/


















































































































































































































Текст
Б.М.Панкратов
Спускаемые
АППАРАТЫ
МОСКВА
« МАШИНОСТРОЕНИЕ »
1984
ББК 39.62
П16
УДК 629.78
Рецензент акад. И. Ф. ОБРАЗЦОВ
Панкратов Б. М.
П16 Спускаемые аппараты. — М.: Машиностроение,
1984.— 232 с., ил.
В пер.: 2 р. 70 к.
В книге изложены современные представления о методах проекти-
рования различных типов космических аппаратов для посадки на пла-
неты Солнечной системы и возвращения на Землю с орбит и межпла-
нетных траекторий. Проанализированы аэродинамические схемы, при-
ведены методы определения основных проектных параметров аппара-
тов баллистического, планирующего и скользящего спусков при входе
их в атмосферу с первой и второй космическими скоростями.
Рассмотрены вопросы тепловой защиты спускаемых аппаратов и
дан расчет на прочность топливных, приборных, двигательных отсе-
ков, конструкций аппаратов и их посадочных систем.
Для научных работников, занимающихся проектированием косми-
ческих аппаратов.
3607000000-317 ББК 39.62
П ---------------317-84 Свод. пл. подписных изд. 1984 г.
038(01)-84 6Т6
©Издательство «Машиностроение», 1984 г.
ПРЕДИСЛОВИЕ
Интенсивное развитие космической техники привело к дальней-
шему освоению космического пространства. В связи с этим полу-
чили бурное развитие новые разделы науки и техники, в частности
связанные с сзоданием и разработкой различных типов спускаемых
аппаратов для возвращения на Землю и посадки на другие плане-
ты Солнечной системы.
Спускаемые аппараты (СА) образуют особый класс космичес-
ких аппаратов, основное назначение которых — доставка на плане-
ты научно-исследовательского оборудования и экипажей.
Вход в атмосферу и посадка на планеты или возвращение на
Землю из космоса — одни из наиболее сложных и важных этапов
космического полета. Это, в первую очередь, связано с тем, что
кроме «обычных» факторов космического полета (вакуум, невесо-
мость, радиационные воздействия, метеорная опасность и т. д.)
спускаемые аппараты испытывают экстремальные воздействия,
связанные с высокими значениями тепловых потоков, перегрузок
и вибраций, действующих на СА при входе в атмосферы Земли и
планет с большими скоростями (первая, вторая космические ско-
рости и выше). В связи с этим предъявляются достаточно жесткие
требования к обеспечению ^максимальной надежности всех систем
СА и безопасности экипажа прй соблюдении необходимых ком-
фортных условий (для пилотируемых Тюлетов), а также к миними-
зации массы аппарата по выбранным критериям эффективности.
В общей постановке задачу проектирования СА можно свести
к задаче выбора облика спускаемого аппарата и функции его уп-
равления. При этом должны удовлетворяться заданный критерий
эффективности и уравнения математической модели аппарата.
Задачу баллистического проектирования в первом приближе-
нии можно представить как задачу определения траектории входа
СА в атмосферы планет с учетом основных особенностей спуска
аппарата, а также ограничений на систему приземления, конструк-
тивных и других требований, выдвигаемых при выборе оптималь-
ной формы аппарата. Таким образом, в результате анализа ха-
рактеристик атмосферного участка спуска СА, основанного на
численных или аналитических решениях уравнений движения и
теплообмена на обтекаемой высокоскоростным газовым потоком
поверхности аппарата, определяют его аэродинамический облик,
управление, величины действующих перегрузок и тепловых пото-
ков, прочностные характеристики конструкции.
Расчет спускаемых аппаратов на прочность достаточно сло-
жен и охватывает множество проблем. В данной книге рассматри-
ваются вопросы, связанные с анализом работы агрегатов и систем
СА при воздействии на него основных нагрузок, т. е. проектиро-
вочные расчеты, позволяющие выбирать оптимальные конструкции
отсека экипажа, приборного отсека, топливных баков, корпуса
аппарата, посадочных и других систем с точки зрения минимума
3
их массы. При разработке конструкции таких аппаратов сущест-
венную роль играет система теплозащиты, предохраняющая агре-
гаты, приборы, экипаж от воздействия высоких тепловых нагузок.
Анализ взаимодействия нагретого газа с теплозащитными ма-
териалами в общем случае основывается па решении дифферен-
циальных уравнений, описывающих явление нестационарного теп-
ломассопереноса в системе газ — тело. При изучении таких слож-
ных явлений существенно возрастает роль экспериментальных ис-
следований с широким применением автоматизированных комплек-
сов сбора и обработки информации. Во многих случаях основу ма-
тематического обеспечения неестационарных тепловых эксперимен-
тов составляют методы решения обратных задач теплообмена:
определения граничных тепловых режимов, идентификации процес-
сов переноса тепла и массы, восстановления внешних и внутренних
температурных полей и т. д.
Тепловое проектирование СА, его систем, отсеков и конструк-
тивных элементов является лишь частью общего проектирования
аппарата. Однако этот раздел существенно отличается от прочих
тем, что кроме решения основных вопросов, связанных с массовым
и баллистическим проектированием, требует от исследователя
глубокого анализа основных физических явлений с привлечением
многих смежных разделов науки и техники.
Основу оптимального теплового проектирования в общем слу-
чае могут составить математическая тепловая модель рассматри-
ваемого СА или его системы и экстремальная функция цели. Мо-
дель должна связывать искомые проектные параметры с действую-,
щими на аппарат внешними и внутренними тепловыми потоками.
Таким образом, задача оптимального теплового проектирования
может рассматриваться как обратная задача тепломассообмена в
экстремальной постановке, т. е. по известным условиям, определяю-
щим тепловое состояние системы, необходимо найти параметры,
удовлетворяющие этому состоянию и выбранному критерию опти-
мальности, и проанализировать массовые соотношения.
В книге изложена методология решения проектных задач и
приведены относительно простые и удобные зависимости, полез-
ные при определении ряда характеристик СА и их систем, а также
при расчете баллистических, прочностных и тепловых параметров
на начальном этапе проектирования. Даны численные значения
различных параметров. Все это дает возможность использовать
книгу и как справочное пособие. Наряду с изложением основ про-
ектирования СА в книге дается представление о современном уров-
не исследований по рассматриваемым вопросам.
Разд. 4.8 написан совместной с канд. техн, наук Н. В. Керовым,
которому автор приносит искреннюю благодарность.
Автор особо признателен академику В. П. Мишину, оказавше-
му большую помощь при подготовке и написании книги, и акаде-
мику И. Ф. Образцову за ценные замечания и предложения, сде-
ланные им при рецензировании рукописи.
4
глава 1 Спускаемые аппараты
11. ОСНОВНЫЕ ЗАДАЧИ СА И ФИЗИЧЕСКИЕ УСЛОВИЯ
СПУСКА В АТМОСФЕРЕ ЗЕМЛИ
Для спускаемых аппаратов, предназначенных для посадки на
поверхности планет, характерны широкий диапазон скоростей
полета в атмосфере (от космических на входе до малых посадоч-
ных), достаточно высокие значения тепловых потоков и перегру-
зок, действующих на аппарат. К СА предъявляются требования по
обеспечению заданной устойчивости его движения по траектории
спуска, управлению, посадке аппарата с высокой точностью
и др.
К числу основных ограничений, накладываемых на выбор про-
ектных параметров СА, следует при прочих равных условиях от-
нести ограничения, связанные с типом системы теплозащиты и оп-
ределением формы аппарата.
Выбор оптимального типа системы теплозащиты спускаемого
аппарата определяется возможностью получить максимальную эф-
фективность работы при выполнении СА поставленной задачи
(траектория полета и значения надежности и безопасности заданы)
при минимальной массе системы. При этом следует учесть, что
форма спускаемого аппарата также непосредственно влияет на тип
системы теплозащиты.
Как правило, форма СА в первую очередь определяется соста-
вом и назначением транспортируемого полезного груза, числом
членов экипажа и задачей, которую должен выполнять аппарат.
В значительной степени форма спускаемых аппаратов выбирается
из условий обеспечения заданных аэродинамического качества,
устойчивости, управляемости; допустимых величин перегрузок и
тепловых потоков; максимальной плотности компоновки; мини-
мальной массы теплозащиты и аппарата в целом; наибольшей на-
дежности приборов, оборудования, удобства их эксплуатации и
обслуживания; комфортности экипажа.
При входе спускаемого аппарата в атмосферу на него могут
действовать следующие силы:
1. Тяга корректирующего (тормозного) двигателя (на началь-
ном участке — вход СА в атмосферу и на конечном — предпосадоч-
ное торможение и посадка на поверхность планеты).
2. Аэродинамические силы (лобовое сопротивление, подъемная
и боковая силы).
3. Сила тяжести.
5
Рис. 1. Схема действия сил на СА:
У \ — центр тяжести СА; 2 — центр давления
В частных случаях некоторые из сил
fULr*/ могут отсутствовать (рис. 1), например
V сила тяги тормозных двигателей (если
предпосадочное торможение аппарата
упд обеспечивается только парашютной си-
осУ \ стемой посадки); аэродинамические силы
\ (при полете вне атмосферы); подъемная
сила (при полете в атмосфере по балли-
7п~*\ стической траектории) и т. д.
д Для дальнейшего исследования ха-
\ рактеристик спускаемых аппаратов удоб-
\ о3 но все силы, действующие на СА, объ-
° единить в следующие две группы: 1) по-
верхностные; 2) массовые. К первой
группе относятся аэродинамические силы и силы тяги двигателей.
Ко второй — сила тяжести и инерционные силы.
Силы, действующие на отдельные агрегаты и системы аппа-
рата, можно также объединить в подобные группы. Для агрегатов,
располагаемых внутри аппарата, поверхностными являются силы
реакции, возникающие в узлах их крепления к конструкции СА.
Понятие перегрузки сформулируем следующим образом. Пе-
регрузка — отношение равнодействующей поверхностных сил к
силе тяжести аппарата
n=fta/(mg0'), (1.1)
j
где Rm— равнодействующая поверхностных сил J?™; 1 =
i=l
= 1, 2, ..., N — число поверхностных сил; т — масса СА; go — уско-
рение силы тяжести на Земле.
Перегрузка — величина векторная. По направлению она совпа-
дает с направлением равнодействующей поверхностных сил.
В практике чаще пользуются не полной перегрузкой п, а ее проек-
циями на оси выбранной системы координат: продольная пере-
грузка — nx=/?x/(mg0); поперечная — ny = Ryl(mg$); боковая —
nz = Rzf , где Rx, Ryi Rz — проекции равнодействующей поверх-
ностных сил на оси координат х, у, г.
Полную перегрузку в этом случае можно представить в таком
виде:
П = ^ hx~\- Пу ftz • (^*2)
Величины перегрузок имеют большое значение при расчете
агрегатов, систем и конструктивных элементов СА на прочность,
выборе параметров систем обеспечения жизнедеятельности экипа-
жа, траектории спуска, управления, безопасности полета и т. д.
Характер изменения основных параметров движения СА во
времени сильно зависит от начальных условий, поэтому основные
6
этапы движения и управления аппаратом целесообразно характе-
ризовать величинами, связанными с динамикой его спуска в атмо-
сфере. Для этой цели с успехом могут быть использованы пере-
грузки, а также кажущаяся скорость СА.
В процессе движения аппарата перегрузка формируется как
функция времени n(t). В момент пересечения условной границы
атмосферы величина п близка к нулю (мала плотность атмосфе-
ры), в дальнейшем она быстро нарастает. В зависимости от тра-
ектории (управления спуском) и типа аппарата эта величина мо-
жет иметь один или несколько локальных максимумов. К концу
движения, у поверхности Земли, перегрузка становится малой в
связи с уменьшением скорости спуска.
Для каждого СА существует предельно допустимое значение
перегрузки, гарантирующее безопасность экипажа и сохранность
аппаратуры и оборудования. Кроме того, степень воздействия пе-
регрузки на организм человека в значительной мере зависит от ее
величины, направления и времени действия. Чем меньше величина
перегрузки, тем большее время при прочих равных условиях кос-
монавт может ее выдержать.
При наличии на борту СА акселерометров, измеряющих
компоненты вектора аэродинамического ускорения а (аь аг, а3),
кажущаяся скорость может быть представлена в виде следующей
зависимости:
t __________________ t
w (/)=J Va^t^al (O+ai (/) di=gQ J ndt,
to to
где to — момент начала регистрации аэродинамического ускоре-
ния; аь а-2, а3 — компоненты вектора аэродинамического ускоре-
ния СА.
Функция №(/) монотонна. Это позволяет использовать ее как
независимую переменную вместо времени. Согласно работе [43]
кажущаяся скорость приближенно равна потере скорости аппара-
та в процессе движения в атмосфере. Этот вывод в основном оста-
ется верным и для траекторий спуска СА, содержащих участок
свободного полета.
Атмосфера Земли. Для определения величин сил, действующих
на аппарат, необходимо знать основные характеристики атмосфе-
ры: плотность, давление и температуру.
Эти величины сильно зависят от ряда факторов: высоты над
поверхностью Земли (планеты), географической широты, времени
года и суток и т. д. В первом приближении обычно принимается
во внимание зависимость характеристики атмосферы только от вы-
соты, приводимая в таблицах стандартной атмосферы (см., на-
пример, [12]).
Температура Г, давление р и плотность р связаны между со-
бой и с высотой над поверхностью Земли уравнением состояния
P=?RT
7
и дифференциальным соотношением равновесия
dp=—g?dli,
где R — газовая постоянная для воздуха.
Исключая р из уравнений, получим
dplp = —gdh/(RT)
и после интегрирования (в пределах от р0 до р и от 0 до ft)
Из уравнения состояния можно записать
р Го р р
—= ——или —
Ро Г ро
Атмосфера простирается до высот порядка 2 и даже 3 тыс. км,
где она постепенно переходит в межпланетный газ.
Самые нижние слои атмосферы, до 11 км, где справедливы ос-
новные соотношения между параметрами атмосферы, принято на-
зывать тропосферой. Слои, расположенные выше И км, называют
стратосферой. Область атмосферы, начиная с 90 км — ионосфера,
а самые верхние слои (выше 1000 км) —экзосфера.
Химический состав атмосферы Земли до высоты 90 км остает-
ся практически неизменным. На больших высотах газ становится
сильно ионизированным, и начинается заметная диссоциация мо-
лекулярного кислорода на атомы, а с высоты 220 км на атомы на-
чинает распадаться и молекулярный азот.
Одновременно в составе атмосферы появляется окись азота
NO. Все эти газы в значительной степени ионизированы. Кроме
ионизированных атомов и молекул в верхних слоях атмосферы
может содержаться и заметное количество свободных электронов.
Все это приводит к тому, что молярная масса воздуха (28,97),
сохраняющаяся неизменной до высоты 95 км, затем несколько
уменьшается и на высоте 160 км имеет значение 27,9.
Химический состав атмосферы и наличие в ней некоторых не-
значительных примесей и заряженных частиц наряду с другими
причинами сильно влияют на температурный режим атмосферы.
Начиная с высоты 11 км, температура воздуха остается почти
неизменной и равной в среднем —56° С. Затем с высоты 30 км
наблюдается повышение температуры до максимума, расположен-
ного на высоте 50 км. Далее начинается новое понижение темпера-
туры, на высоте 80...100 км она снова достигает минимума, а затем
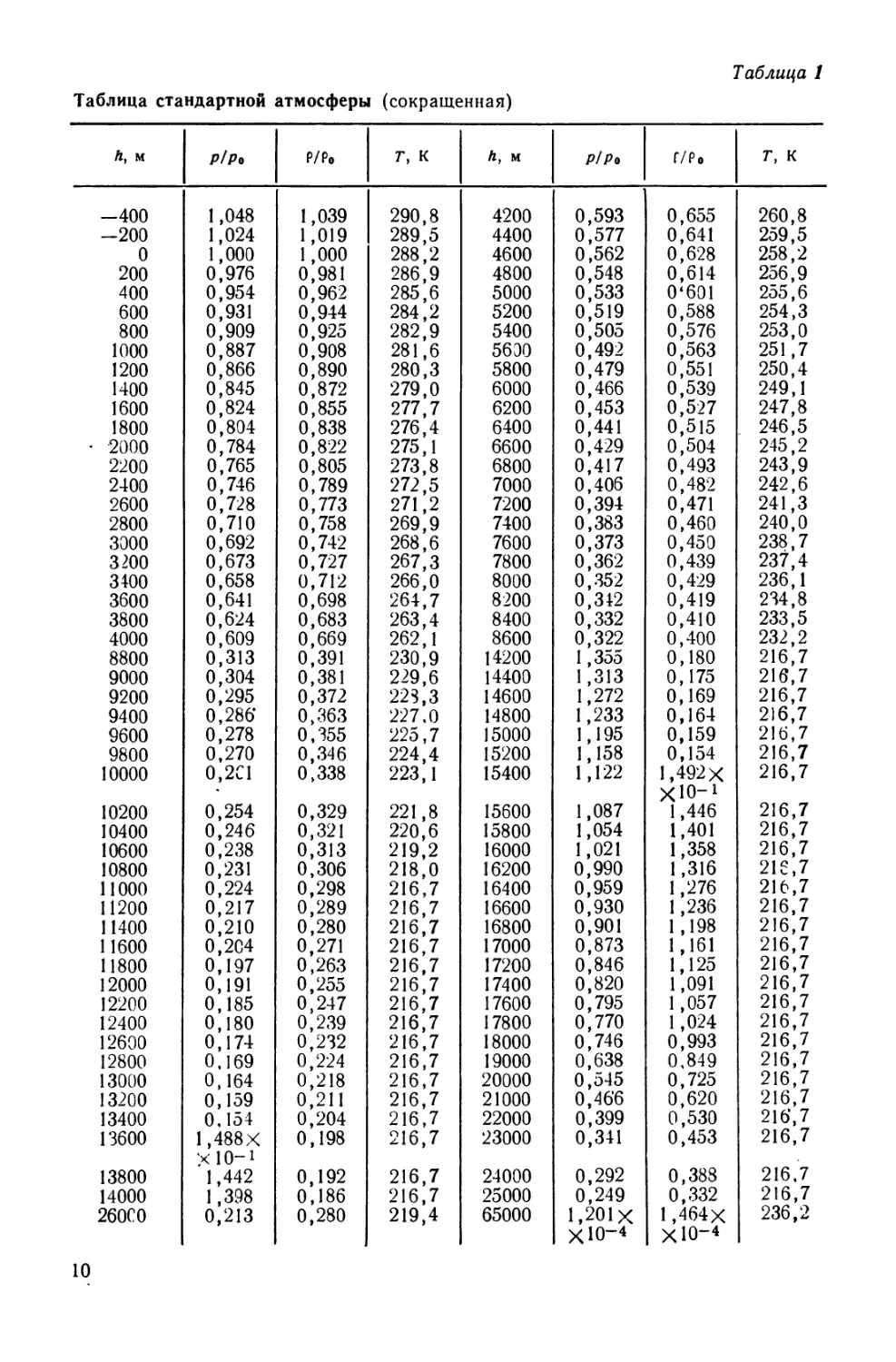
возрастает (см. табл. 1).
Первое повышение температуры в диапазоне 30...50 км в основ-
ном объясняется тем, что на этих высотах в составе атмосферы
содержится большее, чем в других слоях, количество озона, кото-
рый достаточно интенсивно поглощает ультрафиолетовое излуче-
8
ние. Дальнейшее понижение температуры можно объяснить теми
же естественными причинами, что и в нижних слоях атмосферы.
Наконец, последнее повышение температуры, начинающееся с вьь
сот 80... 100 км, связано с бомбардировкой самых верхних слоев
атмосферы космическими частицами и воздействием прямой сол-
нечной радиации. Поэтому здесь температура сильно колеблется
в течение суток. Установлено, что на высотах 250...300 км темпе-
ратура составляет 1000....2000 К.
Не следует, однако, думать, что столь высокая температура
требует создания специальной системы теплозащиты летательных
аппаратов или спутников, длительное время находящихся на
этой высоте. Вследствие большой разреженности среды передача
энергии от газа любому телу очень мала, и баланс между тепло-
вой энергией, полученной от газа и потерянной телом посредством
излучения, устанавливается при относительно низкой температуре.
В этом отношении несравненно большее значение имеет подвод
тепла от внешних источников излучения (Солнца, факела двига-
теля и т. д.), а также внутренних источников тепла (энергетиче-
ских установок, работающего оборудования, приборов и т. д.)
[46].
Необходимые для аэродинамических и баллистических расче-
тов параметры атмосферы приводятся в сокращенной таблице
стандартной атмосферы (табл. 1).
На уровне моря по международному стандарту принято: ро =
= 760 мм рт. ст. (1013 гПа); р0= 1,225 кг/м3; Г0 = 288,16 К; пока-
затель адиабаты К= 1,4; газовая постоянная )? = 287,1 Дж/(кг-гра-
Дус).
Для тропосферы законы изменения давления, плотности и тем-
пературы по высоте могут быть представлены в виде [73]
Л * V’256 /l Л V’256 'Т' 'Г
р = г0 [ 1-----] • р = р0(1------] ; Т = ТQ—0,0065Л,
7 /0\ 44 300/ ’ К 44 330/ °
где h — высота (выражается в метрах).
Аналогичные выражения могут использоваться не только для
тропосферы, но и в пределах характерных слоев атмосферы с со-
ответствующим изменением числовых коэффициентов и начальных
значений р0, р0 и То. Именно этим и объясняется кусочно-линейное
распределение температур по высоте.
Таблицы стандартной атмосферы содержат необходимые исход-
ные данные для определения аэродинамических сил на траектории
спуска СА. Но в то же время стандартная атмосфера как статиче-
ская модель не способна ответить на все возникающие при расче-
тах вопросы. Как правило, реальная атмосфера турбулентна, в
ней происходит постоянное перемещение масс воздуха, что может
привести к отклонению траектории от расчетной; аппарат, пересе-
кающий с большой скоростью слои атмосферы, движущиеся в
различных направлениях, может испытывать значительные крат-
ковременные поперечные нагрузки. Для разработки алгоритма дви-
жения СА в атмосфере необходимо знать возможные предельные
9
Таблица 1
Таблица стандартной атмосферы (сокращенная)
А, м Р/Ро Р/Ро г, к А, м Р/Ро Г/Ро г, к
-400 1,048 1,039 290,8 4200 0,593 0,655 260,8
-200 1,024 1,019 289,5 4400 0,577 0,641 259,5
0 1,000 1,000 288,2 4600 0,562 0,628 258,2
200 0,976 0,981 286,9 4800 0,548 0,614 256,9
400 0,954 0,962 285,6 5000 0,533 0‘601 255,6
600 0,931 0,944 284,2 5200 0,519 0,588 254,3
800 0,909 0,925 282,9 5400 0,505 0,576 253,0
1000 0,887 0,908 281,6 5630 0,492 0,563 251,7
1200 0,866 0,890 280,3 5800 0,479 0,551 250,4
1400 0,845 0,872 279,0 6000 0,466 0,539 249,1
1600 0,824 0,855 277,7 6200 0,453 0,527 247,8
1800 0,804 0,838 276,4 6400 0,441 0,515 246,5
• 2000 0,784 0,822 275,1 6600 0,429 0,504 245,2
2200 0,765 0,805 273,8 6800 0,417 0,493 243,9
2400 0,746 0,789 272,5 7000 0,406 0,482 242,6
2600 0,728 0,773 271,2 7200 0,394 0,471 241,3
2800 0,710 0,758 269,9 7400 0,383 0,460 240,0
3000 0,692 0,742 268,6 7600 0,373 0,450 238,7
3200 0,673 0,727 267,3 7800 0,362 0,439 237,4
3400 0,658 0,712 266,0 8000 0,352 0,429 236,1
3600 0,641 0,698 264,7 8200 0,342 0,419 234,8
3800 0,624 0,683 263,4 8400 0,332 0,410 233,5
4000 0,609 0,669 262,1 8600 0,322 0,400 232,2
8800 0,313 0,391 230,9 14200 1,355 0,180 216,7
9000 0,304 0,381 229,6 14400 1,313 0,175 216,7
9200 0,295 0,372 223,3 14600 1,272 0,169 216,7
9400 0,286 0,363 227,0 14800 1,233 0,164 216,7
9600 0,278 0,355 225,7 15000 1,195 0,159 216,7
9800 0,270 0,346 224,4 15200 1,158 0,154 216,7
10000 0,2С1 0,338 223,1 15400 1,122 1,492Х хю-1 216,7
10200 0,254 0,329 221,8 15600 1,087 1,446 216,7
10400 0,246 0,321 220,6 15800 1,054 1,401 216,7
10600 0,238 0,313 219,2 16000 1,021 1,358 216,7
10800 0,231 0,306 218,0 16200 0,990 1,316 216,7
11000 0,224 0,298 216,7 16400 0,959 1,276 216,7
11200 0,217 0,289 216,7 16600 0,930 1,236 216,7
11400 0,210 0,280 216,7 16800 0,901 1,198 216,7
11600 0,204 0,271 216,7 17000 0,873 1,161 216,7
11800 0,197 0,263 216,7 17200 0,846 1,125 216,7
12000 0,191 0,255 216,7 17400 0,820 1,091 216,7
12200 0,185 0,247 216,7 17600 0,795 1,057 216,7
12400 0,180 0,239 216,7 17800 0,770 1,024 216,7
12600 0,174 0,232 216,7 18000 0,746 0,993 216,7
12800 0,169 0,224 216,7 19000 0,638 0,849 216,7
13000 0,164 0,218 216,7 20000 0,545 0,725 216,7
13200 0,159 0,211 216,7 21000 0,46’6 0,620 216,7
13400 0,154 0,204 216,7 22000 0,399 0,530 216,7
13600 1,488Х X 10-1 0,198 216,7 23000 0,341 0,453 216,7
13800 1,442 0,192 216,7 24000 0,292 0,388 216,7
14000 1,398 0,186 216,7 25000 0,249 0,332 216,7
26000 0,213 0,280 219,4 65000 1,201X Х10-4 1,464Х ХЮ-4 236,2
10
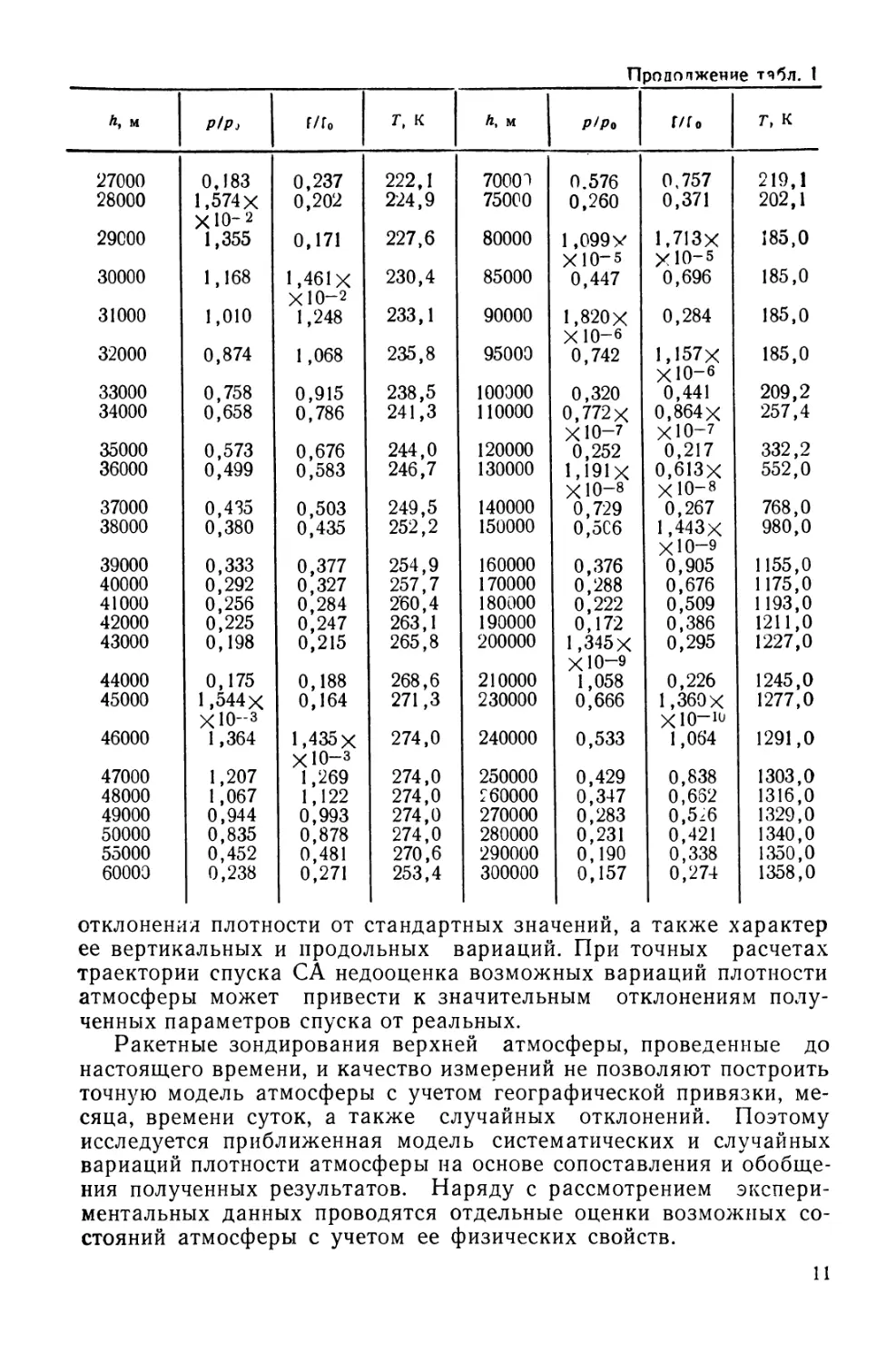
Продолжение тябл. 1
h, м Р/Рз f/Го г, к А, м р/ро Г/Г 0 т, К
27000 0,183 0,237 222,1 70003 0.576 0.757 219,1
28000 1.574Х ХЮ-2 0,202 224,9 75000 0,260 0,371 202,1
29000 1,355 0,171 227,6 80000 1,099х ХЮ-5 1,713Х ХЮ-5 185,0
30000 1,168 1.461X Х10-2 230,4 85000 0,447 0,696 185,0
31000 1,010 1,248 233,1 90000 1,820Х ХЮ-б 0,284 185,0
32000 0,874 1,068 235,8 95000 0,742 1,157Х хю-6 185,0
33000 0,758 0,915 238,5 100000 0,320 0,441 209,2
34000 0,658 0,786 241,3 110000 0.772Х ХЮ-7 0.864Х XI0-7 257,4
35000 0,573 0,676 244,0 120000 0,252 0,217 332,2
36000 0,499 0,583 246,7 130000 1,191Х ХЮ-8 О,613Х ХЮ-8 552,0
37000 0,435 0,503 249,5 140000 0,729 0,267 768,0
38000 0,380 0,435 252,2 150000 0,5С6 1,443х ХЮ-9 980,0
39000 0,333 0,377 254,9 160000 0,376 0,905 1155,0
40000 0,292 0,327 257,7 170000 0,288 0,676 1175,0
41000 0,256 0,284 260,4 180000 0,222 0,509 1193,0
42000 0,225 0,247 263,1 190000 0,172 0,386 1211,0
43000 0,198 0,215 265,8 200000 1,345х XI0-9 0,295 1227,0
44000 0,175 0,188 268,6 210000 1,058 0,226 1245,0
45000 1,544х ХЮ-з 0,164 271,3 230000 0,666 1,36ОХ X Ю- ю 1277,0
46000 1,364 1,435х ХЮ-з 274,0 240000 0,533 1,064 1291,0
47000 1,207 1,269 274,0 250000 0,429 0,838 1303,0
48000 1,067 1,122 274,0 260000 0,347 0,662 1316,0
49000 0,944 0,993 274,0 270000 0,283 0,5x6 1329,0
50000 0,835 0,878 274,0 280000 0,231 0,421 1340,0
55000 0,452 0,481 270,6 290000 0,190 0,338 1350,0
60000 0,238 0,271 253,4 300000 0,157 0,274 1358,0
отклонения плотности от стандартных значений, а также характер
ее вертикальных и продольных вариаций. При точных расчетах
траектории спуска СА недооценка возможных вариаций плотности
атмосферы может привести к значительным отклонениям полу-
ченных параметров спуска от реальных.
Ракетные зондирования верхней атмосферы, проведенные до
настоящего времени, и качество измерений не позволяют построить
точную модель атмосферы с учетом географической привязки, ме-
сяца, времени суток, а также случайных отклонений. Поэтому
исследуется приближенная модель систематических и случайных
вариаций плотности атмосферы на основе сопоставления и обобще-
ния полученных результатов. Наряду с рассмотрением экспери-
ментальных данных проводятся отдельные оценки возможных со-
стояний атмосферы с учетом ее физических свойств.
11
Модель вариации плотности атмосферы, например, рассматри-
вается для высот 30...80 км и широт от 50° ю. ш. до 50° с. ш. в ра-
боте [43]. Эта область представляет собой практический интерес
для решения широкого круга задач, связанных с движением аппа-
ратов в атмосфере Земли. В этой же работе приводятся парамет-
ры атмосферы с учетом сезонно-широтных, суточных, случайных
вариаций плотности, а также некоторые данные по предельным
отклонениям плотности от средних сезонно-широтных вариаций.
Спускаемые аппараты
Пилотируемь ie
АдтоматичЕС-
кие
призна-
кам
спасения
и посадки
По типу
траек-
тории
По типу
систем
теплоза-
щиты
^5
По типу
управ-
ления
, Г , г-1
По типи По дру-
средсто гам
53 53
У
н
3 Е
S
Рис. 2. Схема систематизации СА по отдельным характерным признакам
Несмотря на относительно короткий период развития космиче-
ской техники, огромное многообразие различных типов аппаратов
вызывает необходимость хотя бы приблизительной их классифи-
кации по некоторым характерным признакам. Следует отметить,
что спускаемые аппараты по различиям в структуре и разновид-
ностям занимают среди всех других типов летательных аппаратов
одно из первых мест.
На рис. 2 представлена одна из возможных схем систематиза-
ции СА по отдельным признакам, дающая возможность в даль-
нейшем провести более последовательное изложение материала
12
при рассмотрении основных разделов разработки спускаемых ап-
паратов.
Как видно из схемы, СА делятся на два основных типа по ха-
рактеру полезной нагрузки. Наличие экипажа на борту и, как
следствие, систем, обеспечивающих его жизнедеятельность, рабо-
тоспособность, участие в управлении, существенным образом вли-
яет на состав и назначение полезной нагрузки и значительно от-
ражается на облике аппарата; траекториях спуска и посадки; си-
стемах спасения и посадки; обеспечении надежности, безопасно-
сти, комфортности экипажа и т. д.
Автоматические СА, в свою очередь, имеют ряд особенностей,
присущих только этому классу. Например, они могут быть рас-
считаны на значительные перегрузки. В силу этого, в частности,
исчезает потребность в управляемом спуске и высоких несущих
способностях таких аппаратов и т. д.
В значительной степени облик автоматических СА зависит от
планеты, на которую осуществляется доставка полезной нагрузки.
Большое влияние на аэродинамическую компоновку и конструк-
тивное исполнение системы теплозащиты (ТЗ) оказывает и состав
полезного груза СА, его агрегатов и систем.
1.2. МОДЕЛИРОВАНИЕ ОБЛИКА СПУСКАЕМОГО
АППАРАТА И ИСПОЛЬЗОВАНИЕ САПР
Общая постановка задачи. На начальном этапе проектирова-
ния определить облик СА можно, построив общую модель системы
в виде математических алгоритмов, позволяющих рассчитать для
сравнительных вариантов искомые характеристики: массу, затра-
ты, надежность и т. д.
Чтобы сформировать математическую модель спускаемого ле-
тательного аппарата, т. е. установить зависимость между основ-
ными показателями качества и параметрами СА, необходимо оп-
ределить совокупность уравнений модели проектирования. При
моделировании приходится преодолевать противоречия между же-
ланием увеличить точность, достоверность результатов, полученных
при анализе, и необходимостью упростить процесс, хотя бы до
уровня, когда моделирование вообще возможно, а результаты под-
даются достаточно ясной трактовке.
Размерность модели, как правило, всегда ограничена. Это
значит, что в ней учтены лишь некоторые связи. Отсечение второ-
степенных связей приводит к некоторой неопределенности любых
оценок, получаемых для модели, в том числе и к неопределенности
эффективности аппарата, а увеличение количества учитываемых
связей — к росту размерности модели. По мере роста последней
трудности исследования нарастают лавинообразно, в связи с чем
рано или поздно теряется возможность получить желаемый ре-
зультат.
Кроме того, начиная с некоторого уровня исследований, уточ-
нение собственно модели элементарной операции без дополни-
13
тельной информации о характере операций высшего уровня, а так-
же об условиях, в которых данная операция будет использовать-
ся, не дает действительного уточнения получаемых в результате
моделирования оценок. Такое уточнение следует считать даже
вредным, поскольку результаты, полученные по переуточненной
модели, создают иллюзию достоверности, тогда как на самом деле
они имеют всего лишь оценочный характер.
Построение модели и использование САПР. Основная труд-
ность, с которой приходится зачастую сталкиваться при построе-
нии модели любого космического летательного аппарата (КЛА),
а тем более спускаемого, состоит в том, что существует огромное
количество возможных схем их построения. Расчет всех возможных
вариантов, даже если каждый из них достаточно прост, представ-
ляет собой значительные технические трудности. Использование
современных быстродействующих ЭВМ позволяет при решении по-
добных задач не только повысить вычислительные возможности,
но и применять теории и методы, ранее не использовавшиеся из-за
большого объема вычислительных работ.
Энергично внедряются автоматизация проектных разработок
и автоматизированные системы обработки экспериментальных ре-
зультатов при тепловом проектировании СА. Это стало возмож-
ным вследствие широкого распространения нетрадиционных мето-
дов использования ЭВМ для сложных вычислительных процедур,
создания нового поколения вычислительных машин, оснащенных
сетью периферийных устройств, позволяющих эффективно выпол-
нять обработку, систематизацию и хранение информации, осуще-
ствлять диалоговый режим работы с ЭВМ, отображать информа-
цию в графическом виде. Все это в значительной степени стиму-
лирует разработку систем автоматизированного проектирования
(САПР) летательных аппаратов, в том числе и СА.
Следует отметить, что высокое быстродействие ЭВМ, опера-
тивность поступления к исследователю различной информации,
постоянное накопление новой информации существенно изменяют
содержание отдельных этапов проектирования СА.
Функционирование системы автоматизированного проектирова-
ния СА в целом, особенности ее построения в значительной степе-
ни определяются работой отдельных модулей. Последние, в свою
очередь, испытывают обратное влияние, определяющее в значи-
тельной степени их состав и структуру. Структура, состав отдель-
ных блоков модуля теплового проектирования СА и связи между
ними различны, хотя отдельные принципы построения могут иметь
общий характер [48].
Рассмотрим в первом приближении кратко некоторые особен-
ности условий работы СА (тепловое нагружение), которые в оп-
ределенной степени влияют на структуру и состав модуля.
В зависимости от значений начальных параметров движения
СА, характеристик аппарата и атмосферы, схемы спука в атмо-
сфере тепловые нагрузки количественно и качественно могут из-
меняться существенно. Так, при входе СА в атмосферу Земли со»
14
скоростями порядка 11 км/с и более на него будут действовать
как конвективные, так и радиационные тепловые потоки. При
меньших (больших) скоростях входа преобладающими в тепло-
вом нагружении будут конвективные (радиационные) тепловые
потоки.
В зависимости от скорости движения по траектории можно вы-
делить следующие основные диапазоны скоростей, для которых
характерно особое поведение газа набегающего потока: несжима-
емый газ (число Маха М^С0,7...0,8), сжимаемый газ (М^С5 для
воздуха) и наличие химических реакций в газе [49].
К числу многих ограничений, накладываемых на выбор конст-
руктивных параметров при тепловом проектировании систем и аг-
регатов СА, в первую очередь, следует отнести обеспечение надеж-
ного теплового режима их работы при специфических условиях
полета в период спуска аппарата. Как правило, в этом случае
при тепловом проектировании вопрос о выборе наиболее рацио-
нальных характеристик агрегатов может решаться путем ана-
лиза массовых параметров рассматриваемой системы с учетом
требований комфортности экипажа, безопасности, надежности,
эффективности СА и т. д.
Для обеспечения нормального функционирования аппаратуры,
приборов, снаряжения (с заданными точностью и надежностью),
работы экипажа СА (с заданными безопасностью и комфорт-
ностью); минимальных потерь компонентов топлива (особенно
криогенных) на торможение аппарата и коррекцию траектории и
так далее внутри всех герметичных отсеков и топливных баков
аппарата должен поддерживаться вполне определенный и доста-
точно стабильный тепловой режим.
В отсеках, где размещаются приборы и оборудование, как
правило, должен поддерживаться температурный режим, соответ-
ствующий нормальным условиям их работы на Земле [46]; при-
борный отсек —О... + 4О°С (некоторая высокочувствительная аппа-
ратура— фото- и телеаппаратура и др. требует при эксплуатации
более жесткого температурного режима); отсек химических бата-
рей и аккумуляторов —70... + 50° С.
Для топливных баков (кроме баков с криогенными компонен-
тами) температура может быть в диапазоне —О... + 35°С. При вы-
боре наиболее благоприятного температурного режима криоген-
ных компонентов необходимо учитывать, что температура кипения
водорода минус 253° С, а кислорода — минус 183° С [46].
Для нормальной жизнедеятельности членов экипажа СА в ка-
бине целесообразно поддерживать температуру 15...20° С, т. е.
соответствующую комфортным условиям работы человека в обыч-
ных (земных) условиях.
Одной из основных задач теплового проектирования СА явля-
ется обоснованный выбор тепловой модели системы теплозащиты,
которая на начальном этапе проектирования аппарата с достаточ-
ной точностью обеспечивает заданный тепловой режим отсека
15
экипажа, аппаратуры, агрегатов и конструкции, т. е. тепловой
режим спускаемого аппарата.
Для обеспечения минимальной массы системы теплозащиты
необходима (при прочих равных условиях) достаточно высокая
точность тепловой модели системы. Последняя в значительной
степени определяется граничными условиями на внешней и внут-
ренней ее поверхностях, т. е. взаимодействием высокотемператур-
ных газовых потоков с внешней стенкой теплозащиты и заданной
температурой стенки силового корпуса СА.
Таким образом, основными элементами составления математи-
ческой тепловой модели СА могут быть выбор параметров системы
тепловой защиты и составление ее тепловой модели, расчет тем-
пературных полей в агрегатах и конструктивных элементах ап-
парата.
В данной работе больше внимания будет уделено решению
первой части задачи — выбору тепловой модели ТЗ и несколько
меньше второй, как более общей, необходимость решения которой
чаще возникает на заключительных этапах проектирования, когда
имеется достаточно четкая конструктивно-силовая схема СА и его
систем.
Однако то или иное решение первой части задачи обусловлено
в известной степени формализацией тепловой модели аппарата.
Традиционные методы построения моделей облика СА предпола-
гают составление взаимосвязанных соотношений для всего аппа-
рата в целом. Такой подход для спускаемых аппаратов, как пра-
вило, затруднителен в основном из-за большого разнообразия воз-
можных обликов. Особенно четко это проявляется для аппаратов,
использующих планирующие траектории спуска. Облик подобных
СА определяется особенностями условий спуска; аэродинамической
компоновкой; управлением; динамикой; значительным количест-
вом ограничений, требований к работе и обслуживанию системы
теплозащиты, средств спасения и посадки и т. д. Все это вносит
в каждую из рассматриваемых моделей облика такого СА значи-
тельное число изменений, существенно отличающих модели друг
от друга.
Таким образом, традиционный подход требует при формирова-
нии модели аппарата составлять для каждого облика СА соответ-
ствующие проектные соотношения. В этом случае задача становится
достаточно громоздкой даже при использовании ЭВМ.
Более рациональным представляется следующий подход.
В самом начале определения проектных параметров аппарат фор-
мируется в виде отдельных блоков (отсеков). Каждый из блоков
описывается своими специфическими проектно-массовыми, геомет-
рическими, аэродинамическими, тепловыми и другими соотноше-
ниями, для формирования моделей которых можно сначала полу-
чить их характеристики отдельно для каждого блока, а затем син-
тезировать их в общую модель СА.
Такой подход позволяет комбинацией нескольких основных
моделей блоков формировать облики спускаемых аппаратов раз-
16
Рис. 3. Примерная последовательность вычислительных
работ при выборе проектных параметров СА с использо-
ванием ЭВМ:
/ — блок формирования облика СА; 2 — присвоение про-
ектным параметрам числовых значений; 3 — определение
массовых характеристик; 4 — определение аэродинамиче-
ских характеристик; 5 — моделирование движения; 6 —
расчет системы теплозащиты; 7 — компоновка СА; 8 —
определение внешних нагрузок; 9 — анализ параметров
конструкции, динамики, управления, теплозащиты и т. д.;
10 — выпуск технической документации; // — оценка по-
казателей для принятия решений
личных типов. Например, при исследова-
нии параметров новых СА, имеющих ана-
логичные существующим блоки, доста-
точно ввести в общую модель их основ-
ные характеристики (массовые, аэроди-
намические, динамические, тепловые и
другие), что значительно упрощает фор-
мирование модели аппарата в целом.
Далее следует процесс определения
основных параметров СА и оценка пока-
зателей его качества, на основании ко-
торых принимаются решения (рис. 3).
Выбор критериев качества СА. Процесс проектирования СА
обычно имеет итерационный многоуровневый характер.. На каж-
дой итерации и на каждом уровне осуществляется оценка тех или
иных характеристик по определенным показателям — критериям.
В настоящее время качество сложной технической системы, ка-
ковой, несомненно, является спускаемый космический аппарат,
принято определять через ее эффективность, т. е. степень пригод-
ности для использования по назначению. При оценке эффектив-
ности применяют различные критерии, под которыми понимают
объективные показателе, имеющие обычно количественное выра-
жение.
Определение эффективности — заключительный этап проекти-
рования аппарата, по результатам которого принимается решение
о выборе одного из альтернативных вариантов или о новом цикле
исследований. Для каждого исследуемого варианта вычисляют
величину эффективности, соответствующую выбранному единому
критерию. При этом выбирается экстремальное значение этого
критерия и, как следствие, оптимальные проектные параметры ап-
парата. Полученные результаты являются главными аргументами
для принятия решения о выборе одного из альтернативных вари-
антов спускаемого аппарата.
Как численная характеристика критерий эффективности явля-
ется функцией, характеризующей качество технической системы,
и должен отвечать следующим основным требованиям: оценивать
главную задачу, решаемую системой рассматриваемого уровня;
быть чувствительным к изменению параметров управления; иметь
простое и надежное количественное представление, характеризу-
ющее возможно большее число свойств системы.
17
Задачи могут решаться в поли- или монокритериальной поста-
новках, каждая из которых характеризуется выбором определен-
ного рода критериев и имеет соответственно свои положительные
и отрицательные стороны.
Представляет также интерес задача, приведенная в работе [48].
В качестве критерия оценки различных вариантов решений пред-
лагается стоимостный показатель, а остальные показатели высту-
пают как дисциплинирующие условия (ограничения), наклады-
ваемые на решение оптимальной задачи. Такая постановка задачи
достаточно обоснована и объективна. Экономическая эффектив-
ность, т. е. выраженный в конкретной стоимости результат в со-
поставлении с затратами на создание и эксплуатацию аппарата,—
критерий высокого уровня, который в общем случае наиболее це-
лесообразно использовать на заключительных этапах создания
системы.
Для оперативных оценок сравниваемых вариантов (в данном
случае СА) при принятии решений по конкретным вопросам ис-
пользуются упрощенные специализированные показатели:
относительная масса полезной нагрузки СА
Р'п.н = тим1тСк\ (1.3)
относительная объемная характеристика СА
pv = 7тгПеН/IZ СА; (1.4)
относительная стоимость полезного груза, доставленного на
планету,
Нс ^И.Н/С» (1*^)
где /Ип.н, шса—масса полезной нагрузки и начальная масса СА;
Уса — объем СА; с — стоимость затрат (в рублях) на проектиро-
вание, изготовление и отработку СА.
Согласно работе [13] одним из основных безразмерных крите-
риев, используемых при сопоставлении характеристик спускаемых
аппаратов, является критерий массового (весового) совершенства
средств спуска и посадки. Этот критерий характеризуется тем, что
рассматривается отношение массы средств спуска и посадки не к
начальной массе СА, а к некоторой эталонной величине, неизмен-
ной для рассматриваемых вариантов аппаратов. Такой эталонной
величиной при прочих равных условиях авторы работы [13] предла-
гают считать массу полезной нагрузки СА. Этот критерий для
ряда исследований параметров спускаемых аппаратов в известной
степени может объективно свидетельствовать о массовом совер-
шенстве рассматриваемого СА.
1.3. АППАРАТЫ БАЛЛИСТИЧЕСКОГО, ПЛАНИРУЮЩЕГО
И СКОЛЬЗЯЩЕГО СПУСКА
Спуск СА с околоземной или межпланетной орбиты можно осу-
ществить следующими основными способами.
18
1. Баллистический спуск. В этом случае в процессе спуска уп-
равление траекторией движения, перегрузками, точкой посадки
не производится. При этом имеется в виду СА с неизменяющейся
конфигурацией, аэродинамическое качество которого
k = cy/cx = 0 (^ = 0)*.
Примерами аппаратов, совершающих спуск с орбиты ИСЗ на
поверхность Земли по баллистической траектории, могут служить
СА космических летательных аппаратов типа «Восток», «Мерку-
рий», с межпланетной орбиты — типа «Марс», «Венера». Оба типа
СА не обладают аэродинамическим качеством, поэтому их полет
в атмосфере неуправляем. Траектория движения аппарата опреде-
ляется скоростью и углом входа в атмосферу; обычно полагают,,
что условная граница последней находится на высоте. 100...120 км.
Поскольку скорость входа при спуске с низких околоземных
орбит практически не изменяется, то основным варьируемым па-
раметром в этом случае оказывается угол входа, т. е. угол на-
клона траектории на границе атмосферы. Величина последнего
определяет аэродинамические нагрузки и тепловые потоки, дейст-
вующие на СА, а также существенно влияет на разброс точек по-
садки.
Угол входа зависит от величины и направления тормозного им-
пульса, который прикладывается для схода СА с орбиты. Сущест-
вует оптимальная ориентация вектора тормозного импульса, по-
зволяющая получать заданный угол входа при минимальной ха-
рактеристической скорости, затрачиваемой на торможение.
Баллистической траектории спуска присущи большие пере-
грузки, обусловленные неуправляемым аэродинамическим тормо-
жением, и большие возможные отклонения фактической точки по-
садки от заданной. Даже при относительно пологой траектории
спуска, когда угол входа в атмосферу близок к нулю, максималь-
ная перегрузка оказывается достаточно высокой [43]. Промах
может достигать нескольких сот километров.
2. Спуск с малым аэродинамическим качеством (£ = 0,1...0,6).
«Скользящие» СА. При положительной величине аэродинамиче-
ского качества существенно уменьшаются перегрузки на спуске
(рис. 4, 5). Управление качеством в пределах Д£ = ±0,1 может
обеспечить (для ряда СА) посадку на поверхность Земли с откло-
нением ~ 1 км.
За счет отрицательной подъемной силы при малых углах входа
и положительной при предельно больших удается существенно
расширить «коридоры» (области допустимых параметров) входа
СА.
Аэродинамическое качество может быть использовано и при
формировании функций внешнего теплового воздействия на аппа-
рат для получения минимальной массы теплозащиты.
* cXi су — аэродинамические коэффициенты сопротивления и подъемной
силы.
19
Рис. 5. Зависимость максимальной пере-
грузки % maI и скорости СА (в момент
достижения пх maI) от угла входа 0ВХ и
влияние угла выхода на относительный
максимальный тепловой поток gmax (//вх =
= 120 км; VBX = 10,7 км/с; (Ух=0,2110-3 м2/Н)
для различных значений качества:
------------- зависимость пх тах=^вх);
%ах = ^®вх^’ ’ ’
Рис. 4. Зависимость величин перегрузок и
температуры от времени при спуска СА в
атмосфере Земли:
/ — вход СА с VBX=11 км/с (fc=0; 0ВХ=
= -5°; Г=3300 ... 4300 К); 2 - баллистиче-
ский спуск (Л=0; VBX=7,8 км/с; 0ВХ=—2°;
Т=2800 ... 3800 К); 3 — скользящий спуск
(fe=0,2; VBX=7,8 км/с; 0ВХ=—2°); 4 —за-
висимость изменения температуры време-
ни для Л=0,2 (скользящий спуск)
Для аппаратов, обладающих аэродинамическим качеством,
торможение в атмосфере может осуществляться при существенно
больших нагрузках на мидель, чем для баллистических СА. Это
в известной степени позволяет уменьшить величину относительной
массы конструкции аппарата и увеличить долю полезной нагруз-
ки. К этому типу можно отнести аппараты с малым качеством типа
«Союз», «Зонд», «Джемини», «Аполлон».
3. Планирующий спуск. В этом случае в процессе спуска про-
изводится управление траекторией движения и дальностью путем
использования аэродинамической подъемной силы. Гиперзвуковое
качество в этом случае k = 1 ... 2, посадочное — до 4.
Такие схемы предназначены для дальнейшего развития воз-
можностей «скользящих» СА (расширения «коридоров» входа,
уменьшения перегрузок, увеличения полезной нагрузки), обеспече-
ния спуска в заданный район планеты без длительного ожидания
на орбите.
Таким образом, минимальная задача СА — затормозиться и пе-
редать в атмосферу максимально большую часть энергии, полу-
ченной аппаратом перед входом. Эта задача в общем виде может
быть решена следующим образом:
1. Определяются основные параметры траектории входа в ат-
мосферу (угол наклона траектории к местному горизонту и вели-
чина скорости входа), которые при неизменной форме баллисти-
ческого СА в основном определяют всю дальнейшую траекторию
полета, функцию изменения перегрузок и тепловых потоков, вос-
принимаемых аппаратом.
20
2. Определяется баллистический коэффициент СА
^x = cxSmVi/(mgQl (1.6)
где т — масса аппарата; Smid — его площадь миделя; go— ускоре-
ние силы тяжести на поверхности планеты.
В этом выражении представлены необходимые параметры
(масса, геометрия — через сх, габариты — через площадь миделя),
которые должны обеспечить захват аппарата атмосферой и конеч-
ные условия спуска, допускающие использование соответствующей
системы посадки.
Следующей по сложности является задача аэродинамически
управляемого спуска. К определяемым проектным параметрам
СА в этом случае необходимо добавить максимальное аэродина-
мическое качество 6тах и функцию изменения качества в течение
спуска аппарата k = f(t).
Характерной особенностью решения проблемы теплозащиты
подобных спускаемых аппаратов является, например, применение
частично уносимого материала и обычной нежаростойкой кон-
струкции.
Траекторию спускаемого аппарата целесообразно разбить на
два участка — внеатмосферный и атмосферный (участок полета в
атмосфере).
На первом участке влияние аэродинамических сил на траек-
торию движения спускаемого аппарата можно считать пренебрежи-
мо малым по сравеннию с гравитационными и реактивными си-
лами.
На атмосферном участке, наоборот, превалирующее влияние
ла траекторию спуска будут оказывать аэродинамические силы,
особенно при спуске СА с начальной скоростью, превышающей ор-
битальную (см. рис. 4, 5).
Целесообразно, чтобы для пилотируемых спускаемых аппара-
тов величины максимальных перегрузок (исключая аварийные си-
туации) не превосходили 8... 10, для автоматических nxmax—
—300...400 (вертикальный вход в атмосферу Земли с VBX=11 км/с
и в атмосферу Венеры с VBX~12 км/с). Для Марса при прямом
входе СА в атмосферу (0вх = 90 ) с VBX = 6 км/с Яхтах ^40...70,
тепловые потоки в этом случае существенно ниже, чем в атмосфе-
ре Земли, что в основном объясняется меньшим градиентом изме-
нения плотности атмосферы р = р(//). Для Юпитера при прямом
входе с VBX—60 км/с максимальные перегрузки могут достигать
величин (7...8)-103, а тепловые потоки в сотни раз выше, чем в
атмосфере Земли.
Заключительный этап атмосферного спуска СА — приземление
аппарата — осуществляется, как правило, с помощью последова-
тельного раскрытия парашютной системы (вытяжного, тормозного
и основного парашютов), тормозных двигательных установок или
других средств посадки. Мгновенные ударные перегрузки в этом
случае составляют ~ 15...20.
21
1.4. СОСТАВ И НАЗНАЧЕНИЕ БОРТОВОГО КОМПЛЕКСА,
СИСТЕМ ТЕПЛОЗАЩИТЫ И ПОСАДКИ СА
При рассмотрении состава основного бортового комплекса и
систем пилотируемого СА остановимся на некотором типовом
(в известной степени условном) аппарате для спуска экипажа ор-
битальной станции и доставки на Землю материалов и физиче-
ского оборудования (рис. 6) [60].
Спуск СА может производиться в следующей последователь-
ности. Перед отделением от орбитальной станции аппарат ориен-
тируется (по азимуту и углу восхождения) в орбитальной системе
координат, после чего с минимально возможными возмущениями
производится его отделение с одновременным запуском временно-
го механизма. Включаются тормозные двигатели (ТДУ) (отраба-
тывается тормозной импульс скорости). После участка торможе-
ния производится отделение (отсечка) ТДУ. Если необходимо уп-
равление по крену, используются двигатели с тангенциальным
направлением тяги.
При входе в плотные слои атмосферы кормовой теплозащитный
экран 18 может быть сброшен. Производится ввод парашютной
(или парашютно-реактивной) системы посадки. Таким образом,
Рис. 6. Конструктивно-компоновочная схема
двухместного пилотируемого СА:
1— сопла системы управления; 2 — тор-
мозные двигатели (ТДУ); 3 — топливные
баки ТДУ и СУ; 4 — инфракрасный датчик
горизонта; 5 — люк; 6—штыревая антенна;
7 — модуль ДУ (орбитального торможе-
ния); 8 — система посадки (парашютная);
9 — программно-временное устройство;
10 — оборудование системы связи; 11— ло-
бовой теплозащитный экран; /2 —система
энергопитания (аккумуляторы); 13— амор-
тизационная система; 14— кресло; 15—
скафандр; 16 — иллюминатор; 17 — пульт
управления; 18 — кормовой теплозащитный
экран
Рис. 7. Схема компоновки* автоматического
СА для спуска на Венеру:
1 — силовой корпус; 2 — блок коммутации;
3 — теплозащита (многослойная); 4 — ра-
диатор СТР; 5 — крышка и замок пара-
шютного контейнера; 6 — антенна; 7 —
парашют; 8 — антенна; 9 — вентилятор
СТР; 10 — радиовысотомер; 11 — радиопе-
редатчик; 12 — демпфер
22
рассматриваемый СА может иметь следующие основные бортовые
системы и элементы:
отсек экипажа, включающий в себя: систему обеспечения жиз-
недеятельности; полуавтономные скафандры; профилированные
кресла; привязную систему; гермолюк; пульт управления; систе-
мы энергопитания, управления, ориентации, управления вектором
тяги ТДУ, управления безопасной посадкой, связи и т. д.;
система спуска, включающая в себя: парашюты (вытяжной,
тормозной и основной) и реактивную тормозную установку с не-
обходимыми вытяжными средствами, устройствами рифления и
приведения в действие;
теплозащитная система, состоящая из лобового и кормового
экранов. Кормовой экран может быть сбрасываемым, и в этом
случае должны быть предусмотрены специальные средства отде-
ления, например пирозамки;
модуль орбитального торможения, включающий в себя: датчи-
ковую командную и управляющую аппаратуру; исполнительные
органы и элементы управления и ориентации; систему топливных
баков, тормозную (ТДУ) и корректирующую (КДУ) двигательные
установки. В рассматриваемом варианте модуль представляет со-
бой кольцеобразный блок, отделяемый от основного СА непосред-
ственно перед входом в плотные слои атмосферы. Кольцеообраз-
ный модуль орбитального торможения облегчает доступ в отсек
экипажа СА и соответственно в орбитальную станцию.
Следует отметить, что для стыковки с орбитальной станцией
СА должен иметь специальную систему. На рис. 6 система стыков-
ки не показана.
Среди систем бортового комплекса автоматических СА (рис. 7,
8) целесообразно, в первую очередь, выделить полезную нагруз-
ку— исследовательский блок, непосредственно решающий основ-
ную целевую задачу всего космического аппарата, а также ряд
систем, обеспечивающих выполнение основных траекторных задач
при спуске и посадке, систем энергообеспечения, терморегулиро-
вания, теплозащиты.
В исследовательском блоке размещаются приборы, аппаратура
и агрегаты, обеспечивающие выполнение научной задачи, соби-
рающие, анализирующие и передающие эту информацию на Землю.
В нем размещаются автоматические устройства для обеспечения
последовательности работы всех агрегатов и систем СА; приемно-
передающая радиостанция с антенно-фидерным устройством; фо-
тотелевизионная система; магнитное записывающее и запоминаю-
щее устройство; системы проб и анализа атмосферы, забора грун-
та; датчики перегрузок, температуры, тепловых потоков, давления,
влажности, освещенности, концентрации космических частиц, ме-
теоров, интенсивности электромагнитных колебаний, радиационной
интенсивности и т. д. (см. рис. 7, 8). На рис. 9 представлена ком-
поновочная схема СА, полезной нагрузкой которого являлся
«Луноход-1». Для выполнения основных траекторных задач на СА
имеются специальные управляющие и исполнительные органы;
23
Рис. 8. Схема компоновки автоматического
СА для спуска на Марс:
1 — исследовательский блок (полезный
груз); 2 — аэродинамический обтекатель
(тормоз); 3 — парашютный контейнер; 4 —
антенна; 5— ТДУ; 6 — отсек системы уп-
равления и аппаратуры; 7 — парашют; 8 —
шпангоуты обтекателя
1 — СА; 2 — посадочное устройство; 3 —►
ТДУ; 4 — трап для спуска лунохода на
поверхность Луны; 5 — полезный груз
(«Луноход-1»)
Рис. 9. Компоновочная схема спускаемого
аппарата автоматической станции
«Луна-17»:
блок управления траекторными операциями с гироскопической
системой и датчиками точной ориентации, осуществляющими
строго ориентированный полет и посадку.
Управляющая система включает в себя временное устройство,
датчики давления, перегрузок, радиовысотомер, обеспечивающие
заданную последовательность и продолжительность работы ис-
полнительных органов. К последним относятся пирозамки, толка-
тели, отделяющие СА от КЛА. Небольшие спускаемые аппараты
(без гироскопического управления) перед отделением от КЛА за-
кручиваются с помощью тангенциальных ДУ и сохраняют таким
образом направление вектора кинетического момента до входа в
атмосферу.
В атмосфере СА может ориентироваться относительно набега-
ющего потока, используя аэродинамические, газодинамические
или другие системы. Торможение СА в атмосфере, как правило,
сопровождается не только сильным нагревом аппарата, но и коле-
баниями его вокруг центра масс. Колебания могут быть частично
погашены с помощью струйных сопел или механических демпфе-
ров.
В качестве предпосадочной тормозной системы на многих СА
используется парашютная система, вводящаяся по команде от
временного механизма, датчика перегрузки или барореле. После
отстрела крышки парашютного отсека выпускается прикреплен-
ный к ней малый сталибизирующий, или вытяжной, парашют (см.
рис. 7; рис. 10, 11).
Обычно используется трехкаскадная парашютная система спу-
ска и посадки. Вытяжной парашют вводит в работу тормозной,
который затем вводит основной. Введение осуществляется сраба-
тыванием пироболтов крепления строп каждого каскада. Число
24
1
Рис. 10. Схема спуска СА станции «Венера» на планету Венера:
А— отделение СА; 2— торможение аппарата в атмосфере; 3— раскрытие тормозного пара-
шюта; 4 — раскрытие основного парашюта (начало передачи информации на Землю с бор-
та СА); 5—начало работы радиовысотомера; 6 — посадка
каскадов может быть задано или выбирается при проектировании
парашютной системы.
Непосредственно перед контактом СА с поверхностью планеты
может включаться специальный посадочный двигатель (РДТТ),
снижающий посадочную скорость аппарата до нуля. При этом па-
рашютная система обеспечивает начальную ориентацию вектора
тяги. Посадка спускаемого аппарата завершается срабатыванием
системы амортизации — деформируемого корпуса или специаль-
ного шасси.
Для обеспечения нормального теплового режима функциони-
рования систем и агрегатов СА предусматривается система термо-
регулирования (СТР). На спуске внешние тепловые потоки в ос-
новном воспринимаются специальной теплозащитной системой.
Однако те их них, которые поступают внутрь СА, а также выде-
ляемые работающей аппаратурой, в свою очередь, воспринимают-
ся циркулирующим, газом или другими хладагентами и переда-
ются на радиатор СТР (см. рис. 7).
25
Рис. 11. Схема спуска и посадки С А станции «Марс» на планету Марс:
/ — отделение СА; 2 — запуск ТДУ; 3— аэродинамическое торможение; 4 — спуск полезного
груза СА на парашюте; 5 — запуск ДУ мягкой посадки и увод парашюта; 6 — спускаемый
аппарат в рабочем положении на поверхности Марса;-условная граница атмосфе-
ры Марса
В качестве энергетических систем на СА часто используют
химические батареи с преобразователями и распределительными
устройствами. В зависимости от времени функционирования и за-
дач, решаемых СА, может оказаться целесообразным использова-
ние топливных элементов, изотопных источников, а иногда сол-
нечных батарей (для СА, выполняющих задачи на поверхности
планеты, и т. д.).
1.5. ВЗАИМОСВЯЗЬ КРИТЕРИЕВ И ВЕРОЯТНОСТЬ
ВЫПОЛНЕНИЯ СА ПОСТАВЛЕННОЙ ЗАДАЧИ
Основными дисциплинирующими условиями при создании
спускаемых аппаратов являются установленные нормы безопасно-
сти пилотируемых полетов, нормы комфортности, вероятность вы-
полнения поставленной задачи.
Кроме указанных выше (см. разд. 1.2) критериев эффективно-
сти СА (|Цп.н, uv, Цс и др.), для спускаемых аппаратов могут быть
также приняты стоимость доставки единичного груза, ресурс, сте-
пень использования и преемственность имеющихся материальной
части и экспериментальной базы, состав возвращаемых на Землю
полезных грузов и рентабельность их возвращения, качество
средств приземления и посадки.
26
Необходимость оценки безопасности полета СА обусловлена в
первую очередь сложностью и многочисленностью систем и агре-
гатов аппарата, работающих в достаточно жестких условиях и
обеспечивающих спуск. Кроме того, под влиянием внешней среды
возможно появление экстремальных ситуаций, которые могут при-
вести к тяжелым последствиям.
