проводится по-
вторное электронное сканирование в малой зоне.
В случае удачного повторного сканирования прибор начинает передавать в
БЦВК измеренные координаты РЗ и переходит в режим сопровождения ориентира.
Режим сопровождения ориентира заключается в том, что в БЦВК по ин-
формации об угловой скорости КА определяются величины а и у - угловые
скорости углов азимута и возвышения. Передача этих величин в прибор и отсле-
живание их посредством ШД позволяет удерживать РЗ в центре поля зрения оп-
тической системы прибора и определять ее измеренные координаты по показани-
ям ДУ при угловом движении КА и обеспечивать устойчивое сопровождение РЗ.
3.4.7 Звездный датчик ориентации по группе звезд (астроизмерительная
система - АИС)
3.4.7.1 Назначение, состав и принцип действия
Звездный датчик ориентации по группе звезд представляет собой моноблок
или блочную систему (отдельно оптический блок и блок электроники) и предна-
значен для определения параметров ориентации осей приборной системы коор-
динат (ПСК) относительно инерциальной системы координат (ИСК).
АИС представляет собой функционально законченный оптико-электронный
прибор, имеющий в своем составе все необходимые программно-аппаратные ре-
сурсы для решения задачи определения ориентации при полностью неизвестной
начальной ориентации КА.
Функциональная схема АИС изображена на рис. 3.4.25.
Оптический блок
Блок электроники
Протокол
передачи
данных
БЦВМ
Рисунок 3.4.25 - Функциональная схема АИС
В состав АИС входят: 1 - бленда; 2 - защитная крышка; 3 - блок объектива;
4 - матрица фотопреобразователя; 5 - процессорный блок; 6 - блок питания.
Бленда, защитная крышка, блок объектива, матрица фотопреобразователя
образуют оптический блок. Процессорный блок и блок питания образуют блок
электроники.
Внешний вид АИС с приборной системой координат показан на рис. 3.4.26.
174
Рисунок 3.4.26 - Внешний вид АИС
с приборной системой координат
Основной задачей АИС является определение параметров ориентации осей
ПСК в ИСК. Определение параметров ориентации происходит в соответствии со
следующим алгоритмом. АИС проводит съемку участка звездного неба, видео-
сигнал обрабатывается и преобразуется в массив цифровой информации, снаб-
женный необходимыми синхросигналами, а также данными, характеризующими
состояние отдельных элементов и узлов АИС. Далее информация поступает в
процессорный блок, где с помощью специального программного обеспечения
проводятся вычисления, и формируется результат измерений (матрица или ква-
тернион ориентации).
В программном обеспечении процессорного блока АИС реализуется под-
ход к решению задачи распознавания зарегистрированных изображений звезд в
звездном каталоге путем сравнения измеренных и каталожных угловых расстоя-
ний.
Для астроизмерений обычно используют звезды, эквивалентные по энерге-
тической освещенности звездам спектрального класса G2V, до звездной величи-
ны +7т в условиях отсутствия источника засветки поля зрения прибора (Солнце,
Луна, Земля).
К звездному каталогу АИС предъявляют следующие основные требования:
- полнота (количество) звезд в бортовом каталоге и их распределение на
небесной сфере должны обеспечить заданную вероятность попадания в
поле зрения прибора, необходимого для распознавания количества звезд;
- необходимо, чтобы в каталоге отсутствовали астрономические объекты,
являющиеся помехами (визуально-двойные звезды, рассеянные звездные
скопления, переменные звезды, яркие галактики, шаровые звездные ско-
пления).
175
Оптимальный объем звездного каталога определяется заданной вероятно-
стью распознавания звезд (вероятность появления в поле зрения прибора необхо-
димого числа каталожных звезд).
Для определения параметров ориентации достаточно иметь в поле зрения
прибора изображения двух звезд, но для уверенного распознавания измеренных
звезд в звездном каталоге при отсутствии априорной информации об ориентации
КА необходимо регистрировать более трех звезд.
3.4.7.2 Основные технические требования
Современный этап космических исследований характеризуется постоянным
сокращением финансовой поддержки научных исследований даже в ведущих
странах, что привело к развитию мини-, микро- и наноспутников с низкой стои-
мостью и коротким временем подготовки. В свою очередь, это стимулирует соз-
дание нового поколения приборов с низкими массой и потребляемой мощностью,
но с высокими точностными характеристиками.
К факторам, связанным с развитием техники, относятся и резкое повыше-
ние срока службы существования аппаратуры на орбите. Если на начальных эта-
пах освоения космоса этот срок составлял несколько недель или месяцев, то се-
годня по многим типам космической техники достигнут уровня 5-7 лет и актив-
но ведутся работы по повышению его до 10 - 15 лет и более. Данное обстоятель-
ство вызывает необходимость решения ряда технических проблем, связанных с
устойчивостью элементной базы, материалов, конструкций к длительному воз-
действию факторов космического пространства.
Особую актуальность приобретает также и снижение массы приборов - это
лишние энергетические затраты на обеспечение ее существования и вывод на ор-
биту.
Одним из важных путей для снижения массы астроизмерительной системы
является применение новых конструкционных материалов, в частности, компози-
тов. Из углепластика успешно изготавливают детали малой и средней точности -
защитные крышки, корпуса бленд. Ведутся работы, связанные с созданием тех-
нологий изготовления и конструкций прецизионных деталей из композиционных
материалов.
3.4.7.3 Требования к точностным характеристикам
Характеристики, достижимые сегодня для приборов, построенных на базе
описанных подходов, весьма высокие.
Уже одни из первых разработок АИС [41] в режиме инерциальной ориента-
ции при угловой скорости стабилизации не более 0,01 град/с обеспечивали точ-
ность определения направления оптической оси ПСК в ИСК не хуже 18 угл. с, а
вокруг этой оси - 50 угл. с.
В режиме орбитальной ориентации при наличии постоянной составляющей
угловой скорости обеспечивалась точность определения направления оптической
оси ПСК в ИСК не хуже 30 угл. с, а вокруг этой оси - 100 угл. с.
Заданные точностные характеристики АИС обеспечивает при следующих
светотехнических условиях:
176
- угол между оптической осью ОБ и направлением на Солнце или на зер-
кальные элементы конструкции КА, отражающие солнечный свет в сто-
рону ОБ, должен быть не менее 30 град;
- угол между оптической осью ОБ и направлением на край Земли или Лу-
ны, освещенный Солнцем, должен быть не менее 20 град.
Эффективность применения современных космических аппаратов и, следо-
вательно, эффективность решаемых ими практических задач существенным обра-
зом зависит от точностных характеристик системы управления космического ап-
парата. В связи с этим повышение точностных характеристик астроизмеритель-
ной системы, как одного из основных командных приборов системы управления
КА, является актуальной задачей для производителей оптико-электронных при-
боров.
В задаче повышения точностных характеристик АИС особое место занима-
ет учет систематических и медленно меняющихся погрешностей. Систематиче-
ские погрешности определяют при наземной паспортизации на специальных вы-
сокоточных стендах. В бортовом приборном программном обеспечении преду-
сматривается специальный алгоритм учета результатов наземной паспортизации.
Таким образом учитывают погрешности механической сборки в пределах допус-
ков, дисторсия оптической системы.
Сложнее обстоит дело с погрешностями, медленно меняющимися из-за
влияния условий эксплуатации, деградации электрорадиоизделий и материалов.
Принимать ли какие-либо меры для исключения этих погрешностей и какие имен-
но, зависит от предъявляемых к прибору требований по точности. При требовании
к полной предельной погрешности порядка 1 угл. мин можно обойтись простей-
шими конструктивными мерами по рациональному закреплению узлов объектива
и матрицы фотопреобразователя. При более высоких требованиях необходимо
предусматривать какие-либо нетрадиционные способы сочленения объективов с
матрицей или вводить канал геометрического эталона и проводить калибровку по
опорным световым меткам. В некоторых случаях можно проводить полетную ка-
либровку по звездам в комплексе с целевой аппаратурой. Это возможно тогда, ко-
гда целевая аппаратура способна воспринимать излучение звезд.
3.4.7.4 Схемы установки на КА
Чувствительным элементом современных АИС является матрица прибора с
зарядовой связью (ПЗС). Большинство матриц ПЗС выдерживают прямое сол-
нечное излучение, однако разработчики не рекомендуют подвергать их длитель-
ному воздействию. Во избежание засветок матриц ПЗС необходимо установить
АИС на КА соответствующим образом.
Схему установки АИС на КА рассчитывают из условия исключения засвет-
ки прибора Солнцем, Землей и Луной, освещенными Солнцем, зеркально отра-
жающими элементами конструкции. В качестве исходных данных при расчете
используют параметры орбиты КА (тип орбиты, высота, наклонение, время про-
хождения нисходящего узла), требуемую в процессе эксплуатации ориентацию
КА, углы засветки по отношению к оптической оси АИС.
177
При измерениях АИС максимальная точность достигается в определении
ориентации оптической оси прибора, а определение ориентации вокруг нее про-
исходит с достаточно большой ошибкой. Таким образом, основным источником
ошибок определения трехосной ориентации КА является ошибка измерений АИС
углового положения осей ПСК вокруг оптической оси прибора.
При использовании измерений двух или трех АИС, установленных на КА
таким образом, что их оптические оси ортогональны, ошибка определения ориен-
тации вокруг оптической оси не влияет на суммарную погрешность определения
ориентации КА в инерциальном пространстве и в среднем в три раза меньше по
сравнению с ошибкой при использовании измерений одного АИС.
Оптические оси АИС при такой установке должны располагаться по ребрам
трехгранной пирамиды, а углы между осями, лежащими в одной плоскости,
должны составлять 90 град (рис. 3.4.27).
Рисунок 3.4.27 - Схема установки трех АИС
Предлагаемый способ определения ориентации, заключающийся в ком-
плексировании информации нескольких АИС, может использоваться для повы-
шения точности системы управления КА, а также после отказа одного из АИС
или для равномерного применения ресурса датчиков для повышения срока ак-
тивного существования КА.
3.4.7.5 Требования к условиям эксплуатации
В требованиях к условиям эксплуатации АИС производитель указывает:
- климатические условия при испытаниях прибора;
- класс чистоты помещения при испытаниях прибора;
- допустимый диапазон напряжения питания;
- температуру посадочного места при эксплуатации;
- уровень стойкости прибора по отношению к ионизационной дозе косми-
ческих излучений;
- светотехнические условия (угол между оптической осью АИС и направ-
лением на источник засветки) функционирования АИС;
178
- максимальную угловую скорость КА, при которой АИС может решать
задачу определения ориентации;
- время восстановления работоспособности АИС после попадания источ-
ника засветки в поле зрения объектива;
- количество циклов включения/выключения прибора;
- ресурс работы.
3.4.7.6 Общие технические требования
В общих технических требованиях производитель указывает:
- спектральный класс звезд и диапазон звездных величин, которые прибор
может регистрировать;
- интерфейс информационного обмена;
- поле зрения оптического блока АИС;
- время готовности после подачи питания;
- точностные параметры прибора;
- частоту обновления информации;
- массу;
- габаритные размеры;
- энергопотребление;
- срок службы.
3.4.7.7 Математическое обеспечение АИС, Звездный каталог
Математическое обеспечение (МО) АИС - это совокупность алгоритмов,
предназначенных для обеспечения функционирования АИС. Состав МО опреде-
ляется спектром задач, выполняемых АИС, а также характеристиками АИС.
В состав математического обеспечения АИС входят:
- наземное звездное обеспечение (НЗО);
- бортовое МО АИС.
НЗО используют для разработки звёздного каталога (ЗК) АИС и может вы-
полнять следующие функции:
- формирование ЗК, содержащего звезды, удовлетворяющие характери-
стикам АИС;
- упорядочение (сортировка) ЗК по возрастанию (либо по убыванию)
звездной величины или значений экваториальных координат звезд;
- сканирование ЗК полем зрения АИС с определенным шагом изменения
экваториальных координат центра поля зрения, расчет минимального и
максимального количества звезд каталога, попадающих в поле зрения
АИС;
- формирование подкаталогов ЗК, позволяющих оптимизировать процесс
идентификации звезд, находящихся в поле зрения АИС.
Бортовым МО АИС реализуются следующие функции:
- идентификация (распознавание) звезд, находящихся в поле зрения АИС;
- определение ориентации связанных осей КА относительно инерциаль-
ной системы координат.
179
Бортовое МО АИС может быть реализовано как на вычислительных сред-
ствах АИС, так и на вычислительных средствах СУ, в состав которой входит
АИС. Распределение функций по реализации бортового МО АИС между АИС и
СУ определяется возможностями их вычислительных средств.
3.4.7Л.1 Разработка звёздного каталога
Ориентация КА при произвольном положении осей ССК относительно
инерциального пространства и отсутствии априорной информации об ориентации
КА может быть определена в случае наличия в поле зрения АИС не менее трех
звезд. В настоящее время для этой цели используют АИС с полем зрения
8 мм* 8 мм, фокусным расстоянием 60 мм, которые фиксируют в поле зрения
прибора звезды со звездными величинами не менее 7,5т. В поле зрения таких
АИС попадает участок небесной сферы площадью Бпз ~ 61 кв. град. Автоном-
ность и помехозащищенность АИС такого типа обеспечивается наличием в памя-
ти прибора ЗК навигационных звезд.
Основной целью разработки звёздного каталога АИС является получение
исходной информации о положении звёзд в инерциальном пространстве для осу-
ществления идентификации звезд, находящихся в поле зрения АИС.
К звездному каталогу предъявляют следующие основные требования:
- полнота (количество) навигационных звезд в ЗК АИС и их распределе-
ние на небесной сфере должны обеспечить заданную вероятность попа-
дания в поле зрения АИС необходимого для распознавания количества
звезд;
- необходимо, чтобы в каталоге отсутствовали астрономические объекты,
являющиеся помехами (визуально-двойные звезды, рассеянные звездные
скопления, шаровые звездные скопления, яркие галактики, звезды пере-
менной яркости).
Звёздный каталог разрабатывают на основе фундаментальных астрономи-
ческих каталогов с учётом типа АИС, способа опознания звёзд, особенностей
траектории движения КА. Фундаментальные каталоги (ФК) содержат средние
координаты звёзд, отнесённые к средней эпохе всех наблюдений звёзд, положен-
ных в основу при составлении фундаментального каталога [24]. Разрабатываемый
звёздный каталог должен содержать информацию о среднем положении звёзд на
момент времени, близкий к началу эксплуатации АИС. В качестве такого момен-
та времени (эпохи) выбрана эпоха J2000.0. Стандартной эпохе J2000.0 (1 янва-
ря 12 ч 00 мин 00 с 2000 г.) соответствует юлианская дата JD2451545.0.
В качестве фундаментального каталога широко применяют созданный в
Смитсоновской астрофизической обсерватории в 1959 г. каталог SAO, который
содержит положения и собственные движения 258997 звёзд для целей обработки
наблюдений ИСЗ. Данный каталог опирается на измерения звёздных положений,
проведенные сравнительно недавно, достаточно полон (содержит данные о звёз-
дах до 10-й звёздной величины) и обладает довольно высокой точностью. Поло-
жения звёзд в фундаментальном каталоге определяются заданием средних эква-
180
ториальных координат; прямого восхождения а (часы, минуты, секунды) и скло-
нения 8 (градусы, угл. минуты, угл. секунды) на эпоху Л 950.0.
Звёздный каталог АИС разрабатывают поэтапно. На первом этапе из фун-
даментального каталога выбирают навигационные звёзды, звёздные величины
которых не превосходят установленной величины N. Значение N выбирают в со-
ответствии со следующими критериями:
- величина N должна перекрывать возможный диапазон звёздных вели-
чин, наблюдаемых АИС звезд (обычно значение N<7,5m);
- вероятность попадания в поле зрения АИС более трех звезд, содержа-
щихся в каталоге АИС, должна составлять не менее 0,995.
На втором этапе проводят оптимизацию объема ЗК - предпринимают спе-
циальные меры по реализации более равномерного распределения звезд каталога
на небесной сфере, обеспечивающего попадание в поле зрения АИС по крайней
мере трех звезд при любой ориентации поля зрения АИС относительно небесной
сферы.
Максимальный объём ЗК определяется чувствительностью АИС (способно-
стью регистрировать в поле зрения АИС звезды до определенной звёздной вели-
чины mvAn). Оптимальный объём ЗК определяется вероятностью распознавания
навигационных звёзд, попадающих в поле зрения АИС.
Распределение звёзд на небесной сфере достаточно хорошо аппроксимиру-
ется законом распределения Пуассона. В этом случае вероятность попадания в
поле зрения АИС к звёзд определяется выражением
Р(к)-^-е‘\ (3.4.36)
к!
где X - среднее количество звёзд, попадающих в поле зрения АИС.
Вероятность попадания в поле зрения АИС не менее п звёзд Р(ш>п) находят
по формуле
P(m>n) = l-e-x-£^-. (3.4.37)
к=о к!
Ниже в табл. 3.4.10 приведены вычисленные значения вероятности попада-
ния в поле зрения АИС не менее п звёзд P(m>n) и соответствующие размеры ка-
талогов для различного значения среднего количества звезд в поле зрения АИС.
Таблица 3.4.10 - Характеристики звёздной обстановки
Среднее значение X 7 8 9 10 11 12
P(m>n) 0,920 0,958 0,974 0,990 0,995 0,998
Объем каталога 4690 5560 6700 7370 8040 8710
Таким образом, для обеспечения вероятности попадания в поле зрения
АИС более трех навигационных звезд, равной 0,995, объем ЗК АИС должен со-
ставлять не менее 8040 звезд.
181
3.4.7.7.2 Определение средних координат звёзд. Оценка точности
звёздного каталога
Согласно принятой в астрономии методике расчёта положения звёзд сред-
ние координаты звёзд являются исходными для определения видимых и истин-
ных координат звёзд на данную эпоху, а также для преобразования координат
звёзд от эпохи к эпохе.
Указанная методика оптимальна с точки зрения минимизации вычисли-
тельного процесса при расчёте координат звёзд.
Средним местом звезды (средними координатами звезды) называется её ге-
лиоцентрическое положение, отнесённое к среднему экватору и равноденствию
определенной эпохи, которая при составлении фундаментальных каталогов вы-
бирается обычно совпадающей с моментом начала определенного бесселева года
[29].
Изменение средних координат звёзд с момента То до момента Ti определя-
ется следующими основными факторами:
- прецессией оси вращения Земли,
- собственным движением звёзд.
Здесь То - эпоха фундаментального каталога (Л 950.0), Ti - эпоха разрабатывае-
мого звёздного каталога (J2000.0).
Средние координаты звёзд с эпохи То на эпоху Тi преобразуются по форму-
лам [29]:
азк = ао ^апр + На ' TjS (3.4.38)
$зк - + Д$пр + Нб ‘ Тг >
(3.4.39)
где ао - прямое восхождение звезды на момент То; 50 - склонение звезды на
момент То; АаПр - изменение прямого восхождения звезды от прецессии; АЗдр -
изменение склонения звезды от прецессии; ца - собственное движение звезды по
прямому восхождению за один год; - собственное движение звезды по склоне-
нию за один год; Тг =Ti-T0- интервал времени, прошедший от момента То до
момента Ti в годах; азк - прямое восхождение звезды на момент Ть 8зк - склоне-
ние звезды на момент Тр
Для преобразования ортов направлений на звезду используем соотношение
iT1=P-iT0. (3.4.40)
Здесь iT0 - орт направления на звезду во второй экваториальной системе коорди-
нат среднего равноденствия и геоэкватора эпохи Л 950.0, его определяют как
%'ох^ (cos60 -cosao^
cos80sina0 ;
sin80 j
1То - 1TOY
<1tozJ
где iT| - орт направления на звезду во второй экваториальной системе координат
среднего равноденствия и геоэкватора эпохи J2000.0, его определяют по формуле
(3.4.41)
182
1Т| - ^TlX^ 1T|Y Jtiz > rcos8] • cosa^ cos St - sin at k sin 81 } (3.4.42)
где at=a0+AanP; = 80 + Абщ»; Р - матрица прецессии. Используя соотношения: АаПР = af -а(), А8пр = 8j — 80, sin — iyjZ, cos8t - л/l -ijiz , (3.4.43) (3.4.44) (3.4.45) (3.4.46) (3.4.47) (3.4.48)
sin at _ 1T1Y (3.4.49)
X/1 ^IZ
COSttj = *TIX (3.4.50)
лД-'tiz ’
получим формулы для вычисления изменений прямого восхождения и склонения
от прецессии.
. . Д-ру * cos (Xq — i-T-jv • sin (Xq i. I
Aa1IP = arcsin(—-------7- --------), при | iTlz| * 1,
Vi-iiiz (3.4.51)
ДаПР =-а0, при |iTlz| = 1;
А5пр =arcsm(iTlz -cos80 -^1 -i|lz -sin80), при| iTlz| *1,
я . ... (3.4.52)
ASnp =" -ijiz “80, npH|iT)Z| = l.
При расчёте средних координат звёзд (азк, $зк) на момент 1\ используют
средние координаты (<Хо, 80) и собственные движения (ца, Цз) звёзд, которые бе-
рут из базового каталога SAO.
Точность ЗК определяется точностью задания его составляющих:
- средних координат звёзд;
- звёздных величин (приборных);
- собственных движений звёзд.
Ошибки определения средних координат звёзд подразделяют на системати-
ческие и случайные. Ошибки представления координат навигационных звёзд в
ЗК на эпоху Тi соответственно имеют вид [36]
183
Дазк - Д^зксист + Дазк сл > (3.4.53)
Д8ЗК = Д6ЗК сист + Д$зксл • (3.4.54)
Систематические ошибки задания координат звёзд в ЗК определяются сис-
тематическими ошибками базового каталога SAO и не превышают величин [23]:
- по прямому восхождению Дазк сист < 0\15;
- по склонению Д5ЗК сист < 0*,10.
Случайные ошибки определения координат звёзд в ЗК представляются вы-
ражениями:
Д^зксл - А30СЛ + Дрзсл *ТГ + А8Прсл ”ТС; (3.4.55)
А$зксл = А80СЛ + Арасл -Тг + АЗпрсл ’Тс , (3.4.56)
где Да0 сл - случайная ошибка задания прямого восхождения в базовом катало-
ге; Д§о сл - случайная ошибка задания склонения в базовом каталоге; Дра сл -
случайная ошибка задания в базовом каталоге собственного движения звезды по
прямому восхождению; сл - случайная ошибка задания в базовом каталоге
собственного движения звезды по склонению; Дацр сл - случайная ошибка, воз-
никающая под влиянием прецессии по прямому восхождению; АЗпр сл - случай-
ная ошибка возникающая под влиянием прецессии по склонению; Тг - интервал
Т
времени, прошедший от момента То до момента Ть в годах; Тс = - интервал
времени, прошедший от момента То до момента Ti, в столетиях.
Предельные случайные ошибки с вероятностью 0,997 не превосходят вели-
чин [29]:
Задаосл 0",45;
Задней 0",45;
Зсгдцасл 0",027 за год;
Задрйсл 0",024загод;
Зодапрсл 0",26 за столетие;
Задзпрсл 0",26 за столетие.
В силу независимости отдельных составляющих среднеквадратические
ошибки случайных погрешностей задания координат звёзд в ЗК определяются
выражениями
^Дазксл 'У^Даосл ^аирсл ’ Т^ ^Драсл ' Тг i (3.4.57)
Одбзксл “ Дбосл + О'бпрсл ’ ТС + ^Дцбсл ' Тг - (3.4.58)
Поскольку Т| соответствует эпохе ЗК (J2000.0), а То - эпохе базового ката-
лога (J1950.0), то Тг = 50 и Тс = 0,2. В этом случае среднеквадратические ошибки
случайных погрешностей задания координат звёзд в ЗК не превосходят величин:
Одазксл — 0 ,46,
184
зк сл — 0 ,41.
Соответственно для предельных результирующих погрешностей определе-
ния координат звёзд в ЗК получим
= Дазкснсг + 3 • аДозксл < Г,53;
Д8^д = Д8ЗКСИСТ +3-Стд5зксл <Г,33.
(3.4.59)
(3.4.60)
Предельная результирующая погрешность представления звёздной величи-
ны в ЗК определяется выражением [29]
ди^зд _ 2. Сг + с2
□К. у Mr; Мд ’
(3.4.61)
где oMg - среднеквадратическая погрешность расчёта приборной звёздной ве-
личины; оМо --среднеквадратическая ошибка задания исходной звёздной вели-
чины в базовом каталоге.
Существующие методы [29] позволяют определить приборную звёздную
величину (Mg) с максимальной погрешностью Зпм<3 <0™21. Предельная ошибка
задания исходной звёздной величины в базовом каталоге (SAO) ЗаМц <0т15.
Следовательно, предельная результирующая погрешность представления звёзд-
ной величины в ЗК с вероятностью 0,997 не превосходит 0т,26.
Следует отметить, что составляющие собственного движения для звёздного
каталога не рассчитывают, а принимают равными величинам, приведенным в
фундаментальном каталоге. Точность знания составляющих собственного движе-
ния в ЗК определяется точностью исходного фундаментального каталога.
3.4.7.7.3 Определение видимых координат звёзд. Оценка погрешности
расчёта видимых координат звёзд
АИС фиксируют видимые места звёзд. Видимые места (координаты)
звёзд- видимые прямое восхождение и склонение звёзд, включающие в себя
влияние аберрации и отсчитываемые относительно истинного экватора и равно-
денствия (в момент времени проведения измерения) с учётом долгопериодиче-
ских и короткопериодических нутационных членов.
Для идентификации рабочих звёзд необходимо определять видимые места
звёзд на момент проведения измерений (Ти). Данную задачу решают в несколько
этапов.
1. Определяют орт направления на звезду, отнесённый к среднему равно-
денствию и геоэкватору эпохи ЗК J2000.0 (Ti):
^COsSi COS ОС j
iTl = cosSjsinaj
(3.4.62)
k sin 5] }
Находят проекции вектора собственного движения звезды m, выраженные
в столетиях, по формулам [36]:
mx=- paicos5isinai-|i5isin5icosai;
185
(3.4.63)
mY= ^aicos8icosar^5isin5isiiiai; (3.4.64)
mz = psicosSi- (3.4.65)
Значения параметров pab |i§i, 5i сц берут из ЗК.
На момент Ти вычисляют геоцентрический вектор звезды цТи, отнесённый
к среднему равноденствию и геоэкватору эпохи J2000.0:
Чти =>Т1 + т *ТГ,
где Тг - интервал времени между моментом проведения измерения Ти и момен-
том Ть выраженный в годах.
2. Рассчитывают вектор Чкл-з направления «КА - звезда» во второй сред-
ней экваториальной геоцентрической системе координат эпохи J2000.0 с учётом
аберрации:
Vgka л
Чка-з - Чти , (3.4.66)
с
здесь VGKA - вектор гелиоцентрической скорости движения КА; с - скорость
света.
Вектор гелиоцентрической скорости движения КА определяется соотноше-
нием
VGka=VKa + Ve, (3.4.67)
где - вектор скорости КА, отнесённый к среднему равноденствию и гео-
экватору эпохи J2000.0; VE - вектор гелиоцентрической скорости Земли, отне-
сённый к среднему равноденствию и геоэкватору эпохи J2000.0.
3. Для получения видимого направления на звезду Чрн-з редуцируют соб-
ственное направление Чрн-з с учётом прецессии и нутации:
Чрн-з = N • Р-Qph-з; (3.4.68)
:В _ Чрн-3
‘РН-З “Г R “ । -
|Чрн-з|
Здесь iPH_3 - орт направления на видимое место звезды; Р - матрица прецессии
на текущий момент времени Тн; N - матрица нутации на текущий момент време-
ни Ти.
Погрешности расчёта видимых координат звёзд представляют соотноше-
ниями
(3.4.69)
Act в — Aa3I< + Дссв Сл >
(3.4.70)
А5В — А5ЗК ч- А5ВСЛ • (3.4.71)
Здесь Аа зк - ошибка представления прямого восхождения звезды в ЗК; А5 зк -
ошибка представления склонения звезды в ЗК; Аа в сл - случайная ошибка опре-
деления видимого прямого восхождения звезды; А5 в сл - случайная ошибка оп-
186
ределения видимого склонения звезды.
Ошибки представления координат звёзд в ЗК определяются соотношениями
(3.4.59) и (3.4.60).
Случайные ошибки определения видимых координат звёзд представляются
выражениями
А^ВСЛ =АаНСЛ сл * Т г + Д«прсл’Тс; (3.4.72)
Д^всл =А£Нсл + АЦбсл + Д^прсл ’Тс, (3.4.73)
где Дан сл - случайная ошибка по прямому восхождению за счёт нутации;
Дбнсл ~ случайная ошибка по склонению вследствие нутации; Дца Сл - случайная
ошибка задания в ЗК собственного движения звезды по прямому восхождению;
сл ~ случайная ошибка задания в ЗК собственного движения звезды по скло-
нению; Дапр сл - случайная ошибка по прямому восхождению вследствие пре-
цессии; Дбпр сл ~ случайная ошибка по склонению, возникающая под воздействи-
ем прецессии; Тг - интервал времени между эпохой ЗК Tj и текущей эпохой Ти в
Тг
годах; Тс = - интервал времени между эпохой ЗК Ti и текущей эпохой Ти в
столетиях.
Предельные случайные ошибки с вероятностью 0,997 не превосходят величин [29]:
Зодазкса К',45; ЗОд5зксп < 1"а23;
Зодцасл 0",027 за год; ЗсгДр ,$сл < 0",024 за год;
Зсдайрся < 0",26 за столетие; Зод5Прсл < 0",26 за столетие;
ЗсГдансл — 0”, 10; -ЭС>Д5 я сл — 0"?10.
В силу независимости отдельных составляющих предельные результирую-
щие погрешности определения видимых координат звёзд представляются выра-
жениями
А&В — АОСЗКСИСТ ’ л/^Дазксл + Да пел ^апрсл ’ Т^ '^О’дцасл ‘ Tf ? (3.4.74)
д§врсд = Дбзксист + 3-J(j^53KCJT +сгд5нсл + Попрел -т[ +адр5сл -Т£ , (3.4.75)
где Дазксист- систематическая ошибка задания прямого восхождения в ЗК;
А^зксист- систематическая ошибка задания склонения в ЗК; адаз-кся- средне-
квадратическая ошибка задания прямого восхождения в ЗК; зк сл - среднеквад-
ратическая ошибка задания склонения в ЗК; ОдаНсл- среднеквадратическая
ошибка определения прямого восхождения вследствие нутации; ада н сл - средне-
квадратическая ошибка определения склонения вследствие нутации; ОдаПрсл-
среднеквадратическая ошибка определения прямого восхождения, возникающая
под влиянием прецессии; сгД8ПрСл- среднеквадратическая ошибка определения
склонения, возникающая под влиянием прецессии; сгДра сл - среднеквадратическая
ошибка задания в ЗК собственного движения звезды по прямому восхождению;
адцбел ~ среднеквадратическая ошибка задания в ЗК собственного движения звез-
ды по склонению.
187
Соответственно для предельных результирующих погрешностей определе-
ния видимых координат звёзд получим
Да£гед = 0,15 + 71,9144+ 0,00073576• Т£ угле; (3.4.76)
д§пгы = 0,10 + 71,5229 +0,00058276-Т2Г угл.с. (3.4.77)
В заключение в табл. 3.4.11 представлены предельные результирующие по-
грешности определения видимых координат для различных значений текущей
эпохи Ти.
Таблица 3.4.11 - Предельные результирующие погрешности определения
видимых координат звёзд
ти J2010 J2020 J2030 J2040 J2050
Да^ВД, угл. с 1,56 1,64 1,76 1,91 2,09
ддпрвд, с 1,36 1,43 1,53 1,67 1,83
Таким образом, на интервале времени 50 лет от эпохи J2000.0 предельные
результирующие ошибки определения видимых координат звёзд не превосходят
величин:
Да£РЕД <2",09;
дзпгед <f83
3.4.7.7.4 Распознавание визируемых звезд
В задачах автоматизированного определения астроориентации КА по изо-
бражениям участков звездного неба наибольшую сложность представляет про-
блема распознавания визируемых звезд взвез дном каталоге [18, 40].
В качестве исходных данных при распознавании используют следующие
исходные данные:
- каталожные координаты звезд и звездные величины;
- координаты изображений звезд и их относительные интегральные ярко-
сти.
Известные методы распознавания звезд обычно базируются как на коорди-
натометрических, так и на фотометрических измерениях. Применение только фо-
тометрических измерений позволяет решать задачу со сравнительно невысокой
вероятностью распознавания. Использование только координатометрических из-
мерений позволяет выполнять распознавание с высокой степенью точности. При-
влечение дополнительной информации об измеренных интегральных яркостях
приводит в основном к существенному снижению машинного времени [1].
Режим распознавания визируемых звезд является основным для астроизме-
рительных систем. Режим позволяет удостовериться, что обнаруженный источ-
ник излучения является рабочим ориентиром. В программном обеспечении про-
цессора АИС обычно реализован подход к решению задачи распознавания заре-
188
гистрированных изображений звезд в каталоге путем сравнения измеренных и
каталожных угловых расстояний.
Для большей эффективности распознавания визируемых звезд применяют
также распознавание по следующим признакам:
- по уровню сигнала;
- оптическому спектру;
- угловому положению относительно других астрономических объектов.
При решении задачи распознавания звезд после включения АИС, когда
ориентация КА не известна (режим работы АИС без априорной информации),
осуществляют сравнения измеренных и каталожных межзвездных угловых рас-
стояний по всему каталогу. После определения начальной ориентации БЦВК СУ
в процессор АИС выдает параметры ориентации, и поиск звезд осуществляется в
ограниченной зоне - в рабочем сегменте звездного каталога (режим работы АИС
с априорной информацией). Такой подход позволяет существенно сократить вре-
мя обновления информации АИС, поступающей в БЦВК СУ.
3.4.7.7.5 Определение ориентации
Основной задачей АИС является определение параметров ориентации осей
приборной системы координат (ПСК) АИС в ИСК. Определение параметров ори-
ентации происходит в соответствии со следующим алгоритмом. АИС проводит
съемку участка звездного неба, видеосигнал обрабатывается и преобразуется в
массив цифровой информации. Далее информация поступает в модуль процессо-
ра, где с помощью специального программного обеспечения выполняются вы-
числения и формируется результат измерений.
Вычисления делят на следующие основные операции [1]:
- вычитание низкочастотной составляющей изображения;
- локализация изображений источников света (звезд) и определение коор-
динат их энергетических центров и интегральной яркости;
- распознавание зарегистрированных звезд в бортовом звездном каталоге;
- редукция координат звезд на момент наблюдения и формирование таб-
лицы направляющих косинусов во внутренней системе координат и во
второй экваториальной системе координат;
- расчет элементов ориентации осей приборной системы координат АИС в
ИСК.
Вычитание низкочастотной составляющей проводят для устранения по-
грешностей, обусловленных неравномерностью фоновой компоненты. Получен-
ное таким образом изображение звезд имеет равномерный фон и используется
для последующей процедуры локализации. Процедура локализации позволяет
определить координаты энергетических центров пространственно связанных
элементов (кластеров) во внутренней системе координат звездного датчика.
Далее путем сравнения измеренных и каталожных угловых расстояний ре-
шают задачу распознавания зарегистрированных изображений звезд.
После завершения процедуры таких сравнений формируется таблица рас-
познавания, содержащая измеренные координаты идентифицированных изобра-
189
жений звезд и их каталожные координаты (прямое восхождение и склонение).
Так как координаты звезд в бортовом каталоге приведены на фиксирован-
ную эпоху, необходимо редуцировать их на момент наблюдения. В процедуре
редукции проводится учет собственных движений звезд, учет влияния прецессии,
учет нутации и т.д.
Для определения параметров ориентации используется модель измерений,
базирующаяся на условии коллинеарности направлений на одноименные звезды в
инерциальной системе координат и их изображения в системе координат, связан-
ной с плоскостью фотоэлектрического прибора с зарядовой связью
(ПЗС-матрицей).
В звездном каталоге положение i-й звезды во 2-й ЭСК определено заданием
прямого восхождения оц и склонения Si (рис. 3.4.28).
Рисунок 3.4.28 - Угловые координаты
звезды
Тогда направляющие косинусы звезды вычисляют как
SiI = {SJIi} = (c°saic°s8i cos8isinaI sinSj1 (j = x,y,z; i = 1,2,...,N).
Если M = { my j (i, j = 1,2,3)- матрица перехода от 2-ЭСК к ВСК, то направ-
ляющие косинусы i-й звезды в ВСК = {SjJ (j = х, y,z; i = 1,2,.,., N) опреде-
ляются формулой
Si =MS'.
Измеренные значения xj и у; координат энергетических центров изображе-
ний звезд во внутренней системе координат связаны с направлениями на соответ-
ствующие звезды во второй экваториальной системе координат и параметрами
модели измерений следующими соотношениями:
mnS^j + m12S^ + m13S'j
------------z------- + x0 + Ax, + Sx
m3iS^i+m32S^+m33S’j
190
Yi
n + m„S' +m7,S*.
_f._2._2i-n_j!-«_л д g
mX+m32S‘ +m33S'
где f, xo, yo ~ параметры, реализующие ВСК: фокусное расстояние и координа-
ты главной точки (центр ПЗС-матрицы); Дхь Ayi-ошибки по полю кадра;
5xi, бу, - остаточные рассогласования по осям координат.
Параметры f, Хо, у0 определяют в процессе проведения калибровочных ра-
бот на Земле, паспортизуют и используют в бортовом ПАО при обработке изме-
рительной информации.
Из всего числа изобразившихся на снимке звезд для распознавания в борто-
вом каталоге выбирают самые яркие объекты. Минимальное число распознанных
звезд не может быть меньше трех. Поэтому при решении задачи определения па-
раметров ориентации решают систему, содержащую от шести до 32 уравнений с
девятью неизвестными направляющими косинусами. Для случая шести уравне-
ний они дополняются уравнениями для mlj3 следующими из свойств элементов
ортогональной матрицы. Вычислительная процедура решения избыточной систе-
мы уравнений реализуется по способу наименьших квадратов.
Вычисленные параметры ориентации выдаются в систему управления КА в
виде матрицы направляющих косинусов или кватерниона.
3.4.7.8 Характеристики современных астродатчиков
Наиболее высокоточными астродатчиками на данный момент являются
широкопольные астродатчики (АД) или астроизмерительные системы (АИС) на
базе приборов с зарядовой связью (ПЗС), работающие по звездному полю. Опре-
деление параметров ориентации в таких приборах осуществляют путем сравне-
ния изображения наблюдаемого участка звездного неба на ПЗС-матрице с хра-
нящимся в памяти звездным каталогом.
Впервые широкопольные звездные датчики нашли применение в 80-х гг. про-
шлого века. Пионерами в этой области стали JPL (США), Officine Galileo (Италия),
SODERN (Франция) и ИКИ АН СССР в кооперации с предприятием «Карл Цейсс
Йена» (ГДР). Фирма SODERN в 1985 г. начала разработку звездного координатора
SED12, основанного на ПЗС-матрице, для русско-французского проекта «Сигма».
В настоящее время за рубежом насчитывается более 10 производителей
звездных приборов, среди них: SODERN (Франция), Jena-Optronik (Германия),
Galileo Avionica (Италия), Ball Aerospace (США), Goodrich (США), Тепла (Дания,
Германия, Нидерланды, Сингапур, США) и др., которые выпускают более 30 мо-
делей звездных приборов различного типа и назначения [25]. В России одной из
организаций, производящей звездные датчики ориентации для космических ап-
паратов (КА), является ИКИ РАН [16]. С середины 90-х годов институтом было
изготовлено более 60 приборов БОКЗ (рис. 3.4.29) в различных модификациях,
которыми были оснащены 14 КА. Среди них Международная космическая стан-
ция, аппараты серии «Ямал», «БелКА», «Ресурс-ДК».
191
Рисунок 3.4.29 - Внешний вид
БОКЗ-М
Одним из мировых лидеров по производству звездных приборов является
французская фирма SODERN. Сегодня она выпускает звездные приборы SED16,
SED26 и SED36 (рис. 3.4.30).
Рисунок 3.4.30 - Внешний вид
прибора SED16
В 2003 г. фирма SODERN начала разработку нового звездного прибора
HYDRA (рис. 3.4.31), основанного на КМОП-матрице StarlOOO HAS. В состав
прибора входят две или три оптические головки и два блока электроники. Каж-
дый блок электроники способен обслуживать два оптических блока. Использова-
ние нескольких оптических блоков позволяет повысить точность измерений, уве-
личить помехозащищенность и надежность прибора. Кроме того, благодаря не-
скольким оптическим блокам прибор имеет равноточную характеристику по трем
осям.
192
Рисунок 3.4.31 - Внешний вид
прибора HYDRA
В космическом приборостроении наблюдается тенденция к комплексирова-
нию функционально близких приборов. Так, независимо друг от друга, фирмой
Draper (США) и ИКИ РАН созданы два интегрированных прибора: Inertial Stellar
Compass (ISC) и БОКЗ-МФ (рис. 3.4.32) соответственно, сочетающих в себе
звездный датчик ориентации и гироскоп. Эти функциональные блоки удачно
взаимодополняют друг друга, увеличивая надежность выполнения прибором це-
левой задачи.
Рисунок 3.4.32 - Внешний вид
БОКЗ-МФ
В соответствии с Национальной космической программой в Украине также
ведутся разработки АД. Так, в рамках опытно-конструкторской работы «Созда-
ние перспективных приборов и двигательных установок КП СПС «Арсенал» (г.
Киев) создана малогабаритная астроизмерительная система (МАИС-Б) (рис.
3.4.33).
193
Рисунок 3.4.33 - Внешний вид
МАИС-Б
В табл. 3.4.12 представлены технические характеристики современных аст-
роизмерительных систем.
Таблица 3.4.12 - Технические характеристики современных АИС
Наименование характеристики FSC-701. Ball Aerospace & Technolo- gies Corp., США HYDRA, EADS SODERN, Франция БОКЗ-М, ОФОИКИ РАН, Россия МАИС-Б, КП СПС «Арсенал», Украина
Точность определения ориентации (За), угл.с - оптическая ось - 9; - вокруг оп- тической оси - 89 - оптическая ось -12; - вокруг оптиче- ской оси - 71 - оптическая ось - 18; - вокруг оп- тической оси - 50 - оптическая ось - 8; - вокруг оп- тической оси - 49
Частота обновления информации, Гц >30 <30 0,3 10
Интерфейс MIL 1553В MIL 1553В или RS 422 MIL 1553В RS 485
Допустимая угловая скорость КА, град/с <8 <5 0,16 <5
194
Окончание табл. 3.4.12
Наименование характеристики FSC-701, Ball Aerospace & Technolo- gies Corp., США HYDRA, EADS SODERN, Франция БОКЗ-М, ОФО ИКИ РАН, Россия МАИС-Б, КП СПС «Арсенал», Украина
Поле зрения, град 22x22 23 х23 8x8 9x9
Рабочая температура, °C ОБ:-20 ...+50 БЭ:-24...+61 -30.:.+60 -15 ...+45 - 10...+35
Энергопотреб- ление, Вт ОБ: 0,85; БЭ: 16 ОБ+БЭ:11 ОБ+БЭ: 12 ОБ+БЭ: 6
Масса, кг ОБ: 1,6; БЭ: 5,83 ОБ: 1,25; БЭ: 1,75 4 4
Габаритные размеры, мм ОБ: 0154; В=283БЭ: 318x274x39 ОБ: 130x130x225 БЭ:145х160хЮ0 235x236x381 252x261x3 48
Срок службы, лет Нет данных - низкая орбита - 7 лет; - геостационарная орбита - 18 лет 5 7
3.4.8 Бесплатформенный астроииерциальный блок
3.4.8.1 Назначение, состав и принцип действия
Бесплатформенный астроинерциальный блок (БАЙБ) предназначен для ре-
шения следующих задач [38]:
- вычисления и выдачи в СУ КА абсолютной угловой скорости основания
прибора в проекциях на оси приборной системы координат (ПСК);
- начального определения ориентации ПСК относительно инерциальной
системы координат и последующей её коррекции по информации аст-
роблока (или АИС);
- вычисления и выдачи в СУ КА кватерниона ориентации приборной сис-
темы координат относительно инерциальной системы координат (2-й эк-
ваториальной системы координат OXKY„ZH);
- контроля функционирования составных частей прибора и выдачи в бор-
товой компьютер СУ донесений об исправном (неисправном) состоянии
прибора;
формирования и выдачи в систему телеметрического контроля парамет-
ров, необходимых для оценки и контроля правильности функциониро-
вания прибора;
- обеспечения обмена БАЙБ и БЦВК СУ КА;
- приема из БЦВК и записи в СВ БАЙБ компонентов ПО и данных;
195
- приема из бортового компьютера СУ полетного задания (ПЗ) и команд
управления режимами работы прибора;
- приема, хранения и учета систематических погрешностей, определяемых
при изготовлении прибора и его последующих калибровках.
В состав БАИБ входят:
- блок из четырех волоконно-оптических гироскопов (БИУС), один из ко-
торых находится в холодном резерве;
- астроблок (АБ) из трех астродатчиков, один (или два) из которых нахо-
дится в холодном резерве;
- основной и резервный (в холодном резерве) специализированный вы-
числитель (СВ);
- вторичные источники электропитания;
- блок коммутации первичного электропитания;
- система термостатирования (СТС);
- кабельная сеть.
Схема номинального положительного направления осей чувствительности
ВОГ (01...04) показана на рис. 3.4.34.
В качестве приборной системы координат принята правая ортогональная
система координат OXnYnZn, реализуемая посадочными местами прибора.
ОХпУп - посадочная плоскость прибора.
Рисунок 3.4.34 - Схема номинального расположения
чувствительных элементов БИУС
196
В основу построения БАИБ положен метод инерциальной ориентации с ас-
трокоррекцией ошибок, который предусматривает комплексное использование
информации АБ и БИУС. Определение ориентации ПСК БАИБ относительно
инерциальной системы координат (ИСК) осуществляется путем численного ин-
тегрирования в СВ БАИБ кинематического уравнения углового движения БАИБ.
В качестве параметров ориентации применяют параметры Родрига-Гамильтона
(кватернионы). Задание начальных условий для интегрирования проводят с по-
мощью АБ, который также используют для определения и компенсации ошибок
ориентации, вызванных погрешностью интегрирования и нестабильностью ха-
рактеристик БИУС. Для повышения точности определения ПСК БАИБ относи-
тельно ИСК предусмотрено определение и компенсация нулевого сигнала БИУС
в процессе орбитального полета.
Математическое обеспечение БАИБ, реализуемое в СВ, включает в себя
следующие программные модули:
- модуль обмена с ВОГ, АБ и СТС БАИБ;
- модуль обмена между СВ и БЦВК системы управления КА;
- модуль управления ВОГ, СТС;
- модуль обработки информации и контроля ВОГ;
- модуль формирования выходной информации БАИБ;
- модуль управления и обработки информации АБ.
Математическое обеспечение БАИБ при необходимости полностью или час-
тично может быть заменено через КИА БАИБ или БЦВК системы управления КА.
3.4.8.2 Основные технические требования
Основные технические требования к БАИБ приведены в табл. 3.4.13.
Таблица 3.4.13 - Основные технические требования к БАИБ
№ п/п Наименования Значение па- раметра
1 Диапазон измерения угловых скоростей ±10 %
2 Погрешность определения проекции вектора абсолют- ной угловой скорости: - при постоянной температуре в диапазоне +10°С...+30°С; - при изменении температуры в диапазоне +10°С...+30°С 0,122 7ч 0,15 7ч
3 Скорость ухода кватерниона (без коррекции кватернио- на ориентации по измерениям АБ): - при постоянной температуре в диапазоне +10°С...+30°С; - при изменении температуры в диапазоне +10°С...+30°С 0,21 7ч 0,267ч
197
Окончание табл. 3.4.13
№ п/п Наименования Значение па- раметра
4 Время функциональной готовности 3 с
5 Время тепловой готовности 30 мин
6 Время точностной готовности 30 мин
7 Гарантийный срок службы прибора в составе КА, в том числе: - эксплуатация и хранение в наземных условиях в составе КА или в штатной таре; - натурная эксплуатация 4 года 3 года
8 Вероятность безотказной работы за время натурной экс- плуатации 0,9
9 Потребляемая мощность 50 Вт
10 Масса БАИБ без АБ 9 кг
3.4.8.3 Общие технические требования
К общим техническим требованиям к прибору относятся требования:
- к конструкции прибора;
- сырью, материалам и комплектующим изделиям, применяемым при из-
готовлении прибора;
- унификации, стандартизации, технологичности и метрологическому
обеспечению;
- программно-математическому обеспечению;
- радиоэлектронной защите;
- испытаниям и проверкам;
- безопасности при испытаниях и эксплуатации прибора.
Требования, к конструкции
Разработку БАИБ проводили с учетом обеспечения его стойкости, прочно-
сти к воздействию механических, климатических и других факторов, приведен-
ных ниже.
В БАИБ реализованы схемно-конструктивные меры, исключающие неад-
ресную стыковку соединителей кабелей при установке прибора в схему СУ, а
также предусмотрены цепи для контроля стыковки соединителей.
Конструкция БАИБ исключает возможность неправильной его установки в
КА, обеспечивает удобство доступа к электросоединителям, удобство их стыков-
ки и расстыковки с применением стандартного инструмента, удобство монтажа и
демонтажа блока, обеспечивает пылевлагозащиту прибора и его функционирова-
198
ние в полете в условиях негерметичного приборного отсека не хуже IP54 (в соот-
ветствии с ГОСТ 14254-96).
БАИБ и блоки, входящие в состав прибора, сохраняют эксплуатационные и
технические характеристики после воздействия механических и акустических на-
грузок на участке выведения КА с помощью PH.
На корпусе БАИБ нанесены положительные направления осей приборной
системы координат.
На габаритно-установочном чертеже указаны:
- положение центра масс и моменты инерции;
- направление осей приборной системы координат;
- мощность, выделяемая прибором в установившемся режиме его работы.
Предельные погрешности установки ВОГ (отклонения ОЧ ВОГ от их но-
минальных положений) должны быть не более 30'. Погрешности установки ВОГ
обмеряют и паспортизуют в эксплуатационной документации на БАИБ. Предель-
ные отклонения угловых положений осей чувствительности ВОГ от их паспор-
тизованных значений за весь срок эксплуатации, включая погрешности паспорти-
зации, не должны превышать 30".
Масса БАИБ не превышает 9 кг в резервированном исполнении (четыре
ВОГ, две электронные платы спецвычис лите лей, плата питания) и 6 кг в нерезер-
вированном исполнении (три ВОГ, одна электронная плата спецвычис лите ля).
Требования к сырью, материалам и комплектующим изделиям
БАИБ разрабатывали с использованием сырья, материалов, комплектую-
щих изделий и электрорадиоизделий (ЭРИ), обеспечивающих получение требуе-
мых характеристик аппаратуры.
В конструкции БАИБ применяют материалы в соответствии с ограничи-
тельными перечнями разрешенных к использованию материалов, действующими
на предприятии-изготовителе прибора.
В целях обеспечения высокой надежности аппаратуры ЭРИ применяли в
облегченных режимах функционирования. Использование ЭРИ в условиях и ре-
жимах, не оговоренных или отличающихся от указанных в стандартах и техниче-
ских условиях на них, допускалось в исключительных случаях.
Правильность применения ЭРИ, а также возможность их использования в
условиях, отличных от ТУ, подтверждена положительными результатами функ-
ционирования в составе БАИБ при автономных и совместных отработочных ис-
пытаниях прибора.
Комплектация БАИБ проводилась отечественными ЭРИ с индексами «ОС»,
«ОСМ», «М», «ОВП (ВП)» и ЭРИ иностранного производства индустриального
применения, Space, Military. ВОГ, ЭРИ до установки их в БАИБ подвергались
входному контролю в целях отбраковки потенциально ненадёжных.
Требования к унификации, стандартизации, технологичности и метроло-
гическому обеспечению
В БАИБ в максимальной степени использованы стандартные, унифициро-
ванные и ранее разработанные детали и узлы, приняты меры по обеспечению
199
технологичности конструкции.
Метрологическое обеспечение разработки и эксплуатации БАИБ соответст-
вует требованиям нормативно-технической документации.
Требования к программно-математическому обеспечению
Структура и состав программно-математического обеспечения БАИБ не за-
висит от целей и задач основной работы системы управления КА.
Программное обеспечение (ПО) БАИБ должно обладать гибкостью и адап-
тируемостью к наращиванию и видоизменению задач. Покупное программное
обеспечение сертифицировано и имеет лицензию на эксплуатацию.
Программно-математическое обеспечение БАИБ должно проходить ком-
плексную отработку в схеме исследовательского стенда. Необходимо обеспечить
возможность замены массивов ПО из контрольно-испытательной аппаратуры
(КИА) (в условиях наземной отработки прибора) и из БЦВК системы управления
КА (при летной эксплуатации).
Требования к радиоэлектронной защите
Требования к радиоэлектронной защите БАИБ состоят в обеспечении его
электромагнитной совместимости с аппаратурой СУ и смежных с ней систем и
соответствуют требованиям нормативно-технической документации (стандарт
SSP 5004 (с учетом ECSS-E-20A)
Требования к помехообразованию БАИБ состоят из требований:
- к напряжению создаваемых низкочастотных кондуктивных помех в диа-
пазоне частот Af=0,01 ... 10 кГц;
- напряжению создаваемых кондуктивных помех в диапазоне частот
ДМ),01 ... 100 МГц;
- напряженности электрического поля создаваемых радиопомех в диапа-
зоне частот Af=0,01 ... 1000 МГц.
БАИБ устойчив:
- к низкочастотным кондуктивным помехам в диапазоне частот
Af^=0,01 ... 10 кГц;
- низкочастотным кондуктивным помехам в диапазоне частот
ДМ),01 ... 100 МГц;
- излучаемым радиопомехам внутри изделия в диапазоне частот для на-
пряженности электрического поля Af=O, 1 ... 1000 МГц.
Требования по помехообразованию и помехоустойчивости БАИБ изложены
в техническом задании на прибор. Их выполнение проверено на этапе автоном-
ных и совместных отработочных испытаний БАИБ.
Требования к испытаниям и проверкам
Для оценки соответствия изготовленного образца его документации БАИБ
подвергался автономным испытаниям на специальном рабочем месте с использо-
ванием КИА, имеющей информационный обмен:
- с основным и резервным каналами СВ БАИБ;
200
- технологическими параллельными каналами (основной и резервный) СВ
БАИБ;
- технологическими последовательными каналами (основной и резерв-
ный) СВ, БАИБ;
- каналом передачи телеметрической информации;
- системой термостатирования (цифровой и сигнальной информации).
Сводный состав видов испытаний, подтверждающих выполнение требова-
ний ТЗ, приведен в комплексной программе экспериментальной отработки при-
бора, подготовленной на стадии разработки технической документации.
Входной контроль БАИБ перед монтажем прибора в КА проводят в объеме
внешнего осмотра, проверки сопроводительной документации, контроля функ-
ционирования прибора в целом и всех его основных узлов и блоков, с использо-
ванием КИА БАИБ на предприятии-изготовителе КА.
В табл. 3.4.14 приведены методы проверки требований ТЗ к БАИБ.
Таблица 3.4.14 - Методы проверки требований ТЗ к БАИБ
Раздел ТЗ Метод подтверждения
Анализ, расчет; моделирование; испытания - автономные (ЛОИ)
Назначение 4- 4- 4-
Состав +
Состав информации 4- 4- +
Диапазон измерения 4- + +
Динамические характеристики 4- 4- 4-
Обмен информацией с БЦВК 4- 4-
Погрешность измерения + + +
Ресурс работы 4- 4-
Электропитание + +
Надежность 4-
Стойкость к воздействию ионизи- рующих и электромагнитных излу- чений космического пространства и грозы 4-
Стойкость к воздействию механиче- ских нагрузок 4-
Точностные характеристики выход- ной информации БАИБ 4- +
Радиоэлектронная защита 4- 4-
Телеметрия 4- + 4-
Безопасность 4-
Удобство в эксплуатации 4-
201
Окончание табл. 3.4.14
Раздел ТЗ Метод подтверждения
Анализ, расчет; моделирование; испытания - автономные (ЛОИ)
Стойкость к воздействию климати- ческих условий + +
Гарантийный срок эксплуатации +
Конструктивное исполнение + +
Упаковка и маркировка +
Требования по безопасности
БАИБ не должен являться источником взрыва или пожара. С этой целью
следует выполнять такие требования:
- все применяемые неметаллические материалы, находящиеся в контакте с
атмосферой отсека, не должны при испытаниях и штатной эксплуатации
возгораться и выделять токсичные вещества;
- необходимо обеспечить металлизацию приборов и кабельной сети, ис-
пользуемых при испытаниях.
Места крепления и типы элементов металлизации определены при разра-
ботке габаритно-установочного чертежа. В технических требованиях габаритного
чертежа прибора есть указание о металлизации его с конструкцией, на которой
его устанавливают.
Материалы и покрытия, примененные при изготовлении БАИБ, не поддер-
живают горение и самостоятельно не горят после удаления источника воспламе-
нения.
Требования к упаковке и маркировке
Прибор имеет соответствующий идентификационный ярлык, расположен-
ный на видимой, несъемной части прибора. Нанесенные идентификационные
данные содержат следующие сведения:
- индекс прибора,
- заводской номер,
- дата изготовления.
БАИБ опломбирован и опечатан представителями отдела технического
контроля предприятия-изготовителя.
Маркировка должна быть устойчивой к воздействию внешних факторов в
течение всего срока эксплуатации, механически прочной и не должна стираться.
Упаковка обеспечивает сохранность БАИБ при транспортировке всеми ви-
дами транспорта в условиях, оговоренных в техническом задании на разработку
прибора.
202
3.4.9 Требования к условиям эксплуатации приборов системы
управления КА
В подразд. 3.4.9 приведены конкретные величины требований к условиям
эксплуатации, предъявляемые к приборам, эксплуатируемым в составе КА на
околокруговых орбитах высотой до 500 км и выводимым PH типа «Циклон» на
примере БАИБ.
Данные требования приведены в техническом задании на прибор, их вы-
полнение проверено при проведении автономных испытаний БАИБ на предпри-
ятии-изготовителе прибора.
3.4.9.1 Механические воздействия
БАИБ должен обеспечивать заданные характеристики после воздействия на
него в выключенном состоянии механических нагрузок, действующих при выве-
дении КА, приведенных ниже.
Линейные перегрузки
Квазистатические перегрузки в трех взаимно перпендикулярных направле-
ниях должны иметь максимальные значения ±8,5g. Время действия перегру-
зок - 15мин в каждом направлении.
Вибрации
Параметры низкочастотных гармонических колебаний и случайных вибра-
ций приведены в табл. 3.4.15 и 3.4.16 соответственно.
Амплитуды гармонических вибраций и значения спектральных плотностей
заданы в граничных точках октав. Изменение значений спектральных плотностей
и амплитуд гармонических вибраций в пределах каждой октавы - линейное при
логарифмическом масштабе частоты, значений спектральной плотности и ампли-
туд вибрации.
Случайные вибрации действуют с примерно одинаковой интенсивностью
виброускорений в каждом из трех произвольно выбранных взаимно перпендику-
лярных направлений.
Таблица 3.4.15 - Гармонические колебания
Частота, Гц Амплитуда, g Длительность, с
2... 5 0,2... 0,5 100
5 ... 10 0,5 100
10... 15 0,6 ... 1 100
15 ...20 1,0 ... 0,5 60
203
Таблица 3.4.16 - Случайные вибрации
Полосы частот, Гц Случай нагружения
Старт | Работа ДУ
Спектральная плотность, g2/ Гц
20 ... 40 40 ... 80 80... 160 160 ... 320 320 ... 640 640... 1280 1280... 2000 0,007 0,007 0,07-0,022 0,022 ...0,035 0,035 0,035 ...0,017 0,017... 0,005 0,007 0,007 0,007 0,007... 0,009 0,009 0,009 ... 0,0045 0,0045
Среднеквадратическое значение, g 6,5 3,6
Длительность, с 35 831
Ударные нагрузки
В табл. 3.4.17, 3.4.18 приведен спектр удара нагрузок в местах крепления
БАИБ в PH со значением добротности Q = 10 при отделении обтекателя.
Изменение значений спектра удара в поддиапазонах частот - линейное при
логарифмическом масштабе по частоте и значениям спектра удара. Приведенные
спектры удара справедливы для любых трех взаимно перпендикулярных направ-
лений.
Таблица 3.4.17 - Спектр ударных нагрузок
Поддиапазоны частот, Гц 30 ... 50 50 ... 100 100 ... ... 200 200 ... ... 500 500... ... 1000 1000... ... 2000 2000... ... 5000
Значения спектра удара, g 5 ... 10 10 ... 25 25 ... 50 100 100... 400 400 400
Количество воздействий в каждом направлении 2
Таблица 3.4.18 - Параметры ударного спектра, характеризующего
виброимпульсные нагрузки при отделении КА и расчековки
солнечных батарей
Полоса частот, Гц Значения ударного спектра, g (при добротности Q=10)
20... 50 7 ... 12
50 ... 100 12 ... 20
204
Окончание табл. 3.4.18
Полоса частот, Гц Значения ударного спектра, g (при добротности Q=10)
100 . . 200 20 . .. 50
200 . . 500 50.. . 140
500 .. . 1000 140 . ..400
1000 . .. 2000 400 . .. 500
2000 .. .. 5000 500
5000 .. .. 8000 500
Количество воздействий в каждом направлении 2
Отработку БАИБ на виброимпульсные нагрузки допускается проводить при
испытаниях на воздействие ударов с полусинусоидальной формой импульса, па-
раметры ударов приведены в табл. 3.4.19. Испытания на воздействие ударов про-
водят в каждом из трех взаимно перпендикулярных направлениях дважды - в
двух противоположных направлениях.
Таблица 3.4.19 - Параметры ударов полусинусоидальной формы
Случай нагружения Пиковое ус- корение, g Длительность, мс Количество ударов в каждом направлении
Отделение обтекателя и третьей ступени PH 300 0,4 2
Отделение КА от PH 300 0,6 2
Расчековка солнечных батарей 200 0,4 1
3.4.9.2 Акустические нагрузки
Акустические нагрузки характеризуются:
- уровнями звукового давления в октавных полосах частот со среднегео-
метрическими частотами 31,5; 63; 125; ...; 2000; 4000; 8000 Гц;
- интегральным уровнем звукового давления в полосе частот 20 ...8000 Гц
относительно порогового значения звукового давления ро=2-1О"5 Па;
- длительностью действия.
Параметры акустических нагрузок для среды, окружающей БАИБ, приве-
дены в табл. 3.4.20.
Таблица 3.4.20 - Параметры акустических нагрузок
Средняя геометрическая частота октавной полосы частот, Гц Уровни звукового давления, дБ
31,5 125
63 132
125 135
250 134
205
Окончание табл. 3.4.20
Средняя геометрическая частота октавной полосы частот, Гц Уровни звукового давления, дБ
500 132
1000 129
2000 126
4000 121
8000 115
Длительность действия, с 35
Интегральный уровень звукового 140
давления, дБ
Низкочастотные гармонические колебания действуют на участке предстар-
товой подготовки вокруг OXuYnZn с параметрами, указанными в табл. 3.4.21.
Таблица 3.4.21 - Параметры низкочастотных гармонических колебаний
Поддиапазон частот, Гц 5 ... 10 10 ... 15 15 ... 30
Амплитуда ускорений, g 0,5 0,6 0,5
Длительность воздействия, с 10 30 60
3.4.93 Угловые движения изделия
Значения параметров угловых колебаний PH вокруг осей тангажа, рыска-
ния, вращения при выведении КА приведены в табл. 3.4.22.
Таблица 3.4.22 - Параметры угловых колебаний PH
Частота колебаний, Гц 0,1 3 5 10 20 40 60
Амплитуда колебаний, град 5 2 1 0.5 0,25 о,1 0,05
Максимальная угловая скорость изделия при указанных колебаниях не пре-
вышает 40 %.
Значения параметров угловых колебаний КА в автономном полете приве-
дены в табл. 3.4.23.
Таблица 3.4.23 - Параметры угловых колебаний КА в автономном полете
Частота колебаний, Гц 0,1 1,0 2,0 10,0
Амплитуда колебаний, град 5 0,2 од 0,05
Между указанными в таблицах значениями амплитуда уменьшается по ли-
нейному закону.
206
3.4.9.4 Климатические условия на старте и в полете
БАИБ должен обеспечивать заданные характеристики при воздействии и
после воздействия климатических факторов, приведенных ниже.
В процессе предстартовой подготовки в приборном отсеке PH:
- температура посадочных мест БАИБ может находиться в диапазоне
+8 ... 35°С;
- относительная влажность - до 80% ( при температуре до +20°С);
- атмосферное давление - от 630 до 800 мм рт. ст.
В процессе полета:
- • температура посадочных мест БАИБ может находиться в пределах от
минус 10°С до плюс 45°С;
- атмосферное давление - от 780 мм рт. ст. до W6 мм рт. ст.;
- воздействие невесомости.
3.4.9.5 Ионизирующие излучения космического пространства
БАИБ должен обеспечивать заданные характеристики при воздействии и
после воздействия ионизирующих излучений космического пространства с пара-
метрами, приведенными ниже.
Ионизирующие излучения космического пространства с параметрами:
- поглощенная доза от электронов ЕРПЗ, De=6,6-103 рад;
- поглощенная доза от протонов, Dp= 1,4-103 рад.
Количественные показатели стойкости БАИБ к воздействию ионизирую-
щих излучений космического пространства определяются расчетным, расчетно-
экспериментальным или экспериментальным методом.
3.4.9.6 Условия проведения наземных испытаний и хранения
Испытания БАИБ с использованием КИА БАИБ проводят при температуре
воздуха +25°С ±10°С и относительной влажности от 30 до 75%.
Хранение БАИБ проводится при температуре окружающего воздуха от
плюс 5°С до плюс 25°С с относительной влажностью до 60% (при t = +25°С).
3.4.9.7 Требования по транспортабельности
БАИБ должен сохранять работоспособность после транспортировки в со-
ставе изделия или в штатной таре следующими видами транспорта:
- по железной дороге без ограничений по скорости и расстоянию;
- воздушным транспортом без ограничений по скорости и расстоянию при
изменении давления воздуха в кабине от 780 до 280 мм рт. ст. со скоро-
стью до 2 мм рт. ст. в секунду;
- автотранспортом на расстояние до 500 км со скоростью до 90 км/ч.
Температура окружающего воздуха при транспортировке - от минус 40°С
до +50°С. Относительная влажность воздуха - до 85% с отдельными выбросами
до 90% (при t =+25°C).
При транспортировании железнодорожным транспортом действуют квази-
статические перегрузки и случайные вибрации:
а) максимальные значения квазистатических перегрузок, действующие в
207
трех взаимно перпендикулярных направлениях п = ±2;
б) параметры случайных вибрации в трех взаимно перпендикулярных на-
правлениях, приведенные в табл. 3.4.24.
Таблица 3.4.24 - Параметры случайных вибраций
Полоса частот, Гц Время действия вибраций, ч
0 ... 10 10 ... 20 20 ... 40 40 ... 60 60 ... 100
0,0031 0,18 0,00046 0,068 0,00011 0,047 0,00013 0,05 0,000048 0,044 0,02L
Примечание: в числителе указана СПМ ускорения, g2/Tn, а в знаменателе -
СКЗ ускорения g; L - расстояние, км, на которое проводится транспортирование.
Случайным вибрациям эквивалентны гармонические вибрации с парамет-
рами, приведенными в табл. 3.4.25.
Таблица 3.4.25 - Параметры эквивалентных гармонических вибраций
Полоса частот, Гц Время действия вибраций, ч
0... 10 I | 10... 20 | 20 ...40 | | 40... 60 | | 60 ... 100
Амплитуда виброускорений, g
0 ...0,289 0,111 ... ...0,153 0,075 ... ...0,102 0,111 ... ... 0,130 0,079 ... ... 0,095 0,02L
Примечание: L - расстояние, км, на которое проводится транспортирование.
Внутри полосы частот величина амплитуды виброускорений меняется по
линейному закону при логарифмическом масштабе частоты.
Транспортировка изделия от ТК до СК проводится со скоростью 20 км/ч
(время - до 1 часа) при температуре воздуха от минус 40°С до плюс 50°С и влаж-
ности до 85% с отдельными выбросами до 90% (при t=+25°C).
3. 4.10 Использование аппаратуры потребителей спутниковых
радионавигационных систем (АП СРНС) в системах управления КА
3.4.10.1 Характеристики глобальных навигационных спутниковых
систем
В настоящее время интенсивно развиваются глобальные оперативные спут-
никовые радионавигационные системы (СРНС) ГЛОНАСС (Россия) и GPS
(США) [34]. Термин “глобальная оперативная навигация” означает, что подвиж-
ный объект, оснащенный навигационной АП СРНС, может в любом месте около-
земного пространства в любой момент времени определить (уточнить) кинемати-
ческие параметры своего движения - три координаты и три составляющие векто-
208
ра скорости. Обе системы продемонстрировали высокие точностные характери-
стики определения координат и скоростей различных подвижных средств, вклю-
чая космические. Регулярно происходящие и намечающиеся изменения в области
спутниковых навигационных систем позволяют обеспечить повышение непре-
рывности, точности и надежности навигационных и временных определений.
Полная орбитальная группировка (ОГ) в системе ГЛОНАСС содержит 24
штатных навигационных космических аппарата (НКА) на круговых орбитах с на-
клонением { = 64,8° в трех орбитальных плоскостях по восемь НКА в каждой.
Долготы восходящих узлов трёх орбитальных плоскостей различаются номи-
нально на 120°. Номинальный период обращения НКА равен ~11 ч 16 мин, и, со-
ответственно, номинальная высота круговой орбиты составляет 19130 км. В каж-
дой орбитальной плоскости восемь НКА разнесены по аргументу широты через
45°, а их аргументы широты в трёх орбитальных плоскостях сдвинуты на ±15°. За
время эксплуатации НКА на орбите (до пяти лет) реальные положения НКА
ГЛОНАСС могут отличаться от номинальных не более чем на ±5°.
ОГ в системе GPS содержит 24 штатных НКА на шести круговых орбитах с
периодом обращения 11 ч 58 мин, высотой 20180 км, наклонением 55° и равно-
мерно разнесенных по долготе через 60°.
Каждый штатный НКА постоянно излучает непрерывные навигационные
радиосигналы в двух диапазонах частот L1 и L2:
- в системе ГЛОНАСС - 1600 МГц (L1) и 1250 МГц (L2);
- в системе GPS - 1575,42 МГц (L1) и 1227,6 МГц (L2).
В навигационной аппаратуре потребителя проведение навигационных из-
мерений в двух диапазонах частот позволяет исключить ионосферные погрешно-
сти измерений.
В системе ГЛОНАСС навигационный L1 радиосигнал 1600 МГц - двух-
компонентный. На заданной несущей частоте в радиопередатчике формируются
два радиосигнала: узкополосный (пониженной точности - ПТ) и широкополос-
ный (высокой точности - ВТ). Навигационный L2 радиосигнал-
однокомпонентный широкополосный.
Узкополосный навигационный радиосигнал в системе ГЛОНАСС является
открытым и предназначен для гражданских потребителей. Широкополосные на-
вигационные радиосигналы предназначены для использования санкционирован-
ными потребителями и имеют защиту от несанкционированного использования.
В перспективе при восполнении ОГ предполагается применять двухкомпонент-
ный радиосигнал (узкополосный и широкополосный) в обоих диапазонах час-
тот - 1600 и 1250 МГц.
В настоящее время в ОГ ГЛОНАСС размещен неполный состав НКА, что не
дозволяет пользователям непрерывно получать навигационную информацию. При
полной ОГ ГЛОНАСС (24 штатных НКА) радионавигационное поле на высотах
Ь<2000км непрерывно в пространстве, т.е. потребитель в любой точке этого про-
странства “освещается” радиолучами не менее чем от четырех НКА, образующих
по отношению к нему удовлетворительное по геометрическому фактору созвездие
для оперативного автономного определения координат и вектора скорости.
209
Передатчики НКА GPS излучают два непрерывных сигнала на частотах L1
и L2. Несущая частота L1 состоит из двух компонентов. Первая модулируется
дальномерным псевдослучайным P-кодом, вторая - С/А-кодом. Несущая частота
L2 имеет одну компоненту и моделируется дальномерным псевдослучайным
P-кодом. Основным дальномерным кодом является точный Р-код.
В распоряжении мирового сообщества находится открытый псевдослучайный
код С/А (Clear (Coarse)/Acguisition). В целях преднамеренного снижения точности
определения координат для С/А-кода введен специальный режим селективного
доступа S/A (Selective Availability). В настоящее время специальный режим селек-
тивного доступа отменен. Однако не исключена возможность его возобновления.
В перспективе предполагается обеспечение передачи НКА второго откры-
того сигнала с С/А-кодом на частоте L2 1227,6 МГц. Этот сигнал может исполь-
зоваться в гражданских применениях, не критических с точки зрения безопасно-
сти. Решено также начать работы, связанные с обеспечением излучения третьего
гражданского сигнала на частоте 1176,5 МГц для применений, критических с
точки зрения обеспечения безопасности (например, в авиации).
Схожесть алгоритмов работы систем ГЛОНАСС и GPS позволяет приме-
нять совместно системы двух группировок для навигационных измерений. В на-
стоящее время существуют навигационные приемники, способные обрабатывать
одновременно сигналы этих систем.
3.4.10.2 Аппаратура потребителей СРНС
АП СРНС предназначена для определения параметров движения КА на ор-
битальном участке полета посредством приема и обработки радиосигналов с
НКА СРНС ГЛОНАСС и (или) GPS.
АП СРНС включает в себя бортовой приемовычислитель (ПВ) и антенно-
фидерную систему, состоящую из антенных устройств, размещаемых на внешней
поверхности КА. АП СРНС является многоканальной аппаратурой и в зависимо-
сти от предъявляемых к ней требований может выпускаться различных типов,
обеспечивающих прием и обработку сигналов только от одной из СРНС
(ГЛОНАСС или GPS) либо от двух СРНС одновременно.
АП СРНС формируег и выдает в систему автономной навигации (САН) КА
следующую навигационную информацию:
- три координаты КА;
- три составляющие скорости КА;
- текущее системное время ГЛОНАСС и (или) GPS, к которому относятся
параметры движения КА;
- временную метку для привязки бортовой шкалы времени СУ к систем-
ному времени ГЛОНАСС и (или) GPS;
- признак достоверности информации.
Параметры движения определяются АП СРНС в Гринвичской вращающей-
ся системе координат (ГСК). Системное время ГЛОНАСС соответствует шкале
Государственной Системы Единого Времени (СЕВ). Системное время GPS соот-
ветствует Международной шкале атомного времени TAI.
210
Для штатной работы АП СРНС КА может использоваться следующая апри-
орная информация:
- дата и текущий момент времени на начало навигационного сеанса;
- параметры движения КА (ГСК) и момент времени, к которому они относятся;
- альманахи параметров орбит НК А ГЛОНАСС и (или) GPS.
Текущий момент времени и параметры движения КА поступают в АП СРНС
из САН КА. Альманах системы содержит: время, к которому относится альманах;
параметры орбиты; номер пары несущих частот и поправку к бортовой шкале вре-
мени для каждого НКА в ОГ (24 НКА), а также поправку к шкале времени системы
относительно шкалы времени страны (погрешность поправки не более 1нс).
Альманах системы необходим в АП СРНС для планирования сеанса нави-
гационных измерений (выбор оптимального созвездия НКА) и для приема нави-
гационных радиосигналов в системе (прогноз сдвига доплеровской частоты).
Обновление альманаха осуществляется аппаратными средствами АП
СРНС путем их сбора от видимых НКА. Время, необходимое для полного обнов-
ления альманаха для ГЛОНАСС, составляет 3-4 мин, а для СРНС GPS - до 14
мин. Период обновления альманахов < 30 дней. Альманахи загружаются в энер-
гонезависимую память АП СРНС.
3.4.10.3 Определение параметров движения КА системой автономной
навигации, оснащенной АП СРНС
В рассматриваемом варианте комплектации бортовой навигационной изме-
рительной аппаратурой САН является АП СРНС.
Для обеспечения штатного функционирования САН необходима следую-
щая априорная информация:
- начальные значения радиуса-вектора и вектора скорости КА;
- момент времени, к которому относятся эти векторы;
- баллистический коэффициент КА;
- база отсчета бортового времени, позволяющая в любой момент опреде-
лять дату (число, месяц, год) и текущий момент времени на борту КА;
- параметры движения кооперируемого КА (в случае выполнения опера-
ций сближения, причаливания и стыковки).
При необходимости для обеспечения штатной работы АП СРНС в САН
может формироваться следующая априорная навигационная информация:
- дата и текущий момент времени на начало навигационного сеанса АП СРНС;
- параметры движения КА (в ГСК) и момент времени, к которому они от-
носятся (начало навигационного сеанса АП СРНС).
Обработка информации, поступающей от АП СРНС, проводится непрерыв-
но по следующей схеме:
- на интервалах времени, соответствующих интервалу обновления нави-
гационной информации САН, осуществляется фильтрация и предвари-
тельная отбраковка измерений;
- в моменты времени обновления навигационной информации САН кон-
тролируется достоверность информации, формируемой АП СРНС, путем
211
сравнения текущих отфильтрованных параметров движения КА с про-
гнозируемыми параметрами движения КА.
3.4.10.4 Дифференциальный режим функционирования АП СРНС
В основе метода дифференциальной навигации лежит относительное по-
стоянство значительной части погрешностей СРНС во времени и в пространстве.
Необходимость использования дифференциального режима СРНС определяется
стремлением удовлетворить наиболее жестким требованиям, предъявляемым к
навигационному обеспечению различного класса объектов.
Уже первые эксперименты показали возможность снижения ошибок (СКО)
определения координат по системе GPS с 20 до 5 м и высоты - с 40 м также до
уровня 5 м [34].
Дифференциальный режим СРНС предполагает наличие как минимум двух
спутниковых приемников (СП): СП1 - спутникового приемника контрольно-
корректирующей станции и СП2 - спутникового приемника АП СНС, которые
расположены в различных точках пространства, причем СП1 геодезически точно
привязан к принятой системе координат (ПЗ-90 или WGS-84). Разности между
измеренными СП1 и рассчитанными в нем значениями псевдодальностей ’’види-
мых" КА, а также разности соответствующих псевдоскоростей по линии переда-
чи данных (ЛПД) передаются в виде дифференциальных поправок СП2, в кото-
ром они вычитаются из измеренных СП2 псевдодальностей и псевдоскоростей. В
случае, если погрешности определения псевдодальностей слабо изменяются во
времени и пространстве, они существенно компенсируются переданными по
ЛПД поправками [3]. В нашем случае ошибки псевдодальностей вследствие син-
хронизации НКА практически постоянны в пространстве. Например, для по-
грешности определения координат НКА 20 м изменение ошибок псевдодально-
стей составляет сантиметры при разности расстояний порядка 100 км и децимет-
ры при взаимных удалениях СП1 и СП2 порядка 1000 км [3].
Изменение во времени и пространстве стабильных составляющих ионо-
сферных погрешностей, обусловленных запаздыванием сигнала при прохожде-
нии в ионосфере, характеризуется корреляционной функцией, которая имеет
времена и пространственные радиусы корреляции на уровне соответственно не-
скольких часов и тысяч километров. Поэтому на интервалах в несколько единиц
минут и сотен километров ионосферные погрешности в условиях спокойной ио-
носферы можно полагать достаточно стабильными. Их уровень составляет от 10
до 40 м и достигает минимума при максимальном угле места визируемого КА.
Обычно их изменение через 1 минуту составляет от 0,1 до 0,2 м (СКО), а через
6 мин - от 0,3 до 1,4 м (СКО) [34].
Точность определения псевдодальностей СП2 после ввода поправок опре-
деляется остаточными погрешностями, обусловленными изменчивостью квазиси-
стематических ошибок синхронизации и эфемеридного обеспечения НКА, оши-
бок за счет ионосферы, погрешностей селективного доступа GPS, а также ошиб-
ками, обусловленными шумами и помехами, многолучевостью и воздействием
тропосферы.
212
Библиографический список к разделу 3
1 . Астроизмерительная система (АИС-М). Техническое описание.
КБДУ.201231.001 ТО. -М.: ИКИ РАН, 2004.-44 с.
2 . Алексеев, К.Б. Управление космическими летательными аппаратами
[Текст] / К.Б. Алексеев, Г.Г. Бебенин. - М.: Машиностроение, 1974. - 340 с.
3 . Анучин, О.Н. Бортовые системы навигации и ориентации искусственных
спутников Земли [Текст] / О.Н. Анучин, И.Э. Комарова, Л.Ф. Порфирьев. -
СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2004. - 326 с.
4 . Астрономический ежегодник на 2000 г. -М.: Изд-во Института прикладной
астрономии РАН, 1999. - 714 с.
5 . Бабаков, И.М. Теория колебаний [Текст] / И.М. Бабаков. - М.: Наука,
1968.-260 с.
6 . Белоцерковец, Ю.В. Исследование работы малогабаритного солнечного
датчика на стенде физического моделирования [Текст] /
Ю.В. Белоцерковец. Ю.А. Кузнецов, С.А. Ковалев и др. И Сб. тезисов X
междунар. молодежной научно-практ. конф. “Людина i Космос”. -
Дншропетровськ, 2008. - С. 210.
7 . Бранец, В.Н. Применение кватернионов в задачах ориентации твердого те-
ла [Текст] / В.Н. Бранец, И.П. Шмыглевский. - М.: Наука, 1973. - 320 с.
8 . Бэттин, Р. Наведение в космосе [Текст] / Р. Бэттин. - М.: Машиностроение,
1966.-448 с.
9 . Волоконно-оптические гироскопы. Рекламный проспект. - Зеленоград:
ООО НПК «Оптолинк», 2009.
10 .Повышение точности и диапазона измерения прецизионных гироскопиче-
ских измерителей вектора угловой скорости на базе поплавковых чувстви-
тельных элементов [Текст] / А.А. Волынцев, В.В. Воробушкин,
Б.А. Казаков и др. // XVI Санкт-Петербургская междунар. конф, по интег-
рированным навигационным системам: сб. материалов. - СПб.: ОАО «Кон-
церн «ЦНИИ «Электроприбор», 2009. - С. 114-123.
11 .Гончаров, А.В. Алгоритм идентификации звезд в астроизмерительном
приборе [Текст] / А.В. Гончаров, Ю.А. Кузнецов. // Сб. докладов и тезисов
междунар. научно-практ. конф. «Информационные технологии в
управлении сложными системами». - Днепропетровск: ИТМ НАНУ и
НКАУ, 2008. - С. 90.
12 .Дубошин, Г.Н. Небесная механика: Методы теории движения искусствен-
ных небесных тел [Текст] / Г.Н. Дубошин. - М.: Наука. Гл. ред. физ.-мат.
лит-ры, 1983. - 352 с.
13 .Единая система конструкторской документации. Правила выполнения
схем. Изд. официальное. - М.: Государственный комитет СССР по стандар-
там, 1987.- 136 с.
14. Результаты исследования, влияния магнитного поля Земли на погрешность
измерений волоконно-оптического гироскопа [Текст] / Ю.М. Златкин,
С.В. Олейник, Ю.А. Кузнецов и др. // Научно-техн. сб. «Космическая
техника. Ракетное вооружение», посвященный 100-летию со дня рождения
213
академика М.К. Янгеля,- Днепропетровск: ГП «КБ «Южное», 2011.-
С. 6-11.
15 .Ивандиков, А.В. Оптико-электронные приборы систем управления косми-
ческих аппаратов [Текст] / А.В. Ивандиков. - М.: Наука, 1971. - 325 с.
16 .ИКИРАН, Электронный ресурс, www.iki.rssi.ru/ofo.
17 .Инженерный справочник по космической технике [Текст] / под ред.
А.В, Солодова. - 2-е изд., перераб. и доп. - М.: Воениздат, 1977. - 430 с.
18 .Кузнецов, Ю.А. Применение нейронных сетей для идентификации звезд
при астроизмерениях [Текст] / Ю.А. Кузнецов, А.Е. Истомин // Вестник
НТУ "ХПИ": сб. науч. тр. Темат. вып. "Системный анализ, управление и
информационные технологии". - X.: НТУ "ХПИ". - 2005. - № 54. - С. 3-6.
19 .Кузнецов, Ю.А. Математическое обеспечение системы астроизмерений
микроспутника [Текст] / Ю.А. Кузнецов, О.А. Лабазов // Мехашка та
машинобудування. - X.: НТУ «ХП1», 2007. - № 2. - С. 52-65.
20 . Исследование характеристик бесплатформенного инерциального блока на
базе волоконно-оптических гироскопов в процессе наземной отработки
[Текст] / В.М. Кутовой, О.И. Маслова, С.Ю. Перепелкина и др. // XVIII
Санкт-Петербургск. междунар. конф, по интегрированным навигационным
системам: сб. материалов. - СПб.: ОАО «Концерн «ЦНИИ «Электропри-
бор», 2011.-С. 142-151.
21 .Трехосный волоконно-оптический гироскоп. Результаты разработки
[Текст] / И.К. Мешковский, В.Е. Стригалев, Г.Б. Дейнека и др. И XVHI
Санкт-Петербургск. междунар. конф, по интегрированным навигационным
системам: сб. материалов. - СПб.: ОАО «Концерн «ЦНИИ «Электропри-
бор», 2011.-С. 8-14.
22 .Командно-измерительные приборы [Текст] / Б.И. Назаров и др. - М.: Изд-
во МО СССР, 1975. - 640 с.
23 .Звездное обеспечение. Оценка точности бортового каталога: научно-
технический отчет. Per. № ТО-11041-534-11/99. - X.: НПО «Хартрон»,
1992.-9 с.
24 .Разработка специализированного каталога для моделирования звездной об-
становки: научно-технический отчет. - X.: ХНУ им. В.Н Каразина, 1991. -
15 с.
25 .Обзор астроизмерительных систем. Электронный ресурс, www.ras.ru.
26 .Одноосный измеритель угловой скорости. Прибор ОИУС 501 ПНСК40-014.
Технические условия. ПНСК.402137.014ТУ. - Зеленоград: ООО ПНК
"Оптолинк", 2009.
27 . Основы теории полета космических аппаратов [Текст] / под ред.
Г.С. Нариманова, М.К. Тихонравова. -М.: Машиностроение 1972. - 607 с.
28 .Гироскопические системы [Текст]: учеб, пособие для вузов / Д.С. Пельпор
и др. - М.: Высш, шк., 1971. - Ч. 2. Гироскопические приборы и системы. -
488 с.
29 .Подобед, В.В. Общая астрономия [Текст] / В.В. Подобед, В.В. Нестеров. -
М.: Наука, 1982.-576 с.
214
30 .Проектирование датчиков дня измерения механических величин [Текст] /
под общ. ред. Е.П. Осадчего. - М.: Машиностроение, 1979. - 480 с.
31 . Проектирование и экспериментальная отработка систем управления объек-
тов ракетно-космической техники. Проектирование систем управления ра-
кет-носителей. Т. 1 [Текст] / под общ. ред. Ю.С. Алексеева, Ю.М. Златкина,
В.И. Чумаченко и др. - X.: НПП Хартрон-Аркос, НАУ им. Н.Е. Жуковского
«ХАИ», 2012. - 578 с.
32 .Разыграев, А. П. Основы управления полетом космических аппаратов и ко-
раблей [Текст] / А. П. Разыграев. - М.: Машиностроение, 1977. - 472 с.
ЗЗ .Раушенбах, Б.В. Управление ориентацией космических аппаратов [Текст] /
Б.В. Раушенбах, Е.Н. Токарь. - М.: Наука, 1974. - 600 с.
34 .Соловьев, Ю.А. Системы спутниковой навигации [Текст] /
Ю.А. Соловьев. - М.: Эко-трендз, 2000. - 267 с.
35 .Спенсер, Г. Простой последовательный протокол (SSP) [Текст] /
Г. Спенсер. - США: Университет Торонто, 2003.
36 .Справочное руководство по небесной механике и астродинамике [Текст] /
под ред. Т.Н. Дубошина. - М«: Наука, 1971. - 584 с.
37 .Тенденции развития космических аппаратов дистанционного зондирования
Земли. Обзор по материалам открытой отечественной и зарубежной печати
и Интернета за 2009-2011 гг. - № 331 / под ред. В.П, Савченко. - Днепро-
петровск: ГП «КБ «Южное» им. М.К. Янгеля, 2011. -49 с.
38 .Техническое задание на разработку бесплатформеннного астроинерциаль-
ного блока на основе волоконно-оптических гироскопов для систем управ-
ления космических аппаратов. Per. № 13070.21 - 55/10 ТЗ. - X.: Н1Ш Хар-
трон-Аркос, 2010. - 34 с.
39 .Топчеев, Ю.И. Атлас для проектирования систем автоматического регули-
рования [Текст]: учеб, пособие для втузов / Ю.И. Топчеев. - М.: Машино-
строение, 1989. - 752 с.
40 .Ту, Дж. Принципы распознавания образов [Текст] / пер. с англ. / Дж. Ту,
Р. Гонсалес.-М.: Мир, 1978.-412 с.
41 .Федосеев, В.И. Оптико-электронные приборы ориентации и навигации
космических аппаратов [Текст]: учеб. пособие/ В.И. Федосеев,
М.П. Колосов. - М.: Логос, 2007. - 248 с.
42 .Черемухин, Г.С. Приборы ориентации на Солнце для космических аппара-
тов [Текст] / Г.С. Черемухин. - М.: Воентехиниздат, 2004. - 384 с.
43 .Шереметьев, А.Г. Волоконный оптический гироскоп [Текст] /
А.Г. Шереметьев. -М.: Радио и связь, 1987. - 152 с.
44 .Эльясберг, П.Е. Введение в теорию полёта искусственных спутников Земли
[Текст] / П.Е. Эльясберг. - М.: Наука, 1965. - 540 с.
215
4 ПРОЕКТИРОВАНИЕ ПОДСИСТЕМ СУ КОСМИЧЕСКИХ
АППАРАТОВ
4Л Баллистико-навигационное обеспечение КА
Баллистико-навигационное обеспечение (БНО)-это совокупность алго-
ритмов, которые формируют широкий спектр параметров, необходимых для вы-
полнения поставленных перед КА задач управления полетом, обеспечения рабо-
ты аппаратуры, оборудования и его исполнительных органов.
4ЛЛ Структура и состав баллистико-навигационного обеспечения
Основной задачей БНО КА является формирование баллистико-
навигационной информации, которая используется:
- в задачах управления движением;
- в научной (специальной) аппаратуре;
- в астроизмерительных и других измерительных системах КА;
- при наведении направленных антенн КА на наземные пункты приема
информации (НППИ).
Структурно БНО представляет собой комплекс программных модулей,
формирующих баллистико-навигационную информацию, включающую в себя:
- программную информацию для реализации на борту КА динамических
операций;
- программную информацию для наведения научной (специальной) аппа-
ратуры КА на объекты наблюдений;
- программную информацию для наведения направленных антенн на на-
земные пункты приема информации (НППИ) - направляющие косинусы
положения КА относительно НППИ и вектор угловой скорости линии
визирования «КА - НППИ»;
- параметры орбитального движения КА (радиус-вектор, вектор скорости,
вектор ускорения центра масс КА в требуемой системе координат);
- признаки нахождения КА в тени Земли или Луны;
- параметры астрообстановки (направляющие косинусы Солнца, Луны и
планет в требуемой системе координат);
- навигационную информацию, необходимую для работы астроизмери-
тельных систем (ПАИС) и других бортовых измерительных средств (на-
правляющие косинусы рабочих звезд, нормированную гелиоцентриче-
скую скорость Земли);
- дополнительные специфические параметры, являющиеся функциями па-
раметров движения КА и текущей астрообстановки.
Состав БНО определяется степенью автономности управления КА. В об-
щем случае баллистике-навигационное обеспечение содержит:
- БНО, реализованное на борту КА;
- БНО центра управления полетами (ЦУП).
Распределение функций между ЦУП и КА в части формирования баллисти-
ко-навигационной информации определяется составом целевых задач, постав-
216
ленных перед КА, требованиями к точности, оперативности и надежности их
реализации.
4.1.2 Наземное баллистико-навигационное обеспечение
Баллистико-навигационная информация, формируемая наземными средст-
вами ЦУП, используется:
- при планировании управления полетом КА;
- на борту КА в процессе выполнения различных динамических операций;
- для контроля выполнения задач, возложенных на КА.
На этапе планирования управления полетом рассчитывают следующую
баллистико-навигационную информацию:
- априорная информация для системы навигации КА (радиус-вектор и
вектор скорости центра масс КА в требуемой системе координат);
- программная информация для проведения на борту КА различных дина-
мических операций;
- зоны радиовидимости измерительных средств наземного комплекса
управления;
- участки полёта КА в тени Земли и Луны;
- участки сеансов связи с КА;
- угол «Солнце - КА - Земля»;
- трасса полёта;
- время существования КА.
Программную информацию, формируемую в ЦУП, используют на борту
КА для реализации следующих динамических операций:
- построения программной ориентации;
- проведения коррекции орбиты;
- осуществления автономного сближения и стыковки КА с кооперируе-
мым объектом (КО);
- проведения тестовых включений двигательной установки;
- спуска с орбиты.
Априорную информацию для системы навигации КА определяют по ре-
зультатам проведения внешнетраекторных измерений параметров орбиты КА.
Программная и априорная информации передаются на борт КА в составе полет-
ного задания (ПЗ), которое рассчитывают в ЦУП.
Для контроля качества выполненных КА функций и задач наземными сред-
ствами проводится оценка:
- качества навигационных измерений;
- отклонения величины и направления корректирующего импульса от
расчётных значений, определяемых по измерениям до и после коррек-
ции;
- промаха при дальнем сближении;
- взаимного положения КА и КО на участке автономного сближения.
217
4.1.3 Бортовое навигационное обеспечение КА
Бортовое навигационное обеспечение является составной частью про-
граммного обеспечения БЦВМ СУ. Реализация развитой многофункциональной
структуры БНО непосредственно на борту КА позволяет:
- повысить автономность функционирования, а также оперативность и
точность решения задач СУ и смежных систем КА;
- сократить объем служебной информации, передаваемой с Земли на борт
КА;
- уменьшить нагрузку на ЦУП, как следствие, увеличить его пропускную
способность.
Навигационная информация на борту КА формируется двумя системами
БНО:
- системой автономной навигации (САН);
- системой обеспечения навигационной информации (СОНИ).
Системой автономной навигации определяются кинематические параметры
движения центра масс КА, включая вектор ускорения КА.
В зависимости от состава целевых задач, поставленных перед КА, и точно-
стных требований к ним на борту КА может быть реализована САН как без ис-
пользования измерительных средств, так и с их использованием.
В первом случае задачей навигации осуществляется прогноз параметров
движения центра масс КА по начальным условиям, переданным с Земли.
Наличие измерительных средств на борту КА позволяет увеличить точ-
ность навигационных определений путём коррекции ПДЦМ КА по результатам
измерений. В качестве таковых могут использоваться астроизмерительные сис-
темы, приборы ориентации на Солнце и планеты, спутниковые навигационные
системы и др.
В этом случае САН реализуются следующие задачи:
- прогноза параметров движения КА;
- планирования измерений;
- уточнения параметров движения КА по результатам измерений.
В настоящее время для КА на околоземных орбитах наиболее рациональ-
ными являются системы навигации, основанные на использовании спутниковых
навигационных систем (GPS, ГЛОНАСС), которые обеспечивают точность опре-
деления координат не хуже 45 м, а в перспективе (после модернизации систем
GPS, ГЛОНАСС) - не хуже 5 м. При необходимости для повышения автономно-
сти и живучести такие КА могут дополнительно комплектоваться резервными
навигационными системами, использующими измерительные приборы, непо-
средственно установленные на борту КА.
В состав навигационной информации, формируемой СОНИ на требуемые
моменты времени, могут входить:
- параметры движения КА;
- гелиоцентрические координаты и скорость Земли;
- геоцентрические координаты Солнца, планет и Луны;
- направляющие косинусы Солнца, Луны, Земли и других планет;
218
- участки (признаки) нахождения КА в тени Луны, Земли и других планет;
- нормированная гелиоцентрическая скорость КА;
- направляющие косинусы положения КА относительно НППИ;
- вектор угловой скорости линии визирования «КА - НППИ».
Необходимые СОНИ данные о состоянии ПДЦМ КА поступают от САН.
В интервалах времени между поступлением обновленной информации из
САН формирование ПДЦМ КА на требуемый момент времени проводится СОНИ
путем экстраполяции параметров движения, формируемых САН.
СОНИ позволяет определять расчётные направления на Солнце с точно-
стью не хуже I угл. мин, на Луну-не хуже 10 угл. мин, на звезды-не хуже
1 ...2 угл. с, на наземные пункты приёма информации - не хуже 3 угл. мин.
4.1.4 Алгоритмы системы определения навигационной информации
Вычислительные возможности современных бортовых цифровых вычисли-
тельных машин (БЦВМ) позволяют формировать непосредственно на борту КА
широкий спектр баллистико-навигационной информации. Представленные ниже
алгоритмы СОНИ могут быть реализованы как на БЦВМ, так и на вычислитель-
ных средствах ЦУП.
4.1.4.1 Алгоритм экстраполяции параметров движения центра масс КА
В целях существенного уменьшения времени, затрачиваемого БЦВМ на
вычисление вектора состояния КА с требуемым шагом, в алгоритмах САН реко-
мендуется использовать комбинированный способ формирования ПДЦМ КА (см.
подразд. 4.2.2). Суть данного метода заключается в том, что вектор состояния
центра масс КА прогнозируется численным интегрированием системы диффе-
ренциальных уравнений движения КА в прямоугольных координатах с шагом,
большим требуемого шага формирования ПДЦМ КА, а для его определения с
требуемым шагом применяется алгоритм экстраполяции. Основной проблемой
при разработке алгоритма экстраполяции является обеспечение требуемой точно-
сти определения ПДЦМ КА при минимальных затратах ресурсов БЦВМ.
Таким образом, алгоритм экстраполяции должен формировать ПДЦМ КА
на интервале времени, соответствующем шагу интегрирования. Параметры дви-
жения КА на интервале экстраполяции должны рассчитываться с требуемой пе-
риодичностью (обычно ежесекундно), при этом погрешность определения ПДЦМ
КА в конце интервала экстраполяции не должна превышать предельно допусти-
мых значений.
Исходной информацией для алгоритма экстраполяции являются:
- момент времени начала n-го шага интегрирования tn;
- шаг экстраполяции At;
- проекции радиуса-вектора (Xn, yn, zn) и вектора скорости (vxn, Vyn, v^) КА
в ГСК в момент времени tn.
Наиболее простой формой экстраполяции является полиномиальная экст-
раполяция, основанная на разложении в степенной ряд Тейлора - Маклорена. В
этом случае радиус-вектор и вектор скорости центра масс КА можно представить
в следующем виде:
219
, А \ , X Л (d1^ Atk
п £<dt /п (к-1)!
где N - порядок полинома экстраполяции положения центра масс КА.
Характерной особенностью полиномиальной экстраполяции является от-
сутствие многократно повторяющихся итерационных операций. Это позволяет, с
одной стороны, минимизировать объём требуемых вычислений, а с другой, на
определённых интервалах времени обеспечить достаточно высокую точность вы-
числения ПДЦМ КА.
Необходимо отметить, что объём вычислений в этом случае зависит не
только от степени полинома, но и от формы представления производных от ра-
диуса-вектора и вектора скорости КА, в частности, от степени сложности пред-
ставления модели ускорения КА.
На коротких интервалах экстраполяции (до 30 с) в модели ускорения КА,
обусловленного гравитационным полем Земли, достаточно учитывать две состав-
ляющие ускорения:
- ускорение центрального поля;
- возмущающее ускорение, создаваемое второй зональной гармоникой
Сго-
При этом вектор проекции гравитационного ускорения КА в ГСК можно
представить в следующем виде:
В ряде случаев достаточную точность определения ПДЦМ обеспечивает
алгоритм экстраполяции положения КА полиномом второго порядка:
г (tT) = г (tn) + [ v (tn) + — - g(tn)] At,
< v(tT) = v(tn) + g(t„)-At,
At = tT-tn,
220
где At - интервал экстраполяции параметров движения КА; tT - текущий мо-
мент времени; tn - момент времени, в который системой навигации определены
параметры движения центра масс КА; г (tT) - радиус-вектор КА на момент вре-
мени tT; v(tT)-вектор скорости КА на момент времени tT; r(tn) - радиус-
вектор КА на момент времени tn; v (tn) - вектор скорости КА на момент време-
ни tn; g(tn ) - вектор ускорения КА на момент времени tn.
Повысить точность экстраполяции ПДЦМ можно, применяя алгоритмы
экстраполяции положения КА полиномами более высокого порядка. Однако для
их использования необходимо рассчитывать производные ускорения КА, что
значительно увеличивает объём вычислений.
4.L4.2 Алгоритм определения гелиоцентрических координат Земли
Гелиоцентрические координаты Земли используют при расчёте орта на-
правления «КА - Земля», а также для определения признаков нахождения КА в
тени Земли.
Гелиоцентрические координаты Земли определяют по средним элементам
орбиты. Для определения средних элементов орбиты Земли воспользуемся теори-
ей Ньюкома [58].
Выражения для средних элементов орбит получаются, если во внимание
принимать только вековые возмущения. В теории движения внутренних планет
Ньюкома для средних элементов орбиты Земли ХЕ (средняя долгота орбиты),
(0Е (аргумент перигея), еЕ (эксцентриситет), QE (долгота восходящего узла),
iE(наклонение орбиты) приняты следующие выражения [9]:
^E=k«l+klE2-T + kXE3-T:>
me ~ knEl + k«E2 ’^ + k«EJ ‘T >
eE ~ kcEI + k«F.J ‘ T + eeE3 ’ T >
QE=0,
iE=0.
Значения коэффициентов берут из астрономического ежегодника [9].
Здесь Т - время, отсчитываемое в юлианских столетиях от эпохи J2000 г.
январь 1.5,12hUTl.
Долготы ХЕ и соЕ отнесены к мгновенной эклиптике и средней точке рав-
ноденствия текущего момента.
Средняя аномалия определяется формулой
МЕ - ХЕ -шЕ.
Эксцентрическую аномалию Ее находят из уравнения Кеплера
МЕ = Ее -еЕ sinEE.
221
После нахождения эксцентрической аномалии определяют орбитальные
координаты Земли:
=аЕ -(cos(EE)-eE);
nE=aE-(^-eE2-sir-(EE))-
Переход от орбитальных координат к прямоугольным эклиптическим коор-
динатам осуществляют следующим образом:
^Е- cos(coE)-T]E- sm(<oE)
’.« = sin(mE)+nE- cos(coE)
О
Гелиоцентрические координаты Земли во второй экваториальной системе
координат среднего геоэкватора и среднего равноденствия на текущий момент
времени определяются выражением
Г8Е “ ^Eekl * ГекР
где
"1 0 0
^Eekl - 0 COS(£0) -sin(£0)
0 sin(£0) COS(£0)_
(4.1.1)
Eq - средний угол наклона эклиптики к экватору в текущий момент времени, оп-
ределяется в подразд. 2.1.1 соотношением (2.1.13).
Для перевода вектора rSE в ГСК (г) или инерциальную 3CKJ2000 (г0)
нужно выполнить следующие действия:
r = R N rSE,
(4.1.2)
где R и N - матрицы учёта вращения Земли и нутации соответственно, опреде-
ляются в подразд. 2.1.1.2 соотношениями (2.1.18) и (2.1.7).
r0=PT-rSE, (4.1.3)
где Р-матрица прецессии, определяется в подразд. 2.1.1.2 соотношени-
ем (2.1.3).
4.L4.3 Алгоритм определения геоцентрических координат Луны
Геоцентрические координаты Луны используют при расчёте орта направ-
ления «КА - Луна» и для формирования признаков нахождения КА в тени Луны.
Для определения параметров движения Луны достаточно воспользоваться
ограниченной теорией Брауна, в которой учитывается лишь влияние солнечных
возмущений. Окончательные выражения для долготы Хм, широты Рм и синуса
параллакса Pm(shipm) Луны представляются в следующем виде [58]:
Ч=1м +ZkxMk-sinvk;
к
Рм=Ек₽мк smyk;
к
222
sinPM=SkpMk-cos\|/k,
•sin(2-DM)+kXM7 -sin(2-BM - 2-AMS) +
где Tk - различные комбинации четырёх основных аргументов AMS, Вм, , Cs.
С достаточной степенью точности положение Луны в сферической эклип-
тической системе координат может быть рассчитано по формулам [17]:
^м = 1м + Iехм 1 • 8И1(Вм) + ^хм2 ’ 8т(Вм “ 2 • AMS )+
+ кшз *sin(2• AMS) + kXM4-sm(2-BM)4-kxM5-sin(Cs) +
+ кШб
+ кШ8 ’SH^Bm +Cs — 2AMS)+kXM9 -sin(AMS)+
+ кШ10 *sin(BM + 2 • AMS)+ k^Mii -sm(Cs - 2* AMS) +
+ kXMi2'Sin(BM -Cs) + kKM13 -sin(BM + CS);
Pm - kpMi sin(DM) + kpM2 - sin(BM + DM) 4- kpM3 sin(DM - BM )4-
4-kpM4 • sin(DM — 2 • AMS)+ kpM5 • sin(DM +2 • AMS) +
+ крмб * sin(DM 4- AMS - BM) +
+ kpM7 ‘ §1п(Вм + - 2 • AMS) + kpM8 • sin(2 • BM + DM);
sin (рм) = kpMi +крш * cos(BM) + kpM3 • cos(BM - 2-AMS) +
+ kpM4 • cos(2 AMS)+kpM5 • cos(2 • BM) +
+ kPM6 ’ c0S(Bm + 2 • AMS)+kpM7 • cos(Cs - 2 • Ams) +
+ kpM8 * C0S(Bm + Cs - 2 • AMS) + kpM9 • cos(BM - Cs);
n = &QE
sin(p„)’
где a0E - большая полуось Земли; RM - расстояние от центра Луны до центра
Земли.
В этом случае погрешность расчёта орта направления «КА - Луна» не бу-
дет превосходить 10 угл. мин.
Основные аргументы этих уравнений являются функциями времени, кото-
рое выражается в юлианских столетиях от эпохи J2000.0.
Геоцентрическая средняя долгота Луны имеет вид [9]
1м = kIMkl ”* k-iMk2 * Т ^1МкЗ * Т ’
где Т - время, отсчитываемое в юлианских столетиях, от стандартной эпохи
J2000.0 до текущего момента времени.
Разность средних долгот Луны и Солнца определяют по формуле [9]
AMS — kAkl + k^ • Т 4- kAk3 • Т .
Средняя аномалия Луны представляют в виде [1]
Вм — kBkl 4" kBk2 • Г 4- kBk3 • Т .
223
Среднюю аномалию Солнца и аргумента широты Луны определяют как [9]
Cs = kcki + kCk2 • Т + кСк3 • Т2;
DM ~ kDkl + kDk2 • Т + kDk3 • Т2.
Исходя из требуемой точности расчёта орбиты Луны обычно используют
не более двух-трех членов разложения. Значения коэффициентов берут из астро-
номического ежегодника [9].
Имея сферические координаты XM,pM,RM, можно перейти к прямоуголь-
ной эклиптической системе координат
где iME - орт геоцентрического радиуса-вектора Луны в эклиптической системе
координат, определяемый как
~cos(pM)-cos(XM)
•ме= cos(PM)-sin(XM)
sin(PM)
Затем осуществляется переход от геоцентрической эклиптической системы
координат ко второй экваториальной системе координат среднего геоэкватора и
среднего равноденствия текущей эпохи:
rMt ={*Еек1 ' ГМЕ,
где G Еек| - определяется соотношением (4.1.1).
Для определения его в ГСК (гм) или инерциальной 3CKJ2000 (гмо) нужно
выполнить следующие действия:
rM =R-N-rMt; (4.1.4)
rMo=PTrM.- (4-1.5)
Матрицы Р, N и R определяются в подразд. 2.1.1.2 выражениями (2.1.3),
(2.1.7) и (2.1.18) соответственно.
4.1.4.4 Алгоритм формирования признака нахождения КА в тени Земли
или Луны
Признаки нахождения КА в тени Земли или Луны могут использоваться на-
земными средствами для формирования участков прохождения орбиты КА в тени
Земли, а также на борту КА при реализации построения и поддержания солнеч-
ной ориентации.
Признаки нахождения КА в тени Земли или Луны формируются путем оп-
ределения моментов вхождения КА в полутень и выхода КА из полутени Земли
или Луны. При расчётах используют сферические модели Земли и Луны. При
этом принимают:
- радиус земной сферы reqE = 6378,136 км;
- радиус лунной сферы reqm = 1738,57 км;
224
- экваториальный радиус Солнца = 696000 км.
Как показано на рис. 4.1.1, область полутени, создаваемая Землей, образуется
двумя касательными линиями (AsBe и AeBs), соединяющими соответствующие
точки поверхностей сфер Земли и Солнца (As> ВЕ и АЕ, Bs).
Рисунок 4.1.1 - К формированию признака
нахождения КА в тени Земли
Введем обозначения:
Фзка -угол, образуемый лучами OkaOs^-s) и O^Bg;
Фека -угол, образуемый лучами О^Вд и О^Ое (itra);
Фекаб - угол, образуемый лучами OKAOS и Ока^е;
OeCka “ перпендикуляр, проведенный из центра Земли ОЕ на отрезок
Ora^s •
ГПЕ - длина перпендикуляра ОеСка ;
225
reqs - длина отрезков OSBS и OSAS;
reqE - длина отрезков ОЕВЕ, ОеАеи ОеСе.
Из рис. 4.1.1 видно, что
Гпе = Гка -sin((pEKA),
где гКА - модуль радиуса-вектора КА, определяемый по формуле
1’КА = л/хка + ук + 2ка ; (4.1.6)
sin(<PEKA) = sin(<PEKAS - <Pska ) • (4.1.7)
Преобразуем соотношение (4.1.7) следующим образом:
Sill(<PEKA ) = Sin(<PEKAS ) ’ COS(<PSKA ) - C0S(<PeKAS) ’ ^(«PsKA )•
Здесь cos(<pEKAS) = - r|ovs ---,
rKA-S ' rKA
где Гкд-s - вектор направления «КА - Солнце»; гЕ - гелиоцентрический ради-
ус-вектор Земли; Гкд - геоцентрический радиус-вектор КА; i^as - модуль векто-
ра Гка-s > определяемый как
rKAS “ a/xkas + Указ + zkas > (4.1-8)
sin(4>EKAS) = 71-C0S2(<pEKAs) J (4.1.9)
rKA-S “ ~ГЕ ~ rKA ’
sin(<PsKA) = —; (4.1.10)
rKAS
cos(<PsKA) = 'A-sin2(<PsKA)- (4.1.11)
Как видно из рис. 4.1.1, КА будет находиться в области полутени Земли при
г
^KAS ^Е’
(4.1.12)
ГПЕ < feqE >
где гЕ - модуль геоцентрического радиуса-вектора Земли, определяемый как
ГЕ=л/хе + Уе+4-
Таким образом, при одновременном выполнении соотношений (4.1.12) признак на-
хождения КА в тени Земли (Пте) формируется равным единице, иначе - равным нулю.
Аналогичным образом формируется признак нахождения КА в тени Луны.
Как показано на рис. 4.1.2, область полутени, создаваемая Луной, образуется
двумя касательными линиями ASBM и BsAM, соединяющими соответствующие
точки поверхностей сфер Луны и Солнца (As, Вм и Bs, Ам).
Введем обозначения:
226
Фмка - угол, образуемый лучами OkaBs и ОкаОм («ом);
4>mkas _ угол, образуемый лучами OkaOs и OraOmJ
OmQka “ перпендикуляр, проведенный из центра Луны (Ом) на отрезок OkaBsJ
гпм - длина перпендикуляра ОмСка;
rCqm - длина отрезков ОМАМ, ОМВМ, Омсм.
Рисунок 4.1.2 - К формированию признака нахождения
КА в тени Луны
Из рис. 4.1.2 видно, что
гпм = гм * ^(Фмка),
где Гм - модуль геоцентрического радиуса-вектора Луны гм.
sin(<PMKA )= ^(Фмказ _ Фзка ) • (4.1.13)
227
(4.1.15)
Преобразуем соотношение (4.1.13) следующим образом:
зйХФмка ) = Simkas ) • cos(q>SKA) - cos(<pMKAS) • sin(<pSKA)
Здесь sin(<pMKA) = л/1 - cos2(cpM10J);
rKA-S ' rKA-M
rKA-S * rKA-M
где rKA_M - вектор направления «КА - Луна», вычисляемый как
гка-м = гм “гка- (4.1.14)
Функции sin((pSKA) и cos(cpSKA) определяются соотношениями (4.1.10) и
(4.1.11) соответственно.
Как видно из рис. 4.1.2, КА будет находиться в области полутени Земли при
I rKAS > rs-M,
[ГПМ < reqM>
где rs-м-модуль радиуса-вектора Луны относительно Солнца rs_M, который
определяется выражением
г = г + г
*S-M ЖЕ М'
Таким образом, при одновременном выполнении соотношений (4.1.15) при-
знак нахождения КА в тени (Птм) Луны формируется равным единице, ина-
че - равным нулю. Очевидно, что признак нахождения КА в тени Земли или Луны
(Пт) задаётся равным единице, если значение одного из признаков или обоих
признаков равно единице, в противном случае признак Пт задаётся равным нулю.
Моменты времени вхождения КА в полутень и выхода КА из полутени
Земли или (и) Луны определяются по изменению значений признаков ПТе и Птм с
нуля на единицу и с единицы на нуль соответственно.
4.1.4.5 Алгоритм расчёта направляющих косинусов и угловой скорости
линии визирования «КА - объект наблюдений», направляющих
косинусов Солнца, Земли и Луны
Вектор направления «КА - объект наблюдений» Гка-он определяется как
разность радиуса-вектора объекта наблюдений (гон ) и радиуса-вектора КА (гкд):
ГКА-ОН = ГОН ~ ГКА •
Орт направления «КА - объект наблюдений» определяется формулой
= ^КА-ОН
1КЛ-ОН ’
ГКА-ОН
гДе rKA-OH - J^KA-OH + УКА-OH + ZKA-OH ’
Угловую скорость линии визирования «КА - объект наблюдений» находят
как угловую скорость движения объекта наблюдений относительно КА. В этом
случае угловую скорость линии визирования «КА - объект наблюдений»
(^ка-он) вычисляют следующим образом:
228
гл = L^KA-OH х VKA-OhJ
ШKA-ОН 2 9
лА-ОН
где vka-oh - вектор скорости объекта наблюдений относительно КА.
Как показано на рис. 4.1.3, вектор скорости объекта наблюдений относи-
тельно КА vKA_0H определяется разностью векторов скорости движения объекта
наблюдений v0H и скорости движения КА :
VKA-OH “ VOH “ ^КА*
Рисунок 4.1.3- Вектор скорости объекта наблюдений относительно КА
В свою очередь, вектор скорости объекта наблюдений vOH определяется
векторным произведением вектора угловой скорости движения объекта наблюде-
ния <о3 и радиуса-вектора объекта наблюдения гон:
укл-он=[<»,хгонЬ
где (Оз - вектор угловой скорости Земли в ГСК; со3 = 0,729 • 10-4 рад/с - модуль
угловой скорости вращения Земли.
Направляющие косинусы Солнца и Земли вычисляют как проекции ортов на-
правлений «КА - Солнце» и «КА - Земля» на оси требуемой системы координат:
rKA-S - ~ГЕ ~ ГКА а_________
’ rKA-s ~ VxLk-s *" Ука-s + zLv-s >
„ - ГКА-5
rKA-S ~ у
rKA-S
229
где ГЕ - гелиоцентрический радиус-вектор Земли; Гка-s - радиус-вектор на-
правления «КА - Солнце»; <ка-з - °РТ направления «КА - Солнце».
гкА=-ч/хк+УкА+2^;
' - _ ГКА
ГКА-Е“ >
ГКА
гДе Г1<А - модуль радиуса-вектора КА гюг; г^д.е - орт направления «КА -
Земля».
Направляющие косинусы Луны определяют как проекции ортов направле-
ния «КА-Луна» (i ка-м ) на оси требуемой системы координат:
ГКА-М ~ГМ ~ГКА^__________
ГКА-М “ + У КА-М + ZKA-M ’
; __ ГКА-М
‘КА-М - ,
ГКА-М
Луны; Гка-м - радиус-вектор направления «КА -
радиуса-вектора Гка-м J *ка-м “°Рт направления
вычисления нормированной гелиоцентрической
где гм - радиус-вектор
Луна»; Гкд-и - модуль
«КА - Луна».
4.1.4.6 Алгоритм
скорости КА
Нормированную гелиоцентрическую скорость КА используют для учёта
аберрации света при вычислении видимых координат звезд (см. под-
разд. 3.4.7.7.5). Нормированную гелиоцентрическую скорость КА vG0 определя-
ют как отношение гелиоцентрической скорости КА vrKA к скорости света с:
_ УГКА
VGO ------
с
В свою очередь, вектор гелиоцентрической скорости КА vrKA определяет-
ся суммой векторов гелиоцентрической скорости Земли vE и геоцентрической
скорости КА v :
(4.1.16)
Т ГКА “ ’ Е ' ¥ КА ’
Вектор гелиоцентрической скорости Земли в ЭСК текущей эпохи vET рас-
считывают аналогично гелиоцентрическому радиусу-вектору (см. под-
разд. 4.1.4.2) через средние элементы орбиты Земли [5]:
vrE=J—- еЕ -sin»E;
vnE =
+ еЕ -cos^e);
230
-sinuE
r
ET
uE
COSUE -COS 8
cos uE - sine
где vrE — радиальная составляющая скорости Земли; vnF - трансверсальная со-
ставляющая скорости Земли; рЕ - параметр орбиты Земли; &Е - истинная ано-
малия Земли; еЕ - эксцентриситет орбиты Земли; еЕ - истинный угол наклона
эклиптики к геоэкватору; иЕ = ЭЕ + «Е - аргумент широты Земли.
Тригонометрические функции истинной аномалии Земли &Е определяют
через эксцентрическую аномалию орбиты Земли Ее:
. д/1-еЕ-sinEE
sin SE = -----------;
1-еЕ -cosEe
cos3E =
cosEe -eE
1 -eE - cosE E
где rET - гелиоцентрический радиус-вектор Земли в ЭСК текущей эпохи; vET —
вектор гелиоцентрической скорости Земли в ЭСК текущей эпохи; гЕ -модуль
радиуса-вектора гЕТ.
Для перевода вектора гелиоцентрической скорости Земли в ГСК (vE) или
инерциальную ЭСК12000 vE0 нужно осуществить следующие действия:
vE=R-N-vET;
V = Рт ’ V
V ЕО Г V ЕТ ’
где матрицы Р, N и R определяю! в подразд. 2.1.1.2 соотношениями (2.1.3),
(2.1.7) и (2.1.18) соответственно.
4.2 Системы навигации околоземных КА
4.2.1 Требования к системе навигации околоземных КА
Системы навигации околоземных КА предназначены для определения па-
раметров движения центра масс (ПДЦМ) КА, траектории движения которых рас-
положены на высотах от 250 до 2000 км (околокруговые и эллиптические орби-
ты) и от 500 до 500000 км (высокоэллиптические орбиты) относительно поверх-
ности Земли. Формируемые системой навигации параметры используют на борту
КА для расчёта баллистико-навигационной информации, необходимой для реали-
зации возложенных на КА функций.
Оценка требуемой точности формирования вектора состояния центра масс
КА для наиболее часто используемых баллистико-навигационных параметров
представлена в табл. 4.2.1.
231
Таблица 4.2.1 - Оценка требуемой точности формирования вектора состояния
центра масс КА
№ п/п Наименова- ние пара- метра Обо- значе- ние до- пусти- мой по- греш- ности пара- метра Раз- мер- ность Соотношение, оп- ределяющее экви- валентную сфери- ческую погреш- ность по положе- нию или по скоро- сти Типо- вое пре- дель- ное зна- чение пара- метра Эквива- лентная сфериче- ская по- греш- ность по положе- нию или скорости
1 Орт направ- ления «КА - НППИ» др угл. мин АКнпии“Ар * Rn 3 0,9 км
2 Орт направ- ления «КА - Луна» Арт угл. мин ARm—Apm • Rm 10 1118,2 км
3 Орт направ- ления «КА - Солнце» APs угл. мин ARs=Aps • Rs 1 43516,3 км
4 Радиус- вектор цен- тра масс КА - на участках точной ори- ентации КА Ах, Ау, Az км AR = = ^/Ax2 + Ay2 4- Az2 о,1 0,173 км
-на участках «грубой» ори- ентации КА 100 173,2 км
5 Вектор ско- рости центра масс КА - на участ- ках точной ориентации КА Avx, Avy, Avz м/с Av = = ^AVx + Av2 + Av2 1 1,732 м/с
-на участках «грубой» ори- ентации КА 10 17,321 м/с
232
В табл. 4.2.1 использованы следующие обозначения:
НППИ - наземный пункт приёма информации;
ARn - расстояние от перигея орбиты КА до НППИ;
Rm - среднее расстояние КА от Луны;
Rs - среднее расстояние КА от Солнца;
Д(3- угловое отклонение расчётного орта направления «КА-НППИ» от
истинного;
Дрш - угловое отклонение расчётного орта направления «КА - Луна» от ис-
тинного;
Aps-угловое отклонение расчётного орта направления «КА-Солнце» от
истинного;
Ах, Ay, Az - предельные погрешности определения координат центра масс
КА;
Avx, Avy, Av2 - предельные погрешности определения составляющих векто-
ра скорости центра масс КА.
Для расчёта сферических ошибок формирования параметров движения КА
применяли следующие значения [9]: ARn = 1000 км; Rm = 384440 км;
Rs = 149597870 км.
Данная методика позволяет оценить требуемую точность формирования
вектора состояния центра масс КА по известным предельным значениям погреш-
ностей используемых баллистико-навигационных параметров.
4.2.2 Общие принципы формирования параметров движения центра
масс околоземных КА
Основной проблемой при определении ПДЦМ на борту околоземных КА
является обеспечение требуемой точности вычисления вектора состояния центра
масс КА на различных участках функционирования КА в условиях ограниченной
производительности БЦВМ.
В зависимости от состава целевых задач, поставленных перед КА, и точно-
стных требований к ним на борту КА может быть реализована задача определе-
ния ПДЦМ КА как без использования измерительных средств, так и с их исполь-
зованием.
В первом варианте реализации задачи определения параметров движения
центра масс осуществляется прогноз ПДЦМ КА по начальным условиям, пере-
данным с Земли. В этом случае погрешность формирования ПДЦМ КА определя-
ется:
- длительностью интервалов прогноза (частотой обновления начальных
условий, передаваемых с Земли);
- погрешностью задания начальных условий, переданных с Земли;
- методической погрешностью модели движения КА;
- погрешностью метода решения задачи прогноза ПДЦМ масс КА;
- методической погрешностью учёта управляющих воздействий (коррек-
тирующих импульсов скорости);
- погрешностью знания времени на борту КА;
233
- погрешностью, обусловленной ограниченностью разрядной сетки
БЦВМ.
Во втором варианте в качестве начальных данных для прогнозирования
ПДЦМ может использоваться также информация, формируемая измерительными
средствами, установленными на борту КА.
4.2.2Л Способы прогнозирования параметров движения центра масс
околоземных КА
Способ прогнозирования вектора состояния центра масс является важным
элементом системы навигации КА. От него зависит точность определения радиу-
са-вектора и вектора скорости центра масс КА, а также время, затрачиваемое
БЦВМ на формирование этих навигационных параметров. В свою очередь, от
точности, с которой рассчитывают вектор состояния центра масс КА, зависит
точность построения ориентации и стабилизации при выполнении КА таких
функций, как наблюдение за планетами и звёздами, зондирование земной по-
верхности, коррекция орбиты.
Известен ряд способов прогнозирования вектора состояния центра масс
околоземного КА аналитическими методами [71]. При разработке таких аналити-
ческих методов используют разнообразные методы приближённого интегрирова-
ния уравнений в оскуллирующих кеплеровых элементах или пытаются найти та-
кой вид потенциальной функции, аппроксимирующей гравитационное поле Зем-
ли, который допускает решение дифференциальных уравнений в квадратурах.
Недостатком аналитических методов является то, что в них используются при-
ближённые формулы и не учитывается широкий спектр действующих на КА воз-
мущений.
Существуют также способы прогнозирования вектора состояния центра
масс околоземных КА численным интегрированием системы дифференциальных
уравнений движения центра масс КА в прямоугольных координатах. К общим
недостаткам прогнозирования численным интегрированием относится зависи-
мость точности расчёта и времени, затрачиваемого на вычисления ПДЦМ КА, от
полноты учёта возмущающих факторов в правых частях дифференциальных
уравнений и от величины шага интегрирования. Для обеспечения высокой точно-
сти расчета ПДЦМ КА необходимо использовать относительно небольшие шаги
интегрирования, что ограничивает возможность существенного увеличения бы-
стродействия расчётных методов, а в ряде случаев вообще исключает возмож-
ность их применения.
В целях существенного уменьшения времени, затрачиваемого БЦВМ на
вычисление вектора состояния КА, целесообразно использовать комбинирован-
ные методы формирования вектора состояния КА. В этом случае численное ин-
тегрирование системы дифференциальных уравнений движения центра масс КА
проводят с шагом, значительно большим, чем требуемый шаг формирования век-
тора состояния КА, а для его определения с шагом, равным шагу формирования,
используют полиномиальную функцию, которая основана на разложении в сте-
пенной ряд Тейлора-Маклорена и представляет собой полиномиальную зависи-
234
мость радиуса-вектора в конце шага формирования от радиуса-вектора и его про-
изводных в начале этого шага, а также аналогичную зависимость вектора скоро-
сти. Эти полиномиальные зависимости представлены в подразд. 4.1.4.1.
Очевидно, что шаг интегрирования может быть увеличен только так, чтобы
точность формирования радиуса-вектора и вектора скорости КА на протяжении
необходимого промежутка времени удовлетворяла установленным требованиям.