Под безопасностью полета СА будем понимать такие свойства
системы, которые в случае аварийной ситуации обеспечат членам
экипажа сохранение состояния, достаточного для сознательной и
минимально необходимой активной деятельности [64.] Количест-
венная оценка безопасности полета СА может быть в первом при-
ближении определена как вероятность того, что при выполнени
поставленной задачи полет спускаемого аппарата окажется без-
опасным.
Абсолютная безопасность может характеризоваться вероят-
ностью, равной единице. В действительности безопасность полета
СА, как правило, близка к единице, но не равна ей. Поэтому оце-
нивать ее удобно с помощью некоторой дополнительной величины,
которую назовем уровнем риска события.
Средний уровень риска за данный период и в определенных ус-
ловиях для каждого участника события, если основное значение
имеет сам факт полета (спуск СА), может быть определен так:
где — суммарное количество человек, погибших или утратив-
ших здоровье (работоспособность) в результате летных происше-
ствий за данный период; SW — общее число полетов СА за рас-
сматриваемый период.
В табл. 2 приведены уровни риска некоторых транспортных
средств за 1958—1968 гг. в среднем по земному шару [64].
Таблица 2
Средства передвижения УМО”6 Примерное количество жертв за год, тыс. Примечание
Теплоходы Легковые автомобили Мотоциклы Междугородные автобусы Железнодорожный транспорт Морской транспорт Аэрофлот ВВС Опытная авиация Космические аппараты 0,1 9,0 23,0 2,0 12,0 50 100,0 500,0 104 2-104 60 120 10 2 4 20 (200) 2 1 0,1 0 Мужчины — 78%; женщины — 22% 200 с учетом ры- боловных судов
Происшествие, представляющее опасность для жизни экипажа,
Возникает тогда, когда параметры, определяющие безопасность
27
полета (критические параметры), выйдут за допустимые пределы,
а резервные системы или вмешательство экипажа не устраняет
эти опасные отклонения. Вероятность происшествия Qhp количест-
венно может быть подсчитана так же, как ненадежность систем,
агрегатов и механизмов СА, но с учетом значительной роли чело-
века, являющегося важным звеном в системе подготовки и управ-
ления полетом.
т
В первом приближении = где Qi — вероятность
/•-1
возникновения происшествия, /=1, 2, ... , т.
Величина Qi близка к нулю, и дальнейшее уменьшение ее весь-
ма затруднительно. Число возможных причин происшествий (от-
казов) т в ряде случаев может быть двузначным, поэтому сниже-
ние величины Qnp, например, на порядок является малоперспек-
тивным и требует больших затрат.
Значительное влияние на безопасность полета СА оказывает
применение средств спасения. Между вероятностями происшест-
вия Qnp и отказа средств спасения Qc.c и риском события сущест-
вует следующая зависимость:
A =QnpQc.c-
В идеальном случае Qc.c->0. Тогда абсолютная безопасность
при любой вероятности происшествия будет равна единице.
Однако при разработке СА основной задачей является создание
такого аппарата, который должен при прочих равных условиях
обеспечить эффективное и надежное выполнение поставленной за-
дачи.
Непомерно развивая какие-то качества спускаемого аппарата,
можно лишить его способности служить основному своему назна-
чению. Спускаемые аппараты должны разрабатываться на макси-
мальную эффективность при достаточно низком уровне риска.
Действенность средств спасения Sc можно в первом приближе-
нии представить в виде следующей зависимости [64]:
5С = РПНК,
где F — эффективность средств спасения (вероятность обеспечения
спасения в данных условиях в принципе); П — вероятность свое-
временных и правильных действий экипажа (спасающихся); Н —
надежность срабатывания в определенной последовательности
всех элементов и механизмов СА; К — вероятность выживания
экипажа в случае попадания в неблагоприятные условия (район)
после спуска. При Qmax~ 1
Fmin= 1 Qmax ~
Qmax — наибольшая вероятность возникновения такой ситуации,
когда средства спасения не эффективны.
Техническую надежность всех элементов системы спасения,
полагая закон распределения случайных отказов экспоненциаль-
28
ним, можно представить в виде
т
н=1-2(^,),
/• 1
где X/ — интенсивность отказов элементов системы в аварийной
обстановке; — продолжительность нахождения средств спасения
в «рабочем состоянии.
1.6. МОДЕЛЬ МАССОВЫХ ХАРАКТЕРИСТИК
АППАРАТА
Успех проектирования СА в значительной степени зависит от
достоверности результатов, получаемых при расчетах массы аппа-
рата. Важность этих расчетов объясняется органической связью
последних с основными этапами создания спускаемых аппаратов.
В связи с этим разработка зависимостей для определения масс
конструкции, агрегатов и СА в целом представляет собой весьма
сложную и трудоемкую задачу. Как правило, в окончательном
виде эти зависимости должны содержать статистические коэффи-
циенты, которые приводят аналитические зависимости в соответст-
вие с данными статистики.
’Можно выделить два типа уравнений для расчета массы СА:
развернутые и приведенные. Первые формируются путем суммиро-
вания масс всех элементов аппарата с использованием точных
прочностных, геометрических и массовых соотношений, вторые
отражают главные — линеаризованные по основным параметрам
СА — связи.
К недостаткам развернутых уравнений следует отнести их оп-
ределенную громоздкость, а к достоинствам — достаточно строгий
учет зависимостей между массой и определяющими ее парамет-
рами.
Точность приведенных уравнений в значительной степени оп-
ределяется точностью используемых в расчетах масс статистиче-
ских коэффициентов. Это объясняется в известной степени тем>
что математическая форма связи между параметрами приведен-
ного уравнения более стабильна, чем значения его коэффициен-
тов. К достоинствам подобных уравнений следует отнести просто-
ту записи и, как следствие, удобство использования их для ана-
лиза.
Используя результаты подразд. 1.4, представим в первом при-
ближении выражение для массы СА баллистического и «скользя-
щего» спусков в следующем общем виде:
/Яса = яги.н я/констр 4“ ягду “F ягтз 4" 4“шсу 4" я/сэп 4“
4-ягсож4"^ св> (1.7)
где /пса—масса СА в момент входа в атмосферу планеты; тп.н —
масса полезной нагрузки (экипаж, исследовательское оборудова-
29г
ние, аппаратура и т. д.); тКОнстр— масса конструкции аппарата;
/иду — масса двигательной установки (тормозные, управляющие
и другие двигатели, топливные баки и т. д.); тТз —масса системы
теплозащиты; тс.п— масса средств посадки; тсу, тсэп —массы
систем управления и энергопитания; тсож —масса системы обес-
печения жизнедеятельности экипажа (системы СТР, амортизацион-
ные кресла, системы регенерации и т. д.); тсв — масса системы
связи (аппаратура, антенны, кабельная сеть, телевидение и т. д.).
Анализируя уравнение (1.7), можно установить, что практиче-
ски все его составляющие в той или иной степени зависят при
прочих равных условиях от нескольких величин: массы СА, его
объема (Уса), времени функционирования аппарата (/пол), числа
членов экипажа (пэк) для пилотируемых СА, надежности. На-
пример, масса конструкции аппарата для заданных конструктив-
но-силовой схемы, компоновки, типа СА зависит от тел и числа
членов экипажа; масса двигательной установки для заданных типа
двигателя, компонентов топлива, числа импульсов и времени их
действия — от массы СА; масса средств посадки — от массы СА;
масса системы обеспечения жизнедеятельности для заданного типа
СОЖ — от пэк и времени функционирования (/Пол);
Монстр = /1(^Са; /Пэк); /Иду = /2("*Ca); /«Т3 = /з (/«СА, «эк):
/Псп=Л Иса); /Псож = /5(«эК; А™)- (1.8)
В то же время рассматриваемые типы аппаратов (баллистиче-
ские и «скользящие») имеют (в допустимых пределах) сходные
комплектующие системы, агрегаты и конструктивные элементы,
следовательно, можно считать, что
mCy~ const; тСэп~const; тсв^ const. /1.9)
Суммарно эти величины могут составить 18...20% от тел [60].
Поэтому в дальнейшем эти составляющие удобно учитывать сле-
дующим образом:
/пе=/псу+/Псэп + /Псв- (1*10)
Кроме того, для автоматических спускаемых аппаратов систе-
ма СОЖ существенно упрощается и практически сводится к си-
стеме СТР и нескольким элементам. Поэтому ее в первом прибли-
жении можно объединить с системой энергопитания или согласно
(1.10) с mZ) т. е. для автоматических СА выражение (1.10) будет
иметь вид
т'Е=тСу + тСэп + тсв + ^сож. (1.11)
Учитывая сделанные выше допущения, развернутое уравнение
(1.7) представим следующим образом:
для пилотируемых СА
ГПск = ^п.н + Монстр + тДУ + ГПТЗ + ^с.п + ^сож + (1 • 12)
30
для автоматических СА
т'Ск=тпм+/пконстр+m Ду Ц- ттз + тс,„ + mi (1.13)
Преобразуем уравнения (1.12) и (1.13) и представим их в без-
размерном виде
Р-П.н = тп.н/т С А = 1 — [Иконстр + Iх ДУ + Итз + Р'с .П + Р'СОЖ + Iх s]»
Р-п.н = ^п.н/^СА = 1 — [Р-констр + Iх ДУ + Р*ТЗ + Нс .п + Н sj • (1-14)
Максимальное значение относительной массы полезной нагруз-
ки при заданных значениях массы СА (конструкции, двигательной
установки, и ц2') будет при минимальной массе средств, обес-
печивающих спуск и посадку, а именно:
Р'пос = Р'Тз + Р-с.пш1п- ( 1 • 15)
Для аппаратов планирующего спуска первое уравнение систе-
мы (1.14) должно включать в себя член, определяющий массу
компонентов топлива. Тогда после некоторого преобразования мо-
жем получить следующее выражение:
Р-П.н = 1 — [p-констр + Уду^о + Р-т + Р*тз + Р-с.п 4" Р*сож 4" P's]» (1*16)
где уду=/Иду go/Po — относительный (удельный) вес двигатель-
ной установки; Ро — тяга двигателя в начале спуска СА; п0 =
= Р0/(шса£о) —величина начальной перегрузки; gQ— ускорение
силы тяжести на Земле; цт = аит//пса— относительная масса ком-
понентов топлива (тт — масса топлива) ;р4онстр— относительная
масса конструкции, в этом случае в нее включаются и массы топ-
ливных баков для хранения компонентов топлива двигательной
установки.
Следует заметить, что масса топливных баков в конце работы
двигательной установки (в конце траектории спуска) будет вклю-
чать в себя также и топливные остатки, т. е. топливо незабора,
некоторый (неизрасходованный) гарантийный запас топлива и газы
наддува
Р'констр = Р'констр 4“ Р'т.о 4" Р'т.о.гар 4" Р'т.о.незаб 4" Р*газ» ( 1*17)
где Цконстр — относительная масса силового набора, обшивки кор-
пуса, хвостового, приборного отсеков и других конструктивных
элементов СА; цт.о — относительная масса конструкции, арматуры
и систем топливных баков; Цт.о.гар, Цт.о.незаб — относительные мас-
сы гарантийных запасов и остатков топлива в баках, трубопрово-
дах, системе подачи и т. д.
Необходимый запас топлива для двигательной установки СА
можно получить из известного соотношения Циолковского. Запи-
шем выражение для потребной массы топлива в безразмерном
виде
|iT=l-expI-AlZ/(Py,go)]. (1-18)
где AV—приращение характеристической скорости (импульс дви-
31
гательной установки); РУД=РО/(mgo)—удельная тяга двигателя:
m = mlt — массовый секундный расход компонентов топлива.
Приближенный анализ зависимости массы средств посадки от
массы СА проведем следующим образом. Увеличение массы кон-
струкции СА за счет введения систем посадки будем определять в
долях от массы полезного груза, доставляемого на поверхность
планеты. Тогда выражение Цс.п = ^с.п/^са можно привести к виду
Н*С.и==Н*11.Н®1> (1.19)
где ai = /nc.n/mn.H — масса средств посадки, отнесенная к массе по-
лезного груза СА (табл. 3 [48]).
Таблица 3
Средства посадки Парашютно- реактивные Роторные Баловные С использовани- ем решетчатых аэродинамиче- ских щитков
«1 0,06... 0,075 0,12... 0,18 0,12 ...0,16 0,10... 0,15
Следует отметить, что в упоминавшейся выше работе [13] в ка-
честве полезной нагрузки СА принималось не только научное обо-
рудование, которое возвращалось на Землю или доставлялось на
планету, но и все бортовые системы, сохраняемые постоянными
при изменении основных проектных параметров аппарата, т. е.
при переходе от одного варианта СА к другому. Как правило, при-
нималось, что в состав средств спуска и посадки в данном случае
входят конструкции гермокабины, корпуса СА пли аэродинамиче-
ского тормозного устройства, теплозащита и теплоизоляция, дви-
гательные установки для ориентации и предпосадочного торможе-
ния и системы, обеспечивающие мягкую посадку аппарата.
Все остальные бортовые системы, а именно: системы обеспече-
ния жизнедеятельности экипажа, терморегулирования, энергопи-
тания, связи и аппаратурная часть системы управления входят в
состав полезной нагрузки СА.
Такое разбиение масс агрегатов и систем СА в общем право-
мерно и может с успехом использоваться для анализа масс ап-
паратов, особенно при сравнительных оценках их характеристик
на начальном этапе проектирования.
В общем виде массовое уравнение для аппарата должно учи-
тывать не только массу собственно СА, но и модуля орбитального
торможения, включающую массы тормозной двигательной уста-
новки (ТДУ), топливных баков, конструкции корпуса модуля
и т. д.
/Ио=/ПМот+^СА,
где, шмот — масса модуля орбитального торможения СА
/ЯМОТ = ^констр 4“ ^ТДУ ^КДУ ^т.б 4“
32
ягКонстр, ^тду, ткду, тт.б — массы конструкции модуля, ТДУ,
КДУ и топливных баков соответственно; в выражение для прочей
массы тПр включаются массы исполнительных органов управления,
датчиков командной и управляющей аппаратуры, узлов крепле-
ния и т. д.
Следует отметить, что коррекция траектории для обеспечения
расчетных параметров входа СА в атмосферу планеты может осу-
ществляться с помощью бортовой аппаратуры спускаемого аппара-
та или космического транспортного корабля, в состав которого
входит СА. Таким образом, в целом для комплекса (спускаемый
аппарат и модуль орбитального торможения) можно считать, что
СА является полезной нагрузкой.
глава 2 Баллистическое проектирование
спускаемых аппаратов
2.1. ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ
В общей постановке задачу проектирования спускаемых аппа-
ратов можно свести к задаче выбора облика СА и функций его
управления (см. разд. 1.2). При этом необходимо, чтобы послед-
ние обеспечивали оптимальное значение заданного критерия эф-
фективности СА и удовлетворяли уравнениям математической мо-
дели аппарата.
Условно задачу оптимального проектирования спускаемых ап-
паратов можно представить в виде следующих этапов.
Для поставленной задачи в первом приближении определяют
аэродинамическую форму СА (или она может быть задана) с уче-
том основных особенностей спуска аппарата в атмосферу планеты
(траектории входа), ограничений на систему приземления, обес-
печения комфортных условий экипажу, конструктивных требова-
ний, требований по точности, надежности, безопасности и т. д.
Затем для выбранной формы аппарата уточняют траекторию
движения в атмосфере и на других участках спуска, оптимальные
параметры (баллистическое проектирование). При этом могут
иметь место постановки задач синтеза оптимального управления
(движения) СА при спуске по различным критериям. Например,
по критериям минимума массы теплозащиты, минимума интеграль-
ных тепловых потоков за время спуска, непревышения заданной
допустимой температуры поверхности аппарата и т. д. (тепловое
проектирование СА) или по критериям минимума массы аппарата,
его агрегатов и систем, перегрузок, действующих на него, надеж-
ности и т. д. (массовое проектирование СА).
В данной главе рассмотрены основные вопросы баллистическо-
го проектирования — расчет траекторий движения СА различных
2-331 33
Рис. 12. Схема входа СА в атмосферу с орбиты спут-
ника планеты:
1 — положение СА на орбите (4) в момент включе-
ния ТДУ для перехода аппарата на траекторию вне-
атмосферного участка — опорную траекторию (5);
2 — точка входа СА в атмосферу планеты; 3 — услов-
ная граница атмосферы
типов, предназначенных для спуска
на некоторые планеты Солнечной си-
стемы.
Для удобства дальнейшего рас-
смотрения движения аппаратов в про-
цессе их спуска на планеты условно
разобъем траектории полета па сле-
дующие основные участки: коррекция
космической траектории и вход спу-
скаемого аппарата в атмосферу (по-
лет СА на внеатмосферном участке); атмосферный участок поле-
та; участок предпосадочного торможения и посадки аппарата.
Полет СА на внеатмосферном участке. Коррекция траектории
аппарата осуществляется с помощью бортовой системы СА или
космического корабля, в состав которого может входить спускае-
мый аппарат. Процесс коррекции включает в себя основные тра-
екторные операции, необходимые при подходе КЛА к планете,
или же в случае нахождения аппарата на орбите искусственного
спутника торможение его.
В общем случае задача коррекции траектории заключается в
обеспечении расчетных параметров входа СА в атмосферу пла-
неты. В этом случае основные исходные параметры движения ап-
парата на орбите (рис. 12) —скорость Vop и угол между вектором
скорости и местным горизонтом 0ор— можно изменить, используя
импульсы AV его тормозной двигательной установки.
Если принять, что. отношение ЛУ/Уор<С1, то скорость аппарата
VTp на траектории спуска (после работы ТДУ) и угол 0тр могут
быть в первом приближении представлены следующими выраже-
ниями (см. рис. 12):
VTP = VOP + 4V cos&;
етр«бор-------(2.1)
Р Р Иор + ДИ COS &
где О — угол между направлениями векторов скорости на орбите
Vop и импульса AV.
На рис. 12 представлена схема спуска СА с орбиты спутника.
Аналогично можно получить и выражения для оценки скоростей
VBI и углов 9вх входа СА в атмосферу планеты:
V
ВХ---
2^пл
*вх*ор
(^?ор ^ex)i
(2.2)
cos 9ВХ= уТР^°Р cos 6тр,
v вх^вх
34
где Кпл, /?вх, /?ор — радиусы планеты, входа и исходной орбиты со-
ответственно; go — ускорение силы тяжести на поверхности пла-
неты.
Время полета СА на внеатмосферном участке
*вх
/= f -----—----. (2.3)
J Гтр sin 6fp
^ор
Если известны параметры орбиты Vop, /?ор, 0ор, а также значе-
ния 0ВХ и й, то величина тормозного импульса находится относи-
тельно просто. За высоту входа Нвх или опорную высоту принима-
ется так называемая условная граница атмосферы (см. рис. 12)
HBx = Rbx—^?пл, на которой аэродинамические силы становятся
значительными, например аэродинамическое сопротивление
^>O,OlmGAgo.
В первом приближении высоту входа для различных планет
можно принять равной:
для Земли Нвх—100...105 км (VBX—7600... 11 200 м/с);
для Венеры /7ВХ—110 км (Увх—11 000 м/с);
для Марса Явх—80...85 км (VBX—3500...5500 м/с).
При исследовании характеристик внеатмосферного участка по-
лета необходимо в большинстве случаев определять разброс пара-
метров входа аппарата, особенно ошибки в угле и скорости входа,
так как они оказывают наибольшее влияние на траекторию атмо-
сферного участка полета СА. Разброс параметров входа можно оп-
ределить путем вычисления производных рассеивания. Для вычис-
ления последних необходимо продифференцировать частным об-
разом уравнения (2.2) и (2.3).
Среднеквадратичные отклонения параметров входа выражают-
ся через отклонения исходных параметров
Таким образом, точность параметров входа СА VBX, 0ВХ, /?вх зави-
сит от точности характеристик орбиты после подачи тормозного
импульса 6V, 6/?, 60 и характеристик дх!д\1\ dxldR\ dx/d0 опорной
траектории 5.
Точность параметров спуска СА с орбиты искусственного спут-
ника планеты в первом приближении существенно зависит и от
угловой дальности <р (см. рис. 12).
Используя основные соотношения эллиптической теории (12, 59],
для нисходящей ветви траектории спуска аппарата с начальной
высотой HOp=Rov—#пл можно получить выражение для величины
относительного импульса ТДУ
ду==-АУ_ = 1— 1/ flBX(l — cos у)
^ор V 7/ОрЧ-^вх(1 —cosy)
2Ф
35
и соотношение
fo._ 2/?нх (1 — cos у)2
dV Яор sin <р
Очевидно, что с увеличением ср характеристическая скорость
коррекции уменьшается и достигает минимума при <р = 180°.
Дальность спуска СА на внеатмосферном участке, измеренная
по поверхности планеты, также является функцией параметров
движения аппарата в момент подачи тормозного импульса (вели-
чины тормозного импульса и его направления). Разброс по даль-
ности в этом случае может быть определен из следующей зави-
симости:
± j/ (^8Ч2+йг 842+Ur842+
V+(— ВдН2 + (— 8&)2 + (— 8/V ,
) \ db J \ dt j
где б/ — ошибка по времени подачи импульса.
Необходимый запас топлива тт для торможения СА можно
рассчитать, используя соотношение /пт=шса (1 — е-ДУ/^Руд), где
Руд— удельная тяга ТДУ (отношение тяги к секундному расходу
топлива).
При возвращении аппарата на Землю из полета в космическое
пространство скорости входа его в атмосферу, если не принять
каких-либо дополнительных мер, будут равны или значительно
больше параболической скорости вблизи Земли. Уменьшить ско-
рость можно, например, следующим образом:
уменьшением скорости СА до орбитальной с помощью ТДУ;
использованием для торможения аппарата атмосферы Земли;
комбинацией первого и .второго способов.
Основные уравнения движения спускаемых аппаратов на ат-
мосферном участке полета. Этот участок полета СА является оп-
ределяющим при выборе основных проектных параметров спускае-
мого аппарата и характеристик его систем теплозащиты. Спуск на
этом участке характеризуется интенсивным аэродинамическим
торможением, большими тепловыми потоками и для некоторых
СА необходимостью значительного маневрирования.
Анализ характеристик атмосферного участка полета СА в на-
стоящее время основан на численных или аналитических решениях
уравнений движения и тепломассообмена на обтекаемой газовым
потоком поверхности аппарата. В результате анализа определяют
аэродинамический облик СА, управление, величины действующих
перегрузок и тепловых потоков.
Расчет атмосферного участка заканчивается при получении
таких траекторных характеристик, которые обеспечат с заданной
надежностью и точностью безопасную посадку спускаемого аппа-
рата на планету.
36
Движение СА можно условно разбить на абсолютное движение
его центра масс и вращательное движение аппарата относительно
этого центра масс [46].
Уравнения движения в этом случае после ряда преобразований
в первом приближении могут быть представлены (в скоростной
системе координат) в следующем виде:
dH I/ • п
----= V sin 6;
dt
dV
dt
dti
dt
nxg cos (a — од) — g0 — go sin 0;
sin (a _ 8 j + gs _ + Ht - v
где a — угол атаки; бд — угол между направлением тяги и про-
дольной осью СА; go, g — ускорения силы тяжести на Земле и не-
которой высоте (//); Gx = cxSmi&l (mgQ)—баллистический коэффи-
циент; k = cylcx — аэродинамическое качество; 0 — угол наклона
вектора скорости к местному горизонту.
Если движение СА происходит только под действием аэроди-
намических и гравитационных сил, то система (2.4) имеет вид
dV р^2 .
-----——go —g sin 0;
dt х 2 su s
dti 1 Г , рГ2
---=----\Gxk —--
dt V [ x 2
dH I 7 ’ fi
----=V sin 6.
dt
V2
g
___P2
Япл 4
g cos 6;
(24)
(2.5)
Следует заметить, что, как правило, спуск аппарата с постоян-
ным качеством требует переменных углов наклона траектории.
Большие углы приводят к большим тепловым потокам, но к мень-
шему суммарному количеству подведенного тепла.
Траектории при спуске СА с переменным аэродинамическим
качеством могут быть рассчитаны так, что максимальные пере-
грузки, действующие на аппарат, его нагрев будут выдерживать-
ся в заданных пределах.
Управление качеством СА может быть введено для обеспече-
ния следующих основных режимов спуска:
полет с постоянным торможением или постоянным скоростным
напором (изоперегрузочные траектории спуска);
полет с постоянным углом наклона траектории;
полет с постоянным тепловым потоком или с постоянной сред-
ней температурой в критической точке; •
полет с постоянной скоростью спуска.
Математические методы исследования уравнений движения СА,
позволяющие получить основные термобаллистические параметры
траектории полета аппарата в процессе спуска, приведены, на-
пример, в работах [43, 46, 61, 83].
37
Рис. 13. Зависимость сх для парашютной
системы от числа Маха М
Предпосадочное торможение
и посадка СА. Для обеспечения
предпосадочного торможения
спускаемого аппарата (в атмо-
сфере планеты) могут использо-
ваться парашютные системы,
ТДУ или специальные (аэродина-
мические) средства торможения.
Обычно используются двух- и трехкаскадные парашютные си-
стемы, состоящие из вытяжных, тормозных и основных пара-
шютов.
Эти системы в основном характеризуются некоторым балли-
стическим коэффициентом — параметром торможения каскадов
3xn=^Sn/(zng-0), (2.6)
где оХп — баллистический коэффициент парашютов; 5П — площадь
купола парашютов; сх — коэффициент сопротивления парашютов
(рис. 13).
Эффективность парашютных систем в значительной степени
зависит от условий их применения. Например, для Земли и Венеры
тормозную парашютную систему целесообразно использовать со
скоростью ~250 м/с, основную — ~70 м/с, а для Марса —
~900 м/с.
Приближенное соотношение между отдельными параметрами в
процессе спуска СА может быть представлено зависимостью, опре-
деляющей скорость, при которой возможно введение парашютной
системы или ее каскада,
(2.7)
где VB, Ук — скорости движения СА в моменты введения и конца
работы парашютной системы; рв, рк — плотность атмосферы в мо-
менты введения и концд работы .парашютной системы;
Рв=РоС-РЯв; Рк=Рое-₽Як; (2.8)
Нв — высота введения парашютной системы (|расстояние от по-
верхности Земли до точки введения); НК=НВ—Нт — расстояние
(высота) от поверхности Земли до точки конца работы парашют-
38
ной системы (для Земли р = 1/7170 1/м; ро=0,14 кг-с2/м4); i — чис-
ло каскадов (z= 1,2,3, ...).
Для определения протяженности участка торможения аппарата
Ят в первом приближении можно использовать соотношение
Н .г = V — 1П-^- .
? Рв
1
Для определения приближенных значений величин перегрузок в
каждый момент спуска СА на этом участке траектории использу-
ют соотношение
nx=l-oxnpW. (2.9)
При использовании тормозных двигательных установок для тор-
можения СА на этом участке (относительно близком к вертикаль-
ному) уравнение движения (без учета лобового сопротивления СА)
представим в виде
-Р’уд—+mU°’ (2J0)
dt \ dt J
где dmldt — секундный расход топлива.
Дважды интегрируя уравнения (2.10) и учитывая, что конеч-
ные высота и скорость спуска СА должны -быть равны нулю, полу-
чим следующие зависимости для начальных параметров спуска на
этом участке:
"° 7 (2.11)
^о=-^о[(1-Ик+^1п^)-(-Ц^-+-^ (1-^)1,
L 2и0 * уд^Го J
где tiQ = P!— начальная перегрузка; Р — тяга ТДУ; т0 —
начальная масса СА на предпосадочном участке; цк=^кМо — от-
носительная конечная масса СД на участке предпосадочного тор-
можения и посадки.
Посадочный участок, как правило, характеризуется начальной
скоростью 7о/=Ук-и допустимой перегрузкой. Так как движение СА
в данном случае равномерно-замедленное, то уравнение для опре-
деления протяженности этого участка можно представить в виде
/y' = (r;)2/(2gonj. (2.12)
2.2. БАЛЛИСТИЧЕСКИЙ СПУСК СА
Рассмотрим основные уравнения движения и некоторые зави-
симости для определения параметров СА при баллистическом спус-
ке аппарата. В этом случае аэродинамическое качество k = cy!cx = Q
(су = 0) и реактивная сила (тяга двигателя) Р = 0. В общем случае и
коэффициент боковой аэродинамической силы cz=0.
39
Примем следующие допущения: планета, на которую «спускается
аппарат, представляет собой правильную сферу; атмосфера плане-
ты не вращается (считаем ее изотермической); плотность ее по вы-
соте меняется согласно экспоненциальному закону (2.8); высота
спуска СА мала по сравнению с радиусом планеты; проекция уско-
рения силы тяжести на касательную -к траектории спуска незначи-
тельна по сравнению с ускорением от силы лобового сопротив-
ления.
Тогда система уравнений (2.4) может быть представлена в сле-
дующем упрощенном виде:
dV _ pZ2
dt —
dH n
----=V sin 6.
dt
(2.13)
Следует отметить, что при изотермической атмосфере система
(2.13) может быть дополнена функцией изменения плотности
Р=Рое-^. (2.14)
Кроме того, после входа баллистических СА в атмосферы пла-
нет с относительно большими углами (Земля и Венера 0>5°, Марс
0>2О° и т. д.) на достаточно большом участке траектории спуска,
на котором действуют максимальные тепловые потоки и перегруз-
ки, полет аппарата в первом -приближении можно считать прямо-
линейным:
9=const. (2.15)
Используя уравнения (2.13), (2.14) и условие (2.15), можно по*
лучить, что
~Г~ =----£оРо , dH- (2-16)
V 2 gsin 0
Интегрируя это уравнение, находим
(f-p-)]’ Р-17’
sin 0ВХ J
где рвх=р0е“рЯвх— плотность атмосферы на высоте входа Нвх ап-
парата в атмосферу планеты; 0ВХ, Квх — начальные угол и ско-
рость входа СА.
Выражение для перегрузки при баллистическом спуске аппара-
та можно найти из соотношения
Пх = а,р^/2. (2.18)
Здесь и в дальнейшем будем иметь в виду модуль продольной
перегрузки, которая в процессе спуска СА в атмосфере является
отрицательной величиной. Максимальная перегрузка ихтах дости-
гается при максимуме скоростного напора.
40
Приведем уравнение (2.17) к виду
V2=l/B2xexpkg0
L Р sin 9ВХ
продифференцировав (2.19), найдем
р= - Р sin 9BX/(3xgo). (2.20)
После подстановки выражения (2.20) в (2.17) получим при
Пх max
(2.19)
P sin eBX
2^o
Поскольку Рвх«Рпхтах> т0
vn
xmai
q.rff0pBx
sin 9BX
(2.21)
(2.22)
P”xmax
<^оР
l/ = I/BXe2psl"e^;
Vn =1/вхе-°-5^0,611/вх;
xmax вх ’ вх’
и _____ Э Sm 6RX ж г 2 .
^.rmax— ~ Л v вх,
3 Sin 6ВХ
Для аппаратов с меньшим ах (заостренная форма СА, большая
удельная нагрузка на мидель) nxmax реализуется в более плотных
слоях атмосферы.
Кроме того, максимальное значение перегрузки увеличивается
с увеличением угла входа. На рис. 14 приведены зависимости
max= f(Овх) при спуске СА в атмосфере Земли (7), Марса (3) и
Венеры (2) с начальной скоростью, равной первой космической
(Н= 100 км).
Аналогично можно получить зависимости параметров спуска СА
с учетом максимального среднего удельного теплового потока
gmax, действующего на аппарат:
Р« = - ?sin 0вх/(3зх£о);
vmax
У-
*max
0,85Увх;
(2.23)
<7max ? 6BX.
Очевидно, что t/max воздействует на СА раньше, чем перегруз-
ка. В общем случае суммарный воспринимаемый СА тепловой по-
ток в первом приближении можно представить в в'иде следующего
функционала:
/ у2
Qs=/ p2L, smld, е psIne«x и т. д.
\ ®ЛГ
(2.241
41
77 x max
Рис. 14. Зависимость максимальной пе-
регрузки Пх тах от угла входа 0ВХ
Рис. 15. Зависимость перегрузки от
времени (ох=3310-3 м2/Н; Явх=90 км;
евх= -1°)
При входе СА в атмосферы планет с первой космической ско-
ростью для уменьшения суммарного конвективного теплового по-
тока, составляющего основную часть .суммарного потока для этого
Случая, целесообразно делать головную часть СА затупленной, ма-
лого удлинения.
Все приведенные выше соотношения применимы при относитель-
но больших углах входа 0ВХ>5° (для Земли) при входе СА в атмо-
сферу с первой космической скоростью и 0ВХ>1О° — со второй кос-
мической скоростью.
В разд. 1.1 отмечалось, что ври баллистическом спуске СА с
экипажем следует обращать внимание не только на величину пере-
грузки, но и на время ее действия. На рис. 15 приведена зависи-
мость nx = f(t) при баллистическом спуске СА в атмосфере Земли,
вход с первой космической скоростью.
Таким образом, (приведенные выше зависимости (2.22), (2.23)
и другие выражения дают основание сделать заключение о том, что
параметры траектории СА в значительной степени зависят от на-
чального угла входа и величины баллистического коэффициента.
К типичным схемам СА баллистического спуска можно в пер-
вую очередь отнести аппараты, имеющие форму (рис. 16): сферы
Рис. 16. Аэродинамические схемы СА баллистического спуска:
а —сфера; б — «фара>; в — затупленный конус; Ц.М. — центр масс; Ц.Д. — центр давления
42
(ax«2-10“4 м2/Н; хцд—хцм = О,Ы); фары (ах«2-10~4 м2/Н; 0! =
= 60 ... 80°; 0S=5 ... 30°; e = d); закругленного конуса (гКос ~'0,2d)
с большим углом 'раствора или близкого к нему тела с образую-
щей — кривой второго порядка (ox«2-10~4 м2/Н) и др. [46].
2.3. ПЛАНИРУЮЩИЙ СПУСК (АППАРАТЫ
«СКОЛЬЗЯЩЕГО» СПУСКА)
Основными недостатками аппаратов баллистического спуска яв-
ляются большие .перегрузки в процессе спуска и резкое возраста-
ние их при увеличении углов входа СА в атмосферы планет. К чис-
лу недостатков 'баллистических аппаратов следует отнести также и
значительные отклонения от заданного места посадки.
Применение спускаемых аппаратов, обладающих аэродинами-
ческим качеством, позволяет снять многие из указанных ограниче-
ний и существенно расширить диапазон использования таких СА.
Наличие даже .небольшого аэродинамического качества позволяет
значительно снизить величины перегрузок в процессе спуска СА, а
управление подъемной силой дает возможность расширить допус-
тимый «коридор» входа (см.,рис. 5 и рис. 17) [23, 61].
Анализируя различные схемы СА, обладающих качеством, обыч-
но выделяют две основные группы. Спускаемые аппараты, имею-
щие небольшое (качество (6 = 0,1 ... 0,6), относят к аппаратам
«скользящего» спуска, а СА с аэродинамическим качеством 0,6<
<6<3 (посадо-чное до 4) — к аппаратам планирующего спуска.
Аппараты, использующие траектории с k = const. В первом при-
ближении решения уравнений движения СА при 6=const рассмот-
рим в следующем виде. В дополнение к допущениям, приведенным
в разд. 2.2, принимаем, что разность между центробежной силой и
силой тяжести мала по сравнению с подъемной силой, т. е.
(D mV2u—mgo) cos 9 — °* (2.25)
\^Ч1Л + “ )
Из уравнений (2.5), используя (2.25) и принимая, что 0<5\ в
первом приближении можно получить следующее выражение:
= ре-₽н
dH- 2
Рис. 17. Зависимости перегрузок от аэродинамиче-
ского качества при входе СА в атмосферу Земли:
-------------эффективность регулирования аэро-
динамического качества при спуске СА
лхшах^=уаг>
"rniax (* = const) ’
nxmax
----------зависимость величины ~ ~
(&=0)
от качества при различных углах входа
43
откуда (после интегрирования) можно определить, что
Р = Рвх--1-(92-9вх). (2.26)
Разделив первое уравнение системы (2.5) на второе, после ин-
тегрирования получим
y=IZBXe_(9-e>'x)/ft. (2.27)
Из уравнения (2.27) имеем
9=0вх + *1п(Квх/Ю.
Выражение для .суммарной перегрузки можно представить в
следующем виде:
Отсюда следует, что максимум п2 будет соответствовать макси-
муму скоростного напора gmax- Определим значение ^тах, при ко-
тором pV2 будет иметь максимальное значение. Попользуем урав-
нения (2.26) и (2.27) и получим условие экстремума
92 _ _ 0В2Х = О,
откуда 0?max = k/2 + V £2/4 + 6ВХ,
откуда P9max= x__L_^±/M + 01x_qX
х(-у ± /у + евх)]+6вх; (2.28)
^тах=^ехР[-0,5(1 ± /(1 + 402>2) + 9ВХ/Л] .
Условие рикошетирования можно представить в этом случае так:
Ьж£о=6«Р/(Р1 — Рвх),
где pi — (плотность атмосферы при 0 = 0.
Согласно (46] для малых углов входа (качество положитель-
ное) выражение для n2max (при рвх~0) можно представить так:
«Sn,ax= -/-г V'bX /Ф2 е29вк/\ (2-29)
т. е. для £>2|0ВХ| с увеличением качества n2max уменьшается.
Для больших углов входа
ру*2 k cos 0ВХ Y1 + k2 _ /----
nSam =—*—7^ГТТ\-------------V^2 + 4 sin ®вхехРХ
g (Я2 + 4)
X I — [— (arcsin 2cos 9в- Д arctg — — 9BX]1|. (2.30)
( k \ /^2 + 4 1 5 k 7 J J
44
Обычно при 9вх>20° увеличение качества должно приводить к
увеличению n2max в основном за счет вертикальной составляющей.
Соответственно при меньших углах перегрузка уменьшается.
Таким образом, максимальные перегрузки зависят, в первую
очередь, от k, Увх, 0вх и 0 и не зависят от сгх. В свою очередь, ве-
личины теплового потока в критической точке СА при малых на-
чальных углах входа в перво-м приближении можно получить из
зависимости
г-------й--------- -3(9~9вх)
<7кр=ЛИвх У рвх + -(62-£) е * . (2.31)
' <Ъ№()
При спуске по рикошетирующей траектории (й>0, 0 = 0)
Г о--- 311 вх
^ртах=А^х|9вх|1/ 4-е * , (2.32)
где Ai — некоторый коэффициент, аппроксимирующий величину
теплового потока (Ai ecrTw4/( V3p0’5); 9 — полетный угол СА; Tw<.—
температура стенки.
Аппараты, использующие траектории равновесного планирова-
ния (£ = var). Подобные траектории обеспечивают длительный
спуск СА с относительно малыми силовыми и тепловыми нагруз-
ками и характеризуются малыми и слабо меняющимися углами
спуска. В этом случае управление качеством СА, как правило, есть
функция вида k = f(fy 1/ох; 1/р; 1/V2).
К типичным схемам аппаратов, обладающих малым аэродина-
мическим качеством («скользящих» СА), в первую очередь, можно
отнести следующие:
Конус с малым радиусом затупления, имеющий (в отличие от
СА подобной формы баллистического спуска) в хвостовой части
аэродинамические рули высоты и бокового управления. Первые из
них в данной схеме используются также для создания управляю-
щей подъемной силы. Основные параметры такого аппарата сгх~
^10-4м2/Н; £>0,3.
Рис. 18. Аэродинамические схемы СА «скользящего» типа:
я—фара; б — затупленный конус; в — конус со скошенным основанием
45
Рис. 19. Аэродинамическая схема (а) и не-
которые характеристики СА формы «фа-
ра» (б)
Рис. 20. Аэродинамическая схема (а) и не-
которые характеристики (б) СА с лобовым
щитом в форме косо срезанного конуса
СА, имеющие сегментально-коническую форму (рис. 18, а) (сг,-«
« 10-4 м2/Н; Rla^ 1,0 ... 1,5; £«0,1 ... 0,4) или форму затупленного
конуса с большим углом раствора (рис. 18, б) (0s«70°; Гнос/^«0,1;
ах«5-10-4 м2/Н; £«0,5), используют для •балансировки на марше-
вом угле атаки возможность смещения центра масс вверх относи-
тельно продольной оси аппарата («весовая» балансировка).
Некоторые аэродинамические характеристики для аппарата сег-
ментально-конической формы («фары») представлены на рис. 19.
Варьируя угол атаки (с помощью управляющих двигателей уг-
ла тангажа) и соответственно ориентируя плоскость действия подъ-
емной силы с помощью управляющих двигателей крена, можно по-
лучить вертикальную и горизонтальную управляющие силы —
«газодинамическая» балансировка.
Использование «весовой» и «газодинамической» балансировок
для управления СА дает возможность в некоторых случаях полу-
чить аэродинамическое качество £>0,15.
Иногда для создания большего аэродинамического качества ис-
пользуют схемы, например, типа конуса со скошенным основанием
(см. рис. 18, в), с лобовым щитом в форме косо срезанного конуса
и другие, которые дают возможность сделать обтекание и дейст-
вующие на несущую коническую поверхность нагрузки несиммет-'
ричными — «геометрическая» балансировка. На рис. 20 приведены
форма и некоторые характеристики СА. такого типа.
46
Следует отметить, что каждая из рассмотренных схем аппара-
тов баллистического и «скользящего» спусков может в общем слу-
чае обеспечить торможение до скоростей, на которых целесообраз-
но использовать предпосадочную тормозную систему (парашютную
систему; двигательную установку и т. д.).
2.4. НЕКОТОРЫЕ ЗАДАЧИ ВЫБОРА ОПТИМАЛЬНОЙ
ТРАЕКТОРИИ И УПРАВЛЕНИЯ СПУСКОМ СА
Вход космического аппарата в атмосферу планеты со второй
или третьей космическими скоростями выдвигает ряд дополнитель-
ных требований к конструкции СА, выбору траектории и управле-
ния. В этом случае значительно более сложной становится и зада-
ча выбора системы теплозащиты спускаемых аппаратов, так как
наряду с конвективными тепловыми потоками существенно возрас-
тают радиационные, что может привести к значительному увели-
чению массы системы теплозащиты и в целом аппарата.
При баллистическом спуске СА со второй или третьей космиче-
скими скоростями возможен .прямой спуск аппарата в пределах
«коридора» входа и спуск с отражениями (рикошетирующий).
В последнем случае на аппарат накладываются достаточно жест-
кие условия, которые в основном определяют предельный угол вхо-
да и совместно с траекторией, зависящей от /гхтах, определяют «ко-
ридор» входа ДНп в атмосферу, обеспечивающий успешную посад-
ку СА (рис. 21).
Рикошетирующий спуск при достаточно точном управлении мо-
жет быть использован для преобразования траектории подхода
КЛА к планете в траекторию орбиты ее искусственного спутника,
дальнейший спуск в этом случае может быть осуществлен с орби-
тальной скоростью подхода. Особенностью нагрева СА при рикоше-
тирующем спуске является то, что поглощенное в процессе про-
хождения атмосферы тепло может быть ‘излучено во время полета
СА за пределами атмосферы (после рикошетирования). С точки
зрения перегрузочных и тепловых режимов полета опускаемых ап-
паратов такой спуск является достаточно интересным, однако он
предъявляет определенные требования к точности системы управ-
ления в процессе прохождения аппаратом атмосферного участка
и к начальным параметрам входа (в случае неуправляемого бал-
листического полета). В этом случае влияние радиационного теп-
лового потока на выбор системы теплозащиты .будет значительно
больше, чем при спуске с орбиты искусственного спутника пла-
неты.
Общее количество поглощенного тепла при баллистическом
спуске со второй или третьей космическими скоростями также бу-
дет больше, чем при спуске СА с орбиты спутника, и сильно воз-
растает при уменьшении начального угла входа.
При малых углах входа максимальная перегрузка при входе со
скоростью, близкой ко второй космической, меньше, чем при бал-
листическом спуске с орбиты ИСЗ (рис. 22). Этот на первый взгляд
47
Рис. 21. Зависимости максимальной пере-
грузки и величины коридора входа от ско-
рости входа и аэродинамического качества:
rtxmax» ’ '
Рис. 22. Зависимость максимальной пере-
грузки от угла входа при баллистическом
спуске СА (Явх=91,5 км; ох=0,210-3 м/Н>
парадоксальный факт объясняется тем, что при спуске с большими
Vbx эффективное аэродинамическое торможение СА происходит на
больших высотах в менее плотных слоях атмосферы [23, 24]. С уве-
личением же угла входа аппарат, как правило, не успевает затор-
мозиться в верхних слоях атмосферы, и максимальная величина
нагрузки начинает резко расти.
В заключение рассмотрим систему посадки с использованием
несущего винта. Данная система может быть использована как при
баллистическом спуске, причем подъемная сила винта увеличивает
в этом случае лобовое сопротивление СА, так и при спуске с А =
=const.
Система имеет определенное преимущество по сравнению с дру-
гими способами посадки, а именно: относительно небольшие пере-
грузки в процессе спуска и обеспечение мягкой посадки в задан-
ной точке с большой точностью.
Лопасти винта находятся в сложенном состоянии при входе в
атмосферу и распрямляются, когда скоростной напор становится
настолько большим, чтобы вызвать его авторотацию. Несущий
винт может быть использован также для перелета СА на опреде-
ленные расстояния и для достаточно длительного поддержания ап-
парата в воздухе перед приземлением.
Основные ограничения, которые возникают при реализации этой
схемы, следующие: требуется жесткая минимизация теплового на-
грева лопастей и получение регулируемой подъемной силы для
обеспечения полета по заданной траектории.
Рассматривая основные вопросы, связанные с баллистическим
проектированием различных типов спускаемых аппаратов, следует
остановиться на выборе управления спуском. Последнее в значи-
тельной степени определяет основные траекторные и проектные па-
раметры аппаратов. Управление спуском достаточно сложно осу-
ществить, особенно при больших скоростях входа.
48
В первом приближении рассмотрим алгоритм управления вхо-
дом спускаемого аппарата в атмосферу Земли со второй и третьей
космическими скоростями.
Наибольшие сложности .при решении подобных задач в основ-
ном сводятся к выполнению требований, связанных с обеспечением
(непревышением) заданных аэродинамических перегрузок, тепло-
вых потоков и точностей. Все эти проблемы особенно остро встают
при спуске СА с сильно вытянутой эллиптической орбиты, при воз-
вращении КЛА от Луны или из межпланетного полета (VBx~
«41 ... 15 км/с).
Для УВх<15 км/с целесообразно использовать опускаемые аппа-
раты затупленной формы с относительно малым аэродинамическим:
качеством. К таким аппаратам можно отнести, в первую очередь,
аппараты типа «Зонд», «Аполлон» и другие. Для Увх> 15 км/с бо-
лее эффективными могут оказаться СА, имеющие менее затуплен-
ную форму и несколько большее качество, чем в предыдущем слу-
чае [43].
Наиболее жесткие требования обычно предъявляются к управ-
лению спуском СА на участке первого погружения, если вход про-
исходит с двумя погружениями (рикошетированием). На первом
участке СА, как правило, тормозится до скорости, несколько мень-
шей первой космической; возникающие при этом аэродинамические
и тепловые нагрузки достигают достаточно больших значений.
На участке второго погружения СА в атмосферу (в области
?тах при движении в нижней части траектории) эффективность
управления также должна быть высокой. Поэтому угол входа дол-
жен выбираться достаточно тщательно, чтобы избежать больших
ошибок в точке вылета СА из атмосферы и тем самым большого
разброса начальных параметров движения на участке второго по-
гружения.
Представляют несомненный интерес задачи управления, связан-
ные с возможностью использования аэродинамического качества
спускаемого аппарата для уменьшения величины перегрузки и рас-
ширения «коридора» входа; задача максимизации последнего путем
управления углами крена и атаки [61], оптимизации показателя
комфортности экипажа и т. д. Эти задачи (в первом приближении)
в дальнейшем будут рассматриваться в данной работе при иссле-
довании предельных возможностей СА и при разработке алгорит-
мов управления входом аппаратов при воздействии возмущающих
факторов.
Следует иметь в виду, что на участке движения СА до входа в
атмосферу 'координаты и составляющие скорости могут быть опре-
делены наземными измерительными средствами или автономными
системами аппарата. На участке же после входа (погружения) в
атмосферу следует ориентироваться только на автономные средст-
ва, поскольку образующаяся при спуске вокруг аппарата плазмен-
ная оболочка препятствует прохождению радиосигналов.
Условно все известные алгоритмы управления СА можно разде-
лить на две основные группы:
49
базирующиеся на принципах отслеживания заданных траекто-
рий спуска аппаратов («жесткие» траектории);
использующие прогнозирование оставшегося участка траекто-
рии полета СА; управление в этом случае выбирается из условия
обеспечения терминальных параметров движения аппарата («гиб-
кие» траектории). Последние используют в управлении БЦВМ.
Вопрос о прогнозировании движения СА при выборе управления
имеет большое значение для повышения точности приведения и для
возможности реализации алгоритма конкретной БЦВМ. Поскольку
прогнозирование осуществляется на каждом шаге коррекции управ-
ления, то эти расчеты должны укладываться в пределы длитель-
ности одного шага.
Самый простой способ прогнозирования предполагает расчет
величины промаха либо по конечным приближенным формулам,
либо в виде линейных поправок к номинальной траектории с ис-
пользованием табулированных функций. Оба способа применялись
на различных этапах полета СА космического корабля «Аполлон».
Следует отметить, что в общем случае алгоритмы управления
входом СА в атмосферу, основанные на применении прогнозирова-
ния, обеспечивают достаточно высокую точность, большую гибкость
и автономность управления в широком диапазоне изменения усло-
вий движения опускаемого аппарата.
Рассмотрим в первом приближении алгоритм, где предполага-
ется, что измерительная информация поступает от акселерометра,
ось чувствительности которого параллельна градиенту дальности
по скорости в конце участка первого погружения, т. е. ориентиро-
вана определенным образом, например в некоторого направлении х.
При повороте СА по крену меняется измеряемая перегрузка.
Этот факт используют при построении логики управления, которая
базируется на отслеживании следующей зависимости • ^х ном (^х),
t
тд& UZx=g0 J nxdt— кажущаяся скорость в х направлении,
о
Для компенсации возмущений по углу входа или по некоторому
эквивалентному возмущению типа отклонения .плотности атмосфе-
ры, а также для обеспечения начальной привязки номинальная
программа пХНом(^х) должна формироваться с учетом опорных
функций, которые соответствуют границам «коридора» входа. Фак-
тический угол входа может быть с достаточной степенью точности
определен, например, по темпу нарастания перегрузки.
Исследование алгоритма управления, основанного на отслежи-
вании одной номинальной траектории спуска, оптимальной .по вы-
бранному критерию качества, изложено в работах [43, 59]. Эта за-
дача решается с помощью второго метода Ляпунова и заключается
в том, что строится управление, минимизирующее отклонение от
номинальной траектории.
Остановимся еще на одной проблеме, которая привлекает вни-
мание исследователей; задаче, связанной с управлением спуском
СА с большим качеством («планирующих»). Создание алгоритмов
50
управления входом в атмосферу аппаратов с &>1 значительно
усложняется из-за существенных перекрестных связей при движе-
нии относительно центра масс. Траектория движения может далеко
отклоняться от плоскости исходной оскулирующей орбиты.
Механика оптимального пространственного движения СА с боль-
шим аэродинамическим качеством достаточно полно исследуется в
работе [79]. В этой книге рассмотрен, в частности, ряд задач, свя-
занных с максимизацией бокового маневра при управлении по уг-
лам атаки и крена. Показано, что спускаемые аппараты ‘с й>3,5
могут при сходе с экваториальной орбиты решать многие транспорт-
ные задачи народнохозяйственного и исследовательского плана.
Спускаемые аппараты с аэродинамическим качеством способны
совершать значительные маневры при входе в атмосферу: при по-
садке на поверхность планеты и при изменении (плоскости орбиты.
Последние являются следствием относительно высокого аэродина-
мического качества на гиперзвуковых скоростях полета СА.
Использование аэродинамического качества дает также воз-
можность значительно снизить перегрузки, обеспечить, если это не-
обходимо, маневрирование по боковой дальности и несколько
уменьшить энергетические затраты.
Для оптимизации управления СА планирующего спуска могут
быть использованы (кроме изложенных выше) различные методы»
которые можно разделить на численные (наискорейшего спуска, ди-
намического программирования и т. д.) и аналитические (вариа*
ционного исчисления, принцип максимума Понтрягина и др.).
Достаточно большая часть опубликованных работ посвящена
численным методам оптимизации управления траекториями спуска
СА. При этом были также получены и многочисленные аналитиче-
ские решения рассматриваемых задач для случаев, (когда удавалось
упростить исходную нелинейную математическую модель движения
спускаемого аппарата при входе в атмосферу.
Аналитические решения менее точны по сравнению с численны-
ми методами, однако они обладают и определенными преимущест-
вами, поскольку форма решения в этом случае более наглядна, а
анализ его, как правило, приводит к явным характеристикам, ко-
торые можно относительно полно исследовать с помощью числен-
ных методов. Кроме того, аналитические решения позволяют полу-
чить оптимальные законы управления в функциональной форме»
что облегчает проведение быстрого сравнительного анализа различ-
ных траекторий. И наконец, в областях пространства состояний,
для которых справедливы введенные упрощения, аналитические
решения обеспечивают относительно полное описание динамики
системы.
Рассмотрим пример изменения плоскости орбиты СА (задачу
решим численным методом). Такой маневр (рис. 23) может осуще-
ствляться с помощью совместного действия силы тяги и боковой
составляющей подъемной силы Rz. При этом эффективность мане-
вра возрастает с ростом аэродинамической силы. В точке А спус-
каемый аппарат под действием тормозного импульса силы тяги пе-
51
ч Рис. 23. Схема аэродинамического маневра по изменению плос-
кости орбиты СА планирующего спуска:
/ |\//? — начало аэродинамического маневра; 2 — изменение плоско-
/ с сти орбиты; 3 — первоначальная орбита; 4 — проекция первона-
J чальной орбиты; 5 — проекция новой траектории; 6 — круговая
. /7 О/ Г/ орбита
!/ X '
Реходит на эллиптическую орбиту, перицентр
которой лежит в плотных слоях атмосферы
(В — точка входа в атмосферу). В дальней-
шем за счет силы Т?2 (<р#=0) происходит изме-
нение плоскости орбиты. Одновременно СА
рикошетирует и, пройдя точку минимальной высоты, начинает под-
ниматься, покидая плотные слои атмосферы (точка С). Здесь дви-
гатель выключается, затем при выходе на заданную высоту (точ-
ка D) дается еще один импульс, переводящий СА на круговую
орбиту.
Предполагается, что распределение плотности атмосферы по вы-
соте подчиняется экспоненциальному закону р = рое_ря, а СА рас-
сматривается .в первом приближении как материальная точка.
В качестве опорной системы координат выбираем скоростную си-
стему. Управляющие величины — аэродинамическое качество и угол
крена у.
Тогда систему уравнений, описывающих движение СА, можно
представить в виде
-^-=/(1/, н, ty
dV
dt
— g sin 9
~~— go,
dty
dt
r л , j. I ахрИ2 sin V
----cos 0 cos Ф tg <p 4-k ----g0------L ;
\-H т & T-г 2Z 6 COS0 ’
dft V cos 6 л n
----=-----------------cos 9;
dt Rnn + H cos
dy>
dt
--------cos 9 sin Ф;
d (Кпя + Я) = dH у sin 0.
dt dt
H, t).
dt
Состояние СА может быть задано параметрами (/?Пл + #) и V:
(Кпл + Н) =Цъ, б); V = f(ty> 9), гД,е Ф — Угол курса относительно не-
которого исходного положения; 0 — угол наклона траектории;
е — долгота; б — широта;
da V cos 0 cos ф . d& _ P sin ф cos 0
dt ~ Rnn + H ’ dt (Япл +) cos В
<p — угловая дальность СА в направлении, перпендикулярном
начальной плоскости движения; Q — тепловой поток.
Выражение для аэродинамической поляры можно представить
как сх = сХо-\-О^Су. Коэффициенты Do, п являются функциями ско-
рости и высоты полета, или чисел Маха и Рейнольдса (Сг0— коэф-
фициент лобового сопротивления .при а=0; DQ — коэффициент на-
клона поляры).
В данном случае задача оптимизации управления маневром СА
может быть решена, например, с помощью -модифицированного ме-
тода градиентов или другими методами.
При решении подобной задачи для рассматриваемого типа
спускаемых аппаратов в аналитической форме следует отметить, что
в точной постановке такая задача относительно сложна и во мно-
гих случаях целесообразно бывает решать ее численными мето-
дами.
В связи с этим, не приводя здесь точного решения такой зада-
чи, для дальнейшего анализа (параметров СА ограничимся лишь не-
которыми общими решениями задачи оптимального управления в
упрощенной постановке.
В общем случае предположим, что углы наклона траектории
малы, а продольная дальность велика. Для планирующих аппара-
тов с качеством 1 ... 2 обычно боковая дальность L& относительно
мала по сравнению с радиусом Земли. Поэтому для упрощения ди-
намических уравнений движения целесообразно ввести дополни-
тельно следующие допущения: угол наклона траектории постоян-
ный; поверхность Земли в направлении бокового движения плос-
кая.
При этих допущениях динамические уравнения (после некото-
рых преобразований) можно представить в следующем безразмер-
ном виде:
d£ ___ k cos ф cos у
dV ~ 2(1 — 7) ’
d-f\ _ k sin ф cos y
dV ~ 2(1-7) ’
flfp _ tg 6 cos y
dV ~ 2(1 —7) ’
dty___ fcsinY . dV _____।
dV 2V cos 6 ’ dV ’
где V= V2/(^сЛпл) — безразмерная скорость; g = L/p, т] = £б/Р — 'без-
размерные продольная и боковая дальности соответственно; р =
= — безразмерная плотность атмосферы; |3 — некоторый
масштабный коэффициент высоты полета.
Основные условия оптимальности. Определим в первом прибли-
жении оптимальные законы управления аэродинамическим качест-
вом и углом крена, при которых^ максимизируется функционал
J = f(6o, хо, 0к, хк,) где x=f(g, т), р, 7, ф). Функция Гамильтона в
53
этом случае имеет вид
г_ k Г (Xi cos ф-Ь Хг sin ф-+- X3tg6)cosY . Х4 sin у 1 . .
1 - ст L ст +“стг|+к5
а сопряженные уравнения можно представить следующим обра-
зом:
__ dT Qe d\2 dr d\$ dr
— """dT— ’ dV d-ц ~ ’ dV dT~ ’
d^A dr fccosv л • , s ,4
—=4- =------=---------— (Xi Sin Ф — k2 cos Ф):
dV d<p 2(1 — И) k 1 T 2 ТЛ
dX5_____dr k Г (Xi cos ф + X2 sin ф + X3 tg 6) cos у X5 sin у 1
dV ~ dV 2 [ 1—Й 72cos0 J ’
где Xi, X2, Хз, X4, X5 — множители Лагранжа.
Минимизируем функцию Гамильтона относительно параметров
управления (качество и угол крена). Так как в задаче рассматри-
ваются оптимальные маневры при планировании, то подъемная си-
ла должна быть всегда положительной. В общем случае при управ-
лении подъемной силой аэродинамическое качество должно под-
держиваться максимальным.
Например, минимизация гамильтониана Г относительно угла
крена дает возможность получить следующее общее выражение для.
определения у:
t (1 — —д26 + д4)
V (ад cos ф 4- 02 sin ф + а3 tg 0)
где а\, а2, а3, а4 — некоторые коэффициенты, .значения которых бу-
дут определены при рассмотрении отдельных случаев оптимизации.
Максимизация продольной дальности. Аналитическое решение
для этого случая можно получить, когда конечные значения угла
курса ф и боковой дальности не заданы. Из условия трансверсаль-
ности следует ai = — 1, продольная дальность полагается «свобод-
ной», то 02 = 0. При Х4 = 0 это приводит к оптимальному управле-
нию, когда
V 0» == ^тах*.
Максимизация боковой дальности. Если конечная продольная
дальность и угол курса «свободны» и необходимо максимизировать
боковую-дальность и угол курса, то 01 = 0, а2 =— 1. Кроме того, из-
условия трансверсальности следует, что 04 = £i. Оптимальное значе-
ние угла крена в этом случае у = утах-
Оптимальное управление спуском с учетом гравитационных и
центробежных сил. Используем следующее уравнение для угла на-
клона траектории в исходной системе уравнений движения СА:
= g0 cos y+M),
dt \ 2
где M = [ 1 - (Япл+И) j (/?пл+H).
54
Можно провести некоторую аппроксимацию, основанную на
следующих допущениях: величина М, которая мало меняется при
интегрировании уравнений по аргументу 0, принимается постоян-
ной; величина g sin 0 пренебрежимо мала по -сравнению с ахрУ2£о/2
и не учитывается; величина 7(/?пл + Я) cos 0 sin\pctg<p<C 1 и не учи-
тывается. Эти допущения приемлемы, очевидно, при малых 0 и ср.
Тогда уравнения движения СА сводятся к следующим:
dV_____алР^2 „ .
dt 2 ^°’
-^- = рУЛ-^§-0 cosy+31;
at z
dH т/ • л
---= ]/ sin 0;
dt
—-=—-----— gQ sin y,
dt 2 cos 0
где J7=2A4/(i£qx).
Если перейти к новому аргументу 0 с помощью второго_ урав-
нения приведенной системы и к переменным состояния (q, р и 7),
то уравнения этой системы можно привести к виду
•а = 2 max)/[(^/^hiax) Y Af],
uo
“4?-— - S’" M(<W^max) C°S Y +31];
at)
4r=(^/CJ-max) Sin Y/I(^/^max) COS Y+31] COS 6.
at)
В общем виде задача оптимального управления состоит в на-
хождении программы управления су и у на промежутке [0О, 0К], мак-
симизирующей функцию конечного состояния f[7(0K), p(0K), ф(0к)-,
0к] приведенных уравнений движения СА, заданных начальных и
конечных условиях Q[7(0K), р(0к), ф(0к), 0К] = О, где Q — трехмер-
ный вектор-столбец, а также при ограничениях на управление
Су mlnщах’, Ymin^S Y^Ymax, ГД 6 £ymin, Су max, Crmax Значения
аэродинамических коэффициентов, соответствующие минимально-
му и максимальному аэродинамическому качеству.
Гамильтониан для системы имеет вид
r=IM<W^max) sin Y/cos 9 —Х2 sin 9 —
^3 (^х/^лтахИА^у/^Утах) <-OS Y + -/И.
Из уравнений Эйлера — Лагранжа и условий трансверсально-
сти следует, что Xi, М, Хз являются константами. Если искомые оп-
тимальные управления лежат внутри . допустимых областей по
Су min, Су max, Ymin, Ymax, ТО ОНИ удовлетворяют УСЛОВИЯМ
dV/dCy=0; дГ/д (cos y)=О.
55
После упрощений и перегруппировки из этих условий можно полу-
чить, что
sin у—^i/[2k3 cos 0 (дсх/дсу) (Cym^jcxm^\.
Если предположить, что Хз¥=0, то после преобразования послед-
него выражения получим
+ 7И {[2 cos 0 (дсх/дсу) (^шах/^хшзх) М2 ^1) /2/cos0 =
=Х2 sin 0 + 2кз 1^-су (dcx/dcyy]/cxmin.
Это уравнение после некоторых преобразований можно приве-
сти к виду
+ М [4 cos2 0Х2 - / fp/2/cos 0=k2 sin 0 + [ 1 - к2],
которое можно решить относительно X
Х = [(-Л4 ± /v2)2 +/2/4 cos2 0]1/2,
где / = 7И24-^2 sin б + 1“Tf/4cos20; Х1 = Х1/Х3,
Л2 = %2Аз — нормированные множители Лагранжа; \2=кс2/сХо.
Следует заметить, что наименьшее значение X, равное Xi/2cosd, до-
стигается при 12 = М, что практически соответствует у=±90°.
Константы Xi и Х2 выбирают так, чтобы удовлетворилось конеч-
ное условие, определяемое трехмерным вектором-столбцом Q, левая
часть которого практически представляет собой функцию Xi, Х2, ко-
торая получается после подстановки соответствующих уравнений и
интегрирования. Получающиеся при этом выражения можно упро-
стить и привести к эллиптическим интегралам, которые при малых
0 выражаются в замкнутой форме:
Р (0к)- Р (М = ± 1(2а26к- 46) (/.29к + б^/З^ + (2лД-46) X
X (Мо+^/За11;
ф(9к)-ф(90)=± 2(Vx2)KMk + ^1/2 ± Ы6о) + *]1/2).
где л=Л42+.1 Н-л?/4; b=M2-\-1 -а?/4.
Знаки ± перед правыми частями соотношений показывают, воз-
растает или убывает 0 сначала. Знак + перед вторыми членами в
этих выражениях показывает, что имеется точка перегиба. Четыре
возможные комбинации знаков могут привести к четырем различ-
ным вещественным значениям констант Xi, Х2, Хз и 0К, для которых
56
выполняются конечные граничные условия, задаваемые ограниче-
ниями (трехмерный вектор-столбец) и условиями трансверсально-
сти. Конечные условия записываются через константы путем ис-
ключения параметров конечного состояния в выражениях эллипти-
ческих интегралов, приведенных выше, и использования условий
трансверсальности для исключения 0.
В общем случае можно использовать численную процедуру для
решения только этих уравнений. Хотя четыре различных решения
могут дать вещественные значения констант, только одно решение
дает глобальный 'максимум. Другие решения, если существуют, да-
дут локальный -максимум или экстремум, которые не удовлетворя-
ют необходимым условиям Лежандра — Клеба или Якоби.
Следует отметить также, что для решения задачи оптимального
управления спуском может быть использован -метод стыковки асим-
птотических решений, 'который пригоден для оптимизации движе-
ния СА по рикошетирующей траектории. Метод может использо-
ваться для оптимального управления спуском в атмосфере план-ет
с кеплеровских орбит вплоть до малых высот. При этом гравита-
ционное поле полагается центральным, а плотность атмосферы яв-
ляется произвольной функцией высоты.
Разложения рассматриваются в двух областях: внешней (кеп-
леровской) и внутренней (аэродинамической). Обе области харак-
теризуются в той или иной степени преобладанием гравитационных
и аэродинамических сил соответственно. Эти разложения получают
в аналитически замкнутой форме и стыкуют. Затем строится со-
ставное решение, пригодное для обеих областей.
Управление спуском СА и минимизацией теплоподвода. Рас-
смотрим приближенную задачу определения оптимального управле-
ния температурой поверхности спускаемого аппарата, которая мо-
жет использоваться на начальном этапе теплового проектирования
СА (планирующего типа) для анализа его характеристик при спус-
ке в атмосфере. Используем приведенные выше уравнения. Пред-
полагается, что СА совершает полет в вертикальной -плоскости -в
атмосфере невращающейся Земли. Влияние бокового движения на
продольное (в номинальной плоскости спуска) при гиперзвуковых
скоростях полета невелико. Управление СА выбирается из условия
обеспечения минимального времени полета при ограничении темпе-
ратуры обшивки некоторым предельно допустимым значениям Ттах-
Движение аппарата в первом приближении представим как нели-
нейный колебательный процесс, причем интенсивность колебаний»
значительной степени будет зависеть от начальных условий полета,
аэродинамического качества и нагрузки на площадь Миделя.
Если угол атаки a=const, то основной величиной, характеризую-
щей интенсивность колебаний, будет производная др!дН, характе-
ризующая в первом приближении коэффициент упругости системы,
У2 Ьсх?У2£п
В зависимости от знака производной dajdH колебания могут уси-
ливаться или затухать.
57
Из анализа уравнений СА следует, что демпфирование системы
может определиться коэффициентом
j= । К . 1 \ dH
2 ~*4 2 + dt
При этом оказывается, что для естественного демпфирования значи-
тельную роль играет лобовое сопротивление.
Этот вывод в известной -мере дает возможность говорить о воз-
можных способах снижения нелинейного колебательного (процесса
траектории спуска при неизменных параметрах СА (начальных ус-
ловиях входа в атмосферу, нагрузке на площадь Миделя, аэроди-
намическом качестве).
Как отмечалось выше, заданной величиной в процессе регули-
рования является максимально допустимая температура обшивки.
Входными параметрами системы могут быть отклонения органов
управления СА. Учитывая, что угол атаки быстро принимает за-
данное значение, можно в первом приближении считать, что угол
отклонения органов управления высоты равен углу атаки.
Динамика управляемого участка спуска может быть представ-
лена уравнениями движения и некоторой системой уравнений, ха-
рактеризующих нагрев. Можно считать, что последние связаны с
системой уравнений движения односторонне (на изменение термо-
динамических параметров влияют параметры движения, но не нао-
борот). Функциональная связь температуры поверхности САв неко-
торой точке с плотностью воздуха, скоростью полета и углом атаки
может быть представлена следующей зависимостью: Tu>=Tw{p(/f>),
V, a] = f[p(H)y V, а]. Для приращения температуры можно записать
соотношение
-/РР?ДЯ+АД^+/вДа,
где /р= > 0; fv = — > 0; Д = -^ > 0; р= - —
J р д? dV J л да v р dH
Из приведенной выше функциональной зависимости для темпе-
ратуры в некоторой точке поверхности СА можно, в свою очередь,
получить следующее выражение для угла атаки:
а=|а[р(Я), К Tw],
Таким образом, для расчета аэродинамического нагрева в рас-
сматриваемой нами задаче необходима специальная программа
для вычисления температуры Tw в .каждой точ1ке поверхности аппа-
рата. Следует заметить, что аналитические зависимости в этом слу-
чае получить достаточно сложно и не всегда это удается; для чис-
ленного расчета Tw необходимо определять аэротермодинамиче-
ские параметры одновременно с расчетом параметров траектории.
Тогда для каждого момента времени можно представить полную
«картину распределения температуры по поверхности СА. Такой
подход может быть использован в счетно-решающем устройстве
системы управления.
58
Уравнение для изменения высоты полета СА запишем следую-
щим образом:
. т дкН . др гг др А др ,
д& ’ 1 dt 1 дН да dt
Анализируя приведенные уравнения, можно, например, установить,
что положительные величины Да увеличивают приращение темпе-
ратуры ATW, а отрицательные уменьшают и т. д. Связь между Да
и Д/7 в первом приближении описывается дифференциальным урав-
нением изменения высоты прлета СА. Можно получить уравнение
изменения угла атаки в виде
^-=1?рЛ/Л+(^о^)/Л/Д1 .
tv* 2j &
принимается, что ATW = O.
При ---------------
Е dt 2(p?/p//v+
производная dajdt становится больше нуля. Вертикальная ско-
рость и высота полета начинают возрастать. Этот процесс продол-
жается до выхода СА на максимально допустимый угол атаки.
Еще одна особенность состоит в том, что точка максимума тем-
пературы-поверхности меняет свое положение на корпусе СА вслед-
ствие изменения процесса обтекания, особенно в кормовой части
аппарата, когда ламинарное течение переходит в турбулентное.
Требования к тепловому режиму спуска С А можно выполнить,
если задать некоторую программу изменения угла атаки в виде
входного сигнала системы управления а3 = аа(/), где а3 — заданное
значение угла атаки. Программа а3(/) рассчитывается заранее и
соответствует заданным начальным условиям входа. Ошибки в на-
чальных условиях, отклонения параметров атмосферы от расчетных
и т. д. могут привести, в свою очередь, к значительным возмуще-
ниям траектории. Уменьшить в определенной степени влияние оши-
бок можно, например, выбрав управляющую функцию, соответст-
вующую условию Tw = Tmax, в виде аа=а3(Н, V). Для этого целе-
сообразно предусмотреть систему, измеряющую с заданной точно-
стью Я и К и счетно-решающее устройство» вырабатывающее тре-
буемую величину а3. Однако такая система’, как правило, чувстви-
тельна к колебаниям плотности атмосферы.
Задача определения точки, в которой достигается Ттах, решает-
ся таким образом, что под этой температурой обычно (-в первом
приближении) понимают -максимальную температуру на поверхно-
сти аппарата.
Задание управляющей функции в виде а3 = а3(7Л V) представ-
ляется в ряде случаев целесообразным. При этом предполагается,
что расчетная аэродинамическая модель близка к реальной.
Влияние неучтенных возмущений и ошибок может быть устра-
нено при помощи системы регулирования заданной температуры
обшивки. При этом точное задание зависимости температуры от
59
параметров траектории не требуется. Отклонение регулируемой ве-
личины от заданного значения выражается в виде \TW=TW—Гтах.
Предполагается, что можно достаточно точно измерить Tw и dTw/dt
в каждый момент времени. При этом Tw измеряется непосредствен-
но, a dTJdt определяется путем численного дифференцирования
функции Tw(t).
Регулирующей величиной системы управления в данном случае
является угол атаки. Закон регулирования может быть выбран та-
ким образом:
аз=аВх+Я (^) +Rr^Tw.
Необходимо отметить, что регулирование температуры с -помощью
изменения угла атаки возможно тогда, когда функционал J доста-
точно велик по сравнению с -коэффициентом упругости (др/дН). Но
для этого необходимо, чтобы отношение сх/су было велико, что тре-
бует при прочих равных условиях либо максимального угла атаки,
либо сильно затупленной формы СА. В каждом из этих вариантов
есть свои преимущества и недостатки.
2.5. ОСОБЕННОСТИ СПУСКА СА НА НЕКОТОРЫЕ
ПЛАНЕТЫ СОЛНЕЧНОЙ СИСТЕМЫ
При баллистическом проектировании опускаемых аппаратов,
предназначенных для доставки полезных грузов на планеты Сол-
нечной системы, а также на Луну, можно использовать в основном
уравнения движения для спуска на поверхность Земли, приведен-
ные выше.
Однако при этом необходимо четко представлять, что гранич-
ные условия, особенности окружающего пространства и атмосферы
рассматриваемых планет, условия посадки и другие особенности
выдвигают ряд специфических требований и ограничений, связан-
ных с решением задач баллистического проектирования, управлени-
ем спуском, выбором рациональной аэродинамической компоновки
СА, конструктивными решениями и т. д. Причем эти ограничения
и условия достаточно резко различаются для определенных групп
планет Солнечной системы (табл. 4 [46]).
В данном разделе рассмотрены только определенные ограниче-
ния, условия и особенности, свойственные различным типам СА,
предназначенных для спуска и посадки на поверхность различных
планет Солнечной системы.
Условно разобьем все рассматриваемые в этом разделе задачи
на следующие две основные группы:
1. Задачи, решаемые с помощью аппаратов, обеспечивающих
спуск в относительно разреженной атмосфере. В основном эти за-
дачи относятся к так называемой группе планет Земли (четырем
ближайшим к Солнцу сравнительно малым планетам: Меркурию,
Венере, Земле, Марсу).
60
Таблица 4
Наименование планет Расстояние от планеты Солнца, а.е Средний радиус планеты, км Тепловое солнечное излучение на планете, Вт/м2 Альбедо Постоянная излучения планеты, Вт/м*
Меркурий 0,387 2422 9318,4 0,07 2166,55
Венера 0,723 6125 26669,7 0,76 160,19
Земля 1,030 6378 1395,6 0,43 209,34
Марс 1,524 3332 600,9 0,15 127,70
Юпитер 5,203 69929 51,7 0,51 6,25
Сатурн 9,539 57531 15,5 0,50 1,92
Уран 19,180 34851 3,8 0,66 0,32
Нептун 30,060 21566 1,6 0,62 0,16
Плутон 39,520 2897 0,95 0,16 0,19
Луна 1,000 1737 1395,6 0,07 324,48
2. Решение задач обеспечивается СА, работающими в плотной
атмосфере планет группы Юпитера (,планет-гигантов): Юпитера,
Сатурна, Урана, Нептуна. Последняя планета — Плутон — по не-
которым своим свойствам (большой наклон орбиты, значительная
вытянутость орбиты и др.) не принадлежит ни к одной из указан-
ных групп планет [74].
Среди основных признаков, отличающих планеты названных
групп, в первую очередь следует отметить:
а) высокую среднюю плотность планет группы Земли, свиде-
тельствующую о значительном содержании в них железа и других
элементов, тяжелее водорода и гелия. Планеты-гиганты обладают
относительно низкой средней плотностью (у Сатурна, например,
она даже меньше плотности воды), что указывает, по-видимому, на
существенное различие в составе вещества, из которого образова-
лись эти две группы планет;
б) наличие и состав атмосферы. Атмосферы планет земной груп-
пы в среднем обладают значительно меньшей плотностью, чем
атмосферы планет-гигантов.
Меркурий, например, в силу своей малой массы (1/20 массы
Земли) и высокой температуры обращенной к Солнцу стороны, име-
ет очень разреженную газовую оболочку. Венера обладает относи-
тельно плотной атмосферой (практически целиком СО2) по сравне-
нию с другими планетами этой группы; плотность ее примерно в
60 раз превышает плотность атмосферы у поверхности Земли. Тем-
пература атмосферы Венеры (у поверхности) ~700 К, давление
~107 Па (по данным советских космических станций «Венера-7 и
8» [74]).
Атмосфера Марса также почти целиком состоит из СО2 (с не-
большой примесью окиси углерода, атомарных водорода и кисло-
рода, водяного пара; примеси составляют доли процента). Сред-
няя величина давления у поверхности Марса ~6 -102 Па.
Для планет группы Юпитера характерно наличие достаточно
плотных и протяженных атмосфер, состоящих в основном из мета-
на, аммиака и водорода;
61
ib) скорость вращения планет. Планеты-гиганты отличаются от-
носительно высокой скоростью осевого вращения и связанным с
этим значительным сжатием. Интересной особенностью их враще-
ния является так -называемое экваториальное ускорение. С прибли-
жением к экватору у них возрастает не только линейная, но и угло-
вая скорость вращения атмосферы.
Хотя планеты земной группы являются нашими «ближайшими»
космическими соседями, до недавнего (времени данные об их осевом
вращении (кроме Марса) были неточными. Считалось, например,
что звездные сутки на Меркурии равны его звездному году (88 зем-
ных суток), вследствие чего эта планета все время якобы поверну-
та к Солнцу одной стороной, и что на противоположной ее стороне
царит вечная ледяная ночь. Сейчас от этих представлений прихо-
дится отказаться: радиолокационные измерения, проведенные в
1964 г., показали, что Меркурий вращается в прямом направлении
с .периодом 59 суток, благодаря чему там происходит смена дня и
ночи через каждые 176 земных суток.
Еще более неожиданный результат был получен при исследо-
вании Венеры. Оказалось, что Венера вращается в обратном на-
правлении с периодом 243,18±0,09 суток (относительно звезд) [74].
г) тепловой режим планет. Если бы планеты были черными или
серыми для всех волн телами и их температура определялась бы
только количеством поступающего на них солнечного тепла, то она
зависела бы лишь от радиуса планетной орбиты и выражалась бы
по шкале Кельвина формулой
7=277//^, (2.33)
где /?Ор — радиус планетной орбиты (выражается в астрономиче-
ских единицах).
Однако на тепловой режим планеты влияют еще и такие фак-
торы, как выделение в ее недрах теплоты за счет радиоактивных
процессов и внутреннего трения, вызываемого различными дефор-
мациями, а также так называемый парниковый эффект. Темпера-
тура верхних слоев планетной атмосферы может, кроме того, суще-
ственно отличаться от величины, предписываемой формулой
(2.33), из-за поглощения и излучения в отдельных спектральных
линиях и полосах, а также из-за других электромагнитных эффек-
тов.
Высокая температура Венеры обусловлена парниковым эффек-
том. У остальных планет Солнечной системы средняя температура
отличается от значения (по формуле (2.33)) не более чем на
5... 10%.
Несколько слов о спутнике Земли — Луне. Отсутствие атмо-
сферы и медленное вращение Луны вокруг своей оси (продолжи-
тельность дня равна продолжительности ночи и составляет ~ 14,75
земных суток) приводят к огромной разнице температур между
различными участками ее .поверхности. Так, на Лунном экваторе в
лунный полдень, когда Солнце находится в зените, температура по-
верхности доходит до +130° С; температура теневой, не освещен-
62
ной Солнцем, поверхности Луны в период лунной ночи падает до
— 150 ... —170° С.
Аппараты, предназначенные для спуска в разреженной атмосфе-
ре (Марса, Меркурия и т. д.). СА, предназначенные для атмосферы
Марса или Меркурия, обычно характеризуются малой удельной
нагрузкой на миделево сечение (m^o/S = 600 ... 3000 Н/м2 для Мар-
са), обеспечивающей торможение аппарата до посадочных ско-
ростей при баллистическом или «скользящем» спусках (см.
рис. И).
Такое значение удельной- нагрузки может быть обеспечено пу-
тем использования аэродинамического лобового экрана (большой
площади) и вкладного посадочного приборного отсека (см. рис. 8).
Аэродинамический лобовой экран обтекается под углом атаки,
достаточным для получения небольшого аэродинамического каче-
ства. Причем угол а и качество определяются в основном весовой
балансировкой или несимметричной формой экрана и сохраняются
неизменными в процессе спуска.
Управление осуществляется путем изменения угла крена. Пред-
посадочное торможение аппарата, представленного на рис. 8, обес-
печивается ТДУ.
Выбор оптимального закона управления спуском производится
для марсианских СА по -критериям, описывающим конечную фазу
спуска в момент подлета аппарата к поверхности планеты.
Вопрос выбора оптимальной тяговооруженности решается комп-
лексно с учетом изменения скорости полета на высотах включе-
ния двигателя и с учетом программы управления тягой при тормо-
жении СА.
Скорость входа в атмосферу Марса значительно меньше скоро-
стей входа в атмосферы Земли и Венеры (~3,6 км/с — при спуске
с низких околопланетных орбит, до 6 км/с —• с высоких орбит или
подлетных траекторий) [13]. На таких траекториях спуска макси-
мальные конвективные тепловые потоки, которые доминируют в
данном случае, не превышают, как правило, 102 кВт/-м2. В связи с
этим ограничения по тепловому и перегрузочному воздействиям не
являются решающими для СА, предназначенных для посадки на
Марс.
Значения конечной скорости полета СА имеет смысл аппрокси-
мировать некоторыми приближенными зависимостями, определяю-
щими для оптимальных спусков эту скорость в зависимости от вы-
соты полета и нагрузки на миделево сечение аппарата (для диа-
пазона рациональных режимов балансировки), т. е. при определен-
ных значениях располагаемого качества, которые характерны для
затупленных и умеренно заостренных форм.
Наиболее целесообразными формами моноблочных СА, спускаю-
щихся в атмосферы Земли или Венеры, являются сферическая или
фарообразная (см. рис. 7). Причем вторая обеспечивает большую
полезную отдачу и может использоваться на траекториях «скользя-
щего» спуска с k = 0,2 ... 0,4, однако, как правило, требует специ-
альной системы ориентации.
63
Относительно высокая плотность атмосферы Венеры, таким об-
разом, определяет облик спускаемого аппарата и перечень опера-
ций, проводимых ими во время спуска и последующего снижения
на поверхность.
Противоречивые требования, (предъявляемые к аппарату на раз-
ных этапах снижения, заставляют менять конфигурацию СА по ме-
ре проникновения в атмосферу. Вход в атмосферу происходит с
относительно большой скоростью, которая достигает ~ 12 км/с при
спуске с подлетных траекторий, ~10,2 км/с — с высокоэллипти-
ческой орбиты и ~7,5 км/с —с околопланетных орбит.
СА интенсивно тормозится в верхних слоях атмосферы, и при
пологом входе его движение и теплообмен подобны аналогичным
процессам, происходящим в земной атмосфере. Процесс интенсив-
ного торможения завершается, как правило, к высотам ~30 ...
40 км, после чего СА начинает плавно снижаться, погружаясь в
плотную, разогретую атмосферу (~700°С).
Аппараты для снижения в атмосфере Венеры (р~ 1000 Н/м2) по
внешнему виду и конструктивному оформлению, как правило, бли-
же к глубоководным аппаратам, чем к летательным.
Задача уменьшения энергии движения аппарата и получения
допустимых посадочных скоростей при спуске на Венеру осущест-
вляется без специальных изменений в конструкции СА и без про-
ведения особых операций, связанных с управлением на участке
опуака. Аппарат баллистического спуска, входящий в атмосферу
Венеры в широком диапазоне углов входа (—30 ... —90°), может
свободно затормозиться до скоростей, необходимых для работы по-
садочных систем.
В свою очередь, выбор соответствующих режимов спуска для
аппарата с умеренным качеством дает возможность наиболее эф-
фективно завершить торможение на больших высотах, чем, напри-
мер, при полете с су = const.
Если углы наклона траектории считать малыми, то зависимость
угла крена СА имеет вид
Г 1 [л * И2 \ g 1
Y=arccos I--- 1--------1 — ,
L knx \ gRUJl ) gQ J
где nx — текущее значение перегрузки, определяемое величиной
_______^.rmax
'х~
скорости полета,
J Йо, ускорение силы тя-
жести на Земле и на планете; 7?пл — радиус планеты; мхтах — здесь
величина максимальной перегрузки перед выходом аппарата на
режим выравнивания.
Рассмотрение режимов спуска СА на планету Венера и описа-
ние программы торможения относительно подробно даны в работе
[13]. В ней делается заключение о том, что основным результатом
предлагаемой программы торможения является вывод СА за отно-
сительно короткое время и без значительной потери высоты в конеч-
ную фазу торможения, на которой начинает фунционировать поса-
дочный аппарат.
64
Аппараты, предназначенные для спуска в плотной атмосфере
(Юпитера, Сатурна и других планет). В отличие от СА, входящих
в атмосферы планет земной группы, спускаемые аппараты, пред-
назначенные для планет-гигантов, подвергаются более мощным
тепловЫхМ нагрузкам. Кроме того, скорости подлета аппарата, на-
пример, к планете Юпитер могут достигать величины 60 км/с, по-
этому для СА, обеспечивающих посадку на Юпитер, проблема теп-
ловой защиты является достаточно сложной.
Следует отметить также, что в настоящее время большинство
моделей атмосферы планеты Юпитер строится .в предположении,
что изменение температуры по высоте атмосферы (в верхних сло-
ях) достаточно мало. Предполагается, что ib состав атмосферы в
основном входят водород (~85%) и гелий (~15 ... 30%).
Большой интерес представляет исследование /планеты Сатурн и
его наибольшего спутника Титана. Однако вследствие значительной
неопределенности условий входа в атмосферу Сатурна и сложно-
сти их моделирования в наземных условиях большая часть исход-
ных данных при разработке таких СА должна определяться расчет-
ным путем. При этом, как правило, необходимо рассматривать до-
статочно широкий диапазон возможных условий входа, состава
атмосферного газа и вариаций аэродинамической компоновки СА.
Математические модели расчета поля обтекания и теплообмена
входящего в атмосферу Сатурна аппарата предложены в работе [54].
Первые две методики основаны на численных решениях уравнений
вязкого ударного слоя, а третья дает (приближенный метод расчета
невязкого поля обтекания с учетом радиационного и конвектив-
ного теплообмена.
Кроме того, ,в первых методиках достаточно подробно рассмат-
ривается перенос излучения при наличии равновесных химических
реакций в ударном слое и уноса массы теплозащиты. Причем поток
может быть как ламинарным, так н турбулентным. Система урав-
нений вязкого ударного слоя получена из стационарных «безразмер-
ных уравнений Навье<—Стокса с сохранением членов второго по-
рядка малости. Полученная система параболических уравнений
решена с помощью обычной явной конечно-разностной схемы.
В третьей методике применен тот же метод решения стационар-
ных уравнений вязкого ударного слоя, однако расчет проводится
только безотрывного ламинарного обтекания гиперболоида враще-
ния с учетом как равновесных, так и неравновесных химических ре-
акций в газовом потоке.
Подобные расчеты входящего в атмосферу планеты Сатурн ап-
парата, как правило, требуют значительных затрат машинного вре-
мени и большого объема памяти. Поэтому для проектных и пара-
метрических исследований характеристик подобных СА может быть
использован приближенный метод расчета, изложенный в [54]. Ме-
тод основан на использовании гиперзвукового обтекания невязким
потоком симметричных тел. Для описания термодинамических
свойств и характеристик переноса излучения в газовом потоке раз-
работаны относительно простые корреляционные зависимости, при-
3—331 65
годные для широкого диапазона изменения температур, давлений
и соотношения компонентов гелиево-водородной смеси.
Спектральные .‘коэффициенты поглощения (излучения) газовой
смесью описываются многополостной моделью. По ней коэффици-
енты поглощения рассчитываются путем суммирования произведе-
ний сечения поглощения каждого компонента газовой смеси.
Форма входящего в атмосферу Сатурна спускаемого аппарата
может аппроксимироваться аналитическими выражениями, описы-
вающими сферически затупленный конус или гиперболоид враще-
ния. Предлагаемые приближенные уравнения конвективного нагре-
ва могут быть использованы для газовых потоков с постоянной или
переменной энтропией независимо от наличия химических реакций
в потоке.
2.6. МОДЕЛЬ АЭРОДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК АППАРАТА
К числу многих ограничений, накладываемых на выбор пара-
метров СА при тепловом проектировании в первую очередь необ-
ходимо отнести ограничения, накладываемые на выбор формы ап-
парата, его аэродинамическую компоновку.
Как правило, при прочих равных условиях форма СА выбирает-
ся из условий обеспечения оптимальных аэродинамического каче-
ства, устойчивости, управляемости, минимальной перегрузки, мак-
симальной плотности компоновки, минимальных масс ТЗ и в целом
аппарата, надежности и эффективности СА и т. д. При этом следу-
ет учитывать, что форма СА непосредственно влияет на тип приме-
няемого теплозащитного покрытия.
Например, если СА имеет сегментально-коническую форму, то
при скоростях входа больше круговой могут резко возрасти радиа-
ционные тепловые потоки. Последние не только увеличат суммар-
ный тепловой поток, подводимый к поверхности СА, но и будут по-
глощаться внутри ТЗ, вызывая ее объемный нагрев, что наклады-
вает определенные ограничения на выбор теплозащитного покры-
тия. Применение относительно заостренных тел типа «двойной ко-
нус» сопряжено, например, с большими конвективными потоками в
области критической точки и относительно малыми конвективными
и радиационными потоками на остальной поверхности аппарата.
Теплозащита аппарата такого типа будет иметь большую толщину
в области критической точки и довольно малую на остальной ло-
бовой поверхности.
Кроме того, цри расчете СА конической формы большое значе-
ние может иметь неточность знания положения на поверхности
точки перехода ламинарного пограничного слоя в турбулентный, а
для аппаратов затупленной формы большое влияние может оказать
неточность знания характеристик излучения и поглощения энергии
газообразными продуктами пиролиза уносимого покрытия. Установ-
лено, что для СА затупленной формы при прочих равных условиях
масса ТЗ при увеличении скорости входа аппарата в атмосферу
растет быстрее.
Моделирование движения спускаемых аппаратов и выбор опти-
66
мальных траекторий, рассмотренные в предыдущих разделах, |р.внат
чительной степени зависят также от аэродинамической компонов-
ки СА.
Определение аэродинамических сил, действующих на аппарат,
а точнее коэффициентов аэродинамической (подъемной силы и силы
лобового сопротивления, представляет собой одну из наиболее
сложных задач в общей «проблеме создания спускаемых. аппара-
тов, особенно планирующего (спуска. Достаточно точный расчет тре-
буется при проектировании СА уже на этапе технических предло-
жений для проведения сравнительного анализа рассматриваемых
вариантов и выбора аэродинамической схемы компоновки. Приве-
дем некоторые соотношения, положенные в основу рассматрива-
емой модели аэродинамических сил, действующих на аппарат при
М<4 и на гиперзвуковых скоростях полета при М>4 [27, 48].
Аэродинамические характеристики СА при М<4. Коэффициент
лобового сопротивления аппарата при угле атаки а = 0 можно в
первом приближении выразить в следующем общем виде:
СгО = Сх тр Схнос Н” корм “Ь Сх дн>
где сх тр — коэффициент сопротивления трения; схп0С, Сх корм»
^хдп — коэффициенты сопротивления носовой, кормовой и донной
частей корпуса СА соответственно.
Коэффициент сопротивления трения
Сг тр — mid *
где FK — площадь обтекаемой поверхности корпуса СА; Cf — коэф-
фициент трения плоской пластины, длина которой равна длине кор-
пуса СА:
2г/='Пм(2б?/)м=0; (2cz)M=0=/(Re, л),
где Re — число Рейнольдса; х — относительная координата (х//);
I — длина корпуса СА.
Зависимость для (2q)m=o при х = 0 можно приближенно ап-
проксимировать следующим образом [48]:
(2cz)m=o — 0,009 ехр{ — a (Re — 106)}, а ~0,35.
Коэффициент т|м определяется в зависимости от значений числа
Мих, например, при х = 1 т]м~ 11—0,006 М2.
Сужение носовой части СА может учитываться введением неко-
торого дополнительного коэффициента т]Кон (сопротивление возрас-
тает с увеличением конусности и числа М). Приближенная за-
висимость для этого коэффициента имеет вид
IKOH g।
Тогда сх Тр.кон — Т]кон£х Тр‘
Так как для конической носовой части СА
к 2ХНОС 1
SmId cos 0 sin 0
3*
67
где Хнос — удлинение носовой части; 0 — угол полураствори кону-
са, то
Сгтр.кон === 2£уПкон/(2 Sin 6).
Значения коэффициента сопротивления для параболической (и
близкой к ней) носовой части СА со сферическим затуплением (ра-
диус г) в первом приближении можно определить из упрощенного
•выражения [48}
сЖН0С = ^н0С [1 — г2 cos 0(3,1 — 1,4г cos 0 — 0,7г2 cos2 0)] + 0,5,
где
г' х' V X* ^нос .
^ЛНОС J ЛНОС/, ЛНОС , /--,
V 1 —Г
— 2г , с 1 — г
г=--------; tg 0 =-----= .
£Xnid ^нос* Г/2
Определение аналогичных коэффициентов для других форм но-
совых частей и в целом СА дается, например, в работах [27, 37, 40,
48, 81 и др.] Некоторые из этих зависимостей приведены в следую-
щих разделах.
При определении коэффициентов донного сопротивления можно
использовать приближенную зависимость
Сглн Р днЛ*^дн/^mid,
где — (М < 0,8);
-W,.1=O,O175(M-5)2;(M>1);
5дн — площадь донной части СА; X — удлинение СА.
Выражение для расчета коэффициента индуктивного сопротив-
ления (той части общего лобового сопротивления, которая зависит
от угла атаки а или, если есть управляющие поверхности, и от уг-
ла отклонения этих поверхностей S') представим в виде
cxi = (Суц сх$ sin a)tg a Lcx cos a,
где Дсх=2£ sin2a; ?=/(KM2—1/XHOC) .
Несущие поверхности умеренных и относительно больших удли-
нений (Х^З) на дозвуковых скоростях полета при безотрывном об-
текании обычно характеризуются коэффициентом подъемной силы,
зависящим от угла а или его производной по этому углу,
^ = c£(a —а0), (2.34)
где а0 — угол атаки при су = 0, зависящий в основном от аэроди-
намической компоновки поверхностей
68
где р—отношение полупериметра некоторой поверхности к ее дли-
не. При наличии прямолинейных передних и задних кромок поверх-
ности
(2.36)
— 1/1 , 1 . 2
р — — I--------1---------(-------
2 \ cosXn.K . ccsb.K Мч + 1)
где хпк, Хз к — углы по передней и задней кромкам поверхности со-
ответственно; т] — сужение несущей поверхности.
Выражения (2.35), (2.36) могут использоваться при расчете не-
сущих поверхностей любой формы. Для поверхностей малого удли-
нения эти зависимости требуют некоторой модификации, соответст-
вующей особенностям их пространственного обтекания [27].
Обтекание поверхностей малого удлинения (Х<СЗ), различных
по форме, является существенно пространственным даже при не-
больших углах атаки. Пространственная вихревая система может
индуцировать на верхней части несущих поверхностей СА (вдоль
хорд) дополнительную скорость. Дополнительное разрежение соз-
дает добавочную подъемную силу, которая может компенсировать
потери от местных срывов потока вдоль боковых или передних
кромок.
Такой аэродинамический эффект, как правило, усиливается с
увеличением угла атаки. Если использовать зависимость (2.34) в
качестве решения первого приближения и дополнить ее решением
для поверхностей малого удлинения, можно получить приближен-
ные зависимости коэффициента подъемной силы таких поверхно-
стей от угла атаки су = су(а) и его (Производной £j = c£(a),
т. е. Су = сУ1 (14-4а/лХ), (2.37)
где су\ соответствует значению первого приближения, определяе-
мого выражением (2.35).
В зависимость (2.37) можно ввести поправку, учитывающую
распределение подъемной силы по поверхности, которое для кон-
струкций малого удлинения близко к эллиптическому. Тогда
су = 2лК Л.-"0- (1 + 2 . (2.38)
у рк + 2 \ рк ) к
Для Х<1 эта зависимость на малых углах атаки примет вид
Cj,=yk(a-Oo). (2.39)
Нелинейность по углам атаки можно учесть с помощью поправ-
ки к выражению (2.39). Например, при Х->0 тогда
су = (л/2) k (a — a0) [1 + 2 (а — а0)].
Влияние сжимаемости газовой среды при дозвуковых скоростях
полета на подъемную силу, можно учесть с помощью закона подо-
бия, например, в формулах (2.35) и (2.38) через безразмерный па-
раметр р [58, 81].
69
Если число Маха лежит в диапазоне М^0,85 ... 1,15, вышепри-
веденные зависимости не всегда верны, так как при таких скоро-
стях полета СА на его поверхностях могут -возникать зоны местных
как дозвуковых, так и сверхзвуковых скоростей. Общепринятого
метода расчета в этом случае нет. Например, для поверхностей ап-
парата, имеющих треугольную форму, можно .использовать зависи-
мость [81]
=4k/(k /М2-1 + 0,3),
а для других форм использовать результаты, приведенные в рабо-
тах [15, 18, 27, 37 и д-р.].
Зависимость суа(М) для поверхностей СА малых удлинений, как
правило, остается примерно постоянной: с2/а=лХ/2; нелинейность ее
на сверхзвуковых скоростях полета (на начальном этапе проекти-
рования СА) практически можно не учитывать. Выражение для си-
лы лобового сопротивления в форме безразмерных аэродинамиче-
ских коэффициентов имеет вид
Сх ~ Сх0 4“ ^xi» (^*40)
где сх0 — коэффициент лобового сопротивления при а = 0; сХг — ко-
эффициент индуктивного сопротивления.
Выражение (2.40) для режимов безотрывного обтекания имеет
вид квадратичной параболы
Сх == 4“ D<fiy,
где Dq — коэффициент наклона (отвала) поляры.
Коэффициент cxq можно представить таким образом:
СхО '== Схр 4“ Схв.
где схр — коэффициент профильного сопротивления, учитывающий
трение пограничного слоя о поверхность профиля; схв — коэффици-
ент волнового сопротивления.
Для определения сХр воспользуемся зависимостью
^=2^(1+3ё) (1 + с М2) 5+0,0017, (2.41)
где S — относительная площадь некоторой поверхности, описывае-
мая с учетом интерференций зависимостью 5 = Ь—&Ин5п;
Sa — относительная площадь части поверхности (корпуса СА);
Угин«0,7 — коэффициент интерференции; с/пл — коэффициент тре-
ния плоской пластины; 1 — относительная суммарная длина (раз-
мах) щелей на несущей поверхности (между поверхностью и орга-
нами управления, если они имеются на этой поверхности СА).
Коэффициент трения плоской пластины с учетом влияния сжи-
маемости при ламинарном (ламинарно-турбулентном) обтекании
можно определить по формуле
С/пл Г. — , 40 -5/814/5
(1 + 0,1 М2)2/3 I п+ Re3/2 J ’
где Cj пл = 0,455/ (lg Re)258 — .коэффициент трения плоской пласти-
70
ны при турбулентном обтекании; хп — относительная координата
по хорде профиля точки перехода ламинарного пограничного слоя
в турбулентный.
Точку перехода приближенно можно определить следующим об-
разом:
I •^'П.пл 5
xII=min/x2_|_-2.
b
где Хппл — точка 'перехода для плоской пластины с учетом разме-
ров шероховатости ее поверхности; хс, х/ — относительные коор-
динаты местоположения максимальных толщины и вогнутости про-
филя несущей поверхности СА; дп — относительная хорда управ-
ляющих поверхностей (органов), расположенных на поверхности
СА.
— юл
В nepiBOM приближении хп.пл^--,
Re
где _________________________
л=5 +11,3-1-0,6 М( 1 - 0,25)2] 1/ 1--igKAjn/MRebJ-----.
Il* 1 v 'V 2,2 4-0,08M2/(l + 0,312M2)
Аш — средняя высота бугорков шероховатости несущей поверхно-
сти, которая в зависимости от обработки поверхности составляет
(3 ... 15) • 10-6 м.
Волновое сопротивление на околозвуковых скоростях можно оп-
ределить, используя зависимость
= / м-м;р \3/ м-м^р \
" ХВтаХ M^n,ax-MKP ) к Мсхтах-Мкр / ’
где
м' - 1 Г1'(*+1>4/3 ~с4/3 (fe+i)2/3a2/3
кр cos Хс L 2 COS2/3 Хс cos1/3Xc
Хс — угол несущей поверхности по линии максимальной толщины;
Мкр— критическое число М для этой поверхности при су = 0; k =
= 1,4— показатель адиабаты воздуха; с — относительная толщина
пластины; .
__ 2лХ ic)2 cos2 Хс
Схвтах- 2 + X(-c)1/3cos5/3Xc 5
1 ( г2/3 - )
==Г 1 + °’4 7^I2-XcWcos!M •
COS I COS Хс )
-Волновое сопротивление при М>1,2 можно определить по фор-
муле ./
4/^2] I1 + (*₽- <2-43)
71
где fenp — коэффициент профиля поверхности; £йр= 1 — ромбовид-
ный профиль; &Пр = 4/3 — профиль, образованный дугами окружно-
сти; /?пр = 3 ... 4 — дозвуковой профиль;
o,i6(xrjFi-xtgxc)2 КМ2—j>t
<р = 1+0,16 (/M2^1-XtgXc)2 gZc’
0, /M2^T<tgZc.
Индуктивное лобовое сопротивление СА на малых скоростях
полета
сХ1=сУ1(л\зм), (2.44)
где — эффективное удлинение несущей поверхности в несжи-
маемом потоке газа, связанное с геометрическим удлинением соот-
ношением
Х,.н=Х/(1 + 8и), (2.45)
где 8„=0,02-J—(з,1---—+ —-------8_\ (2.46)
COS X \ ”4 “П2 TQ3 /
В условиях закритического обтекания в околозвуковом диапазо-
не скоростей, когда сказывается сжимаемость газа,
Cxi ~МЛ^'э.сж)) (2.47)
ГДе ^э.сж^э.н/U+5сиЛ
._р?/3(М-МХ М>М;Р;
сж to, м < м;Р.
При су>0
М'Ку=М'кр-с3у/2~с1/2. (2.48)
Зависимости (2.45) ... (2.48) можно использовать для несущих
поверхностей и элементов конструкций с Х>3. При Х«СЗ вихревое
индуктивное сопротивление равно
2С(//(лк).
На сверхзвуковых скоростях индуктивное сопротивление подоб-
ных элементов СА при оптимальном распределении напрузки по их
размаху и хордам будет
с2 /
1+2
лк \
М2 — 1 \
tg2X /
Учет интерференции корпуса и различных поверхностей СА мо-
жет осуществляться введением некоторого коэффициента интерфе-
ренции
—(//" Ук)/Уиз.и
72
в общем случае характеризующего изменение общей нормальной
силы вследствие взаимного влияния несущих элементов и корпуса,
У»—Уиз.п^аа»
где kaa — коэффициент, характеризующий изменение нормальной
силы несущих конструкций СА вследствие влияния на них корпу-
са; г/ка — индуцированная нормальная сила корпуса СА; Уиз.п —
нормальная сила некоторой изолированной поверхности.
Для коэффициентов ka и kaa имеются следующие зависимости:
^а^п.с ^М^'нос ’ == ^аа*п.с^М*нос »
где
---;
1
jC=( 1 + 0,4£>)21 + 30 - < (I — о).
D = DmtfJln; /п — -полный размах несущей поверхности; Dm\d —
диметр мидзлевого сечения СА; г] — коэффициент сужения несу-
щих поверхностей; хп.с — коэффициент, учитывающий влияние по-
граничного слоя корпуса толщиной 6;
; Х|1_,'1—
\ I-O2 /I (I-О <1-1> 1
г 0,093
о = ------
(vl /v)1"5" Ъ"7Г (1+°’4 м+°’14 М2 - °’006 мз)’
Li — некоторая координата по длине аппарата; V — скорость по-
лета СА; v — коэффициент кинематической вязкости; хНос — коэф-
фициент, учитывающий влияние длины носовой части СА,
«нос — 0,6+0,4 (1 — е-°-5?-); Л=£1/Дпш;
хм — коэффициент влияния числа М, изменяется в пределах от
0,08 (М>4) до 1 (М< 1,5).
С учетом приведенных выше зависимостей нормальную силу (в
безразмерном виде), например, можно представить следующим об-
разов:
^СА = ^Лгиз.п^а+^Лгиз.к, (2.49)
где с^из.п, Cvii3.k — коэффициенты нормальных сил изолированных
несущих поверхностей и корпуса СА соответственно. Аналогично и
для касательных сил (в -безразмерном виде) получим
£тСА== £тИ3.1Ла~|“ £тиз.к« (2.50)
Таким образом, аэродинамические характеристики СА плани-
рующего спуска в первом приближении можно определить в сле-
дующей последовательности: 1) определение коэффициентов сх и
су для изолированных несущих поверхностей и корпуса СА; 2) опре-
73
деление коэффициентов cN и сх (изолированных); 3) нахождение
суммарных коэффициентов cnqa и стса; 4) определение суммарных
коэффициентов схса и суса-
Переход от поточной системы координат к связанной и от свя-
занной к поточной можно осуществить с помощью зависимостей
£№=£<- cos а4-Си sin а; сх—с^ sin а4-£т cos а;
1 у ' х т (2.51)
сх = сх sin а — су cos а; су = Ск cos а — сх sin а.
Аэродинамические характеристики при М>4. В общем случае
для определения аэродинамических характеристик тел сложной
формы при гиперзвуковых скоростях необходимо решить систему
дифференциальных уравнений в частных производных. В данном
случае будем определять характеристики приближенными метода-
ми с использованием теории Ньютона.
Для получения коэффициентов подъемной силы и волнового со-
противления используем формулы (2.51). Спускаемый аппарат
(Представим в виде комбинации нескольких тел простой формы.
Для сферического сегмента
Cyvc = 0,5 sin4? sin (а — Вкон);
V у I \ КОН/7 /О
(^.0^1
ctc = 2 sin2[1 —0,5 sin2cp— sin2<р(1 — 0,75 sin2ср)],
где дкон — угол наклона конуса к оси аппарата; <р — угол полу-
раствора сегмента; cn, с? приведены .к л/?с2, где Rc — радиус
сферы.
Для острого конуса (с углом полураствора 0КоН) при а^0КОн
^KOH=cos29KOH sin 2 (а — 8К);
<\кон=2 sin2 Окон + sin2 (а-8К) (1-3 sin29KOH).
При а>0Кон
Сл-кон=0,5 cos2 6КОН sin 2а Г1 4—1 — cos Yi X
|_ л о л
X ( tge кон -4.2^- ^кон)\1 .
\tg (сс ЛкОн) tg вкон /J
^кон=0,5 [(14~) (2 sin29KOH4- sin2(a — 8КОН))(1 -3 sin2 0КОЯ)]4~
з
-I----cos Vi sin 29КОИ sin 2 (а — 8КОН),
I 1 1 кин \ лип/ у
где Yi=arctg [tg 9K0H/tg (а — SKOH)] — 8КОН,
Для цилиндра (при а#=0)
c.vu=(16/3n)ku sin2а;
где — удлинение цилиндра.
74
(2.55)
Рис. 24. Блок-схема алюритма определения коэффициентов аэродинамических сил для СА
планирующего спуска
Для комбинации конус — цилиндр
C/Vkoh ( 1 — Г1) -|- £дГ(У?с CN
С? КОН (1 ^*1) “1“
(2.56)
где Bc=Rc/R', ri — Rcicos 0коН; Rc, R — радиусы сферы затупления и
конуса (корпуса) соответственно.
Для пластины
z
Сг/пл=—J(k —^в) dx,
О
(2.57)
где z — координата по размаху пластины; рв, рн — коэффициенты
давления на верхней и нижней поверхностях,
Рв=Ро sin2aMeB; ри=р0 sin2<xM,H;
Ро
к М2Ю
Zfe+ I \л/(л—1)_________М^/(* °______________'
к 2 J I 2k о k— 1 \i/(*-i)
-------------------------М-------------
\Л + 1 “ k + 1 ) »
«м.н = « + ан; aM.B=a—(4
Для тонких профилей, заданных уравнениями вида ун=Ун(х);
Ув=Ув(х), где х, у — оси связанной системы иоординат, углы а со-
75
ответственно равны
a„=dyH/dx; an=dyjdx,
z
a Cx=— J (Л“н —
0
Аэродинамические характеристики для цилиндра определяются
из выражений (2.55). Тогда для несущей плоскости СА в целом
можно записать
с у = Су пл “F Су ц ; сх=сх пл -|- сх ц.
На рис. 24 приведена блок-схема алгоритма расчета аэродина-
мических характеристик СА планирующего спуска с использовани-
ем приведенных выше зависимостей.
глава 3 Тепловые потоки,
действующие на СА
3.1. НЕКОТОРЫЕ ПРОБЛЕМЫ РЕШЕНИЯ ЗАДАЧ
ТЕПЛОМАССООБМЕНА ПРИ ВЗАИМОДЕЙСТВИИ
ГАЗОВЫХ ПОТОКОВ С ПОВЕРХНОСТЯМИ ТЕЛ
Вопросы взаимодействия высокотемпературных и высокоскоро-
стных газовых потоков с 'поверхностями различных тел приобрета-
ют все большее значение в связи с тем, что многие области техни-
ки нельзя плодотворно развивать без глубокого знания сущности
и законов этого взаимодействия. Это вызвало бурное развитие в
последние годы делого научного направления тепломассообмена —
теории тепловой защиты. Опираясь на положения классической
теории теплопроводности, задачи тепломассообмена при взаимодей-
ствии газовых потоков с поверхностями тел, в свою очередь, суще-
ственно расширили ее границы. Это связано прежде всего с рас-
смотрением проблем теплопереноса не только в однородных или
стабильных веществах, но и в материалах типа пластмасс — много-
компонентных, армированных, разлагающихся и химически актив-
ных, претерпевающих при нагреве ряд фазовых превращений. Это
•связано также с разработкой основ массопереноса в пористых ве-
ществах переменной структуры, или другими словами, массопере-
носа, который является следствием прогрева и интенсивность кото-
рого определяется не только общим количеством подведенного теп-
ла, но и темпов нагрева [47].
Проблемы взаимодействия высокоэнтальпийных потоков газа с
поверхностями материалов теплозащиты имеют и важное научное
значение, прежде всего потому, что это — пограничные проблемы
76
для многих наук: аэродинамики и физики твердого тела, химии и
теплофизики, прочности и материаловедения и «многих других.
Кроме того, диапазон высоких и сверхвысоких температур, много-
образие взаимодействующих друг с другом процессов, протекаю-
щих за ограниченные (временные интервалы; — все вместе это пред-
ставляет собой интерес для исследователей различных направле-
ний, связанных с тепломассообменом. Развитие этих и смежных с
ними направлений науки и техники привело к бурному развитию
-методов вычислительной математики.
Трудно дать общее и стройное изложение всех проблем взаимо-
действия высокотемпературных и высокоскоростных потоков газа
с поверхностями материалов. Если охарактеризовать современный
уровень знаний, то, пожалуй, большая часть исследований посвя-
щена сейчас чисто фактической, внешней стороне проблемы, попыт-
кам установить закономерности взаимодействия различных клас-
сов материалов и внешних факторов. Причины такого состоят :я
кроются не только в сложности явлений, но и в трудности проведе-
ния экспериментальных исследований, а в некоторых случаях и не-
возможности прямого измерения большинства определяемых пара-
метров.
Взаимодействие горячего газа с теплозащитным материалом
связано с протеканием многочисленных и взаимозависимых процес-
сов. Теоретическое изучение этой проблемы в общем случае долж-
но основываться на решении системы дифференциальных уравне-
ний, описывающих явление нестационарного тепломассопереноса в
системе газ — тело: уравнений внешней газодинамики, конвектив-
ного и радиационного переноса тепла к телу, переноса массы в мно-
гокомпонентной реагирующей газовой смеси; кинетики, разрушения
и движения материалов тела в твердом, жидком и газообразном
состоянии; прогрева тела. Решение задачи в такой сложной сопря-
женной постановке (должны удовлетворяться .условия четвертого
рода на соответствующих границах раздела газовых, жидких и
твердых фаз как на поверхности, так и внутри тела) с учетом неод-
номерности процессов вызывает в настоящее время исключитель-
ные трудности с математической и вычислительной точек зрения.
К тому же исходная физическая модель данного явления еще не
полностью ясна, а величины коэффициентов переноса для некото-
рых процессов недостаточно достоверны [30]. В этих условиях часто
трудно априори оценить влияние отдельных процессов и парамет-
ров на итоговые результаты и обоснованно назначить упрощающие
допущения. Поэтому при изучении таких сложных явлений, как не-
стационарное разрушение и прогрев теплозащитного покрытия, су-
щественно возрастает роль эксперимента, который может стать
основным инструментом решения многих тепловых проблем. Одна-
ко экспериментальные исследования в ряде случаев также не дают
правильного ответа на поставленные вопросы. В определенной сте-
пени это связано с трудностями выделения влияния нужного фак-
тора в сложной системе взаимодействующих процессов, а также с
методическими погрешностями измерений. Но, вероятно, в большей
77
степени здесь повинна методологическая сторона как самого экспе-
римента, так и обработки его результатов.
В настоящее время/когда для обработки результатов экспери-
мента используются мощные вычислительные машины, разрабаты-
ваются автоматизированные комплексы сбора и обработки инфор-
маций, во многих случаях необходим новый подход к методологии
тепловых экспериментов — изучение сложного механизма неста-
ционарного теплообмена требует не только тонкого, технически со-
вершенного эксперимента, но и принципиальных изменений в мето-
дической и расчетной частях исследований [53]. Особенно сложны
для понимания и количественного представления нестационарные
эффекты взаимодействия высокотемпературных газовых потоков с
твердым телом, если в процессе нагрева происходит разрушение ма-
териала тела. Данную проблему следует считать еще недостаточно
изученной. Трудности' ее исследования очевидны и в значительной
мере' обусловлены отсутствием эффективных методов моделирова-
ния нестационарных режимов, интерпретации экспериментальных
данных и обобщения результатов [20, 49, 53]. При изучении таких
сложных явлений, как нестационарное взаимодействие разрушаю-
щегося теплозащитного материала с высокоэнтальпийным потоком
газа,, эксперимент часто становится основным, инструментом [49].
Однако следует иметь в виду, что современные тепловые испытания
сопряжены с большими затратами, не говоря уже о затратах на
разработку, производство, монтаж и наладку экспериментальных
комплексов.
! Вб многих случаях основу математического обеспечения не-
стационарных тепловых экспериментов должны составлять методы
решения обратных задач теплообмена (определение граничных
тепловых режимов, идентификация процессов переноса тепла и
массы, восстановления «внешних» температурных полей и т. д.).
В отличие от прямых задач расчета тепломассообменных процессов
обратные задачи некорректны в классическом смысле (малые изме-
нения в регистрируемых функционалах соответствуют большим из-
менениям в искомых решениях). Эта главная особенность обратных
задач делает их трудными для решения и требует разработки спе-
циальных методов получения устойчивых результатов без наруше-
ния в целом адекватности математических моделей реальным про-
цессам [7, 69].
Возможности решения задач тепломассообмена в значительной
мере ..ограничены в связи с отсутствием необходимых для расчета
данццх по кинетике гомогенных реакций внутри пограничного слоя
и гетерогенных реакций на поверхности [9, 10]. В случае турбулент-
ного пограничного слоя, как правило, возникают дополнительные
трудности, связанные с незамкнутостью уравнений многокомпонент-
ного турбулентного пограничного слоя с химическими реакциями
[2]. Присутствие частиц в потоке и выпадение их на стенку может
привести к значительному увеличению коэффициента теплоотдачи
по сравнению с чистым газом. Определение переноса тепла и мас-
сы в двухфазных потоках осложняется многообразием действующих
78
факторов (большая инерционность частиц, турбулентный перенос,
действие подъемных и термофрезерных «сил и др.). Несмотря наряд
крупных исследований, теория тепломассообмена в двухфазных
средах еще далека от завершения. Одна из сложных задач тепло-
массообмена связана с механическим разрушением теплозащитных
эрозионно стойких материалов в высокоэнтальпийных газовых по-
токах. Это связано с химико-механическим выкрашиванием струк-
турно неоднородных наполненных и пористых материалов, сопро-
вождающим их разрушение в химически активных газовых пото-
ках, и со сложностью физической интерпретации различных фак-
торов, сопутствующих процессу термодеструкции теплозащитных
материалов на основе органических связующих. Последние могут
привести к механическому разрушению коксующегося слоя в усло-
виях интенсивного теплового и силового воздействия газового по-
тока [49, 53].
Выбор характеристик теплозащитных покрытий спускаемых ле-
тательных аппаратов, движущихся в атмосфере планет с гипербо-
лическими и параболическими скоростями, представляет опреде-
ленный интерес, поскольку покрытия на отдельных участках траек-
тории подвержены действию мощных лучистых потоков. В этих
условиях для теплозащиты можно использовать следующие мате-
риалы: разрушающиеся, полупрозрачные (слабопоглощающие или
сильнорассеивающие, комбинацию указанных выше материалов).
Актуальными вопросами, требующими своего решения и пред-
шествующими анализу эффективности той или иной системы тепло-
защиты, являются расчет лучистых (потоков в атмосферах, отлич-
ных от земной; распределение лучистых потоков по поверхности
тела и влияние вдува на величину потока в стенку (вопрос рас-
пределения лучистых потоков является принципиальным, поскольку
от его решения зависит выбор формы СА). Использование полупро-
зрачных материалов в качестве теплозащитных предполагает
прежде всего знание их оптических свойств в рабочем диапазоне
температур; исследование физико-химических процессов, иниции-
руемых лучистым теплопереносом; развитие точных и приближен-
ных методов расчета прогрева и разрушения в условиях сложного
теплового нагружения.
Решение отмеченных выше вопросов позволит в известной сте-
пени оценить эффективность различных методов решения задач
тепломассообмена при взаимодействии газовых потоков с поверх-
ностями тел и области их применения при определении параметров
спускаемых аппаратов.
3.2. АЭРОДИНАМИЧЕСКИЙ НАГРЕВ
Совершая полет в атмосфере планеты, спускаемый аппарат воз-
мущает воздушную окружающую среду, приводя частицы, находя-
щиеся в ней, в движение. Часть кинетической энергии СА, затрачи-
ваемой на ускорение этих частиц, неизменно переходит в тепло.
Вследствие выделения тепла в слое газа у поверхности аппарата
79
происходит нагрев оболочки СА — аэродинамический нагрев [19,
27, 53].
При очень больших скоростях полета аэродинамический нагрев
оказывается настолько сильным, что может привести к разрушению
материала стенки СА путем его оплавления или сублимации. Аэро-
динамический напрев может также вызвать химическое взамодей-
ствие между твердой стенкой и омывающей ее газообразной сре-
дой. В результате этого также может возникнуть эффект уноса ча-
сти вещества.
Высокие скорости полета могут оказаться причиной уноса мас-
сы, и вследствие механического взаимодействия между газовой сре-
дой и движущимся телом происходит эрозия материала стенки и
нарушение его структуры.
Исследование всех видов взаимодействия газовых потоков с
поверхностью тел является важной задачей и позволяет осущест-
вить аэродинамические расчеты, связанные с вычислением количе-
ственных критериев указанного взаимодействия, а именно: с опре-
делением теплопередачи, уноса массы, аэродинамических сил и мо-
ментов [18, 27, 47, 49].
В современной постановке задача сводится, как правило, не
только к определению основных суммарных величин (подъемной
силы, лобового сопротивления, суммарного теплового потока от
газа к стенке и т. д.), но и к вычислению распределения этих пара-
метров по поверхности тела.
Решение подобной задачи требует глубокого исследования дви-
жения газовых потоков и в основном сводится ,к определению пара-
метров газа, характеризующих его движение в каждой точке за-
нимаемого им пространства в каждый момент времени.
Современные методы исследования движения газа опираются
на ряд основных принципов и гипотез. Одной из таких гипотез, на-
пример, является гипотеза о неразрывности (оплошности) движу-
щегося газового потока. В соответствии с ней можно в первом при-
ближении пренебречь межмолекулярными промежутками и моле-
кулярными движениями и рассматривать непрерывные изменения
основных параметорв газа в пространстве и во времени, т. е. длина
свободного пробега молекул и амплитуда их колебательного дви-
жения достаточно малы по сравнению с линейными размерами
тела, характеризующими обтекание (диаметром, длиной и т. д.).
Эта гипотеза в общем не противоречит понятию о сжимаемости
газовой среды, хотя, казалось бы, при отсутствии молекулярных
промежутков среда должна быть несжимаемой [27].
При аэродинамическом нагреве аппарата наблюдается также
снижение прочностных характеристик конструкционных материа-
лов, ухудшающее несущую (способность корпуса СА, появляются
термические напряжения. Последние обусловлены, например, тем,
что 'обычно на поверхности СА появляются участки, нагретые до-
различных температур. Знание температурного режима работы
оболочки и примыкающих к ней силовых элементов конструкций
необходимо прежде всего для оценки прочности (несущей способ-
80
Рис. 25.' Схема течения гиперзвукового потока в окрестности
точки торможения затупленного тела:
/—ударная волна; 2 — зона невязкого течения; 3 — погра-
ничный слой; 4 — СА; 5 — точка полного торможения (кри-
тическая точка)
ности) корпуса аппарата в полете и обое-
нования выбора его материалов. Подводи-
мое к оболочке аппарата тепло частично
передается оборудованию и снаряжению,
расположенным внутри СА. Поэтому аэро-
динамический нагрев может быть опасен не
только для конструкционных материалов
аппарата, но и для его агрегатов и снаря-
жения.
При пилотируемых полетах исследование влияния аэродинами
чеокого нагрева необходимо также для оценки температурного ре-
жима и обеспечения заданных комфортных условий внутри каби-
ны экипажа. Интенсивность нагрева существенно зависит от скоро-
сти и высоты полета аппарата. Нагрев тем сильнее, чем больше ско-
рость полета и плотность атмосферы планеты. Следует отметить,
также, что три спуске СА в атмосферах планет существенное вли-
яниена характер его обтекания оказывает сжимаемость окружаю-
щей среды. Например, для атмосферы Земли (при М<1) это влия-
ние будет незначительным и им (в .первом приближении) можно
пренебречь. При 1<М^5 могут существенно меняться аэродина-
мические характеристики аппарата. При М>5 почти для всех рас-
смотренных выше форм СА можно считать-в первом приближении,
что значения этих параметров от числа Маха практически не за-
висят.
Рассмотрим течение в окрестности точки торможения затуплен-
ного тела, движущегося в атмосфере со сверхзвуковой скоростью
(рис. 25). В этом случае в первом приближении можно считать, что
скачок уплотнения близок к поверхности СА и приблизительно эк-
видистантен. Газ, проходя через ударную волну, замедляется и
резко меняет свои параметры. Образуется сжатый (ударный) слой
газа с повышенной плотностью, меняются скорость, давление и тем*
пература.
Течение между поверхностью тела и ударной волной дозвуко-
вое, но по мере движения вдоль тела поток вновь разгоняется и
становится сверхзвуковым. Однако в этом случае редко достига-
ются значения М, имевшие место в набегающем гиперзвуковом по-
токе. Следует также иметь в виду, что в отличие от обычных сверх-
звуковых течений газа здесь высокотемпературный газ.
В области, где параметры потока претерпевают быстрое изме-
нение, например за ударной волной, состояние газа может не со-
ответствовать равновесному. В основном это связано с тем, что для
установления равновесия смеси газа как по составу, так и по рас-
пределению энергий между различными степенями свободы моле-
кул нужно конечное время. Характерное время установления тер-
81
мохимического равновесия (время релаксации) разное для различ-
ных процессов.
Проблемы конвективного теплообмена и тепловой защиты свя-
заны, как правило, с натеканием на тело потока газа высокой
плотности. Поэтому при анализе (подобных задач пользуются урав-
нениями сплошной среды. Следует также отметить, что из .всех про-
явлений неравновесности выделяют прежде всего химическую не-
равновесность, связанную с конечным временем установления со-
става газовой смеси. Последнее в основном определяется соотно-
шением скоростей гидродинамического или диффузионного и хи-
мического процессов. Если скорость химических реакций в потоке
мала по сравнению со скоростью гидродинамического или диффу-
зионного переноса, течение считается замороженным (состав газа
принимается постоянным).
При переходе газа через ударную волну энтальпия торможения
сохраняется неизменной, хотя температура газа может меняться.
Параметры за прямым скачком уплотнения связаны с характери-
стиками набегающего потока соотношениями
• Л 1 1 м2\ ' /1 । k — I 1д2 i)
OO “ M 00 j » PO Poo I 1 "4 ~ M. co | ,
где /’o', po' — соответственно энтальпия и давление заторможен-
ного потока, нижний индекс «О» означает окрестность точки тор-
можения; /оо, Роо — параметры невозмущенного набегающего по-
тока.
Значительное влияние на аэродинамические характеристики СА
оказывает также характер обтекания в пограничном слое [2, 9, 10].
Из кинетической теории газов известно, что длина свободного
пробега зависит от кинематической вязкости атмосферы и от ско-
рости звука на данной волне. С увеличением высоты полета длина
свободного пробега молекул растет. Если последняя соизмерима с
характерным линейным размером СА (число Кнудсена мало) *, об-
текание будет сплошным (до //^185 ... 90 км). Если число Кнуд-
сена значительно (»1), то естественно рассматривать поток сво-
бодно молекулярным (//>100 км). Иногда за характерный линей-
ный размер принимают толщину пограничного слоя. Длина свобод-
ного пробега молекул и толщина пограничного слоя являются функ-
циями чисел Маха и Рейнольдса. Существует ряд методов решения
задач обтекания затупленных тел гиперзвуковым потоком газа.
Среди них следует отметить метод аналогии с течением за взрыв-
ной волной [58], несколько методов, изложенных в работе [4], метод
численного интегрирования уравнений газа [18], метод трубок тока
и ряд других. Часто используется для таких задач теория Ньютона,
которая отражает основные процессы обтекания в области затупле-
ния, а также в тех случаях, когда ударный слой или слой возму-
щенного течения между головным скачком уплотнения и телом яв-
* Число Кнудсена г—отношение свободного пробега молекул к характерно-
му линейному размеру аппарата.
82
ляется тонким, т. е. скачок уплотнения параллелен поверхности
тела. Задача значительно усложняется при учете таких явлений^
как диссоциация, реком!бинация и ионизация молекул газа в по-
граничном слое.
Если сжатый слой (см. рис. 25) формирует основную газодина-
мическую картину обтекания тела, то пограничный слой у его по-
верхности, составляющий при обычных условиях лишь малую часть
сжатого слоя, определяет тепловые и диффузионные потоки к по-
верхности. В данном случае имеется в виду лишь конвективный
теплообмен, вопрос об излучении и радиационном теплообмене по-
ка не затрагивается.
Под пограничным слоем (см. рис. 25) будем подразумевать не-
который тонкий вязкий слой толщиной б вблизи поверхности телаг
обтекаемого газом или жидкостью.
Основной постулат теории пограничного слоя сводится к тому,,
что на некотором расстоянии б от поверхности тела, существенно
меньшем размеров самого тела, происходит увеличение скорости
течения от нуля (на поверхности) до некоторого максимального
значения ие («а внешней границе пограничного слоя). .
При гиперзвуковых скоростях обтекания тела теплопередача . а
пограничном слое имеет ряд особенностей, в частности атомы и ио-
ны, появившиеся в результате диссоциации и ионизации, участвуют
в переносе тепла. Это ,происходит в основном за счет их диффузии
в области с меньшими атомарной и ионной концентрациями. Диф-
фузия,. как правило, сопровождается реком1бинацией атомов и ио-
нов и приводит к выделению дополнительного тепла
Яр = ^Яр^ь
где qm — диффузионный поток; Ц — энтальпия некоторого i-ro
компонента газовой смеси,
(г \
СрУ*Т I 4"^хим/»
6 Ji
где первый член — теплосодержание i-iro компонента газовой сме-
си; zXHMi — химическая энергия преобразования ьго компонента.
Диссоциация и ионизация молекул различных газов сопровож-
даются высокими тепловыми эффектами (табл. 5 [53]). Поэтому
очень важным может быть учет той части химической энергии, ко-
торая выделяется на относительно холодной поверхности тела при
рекомбинации атомов или ионов, поступающих к ней из смеси га-
зов.
Можно в первом приближении для некоторой модели газа (на-
пример, воздуха), представляющего собой реагирующую атомно-
молекулярную смесь, записать следующее соотношение:
Яр = Яр а^а “Ь Яр м^м»
Т Т
где /а = J сpadT /химj CpadT,
83
Таблица 5
Компонент Тепловой эффект, кДж/кг
диссоциация ионизация
О, 15 450 41000
N, 33 400 50 000
Н,0 13430 —
а и М — индексы атомной и моле-
кулярной компонент газовой сме-
си соответственно.
Если считать, что перенос ве-
щества происходит в некотором
заданном направлении у, то
47)а= “<7dm= “Р^ам;
дУ
где D — коэффициент диффузии; са — массовая концентрация ато-
мов.
В дальнейших расчетах для атмосферы Земли, например, мож-
но в первом приближении принять бинарную модель структуры
диссоциированного воздуха. Это обусловлено, в первую очередь,
тем, что основные величины коэффициентов переноса, характери-
зующие, например, вязкость, теплопроводность и диффузию, а так-
же относительные атомные массы кислорода и азота достаточно
близки. Кроме того, поскольку концентрация окиси азота относи-
тельно мала, ее влиянием на перенос энергии для приближенных
расчетов можно пренебречь. Следует также отметить, что влияние
ионизации особенно сильно сказывается при Моо>20 ... 25 [27J.
При решении задач тепломассообмена в пограничном слое ча-
сто указывают на то, что кроме переноса вещества, обусловленно-
го в основном переменной концентрацией, образуются также диф-
фузионные потоки, вызванные, в первую очередь, наличием гради-
ентов температур (термодиффузия) и давлений (бародиффузия).
Обе эти составляющие диффузионного потока, как правило, не име-
ют большого значения (для приближенных расчетов), и поэтому
при оценке теплопроводности в потоке газа, окружающего тело,
ими часто пренебрегают.
Таким образом, в этом случае удельный тепловой поток qK мо-
жет характеризоваться теплопередачей за счет обычной молеку-
лярной теплопроводности q? и выделением теплоты в результате
рекомбинации атомов, участвующих в диффузии, qD
Qk=4t~\t(1d
или
qK = - х (-“Я -НН ’
\ ду / \ /
Расчет тепловых потоков при ламинарном обтекании цилиндри-
ческой части корпуса, полусферы с цилиндром и других частей спус-
каемого аппарата (особенно СА скользящего типа) под углом ата-
ки может быть проведен в первом приближении при тепловом про-
ектировании его по .методике, изложенной выше. Однако часто при-
меняются и другие методы расчета, например требующие двух от-
дельных видов вычислений: при малых углах атаки может приме-
84
пяться метод касательных конусов, а при больших — эмпириче-
ский. Уравнения, на которых основаны эти методы, как правило, в
общем виде часто бывают несовместимы и могут дать разные значе-
ния тепловых потоков .при одном и том же угловом положении СА.
В связи с этим результаты .расчета теплового потока могут иметь
резкий скачок в точке перехода от одной системы уравнений к дру-
гой. В данном случае для ламинарного обтекания получим доста-
точно простое эмпирическое уравнение, которое может устранить на
начальном этапе теплового проектирования СА основные неточно-
сти двухступенчатого расчета и дать хотя и приближенное, но не-
прерывное решение для коэффициента теплопроводности на линии
торможения при любом угле атаки. Это уравнение в первом при-
ближении может использоваться и для тел других форм. Оно пред-
ставляет собой модификацию соотношения, содержащегоco$J’^p(<p=
= (90—а)°], и получено путем обработки серии испытаний различ-
ных моделей в аэродинамических трубах *.
Коэффициент теплопроводности X на линии торможения, напри-
мер для корпуса СА цилиндрической формы под углом атаки, при
МоеЗ>1 может быть представлен следующим выражением:
(Л>/7\)1/4 (Л/А)1/2 (Po/Ps)1/2.
где То, Tg; ро, ps; pQ, gs — температура, давление и вязкость потока
торможения за .прямым скачком и на линии торможения (для ци-
линдра под углом а) соответственно.
Это уравнение в первом приближении можно привести к виду
X/X^o=cosrt<?>
где для линейной зависимости вязкости от-температуры приближен-
но можно принять п=1,5, а при использовании закона Садерленда
л =1,1. Последнее уравнение обычно достаточно хорошо согласует-
ся с экспериментальными данными при больших углах атаки (ма-
лых ф). Однако следует учесть, что при а = 0 оно дает нулевой теп-
ловой поток, в то время как экспериментальные данные, естест-
венно, соответствуют тепловому потоку на плоской пластине.
Вследствие этого (для получения правильных значений теплового
потока при нулевом угле атаки) уравнение целесообразно предста-
вить следующим образом:
k/k^o=cosncp-[-& sin2 ср,
где п=1,5 или 1,1 в зависимости от того, какой закон изменения
вязкости используется; k — коэффициент согласования, равный
нормированной величине теплового потока для плоской пластины,
& — Qwl <7ф=о-
При малых ф (больших углах атаки) основную роль играет пер-
вый член уравнения соэ^ф, при больших ф (малых углах атаки)
второй член &эш2ф становится соизмеримым с первым. Поэтому
уравнение в целом позволяет аппроксимировать эксперименталь-
* Сейяно С., Гринвальд Ж. Ф. Метод расчета теплопередачи при ламинар-
ном обтекании корпуса ракеты под углом атаки. — ВРТ, 1974, № 11, с. 20—24,
85
ные зависимости во воем диапазоне углов атаки от 0 до 90°. При
этом следует отметить, что коэффициенты теплопроводности были
отнесены к температуре торможения. Рассматривались тела в виде
конусов, цилиндров, полусферы с цилиндром, цилиндра с плоским
срезом.. Значения постоянной k менялись в зависимости от положе-
ния точки на модели и применяемой теории нагрева. Оказалось, что
при и=1,5 принятое уравнение достаточно хорошо аппроксимиру-
ет экспериментальные зависимости и его можно использовать для
определения нагрева цилиндрического тела и тел других форм во
всем диапазоне углов атаки.