Шаг прогнозирования и порядок полиномиальной функции также необходимо
выбирать из соображений обеспечения требуемой точности. Важным преимуще-
ством такого подхода является отсутствие на шаге интегрирования многократно
повторяющихся итерационных операций. Объём расчётов радиуса-вектора и век-
тора скорости так же, как и точность их определения при использовании полино-
миальной функции, зависит не только от порядка полинома, но и от степени
сложности представления модели ускорения центра масс КА.
Полная погрешность комбинированного способа в основном зависит от по-
рядка метода численного интегрирования, шага интегрирования и полноты учета
возмущающих факторов в правых частях дифференциальных уравнений движе-
ния центра масс КА, а на промежутках внутри шага интегрирования - от величи-
ны погрешности численного интегрирования, порядка полиномиальной функции,
состава возмущающих ускорений, учтённых в полиномиальной функции, и шага
полиномиальной экстраполяции ПДЦМ КА.
4.2.2.2 Интегрированные системы автономной навигации околоземных КА
На большинстве участков полёта, где не требуется высокая точность опре-
деления параметров движения околоземного КА, задача навигации может ре-
шаться путем прогнозирования ПДЦМ КА по начальным условиям, переданным
с Земли. Для высокоточного определения ПДЦМ околоземных КА необходимо
использовать АП СРНС (GPS, ГЛОНАСС). В настоящее время АП СРНС обеспе-
чивает точность определения координат не хуже 45 м, а в перспективе (после мо-
дернизации систем GPS, ГЛОНАСС) - не хуже 5 м.
Система навигации формирует ПДЦМ КА с использованием навигацион-
ной информации, принимаемой от АП СРНС, при этом на борту КА реализуется:
- контроль достоверности и отбраковка недостоверной навигационной
информации, принимаемой от АП СРНС;
- прогнозирование вектора состояния центра масс КА комбинированным
способом по достоверной навигационной информации АП СРНС.
Погрешность формирования ПДЦМ КА определяется (наряду с перечис-
ленными выше) следующими факторами:
- длительностью интервалов между последовательными достоверными
измерениями АП СРНС;
- погрешностью определения АП СРНС вектора состояния КА;
- погрешностью используемых методов обработки навигационной ин-
формации в АП СРНС.
235
При необходимости для повышения автономности и живучести такие сис-
темы навигации околоземных КА могут дополнительно комплектоваться резерв-
ными навигационными системами, в которых для уточнения ПДЦМ КА могут
использоваться измерители углов звезда - КА - центр (край) Земли, углового
диаметра Земли, радиовысотомеры или радиовысотомеры-вертикали и др.
4.2.3 Схемы информационного взаимодействия системы навигации
околоземных КА со смежными системами
Схемы информационного взаимодействия системы навигации околоземных
КА со смежными системами изображены на рис. 4.2.1 и 4.2.2 для двух вариантов
представления уравнений движения центра масс КА: в 3CKJ2000 (2.1.83) и в ГСК
(2.1.84).
Рисунок 4.2.1 - Схема информационного взаимодействия системы
навигации, формирующей ПДЦМ КА в ГСК, со смежными
подсистемами
236
Рисунок 4.2.2 - Схема информационного взаимодействия системы
навигации, формирующей ПДЦМ КА в 3CKJ2000, со смежными
подсистемами
На рис. 4.2.1 и 4.2.2 использованы следующие обозначения:
ПЗ- полетное задание;
- момент времени, на который АП СРНС сформированы ПДЦМ КА
r(tM) - радиус-вектор КА в ГСК на момент времени tn;
v(tH) - вектор скорости КА в ГСК на момент времени 1и;
tn- момент времени, на который системой навигации определены на-
чальные данные для АП СРНС;
r(tH) - радиус-вектор КА в ГСК на момент времени tH;
v(tH) - вектор скорости КА в ГСК на момент времени tH;
to- момент времени, на который наземными средствами рассчитаны
ПДЦМ КА в ПЗ;
r(to) -радиус-вектор КА в ГСК на момент времени to;
v(t0) -вектор скорости КА в ГСК на момент времени t0;
Рки - признак способа учёта КИ скорости в ПЗ;
ёки~ вектор возмущающих ускорений в ГСК, создаваемый ДУ КА в про-
цессе выдачи корректирующего импульса скорости;
t- текущий момент времени, на который системой навигации КА рас-
считаны ПДЦМ КА;
237
r(t) - радиус-вектор KA в ГСК на момент времени t;
v(t) - вектор скорости КА в ГСКна момент времени t;
1ки - момент времени, в который в ПДЦМ КА учтены изменения радиуса-
вектора и вектора скорости КА после реализации КИ скорости;
r(tKM) - радиус-вектор КА в ГСК на момент времени tH;
v(tKH) “ вектор скорости КА в ГСК на момент времени tH;
vGO(t)- нормированная гелиоцентрическая скорость КА на момент време-
ни t;
G(t) - матрица перехода от ГСК к орбитальной системе координат;
Go(t) - матрица перехода от 3CKJ2000 к орбитальной системе координат;
’ка-м ” °РТ направления «КА - Луна»;
ii<A-s - °РТ направления «КА - Солнце»;
P(tj - матрица прецессии;
N(t) - матрица нутации;
Rs(t) - матрица учёта суточного вращения Земли на момент времени t;
Rpoi(t) - матрица, учитывающая смещение положений мгновенных полюсов
Земли в эпоху t относительно Международного условного начала.
Следует отметить, что параметр РКИ задается в ПЗ равным нулю при учете
изменения радиуса-вектора и вектора скорости КА в момент выключения ДУ ли-
бо равным единице при внесении на интервале времени от включения до выклю-
чения ДУ в правые части систем дифференциальных уравнений (2.L83) или
(2.1.84) движения КА вектора возмущающего ускорения, создаваемого ДУ КА в
процессе выдачи корректирующего импульса скорости (см. подразд. 2.1.6).
4.2.4 Алгоритмическое обеспечение системы навигации
Алгоритмы системы навигации функционально объединены в две задачи:
- прогнозирование параметров движения центра масс КА;
- уточнение параметров движения центра масс КА по результатам изме-
рений.
Параметры движения центра масс КА прогнозируются непрерывно с мо-
мента включения СУ и до момента её выключения. При этом требуемая перио-
дичность обновления параметров движения центра масс КА обеспечивается:
- интегрированием, системы дифференциальных уравнений с шагом ЬИ1ГГ;
- экстраполяцией параметров движения центра масс КА с шагом Ьэксгр
внутри шага интегрирования.
Метод интегрирования и шаг интегрирования Ьинт зависят от требуемой
точности прогнозирования. Величина шага h3KCTp и тип используемого метода экс-
траполяции определяются требуемыми частотой обновления и точностью экстра-
поляции навигационной информации.
Перечень алгоритмов задачи прогнозирования параметров движения центра
масс КА представлен в табл. 4.2.2.
238
Таблица 4.2.2 - Перечень алгоритмов задачи прогнозирования параметров
движения центра масс КА
Наименование алгоритма Функциональное назначение алгоритма
Алгоритм диспетчеризации задачи прогнозирования 1. Реализация логической последовательности подключения алгоритмов задачи. 2. Организация численного интегрирования системы дифференциальных уравнений дви- жения центра масс КА
Алгоритм расчёта правых час- тей системы дифференциаль- ных уравнений движения цен- тра масс КА 1. Реализация логической последовательности подключения алгоритмов расчёта составляю- щих полного ускорения КА. 2. Организация подключения алгоритмов рас- чёта возмущающих ускорений требуемого ти- па
Алгоритм расчёта ускорения, создаваемого гравитационным полем Земли 1. Расчёт вектора ускорения, создаваемого гравитационным полем Земли в ГСК. 2. Организация учёта требуемого спектра со- ставляющих гармонического разложения по- тенциала гравитационного поля Земли в ряд по сферическим функциям
Алгоритм расчёта ускорения, обусловленного аэродинами- ческим сопротивлением атмо- сферы Земли 1. Выбор используемой модели расчёта плот- ности атмосферы (статическая, динамическая). Расчёт плотности атмосферы. 2. Вычисление ускорения, обусловленного аэродинамическим сопротивлением атмосферы Земли
Алгоритм расчёта ускорения, создаваемого гравитационным полем Луны 1. Определение вектора направления «КА- Луна» в требуемой СК. 2. Расчёт возмущающего ускорения, созда- ваемого гравитационным полем Луны
Алгоритм расчёта ускорения, создаваемого гравитационным полем Солнца 1. Определение вектора направления «КА- Солнце» в требуемой СК. 2. Расчёт возмущающего ускорения, созда- ваемого гравитационным полем Солнца
Алгоритм расчёта возмущаю- щего ускорения, обусловлен- ного солнечным давлением Расчёт возмущающего ускорения, обусловлен- ного солнечным давлением
Алгоритм вычисления пара- метров движения КА внутри шага интегрирования Экстраполяция параметров движения по ко- нечным формулам
239
Отметим некоторые особенности функционирования задачи прогнозирова-
ния параметров движения центра масс околоземных КА:
- для уменьшения объёма вычислений на отдельных участках полёта КА
(в зависимости от высоты орбиты КА) могут учитываться (или не учи-
тываться) различные возмущающие факторы, оказывающие (или не ока-
зывающие) сильное влияние на движение центра масс КА.
- задействование алгоритма расчёта возмущающих ускорений требуемого
типа, а также учёт требуемого спектра составляющих гармонического
разложения потенциала гравитационного поля Земли определяются мас-
сивом признаков, задаваемых в ПЗ.
Основными функциями задачи уточнения параметров движения центра
масс КА являются:
- периодическое обновление начальных условий для задачи прогнозиро-
вания параметров движения центра масс КА;
- обеспечение непрерывности определения параметров движения центра
масс КА при переключениях комплектов БЦВМ СУ;
- уточнение параметров движения центра масс КА на участках проведе-
ния спецработ.
Перечень алгоритмов задачи уточнения параметров движения центра масс
КА представлен в табл. 4.2.3.
Таблица 4.2.3 - Перечень алгоритмов задачи уточнения параметров движения
центра масс КА
Наименование алгоритма Функциональное назначение алгоритма
Алгоритм диспетчериза- ции задачи уточнения па- раметров движения цен- тра масс КА Реализация логической последовательности подключения алгоритмов задачи
Алгоритм планирования измерений 1. Организует периодическое включение и выклю- чение измерительной аппаратуры (ИА) с требуемым периодом. 2. Анализирует моменты времени начала и окон- чания участков спецработ. Организует включение и выключение ИА на требуемом интервале времени. 3. Анализирует факт переключения комплектов БЦВК СУ. Организует включение и выключение ИА на требуемом интервале времени. 4. Формирует признак на включение алгоритма контроля достоверности измерительной информа- ции
240
Окончание табл. 4.2.3
Наименование алгоритма Функциональное назначение алгоритма
Алгоритм контроля дос- товерности измеритель- ной информации 1. Вычисляв! расчётные значения измеряемых па- раметров на момент проведения измерений. 2. Контролирует достоверность измерительной информации. 3. Формирует признак задействования алгоритма статической обработки навигационной информации
Алгоритм статической обработки навигационной информации 1. Уточняет парамегры движения центра масс по результатам измерений. 2. Определяет погрешности расчёта параметров движения центра масс КА
‘Отметим некоторые особенности функционирования алгоритмов задачи
уточнения параметров движения центра масс КА:
- алгоритм планирования измерений задействуется непрерывно с момента
начала задачи и до её окончания;
- алгоритм контроля достоверности измерительной информации включа-
ется только на интервалах работы ИА;
- включение алгоритма статической обработки навигационной информа-
ции осуществляется при наличии достоверной информации от ИА;
- требуемый период обновления начальных условий для интегрирования,
а также моменты времени начала и конца участков спецработ задаются в
ПЗ СУ.
4.2.5 Анализ точности системы навигации околоземных КА
4.2.5.1 Оценка влияния погрешностей задания начальных условий на
точность прогнозирования параметров движения центра масс
околоземных КА
На длительных интервалах прогнозирования (более одного витка) основной
погрешностью, определяющей точность решения навигационной задачи, является
погрешность, обусловленная неточностью задания начальных условий ПДЦМ
КА. Она содержит как периодическую, так и вековую составляющую, изменение
которой во времени носит систематически нарастающий характер.
Ввиду ограниченных возможностей наземного комплекса управления
(НКУ) передача данных о ПДЦМ КА с Земли на борт КА возможна не чаще од-
ного раза в сутки. При этом наземными средствами формируются два типа дан-
ных:
- уточнённые по результатам радиоконтроля орбиты ПДЦМ КА на мо-
мент времени прохождения КА восходящего узла орбиты;
- ПДЦМ КА, спрогнозированные на текущий (требуемый) момент време-
ни.
241
В первом случае погрешности определения ПДЦМ КА не превосходят 50 м
по координатам и 0,05 м/с по проекциям вектора скорости.
Во втором случае погрешности формирования ПДЦМ КА монотонно уве-
личиваются и в конце суточного интервала (~15 витков) могут достигать сле-
дующих предельных значении:
1) по положению КА:
- вдоль орбиты - 8,0 км;
- по радиусу-вектору -1,0 км;
- по нормали к плоскости орбиты - 1,0 км;
2) по проекциям вектора скорости - 9,0 м/с.
Предельные погрешности определения ПДЦМ КА (смещения по положе-
нию и отклонения компонент вектора скорости) для трёх вариантов погрешно-
стей задания начальных значений ПДЦМ представлены в табл. 4.2.4 (для коорди-
нат центра масс КА) и табл. 4.2.5 (для компонентов вектора скорости КА).
Таблица 4.2.4 - Предельные погрешности определения положения центра масс
КА, обусловленные неточностью задания начальных данных
№ п/п Начальные возмуще- ния Смещение КА, км
Направле- ние Величи- на Максимальное периоди- ческое Вековое вдоль ор- биты Апв
Ап Дг АЬ за виток за сутки
Апо, км 0,1 0,3 од - - -
Аг0, км 0,1 0,2 0,3 - 1,885 28,26
1 Abo, км 0,1 - - 0,1 - -
1 Дупо, м/с 0,05 0,187 _ 0,187 - 0,883 13,24
Дул, м/с 0,05 0,187 0,047 - - -
Дуьо, м/с 0,05 - - 0,047 - -
Апо, км 0,045 0,135 0,045 - - -
Аго, км 0,045 0,090 0,135 - 0,848 12,72
Abo, км 0,045 - - 0,045 - -
Z Avn0, м/с 0,5 1,87 1,87 - 8,83 132,45
Avjo, м/с 0,5 1,87 0,47 - - -
Ауьо, м/с 0,5 - - 0,47 - -
Апо, км 8,0 24,0 8,0 - - -
Аго, км 1,0 2,0 3,0 - 18,85 254,86
Abo, км 1,0 - - 1,0 - -
AVnO, м/с 9,0 33,72 33,72 - 158,91 2383,65
Аун), м/с 9,0 33,72 8,43 - - -
Ауьо, м/с 9,0 - - 8,43 - -
242
Таблица 4.2.5 - Предельные погрешности определения вектора скорости КА,
обусловленные неточностью задания начальных данных
№ п/п Начальные возмуще- ния Отклонение компонентов вектора скорости КА, м/с
Направле- ние Величи- на Максимальное периоди- ческое Вековое по радиу- су-вектору Avra
Av„ Avr Avb за виток за сутки
Апо, км о,1 0,11 0,21 - - -
Аго, км 0,1 0,21 0,11 2,012 30,18
1 Abo, км 0,1 - - 0,11 -
1 Avn0, м/с 0,05 0,15 0,1 - 0,942 14,14
Дул, м/с 0,05 0,05 0,15 - - -
Дую, м/с 0,05 - - 0,05 - -
Апо, км 0,045 0,048 0,096 - - -
Аго, км 0,045 0,096 0,048 - 0,906 13,59
Abo, км 0,045 - - 0,048 - -
Z Avo0, м/с 0,5 1,5 1,0 - 9,42 141,37
Avro, м/с 0,5 0,5 1,5 - - -
Ауьо, м/с 0,5 - - 0,5 - -
Апо, км 8,0 8,54 17,08 - - -
Ат0, км 1,0 2,14 1,07 - 20,12 301,83
□ Abo, км 1,0 - - 1,07 - -
0 Avn0, м/с 9,0 27,0 18,0 - 169,64 2544,63
Avrt, м/с 9,0 9,0 27,0 - - -
Avm, м/с 9,0 - 9,0 - -
Первому варианту соответствует задание начальных данных в начальный
момент времени после уточнения ПДЦМ КА наземными средствами. Во втором
варианте в качестве начальных данных используют навигационную информацию,
формируемую АП СРНС. Третьему варианту соответствует задание, начальных
данных, полученных наземными средствами в результате баллистического про-
гноза в конце суточного интервала времени.
В табл. 4.2.4 и 4.2.5 применяют следующие обозначения:
- An, Ar, АЬ - проекции смещения радиуса-вектора КА, обусловленного
погрешностями задания начальных значений ПДЦМ КА вдоль орбиты,
по радиусу-вектору и в направлении, перпендикулярном плоскости ор-
биты соответственно;
- Avn, Avr, Avb - проекции отклонения вектора скорости КА, обусловлен-
ного погрешностями задания начальных значений ПДЦМ КА, вдоль ор-
биты, по радиусу-вектору и в направлении, перпендикулярном плоско-
сти орбиты, соответственно.
243
Значения предельных погрешностей определения ПДЦМ, обусловленных
неточностью задания начальных данных, рассчитывали в соответствии с реко-
мендациями П.Е. Эльясберга [71] для околокруговой орбиты КА при следующих
значениях параметров орбиты в начальный момент времени:
- период обращения КА То=5885,7 с;
- большая полуось орбиты ао=7О45,71 км;
- модуль радиуса-вектора го=7О39,66 км;
- модуль вектора скорости Vo=7,528 м/с.
Д анные, представленные в табл. 4.2.4 и 4.2.5, показывают, что сферические
погрешности определения положения ARZ и скорости AVZ центра масс КА, обу-
словленные начальными возмущениями орбиты КА, могут составлять следующие
величины:
- по первому варианту начальных возмущений:
ARZ>2 км, AVZ>2 м/с за виток и ARz>30 км, AVe>30m/c за сутки;
- по второму варианту начальных возмущений:
ARZ>8 км, AVZ>9 м/с за виток и ARz>120 км, AVZ> 135м/с за сутки;
- по третьему варианту начальных возмущений:
ARz>160 км, AVz>170 м/с за виток и ARz>2400 км, A VE >2,6км/с за
сутки.
4.1.5.2 Анализ влияния различных возмущающих факторов на
точность прогнозирования параметров движения центра масс
околоземного КА
На высотах от 250 до 700 км сильное влияние на движение околоземных
КА оказывают нецентральность гравитационного поля тяготения и сопротивле-
ние атмосферы Земли. Влияние остальных возмущающих факторов несущест-
венно [71]. На высотах от 700 до 2000 км на эволюцию орбит околоземных КА
существенно влияет только нецентральность гравитационного поля Земли.
Оценку степени влияния различных возмущающих факторов на точность
прогнозирования параметров движения центра масс околоземных КА, а также ис-
следование характера изменения погрешности прогнозирования в зависимости от
длительности интервала прогноза проводят по результатам математического мо-
делирования движения центра масс КА.
В подразд. 5.3 представлены результаты моделирования для транспортных
модулей, которые функционируют на орбитах с высотой полёта от 250 до 500 км.
4.3 Системы навигации межпланетных КА
4.3.1 Методы определения расчётных межпланетных траекторий.
Расчёт даты старта
Одной из задач современной космонавтики является освоение космическо-
го пространства с помощью пилотируемых аппаратов. Под освоением космиче-
ского пространства понимают действия, направленные на то, чтобы научиться
жить и работать в космосе, быть в межпланетном пространстве в будущем посто-
янным жителем. Систематические научные исследования ближнего космоса (Лу-
244
на) и более далеких объектов Солнечной системы: планет, комет, астероидов и
спутников планет с помощью автоматических аппаратов и пилотируемых кораб-
лей являются в настоящее время наиболее перспективными направлениями раз-
вития космической науки и техники.
Важная роль при осуществлении межпланетного перелёта отводится системе
навигации КА. Поэтому на одном из первых мест стоит проблема выбора началь-
ных параметров и траекторий межпланетных полетов КА. Выбор межпланетных
траекторий КА заключается в определении траектории полёта от одной планеты к
другой, а также от Земли к Луне с удовлетворением следующих требований:
- выведение КА на межпланетную траекторию, его маневры, необходи-
мые коррекции траектории должны осуществляться при минимальных
затратах энергетических возможностей;
- время перелёта от одной планеты к другой следует выбирать так, чтобы
выполнение задачи обеспечивалось в кратчайший срок с максимальной
надёжностью;
- траектории полёта должны быть выбраны таким образом, чтобы обеспе-
чивались определенные условия для наблюдения за полётом КА, ориен-
тации КА при манёврах и коррекции траектории КА, в сеансах связи и
во время проведения научных экспериментов;
- при полёте КА вблизи планеты назначения должны выполняться усло-
вия, обеспечивающие посадку на планету, или фотографирование её по-
верхности, или переход на орбиту спутника планеты.
Эти требования в большей части противоречивы и требуют просмотра
большого числа возможных траекторий.
Межпланетные траектории можно разделить на следующие классы:
- траектории к планете в целях пролёта или посадки на неё без возврата к
Земле;
- траектории облёта планеты с возвращением к Земле без задержки у пла-
неты;
- траектории для осуществления полётов к планетам и обратно с задерж-
кой у планеты, на её поверхности или на орбите спутника этой планеты;
- сложные челночные траектории с облётом двух и более планет и манёв-
рами на гелиоцентрическом участке траектории.
Особый интерес представляют траектории полёта КА с использованием
гравитационных полей других (промежуточных) планет при полёте к планете на-
значения (использование пертурбационных манёвров). В этом случае в результа-
те пролёта КА вблизи промежуточной планеты вследствие воздействия её грави-
тационного поля изменяется последующий гелиоцентрический участок межпла-
нетной траектории, что в принципе позволяет добиться большего эффекта от
межпланетного полёта: уменьшения суммарных энергетических затрат, увеличе-
ния «окон» старта, возможности одним межпланетным КА провести исследова-
ния сразу нескольких планет и т.д. В частности, возможности использования воз-
мущающего влияния Луны, по-видимому, реализованы ещё не все. Так, напри-
мер, существуют оценки, показывающие энергетическую целесообразность за-
245
пуска КА на стационарную орбиту вокруг Земли с первоначальным облётом Лу-
ны [34].
Начальный этап планирования большинства межпланетных операций за-
ключается в выборе подходящей траектории полёта космического корабля. В
свою очередь, выбор такой траектории полёта начинается с выбора даты и време-
ни старта КА с Земли или с орбиты искусственного спутника Земли.
Моменты старта должны быть жёстко согласованы со взаимным располо-
жением планеты назначения и Земли с тем, чтобы КА достиг орбиты планеты
именно в тот момент, когда планета подойдёт к намеченной точке встречи. Кроме
того, на даты старта КА накладываются ограничения, обусловленные энергетиче-
скими возможностями ракет-носителей. В частности, с точки зрения минимиза-
ции энергетических затрат целесообразно осуществлять перелёт КА по орбите с
нулевым наклонением к эклиптике, планируя встречу с планетой назначения в
восходящем или нисходящем узле её орбиты (относительно эклиптики).
Указанные обстоятельства приводят к тому, что старты КА к планетам воз-
можны только в определённые периоды различной длительности, так называемые
«окна» старта КА. Промежуток времени между допустимыми периодами старта
КА к планетам назначения («окнами») определяется синодическими периодами
обращения планет - промежутками времени, по истечении которых планета, дви-
гаясь по своей орбите, возвращается в прежнее положение относительно Солнца,
если наблюдать планету с Земли:
т _ 2л
*СИН ” I I >
|соо-а>1|
где Тсин - синодический период обращения планеты; св0 и cdj - угловые скоро-
сти орбитального движения Земли и планеты соответственно.
Синодические периоды обращения планет и Луны известны [34] и приве-
дены в табл. 4.3.1. '
Таблица 4.3.1 - Синодические периоды обращения
планет и Луны
Планета Синодический период, Тсин
сутки годы
Меркурий 115,94 0,32
Венера 583,922 1,60
Марс 779,937 2,13
Юпитер 398,89 1,09
Сатурн 378,11 1,03
Уран 369,65 1,01
Нептун 367,50 1,01
Плутон 366,75 1,00
Луна 29,53 0,08
246
Величина (продолжительность) «окон» старта составляет от ~1 месяца
(Меркурий) до ~3,5 месяца (Сатурн) [29]. Заранее просчитываются также и воз-
можные даты старта к планетам Солнечной системы. Методика расчёта дат стар-
та приведена в [54].
В табл. 4.3.2 представлены даты старта за период 1980-1990 гг. При необ-
ходимости приведенные даты пусков и величины синодических периодов позво-
ляют экстраполяцией этих данных определить возможные даты пусков и после
2010 года.
Следует отметить, что даты старта КА зависят также от конкретной задачи
полёта к планете назначения: даты старта для задач пролёта мимо планеты (облё-
та планеты) и даты старта для задачи выведения КА на орбиту искусственного
спутника планеты могут отличаться на период <1 месяц [34]. Кроме того, различ-
ные даты возможных пусков КА к планетам не эквивалентны с энергетической
точки зрения. Так, например, для Венеры оптимальные с энергетической точки
зрения даты старта повторяются примерно через 8 лет, для Юпитера - 12 лет, для
Марса - 15,8 лет, для Меркурия - 1 год [34].
Таблица 4.3.2 - Даты старта к Марсу, Венере, Юпитеру
(задачи пролёта, облёта)
Марс Венера Юпитер
18.12.1981 07.01.1985 23.05.1986
08.02.1984 13.08.1986 05.07.1987
22.04.1986 24.03.1988 30.08.1988
05.07.1988 15.11.1989 07.09.1989
30.08.1990 19.06.1991 11.10.1990
В общей постановке аналитической теории движения небесных тел иссле-
дование характера движения КА под действием сил тяготения нескольких небес-
ных тел приводит к так называемой задаче п тел - задаче движений п тел под
действием их взаимного притяжения по закону всемирного тяготения Ньютона.
Задача п тел (п>3) не имеет точного аналитического решения [26, 34]. В то
же время типичная задача полёта КА к другой планете или Луне является задачей
четырех тел, поскольку в первом случае в качестве рассматриваемых тел прини-
маются Земля, Солнце, планета назначения и КА, во втором случае - Земля,
Солнце, Луна и КА. При челночных облётах нескольких планет либо полётах к
планетам назначения с использованием пертурбационных манёвров задачи опре-
деления траектории межпланетных полётов КА относятся к задачам пяти, шести
и более тел. Кроме того, поскольку в рассматриваемой задаче п>3 тел движение
всех участвующих в задаче небесных тел (Земли, планет, Луны, спутников планет
и т.д.) практически известно с достаточной степенью точности, задача определе-
ния движения КА по сути является ограниченной задачей и тел, которая также не
имеет аналитического решения.
247
К сожалению, как следует из сказанного выше, задачи определения траек-
тории движения КА к планетам или Луне не имеют строгого аналитического ре-
шения. Необходимо отметить, что даже если бы и существовало решение задач
п>3 тел, то оно не давало бы точного решения, поскольку в классической поста-
новке задач п тел не учитывается нецентральность гравитационного поля небес-
ных тел, наклон их орбит к эклиптике, влияние атмосферы планет, солнечного
давления и т.д.
Точное решение задачи определения межпланетной траектории полёта воз-
можно только с применением численных методов расчёта. Однако использование
только численных методов не позволяет рассчитать межпланетную траекторию,
поскольку для решения данной задачи необходимо знать начальные условия
движения (начальные координаты и скорость КА), которые нельзя непосредст-
венно получить указанными численными методами.
В связи с этим задача определения межпланетных траекторий на практике
решается в два этапа [17]. На первом этапе на основе применения конических се-
чений (задача двух тел) достигается хорошее приближение к желаемой траекто-
рии. На втором этапе численными методами, также путём итерационного процес-
са, определяется окончательная траектория полёта КА с учётом различного рода
возмущений.
Точную траекторию полёта вычисляют путем интегрирования уравнений
движения КА. Для интегрирования уравнений движения наиболее часто исполь-
зуют методы Рунге - Кутта и Адамса.
Как показал опыт расчёта межпланетных траекторий КА, весьма целесооб-
разно при расчётах использование понятий гравитационных сфер, в которых
влияние какого-либо притягивающего тела становится основным (среди осталь-
ных притягивающих тел). При этом основное применение нашло понятие сферы
действия планет [26, 29].
Сферой действия малого небесного тела (например, Земли) по отношению к
большому небесному телу (например, Солнцу) называют ту область пространства
вокруг малого небесного тела, в пределах которой движение КА определяется в
основном полем тяготения малого небесного тела, а остальные небесные тела вы-
зывают только некоторые возмущения в его движении.
Радиус сферы действия планеты определяется соотношением
2
где m - масса малого небесного тела; М - масса большого небесного тела; г -
расстояние между этими небесными телами.
Сферы действия планет относительно Солнца и сфера действия Луны отно-
сительно Земли представлены в табл. 4.3.3 [35].
248
Таблица 4.3.3 - Сферы действия
планет
Планета Гд, млн км
Меркурий 0,119
Венера 0,615
Земля 0,925
Марс 0,579
Юпитер 48,100
Сатурн 54,600
Уран 52,000
Нептун 86,900
Плутон 34,00
Луна 0,066
Введение понятия сфер действия планет, как показано на рис 4.3.1, позво-
ляет разделить траекторию межпланетного полёта на три основных участка: в
сфере действия Земли (планеты отправления), в поле тяготения Солнца и в сфере
действия планеты назначения.
На рис.4,3.1 использованы следующие обозначения:
гкс _ гелиоцентрический радиус-вектор КА;
г3 - гелиоцентрический радиус-вектор Земли;
гка - геоцентрический радиус-вектор КА;
R-сдз - радиус сферы действия Земли;
R-сдпл - радиус сферы действия планеты назначения;
ОСХС YCZC - гелиоцентрическая система координат;
O3X3Y3Z3 - геоцентрическая система координат;
ОплХпл^пл^пл - планетоцентрическая система координат.
При полётах к Луне различают два участка: в поле тяготения Земли, в сфе-
ре действия Луны, которые изображены на рис. 4.3.2.
На рис.4.3.2 использованы следующие обозначения:
гл - геоцентрический радиус-вектор Луны;
гка “ геоцентрический радиус-вектор КА;
гкл ~ селеноцентрический радиус-вектор КА;
КСдз - радиус сферы действия Земли;
Ксдл ~ радиус сферы действия Луны;
ОЛХЛ УЛ2Л - селеноцентрическая система координат;
О3Х3 Y3Z3 - геоцентрическая система координат.
249
250
Орбита КА
Рисунок 4.3.1 - Траектория межпланетного полёта КА
Рисунок 4.3.2 - Траектория полёта КА к Луне
На первом этапе определения межпланетных траекторий (получение на-
чального приближения) движение КА в каждой сфере действия и поле тяготения
Солнца описывается своим коническим сечением (эллипс, гипербола, парабола).
При полётах к планетам движение КА описывается:
- гиперболой (сфера действия Земли);
- эллипсом (поле тяготения Солнца);
- гиперболой (сфера действия планеты назначения).
При полёте к Луне движение КА описывается:
- эллипсом (поле тяготения Земли);
- гиперболой (сфера действия Луны).
При обратном возвращении к Земле последовательность конических сече-
ний обратная. Приближение к желаемой траектории осуществляется путем со-
единения указанных конических сечений в единую траекторию посредством со-
гласования на границах сфер действия параметров движения КА по различным
коническим орбитам («склеивание» конических орбит). Более того, в связи с тем,
что время движения КА в сфере действия планет пренебрежимо мало по сравне-
нию со временем движения на гелиоцентрическом участке, на первоначальном
этапе расчёта межпланетной орбиты указанные времена не учитывают в оценке
продолжительности полёта к планете назначения, даты возможных стартов и
оценки энергетических затрат, полученные по параметрам гелиоцентрического
участка полёта (эллиптическая орбита), дают очень хорошее приближение к ха-
рактеристикам точной орбиты перелёта [22, 34].
Следует отметить, что введение понятия сферы действия небесных тел по-
зволяет достичь более точных результатов численного интегрирования уравнений
движения на втором этапе расчёта межпланетных траекторий, поскольку в этом
случае можно избежать чрезмерно больших значений слагаемых в правых частях
дифференциальных уравнений движения КА [22].
Проблемам межпланетных полётов КА и полётов КА к Луне посвящено
достаточно большое количество научных работ, например [22, 28, 29, 32, 35]. Не-
обходимо отметить, что во многих работах не всегда просматривается единый
подход к методике определения межпланетных траекторий КА. В частности,
М.Д. Кислик показал [32], что построение траекторий космического полёта ме-
тодом «склеивания» эффективнее, если вместо сфер действия планет рассматри-
вать сферы влияния (на первом этапе определения межпланетной траектории).
М.Д. Кислик привел примеры расчёта, подтверждающие, что при аппроксимации
межпланетной траектории коническими сечениями ошибки расчёта параметров
траектории будут в среднем минимальными на границе сферы влияния при пере-
ходе от одного притягивающего небесного тела к другому.
Проблемы пассивного перелёта Земля - Луна достаточно полно отражены в
работе В.А. Егорова [22]. В.А. Егоров дал подробную классификацию траекторий
перелета Земля - Луна, оценил влияние эллиптичности лунной орбиты, влияние
сжатия Земли и влияние возмущающего притяжения Солнца на координаты то-
чек попадания КА на лунную поверхность и т.д.
252
4.3.2 Принципы функционирования системы автономной навигации
на различных участках межпланетного перелёта
При межпланетных полётах на борту КА задача навигации, как правило,
решается путём прогнозирования параметров движения центра масс КА. Прогноз
параметров движения КА на борту осуществляется путём численного интегриро-
вания системы дифференциальных уравнении движения КА. Начальные условия
для прогноза параметров движения КА (координаты и вектор скорости центра
масс КА, момент времени, к которому они относятся) передаются периодически с
Земли после проведения сеансов измерений параметров движения центра масс
КА наземными радиотехническими средствами.
Учёт различных возмущающих ускорений в правых частях системы диффе-
ренциальных уравнений имеет ряд особенностей. Полнота учёта возмущающих
ускорений зависит в общем случае от типа межпланетной траектории КА и может
отличаться даже при полёте к одной и той же планете в различные даты старта с
Земли ввиду постоянного изменения взаимного положения планет.
Типичными возмущающими факторами на различных участках траектории
межпланетного полёта КА являются [17]:
1. В сфере действия Земли:
- нецентральность гравитационного поля Земли;
- возмущающие действия Солнца и Луны;
- возмущающее влияние атмосферы Земли (на высотах менее 700 км).
2. В сфере действия Луны:
- нецентральность гравитационного поля Луны;
- возмущающие действия Земли и Солнца.
3. В поле тяготения Солнца:
- возмущающие действия Земли и Луны;
- возмущающие действия планеты назначения и других планет, которые
могут быть на относительно близких расстояниях от траектории полёта
КА (в первую очередь Юпитера и Сатурна).
4. В сфере действия планеты назначения:
- нецентральность гравитационного поля планеты;
- возмущающие действия ближайших планет и Солнца;
- возмущающее влияние атмосферы планеты (Венера, Юпитер, Сатурн);
- возмущающие действия спутников этой планеты.
Состав возмущающих сил при движении КА по орбите искусственного
спутника Луны, по орбитам искусственных спутников планет аналогичен составу
возмущающих факторов в сфере действия этих небесных тел. Отличия в уравне-
ниях движения обусловлены в основном используемыми системами координат,
полнотой учёта нецентральное™ гравитационного поля планеты, учёта влияния
атмосферы планеты и т.п.
Принятая идеология разбиения траектории межпланетного перелёта КА на
последовательность участков полёта в сферах действия различных небесных тел
приводит к необходимости следующих коррекций бортовых алгоритмов прогноза
движения КА при достижении границ сфер действия небесных тел:
253
- переход от систем координат, связанных с центром масс планеты (Солн-
ца, Луны), сферу действия которой покидает КА, к системам координат,
связанных с центром масс другой планеты (Солнца, Луны), в сферу дей-
ствия которой попадает КА;
- перевод параметров движения в новую систему координат, в которой
будет проводиться дальнейший прогноз параметров движения КА в но-
вой сфере действия (указанный перевод определяет начальные условия
для прогноза параметров движения в новой сфере действия);
- пересчёт’ радиусов-векторов возмущающих небесных тел к новой систе-
ме координат;
- введение (исключение) новых возмущающих факторов (например, необ-
ходимость учёта наличия атмосферы планеты назначения).
Моменты достижения границ сфер действия небесных тел должны рассчи-
тываться системой навигации параллельно с прогнозом параметров движения
КА.
Подавляющее число задач космической навигации требуют знания положе-
ния в пространстве КА и небесных тел. Наилучшим образом этому требованию
отвечают прямоугольные системы координат.
В качестве фундаментальной системы координат при полётах к планетам
обычно принимают гелиоцентрическую прямоугольную экваториальную систему
координат определённой эпохи. Ось ОХ лежит в плоскости среднего экватора
Земли стандартной эпохи и направлена в среднюю точку весеннего равноденст-
вия стандартной эпохи. Ось OZ направлена по нормали к плоскости среднего эк-
ватора в сторону северного полюса. Ось OY дополняет систему координат до
правой. В качестве стандартной принимают эпоху J2000.0 (январь 1,5, 2000 г.),
которой соответствует юлианская дата JD 2451545,0. В данной системе коорди-
нат рассчитывают движение КА на самом протяженном участке полёта - в поле
тяготения Солнца. В этой же системе координат достаточно просто определяют
положения других планет при учёте их возмущающего действия на движение КА,
направляющие косинусы Солнца (для системы ориентации), программную ин-
формацию для наведения направленных антенн на наземные пункты приема ин-
формации от КА.
При полётах к Луне фундаментальной системой координат в сфере дейст-
вия Земли является геоцентрическая прямоугольная экваториальная система ко-
ординат той же эпохи (3CKJ2000). При полётах к планетам (Луне) используют
также планетоцентрические (селеноцентрические) прямоугольные экваториаль-
ные системы координат.
Все указанные системы координат экваториальные, направление их осей
совпадает, и все они относятся к одной и той же стандартной эпохе J2000.0.
Следует отметить также, что на границе сфер действия небесных тел непо-
средственно происходит переход от экваториальной системы координат с нача-
лом в центре текущего небесного тела к экваториальной системе координат с на-
чалом в центре небесного тела, в сферу действия которого попадает КА.
254
Взаимосвязь параметров движения КА в смежных сферах действия небес-
ных тел при полетах к планетам
Связь между параметрами движения КА в смежных сферах действия не-
бесных тел на момент пересечения границ сфер действия определяется следую-
щим образом.
При переходе из сферы действия Земли, а также при переходе из сфер дей-
ствия планет (при пролётах мимо планет) в поле тяготения Солнца радиус-вектор
гкс и вектор скорости vKC КА относительно Солнца определяют следующим об-
разом (см. рис. 4.3.1):
Гкс ~~ ^*ка + ®*пл 7 (4.3.1)
VKC — VKa + ^пл? (4.3.2)
где гка и vKa - радиус-вектор и вектор скорости КА в сфере действия Земли
(планеты); гга и vra - радиус-вектор и вектор скорости Земли (планеты) на орби-
те вокруг Солнца.
Векторы гкс (4.3.1) и у кс (4.3.2) служат начальными условиями для даль-
нейшего прогноза параметров движения в поле тяготения Солнца.
При переходах из поля тяготения Солнца в сферу действия планеты (Земли
при возврате после облёта планет) радиус-вектор гка и вектор скорости vKa КА в
новой сфере действия определяются выражениями:
1*ка ~ ®кс — > (4.3.3)
vKa=vKC-vnjl. (4.3.4)
В этом случае радиус-вектор гка (4.3.3) и вектор скорости vKa(4.3.4) служат
начальными условиями для дальнейшего прогноза параметров движения в сфере
действия планеты назначения.
Взаимосвязь параметров движения КА, осуществляющего полёт к Луне, в
смежных сферах действия Земли и Луны
Как показано на рис. 4.3.2, при переходе из сферы действия Земли в сферу
действия Луны радиус-вектор и вектор скорости в сфере действия Луны
определяются следующим образом:
*кл ~ гл, (4.3.5)
vKn = vK3-vJI, (4.3.6)
где гю и - радиус-вектор и вектор скорости КА в сфере действия Земли;
гл и ул - радиус-вектор и вектор скорости Луны на орбите вокруг Земли.
При обратном переходе из сферы действия Луны в сферу действия Земли
(пролёт мимо Луны, облёт Луны с возвращением на Землю) радиус-вектор и
вектор скорости vh3 КА в сфере действия Земли вычисляют по формулам:
гкз — гю1 + гл, (4.3.7)
255
vK3=vKn+vJI. (4.3.8)
При этом векторы (4.3.5) и (4.3.6) в первом случае и векторы гю
(4.3.7) и (4.3.8) - во втором служат начальными условиями для прогноза па-
раметров движения в соответствующих сферах действия.
Кроме того, следует отметить, что в ряде случаев (посадка КА на планету в
заданный район, перевод КА на орбиту искусственного спутника планеты и т.п.)
возможно появление необходимости введения в рассмотрение систем координат
(подвижных или неподвижных), непосредственно связанных с фигурой небесно-
го тела.
В частности, системы координат подобного типа необходимы в случаях:
- учёта нецентральное™ гравитационного поля планет;
- определения моментов времени пролёта над исследуемыми районами
планет;
- определения уставочной информации для наведения научной аппарату-
ры на наблюдаемые объекты на поверхности планеты.
Принципы учёта возмущающих ускорений
Нецентральность гравитационного поля учитывается только для небесного
тела, в сфере действия которого находится КА. В частности, в [58] приведены ха-
рактеристики силовой функции пригяжения Луны. При расчёте возмущающего
действия других небесных тел, находящихся вне сферы действия, гравитацион-
ные поля указанных небесных тел принимают как центральные, т.е. их влияние
на движение КА учитывается, например, по формуле [17]
где pi - гравитационный параметр i-ro небесного тела, находящегося вне сферы
действия; г( - радиус-вектор внешнего небесного тела в системе координат, свя-
занной с центром небесного тела, в сфере действия которого находится КА; fBi -
вектор возмущающего ускорения, обусловленного гравитационным полем i-ro
внешнего небесного тела.
В свою очередь:
Ti =rci -Ггш, (4.3.10)
где rci - радиус-вектор i-й внешней планеты относительно Солнца; гпл - как и
ранее, радиус-вектор центральной планеты сферы действия относительно Солн-
ца.
Обычно указанные радиусы-векторы rci и гпл определяют в прямоугольной
инерциальной экваториальной системе координат с началом системы координат в
центре Солнца.
В связи с тем, что плотность солнечного излучения и гравитационное при-
тяжение Солнца изменяются с расстоянием одинаковым образом (обратно про-
порционально квадрату расстояния), то учёт возмущающего действия светового
256
давления (при необходимости) может быть проведен формальной заменой цс ве-
личиной [17]
M'=Hc(l-vJ (4.3.11)
где цс - гравитационный параметр Солнца; vc - постоянная, характеризующая
величину светового давления на данный КА.
Влияние светового давления на элементы орбиты КА описаны также в [58].
В [26] приведена более полная схема вычисления возмущающего ускорения jgc
космического аппарата, вызываемого световым давлением:
jgc =k qCB SM/m, (4.3.12)
где m - масса КА; SM - площадь миделева сечения; jgc - сила светового давле-
ния; к - коэффициент, зависящий от характера отражения света и распределения
теплового излучения по поверхности КА (1е=1-44).
Сила светового давления определяется соотношением
Чсв = Чо • (ге/гкс)2, (4.3.13)
где q0 - световое давление на удалении земной орбиты (q„=4,4-1 О’6 Н/м2); ге -
средний радиус орбиты Земли; гкс - расстояние КА от Солнца.
Возмущающее ускорение jgc направлено по световому потоку. Исследова-
ния показывают [21], что при движении КА в окрестностях Земли световое дав-
ление до высоты полёта КА h<500 км оказывает на движение КА меньшее влия-
ние, чем сопротивление атмосферы, и поэтому при баллистических расчетах дав-
ление солнечного света не учитывается. При 500 км<Ь<700 км влияние светового
давления и сопротивления атмосферы приблизительно одинаковое, а для высот
полета h>700 км световое давление становится более значимым. Необходимость
учёта светового давления оценивается по результатам моделирования движения
центра масс КА.
4.3.3 Интегрированные системы автономной навигации межпланетных
КА
На большинстве участков межпланетного перелёта на борту КА задача на-
вигации может решаться только путём прогнозирования параметров движения
КА по начальным условиям, переданным с Земли. Указанное обстоятельство обу-
словлено тем, что на межпланетных трассах основной участок полёта КА нахо-
дится на больших расстояниях от Земли и планеты назначения (Луны), и, как
следствие, для уточнения вектора состояния центра масс КА возможно использо-
вание практически только методов астронавигации: измерение углов звезда-
КА - центр (край) Земли, звезда - КА - центр (край) планеты назначения (Луны),
углового диаметра Земли, планеты назначения (Луны), моментов затмения звёзд
краем Земли, Луны, планеты назначения и т.д.
С другой стороны, для данного состава навигационных измерений погреш-
ность определения положения центра масс КА прямо пропорциональна расстоя-
нию до указанных небесных тел. В частности, проведенные в [17] оценки по-
грешностей определения положения КА при полётах на Марс и Венеру показали,
257
что при погрешностях измерения углов звезда - планета, звезда - Солнце 0,00015
радиан (0,52 угловых минут) погрешность (Зс>) определения положения КА в за-
висимости от возможной траектории полёта может достигать недопустимо боль-
ших величин: -39000 км при полёте на Марс и 100000 км при полёте на Венеру.
В принципе уточнение вектора состояния центра масс на борту КА может
быть реализовано по результатам измерении при подлёте к планете назначения
(Луне), при пролёте вблизи или на орбитах искусственных спутников планет
(Луны), т.е. в сфере действия планеты назначения, когда КА находится на боль-
ших расстояниях от Земли и эффективность радиотехнических измерений с на-
земных измерительных пунктов недостаточна для выполнения программы полёта
(например, на обратной стороне Луны). В этом случае возможно применение до-
полнительных бортовых навигационных измерительных средств, в частности,
измерителей углов звезда - КА - центр планеты, радиовысотомеров или радио-
высотомеров-вертикалей.
4.4 Система наведения КА
4.4.1 Назначение, задачи и принципы функционирования системы
наведения
Система наведения (СН) является составной частью системы управления
КА и предназначена для реализации изменения формы или пространственного
расположения орбиты, а также положения центра масс КА на орбите.
Системы наведения КА обеспечивают решение следующих задач орбиталь-
ного маневрирования:
- перевод КА с орбиты выведения на рабочую орбиту (на околоземных
орбитах);
- перевод КА со стартовой орбиты на орбиту межпланетного перелёта;
- коррекцию орбиты в целях поддержания её параметров;
- сближение и причаливание к другим КА;
- спуск КА с орбиты.
Структурно полная задача наведения при орбитальных манёврах КА вклю-
чает в себя две составляющие:
- определение требуемых параметров управляющего воздействия (пара-
метров корректирующего импульса скорости);
- реализацию управляющих воздействий.
В зависимости от используемого способа управления движением центра
масс КА и степени автономности КА расчёт оптимальных управляющих воздей-
ствий и формирование программной информации проводится непосредственно
на борту КА либо наземным комплексом управления (НКУ). СН КА реализует
заданную программу полёта автоматически в соответствии со сформированной
программной информацией.
Исходной информацией для СН при этом являются:
- величина требуемого приращения кажущейся скорости;
- программные углы, характеризующие необходимое направление вектора
тяги;
258
- момент включения ДУ;
- расчётное время работы ДУ.
Момент выключения ДУ определяется на борту КА одним из двух спосо-
бов:
- по информации от акселерометра (при его наличии), положение оси чув-
ствительности которого относительно вектора тяги ДУ известно;
- по времени работы ДУ.
Для обеспечения решения возложенных на СН задач должны быть выпол-
нены следующие динамические операции:
- пространственный разворот КА относительно базовой системы коорди-
нат в требуемое для выдачи корректирующего импульса (КИ) положе-
ние;
- полёт КА с неизменной ориентацией относительно базовой системы ко-
ординат до момента включения ДУ;
- включение ДУ в заданное время;
- полёт КА в процессе выдачи корректирующего импульса с неизменной
ориентацией в базовой системе координат или с программным разворо-
том по тангажу, начиная с момента начала отсчёта системой управления
времени работы ДУ;
- выключение ДУ по достижении заданного значения кажущейся скоро-
сти при наличии на борту КА блока акселерометров (БА) или по време-
ни работы ДУ.
Под базовой системой координат здесь и далее понимается инерциальная
система координат НОСК, начало которой расположено в центре масс КА, а на-
правления осей совпадают с направлениями осей ОСК, зафиксированной на мо-
мент начала пространственного разворота в требуемое для выдачи КИ положе-
ние.
СН должна обеспечивать выдачу корректирующего импульса в любом тре-
буемом направлении на одном или на двух двигателях коррекции (ДК). При этом
максимальная погрешность реализации приращения кажущейся скорости по аб-
солютной величине не должна превышать требуемых значений. Требования к
точности выдачи импульсов по направлению обеспечиваются путём наложения
ограничений на суммарную погрешность ориентации КА на участках выдачи
корректирующих импульсов. Основной точностной характеристикой СН является
погрешность реализации приращения кажущейся скорости по величине, которая
зависит от способа реализации КИ.
4.4.2 Схема информационного взаимодействия системы наведения КА
со смежными системами
Схема информационного взаимодействия системы наведения со смежными
системами показана на рис. 4.4.1.
259
Рисунок 4.4.1 - Схема информационного
взаимодействия системы наведения
На рис. 4.4.1 использованы следующие обозначения:
ПЗ - полётное задание;
tBKJI - момент времени включения ДК;
Тож - интервал ожидания включения ДК и БА с момента окончания разво-
рота КА в требуемое положение;
Atjcn - продолжительность КИ скорости;
Pt - признак реализации КИ по времени;
Рки - признак способа учёта КИ скорости;
Рдк - признак способа реализации КИ скорости;
Wba - вектор приращения кажущейся скорости за один такт опроса БА То;
Йки - вектор возмущающих ускорений в ГСК, создаваемый ДУ КА в про-
цессе выдачи корректирующего импульса скорости.
Параметры полетного задания СН формируются группой планирования
ЦУП в составе общего массива ПЗ системы управления КА следующим образом:
- признак реализации КИ по времени Pt задается равным 1 в случае вы-
ключения ДУ по времени или равным 0, когда ДУ выключается по при-
ращению кажущейся скорости;
- состояние признака способа реализации КИ скорости Рдк, равное 01, со-
ответствует реализации КИ на первом ДК, равное 10-на втором ДК и
равное 11 - на двух ДК;
- признак способа учёта КИ скорости Рки задается 0, если необходимо
учитывать динамику изменения ПДЦМ КА в процессе реализации КИ
для точного прогнозирования ПДЦМ КА на активных участках полёта
КА, иначе - равным 1;
- параметр ПЗ ТОж формируется с учётом особенностей принятой цикло-
граммы реализации КИ.
260
4.4.3 Алгоритмическое обеспечение системы наведения
В процессе реализации КИ алгоритмы системы наведения и системы
управления ориентацией и стабилизации КА функционально объединяют в еди-
ную задачу. Всю задачу разбивают на несколько участков:
1. Участок пространственного разворота (переориентации КА из любого на-
чального положения в требуемое положение в инерциальной системе коор-
динат).
2. Участок полёта изделия в программном стабилизированном положении в
течение заданного времени ожидания.
3. Участок подготовки и калибровки блока акселерометров (БА). Участок за-
действуется при необходимости использования БА, которая определяется
на основании анализа информации, содержащейся в полётном задании.
4. Участок подготовки двигателей, реализующих выдачу корректирующего
импульса.
5. Участок выдачи корректирующего импульса.
6. Участок выключения двигателей.
Состав и функциональное назначение алгоритмов СН в части алгоритмов
наведения представлены в табл. 4.4.1.
Таблица 4.4.1 - Перечень алгоритмов системы наведения
Номер участка Наименование алгоритмов Функциональное назначение алгоритмов
1 Алгоритм начальной установки Приводит в исходное состояние переменные алгоритмов СН, характеризующие состояние СН, а также параметры, используемые в каче- стве начальных условий для накопления те- кущей информации
2 Алгоритм определе- ния момента включе- ния БА иДК Анализирует интервал времени, прошедший с момента окончания разворота до требуемого момента включения ДК. По истечении интер- вала ожидания Тож (параметр ПЗ системы на- ведения) формирует признак на включение БА и ДК
3 Алгоритм анализа суммарной информа- ции, принимаемой от БА на этапе калиб- ровки Определяет суммарную информацию, прини- маемую по каждому каналу БА. Формирует признаки состояния каналов БА
Алгоритм расчёта нулевого сигнала, принимаемого от БА Контролирует работоспособность БА. Фор- мирует признаки, характеризующие результат проведенного контроля. Рассчитывает нуле- вой сигнал, принимаемый от БА
261
Окончание табл. 4.4.1
Номер участка Наименование алгоритмов Функциональное назначение алгоритмов
4 Алгоритм включения ДК Определяет тип и набор двигателей, с помо- щью которых реализуется корректирующий импульс. Формирует признаки включения выбранного набора двигателей. Формирует временные настройки выключения ДК
5 Алгоритм обработки информации, прини- маемой от БА Контролирует работоспособность БА. Фор- мирует признаки, характеризующие результат проведенного контроля. Вычисляет величину кажущейся скорости по информации, прини- маемой от БА
Алгоритм определения момента времени вы- ключения ДК Определяет момент времени выключения ДК по достижении заданной величины кажущей- ся скорости
Алгоритм счёта вре- мени работы ДК Рассчитывает время работы ДК. Определяет момент времени выключения ДК по достиже- нии заданной продолжительности работы ДК
6 Алгоритм формиро- вания признаков вы- ключения ДК Формирует разность между фактическим и номинальным временем работы ДК, признаки реализации выдачи КИ и выключения ДК
4.4.4 Оценка ожидаемой точности реализации импульсов скорости
Ожидаемую точность реализации корректирующих импульсов (КИ) скоро-
сти двигателями коррекции (ДК) оценивают на основе результатов расчётов по-
грешностей реализации КИ по направлению и величине. При расчёте погрешно-
стей реализации КИ как по величине, так и по направлению учитывают следую-
щие особенности:
1. Импульс скорости может быть реализован как на одном, так и на двух ДК,
каждый из которых установлен под углом 5ц к продольной оси изде-
лия O]Xi ССК.
2. Стабилизация КА в каналах тангажа и рыскания на участке выдачи КИ про-
водится одновременным включением равного количества симметрично рас-
положенных двигателей стабилизации (ДС), создающих только управляющий
момент. Таким образом, включение ДС не оказывает непосредственного
влияния на величину и направление результирующего вектора тяги.
4.4.4 Л Оценка ожидаемой точности реализации импульсов скорости по
направлению
4.4.4 Л.1 Состав результирующих погрешностей реализации КИ по
направлению
Точность реализации КИ по направлению определяется точностью ориен-
тации вектора тяги относительно программного направления в каналах тангажа и
262
рыскания.
Результирующие погрешности реализации КИ по направлению в основном
обусловлены влиянием следующей совокупности погрешностей:
- погрешностей построения базовой системы координат (БСК) ДЗБ, Лу б;
- погрешностей поддержания БСК 3Б, уБ;
- погрешностей стабилизации осей КА относительно программного поло-
жения АЗ ст, Av|/CT;
- погрешностей установки первого или (и) второго ДК по угловым откло-
нениям от базовых осей изделия А3(1)1а, А5(1\кр и A5(2)i&, A5(2)i¥ соответ-
ственно;
- погрешностей установки первого или (и) второго ДК, обусловленных
неперпендикулярностью оси сопла относительно плоскости стыковки
двигателя с КА ДЗ(1)2тИ А5(2)2э, Аб(2)2т соответственно;
- разбросов тяги двигателей коррекции (разнотяговость проявляется толь-
ко в канале тангажа при выдаче КИ на двух ДК) ДРЬ ДР2;
- погрешностей привязки осей чувствительности измерителя вектора уг-
ловой скорости к связанным осям КА АЗгь А Зг2, Аугь AVroJ
- погрешностей расчёта программных углов АЗпр, Д\|/пр-
Результирующие погрешности ориентации вектора тяги в каналах тангажа
(A 3 s) и рыскания (А\|/е) могут быть представлены в виде двух слагаемых:
ДЗЕ=ДЗст+ДЗн; (4.4.1)
A\|/s=A\|/ct+A\|Jh, (4.4.2)
где АЗ ст, А\|/ст - погрешности стабилизации осей КА относительно программно-
го положения; ДЗн, Д\|/н - суммарные погрешности ориентации вектора тяги ДК.
Состав суммарных погрешностей АЗН, Аун приведен в табл. 4.4.2 [62].
В табл. 4.4.2 использованы следующие обозначения:
Pi и Р2 - тяга первого и второго ДК;
АЗр и А'Рр - составляющие суммарной погрешности ориентации вектора
тяги ДК, зависящие от способа реализации КИ;
Аар - погрешность ориентации суммарного вектора тяги в канале тангажа,
обусловленная разнотяговостью ДК;
АЗ* и АТр - погрешности ориентации реального суммарного вектора тяги
относительно расчётного положения, обусловленные погрешностями
изготовления и монтажа ДК;
5Н- номинальное значение угла установки ДК в плоскости XiOiYi ССК
относительно продольной оси изделия OjXj;
т- интервал времени между окончанием построения БСК и моментом
включения ДК.
263
Таблица 4.4.2 - Состав суммарных погрешностей ориентации вектора тяги ДК
№ п/п Тип погрешностей Соотношения, определяющие по- грешности и их составляющие
1 По танга- жу Суммарная погрешность ориентации вектора тяги ДК ДЗц = Д^д + Д$р
Составляющая погреш- ности, не зависящая от способа реализации КИ Д3§ = ДЗр + • т + + ДЗГ1 + Д$Г2 + Л&пр
Составляющая погреш- ности, возникающая при реализации КИ на одном (ьм)ДК ДЭР=Д80) + Д8°> г 1,3 2,3
Составляющая погреш- ности, возникающая при реализации КИ на двух ДК Д&р = ДЗр + ДоСр, ДЭ" = --[Д8^ + Д6(21)э + где 2 + Д8$ + Д8<2’]; . ДР!+ДР2 + _ Да’- р1+рг -,g6-
2 По рыска- нию Суммарная погрешность ориентации вектора тяги ДК ДКРН=ДЧ/ s+A'P Р
Составляющая погреш- ности, не зависящая от способа реализации КИ Д’РБ=ДТБ+ТБг + + Д'РГ(+ДТГ2+Д‘Рпр
Составляющая погреш- ности, возникающая при реализации КИ на одном (1-м)ДК ДТр=Д8<» +Д8™
Составляющая погреш- ности, возникающая при реализации КИ на двух ДК [Д8^+Д8^+Д8^+Л8^]
Aip — 2 • cos 5Н
4.4.4Л.2 Статистические характеристики результирующих
погрешностей реализации КИ по направлению
Для оценки точности реализации КИ по направлению используют следую-
щую модель погрешностей [62]:
- ошибки угловой стабилизации в каналах тангажа и рыскания с вероят-
ностью 0,5 принимают одно из дискретных случайных значений, соот-
ветствующих их предельным значениям ДЗ^,(Д\|/*) или - Д&^.(“ AVc)’
- случайные величины Д 0н и Дв соответствии с предельной теоремой
теории вероятностей подчиняются нормальному закону распределения,
264
при этом их математические ожидания равны нулю.
В этом случае закон распределения модулей случайных результирующих
погрешностей ASZ и A\gz можно представить в виде [17]
р(|ДЭЕ| < ДЗЕ)= А^+АЯ-к>| + ф/ (4.4.3)
°Д»н J к ад8н )
Р(|Ду2|<Д\Ие)= Фо +Av|Z^-
к Стдта
+Фо Miz^vk
\ аА»ИН
(4.4.4)
где Ф0(х) - интеграл вероятности, значения которого представляют в таблич-
ном виде [20]; адзм,аДчгн - среднеквадратические отклонения (СКО) случайных
суммарных погрешностей ориентации вектора тяги ДК, подчиненных нормаль-
ному закону распределения, которые представлены в табл. 4.4.3.
Таблица 4.4.3 - Среднеквадратические отклонения случайных суммарных
погрешностей ориентации вектора тяги ДК
№ п/п Тип погрешностей Соотношения, определяющие СКО погрешностей
1 По тангажу Составляющая погрешности, возни- кающая при реализации КИ на одном ДК Oa3h=^Ss+o26i+CT^2
Составляющая погрешности, возни- кающая при реализации КИ на двух ДК аА9п ~ 1 О'2 + O2g СУ2 + O2 _ а2 _|_ А8> А52 + ДР1 ДР2 У 2 (Р1+Р2)2
2 По рыска- нию Составляющая погреш- ности, возникающая при реализации КИ на одном ДК аДЧ/н ~ &VS + + ПД32
Составляющая погреш- ности, возникающая при реализации КИ на двух ДК „ = L , +°iS2 ДУ» Avs 2-COS25„
В табл. 4.4.3 использованы следующие обозначения:
+ (»Б • о J + стд9п + сткгг + °AS„P; (4-4-5)
+ (VE • a J2 + <^n + . (4.4.6)
где qa9s и - CKO суммы составляющих результирующих погрешностей,
не зависящих от способа реализации КИ, по тангажу и по рысканию;
265
°Д51 ? С5Д82 ’ ^ЛР1 ’ ^АР^ ’ ^ДЭг 1 ? ^А^Г2 ’ °Д\|/гI ’ ^ДУГ2 ’ ^А^пр ’ ^Л^пр ’ ^A3g ’ ^Д^Б — СКО соот-
ветствующих составляющих результирующих погрешностей, подчиняющихся
нормальному закону распределения.
4.4.4.2 Оценка ожидаемой точности реализации импульсов скорости
по величине
Погрешность реализации импульса скорости по величине оценивают для
двух способов реализации КИ
- выключение ДК по достижении заданной величины кажущейся скорости;
- выключение ДК по расчётному времени его работы.
4.4.4.2.1 Состав результирующей погрешности реализации КИ по
величине при выключении двигателей коррекции по достижении
заданного значения кажущейся скорости
При выключении ДК по достижении заданного значения кажущейся скоро-
сти формируются СН КА по результатам измерений блоком акселерометров ка-
жущегося ускорения. В этом случае результирующая погрешность реализации
импульсов скорости по величине определяется;
- инструментальными погрешностями БА (AWP, AWT);
- погрешностями, обусловленными дискретностью информации, получае-
мой от БА (AWq), и дискретностью обработки информации от БА (ДА¥д);
- начальной погрешностью съёма информации с БА («приобретение» час-
ти или полного импульса AWo);
- погрешностью, обусловленной неточностью ориентации оси чувстви-
тельности БА относительно вектора тяги (А5ба);
- погрешностью, обусловленной влиянием вибрационных перегрузок на
показания БА (AWBhb);
- методической погрешностью обработки информации БА (AWmet);
- погрешностью, обусловленной разбросом времени формирования и ис-
полнения команд на выключение ДК (AWMcn);
- отклонением импульса последействия (А1цд ).
Не нарушая общности изложения, будем считать, что на КА установлен один
блок акселерометров, ось чувствительности которого направлена вдоль оси 01X1
ССК. Таким образом, при реализации КИ на двух ДК ось чувствительности БА па-
раллельна суммарному вектору тяги. В случае реализации КИ на одном ДК ось
чувствительности не совпадает с направлением вектора тяги ДК, что не только на-
кладывает дополнительные требования к точности ориентации изделия в процессе
выдачи КИ, но и существенно влияет на точность реализации КИ по величине.
Для оценки точности реализации КИ двигателями коррекции по величине
используем следующую модель погрешностей [62]:
AWu+AWn -AW0
awe=awn +---------д---
COS оБЛ
(4.4.7)
266
^ба -
где 8ба - угол между суммарным вектором тяги ДК и осью чувствительности
БА, определяется как
5 н при реализации КИ на одном ДК,
О при реализации КИ на двух ДК;
AW4, AWfl и AW0 - погрешности, подчиняющиеся равномерному закону распре-
деления; AWn - сумма погрешностей, подчиняющихся нормальному закону рас-
пределения, которая в общем случае определяется соотношением [62]
AW + AW -AWba
AWn = AWycT + AWHa] + AW^ + a bhb.^vv AVV1IH) (4A,8)
COS ёБА
где AWycT - погрешность, обусловленная отличием фактической ориентации
оси чувствительности БА относительно вектора тяги от расчётной (не учитывает-
ся при реализации КИ на двух ДКС); AW^ - погрешность, обусловленная раз-
бросом импульса последействия; AW^ - ошибка определения кажущейся ско-
рости, обусловленная влиянием инструментальных погрешностей БА (AWP - за-
висящей от перегрузки и AWT - не зависящей от перегрузки).
Состав суммарной погрешности, подчиняющейся нормальному закону рас-
пределения, представлен в табл. 4.4.4.
Таблица 4.4.4 - Состав суммарной погрешности
№ п/п Тип погрешностей Состав суммарной погрешности и её составляю- щих, подчиняющихся нормальному закону распределения
1 Составляющие по- грешности, не зависящие от способа реализации КИ Состав погрешности AWBhe зависит от конструк- тивных особенностей используемого БА, её харак- теристики определяются опытным путем на виб- рационных стендах
Состав погрешности A зависит от конструк- тивных особенностей используемого БА, а также особенностей используемого метода обработки информации БА
2 Составляющие по- грешности, возни- кающие при реали- зации КИ на одном б-м)ДК = W21 • 6тИСп
AWycr=Wtg5H(A5B+A»p)
AWHnfl=-^ m
AW^ = AWp • W + AWT • At
267
Окончание табл. 4.4.4
№ п/п Тип погрешностей Состав суммарной погрешности и её составляю- щих, подчиняющихся нормальному закону распределения
3 Суммарная по- грешность, подчи- няющаяся нор- мальному закону распределения, при реализации КИ на одном ДК AWn = AWycT + AWHcn + AWttna + , AWbhb+AWmet-AW^ cos 5H
4 Составляющие по- грешности, возни- кающие при реали- зации КИ на двух ДК = WL2 • Зтисп
AW — + ^пд2 А^ипд - " ' ~ m
AW^ = AWp • W • cos8H + AWT • At
5 Суммарная по- грешность, подчи- няющаяся нор- мальному закону распределения, при реализации КИ на двух ДК AWn = AWHcn + AWjjnfl + AWB1IB + AWmet - AW™
В табл. 4.4.4 использованы следующие обозначения:
W£1=^; (4.4.9)
ш
р
W.2=2-^‘Cos8h; (4.4.10)
m
WZ1 - кажущееся ускорение, создаваемое одним ДК;
WZ2 - кажущееся ускорение, создаваемое двумя ДК;
Рн - номинальное значение тяги ДК;
m - масса КА после реализации импульса скорости;
5н- номинальное значение угла установки ДК в плоскости XiOiYj ССК
относительно продольной оси КА OiXi;
А1ПД - разброс импульса последействия i-ro ДК;
W - фактическая проекция кажущейся скорости на ось чувствительности БА;
At - продолжительность импульса скорости;
6тИсп “ разброс времени формирования и исполнения команды на выклю-
чение ДК.
268
4.4.4.2.2 Статистические характеристики погрешности реализации КИ
по величине при выключении двигателей коррекции по достижении
заданного значения кажущейся скорости
Последовательно применяя к нарастающему объёму слагаемых в выражении
(4.4.7) формулы полной вероятности, получим интегральный закон распределения
результирующей погрешности реализации импульса скорости по величине [62]
F(AWJ = P(AW£ < AW^ = 0,5 + .[r, (т) - R2(T)]_
(4.4.11)
где
где
Здесь
(4.4.12)
тп =— ----(AWj+ —-----);
ActAWn cos5ea
?i2=—-----(AW£);
tb=—------(AW^-Wx-T,);
AqAWN
----(AW£-W£-T,+-^—);
AqAWn COSOba
(4.4.13)
(4.4.14)
^21 =—2—-(AWj);
Aqawn
T,2=— ----(AWj----2---);
AoAWn cos5ba
t23=—!----(AW£-W£-Tt-----);
AcTawn cos5ba
T24=—-----(AW^-Wx-Tj).
Act AWn
(4.4.15)
269
Математическое ожидание результирующей погрешности реализации им-
пульсов скорости по величине mAWz определяется выражением [62]
Wy Т
mAWz =— ------ (4.4.16)
Оно является функцией кажущегося ускорения W^h величины такта опро-
са БА Т] и не зависит от величины и продолжительности импульса скорости. Ма-
тематическое ожидание результирующей погрешности реализации импульсов
скорости по величине mAWz зависит от способа реализации КИ, поскольку
Wx j при выдаче КИ на одном ДКС;
Ws 2 при выдаче КИ на двух ДКС,
где Wjj - кажущееся ускорение, создаваемое одним ДК, определяется соотно-
шением (4.4.9); We2 - кажущееся ускорение, создаваемое двумя ДК, определяет-
ся соотношением (4.4.10).
Для определения среднеквадратического отклонения суммы погрешностей,
подчинённых нормальному закону распределения aAwN, используют соотноше-
ние (4.4.8). Поскольку погрешности AWyCT, AWHcn, ЛЖшд, AWbhb, AWMet и
AW**, а также определяющие их составляющие независимы, то cfAwn можно
представить в следующем виде:
<*awN = -.Mws + <^Wp > (4.4.17)
где oAws~CKO суммы случайных составляющих результирующей погрешно-
сти, не зависящих от способа реализации импульса скорости, при выключении
ДК по величине; oAWp - CKO суммы случайных составляющих результирующей
погрешности, зависящих от способа реализации импульса скорости, при выклю-
чении ДК по величине.
Соотношения для определения дисперсий составляющих результирующей
погрешности реализации КИ по величине, подчиняющихся нормальному закону
распределения, представлены в табл. 4.4.5.
Таблица 4.4.5 - Соотношения для определения дисперсий составляющих
результирующей погрешности реализации КИ
№ п/п Тип погрешно- стей Соотношения, определяющие дисперсии погрешностей
1 Составляющая погрешности, не зависящая от способа реа- лизации КИ °lws =(°AWp -WP+tfMET
270
Окончание табл. 4.4.5
№ п/п Тип погрешно- стей Соотношения, определяющие дисперсии погрешностей
2 Составляющая погрешности, возникающая при реализации КИ на одном ДК 2 _(o4Wl-At)2+a2w - О __ ----- -f- Wyi • iwp cos28H + [W • tg 8H ]2- (сг1эв + ст1эр + Ги2. A + p2 ОТИСП )" p7
3 Составляющая погрешности, возникающая при реализации КИ на двух ДК CTiwp = (^w, • At)2 + o2Wb№ + WX2 Г2'аЛ>‘ 1 + p2 йтИСП < H 7
В табл. 4.4.5 использованы следующие обозначения:
W^i - кажущееся ускорение, создаваемое одним ДК, определяется соотно-
шением (4.4.9);
WS2 - кажущееся ускорение, создаваемое двумя ДК, определяется соотно-
шением (4.4.10);
Рн - номинальное значение тяги ДК;
m - масса КА после реализации импульса скорости;
W - фактическая проекция кажущейся скорости на ось чувствительности
БА;
At - продолжительность импульса скорости;
6н- номинальное значение угла установки ДК в плоскости XiOiY( отно-
сительно продольной оси КА OiXi;
aAWp> aAwT> aMET 5 °AWbh6 > ад1цд ’ ° 5тисп > °даБ ’ GA3p > стДар “CKO СООТВвТ-
ствующих составляющих погрешностей.
4.4.4.2.3 Состав результирующей погрешности реализации КИ
по величине при выключении двигателей по времени
На точность реализации импульса скорости при выключении ДК по време-
ни влияет следующая совокупность факторов:
- отклонение массы изделия от номинала Ат;
- разброс тяги i-ro ДК APj;
- отклонение импульса последействия тяги i-ro ДК А!^;
- технологические погрешности установки i-ro ДК A5i, А5г;
- разброс времени включения i-ro ДК AtBKJIi;
- разброс времени выключения i-ro ДК AtBblKni;
- отклонение задержки набора тяги i-ro ДК AtHa6i;
- разброс времени в тракте включения - выключения i-ro ДК AtMoi-
271
Результирующую погрешность реализации импульса скорости по времени
AWv можно представить в виде суммы двух составляющих [62]:
AW^ = Д^нп + AW3n, (4.4.18)
где ДWhh - составляющая результирующей погрешности реализации импульса
скорости по величине, не зависящая от продолжительности (величины) КИ;
AW3n - составляющая результирующей погрешности реализации импульса ско-
рости по величине, зависящая от продолжительности (величины) КИ.
Соотношения для определения составляющих результирующей погрешно-
сти реализации КИ по величине при выключении ДК по времени представлены в
табл. 4.4.6.
Таблица 4.4.6 - Соотношения для определения составляющих результирующей
погрешности реализации КИ
№ п/п Тип погрешностей Составляющие результирующей погрешности реализации КИ по величине при выключении ДК по времени
1 Составляющая погрешности, возникающая при реализации КИ на одном (ьм)ДК AW^ = WH + А1-наб1 4 A^HOi 4 AtBbIKni AtBIUli | Mil О 1 nUUL Jrlv/l .DblKJll oKull 1 \ *H J
4W3n = WH - tg8H Д6,- - -—]• At l Рн тн J
2 Составляющая погрешности, возникающая при реализации КИ на двух ДК Alrrni AWHn - WH • + AtHa6 + At-Hoi + AtBbiKni AtBiaii i=l \ ГН J
AW3n = 2 WH • f tg8H • A8i 1 - —1 At V=i 2 PH ) mH J
В табл. 4.4.6 использованы следующие обозначения:
WH=-—-cos8H;
mH
(4.4.19)
WH - номинальное значение кажущегося ускорения;
At - продолжительность импульса скорости;
Рн - номинальное значение тяги ДК;
бн- номинальное значение угла установки ДК в плоскости X1OIY] ССК
относительно продольной оси КА OiXi;
Am - разброс массы КА;
тн - номинальное значение массы КА.
4.4.4.2.4 Статистические характеристики погрешности реализации КИ
по величине при выключении двигателей по времени
Исходя из физической природы будем полагать, что все рассматриваемые
погрешности являются случайными величинами, распределенными по нормаль-
272
ному закону, при этом их математические ожидания равны нулю.
В этом случае результирующая погрешность реализации импульса скоро-
сти по величине AWS представляет собой линейную функцию случайных вели-
чин, подчиняющихся нормальному закону распределения, а следовательно, также
подчиняется нормальному закону распределения.
Для определения закона распределения модуля результирующей погрешно-
сти реализации импульса скорости по величине |AWZ| воспользуемся соотно-
шением, определяющим вероятности попадания случайной величины в заданный
диапазон.
Поскольку математическое ожидание AWy равно нулю, то закон распреде-
ления случайной величины | AWZ1 можно записать в следующем виде [62]:
p(|AWz| < AW^)= Фо
AW^ 1
GAW£ )
(4.4.20)
где среднеквадратическое отклонение результирующей погрешности реализации
КИ по величине ctAWx определяется выражением
=7CTAWHn +<WE 'At2-
(4.4.21)
Соотношения для определения CKO составляющих результирующей по-
грешности реализации КИ по времени представлены в табл. 4.4.7.
Таблица 4.4.7 - Соотношения для определения СКО составляющих результирующей
погрешности реализации КИ
№ п/п Тип по- грешно- стей Соотношения, определяющие СКО погрешностей
1 Составляю- щие по- грешности, возникаю- щиепри реализации КИ на од- ном ДК °™нп = WS1 • Д Рнод j + + aitH0i + а!,выкл t + стд1вкл.
,4 г aAPj СТ= Wyi L awep р
Состав- ляющие по- грешности, СТ\ Z =WX2 —-33-+ ст2 +ст2 НП У 2-РН < Д1НАБ AtHoJ
возникаю-
щие при
реализации
КИ на двух
ДК
°4W хр = | у-г- + tg 8н2 + п£82 j
V z * rH
273
В табл. 4.4.7 использованы следующие обозначения:
WS1 - кажущееся ускорение, создаваемое одним ДК, определяется соотно-
шением (4.4.10);
W^2 - кажущееся ускорение, создаваемое двумя ДК, определяется соотно-
шением (4.4.11);
awHn “CKO суммы случайных составляющих погрешности AWhil не за-
висящих от способа реализации импульса скорости;
aAwZP "CKO суммы случайных составляющих погрешности AWH, зави-
сящих от способа реализации КИ.
Необходимо отметить, что аналогичная методика может использоваться
для оценки погрешностей реализации КИ и на других типах ДУ, например, на
двигателях стабилизации, которые применяются для реализации корректирующе-
го импульса скорости в случае нештатного функционирования двигателей кор-
рекции.
В соответствии с представленной методикой оценивали погрешности реа-
лизации КИ транспортного модуля. Результаты оценки представлены в под-
разд. 5.4.
4.5 Система управления ориентацией и стабилизации (СУОС) КА
Система управления ориентацией и стабилизации является одной из под-
систем системы управления КА и предназначена для управления угловым поло-
жением КА относительно центра масс.
Основными задачами СУОС являются:
- успокоение КА после отделения от ракеты-носителя;
- приведение КА из произвольного углового положения в заданное (ори-
ентация);
- поддержание заданного углового положения (стабилизация);
- выполнение угловых маневров КА (программные развороты);
- управление ориентацией и стабилизация КА при орбитальных маневрах;
- управление КА при решении целевой задачи.
4 .5.1 Основные технические требования к СУОС
Проектирование СУОС начинается с анализа основных технических требо-
ваний, предъявляемых к ней. Данные требования содержатся в наиболее важном
для разработчика СУОС разделе ТЗ - «Тактико-технические требования». Его со-
держание достаточно подробно описано в первом разделе книги, в том числе и в
отношении к СУОС. Здесь остановимся на некоторых отдельных пунктах такти-
ко-технических требований к СУОС.
Общие технические требования к СУОС
Требования к массе и габаритным размерам аппаратуры СУОС зависят от
массы и размеров самого КА. Так, для микроспутников дистанционного зондиро-
вания Земли требование по массе СУОС обычно составляет около 15...20 кг, а
для тяжелых модулей это требование может быть существенно расширено при-
274
мерно в 20 - 30 раз.
Соответственно меняются и требования по потребляемой мощности СУОС.
Они могут составлять от 30 до 500 Вт и выше.
Важной характеристикой является среднее энергопотребление СУОС за ви-
ток. Знание этой характеристики позволяет правильно планировать программу
полета с точки зрения рационального расхода энергии на функционирование
СУОС и энергообеспечение остальных подсистем КА.
В нештатных ситуациях потребляемая мощность СУОС может возрастать,
что специально оговаривается в ТЗ и приводится требование по значению макси-
мального энергопотребления СУОС в таких ситуациях. Это значение обычно в
3-5 раз превосходит средневитковую потребляемую мощность СУОС. При этом
обязательно ограничивают длительность участка, на котором требуемая для
СУОС мощность максимальна. Для малых КА допустимая длительность участка
с максимальным энергопотреблением нс должна превышать нескольких минут.
Требования к точностным и динамическим характеристикам СУОС
В дополнение к описанию в первом разделе требований к точностным и
динамическим характеристикам СУОС приведем в качестве примера требования
ТЗ к СУОС в режиме инерциальной ориентации (ИНО) высокоманевренного КА
средней массы типа «Аркон» космической системы наблюдения за поверхностью
Земли.
Режим ИНО обеспечивает решение целевой задачи КА путем выполнения
быстрых перенацеливаний КА и наведения оптической аппаратуры на заданный
район съемки. Режим представляет собой набор циклов, состоящих из участка
перенацеливания и участка прецизионной стабилизации. Требования к режиму
ИНО формулируются в ТЗ следующим образом.
1. СУОС на участке перенацеливания должна обеспечивать пространствен-
ный поворот ССК КА из фактической ориентации в заданную ориентацию с
обеспечением к концу перенацеливания начальных условий для очередного уча-
стка стабилизации.
Максимальная угловая скорость перенацеливания должна быть не менее
1 град/с.
Направление вращения на участке перенацеливания должно автономно выби-
раться в СУОС так, чтобы исключать засветку Солнцем полусферы «-Z» ССК на
этом участке, при условии, что начальное и конечное направления на Солнце нахо-
дятся в полусфере «н-Z» ССК. Если начальное или конечное направление на Солнце
находится в полусфере «-Z» ССК, то засветка полусферы «-Z» ССК не нормируется.
2. Должны быть предусмотрены два варианта участка стабилизации:
- с использованием ДС при стабилизации ССК КА относительно ее про-
граммного положения с ошибками по углу не более 1 град (За) и угло-
вой скорости ухода ССК не более 0,5 4 О’4 град/с относительно каждой
оси ССК;
- с использованием ПЗО и ДМ при ориентации ССК относительно ее про-
граммного положения с ошибками, определяемыми ошибками ПЗО (со-
гласовывается дополнительно) и ошибкой стабилизации программной
275
угловой скорости не более 10’5 град/с относительно каждой оси ССК.
При этом без использования ПЗО ошибка стабилизации по углу должна
быть не более 0,5 угл. с, а угловая скорость ухода ССК должна быть не
более 10"4 град/с относительно каждой оси ССК КА.
В ТЗ к СУОС могут предъявляться дополнительные требования по реше-
нию отдельных задач. Например:
- в СУОС должна быть предусмотрена задача разгрузки накопленного ки-
нетического момента с помощью двигателей стабилизации по насыще-
нию двигателей-маховиков, а также по командам управляющего инфор-
мационно-вычислительного комплекса (УИВК) в режимах солнечной и
орбитальной ориентации (порог разгрузки задается в полетном задании);
- при использовании двигателей-маховиков СУОС должна выдавать в
УИВК информацию о накопленном кинетическом моменте для разгруз-
ки с помощью смежной системы сброса кинетического момента.
Требования по надежности
Требования по надежности СУОС задаются вероятностью безотказной ра-
боты при заданной длительности наработки на орбите из расчета определенного
времени эксплуатации, а также сроком службы.
Общий ресурс СУОС должен указываться с учетом проведения всех видов
наземных испытаний.
Например, срок гарантии СУОС устанавливается не менее 10 лет, включая:
- 8 лет эксплуатации в составе КА на орбите (срок активного существова-
ния - САС);
- 1 год в процессе изготовления;
- 1 год при наземных испытаниях в составе КА и хранении.
К СУОС также предъявляют требования:
- по эксплуатации;
- к интерфейсам;
- к разработке конструкции;
- специальные требования к наземной стендовой отработке, обеспечению
патентной чистоты, сохранению коммерческой тайны.
Об этих требованиях в достаточном объеме шла речь в первом разделе книги.
4.5.2 Структурная и функциональная схемы СУОС
В соответствии с тактико-техническими требованиями в состав СУОС КА
должны входить:
- бортовой цифровой вычислительный комплекс;
- комплекс командных приборов;
- исполнительные органы;
- бортовая кабельная сеть.
Дополнительно в комплект СУОС должны входить:
- наземное оборудование;
- наземная кабельная сеть;
- ЗИП бортовой и наземной аппаратуры;
276
- программно-математическое обеспечение, необходимое для основной
работы, наземных проверок и обработки телеметрической информации
СУОС при проверках;
- эксплуатационная документация на систему.
В качестве примера на рис. 4.5.1 изображена структурная схема СУОС-
подсистемы определения и управления ориентацией (ПОУО) микроспутника
дистанционного зондирования Земли (ДЗЗ) МС-2-8.
На рис. 4.5.1 показаны:
ПАИС - астроизмерительная система;
БК - бортовой компьютер;
СД - солнечный датчик;
ИУС - измерители угловой скорости;
МГТ - магнитометр;
ДМ - двигатель-маховик;
У ВВ - устройство ввода-вывода;
ЭМ - электромагниты.
Приведены обозначения:
КПА - контрольно-проверочная аппаратура;
АП1, АП2 - асинхронный порт первый и второй;
ПДП - подсистема данных платформы;
RS-232 - канал связи БК ПОУО с БК ПДП.
На рис. 4.5.2 показана функциональная схема СУОС КА.
277
Центр
управления
полетом
Рисунок 4.5.2 - Функциональная схема СУОС КА
4.5.3 Математические модели объекта управления
4.5.3.1 Кинематические уравнения орбитального движения КА
4.5.3.1.1 Формы представления математической модели орбитального
движения КА
Математическая модель орбитального движения КА представляет собой
систему соотношений, решение которых позволяет определить в любой момент
времени с требуемой точностью кинематические параметры движения центра
масс (ПДЦМ) КА:
- радиус-вектор;
- вектор скорости;
- вектор ускорения КА.
Определение способа формирования ПДЦМ на борту КА является важным
элементом разработки навигационных алгоритмов СУ. От него зависит точность
определения радиуса-вектора и вектора скорости центра масс КА, а также время,
затрачиваемое бортовой цифровой вычислительной машиной (БЦВМ) на вычис-
ление этих навигационных параметров. В свою очередь, от точности, с которой
278
рассчитывают вектор состояния центра масс КА, зависит точность построения
ориентации и стабилизации при выполнении КА таких функций, как наблюдение
за планетами и звёздами, зондирование земной поверхности, коррекция орбиты.
Известен ряд способов определения вектора состояния центра масс КА ана-
литическими методами. При разработке таких аналитических методов использу-
ют разнообразные методы приближённого интегрирования уравнений в оскулли-
рующих кеплеровых элементах или пытаются найти такой вид потенциальной
функции, аппроксимирующей гравитационное поле притягивающего центра, ко-
торый допускает решение дифференциальных уравнений в квадратурах.
Для околоземных орбит часто используют способы экстраполяции возму-
щенной орбитой, когда учитывается влияние второй зональной гармоники в раз-
ложении потенциала гравитационного поля Земли в ряд по сферическим функци-
ям [43]. Недостатком аналитических методов является то, что в них использова-
ны приближённые формулы и не учтен широкий спектр действующих на КА
возмущений, а также то, что для любого типа орбиты практически невозможно
разработать обобщенный аналитический метод решения.
Известен ряд способов определения вектора состояния центра масс КА
приближённым интегрированием системы дифференциальных уравнений возму-
щённого движения КА в оскуллирующих кеплеровых элементах орбиты. Для
описания возмущённого движения чаще всего используют уравнения Лагранжа
или уравнения Ньютона [43]. Но эти системы уравнений нелинейные как по ар-
гументу - времени, так и по искомым функциям - оскуллирующим элементам, и
поэтому не интегрируются в конечном виде. Так как оскуллирующие элементы
являются функциями, которые медленно изменяются во времени, то уравнения
движения в оскуллирующих элементах обычно интегрируют приближёнными
методами, что является существенным недостатком, поскольку требуемая точ-
ность вычисления вектора состояния КА может обеспечиваться на коротких ин-
тервалах времени.
Наиболее широко в навигационных системах применяют способы опреде-
ления вектора состояния центра масс КА численным интегрированием системы
дифференциальных уравнений движения центра масс КА в прямоугольных коор-
динатах. В подразд. 2.1.6 приведены два часто используемых варианта представ-
ления таких систем дифференциальных уравнений в 3CKJ2000 и ГСК.
4.5.3.1.2 Возмущающие факторы, оказывающие влияние на
орбитальное движение КА
В общем случае суммарный вектор возмущающих ускорений определяется
действием на КА следующих возмущающих факторов:
- притяжением Солнца, Луны и планет Солнечной системы;
- сопротивлением атмосферы;
- световым давлением;
- деформацией Земли вследствие приливов;
- электромагнитными силами;
- притяжением атмосферы;
279
- релятивистскими эффектами.
Влияние этих возмущающих факторов зависит от таких параметров:
- характеристик орбиты КА (наклонения, эксцентриситета орбиты, высо-
ты полёта КА);
- скорости движения КА по орбите;
- степени близости прохождения орбиты КА возле Луны или планет Сол-
нечной системы и др.
Приближённые (завышенные) оценки влияния различных возмущающих
факторов на движение КА можно привести для случая круговых орбит, где ско-
рость движения КА постоянна [71].
Световое давление, приливные деформации Земли, электромагнитные си-
лы, притяжение атмосферы, релятивистские эффекты оказывают крайне слабое
влияние на движение КА и учитываются только в редких случаях, требующих
прогнозирования параметров движения КА с очень высокой точностью.
На высотах меньше 150 км основным возмущающим фактором является со-
противление атмосферы. Сильное влияние на движение КА также оказывает не-
центральность гравитационного поля тяготения Земли. Влияние остальных возму-
щающих факторов несущественно. На высотах от 150 до 700 км существенно
влияют на эволюцию орбиты КА только нецентральность гравитационного поля
Земли и сопротивление атмосферы. На высотах от 700 до 100000 км основным
возмущающим фактором является нецентральность гравитационного поля Земли,
а на высотах выше 100000 км основными возмущающими фактора-
ми - гравитационные поля Луны и Солнца. Влияние гравитационных полей планет
Солнечной системы учитывают при межпланетных полётах вблизи этих планет.
Детальное исследование различных возмущающих факторов и их влияния
на движение центра масс КА проведено П.Е. Эльясбергом [71], Г.Н. Дубошиным
[21] и др. Здесь мы приведем модели ускорений, оказывающих наиболее сильное
влияние на движение центра масс КА.
4.5.3.1.3 Математическая модель ускорения, создаваемого
гравитационным полем Земли
Как известно, точная фигура Земли представляет собой достаточно слож-
ную поверхность. Форма поверхности Земли до настоящего времени окончатель-
но не определена, и задача её дальнейшего уточнения является предметом теории
фигуры Земли и гравиметрии.
Для определения потенциала гравитационного поля Земли U по рекоменда-
ции Международного астрономического союза обычно используют разложение
потенциала в ряд по сферическим функциям [9]:
U(r,X,0) =
со / а \Л
1+1 7
п=2\ Г J
г
С„о • Р“ + fcnk • cos (k • X) + Sllk • sin (k • X) • P„k
k=l
(4.5.1)
где г- модуль радиуса-вектора КА; р- геоцентрическая гравитационная посто-
янная Земли; а- большая полуось обшеземного эллипсоида; X- долгота центра
280
(4-5.2)
масс КА; 0- дополнение к широте (<р), определяется как 9=-|--(р; PJ - присоеди-
нённые функции Лежандра, определяемые рекуррентными соотношениями [33]
[Рk = (2 n-l) cos 0-Р];1-(п + к-1) Р^2, (к<п)
Рй= (2 -п-1) -sin 0 • Р (к = п).
Начальные условия для рекуррентных соотношений:
ро=1; P«=cos0; Р/ =sin0.
Всё выражение (4.5.1) представлено в виде суммы трёх составляющих -
силовой функции материальной точки, возмущающей функции в виде суммы зо-
нальных гармоник и второй части возмущающих функций в виде суммы тессе-
ральных и секториальных гармоник.
Ускорение, создаваемое гравитационным полем Земли, вычисляют в ГСК
таким образом:
JZTT4 аи du аи
g = grad (U) = — -- — .
ax ay от _
Существуют различные формы представления проекций гравитационного
ускорения Земли. Наиболее рациональной из них является представление в виде
функций декартовых координат центра масс КА.
Используя известную взаимосвязь производных полиномов Лежандра Rk и
присоединённых функций Лежандра Р k:
P£=sink0 -RJ;,
формулу (4.5.1) можно преобразовать к виду:
U(x,y,z) = ^. l + ff-1 • C^.RS+f^.c^+S^.sXsej Rjl -.
г П-2\Г
(4.5.3)
г
Здесь введены обозначения cXs0k:= cos(k X)- sink0;
sXs0k= sin(k X)- sink0.
Сферические функции в формуле (4.5.3) определяются рекуррентными со-
отношениями
к-1
X у
cXs0k=—• cXs0k-i—' sXsOk-ii
г г
sXs0k=—* sXs0k.i+-~- cXs0k.i, k>2.
г г
Начальные условия для рекуррентных соотношений (4,5.4) и (4.5.5):
cks0i=—; sXs9i=—;
г г
(4.5.4)
(4.5.5)
281
' к = (2-n-l) cos 6-R];,-(n + k-l)-Rt2 z. .
n-k
R;=(2-n-i) R-; (k=n).
Начальные условия для рекуррентных соотношений (4.5.6):
Rg=l; R°=cos9; RJ =1.
Дифференцируя соотношение (4.5.1), получаем
х
Srx -gR----gx>
г
у
| grY -gR gy>
r
Z
grZ-gR-----gz,
l Г
(4.5.6)
(4.5.7)
k-1
+ Snk
•sA.s0k-i)Rn
(4.5.8)
gy =
’k-J
- Cnk * sXsOk-l)' j
(4.5.9)
no ‘^11 + S(Cnk -cXsGk-j 4-Snk
k=2
•sXsOk4)-R^1 , (4.5.10)
n
Cn0-RS-
a i n
- -£(n + k + l)- (Cnk-cXsOk-i+Snk sA.s0k-i)-Rn + gzcos0.
r J k=l
(4.5.11)
При расчёте ускорения гравитационного поля Земли (в зависимости от тре-
буемой точности прогноза параметров движения КА) обычно ограничиваются
учётом гармоник гравитационного поля Земли Cnk, Snk до четвертого порядка
включительно (п=2-4, к=0-п).
4.5.3.1.4 Математическая модель возмущающего ускорения,
обусловленного влиянием атмосферы Земли
Воздействие сопротивления атмосферы на траекторию движения КА носит
вековой нарастающий характер и, несмотря на свою малость, может по истечении
достаточного промежутка времени привести к существенному изменению пара-
метров движения КА.
Как известно, сила Fa сопротивления воздуха противоположна по направ-
лению скорости движения рассматриваемого объекта относительно воздуха, а её
величина определяется соотношением [71]
282
F =cx’Sm-p‘-^,
где cx - безразмерный аэродинамический коэффициент сопротивления воздуха,
величина которого определяется характером отражения частиц воздуха от по-
верхности КА; Sm - площадь миделева сечения; р - плотность воздуха; v0TH - мо-
дуль вектора скорости КА vOTH относительно атмосферы.
В этом случае возмущающее ускорение, обусловленное воздействием атмо-
сферы Земли, представляют в виде
8а — • Р* V0Th ’^отн» (4.5.12)
где Сб - баллистический коэффициент, определяемый формулой
m - масса КА; V0TH - модуль вектора скорости КА относительно набегающего
потока воздуха v0TH, определяемый как
^отн
vx0 + ю3 • у0
VyO “ ©3 *Х0
VzO
в 3CKJ2000,
(4.5.13)
ИЛИ
В ГСК. (4.5.14)
Здесь х0,у0 и ¥^,¥^,¥20 - проекции радиуса-вектора и вектора скорости КА в
3CKJ2000; vx, vy, vz - проекции вектора скорости КА в ГСК.
Существующие динамические модели атмосферы представляют собой со-
вокупность таблиц и формул, позволяющих определить плотность атмосферы на
определенной высоте для заданного момента времени. Основными исходными
данными этих моделей, помимо высоты и местного солнечного времени, могут
являться широта точки, в которой определяется плотность, склонение Солнца,
индексы солнечной активности, характеризующие поток солнечного излучения,
геомагнитный индекс и др. В силу сложной зависимости плотности атмосферы от
времени эти модели не нашли широкого применения в космической навигации.
Обычно при расчётах, связанных с определением влияния сопротивления
воздуха на движение КА, пользуются более простыми статистическими моделя-
ми атмосферы, учитывающими зависимость плотности атмосферы только от вы-
соты. Точность таких моделей атмосферы является во многих случаях недоста-
точной, в связи с чем возникает необходимость в их согласовании с имеющимися
опытными данными. Это согласование проводится путем использования некото-
рых поправочных коэффициентов, определяемых обычно по результатам измере-
283
ний элементов фактических орбит. По существу в процессе полёта уточняется
влияние атмосферы на движение КА.
4.5.3.1.5 Влияние гравитационных полей Луны, Солнца и других
планет Солнечной системы
На расстояниях от Земли более 20000 км ускорения, вызванные гравитаци-
онным влиянием Луны и Солнца, оказывают существенное влияние на движение
центра масс КА. При расчёте параметров движения центра масс в сфере действия
Земли достаточно учитывать в потенциалах полей Луны и Солнца только сило-
вые функции материальной точки [21].
В этом случае ускорение, вызванное гравитационным влиянием Луны, за-
писывают в виде
£м - Нм '
ГМА _ £м
\ ГМА ГМ
(4.5.15)
где Ц м ~ гравитационный параметр Луны; г м - радиус-вектор Луны в геоцен-
трической экваториальной системе координат стандартной эпохи J2000; гм -
модуль радиуса-вектора Луны г м, который определяется выражением
гм +Ум +Zm;
гма ~ вектор направления «Луна - КА», определяемый как
Г МА = Г М “ С
гма “ модуль вектора направления «Луна - КА» гМА, определяемый как
гма=|Гм “Г | = aT(xL - X )2 +(У м - У )2 + (Z м -Z)2.
Ускорение, вызванное гравитационным влиянием Солнца, записывают в виде [21]
rs
3
Is J
где ps - гравитационный параметр Солнца; rs - геоцентрический радиус-
вектор Солнца, определяемый выражением
rs=-rE;
rs - модуль радиуса-вектора Солнца rs, который определяют как
rs - Vxs + Ys 2+ zs2 J
rSA = rs - r - вектор направления «Солнце - КА»; rSA - модуль вектора направ-
ления «Солнце - КА» г SA, определяемый как
rsA = |rs - г | = ^(Xs-x)2+(ys-y)2+(zs-z)2.
284
4.5.3.1.6 Учёт управляющих воздействий при коррекции параметров
орбиты КА
Необходимость проведения коррекции орбиты КА определяется следую-
щими факторами:
- несоответствием расчётной (требуемой) орбиты КА фактической орбите
КА, сформированной в процессе выведения КА на расчётную орбиту;
- эволюционными изменениями траектории движения под действием воз-
мущающих сил.
Наличие этих факторов в конечном итоге приводит к необходимости пере-
вода КА с фактической орбиты на требуемую (рабочую) орбиту посредством реа-
лизации импульса скорости двигательной установкой КА.
Для проведения коррекции ПДЦМ КА на борту КА используют следую-
щую информацию: tBIO1 - момент начала выдачи КИ; AvKH - величина требуемого
приращения вектора скорости КА; Атки - длительность КИ.
Наиболее простой формой учета КИ является учёт изменения радиуса-
вектора и вектора скорости КА в момент выключения двигательной установки
(ДУ). При этом вектор состояния центра масс КА корректируют в соответствии
со следующими соотношениями [71]:
fl*KA Свыкл ) ~ ®*КА Свыкл ) AVrjj 5 /л г 1 z*x
1 , (4.5.16)
КА Овьгкл ) ~ ^КА (^выкл ) *" AVjqj ’
где -радиус-вектор КА, экстраполированный на момент выключения ДУ;
v'ka-вектор скорости КА, экстраполированный на момент выключения ДУ;
1выкл - момент окончания выдачи КИ, определяемый как
1выкл ~1вкл“^ Ат ки .
Для более точного прогнозирования ПДЦМ КА на активных участках полё-
та КА необходимо учитывать динамику изменения ПДЦМ КА в процессе реали-
зации КИ. В этом случае на интервале времени от включения до выключения ДУ
в правые части систем дифференциальных уравнений (2.1.6.1) или (2.1.6.2) дви-
жения КА вносится вектор возмущающих ускорений, создаваемый ДУ КА в про-
цессе выдачи корректирующего импульса скорости (см. подразд. 2.1.6).
4.5.3.2 Кинематические уравнения вращательного движения КА
вокруг центра масс
4.5.3.2.1 Параметры ориентации
Параметры ориентации (или кинематические параметры) определяют угло-
вое положение КА в некоторой базовой системе координат (СК), направление
осей которой в пространстве заранее известно.
Наиболее распространенными базовыми системами координат, используемыми
для ориентации и стабилизации КА, являются инерциальная и орбитальная. Первую
из них применяют, когда проводят исследования, требующие ориентации КА в за-
данную точку космического пространства, например при наблюдении звезд и изуче-
нии различного рода космических излучений. В качестве инерциальной базовой сис-
285
темы координат для КА чаще всего применяют геоцентрическую прямоугольную СК,
оси которой ориентированы неподвижно в инерциальном пространстве, например,
относительно второй ЭСК. При проведении исследований, связанных с наблюдения-
ми на поверхности Земли или других планет, используют орбитальную СК.
Для определения угловых отклонений КА от выбранной базовой системы
отсчета вводят систему координат, связанную с КА. В качестве связанной обычно
принимают СК, образованную некоторыми, связанными с конструкцией КА ося-
ми, наиболее близко совпадающими с главными осями инерции. Такая СК в наи-
большей степени соответствует задачам системы ориентации и стабилизации, по-
скольку в них входит обеспечение определенной ориентации того или иного обо-
рудования, которое, как правило, жестко установлено на корпусе и функциональ-
ные оси которого чаще всего совпадают с осями симметрии КА.
Кинематические параметры ориентации являются обобщенными координа-
тами, позволяющими описывать угловое движение твердого тела.
В настоящее время существует три типа параметров, различие между которы-
ми определяется способом описания вращения твердого тела. Это направляющие ко-
синусы, углы Эйлера и их разновидности, параметры Родрига-Гамильтона и парамет-
ры, сводящиеся к ним (вектор конечного поворота, параметры Кейли-Клейна, вектор
Гиббса и др.) [2, 14, 30, 42]. При этом в случае направляющих косинусов положение
связанного с КА базиса в инерциальном базисе задается покоординатно, в случае уг-
лов - с помощью трех последовательных поворотов, а в случае кватернионов опреде-
ляется одним плоским поворотом вокруг оси эйлерова вращения. Между различными
параметрами существует связь, позволяющая перейти от одной системы кинематиче-
ских параметров к другой.
Углы Эйлера-Крылова
Переход от базовой системы координат, например орбитальной OX0Y0Zo, к
связанной OXYZ можно осуществить с помощью трех последовательных поворо-
тов вокруг определенных осей. Углы этих поворотов, называемые углами Эйле-
ра-Крылова, для последовательности поворотов 0—ир показаны на рис. 4.5.3.
Рисунок 4.5.3 - Углы Эйлера-
Крылова (О-^у-хр)
286
В теории управления КА углы G, у и <р принято называть углами тангажа,
рыскания (курса) и крена.
Направляющие косинусы
Углы Эйлера-Крылова представляют собой три независимые величины, че-
рез которые могут быть выражены девять направляющих косинусов my (i, j=l, 2,
3) углов между осями связываемых систем координат:
М=-(т,}
У Ji,>1,2,3
(e„i,) (e„i2) (e„i3)
(e2,i,) (e2,i2) (e2,i3)
(взЛ,) (еэД2) (e3,i3).
Здесь (ej,ij),i,j = 1,2,3 - скалярное произведение базисных векторов, компоненты
которых задаются в одной системе координат, например в ОСК.
Каждому повороту на угол 9, у и (р соответствует своя матрица направ-
ляющих косинусов, называемая также матрицей перехода от одной системы ко-
ординат к другой:
cosG sin 9 O'
- поворот на угол G: Ме = -sinG 0 COS у cosG 0 ; 0 L 0 siny
- поворот на угол : Мф = 0 — sin v “1 0 1 0 0 cosy 0
- поворот на угол у: Мф = 0 cosy 0 -siny siny . cosy
Ориентация связанной с КА СК OXYZ в орбитальной СК OXoYoZo будет
определяться суммарной матрицей М направляющих косинусов (матрицей пере-
хода от ОСК к ССК):
M = M<pMvM0.
Матрицу М удобно представить в виде табл. 4.5.1.
Таблица 4.5.1 - Направляющие косинусы в углах Эйлера-Крылова
Оси x0 Yo Zo
X cosy cosG cosy sin G -sin у
Y -cosysinG + + sinysinycosG cosycosQ + + sin (p sin у sin G sin у cos у
Z cosysinycosG + + sin у sin G cosysinysinG- - sin у cosG cosy cos у
287
Параметры Родрига-Гамильтона
Пусть твердое тело, имеющее неподвижную точку О, подвергается поворо-
ту на угол х вокруг оси, направление которой задается единичным вектором е;
это направление на оси выбирают так, чтобы, смотря с его конца, видеть поворот
на угол < 180° происходящим в положительную сторону (против часовой стрел-
ки для правой системы осей).
Рассмотрим радиус-вектор точки тела ОМ = р до поворота. После поворота
он займет положение ОМ' = р', так что вектор ММ ^р'-р представит собой
перемещение точки М при повороте тела. Это перемещение выражается через ве-
личины (угол х и вектор е), определяющие поворот, и вектор р. Очевидно, что
векторы р и р' являются образующими кругового конуса, по оси которого на-
правлен единичный вектор е.
Будем считать, что вектор р связан с подвижной системой осей OXYZ, ко-
торая до поворота совпадала с неподвижной системой осей OXiYjZ]. Вектор
у
0 = 2e-tgy и, называемый вектором конечного поворота, осуществляет поворот
системы OXiYiZ( в OXYZ.
Представляя вектор е в форме разложения по единичным векторам осей
OXfY iZf. е = cos а + i2 cosp + i3 cosy, где а, p, у - углы, которые составляет век-
тор е с этими осями, можно записать
0 = 0Г i' + ОХ + 03 i; = 0^ + 02i2 + 03i3.
Формулы теории конечных поворотов приобретают более симметричный
вид, если пользоваться не проекциями вектора поворота, а пропорциональными
им величинами:
= (4.5.17)
Коэффициент пропорциональности выбирают по условию
Х2+Х2+Х22+Х2 =1. (4.5.18)
Таким образом, вектор конечного поворота 0 будет определяться четырьмя
параметрами, названными параметрами Родрига-Гамильтона:
Х1 =cosasin-|-; Х2 = cospsiny; Х3 = cosy sin у; Хо =cosy, (4.5.19)
связанными одним условием (4.5.18). Здесь а,р,у - углы, образуемые осью по-
ворота с осями координат (одинаковые в системах OXfYiZj и OXYZ), % - угол
поворота.
Кватернионы
Кватернионы впервые были введены в математику в 1843 г. Гамильтоном.
Под кватернионом понимают число, составленное из действительной едини-
цы 1 и трех мнимых единиц ib i2,1з следующего вида:
288
A — ,%2,X3) = XO1 + Mi + ^2*2 ^*зЧ- (4.5.20)
Другими словами, кватернион представляет собой гиперкомплексное чис-
ло, компонентами которого являются параметры Родрига-Гамильтона.
Геометрический смысл кватерниона ориентации состоит в следующем.
Вектор Х = (Х1Л2А3)т, называемый векторной частью кватерниона А, направлен
вдоль оси Эйлера (оси конечного поворота), а угол поворота % вокруг этой оси
у
определяет скалярную часть кватерниона =cosy. При этом из условия нор-
мировки следует, что векторная часть имеет длину jl| = siny.
Для кватерниона ориентации существует формула сложения поворотов.
Так, если выполнено три последовательных поворота на кватернионы соответст-
венно А1, Аг и А3, то результирующий кватернион А вычисляют по формуле
Л = А1оД2оА3, (4.5.21)
где «°» - знак кватернионного умножения.
Если каждый элементарный плоский поворот, выполняемый на соответст-
вующий угол Эйлера-Крылова, при переходе от одного базиса к другому (напри-
мер, от ОСК к ССК), представить в виде кватерниона, а затем воспользоваться
формулой сложения поворотов (4.5.21), то можно получить соотношения, связы-
вающие кватернион (параметры Родрига-Гамильтона) с углами Эйлера-Крылова
6 V <р , . 0 . у . <р
Л о = cos—cos—cos— + sm —sin—sin—;
2 2 2 2 2 2
. 0 v . cp . 0 . v 9
Л, = cos—cos—sin---sin—sin—cos—;
2 2 2 2 2 2
- 0 . W ф . 0 u . (p
= cos—sin—cos—+ sin—cos—sin—;
2 2 2 2 2 2
. .0 w <p 0 . ф . ф
Л3 = sin—cos—cos— -cos—sin—sin—.
3 2 2 2 2 2 2
Таблицу направляющих косинусов (табл. 4.5.2) также можно записать через
кватернионы (параметры Родрига-Гамильтона).
Таблица 4.5.2 - Направляющие косинусы в кватернионах (параметрах Родрига-
Гамильтона)
Оси Хо Yo Zo
X X2+Х2-Л.2-Л.2 2(ХоХз +AqX2) 2(—XqX2 +Х|А/з)
Y 2(—+X2Xj) Х2+А.2-Х2-Х2 2(21qX] +А,2Х3)
Z 2(XqX2 +Х3Х1) 2(—XqA.! +Х3Х2) х2+x2-x2-x2
289
Теория кватернионов позволяет создать весьма удобный и наглядный фор-
мализм, использующий данные параметры. Применение кватернионов позволило
представить в единой векторной форме бесконечно малые вращения, опреде-
ляющие вектор угловой скорости, и произвольные преобразования, являющиеся
конечными поворотами. Кватернионы дают удобный аппарат для исследования
кинематики движения твердого тела [14].
Кватернионы по сравнению с другими параметрами ориентации обладают
следующими преимуществами:
- они не вырождаются при любом положении твердого тела;
- этих параметров четыре, поэтому они имеют одно уравнение связи в от-
личие от шести для направляющих косинусов;
- уравнения в кватернионной форме имеют более простой вид, так как они
не содержат тригонометрических функций.
В связи с этим упрощается задача численного решения кинематических
уравнений,
4.5.Зо2.2 Кинематические уравнения вращательного движения КА
Кинематические уравнения связывают векторы угловой скорости вращения
твердого тела с производными по времени от параметров ориентации.
Соответственно выбранным кинематическим параметрам уравнения, опи-
сывающие движение твердого тела вокруг центра масс, могут иметь различные
формы: уравнения в углах Эйлера-Крылова, направляющих косинусах, кватер-
нионах и др.
Кинематические уравнения в углах Эйлера-Крылова
Для получения кинематических уравнений в углах Эйлера-Крылова можно
использовать тот факт, что вектор угловой скорости о равен сумме угловых ско-
ростей относительных составляющих движений, определяемых скоростями ф, ф,
0. Так, для последовательности поворотов 0—>\|/—>ф получим
сох — ф — (б — со0 )sin \|/,
©У =ycos(p + (9-(D0)sin(pcos\y, >
coz =(o-(o0)cos(pcos(p-vsin(p.
(4.5.22)
Здесь ©о - орбитальная угловая скорость КА.
Данное уравнение легко можно получить исходя из того, что так как преоб-
разование базисов задается тремя последовательными плоскими поворотами на
Кинематические уравнения (4.5.22) после несложных преобразований мо-
гут быть обращены:
290
(p = CDX + tg\|/((Dy SHI ф + G>z COS(p),
V = CDy coscp - oz sin <p,
3 = —-—((Dy sin(p + CD2 COSCp)+(D0.
cosy
(4.5.23)
Как видно из (4.5.23), обращенные кинематические уравнения вырождают-
ся при у=90° (второй угол в последовательности поворотов).
Кинематические уравнения в направляющих косинусах
Для вывода кинематических уравнений, связывающих производные от ко-
синусов с компонентами вектора угловой скорости, рассмотрим соотношение
г = Вг, задающее ортогональное преобразование вектора. Этому соотношению
соответствует матричное равенство R = BR.
Пусть имеются два близких значения R'(t+dt) и R’(t), которые отличаются
на бесконечно малый оператор:
R'(t + At)=(l + ©)R'(t). (4.5.24)
Из этого соотношения имеем
AR' = R'(t + At)- R'(t)=0R'(t).
Разделив данное соотношение на At и перейдя к пределу, получим
R' = f — IR^SIR',
I dt J
(4.5.25)
0 -Q3 q2
где d 0 /dt - матрица угловой скорости £2 = Q3 0 -Q,
-q2 Qt 0
Элементами матриц R и R' так же, как и матрицы угловой скорости £1, яв-
ляются соответственно проекции векторов г, г' и ю на неподвижную систему
координат / (<D = Q1il +Q2i2 + £l3i3). Поэтому матрицу £1 в равенстве (4.5.25) бу-
дем отмечать индексом базиса, т.е. Ор
Сравнивая соотношения (4.5.25) и (4.5.24), получаем
£1,=ВГВТ. (4.5.26)
Откуда, умножая справа выражение (4.5.26) на ненулевую матрицу В, име-
ем (ВВТ - ВТВ -1):
В = £2]В. (4.5.27)
Уравнение (4.5.27) представляет собой первую форму кинематического
уравнения для направляющих косинусов, в которую входят величины проекций
вектора угловой скорости КА на неподвижный базис I.
Преобразуем оператор £1] в оператор £1Е следующим образом:
291
nE =BT£1IB,
О
где
ПЕ — со3
-со2
-<о3 <л2
О -СО]
СО] О
(4.5.28)
co = + со2е2 + мзез > (i= 1, 2, 3) - проекции вектора со на базис Е.
Поскольку А=ВТ, то в соответствии с преобразованием (4.5.28) оператор П
в базисе Е (он обозначен ПЕ) будет связан с £lj следующим подобным преобра-
зованием:
£2] — В£2Е А.
Подставляя в уравнение (4.5.27) матрицу угловой скорости П15 выражен-
ную через получаем вторую форму кинематического уравнения, в которую
входят величины проекций угловой скорости КА на связанную систему коорди-
нат:
В — В£1Е .
(4.5.29)
В том случае, когда ортогональное преобразование задается в таком виде,
где используется матрица А, кинематические уравнения для матрицы А=ВТ полу-
чаются из (4.5.27) и (4.5.28) с учетом того, что АВ=ВА=1, АВ + АВ = 0,
В = -ВАВ:
А — —£1еА — —А£1р
(4.5.30)
Аналогично соотношению (4.5.26) исходя из равенства (4.5.30) получим
матрицу, определяемую проекциями вектора угловой скорости на связанные оси,
как функцию от направляющих косинусов и их производных:
Пе=ВтВ = -ААт. (4.5.31)
Поскольку определитель матрицы ортогонального преобразования равен
единице, то обращение уравнений (4.5.26) и (4.5.31) всегда выполнимо. Поэтому
кинематические уравнения (4.5.27), (4.5.29) и (4.5.30) не вырождаются при любом
значении параметров, т.е. при любом положении твердого тела.
На примере уравнения (4.5.30), имея в виду, что = a , запишем для эле-
ментов ау кинематические уравнения в скалярном виде
aRl =”^3aR2 +^2aR3i
aR2 =“^1aR3 +^3aRU
aR3 =—^2aRl +^2aR2-
ан =-G)2a3i + <»За2Ь
a2i =- co3au +G)Ia3i;
a3i - —03^2] + CD2ali i
(4.5.32)
Соотношения (4.5.26) и (4.5.31) определяют величины компонентов угло-
вых скоростей:
292
Ч = —a31a21 -a32a22 ~a33a23 =a21a31 — a22a32 -a23a33;
co2 =-a11a31 ~a12a32 -a13a33 =a3iaH -a32a12 ~a33a13;
4 = -a21aH -a22a12 -a23al3 =ana21 — al2a22 -al3a23:
a21a13 — a22a23 — a32a33 = a13a12 “a23a22 “a33a32>
Q2 = —а13аи — a23a21 — a33a31 =аца13 — a2ia23 — a31a33;
Q3 = -а12ап — a22a21 — a32a31 =a12aii -a22a21 -a32a31.
(4.5.33)
Полученные 18 скалярных уравнений называются уравнениями Пуассона.
Девять кинематических уравнений Пуассона (4.5.32), содержащие проекции век-
тора угловой скорости на связанные или на неподвижные оси, описывают движе-
ние трех ортов связанного с твердым телом базиса.
Кинематические уравнения в кватернионах
С развитием цифровой вычислительной техники и появлением бесплат-
форменных инерциальных навигационных систем чаще стали использовать ква-
тернионы, компонентами которых являются параметры Родрига-Гамильтона.
Теория кватернионов позволила создать весьма удобные и наглядные математи-
ческие конструкции для исследования кинематики движения твердого тела во-
круг центра масс.
Кинематические уравнения в кватернионной форме в инерциальной систе-
ме координат имеют вид [14]
А = 0,5А о оз,
(4.5.34)
(4.5.35)
где А = {Xi} (i=0, 1, 2, 3) - кватернион ориентации ССК в ИСК; о = {со,} (j=x, у,
z) - вектор угловой скорости КА в проекциях на оси ССК.
В покомпонентной записи кинематические уравнения имеют вид
2Х0 ——шхХ| —щуХ2 —cozX3;
2Xj = шхХ0 + <ozX2 — соуХ3;
2Х2 = сОуХр + шхХ3 (DzXj;
2Х3 = ©2Х0 + (DyXj й)хХ2.
Иногда используют матричную форму уравнения (4.5.34):
А = 0,5ПА,
О - сох - (оу - coz
и О coz - соу
где П = .
шу - coz 0 сох
_Ч ч -ч 0
При записи кинематических уравнений в орбитальной системе координат
необходимо учесть ее вращение относительно ИСК с орбитальной угловой ско-
ростью ш0-
(4.5.36)
293
Л = 0,5Л о (ш-о0). (4.537)
Несмотря на то, что для численного интегрирования удобно использовать
уравнения в кватернионной форме, для аналитических исследований часто при-
меняют линеаризованные кинематические уравнения в углах Эйлера-Крылова.
4.5.4. Математические модели командно-измерительных приборов
СУОС
4.5.4.1 Математическая модель ГИВУС
Математическая модель ГИВУС предназначена для формирования инфор-
мации об угловой скорости КА в процессе математического моделирования рабо-
ты СУОС КА.
Для понимания описания данной модели следует обратиться к рис. 3.4.4,
поясняющему принцип работы самого прибора.
Работа каждого измерительного канала (ИК) ГИВУС построена на интег-
рировании проекций входной угловой скорости на измерительную ось ИК и вы-
даче дискретной информации о приращении угла кажущегося поворота вокруг
измерительной оси в виде суммы информационных импульсов за интервал вре-
мени измерения.
Приращение информации о кажущемся угле поворота 0i(n) за такт измере-
ния определяется формулой
0i(n) = Ci • Н(п) - G)Tj • Ти,
где i - индекс, соответствующий номеру ИК; п - текущий такт измерения; Ni -
количество информационных импульсов на выходе ИК, накопленное за n-й такт
измерения; Ти - длительность интервала измерения; Ci - систематическое (пас-
портизованное) значение масштабного коэффициента HKi; соТ] - систематическое
(паспортизованное) значение нулевого сигнала HKi, не зависящее от ускорения;
Nj(n) = Ent
1 ш
- fM^Odt + A^
н сф; tn-
где Н- кинетический момент гироскопа; Mod(t)- момент обратной связи в
HKi; Ent - выделение целой части числа; Дшум - шумовая составляющая нулевого
сигнала HKi; Сф; - фактическое значение масштабного коэффициента:
Сф, = Ci + (Ci • ACi + Cpi 8Ci) 1 O'2,
где Cpi - среднее значение масштабного коэффициента в запуске; ACi - откло-
нение среднего значения в запуске от паспортизованного значения, %; 5С< - слу-
чайное отклонение от среднего значения в запуске, %.
Момент обратной связи в HKi определяют по формуле
Mod — [l/(Toi • Р + 2^oi • Toi • Р + 1)] • {Н ’ (Oxi + Jyi ’ (Jzi — Jxi) х
X COxj • (Од 4- [<дОфт1 + (Офп ’ (ctxi/р) + Ффр{ * (ctz/р)]} j
где TOj, ^oi - постоянная времени и относительный коэффициент демпфирова-
ния колебательного звена HKt; CDxi - проекция угловой скорости прибора на изме-
294
рительную ось ИК,; coyi - проекция угловой скорости прибора на ось прецес-
сии ИК; (Dzi - проекция угловой скорости прибора на ось кинетического момента
ИК; (byi, aXi3 azi - проекции углового и линейного ускорений движения прибора
по оси ИК;
К ““ ^Hxi + 5Jxi,
Jyi — Jnyi 6Jyj,
Jzi JHZi “b 6Jzi,
где Jhxi, JHyi, JHZi, 5Jxi, 5Jyi, 5JZi - номинальные значения и отклонения моментов
инерции подвижной части i-ro гироскопа вокруг соответствующих осей; coxi, ©pi,
oori — фактическое значение нулевого сигнала ИК» не зависящего от ускорения х и
нулевых сигналов ИК, пропорциональных перегрузке от осевой р и радиальной г
разбалансировок i-ro гироскопа, которое можно представить в следующем виде:
СОфх] COxi “Ь ДсО-п ScoTj,
®Фрг ®pi Scdpi,
софп = <0п + ДЮп + 5®ri,
где ccipi, a>ri - систематические (паспортизованные) значения нулевых сигналов,
зависящих от перегрузки; A<x>Ti, Дсорь ДшГ1 - отклонение средних значений в запус-
ке от паспортизованных значений; 5a>Ti, <5сорь случайные отклонения от
средних значений в запуске.
4. 5.4.2 Математическая модель ВОГ
Представленная в данном разделе математическая модель описывает про-
цесс формирования измерений волоконно-оптическим гироскопом типа
ОИУС 501 проекции вектора угловой скорости КА на ось чувствительности при-
бора, называемую также измерительной осью.
Математическая модель ВОГ состоит из разовой и тактируемой частей. В
разовой части модели (блок начальной установки) осуществляется настройка пе-
ременных модели и некоторых постоянных параметров. В тактируемой части мо-
дели проводят расчет проекции вектора угловой скорости КА на измерительную
ось прибора с учетом погрешностей измерения и установки. В математической
модели предусмотрена возможность изменения характеристик ВОГ в зависимо-
сти от температуры прибора. Коэффициенты функциональной зависимости по-
грешности прибора от температуры определяются по результатам термоиспыта-
ний. Предусмотрена возможность моделирования неисправностей ОИУС.
При описании математической модели используют следующие системы ко-
ординат:
Хоиус, Уоиус, Zonyc - правая ортогональная приборная система координат,
определяющая номинальное положение измерительной оси ОИУС Zonyc (ось
чувствительности), оси Хоиус, Уоиус параллельны установочной поверхности
295
ОИУС, при этом ось Хоиус направлена в сторону группы контактов прибора, ось
Zonyc перпендикулярна установочной поверхности ОИУС;
Хоиусд, Уоиусд, 2оиусд- система координат, определяющая действитель-
ное положение измерительной оси ВОГ.
Отклонение действительного положения измерительной оси ОИУС от но-
минального задается двумя углами <рх и <ру (рис. 4.5.4).
Рисунок 4.5.4 - Положения измерительной
оси ОИУС: Zonyc - номинальное положение
измерительной оси ОИУС; Zonycfl -
- действительное положение измерительной
оси ОИУС
Входной переменной модели ВОГ является «идеальная» угловая скорость
КА в данном канале, получаемая путем интегрирования динамических уравнений
Эйлера, описывающих движение КА вокруг центра масс, в блоке "Математиче-
ская модель динамики КА". Выходными переменными модели ВОГ являются
импульсы, соответствующие проекции угловой скорости КА на измерительную
ось прибора, или импульсы, соответствующие кажущемуся углу поворота КА,
т.е. интегралу от проекции угловой скорости. Кроме того, на выходе модели
формируется сигнал, пропорциональный показаниям встроенного температурно-
го датчика ВОГ.
Описание блоков математической модели ВОГ
1. Формирование показаний датчика температуры:
- моделирование температуры ВОГ
T(n) = То + AT-sin(o0‘nT-Tc + фто);
Тк(п) = КтТ(п) + (1-Кт) Тк(п);
Тв(п) = Та-1п(ат(пт-Тс+1));
Тоиус(п) = Тк(п) + Тв(п);
- моделирование показания датчика температуры
296
T„(n) = Тоиус(п) + 8T;
^тк(п)— Ent[TJT(n)/ATKB].
Здесь переменные:
Т(п) - температура посадочного места;
Тк(п) - температура корпуса;
Тв(п) - температура внутреннего прогрева;
пт - текущий такт.
Постоянные параметры:
То ~ среднее значение температуры посадочного места (20°С);
АТ - амплитуда изменения температуры посадочного места;
Тс - период обновления информации с ВОГ;
Кт - температурный коэффициент;
Та, ат - коэффициенты в законе изменения температуры собственного про-
грева ВОГ;
8Т - погрешность датчика температуры;
АТКв ~ дискретность квантования температуры;
сп0, фто - частота и фаза в законе изменения температуры посадочного мес-
та.
2. Вычисление проекции вектора абсолютной угловой скорости КА на изме-
рительную ось ВОГ
\Ущ(п) = (WxB(n)-sin(py(n) - WYB(n)cos9y(n)-sin(px(n) +
WZв(n)♦cosфy(n)•cosфx(n)).
Здесь Wjb (j=x> У» z) “ входные переменные модели ВОГ; cpj(n) = 8<pjM + A<PjM (j=x,
у) - ошибки углов ориентации измерительной оси ОИУС заранее вычисляются в
разовом блоке начальной установки.
3. Вычисление температурной составляющей смещения нуля:
- вычисление градиента температуры
GT(n) = (Тоиус(п) - ТОИуС(п-1))/(60-Тс);
- вычисление нормированных температуры и градиента
т z х Тоиус(п)-Трм GT(n)-GpM
Тм(п) =----—------ GM(n) =----—-------;
АТМ AGM
- вычисление температурной составляющей смещения нуля
WI(n) = К- + К”Тм(п)+К^^^
+ Ko2GM2(n)+KJ3GM3(n);
- вычисление смещения нуля
WE(n) = W0M + WDBM + WT(n).
Постоянные параметры:
ТрМз GpM - рабочие значения температуры и градиента соответственно;
АТМ, AGM - интервалы изменения температуры и градиента соответственно;
297
KoO, Kim0,...Kq3 -- коэффициенты температурной составляющей смещения
нулевого сигнала;
W0M5 WDBM - систематическая и случайная составляющие нулевого сигнала
соответственно.
4. Вычисление погрешностей масштабного коэффициента:
- отличие температуры ВОГ от рабочего значения
ДТ(п) = Трм — Тоиус(п);
ЕТ(п) = Ео + К4-ДТ(п) + К5-АТ2(п);
- нелинейность масштабного коэффициента
EW(n) = 1 + К6(\У1Д(п) / WM)2 + К7(\¥1Д(п) / Wm)4;
- суммарная погрешность масштабного коэффициента
ES(n) = ET(n)EW(n).