Так как при малых а для расчета тепловых потоков обычно
можно попользовать теорию касательных конусов, то были рассчи-
таны* также значения тепловых потоков при нескольких положени-
ях точки: с координатой х/7? (х — расстояние вдоль оси тела, R—
радиус-; тела) и различных условиях обтекания потоком. При
x/R = 2 результат расчета для плоской пластины совпал со значе-
нием; определяемым по уравнению (й = 0,05). При увеличении угла
атаки^ (убывании ср) уравнение и решение для касательных кону-
сов дали практически одинаковые результаты в пределах отклоне-
ния углов до 2 ... 5°. Значительное расхождение было отмечено при
углах атаки более 10° и x!R = 2. Однако следует отметить, что ре-
зультаты расчетов по теории касательных конусов с увеличением
значения x]R все больше отклоняются как от экспериментальных
данных, так и от расчетных.
В заключение следует отметить, что предложенное эмпирическое
уравнение для теплового потока на линии торможения может быть
использовано на начальной стадии теплового проектирования СА
при ламинарном обтекании цилиндрического тела (и тел других
форм) .. Оно достаточно хорошо согласуется с результатами расчета
теплового потока плоской пластины под нулевым углом атаки и
обеспечивает плавный переход от его значений на плоской пласти-
не к решению для цилиндра под углом атаки.
Сравнение с результатами испытаний в аэродинамических тру-
бах дает, как правило, относительно хорошее согласование при всех
значениях угла атаки, если показатель степени в первом члене
эмпирического уравнения принимается равным 1,5. В свою очередь,
при малых углах атаки это уравнение также согласуется с широко
известным решением по методу касательных конусов и устраняет
в первом приближении ряд ограничений, препятствующих исполь-
зованию эмпирического метода расчета для цилиндрических форм
под большими углами атаки.
Одним из наиболее важных критериев диффузионной теплопе-
редачи является число Льюиса
Le = pcpT)/X,
или это выражение может быть представлено в таком виде:
Le=^_£°_,
X р.
где |iCj>/A=Pr — число Праадтля.
86
Второй сомножитель выражения для Le — безразмерная вели-
чина, которую в общем случае можно рассматривать в качестве
характеристики диффузионного переноса. Обычно в теории тепло-
передачи вводится параметр, обратный по значению этой величи-
не,— число Шмидта
Sc=p./(pz5).
Зависимость между числами Sic, Le и Рг следующая:
Le=Pr/Sc.
Большое значение в настоящее время получили эксперимен-
тальные методы исследования обтекания тел гиперзвуковым пото-
ком газа, что в известной степени позволяет моделировать процесс
взаимодействия высокотемпературных газовых потоков со стенкой,
проверить результаты, полученные теоретическим путем, в том
числе и результаты расчетов теплопередачи в ламинарном и тур-
булентном пограничных слоях.
3.3. ТЕПЛОПЕРЕДАЧА В ЛАМИНАРНОМ
ПОГРАНИЧНОМ СЛОЕ
Рассмотрим произвольную форму поверхности обтекаемого те-
ла. Пограничный «слой ламинарный (диссоциация равновесия).
Следует отметить, что расчет распределения тепловых потоков
на поверхности тела произвольной геометрии является достаточно
сложной задачей. Существует ряд методов решения подобных за-
дач: интегральные методы, метод разложения в ряды, метод ло-
кального подобия и численные методы [9, 10, 53].
Если принять Le= 1, что в .первом приближении оправдано для
случая гиперзвуковых течений, то расчет теплопередачи практиче-
ски можно свести к решению системы уравнений, включающей в
себя уравнения неразрывности, движения и энергии
Здесь в уравнении неразрывности радиальная координата г
точки пограничного слоя заменена координатой г0 точки контура,
расположенного в соответствующем сечении пограничного слоя.
Коэффициент е имеет следующие значения: для тел вращения е =
= 1, для несущих (поверхностей е = 0.
Принимаем следующие граничные условия:
87
на.стенке, у = 0
ux = iiy=Q, ^=z^w'> T=TW\
на границе слоя, у->оо
zzv = n§; z/y==O, /о = /сб» Р==Рб» ^ = ^5; Т = Т\.
Полагаем также, что Н=ц(р, Г); Х = Х(р; Г).
Решая систему уравнений (3.1), после некоторых преобразова-
ний [27] получим следующее выражение для удельного теплового
потока в произвольной точке поверхности тела:
Ях=0,5 Рг-2/3.' V poHoUoo (ie — iw) F (x), (3.2)
где У7 (x) = 0,7-^т-— rof C-^r- — ro'rfx'j 2,
/’o «» \J Po u<x> J
Таким образом, для нахождения удельного теплового потока в
какой-либо точке поверхности заданной формы необходимо в пер-
вую очередь определить распределение скоростей и давлений на
всем участке от критической точки (полного торможения) до рас-
сматриваемой. В частности, вблизи критической точки в первом
приближении можно принять, что рь/ръ ~1; Считаем, что
пб=Хх,...где X— градиент скорости, равный
Тогда
/Г* ~ 1/2
f=0,7 -^-х' I f — x2‘dx | . (3.3)
U IJ И- /
~ \o /
Интегрируя (3.3), получаем
F=F0=/(e4-l)X/«.. (3.4)
Подставив выражение (3.4) в (3.2), получим для теплового по-
тока в критической точке
q0=0,5 Рг-2/3 V Ро?сХ(е+1) (le - Zw). (3.5)
Выражения для величины теплового потока в произвольной
точке поверхности тела qx можно представить, используя зависи-
мости (3.2) и (3.5), в следующем безразмерном виде:
В случае обтекания сферы имеется достаточно простая зависи-
мость, хорошо описывающая распределение теплового потока [27],
^сф=0,2(1 + 4 cos2 6),
88
Рис. 26. Распределение конвективного теплово-
го потока вдоль поверхности полусферы:
/-Мх=2; 2-3; 3-5; 4-10; 5-Мх;
6 — расчетная формула
Рис. 27. Схема СА типа конуса с
затупленным сферическим носком
где 0 — угол между радиусом затупления и осью симметрии (рис.
26).
Обработка численных результатов и экспериментальных дан-
ных [27] при гиперзвуковых скоростях дает возможность получить
следующую зависимость для удельного теплового потока в крити-
ческой точке (сферическое затупление):
Л _ 1,3-108 / р.н / \3-25Л iw \
YR V к I I I '
где рооя, Рооя0"“ соответственно плотность газа на некоторой высо-
те Н и у Земли /70; Uhq — скорости обтекания на высоте Н и
у Земли соответственно.
Для плоского торца в первом приближении можно записать,
что <7спл~ (0,55±0,05) ^осф-
Используя полученные выражения для величин qx, можно в
первом приближении найти суммарное значение тепловых потоков,
действующих на часть или полную поверхность полусферы,
е _
^сф=J qsdS=2nR2q0 С qx sin 0Ж
S о
При рассмотрении тепловых потоков, действующих на поверх-
ность усеченного конуса со сферическим носком, примем, что на
конической поверхности невязкие параметры газа постоянны и
равны в общем случае соответствующим значениям в конце носка
(рис. 27). В частности, скорость
«8=8/?0кон=й?(у-£и),
где Ркон — угол наклона образующей конуса.
89
Отношение давлений р
p=pt/p’o= sin ?КОн + (Роо/Ро) cos2?KOH.
Для СА, имеющего форму заостренного конуса, основные соот-
ношения можно представить в виде
?кон=0,61 Pr-2/3 уР|»я/хкои (ie — iw).
Суммарный тепловой поток
^КОН
*7SKOH J Я
0
ИЛИ q£кон 0,81 Рг /' *^кон I^PP'^/^koh (^*е
где 5 = лХкон sin ркон— —боковая поверхность конуса с длиной:
образующей хкоп и углом полураствора рКон-
3.4. РАСЧЕТ ТЕПЛОПЕРЕДАЧИ В ТУРБУЛЕНТНОМ
ПОГРАНИЧНОМ СЛОЕ
В этом случае в первом приближении можно использовать сис-
тему уравнений (3.1), которая в известной степени учитывает и
особенности турбулентного движения.
Согласно [2] можно получить, что
^=0,5 Sc-2/3 У PoH>o««,F (х) /Dcp, (3.7.)
где каталитический коэффициент <р=(1 + Al(pwkw)]-X.
Этот коэффициент учитывает влияние конечной скорости ре-
комбинации, так как в его выражение входит параметр kw. Оче-
видно, что при kw-^oo значение ф—И (случай бесконечно быстрого
катализа), а при kw-+0 значение ф—>-0 (стенка некаталитическая)-
Для условия течения вблизи критической точки можно полу-
чить, что
А = До=О,5 Sc-2/3 ]/роНоХ(е + 1);
?=?о=14-0,5 Sc-2/3}/ роМе4"1)-
В соответствии с этим тепловой поток в критической точке
<7do=0,5 Sc-2/3 УроНоХ(е 4~ 1) W (3.8)
Удельный тепловой поток к стенке можно найти, если тепло-
вой поток сложить с потоком, определяемым молекулярной
теплопроводностью qTx. Тогда выражение для этого теплового по-
тока
Qk = Qtx-V^Dx'- X / di \ Г| _ (^са/^</)(<а —<м) ' Ср \ &У J L д*/дУ -pZ>f-^-Vza-zM). \ ду J
90
Отношение количества тепла 7К, выделяющегося при конечной
скорости рекомбинации, к тепловому потоку в случае;бес-
конечно быстрого катализа можно представить таким образом:
Як l + (Le2/3<p— 1)7d
где iD==i'D(j,r iw) •
Так как предельное значение неравновесного теплового; .потока
соответствует нулевому каталитическому коэффициенту, то
а =_______L~z°_______.
Ч i+(Le2/3_1)zD
В случае обтекания сферы равновесно диссоциированным ги-
перзвуковым потоком воздуха и при отсутствии излучения можно
использовать достаточно простую зависимость, описывающую рас-
пределение теплового потока по поверхности (см. рис. 26) [53]:
#х = <7лг/<7о=О,55-|-О,45 cos 20.
В окрестности точки торможения максимум энтальпии прихо-
дится на внешнюю границу пограничного слоя. На боковой поверх-
ности тела поток над пограничным слоем холоднее, чеАм в его внут-
ренних слоях, где температура газа повышается за счет диссипа-
ции энергии движения и выделения тепла. Максимум температуры
должен быть на теплоизолированной поверхности самого тела.
В связи с этим появляется необходимость введения энтальпии вос-
становления ir. При числе Рг= 1 ir=io', а при Рг=И=1 энтальпия
восстановления не соответствует энтальпии адиабатически затор-
моженного потока iQf.
3 5. ПРИБЛИЖЕННАЯ ОЦЕНКА ТЕПЛОВЫХ ПОТОКОВ,
ДЕЙСТВУЮЩИХ НА СА (КОНВЕКТИВНЫЙ ТЕПЛОВОЙ
ПОТОК)
В предыдущих разделах было в первом приближении установ-
лено, что скорость потока в передней критической точке тела обра-
щается в нуль, а в пределах пограничного слоя изменяется от
и = и& на границе слоя до и = 0 на поверхности. Изменение скоро-
сти набегающего потока, таким образом, приводит к изменению
его кинетической энергии вблизи оболочки СА. Полная энергия не-
которой массы воздуха (для Земли) складывается из кинетической
энергии направленного движения частиц, потенциальных энергий
давления и веса, а также внутренней энергии (кинетической энер-
гии хаотического движения молекул, химической энергии диссоци-
ации). Поскольку для воздушных потоков потенциальной энергией
веса обычно пренебрегают, то можно сказать, что полную энергию
некоторой массы воздуха составляют энтальпия и кинетическая
энергия направленного движения. Если движение потока происхо-
дит без обмена энергией с окружающей средой и с обтекаемым те-
91
лом, то всякое уменьшение кинетической энергии будет сопровож-
даться соответствующим увеличением энтальпии воздуха, но их
сумма; остается без изменения (закон сохранения энергии).
Для единицы массы воздуха запишем
к + Я1/2 = /2 + ^2/2 = const,
где i — удельная (на единицу массы) энтальпия воздуха.
Если полностью остановить (затормозить) поток, то вся его ки-
нетическая энергия перейдет в энтальпию, т. е. при
W2==0, f j ZZi/2 =/о»
В этом случае величина энтальпии, достигаемая при торможе-
нии потока до нулевой скорости без обмена энергией с окружа-
ющей средой и с обтекаемым телом (энтальпия торможения), мо-
жет быть представлена следующим соотношением:
io = iooUoo/2^ (3.9)*
где Wo,, i’oo — скорость и энтальпия невозмущенного набегающего
потока.
Анализируя действующие на аппарат тепловые потоки, следует
отметить, что в общем случае аэродинамический нагрев спускаемо-
го аппарата при входе в атмосферу планет обусловлен подводом к
нему тепловой энергии, выделяющейся вблизи обтекаемой поверх-
ности СА при торможении потока, химической энергии диссоциа-
ции и ионизации молекул и атомов, а также энергии излучения, т. е.
передача тепла от потока газа к телу происходит за счет конвек-
тивной и радиационной теплопередачи.
Таким образом, суммарный тепловой поток ^2, действующий
при аэродинамическом нагреве на аппарат, можно представить в
виде
<7е=<7к + ?1>» (3-Ю)
где qK— конвективный тепловой поток от высокотемпературного
пограничного слоя; qp — радиационный тепловой поток от нагрето-
го газа за головной волной.
Приближенный анализ и оценка величин конвективного и ра-
диационного тепловых потоков даны ниже. Здесь же отметим, что
они складываются из следующих тепловых потоков: излучения с
поверхности СА 9ИЗЛ; идущего на нагрев внутренних слоев qw\ от-
водимого за счет вдува некоторых компонентов в пограничный
слой 4?в; отводимого за счет эффектов плавления и уноса массы с
пленкой расплава ^Пл; за счет уноса газифицированных компонен-
тов материала (физико-химических превращений на поверхности)
<7ун
+ *7р== *7изл ”Ь tfw “f” У ПЛ 4"<7в 4"<7ун‘
В первом приближении поток излучения с поверхности СА мож-
но представить в виде <?Изл = ecr7V, где е — степень черноты по-
92
верхности; а — постоянная Стефана — Больцмана; Tw — темпера-
тура поверхности.
Величина теплового потока, идущего на нагрев внутренних сло-
ев, зависит от температурного поля внутри покрытия, а также ко-
эффициента теплопроводности материала. Согласно закону Фурье-
qw—
где X — коэффициент теплопроводности материала; п — нормаль к
поверхности тела.
Тепловой поток, образующийся за счет эффектов плавления и
уноса массы с пленкой расплава, в значительной степени опреде-
ляется суммарным расходом массы вещества, образующейся при
поверхностных превращениях, выделяющегося внутри теплозащит-
ного покрытия газа, и массы, уносимой с пленкой расплава. В свок>
очередь, составляющие qB и qyu также практически определяются
при задании расхода массы вдуваемых или газифицированных
компонентов материала.
Расход массы зависит в значительной степени от коэффи-
циента теплообмена, энтальпии, давления и температуры поверх-
ности тела.
Для проведения оценочных расчетов тепловых потоков на на-
чальном этапе проектирования и сравнения некоторых параметров:
систем теплозащиты используем приближенные зависимости для
определения составляющих уравнения (3.10). Выражение для кон-
вективного теплового потока в первом приближении представим в
виде
<7к=—(3.11)
СР
где а — коэффициент теплопередачи; ср — удельная теплоемкость
^аза (для воздуха ср^ 1005 Дж/(кг-градус); ie, iw— энтальпии
набегающего газа при температуре торможения и стенки соответ-
ственно.
Следует отметить, что для больших чисел Маха (М>
^5... 6) тогда величина qu~ai?ICp (при скоростях, где
1 <Моэ<6) может быть найдена из решения системы уравнений
пограничного слоя в критериальной форме для ламинарно-
го обтекания St== Аг Re^0’5Pr-0,6; для турбулентного обтекания
St = ^2Rew°’2Pr-0’6» где St=a/(cppeue) — критерий Стантона;
Re.^p^UooZ/^ — критерий Рейнольдса; Prw=VwCp/hw — критерий
Прандтля; — коэффициент вязкости газа; kw— коэффициент
теплопроводности; I—характерный геометрический размер аппа-
рата; Цоо — скорость набегающего потока, невозмущенного движе-
нием аппарата; 0,332; Л2^0,029 — некоторые коэффициенты^
принятые согласно [46].
Выражения для обобщенных коэффициентов теплоотдачи в слу-
чае гиперзвукового (МД^б) полета можно получить из критери-
альных уравнений в следующем виде:
93
для ламинарного обтекания ;
(а/^)л=^1(рда!-ь№«~)0'5/-°’5П
y=i
для турбулентного обтекания
п
(а/сД=А(рЖ2«°Л Г°'5П
i=i
тде kj — коэффициенты, учитывающие ряд эффектов, связанных с
гиперзвуковым обтеканием тела [40].
Тепловой поток в критической точке носового затупления СА
можно определить следующим образом. Поскольку градиент ско-
рости обтекания за ударной волной для полусферического затуп-
ления
~_L1/2£l = _L 1/^2 — Т'о, (3.12)
\dx jo Rn У р0 /?„ V М v '
где RN = b2/a (рис. 28); /?, То', р0' — газовая постоянная, темпера-
тура набегающего потока и давление торможения за ударной вол-
ной, а для вязкого газа можно использовать зависимость Сезер-
ленда, то тепловой поток в критической точке
<7ол = сЖ’5ГзР°Л (3.13)
Для более сложных геометрических форм затупления введем
некоторые поправочные коэффициенты для (dueldx)$ в зависимо-
сти от степени затупления. Аналогично для турбулентного погра-
ничного слоя
(3.14)
где Фт — поправочный коэффициент (параметр формы носового
затупления) (см. рис. 28); сл, ст— коэффициенты ламинарного и
турбулентного потоков обтекания; х—расстояние от критической
точки по обводу затупления.
В первом приближении для определения максимального значе-
ния t/от в звуковой точке полусферического затупления можно ис-
пользовать следующее выражение:
<7oT=^°’W’8;
сл~Ке-°Т cT~Re-°>2; (Re ~ sin 9вл ). (3.15)
\ /
3.6. РАДИАЦИОННЫЙ ТЕПЛОВОЙ ПОТОК
Второй член уравнения (3.10) учитывает радиационный тепло-
вой поток от высокотемпературного излучающего газа, действу-
ющий на поверхность СА в окрестности точки торможения.
34
Рис. 28. Зависимость параметра формы от
отношения рw/ро для различных значений
Ь/а
Рис. 29. Зависимости радиационного и кон-
вективного тепловых потоков от скорост»
полета в точке торможения затупленного
тела (Я=4,6 м) [53]
Затупленная форма может успешно использоваться для спуска-
емых аппаратов с баллистическим входом в атмосферу и облада-
ющих подъемной силой при полетах с углом атаки (см. рис. 16%
18). Однако большой радиус затупления может вызвать появление
за ударной волной значительных по толщине сжатых слоев высо-
котемпературного (излучающего) газа. Последнее обстоятельства
требует поиска эффективных способов защиты аппарата от ради-
ационного теплового воздействия.
Аппараты планирующего спуска могут успешно функциониро-
вать при скоростях входа, больших или равных второй космиче-
ской. Такие скорости входа практически являются следствием
сложения скоростей полета по межпланетной траектории и свобод-
ного падения на Землю.
Конвективный и радиационный тепловые потоки зависят от ско-
рости полета аппарата неодинаково (рис. 29). Следует отметить^
что становится уже значительным при скоростях входа СА за-
тупленной формы, превышающих круговые, а при Voo>ll км/с яв-
ляется определяющим в уравнении теплового баланса (3.10).
С уменьшением радиуса затупления радиационный тепловой поток
уменьшается (при прочих равных условиях) практически пропор-
ционально уменьшению толщины ударного слоя (см. рис. 25). Ра-
диационный тепловой поток на неразрушающейся поверхности те-
ла, как и конвективный при ламинарном пограничном слое, дости-
гает максимального значения в окрестности критической точки.
При расчете величины радиационного теплового воздействия на
СА необходимо учитывать следующее. В настоящее время сущест-
вует несколько основных подходов к исследованию характеристик
излучающего сжатого слоя газа, базирующихся главным образом
на принятых моделях переноса излучения. Модель прозрачного га-
за (в этом случае принимается, что газовый поток только излучает
энергию). Модель самопоглощающего несерого газа (здесь в отли-
9S
чие от первой модели принимается, что некоторый рассматривае-
мый газовый объем не только излучает, но и поглощает часть лу-
чистой энергии, выделяемой соседними элементами сжатого слоя
газа).
Третья модель описывает значение самопоглощения для се-
рого таза (в этом случае принимается, что коэффициент поглоще-
ния для всех длин волн постоянный). Приведенные модели подраз-
делим на модели прозрачного газа с высвечиванием и самопогло-
щающие с высвечиванием (в зависимости от взаимодействия поля
течения газа с лучистым переносом энергии). Рассмотрим некото-
рые основные соотношения для определения радиационного тепло-
вого потока, действующего на СА.
При учете самопоглощения в ударном слое несерого газа ® вы-
ражение для радиационного теплового потока вводится некоторая
эффективная степень черноты газа, тогда
= (3.16)
где е*=/(Ге, ре, б) —эффективная степень черноты газа; ре, 6 —
давление и толщина изотермического сжатого слоя газа.
Рассмотрим высвечивание (радиационное охлаждение) газа за
ударной волной. Представляет интерес проанализировать вначале
выражение для прозрачного газа без учета высвечивания, так как
дальнейшие рассуждения в известной степени будут базироваться
на полученных здесь некоторых соотношениях. Таким образом,
согласно [53] для прозрачного адиабатического слоя можно запи-
сать
qp=4kn^/2, (3.17)
где kn — некоторый параметр, определяющий средний планковский
коэффициент поглощения.
Предположение о прозрачности газа дает возможность пра-
вильные результаты получать лишь в случае малых оптических
толщин в сжатом слое, которые, например, для Земли достигаются
при скоростях полета Voo<9 км/с, когда влияние излучения только
начинает проявляться. Произведение 4£цоТе4 определяет лучи-
стую энергию, испускаемую некоторым единичным объемом при
температуре, соответствующей равновесным условиям за прямым
скачком уплотнения в единицу времени.
Учет высвечивания сжатого слоя при определении радиацион-
ного теплового потока может оказывать значительное влияние на
величину последнего. Представим зависимость для в этом слу-
чае в таком виде:
^Р = ^р.ад/(П), (3-18)
где /(т])—функция радиационного охлаждения (высвечивания).
Величина т] может быть представлена в следующем виде:
т]=--2?|)-ал_- = - (3.19)
0,5р^
*96
и характеризует отношение излучения адиабатического слоя газа
^7р.ад к полной кинетической энергии газового потока 0,5pooVl. Со-
отношение (3.18) может быть приведено к следующему виду:
^Р~^р.аД1+П0'7)-
Функция f(r]) в известной степени универсальна, так как прак-
тически она одинакова для различных газовых смесей. Расчеты
этой функции для серого самопоглощающего газа с достаточной
степенью точности подтвердили эту универсальность и показали,
что изменение оптической толщины излучающего сжатого слоя в
данном случае не нарушает установленной зависимости. Таким об-
разом, учет несерого самопоглощения и радиационного высвечива-
ния (прозрачного и несерого самопоглощающего газов) может
привести к значительному расхождению (уменьшению) величины
*7Р с величиной, полученной йз зависимости (3.17) для прозрачного
адиабатического сжатого газа. При этом указанные эффекты суще-
ственно увеличиваются при увеличении радиуса кривизны СА.
Некоторые зависимости функции высвечивания для несерого
самопоглощающего газа и универсальная зависимость степени вы-
свечивания ударного слоя от радиационного охлаждения даны в
работе [53]. При определении радиационного теплового потока зна-
чительное влияние на его величину может оказывать также учет
излучения в линиях атомов.
В настоящее время, чтобы учесть излучение атомов в линиях,
принято увеличивать в 1г5 раза величину радиационного теплового
потока, рассчитанного для сплошного излучения (самопоглощаю-
щего несерого газа с высвечиванием).
3.7. ОПРЕДЕЛЕНИЕ ТЕМПЕРАТУРЫ СТЕНКИ.
РАВНОВЕСНАЯ РАДИАЦИОННАЯ ТЕМПЕРАТУРА
При установившемся движении аппарата тепловой режим на
обтекаемой поверхности может характеризоваться равенством теп-
ловых потоков, направленных к поверхности и от нее.
Если предположить, что теплопередача характеризуется только
подводом конвективного теплового потока к стенке и отводом от
нее тепловой энергии путем радиации, то для ^113Л можно записать
сpW) (ie iw)=zzTW
Температура стенки, определяемая этим уравнением, — равновес-
ная радиационная температура Tw=Te.
В окрестности точки полного торможения сферы равновесную
радиационную температуру можно вычислить в предположении
ламинарного пограничного слоя. Это можно сделать, решив следу-
ющую систему уравнений (местная скорость ^6 = 0):
Tl = [Ах/еа] (Zr - Z J [ 1 + (? Ье2/3 - 1) iD\;
= iw) 1 0 а ^а = о)»
4-331
97
ср=(1-Д2/^о|)-1; pw = Po|icpw/(g/?o7’w)»
где P'cpw fi(,Pot T^}, i,w^= fi(.P(h T'w)'t i ==^з(/^о, T'w}} Ax=o==
=cp„(Tw/T^Tw-,
Д!=0,5Рг-2/3 }f 2po(i'k;
Д2=0,55с-2/3^1 }/ 2ророГ.
В случае небольших скоростей обтекания тела, при которых
можно не учитывать диссоциацию и считать термодинамические и
кинетические характеристики воздуха постоянными, расчет темпе-
ратуры Tw=Te упрощается. В этом случае система уравнений при-
нимает вид
««•(Лг —Л»)=637’®;
ах=Л Tw.
где Л' — некоторая функция температуры Tw, определяющая коэф-
фициент теплоотдачи [27]; е — степень черноты.
глава 4 Тепловое проектирование
систем теплозащиты
спускаемых аппаратов
4.1. ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ
Анализируя основные (часто употребляемые) критерии оптими-
зации параметров СА, отметим некоторые из них. Это, в первую
очередь, массы спускаемого аппарата и теплозащиты; перегрузки,
действующие на СА во время спуска; удельные тепловые потоки
и др. (см. разд. 1.2, 2.1).
Максимальные удельные тепловые потоки в основном определя-
ют нагрев поверхности СА и в значительной степени могут влиять
на условия работы конструкции аппарата и унос массы теплоза-
щиты. Суммарная масса теплозащиты СА, использующая, напри-
мер, изолирующие и уносимые материалы, обычно определяется
не локальными величинами тепловых потоков в некоторые момен-
ты времени, а суммарным (интегральным) ‘потоком на всей по-
верхности аппарата за время спуска.
В качестве критериев оптимизации могут в этих случаях ис-
пользоваться также значения средних удельных тепловых потоков
на единицу поверхности аппарата, непревышения заданной допу-
стимой температуры поверхности СА и другие.
98
Рис. 30. Толщины уносимого ду и прогретого дп
слоев теплозащиты от температуры
Рассмотрим основные положения, ка-
сающиеся выбора параметров систем те-
плозащиты.
Обозначим через 8тз суммарную тол-
щину слоя или слоев теплозащиты и
бконстр — толщину, конструкционных ма-
териалов, из которых выполнена оболоч-
ка СА. Обычно конструкционные материалы выполняют роль сило-
вой оболочки. Для обеспечения надежности работы последней не-
обходимо, чтобы в течение заданного времени температура конст-
рукции была ниже некоторой предельно допустимой величины
Тдоп- Тогда расчетное значение толщины теплозащиты при ста-
ционарном тепловом воздействии можно в первом приближении
представить так:
8тз=&у+&п, (4.1)
где бу, бп — толщины уносимого и прогретого слоев теплозащиты
соответственно (рис. 30).
Однако вследствие существенного разброса эрозионных и теп-
лозащитных свойств материалов ТЗ вводится некоторый поправоч-
ный коэффициент к>0, тогда (4.1) примет вид
8T3=fe8T3=fey8y 4“#п&п, (4.2)
где fey, fen — коэффициенты, характеризующие разбросы эрозион-
ных и теплозащитных свойств материалов соответственно.
Обычно поправочные коэффициенты определяют при стендовых
отработках теплозащитных систем и уточняют при натурных экс-
периментах.
Согласно (4.1) массу теплозащиты условно можно разделить
на уносимую ту, связанную с уносом наружной поверхности ТЗ, и
массу прогретого слоя тп, обеспечивающую заданную рабочую
температуру конструкции СА,
тТз=/^У + тп, или |хтз=|ху + |хп, (4.4)
где цу=ту//иСА; цп=Рп//^са — относительные массы теплозащит-
ных слоев (уносимого и прогретого соответственно); цтз =
= тТз /тсА — относительная масса теплозащитной системы.
Однако в зависимости от схемы СА или назначения его спаса-
емых агрегатов изменение массы ТЗ может зависеть в каждом
конкретном случае от изменений интегрального теплового потока,
температуры поверхности, управления спуском, аэродинамического
качества, угла входа и т. д., которые в конечном счете необходимо
учитывать при анализе массовых характеристик спускаемого аппа-
рата.
4*
99
4.2. ОСНОВНЫЕ ВИДЫ ТЕПЛОЗАЩИТНЫХ СИСТЕМ
Теплозащита спускаемого аппарата должна обеспечивать за-
данный тепловой режим для обеспечения комфортных условий дея-
тельности экипажа, работы конструкции, бортовых систем и аппа-
ратов, и на нее приходится значительная доля массы СА.
Выбор характеристик системы ТЗ (тепловое проектирование
СА). может проводиться как параллельно, так и последовательно с
баллистическим проектированием.
В настоящее время известно несколько основных способов отво-
да (поглощения) тепла, к которым можно отнести в первую оче-
редь следующие: теплопроводность и использование теплоемкости
конденсированных веществ, конвекцию, массообмен, излучение, ис-
пользование электромагнитных полей и физико-химических превра-
щений. Для более эффективной теплозащиты могут использовать-
ся комбинированные системы, основанные на комбинации двух или
более указанных выше способов. Каждый из этих способов или их
сочетание могут быть реализованы в виде различных методов теп-
ловой защиты в зависимости от конкретного конструктивного
оформления. Кратко проанализируем каждый из указанных спосо-
бов.
Системы с накоплением тепла — это теплозащитные системы,
работающие при температурах ниже точки плавления поглощаю-
щих тепло материалов. Тепло в этом случае отводится от поверх-
ности теплопроводностью в соответствии с законом Фурье (3.5).
Эффективность данного отвода тепла тем выше, чем больше тепло-
емкость материала, его теплопроводность и температура плавле-
ния или сублимации. Широко используются в этом случае различ-
ные материалы (медь, алюминий, вольфрам и т. д.), обладающие
высокими коэффициентами теплопроводности. Теплоемкость мате-
риала — важный параметр, но ее величина может значительно из-
меняться с изменением температуры, поэтому при расчетах иногда
удобнее пользоваться значением общего количества тепла, затра-
ченного на нагрев материала от начальной температуры до точки
плавления.
Конвективное охлаждение заключается в том, что от обогрева-
емой горячим потоком стенки тепло передается охлаждающей жид-
кости или газу. При высоких температурах стенки для охлаждения
ее могут применяться расплавленные металлы (натрий, литий).
В качестве охладителей могут также использоваться как газооб-
разные (водород), так и жидкие (вода, спирт и т. д.) вещества.
Для снижения перепада температуры в стенке и улучшения усло-
вий отвода тепла материал стенки должен обладать большой теп-
лопроводностью (медь, молибден и др.). Использование теплоты
фазовых превращений (испарения) охладителя на поверхности мо-
жет дать возможность расширить интервал допустимых тепловых
потоков, реализуемых этой системой.
Массообмен. Этот принцип поглощения тепла основан На ис-
пользовании пористого, пленочного или заградительного охлажде-
100
ния при радиационном, и особенно конвективном, нагреве тела.
При вводе холодного газа или жидкости непосредственно в присте-
ночный слой набегающего потока толщина последнего увеличива-
ется, происходит оттеснение горячего газа от защищаемой поверх-
ности (интенсивность теплообмена на поверхностные стенки сни-
жается).
Радиационное охлаждение. Метод, основанный на радиацион-
ном охлаждении, использует способность нагретой поверхности из-
лучать тепло. Конвективный или радиационный тепловой поток,
поступающий к поверхности, повышает ее температуру. Существу-
ет предельное количество энергии, которое может излучаться те-
лом при данных температуре и длине волны. Источник такого из-
лучения называется абсолютно черным телом.
Используемые для тепловой защиты материалы не являются
абсолютно черными телами. На каждой длине волны они излучают
лишь часть энергии, определяемую некоторым коэффициентом —
степенью черноты (спектральной и интегральной). Следует отме-
тить, что в основе этого метода заложена- также идея равенства
подведенного к стенке и излучаемого тепловых потоков. Причем
температура поверхности стенки, при которой достигается это ра-
венство, называется равновесной (предполагается при этом, что
теплоотвод внутри покрытия равен нулю). Для системы радиаци-
онного охлаждения могут применяться тугоплавкие металлы (мо-
либден, вольфрам и т. д.).
Использование электромагнитных полей. В этом случае можно
использовать методы электрического или магнитного воздействия
на плазму, обтекающую тело (магнитодинамический способ).
Использование физико-химических превращений на поверхно-
сти тела. Использование фазовых превращений (плавления и испа-
рения, или сублимации), как правило, основывается на сопровож-
дающем их тепловом эффекте, который связан с температурой фа-
зового превращения. При плавлении происходит частичное ослаб-
ление межатомных связей, а при испарении связи кристаллической
решетки нарушаются, и атомы становятся практически независи-
мыми друг от друга. На разрушение материала, как правило, за-
трачивается основное количество тепла, поступающего к поверхно-
сти тела извне, и лишь небольшая его часть отводится внутрь ма-
териала теплопроводностью. Фактически разрушающиеся теплоза-
щитные системы являются комбинированными. Они не только по-
глощают тепло, но одновременно с этим блокируют падающий
тепловой потока за счет вдува газа в пограничный слой (массооб-
менный метод). Вместе с тем они излучают тепло с поверхности
(радиационный метод охлаждения). Однако необходимо помнить,
что принцип разрушающейся ТЗ основывается на фазовых (физи-
ко-химических) превращениях, приводящих к переходу части ма-
териала в газообразное состояние.
Для удобства дальнейшего рассмотрения приведенные выше си-
стемы тепловой защиты можно условно разделить на две группы,
учитывающие их основные свойства и принципы работы (рис. 31).
101
Системы теплозащиты С А
Рис. 31. Классификация систем теплозащиты по основным способам отвода (поглощения)
тепла
1. Системы теплозащиты, использующие искусственное умень-
шение внешних тепловых потоков, действующих на СА (активные
системы):
конвективного охлаждения, основанного на циркуляции тепло-
носителя;;
массообменные (на основе пористого, пленочного или загради-
тельного охлаждения);
с разрушением (уносом) материала, использующие физико-хи-
мические превращения на поверхности тел;
электромагнитного регулирования теплообмена.
2. Системы, не использующие искусственное уменьшение внеш-
них тепловых потоков (пассивные системы):
•использующие радиационное охлаждение (экраны);
теплоаккумулирующие:
а) на основе теплоизолирующих материалов (обмазок) из теп-
лостойких материалов с низкой температуропроводностью — «хо-
лодная» конструкция;
б) на основе жаропрочных материалов с рабочей температурой
1800 К и выше — «горячая» конструкция. Последняя в известной
степени может быть отнесена также и к системе, использующей ра-
диационное охлаждение.
4.3. ПАССИВНЫЕ СИСТЕМЫ ТЕПЛОЗАЩИТЫ
Эти системы в основном характеризуются способностью приме-
няемых в теплозащите материалов относительно легко отводить
тепло от нагретых поверхностей.
Теплоаккумулирующие системы. К теплоаккумулирующим сис-
темам в первую очередь предъявляется требование обеспечения
максимального поглощения всей массой материала теплозащиты
подводимого к СА теплового потока. В этом случае максимальное
количество тепла, которое может поглотить такая система тепло-
защиты, определяется зависимостью
рПЛ
Q=m f сг4Т=срт{Тпл — То),
т,
где ш — масса вещества; ср — теплопроводность; Тпл — темпе-
ратуры начальная и фазового превращения (плавления) матери-
ала соответственно. Подобные системы могут характеризоваться
также способностью к быстрому теплоотводу (коэффициентом теп-
лопроводности материалов), в известной степени относится к ним и
требование обеспечения жаропрочности применяемых материалов.
При определении характеристик такой теплозащиты целесообраз-
но учитывать анализ ее прогрева.
В безразмерном виде уравнение прогрева в первом приближе-
нии можно представить следующим образом:
дТ/дРо=д2Т/дх2, (4.5)
где Fo=-^— критерий Фурье; а=к[(сруУ—коэффициент
температуропроводности; x=x/8w— некоторая безразмерная ко-
ордината толщины теплозащиты 8W-
Уравнение (4.5) дает возможность оценить эффективность теп-
лоаккумулирующей системы по основным критериям: способности
к поглощению теплового потока сру и быстрому теплоотводу X.
В табл. 6 [46} приведены характеристики некоторых материалов,
представляющие интерес для рассматриваемой системы теплоза-
щиты.
Таблица 6
Материалы, используемые в качестве поглотителей тепла
Материал X при 20®С, Вт/(мК) С при 20®С, кДж/(кг-К) T к пл’ Q, кДж/кг р, кг/м*
Медь 386 0,37 1370 450 8950
Алюминий 293 0,92 950 650 2700
Железо 78 0,45 1800 790 7870
Молибден 148 0,25 2990 975 10200
Вольфрам 150 0,08 3640 1790 19300
Бериллий 167 2,18 1640 3690 1820
Графит 130 1,63 3770 9550 2190
103
Рис. 32. Схема размещения теплоизолирующего покрытия и
оболочки корпуса СА:
1 — стенка оболочки корпуса СА; 2 — слои теплоизолиру-
ющего покрытия
Теплозащитные системы на основе тепло-
изолирующих материалов (обмазок)—«хо-
лодная» конструкция. Одним из широко
применяемых видов теплозащиты в настоя-
щее время являются системы на основе
теплостойких покрытий (теплоизолирующих
обмазок). К ним предъявляются два основ-
ных требования: малая теплопроводность
материала (малый коэффициент температу-
ропроводности) ; относительно высокая
температура плавления.
В этом случае температура на внешней поверхности теплоизо-
лирующего покрытия должна быть значительно выше (вследствие
его малой теплопроводности), чем у металлической стенки, а теп-
ловой поток в покрытие соответственно меньше.
Решая в первом приближении уравнение нагрева (4.5) для за-
данного внешнего теплового потока (рис. 32)
<7в =
кдТ (х, Fo)
B^dx
=T(Fo)^-
при нулевом начальном условии Т(х, 0)=0 и принимая, что теп-
лоотвод внутрь СА отсутствует, можно получить общее решение
уравнения и зависимость для максимальной температуры на по-
верхности внутреннего слоя теплоизоляции (д~0), соответству-
ющую конечному моменту работы системы FoK.
Выражение для максимальной температуры можно представить
в следующем виде:
Fo
^max (0» Р°к)= f
—л2/г2 (FoK — Fo)] d Fo,
(4.6)
где FoK — критерий Фурье в конце работы системы; п — число сло-
ев покрытия.
Принимая, что граничное условие на внешней поверхности теп-
лоизолирующего покрытия (p(Fo') может быть определено в виде
некоторой функции параметров набегающего потока из уравнения
Ct / . • \ I 'Т'^ 'Т'^ \
( ^ оо —। ° Те ”7 ’
Ср ОХ
w
можно получить выражение для температуры на внешней стен-
ке ТЗ
Fo
TW = T (8да, Fo') = f <₽(Fo)
6
14- 2 2 exp [ —л2/?2’ (Fo2 — Fo)]
i
d Fo,
(4.7)
104
где Foz — критерий Фурье на внешней поверхности теплоизолиру-
ющего покрытия (в начале работы системы); ег, ew— степени чер-
ноты газа и стенки.
Так как скорость прогрева ТЗ определяется критерием Фурье,
то при сохранении граничных условий в каждый момент времени
слои теплозащиты с одинаковым значением этого параметра будут
иметь одинаковые температуры, тогда
Таким образом, для известного внешнего теплового потока, ис-
пользуя полученные зависимости, определяем толщину изолирую-
щего слоя 6W, обеспечивающую заданную максимальную темпера-
туру конструкции Tmax(0, FoK). Минимальную массу теплозащит-
ной системы можно получить при варьировании перепадом темпе-
ратуры, числом слоев покрытия и материалов. В данной системе
теплозащиты могут использоваться армированные стеклотекстоли-
том и асботекстолитом пластики на основе полимеризующихся
смол, изолирующие — термопласты, облегчающие материалы на
основе кремнезема и т. д.
Системы, использующие радиационное охлаждение (экраны).
Б тепловой защите СА на основе радиационного охлаждения ис-
пользуется способность нагретой поверхности излучать тепло. Ис-
пользуя второй закон термодинамики, можно показать, что суще-
ствует предельное количество энергии, которое может излучаться
телом при данной температуре и при данной длине волны. Источ-
ник такого излучения называется абсолютно черным телом. Следу-
ет также иметь в виду то, что равновесная температура поверхно-
сти Tw=V'qQ/(ea) не может быть выше температуры разрушения
материала радиационного покрытия Гразр. Поэтому максимальный
тепловой поток, который снимается с поверхности (экрана) мето-
дом радиационного охлаждения, ограничен величиной
(4*8)
В качестве конструкционных материалов для таких систем при-
меняются тугоплавкие металлы — молибден, вольфрам и др. Одна-
ко в окислительной среде, в том числе и в воздухе, температура их
разрушения оказывается значительно ниже температуры плавле-
ния. Если радиационная тепловая защита работает при малых
давлениях окружающей среды, необходимо считаться с возможно-
стью сублимации поверхности. Подобный метод защиты применим
для охлаждения открытых в окружающее пространство частей из-
делия, поскольку в противном случае возможно самооблучение
конструкции аппарата. Чистые полированные металлы характери-
зуются низкими значениями интегральной степени черноты при ма-
лых температурах, с увеличением температуры они несколько воз-
растают.
105
Если излучение набегающего потока соизмеримо с конвектив-
ным воздействием или выше него по интенсивности, то целесооб-
разно переизлучать тепловую энергию не с поверхности теплоза-
щиты, а из пограничного слоя. В последнем случае пограничный
слой практически является прозрачным для падающего излучения.
Поэтому при интенсивном радиационном нагреве вдув газа в по-
граничный слой не может быть эффективным средством защиты.
Целесообразно «зачернять» пограничный слой, увеличивая его ко-
эффициент ослабления излучения, т. е. вводить различные присад-
ки для снижения величины падающего на поверхность радиацион-
ного теплового потока.
Системы теплозащиты на основе жаропрочных материалов (го-
рячие конструкции). Рассмотрим стационарный набегающий поток
(p=const, r/oo = const). Тогда тепловой режим в некоторой харак-
терной точке поверхности СА можно представить в виде системы
уравнений теплового баланса и одномерного прогрева
— + ; (4-9)
Ср ох
дТ д*Г
=а ,
dt-------дх^
где ie—iw — перепад энтальпий в пограничном слое, где ie, iw — со-
ответственно энтальпии на внешней границе пограничного слоя га-
за и на стенке; а/ср — коэффициент теплообмена; а=~— коэф-
срУ
фициент температуропроводности (у — удельная масса матери-
ала); сру — объемная теплоемкость материала.
Используя критерий Био (Bi = ад^А), связывающий внешнее
тепловое воздействие с тепловоспр.инимающими свойствами мате-
риала защиты, можно принять, что при Bi^lO-4 температура по
толщине стенки 6W в первом приближении постоянна (тонкие стен-
ки), а при BiJ>5-10-3 градиент температуры достаточно велик
(толстые стенки). Таким образом, при малых числах Bi тепловой
поток практически будет восприниматься всей массой материала
теплозащитной системы (внутренний тепловой поток)
<7вн ==
Тогда режимы работы системы, использующей радиационное
охлаждение или «горячую» конструкцию, характеризуемую малы-
ми Bi, можно представить уравнением
, (4.10)
где первые два члена определяют внешний тепловой поток (соот-
ветственно конвективный и излучения от газа) и могут быть в пер-
вом приближении аппроксимированы функциями плотности и ско-
рости набегающего потока
<7 внеш = f (Р«). (4.П)
106
Рис. 33. Зависимость массы теплозащиты (на единицу
поверхности) от температуры и продолжительности
работы
При стационарном режиме нагрева
правая часть уравнения (4.10) будет
равна нулю (dT/dt = O), тогда
а/Ср {ie — iw) + ггаТ4е = (4.12)
Используя зависимости (3.11), (3.12),
из уравнений (4.10), (4.11) можно оп-
ределить основные параметры рассма-
триваемой системы ТЗ. На рис. 33
представлены зависимости m = f (/) для
разных температур («горячая» конст-
рукция). К материалам, которые могут быть использованы в подоб-
ных системах, в первую очередь относятся алюминиевые и магние-
вые сплавы, титан, стали, ниобий, молибден, вольфрам и т. д., обла-
дающие высокими параметрами прочности бв/у и устойчивости
Е 1/2/у при заданных рабочих температурах.
4.4. СИСТЕМЫ ТЕПЛОЗАЩИТЫ, ИСПОЛЬЗУЮЩИЕ
ИСКУССТВЕННОЕ УМЕНЬШЕНИЕ ВНЕШНИХ
ТЕПЛОВЫХ ПОТОКОВ, ДЕЙСТВУЮЩИХ НА СА
Конвективная теплозащита. В тепловой защите такого типа от-
вод внешнего теплового потока обеспечивается с помощью жидко-
го или газообразного теплоносителя. Задачу можно свести к опре-
делению оптимальных значений коэффициентов теплоотдачи и тем-
пературы теплоносителя, которые, в свою очередь, зависят от ха-
рактеристики теплоносителя и конструкции охлаждающего трак-
та. В зависимости от способа рассеяния тепла в окружающее про-
странство системы конвективного охлаждения подразделяются на
замкнутые и разомкнутые. Обязательным элементом первых явля-
ется теплообменник, в котором охладитель, получающий тепло от
горячей стенки, рассеивает его в окружающую среду или передает
другому теплоносителю. Как правило, в этом случае необходимое
количество охладителя не зависит от времени эксплуатации систе-
мы. Если принять, что весь подводимый тепловой поток восприни-
мается только теплозащитой СА, то можно записать следующее
уравнение теплового баланса:
а!ср Ve — U + = авн (Tw — TJ, (4.13)
где авн — коэффициент внутреннего теплообмена; — температу-
ра жидкого теплоносителя.
При относительно небольшой температуре охлаждаемой конст-
рукции излучение, как правило, мало. Поэтому интегральны.'!
внешний тепловой поток, воспринимаемый теплоносителем, в пе?-
107
вом приближении может быть представлен в виде
J — Qe»
О
где /к — время работы системы.
Практически интегральный поток определяет расход и массу
теплоносителя. Так как
^ж=--0,021Ке°ж8Рг°ж43,
то
а~Х°>57 (су)°’43Л,
где Nu = aZ/A — критерий Нуссельта; Re=V7/|ji — критерий Рей-
нольдса; Pr = v/a — критерий Прандтля для жидкости; а — коэф-
фициент температуропроводности; v — коэффициент кинетической
вязкости жидкости.
Если теплоносители — жидкие металлы, то согласно работе
[72] Nu«=4,5 + 0,014 Реж, где Реж = ИеРг — критерий Пекле.
Отношение мощности затрачиваемого на прокачку теплоноси-
теля в системе А/и к интегральному потоку можно в первом при-
ближении представить в виде выражения
-^2- --------, (4.14)
Qs 9ер (Т'р.т —
где потери давления Др, определяемые суммой потерь на все уча-
стки при движении теплоносителя, равны
П TZ2
(4.15)
i= 1
где pi — плотности теплоносителя на каждом из участков его дви-
жения; т)н — коэффициент полезного действия насоса; gi — коэф-
фициенты гидравлического сопротивления отдельных участков
тракта подачи теплоносителя; A, di— длины и диаметры магист-
ралей, каналов, пор и т. д.; — скорость движения теплоносите-
ля; Тр.т, Тт — температура теплоносителя в резервуаре хранения и
на выходе из системы; ср — теплоемкость теплоносителя.
Мощность на прокачку равна
JVH=(mAp/p)/T)H, (4.16)
где tn — масса теплоносителя, которую можно определить, исполь-
зуя соотношения (4.14) и (4.16),
m=Qj(cpbT), (4.17)
где ДТ=Тр т—Тт.
Отсюда массовый расход теплоносителя
108
В качестве теплоносителей можно использовать воду, спирт, во-
дород, литий, натрий и другие вещества.
Системы теплозащиты, использующие массообменный принцип
охлаждения. Преимущества этого вида теплозащиты перед други-
ми в основном обусловлены тем, что в этом случае может быть
сохранена внешняя форма защищаемого тела и в известной степе-
ни возможно поддержание температуры поверхности на желаемом
уровне с помощью соответствующего регулирующего расхода ох-
ладителя. Из приведенных выше (см. рис. 31) трех типов систем,
использующих массообменный принцип охлаждения (пленочное,
заградительное и пористое), рассмотрим подробнее последнее.
Системы теплозащиты с пористым охлаждением. Применение
пористой защиты основывается на том, что через пористую стенку
пропускается (вдувается) в пограничный слой (навстречу посту-
пающему тепловому потоку) охладитель (жидкость или газ). Про-
ходя через поры, охладитель отбирает тепло у стенки, а выйдя на
поверхность, снижает интенсивность теплообмена между горячим
газом и стенкой. При этом необходимо учитывать, что стенка дол-
жна при заданной пористости обладать достаточными теплоемко-
стью и прочностью. При расчете такой системы необходимо также
учитывать мощность, требуемую на прокачку теплоносителя через
поры стенки, и его свойства.
Уравнение баланса тепловых потоков у стенки в первом при-
ближении можно представить в виде
?вд (а/Ср) (ie -iw) = /пА/охл, (4.19)
где а/ср — коэффициент теплообмена без учета вдува: /и— массо-
вый расход вдуваемого в пограничный слой охладителя; фвд — ко-
эффициент, учитывающий влияние вдува охладителя на внешний
теплообмен (1 ^<рВд0); Д/0Хл— приращение энтальпии охлади-
теля.
Используя анализ, приведенный в работе [46], можно в первом
приближении получить зависимость для коэффициента фвд, кото-
рая оказывается единой для всех газов и может быть описана про-
стыми аналитическими выражениями
__f 1—pm, —0,3 < pm <0,4;
Твд < __ ___________ _________
/р I 1,012—1,16 (рт)-|-0,325 (pm)2, 0,4<рт<1,2,
где (a/cp)w — коэффициент теплообмена с учетом вдува; 0 — коэф-
фициент вдува; т=П1т^1а1ср — относительный расход теплоноси-
теля.
Поскольку в рассматриваемой постановке задачи влияние при-
роды вдуваемого газа на теплообмен можно, выразить через отно-
шение молекулярных масс вдуваемого охладителя и набегающего
газа, то коэффициент вдува может быть представлен таким обра-
зом:
ламинарный поток
Р = (Р'еФ'тепл)»
109
где а=0,6 для критической точки тела, а = 0,8 для поверхности
пластины или конуса;
турбулентный поток
₽=9,19(|1е/!х.гепл)»,
где
6=0,35 при 0,2<{1£/{1тепл< 1, 6=0,70 при 1 <^ге.,л<8;
ре, Цтепл — молекулярные массы набегающего газа и вдуваемого
охладителя соответственно.
При одновременном вдуве нескольких охладителей
п In
1=1 I i=l
где i= 1, 2,..., n — число охладителей.
Охладители кроме высокой энтальпии для заданного перепада
температур должны обладать также минимальной молекулярной
массой, не быть химически активными по отношению к материалу
стенки (не снижать его прочностные свойства, не осаждаться на
стенках каналов, пор и т. д.) (табл. 7) [46].
Таблица 7
Характеристики охладителей
Охладители Молеку- лярная масса Удельная теплоемкость, кДж/(кг-К), Г=370 К Охладители Молеку- лярная масса Удельная теплоемкость, кДж/(кг К), Г=370 К
Водород 2 14,45 Воздух 29 1,00
Гелий 4 5,20 Метиловый спйрт 32 1,72
Вода (пар) 18 2,14 Аргон 40 0,52
Аммиак 17 2,22 Двуокись угле- 44 0,91:
Азот 28 1,03 рода 'Глицерин 92 2,40
Представляет несомненный интерес использование в подобных
системах вдува газа, у которого массовая скорость будет сравни-
ма с удельным расходом газа в набегающем потоке (интенсивный
вдув). В этом случае возможно практически полное оттеснение
внешнего потока от стенки. Пограничный слой в первом приближе-
нии можно считать состоящим из двух частей. Во внутреннем слое
температура и состав газа постоянны, во внешнем — температура
и скорость фактически достигают соответствующих значений не-
возмущенного потока.
Такая схема пористой теплозащиты имеет ряд особенностей, но
случай больших скоростей вдува безусловно интересен, особенно’
в связи с проблемой входа спускаемых аппаратов в атмосферы
планет со скоростями, равными второй космической или превосхо-
дящими ее, т. е. когда радиационные тепловые потоки достигают
значительных величии.
ПО
Пленочное и заградительное охлаждения. Эффективность пле-
ночной системы теплозащиты зависит в первую очередь от способа
подвода охладителя, угла подачи, свойств охладителя, состояния
поверхности (шероховатость, загрязнение и т. д.) и числа щелей
или отверстий для подачи охладителя на поверхность. При увели-
чении числа щелей температура стенки становится более равно-
мерной. Этот принцип охлаждения чаще используется для стенок
камер сгорания и сопел ЖРД.
Еще одной разновидностью тепловой защиты массообмена яв-
ляется заградительное охлаждение. В этом случае защищаемая
стенка изолируется от горячего потока слоем холодного газа, ко-
торый подводится через отверстия (щели). Система заградитель-
ного охлаждения может использоваться, например, в РДТТ для за-
щиты внутренних поверхностей сопел и в других случаях.
Система теплозащиты с разрушением (уносом) материала — ох-
лаждение за счет физико-химических превращений. Тепловая защи-
та СА на основе частично уносимых и теплоизолирующих матери-
алов в значительной степени, как уже говорилось выше, базирует-
ся на использовании фазовых превращений (плавления и испаре-
ния, или сублимации), что, в свою очередь, может повысить эффек-
тивность этой системы. Таким образом, принцип разрушающейся
теплозащиты в общем случае основан на фазовых или физико-хи-
мических превращениях, приводящих к переходу части материала
в газообразное состояние.
В пограничном слое продукты разложения оказывают сущест-
венное влияние на интенсивность теплообмена между набегающим
потоком и тепловой защитой СА. При расчете тепловой защиты по-
добного типа целесообразно для каждой из рассматриваемых схем
уноса вводить относительно точные математические модели, на-
пример для сублимации материалов (графита и др.), процессов,
сопровождающихся обугливанием и вдуванием жидкой фазы, мно-
гокомпонентных пластмасс, деполимеризации термопластов и т. д.
Общие требования, предъявляемые к материалам систем, бази-
рующихся на физико-химических превращениях, следующие:
поглощение максимально большого количества тепла при физи-
ко-химических превращениях и наличие высоких значений объем-
ной теплоемкости;
достаточно хорошая прочность при высоких температурах (для
обеспечения минимального механического уноса массы);
большое значение степени черноты и максимально возможная
температура разрушающейся поверхности;
образование газообразных продуктов с малыми молекулярными
массами при разрушении (для эффективного снижения конвектив-
ного теплового потока);
относительно большая вязкость жидкой пленки, образующейся
на поверхности при физико-химических превращениях.
В отличие от систем пористого охлаждения подобные теплоза-
щитные системы, как правило, обладают достаточно высокой сте-
пенью надежности; расход вещества саморегулируется в зависи-
111
мости от интенсивности теплообмена: не требуют применения ря-
да вспомогательных систем (насосов, трубопроводов, распредели-
телей, клапанов и т. д.).
Следует отметить, что практически трудно подобрать материал,
который одновременно удовлетворял бы всем требованиям и при
этом обладал минимальной стоимостью и относительно большой
долговечностью.
Рассмотрим некоторые из приведенных выше схем тепловой за-
щиты СА с физико-химическими превращениями. Деполимериза-
ция термопластов может происходить, например, в широком диапа-
зоне температур, тогда как для других типов теплозащит начало
интенсивного поверхностного уноса, как правило, связывается с не-
которой мало изменяющейся температурой. В этом случае унос оп-
ределяется профилем температуры в поверхностном слое Т(х).
Для стационарного уноса (при постоянных внешнем теплонагруже-
нии, скорости уноса и профиле прогрева) функция температур оп-
ределяется следующей зависимостью:
Т(х)=Т«+(7’да —Т«)ехр[—/п„,х/ар)], (4.21)
где TWi Tw' — температуры на поверхности и в глубине теплоза-
щитного покрытия соответственно; tnw — массовый унос,
mw = У ярЮ^'Гда+Л2/а,‘*^;
^2, ^3 — коэффициенты, определяющие свойства деполимеризу-
ющегося материала.
Следует учесть, что при входе в атмосферу СА испытывает воз-
действие существенно нестационарных тепловых потоков. Поэтому
при возрастающем теплопотоке глубина прогрева поверхностного
слоя меньше, чем при стационарном, соответствующем каждому
моменту времени (действительный унос будет меньше стационар-
ного), при уменьшающемся <— выше (действительный унос будет
больше стационарного).
На начальном этапе теплового проектирования СА приближен-
ные оценки уноса и прогрева теплозащитного покрытия можно
также проводить, используя модели равновесного процесса.
Для многокомпонентных (композиционных) материалов целе-
сообразно при определении основных параметров тепловой защиты
СА ввести некоторую обобщающую характеристику — эффектив-
ную энтальпию разрушения
Лф=[(а/^)о(/е — iw}~ ^Tt\lmw. (4.22)
Или, используя уравнения баланса тепла для стационарного уноса
Лф=Йг (4 — iw} + c^Tw — T’o) + wrQy,
где mw, rhr— суммарный унос массы и та его часть, что уносится в
газообразной форме (0^тг^1) соответственно; Qy — теплопогло-
щение при фазовых переходах материала.
112
Для заданной атмосферы в широком диапазоне скоростей вхо-
да СА температура Tw обычно изменяется незначительно. Поэтому,
принимая ее в первом приближении постоянной, с приемлемой
степенью точности можно оценивать некоторые параметры и ап-
проксимирующую функцию для /Эф, например, для ряда матери-
алов [46]: стеклотекстолита /эф« 1450 + 0,29(4—iw) кДж/кг (Tw=
= 2500° С; = 1,20 кДж/(кг-К); для асботекстолита /эф«800 +
+ 0,4(4—4) кДж/кг (74 = 2200° С, ср= 1,25 кДж/(кг-К).
Материалы типа графита (пирографит и т. д.), сублимирующие
при 74 = 3500° С (7эф~ 10500 кДж), обладают достаточно малой
температуропроводностью (~3-10~6 м2/с) и высокой жаропрочно-
стью и могут быть использованы для тепловой защиты передних
кромок несущих поверхностей и носков СА планирующего типа и.
некоторых частей двигателей.
Характерным в уносе материалов типа графита является суще-
ствование нескольких четко выраженных режимов уноса. Однако
следует иметь в виду, что температурные границы режимов работы
таких материалов сильно зависят от конкретных марок графитов,
давления в пограничном слое, режима течения и других факторов.
Поэтому при расчете значений границ температуру стенки необхо-
димо рассматривать для каждого конкретного случая.
Так как при проектировании частично уносимых покрытий кро-
ме толщины уноса следует выбирать и толщину прогреваемого
слоя, обеспечивающего номинальный режим работы силовой кон-
струкции, то, имея профиль температуры после окончания уноса
Т(х) ж Ту ехр [—mxl(ар)],
можно получить максимальное значение температуры по глубине и
спроектировать многослойную теплозащитную систему СА [Ту —
температура разрушающейся поверхности материала (см.
рис. 30)].
Таким образом, приближенное и далеко не полное рассмотре-
ние отдельных принципов построения систем тепловой защиты СА
в известной степени дает представление о их возможных характе-
ристиках и областях применения.
Системы с накоплением тепла, например, имеют ограничения
как по суммарному количеству подводимого тепла, так и по макси-
мальному тепловому потоку (из-за ограничения величины коэффи-
циента теплопроводности).
Радиационные системы тепловой защиты (естественно, при ог-
раничении по максимальному удельному тепловому потоку) прак-
тически могут работать при произвольном суммарном теплопод-
воде.
Для многих СА (при 74<500°С) системы, использующие раз-
рушающиеся теплозащитные материалы, обладают, например,
меньшей массой. Для СА, совершающих продолжительные (и ме-
нее теплонапряженные) спуски в атмосфере, может оказаться це-
лесообразным использование пористых и радиационных систем
теплозащиты и т. д.
ИЗ
4.5. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ И ВОЗМОЖНЫЕ
ОБЛАСТИ ПРИМЕНЕНИЯ МАТЕРИАЛОВ,
ИСПОЛЬЗУЕМЫХ В СИСТЕМАХ ТЕПЛОЗАЩИТЫ
С РАЗРУШЕНИЕМ (УНОСОМ) ВЕЩЕСТВА
В разд. 4.4 рассматривался (в первом приближении) вопрос о некоторых
основных особенностях системы теплозащиты, использующей частичное разруше-
ние (унос) материала и базирующейся на фазовых превращениях (плавлении и
испарении, или сублимации), происходящих в нем. В целом эту проблему можно
определить как саморегулируемый процесс теплопередачи и массообмена, при
которых падающая энергия расходуется в результате частичного уноса матери-
ала [4, 39, 49, 53 и др.].
В зависимости от требований к тепловым потокам для теплозащиты в пер-
вую очередь могут быть использованы следующие материалы:
1) термические деполимеризующиеся и имеющие малую плотность термо-
пласты, например пористый политетрафторэтилен;
2) некоторые жаропрочные, главным образом графит;
3) коксующиеся композиционные материалы на основе термореактивных
смол и порошкообразного или волокнистого неорганического или органического
наполнителей.
Первая группа обладает недостаточными свойствами, характеризующими
унос (сублимацию) материала, и средними теплоизоляционными свойствами и
может найти применение главным образом в системах, предназначенных для
эксплуатации при относительно малых удельных тепловых потоках, например в
качестве теплозащиты некоторых СА планирующего или скользящего типов. Вто-
рая группа, наиболее характерным представителем которой является графит в
его структурных модификациях, обладает достаточно хорошей способностью к
сублимации при высоких значениях удельного теплового потока. Однако чувст-
вительность к механическому и тепловому ударам в сочетании с некоторыми
технологическими особенностями получения этого материала несколько ограни-
чивает области возможного их использования.
Материалы третьей группы находят достаточно широкое применение в ус-
ловиях средних и высоких удельных тепловых потоков.
Механизм взаимодействия композиционных материалов с газовыми потока-
ми для подобных систем теплозащиты достаточно сложен из-за множества хи=-
мических, физических и механических процессов. На рис. 34 схематически пока-
зано состояние материала коксующегося типа (фенольный углепластик) в про-
цессе работы (уноса). Слой исходного композиционного материала 3 отделяет
силовую конструкцию 4 от зоны пиролиза 2 и от слоя кокса 1. Слой кокса, рас-
положенный у поверхности уноса, представляет собой пористую карбонизирован-
ную зону, образованную в результате пиролитической деструкции связующего
(и других органических компонентов, например нейлона), в то время как фронт
пиролиза перемещается в направлении исходного материала. Газообразные про-
дукты деструкции, например водород, аммиак и углеводороды, просачиваются
через поры и микротрещины в нагретом слое кокса. При этом происходит тепло-
обмен между этими газами и карбонизированной средой, и газообразные про-
дукты с высокой скоростью вылетают с поверхности в пограничный слой (по-
следний является частью ударного слоя, непосредственно примыкающего к по-
верхности уноса). Такой выброс газообразных продуктов пиролиза препятствует
распространению поля теплового потока, и в результате этого может значитель-
но уменьшиться конвективный тепловой поток, достигающий корпуса аппарата.
Этот блокирующий эффект, известный как охлаждение путем уноса материала,
усиливается с увеличением скорости входа СА в плотные слои атмосферы и эн-
тальпии воздуха [53]. На поверхности уноса происходят различные реакции,
причем каждая из них, как правило, ведет к уменьшению толщины материала и,
следовательно, к уменьшению расстояния между наружной поверхностью тепло-
защиты и несущей конструкцией.
Поглощение энергии в процессе фазовых превращений и уноса складывается
из следующих реакций:
экзотермических реакций деструкции, приводящих к разрыву связи, и нагре-
ва газообразных продуктов пиролиза до равновесной поверхностной температу-
114
Рис. 34. Распределение зон в коксующемся сублимирующем
материале (фенольный углепластик) при установившемся
уносе:
1 — слой кокса; 2 — переходная зона неполного коксования;
3 —слой исходного уносимого материала; 4 — металлическая
несущая конструкция корпуса СА
ры. Причем первый из этих двух механизмов зависит
от прочности связи и делокализации электронного об-
лака в полимере. Второй — от удельной теплоемкости
газообразных компонентов;
испарения (сублимации) науглероженного матери-
ала поверхности спускаемого аппарата и, в случае
присутствия других ингредиентов, их плавления и ис-
парения;
охлаждения в результате уноса массы.
Полную эффективность всего процесса, которая оп-
ределяется взаимодействием таких противодействую-
щих механизмов, как экзотермические реакции в по-
граничном слое (окисление) и потеря материала в ре-
зультате откольных явлений, измеряют, определяя общую тепловую энергию, за-
трачиваемую на единицу массы уносимого материала.
Рассмотрим некоторые покрытия на основе коксующихся уносимых матери-
алов. Основные требования к ним:
высокая механическая прочность в интервале температур эксплуатации СА;
низкая термическая диффузия, предотвращающая преждевременную переда-
чу тепла от зоны пиролиза к силовой конструкции корпуса;
способность к пиролизу с образованием имеющих высокую теплоемкость
низкомолекулярных газообразных продуктов, преимущественно молекулярного
водорода;
способность к образованию в результате пиролиза значительного выхода по-
ристого кокса, достаточно плотного, механически прочного. Слой кокса предотв-
ращает откольную замедленную тепловую эрозию, и получение равновесной тем-
пературы поверхности становится максимально возможным, что обеспечивает
эффективное излучение и максимальное поглощение тепла газообразными про-
дуктами пиролиза;
технологичность исходных материалов.
Свойства материалов, связанные с фазовыми превращениями и уносом, ста-
новятся решающими критериями при высоких температурах поверхности и высо-
ких удельных тепловых потоках, особенно при условии незначительного времени
работы СА в плотных слоях атмосферы [39, 49, 53 и др.]. Имеющие высокую
плотность композиционные материалы на основе армированной графитом фе-
нольной смолы являются основными материалами подобного класса. В случае
пилотируемых СА, совершающих полеты с использованием аэродинамического
качества (планирующих СА), для которых характерен более продолжительный,
чем для аппаратов баллистического типа, вход в плотные слои атмосферы, ос-
новным требованием является сочетание механизмов защиты, включающих
унос и теплоизоляционные свойства материалов. Таким образом, в последнем
случае целесообразно использовать композиционные материалы с малой плотно-
стью, имеющие высокую теплоемкость и низкую удельную теплопроводность.
Примером таких материалов в какой-то степени могут служить армированные
нейлоном фенольные смолы, в которые для уменьшения плотности вводятся пол-
ные фенольные микросферы. Корреляция между составом, плотностью, уносом и
теплоизоляционными характеристиками является достаточно сложной.
Например [39], фенольный углетекстолит (углеродная ткань 65%, феноль-
ная смола 35%) имеет р=1,39«10-3, способность уноса 160 МДж/кг (при
энтальпии торможения 21,6 МДж/кг), время, в течение которого на обратной
стенке образца достигается температура 149° С, 30 с; фенольный стеклотекстолит
на основе кварцевой ткани (кварцевая стеклоткань 65%, фенольная смола
35%)—соответственно 1,55-10-3 кг/м3; 27 МДж/кг; 30 с; фенольная смола, ар-
мированная порошком нейлона (порошок нейлона 50%, фенольная смола 25%,
фенольные микросферы 25%), — соответственно 0,59-10-3 кг/м3, 35 МДж/кг)
(при энтальпии торможения 18,6 МДж/кг), 258 с.
115
Приведенные фенольные композиционные материалы могут эффективно ис-
пользоваться для СА при спуске в атмосферу Земли со скоростями второй кос-
мической и выше.
Повышение температур эксплуатации и одновременное увеличение выхода и
плотности кокса по сравнению с фенольными смолами может быть, например,
получено в случае применения полифенилена или линейных полиаценов. Высокая
-степень делокализации электронного облака наряду с регулярностью и жестко-
стью цепи таких полимеров должна, по-видимому, привести к оптимальной тер-
модинамической устойчивости и высоким температурам плавления (свыше
.800 ...900° С).
В работе [39] представлены некоторые теоретические основы н описано
практическое применение методов исследования полимеров (термогравиметриче-
ский, дифференциальные термический и термомеханический анализы, дифферен-
циальная сканирующая калориметрия и др.). Показаны возможности решения ос-
новных технологических проблем, связанных в основном с переработкой линей-
ных и фенилзамещенных полифенилонов. Следует отметить, что при испытаниях
углепластика на основе полифениленового связующего, армированного углерод-
ной тканью, в плазме дугового разряда при удельном тепловом потоке
17,0 МВт/м3 значение теплоты уноса достигало — 68 МДж/кг (соответствующая
величина для аналогичного фенольного углепластика составляла
— 38,4 МПж/кг).
Рассмотрим гетероциклические полимеры, которые состоят из систем арома-
тических ядер, содержащих гетероциклы, сшитые или конденсированные с угле-
водородными ароматическими кольцевыми структурами. Полимерные соединения
этого типа обладают способностью к коксообразованию. Последнее более или
тиенее сравнимо с коксообразующей способностью аналогичных карбоцикличе-
ских полимеров, и их наиболее значительным преимуществом является возмож-
ность двухступенчатого механизма замыкания кольца.
Данный метод позволяет относительно легко решить проблему, связанную с
недостаточной растворимостью полученного полимерного соединения при исполь-
зовании его для приготовления связующего. Это связано с тем, что появляется
возможность применить в качестве исходного продукта растворимый и легко пе-
рерабатываемый форполимер. В этом случае могут быть использованы традици-
онные методы предварительной пропитки армирующих тканых и волокнистых на-
полнителей с последующей намоткой волокна или ленты.
Не затрагивая синтеза макромолекулярных структур с использованием бес-
численных комбинаций пяти- и шестичленных гетероциклов, отметим, что наибо-
лее широкое применение из этих полимеров нашли полиимиды.
Ароматические полиимиды обычно показывают достаточно хорошую термо-
стабильность, что подтверждают результаты термогравиметрического анализа:
начальная термическая деструкция в атмосфере гелия происходит при
— 550 ...600° С [39].
Благодаря тому что величина выхода кокса для этих полимеров (60... 70%
при 800° С) больше, чем для полимеров, полученных на основе фенольных смол,
и состав газообразных продуктов пиролиза (32% молекулярного водорода при
450... 550° С) способствует охлаждению (путем уноса массы), подобные матери-
алы (особенно полиимидные углепластики) могут эффективно использоваться
для рассматриваемых систем теплозащиты СА.
Другим достаточно известным типом гетероароматических полимеров явля-
ются полибензимидазолы, которые имеют более высокую термостабильность, чем
полиимиды, и исключительную способность к коксообразованию (выход твердого
-остатка при 800° С в атмосфере гелия достигает 80%).
Перспективными являются также бензоксазольные или бензотиазольные по-
лимеры. Определенный интерес представляет класс полимеров, содержащих шес-
тичленный оксазиновый гетероцикл, соединенный, например, с бензольным коль-
цом.
Не перечисляя многие виды гетероциклических полимеров, каждый из кото-
рых имеет определенные преимущества и недостатки, следует все же остановить-
ся на некоторых композиционных материалах. Это, в первую очередь, полимеры с
гибкими скелетными структурами, содержащими кислородные мостиковые свя-
зи. Например, стеклопластики на основе такого полимера, армированного стекло-
116
тканью, обладают достаточно высокой прочностью и модулем упругости при из-
гибе.
Приведем некоторые результаты испытаний таких материалов [39, 49]:
без термообработки: температура испытаний 25° С; предел прочности (при
статическом изгибе 106 Н/м2) — 769; модуль упругости (при статическом изгибе
109 Н/м2) — 26,7;
термообработка в течение 1 ч при 371° С: температура — 37Г С; предел
прочности — 368; модуль упругости — 24,1:
термообработка в течение 50 ч при 371° С: температура — 371° С; предел
прочности —247; модуль упругости— 18,1;
термообработка в течение 10 мин при 538°С: соответственно температура:—
538°; предел прочности (при статическом изгибе 106 Н/м2) —206; модуль упруго-
сти (при статическом изгибе 109 Н/м2) —22,1.
Таким образом, особое значение имеют результаты механических испытаний,
полученные при температуре 538° С после кратковременного старения при этой
-температуре. Эти испытания свидетельствуют о возможности использования ком-
позиционных материалов на основе полихиноксалиновых связующих.
Для получения обладающих высокими эксплуатационными характеристика-
ми композиционных материалов на основе борного или графитового (волокни-
стых) армирующих наполнителей также можно использовать различные полимер-
ные структуры (типа поли- 6,6- оксидихиноксалин-3,З-диил-1,4-фениленоксин-1,4-
хренилен и т. д.).
При пиролизе полихиноксалинов в вакууме выделяется достаточное коли-
чество газов, обеспечивающих охлаждение путем уноса массы. Достаточно вы-
сокими являются и термогравиметрические характеристики полихиноксалинов.
Например, начальная потеря массы полностью ароматизированного полимера в
атмосфере азота происходит при температуре «650° С, и выход твердого остат-
ка составляет ~85% (при температуре 800° С). Термограмма, полученная для
этого полимера в атмосфере азота, обычно полностью повторяет характер кри-
вой для некоторых типов пирролона.
Таким образом, некоторые из перечисленных здесь полимерных структур мо-
гут найти применение в качестве армирующих наполнителей композиционных ма-
териалов, которые, в свою очередь, могут быть использованы в теплозащитных
системах с уносом материала.
Основным требованием, предъявляемым к клеям, используемым для соеди-
нения теплозащитных экранов с несущей конструкцией, является теплостойкость.
Это обусловлено в первую очередь тем, что эти клеевые соединения должны вы-
держивать по меньшей мере предельные эксплуатационные температурные воз-
действия, которым подвергается нагруженный силовой каркас спускаемого аппа-
рата.
Полиимиды и полибензимидазолы уже нашли применение в современных
конструкциях аппаратов. С успехом в ряде случаев можно принять и многие из
полимеров, перечисленных здесь.
Рассмотрим кратко некоторые другие органические и графитизированные
полимеры [49].
Ароматические полимеры, содержащие мостиковые сегменты — CH = N'—,
расположенные между ароматическими звеньями, в настоящее время широко ис-
следуются. Синтез этих полимеров осуществляется прямой полимеризацией в
растворах различных ароматических соединений или реакциями обмена. Для
этих полимерных продуктов, как правило, характерна плохая растворимость в
большинстве органических растворителей, и поэтому может происходить осаж-
дение их из раствора до получения достаточно высокой молекулярной массы
полимера. И в этом случае конденсация в расплаве с помощью реакции обмен-
ного типа позволяет достигнуть более высокой степени полимеризации. Термо-
стабильность, как правило, не особенно высокая, и термическую деструкцию в
этих случаях можно наблюдать уже при темпертурах 300... 400° С.
Несмотря на этот недостаток, характерная для этих полимеров термолити-
ческая деструкция, которая происходит в результате выделения азота и образо-
вания новой углерод-углеродной связи с образованием структур стильбенового
типа, может иметь значительное преимущество для процессов, связанных с аб-’
ляцией.
117
В свою очередь, образование в результате пиролиза газообразного азота
способствует процессу охлаждения путем уноса массы. Продукт, образующийся
на этой первой стадии деструкции, может подвергаться (при более высоких тем-
пературах) второй стадии пиролиза с образованием газообразных веществ. При
этом он вновь участвует в охлаждении материала за счет уноса массы, и обра-
зующийся кокс может в конечном счете уноситься обычным образом.
Перспективное направление в области получения теплозащитных композици-
онных материалов, основанных на уносе веществ, связано с графитизацией обыч-
ных органических смол, армированных углеродными волокнами, на основе регу-
лируемых циклических операций пиролиза и повторной пропитки.
Полученные в настоящее время графитизированные углепластики, как пра-
вило, кроме достаточно высокой эффективности уноса (графитов), являющейся
результатом большой теплоты сублимации и высоких равновесных температур
поверхности, отличаются также сохранением прочности при относительно высо-
ких температурах (в случае отсутствия воздуха). Значения пределов прочности
при изгибе (в атмосфере гелия) при комнатной температуре составляют 800...
...950 МН/м2 и при температуре 1500° С—1000 МН/м2. Следует отметить, что
композиционный материал, получаемый на основе пропитанного смолой углерод-
ного штапельного волокна, графитизируется, например, при температуре 2500° С.
В работе [63] показано, что непосредственная обработка металлов карбида-
ми улучшает их эрозионную стойкость в окислительной среде при испытаниях
камер сгорания ЖРД и, кроме того, достаточно отчетливо доказывает перспек-
тивность этого способа при изготовлении систем теплозащиты (с уносом; для
спускаемых аппаратов, входящих в плотные слои атмосферы. Углепластики изго-
товляются на основе ориентированных углеродных (или графитовых) волокон.
Поверхность последних для улучшения когезионной связи между волокном и
матрицей перед пропиткой обычно окисляется в результате нагрева волокна на
воздухе при температуре 400... 600° С или обработки химическими окислителями.
В зависимости от содержания волокна предел прочности и модуль упругости при
изгибе полученных по данному способу композиционных материалов могут сос-
тавить соответственно ~575 МН/м2 и 222 ГН/м2.
Приведем для сведения некоторые механические свойства графитизирован-
ных углепластиков при изгибе (при комнатной температуре): содержание волок-
на 30, 50 и 70%, тогда соответственно предел прочности при статическом изгибе
будет: 245; 400; 575 МН/м2 и модуль упругости 132; 150; 222 ГН/м2 [39].
Основной интерес с точки зрения возможности использования в качестве
темпер-атуростойких материалов, использующих фазовые превращения (унос),
представляют полимеры, содержащие такие л-комплексы, в которых металлы
VIII группы периодической системы с помощью рк—^-связей образуют соеди-
нение с многочисленными ароматическими кольцами и другими лиганд-замести-
телями. В таких комплексах, принадлежащих к классу металлоценов, электроны,
обеспечивающие связь металл — лиганд, в более или менее значительной степени
делокализованы и благодаря этому приводят к повышенной устойчивости связи
металл — ароматическое кольцо.
Наиболее химически и термодинамически устойчивыми металлоценами явля-
ются соединения, в которых теоретически отсутствуют не полностью заполненные
электронные подуровни (3d, 4d, 4f и т. д.) (ферроцен, рутеноцен, осмоцен). Ко-
бальтопроизводное — кобальтоцен — имеет по сравнению с ферроценом один из-
быточный электрон и поэтому обнаруживает заметную химическую неустойчи-
вость.
С другой стороны, удаление этого отдельного электрона приводит к обра-
зованию положительно заряженного кобальтоцениевого комплекса, который явля-
ется изоэлектронным по отношению к ферроцену и, как правило, имеет сравни-
мую с ним термодинамическую устойчивость. Необходимо заметить, что этот
комплекс, в свою очередь, обладает значительно более высокой химической стой-
костью, особенно к окислению.
В то же время, несмотря на значительный интерес, проявляемый к полимер-
ным металлоценам, лишь небольшое число структур может быть рассмотрено с
точки зрения возможности использования их в качестве уносимых (аблирующих)
материалов, и до настоящего времени синтезированы далеко не все из возмож-
ных структур.
118
Исследования показали, что выход твердого остатка (в атмосфере аргона)
для. чистой матричной смолы с содержанием железа, например, ~4,5% пример-
но на 17% выше, чем в случае пиролиза немодифицированных фенольных смол.
Таким образом, исходя из этого, можно предположить, что различные сопо-
лимеры после изготовления на их основе (при оптимальных условиях) компози-
ционных материалов должны показать более высокие абляционные характеристи-
ки, чем фенольные смолы.
С другой стороны, наличие метиленовых и метилидиновых мостиков, которые
поддаются термолизу (с образованием газообразных углеводородных остатков),
что крайне необходимо для обеспечения охлаждения путем уноса массы, способ-
ствует образованию «слабых связей» в полимерном связующем и, следовательно,
будет в известной степени препятствовать выходу кокса по сравнению с достиг-
нутыми уже высокими уровнями, полученными при использовании ароматических
гетероциклических полимеров [39, 49].
В некотором отношении более перспективными могут оказаться полимеры, в
которых ферроценовые звенья связаны сопряженными или ароматическими груп-
пами или сочетанием этих двух типов связей. Как правило, выход твердого ос-
татка для такого полимера обычно оказывается равным — 62%, что примерно
на 15% выше, чем выход твердого остатка аналогичного полимера фениленового
типа, полученного при идентичных условиях. По-видимому, с полным основанием
можно считать, что дальнейший нагрев значительно увеличит выход кокса.
Полимерный продукт, структура которого состоит, по-видимому, из ферроце-
нилендифениленазосегментов, приводит к образованию фракций, обладающих
исключительной термостабильностью (в атмосфере инертного газа). Причем вы-
ход кокса з этом случае при температурах 600 и 700° С соответственно состав-
ет 93 и 92%.
Необходимо отметить, что серьезным недостатком этого полимера является
его нетехнологичность, объясняющаяся неудовлетворительной растворимостью
конечных продуктов, а также невозможность получения форполимеров и очень
низкая стойкость к термоокислительной деструкции.
Интересные возможности (в смысле использования в системах теплозащит)
могут дать также материалы, содержащие полимеры, в значительной степени
или полностью состоящие из прямо связанных ферроценовых групп.
Разработан ряд способов синтеза [39], большинство которых, однако, приво-
дит к получению полимеров со структурой, достаточно сильно отклоняющейся от
идеальной из-за большого числа побочных реакций, приводящих к появлению в
скелетной цепи включений неферроценовых заместителей. Кроме того, эти спо-
собы синтеза, обеспечивающие получение достаточно чистых соединений, не позво-
ляют (в данном случае) добиться получения высоких молекулярных масс по-
лимера. Наиболее высокая величина молекулярной массы обычно составляет
-3500.
Однако даже такие низкомолекулярные полимеры довольно удовлетвори-
тельно ведут себя при термогравиметрических испытаниях. При этом выход ос-
татка при температуре —800° С в атмосфере аргона составляет —75%.
Несмотря на возможность использования ферроценсодержащих полимеров в
качестве уносимых (аблирующих) материалов, необходимо проявлять осторож-
ность при определении их теплозащитных характеристик. Это, в первую очередь,
связано с тем, что для этого класса полимеров характерна довольно низкая
стойкость к окислению при высоких температурах. Последнее в основном объяс-
няется каталитической активностью ферроцена в реакциях горения. Этот комп-
лекс самокатализирует окислительную деструкцию.
Данная проблема, не имеющая большого значения при выборе теплозащит-
ных материалов, при входе СА в плотные слои атмосферы может стать факто-
ром, в значительной степени препятствующим использованию ферроцеисодержа-
щих материалов в условиях, когда определяющую роль играет механизм окисли-
тельной эрозии. Эта проблема в первом приближении может быть решена путем
использования ферроценовых мономеров, в которых все восемь атомов водорода,
не входящие в замещение, заменены атомами хлора.
Представляет определенный интерес сравнение термоокислительной устойчи-
вости полиферроценов (ферроцениленметиленов) с устойчивостью их полимерных
рутеноценовых аналогов (рутеноцениленметилена) [39].
119
В атмосфере аргона выход твердого остатка рутеноценового полимера в ин-
тервале температур 600... 700° С примерно на 10% выше, чем таковой для фер-
роценового полимера. В том же диапазоне температур, но при наличии непод-
вижной воздушной атмосферы это различие может в ряде случаев достигать поч-
ти 50%.
К классу поликарбонов, представляющих несомнений интерес с точки зрения
высокотемпературного использования, относятся некоторые макромолекулярные
соединения с карборановыми включениями в скелетном каркасе полимера. Эти
материалы не являются оптимальными для коксующихся (уносимых) теплоза-
щитных систем, однако есть основание предположить [39], что полимеры с жест-
ким скелетом, содержащие исключительно карбораниленовые и ароматические
или гетероаромэтические группы, должны удовлетворительно работать в услови-
ях гипертепловой среды.
Таким образом, рассмотренные выше полимерные соединения являются пер-
спективными для использования в качестве основных связующих в уносимых теп-
лозащитных материалах ряда систем теплозащиты спускаемых аппаратов, ис-
пользующих фазовые превращения (разрушение — унос) [4, 39 ,49, 53].
Получение графитизированных фенольных углепластиков на основе армиро-
ванных углеродной тканью фенольных смол является успешным подходом к соз-
данию термостабильных материалов с высоким выходом кокса.
Полифенилы, имеющие удовлетворительную термостабильность, дают воз-
можность получить высокий выход кокса и обладают достаточно хорошими
эксплуатационными свойствами при использовании их в качестве аблирующих
материалов.
Полимеры, относящиеся к классу гетероароматических соединений (в первую
очередь, полиимиды и полибензимидазолы), имеют ряд преимуществ: относитель-
но высокая эффективность уноса, повышенная (по сравнению с полифенилена-
ми) растворимость, возможность использования многоступенчатых реакций и вы-
деления растворимых форолимеров. Все это является одним из наиболее важных
факторов, влияющих на развитие композиционных материалов, используемых в
теплозащитных системах СА (на основе полимерных связующих). Дальнейшее
усовершенствование подобных материалов, очевидно, должно быть направлена
на повышение их способности к коксообразованию и термостабильности в соче-
тании с высокой термоокислительной стойкостью.
Интересные возможности открываются для полимерных азометинов и особен-
но азинов благодаря участию этих полимеров в процессе охлаждения путем
уноса массы в результате выделения азота в процессе пиролиза.
Несмотря на относительно высокую стоимость и ряд трудностей при синте-
зе, переработке, большие перспективы для использования в системах теплозащи-
ты могут иметь металлоорганические полимеры — полиферроценилены (высокая
термическая стабильность), полирутеноцены и полиосмоцены (повышенная тер-
моокислительная устойчивость), поликобальтоцены (устойчивость к термическо-
му воздействию и действию окислительных сред при высокой температуре)
и т. д.
Перспективным является применение полимеров, получаемых на основе ме-
таллоценов и смешанных лигандов.
Боросодержащие полимеры (благодаря устойчивости выбранных исходных
металлоценов) могут быть использованы в тех случаях, когда необходимо для
системы теплозащиты СА получить такие дополнительные свойства, как стой-
кость к излучению высокой энергии или способность поглощать это излучение
(радиационных поясов, солнечных вспышек и т. д.).
Результаты исследования полимерных карборановых соединений дают осно-
вание предположить довольно высокие эксплуатационные свойства этих полиме-
ров полностью ароматизированного типа при их использовании в качестве кок-
сующихся уносимых материалов.
4.6. НЕКОТОРЫЕ СИСТЕМЫ ОХЛАЖДЕНИЯ
КОНСТРУКЦИИ СА
Система охлаждения, использующая сублимирующие материалы
и легкоплавкие металлы. Способ охлаждения на основе пеномате-
риалов с использованием сублимации хладагента обычно применя-
ется в системах терморегулирования и отвода тепла от элементов
конструкции аппарата.
Эта система охлаждения, как правило, высокоэффективна, не-
дорога и достаточно компактна. Разделение поверхностей охлаж-
дения и области испарения и сублимации снижает засоряемость
каналов системы и может в конечном счете существенно увеличить
срок ее эксплуатации по сравнению с системами охлаждения на ос-
нове пористых металлических матриц.
В состав этой активной системы охлаждения обычно входит
теплообменник со слоем пенополиуретана на внешней поверхности
и равномерно распределенными по поверхности теплообменника
каналами для хладагента. Работает она подобно системам, приме-
няемым в космических скафандрах (рис. 35).
Для охлаждения поверхностей аппаратов, наиболее прогрева-
емых при входе СА в плотные слои атмосферы, например, приме-
няются системы, состоящие из внешней и внутренней обшивок с
сотовой конструкцией между ними, заполненной хладагентом (лег-
коплавкие металлы: литий, калий, цезий, висмут, магний, иногда
ртуть [46].
Наиболее эффективным хладагентом считается литий, который
при нормальной температуре находится в твердом состоянии и яв-
ляется самым легким металлом из перечисленных выше, имею-
щим к тому же большую теплоту парообразования (общая тепло-
поглощающая способность 1 кг лития 25 540 кДж). Внешняя об-
шивка такой системы охлаждения изготавливается из материалов
типа ниобия, молибдена, титана, стали. Она должна быть корро-
зионно-стойкой и выдерживать те же температуры и давления, что
и применяемый хладагент.
В качестве материалов для внутренней изоляционной обшивки
применяются коррозионно-стойкие стали или жаропрочные сплавы
[46]. Для образования дренажной полости (для прохода паров
хладагента к выходному дренажному отверстию) внутреннюю об-
шивку целесообразно отделять от внешней обшивки и сот.
Сотовая конструкция должна обеспечить эффективную и равно-
мерную теплопередачу от стенки агрегата к хладагенту по всей по-
верхности. При наполнении сот, например, литием каждая ячейка
может обеспечить дополнительную передачу тепла от обшивки к
хладагенту.
Литий плавится при относительно низкой температуре
(~454 К), поэтому в соты может заливаться в жидком состоянии.
Здесь он затвердевает и остается в твердом состоянии, пока в ре-
зультате аэродинамического нагрева не начнет плавиться и кипеть.
Точка кипения лития при р= 133,3 Н/м2 равна 977 К. Охлаждение
стенки агрегата или системы обеспечивается до тех пор, пока жид-
121
Рис. 35. Зона сублимации хладагента:
/ — лед внутри пеноматериала внешнего слоя;
2 — распределение давления паров внутри пе-
номатериала; 3 — элементы конструкции; 4—
пульсирующий поток воды вдоль поверхности
конструкции
а)
Рис. 36. Схема системы охлаждения на основе легкоплавких металлов (а) и характер измене-
ния плотности теплового потока qQ от обшивки к жидкому литию в зависимости от перепада
температур (б):
I — внешняя обшивка; 2 — металлическая сотовая конструкция; 3 — хладагент; 4 — внутрен-
няя изоляционная обшивка; 5 — дренажная полость; 6—поток паров хладагента; / — зона
пузырькового кипения; // — кризис кипения; /// — зона пленочного кипения
кий литий находится в сотах в достаточном количестве, поэтому
для более эффективного функционирования такой системы охлаж-
дения целесообразно предусматривать систему подпитки хладаген-
та. На рис. 36 представлены система охлаждения на основе лития
и зависимость изменения плотности теплового потока (от обшивки
к литию) от перепада температур между стенкой Tw и литием Гж.
Система охлаждения выпотеванием. Эта система может исполь-
зоваться для охлаждения теплонагруженных агрегатов летатель-
ных аппаратов различных типов, двигателей и лопаток турбин.
Возможно использовать этот способ охлаждения и при разра-
ботке спускаемых аппаратов, так как применение таких систем
позволяет эксплуатировать элементы конструкции СА в экстре-
мальных условиях.
Анализ параметров пассивных и активных систем охлаждения
показывает, что обычно масса активных систем больше, чем пас-
сивных. Активная система охлаждения выпотеванием с охлажде-
нием водой является относительно эффективной, причем эффектив-
ность ее повышается с ростом температуры поверхности.
В пористом материале, как правило, происходит фазовый пере-
ход жидкого хладагента, что при высоких температурах поверхно-
сти вследствие зависимости его вязкости от температуры обычно
приводит к неустойчивому течению. Устранить неустойчивость
можно путем использования двухслойной конструкции в виде по-
ристой матрицы из материалов с разными свойствами. Внутренний
122
Рис. 37. Схема размещения материалов системы
охлаждения выпотеванием конструкции с высокой
температурой поверхности:
1 — поверхностный слой из материала с низкими
плотностью и теплопроводностью и высокой по-
ристостью; 2 — подслой из прочного материала с
высокими плотностью и теплопроводностью и
низкой пористостью; 3 — подача хладагента; 4 —
кривая фазовых изменений хладагент
слой при этом должен иметь низкую проницаемость, позволяющую
регулировать расход хладагента, а внешний — низкую теплопро-
водность и высокую проницаемость. При тепловом проектировании
таких систем для СА необходимо учитывать режимы течения хла-
дагента в пористой матрице и в пограничном слое (ламинарный и
турбулентный) (рис. 37).
Таким образом, в двухслойной конструкции пористой матрицы
проницаемость обоих слоев должна выбираться так, чтобы боль-
шая часть падения давления хладагента была сосредоточена во
внутреннем металлическом слое.
Это позволяет получить довольно устойчивое течение в
матрице и регулировать расход при изменении давления подачи
хладагента.
Для теплозащиты СА методом выпотевания можно также ис-
пользовать пористые матрицы из коррозионно-стойкой стали или
высокотемпературных сплавов. В зоне взаимодействия корпуса
спускаемого аппарата со скачком уплотнения необходимо, чтобы
конструкция имела специальный защитный слой, например, из оки-
си циркония и т. д.
Проницаемость металлической матрицы и защитного слоя в ос-
новном (при прочих равных условиях) определяется давлением по-
дачи хладагента из резервуара, где он хранится, т. е. мощностью
на прокачку. Используя соотношения (4.15) и (4.16), можно запи-
сать
где Др — потери давления, определяемые суммой потерь на всех
участках системы при подаче хладагента,
п Т/2
VZ ь 11 \ Р ж . 1 О о
, Н/--Г —’ * = 1,2,3,..., ZI;
Z-1
Ржг — плотность хладагента на некотором i-м участке подачи, мат-
рицы и т. д.; /пж — масса хладагента.
123
4.7. ПРИБЛИЖЕННЫЕ МЕТОДИКИ ОПРЕДЕЛЕНИЯ
ОСНОВНЫХ ПАРАМЕТРОВ ТЕПЛОЗАЩИТЫ
СПУСКАЕМЫХ АППАРАТОВ. МОДЕЛИРОВАНИЕ
И ЧИСЛЕННЫЕ РЕЗУЛЬТАТЫ РАСЧЕТОВ
Определение основных параметров ТЗ при баллистическом спус-
ке СА. Для определения потребной суммарной толщины, массы и
других характеристик систем теплозащиты используем расчетно-
экспериментальный метод, основанный на определении пропорцио-
нальных толщин, позволяющий с заданной точностью сделать
оценку основных параметров ТЗ в экстремальных условиях ее ра-
боты. Согласно соотношениям (2.17) ... (2.22) в первом приближе-
нии можно принять, что 0BX=const (0>1О°), тогда согласно (2.17)
V = I/BX ехр Г Р»х) .1, (4.23)
L 2р sin 0ВХ J
—0Я Q 1 1
где рвх = рое «; ₽=— — .
7170 м
Рассмотрим следующие основные параметры ТЗ, характерные
для любого из рассмотренных выше типов систем теплозащиты СА:
энтальпию торможения iQ'=iezx V2/2~ cpTQ'-, давление торможе-
ния Poz; удельный тепловой поток qQ; суммарный тепловой поток
д
Qe= I q$dt.
/о
Давление торможения за ударной волной связано с давлением
в набегающем потоке р формулой Релея
РО (k+ ])(*+D/(*-l)M2 ,А„Л>
---=------------------------------------ , ( т-. Jt- »
Р u<t n / 2* 1 k 7
где M — число Маха; k — показатель адиабаты.
Так как значительное тепловое воздействие на теплозащиту
имеет место при высоких температурах набегающего потока за
ударной волной
(1 + 1)М2/2) (4.25)
или гиперзвуковых числах М (М^б), то формула (4.24) может
быть приведена к следующему виду:
р'^0,9рУ2. (4.26)
Так как перегрузка пх=—(l/go)dV/dt связана с давлением
торможения через первое уравнение системы (2.13), то выражение
(4.26) можно представить в виде
Ро~ l,8/zx/ox, (4.27)
где nx = X/(mQgQ)\ ux = cxS mid/(mogQ); m0 — масса СА; X =
= cxpV2S/2.
124
Тепловые потоки в критической точке носового закругления СА_
можно определить из выражений (3.13) ... (3.15) для ламинарного
и турбулентного состояния.
Рассматриваемые параметры являются функциями высоты Н и
плотности атмосферы р, т. е.
f = c[V (/7)]m(р (//)]«, (4.28)
где с, т, п — некоторые параметры (табл. 8).
Таблица 8
fi Параметры Л’ max ^/тах ДЯу>0,1, м. Время воз- действия с
п т
^вх
, КГ р°' 1 2 - о- sin ®вх /Ивх ^2 0,605 34 000 56 000
Э, 20 | 1 ах \1 000/ Ивх s*n 0вх
кВт ?°Л( м2 0,5 3 / sinflBX \0.5 X1 I \ ах / 0,850 53 000 62 000
вх sin ввх
кВт 0,8 3 2,80- 10-ю/?^°’2Г®Х X ( яиеВх \°>8 \ / 0,770 39 000 50 000
4°" М2 Ивх sin 0ВХ
Дифференцируя (4.28) и используя выражение (4.23), найдем
что максимум функции (4.28)
V п
J max — вхрО
П “1л
I \ I
т ехр —-----------
\ 20 sin 0ВХ/ J
(4.29)
соответствует следующим высоте и скорости полета СА:
Hf =—In—4- —In g^°
ma* 0 n ' 0 20 sin t)BX
Vf =]7e~n/m.
7 max BX
На рис. 38 приведены некоторые зависимости для основных:
рассматриваемых параметров. Некоторые из этих параметров при*
ведены в табл. 8. При этом необходимо учесть следующее:
ДЯ/ =Hf -И.
''max J max POmax
LHf>GA=LH при Л>0,1//тах.
Преобразуя зависимость f = cmpn и нормируя ее по максимуму
/max, можно получить следующую функцию:
125
Рис. 38. Зависимости высоты полета от плот-
ности атмосферы о, давления торможения pQ',
скорости полета V и удельного теплового пото-
ка q0
Рис. 39. Зависимость функции F от
величин р и z
, , , т exp —---------
р = ( f \1/zl _ \2ft sin 6BX / Г fm (TxgoPo c_aH
\/max / n L \ Л2 2fi sin 0BX /J
На рис. 39 дана зависимость функции F=/(pz). Отсчет высоты
Н ведется от некоторой точки максимума
z=H — Hf , или z=H----------Lin-—.
7max p n2p sin 0BX
В этом случае функция F становится в известной степени универ-
сальной (при прочих равных условиях) для рассматриваемоей пла-
неты спуска СА
F=exp(l — —е~рг).
Для того чтобы получить соответствующие распределения для
ламинарного и турбулентного теплообмена, необходимо функцию
F возвести соответственно в степени п=О,5<7ол и и = О,8^от-
Поскольку скорости прохождения точек максимумов давления
торможения или тепловых потоков являются величинами извест-
ными (независимо от условий входа и баллистических коэффициен-
тов), то приближенная оценка времени воздействия может быть
представлена в виде
Д//;=-------AZ------, Д/>0,1.
h V^~n/n sin евх J
Суммарный тепловой поток как интеграл от удельного _ потока по
времени будет равен
Qt=0,5glmaxM9l, (4.30)
Соответственно для критической точки полусферического затупле-
ния выражение (4.30) можно представить в виде
Qsa = 2,1 • 10-5^1/в2х sin 0Гх°’5а70’5, (4.31)
126
или
q _4Q p°max ( q* Y>5 кДж,
2 sin 0ВХ \ RN sin 0ВХ ) ’ м2
где RN = b2ja [зависимость (3.12), см. рис. 28]. Для звуковой точки
полусферического затупления
QBT=0,7- 10-5^°’Vb2x sin 9ВХ sin 9rx°’V’8, (4.32)
или
Rn sin евх
sin 0BX
Для определения толщины унесенного слоя 6У (см. рис. 30) раз-
рушающейся теплозащиты необходимо знать эффективную энталь-
пию разрушения /Эф [см. (4.22)] и максимальную температуру раз-
рушающейся поверхности Twmax, тогда
8У=Г— dt', ту — t (4,зз)
J Р £(/эф
где р — плотность материала уносимого слоя теплозащиты; ту —
масса уносимого слоя.
Функция изменения по времени скорости уноса массы fh(t)
обычно имеет тот же вид, что и зависимость теплового потока
9о(О> поэтому толщина унесенного слоя в первом приближении бу-
дет пропорциональна максимальной скорости разрушения и време-
ни теплового воздействия
йу = 0,5/ny max №q ./р
при малых <7отах » max,
тогда 8y=Qs/(P/8(J)^omax).
В первом приближении /Эф [см. (4.22)] может определяться при
значении энтальпии заторможенного потока ie, при которой тепло-
вой поток достигает максимума: /ел = 0,35ИвХ — для ламинарного
потока; гет=0,ЗУвх— для турбулентного потока.
Определение основных параметров теплозащиты при планирую-
щем спуске СА. Рассмотрим некоторые варианты систем теплозащи-
ты для аппаратов планирующего спуска на основе неуносимых и
многослойных покрытий. Последняя может формироваться следую-
щим образом. Например, если для внешнего слоя используются
теплоаккумулирующие материалы (неразрушаемые), то целесооб-
разно такую теплозащиту использовать в основном в тех местах
поверхности аппарата, где температура больше некоторой величи-
ны Tw, ниже которой силовая оболочка СА еще обладает допусти-
мыми рабочими характеристиками, или равной ей. Толщина внеш-
него слоя в этом случае будет в первом приближении пропорцио-
127
иальна аккумулированному теплу. В качестве теплозащиты от-
дельных поверхностей аппарата могут быть использованы и конст-
руктивные панели силовой оболочки СА (использование однослой-
ной тепловой защиты радиационного охлаждения — экраны, горя-
чие конструкции и т. д.). Температура поверхности корпуса аппа-
рата в этом случае может определяться из соотношения
7’®=г/ Ыеб)-
В общем случае зависимость суммарной массы теплозащитной
системы т2, использующей как специальный внешний теплозащит-
ный слой (слои) теплозащиты ть так и панели силовой оболочки
СА т2,
т^ = тх (4.34)
где
п __
Z = 1
(4-35)
I = 1
= — масса теплозащиты на единицу площади £г«; т-^ —
масса теплозащиты некоторой f-й площади, отнесенная к суммар-
ному количеству тепла, подводимого к этой площади в течение
спуска СА; Qi — суммарное количество тепла, подводимого на еди-
ницу площади в течение полета; т* — масса ьй панели силовой
оболочки СА без внешних теплозащитных слоев на единицу пло-
щади; /=1, 2, 3,..., п — число рассматриваемых площадей тепло-
защиты или панелей силовой оболочки СА; ki — коэффициент, рав-
ный ki=\, если rmaXiC^w, &/ = 0,2если TmaXi^Tw.
Суммарное количество тепла Qi можно определить, используя
соотношение
t
Qi=\r~qiq()dt, (4.36)
to
где г=гДр, V, qQ) —коэффициент, учитывающий влияние числа
Рейнольдса; дг- — относительный удельный тепловой поток для f-й
площади теплозащиты; qQ— удельный тепловой поток в критиче-
ской точке. _
На рис. 40 приведена зависимость mi=f(Q) для внешних слоев
теплозащиты, а на рис. 41 — m2=f(Tw) цля панелей силовой обо-
лочки СА из различных материалов [16].
Поскольку масса рассматриваемых систем теплозащиты глав-
ным образом зависит от максимально допустимой температуры на
поверхности, величины аккумулированного тепла (в основном для
многослойной системы) и используемых материалов, то для при-
ближенной оценки параметров ТЗ непосредственное применение
128
Рис. 40. Зависимость массы теплозащиты
тц (на единицу площади) от суммарного
количества тепла (на единицу площади Q):
1 — корпус СА; 2 — несущие поверхности
Рис. 41. Зависимость массы панелей сило-
вой оболочки (на единицу площади) от
температуры стенки:
/ — титановые сплавы; 2 — никелевые; 3—
кобальтовые; 4 — ниобиевые
обычных методов оптимизации к задаче минимизации массы тепло-
защитной системы представляется не всегда целесообразным.
Как правило, до проведения баллистических расчетов (прове-
дения итерационного процесса по выбору параметров траектории
входа СА) практически невозможно в первом приближении устано-
вить максимальные значения температуры на различных участках
поверхности аппарата и определить заранее, какие материалы на-
иболее эффективно могут быть использованы для той или иной по-
верхности или панели силовой оболочки. Поэтому целесообразно
для упрощения решения подобной задачи вначале ввести некото-
рые ограничения на величину удельного теплового потока q0 в кри-
тической точке. Практически необходимо принять такой диапазон
изменения этой величины, который позволяет с известной степенью
точности поддерживать при прочих равных условиях максималь-
ную температуру поверхности аппарата в заданном интервале ве-
личин для наиболее нагретых участков и в первом приближении
выбирать материалы теплозащиты.
В дальнейшем следует уточнить выбранные в первом прибли-
жении параметры, используя полученные характеристики в каче-
стве исходных для расчета.
Моделирование систем теплозащиты и численные результаты рас-
четов.
1. Исследование аппроксимации кривых (см. рис. 40) с помо-
щью полиномов разной степени показало, что для рассматрива-
емой задачи в точной постановке можно принять полиномы четвер-
той степени. Однако для типовой траектории СА планирующего
спуска и заданных диапазонов изменения удельных тепловых пото-
ков в первом приближении может использоваться и линейная ап-
проксимация
^=^ + 6/. (4.37)
5-331
129
Если для представления т, принять эту аппроксимацию, то подста-
новка выражений (4.36) и (4.37) в первое уравнение системы
(4.35) даст следующую зависимость для массы теплозащиты:
л _ *к п
f rz(aza-pz)^ + 25A, (4.38)
Z=1 t0 Z=1
где a — угол атаки; aiy biy ciy c2 — некоторые коэффициенты ап-
проксимации, принятые согласно уравнениям (4.35) и (4.36).
Моделируя вход СА в атмосферы планет с постоянным углом
атаки, можно определить максимальные значения температуры по-
верхности аппарата и массу теплозащитной системы.
В данной программе моделирования была использована зави-
симость
^ = /(Qz). (4.39)
Анализ результатов решения этой задачи показал также, что
основное аккумулирование тепла в этом случае происходит при ла-
минарном режиме обтекания поверхности СА, т. е. гг=1.
Для траектории входа спускаемого аппарата в атмосферу с
a = const уравнение (4.38) можно привести к виду
t
/П1 = (Л1а + ^2) + (4.40)
*0
где ky = Jp 5,az (1 — Г;);
1=1
п п
k2=^i^lsiai^—kiy, k3=C2^Si.
1=1 i=l
Выбор модели системы теплозащиты для рассматриваемых ва-
риантов в общем случае может привести к тому, что ее минималь-
ная масса получается для траектории полета СА (при a = const),
когда имеется минимум выражения
(^iCt—|—#2) f
to
В случае входа СА в атмосферу с переменным углом атаки ми-
нимальная масса системы теплозащиты может быть для траекто-
рии, имеющей, как правило, минимальное значение для выраже-
ния
+ [ qQdt-^k3m2.
to t0
На рис. 42 и 43 приведены некоторые основные параметры тра-
екторий входа СА в атмосферу Земли с постоянным и переменным
130
Рис. 42. Параметры траектории входа СА в атмосферу a=const (^35°)
углом атаки соответственно (ср — угол крена). Характеристики этих
траекторий можно получить, используя метод градиентов для слу-
чая входа с переменным и постоянным углом атаки.
Анализ полученных результатов показал, что вход СА с перемен-
ным углом атаки может обеспечить меньшую массу системы тепло-
защиты для одно- и многослойной рассматриваемых систем тепло-
защиты. Степень уменьшения массы теплозащиты зависит от харак-
терного угла атаки, выбранного для входа СА (при a^const), и
диапазона его изменения при входе с переменным углом атаки. Хотя
из анализа полученных результатов следует, что с точки зрения
получения минимума массы системы теплозащиты целесообразны
траектории спуска СА на Землю с переменным углом атаки, однако
для обеспечения других требований может оказаться необходимым
использование параметров траектории с a = const. Например, а =
= const позволяет в известной степени обеспечить и достаточно
хорошо реализовать, с точки зрения управления, метод автономного
управления.
Следует также отметить, что возможны и такие программы уп-
равления СА: п0 = const; qo = const и другие, которые могут быть це-
лесообразны в определенных случаях входа в атмосферы планет
спускаемых аппаратов различных типов.
2. Для аппаратов баллистического спуска, входящих в атмосфе-
ру Земли или Венеры, может оказаться целесообразной многослой-
ная система теплозащиты с частично уносимыми материалами. На-
пример, внешние слои теплозащиты могут быть из асбо- или стекло-
текстолита с фенольными или эпоксидными наполнителями,
внутренние — из облегченных изолирующих материалов [46].
Для СА, входящих в атмосферу Марса, могут, например, ис-
пользоваться термостаты, так как при оптимальном проектирова-
нии может быть получен общий выигрыш в массе теплозащиты
(унос относительно высок, но из-за сравнительно низкой темпера-
туры внешней поверхности при достаточно высокой температуро-
проводности изолирующий слой мал).
5* ‘ 131
Рис. 43. Параметры траектории входа СА в атмосферу a=var
Рассмотрим унос материала теплозащиты СА в виде двух вза-
имосвязанных процессов: прогрева и стационарного разрушения —
уноса с постоянной скоростью. Тогда, используя соотношения (4.1),
(4.21), (4.22), (4.33), основное уравнение для прогретого и унесен-
ного слоев можно записать в следующем приближенном виде:
Зтз=Вп-|-Ву = ^п]/" + (^у —АЛ (4.41)
где /п, /у — время прогрева и уноса материала соответственно;
s = f(&n)—некоторый коэффициент пропорциональности, характе-
ризующий скорость движения зоны прогрева и разбросы теплофи-
зических свойств материалов; Vy = const — скорость уноса материа-
ла теплозащиты; Вп=$п]/7п — толщина прогрева; 6y=Vy(/y—/п) —
толщина уноса материала.
Можно считать, что величины прогретых слоев взаимосвязаны
следующим соотношением: бпо£по = бп£п, где бпо, £о — начальные зна-
чения; тогда бп = бпо?п/^по, откуда Дбп = 6п—бпо — величина некоторо-
го слоя материала ТЗ, или Дб = дпо(£п/£по—1).
Аналогичным образом можно получить выражение и для опреде-
ления величины прогретой массы теплозащиты
==^пОР£ь/( Ро^по)
И Д^п = ^п —/Пп0 = ^п0[ри(р0^п0) — Л-
Для уноса материала аналогичным образом можно в первом
приближении получить следующие выражения для толщин уноси-
мых слоев материала и их масс:
^уОРоУо^уО^ ^уРуУу^у J
fjy ==^уОРоУ'о^уо/(РуУ,у^у)*
Syo = f(^y); £у=/(£у)—согласно зависимости (4.2), где р0, ру —
плотности материала уносимого слоя ТЗ в начальный и в конеч-
ный моменты времени; f0, fy— коэффициенты массовых долей свя-
132
зующих в материале; £у0, ду— коэффициенты пропорциональности,
характеризующие скорость движения границы уноса и разброса
теплофизических свойств материалов с учетом коксования связую-
щей составляющей.
Величину Лбу для унесенного слоя определим из зависимости
Д8у=8у - 8у0 [ PoZoSyo/(pyZygy) - 1].
а значение величины уносимой массы теплозащиты — из соотно-
шений
и
Дту=ту — ту0=/пу0 [ру£у/(р(£у0) — 1 ].
Время прогрева /п [см. (4.22)] можно определить из формулы
А1 “F 8П 1к/^2 >
где
/ — 1 pl V [ Tw~T°° _ 1 2 In (Tw~T^ YI . ’
к ЗаД а Д Tw — Тк \TW — rJJ’
X _ 2х2 (ТЬ — \
°по—— ;
а \ — т к /
^(Ту-Гк)
-- | »
~ [^2 (Г к — ) 4" д2Рк®к] 4- ”7” w — Гу)
ЬпО 2
а — коэффициент теплоотдачи; Xi, Л2, «ь — коэффициенты тепло-
и температуропроводности исходного (до нагрева) и прококсован-
ного материала теплозащиты: Tw, Тк — температуры материалов до
нагрева и коксования соответственно; бк, Рк, 0к — толщина, плот-
ность и теплота пиролиза теплозащиты.
Отсюда, используя выражение (4.41), получим
St3 = SIio“t2L
СиО
|/ ^+[8уо + ^уо(/уо-4П-^.
F *п0 Р
Для единицы площади суммарная унесенная и прогретая мас-
са равна
Azns=p0Rn0 1 f -° 1) + 1/Гуо(^уО“"^п) »
L Чпо * *по / J
или
8a=8nOl/-^+[8yo+Vyo^yo-^]— ;
Г ЯО*пО_ р
Даив=8п0 fy l/^ —-21-Й“hV\oPo(^yO — ^п)*
\ Г WnO /
5*—331
133
Следует отметить, что коэффициенты массовых долей связую-
щих в материале fy и пропорциональности gy и £п для уноса и про-
грева обычно определяются экспериментально.
4.8. ПРОЕКТИРОВАНИЕ ТЕПЛОЗАЩИТНЫХ
ПОКРЫТИЙ СА С УЧЕТОМ МНОГОМЕРНОГО
РАСПРОСТРАНЕНИЯ ТЕПЛА В МАТЕРИАЛЕ
Методики выбора оптимальных параметров систем теплозащиты
при тепловом проектировании спускаемых аппаратов могут базиро-
ваться на различных методах оценки температурных полей в мате-
риале проектируемых конструкций.
Выбор того или иного метода определения прогрева теплозащи-
ты связан с конструктивными особенностями покрытия, внешним
тепловым нагружением, тепловым режимом внутри отдельных аг-
регатов аппарата, теплопроводностью материала теплозащиты и
многими другими ограничениями. Для спускаемых аппаратов ис-
пользуются различные виды теплозащитных систем. В зависимости
от условий {работы теплозащитных систем в процессе проектирова-
ния может приниматься одномерная, двухмерная или трехмерная
модель теплопроводности. Кроме того, на выбор метода решения
задачи прогрева оказывает значительное влияние многослойность
теплозащитных покрытий. Например, теплозащитное покрытие мо-
жет состоять . из теплозащитного и теплоизолирующего слоев и
силовой оболочки. Все три слоя обладают различными теплофизи-
ческими характеристиками, которые должны учитываться при ре-
шении задачи прогрева.
Сложность проектирования ряда теплозащитных систем связа-
на с нагревом их до температур, приближающихся к максимально
допустимым для большинства теплозащитных материалов, и с воз-
никновением существенных перетоков тепла вдоль образующей
внешней поверхности, что приводит к необходимости использова-
ния многомерной модели теплопроводности.
Выбор конструктивной схемы теплозащиты во многом опреде-
ляет постановку задачи прогрева при проведении проектных расче-
тов. Например, при использовании теплозащитных материалов с
небольшим коэффициентом теплопроводности внутреннее тепловое
состояние агрегатов СА, как правило, не влияет существенно на
результаты решения задачи прогрева. Во то же время для горячих
конструкций необходимо учитывать значительные тепловые потоки,
излучаемые с внутренней поверхности теплозащитного покрытия.
Применение при тепловом проектировании систем теплозащиты
СА той или другой модели теплопроводности обусловливается ря-
дом требований и ограничений, которые часто вступают в конфликт,
оптимальное разрешение последнего во многом влияет на своевре-
менность и качество конструкторских разработок систем теплоза-
щиты СА.
Основными требованиями, предъявляемыми к выбору моделей
теплопроводности, так же как и к методикам, основанным на этих
134
моделях, являются максимально точное воспроизведение физиче-
ской картины тепло- и массообменных процессов, протекающих в
теплозащитных покрытиях, и минимальное время, затрачиваемое
на решение поставленной задачи. К основному ограничению в этом
случае можно отнести тот факт, что чем ближе математическая
тепловая модель приближается к физической, тем большее время
требуется для решения задачи (см. разд. 1.2). Это еще раз показы-
вает, насколько существенным является правильный выбор модели
теплопроводности. На первых этапах проектирования целесообраз-
но использовать, как правило, упрощенные модели теплопроводно-
сти, которые обеспечивают возможность анализа большого количе-
ства начальных вариантов, и здесь прежде всего следует назвать од-
номерные модели. Выбор таких моделей обоснован для случаев, ко-
гда можно принять гипотезу одномерности прогрева. Эта гипотеза
справедлива для многих конструкций теплозащиты из материалов,
обладающих низкой теплопроводностью. Одномерные модели хоро-
шо зарекомендовали себя при расчете прогрева теплозащит с ма-
лыми толщинами и большими радиусами кривизны внешней по-
верхности каркаса спускаемого аппарата. В этом случае искривлен-
ная поверхность может в первом приближении условно заменяться
плоской пластиной. Быстродействие методик, в которые заложены
одномерные модели, дает возможность расширять поставку
задачи до необходимых пределов. Безусловно, одномерные*
модели являются основным инструментом при проведении прибли-
женных проектировочных расчетов. Более точные модели, например
двухмерные, в этом случае применяются для проверочных расчетов,
так как они требуют значительно большего времени для вычисле-
ний. Тем не менее проектирование теплозащиты современных СА
требует в ряде случаев учитывать неодномерность прогрева уже на
ранних стадиях проектирования.
Рассмотрим критерии, с помощью которых можно проводить вы-
бор основных моделей теплопроводности. К наиболее существенным
факторам, влияющим на многомерный характер прогрева, относят-
ся, в первую очередь, кривизна внешней поверхности теплозащитно-
го покрытия и нестационарность теплового потока q0 вдоль образую-
щей внешней поверхности.
Для цилиндрических конструкций в работе [21] предложен не-
который критерий д/7?^0,1, где д — толщина теплозащитного слоя;
7? — радиус кривизны внешней поверхности теплозащиты. При вы-
полнении данного соотношения необходимо учитывать кривизну по-
верхности.
Для плоской пластины многомерный характер распространения
тепла учитывается в том случае, когда градиент температуры по
нормали к поверхности (dT/dy)v=Q соизмерим с изменением темпе-
ратуры вдоль нее (дТ1дх, дТ/дг) [53]. Подобное положение возни-
кает при резком изменении теплового потока t/о вдоль поверхности
конструкции или при достаточно высоких значениях коэффициента
теплопроводности материала Z. Безусловно, для проведения проек-
тировочных расчетов необходимо иметь полный набор методик ре-
5**
135
шения задач прогрева, основанных на одномерных, двухмерных и
трехмерных моделях теплопроводности. Однако в практике проек-
тирования теплозащиты СА обычно вводятся различные упрощения
с целью понижения мерности задачи. Трехмерные задачи использу-
ются достаточно редко в силу их значительной трудоемкости. Кроме
того, трехмерность распространения тепла в теплозащитном покры-
тии может учитываться в первом приближении и в двухмерной по-
становке путем введения аналитических зависимостей, аппроксими-
рующих процесс распространения тепла в одном из направлений.
Рассмотрим ряд конструктивных решений теплозащиты СА, для
которых целесообразно использовать методики проектирования,
основанные на двухмерных тепловых моделях. Особый интерес в
этом отношении представляет теплозащита затупленных носков СА.
Различные конструктивные решения теплозащиты в этих случаях
сводятся к простой геометрической фигуре — толстостенной оболоч-
ке с малым радиусом кривизны, причем толщина оболочки выбира-
ется из соображений интенсивного уноса теплозащитного материала
в области критической точки, что связано с высокими уровнями под-
водимых тепловых потоков. В результате уноса форма носовой час-
ти сильно изменяется, и к моменту окончания работы теплозащиты
она может иметь сильно отличающуюся от первоначальной геомет-
рическую форму, что оказывает существенное влияние на аэродина-
мические характеристики СА. В этом случае применение одномер-
ной модели теплопроводности, как правило, невозможно. Проекти-
рование некоторых аппаратов планирующего спуска вызывает
необходимость использования методик, основанных на различных
моделях теплопроводности. Чаще всего для определения толщин
теплозащиты в первом приближении используется одномерная мо-
дель теплопроводности. Но подобные аппараты обычно имеют
достаточно сложную форму корпуса, иногда несущие поверхности
и различного вида обтекатели. Все перечисленные элементы имеют
достаточно сложную аэродинамическую форму и находятся в вы-
сокоэнтальпийном потоке. Для проектирования теплозащиты боко-
вых поверхностей в этих случаях также можно использовать одно-
мерные модели. В то же время для расчета прогрева лобовых
поверхностей и передних кромок такие модели малопригодны.
Следует отметить, что результаты, полученные с помощью раз-
личных методик, имеют, как правило, разброс 16...20%. Например,
форма затупленной передней кромки передней поверхности СА
определяется на основе аэродинамических расчетов с учетом про-
цессов теплопередачи в системе газ — тело с последующим опреде-
лением прогрева теплозащитного слоя. Обычно аэродинамический
профиль передней кромки несущей поверхности СА планирующего
спуска характеризуется достаточно сложной геометрической фор-
мой с малыми радиусами кривизны. Расчет прогрева теплозащит-
ного покрытия такого типа должен также базироваться на двух-
мерной модели теплопроводности.
Программа спуска планирующих аппаратов обуславливает от-
носительно большое время нагрева элементов конструкции их теп-
136
Рис. 44. Изменение температуры стенки от
времени (номера соответствуют номерам
точек на профиле носка СА)
Рис. 45. Изменение удельного теплового по-
тока от времени
лозащиты. На рис. 44 и 45 приведены графики изменения температу-
ры стенки и удельного теплового потока на кромке корпуса СА. Из
приведенных графиков видно, что наибольший пик максимальной
температуры реализуется в критической точке, расположенной не-
сколько ниже геометрической вершины. Это объясняется большим
углом атаки при максимальных тепловых нагрузках. Система тепло-
защиты передних кромок корпуса и несущих поверхностей должна
обеспечивать успешное использование СА в условиях набора высо-
ты и особенно входа в плотные слои атмосферы. В качестве перспек-
тивных материалов для теплозащиты передних кромок могут рас-
сматриваться, например, некоторые композиционные материалы
(см. разд. 4.5). В результате растрескивания и разрушения покры-
тия поверхности материала внутренняя поверхность может подвер-
гаться окислению. Покрытие поверхности пор композиционных ма-
териалов противоокислительными добавками значительно умень-
шает окисление внутренней поверхности. Рассмотренные
мероприятия могут привести к тому, что в течение расчетного вре-
мени функционирования теплозащиты не будет существенного уно-
са массы из подобного материала и изменения, таким образом,
характеристик системы теплозащиты. Следовательно, при прове-
дении проектировочных расчетов в первом приближении можно не
учитывать изменение внешней поверхности теплозащитного покры-
тия. В настоящее время рассматривается возможность применения
подобных материалов не только для элементов СА, входящих в
атмосферу Земли, но и для изготовления защитного экрана для
аппаратов, предназначенных, например, для входа в атмосферу
Юпитера [63, 67]. Возможны и другие модификации композицион-
ных материалов.
Рассматриваемые материалы обладают достаточной прочно-
ностью и работоспособностью при высоких температурах и ско-
ростях набегающего потока в широком диапазоне давлений. Обла-
дая хорошими теплозащитными свойствами, подобные материалы
137
имеют повышенную теплопроводность, поэтому при проектировании
теплозащиты из таких материалов в ряде случаев целесообразно
также использовать двухмерную модель теплопроводности. Для
композиционных материалов эффект двухмерности необходимо
учитывать и в том случае, когда имеет место анизотропия теплофи-
зических свойств.
Для систем теплозащиты поглощающего типа определяющим
параметром является не интенсивность нагрева, а общее количе-
ство тепла, получаемое за весь период полета. Поэтому для умень-
шения поверхности нагрева, а следовательно, и массы системы
теплозащиты целесообразно проектировать передние кромки с ма-
лым радиусом кривизны гкр внешней поверхности. Увеличение ра-
диуса кривизны внешней поверхности кромки уменьшает равновес-
ную температуру, так как тепловой поток уменьшается примерно
пропорционально ]/2гкр. Снижению температуры внешней поверх-
ности способствует и повышение теплопроводности внутренней кон-
струкции передней кромки, что приводит к отводу тепла из зон
повышенного нагрева. Так, при гкр = 150 мм максимальная темпе-
ратура внешней поверхности может быть понижена до Tw = 780r' С.
Следует отметить, что на Tw влияет угол стреловидности несущей
поверхности. Например, изменение угла стреловидности % с 60 до
75° уменьшает температуру передней кромки (г1;р = 50 мм) на 400° С.
Комбинируя различные варианты угла стреловидности х> тепло-
проводности Z, удельной нагрузки рм и перегрузки и0, можно прий-
ти к следующему заключению. Температура внешней поверхности
подобных конструкций должна поддерживаться в пределах 1400..,
1670° С [16]. При таких температурах не ухудшаются характерис-
тики аппарата, и серьезных конструктивных ограничений нет. Рас-
смотренные температуры являются допустимыми для большинства
конструкционных материалов.
Важной задачей, которую необходимо решить при проектирова-
нии теплозащитного покрытия, является также расчет полей тем-
ператур внутри конструкционного материала. Расчет полей темпе-
ратуры необходим для оценки теплозащитных свойств выбранной
системы теплозащиты, а также температур на внешней и внутренней
поверхностях. Кроме того, расчет поля температур связан с опре-
делением термической прочности конструкции. Необходимость та-
ких исследований связана с одновременным воздействием на по-
крытие противоположных по знаку деформаций со стороны силовой
конструкции и теплозащитного экрана и больших термических на-
пряжений. Наиболее опасным видом разрушения подобной теплоза-
щиты является растрескивание, так как в большинстве случаев рас-
четные деформации очень близки к максимально допустимым.
Следовательно, для оценки работоспособности теплозащиты необ-
ходимо знать в каждый момент времени поле температур.
Рассмотрим задачу расчета прогрева теплозащитного покрытия
СА, имеющего несимметричную или подвижную внешнюю границу с
малым радиусом кривизны. В полной постановке такая задача
должна решаться для трехмерной модели прогрева с учетом несим-
138
метричного обтекания. Решение задачи в подобной постановке свя-
зано с большими трудностями при разработке алгоритмов и их ре-
ализации средствами современной' вычислительной техники. При
переходе к двухмерной модели задача упрощается, но постановка
ее остается достаточно близкой к физической картине процесса для
таких теплозащитных систем, как носки СА при их осесимметрич-
ном обтекании, передней кромки несущих поверхностей и т. д.
Существуют различные подходы к решению задачи двухмерно-
го прогрева при проектировании систем теплозашиты. В работах
[21, 53] рассматривается прогрев затуплений носовых частей СА.
Температурное поле внутри носовых частей в настоящее время
рассчитывается, как правило, конечно-разностными методами. Из-
вестны различные постановки таких задач, например с использова-
нием сетки, в которой число узловых точек изменяется в зависимо-
сти от движения внешней границы. Задача решается в неизменной
во времени системе координат. Если происходит унос массы с по-
верхности тела, то по мере движения внешней границы число узло-
вых точек уменьшается. Метод расчета температур с учетом дви-
жения границы отличается сложностью и требует большого объема
памяти и большого количества времени ЭВМ, так как для обеспе-
чения необходимой точности в конце вычислений необходимо в на-
чале счета иметь сетку с большим, чем того требует точность, коли-
чеством узловых точек.
Иногда предлагается проводить пересчет пространственной раз-
ностной сетки на каждом шаге по времени. В этом случае размер
пространственной разностной сетки остается постоянным в процес-
се всего счета.
Другой подход описан в работе [26], где предлагается исполь-
зовать метод, хорошо зарекомендовавший себя при решении задач
одномерного прогрева. В основу его положено введение новой по-
движной системы координат, которая отслеживает движение и гео-
метрическую форму границ области интегрирования. В отличие от
других методов данный подход в первом приближении дает возмож-
ность не только использовать в процессе счета постоянное количе-
ство пространственных узлов, но и проводить численное решение в
прямоугольной области с неподвижными границами.
В результате перехода к новой системе координат исходное
уравнение теплопроводности изменяется таким образом, что дви-
жение храниц учитывается самим уравнением. Предлагаемая мето-
дика позволяет рассчитывать двухмерное поле температур внутри
теплозащитного покрытия затупленного носка или внутри теплоза-
щитных покрытий типа передней кромки несущей поверхности. При
этом форма внешней границы теплозащиты может отличаться от
сферической или цилиндрической, учитывается движение внешней
границы, происходящее вследствие разрушения теплозащитного ма-
териала.
В обычных анизотропных материалах ориентация главных осей
теплопроводности может быть произвольной. Единичные векторы,
определяющие их направление, взаимно перпендикулярны. Если
139
теперь из технологических соображений предположить, что теплоза-
щитное покрытие многослойное, то можно принять гипотезу о том,
чю теплофизические характеристики будут различны по двум вза-
имно перпендикулярным направлениям: первое — в направлении
нормали, второе — в направлении касательной к поверхности.
В этом случае анизотропия физических свойств может быть легко
учтена.
Запишем краевые задачи для двухмерного однородного уравне-
ния теплопроводности в полярной системе координат:
С(Т) —=— fk(T') — (Г,) —) ; (4.42)
v дт: dr \ ' dr г дг г? ду Х. д? ) ’
Я.и(?) < г </?(?, г), 0<<р<<рк, 0<r<tmax;
Т(г, <р, 0)=/(г, <р), /?„„(?)
0
R (?, 0). < ?к; (4.43)
—* (Л т) = qx г, Т) = q0 (<р, т) - esTl — qy (ср, г);
ЧП дГ(-^«(^т-)-=?2(У, Т)=^в- (ср, Г); (4.44)
or
. 1 дТ (г, 0, т) , .
-МЛ----------- ; =?з(г, г);
Г 0<р
х (Г) J_ дТ(г <fKZ±) (г, о < Г < ттах>
г ду
где 2v(T)—коэффициент теплопроводности; f(r, ср) — распределе-
ние температур в начальный момент времени; /?вн(ф), т) —про-
странственные координаты внутренней и внешней границ теплоза-
щитного покрытия по радиусу; <рк — пространственная координата
окончания области определения поля температур по углу; ттах —
наибольшее значение переменной т; <7о (ф, т) —плотность конвектив-
ного теплового потока, подводимого к неразрушаемой поверхности;
еаГ1— плотность теплового потока, излучаемого нагретой поверх-
ностью теплозащитного покрытия; qy(q, т) —плотность теплового
потока, расходуемого на разрушение материала теплозащитного по-
крытия; *7вн(ф, т) — плотность теплового потока, обусловленная
внутренним тепловым состоянием защищаемой конструкции спус-
каемого аппарата.
Для осуществления преобразования области интегрирования в
работе [26] введены новые переменные
Л=Л(?. т)—/?(<?, т)—/?вн(т). (4.45)
Благодаря новым переменным осуществляется переход из кри-
волинейной области интегрирования в прямоугольную. Подобный
подход дает существенный выигрыш при численной реализации ал-
140
горитма в скорости вычислений, так как при движении границы
численное решение ищется на разностной сетке с минимально не-
обходимым по точности числом узлов. Кроме того, обеспечивается
достаточная универсальность алгоритма в связи с тем, что формы
ьнешней и внутренней поверхностей теплозащиты могут задаваться
зависимостями fi (<р) и ^(ф, т), что особенно важно при использова-
нии алгоритма в процессе проектирования теплозащиты СА.
Как показывает практика, в связи со стремительным развитием
вычислительной техники наиболее удобными и перспективными ме-
тодами решения сложных двухмерных задач теплопроводности яв-
ляются различные численные методы.
В настоящее время разработано и опробовано большое количе-
ство методов решения конечно-разностных уравнений. Ценность
методов определяется целым рядом факторов, среди которых мож-
но назвать такие, как быстродействие, устойчивость алгоритма,
точность получаемых решений и трудоемкость при использовании
на ЭВМ. Наибольшие трудности при использовании алгоритмов
связаны с устойчивостью и точностью решений.
Уравнения параболического типа особенно чувствительны к
факторам устойчивости. Поэтому вопросу устойчивости при выборе
численного метода решения таких уравнений обычно уделяется
большое внимание.
Трудности, возникающие при решении параболических уравне-
ний методом сеток, в основном следующие. Наиболее простые и,
на первый взгляд, заманчивые с точки зрения приложений методы,
как правило, особенно чувствительны к фактору устойчивости. При
использовании их приходится накладывать ограничения на
выбор шага по времени относительно шага по пространственным
координатам. С другой стороны, удобные с точки зрения устойчиво-
сти схемы, в свою очередь, неудобны при их практическом примене-
нии. Поэтому проводится постоянный поиск методов, позволяющих
использовать в известном смысле промежуточные качества между
двумя вышеприведенными крайними положениями, сочетающих
слабые ограничения устойчивости со сравнительно несложным про-
ведением вычислений.
Наиболее существенное отличие имеют методы, основанные на
использовании явных и неявных уравнений. Неявные сеточные урав-
нения по сравнению с явными характеризуются следующими свойст-
вами: 1) менее ограничительное условие устойчивости; 2) как пра-
вило, большая точность. Сравнивая классическое явное уравнение
И?+1=_Д2Ь(И? 4 (ДХ)2 /= 1, 2,..., т — 1 с неявным Л.п+1 | ,Л+1 2(Ах).("|-,+“'+1 -fl + \ (ДХ)2/ (4'46’ ; га = 0, 1,..., г— 1 )+/1+_^Ь«+‘= М 1 (ДХ)2/ + (4.47) 2(Дх)*2
141
i— 1, 2,,.., m — 1; n = 0, 1,..., r — 1,
можно отметить, что хотя приведенные уравнения имеют формально
один и тот же порядок погрешностей 0((Ах)2), уравнение (4.47)
точнее уравнения (4.46) за счет меньшего коэффициента (Ах)2 в вы-
ражении погрешности. Неявные уравнения, как правило, уменьшают
порядок погрешности. Для некоторых неявных уравнений достигает-
ся порядок погрешностей 0((Ах)4) и даже 0((Ах)г). Вместе с тем
явные уравнения имеют погрешность 0 ((Ах)2). Неявные уравнения
обычно всегда устойчивы. В то же время явные уравнения, как пра-
вило, устойчивы только при сильных ограничениях на Ат.
При решении неявных уравнений на каждом шаге по выбранной
оси необходимо решать систему линейных алгебраических уравне-
ний, т. е. для вычисления каждого шага по оси здесь требуется зна-
чительно большее число вычислительных операций. При решении
одномерных уравнений неявность сеточных уравнений не является
их существенным недостатком. Матрица Ао в случае неявных одно-
мерных уравнений является трехдиагональной. Благодаря наличию
удобных и быстрых методов решения систем трехчленных уравне-
ний, например метода прогонки, неявные уравнения оказываются
предпочтительнее явных, так как обладают большей устой-
чивостью.