Постоянные параметры:
Трм - рабочая температура;
Ео - начальное значение погрешности масштабного коэффициента;
Wm - максимальное значение измеряемой угловой скорости;
К4, К5, Кб, К7 - коэффициенты, учитывающие изменение погрешности
масштабного коэффициента от температуры и от нелинейности характери-
стики.
5. Вычисление шума ВОГ:
fm(n) =(R(n) / Тс) / R^;
WDN(n) = 3-ош(п) • sin (2л-Гш(п) пт-Тс),
где аш(п) = (60Е1Л/^)/57,2957795 вычисляется в блоке начальной установ-
ки; fnpon - полоса пропускания (100 Гц); FI- спектральная плотность мощности
шума (0,005 град/7ч); R(n)- случайное число (выход процедуры RANDOM,
равномерный закон распределения с нулевым математическим ожиданием);
Rmax - максимальное значение случайного числа.
6. Моделирование неисправностей:
- неизменного значения угловой скорости в течение продолжительного
времени при Т]НОТК <Пт <Т1КОТк, при этом необходимо выполнить
W«yc(n) = Wwc(n-l)
и идти на сравнение с максимальным значением WM;
- дрейфа нулевого сигнала к значению максимальной измеряемой угловой
СКОрОСТИ При Tjhotk <_ПТ S-Tzkotk’
Wo(n)=K0TK-WM + (l-K^W^n),
WE(n)= W0TK(n);
- увеличения в несколько раз смещения нулевого сигнала и шума прибора
При Тз нотк <^т <_Тз котк*
298
NK(n) = NKC,
где Тшотк<пт<Т\Котк (i=l, 2, 3)- временные метки возникновения и снятия неис-
правностей; NKC - коэффициент кратности при отказе третьего типа.
7. Формирование выходной информации:
- вычисление измеренной угловой скорости с учетом погрешностей
W,yc(n) = (Ww(n) + NK(n)WE(n) + NK(n)-WDN(n))/ES(n) +WB(n),
где Wb(h)- сбойная информация ВОГ, представляет собой кратковременные
(один, два такта) выбросы или провалы в измерении угловой скорости Wflyc(n);
- вычисление измеренной угловой скорости с учетом диапазона.
Если WAyc(n) > WM(n), то \Удус(п) = WM(n)-sign(W^c(n)),
f 1 прих>0,
где sign(x) = s
[-1 прих<0;
- квантование угловой скорости
N0(iyc(n) = Ent[57,2957795 ЛУдус(п)/Ди];
- квантование угла
0(n)=0(n)+O,5(Wayc(n)+Wflyc(n-l))Tc;
N0K(n) = Ent[57,2957795-36OO-0(n)/A0KB].
Если NO^n) > 232-1, то 5N0K(n) = N0K(n) - (232-1).
|N0K (п)| при 0 < N0K (n) < 232 -1,
8N0K (n) при N0K (n) > 232 -1,
(232 -1) + N0K (n) при N0K (n) < 0,
где Дкв - дискретность квантования угловой скорости (3,05-10“7град/с); А0кв-
дискретность квантования по углу (0,00075 угл. с).
N0(n) =
4.5.4.3 Математическая модель погрешности БА
Блок акселерометров предназначен для измерения в месте установки при-
бора проекции ускорения КА на ось ОХ связанной с прибором ортогональной
системы координат и выдачи в систему наведения информации о приращении
кажущейся скорости КА в направлении указанной оси. Использование СН (при
выключении ДУ по величине приращения кажущейся скорости) измерительной
информации, определяемой БА, позволяет значительно увеличить точность реа-
лизации КИ.
Результирующую погрешность формирования БА приращения кажущейся
скорости AWbazb общем виде представляют следующим образом [62]:
Лw _ AWBffi + AWMET - AW^ + AWU + AWfl - AW0
A WBAI -
(4.5.38)
cos5ea
где 5ба - угол между суммарным вектором тяги ДУ и осью чувствительности
БА; AWbhe - погрешность, обусловленная влиянием вибрационных перегрузок на
показания БА; AWMet - методическая погрешность обработки информации БА;
299
AW^ - погрешность определения кажущейся скорости, обусловленная влияни-
ем инструментальных погрешностей БА (AWP и AWT); AW4 - погрешность, обу-
словленная дискретностью информации, получаемой от БА; AV/д - погрешность,
обусловленная дискретностью обработки информации от БА; AWq ~ начальная
погрешность съёма информации с БА («приобретение» части или полного им-
пульса скорости).
Состав компонент AWbhe, AWmet и AW^ результирующей погрешности
формирования БА кажущейся скорости представлен в табл. 4.5.3.
Таблица 4.5.3 - Состав компонент результирующей погрешности кажущейся
скорости
№ п/п Тип составляющей погрешности Состав компонент суммарной по- грешности
1 Погрешность, обусловленная влия- нием вибрационных перегрузок на показания БА AWBHE=AWnn+AWBt+AWBI, П‘АВ где AWnn = _ , 7t-fB AWBi =K.W1 • А|-t, AWBI=KW2-A|-I
2 Методическая погрешность обра- ботки информации БА AWmet = ~ • (Aroax - Bmin) • Д’ •
3 Погрешность определения кажу- щейся скорости, обусловленная влиянием инструментальных по- грешностей БА AW“ = (AWp • W • cos8ea + AW, )• T,
В табл. 4.5.3 используют следующие обозначения:
AWnn - случайная погрешность, определяемая характеристиками вибраци-
онных перегрузок;
Ав - среднеквадратическое значение вибрационной перегрузки;
fB - частота вибрации, на которой достигается максимальное значение ве-
личины вибрационной перегрузки;
п — коэффициент, соответствующий максимальному значению вибраци-
онной перегрузки (п < 5);
AWBl - составляющая, пропорциональная времени действия вибрационной
перегрузки (t);
KWI - коэффициент, определяемый опытным путем при испытаниях БА на
вибростенде;
AWBI - составляющая, пропорциональная величине приращения кажущей-
ся скорости;
300
KW2 - коэффициент, определяемый опытным путем при испытаниях БА на
вибрационном стенде;
Атах - максимальное количество импульсов, поступающих за один такт с
нечетных каналов БА;
Впйп -минимальное количество импульсов, поступающих за один такт с
четных каналов БА;
Д* - номинальная цена импульса скорости (Д =0,01 м/с);
AWP - инструментальная погрешность БА, зависящая от перегрузки (уско-
рения);
AWT - инструментальная погрешность БА, не зависящая от перегрузки;
W - фактическая величина кажущегося ускорения;
Тl - такт опроса информации БА;
5Т1 - разброс времени съема информации с БА в такте опроса Т(.
4.5.4.4 Математическая модель прибора ориентации на Солнце (ПОС)
В математической модели ПОС последовательно выполняют следующие
операции.
1. Формирование признаков приборного включения и выключения ПОС-
ППОСп и встроенного имитатора ППОСи в зависимости от поступления соот-
ветствующих команд.
2. Учет задержки включения и выключения прибора.
3. Вычисление положения Солнца в приборной системе координат.
4. Учет готовности прибора, имитация отказа в работе, формирование призна-
ка неисправностей.
5. Формирование признака наличия Солнца в поле обзора ПОС и вычисление
информационных импульсов с учетом задержки.
6. Моделирование работы УВВ.
7. Моделирование сбойных измерений.
Выходная информация математической модели ПОС формируется в виде
импульсов Nj(n) и N2(n) по формулам
N2(n) = Ent<
тс - 2arcsin
s;oc(n)
б-1
ии
1^ (n) = Ent< (+ arctg
Sr(n)Vl N2(n)l
sr(n)j ™ 2 ]
где N^n)- количество информационных импульсов ПОС на интервале от
«НО» до «КС1» (Солнце попало в первую щель); N2(n) ~ количество информа-
ционных импульсов ПОС на интервале от «КС1» до «КС2» (Солнце попало во
вторую щель); S"-* (n) (j=x, у, z) - кинематические направляющие косинусы век-
тора «КА - Солнце» в ПСК ПОС; 5“^ - приведенное значение цены информаци-
онного импульса.
301
4.5.4.5 Математическая модель прибора ориентации на Землю (ПОЗ)
Свяжем с ПОЗ приборную систему координат ОХПОз¥поз2поз- Положение
вектора «KA-Земля» в этой системе зададим углами аЕ и 0Е или вектором на-
правляющих косинусов:
Е1 = {Е*} = [cosaE cos0E :sinaE cos0E :-sin0E]T.
Способ вычисления угла отклонения плоскости чувствительности прибора
от местной геоцентрической вертикали (ГЦВ):
0Е=О,5(01-02)
ясен из рис. 4.5.5.
Рисунок 4.5.5 - Схема работы прибора
ориентации на Землю
Углы 01 и 02 измеряют путем вычисления в УВВ числа импульсов Nj (i=l -
4), выдаваемых кодирующим устройством ПОЗ за интервал времени, в течение
которого мгновенное поле зрения оптической системы совершает движение от
левого концевого контакта (ЛК) (или правого - ПК для угла 02) до линии гори-
зонта Земли по грубому порогу (ЛГ2) и точному (ЛГ1).
При поиске, захвате и приведении КА к местной вертикали угол 0Е вычис-
ляют по информационным импульсам грубого порога:
P7=O,5(N3-N4)5^;
302
а в режиме точной стабилизации КА - по информационным импульсам точного
порога:
Основу математической модели ПОЗ составляют выражения для углов Pi
(i=l, 2). Из рис. 4.5.5 следует, что они могут быть найдены из уравнения
а,, (n) cos ₽, (и) + (-1)‘+1 а21 (n) sin ft (n) = cos г',
где an(n), a21(n) - элементы матрицы направляющих косинусов углов между
осями ОСК и ПСК ПОЗ; - угловой радиус ’’видимого” диска Земли.
Модель ПОЗ состоит из следующих блоков:
АНУ - блок начальной установки. Присваивает переменным модели начальные значе-
ния.
БЭМ - блок вычисления углов Эйлера, определяющих положение местной вер-
тикали в ПСК ПОЗ.
ПКН - блок преобразования кода в напряжение. Вычисляет величину смещения
следящего зеркала ПОЗ.
А- блок моделирует следящую систему, смещающую зеркало по сигналу с
ПКН. Вычисляет направляющие косинусы местной вертикали в ПСК
ПОЗ с учетом положения следящего зеркала.
ПНК - блок преобразования напряжения в код. Вычисляет величину положения
следящего зеркала.
АСВ - блок определения засветок по Солнцу и Луне по информации из модели
кинематики.
При засветке ПОЗ Солнцем блок АСВ формирует импульс наличия Солнца
и включает в себя блок АСН. При засветке Луной блок АСВ формирует соответ-
ствующий помеховый сигнал. Работа блока АСВ может блокироваться призна-
ком ZCB=1.
АСН - блок, имитирующий засветку ПОЗ Солнцем.
АФП - блок формирования поля обзора ПОЗ. Формирует информацию ПОЗ в
угловой мере.
АШ - блок шума. Искажает информацию ПОЗ введением шума. Работа блока
АШ может блокироваться признаком Ziu=l.
АИ- блок формирования сумм информационных импульсов. Переводит ин-
формацию ПОЗ из угловой меры в импульсную.
АОСН- блок сканирования. Вводит в импульсную информацию запаздыва-
ния, вызванные процессом сканирования мгновенного поля зрения ПОЗ.
БАРУ - блок АРУ. Имитирует работу блока автоматической регулировки уси-
ления ПОЗ. Формирует суммы информационных импульсов ПОЗ по
грубому и точному порогам. Возможна имитация неисправности ПОЗ
’’Невключение АРУ” по НАРУ=1.
АПСЗ - блок переключения следящего зеркала ПОЗ. Устанавливает плоскость
сканирования мгновенного поля зрения ПОЗ в положение I или II в со-
ответствии с признаком, поступающим из БЦВК, или при возникнове-
303
нии импульса наличия Солнца. Возможна имитация неисправности ПОЗ
"Непереключение следящего зеркала” по признаку НВКпсз=1.
БПА - блок присвоения буферу приема признаков АРУ и ИНС.
Описание основных блоков математической модели ПОЗ
Блок БЭМ
l. MB[n] = 1.
2. Ej^fn] = MH[n]-Ecj[n] б=х, у, z).
3. Эприб[п] = -arcsinEz"₽1,6[n].
4- Фм[п] =
signE"p”6[n] при!Е^ри6[п]| < До,
ЕПрибГцТ
arctg ПРИ |ЕГб[п^ £ Ао и Е”риб[п] > О,
Ьхи LnJ
рприбгп1
- л + arctg—при |Е"₽иб[п]| > До И Е^и6[п] < 0 и Е7"б[п] < О,
k х LnJ
Епри6Гп1
л + arctgпри|Е"р,,б[п]| > До и Е^иб[п] < 0 и Е7"6[п] > 0.
5. Если MB[n] = 1, то {МВ[п] = 2; <рпри6[п] = фм[п]; EjnpH6[n] = Eq[n] и идти
к п. 4}.
6. End БЭМ.
Здесь МВ[п] - логический признак;
Ejnpil6[n] - направляющие косинусы вектора КА - Земля в ПСК;
Ми[п] - матрица перехода от ССК к ПСК;
ECj[n] - направляющие косинусы вектора КА - Земля;
Зприб[п] - угол отклонения ГЦВ от плоскости чувствительности ПОЗ;
ф 11риб[п] - угол отклонения ГЦВ от измерительной плоскости ПОЗ;
фм[п] - модельный угол отклонения ГЦВ от измерительной плоскости ПОЗ;
До - малая постоянная для защиты от деления на нуль.
Блок А
1 ф ПРИ!исм[п]-фсМ[п]|>Дс„
с [0 иначе
2. Фсм[п] = Фсм[п -1] + <рсм[п].
3. Ф?м[п] = Фсм[п] + Дф[п].
4. а?! [и] = cos З"1™6 [п] • соз(феМ [п] - фприб [и]);
а21 [n] = - sin &"риб[п].
Здесь фсм[п] - скорость смещения плоскости сканирования ПОЗ;
фсм[п] - угол смещения плоскости сканирования ПОЗ;
304
<PcM[n] ~ угол между положением следящего зеркала и измерительной
плоскостью ПОЗ;
А(р[п] - угол дополнительного смещения плоскости сканирования ПОЗ;
Щм[п] - напряжение, пропорциональное сигналу смещения плоскости ска-
нирования ПОЗ;
ан[п] - направляющий косинус между ГЦВ и оптической осью ПОЗ;
a2J[n] - направляющий косинус между ГЦВ и плоскостью чувствительно-
сти ПОЗ;
усм - скорость смещения плоскости сканирования ПОЗ.
Блок АСН
Зл[п] = 5 Зп[п] = и идти на блок АШ.
Здесь Зл[п] - угол между левым «концевиком» и линией горизонта Земли;
&п К “ угол между правым «концевиком» и линией горизонта Земли;
_ угол от левого края траектории сканирования до линии горизонта при
попадании Солнца в мгновенное поле зрения;
3° - угол от правого края траектории сканирования до линии горизонта
при попадании Солнца в мгновенное поле зрения.
Блок ПНК
1. ф™к[п] = Кх1<РсМ[п] + С т .
СМ ь J All vM *- J ф
2. БПОб! = entire
3. БП0б6=БП06ь
Здесь Фсмк[п] - сигнал положения следящего зеркала;
eJm - дискретность квантования цифрового сигнала смещения;
К^ - крутизна ПНК;
С , - смещение нуля ПНК;
БП061 - буфер съема информации с ПНК положения следящего зеркала ПОЗБ;
БПОбб- буфер съема информации с ПНК положения следящего зеркала
ПОЗА.
Блок ПКН
UjM[n] = г entire
где UCM[n] - смещение следящего зеркала.
305
Блок АИ
— 9-шГп1 — ЗшГп1
N4[n] = entire , Nn[n] - entire —nJ^,
ли ли
где Ыл[п] - квантованное значение суммы импульсов от левого края до линии
горизонта;
Nn[n] - квантованное значение суммы импульсов от правого края до ли-
нии горизонта;
[п] - угол отклонения левой линии горизонта от левого края траектории
сканирования с учетом погрешности;
[п] - угол отклонения правой линии горизонта от левого края траекто-
рии сканирования с учетом погрешности;
Аи - цена информационного импульса.
Блок АОСН
1. тл[п]= Тсяк[п-1] + 1 при Тсл [п-1]<ТССК;
1 при Тл[п-1]>ТССК.
2. Т"[п] = Тс"к[п-1] + 1 при Тсл [п-1]<Тсск;
при Тл [п -1] > Тсск.
3. NJnl= . Йл[п] при Тл[п]>1£;
[NJn-l] при Тлк[п]<Тсск.
4. N„[n] = < Nn[n] при Тс"[п]>Тсск;
Nn[n-1] при Тспк[п]<Тсск.
Здесь Тслк[п] - время сканирования мгновенного поля зрения от датчика левого
края;
Тслк[п-1] - предыдущее значение времени сканирования мгновенного поля
зрения от датчика левого края;
Тспк[п] - время сканирования мгновенного поля зрения от датчика правого
края;
Тс" [n -1] - предыдущее значение времени сканирования мгновенного поля
зрения от датчика правого края;
Nn[n] - сумма информационных импульсов от левого края до линии гори-
зонта;
Nn[n] - сумма информационных импульсов от правого края до линии го-
ризонта;
Тсск - период сканирования;
Ил[п-1] - квантованное значение суммы импульсов от левого края до ли-
нии горизонта;
306
Nn[n-1] - квантованное значение суммы импульсов от правого края до
линии горизонта.
4.5.4.6 Математическая модель звездного датчика (ЗД) на одну звезду
При проектировании СУ, разработке алгоритмов и их отладке в схеме ма-
тематического моделирования используются математические модели всех ко-
мандных приборов, в том числе и математическая модель ЗД на одну звезду.
Рассмотрим структуру и принципы работы математической модели ЗД,
приведенного в подразд. 3,4.6 настоящей книги.
Схема математической модели ЗД и ее взаимодействие с БЦВМ показаны
на рис. 4.5.6.
Рисунок 4.5.6 - Схема математической модели ЗД и ее
взаимодействие с БЦВМ
На схеме математической модели ЗД (рис. 4.5.6) обозначены следующие
блоки:
- БНУ - блок начальной установки;
- БРПК - блок расчета программных координат;
- БРК - блок реализации команд;
- БОКЗ - блок определения координат звезды.
Рассмотрим работу математической модели и ее взаимодействие с алгорит-
мами СУ, реализованными в БЦВМ.
В БНУ по данным, определяющим установку ЗД на конкретном КА, опре-
деляется матрица установки приборной системы координат (ПСК) ЗД МуСТ в свя-
занной системе координат (ССК) КА. БНУ также обеспечивает остальные блоки
ММ необходимыми для их работы настройками. БНУ является разовым блоком,
307
остальные блоки тактированы.
В блоке кинематики КА, учитывающем угловое движение КА и колебание
его упругих элементов, исходя из координат рабочей звезды (РЗ) в инерциальной
системе координат определяются реальные координаты РЗ в ССК. Далее они пе-
редаются в БРПК ММ ЗД и в алгоритмы СУ (БЦВМ) для дальнейшей обработки
и преобразования.
В БРПК по полученной информации из кинематики КА и предварительно
рассчитанной матрице МУСт рассчитываются координаты РЗ в ПСК ЗД и опреде-
ляются требуемые программные углы разворота телеблока ЗД ащ>, Рпр для обна-
ружения РЗ.
БРК предназначен для обеспечения временной циклограммы работы ЗД
при получении соответствующих команд от БЦВМ и управления блоком БОКЗ.
Из БЦВМ поступают следующие команды:
- «Вкл/Выкл»;
- «Поиск»;
- «Сопровождение»;
- «Ожидание».
По команде «Вкл/Выкл» в ММ ЗД подключается или выключается БРК (и,
соответственно, БОКЗ).
При приходе от БЦВМ команды «Поиск», содержащей рассчитанные по
бортовой информации об ориентации КА углы целеуказания для ЗД апр, Рпр, кода
яркости и размера поля зрения РЗ, в соответствии с рабочей временной цикло-
граммой ЗД БОКЗ начинает обработку поступивших данных.
Размер задаваемого поля зрения ЗД может быть от 3°х3° до 40'х40'.
В зависимости от заданного поля зрения ЗД БОКЗ формирует разрешенную
область, определяемую как ап, Рп ± ’/4 размера заданного поля зрения, в которую
должны попасть пришедшие целеуказания ац и Рц из БЦВМ.
В случае попадания целеуказаний в определенную ранее зону БОКЗ выдает
в БЦВМ признак информативности ЗД Пинф ~ 1 (обнаружение ЗД или Пинф = О
при необнаружении) и измерение относительно центра квадрата поля зрения
(аПр, Рпр) координаты РЗ - а3, р3.
При наличии признака Пинф = 1 БЦВМ начинает передавать в ММ ЗД ве-
личины (Хц,Рц (требуемые угловые скорости поворота телеблока ЗД), позво-
ляющие поддерживать РЗ в центре поля зрения ЗД. Данная операция проводится
при задании из БЦВМ команды «Сопровождение».
После прихода из БЦВМ команды «Ожидание» ММ ЗД перестает переда-
вать измеренные координаты РЗ, но находится во включенном состоянии до при-
хода следующей команды «Поиск».
4.5.4.7 Математическая модель астроизмерительной системы (АИС)
Математическая модель АИС предназначена для моделирования работы и
формирования измерений астроизмерительной системы, которые используют для
определения ориентации и управления космическим аппаратом. На рис. 4.5.7 по-
казана схема взаимосвязи систем координат, используемых в модели.
308
Рисунок 4.5.7 - Схема взаимосвязи систем координат
На рис. 4.5.7
ИСК - инерциальная система координат;
ССК - связанная система координат;
ПСКР - приборная система координат (с учетом погрешностей установки -
реальная);
ПСКИ - приборная система координат (без погрешностей установки - иде-
альная);
Mv - матрица ориентации ССК в ИСК;
Мог - матрица ориентации, задающая переход от ИСК к ПСКР;
МуСТ - матрица номинального углового положения ПСК АИС относительно
ССК;
Моуст - матрица ошибок углового положения ПСКР АИС относительно но-
минального положения;
Мруст - матрица углового положения ПСК₽ АИС относительно ССК.
1. Матрицу номинального углового положения приборной системы координат
(ПСК) АИС относительно связанной с КА системы координат (ССК) опре-
делим из формул
fl 0 0 1
Мустх ~ 0 cosF* sinF*
k0 -sinF* cosF*^
^cosF* 0 -sinFy^
Мусту “ 0 1 0
^sinF* 0 cos F*
' cosFz* sin F* (Г
MyCTZ — -sinFz* cosF* 0
< 0 0 ъ
309
где SFj* - угол установки ПСК относительно ССК в канале j (j=x, у, z).
2. Сформируем матрицу ошибок углового положения ПСК АИС относительно
номинального положения:
Моусг
' 1
-5Fz
t8Fy
8FZ
1
-8FX
-8F/
5F
1 J
где 5Fj = 5F* + 8F0j-; 8F* - измеренная ошибка установки ПСК относительно
номинального положения ПСК в канале j (j=x, у, z); 8F0j - остаточная ошибка ус-
тановки ПСК относительно ССК в канале j (j=x, у, z).
3. Сформируем матрицу углового положения ПСК АИС относительно ССК:
М =М М
1TJLpycT 1ТХоуст 1ТХуст •
4. Искомую матрицу перехода от ИСК к ПСК, измеренную АИС, определим
как
Мог — • Mv,
где Mv - «идеальная» матрица ориентации ССК в ИСК, рассчитанная в модели
кинематики.
4.5.4.8 Математическая модель БАИБ
Математическая модель БАИБ предназначена для формирования выходной
информации БАИБ:
- проекций вектора угловой скорости космического аппарата на оси при-
борной системы координат (ПСК);
- параметров ориентации (кватернионов) ПСК относительно инерциаль-
ного пространства.
Математическая модель БАИБ включает в себя следующие блоки:
- математическую модель блока измерителей угловой скорости - БИУС;
- математическую модель астроизмерительной системы - АИС;
- программно-алгоритмическое обеспечение спецвычислителя БАИБ.
Математическая модель БИУС состоит из четырех идентичных модулей,
описывающих функционирование волоконно-оптических гироскопов (ВОГ). Ма-
тематическая модель ВОГ приведена в подразд. 4.5.4.2.
Математическая модель АИС описана в подразд. 4.5.4.7, а программно-
алгоритмического обеспечения СВ БАИБ - в подразд. 3.4.8.
4.5.4.9 Математическая модель погрешности измерений АП СРНС GPS
АП СРНС GPS обеспечивает измерение навигационных параметров сигна-
лов, принимаемых от НКА СРНС GPS. Приёмник АП СРНС GPS непосредствен-
310
но измеряет псевдозадержку и доплеровский сдвиг частоты сигнала на трассе
«КА-АП СРНС».
Текущие навигационные параметры фиксируются в один и тот же момент
времени, что позволяет обрабатывать их совместно. В результате решения нави-
гационной задачи определяются координаты и составляющие вектора скорости
фазового центра антенны АП СРНС. Исходной информацией для этого являются
первичные навигационные параметры (ПНП): псевдодальность и радиальная
псевдоскорость.
АП СРНС является одной из разновидностей радиотехнических измери-
тельных систем. Она обладает такими характерными для них особенностями, как
наличие в составе ПНП широкого спектра медленно меняющихся (включая сис-
тематические) и быстроменяющихся (флуктуационных) погрешностей.
4.5.4.9.1 Математическая модель погрешности измерений
псевдодалыюсти
Псевдодальность рассчитывают в АП СРНС по формуле
^ks = С ’
где AtI<s - разность времён приёма АП СРНС GPS (по шкале времени приём-
ника АП СРНС GPS) и излучения НКА сигнала (в шкале времени СРНС GPS);
с - скорость света в вакууме.
Состав погрешности измерений псевдодалъности
В общем виде измеренное значение псевдодальности до s-ro навигационно-
го космического аппарата (НКА) DKS в момент излучения tKs может быть пред-
ставлено следующим образом:
DKS = D& + AD“Mn + 5D™, (4.5.39)
где D£s -фактическое (истинное) значение псевдодальности до s-ro НКА;
AD^111- медленно меняющаяся составляющая погрешности (ММП) измерения
псевдодальности до s-ro НКА; 8D^<? - флуктуационная составляющая погрешно-
сти измерения псевдодальности до s-ro НКА.
Представим фактическое значение псевдодалъности Dj^ в виде суммы её
расчётного значения и погрешности расчёта псевдодааьности ', обу-
словленной неточным прогнозом эфемерид НКА
D^=D^+AD^.
Подставив это соотношение в формулу (4.5.39), получим
0^=0^+ AD^ + дрммп + шфл . (4.5.40)
В формулах (4.5.39) и (4.5.40)
DJcs = 7(ГКП " rKs)T (ГКП “ rKs) ;
Dks = V (гкп ~ rKS ) ' (ГКП ~ rKS ) ,
311
^де гкп - фактический (истинный) радиус-вектор фазового центра антенны АП
СРНС GPS; rKS - фактический (истинный) радиус-вектор НКА; r^s -
спрогнозированный по эфемеридной информации (ЭИ) радиус-вектор s-ro НКА.
К основным источникам медленно меняющихся погрешностей (ММП) оп-
ределения псевдодальности в стандартном режиме функционирования АП СРНС
3PS относятся [75]:
AD™H - ММП, обусловленная неточным учётом влияния систематической
составляющей показателя преломления ионосферы;
ADJ^ - ММП, обусловленная уходами эталона частоты и времени (ЭЧВ)
НКА относительно ЭЧВ СРНС GPS и эффектами общей теории отно-
сительности;
AD£{? - ММП, обусловленная задержкой в аналоговом тракте АП СРНС
GPS;
AD^T- методические погрешности (из-за неточной синхронизации изме-
рений и др.).
Основными источниками флуктуационной погрешности определения псев-
цодальности в стандартном режиме функционирования АП СРНС GPS являются
[75]:
6D™H - флуктуационная погрешность, обусловленная влиянием случай-
ной составляющей показателя преломления ионосферы;
- флуктуационная погрешность, обусловленная приёмом антеннами
АП СРНС GPS навигационных сигналов (НС), отражённых от эле-
ментов конструкции КА (многолучёвость НС);
- флуктуационная погрешность, обусловленная шумами приёмника
АП СРНС GPS.
Следует отметить, что в составе перечисленных выше погрешностей отсут-
ствуют:
- погрешность, обусловленная влиянием тропосферы, поскольку основ-
ные участки полета КА (за исключением спуска с орбиты) пролегают на
высотах более 200 км, а влияние тропосферы на высотах более 45 км не-
значительно;
- погрешность, обусловленная преднамеренным снижением точности оп-
ределения координат для С/А-кода, так как в настоящее время режим
«селективного доступа» отменён [54] (при включённом специальном
режиме СД эта погрешность является основной в составе результирую-
щей погрешности измерения).
Медленно меняющиеся аппаратные и методические погрешности зависят
от конструктивных особенностей АП СРНС GPS и используемых ею методов об-
работки измерений. При правильном учёте аппаратных задержек и обработки из-
мерений они становятся пренебрежимо малыми по сравнению с другими состав-
ляющими погрешности измерения псевдодальности и в дальнейшем не учитыва-
ются.
312
Таким образом, медленно меняющаяся AD^sMn и флуктуационная 8D^
составляющие погрешности измерения псевдо дальности могут быть определены
соотношениями [75]:
AD&Mn = AD™H + ADSqA ; (4.5.41)
5D£? = 5DJJ2H + 5DM? + 5ОШАП (4.5.42)
Предельные значения медленно меняющихся составляющих погрешности
измерения псевдодальности представлены в табл. 4.5.4, а предельные значения
флуктуационных составляющих - в табл. 4.5.5. В качестве источников информа-
ции при формировании таблиц использовали [75] и [54].
Таблица 4.5.4 - Предельные значения эфемеридной погрешности и медленно меняющихся
составляющих погрешности измерений псевдодальности
№ п/п Источник погрешности Предельные значения погреш- ности, м
2,7ст 3,0(7
1 Эфемеридная погрешность 8,2... 14,7 10,8
2 Влияние ионосферы 10,0... 18,0 21,0
3 Уход ЭЧВ НКА, эффекты общей тео- рии относительности 3,0 3,0
4 Суммарная погрешность при выклю- ченном режиме СД 13,3 ... 23,4 23,8
Нижние и верхние границы диапазонов в табл. 4.5.4 приведены соответст-
венно для НКА с большими и малыми углами возвышения.
Таблица 4.5.5 - Предельные значения флуктуационных составляющих погрешности
измерений псевдодальности
№ п/п Источник погрешности Предельные значе- ния погрешности, м
2,7а
1 Влияние ионосферы 0,03
2 Влияние многолучёвости 3,0
3 Влияние шумов приемника GPS 3,0
4 Суммарная погрешность 4,2
Очевидно, что в составе суммарной флуктуационной погрешности 8D£g
ионосферная погрешность 8DJ!£H значительно меньше остальных флуктуацион-
ных погрешностей и далее также учитываться не будет.
313
Таким образом, для одночастотных измерений псевдодалъности на частоте
L1 и одновременных двухчастотных измерений псевдодалъности на частотах L1
и L2 в соответствии с (4.5.40) - (4.5.42) получим
Dks = DKS + AD™ + AD^hli + ADhka 4.5Dмлн + sDulmili . (4.5.43)
DKS = Dks + ADk? + ADS?HL2 + AD™* + SD^2 + SD™1™-2. (4.5.44)
В различных источниках информации могут приводиться существенно от-
личающиеся оценки составляющих погрешностей измерения псевдодалъности.
Эти отличия имеют различные причины. Так, например, ионосферная погреш-
ность содержит систематическую и случайную погрешности, обусловленные не-
точным учётом показателя преломления ионосферы. Она зависит от угла возвы-
шения НКА, положения КА в пространстве, состояния солнечной активности и
др. Отклонение ионосферной задержки относительно среднемесячной может со-
ставлять около 25%. Ионосферная погрешность носит характер дополнительной
задержки сигнала, никогда не бывает с отрицательным знаком и уменьшается с
увеличением угла возвышения НКА. Поэтому не рекомендуется использовать в
АП СРНС GPS сигналы от НКА. с углами возвышения меньше 5°.
Способы компенсации погрешностей измерений псевдодалъности
Медленно меняющиеся погрешности, содержащиеся в соотношениях
(4.5.43) и (4.4.44), могут быть частично скомпенсированы.
ММП измерения псевдодальности, обусловленная уходом ЭЧВ НКА и реля-
тивистской составляющей погрешности AD^, компенсируется поправкой [54]
AD‘l0Ck = с-Atsv,
где AtSv - временная поправка, которая рассчитывается АП СРНС GPS в соот-
ветствии с ICD-GPS-200C [54]; с - скорость света в вакууме.
Погрешность, обусловленная неточностью расчёта временной поправки
Atsv, не превосходит 1 нс [54]. При этом остаточная погрешность
AD||0 = ADg^ - AD£lock (4.5.45)
не превосходит 0,3 м.
В одночастотных приёмниках АП СРНС GPS ионосферная поправка AD££H
рассчитывается АП СНС GPS по известной модели Клобушара. Считается, что эта
модель позволяет устранить половину ионосферной погрешности [54]. Таким об-
разом, в этом случае предельное значение остаточной ионосферной погрешности
ADJJ&? = AD“?H - AD”°H (4.5.46)
NOU Ко N3 4 x
составляет « 0,5 • AD^H.
Для компенсации ионосферной ММП в двухчастотных приёмниках АП
СРНС GPS, использующих измерения псевдодалъности на частотах L1 и L2, ре-
комендуется использовать модифицированное значение псевдодалъности DKS:
314
„ Bbl-yDgs
Dks= . > (4-5.47)
1-y
где Dks-измеренное значение псевдодальности на частоте LI; Не-
измеренное значение псевдодальности на частоте L2;
После расчёта компенсирующих поправок проводят коррекции измерений
псевдодальности в одночастотной АП СРНС GPS на частоте LI и модифи-
цированной псевдодальности DKS в двухчастотной аппаратуре по формулам
Dks = Dks - ADS,ock - ADg°HLl; (4.5.48)
Dks = Dks - ADSlock, (4.5.49)
где D^s - откорректированное измеренное значение псевдодальности на час-
тоте L1 в момент времени tKS; DKS - откорректированное модифицированное
значение псевдодальности в момент времени t^; AD£lock - поправка к шкале
времени s-ro НКА; AD^HL1 - ионосферная поправка на частоте L1.
Используя соотношение, характеризующее известную зависимость ионо-
сферной погрешности от частоты излучения f,
AD™(f) = 4,
нетрудно показать, что в модифицированном значении псевдодальности сис-
тематическая составляющая ионосферной погрешности компенсируется полно-
стью.
Оценка остаточной погрешности измерений псевдодалъности одночас-
тотной АП СРНС GPS
Определим остаточную погрешность измерений псевдодальности AD^0
одночастотной АП СРНС GPS как разность откорректированного значения изме-
ренной на частоте L1 псевдо дальности D{^ и её расчётного значения D£s:
ADrso = Dks “D£s.
Последовательно подставляя в это выражение соотношения (4.5.48),
(4.5.43) и (4.4.45), получим
ADkso = ADk? + AD™ + AD|PSO + SD™ + 8D™, (4.5.50)
где AD|j0 определяется соотношением (4.5.45):
ЛОионы =ДЕ)ионы -AD™.
KoVJ Ko Ko
315
Используя выражение (4.5.50) и полагая составляющие результирующей
остаточной погрешности A D J^o независимыми случайными величинами, полу-
чим соотношение для расчета её СКО:
ADkso = + AD™ +aDbp0 +5Dwi +5D^nL1. (4.5.51)
Предельные значения результирующей остаточной погрешности измерения
псевдодальности и её составляющих для одночастотной АП СРНС GPS представ-
лены в табл. 4.5.6.
Таблица 4.5.6 - Предельные значения результирующей остаточной погрешности
измерения псевдодалыюсти одночастотной АП СРНС GPS
N п/п Источник остаточной погрешности Предельные значения оста- точной погрешности, м
2,7а 3,0а
1 Эфемеридная погрешность 8,2... 14,7 10,8
2 Влияние ионосферы 5,0... 9,0 10,5
3 Уход ЭЧВ НКА 0,3 0,3
4 Влияние многолучёвости 3,0 -
5 Влияние шумов приёмника GPS 3,0 -
6 Результирующая погрешность при вы- ключенном режиме СД 10,5 ... 17,8 15,1
Нижние и верхние границы диапазонов в табл. 4.5.6 приведены соответст-
венно для НКА с большими и малыми углами возвышения.
Для расчёта предельного значения результирующей остаточной погрешно-
сти измерения псевдодальности и её составляющих использовали соотношения
(4.5.45) и (4.5.46), а также данные, приведенные в табл. 4.5.4 и 4.5.5. Предельное
значение результирующей остаточной погрешности рассчитывали как За
док1о
Вычисление СКО a.nLI проводили по формуле (4.4.51). Из табл. 4.5.6 видно, что
основными источниками результирующей остаточной погрешности измерения
псевдодальности одночастотной АП СРНС GPS являются погрешность расчёта
по эфемеридной информации положения НКА и ионосферная погрешность.
Оценка остаточной погрешности измерений псевдодальности двухчас-
тотной АП СРНС GPS
Остаточную погрешность измерений псевдодальности ADKS0 двухчастот-
ной АП СРНС GPS определим как разность модифицированного значения псев-
додальности DKS и её расчётного значения D£s:
^kso~^ks DPKS.
316
Подставив последовательно в это выражение соотношения (4.5.49), (4.5.43)
и (4.5.44), (4.5.45) и (4.5.46), получим
ADKS0 = AD& + ADBP0 + <Dks, " Y .Pks )HDKS J (д $
Используя выражение (4.5.52) и полагая составляющие результирующей
остаточной погрешности AD“ 0 независимыми случайными величинами, запи-
шем соотношение для расчета её СКО:
г 1+у
“«ИЗО f + + (TZV7' (a»g+ “»!?." ’' <4-5-5”
Поскольку Т = П’, то ini-.60;477’ 8,87.
l_6oj (1-т) 172-1372
Таким образом, в случае проведения двухчастотных измерений влияние
многолучёвости и шумов аппаратуры увеличивается почти в три раза.
Предельные значения результирующей остаточной погрешности измерения
псевдодальности её составляющих для двухчастотной АП СРНС GPS представ-
лены в табл. 4.5.7. Здесь нижние и верхние границы диапазонов приведены соот-
ветственно для НКА с большими и малыми углами возвышения.
Таблица 4.5.7 - Предельные значения результирующей остаточной погрешности
измерения псевдодальности двухчастотной АП СРНС GPS
N п/п Источник остаточной погрешности Предельные значения погрешности, м
2,7ст 3,0ст
1 Эфемеридная погрешность 8,2 ... 14,7 10,8
2 Уходы ЭЧВ НКА 0,3 0,3
3 Влияние многолучёвости 9,0 -
4 Влияние шумов приёмника GPS 9,0 -
5 Результирующая погрешность при выклю- ченном режиме СД 13,3... 17,2 10,8
В случае проведения двухчастотных измерений для расчёта предельного
значения результирующей остаточной погрешности измерения псевдодальности
и её составляющих использовали данные, приведенные в табл. 4.5.4 и 4.5.5. Пре-
дельное значение результирующей остаточной погрешности рассчитывали как
3 ст . Вычисление СКО ст проводили по формуле (4.4.53). Как показано
adkso adkso
в табл. 4.5.7, основными источниками результирующей остаточной погрешности
измерения псевдодальности двухчастотной АП СРНС GPS являются погрешность
расчёта положения НКА по эфемеридной информации, а также погрешности,
обусловленные влиянием многолучёвости и шумами приёмника GPS.
317
4.5.4.9.2 Математическая модель погрешности измерений радиальной
псевдоскорости
Радиальная псевдоскорость рассчитывается АП СРНС по формуле
D = -— с,
f
где Рд - доплеровское смещение частоты сигнала, излучаемого НКА СРНС GPS;
f-частота сигнала, излучаемого НКА СРНС GPS; с - скорость света в вакууме.
Состав погрешности измерений радиальной псевдоскорости
В общем виде измеренная радиальная псевдоскорость DKS в момент излу-
чения tns может быть представлена следующим образом:
Ькв = D* + ADMsMn + 5D™ (4.5.54)
где D£s - фактическое (истинное) значение радиальной псевдоскорости;
двммп - медленно меняющаяся составляющая погрешности (ММП) измерения
радиальной псевдоскорости; 3D флуктуационная составляющая погрешно-
сти измерения радиальной псевдоскорости.
Представим фактическое значение радиальной псевдоскорости в виде
суммы её расчётного значения и погрешности расчёта радиальной псевдо-
скорости , обусловленной неточным прогнозом эфемерид НКА:
Ь^=Ь^+аЬ'^.
Подставив это соотношение в формулу (4.5.54), получим
DKS +AD^ +AD&Mn +8D^. (4.5.55)
В формуле (4.5.55) AD^ = D& - D£s;
Drs - jy^“7(vKn “ vks)T ’ (гкп _|ks);
Dks = j}p ’7(vKn “ vks) * (гкп " rKs) >
где Гкп, Укп - фактические (истинные) значения радиуса-вектора и вектора
скорости фазового центра антенны АП СРНС GPS; , vKS - фактические (ис-
тинные) значения радиуса-вектора и вектора скорости НКА;
r^s, v'ks - спрогнозированные по эфемеридной информации (ЭИ) радиус-вектор и
вектор скорости s-ro НКА; - фактическое (истинное) значение псевдодаль-
ности до s-ro НКА; - расчётное значение псевдодальности до s-ro НКА.
К основным источникам медленно меняющихся погрешностей (ММП) оп-
ределения радиальной псевдоскорости в стандартном режиме функционирования
АП СРНС GPS относятся [75]:
318
AD™H -ММП, обусловленная неточным учётом влияния систематической
составляющей показателя преломления ионосферы;
AD££a - ММП, обусловленная уходами эталона частоты и времени (ЭЧВ)
НКА относительно ЭЧВ СРНС GPS и эффектами общей теории отно-
сительности.
Основными источниками флуктуационной погрешности определения ради-
альной псевдоскорости в стандартном режиме функционирования АП СРНС GPS
являются [75]:
5D^H - флуктуационная погрешность, обусловленная влиянием случай-
ной составляющей показателя преломления ионосферы;
Ж™1 - флуктуационная погрешность, обусловленная приёмом антеннами
АП СРНС GPS навигационных сигналов, отражённых от элементов
конструкции КА (многолучёвость НС).
- флуктуационная погрешность, обусловленная шумами приёмника
АП СРНС GPS.
Аналогично измерению псевдодальности в составе результирующей по-
грешности измерения радиальной псевдоскорости отсутствуют тропосферная по-
грешность и погрешность, обусловленная влиянием режима СД.
Таким образом, медленно меняющаяся AD^1 и флуктуационная со-
ставляющие погрешности измерения псевдодалъности могут быть определены
соотношениями [75]
АЬ&МП = AD*°H + ADJ^A (4.5.56)
8D£? = 8D$?H + зЬй!1 + SDffi411. (4.5.57)
Предельные значения эфемеридной и медленно меняющихся составляю-
щих результирующей погрешности измерения радиальной псевдоскорости пред-
ставлены в табл. 4.5.8, а предельные значения флуктуационных составляющих - в
табл. 4.5.9.
Таблица 4.5.8 - Предельные значения эфемеридной и медленно меняющихся
составляющих результирующей погрешности измерений радиальной псевдоскорости
№ п/п Источник погрешности Предельные значения погрешности, см/с 2,7g
1 Эфемеридная погрешность 0,8 ... 1,6
2 Влияние ионосферы 0,3 ... 5,2
3 Уход ЭЧВ НКА, эффекты общей теории относительности 0,03
4 Результирующая погрешность при вы- ключенном режиме СД 0,9... 5,4
319
В табл. 4.5.8 нижние и верхние границы диапазонов приведены соответст-
венно для НКА с малыми и большими углами возвышения.
Таблица 4.5.9 - Предельные значения флуктуационных составляющих погрешности
измерений псевдоскорости
№ п/п Источник погрешности Предельные значения погрешности, см/с 2,7а
1 Влияние ионосферы 0,7
2 Влияние многолучёвости 0,5 ... 1,0
3 Влияние шумов приёмника GPS 0,2
4 Суммарная флуктуационная погрешность 0,9... 1,2
Таким образом, для одночастотных измерений псевдоскорости на частоте
L1 и одновременных двухчастотных измерений псевдоскорости на частотах L1 и
L2 в соответствии с (4.5.55) - (4.5.57) получим:
Ь& = D£s + AD^ + ADS?141'1 + AD^A + 5Ь&ли + ; (4.5.58)
Кд Ku ко КО КО КО КО 7 > z
Ьй = DL + AD2? + AD*J9HL2 + ADI^ + 5D£“L2 + 5D£?L2. (4.5.59)
Способы компенсации погрешностей измерений радиальной псевдоскорости
Медленно меняющиеся погрешности, содержащиеся в соотношениях
(4.5.58) и (4.4.59), могут быть частично скомпенсированы.
ММП измерения радиальной псевдоскорости, обусловленная уходом ЭЧВ
НКА и релятивистской составляющей погрешности ДЭ^, компенсируется по-
правкой
AD‘,0Ck =c-Atsv,
где Atsv - скорость изменения временной поправки Atsv, рассчитывается АП
СРНС GPS; с - скорость света в вакууме.
При этом остаточная погрешность
ДЬ®?П = ADgF1 - ADclock (4.5.60)
AjjU КО О '
не превосходит 0,03 см/с [54].
В одночастотных приёмниках АП СРНС GPS ионосферную поправку
AD”°H рассчитывают по формуле
ADHOH_d^°H
В этом случае предельное значение остаточной ионосферной погрешности
320
AD”™ = лЬ”°н - ADJ£H (4.5.61)
KO KO
составляет »0,5-AD^H.
Для компенсации ионосферной ММП в двухчастотных приёмниках АП
СРНС GPS, использующих измерения радиальной псевдоскорости на частотах L1
и L2, применяют соотношение, аналогичное соотношению для модифицирован-
ного значения псевдодальности DKS (4.4.47)
Dks = D^s ~YD^, (4.5.62)
1-у
где D{^ - измеренное значение радиальной псевдоскорости на частоте L1;
” измеренное значение радиальной псевдоскорости на частоте L2.
После расчёта компенсирующих поправок проводят коррекции измерений
радиальной псевдоскорости в одночастотной АП СРНС GPS на частоте LI Dj^ и
модифицированной радиальной псевдоскорости в двухчастотной аппаратуре
по формулам
DU = ь& - AD5,ock - ADgOHLi. (4.5.63)
fkO Л-Э О КО 7
DKS=DKS-AD^> (4.5.64)
где D^s - откорректированное измеренное значение радиальной псевдоскоро-
сти на частоте L1 в момент времени tKS; DKS - откорректированное модифици-
рованное значение радиальной псевдоскорости в момент времени tKS; AD£lock -
поправка к шкале времени s-ro НКА; AD^HL1 - ионосферная поправка на часто-
те L1.
Используя соотношение (4.5.62), можно показать, что в модифицированном
значении радиальной псевдоскорости DKS систематическая составляющая ионо-
сферной погрешности компенсируется полностью.
Оценка остаточной погрешности измерений радиальной псевдоскорости
одночастотной АП СРНС GPS
Определим остаточную погрешность измерений радиальной псевдоскоро-
сти AD^SO одночастотной АП СРНС GPS как разность откорректированного
значения измеренной на частоте L1 радиальной псевдоскорости D^s и её расчёт-
ного значения D^:
дЬ“ =5“ -Ь^ .
KoU Л-о Ivo
321
Последовательно подставляя в это выражение соотношения (4.5.63),
(4.5.58) и (4.4.60), получим
ДЬ“ 0 = ADj|| + ADHohl. + ad&o + 5D&JI + 5D™, (4.5.65)
где AD^|O определяется соотношением (4.4.60),
AD™ = AD“hli -AD«?HL1.
Используя выражение (4.5.65) и полагая составляющие результирующей
остаточной погрешности AD^SO независимыми случайными величинами, полу-
чим соотношение для расчёта её СКО:
I 2 2 2 2 2
стдЬ^о = \Г+ адЬИ0НЫ + %мл + сгдЬвр + a8DgJLi • (4.5.66)
Предельные значения результирующей остаточной погрешности измерения
радиальной псевдоскорости и её составляющих для одночастотной АП СРНС
GPS представлены в табл. 4.5.10.
Таблица 4.5.10 - Предельные значения результирующей остаточной погрешности
измерения радиальной псевдоскорости одночастотной АП СРНС GPS
№ п/п Источник погрешности Предельные значения погрешности, см/с 2,7о
1 Эфемеридная погрешность 0,8 ... 1,6
2 Влияние ионосферы 0,2 ... 2,6
3 Уход ЭЧВ НКА, эффекты общей теории относи- тельности 0,03
4 Влияние многолучёвости 0,5 ... 1,0
5 Влияние шумов приёмника GPS 0,2
6 Результирующая погрешность при выключен- ном режиме СД 0,9 ... 3,2
Нижние и верхние границы диапазонов в табл. 4.5.10 приведены соответст-
венно для НКА с большими и малыми углами возвышения.
Для расчёта предельного значения результирующей остаточной погрешно-
сти измерения радиальной псевдоскорости и её составляющих использовали со-
отношения (4.5.60) и (4.5.61), а также данные, приведенные в табл. 4.5.8 и 4.5.9.
Предельное значение результирующей остаточной погрешности рассчитывали
как ЗоАПц . Вычисление CKO oAnLi проводили по формуле (4.4.66). Из табл.
4.5.10 видно, что основными источниками результирующей остаточной погреш-
ности измерения радиальной псевдоскорости одночастотной АП СРНС GPS яв-
ляются погрешность расчёта по эфемеридной информации положения и скорости
НКА, погрешность, обусловленная влиянием многолучёвости, и ионосферная по-
грешность.
322
Оценка остаточной погрешности измерений радиальной псевдоскорости
двухчастотной АП СРНС GPS
Остаточную погрешность измерений радиальной псевдоскорости ADKS0
двухчастотной АП СРНС GPS определим как разность модифицированного зна-
чения радиальной псевдоскорости и её расчётного значения D^s:
Z^>KSO=5KS
KoVJ NJ
Подставляя последовательно в это выражение соотношения (4.5.64),
(4.5.62), (4.5.58), (4.5.59) и (4.5.60), получим
ADKS0 = АР** + АР|>0 + .
l-y
Полагая в этом выражении составляющие результирующей остаточной по-
грешности ADkSO независимыми случайными величинами, получим соотноше-
ние для расчета СКО результирующей остаточной погрешности
I | у2
CTaDkso = + °1dBP0 + ’(а^ + СТ6О^АП ) - (4.5.67)
Как видно из соотношения (4.5.67), в случае проведения двухчастотных из-
мерений радиальной псевдоскорости влияние многолучёвости и шумов аппарату-
ры увеличивается почти в три раза.
Предельные значения результирующей остаточной погрешности измерения
радиальной псевдоскорости и её составляющих для двухчастотной АП СРНС
GPS представлены в табл. 4.5.П. Здесь нижние и верхние границы диапазонов
приведены соответственно для НКА с большими и малыми углами возвышения.
Таблица 4.5.11 - Предельные значения результирующей остаточной погрешности
измерения радиальной псевдоскорости двухчастотной АП СРНС GPS
№ п/п Источник погрешности Предельные значения погрешности, см/с 2,7а
I Эфемеридная погрешность 0,8 ... 1,6
2 Влияние ионосферы 0,7
3 Уход ЭЧВ НКА, эффекты общей теории относи- тельности 0,03
4 Влияние многолучёвости 1,5 ... 3,0
5 Влияние шумов приёмника GPS 0,6
6 Результирующая погрешность при выключен- ном режиме СД 1,9 ... 3,5
323
В случае проведения двухчастотных измерений для расчёта предельного
значения результирующей остаточной погрешности измерения радиальной псев-
доскорости и её составляющих использовали данные, приведенные в табл. 4.5.8 и
4.5.9. Предельное значение результирующей остаточной погрешности рассчиты-
вали как . Вычисление СКО CF • проводили по формуле (4.4.67).
AUKSO AL?KSO
Как показано в табл. 4.5.11, основными источниками результирующей остаточ-
ной погрешности измерения радиальной псевдоскорости двухчастотной АП
СРНС GPS являются погрешность расчёта положения и скорости НКА по эфеме-
ридной информации, а также погрешность, обусловленная влиянием многолучё-
вости.
4.5.5 Математические модели исполнительных органов СУОС
4.5.5.1 Математическая модель реактивных двигателей ориентации и
стабилизации
В процессе проектирования СУ космических аппаратов обязательным явля-
ется математическое моделирование процессов ориентации и стабилизации.
Составная часть математической модели КА - это математические модели
исполнительных органов - двигателей стабилизации, маховиков, силовых гиро-
скопов и др.
Для исследования динамических процессов ориентации с использованием
реактивных двигателей стабилизации математическая модель должна адекватно
отражать характер набора и спада тяги ДС при их включениях-отключениях, а
также поддержания заданного уровня тяги. На рис. 4.5.8 показан типичный гра-
фик набора поддержания-спада тяги при одиночном включении реактивного дви-
гателя стабилизации продолжительностью Т секунд.
Рисунок 4.5.8 - График набора поддержания-спада тяги при
одиночном включении реактивного двигателя стабилизации
324
Здесь U - запрос на включение Д; Р - тяга двигателя стабилизации.
После формирования команды на включение в момент времени ti набор тя-
ги начинается не мгновенно, а спустя некоторое время tBKJI, определяемое про-
должительностью открытия электромагнитных клапанов.
Аналогично при снятии команды на включение в момент времени t2 спад
тяги начинается спустя время tOTKrr от этого момента. Нарастание тяги по кривой I
и спад тяги по кривой П определяются химическими процессами горения при на-
растании и спаде давления в камере сгорания соответственно.
Такие процессы наблюдаются в жидкостных реактивных управляющих
двигателях. Для управляющих двигателей на сжатом газе общая картина импуль-
са тяги аналогична показанной на рис. 4.5.8, но имеет количественные различия
по кривым I и II в связи с отсутствием горения и распространением продуктов
горения через сопло. Вместо них происходят процессы расширения через сопло
однокомпонентного сжатого газа.
Математическая модель может быть приближенно представлена дифферен-
циальным уравнением второго порядка с правой частью
TiP + TP + P^UCt-r),
где U(t) - команда на включение (отключение) двигателя (на рис. 4.5.8 показа-
на прямоугольником на оси времени); Ть Т- коэффициенты дифференциального
уравнения, характеризующего участки набора и спада тяги I и II; P(t) - тяга дви-
гателя; т - временное запаздывание.
Численные значения коэффициентов Т>, Т, т отличаются для участков на-
бора и гашения, отличаются между жидкостными реактивными управляющими
двигателями и двигателями на сжатом газе (однокомпонентными). Участок спада
тяги II имеет продолжительность, большую, чем участок набора тяги I.
Для упрощения часто постоянные времени Ть Т задают одинаковыми для
участков набора и спада тяги I и II, а продолжительный неучтённый участок спа-
да заменяют эквивалентным по импульсу временным запаздыванием 1з(его до-
бавляют к tOTKJ1). Эквивалентность понимается в том смысле, что площадь импуль-
са Рх1з равна площади под кривой спада тяги за время тк. Для удобства вычисле-
ний (интегрированием) временное запаздывание может быть заменено эквива-
лентным дифференциальным уравнением.
Часто на практике для моделирования процессов ориентации и стабилиза-
ции ограничиваются простой моделью
TP + P = U(t);
Т« 0,002... 0,05... 0,1 с.
При подаче серии команд на включение-отключение ДС получают серию
импульсов тяги постоянной величины. При высокой частоте следования заявок
на включение (отключение) может наступить момент, когда электроклапан не ус-
певает закрыть вход в сопло до прихода очередной команды на включение - ус-
танавливается некоторый колебательный уровень тяги без полного отключения.
325
Эта частота является предельной для данного ДС и определяет его совершенство.
Выражается оно в величинах Т, твкп, 1ОТКЛ. В настоящее время предельная частота
для ряда жидкостных управляющих ДС составляет 7 ... 8 Гц. В отдельных совер-
шенных конструкциях она достигает 10 ... 12 Гц. Для математической модели со-
вершенство ДС проявляется в меньших значениях параметров твкл, Т, Ть
4.5.5. Z Математическая модель корректирующего импульса линейной
скорости при коррекции параметров орбиты КА
Математическая модель корректирующего импульса линейной скорости
показана на рис. 4.5.9 и представляет собой зависимость тяги, развиваемой ДУ, от
времени в процессе реализации КИ.
Принято различать три основных участка функционирования ДУ:
- участок нелинейного нарастания тяги ДУ;
- участок постоянной тяги ДУ;
- участок нелинейного спада тяги ДУ.
Оценку величины реализованного КИ проводят:
- при выключении ДУ по времени продолжительности эквивалентного
импульса;
- при выключении ДУ по приращению вектора кажущейся скорости, фор-
мируемого БА.
Рисунок 4.5.9 - Математическая модель корректирующего импульса
линейной скорости
На рис. 4.5.9 использованы следующие обозначения:
Р- тяга ДУ;
Tj - момент времени выдачи команды на включение ДУ;
Т2 - фактический момент времени включения ДУ;
Т3 - момент времени выдачи команды на выключение ДУ;
326
Т4 - фактический момент времени выключения ДУ;
ТВКЛ,ТВЫКП - моменты времени начала и конца эквивалентного импульса;
АТвыкл “ систематическая задержка от момента окончания отработки СУ ус-
тавки тном до момента фактического выключения ДК;
Атвкл - систематическая задержка подачи электрического напряжения на
ДК относительно начала отсчёта СУ уставки тном;
Ат вых - систематическая задержка от момента подачи электрического на-
пряжения на ДК до момента начала эквивалентного импульса;
Атсп - систематическая задержка от момента снятия электрического на-
пряжения с ДК до момента окончания эквивалентного импульса;
ти - продолжительность эквивалентного импульса (без участка выхода тя-
ги на режим, спада тяги и систематических задержек подачи электри-
ческого напряжения); определяется соотношением
Т -Т _Т •
ии хвыкл х вкл >
тном - номинальное время работы ДУ, определяемое по формуле
^ном ~~ А'Свкд + Атвых + ти — Атвыкл — Атсп.
При математическом моделировании процессов стабилизации выдачу кор-
ректирующего импульса двигателем коррекции можно учитывать в виде посто-
янного воздействия.
4.5.5.3 Математическая модель силового гироскопического комплекса
Математическая модель силового гироскопического комплекса (ММСГК)
предназначена для моделирования работы КА, оснащенного СГК с принятой
структурой, известным расположением гиродинов, известным конструктивным
расположением составных частей СГК.
Математическая модель силового гироскопического комплекса состоит из
двух основных частей:
- модели привода СГК;
- модели выходного устройства (ВУ) СГК.
Модель ВУ СГК является самостоятельным блоком, так как информация об
угле поворота i-й рамки гиродина должна поступать в БЦВМ до принятия реше-
ния о величине управляющего момента на двигатель i-ro гиродина.
В качестве базовой математической модели принята упрощённая модель
СГК, разработанная на основе расчётной базовой модели путём:
- учёта математического описания вращения двигателя привода;
- учёта описания взаимного движения кожуха и ротора гироскопа;
- введения описания момента сопротивления в опоре кожуха гироскопа;
- рассмотрения движения гироскопа вокруг оси прецессии (оси вращения
рамки подвеса).
В данной математической модели СГК представлено функционирование
конкретного устройства со следующими характеристиками:
1. Максимальный управляющий момент, Нм 44
327
2. Кинетический момент ротора, Нмс 250 ± 5
3. Угол прокачки подвеса ротора Не ограничен
4. Диапазон изменения скорости поворота подвеса, град/с ± 10
5. Средняя дискретность отработки единичного углового пе-
ремещения рамки подвеса, угл.с < 2
6. Погрешность выдачи информации об угловом положении
подвеса, угл.мин ± 22
7. Жёсткость привода, приведенная к оси вращения наруж-
ной рамки, Нм/рад > Ю4.
Положение гиромотора СГК должно изменяться в пределах суммарного
«мёртвого хода»:
AS = Ал + Аупр 4- Адв,
где Ал - люфт, приведенный к оси вращения рамки подвеса, Ал < 30 угл.с; А^ -
упругий «мертвый ход», приведенный к оси вращения рамки подвеса; Ддв - ста-
тическая ошибка углового положения выходного вала двигателя.
Значение Ада не превосходит:
- 10 угл. с - в режиме «стабилизация»;
- 25 угл. с - в режиме «стоянка».
Модель привода СГК
Модель привода СГК предназначена для математического моделирования
процесса создания управляющего момента в соответствии с сигналами, посту-
пающими из СУОС, расчёта проекций суммарного кинетического момента СГК,
а также определения текущего углового положения рамок подвеса гиродинов, не-
обходимого для работы выходного устройства СГК.
Модель привода СГК состоит из следующих составных частей:
- блока начальной установки (БНУ);
- блока динамики вращения моментного исполнительного двигателя
(МИД);
- блока редуктора (РЕД);
- блока определения текущего положения и скорости вращения рамок ги-
родинов (УПС);
- блока определения проекций суммарного кинетического момента и сум-
марного управляющего момента (КУМ).
На вход модели привода СГК из выходного регистра БЦВМ поступают
управляющие импульсы Nh, обеспечивающие работу СГК, а также начальное по-
ложение рамок гиродинов рассчитанное в БНУ математической модели ВУ
СГК.
Последовательность счёта блоков в модели привода СГК:
- БНУ - только на первом такте;
- на первом и последующем тактах - блоки МИД - РЕД - УПС - КУМ.
Блок начальной установки (БНУ)
БНУ предназначен для задания параметров математических моделей для
блоков:
328
- МИД(1д,цд, Сэл 5 м«т 1ред5 О-дЬ ^да )?
- РЕД (А, В, СОред, Сред, Zo, Луо? 1ред)>
- УПС (Jr, Н, Д, Моно, Моп1, Sa, Сд);
- КУМ (Н, 8д, С а, f*i, Ф>, Е, Р min)*
Блок динамики вращения моментного исполнительного двигателя (МИД)
Блок МИД описывает динамику вращения моментного исполнительного
двигателя, представленную в виде дифференциального уравнения
М •
^даД1 +Ндад1 +СэлаД| =СЭл^пЕдВ — M^sign(a^j) 7——, (4.5.68)
!ред
где 1д - момент инерции элементов привода, кгм2; ад1 - текущее угловое поло-
жение вала двигателя, рад; цд - коэффициент вязкого демпфирования, Нмс/рад;
Nn- управляющий сигнал, поступающий из СУОС; едн- коэффициент пропор-
циональности, рад; М£т - момент сухого трения, Нм; М^ - упругий момент, Нм;
1ред - передаточное отношение редуктора; Сэя - коэффициент «жесткости» приво-
да, Нм/рад.
В результате решения любым численным методом уравнения (4.5.68) полу-
чаем текущее угловое положение вала двигателя i-ro гиродина аД1, поступающее
на вход блока редуктора (РЕД).
Блок редуктора (РЕД)
Блок редуктора предназначен для учёта угла скручивания вала редукто-
ра, рад.
Угол скручивания определяется уравнением:
Yi =т-—-Pi + Asin-^ + Bsin 2°ад1 . (4.5.69)
1ред 1ред 1ред
[СоредУ; прик|<Ду0,
М«=-! р 11 . . (4.5.70)
[Сред (Yi - Ду oSigny,) при I Yi I > Ay о,
где yi - угол скручивания вала редуктора i-ro гиродина, рад; pL- текущее угло-
вое положение подвеса i-ro гироскопа, рад; ад; - текущее угловое положение вала
двигателя (выход блока МИД), рад; А - амплитуда гармонической составляющей
кинематической погрешности редуктора, вызванной биением зубчатого венца
выходного колеса редуктора, рад; В - амплитуда гармонической составляющей
кинематической погрешности редуктора, обусловленной местной зубцовой по-
грешностью колёс редуктора, рад; Ауо- полуширина упругого «мёртвого хода»
редуктора, рад; Zo - число зубьев выходного колеса редуктора; Сред - коэффици-
ент жесткости редуктора, Нм/рад; СореД- начальный коэффициент «жесткости»
редуктора, Нм; М^ - управляющий момент редуктора, передаваемый на i-ю рам-
ку силового гироскопа, Нм; 1ред - передаточное отношение редуктора; sign(n) -
выделение знака числа п.
329
Блок определения текущего углового положения и скорости вращения ра-
мок гиродинов (УПС)
Блок УПС предназначен для описания углового движения рамки подвеса
i-ro гиродина с учётом:
- взаимного движения кожуха и рамки подвеса i-ro гиродина;
- момента сопротивления в опоре кожуха i-ro гиродина.
Угловая скорость и угловое ускорение взаимного движения кожуха и рамки
подвеса i-ro гиродина для конкретного расположения гиродинов на КА опреде-
ляются выражениями
cOvi * СА — сОу • Бд;
~~ * С д I- СОу Бд,
У (4.5.71)
<dV3 — сох * СА - tOy' 8д,
Ct>v4 сох ’ Са ’ Sa,
a>vi = (cOvi-®vi(-l))/T,
(4.5.72)
где coVi - угловая скорость взаимного движения кожуха и рамки подвеса i-ro
гиродина, 1/с; C0j - проекции угловой скорости вращения КА на оси связанной
системы координат, 1/с; Сд, Бд- синус и косинус угла установки плоскости пре-
цессии гиродинов; Т - время счёта блока УПС, с; <Oyi(-l) - угловая скорость вза-
имного движения кожуха и рамки подвеса i-ro гиродина с предыдущего просчёта
блока УПС, 1/с.
Момент сухого трения на оси подвеса получают по формуле
M*ni =Myi-Jr-<Bvi; (4.5.73)
Моп1 signp, прир^О,
Мх
ОШ
<М^, при(Р = Ол|М^|<Моп0),
Моп0 signMSni, при (Р = 0 л|M^ni| > Моп0),
(4.5.74)
где М^П1 - суммарный момент на опоре кожуха; Myi- управляющий момент
редуктора, передаваемый на i-ю рамку силового гироскопа, Нм (выход блока
РЕД); Jr - суммарный момент инерции рамки СГ, кгм2; d)vi - угловое ускорение
взаимного движения кожуха и рамки подвеса i-ro гиродина, 1/с2; Moni - устано-
вившийся момент трения в опоре кожуха, Нм; Мопо~ момент трогания в опоре
кожуха, Нм; - угловая скорость движения рамки подвеса i-ro гиродина, 1/с;
- момент сухого трения на оси подвеса i-ro гиродина, Нм.
Далее определяется гироскопический момент, действующий на ось подвеса
рамки i-ro гиродина, вызванный движением основания СГК (вращением КА с уг-
ловой скоростью со):
330
Ri = Н[(шх • SA+ Шу ’ CA) • sin Pi - coz • cosPi];
R2 = Н[(-шх • SA + шу • CA) • sin p2 - cdz • cosp2]; 4575
R3 = Н[(-шх • SA- шу • CA) ’ sin p3 4- cdz • cosp3];
R4 — Н[(шх ’ SA- Шу • CA) ’ sin p4 + <±>z • cosp4],
где Ri — гироскопический момент, действующий на ось подвеса рамки i-ro ги-
родина; Нм; C0j (j = х, у, z) - проекции угловой скорости вращения КА на оси свя-
занной системы координат, 1/с; Н - кинетический момент ротора, Нмс; pi - теку-
щее угловое положение рамок подвеса гиродинов, рад.
Вычисление текущего углового положения подвеса гиродина р( и его про-
изводных осуществляется решением уравнения
Jr ’ (Pi + <bvi) + D • Pi + + Ri = Myi, (4.5.76)
где D - коэффициент вязкого демпфирования на оси подвеса рамки i-ro гиро-
дина, Нмс/рад.
Вычисленные значения текущего углового положения подвеса гиродина pi
и его производная Р, (угловое ускорение движения рамки подвеса i-ro гиродина)
поступают на вход блока КУМ.
Блок определения проекций суммарного кинетического момента и суммар-
ного управляющего момента (КУМ)
Блок КУМ определяет проекции суммарного кинетического и управляюще-
го моментов СГК на оси связанной системы координат КА.
Суммарный кинетический момент СГК определяется формулами
Нсгх = Но • sina(cosPi - cosp2 - cosp3 + cosp4);
Негу = Но - cosa(cospj + cosp2 - cosp3 - cosp4); (4.5.77)
Hcrz = Ho • (sinPi + sinp2 - sinp3 - sinp4),
где Но - внутренний кинетический момент ротора гироскопа, Нмс; a - угол ус-
тановки плоскости прецессии гиродинов; Hcrj (j = х, у, z) - проекции суммарного
кинетического момента СГК на оси связанной системы координат КА, Нмс.
Минимальная скорость поворота рамки подвеса гиродина с учётом погреш-
ностей ее реализации:
. (о, при^кр^;
Pi=f 11 I-1 • (4.5.78)
+ е sm(<t>i + 27tfi t), при |Р) j > ,
где e, Ф и f - соответственно, амплитуда, фазы и частота ошибки при отработке
скорости поворота рамки подвеса гиродина; р min - минимальное значение скоро-
сти вращения рамки подвеса, 1/с.
Суммарный управляющий момент, созданный СГК, определится как
331
Mcrx = -Но ’ sina (sinp! • Pi - sinp2 • P2- sinp3 • p3 + sinp4 • p4);
Mcry = -Ho • cosa (sinpi • pL + sinp2 • p2- sinp3 • p3 - sinp4 • p4); (4.5.79)
Mera = -Ho(-cospi • pi - cosp2 • p2+ cosp3 • p3 + cosp4 • p4).
Вычисленные значения суммарного кинетического и управляющего момен-
тов в проекциях на связанные оси координат КА поступают на вход математиче-
ской модели объекта управления.
Выходное устройство силового гироскопического комплекса (ВУ СГК)
Выходное устройство, предназначенное для выдачи в СУОС цифрового ко-
да, соответствующего углу поворота рамки i-ro силового гироскопа (СГ) или ги-
родина, представляет собой синусно-косинусный вращающийся трансформатор,
жёстко соединенный с осью поворота внешней рамки СГ. Аналоговый сигнал,
снимаемый с синусно-косинусного вращающегося трансформатора, поступает на
преобразователь аналог-код, который выдаёт на выходе цифровой код, соответст-
вующий углу поворота рамки i-ro гиродина.
Математическая модель ВУ СГК должна учитывать внешний кинетический
момент КА, который должен быть компенсирован внутренним кинетическим мо-
ментом СГК.
С учетом принятой схемы расположения гиродинов на СГК математическая
модель ВУСГК представляется следующим образом.
Математическая модель ВУ СГК состоит из двух блоков:
- разового блока начальной установки (БНУ);
- задействуемого на каждом такте блока определения цифрового кода, со-
ответствующего углу поворота рамки i-ro гиродина.
БНУ определяет:
- суммарную проекцию накопленных на начало задачи внутреннего и
внешнего кинетического моментов на оси Ov СГК (Нун]3, HVH24)-
Нх HhxJ
Ну — J уСОу 4~ Нну,
Hv«i3 ~ Нх 4- tga * Ну,
HVh24 Нх — tga • Ну,
(4.5.80)
- в зависимости от знака вектора угловой скорости на ось OZcnc рассчи-
тывают проекции попарных кинетических моментов от 1-го, 3-го и
2-го, 4-го СГ на ось OZ (Нет1з, НЯ124):
Hzhi3 = -0,5 • Jz • coz - Hno ПрИ < о-
Hjh24 ~ ~0,5 ' Jz • coz — Hno 4" HHZ
Hzh13 = -0,5 J2 • coz - HNo + H„z
Hzh24 = -0,5- Jz-mz+HN0 присо2>0;
- рассчитывают проекции суммарных кинетических моментов 1-го, 3-го и
2-го, 4-го СГ:
332
Нн1з ~ ;
(4.5.82)
Нц24 — V^zh24 ^vh24 ’
- рассчитывают начальные угловые положения пар СГ:
Yi3 = arccos(HVHi3/ H„i3);
Y24 = arccos(HVH24/ Нн24);
(4.5.83)
ан = arccos(HHi3/ НСОБ);
a24 = агссо5(Нн24/ НСОБ);
- рассчитывают текущие угловые положения рамок гиродинов:
Pi = (Гн + 3Н1з * ап) sign(HN0);
₽2 = (Я - Y24 - Зн24 • а24) sign(HNo); fA с
(4.5.84)
рз = (л - yb - Зн13 • а13) sign(HN0);
р4 = (- Y24 + 3„24 • (*24) sign(HN0).
В выражениях (4.5.68) - (4.5.72) использованы следующие обозначения пе-
ременных:
HHj (j = х, у, z) - начальное значение накопленного СГК кинетического мо-
мента, Нмс;
coj - начальные значения вектора угловой скорости КА, 1/с;
Hj - накопленный внутренний кинетический момент, Нмс;
J, - центральные моменты инерции КА, кгм2;
а - угол установки осей прецессии гиродинов;
HVh13> Hvh24- проекции внутреннего кинетического момента СГК от 1-го,
3-го и 2-го, 4-го гиродинов на ось Ov, Нмс;
Hzi3, Hz24 - проекции внутреннего кинетического момента СГК от 1-го, 3-го
и 2-го, 4-го гиродинов на ось 0Z, Нмс;
Нио - точка начального положения рамок гиродинов относительно оси 0Z,
Нмс;
Нн1з, Нн24- суммарные кинетические моменты 1-го, 3-го и 2-го, 4-го гиро-
динов, Нмс;
Yi3, Y24 - углы поворота суммарных кинетических моментов СГК относи-
тельно оси Ov по 1-му, 3-му и 2-му, 4-му гиродинам;
ajз, а24 - угол поворота суммарных кинетических моментов СГК относи-
тельно оси 0Z,;
3Н1з, 3Н24 - знак коррекции полуплоскости, позволяет выставлять гиродины
в любую плоскость;
НСОБ = 2Hno - собственный кинетический момент пары гиродинов, Нмс;
pi (i = 1 - 4) - текущее угловое положение рамок подвеса гиродинов.
Дальнейшее интегрирование текущего угла pi проводится в математиче-
ской модели привода СГК.
333
Блок определения цифрового кода, соответствующего углу поворота рамки
i-ro гиродина, моделирует работу аналого-цифрового преобразователя (АЦП),
выдающего цифровую информацию на входной регистр БЦВМ.
Ввиду того, что углы положения рамок подвеса гиродинов, измеряемые си-
нусно-косинусным вращающимся трансформатором, не бывают отрицательными
и не превышают величину 2л, вводят ограничение:
Pi = pi + 2л, если Pi < 0;
(4.5.85)
Pi = Pi - 2л, если pi > 0.
Цифровой код с входа АЦП, определяющий углы поворота рамок i-ro гиро-
дина, вычисляют по формуле
qi = enter(|pi| / £дп), (4.5.86)
где qi - цифровой код, соответствующий углу поворота рамки i-ro гиродина;
Едп - цена младшего разряда выходной информации АЦП; enter(n) - выделение
целой части числа(п).
Для оценки влияния помех, которые могут иметь место на выходе ВУ СГК,
в математической модели предусмотрена возможность задания помех:
qi - qi + enter(Aqii + Aq2i sin (2л-^Ч)), (4.5.87)
где Aqii — постоянная составляющая помехи выходного устройства по i-му ги-
родину; Aqii - амплитуда знакопеременной составляющей помехи выходного
устройства по i-му гиродину; £ - частота закономерной составляющей помехи
выходного устройства по i-му гиродину.
Кроме того, математическая модель ВУ СГК может иметь связь с алгорит-
мическим обеспечением БЦВМ для принятия команд управления СГК. Это ко-
манды на включение и выключение i-ro гиродина. При этом по i-му гиродину об-
нуляется (гиродин выключен), либо изменяется по принятому закону (гиродин
включается или выключается) внутренний кинетический момент ротора i-ro ги-
родина, например по зависимости:
Н = Но (1 ± eaBt), (4.5.88)
где Н - кинетический момент гиродина, Нмс; Но - кинетический момент гиро-
дина с разогнанным гиромотором, Нмс; ав - коэффициент выбега, 1/с:
- при включении время разгона гиромотора - 1 час;
- при включении время выбега - до 12 часов;
t - текущее время, с.
4.5.5.4 Математическая модель двигателей-маховиков
Математическая модель двигателей-маховиков (ДМ) предназначена для
формирования управляющего момента и информации о скорости вращения (ки-
нетическом моменте) ротора ДМ.
Управляющий и кинетический моменты каждого ДМ формируются путём
интегрирования следующего дифференциального уравнения:
334
Тм . Нм + Нм + Дм • Нм = им - Мт - sign(HM),
где Нм - кинетический момент ДМ; UM - управляющий сигнал, формируемый
СУОС КА; Мт- момент сухого трения; Дм- коэффициент вязкого трения;
Тм - постоянная времени контура формирования управляющего момента ДМ.
Информация о скорости вращения ДМ формируется датчиком скорости
вращения и вычисляется в соответствии с выражением
U = К • (1 +ДК) • Нм +AU,
где U - выходной сигнал ДМ, пропорциональный скорости вращения ротора
ДМ; К - крутизна выходной характеристики датчика скорости ДМ; ДК - разброс
крутизны выходной характеристики; AU - погрешность измерения датчика ско-
рости.
4.5.5.S Математическая модель электромагнитных катушек
В подразд. 2.1.4.2.4 описаны принципы функционирования ЭМ. При прове-
дении математического моделирования необходимо использовать математиче-
ские модели ЭМ.
На рис. 4.5.10 изображена схема математического моделирования управле-
ния КА с использованием электромагнитов.
Рисунок 4.5.10 - Схема математического модели-
рования с использованием электромагнитов
На рис. 4.5.10 показаны:
- БЦВК, формирующая по требуемому закону управления КА признаки
управления электромагнитами, поступающие на вход математической
модели ЭМ;
- , (ij) - управляющие признаки (будут описаны ниже);
- Bj - измеренные проекции вектора магнитной индукции магнитного по-
ля Земли или поступающие из математической модели измерителей
(магнитометров);
335
- Mj - проекции управляющего момента, рассчитанные в ММ электромаг-
нитов;
- ММ космического аппарата;
- <x>j — угловые скорости КА, определенные в математической модели из-
мерителей угловых скоростей для формирования управляющих воздей-
ствий БЦВК.
Здесь и далее по тексту индексу j соответствует канал управления КА
(х, у, z).
Таким образом, функцией математической модели электромагнитов являет-
ся расчет управляющих моментов по выработанным управляющим признакам и
величине индукции магнитного поля Земли.
Электромагнитные исполнительные органы, как правило, использующиеся
в СУ, преимущественно бывают двух типов: управляемые дискретно и управляе-
мые постоянно.
При использовании ЭМ первого типа управления ими применяют управ-
ляющие признаки Up
Признаки U| принимают значение -IvOvl, что означает включение ЭМ в
канале j с созданием положительного или отрицательного момента.
При этом включении соответствующего ЭМ компонента j в векторе маг-
нитного момента КА остается постоянной при Uy 0.
При использовании ЭМ второго типа управляющим сигналом со стороны
БЦВК является ток соответствующей полярности (i^) для ЭМ.
Таким образом, ММ электромагнитов первого типа приобретает вид:
1. Ввод постоянных параметров ММ:
LHj ~ номинального значения магнитного момента КА в канале j;
Д Ц - отклонение магнитного момента КА в канале (паспортизированные
значения).
2. Расчет магнитного момента КА (без учета магнитного момента конструк-
ции):
Ц+дц при(и;=1)А(и-=0),
< - (Ц+дц) при (и; = -1) Л (и; = о),
О при U* = 0.
(4.5.89)
3. Расчет управляющего момента КА по формулам (2.1.66).
ММ электромагнитов второго типа имеет вид, описанный в [4].
4. Расчет вектора магнитного момента КА:
L = nS(xix +yiy +ziz),
где и - число витков электромагнита; S - площадь электромагнита; i£ - рас-
считанные в БЦВК управляющие токи; х, у, z - орты связанных осей КА.
336
4.5.6 Модульный принцип построения структуры математического
обеспечения СУОС
Принцип бесплатформенной инерциальной ориентации
Современные системы управления ориентации и стабилизации строятся на
основе принципа инерциальной ориентации с астро коррекцией. Такие системы
получили название бесплатформенных (бескарданных) инерциальных систем
ориентации (БИСО). Системы навигации, создаваемые на этом принципе, назы-
вают бесплатформенными инерциальными навигационными системами (БИНС).
В бесплатформенных инерциальных системах ориентации чувствительны-
ми элементами являются гироскопические датчики первичной информации, из-
меряющие приращения углов или угловые скорости поворота КА. Эти датчики
устанавливают непосредственно на борту КА. Они работают совместно с борто-
вым компьютером, непрерывно рассчитывая углы курса, крена и тангажа или
иные параметры, например кватернионы, определяющие ориентацию КА относи-
тельно базовой системы координат [15, 51]. Так как точность БИСО, использую-
щих только набор инерциальных датчиков, вследствие уходов гироскопов с тече-
нием времени падает, то проводят их периодическую или постоянную коррекцию
по показаниям датчиков углового положения. Эти же датчики применяют для за-
дания начальных условий для интетрирования кинематических уравнений в бор-
товой ЦВМ, т.е. для начальной выставки БИСО. Таким образом, принцип по-
строения бесплатформенной инерциальной системы ориентации (БИСО) состоит
в аналитическом построении расчетной системы координат в бортовой ЦВМ на
основе информации первичных, датчиков. Задачу определения ориентации в
БИСО решают, как задачу оценки вектора состояния КА в динамическом фильтре
(наблюдателе) типа Люенбергера или Калмана, корректируемом по астроизмере-
ниям. Непосредственно информация датчиков углового положения не использу-
ется в управлении КА. Управление выполняется по рассчитываемым в БИСО па-
раметрам стабилизации. Можно сказать, что в БИСО происходит комплексирова-
ние измерительной информации приборов совершенно разного вида: датчиков
углового положения, например ПАИС и ИУС.
Применение БИСО стало возможным после прогресса вычислительной
техники, который привел к появлению надежных бортовых цифровых вычисли-
тельных машин, обладающих нужным объемом памяти и достаточным быстро-
действием [15]. Это сделало возможным непрерывное интегрирование уравнений
движения космического аппарата при сколь угодно сложном характере его дви-
жения.
Преимущества БИСО над системами с гиростабилизированной платформой
хорошо известны [15, 51], поэтому не будем на них останавливаться. Рассмотрим
дополнительные возможности систем ориентации, построенных по принципу
БИСО.
Суммарная ошибка, обусловленная погрешностями командно-
измерительных приборов, приводит к неточности построения расчетной системы
координат относительно базисной системы. Наиболее приемлемым способом ре-
шения задачи обработки измерительной информации в целях повышения точно-
337
сти системы для подвижных объектов является метод динамической фильтрации.
Как было сказано выше, именно этот метод лежит в основе подхода, используе-
мого для оценки вектора состояния КА в БИСО. Метод позволяет обеспечить:
- фильтрацию шумов приборов;
- сглаживание сбойных измерений (но лучше отбраковывать сбои до
фильтра);
- подавление в установившихся ошибках системы некоторых составляю-
щих суммарной погрешности позиционных измерителей;
- возможность компенсации динамических погрешностей оптических
приборов, возникающих вследствие запаздывания в обновлении измери-
тельной информации;
- достаточно высокую точность на коротком интервале времени при за-
светке астродатчика или переключения его на резерв (используются сиг-
налы некорректируемой БИСО). Точность такой системы выше, чем с
двумя астродатчиками без инерциального блока, так как по одному (в
случае неработоспособности второго астродатчика) оценить угловую
скорость и параметры ориентации с высокой точностью невозможно из-
за высокой погрешности определения ориентации вокруг оптической
оси астродатчика.
В части динамических требований к системе отметим следующие преиму-
щества инерциальных систем ориентации:
- инерциальные датчики не подвержены влиянию засветок светила-
ми-помехами, инвариантны к расположению орбиты в пространстве и к
ориентации КА, т.е. после включения и подготовки постоянно готовы
обеспечивать систему управления информацией как в режиме угловых
маневров, так и в режиме прецизионной стабилизации;
- переход от управления относительно поступательно движущихся осей
(инерциальной) ориентации к управлению в орбитальных или вращаю-
щихся программных осях может проводиться мгновенно путем простого
изменения программы работы бортового компьютера.
Использование измерителей угловой скорости с минимально избыточной
структурой совместно с несколькими астроизмерительными системами и приме-
нение принципа инерциальной ориентации обеспечивают выполнение жестких
требований к современным системам управления по их отказоустойчивости и
живучести КА.
Отметим следующие возможности БИСО:
- потенциальное повышение надежности за счет резервирования;
- восстановление непосредственно неизмеряемых компонент вектора со-
стояния. Например, если нужно реализовать режим орбитальной ориен-
тации, то достаточно включить один позиционный датчик - построитель
местной вертикали, а по сигналам датчика угловой скорости провести
курсовую ориентацию космического аппарата, используя их как инерци-
альные датчики ориентации;
- применение гироскопических аналогов датчиков углового положения,
338
например, солнечного датчика, в случае их неработоспособности;
- получение одного и того же режима ориентации путем включения раз-
личных наборов датчиков;
- комплексирование показаний различных датчиков.
Приведенные примеры показывают большую гибкость системы управления
ориентацией, использующей бесплатформеннуто инерциальную систему, в части
управления угловым положением космического аппарата по отношению к раз-
ным осям ориентации, а также возможности обеспечения точности, быстродейст-
вия и надежности системы управления.
Модульная структура математического обеспечения СУОС КА
Математическое обеспечение СУОС КА имеет многоуровневую иерархиче-
скую структуру:
- режим;
- модуль;
- задача;
- алгоритм;
- блок.
Режим реализуется в виде набора последовательных функционально закан-
чивающихся или решаемых в течение всего режима модулей и задач. Модули и
задачи состоят из множества алгоритмов, объединенных по своему функцио-
нальному назначению.
Весь комплекс алгоритмов, входящих в состав типового режима СУОС КА,
по целевой принадлежности можно представить следующим образом.
Алгоритмы модуля определения ориентации (модуль наблюдения):
- обработка информации и управление командно-измерительными прибо-
рами;
- астрокоррекция;
- инерциальная ориентация.
Алгоритмы модуля управления ориентацией и стабилизации (модуль
управления):
- формирование параметров управления;
- формирование управления исполнительными органами.
Алгоритмы, решающие вспомогательные задачи:
- организация режимов;
- подготовка команд приборов и исполнительных органов;
- обмен информацией БЦВМ с внешними абонентами;
- разгрузка инерционных исполнительных органов;
- бортовой конгроль, диагностика и парирование неисправностей;
- формирование телеметрической информации и др.
Структурная схема основного алгоритмического обеспечения СУОС КА
изображена на рис. 4.5.11.
339
340
Рисунок 4.5.11 - Структурная схема алгоритмического обеспечения СУОС КА
На рис. 4.5.11 показаны основные обменные переменные алгоритмов:
Лп - программный кватернион;
Ад- кватернион ориентации приборной системы координат ПАИС отно-
сительно инерциальной системы координат, вычисляемый в процес-
соре ПАИС по измерениям угловых положений звезд;
А[- кватернион ориентации связанной системы координат КА относи-
тельно инерциальной системы координат, вычисленный по информа-
ции ПАИС;
NkQ, (k=l,..., п)- число импульсов выходной информации k-го чувствитель-
ного элемента ИУС;
0j - приращение угла поворота КА за такт счета алгоритма;
0KEj, Gxnj - параметры коррекции базовой и программной систем координат
соответственно;
Л - кватернион ориентации ССК КА относительно ИСК, вычисленный в
бесплатформенной инерциальной системе (БИС);
ДА - кватернион ориентации ССК К А относительно программной (базо-
вой) системы координат, вычисленный в БИС;
Yj - угловые рассогласования ССК КА относительно программной (базо-
вой) системы координат;
cooj - оцененная по информации ИУС угловая скорость КА в проекциях на
оси ССК;
Kyj, K^j - коэффициенты усиления по углу и угловой скорости аргумента
стабилизации;
Aopj ~ зона нечувствительности закона управления на ДС;
conpj - программная угловая скорость разворота;
conj - программная угловая скорость стабилизации;
Пр) - аргумент стабилизации на ДС;
ctyj - аргумент стабилизации на ДМ;
Ui, (i=lN) - управляющий сигнал на i-й ДС;
NMj - управляющий сигнал на j-й ДМ;
NcMj “ сигнал, пропорциональный угловой скорости вращения ротора j-ro ДМ;
j=x, у, z.
4.5.6.1 Модули обработки информации и управления командно-
измерительными приборами
Работу цифровых командно-измерительных приборов в составе СУ обеспе-
чивают специальные алгоритмы, объединяемые по своему функциональному на-
значению и решаемым задачам в отдельные модули обработки информации и
управления соответствующим командно-измерительным прибором.
Независимо от типа конкретного прибора данные модули во многом реша-
ют одинаковые типовые задачи:
- выбирают рабочую конфигурацию и в соответствии с этим формируют
заявки на включение нужных приборов или каналов;
341
- проводят тестирование линий передачи информации и выбирают ис-
правную;
- формируют признаки функциональной и точностной готовности прибо-
ра;
- переводят измерения прибора из его приборной системы координат в
связанную с КА или другую систему координат, в которой решается за-
дача определения ориентации, при этом априори учитываются детерми-
нированные погрешности установки прибора на КА, могут апостериори
учитываться и остаточные случайные составляющие этих погрешностей
после их уточнения в полете;
- учитывают систематические погрешности измерений прибора;
- выполняют предварительную обработку выходных сигналов прибора по
отбраковке сбойных измерений и фильтрации шумов;
- вычисляют на основе получаемой из прибора кодовой измерительной
информации переменные, используемые далее в алгоритмах СУ;
- ведут контроль функционирования прибора и формирование признака
информативности и достоверности полученной по его измерениям ин-
формации.
4.5.6.1.1 Оценка угловой скорости КА по измерениям ГИВУС
Основной задачей модуля обработки информации и управления ГИВУС яв-
ляется оценка угловой скорости КА.
С учетом того, что на входных регистрах БЦВМ по измерениям ГИВУС
формируются сигналы, соответствующие приращениям кажущихся углов пово-
ротов КА за такт БЦВМ, возникает задача оценки по данным сигналам проекций
абсолютной угловой скорости КА.
Простое дифференцирование входного сигнала приводит к усилению шу-
мовой составляющей, а использование для фильтрации рекуррентных процедур
типа экспоненциального сглаживания приводит к появлению запаздывания. Наи-
более целесообразно для решения данной задачи применить метод динамической
фильтрации, а именно, его реализацию в виде наблюдателя Люенбергера [38]:
£ = Ах + Bu + K(z - Нх), (4.5.90)
где х - оценочное значение n-мерного вектора состояния х; и - m-мерный век-
тор детерминированных (доступных измерению) входных сигналов; z - скаляр-
ный сигнал измерений; А, В, Н - матрицы размеров nxn, nxm, 1*п;
ГМ
- коэффициенты усиления наблюдателя.
Если коэффициенты КЬ...,КП постоянны, то наблюдатель называют ста-
ционарным.
Ошибку оценивания определим как х = х - х. Ее можно найти из уравнения
342
i = (A-KH)x, (4.5.91)
получаемого вычитанием уравнения системы из уравнения наблюдателя (4.5.90).
Выбрав коэффициенты усиления Ki,...,Kn так, чтобы система (4.5.91) была ус-
тойчивой, получим x(t) -> 0 при t оо. Другими словами, с ростом t оценка х
стремится к оцениваемому вектору x(t).
Если по измеренному сигналу z(t) система полностью наблюдаема, то вы-
бором коэффициентов KI?...,Kn можно замкнутой системе (4.5.90) придать лю-
бое желаемое распределение корней, т.е. можно синтезировать наблюдающее
устройство идентификации. Если же по выходному сигналу z(t) вектор состояния
объекта х наблюдаем не полностью, то можно оценить лишь наблюдаемую часть
вектора состояния [38].
Построим алгоритм оценки угловой скорости на основе стационарного наблю-
дателя Люенбергера, используя линеаризованные динамические и кинематические
уравнения КА, которые после преобразований дадут следующую систему уравнений:
L---Г- = Мупох + Мвх j
' ly = Мупру + Мву, (4.5.92)
Iz Mynpz + MBZ,
где Ij - моменты инерции объекта; <р,\|/,& - углы Эйлера-Крылова;
MynpjjMgj - управляющий и возмущающий моменты соответственно; j = х, у, z.
Для построения алгоритма оценки примем следующую модель объекта наблюдения:
0<i>j =co<Dj;
’ d)0j = mBj + rnjUj-; (4:5.93)
mBj =0,
A ^ynpj
где 0ф3- - оцениваемое приращение угла поворота; mBj = —-, mj = —;
Ij Ij
u j - управление.
Пусть проводится измерение приращения угла поворота 0р
ej(n)=0sj(n)-esj(n-i),
где 0Sj(n) - фактический угол поворота объекта за такт БЦВМ.
Задачу оценки угловой скорости рассмотрим для одного канала, поэтому
индекс "j” далее опустим.
Матрица Н в уравнении наблюдателя (4.5.90) имеет такой вид:
Н = [1 0 0].
343
Модель системы наблюдения (4.5.93) представим в форме Коши, введя век-
тор х = (Х],х2,х3)т с компонентами:
Xi =0Ф;
*2 =<оф;
х3 = тв.
Тогда система (4.5.93) примет вид
Xj =х2;
< х2 = х3 4-mu;
х3 = 0,
или в векторно-матричном виде:
х = Ах + Ви,
(4.5.94)
(4.5.95)
где
Вектор состояния x(t) определяется решением данного уравнения:
x(t)=O(t,t0)+ |ф(1,т)В(т)и(т)ат,
to
где Ф(1, to) - фундаментальная матрица, равная eA(t“to).
Найдем Ф((, to), используя преобразование Лапласа
s -1
O'
Ф(8) = [зЕ-А]= 0 s -1.
0' 0
С учетом того, что ёе1Ф(8) = s3, получим
1/s3
1/s2 .
1/s
Ф-1 (s) =
1/s
О
О
1/s 2
1/s
О
S
Выполнив обратное преобразование Лапласа, найдем фундаментальную
матрицу системы (4.5.94):
1
О
О
т
1
O(t,t0) =
Т Т2/2~
1
О
Здесь Т - период квантования.
Уравнение, оценивающее вектор x(t), имеет вид
x(t) = Ax(t) + Bu(t) + K[Gs (t) - 04, (t)].
344
Знак оценки «л» в уравнении опущен.
При малом периоде квантования Т вектор x(t) - линейная функция времени,
следовательно:
хк+( =Фхк+Ви + К[0ч-0Ф].
Пренебрегая Т2, запишем:
х1,кЯ = xl,k + x2,kT + КДк - х1,к ]>
‘ x2,k+i ~ х2,к + muT + Хз,кТ + K2[0sk - X] к]; (4.5.96)
чхЗ,к+1 =Х3,к +K3[0sk “xl,kL
В исходных обозначениях алгоритм оценки угловой скорости приобретает вид
0ф/п) = 0ф|(п -1) + (Оф/Г + К^/п) - 0фДп -1)];
< ©ф/п) = оф](п -1) + mUj(n) + mBj(n)T + K2[0sj(n) - 0ф/п)]; (4.5.97)
mBj(n) = mBj(n -1) + K3[0sj(n) ~ 0Ф](п)],
где n - такт счета БЦВМ; j = х, у, z.
Найдем коэффициенты Кь К2, К3.
В соответствии с уравнением ошибки (4.5.91) получим
X) =х2
< х2 =х3 -K2Xj;
х3=- K3Xj.
Знак ошибки «~» в системе опущен.
Запишем характеристическое уравнение для этой системы
s3 + К^2 + K2s + К3 = 0. (4.5.98)
Пусть для системы оценки угловой скорости желательны равные отрица-
тельные корни: Sj = X. Тогда желаемый характеристический полином примет вид
(s + X)3 = s3 + 3Xs2 + 3X2s + X3 = 0. (4.5.99)
Приравняв коэффициенты при одинаковых степенях S в уравнениях (4.5.98)
и (4.5.99), получим
К1=ЗХ;
К2=ЗХ2;
к3=х3.
Проведем аналитическое обоснование полученных коэффициентов алго -
ритма оценки угловой скорости.
Приведем характеристическое уравнение (4.5.98) к нормированному виду.
Для этого разделим все члены на К3 и введем новую переменную [12]
345
4 = S-3
Получим
где коэффициенты
q3 +Aq2 + Bq + l = 0,
А= В = -Ь=
Vk? Vk?
называются параметрами Вышнеградского.
На плоскости параметров А и В построим границу устойчивости. Условия
устойчивости имеют вид
А> О, В > О, АВ > 1.
Запишем уравнение границы устойчивости
АВ = 1 при А > 0 и В > 0.
Выделим в области устойчивости части, соответствующие различному рас-
положению корней характеристического уравнения.
В точке А=В=3 характеристическое уравнение имеет три равных корня
При этом для исходного уравнения получим
S1=s2=S3=-VK3.
Построим области апериодических процессов (все три корня вещественные -
Ш) и колебательных процессов (один корень вещественный и два комплексных).
Причем во втором случае будем различать область, где пара комплексных корней
лежит ближе к мнимой оси, чем вещественный, - I, и область, где вещественный
корень лежит ближе к мнимой оси, чем пара комплексных, - П.
Границы указанных областей описываются уравнениями:
- кривые СЕ, CF:
А2В2 - 4(А3 + В3) +18АВ - 27 = 0;
- кривая CD:
2А3-9АВ1-27=0, А<3.
На плоскости К1К2 для фиксированного К3 построим области различного
расположения корней внутри каждой части области устойчивости (рис. 4.5.12).
Построенный график называется диаграммой Вышнеградского [12].
346
Рисунок 4.5.12 - Области значений коэффициентов алгоритма
оценки угловой скорости
На рис. 4.5.12 точками А, В, С, D, Е показаны различные значения коэффи-
циентов алгоритма оценки угловой скорости из различных участков (I, П, Ш) об-
ласти устойчивости:
I - область колебательной оценки;
II - область монотонной оценки;
III - область апериодической оценки.
Границы областей обозначены следующим образом:
-*
Кз=1
iq=2
1Ц--8
А : К=3; К2=3; К3=1;
В : К =2; ^=2; К3=1;
С : Кг=6; 1^=6; К3=2;
D : К=6; 1^=12; £=8;
Е : К =9; 1^=9; К3=3.
347
4.5.6.1.2 Обработка информации и управление оптико-электронными
приборами определения ориентации КА
Модули обработки информации и управления оптико-электронными при-
борами определения ориентации КА выполняют те же типовые задачи, которые
указаны в подразд. 4.5.6.1. Однако они имеют некоторые особенности, связанные
с принципами их функционирования.
Во-первых, если в поле обзора прибора отсутствует светило-ориентир
(Солнце, Земля или звезды в соответствии с типом оптического прибора), необ-
ходимо формировать соответствующий логический признак для СУОС, которая в
этом случае должна организовывать поиск ориентира путем закрутки КА.
Во-вторых, приборы, использующие в качестве ориентиров Землю или
звезды, нормально функционируют при отсутствии в их поле обзора Солнца
и/или Луны. Следовательно, если не удается избежать угрозы засветок этих при-
боров Солнцем путем специальной их установки на КА, необходимо предусмат-
ривать специальные алгоритмические способы защиты.
Способы защиты могут быть пассивными и активными.
При пассивном способе ограничиваются выдачей в СУОС логического при-
знака, констатирующего факт неинформативности прибора по причине его за-
светки. В этом случае СУОС может продолжать работу на гиропамяти, т.е. без
астрокоррекции бесплатформенной инерциальной системы ориентации (БИСО)
остаться в режиме астрокоррекции, но используя при этом измерения других оп-
тических приборов.
Активный способ защиты был реализован в модуле обработки информации
и управления прибором ориентации на Землю (ПОЗ) секущего типа 254К СУОС
КА 71X6 российской системы наблюдения «Око-1». Способ заключался в том,
что из навигационной системы в СУОС поступала информация об угловых коор-
динатах положения Солнца и Луны в инерциальном пространстве. По информа-
ции из БИСО об ориентации КА при известной установке ПОЗ на КА угловые
координаты светил-помех пересчитывались в приборную систему координат
ПОЗ. Далее проводили анализ для выяснения возможности попадания светил-
помех в критическую область. При возникновении угрозы засветки в ПОЗ выда-
валась команда на переключение траектории сканирования мгновенного поля
зрения прибора в другое фиксированное положение. Такой способ защиты осо-
бенно эффективен, когда засветка прибора происходит Солнцем или Луной, вы-
ходящих из-за горизонта Земли и сливающихся с ее видимым с орбиты диском. В
этом случае автономная, т.е. встроенная в прибор, защита от засветок не эффек-
тивна.
В модулях обработки информации и управления оптическими приборами
целесообразно размещать гироскопические аналоги этих приборов, представ-
ляющих собой автономную одноосную БИСО, обеспечивающую оценку вектора
направления на ориентир в случае временной неработоспособности прибора. На-
пример, в случае замены основного комплекта прибора на резервный, а для при-
бора ориентации на Солнце это может быть прохождение теневого участка орби-
ты.
348
Особенностью модуля обработки информации и управления прибором ори-
ентации по звездам является необходимость предусматривать алгоритмическую
защиту от недостоверной информации. Такая ситуация может возникать при на-
хождении перед объективом прибора пылинок, святящихся в лучах Солнца, ко-
торые могут восприниматься как ложные звезды. Для селекции таких «звезд» ис-
пользуют способы, основанные на анализе межзвездных расстояний и установле-
нии связи между изменениями координат локализованных прибором светящихся
объектов с динамикой КА.
К специальным задачам модулей обработки информации и управления оп-
тико-электронными приборами следует также отнести ряд технологических опе-
раций, необходимых для нормального функционирования приборов. Например, в
модуле прецизионной астроизмерительной системы (ПАИС) КА «Аркон» реша-
лась задача наведения подвижного телеблока ПАИС на рабочие звезды. Кроме
того, при выдаче корректирующего импульса в целях предохранения оптики те-
леблок ПАИС заводился за защитный экран. С аналогичной целью астроизмери-
тельная система (АИС) СУОС научного КА «Спектр» снабжена защитной крыш-
кой, управление которой выполняется по командам модуля обработки информа-
ции и управления АИС.
4.5.6,2 Унифицированный модуль определения ориентации
4.5.6.2.1 Формульные схемы алгоритмов определения ориентации
При решении задачи определения ориентации КА в БИНС разработчик СУ
сталкивается с необходимостью решения задачи Коши для нелинейной системы
обыкновенных дифференциальных уравнений, которыми являются кинематиче-
ские уравнения.
Разработано достаточно много численных методов приближенного реше-
ния обыкновенных дифференциальных уравнений:
- метод Адамса;
- метод Эйлера с различными модификациями;
- семейство методов Рунге-Кутта;
- метод, основанный на вычислении фундаментальной матрицы, и другие.
Эти методы хорошо известны и широко освещены в литературе [33].
Для использования того или иного численного метода необходимо учиты-
вать, что он должен обладать, с одной стороны, достаточно высокой точностью, а
с другой - быть удобно реализуемым в БЦВМ, например, с точки зрения требо-
ваний к ее ресурсам.
Для интегрирования кинематических уравнений движения КА вокруг цен-
тра масс в БИСО широкое распространение получил метод Эйлера первого по-
рядка с реверсом на шаге [33, 65]. Реверс заключается в изменении последова-
тельности вычисления переменных на очередном такте счета. При последова-
тельном вычислении каждой переменной как функции от других переменных ис-
пользуют уже вычисленные на данном такте значения этих переменных. Благода-
ря реверсу точность данного метода, сравнительно просто реализуемого в БЦВМ,
равноценна точности метода Эйлера второго порядка.
349
Алгоритм интегрирования кинематических уравнений движения КА вокруг
центра масс в кватернионной форме, реализующий реверсивный метод, имеет
вид:
- на четном такте
Vo (п) = v0 (п -1) - ~{osx (n)v( (n — 1) + 0sy (n)v2 (n -1) + 0SZ (n)v3 (n -1)},
V| (n) = vf (n -1) + у {esx (n)v0 (n) + 0И (n)v2 (n -1) - 0sy (n)v3 (n -1)},
v2(n) = v2(n -1) + у {0sy(n)vo(n) + 0SX (n)v3(n -1) - 0sz(n)v1 (n)},
v3 (n) = v3 (n -1) + ~ {0SZ (n)v0 (n) + 0sy (n)V] (n) - 0SX (n)v2 (n)},
- на нечетном такте
v3(n) = V3(n - 1) + у {0sz(n)vo(n - 1) + 0sy(n)V!(n -1) - 0sx(n)v2(n - I)},
v2(n) = v2 (n -1) + у {esy (n)v0 (n -1) + 0SX (n)v3 (n) - es2 (n)Vj (n -1)},
vi (n) = vI (n — 1) + у {osx (n)v0(n -1) + 0S2 (n)v2(n) - 0sy(n)v3 (n)};
Vo(n) = Vo(n -1) - у {0sx(n)v,(n) + 0sy(n)v2(n) - 0sz(n)v3(n)}.
Здесь QSj(n) = у^(п) - у^(п -1), где yp(n) - кажущийся угол поворота КА.
Начальное значение кватерниона определяется в результате решения задачи
начальной выставки БИСО. Для этой цели используют информацию астроприбо-
ров.
Если выставку осуществляют в базовой системе координат (БСК), то ре-
зультатом счета алгоритма является получение кватерниона ориентации ССК КА
в БСК. Если выставку проводят относительно некоторой заданной программной
системы координат (ПСК), то соответственно получают кватернион ориентации
ССК относительно ПСК (разностный кватернион), который непосредственно ис-
пользуют в законе стабилизации. Удобно реализовать двухразовый счет алгорит-
ма в такте (или разовый через такт): один раз для расчета первого кватерниона,
второй раз - второго, разностного.
Если ориентация осуществляется во вращающейся (подвижной) системе
координат, то в приращениях кажущегося угла поворота необходимо учитывать
приращения, вызванные вращением подвижной системы координат.
Для повышения точности интегрирования кинематических уравнений дви-
жения КА вокруг центра масс используют методы более высокого порядка или
вводят дополнительную информацию о движении объекта в такте [45, 46].
Приведем один из таких алгоритмов [46].
350
1. Вычислить углы поворота за такт БСК в ОСК:
0y6[n] = y°6[n]-yj6[n -1].
2. Определить углы поворота за такт БСК в ОСК с учетом вращения ОСК:
0}[п] = е;б[п]-е,[п],
где 0aj[n] (j = х, у, z) - углы поворота за такт ОСК в ИСК в проекциях на оси БСК
3. Вычислить промежуточные переменные:
6[п]= ^0j[n];
j=x,y,z
q[n] = 0,5 -0[n]/48;
d[n] = l-0[n]/8 + O,l
4. Определить текущее значение кватерниона:
M[n] = (J • d[n] + ®[п] • q[n]) • М[п -1],
'1 0 0 o’ 0 -Ox[n]-0y[n] -0x[n] -0z[n]'
0 1 0 0 ;0[n] = Ox[n] 0 OJn] -0y[n]
где J — 0 0 1 0 0y[n] -0z[n] 0 0x[n]
0 0 0 1 0z[n] 9y[n] 0
Повышение точности в данном алгоритме определения ориентации дости-
гается за счет использования нескольких измерений кажущихся углов поворота
КА в одном такте счета алгоритма. Кроме того, в алгоритме обеспечивается нор-
мировка вычисляемого кватерниона.
4.5.6.2.2 Алгоритм астрокоррекции
Определение ориентации по астроизмерениям
Определение кватерниона Q(n) ориентации ССК КА (базис Е) относитель-
но некоторого исходного базиса (I), например ИСК, по результатам измерений
направлений на два опорных ориентира (Солнце-Земля, Солнце-звезда или пер-
вая звезда - вторая звезда; условно их назовем рабочими звездами - РЗ, а прибо-
ры, измеряющие направления на соответствующие ориентиры, назовем астродат-
чиками - АД) осуществляется следующим образом.
1. По результатам измерений АДт (т=1, 2) определяют направляющие коси-
нусы направления на РЗт в приборной системе координат m-го астродатчи-
ка:
cosHDm(n)cosADm(n)
SDin(n)= sinHJn)
-cosH^GO-sinA^Cn)
351
где Нпт(п), Aom(n) - угловые координаты ориентиров, измеренные m-м АД.
2. Направляющие косинусы направлений на РЗт в ССК КА определим, вос-
пользовавшись известным кватернионом Аут установки АДт на КА:
Sm(n) — Аут SDnl(n) Аут .
3. На двойке векторов Sm(n) построим правый ортогональный базис
(Sj (n), W1 (n), W2(n)), который обозначим F:
|Si(n)xS2(n)|
W2(n) = ^^.
|S,(n)xW,(n)|
4. Составим матрицу направляющих косинусов перехода от измеренного по-
ложения ССК КА к построенному формальному базису F:
MD(n) = {mDij(n)}.
SJn) Sly(n) SJn)
W„(n) W,y(n) W„(n)
W2,(n) W2y(n) W2l(n)
5. На двойке векторов SNm(n) направляющих косинусов РЗ в исходном бази-
се I построим правый ортогональный базис (SNI(n),WN1(n),WN2(n)), кото-
рый обозначим Fn:
WN1(n) =
|Sn1 (п)х^№(п)|
WN1(n)=Sw(r‘)xWN1(ri)
|SN1(n)x-WN1(n)|
6. Аналогично п. 4 составим матрицу направляющих косинусов перехода от
исходного базиса к формальному базису FN:
MN(n) = {mNij(n)}.H23 =
$Nlx(n) SNly(n) SNlz(n)
WNlx(n) WNly(n) WNlz(n)
WN2x(n) WN2y(n) WN2z(n)
7. После преобразования полученных матриц в соответствующие кватернио-
ны AD(n) = {XDi(n)}и Ans(u) = {XNsi(n)}[14] искомый кватернион
Q(n) определим из выражения:
Q(n) = ANS(n) ° AD‘(n).
При необходимости результат может быть получен и в виде матрицы на-
правляющих косинусов М(п):
M(n) = M^(n)-MN(n).
352
Графическая иллюстрация данного алгоритма показана на рис. 4.5.13.
Рисунок 4.5.13 - К задаче определения
ориентации
Необходимо принять к сведению, что поскольку базисы F и Fn построены
на одних и тех же векторах, эти базисы совпадают. Компоненты векторов SNm(n)
вычисляют по данным звездного каталога.
Если получены измерения угловых координат опорных ориентиров в боль-
шем количестве, чем два, можно использовать следующий способ определения
ориентации.
Через искомую матрицу М(п) запишем уравнение связи между векторами
Sm(n) и SNm(n):
Sm(n) = M(n) SNm(n) (m=l, 2, 3, ...). (4.5.100)
Для определения девяти элементов матрицы М(п) достаточно измерений
трех астроориентиров. Для широкоугольных астросистем обычно количество
распознанных звезд существенно больше трех. Поэтому уравнение (4.5.100) по-
рождает избыточную систему уравнений, решение которой выполняется методом
наименьших квадратов. Затем матрица М(п) преобразуется в кватернион ориен-
тации Q(n).
Звездные датчики - наиболее точные оптико-электронные приборы СУ для
определения ориентации КА. В настоящее время более широкое распространение
получили широкоугольные ЗД, или, как их называют, астроизмерительные сис-
темы. Благодаря статистической обработке избыточной информации об угловом
положении группы звезд ПАИС обеспечивают довольно высокую точность опре-
деления ориентации. Для обеспечения еще более высокой точности на КА уста-
навливают два (и более) ПАИС с взаимно ортогонально направленными оптиче-
скими осями для уменьшения методической ошибки определения трехосной ори-
ентации.
Формирование параметров коррекции
Вычисленный кватернион ориентации используют для начальной выставки
БИСО и последующей ее астрокоррекции.
353
Граф на рис. 4.5.14 объясняет принципы формирования параметров астро-
коррекции.
Рисунок 4.5.14 - К формированию парамет-
ров астрокоррекции
Пусть идеальная ориентация связанного с КА базиса Е* относительно ис-
ходного базиса I задается кватернионом Л .
При работе без астрокоррекции с течением времени в БИСО накапливается
ошибка 8Л в определении кватерниона (базис Е):
6Л = Л*о А.
ПАИС обеспечивает вычисление кватерниона ориентации Ад связанного
базиса Еа относительно исходного базиса I:
Л‘=Ло8Л..
А А
Так как ПАИС определяет кватернион Ад с высокой точностью, то можно
положить, что 8Лд = (1, 0, 0, 0), и Л = Ад.
Таким образом, накопленная в БИСО ошибка 8Л может быть определена как
8А = Ад © А.
Далее вычисленная ошибка 8Л из кватернионной формы переводится в уг-
ловую:
8j = 28X08Xj, (j = х, у, z; i = 1,2,3),
где 8Xj (i = 0, 1, 2, 3) - компоненты кватерниона 8Л.
Фактически ошибка 8j представляет собой невязку в уравнении наблюдате-
ля (фильтра), реализуемого в БИСО. Для случая использования стационарного
наблюдателя типа Люенбергера эта невязка, умноженная на весовой коэффици-
ент Kg (j = х, у, z), и является параметром астрокоррекции БИСО:
9KIj=Kq-£j. (j = x,y,z). (4.5.101)
354
Параметры астрокоррекции аддитивно вводятся с информацией о прираще-
нии угла кажущегося поворота в алгоритм определения ориентации БИСО.
Аналогично астрокоррекция БИСО может выполняться относительно не
только исходного базиса I, но и заданного программного базиса, в котором вы-
полняется стабилизация КА.
Численные значения коэффициентов усиления наблюдателя Kej выбираются
из условий обеспечения устойчивости процесса оценки вектора состояния КА,
быстродействия и заданного ограничения на величину установившейся ошибки
оценки. Кроме того, для КА ДЗЗ необходимо учитывать следующую их особен-
ность.
Повышение точности определения ориентации КА относительно про-
граммного базиса в режиме выполнения целевой задачи (съемки наблюдаемого
объекта) достигается путем проведения астрокоррекции на участке съемки, что, в
свою очередь, порождает проблему обеспечения точности стабилизации КА как
по угловой скорости, так и по углу. Решение проблемы заключается в корректном
выборе коэффициентов усиления наблюдателя (фильтра) алгоритмов БИСО, при-
чем во взаимосвязи с коэффициентами усиления закона управления.
4.5.6.2.3 Анализ точности алгоритмов определения ориентации
эталонными моделями вращения
Задача определения ориентации твердого тела является сложной задачей
механики, решаемой с помощью специальных алгоритмов. Эти алгоритмы нахо-
дят применение в бесплатформенных инерциальных системах ориентации
(БИСО) космических аппаратов (КА). Для выбора наилучшего (адекватного) ал-
горитма определения ориентации (АОО) необходимо оценить имеющиеся алго-
ритмы по некоторым критериям.
Для оценки АОО необходимо иметь некоторые модели движения, в общем
случае делящиеся на непрерывные и дискретные, на которых можно отрабаты-
вать алгоритмы. Из непрерывных моделей наиболее часто используют модели
плоского и конического вращений, однако проведенные исследования показыва-
ют, что класс используемых эталонных моделей целесообразно расширить путем
введения тригонометрических моделей и моделей типа регулярной прецессии.
Реализация дискретных моделей связана с численным интегрированием динами-
ческих и кинематических уравнений, поэтому параметры ориентации и первич-
ная информация здесь представляются в дискретной форме. Для непрерывных
моделей характерно, что кинематические параметры описываются непрерывными
явными функциями времени.
Преимущество дискретных моделей заключается в том, что их можно вве-
сти для достаточно сложных объектов, а недостатки выражаются в том, что в по-
лучаемые с их использованием оценки точности алгоритмов входят ошибки ме-
тода численного интегрирования уравнений модели. Область определения таких
моделей охватывает только множество точек интегрирования, что в общем слу-
чае ограничивает возможности детального оценивания алгоритмов.
355
Число используемых в настоящее время непрерывных эталонных моделей
ограничено частными случаями интегрируемости в квадратурах уравнений вра-
щения (случаи плоского и конического вращений и регулярной прецессии).
Для совмещения взаимных преимуществ дискретных и непрерывных моде-
лей применяют аппроксимирующие модели, которые строят на основе аппрокси-
мации численного интегрирования динамических и кинематических уравнений.
Такие непрерывные модели можно ввести на основе аппроксимации кватерниона
ориентации дискретной модели квазимногочленами. В отличие от других ап-
проксимирующих параметров ориентации при этом не требуется априорного за-
дания спектральных характеристик вращения.
Введение аппарата аппроксимирующих моделей позволяет более адекватно
описать непрерывными функциями кватернионы и первичную информацию ре-
ального вращения, чем это делается в результате использования аналитических
решений в частных случаях [47].
В качестве примера рассмотрим следующую модель зависимости кватер-
ниона ориентации твердого тела от времени [37]:
X0(t)= cos(ktt) • cos(k2t),
Xi (t) = sinCkit) • cos(k2t),
X2 (t)= sin(k2t) • cos(k3t),
X3(t)=sin(k2t)- sin(k3t),
где kb k2, k3 - параметры модели, подбираемые путем аппроксимации дискрет-
ной модели.
Запишем обратное кинематическое уравнение
со» = 2 • Л о Л,
которое в скалярной форме выглядит следующим образом:
©I — 2 • ^Xq — X jXq + Х3Х2 Х2Х3
со2 —- 2 • (XqX2 — X2Xq + X । Х3 Х3Х]
©3 — 2 • ^XqX3 — Х3Х0 X2Х| X|Х2 j.
Выражения для вектора кажущейся угловой скорости будут выглядеть сле-
дующим образом:
cot (t) = kj -k3 +(kj +k3)cos[2k2t];
<o2(t) = y((k, +k3)-(cos[(k] -2k2 -k3)t]-cos[(k| + 2k2 -k3)t]))+
+ 2k2cos[(k1 -k3)t];
(t) = (- (k, + k3 )• (sin[(k1 - 2k 2 - k3 )t] - sin[(k3 + 2k2 - k3 )t] j)-
- 2k2 sin[(kj -k3)t].
356
Вектор кажущегося поворота определим из следующего соотношения:
y(t)=
О
Выражения для кажущегося поворота выглядят следующим образом:
2k 2
Y2(0= . 2k^ sin[(k! - k3)t]+ , kl J,k3 sm[(k, - 2k2 - k3)t]~
K| — K3 — ZK2 — *3 /
— —k[ +k3------sin^kj +2k2 -k3)tj
2(kj+2k2-k3) LV 2 37 J
YM_ 8k2(2k22+k,(-k1+k3))
3U 2-(-4k22+(kI-k3)2)-(k1-k3)
+ 4k2 (~ 4k22 + (ki ~ k3) )• cos[(kt - k3 )t] +
2 • (— 4k2 + (k( — k3) j- (kt — k3)
(kt + k3) • (kt + 2k2 - k3) • cos[(kj - 2k2 - k3 )t]
2-pk22+(kI^kJrT
(kj + k3 )• (- kt + 2k2 + k3 )-cos[(k1 + 2k2 - k3 )t]
+ 2-(-4k22+ (k]-k3)2) ’
Вектор приращения кажущегося поворота за такт определяется из следую-
щего выражения:
в(0= f®(t)dT = y(t)-y(t-h),
t-h
где h - шаг счета информации о приращении вектора кажущегося поворота.
Замкнутую задачу оценки точности алгоритмов определения ориентации
эталонной моделью вращения можно представить с помощью структурной схе-
мы, показанной на рис. 4.5.15.
357
Рисунок 4.5.15 - Схема моделирования задачи
оценки точности алгоритмов определения
ориентации эталонной моделью вращения
Эталонная модель вращения формирует информацию о текущем положе-
нии тела - вектор кажущегося поворота 0п, вектор угловой скорости <оп и ква-
тернион ориентации Лп.
Входным параметром для алгоритма определения ориентации является век-
тор кажущегося поворота 0п. Выходным параметром есть кватернион ориента-
ции Л*, в общем случае отличный от А п на величину ошибки.
В блоке оценки точности происходит сравнение эталонного кватерниона
ориентации Лп, поступающего из модели, и кватерниона, найденного с помощью
аоо л;.
Для определения методической погрешности используют локальные (на
шаге) и интегральные оценки. Они могут быть мажорантными, асимптотически-
ми и экспериментальными. Значения мажорантных оценок, как правило, завыше-
ны и на практике обычно не достигаются. Асимптотические оценки в частных
случаях движения (коническом) при достаточно малых значениях шага вычисле-
ний дают результаты, близкие к реальным значениям погрешностей.
С математической точки зрения алгоритмы одинакового формального по-
рядка равноценны, поэтому вывод о фактической эффективности алгоритма
можно сделать только на основе численного эксперимента.
Оценки методической погрешности могут быть получены в разных видах -
матрица ошибок направляющих косинусов, нормы матрицы ошибок, скорости
нормы, а также в виде дрейфа, скорости дрейфа, неортогональности и нарушения
358
масштаба. Предпочтение отдается дрейфу и скорости дрейфа из-за простоты, на-
глядности и универсальности этих критериев.
Дрейф на такте определяется с помощью следующих вычислений. В пер-
вую очередь вычисляется кватернион рассогласования кватернионов Л* и Лп:
8Л = Л* о д
п п п ’
где 8ЛП - кватернион рассогласования; Лп -кватернион, сопряженный Лп.
Затем находится собственно дрейф:
8®„= 2forctglVeCtSAj. а 2|vect5Ao|1
sca!8An
где |vect8An| - норма векторной части кватерниона рассогласования 8ЛП; £ -
вектор конечного поворота.
Скорость же дрейфа определяется как отношение приращения дрейфа к
приращению времени:
h
где 80п ~ скорость дрейфа на такте; 80п - дрейф на такте; 80n_i - дрейф на
предыдущем такте; h - величина шага счета.
Важной оценкой может служить также среднее значение (математическое
ожидание) дрейфа и скорости дрейфа:
8© =-- У 8® ,
ер NZ, р,
где 80^ - среднее значение дрейфа; N - количество измерений,
8© =—Уб© ,
ер NZ, «>
где 80ср - среднее значение скорости дрейфа.
4.5.6.3 Унифицированный модуль управления
4.5.6.3.1 Законы управления ориентацией КА с помощью реактивных
двигателей
Процесс управления движением КА вокруг центра масс предполагает опре-
деление и выдачу на исполнительные органы КА управляющих сигналов, обеспе-
чивающих выполнение текущей задачи СУОС.
Практически все динамические режимы СУОС КА состоят из набора уча-
стков, на которых реализуются следующие типовые операции:
- демпфирование угловых скоростей КА;
- поиск опорных ориентиров и построение заданной одноосной или трех-
осной ориентации;
7 разворот КА в заданное программное положение;
- стабилизация КА относительно заданного положения.
359
Комплекс командных приборов КА позволяет определить:
- угловые скорости относительно центра масс (с помощью измерителя уг-
ловой скорости);
- угловое положение КА относительно опорных астроориентиров (с по-
мощью приборов ориентации на светила).
Формирование управления осуществляется по информации о текущем век-
торе состояния КА и задаче целевой операции конкретного участка функциони-
рования КА.
Обычно закон управления формируется как линейная функция вектора со-
стояния КА:
CTj (п) = к/п) • у.(п) + К„Дп) • (шф/п) - %(п)), (4.5.102)
где Qj(n) - аргумент управления в j-м канале; К^(п),К^(п) - коэффициенты
усиления по углу и угловой скорости соответственно в j-м канале; у/п) - угло-
вое рассогласование в j-м канале; (Оф/п) - оцененная по измерениям ИУС угло-
вая скорость КА; a>nj(n) - программная угловая скорость КА; j = х, у, z.
Данный закон управления имеет универсальную форму и в зависимости от
выполняемой КА задачи может видоизменяться путем настройки коэффициентов
К^(п),КШ](п) и законом формирования программной угловой скорости (onj(n).
Для участков демпфирования угловых скоростей КА достаточно задать
следующие настройки:
Kyj(n) = 0; Kfflj(n)^0; G>^(n) = 0.
Участок поиска опорных ориентиров характерен тем, что в случае отсутст-
вия ориентира в поле обзора оптического прибора в одном из каналов управления
формируется программная угловая скорость conj (п) 0 для сообщения КА поис-
ковой угловой скорости.
При осуществлении программного разворота КА в требуемое положение
программная угловая скорость conj(n) формируется в алгоритмическом модуле
программного разворота в соответствии с выбранным способом управления.
Ранее обычно использовали способ поканального управления. При таком
способе управления значения программных угловых скоростей в законе управле-
ния (4.5.102) обнуляются, а угловые рассогласования %(п) порождают значения
аргумента стабилизации а/п) больше зоны нечувствительности, что и вызывает
включение реактивных двигателей. Создаваемые двигателями управляющие мо-
менты обеспечивают набор в каждом канале необходимых угловых скоростей
разворота КА в требуемом направлении. При этом формирование управления в
каждом канале происходит независимо от управления в других каналах.
С появлением БЦВМ возникла возможность реализации более сложных
формул и логики алгоритмов программного разворота. Так, был разработан спо-
соб экстенсивного разворота КА [4], в соответствии с которым разворот КА вы-
полняют вокруг пространственной оси (оси Эйлера), неподвижной в базовой и
360
связанной системах координат. При этом проекции программной угловой скоро-
сти КА на оси связанной системы координат вычисляют по формуле
Z \ z ч АХ;(п) • Z 4 Л Z
a>^(n) = -con(n)-, sign(M0(n))> (4.5.103)
71-(ДХ0(п))2
где соп(п) -- модуль программной угловой скорости разворота; Akj(n) (г=0, 1,
2, 3) - компоненты кватерниона рассогласования между текущим и конечным по-
ложениями ССК КА.
Логика алгоритма управления строится таким образом, что в начале разво-
рота позиционная компонента в законе (4.5.102) обнуляется и управление осуще-
ствляют по разности между оцененной по измерениям ИУС угловой скорости КА
и вычисленной по формуле (4.5.103) программной угловой скорости.
В конце разворота, когда угловое отклонение КА от заданной ориентации
становится меньше некоторого порогового значения 5Ф, т.е. выполняется усло-
вие 2arccos(AX0) <5Ф, в закон управления (4.5.102) подается позиционная ком-
понента в виде
у^(п) = 2АХ0АХ| (j = x, у, z; i = 1,2,3),
а программная угловая скорость обнуляется.