При переходе к двухмерным уравнениям теплопроводности су-
щественную роль при выборе метода решения начинает играть бы-
стродействие, т. е. количество вычислительных операций, необходи-
мых для получения решения с заданной точностью при одном шаге
по времени.
Не останавливаясь подробно на неявных схемах, отметим, что
существуют явные схемы, устойчивые для любых шагов по времени
[57], но, к сожалению, для использования в задачах проектирова-
ния теплозащиты СА они оказались малопригодными из-за того, что
точность получаемых решений такими методами зависит от темпов
нагрева материала.
Сравнительный анализ показал, что лучшие результаты дают
методы, основанные на неявных схемах: локально-одномерный и
переменных направлений.
При решении задач двухмерного прогрева цилиндрических и
сферических теплозащитных покрытий с использованием уравне-
ний (4.42) ...(4.44), как правило, можно использовать локально-од-
номерный метод [75], так как он легче реализуется при составле-
нии численных алгоритмов. Для определения поля температур с
применением уравнения двухмерной теплопроводности в преобра-
зованной системе координат предпочтительнее метод переменных
направлений [56]. Это связано, в первую очередь, с тем, что в про-
цессе преобразования в уравнении теплопроводности появляются
смешанные производные. Кроме того, метод переменных направлен
ний дает более точные результаты, так как разностная аппрокси-
мация в этом случае лучше отслеживает физику двухмерного про-
грева теплозащитного покрытия.
142
Рис. 46. Толщина теплозащиты передней кром-
ки носка СА б для одномерной 1 и двухмер-
ной 2 моделей теплопроводности
Рассмотрим для примера зада-
чу определения поля температур,
допустимых толщины и массы
оболочки теплозащитного покры-
тия передней кромки носка СА.
Для сравнения оценку необходи-
мых толщины и массы теплоза-
щитного покрытия проведем с ис-
пользованием двухмерной модели
теплопроводности и по програм-
ме, реализующей алгоритм одномерного прогрева. В последнем
случае толщина теплозащитного покрытия определяется в точках,
показанных на рис. 44. Полученные толщины интерполируются на
всю длину образующей поверхности.
Анализ результатов (рис. 46) показывает, что при использовании
одномерной модели теплопроводности профиль теплозащитного по-
крытия обычно получается более толстым с максимальным разме-
ром й области торможения потока.
Профиль теплозащитного покрытия, полученный с использовани-
ем двухмерной модели, как правило, имеет меньшую толщину в об-
ласти корневого сечения по сравнению с первым случаем; физически
такая картина объясняется существенными перетоками тепла из зо-
ны высокого нагрева.
Таким образом, проектирование теплозащитных покрытий перед-
них кромок из материалов на основе графита с использованием од-
номерной модели теплопроводности может привести к неправильно-
му профилированию и к ошибкам в оценке массы теплозащитного
покрытия до 15% [26].
4.9. ОБРАТНЫЕ ЗАДАЧИ ТЕПЛОПРОВОДНОСТИ
ПРИ ИССЛЕДОВАНИИ ПАРАМЕТРОВ СИСТЕМ
ТЕПЛОЗАЩИТЫ
Задачи исследования тепловых режимов СА и, как следствие,
теплозащиты из-за своей сложности часто сводятся к решению в
квазистационарной постановке. Как правило, такая постановка ба-
зируется на расчетах по совместному решению задачи тепломассооб-
мена в системе газ — тело с учетом эффектов разрушения материа-
ла теплозащиты и вдува продуктов разрушения в пограничный
слой. Однако в реальных условиях теплозащита обычно находится
под существенно нестационарным силовым воздействием. Для учета
влияния нестационарности необходимо решить «сопряженную за-
дачу тепломассообмена», которая включает в себя систему уравне-
ний нестационарного газового пограничного слоя, уравнения, описы-
вающие разрушение материала, и уравнение теплопроводности для
системы теплозащиты. В общей постановке такая задача очень
143
сложна, и ее решение вызывает значительные трудности, связанные
с ограниченными возможностями современных ЭВМ.
Теоретически получаемые результаты обычно подвергаются экс-
периментальной проверке. При проектировании систем теплозащиты
СА эксперимент приобретает и большое самостоятельное значение.
Причем целесообразно особое внимание в этом случае уделить не-
стационарному моделированию тепловых режимов при спуске ап-
парата.
В работе [46] проведен анализ возможных областей применения
обратных задач теплопроводности как при проектировании, так и
при экспериментальных исследованиях систем теплозащиты различ-
ных типов СА. Отмечается, что математическое обеспечение*автома-
тизированных систем обработки данных тепловых экспериментов во
многом определяется алгоритмами решения обратных задач.
Обратные тепловые задачи состоят в поиске причины (тепловые
нагрузки, коэффициенты лучистого и конвективного теплообмена,
теплофизические характеристики и т. д.) по известному следствию
(температурам в некоторых точках исследуемого макета, модели,
образца). Принципиально возможны два случая их применения в
процессе проектирования СА. Первый является основой теплового
проектирования таких аппаратов и состоит в определении характе-
ристик проектируемого объекта, параметров его теплозащиты и дру-
гих агрегатов и отсеков с учетом возможных тепловых эффектов.
Например, по оценкам изменения внешних тепловых нагрузок,
известным математическим моделям взаимодействия СА с окружа-
ющей средой ставится задача выбора числа слоев теплозащитного
покрытия и материалов с необходимыми свойствами. Такой анализ
в основном базируется на рассмотрении массовых и объемных ха-
рактеристик, стоимости агрегатов и систем, требований надежности
и эффективности работы аппарата и т. д. При этом обычно вводят
в рассмотрение основные критерии проектирования, определяющие
поставленную задачу.
Подобные задачи комплексного проектирования с учетом тепло-
вых режимов включают в себя решение различных обратных задач,
в частности обратных задач теплопроводности. Основная особен-
ность этих задач заключается, как правило, в том, что их постанов-
ки допускают множество решений и окончательный отбор того или
иного решения производится по некоторым дополнительным усло-
виям.
Второй случай типичен для экспериментальных исследований ма-
кетов и моделей, испытаний агрегатов и систем СА. Здесь можно
выделить следующие три типа обратных задач теплопроводности
(ОЗТ): граничные, коэффициентные и задачи с обратным временем.
Все эти задачи некорректны в классическом смысле (по Адамару):
отсутствует непрерывная зависимость результатов от входных дан-
ных.
Основные области применения обратных задач теплопроводности
при проведении теплового проектирования систем теплозащиты СА:
1. Определение граничного теплового режима, т. е. восстановле-
144
ние тепловых потоков и температур поверхности тела (по этим вели-
чинам затем могут быть определены внешние тепловые условия ок<
ружающей среды). Здесь типичен случай нестационарного калори-
метрирования с помощью специальных тепловых датчиков.
Поскольку термопары или термометры сопротивления часто не уда-
ется или нецелесообразно по целому ряду причин устанавливать на
нагреваемой стенке чувствительного элемента, то для получения
граничного теплового потока приходится решать обратную задачу.
Причем задача конструирования таких датчиков тесно связана с
применяемым методом решения обратной задачи и предполагаемым
его применением. Калориметрические датчики широко используются
при моделировании тепловых режимов на газодинамических и ради-
ационных стендах, при испытании двигателей на жидком и твердом
топливе и т. д.
2. При экспериментальном изучении разрушения и уноса тепло-
защитных материалов исследовании эффективности их работы пред-
ставляет интерес определение теплового потока, поглощенного те-
лом кондуктивным путем. Определить изменение этого потока
тепла в процессе эксперимента можно с помощью обратной задачи,
входными данными которой будут являться температуры, измерен-
ные во внутренних точках исследуемого образца. Такая постановка
эксперимента необходима при изучении нестационарных тепловых
процессов теплозащитных материалов систем. Однако решение
этой проблемы существенно осложняется эффектами уноса массы
с поверхности и по объему тела, термическим разложением мате-
риала и другими явлениями, из которых складывается унос мате-
риала.
3. Изучение процессов горения топлива и теплопередачи в
РДТТ, при экспериментальной отработке воспламенителей и тепло-
защиты двигателей, при исследовании переходных процессов, в част-
ности, при запуске, регулировании и отключении двигателей и т. д.
4. Экспериментальное определение тепловых контактных сопро-
тивлений и сопротивлений пленок, например, в многослойной тепло-
защите.
5. Весьма часто возникает задача восстановления температур-
ных полей, соответствующая продолжению решения уравнения теп-
лопроводности с меньшей области на большую (также ОЗТ). Тесно
связана с такой задачей проблема термопрочности различных теп-
лозащитных материалов, когда в процессе эксперимента необходимо
смоделировать градиенты температур и определить поле темпера-
тур.
В то же время исходная информативность таких исследований
трудно повышаема и часто сводится только к косвенным темпера-
турным измерениям на достаточно большом удалении от внешних
нагреваемых поверхностей моделей.
6. Проблема организации замкнутых систем управления, напри-
мер, в плазменных установках или установках лучистого нагрева
также почти неминуемо приводит к необходимости иметь алгорит-
мы решения ОЗТ.
145.
7. Исследование нестационарного теплообмена в системе внеш-
няя газовая среда — твердое тело (т. е. учет влияния тела на про-
цесс передачи тепла) может быть построено на методах ОЗТ. Теоре-
тическая постановка сопряженных задач при всем множестве и вза-
имосвязанности различных параметров часто оказывается весьма
сложной (не проходит на самых больших ЭВМ) и содержит целый
ряд трудно проверяемых предположений. В этих условиях ОЗТ
являются одним из главных способов изучения эффектов тепловой
нестационарности.
8. Определение теплофизических характеристик тел в условиях
нестационарного нагрева; определение интенсивностей внутренних
источников тепло- и массовыделения в теплозащитных материалах
при их деструкции — все это составляет цель коэффициентных ОЗТ.
9. Определяемыми параметрически могут быть также коэффици-
енты лучистого теплообмена (поглощения, отражения, излучения).
Идентификация их осуществляется при тепловых испытаниях по
замерам температур в соответствующих точках конструкций, напри-
мер в процессе испытаний макета СА в термобарокамере.
10. Представляют теоретический и практический интерес крае-
вые задачи с обратным временем, т. е. когда по известным значе-
ниям решения в конечный момент времени и на боковой, поверхно
сти рассматриваемой области ищется решение внутри области.
Такие проблемы могут быть связаны с некоторыми натурными ис-
пытаниями различных отсеков СА.
Этот перечень можно продолжить и дальше. Но, вероятно, и
этого перечисления достаточно, чтобы представить то .место, кото-
рое занимают или могут занимать методы решения 031, особенно
как методы обработки и интерпретации экспериментальных дан-
ных. Отметим, что с вышеназванными типами ОЗТ тесно связано
планирование тепловых экспериментов и испытаний.
Постановка экспериментальных исследований по нестационарно-
му разрушению и прогреву ТЗП. Обычный упрощающий подход к
исследованию теплообмена между газом и твердым телом состоит
в искусственном разделении общей задачи на две: внешнюю и внут-
реннюю. Внешняя — определение тепловых потоков к телу в предпо-
ложении квазистационарности режима нагрева. Внутренняя — рас-
чет прогрева тела при известных тепловых граничных условиях.
Строго говоря, такой подход не полностью отвечает физике про-
цесса теплообмена твердого тела и окружающей среды, поскольку
не учитывается активная роль тела. В критериальное уравнение
входят только величины, характеризующие внешнюю задачу, на-
пример
Nu = Nu(Re, Рг, М, TJTJ.
При нестационарном нагреве происходит непрерывное измене-
ние полей температуры и скоростей в пограничном слое. Это изме-
нение зависит, не только от интенсивности изменения параметров
набегающего потока, но и от теплофизических характеристик и ли-
нейных размеров тела, определяющих отвод тепла внутрь тела. Для
146
уносимых материалов указанное явление осложняется нестационар-
ным протеканием процессов, связанных с их уносом. При нестацио-
нарном теплообмене в критериальное уравнение необходимо вклю-
чить комплекс теплообмена:
Nu = Nu(Re, Рг, М, TW!T^ ku k2„..9 km\
Влияние нестационарное™ на теплообмен можно учесть следующи-
ми переменными [46]: dTw(x)/dx\ d2Tw(x)/dx2. В первом приближе-
нии можно во многих случаях учитывать только первую производ-
ную температуры. Тогда критериальное уравнение примет вид
Nu=Nu(Re (В\, М(В), Pr, Le, Tw/7\,
* . & dTw 1
где kT=------* ----— .
a dx 7\ — Tw
Определение областей моделирования, где верна гипотеза квази-
стационарности процесса теплообмена, можно оценить по следую-
щему критерию: A' = Nu/Nu0 = f (&т).
Испытания теплозащитных материалов часто проводят в стацио-
нарных условиях. Однако на самом деле теплозащита функциониру-
ет в нестационарных режимах, и именно такие режимы в первую
очередь важно моделировать на экспериментальных установках.
В квазистационарном случае тепловое и динамическое подобие
можно обеспечить через тепловой поток ?w(r), энтальпию гв(т) и
давление Рб(т) на границе пограничного слоя. Изменения этих па-
раметров по времени должны соответствовать данному участку тра-
ектории спуска СА.
При реализации требуемых законов изменения 1б_и qw необходи-
мо учитывать взаимосвязь этих величин: qw~hVРъ-
В свою очередь, энтальпия и давление связаны друг с другом через
основные характеристики экспериментальной газодинамической ус-
тановки (обычно такими характеристиками являются мощность и
массовый расход). Регулирование требуемых параметров работы
установки целесообразно осуществлять автоматически в соответст-
вии с заданной программой.
Математическое обеспечение подобной автоматизированной си-
стемы может строиться на базе алгоритмов решения ОЗТ, в резуль-
тате чего можно решить следующие основные задачи эксперимен-
тального исследования работы систем теплозащиты:
1. Оценка границ применимости квазистационарной теории.
2. Выбор и отработка требуемых законов изменения параметров
моделирования.
3. Исследование нестационарного прогрева и уноса теплозащит-
ных покрытий при квазистационарных внешних тепловых потоках.
4. Изучение неустановившихся режимов прогрева и уноса в об-
ласти нестационарной внешней теплопередачи и т. д.
Прогрев и разрушение ряда теплозащитных материалов, таких,
как стеклопластики, некоторые полимеры, относящиеся к классу по-
лупрозрачных, характеризуются тем, что теплоперенос в них осуще-
.147
ществляется за счет как молекулярной теплопроводности, так и
лучистого теплообмена.
Радиационный обмен энергией между горячими и холодными
зонами полупрозрачного слоя приводит к значительной деформации
температурного слоя, выражающейся в охлаждении одних участков
и нагреве других, что влияет на глубину прогрева и скорость разру-
шения.
Еще в большей степени искажение профиля температур имеет
место при воздействии внешних радиационных тепловых потоков от
высокотемпературного ударного слоя. В этом случае при определен-
ных условиях максимум температуры реализуется не на поверхно-
сти теплозащитного покрытия, а внутри него. Последнее может
вызвать различного рода физико-химические превращения (внутри
слоя).
Задача прогрева и разрушения, характеризуемого указанными
выше особенностями, ставит перед исследователями ряд интересных
и сложных вопросов, каждый из которых имеет и самостоятельное
значение. Вот некоторые из них:
разработка математических методов расчета характеристик поля
излучения; в этом случае обычная система уравнений дополняется
интегродифференциальным уравнением лучистого переноса, индика-
триса рассеяния и коэффициенты отражения от граничных поверх-
ностей имеют произвольный вид;
расчет интегральных оптических характеристик полупрозрачных
слоев. Экспериментальное определение их нецелесообразно, по-
скольку их применение ограничено условиями эксперимента;
определение основных оптических характеристик (коэффициен-
тов поглощения и рассеяния, индикатрисы рассеяния) в рабочем
диапазоне температур. Следует отметить, что прямые методы опре-
деления этих характеристик достаточно сложны и обеспечивают
точность порядка 50%, поэтому представляется целесообразным
использовать обратные методы для нахождения указанных харак-
теристик; в этом плане имеется некоторый опыт применительно к
газовым средам;
разработка методологии эксперимента по определению темпера-
турных полей в полупрозрачных материалах. Особенность данного
эксперимента заключается в том, что введение в полупрозрачное
тело термопар может существенным образом исказить радиацион-
ное поле, а следовательно, и поле температур.
Решение поставленных задач позволяет количественно и каче-
ственно оценить эффективность используемых систем теплозащиты
в различных условиях теплового нагружения.
Учитывая вышеизложенные обстоятельства, необходимо прово-
дить обработку результатов теплового эксперимента с учетом из-
менения определяющих параметров во времени. Такой подход тре-
бует изменения всей методической части экспериментальных иссле-
дований, так как методики, разработанные, например, для
стационарных тепловых режимов, в большинстве своем непримени-
мы при исследовании нестационарных процессов. Задача получения
148
выходных параметров эксперимента существенно усложняется и эф-
фективно может быть решена только с применением современных
ЭВМ.
Процесс получения данных, интересующих исследователя при
проведении теплового эксперимента, можно разбить на два больших
самостоятельных этапа. 1. Первичная обработка показаний различ-
ного рода датчиков (температуры, давления, силы тока и т. д.)..
2. Вторичная обработка — получение выходных параметров экспе-
риментов.
Первичная обработка заключается в получении статистических
характеристик измеряемых величин; восстановлении функций и их
первых производных по экспериментальной информации, которая
всегда содержит в себе погрешности, связанные с несовершенством
измерительных и регистрирующих приборов; получении простых
аналитических выражений, аппроксимирующих показания датчиков»
и т. д.
Под вторичной обработкой понимают получение выходных пара-
метров эксперимента по результатам, полученным после первичной
обработки. Это, в первую очередь, получение тепловых граничных
условий на внешней омываемой высокоэнтальпийным газом поверх-
ности исследуемого объекта; определение теплофизических харак-
теристик материала образца, параметров тепло- и массообмена в
системе газ — тело и др. Вторичная обработка результатов экспери-
мента тесно связана с решением обратных (граничных и коэффици-
ентных) задач теплопроводности в линейной и нелинейной постанов-
ках. В общем случае при исследовании тепло- и массообмена задача
осложняется наличием подвижной границы на образце или модели.
Каждая из перечисленных выше задач обработки эксперименталь-
ных данных связана с проведением большого числа однотипных и
трудоемких расчетов, что вызывает большие временные затраты на
получение конечных результатов. Особенно это относится к задачам
вторичной обработки, алгоритмы решения которых основаны на ис-
пользовании итерационных процессов, причем каждая итерация яв-
ляется решением краевой задачи уравнения теплопроводности в той
или иной постановке.
Постановка отдельных задач на ЭЦВМ частично решает общую
задачу обработки данных нестационарного эксперимента. Однако
большая работа по подготовке входной информации для каждой
частной задачи не дает возможности достаточно оперативно полу-
чить выходные параметры эксперимента.
Единственным путем сокращения общего цикла обработки явля-
ется полная автоматизация процесса, что достигается за счет сов-
местного использования аналоговых и цифровых ЭВМ. Сигнал с
датчика преобразователя «аналог — код» поступает в ЭЦВМ. Полу-
ченная информация используется далее для первичной и вторичной
обработок.
Помимо сложной технической реализации такая автоматизиро-
ванная система обработки данных требует алгоритмизации всех от-
дельных задач и, кроме того, создания управляющей программы-
149
диспетчера, функции которой состоят в объединении частных
алгоритмов в единое поле и проведении расчетов в необходимой по-
следовательности. Автоматизированная система открывает широкие
возможности при экспериментальном исследовании тепловых про-
цессов. Различные накопители (магнитные барабаны, ленты, диски)
позволяют хранить обширную информацию для получения многооб-
разных статистических характеристик и корреляционных зависимос-
тей между отдельными параметрами.
Помимо быстрого получения результатов эксперимента, что на
современном уровне развития является весьма актуальным, такой
подход к задаче обработки данных эксперимента позволяет ис-
ключить известный субъективизм в процессе получения конечных
результатов.
глава 5 Анализ массовых характеристик
систем и агрегатов СА
5.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ РАСЧЕТА СИСТЕМ,
АГРЕГАТОВ И ОТСЕКОВ СА НА ПРОЧНОСТЬ
Для расчета прочности конструкции СА необходимо определить
нагрузки, действующие на аппарат в полете. Наибольшие нагруз-
ки (силовые и тепловые) возникают при спуске в плотных слоях
атмосферы. При этом определяются наиболее тяжелые условия на-
гружения конструкции на различных этапах спуска (расчетные
случаи) *. Последние определяются не только величиной силового
воздействия, но и температурным режимом конструкции.
При этом необходимо иметь в виду, что расчетные случаи для
отдельных агрегатов, систем и отсеков (экипажа, приборных, топ-
ливных и т. д.), как правило, имеют место в разные моменты вре-
мени полета СА, поэтому конструкция аппарата в целом обычно не
бывает равнопрочной для каждого расчетного случая. Таким обра-
зом, прочность аппарата должна определяться прочностью его
отдельных отсеков, агрегатов и систем в разные моменты времени
полета при заданных коэффициентах безопасности [с
ft== расц/Fэкспл,
где Грасч, ^экспл — расчетная и эксплуатационная нагрузки, дейст-
вующие на СА. Коэффициент безопасности устанавливают на осно-
* Определение основных нагрузок можно проводить по зависимостям, при-
веденным в гл. 2. Для некоторых конструктивных элементов расчетными случа-
ями могут быть и условия нагружения на участке выведения СА на орбиту.
150
вании опыта эксплуатации того или иного агрегата, элемента конст-
рукции, отсека и системы аппарата.
Кроме основных иногда вводят дополнительные коэффициенты
безопасности при расчете отдельных узлов или деталей, которыми
учитываются особенности их конструкции, технологии изготовления
и специфические условия работы.
После определения расчетных напряжений в конструкции по
расчетным нагрузкам (FpaC4 = F3KcnnA) переходят к определению за-
пасов прочности. Под ними понимают отношение разрушающих на-
грузки Аразр или напряжения оразр к расчетным нагрузке или напря-
жению (арасч) в данном элементе конструкции:
Л °разр/арасч*
При выборе конструкционных материалов агрегатов, отсеков, уз-
лов определяющими факторами, действующими как одновременно^
так й последовательно, могут быть напряженное состояние и рабо-
чая температура конструкции. Критерии выбора наилучших конст-
рукционных материалов в каждом конкретном случае обычно
различны. Например, для определения массы конструкции аппара-
та можно в первом приближении использовать выражение
m=Fl№„
где р/ов — соотношение, в известной степени характеризующее це-
лесообразность использования материала в данных условиях; F —
сила, действующая на элемент конструкции; I — длина стержня;
Ов — предел прочности.
При продольном изгибе цилиндрической оболочки отсека радиу-
са Гоб и толщины 6W в общем случае должно обеспечиваться следую-
щее равенство критического напряжения <ткр и напряжения сжа-
тия Осж-
^кр== °сж
где ^i = f(r06, 6W, Пс/к)—коэффициент, откуда толщина оболочки
равна
= V F/2tikrE
и масса
т = plro6 V ХлЕ/^Е),
где I — длина оболочки; р/]^Е — критерий целесообразности ис-
пользования материала при работе цилиндра на устойчивость.
В качестве подобных критериев могут также использоваться:
г в /р— при кручении, а02 /р— при изгибе и т. д., где тв ...002 — пре-
дельные напряжения пропорциональности материала.
Таким образом, конструктивные формы агрегатов и различных
отсеков аппарата при заданных тепловых нагрузках можно выби-
рать, исходя из характеристик напряженного состояния; в первом
приближении они будут соответствовать минимальной массе сило-
вой конструкции.
151
При использовании специальных тормозных устройств при спус-
ке СА (для уменьшения его скорости и перегрузок) определение
.действующих на аппарат нагрузок проведем следующим образом.
Принимаем, что спуск происходит с некоторой силой торможения
.AT = const, масса аппарата mcA = const. Тогда, используя первое
уравнение системы (2.5), уравнение движения СА на атмосферном
участке с учетом Хт моХно представить в виде
mCKdV/dt-[-X-}-X^mcKgQ sin GBX=0. (5.1)
Приведем уравнение (5.1) к следующему виду:
dV I X * а /С
-т—----------------1---goSin0„=O, (5.2)
аг 2 тСА
где р==рое"Р(Явх“й8|п0вх) ; 3 h — длина участка траектории спуска,
пройденная СА за некоторое время t
Если принять, что dt = dh!V, уравнение (5.2) можно представить
следующим образом:
d f \ । ^rogxPoe_________________. X y — mg$ sin 6BX __q (5 3)
dh V 2 2 ‘ m — • V • 7
Приведем уравнение (5.3) к виду
-^-4-a«/e^4-Z»=0, (5.4)
где y=V2; x—p/tsinOex; dx=dhp sin 0BX — некоторые переменные;
—0Я
a_ °rPpe BX g 2(A\ — /ng0 sin 6Bi[)
0 sin 6BX ’ sin 0BX
Согласно [1] решим уравнение (5.4) и после ряда преобразова-
ний получим зависимости для лобового сопротивления и осевой пе-
регрузки
Х = Cx9aS^e~?H {b (a) -El ($)] + V&}. (5.5)
Функции Ei(a), Ei(l) табулированы (табл. 9 [1]); g = ae\ dx=
=^/в.
При малых значениях х справедлива формула
Ei (х) In сх,
где с=0,577216 — постоянная (Эйлера.
При х>1 можно пользоваться следующим асимптотическим
разложением:
д, , ч ех . 1! , 2! , 3! . \
Еi (х) ~--- 14----------------к... I.
м ' X к 1 X 1 х2 1 X3 )
152
Таблица 9
X (х) X Еz (х) X (х) X Ei (х) X Е-(х)
0,00 0,35 -0,0894 1,3 2,7214 2,9 9,2860 4,4 26,0090
0,01 -4,0179 0,40 +0,1048 1,4 3,0072 3,0 9,9338 4,5 26,9337
0,02 -3,3147 0,45 +0,2849 1,5 3,3013 3,1 10,6263 4,6 30,0141
Ю,03 -2,8991 0,50 +0,4542 1,6 3,6053 3,2 11,3673 4,7 32,2639
€,04 -2,6013 0,55 +0,6153 1,7 3,9210 3,3 12,1610 4,8 34,6979
0,05 -2,3679 0,60 +0,7699 1,8 4,2999 3,4 13,0121 4,9 37,3325
0,06 —2,17ГЗ 0,65 +0,9194 1,9 4,5937 3,5 13.9254 5,0 40,1853
0,07 — 2,0108 0,70 +0,1649 2,0 4,9542 3,6 14,9063 6,0 85,9898
0,08 -1,8669 0,75 +0,2073 2,1 5,3332 3,7 15,9606 7,0 191,5050
0,09 — 1,7387 0,80 +0,3474 2,2 5,7326 3,8 17,0948 8,0 440,3800
0,10 -1,6228 0,85 +0,4857 2,3 6,1544 3,9 18,3157 9,0 1037,8800
0,15 -1,1641 0,90 +0,6228 2,4 6,6007 4,0 19,6309 10,0 2492,2300
0,20 -0,8218 1,00 +0,8951 2,5 7,0738 4,1 21,0485 11,0 6071,4100
0,25 -0,6425 IJ +2,1674 2,6 7,5761 4,2 22,5774 12,0 14959,5000
0,30 -0,3027 1,2 +2,4421 2,7 2,8 8,1103 8,6793 4,3 24,2274 13,0 37197,7000
Осевая перегрузка будет равна
„ _ * + *так _ ^0?Sin90
Х~ mg0 ~ 2g0 Х
X 5е_е Г _2_(Xmax -/ngosin0o) .£ ( _ Е j _|_е*! _|_ JEmax. . (5.6)
( тИ0Р sin 0О J
Выражение (5.6) позволяет определить тормозную силу, кото-
рую необходимо приложить к СА, чтобы получить заданное значе-
ние осевой перегрузки. В данном случае расчет удобнее произво-
дить графически. Для этого нужно задаться несколькими последо-
вательными значениями тормозной СИЛЫ Хщахг и построить для
каждой из них график зависимости осевой перегрузки nx = f(£), из
которых можно будет отыскать ту необходимую силу торможения,
которая соответствует допустимой перегрузке пх°. При этом Xmaxi
должна быть положена в основу расчета крепления тормозной си-
стемы аппарата. На эту же силу должны рассчитываться и тор-
мозные приспособления.
Корпус СА в общем случае представляет собой систему герме-
тичных и негерметичных отсеков, баллонов, ферм и других конст-
руктивных элементов, объединенных в единую силовую схему, ис-
пытывающую как внешние, так и внутренние силовые и тепловые
нагрузки. Наиболее часто используются шаровые, цилиндрические,
тороидальные отсеки и емкости, работающие на внутреннее давле-
ние.
Проектировочный выбор их толщин можно проводить в первом
приближении по безмоментной теории прочности без учета крае-
вых эффектов в местах сопряжения поверхностей.
Конструкции растянутых внутренним давлением баков, прибор-
ных, переходных и других отсеков СА резко отличаются от сжатых.
153
Граница между ними определяется изменением знака меридиональ-
ного напряжения в слабом сечении бака (с плюса на минус)
°1=-Г ’ (5-7)
ow \2ЛГоб лгоб /
где Nx, Л1нзг — осевая сила, сжимающая бак, и изгибающий мо-
мент;.р(Д1) —внутреннее давление в баке,
Р (^1) == Риад“Ь А/^гар ^Ргидр — ^Р (^)>
Рнад — давление наддува в баке; пхр1ц— гидростатическое давле-
ние столба жидкости; пх — перегрузка; h\ — высота столба жидко-
сти; Дргар — некоторое гарантийное давление; Дргидр — гидравличе-
ские потери на сопротивление (магистралей, переходников, дроссе-
лей, клапанов и т. д.); Др (Г) —изменение давления за счет темпе-
ратурных отклонений [46].
Сжатые отсеки (приборные, экипажа, двигательный), работаю-
щие’на устойчивость, в отличие от гладких — растянутых, могут
иметь продольные наборы или вафельные конструкции. Их конст-
руктивные параметры определяются критическим напряжением
+*2(-М2к,
L гоб \ Лсгр / J
где = /(гОб, 6w, —коэффициент; аСТр — расстояние между эле-
ментами продольного набора (стрингерами). При выборе клетки
(расстояний) набора и профилей стрингеров необходимо при про-
чих равных условиях обеспечить одновременную потерю устойчи-
вости стрингеров, оболочки и отсека в целом.
5.2. ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ ПРОЕКТИРОВАНИЯ
ТЕПЛОВЫХ ОТСЕКОВ И ОСНОВНЫЕ ПАРАМЕТРЫ
ДВИГАТЕЛЬНЫХ УСТАНОВОК
Геометрия баков определяется в основном компоновочными,
массовыми, технологическими и некоторыми другими соображения-
ми. Чаще всего это сфера, например модуль ТДУ (см. рис. 6), раз-
новидности цилиндров со сферическими или эллиптическими днища-
ми, торы. На рис. 47 представлены топливные баки цилиндрической
формы, с эллиптическими днищами и т. д.
Используя основные соотношения, полученные при рассмотре-
нии модели массовых характеристик СА (см. разд. 1.6), выражение
для массы топлива, заправляемого в баки тормозного модуля или
собственно СА, можно в первом приближении представить в сле-
дующем виде:
^т.запр 4~ ^т.ост 4“ ^т.дост 4“ ^т.испэ (^*8)
где /ит — масса топлива рабочего (топливо, которое сгорает при
работе двигателя); z?zt.oct— масса топливных остатков (топлива га-
рантийного и топлива незабора),
^т.ост ^т.гар 4~ ^т.незаб j (^*9)
154
Я*ис. 47. Схема компоновки космического кораб-
ля «Апполон» (основной блок):
/ — спускаемый аппарат (отсек экипажа);
2, 3 — двигатели системы управления отсека
экипажа; 4 — двигатели системы управления
корабля; 5 — топливные баки модуля орби-
тального торможения и стыковки; 6 — сопло
.двигателя модуля; 7 — бачки с водородом и
кислородом; 8 — водородно-кислородные топ-
ливные элементы
^т.дост — масса топлива, идущая на запуск (достартовая) и выклю-
чение двигателя, т. е. запасы топлива на выбросы при запуске и от-
сечке двигателя; тт.исп — масса топлива испарившегося (в основном
криогенные компоненты).
При определении объема баков необходимо знать объемы топ-
лива заправленного, газовой подушки (газов наддува), а также ар-
матуры, агрегатов, силового набора, размещаемых в баке. При ис-
пользовании криогенных компонентов топлива необходимо учиты-
вать усадку баков.
Рабочий запас топлива может определяться в первом приближе-
нии через характеристическую скорость при некотором осредненном
значении РуД.сР:
/ят=тСл[1 -ехр(-Кхар/£оРуД.ср)]. (5.10)
Соответственно
mQK=—-—mT —масса окислителя;
ок 1-Н^о
1
/пг=-------тпт —масса горючего,
1 + ka
где kG’=mQKlmv — отношение компонентов топлива или коэффициент
избытка окислителя.
Средний импульс должен учитывать тягу не только основных
двигателей Ро, но и всех управляющих и корректирующих двигате-
лей как собственно СА, так и модуля орбитального торможения
тогда
Л)+ Т pt cosaz
Р =________izl_______
уд-ер * ’
где а« — угол установки управляющих и корректирующих двига-
телей аппарата; т — массовый расход топлива.
Уравнение (5.10) можно представить в следующем более об-
щем виде:
!S=1—ехр( —V\ap), (5.11)
где pT = ffiT/mcA — относительная масса топлива; Гхар=
= Vxap/^o/’уд.ср — относительная характеристическая скорость, ко-
155
торая может быть представлена следующим образом:
^хар:==’ Р*к»
где рт = 1 — -ц =--ти/тсл — относительная конечная масса аппарата;
тк — конечная масса аппарата без учета рабочего топлива.
Суммарная характеристическая скорость должна учитывать ма-
тематическое ожидание п приращений скорости и их среднеквадра-
тичные отклонения , которые в основном зависят от точности
системы управления.
Рассмотрим выражение (5.9), определяющее массу топливных
отсеков. Гарантийные запасы топлива (для ликвидации ошибок,
неточностей и т. д.) определяются с учетом следующих среднеквад-
ратичных отклонений: в удельной тяге оруд, в избытке окислителя
(Jk.t, в конечной массе и отклонения в заправке окислителя и
горючего в баке. Суммарные гарантийные запасы окислителя и го-
рючего
^ок.гар=1/ 2Л/ге°к“ тег-гар=1/ 2Д/И^'’
/=1 F Z=1
где АШокб А/71г г — среднеквадратичные отклонения масс окислите-
ля и горючего.
Незабор топлива — это остатки топлива в трубопроводах т0К.тР>
лл/г.тр, желобах, коллекторах, заборниках, клапанах, на стенках вы-
теснительных устройств и баков (смачивающие жидкости) и т. д.
п п
Тогда ^ок.незаб==^1*^ок-4“^-Al^OKpOK, Шг.незаб = ^2^г ^^гРг>
/=1 1 = 1
где аь 02 — коэффициенты, определяющие потери компонентов на
смачивающие 1 м2 поверхности баков окислителя S0K и горючего 5Г.
Достартовые расходы и расходы на выключение двигателей, по
существу, потери топлива при запуске и отключении (отсечке) дви-
гателя. Последнее слагаемое в уравнении (5.8) определяет массу
топлива испарившегося. Как правило, эта составляющая определя-
ется в каждом конкретном случае в зависимости от свойств компо-
нентов (в основном криогенных), формы и типа бака (подвесной
или несущий) и характеристик термостатирования.
Таким образом, используя зависимость (5.8), можно в первом
приближении определить минимальный потребный объем для раз-
мещения топлива или каждого из его компонентов
17 ^1^4. заир . 'И-г.заир
* ок min “7J » *г m in J д •
(1-Н£г)рок (l+^i)Pr
Полный объем баков компонентов топлива определяется объе-
мами Vmin; газовой подушки АГг; арматуры и силового набора
ДГарм, устанавливаемых внутри бака; топливных магистралей, про-
ходящих через бак, и АГТ, связанным с «усадкой» бака при заправ-
156
ке его криогенными компонентами. Дополнительные объемы можно
определить следующим образом:
А1/7 + AVZapM = aiVr0Kmin‘> Д^+Д1/арл( = а+гт1п
И А1/7 = За.г1/окт1пАГ; АV/= ЗаТУгГО|ПА7\
где «1 — коэффициент, учитывающий долю объема, занимаемого
арматурой, силовым набором и газовой подушкой; ат — коэффици-
ент, учитывающий расширение материала баков при изменении
температуры; АТ=Т0—Тк — перепад температур; То — начальная;
7/— конечная температура стенок бака.
Тогда объемы баков равны
^б.ок = (1 +«1 + ЗатАГ) 1/окш1п; 1/б<г = (1 +а1 + ЗатАГ) 1+пнп.
В основе расчета баков лежат безмоментная и моментная тео-
рии оболочек. Первая из них базируется на предположении о том,
что изгпбные, моментные, напряжения в оболочке играют несуще-
ственную роль по сравнению с напряжениями сдвига и растяжения
в их срединных поверхностях. При этом получается, что напряже-
ния изгиба могут иметь существенную величину только в местах
сочленения оболочек различной геометрической формы, в местах
скачкообразного приложения нагрузок или резкого перепада тем-
ператур. Однако, как показывает опыт эксплуатации тонкостенных
сосудов и емкостей, изгибные напряжения в оболочках, как прави-
ло, играют второстепенную роль и не определяют несущей способ-
ности конструкции, которая в общем случае всецело определяется
безмоментным напряженным состоянием, если материал ее относи-
тельно пластичен.
В дальнейшем для анализа прочностных характеристик при
проектировании баков и других оболочечных конструкций будет
использоваться безмоментная теория оболочек.
В основе расчета баков по безмоментной теории на осесиммет-
ричную нагрузку лежат следующие уравнения * [1]:
W<p/ri+jVe/r2=4; 7V<p=Q/(2nr2 sin ср), (5.12)
где Л^ф, Nq — погонные усилия в срединной поверхности оболочки;
q— интенсивность внутреннего давления; п, г2-~ радиусы; ср — угол
широты, Q — равнодействующая всей внешней нагрузки, располо-
женной выше рассматриваемого сечения в направлении оси обо-
лочки (рис. 48, а).
После определения из системы (5.12) погонных усилий можно
определить и соответствующие напряжения:
°*?== Ncp/Sw; .
Рассмотрим некоторые простейшие формы баков, находящихся
под действием внутреннего давления.
* Первое уравнение — уравнение Лапласа.
157
Рис. 48. Оболочки вращения:
а — нагрузка и усилие, возникающие в срединной поверхности оболочки; б — бак кониче-
ской формы; в — бак тороидальной формы (с круговым поперечным сечением); г — бак ко-
нический подвесной или днище; д — бак цилиндрический, опертый по нижнему основанию;
е — баки — круглый тор с цилиндрической вставкой (левая часть) и круглый тор с несколь-
ко выпуклой вставкой /в«0,1 гоб
Тогда
Сферические баки, В этом случае баки заданного объема с по-
стоянной толщиной стенок обладают наименьшей массой /пСф, у них
меридиональные и широтные напряжения одинаковы:
= г1=г2=гоб*
°? == == 9^*об/( ,
3 17 Р
тсф=—Усфд —,
2 Sq2
где УСф — объем сферического бака; 002/р — критерий оптимально-
сти работы материала на растяжение.
Конический бак (рис. 48, б). Здесь г, 1 = 00; r2=xtga; Q =
=л(Г2 sin <р)2^; ф=соп$1;
qx tg а __qx tg a
°<p— 9X > °e .
Одо
158
Торовые баки (рис. 48, в). Для торовых баков с круговыми сече-
ниями и оболочкой постоянной толщины расчетное напряжение ре-
ализуется по внутреннему диаметру (т. е. ф=180°):
<7гоб 2ri + Гоб cos <? . _ qro6
Су =-------------------, <3 л =-- .
2$w ri -+•r cos <p 2BW
Объем бака Итор=2л2г^бг1; площадь поверхности 5тор = 4л2гОб^1.
Расчетное напряжение
а <Гоб (2п — гоб)
2SW (гj — г0б)
отсюда толщина стенки
8W=<Гоб (2г! — го6)/(2а„).
Масса торового бака
_.S с - — 2г1 —Гоб
™тоР P^w^iop Р*7 *
r 1 — Гоб <Jq2
Тор с круговым поперечным сечением (эллиптический с цилнн-
дрической вставкой) используется для повышения плотности ком-
поновки; уменьшения массы баков.
В случае кругового сечения и постоянной толщины оболочки бак
неравнопрочен. Меридиональные напряжения, действующие пер-
пендикулярно к сварному шву в точке А (см. рис. 48, в), сущест-
венно больше, чем в точках В и С.
Тор эллиптического сечения с большой осью, параллельной оси
тора х—х (см. рис. 48, в), и объемом, равным объему тора с круго-
вым сечением радиусом rG6, имеет полуоси: а=ЛгОб, b = r0^k, где
(&=1 — круговое сечение). Безразмерные погонные нагрузки
по меридиану и широте в характерных точках Л', В', С' определя-
ют геометрию тора, обеспечивающую приближенную равнопроч-
ность конструкции.
Иногда применяется круговой тор с цилиндрической вставкой.
Выбор такой формы также может быть целесообразен с точки
зрения обеспечения плотной компоновки. В этом случае внутренняя
цилиндрическая обечайка оказывается сжатой погонными широт*
1гыми нагрузками и должна быть подкреплена шпангоутами (обыч-
но двумя) (рис. 48, е). Если в этом случае установить вместо ци-
линдрической несколько выпуклую вставку (ZB~O,1 гОб), необходи-
мость во внутренних шпангоутах может отпасть, так как
меридиальные напряжения значительно повышают устойчивость
оболочки.
Цилиндрические баки. Б этом случае ri = oo, г2 = гОб, ф = 90°,
Q=nr^q. Тогда
„ _ ?Г0б . ?гоб
9 2bw ’ 6
Цилиндрические баки при прочих равных условиях по сравнению
со сферическими (одного и того же объема) имеют большую по*
159
верхность и, как правило, большую массу. Цилиндрическая вставка
/в (рис. 48, <5), поскольку широтные напряжения в оболочках посто-
янной толщины могут быть вдвое выше меридиональных, может
иметь шпангоуты. Это дает возможность уменьшить толщину обо<
лочки и, как следствие, общую массу бака.
В месте стыков днищ и цилиндрической обечайки (для компеш
сации резких изменений кольцевых напряжений) также могут ус-
танавливаться шпангоуты.
Днища бака должны иметь форму полусферы или полуэллипсо-
ида вращения. Полусферическое днище обладает высокими проч-
ностью, надежностью, оно технологично. Однако с точки зрения
плотности компоновки оно проигрывает эллиптическому. Следует
заметить также, что последнее, в свою очередь (особенно при со*
отношении осей Ь/а^.0,5), испытывает в зоне стыка некоторые ок-
ружные сжимающие напряжения.
Если днища полусферические, то объем бака
1/б = 2^о6(2/3 + Х),
площадь бака
5б = 4лгоб(1-|-к),
где гОб — радиус днища, обечайки; K = — удлинение цилиндри-
ческой части бака (tfo-=2гОб — диаметр бака).
Для баков с эллипсоидными днищами при &/а = 0,5 имеем
1/б = 2лг03б (1/3+к); 5б=4лГоб (3/4+к).
На рис. 48, г представлен конический подвесной бак, нагружен-
ный внутренним давлением (давление наддува газов рн и гидроста-
тическое давление столба жидкости p/znx).
Гидростатическое давление на расстоянии х от вершины равно
Ргидр = р(/1—х cos а) Их, тогда
вт= Ьи + <h — x cos а)] ;
zow
Г । / 1 / 1 XTxtga
°е= Рн + рлИ-гЛ-—xcosa .
L \ 3 J J 0^,
Если рассмотреть цилиндрический бак, опертый по нижнему ос-
нованию (см. рис. 48, д) и нагруженный только гидростатическим
давлением столба жидкости, то ri = oo, г2 = гОо1 ?гидр=р(Л—х)пх,
тогда
^=0, 0,=^^ —х)/гл/8да.
Размеры и некоторые характеристики двигательной установки с
жидкостными ракетными двгиателями (ЖРД) могут быть опреде-
лены по следующим приближенным зависимостям [46]:
Py^=k„p^Kplm, (5.13)
160
где m —Р/Руд; Р — тяга двигателя;
jfe-i
* — 1 (Ра/Рк) к
2k —1
1 +(Ра/Рк) *
(5.14)
k — показатель адиабаты; FKp— критическое сечение сопла; рк, Ра —
давление в камере сгорания и на срезе сопла двигателя соответст-
LCHHO.
Удельную тягу можно представить следующим образом:
-^-/?Тк(1-лк А), (5.15>
где лк = Рк/Ра — степень расширения сопла; Тк — температура в ка-
мере сгорания двигателя.
Относительная площадь выходного сечения сопла
/а = ^а/Лср,
•/ d а1 Кр"
ИЛИ
/ Ь 1 /9 Л' "
((А + I)/2)(*+D/(*-i) (5Л6*
Решая совместно уравнения (5.13) и (5.16) при заданных пара-
метрах Руд и Р, можно определить FKp и Fa (площадь выходного
сечения сопла), а затем диаметры б/кр и da.
Диаметр камеры сгорания
^k = 2K^o/(^Yp),
где ур — расходонапряженность.
Длину двигательной установки можно определить из зависимо-
сти
Аду = /к + 4»
где /к = /ц+/кон — длина камеры сгорания двигателя; /ц= (1...2)dK —
длина цилиндрической части камеры сгорания;
/кон = (^к-^кр)/(б^ко1&ас)- длина конической части камеры
сгорания (ак~50...60°); lc= (da—dK)/2tgac — длина сопла (ас~
~30...40°).
Массу двигателя с учетом топливных остатков в трубопроводах^
турбонасосном агрегате и т. д. иногда называют массой «залитого»
двигателя. В конце работы двигательной установки обычно в рас-
четах принимают массу двигателя «залитого».
16Г
Относительная масса двигательной установки обычно записы-
вается в виде
Уду = /Пду/Р>
где тду =f(mK, mc, лк, Л компонентов топлива, схемы ДУ и т. д.).
Следует отметить некоторые особенности работы ЖРД в усло-
виях космоса: запуск двигательной установки в условиях невесо-
мости, наличие низкой температуры и глубокого вакуума в камере
сгорания двигателя перед его запуском. В то же время, как прави-
ло, космические ЖРД должны характеризоваться точной и доста-
точно легкой управляемостью, возможностью глубокого дроссели-
рования и повторного запуска. В качестве компонентов топлива
здесь могут использоваться обычные топлива, применяемые на но-
сителях КЛА.
Для обеспечения запуска двигателя в условиях невесомости и
при малых знакопеременных перегрузках в условиях космического
полета аппарата (при сходе СА с орбиты) используются специаль-
ные системы, предназначенные для удержания компонентов топли-
ва у заборного устройства в баке переключения загазирования ком-
понентов. К таким системам относятся: вытеснительные (диафраг-
мы, сильфоны, поршни, мешки и т. д.); инерциальные (обеспечи-
вающие разделение жидкой и газообразных фаз путем создания
перегрузки ускорения продольного или центробежного), а также
использующие явление смачиваемости жидкости (сетки, соты
ит. д.); накопительные системы (небольшие емкости с компонента-
ми топлива и вытеснительной системой); возможно также приме-
нение систем, использующих и другие принципы, например движе-
ние поляризованных (электрически нейтральных) частиц топлива
с хорошими диэлектрическими свойствами в неоднородном электри-
ческом поле, использование ультразвуковых систем и т. д.
Кроме ЖРД на СА могут использоваться и другие типы двига-
тельных установок, например на некоторых участках спуска —
предпосадочное торможение и посадка и т. д. — твердотопливные
двигатели (РДТТ). Компоновка модуля орбитального торможения
(отсека ТДУ) СА в основном определяется габаритами топливного
отсека (баков), двигательной установки, ее системами, вспомога-
тельными агрегатами и оборудованием (см. рис. 47).
5.3. ТЕПЛОМАССООБМЕН В БАКАХ ПРИ НАГРЕВЕ
КОМПОНЕНТОВ ТОПЛИВА
При нагреве компонентов топлива, особенно криогенных, от
внешних и внутренних источников тепла возникает ряд эффектов,
связанных с теплообменом между жидкостью, стенкой бака и га-
зом, вскипанием, расслоением компонентов, конденсацией паров,
диффузией газов наддува и т. д.
В качестве примера рассмотрим бак цилиндрической формы *,
* Предлагаемая методика может быть применена и для баков любой другой
формы.
162
Рис. 49. Схема действия тепловых по-
токов на бак:
а — тепловые потоки: 1 — от двигате-
ля; 2 — к стенке бака от внешних ис-
точников, агрегатов, аппаратуры и
т. д.; 3 — подводимый с газом надду-
ва; б — модель расслоения жидкости
. в баке
заполненный до некоторого
уровня жидкостью, которая
подвергается в общем слу-
чае воздействию тепла от
ряда источников, распреде-
ленных во время и простран-
стве. Это, в первую очередь,
тепловые потоки со стороны газовой подушки, стенок бака и тепло-
вой поток двигательной установки и энергосистем, направленный
на нижнее днище бака (рис. 49, а).
За счет наддува газом в баке поддерживается постоянное давле-
ние, определяющееся условиями работы насоса (при турбонасос-
ной подаче компонентов топлива), подающего компонент к дви-
гателю, и устойчивостью бака при действии на него вышележащих
грузов. Несколько проще этот вопрос решается при вытеснитель-
ной системе подачи.
Исследование процесса расслоения жидкости в баке под влия-
нием теплового воздействия в первом приближении основывается,
на предположениях о существовании непрерывного профиля темпе-
ратуры в нагретом слое и о возможности описания эффектов на-
грева с помощью механизма свободной гравитационной конвек-
ции [44].
Движение жидкости в нижней части бака можно рассматривать
в первом приближении как источник выходящего потока массы с
определенной энергией. Движение граничного объема (сегмент)
жидкости изменяет условия в соседних слоях.
Исходя из уравнения теплового баланса, можно определить ко-
личество нагретой жидкости, поднимающейся у боковых стенок.
Уравнение, связывающее поток в единицу времени Fo, переменную
гравитацию Кт и градиент плотности dp/dz, можно представить в
виде [46]
F0=1,96/1z/<?/2/?c,
(5.17>
где fi — массовая константа; рсх — величина, зависящая от высоты
сегмента; z— некоторый линейный размер бака,
rfP1/rfz=(P1 —р2)/г,
где pi, р2 — плотности жидкости исходная и в рассматриваемом
сегменте.
Интенсивность отвода тепла вверх может быть дана зависимо-
стью
^ВОСХ---С^В ^н)
(5.18).
163.
где vB — скорость жидкости в данном сегменте, определяемая из
граничных условий в источнике восходящего потока и физических
условий, налагаемых на переменные Fq и Лт [44]; vH — скорость дви-
жения потока к нижнему днищу бака; ДТ— перепад температур
исходной и в рассматриваемом сегменте. Следует отметить, что за-
висимость (5.18) будет справедлива только при ув>^н.
Рассмотрим некоторые основные положения, связанные с вы-
бором системы подачи компонентов топлива и системы наддува.
Системы подачи, основанные на использовании турбонасосных аг-
регатов, как правило, применяются только при достаточно больших
суммарных импульсах (значительном торможении, маневрировании
и т. д.). Малые превращения скорости (при коррекции траектории)
могут обеспечиваться двигательной установкой с вытеснительной
системой подачи. В последнем случае необходимо определить оп-
тимальное давление в баке, соответствующее максимальному сум-
марному импульсу двигательной установки при заданных ограни-
чениях по массе.
Примем следующую математическую модель системы наддува.
Бак наддувается газом. Некоторое количество топлива при этом
может испаряться. Пары совместно с подающимся дополнительно
газом используются для наддува и диссоциируют. Для случая —
«нелетучего» компонента топлива диссоциацией компонента и дав-
лением его паров можно пренебречь.
Давление газов наддува в баке РНад может быть представлено
в первом приближении (при заданном давлении перед насосом
/?тна) в виде
/?над=/?ТНА ^х^тРт “Ь А/?гидр ^Ргар i &р (Т), (5.19)
з для вытеснительной системы
/?над.в== Рк ^х^тРт ^Лидр Аргар + Д/? (7^), (5.20)
где ртна — давление перед турбонасосным агрегатом (ТНА); рк —
давление в камере; ДрГидр— гидравлические потери в трубопрово-
дах; Дргар — гарантийное давление; Ар(Т) — изменение давления
за счет температуры.
В начале и в конце работы системы наддува давление обычно
повышают на 15...20% [46]. В первом случае повышение давления
обуславливается тем, что система не успевает (из-за инерционно-
сти) обеспечить необходимое давление в баке при резком «прова-
ле» топлива при включении двигателя. Во втором — повышение дав-
ления в основном необходимо из-за уменьшения гидростатическо-
го давления столба жидкости пхйтрт вследствие того, что «падение»
уровня йт не компенсируется ростом перегрузки.
При относительно малых давлениях в баке для определения ос-
новных параметров газа наддува можно использовать зависимость
Р^=тгТ^/^г1 (5.21)
где пгг, Тг, Vr, Цг — масса, температура, объем и молекулярная мас-
са газа в баке,
164
тг—т'г-\-тгМ; Тт = Тг-\-ТгМ;
vr=i/r+i/rA/;
w/, ТТ', V/, ц/— масса, температура, объем и молекулярная масса
газов наддува в начальный момент; Д/ — некоторый интервал вре-
мени; mr=mBX. г + Шисп — определяется расходом газа, поступающе-
го в бак /Пвх. г, и массообменом между жидкой и газовой фазами
тИСп; Уг = Уж+Уисп — определяется объемным расходом компонен-
та, поступающего к двигателю, и объемной скоростью вскипания
Т^исп-
Изменение р,г есть результат изменения соотношения остаточ^
ного и поступающего в бак газов и изменения средней молекуляр-
ной массы газа вследствие диссоциации:
д f тг \
рьг =---- -------------.
\ ^OCT.r/P'OCf. г 4“ ^вх.г/Р*вх.г /
Согласно работе [46] изменение температуры по времени Тг мож-
но определить из уравнения (5.21), тогда
Л • [^исп.г Qk.t + <2г-ж “F ^вх г^вх.г “F ^ИСП Г^ИСП.Г ^вх.гX
mrcVr
/?гг
Р'ВХ.Г
Р^г-
ky
(5.23)
где cw — удельная теплоемкость газа наддува; <3К. т — производная
теплового потока по времени (за счет конденсации тумана);
Qr-ж — производная теплового потока при теплообмене между га-
зом и жидкостью в баке; iBX. г— энтальпия газа наддува; /Исп. г —
энтальпия газа (при испарении жидкости); kv — коэффициент (44].
При определении интенсивности теплоотдачи на границе жид-
кость— газ и у стенки бака были сделаны следующие допущения.
Температура газа Тг. б и состав его в баке, а также температура
стенок бака Tw, подвергающихся воздействию газа, принимались
постоянными. Температура стенок (бака ниже уровня жидкости при-
нималась равной температуре жидкости Тж.
Поскольку теплообмен между газовой средой и жидкостью осу-
ществляется преимущественно за счет свободной конвекции, то
Qr-ж = аЛ'-г п.ж-г — Тг.б)> (5.24)
где
а1— А' ~ “ [^рг4.ж-г^гР# (Льж-г Л.б “Т
^П.Ж—г L ЛгРт
рг, а — коэффициент объемного расширения газа и ускорение дви-
жения; 5ж-г — площадь поверхности раздела; 1Г, рг, Цг— коэффи-
циент теплопроводности, плотность и молекулярная масса газа;
Дп. ж-г — некоторый характерный размер; Л' и и* — константы.
165
Для теплоотдачи от жидкости к стенке бака характерным раз-
мером L является высота бака; S — площадь стенки бака, подверга-
ющаяся воздействию газа, А' = 0,59 и п* = 0,25 для ламинарного и
0,13 и 0,333 соответственно для турбулентного режимов [44].
Теплообмен между массой жидкости и газом на поверхности
жидкость — газ можно представить уравнением, аналогичным
(5.24); L — в этом случае диаметр бака; А = 0,27; п* = 0,25.
Выражение для средней температуры Tw стенки, подвергающей-
ся нагреву от двигателя и других источников тепла (см. рис. 49, а)
и соприкасающийся с внешней средой <2вн-ж, компонентом топлива
и газом наддува, можно получить, учитывая массу tnw и теплоем-
кость материала стенки cpw, из уравнения теплового баланса
— [TwQmwQCpw + (Qp + QbH + QbH-Ж + Qr-ж) +
4“ (5.25)
где Two, f^wo — начальные значения температуры и массы стенки.
Внешний теплообмен между стенкой бака и средой происходит
путем вынужденной конвекции, создаваемой движением набегаю-
щего потока
Qbh—(ТВН—w ЛД (5.26)
где Tbh-w — температура на границе стенка — внешняя среда.
В случае конвекции за счет потока массы коэффициент теплоот-
дачи в основном будет зависеть от диаметра бака и скорости пото-
ка Ом [44]:
авн_и,= 1,46.10-^'М’4.
Приведем зависимость для тепломассообмена в баке при кон-
денсации, испарении и охлаждении первичного газа при расшире-
нии без подвода дополнительного газа наддува
* Нг^г г п и ]. Т Т’жО ^г.исп^исп^ /к 97\
^г= pr7lA<cn“™ /ж=---------7)
гг bpxv жгж
где Уж — объем жидкости; Тжо — начальная температура жидко-
сти; рИсп — давление «испарившихся» газов; Дгисп — приращение
энтальпии.
Сравнение результатов, полученных с помощью рассмотренного
метода, с результатами [44, 46] дает удовлетворительную для пер-
вого этапа проектирования СА сходимость.
Рассмотрим аналитическую модель расслоения компонента топ-
лива в цилиндрическом баке для случая, когда тепло поступает
через боковые стенки бака (рис. 49, б).
Сделаем в первом приближении следующие допущения. Началь-
ное распределение температуры компонента однородное: весь при-
ток тепла к стенке идет на повышение теплосодержания погранич-
ного слоя (пристеночный слой); верхний нагретый слой равномер-
но перемешан и не смешивается с нижним холодным; толщина по-
граничного слоя мала по сравнению с диаметром бака; флуктуа-
166
ция теплового потока к стенке за время, необходимое для переноса
элементарного объема жидкости в верхний слой при движении
вдоль пограничного слоя, мала.
Записав уравнение сохранения энергии для нижней части погра-
ничного слоя и учитывая сделанные допущения, можно получить
зависимость
5п
^в=-у- nd6^pcp(Tx-Ti)o)B(x)ax,
н о
(5.28)
где SH — площадь нагреваемой поверхности жидкости; Тх — тем-
пература жидкости в пограничном слое на расстоянии х от стенки
бака; 7\— температура насыщения жидкости; (ов(*) — скорость
движения жидкости в пограничном слое на расстоянии х от стенки
бака; бп — толщина пограничного слоя.
Если принять, что удельная теплоемкость сР и плотность ком-
понента р постоянны в пограничном слое, то
дв—-^-лс16срр С Д7’д.<ов(л)</х, (5.29)
где ДТХ — избыточная температура в пограничном слое на расстоя-
нии х от стенки. Средняя избыточная температура равна
_ 6 I 6
ДГХ= С A7\coB(x)rfx / j* u>xdx.
о I 6
Пограничный слой в рассматриваемых условиях турбулентен,
поэтому
Д7'ж=Д7'в,_зк[1 — (x/8)]v;
где ин — определяющая скорость для пограничного слоя.
Уравнение сохранения энергии принимает вид
5„
^в = -^-Л(/брСрД7'д. С (0в(х)(/Л,
О
(5.31)
или qB— pcр^Т XVв,
5п
где 1/в=л^б С шв(лг) dxобъемный расход,
о
Таким образом,
У*=ЯМрсрЬТх). (5.32)
167
Подставив выражения (5.30) в (5.31), получим
77^ = f [1 “ Г Нт) • (5’33)
ж JL \ Ъ J J \ 8 /
0
Подставляя уравнение (5.33) в (5.32 и проведя преобразова-
ния, получим
^=аДТда_ж<$н/(рСрД7\). (5.34)
Из этой зависимости можно определить скорость увеличения
объема верхнего пограничного слоя. Внутренний коэффициент теп-
лоотдачи рассчитывается по значению теплового потока.
Для оценки развития процесса расслоения в течение некоторого
времени необходимо уравнение (5.34) проинтегрировать.
Если значительное количество тепла поступает в бак через ниж-
нее днище, то возникшая благодаря этому свободная (гравитаци-
онная) конвекция разрушает пограничный слой, и значительная
часть бокового нагрева идет на увеличение температуры всей жид-
кости. Таким образом, математическая модель массо- и теплопере-
носа жидкости в этом случае близка к ранее сформулированной.
Температура нагретого слоя определяется из уравнения сохранения
энергии. 1
Следует отметить, что для компонентов топлива, находящихся
под давлением в баках, профиль температур для нагретого слоя
по форме будет похож на гауссово распределение
Г-Г0 = (Л~Г0)е у, (5.35)
где То — начальная температура основного ядра жидкости; Ts —
температура насыщения; с — некоторая константа; у — расстояние
от поверхности жидкости до текущего уровня, на котором опреде-
ляется температура.
Уравнение для теплового баланса цилиндрического бака можно
представить в следующем виде:
го с *4
—г pcp(T-T0)dy,
J sw J 4
о о
где х — отношение количества тепла, поглощенного нагретым сло-
ем жидкости, к теплу, подведенному к стенкам бака; Sw — площадь
нагреваемых стенок бака.
При малом изменении температуры можно принять p = const,
ср = const, и тогда
ndl Р _с2
Qrt=^?cp(Ts-T^\e «ску,
0
У _с2
где j* е ydy— интеграл вероятности, имеет максимум при z/=oo,
о
168
равный У n/f/2, что соответствует тепловому расслоению компонен-
та практически до дна бака. В этом случае
Qz/ = (nd62/8) Рср (Л-Го)
откуда константа с равна
Rd б $cp(Ts Т'о)
£ = Л------------------ .
L 8 Q/x J
На втором этапе расчета можно уточнить полученные величи-
ны, проведя оптимизацию массы топливных баков.
Следует отметить, что в общем случае целесообразно для над-
дува использовать газы с малой молекулярной массой и подогре-
вать их перед введением в бак. Однако при этом необходимо пом-
нить, что легкие газы занимают большой объем (повышается мас-
са баллонов особенно высокого давления) и может значительно
увеличиться тепломассообмен между жидкостью и газом наддува
(нагреваются стенки бака и верхние слои компонента). При «го-
рячем» наддуве иногда можно использовать «мятый» парогаз тур-
бонасосного агрегата, парогаз его генератора или специальных ге-
нераторов на основных компонентах.
Массу баллонов с газом приближенно можно определить из за-
висимости
[1 4~ (ЗРг/ав)/?г^г] Рнад^г
£о(1 + Рк.бал/Рн.бал)
где Риад — давление наддува в баке; рг — плотность газа наддува;
Рн. бал, Рк. бал — давление газов в баллонах начальное и конечное;
Тт — рабочая температура газа (принимается постоянной).
5.4. ОТСЕКИ ЭКИПАЖА И ПРИБОРНЫЕ ОТСЕКИ
Разработка отсеков экипажа и приборных отсеков, как правило,
начинается с определения их объемов в соответствии с заданными
требованиями, составом экипажа (для пилотируемых СА), а также
размещаемых на аппарате (для выполнения поставленной задачи)
оборудования, двигателей, различных систем и приборных блоков.
К последним относятся: системы обеспечения жизнедеятельности
экипажа (СОЖ), системы управления и ориентации ТДУ, связи,
автоматики, электропитания, буферные батареи аккумуляторов,
парашюты и т. д. Определение объемов отсеков может проводить-
ся и по заданным статистическим удельным характеристикам раз-
мещаемых на аппарате систем и приборных блоков.
Отсеки экипажа пилотируемых СА (рис. 50) обычно имеют от-
носительно большие объемы свободного пространства для обеспе-
чения необходимых условий работы космонавтам (по сравнению с
приборными отсеками плотность их в 3—4 раза меньше).
Форма отсека экипажа СА определяется в основном Требова-
ниями заданных норм комфортности, безопасности и надежности
6—331 169
Рис. 50. Схема отсека экипажа спускаемого аппарата
космического корабля «Союз»:
/ — космонавты; 2 — кресло космонавта; 3 — оптиче-
ский визир-ориентир; 4 — приборная доска; 5 — ко-
мандно-сигнальное устройство, 6 —телекамера; 7 —
люк-лаз; 8 — пульт управления радиостанциями; 9 —
иллюминатор
функционирования экипажа и оборудова-
9 ния при спуске аппарата на планету, а
также общими компоновочными, массо-
выми и траекторными (аэродинамически-
ми) и другими соображениями. Это сфе-
ры или близкие к ним формы, фарообраз-
ные формы, цилиндры с эллиптическими
днищами и т. д. Основные расчетные
случаи оболочки отсека: на избыточное
внутреннее давление; на устойчивость оболочки на участке выведе-
ния СА на орбиту.
Необходимо иметь в виду, что размещать оборудование и ап-
паратуру можно как в одном, так и в нескольких герметичных от-
секах. Однако в гермоотсеках можно размещать не всю аппара-
туру, а только ту ее часть, герметизация которой необходима.
Например, целесообразно размещать в гермоотсеках химические
источники тока, если они не имеют собственной герметизации, энер-
гонасыщенную аппаратуру, требующую принудительного охлажде-
ния и т. д. Остальные аппаратура и системы могут располагаться
в негерметичных отсеках, но и в этом случае необходимо преду-
сматривать определенную экранировку для обеспечения теплового
режима.
Форма приборного отсека определяется в основном компоновоч-
ными и массовыми соображениями. Чаще всего это сферы, цилинд-
ры с эллиптическими днищами, иногда — торы.
От воздействия сжимающих нагрузок и напряжений изгибаю-
щего момента так же, как и для отсеков экипажа, оболочка прибор-
ного отсека может разгружаться за счет внутреннего давления га -
зовой смеси, находящейся в отсеке. Обычно это давление превы-
шает номинальное (примерно на 20...25%) и может в данном случае
приниматься за расчетное. Прочностные расчеты конструкции этих
приборных отсеков могут проводиться с использованием зависимо-
стей, приведенных в разд. 5.1 и 5.2.
Существует несколько принципов установки и крепления аппа-
ратуры и систем в приборном отсеке, но в любом случае при обес-
печении максимальной плотности компоновки должны выполнять-
ся следующие основные требования: обеспечиваться нормальные
условия функционирования аппаратуры и систем в полете с задан-
ной точностью, простота и удобство ее эксплуатации и обслужива-
ния; надежность, технологичность и взаимозаменяемость и т. д.
При компоновке отсеков большого удлинения (Х= ^от/^от > 1)
аппаратурные блоки и системы, обеспечивающие работу экипажа,
могут устанавливаться на приборной раме ферменной конструкции
170
или выполненной в виде соединенных друг с другом нескольких
плоских панелей. Эксплуатационный разъем в этом случае целесо-
образно располагать у одного из торцов отсека.
Если удлинение отсека Х<1, то при установке аппаратуры, сис-
тем и оборудования может использоваться сам корпус приборного
отсека. Причем разъем при такой компоновке целесообразно сде-
лать в середине отсека.