Тогда закон управления принимает вид
CTj(n) = Krj(n)Yj(n) + Kfflj(n)cofe(n) (4.5.104)
что обеспечивает гашение угловой скорости разворота и стабилизацию КА отно-
сительно заданного углового положения.
Участки стабилизации относительно заданного программного положения
характерны тем, что действительное угловое положение КА на момент начала
процесса стабилизации определено, т.е. величины углов уДп) вычислены. Закон
формирования управления КА на этих участках требует задания следующих па-
раметров:
Kyj(n) Ф 0; К^(п) Ф 0; conj(n) = 0 (или ^(п) * 0).
Коэффициенты K^n^K^n) выбирают путем предварительных аналити-
ческих расчетов с последующим уточнением по результатам моделирования ди-
намических процессов для конкретного КА с учетом его массово-инерционных
характеристик, точностных требований и др.
Если необходимо выполнять стабилизацию КА не относительно нулевого
углового положения, а некоторого программного положения уа/п)Д), то закон
управления (4.5.102) должен иметь вид
Oj(n) = K,!j(nXYj(n) - Ynj(n)) + Кт/п)(а>ф)(11) - conj(n)). (4.5.105)
По вычисленному аргументу управления формируются управляющие сиг-
налы на исполнительные органы. В зависимости от типа исполнительных органов
применяют соответствующие алгоритмы формирования управляющих сигналов.
361
По величине аргумента управления определяют необходимость создания
управляющего момента соответствующего знака в каждом канале. Затем по этой
информации с учетом типа используемых ИО и их расположения на КА форми-
руются управляющие сигналы на включение конкретного исполнительного орга-
на.
Типовой фазовый портрет управления КА на ДС показан на рис. 4.5.16.
Рисунок 4.5.16 -- Фазовый портрет процесса управления КА на ДС
На рис. 4.5.16 показаны:
Aj - зона нечувствительности закона управления;
coHj - ограничение угловой скорости вращения КА;
Mj(n) - признак управляющего момента.
Для обеспечения помехозащищенности системы в алгоритм управления на
ДС, реализующий релейный закон управления, обычно вводится гистерезис. Для
повышения точностных характеристик системы целесообразно вместо гистерези-
са использовать паузу на повторное включение ДС.
Для повышения динамических и точностных характеристик СОУС приве-
денный выше закон управления может усложняться путем введения дополни-
тельных членов, например:
- сигналов, пропорциональных угловому ускорению КА;
- сигналов, пропорциональных интегралу от угловых рассогласований;
- сигналов, пропорциональных квадрату разности между программной и
оцененной угловыми скоростями КА и др.
4.5.6.3.2 Закон стабилизации КА с помощью реактивных двигателей
При стабилизации, выполнении разворотов КА с помощью реактивных
управляющих двигателей многократного включения должен быть достигнут ком-
промисс между требуемой точностью и требованием минимизации расхода рабо-
362
чего тела. Реализуется это с помощью выполнения алгоритма стабилизации с зо-
ной нечувствительности. В качестве аргумента управления o(t) обычно исполь-
зуют линейную комбинацию углового рассогласования и угловой скорости
<40 = Ycr(0 + K^(D(t),
где уст(0 “ угловое рассогласование; co(t) - оцененная угловая скорость КА.
Угловое рассогласование yCT(t) вычисляют как yCT(t) = у - упр, где упр - про-
граммное значение угла.
Графическое представление классического алгоритма стабилизации с по-
мощью реактивных исполнительных органов показано на рис. 4.5.17 в координа-
тах уст (для одного канала стабилизации).
Рисунок 4.5.17 - Линии переключения алгоритма стабилизации
На рис. 4.5.17 приняты следующие обозначения:
Ду - зона нечувствительности по угловому рассогласованию;
сов, <он ~ верхняя и нижняя полки по угловой скорости алгоритма стабилизации.
Между линиями переключения расположена зона выключенного состояния
двигателей стабилизации, над верхними линиями - зона включения двигателей
отрицательной полярности, развивающих отрицательный управляющий момент
(Mynpj < 0). Зона под нижними - зона включения двигателей стабилизации, разви-
вающих положительный управляющий момент (MynPj > 0).
Значение сов должно быть по модулю меньше диапазона датчика угловой
скорости (ДУС). В противном случае при наличии в системе начальных условий,
приводящих к появлению угловых скоростей, превышающих диапазон измерите-
ля угловой скорости, движение в системе будет неустойчивым (по раскручиваю-
щимся спиралям).
Линии переключений для угловых скоростей, превышающих диапазон ДУС
363
(|со | >сод), автоматически становятся вертикальными, как показано на рис. 4.5.17
пунктиром, что и приводит к неустойчивости:
|®|>СОд.
Заштрихованные маленькие трапеции у пересечения наклонных линий пе-
реключения с горизонтальной осью являются зоной выключенного состояния
двигателей стабилизации 8+ = 8" = 0. Зоны эти предназначены для формирования
экономичных несимметричных предельных циклов (при малых возмущениях или
их отсутствии). Известно, что несимметричные предельные циклы более эконо-
мичны по расходу рабочего тела сравнительно с симметричными предельными
циклами (рис. 4.5.18).
«идеальный»
ай
|©2| < < е
Рисунок 4.5.18 - Предельные циклы
В целях предотвращения высокочастотных включений двигателей стабили-
зации, вызванных влиянием электрической помехи или упругих элементов кон-
струкции, в сигнале угловой скорости (угла) в алгоритм стабилизации вводится
принудительная пауза на повторное включение двигателей стабилизации. Если
по состоянию системы двигатель стабилизации был отключён, то повторное
включение допускается не раньше, чем пройдёт заданное в настройке время от
момента отключения двигателя стабилизации.
Двигатели стабилизации отключаются в зависимости от фазового состоя-
ния системы, как показано на рис. 4.5.17, вне зависимости от счётчика паузы.
4.5.63.3 Особенности управления КА с помощью силовых гироскопов
Для управления СГК, расположенного на КА, необходимо определить закон
регулирования, реализующий требуемое угловое движение вокруг центра масс.
Из выражения (2.1.53) видно, что гироскопический момент, реализующий
управление КА, можно представить в виде
м=н р.
Отсюда можно сделать вывод, что управляющий момент М зависит как от
скорости процессии, так и от угла 0, а модуль М при неизменном модуле собст-
венного кинетического момента СГК Н определяется только величиной скорости
процессии 0:
364
|M| = |Hl-|p|. (4.5.106)
Скорость процессии можно задавать на основе:
- вектора потребного динамического момента;
- вектора потребного кинетического момента.
Управление КА с помощью потребного динамического момента
Вектор потребного динамического момента определяется из динамического
уравнения движения КА совместно с кинематическими уравнениями движения
его вокруг центра масс
1<р = Му(ф,ф,ф...) + Мь,
где ф - угловая координата движения КА относительно центра масс; J - цен-
тральный момент инерции КА; Му - управляющее воздействие; Мь - возмущаю-
щее воздействие.
На практике в законе управления используют производные не выше второ-
го порядка, что позволяет определить закон регулирования в виде
ос =Кгф + К(Оф + Ке ф,
где ос — аргумент управления, 1/с2; Кг - коэффициент усиления по углу, 1/с2; Кш -
коэффициент усиления по угловой скорости, 1/с; Ке- коэффициент усиления по
угловому ускорению.
Вектор потребного кинетического момента
Qr=J-oc. (4.5.107)
Для распределения трёхмерного вектора потребного кинетического момента
на четыре гироскопа существует метод, использующий псевдообратные матрицы.
Из выражения (2.1.57) видно, что
М = А L(p) р, (4.5.108)
где М - вектор управляющего момента СГК, пропорциональный сг, Нм; А - мат-
рица-столбец коэффициентов, определяющих положение плоскостей прецессии ги-
родинов; А = {sina • Но; cosa - Но; Но }т; Но - внутренний (собственный) кине-
тический момент гиродина, Нмс; L(p) - [3x4] матрица, учитывающая угол поворота
внутреннего кинетического момента в плоскости процессии каждого гиродина;
- sinPj sinp2 sinp3 -sinp4
L(₽) = — sin Р] -sinp2 sinp3 sinp4 ; (4.5.109)
COSpi cosp2 -cosp3 - cosp4
р — вектор-столбец, определяющий скорость прецессии каждого гиродина, 1/с:
р={₽,д.М4}т-
Неизвестный вектор р вычисляют на основе псевдообратной матрицы [19]:
Р = LT(p)(L(0)LT(₽))-' • М. (4.5.110)
365
Данное решение не гарантирует управляемость КА во всей области вариа-
ции кинетического момента ввиду возможности попадания рамок гиродинов в
особые сингулярные состояния, делающие невозможным решение уравнения
(4.5.109), так как определитель матрицы (l(₽)Lt (₽)) 1 может стремиться к нулю.
Для исключения данного эффекта решается оптимизационная задача мак-
симизации целевой функции, связанной с определителем Грамма, которая орга-
низует дополнительное «нулевое» движение рамок гиродинов и обеспечивает
максимальную область вариации кинетического момента [65]:
тахф(р)= maxG*(p 4- fJAt);
(4.5.111)
Р
где Ф( Р ) - целевая, дважды дифференцируемая выпуклая функция, характери-
зующая управляющие свойства гиросистемы; G* - определитель Грамма; Р -
вектор текущих значений углов прецессии гиродинов; At - продолжительность
такта счёта БЦВМ в СУОС; - область допустимого управления гиродинами.
Для случая малых скоростей прецессии вектор градиента функции макси-
мум может быть представлен в виде
арар ар1 ар!
Тогда выражение, обеспечивающее выполнение условия (4.5.111), имеет вид
Др = p(G*(P)-(Em-LT(P)• (L(P)• LT(p))-' L(p))^, (4.5.112)
c/p
где вместо F ](P) используется p(G*(p)) • (Era); G*(p), имеет размерность угло-
вой скорости; р - положительный скалярный параметр, величина которого об-
ратно пропорциональна текущему значению определителя G*(0), также имеет
размерность угловой скорости; Ет - единичная матрица; Ар - величина угловой
скорости «нулевого» движения рамок гиродинов.
Суммарную угловую скорость движения гиродина определяют как сумму:
РУ=Р + А₽. (4.5.113)
Ограничивая ру областью допустимого управления гиродинами Пд, полу-
чаем величину скорости прецессии, которая позволяет максимально использовать
возможности гиросистемы длительное время.
Для КА, осуществляющих наблюдение за Землей, характерно чередование
режимов стабилизации, во время которого проводится наблюдение и переориен-
тация, совершаемая для смены наблюдаемого объекта.
Такие манёвры должны выполняться за минимальное время с максималь-
ным использованием возможностей гиросистемы.
366
При рассмотренной выше схеме расположения гиродинов в силовом гиро-
скопическом комплексе (см. рис. 2.1.15) вектор абсолютного кинетического мо-
мента по осям Ovi3 и OV24 обеспечивается поворотом всех четырех гиродинов в
нужное положение, в том числе и в одну полуплоскость. Относительно же оси
OZC таковой возможности нет, так как рамки гиродинов при «перебросе» их в
другую полуплоскость (относительно оси OZC) обязательно попадают в особые
сингулярные состояния, при этом управление СГК невозможно. Игнорирование
особых положений, предлагаемое многими авторами (например, в [65] предпола-
гают ввести сигнулярно-робастную псевдообратную матрицу), приводит к значи-
тельному затягиванию времени переориентации гиродинов, а значит, и времени
выполнения манёвров.
Для эффективного управления силовым гироскопическим комплексом был
разработан другой способ управления гиродинами, обеспечивающий полное ис-
пользование суммарного кинетического момента СГК и обход сингулярных со-
стояний гиросистемы.
Для рассмотрения данного способа управления СГК условно поместим две
полуплоскости Vb и Угдна плоскости YCOZC (см. рис. 2.1.15) и совместим центры
вращения рамок гиродинов с точкой О. Данное положение гиродинов в случае
равенства модулей углов |Pi| = |Рз| и |р2| = |₽4| даёт нулевой кинетический момент
по всем связанным осям КА (см. выражение (2.1.57)). При этом для наглядности
углы Pi отсчитывают от осей ОУ]з и Ov24.
Рисунок 4.5.19 - К способу управления
гиродинами с полным использованием
кинетического момента
Сформированный вектор потребного динамического момента ог (см. выра-
жение (4.5.107)) необходимо спроектировать на оси OVj3 и Ov24h OZc, получая со-
ставляющие Смз, СГу24» O*zl3> ^74-
Управление гиродинами, располагаемыми таким образом, осуществляется
попарно: 1-й плюс 3-й гиродины и 2-й плюс 4-й гиродины. При этом управляю-
щее движение, поданное на вход данного гиродина, должно быть скомпенсиро-
вано другим гиродином, входящим в пару. Для этого рассмотрим рис. 4.5.20.
367
Рисунок 4.5.20 - К попарному управлению
гиродинами
Для обеспечения эффективного управления при стабилизации КА пара 2-4
поддерживает программное положение HZM24 (см. выражение (4.5.117)) и управ-
ление по оси OZc фактически осуществляется парой 1-3 (ввиду равенства HZm24 и
Hz24):
CTzi3 =
aZ24 = HZM24 - HZ24;
<\24=<*ra~tgaH„
где HZ24 = Ho • (sin p2 - sin p4) - вычисленный по углам положения рамок гиро-
динов (р.) кинетический момент пары 2-4; HZM?4 - программное положение ра-
мок пары 2-4, определяется выражением
HZM24 = 0,5-Но,
где Но - внутренний (собственный) кинетический момент гиродина, Нмс.
Рассмотрим работу пары гиродинов 1-3.
368
Составляющие смз, crzi3 проектируем на оси, определяющие направление
собственных кинетических моментов 1-го и 3-го гиродинов, и суммируем их:
(Ti = avl3 cos pi + azl3 sin Pi - для 1-го гиродина;
аз = avi3 cosp3 + azl3 sinp3 - для 3-го гиродина,
где Ст1(3) - потребный кинетический момент 1-го (3-го) гиродина.
Теперь проектируем на 3-й гиродин, а а3 на 1-й и назначаем управление
₽i(i= 1,3):
откуда
p3H0 • sin(P, + p3) = gvl3 cos p, + gzl3 sin P,;
P,H0 sin(P, + p3) = ovl3 cos P3 + стг|3 sin P3,
= avl3cosp3 + gZi3sinp3 .
Pl Hflsin(p1+p3) ’
(4.5.114)
А = CTyBCOsP) +o2|3smpi
3 Hosin(p|+p3)
Аналогично определяется и управление по паре 2-4.
Составляющие oV24, <^z24 также проектируем на оси, определяющие направ-
ление собственных кинетических моментов 2-го и 4-го гиродинов и суммируем
их (см. рис. 4.5.21):
о2 = gv24 cosp2 + gz24 sinp2
- для 2-го гиродина;
°4 - av24 cosp4 + qz24 sin р4 - для 4-го гиродина.
Аналогично паре 1-3 проектируем а2 на ось собственного кинетического
момента 4-го гиродина, а на такую же ось 2-го гиродина, и назначаем управле-
ние ft (i = 2, 4):
откуда
р4но • sin(p, + p4) = gv24 cosp, - gz24 sin p,;
P2H0 sin(P2 + P4) = gv24 cosp4 -gz24 sinP4,
• ov24cosp4 -cz24sinp4 .
P2 H0sin(p2+p4) ’
(4.5.115)
gv24cosp2 -a224sinp2
Hosin(p2+p4)
369
Рисунок 4.5.21 - К формированию управления парой 2+4 гиродинов
Управление КА с помощью потребного кинетического момента
Управление КА с помощью потребного кинетического момента осуществ-
ляется в случае необходимости переориентации его в пространстве. Переориен-
тация осуществляется СУОС путем изменения угловой скорости КА - набор уг-
ловой скорости, поддержание её необходимое время до момента достижения рас-
чётной ориентации в пространстве и затем гашение угловой скорости. Величину
угловой скорости, время набора, поддержания и гашения угловой скорости и уг-
ловую ориентацию определяют с помощью кинематических соотношений в про-
цессе реализации режима переориентации КА.
С точки зрения управления СГК для реализации набора, поддержания и га-
шения угловой скорости переориентации КА необходимо выполнить следующие
действия.
Исходными параметрами для управления гиродинами являются следую-
щие:
- угловая скорость разворота ®р;
- время набора, гашения и поддержания сор;
По известному вектору сор режимом переориентации рассчитывается по-
требный кинетический момент, который необходимо приложить к КА:
370
Hpjj = JjCOpj, (4.5.116)
где Hpj - потребный кинетический момент разворота (j = х, у, z); Jj - централь-
ные моменты инерции.
Потребный кинетический момент раскладывается по осям СГК Ovlb Ov2< и
OZC:
HVM13 Нх tgotHy,
HVM24= Ну - tgaHy, . *
Н^з-ОЛНр,
Hzm24 = 0,5 Нр,
где HVMi3, Hvm24, На11з, Hzm24 - потребные кинетические моменты по осям СГК
OVi3, Ov24 и OZc по каждой паре гиродинов.
Одновременно рассчитывают текущие проекции кинетических моментов
двух пар гиродинов:
Hvi3 = Ho(cosPi - сояРз),
Hv24 = Ho(-COSp2 + cosp4), (45118)
Hzi3 = Ho(sinpi - sinp3),
Hz24 = H0(sinp2 - sm04),
где Низ, Hv24, Hzb, Hz24 - проекции кинетических моментов каждой пары гиро-
динов (1 4- 3 и 2 + 4) на оси гиродинов OvB, Ov24 и OZC; Но - собственный кинети-
ческий момент гиродина; pi - (i = 1 - 4) - углы прецессии i-ro гиродина.
Перемещая пары гиродинов в положение, определяемое потребными кине-
тическими моментами HVMi3, Hvm24, Н^з, получим изменение суммарного
кинетического момента СГК, что повлечёт за собой изменение суммарного кине-
тического момента КА и набор необходимой угловой скорости.
Существенным моментом при расчёте потребных кинетических моментов
является проверка реализуемости набора потребного кинетического момента.
1. Потребный кинетический момент не должен превышать возможности ги-
росистемы, т.е. модуль вычисленного потребного кинетического момента каждой
пары гиродинов не должен превышать 2Но:
Нм!3 = + ^VM13 -2Н0;
-------------- (4.5.119)
Нм24 ~ 'v^ZM24 + ^VM24 ” 2Но,
где НМ1з, Нм24 - модули погребного кинетического момента пар 1-го + 3-го и
2-го + 4-го гиродинов; Но - собственный кинетический момент гиродина.
Если потребный кинетический момент превышает возможности гиросисте-
мы, то необходимо уменьшить угловую скорость разворота сор и добиться выпол-
нения условия (4.5.112).
2. Положение вычисленного потребного кинетического момента по осям
Ovi3> Ov24 И OZc не должно приводить к попаданию рамок каждой пары гиродинов
371
в особые сингулярные положения, когда знаменатели выражений (4.5.110) и
(4.5.111) стремятся к нулю.
Для этого соответствующую компоненту потребного кинетического момен-
та передвигают в «безопасное» место путём перераспределения потребных кине-
тических моментов между парами гиродинов, например (см. рис. 4.5.22):
Рисунок 4.5.22 - Перераспределение потребных кинетических
моментов между парами гиродинов
- перерасчетом компонент и Н^д-
HzmI3 -“7^м13 “ H-VM13 ’
HZM24 = д/^м24 " Нум24 *
- проверкой соотношения:
(4.5.120)
372
если |^2М1з| 0.1 ♦ Но, то
Hzm24 — 0.1 • Но • signHzMn t
^zm13 + 0.1 • Но • signHzMH,
если |HZM24|<0.bH0,To
Hzm24 + 0.1 • Но • signHZM24;
Hzmi3 -0.1 • Ho ♦ signHZM24,
(4.5.121)
и потребные кинетические моменты пересчитываются.
Подробнее об этом - в подразд. 4.5.7.3.3.
3. Проход особых сингулярных положении в процессе реализации разгона
или гашения угловой скорости разворота осуществляется путём анализа знамена-
теля выражении (4.5.110) и (4.5.111):
если | sm(p, - р3) < Д, то Р, = Ртах, р3 = -ртэх; (4 5 1 '’2)
если | sin(p2 - Р4) < Д, то Р2 =Ртах)р4 =-Ргаах,
при этом знак 0, определяют до начала выполнения анализа (4.5,113) и «фикси-
руют» до прохода вырожденного состояния гиросистемы. Дальнейшее управле-
ние СГК проводится по выражениям (4.5.110) и (4.5.111).
Управление СГК пугём проверки реализуемости программного разворота,
расчёта составляющих потребных кинетических моментов, запоминания знака pj
во время разгона или гашения угловой скорости разворота осуществляется бор-
товыми алгоритмами, реализующими режим программного разворота (см. под-
разд. 4.5.7.3.3).
4.5.63.4 Управление КА с помощью двигателей-маховиков
Процесс управления движением КА вокруг центра масс предполагает опре-
деление и выдачу на исполнительные органы КА управляющих сигналов, обеспе-
чивающих выполнение текущей задачи СУ.
Практически все динамические режимы. СУ космического аппарата состоят
из набора участков, на которых реализуются следующие типовые операции:
- демпфирование угловых скоростей КА;
- поиск опорных ориентиров и построение заданной одноосной или трех-
осной ориентации;
- разворот КА в заданное программное положение;
- стабилизация КА относительно заданного положения.
Комплекс командных приборов КА позволяет определить:
- угловые скорости относительно центра масс (с помощью измерителя уг-
ловой скорости);
- угловое положение КА относительно опорных астроориентиров (с по-
мощью приборов ориентации на светила).
Формирование управления осуществляется по информации о текущем век-
торе состояния КА и задаче целевой операции конкретного участка функциони-
373
рования КА.
Обычно закон управления формируется как линейная функция вектора со-
стояния КА:
CTi (°) = (“) • Y j (Q) + к., (п) • (<»« (п) ~ % (п))>
где Oj(n) - аргумент управления в j-м канале; К^(п),К^(п) - коэффициенты
усиления по углу и угловой скорости соответственно в j-м канале; уj(n) - угло-
вое рассогласование в j-м канале; o^j(n) - оцененная по измерениям ИУС угло-
вая скорость КА; conj(n) - программная угловая скорость КА; j = х, у, z.
По вычисленному аргументу управления формируются управляющие сиг-
налы на двигатели-маховики (ДМ).
Типовой фазовый портрет управления КА с помощью ДМ показан на рис.
4.5.23.
Рисунок 4.5.23 - Фазовый портрет процесса управления КА
с помощью ДМ
На рис. 4.5.23 показаны:
Детj - зона нечувствительности закона управления;
юв] “ ограничение угловой скорости вращения КА;
Muj - управляющий момент ДМ.
4.5.6.4 Задача разгрузки инерционных исполнительных органов (ИИО)
СУОС
Известно, что в процессе функционирования КА на ИИО (силовых гиро-
скопах и маховиках) последние имеют свойство компенсировать внешний воз-
мущающий момент, действующий на КА, и накапливать при этом свой кинетиче-
374
ский момент. Кинетический момент инерционных исполнительных органов огра-
ничен:
- в силовых гироскопах - углом прецессии рамки гироскопа или вырож-
дением гиросистемы;
- в маховиках - скоростью вращения ротора-маховика.
Существует множество способов разгрузки ИИО, но все они основаны на
приложении к КА внешнего возмущающего момента, направленного в сторону
уменьшения накопленного кинетического момента.
В качестве источника внешнего возмущающего момента могут служить в
зависимости от высоты орбиты КА следующие физические принципы:
- магнитное поле Земли (или других планет);
- гравитационное взаимодействие с планетами;
- давление излучения Солнца;
- аэродинамические силы, действующих на КА;
- реактивная тяга двигателей стабилизации.
Применение гравитационного взаимодействия с планетами, давления излу-
чения Солнца и аэродинамических сил требует определенного изменения ориен-
тации КА, что неприемлемо для аппаратов, осуществляющих выполнение задач,
требующих определенной (обычно очень точной) ориентации, например скани-
рование участков окружающего пространства, программных разворотов, поддер-
жание ОСК и т.д.
Рассмотрим некоторые способы разгрузки ИИО, позволяющие проводить
их разгрузку без потери необходимой ориентации КА.
4.5.6.4.1 Разгрузка силовых гироскопов
Разгрузка силовых гироскопов в системах управления КА, разработанных
НПП Хартрон-Аркос осуществлялась с помощью:
- системы магнитной разгрузки (ССКМ- система сброса кинетического
момента);
- реактивных двигателей стабилизации.
Использование системы магнитной разгрузки
Разгрузку силового гироскопического комплекса (СГК) с помощью систе-
мы магнитной разгрузки осуществляли путём включений электромагнитных ка-
тушек, описанных в подразд. 2.1.4.2.4.
Информация, необходимая для сброса накопительного кинетического мо-
мента:
Kj - суммарный кинетический момент гиросистемы и КА:
(4.5.123)
где Hrj - проекция суммарного кинетического момента СГК Нг на j-ю ось КА;
Jj - центральные (осевые) моменты инерции КА; tOj - проекция вектора угловой
скорости вращения КА со на j-ю ось КА.
Для разгрузки необходимо назначить порог осуществления начала разгруз-
ки и её завершения. Обычно для СГК назначают:
- порог начала разгрузки 0,4 Но;
375
• порог завершения разгрузки 0,1 Но,
где Но - суммарный кинетический момент гиродина.
Для надёжного и эффективного выполнения разгрузки используют проек-
ции вектора от индукции магнитного поля только тогда, когда они находятся в
диапазоне:
0,8 < |(1| < 0,9, (4.5.124)
где Pi (i = х, у, z) - направляющие косинусы вектора индукции магнитного поля
Земли:
Ви
<4-5125)
где Вф - измеряемый вектор магнитной индукции поля Земли (отфильтрован-
ный).
Для создания приоритетов при включении магнитных катушек нужной по-
лярности рассмотрим векторное произведение:
Е = Кхр, (4.5.126)
где Е - величина тока в i-й магнитной катушке; К - суммарный кинетический
момент гиросистемы и КА; р - вектор направляющих косинусов вектора Вф, ра-
зобьем его на две составляющие:
Exi=Kypz, Ex2=-KzPy;
Eyl=Kzpx) Еу2=-Кхр2;
Ezl=KxPy, Ez2=-Kypx.
Если направляющий косинус р, удовлетворяет условию (4.5.124), то опре-
деляют значение релейной функции ft:
ft =1, иначе ft =0. (4.5.127)
Тогда логика подачи тока на магнитные катушки Ер, где j = х, у, z; i = 1, 2,
определится (ниже символ ”=>" обозначает ’’следует”, р{ в таблице равно 1) так:
Ex2, Eyi, 0z ₽y J=i 1*
Kx Ky, Kz Eyl, Ez2 Exi Erf Eyl, Ez2 Exi
Kx,Kz Ky KX,K2 0, Exi.E^ 2* ₽z
Kx,Ky - K2 Ey2, Ezi Ex2, EZ1 Evi Ex2, Ey|
P, ₽y My 3* Ey2, Ezi
Ey2, Ezl Exl,Ez2 Exi, Ey2 Ezi
Выше обозначены особые ситуации:
1 * - если signKy • signpx = - signKz • signpy;
2* - если signKz • signpx = - signKx • signpz;
3* - если signKx • signpy = - signKy signpx.
376
Подавая токи Ej, в управляющие катушки, добиваемся снижения суммарно-
го кинетического момента К.
Использование реактивных двигателей стабилизации
Разгрузка СГК с помощью реактивных двигателей стабилизации (ДС) осу-
ществляется путём включения ДС, описанных в подразд. 2.1.4.2.1.
Информация, необходимая для сброса накопленного кинетического момен-
та:
Kj - суммарный кинетический момент гиросистемы и КА;
Hnopj - нижний порог разгрузки (например, Нпср, = О,Шо);
М - матрица, определяющая включение ДС нужной полярности.
Для организации разгрузки СГК следует обеспечить исправный комплект
ДС (обычно есть основной и резервный комплект ДС). Для этого в АДУ двига-
тельной установки выдаётся команда «Запрос на включение ДС» (ЗДС), которая
разворачивает циклограмму включения двигательной установки (ДУ) (включает-
ся система наддува, открываются магистральные клапаны окислителя и горючего
и т.д.). После завершения включения ДУ выдаётся команда готовности ДУ (ГДС)
и СУОС готова к проведению разгрузки. Если данный комплект ДС неисправен
(ГДС не сформирован), то в ДУ выдается команда на включение резервного ком-
плекта ДС.
Когда выбран и включен исправный комплект ДС, то происходит процесс
так называемой принудительной разгрузки. Для этого суммарный кинетический
момент гиросистемы и КА сравнивают с нижним порогом разгрузки (HnOpj)-
(4.5.128)
и если условие (4.5.7) выполняется, то включают ДС такой полярности, которая
ведёт к уменьшению кинетического момента Kj:
64j = -CrtsignK, (4.5.129)
где enpj - программное ускорение, создаваемое включаемыми ДС; Cprj - расчёт-
ное ускорение, создаваемое ДС.
Программное ускорение £npj поступает в выражение, формирующее аргу-
мент управления СГК:
<*rj ~ Jj(^rjYj +^ejEnpj)» (4.5.130)
где Grj - аргумент управления СГК, Нм; Jj - центральные моменты инерции,
кг-м2; Кд, KQj, Kq - коэффициенты усиления; yj, ©j - стабилизационный угол и уг-
ловая скорость КА (вектор состояния).
Добавление в аргумент величины £npj позволяет обеспечить опережение по
управлению и уменьшить динамический заброс при включении ДС.
Полярность ДС выбирают по условиям:
если £rfpj > 0, то М* = 1, М? = 0;
если Enpj < 0, то М* = 0, = 1,
377
где М* - управляющие сигналы на включение ДС, выбираемые из матрицы М.
Выключение ДС в j-м канале управления осуществляется при невыполне-
нии условия (4.5.128) с временной задержкой, позволяющей исключить повтор-
ное включение ДС в случае колебаний объекта и появления возможности выпол-
нения условия (4.5.128). При этом задают KEj = 0.
Разгрузка считается выполненной, если Kgj во всех каналах одновременно
равны нулю. При этом формируется
Нпор]=Нгаах,ЗДС = 0, (4.5.131)
где Нтах - величина кинетического момента, также исключающего повторное
включение ДС (например, Нтах - 0,2 Но).
При ЗДС = 0 двигательная установка выключается по заданной циклограм-
ме выключения ДУ.
Контроль разгрузки СГК
При выполнении разгрузки СГК ведется контроль, основанный на следую-
щих принципах:
1. Считается опасной продолжительность включения ДС. В случае превыше-
ния допустимого порога включений ДС - отбой разгрузки.
2. После успокоения объекта по завершении разгрузки при наличии нулевых
угловых скоростей КА проводится контроль кинетического момента СГК.
Если |Нгх| > АГР или |Нгу| > ДГР или |Нг2| > ДГР, то формируется сообщение
для оперативного анализа (в случае, если разгрузка происходила вне зоны види-
мости КА с наземных средств) «Плохая разгрузка СГК», где АГР - порог контроля
(например, 1,5 Но).
Если же гиросистема после разгрузки вошла в насыщение (т.е. |Hrj| > 1,8 Но,
так как был неисправен какой-либо ДС, неправильная полярность и т.д.), то для
оперативного анализа выдаётся сообщение «Перейти на другие исполнительные
органы».
3. Контроль по динамической реакции объекта. Принцип контроля описан в
подразд. 4.5.7. При определении отказа ДС или СГК проводится автомати-
ческий переход на резервный комплект.
4»5.6.4.2 Разгрузка двигателей-маховиков
Двигатели-маховики обычно применяют для управления КА на участках
орбиты, где необходимо обеспечить прецизионную ориентацию относительно
ИСК или медленно вращающуюся подвижную систему координат (например,
поддержание ОСК или программный разворот). Для осуществления эффективно-
го управления КА следует иметь кинетический момент маховика, который обес-
печивал бы эффективное управление в максимальной области вариации кинети-
ческого момента. Для этого кинетический момент двигателя-маховика надо стре-
миться поддерживать минимальным. Для обеспечения минимального кинетиче-
ского момента необходимо приложить внешний момент нужного знака (противо-
положного знаку накопленного кинетического момента) и определить нижнюю
границу вариации кинетического момента. Поэтому для сброса накопленного ки-
378
нетического момента двигателей-маховиков необходима следующая информа-
ция:
- HMj - кинетический момент двигателя-маховика в j-м канале управления
О’ = X, у, z);
- Нм - порог начала разгрузки (например, 0,8 Нгаал, где Нтах - диапазон ва-
риации кинетического момента двигателя-маховика);
- Нор - порог окончания разгрузки (например, 0,1 Нтах).
Разгрузка двигателей-маховиков, поддерживающих заданную ориентацию,
осуществляется с помощью:
- магнитной системы разгрузки;
- реактивных двигателей стабилизации.
Разгрузка двигателей-маховиков с помощью реактивных ДС бывает двух
типов:
- принудительная разгрузка ДМ;
- разгрузка по насыщению.
Использование системы магнитной разгрузки
Разгрузка ДМ с помощью системы магнитной разгрузки осуществляется по
тем же принципам, что и разгрузка СГК, описанная в предыдущем подразделе.
Единственным отличием является то, что токи в магнитных катушках ввиду
малости кинетического момента ДМ включаются релейно на протекание по ним
тока фиксированной величины.
Тогда в выражении (4.5.126) необходимо принять, что pj есть не направ-
ляющий косинус, а его знак - signPj. Вся остальная логика работы системы маг-
нитной разгрузки остаётся аналогичной логике системы, описанной при разгруз-
ке СГК (см. подразд. 4.5.6.4.1).
Использование реактивных двигателей стабилизации
Принудительная разгрузка ДМ осуществляется в режимах ориентации и
стабилизации, где применяются ДС в качестве основных исполнительных орга-
нов. Например, при работе СУОС, использующей в качестве основных исполни-
тельных органов ДМ, необходима периодическая (1 раз в 3 - 6 месяцев) коррек-
ция орбиты. Коррекция орбиты обязательно осуществляется на ДС ввиду необхо-
димости парировать значительные возмущающие моменты, возникающие при
работе двигателя коррекции орбиты (ДКО).
Разворот в требуемую ориентацию для включения ДКО в нужном направ-
лении выдачи вектора тяги в целях экономии рабочего тела осуществляется на
ДМ. ДМ имеют небольшой собственный кинетический момент, и для надёжного
маневра необходимо принудительно обнулить его кинетические моменты.
Разгрузка осуществляется по анализу нижнего порога разгрузки (порога
окончания разгрузки Hopj), при этом включение ДС нужной полярности осущест-
вляется:
если HMJ > 0, то М£ =0, M’j -1,
(4.5.132)
иначе Mpj= 1, M'j = 0,
379
где М* - управляющие сигналы на включение ДС (j = х, у, z).
Если IHmjI > Hopj, то ст. = -С . • signH, РАЗГ = 1,
(4.5.133)
иначе <jpj = О, РАЗГ] = О,
где QPj - аргумент управления ДМ при разгрузке; CPj - расчётное ускорение,
создаваемое ДС; РАЗГ] - признак разгрузки ДМ в j-м канале.
Управление ДС осуществляется в режиме разгрузки по двум сигналам:
- по сигналам СУОС при стабилизации вектора состояния М* ;
- по управляющим сигналам включения ДС при разгрузке М*-.
Управляющий сигнал ДС формируется как логическая сумма сигналов М*
иМ*р
М;=М* vM*, (4.5.134)
где М± - управляющий сигнал ДС.
Разгрузка считается выполненной при одновременном надежном (длитель-
ностью не менее 0,5 с) появлении признака РАЗГ] = 0.
Контроль разгрузки
1. Считается опасной продолжительность разгрузки. В случае превышения
порога - отбой режима, где задействуется разгрузка.
2. Контроль выполнения разгрузки осуществляется в режиме СКР (см. под-
разд. 4.5.7.6).
Разгрузка ДМ по насыщению осуществляется в режимах ориентации и ста-
билизации, где разгрузка ДМ проводится на фоне выполнения основной задачи
(например, наблюдение за определённой точкой в пространстве, на Земле и т.д.),
выполняемой с большой точностью (например, с точностью ориентации ±30 дуг.с
и скоростью стабилизации не более 0,5 дуг. с/с).
Для этого анализируют превышение порога разгрузки кинетическим мо-
ментом HMj:
|HMj+Hnj|>H", (4.5.135)
где HMj - кинетический момент ДМ; Hnj - прогнозируемое приращение кинети-
ческого момента ДМ (выдаётся при перенацеливании КА); Нм - порог начала раз-
грузки.
Как и в случае разгрузки СГК на ДС, описанном в подразд. 4.5.6.4.1, СУОС
должна обеспечить включение ДУ исправной конфигурации, для чего СУОС вы-
даёт в АДУ признак ЗДС = 1 и ожидает готовности ДУ (ГДС =1).
В случае выполнения условия (4.5.135) выдаётся команда ЗДС = 1 и в тече-
ние ожидаемого времени Тпод (после выдачи ЗДС =1) обнуляется признак ГДС.
По истечении времени Тпод ожидается приход сообщения о готовности ДУ
ГДС = 1. При появлении ГДС = 1 начинаются действия, описанные выше в выра-
жениях (4.5.132) - (4.5.134).
380
После получения признака РАЗГР] = 0 в j-м канале задается Hopj = Нм, раз-
грузка в данном канале управления прекращается. Анализ кинетического момен-
та ДМ по выражениям (4.5.132), (4.5.133) обеспечивает Mj-О, а так как
Hopj = Нм, то повторная разгрузка исключается; признаки ЗДС и ГДС обнуляются
до следующих разгрузок, при этом ДУ отключается.
Контроль разгрузки аналогичен контролю принудительной разгрузки.
4.5.6.S Методы обеспечения надежности систем управления КА
Современные космические аппараты в зависимости от их функционального
назначения имеют довольно сложные системы ориентации и стабилизации,
включающие в себя различного рода датчики ориентации, скорости, преобра-
зующие устройства, логические, вычислительные, исполнительные органы, сис-
темы электропитания, телеметрические и другие системы,
В условиях длительного космического полёта естественно возможны неис-
правности отдельных устройств, приводящие к ухудшению точностных характе-
ристик, показателей экономичности, других эксплуатационных характеристик,
вплоть до срыва выполнения целевой задачи. Так случилось на одном из косми-
ческих аппаратов - ионный датчик угла курса стал выдавать знакопеременный
периодический сигнал (ложный) постоянной амплитуды, что привело к расходу
всего топлива и потере управляемости. Космический аппарат прекратил сущест-
вование, не приступив к выполнению целевой задачи.
Надежность является важным показателем системы управления КА, кото-
рый характеризует способность системы обеспечивать решение целевой задачи
КА в течение длительного времени активного существования при условии воз-
никновения отказов приборов, входящих в состав СУ, или при ошибочных дейст-
виях оператора, и в целом обеспечивать живучесть КА.
Надежность систем управления космических аппаратов обеспечивается:
- надежностью аппаратуры, входящей в состав систем;
- специальным математическим обеспечением бортового компьютера;
- полнотой и достаточностью наземных испытаний программно-
математического обеспечения и аппаратуры;
- надежным сопровождением космических аппаратов в полете.
4.5,6.5.1 Аппаратные средства обеспечения надежности СУ .
К аппаратным средствам обеспечения надежности относятся:
- надежность самих элементов систем управления: командных приборов и
исполнительных органов, бортового компьютера и других приборов;
- резервирование элементов систем управления;
- создание систем управления минимально избыточной структуры в ком-
плексе как командно-измерительных приборов, так и исполнительных
органов;
- расширение адаптивных возможностей систем управления при исполь-
зовании командных приборов и исполнительных органов различного ти-
па.
381
Надежность командных приборов, исполнительных органов, бортового
компьютера обеспечивает разработчик данной аппаратуры путем резервирования
отдельных блоков приборов, дублирования или троирования линий передач ин-
формации.
Вопросам разработки высоконадежного бортового компьютера посвящен
седьмой раздел книги, поэтому в данном разделе на них не будем останавливаться.
Резервирование элементов систем управления является основным средст-
вом обеспечения надежности. Разработчики СУ широко используют это путем
введения в состав СУ резервных приборов. Они обычно находятся в «холодном»
резерве и вводятся в работу после отказа и отключения основного комплекта.
В системах управления минимально избыточной структуры, как правило,
нет подразделения на основной и резервный приборы, в них функционирует весь
комплект приборов данного типа, и в случае отказа одного из них оставшиеся
приборы продолжают выполнять задачу, исключив из работы отказавший. При
этом может допускаться некоторое ухудшение характеристик системы.
Например, в современных ИУС для измерения трех проекций вектора абсо-
лютной угловой скорости КА используют четыре-шесть ЧЭ; а для создания
управляющих моментов в трех каналах системы управления - четыре СГК или
четыре маховика.
Адаптивную возможность систем управления к отказам (т.е. возможность
повышения отказоустойчивости СУ) удается расширить при использовании ко-
мандных приборов и исполнительных органов различного типа. Например, если в
состав СУ входят приборы ориентации по Солнцу, Земле и звездам, то при отказе
полного комплекта (основного и резервного) приборов ориентации по Земле его
функции определения направления на Землю передаются оставшимся исправным
приборам ориентации по звездам с использованием соответствующего про-
граммно-математического обеспечения. Можно применять метод комплексиро-
вания показаний оставшихся исправными-приборов разного типа. Например, если
отказал один канал прибора ориентации на Землю, оценку измерений в этом ка-
нале можно выполнить, комплексируя показания солнечного датчика со звезд-
ным.
Решение задачи комплексирования позволяет выявить избыточность в при-
борном составе конкретной БИНС или построить БИНС с минимально допусти-
мым с точки зрения наблюдаемости системы приборным составом. В первом
случае решается задача повышения надежности и живучести КА при заданном
приборном составе СУ; во втором - решается задача снижения веса и энергопо-
требления СУ при требуемой надежности.
Примеры минимально избыточных систем
Измеритель угловой скорости. Комплект ИУС, содержащий четыре ДУ С,
дает возможность работать с ним при отказе одного из ДУС. Для этого нужна
специальная установка четвертого резервного датчика, а именно такая, чтобы он
измерял сумму трех проекций вектора угловой скорости КА на оси связанной
системы координат. Это используется для контроля и поддержания отказоустой-
чивости СУ к неисправностям ИУС. Количество ДУС может быть и боль-
382
ше - например, пять или шесть, установленных под углами к осям ССК, что обес-
печивает хорошую контролеспособность ИУС и высокую надежность СУ (сохра-
нение работоспособности до трех отказов ИУС).
При полном отказе ИУС задача полного восстановления проекций вектора
угловой скорости КА с достаточно высокой точностью может быть решена по
кватерниону, получаемому из АД, путем обращения кинематических уравнений
движения КА вокруг центра масс.
Астродатчик. Для определения трехосной ориентации КА необходимы из-
мерения угловых координат как минимум двух звезд. Если в СУ используются
узкоугольные АД, т.е. работающие каждый по одной звезде, то при отказе одного
из них его функции передаются исправному датчику, измерения которого первой
звезды заменяются на «гироаналог». Затем он угловым маневром КА (или пере-
бросом оптического блока АД, если он подвижен) переводится в положение для
визирования второй звезды.
Если в СУ используются широкоугольные АД, т.е. работающие по группе
звезд, то при отказе одного из них можно просто перейти на работу с одним ис-
правным АД. При этом точность определения ориентации несколько ухудшится,
так как угловые расстояния между визируемыми АД звездами далеко не ортого-
нальны. Для обеспечения точности в этом случае также можно использовать спо-
соб определения ориентации, описанный выше для узкоугольных АД.
Наличие двух оптических головок и двух блоков электроники АД повыша-
ет точность определения ориентации КА и надежность СУ. При этом должна
обеспечиваться возможность работы АД во всех четырех сочетаниях коммутаций
оптических головок и блоков электроники.
Двигатели-маховики. Установка ДМ по схеме «пирамида» существенно по-
вышает надежность СУ в части управляемости КА. При полном отказе одного из
комплектов ДМ можно предложить работу СУ на одном комплекте из оставших-
ся. При некотором ухудшении тактико-технических характеристик СУ остается
работоспособной.
Двигатели стабилизации. Разработаны способы контроля и диагностики от-
казов ДС типа «невключение» при наличии управляющего сигнала, «неотключе-
ние» при отсутствии управляющего сигнала. Способы включают в себя контроль
наработки ДС, оценку фактических возмущений, тестовые воздействия. Париро-
вание отказов возможно с прерыванием текущего режима ориентации и воздей-
ствием через наземный комплекс управления, а также автономно без прерывания
режима.
4.5с6.5.2 Математическое обеспечение надежных СУ
Специальное математическое обеспечение БЦВК для управления резервом
приборов и поддержания высокой надежности систем управления и живучести
космических аппаратов должно решать следующие задачи:
- автономный контроль динамического состояния объекта управления;
- диагностику состояния командных приборов, исполнительных органов и
бортовых компьютеров;
383
- автоматическое парирование нештатных ситуаций.
Контроль состояния СУ:
- определение приборных признаков готовности и исправности;
- допусковый контроль вектора состояния КА (углы, угловые скорости и
др);
- сравнение показаний командно-измерительных приборов одного типа в
минимально избыточных структурах;
- сравнение показаний командно-измерительных приборов разного типа, в
том числе с «гироскопическими аналогами», т.е. с прогнозируемой на
борту КА по информации ИУС измерительной информации ОЭП о по-
ложении ориентиров;
- сопоставительный анализ выходной информации оптико-электронных
приборов ориентации с кинематической моделью обстановки (величины
углов между ориентирами, соответствие движения ориентира в поле
зрения прибора угловой скорости КА);
- анализ циклограммы работы исполнительных органов на различных ди-
намических участках функционирования СУ;
- анализ длительности поиска ориентира, запаздываний в ответе прибо-
ров-абонентов на запросы бортового компьютера;
- анализ параметров относительного движения в режиме сближения и
причаливания.
Диагностика элементов СУ:
- анализ наличия квитанций на результат выдачи соответствующих ко-
манд;
- анализ показаний командно-измерительных приборов одного типа в ми-
нимально избыточных структурах;
- анализ показаний командно-измерительных приборов, сравнение с ин-
формацией «гироскопических аналогов»;
- анализ на «физичность» информации командно-измерительных прибо-
ров.
Парирование нештатных ситуаций:
- автоматическое парирование нештатных ситуаций путем:
• замещения отказавшего прибора на резервный;
• реконфигурации избыточной структуры системы;
• комплексирования измерительной информации;
• передачи функций отказавшего комплекта приборов или исполнитель-
ных органов приборам или исполнительным органам другого типа;
- перевод СУ в режим солнечной ориентации и закрутки КА вокруг на-
правления на Солнце на время детального анализа сложной ситуации и
принятия решения в ЦУП;
- при отказе астроприборов - отключение астрокоррекции и переход на
работу на «гиропамяти»;
- увод КА с траектории сближения (или причаливания) при выполнении
автоматической стыковки с орбитальной станцией;
384
- при решении задачи сближения и причаливания предусматривается воз-
можность перехода из режима автоматического управления на ручное с
контролем параметров движения объекта управления.
При разработке математического обеспечения СУ удобно составлять так
называемые матрицы парирования нештатных ситуаций. Данные матрицы пред-
ставляют собой таблицы, в строках которых указаны динамические режимы сис-
темы управления и номера отказов ее элементов, задействуемых в режимах, а в
столбцах указаны сами элементы, в которых эти отказы происходят. В ячейках
таблицы приводят номера, соответствующие способу парирования отказа. Такие
таблицы позволяют наглядно и компактно представить все возможные нештат-
ные ситуации и способы их парирования.
Теме обеспечения надежности на этапе экспериментальной отработки СУ
посвящен третий том книги. Здесь несколько подробнее расскажем об отдельных
видах автономного контроля СУ и способах парирования нештатных ситуаций,
упомянутых выше.
Обобщенный контроль
Это контроль отклонений от нормального функционирования системы без
определения конкретной причины отклонения (как повышение температуры у
человека: нездоровится, а что конкретно за болезнь, надо ещё выяснить).
Опасное рассогласование по углу и угловой скорости
Существенное отклонение углового рассогласования в канале стабилизации
от нормальных значений; отклонение угловых скоростей от нормальных значе-
ний - «опасное рассогласование по углу в канале», «опасное рассогласование по
угловой скорости в канале». Пороговые значения для «опасного рассогласования
по углу», «опасного рассогласования по угловой скорости» назначаются в разных
режимах функционирования системы управления, на разных участках задаются
разными в зависимости от характера динамических процессов.
Причины опасных рассогласований могут быть разными: повышенный
уровень внешних возмущений, отказ управляющих двигателей, отказ датчиков
углов или датчиков угловых скоростей. Как правило, при формировании призна-
ков «опасного рассогласования» отключается система управления, устанавлива-
ется причина и, если возможно, происходит парирование отказа. Отказавший ор-
ган заменяется резервным, и продолжается выполнение задачи.
Такая ситуация случилась при стыковке транспортного модуля «Квант» к
орбитальной станции «Мир». Система управления «Кванта» автоматически от-
ключилась по «опасному угловому рассогласованию» (при большем, чем допус-
тимо, угловом отклонении стыковочная штанга может не попасть в гнездо стыко-
вочного узла станции). После выяснения причин повышенных возмущений и
уточнения настроек посредством полётного задания стыковка была успешно вы-
полнена.
Контроль рассогласований по углу исторически пришел из ракетной техни-
ки. На ракете контролируется отклонение от программы по тангажу, рысканию и
крену и при достижении опасной величины (~ 12 ... 14 град) проводится аварий-
ное выключение маршевого двигателя.
385
Опасная продолжительность включений двигателей стабилизации
В процессе полёта при функционировании системы управления продолжи-
тельность включений двигателей стабилизации (ДС) суммируется:
ОП(0 = ti + t2 +13 -н t4 + +... tn
на базовых интервалах времени Тб, следующих непрерывно один за другим
(рис. 4.5.24).
ty t2 t3 (4 Й Й Й t3.......tp
Ч>-О--»ГУ->Г>-»П<- п п п пппппппп
<------ Тб---------------Тб ► ◄----------- Тб -------1
Рисунок 4.5.24 - Расчет продолжительности включений ДС
В начале каждого базового интервала проводится обнуление счётчика
OII(t). Допустимое время определяется при исследовании системы при «худших»
условиях (максимальные моменты инерции, минимальная тяга управляющих
двигателей, максимальные возмущения...). Полученное в таких условиях значе-
ние наработки берется за основу для выбора настройки допустимого значения. И
если в полёте окажется, что On(t) > (1,3 ... 1,5) ОП допустимое, это есть признак
неблагополучия в системе без указания конкретной причины. Это либо неис-
правность какого-то датчика, либо неисправность двигателя стабилизации, либо
нерасчётный внешний возмущающий момент, либо другие причины.
На транспортном корабле снабжения орбитальной станции «Салют» «Кос-
мос-929» неисправность инфракрасного датчика местной вертикали вызвала по-
вышенную наработку двигателей стабилизации по признаку «опасной продолжи-
тельности...». Система автоматически выключилась, после установления ’’винов-
ника” по радиокоманде отказавший датчик был заменен резервным, и СУ восста-
новила работоспособность. Если бы в описанном выше случае с ионным датчи-
ком курса в системе был контроль по OH(t), то стравливания топлива не про-
изошло бы.
Неисправность двигателя стабилизации типа «невключение» случалась в
полёте на нескольких транспортных модулях: система управления во всех этих
случаях автоматически выключалась по признаку «опасная продолжительность»,
и дальнейший полёт продолжался на резервных двигателях.
Во всех описанных случаях формирование обобщенных признаков неис-
правности типа «опасная продолжительность», «опасное рассогласование», пари-
рование выполняется по схеме: отключение системы ориентации -> анализ теле-
метрии и выяснение причины отказа —> включение системы с переходом на ре-
зерв или изменение настроек.
Контроль по вычисленным возмущениям
При отказе двигателей стабилизации возможны повышенные вычисленные
возмущения (если двигатели включаются парами), по которым можно оперативно
386
на борту определить место неисправности и перейти на резерв без прекращения
режима функционирования.
Контроль по прогнозируемым значениям
Например, в электромаховичных исполнительных органах модель движе-
ния маховика имеет вид
H + £H + aH = U,
где U - управляющий сигнал; Н - кинетический момент маховика.
При наличии в маховике тахометра можно определить при заданном управ-
ляющем сигнале прогнозируемое значение кинетического момента и сравнить его
с фактическим (определяемым по тахометру - Jco, J - момент инерции, со - угло-
вая скорость ротора маховика).
Значительная разница в вычисленном и замеренном кинетическом момен-
тах свидетельствует о неисправности маховика. Такой контроль использовали в
системе управления спутников серии 71X6, работающих на стационарной орбите.
Контроль астродатчиков
Контроль астродатчиков может выполняться сравнением сигналов с кине-
матическими соотношениями, например в виде направляющих косинусов, полу-
ченных интегрированием угловых скоростей с направляющими косинусами, по-
лученными по информации с астродатчиков. При наличии рассогласования меж-
ду этими двумя группами направляющих косинусов больше допустимого порога
бракуется один из этих приборов (второй принят за исправный, если в нем есть
встроенный контроль).
Встроенный контроль приборов
Разработчики командных приборов (гироскопических, астроприборов,
(датчики Солнца, звездные датчики)) часто проводят контроль по внутренним
параметрам приборов с выдачей внешнего признака о достоверности выдаваемой
датчиком информации. Контроль этот осуществляется непрерывно, и по призна-
ку неисправности осуществляется переход на резерв.
4.5.6.5.3 Обеспечение надежности при сопровождении космических
аппаратов в полете
Обеспечение надежности управления космическими аппаратами из Центра
управления полетами (ЦУП) в процессе их эксплуатации на орбите требует ре-
шения задач:
- оптимального распределения функций контроля между системой управ-
ления и ЦУП;
- суточного и долгосрочного планирования программы полета;
- разработки программно-математического обеспечения для расчета по-
летного задания в ЦУП;
- разработки автоматизированного рабочего места инженера в ЦУП для
отработки полетного задания и текущей программы полета;
- дублирование расчета полетного задания и отработка текущей програм-
мы полета на стендах предприятия-разработчика системы управления;
387
- обеспечение управления космическим аппаратом по разовым командам
из наземных пунктов;
- разработки программно-математического обеспечения обработки теле-
метрической информации и визуализации результатов для оперативного
анализа функционирования системы управления в полете;
- разработки инструкций по надежной эксплуатации СУ и выхода из раз-
личных нештатных ситуаций.
Подробнее вопросы, связанные с сопровождением СУ при полете космиче-
ских аппаратов, изложены в третьем томе книги.
Таким образом:
I. Проблема обеспечения высокой надежности СУ представляет собой важ-
ную и сложную научно-техническую задачу, решение которой должно идти
в двух направлениях:
- первое - обеспечение надежности аппаратуры СУ;
- второе - разработка специального ПМО, способного автоматически вы-
полнять контроль, диагностику и парирование возникающих нештатных
ситуаций.
2. Основными методами обеспечения надежности системы являются:
- резервирование ненадежных элементов с созданием из них надежной
системы;
- использование в составе системы широкого спектра командно-
измерительных приборов и исполнительных органов различного вида;
- построение систем на базе минимально избыточных структур;
- разработка ПМО управления минимально избыточными структурами,
способного выполнять комплексирование приборов и реконфигурацию
структуры системы управления в целях адаптации к возникшей ситуа-
ции, обеспечивая отказоустойчивость системы.
3. Создание надежных систем управления основано на умении правильно вы-
бирать показатели надежности и по специальным методикам рассчитывать
надежность как отдельных элементов, так и СУ в целом с учетом особенно-
стей функционирования аппаратуры и ПМО.
4. Надежность должна подтверждаться полнотой и достаточностью наземных
испытаний и обеспечиваться при сопровождении полета КА.
4.5.7 Типовые динамические режимы функционирования СУОС КА
4.5.7.1 Режим построения одноосной солнечной ориентации
4.5.7.1.1 Назначение и требования к режиму
Режим построения одноосной солнечной ориентации (ПСО) предназначен
для поиска Солнца из произвольного положения и ориентации программной оси
солнечных батарей (СБ) в направлении на Солнце в целях обеспечения первона-
чальной одноосной ориентации для заряда солнечных батарей и дальнейшего по-
строения базовой системы координат в соответствующем режиме.
В соответствии с требованием технического задания на разработку системы
управления научного КА «Спектр» в режиме ПСО СУОС обеспечивает поиск
388
Солнца из произвольного углового положения и приведение его к заданному про-
граммному положению в поле солнечного прибора ориентации на Солнце (ПОС)
с погрешностью не более ±1 град за время не более 50 мин. Погрешность при по-
следующей стабилизации - не более ±1 град.
Предусмотрена реализация режима ПСО как по уставке полетного задания,
так и по разовой команде. Длительность режима ПСО не ограничена.
При попадании КА в тень Земли (Луны) от Солнца в режиме ПСО СУОС
обеспечивает сохранение с погрешностью не более 40 угл. мин ориентацию КА,
зафиксированную при входе в тень.
В качестве исполнительных органов в режиме ПСО используют СГК или
ДС. В режим ПСО выполняется попарный разгон силовых гироскопов.
СУОС обеспечивает закрутку КА со скоростью до 0,5 град/с вокруг оси -OZ
ССК, приведенной к направлению на Солнце с ошибкой не более 1 град. Направ-
ление вращения КА вокруг оси произвольное. Величина угловых скоростей по
осям ОХ и OY ССК на момент окончания закрутки - не более ±0,01 град/с.
Разворот КА в требуемую ориентацию осуществляется с помощью ДС или
СГК. Перед выполнением закрутки проводится разгрузка СГК с последующей
установкой векторов кинетических моментов гироскопов вдоль оси OZ ССК в
полярно противоположных направлениях и выключение СГК. После выполнения
закрутки КА все приборы СУОС должны быть обесточены.
СУОС обеспечивает проведение разгрузки инерционных ИО и стабилиза-
цию АКА в процессе разгрузки.
СУОС проводит контроль состояния аппаратуры и расхода рабочего тела. В
случае отклонения контролируемых параметров от нормы происходит переключение
отказавшего прибора на резервный без прерывания режима или смена режима. До-
пускается нарушение точностных требований на время парирования неисправности,
которое должно быть минимальным.
4.5.7.1.2 Приборный состав СУОС в режиме
На рис 4.5.25 показана частная структурно-функциональная схема СУОС
КА в режиме ПСО.
Рисунок 4.5.25 - Структурно-функциональная схема СУОС КА
в режиме ПСО
В режиме ПСО использованы следующие приборы и аппаратура системы
(рис. 4.5.25):
389
- прибор ориентации на Солнце (ПОС) типа 251КЗ;
- гироскопический измеритель вектора угловой скорости (ГИВУС)
КИНД34-011;
- прибор связи с ГИВУС (ПСГ);
- бортовая цифровая вычислительная машина (БЦВМ);
- устройство ввода и вывода (УВВ);
- блок усилителей мощности (БУМ);
- реактивные двигатели стабилизации (ДС);
- силовой гироскопический комплекс (СГК), состоящий из четырех двух-
степенных силовых гироскопических приборов (СГП).
Для обеспечения требуемой надежности системы управления на КА уста-
навливают два ПОС с совмещенными осями чувствительности, построительные
оси приборов развернуты относительно друг друга на 180 град вокруг осей чув-
ствительности.
Двигатели стабилизации задействуют по два на каждую полярность управ-
ляющего сигнала в канале ориентации X и по одному в каналах Y и Z. Для обес-
печения требуемой надежности каждый двигатель стабилизации резервирован.
Требуемая надежность электромеханических исполнительных органов
обеспечивается использованием комплекса минимально избыточной структуры
из четырех силовых гироскопов, а также резервированием выходных устройств и
шаговых двигателей каждого СГП.
4.5.7.1.3 Принципы построения режима
Процесс функционирования режима ПСО разделяют на четыре характер-
ных участка углового движения КА:
- набора и поддержания угловой скорости поиска Солнца (поиск Солнца);
- приведения Солнца в программное положение поля обзора ПОС (приве-
дение);
- активного поддержания построенной ориентации относительно направ-
ления на Солнце;
- закрутки изделия вокруг оси, направленной на геометрический центр
диска Солнца.
В зависимости от состава командных приборов и ИО, готовых к работе в
начале режима, различают три модификации режима, описанных ниже.
Первая модификация режима ПСО-1 задействуется сразу на выводном вит-
ке после включения СУ, а также тогда, когда в качестве исполнительных органов
необходимо использовать двигатели стабилизации.
Вторая модификация режима, в свою очередь, может выполняться в двух
вариантах:
а) удлиненный вариант режима применяют для проведения на СГК подго-
товительных операций для того, чтобы использовать их в качестве органов
управления;
б) рабочий вариант ПСО-2 задействуется, когда СГП подготовлены к рабо-
те.
390
Третья модификация режима - дежурный экономичный режим, который
предназначен для построения и поддержания ориентации с минимальным по-
треблением энергии СУОС. Минимальное потребление достигается путем снятия
питания с роторов СГК и ГИВУС, ориентация поддерживается на ДС по инфор-
мации ПОС.
В режиме ПСО задействован прибор ориентации на Солнце типа 251 КЗ, уг-
ловое поле обзора которого в плоскости измерения координаты q составляет ±90°
и ±45°. С учетом этого при поиске Солнца использован классический способ по-
иска, заключающийся в задании вращения КА вокруг оси, лежащей в плоскости,
совпадающей с плоскостью, имеющей максимальное угловое поле обзора ПОС,
при одновременном демпфировании угловых скоростей вокруг двух других осей.
В этом случае, как показала практика эксплуатации КА подобного класса, захват
Солнца происходит за один оборот. Особенностью задания поисковой скорости
вращения КА в режиме ПСО является то, что направление вращения определяет-
ся остаточной скоростью в этом канале. Исполнительные органы включаются
только на увеличение остаточной скорости вращения до требуемого значения.
Поисковая скорость вращения формируется в соответствии со следующей
логикой:
ПрИ НС 0. СОпрХ = (О Sign СОфх, СОпру ®npz
где НС - признак наличия Солнца в поле обзора ПОС; - программное значе-
ние угловой скорости вращения относительно оси ОХ; сопру,z - программные значения
угловой скорости вращения КА вокруг осей ОУ и OZ соответственно; <£>' - вели-
чина поисковой угловой скорости; ШфХ - текущее значение фильтрованной угло-
вой скорости КА относительно оси ОХ.
Величина поисковой скорости задаётся в полётном задании, определяется
диапазоном ГИВУС и эффективностью двигателя стабилизации ДС.
В режиме ПСО алгоритмы ориентации разработаны с учетом стабилизации
оси изделия, совпадающей с оптической осью ПОС не только относительно на-
правления на Солнце, но и относительно программного отклонения от направле-
ния на Солнце.
При попадании Солнца в поле обзора ПОС его приведение в программное
направление осуществляется вокруг оси конечного поворота. Направление а, оси
поворота в визирной системе координат определяется в соответствии с [25] соот-
ношением
aj = -6Sj/OS,
где 5Sj - проекции вектора угла поворота из текущего положения Солнца в по-
ле обзора ПОС в программное направление на Солнце; OS - угол конечного по-
ворота, вычисленного по формуле
Ф8 = д/ss/+ 8Sy2 + 8SZ2.
В процессе приведения изделие вращается вокруг своей оси конечного по-
ворота OS с угловой скоростью со', проекции которой определяют как
391
OOnpj G) OLj.
Величины проекций угла поворота на оси изделия формируют в соответст-
вии с формулами
5SX — Sry S Ир2 — Sj-z S Hpy,
5Sy“ Snpx-Srx S npzs
8SZ-Srx Snpy_ Spy SIipz.
Здесь Srj (j=x, У> z) ~ направляющие косинусы «гиросолнца» - гироскопического
аналога ПОС.
На теневом участке орбиты направляющие косинусы гиросолнца форми-
руют по сигналам об угловой скорости изделия относительно осей визирной сис-
темы координат, поступающим в алгоритм формирования гиросолнца с ГИВУС в
соответствии с формулами
Srx = Snc + Sry ’ 0Z — Sr2 ’ 0y;
Sry “ Sry "J" Sr2 0X — Srx 02j
Srz ~ Spz Srx Эу Spy 0X?
где 0j - приращение угла поворота относительно осей визирной СК, форми-
руемое по информации ГИВУС.
После приведения Солнца в нулевую зону поля обзора ПОС или в окрест-
ность программного положения в поле обзора осуществляется переход к поддер-
жанию стабилизации угловых отклонений.
В этом случае в алгоритме стабилизации обнуляется скорость приведения
угловой координаты <x>npj = 0, а у, задается значение 8Sj: у, = 5SP
При использовании в качестве исполнительных органов СГК необходима
разгрузка, которую осуществляют с помощью двигателей стабилизации, что
обеспечивается работой задачи разгрузки СГК.
Разгрузка включается по каждому из каналов X, Y, Z тогда, когда модуль
величины соответствующего суммарного кинетического момента К/п) превзой-
дет наперед заданное пороговое значение Kmj(n), а отключение разгрузки про-
изойдет тогда, когда модуль величины соответствующего суммарного кинетиче-
ского момента Kj(n) станет меньше наперед заданного другого порогового значе-
ния К,.
Время от момента начала режима ПС 0-1 и до момента выдачи признака
выполнения задачи ПВЗ(п)=1 будет определяться временем поиска Солнца тпс,
временем приведения тпр, временем контроля тк и для КА серии «Спектр» будет
составлять не более 50 мин, что соответствует требованию ТЗ.
Контроль и парирование нештатных ситуаций в режиме
В режиме ПСО заложен принцип автоматического обнаружения неисправ-
ностей любого из датчиков информации и ИО, а также их парирование без поте-
ри ориентации на Солнце.
392
После попадания Солнца в поле обзора ПОС оценивается надежность за-
хвата по времени бесперебойной выработки сигнала «Наличие Солнца», посту-
пающего из ПОС на входной регистр БЦВМ.
Кроме того, в процессе функционирования режима ПСО осуществляется
контроль достоверности выходной информации ПОС.
На протяжении всего времени функционирования режима ПСО в любой
модификации выполняется также контроль неисправности ГИВУС и ИО.
Контроль ГИВУС осуществляется задачей обработки информации ГИВУС.
На протяжении всего времени использования в качестве исполнительных
органов ДС контролируется их работоспособность. В случае отказа любого из ДС
в данный момент времени формируются соответствующие значения признаков
«неотключения» ДС HO+j(n), НО'/п) и признаков «невключения» НВ+/п), НВ’/п).
По этим признакам СУОС проводит соответствующую замену отказавшего пояса
ДС на резервный.
Принцип контроля ДС заключается в оценке приращения угловой скорости
при подаче команды на включение ДС (HBj1) и по величине возмущающего мо-
мента после снятия команды на фиксированном интервале времени («10 с) после
выключения ДС - (НО,*).
Указанная замена отказавшего двигателя стабилизации резервным осуще-
ствляется как в случае использования СУ только двигателей стабилизации, так и
тогда, когда ДС применяется для разгрузки СГК, функционирующих в качестве
исполнительных органов.
Контроль СГК при использовании его в качестве основного исполнитель-
ного органа или при их разгрузке осуществляется по информации с его выходных
регистров. В случае отказа СГК по одной из его составляющих частей (ВУ или
ДВ) отказавший ВУ или ДВ переключается на резервный. В случае разгрузки
СГК на время этого переключения контроль ДС по величине возмущающего мо-
мента или по приращению угловой скорости запрещается ввиду возможности ис-
кажения выходной информации СГК на время переходного процесса. Кроме того,
контроль СГК осуществляется также сравнением информации, поступающей на
вход СГК и снимаемой с его выхода. В случае, если эта информация отличается
на величины, определяемые параметрами ПЗ, то контроль ДС при разгрузке СГК
также запрещается.
Наряду с описанным выше контролем отдельно взятых датчиков информа-
ции и исполнительных органов непрерывно осуществляется обобщенный кон-
троль процесса ориентации и стабилизации по количественным критериям.
Непрерывно контролируются по продолжительности включения ДС на ба-
зовом времени счета продолжительности включения ДС Тп. Причем величина Тп
задается в зависимости от участка режима в пределах от 100 до 1000 с.
Кроме контроля величины включенного состояния ДС, характеризующего
экономичность и качество процесса управления, непрерывно контролируются ве-
личины рассогласования по углу и угловой скорости, характеризующие общее
состояние процесса ориентации.
393
При отсутствии неисправности эти величины всегда будут находиться в
определенных границах и не превысят расчетных величин.
При превышении угловым рассогласованием у(п) порога опасного рассо-
гласования по стабилизационному углу Ау(п) в течение фиксированного времени
Ар (задержки выработки признака опасного рассогласования):
I у(п) | >Ду(п) и Sopj(n)>Ap,
где Sopj(n) - счетчик продолжительности опасного рассогласования по стабили-
зационному углу.
Вырабатывается признак опасного рассогласования по углу в j-м канале
C)pyj(n)^l и обобщенный признак опасного рассогласования по стабилизационно-
му углу Ору(п)=1, поступающему в алгоритм (настройки в ПСО по участкам), ко-
торый проведет обнуление признака ГГВЗД(п) (признак выполнения динамиче-
ских задач режима), признака RHO(n)=0 (признак обнуления регистров ИО), а при-
знаку Окод(п) (запрос на выдачу нулевого кода) и признаку ПРВ(п) (запрос на пе-
ревод СУ в режим "ВЫКЛ") присвоит единицу. В результате (по признаку
RHO(n)=0) произойдет блокировка включения ДС, а задача парирования нештат-
ных ситуаций переведет СУ в режим «ВЫКЛ».
Аналогичным образом оценивается рассогласование по угловой скорости.
При превышении относительной угловой скоростью cocj(n) порога опасного рас-
согласования по относительной угловой скорости Ас(п) произойдет запуск счет-
чика продолжительности опасного рассогласования по угловой скорости Copj(n) и
по истечении времени Тр СУ AM выполнит те же операции, что и при рассогла-
совании по углу.
4.5.7.1.4 Моделирование работы СУОС в режиме
Угловое положение Солнца в ИСК в процессе построения одноосной сол-
нечной ориентации определялось с помощью интегрирования кинематических
уравнений Пуассона и уравнений движения КА по орбите.
На рис. 4.5.26 - 4.5.28 показаны процессы построения и поддержания ори-
ентации в программном положении Солнца в поле обзора ПОС с помощью СГК.
Показаны графики изменения параметров Sgj, WFJj, UJj в зависимости от време-
ни:
Sgj (j= х, у, z) - направляющие косинусы вектора «гиросолнца» в системе
координат, связанной с КА;
WFJj (j= х, у, z) - фильтрованная угловая скорость КА, рад/с;
UJj (j= х, у, z) - управляющий момент СГК.
Время задается в тактах То=О.1 с БЦВМ.
Графики соответствуют устойчивым процессам построения ориентации за
заданное время с требуемой по ТЗ точностью.
394
Рисунок 4.5.26 - Процесс построения и поддержания солнечной ориентации
в канале X
395
Рисунок 4.5.27 - Процесс построения и поддержания солнечной ориентации
в канале Y
396
Рисунок 4.5.28 - Процесс построения и поддержания солнечной ориентации
в канале Z
397
4.5Л.2 Режим построения базовой солнечно-земной ориентации
4.5.7.2.1 Требования к режиму
Режим построения базовой солнечно-земной ориентации предназначен для
определения положения (трехосной ориентации) связанной с КА системы коор-
динат (ССК) относительно инерциальной системы координат. В качестве инерци-
альной системы координат, как правило, используют геоцентрическую вторую
экваториальную систему координат (2ЭСК).
Из названия режима следует, что для привязки ССК к 2ЭСК применяют два
опорных астроориентира - Солнце и Землю.
Таким образом, основной задачей режима является организация динамиче-
ских операций с КА для захвата и определения координат опорных ориентиров в
ССК по информации комплекса командных приборов КА.
Точность определения координат опорных астроориентиров для каждого
КА задается в техническом задании на СУОС.
4.5.7.2.2 Приборный состав СУОС в режиме
Исходя из назначения режима приборный состав СУОС в режиме изобра-
жен на рис. 4.5.29.
Рисунок 4.5.29 ~ Приборный состав СУОС
На рис. 4.5.29 показаны:
- БЦВМ с комплексом алгоритмов, обеспечивающих динамические опе-
рации КА и определение его ориентации;
- прибор ориентации на Солнце (ПОС);
- прибор ориентации на Землю (ПОЗ);
- гироизмеритель вектора угловой скорости (ГИВУС);
- исполнительные органы (ИО);
- аппаратура расчета навигационно-баллистической информации.
398
Приборы ПОС и ПОЗ используют, как правило, с большими угловыми раз-
мерами полей зрения (~ 180°х90° для ПОС и - 170°х6 ... 10° для ПОЗ).
С комплекса командных приборов в БЦВМ поступает следующая информация:
Sj - направляющие косинусы измеренного положения Солнца в ССК;
Ej - направляющие косинусы измеренного положения центра Земли в ССК;
(Oj - вектор угловой скорости КА.
В аппаратуре расчета навигационно-баллистической информации опреде-
ляются SJ1, EJ1 - векторы текущего положения Солнца и Земли в инерциальной
системе координат соответственно.
Здесь и далее индексу) соответствуют оси ССК X, Y, Z.
БЦВМ вырабатывает сигналы управления ИО Uj.
ИО могут быть любого типа - двигатели стабилизации, силовые гироскопы,
двигатели-маховики.
4.5,7.23 Принципы построения режима
Рассмотрим типичный процесс построения базовой ориентации.
Расположение приборных систем координат и полей зрения приборов пока-
зано на рис. 4.5.30.
Рисунок. 4.5.30 - Расположение приборных систем координат и
полей зрения приборов
На рис. 4.5.30 показано:
дхпосупос^пос 0Xn03Yn03Zn°3 _ ПрИбОрные системы координат ПОС и
ПОЗ соответственно;
399
OXYZ - связанная система координат КА;
ABCD - поле зрения ПОС;
EFGH - поле зрения ПОЗ.
Обычно режиму ПВО предшествует режим построения одноосной ориента-
ции КА (в нашем случае одноосной ориентации на Солнце, т.е. направление на
Солнце S* близко к оси OZnoc). Тогда вектор измеренного положения Солнца
S = (0, 0,1)т.
От начала режима и до его завершения рассчитывается текущий угол
Солнце-КА-Земля по навигационно-баллистической информации:
as =arccos[Sn,En],
Введем понятие программного положения Солнца Sn в связанной системе
координат: положение Солнца в плоскости X0Z ССК, при поисковом вращении
вокруг которого поисковая линейка ПОЗ пройдет вблизи центра Земли. В нашем
случае
Sn =
cosas
О
sinas
Управление исполнительными органами в течение всего режима формиру-
ется так:
Uj = fj (Qj),
где fj - законы управления конкретным типом ИО; Oj - обобщенный аргумент
управления.
^=кп.У)+к^-О,
где Yj - рассчитываемые стабилизационные углы в канале j; а>ур - рассчиты-
ваемая программная угловая скорость в канале j; CDj — измеренная угловая ско-
рость в канале j; Kpj, Kwj - коэффициенты усиления закона управления по углам и
угловым скоростям соответственно.
Режим ПВО состоит из нескольких функционально заканчиваемых участ-
ков.
Участок 1
На этом участке проводится перемещение изображения Солнца в поле зре-
ния ПОС из положения S* в положение Sn путем вращения вокруг оси OY ССК.
По оси OY задается угловая скорость ©Р. При этом вектор программной уг-
ловой скорости
о1711 = {0, сор, 0}т
Вращение управляется только по угловой скорости, т.е. Kq = 0.
При достижении рассогласования 5as = arccos[Sn,S] необходимого порога,
управление по скорости прекращается и КА стабилизируется относительно Sn.
400
Участок 2
Для гарантированного захвата Земли прибором ПОЗ осуществляется за-
крутка КА относительно вектора Sn.
При этом за один оборот КА вокруг оси измерительной линейки (поле зре-
ния) ПОЗ должна пройти вблизи центра Земли.
Для обеспечения данной динамической операции рассчитывается вектор
конечного поворота
O3 = [SxSn].
Далее определяются программные угловые скорости и стабилизационные
углы в каждом канале управления КА:
©пр = 221(0 ;
J |оэ| ₽
Yj =
- 03j при
-psign(03j)npH
03j
O3j
<p;
где p - максимальное значение стабилизационных углов.
Сигналы conpj и yj направляются в алгоритм формирования управления ИО.
После начала определения координат центра Земли (Ej) СУОС переходит к
участку определения относительного программного положения.
Участок 3
После того, как получены результаты измерения ПОЗ в виде направляющих
косинусов геоцентрической вертикали в ПСК ПОЗ (или углов отклонения верти-
кали в ПСК ПОЗ) при соблюдении определенных условий стабилизации КА,
можно приступить к выполнению основной задачи режима ПВО.
Поскольку теперь известны векторы S и Е и векторы Sn и Еп, то по извест-
ным методикам [14] возможно определение рассогласования ССК и ИСК в виде
либо кватерниона, либо матрицы рассогласования.
4.5.7.3 Режим инерциальной ориентации (программных разворотов)
4.5.7.3.1 Назначение и требования к режиму
Режим инерциальной ориентации (ИНО) предназначен для обеспечения
требуемой ориентации КА относительно базовой системы координат, построен-
ной режимом ПВО (построения базовой ориентации). Обеспечение требуемой
ориентации подразумевает:
- переориентацию КА в заданное (фиксированное) программное положе-
ние и её поддержание;
- обеспечение ориентации КА в подвижной относительно базовой системе
координат;
- обеспечение специальных задач:
а) юстировка научной аппаратуры;
б) сканирование пространства (поверхности Земли) в заданном районе;
в) реализация калибровок приборов, входящих в состав СУОС;
401
г) обеспечение компенсации измеренных взаимных погрешностей установ-
ки приборов, научной аппаратуры и т. д. для повышения точности СУОС и улуч-
шения выполнения работ по наблюдению за данными объектами.
Режим ИНО в зависимости от класса КА может быть основным (оптималь-
ным по быстродействию с ограничениями по модулю угловой скорости и воз-
можностями гиросистемы) и вспомогательным (оптимальным по расходу топли-
ва). Например, для КА, обеспечивающих интенсивное наблюдение за земной по-
верхностью, ИНО - это основной режим.
Для КА, обеспечивающих прецизионную ориентацию (для космических те-
лескопов, инфракрасных, ультрафиолетовых сканеров земной поверхности и
т. д.), проектируют специальные режимы работы СУОС, которые реализуют пре-
цизионную стабилизацию КА (до НГ6 град/с), а режим ИНО является вспомога-
тельным и выполняет, например, программный разворот для выдачи корректи-
рующего импульса один раз в 6 - 9 месяцев.
Рассмотрим требования к режиму ИНО, который является основным в
СУОС. Требования к режиму оговариваются в техническом задании (ТЗ), где на-
ряду с другими требованиями приведены и основные требования к режиму и точ-
ности его реализации. Для примера рассмотрим требования к режиму ИНО для
астрофизического модуля (AM) «Спектр».
Согласно ТЗ основным режимом работы СУ AM должна быть трёхосная
прецизионная инерциальная ориентация КА со стабилизацией относительно за-
данного программного положения и астрокоррекцией (АК) уходов ГИВУС.
Должны быть реализованы два варианта корректирующего контура АК:
- с использованием АИС (звездная ориентация);
- с использованием КОЭКП (солнечно-звездная ориентация).
Основные требования ТЗ к режиму ИНО приведены в табл. 4.5.12.
Таблица 4.5.12 - Основные требования ТЗ к режиму ИНО
Пункт ТЗ Содержание требований
1 СУ AM в режиме трехосной инерциальной ориентации (ИНО) с АК уходов при длительности рабочего участка до 24 ч в сутки должна обеспечивать ориентацию КА в неподвижной относительно инерци- ального пространства системе координат с параметрами, приведенны- ми в пп. 2 и 3. Время успокоения КА после проведения переориентации со ско- ростью до 0,3 град/с - не более 400 с. Окончание успокоения опреде- ляется моментом, начиная с которого обеспечивается выполнение тре- бований по точности стабилизации, оговоренных в пп. 2 и 3.
402
Продолжение табл. 4.5.12
Пункт ТЗ Содержание требований
2 Параметры звездной ориентации: 1) при использовании не менее двух измерительных каналов АИС предельные (За) погрешности ориентации указанных ниже сис- тем координат, связанных с КА, относительно второй экватори- альной системы координат должны быть не более: - ±18 угл. с - внутренней системы координат АИС; - ± 55 угл. с - приборной системы координат (ПСК) АИС; 2) разность между максимальным и минимальным значениями ста- билизационного отклонения по угловой координате вокруг оси «ОХ» («OY», «OZ») КА не более 5 угл с. на любом интервале времени длительностью 60 с внутри участка исследований (+ 2,5 угл. с относительно среднего значения) при использовании не менее двух измерительных каналов АИС при неподвижных пе- ремещаемых элементах конструкции КА. При этом на любом ин- тервале продолжительностью в 1 с указанная разность не должна превышать 0,36 угл. с. В случае невозможности использования более одного измери- тельного канала АИС из-за засветки двух других Землей или Луной допускается увеличение предельной (За) погрешности ориентации во- круг визирной оси используемого канала до 18 угл. мин.
3 Параметры солнечно-звездной ориентации: 1) погрешность ориентации программной оси солнечного прибора (СП) относительно направления на центр Солнца - не более 3 угл. мин по соответствующему каналу измерений; 2) погрешность ориентации программной оси звездного прибора (ЗП) относительно направления на опорную звезду-не более 1 угл. мин по соответствующему каналу измерений; 3) разность между максимальным и минимальным значениями ста- билизационного отклонения по угловой координате вокруг оси «ОХ» («ОУ», «OZ») КА - не более 6 угл. с на любом интервале времени длительностью 60 с внутри участка исследований (± 3 угл. с относительно среднего значения) при неподвижных эле- ментах конструкции КА. При этом на любом интервале продол- жительностью в 1 с указанная разность не должна превышать 0,36 угл. с. При затенении опорного источника на время до 1 ч допускается ухудшение точности ориентации вокруг соответствующей оси по от- ношению к программному положению до 18 угл. мин до калибровки ГИВУС и до 1 угл. мин после калибровки
403
Окончание табл. 4.5.12
Пункт ТЗ Содержание требований
4 СУ AM в режиме трехосной инерциальной ориентации (ИНО) с АК уходов должна обеспечивать: - ориентацию КА в подвижной относительно инерциального пространства системе координат; - наведение научной аппаратуры (НА) на точку или по задан- ному маршруту на поверхности Земли
5 При затенении опорного источника в режиме солнечно-звездной ориентации управление по соответствующему каналу должно осуще- ствляться только по информации ГИВУС. Начало и конец участка за- тенения задаются командами ПВС МРК или задачей навигации
6 СУ AM в режиме ИНО без АК уходов должна обеспечивать ори- ентацию КА в подвижной и неподвижной относительно инерциально- го пространства системе координат. При ориентации в неподвижной системе координат стабилиза- ционные отклонения КА относительно гироинерциальной системы ко- ординат не должны превышать ± 2,5 угл. с относительно среднего зна- чения при неподвижных перемещаемых элементах конструкции КА
7 СУ AM должна обеспечивать изменение ориентации КА в не- подвижной относительно инерциального пространства системе коор- динат в процессе юстировки НА. Необходимо предусмотреть два варианта реализации этого режима: 1) непрерывное изменение ориентации КА по заданной программе; 2) последовательная переориентация КА из исходного положения в некоторое число заданных положений со стабилизацией в каж- дом из них в течение заданного времени
К способам повышения точности ориентации КА относятся:
- калибровка масштабного коэффициента каждого из гироблоков ГИВУС;
- оценка систематической составляющей ухода нулевого сигнала ГИВУС;
- взаимная привязка углового положения ПСК АИС и КОЭКП относи-
тельно ВСК с возможностью компенсации измеренных погрешностей
через ПЗ;
- использование для ориентации и стабилизации КА информации, посту-
пившей с НА;
- юстировка НА с возможностью компенсации измеренных погрешностей
через ПЗ.
Системы координат
В качестве базовой системы принята визирная система координат (ВСК)
OXBYBZB, реализованная посадочными местами под НА изделия. Точность об-
404
меров ± 30 угл. с. Диапазон измеряемых погрешностей обмеров, вносимых в ПЗ,
составляет ± 0,5 град. При нулевых погрешностях установки гироплатформы оси
ВСК совпадают со связанными осями КА, реализованными его конструкцией.
Привязка приборных систем координат КОЭКП и АИС к ВСК приведена в
подразд. 3.4.4, 3.4.6 и 3.4.7. Расчёт взаимной увязки систем координат и точност-
ные характеристики, получаемые при учете взаимного положения приборов,
обычно определяются после уточнения точностных характеристик положения
осей чувствительности указанных приборов и точностей обмера положения поса-
дочных мест КОЭКП и АИС относительно ВСК.
Положение КА относительно второй экваториальной системы координат
должно задаваться в ВСК.
4.5.7.3.2 Приборный состав СУОС в режиме
В режиме ИНО используются следующие командные приборы (КП) и ис-
полнительные органы (ИО):
ГИВУС - гироскопический измеритель вектора угловой скорости с шестью
ГБ, диапазон измеряемых угловых скоростей ±0,4 град/с, в данном
приборе имеется два диапазона измерения - грубый и точный
±0,1 град/с;
ПАИС - прецизионная астроизмерительная система (три комплекта);
КОЭКП - два комплекса оптико-электронных командных приборов, в со-
став каждого из которых входит солнечный, прибор (СП) и звездный
прибор (ЗП) с подвижным полем зрения;
СГК - силовой гироскопический комплекс с четырьмя гиродинами;
ДМБ - трехосный двигатель-маховик бесконтактный;
ДС - двигатели стабилизации - 16 штук.
Циклограмма задействования КП и ИО определяется внутренней логикой
режима ИНО.
4.5.7.3.3 Принципы построения режима
Основными задачами режима ИНО являются:
- переориентация КА;
- прецизионная ориентация (ПО);
- обеспечение ориентации ОНА в требуемом направлении.
В режиме ИНО предусмотрено также решение следующих фоновых задач:
- разгрузка СГК;
- разгрузка ДМБ;
- калибровка ГИВУС;
- юстировка командных приборов и НА;
- юстировка ОНА;
- подготовительные операции для режима ВКИ;
- контроль функционирования СУОС.
Циклограмма реализации режима ИНО
Режим ИНО следует после режимов ПБО, ВКИ, ИНО, т.е. режимов, обес-
печивающих построение и поддержание ориентации КА в ИСК и передающих
405
необходимую ориентацию на начало режима ИНО.
Режим ИНО можно разбить на ряд следующих друг за другом и функцио-
нально завершающихся участков NHIJ0 = к (к = 1 - 4).
Nhho - 1 - участок подготовки. Начало участка определяется заданием при-
знака Ппц = 1, на этом участке проводится:
- включение ПАИС или КОЭКП (задается по ПЗ);
- включение грубого диапазона ГИВУС (при необходимости);
- разгрузка СГК (при необходимости);
- поддержание трехосной ориентации, оставленной предыдущим режи-
мом.
Участок 1 может отсутствовать, если имеются все необходимые условия
для реализации режима ИНО.
Ыино = 2 - участок переориентации КА. На рис 4.5.31 этот участок заверша-
ется в момент времени . На этом участке рассчитывается и осуществляется
программный разворот на СГК в целях:
- наведения научной аппаратуры для выполнения целевой задачи;
- выдачи корректирующего импульса режимом ВКИ или возврата в тре-
буемую ориентацию режима ИНО после режима ВКИ;
- юстировки командных приборов и научной аппаратуры или возврата в
требуемую ориентацию режима ИНО после юстировки.
Nuho = 2 i Ь1ино=3,4
Тр Тст - Тст v Тст^
• ----------------- ----------------------------
Тус = Тус v О <л,.,*0)
Рисунок 4.5.31 - Циклограмма режима ИНО
На рис 4.5.31 показано:
Кода- - время подготовки (участок NHHO=1);
со - угловая скорость КА;
t - текущее время;
Тупр - упрежденное время обеспечения поддержания программного движе-
ния (параметр ПЗ);
Тр- время разворота, рассчитываемое по и ХДХ^ и X, определяют
конечную и текущую ориентацию КА), разворот проводится вокруг
оси конечного поворота, неподвижной в ИСК;
406
Тст - время стабилизации (ПЗ) в расчетном положении XKpj;
Тусп ~ время успокоения после разворота и переключения ГИВУС на точ-
ный диапазон (ПЗ);
Так - время, отведенное на астрокоррекцию при необходимости (ПЗ);
ТЙС - время набора программной скорости (при необходимости) (ПЗ);
Тус - время успокоения после набора программной скорости (при необхо-
димости) (ПЗ);
К Jo - коэффициент усиления по угловой скорости (параметр ПЗ);
Ку - коэффициент усиления по углу (параметр ПЗ).
Nhhq = 3 - участок поддержания ориентации КА, на этом участке выполня-
ются фоновые задачи режима, задаваемые по ПЗ:
- калибровка масштабного коэффициента ГИВУС;
- юстировка измерительных осей ГИВУС;
- юстировка НА;
- подготовительные операции для режима ВКИ.
При необходимости выполнить последующий прямой или обратный разво-
рот для обеспечения выполнения любой из фоновых задач осуществляется пере-
ход на другой участок режима согласно табл. 4.5.13.
Таблица 4.5.13 - Переходы между участками в режиме ИНО
Предыдущий участок Последующий участок
1 2 3 4
1 - + - -
2 - - 4“ 4-
3 + - 4- 4-
4 4- - - 4-
Принципы организации фоновых задач калибровки масштабного коэффи-
циента ГИВУС, юстировки измерительных осей ГИВУС и юстировки НА обычно
оговариваются отдельными протоколами.
Nhhq = 4 - участок выполнения задач ПО:
- обеспечение требуемой прецизионной ориентации КА на ДМБ с исполь-
зованием информации ПАИС (Пап =1) или КОЭКП (Пап = 0);
- контроль функционирования СУОС;
- выполнение фоновых задач:
• разгрузка СГК;
• разгрузка ДМБ;
• калибровка ухода ГИВУС.
Переход в следующий режим можно осуществить с любого участка режима
ИНО при выполнении требований к режиму (ПВЗ = 1). Последующими режима-
407
ми могут быть режимы ПБО, ИНО, ВКИ, ПСО.
Задача обеспечения ориентации ОНА в требуемом направлении выполняет
ся на протяжении всего режима.
В случае некорректного задания программной информации по опорным ориен
тирам проводится поддержание текущей ориентации, АК не осуществляется, продол
жается выполнение режима по участкам. Далее - принятие решения и коррекция ПЗ.
В табл. 4.5.14 представлена программная информация, используемая в режиме.
Таблица 4.5.14- Программная информация
Наименование параметра Имя Характеристика параметра
Программный ква- тернион рассогла- сования 2-й ЭСК и ВСК Axi Задает положение ВСК относительно 2-й ЭСК на момент , i = 1 - 4
Время упрежденно- го положения ВСК относительно 2-й ЭСК Тупр Время, с, на которое необходимо обеспечить ориентацию в положение, определяемое Axi, и программную скорость А^-
Программная ско- рость ВСК относи- тельно 2-й ЭСК на момент Туир Acoj Конечная скорость, 1/с, которую необходимо реализовать на момент . В случае, если за- дачу баллистического обеспечения считают не на каждом такте, возможна выдача полинома (производных): - B^j - первая производная, - C<oj - вторая производная, - Цц - третья производная (согласуется дополнительно), j=x,y,z
Признак перенаце- ливания Ппц Задает необходимость перенацеливания для реализации Ахь А^ на момент . Определяет- ся по разностному кватерниону Лр = Лн о Ах на основе условия Хр0 > А (А - параметр ПЗ)
Признак прецизи- онной стабилизации Ппс Задает время начала прецизионной ориентации для выполнения наблюдений (ПО)
Программное поло- жение астроориен- тиров относительно 2-й ЭСК $nj Zni Программное положение Солнца относительно 2-й ЭСК. Направляющие косинусы во 2-й ЭСК Программное положение звезды относительно 2-й ЭСК. Направляющие косинусы во 2-й ЭСК
408
Окончание табл. 4.5.14
Наименование параметра Имя Характеристика параметра
Признак тени пт Определяет положение КА на орбите, при кото- ром СП КОЭКП неинформативен
Признак смены па- раметров Znj, A^j (и соответствующих производных) Пл Определяет момент смены указанных парамет- ров, при этом перенацеливание может не прово- диться, иначе задается Ппц
Признак смены ра- бочих звезд ПРЗ Определяет момент, когда параметры Znj изме- няются
Признак АК пак Задает необходимость АК при больших разво- ротах (Хр0 > ;ЛЛК - параметр ПЗ) или для осуществления уточнения ОР по времени (если АД выключены)
Признак засветки (или признак “пря- мого” или “обрат- ного” разворота) Пзас Определяет возможность засветки Солнцем за- претных зон КА как на участке Ппц, так и на участке Ппс. На участке Ппц парируется задачей ИНО
Программная инс юрмация задается оперативной группой ПЗ или формиру
ется задачей баллистического обеспечения (см. подразд. 4.1). Циклограмму выда-
чи необходимой программой информации из ПЗ организует СУ AM.
4.5.7.3.4 Реализация программного разворота в режиме
Расчет начальных параметров программного разворота
Для выполнения программного разворота в режиме ИНО необходимо рас-
считать следующие основные параметры движения КА:
а) модуль конечной скорости движения КА в случае переориентации в под-
вижную систему координат А^:
Af0= |А^|; (4.5.136)
б) кватернион Л1ф ориентации ВСК во 2-й экваториальной системе коор-
динат, который угочняется по измерениям внешних ориентиров с помощью
ПАИС или КОЭКП при наличии конечной угловой скорости Aw > отш. где <jOmin -
параметр ПЗ. Для этого необходимо:
- рассчитать направляющие косинусы конечной угловой скорости
Аш;
Ykj=V ; (4.5.137)
А. со
- по известным временным параметрам Тнск,Тус и модулю конечной уг-
ловой скорости определить величину кватерниона, отрабатываемого при
реализации конечной угловой скорости.
Скалярная часть кватерниона
409
V=cos^(THCK+Tyc). 4 (4.5.138)
Векторная часть кватерниона
V = sin 4р(Т„ек + )у kj, (j = 1,2,3); (4.5.139)
Лкр = Ах о (Л1)-1, (4.5.140)
(4.5.142)
(4.5.143)
где Акр - кватернион конечного разворота;
в случае, если конечная скорость отсутствует, то
^кр ~ j
в) разностный кватернион (Л ):
Лр--=АоД-;, (4.5.141)
где Л - кватернион рассогласования между 2-й экваториальной СК и ВСК на
момент начала разворота;
г) угол конечного разворота (%):
X = 2arccosXp0;
д) направление оси конечного разворота
vectAp
П|’ sin(x/2)’
где vectAp - векторная часть кватерниона Лр;
е) величину угла конечного поворота:
- если х < Хрю то разворот не выполняется (рассогласование компенсиру-
ется на участке стабилизации),
гДе ХРн -нижний порог осуществления программного разворота, параметр ПЗ
(диапазон 0,033 ... 2 град);
- если X > ХРн >то осуществляется программный разворот;
ж) вектор угловой скорости программного разворота Фр:
со = со п,
pj р р ’
где сор -- модуль угловой скорости переориентации КА;
з) возможности гиросистемы и необходимость разгрузки
Hb=J/®pp (4.5.144)
где Jj - момент инерции КА относительно центральных осей; copj - проекции
сорна оси ВСК (j = х, у, z); Hpj - проекции кинетического момента на оси ВСК,
необходимые для осуществления разворота.
Рассмотрим применение способа управления СГК, описанного в под-
разд. 4.5.6.3.4.
410
Для осуществления программного разворота со скоростью до 0,3 рад/с при
возможном достижении кинетического момента гиросистемой до 100 Н с (2Н0)
возникает необходимость переброса пары гиродинов 1-3 или 2 - 4 из “своей”
полуплоскости в “чужую” полуплоскость. При этом конечные положения обеих
пар гиродинов могут оказаться в заштрихованных (запретных) областях (см.
рис. 4.5.41 -- 4.5.45), где гиросистема в силу особенностей своего взаимного по-
ложения может “вырождаться”, т.е. оказаться в неопределенном состоянии (см.
подразд. 4.5.6.3.4). Для избежания попадания суммарного вектора кинетического
момента в запретные зоны выполняются следующие действия.
Предпринимают попытку перераспределить суммарный кинетический мо-
мент между парами гиродинов 1 - 3 и 2 - 4 так, чтобы кинетический момент каж-
дой пары гиродинов находился вне запретных зон. В случае, если это не удается,
выдается заявка на проведение принудительной загрузки. Алгоритм проведения
перераспределения кинетических моментов понятен из рассмотрения рис.
4.5.32-4.5.36.
Совмещенная ось вращения рамок
гиродинов 2-4
А ° 2 А
_ ____________________
Плоскость вращения рамок
с гирод и нов 2-4
Совмещенная ось вращения рамок
гиродинов 1 - 3
Рисунок 4.5.32 - К алгоритму перераспределения кинетических моментов
гиродинов
Рисунок 4.5.33 - Исходное состояние гиросистемы:
точки О2-4 и Оьз (см. рис. 2.2.3,а) совмещены в точке О
411
V
Z
Рисунок 4.5.34 - Результат первого расчета
конечного положения кинетических моментов СГК:
суммарный вектор HMZu не удовлетворяет
возможностям гиросистемы
У
Z
Рисунок 4.5.35 - Результат второго расчета
конечного положения кинетических моментов СГК:
вектор HMz24 находится в зоне вырождения
гиросистемы
412
Рисунок 4.5.36 - Результат окончательного расчета
конечного положения кинетических
моментов СГК
Для прохождения особых сингулярных положений СУ AM должна опреде-
лить необходимость «фиксации» скорости движения рамок гиродинов (см. под-
разд. 4.5.6.3.4.2).
Для выбора пары гиродинов, которую необходимо перевести в «чужую»
полуплоскость, проводят анализ - выясняют текущее состояние гиросистемы.
Если I Hzi3*Hz241 < £м, то гиросистема вырождена,
если sign (Hzi3) sign(Hz24) и Hzl3 > 0, (4.5.145)
то в «чужую» полуплоскость переводят пару гиродинов 1 -3, иначе пару 2-4.
При этом рассчитывают косинус угла между требуемым и текущим кинетиче-
ским моментом гиросистемы для пары гиродинов 1-3:
HZJ3 • HZM13 + Hvl3 • HvM13
cs =----------—-------------- (4.5.146)
H13 MM13
и для пары гиродинов 2-4:
г _ Н224 • HZM24 + Hv24 • HvM24
CS - - - . (4.5.147)
24 ’ nM24
Если Cs > CS(p, то «фиксируют» скорость движения рамок соответствующих
гиродинов и знак S = sin(pi - р3) или S = sin(P? - р4) в зависимости от «фиксируе-
мой» пары гиродинов.
Далее в процессе набора или гашения угловой скорости разворота анализи-
руют смену знака переводимой в «чужую» полуплоскость пары гиродинов:
ST = sin(P i - Рз) или ST = sin(p2 - р4) в зависимости от «фиксируемой» пары
гиродинов, и если ST = S, то управление этой парой проводится по выражению
(4.5.122), иначе - по выражениям (4.5.114) - (4.5.115). По последним же соотно-
413
шениям осуществляется управление и другой парой, которая осталась в «своей»
полуплоскости.
Обычно в гиродинах имеется ограничение на диапазон изменения скорости
поворота подвеса (см. подразд. 4.5.5.3), т.е. ограничение на скорость прецессии
рамки гиродина.
Для исключения динамических забросов при управлении парами гиродинов
на предельных скоростях прецессии рамок управляющие коды, подаваемые на
входы двигателей вращения рамок, взаимно согласовываются. Для этого в каж-
дой паре гиродинов выбирается угловая скорость прецессии рамки Pi (см. под-
разд. 4.5.6.3.4), имеющая максимальный модуль (например, для 1-го гиродина).
Тогда для 1-го гиродина задаётся максимальная скорость NrJ = , а для дру-
гого гиродина (3 -го) определяется пропорциональная скорость:
Nr3 =sign(p1) - enter
,^MAX
(4.5.148)
Аналогичная операция проводится и с парой 2-4.
В случае отсутствия предельной скорости прецессии рамок управляющие
коды формируются:
I0J
Nri = —sign(Pj). (4.5.149)
ег
Управляющий код Nrj поступает на вход СГК и соответственно математи-
ческой модели СГК.
Реализация переориентации КА
В основу построения системы управления положен метод инерциальной
ориентации с астрокоррекцией ошибок. Выбор метода ориентации КА обуслов-
лен прежде всего высокой точностью и стабильностью характеристик современ-
ных инерциальных средств (ГИВУС), а также возможностью поддержания задан-
ной ориентации при достаточно длительном отсутствии информации астропри-
боров. Кроме того, построение СУ на основе бесплатформенной системы инерци-
альной ориентации позволяет проводить переориентацию КА без ограничений на
величину углов поворота. Использование ГИВУСа в качестве основного команд-
ного прибора дает возможность на протяжении всей работы СУ осуществлять
численное интегрирование дифференциальных уравнений для расчета кватер-
ниона, элементами которого являются параметры Родрига-Гамильтона:
2А = Ло(ю-соух +й)кб) — шпб ° Л, (4.5.150)
где А - кватернион ориентации ВСК относительно БСК; ш - вектор абсолют-
ной угловой скорости КА, измеряемый ГИВУС; - вычисленное значение
вектора угловой скорости ухода ГИВУС; сокб - вектор угловой скорости коррек-
ции параметров ориентации; шпб - вектор абсолютной угловой скорости движе-
ния БСК.
Результатом решения дифференциального уравнения является кватернион
414
Л, характеризующий положение ВСК относительно БСК. Начальная выставка
кватерниона Л проводится по информации ПАИС или КОЭКП. В качестве базо-
вой системы координат, относительно которой осуществляется ориентация КА,
целесообразно принять вторую экваториальную инерциальную систему коорди-
нат. В этом случае в соотношении (2.2.17) <йпб= 0.
Для компенсации ошибок параметров ориентации, вызванных погрешно-
стями интегрирования и погрешностями ГИВУС, в уравнении (2.2.17) вводится
угловая скорость коррекции шкб, рассчитываемая по информации ПАИС или
КОЭКП в системе астрокоррекции. В системе астрокоррекции проводится также
оценка с помощью фильтра Люенбергера суммарного углового ухода инерциаль-
ной системы координат, основной составляющей которого является нулевой сиг-
нал ГИВУС. Оценка углового ухода ИСК позволяет обеспечить высокую точ-
ность поддержания заданной ориентации и стабилизации КА, а также увеличить
без ухудшения заданной ориентации и стабилизации КА период между проведе-
нием сеансов астрокоррекций.
Участок переориентации начинается с набора программной угловой скоро-
сти разворота.
Для этого в каждый момент времени рассчитываются стабилизационные
параметры ориентации ДА и параметры ориентации Л:
(4.5.151)
2ЛЛ = ДА ° со;
2 А = Л о со,
где ДА - стабилизационные параметры ориентации; А - кватернион рассогла-
сования между 2-й экваториальной СК и ПСК ГИВУС; о - измеренный вектор
угловой скорости.
Вектор со измеряется по информации с ГИВУС путем проецирования со-
ставляющих вектора действительной угловой скорости КА со0, измеряемых каж-
дым из шести ГБ ГИВУС с учетом погрешностей их установки, вычисленного
ухода и уточненным после калибровки масштабным коэффициентом (если тако-
вые имели место) на оси ВСК.
В каждый момент времени при осуществлении программного разворота
рассчитывают:
- текущий угол конечного поворота
=2arccosAk0, (4.5.152)
где ДХ0 - скалярная часть стабилизационного параметра ориентации ДА;
- текущее положение оси конечного поворота
С _ vectAA
8т(хй/2)’
где vectAA - векторная часть стабилизационного параметра ориентации ДА;
- программная скорость разворота
(О = (О С,
пр Р >
(4.5.153)
(4.5.154)
415
где сйр - модуль скорости конечного разворота (параметр ПЗ).
Для сообщения КА программной скорости формируется аргумент управле-
ния СГК:
О = (4.5.155)
где - аргумент управления СГК; J - проекции моментов инерции КА на его
главные оси; - вектор оцененной угловой скорости.
Оценка угловой скорости осуществляется системой оценки. В процессе
исследований динамики процессов управления КА использован один из методов
оценки вектора состояния, подробно описанный в подразд. 4.5.6.1.1. После набо-
ра и поддержания программной скорости (а = 0) осуществляется переориентация
и стабилизация КА относительно ®пр, определяемая по соотношению (4.5.155).
Одновременно в каждый момент времени контролируется угол конечного пово-
рота хдх. По достижении порога %дк < А (А - параметр ПЗ) начинается процесс
гашения набранной угловой скорости переориентации.
Если какая-либо пара гиродинов была переведена в «чужую» полуплос-
кость, то выполняется обратный пересчёт выражений (4.5.146)- (4.5.147), срав-
нивается Cs с С8<рт, где С5фТ - косинус угла, определяющего новое положение пары
гиродинов после перевода их в «чужую» полуплоскость, фиксируется знак S. За-
тем выполняется та же последовательность действий, что и при наборе угловой
скорости разворота.
После изменения знака ST программная угловая скорость в соотношении
(4.5.155) изменяется по закону:
“пр = -72|Мф»- • т| • signy, (4.5.156)
где Мфсг - эффективность расчетного управляющего момента СГК, определя-
ется по фактическому положению внутреннего кинетического момента гироси-
стемы, получаемому с выходного устройства каждого гиродина, и для исключе-
ния динамических забросов, имеющих место при расчёте Мсг, последний фильт-
руется; у - стабилизационный угол, определяемый по соотношению
у = 2(scalA A)vectA А. (4.5.157)
Процесс гашения угловой скорости завершается, когда угол конечного по-
ворота Хд/. достигает нижнего порога Ахн (параметр ПЗ, выбираемый в процессе
моделирования). При этом в выражении (4.5.156) формируется компонента
®пр=0.
После выполнения условия
Хдх<ДХн (4.5.158)
начинается участок успокоения. КА при этом стабилизируется относительно рас-
считанного положения Akp(AAKp = 1) и гасятся остаточные угловые скорости.
При этом закон управления (4.5.156) принимает вид
416
<т = К^Г + К^(Оф-<оЯ1,), (4.5.159)
где у - стабилизационный угол, вычисляется в каждый момент времени по вы-
ражению (4.5.161); К© - коэффициент усиления по угловой скорости (параметр
ПЗ); Ку - коэффициент усиления по углу (параметр ПЗ).
Затем следует участок АК. Участок АК представляет собой стабилизацию
КА относительно заданного положения в пространстве при введении в соотно-
шение (4.5.150) оцененного рассогласования между' измеренным и интегрирован-
ным положением КА в инерциальном пространстве. При этом изменяется и рас-
чёт кинематических уравнений параметров АЛ и Л:
2АА = ДА ° (со - сокс);
2Л = Ло(ш-юкб), (4.5.160)
где <окс, шкб - угловая скорость коррекции, определяемая по оцененному рас-
согласованию между измеренными астроприборами Апи интегрированными па-
раметрами ориентации Л и стабилизации ДА, находится как
^кс =®кб = Лк ‘ vekt(An °Ар), (4.5.161)
где (Лп)~ измеренный астроприборами кватернион ориентации ССК относи-
тельно БСК; Лр - разностный кватернион при реализации разворота в упреждён-
ную точку (см. выражение (4.5.142)).
Астрокоррекция проводится на участке стабилизации при наличии в законе
управления (4.5.163) стабилизационного угла у.
Результатом АК являются:
а) минимизация полученного рассогласования между измеренным и интег-
рированным положением КА, при этом сами стабилизационные параметры ори-
ентации ДА и кватернион рассогласования Л не изменяют своего фактического
значения (ДА = 1, AaAKT);
б) в результате отработки полученного при АК рассогласования по углу и
угловой скорости КА занимает максимально точное требуемое положение в про-
странстве.
После проведения АК по необходимости начинается участок набора конеч-
ной угловой скорости КА.
При этом в закон управления вводится дополнительная фазовая координа-
та - угловое ускорение (£пр):
О’ У 4" Кш((о ф — сопр) 4- Ке8Пр j (4.5.163)
где Кв - коэффициент усиления по угловому ускорению (параметр ПЗ).
Угловое ускорение формируется:
- при наборе конечной угловой скорости в целях уменьшения переходного
процесса стабилизации КА;
- изменении конечной программной скорости движения КА при юстиров-
417
ке НА;
- отслеживании точки на поверхности Земли (если такая задача необхо-
дима) и т.д.
Угловое ускорение £1ф, параметр <окс и программная скорость оЕ форми-
руется в промежутке времени Тнс по выражениям
®пс=Аш;
conD =о>е =®i>c -е"м;
р (4.5.164)
_d(oe-«)np)
£пр ’ dt
На промежутке времени Тус эти же параметры определяются как
с* — = Асо;
wnc Пр j. ,
(4.5.165)
^пр “ О-
Таким образом, введение данных соотношений позволяет обеспечить ори-
ентацию КА на момент ТупР, заданную кватернионом рассогласования Ах, и дви-
жение со скоростью Ао.
4.5.7.3.5 Выбор параметров режима
Для реализации задач режима ИНО необходимо выбрать параметры, опре-
деляющие возможности режима ИНО, циклограмму режима, основные парамет-
ры программной информации и параметры полётного задания (ПЗ).
Выбор определяющих параметров режима
Определяющие параметры режима ИНО - это соответствие основных па-
раметров режима:
- максимально допустимой скорости перенацеливания, которая ограничи-
вается диапазоном измерения угловой скорости КА с помощью ГИВУС;
- максимально допустимой эффективности исполнительных органов;
- требуемого времени реализации программного разворота, возможности
реализовать программный разворот.
Определяющие параметры режима обычно выдаются в виде некоторой про-
граммной информации. Эта информация либо поступает из смежной (управляю-
щей) бортовой вычислительной машины, либо циклограмма разворачивается в
СУОС при использовании оперативной группы полётного задания, которое пере-
даётся на борт с помощью наземных средств.
Требования к программной информации:
1. AXi, AQj, Znj- должны быть реализованы исходя из реальных возможностей
СГК. Максимальная скорость перенацеливания не должна превышать
0,4 град/с. Задается параметром ПЗ О)р. При реализации программы режима
ИНО необходимо предусмотреть возможность разгрузки СГК. Максималь-
ное время проведения разгрузки - 150 с.
418
2. Признаки П„ц и Ппс определяют начало ПЦ и ПС соответственно. Выдаются
исходя из реальной циклограммы текущего сеанса. Эти признаки должны
быть взаимно согласованными. ПпцМ и Ппс=0 (см. рис. 4.5.42), а на участке
прецизионной стабилизации Ппс = 1, а Ппц = 0. Положение астроориентиров
на момент АК должно быть согласовано с участком ПЦ и ПС.
3. Признак Пх должен изменяться на противоположный (с 0 на 1 или с 1 на 0)
в момент смены (частота 1 ... 4 с) следующих параметров - AWJ, Znj. В слу-
чае выдачи параметров A0)J должна быть предусмотрена выдача произвол-
них от Awj (B(Oj, Сш? ...).
4. Циклограмма следования участков ПЦ - ПС изображена на рис 4.5.37.
Подготовка АД
Разгрузка СГК
Ппц = 1
Ппс= О
е—
Рисунок 4.5.37 - Циклограмма участков ПЦ
и ПС
На рис. 4.5.37 показано:
ТупРр - текущее значение , поступившее при задействовании текущего
программного разворота;
Туспр - время успокоения после разворота;
Тстр - время стабилизации в программном положении с обеспечением ус-
ловий для возможной АК;
t - текущее время.
Развороты КА могут быть выполнены как с проведением АК параметров
ориентации, так и без проведения ее после завершения разворота. Расчет приве-
денных выше времен осуществляется:
а) разворот без АК и AOJ = 0 (ВКИ)
n 2arccosXn0
W =------------^ + т₽ + Т₽П +150 с, (4.5.166)
ир
где Тстр = Тст - параметр ПЗ;
Ар=ЛноАх, (4.5.167)
419
ТуспР = ТусП - параметр ПЗ;
Лн - кватернион начального положения ВСК во 2-й ЭСК,
б) разворот с АК и Afflj = 0 (отслеживание “маршрута”)
D 2arccosXn0
Тупр =----~ + Тсг + Т£п +150 с > (4.5.168)
где Тстр = - параметр ПЗ;
Тус„р =1^^ - параметр ПЗ;
Хр0 - scal(Ap) - см. (4.5.143).
При А 0 (отслеживание точки или сканирование пространства) расчет-
ные формулы те же, а Тст , Тусп , ТуспЛК увеличиваются (уточняется в процессе
проектирования).
5. В случае, если разворот не превышает 0,033 ... 2 град (уточняется по ре-
зультатам моделирования и заносится в ПЗ), признак Пщ = 1 можно не вы-
давать.
6. Оптимальное значение угла ’’Солнце-объект-Земля” (СОЗ) должно лежать в
пределах 60... 120 град в любой момент времени (уточняется в процессе
проектирования).
Кроме того, программная информация должна содержать:
Ппо - признак начала ПО;
Пап - признак задействуемых астроприборов;
RoHaj - направляющие косинусы вектора КА - наземный пункт во второй
экваториальной СК;
QOHaj ~ проекции вектора угловой скорости линии визирования “КА-НИП”
во 2-й ЭСК;
Прона - признак рода работ с приводом ОНА;
N3n - номер уставки приведения привода ОНА в заданное положение;
Пр кон ~ признак окончания работ с приводом ОНА;
q - номер используемого НИПа.
Выбор параметров полётного задания для режима ИНО осуществляется ис-
ходя из соображений:
- реализации циклограммы режима ИНО, которая планируется в ЦУП ис-
ходя из задач, которые должен решать КА в данный момент времени;
- обеспечения требуемой точности программного разворота исходя из
конкретных динамических характеристик КА, командных приборов и
исполнительных органов.
Выбор параметров ПЗ
Выбор параметров ПЗ осуществляется путем численного моделирования
замкнутой задачи управления объектом, реализованной с учётом математических
моделей командных приборов, исполнительных органов и кинематики движения
астроориентиров.
420
4.5.7.3.6 Контроль и парирование нештатных ситуаций в режиме
Для контроля функционирования системы управления при развороте ана-
лизируются возможности гиросистемы по развиваемому управляющему моменту
за заданное время. Если
Т2 у
4-------^Т<0, (4.5.169)
4 Sm-t/
то эффективности исполнительных органов не хватает для осуществления пере-
ориентации (данный контроль может быть исключен по ПЗ).
Разворот невозможен в случае:
- расчетное время разворота отрицательно:
Тр—Тупр-Тсг, (4.5.170)
где Тр - время разворота; Тупр - время прихода в упрежденную точку; Тст - вре-
мя стабилизации;
- запрещена (по ПЗ) принудительная разгрузка, а возможностей гироси-
стемы по достижимому кинетическому моменту не хватает для осущест-
вления переориентации.
Причиной прерывания режима может быть:
- невозможность разворота;
- полный отказ ГИВУС;
- полный отказ СГК;
- в случае отсутствия ориентиров в КОЭКП и наличия опасного рассогла-
сования по углу или угловой скорости в течение критического времени
(определяется согласованием с разработчиком аппаратуры наблюдения).
При появлении причин прерывания режима формируется признак «Запрос
на прерывание режима» (ЗПР = 1), поступающий в управляющую машину или
телеметрию, по которому либо автоматически (по согласованной логике париро-
вания нештатных ситуаций), либо с помощью оператора режим должен быть пре-
кращён.
Для контроля выполнения задач режима существует:
- признак выполнения задачи (ПВЗ = 1);
- признак выполнения точностных требований (ПВТ = 1).
Признак выполнения задачи формируется при отсутствии признака ЗПР = 1
после завершения программного разворота.
Признак выполнения точностных требований формируется при нормальном
прохождении циклограммы режима и завершения астрокоррекции. Дополнитель-
ным источником формирования ПВТ = 1 может быть информация с научной ап-
паратуры.
Парирование нештатных ситуации проводится в следующих случаях:
- ввиду избыточности ЧЭ в ГИВУС (для вычисления вектора угловой ско-
рости достаточно трех ЧЭ, а в ГИВУС их шесть) сравнивается информа-
ция с «рабочих» ЧЭ с одним или несколькими контрольными ЧЭ;
- имеется возможность парировать отказ ГИВУС в случае наличия ре-
421
зервных ЧЭ, при этом информация с неисправных ЧЭ автоматически
блокируется и не применяется в контуре управления, а используются
исправные ЧЭ;
- сравнением входной и выходной информации гиродинов СГК можно
определить неисправный гиродин и перейти на управление тремя гиро-
динами.
4.5.7.4 Режим поддержания трехосной солнечной ориентации
4.5.7.4.1 Требования к режиму
Режим поддержания трехосной солнечной ориентации (ПСО-3) предназна-
чен для поддержания инерциальной ориентации в положении, обеспечиваемом
предыдущим режимом, с ориентацией:
- ось OZc направлена на Солнце на начало режима ПСО-3;
- положение остальных осей определяется группой баллистического обес-
печения и реализует ориентацию, минимизирующую внешние возму-
щающие моменты, действующие на КА.
Точность ориентации должна обеспечивать захват звезд астродатчиками.
В режиме ПСО-3 предусматривается решение следующих задач:
- периодическая (один раз за виток) астрокоррекция положения КА отно-
сительно заданного в режиме положения в ИСК;
- автономное или через средства наземного комплекса управления (НКУ)
определение ухода гироблоков ГИВУС и возможность его коррекции;
- разгрузка СГК по насыщению;
- подготовка условий для выполнения основной работы в режиме ИНО,
осуществляемой по команде «малый порог разгрузки (МПР)», при кото-
ром осуществляется:
• оценка ухода;
• астрокоррекция;
• принудительная разгрузка СГК.
Режим ПСО-3 был организован на КА типа «Аркон» в целях обеспечения
циклограммы работы аппаратуры наблюдения (полезной нагрузки). В режиме
ПСО-3 осуществлялось ее выключение. По команде МПР разворачивалась цик-
лограмма включения аппаратуры наблюдения и СУОС переводилась в режим
ИНО. Статус режима ПСО-3 - дежурный режим. При этом КА постоянно нахо-
дится в инерциальной ориентации и не требует ее построения.
4.S.7.4.2 Приборный состав СУОС в режиме
В режиме ПСО-3 используют следующие командные приборы и исполни-
тельные органы:
ГИВУС - гироскопический измеритель вектора угловой скорости с че-
тырьмя ЧЭ;
ПАИС - прецизионная астроизмерительная система;
ПОС - прибор ориентации на Солнце;
МГТ - магнитометр;
422
СГК - силовой гироскопический комплекс с четырьмя гиродинами;
ДС - двигатели стабилизации в количестве 16 штук;
МИО - магнитные исполнительные органы.
4.5.7.4.3 Принципы построения режима
В режиме ПСО-3 заложены следующие принципы:
- трехосная инерциальная ориентация;
- поддержание ориентации ССК относительно ИСК (2-й экваториальной
СК);
- периодическая астрокоррекция заданной ориентации;
- оценка уходов ЧЭ ГИВУС;
- принудительная разгрузка СГК перед началом работы полезной нагруз-
ки;
- обеспечение разгрузки СГК по насыщению;
- непрерывный сброс кинетического момента СГК с помощью МИО.
Режим ПСО-3 длится несколько витков до принятия решения НКУ о начале
работы полезной нагрузки. Циклограмма режима организована следующим обра-
зом. После включения режима проводится астрокоррекция. При этом СУОС ис-
пользует две ПАИС из трех или одну ПАИС и ПОС (по призаку ПЗ). Программ-
ная информация о положении астроориентиров поступает из УИВК. Программ-
ная информация определяет положение двух звезд во 2-й ЭСК и номер ПАИС, в
поле зрения которых они находятся, и постоянно изменяющееся положение
Солнца во 2-й ЭСК. Программное положение астроориентиров пересчитывается
в ССК и сравнивается с показаниями ПАИС и ПОС. Рассогласование между про-
граммным и измеренным положениями обрабатывается как векторное произве-
дение. После совмещения ССК с ИСК и стабилизации КА процесс астрокоррек-
ции завершен и ПАИС выключаются.
Далее в течение всего витка (время Тдк задается в ПЗ, равно периоду обра-
щения КА по орбите) выполняется стабилизация КА относительно постоянного
положения в ИСК. При этом возможна разгрузка СГК по насыщению.
По истечении времени Тдк определяются уходы ЧЭ ГИВУС. Измеряется
текущее положение астроориентиров, и их сравнивают с неизменным в течение
всего витка программным положением астроориентиров. Вычисленное рассогла-
сование проецируется на ПСК ГИВУС и определяется уход по каждому из задей-
ствованных для стабилизации ЧЭ ГИВУС. Затем проводится астрокоррекция.
Такой режим работы продолжается в течение нескольких витков (определя-
ется группой планирования на НКУ).
Вычисленные значения уходов накапливаются в специальной зоне ОЗУ
БЦВМ и периодически сбрасываются в составе ТМИ в НКУ. В НКУ специальной
программой статистической обработки вычисленные значения уходов обрабаты-
ваются, вычисляется среднестатистический уход по каждому из ЧЭ ГИВУС, ко-
торый передается на борт в составе ПЗ.
Калибровка, проведенная таким образом при эксплуатации КА «Аркон»,
позволила уменьшить вычисленный уход до 0,02 град/ч, что существенно повы-
423
сило точность выполнения задачи полезной нагрузкой. Была предусмотрена воз-
можность заносить в алгоритмы вычисленный уход ЧЭ ГИВУС автономно (без
НКУ) и использовать текущую оценку уходов ЧЭ ГИВУС непосредственно перед
включением в работу полезной нагрузки.
Подготовка условий для выполнения основной работы (в режиме ИНО)
осуществлялась после подачи из УИВК команды ПРМ. При этом проводилась:
- оценка ухода способом, описанным выше;
- астрокоррекция, проводимая так же, как и при включении режима;
- принудительная разгрузка СГК.
4.5.7.44 Контроль, и парирование нештатных ситуаций в режиме
Система бортового оперативного контроля в режиме ПСО-3 состоит из сле-
дующих видов контроля:
1. Анализа отсутствия информации с двух астроориентиров в течение задан-
ного времени при задействовании операций определения ухода и астрокор-
рекции.
2. Анализа полного отказа СГК.
3. Анализа полного отказа ГИВУС.
4. Допускового контроля, состоящего из контроля по опасному рассогласова-
нию по стабилизационному углу и угловой скорости.
5. Контроля ориентации по Солнцу (ПОС в данной СУОС не выключался во
всех режимах работы), который заключался в сравнении программного по-
ложения Солнца (поступает из УИВК во 2-й ЭСК и приведенной к ССК) с
текущими измерениями астроориентира с помощью ПОС. Этот контроль
проводился на всех участках режима.
По результатам этого контроля осуществлялось парирование нештатных
ситуаций с помощью выдачи в УИВК признака «Запрос на прерывание режима»
(ЗПР2=1).
Контроль выполнения задач режима проводился следующим образом:
1. Отсутствием ЗПР2--1.
2. Прохождением всей циклограммы режима.
3. Подтверждением ожидаемых точностей ориентации и стабилизации.
Если контроль выполнения задач режима дал положительные результаты и
отсутствует процесс переключения отказавших КП и ИО, вырабатывается при-
знак выполнения задачи режима ПВЗ=1, разрешающий переход в следующий ре-
жим.
В задаче разгрузки СГК с помощью ДС контроль осуществлялся также по
динамической реакции системы оценки, созданной на основе фильтра Люенбер-
гера, построенного путем решения дифференциальных уравнений, описывающих
движение КА с учетом выключения ИО (СГК и ДС) и измеряемой ГИВУС угло-
вой скорости КА. Если динамическая реакция системы оценки превышает допус-
тимый порог, то ДС переключается, так как ГИВУС контролируется избыточным
ЧЭ, а СГК - по внутреннему контролю.
Контроль ПОС, ПАИС, СГК, МИО осуществлялся внутренним контролем
424
данных КП и ИО, по которым осуществлялось переключение отказавших компо-
нентов СУОС на исправные.
4.S.7.5 Режим прецизионной ориентации
Режим прецизионной ориентации (ПО) предназначен для ориентации и
стабилизации КА с требуемой точностью при выполнении им целевой задачи, а
также перенацеливания КА на заданные углы.
4.5.7.5.1 Требования к режиму
Система управления ориентацией и стабилизации (СУОС) в режиме ПО
при длительности рабочего участка (РУ) до 24 часов в сутки должна обеспечи-
вать:
1) возможность перенацеливания продольной оси ОХв КА относительно ГЦВ
на углы в направлении Запад-Восток ± 9 град, в направлении Север - Юг
О ... 7 град. Длительность перенацеливания не должна превышать 20 мин;
2) ориентацию КА за счёт:
- ориентации программной оси ППЗ относительно направления на Поляр-
ную звезду с максимальной ошибкой по каждому каналу измерения не
более 8 угл. мин;
- ориентации программной оси ПОС относительно направления на центр
Солнца с максимальной ошибкой по каналу измерения, участвующему в
управлении движением КА, не более 8 угл. мин;
- ориентации программной плоскости прибора ориентации на Землю
(ПОЗ) относительно ГЦВ с максимальной ошибкой не более 10 угл. мин;
3) стабилизацию КА относительно задаваемого УИВК программного положе-
ния, при которой разность между максимальным и минимальным значе-
ниями ошибок стабилизации по угловой координате вокруг оси OYb (OZb)
КА на интервале времени 60 с не превышает 6 угл. с и 30 угл. с вокруг оси
ОХв;
4) выдачу информации о фактическом угловом положении опорных ориенти-
ров относительно неподвижных осей приборов ориентации с максимальной
ошибкой по каждому каналу не более 6, 4, 3 угл. мин по Земле, Солнцу и
Полярной звезде соответственно, а также выдачу информации о стабилиза-
ционных углах и абсолютной угловой скорости КА с квантом по углу не
грубее дискретности измерения прибора ГИВУС.
Программные оси ППЗ и ПОС развёрнуты относительно визирной системы
координат ОХв, OYb, OZb, материализованной элементами конструкции КА, на
программные углы, задаваемые УИВК и характеризующие требуемые положения
Полярной звезды и Солнца относительно визирной системы координат. Про-
граммная плоскость ПОЗ развёрнута относительно визирной системы координат
на угол, задаваемый УИВК.
5) в целях повышения функциональной надежности КА должна быть предусмотрена:
- реализация режима с использованием ДСмт;
- комплексное использование информации астроприборов для астрокор-
рекции инерциальной ориентации;
425
6) переключение резерва без прерывания режима при возникновении неис-
правности. Допускается нарушение точностных требований на время пари-
рования неисправности.
4.5.73.2 Приборный состав СУОС в режиме
Исходя из задач режима ПО и принципов его построения определён сле-
дующий приборный состав СУОС в режиме ПО:
- гироскопический измеритель вектора угловой скорости (ГИВУС);
- четыре прибора ориентации на Солнце (ПОС);
- два прибора ориентации на Землю (ПОЗ);
- два прибора Полярной звезды (ППЗ);
- электромеханические исполнительные органы (ЭМИО);
- двигатели стабилизации малой тяги (ДСмт).
4.5.73.3 Принципы построения режима
Для выполнения требований, предъявляемых к режиму, в основу режима
ПО положен метод инерциальной ориентации с астрокоррекцией ошибок, кото-
рый предусматривает комплексное использование информации астроприборов и
ГИВУС. Определение ориентации КА осуществляется путём численного интег-
рирования в БЦВМ кинематических уравнений углового движения КА. В качест-
ве параметров ориентации используют параметры Родрига-Гамильтона (кватер-
нионы). Задание начальных условий для интегрирования проводится с помощью
астродатчиков. Астродатчики применяют также для компенсации ошибок ориен-
тации, вызванных погрешностью интегрирования и нестабильностью характери-
стик ГИВУС. Для повышения точности ориентации КА предусматривается опре-
деление и компенсация нулевого сигнала ГИВУС.
В качестве базовой системы координат, с помощью которой определяется
ориентация КА, могут быть использованы:
- солнечно-звёздная СК;
- звёздно-земная СК;
- солнечно-земная СК.
Построение ортогональной БСК осуществляется ортонормированием век-
торов, направленных от КА к двум выбранным астроориентирам. Расчёт движе-
ния БСК проводится в предположении, что один из выбранных астроориентиров
неподвижен в ИСК, а второй движется с известной угловой скоростью.
Непосредственное управление КА осуществляется по параметрам стабили-
зации (кватерниону АА). При необходимости проведения перенацеливания КА
переориентация осуществляется относительно оси конечного поворота.
Выбор параметров. Полетное задание
Выбор настроек алгоритмов работы СУОС в режиме ПО осуществлялся:
- расчётным путём;
- путём математического моделирования процессов ориентации и стаби-
лизации КА в режиме ПО;
- на основании оценки устойчивости контура стабилизации.
Все настройки алгоритмов работы СУОС можно разделить на две группы:
426
- консервативные настройки, записываемые в постоянное запоминающее
устройство СУОС (константы ПЗУ);
- настройки, изменяемые в процессе эксплуатации КА (параметры полёт-
ного задания).
В состав полётного задания (ПЗ) СУОС вводятся параметры, обеспечивающие:
- настройку закона управления исполнительными органами (ЭМИО и
ДСмт);
- настройку алгоритмов астрокоррекции и оценки уходов ГИВУС;
- контроль и диагностику приборного состава СУОС.
Кроме того, в состав ПЗ введены технические характеристики командных
приборов, исполнительных органов и объекта управления.
Контроль и парирование нештатных ситуаций в режиме
В соответствии с требованиями, предъявляемыми к режиму ПО, СУОС при
возникновении неисправностей должна осуществлять переключение резерва без
прерывания режима.
В режиме ПО контролируются все командные приборы и исполнительные
органы. При обнаружении неисправности переключается резерв соответствую-
щего прибора. При исчерпании резерва по отказавшему прибору в режиме ПО
предусмотрены следующие действия:
- при отказе ПОС требуемой группы - переход в звёздно-земную ориен-
тацию;
- при отказе ПОЗ прохождение теневого участка орбиты - без асгрокор-
рекции (на «гиропамяти»);
- при отказе 11113 - переход в режим ПСО;
- при отказе ЭМИО - переход на ДСмт;
- при отказе ГИВУС - переход на оценку угловой скорости по информа-
ции астродатчиков.
Моделирование работы СУОС в режиме
Математическое моделирование работы СУОС проводят в целях выбора
настроек СУОС и проверки соответствия её характеристик требованиям техниче-
ского задания на разработку.
В процессе моделирования проверяют:
- точность стабилизации и ориентации КА;
- длительность перенацеливания КА на максимальные углы;
- парирование нештатных ситуаций, возникающих при отказах команд-
ных приборов или исполнительных органов;
- выполнение требований к режиму при наличии предельных отклонений
параметров динамической модели КА и разбросов по характеристикам
командных приборов и исполнительных органов.
4.5.7.6 Режим стабилизации при выдаче корректирующего импульса
4.5.7.6.1 Назначение и требования к режиму
В данном разделе в качестве примера приведены основные требования к
режиму, разработанному для КА «Купон» (система управления В43К).
427
Режим стабилизации при выдаче корректирующего импульса (СКР) пред-
назначен для решения следующих задач:
1) стабилизации объекта управления относительно заданной ПСК при выдаче кор-
ректирующего импульса (КИ) в задачах коррекции приведения и наклонения;
2) принудительной разгрузки ЭМИО при стабилизации на двигателях боль-
шой тяги (ДСБт)-
Первая задача выполняется в модификации режима СКР-КИ, а вторая - в
модификации СКР-Р.
Согласно ТЗ система управления должна обеспечивать в режиме проведе-
ния коррекции орбиты стабилизацию ССК КА относительно программного по-
ложения, заданного аппаратурой УИВК, с точностью не хуже 3 град.
Модификация режима СКР-Р всегда предшествует модификации режима
СКР-КИ.
Указанная выше суммарная точность связки режимов должна выполняться
как при выдаче КИ при коррекции приведения, максимальная длительность кото-
рого равна 1300 с, так и при выдаче КИ при коррекции наклонения, длительность
которого не превышает 300 с.
4.5.7.6.2 Приборный состав СУОС в режиме
В режиме СКР используют следующие командные приборы и исполни-
тельные органы:
- гироскопический измеритель вектора угловой скорости (ГИВУС);
- прибор ориентации на Солнце (ПОС);
- электромеханические исполнительные органы (ЭМИО);
- двигатели стабилизации большой тяги (ДСБт)«
4.5.7.6.3 Принципы построения режима. Основные формульные схемы
алгоритмов
В режиме СКР заложены следующие принципы:
- трехосная инерциальная ориентация;
- поддержание ориентации ССК относительно положения ПСК на момент
окончания предыдущего режима;
- учет через ПЗ характеристик приборов и углов их установки на КА в це-
лях повышения точностных характеристик СУОС;
- бортовой контроль.
В состав режима СКР СУОС, разработанного в соответствии с перечислен-
ными принципами, вводят следующие подсистемы:
- инерциальной ориентации;
- стабилизации;
- разгрузки ЭМИО;
- бортового оперативного контроля.
Система инерциальной ориентации
Система инерциальной ориентации предназначена для определения поло-
жения ССК относительно некоторой базовой системы координат путем интегри-
рования кинематических уравнений.
428
Результатами расчета являются кватернион параметров ориентации
Xj (i=0 ... 3) и кватернион параметров стабилизации AXj. Кватернион Xj характе-
ризует положение ССК относительно выбранной БСК. Кватернион AXj характе-
ризует положение ССК относительно ПСК.
В режиме СКР в качестве ПСК принимается положение ССК на момент
окончания предшествующего режима.
Начальное значение составляющих кватернионов ориентации Xj и стабили-
зации AXj разово задается следующим образом.
1. Согласно ТЗ при выдаче КИ по штатной циклограмме в качестве БСК при-
нимается программное положение ССК, занимаемое ею на момент оконча-
ния режима ПО, предшествующего режимам СКР-Р и ИНО(1). Поэтому
кватернионы Xj и AXj задаются в следующем виде:
Х|=АХ*;
АХ0 = 1, AXt = АХ2 = АХ3 = О
2. Относительно этой системы координат рассчитываются углы разворота для
перехода в ориентацию, необходимую для коррекции VKop орбиты КА.
После разворота изделия, осуществляемого режимом ИНО(1), в положение,
определяемое как VKop, эта система координат в режиме СКР принимается как ба-
зовая на время выдачи КИ:
Xi=X*;
AXj = АХ*,
где X*, АХ* - составляющие кватернионов ориентации и стабилизации, форми-
руемые в предшествующем режиме, соответственно.
3. После режима ПСО, где X* и АХ* не определены, параметры ориентации и
стабилизации задаются следующим образом:
Хо — 1, Х( — Х2 — Х3 ~ о,
АХ0=1, АХ, = АХ2 = АХ3 = 0.
Система стабилизации
Система стабилизации предназначена для управления КА относительно
программного положения (программные движения и программные развороты не
совершаются).
Информация с ГИВУС поступает в модуль обработки информации ГИВУС.
Эта информация поступает в систему оценки угловой скорости (см. под-
разд. 4.5.6.1.1) и в кинематические уравнения. Затем определяется угловое рассо-
гласование и формируется аргумент управления ст,, по которому вырабатываются
управляющие воздействия на ДС (см. подразд. 4.5.6.3.2).
4.5.7.6.4 Функционирование системы управления в режиме СКР
Функционирование в режиме СКР при разгрузке ЭМИО
Модификация режима СКР-Р, задаваемая с помощью кода модификации ре-
429
жима КТ=3, задействуется для принудительной разгрузки ЭМИО в целях обеспече-
ния последующего режима ИНО минимальной величиной начального кинетического
момента ЭМИО. Принципы реализации разгрузки определены в подразд. 4.5.6.4.2.
Разгружается ЭМИО при условии, что хотя бы одна из составляющих век-
тора кинетического момента по абсолютной величине превышает порог включе-
ния разгрузки Нор (значение Нор заносится в ПЗ) путем формирования управляю-
щего сигнала на торможение ЭМИО (crpj), который приводит к уменьшению ки-
нетического момента ЭМИО. Величина этого управляющего сигнала постоянна и
задается с помощью ПАО СУОС равной <rpj- =-СР • sign(HBj), где величина
СР = С£ = 0,006 кгм (задается из ПЗУ).
Ориентировочная длительность участка tpMr, на котором формируется тор-
мозящий управляющий сигнал на ЭМИО (без учета трения и дискретности тахо-
генератора), может быть определена по следующей зависимости:
~ max(HBi)-HOp
разг" min(apj)
j = x,y,z.
Торможение разогнанных маховиков приводит к появлению возмущающе-
го момента, действующего со стороны ЭМИО на КА, что, в свою очередь, приво-
дит к необходимости периодически включать ДСБТ в целях стабилизации объек-
та относительно ПСК.
Функционирование в режиме СКР при выдаче корректирующего импульса
Модификация режима СКР-КИ (код модификации КТ =1) задействуется
для выдачи КИ в целях коррекции параметров орбиты КА.
Циклограмма режима СКР показана на рис. 4.5.38.
8.4с 61.6с । । 120с 1 120с + АУт+Диип । Т, . 1
। । । Контроль 1 [ ориентации по ] | Солнцу (приПу =0) [ 1 Контроль ориентации по информации ГИВУС । । Диагностика КП ] и ИО । । 1 1 1 1 1 1 1
Т А контр । AVt+AUm i 1 Т 1 А усп ь 1 1 1 1 >1
1 -й участок 2-й участок Допусковый контроль по ОРу, ОРс 3-й участок ।
Допусковый контроль по ОПДС
Контроль выполнения задач режима I
Рисунок 4.5.38 - Циклограмма режима СКР
430
В соответствии с решаемыми задачами весь режим состоит из трех участков:
- первый участок - участок контроля;
- второй участок - участок выдачи КИ;
- третий участок - участок успокоения.
Примечание: при Пу = 1 контроль ориентации по Солнцу не проводится, а
контроль ориентации по ГИВУС осуществляется с момента 61,6 с до
120 c+AVT+AUwn.
Первый участок. Длительность первого участка всегда неизменна и равна
120 с. Согласно ТЗ включать ДК можно только в случае, когда рассогласование
между текущим и программным положениями КА не более 3 град.
В целях выполнения этого условия в режиме СКР-КИ на участке контроля
перед выдачей КИ осуществляется контроль ориентации. Поскольку ПОС в дан-
ной СУОС не включается, можно осуществить контроль положения Солнца в по-
ле обзора ПОС. Программное положение Солнца Sn рассчитывается группой бал-
листического обеспечения вместе с кватернионами ориентации X1 и Хп. Если
Солнце не может быть в поле зрения ПОС (например, оно затенено Землей), то
одновременно определяется и признак тени (Пт = 1). Все эти параметры помеща-
ются в ПЗ.
Контроль предусматривает сравнение программного и фактического поло-
жения Солнца:
если |Sj - S?| > Ash Пт =0, то НДС = 1, иначе НДС = 0,
где S - вектор направляющих косинусов Солнца; As - порог контроля (~2 град),
параметр ПЗ.
После контроля по Солнцу (0 ...600 с) осуществляется и контроль по
ГИВУС - стабилизационный параметр у (у = у, и, ср) сравнивается с допустимым
порогом ориентации Ау:
если |у| > Ау, то НДО = 1,
иначе НДО = 0.
Допустимый порог ориентации Ау (~2 град) задается в ПЗ.
Результатом этого контроля является формирование параметров НДС и
НДО равными единице, запрещающих работу ДК. При НДС = 0 и НДО = 0 рабо-
та ДК осуществляется.
Второй участок. Этот участок, начинающийся на 120 с, имеет длитель-
ность, которая определяется величиной настройки АУт (параметр ПЗ). В дли-
тельность участка входит также и длительность импульса последействия АГГип,
принимаемая равной 1 с. Максимальная длительность работы ДК согласно ТЗ
равна 1300 с при коррекции приведения и 300 с при коррекции наклонения. Ха-
рактерной особенностью второго участка является повышенный уровень возму-
щающих моментов, значения которых для данного КА по абсолютной величине
равны:
* в канале X - не более 0,06 Нм;
- в канале Y - не более 0,32 Нм;
431
- в канале Z - не более 0,3 Нм.
Величины этих моментов определяются в основном возмущающими воз-
действиями, возникающими при работе ДК.
При отсутствии работы ДК фон возмущающих моментов содержит момен-
ты от МПЗ, от сил светового давления, от гравитационного поля Земли, негерме-
тичности клапанов ДС, суммарная величина которых по модулю равны:
- в канале X - не более 1,2-10’5 Нм;
- в канале Y - не более 23,0-10‘5 Нм;
- в канале Z - не более 7,1 • 10‘5 Нм.
Последние оказывают влияние на динамику КА на первом и третьем участ-
ках режима.
Третий участок. Участок начинается в момент времени
пр=ТК0Нтр+ДУт+Диип- Согласно ТЗ его длительность - не менее 120 с.
4.5.7.6.5 Контроль и парирование нештатных ситуаций в режиме СКР
Система бортового оперативного контроля в режиме СКР состоит из сле-
дующих видов контроля:
1) контроля ориентации по Солнцу и контроля ориентации по ГИВУС, опи-
санных выше;
2) допускового контроля, состоящего из контроля по опасной продолжитель-
ности включенного состояния ДСбт и контроля опасного рассогласования
по стабилизационному углу и угловой скорости;
3) диагностики работоспособности приборов. Работоспособность ПОС прове-
ряется только внугренней диагностикой, заложенной в блоке электроники
этого прибора. Диагностика ГИВУС и ДС осуществляется по динамической
реакции системы оценки, созданной на основе фильтра Люенбергера, по-
строенного с помощью решения дифференциальных уравнений, описы-
вающих движение КА с учётом включения ИО и измеряемой ГИВУС угло-
вой скорости КА. Если динамическая реакция системы оценки превышает
допустимый порог, то проводят тестовые включения имитационных сигна-
лов ГИВУС. Если ГИВУС исправен по результатам теста, то бракуют ДСБт,
Контроль выполнения задач режима осуществляется:
- отсутствием признаков опасной продолжительности включенного со-
стояния ДСбт и опасного рассогласования по стабилизационному углу и
угловой скорости;
- завершением процесса переключения отказавших приборов на резерв-
ные, если это имело место;
- завершением функциональных задач режима - разгрузки ЭМИО для ре-
жима СКР-Р и окончанием выдачи КИ, определяемого по истечении
времени 120 с+АУт+ДиИпДЛя СКР-КИ;
- подтверждением ожидаемых точностей ориентации и стабилизации (до-
пусковый контроль) на момент завершения режима.
Если контроль выполнения задач режима дал положительные результаты,
то формируется признак ПВЗ = 1, разрешающий переход в следующий режим
432
(осуществляется управляющей машиной - УИВК или диспетчером БЦВМ, опре-
деляющим циклограмму задействования режимов).
Нештатные ситуации парируются выдачей признака «Запрос на прерывание
режима» ЗПР - 1, который формируется при наличии признаков опасной про-
должительности включенного состояния ДСбт, или опасного рассогласования по
стабилизационному углу, или опасного рассогласования по угловой скорости.
Так как режим СКР включается редко (один раз в 6 - 9 месяцев) и не является
определяющим, то при ЗПР = 1 СУОС переводится в дежурный режим ПСО.
В режиме СКР-КИ осуществляются все виды контроля. В режиме СКР-Р в
течение всего режима проводятся все виды контроля, кроме первого.
4.5.7.7 Режим калибровки измерителей угловой скорости
4.5.7.7.1 Назначение и требования к режиму
Режим калибровки измерителей угловой скорости (режим "Калибровка-Г")
предназначен для оценки значения цены импульсов выходных сигналов ГИВУС.
Это редко задействуемый режим СУОС, он предназначен для уточнения
цены импульса (масштабного коэффициента) ГИВУС в полете. Для данного ре-
жима в программе полета отводится специальное время (обычно режим выполня-
ется в начале летных испытаний) и затем далее - по мере необходимости уточня-
ется цена импульса в процессе длительной эксплуатации КА.
В ТЗ к данному режиму предъявляются требования по точности как по по-
зиционным, так и по скоростным параметрам угловой стабилизации КА. Кроме
того, предъявляются требования по его длительности с учетом выполнения необ-
ходимых угловых маневров, набора и гашения угловой скорости в конце каждого
маневра, успокоения и проведения астроизмерений.
Требования по точности стабилизации по углу для режима ’’Калибровка-Г”
КА дистанционного зондирования Земли типа «Аркон» могут составлять
1... 1,5 угл. мин, а по угловой скорости - около 10’3 град/с.
Длительность режима "Калибровка-Г" для такого типа КА может лежать в
диапазоне 20.. .30 мин.
4.5.7.7Л Приборный состав СУОС в режиме
В режиме "Калибровка-Г" задействуются следующие командно-
измерительные приборы и исполнительные органы СУОС:
- гироскопический измеритель угловой скорости - ГИВУС;
- прецизионная астроизмерительная система - ПАИС;
- бортовой цифровой вычислительный комплекс - БЦВК;
- силовые гироскопические комплексы - СГК;
- двигатели-маховики - ДМ.
4.5.7.73 Принципы построения режима
Для получения информации, необходимой для уточнения цены импульсов
ГИВУС, проводят соответствующие динамические операции с объектом: после-
довательные развороты вокруг осей чувствительности ГИВУС и стабилизация с
уточнением углового положения КА. При этом замеряются углы поворота с по-
433
мощью ГИВУС и ПАИС.
Разворот может выполняться на угол любой величины с перенаведением
ПАИС с первой звезды на вторую. Расстояние между звездами строго фиксиро-
вано и известно по данным звездного каталога. Для обеспечения достаточной
точности целесообразно разворот выполнять на угол 2л с фиксацией ПАИС од-
ной и той же звезды в начале и в конце разворота.
Предварительная оценка цены импульсов осуществляется бортовыми алго-
ритмами. По информации, записываемой в специально отведенную зону ОЗУ на
начало и конец каждого разворота и передаваемой на Землю в составе разового
ТМ-кадра, алгоритмами НКУ уточняются значения цены импульсов ГИВУС. За-
тем уточненные значения цены импульсов ГИВУС задаются в составе полетного
задания для учета в бортовых алгоритмах обработки информации.
Таким образом, режим представляет собой набор типовых участков, каж-
дый из которых состоит из разворота и прецизионной стабилизации с астрокор-
рекцией. Развороты выполняются последовательно вокруг каждой оси чувстви-
тельности ГИВУС, т.е. осуществляются «плоские» повороты в отличие от про-
странственных в режиме ИНО. Развороты КА типа «Аркон» проводятся со скоро-
стью 0.0105 рад/с. Длительность разворота зависит от угла конечного поворота и
угловой скорости разворота и в среднем составляет около 300 с.
Каждый разворот состоит из трех участков:.
- набор программной угловой скорости;
- вращение с постоянной угловой скоростью;
- гашение программной скорости.
Длительность участков набора и гашения скорости составляет 30 с.
По окончании каждого разворота следует участок успокоения длительно-
стью около 10 с, по истечении которого начинается участок прецизионной стаби-
лизации с астрокоррекцией по информации ПАИС. После прихода из ПАИС век-
тора измерений проводится релейная коррекция- перенацеливание телеблока
ПАИС и отработка рассогласований по угловой скорости и углу КА, а затем его
стабилизация.
В качестве исполнительных органов на участке разворота используются си-
ловые гироскопы, на участке стабилизации могут применяться как СГК, так и ДМ
или совместно СГК и ДМ.
При выполнении разворота рассчитывают угол поворота у(п) по импульс-
ной информации ГИВУС:
NE(n) = N(n)+ N(n-1);
Y(n) = £Мг(п),
где в - цена импульсов ГИВУС, которую надо уточнить; N(n) - число импуль-
сов, полученное с ГИВУС за такт БЦВМ; N£(n) - суммарное число импульсов
ГИВУС.
При достижении условия у(п)«2л разворот заканчивается, происходит
стабилизация КА относительно повернутого положения и определение его ори-
434
ентации по измерениям ПАИС.
Пусть вследствие неточного знания цены импульсов 8 разворот заканчива-
ется с ошибкой бу, которая определяется показаниями ПАИС. Тогда будет спра-
ведливо уравнение
у(п) + бу = 2 л,
или
eN£ (п) + бу = 2л,
откуда следует, что искомая цена импульсов ГИВУС может быть вычислена по
формуле
2я-бу
8 “-----L.
Контроль и парирование нештатных ситуаций в режиме
При работе режиме ведется текущий автономный контроль:
- работоспособности задействованных командных приборов;
- работоспособности задействованных исполнительных органов;
- рассогласования по углам и угловым скоростям.
В случае штатного функционирования в конце режима формируется логи-
ческий признак выполнения задачи режима - ПВЗ. В случае возникновения не-
штатной ситуации формируется запрос на прерывание режима -- ЗПР с переводом
СУОС в режим построения одноосной солнечной ориентации.
В алгоритмах НКУ также ведется контроль процесса калибровки с выра-
боткой признаков контроля - Пк1 (i=l, 2, 3,...), которые соответствуют возник-
шим ситуациям, основные из них следующие:
ПК1=1 - ’’Повышенное рассогласование угловых баз”;
ПК2=1 - "Повышенное рассогласование сигнала ГИВУС и угловой базы”;
ПКЗ=1 - "Исходная информация недостоверна";
ПКФ=1 - "Цена импульса превышает пределы ТЗ”;
ПК5=1 - "Цена импульса превышает пределы ПЗ";
ПК6=1 -- "Цена импульса не соответствует бортовой оценке";
ПК7=1 - "Калибровка не проведена, произошло переключение электрони-
ки";
ПК8=1 - "Данный разворот нулевой”;
ПК91=1 - "Отказ i-ro канала ГИВУС" (i=l-4);
ПК1 Oi=l - "Отказ i-й ПАИС" (i=l-3).
Параметры полетного задания и массива уставочной информации
Для гибкого управления режимом в состав полетного задания введены сле-
дующие параметры:
- угол разворота;
- угловая скорость разворота;
- длительность участков набора и гашения скорости;
- длительность участка успокоения;
- используемые исполнительные органы;
435
- цена импульса ГИВУС в основном канале блока электроники;
- цена импульса ГИВУС в резервном канале блока электроники;
- погрешности установки ЧЭ ГИВУС.
Из управляющего информационно-вычислительного комплекса в СУОС в
составе уставочной информации поступают следующие параметры:
- угловые координаты рабочей звезды для соответствующей ПАИС;
- признак выбора ПАИС;
- начальный и конечный кватернионы для каждого разворота.
4.5.7.8 Режим тестирования динамической схемы КА
Режим тестирования динамической схемы КА предназначен для уточнения
математической модели уравнений движения КА относительно центра масс уче-
том упругих колебаний элементов конструкции. Эта математическая модель по-
зволяет с помощью математического моделирования уточнять основные пара-
метры, влияющие на динамику КА, и улучшать точностные характеристики сис-
темы управления.
Разработчик КА, обычно отвечающий за параметры динамической модели,
не всегда может определить их величины, так как в условиях земного притяжения
упругие элементы конструкции ведут себя иначе, чем в невесомости.
Для уточнения параметров, определяющих динамику КА, определён способ
проверки динамической модели изделия.
4.5.7.8.1 Требования к режиму
Режим тестирования динамической схемы (ТДС) КА является «фоновым» и
выполняется в среде любого режима, обеспечивающего трёхосную ориентацию в
ИСК.
Циклограмма режима ТДС реализует заданную последовательность, вклю-
чений ДС или СГК в целях возбуждения колебаний конструкции КА. Цикло-
грамма задействуется через время йооо (реализовалось с 1000 с) от начала режима.
Перед ТДС проводилась принудительная разгрузка СГК. Информация, необхо-
димая для анализа, выдается при непосредственной передаче ТМИ.
Вид циклограммы включений ДС или СГК уточняется отдельным согласо-
ванием. Длительность циклограммы, включения ДС без участка подготовки tiooo -
не более 700 с, включая участок восстановления ориентации и успокоения, и не
более 900 с для циклограммы включения СГК. В режиме должна быть преду-
смотрена возможность изменения скважности включений исполнительных орга-
нов и продолжительности их включений.
43.7.8.2 Приборный состав СУОС в режиме
Приборный состав, необходимый для реализации режима, - такой же, как и
в режиме ПСО-3, при этом задействуются:
- ГИВУС - гироскопический измеритель вектора угловой скорости;
- СГК - силовой гироскопический комплекс;
- ДС - двигатели стабилизации.
436
4.5.7.83 Принципы построения режима
Математическая модель КА, предложенная для тестирования в под-
разд. 2.1.8, представляет собой сложную динамическую систему, управляемую
внешними воздействиями MJcr (для СГК) и Му] (для ДС). Динамическая модель
упругого КА традиционно представлена в виде динамических уравнений движе-
ния в пространстве некоторого твердого тела, к которому присоединены упругие
осцилляторы.
Проведем предварительный анализ частотных характеристик упругого КА.
Рассмотрим уравнения движения КА. Если пренебречь величинами второго
порядка малости, а также взаимным влиянием каждого осциллятора друг на дру-
га, то эти выражения запишем так:
IJ-(bJ=ajq-q + Mj, (4.5.171)
а уравнения осцилляторов приводятся к виду:
4+1, •q+<B2q = aqj - <br (4.5.172)
Рассмотрим уравнения (4.5.171) и (4.5.172), описывающие вынужденные
колебания осциллятора. Подставив выражения (4.5.171) в (4.5.172), получим
а * а 1\4
(l_j_Js.)q + l4.q + ^q = _i. (4.5.173)
Как видно из выражения (4.5.173), характеристики каждого осциллятора
изменяются на величину коэффициента при q.
Оценим характеристики осцилляторов, описанных выражением (4.5.173),
при условии равенства нулю его правой части. Свободную составляющую реше-
ния выражения (4.5.173) запишем в виде
q = R • eot sin((Bt + а), (4.5.174)
где R - амплитуда приведенных упругих колебаний; о - приведенный декре-
мент затухания; со - приведенная круговая частота; а - фазовый сдвиг.
Величины о и о определяются соотношениями
а-----------------------------'= -,
ЭД.МЦ) (4.5.175)
4(1—5-^-)<о2-12
А I. 4
(» = J------г---------, (4.5.176)
а . а.
2(1--JU)
а величины R и а определяются из начальных условий.
Представим управляющее воздействие MjB виде произведения 8-функции
на скаляр Mj:
437
о
8 =
при t < 0;
npnt = O...O,lc;
при t< 0,1 с.
Тогда при нулевом начальном векторе состояния объекта имеем
Ij • со2
со
а = arctg—.
ст
(4.5.177)
(4.5.178)
(4.5.179)
В табл. 4.5.15 представлены характеристики приведенных осцилляторов,
определенных по выражениям (4.5.175) - (4.5.179) для одного конкретного объ-
екта (КА «Аркон»).
Из рассмотрения выражения (4.5.171) можно оценить приращение <Oj, по-
лучаемое от управляющего воздействия М j и от колебаний упругого осциллято-
ра. Для этого достаточно определить вторую производную от выражения
(4.5.174) и подставить в (4.5.171). Учитывая, что наблюдается cdJ5 то при допуще-
нии нулевых начальных условий (что и происходит в начальный момент времени
ТДС) величины приращения угловой скорости составят:
- от управляющего воздействия за каждую 0,1 с:
—dt; (4.5.180)
О
- от действия q:
if а ia * °)
R • em sm((ot + a) (4.5.181)
при t, когда sin(cnt + a) = 1.
В табл. 4.5.16 приведены сопоставительные данные величин приращения
угловой скорости от указанных выше составляющих, рассчитанных по выраже-
ниям (4.5.180) и (4.5.181).
Как видно из сопоставления данных, приведенных в табл. 4.5.16, амплитуда
свободных колебаний от воздействия осциллятора меньше, чем управляющее
воздействие, поэтому, чтобы отобразить на графиках a>j(t) составляющую от q,
необходимо максимально уменьшить влияние составляющей от М,. Это достига-
ется подачей двух управляющих воздействий подряд таким образом, чтобы каж-
дое последующее включение не снижало амплитуду свободных колебаний ос-
циллятора. Необходимость восстановления ориентации, потерянной в результате
набора угловой скорости, требует подачи еще двух управляющих воздействий,
направленных на набор и гашение угловой скорости противоположного знака.
Кроме того, необходимо обеспечить наличие незатухающих колебаний осцилля-
тора.
438
Для достижения этой цели следует определить моменты включения ИО, не
приводящие к затуханию осциллятора.
Векторное дифференциальное уравнение, описывающее колебания осцил-
лятора согласно выражению (4.5.173), можно представить в следующем виде:
при введении новых переменных:
Xj =(d/Mj -q;
x2=l/Mj-(a-q + q).
(4.5.183)
Гамильтониан H, полученный из выражения (4.5.182), представляется как
Н = l-cy-Xj -р, +со-х2 -р, — со-х, • р2 — g• х2 • р2 4-М • р2, (4.5.184)
а управление, минимизирующее гамильтониан Н запишем как
M = -signpr (4.5.185)
Дополнительные переменные pi и pi удовлетворяют векторному уравнению
р, = ст со р1
р2] LPz
(4.5.186)
а фундаментальная матрица Ф системы (4.5.186) запишется как
Ф = е*
cos cot
- sin cot
sincot
coscot
(4.5.187)
Отсюда функция p2 выражается соотношением
Pz = eat(nl -coscot + 7i2 -sincot), (4.5.188)
где т^и к2 - начальные значения дополнительных переменных.
Так как о>0, то функция (4.5.188) есть произведение возрастающей экс-
поненты на синусоиду и является сопряженной выражению (4.5.174).
Исходя из выражения (4.5.188) управление должно быть:
- кусочно-постоянным и переключаться между значениями ± М j;
- Mj не может быть постоянным более чем л/со с.
Определим полярность включения Ц. Соответствующие производные от
выражения (4.5.186) будут иметь следующий вид:
р2 = Q • е* sin(cot + ₽), (4.5.189)
где Q = TrcfTnf, р = arctg —.
Сравнение выражений (4.5.174), (4.5.178), (4.5.179) и (4.5.189) показывает
их идентичность в части частотных характеристик, поэтому для управления ос-
циллятором q достаточно наблюдать составляющую C0j, выделяя из нее состав-
ляющие q и q.
439
Учитывая, что оптимальное управление, минимизирующее гамильтониан Н
согласно выражению (4.5.184), приводит фазовые координаты в начало коорди-
нат, т.е. «успокаивает» осциллятор, а в решаемой задаче необходимо, наоборот,
максимально возбудить его, то выражение (4.5.185) следует преобразовать так:
М = sign р2.
Тогда оптимальное управление, приводящее к максимальной амплитуде
колебаний осциллятора, будет иметь вид, изображенный на рис. 4.5.39.
Рисунок 4.5.39 - Оптимальное управление,
приводящее к максимальной амплитуде
колебаний осциллятора
Описание алгоритмов теста динамической схемы
Для реализации теста динамической схемы упругого КА необходимо вы-
дать соответствующие управляющие воздействия на вход объекта управления. В
алгоритме ТДС, принятом к реализации, в качестве управляющего воздействия
формируется параметр
Cj = Mr (4.5.190)
Алгоритм ТДС реализует следующие основные действия:
1. Вводит блоком «DATA» параметры ПТОБ, t1000, tOTo6j, tTo6j, t^j, tB0CCT,
реализующие циклограмму, показанную на рис. 4.5.40.
2. Задает НУ внутренних переменных алгоритма ТДС.
3. Выдерживает паузу от начала задействования алгоритма ТДС до времени
tiooo, где должна проводиться стабилизация КА на основных ИО (реализо-
440
вано по просьбе разработчика КА). Это время может быть уменьшено до
нуля.
Рисунок 4.5.40 - Циклограмма теста динамической схемы упругого КА
4. Задействуется алгоритм, непосредственно реализующий тест динамической
схемы и выдающий Oj, кгм. При этом j принимает значение х, у, z.
Тест динамической схемы реализовался с помощью ДС (по соглашению с
разработчиком КА).
Тест динамической схемы реализуется в такой последовательности:
- тест динамической схемы в канале х;
- восстановление ориентации, реализуемое от времени tB0CCT до времени
^тобх !>
- аналогично по каналу у
- аналогично по каналу z.
Таблица 4.5.15 - Характеристики осцилляторов
i Характеристики Осциллятор
Г(П г(2) дх Р1 Чбх) 11 Гз ЧбУ) 41 Чг
R -1.376Е-4 -L1317E4 -4.76Е-7 -4.47Е-7 -1.026Е-6 -9.71Е-7 -1.696Е-7 -1.08Е-6 -3.45Е-6
(0 8.822 8.803 35.3 44.13 19.207 16.54 44.32 19.04 25.32
-0.2276 -0.1703 -2.27 -1.407 -1.014 -0.4526 -1.419 -0.9972 -0.7547
а -1°28'40" -ГОб'ЗО" -3°40'47" -Г49'3 5" -3°01'20" -1 •’34'03" -1°55'41" -2°59'54" -\°Ю2Т
441
Таблица 4.5.16 - Приращения угловой скорости от осцилляторов
Переменные Наименование каналов управления и осцилляторов
X У Z
г:2’ Р1 Г1 Гз Чбу1 qz
CD j за 0,1 с, град/с 2.94Е-4 1.096Е-4 1.153Е-4
CD jq ,град<с 221Е-4 0.23Е-4 0.065Е-4 0.062Е4 0.202Е-4 О.ОЗбЕ-4 0.012Е-4 0.192Е-4 0.0676Е-4
при t, когда sin(cot + а) - = 1, с 0.181 0.181 0.046 0.036 0.0845 0.0966 0.036 0.085 0.0632
Результаты численного моделирования
Численное моделирование теста динамической схемы осуществлялось на
универсальной ПЭВМ.
Моделирующая задача состоит из следующих математических моделей и
алгоритмов:
- математическая модель объекта управления, реализованная согласно
уравнениям, приведенным в подразд. 2.1.8; для моделирования были
приняты параметры динамической схемы КА «Аркон»;
- алгоритм теста динамической схемы;
- блок настроек;
- математическая модель СГК, реализованная в подразд. 4.5.5.3;
- математическая модель ДС, реализованная в подразд. 4.5.5.1.
Интегрирование дифференциальных уравнений движения КА относительно
ЦМ КА проводилось методом переходных матриц.
Уравнения, приведенные в подразд. 2.1.8, можно привести к виду
Су--Ау + В0, (4.5.191)
где у - (nxl) вектор состояния объекта управления; А и С - (пхп) матрицы; В -
(nxl) матрица управления и правых частей (нелинейностей).
Решение векторного уравнения (4.5.191) имеет такой вид:
y(n) = F • у(п -1) + GU(n -1), (4.5.192)
где F-(nxn) фундаментальная матрица решения системы (4.5.191). Представ-
ляет собой следующее:
F = C"1-A;
G = A 1 В.
Моделировались основные ситуации проведения теста динамической схе-
мы.
(4.5.193)
1. Номинальные настройки динамической схемы КА:
- тест в канале х (вариант 1);
442
- аналогично в канале у (вариант 4);
- аналогично в канале z (вариант 7).
2. Увеличенные на 30 % значения частот осцилляторов:
- тест в канале х (вариант 2);
- аналогично в канале у (вариант 5);
- аналогично в канале z (вариант 8).
3. Уменьшенные на 30 % значения частот осцилляторов:
- тест в канале х (вариант 3);
- аналогично в канале у (вариант 6);
- аналогично в канале z (вариант 9).
Материалы моделирования, полученные для проведения теста динамиче-
ской схемы, выявили необходимость принять следующие основные диапазоны
настроек параметров, отображенных в табл. 5.4.17.
Таблица 5.4.17 - Значения диапазонов и настроек параметров алгоритма ТДС
Наименование параметра Диапазон
^1000 0... 2000
^втобх 0 ...2
^втобу 0 ... 1
^втобг 0 ... 1
^тобх 0. .. 10
1-гобу 0 ...5
^тобх 0 ...5
^втобх 0.. .450
^втобу 0.. .450
^втобг 0.. .450
^восст 0.. .200
Типовые процессы, получаемые для анализа по результатам обработки
ТМИ, показаны на рис. 4.5.41,а-г. Данные процессы получены по результатам
проведения теста динамической схемы на 1955-м витке НИ (163-е сутки полёта)
КА «Аркон».
443
о.ое
0.06
□JM
0JJ2
0
1
0.8
0.6
0.4
0.2
О
0.18
0.15
0.12
OJM
0.06
одз
а
Рисунок 4.5.41 - Стабилизационные углы при реализации ТДС в канале X
•ТЕТАХ
•TETAZ
б
Рисунок 4.5.41 - Угловые скорости при реализации ТДС в канале X
444
:пси
0.01 1- —
0.00В i—
Mos i......
0.004 ;....
11900
0,002 r —
0JJB2 у
Рисунок 4.5.41 - Стабилизационные углы при реализации ТДС в канале Y
г
Рисунок 4.5.41 - Угловые скорости при реализации ТДС в канале Y
445
На рис. 4.5.41,а показаны стабилизационные углы при реализации ТДС в
канале X, а на рис. 4.5.41,6 - угловые скорости, полученные при реализации ТДС
в канале X.
На рис. 4.5.41,в показаны стабилизационные углы при реализации ТДС в
канале Y, а на рис. 4.5.41,г - угловые скорости, полученные при реализации ТДС
в канале Y.
Из-за сбоя управляющей машины ТДС по каналу Z проведен не был.
Включения ДС в канале X проводились:
1000,0 ... 1000,1 с - включение ДС отрицательной полярности;
1000,5 ... 1000,6 с - включение ДС положительной полярности;
1001,2 ... 1001,3 с - включение ДС положительной полярности;
1001,7 ... 1001,8 с ~ включение ДС отрицательной полярности.
Включения ДС в канале Y проводились:
1200,2 ... 1200,3 с - включение ДС отрицательной полярности;
1200,7 ... 1200,8 с - включение ДС положительной полярности;
1201,0 ... 1201,1 с - включение ДС положительной полярности;
1201,5 ... 1201,6 с - включение ДС отрицательной полярности.
Как видно из приведенных материалов, тест динамической схемы позволя-
ет идентифицировать следующие тона упругих колебаний объекта управления:
- в канале х - тон г*11;
- в канале у - тон ц;
- в канале z - тон q!.
Остальные осцилляторы имеют слишком малую амплитуду колебаний, и
для выявления их влияния с помощью теста необходимы дополнительные иссле-
дования.
4.6 Система телеметрических измерений
4.6.1 Требования к системе
Получение достоверной информации о функционировании СУ при назем-
ных испытаниях, в процессе штатной эксплуатации, а также обеспечение воз-
можности своевременного и контролируемого парирования нештатных ситуаций
на борту КА является основной задачей системы измерений.
В процессе разработки СУ КА определяется объем телеметрируемых пара-
метров, требуемые частоты их формирования с учетом ограничений, наклады-
ваемых применяемыми радиотелеметрическими системами (РТС). Так как СУ яв-
ляется одной из. систем, входящих в состав КА, в объеме информации, форми-
руемом КА, информация СУ составляет < 30 %.
Выбранный и реализованный объем ТМ параметров должен обеспечить:
- контроль отделения КА и приведения в рабочее положение его элемен-
тов конструкции после выведения на орбиту;
- контроль динамических процессов ориентации и стабилизации КА;
- контроль состояния и функционирования приборов, входящих в состав
СУ;
446
- контроль отработки заданной программы управления;
- выявление неисправностей в работе приборов и систем;
- контроль исполнения командных воздействий;
- контроль условий эксплуатации приборов СУ;
- контроль выполняемых операций при проведении испытаний КА на за-
воде-изготовителе, технической позиции.
Для выполнения этих требований система измерений должна обеспечить
получение потоков телеметрической информации с КА на всех этапах испытаний
и штатной эксплуатации. Система телеизмерений КА должна иметь возможность
собирать, хранить и ретранслировать информацию о состоянии бортовых систем
КА, собираемых в отсутствие радиовидимости НКУ.
По способу формирования телеметрическую информацию (ТМИ) СУ мож-
но разделить на датчиковую ТМИ и цифровую ТМИ. Датчиковая ТМИ формиру-
ется приборами и с использованием встроенных в аппаратуру СУ согласующих
устройств транслируется непосредственно в систему измерений.
Цифровая ТМИ формируется алгоритмами основной работы СУ и других
подсистем КА, реализованными в вычислительных устройствах подсистем КА, и
выдается в аппаратуру системы измерений в виде массивов цифровой информа-
ции (цифровых телеметрических кадров).
4.6.2. Функциональная схема системы телеметрических измерений
4.6.2Л Традиционная схема сбора телеметрической информации
Система телеизмерений космического аппарата, как и любая система теле-
контроля, состоит из двух функциональных частей: системы сбора информации и
системы ее передачи - радиотелеметрической станции (РТС).
В состав системы сбора ТМ информации входят:
- датчики;
- преобразователи;
- нормализаторы сигналов;
- телеметрические согласующие устройства, в том числе цифровой ин-
формации;
- кабельная сеть.
Система управления является одним из абонентов системы измерений в
части информационного обеспечения процессов управления КА.
Кроме того, в современных КА на систему управления возлагаются задачи
управления системой измерений. Поэтому планирование работ с КА и анализ
информации проводятся совместно для СУ и СИ.
Система опроса сигналов построена по принципу трехступенчатого коммутатора,
где 1-я ступень - основной коммутатор - шифратор (ОКШ) имеет восемь вхо-
дов;
2-я ступень - локальный коммутатор (ЛК) содержит 64 канала, каждый из
которых обеспечивает подключение одного аналогового или группы
из восьми сигнальных параметров;
447
3-я ступень - система измерения температур (СИТ) для приема 64 сигналов
термопар, термосопротивлений или амплитудных датчиков.
К одному ЛК можно подключать до трех приборов СИТ, каждый из кото-
рых занимает три канала ЛК.
4.6.2.2 Структурная схема сбора ТМИ микроспутника
Телеметрический контроль в объеме, необходимом для оценки работы бор-
товых подсистем микроспутника, организован с использованием ресурсов борто-
вого компьютера подсистемы данных платформы (БК ПДП), модуля телеметрии
(МТ) и связной подсистемы СПС (см. рис. 4.6.1).
Вся информация, в том числе и телеметрическая, циркулирует на борту в
виде цифровых информационных массивов (исходных пакетов структуры
CCSDS) [56].
Структура исходного пакета информации, в том числе и телеметрических
массивов, формируемых подсистемами КА, показана на рис. 4.6.2.
В структуре исходного пакета:
- версия - «ООО» двоичное;
- идентификатор типа информации- «О» (телеметрическое устройство
данных - все пакеты, предназначенные для выдачи в НСУ) или «1» (уст-
ройство данных телеуправления - все пакеты, пришедшие от НСУ);
- флаг вторичного заголовка - «О» (нет вторичного заголовка);
- LD прикладного процесса- идентификатор процессов, формирующих
пакеты информации;
- флаги сегмента (группирования)- «И» (самостоятельный массив ин-
формации);
- порядковый номер исходного пакета - формируется процессом;
- длина данных пакета - переменная величина (не более 2 Кб),
БК ПДП своими сетевыми ресурсами, являясь мастер-устройством в этой
сети, обеспечивает сбор и передачу пакетов ТМ в аппаратуру СПС или в МТ без
изменения их структуры и содержания заголовков. Обращение к абонентам ло-
кальной сети со стороны БК ПДП выполняется непрерывно на протяжении всего
периода функционирования БК ПДП.
На всех участках работы КА каждая подсистема формирует пакеты цифро-
вой телеметрической информации, которые по локальной сети обмена данными
поступают в БК ПДП. БК ПДП при работе в зоне радиовидимости НСУ (режим
НВ) выдает пакеты телеметрической информации в аппаратуру СПС для переда-
чи на НСУ. На участках работы КА вне зоны радиовидимости НСУ (режим ЗАП)
БК ПДП транслирует пакеты ТМИ в модуль телеметрии для запоминания в ЗУ.
Данная информация по команде с НСУ в сеансе связи по запросам БК ПДП
транслируется в аппаратуру СПС для передачи на НСУ (режим ВОСПР).
Обмен данными между подсистемами КА, в том числе и при обмене теле-
метрической информацией, осуществляется с использованием транспортного
протокола SSP [56], структура пакета данных которого показана на рис 4.6.3.
448
449
СПС - связная подсистема,
МТ - модуль телеметрии,
БУК - блок управления конфигурацией
Рисунок 4.6.1 - Схема сбора и передачи ТМИ микроспутника
Пйпвичиый яагпппппк пяката Поле данных пакета
Идентификатор пакета Управление после- довательностью пакетов Поле длины данных пакета
Версия № Иденти- фикатор типа Флаг вторич- ного за- головка ID при- кладно- го про- цесса Флаги сегмента (группи- рования ) Поряд- ковый номер исход- ного пакета Исходные данные
3 бита 1 бит О 1 1 бит байта 11 битов 2 бита 14 битов 16 битов 2 байта ~► Переменная длина
Z 1 Я Z OS
Рисунок 4.6.2 - Структура исходного пакета
FEND dest sree type data сгсО сгс 1 FEND
с<М1 Адрес назначе- ния Адрес источника Тип пакета Поле данных 16-битная проверочная последовательность cOh
1 байт 1 байт 1 байт 1 байт < 2 Кбайт 2 байта 1 байт
Байты, контролируемые с :гс ►; ►
Рисунок 4.6.3 - Структура пакета обмена данными в сети КА
Типы пакетов, которые используются при сборе, запоминании и передаче
на НСУ телеметрической информации КА, представлены в табл. 4.6.1.
Таблица 4.6.1 - Типы пакетов
Наименование паке- та Выполняемая функция (транзакция) Значение поля type
PING Опрос готовности абонентов сети к обме- ну 00h
COMMAND Передача команд управления в МТ OBh
WRITE_STREAM Передача пакетов ТМИ: - для запоминания в МТ; - в СПС для передачи на НСУ OAh
READ STREAM Запрос ТМИ у абонентов сети OBh
ACK/0 Подтверждающий ответ с данными или без данных 02h
NAK/1 Бракующий ответ 03h
Датчиковая ТМИ (сигнальная, аналоговая и температурная) поступает от
подсистем КА непосредственно на входы МТ. МТ из поступивших параметров по
450
заданной программе измерений формирует пакеты датчиковой ТМИ. В сеансе
связи (режим НВ) пакеты ДТМИ по запросу БК ПДП МТ выдает в БК ПДП для
дальнейшей трансляции в общем потоке ТМИ через аппаратуру СПС на НСУ. На
участках работы вне сеанса связи (режим ЗАП) пакеты ДТМИ вместе с пакетами
цифровой ТМИ подсистем КА запоминаются в ЗУ МТ.
В том случае, когда БК ПДП не может выполнять задачи мастера-
устройства (режим ограниченного функционирования «ОФ»), функции мастера-
устройства переходят к МТ. В этом случае МТ начинает формировать запросы,
содержащие ТМИ, и выдает их в аппаратуру СПС для передачи на НСУ. Запросы,
выдаваемые МТ, содержат как пакеты датчиковой ТМИ, сформированные в ре-
альном времени, так и цифровую и датчиковую ТМИ, считанную из запоминаю-
щего устройства МТ.
4.6.3 Аппаратура системы телеметрических измерений
4.6.3.1 Описание аппаратуры традиционной системы сбора
телеметрической информации КА
4.6.3.1.1 Радиотелеметрическая станция
Радиотелеметрическая станция (РТС) традиционно состоит из устройств:
- антенно-фидерных;
- передатчика;
- хронизатора;
- блока управления;
- коммутации сигналов.
Радийная часть РТС традиционно работает на фиксированных частотах
(двух-трех) в метровом или дециметровом диапазонах.
Крупные КА стартуют и выводятся с работающей системой управления и,
следовательно, системой измерений.
Вследствие того, что при выведении КА находится под головным обтекате-
лем ракеты-носителя, для работы передатчика используются антенны, располо-
женные на PH. После сброса ГО происходит переключение передатчика на соб-
ственные антенны КА.
Для КА ближнего космоса телеметрические антенны формируют круговую
диаграмму направленности, что обеспечивает прием наземными средствами те-
леметрической информации при любой ориентации КА на расстоянии до
100 000 км.
Для КА изучения дальнего космоса используются антенны с остронаправ-
ленной диаграммой излучения. Связь с такими КА проводится только в специ-
ально организованных режимах ориентации ОНА на Землю.
РТС представляет собой систему циклического опроса сигналов с фиксиро-
ванной суммарной информативностью. Как правило, применяются РТС, рабо-
тающие с информативностью 25600 или 3200 изм/с.
Хронизатор представляет собой высокостабильный кварцевый генератор и
линейку делителей частоты для обеспечения синхронной работы всех устройств
бортового измерительного комплекса, а также службу ведения бортового времени.
451
Для абонентов системы измерений определяющими являются:
- ИЗС - импульс запроса слова;
- ФЛК- импульс фазирования локальных коммутаторов или кадровой
синхронизации.
ФЛК определяет границы кадра, формируемого РТС, т.е. начало и конец
цикла опроса параметров.
Соответствие частот поступления синхроимпульсов режимам работы РТС
приведено в табл. 4.6.2.
Таблица 4.6.2 - Соответствие частот синхроимпульсов режимам работы РТС
Режим работы Ед.изм. ИЗС ФЛК (ИКС)
НП, ЗАП, НП+ЗАП 25600 изм/с Гц 6400 50
НП, ЗАП1, НП+ЗАП 1 3200 изм/с Гц 800 6,25
ЗАП2 400 изм/с Гц 100 0,78
В таблице приведено: НП-режим непосредственной передачи; ЗАП-
режим записи информации в бортовое ЗУ РТС; ВОСПР - режим воспроизведе-
ния информации из ЗУ.
Информация из бортового ЗУ воспроизводится с частотой 25600 бит/с.
Управление режимами работы РТС может выполняться различными спосо-
бами.
Самым простым является управление по разовым командам, поступающим
с наземного комплекса управления полетом по командной радиолинии. В этом
случае по каждой команде включается или выключается соответствующий ре-
жим.
Следующим этапом развития РТС стало комбинированное управление, ко-
гда по получении извне определенной команды сама автоматика РТС разворачи-
вает ряд типовых циклограмм последовательности режимов. Циклограммы реа-
лизуются программно-временным устройством из состава РТС или одной из
смежных систем и могут задавать режим работы на сеанс связи, виток, сутки по-
лета и более.
В современных РТС режим работы в каждый момент времени полета явля-
ется следствием совместного управления «жестких» и «гибких» программ ПВУ
самой РТС и команд управления, формируемых СУ в соответствии с полетным
заданием.
Аналогично эволюционировала и система сбора и коммутации параметров
в составе системы измерений.
Исходной была система, в которой множество контролируемых параметров
Мпар равнялось множеству опросов РТС- Мси.
452
При превышении количества контролируемых сигналов технических воз-
можностей РТС, т.е., когда Мпар > Мси, в состав системы сбора пришлось вводить
дополнительные коммутаторы входных сигналов, чтобы равенство соблюдалось.
Таким образом, на одном участке полета КА контролировалась одна сово-
купность сигналов (например, параметры двигательной установки), а на другом -
другая (например, системы астроориентации).
В современных РТС количество контролируемых сигналов может значи-
тельно превышать объем кадра РТС. При этом для каждого участка полета КА
или выполняемой задачи выбирается определенный состав ТМ параметров, про-
грамма выбора которого заранее задана и запускается по внешней команде или
полетному заданию.
Основные решения по облику РТС были приняты в 60-70-е годы, что связа-
но с бурным освоением космоса.
Появление в составе КА систем с использованием бортовых цифровых вы-
числительных машин привело к соответствующим изменениям в составе РТС -
появились запоминающие устройства, жесткие и гибкие циклограммы режимов
работы и др.
4.6.3.1.2 Телеметрические согласующие устройства
Реализация требований по нормализации сигналов и гальванической раз-
вязке осуществляется специальной аппаратурой в составе СУ - телеметрически-
ми согласующими устройствами (ТСУ).
Как правило, руководствуясь требованиями достижения минимальной мас-
сы, ТСУ выполняют как отдельные узлы (блоки) в составе приборов СУ. При
этом не требуется введение отдельных конструктивов (корпусов), обеспечивают-
ся минимальные длины линий связи от источника контролируемого сигнала до
преобразователя, одинаково решаются проблемы температурных режимов. В от-
дельных случаях в качестве ТСУ может использоваться часть штатного оборудо-
вания аппаратуры СУ. Например, одна из групп контактов электромагнитного
реле может являться датчиком сигнального параметра, в то время как другие
группы будут выполнять функциональную задачу - коммутировать управляющий
сигнал каким-либо исполнительным органом.
При проектировании ТСУ не следует забывать о жестких ограничениях не
только массы, но и энергетических характеристиках аппаратуры. Электропотреб-
ление ТСУ является нагрузкой на бортовой источник электропитания и, в конеч-
ном счете, превращается в тепло, что необходимо учитывать при расчетах тепло-
вых режимов аппаратуры СУ и КА в целом.
В качестве ТСУ сигнальных параметров в основном используют:
- контакты электромеханических либо магнитоуправляемых реле;
- оптроны;
- ударные генераторы с последующим управлением электронным ключом.
В этом случае питание генератора осуществляется самим контролируе-
мым сигналом.
453
При выборе схемы ТСУ соблюдается принцип преемственности решений
при проектировании основной аппаратуры и ТСУ - не следует применять элек-
тромагнитные устройства в электронных приборах и электронные ТСУ в релей-
но-коммутационной аппаратуре СУ.
В первом случае они являются источником дополнительных помех внутри
электронного прибора, а во втором - условия эксплуатации внутри релейных
приборов могут быть более жесткими и неприемлемыми для электронных уст-
ройств.
Кроме того, в обоих случаях установка разного вида ЭРИ на одном конст-
руктиве требует дополнительных технологических решений, что усложняет про-
цесс изготовления аппаратуры.
Важным фактором при выборе схемы ТСУ является также ток опроса со-
стояния выходного элемента со стороны РТС, который, как правило, составляет
1опр= (100 ... 300) мкА. Коммутацию токов такого порядка обеспечивают только
золоченые контакты, что и определяет тип применяемых ЭРИ и соединителей.
В качестве ТСУ аналоговых сигналов обычно используют операционные
усилители, выполненные по схеме «модулятор - усилитель - демодулятор».
Такая схема обеспечивает высокие эксплуатационные характеристики трак-
та преобразования сигнала и практически исключает влияние температурных
факторов на коэффициент передачи ТСУ.
Кроме того, при этом обеспечивается гальваническая развязка контроли-
руемого сигнала от входа РТС, а также легко выполняется требование минимиза-
ции выходного сопротивления ТСУ до уровня менее 2 кОм.
Такие ограничения определяет бортовая РТС, поскольку при этих условиях
гарантируется высокая точность преобразования и передачи сигнала.
Важным параметром аналогового ТСУ являются характеристики выходно-
го фильтра, они выбираются исходя из частоты изменения входного сигнала и
частоты опроса РТС. Выходная емкость^ должна полностью разрядиться через
внутреннее сопротивление ТСУ до прихода очередного импульса опроса. В этом
случае выходное напряжение ТСУ соответствует величине контролируемого сиг-
нала с заданной точностью.
Кроме традиционной схемы построения ТСУ могут применяться и ориги-
нальные решения. Так, для измерения величины тока в силовых фидерах исполь-
зуют трансформаторы тока для контроля потребления от источников переменно-
го тока, а для измерения постоянного тока применяют дроссели насыщения, маг-
нитное сопротивление которых пропорционально току, протекающему по сило-
вой шине, на которой размещается дроссель. Могут использоваться также датчи-
ки Холла либо другие методы измерений.
Для контроля импульсных сигналов в составе ТСУ могут применяться
счетчики, которые превращают последовательность импульсов в меандр, скваж-
ность которого определяется временем, за которое поступает определенное число
импульсов.
454
4.63.1.3 Блок согласования телеметрического кадра
Отдельный ряд задач необходимо решать при создании ТСУ цифровой ин-
формации СУ, формируемой БЦВМ. Эти устройства получили название БСТК -
блок согласования телеметрического кадра.
По своему исполнению они могут являться составной частью электронного
контейнера СУ, т.е. одним из элементов устройства ввода-вывода, либо испол-
няться в виде отдельного конструктива.
Главной задачей, решаемой БСТК, является согласование тактовых сеток
двух независимых асинхронных систем - БЦВМ СУ и СИ.
Такт решения задачи БЦВМ СУ (То) для разных КА определяется типом
применяемого БК и объемом задач, решаемых БК с заданной точностью. Наи-
большее распространение получили СУ, работающие с тактом, равным 0,1024 с,
100 мс, 50 мс, 40 мс, 33 мс и др.
Период опроса ТМ параметров БРТС в режиме НП составляет 20 мс и
160 мс, 1280 мс для режимов ЗАП1 и ЗАП2 соответственно.
Кроме того, включение СУ и СИ происходит в произвольные моменты
времени относительно тактовой сетки каждой из них.
Следующим фактором, осложняющим задачу контроля цифровой инфор-
мации, является нестабильность частот задающих генераторов БЦВМ и СИ, дос-
тигающая 110 '5 для каждой независимой системы. Для режимов длительной со-
вместной работы СУ и СИ (несколько часов, суток) взаимные уходы могут дос-
тигать существенных значений.
Следует также учитывать рассинхронизацию каналов БЦВМ (как правило,
трехканальной) при выдаче сформированного массива цифровой информации в
одноканальную БРТС.
Все эти проблемы решаются путем разнесения во времени процессов запи-
си и чтения информации.
Это достигается в БСТК путем применения двухстраничной «памяти» - в
одну страницу выполняется запись ЦИ из БЦВМ, а из другой - считывание ее в
БРТС, потом они меняются местами.
Условием переключения страниц является наличие двух признаков - конец
записи в одну и окончание считывания из другой.
Такая схема устанавливается в каждом канале БСТК, а при считывании ин-
формация мажоритируется, т.е. все временные погрешности исключаются, в том
числе и межканальные.
Кроме перечисленных задач БСТК решает и традиционные задачи - галь-
ваническую развязку боевых цепей СУ и входов СИ, а также формирование ин-
формационных сигналов обмена в соответствии с требованиями интерфейса
БРТС.
БСТК подключается к двум запараллеленным входам основного коммутатора,
чем обеспечивается потребный объем контролируемой цифровой информации БЦВМ.
В составе БСТК имеется схема управления информативностью при измене-
нии режима работы БРТС с 25600 на 3200 изм/с. Информативность БСТК изме-
455
няется либо по командам от БЦВМ, либо от собственного анализатора частоты
поступления синхроимпульсов ИКС и ИЗС от БРТС.
4.63.2 Описание аппаратуры системы измерений современного
микроспутника
4.63.2.1 Описание модуля телеметрии (МТ)
Модуль телеметрии предназначен для таких целей:
- сбора, преобразования в структуру пакетов ТМ формата CCSDS инфор-
мации от телеметрических датчиков бортовых подсистем (ДТМИ);
- приема от БК ПДП цифровой телеметрической информации (ЦТМИ)
бортовых подсистем в структуре пакетов ТМ, включая пакет с бортовым
временем;
- запоминания в ЗУ МТ пакетов ТМ с ДТМИ и ЦТМИ,
- считывания из ЗУ МТ и выдачи в БК ПДП пакетов ТМ с ЦТМИ и
ДТМИ;
- считывания из ЗУ МТ и выдачи в аппаратуру СПС пакетов ТМ с ДТМИ
и ЦТМИ при получении сигнала «ОФ».
В состав МТ входят:
- микроконтроллеры (МкК);
- коммутаторы аналоговых датчиков (КАД);
- коммутаторы температурных и потенциометрических датчиков (КТПД);
- коммутаторы сигнальных датчиков (КСД);
- блоки питания, управления и контроля;
- программное обеспечение МТ.
Структурная схема МТ изображена на рис. 4.6.4 [7].
В МТ резервируются блок питания, микроконтроллер и коммутаторы ана-
логовых, сигнальных, температурных и потенциометрических датчиков. Задейст-
вование резервных комплектов аппаратуры происходит по командам с НСУ на
основе результатов анализа работы прибора. Переключение блока питания и
микроконтроллера осуществляется также автоматически по логике работы БК
ПДП при выполнении задачи поиска рабочей конфигурации прибора в случае,
когда задействованный комплект аппаратуры становится неработоспособным.
МТ обеспечивает сбор информации от телеметрических датчиков следую-
щих типов:
- аналоговых (функциональных) датчиков;
- сигнальных датчиков типа «сухой контакт» реле;
- сигнальных (схемных) датчиков, представляющих собой оптоэлектрон-
ную пару;
- температурных датчиков;
- потенциометрических датчиков.
Модуль телеметрии обеспечивает опрос заданной группы датчиков по од-
ной из пяти программ измерений (ПИ). Результаты опроса преобразуются в паке-
ты датчиковой телеметрической информации (ДТМИ).
456
БК ПДП - бортовой компьютер
подсистемы данных
платформы;
СПС - связная подсистема
спутника;
БУК - блок управления
конфигурацией;
КПА - контрольно-проверочная
аппаратура;
ИП - источник питания;
МкК - микроконтроллер;
КТПД - коммутатор температурных
и потенциометрических
датчиков;
КАД - коммутатор аналоговых
датчиков;
КСД - коммутатор сигнальных
датчиков
Температурные и
потенциометрические
датчики
Аналоговые
датчики
Сигнальные
датчики
Рисунок 4.6.4 - Структурная схема МТ
В МТ формируются пакеты ТМ следующего назначения и содержания:
- пакеты ДТМИ, формируемые по ПИ №1, включают в себя однократный
опрос всех подключенных к МТ датчиков; ПИ №1 задействуется авто-
матически при каждом включении питания МТ и при переключении
МкК;
- пакеты ДТМИ, формируемые по ПИ №2, включают в себя параметры
подсистем, работающих в дежурном режиме КА, температурные пара-
метры элементов конструкции;
- пакеты ДТМИ, формируемые по ПИ №3, включают в себя тесты всех
каналов МТ и используются для тестирования МТ в полете и при назем-
ных испытаниях;
- пакеты ДТМИ, формируемые по ПИ №4 и ПИ №5, могут иметь изме-
няемое в процессе испытаний и полета содержание. ПИ №4 и ПИ №5
вводятся в МТ при необходимости и могут содержать информацию лю-
бого количества задействованных на борту КА датчиков;
- пакеты ДТМИ, формируемые при наличии на входе МТ сигнала «ОФ»,
включают в себя информацию регистров состояния БУК.
Задействование конкретной ПИ осуществляется:
- по командам, сформированным и выданным БК ПДП в МТ, которые
входят в состав пакета телеуправления, сформированного на НСУ;
- по командам, сформированным по логике работы БК ПДП: при работе
КА в дежурном режиме задействуется ПИ №2, при окончании дежурно-
го режима задействуется ПИ №1.
Для выдачи команд БК ПДП формирует и выдает в МТ пакет COMMAND,
в поле данных которого содержится код команды. Для повышения надежности
выполнения программы полета при получении на запрос ответа, отличного от
АСК/0, БК ПДП в следующем такте своей работы повторяет выдачу запроса
COMMAND. Выдача запроса COMMAND прекращается после его трехкратной
выдачи.
Запоминающее устройство (ЗУ) МТ предназначено для запоминания циф-
ровой и датчиковой ТМИ подсистем КА на участках полета вне зоны радиовиди-
мости с НСУ и содержит:
- основную область (ООП), состоящую:
1) из рабочей области;
2) резервной области, страницы которой используются в случае выхода из
строя страниц из рабочей области;
- две специальные области (СОП1 и СОП2) с циклическим принципом за-
писи и воспроизведения, а также с возможностью блокировки записи
информации.
МТ обеспечивает отработку следующих режимов:
- НВ - непосредственная выдача пакетов ТМ с ДТМИ в БК ПДП;
- ЗАП - прием и запоминание пакетов ТМ с ЦТМИ, формирование и за-
поминание пакетов ТМ с ДТМИ циклами из N опросов через М сек;
- ВОСПР - считывание информации из ООП МТ и выдача её в БК ПДП;
458
- ВОСПР из СОШ - считывание информации из СОП1 МТ и выдача её в
БК ПДП;
- ВОСПР из СОП2 - считывание информации из СОП2 МТ и выдача её в
БК ПДП;
- РПО - режим посекундного опроса и запоминания ДТМИ;
- прием и отработка сигнала «ОФ».
Задействование режимов работы МТ осуществляется:
- по командам, сформированным и выданным БК ПДП в МТ, которые
входят в состав пакета телеуправления, сформированного на НСУ;
- по командам, сформированным по логике работы БК ПДП: при получе-
нии команды на включение аппаратуры СПС для проведения сеанса свя-
зи БК ПДП выдает в МТ команду на задействование режима НВ, при
получении команды на выключение аппаратуры СПС по окончании се-
анса связи БК ПДП выдает в МТ команду на задействование режима
ЗАП;
- режим РПО задействуется при выдаче в МТ команды на включение или
переключение комплектов МкК.
При работе в режиме НВ МТ на каждом такте своей работы формирует
массив датчиковой информации в соответствии с задействованной программой
измерения, который по запросу READ STREAM выдается в БК ПДП для даль-
нейшей трансляции на НСУ.
При работе в режиме ЗАП вся ТМ информация, формируемая подсистема-
ми КА, запоминается в ЗУ МТ.
Объем и интенсивность изменения телеметрических параметров бортовых
систем на протяжении типовых суток существенно изменяются в зависимости от
режимов работы СУ и КА в целом. Объем рабочей области ООП МТ выбран ис-
ходя из возможности его полного воспроизведения при задействовании штатной
скорости передачи информации аппаратуры СПС за время, не превышающее 40%
длительности сеанса связи КА с НСУ. В современных КА отечественной разра-
ботки объем ООП составляет 1 ... 2 Мб.
В целях оптимизации потоков телеметрических данных, поступающих в ЗУ
МТ, в БК ПДП реализованы алгоритмы, обеспечивающие изменения коэффици-
ентов прореживания ЦТМИ (периодичность записи) в зависимости от режимов
работы СУ. Выбранные значения коэффициентов прореживания для каждого ре-
жима работы СУ должны обеспечить:
- сохранность ТМИ для всего участка полета КА (его максимальной дли-
тельности), находящегося вне зоны радиовидимости НСУ;
- возможность проведения анализа выполнения КА запланированной про-
граммы полета и функционирования аппаратуры КА.
Значения коэффициентов прореживания ТМИ для каждого режима функ-
ционирования СУ можно изменять в процессе полета КА с помощью ввода ново-
го массива полетного задания БК ПДП.
Для выявления причин нештатного функционирования подсистем КА ин-
формации, которая была записана в ООП с прореживанием, может оказаться не-
достаточно. В этом случае используется ТМИ, которая запоминается в специаль-
ных областях памяти МТ. Телеметрическая информация в специальных областях
памяти МТ запоминается без прореживания. В процессе проектирования системы
измерений определяется перечень нештатных ситуаций, которые могут возник-
нуть в процессе функционирования подсистем КА. БК ПДП на участках полета
вне сеансов связи с НСУ анализирует признаки возникновения этих нештатных
ситуаций и, в случае их возникновения, формирует и выдает в МТ команды на
блокировку записи информации в СОП. Одна из СОП блокируется только при
возникновении режима ОФ (отказ БК ПДП).
Таким образом, в СОП сохраняется полный объем ТМИ на участке, кото-
рый предшествует возникновению нештатной ситуации, что позволяет качест-
венно и с высокой степенью достоверности определить и по возможности устра-
нить причины возникновения неисправности. Объем каждой СОП составляет
256 ...512 Кб.
Выдача информации для запоминания в ЗУ МТ осуществляется при выдаче
пакета WRITESTREM, в поле данных которого содержится телеметрическая
информация, сформированная подсистемами КА в данный момент времени. При
этом в зависимости от выбранного коэффициента прореживания в пакете моди-
фицируется адрес назначения (поле dest) для организации запоминания информа-
ции во всех областях памяти МТ или только в общей области памяти.
В целях оптимизации потоков ТМИ в части датчиковой информации МТ в
режиме ЗАП формирует и запоминает как в ООП, так и в СОП пакеты ДТМИ
циклами из N раз через М с (N - количество опросов в одном цикле опроса, М -
период повторения циклов опроса).
Числа N и М - переменные, задаются пакетом телеуправления, который
формируется на НСУ и выдается БК ПДП в МТ. N может принимать значения от
О до 59, а М - от 60 до 1023. Эти числа хранятся в МТ и используются для управ-
ления временными характеристиками режима ЗАП до прихода пакета телеуправ-
ления, содержащего новые значения чисел М и N.
При поступлении в составе пакета телеуправления чисел М, N БК ПДП
формирует и выдает в МТ пакет WRITE STREAM, содержащий соответствую-
щую информацию.
Признаком ввода информации в МТ является получение ответа АСК/0.
При отсутствии ввода массива чисел в МТ по норме БК ПДП реализует по-
вторную выдачу заданного массива в следующем такте работы. При отсутствии
положительного результата по вводу соответствующего массива в течение 3 с
выдача массива в МТ прекращается.
При изготовлении МТ в каждый МкК (основной и резервный) записывают-
ся в виде константы числа N и М (например, N=5, М=60), которые используются
«по умолчанию» с момента первого исполнения команды режим ЗАП, если пред-
варительно числа N и М не были установлены.
Для получения на НСУ ТМИ, сформированной подсистемами КА на участ-
ке работы вне зоны радиовидимости, задействуется режим ВОСПР. В режиме
воспроизведения ТМИ в МТ выдаются запросы для считывания накопленной в
460
ЗУ МТ (ООП или СОП) информации. Область воспроизведения (ООП, СОП1 или
СОП2) определяется командой, сформированной НСУ. Объем считываемой в
такте работы информации определяется константой ПЗ ПДП и зависит от пропу-
скной способности (информативности) аппаратуры СПС.
ТМИ, которая содержится в заблокированной СОП, может многократно
считываться при выдаче команды НСУ. Стирание информации происходит по
отдельной команде.
Режим «ОФ» возникает при отказе БК ПДП.
При наличии на входе сигнала «ОФ» МТ выполняет:
- приостановку отработки текущего режима работы;
- блокирование СОП1;
- отключение интерфейса МТ - БК ПДП;
- выдачу запросов в БУК для получения информации о состоянии аппара-
туры КА, формирование из полученной информации пакетов CCSDS и
запоминание их в общей области памяти;
- после окончания формирования и запоминания пакетов - поиск активно-
го радиуса по интерфейсу МТ-СПС путём поочерёдной выдачи запросов
WRITE STREAM одинакового содержания до получения ответа, под-
тверждающего готовность аппаратуры СПС к приёму пакетов ТМИ.
После получения положительного ответа от включённого комплекта СПС
МТ по внутренней логике отрабатывает режимы в такой последовательности:
- воспроизводит пакеты, содержащие информацию, полученную от БУК;
- включает на 1 мин режим НВ с формированием пакетов ТМ с ДТМИ по
ПИ№1;
- после окончания режима НВ включает режим ВОСПР с выдачей пакетов
ТМИ из СОШ.
Так как получение телеметрической информации в процессе полета КА яв-
ляется важной задачей и в составе МТ имеются в наличии блоки, находящиеся в
холодном резерве, БК ПДП в процессе полета КА контролирует работоспособ-
ность МТ и в случае установления неисправности осуществляет поиск рабочей
конфигурации прибора.
Автоматический выбор рабочей конфигурации МТ осуществляется:
- при установлении связи БК ПДП с МТ при включении БК ПДП в случае
отсутствия ответов на запросы установления связи (PING), выданные БК
ПДП в МкК-0 и МкК-Р;
- при отсутствии положительного ответа на запрос на команду Режим
ЗАП, выданную в МТ при выходе из сеанса связи;
- при отсутствии ответов в течение 60 с (константа ПЗ ПДП) на запросы,
содержащие ТМИ, которую необходимо запомнить в ЗУ МТ при работе
МТ в режиме ЗАП вне сеансов связи.
Задача выбора рабочей конфигурации заключается в последовательном пе-
реключении комплектов аппаратуры (БП и МкК МТ) и выдаче запросов PING в
задействованный комплект.
В каждую конфигурацию аппаратуры с интервалом 1 с выдаются шесть за-
461
просов PING. Если БК ПДП ни на один из запросов не получил ответ от МТ, БК
ПДП формирует признак, который входит в состав ТМ кадра БК ПДП, задейству-
ет следующую конфигурацию МТ и процесс выдачи запросов PING повторяется.
При получении ответа на запрос PING БК ПДП переходит в режим выдачи
в МТ ТМИ для запоминания в ЗУ. В МТ с помощью запросов БК ПДП восста-
навливается режим запоминания ДТМИ, который предшествовал участку поиска
рабочей конфигурации.
Если в процессе переключения комплектов аппаратуры МТ ответ на запрос
PING не получен, процесс выдачи запросов повторяется для каждого из комплек-
тов аппаратуры еще дважды (всего три раза) с формированием признаков, вклю-
ченных в состав ТМК БК ПДП. После этого задача поиска конфигурации завер-
шается. Информационный обмен с МТ не проводится.
4.6.3.2.2 Описание связной подсистемы (СПС)
Аппаратура СПС совместно с антенно-фидерным устройством предназна-
чена для решения совместно с подсистемой данных платформы (ПДП) спутника
и наземной станцией управления (НСУ) задач управления, телеконтроля, обмена
пакетами траекторных измерений спутника [8].
СПС обеспечивает прием сигналов НСУ и когерентное их переизлучение
при произвольном положении спутника.
СПС обеспечивает реализацию рекомендаций CCSDS на уровнях от физи-
ческого до уровня пакетизации (декодирование корректирующих кодов и распа-
ковка транспортных структур CCSDS, сборка и разборка исходных пакетов, ор-
ганизация квитирования приема данных из радиоканала).
Процедуры обмена данными БК ПДП <-> СПС выполняются одновременно
с процедурами обмена в остальной части локальной сети КА.
Процедуры обмена данными на радиусе БК ПДП -> СПС обеспечивают не^
прерывность информационного потока на линии вниз (скорость передачи на ли-
нии вниз равна 32 Кбит/с) при объеме входного буфера СПС не менее 2 Кбайт.
При отсутствии достаточного потока данных БК ПДП -» СПС информационный
поток на линии вниз дополняется холостыми пакетами.
Интерфейс обмена данными аппаратуры СПС - ПДП обеспечивает переда-
чу командной информации, массивов данных, принимаемых по линии «вверх», а
также кадра телеметрической информации от аппаратуры СПС в ПДП, и прием
аппаратурой СПС квитанционной и телеметрической информации, массивов дан-
ных, в том числе массивов навигационных измерений для передачи по линии
«вниз».
Интерфейс команд управления обеспечивает прием от ПДП и исполнение
команд для включения, выключения и изменение скорости передачи информации
аппаратуры СПС, а также выдачу из СПС в ПДП реанимационных команд в слу-
чае отказа.
В состав аппаратуры входят два полукомплекта, каждый из которых вклю-
чает в себя:
- антенно-фидерное устройство;
462
- приемопередающее устройство, которое состоит из приемного устройст-
ва, передающего устройства и синтезатора частот с частотно-
разделительным устройством;
- блок цифровой обработки и формирования модулированных сигналов со
встроенным программно-математическим обеспечением;
- блок сопряжения с подсистемой данных платформы спутника;
- источник вторичного питания.
Аппаратура СПС работает в дежурном и сеансном режимах.
В дежурном режиме работают только приемное устройство и отдельные
устройства блока цифровой обработки и формирования модулированных сигна-
лов. Дежурный режим устанавливается по умолчанию при включении СПС. В се-
ансном режиме работают приемное и передающее устройства. Переход из де-
журного режима в сеансный выполняется автоматически после обнаружения сиг-
нала запроса без команды от ПДП путем подачи от блока цифровой обработки и
формирования модулированных сигналов через блок согласования сигнала «Вкл.
излучения» на вход управления вторичного источника питания передающего уст-
ройства.
Таким образом, фактически дежурный и сеансный режимы работы аппара-
туры являются двумя последовательными этапами процесса вхождения в радио-
связь наземной станции управления с СПС.
В бортовой аппаратуре в целях компенсации энергетического дефицита ра-
диолинии «борт-Земля» в режиме неориентированного полета также предусмот-
рена возможность изменения скорости передачи информации. По умолчанию при
включении СПС устанавливается скорость передачи информации 8 Кбит/с, а по
специальной команде осуществляется переход на скорость 32 Кбит/с. Команды
на переключение скорости передачи информации поступают в СПС из БК ПДП.
Антенно-фидерное устройство бортовой аппаратуры связной подсистемы
(СПС) должно обеспечивать прием информации, передаваемой с НСУ на борт
спутника, и передачу информации со спутника на НСУ при минимальном угле
места спутника 5 град, любом азимуте, ориентированном и неориентированном
полете спутника.
4.6.4 Принципы формирования телеметрической информации
4.6.4.1 Определение объема сигнальной и аналоговой ТМИ
Перечень телеметрических параметров любой из систем КА, в том числе и
системы управления, является результатом компромисса между пожеланиями
разработчика системы и возможностями системы измерений.
Применяемые системы измерений обладают, как правило, общей информа-
тивностью 25600 измерений в секунду, распределение которой между потребите-
лями с максимальной эффективностью и является одной из задач проектирования
аппаратуры КА.
В общем случае для анализа функционирования системы КА необходимо
иметь входную информацию и выходные сигналы, т.е. результат решения задачи.
Зная реализуемый системой алгоритм, легко можно оценить правильность функ-
463
ционирования системы. Для подтверждения исправности аппаратуры, в том чис-
ле и каналов резервирования, необходимо иметь промежуточную информацию
между входом и выходом системы.
В состав телеметрических параметров системы управления традиционно
входят сигналы, формируемые комплексом командных приборов (углы, скорости,
ускорения, смещения и пр.), сигналы, выдаваемые на исполнительные органы и
элементы (токи, напряжения, коды и др.), параметры, характеризующие состоя-
ние аппаратуры (температуры, давления, обороты и др.).
Отдельную группу параметров составляют параметры, формируемые бор-
товым компьютером. Условно их можно разделить на две группы - параметры
постоянного формирования и параметры, характеризующие выполнение текущей
задачи.
К первой группе можно отнести результаты выполнения теста основной ра-
боты, параметры, характеризующие функционирование операционной системы и
системного МО, параметры бортовой службы времени и вычислительного про-
цесса.
Ко второй группе относятся параметры решения текущих задач режима -
стабилизации, навигации, управления ДУ и др.
Принципы формирования ТМ кадра цифровой информации СУ более под-
робно будут описаны ниже.
В общем случае все телеметрические параметры СУ представляют собой
изменение значений электрических сигналов (ток, напряжение, сопротивление,
фаза, частота, изменение емкости или индуктивности и пр.).
Радиотелеметрическая станция предъявляет жесткие требования к характе-
ристикам контролируемых сигналов.
Аналоговые параметры должны формироваться в виде напряжения посто-
янного тока в диапазоне от нуля вольт до 6,2 вольта. Величина эффективного
значения напряжения пульсаций контролируемого сигнала не должна превышать
80 мВ.
Выходное сопротивление источника сигнала должно быть <2 кОм. В этом
случае гарантируется, что погрешность измерения РТС не превышает 1%, вклю-
чая весь тракт передачи и регистрации сигнала наземной аппаратуры системы
измерений.
Сигнальные параметры регистрируются как изменение выходного сопро-
тивления источника сигнала. Информационной «1» соответствует выходное со-
противление цепи не более 5 кОм, информационному «0» соответствует выход-
ное сопротивление - не менее 100 кОм.
Температурные параметры формируются термодатчиками в диапазоне со-
противлений (0 ... 140) Ом с дальнейшим преобразованием в напряжение рабочей
шкалы (0 ... 6) В.
РТС регистрирует только нормализованные сигналы, которые должны быть
гальванически развязаны от информационных цепей и цепей управления аппара-
туры СУ, а также от шин «+» и « - » бортового источника питания и «корпуса»
КА.
464
Бортовая система измерений, как правило, имеет собственный независимый
источник электропитания, что значительно повышает достоверность измеритель-
ной информации и практически исключает влияние на ее работу процессов, про-
исходящих в других системах КА, в том числе и при нештатных ситуациях.
Выполнение этих требований исключает взаимовлияние бортовых систем и
системы измерений на работу друг друга и служит обеспечению надежности
функционирования КА в целом.
4.6.4.2 Принципы формирования цифровой ТМИ СУ
Цифровая ТМИ формируется в БЦВМ алгоритмами основной работы СУ.
На этапе разработки ПАО СУ для обеспечения высокоэффективного ТМ
контроля состояния СУ и смежных подсистем КА на всех этапах испытаний реа-
лизуется следующее:
- включение в состав бортового ПАО алгоритмов, осуществляющих кон-
троль работоспособности аппаратуры с формированием соответствую-
щих признаков;
- включение в состав бортового ПАО алгоритмов, осуществляющих кон-
троль выполнения требований ТЗ по стабилизационным и навигацион-
ным параметрам с формированием соответствующих признаков;
- формирование признаков, позволяющих однозначно в любой момент
времени определить участок функционирования СУ и дать заключение о
выполнении целевой задачи участка;
- включение в состав бортового ПАО алгоритмов обработки бортовой ин-
формации для формирования разовых кадров, содержащих обобщенные
и статистические параметры, характеризующие выполнение задач режи-
ма, и кадров, содержащих ресурсные характеристики приборов, входя-
щих в систему.
Данный подход к построению ПАО КА позволяет обеспечить качественное
выполнение задач, возложенных на систему телеметрического контроля по обес-
печению контроля функционирования системы при проведении всех видов испы-
таний, выполнения легального анализа, обеспечение проведения оперативного
анализа ТМИ в целях оперативного управления КА при проведении ЛКИ и штат-
ной экспулатации.
Цифровая. ТМИ, формируемая СУ, подразделяется:
- на текущую ТМИ;
- разовые кадры «Отчет СУ»;
- разовые кадры оперативного запоминающего устройства (ОЗУ).
Текущая ТМИ формируется в каждом такте работы БЦВМ в виде кадров.
Объем ТМК определяется сложностью построения СУ, требуемыми частотами
формирования параметров и информативностью аппаратуры, которая передает
телеметрическую информацию на НСУ.
Учитывая то, что перечень задач, решаемых в одном режиме работы СУ,
отличается от перечня задач, решаемых в других режимах, перечень параметров,
входящих в состав ТМК, в режимах различен. В соответствии со сложившейся
465
практикой в состав ТМК включаются:
- маркер типа кадра;
- входная информация БЦВМ (информация, формируемая командными
приборами СУ и смежными системами);
- выходная информация БЦВМ (управляющие сигналы на исполнитель-
ные органы, информация в смежные системы);
- результаты диагностики работоспособности приборов;
- результаты теста основной работы БЦВК;
- маркировка участков режима СУ;
- параметры, подтверждающие выполнение задач режима;
- динамические параметры, подтверждающие выполнение точностных
требований, предъявляемых к СУ;
- результаты промежуточных вычислений, используемых для локализации
неисправностей в случае нештатного функционирования СУ.
Для параметров и массивов, частота формирования которых существенно
меньше частоты формирования телеметрического кадра СУ, предусматривается
последовательная выдача параметров или слов массива в одном и том же слове
(или словах) кадра с формированием и выдачей в составе кадра признаков выда-
ваемой информации. Такой подход позволяет «уплотнить» информацию, форми-
руемую СУ.
Для параметров, входящих в состав ТМК СУ, длительность сигнала с уче-
том частоты получения информации должна позволить достоверно установить
факт их формирования (это не относится к параметрам, характеризующим дина-
мические параметры ориентации и стабилизации КА).
Так как ТМ информация, характеризующая процессы функционирования
СУ на участках вне зоны видимости НСУ, запоминается на борту КА с прорежи-
ванием, то при анализе функционирования СУ используется информация разовых
кадров массива «Отчет СУ». Необходимость прореживания ТМИ вызвана огра-
ниченным объемом памяти запоминающих устройств на борту КА и ограниче-
ниями, накладываемыми на интервал времени, в течение которого в сеансе связи
осуществляется передача ТМИ, записанной в ЗУ.
Информация, входящая в состав разовых кадров «Отчет СУ», формируется
алгоритмами обработки бортовой информации (АОБИ). Задача АОБИ работает
во всех «динамических» режимах СУ. Алгоритмы формируют обобщенные пара-
метры, характеризующие работу СУ за весь режим в целом:
- значения динамических параметров на начало и конец режима и его ха-
рактерных участков;
- максимальные значения параметров, времена достижения максимальных
значений;
- математическое ожидание и дисперсия динамических параметров на ха-
рактерных участках режима;
- времена включения и выключения двигателей коррекции при проведе-
нии корректирующего импульса;
- длительности участков построения заданной ориентации КА;
466
- длительности включения двигателей управления и расход рабочего тела
на режиме и т.д.
При переходе из одного режима работы СУ в другой или по окончании ха-
рактерных участков режима информация, сформированная АОБИ данного режи-
ма, в виде кадра записывается в массив разовых кадров «Отчет СУ». Для получе-
ния информации разовых кадров на НСУ в сеансе связи с КА выдается команда
«Считывание массива «Отчет СУ». При получении данной команды формируется
и запоминается в массив «Отчет СУ» кадр ресурсных характеристик.
Кадр ресурсных характеристик содержит следующую информацию:
- суммарная длительность включенного состояния (наработка) приборов
СУ;
- суммарная длительность включенного состояния двигателей управле-
ния;
- суммарный расход рабочего тела и т.д.
После этого осуществляется последовательная выдача кадров массива «От-
чет СУ» на НСУ. Выдача каждого кадра для надежности получения информации
повторяется несколько раз. При этом выдача текущего телеметрического кадра
режима прекращается. После выдачи всего объема массива «Отчет СУ» продол-
жается выдача телеметрического кадра текущего режима функционирования СУ.
Объем массива «Отчет СУ» определяется количеством режимов, которые может
реализовать СУ в промежутке между сеансами связи с КА.
Разовые кадры ОЗУ используются:
- при проведении детального анализа функционирования ПАО БЦВК;
- при необходимости получения на НКУ массивов информации, которые
формируются в выделенных зонах ОЗУ и необходимы при проведении
исследовательских работ, носящих разовый характер.
Полный объем ОЗУ БЦВК делится на несколько зон. Выдача каждой зоны
осуществляется по команде, которая формируется на НСУ.
При поступлении команды формируются ТМ кадры, в заголовке которых
размещается маркер кадра ОЗУ и адрес ячейки ОЗУ, первой размещающейся в
ТМ кадре. Затем в кадр записывается содержимое ячеек ОЗУ, начиная с указан-
ного в заголовке адреса. Выдача сформированного кадра для надежности его по-
лучения на НСУ повторяется несколько раз (количество повторов определяется
информативностью работы РТС), а затем формируется следующий кадр, содер-
жащий очередную последовательность ячеек ОЗУ и т. д.
Процесс повторяется до выдачи всех ячеек ОЗУ, входящих в заданную зону.
Библиографический список к разделу 4
1. А. с. № 247997 СССР, МКИ2 B64G 1/20. Система ориентации космического
аппарата / Ю.А. Кузнецов, АН. Орлов, А.Н. Степанов и др. - № 3110007;
заявл. 20.03.85.
2. Алдошкин, Ю.Г. Введение в механику твердого тела. Основные понятия и
общий метод составления уравнений движения [Текст] / Ю.Г. Алдошкин. -
М.: Мир, 2003.-304 с.
467
3. Алексеев, К.Б. Экстенсивное управление ориентацией космических лета-
тельных аппаратов [Текст] / К.Б. Алексеев. - Мл Машиностроение, 1977. -
120 с.
4. Алексеев, К.Б. Управление космическими летательными аппаратами
[Текст] / К.Б. Алексеев, Г.Г. Бебенин. - Мл Машиностроение, 1974. - 340 с.
5. Алексеев, К.Б. Маневрирование космических аппаратов [Текст] /
К.Б. Алексеев, Г.Г. Бебенин, В.А. Ярошевский. - Мл Машиностроение,
1970.-416 с.
6. Анучин, О.Н. Бесплатформенные инерциальные системы навигации й ори-
ентации (БИНС и БИСО) [Текст]: учеб, пособие/ О.Н, Анучин,
Г.И. Емельянцев. - СПбл ИТМО, 1995. - 110 с.
7. Аппарат космический МС-2-8 КС5МФ4. Программа телеметрических из-
мерений КС5МФ4 94.0005.0000.0000.00.0 ДПМ. - Днепропетровск: ГП «КБ
«Южное», 2010,
8. Аппаратура АИ 820. Документ контроля интерфейсов АФКЕ.461925.002
Д08. - Хл ОАО «НИИРИ», 2008.
9. Астрономический ежегодник на 2000 г. ~ Мл Изд-во Института прикладной
астрономии РАН, 1999. - 714 с.
10. Астрономический календарь. Постоянная часть [Текст]/ под ред.
П.И. Бакулина. - Мл Физ.-мат. лит., 1962. - 772 с.
11. Космическая навигация [Текст]/ И.К. Бажинов, В.И. Алешин,
В.Н. Почукаев, В.С. Поляков. - Мл Машиностроение, 1975. - 352 с.
12,Бесекерский, В, А. Теория систем автоматического регулирования [Текст] /
В. А. Бесекерский, Е.П. Попов. - Мл Наука, 1972. - 768 с.
13 .БИТС-РБ-2. Система измерений. Техническое описание и инструкция по
эксплуатации. - Мл. НИИ КП, 1997.
14 . Бранец, В.Н. Применение кватернионов в задачах ориентации твердого те-
ла [Текст] / В.Н. Бранец, И.П. Шмыглевский. - Мл Наука, 1973. - 320 с.
15 .Бранец, В.Н. Введение в теорию бесплатформенных инерциальных навига-
ционных систем [Текст] / В.Н. Бранец, И.П. Шмыглевский. - Мл Наука,
1992.-280 с.
16 .Бухгольц, Н.Н. Основной курс теоретической механики [Текст] /
Н.Н. Бухгольц. - Мл Гостехиздат, 1945. - Ч. II. - 322 с.
17 .Бэттин, Р. Наведение в космосе [Текст] / Р. Бэтгин. - Мл Машиностроение,
1966.-448 с.
18 .Управление угловым положением ДОС при помощи двухстепенных сило-
вых гироскопов [Текст] / В.Н. Васильев и др. // Изв. АН СССР. Механика
твердого тела - 1978. - № 5.
19,Гантмахер, Ф.Р. Теория матриц [Текст] / Ф.Р. Гантмахер. - 3-е изд. - Мл
Наука, 1967. - 576 с.
20.Джашитов, В.Э. Обеспечение термоинвариантности волоконно-
оптического гироскопа [Текст] / В.Э. Джашитов, В.М. Панкратов и др. //
XVII Санкт-Петербургская междунар. конф, по интегрированным навига-
468
ционным системам: сб. материалов. - СПб.: ГНЦ РФ ЦНИИ «Электропри-
бор», 2011. - С. 15-24.
21,Дубошин, Г.Н. Небесная механика: Методы теории движения искусствен-
ных небесных тел [Текст] / Г.Н. Дубошин. - М.: Наука. Гл. ред. физ.-мат.
лит-ры, 1983. - 352 с.
2 2.Егоров, В.А. Пространственная задача достижения Луны [Текст] /
В.А. Егоров. - М.: Наука, 1965. - 224 с.
23 .Результаты исследования влияния магнитного поля Земли на погрешность
измерений волоконно-оптического гироскопа [Текст] / Ю.М. Златкин,
С.В. Олейник, Ю.А. Кузнецов и др. // Научно-техн. сб. «Космическая тех-
ника. Ракетное вооружение», посвященный 100-летию со дня рождения
академика М.К. Янгеля. - Днепропетровск: ГП «КБ «Южное», 2011. -
С. 6-11.
24 . Технология и результаты испытаний бесплатформенного астроинерциаль-
ного блока для систем управления космических аппаратов [Текст] /
Ю.М. Златкин, С.В. Олейник, Ю.А. Кузнецов и др. И XIX Санкт-
Петербургская междунар. конф, по интегрированным навигационным сис-
темам: сб. материалов. - СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2012. -
С. 211 -214.
25 .Ивандиков, А.В. Оптико-электронные приборы систем управления косми-
ческих аппаратов [Текст] / А.В. Ивандиков. - М.: Наука, 1971. - 325 с.
26 .Иванов, Н.М. Баллистика и навигация космических аппаратов [Текст] /
Н.М. Иванов, А.А. Дмитриевский, Л.Н. Лысенко. - М.: Машиностроение,
1986.-296 с.
27 .Изерман, Р. Перспективные методы контроля, обнаружения и диагностики
неисправностей и их применение [Текст] / Р. Изерман // Приборы и систе-
мы управления- 1998-№4. - С. 56-71.
28 .Ильин, В.А Оптимальные перелёты космических аппаратов [Текст] /
В.А. Ильин, Г.Е. Кузмак. - М.: Наука, 1976. - 744 с.
29 .Инженерный справочник по космической технике [Текст] / под ред.
А.В. Солодова. - 2-е изд., перераб. и доп. - М.: Воениздат, 1977. - 430 с.
ЗО .Ишлинский, А.Ю. Ориентация. Гироскопы и инерциальная навигация
[Текст] / А.Ю. Ишлинский. - М.: Наука, 1976. - 672 с.
31 . Караулов, Д.А. Об одной аппроксимации свободных вращений несиммет-
ричных твердых тел [Текст] / Д.А. Караулов, Ю.А. Кузнецов И Материалы
семинаров Секции программного обеспечения систем управления и спе-
циализированных вычислительных устройств. - X.: СУХ АР, 1991.
32 .Кислик, М.Д. Сферы влияния больших планет и Луны [Текст] /
М.Д. Кислик// Космические исследования. - Т. П. - Вып. 6.- М.: Наука,
1964.-С. 853 -858.
33 .Корн, Г. Справочник по математике для научных работников [Текст] /
Г. Корн, Т. Корн. - М.: Наука, 1970. - 720 с.
34 .Космонавтика: Энциклопедия [Текст] / под ред. В.П. Глушко. - М.: Сов.
энциклопедия, 1985. - 528 с.
469
35 .Кубасов, В.Н. Межпланетные полёты [Текст] / В.Н. Кубасов,
А.А. Дашков. -М.: Машиностроение, 1979. -271 с.
36 .Кузнецов, Ю.А. Оптимальная переориентация упругого космического ап-
парата, использующего электромеханические исполнительные органы
[Текст] / Ю.А. Кузнецов // Труды Школы-83 '’Электромеханические систе-
мы управления КА”. - М.: ИМИ АН СССР. - 1986.
37 .Применение моделей вращения для анализа погрешностей алгоритмов бес-
платформенных инерциальных систем ориентации подвижных объектов
[Текст] / Ю.А. Кузнецов, С.В. Олейник, В.А. Деменков, Ю.А. Плаксий И
XVII Санкт-Петербургская междунар. конф, по интегрированным навига-
ционным системам: сб. материалов. - СПб.: ГНЦ РФ ЦНИИ «Электропри-
бор», 2010.-С. 114-116.
38 .Кузовков, Н.Т. Непрерывные и дискретные системы управления и методы
идентификации [Текст] / Н.Т. Кузовков, С.В. Карабанов, О.С. Салычев. -
М.: Машиностроение, 1978. - 224 с.
39 .Кулик, А.С. Основы моделирования систем [Текст]: учеб, пособие. - X.:
Харьк. авиац. ин-т, 1998. - 95 с.
40 .Кулик, А.С. Отказоустойчивая ориентация и стабилизация существенно не-
симметричного космического аппарата [Текст] / А.С. Кулик,
О.И. Гавриленко, О. А. Лученко // М1жнар. наук.-техн. конф. “IKTM-
2003”. - X.: XAI, 2003. - С. 107.
41 .Кулик, А.С. Решение задачи прецизионной ориентации космического лета-
тельного аппарата [Текст] / А.С. Кулик, О.И. Гавриленко, О.А. Лученко//
Радиоэлектроника, информатика, управление. - Запорожье. - 2005. - № 2. -
С. 69-78.
42 .Лурье, А.И. Аналитическая механика [Текст] / А.И. Лурье. - М.: Физмат-
гиз, 1961. - 824 с.
43 .Основы теории полета космических аппаратов [Текст] / под ред.
Г.С. Нариманова, М.К. Тихонравова. - М.: Машиностроение, 1972. - 607 с.
44 . Отчет о научно-исследовательской работе «Разработка и реализация мето-
дики калибровки и методики моделирования нестационарных тепловых
процессов для блока датчиков угловой скорости на основе ВОГов (воло-
конно-оптических гироскопов)»/ Д.В. Бреславский, В.Б. Успенский,
И.А. Багмут и др. - X.: НТУ ”ХПИ”, 2011. - 248 с.
45 .Панов, А.П. Математические основы теории инерциальной ориентации
[Текст] / А.П. Панов. - К.: Наук, думка, 1995. - 280 с.
46 .Плаксий, Ю.А. Алгоритм определения ориентации свободно вращающего-
ся твердого тела с учетом его инерционных характеристик [Текст] /
Ю.А. Плаксий, Ю.А. Фролов. - X.: Рук. предст. ХПИ. Деп. в УкрНИИТИ,
№ 1551 Ук-84 Деп., 1984. - 10 с.
47 .Плаксий, Ю.А. Аппроксимация параметров ориентации квазимногочлена-
ми и эталонные модели [Текст] / Ю.А. Плаксий, Ю.А. Фролов. - X.: ХПИ,
1982. - 17 с. Деп. в. ВИНИТИ, № 5704-82.
470
48 .Попов, В.И. Системы ориентации и стабилизации космических аппаратов
[Текст] / В.И. Попов. - 2-е изд. - М.: Машиностроение, 1986. - 184 с.
49 .Прибор АИ511. Документ контроля интерфейсов АФКЕ.46744.035 Д08. -
X.: ОАО «НИИРИ», 2008.
5О .Разыграев, А.П. Основы управления полетом космических аппаратов и ко-
раблей [Текст] / А.П. Разыграев. - М.: Машиностроение, 1977. - 472 с.
51 .Раушенбах, Б.В. Управление ориентацией космических аппаратов [Текст] /
Б.В. Раушенбах, Е.Н. Токарь. - М.: Наука, 1974. - 600 с.
52 . Система “С1Ч-2”. Космический аппарат МС-2-8. Техническое задание. Раз-
работка подсистемы определения и управления ориентацией. Ч. 2. Техни-
ческие требования. “С1ч-2”. 12.7346.312 ТЗ ч. 2. - Днепропетровск: ГП «КБ
«Южное», 2008.
53 .Советов, Б.Я. Моделирование систем [Текст]: учебник для вузов/
Б.Я. Советов, С.А. Яковлев. - М.: Высш, шк., 1985. - 271 с.
54 . Соловьёв, Ц.П. Прогнозирование межпланетных полётов [Текст] /
Ц.П. Соловьёв, Е.В. Тарасов. - М.: Машиностроение, 1973. - 400 с.
55 . Соловьев, Ю.А Системы спутниковой навигации [Текст] / Ю.А. Соловьев. -
М.: Эко-трендз, 2000. - 267 с.
56 .Спенсер, Г. Простой последовательный протокол (SSP) [Текст] /
Г. Спенсер. - США: Университет Торонто, 2003.
57 .Справочник по космонавтике [Текст] / под ред. Н.Я. Кондратьева,
В. А. Одинцова. - М.: Воениздат, 1966. - 325 с.
58 .Справочное руководство по небесной механике и астродинамике [Текст] /
под ред. Т.Н. Дубошина. - М.: Наука, 1971. - 584 с.
59 .Стандарт IEEE спецификации формирования инструкции и тестовой про-
цедуры для одноосного волоконно-оптического гироскопа. IEEE 952-1997.
Институт инженеров электриков и электронщиков. Нью-Йорк, США.
60 .СТП 523.2-444-2012. Стандарт предприятия. Математическая модель кос-
мического аппарата как объекта управления (включая командные приборы
и исполнительные органы). Порядок разработки и использования. - X.:
НПП Хартрон-Аркос, 2012. - 23 с.
61 .СТП 523.2-509-2012. Стандарт предприятия. Система управления качест-
вом. Математическая модель регулятора системы управления космического
аппарата. Порядок разработки и использование. - X.: НПП Хартрон-Аркос,
2012.-17 с.
62 . Технический отчет. Основные принципы построения системы наведения в
режиме РЖ03 СУ изделия 77КС. - X.: НПП Хартрон-Аркос, 1989. - 198 с.
63 .Основы теории полета и элементы проектирования искусственных спутни-
ков Земли [Текст] / М.К. Тихонравов, И.М. Яцунский, Г.Ю. Максимов и
др.: под ред. М.К. Тихонравова. - М.: Машиностроение, 1967. - 296 с.
64 . Токарь, Е.Н. Критерий настройки гиросиловых систем [Текст] /
Е.Н. Токарь// Космические исследования. АН СССР. - М.: Наука.-
Т. XVIII. - Вып. 3, май - июнь 1980.
471
65 .Успенский, В.Б. Теоретические основы гиросилового управления ориента-
цией космического летательного аппарата [Текст]: моногр. /
В.Б. Успенский. - X.: НТУ ”ХПИ”, 2006. - 328 с.
66 .Федосеев, В.И. Оптико-электронные приборы ориентации и навигации
космических аппаратов [Текст]: учеб. пособие/ В.И. Федосеев,
М.П. Колосов. - М.: Логос, 2007. - 248 с.
67 .Фролов, Ю.А. Аппроксимирующие модели вращения в параметрах Родри-
га-Гамильтона [Текст] / Ю.А. Фролов, Л.В. Шипулина. - X.: ХПИ, 1982. -
11 с. Деп. в. ВИНИТИ, № 3398-82.
68 .Шереметьев, А.Г. Волоконный оптический гироскоп [Текст] /
А.Г. Шереметьев. - ML: Радио и связь, 1987. - 152 с.
69 .Шипулина, Л.В. Синтез инерционного разворота осесимметричного объек-
та [Текст] / Л.В. Шипулина, Н.В. Середа, С.А. Рыльцева // Вестник ХПИ.
Техн, кибернетика и ее приложения, - X.: ХПИ, 1988.- Вып. 8 (252).-
С. 21-25.
70 . Экспериментальная отработка систем управления объектов ракетно-
космической техники [Текст]: учеб, пособие / под общ. ред. Ю.М. Златкина,
В.С. Кривцова, А.С. Кулика и др. - X.: Нац. аэрокосм, ун-т «Харьк. авиац.
ин-т», НПП Хартрон-Аркос, 2008. - 501 с.
71 ,Эльясберг, П.Е. Введение в теорию полёта искусственных спутников Земли
[Текст] / П.Е. Эльясберг. - Мл Наука, 1965. - 540 с.
72 .Kuznetsov, Y.A. Quasi-optimal control of Orbital Transport Spacecraft attitude
maneuvers [Text] / Y.A. Kuznetsov, V.N. Konovalov // Proceeding of Fourth
Ukraine-Russia-China Symposium on Space Science and Technology. - Kiev:
NTUU “KPI”. - 1996. - Vol. 1. - P. 450-451.
73 .11Ф77. Система управления. Прибор 11M831-7. Техническое описание. -
Запорожье: НПП Хартрон-Юком, 1977.
74 .11Ф77. Система управления. Прибор 11М831-8М. Техническое описание. -
Запорожье: НПП Хартрон-Юком, 1977.
75 .Эскизный проект. Пояснительная записка. Ч. 2. Кн. 3. Бортовая аппаратура
потребителя информации от спутниковых навигационных систем ”Рось-1”
ПЗ 2.3. ОАО "АО НИИРИ". - X., 2002. - 720 с
472
5 ПРОЕКТИРОВАНИЕ ПОДСИСТЕМ СУ ТРАНСПОРТНЫХ
МОДУЛЕЙ (ТМ) ОРБИТАЛЬНЫХ СТАНЦИЙ
5.1 Требования технического задания к разработке СУ ТМ
Система управления транспортного модуля предназначена для управления
движением:
- при старте и выведении ТМ на орбиту;
- центра масс и вокруг центра масс ТМ;
- при поиске, сближении и причаливании к кооперируемому объекту;
- при уводе от кооперируемого объекта.
Далее более детально рассмотрим основные технические требования СУ
ТМ, а именно тактико-технические требования к образцу (СУ ТМ) относительно
состава и требований по назначению.
При составлении типового перечня тактико-технических требований к СУ
ТМ, касающихся состава СУ ТМ, и требований по назначению авторы руково-
дствовались требованиями к разработке СУ изделий серий 77КС и 77КМ, спроек-
тированных НПП Хартрон-Аркос и успешно выполнявших при пуске и на орбите
все функции по управлению движением ТМ, что подтверждено результатами лет-
ных испытаний этих изделий.
Система управления транспортного модуля "Заря" (изделие серии 77КМ)
для МКС "Альфа" разрабатывалась НПП Хартрон-Аркос на основе базовой сис-
темы управления транспортных модулей серии 77КС для космической станции
"Мир" (СУ ТМ "Квант-2", "Кристалл", "Спектр", "Природа" - также разработка
ШШ Хартрон-Аркос).
Проанализировав задачи, возлагаемые на СУ ТМ и обобщив ТЗ, приведем
типовой перечень тактико-технических требований к ней в части состава и требо-
ваний по назначению.
5.1.1 Состав СУ ТМ
В соответствии с ТЗ в состав СУ ТМ должны входить:
- бортовые приборы;
- бортовая кабельная сеть, как соединяющая приборы СУ, так и подклю-
чающая СУ к смежным системам (по согласованной принадлежности в
части смежных систем), в том числе и к агрегатам ДУ и ПЭ;
- наземное оборудование, обеспечивающее все виды наземных проверок
СУ;
- наземная кабельная сеть;
- ЗИП бортовой и наземной аппаратуры;
- программно-математическое обеспечение, необходимое для основной
работы, наземных проверок и обработки телеметрической информации
СУ при проверках;
- эксплуатационная документация на систему.
473
5.1.2 Требования к назначению СУ ТМ
Система управления должна выполнять следующие функции:
- обеспечение предстартовой подготовки с выдачей сигнала стартовой го-
товности аппаратуры СУ. Сигнал стартовой готовности должен выда-
ваться с учетом сигналов готовности подсистем АДУ, АПС.
- обеспечение задействования аппаратуры СУ, сброс обтекателя, подго-
товка к работе ДУ на участке выведения. Расчековка механизмов антенн
и механизмов панелей солнечных батарей на орбитальном участке. На
время раскрытия СБ работа ДПС увязывается с требованием по демпфи-
рованию угловых скоростей (в соответствии с циклограммой работы из-
делия в части задействования ДПС и ДТС на участке раскрытия вынос-
ных элементов и СБ, установленных на ТМ);
- включение и выключение СУ в полете по полетному заданию, по внеш-
ним командам или по гибкой метке. Использование режима задейство-
вания гибкой метки определяется отдельным решением;
- ввод и коррекция полетного задания как по ПЗ, так и по внешней коман-
де;
- управление элементами смежных систем изделия: ДУ, пиротехники на
всех участках полета до стыковки с базовым модулем (космической
станцией). Номенклатура, размещение и требования по задействованию
ИО и ИЭ приводятся разработчиком ТМ в ИД;
- обеспечение функционального контроля работоспособности аппаратуры
системы управления, двигателей ДКС и ДМТ (ДПС, ДТС) в полете с ав-
томатическим парированием последствий отказов (прекращение выпол-
нения СУ задач текущего режима) и переходом в режим выключения.
Возможность обеспечения контроля, диагностики и парирования отказов
других бортовых систем (по алгоритмам разработчика ТМ) определяется допол-
нительно:
- обеспечение возможности изменения по полетному заданию или масси-
вом изменения программ (МИП) длительности построения заданной
ориентации, выборки двигателей и выполнения заданных угловых ма-
невров для выбора оптимального режима управления как по быстродей-
ствию, так и по расходу рабочего тела, а также изменения точностных
характеристик системы;
- обеспечение сбора и упаковки ТМИ СУ. Формирование обобщенных па-
раметров состояния СУ, передача обобщенных параметров и результа-
тов предварительной обработки в систему РТС;
СУ должна обеспечивать выполнение своих функций при полете ТМ на ор-
битах с параметрами:
- опорная орбита (высота 185 ... 350 км);
- монтажная орбита (высота - 350 ... 410 км);
- рабочая орбита (высота - 370 ... 460 км).
СУ должна управлять движением центра масс и вокруг центра масс ТМ:
474
- при решении задач:
• ориентации связанных осей ТМ в базовых системах координат (БСК):
инерциальной (ИСК), орбитальной (ОСК) и развернутой на 180 град
по курсу ОСК (РОСК);
• ориентации связанных осей изделия в любом требуемом направлении
относительно базовой системы координат для выполнения:
а) программных разворотов связанных осей изделия относительно
БСК в любое направление, которое задается ПЗ;
б) закруток и дозакруток изделия до программного значения абсо-
лютной угловой скорости, заданной по ПЗ относительно двух
осей ОХ и OY или ОХ и OZ, или относительно любой одной
оси ОХ или OY, или OZ связанной с изделием системы коорди-
нат из любого ориентированного или неориентированного по-
ложения;
• поддержания ориентации связанных осей изделия в БСК. Продолжи-
тельность ориентации задается полетным заданием;
• демпфирования угловых скоростей ТМ;
• определения угловых скоростей вращения изделия относительно свя-
занных осей в отсутствии включения исполнительных органов (инди-
кационный режим);
- при выдаче корректирующего импульса в любом требуемом направле-
нии относительно построенной БСК как двигателями ДКС, так и двига-
телями ДПС (переднего и заднего поясов, создающими тягу по продоль-
ной оси ТМ) в целях коррекции орбиты ТМ;
- при выполнении следующих маневров:
• поиск кооперируемого объекта в пространстве;
• сближение с кооперируемым объектом;
• зависание на заданном по полетному заданию расстоянии от коопе-
рируемого объекта;
• облет кооперируемого объекта (при необходимости);
• зависание на заданном по полетному заданию расстоянии от коопе-
рируемого объекта (в случае выполнения облета);
• причаливание к кооперируемому объекту или "связке" объектов;
• увод от кооперируемого объекта или "связке" объектов,
при этом СУ должна обеспечивать:
а) ориентацию продольной оси ТМ вдоль линии визирования с
точностью ± 3 град по информации об углах пеленга от измери-
тельной системы при угловой скорости линии визирования до
0,5 град/с в процессе поиска кооперируемого объекта;
б) выполнение требований по кинематическим параметрам на мо-
мент механического контакта ТМ и базового модуля в составе
космической станции (КС);
475
в) прекращение сближения с реализацией увода в целях предот-
вращения столкновения объектов в соответствии с принятым
для СУ ТМ составом программных ситуаций;
г) прекращение при определенных условиях и на определенных
этапах сближения и реализация зависания в диапазоне дально-
стей 100 ... 500 м до момента прекращения зависания, опреде-
ляемого полетным заданием или радиокомандой (РК);
д) реализацию импульсов “дожатия” по сигналу “Касание 1” и
“увода” по сигналу “Промах”. Циклограммы реализации им-
пульсов “дожатия” и “увода” согласовываются дополнительно.
Система управления должна:
- строиться на базе унифицированного бортового цифрового вычисли-
тельного комплекса (БЦВК) с соответствующим программно-
математическим обеспечением для выполнения гибкости управления,
повышения живучести и автономности работы системы;
- осуществлять управление работой системы по полетному заданию, ко-
торое определяет последовательность выполнения задач и содержит не-
обходимую информацию для их реализации (состав параметров ПЗ, фор-
мат представляемых параметров ПЗ в разрядной сетке БЦВМ определя-
ются инструкцией по расчету ПЗ);
- иметь количество задаваемых в полетном задании одинаковых режимов,
следующих непрерывно один за другим, и общее количество режимов,
задаваемых полетным заданием, которое определяется на этапе техниче-
ского проектирования, исходя из ресурса приборов и максимальной про-
должительности непрерывной работы каждого прибора;
- осуществлять ввод ПЗ по командной радиолинии (КРЛ). ПЗ должно хра-
ниться в запоминающем устройстве БЦВК СУ. Ввод ПЗ в полете возмо-
жен при включенной СУ. При выключенном состоянии СУ для ввода ПЗ
необходимо включить БЦВК по разовой команде КРЛ или по гибкой
метке;
- обеспечивать работы аналогично работам, проводимым с ПЗ (ввод ПЗ,
контроль ПЗ и т.д.), и с МИП системы динамической коррекции про-
грамм при всех видах испытаний, включая полет;
- строиться на базе унифицированного БЦВК (СУ изделий серии 77КС и
77КМ), позволяющего наращивать число подсистем и устройств ввода-
вывода подключением дополнительных приборов и обеспечивающего
возможность изменения и наращивания задач, возлагаемых на СУ. При
этом разработчик ТМ обеспечивает размещение на изделии дополни-
тельной аппаратуры СУ и её БКС (при необходимости);
- обеспечивать реализацию жестких программ, необходимых для работы
системы управления, в БЦВК последовательно во времени и не более
одной программы одновременно;
476
- обеспечивать проведение тестов особо важных режимов: сближения,
выдачи корректирующих импульсов и др. в согласованном с разработ-
чиком ТМ объёме:
- обеспечивать учет количества включений и суммарного времени работы:
• каждого двигателя малой тяги на всех этапах работы, включая ОР;
• приборов СУ на этапах эксплуатации: стенд-электроаналог, КИС, П2
и при ОР.
СУ должна взаимодействовать со следующими смежными системами
транспортного модуля:
- системой управления бортовым комплексом (СУБК);.
- командно-измерительной системой (КИС);
- измерительной системой стыковки “Курс-A” (система измерения пара-
метров относительного движения (СИНОД));
- двигательной установкой и пиросредствами изделия;
- системой электроснабжения по обеспечению питания приборов (СЭС);
- системой телеметрического контроля (РТС);
- аппаратурой телеоператорного режима управления (аппаратура ТОРУ).
5.2 Структурная и функциональная схемы СУ ТМ
Для выполнения задач, поставленных в ТЗ на СУ, СУ ТМ, необходим опре-
деленный набор бортовой аппаратуры (приборов), с помощью которого должно
реализоваться автоматическое управление движением ТМ.
Приборный состав и подсистемы СУ ТМ показаны на рис. 5.2.1.
Функционально СУ ТМ подразделяют на следующие подсистемы:
- навигации;
- наведения;
- ориентации и управления движением;
- управления ДУ;
- управления пиросредствами;
- распределения питания и коммутирующих устройств;
- сбора и упаковки ТМИ.
Структурная схема СУ ТМ показана на рис. 5.2.2, а функциональная схема
СУ ТМ-на рис. 5.2.3.
При более детальной декомпозиции функционального состава СУ ТМ на
функциональные подсистемы как группы функционально связанных приборов,
выполняющих одну задачу, можно составить типовой перечень функциональных
подсистем СУ ТМ, который приведен в табл. 5.2.1.
477
СМЕЖНЫЕ СИСТЕМЫ
ТРАНСПОРТНОГО МОДУЛЯ
1 |’Система управления ।
--------1 бортовым комплексом_’
«_(СУБК) I
2 1 Командно-измеритель- I
| мая система (КИС) ।
I Система измерения па- |
j раметров относитепь- .
него движения (система *
I стыковки “Курс-A") |
I Система энергоснабже- |
| ния (СЭС) ।
5____’ Радиотелеметрическая 1
| система (РТС)
6___Двигательная установ-
I ка (ДУ)
---------- Малые двигатели (МД) |
------! Пирозлементы (ПЭ) I
9 |Т
I Аппаратура телеопера- |
.. | торного режима управ- .
I пения (ТОРУ) •
Ю I Аппаратура потребите- |
-----1 ля спутниковой навита-
* ционной системы *
I (АПСНС) |
Рисунок 5.2.1 - Приборный состав и подсистемы СУ ТМ
478
479
Рисунок - 5.2,2. Структурная схема СУ ТМ
480
Рисунок 5.2.3 - Функциональная схема СУ ТМ
Таблица 5.2.1 - Типовой перечень функциональных подсистем СУ ТМ
№ п/п Наименование подсистемы Функциональная задача подсис- темы
1 Подсистема контроля сты- ковки бортовых разъемов СУ Обеспечение электрического кон- троля правильности стыковки разъемов СУ в соответствии со схемой общей СУ
2 Подсистема контроля и при- ведения в исходное состоя- ние приборов СУ Формирование команд управле- ния по приведению в исходное состояние аппаратуры СУ, кон- троль исходного состояния и пе- редача сигналов об его наличии в КПА
3 Подсистема включения и от- ключения БЦВК Распределение команд управле- ния по включению и отключению ЦВК СУ, поступающих от КПА, СУБК и КИС
4 Подсистема электропитания бортовой аппаратуры и со- пряжения СУ с СЭС Распределение, включение, от- ключение цепей питания прибо- ров-потребителей СУ по коман- дам из ЦВК и БРП, а также прием команд из СУБК на отключение приборов по ОЦВК
5 Подсистема БЦВК Выполнение вычислительных и программно-управляющих функ- ций в составе СУ
6 Подсистема связи СУ с аппа- ратурой СУБК Организация обмена информаци- ей с аппаратурой СУБК по циф- ровому каналу связи и по линиям передачи релейных команд
7 Подсистема связи СУ с аппа- ратурой командной радиоли- нии (командно- измерительного комплекса - КИС) Организация обмена информаци- ей с аппаратурой командной ра- диолинии по цифровым каналам связи и по линиям передачи ре- лейных команд
481
Продолжение табл. 5.2.1
№ п/п Наименование подсистемы Функциональная задача подсис- темы
8 Подсистема связи СУ с аппа- ратурой СИПОД - с систе- мой «Курс-А» Организация обмена цифровой информацией с аппаратурой «Курс-A», предназначенной для автономного измерения парамет- ров относительного движения двух космических объектов при их сближении (удалении) до тре- буемых расстояний перед меха- ническим контактом
9 Подсистема связи СУ с аппа- ратурой ТОРУ Организация обмена информаци- ей с аппаратурой ТОРУ, предна- значенной для реализации авто- матизированного (ручного) ре- жима причаливания при невоз- можности стыковки в автомати- ческом режиме
10 Подсистема комплекса командных приборов
10.1 подсистема измерения угло- вых скоростей формирование цифровых управ- ляющих сигналов "+Х", "-Х", "+Y", "-Y", "+Z", "-Z", соответст- вующих измеренным проекциям вектора угловой скорости ТМ на оси OX, OY, OZ, связанной с из- делием (ТМ) системы координат
10.2 подсистема измерения ли- нейных ускорений измерение в месте установки прибора проекции ускорения объекта на ось ОХ связанной сис- темы координат при работе кор- ректирующей двигательной уста- новки и выдачи в СУ объекта ин- формации о приращении кажу- щейся скорости в направлении указанной оси
10.3 подсистема измерения коор- динат Земли выработка и выдача в подсистему БЦВК информации об угловом отклонении объекта от местной геоцентрической вертикали (МВ)
482
Окончание табл. 5.2.1
№ п/п Наименование подсистемы Функциональная задача подсис- темы
10.4 подсистема астроизмери- тельной системы определение параметров ориен- тации осей приборной системы координат (ПрСК) относительно инерциальной (второй экватори- альной) системы координат (ИСК)
11 Подсистема управления ра- ботой АДУ Обеспечение управления ИО АДУ
12 Подсистема управления ра- ботой пироэлементов Обеспечение управления пиро- элементами ТМ по командам СУ ТМ в порядке и последовательно- сти, определенной циклограммой
13 Подсистема сбора телемет- рической информации Обеспечение сопряжения с бор- товой РТС тремя видами инфор- мации: цифровой (телеметрический кадр); сигнальной; аналоговой
14 Подсистема связи БЦВК и НЦВК Обеспечение взаимодействия бортового и наземного ЦВК С У ТМ
5.3 Система автономной навигации транспортных модулей
5.3.1 Требования к системе навигации
Система автономной навигации транспортных модулей (САН ТМ) является
одной из разновидностей системы навигации околоземных КА, траектории дви-
жения которых расположены на высотах от 250 до 600 км относительно поверх-
ности Земли.
САН определяет кинематические параметры движения центра масс ТМ.
САН должна обеспечивать автономное определение на борту ТМ следующих на-
вигационных параметров:
- положения центра масс ТМ в ГСК на участках построения точной ори-
ентации (период обновления информации - 1 с) с точностью не хуже
50 м;
- положения центра масс ТМ в требуемые моменты времени на интервале
времени 1200 с без учёта погрешности задания начальных значений па-
раметров движения центра масс (ПДЦМ) КА с точностью не хуже 300 м.
Формируемые САН параметры используют на борту ТМ для расчёта алго-
ритмами СОНИ, приведенными в подразд. 4.1, следующей баллистико-
483
навигационной информации:
- ПДЦМ ТМ в требуемой системе координат;
- направляющих косинусов Солнца, Луны и Земли, признаков нахождения
ТМ в тени Луны и Земли для СУОС;
- нормированной гелиоцентрической скорости ТМ для АИС;
- направляющих косинусов положения ТМ относительно НППИ и вектора
угловой скорости линии визирования «ТМ - НППИ» для приводов наве-
дения антенн.
Функциональная схема информационного взаимодействия САН ТМ со
смежными подсистемами показана на рис. 4.2.1. Требуемая точность расчёта ука-
занной баллистико-навигационной информации и соответствующая ей точность
формирования вектора состояния центра масс ТМ представлены в табл. 4.2.1.
Для автономного определения на борту ТМ вектора состояния центра масс
ТМ задача навигации решается с использованием АП СРНС GPS (максимальная
погрешность АП СРНС в ГСК по координатам - 45 м, по проекциям вектора ско-
рости - 0,5 м/с). САН должна обеспечивать требуемые точности определения на-
вигационных параметров в следующих условиях функционирования:
- АЛ СРНС GPS включается с периодом 12000 с для обновления
ПДЦМ ТМ в САН или на участках неограниченной длительности, где
необходимо обеспечить точную ориентацию ТМ;
- на участках функционирования АП СРНС возможны кратковременные
интервалы (периоды) отсутствия информации от АП СРНС длительно-
стью до 30 с;
- АП СРНС может выдавать недостоверную информацию о векторе со-
стояния ТМ.
5.3.2 Принципы построения системы автономной навигации
транспортных модулей
Принципы построения САН ТМ аналогичны принципам построения систем
навигации околоземных КА, изложенных в подразд. 4.2. На большинстве участ-
ков полёта, где не требуется высокая точность определения ПДЦМ ТМ, задача
навигации решается путём прогнозирования вектора состояния центра масс по
последней достоверной навигационной информации, сформированной в сеансе
функционирования АП СРНС. Для прогнозирования ПДЦМ используют комби-
нированный метод формирования вектора состояния ТМ. В этом случае числен-
ное интегрирование системы дифференциальных уравнений движения центра
масс ТМ в ГСК (2.1.84) проводят методом Рунге-Кутта 4-го порядка с шагом 20 с,
а для его определения с шагом прогнозирования, равным 1 с, применяют поли-
номиальную экстраполяцию ПДЦМ ТМ полиномом второго порядка. Эта поли-
номиальная зависимость представлена в подразд. 4.1.4.1.
Шаг прогнозирования и порядок полиномиальной функции выбраны из со-
ображений обеспечения требуемой точности вычисления ПДЦМ ТМ.
Высокоточное определение ПДЦМ ТМ осуществляется САН с использова-
нием навигационной информации, принимаемой от АП СРНС GPS. На борту ТМ
484
проводят:
- контроль достоверности и отбраковку недостоверной навигационной
информации, принимаемой от АП СРНС;
- уточнение параметров движения центра масс ТМ по результатам изме-
рений АП СРНС GPS;
- прогнозирование вектора состояния центра масс ТМ по достоверной на-
вигационной информации АП СРНС на требуемые моменты времени.
5.3.3 Алгоритмическое обеспечение системы навигации транспортных
модулей
Алгоритмы САН ТМ функционально объединены в две задачи:
- прогнозирования ПДЦМ ТМ;
- уточнения ПДЦМ ТМ по результатам измерений.
Перечни алгоритмов задач прогнозирования и уточнения ПДЦМ ТМ пред-
ставлены в табл. 5.3.1 и 5.3.2 соответственно.