Возможно использование комбинированного способа компонов-
ки— трехслойного монтажа аппаратуры в отсеке. В этом случае
блоки могут располагаться на двух днищах (торцах) приборного
отсека и в центральной части на приборной раме.
Однако в любом случае целесообразно системы, приборы и обо-
рудование объединять в определенные тематические блоки (по
функциональному признаку), например блок питания, блок СОЖ,
блок ориентации, блок управления и т. д., не создавая при этом
чрезмерно больших блоков, так как это затрудняет эксплуатацию
и обслуживание аппаратуры и систем в целом.
Внутренняя компоновка аппаратуры в герметичном отсеке тес-
но связана также с обеспечением заданного теплового режима.
В связи с этим одним из требований при компоновке приборного
отсека является то, что размещать аппаратуру в блоке необходи-
мо таким образом, чтобы он обладал минимально возможным гид-
равлическим сопротивлением при циркуляции газовой смеси в от-
секе. В свою очередь, это в значительной степени улучшает работу
системы терморегулирования и повышает ее эффективность при
обеспечении заданного теплового режима СА.
Следует отметить, что в любом гермоотсеке должны поддержи-
ваться определенные характеристики атмосферы по давлению, тем-
пературе, газовому составу, влажности, а также определенный уро-
вень вибрационных нагрузок.
Степень герметичности отсека определяется величиной утечки
где V0T — объем отсека (газа); Др — падение давления в отсеке за
время Д/.
Повышая герметичность, следует, например, для размещения
приборов и систем компоновать единый отсек, а не несколько ма-
лых. Единый отсек при прочих равных условиях будет иметь менее
длинный герметичный разъем и меньшую длину сварных швов, чем
несколько отдельных малых отсеков.
Для герметизации стыков могут использоваться: белая вакуум-
ная резина, которая допускает обжатие до 50% и достаточно хо-
рошо работает при температуре —30... + 50° С до р = 4-106 Па; се-
ликоновая резина или фторопласт — при —150... + 350° С; алюми-
ниевые или медные прокладки ~ 400° °C и т. д. В связи с тем, что
фторопласт — неупругий материал, после каждой разборки стыка
его необходимо заменять.
Целесообразно предусматривать минимальное количество экс-
плуатационных разъемов (желательно один). Если для стыка ис-
6* 171
пользуется болтовое соединение, то к жесткости его необходимо
предъявлять особые требования (необходимо выбирать диаметр
болтов, их шаг). Расстояние между болтами обычно устанавлива-
ется /= (8...10)йбт (^бт — диаметр болта, выбирается приблизитель-
но равным толщине фланца стыка).
Для герметизации люков-лазов отсека экипажа (см. рис. 50)
целесообразно использовать специальные зажимные устройства
(желательно с поступательным движением — во избежание смятия
уплотнения). Для герметизации различных отсеков с большим вре-
менем работы (без проверки) можно применять сварные стыки (со-
единения).
Представляют несомненный интерес отсеки экипажа, а для ав-
томатических СА (типа «Венера») приборные отсеки, воспринима-
ющие значительные внешние силовые и тепловые нагрузки. Прак-
тически оболочка таких отсеков одновременно является и корпу-
сом спускаемого аппарата.
5.5. КОНСТРУКЦИЯ КОРПУСА
Необходимые объемы и массы отсеков экипажа, приборного и
других отсеков аппарата, потребный баллистический коэффициент
и аэродинамическое качество, определенные в результате балли-
стического проектирования, в известной степени являются необхо-
димыми для аэродинамической и, как следствие, массовой компо-
новки СА и конструирования его корпуса.
Рассмотрим два возможных вида конструкции корпуса (как пи-
лотируемых, так и автоматических) СА«—моноблочный, предназна-
ченный для аппаратов, совершающих спуск в «плотной» атмосфе-
ре (Земли, Венеры, Юпитера), и комбинированный, или сборный —
для «разреженной» атмосферы (Марса, Меркурия).
Исследование характеристик теплозащитных и охлаждающих
систем СА было проведено в гл. 4, результаты его будут использо-
ваться при анализе параметров конструкций корпуса аппарата и
отсека экипажа (для пилотируемых аппаратов).
Конструкция корпуса СА для «плотной» атмосферы. Наиболее
приемлемыми формами корпуса при использовании моноблочных
конструкций СА являются сферическая, коническая со сферическим
затуплением и фарообразная. Анализ их (см. разд. 2.5) показал,
что в известной степени спускаемые аппараты, имеющие форму
фары, могут обеспечить большую массовую отдачу и использовать-
ся на траекториях «скользящего» спуска, однако требуют специ-
альной системы ориентации.
Расчетной нагрузкой, аппаратов моноблочной конструкции яв-
ляются максимальное давление при аэродинамическом торможении
и в случае заглубления в грунт—при посадке, а также атмосфер-
ное давление и значительные тепловые нагрузки. Например, пило-
тируемые аппараты серий «Восток», «Союз», «Аполлон» и другие,
а также автоматические СА серий «Венера», «Зонд» имели моно-
блочную конструкцию корпуса. На рис. 7 представлена схема кон-
172
струкции корпуса спускаемого аппарата серии «Венера» [2]. Сме-
щение центровки вперед относительно геометрического центра в
известной степени обеспечивает ориентированный полет в атмосфе-
ре планеты.-При достаточно плотной компоновке приборный отсек
занимает большую часть корпуса. Оставшуюся (меньшую) —пара-
шютный отсек, отделенный от приборного герметичной стенкой. Па-
рашютный отсек закрывается крышкой с герметизируемым рези-
новым кольцом стыковым шпангоутом. Крышка открывается перед
выпуском парашюта.
Комбинированная (сборная) конструкция корпуса. Спускаемые
аппараты, предназначенные для атмосферы Марса или Меркурия,
характеризуются относительно малой удельной нагрузкой на ми-
дель (600...3000 Н/м2 для Марса), обеспечивающей торможение до
посадочных скоростей при баллистическом или «скользящем» спус-
ках.
Такое значение удельной нагрузки в основном достигается ис-
пользованием аэродинамического экрана (конической формы)
большой площади и посадочного контейнера — исследовательского
блока. Экран — аэродинамический тормоз — имеет теплозащиту.
Для обеспечения требований аэродинамики (с целью уменьше-
ния возмущающих моментов) конструкция экрана должна обла-
дать высокой жесткостью, т. е. обеспечивать минимальное линейное
искажение обвода конуса.
При выборе конструктивных характеристик экрана на этапе
предварительного проектирования СА можно рассмотреть следую-
щую упрощенную модель работы конструкции (см. рис. 8).
Нагружение носовой части экрана, имеющей сферическое затуп-
ление, в основном аналогично обычным гладким подкрепленным
оболочкам, испытывающим внешнее давление.
Если боковая поверхность экрана подкреплена гофрами и шпан-
гоутами, то необходимо учитывать давление (нормальное и обра-
зующей конуса), уменьшенное за счет инерциальных сил от поса-
дочного контейнера. Давление будет вызывать изгиб гофр, которые
в первом приближении можно рассматривать как балки, опертые
на шпангоуты. В этом случае нормальные к образующей конуса
реакции qni можно разложить на радиальные qCi и касательные
<7р/ составляющие. Наряду с распределенной нагрузкой от внешне-
го давления qc и q$ являются расчетными нагрузками. Первые —
для шпангоутов, вторые — для гофрированных элементов обшивки.
Таким образом, принимаем, что растягивающие усилия в гоф-
рированных элементах и сжимающие (радиальные) на стыковых
шпангоутах экрана должны будут уравновешиваться инерциальны-
ми силами от полезной нагрузки (посадочного контейнера).
Рассмотрим некоторую элементарную площадь конической обо-
лочки dS0Q i с углом da06 i между образующими /Об, тогда погонная
нагрузка вдоль образующей будет равна
(7об ==Рв^*-*об 4ин»
где рв — внешнее давление; 7ин— инерциальная нагрузка от массы
173
посадочного контейнера; dSoe z=/o6(daO6 0 —элементарная пло-
щадь оболочки.
Реакция за счет погонной (по окружности) нагрузки qni может
быть представлена следующими составляющими: qCi=
= <7nz/cos (а/2)—нагрузка, сжимающая шпангоут; q?i—
= <7пг tg (а/2) —нагрузка, растягивающая оболочку экрана; qni —
погонная нагрузка на /-й шпангоут; 1=1, 2, ..., п — число шпангоу-
тов (отсчет от среза обвода конуса к носку), тогда
/ а х а Г[
qc(i+D—<ZnG+i)/C0S —; 4pG+D=4n(z+i)tg -------»
2 2 r i + 1
где n— радиус i-го обвода (шпангоута).
Растягивающие нагрузки между Z-м и (1+ 1-м) шпангоутами
и т. д. соответственно будут равны
^pG\z+i) —(<7п/ + <7н(/+1)) tg“ 5 <7p(Z + l,2)’ = (?n(Z + l) —
I2 \ ri+l
Ь ?n(i+2)J tg И Т.Д
Заключительный этап полета спускаемого аппарата — этап по-
садки — включает в себя момент его контакта с грунтом, скольже-
ние и, наконец, полное успокоение аппарата на поверхности пла-
неты в положении, которое должно являться исходным для его по-
следующего функционирования.
Относительные массы некоторых средств посадки СА, приведен-
ные в табл. 3, дают представление о вкладе их в общую массу
спускаемого аппарата. Посадочные системы как один из элементов
средств посадки должны обеспечить на заключительном этапе мак-
симальную надежность приземления (мягкую посадку) и безопас-
ность доставки экипажа (научного оборудования) на планету.
При посадке стараются обычно обеспечить величины перегру-
зок, не превышающие траекторные. Бортовые системы управления
и торможения СА, использующие высотомеры и регулируемые дви-
гательные установки (рис. 51), должны обеспечить ориентирован-
ный контакт аппарата с поверхностью планеты. При этом необхо-
димо получить сравнительно небольшие относительные скорости их
сближения.
Анализ, проведенный в работе [13], показывает, что скорость
встречи аппарата с поверхностью планеты может находиться в пре-
делах 1...10 м/с и более. Отсюда следует, что СА необходимо обес-
печить надежными посадочными системами со специальными амор-
тизирующими (энерго.поглощающими) устройствами: деформи-
рующейся толстостенной оболочкой пористого пластика; баллоном-
амортизатором, заключающим внутри себя приборный блок;
устройствами лепесткового типа, в виде стержневых опор, фермен-
ной конструкции, использующими шасси вертолетного или само-
летного типов; тонкостенными оболочками и т. д. Следует отметить,
что на этом этапе кроме обеспечения «мягкой» посадки СА на по-
верхность планеты должны также выполняться следующие условия:
обеспечение заданной устойчивости аппарата в течение всего
процесса посадки;
174
б)
Рис. 51. Схема посадочного устрой-
ства СА:
а — положение аппарата при по-
садке: 1 — СА; 2 — торовый при-
борный отсек; 3 — посадочные опо-
ры с энергопоглотителем (аморти-
затором); -/ — ТДУ (он же марше-
вый двигатель при старте с плане-
ты); 5 — пяты посадочной опоры;
б — положение опоры 1:6 — амор-
тизаторы
исключение возможности «подпрыгивания» аппарата после кон-
такта с поверхностью планеты;
максимальная надежность функционирования всех систем и аг-
регатов аппарата для обеспечения безаварийной и безопасной по-
садки;
положение спускаемого аппарата на поверхности планеты пос-
ле посадки должно обеспечивать нормальную работу научной ап-
паратуры, экипажа, систем и т. д., а также необходимые условия
(если это предусматривается программой) для последующего стар-
та аппарата с планеты.
Из перечисленных посадочных систем рассмотрим в качестве
примера систему типа вертолетного шасси с преимущественно одно-
направленной работой амортизаторов, которые могут использовать
достаточно энергоемкий принцип пластической деформации.
Физическую модель спускаемого аппарата представим в виде
жесткого корпуса и установленных на нем деформируемых опор
на ферменной конструкции с определенной базой, выбираемой из
условия непереворачиваемости СА при посадке. Центральные стер-
жни опор снабжены амортизаторными устройствами, воспринимаю-
щими кинетическую энергию движения аппарата (см. рис. 51). Та-
кая система рассчитывается на однократную работу и выдержива-
175
ет перегрузки контакта аппарата с грунтом ~10...15 (для сравне-
ния, система баллон-амортизатор с приборным отсеком внутри вы-
держивает перегрузки 100...300) [13].
В свою очередь, относительно сложное движение СА при по-
садке на поверхность планеты можно в первом приближении услов-
но представить в виде двух более простых движений: пространст-
венного движения жесткого корпуса спускаемого аппарата и дви-
жения оснований (пят) посадочных опор по поверхности грунта в
любом направлении, но с ограничениями, накладываемыми поверх-
ностью посадки.
Пространственное движение корпуса может происходить под
действием возмущающих сил и моментов при взаимодействии поса-
дочной системы СА с грунтом. При этом угол наклона поверхности
посадки р и коэффициент трения пят по поверхности, как прави-
ло, могут варьироваться в достаточно широких пределах.
В общем случае работа, которую должны выполнять амортиза-
торы посадочных опор, обычно задается нормами прочности фор-
мулой
Лорм="iCAVy/2, (5.36)
где Vy — вертикальная скорость посадки СА.
Соответственно для одной опоры (принимается одновременная
и равномерная нагрузка всех опор) А/=АнормЛ* (* = 1, 2, ..., п —
число опор).
Приближенный проектировочный расчет посадочной системы СА
обычно сводится к определению величины кинетической энергии,
поглощаемой наиболее нагруженной опорой или же зоной одного
амортизатора. Для упрощения подобных расчетов целесообразно
ввести понятие «редукционная масса» тред. Например, для пяты
опоры I (точка О на рис. 51) эта масса получает (под действием
силы реакции Ny' такое же ускорение, как и соответствующая точ-
ка в реальной системе. «Редуцированная масса» в этом случае (при
таком нагружении) может быть представлена, например, в виде
р-37)
где ах, ау — соответствующие ускорения точки О с учетом поступа-
тельного и вращательного движения,
Ny . N'
ах——— kx, а.и=—— k2,
«СА «СА
kx = sin —ту- c°sp; £2=cos? (1 —+ -у?- cos P’
где iz—YJ21тск— радиус инерции; /г — осевой момент инерции.
Используя соотношения (5.38), выражение (5.37) можно при-
вести к виду
Шрел = "ICa’/K kl 4- k\.
(5.39)
3 76
Работа амортизатора опоры I
А1—т&УЪ/2,
где Уя — скорость, поглощаемая реакцией опоры, равная
Vn=Vy cos р-f-Vx sin p.
В пространственной модели аппарата реакция для опоры I мо-
жет быть задана соответственно составляющими Nx, Nv, Nz, тогда
редуцированная масса *
т^л= N'y/a^ (5.40)
где Ny=yNx, Nv, Nz— составляющие реакции
опоры /; —V Ях Н“ #1/+
Деформируемый материал амортизатора можно выбирать, ис-
пользуя, например, следующий критерий:
где та — масса материала амортизатора; р — плотность материала;
о(е)—напряжение; е — степень деформации; ек — предельная (ко-
нечная) степень деформации материала.
Анализ характеристик амортизационных устройств, использу-
ющих различные материалы, показывает определенные преимуще-
ства металлических амортизаторов для большинства посадочных
устройств СА.
5.6. АНАЛИЗ МАССОВЫХ УРАВНЕНИИ СПУСКАЕМЫХ
АППАРАТОВ
Используя зависимости, полученные выше, перейдем к анализу
массовых уравнений СА. Следует отметить, что подобный анализ
является составной частью общего проектирования летательных ап-
паратов, а для класса спускаемых аппаратов в значительной степе-
ни также базируется на тепловом проектировании. В этом случае
для определения основных проектных параметров^ СА к системе
уравнений, описывающих явление нестационарного тепломассопере-
носа в системе газ — тело, необходимо добавить уравнения дина-
мики движения, массовые и другие соотношения, характеризующие
облик аппарата [46].
Таким образом, здесь очевидны постановка и решение обратных
задач теплообмена. Причем такие задачи могут использоваться
практически на всех основных этапах проектирования и экспери-
ментальной отработки аппарата, его системы теплозащиты, других
систем и агрегатов, характеристики которых в значительной степе-
ни зависят от ограничений, связанных с воздействием тепловых на-
грузок.
177
Основу оптимального теплового проектирования в общем случае
могут составить математическая тепловая модель рассматривае-
мого летательного аппарата или его системы и экстремальная
функция цели. Модель должна связывать искомые проектные пара-
метры с действующими на аппарат внешними и внутренними тепло-
выми потоками.
Таким образом, задача оптимального теплового проектирования
СА может рассматриваться как обратная задача тепломассообме-
на в экстремальной постановке, т. е. по известным условиям, опре-
деляющим тепловое состояние системы, необходимо найти требуе-
мые параметры, удовлетворяющие этому состоянию и выбранному
критерию оптимальности, и проанализировать массовые соотноше-
ния аппарата.
Преобразовав наиболее общее (из полученных в разд. 1.6) урав-
нение (1.16), можно получить основное выражение для относитель-
ной конечной массы СА
Р'к = = Ип.н 4“ Р'ТЗ + Р'констр 4" Р'СОЖ 4" Р'с.п 4" Р*Е 4" Уду^о** (5*41)
тСА
Зависимость изменения относительной конечной массы аппарата
от изменения массы теплозащиты (при рп. H=const и VBx=const)
ДР'к (р*тз) = ДР'тз (Фк/^тз), (5.42)
где дцк/дцтз —производная относительной конечной массы САпо
суммарной массе теплозащиты при постоянных значениях относи-
тельной массы полезной нагрузки и скорости входа; согласно (4.4)
Р-тз = ру+ цп*. Откуда
Др<тз=ДР'У(Фтз/Фу); Др-тз=ДР'ц (дАтз/Фи).
Однако в зависимости от схемы' СА или назначения его отдель-
ных спасаемых систем и агрегатов изменение массы теплозащиты
может зависеть в каждом конкретном случае и от изменения ин-
тегральных тепловых потоков Q, температуры поверхности Tw,
управления спуском, аэродинамического качества ky баллистиче-
ского коэффициента ох, угла входа Овх и т. д., которые также необ-
ходимо учитывать при анализе масс СА при его тепловом проекти-
ровании:
Д|*ТЗ(£)=Д* ; Д{*тз(Го,)=Д7'ю(-^-) ;
\ ok / \ OTW J
; Др-тз(О) —ДО
Зависимость изменения относительной конечной массы СА от
изменения массы конструкции, топливных остатков и гарантийных
* Аналогичным образом можно записать соотношение и для других типов
теплозащитных систем.
178
dfiT3 \
—— и т. д
09 /
A|*T3(Q)=Aq[^-')
\ oQ ]
запасов топлива (5.9) при прочих равных условиях будет такова:
АР*к (Р*т.гар) ДР'т.гар f 7 1 (Нт.незаб) ^Р*т.незаб ("7 •
(5.44)
Причем изменение массы гарантийных остатков зависит от из-
менения многих параметров СА и характеристик траектории спус-
ка, например, таких, как масса системы теплозащиты; аэродинами-
ческое качество; угол входа; угол крена v; угол рысканья 0'; им-
пульс последействия при включении двигателя; отклонения темпе-
ратуры, плотности атмосферы; отклонения работы двигателя, сис-
темы управления и других систем от номинальных режимов рабо-
ты, и многих других параметров.
В свою очередь, все эти параметры всегда взаимосвязаны и в
значительной степени зависят от изменения массы системы тепло-
защиты и режима ее работы. Вследствие этого анализ влияния ука-
занных параметров можно в первом приближении проводить изло-
женным выше методом, но для конкретной (заданной) схемы СА
или его агрегатов и систем
41S,wW = i4 (*£SJ . ЛИг.г<р(в) = Лв (*£L) ;
\ Ок . I \ Ou )
. , ч А / д^т.гар \
ДНг.гарМ = АЧ—7-------Ч И Т, Д.
\ OV )
(5.45)
Аналогичны выражения и для изменения топлива незабора. По-
следнее может зависеть при прочих равных условиях не только от
конфигурации баков, топливных магистралей, но и от времени вы-
ключения двигателя, работы системы подачи и т. д.
Суммарное изменение относительной конечной массы в самом
общем виде может быть представлено так:
п
Д|1к = 21Д^- (5.46)
/ = 1
где 1 = 1, 2, ..., п — некоторые факторы [(5.42), (5.44) и др.], влия-
ющие на относительную конечную массу СА и взаимосвязанные с
изменением и отклонением массы теплозащиты аппарата.
Таким образом, изменение одного из основных проектных па-
раметров Цк=/(ЦТЗ , Цконстр, ЦС0Ж , ЦЕ, Цс. п, уду и т. д.) в значи-
тельной степени может определять конечные параметры спуска
(Vk, 0к, v, р'), проектные параметры системы посадки и, как след-
ствие, точность, надежность, безопасность экипажа (для пилотиру-
емых аппаратов) и в целом эффективность СА.
глава 6 Моделирование входа
искусственных метеоров
в атмосферу Земли
6.1. ИСПОЛЬЗОВАНИЕ СА ДЛЯ ВХОДА
ИСКУССТВЕННЫХ МЕТЕОРОВ В АТМОСФЕРУ
Общая постановка задачи. Наряду с широкими исследованиями
околоземного и дальнего космоса представляет несомненный науч-
ный интерес проведение ряда экспериментов по изучению в натур-
ных условиях процессов, происходящих при входе метеорных тел в
атмосферу Земли. Подобную задачу можно решить, используя для
этой цели, например, моделирование входа в атмосферу искусствен-
ных метеоров.
Для проведения экспериментов с искусственными метеорами,
входящими в атмосферу Земли со скоростями, превышающими вто-
рую космическую, требуются специальные спускаемые аппараты с
разгонными блоками (ступенями), способные сообщить телу по-
требную скорость входа. При относительно небольшой массе искус-
ственного метеора (~ 0,2...1,0 кг) масса и размеры такого аппарата
могут быть достаточно малы для того, чтобы производить их старт
с имеющихся космических средств (ИСЗ, спутников связи, орби-
тальных станций и т. д.).
Создание такого спускаемого аппарата, как и любого другого,
связано с решением ряда задач оптимального теплового проекти-
рования и управления. Применение быстродействующих ЭЦВМ
позволяет значительно расширить область вариационных задач про-
ектирования СА и провести в первом приближении более полный
анализ системы.
Рассмотрим некоторые задачи, связанные с определением основ-
ных проектных параметров специальных спускаемых аппаратов,
предназначенных для обеспечения входа в атмосферу Земли ис-
кусственного метеора со скоростями, превышающими вторую кос-
мическую. При этом область оптимального наблюдения метеоров с
Земли должна быть задана. Аппарат стартует с некоторого базово-
го аппарата, двигающегося в околоземном пространстве по опреде-
ленной (опорной) траектории.
В процессе анализа основных параметров СА необходимо будет
решать задачу, связанную с определением оптимальной программы
управления вектором тяги его двигателя на разгонном участке, ко-
торая практически сведется к получению максимально возможного
ускорения искусственного метеора при входе в атмосферу Земли.
В качестве критерия оптимизации целесообразно принять относи-
тельный массовый критерий цп.н-
180
Рис. 52. Схема разгоца искусственного метеора.
Системы координат
Предварительный анализ ос-
новных характеристик СА пока-
зывает, что они в сильной степе-
ни зависят от базовой траекто-
рии, а в некоторых случаях и от
положения точки старта на этой
траектории. При этом не нужно
забывать, что в любом случае не-
обходимо обеспечить заданную
область наблюдения с Земли за
входом и движением метеора в
атмосфере.
В связи с этим проанализиру-
ем несколько вариантов разгона
метеора с помощью СА примени-
тельно к типовым базовым траек-
ториям, например вертикальный
разгон, старт с околоземной орбиты ИСЗ (круговой), старт с
эллиптической орбиты. Математическая модель СА должна с до-
статочной степенью точности воспроизводить поведение аппарата в
1
полете.
Примем следующие основные допущения:
1. Стабилизация СА относительно центра масс в любой момент
времени происходит мгновенно.
2. Движение газов в камере сгорания и сопле двигателя, а так-
же компонентов топлива в баках и трубопроводах (в случае ЖРД)
стационарно.
3. Движение СА плоское в центральном поле Земли, вращением
Земли пренебрегаем.
4. Влияние атмосферы учитываем с высоты 100 км.
5. Протяженность участка разгона пренебрежимо мала по срав-
нению с расстоянием от СА до центра Земли (r = R +//).
Уравнения движения СА при сделанных выше допущениях в
первом приближении можно представить следующим образом
(рис. 52):
x = {Plm) cos ср — g соэФ;
y — —{Pim) sin ср — g sin ЧТ.
В свою очередь, кинематические соотношения будут иметь вид
x = V cos 9;
у= —~V sin 9.
(6.2)
Тогда, используя (6.2), преобразуем систему (6.1)
V = -!— cos (ср — 9) — g cos (Ф4"9);
т
181
9=f[£ sin(?-8)4-gsm(»F + 0)p
x=V cos 9;
(6.3)
y= — V sin 6.
В уравнениях системы (6.3) управляющими функциями явля-
ются Р, т, ф, зависящие в общем случае от системы координат, ско-
рости и времени; ф — угол тангажа (см. рис. 52).
Для более полного описания поведения аппарата в полете до-
бавим к уравнениям движения уравнение массового анализа, кото-
рое запишем в виде функции
Р*п.н f (Рул.) °/Р» ^/Р» ^О»***)»
ИЛИ Нп.н = /О
где о/p, £/р — удельные характеристики прочности и модуля упру-
гости конструкции СА; Tw — температура стенки корпуса аппарата;
£к— обобщенный параметр, определяющий конструктивные харак-
теристики аппарата. Тогда
V = — cos (? — 6) — g cos -J-б);
т
9 = -Ц— sin (ср — 9) sin (4'4'9)] ;
x=l/cos6; (6.4)
у= —V sin б;
Нп.н == f (Si)
при наличии связей вида ф/ (gi, £2, ...» %>я)=0 (/=1, 2, 3, ..., q;k = l,
2, 3, ..., р) и начальных условиях г (0) = r0, V(0) = Vo.
При решении поставленной задачи принимаем, что оптимальный
выбор программы управления и основных проектных параметров
СА должен соответствовать /Иотш (минимальной начальной мас-
се аппарата), что равнозначно (при заданной массе полезного
груза — искусственного метеора) цп. н max*
Постановка вариационной задачи и метод ее решения. Выбранная
математическая модель разгонного СА характеризуется тем, что
масса и величина тяги суть функции времени. При расчете опти-
мальных траекторий они могут рассматриваться как заданные, про-
извольно меняющиеся. Последнее следует понимать скорее в физи-
ческом, чем в математическом смысле, т. е. эти функции могут быть
произвольными, оставаясь непрерывными, дифференцируемыми и
конечными по времени.
Траектория полета СА в первую очередь будет зависеть от на-
правления вектора тяги, т. е. от изменения угла ф(/) между на-
правлением тяги и стартовым горизонтом.
182
Для любой заданной функции ф(/) всегда можно определить
параметры конца разгонного участка СА хк, i/к, VK, 0К и как след-
ствие, значение величины критерия оптимальности.
Таким образом, параметры хк, //к, VK, Ок представляют собой
функционал от ф(/).
Необходимо найти такую функцию ф(/), при которой величина
т0 достигает минимума, т. е. ф(/) должна удовлетворять необходи-
мому условию экстремальности: при бесконечно малом изменении
функции [ф(0“>ф(0 +бф(О] величина /п0 не должна получать при-
ращения первого порядка малости относительно е в разложении вы-
ражения т0(ф-{-8Т]) в ряд по степеням 8 [для любой функции ф(0]«
Применяя для решения задачи метод неопределенных множи-
телей Лагранжа, запишем систему дифференциальных уравнений
в следующем виде:
4--£-(Vrg*)-V,iX = 0;
at
г— ------g = 0;
Н
nW , d Г- W
m2 dt [ m
2^_l=0; (6.5)
m dm J
52,..Uk,...,U + 2j =0;
<Pz(?i, U=°,
где k=\, 2, 3,..., p; Z=l, 2, 3,..., q;
^=l4+i. *?+2> Мз]; IT=Руд£о(Руд —удельная тяга двигателя).
Система (6.5) должна удовлетворять следующим граничным
условиям:
(Z=ZK);
г(О)=?о; ИО)=^о; (6.6)
(Z=0; ZK).
_ Полученная замкнутая система уравнений для определения /и,
Р, г, п относительно сложна, поэтому для предварительного ана-
лиза параметров рассматриваемых СА целесообразно (с учетом сде-
183
ланных в предыдущем разделе допущений) привести систему (6.5)
к более простому виду:
г— fi-t--------g = 0;
|А|
при следующих граничных условиях:
r(O)=7o; V(О)=ко;
/УК=ЮО км; Ик=15 км/с,- 9к = 0вх. (6.8)
Выбор проектных параметров аппаратов желательно проводить
для оптимальных (или близких к оптимальным) траекторий. Эту
задачу можно свести к решению системы дифференциальных урав-
нений типа (6.5). Однако поскольку функция P(f)=const и опреде-
ляется из граничных условий, а последнее уравнение системы в
значительной степени зависит от компоновочной схемы СА, усло-
вий (6.8) и ряда других факторов конструктивно-прочностного
характера, то целесообразно в дальнейшем условно задачу разде-
лить на баллистическую и массовую.
Следует отметить также, что для различных формулировок
граничных условий (в основном для различных опорных траекто-
рий) система уравнений (6.5) может несколько видоизменяться.
6.2. вертикальный разгон тела
Рассмотрим один из вариантов разгона искусственного метеора
с помощью СА, стартующего с геофизического аппарата вертикаль-
но вниз. Начальные условия старта
1/(0)=0; //(О)=//о. (6.9)
В результате разгона должны быть обеспечены следующие пара-
метра входа метеора в атмосферу Земли (конечные условия):
1/вх> 15 км/с; //вх = 100 км; 9вх=90°. (6.10)
Следует заметить, что при входе метеора в атмосферу может
обеспечиваться широкий диапазон углов входа 0ВХ=О°...9О°
(с помощью изменения программы угла тангажа разгонного СА).
Вариации высот старта //0 и включения двигательной установки
Явкл должны в конечном счете (при прочих равных условиях) обес-
печить получение /nOmin.
Наиболее трудоемкой частью в задаче вертикального разгона
тела является интегрирование уровней движения СА (6.3), которые
184
Рис. 53. Набор скорости метеором при вертикальном раз-
гоне (одноступенчатый СА>:
/ _ участок свободного падения; // — участок
ДУ
работы
в данном случае принимают вид
^о^удпо .
v=~------+&>—;
^УД —
'y=-V.
Интегрирование системы (6.11)
ничные условия (6.9), (6.10)] можно про-
водить численными методами. Причем
удобнее вести обратное интегрирование,
т. е. по известным конечным условиям
(6.10) вести интегрирование до получе-
ния условия Vo=0, определяя таким об-
разом реальную высоту старта Н$.
Совместное решение (6.11) и уравне-
ний движения на участке свободного па-
дения после старта с аппарата-носителя
до момента включения двигателей разгон-
ного СА дает возможность в первом при-
ближении определить зависимость относительной конечной массы СА
Рк от Но и Явкл (рис. 53).
Уравнение движения аппарата на участке свободного падения
y=g(y) сводится к известному интегралу энергии, из которого
скорость в конце участка свободного падения определяется по фор-
(6.11)
[гра-„
муле
=/2ЛГз (\/Н'вкл - 1 /7/о).
где Кз «3,9862-105 км3/с2 — гравитационная постоянная Земли;
ЯвкЛ=//вкл + /?з; Но—Но-\-Нз»
Значения относительной конечной массы СА (при mOmin) для
анализа возможности реализации траектории разгона аппарата
можно в первом приближении определить из выражения
H^l-V/^yv (6.12)
Однако СА с одним разгонным блоком не всегда удовлетворяют
этому условию, поэтому в ряде случаев для обеспечения заданной
скорости разгона метеора число разгонных блоков (ступеней) СА
требуется увеличить.
Таким образом, в результате приближенного баллистического
проектирования СА может быть определено число разгонных сту-
пеней и семейство траекторий, обеспечивающих выполнение усло-
вия (6.10). В свою очередь, семейство траекторий позволяет вы-
брать такую ИЗ НИХ, при которой МОЖНО получить Womin ИЛИ, что
однозначно, max-
185
Основными параметрами, влияющими на принятый критерий оп-
тимизации цп.н, являются, в первую очередь, удельная тяга Рудг и
начальная перегрузка not каждой ступени СА, определяющие мас-
сы агрегатов аппарата.
В конечном счете эти параметры связаны с относительной мас-
сой полезной нагрузки (метеора) зависимостью
w
Р'п.н = П [Р'к/ Р'т.о/ (1 Р*к/) Р'пр/]» (6.13)
7-1
где
Рк/ = flj (^01, /2-он,--*, ^-ОуУ; ^уд/v);
Нт.о; = /2/(Л01, ПОП,..., Руд7-; a/Y; f/y);
Тдв/ ./зД^уд/;
Pnp7 = /v ДОЛГ,’ а/у; Е/у\ ИЛИ |1к7 = -^ ;
/По/
„ __ "Ч.о/ . ,, . "W
^т.о т ’ »дв/ р , Рпр/----------------------- .
/пт7 г* j т$]
В массу прочей конструкции pnp включаются массы элементов
конструкции переходников между блоками, узлов креплений и дру-
гих неучтенных элементов.
Схема разгона и незначительная угловая дальность полета СА
могут дать возможность упростить управление вектором тяги и
считать программу управления по углу тангажа в первом прибли-
жении постоянной по времени. Для обеспечения стабилизации ап-
парата в полете можно использовать предварительную закрутку
его относительно продольной оси.
Отсечку двигателей, разделение ступеней, если система много-
ступенчатая, и отделение искусственного метеора от СА предпола-
гается проводить с помощью команд от устройств типа временных
механизмов.
Для лучшего наблюдения с Земли входа и движения искусст-
венного метеора в атмосфере целесообразно, чтобы большая по-
луось эллипса рассеяния не превышала 150 км при отклонении про-
граммного угла тангажа на ±10°.
6.3. ЗАДАЧА ВХОДА ИСКУССТВЕННОГО МЕТЕОРА
В АТМОСФЕРУ С КРУГОВОЙ ОРБИТЫ ИСЗ
Рассмотрим некоторые особенности задачи оптимизации основ-
ных параметров разгонного СА, стартующего с круговой (базовой)
орбиты ИСЗ с набором заданной скорости входа в атмосферу Зем-
ли искусственного метеора.
Базовая опорная орбита характеризуется параметрами Hq, Vo.
Параметры входа в атмосферу искусственного метеора следующие:
^вх> Vbx, 0вх« Если краевые условия (по базовой орбите и входу)
186
достаточно жесткие, то общая вариационная задача может быть
представлена в достаточно простом виде. В рассматриваемом ва-
рианте разгон метеора осуществляется по траектории, на всем про-
тяжении которой двигатель имеет тягу Р = const. Поведение СА
в полете (при работающем двигателе) описывается системой урав-
нений (6.7), в которой, в первую очередь (для баллистического про-
ектирования), представляют интерес уравнения движения разгон-
ного аппарата.
Систему (6.7) представим в развернутом виде следующим обра-
зом:
•f.o
Й = g(A*”o cos _ 0) _ go . j* (cos ЧГ)+6;
Ру А — + У2
0=— [ — дП° sin (<р — 6) 4- g —----sin (Ф 4- 0)1; (6.15)
х= V cos 6;
у = — V sin 0.
При решении системы (6.15) необходимо также использовать,
выражение (6.12) для относительной конечной массы СА, которое
запишем в форме (6.13) и представим в таком виде:
Ик _ Y (------------^2—А —_ 22m=о. (6.16)
дп дп \ Ру4г ntK ) дп дп
Анализируя уравнение (6.16), следует отметить, что масса топ-
ливного отсека Аредставляет собой практически основную часть
массы конструкции СА. Конструктивное совершенство аппарата в
значительной степени зависит от характеристик топливного отсека.
Рассмотрим вопрос об определении зависимости цт.0=/(п)
(п—перегрузка). Масса топливного отсека зависит от его объема,
геометрических и конструктивных характеристик, действующих на
него нагрузок, вида применяемых топлив и значения величины пере-
грузки. Параметры топливного отсека будут зависеть также (при
прочих равных условиях) от применяемой схемы подачи, компонен-
тов топлива. В связи с этим существуют расчетные случаи для ба-
ков «низкого» и «высокого» давления (соответственно подача ком-
понентов с помощью турбонасосной системы подачи (ТНА) и вытес-
нительной).
В первом случае расчетными будут нагрузки, определяемые
максимальной величиной осевой сжимающей силы. Во втором —
толщина обечайки бака в основном определяется величиной внут-
реннего давления, необходимого для получения требуемых ха-
рактеристик системы подачи компонента к двигателю.
Используя приближенные методики для проектировочных рас-
четов, можно записать для баков «низкого» давления
1^1.0-----^1
Bi
X
187
Рис. 54. Зависимости относительных масс
полезной нагрузки цп н и топливного отсе-
ка цт 0 от перегрузки при входе искусствен-
ного метеора в атмосферу с круговой орби-
ты ИСЗ:
I — вытеснительная система подачи; II —
ТНА; 1 — баки из материалов на основе
Fe; 2 — на основе Ti; 3 — на основе А1;
4 — на основе Mg;---------- ИПн“Пп°);
------Цт,о“И^)
жсторые коэффициенты.
Для баков «высокого» давления
где рю, рг — удельные плотно-
сти материала обечайки бака
и топлива соответственно; ир —
расчетная перегрузка; Е — мо-
дуль упругости; I — удлинение
топливного отсека; Aif Bi— не-
Рт tfp
где pg — давление в баке; <ув — предел прочности материала бака.
Целесообразно выбор материалов для баков проводить: для
низкого давления по критерию kt = E/pw; для высокого давления —
^2=aB/pw. Зависимости |Хп.н=7(ло) и |xT.o=f(n0) представлены на
рис. 54.
Аналогично предыдущему варианту (вертикальному разгону)
при старте СА с круговой орбиты ИСЗ незначительная угловая
дальность аппарата позволяет отказаться от управления вектором
тяги и считать программу тангажа постоянной по времени. Реали-
зуемая траектория при этом будет близкой к оптимальной. В от-
личие от варианта вертикального разгона в этом случае большая
полуось эллипса рассеяния обычно не превышает 30 км при откло-
нениях угла тангажа на±10°.
6.4. СТАРТ С ЭЛЛИПТИЧЕСКОЙ ОРБИТЫ
(ОДНОИМПУЛЬСНЫЙ ПЕРЕХОД)
Общая вариационная задача (см. разд. 6.2) в данном случае
значительно усложняется из-за необходимости введения подвижных
граничных условий, решение ее целесообразно проводить, разде-
ляя задачу на баллистическую и массовую. Однако и в этом случае
подобные задачи являются достаточно сложными и трудоемкими.
Для упрощения их на начальном этапе проектирования СА
можно воспользоваться теорией импульсных компланарных пере-
ходов. С помощью этой теории в первом приближении решается во-
прос о траектории разгона, о величинах и направлениях импульсов
тяги и о выборе точки старта с базовой эллиптической орбиты. По-
следняя характеризуется следующими основными параметрами:
наклонением орбиты к плоскости экватора г, высотами в перигее
Нп и апогее На.
В результате разгона СА должен перейти на гиперболическую
188
траекторию спуска, определяемую по заданным условиям входа в
атмосферу Земли VBX и 0ВХ. Параметры гиперболы спуска, вычис-
ленные по значениям скорости и угла входа на высоте Н=
= 100 км, должны быть следующими: большая полуось аг; малая
(мнимая) полуось Ь2\ эксцентриситет /2-
Выбор траектории. Получение требуемых параметров входа тела
в атмосферу Земли возможно с помощью целого семейства траек-
торий. Окончательный выбор траектории и точки старта произво-
дится на основе учета некоторых дополнительных требований, оп-
ределяющих оптимальность той или иной траектории. Эти требова-
ния, как правило, являются критериями оптимальности и в зави-
симости от конкретной задачи могут использоваться по отдельности
или одновременно. К числу таковых следует отнести прежде всего
массовый критерий (хорошо известный по предыдущим задачам)
и энергетический.
В качестве энергетической характеристики часто пользуются
характеристической скоростью (суммарным импульсом)
av\=2av(.,
(6.17)
где Wi — приращение скорости за время действия ьго импульса,
которое при кратковременном действии достаточно большой тяги
двигателя определяется по известному уравнению Циолковского
— ^уд iSo In Hki•
Определим минимальный импульс AVZ, необходимый для пере-
хода с энергетического уровня базовой орбиты на уровень конечной
орбиты при отсутствии потерь, возникающих из-за приложения
AVS под углом к начальной скорости Vo.
Очевидно, что
AVzs=l/BX-Vo,
(6.18)
где Vq —скорость точки на траектории с полной энергией, равной
полной энергии на базовой орбите h0. Скорость определяется на
расстоянии гвх от центра притяжения
Отсюда получаем, что рациональной будет такая схема перелета
с базовой эллиптической орбиты на гиперболическую орбиту вхо-
да, когда значение суммарного импульса будет
min ДУЕ=УВХ — Уо.
(6.19)
Одноимпульсный переход. При рассмотрении этой схемы пере-
лета СА примем следующее допущение. Можно считать в первом
приближении, что переход с базового эллипса на гиперболу входа
происходит в точке D, определяемой радиусом-вектором г0 (рис. 55).
189
Рис. 55. Схема одноимпульсного перехода
Из треугольника ADB имеем
Д1/02=Vo + Vl - 2 Vo V2 cos (02 - в0),
где Д V02 — импульс скорости, не-
обходимый для перехода с базо-
вой орбиты О на гиперболу вхо-
да 2.
Построив зависимости V0(r)>
Уг(г), 0о(г), 02(г) для каждой из
этих орбит, по формуле (6.20) на-
ходим Д1/о2(/'). Результаты расче-
та представлены на рис. 56.
В данном случае (это видно из сопоставления ДУ02 с min ДУ2)
частб одноимпульсный переход не является оптимальным, т. е. для
многих вариантов* решения подобной задачи обычно получается,
что вблизи центра притяжения Оз скорость СА на базовой орбите
будет велика, и форма орбитьгтакова, что импульс Д V02 необходи-
мо давать под значительным углом а к вектору Vo. Вдали же от
центра притяжения одноимпульсный переход заведомо невыгоден,
так к$к при этом не полностью используется энергия базовой ор-
биты,., .
6.5. СТАРТ С ЭЛЛИПТИЧЕСКОЙ ОРБИТЫ
(ДВУХИМПУЛЬСНЫЙ ПЕРЕХОД)
Рассмотрим такую орбиту перехода, при которой разгон СА
производится вблизи центра притяжения с минимальными потеря-
ми в ДУ2 из-за угла а.
Для формирования промежуточной эллиптической орбиты, обес-
печивающей выполнение равенства си2=0, необходимо дать им-
пульс ДУоь изменяющий форму базового эллипса надлежащим об-
разом (рис. 57). В этом случае переходим к двухимпульсной схеме
перелета СА.
Первый импульс — формирование переходной орбиты / с мини-
мальными энергетическими затратами; второй — разгон от переход-
ной эллиптической до гиперболической скорости.
Примем следующие обозначения (см. рис. 57): Vo — скорость
на эллиптической базовой орбите О в точке старта; 0О — угол на-
клона вектора Vo к местному горизонту в точке старте СА; Фо —
истинная аномалия точки старта СА; AVOi— импульс скорости для
перехода с базовой орбиты О на переходной эллипс /; <pOi — угол,
под которым прикладывается импульс AVOi к местному горизонту
(в точке старта); <xoi = <Poi—0о— угол вектора AVOi по отношению
к вектору Vo; VOi — скорость на переходной орбите 1 в точке старта;
0о1 — местный угол вектора Vor, AV12— импульс скорости для пе-
рехода с орбиты 1 на гиперболическую орбиту 2; <pi2 — угол между
AV12 и местным горизонтом в точке старта (в точке второго импуль-
190
ca); 0i2 — наклон вектора Vi2 к местному горизонту; 02 — наклон V2
к местному горизонту.
Поставим задачу следующим образом: необходимо выбрать
точку старта (приложение первого импульса) так, чтобы
ДР^Ио, а01) = |ДК01| + |ДК12] = тт.
Задаемся параметрами базовой орбиты (а0, /0, ро, гПо, Vnot Cq — ин-
теграл площадей) и гиперболы входа а2, Ь2, /2, 0вх2, VBx2, с2-
Первый импульс. Из векторного треугольника VOi = Vo+AVOi
можно записать
= Vi + Д Vo2! + 21/0Д V01 cos (ТО! - 6о). (6.20)
Проецируя векторный треугольник на ось Ох0, получаем второе
соотношение
I/oi cos 601 = ^0 cos 0О + cosepop (б-21)
Из уравнений (6.20) и (6.21) находим угол наклона вектора VOi
или
cos 001 = (Vo cos 0о+ Al/oi cos <?О1Жоь (6.22)
с другой стороны, из интеграла площадей для орбиты 1 имеем
cos 0о1 = М‘г(Уо1). (6.23)
Из (6.22) и (6.23) получаем интеграл площадей переходного
эллипса
^i = r0(V0cos 0О + cos<?01). (6.24)
191
В произвольной точке переходного эллипса крутизна траекш-
рии может быть определена из зависимости
cos = (6.25)
где значение скорости Vi определяется из интеграла энергии для
орбиты 1 по известным Voi и г0:
Г1 = )/^1 + 2Лз(1/г1- 1/Го). (6.26)
Из зависимостей (6.24)...(6.26) следует, что
Рг>? _ г0 (^о cos Оо + АИ01 cos у01) . (6.27)
n/^1+2/<3(l/ri-l/r0)
Кз —гравитационная постоянная Земли.
Второй импульс наиболее выгодно давать для перевода тела с
траектории 1 на траекторию 2 в непосредственной близости к цен-
тру тяготения. В этом случае почти вся потенциальная энергия пе-
реходного эллипса /, которая соответствовала точке старта (при-
ложение первого импульса), переходит в кинетическую.
Очевидно, что минимальный суммарный импульс AV2 будет в
том случае, когда векторы V2 и Vi2 в точке приложения второго
импульса будут коллинеарны, так как в данном случае скорость Vi
растет достаточно быстро с уменьшением г\ (крутая траектория)
и при малых Г\ в случае 02=/=Bi2 возможны большие потери в AVj2.
Таким образом, полагаем, что наибольшие потери будут во второй
точке (в точке приложения второго импульса при 02=/=0i2,a не в
первой, где вовсе не обязательно условие Voll Vi||AVOi, т. е. основным
условием, обеспечивающим min A Vz, будет
cos 612==cos 02 при г12=г2,
тогда
cos 02=----- С2 ,
1/а2)
или из (6.27), (6.28) и (6.29) получаем
2 2
___f2___ =________________<1_________
12 + 1/а2) + 2^3 (1/Г12— 1/г01)
Величину характеристической скорости для второго
можно определить, используя (6.26) и интеграл энергии для гипер-
болы, из следующего выражения:
ДУ12=/Кз (2/г12 + 1/а2) - /1/^ + Кз (2/г12 - 2/г01). (6.31)
Тогда величина суммарного импульса ДУХ [согласно (6.17)
и (6.31)] будет равна
Д1/2=И01 + ККз (2/г12 + 1/а2) - VV201 + Кз Щг12 - 2/г01). (6.32)
(6.28)
(6.29)
(6.30)
импульса
192
Обозначив отношение Ci/C2=₽> преобразуем (6.32) с учетом
(6.30)
ДИЕ = ДИ01 + (1 - р) ^з(2/г12+1/а2). (6.33)
В (6.33) параметр р определяется начальными условиями стар-
та в точке первого импульса и вектором VOi.
Из (6.30) определим
^з/Д2 + 2К3Ло1-^21 _л (6 34)
Г12 1-Р2 • '
Тогда (6.33) можно представить в виде
Д^=ди01+1/Ь2х
Г 1 -Г Р
X Р^А^з/^г+^^з/Го!— (^о4“ cos а01. (6.35)
Таким образом, задачу можно сформулировать следующим об-
разом: найти минимум выражения (6.35) при условии
2^3 =Г12=^3_|_//12 или А < 2^3 -=х/Сз, (6.36)
где //12 — высота точки соприкасания траекторий 1 и 2.
Аналитическое решение поставленной задачи достаточно труд-
но. Поэтому можно здесь использовать численно-графическое ре-
шение, которое проводим в два этапа. Первый этап — определяем
области допустимых значений Д VOi, <Poi для выбранной точки старта.
Второй — в найденной области допустимых значений определяем
Д Vs при вариациях бДУоь 6<poi и находим minAVi, строя зависимо-
сти ДVz = f (AVoi) по параметру <poi (ctoi) -
Под областью допустимых значений Д Von Ф01 понимается такая
область, которая обеспечивает высоту точки соприкасания тра-
екторий / и 2 не ниже заданной.
Из условий (6.34) и (6.36) имеем
А\Р2 2Л\ г 9 9
—— н-------- - № + aWi +2Г0ДГ01 cos (<р01 - 6)1 < хКз (1 - Р2),
• 01
(6.37)
или после преобразования
СДVol+2£)ДК01 + F < 0, (6.38)
где
С=В cos2 <Poi— 1;
D=Го [В cos 90 cos <Poi — cos (<р01 — 60)];
F=BV20 cos260— I/o4-2/C3/rol -хКз; (6.39)
5 = х== ъ .
<4 \ #2 у 4" //12
193
Рис. 58. Область допустимых значений ДУОь
<Ро1» обеспечивающих условие Я12=200 км
Рис. 59. Зависимость ДУЕ=/(ДУ01, aOi)
при 'О'о=180°
Неравенство (6.38) определяет область допустимых значении
Д Voi, Фоь Решение его
д |/01 = > о (6.40)
дает кривые, ограничивающие эту область.
Построим область допустимых значений для первой точки стар-
та, находящейся вблизи апогея траектории О (рис. 58). Выбор этой
точки для анализа допустимых ДУ01 и <Poi объясняется в основном
тем, что в области, наиболее удаленной от центра притяжения, ки-
нетическая энергия (скорость) мала, а потенциальная велика, т. е.
здесь наиболее целесообразно в данном случае формировать кру-
тую переходную траекторию 1.
После определения области допустимых значений необходимо
определить AVs = f(AVoi, <poi, Фо). Из анализа результатов можно
сделать вывод, что наиболее выгодной является точка старта
0=180°, которая в достаточно широком диапазоне углов <pOi дает
значения ДУ2 при выбранном ЛVOi (рис. 59).
Получаемое решение для двухимпульсной схемы перехода СА
близко к оптимальному. Поэтому целесообразно в данном случае
остановиться на этой схеме при уточненном решении задачи бал-
листического проектирования и оптимизации проектных парамет-
ров разгонного СА.
Баллистическое проектирование СА. Интегрирование уравнений
системы (6.15) проводилось при следующих начальных условиях: *
* Интегрирование проводилось методом Рунга—Кутта.
194
I участок
Ио(&о)=1/ 2K3[l/ro(»o)-----Ч ;
У L до J
°( °) l + e0cos&o * (6.41)
*о=0; у0=г0-
cos0o=Co/rol/o; c0=rKVT.
II участок
2/<3(1 + ₽2)
Г° ^/«2 + 2/Сз/г^-^ :
У’й=У2К3^1гкХ-11аху, (6.42)
cos ©o=c1/(z'oV*G);
^=^KirKl cos 0К1.
Интегрирование на пассивном участке сводится к известным ин-
тегралам кеплерова движения.
Алгоритм решения задачи баллистического проектирования СА
в этом случае сводится к последовательному интегрированию си-
стемы (6.15) при условиях в начале (6.41) с проверкой после каж-
дого шага интегрирования условия соприкасания траектории 1 с
гиперболой 2:
0о (го) = 02 (го). (6.43)
В случае выполнения условия (6.43) далее ведется интегрирова-
ние системы (6.15) для второго участка с учетом (6.42) до выпол-
нения условия
^кп(г) = И2(г). (6.44)
При этом предполагается, что Pj(/)=const и (p(/)=const (/ — ин-
декс активного участка или импульса).
На каждом активном участке полета СА необходимо опреде-
лить относительную конечную массу аппарата цк/.
В качестве критерия оптимальности при анализе траектории
разгона, положения точек старта, программы угла тангажа <р при-
нимаем суммарную относительную конечную массу СА |1ке =
= Цко1М-к 12. Интегрирование системы целесообразно проводить во
всем интересующем нас диапазоне проектных параметров: вариации
начальной перегрузки на I и II участках; удельной тяги; изменения
программы угла тангажа <р; координат точки старта О.
Проведенный анализ показал, что цкоь М-к 12, М-ks, как правило,
слабо зависят от начальных перегрузок, и этой зависимостью в
пределах точности расчета в первом приближении можно прене-
бречь.
195
Зависимость же p,K2 = f(^Oi, <poi) дает основание подтвердить
вывод о целесообразности старта СА в области апогея базовой эл-
липтической траектории полета. Эта область характеризуется и
тем, что в довольно широком диапазоне углов <pOi = 180°±45° изме-
нение цк2 не превышает 3%.
Принятая траектория спуска с базовой орбиты накладывает ряд
требований на систему управления и стабилизации разгонного СА.
Поэтому необходимо, хотя бы приближенно, провести анализ воз-
можных отклонений от расчетной траектории, которые обеспечива-
ют вход искусственного метеора в заданную область околоземного
пространства с допустимым разбросом по угловой дальности ДФ
и угловому сносу Д/. Последние величины определяются из усло-
вия обеспечения максимального времени наблюдения полета мете-
ора (его сгорания) в плотных слоях атмосферы, т. е. движения в
зоне видимости.
При определении ДФ и Д/ введем следующие допущения:
1. Пренебрегаем кривизной траектории на участке входа мете-
ора в плотные слои атмосферы.
2. Считаем возмущенные траектории на подлете метеора к Земле
направленными параллельно расчетной.
3. Принимаем, что точка конца участка траектории сгорания
метеора возвышается на линии горизонта на угол рк^20° (что со-
ответствует условию достаточно хорошей видимости).
Схема входа метеора в плотные слои атмосферы на участке
траектории Но=1ОО км, Як=80 км представлена на рис. 60. Пред-
ставим некоторые основные параметры участка траектории входа:
0o=0q i ДФ, (6.45)
где 0о' — угол входа метеора в атмосферу при возмущениях расчет-
ной траектории; ДФ — разброс по угловой дальности (ДФ>0 — пе-
релет; ДФ<0 — недолет);
а' —--------cos 0о; (6.46)
*3 + Як
а' — угол, под которым виден участок траектории S из центра Зем-
ли Оз ; Як — высота конца участка входа;
Яо-Як .
sin (0О ± ДФ) ’
• / .Г sin (ДФ -4- а')
е =arctg ------------———------------
Lcos (ДФ + а') — ^з/(/?3 + Як)
L cos ДФ — /?3/(Я3 г Яо.) J
где е' — угол, под которым виден участок S' из точки наблюде-
ния N.
Из (6.46) после подстановки значений Як, 5', /?з имеем
а' ж 0,0031 etg (90 + ДФ). (6.48)
196
Рис. 60. Схема входа метеора в плотные
слои атмосферы:
---------- фактическая траектория;
---------- траектория согласно допуще-
нию о малости кривизны на участке НК
Рис. 61. Зависимости а'=|(ДФ) и e'«-=f(A<k^)r
1 — ограничения по углу возвышения точ-
ки К (0>2О°); 2-е'>25°
Зависимости а'=((ДФ) и е'=/(АФ) приведены на рис. 61.
В качестве примера рассмотрим задачу (для рк^20° и 0о^25°)
при следующих параметрах (см. рис. 60):
<Ротах = Л/2 —₽к —е'; (рот1п = л/2 + ?к + е'« (6.49)
Используя зависимость для <рох
<Ро (ДФ)=arctg Г------S1“ ------—1 (6.50)
} & L cos ДФ — /?з/(7?з + Яо) J
и уравнения (6.48) и (6.49), определим величины АФ, обеспечива-
ющие условия 0^20° и 0о^25°,
дф=1^:. (6.51)
Угловое (боковое) отклонение А/ можно определить, используя
зависимость
tg (л/2 - В) ж------—---------, (6.52)
И СО5Д/-/?з/(Яз+Як)
аналогичную зависимости (6.50), откуда для поставленных усло-
вий А=±1,8°.
Исследуем теперь влияние погрешностей ориентации продоль-
ной осп аппарата на точку попадания в зону видимости. Точное ре-
шение этой задачи достаточно сложно и трудоемко. Поэтому для
начального этапа проектирования разгонных СА целесообразна
проводить упрощенный анализ, исходя из допущения, что погреш-
ности на первом активном участке в большей степени влияют на
точность попадания, чем на втором. При анализе точности можно
в первом приближении не исследовать вопрос о корреляции веро-
ятных возмущений.
197
л — ДФ=/(6Т); Oo=180e; <p0i = 150°; 64^Oi= +12° ... —17°; б — АФ=/(6ф01); d<pOi=+7° ...-4е;
в — АФ=/(дАУ(и); 6AVoi= +0,010 ...0,015
В результате баллистических расчетов «возмущенных» траекто-
рий при вариациях б<роь 6(AVOi), S^oi можно получить зависимости
ДФ(бфо1), ДФ(6Чго1), ACD(SVoi), которые представлены (для задан-
ных условий) на рис. 62.
На угловой снос (А/) возмущения бЧ'оь 6<poi и б (A Voi) оказыва-
ют следующее влияние: A/=/=f(6<poi) при 0=180°; Д/=О,168бЧгоь
откуда бЧ'о^ + Ю^0.
Широкий диапазон допускаемых отклонений в данном случае
объясняется большой крутизной траектории спуска и малой вели-
чиной AVoi по сравнению с Vo на базовой орбите. При последу-
ющем анализе полученные значения допускаемых отклонений дол-
жны быть подкорректированы с учетом корреляции.
Таким образом, следует отметить, что старт разгонного СА с
эллиптической орбиты ИСЗ обеспечивает такую схему разгона ис-
кусственного метеора и малую протяженность активных участков,
которые, в свою очередь, позволяют избежать в первом приближе-
нии управления вектором тяги по времени на каждом активном
участке и считать программу угла тангажа постоянной.
Оказалось, что в рассмотренных примерах большая полуось
эллипса рассеяния не превышала 200 км при отклонении угла тан-
гажа до ±3°, а малая полуось не превышала 150 км при отклоне-
нии оси СА по курсу до ±5°. Для обеспечения минимальных откло-
нений от заданной траектории разгона, очевидно, целесообразно в
начальный момент старта проводить стабилизацию СА с помощью
закрутки относительно его продольной оси.
В табл. 10...31 приложения приведены основные параметры СА,
полученные при баллистическом и массовом анализе траекторных
и конструктивных характеристик аппарата.
198
6 6. НЕКОТОРЫЕ ВОПРОСЫ ОБЕСПЕЧЕНИЯ СВЯЗИ
ПРИ ВХОДЕ СА В АТМОСФЕРУ
Спускаемые аппараты, входящие в атмосферу Земли, обычна
окружены некоторым слоем плазмы (см. рис. 25). Последний яв-
ляется основной причиной нарушения радиосвязи, которое, в свою
очередь, во многих случаях приводит к полному прекращению свя-
зи или по крайней мере может привести к резкому снижению ин-
тенсивности ВЧ-сигналов, проходящих между спускаемым аппара-
том и Землей.
Эта проблема приобретает особое значение не только вслед-
ствие прекращения связи и потери телеметрических данных, но и в.
связи с ухудшением работы некоторых электронных систем СА.
Этот эффект может продолжаться до десяти и более минут полета
на участке наиболее важной части траектории спуска. Для СА пла-
нирующего или «скользящего» спусков нарушение радиосвязи мо-
жет быть и несколько больше, чем для аппаратов баллистического*
типа.
В работе [78] приведены некоторые методы, в известной степени
устраняющие основные трудности, связанные с образованием плаз-
менной оболочки на спускаемом аппарате и влиянием ее на связь
при входе СА в атмосферу. К ним, например, относятся: инжекция
электрофильных химических веществ в обтекающую аппарат плаз-
му выше мест расположения антенн, изменение параметров потока
путем изменения аэродинамической формы СА и другие.
Однако для разработки подобных систем, которые позволили бы
поддерживать связь с аппаратом при его входе в атмосферу, необ-
ходимо, в первую очередь, иметь достаточно полные и точные све-
дения о свойствах самого плазменного слоя, образующегося на по-
верхности СА в результате сложных химических и термодинамиче-
ских процессов.
Кроме того, условия, определяющие скорость протекания этих
процессов, могут резко изменяться в течение всего времени входа
аппарата в атмосферу, что еще более усложняет рассматриваемые
явления (см. разд. 3.1). Поэтому сколько-нибудь законченное пред-
ставление о процессах, происходящих в этом слое, не может быть
получено только аналитическими методами. Само собой разумеет-
ся, что необходимо проводить и тщательные экспериментальные
исследования, и летные измерения свойств плазменного слоя на
спускаемых аппаратах.
Рассмотрим СА, имеющий коническую форму. Плазменная обо-
лочка вокруг аппарата такой формы условно может быть разде-
лена на следующие характерные области (см. рис. 25).
Область торможения (около критической точки) характеризу-
ется высокими значениями давления и температуры газа, который
отделен от поверхности аппарата тонким пограничным слоем и са
стороны внешнего потока ограничен почти прямым скачком уплот-
нения. Наиболее тяжелые условия по параметрам плазмы и уров-
ню температуры имеют место именно в этой области. По этой при-
чине антенны целесообразно размещать не в области торможения,
199>
а в кормовой части подобного аппарата, где условия окружающей
среды могут быть менее тяжелыми.
В промежуточной области (на конической поверхности СА)
таз находится в химически неравновесном состоянии. Параметры
плазмы в этой области не являются столь высокими, как в области
торможения, но тем не менее они оказывают значительное влияние
на блокирование антенн, размещаемых в кормовой части спускае-
мого аппарата, если полет не происходит под большими углами
атаки. Ионизация газа в кормовой области происходит в основном
при прохождении косого скачка уплотнения, ограничивающего эту
область обтекания.
Профиль концентрации электронов в плазме очень сильно за-
висит от угла атаки и формы СА, в связи с чем чрезвычайно труд-
но обычно бывает проводить соответствующие расчеты для аппа-
ратов, имеющих более или менее сложную форму. Условия в плаз-
ме в кормовой области СА обычно существенно менее тяжелые,
чем в промежуточной.
Как уже говорилось выше, на поверхности спускаемого аппара-
та существует вязкий пограничный слой. Для этой области течения
характерны большие градиенты скорости и температуры, причем
условия в этом слое существенно отличаются от соответствующих
условий в областях невязкого течения (см. рис. 25). Ионизация в
пограничном слое, как правило, оказывается значительной лишь на
высотах более 75...80 км. На меньших высотах условия в областях
невязкого течения обычно являются более тяжелыми, чем в погра-
ничном слое, поэтому эффектами ионизации в пограничном слое в
первом приближении можно пренебречь.
Донная часть многих пилотируемых СА по форме обычно близка
к плоской пластине (рис. 63). Критическая точка в этом случае
располагается вблизи верхней кромки аппарата. Окружающий
воздух, расширившийся при обтекании этой части аппарата, пред-
ставляет собой невязкий присоединенный поток с существенно ла-
минарным пограничным слоем. Однако вблизи противоположной
кромки СА поток воздуха уже не может следовать за сходящимся
участком обтекаемого тела, что приводит к возникновению отрывно-
го течения. Распределения концентрации свободных электронов в
этих областях течения вокруг аппарата могут существенно отли-
чаться друг от друга.
В отрывной области имеет место циркуляционное течение, ко-
торое может простираться на большое расстояние. В этой области
поток обычно содержит большое количество продуктов уноса (аб-
ляции) теплозащитных материалов, и концентрация электронов в
нем довольно высока. Термодинамическое и химическое состояние
таза в этой области достаточно сложное, и поле обтекания в той
пасти аппарата, где поток является присоединенным, более легко
поддается теоретическому рассмотрению, а концентрация электро-
нов в невязкой области потока, где располагаются антенны, в пер-
вом приближении может быть определена с помощью обычного
рассмотрения трубок тока.
200
Рис. 63. Характерные области^ гиперзву-
кового обтекания СА типа «Аполлон»:
/ — СА; 2 — пограничный слой; 3 —
ударная волна; 4 — невязкий слой; 5 —
отрывная область; 6 — вязкая область
смешения
газодинамических уравнений,
Свойства плазменного слоя вок-
круг СА сильно зависят от неравно-
весных условий в области торможе-
ния. Поэтому при расчетах необхо-
димо учитывать конечные скорости
химических реакций. Расширение
воздушного потока вокруг боковых
кромок СА типа «Аполлон» приво-
дило к снижению скорости электрон-
но-ионной рекомбинации и сохране-
нию концентрации электронов на до-
статочно высоком уровне.
Для точного определения профи-
лей концентрации электронов в рас-
положенных ниже областях течения
приходится, как правило, совместно
рассматривать большое количество
уравнений химической кинетики и
при решении которых встречается ряд математических трудностей.
Кроме того, следует отметить также, что константы скоростей ре-
акций рассматриваемых химических процессов в основном извест-
ны не очень точно.
Некоторое приближенное представление о механизме взаимо-
действия электромагнитных волн и плазмы, посредством которого
свободные электроны могут вызывать отражение и затухание этих
волн, можно получить на основе следующего упрощенного под-
хода.
Предположим, что плазма состоит из равного количества поло-
жительных ионов и свободных электронов и определенного количе-
ства нейтральных частиц. Благодаря своим электростатическим
полям заряженные частицы удерживаются на некотором среднем
равновесном расстоянии друг от друга.
Если одна из заряженных частиц сместится из такого равновес-
ного положения, а все остальные останутся в своих фиксированных
положениях, то сместившаяся частица будет колебаться относитель-
но своего равновесного положения. При этом частица будет подоб-
на колеблющейся массе, а возвращающаяся электростатическая
сила, обусловленная взаимодействием с соседними заряженными
частицами, будет представлять собой аналог пружины. При этом
столкновения колеблющейся частицы с нейтральными будут опре-
делять затухание. Частота колебаний заряженной частицы (плаз-
менная частота) представляет собой собственную частоту колеба-
ний свободного заряда в плазме. Угловая плазменная частота элек-
тронов в плазме сор определяется соотношением
wp = V‘^2/(so/«e), (6.53.
где У о — концентрация электронов (количество электронов в еди-
нице объема); е — заряд электрона; те — масса электрона; е0 — ди-
электрическая проницаемость вакуума.
7—331
201
Уравнение, аналогичное (6.53), можно использовать и для оп-
ределения плазменной частоты ионов. Поскольку масса ионов при-
мерно на четыре порядка больше массы электронов, для данной
плазмы плазменная частота ионов оказывается намного меньше,
чем у электронов.
В этом примере электроны отклоняются от своего равновесного
положения в плазме и затем колеблются со своей собственной час-
тотой. Однако электромагнитная волна действует на электрон как
некоторая периодическая возмущающая сила. Если возмущающая
частота (частота электромагнитной волны) значительно меньше
собственной частоты электронов плазмы, а затухание при столкно-
вении мало сказывается на колебании электронов, то инерционные
эффекты также оказываются малыми и электрон будет колебаться
с частотой возмущающей силы. Такой колеблющийся заряд дейст-
вует как некоторый дипольный излучатель, генерирующий электро-
магнитные волны, распространяющиеся в прямом и обратном на-
правлениях. Причем обратная волна представляет собой как бы
отраженную, а распространяющаяся в прямом направлении претер-
певает сдвиг фаз по отношению к падающей и стремится подавить
возмущающий сигнал. Этот процесс повторяется при проникнове-
нии возмущающего сигнала в плазму, что приводит к затуханию
сигнала, которое увеличивается с толщиной плазменного слоя. По-
добный эффект возникает и для тонких слоев, амплитуда отражен-
ной волны у которых возникает вне плазменного слоя. Увеличение
затухания, возникающего при столкновении, при колебаниях элек-
трона приводит к снижению интенсивности излучаемых в прямом
и обратном направлениях волн и к соответствующему уменьшению
отражения и ослабления сигнала.