Таблица 5.3.1 - Перечень алгоритмов задачи прогнозирования ПДЦМ ТМ
Наименование алгоритма Функциональное назначение алгоритма
Алгоритм диспетчеризации зада- чи прогнозирования ПДЦМ ТМ Реализация логической последовательности подключения алгоритмов интегрирования системы дифференциальных уравнений движения центра масс ТМ методом Рунге- Кутта 4-го порядка
Алгоритм расчёта правых частей системы дифференциальных уравнений движения центра масс ТМ Реализация логической последовательности подключения алгоритмов расчёта состав- ляющих полного ускорения ТМ
Алгоритм расчёта ускорения, создаваемого гравитационным полем Земли Расчёт вектора ускорения, создаваемого гармониками гравитационного поля Земли до четвёртого порядка включительно
Алгоритм расчёта ускорения, обусловленного аэродинамиче- ским сопротивлением атмосферы Земли Расчёт плотности атмосферы по её статиче- ской модели. Вычисление ускорения, обу- словленного аэродинамическим сопротив- лением атмосферы Земли
Алгоритм экстраполяции ПДЦМ ТК полиномом второго порядка Вычисление параметров движения центра масс ТК с шагом 1 с
485
Таблица 5.3.2 - Перечень алгоритмов задачи уточнения ПДЦМ ТМ
Наименование алгоритма Функциональное назначение алгоритма
Алгоритм диспетчериза- ции задачи уточнения ПДЦМТМ Реализация логической последовательности под- ключения алгоритмов задачи
Алгоритм функциональ- ного включения и выклю- чения АП СРНС Организация периодического включения и вы- ключения приёмника АП СРНС
Алгоритм отбраковки не- достоверной измеритель- ной информации АП СРНС Вычисление расчётного значения измеряемых па- раметров приёмника АП СРНС на момент прове- дения измерений. Контроль достоверности изме- рительной информации
Алгоритм статической обработки навигационной информации АП СРНС Уточнение ПДЦМ ТМ по достоверной измери- тельной информации приёмника АП СРНС
5.3.4 Оценка степени влияния различных возмущающих факторов на
точность прогнозирования параметров движения центра масс
транспортных модулей
Оценка степени влияния различных возмущающих факторов на точность
прогнозирования ПДЦМ ТМ, а также исследование характера изменения по-
грешности прогнозирования в зависимости от длительности интервала прогноза
проводятся по результатам математического моделирования движения центра
масс ТМ.
При математическом моделировании исследовали влияние на точность оп-
ределения ПДЦМ ТМ возмущающих ускорений гравитационного поля Земли до
четвертого порядка включительно.
Математическое моделирование навигационной задачи выполняли на двух
интервалах времени - 20 и 12000 с. Оценка точностных характеристик алгорит-
мов осуществлялась путём сравнения результатов моделирования с эталонными
результатами в контрольных точках. Контрольные точки задавались на первом
интервале моделирования с шагом 1 с, на втором - с шагом 20 с.
Моделирование эталонной орбиты движения ТМ осуществлялось путём
интегрирования системы дифференциальных уравнений движения КА (2.1.83)
методом Рунге-Кутта четвертого порядка с шагом 1 с. В правых частях уравнений
учитывались возмущающие ускорения гравитационного поля Земли до 16-го по-
рядка включительно, центробежное и кориолисово ускорения. Для оценки точно-
сти определения ПДЦМ ТМ в состав учитываемых возмущений включалось ог-
раниченное количество возмущающих ускорений.
В первом варианте в составе гравитационного ускорения учитывалось воз-
мущающее ускорение, создаваемое гармоникой С20, оказывающей наиболее
сильное влияние на движение центра масс ТМ. Во втором варианте учитывались
возмущающие ускорения, создаваемые гармониками гравитационного поля Зем-
486
ли Cnk, Snk (n=2; k=0-2) до второго порядка включительно. В третьем варианте
учитывались возмущающие ускорения, создаваемые гармониками гравитацион-
ного поля Земли Cnk, Snk (п=2, 3; k=0-n) до третьего порядка включительно, в чет-
вёртом варианте - до четвёртого порядка включительно. Во всех вариантах учи-
тывалось влияние сопротивления атмосферы.
Сферическая погрешность определения положения ТМ на интервале 12000 с
для четырёх вариантов учёта возмущающих ускорений приведена в табл. 5.3.3.
Таблица 5.3.3 - Сферическая погрешность определения
положения ТМ
№ п/п Состав учитываемых воз- мущающих ускорений гра- витационного поля Земли Сферическая погрешность определения положения КА dr, км
1 С20 2,384
2 Cnk? Snk (n=2, k=0-2) 1,183
3 Cnk, Snk (n=2 ... 3, k=0-2) 0,359
4 Cnk, Snk (n=2 ... 4, k=0-2) 0,291
Расчёт сферической погрешности определения положения центра масс ТМ
dr проводился в соответствии с формулой
<1г = Л/(хр-Хф)2 ч-(ур-уф)2 + (гр-гф)2 , (5.3.1)
где хр, ур и zp - расчётные значения координат центра масс ТМ;
Хф, уф и 2ф - фактические значения координат центра масс ТМ.
Анализ результатов, приведенных в табл. 5.3.3, показывает, что сфериче-
ская погрешность определения положения центра масс ТМ на интервале 12000 с
в первых трёх вариантах превосходит допустимое значение 300 м. Таким обра-
зом, только четвертый вариант учёта возмущающих ускорений обеспечивает тре-
буемую точность определения положения ТМ.
На рис. 5.3.1 показана динамика изменения сферической погрешности оп-
ределения положения центра масс ТМ в ГСК на интервале 12000 с по четырём
вариантам учёта возмущающих ускорений.
Оценка погрешности экстраполяции положения центра масс ТМ проводи-
лась на интервале времени 20 с сравнением радиуса-вектора центра масс ТМ,
ежесекундно рассчитываемого алгоритмом экстраполяции ПДЦМ ТМ полиномом
второго порядка, с результатами интегрирования системы дифференциальных
уравнений движения центра масс КА с шагом 1 с. Характер изменения сфериче-
ской погрешности экстраполяции положения центра масс ТМ на интервале 20 с
показан на рис. 5.3.2.
Сферическую погрешность экстраполяции положения центра масс ТМ рас-
считывали по формуле (5.3.1).
487
— - С20
------Cnk.Snk(n=2,k=0-n)
------Cnk,Snk(n=2-3,k=0-fl)
------Cnk,Snk(n=2-4,k=0-fl)
Рисунок 5.3.1 - Динамика изменения сферической погрешности определения по-
ложения центра масс ТМ в ГСК
Анализ результатов (рис 5.3.2) показывает, что сферическая погрешность
алгоритма экстраполяции ПДЦМ ТМ полиномом второго порядка не превосхо-
дит на интервале 20 с допустимое значение 50 м.
Рисунок 5.3.2 - Характер изменения сферической погрешности
экстраполяции положения центра масс ТМ
488
5.4 Система наведения транспортных модулей
5.4.1 Назначение, принципы функционирования системы наведения и
основные требования к системе наведения транспортных модулей
К системам управления транспортных модулей предъявляют высокие тре-
бования по гибкости и оперативности управления, что обусловливает необходи-
мость применения функционального метода наведения. Этот метод апробирован
в СУ различных околоземных КА. Данный подход обеспечивает максимальную
преемственность проверенных на практике технических решений при разработке
систем управления ТМ. Расчет оптимальных управляющих воздействий в этом
случае возлагается на наземный комплекс управления. Система управления ТМ
реализует заданную программу полета автоматически в соответствии с про-
граммной информацией, задаваемой с Земли. Один из аналогов этого метода реа-
лизован в системе управления функционально-грузового блока (ФГБ) КА «Заря»,
на базе которого была собрана на орбите международная космическая станция
(МКС).
Система наведения ТМ предназначена для решения следующих задач:
- перевод ТМ на рабочие орбиты станции и сход с них (при необходимо-
сти);
- коррекция орбиты ТМ в целях поддержания ее параметров;
- перевод ТМ на орбиты фазирования и сход с них;
- спуск ТМ с орбиты (при необходимости).
В соответствии с ТЗ на СУ ФГБ максимальная погрешность AWZ реализа-
ции приращения кажущейся скорости по абсолютной величине в интервале
0,2 ... 100 м/с не должна превышать:
- (0,12+0,014 I) м/с при W >0,13 м/с2 в случае выдачи корректирующего
импульса (КИ) на одном двигателе коррекции (ДК);
- (0,10+0,0074) м/с при W > 0,20 м/с2 в случае выдачи КИ на двух ДК,
где I - номинальная величина приращения кажущейся скорости.
Система наведения ТМ должна обеспечивать выдачу корректирующего им-
пульса в любом требуемом направлении. Для управления движением центра масс
ТМ могут использоваться один из двух ДК или оба ДК одновременно. Для обеспе-
чения решения возложенных задач система наведения ТМ должна осуществлять:
- выбор варианта реализации КИ (на одном или двух ДК);
- включение одного или двух ДК в заданное время;
- выключение одного или двух ДК по достижении заданного значения ве-
личины кажущейся скорости (на базе использования блока акселеромет-
ров) или времени их работы.
5.4.2 Алгоритмическое обеспечение системы наведения. Выбор
настроек параметров полетного задания алгоритмов системы
наведения ТМ
Схема информационного взаимодействия системы наведения ТМ со смеж-
ными системами показана на рис. 4.4.1. Состав и функциональное назначение ал-
489
горитмов СН представлены в табл. 4.4.1.
Для организации работы системы наведения на борт ТМ в составе ПЗ вво-
дится ряд параметров. Параметры ПЗ алгоритмов СН представлены в табл. 5.4.1.
Таблица 5.4.1 - Параметры ПЗ алгоритмов системы наведения
№ п/п Наименование параметра Условное обозначение
1 Номинальное время работы ДУ, такт тном
2 Номинальная величина кажущейся скорости, м/с I
3 Код, определяющий способ реализации КИ на ДК Рдк
4 Признак реализации КИ по времени Pt
Номинальное время работы ДУ в тактах тном рассчитывают следующим
образом:
тном -Е
^- + 0,5
. т,
(5.4.1)
где Т] - величина базового такта решения; тном - номинальное время работы
ДУ в секундах, определяется соотношением (4.5.69).
Уставка по величине кажущейся скорости I определяется формулой
I = |cosa|x(W0W-Дт). (5.4.2)
ID
Здесь 1ВД - величина импульса последействия; Ат - систематическая задержка;
ш = ш0 -шР-At,
где то - масса изделия до выдачи импульса; riiP -- номинальный массовый рас-
ход на непрерывном режиме работы ДУ; At - продолжительность импульса ско-
рости; а - угол ориентации суммарного вектора тяги ДК относительно оси OXi
ССК, задается равным 8н при реализации КИ на одном ДК или равным 0 - при
реализации КИ на двух ДК; 8н- номинальное значение угла установки ДК в
плоскости XiOYi относительно продольной оси ТМ OXj; Wo - номинальная ве-
личина кажущейся скорости ТМ; W - величина кажущегося ускорения ТМ, оп-
ределяемая по формуле
w=4,
m
где Pz - величина суммарной тяги двигателей, с помощью которых реализует-
ся КИ.
В баллистических расчетах тяга РЕ принимается постоянной от момента
времени TB]UI до момента времени Твыкл эквивалентного импульса. При реализации
490
КИ на одном ДК Р£ задаётся равным Рн, а при реализации КИ на двух ДК рас-
считывается по формуле
Р£ = 2 • Рн • cos 8Н.
Продолжительность импульса скорости At, параметры шо и Wo определя-
ются оперативной группой управления ЦУП. Остальные параметры, используе-
мые для расчета параметров ПЗ, являются уставочной информацией. Значения
этих параметров представлены в табл. 5.4.2 [1].
Таблица 5.4.2 - Уставочная информация, используемая для расчёта
параметров ПЗ
№ п/п Наименование параметра Обозначение параметра Значение параметра
1 Величина базового такта решения, с ь 0,1025
2 Разброс времени между моментом формиро- вания признака на включение ДК и моментом формирования команды включения ДК, с А1вкл 0,0512
3 Разброс времени между моментом формирова- ния признака на выключение ДК и моментом формирования команды выключения ДК, с А1выкл 0,0512
4 Систематическая задержка подачи электриче- ского напряжения на ДК относительно начала отсчёта СУ уставки тном, с Атвкл 1,4
5 Систематическая задержка от момента окон- чания отработки СУ уставки тном до момента фактического выключения ДК, с Атвыкл 0,05
6 Систематическая задержка от момента подачи электрического напряжения на ДК до момента начала эквивалентного импульса, с АтВых 0,35
7 Систематическая задержка от момента снятия электрического напряжения с ДК до момента окончания эквивалентного импульса, с Атсп 0,1631
8 Систематическая задержка, с Ат 0,14
9 Тяга двигателя на установившемся режиме при номинальных условиях, Н Рн 4090,77
10 Импульс последействия тяги от момента начала спада тяги при номинальных условиях, Н 1пд 667
11 Номинальный массовый расход на непрерыв- ном режиме работы ДУ, кг/с ihp 1,4
12 Номинальное значение угла установки двига- теля коррекции (ДК) в плоскости XiOYj отно- сительно продольной оси изделия ОХЬ град 36,0
491
Коды параметра Рдк определяются в соответствии с табл. 5.4.3.
Таблица 5.4.3 - Коды параметра Рдк
№ п/п Способ реализации КИ Значение параметра
1 Выдача КИ с помощью первого ДК 01
2 Выдача КИ с помощью второго ДК 10
3 Выдача КИ с помощью двух ДК 11
Признак реализации КИ по времени Pt задаётся равным нулю при реализа-
ции КИ по времени, а при реализации КИ по скорости - равным единице. В пер-
вом случае (Pt=0) БА не включается, во втором (Pt=l) - включается.
5.4.3 Анализ погрешности реализации импульсов скорости
Для оценки погрешности реализации импульсов скорости использовались
характеристики ФГБ КА «Заря», его двигателей коррекции и блока акселеромет-
ров, а также технологические погрешности изготовления, монтажа ДК и установ-
ки БА, приведенные в приложении к [47].
5.4.3.1 Анализ погрешности реализации импульсов скорости по
направлению
Результирующую погрешность реализации импульсов скорости по направ-
лению оценивали в соответствии с формулами, представленными в табл. 4.4.3, а
также соотношениями (4.4.5) и (4.4.6). Для расчётов использовали максимальные
значения составляющих результирующих погрешностей в каналах тангажа и рыс-
кания, представленные в табл. 5.4.4, а также следующие упрощенные формулы
для расчёта результирующих погрешностей:
^пред - A&CT + 3 ’ Одэи i
Sv пред =Ауст+3-СДч/н.
Погрешность упрощенных формул расчета не превосходит 5% относитель-
но более общих.
Таблица 5.4.4 - Максимальные значения составляющих результирующих
погрешностей реализации импульсов скорости по направлению
№ п/п Наименование Обозначение Размерность Величина
1 Погрешность построения базо- вой системы координат (БСК) Д9б AVe угл. мин угл. мин 60 60
2 Погрешность поддержания (’’уход”) БСК Де ¥б угл. мин/мин угл. мин/мин 0,25 0,25
492
Окончание табл. 5.4.4
№ п/п Наименование Обозначение Размерность Величина
3 Погрешность стабилизации осей ТМ относительно программного положения АЭСТ Д\|/ст угл. мин угл. мин 90 90
4 Погрешность привязки осей чувствительности ГИВУС к ба- зовым плоскостям прибора Д&Г1 Дуп угл. мин угл. мин 3 3
5 Погрешность привязки базовых плоскостей ГИВУС к связанным осям ТМ Д&Г2 ДУГ2 угл. мин угл. мин 5 5
6 Погрешность расчета программ- ных углов в каналах: тангажа рыскания Д&пр Дупр угл. мин угл. мин 0,3 0,3
7 Разброс тяги ДК ДР н ±157
8 Допуск на установку ДК по углово- му отклонению от базовой оси ТМ Д51 угл. мин 10
9 Неперпендикулярность оси сопла относительно плоскости стыковки ДК с ТМ, не более, угл.мин Д82 угл. мин 2
Результаты расчетов ожидаемой точности реализации КИ по направлению,
соответствующие вероятности 0,997, приведены в табл. 5.4.5.
Таблица 5.4.5 - Результаты расчетов ожидаемой точности реализации КИ
по направлению
№ п/п Вариант реализации КИ Канал Величины средних квадратических отклонений аД9н j аДун » град Ожидаемые предельные погрешности ^пред» пред j град
1 КИ на одном ДК тангажа рыскания 0,35 0,35 . 2,55 2,55
2 КИ на двух ДК тангажа рыскания 0,55 0,35 3,15 2,55
Следует отметить, что погрешности стабилизации осей ТМ относительно
программного положения являются основными составляющими результирующих
погрешностей реализации импульса скорости по направлению. Таким образом,
уменьшение погрешностей стабилизации автоматически приводит к уменьшению
результирующих погрешностей реализации импульса скорости по направлению.
493
5,4.3.2 Анализ точности реализации импульсов скорости по величине
Оценка погрешности реализации импульса скорости по величине прово-
дится для двух способов реализации КИ:
- выключение ДК по достижении заданной величины кажущейся скоро-
сти;
- выключение ДК по расчётному времени его работы.
Анализ результирующих погрешностей реализации импульсов скорости по
величине при выключении ДК по достижении заданного значения кажущейся ско-
рости
Результирующие погрешности реализации импульсов скорости по величи-
не при выключении ДК по достижении заданного значения кажущейся скорости
рассчитывали в соответствии с формулами, представленными в табл. 4.4.5 и 4.5.3.
При этом использовали максимальные значения составляющих результирующей
погрешности, представленные в табл. 5.4.6
Таблица 5.4.6 - Максимальные значения составляющих результирующей
погрешности реализации импульсов скорости по величине при выключении ДК
по достижении заданного значения кажущейся скорости
№ п/п Наименование Обозначе- ние Размерность Величина
1 Погрешность БА, не завися- щая от перегрузки AWT м/с2 3,3-Ю-4
2 Погрешность БА, зависящая от перегрузки AWp % 8КУ4
3 Цена импульса выходной ин- формации д м/с 0,009- 0,01025
4 Погрешность ориентации осей чувствительности БА относи- тельно посадочного места прибора Да] угл. мин 15
5 Минимальное количество им- пульсов с работоспособного БА за 1 такт опроса на участке калибровки БА А Лпип - 13094
6 Максимальное количество им- пульсов с работоспособного БА за 1 такт опроса на участке калибровки БА Птах - 13146
7 Коэффициенты, используемые при расчете погрешности в показаниях БА, обусловленной вибрацией П Kwi Kw2 Гц с2/м с4/м2 3 500 10^ 2-10'7
494
Результаты расчётов результирующих погрешностей реализации импульсов
скорости по величине при выключении ДК по достижении заданного значения
кажущейся скорости представлены в табл. 5.4.7 и на рис. 5.4.1.
Суммарные значения кажущегося ускорения Wz и соответствующие им
значения математического ожидания результирующей погрешности реализации
импульсов скорости для различных величин массы изделия приведены в
табл. 5.4.7.
Таблица 5.4.7 - Суммарные значения кажущегося ускорения и соответствующие
им значения математического ожидания результирующей погрешности
реализации импульсов скорости
№ п/п Масса ТМ т, кг Реализация КИ на одном ДК Реализация КИ на двух ДК
Wx,m/c2 mdWj. .м/с We,m/c2 mAWs J
1 20530 0,1993 0,0102 0,3224 0,0165
2 19083 0,2144 0,0110 0,3469 0,0178
3 18373 0,2227 0,0114 0,3603 0,0185
4 16926 0,2417 0,0124 0,3911 0,0200
Результаты расчётов по оценке ожидаемой погрешности реализации КИ по
величине AWZ показаны на рис. 5.4.1. Здесь приведена зависимость величин пре-
дельных погрешностей dWnpefl от величины корректирующего импульса I, соот-
ветствующих вероятности P(AWi<dWnpe/l)=0,997.
Рисунок 5.4.1 - Результаты расчётов по оценке ожидаемой погрешности
реализации КИ по величине AWS
495
Как следует из приведенных результатов, точность реализации КИ по вели-
чине в случае выдачи КИ на одном ДКС значительно хуже, чем для случая двух
ДКС. Это обусловлено отличием ориентации оси чувствительности БА от ориен-
1
тации вектора тяги, в результате чего увеличивается в ~- влияние инстру-
cos§ba
ментальных и методических погрешностей, а также влияние вибрационных пере-
грузок в местах крепления БА на показания БА. Кроме того, резко возрастает
влияние отличия взаимной ориентации оси чувствительности БА и вектора тяги
от расчётной.
Необходимо отметить, что в обоих вариантах выдачи КИ определяющей
погрешностью является погрешность, обусловленная воздействием вибрацион-
ных перегрузок на точность измерения кажущейся скорости. Таким образом, в
этом случае существенное повышение точности реализации КИ по величине мо-
жет быть достигнуто путём принятия определенных конструктивных мер, пони-
жающих уровень вибрационных перегрузок в местах крепления БА.
Сравнение расчётных зависимостей с требованиями ТЗ показывает, что тре-
бования ТЗ выполняются со значительным запасом в случаях реализации КИ как
на одном, так и на двух ДК.
Анализ результирующих погрешностей реализации импульсов скорости по
величине при выключении ДК по времени
Расчёт результирующих погрешностей реализации импульсов скорости по
величине при выключении ДК по времени проводили в соответствии с формула-
ми, приведенными в табл. 4.4.7, а также соотношением (4.4.21). При этом исполь-
зовали максимальные значения составляющих результирующей погрешности,
представленные в табл. 5.4.2 и 5.4.8.
Таблица 5.4.8 - Максимальные значения составляющих результирующей
погрешности реализации импульсов скорости по величине при выключении
ДК по времени
№ п/п Наименование параметра Обозначение Размерность Величина
1 Отклонение величины массы изделия от номинала Дт % ±0,5
2 Разброс времени в тракте включения - выключения ДК Дтио с 0,0512
Результаты расчётов результирующей погрешности реализации импульсов
скорости по величине при выключении ДК по времени представлены в табл.
5.4.9 - 5.4.12 и на рис. 5.4.2. В табл. 5.4.9 и 5.4.11 приведены зависимости состав-
ляющих предельной результирующей погрешности реализации КИ по величине
от кажущегося ускорения для двух вариантов реализации КИ. Зависимости пре-
дельной результирующей погрешности реализации КИ по величине от импульса
скорости для двух вариантов реализации КИ приведены в табл. 5.4.10 и 5.4.12, а
также показаны на рис. 5.4.2.
496
Таблица 5.4.9 - Составляющие результирующей погрешности реализации
импульса скорости на одном ДК при выключении ДК по времени
№ п/п Масса изделия ш, кг Кажу- щееся ускоре- ние Wz,m/c2 Предельное значение составляющей результирующей погрешности реализации КИ по величине, не зависящей от продолжительности (величины) КИ 3<tAWhii , м/с Предельное значение отклонения величины кажущегося ускорения изделия от номинального значения ЗСТд^.мЛ2
1 20530 0,1993 0,0745 0,0078
2 19083 0,2144 0,0802 0,0084
3 18373 0,2227 0,0833 0,0087
4 16926 0,2417 0,0904 0,0094
Таблица 5.4.10 - Предельная результирующая погрешность реализации КИ
по величине на одном ДК при выключении ДК по времени
№ п/п Масса изделия ш, кг Величина кажуще- гося ускорения Wz,m/c2 Зависимость предельной результирующей погрешности SW£peA ,м/с, от величины импульса скорости I, м/с
1 20530 0,1993 Л/(0,0745)2+(0,039х1)2
2 19083 0,2144 х/(0,0802)2+(0,039х1)2
3 18373 0,2227 7(0,0833)2 +(0,039x1)2
4 16926 0,2417 -7(0,0904)2+(0,039x1)2
Таблица 5.4.11 - Составляющие результирующей погрешности реализации
импульса скорости на двух ДК при выключении ДК по времени
№ п/п Масса изделия т, кг Суммарное значение кажущегося ускорения W,;,M/C2 Предельное значение составляющей результирующей погрешности реализации КИ по величине, не зависящей от продолжительности (величины) КИ 3CTAWHn, м/с Предельное значение отклонения величины кажущегося ускорения изделия. от номинального значения Зо • , м/с2
1 20530 0,3224 0,0938 0,0090
2 19083 0,3469 0,1009 0,0097.
3 18373 0,3603 0,1048 0,0101
4 16926 0,3911 0,1138 0,0110
497
Таблица 5.4.12 - Предельная результирующая погрешность реализации КИ по
величине на двух ДКС при выключении ДКС по времени
№ п/п Масса изделия ш, кг Величина суммарного кажущегося ускорения Wz,m/c2 Зависимость предельной результирующей по- грешности 8W£pea , м/с от величины импульса скорости I, м/с
1 20530 0,3224 -7(0,0938)2 +(0,028 х!)2
2 19083 0,3469 7(0,1009)2 +(0,028х1)2
3 18373 0,3603 Л/(0,1048)2 + (0,028 х I)2 '
4 16926 0,3911 7(0,1138)2 + (0,028 х!)2
Рисунок 5.4.2 - Зависимости предельной результирующей погрешности
реализации КИ по величине от импульса скорости
Как следует из приведенных результатов, точность реализации КИ по вели-
чине в случае выдачи импульса по времени на одном ДК значительно хуже, чем
для случая двух ДК. Это обусловлено отличием влияния импульса последействия
и вектора тяги от расчётных значений.
5.5 Динамические режимы функционирования СУ ТМ
5.5.1 Режим демпфирования, закрутки и индикации
Весь полёт ТМ разбивается на ряд стандартизованных динамических опе-
раций- демпфирование после отделения от носителя, построение орбитальной
ориентации, развороты, коррекция орбиты, закрутки, стыковки, индикационный
режим и др. Соответствующим образом проектируется и выполняется система
498
управления в виде ряда унифицированных режимов. В процессе полёта КА осу-
ществляются запланированные в полётном задании переходы из режима в режим
после завершения им (режимом) предназначенной динамической операции. Так
происходит в течение всего полёта до завершения целевой задачи.
5.5.1.1 Назначение и требования к режиму
Режим демпфирования, закрутки и индикации является вспомогательным
режимом и предназначен для выполнения следующих задач:
- закруток и дозакруток КА до программного значения абсолютной угло-
вой скорости относительно двух осей ОХ и OY или ОХ и OZ или относи-
тельно любой одной из трёх осей связанной со спутником системы ко-
ординат из любого ориентированного или неориентированного положе-
ния с заданной точностью. Угловая скорость закрутки -не более
3 град/с при закрутке с использованием измерителя угловой скорости и
не более 10 град/с без - использования измерителя;
- демпфирования угловых скоростей с требуемой точностью, в том числе
начальных угловых скоростей, возникающих после отделения КА от ра-
кеты-носителя;
- определения угловых скоростей вращения КА относительно связанных
осей при отсутствии включения исполнительных органов (индикацион-
ный режим).
Такие задачи встречаются при длительном космическом полёте. Одноосная
закрутка с существенной скоростью обеспечивает ориентированный определён-
ным образом полет с помощью гироскопического эффекта; двухосная - тоже, но
уже относительно промежуточной оси - оси векторной суммы угловых скоро-
стей. Так, при полёте первого из модулей к орбитальной станции «Мир» в не-
штатной ситуации (нераскрытое солнечной батареи) в неориентированном полёте
снижался приход электроэнергии к бортовым аккумуляторам. Назревал энергети-
ческий кризис, грозящий срывом экспедиции. После нескольких попыток был
найден вариант двухосной закрутки модуля, обеспечивший необходимый приход
электроэнергии от солнечных батарей, и в итоге кризис миновал, задача была вы-
полнена.
Другой пример - строительство международной космической станции
«Альфа». Первый её модуль - функциональный грузовой блок (ФГБ) «Заря» был
выведен на орбиту 20.11.1998 г. После стыковки с Шаттлом «Дискавери» и обра-
зования «связки» «Заря + NODE» эта связка провела на орбите более года в ожи-
дании российского модуля «Звезда». В течение всего этого времени основными
задействуемыми режимами были «закрутка» и «индикация». Остро стоял вопрос
экономии ресурсов (топлива, электроэнергии, ресурса бортового оборудования,
количества включений двигателей). После выполнения закрутки система управ-
ления выключалась. Вследствие действия возмущений (аэродинамических, гра-
витационных, световых) закрутка со временем разваливалась (через 7-15 дней),
что могло приводить к разряду бортовых электробатарей. Чтобы предотвратить
эту ситуацию, периодически задействовалась модификация режима «Индикация»
499
угловых скоростей и при необходимости по полётному заданию снова задейство-
вался режим закрутки или дозакрутки с последующим выключением системы.
5.5.1.2 Приборный состав СУОС в режиме
Датчиком информации служит измеритель угловой скорости (ИУС) в трёх
каналах (х, у, z). Исполнительные органы- двигатели стабилизации большой
(-40 кг) и малой (-1,2 кг) тяги.
5.5.1.3 Принципы построения режима
Циклограмма построения режима состоит из трёх участков, показанных на
рис. 5.5.1.
Участок подготовки Динамический участок Участок перехода в следующий режим
Рисунок 5.5.1 - Циклограмма построения режима
На участке подготовки реализуется включение системы термостатирования
ИУС, блоков электроники ИУ С основного и резервного, раскрутка его гиромото-
ров, а также включение блоков усилителей мощности (БУМ).
На динамическом участке в зависимости от признака в полётном задании
выполняются указанные выше задачи (индикация, демпфирование, закрутка, до-
закрутка).
Реализуемый закон управления на этом участке может быть записан в виде
если (cof- шпр) > Асо, то < 0;
если (Of - Шпр) < - Аш, то МупР > 0; (5.5.1)
иначе |<Of— со11р| < Аа>, МупР = 0,
где Of (t)- текущее фильтрованное значение угловой скорости КА; сопр-
программное (заданное) значение угловой скорости закрутки (дозакрутки); Асо -
настроечное значение зоны нечувствительности; МупР- управляющий момент,
реализуемый включаемыми управляющими двигателями.
Закон управления (5.5.1) реализуется из закона, приведенного в под-
разд. 4.5.6.3.2 заданием соответствующих настроек, т.е. из стабилизации получа-
ем демпфирование.
Выбор параметров. Полётное задание
Величину зоны нечувствительности Am выбирают так, чтобы не было
«прострела» зоны 2А со угловой скоростью cof под действием управляющего мо-
мента в течение времени запаздывания управляющего двигателя на отключение
(см. подразд. 4.5.5.1), когда после прохождения команды на отключение двигате-
ля тяга сохраняется ещё время Тоткл. В противном случае возникнут двусторонние
включения управляющих двигателей, приводящие к потере рабочего тела (топли-
ва).
При задании в законе управления (5.5.1) <опр = 0 получаем чистое демпфи-
рование угловых скоростей.
500
В законе управления используют паузу на повторное включение управ-
ляющего двигателя 1^. Ее выбирают так, чтобы период между двумя соседними
включениями двигателей не совпадал с периодом собственных осцилляторов.
Ограничение сверху на величину паузы ljs определяется требованием точности.
На рис. 5.5.2 показана схема процесса демпфирования при учёте паузы на по-
вторное включение.
Рисунок 5.5.2 - Схема процесса демпфирования при
учёте паузы на повторное включение
Крутой наклон графика tof(t) - движение под действием момента
М = Мупр - Мвозм (разность управляющего и возмущающего моментов), пологий
наклон графика - изменение угловой скорости под действием только возмущаю-
щего момента в течение 1^ секунд. Как видно из графика, CDf(t) «переступает» зо-
ну Дев на величину соЕ. При уменьшении паузы Us уменьшается сое. Таким обра-
зом, паузу U надо ограничить так, чтобы выполнялись требования точности
демпфирования.
Параметры полётного задания в режиме:
- признак модификации режима ni3 = <код>;
- величина зоны нечувствительности по угловой скорости Лео;
- пауза на поворотное включение двигателей U;
- величина скорости закрутки co3J (j = х, у, z) при работе с датчиком угло-
вой скорости;
- величина скорости закрутки по времени (без использования датчика уг-
ловой скорости).
Контроль и парирование нештатных ситуаций в режиме
В процессе функционирования режима решается задача контроля качества
функционирования СУОС, которая формирует программную ситуацию (ПС) в
каждом канале (j = х, у, z), - опасную продолжительность работы двигателей ста-
билизации. Программная ситуация формируется при превышении заданных по-
роговых значений продолжительности работы двигателей стабилизации на вре-
менной базе. При возникновении программной ситуации осуществляется переход
в режим «Отключение СУ». Далее инженерами ведется детальный анализ проис-
шедшего инженерами в центре управления полетом.
501
5.5.2 Режим построении базовой ориентации
5.5.2.1 Назначение и требования к режиму
Режим построения базовой ориентации (ПБО) предназначен для совмеще-
ния осей связанной с изделием системы координат (ССК) с базовой системой ко-
ординат (БСК).
В качестве БСК используют системы координат:
- орбитальную (ОСК);
- развернутую вокруг местной геоцентрической вертикали (ГЦВ) на
180 град орбитальную систему координат (РОСК);
- инерциальную (ИСК), представляющую собой ОСК (или РОСК), зафик-
сированную на заданный момент времени.
В качестве ОСК принята правая ортогональная система координат OX0YoZo
с началом в центре масс КА, в которой:
- ось ОХо лежит в плоскости орбиты и направлена в сторону движения
КА;
- ось 0Yo направлена вдоль ГЦВ от центра Земли;
- ось OZo дополняет систему координат до правой.
Точность построения и поддержания БСК по трем осям должна составлять
величину не хуже 1 град.
Точность стабилизации по углу не хуже 5 ... 90 угл. мин (определяется ПЗ),
а точность стабилизации по угловой скорости — не хуже 0,05 град/с. Эти харак-
теристики могут настраиваться по ПЗ.
Длительность построения базовой ориентации должна составлять величину
не более 20 мин для автономного ТМ и не более 80 мин при управлении в связке
с орбитальным комплексом. Длительность может меняться по полетному зада-
нию.
Максимальная величина случайной составляющей скорости “ухода” свя-
занных осей КА относительно построенной базовой ИСК - ±0,25 угл.мин/мин.
В модификации программного разворота к режиму предъявляются такие же
требования по точности стабилизации при возможности выполнения программ-
ных разворотов относительно БСК в любом направлении (построение программ-
ной системы координат - ПСК), которое задается в ПЗ за время 200 ... 600 с (оп-
ределяется параметром ПЗ). Максимальная угловая скорость разворота - 3 град/с.
В режиме решаются с ле,дующие задачи:
- подготовка к работе ГИВУС, включение ПОЗ, БУМ, управление элемен-
тами пневмогидросистемы;
- демпфирование угловых скоростей в начале режима;
- поиск Земли и построение вертикали;
- определение ориентации по курсу;
- разворот в инерциальной или орбитальной системе координат;
- поддержание базовой ориентации;
- ввод ПЗ;
- переход в следующий режим.
502
5.S.2.2 Приборный состав СУОС в режиме
В режиме ПВО задействуются следующие приборы:
- командные приборы - ГИВУС, ПОЗ;
- исполнительные органы-- двигатели причаливания и стабилизации
(ДПС), двигатели точной стабилизации (ДТС);
- БЦВК.
В СУ транспортных кораблей снабжения орбитальной станции «Салют» в
режиме ПБО использовали инфракрасный построитель местной геоцентрической
вертикали с круговым сканированием, а в качестве датчика курса - гироорбитант
[32]. В дальнейшей модификации режима для СУ ТМ станции «Мир» применен
построитель вертикали секущего типа, а гироорбитант был исключен.
5.5.2.3 Принципы построения режима. Основные формульные схемы
алгоритмов
Построение ориентации
Режим ПБО состоит из двух функциональных частей - подготовительной и
динамической. Каждая часть структурно подразделяется на участки, на которых
решаются перечисленные выше задачи.
Динамическая часть режима состоит из семи участков:
1 - демпфирование;
2 - поиск Земли;
3 - построение вертикали;
4 - начальное определение курса;
5 - точное определение курса;
6 - разворот;
7 - стабилизация.
Предусмотрена возможность реализации режима по трем основным и од-
ной технологической модификациям, задаваемым признаком полетного задания
К8:
К 8=00 - используется для построения базовой ориентации из произвольной
начальной ориентации КА (реализуются все семь участков режима);
К 8=01 - применяется для построения вертикали и определения ориентации
по курсу (осуществляется обход разворота на шестом участке);
К8 =10 - используется для разворота в требуемую ориентацию при извест-
ной начальной ориентации КА (осуществляется обход первых пяти
участков);
К8 =11 - технологическая модификация, применяется для наземных испы-
таний системы.
На рис. 5.5.3 показана циклограмма режима ПБО с учетом логики форми-
рования его модификаций.
503
К8 = 11
Рисунок 5.5.3 - Циклограмма режима ПБО
Режим построен по принципу бесплатформенной инерциальной системы
ориентации с коррекцией по информации ПОЗ.
При построении местной ГЦВ вычисленные по кодово-импульсной инфор-
мации ПОЗ углы отклонения ГЦВ от плоскостей чувствительности приборов пе-
ресчитываются в направляющие косинусы вектора “KA-Земля”, по которым оп-
ределяются проекции эйлеровой оси вращения КА по направлению к ГЦВ.
Проекции угловой скорости приведения вычисляют по формулам
conPj(n) = con(n)'aj(n)>
где ax(n) = r2/^(12,z ч; аг(п) = _/^==тгТ’ ау(п)=0; ®п(п)-модуль
VE?(n) + El(n) /EKn) + E’(n)
угловой скорости; E(n) -- {Ej(n)}, j = х, z - вектор «KA-Земля», компоненты кото-
рого вычисляют как
Е (n)^Pui(") + Pu2(n). Е (и) ~
2cosyJ<cr ’ * 2sinyyci
Здесь Pui, Pu2 - углы отклонения ГЦВ от плоскости чувствительности ПО31
и ПО32 соответственно; уусг ^45град - угол установки ПОЗ; п - такт БЦВМ.
Построение ГЦВ заканчивается функционально после входа фазовой точки
в ее малую окрестность.
Схема построения орбитальной системы координат характеризуется отсут-
ствием датчика, непосредственно измеряющего угол курса. Поэтому определение
курсовой ориентации объекта осуществляется в БИСО по показаниям ПОЗ и при-
бора ГИВУС методом, основанным на существовании кинематической завязки
каналов крена и рыскания при орбитальном движении КА, отслеживающем мест-
ную вертикаль. Ориентация по курсу определяется на основе решения задачи ди-
намической оценки вектора состояния объекта, позволяющего получить неизме-
ряемый угол рыскания. Задача оценки полного вектора состояния (определение
параметров трехосной ориентации КА) решается на базе стационарного наблюда-
504
теля типа Люенбергера. Вектор невязки формируется как разность оценочных
значений вектора “KA-Земля” и вычисленных по измерениям ПОЗ.
Наблюдатель представляет собой кинематическую модель вращения КА
вокруг центра масс в процессе орбитального движения, которая корректируется
по измерениям ПОЗ. Коррекция по ПОЗ обеспечивает уточнение математическо-
го построения БСК до начала участка ее физического построения (построения
курса) и далее для уточнения БСК на участке поддержания. Линеаризовав систе-
му кинематических уравнений относительно ОСК и составив матрицу критерия
наблюдаемости Калмана, можно увидеть, что ее ранг равен трем, т.е. соответст-
вует порядку системы и, следовательно, свидетельствует о ее наблюдаемо-
сти [46].
При программно-алгоритмической реализации оценки вектора состояния
используют кватернионы, компонентами которых являются параметры Родрига-
Гамильтона.
Для определения начального вектора состояния (для начальной выставки
наблюдателя) на четвертом участке режима осуществляется осреднение сглажен-
ных фильтрованных значений проекций угловой скорости КА на оси ССК:
^j(n) = K4)j <Оф,(n) + (1 -Кф,)<оф,(п-1), (j = x,y,z);
(п) = Шф) (п) + —-1-— [шф. (п) - (n)], (j = х, z),
QnsW
где Кф,- коэффициент сглаживающей процедуры (0<Кф]<1); nN8(n)- счетчик
времени на участке.
При этом КА стабилизируется вокруг ГЦВ и демпфируется по курсу.
В конце четвертого участка - nNg(n) = lOOOTi (Ti = 0,1025 с) происходит на-
чальная выставка наблюдателя, определение компонент кватерниона происходит
по формулам
А0(п) = 0,51--^*^- ;
|_ ^08
(n) = sign^x (п)}д/|1-Х.20(п)|;
Х1(п) = Х3(п) = 0;
AXi(n) = Xi(n), (i=03),
где A(n) = }, (i = 0,3) - кватернион ориентации ССК в базовой СК;
ДА(п) = {ДА. i(n) }5 0 ~ 0,3) _ кватернион ориентации ССК в программной СК;
®08 - величина осредненной на витке орбитальной угловой скорости (задается в
полетном задании).
505
На пятом участке определяется точная ориентация по курсу на основе ре-
шения задачи оценивания вектора состояния в наблюдателе, корректируемого
вектором невязки, компоненты которого формируются следующим образом:
- для коррекции относительно базовой системы координат (ОСК)
Охкб =Кнх(п). (Ez(n)-Ez(n));
Оукь = (п) (Х20(п) - Х2(п)) • (Ez(n) - Ez(n)) -
- 2X0(n) X2(n) (Ex(n)-Ex(n));
ezKK=-KItz(n).(Ex(n)-Ex(n));
- для коррекции относительно заданной системы координат (ОСК или
РОСК)
@хКС =^хКб(П) 5
б уКС = -sig11 {в znc (n) уКБ (n) ;
в2КС “^zKb(n)-
Здесь Ex, Ez - оценочные значения направляющих косинусов Ej(n), (j=x, у, z),
вычисляемые по формулам
Ex(n) = 2(X1(n)X2(n)-X0(n)X3(n));
Ez(n) = 2(X0(n)X1(n)4-X2(n)X3(n)).
Коэффициенты усиления наблюдателя КнцП) формируются по логике:
„ < . Ч nN8(n)<iOOOT„
Ч о nN8(n)>1000TP
Численные значения коэффициентов коррекции наблюдателя выбираются
из условия обеспечения его устойчивости, быстродействия и требуемой точности
оценки вектора состояния КА.
«Грубые» коэффициенты наблюдателя , обеспечивающие быструю вы-
ставку, занесены в ПЗУ; «точные» коэффициенты наблюдателя K„j, обеспечи-
вающие необходимую точность, задаются в ПЗ.
После точной математической выставки курса осуществляется приведение
КА в конечное заданное в полетном задании угловое положение.
Построенная ориентация поддерживается по информации наблюдателя,
корректируемого по измерениям ПОЗ. Предусмотрена возможность отключать
коррекцию наблюдателя по признаку ПЗ.
Принципы контроля функционирования командных приборов основаны на
анализе их выходной информации.
506
Контроль исполнительных органов осуществляется путем анализа величин
их наработок на временной базе. Ведется также контроль опасного рассогласова-
ния по угловым скоростям и углам.
Программный разворот
Задача программного разворота объекта может выполняться в различных
модификациях, задаваемых параметрами ПЗ:
- одноосный либо трехосный разворот;
- разворот за фиксированное время либо с фиксированной скоростью (за-
дача быстродействия);
- разворот вокруг оси Эйлера либо разворот вокруг оси свободного вра-
щения.
Разворот по способу свободного вращения учитывает в итерационно-
терминальном расчете подвижной оси поворота нелинейные гироскопические
межканальные завязки несимметричного объекта. Синтез управления по такому
способу разворота представлен в подразд. 5.6.
Модуль скорости разворота в случае задачи быстродействия задается в ПЗ,
а в случае разворота за фиксированное время вычисляется на борту как функция
времени разворота.
Кроме того, следует отметить, что разворот в режиме может осуществлять-
ся во вращающейся (орбитальной) или инерциальной системе координат.
ПАО разворота реализовано в виде унифицированной задачи, используе-
мой также в режиме выдачи корректирующего импульса и режиме сближения и
причаливания.
В этой модификации режима также ведется контроль функционирования
СУ путем анализа величин наработок исполнительных органов на временной базе
и анализа опасного рассогласования по угловым скоростям и углам.
5.S.2.4 Анализ точности построения базовой ориентации
Для оценки точности построения ОСК в режиме ПВО воспользуемся фор-
мулами для установившихся ошибок оценок вектора состояния объекта в наблю-
дателе, реализуемого в ПАО режима для восстановления неизмеряемого угла
курса [36]:
j 5о)у >2 ( Ку5<р >2
~~ Ку , (Oq — Ку
5cdx Y Г Кх5соу ' ± Кхб<р
<о0 J -Ky)J ^«o-KyJ
(5.5.2)
(5.5.3)
(5-5.4)
507
где 5a)j - постоянный дрейф ИУС; 8<р, 8$ - постоянные ошибки прибора ориен-
тации на Землю (ПОЗ); Kj - коэффициенты усиления наблюдателя; соо - орби-
тальная угловая скорость; j=x, у, z; z S, у <-> ц/, х <-> <р.
Для численного анализа значений ошибок £j (j=x, у, z) по указанным фор-
мулам примем следующие исходные данные:
8(Oj=0,2 угл.с/с;
8ф=8$=41 угл.мин;
Кх=0,005, Ку=-0,004, Kz=0,003;
< йо=О,О65 град/с (высота околокруговой орбиты -- 400 ... 450 км).
Тогда точность построения орбитальной ориентации в режиме составит:
- в канале крена ех=Ч),53 град;
- в канале рыскания гу=0,67 град;
- в канале тангажа ez=0,68 град.
Полученные значения ошибок лежат в пределах точностных требований ТЗ
на разработку СУ, в соответствии с которым точность построения БСК должна
составлять ±1 град по всем трем осям.
Оценку ошибок определения ИСК перед режимом сближения и причалива-
ния получим как сумму ошибки определения ОСК 8j в режиме ПВО и ошибки,
вызванной уходом ИСК £JH, которую вычислим по формуле
EjH — 8cOjTH,
где Ти - длительность поддержания ИСК; j = х, у, z.
Так, при величине дрейфа ИУС 3a>j=0,2 угл.с/с и длительности поддержа-
ния ИСК в течение двух витков (Ти =3 ч) дополнительная ошибка определения
ИСК составит 0,6 град.
53.2.5 Моделирование работы СУОС в режиме
В табл. 5.5.1 представлены варианты математического моделирования
штатных процессов построения базовой ориентации и разворота в режиме ПБО.
Таблица 5.5.1 - Перечень вариантов моделирования
Номер варианта Начальные условия Конечные условия К8
фо, град фо, град $0, град «X, град/с (By, град/с (02, град/с
1 0 70 170 -0,2 -0,15 0,25 ОСК 0
2 0 0 90 0,3 0,1 -0,065 РОСК 0
3 64 -140 65 од -0,1 0,05 ОСК 10
Моделирование проведено для объекта МЛМ с номинальными параметра-
ми динамической схемы.
В таблицах обработки результатов моделирования (табл. 5.5.2 - 5.5.4) при-
ведены параметры:
ФиО, ПсиО, ТетаО, WXO, WYO, WZ0 - начальные условия, град, град/с;
508
Фир8, Псир8, Тетар8 - конечные, заданные в ПЗ условия, град;
Тш (i = 2,.., 7) - времена начала участков, такт;
Ткр - длительность режима, такт;
H31(i), H32(i) (i=2, 3)- признаки наличия Земли на начало N8=2, N8=3
(N8 - номер участка);
Л6, Л7, ЛК, ДЛ6, ДЛ7, ДЛК - значения параметров ориентации и стабили-
зации на начало N8=6, N8=7 и конец режима;
Бет1(1), Бет2(1) (i=3,4,7), Бет1К, Бет2К- углы отклонения ГЦВ на начало
N8=3, N8-4, N8=7 и конец режима;
MAXW, TMAXW - максимальная угловая скорость и время ее формирова-
ния, град/с, такт;
Гц, Wu - углы и угловые скорости цикла, град, град/с;
Гк, Wk - углы и угловые скорости на конец режима, град, град/с;
Ti, Ni (i=l36) - времена включенного состояния и количество включений
ДПС и ДТС, с;
Oni (i=l,..,9) - максимальные наработки ДС на i-й базе;
Ro - расход рабочего тела на ориентацию, кг;
Rc - расход рабочего тела на стабилизацию, кг;
R - расход рабочего тела на режим, кг;
Rb - расход рабочего тела на виток, кг;
ПС, ТПС - код программной (нештатной) ситуации и время его формиро-
вания, такт.
На графики процессов выведены следующие параметры:
<дх, соу, (о2 - проекции на оси связанной системы координат (ССК) вектора
абсолютной угловой скорости КА, град/с;
Ex, Еу, Ez - направляющие косинусы вектора ”КА-Земля”;
Хо, ^з- параметры (кватернионы) ориентации, формируемые в бор-
товом ПАО;
Vo, Vi, v2, v3- параметры (кинематические кватернионы) ориентации, фор-
мируемые в модели кинематики.
Время на графиках приведено в тактах п, длительность такта - 0,1025 с.
На рис. 5.5.4, а -г , 5.5.5, а-г изображены графики математического мо-
делирования типового процесса построения базовой ориентации (вариант 1 -
ОСК и вариант 2 - РОСК) в режиме ПБО модификации К8=00.
На рис. 5.5.6, а-б показаны графики математического моделирования типо-
вого процесса программного разворота (вариант 3) в режиме ПБО модификации
К8=10 с реализацией способа квазисвободного разворота.
509
Таблица 5.5.2 - Вариант моделирования № 1
Режим Р8 К8 = 0 Изделие 77КМЛ
Вариант N 1
Изменение полетного задания
Группа 3: Фир8 = 0.00 ПсирЗ = 0.00 Тетар8 = 0.00
Исходные параметры
ФиО = 0.00 ПсиО = 69.99 ТетаО = 170.00
WX0 = -0.20 WY0 = -0.15 WZ0 = 0.25
Тн2 = 927 Тн4 = 3968 Тнб = 7968 Ткр = 20000
ТнЗ = 1329 Тн5 = 4968 Тн7 = 11969
Н31 (2) = 0 Н32(2) = О Н31(3) = 1 Н32(3) = О
Л6=( 0.542 -0.006 0.840 0.005) ДЛ6= ( 0.542 -0.006 0.840 0.005)
Л7=( 1.000 0.000 0.001 0.000) ДЛ7=( 1.000 0.000 0.001 0.000)
ЛК=( 1.000 0.000 0.001 -0.001) ДЛК=( 1.000 0.000 0.001 -0.001)
Бет1(3)= -14.99 Бет1(4) = 0.71 Бет1(7) = 0.04 Бет1К= 0.12
Бет2(3) = 0.00 Бет2(4) = -0.46 Бет2(7) = 1.12 Бет2К= 0.12
MAXW = (-0.499 -0.294 -0.287 ) TMAXW = ( 1332 11416 1336 )
Гц = ( 0.28 -0.53 -0.26) Иц = ( -0.007 0.002 0.005)
Гк = ( 0.01 0.11 -0.12) Wk = ( 0.002 0.000 -0.066)
Т1= 0.8 T7 - 0.0 T13= 0.0 T19= 0.0 T25 = 11.5 T31= 19.0
Т2= 0.0 T8 = 0.1 T14= 0.0 T20= 0.5 T26= 11.5 T32= 21.6
Т3= 0.1 T9 = 0.5 T15= 0.0 T2I= 24.9 T27- 10.1 T33= 11.5
Т4 = 0.0 T10 = 0.0 T16= 0.0 T22= 13.8 T28 = 10.1 T34= 11.5
Т5= 0.0 Tll = 0.0 T17= 0.3 T23= 19.0 T29= 24.9 T35= 10.1
Т6= 0.8 T12 = 0.3 T18= 0.0 T24= 21.6 T30= 13.8 T36= 10.1
Nl = 3 N7 = 0 N13= 0 N19= 0 N25 = 15 N31= 71
N2= 0 N8 = 1 N14= 0 N20= 2 N26= 15 N32= 48
N3= 1 N9 = 2 N15= 0 N21= 48 N27 = 17 N33= 15
N4 = 0 N10 = 0 N16= 0 N22= 73 N28 = 17 N34= 15
N5= 0 Nll = 0 N17= 1 N23= 71 N29= 48 N35= 17
N6= 3 N12 = 1 N18= 0 N24= 48 N30 = 73 N36= 17
ОП1= ( 14 102 164) ОП4= ( 2 32 13) ОП7= ( 2 5 15)
ОП2= ( 58 9 85) ОП5= ( 1 3 18) ОП8= ( 0 0 0)
ОПЗ= ( 3 0 1) ОП6= ( 10 67 34) ОП9= ( 2 1 1)
Расход: на ориентацию Ro = 1.760 ПС = 0 ТПС = 0
на стабилизацию Rc = 0.010
на режим R = 1.770
на виток Rb = 0.078
510
Таблица 5.5.3 - Вариант моделирования № 2
Режим Р8 Изделие 77КИЛ
К8 ~ 0
Вариант N 2
Группа 3: Фир8 = Изменение полетного задания = 0.00 Псир8 = 179.91 Тетар8 = 0.00
Исходные параметры ФиО = 0.00 ПсиО = 0.00 ТетаО = 89.95
WX0 = 0.30 WY0 = 0.10 WZO = -0.06
Тн2 = 927 Тн4 - 3322 Тнб = 7322 Ткр = 20000
ТнЗ = 928 Тн5 -- 4322 Тн7 = 11323 Н31(2) = 1 Н32(2) --- 1 Н31(3) = 1 Н32 (3) - 1
Л6=( 0.963 -0.001 0,270 0.006) ДЛ6= ( 0.963 -0.001 0.270 0.006)
Л7=( 0.001 -0.001 1.000 -0.003) ДЛ7= ( 1.000 0.003 0.000 -0.001)
ЛК=(-0.005 0.002 1.000 -0.007) ДЛК=( 1.000 0.002 0.000 0.002)
Бет1(3)= -14.99 Бет1(4)= -0.21 Бет1(7)“ 0.67 Бет1К= -0.71
Бет2(3) = -14.99 Бет2(4) = -0.50 Бет2(7)= 1.17 Бет2К= 0.42
МАХИ = ( 0.339 0.384 -0.481 ) TMAXW = ( 928 11113 1165 )
Гц = ( -0.28 - -0.28 0.27) Иц - ( 0.007 0.002 0.002)
Гк = ( 0,21 - -0.04 0.25) Ик = ( -0.002 0.002 0.065)
Т1= 0.2 Т7 = 0.0 Т13= 0.0 Т19= 0.0 Т25= 7.С ) Т31= 5.4
Т2= 0.0 Т8 = 0.0 Т14= 0.0 Т20= 0.4 Т26= 7.С ) Т32 = 22.9
Т3= 0.0 T9 = 0.4 Т15= 0.0 Т21» 20.6 Т27= 12.3 Т33= 7.0
Т4= 0.2 Т10= 0.0 Т1б= 0.0 Т22= 7.1 Т28= 12.3 Т34= 7.0
Т5= 0.0 Т11= 0.0 Т17= 0.7 Т23= 5.4 Т29= 20.6 Т35= 12.3
Т6= 0.4 Т12= 0.7 Т18= 0.0 Т24= 22.9 Т30= 7.1 . Т3б= 12.3
Nl= 1 N7 = 0 N13= 0 N19= 0 N25= 1С ) N31= 29
N2= 0 N8 = 0 N14 = 0 N20= 1 N26= 10 N32= 87
N3= 0 N9 = 1 N15- 0 N21= 81 N27= 2z > N33= 10
N4= 1 N10= 0 N16= 0 N22= 35 N28- 22 N34= 10
N5= 0 Nll= 0 N17= 2 N23= 29 N29- 81 . N35= 22
N6= 1 N12= 2 N18= 0 N24= 87 N30= 35 j N36= 22
ОП1= ( 16 73 41) ОП4= ( 11 44 23) ОП7= ( I 2 0 3)
СП2= ( 53 15 117) ОП5= (0 3 22) ОП8= 1 : i o i)
ОПЗ= ( 2 0 0) ОП6= ( 17 63 26) ОП9= < : з i i)
Расход: на ориентацию Ro = 1.406 ПС = 0 ТПС = 0
на стабилизацию Rc = 0.020 на режим R = 1.426 на виток Rb = 0.143
511
Таблица 5.5.4 - Вариант моделирования № 3
Режим Р8 К8 = 2 Изделие 77KMJ1
Вариант N 3
Изменение полетного задания
Группа 3: Фир8 = 0.00 Псир8 = 0.00 Тетар8 = 0.00
Исходные параметры
ФиО = 63.99 ПсиО = -1.39.92 ТетаО = 65.00
WX0 = 0.10 WY0 = -0.10 WZ0 = 0.05
Тн2 = ТнЗ = 0 0 Тн4 = 0 Тн5 = 0 Тнб = Th7 - 3 Ткр = 20000 4028
Н31(2) = 0 H32(2) = 0 H31 (3) = 0 H32 (3) - 0
Лб=(-0.023 0.581 -0. 575 0.576) ДЛ6 = ( 1- 000 0.000 0.000 0.000)
Л7= (-1.000 -0.001 -0. 001 0.001) ДЛ7 = < 1- 000 0.001 0.001 -0.001)
ЛК=(-1.000 -0.001 -0. 002 0.000) ДЛК = ( 1- 000 0.001 0.002 0.000)
Бет1 (3) = 0.00 Бет1(4) = 0.00 i Бет1(7) = 0.00 Бет1К= 0.00
Бет2(3) = 0.00 Бет2(4)= 0.00 i Бет2(7) = 0.00 Бет2К= 0.00
MAXW = ( 0.396 -0.228 0.219 ) TMAXW = ( 2489 483 3092 )
Гц = ( -0.30 0.28 -0.28) Иц = ( 0 .008 0.003 -0.002)
Гк = ( 0.14 0.19 0.03) Wk = ( -0 .001 0.000 -0.066)
Т1= 0.5 T7 = 0.0 Т13= 0.0 T19= 0.0 T25= 7.4 T31= 4.6
Т2= 0.0 T8 = 0.1 Т14= 0.0 T20= 0.0 Т26= 7.4 Т32= 4.5
Т3= 0.2 T9 = 0.0 Т15= 0.0 T21= 3.0 Т27= 4.2 тзз- 7.4
Т4= 0.0 Т10 = 0.0 Т16= 0.0 T22 = 4.1 Т28= 4.2 Т34 = 7.4
Т5= 0.0 Т11 = 0.0 Т17= 0.1 T23= 4.6 Т29= 3.0 Т35= 4.2
Т6= 0.4 Т12 = 0.1 Т18= 0.0 T24- 4.5 Т30= 4.1 Т36= 4.2
Nl= 2 N7 = 0 N13-- 0 N19= 0 N25= 7 N31 = 12
N2= 0 N8 = 1 N14= 0 N20= 0 N26= 7 N32= 24
N3= 1 N9 = 0 N15= 0 N21= 29 N27= 34 N33= 7
N4= 0 N10= 0 N16= 0 N22= 8 N28= 34 N34= 7
N5= 0 Nll= 0 N17= 1 N23= 12 N29= 29 N35= 34
N6= 1 N12= 1 N18= 0 N24 = 24 N30= 8 N36= 34
ОП1= ( 29 36 34) ОП4- ( 0 0 1) ОП7= ( 0 0 0)
ОП2 = ( 25 71 16) ОП5-- ( 0 0 0) ОП8= ( 0 1 1)
ОПЗ= ( 4 4 2) ОП 6= ( 0 1 0) ОП9= ( 2 1 1)
Расход: на ориентацию Ro - 0.602 ПС = 0 ТПС = 0
на стабилизацию Rc = 0.016
на режим R = 0.619
на виток Rb == 0.059
512
2.50Е-01
-1.50Е-01
6000
8)00
14000
П
16000 18000 20000
-2.50Е-01 •
-3.50Е-01
а
Рисунок 5.5.4 - Вариант моделирования № 1: а - угловые скорости; б - направляющие косинусы вектора
"КА -Земля"; в - кватернионы ориентации; г - кинематические кватернионы ориентации
6.00Е-02. т
4.00Е-02 -
2.00Е-02 -
О.ООЕ+ОО -
-2.00Е-02 --
2.00Е-01 т
О.ООЕ+ОО -
-2.00Е-01 п
ЕУ
—I--------1---------1--------1---------1--------1---------i--------1--------1---------1 п
2000 4000 6000 8000 10000 12000 14000 16000 18000 20000
-4.00Е-01 -
-6.00Е-01 -•
-8.00Е-01 -
-1.00Е+00 -•
-1.20Е+00
4.00Е-01
3.00Е-01 -•
2.00Е-01 -•
1.00Е-01 -
О.ООЕ+ОО -
-1.00Е-01
2000 4000 6000 8000 10000 12000 14000 16000 18000 20000
б
Рисунок 5.5.4 - Продолжение
1.10Е+00 т_
6.00Е-01 -
1.00Е-01 -i
-4.00Е-01 «
—!--------1----------[---------1--------1---------1---------1--------1---------1--------1
2000 4000 6000 8000 10000 12000 14000 16000 18000 20000
В
Рисунок 5.5.4 - Продолжение
2.00Е-01 т V1 П
О .ООЕ+ОО-------------1----------------------1-----------1-----------1-----------1-----------1-----------1----------1------------1
-2.00Е-01 О 20004000 6000 8000 10000 12000 14000 16000 18000 20000
-4.00Е-01 - .s'
-6.00Е-01 ---------
-8.00Е-01
2.00Е-01
0.00Е+00
-2.00Е-01 О
-4.00Е-01 -
-6.00Е-01 -•
-8.00Е-01 -
14000 16000 18000 20000
-1.00Е+00
1.ООЕ+ОО -г
8.00Е-01---------V3
6.00Е-01 -
4.00Е-01 --
2.00Е-01 -
О.ООЕ+ОО-------------1-----------------------1----------1-----------Н----------1------------- I--------1----------1-----------1 П
-2.00Е-01 6 2000 4000 6000 8000 10000 12000 14000 16000 18000 20000
Г
Рисунок 5.5.4 - Продолжение
4.00Е-01 т
3.00Б01
2.00Е-01
1.00Е-01
О.ООЕ+ОО
1.00В01-Р 2000 4000
6000 8000 10000 12000
!
14000
П
I I "™1
16000 18000 20000
П
1.00&01"
0.00Е+00- ?
-1.00E01J
-2.00Е-01 - *
-3.00E-01--
-4.00Е-01--
-5.00Е-01
2000
8000 10000 12000 14000 16000 18000 20000
а
Рисунок 5.5.5 - Вариант моделирования № 2: а - угловые скорости; б - направляющие косинусы вектора
"КА -Земля"; в - кватернионы ориентации; г - кинематические кватернионы ориентации
518
-5.00Е-02
-2.50Е-01
-4.50Е-01
-6.50Е-01
-8.50Е-01
-1.05Е+00
—I---------1---------1---------1--------1---------1--------1---------1--------1---------1 П
2000 4000 6000 8000 10000 12000 14000 16000 18000 20000
2.50E-02
5.00E-03 -
-1.50E-02
-3.50E-02 --
-5.50E-02 -
-7.50E-02 -
6
Рисунок 5.5.5 - Продолжение
519
в
Рисунок 5.5.5 - Продолжение
О.ООЕ+ОО
-5.00E-02
2.00Е-01
1.50Е-01
1.00Е-01
5.00Е-02
2000
4
=1 n
20000
8000
10000
16000
18000
4000
6000
12000
14000
Г
Рисунок 5.5.5 - Продолжение
a
Рисунок 5.5.6 - Вариант моделирования № 3: а - угловые скорости; б - кватернионы ориентации
522
б
Рисунок 5.5.6 - Продолжение
5.5.3 Режим выдачи корректирующего импульса
5.5.3.1 Требования к режиму
Корректирующий импульс сообщается космическому аппарату в целях
коррекции параметров орбиты - высоты, наклонения, периода. Коррекция пара-
метров орбиты выполняется для построения расчётной орбиты, маневрирования
КА при выполнении стыковки с кооперируемыми объектами, для уклонения от
столкновения с элементами космического «мусора» (отработавшие свой ресурс
неуправляемые КА или их части) и других задач.
Система управления должна управлять движением центра масс и вокруг
центра масс при выдаче КИ в любом требуемом направлении относительно по-
строенной БСК как двигателями коррекции, так и ДПС переднего и заднего поя-
сов, создающими тягу по продольной оси.
Среднеинтегральная ошибка стабилизации определяется как интеграл
ошибки угловой стабилизации за время выдачи КИ, деленный на время выдачи
КИ(Тки):
Тки
|8уст(0Л
О_______
тки
где 8yCT(t) - текущая ошибка стабилизации в процессе выдачи КИ.
Для космических модулей, стыковавшихся с орбитальной станцией «Мир»,
а также при строительстве Международной космической станции «Альфа» до-
пустимое значение составляло бустдоп » 0,5 ... 1,2 град.
При реализации режима с использованием только датчика угловой скоро-
сти уход направления БСК при выдаче КИ оценивается как
8ух = (Н.С.гивус) х Тки,
где 8^- уход направления, угл. мин/мин; Н.С.гивус - нескомпенсированный
нулевой сигнал гироскопического измерителя угловой скорости, угл. мин/мин;
Тки - время КИ, мин.
Максимальная погрешность реализации кажущейся скорости по абсолют-
ной величине с использованием двигателей коррекции (ДК) в интервале
0,2 ... 100 м/с не должна превышать
- при выдаче КИ на одном ДК (0,12 + 0,014 х J) м/с при W > 0,13 м/с2;
- при выдаче КИ на двух ДК (0,1 + 0,007 х J) м/с при W > 0,2 м/с2,
где J - максимальная величина приращения кажущейся скорости.
Продолжительность выдачи КИ на ДС:
- максимальная ~400 с,
- минимальная 2,8 с.
Продолжительность выдачи КИ на ДПС:
- максимальная ~700 с,
- минимальная 2,8 с.
523
5.5.3.2 Приборный состав и принципы построения режима
Анализ требований к режиму выдачи КИ и характеристик объекта показы-
вает, что задача режима может быть выполнена на основе изображенной на
рис. 5.5.7 функциональной схемы.
Рисунок 5.5.7 - Функциональная схема режима выдачи КИ
Здесь ГИВУС - гироскопический измеритель вектора угловой скорости;
БА- блок акселерометров;
БУМ - блок усилителей мощности;
ДПС - двигатели причаливания и стабилизации;
ДТС - двигатели коррекции и сближения;
АДУ - автоматика двигательной установки;
БЦВМ - бортовая цифровая вычислительная машина, в которой реали-
зуется программно-алгоритмическое обеспечение системы управления.
- Режим выполняется после построения базовой системы координат. На
рис. 5.5.8 показана общая циклограмма режима выдачи КИ.
Режим Поддержание Выдача
построения Разворот ориентации в КИ Полет в ИСК
БСК I I ИСК I ।
Рисунок 5.5’8- Общая циклограмма режима выдачи КИ
Разворот выполняется относительно БСК для ориентации вектора тяги дви-
гателей коррекции в требуемом направлении, у требуемой точки орбиты. В каче-
стве кинематических параметров применяются кватернионы, которые интегри-
руются по алгоритмам БЦВМ с использованием информации об угловой скоро-
сти с ГИВУС.
Разворот выполняется по алгоритму, реализующему метод пространствен-
ного разворота, описанного в подразд. 5.6.1.1. Требуемые углы разворота относи-
тельно БСК задаются через полетное задание.
После выполнения разворота осуществляется полет в инерциальной систе-
ме координат (ИСК) с управлением двигателями стабилизации малой тяги отно-
сительно программного положения. Аргумент управления формируется следую-
щим образом:
524
o(t) = Ду + , j = x, у, z, (5,5.5)
где Ду (ДЯ,Д\|/,Д<р) - отклонение от программного положения канала тангажа,
рыскания и крена; со j - угловые скорости по соответствующим каналам.
Полет в ИСК выполняется до точки орбиты, где требуется выполнить кор-
рекцию орбиты.
На участке КИ включается двигатель коррекции и в режиме стабилизации
удерживается ориентация оси ОХ (вектор тяги) в ИСК. Так как двигатель коррек-
ции имеет существующую тягу, возникают заметные возмущения по каналам ста-
билизации, с которыми двигатели стабилизации справиться не могут. Поэтому
они отключаются и включаются ДПС, имеющие существенно большую эффек-
тивность (~ в 40 раз).
Процесс стабилизации при выдаче корректирующего импульса показан на рис. 5.5.9.
Wx
2.5Е-01 2.Е-01 1.5Е-01 1.Е-01 5.Б02 О.ЕНЮ -5.Е-02 -1.Б-01 -1.5Б-01 -2.Е-01 -2.5Е-01 -З.Е-01 2.ЕЮ0 1.5EKI0 1.Е+00 5.Б-01 О.ЕНЮ -5.Е-01 -1,В00 -1.5Е+00 -2, ЕШО 2, ЕН) 2 О.ЕНЮ -2,Е+О2 -4.Е+02 -6.ЕЮ2 -8,В02 -1,ЕН)3 -1.2ЕЮЗ -1.4ЕЮЗ о п Gamx 1 ‘ 0 5000 feooo / Мх 1 йЙШЙНММЙ : ппгт— п Q 1 Н niHUIIIIHin 1 6Q0O f :
Рисунок 5.5.9 - Процесс стабилизации при
выдаче корректирующего импульса
525
Алгоритм стабилизации остается тот же, но изменяются настройки -
уменьшаются зона нечувствительности A5j, коэффициент воздействия по угло-
вой скорости Кшсор Это делается, чтобы предотвратить двусторонние включения
двигателей стабилизации, приводящие к непроизвольным затратам рабочего тела
(жидкого топлива или сжатого газа) и к повышенным нагрузкам на упругие эле-
менты конструкции, а зона нечувствительности A8j уменьшается, чтобы обеспе-
чить требуемую точность поддержания ориентации вектора тяги.
После выполнения коррекции последний участок (участок успокоения) реа-
лизуется на двигателях стабилизации малой тяги так же, как и предшествующий
КИ участок. Здесь полет выполняется также в инерциальной системе координат.
И завершается этот участок переходом в следующий режим, как правило, это ре-
жим построения БСК.
Выбор параметров. Полетное задание
Параметры системы ориентации и стабилизации (настройки) выбирают так,
чтобы выполнить основные задачи и требования к системе:
- устойчивость движения;
- требуемая точность ориентации и стабилизации по углам и угловым ско-
ростям;
- достаточное быстродействие;
- минимальный расход рабочего тела;
- ограничения по количеству и продолжительности включений двигателей
стабилизации;
- прочностные ограничения по изгибающим и крутильным моментам в
элементах конструкции;
- помехоустойчивость системы, и ряд других требований.
Основными параметрами системы стабилизации транспортного модуля с
реактивными управляющими двигателями являются:
- Ап - зона нечувствительности в законе управления, на участке КИ ми-
нимальна и определяется требованиями точности выдачи КИ по направ-
лению ~0,3 ... 0,5 град; для участков успокоения допускаются большие
значения (1 ... 1,5 град) из соображений минимизации расхода топлива
на стабилизацию;
- Кш- коэффициент при угловой скорости в аргументе управления cr(t);
определяется требованиями устойчивости (Ко > 0), скорости затухания
переходных процессов; уменьшение К© расширяет зону нечувствитель-
ности по угловой скорости, что позволяет предотвратить «прострел» зо-
ны упругой составляющей в сигнале и избежать ненужных включений
двигателей стабилизации на частотах упругости; малые значения Кы
уменьшают быстродействие, приводят к затягиванию переходных про-
цессов;
- ©в, ®н- верхняя и нижняя «полки» в алгоритме стабилизации; <ов долж-
но быть ниже ограничения по диапазону датчика угловой скорости; раз-
ница Дсо = |сов - ®н| должна быть больше приращения угловой скорости
526
от включения двигателей стабилизации на один такт счета: Дш > |aj|-T,
где aj - эффективность двигателя стабилизации в j-м канале при управ-
лении парой двигателей соответственно Д<о > (|ац| + |a2j|) Т;
- аь bi - коэффициенты алгоритма оценки угловой скорости, выбираются
из условий ослабления шумовой и колебательной (за счет упругости) со-
ставляющих в сигнале ГИВУС.
Настройки алгоритмов контроля выбираются из следующего общего под-
хода. После моделирования процессов стабилизации при номинальных значениях
параметров объекта, а также при возможных эксплуатационных их разбросах и
максимальных значениях возмущений определяются максимальные значения
контролируемых параметров по участкам режима:
- угловые отклонения Yy max, j --= х, у, z; i = 1, 2.. .п участка режима;
- угловые скорости Шу п^;
- наработки двигателей стабилизации ОПу тах.
В качестве настроек выбираются эти максимальные значения, увеличенные
на коэффициент запаса 1,5 ... 2.
Настройки системы управления задаются в двух вариантах:
- в постоянном запоминающем устройстве такие, которые не предполагается
менять ни при каких обстоятельствах, не зависят от реальных условий полета;
- параметры, которые могут быть изменены непосредственно перед поле-
том и в процессе полета через инструмент ввода полетного задания.
Через полетное задание задаются паспортные данные ГИВУС (цена им-
пульса, систематическое значение нулевого сигнала), величина и направление
корректирующего импульса, значения эффективностей управляющих двигателей
(используются в алгоритме оценки угловой скорости), которые могут быть уточ-
нены и в процессе полета из-за их фактического отличия от заданных при проек-
тировании и отработке системы.
В процессе полета могут быть выявлены отличия в математической модели
объекта, использованной при проектировании от реальных характеристик, и в
связи с этим возникнет необходимость изменить такие настройки системы, как
Кш, Дст, настройки алгоритмов контроля, указанных выше.
Контроль и парирование нештатных ситуаций в режиме
В процессе полёта проводится контроль процессов стабилизации по на-
правлениям:
- угловые отклонения от программного положения;
- угловые скорости по каналам х, у, z;
- включение двигателей стабилизации;
- изменение кажущейся скорости на участке КИ (по акселерометру).
Указанные параметры контролируются по телеметрии визуально и путём
машинной отработки.
Кроме того, в бортовом математическом обеспечении режима выполняется
автоматический контроль нештатных ситуаций в режиме по участкам:
- автоматический контроль рассогласований (на всех участках режима)
527
|у(п)1>¥доп; (5.5.6)
- автоматический контроль отклонений угловых скоростей
l“j(n)| > <йд0П. (5.5.7)
Контроль не проводится на участке разворота, и «вырезаются» из контроля
некоторые короткие по времени участки КИ и успокоения, на которых предпола-
гаются активные переходные процессы. Если имеет место выполнение условий
(5.5.6) или (5.5.7) 10 тактов подряд, то формируется признак «опасного рассогла-
сования» по углу или угловой скорости;
- контроль суммарной наработки двигателей стабилизации на базовых
интервалах времени Тб, следующих непрерывно один за другим поканально. В
начале очередного интервала наработка обнуляется. При превышении суммарной
наработкой расчётного значения формируется признак «опасной наработки» дви-
гателей стабилизации.
При возникновении любого из признаков в соответствии с бортовой логикой
отключается система управления, так как они свидетельствуют о какой-то неис-
правности в системе (приборах, двигателях, согласующих устройствах и т. д.).
Далее по телеметрии в центре управления выполняется анализ, устанавли-
вается причина, отказавшее устройство заменяется резервным и продолжается
выполнение задачи полёта.
Практический опыт подтверждает работоспособность описанного контроля
и парирования:
- при полёте одного из модулей к космической станции «Мир» в режиме
коррекции орбиты был зафиксирован признак «опасной продолжитель-
ности» по наработке двигателей на участке успокоения с отключением
системы управления. Анализ телеметрии выявил неисправность ДТС
типа «невключение». После отключения пояса двигателей с отказавшим
' ДТС и перехода на резервный пояс задача была выполнена;
! - аналогичная ситуация была на одном из транспортных кораблей снаб-
жения, но причиной оказался нештатно функционирующий датчик ин-
фракрасной вертикали;
- «опасное рассогласование» при стыковке одного из модулей было след-
ствием повышенных нерасчётных возмущений;
- были и другие случаи нерасчётного функционирования, но всегда благо-
даря контролю удавалось парировать неисправность и выполнить задачу.
5.5.4 Режим сближения и причаливания
5.5.4.1 Назначение и особенности режима
Режим сближения и причаливания предназначен для управления движени-
ем ТМ при стыковке с орбитальной станцией (ОС).
Режим состоит из двух участков:
- дальнего наведения (ДН), на котором выполняются межорбитальные пе-
реходы с управлением методом “свободных” траекторий, обеспечиваю-
щим приход в заданную окрестность кооперируемого объекта - орби-
528
тальной станции (ОС);
- ближнего наведения (БН), на котором управлением формируется траек-
тория сближения, обеспечивающая выход на продольную ось стыковоч-
ного узла ОС, причаливание до механического контакта с ОС. Метод
управления на участке БН - координатный.
Построение режима в качестве основных информационных систем преду-
сматривает использование:
- навигационной аппаратуры НАП на всех участках режима и аппаратуры
измерения параметров относительного движения в диапазоне расстоя-
ний между объектами менее 1 км на участке БН - «Курс-ММ»;
- либо аппаратуры измерения параметров относительного движения
«Курс», обеспечивающей формирование параметров относительного
движения на всех участках режима, вплоть до механического контакта,
прошедшей неоднократные испытания на ТМ ОС “Мир”, МКС и экс-
плуатируемую на объектах «Прогресс», «Союз».
Далее по тексту в качестве измерительной системы параметров относи-
тельного движения будем рассматривать аппаратуру «Курс-ММ».
К особенностям режима сближения и причаливания ТМ относятся:
- высокие требования по точности к кинематическим параметрам на мо-
мент механического контакта;
- компоновка двигательной установки, обеспечивающая одновременное
управление как центром масс, так и вокруг центра масс ТМ;
- знание ориентации строительных осей ТМ относительно инерциальной
базовой системы координат, построенной режимами, предшествующими
режиму сближения и причаливания.
Реализованные в СУ принципы управления должны обеспечить безопас-
ность ТМ и ОС в случае отказа одного из элементов системы. Так, на участке
ДН - путем формирования безопасной пролетной траектории; на участке БН -
переходом в состояние функционального «зависания» с поддержанием безопас-
ной относительной дальности, что дает возможность принятия решения:
- о прекращении режима и формировании пролетной траектории;
- о продолжении режима с передачей управления ДУ ТМ экипажу ОС
(ТОРУ) с обеспечением комфортных условий для задействования ТОРУ.
5.5.4.2 Требования к режиму, к баллистической траектории сближения
и к параметрам относительного движения
СУ в режиме сближения и причаливания должна обеспечивать управление
движением центра масс и вокруг центра масс ТМ при выполнении следующих
маневров:
- поиск ОС в пространстве по информации аппаратуры «Курс-ММ»,
(«Курс»);
- сближение с ОС;
- зависание на заданном по полетному заданию расстоянии от ОС;
- облет ОС (при необходимости);
529
- зависание на заданном по полетному заданию расстоянии от ОС (в слу-
чае выполнения облета);
- причаливание к ОС до механического контакта стыковочного узла.
При этом СУ должна обеспечивать:
- ориентацию продольной оси ТМ вдоль линии визирования с точностью
± 3 град по информации об углах пеленга линии визирования (ЛВ) от
измерительной системы ’’Курс” при угловой скорости ЛВ до 0,5 град/с.
Под линией визирования понимают прямую, соединяющую точки нача-
ла систем координат, связанных с антеннами измерительной системы;
- выполнение требований по кинематическим параметрам на момент ме-
ханического контакта ТМ и ОС, приведенных в табл. 5.5.5;
- прекращение сближения с реализацией увода в целях предотвращения
столкновения объектов в соответствии с разработанным для СУ ТМ со-
ставом программных ситуаций;
- прекращение при определенных условиях и на определенных этапах
сближения и реализации «зависания» в диапазоне дальностей
100 ... 500 м до момента прекращения зависания, определяемого полет-
ным заданием или радиокомандой (РК);
- организацию незапланированных зависаний по программным ситуациям
и увод;
- реализацию импульсов «дожатия» по сигналу «Касание 1» и «увода» по
сигналу «Промах». На участке реализации импульсов увода по сигналу
«Промах» СУ обеспечивает стабилизацию угловой скорости относи-
тельно связанных осей в пределах ±0,5 град/с;
- обеспечение функционального контроля работоспособности аппаратуры
системы управления, двигателей ДКС и ДМТ (ДПС, ДТС) в полете с ав-
томатическим парированием последствий отказов (прекращение выпол-
нения СУ задач текущего режима) и переходом в режим выключения.
Таблица 5.5.5 - Требования по кинематическим параметрам на момент
механического контакта ТМ и ОС
Линейная продольная относительная скорость сближения Ух, м/с не более 0,15
Линейная боковая относительная скорость Vyz = + Vz2 , м/с не более 0,07
Суммарное относительное угловое рассогласование продоль- ных осей ТМ и ОС по тангажу и рысканию, град не более 4
Суммарное относительное угловое рассогласование по крену осей Y стыковочных агрегатов, град не более 7
Суммарная угловая скорость по тангажу и рысканию ТМ, град/с не более 0,5
Угловая скорость по крену ТМ, град/с не более 0,6
Боковое относительное смещение стыковочных агрегатов, «промах», м не более 0,15
530
5.5.4.3. Приборный состав СУ в режиме
Гироскопический измеритель вектора угловой скорости
Гироскопический измеритель вектора угловой скорости предназначен для
измерения интегралов от проекций вектора угловой скорости объекта на оси чув-
ствительности прибора.
В качестве измерителя угловой скорости в системе управления ТМ исполь-
зован поплавковый ГИВУС с четырьмя осями чувствительности. Принцип дейст-
вия ГИВУС, его основные технические, точностные и эксплуатационные харак-
теристики описаны в подразд. 3.4.1.
Алгоритмическое обеспечение по обработке информации ГИВУС включает
в себя:
- алгоритм расчета приращений углов поворота объекта в связанной сис-
теме координат (ССК);
- алгоритм контроля информации ГИВУС;
- алгоритм оценки угловой скорости
Алгоритм расчета приращений углов поворота объекта предназначен для
преобразования импульсной информации ГИВУС в приращения углов поворота
за такт в связанных осях.
Приращение угла за такт в осях ЧЭ вычисляется следующим образом:
0ЧЭ1(п) == mi • Ni(n) - (от, Ti - 0yxi(n),
где i = 1 ... 4; m, - цена импульсов i-ro ЧЭ (i-й оси); Ni(n) - число импульсов с i-
го ЧЭ (i-й оси) за такт; со\ - паспортизованный уход i-ro ЧЭ (i-й оси); Oyxi(n) -
вычисленное значение ухода i-ro ЧЭ (i-й оси); Ti - такт счета БЦВМ.
Приращение угла за такт в ПСК ГИВУС имеет вид
0Gj(n) = В(п) • 049i(n),
где j = 1, 2, 3; В(п) - матрица (j, i) установки ЧЭ в ПСК ГИВУС.
Приращение угла за такт в ССК имеет вид
0j(n) = М(п) • 0Gj(n),
где М(н) - матрица (3x3) перехода от ПСК ГИВУС к ССК.
В случае, когда ГИВУС неинформативен, возможен расчет приращений уг-
лов поворота объекта по информации, поступающей с АИС.
Информация о приращении углов поворота объекта поступает в алгоритм
оценки угловой скорости.
Алгоритм вычисляет оценочное значение приращения угла поворота объекта
Oocj(n) = Т|((Оф](п) + К1С(п)Дод(п)),
а также оцененную угловую скорость объекта по информации о приращении угла
поворота, поступающей с ГИВУС или АИС:
(O(1,j(n) = юф]-(п) + TiUaj(n) + Т](МВд(п) + K2C(n)Aocj(n)),
где A0Cj - разность оценочного и текущего угла поворота; Uaj - оценочная эф-
фективность исполнительных органов; MBCj(n) = MBCj(n) + Т]Кзс(п) Д^п)- уско-
531
рение возмущающих моментов; К|С, К2с, К3с - коэффициенты усиления системы
оценки скорости по углу, по угловой скорости и ускорению соответственно.
Блок акселерометров
Блок акселерометров (БА) предназначен для измерения в месте установки
прибора проекции ускорения объекта на ось ОХ] связанной системы координат
при работе корректирующей двигательной установки и выдачи в СУ информации
о величине приращения кажущейся скорости в направлении указанной оси.
Принцип действия БА, его основные технические, точностные и эксплуата-
ционные характеристики описаны в подразд. 3.4.3.
5.5.4.4 Информационные системы, используемые в режиме
5.5.4.4.1 Навигационная аппаратура потребителя (НАП)
НАП предназначена для определения параметров движения ТМ на орби-
тальном участке полета посредством приема и обработки радиосигналов со спут-
ников космических навигационных систем (КНС) «Глонасс» (Россия) и GPS
(США).
По отношению к СУ ТМ навигационная аппаратура потребителя представ-
ляет собой смежную систему.
НАП включает в себя бортовой приемовычислитель (ПВ) и антенно-
фидерную систему, состоящую из антенных устройств, размещаемых на внешней
поверхности ТМ.
НАП является многоканальной системой и в зависимости от текущих усло-
вий приема сигналов навигационных КА от обеих КНС может работать в сле-
дующих режимах:
- сигналы канала высокой точности (ВТ) КНС «Глонасс» - приоритетно;
- сигналы канала ВТ КНС «Глонасс» + сигналы пониженной точности
С/А КНС GPS (свободными каналами от приема сигналов ВТ КНС
«Глонасс»);
- сигналы канала пониженной точности КНС «Глонасс» + С/А КНС GPS.
НАП формирует и выдает в СУ следующую навигационную информацию:
- три координаты ТМ;
- три составляющие скорости ТМ;
- текущее системное время КНС «Глонасс», к которому относятся пара-
метры движения ТМ;
- временную метку для привязки бортовой шкалы времени СУ к систем-
ному времени КНС «Глонасс»;
- признак достоверности информации.
Параметры движения определяются НАП в Гринвичского вращающейся
системе координат (ГСК); системное время КНС «Глонасс» соответствует шкале
Государственной Системы Единого Времени (ГСЕВ).
Предельные погрешности (Зст) определения навигационных параметров со-
ставляют:
а) КНС «Глонасс», сигналы ВТ:
- по координатам - 30 м;
532
- по составляющим вектора скорости - 0,1 м/с;
- по текущему времени КНС «Глонасс» - 0,0001 с;
б) комбинированный вариант: КНС. «Глонасс» (сигналы ВТ)+КНС GPS
(сигналы С/А):
- по координатам - 80 м;
- по составляющим вектора скорости - 0,3 м/с;
- по текущему времени КНС «Глонасс» - 0,0003 с.
Временная метка НАП должна обеспечивать привязку временной шкалы
СУ к системному времени КНС «Глонасс» с точностью < 0,001 с.
Частота обновления навигационных параметров, привязанных к импульс-
ной метке времени, - 1 с.
Время готовности системы к выдаче навигационных параметров, включая:
время прогрева опорного генератора, время проверки в режиме «Контроль», вре-
мя загрузки априорных данных, - не более 25 мин.
Расчетная длительность непрерывной работы - не менее 10 суток.
Потребляемая мощность ~ 20 Вт.
Масса (блок приемовычислителя, блоки антенных устройств, БКС) < 10 кг.
Дополнительными требованиями к НАП, обусловленными специфическими
особенностями функционирования НАП в составе СУ ТМ, являются:
- обеспечение кругового радиообзора антенными устройствами НАП ТМ;
- функционирование НАП ТМ в двух режимах: штатном и дежурном,
обеспечивающем минимальное энергопотребление на определенных ин-
тервалах времени.
Для штатной работы НАП ТМ необходима следующая априорная инфор-
мация:
- дата и текущий момент времени (СЕВ) на начало навигационного сеан-
са;
- параметры движения ТМ (ГСК) и момент времени (СЕВ), к которому
они относятся;
- альманахи параметров орбит навигационных космических аппаратов
(НКА) КНС «Глонасс» и GPS.
Текущий момент времени и параметры движения ТМ поступают в НАЛ от СУ ТМ.
Загрузку или обновление альманахов можно проводить предварительно на
ТП с использованием ретранслятора сигналов НКА из состава КПА НАЛ. При
орбитальном полете обновление альманаха осуществляется также аппаратными
средствами самой НАП путем их сбора от видимых НКА. Время, необходимое
для полного обновления альманаха для КНС «Глонасс», составляет 3-4 мин, а
для КНС GPS - до 14 мин. Период обновления альманахов < 30 дней. Альманахи
загружаются в энергонезависимую память НАП.
5.5.4.4.2 Радиотехническая система измерения параметров
относительного движения «Курс-ММ»
Аппаратура «Курс-ММ» предназначена для автономного измерения пара-
метров относительного движения двух космических объектов (КО) при их сбли-
533
жении вплоть до механического контакта.
«Курс-ММ» представляет собой радиотехническую систему миллиметрово-
го диапазона длин волн (8-миллиметровый диапазон).
Угловые параметры измеряются методом фазового пеленгования с помо-
щью неподвижных антенных систем, состоящих из разнесенных слабонаправ-
ленных излучателей с диаграммами направленности, перекрывающими весь диа-
пазон измеряемых углов.
Угол взаимного крена вычисляется в БЦВК СУ по совокупности угловых
параметров.
Угловые скорости определяются в цифровом вычислительном устройстве
(ЦВУ) «Курс-ММ» численным дифференцированием данных об угловых пара-
метрах.
Относительная дальность р измеряется по временной задержке модулиро-
ванного сигнала канала измерения дальности, а радиальная скорость р - по доп-
леровскому сдвигу частоты несущих колебаний канала измерения радиальной
скорости.
Схема размещения аппаратуры «Курс-ММ» на ТМ и ОС, измерительные
системы координат, связанные с посадочными местами антенных модулей, пока-
заны на рис. 5.5.10.
Рисунок 5.5.10 - Схема размещения аппаратуры «Курс-ММ» на ТМ и ОС
В состав аппаратуры «Курс-ММ» входят:
- антенные модули Аь А3, приборный контейнер электроники (ПК) и уст-
ройства сопряжения, установленные на ТМ;
- антенные модули Аг, Ад, приборный контейнер электроники (ПК) и уст-
ройство сопряжения, установленные на ОС.
Измерительные каналы «активной» части «Курс-ММ» работают либо в ре-
жиме поиска сигнала по частоте, либо в режиме измерения параметров. Пере-
ключение режимов функционирования происходит по формированию признаков
обнаружения сигнала - «Сигнала наличия цели».
Функционально аппаратура обеспечивает работу двух подсистем:
- подсистемы дальнего действия (ДД);
- подсистемы ближнего действия (БД).
534
Подсистема дальнего действия работает на дальностях от 1000 и до 1 м и
измеряет параметры:
- дальности р, цена дискрета -1м;
- скорости р, цена дискрета - 0.001801 м/с;
- углов пеленга Л В (\|/аь oAi) - в измерительной системе координат ан-
тенного модуля Aj, цена дискрета - 1/116 град;
- угловых скоростей ЛВ (vj/A1,6А1) - в измерительной системе координат
антенного модуля Аь
Подсистема ближнего действия работает на дальностях от 300 до 1 м и
обеспечивает измерение параметров:
- углов пеленга ЛВ А2» и а?.) - в измерительной системе координат ан-
тенного модуля А3, цена дискрета - 1/116 град;
- угловых скоростей ЛВ (фА2,оА2) - в измерительной системе координат
антенного модуля Аз;
- «пассивных» углов (уп, оп)- в измерительной системе координат ан-
тенного модуля Ад, цена дискрета - 1/116 град;
- триангуляционной дальности рт на дальностях от 30 до 1 м.
Такт формирования параметров подсистемами дальнего и ближнего дейст-
вия - 0,205 с.
Комплекс обеспечиваег формирование перечисленных угловых параметров
по измерению углового положения четырех ЛВ, показанных на рис. 5.5.11.
ТМ ОС
Рисунок 5.5.11 - Схема измерения углового положения четырех ЛВ
535
Угловым координатам ЛВЗ соответствуют углы пеленга \|/АЬ uAi С|/Аь vAi).
Угловым координатам ЛВ1 соответствуют углы пеленга Ua2 (v|/a2, ^а2)-
Угловым координатам ЛВ2, ЛВО, измеряемым в системе координат антен-
ного модуля 4, соответствуют «пассивные» углы пеленга \|/п, ип- По этим ЛВ оп-
ределяется и триангуляционная дальность рт.
Состав измеряемых параметров, диапазоны измерения и допустимые мак-
симальные погрешности приведены в табл. 5.5.6.
Таблица 5.5.6 - Состав измеряемых параметров, диапазоны измерения и
допустимые максимальные погрешности
Измеряемый параметр, единицы измерений Диапазон измерений Максимальная погрешность измерения Условия измерений
Дальность измерений, м Максимальное отклонение относительно антенных модулей ЛБ, град
А П
р, м 1.. .1000 3+0,01 р 0,01 р2 15...1000 1...15 5 5 10...15 5...15
р, м/с ±5 0,003±0,02 р 1...1000 5 15
УА1.П, град ± 15 круговой конус 0,15+ 0,02 у 1...300(П) 1...1000(A) 15 15
v>Ai,n, град ±15 круговой конус 0,15 +0,02 и 1...300(П) 1...1000(A) 15 15
ТА|) град/с + 1 0,01 +0,1 Ф Время ос- реднения 1 с 1...1000 15 15
6А1, град/с ± 1 0,01+0,16 Время ос- реднения 1 с 1...1000 15 15
<Иа2, град ±15 круговой конус 0,15 +0,02 у 1...300 15 15
Оа2, град ±15 круговой конус 0,15+ 0,02 и 1...300 15 15
ш / т а2 , град/с ±1 0,1 +0,1 Ф Время ос- реднения 1 с 1...300 15 15
°А2, градус ± 1 0,1 + 0,1 и Время ос- реднения 1 с 1 ...300 15 15
536
5.5.4.5 Орбитальные маневры. Траектории сближения
Выполнению режима сближения и причаливания ТМ к ОС предшествуют
следующие этапы:
1. Выведение транспортного модуля ракетой- носителем на опорную орбиту с
параметрами:
- максимальная высота орбиты - 300 км;
- минимальная высота орбиты - 180 км.
Продолжительность этапа - 1 виток.
2. Отделение от PH, включение СУ ТМ и выполнение тестовых проверок го-
товности двигательной установки, командных приборов, подготовку систе-
мы механической стыковки, а также выполнение проверок функционирова-
ния СУ в различных режимах.
Продолжительность этапа - 2 суток.
3. Построение базовой ориентации;
- наведение по целеуказаниям наземного контура управления, форми-
рующего траекторию сближения.
Продолжительность этапа - 1 сутки.
Режим сближения и причаливания задействуется на четвертые сутки полета.
На рис. 5.5.12 изображена схема баллистической траектории наведения и
траектории сближения.
Рисунок 5.5.12 - Схема баллистической траектории наведения и траектории сближения
537
Под баллистической траекторией наведения будем понимать отрезок орбиты пе-
рехода, формируемый корректирующими импульсами наведения, соединяющий точку
начала перехода на опорной орбите ТМ и зону действия бортовых автономных измери-
тельных систем ТМ и измерения параметров относительного движения. Корректирую-
щие импульсы для формирования баллистической траектории планируются наземным
сегментом (НС), выполняющим наведение ТМ (коррекцию орбиты, фазирование). Пе-
редаваемое на борт ТМ полетное задание (ПЗ) отрабатывается системой управления ТМ.
Задача орбитальных маневров наведения по целеуказаниям наземного кон-
тура управления - сформировать траекторию, обеспечивающую одновременный
приход ТМ и ОС в расчетную область (точку) встречи.
Начало маневров, количество корректирующих импульсов, их величина и
направление определяются НС исходя из таких параметров:
- выбранного момента встречи, времени, отводимого по программе полета
на участок дальнего наведения;
- требуемого момента касания ТМ и ОС;
- ограничений на допустимый расход топлива.
Траектория сближения должна удовлетворять:
- условиям функционирования системы измерения параметров относи-
тельного движения по диапазонам измеряемых параметров (дальности,
скорости сближения, угловой скорости ЛВ, углов пеленга ЛВ);
- возможностям двигательной установки ТМ, ограничивающим макси-
мальную величину последнего корректирующего импульса дальнего ав-
тономного наведения;
- требованиям по длительности участка дальнего сближения;
- требованиям по безопасности участка дальнего сближения.
Траектории сближения определяются схемой фазирования и могут быть
сформированы:
- с внешней фазирующей орбиты по отношению к круговой орбите ОС;
- с внутренней фазирующей орбиты.
5.5.4.6 Схема доступа к кооперируемым объектам
Орбитальная станция как цель при решении задач сближения и причаливания
в общем случае представляет собой инженерное сооружение сложной геометриче-
ской формы, оборудованное стыковочными узлами и устройствами причаливания.
Схема доступа к ОС регламентирует процедуры и правила нахождения ТМ
вблизи ОС, определяет требования к интерфейсам и функционированию, являю-
щиеся специфичными для ТМ, способного осуществлять независимое маневри-
рование в пространстве вблизи ОС.
Сближение и причаливание ТМ к ОС выполняются только к допустимым
местам (портам), оборудованным требуемыми стыковочными приспособлениями
(в том числе стыковочными агрегатами).
Должна обеспечиваться совместимость геометрической конфигурации ТМ
и ОС в месте стыковки.
Должен планироваться график (временной распорядок выполнения опера-
538
ций и нахождения вблизи ОС) и сценарий проведения операций сближения и
причаливания.
СУ ТМ должна автономно (независимо от ОС) определять собственное по-
ложение в пространстве, используя информацию приборов и систем ТМ, а также
информацию наземных средств обеспечения полета.
Траектория и время сближения определяются заранее, при планировании полета,
и включает в себя заранее предопределенные «точки зависания», в которых СУ ТМ
получает команды «остановиться/начатъ движение» от внешнего контролирующего
процесс сближения источника (наземный сегмент управления, экипаж ОС и др.).
Ограничения на траекторию сближения
1. Начальный участок сближения
Началом сближения считается точка траектории сближения, выводящая ТМ на
траекторию вхождения в «эллипсоид сближения» размерами 4x2x2 км с центром в
центре масс ОС, большой осью направленный вдоль вектора скорости ОС (рис. 5.5.13).
Эллипсоид
сближения
Рисунок 5.5.13 - К схеме доступа к кооперируемым объектам
539
2. Прицеливание при сближении
После начала сближения движение ТМ должно осуществляться по схеме
прицеливания со смещением, при котором траектория движения внутри «эллип-
соида сближения» с учетом возможных разбросов должна находиться вне сфери-
ческой «зоны доступа» радиусом 200 м с центром в центре масс ОС (рис.5,5.13).
3. Вход в зону доступа
ТМ должен входить в зону доступа через согласованный «коридор сближе-
ния и увода», как правило, конической формы, своей вершиной совпадающий со
стыковочным агрегатом ОС, на который осуществляется стыковка ТМ
(рис.5.5.13).
4. Уход из зоны доступа
ТМ в зоне доступа должен уходить от ОС в точку зависания только внутри
согласованного «коридора сближения и увода».
5. Уход из области эллипсоида сближения
ТМ при уходе из области «эллипсоида сближения» должен сохранять по-
ложительную относительную скорость для увеличения относительного расстоя-
ния до выхода из области «эллипсоида сближения» и не должен повторно вхо-
дить в эту область, если не предусмотрено повторное сближение.
Требования к ориентации ОС
Ориентация ОС должна быть построена к началу управления ТМ по ин-
формации аппаратуры «Курс-ММ» и должна обеспечивать вхождение в связь
«активной» и «пассивной» частей аппаратуры.
Ориентация задается программными углами в СУ как ТМ, так и ОС и опре-
деляет положение ССК ОС на расчетный момент касания относительно согласо-
ванной системы координат (инерциальной либо орбитальной вращающейся).
Кроме того, ориентация ОС должна обеспечивать освещенность стыковоч-
ного узла для телевизионного контроля процесса причаливания, а также для
обеспечения работы ТОРУ.
5.5.4.7 Принципы построения управления на участке дальнего
наведения (ДН)
Задачи участка ДН
Основной задачей участка ДН является формирование траектории сближе-
ния ТМ с ОС по информации НАП до зоны работы ИС «Курс-ММ» с требуемы-
ми кинематическими параметрами.
Для реализации данной задачи участок ДН разделен на следующие участки:
- программный разворот ТМ для обеспечения работы НАП;
- подготовка аппаратуры НАП и ИС «Курс-ММ» к работе с проведением
тестов;
- ориентация ТМ для обеспечения работы НАП;
- формирование оценки вектора состояния относительного движения в
ОСК на моменты реализации КИ и начала поиска ИС «Курс-ММ» по
информации НАП и прогнозу АСН;
- вычисление величины КИ и программных углов ориентации ТМ;
540
- выполнение программных разворотов в направлении прогнозируемого
положения ЛВ на ОС , в направлении реализуемого КИ;
- реализация КИ на ДКС или ДПС с использованием информации БА;
- ориентация и стабилизация ТМ в БСК с точностью, требуемой для вы-
полнения задач перечисленных выше участков ДН;
- вычисление прогнозируемых значений параметров относительного дви-
жения на моменты начала поиска и начала сеансов работы с НАП;
- прогнозирование вектора состояния ОС и ТМ от момента начала функ-
ционирования на момент начала поиска, оценка текущего вектора со-
стояния ТМ в ОСК на всех участках ДН, включая реализацию КИ.
На всем участке ДН проводится:
- контроль процесса сближения с использованием показаний НАП и про-
гнозов вектора состояния ТМ и ОС и параметров относительного дви-
жения ТМ и ОС;
- контроль невключений-неотключений ДПС с использованием информа-
ции ГИВУС.
Такт работы БЦВК - 0,1025 с.
Циклограмма ДН показана на рис. 5.5.14.
Участок ДН Участок
БН
Цикл коррекции 1,2, 3
0 1758 10020 0 1760 2844 4520 4523+Ти 8282 Тег
Разворот Подготовка и Ориен- Измерения Разворот Реализация Разворот
ТМ для тестирование тация НАП, оценка ТМ для КИ ТМ в поло-
обеспече- аппаратуры ТМв вектора сос- выдачи жение, тре-
ния рабо- ты НАП НАП и ИС «Курс-ММ» ОСК тояния ТМ, расчет вели- чины и на- правления КИ КИ буемое для работы НАП или в на- правлении прогнозиру- емого ПОЛО- ’::
жения ЛВ
Рисунок 5.5.14 - Циклограмма ДН
Типовая траектория сближения на ДН (в плоскости орбиты) изображена на
рис. 5.5.15.
541
Рисунок 5.5.15 - Типовая траектория сближения на ДН (в плоскости орбиты)
Идеология организации управления сближением на участке ДН
Штатная схема организации сближения на участке ДН предусматривает три
цикла коррекции с выдачей КИ.
Первые два КИ (КИ1, КИ2) реализуются для обеспечения попадания в за-
данную по ПЗ точку прицеливания.
Расчет корректирующего импульса включает в себя:
- вычисление требуемой величины приращения скорости;
- определение направления выдачи КИ.
При расчете требуемой величины приращения скорости формируются:
rv»i
1. Программный вектор скорости на момент начала КИ- Vr
по следующей схеме:
Vb
14• г-[cos(co09 • ТР)-1]+ 2 • гт • [1 -cos(a)09 • ТР)]
sin(coO9 - Тр)-
6 • соО9 • Тр • г+ пт - и
Д
542
4 • sin(<x>09 -ТР)- гт - г + 2 • [1 - cos^Oqp Тр)]- п-пт
3 (О09 Тр- г* cos((Dq9 Тр)-гт
Vb — ~й>09 • b— bT •
cos^cOo9 • Tp J] --------3 • Tp • sin((DQ9 • Tp ),
CL>09
- вектор оценки относительного положения в ОСК на момент на-
чала импульса коррекции X] на оси 0п, 0г, 0ь’,
- координаты требуемой точки прицеливания в ОСК по осям 0^ 0г, 0ъ;
Тр - время до окончания дальнего наведения; <Оо9 - орбитальная
угловая скорость в режиме.
При этом следует отметить, что первые два импульса КИ рассчитываются
для прицельной точки, выбранной из условия безопасности ОС и ТМ. Обычно
это координаты:
пт =-1000... -1500 м, гт = Ьт = 0 - для траектории сближения с нижней фа-
зирующей орбиты,
пт =1000... 1500м,гт =ЬТ = 0 - для траектории сближения с верхней фази-
рующей орбиты,
2. Требуемое приращение скорости Vx
где
- вектор оценки относительной скорости в ОСК на момент начала КИ;
b
543
Vn
vr
Vb.
Дхг
Дуг
Azr
- программный вектор скорости на момент КИ;
- вектор требуемого приращения скорости в приборно-базовой сис-
теме координат (ПБСК);
GT - матрица перехода из ОСК в ПБСК.
При расчете направления выдачи КИ формируются углы ориентации оси
ОХ ТМ в ПБСК по следующим формульным схемам:
угол тангажа
при Ахг >0,
при Ах г -<0;
У
Azr
угол рыскания м/ = arcsin ______——_ _______—
I JUir)1 + (Луг)2 +(Air)2
угол крена ф = 0.
Следующий за ними КИЗ (последний) выполняется для обеспечения пере-
хода в расчетную область начала поиска ИС «Курс-ММ», которая определяется
расположением целевого стыковочного узла, ориентацией ОС, зоной измерений
параметров относительного движения ИС «Курс-ММ».
При необходимости по настройкам параметров ПЗ прицельная точка также
используется для задания координат точки «ожидания» на заданном безопасном
расстоянии от ОС (обычно ±1500 м по координате п в ОСК), что позволяет вы-
полнять «ожидание», исключая опасность столкновении с ОС, а также уточнять
параметры относительного движения ОС и ТМ по НАП, баллистическим устав-
кам от НКУ, а при необходимости и уточнять ПБСК. Дальнейшее приближение к
окрестности требуемого стыковочного узла выполняется как по программе, зало-
женной в БЦВК ТМ, так и по разовым командам от НКУ.
Вычисляемые КИ реализуются с программным разворотом, если величина
реализуемого КИ превышает заданное по ПЗ значение. Если величина реализуемо-
го КИ не превышает заданное по ПЗ значение, то КИ реализуются координатно:
- при текущей ориентации ТМ (например, для сохранения ориентации
НАП);
- ориентации с проектированием вектора КИ в направлении вектора тяги
ДПС, проходящей через центр масс ТМ;
- ориентации вдоль прогнозируемого положения ЛВ для поиска ИС
«Курс-ММ».
544
Характерной особенностью функционирования системы стабилизации ТМ
при выдаче КИ одним ДКС является наличие больших возмущающих сил и мо-
ментов от работающих ДКС, а также необходимость выполнения требований по
допустимой величине моментов, действующих на узлы крепления солнечных ба-
тарей (СБ) ТМ и вызванных упругими колебаниями СБ.
5.5.4.8 Особенности выбора прицельной точки для дальнего наведения
КИЗ зависит от программной ориентации ОС, требуемого стыковочного уз-
ла и баллистической схемы сближения, реализуемой СУ ТМ по информации от
НКУ.
При выборе прицельной точки необходимо рассматривать следующие ва-
рианты ориентации ОС:
- ОСК (ориентация OC-LVLH);
- ИСК, совпадающая с ОСК в момент Тст (ориентация ОС - ХРОР).
Возможными стыковочными узлами (имеющими расположение «пассив-
ной» части аппаратуры «Курс-ММ») считаются:
- торцевой стыковочный узел ОС,
- надирный стыковочный узел ОС.
Возможными баллистическими схемами сближения считаются:
- сближение с ОС с нижней орбиты ТМ (НО),
- сближение с ОС с верхней орбиты ТМ (ВО).
S.5.4.9 Управление сближением на участке ближнего наведения
Исходя из принципов построения управления участка дальнего наведения
режима «сближения и причаливания» ближнее наведение должно начинаться на
относительной дальности между кооперируемыми объектами, обеспечивающей
вхождение в связь «активной» и «пассивной» частей аппаратуры «Курс-ММ».
При этом угловые положения объектов относительно ЛВ, соединяющей антенные
модули аппаратуры «Курс-ММ», не должны превышать 15 град.
Такие требования означают, что ТМ должен быть выведен импульсами
дальнего наведения в расчетный «конус причаливания» относительно стыковоч-
ного узла ОС объекта с углом при вершине, не превышающим 20... 25 град на
дальности —1000 м. Траектория сближения на БН в плоскости, определенной век-
тором скорости ТМ и радиусом-вектором Земля-ТМ, показана на рис. 5.5.16.
Участок ближнего наведения начинается с поиска ОС. При этом осуществ-
ляется управление движением вокруг центра масс с набором поисковой скорости
в каналах тангажа и рыскания. По «Сигналу наличия цели 1» (СНЦ1), формируе-
мому аппаратурой «Курс-ММ», гасится поисковая скорость и начинается отра-
ботка углов пеленга igAb oAi ЛВЗ (рис. 5.5.11). Поиск завершается при значениях
углов пеленга, не превышающих 3 град при наличии СНЦ1. В этом режиме
«Курс-ММ» обеспечивает измерение параметров относительного движения по
дальности, скорости сближения и углам пеленга ЛВ. С такого момента управле-
ние движением ведется как вокруг центра масс, так и центром масс по информа-
ции «Курс-ММ».
545
Рисунок 5.5.16 - Траектория сближения на БН в плоскости, определенной
вектором скорости ТМ и радиусом-вектором Земля-ТМ
При этом необходимо отметить, что управление движением вокруг центра
масс решает задачу стабилизации продольной оси ТМ вдоль линии визирования с
управлением в канале крена и выполняется с тактом 0,1025 с.
Управление движением центра масс решает две задачи:
- управление движением вдоль линии визирования - продольное;
- управление движением в плоскости, перпендикулярной линии визирова-
ния, - боковое и выполняется с тактом 0,205 с.
Весь процесс сближения ближнего наведения можно разбить на следующие этапы:
- сближение до дальности «зависания»;
- функциональное «зависание»;
- причаливание, включающее в себя участки сближения до дальности
~50 м и движения с постоянной скоростью.
Временная циклограмма сближения показана на рис.5.5.17.
Рисунок 5.5.17 - Временная циклограмма сближения
546
ТК1 - время прихода на дальность между объектами 200 м - дальность за-
висания;
ТК2 - время окончания функционального зависания;
ТКЗ - время прихода на дальность 40 м;
tcu - время касания.
1. Сближение до дальности «зависания»:
а) управление центром масс
На этом этапе в продольном канале решается задача управления скоростью
сближения с приходом на дальность «зависания» по времени, определяемому
циклограммой режима и настройками полетного задания.
Программное значение дальности для этого этапа определяется зависимо-
стью
рПР=|р|-(с-тк1-тт)-£>
za
где р - скорость сближения, измеренная аппаратурой «Курс-ММ»; Тт - теку-
щее время режима сближения и причаливания; а - расчетное ускорение от работы
двигателей сближения и причаливания.
В каналах управления боковым движением - задача «удержания» в «конусе
причаливания». Управление ведется по оценке угловой скорости ЛВ в каналах
тангажа и рыскания, а также углам пеленга ЛВ1, рассчитанным по положению
ЛВ относительно программного положения стыковочного узла «пассивного»
объекта в текущий момент времени.
Закон управления определяется формульной схемой
<0уупр = К • <pz + £2улв; шпр - Дшзи < C0yYnp < сопр + Дшзн;
®zynp =К-фу +О2Л"; <опр - Д<азн <<oYYnp <сопр + Д<озн,
упр упр
где <dy ,coz н - аргумент управления соответственно в каналах рыскания и
тангажа; К - коэффициент при углах пеленга ЛВ1; <pz, <pY - расчетные углы пе-
ленга ЛВ1 в канале рыскания и тангажа; сопр - программное значение угловой
скорости (задается в ПЗ); £1УЛВ,£22ЛВ - оценка угловой скорости ЛВ в проекции
на оси OY и OZ ССК ТМ; Дсозн - зона нечувствительности в законе управления
(задается в ПЗ).
б) управление угловым движением
На этом этапе решается задача стабилизации вдоль линии визирования по
углам пеленга \|/АЬ иА1 «Курс-ММ». Точность стабилизации - не хуже ±3 град от-
носительно ЛВ (требования ТЗ). В канале крена в качестве стабилизационного
угла используется расчетный угол, формируемый алгоритмами СУ по информа-
ции о программном положении стыковочного узла «пассивного» объекта в теку-
щий момент времени и положении связанных осей ТМ относительно ПБСК. Ин-
формация об абсолютной угловой скорости объекта относительно связанных осей
поступает из аппаратуры ГИВУС.
547
2. Функциональное «зависание»:
а) управление центром масс
В канале продольного управления решается задача поддержания дальности,
задаваемой через ПЗ в требуемом диапазоне с обнулением скорости сближения.
Длительность «зависания» определяется циклограммой режима и полетным зада-
нием.
Программное значение дальности определено выражением
РЛр=Ь«Р,
где Ък - коэффициент при скорости сближения.
В каналах управления боковым движением - задача «удержания» на про-
дольной оси стыковочного узла ОС. Управление ведется по оценке угловой ско-
рости ЛВ, а также по углам пеленга ЛВ1 \уп> Vn, измеряемым «Курс-ММ» отно-
сительно системы координат антенного модуля А4 ОС на дальности р < 300 м
Закон управления аналогичен участку управления боковым движением эта-
па сближения. При этом углы пеленга ЛВ1 <pz, <pY определяются по измеренным
углам Тп, ип, как проекции на ось ССК ТМ;
б) управление угловым движением
Решается задача стабилизации вдоль линии визирования по углам пеленга
Vai, Vai «Курс-ММ». В канале крена в качестве стабилизационного используется
расчетный угол, формируемый алгоритмами СУ по информации об углах пеленга
двух линий визирования (ЛВЗ - Vai и dAi, ЛВ1 - \|/д2 и Daz), где \|/ai, oAi - углы
пеленга ЛВ1 в системе координат антенного модуля АЗ «активного» объекта ап-
паратуры «Курс-ММ». В управлении используется информация о проекциях аб-
солютной угловой скорости объекта на связанные оси из аппаратуры ГИВУС.
3. Причаливание
а) управление центром масс
В продольном канале решается задача управления скоростью сближения с
приходом на дальность, задаваемую по ПЗ за время, определяемое циклограммой
режима и ПЗ. Программное значение дальности вычисляют по выражению
р1Ф=|р|-Ои-ткз-т1)-£-.
za
От момента прихода на требуемую дальность и до касания причаливание
проходит со скоростью, программное значение которой задано по ПЗ из условия
выполнения требований ТЗ на момент механического контакта. Например, про-
граммное значение на дальности р < 20 м определяется как рпр - -0.15 м/с.
В каналах бокового движения - управление аналогично этапу «зависания»;
б) управление угловым движением
Задача стабилизации - управление аналогично этапу «зависания».
Типовой процесс управления скоростью сближения на участках БН показан
на рис. 5.5.18, а-з. На рисунках время указано в тактах Т]=0,1025 с, 1^=51868 Ть
548
a
Рисунок 5.5,18 ~ Управление скоростью сближения на участках БН
б
Рисунок 5.5.18 — Продолжение
215,000
185,000
L,
S
Дальность, м
210,000
205,000
200,000
195,000
190,000
1 1
1L
Till ll 1
л Ju 1 . l|i 1 It
Н № ! | । jt II1111I1 it
1 , MSBuriiiiiTmui'iiii'jii'iiiJB
1 ^гт И111ШШ111ШМ
fill ll J ! ll iimrimwaiiaii
111П1 И11К1 ilffWIli Pllliil 1
Mini 1 aS Sm анп iiiaii' la A IlMlWW [ИГЛ
(Ум 1 II Mil» WrillKIUIJlilUHMB 1,
1 11 1 | . 1, j. t Л till rn Wi’Hlllfi, UKHllIllllUI 1
_ия Illi 11 1 1 Il il il llil j Mmiiimiiinw шгашшиаш
1 IIIMMl il i 111Ш If1 >
МЖ1Н ин Mill Hl Mill вна II II
IK'I KwaiimiumiuihwiTiiMuum'iiaBMiikMuuiian
«ши iiuiiwiiwoimK aaiM ® L
flit Ш pH > V 1 1 1 1 H | M
wwiuiiauMiuiuiwH 1 “
111П1 1 II 1 ШШ и 1
! 1 II [ 1 ' 1
’ ср
Ь В
Я
3
5
5
Твкт
8
$
В
5
•Л
в
Я
ID
в
Рисунок 5.5.18 - Продолжение
Рисунок 5.5.18 - Продолжение
к с 42985 о <Ь о о о о о -<х> “сл Ъ- ю "о К) о о о о о о о о о о о о о о
43235 43485 43735 43985 44235 44485 44735 44985 45235 3 45485 45735 45985 46235 46485 46735 46985 47235 47485 47735 Относительная скорость, м/с
г
р
ч,
-
з
>
/
t
%
- j
J-
k
I;
£
—
— — — -•
240,000 Дальность, м
ОЛП ппл 1 ,
yVA
160,000
'А/
120,000 А Л
Ж
Ил,
80,000
*ч.
УЛ.А А А
40 ООП•
С U V > с » с > ОС 3 3 3 с £ 3 3 с 3 5 ? S 3 3 Такт 48550- с § а > с 3 >
д
Рисунок 5.5.18 - Продолжение
554
е
Рисунок 5.5.18 - Продолжение
ж
Рисунок 5.5.18 - Продолжение
Рисунок 5.5,18- Продолжение
со
9SS
О) о о о 8 о о о о о о 6 8 о р о о о о о о
49005
1
49105 1
49205
1
49305 1
49405
49505
49605
1 1
49705 — 1 1
49805
1
49905
50005
50105 О
№
50205 О о
§
50305 1 L§
Я
ЕЛЛЛД £
эичио t
Ю 5 50505 J :орос
ЕЛАПК
□иоио &
50705 2^
50R05
50905
51005 1 Ь-
51105
51205
51305 4,
51405
51505
i
51605 |
51705
51805 fe
51905
U 1
5.5.4.10 Принципы бортового навигационного обеспечения режима
сближения и причаливания
В режиме сближения и причаливания бортовое навигационное обеспечение
на базе НАП ТМ предназначено для информационного обеспечения рекпения
следующих задач управления движением ТМ:
- управления движением центра масс ТМ на участке дальнего наведения
(ДН);
- реализации увода в расчетную область относительных положений ТМ и
ОС при неисправности системы «Курс-ММ» на участке причаливания;
- реализации зависания в расчетной области относительных положений
ТМ и ОС.
Дальнее наведение
На участке ДН НАП ТМ выполняет функции основной информационной
системы и обеспечивает решение таких задач:
- определение параметров относительного движения ТМ и ОС, исполь-
зуемых непосредственно для управления движением центра масс ТМ;
- формирование начальной навигационной информации для участка
ближнего наведения (БН).
Навигационная информация формируется на участке ДН по следующей
схеме.
В начале режима на участке подготовки, контроля и калибровки ИС «Курс-
ММ» выполняется:
- переключение НАП ТМ в штатный режим работы (при необходимости);
- прогноз параметров движения ТМ на момент начала функционирования
НАП ТМ и выдача их в НАП ТМ;
- прогноз параметров движения ТМ и ОС на момент начала первого сеан-
са измерений НАП ТМ.
Далее в каждом цикле ДН проводится:
- прогноз предыдущих оценок параметров движения ТМ на момент окон-
чания сеанса измерений НАП (с учетом выдачи КИ);
- обработка информации, поступающей от НАП ТМ, включая фильтра-
цию и проверку этой информации на достоверность;
- формирование уточненных параметров движения ТМ;
- прогноз параметров движения ОС на момент времени (СЕВ), к которому
относится вектор состояния ТМ;
- преобразование параметров движения ОС к базовой системе координат
НАП (ГСК);
- определение параметров относительного движения ТМ и ОС как раз-
ность параметров абсолютного движения этих объектов (ГСК);.
- перевод параметров относительного движения из ГСК в ОСК, привязка к
шкале времени СУ.
Дополнительно на участке ДН может быгь организован также контроль
функционирования НАП путем сравнения текущих измеренных НАП параметров
движения центра масс с прогнозируемыми параметрами движения ТМ.
557
Прогноз параметров абсолютного движения ТМ и ОС проводится интегри-
рованием уравнений движения методом Рунге-Кутта 4-го порядка. Шаг интегри-
рования переменный.
Ввиду требуемой высокой точности прогноза параметров движения ОС в
правых частях уравнений движения ОС должны учитываться:
- гравитационное поле Земли до гармоник порядка 4x4 включительно;
- аэродинамическое торможение ОС.
Выбор схемы обработки выходной информации НАП ТМ обуславливают
следующие факторы.
На протяжении малых сеансов навигационных измерений (-100 - 300 с)
практически не происходит смены видимых НКА, а НАП ТМ для определения
параметров движения ТМ выбирает одно и то же «созвездие» НКА.
Основными погрешностями (За) навигационных измерений НАП являются
[13]:
1 - эфемеридная < (15,2 ... 24,0) м;
- , ионосферная < (6,4 ... 11,0) м;
- влияния селективного доступа (GPS) < 80 м.
Для малых сеансов измерений данные погрешности носят систематический
характер. Случайная погрешность измерений (шумы приемника НАП, уход часов
НКА) на порядок меньше и не превышает (За) -6 м.
Следовательно, практически независимыми можно полагать навигацион-
ные измерения, выполняемые через -10-15 мин.
Данные особенности навигационной обстановки и характеристик измере-
ний НАП ТМ приводят к необходимости обработки выходной информации НАП
ТМ по следующей схеме:
- в сеансах навигационных измерений на каждом цикле ДН выполняется
сглаживание и отбраковка аномальной информации, поступающей от
НАП ТМ, в конце сеанса формируется результирующая оценка кинема-
тических параметров движения ТМ;
- статистической обработке подлежат только результирующие оценки па-
раметров движения ТМ(3 цикла согласно циклограмме участка ДН).
При статистической обработке необходимо учитывать как влияние КИ на
параметры движения ТМ, так и статистические характеристики погрешностей
реализации этих КИ.
Предварительные оценки точностных характеристик прихода ТМ в расчет-
ную точку начала участка БН проводились при следующих предположениях:
- последний импульс скорости в режиме обеспечивает приход ТМ в рас-
четную точку начала участка БН (проекция на ось п = - 1000 м);
- начальные условия движения ОС определены за 2 - 3 часа до начала ре-
жима и уточнены (по ПЗ) на участке подготовки режима по результатам
дополнительных навигационных измерений, проведенных за -1 час до
начала режима;
558
- точность прогноза (За) параметров движения ОС на 2 - 3 часа (на мо-
мент начала участка БН режима) составляет величину ~(220 ... 270) м;
- после выдачи последнего КИ на участке ДН проводится дополнитель-
ный сеанс навигационных измерений НАП ТМ.
Предварительные оценки точностных характеристик параметров относи-
тельного движения ТМ и ОС на момент начала участка БН показали, что навига-
ционная информация от НАП ТМ совместно с априорной информацией о пара-
метрах движения ОС (ПЗ) позволяет обеспечить точность знания параметров от-
носительного движения в ОСК на момент начала участка БН в проекциях на ось
ОСК:
по п < 300 м;
по г< 150 м;
по b < 100 м.
Более перспективным представляется вариант навигационного обеспечения
задач управления движением в режиме с использованием прямой радиосвязи меж-
ду ТМ и ОС. При этом на ОС устанавливается передающее радиоустройство,
транслирующее практически в реальном масштабе времени параметры движения
ОС и соответствующий момент времени, На ТМ устанавливается приемное уст-
ройство, через которое информация о параметрах движения ОС поступает в БЦВМ
ТМ. В общем случае точность знания параметров относительного движения на
момент начала участка БН будет характеризоваться величинами < 150 м (За).
Наивысшей точности определения параметров относительного положения
ТМ и ОС (< 6 ... Юм) можно добиться в случае применения модифицированного
метода дифференциальной навигации. При этом также предполагается наличие
канала непосредственной радиосвязи между ТМ и ОС, по которому с ОС переда-
ются на ТМ измеренные НАП параметры (псевдодальности и псевдоскорости),
временные метки и номера НКА выбранного «созвездия». На ТМ выбираются
для обработки те же самые НКА, т.е. на борту ТМ по одному и тому же «созвез-
дию» НКА определяются параметры движения как ТМ, так и ОС.
При определении относительных координат ТМ и ОС исключаются все
систематические погрешности, остаются практически только случайные погреш-
ности, обусловленные шумами приемника НАП ТМ (< 6 ... 10м).
Участок БН
При штатном функционировании ИС «Курс-ММ» навигационная информа-
ция НАП ТМ для управления движением центра масс ТМ не используется. Ос-
новной задачей, решаемой при этом, является формирование начальных условий
по параметрам относительного движения ТМ и ОС на случай возможного отказа
ИС «Курс-ММ».
Как и на участке ДН, параметры относительного движения ТМ и ОС опре-
деляются как разности параметров абсолютного движения этих объектов в Грин-
вичской системе координат с последующим преобразованием их в подвижную
орбитальную систему координат.
559
На участке БН ввиду непредсказуемости момента отказа ИС «Курс-ММ», с
одной стороны, и требованием обеспечения высоких точностных характеристик
знания начальных условий по параметрам относительного движения, с другой,
навигационные измерения НАП ТМ необходимо проводить непрерывно на про-
тяжении всего участка БН. Относительно высокая частота формирования НАП
навигационной информации (~1 с) позволяет значительно упростить, а в пределе
и исключить на участке БН алгоритмы прогноза параметров движения ТМ. В то
же время существенное отличие величины оптимального шага численного интег-
рирования (-20 с) и шага формирования параметров относительного движения
(~1 с), сложность правых частей уравнений движения, требование минимизации
загрузки БЦВМ в такте обуславливают необходимость включения в вычисли-
тельную схему прогноза параметров движения ОС двух навигационных алгорит-
мов:
- базового навигационного алгоритма, реализующего точный прогноз с
шагом -20 с;
- навигационного алгоритма пользователя, формирующего информацию о
параметрах движения ОС с шагом 1 с, с использованием достаточно
простых конечных соотношений.
, Необходимо отметить также, что условия движения ТМ на участке БН ре-
жима накладывают более жесткие требования на комплектацию НАП ТМ по
сравнению с участком ДН. Существенное отличие ориентации ТМ на участке БН
в общем случае от ориентации в ОСК обуславливает необходимость кругового
радиообзора антенными устройствами НАП ТМ.
Для обеспечения реализации предлагаемой идеологии управления движе-
нием ТМ в режиме сближения и причаливания с использованием НАП ТМ в со-
ставе ПЗ необходимо передавать на борт для ТМ и ОС:
- вектор состояния объекта (шесть кинематических параметров движе-
ния);
- момент времени, к которому относится вектор состояния объекта;
- баллистический коэффициент объекта.
Начальные условия движения для ТМ используют в качестве как априор-
ной информации для НАП ТМ, так и контроля достоверности информации, фор-
мируемой НАП ТМ.
В заключение необходимо отметить, что основным проблемным вопросом
реализации управления движением центра масс ТМ в режиме с использованием
НАП ТМ является обеспечение требуемой точности прогноза параметров движе-
ния ОС на всем протяжении режима сближения и причаливания (в том числе с
учетом возможного длительного интервала зависания в случае отказа ИС «Курс-
ММ» на участке БН).
Основными путями обеспечения требуемой высокой точности знания па-
раметров движения ОС являются:
- задание наиболее точных начальных условий (по ПЗ) движения ОС, со-
ответствующих статистическим оценкам, которые формируются навига-
560
ционным комплексом ОС;
- применение достаточно полной модели движения ОС в навигационных
алгоритмах СУ ТМ.
5.5.4.11 Методы обеспечения безопасности кооперируемых объектов
при подлете и зависании
Рассматривая вопрос безопасности КО на участке ближнего наведения ре-
жима «сближение и причаливание», необходимо отметить, что для выполнения
условий «зависания» на дальностях от 100 ... 500 м необходима достоверная ин-
формация об относительном положении и движении ОС. Такую информацию
можно получить только от ИС «Курс-ММ»,
Знание относительного положения ОС в системе координат ТМ, а также ин-
формации НАП о положении ТМ в абсолютной геоцентрической (ГцСК) СК с так-
том 1 с позволяет алгоритмам СУ рассчитать координаты ОС в ГцСК в текущий
момент времени. Точность знания координат ОС определяется точностью измере-
ний НАП ТМ и ошибками «Курс-ММ». Сравнительный анализ погрешностей из-
мерений показывает, что ошибки «Курс-ММ» существенно меньше погрешностей
измерений НАП. Поэтому справедливо предположение, что положение коопери-
руемого объекта в ГцСК определяется с точностью измерений НАП ТМ.
В случае возникновения нештатностей в процессе сближения и причалива-
ния, при которых возможна потеря информативности аппаратуры «Курс-ММ»,
алгоритмы СУ обеспечивают уход на дальность «зависания» и «зависание». При
этом в БЦВК ТМ интегрируется движение ОС в ГцСК, а информация о положе-
нии ТМ поступает из НАП. Управление ведется по разностному вектору относи-
тельного положения, переведенному в текущую орбитальную систему координат.
В таком режиме работы алгоритмов СУ точность «зависания», а тем самым
безопасность, определяется точностью прогноза.
По оценкам за виток (~1,5 часа) ошибка прогноза по дальности не превы-
шает 100 м. Исходя из этого определяется длительность такого режима и даль-
ность «зависания», задаваемая по ПЗ и равная 200 м.
5.5.4.12 Обеспечение условий для передачи управления аппаратуре
телеоператорного режима управления (ТОРУ)
«Зависание», при котором алгоритмы управления удерживают ТМ на рас-
четной оси стыковочного узла и на безопасной дальности от кооперируемого
объекта, ориентируя продольную ось вдоль прогнозируемого положения ЛВ,
обеспечивает наиболее «комфортные» условия для перехода в режим ТОРУ.
Этот же режим является самым безопасным с точки зрения выполнения ма-
невра увода при формировании программной ситуации. Разветвленная конфигу-
рация ОС не позволяет выполнить увод на малых дальностях. Поэтому «актив-
ный» объект должен отойти на безопасное расстояние, а затем выполнить им-
пульс увода вдоль вектора скорости орбитального движения.
5.5.4.13 Контроль нештатных ситуаций в режиме
Во всех динамических режимах функционирования СУ непрерывно осуще-
ствляется контроль наработки ДС на базовых интервалах времени, следующих
561
друг за другом, - в каждом канале стабилизации суммируются времена выдачи
управляющих сигналов на включение ДС и сравнение их с допустимыми значе-
ниями aonj, j = х, у, z. В конце базового интервала проводится обнуление накоп-
ленной наработки. Пороговые значения aonj выбираются как наработка ДС для
наихудших сочетаний параметров КА (понижение эффективности ДС, макси-
мальные возмущения и т. п.) плюс некоторый запас на незнание. При исправной
системе управления и расчетных характеристиках КА наработка ДС на базовых
интервалах времени не должна достигать пороговых, значений aonj. При наличии
некоторых неисправностей (невключение иди неотключение ДС, неисправность
командных приборов, нерасчетные невозмущения) имеют место повышенные на-
работки ДС вплоть до превышения заданного порога с формированием признака
нештатной ситуации «опасная продолжительность». По признаку «опасная про-
должительность» происходит отключение системы управления, выявление места
неисправности, отключение отказавшего элемента и последующее выполнение
программы полета. Такая ситуация происходила на модуле «Кристалл», когда от-
казал ДТС N 24 (неисправность типа «невключение»). После выявления места
неисправности по данным ТМИ и перехода на резерв программа полета была вы-
полнена. Аналогичная ситуация наблюдалась на одном из транспортных кораб-
лей снабжения.
Обобщенный контроль по опасному рассогласованию
Во всех динамических режимах в процессе полета проводится контроль
опасных рассогласований по фазовым координатам:
- относительной угловой скорости соц = Оф, - 0)ripj( где j = х, у, z,
G>npj “ программное значение проекции абсолютной угловой скорости в
канале];
- угловых отклонений относительно программного направления на участ-
ках угловой стабилизации.
Текущие значения относительной угловой скорости и угловые рассогласо-
вания сравниваются с соответствующими порогами, и при подтверждении рассо-
гласования контрольное число раз формируются признаки нештатной ситуации
по соответствующему каналу.
Причиной опасного рассогласования могут быть неисправности системы
управления, двигателей стабилизации, нерасчетные значительные возмущения,
не соответствующие динамической схеме и настройкам СУ и др.
После анализа ТМИ проводится парирование нештатной ситуации с пере-
водом ПЗ и повторным выполнением программы полета.
Контроль работы ГИВУС
Алгоритм контроля поплавкового ГИВУС может быть реализован следую-
щим образом.
В алгоритме рассчитывается разность приращений:
ек(п) = b4i(n) • 0Gi(n) + b42(n) -0G2(n) + b43(n)’0G3(n) - 0G4(n).
Если разность по модулю не превышает порог, заданный в ПЗ, то все включен-
ные ЧЭ считаются исправными. В противном случае наблюдается отказ ЧЭ. Иденти-
562
фикация неисправное™ осуществляется по характеру изменения выходного сигнала с
каждого ЧЭ в соответствии с перечнем возможных неисправностей прибора.
Контроль, диагностика и парирование неисправности осуществляются без
прерывания основной задачи СУ.
Если неисправный ЧЭ идентифицирован, то формируется признак неис-
правности Pi(n)= 1 и осуществляется переход на работу на трех ЧЭ.
Контроль системы «Курс-ММ»
Ограниченный диапазон работы радиоизмерительной системы «Курс-ММ»
в угломерных каналах, канале дальности, а также два возможных режима работы
(рабочий режим и режим тест-контроля) без формирования дополнительной сиг-
нальной информации не позволяют развернуть расширенный контроль функцио-
нирования, реализованный в СУ ТМ, стыкуемых к ОС «Мир», МКС.
Из существующего перечня контролируемых признаков нерасчетного
функционирования для «Курс-ММ» актуальными остаются:
- отсутствие готовности аппаратуры «Курс-ММ» к работе по результатам
автономного тест-контроля электроники;
- отсутствие сигнала наличия цели 1 (СНЦ1) при поиске на заданном ин-
тервале времени;
- признак несанкционированного пропадания СНЦ1 по системе дальнего
действия при углах пеленга \|/дь Здь не превышающих по абсолютной
величине 15 град;
- отсутствие сигнала наличия цели 2 (СНЦ 2) при р < 300 м;
- признак несанкционированного пропадания СНЦ2 по системе ближнего
действия при углах пеленга \|/АЬ не превышающих 5 град, и углах
пеленга \|/п, не превышающих 15 град, на дальности р < 300 м;
- отсутствие набора тройки достоверных измерений по дальности;
- отсутствие набора тройки достоверных измерений по скорости сближе-
ния;
- недостоверность информации по дальности;
- недостоверность информации по скорости сближения;
- несовпадение прогноза и измеренной информации.
Алгоритмический бортовой контроль функционирования аппаратуры
«Курс-ММ» заключается в идентификации ситуаций, описанных выше, и форми-
ровании соответствующего признака нерасчетного функционирования (ПНФ).
По ПНФ система управления переводит «Курс-ММ» в режим тест-
контроля. Выбор рабочего полукомплекта определяется результатами теста, по-
сле чего возобновляется работа СУ по информации «Курс-ММ».
В СУ предусмотрена возможность блокирования формирования ПНФ по
полетному заданию.
Контроль работы двигательной установки
Контроль работы ДУ осуществляется аппаратными и алгоритмическими
средствами. Исправность ДКС контролируется аппаратно (по показаниям прибо-
563
ров формируется признак неисправности ДКС), а парирование неисправности
осуществляется алгоритмически.
Аппаратные средства контроля работы ДПС и ДС отсутствуют.
В целях улучшения эксплуатационных характеристик СУ при возникнове-
нии неисправностей ДПС и ДС осуществляется алгоритмический контроль их ра-
боты, обеспечивающий (в случае возникновения неисправности):
- повышение вероятности выполнения функциональных задач динамиче-
ских режимов СУ;
- уменьшение вероятности возникновения аварийных ситуаций, в том
числе и при выполнении сближения и причаливания;
- сокращение расхода топлива.
Улучшение эксплуатационных характеристик достигается путем автомати-
ческого парирования неисправностей двигателей, реализующегося отключением
топливных магистралей (коллекторов), «питающих» неисправный двигатель.
Под неисправностью двигателя будем понимать отличие его фактической
тяги от номинальной на величину, превышающую некоторый допустимый порог.
Если неисправность проявляется во включенном состоянии, то это неисправность
типа «неотключение» (случай, когда тяга значительно выше номинальной, не
рассматривается). При выключенном состоянии может наблюдаться неисправ-
ность типа «невключение».
Автоматическое парирование неисправности двигателя без прекращения
выполнения задачи режима возможно в том случае, если оставшихся после от-
ключения коллектора двигателей достаточно для обеспечения управляемости из-
делия. В случае, если после парирования неисправности выполнение задачи ре-
жима становится невозможным, то происходит отключение СУ с предваритель-
ным проведением операций по обеспечению безопасности.
Алгоритмический контроль работы двигателей основан на непрерывной
оценке кинематических и динамических параметров углового и относительного
движения и последующем их анализе.
Основным принципом организации алгоритмического контроля работы
двигателей является возможность настройки алгоритмов путем задания соответ-
ствующих параметров ПЗ. Настройкой по ПЗ обеспечивается:
- блокировка автоматического парирования неисправности двигателя;
- блокировка выполнения задачи режима при автоматическом парирова-
нии неисправности двигателя;
- адаптивность алгоритмов контроля к текущим параметрам динамиче-
ской схемы изделия.
Двигатели № 1 - 20 (ДПС) (схема расположения двигателей на КА приве-
дена.в подразд. 2.1.2) используются в режиме одновременно как для управления
центром масс ТМ, так и для управления вокруг центра масс. Примеры вариантов
заявок на включение двигателей для решения заказанной выше задачи приведены
в табл. 5.5.7.
564
Таблица 5.5.7 - Примеры вариантов заявок на включение двигателей
Номера включаемых ДПС
для реализации необхо-
Вариант сил и (или) моментов, необходимых для
управления центром масс и (или) вокруг центра
масс ТМ
Fx Fy Fz Mx My Mz (или) моментов
F+ 0 0 0 0 0 9 ... 14
0 F4- 0 0 0 0 1,4,5,8
0 0 F-4 0 0 0 9,11,15,17
F- 0 0 0 0 0 15 ...20
0 F- 0 0 0 0 2,3,6,7
0 0 F- 0 0 “1 0 12,14,18,20
0 0 0 M+ 0 0 1,3
0 0 0 0 M+ 0 10,19
0 0 0 0 0 M+ 3,8
0 0 0 M- 0 0 2,4
0 0 0 0 M- 0 13,16
0 0 0 0 0 M- 1,6
0 F+ 0 M+ 0 _ M+ 1,3,5,8
0 F+ 0 M+ 0 M- 1,4,5,7
0 F+ 0 M- 0 M+ 2,4,5,8
0 F+ 0 M+ 0 0 1,5
0 F+ 0 M- 0 0 4,8
0 F+ 0 0 0 M+ 5,8
0 F+ 0 0 0 M- 1,4
0 F+ 0 M- 0 M- 1,4,6,8
0 0 0 M+ 0 M+ 3,5
0 0 0 M+ 0 M- 1,7
0 0 0 M- 0 M+ 2,8
0 0 0 M- 0 M- 4,6
0 F- 0 M+ 0 M+ 2,3,5,7
0 F- 0 M+ 0 M- 1,3,6.7
0 F- 0 M- 0 M+ 2,3,6,8
0 F- 0 M+ 0 0 3,7.
0 F- 0 M- 0 0 2,6
0 F- 0 0 0 M+ 2,3
0 F- __0 0 0 M- 6,7
0 _ F- 0 _M- 0 M- 2,4,6,7
F+ 0 F+ 0 M+ 0 9,10,11,13
F+ 0 F+ 0 M- 0 9... 14,15,17
F+ 0 F- 0 M+ 0 9 ... 14,18,20
F+ 0 0 0 M+ 0 9 ... 12,14,19
F+ 0 0 0 M- 0 9,11 ... 14,16
565
Окончание табл. 5.5.7
Вариант сил и (или) моментов, необходимых для управления центром масс и (или) вокруг центра масс ТМ Номера включаемых ДПС для реализации необхо- димого варианта сил и (или) моментов
Fx Fy Fz Mx My Mz
F+ • 0 F+ 0 0 0 9... 12,14,16
F+ 0 F- 0 0 0 9,11... 14,19
F+ 0 F- 0 M- 0 10,12,13,14
0 0 F+ 0 M+ 0 _ 9,10,11,15,17,19
0 0 F+ 0 M- 0 9,11,13,15,16,17
0 0 F- 0 M+ 0 10,12,14,18 ... 20
0 0 F- 0 M- 0 12-14,16,18,20
F- 0 F+ 0 M+ 0 9,11,15 ... 20
F- 0 F+ 0 M- 0 15,16,17,19
F- 0 F- 0 M+ 0 16,18... 20
F- 0 0 0 M+ 0 10,15,17... 20
F- 0 0 0 M- 0 13,15 ... 18,20
F- 0 F+ 0 __0 0 10,15 ... 18,20
F- 0 F- 0 0 0 13,15,17-20
F- 0 F- 0 M- 0 12,14 ...20
В таблице представлены варианты выборок двигателей для случая всех ис-
правных ДПС. В режиме осуществляется оценка параметров относительного
движения по информации измерительной системы «Курс-ММ» и ГИВУС, в том
числе формируется оценка вектора абсолютного линейного ускорения, возму-
щающего относительное движение.
В случае, если величины возмущающих ускорений (угловых и линейных)
позволяют сделать вывод о наличии неисправного двигателя и идентифицировать
номер коллектора, в котором он находится, то возможно автоматическое отклю-
чение коллектора с прекращением или без прекращения выполнения задачи те-
кущего режима. В случае отключения коллектора все двигатели, находящиеся в
данном коллекторе, исключаются из управления, а силы и (или) моменты, необ-
ходимые для управления цетггром масс и (или) вокруг центра масс ТМ, реализу-
ются другой выборкой двигателей.
Контроль НАП
Контроль технического состояния и контроль функционирования НАП про-
водится как средствами НАП, так и СУ, навигационные алгоритмы которой вклю-
чают в себя задачу контроля достоверности информации, поступающей от НАП.
Средствами НАП осуществляется:
- самоконтроль и диагностика технического состояния НАП на участке
включения и подготовки НАП к работе;
- контроль достоверности навигационной информации, формируемой
НАП на участке основной работы НАП.
566
СУ алгоритмически организует контроль функционирования НАП путем
сравнения текущих параметров движения, измеряемых НАП, с прогнозируемыми
параметрами движения ТМ. Параметры движения ТМ на начальном этапе работы
НАЛ (начало режима построения базовой ориентации) прогнозируются по на-
чальным условиям, передаваемым на борт ТМ в составе ПЗ, на последующих
этапах в качестве начальных условий используются предыдущие достоверные
оценки параметров движения ТМ, сформированные НАЛ. При этом величина по-
рога отбраковки информации от НАЛ зависит от величины интервала, на кото-
рый выполняется прогноз параметров движения ТМ.
5.6 Особенности применения СУ ТМ для управления
крупногабаритным орбитальным комплексом растущей
конфигурации
5.6.1 Управление при построении ориентации и угловых маневрах
В случае управления упругим крупногабаритным орбитальным комплексом
в общем случае с несимметричным эллипсоидом инерции (будем называть его
кратко упругим крупногабаритным объектом - УКО) особое внимание следует
уделять проблемам минимизации возбуждения колебаний конструкции, ее упру-
гих элементов и топлива в баках, а также экономии расхода топлива и ресурса
двигателей ориентации и стабилизации.
При синтезе управления угловыми маневрами для решения этих проблем
оказывается полезной идея перевода объекта из начальной ориентации в задан-
ную конечную по дуге прецессии и оптимизации управления на активных участ-
ках маневра: набора и гашения угловой скорости разворота [11, 24, 38, 50]. Полу-
ченная при таком подходе траектория углового маневра УКО в большей части
состоит из участка свободного вращения объекта по инерции без включения дви-
гателей в отличие от экстенсивного способа разворота [2].
5.6.1.1 Принципы построения и основные формульные схемы
алгоритма углового маневра (программного разворота)
Будем решать задачу синтеза квазиоптимального, т.е. близкого к оптималь-
ному, управления раздельно по участкам активного и свободного вращения. В
данном пункте рассмотрим решение задачи на свободном участке вращения.
Положим, что объект управления представляет собой твердое тело, враща-
тельное движение которого вокруг центра масс в связанной системе координат
описывается совокупностью динамических и кинематических уравнений
0(0 + [со, 0©] = МуПр + Мв,
( (5.6,1)
Л = 0,5Ао<о. J
Здесь 0 - тензор инерции твердого тела.
Граничные условия имеют вид
A(t0) = AH, A(t]) = AK, 1 -
/ . Л , . Л f (5.6.2)
со(1д) = (0н = 0, co(t]) —(0^ — 0.J
567
Вращательное движение ССК (связанный базис Е) будем рассматривать от-
носительно ИСК (неподвижный исходный базис Г).
Задача состоит в том, чтобы для t из замкнутого интервала T=[to, tj найти
управление в форме синтеза, переводящее объект (5.6.1) из известного начально-
го углового положения Лн={2чн} (i=0 - 3) в заданное конечное Лк=-{1^} (i=0 - 3),
при |<o(t)| eGto и условии, что момент управляющих сил должен прикладываться к
объекту только в начале переориентации, сообщая ему угловую скорость враще-
ния ш(0)= {<Ojo} (j=x, у, z) в требуемом направлении, и в конце - демпфируя угло-
вую скорость, а между участками разгона и демпфирования движение объекта
должно происходить по инерции.
Основная сложность решения поставленной задачи заключается в сущест-
венной нелинейности дифференциальных уравнений объекта.
Сведем задачу к одному из трех случаев движения твердого тела вокруг
центра масс, для которых известны решения в квадратурах.
Очевидно, вращение КА относительно неподвижной точки, совпадающей с
его центром масс, на участке свободного движения, где управляющий момент ра-
вен нулю, а возмущающими моментами будем пренебрегать, может быть сведено
к случаю Эйлера-Пуансо [39]. Далее сделаем предположение, что эффективность
исполнительных органов велика настолько, что участки разгона и демпфирования
КА по сравнению с общим временем разворота Т исчезающе малы и ими можно
пренебречь. Предположим также, что замкнутая область, которой принадлежит
модуль угловой скорости маневра Сш, является сферой радиуса соппшх, равной
максимально допустимой величине модуля вектора абсолютной угловой скоро-
сти вращения КА. Постоянную матрицу тензора инерции КА будем считать диа-
гональной с главными моментами инерции Ij (j=x, у, z).
Теперь задача может быть сформулирована следующим образом.
Требуется определить вектор угловой скорости |o)(0)|gG0, который, будучи
сообщенным твердому телу в начальный момент времени исполнительными ор-
ганами большой эффективности, задает ему свободное вращение, переводящее
базис Е из положения Лн в положение Лк за ограниченное время Т.
Поставленную задачу можно рассматривать как обратную классической за-
даче Коши для динамических и кинематических уравнений твердого тела, в кото-
рой при заданных начальных условиях по угловому положению и угловым ско-
ростям определяют фазовые координаты вращательного движения твердого тела
в функции текущего времени.
Как известно, в случае Эйлера-Пуансо прямая задача Коши для динамиче-
ских уравнений имеет решение, выражающееся в эллиптических функциях Якоби
[39]. Их использование в целях получения выражений для вектора co(t) в общем
случае несимметричного объекта (Iz>Ty>Ix) не представляется возможным.
Анализ динамических схем объектов рассматриваемого класса (продольно-
осевые связки орбитальной станции, научных и транспортных модулей) показы-
вает, что их эллипсоид инерции весьма близок к эллипсоиду вращения.
Для твердого тела, близкого к динамически осесимметричному (ОХ - ось
568
симметрии), введем среднее невозмущенное значение момента инерции
I=0,5(Iy4-Iz)
и выразим через него главные моменты инерции:
1г1(1+е8;),
где 0<е« 1, Sj~ 1, j=y, z.
Тогда динамические уравнения Эйлера примут вид
1хспх =е!(6у - 8z)coycoz;
< Id)y + (Ix - I)cox(Dz = e[(Ix - l)5y + I6z](oxcoz; (5.6.3)
Ifi)x 4- (I — Ix)<BxCOy — 8[(I — Ix)6Z 4- I8y]coxcoy.
Члены в правой части уравнений можно рассматривать как моменты, воз-
мущающие движение осесимметричного твердого тела. Полагая в системе (5.6.3)
с—>0, приходим к вращению твердого тела в виде регулярной прецессии. Для ре-
гулярной прецессии эллиптические функции вырождаются в тригонометрические
и решение динамических уравнений принимает вид
®х0
<o(t)= соу() cosncox()t+ coz0sinncDx0t
(5.6.4)
cozO cosna>x0t - G)yo sinncDxOt
где n = (I-Ix)I1 - коэффициент динамической несимметрии твердого тела,
пе(-1, 1).
Аналитическое решение кинематического уравнения может быть получено
в виде произведения кватернионов, удовлетворяющих более простым кинемати-
ческим уравнениям, например, если соответствующие им угловые скорости будут
иметь постоянные направления [13].
Найдем разложение вектора o(t) на постоянно направленный в некотором
промежуточном базисе Ei вектор a>;(t) и постоянно направленный в связанном
базисе Е вектор ©2(t).
Как следует из уравнения (5.6.4), <ох = сохО = const. Следовательно, в каче-
стве вектора со2 можно принять ш2 = ncox0i], где Ъ ~ орт оси ОХ ССК. Тогда
со, (t) = co(t) - о>2, и вектор (oj (t) вычислим как
(t) = Л2 (t) О (t) О л2 (t) = A2(t) О [(1 - n)(Oxoi! +
4- (<йуо cosncox0t 4- cozo sinncox0t)i2 4-
4- (coz0 cosncox0t - coyo sin ncox0t)i3 ] ° Л2 (t);
cn1 (t) = (1 - n)cox0i1 4- coyOi2 + <£>20*3 = <o(0) - ш2 = const.
Будем искать решение кинематического уравнения в виде
A(t) = A,(t)oA2(t),
569
где A^t) и A2(t) - кватернионы, соответственно удовлетворяющие кинемати-
ческим уравнениям
(5.6.5)
(5.6.6)
to
Aj(t) = 0.5Al(t)o<o;(t);
A2(t) = 0.5A2(t)oo2(t).
Таким образом, общее решение кинематического уравнения примет вид
A(t) = A(t0)oexp 0.5 JoJdT ° exp 0.5 |ш2бт ,
*o
или A(t) = A(tg) ° exp[0.5(a>(0) - co2)] о exp[0.5co2t • ij ] = AH ° ePl^ ° eati,
где pt = 0.5[co(0)-n • coxo ]t = 0.5t[(l- n)2a>*0 + n
направленный вдоль вектора a>i;
5-0.3[»(0)-2a, .|1)з-.,=
(5.6.7)
; at =O.5na)xot; £ - орт,
(1-nrcoJ + co J +coj f
i> f *0 У0 z0 j
В конце переориентации (t=T) получим
Л(Т) = Ак = AH о ° ea(T)lJ,
Гр(т)=р = 0.5[ш(0)-п<0Х0}Г;
[а(т) = a = 0.5na>X0T.
В покомпонентной записи равенство (5.6.7) примет вид
^0k + ^1к*1 + ^2kh + ^ЗкЪ “ (^-ОН + ^1Н*1 * ^2НЪ + ^ЗН®з)°
о (cos 0 + £ sin р) ° (cos a + it sin a).
Расписав кватернионное произведение и приравнивая коэффициенты при
соответствующих компонентах кватерниона слева и справа, уравнение (5.6.10)
преобразуем в систему
. Хон cosacosP-0.5p~]T[XOHcoxo -Хзнсвуо +X2Hcozo]sinasinp +
+ [^1Н®ХО +^2Н®УО +Мнюго ]sin р cos a - XlH sin a cos Р = Z0K,
X1H cosacosP-0.5p_1T[x1Hojxo +X2Hcoyo +X3H<oZo]sinasinp-
“ [^он^хо - ^зн^уо + ^2H^zo lsin P cos a + k0H sin a cos P = X|K,
X2HcosacosP-0.5P“1T[x2HcoX(> -XlHcoyo -X0H<D20]smasinp- (5.6.11)
- [Азн^хо + ^он<ауо - ^1H<0ZO ]sin p cos a + X3H sin a cos p = X2K,
k3H cosacosp-0.5P"lT[A,3HG)X0 +?loHf0yo -kiH®zo]s“1<xs“1P+
+ [^2H<°x0 -^iH«y0 ”^oh<o20]sinpcosa-X2Hsinacosp = X3K.
Из системы (5.6.11) требуется найти проекции (Oj0 = Г(Хаъ Хк, n, Т), причем
(5.6.8)
где
(5.6.9)
(5.6.10)
570
исходные величины входят в систему как в явном виде, так и в аргументы трансцен-
дентных функции, так как a = f (a\0, n, t), p = f (coX0, n, t), i = 0,3, j = x, y, z.
Введем вектор-столбец
cos a cos р
sinasinp
cos a sin p
sinacosp
(5.6.12)
Тогда система (5.6.11) может быть сведена к виду
Ах = Ь,
(5.6.13)
гДе А = {ау},i,j = l,4; b = [Х0К,Х1КД2К, Хзк] ;
аИ = ^0Н » а21 = ^1Н J а31 "^2Н^а41
а12 =“0.5Р"1Т(Хон®хо ”^зншуо “^2H°\));
а22 =-0.5p-lT(XIHcoxo + Х2Нй>У0 +^знюго);
а32 =~0.5р’1Т(Х2Н(охо -Х1Но)у0 -Хонй)^);
а42 = -0.5р-1Т(А,знсоХ0 +Хон(Оу0 -^ih^zo);
а13 =а22»а23 — —aI2i а33 = —а42>а43 = а32»
а14 =-А,1Н;а24 = ^он^аз4 =^зн>а44 'Чн-
Для решения полученной алгебраической системы относительно вектора х
воспользуемся формулой Крамера
Причем далее положим b = (1,0,0,0)т. Это допущение не уменьшает общно-
сти решения задачи, так как в качества начального кватерниона Лн и в системе
(5.6.12) всегда можно принять разностный кватернион АЛ = ЛК °ЛН, который в
результате устойчивого управления должен стремиться к единичному:
A(t)-»AK, AA(t)->(l,0,0,0) Тогда определители А, и det А после преобразова-
ний приобретают компактный вид
X = О.25р“2Т2|АЛ.о(<вуо +С02,)- ДХ2<йхо®го + Д13шхой)уо|дЛ||;
А2 =О.5р-'т(АХ3®уо - АХ2О|АЛ||;
' Аз =-О.5р-1т(ДХ2«гуо + A^<aJ|AA||;
Л4 =O.25p-2T2[-AX1(<Bjo +ш2о)+АХ2®хоа>У!) +Д%зШхошго]|ДЛ||.
571
Здесь |ДЛ|1 = £ДХ? =1; де1А = ^(-1)‘+1аиД; = O.25p-2T2(c£>Jo + )|ДЛ|2.
i-0 i-t
Отметим, что для существования решения системы (5.6.13) необходимо
выполнение условия (0уо + со^ * О-
Полагая разностный кватернион нормированным, найдем, что искомый
вектор х определяется формулой
“х0 (Л>-3<ВУО - Д^2®го Х®уо + Ш20 Г + АХ»
2р(дХ3со - ДХ2ог /т(со2 + со2 jl4
Х= Зп ° “V (5.6.14)
- 2р(дХ2соуо + ДХ^ )[т(а>2о + )f
юхо (дХ2юуо + ДХзШго + <о2о - ДХ, _
Далее в соответствии с (5.6.13) составим следующие уравнения:
х,х2 = х3х4;
• x2xj* = Х4Х71 = tga; (5.6.15)
XzX^XjXf^tgP-
Подставив в систему (5.6.15) выражения для компонент вектора х, получим:
(ДЦ + ДХ3)о)Х0 + (ДХ0 • ДХ3 - ДА-! • Дк2)соуо -
- (ДЛ,0 * ДХ2 + ДХ| * AX3)a)Z0 = 0;
' tga = (ЛХ2юго - ДХЗсоуо)(ДХ2<оу() + ДХ3со20); (5.6.16)
tgP = 2р(ДХ3шуо -ДХ2со20)(Т(соК0(ДХ2<вУ0 +AA.3®Z0)-Mi(®20 +со^))).
Дополним эту систему выражением для модуля вектора со
= «п = = const < <ng“, j = X, у, z.
V j
Используя первые два уравнения системы (5.6.16), представим проекции
соу0 и <DZ(J в виде функции от шхо
“уо = [а - и)(Д^2 - > «о ] • (Д^2 - %Д^о )ч;
“zo =[(1-п)(ДХ3 -хДХ2)<йх0]-(Д^1 -хДХо)-1. (5.6.17)
С учетом (5.6.13) из (5.6.12) определим
со юп I Д^-1 +ХД^о I
^(ДХ] + %ДХ0 )2 + (1 - и)2 (1 + Х2)(Д^-2 +ДХ3)
Окончательно искомые выражения для угловых скоростей как функций от
параметров ДХ, (i = 0,3) и х с учетом того, что
sign(coxo) = sign(n) • sign(arctg% + кл), к = 0, ± 1, ± 2,...,
принимают вид
572
( (дх ч (оп |AXt+%ДХ01 sign(n)-sign (arctgx + кя) .
Х° ” лДДХ| + ХДХП)2 + (1 -п)2(1 + Х2)(АХ22 + АХ2) ’
®п(1-п)|ЛХ2 +хДХ31 sign (<х>х0) • sign (АХ [ + хдХ0).
л/(АХ, + хДХо)2 + (1 -?)2(1 + х2)(ЛХ2 + АХ2)
„ ш ‘»n(l-n)|AX3+xAX2|sign(<nx0)sign(AX1+xAX0)
7(AXi + ХдХ0)2 + О “ п)2(1 + Х2)(АХ2 + ДХ2з)
Для компенсации уходов реальной траектории вращения КА от расчетной
траектории регулярной прецессии из-за моментов возмущающих сил, не учтен-
ных при получении формул (5.6.15), необходимо в каждый момент времени вы-
числять а)ДЛХ;(1:), %], строить траекторию вращения из текущего положения
связанного базиса A(t) в заданное конечное Л(Т) и создавать итерационно-
терминальное управление
иДДХХО, <Oj(t)]=-signfo/t) - <oj0[АХ,(t),x(t)]} Vt e [t„,t,].
Модуль угловой скорости соп определяем исходя из величины рассогласо-
вания базисов и фиксированного времени построения ориентации Т, аппрокси-
мировав изменение величины |a>(t){ Vt^fto^ti] неполной трапецией, состоя-
щей из участка квазисвободного вращения и участка гашения. Для максимально-
го быстродействия в соответствии с известным решением задачи разворота за
минимальное время с фазовым ограничением по угловой скорости модуль соп
должен принимать максимально допустимое значение 0^“, соответствующее
радиусу замкнутой сферической области G„.
Обратимся к задаче выбора параметра квазисвободного вращения х, пред-
варительно проведя некоторые исследования.
Запишем выражение для кинетической энергии вращения твердого тела от-
носительно центра масс:
Е =0,5^2 lj®’0(AXi,x) = const, i=0-3; j = x,y,z.
Значение параметра х, сообщающее кинетической энергии экстремум, най-
дем из уравнения
оЕ(Д\,х)/дх = 0.
Это уравнение преобразуется в квадратное, причем с коэффициентами, не
зависящими от динамических характеристик твердого тела, а зависящими только
от рассогласования базисов:
х2 +(Д^ - AVoMAXoAXO-’x-l^O,
откуда Xi = АХ0/А^; Х2 = -А*-] /АХ0.
Как следует из уравнений (5.6.13), необходимо выполнение условия
X * -АХ| / АХ0, т.е. корень Х2 следует отбросить.
573
Значение параметра % необходимо вычислять исходя из граничных условий
задачи.
Из второго и третьего уравнения системы (5.6.11) с учетом (5.6.15) и
(5.6.16) получим выражения для времен вращения твердого тела вокруг продоль-
ной оси ОХ и оси направленной вдоль вектора кинетического момента.
В предположении, что оба вращения (на углы а и 0) должны заканчиваться
за одно и то же время Т, получим уравнение для параметра %
Та (AXj, х, п, к) = Тр (AXj, Xj н, к, m) = Т к, ш=0, ±1, ±2,' (5.6.18)
Аналитически решить уравнение (5.6.18) относительно параметра % не
представляется возможным. Поэтому необходимо применить какой-либо числен-
ный метод, например метод Ньютона. Он обладает высокой скоростью сходимо-
сти и достаточно прост для реализации в БЦВМ.
Вопрос выбора начального значения корня является одним из важных при
использовании итерационных методов. От начального приближения зависит не
только скорость сходимости, но и сходимость метода в принципе. Можно заклю-
чить, что при достаточно близком начальном приближении параметра х[01 к кор-
ню х* = Xi метод Ньютона будет устойчивым. Причем выбором х[0] можно опре-
делить однозначно решение х* •
Для выбора начального приближения параметра свободного вращения в
методе Ньютона могут быть использованы следующие соображения.
Угол поворота вокруг оси симметрии при вращении по оси Эйлера за вре-
мя Т (проекция вектора конечного поворота на ось ОХ) составит величину
Фх = -sign(AX0 )2АХ, (1 - АХ20 )",/7- arccos АХ0.
Тот же угол при вращении вокруг оси свободного вращения в соответствии
с (5.6.9) и (5.6.16) составит величину
Фх = 2n''arctg%.
Считая углы Фх и Фх величинами одного порядка, выражение для нулево-
го (эйлерова) приближения запишем в виде
xm = -tg{sign(Al0)nAX,(l - ДХ2 )ч/2 arccos ДХ0}.
5.6.1.2 Квази оптимальное управление на участках набора и гашения
угловой скорости разворота
Пренебрегая гироскопическим и внешним возмущающими моментами, пре-
образуем математическую модель движения упругого объекта вокруг центра масс в
связанном базисе с учетом m тонов колебаний (2.1.100) к следующему виду:
m
IjCOj - MynPj + Xajn4n 5
* n=l (5.6.19)
Qn + ^пЧп *" ®qnQn =^qjn®j-
574
В силу адекватности управления на участках разгона и гашения не будем пока
конкретизировать, о каком участке идет речь, а зададимся граничными условиями:
^jO-ao) ” (°jam °\jOal) = ^jak >
Чп(^ао) — QnGao) = 0, QnCal) = Чп(Ла1) = О
и будем рассматривать задачу синтеза управления, такого, что со^ ->0)^, не
оговаривая соотношения между |®^[ и |ct)jaK|, при минимизации функционала
tai m lal
J=[0,5 j£q*(t)dt Jdt]T (5.6.20)
la0 taO
и допустимом управления Мупрр
Здесь ta0, tal - начальный и конечный моменты времени активного участка
соответственно.
На данном этапе такой вид функционала определен тем, что для упругого
крупногабаритного объекта в векторной целевой функции (5.6.20) первая состав-
ляющая является наиболее критичной компонентой. Длительность активного
участка будем стремиться минимизировать, сохраняя приоритет в функционале
(5.6.20) за первой компонентой. Такой подход близок к чебышевской модели
схемы компромиссов [15] многокритериальной задачи оптимального управления.
Поставим цель получить аналитическое решение упрощенной задачи опти-
мального управления, что позволит понять общий характер и закономерности
этого управления для упругих объектов и затем на его основе построить универ-
сальное квазиоптимальное управление в форме синтеза.
Допустим ряд упрощений в постановке задачи.
Во-первых, длительность такта счета БЦВМ Т[=0,1 с, т.е. частота счета
fi=10 Гц, а максимальная частота высокочастотных тонов УКО составляет около
1 Гц. При таких соотношениях между частотой квантования по времени и собст-
венными частотами упругих колебаний и при малом дискрете квантования по
уровню специфические особенности динамических цифровых систем практиче-
ски не проявляются, поэтому достаточно ограничиться рассмотрением непрерыв-
ной системы с последующей проверкой работоспособности алгоритмов путем
численного интегрирования.
Во-вторых, рассмотрим случай плоской переориентации объекта с учетом в
системе (5.6.19) одной наиболее существенной, обычно низкочастотной и слабо-
демпфированной гармоники упругих колебаний; причем ее влиянием на объект
будем пренебрегать.
Тогда, опуская индексы j и п и вводя вектор состояния
x = {xi :i = 1,з]=[1т"1Та~1<о I Jm ’a^Ta^q I Im^a^Ta^qp
и нормированное время т = —, те[0,1], систему динамических уравнений
Та
(5.6.20) запишем в векторной форме
575
где
О
О
О
д
с1х(т)/<1т=х(т) = Ах(т) + Ви(т),
УПР’
(5.6.21)
А =
Та - длительность активного участка;
|и(т)| < 1V -с 6 [0,1].
Граничные условия в новых переменных примут вид
x(O) = [xlo,O,OJr; х(1) = [хп,0,0]т.
(5.6.22)
(5.6.23)
Сначала рассмотрим задачу минимизации упругих колебаний с фиксиро-
ванным временем
(5.6.24)
Jj(T)=O,5fxj(T)dT->iniii.
о
Будем полагать, что управляющий момент подвергается широтно-
импульсной модуляции, осуществляющей импульсную линеаризацию релейного
управления, или создается ДС с дросселированием тяги. Кроме того, в качестве
исполнительных органов могут использоваться гиродины. Тогда управление
ц(т) можно считать непрерывной функцией.
Поставим следующую задачу оптимального управления. Определить ска-
лярную непрерывную дифференцируемую функции и(т) и непрерывную диффе-
ренцируемую вектор-функцию х(т) при т е [0,1], доставляющие минимум функ-
ционалу (5.6.24) при дифференциальных связях (5.6.21), краевых условиях
(5.6.23) и ограничении (5.6.22).
Переведем решение поставленной задачи из замкнутой области управления
в открытую. Для этого введем следующее нелинейное преобразование [37]:
U[u(t)]=U(O =
(5.6.25)
где £ - заданное положительное число; v(^) - любая непрерывная функция,
имеющая производную, непрерывную при |£| < и равную нулю при £ = 0.
Запишем функцию Гамильтона:
Н(у(т),х(т), U(Q) = -dJ(T)/dt+v(?)[Ax(t) + BU(^)]=
= -0,5a2x|-ax2U(Q- (5.6.26)
- 0.5[U(O]2 +ViU©+y2x, +v3ax2 + V3U(^),
где' a = -<OqTa2; = {v,: i = 1,з} - вектор сопряженных переменных.
576
Условие экстремума гамильтониана
Ж(1и(т),х(г),и(У)/^ = 0
распадается на два уравнения:
[ аН(у(т),х(т),и(£))
— -———= -ах2 - U(£) + yt + уз = 0;
(5.6.27)
аи(^)
^)=о.
Первое уравнение системы (5.6.27) должно приводить к решению задачи
для открытой области управления, второе уравнение в силу (5.6.26) дает решение
U(y=±iv|^|>^.
Перейдем к решению задачи в открытой области управления.
Из первого уравнения системы (5.6.27) получим выражение для оптималь-
ного управления v*(^) в функции вектора сопряженных переменных и вектора
состояния
V'(v(t)>Х(т)) = у, (т) + у 3(т) - ax2 (t). (5.6.28)
В соответствии с принципом максимума Понтрягина вектор сопряженных
переменных и оптимальные фазовые траектории должны удовлетворять системе
уравнений [40]
<1х(т) _[~ аН(у(т),х(т),уО Т
J v(Q = у’(у(т),х*(т))’
dr
-IT
dx
dyOO __ аН(у(т),х(т),у(^))
0х(т) J v(£) = v*(y(T),x*(-r))
при начальных условиях х(0) = jxi0 : i = 1>з}у(О) = {уш:1 = 1,з}-
Из этой системы получим следующие выражения для вектора оптимальных
фазовых траекторий х*(х) и сопряженного вектора <|/(х):
“Yiot5 + ^,-4'20't4 -7(2yio +Узо№ -
12U 24 о
--V2ot2+(Vio+V3o)T+xlo
а л 1 1 1 , . о
“ —Yio^4 --V20T3 + -(Vio + Узо)*2
__24_______О.______2____________
x*(t) =
(5.6.29)
a , 1 , , 4
-7V10T3 --V20T2 + (Vio + Узо)т
о 2
577
T
Vio ; avi0T + V20 '
a 7
-Viot2 -V20T + V30
(5.6.30)
Неизвестные начальные значения компонент сопряженного вектора у(0)
найдем из алгебраической системы уравнений
Дх(1) = АЛ(0),
1 ;
2 i
6 I
2 24 ' 6J
Дх(1) = (Лх, :i = й}=х(1) -х(0) = [Дх, | 0 | Of.
1--
6
1 а
2~24
3 120
1
£
2
Получим
¥(0) =
/х0д : 360 А I 60 Z1 12.. Т
—— Дх, ।-----1--------(1 + —)Axt
а2 1 а 1 а а
’720
(5.6.31)
В соответствии с (5.6.28)- (5.6.31) после преобразований оптимальное
управление и оптимальные фазовые траектории принимают вид
Дх1 6т5 -15т4 + 10(1- — )т3 + ———-т2 т +Xj(O)
a a a J
30
- — Axj (т4 - 2т3 + т2)
а
-— Axt(2x3 -Зт2 + т)
а
х*(т) =
(5.6.32)
v*(t) = 304xj
. „ 12ч 9 12 2
т4 -2т3 + (1---)т2 +—т-----
а а а
(5.6.33)
Чтобы убедиться в том, что полученное управление является именно опти-
мальным, а не только экстремальным, достаточно показать
Н(у(т), х (т), v* (т)) ~ max Н(у(т), х(т), v(t)),
что просто следует из (5.6.27), (5.6.32) и (5.6.33).
Из решения (5.6.32) и (5.6.33) следует, что полученные траектории и управ-
ление носят плавный характер и соответствуют априорному интуитивно-
физическому представлению о движении тела с минимальным возбуждением его
упругого элемента. При оптимальном управлении упругий элемент плавно от-
клоняется в начале движения и плавно возвращается в свое нейтральное положе-
ние в конце движения.
Можно предположить, что решение задачи оптимального гашения (разгона)
угловой скорости упругого объекта для открытой области управления эквивалентно
578
решению задачи гашения (разгона) в замкнутой области за такое фиксированное вре-
мя Та, что граничные условия и время Та соотносятся между собой так, что ограни-
чение на оптимальную управляющую функцию 1и*(т)| <1 выполняется и, следова-
тельно, |^| < £, V т е [0,1]. При уменьшении времени Та тах|и*(т)| —> 1, и при некото-
ром Та = Т* max|u*(x)| = 1. В этом случае управление и*(т) касается границы своей
допустимой замкнутой области. Такое управление будем называть касательным
управлением. При таком управлении участки временного интервала т, где U(Q = ±1
стягиваются в точку тт; тогда в (5.6.33) вместо v*(r) будем писать и*(т).
Далее на основании теоремы 2 [22] решение двухкритериальной задачи
J( min, J 2 —> min для замкнутой области управления получим на базе решения
вида (5.6.33) задачи J1^min с неизвестным фиксированным временем Та для
открытой области, трансформировав его в касательное управление при Та —> Т*,
следующим образом.
Пусть получено решение задачи Jj min при ju*(x)| < 1 для времени активного
участка Та, где Та - свободный параметр, входящий в коэффициент а. Определим
время быстродействия Та из условия, что управление и*(т) является касательным.
Из уравнения ди*(т)/дт = 0 с учетом (5.6.33) определим, что время тт. при
котором |и*(т)|| ю =тах|и*(т)|, равно 0,5. Затем из уравнения |и*(тт)| = 1 или
u*(Tm) = sign(xn -х10) при тт =0,5, вернувшись в (5.6.33) к исходным перемен-
ным, получим кубическое уравнение для нахождения времени быстродействия Т*:
г(т;)^(тат+с1(т;)^с2 = о,
С!=-0,0625С; С2=Ссв-2;
ГДе С = 30Ьп-1|Аа)|; A<n = CD(tal)-аХЛо)- (5.6.34)
Число действительных корней уравнения f(T*) = O зависит от знака дис-
криминанта:
D = q|+p3,
где qT =Cj/27 + С2/2; р = -С2/9.
Исследование функции D(cOq) свидетельствует о том, что в решении урав-
нения f(T*) = O не исключается наличие полного набора корней кубического
уравнения. Результаты качественного анализа показывают, что уравнение (5.6.34)
может иметь два действительных положительных корня Та1, Т*2, один действи-
тельный корень Та0 > 0, Та2 > Та0 > Та1 и вообще не иметь решений в области
действительных положительных корней.
Так как при увеличении |Дса| значение корня Та1 уменьшается, то этот ко-
579
рень следует отбросить, как не соответствующий физике процесса.
Можно показать, что касательное управление существует, если между гра-
ничными условиями и параметрами системы выполняется неравенство
-/3
m
|4AUJ|" 0/3125 ко/
а время Т* должно удовлетворять условию
2л/ЗТд
Л
(5.6.35)
(5.6.36)
' ""4'73 .
Ta >----или Та >
где Tq - период колебаний упругого тона.
Таким образом, быстродействие управления ограничивается частотой уч-
тенного тона упругих колебаний. Физически это объясняется тем, что упругий
тон не успевает совершить полного колебания за время Та, не удовлетворяющего
условию (5.6.36). При равенстве в условиях (5.6.35) и (5.6.36) имеет место макси-
мальное быстродействие системы, при котором Т*=Т*0=1,25ТР, т.е. время Т*о
только на 0,25 ТР превышает время управления ТР в обычной релейной системе.
На рис. 5.6.1 изображены графики функции для двух значении времени Т*.
ф 4./3
Из графиков видно, что при Т*» Та0 =----касательное управление имеет
колоколообразный вид с плавным нарастанием и снятием управляющего момен-
та. При уменьшении времени Та (при A<o=const) увеличиваются значения управ-
ляющей функции
580
5.6.2 Стабилизация при коррекции орбиты
Стабилизация при коррекции орбиты занимает особое место в режиме вы-
дачи КИ. Включение двигателей коррекции вызывает появление возмущений в
каналах стабилизации вследствие отклонения линии действия тяги от направле-
ния на центр масс (в идеале конструктор направляет линию действия тяги в центр
масс, но вследствие монтажных погрешностей и смещения центра масс в полете
из-за выработки топлива это условие нарушается). Возмущения вызывают актив-
ное включение двигателей стабилизации, что, в свою очередь, может привести к
"раскачке" упругих элементов конструкции КА. Поскольку при выдаче КИ тре-
буется обеспечить выполнение достаточно жестких точностных требований и,
следовательно, малое значение зоны нечувствительности Дет, град, то возможно
появление двусторонних включений, что усложняет задачу.
Так как в аргументе управления используется сигнал угловой скорости с
датчиков угловой скорости, то в нем будет присутствовать "упругая" составляю-
щая в виде слагаемого (см. подразд. 2.1.8):
£fra-qn(t), (5.6.37)
П~1
где f^n - производная n-го тона упругих колебаний в месте установки датчика,
q(t) - производная n-го тона упругих колебаний.
Наличие этих составляющих в аргументе управления может вызвать лиш-
нее включение двигателей стабилизации на частотах упругих тонов.
Разработано несколько способов ослабления влияния упругости при стаби-
лизации КА во время выдачи корректирующего импульса:
1. Введение цифрового линейного фильтра на выходе датчика угловой скоро-
сти вида
Mn)-Eai<o(n-l)-j>f(“-j)» (5.6.38)
о н
где оз(п-1) - сигнал на выходе датчика угловой скорости на (n-j)-M такте
счета БЦВМ; <of(n-j) - фильтрованное значение сигнала угловой скорости
на (n-j)-M такте.
2. Задание линий переключения с изломом для расширения зоны нечувстви-
тельности по угловой скорости, как изображено на рис. 5.6.2.
Пунктиром на рисунке показан случай с единым значением коэффициента
Ко, как в подразд. 4.5.6.3.2.
Такое расширение зоны нечувствительности по угловой скорости позволяет
ослабить влияние колебательной составляющей в сигнале угловой скорости, обу-
словленное упругими элементами конструкции.
3. Введение принудительной паузы между включениями двигателей стабили-
зации, что позволяет избежать резонансных включений на частотах упру-
гих осцилляторов и частотах помехи в цепи полезного сигнала.
581
ДК*,
\ 5+
Рисунок 5.6.2 - Линии переключения
4. Фазированное управление. Сигнал с датчика угловой скорости имеет в сво-
ем составе наряду со значением скорости КА как твердого тела еще и коле-
бательную составляющую (5.6.38). Если расположить потребное .по усло-
виям управления включение двигателей стабилизации (ДС) на некотором
интервале от экстремума колебательной составляющей ть, колебательная
составляющая будет уменьшаться, а не увеличиваться (рис. 5.6.3).
Рисунок 5.6.3 - К понятию фазированного управления
На рис. 5.6.3 обозначено q(t). - производная обобщенной координаты упру-
гих колебаний (n-й тон).
Величина ть подбирается при моделировании системы управления в про-
цессе проектирования. Момент экстремума определяется в алгоритме стабилиза-
ции упругих колебаний. Метод использовался на одном из модулей орбитальной
582
станции "Мир" для предотвращения раскачки одного определяющего тона упру-
гих колебаний солнечных батарей.
5. При управлении длинной связкой КА ”ТКС + орбитальная станция "Са-
лют-7" + спускаемый аппарат "Союз” возникли проблемы стабилизации
"упругой линии" в части требовании к прочности стыков между космиче-
скими аппаратами. Задача была решена введением в цепи сигнала угловой
скорости (после датчика угловой скорости) нелинейного фильтра из класса
систем с переменной структурой:
cof(n) =
£aj(n-i) •sign’Tb/m-j),
i=0 j=0
(5.6.39)
n
где Xai(n “0 ~ линейный фильтр с невозрастающей (убывающей на частотах
i=0
m
упругости) амплитудной частотной характеристикой; ^bj(m-j) - линейный
j=0
фильтр с положительной возрастающей на низких частотах фазовой частотной
характеристикой.
6. Еще один способ "борьбы с упругостью", использовавшийся на транспорт-
ных модулях, основан на разбиении включения управляющих двигателей
на ряд парных включений. При этом в каждой такой паре начала каждого
включения разделены по времени на половину периода колебаний про-
блемного тона упругих колебаний, а продолжительность каждого из им-
пульсов в несколько раз меньше полупериода этого тона.
Необходимый но условиям стабилизации объекта как твердого тела им-
пульс управляющего момента набирается суммой парных импульсов включений
управляющих двигателей.
Рассмотрим подробнее этот способ стабилизации упругих колебаний.
Колебание упругого гармонического осциллятора под действием внешней
силы описывается неоднородным линейным дифференциальным уравнением
второго порядка с постоянными коэффициентами вида
х* + (о2х = f (t); (5.6.40)
к” + 2hx' + со2х = f (t); (5.6.41)
f(t) =
M
0
M
0
to < t < t1;
t2 <t£t3;
Ц < *з> ’
(5.6.42)
где параметры в формуле (5.6.40) определяют вынужденные незатухающие коле-
бания, параметры в формуле (5.6.41) - вынужденные затухающие колебания.
На физическом уровне эти уравнения описывают колебания i-ro тона панели
583
солнечной батареи относительно корпуса спутника, обусловленные начальными ус -
ловиями (x0,Xq) и включениями релейных исполнительных органов. Особенно-
стью работы этих управляющих органов и соответственно функции f(t) является то,
что включать и отключать двигатели можно только дискретно (например, с тактом
0,1 с), а также то, что тяга нарастает и спадает быстро и величина ее постоянна.
Предлагается управлять включением и отключением управляющих двига-
телей таким образом, чтобы включения:
- были парными;
- длительность включений была одинаковой и время включения в разы
п
меньше половины периода тона колебания — ;
(О
- время между началом первого и второго включения равнялось половине
периода тона колебания.
Из рис. 5.6.4 (участки 2 и 4) видно, что упругий осциллятор будет совершать ко-
лебание только вследствие начальных условий (x0,Xq), которое описывается одно-
родным линейным дифференциальным уравнением с постоянными коэффициентами:
х* + со2х = 0; (5.6.43)
х* + 2hx' + со2х = 0. (5.6.44)
Рисунок 5.6.4 - Участки включения
и отключения двигателей
Решения уравнений (5.6.43) и (5.6.44) с помощью замены, предложенной
Эйлером x=ePt, описаны и выглядят так:
х = С\ cos cot + С2 sin cot, (5.6.45)
х = e"ht(C] cos co* t + C2 sin co* t), (5.6.46)
где co* =л/со2-h2 .
На участках 1 и 3 (рис. 5.6.4) из-за работы двигателей в правых частях
уравнений (5.6.40) и (5.6.41) присутствует управляющий момент М (постоянная
х М
величина). Тогда легко убедиться, что х = — является частным решением ука-
со2
занных выше уравнений. Отсюда общее решение для участков 1 и 3 следующее:
584
x Q coscot + C2 smcot + —; (5.6.47)
со2
х = eht(Cj cosco*t + C2 sinto*t)+ . (5.6.48)
Общее решение для всех четырех участков есть сумма решений каждого
участка таким образом, что значения х0 и х'о , достигнутые на момент окончания
предыдущего участка, будут начальными значениями для следующего. Такое ре-
шение, в которое входит большое число тригонометрических и показательных
функций, нагляднее представить графически. Анализируя полученные решения
(5.6.45) - (5.6.48), можно заметить, что решения описывают вынужденные неза-
тухающие ((5.6.45) и (5.6.47)) или затухающие ((5.6.46) и (5.6.48)) колебания, реа-
лизующиеся вследствие наличия начальных условий по х0 и х'о, относительно
М
х = 0 или относительно х = —. Графически при соответствующем подборе раз-
(О2
мерности незатухающие ((5.6.45) и (5.6.47)) колебания можно изобразить на фа-
зовой плоскости следующим образом:
Рисунок 5.6.5 - Незатухающие колебания
на участках 2 и 4
585
Рисунок 5.6.6 - Незатухающие колебания
на участках 1 и 3
Причем из положения хо,Хо, точка на фазовой плоскости будет двигаться по
окружности с центром либо в начале координат ((5.6.45), участки 2 и 4
М
(рис. 5.6.4)), либо с центром в х = — ((5.6.47), участки 1 и 3). Радиус окружности
со2
r=7(x»"xw)2+к -xUУ•
Тогда графическое решение уравнения (5.6.40) при нулевых начальных ус-
ловиях и управлении f (t) выглядит следующим образом:
Рисунок 5.6.7. Графическое решение уравнения (5.6.40)
586
Точка на фазовой плоскости (рис. 5.6.7) из положения х0 = х'о = 0 двигается
М ,
по окружности с центром х = — до положения хьХ| за время (to, tj, затем из
со2
положения х1>Х; до положения х2,х2 по окружности с центром в начале коорди-
нат за время (tb t2) и т.д. Движение происходит по часовой стрелке. Аналогично
можно построить решение уравнения (5.6.40) для любых начальных условий.
Графическое решение для затухающего колебания ((5.6.46) и (5.6.48)) на фазовой
плоскости изображается следующим образом:
Рисунок 5.6.8 - Затухающие колебания
на участках 2 и 4
Движение происходит не по окружности, а по сходящейся к центру враще-
ния спирали. Это обусловлено наличием силы сопротивления или коэффициентом
демпфирования 2h в уравнении (5.6.41)). На рис. 5.6.10 изображено графическое
решение уравнения (5.6.41) для ненулевых начальных условий: х'о = 0, х0 = а.
587
Рисунок 5.6.9 - Затухающие колебания на участках 1 и 3
588
Анализируя рис. 5.6.7 и 5.6.10, видим, что в первом случае мы начали с ну-
левых начальных условий - к ним и вернулись. При этом размах колебания был
ограниченным. Во втором случае в точку на фазовой плоскости, с которой нача-
ли, мы не вернулись. Однако исходя из характера силы сопротивления (отсутст-
вие атмосферы, достаточная упругость элементов конструкции батареи) h - мало,
h<0) и короткого отрезка времени, необходимого для двух включений с паузой,
сопоставимого с половиной периода колебания, ошибка, которую видно на рис.
5.6.10, будет незначительной и примерно равной 1 - e-ht3. При этом если учесть,
что в реальности время половины периода колебания не всегда равна целому
числу тактов, то этой ошибкой можно пренебречь.
Для сравнения изобразим решение уравнения (5.6.40) при двух включениях
и паузе, каждое из которых длится время, равное половине периода колебания.
Начальные условия - нулевые.
Из рис. 5.6.11 видно, что при такой продолжительности включений получа-
ется расходящийся процесс. Из рис. 5.6.11 также видно, что продолжительность
включений должна быть ограниченной (существенно меньше полупериода тона),
а необходимый для отработки рассогласований импульс момента управляющих
двигателей следует набирать как сумму парных включений. Для транспортного
модуля к орбитальной станции ’’Мир" продолжительность каждого из пары им-
пульсов составляет -0,2 с.
Рисунок 5.6.11 - Расходящиеся колебания
Из описания способа следует, что при его использовании необходимо зна-
ние периода колебаний низшего, наиболее сложного для стабилизации тона. При
создании КА и определении его динамической схемы рассчитывают в том числе
и частоты колебаний упругих элементов. При отличии частот в реальном полете
от их значений в процессе проектирования системы настройка для полупериода в
парных импульсах может быть уточнена в БЦВМ через полетное задание путем
589
определения фактической частоты колебаний объекта управления после тестово-
го (короткого) корректирующего импульса с использованием телеметрической
информации.
5.6.3 Обеспечение экономичного длительного ориентированного полета
При длительных ориентируемых полетах космических комплексов или ав-
тономных КА особую актуальность приобретает проблема экономии ресурса СУ.
При управлении КА с использованием двигателей стабилизации особенно остро
стоит вопрос экономии рабочего тела. При ориентированном полете обеспечива-
ется поддержание теплового и энергетического режимов объекта.
В режиме длительного поддержания ориентации основными факторами,
влияющими на расход рабочего тела, являются возмущающие моменты. Поэтому
при полете в орбитальной системе координат (ОСК) и при отсутствии жестких
требований к точностным характеристикам ориентации целесообразно ориенти-
ровать объект управления таким образом, чтобы суммарные возмущающие мо-
менты (главным образом гравитационные и аэродинамические) обнулялись. При
этом ориентация КА будет близкой к орбитальной (квазиорбитальная ориентация
по вектору возмущающих воздействий без использования информации ПОЗ).
Для исследования возможностей такой ориентации целесообразно проана-
лизировать, к какому типу объектов относится данный КА:
- осесимметричный (типа «диск» или типа «цилиндр»);
- несимметричный.
Для эллипсоидов инерции автономных КА и для связок объектов, обра-
зующих космический комплекс, типична приближенность к эллипсоидам враще-
ния. Если такой объект сориентировать осью, относительно которой момент
инерции минимален, по гравитационной вертикали, то при таком угловом поло-
жении может быть обеспечена длительная экономичная ориентация КА в ОСК
без использования информации ПОЗ и, более того, СУ может быть на некоторый
промежуток времени даже выключена.
Коэффициенты усиления сигналов в законах управления применительно к
конкретным объектам выбираются из условий максимальной устойчивости их
движения и минимизации расхода рабочего тела.
Подобный режим был использован для экономичного длительного ориен-
тированного полета связки первых двух блоков Международной космической
станции «Альфа» ФГБ «Заря» и американского модуля NODEI Unity до стыковки
с российским служебным модулем (СМ) «Звезда», пуск которого откладывал-
ся [20].
В результате исследований был избран следующий режим работы. Сначала
строилась базовая орбитальная ориентация. Потом выполнялся программный
разворот в целях ориентации продольной оси связки ОХ связанной системы ко-
ординат вдоль гравитационной вертикали (в зенит или надир), и дальше связка
«закручивалась» вокруг продольной оси с угловой скоростью 0,25...0,5 град/с и
вокруг ортогональной к ней оси OZ ЗСК с орбитальной угловой скоростью
0,065 град/с; после чего СУ выключалась. Обращение вокруг оси ОХ обеспечива-
590
ло равномерное освещение связки Солнцем, а обращение вокруг оси OZ - неиз-
менность направления продольной оси ОХ по гравитационной вертикали.
Со временем под действием внешних моментов, возмущающих движение
связки, модуль вектора абсолютной угловой скорости уменьшался, а угол между
местной гравитационной вертикалью и продольной осью связки увеличивался,
т. е. нужно было периодически «дозакручивать» связку, а при необходимости пе-
ред закруткой восстанавливать гравитационную ориентацию. Кроме того, для
контроля состояния связки необходимо было периодически включать СУ в ре-
жиме индикации, чтобы измерить угловые скорости обращения связки и переда-
вать измерения в составе телеметрической информации в Центр управления по-
летами. Поэтому типовые циклограммы режимов работы СУ ФГБ имели вид, по-
казанный на рис. 5.6.12.
Именно такой способ управления позволил экономить ресурс СУ, рабочее
тело двигателей стабилизации при достаточно равномерной освещенности связ-
ки, которое обеспечивало необходимый тепловой и энергетический режимы стан-
ции. В целом основные результаты аналитических исследований и математиче-
ского моделирования были подтверждены натурными испытаниями.
Построение
орбитальной
ориентации
Программный
разворот в
гравитационную
ориентацию
Введение полетного
задания (ПЗ)
Закрутка
Вкл.
Введение ПЗ
ТМ
Рисунок 5.6.12 - Типовые циклограммы режимов работы
СУ ФГБ при управлении связкой ФГБ+ NODE1:
а - закрутка с предшествующим построением орбитальной ориентации; б -
режим индикации; в - закрутка без восстановления ориентации
5.7 Управление при отделении и уводе ТМ от орбитальной станции
Как правило, отделение модуля от орбитальной станции выполняется через
следующие операции:
591
- раскрытие замков;
- срабатывание пружинных толкателей;
- увод.
Поскольку в процессе раскрытия замков и срабатывании пружинных толка-
телей модулю сообщается определенный импульс угловой и линейной скоростей,
при дальнейшем свободном движении возможно соударение элементов модуля и
станции (солнечные батареи, антенны, штанги). Чтобы предотвратить такое со-
ударение, дальнейший увод модуля необходимо сделать управляемым.
Простейшая схема увода модуля после его отделения от станции показана
на рис. 5.7.1.
Рисунок 5.7.1 - Вариант схемы увода модуля от орбитальной
станции
Здесь тОж - время ожидания (-100 ... 150 с) для отхода от станции на безо-
пасное расстояние и подготовку к задействованию режима увода (включение
ДУС, подготовка двигательной установки, включение БЦВМ):
- 1-й участок включения двигателей стабилизации и причаливания ДПС
на выдачу импульса увода (- 6 двигателей с тягой по 40 кг вдоль про-
дольной оси) на время - 10 ... 20 с;
- 2-й участок - демпфирование угловых скоростей;
- 3-й участок -2-й импульс двигателями ДПС (-50 с);
- 4-й и 5-й участки - демпфирование угловых скоростей, подготовка к пе-
реходу и переход в следующий режим (построение орбитальной систе-
мы координат или закрутка).
На всех участках с 1-го по 5-й проводится демпфирование угловых скоро-
стей вначале с помощью ДПС до уровня -0,15 град/с, а затем с помощью двига-
телей точной стабилизации - до уровня 0,1 ... 0,05 град/с..
После выполнения режима увода возможно применение других динамиче-
ских режимов, например, построения базовой ориентации.
5.8 Завершение работы с ТМ. Маневр спуска с орбиты
Обычно миссия ТМ после работы в составе орбитальной станции считается
выполненной, и остается осуществить спуск возвращаемого аппарата (ВА), если в
конструкции модуля он предусмотрен, и затем выдать КИ для потопления ТМ в
заданной акватории мирового океана.
Для спуска ВА предварительно выполняется ориентирование ТМ, а затем в
расчетный момент времени происходит отделение В А от базового блока ТМ.
Маневр спуска с орбиты и потопление базового блока ТМ (или КА) начи-
592
нается с построения развернутой орбитальной ориентации. Затем выполняется
программный разворот для ориентации вектора тяги тормозной двигательной ус-
тановки (ТДУ) в направлении, противоположном линейной скорости ТМ. В каче-
стве ТДУ могут служить двигатели коррекции орбиты. В момент времени, соот-
ветствующий расчетной точке схода ТМ с орбиты, включается ТДУ для умень-
шения линейной скорости до требуемой для снижения.
Траектория спуска определяется как линия, но которой движется КА с мо-
мента схода с орбиты и до момента достижения высоты, на которой возможно
применение специальных средств для осуществления посадки.
Вся траектория спуска подразделяется на три участка:
- участок торможения, движение на котором происходит под действием
тяги работающей ТДУ;
- участок снижения с момента выключения ТДУ и до момента входа в
плотные слои атмосферы;
- атмосферный участок движения в плотных слоях атмосферы до высоты,
на которой возможно применение специальных средств для осуществле-
ния посадки. Посадка КА, снизившего скорость до допустимых величин,
выполняется теми же методами, что и посадка обычных авиационных
средств (парашютирование, планирование) [21].
При баллистических расчетах траекторий спуска обычно принимают, что
граница атмосферы Земли находится на высоте 80 ... 90 км. Точка пересечения
траектории спуска с верхней границей атмосферы называется точкой входа. Па-
раметры движения КА, относящиеся к этому моменту, называются параметрами
входа и обозначаются индексом «вх»: гвх, Увх, 0^ (рис. 5.8.1).
Рисунок 5.8.1 - Характерные точки траектории входа
593
На рис. 5.8.1 показаны:
. ВХ - точка входа КА в атмосферу;
П- условный перигей гипотетической траектории, по которой двигался
бы КА, если бы Земля не имела атмосферы;
AV - вектор тормозного импульса;
8 - угол между вектором тормозного импульса и местным горизонтом.
Основная специфика движения КА связана с атмосферным участком, на ко-
тором из-за аэродинамического сопротивления возникают значительные механи-
ческие перегрузки конструкции КА и сильный нагрев поверхности его оболочки.
При снижении в атмосфере с неработающим двигателем перегрузка
nn =-R/(mg0), т. е. определяется величиной и направлением полной аэродина-
мической силы R.
Важным понятием теории расчета траекторий спуска КА в атмосфере Зем-
ли (планеты) является понятие коридора входа.
Нижняя граница коридора входа - это траектория спуска, на которой возни-
кает максимально допустимая перегрузка. Верхняя граница коридора входа - это
траектория спуска, на которой в результате торможения КА в атмосфере достига-
ется минимальное значение скорости, равное местной круговой скорости [21].
Энергия, рассеиваемая при снижении КА в атмосфере, в конечном счете
превращается в тепло. Влияние нагревания на конструкцию КА принято оцени-
вать величиной теплопотока qT (количеством тепла, подводимого за единицу
времени к единице поверхности обшивки КА) или полным количеством подве-
денного тепла QT.
В зависимости от наличия подъемной У и боковой Z составляющих аэро-
динамической силы R, которые могут использоваться для управления полетом
КА, различают баллистический спуск (Cy=Cz=0) и спуск с аэродинамическим ка-
чеством, под которым понимают величину К=Су/СХ-
Для потопления ТМ обычно применяется баллистический спуск.
При спуске с аэродинамическим качеством появляющаяся подъемная сила,
обусловленная несимметричностью обтекания воздушного потока, позволяет
управлять движением КА путем его разворота вокруг продольной оси.
В зависимости от направления подъемной силы различают траектории с
пикированием и кабрированием. При достаточно большой величине аэродинами-
ческого качества кабрирующие траектории могут приобрести волнообразный ха-
рактер с одним или несколькими рикошетами. В этом случае максимальные пере-
грузки могут быть значительно снижены по сравнению с перегрузками при бал-
листическом спуске, но общее время спуска значительно возрастет. Использова-
ние пикирующих траекторий, наоборот, позволяет сократить время спуска при
значительном увеличении перегрузок [21].
Библиографический список к разделу 5
1. Синтез управления угловым маневром крупногабаритного КА с примене-
нием БИНС [Текст] / Я.Е. Айзенберг, Ю.А. Кузнецов, Д.А. Караулов,
В.Г. Симагин // Труды Школы-87 «Бесплатформенные инерциальные сис-
594
темы (БИНС) навигации и ориентации». ИПМ АН СССР. - 1989. - Кн. 2. -
С. 259-264.
2. Алексеев, К.Б. Экстенсивное управление ориентацией космических лета-
тельных аппаратов [Текст] / К.Б. Алексеев. - М: Машиностроение, 1977. -
120 с.
3. /Алексеев, К.Б. Маневрирование космических аппаратов [Текст] /
К.Б. Алексеев, Г.Г. Бебенин. -М.: Машиностроение, 1970. -416 с.
4. Алексеев, К.Б. Управление космическими летательными аппаратами
[Текст] / К.Б. Алексеев, Г.Г. Бебенин. - М.: Машиностроение, 1974. - 340 с.
5. Алпатов, А.П. Анализ способов управления ориентацией космической сол-
нечной электростанции [Текст] / А.П. Алпатов, С.В. Хорошилов И Техниче-
ская механика.- Ин-т технической механики НАН Украины и
НКА Украины. - 2005. - №1. - С. 3-12.
6. А.с. № 200322 СССР, МКИ3 B64G 1/24. Система ориентации и стабилиза-
ции упругого космического аппарата / А.Н. Орлов, А.Н. Степанов,
Ю.А. Кузнецов. -№ 3068131; Заявл. 14.02.83.
7. А.с. № 247997 СССР, МКИ4 B64G 1/24. Система ориентации космического
аппарата/ Ю.А. Кузнецов, А.Н. Орлов, А.Н. Степанов, А.Н. Тынок. -
№3110007; Заявл. 20.03.85.
8. А.с. № 304639 СССР, МКИ2 B64G 1/20. Способ ориентации космического
аппарата на Землю / Ю.А. Кузнецов, А.Я. Макаренко, В.Г. Симагин,
Я.Е. Айзенберг. -№ 3186819/22; Заявл. 15.12.87.
9. А.с. № 310319 СССР, МКИ2 B64G 1/20. Система ориентации космического
аппарата / А.Я. Макаренко, Ю.А. Кузнецов, Д.А. Караулов, А.Н. Орлов. -
№ 4514378; Заявл. 15.05.89.
10. А.с. № 324400 СССР, МКИ5 B64G 1/24. Система ориентации космического
аппарата / Ю.А. Кузнецов, О.Я. Макаренко, И.В. Максимов,
Д.А. Караулов. -№ 4530045/22; Заявл. 10.04.90.
11. Барсуков, О.К. Синтез разворота твердого тела по кажущемуся повороту
[Текст] / О.К. Барсуков, В.Б. Успенский // Вестник ХПИ. Техн, кибернетика
и ее приложения. - X.: ХПИ, 1986. - Вып. 6 (229). - С. 18-20.
12. Бранец, В.Н. Введение в теорию бесплатформенных инерциальных навига-
ционных систем [Текст] / В.Н. Бранец, И.П. Шмыглевский. - М.: Наука,
1992.-280 с.
13. Бранец, В.Н. Применение кватернионов в задачах ориентации твердого те-
ла [Текст] / В.Н. Бранец, И.П. Шмыглевский. - М.: Наука, 1973. - 320 с.
14. Волосов, В.В. Об управлении ориентацией космического аппарата в орби-
тальной системе координат с использованием эллипсоидальных оценок его
вектора состояния [Текст] / В.В. Волосов // Проблемы управления и ин-
форматики. - 1998. - № 5. - С. 31-41.
15.Воронин, А.Н. Многокритериальная оптимизация динамических систем
управления [Текст] / А.Н. Воронин // Кибернетика. - 1980. - № 4. -
С. 56-68.
595
16 .Гончаров, А.В. О точности определения ориентации спутника дистанцион-
ного зондирования Земли в некорректируемой бесплатформенной инерци-
альной системе [Текст] / А.В. Гончаров, Ю.А. Кузнецов, О.Ю. Златкин //
Материалы XVI междунар. научно-практ. конф. "Информационные техно-
логии: наука, техника, технология, образование, здоровье’’. - X.: НТУ
“ХПИ”. - 2008.
17 . Дегтярев, Г.Л. Теоретические основы оптимального управления упругими
космическими аппаратами [Текст] / Г.Л. Дегтярев, Т.К. Сиразетдинов. - М.:
Машиностроение, 1986. - 216 с.
18 .Железняк, А.И. Об одном способе формирования закона угловой стабили-
зации КА [Текст] / А.И. Железняк И Ракетно-космическая техника.
Сер. V. - Днепропетровск, 1990. - Выл. 5. - С. 115-134.
19 .3акржевский, А.Е. Оптимизация Эйлерова разворота нелинейного упругого
объекта [Текст] / А.Е. Закржевский И Механика твердого тела. - 1982. -
Вып. 6. - С. 3-6.
20 .3латк1н, Ю.М. Особливосп керування М1жнародною косм!чною станщею
"Альфа" на початковому erani польоту [Текст] / Ю.М. Златкш,
В.П. Ржемовський, Ю.О. Кузнецов // Косм1чна наука i технолопя. Нац.
косм, агентство Укра'ши, НАНУ. - 2006. - Т. 12. - № 2/3. - С. 3-7.
21 .Инженерный справочник по космической технике [Текст]/ под ред.
А.В. Солодова. - 2-е изд., перераб. и доп. - М.: Воениздат, 1977. - 430 с.
22 .Комков, В. Теория оптимального управления демпфированием колебаний
простых упругих систем [Текст] / В. Комков. - М.: Мир, 1975. - 160 с.
23 .Кузнецов, Ю.А. Оптимальная переориентация упругого космического ап-
парата, использующего электромеханические исполнительные органы
[Текст] / Ю.А. Кузнецов И Труды Школы-83 «Электромеханические систе-
мы управления КА». ИПМ АН СССР. - 1986.
24 .Кузнецов, Ю.А. Решение динамической задачи разворота "связки" косми-
ческих аппаратов [Текст] / Ю.А. Кузнецов // Ракетно-космическая техника.
Сер. V. - Днепропетровск, 1986. - Вып. 5.
25 .Кузнецов, Ю.А. Исследование неоднозначности квазисвободного разворота
осесимметричного КА [Текст] / Ю.А. Кузнецов // Ракетно-космическая тех-
ника. Сер. V. - Днепропетровск, 1990. - Вып. 5. - С. 65-74.
26 .Кузнецов, Ю.А. Построение базовой ориентации орбитального туристиче-
ского комплекса для спуска возвращаемого аппарата [Текст] /
Ю.А. Кузнецов, О.Ю. Златкин // Сб. докладов XV междунар. конф, по ав-
томатическому управлению «Автоматика-2008». - Одесса: ОНМА, 2008. -
Т. 1.-С. 279-282.
27 .Кузнецов, Ю.А. Экономичная ориентация связки модулей "Заря" и "Един-
ство" Международной космической станции "Альфа" [Текст] /
Ю.А. Кузнецов, А.С. Капланянц// Мехашка та машинобудування. - X.:
ХДПУ, 1999.-№2.
596
28 .Кузнецов, Ю.А. Исследование решения задачи динамического разворота
космического аппарата [Текст] / Ю.А. Кузнецов, Д.А. Караулов // Ракетно-
космическая техника. Сер. V. - Днепропетровск, 1986. - Вып. 5.
29 .Кузнецов, Ю.А. Об одной аппроксимации свободных вращений несиммет-
ричных твердых тел [Текст] / Ю.А. Кузнецов, Д.А. Караулов // Материалы
семинаров Секции Программного обеспечения систем управления и спе-
циализированных вычислительных устройств. - X.: СУХАР, 1991.
30 .Кузнецов, Ю.А. Метод анализа импульсного управления упругим космиче-
ским аппаратом [Текст] / Ю.А. Кузнецов, Д.А. Караулов, А.М. Орлов // Ра-
кетно-космическая техника. Сер. V. - Днепропетровск, 1987. - Вып. 5.
31 .Кузнецов, Ю.А. Синтез кинематического наблюдателя упругого космиче-
ского аппарата, ориентируемого вокруг геоцентрической вертикали
[Текст] / Ю.А. Кузнецов, В.Г. Симагин И Ракетно-космическая техника.
Сер. V. - Днепропетровск, 1982. - Вып. 5.
32 .Кузнецов, Ю.А. Применение фильтра Калмана в задаче идентификации от-
казов двигателей стабилизации космического аппарата [Текст] /
Ю.А. Кузнецов, Е.В. У ханов // Bic ник Нацюнального техничного
ун!верситету “ХШ”. - X.: ПТУ “ХШ”, 2004. - № 19.
33 .Кузнецов, Ю.А. Методические указания к решению задач по геме «Расчет
траекторий движения космических аппаратов в околоземном пространстве»
курса «Космическая навигация» [Электронный ресурс]. - X.: Нац. аэро-
косм. ун-т «Харьк. авиац. ин-т», 2011. - 66 с.
34 .Кузнецов, Ю.О. Динамжа польоту орбпальноТ косм1чно! станцп в режим!
економ1чно! оркнтацп [Текст] / Ю.О. Кузнецов, Г.В. Беляев,
А.Ю. Кузнецов // Тези доп. М!жнар. наук.-практ. конф. /ТнформаЦшш
технологи: наука, техшка, технолога, освтга, здоров’я”. - X.: НТУ “ХШ”. -
2003.-С. 9.
35 .Кузовков, Н.Т. Непрерывные и дискретные системы управления й методы
идентификации [Текст] / Н.Т. Кузовков и др. - М.: Машиностроение,
1978.-224 с.
Зб .Легостаев, В.П. Основные принципы построения системы управления ор-
битальных космических комплексов с учетом деформации конструкции
[Текст] / В.П. Легостаев. А.Д. Сверчков, Ю.П. Яблонько.// Ракетно-
космическая техника. - Днепропетровск, 1981. - Вып. 4. - С. 3-20.
37 .Моисеев, Н.Н. Элементы теории оптимальных систем [Текст] /
Н.Н. Моисеев. - М.: Наука, 1975. - 528 с.
38 .Патент Российской Федерации 2131832, класс B64G1/24. Способ управле-
ния разворотом космического аппарата / заявитель - АОО ракетно-
космическая корпорация «Энергия» имени С.П. Королева / М.В. Левский,
патентообладатель - АОО «Энергия». - №98107358/28; Заявл. 20.04.1998.
ww w .ru-patent. info.
39 .Петкевич, В.В. Теоретическая механика [Текст] / В.В. Петкевич. - М.: Нау-
ка, 1981.-496 с.
597
40 .Математическая теория оптимальных процессов [Текст] / Л.С. Понтрягин,
В.Г. Болтянский, Р.В. Гамкрелидзе, Е.Ф. Мищенко. - М.: Наука, 1983.-
392 с.
41 .Потапенко, Е.М. Робастное управление маневрирующим упругим космиче-
ским аппаратом [Текст] / Е.М. Потапенко, В.Г. Бичай // Проблемы управле-
ния и информатики. - 1998. - № 4. - С. 72-85.
42 .Рутковский, В.Ю. Алгоритмы управления ориентацией деформируемых
спутников с использованием информации о фазе упругих колебаний
[Текст] / В.Ю. Рутковский, В.М. Суханов // 1‘руды IV симпозиума ИФАК
по управлению в пространстве. - 1976. - Выл. 2. - С. 297-305.
43 .Математическое моделирование эйлеровых разворотов орбитального ком-
плекса ’’Мир” гиродинами [Текст] / В.А. Сарычев и др. // Космические ис-
следования. - 1991. - Т. 29. - Вып. 4. - С. 532-543.
44 .Силверберг, Л. Равномерное стабилизирующее управление космическими
аппаратами [Текст] / Л. Силверберг// Аэрокосмическая техника. - 1986. —
Вып. 12.-С. 161-168.
45 .Справочник по теории автоматического управления [Текст] / под ред.
А.А. Красовского. -М.: Наука, 1987. - 712 с.
46 . Технический отчет. Основные принципы построения системы наведения в
режиме РЖ03 СУ изделия 77КС. -X.: НПП Хартрон-Аркос, 1989. - 198 с.
47 .Техническое задание на выполнение составной части опытно-
конструкторской работы «Система управления многоцелевым лаборатор-
ным модулем на базе ФГБ-2». 315-СУ МЛМ-ТЗ. - М.: КБ «Салют» ФГУП
«ГКНПЦ» им. М.В. Хруничева, 2004.
48 .Хроника дат и событий. 1959-2005 [Текст]/ автор-составитель
В.И. Котович. - X.: НЛП Хартрон-Аркос, 2006. - 212 с.
49 .Черноусько, Ф.Л. Управление колебаниями [Текст] / Ф.Л. Черноусько,
Л.Д. Акуленко, Б.Н. Соколов. - М.: Наука, 1980. - 384 с.
50 . Шипулина, Л.В. Синтез инерционного разворота осесимметричного объек-
та [Текст] / Л.В. Шипулина, Н.В. Середа, С.А. Рылеева// Вестник ХПИ. -
№ 252. Техническая кибернетика и ее применения. - Вып. 8. - X.: Вища
школа, 1988. - С. 21-25.
51 .Kuznetsov, Y.A. Quasi-optimal control of Orbital Transport Spacecraft attitude
maneuvers [Text] I Y.A. Kuznetsov, V.N. Konovalov // Proceeding of Fourth
Ukraine-Russia-China Symposium on Space Science and Technology. - Kiev:
NTUU “KPI”. - 1996. - Vol. 1. - P. 450-451.
598
6 ИНТЕГРИРОВАННАЯ СРЕДА РАЗРАБОТКИ ПРОГРАММНОГО
ОБЕСПЕЧЕНИЯ (ПО) БОРТОВЫХ КОМПЬЮТЕРОВ (БК) СУ
КОСМИЧЕСКИХ КОМПЛЕКСОВ
6.1 Методологические и организационные средства производства ПО
БК систем управления КА
Для разработки и верификации ПО КА используют интегрированную среду
разработки, включающую в себя функционально-ориентированные методы и тех-
нологии проектирования.
Методологической основой предлагаемой технологии являются современ-
ные концепции иерархической декомпозиции, обеспечивающие:
- формализацию процессов проектирования, разработки, верификации и
отладки;
- документирование и использование библиотеки сегментированных компо-
нентов (режимов, задач, процессов, модулей) программного обеспечения;
- реализацию графических методов представления вычислительных про-
цессов при разработке сложных комплексов управления и обработки
данных в реальном масштабе времени.
Предлагаемая технология программирования базируется на комплексе ор-
ганизационных и технических принципов системного проектирования ПО БК,
представленных интегрированной средой разработки.
Комплекс включает в себя такие технические (методологические) принци-
пы, как структурное программирование (кодирование), сегментацию программ
(модульность), разработку проекта «сверху-вниз», верификацию программ «свер-
ху-вниз», а также методы документирования.
К организационным принципам относятся:
- организация работ на этапах жизненного цикла создания ПО;
- организация программистских бригад с лидерами, включающих в себя
также программиста-библиотекаря;
- организация библиотеки обеспечения разработки (библиотека модулей
обеспечения сборки проекта); ....
- использование стандартов разработки программного обеспечения;
- организация верификации методом тестирования и структурных прог
смотров (анализ, аудит, экспертиза).
На основе предлагаемой технологии и методов качество программного
обеспечения обеспечивается применением интегрированной среды производства
программ, содержащей ряд подсистем:
- проектирования ПО, использующую динамические спецификации, для
описания вычислительных процессов БК СУ, представленных алгорит-
мом логической схемы режимов и типовых задач, разрабатываемых на
графическом языке динамических спецификаций (ЯДС), которые являют-
ся исполняемыми спецификациями реального времени в операционной
среде разработки НПП Хартрон-Аркос; таким образом реализуется авто-
матическое решение динамических спецификаций и преобразование этих
599
спецификаций в программную реализацию на языке C++ для ОС;
- разработки программного обеспечения, основу которой составляют объ-
ектно-ориентированные языки пршраммирования, библиотеки, поддер-
живающие структурное программирование;
- автоматической генерации тестовых контрольных примеров;
- верификации ПО методом тестирования на реальном БК, на тестовых
контрольных примерах средствами СКДО на АРМ программиста в ре-
жимах, приближенных к реальному функционированию СУ;
- терминальный отладчик, обеспечивающий отладку в исходном тексте
программирования;
- автоматической обработки результатов выполнения тестовых контроль-
ных примеров при верификации ПО на встроенном БК по допусковому
критерию или с использованием физических принципов;
- для проведения исследовательских работ, связанных с разработкой и
тестированием алгоритмов системы управления и обработки данных с
использованием математических моделей объекта управления, смежных
подсистем, датчиков и исполнительных органов;
- автономной верификации компонентов ПО на симуляторе;
- ведения информационной базы данных, архивирования и документиро-
вания [4].
Организационные средства обеспечения качества ПО поддерживают вы-
полнение процесса разработки и верификации на каждом этапе жизненного цикла
программного обеспечения с учетом требований, специфицированных в стандар-
тах Европейского космического агентства (ESA) и Европейского сообщества по
стандартизации космических систем (ECSS).
При детализации работ, связанных с разработкой и верификацией про-
граммного обеспечения, используют стандарты предприятия (СТП) разработки
НИН Хартрон-Аркос, которые согласуются с требованиями стандартов ECSS и
ESA.
Предлагаемые интегрированные средства разработки ПО апробированы
при разработке многих сложных программных комплексов, реализованных в про-
ектах: целевые модули орбитального комплекса «Мир», модуль «Заря» междуна-
родной космической станции (МКС), спутника «Egyptsat-1», КА МС-2-8.
6.2 Архитектура и средства разработки программного обеспечения
Основой архитектуры объектного ПО являются концепции иерархической
декомпозиции и создание библиотеки сегментированных компонентов (функцио-
нальных режимов, задач, процессов, системных модулей, функциональных моду-
лей, модулей обмена с внешними устройствами, модулей обслуживания, модулей
стандартных функций).
Библиотека модулей - это статический набор запрограммированных спе-
цификаций (алгоритмов), используемых для создания программного проекта и
записи (прошивки) в ППЗУ (ПЗУ) БК.
Важнейшим элементом в формировании архитектуры ПО является исполь-
600
зование метода структурного программирования.
Структурное программирование составляет основу технологии и имеет ва-
жнейшее самостоятельное значение. Оно направлено на получение правильных,
надежных, ясных и читабельных программ, на существенное упрощение процес-
сов верификации и, главное, сопровождения и модернизации программ, а также
проведения коррекции программ [6, 7].
Система при этом рассматривается как структура процессов, составленная
из программных модулей. Процесс, расположенный наверху, содержит логику
управления и решения самого высокого уровня. Он или передает управление
процессам более низкого уровня, или идентифицирует подлежащие вводу модули
более низкого уровня. Таким образом, процессы выполняются до тех пор, пока не
будут определены все функции системы, специфицированные алгоритмом логи-
ческой схемы режима.
Возможности структурного программирования существенно расширяются
при сочетании с методом сегментации (декомпозиции) программ. При этом про-
грамма разбивается на такие логические сегменты (режимы, задачи, процессы,
модули, функции), которые были бы легко понятны. Каждый сегмент программы
должен сам представлять одну из основных логических структур, при этом ин-
формационные связи с другими сегментами ослаблены до минимума. Таким об-
разом, каждый сегмент программы становится логически законченным целым,
которое можно одновременно анализировать, программировать, читать и прово-
дить его верификацию. Каждый сегмент реализует отдельные функции в про-
грамме и представляет собой модуль с одним входом и одним выходом.
Особое место в описываемой технологии занимает использование принци-
па разработки программ «сверху-вниз», что отражает важнейшую тенденцию в
программировании - превращение его в направление системотехники. При реа-
лизации принципа программирования «сверху-вниз» разработка ПО начинается с
определения управляющих операторов архитектуры (интерфейсов) системы и
определения структуры данных. Затем разрабатываются и интегрируются функ-
циональные модули, блоки, причем интеграция выполняется постоянно, по мере
разработки программы.
Сборка требуемой конфигурации ПО из компонентов библиотеки (библио-
теки обеспечения разработки) - один из основных методологических принципов
(рис. 6.2.1). Для поддержки объектно-ориентированных методов программирова-
ния используются языки программирования высокого уровня типа C++. Эти язы-
ки поддерживаю! основные понятия объектно-ориентированного подхода путем
введения абстрактных типов данных (классов, объектов), иерархии типов (под-
классов), наследование свойств, разделения спецификации и реализации и т. п.
Использование объектов для структурирования системы дополняет концеп-
цию декомпозиции в обеспечении модульности программы.
Применение иерархии классов позволяет группировать подобные компо-
ненты вместе.
При разработке ПО БК используют концепции как одновариантного, так и
n-вариантного программирования.
601
При одновариантном программировании создается единая библиотека обе-
спечения разработки npoipaMM, которую применяют как для сборки ПО бортовых
компьютеров, так и для сборки ПО модели алгоритмов СУ для инструментальной
ПЭВМ АРМ алгоритмиста-исследователя в случае проведения всех видов иссле-
довательских работ при математическом моделировании объекта управления,
разработки и верификации АО СУ.
Концепция одновариантного программирования и n-вариантной верифика-
ции предполагает расширение сферы верификации, т.е. верификация ПО п-
вариантная и число п варьируется от двух до трех в зависимости от принятой тех-
нологической схемы верификации проекта. Значение n-вариантной верификации,
безусловно, в этой технологической схеме возрастает, так как эти программные
модули используются и дополнительно верифицируются алгоритмистами-
исследователями.
Принятая технологическая схема не исключает применения п-вариантного
программирования и использования при отладке критериев сопоставления ре-
зультатов выполнения разработанных программных модулей первого варианта с
результатами функционирования второго варианта программных модулей - кон-
цепция двухвариантного программирования и верификации, использующая ме-
тоды диверсификации.
Как уже упоминалось ранее, создаваемый проект из библиотеки модулей -
это статический набор программ. Для создания выполняемой программы режима
или задачи используют модули, реализующие алгоритм информационно-
логической схемы, представленный в форме динамической спецификации.
6.3 Средства верификации ПО встроенного БК
Развивая методологические основы и учитывая важность комплексного по-
дхода разработки ПО БК, изложенные в подразд. 6.1, следует отметить, что од-
ним из основных компонентов, обеспечивающим создание надежного ПО, явля-
ется верификация ПО средствами системы комплексного динамического тести-
рования и отладки (СКДО) [2].
Система СКДО представляет собой программно-аппаратный комплекс,
обеспечивающий верификацию ПО методом тестирования и отладку в режимах
его функционирования, приближенных к реальным условиям эксплуатации
(рис. 6.3.1). Кроме того, СКДО позволяет выполнять динамическое тестирование
и отладку функционального ПО как в штатном режиме функционирования, так и
при создании ожидаемых нештатных ситуаций.
СКДО состоит из следующих подсистем, реализованных в единой интегри-
рованной среде:
- выполнения тестирования ПО на тестовых контрольных примерах в ре-
жиме псевдореального времени на объектном встроенном БК;
- выполнения тестирования ПО на тестовых контрольных примерах в ре-
жиме псевдореального времени на инструментальной ЭВМ, обеспечи-
вающей симуляцию встроенного БК;
602
Уровни иерархии ПО Формы документального
БК представления уровнем ПО БК
[j~BASE В1 | |~TIME 9.4 | [ТмЕН.О
Сред ста
преобразования
Резким, \ ф
функциональная N | prqcessi ] |
задача / I ।
PROCESS2~|
П I
r ’ —T“ |
[ 1 | ALGA1234 | J |
I | ALGA033 | । I
j । I I
1 j 1 ALGA0202 |j |
। Гршр динамической. специфшащии I
Графический \
Формы представления уровнен
ПО на входном языке
| BASE В1 | I TIME 9.4 | | TIME 11.0 |
11 X* •
T ' t
PROCESS 1 j | | ALGA1234 | |
1 1 — , 1
I I I ALGAO33 | ।
PROCESS 2 fj^| |
I [ | ALGA0202 ] I
_____Файл программы ДС __ __
Функциональный
'алгоритм
®м:=Хн«(Еге,; ey>Ktt(AJ=-A2’)
С Л3327 )
1 pS< Ni (п^_>
пет! да
Да _ 4 _'2Т—Да—,
• Кн)(Х0" Кгц| ! Алгебраи-
ческое
Блок-схема - выражение
л;
Текстовый \l
редактор
A3727Q
IF(N8(n)!«=5)
IF(KKOP!=0)
IF(KT=1)
FOR (J=0, J<=2,
Hl)
КВД=КНГЦ];
Файл программы ФА на СИ
г — 1 i | Стандартные Ч ч j функции i 1 / Спецификация | Спецификам абонентов СУ J стандартных (Алгоритмы 1 математических обмена) | функций Технические . характеристики 1 канала ввода- | вывода , । 1
Обмен
СП
buf_о utrs =
*p_m8sout;
Текстовый V *p_masoui++; ।
/toutrs IbCbuf о utrs,
редактор /I г
N_com);
goto rb;
I sincos НМ синус2,
j кос2*АРГ' в масшт
2п*ЭКРР=9,РР1,
.|РХХ,ИР4=4
‘1синус2 23М РР,[7]
I 23МРР1,[7‘
1 23М 12, [71
Срсдсгиа
преобразо-
вания
Формы представле-
ния уровней элеме-
нтами программы
1 Транслятор ЯДС^ kJ, | Объекты ДС Программа ДС (+ОС)
1
, К Единая библиотека 1 программ ; ФА (проекта)
Транслятор \ «С», Asin / 1 г* UL Таблицы пмен 1 Технологические
1 атрибуты т
Драйверы
Трансляторы С-
Ассемблера
Таблицы имен
Технологические
а грибуты
Библиотека
стандартных
программ
Интерфейс с системами^-"'" Таблицы имен, объектов, техноло-
тестирования гические атрибуты программы
Рисунок 6.2.1 - Процесс формирования библиотеки проекта
Средства программирования
Пользователь
Таблицы имен, объектов,
технологические атрибуты
программы
Интерфейс с |
системами |
тестирования!
_____________।
Файлы технологических атрибутов
Система динамического тестирования и отладки
Управление и формирование информационной базы
Информационная база системы тестирования
Процесс разомкнутой технологии тестирования >
и отладки
Модель е
объекта -
Эталонная
' программная
Э модель
алгоритмов
^Процесс замкнутой технологии тестирования и отладки»
Объектная
программа
Обработка -
допусковый
контроль
Модель е
объекта -
- Объектная
э программа
Система СКДО
Эталонная
модель —
алгоритмов
Система СКДО
Обработка
динамических
параметров
процесса
Обработка -
допусковый
контроль
1. Режим (задача) в терминах ДС
2. Набор контролируемых объектов
3. Тип обработки
> Диагностика <-------------
Пользователь
Рисунок - 6.3.1 Комплексное динамическое тестирование и отладка ПО
- управления базой данных, архивирования и документирования;
- проведения исследовательских работ при разработке и верификации ал-
горитмов системы управления и обработки данных с использованием
математических моделей объекта управления, смежных систем, датчи-
ков и исполнительных органов в режимах, приближенных к реальному
функционированию СУ;
- генерации тестовых контрольных примеров;
- обработки результатов выполнения тестовых контрольных примеров при
верификации ПО на встроенном БК или инструментальной ЭВМ по до-
пусковому критерию;
- автоматизированного контроля и анализа результатов испытаний
(САКАРИ) ПО БК;
- подготовки спецификаций и словарей;
- терминальный отладчик DT [3].
Как следует из перечня подсистем, СКДО представляет собой сложный ин-
струментальный комплекс программ, функционирующих в многозадачном режи-
ме и псевдореальном масштабе времени.
Общие функциональные возможности и структура СКДО могут быть пред-
ставлены следующим образом:
- система инвариантна к программно-аппаратным средствам встроенного
БК и имеет средства адаптации для функционирования на различных
программно-аппаратных платформах;
- система предоставляет пользователю возможности верификации ПО как
отдельных режимов, так и пакета режимов;
- рассматриваемая СКДО в условиях нормального функционирования и
при имитации различных нештатных ситуаций обеспечивает верифика-
цию графа ДС (алгоритма логической схемы), верификацию заданной
совокупности маршрутов ПО БК и диапазонов изменения переменных
объектного ПО;
- предложенная система обеспечивает моделирование поведения объекта в ус-
ловиях, максимально приближенным к его реальному функционированию;
- система имеет интерактивный интерфейс с ее пользователем, обеспечи-
вая задание различных режимов функционирования СКДО, проведение
отладки с использованием терминального отладчика и представление
результатов выполнения ПО на тестовых контрольных примерах.
Подсистема генерации тестов реализована на инструментальной ПЭВМ
АРМ алгоритмиста-исследователя и включает в свой состав модель алгоритмов
управления и обработки данных встроенного БК, а также модели объекта управ-
ления. В состав тестовых данных входят результаты работы модели алгоритмов,
смежных систем, датчиков и полетное задание (ПЗ).
В автономном режиме подсистема генерирует входную информацию (ими-
тация функционирования смежных подсистем, датчиков СУ) и ожидаемые (эта-
лонные) результаты (имитация управляющих воздействий и результаты проме-
жуточных вычислений при решении алгоритмов СУ) и записывает их в базу дан-
605
ных СКДО. Для хранения генерируемой информации используются два типа
файлов в архиве для каталога и информационной части.
В совмещенном режиме предусмозрено несколько подрежимов функцио-
нирования системы:
- с записью генерируемой информации в базу данных;
- без записи информации в базу данных;
- прием и выполнение управляющих директив оператора в интерактивном
режиме;
- организацию совместной работы двухмашинного комплекса - инстру-
ментальной ЭВМ и встроенного БК с выполнением обработки запросов
прерываний от технологических аппаратных средств и от пользователя;
- считывание из архива базы данных входной информации или ее генера-
цию в процессе выполнения контрольных тестов и выдачу ее в устрой-
ство имитации абонентов СУ;
- считывание информации с моделей выходных абонентов и ОЗУ встроен-
ной ЭВМ управляющих воздействий и результатов обработки данных, вы-
даваемых на исполнительные органы СУ или в смежные системы. Кроме
того, фиксируются результаты промежуточных вычислений в заданных
контрольных точках (КТ) на заданных временных интервалах, при этом
проводится запись информации в архив результатов базы данных;
- подстановку ожидаемых (эталонных) результатов вместо фактических
результатов по заданию пользователя с использованием метода вырав-
нивания маршрутов покрытия;
- проверку правильности функционирования оборудования автоматизиро-
ванного рабочего места (АРМ) в различных режимах;
- оперативную обработку результатов выполнения ПО с помощью систе-
мы САКАРИ на тестовых контрольных примерах (с проверкой точност-
ных характеристик, покрытия маршрутов и диапазонов переменных и
констант) и выдачу диагностических сообщений;
- обеспечение запоминания состояния выполнения ПО на тестовом кон-
трольном примере в различных задаваемых пользователем контрольных
точках с последующим восстановлением вычислительного процесса как
в инструментальной ЭВМ, так и во встроенном БК. При этом обеспечи-
вается продолжение выполнения ПО БК на тестовом контрольном при-
мере с любой хранимой контрольной точки;
- выдача в интерактивном режиме диагностических сообщений о ходе
выполнения тестирования, наличии ошибок, сбоев и неисправностей
оборудования АРМ.
6.4 Этапы верификации и валидации ПО БК
6.4.1 Задачи и этапы верификации ПО
Каждый проект проходит верификацию и валидацию созданного ПО по-
средством:
- проверки каждого программного компонента до его использования в
606
проекте на соответствие интерфейсу взаимодействующего компонента;
- обеспечения гарантии того, что проверки каждого программного компо-
нента сделаны и, насколько это возможно, не автором;
- предоставления заказчику гарантии, что объемы проведенных работ, за-
траченные на верификацию и валидацию ПО, достаточны, чтобы пока-
зать пригодность каждого программного компонента для использования
в работе.
Цель верификации и валидации - сократить количество ошибок до прием-
лемого уровня. На это требуются затраты в размере от 30 до 90% от всего объема
работ по проекту в зависимости от кригичности и сложности ПО.
Процесс верификации представляет собой действия, связанные с примене-
нием методов анализа, экспертизы, проверки, тестирования, аудита или установ-
ления иным способом соответствия программных компонентов, процессов и до-
кументов предъявляемым требованиям.
Методы верификации на этапах жизненного цикла ПО:
- анализ, аудит, экспертиза, тестирование ПО;
- испытание (проверка) программных модулей на соответствие рабочему
проекту;
- интеграционные испытания ПО на соответствие архитектурному проек-
ту;
- системные испытания ПО на соответствие требованиям ПО;
- приемочные испытания ПО на соответствие требованиям пользователя
(заказчика).
Валидация представляет собой оценку ПО в конце процесса его разработки
на соответствие требованиям заказчика (пользователя). Валидация реализуется на
этапе приемочных испытаний методом тестирования на соответствие требовани-
ям заказчика (пользователя).
Системные испытания методом тестирования обеспечивают проверку ПО
на соответствие требованиям к нему.
Интеграционные испытания методом тестирования обеспечивают проверку
ПО на соответствие требованиям архитектуры проекта и проводятся в процессе
формирования программного проекта.
Испытания модулей выполняются методом тестирования модулей на соот-
ветствие требованиям к рабочему проекту.
6.4.2 Этапы жизненного цикла создания ПО
Этап процесса проектирования ПО может быть представлен в виде сле-
дующих спецификаций:
- требования заказчика (пользователя);
- требования к ПО;
- архитектурное проектирование;
- рабочее проектирование.
Этап процесса испытаний спецификаций представляется следующими ви-
дами проверок, проводимых методом тестирования:
607
- испытания модулей;
- интеграционные испытания;
- системные испытания;
- приемочные испытания.
На этапе анализа требований заказчика и разработки системных специфи-
каций документируются цели и функции создаваемого программного комплекса,
определяются требования к программно-аппаратным средствам, персоналу раз-
работчиков и специалистов по эксплуатации, при необходимости по содержанию
и составу прохраммного обеспечения системы. Для решения данной задачи опре-
деляются иерархия программных компонентов системы (режимы, задачи, моду-
ли, блоки, стандартные подпрограммы), последовательность их выполнения,
функции режимов, задач, функциональных модулей, подпрограмм (стандартные
функции, процедуры...), описание данных и интерфейсов, организация баз дан-
ных (массивов данных) и т. п.
Таким образом, следствием этого описания формируется динамическая
спецификация (алгоритм логической схемы (ЛСх) и описание перечня режимов,
задач, модулей, интерфейсов и организация массивов данных).
Тщательная разработка требований к программному комплексу и создание
системных и проектных спецификаций приобретают особое значение в условиях,
когда создаются столь важные прохраммные системы (комплексы), какими явля-
ются системы управления и обработки данных (СУОД) ракет-носителей и косми-
ческих аппаратов.
Чрезвычайно важно уже на этом этапе выработать единство понимания
проблем между пользователями и разработчиками. С другой стороны, и это мо-
жет быть следствием «непонимания», весьма велика цена ошибок, допущенных
на этой стадии, если их придется устранять впоследствии после разработки про-
граммного обеспечения и его верификации.
Из опыта крупнейших фирм известно, что стоимость корректировки перво-
начальных ошибок может в процессе разработки программного комплекса увели-
чиваться в десятки раз.
На этом этапе используются такие принципы и методы, как иерархическая
декомпозиция, системный анализ, структуризация исследуемых проблем, а также
реализуется принцип разработки и тестирования «сверху-вниз».
В процессе проектирования программного комплекса уточняются:
- требования системных спецификаций, состав и сгруктура системы;
- сегментация и выделение компонентов программного комплекса;
- требования и функции составляющих систему компонентов и модулей
системы;
- входные и выходные данные сегментированной программной системы.
Этап проектирования можно условно разделить на два подэтапа - общего
проектирования (архитектурное проектирование) и детального проектирования.
На этапе архитектурного проектирования разрабатывается общая структура
системы и системные (общие) алгоритмы в соответствии с полученным функ-
циональным описанием системы (техническим заданием).
608
На этапе детального проектирования структура системы сегментируется на.
отдельные компоненты (режимы, задачи, процессы, модули), которые разрабаты-
ваются отдельными программистами или группами программистов, таким обра-
зом обеспечивая коллективный принцип разработки программного комплекса.
Этапы процесса проектирования и испытания спецификаций изображены
на рис. 6.4.1.
Проектирование
Верификация
Рисунок 6.4.1 - Этапы процесса проектирования и испытания спецификаций
Рис. 6.4.1 показывает использование методов верификации на этапах жиз-
ненного цикла ПО. Проектирование ПО начинается в верхнем левом углу, затем
движется вниз по левой «стороне спецификаций» до точки схождения в “V” и за-
тем поднимается вверх по правой «стороне верификаций». V-образность подчер-
кивает необходимость проведения выходящей спецификации на соответствие
входящей спецификации верификации ПО на каждой стадии создания ПО на со-
ответствие определенной спецификации.
6.4.3 Методы верификации ПО БК
В процессе испытания модулей верифицируется правильность функциони-
609
рования прохраммных подсистем и компонентов, по отдельности каждый модуль
или группа модулей на соответствие рабочему проекту.
При проведении интеграционных испытаний верифицируют правильность
функционирования прикладных компонентов ПО вместе с операционной систе-
мой. При этом испытания начинаются с «неполным» проектом. В проект входят
модули, разработанные на данный момент. По мере готовности новых модулей
они подключаются к системе, таким образом, реализуется метод «сборка наращи-
ванием».
Вместо неготовых модулей подключаются их заменители, таким образом,
операционная система (ОС) выходит и на модули-заменители, в которых выпол-
няется команда возврата в ОС [1].
Использование заменителей модулей, реализующих метод «сборки нара-
щиванием», позволяет начать испытания до готовности всех модулей.
Такой подход обеспечивает принцип разработки и тестирования «сверху-
вниз».
При интеграционных испытаниях верифицируют ПО на соответствие архи-
тектурному проекту.
При проведении системных испытаний верифицируют программный ком-
плекс совместно с аппаратными средствами системы управления КА на соответ-
ствие требованиям к ПО.
При проведении приемочных испытаний верифицируют программный
комплекс на соответствие требованиям пользователя (заказчика).
Проведение всех этих видов испытаний, которые являются средствами ве-
рификации ПО, обеспечивает проверку соответствия спецификациям, определен-
ным в требованиях пользователя, в требованиях к ПО, архитектурным и рабочим
проектам.
Верификация и валидация ПО в совокупности должны показать, что про-
граммный продукт удовлетворяет требованиям спецификации и выполняет свое
назначение. Анализ представляет собой процедуру, на которой программный
продукт разработки предоставляется группе, включающей в себя разработчика
проекта, руководителя, менеджера, пользователя, заказчика для одобрения или
внесения замечаний.
Анализ как метод верификации используется для поиска ошибок, несоот-
ветствий ПО спецификациям, кланам и требованиям стандартов.
Экспертиза ПО - это более строгая альтернатива анализу и настоятельно
рекомендуется для ПО с жесткими требованиями к надежности, защищенности и
безопасности.
Кроме того, стадии этапа проектирования должны быть верифицированы -
каждый последующий на соответствие документу предыдущей стадии.
Каждая ошибка, существующая в программном проекте, может привести к
нарушению функционирования или к несоответствию требованиям (не влияю-
щим на функционирование).
Тестирование - это процесс, в ходе которого система или компонент систе-
мы выполняются в определенной среде, результаты отслеживаются и заносятся в
610
БД системы и выполняется оценка результатов тестирования ПО системы или
компонента.
В сравнении с другими методами, технологиями верификации тестирование
является прямым и самым непосредственным, поскольку в ходе неге происходит
выполнение программы в среде, близкой к реальным условиям, и поэтому всегда
бывает предпочтительным.
Если спецификации или компоненты не могут быть проверены с помощью
тестирования, оно может быть заменено другими методами верификации в плане
испытаний (например, экспертизой).
На всех стадиях разработки спецификаций должен стоять вопрос о реали-
зуемости проведения тестирования, т.е. проектирование должно заканчиваться
решением вопроса о достижении тестируемости проектируемого ПО.
В настоящее время существует несколько определений процесса тестиро-
вания:
- Майерс [5] определяет тестирование как процесс выполнения программ
с намерением найти ошибки. Это определение узко и подходит как зада-
ча - следствие более общего определения, формулирующего конечную
цель и назначение процесса тестирования;
- тестирование - процесс выполнения программы в целях утверждения,
что прохрамма выполняет свое назначение, т. е. делает то, что, как пред-
полагалось, она должна делать;
- целью метода тестирования при верификации является доказательство,
что ПО соответствует спецификации, и таким образом сокращение ко-
личества ошибок до приемлемого уровня;
- тестирование - это процесс, в ходе которого программная система или
компонент выполняются в определенной среде, результаты тестирова-
ния анализируются подсистемой обработки результатов.
Специфика создания программных средств требует обязательного проведе-
ния тестирования и отладки. Этап осуществления отладки наступает в случае на-
рушения и невыполнения требований спецификации.
6.4.4 Критерии оценки ПО требованиям спецификации
Основными целями тестирования (верификации) и как сопутствующий
процесс - отладки программы, характеризующими предлагаемую технологию,
являются:
- прикладная пригодность программы, под которой понимается, в какой
степени программа соответствует предъявленным к ней требованиям
спецификации. Требования спецификации:
• легкость работы с программой с точки зрения пользователя;
• проверка выполнения программой своих основных функций;
• эффективность использования вычислительных ресурсов системы;
• реализация программой заданных функций наиболее оптимальным образом;
- степень устойчивости программы относительно искажений ее характе-
ристик;
611
- парирование нештатных ситуаций в реальном времени (либо отложение
парирования), определяющееся поведением программы в условиях, ко-
гда реальные спецификации отличаются от спецификаций, принятых на
этапе разработки программы;
- надежность, под которой понимается частота и критичность отказов
программы, когда она работает в допустимых условиях эксплуатации
аппаратных средств. Под надежностью понимается вероятность безот-
казной работы ПО в течение заданного времени, которая характеризует-
ся (определяется) как оценка надежности;
- производительность ПО, определяющая, в какой мере выполняются за-
данные требования по быстродействию, объему используемой памяти и
другим ресурсам системы (производительность не следует смешивать с
эффективностью программы, которая связана с улучшением производи-
тельности программы различными методами);
- точностные характеристики.
Тестирование как метод верификации представляет собой выполнение про-
граммы с определенными входными данными, для которых заранее известны или
вычислены независимым методом выходные, ожидаемые результаты.
Следует отметить, что при использовании метода структурного программи-
рования и принципа «сверху-вниз» обеспечивается возможность вести тестиро-
вание параллельно с процессом программирования. Программирование и тести-
рование начинаются с блоков самого верхнего уровня и продвигаются до нижне-
го уровня. При этом вместо незапрограммированных модулей применяются фик-
тивные модули (программные имитаторы).
Процесс завершается, когда все фиктивные модули заменены фактически-
ми и вся система интегрирована и оттестирована.
Все виды испытаний - средства верификации ПО, чтобы показать, что оно
действительно соответствует спецификациям.
Выходные данные, которые являются результатом выполнения тестовых
контрольных примеров, включают в себя следующие характеристики:
- меру покрытия тестом заданных контрольных точек, определяющих ко-
личество пройденных маршрутов (ветвей), что составляет тестовое по-
крытие;
- выходные данные, которые являются результатом нормального функ-
ционирования;
- суммарное время выполнения модулей в такте - захрузка в такте;
- время выполнения каждого модуля;
- точностные характеристики реализации вычислительных алгоритмов.
Параллельно с разработкой спецификаций ПО разрабатываются методы
тестирования, проектируются тестовые контрольные примеры. В деталях тесто-
вые контрольные примеры определяются на этапе рабочего проектирования.
В соответствии с требованиями стандарта предприятия разрабатываются
программы проведения испытаний, в которые включаются тестовые контрольные
примеры, процедуры тестирования и ожидаемые результаты тестирования.
612
6.4.5 Верификация модулей методом тестирования
Испытание модулей - это процесс тестирования модулей на соответствие
спецификациям рабочего проекта. Процесс тестирования модулей реализуется
методом наращивания, образуя, таким образом, компоненты архитектуры проек-
та из совокупности модулей. При последовательном наращивании сверху-вниз
модули собираются, начиная с главного компонента, до модулей нижнего уровня.
Правила сборки наращиванием аргументируют применение нисходящей сборки.
Поскольку при таком методе наращивания исключается параллельная работа, то
обычно используются оба метода - нисходящий и восходящий.
Восходящий метод позволяет применять выходные данные порождающего
модуля нижнего уровня как входные данные для модуля потребителя верхнего
уровня.
Тестирование модулей довольно эффективно по критерию найденных оши-
бок. При тестировании модулей может быть найдено примерно 60% ошибок.
Требуемый минимальный объем тестирования диктуется необходимостью
выполнить каждый оператор в модуле, по крайней мере, один раз.
Максимальный объем тестирования модуля - покрытие каждой логической
ветви, обеспечивается соответствующим набором значений входных данных.
При тестировании модуля определяются такие ресурсы, потребляемые мо-
дулем:
- объем памяти, занимаемый модулем;
- время выполнения модуля. Это важный параметр, который должен кон-
тролироваться, поскольку использование современных БК часто имеет
ограничения по ресурсам.
При реализации вычислительных алгоритмов определяются точностные ха-
рактеристики путем сопоставления фактических результатов с ожидаемыми по
допусковому критерию. Абсолютная погрешность параметров не должна превы-
шать допуск. Для указанных алгоритмов проверяется также диапазон входных и
выходных данных. Для практической реализации входные данные выбирают так,
чтобы они были близки граничным значениям, поскольку они наиболее эффек-
тивны для выявления ошибок, а также параметры, соответствующие номиналь-
ным значениям. При разработке тестовых контрольных примеров, чтобы полу-
чить информативные тесты, следует учитывать функциональные, смысловые зна-
чения функций выполняемых алгоритмом.
6.4.6 Интеграционное тестирование модулей в составе проекта
ПО БК КА состоит из нескольких режимов; режимы, в свою очередь, вклю-
чают в себя задачи, модули; и, наконец, модули включают в себя программы
стандартных функций, драйверов обмена.
Задача интеграционного испытания состоит в тестировании модулей в со-
ставе программного комплекса после его интеграции на соответствие специфика-
ции архитектурного проекта.
Процесс интеграционного тестирования, как правило, сопровождается по-
следовательной сборкой проекта методом наращивания «сверху-вниз» или «сни-
613
зу-вверх» с использованием метода восходящей или нисходящей интеграции мо-
дуль за модулем как при сборке, так и при тестировании.
Количество ошибок, обнаруживаемое при интеграционном тестировании,
меньше, чем при тестировании модулей. Исследования и опыт показывают, что
поиск и . исправление ошибок в архитектуре проекта требуют гораздо большего
времени. - в несколько десятков раз, чем ошибки в рабочем проекте (ошибки на
уровне модулей).
Интеграционные испытания проводятся на АРМ-программиста (исследова-
тельском стенде) или на инструментальной ПЭВМ при совпадении архитектур и
системы команд или с использованием симулятора.
Для выполнения интеграционного тестирования разрабатываются програм-
ма (план) и методика отработки ПО, соответствующие фазе архитектурного про-
ектирования.
Эта программа разрабатывается на этапе архитектурного проектирования и
описывает область, методы, ресурсы, средства и график проведения намеченных
интеграционных испытаний на тестовых контрольных примерах.
Областью интеграционного тестирования является верификация проекта и
реализации режимов и задач начиная с наиболее низкого уровня, определяемого
архитектурным проектом, до уровня системы ПО. Методика тестирования долж-
на включать в себя требуемые типы тестовых контрольных примеров и объем
(перечень контрольных примеров) тестирования.
Поскольку компоненты программного проекта (модули и группы модулей)
на этапе тестирования модулей прошли проверку на этапе испытания модулей, то
проверке в основном подлежит межмодульный интерфейс, соответствующий
структуре данных и маршрутам потоков управления, определяемых покрытием
ветвей алгоритмов.
При интеграционном тестировании в соответствии с методом «модуль за
модулем» проект системы наращивается от модулей ядра (диспетчера), которые
зависят от меньшего количества других модулей, но от которых зависят многие
другие модули.
Разработка интеграционных тестовых контрольных примеров выполняется
на этапе рабочего проектирования.
При поэтапной поставке план поставок определяет состав программного
проекта для каждой поставляемой версии ПО.
Интеграционное тестирование проводится методом «белый и черный
ящик».
Тестирование методом «белый ящик» применяют для верификации потоков
данных и маршрутов управления. Тестирование методом «черный ящик» исполь-
зуют, чтобы верифицировать соответствие обмена данными спецификациям
структур данных.
При тестировании применяют штатные и технологические массивы пара-
метров (кадры) для получения информации о ходе выполнения программы.
При анализе параметров, входящих в состав кадров, определяют:
- точностные характеристики вычислительного процесса;
614
- временные характеристики. Время выполнения программы в такте и
время выполнения каждого модуля;
- количество пройденных контрольных точек, по которым определяется
мера покрытия маршрутов потоков управления.
После окончания интеграционного тестирования результаты документиру-
ются в отчете.
6.4.7 Системные испытания
Системные испытания определяются как процесс тестирования программ-
ной системы на соответствие требованиям к ПО и выполняются после заверше-
ния интеграционного тестирования.
Системные тесты разрабатываются алгоритмистами-исследователями и вы-
полняются в два этапа разработчиками ПО АРМ-программиста и испытателями
СУ на комплексном стенде. Для проведения системных испытаний разрабатыва-
ется программа (план) и методика испытаний ПО на АРМ-программиста (иссле-
довательском стенде) и программа и методика испытаний ПО на комплексном
стенде. Программы создаются на этапе разработки требований к ПО и описывают
область применения, методы, ресурсы, место и график проведения системных
испытаний.
Областью применения системного тестирования является верификация ПО
различных связок режимов для решения задач системы управления КА.
Системное тестирование длится до тех пор, пока не будет обеспечена го-
товность к передаче системы заказчику, при этом должны быть проверены все
требования к ПО как в штатном режиме функционирования, так и при различных
нештатных ситуациях функционирования ПО системы управления КА. Разработ-
ка системных тестовых контрольных примеров выполняется на этапе рабочего
проектирования. Тестирование обычно выполняется методом «черный ящик».
Если тестирование некоторых требований невозможно, то используются альтер-
нативные методы верификации (например, экспертиза).
Если применяется поэтапная поставка или метод эволюционной разработ-
ки, системные тесты, разработанные и выполненные для предыдущих этапов,
должны быть повторены для новых версий программной системы.
Системные тесты также обеспечивают верификацию требований обмена к
внешним интерфейсам. На исследовательском стенде интерфейсы не тестируют-
ся с реальными датчиками, командными приборами и исполнительными органа-
ми, поэтому иногда применяют различные программно-аппаратные симуляторы,
имитирующие внешние интерфейсы. На комплексном стенде, как правило, ис-
пользуют реальную внешнюю среду или их эквиваленты, полностью имитирую-
щие физическую и логическую среду.
Система тестовых контрольных примеров должна обеспечить проверку ПО
аналогично интеграционному тестированию. Дополнительно ПО должно быть
протестировано на выполнение требований к надежности, которое определяется
как среднее время безотказной работы ПО.
Среднее время между ошибками может быть вычислено путем деления
615
продолжительности тестирования системы на количество критических (значи-
мых) ошибок. Тестирование на удобство сопровождения определяется средним
временем восстановления. При наземных испытаниях - это внесение изменений в
программу и создание нового проекта. При натурных испытаниях и эксплуатации
КА на орбите в случае необходимости вносятся изменения в ПО средствами сис-
темы динамической коррекции программ и системы замены ПО по командной
радиолинии.
Проверка требований к удобству сопровождения включает в себя также
размер модулей, читабельность, использование языка программирования. Эта
проверка реализуется методом анализа ПО.
Тестирование на проверку требований безопасности включает в себя про-
верку поведения ПО при возникновении различных отказов и их парировании.
При системном тестировании проверяются требования к документации. Эти тре-
бования верифицируются, как правило, проведением экспертизы.
При внесении изменений, реализации поэтапной поставки или использова-
нии метода эволюционной разработки проводится повторное тестирование с ис-
пользованием регрессивных тестов.
При реализации на борту обработки данных очень важно проверить работу
системы с большим количеством входных данных. По окончании системного тес-
тирования выпускается отчет, где документируются результаты выполнения ПО
на тестовых контрольных примерах. В процессе проведения системного тестиро-
вания ведется журнал выполнения работ на исследовательском стенде и на ком-
плексном стенде. В отчете должны быть приведены возникшие при тестировании
проблемные вопросы и результаты их решений.
6.4.8 Приемочные испытания
Приемочными испытаниями называется процесс тестирования программ-
ной системы на соответствие требованиям (заказчика) пользователя.
Приемочные испытания всегда выполняются (заказчиком) пользователем
или его представителями. Если это невозможно, он должен присутствовать на
приемочных испытаниях и подписать результаты.
Для проведения приемочных испытаний составляется (план) программа
приемосдаточных испытаний.
Программа составляется на этапе требований пользователя и должна опи-
сывать цель, методы, ресурсы, место проведения испытаний и график проведения
приемочных испытаний. Областью приемочных испытаний является валидация
того, что ПО соответствует требованиям пользователя.
Приемочные испытания выполняются на этапе «передача в эксплуатацию».
Тестовые контрольные примеры проектируются на этапе рабочего проекти-
рования.
Приемочные испытания проводят методом «черный ящик».
Перед передачей ПО должен быть выполнен пробный прогон программы
приемочных испытаний.
Для валидации функциональных возможностей используют тестовые кон-
616
трольные примеры системных испытаний, которые верифицируют функциональ-
ные требования и требования к рабочим и эксплуатационным характеристикам.
Результаты приемочных испытаний документируются в журнале проведе-
ния приемочных испытаний. После передачи ПО в эксплуатацию составляют от-
чет с указанием проблемных вопросов, которые возникли при тестировании, и
результаты их решения.
6.5 Конфигурация автоматизированного рабочего места (АРМ)
инженера-программиста для верификации ПО
Аппаратные средства инженера-программиста представлены инструмен-
тальной ЭВМ на базе персональной ЭВМ следующей конфигурации:
- центральный процессор Pentium, f > 2100 МГц;
- оперативное запоминающее устройство (ОЗУ) > 1 Гбайт;
- накопитель на жестком магнитном диске (винчестер) >380 Гбайт;
- монитор 17”;
- привод CD-DVD;
- параллельный интерфейс;
- последовательный интерфейс;
- манипулятор «мышь»;
- лазерный принтер А-4 (монохром);
- порт USB.
В состав аппаратных средств входит также адаптер подключения инстру-
ментальной ЭВМ к объектному БК, который должен выполнять следующие
функции:
- прием-выдачу сигналов управления в объектную ЭВМ;
- прием-выдачу массивов информации в различные виды памяти объект-
ной ЭВМ;
- обеспечение синхронной работы инструментальной ЭВМ и объектного
БК.
Интегрированная среда разработки программного обеспечения АРМ вклю-
чает в себя:
1) ОС Windows 98 (ХР, 2000) фирмы Microsoft;
2) систему комплексного динамического тестирования и отладки
ПО (СКДО);
3) симулятор микропроцессора;
4) терминальный пультовой отладчик, реализованный на ПЭВМ;
5) подсистему документирования;
6) систему программирования на базе языка C++ фирмы Microsoft или
Borland.
Средства тестирования и отладки ПО в системе СКДО основаны на прин-
ципе сопоставления результатов выполнения объектной программы на инстру-
ментальной ЭВМ и встроенного БК в заданных контрольных точках по допуско-
вому критерию и реализуются автоматической подсистемой обработки результа-
тов выполнения тестовых контрольных примеров.
617
При этом до начала тестирования в системе СКДО объектная программа
проходит двухвариаптный процесс верификации на АРМ алгоритмиста-
исследователя и АРМ инженера-программиста или одновариантный процесс ве-
рификации на АРМ инженера-исследователя.
6.5Л Подсистема подготовки спецификаций и словарей
Подготовка спецификаций и словарей проводится средствами системы
управления базы данных (СУБД) СКДО.
Подсистема создает следующие данные:
- словарь исходных данных;
- словарь ожидаемых результатов;
- словарь фактических результатов;
- словарь переменных;
- словарь контрольных точек;
- спецификацию входной информации и архив входной информации;
- спецификацию выходной информации и архив выходной информации.
Ввод информации осуществляется в текстовом виде и с помощью СУБД
преобразуется в рабочие структуры.
6.5.2 Автоматическая подсистема обработки результатов выполнения
ПО на контрольных тестах при тестировании ПО на встроенном БК
(критерии завершенности тестирования ПО)
Задача подсистемы обработки результатов выполнения ПО на контрольных
тестах - установить соответствие между результатами, описывающими поведе-
ние программы и сопровождающими утверждениями (ожидаемыми результата-
ми) в заданных контрольных точках.
Результатом сопоставимости (установление соответствия) могут быть два
исхода - сообщение об ошибке или соответствие установлено.
Наличие сообщения об ошибке порождает процесс проведения отладки для
поиска места и характера ошибки, который заканчивается внесением изменения
(коррекции) в программу модели алгоритмов, генерирующую ожидаемые (эта-
лонные) результаты, или в бортовую объектную программу, генерирующую фак-
тические результаты.
Процесс может быть итерационным и повторяться до установления полной
сопоставимости.
Положительный результат сопоставимости является гарантией правильной
работы программы.
Формальные критерии оценки и методы диагностики процессов верифика-
ции и валидации при испытании ПО на АРМ-программиста:
- точностные характеристики реализации вычислительных алгоритмов;
- временные характеристики выполнения программы в такте и отдельных
модулей программы;
- характеристика покрытия вершин и ребер графа динамической специфи-
кации (алгоритма логической схемы (ЛСх));
- характеристика покрытия маршрутов - путей модулей ПО;
618
- характеристика покрытия диапазонов входных, выходных и промежу-
точных переменных и констант полетного задания;
- времена выдачи и коды выдаваемых команд.
Программа, предназначенная для тестирования, снабжается аннотацией
(словарем), содержащей отношения между ожидаемыми и фактическими резуль-
татами. Совокупность ожидаемых результатов можно назвать сопровождающими
утверждениями, описывающими в каждой контрольной точке поведение про-
граммы.
Точностные характеристики определяются по результатам сопоставления
фактических результатов реализации ПО на встроенном БК и ожидаемых резуль-
татов, сгенерированных подсистемой генерации ТКП по допусковому критерию.
При сопоставлении определяется абсолютная пшрешность, которая сравнивается
с допустимой погрешностью.
Временные характеристики определяются автоматически программой,
встроенной в проект. Время выполнения программы в такте должно составлять
~ 90% от длительности такта. Программа, контролирующая время, выполняется в
каждом такте, при этом время уточняется и запоминается максимальное значение
и номер такта, соответствующий максимальному значению.
Определение времени выполнения каждого модуля позволяет выявить за-
цикливания, при этом фиксируется имя модуля, номер такта и время выполнения
модуля.
Контроль времени выполнения программы в такте направлен на сбаланси-
рованное использование вычислительных ресурсов в тактах в целях наиболее
эффективного решения основной задачи верифицируемого комплекса программ.
Положительный результат сопоставимости является гарантией правильной
работы программы. В противном случае выдаются сообщения о несопоставимо-
сти, что затем приводит к переходу в режим отладки для диагностики и локали-
зации ошибки в программе (не исключено и в ожидаемых результатах тестового
контрольного примера).
Для получения характеристик покрытия вершин и ребер графа динамиче-
ской спецификации (ДС) используют метод контрольных точек, который обеспе-
чивает полноту и оптимальность и является наиболее информативным с точки
зрения верификации покрытия графа ДС. Маршрут представляет собой путь по-
крытия, который рассматривается как упорядоченный перечень выполняемых
контрольных точек в каждом модуле.
Характеристика покрытия маршрутов - путей модулей ПО определяется на
этапе верификации модулей проекта.
Характеристика графа ДС определяется при верификации методами тести-
рования при интеграционном и системном испытании.
Мера характеристики покрытия определяется:
- количеством путей покрытия программы;
- количеством задействованных ребер пути;
- суммарной длиной путей покрытия;
- максимальной длиной пути;
619
- количеством контрольных точек в каждом модуле.
Количество пройденных контрольных точек отображает характеристику
покрытия маршрутов программы.
Покрытие описывается характеристикой соответствующей системы тесто-
вых контрольных примеров. Характеристика покрытия является основополагаю-
щей мерой информативности теста и мерой степени верификации.
Характеристика покрытия диапазонов переменных и констант верифициру-
ется заданием граничных и промежуточных значении указанных параметров. Ха-
рактеристика диапазонов оценивается при контроле точности реализации вычис-
лительных алгоритмов.
Времена выдачи и коды выдаваемых команд проверяются при системном
тестировании на комплексном стенде.
Правильность выдачи команд проверяется средствами контрольно-
проверочной аппаратуры.
6.5.3 Верификация ПО средствами системы комплексно-
динамического тестирования и отладки (СКДО)
Выполнение верификации методом динамического тестирования ПО БК на
тестовых контрольных примерах системой СКДО позволяет реализовать не-
сколько режимов тестирования:
- разомкнутая схема исследовательского стенда (РИС) - режим работы
системы, когда математическая модель объекта управления (КА) замк-
нута на модель алгоритмов управления, выполняемых на инструмен-
, v тальной ПЭВМ. В этом режиме работы реализуются два подрежима:
.. « совмещенный, когда на АРМ-программиста (исследовательский
стенд) одновременно выполняются модель объекта управления, мо-
дели датчиков и исполнительных органов, подсистема генерации тес-
товых контрольных примеров (ТКП) и подсистема выполнения тес-
тирования в псевдореальном масштабе времени. Входные данные, ге-
нерируемые подсистемой генерации ТКП, в каждом такте для задан-
ной контрольной точки передаются в подсистему обработки резуль-
татов выполнения тестовых контрольных примеров. В этом подрежи-
ме работы система СКДО в реальном времени формирует результаты
тестирования ПО и передает их в подсистему ведения информацион-
ной базы данных. При необходимости в интерактивном режиме на
экран монитора можно вывести оперативную информацию о ходе
функционирования ПО при тестировании.
Преимущество приведенного подрежима работы заключается в том, что
испытатель может в любой момент времени иметь информацию о ходе функцио-
нирования ПО при тестировании и при возникновении аномальной ситуации
приостановить процесс и перейти в режим отладки, в котором для диагностики и
локализации ошибки используется терминальный отладчик и результаты выпол-
нения ТКП из архива СКДО;
• несовмещенный, в этом случае на АРМ-программиста задействуется
620
подсистема выполнения тестирования ПО на тестовых контрольных
примерах и подсистема ведения базы данных, обеспечивая архивиро-
вание и документирование результатов выполнения ТКП. В этом
подрежиме входные данные, ожидаемые результаты, заранее сгене-
рированные подсистемой генерации ТКП, записаны и хранятся в ар-
хиве системы СКДО;
Результаты выполнения ТКП записываются и хранятся в базе данных. По-
сле окончания этого процесса запускается подсистема обработки результатов вы-
полнения тестовых контрольных примеров при верификации ПО на АРМ-
программиста. Подсистема обработки результатов может быть запущена и в ре-
альном времени в процессе выполнения ТКП;
- замкнутая схема исследовательского стенда (ЗИС) - режим работы сис-
темы, когда математическая модель объекта управления (КА) замкнута
на бортовые алгоритмы управления, выполняемые бортовым компьюте-
ром. В остальном работа системы СКДО такая же, как при совмещенном
режиме;
- «электронный пуск» - режим работы системы, аналогичный ЗИС, реали-
зующий выполнение «связки» режимов СУ космического аппарата на
полетных заданиях, соответствующих орбитальным реальным режимам
работы СУ космического аппарата.
6.6 Сопровождение ПО БК при натурных испытаниях и эксплуатации КА
После передачи встроенной системы управления в эксплуатацию она ста-
новится недоступной для физического контакта. Но сохраняется возможность по-
сле вывода КА на орбиту контролировать, поддерживать и модифицировать ПО
БК СУ с помощью дистанционного управления по линии «Борт-Земля». Иногда
это должно проводиться без перерыва или быть сведено к минимуму в основной
работе, связанной с выполнением программы полета КА.
Опыт проведения натурных испытаний и эксплуатации систем управления
КА при орбитальном полете наглядно показал необходимость модернизации ал-
горитмов и программного обеспечения по различным причинам:
- повышение точностных характеристик, зависящих от степени знания
динамических характеристик объекта управления, которые уточняются в
процессе проведения натурных испытаний. Эти уточнения могут поя-
виться как со стороны командных приборов, отдельных систем, аппа-
ратных средств, так и объекта в целом вследствие расхождения матема-
тических моделей объекта и реальных характеристик объекта управле-
ния;
- парирование различных неисправностей программно-аппаратного ком-
плекса как СУ, так и других сцстем КА;
- улучшение эксплуатационных характеристик СУ и КА в целом;
- внесение коррекции в программно-алгоритмическое обеспечение при
обнаружении ошибок как в алгоритмах, так и в программном обеспече-
нии.
621
Улучшение эксплуатационных характеристик реализуется двумя способа-
ми:
- уточнением параметров полетного задания;
- модернизацией системы управления КА посредством изменения алго-
ритмов системы управления и программного обеспечения.
Новые возможности использования программно-алгоритмического обеспе-
чения, распространение процесса его модификации на этапы натурных испыта-
ний и эксплуатации реализуются встроенными системами модификации и кор-
ректировки программного обеспечения на борту КА:
- системой полной замены программного обеспечения (СЗПО);
- системой динамической коррекции программного обеспечения (СДКП).
Реализация обеих систем поддерживается применением принципов иерар-
хической декомпозиции и структурного программирования на этапах проектиро-
вания и разработки ПО, а также в некоторых БК дополнительно и аппаратными
средствами.
Обе системы входят в состав операционной системы разработки НПП Хар-
трон-Аркос.
Технология реализации замены ПО средствами систем СЗПО и СДКП во
многом зависит от распределения памяти для хранения и выполнения ПО в запо-
минающих устройствах БК, а также схемы резервирования и методов повышения
надежности хранения ПО.
Варианты распределения памяти ЗУ БК:
- объектная программа хранится в одном или двух экземплярах и выпол-
няется из ПЗУ или ПИЗУ, переменные программы и массивы данных
хранятся в ОЗУ БК;
- объектная программа хранится в одном или двух экземплярах в ПЗУ,
ППЗУ, а выполняется из ОЗУ БК.
Схемы резервирования:
- трехканальная (троированная) с аппаратным или программно-
аппаратным мажоритированием по схеме два из трех;
- двухканальная (дублированная) с «холодным» или «горячим» резерви-
рованием каналов.
Реализация проведения изменений ПО БК системой СДКП через массив
изменения программ (МИП) поддерживается как проведением организационных
мероприятий, так и наличием соответствующих технических средств:
- канала передачи информации между наземным оборудованием центра
управления полетом и бортовым оборудованием с обеспечением записи
МИП в ЗУ БК, после выведения объекта на орбиту;
- бортового оборудования, обеспечивающего хранение МИП при выклю-
чении питания БК. При отсутствии энергонезависимого ЗУ ввод МИП
необходимо повторять после каждого выключения-включения БК СУ;
- соответствующих программно- аппаратных средств для записи, хране-
ния МИП БК при всех видах испытаний;
- инструментальных программных средств, обеспечивающих создание
622
МИП, запись на носитель, контроль носителя, создание копий с МИП и
их контроль.
Для реализации полной замены ПО необходимо, как правило, наличие в БК
двух копий программ, что обеспечивает выполнение текущей программы полета.
При реализации текущей программы вводится новая и после проверки правиль-
ности ее ввода проводится переход на новую программу. После этого средствами
вновь введенной программы на место исполняемой вводится, заменяется или пе-
реписывается новая программа.
Полная замена ПО может быть реализована без поддержки ПО БК при на-
личии контроллера для программирования БК. В этом случае при наличии одного
экземпляра ПО выполнение текущей программы прекращается или передается
резервному каналу при его наличии.
Коррекция программно-алгоритмического обеспечения системой динами-
ческой коррекции программ реализуется либо чисто программными средствами,
либо, при их наличии, программно-аппаратными средствами пугем передачи на
борт массива изменения программ (МИП).
Внесение изменений средствами системы СДКП может оказаться единст-
венно возможным в случае, если объектная программа хранится в ППЗУ или ПЗУ
в одном экземпляре и выполняется из этого ЗУ.
Функции, реализуемые системой СДКП:
- подготовка вводимого массива изменения программ (МИП) наземными
средствами;
- поддержка ввода и контроль МИП при записи его в ОЗУ БК;
- перепись МИП из ОЗУ БК в ППЗУ в целях его сохранности при выклю-
чении питания и при переходе на другой канал резервирования, а также
контроль записи. При наличии двух копий ПО МИП переписывается в
обе копии ПО. При двухканальном резервировании МИП переписывает-
ся во второй комплект БК.
СДКП реализует несколько типов коррекции ПО:
- замена исполняемого программного модуля на новый;
- замена некоторых компонентов программного модуля на новые про-
граммные компоненты или введение новых дополнительных;
- введение одного или нескольких новых модулей.
Замена разработанного программного модуля новым реализуется либо за-
меной старого указателя в каталоге на указатель нового модуля (в этом случае
модуль размещается на новое место памяти БК), либо заменой старого текста мо-
дуля на новый без изменения адреса его расположения. При замене некоторых
компонентов программного модуля на новый текст возможно несколько вариан-
тов:
- текст вставки не превышает длины модуля, и она размещается в преде-
лах длины тела модуля;
- текст вставки превышает длину корректируемого модуля. В этом случае
. текст вставки размещается за пределами модуля.
При наличии программно-аппаратных средств задача реализации перехода
623
на вставку нового текста программы значительно облегчается и появляется гиб-
кость в исполнении. В этом случае адреса в точках модуля, где необходимо пе-
рейти на вставку, записываются заранее в регистр адреса индикации совпадения.
При выполнении команды по данному адресу возникает прерывание, по которо-
му вызывается программа обработки прерывания, после чего дальнейшее выпол-
нение программы модуля переходит на вставку. По завершении работы вставки
управление передается на выполнение программы модуля.
Модификация ПО БК средствами системы СДКП путем передачи на борт
МИП может использоваться и до начала проведения натурных испытаний КА.
Это диктуется экономическими требованиями или сроками проведения работ, так
как внесение изменений в ПО средствами СДКП более оперативное как при под-
готовке изменения, так и в случае проведении его испытания, а также времени
передачи на борт.
Кроме того, при сопровождении КА после вывода его на орбиту возникает
задача изменения программы полета, которое диктуется режимами эксплуатации,
а также при проведении исследовательских задач или парирования различных
нештатных ситуаций, возникающих на борту КА.
Изменение программы полета может потребоваться и при возникновении
возможности соударения с инородными телами и поддержки орбиты на геоцен-
трической орбите.
Библиографический список к разделу 6
1. Операционная система реального времени БК МБ386М. Руководство сис-
темного программиста. - X.: НПП Хартрон-Аркос, 2007. - 32 с.
2. Система комплексной динамической отладки ПО СУ на базе БК МБ386М.
Руководство пользователя. — X.: НПП Хартрон-Аркос, 2008. - 51 с.
3. Терминальный отладчик DT-386 для автономной отладки ПО СУ на базе
БК МБ386М. - X.: НПП Хартрон-Аркос, 2005. - 63 с.
4. Автоматизированное рабочее место изготовления технической документа-
ции на машинных носителях. Руководство оператора. - X.: НИИ Хартрон-
Аркос, 2012. - 14 с.
.5 . Майерс, Г. Искусство тестирования программ [Текст] / Г. Майерс. - М.:
Финансы и статистика, 1982. - 315 с.
6. Боэм, Б.У. Инженерное проектирование программного обеспечения
[Текст] / Б.У. Боэм. - М.: Радио и связь, 1985. - 502 с.
7. Иодан, Э. Структурное проектирование и конструирование программ
[Текст] / Э. Иодан. - М.: Мир, 1979. - 289 с.
624
7 ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ БОРТОВОЙ АППАРАТУРЫ.
ПРИНЦИПЫ ОБЕСПЕЧЕНИЯ ОТКАЗОУСТОЙЧИВОСТИ БЦВК
СИСТЕМ УПРАВЛЕНИЯ КА С ДЛИТЕЛЬНЫМ СРОКОМ
АКТИВНОГО СУЩЕСТВОВАНИЯ
7.1 Постановка задачи обеспечения отказоустойчивости БЦВК систем
управления КА
В первой книге данного учебника «Проектирование систем управления
ракет-носителей» подробно описан процесс создания бортовой и наземной
аппаратуры СУ объектов ракетно-космической техники. Изложены основные
принципы структурного построения аппаратного комплекса, предоставлены
материалы по технологии его проектирования и методы подтверждения
выполнения требований ТЗ.
В данном разделе приведены особенности проектирования приборной
части СУ КА, связанные с обеспечением надежности аппаратуры в условиях
длительного полета и воздействия явлений, присущих космическому
пространству.
В процессе всего жизненного цикла работы система управления КА
подвергается воздействию дестабилизирующих факторов, причём на разных
участках работы физические параметры, воздействующие на аппаратуру, различны.
Режим предстартовой подготовки, пусковых операций и атмосферного
участка полёта характеризуется воздействием на аппаратуру:
- электростатического разряда;
- импульсного электромагнитного поля радиопередающей аппаратуры
космодрома;
- магнитного поля.
Заатмосферный участок полёта характеризуется воздействием:
- электронов и протонов искусственных и естественных радиационных
поясов Земли;
- частиц галактического космического излучения;
- солнечного космического излучения;
- электромагнитного излучения Солнца.
Каждый из приведенных дестабилизирующих факторов условий
эксплуатации, определённым* образом воздействуя на электрорадиоэлементы
БЦВК и кабельную сеть, может приводить к сбоям в аппаратной части.
Соответственно, адекватным образом должны быть приняты меры в
аппаратуре БЦВК. обеспечивающие защищённость от сбоев.
В целях минимизации затрат на дополнительное оборудование,
обеспечивающее защиту БЦВК от сбоев, к решению данной проблемы необходим
комплексный подход. Основные требования такого подхода следующие:
- должна быть определена типовая архитектура управляющей БЦВМ, а
также виды периферийных устройств ввода-вывода. Выбор архитектуры
задаёт требования к подбору её элементной базы;
- следует выбирать методы и средства аппаратного контроля БЦВМ,
625
которые определяют степень достоверности процесса вычислений в
условиях сбоев различного оборудования;
- учитывая, что аппаратная реализация средств контроля и защиты от сбоев
требует некоторой избыточности в оборудовании, необходимо дополнительно
применить программно-алгоритмические методы защиты от сбоев;
- в процессе обнаружения сбойной ситуации вычислительного процесса
БЦВМ следует принять соответствующие аппаратно-программные меры
по организации процесса восстановления вычислений без ухудшения
точностных параметров системы управления;
- для реализации процесса восстановления управляющей программы
после сбоя в составе БЦВМ должен предусматриваться ряд специальных
аппаратных средств, входящих в состав БЦВМ;
- необходимо, чтобы циклограмма восстановления вычислительного
процесса обеспечивала сохранение всех управляющих команд СУ;
• г алгоритмы системы навигации, наведения и стабилизации должны быть
модернизированы в целях противостояния сбоям;
- влияние сбоев на точностные характеристики СУ должно быть
. минимальным.
7.2 Классификация отказов БЦВК
Отказы в аппаратуре по своему проявлению определяются:
- происхождением или причиной их возникновения;
- характером проявления;
- временем воздействия на аппаратуру;
- взаимосвязью влияния на исправность аппаратуры и ход
вычислительного процесса.
Причины появления отказов бортовой аппаратуры могут быть самыми
различными и в общем случае разделяются на следующие [1]:
- конструктивные (дефекты разработчика аппаратуры);
- производственные (дефекты изготовителя);
- эксплуатационные (определяемые внешними факторами, в которых
эксплуатируется аппаратура).
Следует отметить, что в общей массе возможных отказов аппаратуры
БЦВК, которая в процессе эксплуатации подвергается внешним климатическим,
механическим, электромагнитным, радиочастотным и радиационным
воздействиям, преобладают сбои, т.е. самоустранившиеся отказы. Под сбоем
логического элемента (узла) понимается непредусмотренное изменение
технических параметров этого элемента, после чего работоспособность такого
элемента самовосстанавливается.
По характеру своего проявления отказы в аппаратуре могут возникать
внезапно, в силу определённых причин, либо проявляться постепенно в виде
ухудшения ряда технических параметров, понижающих барьер
помехоустойчивости аппаратуры. Время сбойного состояния аппаратуры также
характеризует возникающие отказы. Причём время сбоя может зависеть как от
626
длительности времени проявления внешней помехи, так и от её мощности.
Особенно данный эффект проявляется при ионизационных воздействиях на
полупроводниковые ЭРИ и накоплении в них дозы протонов -Др и дозы
электронов - Де [2].
Возникающие сбои одних элементов в аппаратуре могут определённым
образом повлиять на работоспособность других элементов и даже привести к выходу
их из строя. Поэтому в классификации отказов сложных систем следует различать:
- независимые отказы отдельных ЭРИ функционального оборудования,
затрагивающие отдельные узлы в бортовой аппаратуре (например,
разрушение информации отдельных ячеек памяти данных, не влияющих
на ход вычислительного процесса БЦВМ);
- зависимые отказы функционального оборудования, возникшие по
причине отказа универсальной части оборудования БЦВМ, например,
система вторичного питания, вычислительные устройства, система
прерываний и т.д.
Зависимые отказы, как правило, приводят к нарушению вычислительного
процесса.
По степени реакции системы управления на сбои в аппаратуре БЦВК будем
различать два типа сбоев:
1. “Мягкие сбои” - сбои отдельных элементов и (или) узлов, приводящие к
снижению точности и качества работы СУ, возникновению ошибок в
вычислениях, но не приводящие к срыву решения поставленной задачи.
Как правило, после таких сбоев не требуется восстанавливать
вычислительный процесс БЦВМ.
2. “Жёсткие сбои” - сбои всех или основных узлов БЦВК, определяющих ход
вычислительного процесса. Для таких сбоев характерно то, что после
восстановления работоспособности элементной базы всё программно-
алгоритмическое обеспечение оказывается разрушенным и БЦВК без
принятия специальных мер не способен решать возложенную на него
задачу.
Для управляющих систем следует отметить также возможные сбои в
системе реального времени и в процессах синхронизации каналов
резервирования.
Восстановление указанных подсистем БЦВК требует принятия
специальных аппаратных и программно-алгоритмических мер.
7.2Л Математические модели сбоев
Функционирование управляющей БЦВМ, способной к восстановлению
после воздействия потока сбоев, представляет собой с точки зрения надежности
последовательность чередующихся интервалов работоспособного состояния и
интервалов восстановления работоспособности. Конец интервала
работоспособности, а значит, и начало интервала восстановления, связан со
случайным событием - кратковременной потерей работоспособности, поэтому
продолжительность работы аппаратуры до сбоя - tc (время бессбойного
627
состояния) является случайной величиной.
Время восстановления работоспособности tB также можно считать случайной
величиной, так как оно зависит от многих ранее рассмотренных факторов.
Следовательно, окончание восстановления происходит в случайные
моменты времени.
Моменты сбоев (восстановлений) образуют во времени поток сбоев tci
(восстановлений). Математическое описание этих потоков полностью
характеризует математическую модель сбоев.
Рассмотрим основные характеристики потока сбоев. Для этого
предположим, что после каждого сбоя восстановление выполняется мгновенно,
т.е. tB = 0, причем полностью восстанавливаются исходные свойства аппаратуры.
Тогда случайные величины тс1, тс2, ... (время работы до первого сбоя, от первого
до второго сбоя и т.д.) будут иметь одинаковые функции распределения - F(t).
Пусть к моменту первого сбоя система имела наработку й = тс1, второго
t2 = tci + тС2 • Функция Fi(t) распределения случайной величины ti определится
выражением [3]
F,(t)=F(t).
а для t2 - выражением
F2(t)=jF,(t-T)dF(T).
О
В общем случае для времени ti функция распределения находится по
рекуррентной формуле
FI(t)=fF1_,(t-T)-dF(T).
О
Определим случайную величину Y(t) как количество сбоев системы
управления до того момента, когда наработка системы по выполнению задачи
равна t. Чтобы найти закон распределения случайной величины Y(t), принимаем:
P(Y(t)>i) = P(ti<t) = Fi(t).
Тогда вероятность появления i сбоев (i=l,2,...) в течение времени t
определяется формулой
P(Y(t)=i) = Fi(t)-FM(t),
а вероятность отсутствия сбоев (i=0)
P(Y(t)=0) = 1 - F(t).
Среднее значение H(t) случайной величины Y(t) можно определить как
H(t) = Si(F,(t)-F,+,(t)) = SF,(t).
i=l i=l
Функция H(t) достаточно полно характеризует модель потока сбоев и
называется параметром потока сбоев. Физический смысл параметра потока сбоев
- это среднее количество сбоев восстанавливаемого объекта в единицу времени.
Тогда среднее арифметическое величин m^t) сбоев до наработки времени t
628
для N образцов изделий (при достаточно большом N) может служить оценкой
1 °°
н(0 = -1>(0
N i=l
Производная от функции H(t) и будет определять параметр потока сбоев
для восстанавливаемого изделия (условная плотность вероятности):
w(t) = H(t).
Параметр потока отказов после некоторой наработки t=-t0 становится
постоянным:
w (t) = w = const.
При этом распределение случайной величины Y(t) в общем случае будет
подчиняться закону Пуассона
P(Y(t) = i) = —• e~w ', i = l,2,„.
i!
и соответствовать свойствам стационарности (однородности по времени),
отсутствия последствия (предыдущие сбои не влияют на вероятность будущих
сбоев) и ординарности (вероятность появления одновременно двух и более сбоев
вычислительного процесса БЦВМ в течение малого интервала времени
пренебрежимо мала по сравнению с вероятностью появления одного сбоя).
Исходя из характеристики потока сбоев среднее время между сбоями, или
наработка на сбой для периода времени от ti до наработки t2 определяется
выражением
To-^-tO/^-Hft)).
При w(t) - w - const - То =1 / w.
Аналогичным образом характеризуется и процесс восстановления. При
этом вводится термин “поток восстановлений” -p(t), имеющий физический
смысл условной плотности вероятности восстановления изделия в течение
времени t.
Соответственно поток восстановлений для проведения расчётов
принимается простейший, и его параметр связан со средним временем
восстановления Тв соотношением
И = 1 /тв.
Поток сбоев и поток восстановлений описывают процесс
функционирования аппаратуры с двух сторон, независимо друг от друга, и
характеризуют ход вычислительного процесса бортовой аппаратуры системы
управления в терминах теории надёжности.
Для разработки системы защиты от последствий сбоев в ходе
вычислительного процесса БЦВМ с точки зрения построения программно-
алгоритмического обеспечения необходимо уточнить некоторые параметры
потока сбоев.
В общем потоке возникающих сбоев следует отличать:
- общее количество “мягких” сбоев;
629
- общее количество “жёстких” сбоев;
- минимальный период между сбоями tc;
- максимальное время tC6 нахождения аппаратуры в сбойном состоянии;
- время восстановления tB вычислительного процесса аппаратуры системы
управления.
Вместе с тем для восстанавливаемых систем максимальное время tc6
одновременно является временем восстановления системы tB после
восстановления сбоя:
1сб —
для процесса восстановления параметр tB имеет следующие составляющие:
- время контроля и фиксации факта сбоя tK;
- время исполнения алгоритма восстановления taB.
На основании этого
~ tB "Ь (ад.
Восстановление вычислительного процесса БЦВМ зависит от некоторых
критических значений параметров потока сбоев, при которых ещё возможно
восстановление процесса управления:
- величина минимального периода между сбоями tc должна быть больше
времени восстановления tB: tc > tB;
- время восстановления БЦВМ tn не должно превышать максимально
допустимое время tHn неуправляемого полёта аппарата: tB < tHn.
Данные параметры модели определяются исходя из характеристик
быстродействия БЦВМ:
- времени восстановления аппаратной части;
- объёмов памяти БЦВМ и её быстродействия;
- времени восстановления массивов памяти;
- времени восстановления реального времени полёта.
Очевидно, что быстродействие БЦВМ должно быть максимальным, а
времена восстановления - минимальными.
Оптимизация указанных параметров определяет степень
отказоустойчивости БЦВМ и точностные параметры системы управления.
7.2.2 Влияние сбоев на работу БЦВМ
Для определения технических требований, предъявляемых к системе защиты
от сбоев, проведём укрупнённый анализ влияния сбоев на работу различных
устройств БЦВМ и последствий этих сбоев на решение задач системы управления.
Исходя из предположения, что сбойные ситуации могут возникать в работе
любого блока (прибора) БЦВК, рассмотрим наиболее типичные последствия их
влияния на выполнение задачи.
Структурно-функциональная схема типового БЦВК, функционирующего в
контуре системы управления, показана на рис. 7.2.1 и состоит из следующих
функциональных блоков:
- центрального процессора (ЦП);
630
Рисунок 7.2.1 - Структурно-функциональная схема типового БЦВК, функционирующего в контуре системы
управления
- оперативного (ОЗУ) и постоянного (ПЗУ) запоминающих устройств;
- блока адаптации к сбоям и отказам (БАС);
- задающего генератора (ЗГ);
- вторичных источников питания (ВИП);
- канала ввода-вывода (КВВ);
- блока согласования телеметрического кадра (БСТК);
- системы вторичного электропитания (СВЭП);
- согласующего устройства привода аналогового типа (СУАТ);
- согласующего устройства привода шагового типа (СУШТ);
- согласующего устройства приёма-выдачи дискретных команд (СУДК).
Проведенный анализ влияния сбоев на работу основных блоков БЦВК и
последствия их проявления для системы управления в целом показал:
1. Сбои в периферийном оборудовании, к которому относятся КВВ, СУ АТ,
СУШТ, СУДК, БСТК, в основном вызывают ухудшение точностных
характеристик системы управления и не приводят к разрушению
вычислительного процесса. Восстановление последствий таких сбоев
происходит в следующем такте работы системы управления.
2. Сбои в универсальном оборудовании, а именно в ЦП, ОЗУ, ПЗУ, ЗГ, СВЭП,
приводят к нарушению вычислительного процесса и, как следствие, к
невыполнению конечной задачи системой управления.
Таким образом, в основном все устройства БЦВК чувствительны к
возникающим сбойным ситуациям, каждое из них имеет соответствующий порог
помехозащищённости. Нарушение их работоспособности без принятия
специальных мер по парированию последствий сбоев негативно сказывается на
выполнении системой управления конечной задачи.
7.3 Типовая архитектура управляющего БЦВК систем управления КА
Центральное звено управляющего комплекса КА представляет собой
бортовой цифровой вычислительный комплекс. Базовой частью БЦВК является
бортовая цифровая вычислительная машина (БЦВМ), которая по своему
функциональному назначению должна иметь электрические интерфейсы связи с
полезной нагрузкой, подсистемой электроснабжения (ПСЭС), связной
подсистемой (СПС), подсистемой определения и управления ориентацией
(ПОУО), приемником GPS, с механизмами раскрытия солнечных батарей (СБ) и
датчиками отделения (ДО) спутника от ракеты-носителя. В то же время БЦВМ
КА должна быть хранителем бортового времени, поскольку все процессы
управления подсистемами являются функциями временных параметров.
Наличие перечисленных выше требований накладывает на БЦВК и
связанные подсистемы высокие требования по надежности. Это обстоятельство
требует обеспечения максимально возможной отработки и контроля аппаратных
и программных средств в процессе наземных проверок и испытаний
(верификации) на протяжении всего текущего цикла проекта. В связи с этим для
БЦВМ КА очень важным условием является применение программного
обеспечения со встроенными средствами диагностики и контроля.
632
Современные управляющие системы, как правило, строятся с
использованием в их составе интеллектуальных устройств (на базе микроЭВМ),
специальных вычислителей, предназначенных для проведения быстрых
специальных вычислений, а также с применением транспьютерных технологий,
обеспечивающих управление большими потоками информации и
непосредственную передачу информации с использованием элементов, правил
защиты и контроля передаваемой информацией.
Развитая сеть интерфейсов с подсистемами, многообразие и специфичность
процессов управления предопределяют БЦВМ КА как бортовую цифровую
вычислительную систему (БЦВС), где имеет место совокупность взаимосвязанных
и согласованно действующих аппаратно-программных средств передачи, хранения
и переработки цифровой информации, предназначенных для преобразования
входных данных в выходные в соответствии с заданными целями
функционирования.
Объединение функций управления и обработки данных в подсистемы
предоставляет эффективные возможности обеспечения автономного контроля и
управления процессами функционирования КА. Один или несколько бортовых
компьютеров (БК) или микропроцессоров могут выдавать команды и
контролировать состояние телеметрических датчиков с помощью интерфейсов
БЦВМ, обеспечивая контроль состояния и управление функционированием
нескольких смежных подсистем.
Характеристики оборудования БЦВК прямо пропорциональны сложности
КА в целом. Чем больше различного оборудования установлено на его борту и
чем интеллектуальнее это оборудование, тем больше функций контроля
состояния и управления функционированием этого оборудования требуется от
БЦВК. Учет требований обеспечения надежности приводит к увеличению
количества и усложнению схем надежности оборудования подсистемы. В
частности, для решения своих задач только БЦВМ должна иметь несколько
уровней иерархии. В связи с высокими требованиями по надежности и
принципом уменьшения надежности с увеличением его сложности на верхнем
уровне иерархии необходимо иметь очень простой элемент, в то же время
способный принимать решения на основании закладываемых в него алгоритмов.
Принцип минимальности возложенных на верхний уровень задач, а также
большой объем и сложность решаемых задач на нижнем уровне определяют
выделение в архитектуре БЦВМ промежуточных уровней иерархии и важность
правильной логической увязки между элементами всех уровней.
В настоящее время в мировой практике существует три типа построения:
- централизованный тип, в котором обработка данных и принятие решения
проводятся программно-алгоритмически в одном центральном
вычислительном устройстве, а все данные поступают через входной
мультиплексор;
- централизованный тип с распределенной обработкой данных, в котором
данные предварительно обрабатываются в отдельных устройствах в
целях увеличения скорости обработки информации;
633
- распределенный тип, в котором в целях повышения производительности
в части решения сложных вычислительных задач функции
распределяются между несколькими вычислительными устройствами.
Первый тип применяют в настоящее время только на нано- и пико-
спутниках, где из-за габаритно-массовых ограничений и при минимальном
наборе реализуемых функций целесообразнее использовать одно вычислительное
устройство с интегрированными функциями.
Второй и третий типы используют в СУ КА малого и среднего класса.
Окончательный выбор проводится после тщательного анализа технических
требований исходя из перечня функциональных задач и их сложности.
Идеальной является такая БЦВМ, которая уже была отработана в полете на
борту другого КА, не требующая никаких доработок для адаптации к вновь
разрабатываемому космическому проекту. Однако новые космические проекты
обычно применяют и новое бортовое оборудование, которое создается на базе
использовавшегося в предшествующих проектах. Для улучшения
эксплуатационных характеристик бортового оборудования, таких, как
быстродействие, потребляемая мощность, масса, габаритные размеры и т.п., оно
подвергается тем или иным доработкам. В случае разработки нового или
модификации уже реализованного космического проекта выполняется
расширенная программа наземной экспериментальной отработки,
предусматривающая моделирование всех факторов, воздействующих на бортовое
оборудование в процессе выведения и орбитального полета космического
аппарата.
Основным способом поддержания работоспособности аппаратуры КА в
течение длительного времени является ориентация на архитектуру «холодного»
резервирования. Количество каналов резервирования определяется многими
факторами, в том числе такими, как время активного функционирования КА,
требуемые показатели надежности, максимальная масса аппарата и пр. Состояние
активно подключенных блоков и решение о дальнейшем их функционировании
определяются по результатам получения квитанций «норма» передаваемого в
модуль контроля и управления резервом после проводимых тестов с заданной
периодичностью. В качестве точек коммутации оборудования обычно
выбираются интерфейсы взаимодействия с сопрягаемым оборудованием.
Как и большинство зарубежных спутников (фирм SSTL (Великобритания),
Satreci (Южная Корея) и др.), базовая часть БЦВК КА содержит такие
функциональные модули, как бортовой компьютер (БК), блок управления
конфигурацией (БУК), модуль команд (МК), модули устройств ввода-вывода
(УВВ) (рис. 7.3.1).
Бортовой компьютер, применяемый для СУ КА в структуре собственного
оборудования как минимум должен содержать аппаратные средства доя контроля
времени исполнения участков программ - сторожевой таймер (WDT) с функцией
выдачи аппаратного рестарта аппаратуры БК с перезапуском исполняемых
программ и средства определения и оперативной коррекции ошибок (EDAC) для
хранимых данных и программ.
634
мк
ПСЗС
УВВ
CPU
j~WDT~j
Memory
I
БК
БУК
Рисунок 7.3.1 - Состав аппаратуры базовой части БЦВК КА
635
Блок управления конфигурацией (БУК) исполняет две функции:
- контроль работоспособности активно подключенного оборудования и
выдачи команд управления резервом в жесткой аппаратной зависимости
от получения квитанций «норма»;
- прием кодов от модуля команд (МК) и исполнение указанных команд на
коммутацию с включением или выключением аппаратуры выбранных
блоков.
Истинность исполнения данных функций должна быть обеспечена
аппаратными средствами с очень высоким показателем надёжности для всего
периода функционирования КА.
При реализации аппаратуры модуля команд (МК) существует два подхода:
- полностью аппаратный;
- программно-аппаратный.
Второй тип, как вариант с минимальными аппаратными затратами
(питание, масса, габаритные размеры), максимальными функциональными
возможностями и гибкостью в выборе алгоритмов решения задач, наиболее
предпочтителен.
Организацию интерфейсов СУ необходимо выбирать из соображений
обеспечения нераспределения отказов от подсистемы к подсистеме.
Информационная связь БЦВМ КА с модулями МК и УВВ радиальная с
использованием последовательных интерфейсов с электрическим сопряжением
по протоколам RS-422/RS-485 и M1L-STD-1553. Перспективной к применению
для организации информационной связи по радиальному принципу является
также спецификация Space Wire.
К типовым модулям, составляющими базовую часть УВВ СУ, относятся:
- подсистема управления электроснабжением (ПСЭС);
- аппаратура управления регулирования и контроля (АУРК);
- приемник GPS;
- приборы определения и управления ориентацией:
• магнитометр (ММ),
• двигатели-маховики (ДМ),
• измеритель угловой скорости (ИУС),
• астроизмерительная система (АИС);
- расширение УВВ:
• подсистема данных полезной нагрузки (ПДПН),
• аппаратура электронной почты (АЭП),
• прочие системы КА.
7.4 Магистрально-модульный принцип построения отказоустойчивых
БЦВК. Выбор элементной базы
Комплексирование систем на основе модульного принципа имеет ряд
преимуществ. Во-первых, применение готовых модулей с заранее известными
характеристиками позволяет в конечном итоге получить систему с ожидаемыми
техническими характеристиками и сократить сроки проектирования. Во-вторых,
636-
при модульном построении существует возможность гибкого внесения
изменений как в состав, так и в характеристики конечной системы, как
непосредственно в процессе проектирования, так и при изменении требований
заказчика. В-третьих, модульный принцип допускает разработку новых или
модернизацию существующих модулей независимо от разработки новой системы
или адаптации существующей системы и одновременно с ней.
Метод комплексирования систем на основе законченных модулей актуален
при построении БЦВК КА, поскольку аппаратный состав СУ разрабатываемого
КА в конечном проекте, как правило, представлен продукцией различных фирм-
производителей. Одним из основных решений при модульном построении
является интерфейсное сопряжение устройств.
При комплексировании с применением готовых модулей на уровне
интерфейсов возникает ряд проблем, требующих решения еще на этапе эскизного
проектирования. Первая проблема - выбранные для выполнения функций узлы и
модули имеют различные внешние интерфейсы, как стандартизованные, так и
уникальные, требующие специального оборудования в ответных сопрягаемых
модулях. Вторая проблема - время взаимодействия, связанное с пропускной
способностью интерфейсов, количеством обмениваемой информации, накладными
расходами при поддержании протоколов, тайм-аутами ожидания готовности и
прочими факторами, влияющими на момент получения информации абонентом,
отличается от ожидаемого. Третья проблема - сбоев и отказоустойчивость
интерфейсных линий связи, особенно при сетевых решениях построения
взаимодействия, когда один вышедший из строя приемно-передающий элемент
выводит из взаимодействия оставшихся абонентов, подключенных к сети.
Задачу межмодульного взаимодействия наиболее рационально решать
путем разбиения абонентов на классы с однотипными характеристиками, такими,
как тип применяемого интерфейса; период циклического взаимодействия, объем
пересылаемой информации и пр. Данный подход обеспечивает минимум
необходимых интерфейсов в БК и позволяет более рационально построить
межканальное взаимодействие для задач тестирования либо реконфигурации
системы в рабочее состояние при штатном функционировании КА. Кроме того,
целесообразно внешние абоненты сгруппировать по принципу применения в
определенных алгоритмах программы управления, а в качестве модуля
поддержания взаимодействия использовать специализированные интерфейсные
контроллеры, которые исполняют, как минимум, функцию драйвера обмена и
взаимодействуют с вычислительным ядром БК СУ едиными информационными
массивами. Применение интерфейсных контроллеров открывает возможность
организации в БК конвейерного обмена информационными потоками с
абонентами, где модуль процессора выполняет алгоритмы управления
независимо от особенностей периферийных блоков, а интерфейсный модуль
обеспечивает поддержание специфических протоколов связи с разнообразным
периферийным оборудованием.
Успешное выполнение задач системой управления КА обеспечивается не
только функциональным построением системы под управлением БЦВК.
637
Аппаратура модулей должна соответствовать и конструктивно-
эксплуатационным требованиям согласно конструктивно-позиционной
локализации в составе КА:
- по надёжности ЭРИ - интенсивности отказов;
- по радиационной стойкости к воздействию следующих видов
космического излучения: протонов солнечного космического излучения,
а также протонов и электронов радиационных поясов Земли;
- по живучести и стойкости к внешним воздействиям:
• температура,
• атмосферное давление,
• относительная влажность окружающей среды,
• центробежное ускорение,
• вибрация,
• удары,
• акустические нагрузки,
. - по электромагнитной совместимости и восприимчивости.
Перечень эксплуатационных требований составляет базовый набор
ограничений при выборе применяемых элекгронных компонентов и модулей из
множества существующих предложений на рынке. Выбор модулей и
электронных компонентов по функциональным параметрам, таким, как
производительность процессорных элементов и контроллеров, объемы
микросхем памяти для хранения программ и данных, быстродействие
логических, буферных элементов и преобразователей интерфейсов, а также по
другим функциональным параметрам проводится из базового подмножества,
соответствующего указанным выше конструктивно-эксплуатационным
требованиям.
7.5 Принципы построения сбоеустойчивых БЦВМ
7.5.1 Требования к аппаратным средствам сбоеустойчивых БЦВМ
Возникновение сбоя в работе БЦВМ под воздействием внешнего
возмущающего фактора приводит к нарушению в ходе вычислительного
процесса. Аппаратные средства БЦВМ при восстановлении вычислительного
процесса должны обеспечивать:
- контроль хода вычислительного процесса БЦВМ;
- защиту кода программ штатного функционирования;
- защиту данных программ штатного функционирования;
- сохранность оперативной информации в каждой точке вычислительного
процесса;
- сохранность реального времени вычислительного процесса.
7.5.1.1 Блок восстановления
Контроль хода вычислительного процесса БЦВМ обеспечивается
программной фиксацией успешного завершения текущего такта вычислительной
638
задачи в пределах запланированного интервала времени путем реинициализации
аппаратуры независимого таймера граничного временного интервала Watch Dog
Timer (WDT). Условием неисправности (с выдачей команды аварии) является
превышение периода времени реинициализации WDT, что в большинстве
случаев свидетельствует о нарушении запланированного хода вычислительного
процесса. В случае превышения временной границы срабатывания WDT
вырабатываются аппаратные сигналы, приводящие систему в исходное
состояние:
- формирование запроса на немаскируемое прерывание;
- формирование сигнала “RESET” и аппаратной реинициализации
оборудования;
- формирование команды отключения питания аварийного канала БК из БУК.
Защита кода программ и данных обеспечивается организацией интерфейса
оперативной памяти с применением системы обнаружения и коррекции ошибок
(EDAC), функционирующей на основе избыточных кодов шины данных. Система
EDAC парирует одиночные ошибки на циклах чтения, возникающие в
микросхемах памяти при хранении информации. Защита кода программ в памяти
долгосрочного хранения (FLASH, EEPR.OM) осуществляется путем разбиения
кода программы на кластеры хранения, охваченные контрольным
суммированием и организацией резервных копий для каждого кластера.
Защита данных вычислительного процесса программ штатного
функционирования обеспечивается периодической записью информации на
начало каждого последующего такта задачи управления в область памяти
состояния системы (ПСС). При нарушении хода вычислительного процесса
сохраненные в предшествующих тактах в ПСС данные позволят оперативно
восстановить информацию и продолжить задачу управления. Для восстановления
вычислительного процесса необходимо осуществить такую последовательность
действий:
- определить факт нарушения хода вычислительного процесса в БЦВМ;
- перевести БЦВМ в исходное состояние;
- провести контроль состояния аппаратуры БЦВМ;
- проконтролировать время, затраченное БЦВМ на процесс
восстановления;
- восстановить RAM на момент последнего, нормально завершенного
такта;
- организовать повторный запуск БЦВМ в работу.
Для организации указанных функций по восстановлению вычислительного
процесса, нарушенного вследствие воздействия внешнего фактора, в состав
БЦВМ должны входить следующие функциональные узлы:
- сторожевой таймер (WDT);
- таймер реального времени;
- память состояния системы.
639
7.5.1.2 Организация памяти состояния системы
Для сохранения оперативной информации, необходимой для
восстановления вычислительного процесса в случае его нарушения (сбой БЦВМ),
в состав БЦВМ должна входить память состояния системы. ПСС должна быть
доступной для записи и считывания со стороны процессора БЦВМ. Времена
выполнения записи (считывания) в (из) ПСС должны быть минимальными.
Необходимо, чтобы ПСС обеспечивала:
- сохранность информации при возникновении помех вследствие
воздействия внешних дестабилизирующих факторов;
- невозможность искажения информации при несанкционированном доступе
к информации в ПСС вследствие возникновения сбоя в работе БЦВМ.
Для реализации данных функций ПСС должна состоять из двух
(дублированных) массивов. В любой момент времени запись со стороны БЦВМ
должна быть разрешена только в один массив ПСС. Каждый массив должен
содержать две ячейки - ключи защиты информации. Факт наличия в ячейке
ключа защиты кода, отличного от эталонного, свидетельствует о разрушении
всего массива. Подключение дублированных массивов ПСС к магистрали БЦВМ
происходит поочередно в каждом такте основной работы. Целесообразно доступ
к массивам ПСС организовать со стороны как основного, так и резервного
каналов БК.
Доступ к неактивному массиву аппаратно закрыт по шине данных, а
сигналы управления зашунтированы на шину питания. Открытие доступа и
разрешение записи в активный массив формируется аппаратно по программному
признаку «Запись ПСС». Программный признак «Норма записи в ПСС»
одновременно формирует сигнал аппаратного закрытия доступа к активному
массиву ПСС.
Программная поддержка функционирования аппаратуры КА должна
обеспечивать контроль нормы завершения такта задачи о последующей выдачей
признаков в аппаратуру контроля.
7.5.1.3 Служба реального времени
Для организации единой временной шкалы планирования вычислительного
процесса в системе управления БЦВМ должна содержать в своем составе таймер
относительного времени для подсчета длительности такта основной работы,
например То = 20 мс. Входная частота на таймер относительного времени (ТОВ)
должна подаваться от единого для БЦВМ генератора стабильной частоты
256 кГц. ТОВ должен быть доступен для записи и считывания со стороны
процессора БЦВМ. Переполнение ТОВ должно поступать в систему прерываний
процессора БЦВМ. Подсчет реального времени проводится в БЦВМ программно,
путем суммирования числа переполнений ТОВ.
7.5.1.4 Сторожевой таймер
Сторожевой таймер (WDT) предназначен для фиксации признака
нарушения вычислительного процесса. WDT должен по включению питания
640
автоматически запускаться на Twdt^MTo, где То - такт вычислительного
процесса. Входную частоту на WDT необходимо подавать от отдельного
мажоритированного генератора. Перезапуск таймера должен осуществляться в
самом конце такта То - после завершения всех вычислительных алгоритмов. Это
является признаком нормального выполнения вычислительного процесса. При
этом переполнение таймера не формируется.
При нарушении вычислительного процесса программный перезапуск WDT
не производится и формируется его переполнение. После переполнения WDT
должен быть сформирован сигнал немаскируемого прерывания “NMI”, и при
«мягком» сбое - программный перезапуск WDT, а при отсутствии программного
перезапуска WDT должен быть сформирован сигнал «RESET» с длительностью
tR > 1вип, где tBiin ~ время восстановления работоспособности вторичных
источников питания после сбойного состояния.
Сторожевой таймер (WDT) имеет две ступени срабатывания :
- формирование сигнала запроса на немаскированное прерывание по
достижении опасного значения времени запаздывания программного
обслуживания («мягкий» сбой);
- формирование аппаратного сигнала “Reset WDT” по достижении
критического значения времени запаздывания программного
обслуживания («жесткий» сбой).
7.6 Методы обеспечения надежности передаваемой информации
Одна из основных тенденций в области аэрокосмической техники -
унификация и стандартизация оборудования и интерфейсов. Важнейший элемент
любой бортовой системы управления - система передачи информации, которая
должна обладать следующими свойствами:
- повышенной устойчивостью к воздействию электромагнитных помех;
- возможностью резервирования для повышения отказоустойчивости;
- устойчивостью к отказам и сбоям;
- возможностью самовосстановления после сбоя;
- детерминированностью (определенностью) времени доставки
сообщений;
- возможностью работы в реальном времени.
В настоящее время наиболее широко в распределенных бортовых системах
аэрокосмического назначения представлен интерфейс MIL-STD-1553.
Кроме того, по мере расширения и усложнения задач, реализуемых
перспективными космическими и летательными аппаратами, развивается и
внедряется технология SpaceWire. Рассмотрим ее подробнее.
MIL-STD-1553 сегодня - это практически общемировой стандарт,
признанный и поддерживаемый производителями аппаратуры и элементной базы
многих стран. Топология сети - это последовательная шина данных
(экранированная витая пара), к которой посредством шлейфов подключены
устройства (рис. 7.6.1).
641
Контроллер
канала (КК)
Оконечное
устройство
(ОУ1)
Оконечное
устройство
(ОУп)
Мультиплексный канал резервный
Рисунок 7.6.1 - Топология сети
Допустимые устройства - контроллер шины (управляющий вычислитель),
монитор шины и удаленные терминалы.
На физическом уровне (Physical layer) передаваемые данные кодируются
посредством так называемого бифазного кода Манчестер-2, являющегося
самосинхронизирующимся линейным кодом (рис. 7.6.2). Размах напряжения
бифазного сигнала, поступающего в шину данных, составляет 3 ... 10 В.
Тактовая
частота
1 МГц
Входные данные
в формате без
возврата к нулю
Данные в
формате
Манчестер-2
Рисунок 7.6,2 - Код Манчестер-2
MIL-STD-1553 проверяет сообщение при его передаче на следующие
ошибки:
- начало слова - синхросигнал, соответствующий типу передаваемого слова;
- информация должна передаваться последовательным
фазоманипулированным кодом;
- необходимо, чтобы количество информационных разрядов в слове было
равно 17, включая разряд контроля по четности, позволяющего
отследить ошибку передачи;
- сумма значений всех информационных разрядов должна быть нечетной.
Сеть Space Wire состоит в общем случае из некоторого числа узлов-
абонентов и сетевых узлов - маршрутизирующих коммутаторов. Узлы-абоненты
642
сети - это устройства, передающие и принимающие потоки данных. Они связаны
с маршрутизирующим коммутатором или друг с другом последовательными
полнодуплексными каналами (от 2 до 400 Мб/с) типа «точка-точка»,
называемыми линками (рис. 7.6.3).
Рисунок 7.6.3 - Сеть Space Wire
Для эффективного формирования электрических сигналов передатчиком
передающей стороне и их надежного дегустирования и распознавания на стороне
приемной на сигнальном уровне стандарт Space Wire использует Data - Strobe
(DS) - кодирование, которое изображено на рис. 7.6.4.
Рисунок 7.6.4 - Data - Strobe
(DS) - кодирование
Сигнал строба изменяет свое состояние каждый раз, когда состояние линии
данных остается неизменным для следующего бита. Таким образом, в DS - линке
в каждом битовом интервале происходит изменение уровня сигнала в одной из
двух линий, что позволяет приемнику всегда четко определять центр битового
интервала для считывания значения бита данных, даже в случае приема большой
последовательности.
На физическом уровне сформированные и закодированные битовые
последовательности для повышенной помехозащищенности и малого
энергопотребления передаются в линию в виде LVDS-сигналов. LVDS (Low
Voltage Differential Signalling) - дифференциальные сигналы низкого уровня по
643
стандартам TIA/EIA-644 и IEEE 1596.3. Эти стандарты определяют величину
дифференциального сигнала в диапазоне 250 ... 450 мВ при диапазоне входного
напряжения приемника 2,4 В. При этом порог срабатывания приемника - ±100 мВ.
Надежность функционирования канала поддерживает наличие бита
проверки четности для каждого передаваемого символа. Поле контроля для бита
четности включает восемь предшествующих битов данных (если предыдущим
был символ данных) и:ш два бита символа управления, собственно бит четности
и следующий за ним флаг типа символа (рис. 5).
Рисунок 7.6.5 - Поле контроля для бита четности
Уровень обмена в сети Space Wire обеспечивает инициализацию и
перезапуск DS-линка, управление потоком данных между двумя узлами,
обнаружение ошибок и сбоев (контроль четности, рассоединения и др.),
выполнение процедур восстановления соединения.
Вследствие тяжелых условий эксплуатации космических аппаратов,
которые включают в себя радиацию, значительные перепады температур и
большие механические нагрузки, резервирование является широко используемым
методом кардинального повышения надежности.
Резервирование может быть общим, когда резервируется система в целом, и
раздельным (поэлементным), когда резервируются отдельные элементы системы.
Постоянное резервирование (к нему относится мажоритарное
резервирование и метод голосования) - резервирование с нагруженным резервом,
при котором все N элементы в резервированной системе выполняют одну и ту же
функцию и являются равноправными, а выбор одного из N сигналов на их выходе
выполняется схемой «голосования» без переключений.
Постоянное резервирование позволяет получить системы с самым высоким
коэффициентом готовности.
В качестве примера на рис. 7.6.6 показана обобщенная структура
резервированного блока, в котором имеется три идентичных процессорных
модуля и два маршрутизатора, реализующих функцию «горячего»
резервирования интерфейсов.
При штатной работе всех модулей отправляемые ими пакеты должны быть
синхронными и идентичными, а следовательно, могут быть мажоритированы по
принципу «2 из 3-х». Информационные пакеты, адресованные данному блоку,
размножаются в маршрутизаторе и одновременно передаются всем модулям
резервированной системы. Кроме тбго, маршрутизатор обеспечивает
межмодульный обмен данными.
644
Рисунок 7.6.6 - Обобщенная структура резервированного блока
Простой и широко распрос граненный метод обеспечения надежности - это
тройное резервирование и применение ко всем исходящим сигналам схемы
голосования по принципу «2 из 3-х».
7.7 Методика расчёта надёжности БЦВК
В настоящих материалах приведена методика расчёта показателей
надёжности для этапа разработки аппаратуры бортового цифрового
вычислительного комплекса (БЦВК) автоматических систем - управления
космических аппаратов с длительным сроком активного существования.
7.7.1 Общие положения
7.7.1.1 Показатели надежности
В техническом задании на разработку аппаратуры задаётся показатель
надёжности БЦВК системы управления КА в течение времени активного
существования.
В качестве показателя надежности аппаратуры БЦВК системы управления
КА задаётся вероятность безотказной работы аппаратуры БЦВК за время
активного существования КА на орбите с учётом времени хранения до старта РН.
645
Под отказом аппаратуры БЦВК понимается событие, обусловленное
отказами элементов БЦВК, приводящее к невыполнению возложенных задач в
период активного существования КА на орбите.
Высокая надёжность аппаратуры БЦВК обеспечивается:
- применением высоконадёжной элементной базы (ЭРИ);
- использованием ЭРИ в облегчённых электрических, механических и
тепловых режимах;
- тщательной отработкой схемных решений;
- применением современных устройств технологии изготовления
аппаратных средств в производстве аппаратуры;
- использованием аппаратурно- программных мер по защите от искажений
информации;
- проведением отработочных испытаний в полном объёме;
- выбором оптимальной системы эксплуатации.
Требования по надёжности считаются выполненными, если полученные в
результате расчёта показатели надежности аппаратуры не хуже заданных в
ТЗ, т.е.
Р >Р (7.7.1)
7.7.2 Методика получения расчетных формул
Методы получения расчётных формул для оценки показателей надёжности
основаны на использовании:
- структурных схем надёжности (ССН) или структурно-логических схем
надёжности (СЛСН) аппаратуры;
- формулы полной вероятности.
7.7.2.1 Использование ССН или СЛСН
ССН отражает способ соединения элементов с точки зрения надёжности. В
ССН включаются только те элементы, отказ которых влияет на выполнение
аппаратурой основной возложенной задачи. ССН разрабатывается для заданного
показателя надежности.
ССН может быть представлена в виде параллельной или последовательно-
параллельной цепи входящих элементов (приборов). При составлении ССН
допускается, что входящие в ССН элементы независимы в смысле отказа:
- отказ любого из них приводит к отказу аппаратуры;
- отказ элемента не зависит от отказов других элементов аппаратуры.
Получение расчетных формул проводится в два этапа. На первом этапе
анализируется функционирование аппаратуры и устанавливается степень
влияния отказов элементов (приборов) на работоспособность аппаратуры в
целом. На основании этого определяется логика соединения элементов расчёта и
составляется ССН.
ССН составляется для сравнительно простых систем и элементов
аппаратуры (приборов), когда принципиальная схема аппаратуры в целом
(прибора) выполнена без наличия логических связей. Для схем, имеющих
646
логические связи, составляется структурно-логическая схема надёжности -
СЛСН. Метод составления расчетных формул по СЛСН сводится к рассмотрению
логики работы этих схем при различных состояниях элементов схемы.
Задачей второго этапа является определение вида расчётных формул по
заданным показателям надёжности с учётом принятой системы проверок
аппаратуры.
7.7.2.2 Использование формулы полной вероятности
Получение расчетных формул с использованием ССН возможно лишь в тех
случаях, когда элементы расчета, входящие в ССН, являются независимыми.
Если в функциональную схему построения аппаратуры в целом входят зависимые
элементы (отказ одного элемента приводит к отказу или нарушению нормального
функционирования других элементов), составить ССН не предсгавляется
возможным. Для вывода расчетных формул необходимо воспользоваться
формулой полной вероятности
Р(А)=£Р(Н,)Р(А/Н;), (7.7.2)
i=0
где Р(А) - вероятность события А; А - событие, отображающее
работоспособное состояние всей схемы; Р(Н<) - вероятность i-й гипотезы; Hi -
гипотеза, определяющая одно из несовместных работоспособных состояний всей
схемы; Р(А/Н,) - условная вероятность события А при условии наличия i-й
гипотезы; п - число гипотез.
С использованием формулы полной вероятности могут быть получены
расчетные формулы надёжности для любой схемы построения аппаратуры.
Вероятность безотказной работы структуры, состоящей из п каналов при
допустимом отказе m каналов, равна сумме (т+1) членов ряда, т. е.
P(t) = Pkn (t) + С' • Pk“4 (t) • Qk (t) + с2„ • Pk”-2(t) • Qk2(t) +...
... + C™ Pkn-m(t)-Qkm (t) =
n—m
= ZC“-Pkra-n(t)-Qkm(t),
m=0
где Qk(t) = l-Pk(t) - вероятность отказов канала; n - количество
структуре резервирования; m - допустимое количество отказавших
структуре резервирования; Cnm - число сочетаний из п по т:
(7.7.3)
каналов в
каналов в
(7.7.4)
тЬ(п - т)!
На основании формулы (7.7.3) получены расчётные формулы для
различных структур построения аппаратуры:
- дублирование:
горячий резерв (постоянно включён резервный канал)
Рд= 1-(1-рк)2; (7.7.5)
647
холодный резерв (резервный канал не включён)
РД=РК(1+ (-1пРк)); (7.7.6)
- резервирование по типу «2 из 3-х» (аппаратура должна работать на двух
исправных каналах, допускается отказ одного канала)
Рр= Р?+ 3 РКЧ, (7.7.7)
где Рк - вероятность безотказной работы канала; qK - вероятность отказа канала (qx =
= 1-Рк).
7.7.3 Методика расчёта надежности нерезервированной аппаратуры
В основе определения вероятности безотказной работы элемента расчета
(прибора) лежит экспоненциальный закон распределения времени возникновения
отказа т. е.:
- интенсивность отказа всех элементов не зависит от времени - L(t) = const;
- все элементы одного типа равнонадёжны, т.е. величина интенсивности
отказов (L) для всех этих элементов одинакова;
- отказы элементов аппаратуры являются событиями случайными и
независимыми.
Нерезервированная аппаратура имеет основное соединение элементов
расчёта (приборов). Надежность каждого i-ro элемента в любой момент времени t
определяется вероятностью его безотказной рабогы - Pj(t).
Если аппаратура в целом состоит из п последовательно соединенных
элементов расчёта (приборов), имеющих надежности Pi, Р2, ..., Рп,
соответственно, то вероятность безотказной работы такой структуры PCT(t) на
основании теоремы умножения вероятностей независимых событий определяется
формулой
Рст(9=ПР>(0, (7.7.8)
i=l
где Pi(t) = exp (- (Li t));
Li - интенсивность отказов i-ro элемента расчета;
t- время, на которое рассчитывается показатель.
В некоторых случаях при проведении расчётов показателей надёжности
аппаратуры необходимо учитывать не только время непосредственной работы, но
и время хранения от полной последней проверки до применения аппаратуры по
назначению (работы на орбите).
7.7.3.1 Исходные данные для расчёта показателей надёжности
Количественные показатели надёжности рассчитывают на основании
следующих исходных данных:
- интенсивностей отказов комплектующих электрорадиоизделий (ЭРИ);
- временных характеристик;
- режимов и условий эксплуатации аппаратуры;
- схем электрических и функциональных;
- карт рабочих режимов.
648
Численные значения показателей надёжности ЭРИ - интенсивности отказов
- определяются на основании справочников по прогнозированию надёжности
электрорадиоизделий [4, 5].
В справочниках приведены исходные значения интенсивностей отказов:
базовые - L^ (для одного типа) ЭРИ или базовые среднегрупповые - Ьб.с.г (для
группы однотипных ЭРИ). Базовые характеристики интенсивностей отказов ЭРИ
- это характеристики, приведенные к следующим условиям: номинальная
электрическая нагрузка при температуре окружающей среды tOKp = 25°С. Для
получения эксплуатационных (для данного режима эксплуатации)
интенсивностей отказов ЭРИ в справочнике содержатся методические указания
по их расчёту с учётом электрических режимов применения, температуры
окружающей среды, условий эксплуатации, уровня качества производства
(приёмки), а также конструктивных, функциональных, технологических
особенностей конкретного типа ЭРИ.
Каждый тип ЭРИ имеет свою математическую модель расчёта
интенсивности отказов при эксплуатации Lp, в которой с помощью различных
коэффициентов учитываются режимы работы, условия эксплуатации (группа
аппаратуры), технология изготовления, конструктивные особенности.
Математическая модель расчёта интенсивности отказов интегральных
микросхем, изготовленных в странах дальнего зарубежья, представлена
формулой
Lp = KQ(Ci • Кт • Kv + С2 КЕ) - К! НТ6, 1/ч,
(7.7.10)
где Lp - интенсивность отказов ЭРИ в режиме работы; KQ - коэффициент,
учитывающий уровень качества; Ci - коэффициент, учитывающий степень
сложности элемента; Кт - температурный коэффициент ускорения, зависящий от
технологии; Kv - коэффициент, учитывающий снижение максимального значения
напряжения питания; С2 - коэффициент, учитывающий степень сложности
корпуса; КЕ - коэффициент, зависящий от условий эксплуатации;
К| - коэффициент, учитывающий степень отработанности технологического
процесса.
Расчёт интенсивностей отказов остальных типов элементов проводится по
общей модели, приведенной в указанных выше справочниках:
Ьр=иПКн (7.7.11)
i=l
где Lp - интенсивность отказов ЭРИ в режиме работы; L6 - базовая
интенсивность отказов ЭРИ при работе в нормальных условиях; Ki -
коэффициенты учета электрических, тепловых, технологических,
конструктивных и эксплуатационных факторов (параметров), выбранные из
649
соответствующих таблиц справочников или рассчитанные по формулам,
приведенным в справочниках.
Интенсивности отказов ЭРИ при хранении - Lxp, определены на основании
данных по результатам многолетней эксплуатации аналогичной аппаратуры
следующим соотношением:
Lxp=Lp-10'2, 1/ч. (7.7.12)
7.73.2 Формулы для расчёта показателей надёжности
Согласно заданному показателю надёжности необходимо определить
работоспособность аппаратуры БЦВК при работе (в период активного
существования) и хранении (до старта). При этом вероятность безотказной
работы рассчитывают по формуле
P(t)=P(tp)-P(txp), (7.7.13)
где P(t) - вероятность безотказной работы аппаратуры БЦВК системы
управления КА в период активного существования на орбите с учётом хранения
до старта; tp-время работы на орбите; txp - время хранения от последней
проверки аппаратуры до старта PH.
В качестве примера приводим расчёт надёжности БЦВК с БЦВМ МБ386.
Заданный показатель надежности аппаратуры БЦВК системы управления
КА - вероятность безотказной работы в течение трех лет активного
существования КА с учётом времени хранения до старта PH (90 суток и запаса по
времени - 10%) должна быть не менее 0,97.
БЦВК (с БЦВМ МБ386) аппаратуры системы управления КА с длительным
сроком активного существования состоит из следующих подсистем и блоков:
- ПОУО - подсистема определения и управления ориентацией;
- ПДП - подсистема данных платформы;
- БКРП - блок коммутации и распределения питания;
- БУК - блок управления конфигураций;
- МК - модуль команд;
- БЦВМ - бортовая цифровая вычислительная машина;
- УВВ - устройство ввода-вывода;
- БУЭМ - блок управления электромагнитами.
Для проведения количественной оценки заданного показателя надёжности
составляется структурно-логическая схема надёжности (СЛСН), отображающая
логическое соединение элементов аппаратуры (подсистем и блоков) с точки
зрения надёжности.
При составлении СЛСН для каждого конкретного типа аппаратуры
учитывается критерий отказа.
Структурно-логическая схема надёжности БЦВК для периода активного
существования КА показана на рис. 7.7.1.
650
Рисунок 7.7.1 - СЛСН аппаратуры БЦВК для периода активного
существования КА
При расчёте количественных значений показателей надёжности
учитывается, что в аппаратуре БЦВМ применены методы защиты от искажений
информации, основанные на введении аппаратурно-программного контроля с
использованием корректирующих кодов и реализованные на применении в
БЦВМ ОЗУ статического типа, в котором осуществляется обнаружение и
коррекция ошибок по коду Хэмминга.
На основании структурно-логической схемы аппаратуры БЦВК в целом для
заданного показателя надёжности составлены расчётные формулы.
Вероятность безотказной работы нерезервированной структуры (канала) в
период работы и хранения - PK(t) определяется формулой (7.7.14):
Рк(t) = exp(-(LpK • tp + Lxpic t^,)), (7.7.14)
где LpX - интенсивность отказов канала в режиме работы на орбите для группы
аппаратуры - 5.2 (эксплуатация на орбите); Г^рк - интенсивность отказов канала в
режиме хранения; tp - время работы аппаратуры на орбите; txp - время хранения
до старта.
Расчёт показателей надёжности резервированной аппаратуры (подсистем,
блоков) проводится по формулам:
- дублированной с «горячим резервом»
P(t) = J—(l-PK(t))2; (7.7.15)
- дублированной с «холодным резервом»
P(t) = PK(t)(l + (-lnPI((t))); (7.7.16)
- резервированной по типу "2 из 3-х"
P(t) = P\(t) +-3-P2K(t)-(l-PK(t)), (7.7.17)
651
где PK(t) - вероятность безотказной работы канала схемы резервирования.
Вероятность безотказной работы аппаратуры БЦВК в целом для
разработанной СЛСН рассчитывается по формуле
Р(0 = f[Pi(t), (7.7.18)
i=l
где Pi(t) - вероятность безотказной работы подсистем и блоков; п - количество
подсистем и блоков в БЦВК.
Полученные в результате расчёта значения вероятности безотказной
работы - P(t) составляющих БЦВК и БЦВК в целом приведены в табл. 7.7.1.
Таблица 7.7.1 - Показатели надёжности составляющих БЦВК
и БЦВК в целом
Наименование составляющих Вероятность безотказной работы P(t)
БКРП 0,996543613
БУК 0,996334678
канал БУК 0,964326535
МК 0,998752980
канал МК 0,964686829
БЦВМ 0,984115665
УВВ ПОУО 0,948569300
БУЭМ 0,975374136
канал ПОУО 0,910513616
ПОУО 0,995871012
УВВ ПДП 0,963016811
канал ПДП 0,947719929
ПДП 0,998608939
БЦВК в целом 0,986184528
При расчёте вероятности безотказной работы составляющих БЦВК
(подсистем и блоков) учитываются их структурное построение:
- внутреннее дублирование в БКРП;
- резервирование по типу «2 из 3-х» для БУК;
- дублирование в «горячем резерве» для МК;
- дублирование в «горячем резерве» для функционального оборудования
БЦВМ;
- дублирование в «горячем резерве» составляющих блоков в УВВ.
Вероятность безотказной работы БЦВМ и УВВ в ПДП с учётом «холодного
резерва» рассчитывают по формуле
Рццп = Рбцвм ‘ Рувв * О + (-to (Рбцвм ’ Рувв))) • (7.7.19).
652
Вероятность безотказной работы БЦВМ, УВВ и БУЭМ в ПОУО с учётом
«холодного резерва» рассчитывается по формуле
?поуо = Рбцвм * Рувв * Рбуэм (1 + (~1п(Рбцвм ’ Рувв ‘ Рбуэм ))) • (7.7.20)
Вероятность безотказной аппаратуры БЦВК в целом рассчитывают по
формуле (7.7.18) на основании данных по составляющим, приведенных в
табл. 7.7.1.
Заданные на аппаратуру БЦВК требования по надёжности выполняются,
так как РБЦВк > Рзад.
Расчёт показателя надежности БЦВМ МБ386
В качестве примера расчёта показателей надёжности составляющих БЦВК
приведен расчёт показателя надёжности модуля БЦВМ МБ386.
В ТЗ на разработку модуля БЦВМ в качестве показателя надёжности задан
показатель безотказности - вероятность безотказной работы - P(t) за время
активного существования на орбите три года и времени хранения до старта PH
(90 суток с запасом по времени - 10%) должна быть не менее - 0,98.
Для проверки соответствия заданному в ТЗ значению показателя
надёжности модуля БЦВМ проведен расчёт надёжности модуля.
С точки зрения надёжности модуль БЦВМ представляет собой
последовательное соединение функциональных составляющих. Структурно-
логическая схема надёжности (СЛСН) показана на рис. 7.7.2.
В состав модуля БЦВМ МБ386 входят:
- служба времени и сторожевой таймер - (ФО1);
- блок управления центральным процессором (ЦП) и программируемым
постоянным запоминающим устройством (ППЗУ) - (ФО2);
- ЦП и постоянное запоминающее устройство (ПЗУ) - (ФОЗ);
- ППЗУ-(ФО4);
- оперативное запоминающее устройство (ОЗУ) и устройство
обнаружения и коррекции ошибок - (ФО5);
- интерфейсы последовательных каналов (два асинхронных и один
синхронный) - (ФО6);
- интерфейс канала обмена с внешними устройствами -- (ФО7).
При оценке надёжности модуля учтена логическая схема работы
функционального блока ФО4, работающего по принципу дублирования, и
логическая схема надёжности блока ФО5, в котором осуществляется
обнаружение и исправление ошибок по коду Хэмминга.
В качестве исходных данных для расчёта использованы следующие
материалы:
- перечень комплектующих электрорадиоизделий (ЭРИ);
- перечень L-характеристик ЭРИ модуля БЦВМ, приведенный в
табл. 7.7.3;
- функциональная схема БЦВМ;
- карты рабочих режимов модуля;
- временные аргументы;
653
654
Ф01 Ф02 ФОЗ
QEN- 79 RC11 ЕРМ X7R RC11 ки 80386 X7R RC11
2 шт. 1/3 шт. 2 шт. 15 шт. 16 шт.
Резервированная часть ф04
I 1/16 П| WSE 1/16 I WSE I J 1/16 I J WSE Д 1/16 II WSE |П
•
[ 1/16 1 WSE vie L WSE Г •II 1/16 I 1 WSE Д 1/16 |J WSE ||
8 уровней
Последовательная часть Ф04
X7R . TAJ | RC11
3 шт. 20 шт.
Резервированная часть
1/64 . ЕРМ 1/32 WSE 1/32 WSE 1/64 ЕРМ
1/64 1/32 1/32 1/64
ЕРМ WSE WSE ЕРМ |
16
Последовательная фдд часть Ф06
_ X7R _ RC11 _ й ЕРМ ЕРМ RC11 X7R
4 шт. 18 шт. 2/3 шт. 10 шт. 3 шт.
Ф05
1/64 ЕРМ 1/32 WSE 1/32 WSE 1/64 ЕРМ |
1/64 [ 1/32 II || 1/32 1/64
ЕРМ | WSE || || WSE ЕРМ
уровней
Ф07
SNj54 RC11
11 шт.
Рисунок 7.7.2 - Структурно-логическая схема надежности (СЛСН) модуля БЦВМ МБ386
- справочник "Прогнозирование надёжности электронной аппаратуры”,
MIL-HDBK217E.
Модуль БЦВМ выполнен полностью на импортной элементной базе стран
дальнего зарубежья, поэтому для расчёта интенсивности отказов ЭРИ - Lp
использованы расчётные формулы (7.7.10) и (7.7.11), приведенные в методике
расчёта (раздел 7.7.3.1).
Расчёт показателя безотказности модуля БЦВМ проведен на основании
составленной структурно-логической схемы надёжности (СЛСН), показанной на
рис. 7.7.2, с учётом следующих данных:
- рабочая температура в модуле -1 = 55°С;
- время хранения - txp = 2376 часов (90 суток + 10% запаса);
- время активного существования модуля на орбите - tp = 26280 часов (3
года).
Вероятность безотказной работы модуля БЦВМ - РМОдуля(0 рассчитывают по
формуле
N
^модуля (t) = np*Oi(t), (7.7.21)
i=l
где N - количество функциональных составляющих; Рфо; - вероятность
безотказной работы i-й составляющей.
Для нерезервированных составляющих: ФО1, ФО2, ФОЗ, ФО6, ФО7
вероятность безотказной работы рассчитывают по формуле
РфО1С)= exPH4ooi * +ЦрФО1 * txp)). (7.7.22)
Для составляющей ФО4, которая имеет резервированную часть по типу
«дублирования» (8 уровней) и последовательную часть (пч), вероятность
безотказной работы вычисляют по формуле
РфснО) = (1 - (1 - ехр ( -1/8 • (Lp ЕРМ * tp + Lxp ЕРМ • t^)))2)8 •
(7.7.23)
’ eXP ( ~ (^-'рпчФО4 * tp + L ХрпчФО4 * txp))-
Для составляющей ФО5, которая имеет резервированную часть по типу
«дублирования» (16 уровней) и последовательную часть (пч), вероятность
безотказной работы рассчитывают по формуле
P<Dos(t) = (1 ~ (1 - ехр( -1/16 • (LpWSE - tp • Lxp WSE * txp) +
+1/32 • (LpEPM • tp + L^epm • t,,,)))2)16 • (7.7.24)
• exp( (1^рпчФО5 ’ + 1^хрпчФО5 * txp)),
где Lp - интенсивность отказов функциональных составляющих или ЭРИ при
работе на орбите; Lxp - интенсивность отказов составляющих или ЭРИ в период
хранения; tp - время работы (активного существования) модуля на орбите;
txp - время хранения от последней проверки до пуска.
655
Результаты расчёта приведены в табл. 7.7.2.
Таблица 7.7.2 - Показатели надёжности функциональных составляющих модуля
Наименование функциональ- ной составляющей Интенсивность отказов LP, • 10’61/ч Вероятность безотказной работы P(t) за время активного существования три года
ФО1 0,032747 0,999132578
ФО2 0,066182 0,998260679
ФОЗ 0,156740 0,995885926
ФО4 Резервированная часть (канал)-0,013765; Последовательная часть - 0,00784548 0,999792000
ФО5 Резервированная часть (канал)-0,1039; Последовательная часть -0,007431 0,999803745
ФО6 0,2954437 0,992258839
ФО7 0,0420150 0,998895536
Полученное в результате расчёта заданного показателя надёжности модуля
БЦВМ в целом за время активного существования на орбите три года составляет
- 0,98411565.
656
Таблица 7.73 - L-характеристики ЭРИ для расчета надежности модуля БЦВМ
МБ386
Вид оборудования Наименование ЭРИ Количество Коэффициенть A-blO6, 1/4 XplO6 1/ч N Xp-106, 1/ч XxplO8, 1/ч NXxplO8, 1/ч
ФО1 Микросхемы:
QEN79-AHR 50,000 I Kq=1; KE=l 0,031967 0,031967 0,031967 0,031967 0,031967
Резисторы:
RC11 10kOm±5% 50V 1 КЕ=1; Кк=1; Kq=0,3 0,00095 0,000285 0,000285 0,000285 0,000285
RC11 100Om±5% 50V 1 КЕ=1; KR=1; Kq=0,3 0,00095 0,000285 0,000285 0,000285 0,000285
Пайки: 12 0,00004 0,00048 0,00048 0,00048 0,00048
S 0,03302 0,03302
ФО2 Микросхемы:
IC LPLD EPM7192SQI 160-10 7з Kq=2; Kci=0,12; Кт=0,277; Kv=1; Kc2=0,05 3;Ke=1; KL=1 0,17248 0,057493 0,17248 0,057493
Конденсаторы:
X7R 0,47inF±20% 50V 2 KE =0,8; KQ=0,3; Kcv=1,7247 0,00079 0,000327 0,000654 0,000327 0,000654
Резисторы:
RC11 10kOm±5% 50V 2 KE-1; KR=1; Kq=0,3 0,00095 0,000285 0,00057 0,000285 0,00057
RC11 lkOm±5% 50V 13 KE=1; KR=1; Kq=o,3 0,00095 0,000285 0,003705 0,000285 0,003705
Пайки: 94 0,00004 0,00376 0,00004 0,00376
Z 0,066182 0,066182
ФОЗ Микросхемы:
KU80386EX TC-33 1 Kq=1; Ka=0,06; Kt=1,1; Kv=l; Kc2=0,053; Ke=0,9; KL=1 0,1137 0,1137 0,1137 0,1137
657
Продолжение табл. 7.7.3
I 1 о ю о Наименование ЭРИ i । Количество Коэффициенте» MO6, l/ч XplO6 l/ч NXp-106, l/ч A.xp-108, l/ч NXxp-108, l/ч
HS9-666RH- Q 1 Kq=1; Кс,=0,02 5; Кт=0,8; Kv=l; Кс2=0,01 2; Ке=0,9; KL=1 0,0308 0,0308 0,0308 0,0308
Резисторы:
RClllkOm-t 5% 50V 16 Кв=1; KR=1; Kq=0,3 0,00095 0,000285 0,00456 0,000285 0,00456
Пайки: 192 0,00004 0,00768 0,00004 0,00768
X 0,15674 0,15674
ФО4 Микросхемы:
WSE128K16- 73G21A 4п 0У2 Kq— 1; Кс1=0,06; Кт=0,63; Kv=l; Кс2=0,03 2; Ке=0,9; KL=1 0,0666 0,1332 0,0666 0,1332
Конденсаторы:
X7R0,47mF ±20% 50V 3 Ке=0,8; Kq=0,3; Кст=1,7247 0,00079 0,000327 0,000981 0,000327 0,000981
TAJ С 475 М 035 R 6032 1 кЕ =0,8; Kq=O,3; Ksr=0,l,: Kcv=l,2 0,0071 0,0002044 0,0002044 0,0071 0,000204
Резисторы:
RC11 5,lkOm ±5% 50V 10 Ке=1; Kr=1; Kq=0,3 0,00063 0,000189 0,00189 0,000189 0,00189
RC11 lOOOm ±5% 50V 10 кб=1; Kr=1; Kq=0,3 0,00095 0,000285 0,00285 0,000285 0,00285
Пайки: 18 4 0.00004 0,00736 0,00004 0,00736
Е Канал 0,013765 0,013765
Последова- тельная часть 0,007855 0,007855
658
Продолжение табл. 7.7.3
Вид оборудования Наименование ЭРИ Количество Коэффициента XblO6, 1/ч Лр-106 1/ч N Л.р-106, 1/ч XxplO8, 1/ч NXxplO8, 1/ч
ФО5 Микросхемы:
WSE128K16- 73G21A 4п о/2 Kq=1; Kci=0,06; Kf=0,63; Kv=l; Кс2=0,032; Ке=0,9; Kl=1 0,0666 0,1332 0,0666 0,1332
IC LPLDEPM71 92SQI160-10 1 Kq=2; Kci=0,12; Кт-0,277; Kv=l; Кс2=0,053; КЕ=1; KL=1 0,17248 0,17248 0,17248 0,17248
Резисторы:
RC11 5,lkOm±5% 50V 10 КЕ=1; KR=1; Kq=0,3 0,00063 0,000189 0,00189 0,000189 0,00189
RC11 1000m ±5% 50V 8 Ке=1; Kr=1; Ко=0,3 0,00095 0,000285 0,00228 0,000285 0,00228
Конденсаторы:
X7R 0,47mF ±20% 50V 3 Ke =0,8; Kq=0,3; Kcv=l,7247 0,00079 0,000327 0,000981 0,000327 0,000981
Пайки: 208 0,00004 0,00832 0,00004 0,00832
£ Канал 0,1039 0,1039
Последова- тельная часть 0,007431 0,007431
ФО6 Микросхема:
IC LPLD EPM7192SQI 160-10 1+ 2/з k<?=2; Kd=0,12; Kt=0,277; Kv=l; Kc2=0,053; Ke=1; KL=1 0,17248 0,28747 0,17248 0,28747
Резисторы:
RC11 5,lkOm±5% 50V 10 Ke=1; KR=1; Kq=0,3 0,00063 0,000189 0,00189 0,000189 0,00189
659
Окончание табл. 7.7.3
Вид оборудования Наименование ЭРИ i . . 1 Количество Коэффициента lb-10й, 1/ч Ар-106 1/ч NA.pl 06, 1/ч XxplO8, 1/ч NXxplO’, 1/ч
Конденсаторы:
X7R 0,47inF ±20% 50V 3 Ke =0,8; Kq=0,3; Kcv=l,7247 0,00079 0,000327 0,000981 0,000327 0,000981
Пайки: 15 6 0,00004 0,00624 0,00004 0,00624
0,2954437 0,295444
ФО7 Микросхема:
SNJ54ACT16 245WD Kq=1; . Kci=0,0l; KT=0,71; Kv=l; Kc2=0,008; Ke=0,9; Kl=1 0,0356 0,0356 0,0356 0,0356
Резисторы:
RC11 ЮкОтп ±5% 50V 4 KE=1; Kr=1; K<>=0,3 0,00095 0,000285 0,00114 0,000285 0,00114
RC11 IkOm ±5% 50V 7 Ke=1; KR=1; Kq=0,3 0,00095 0,000285 0,001995 0,000285 0,001995
Пайки: 82 0,00004 0,00328 0,00004 0,00328
0,042015 0,042015
7.7.33 Методика нормирования показателей надёжности
для составляющих приборов БЦВК
В настоящей методике рассмотрен порядок распределения (нормирования)
количественного показателя надёжности по составляющим приборам
(подсистемам, блокам), исходя из заданной надёжности (вероятности безотказной
работы - Рзад) на БЦВК в целом..
При нормировании надёжности в основу положено соотношение
Рбцвк = flpi > (77.25)
i=l
где Рбцвк - вероятность безотказной работы БЦВК в целом; Р, - вероятность
безотказной работы i-ro прибора; п - количество приборов, включая количество
резервированных групп, состоящих из нерезервированных приборов.
При этом исходят из того, что приборы БЦВК в смысле надёжности
представляют собой основное соединение. Отказ одного из приборов или полный
660
отказ одной резервированной группы приводит к отказу БЦВК в целом. При этом
обязательным является условие: Рвцвк>Рзад,
где Рбцвк - вероятность безотказной работы БЦВК в целом;
Р3ад - заданная вероятность безотказной работы БЦВК.
7.7.3.4 Расчёт надёжности «условно-базового» прибора
Под надёжностью «условно-базового» прибора (Р^ (t)) понимается
надёжность одного прибора, входящих в БЦВК при условии, что надёжности
всех приборов в БЦВК равны между собой, т.е. выполняется условие
Р£= Рбцвк ^РМд- (7.7.26)
Тогда надёжность «условно-базового» прибора определяется формулой
Руб=^- (7.7.27)
В случае, если отдельные участки основного соединения приборов,
входящих в состав БЦВК, представляют собой группу нерезервированных
приборов, соединенных по схеме резервирования (например, нерезервированный
канал выполнен в виде отдельного прибора, два таких прибора работают по схеме
«дублирования», три таких прибора работают по схеме «2 из 3-х»), то
нормирование проводится на эту группу, которая рассматривается как один
«условно-базовый» прибор.
Вероятность отказа «условно-базового» прибора рассчитывают по формуле
qy6=l-Py6. (7.7.28)
7.7.3.5 Выбор «базового» прибора для нормирования надёжности
Нормирование надёжности по составляющим приборам, как правило,
проводится на ранних стадиях проектирования, когда практически отсутствует
информация о принятых схемно-конструкторских решениях, электрических,
тепловых, механических и других режимах работы приборов. На период
проведения нормирования, когда имеется лишь информация об условиях
применения, условиях будущей эксплуатации, о функциональных задачах,
которые должен решать каждый прибор, широко используется информация о
приборах-аналогах, разработанных в более ранние периоды.
Практически всегда удаётся среди приборов-аналогов найти прибор,
имеющий близкую функциональную задачу, условия применения, условия
эксплуатации, одинаковую или близкую элементную базу, а также близкое
значение показателя надёжности к Р^.
В этом случае выбранный прибор-аналог является «базовым» и по
надёжности приравнивается к «условно-базовому».
7.7.3.6 Выбор коэффициентов сложности
Коэффициент сложности «базового» прибора принимается равным
единице, т.е. Кб = 1.
661
По отношению к нему исходя из ожидаемой сложности определяют
коэффициенты сложности других приборов, входящих в БЦВК. При определении
коэффициентов сложности необходимо соблюдать условие: сумма
коэффициентов сложности нормируемых приборов должна быть равна
количеству приборов, входящих в БЦВК, т.е.
£К(=п. (7.7.29)
i=l
7.7.3.7 Нормирование надёжности на составляющие приборы
При нормировании требований по надёжности для приборов, входящих в
состав БЦВК, исходными данными являются:
- вероятность безотказной работы БЦВК в целом Рзад;
- вероятность отказа «условно-базового» прибора q^;
- коэффициенты сложности каждого из приборов Kj.
Требуемая надёжность i-ro прибора определяется формулой
P^l-q^Kp (7.7.30)
После вычисления требуемой надёжности каждого i-ro прибора
проверяется правильность проведенного нормирования надёжности по
составляющим приборам на основе:
P^=flpi; (7.7.31)
i=l
Рзад=1ч.> (7.7.32)
i=l
где qi=l-Pi; (7.7.33)
Рзац = 1 - Ечуб • Ki. (7.7.34)
i=l
В процессе нормирования может оказаться, что подобрать прибор-аналог в
качестве «базового» невозможно в силу различных причин:
- отсутствуют вообще приборы-аналоги;
- используется новая элементная база, обладающая более высокой
надёжностью, или на данном этапе разработки приборов надёжность
элементной базы неизвестна;
- в новых приборах используются другие методы обеспечения надёжности
(другие методы резервирования) и т. д.
В этом случае нормирование надёжности по приборам усложняется
возможностью выбора коэффициентов сложности Ki, так как отсутствует
«базовый» прибор, по отношению к которому выбирают коэффициенты
сложности. Коэффициенты сложности приборов выбирают по отношению к
«условно-базовому» прибору, надёжность которого определяется формулой
(7.7.27). Коэффициент сложности этого прибора принимается равным единице,
662
т.е. Куб = 1. К «условно-базовому» прибору приравнивают прибор из всего
состава приборов, на которые нормируется надёжность, имеющий среднюю
сложность по насыщенности элементами. По отношению к нему определяют
коэффициенты сложности остальных приборов. При этом должно выполняться
условие формулы (7.7.29).
В случае, если условие формулы (7.7.29) не выполняется, необходимо в
качестве «условно-базового» прибора принять другой прибор из состава
нормируемых и по отношению к нему определить коэффициент сложности других
приборов. Так поступают до тех пор, пока не будет выполняться условие формулы
(7.7.29).
Для каждого прибора Pi определяют в соответствии с формулой (7.7.30), а
проверяют по формулам (7.7.31) - (7.7.34).
Пример 1
Провести нормирование требований по надёжности на составляющие
приборы исходя из заданных требований по надёжности на устройство в целом:
Рзад = Ру стр = 0,98.
Количество приборов, входящих в состав устройства, - и = 10.
По формуле (7.7.27) находим надёжность «условно-базового» прибора
Руб = 0,998.
По формуле (7.727) определяем вероятность отказа «условно-базового»
прибора
q уб = Ру6 =1-0,998=0,002.
В соответствии с подразд. 7.7.3.6 определяем коэффициенты сложности
составляющих приборов:
IQ =1^=1; Кб =1,3;
Кг=0,8; К7 = 0,7;
К3 = 0,9; К8 = 0,75;
К4=1,2; К9= 1,15;
К5 = 1,1; К1о=1,1.
Проверяем выполнение условия:
Ki + К2+ Кз+ Кд+ К5+ К6 +К7+ К8+ К9+ К10 = п;
14-0,8+0,9+1,2-1-1,1+1,3+0,7+0,75+1,15+1,1 = 10, т.е. условие выполняется.
По формуле (7.7.34) определяем требуемую надёжность каждого прибора:
Р( = l-qy6 К1 =1-0,002 1 = 0,998;
Р2=1 -Цуб К2 = 1 -0,002• 0,8 = 0,9984;
Р3 = 1 - Яуб • К3 = 1 - 0,002 - 0,9 = 0,9982;
Р4 = 1 - q К4 = 1 - 0,002 • 1,2 = 0,9976;
663
Р5 = 1 - Яуб • К5 = 1 - 0,002 • 1,1 = 0,9978;
Р6 = 1 -• К6 = 1 -0,002 * 1,3 = 0,9974;
Р7 = l-qy6 К7 =1-0,002-0,7 = 0,9986;
Р8 = 1 - Чуб • К8 = 1 - 0,002 - 0,75 = 0,9985;
Р9 = 1 - qy6 • К9 = 1 - 0,002 -1,15 = 0,9977;
Рю = 1 - Чуб * К10 = 1 - 0,002 • 1,1 = 0,9978.
Правильность проведенного нормирования надёжности по составляющим
приборам проверяем по формуле
Рустр 1 “ ' К,.
i=i
Рустр 1 -(0,002+0,0016+0,0018+0,0024+0,0022+0,0026+0,14+
+ 0,0015+0,0023++0,0022) =1 - 0,02 = 0,98.
Значение Рустр равно Рзад, т.е. нормирование проведено правильно.
7.7.3.8 Нормирование надёжности на приборы, входящие в
резервированную группу
В случае, если отдельные участки основного соединения приборов
представляют собой группу приборов, соединённых по схеме резервирования, то
нормирование надёжности на эту группу проводится как на один «условно-
базовый» прибор.
Рассмотрим распределение надёжности внутри резервированной группы.
Резервирование с целой кратностью
Вероятность того, что произойдёт отказ резервированной группы из-за
отказов входящих в неё приборов, определяется формулой
q>6 = Пчпр =П0 - рпр) • (7.7.35)
i=0 i=0
При этом вероятность безотказной работы резервированной группы, т. е.
«условно -базового» прибора, определяется формулой
Руб=1-ПО-рпр)- (7.7.36)
i=0
Допуская, что все приборы, входящие в схему резервирования, имеют
одинаковую надёжность, определяем надёжность «условно-базового» прибора по
формуле
Py6=l-(l-Pnp)(m+,)- (7.7.37)
664
Таким образом, вероятность безотказной работы приборов, входящих в
схему резервирования, при кратности резервирования, равной целому числу,
определяется формулой
Рпр=1-(т+’У1-Руб , (7.7.38)
где т - кратность резервирования (целое число, при дублировании ш=1).
Резервирование с дробной кратностью
При резервировании с дробной кратностью для нормальной работы
резервированной группы, состоящей из N приборов, необходимо, чтобы
исправными оставались не менее п приборов. Кратность резервирования при
этом определяется формулой
m = (N-n)/n. (7.739)
Вероятность безотказной работы резервированной группы (Ргр) (а значит, и
«условно-базового» прибора Руб) при использовании резервирования с дробной
кратностью рассчитывают по формуле
N-n
Ргр = Руб = ECn • Р*-‘ • qj,р , (7.7.40)
i=0
N’
где с“=?^с"; (7-7-4,)
q.p-1-Р»,. (7.7-42)
Рассмотрим конкретный, применённый в аппаратуре БЦВК, случай
применения резервирования по типу «2 из 3-х», где кратность резервирования
ш = 1/2. На основании формулы (7.7.3) получаем формулу для расчёта Руб:
Руб = С? Р3, • (1 - Р„р )° + С* • Рп3р-‘ (1 - Рпр ) = Р„3р + ЗРп2р • (1 - Рпр ) = 7
= ЗР2р-2Р3р
или IP,,,3 - ЗРпр2 + Р^ = 0. (7.7.44)
Полученное неполное кубическое уравнение строгого математического
решения не имеет. Поэтому после преобразования уравнения (7.7.44), выражая
Рпр через (1- qnp), находим
2qnp3 -3qnp2 +(1-Руб) = 0, (7.7.45)
а
так как qnp «1, то qnp -> 0, тогда
Pnp = 1 - (1-Руб). (7.7.46)
Коэффициент а найден эмпирическим путём, и для данного вида
резервирования по типу «2 из 3-х» а ~ 0,31.
Полученное выражение (7.7.46) применяют при нормировании надёжности
для определения вероятности безотказной работы прибора, входящего в
665
резервированную группу по типу «2 из 3-х» при известном значении вероятности
безотказной работы резервированной группы («условно-базового прибора»).
Процент ошибок при заданных значениях вероятности безотказной работы
- Р3ад «условно-базового» прибора, находящихся в интервале от 0,89 до
0,99999999, составляет менее 10%; в интервале от 0,5 до 0,89 - менее 20%.
Пример 2
Определить вероятность безотказной работы приборов Рпр, входящих в
резервированную группу, при заданной вероятности безотказной работы
резервированной группы Руб, равной 0,9998.
Рассмотрим случаи:
1. Резервирование с целой кратностью (дублирование, троирование).
2. Резервирование с дробной кратностью («2 из 3-х»).
1. Для определения вероятности безотказной работы приборов, входящих в
резервированную группу при кратности резервирования, равной целому числу,
формулой
РПр=1-т+У1-руб ’
Pye =Ррез.П). =0,9998;
- при дублировании т = 1
Рпр = 1 - 7Г-0,9998 = 1 - 0,01414= 0,98586;
- при троировании т=2
Рпр = 1 - V1-0,9998 = 1-0,05848 = 0,94152;
2. Для определения вероятности безотказной работы приборов, входящих в
резервированную группу по типу резервирования «2 из 3-х», воспользуемся
формулой
Рпр ~ — “ Руб )
Так как а ~ 0,31, а Руб= 0,9998 получаем
Рпр .= 1 - Л/0,зГ(К 0,9998) = 1 - 0,007874=0,99213.
Пример 3
Определить вероятность безотказной работы приборов, входящих в состав
БЦВК с БЦВМ МБ386. Вероятность безотказной работы БЦВК в целом - 0,97. В
состав БЦВК входят приборы: БКРП, БУК (резервирование по типу «2 из 3-х» на
уровне канала), МК (дублирование на уровне канала), БЦВМ, УВВ ПОУО и
БУ ЭМ (холодный резерв на уровне канала, состоящего из БЦВК, УВВ ПОУО и
БУЭМ), БЦВМ, УВВ ПДП (холодный резерв на уровне канала, состоящего из
БЦВМ и УВВ ПДП). Аналогов приборы не имеют.
Для оценки вероятности безотказной работы условно-базового прибора
используем формулу (7.7.27) для приборов и резервированных групп (в данном
случае пяти).
666
Руб =57^T = Vo^7 =0,994.
Принимаем вероятность безотказной работы прибора БКРП, равной
вероятности безотказной работы условно-базового прибора Рбкрп = Руб = 0,994.
Надёжность канала БУК определяем по формуле резервирования по типу
«2 из 3-х»
Ркан БУК = 1 - Vad-Руб) = 1 - 70У14Г-0,994) = 0,9569;
РБУК = 0,95693 + 3 • 0,95692 • (1 - 0,9569) =
= 0,876142767 + 3 • 0,91565761 • 0,0431 =
= 0,876192767 + 0,118394529 = 0,994587296
Надёжность канала МК находим по формуле для резервирования по типу
«дублирования»
Ркан мк = 1 - = 1 - #^994 = 0,9225;
Рмк = 1 - (1 - Ркан мк )2 = 1 ~ (1 - 0.9225)2 = 1 - 0,00600625=0,99399275.
Вероятность безотказной работы канала, состоящего из БЦВМ, УВВ ПОУО
и БУЭМ, определяем по формуле для резервирования по типу «дублирования»
Ркан = 1 - =1 - л/Ь^994 = 0,9225.
Учитывая, что для подсистемы ПОУО
Ркан = Рбцвм • Рувв поуо * Рбуэм = 0,9225
и для подсистемы ПДП
Ркан = Рбцвм * Рувв пдп - 0,9225,
а количество составляющих в канале различно (для ПОУО - три, для ПДП - два),
и при этом в состав обеих подсистем входят приборы БЦВМ и УВВ (УВВ ПОУО
сложнее, чем УВВ ПДП по количеству элементов), то перераспределяем значения
Ркан С учётом количества составляющих в канале:
- для канала с тремя составляющими уменьшаем значение Р^ ~ на 30%
(Ркан = 1 — ((1 ~ 0,9225) • 1,3) = 0,89925) и получаем новое значение
Ркан1 = 0,89925;
- для канала с двумя составляющими увеличиваем значение Ркан - на 30%
(РКаи = 1 - ((1 - 0,9225) • 0,7) = 0,94575) и получаем новое значение
Ркан2 = 0,94575.
Проводим нормирование по составляющим подсистемы ПОУО:
Руб = Vp^T = ^0,89925 = 0,9652.
Принимая коэффициент Ki = 1 для прибора БУЭМ и учитывая, что для УВВ
ПОУО Kj = 1,5, а для БЦВМ Kj = 0,5, получим вероятность безотказной работы
составляющих
Руб - Рбуэм - 0,9652;
667
Рбцвм =1-Ki Чуб = 1-0,5 0,0348 = 1-0,0174 = 0,9826;
Рувв поуо = 1 ~ - q ye = 1 -1,5 • 0,0348 = 1 - 0,0522 = 0,9478.
Определяем вероятность безотказной работы канала ПОУО и ПОУО в целом:
Ркан поуо = Рбцвм ’ Руввпоуо ' Рбуэм =
= 0,9826 • 0,9478 • 0,9652 = 0,898898752;
Рпоуо = Ркан ПОУО 0 + (“Ь ПОуо)) - 0,898898752 .(1 + 0,1056584874) =
= 994707762.
Проводим нормирование по составляющим подсистемы ПДП:
так как РБЦВМ = 0,98275, то
Руввпдп = РКан2 /РБцвм = 0,94575/0,9826 = 0,9625
Определяем вероятность безотказной работы канала ПДП и ПДП в целом:
Ркан пдп = Рбцвм * Рувв пдп = 0,9826 • 0,9625 = 0,9457525;
Рпдп = Ркан пдп (1 + (“1пРкан пдо )) = 0,9457525 • (1 + 0,0557525) =
= 0,998501252.
Проводим проверку правильности нормирования требований по
надёжности на составляющие
Рбцвк ~ Рбкрп ’ Рбук ' Рмк ’ Рпоуо * Рпдп =
= 0,994 0,994587296 • 0,99399375 • 0,994707762 • 0,99850125 2 =
= 0,97601629 » 0,976.
Полученное в результате нормирования значение вероятности безотказной
работы аппаратуры БЦВК в целом Рбцвк > Рзад (0,976 > 0,97). Нормирование
проведено правильно.
7.8 Обеспечение надёжности БЦВК в процессе изготовления и
эксплуатации
7.8.1 Программа обеспечения надёжности
7.8.1 Л Общие требования
Программа обеспечения надёжности (ПОН) - документ, устанавливающий
комплекс взаимосвязанных требований и мероприятий, направленных на
выполнение заданных в техническом задании на разработку аппаратуры требований
по надёжности на соответствующей стадии жизненного цикла аппаратуры.
ПОН разрабатывают в виде отдельных документов:
- ПОНр - на стадии разработки;
- ПОНп - на стадии производства;
- ПОНэ - на стадии эксплуатации.
В каждой ПОН должны быть установлены:
668
- перечень конкретных мероприятий по обеспечению надёжности
аппаратуры с указанием этапов видов работ соответствующей стадии
жизненного цикла;
- ответственный исполнитель, исполнители и сроки выполнения каждого
мероприятия;
- нормативно-технические и методические документы, которые следует
использовать при выполнении указанных мероприятий;
контрольные этапы, после завершения которых проводят оценку
достигнутого уровня надёжности аппаратуры и рассматривают ход
реализации ПОН;
- порядок контроля реализации и корректировки ПОН.
ПОНр разрабатывает головной исполнитель ОКР, ПОНп - головной
изготовитель серийной аппаратуры. ПОНэ разрабатывают для образца
аппаратуры, если по результатам выполнения ОКР, освоения производства или
опытной эксплуатации появилась необходимость проведения дополнительных
мероприятий по обеспечению (поддержанию) надёжности на стадии
эксплуатации. Основанием для разработки ПОНэ должно быть совместное
решение разработчика и изготовителя аппаратуры, в котором определяют
предприятие - разработчик ПОНэ.
Основание для разработки ПОНр - техническое задание (ТЗ) на
выполнение опытно-конструкторской работы (ОКР). ПОНр разрабатывается в
начале выполнения ОКР и охватывает все этапы ОКР, предусмотренные в ТЗ. В
качестве этапов разработки могут быть следующие:
- эскизное проектирование (ЭП);
- техническое проектирование (ТП);
- разработка рабочей документации (РД) опытного образца аппаратуры;
- изготовление опытного образца и проведение испытаний.
Перечень мероприятий по обеспечению надёжности, выполняемых в
процессе разработки аппаратуры, должен предусматривать следующие основные
работы:
- анализ требований по надёжности, установленных в ТЗ, с учётом
условий и специфики эксплуатации аппаратуры;
- нормирование надёжности по составляющим приборам;
- определение перечня нормативных документов по надёжности (НД) и
методик, которыми надлежит руководствоваться при выполнении
мероприятий по обеспечению надёжности;
- выбор и обоснование элементной базы (ЭРИ) и материалов
применительно к выбранному варианту построения аппаратуры;
- организация входного контроля ЭРИ и материалов;
- планирование экспериментальной отработки аппаратуры;
- расчет надёжности приборов и аппаратуры в целом;
- сбор и анализ статистики отказов аппаратуры в процессе
экспериментальной отработки и принятие мер по устранению причин их
возникновения;
669
- . определение оптимального количества запасных частей и инструментов
(ЗИП);
- выбор и обоснование оптимальных способов технического
обслуживания (ТО) с учетом принятой системы эксплуатации;
- изготовление и экспериментальная отработка ( испытания ) опытного
образца аппаратуры;
- контроль реализации ПОНр.
Перечень мероприятий по обеспечению надёжности аппаратуры на этапе
серийного производства должен содержать следующие основные работы:
- подготовка производства к выпуску аппаратуры, удовлетворяющей
требованиям по надёжности, разработка технологической документации
и отработка конструкторской документации на технологичность;
- разработка НД и методических документов для реализации ПОН на
этапе производства;
- проведение квалификационных испытаний установочной серии;
- включение в систему контроля техпроцессов операций, позволяющих
выявить и установить отклонения от КД и технической документации
(ТД);
- сбор статистики отказов ЭРИ и материалов по результатам входного
контроля, её анализ и разработка мероприятий по устранению причин
отказов;
- разработка (при необходимости) испытательного оборудования и
средств контроля;
- анализ причин неисправностей аппаратуры в процессе изготовления и
изменение КД и ТД;
- организация обучения персонала, участвующего в производстве
аппаратуры;
- контроль реализации ПОНп на стадии серийного производства.
Перечень мероприятий по обеспечению надёжности аппаратуры при её
эксплуатации должен содержать следующие основные работы:
- организация учёта данных о надёжности продукции при проведении
предусмотренных эксплуатационной документацией (ЭД) работ в
процессе ввода в эксплуатацию;
- организация сбора информации об отказах аппаратуры в процессе её
эксплуатации и предоставление её разработчику;
- авторский надзор;
- оценка надёжности аппаратуры на этапе эксплуатации;
- контроль реализации ПОНэ.
7.8.1.2 Требования к структуре, оформлению и содержанию ПОН
ПОН оформляют в соответствии с требованиями к текстовым документам,
установленным в ГОСТ 2.105, на листах без рамки, основной надписи и
дополнительных граф к ней. ПОН должна иметь титульный лист, оформленный в
соответствии с ГОСТ 15.206.
670
ПОН должна включать следующие разделы:
1. Общие положения.
2. Перечень мероприятий по обеспечению надёжности со следующими
графами:
- виды работ, этапы видов работ;
- мероприятия по обеспечению надёжности;
- срок исполнения;
- ответственный исполнитель, исполнители;
- нормативные и организационно-методические документы;
- отчётные документы.
3. Порядок контроля реализации и корректировки программы обеспечения
надёжности.
В разделе «Общие положения» приводят:
- основание для разработки ПОН;
- перечень нормативных и организационно-методических документов,
используемых при выполнении мероприятий ПОН, с указанием
обозначения и полного наименования. При значительном количестве
требуемых документов перечень может быть оформлен в виде
приложения в составе ПОН (Приложение к подразд. 7.8.1);
- перечень ПОН продукции организаций-субподрядчиков с указанием
предприятий, ответственных за разработку и реализацию.
Раздел «Перечень мероприятий по обеспечению надёжности» оформляют
по форме, приведенной в табл. 7.8.1.
Таблица 7.8.1 - Перечень мероприятий по обеспечению надёжности
Виды работ, этапы видов работ Мероприятия по обеспечению надежности Срок исполнения Ответственный исполнитель, исполнители Нормативно- технические и организационно- методические документы (Приложение) Отчетные документы
2.1 Проекти- рование в разработка рабочей документации 2.1.1 Согласование ТЗ на разработку модуля БЦВМ МБ386 с подразделениями Согласно договору ПР, ПН 24 ТЗ
2.1.2 Разработка ТУ на модуль БЦВМ и согласование с подразделениями Согласно договору ПР 1,6,7, 10, 11 ТУ
2.1.3 Разработка перечня ЭРИ, разрешённых к применению в заказе к 2.^ 3 о. ПК, ПР 1 Перечень ЭРИ
671
Продолжение табл. 7.8.1
Виды работ, этапы видов работ Мероприятия по обеспечению надежности Срок исполнения Ответственный! исполнитель, исполнители Нормативно- технические и организационно- мегодические документы (Приложение) Отчетные документы
2.1.4 Выбор коэффициентов электрических нагрузок ЭРИ при разработке схемно- конструкторской документации При разработке КД ПР,ПК 1,20 Карты рабочих режимов (КРР)
2.1.5 Применение материалов в соответствии с требованиями на заказ и перечнем материалов, разрешенных к применению При разработке кд ПК 1,5,22 кд
2.1.6 Разработка СхЭ на аппаратуру Согласно договору ПР 1,11,15,16 СхЭ
2.1.7 Разработка КД на аппаратуру Согласно договору ПК I, 10, 13, 16, 17 КД
2.1.8 Разработка методических материалов по расчету надежности аппаратуры На этапе разработки рд пн 1,4 Методи- ческие материалы
2.1.9 Выпуск перечня L- харакгеристик примененных ЭРИ На этапе разработки >д пн 21 Перечень
2.2 Изготов- ление и испытания аппаратуры 2.2.1 Выпуск программы и проведение ЛОИа 1 Согласно договору ПР 6,8 Программа ЛОИа, отчеты
2.2.2 Выпуск программ-методик проведения СОИа Согласно договору ПР, ПК, пи 6,8 Программа СОИа
2.2.3 Проведение СОИа В сроки сг ПИ, ПР, ПК 6,8 Отчет
2.2.4 Сбор статистики по отказам аппаратуры при изготовлении и проведении СОИк В течение месяца по окончании пи 11, 19 Материалы по статистике
672
Продолжение табл 7.8.1
Виды работ, этапы видов работ Мероприятия по обеспечению надежности Срок исполнения Ответственный исполнитель, исполнители 1 Нормативно- технические и организационно- методические документы (Приложение) Отчетные документы
2.2.5 Обеспечение конролепригодности аппаратуры и выбор эффективности средств ее контроля От начала разработк и КД до начала изготов- ления поставоч- ных комплек- тов ПР 1 В составе кд
2.2.6 Расчет проектной надежности модуля БЦВМ На этапе изготов- ления ПН 1,4 Отчет
2.2.7 Теоретическая оценка стойкости аппаратуры к КИКП по ИД (перечни материалов, ЭРИ, электронных компонентов) Согласно договору ПИ, ПР 1 Отчет
2.2.8 Оценка соответствия аппаратуры требованиям ТУ по ресурсу Согласно договору ПР 1 Отчет по СОИа
2.2.9 Уточнение условий, режимов функционирования и нагрузок, действующих на аппаратуру, ЭРИ. Доработка аппаратуры при несоответствии режимов, условий функционирования и нагрузок требованиям, оговоренным в ТЗ, ТУ (при необходимости) В процессе испытаний СОИа ПР, ПК 12, 18 Откоррек- тирован- ная КД
2.2.10 Определение запасов работоспособности в объёме программ испытаний: -при ЛОИа -при СОИа В процессе испыта- ний ЛОИа СОИа ПР ПР, ПК 20 20 Отчет по ЛОИа СОИа,
2.2.11 Проверка правильности выбора электрических режимов ЭРИ в соответствии с коэффици- ентами электрических нагрузок По окончании СОИа ПР 20,2 Отчет по СОИа
673
Окончание табл 7 8.1
Виды работ, этапы видов работ Мероприятия по обеспечению надежности Срок исполнения Ответственный исполнитель, исполнители Нормативно- гехничсские и организационно- методические документы (Приложение) Отчетные документы
2.2.12 Проведение работ по при- своению КД литерности в соот- ветствии с действующей ТД В сроки приказа Комиссия 23 Приказ по предпри- ятию
2.2.13 Выпуск отчета о реализации мероприятий ПОНр Согласно разделу 3 ПН Отчет
Примечание: ПР - подразделение - разработчик приборов;
ПН - подразделение надёжности;
ПК - подразделение конструкторское;
ПИ - подразделение испытательное.
В графе «Виды работ, этапы видов» указывают этапы работ по созданию
аппаратуры от ее разработки до эксплуатации включительно.
В графе «Мероприятия по обеспечению надёжности» указывают
конкретные мероприятия с учётом специфики продукции. Рекомендуемые
мероприятия по обеспечению надёжности указаны в табл. 7.8.1.
В графе «Срок исполнения» указывают календарный срок (квартал, год)
или срок по отношению к определённому этапу работы: эскизный проект,
технический проект, рабочая документация и т.д., к которому следует завершить
выполнение соответствующих мероприятий.
В графе «Ответственный исполнитель, исполнители» указывают
подразделение, участвующее в выполнении соответствующего мероприятия.
Первым указывают подразделение (отдел, служба), ответственное за выполнение
данного мероприятия и разработку отчётного документа. Далее перечисляют
подразделения, которые привлекают к этим работам.
В графе «Нормативные и организационно-методические документы»
указывают порядковый номер документа по перечню, приведенному в разделе
«Общие положения» или в отдельном приложении.
В графе «Отчётные документы» указывают наименование (вид) отчётного
документа, отражающего результаты выполнения конкретного мероприятия. В
состав отчётных документов могут входить:
- разделы пояснительных записок эскизного и технического проектов;
- расчёт надёжности аппаратуры;
- документы планирования экспериментальной отработки (комплексная
программа экспериментальной отработки - КПЭО, и др.);
- программы и методики различных видов испытаний;
- методические материалы по расчёту надёжности и ЗИП, ведомость ЗИП;
674
- отчет о результатах анализа причин выявленных неисправностей;
- отчёт о реализации ПОН на контрольных этапах;
- статистика отказов;
- другие документы.
В качестве примера приводим ПОНр для аппаратуры БЦВМ МБ386.
7.8.2 Квалификационные испытания
Испытания изготовленной аппаратуры проводят в соответствии с
комплексной программой экспериментальной отработки аппаратуры (КПЭО),
которая включает в себя все виды автономной и комплексной отработок. Целью и
задачей экспериментальной отработки является проверка функционирования
аппаратуры в условиях, близких к реальным, с имитацией воздействующих
факторов согласно требованиям ТЗ. Испытания проводят по соответствующим
программам и методикам испытаний.
Более подробно технология экспериментальной отработки СУ объектов
ракетно-космической техники изложена в третьем томе данного пособия.
Библиографический список к разделу 7
1. ГОСТ 19999542-74. Машины вычислительные. Помехи. Термины и
определения.
2. Романов В., Обеспечение устойчивости электронных компонентов к
радиоактивному излучению [Текст] / В. Романов И Электронные компоненты
и системы. - К.: VD MAIS, 1996.
3. Журавлёв Ю.П.. Надёжность и контроль ЭВМ [Текст] / Ю.П. Журавлев. -
М.: Сов. радио, 1978.
4. Прогнозирование надёжности электронной аппаратуры. MIL-HDBK 217Е.
Справочник. США, 1986. - Т. 1, 2. - 517 с.
5. Надёжность электрорадиоизделий. Справочник. - СПб.: РНИИ «Электрон-
стандарт», 2004. - 472 с.
675
Приложение к подразд. 7.8.1. Методическое обеспечение мероприятий ПОН
1. Техническое задание на составную часть ОКР тема "Микроспутник".
Разработка БЦВМ. ТЗ №530.454.05-96.
2. ГОСТ В 21256-89. Порядок проведения работ по надёжности.
3. ГОСТ В 15.206-84. Программы обеспечения надёжности. Общие
требования.
4. Частная методика оценки надежности аппаратуры системы управления.
5. СТП ЦР0.012.043-87. Материалы металлические и неметаллические.
Марки, разрешенные к применению (ограничительный перечень).
6. ГОСТ В 22590-86. Виды испытаний и требования к программам испытаний.
7. ГОСТ В 21697-83. Основные положения по обеспечению и контролю
надёжности.
8. ГОСТ В 24412-80. Система информации о техническом состоянии и
надёжности.
9. ГОСТ В 21203-81. Система информации о техническом состоянии и
надёжности.
10. ГОСТ 2.102-68 ЕСКД Виды и комплектность конструкторских документов.
11. ГОСТ 2.701-84. Схемы. Виды и типы. Общие требования к выполнению.
12. ГОСТ 2.503-90 ЕСКД. Правила внесения изменений.
13. ГОСТ 2.902-68. Порядок проверки, согласования и утверждения
документации.
14. ГОСТ В 15:201 -83. Порядок выполнения ОКР по созданию изделий и их
составных частей.
15. ГОСТ 24397-87, ред.4-89. Входной контроль материалов, полуфабрикатов,
комплектующих изделий.
16. ОСТ 92-1615-74, ГОСТВ-19005-81. Полупроводниковые приборы и
микросхемы. Меры защиты от статического электричества.
17. ОСТ 92-1.12-79. Документы конструкторские текстовые. Правила
выполнения.
18. СТП ЦРО.523-53-98. Документация конструкторская и нормативно-
техническая. Правила внесения изменений.
19. СТП ЦР0.091.233-82. Система информации о техническом состоянии и
надежности аппаратуры, выпускаемой предприятием.
20. РУК РП-81. Руководство по оценке правильности применения
электроизделий и средств измерений в аппаратуре.
21. Прогнозирование надёжности электронной аппаратуры. MIL-HDBK 217Е.
Справочник.
22. СТПЦР0.005.036. Порядок согласования применения материалов и изделий.
23. СТП 523-27-98. Документация конструкторская. Порядок присвоения
литер "0","0Г,"А-
24. ГОСТ В 15.201-83. Порядок выполнения ОКР по созданию изделий и их
составных частей.
676
8 ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ
КА И МОДУЛЕЙ ОРБИТАЛЬНЫХ СТАНЦИЙ
Рассмотрев вопросы проектирования систем управления космических ап-
паратов и модулей орбитальных станций, необходимо отметить, что основным
требованием к СУ является обеспечение выполнения объектом управления целе-
вых задач в течение длительного срока активного существования на орбите (5 -
15 лет) без ухудшения эксплуатационных характеристик. Это требование в пол-
ной мере относится и к СУ модулей орбитальных станций, так как от СУ модулей
требуется не только в достаточно короткий срок доставить груз на станцию, но и
управлять комплексом после стыковки длительное время, используя ресурсы мо-
дуля.
Выполнить требование обеспечения длительного срока активного сущест-
вования можно с помощью таких средств:
- надежной аппаратурой СУ;
- специальным программно-математическим обеспечением бортового
компьютера;
- полнотой и достаточностью наземных экспериментальных испытаний
как компонентов СУ, так и системы в целом;
- сопровождением орбитального полета наземными средствами управле-
ния.
Вопросы надежности аппаратуры включают в себя:
- выбор соответствующей электронно радиотехнической элементной ба-
зы;
- резервируемость компонентов СУ (резервный бортовой компьютер, ре-
зервные командные приборы и исполнительные органы), что обеспечи-
вает выполнение целевых задач в случае любого отказа одного из ком-
понентов.
Разрабатываемое программно-математическое обеспечение не только ре-
шает задачи управления движением КА или модуля, но и выполняет функции:
- автономного контроля динамического состояния объекта управления;
- диагностики функционирования и идентификации отказов приборного
состава и исполнительных органов;
- автоматического парирования неисправностей путем реконфигурации
компонентов СУ (переход на резервный комплект, передача функций
другим компонентам).
Наземные испытания системы управления подтверждают функционирова-
ние СУ в течение требуемого срока и включают в себя:
- автономные испытания элементов системы управления;
- математическое моделирование алгоритмов управления;
- отработку программного обеспечения на исследовательском стенде;
- испытания программного обеспечения бортового компьютера и аппара-
туры СУ на комплексном стенде;
- испытания в составе КА или модуля.
677
Сопровождение полетов КА наземными средствами является необходимым
элементом управления, при котором решаются задачи:
- обработки и оперативного анализа телеметрической информации, кон-
троля функционирования СУ и принятия решения;
- планирования программы полета и формирования программной инфор-
мации для передачи в систему управления КА в виде полетных заданий;
- возможности коррекции программного обеспечения средствами массива
изменения программ;
- управления КА по разовым командам.
Особенность систем управления КА, заключающаяся в обеспечении дли-
тельного срока активного существования аппарата, не только порождает жесткие
требования к живучести системы и дополнительные сложности в ее проектирова-
нии, но и дает возможность совершенствовать ее характеристики в полете.
В процессе полета КА могут выполняться режимы СУ, в результате работы
которых повышается точность системы управления. Например, можно опреде-
лять дрейф и проводить калибровку масштабных коэффициентов измерителей
угловой скорости, а затем учесть полученные оценки при алгоритмической обра-
ботке измерительной информации, что особенно важно для СУ, построенных на
основе принципов инерциальной ориентации. Можно выполнять юстировочные
работы, в результате которых с высокой точностью привязать угловое положение
осей систем координат приборов СУ друг с другом и с приборной системой ко-
ординат полезной нагрузки (оптической аппаратуры, радиоэлектронных сканеров
и т.п.), что важно для спутников дистанционного зондирования Земли.
Для оптимизации законов управления как по точности, так и по расходу ре-
сурсов необходимо достаточно хорошо знать параметры динамической схемы
объекта управления (моменты инерции, частоты и коэффициенты демпфирования
упругих элементов). На этапе проектирования СУ численные значения этих па-
раметров известны весьма грубо, разброс может достигать 20...40%. Задейство-
вание специального режима тестирования динамической схемы КА на орбите по-
зволяет путем решения задачи идентификации указанных параметров существен-
но сузить диапазон их численных значений и тем самым обеспечить более каче-
ственное управление со значительно меньшими энергозатратами.
При проектировании систем управления КА обязательно необходимо учи-
тывать такие возможности и разрабатывать не только режимы выполнения целе-
вой задачи КА, но и специальные режимы, позволяющие решать поставленные
задачи с высоким качеством.
Отметим еще одну особенность, характерную именно для полета КА и ор-
битальных модулей, которую необходимо учитывать при проектировании СУ.
Если при полете PH о повторе какой-либо «неудавшейся» динамической
операции не может быть и речи, то при полете КА такая возможность, как прави-
ло, имеется.
Например, при летных испытаниях принципиально новой СУ транспортно-
го корабля снабжения (ТКС) проекта «Алмаз» «Космос-929» в режиме построе-
ния орбитальной ориентации во время выхода ТКС из тени Земли из-за засветки
678
инфракрасного построителя местной вертикали (ПМВ) Солнцем произошла по-
теря построенной ориентации, и автономная система контроля прервала продол-
жение данного режима путем выключения СУ. После выяснения причины не-
штатной ситуации группой анализа была выдана рекомендация по изменению ал-
горитмического способа парирования СУ засветок ПМВ Солнцем. Другой способ
парирования был предусмотрен в программном обеспечении БЦВМ СУ, переход
на него осуществлялся изменением состояния признака полетного задания. После
повторного задействования режима построения орбитальной ориентации этот
способ хорошо показал себя и в дальнейшем обеспечивал высокую помехозащи-
щенность СУ в каналах крена и тангажа при засветках ПМВ Солнцем.
Ситуация, при которой целевая задача режима была выполнена при по-
вторном его применении, произошла с транспортным модулем «Квант-2» орби-
тальной станции «Мир». В процессе сближения модуля с орбитальной станцией
возникло опасное угловое рассогласование между кооперируемыми объектами,
операция сближения была прервана, СУ выключилась. По результатам анализа
имеющейся информации оказалось, что модуль перед пуском был перегружён, й
часть двигателей причаливания и стыковки практически перестала обеспечивать
модулю управляемость, вызвав повышенное угловое рассогласование. После
расширения допустимого значения опасного углового рассогласования (параметр
полетного задания) режим сближения и причаливания был повторен, и стыковка
состоялась.
Конечно, повторное применение режимов приводит к дополнительному
расходованию ресурса СУ, но главное - выполнить целевую задачу, и исключать
такие ситуации при проектировании нельзя. Необходимо предусматривать воз-
можность реконфигурировать программно-алгоритмическое обеспечение, иметь
дополнительные запасы топлива, как в приведенном выше примере запас топлива
для второй стыковки позволил успешно завершить миссию транспортного моду-
ля.
Можно привести еще ряд подобных примеров из опыта эксплуатации КА,
но это уже отдельная тема для другой книги.
Описанные в данной книге методы прошли многолетнюю отработку в НПП
Хартрон-Аркос и лежат в основе технологии проектирования СУ. Их эффектив-
ность подтверждена результатами испытаний не одного десятка КА,- выведенных
на орбиту в течение более 50 лет работы предприятия, и подтверждается на объ-
ектах, эксплуатируемых в настоящее время.
679
ПОСЛЕСЛОВИЕ
Закрывая последнюю страницу этой книга, читатель, по всей вероятности,
должен ощутить масштабность проблемы, которая возникает при проектировании
систем управления КА и модулей орбитальных станций. Как следует из
представленных материалов, четко просматривается длинная и тернистая дорога
инженера-исследователя от момента получения технического задания и исходных
данных на проектирование и разработку СУ до ее производства для
экспериментальной отработки в Головной организации в составе объекта
управления и последующих предполетных испытаний. Многообразие задач,
которые приходится решать на всех этапах создания СУ, подчеркивает, на наш
взгляд, направления и необходимость высокого уровня подготовки специалистов
по данной тематике.
Особое внимание при обучении студентов и аспирантов по данной теме
необходимо уделить ключевым моментам проектирования КА и модулей
орбитальных станций: используемым органам управления, командно-
измерительным приборам, методам анализа динамических схем объектов и
синтезу законов управления ими, вопросам стыковки на орбите, особенностям
спуска возвращаемых аппаратов, обеспечения отказоустойчивости систем при
длительных космических полетах. При этом учебные программы
соответствующих дисциплин должны предусматривать изложение на лекционных
курсах, закрепление на практических и лабораторных занятиях физических
принципов функционирования командно-измерительных приборов и
исполнительных органов, особенностей динамики и кинематики полета КА,
методов математического моделирования, технологии создания программно-
математического обеспечения бортовых компьютеров и разработки надежной
аппаратуры автоматических систем управления космических аппаратов.
680
Навчальне видан ня
За загальною редакшею
Алексеева lOpia Сергтйовича, Златкша Юрш Михайловича,
Кривцова Володимира Станиславовича, Кулака Анатолия Степановича,
Чумаченка Валентина Твановича
ПРОЕКТУВАННЯ I ЭКСПЕРИМЕНТАЛЬНЕ В1ДПРАЦЮВАННЯ
СИСТЕМ УПРАВЛШНЯ OE’CKTIB PAKETHO-KOCMI4HOI ТЕХШКИ
Том 2
ПРОЕКТУВАННЯ СИСТЕМ УПРАВЛШНЯ КОСМ1ЧНИХ АПАРАТ1В
IМОДУЛ1В ОРЫТАЛЬНИХ СТАНЦ1Й
(Росшською мовою)
Редактор Т.Г. Кардаш
Комп’ютерний наб1р: М.В. Ковальова, О.А. Мартинюк, О.Д. Панайотова
Комп’ютерний дизайн i верстка: О.Д. Кривоносова, ТЕ. Минина,
С.В. Амелш
Формат 60x84 1/8. Патр офс. №2. Офс. друк
Ум. друк. арк. 37,7. Обл.-вид. арк. 42,5. Наклад 500 пр.
Замовлення 66. Цша вшьна
Нацюнальний аерокосм!чний ушверситет iM. М.€. Жуковського
«Харк1вський ав!ац!йний i н с т и т у т»
61070, Харк1в-70у вул. Чкалова, 17
http://www.khai.edu
Вщдруковано ФОП Лисенко 1.Б.
61070, Харкш -- 70, вул. Чкалова 17, моторний корпус, к. 147
Свщоцтво про внесения суб’екта видавничо! справи до державного реестру видавц!в,
вигот!вник1в i розповсюджувач!в видавничоУ продукци ДК №2607 вщ 11.09.06 р.