Однако положение может полностью меняться, когда частота
электромагнитной волны много больше плазменной частоты элек-
тронов. В этом случае инерционные эффекты в большей степени
проявляются в движении электронов, которые теперь уже могут
совершать только слабые колебания с частотой возмущающей
волны. В результате этого при отсутствии столкновений электронов
электромагнитная волна распространяется в плазме без затуха-
ния. Если же такие столкновения происходят, то будут иметь место
лишь небольшие отражение и затухание электромагнитной волны.
В том случае, когда частота электромагнитной волны точно рав-
на плазменной частоте электронов, а электронные столкновения
отсутствуют, амплитуда и фаза волн, излучаемых в прямом и об-
ратном направлениях колеблющимся зарядом, принимают такие
значения, что падающая электромагнитная волна полностью отра-
жается от поверхности плазмы и совсем в нее не проникает. При
наличии же электронных столкновений электромагнитная волна
проникает на некоторое расстояние в плазму даже в том случае,
когда ее частота точно равна плазменной частоте электронов. Вы-
вод из этого рассмотрения можно свести к тому, что величина за-
тухания и отражения электромагнитной волны, падающей на плаз-
менный слой, практически зависит от отношения частот электро-
202
магнитной волны и плазменной — электронов. Ионы не оказывают
заметного влияния на распространение электромагнитной волны,
поскольку их плазменная частота обычно очень мала по сравнению
с частотами используемых радиоволн.
Выражение для эффективной диэлектрической проницаемости
плазмы можно получить из рассмотрения движения электронов под
влиянием ВЧ-поля, приводящего к появлению тока поляризации.
В одномерном случае величина поляризации |П| определяется вы-
ражением
]П| = _ N$exe, или |П| = еоае£\ (6.54)
где хе — расстояние смещения зарядов от равновесного положения;
ае— электрическая восприимчивость плазмы; Е — электрическое
поле, вызывающее движение электронов.
Движение электрона под действием электрического поля может
быть описано следующим уравнением (см. статью Чергила и Рай-
бека) :
хе + ^хе+eElme=0, (6.55)
где v — частота столкновений электронов.
Предполагается, что внешние магнитные поля отсутствуют.
Влияние магнитного поля, связанного с меняющимся во времени
электрическим полем (для нерелятивистских электронов), прене-
брежимо мало. Если предположить, что Е и хе зависят от времени,
как ехр(—Zco/), то уравнение (6.55) можно привести к виду
—— 1^хе + eElme=Q, (6.56)
Из зависимостей (6.54) и (6.56) электрическую восприимчивость
плазмы ае можно представить таким образом:
а = —ZVcexg —У0е2
е ^Е тпе^ (о) -|- iv)
Используя (6.53), приведем уравнение (6.57) к виду
2 2 2
—“р —“п . . “pv/“
а, =-------s---=-----------k i —:-----.
и) (со 4- Zv) to2 4- v2 о)2 4- v2
(6.57)
(6.58)
Диэлектрическую проницаемость вещества е в первом прибли
жении можно определить из выражения
е — (1 4"ае) £0»
(6.59)
а эффективную диэлектрическую проницаемость плазмы —
е= 1
2 2 >
“р . . 0)pv/“
—ь—i-z—s—
(i)2 4- v2 ш2 4~
(6.60)
Зависимость для коэффициента электропроводности плазмы в
можно получить после преобразования уравнения (6.55) и приве-
дения его к виду
те (v — Z(o) v2 4-w2
(6.61)
7*
203
В присутствии наложенного магнитного поля электропровод-
ность плазмы является анизотропной по отношению к магнитному
полю и, таким образом, представляет собой некоторый тензор.
Согласно (6.60) поведение плазмы в первом приближении мож-
но описать при помощи комплексной диэлектрической проницаемо-
сти или комплексной электропроводности [уравнение (6.61)].
В общем случае можно показать, что оба метода описания плазмы
в первом приближении эквивалентны. .
Волновое уравнение для вектора электрического поля Е в гомо-
генной изотропной среде без источников и стоков с диэлектриче-
ской проницаемостью е, электропроводностью а и магнитной про-
ницаемостью ц имеет вид
V2^_jXO_£L_}1£_^£=o. (6.62)
Если предположить, что плазма представляет собой среду с ну-
левой электропроводностью, комплексной диэлектрической прони-
цаемостью (6.60) и магнитной проницаемостью вакуума р0, а так-
же, что Е зависит в первом приближении от времени как ехр(—/со/)
тогда уравнение (G.62) будет иметь вид
V2^ 4- [А0е0 1
2 2
<»р . <ДрУ>
0)2 + V2 ы2 -|- v2
^Е = ^Е + р0ео)2£’ = 0. (6.63)
При другом подходе, определяемом в основном уравнением
(6.61), выражение (6.62) можно преобразовать и привести к сле-
дующему равенству:
Е = ^Е + =0. (6.64)
v!£+I.J^±(,+faK
t J1 “pi.-
+ |i0e0a)2 1-—X— H ,
Из уравнений (6.63) и (6.64) видно, что они идентичны, а это,
в свою очередь, свидетельствует об эквивалентности двух рассмот-
ренных выше методов описания плазмы.
Как правило, решения уравнений (6.63) и (6.64) для одномер-
ной волны приводятся к следующему выражению:
£=£’оехр(±урх),
(6.65)
где ур=^о(&г+^/)1/2=ар—фр; Ео— векторная константа.
Коэффициенты затухания ар и фазовый рр определяют из выра-
жений
ар = £0
‘ (^2+fez2)1/2 + *r
2
1/2
где kr=l
204
Если положить, что v = 0, то ki и ар будут тождественно равны
нулю, тогда
Е = exp (± /Л0^г/2лг).
Если частота волны со больше плазменной сор, то кУ2 имеет дей-
ствительное значение и волна может распространяться без зату-
хания. Для значений со, меньших сор, величина kr отрицательна и
Е = £'оехр( — £0|A>r|x). (6.66)
Выражение (6.66) представляет собой уравнение для экспонен-
циально затухающей волны. Значение kr равно нулю, когда со = (ор.
Поэтому ар и рр также будут равны нулю, откуда следует, что элек-
тромагнитная волна в плазме не распространяется, а полностью от-
ражается от ее поверхности.
В плазме со значительной частотой столкновений электронов
описанные выше принципы взаимодействия волны с плазмой не
проявляются. В этом случае ненулевые значения ki практически
могут существовать на всех частотах, уравнение (6.65) описывает
плоскую волну, которая распространяется с затуханием. Значения
ki и, следовательно, ар, как правило, уменьшаются с увеличением
частоты волны. Однако следует отметить, что на низких частотах
такое положение не имеет места, когда частота электронных стол-
кновений оказывается больше частоты сигнала. В последнем слу-
чае уменьшение частоты сигнала несколько снижает и его ослаб-
ление. Сильное затухание электромагнитной волны происходит в
том случае, когда частота этой волны меньше плазменной (рис. 64).
Максимальная концентрация электронов в критической точке
спускаемого аппарата в этом случае составила примерно
5-Ю13 см-3, а в месте расположения антенны 2*10и см-3 [78].
В критической точке частота столкновения электронов на всех вы-
сотах полета оказалась примерно на порядок меньше плазменной.
Более высокие концентрации электронов и, следовательно, большие
значения плазменной частоты для спускаемых аппаратов типа
«Аполлон» обусловлены в первую очередь тем, что скорость его
спуска (И км/с) значительно превышает скорость спуска СА типа
«Меркурий» или «Джемини» (~7 км/с).
Из приведенных выше соображений со всей очевидностью сле-
дует, что необходимо бороться с нарушениями связи со спускаемым
аппаратом. Рассмотрим некоторые пути решения этой задачи. Су-
ществует ряд методов ослабления или полной ликвидации наруше-
ния связи со спускаемыми аппаратами. Некоторые из этих методов
в первом приближении будут рассмотрены ниже [78].
1. На первый взгляд выглядит вполне разумным соображение,
что период времени, в течение которого происходит нарушение
связи, может быть уменьшен или полностью ликвидирован посред-
ством увеличения мощности, подаваемой на антенну СА. Однако
большие электрические поля, связанные с высоким уровнем
ВЧ-мощности, могут привести к электрическому пробою атмосферы
205
Рис. 64. Максимальные значения плазменной час-
тоты fp при спуске аппарата типа «Меркурий»:
перед аппаратом;— 'в месте рас-
положения ангенн С-диапазона; в месте
расположения телеметрических антенн
у поверхности антенны. Вероятность
такого пробоя увеличивается из-за
высоких температур и частичной
ионизации воздуха, которая и без
того имеет место у поверхности ан-
тенны. Это явление еще больше
ии h'KM осложняет проблему связи. В ряде
работ (78 и др.] приводятся сведе-
ния о том, что существует некоторая максимальная мощность, ко-
торая может быть передана антенной независимомо от величины
поступающей мощности.
2. Системы связи, работающие на частотах, превышающих ожи-
даемый максимум плазменной частоты, могли бы, в свою очередь,
существенно облегчить решение проблемы нарушения связи СА—
Земля. В настоящее время существуют достаточно компактные и
легкие ВЧ-системы, работающие на подобных частотах. Однако
стоимость разработки и внедрения подобного оборудования доста-
точно высока.
3. Для электромагнитных волн с частотой существенно меньше
плазменной затухание также может уменьшаться. Однако исполь-
зование НЧ-систем для решения проблемы нарушения связи со
спускаемым аппаратом является непрактичным из-за невозможно-
сти размещения на СА достаточно эффективных направленных
НЧ-антенн.
4. Оптические системы связи, основанные на использовании ла-
зеров, могут вполне обеспечить прохождение сигнала через окру-
жающий спускаемый аппарат плазменный слой, но такие системы
обычно сложно применять для прямой связи СА — Земля из-за зна-
чительного ослабления лазерного сигнала в атмосфере.
5. Существуют методы, использующие (для решения рассматри-
ваемой проблемы связи) возможность изменения аэродинамиче-
ской формы СА, которые позволяют уменьшить толщину плазмен-
ного слоя. Спускаемые аппараты заостренной формы, как прави-
ло, окружены значительно более тонкой плазменной оболочкой,
чем затупленные.
6. Соответствующие магнитные поля, создаваемые около ан-
тенны, могут образовывать «окно» в плазменном слое, через кото-
рое способны распространяться электромагнитные волны. При этом
линии магнитного поля целесообразно ориентировать таким обра-
зом, чтобы движение электронов было жестко ограничено их цикло-
тронным движением и не изменялось под влиянием компоненты
электрического поля электромагнитной волны. Из-за чрезмерно
больших масс оборудования, создающего магнитные поля, этот
206
метод достаточно трудно реализовать практически даже в случае
использования сверхпроводящих магнитов.
7.Ввод электрофильных веществ в плазменный поток выше мес-
та расположения антенны является достаточно интересным мето-
дом уменьшения влияния плазменного слоя.
Молекулы электрофильных веществ, как правило, легко соеди-
няются со свободными электронами и образуют отрицательные
ионы, существенно снижая тем самым плазменную частоту. К по-
добным веществам, в первую очередь, можно отнести шестифтори-
стую серу, молекулярный кислород, двуокись углерода, окись азо-
та и т. д.
Однако следует заметить, что инжекция газа в обтекающий
спускаемый аппарат плазменный поток для уменьшения концентра-
ции электронов не всегда эффективна. Это связано, в первую оче-
редь, с тем, что крайне сложно, а зачастую и невозможно ввести
этот газ в ионизированный слой на большие расстояния за погра-
ничный слой. Твердые частицы также довольно трудно вводить в
плазменный поток. Кроме того, твердые частицы быстро нагрева-
ются до высокой температуры, после чего появление термоэлектрон-
ной эмиссии делает их практически бесполезными.
Относительно эффективной может быть инжекция в плазмен-
ный слой жидких электрофильных веществ, поскольку тонкие струи
жидкости при определенных условиях могут проникать в плазму,
движущуюся с гиперзвуковыми скоростями. Такие жидкости (вода,
четыреххлористый углерод, трехбромистый бор, ацетон, фреон
и др.) могут инжектироваться в поток через специальные сопла,
расположенные выше места установки антенны. При инжектиро-
вании в поток воды происходит некоторое снижение концентрации
электронов. Однако более эффективными, чем вода, обычно оказы-
ваются бор, ацетон, фреон, четыреххлористый углерод и трехбро-
мистый бор [78].
В целом решение этой проблемы требует в любом случае точных
сведений о свойствах плазмы, обтекающей спускаемый аппарат.
Эти сведения в первую очередь необходимы для наиболее эффек-
тивного использования различных методов борьбы с нарушениями
связи СА — Земля. Следует кроме перечисленных выше отдельных
аспектов (и далеко не всех) отметить и необходимость разработки
электромагнитных датчиков для точных измерений свойств плазмы,
что является достаточно важным шагом в решении всей проблемы,
а также — различных методов плазменной диагностики для иссле-
дования свойств плазменной оболочки спускаемых аппаратов, про-
ведения летных испытаний в условиях спуска СА и многих других.
6.7. ПЛАНИРОВАНИЕ ТЕПЛОВЫХ
ЭКСПЕРИМЕНТОВ
Современный тепловой эксперимент, а тем более летный теп-
ловой эксперимент, является исключительно дорогостоящим и
сложным, поэтому проведение его требует тщательной подготовки
и в первую очередь рационального планирования. Последнее дает
Е07
более четкую логическую схему проведения эксперимента, повыша-
ет его эффективность и точность результатов, позволяет сэконо-
мить средства и время на его проведение. Вопросы планирования
эксперимента включают в себя пути выбора моделей теплообмена
или механизма разрушения теплозащитного материала, состава
измеряемых параметров, оптимальной расстановки средств изме-
рений в пространстве и времени, метода обработки результатов
измерений. Они также влияют на выбор конструкции эксперимен-
тальной установки и модели.
Большую часть задач, возникающих при планировании тепло-
вого эксперимента, по-видимому, можно отнести к задачам плани-
рования экспериментов по выявлению механизмов процессов, т. е.
по поиску математических моделей, описывающих исследуемые
процессы. Математической теории планирования эксперимента до
настоящего времени уделяется меньше внимания, чем она того за-
служивает, особенно это касается практического применения
методов планирования подобных экспериментов. Таким образом,
проблема получения наибольшего количества информации об изу-
чаемом процессе теплообмена, при минимальных материальных и
временных, затратах в настоящее время является актуальной. Ма-
тематические методы планирования эксперимента в отличие от су-
ществующих позволяют сократить количество испытаний; умень-
шить ошибку эксперимента; получить математическую модель, об-
ладающую некоторыми оптимальными свойствами; оценить основ-
ные эффекты взаимодействия параметров.
Исследование внешнего теплообмена и прогрева тела, движу-
щегося с большими сверхзвуковыми скоростями, при уносе поверх-
ностных слоев материала является весьма сложной проблемой.
Теоретическое изучение данной проблемы основывается на реше-
нии полной системы уравнений, описывающих явление тепломассо-
переноса в системе газ — тело. Как известно, этими уравнениями
являются уравнения газодинамики, конвективного и радиационного
переноса тепла, переноса массы в многокомпонентной газовой
смеси, уравнения кинетики разрушения и движения материала тела
в твердом, жидком и газообразном состояниях, обобщенные урав-
нения теплопроводности в теле.
Учет всех этих процессов, протекающих в реальных условиях,
очень сложен. Правильность выбора расчетной схемы и достовер-
ности результатов часто бывает очень трудно оценить. Поэтому
для проверки полученных теоретических решений прибегают к по-
мощи эксперимента. В настоящее время имеется довольно много
различных видов установок для исследования теплообмена, работы
материалов и систем теплозащиты при больших скоростях. Наибо-
лее удобными из них для моделирования условий полета СА со
сверхзвуковыми скоростями могут быть, например, установки срав-
нительно длительного времени действия с предварительным подо-
гревом газа. Основным элементом их является электродуговой по-
догреватель. Дуга, горящая в электродуговом подогревателе, нахо-
дится в условиях вынужденной конвекции при газовихревой стаби-
208
лизации. За счет конвекции осуществляется в основном передача
тепловой энергии от дугового столба в окружающую газообразную
среду (струю). С целью расширения областей работы установок,
а также получения газового потока с заданной температурой струи
обычно применяются смесительные камеры, в которых происходит
смешивание горячего и холодного газа. В настоящее время на ус-
тановках такого типа специально проводятся исследования с целью
восстановления изменяющихся во времени тепловых нагрузок, ис-
пользуя решения обратных задач теплопроводности. Тепловые по-
токи восстанавливаются по данным температурных измерений,
соответствующих различным расположениям термопар относи-
тельно нагреваемой поверхности чувствительных элементов датчи-
ков, изготовленных из различных материалов.
Первичная информация об изменении температуры в рассмат-
риваемых точках заделки термопар в чувствительном элементе
датчика теплового потока поступает после расшифровки осцилло-
грамм. Первичная обработка проводится по разработанным для
этого алгоритмам. Далее восстановление тепловых граничных ус-
ловий проводится по регулиризованному алгоритму решения
ОЗТ. В качестве исходной информации рассматриваются измерен-
ные значения температуры в заданном временном интервале теп-
лового испытания.
Важным и интенсивно развивающимся в настоящее время на-
правлением в изучении сложных тепло- и массообменных процес-
сов является их численное моделирование на ЭВМ. Особое значе-
ние приобретает машинный эксперимент в тех случаях, когда до-
статочно полное экспериментальное исследование явления затруд-
нено. Одной из подобного рода проблем является нестационарный
теплообмен при взаимодействии твердого тела с потоком газа. До-
статочно близкая к реальной физической картине математическая
модель процесса может быть построена на базе сопряженной за-
дачи теплообмена, когда рассматривается совместное решение не-
стационарных уравнений газового пограничного слоя и переноса
тепла в твердом теле. На границе раздела твердой и газовой зон
задаются граничные условия четвертого рода. Такая постановка
задачи позволяет включить в рассмотрение взаимное тепловое
влияние газа и твердого тела и оценить зависимость параметров
нестационарного теплообмена от геометрических и теплофизических
характеристик тела. Кроме того, сопряженные задачи дают воз-
можность установить общие закономерности нестационарного теп-
лообмена с учетом влияния целого ряда определяющих парамет-
ров, при получении которых опытным путем требуются многочис-
ленные и дорогостоящие эксперименты. Все это свидетельствует о
том, что исследование сопряженных задач может быть весьма ак-
туальным направлением в теории тепло- и массообмена.
Сопряженные задачи можно использовать при анализе неста-
ционарного теплового взаимодействия твердого тела с обтекающим
по ламинарным потокам жидкости и диссоциированным воздухом.
В этом случае может быть, например, рассмотрена пятикомпонент-
209
пая модель воздушной смеси с учетом химических реакций в по-
граничном слое. Параметры нестационарное™ теплообмена в си-
стеме твердое тело — газ практически не зависят от теплофизи-
ческих и геометрических характеристик твердого тела, а в системе
твердое тело >— жидкость отличие нестационарных параметров теп-
лообмена от соответствующих квазистационарных величин может
быть существенным.
Следует отметить также, что численное решение сопряженных
задач тепло- и массообмена является сложной задачей вычисли-
тельной математики. В связи с ограниченными возможностями сов-
ременной вычислительной техники не всегда удается реализовать
желаемую математическую модель. Однако есть уверенность, что
сопряженные задачи остаются и будут оставаться мощным инст-
рументом в исследованиях закономерностей нестационарных теп-
ло-массообменных процессов.
Для проведения тепловых экспериментов, соответствующих
современному уровню развития техники, необходима система обра-
ботки экспериментальной информации, которая должна обладать
высокой степенью автоматизации всех вычислительных процессов.
Автоматизация не только позволит проводить обработку оператив-
но, но и повысит точность окончательных результатов. Большое
значение в этим случае приобретает предварительная обработка
данных эксперимента. Цель предварительной обработки — приве-
сти всю экспериментальную информацию к виду, удобному для ре-
шения последующих задач, в частности обратных задач теплопро-
водности. В настоящее время в качестве предварительной, первич-
ной, обработки большое распространение получает статистическая
обработка. Методы математической статистики позволяют, опираясь
на опыт изучения широкого класса случайных процессов, прово-
дить достаточно подробный анализ полученных экспериментальных
данных и дают возможность оценить качество полученной экспе-
риментальной информации. Результаты первичной статистической
обработки влияют и непосредственно на решение ОЗТ. Использо-
вание этих результатов при определении тепловых граничных ус-
ловий позволяет повысить точность получения искомых значений
теплового потока и температур поверхности, а также расширить
области применения отдельных алгоритмов ОЗТ.
Любые экспериментальные данные несут в себе кроме полезной
информации всевозможные искажения, наложенные в результате
работы измерительной аппаратуры, недостаточно совершенной тех-
нологии изготовления датчиков и т. д. Кроме того, сами изучаемые
процессы могут обладать некоторой статистической изменчивостью.
Методы статистической обработки дают возможность оценить в
полученных экспериментальных данных вес наложенных искаже-
ний. При изучении процессов теплопроводности достаточно часто
приходится сталкиваться с нестационарностью. При обработке не-
стационарных процессов практически редко удается использовать
традиционные статистические методы, так как все они разрабо-
таны для стационарных процессов. При анализе нестационарных
210
процессов необходимо рассматривать узкий диапазон случайных
процессов, строить гипотезы. Положение часто осложняется нали-
чием после эксперимента сильно ограниченной информации, на-
пример только одной реализации изучаемого процесса.
При проектировании спускаемых аппаратов, как уже говори-
лось, большую роль играет математическое моделирование тепло-
вого режима СА, как одного из факторов, определяющих его облик
и параметры. В процессе математического моделирования для опи-
сания теплофизических процессов используются, как правило, уже
проверенные экспериментальные расчетные зависимости и методы.
Составляемая для исследования теплового режима СА математи-
ческая тепловая модель позволяет исследовать его тепловой режим
при различных условиях внешнего нагружения, учитывать перемен-
ность теплофизических характеристик материалов и покрытий, и,
кроме того, изменения, вносимые в конструктивное решение.
ПРИЛОЖЕНИЕ
Зависимость цк=[(Руд, п, Н) (без учета участка свободного падения)
Таблица 10
Р с УД’ "к «0 Н, км ^к Л с
300 10 0,286 11094 0,0386 1020
10 0,310 10910 0,0310 970
11 0,332 10635 0,0301 907
О1 О 12 0,350 10400 0,0292 860
olU 13 0,367 10195 0,0282 821
14 0,384 10014 0,0275 784
15 0,400 9854 0,0267 754
10 0,336 10740 0,0336 920
11 0,356 10475 0,0323 870
12 0,376 10246 0,0313 825
<5ZU 13 0,395 10047 0,0304 786
14 0,415 9871 0,0297 748
15 0,436 9635 0,0289 712
10 0,361 10586 0,0361 880
330 13 0 426 9911 0,0327 750
15 0,466 9589 0,0310 687
340 10 0,386 10444 0,0386 848
Зависимость цк=^(Руд, п, Н) (с учетом свободного падения)
Таблица 11
Н9, км РУД’ с пк п9 Я, км “к С с
300 10 0,666 9840 0,0666 420
10 0,736 9657 0,0736 390
и 0,849 9310 0,0772 337
Q1 Л 12 0,952 9050 0,0793 300
7ПЛЛ <51U 13 1,05 8840 0,0808 271
/иии 14 1,16 8640 0,0830 244
15 1,21 8540 0,0810 234
10 0,816 9475 0,0816 360
11 0,915 9195 0,0832 321
Q )Л 12 1,03 8940 0,0855 285
<5ZU 13 1,14 8730 0,0876 256
14 1,23 8580 0,0877 238
15 1,35 8410 0,0903 215
212
Окончание табл. № 11
Но, КМ руд’ с "к Я» Н, км Л с
10 0,884 9340 0,0885 340
330 13 1,24 8620 0,0957 240
7000 15 1,44 8340 0,0963 207
340 10 0,967 9210 0,0967 318
300 10 0,545 10250 0,0545 520
10 0,607 10042 0,0607 480
11 0,712 9638 0,0648 407
310 12 0,804 9350 0,0670 360
13 0,899 9100 0,0691 3zl
14 0,979 8910 0,0700 294
15 1,05 8750 0,0706 274
6000 10 0,693 9790 0,0693 430
И 0,781 9480 0,0710 381
320 12 0,884 9200 0,0737 335
13 0,997 8940 0,0767 296
14 1,06 8800 0,0769 278
15 1,16 8630 0,0772 255
10 0,745 9670 0,0745 410
330 13 1,08 8830 0,0831 280
15 1,28 8510 0,0851 237
340 10 0,846 9450 0,0846 368
Зависимость цк=^(Руд, п, Н) (без учета участка свободного падения)
Таблица 12
Р . с уд’ с "к Ло ТУ, км ^к Л с
80 0,600 8053 0,00750 414
90 0,635 7933 0,00710 390
100 0,681 7832 0,00681 364
110 0,729 7746 0,00663 340
120 0,761 7672 0,00635 326
130 0,804 7607 0,00618 309
140 0,837 7550 0,00598 297
150 0,862 7500 0,00575 288
160 0,888 7454 0,00555 280
170 0,906 7412 0,00533 274
213
Окончание табл. № 12
руд’ с "к Ло Я, км ^к /, с
130 0,844 7558 0,00650 300
255 140 0,867 7500 0,00619 292
150 0,912 7453 0,00608 278
160 0,942 7408 0,00598 269
170 0,986 7368 • 0,00580 257
255 130 0,880 7511 0,00678 293
140 0,925 7458 0,00661 279
260 150 0,964 7411 0,00643 268
160 1,000 7360 0,00625 258
ИО 0,943 7468 0,00726 279
565 140 0,983 7416 0,00704 268
150 1,060 7368 0,00702 249
160 1,090 7327 0,00681 241
130 1,020 7427 0,00781 264
270 140 1,050 7376 0,00751 255
150 1,130 7336 0,00731 238
160 1,160 7290 0,00723 232
130 1,010 7389' 0,0)8:1 255
275 140 1,15) 732,9 0,0)7:7 232
150 1,189 7.95 0,0)783 228
160 1,260 7255 0,09789 217
Зависимость цк=/(Руд, н, Я) (без учета участка свободного падения)
Таблица 13
Р . с уд’ пк По Я, км с
100 0,956 7542 0,00956 290
110 1,030 7470 0,00937 269
280 120 1,080 7407 0,00908 254
130 1,130 7352 0,00871 245
140 1,210 7304 0,00869 228
150 1,250 7262 0,00831 223
ПО 1,090 7433 0,00987 260
285 120 1,140 7371 0,00954 247
130 1,190 7318 0,00917 236
НО 1,150 7398 I 0,0104 251
290 120 1,210 7339 0,0101 237
214
Окончание табл. № 13
РУЛ’ с "к «0 Н, км 11к с
100 1,230 7400 0,0123 240
олл по 1,290 7334 0,0117 231
oUU 120 1,370 7273 0,0114 216
130 1,420 7229 0,0108 210
70 1,170 7547 0,0166 270
Q-ЭЛ 80 1,280 7442 0,0160 245
90 1,400 7357 - 0,0156 224
100 1,490 7287 0,0149 212
Q4 Л 70 1,410 7438 0,0202 235
o4U 80 1,560 7338 0,0195 213
60 1,380 7497 0,0229 2-/9
ОКО 70 1,580 7378 0,0225 218
оо2 80 1,710 7286 0,0213 202
90 1,850 7212 0,0206 186
100 2,060 7150 0,0204 167
Руд = 352 с; Як = 6471 км; V=15 км/с
Таблица 14
«кН лоп 4/011, км Hdi zir с «К1 ”01 У'Л /[. с р-з
20 2,75 ТЮ1 0,138 по 0,0207
20 3,0 7501 0,15 100 25 3,44 7753 0,137 88 0,0206
30 4,06 7715 0,1 $5 75 0,0203
20 2,8 7621 0,140 108 0,0214
25 3,81 7280 0,15 80 25 3,28 7564 0,132 93 0,0202
30 3,95 7524 0,130 77 0,0201
20 2,76 7807 0,138 ПО 0,0207
20 3,0 7501 0,15 100 30 40 2,76 5,27 7715 7665 0,131 0,130 78 58 0,0198 0,0196
50 6,05 7635 0,121 51 0,0182
20 2,76 7337 0,138 НО 0,0207
40 6,0 6996 0,15 50 30 40 3,86 4,88 7237 7182 0,128 0,122 80 63 0,0192 0,0183
50 5,63 7143 0,113 55 0,0170
20 2,75 7240 0,138 НО 0,0207
50 7,5 6893 0,15 40 30 49 3,91 5,10 7133 7082 0,130 0,127 78 60 0,0195 0,0191
59 6,07 7043 0,121 51 0,0181
215
Таблица 15
Руд = 352 с; Як = 6471 км; VK = 15 км/с
лк11 лоп !/0Ц,Км Нк11 0b с Лк1 л01 1/01» км Нк1 <1, С Н-кЕ
20 4,0 7260 0,20 70 20 30 40 50 2,23 3,18 4,00 5,06 7710 7583 7500 7464 0,112 0,106 0,101 0,100 140 99 79 63 0,0224 0,0212 0,0202 0,0200
40 8,0 6870 0,20 35 20 30 40 50 2,10 3,07 3,65 4,80 7365 7220 7145 7093 0,105 0,102 0,09.6 0,091 150 103 87,6 66,3 0,0210 0,0204 0,0192 0,0183
50 10,0 6791 0,20 28 20 30 40 50 2,10 2,85 3,74 4,41 7293 7149 7070 7020 0,105 0,095 0,094 0,088 150 112 85,2 73,0 0,0210 0,0190 0,0187 0,0176
Зависимость /К/Нк от п0 и Руд (<р= 1,395 рад)
Таблица 16
ру& с 1 2 3 4 5 6 7 8 9 10
243,2 122,2 82,4 62,1 49,9 41,7 35,8 31,4 27,8 25,1
ZOU 0,021 0,02 0,02 0,02 0,019 0,018 0,018 0,017 0,017 0,017
270 136 90,9 68,5 55 45,9 38,5 33,5 30,4 27,4
0,034 0,03 0,029 0,028 0,027 0,026 0,025 0,025 0,025 0,024
21 Л 294 149 100 74,9 €1,1 50,1 43,2 38 41,6 30
01U 0,053 0,05 0,049 0,048 0,048 0,047 0,046 0,046 0,045 0,045
315 160 109 81,4 64,7 54,1 46,0 40,9 36,3 32,5
0,072 0,07 0,069 0,069 0,067 0,066 0,066 0,066 0,065 0,065
334 171 116 86,4 67,9 57 49,5 42,8 37,6 34,6
о/и 0,083 0,08 0,079 0,078 0,077 0,076 0,076 0,075 0,075 0,075
216
Таблица 17
Зависимость ук1х\< от п0 и Руд (ср= 1,395 рад)
п0
руд» с 1 2 3 4 5 6 7 8 9 . 10
250 5760 1930 6280 1041 6370 741 6441 541 6490 433 6514 361 6521 309 6530 269 6524 241 6565 218
280 5513 2270 6110 1153 6300 771 6411 577 6461 471 6490 395 6512 331 6521 298 6543 268 6552 240
310 5475 2403 612) 1219 6311 817 6390 618 6440 505 6478 427 6495 371 6525 325 6532 287 6545 265
340 5350 2603 6 too 1329 6290 901 6360 675 6400 553 6460 466 6480 387 6511 355 6521 315 6534 300
370 Зависимость г. 5170 2807 Гк/Хк 01 6001 1417 Яо и 6250 1009 руд (<₽: 6343 727 = 1,046 6401 601 рад) 6451 506 6478 417 6501 375 6521 312 Табл 6530 312 ица 18
РуД’ С По
1 2 3 4 5 6 7 8 9 10
250 5906 2108 6320 1081 6434 724 6485 * 545 6515 436 6534 36’4 6547 312 6557 273 6565 243 6570 219
280 5762 2349 6262 1203 6397 808 6459 607 6494 487 6517 406 6532 349 6544 306 6553 271 6560 244
310 5625 2562 6203 1319 6360 887 6432 668 6473 535 6500 447 6518 383 6532 336 6542 300 6550 270-
340 5491 2760 6146 1429 6325 863 6406 725 6453 583 6483 486 6503 417 6519 365 6531 325 6540 293
370 Зависимость i 5285 2960 1/к/*к О' 6053 0071 Г По и J 6300 1071 °УД (ф: 6390 787 = 0,348 6440 633 8 рад) 6471 525 6500 395 6517 395 6530 345 Табл 6535 313 ица 19
руд’ с По
1 2 3 4 5 6 7 8 9 10
250 6200 2282 6473 1153 6536 771 6536 578 6577 464 6586 387 6592 331 6596 291 6599 259 6601 232
280 6121 2530 6446 1280 6591 856 6552 643 6569 515 6580 429 6586 368 6591 323 6595 286 6598 259'
217
Окончание табл. № 10
п0
руд’ с 1 2 3 4 5 6 7 8 9 10
310 6041 2764 6419 1399 6506 937 6542 704 6562 564 6573 470 6581 403 6584 360 6586 324 6510 293
340 5963 2984 6393 1512 6492 1012 6532 761 6554 609 6567 509 6576 437 6583 382 6588 340 6592 305
370 5841 3111 6376 1621 6478 1096 6520 822 6544 648 6565 531 6574 471 6580 402 6586 354 6588 312
Зависимость ук/хк от п0 и Руд (ср=0,6976 рад)
Таблица 20
По
РУД’ с 1 2 3 4 5 6 7 8 9 10
250 6042 2217 6392 1126 6482 754 6562 567 6554 454 6559 378 6568 325 6575 284 6581 253 6285 228
280 5934 2456 6350 1252 6457 840 6504 632 6530 503 6539 419 6552 360 6561 314 6568 281 6574 252
310 5775 2653 6281 1360 6413 914 6472 688 6505 551 6526 460 6541 394 6551 346 6559 308 6566 277
340 5653 2858 I 6236 | 1472 6386 989 6452 746 6490 597 6514 500 6530 428 6543 375 6552 335 6559 300
370 5541 3031 6178 1561 6358 1053 6431 831 6480 635 6501 542 6522 444 6532 404 6545 362 6553 321
Зависимость /и/цк от п0 и Руд (ср =1,046 рад)
Таблица 21
руд’ с По
1 2 3 4 5 6 7 8 9 10
250 241,9 0,033 121,7 0,026 81,3 0,025 61,1 0,024 48,9 0,024 40,8 0,024 35 0,024 30,6 0,024 27,2 0,024 24,5 0,024
280 266 0,049 134 0,04 89,9 0,037 67,5 0,037 54,1 0,037 45,1 0,036 38,7 0,036 33,9 0,035 30,1 0,034 27,1 0,033
310 289 0,067 146 0,056 98 0,052 73,7 0,05 59 0,048 49,2 0,048 42,2 0,047 37 0,046 32,9 0,046 29,5 0,046
218
Окончание табл. 21
По
руд’ с 1 2 3 4 5 6 7 8 9 10
340 310 0,087 157 0,073 106 0,068 79,4 0,066 63,7 0,063 53,1 0,063 45,6 0,061 40 0,061 35,5 0,061 32 0,059
370 329 0,105 167 0,095 113 0,094 84,4 0,094 67,4 0,093 56,0 0,093 48,6 0,093 42,0 0,092 36,9 0,092 34,1 0,092
Зависимость /к/цк от /70 и Руд (ср=0,6976 рад)
Таблица 22
п0
рул’ с 1 2 3 4 5 6 7 8 9 10
250 238,6 120 80,1 60,1 48,1 40,1 34,4 30,1 26,8 24,1
0,0456 0,041 0,039 0,039 0,039 0,038 0,037 0,037 0,037 0,037
280 262 132 88,1 66,2 52,9 44,4 38,1 33,3 29,7 26,7
0,064 0,059 0,057 0,056 0,056 0,055 0,055 0,055 0,054 0,054
310 284,9 143,7 96,2 72,3* 57,9 48,3 41,4 36,3 32,3 29
0,081 0,073 0,07 0,069 0,068 0,067 0,065 0,065 0,064 0,064
340 305 154 103 77,8 62,2 51,9 44,5 39 34,7 31,2
0,102 0,092 0,088 0,098 0,088 0,087 0,086 0,084 0,083 0,083
370 325,1 166,2 110,0 82,6 67,3 55,4 47,6 41,2 36,9 33,3
0,121 0,112 0,112 0,110 0,108 0,108 0,107 0,107 0,106 0,106
Зависимость /к/цк от HQ и Руд (ср=0,3488 рад)
Таблица 23
руд» с По
1 2 3 4 5 6 7 8 9 10
250 237,1 0,0516 118,7 0,0504 79,2 0,0496 59,4 0,0496 47,6 0,048 39,7 0,047 34,0 0,047 30,0 0,0464 26,5 0,046 23,8 0,046
280 260,1 0,071 130,2 0,070 86,9 0,0689 65,2 0,0686 52,2 0,0679 43,4 0,0679 37,3 0,0675 32,7 0,0657 29,0 0,0678 26,2 0,0678
310 281,7 0,0913 141 0,091 94,1 ' 0,0893 70,6 0,089 56,5 0,0887 47,1 0,0883 40,4 0,88 35,3 0,88 31,5 0,88 28,3 0,088
340 301,8 0,112 151,0 0,112 100,7 0,112 75,6 0,111 60,5 0,11 50,5 0,11 43,3 0,108 37,9 0,108 33,7 0,108 30,3 0,108
370 321,3 0,131 162,0 0,131 106,3 0,131 81,0 0,13 64,1 0,129 53,2 0,128 46,1 0,127 39,9 0,126 35,4 0,126 32,1 0,126
219
Таблица 24
'0*0=180°; ао1 = фо1=180с
я0 (01) 0,5
«0 (12) 1 2 3 4 5 6 7 8 9 10
Р'кО! Fk12 HkS 0,893 0,154 0,138 0,906 0,153 0,138 0,911 0,152 0,138 0,913 0,151 0,137 0,915 0,150 0,137 0,916 0,149 0,137 0,917 0,148 0,136 0,917 0,147 0,136 0,918 0,147 0,136 0,918 0,146 0,135
HkOI Нк12 НкЕ 0,900 0,177 0,159 0,912 0,175 0,160 0,917 0,174 0,160 0,919 0,173 0,159 0,921 0,172 0,159 0,922 0,171 0,158 0,923 0,171 0,158 0,923 0,170 0,158 0,924 0,170 0,157 0,924 0,169 0,157
^кО1 P*k12 НкЕ 0,905 0,199 0,180 0,918 0,197 0,181 0,922 0,196 0,181 0,924 0,196 0,181 0,926 0,195 0,180 0,927 0,195 0,180 0,928 0,194 0,179 0,928 0,193 0,178 0,929 0,192 0,178 0,929 0,192 0,177
НкО1 Р-К12 НсВ 0,910 0,221 0,201 0,922 0,219 0,202 0,926 0,218 0,202 0,929 0,217 0,202 0,930 0,216 0,201 0,931 0,215 0,200 0,932 0,215 0,200 0,933 0,214 0,200 0,933 0,214 0,200 0,934 0,214 0,200
НкО1 Нк12 НкВ 0,914 0,242 0,221 0,926 0,240 0,222 0,930 0,239 0,222 0,932 0,239 0,222 0,934 0,238 0,223 0,935 0,237 0,221 0,936 0,236 0,221 0,936 0,235 0,220 0,937 0,234 0,200 0,937 0,234 0,220
л0 (01) 1,0 рул’ с
п0 (12) 1 2 3 4 5 6 7 8 9 10
^кО1 ^к12 0,8941 0,1541 0,1381 0,906 0,154 0,138 0,911 0,153 0,139 0,914 0,152 0,140 0,915 0,151 0,139 0,916 0,150 0,138 0,917 0,149 0,138 0,918 0,148 0,137 0,918 0,148 0,137 0,919 0,147 0,136 250
F’kOI Р*к12 Р'кВ 0,900 ( 0,177( 0,159 ( 3,912 0,176 0,161 0,917 0,176 0,162 0,921 0,176 0,162 0,922 0,175 0,161 0,922 0,175 0,159 0,923 0,174 0,158 0,923 0,173 0,157 0,924 0,172 0,156 0,924 0,171 0,155 270
F'kOI Нк12 НкВ 0,905 ( 0,1981 0,1801 0,918 0,199 0,181 0,922 0,198 0,182 0,924 0,199 0,182 0,926 0,198 0,182 0,926 0,197 0,181 0,927 0,196 0,180 0,928 0,195 0,180 0,928 0,194 0,179 0,929 0,194 0,178 290
ИкО! Р-К12 Н'кВ 0,910 ( 0,220 ( 0,200 ( 0,922 ),219 0,200 0,926 0,219 0,203 0,929 0,218 0,204 0,930 0,218 0,204 0,931 0,217 0,205 0,932 0,217 0,204 0,932 0,216 0,202 0,933 0,215 0,201 0,933 0,215 0,200 310
Р'кО! Нк12 НкВ 0,915 ( 0,242 ( 0,220 ( ),925 ),240 ),223 0,930 0,240 0,225 0,932 0,239 0,224 0,933 0,238 0,223 0,935 0,237 0,223 0,936 0,236 0,222 0,936 0,236 0,222 0,937 0,235 0,221 0,938 0,234 0,220 330
223
Таблица 25
'0,o=1800; (foi= ctoi = 180'
Я0(01) 1,5
Л0(12) 1 2 3 4 5 6 7 8 9 10
Нк01 Нк12 НкЕ 0,893 0,154 0,137 0,900 0,152 3,138 0,911 0,151 0,137 0,914 0,149 0,136 0,915 0,148 0,135 0,916 0,157 0,136 0,916 0,147 0,135 0,917* 0,146 0,134 о;^8 0,145 0,133 0,919 0,144 0,132
Нк01 Нк12 НкЯ 0,900 0,175 0,159 0,910 0,175 0,159 0,916 0,173 0,159 0,919 0,173 0,159 0,920 0,172 0,158 0,921 0,171 0,157 0,922 0,170 0,156 0,923 0,170 0,156 0,924 0,169 0,156 0,924 0,169 0,155
Нк01 Р'кО! НкЯ 0,905 0,198 0,179 0,917 0,197 0,180 0,921 0,196 0,180 0,924 0,195 0,181 0,926 0,194 0,179 0,927 0,193 0,179 0,927 0,193 0,180 0,928 0,192 0,178 0,929 0,192 0,178 0,929 0,192 0,178
^к01 1Ы2 НкЯ 0,910 0,220 0,200 0,922 0,218 0,201 0,926 0,217 0,202 0,928 0,216 0,203 0,929 0,215 0,202 0,930 0,214 0,201 0,93/ 0,214 0,200 0,932 0,213 0,200 0,933 0,213 0,200 0,934 0,212 0,198
Ик01 Нк12 НкЯ 0,914 0,240 0,220 0,926 0,240 0,222 0,931 0,239 0,222 0,933 0,238 0,223 0,934 0,237 0,222 0,935 0,236 0,221 0,936 0,235 0,220 0,936 0,235 0,220 0,937 0,234 0,220 0,937 0,234 0,220
Я0(01) 3,0 РУД’ с
Я0(12) 1 2 3 4 5 6 7 8 9 10
И к 01 ак12 1М 0,890 ( 0,150 ( 0,134( ),901 3,149 3» 134 0,909 0,148 0,135 0,912 0,147 0,135 0,914 0,146 0,135 Ю,914 >0,144 >0,134 0,914 0,143 0,134 0,915 0,143 0,133 0,915 0,142 0,133 0,915 0,142 0,133 250
М’кО! Нк12 НкЕ 0,900 ( 0,1761 0,1581 3,910 3,173 3,158 0,916 0,171 0,159 0,918 0,171 0,159 0,92С 0,17С 0,15S )0,920 >0,169 10,157 0,921 0,168 0,157 0,921 0,167 0,156 0,922 0,167 0,155 0,922 0,166 0,155 270
^кО! !М2 НкЕ 0,905 ( 0,199( 0,179( 3,917 3,196 3,179 0,920 0,195 0,180 0,921 0,194 0,180 0,92$ 0,19с 0,17< >0,924 10,192 >0,179 0,926 0,191 0,178 0,926 0,190 0,177 0,927 0,189 0,176 0,927 0,188 0,165 290
^к01 Нк12 НкЕ 0,910 < 0,221 । 0,200 0,919 0,219 0,200 0,925 0,217 0,200 0,927 0,216 0,200 0,92< 0,215 0,201 )0,930 >0,214 1 0,201 0,930 0,213 0,200 0,931 0,212 0,199 0,932 0,211 0/199 0,933 0,210 0,198 310
Нк01 Нк12 НкЕ 0,9131 0,240। 0,2201 0,925 0,240 0,220 0,930 0,239 0,220 0,931 0,239 0,220 0,93; 0,231 0,22( 5 0,934 5 0,237 )0,221 0,935 0,235 0,221 0,936 0,234 0,220 0,936 0,233 0,219 0,937 0,232 0,218 330
221
Таблица 26
Фо=18О°; <poi = aOi= 150°
п0 (12) 0,5
л0 (12) 1 2 3 4 5 6 7 8 9 10
Нк01 (ак12 НкЕ 0,878 0,154 0,135 0,892 0,152 0,136 0,897 0,150 0,135 0,900 0,149 0,134 0,901 0,148 0,133 0,902 0,146 0,133 0,902 0,145 0,132 0,902 0,144 0,132 0,903 0,143 0,131 0,903 0,142 0,139
Нк01 Нк12 Р*к2 0,884 0,176 0,156 0,899 0,175 0,157 0,904 0,175 0,175 0,906 0,173 0,157 0,907 0,172 0,156 0,908 0,169 0,155 0,909 0,170 0,154 0,909 0,168 0,153 0,909 0,168 0,152 0,910 0,167 0,152
F'-kOI Нк12 ^кЕ 0,890 0,199 0,177 0,905 0,197 0,178 0,910 0,195 0,178 0,911 0,194 0,177 0,913 0,193 0,176 0,914 0,193 0,176 0,914 0,192 0,174 0,915 0,191 0,174 0,915 0,190 0,173 0,916 0,189 0,173
Нк01 Нк12 НкЕ 0,893 0,220 0,197 0,910 0,218 0,198 0,915 0,218 0,198 0,917 0,217 0,198 0,918 0,216 0,197 0,919 0,215 0,197 0,920 0,214 0,196 0,920 0,213 0,195 0,920 0,212 0,194 0,921 0,212 0J94
Нк01 ': 1 Нк12 Нк2 0,901 0,241 0,218 0,914 0,239 0,218 0,919 0,238 0,219 0,921 0,236 0,218 0,923 0,236 0,218 0,924 0,235 0,217 0,924 0,234 0,216 0,925 0,233 0,215 0,915 0,232 0,214 0;926 0,231 0,213
л0(01) 3,0 рул’ с
л0 (12) 1 2 3 4 5 6 7 8 9 10
^кО! Нк12 Нкф 0,875 0,151 0,132 0,893 0,151 0,134 0,897 0,150 0,134 0,898 0,149 0,134 0,899 0,148 0,133 0,901 0,147 0,132 0,902 ’ 0,146 0,132 0,902 0,144 0,131 0,902 0,143 0,130 0.9ЭЗ 0,141 0,130 250
Нк01 ак12 0,884 0,176 0,155 0,895 0,174 0,156 0,904 0,173 0,158 0,906 0,171 0,157 0,907 0,173 0,155 0,908 0,170 0,154 0,909 0,169 0,154 0,909 0,168 0,154 0,909 0,167 0,153 0,910 0,166 0,153 270
ИкЧ Нк12 Нкф 0,890 0,195 0,176 0,898 0,194 0,176 0,909 0,193 0,176 0,911 0,193 0,176 0,913 0,192 0,176 0,914 0,192 0,177 : 0,915 > 0,190 ' 0,177 0,915 0,189 0,177 0,916 0,188 0,177 0,917 0,187 0,176 290
Р-кО! Нк12 НкЕ 0?896 0,216 0,197 0,912 0,215 0,198 0,915 0,214 0,198 0,917 0,213 0,197 0,919 0,213 0,197 0,92( 0,212 9,196 ) 0,920 > 0,211 > 0,196 0,921 0,210 0,195 0,921 0,209 0,194 0,922 0,209 0,193 310
Нк01 НкЕ 0,903 0,241 0,218 0,910 0,240 0,219 0,919 0,239 0,220 0,919 0,23^ 0,219 0,920 0,237 0,218 0,921 9,236 0,217 0,923 1 0,235 ? 0,217 0,924 0,234 0,216 0,925 0,233 0,216 0,926 0,232 0,216 330
222
Оо=180°; фо1 = а01 = 150*
Таблица 27
Я0(01)
1,5
Л0(12) 1 2 3 4 5 6 7 8 9 10
Нк01 Нк12 0,878 0,154 0,13€ 0,892 0,153 0,135 0,897 0,152 0,135 0,899 0,150 0,134 0,900 0,149 0,133 0,902 0,148 0,132 0,903 0,146 0,131 0,903 0,145 0,130 0,903 0,143 0,130 0,903 0,143 0,130
M'kOI ^12 НкВ* 0,884 0,176 0,155 0,891 0,173 0,156 0,904 0,173 0,157 0,907 0,172 0,157 0,907 0,171 0,156 0,908 0,170 0,154 0,909 0,169 0,154 0,909 0,169 0,154 0,910 0,168 0,153 0,910 0,167 0,152
P-kCI FM2 НкЕ 0,891 0,198 0,177 0,905 0,196 0,177 0,910 0,195 0,178 0,912 0,194 0,177 0,913 0,193 0,176 0,914 0,193 0,176 0,915 0,192 0,175 0,915 0,191 0,174 0,916 0,190 0,173 0,916 0,189 0,173
НкО! FM2 Н-кЕ 0,896 0,220 0,197 0,911 0,218 0,198 0,914 0,216 0,198 0,917 0,215 0,198 0,919 0,214 0,197 0,920 0,214 0,197 0,920 0,213 0,196 0,921 0,212 0,195 0,921 0,211 0,194 0,922 0,210 0,194
Р’кС! Нк12 И'кЕ 0,902 0,241 0,218 0,914 0,240 i 0,218 0,919 0,239 0,220 0,922 0,238 0,219 0,923 0,237 0,218 0,924 0,236 0,217 0,925 0,235 0,217 0,925 0,234 0,216 0,926 0,233 0,216 0,926 о.г-’! 0,215
Л0(01) 1,0 руд’ с
Л0(12) 1 2 3 4 5 б 7 8 9 10
H'kOI 1М2 Н-кЕ 0,878 ( 0,154 ( 0,135 ( ),893 3,152 ), 136 0,898 0,150 0,135 0,900 0,149 0,134 0,901 0,148 0,13г 0,902 >0,146 10,133 0,902 0,145 0,132 0,902 0,144 0,132 0,903 0,143 0,131 0,903 0,142 0,130 250
НкО1 Нк12 НКЕ 0,885 ( 0,176 ( 0,151 ( ),899 ), 175 ), 156 0,905 0,172 0,157 0,906 0,170 0,156 0,907 0,163 0,156 0,908 10,168 10,155 0,909 0,167 0,154 0,910 0,167 0,153 0,910 0,166 0,152 0,911 0,166 0,151 270
1М1 Р-К12 Н-кЕ 0,891 ( 0,199 С 0,177 ( 1,905 >,196 ), 177 0,910 0,195 0,178 0,912 0,194 0,178 0,913 0,193 0,177 10,914 10,193 0,176 0,915 0J92 0,175, 0,915 0,191 0,174 0,916 0,189 0,173 0,917 0,149 0,173 290
Р-К01 1 IM2 1 (М 1 3,897 0 3,221 С 3,198 С 1,910 1,219 1,198 0,915 0,218 0,198 0,917 0,217 0,197 0,919 0,216 0,197 0,919 0,215 0,196 0,920 0,214 0,196 0,920 0,213 0,195 0,921 0,212 0,194 0,921 0,212 0,194 310
Р'кО! [ Р-К12 ( Н'кЕ { 3,901 0 3,241 0 3,2170 1,915 |,240 |,220 0,920 0,238 0,219 0,922 0,236 0,218 0,923 0,235 0,218 0,924 0,234 0,218 0,925 0,233 0,217 0,925 0,232 0,216 0,926 0,231 0,215 0,926 0,230 0,213 330
223
Таблица 28
$0=180°; <poi= aOi—120°
л0 (01) 0,5 1,5
л0 (12) 1 3 5 .7 9 н 1 3 5 7
P'kOI Нк12 UkS 0,797 0,154 0,123 0,828 0,150 0,124 0,834 0,148 0,123 0,835 0,147 0,123 0,836 0,145 0,122 0,837 0,143 0,120 0,798 0,154 0,123 0,830 0,151 0,125 0,836 0,148 0,124 0,837 0,147 0,123
HkOI Нк12 НкЕ 0,808 0,177 0,165 0,838 0,173 0,165 0,844 0,170 0,165 0,847 0,169 0,164 0,847 0,168 0,163 0,847 0,167 0,162 0,810 0,177 0,162 0,841 0,173 0,166 0,846 0,170 0,165 0,848 0,169 0,164
Р'кО! Нк12 НзБ 0,818 0,200 0,165 0,848 0,195 0,165 0,854 0,193 0,165 0,856 0,192 0,164 0,857 0,190 0,163 0,857 0.189 0,162 0,820 0,199 0,165 0,849 0,195 0,166 0,855 0,193 0,165 0,857 0,192 0,164
Р’кО! Нк12 Н-кЕ 0,827 0,212 0,175 0,857 0,210 0,176 0,863 0,208 0,175 0,866 0,205 0,174 0,867 0,203 0,173 0,867 0,203 0,173 0,832 0,221 0,184 0,871 0,219 0,185 0,877 0,218 0,183 0,879 0,215 0,182
л0 (01) 1,5 з,о руд’ с
п0 (12) 9 11 1 3 5 7 9 п
Р'кО! Нк12 НкЕ 0,838 0,145 0,122 0,838 0,143 0,120 0,798 0,154 0,123 0,830 0,150 0,125 0,834 0,149 0,124 0,837 0,148 0,123 0,837 0,145 0,122 0,837 0,143 0,120 250
Нк01 ^12 НкЕ 0,849 0,168 0,162 0,849 0,167 0,163 0,809 0,177 0,166 0,840 0,173 0,165 0,844 0,170 0,164 0,847 0,169 0,163 0,849 0,168 0,1*62 0,849 0,167 0,161 270
Ик01 Р-К12 *акЕ 0,858 0,190 0,163 0,858 0,188 0,162 0,820 0,199 0,163 0,849 0,195 0,166 0,855 0,193 0,164 0,857 0,192 0,164 0,857 0,190 0,163 0,857 0,188 0,161 290
P'kOI Нк12 Н*кЕ 0,880 0,210 0,181 0,880 0,208 0,180 0,832 0,221 0,184 0,971 0,219 0,185 0,877 0,217 0,185 0,879 0,215 0,185 0,880 0,210 0,182 0,880 0,208 0,181 310
224
Таблица 29
фо = 2ОО°; 4)01=120'
я0(01) 1,5 3,0
л0(12) 3 5 7 9 п 1 3 5 7 9 и
РкЮ 0,766 0,798 0,804 0,807 0,808 0,808 0,766 0,799 0,805 0,810 0,810 0,810
Рк12 0,159 0,155 0,152 0,149 0,148 0,147 0,159 0,156 0,153 0,150 0,150 0,149 250
^кВ 1 0,122 0,124 0,122 0,120 0,120 0,119 0,122 0,124 0,123 0,122 0,121 0,120
РкЮ 0,780 0,782 0,817 0,820 0,821 0,821 0,779 0,781 0,818 0,820 0,821 0,821
Рк12 0,179 0,179 0,178 0,177 0,176 0,175 0,180 0,179 0,178 0,177 0,176 0,175 270
1 0,139 0,140 0,139 0,138 0,137 0,137 0,139 0,141 0,140 0,138 0,137 0,136
РкЮ 0,792 0,794 0,829 0,833 ’0,834 0,^34 0,793 0,794 0,832 0,833 0,834 0,834
Рк12 0,191 0,190 0,189 0,188 0,187 0,186 0,191 0,190 0,188 0,187 0,186 0,186 290
НкВ 0,152 0,153 0,152 0,151 0,150 0,149 0,153 0,153 0,152 0,151 0,150 0,149
Oo=220°; <poi = 15O°
Таблица 30
л0 (01) 1,5 з,о
п0 (12) 1 3 5 7 9 11 1 3 5 7 9 11
Рк01 0,815 0,845 0,851 0,852 0,854 0,854 0,816 0,845 0,851 0,852 0,854 0,854
Рк12 0,147 0,146 0,144 0,143 0,143 0,140 0,147 0,144 0,144 0,143 0,142 0,141 250
Р’кЕ 0,120 0,123 0,122 0,122 0,120 0,119 0,120 0,122 0,122 0,122 0,120 0,121
Рк01 0,824 0,854 0,860 0,862 0,863 0,864 0,826 0,856 0,861 0,863 0,864 0,865
^к12 0,169 0,167 0,166 0,165 0,163 0,161 0,169 0,168 0,166 0,165 0,165 0,164 270
РкВ 0,139 0,142 0,143 0,142 0,142 0,141 0,140 0,144 0,143 0,142 0,141 0,140
PkOl 0,833 0,863 0,869 0,871 0,872 0,873 0,834 0,863 0,870 0,872 0,873 0,874
Р-К12 0,190 0,189 0,186 0,184 0,183 0,181 0,191 0,189 0,188 0,186 0,185 0,184 290
Р'кЕ 0,160 0,163 0,162 0,161 0,160 0,158 0,159 0,163 0,163 0,162 0,161 0,161
225
Таблица 3f
Оо=220°; <poi=180e
л0 (01) 1, 3,( ) о
л0 (12) 1 3 5 7 9 11 1 3 5 7 9 п о.5**
HkOI 0,735 0,777 0,785'0,788 0,789 0,789 0,736 0,777 0,784 0,789 0,789 0,789
НкГ2 0,141 0,141 0,140 0,138 0,136 0,136 0,141 0,138 0,136 0,138 0,136 0,135 250
Н'кЕ 0,103 0,109 0,110 0,108 0,107 0,107 0,104 0,108 0,107 0,108 0,107 0,106
Н-кО! 0,748 0,790 0,798 0,801 0,802 0,802 0,749 0,791 0,798 0,802 0,802 0,803
М*к12 0,162 0,162 0,161 0,160 0,158 0,157 0,162 0,162 0,160 0,159 0,158 0,157 270
нк2 0,121 0,128 0,126 0,126 0,126 0,123 0,121 0,128 0,127 0,128 0,127 0,125
РжО! 0,760 0,801 0,810 0,813 0,814 0,814 0,760 0,801 0,810 0,814 Э,814 0,814
^к!2 0,183 0,183 0,183 0,179 0,178 0,177 0,183 0,182 0,182 0,180 0,179 0,178 290
0,140 0,146 0,148 0,147 0,146 0,146 0,139 0,145 0,148 0,146 0,144 0,145
СПИСОК ЛИТЕРАТУРЫ
1. Авдонин А. С. Расчет на прочность космических аппаратов. М. Машино-
строение, 1979. 200 с.
2. Авдуевский В. С., Калашник В. И. Проблема расчета трения и теплообме-
на в турбулентном слое. — Изв. АН СССР Сер. Энергетика и транспорт, 1967,
№ 56, с. 9—24.
3. Автоматические станции «Венера-9» и «Венера-10» — функционирование
СА и измерение параметров атмосферы/В. С. Авдуевский, М. Я. Маров,
М. К. Рождественский и др. — Космические исследования, 1976, т. 14, вып. 5,
с. 655—666.
4. Адамс К. Последние достижения в теории абляции. — ВРТ, 1960, № 4,
с. 16—36.
5. Алексеев К. Б., Бебенин Г. Г., Ярошевский В. А. Маневрирование косми-
ческих аппаратов. М.: Машиностроение, 1970, 283 с.
6. Алемасов В. Е., Дрегалин А. Ф., Тишин А. П. Теория ракетных двигате-
лей. М.: Машиностроение, 1969. 547 с.
7. Алифанов О. М., Артюхин Е. А., Панкратов Б. М. Решение нелинейной
обратной задачи для обобщенного уравнения теплопроводности в области с под-
вижными границами. — ИФЖ, 1975, т. 29, № 1, с. 151—159.
8. Андреевский В. В. Динамика спуска космических аппаратов на Землю.
М.: Машиностроение, 1970, 232 с.
9. Анфимов Н. А. Ламинарный пограничный слой в многокомпонентной сме-
си газов. — Изв. АН СССР, ОТН. Механика и машиностроение, 1962, № 1,
с. 25—31.
10. Анфимов Н. А. Ламинарный пограничный слой на химически активной
поверхности. — Изв. АН СССР, ОТН. Механика и машиностроение, 1962, № 3,
с. 46—52.
11. Анфимов Н. А. Тепло- и массообмен и окрестности критической точки
при вдуве и отсосе различных газов через поверхность тела. — Механика жидко-
сти и газа, 1966, № 1, с. 22—31.
12. Аппазов Р. Ф., Лавров С. С., Мишин В. П. Баллистика управляемых ра-
кет дальнего действия. М.: Наука, 1966. 305 с.
13. Баженов В. И., Осин М. И. Посадка космических аппаратов на планеты.
М.: Машиностроение, 1978. 157 с.
14. Вукалович М. П„ Новиков И. И. Техническая термодинамика. М.: Гос-
энергоиздат, 1952. 567 с.
15. Газовая динамика космических аппаратов/Под ред. Г. И. Таганова. М.:
Мир, 1965. 205 с.
16. Гарсиа Ф. Ж., Фаулер В. Т. Система теплозащиты космического транс-
портного корабля. — ВРТ, 1974, № 9, с. 30—41.
17. Гейтвуд Б. Е. Температурные напряжения применительно к самолетам,
снарядам, турбинам и ядерным реакторам: Пер.- с англ. М.: ИЛ, 1969. 349 с.
18. Гинзбург И. П. Аэродинамика. М.: Высшая школа, 1966. 404 с.
19. Дракин И. И. Аэродинамический и лучистый нагрев в полете. М.: Обо-
ронгиз, 1961. 96 с.
20. Душин Ю. А. Работа теплозащитных материалов в горячих газовых по-
токах. М.—Л.: Химия, 1968. 224 с.
227
21. Зарубин В. С. Температурные поля в конструкции летательных аппара-
тов. Методы расчета. М.: Машиностроение, 1966. 206 с.
22. Исследование мирового пространства/Под ред. Д. Р. Бейтса. М.: Физмат-
издат, 1959. 302 с.
23. Каменков Е. Ф., Виноградова Г. А. К вопросу о двухканальном управле-
нии при планирующем спуске аппарата в атмосфере. В кн.: Труды 5 цандеров-
ских чтений. 1978, с. 28—36.
24. Каменков Е. Ф., Виноградов Г. А., Захаров В. Г. Алгоритм управления
дальностью полета на автономном участке спуска. — Вопросы кибернетики,.
1978, № 44, с. 22—30.
25. Карагодин В. М. Теоретические основы механики тела переменного сос-
тава. М.: Оборонгиз, 1963. 178 с.
26. Керов Н. В. Решение двумерной обратной задачи теплопроводности в-
цилиндрической системе координат. — ИФЖ, 1983, т. 45, № 5, с. 752—756.
27. Краснов Н. Ф. Аэродинамика. Ч. 2. Методы аэродинамического расчета.
М.: Высшая школа, 1980. 416 с
28 Кутателадзе С. С., Боришанский В. М. Справочник по теплопередаче.
М.—Л.: Госэнергоиздат, 1959. 204 с.
29. Кузмак Г. Е. Динамика неуправляемого движения летательных аппара-
тов при входе в атмосферу. М.: Наука, 1970. 283 с.
30. Коздоба Л. А. Методы решения нелинейных задач теплопроводности. М.г
Наука, 1975. 227 с.
31. Латышев Л. А. Введение в авиационную и космическую технику. М.г
Машиностроение, 1979. 134 с.
32. Лебедев А. А., Баранов В. Н„ Красильщиков М. Н. К задаче оптималь-
ного управления при входе в атмосферу. — Космические исследования, 1969, т. 7,
бып. 5, с. 32—40.
33. Летов А. М. Динамика полета и управления. М.: Наука, 1969. 285 с.
34. Лох В. Динамика и термодинамика спуска в атмосфере планет: Пер. с
англ./Под ред. И. Н. Гаевинда. М.: Мир, 1966. 382 с.
35. Лыков А. В. Теория теплопроводности. М.: Высшая школа, 1967. 599 с.
36. Лыков А. В. Тепломассобмен. М.: Энергия, 1972. 560 с.
37. Методы и средства исследования и использования космического прост-
ранства (обзор). — Астронавтика и ракетодинамика, 1980, № 35, с. 12—23.
38. Мишин В. П., Осин М. И. Введение в машинное проектирование ЛА. M.i
Машиностроение, 1978. 128 с.
39. Нойс Е. В. Перспективные аблирующие материалы в ракетной техни-
ке. — ВРТ, 1974, № 18, с. 83—99.
40. Обтекание и нагрев затупленных тел гиперзвуковым потоком газа с уче-
том переноса излучения. — ТВТ, 1969, т. 7, № 3, с. 529—541.
41. Олстед У. В. Соотношение для радиационной теплопередачи в критиче-
ской точке. — Ракетная техника и космонавтика, 1969, № 1, с. 209—211.
42. Образцов И. Ф., Алифанов О. М., Панкратов Б. М. Проблемы автомати-
зации теплопрочностных исследований ЛА. — В кн.: Научные чтения по авиа-
ции и космонавтике. М.: Наука, 1981, с. 100—НО.
43. Охоцимский Д. Е., Голубев Ю. Ф., Сихарулидзе Ю. Г. Алгоритмы управ-
ления космическим аппаратом при входе в атмосферу. М.: Наука, 1975. 400 с.
44. Панкратов Б. М. Вопросы тепло- и массообмена в баках жидкости при
радиационном нагреве. В кн.: Труды 2-й Всесоюзной конференции по тепло- и
массообмену. Минск, 1968, с. 491—494.
45. Панкратов Б. М. Некоторые задачи динамики полета многоразовых
транспортных аппаратов. — В кн.: Труды тринадцатых чтений, посвященных раз-
работке научного наследия К. Э. Циолковского М.: Наука, 1979. с. 3—9.
46. Панкратов Б. М. Тепловое проектирование агрегатов летательных аппа-
ратов. М.: Машиностроение, 1981. 176 с.
47. Панкратов Б. М. Некоторые проблемы решения задач тепломассообмена
при взаимодействии газовых потоков с поверхностью тел. — В кн.: Теоретична и
приложна механика, 4 национален конгресс, т. 1, София: изд: на Българската
Акадевия на науките, 1981, с. 938—943.
228
48. Панкратов Б. М. Некоторые проблемы теплового проектирования лета-
тельных аппаратов и их экспериментальной отработки. — ИФЖ, 1977, т. 33, № 6,
с. 967—971.
49 Панкратов Б. М., Полежаев Ю. В., Рудько А. К. Взаимодействие матери-
алов с газовыми потоками. Мд Машиностроение, 1976. 224 с.
50. Передвижная лаборатория на Луне. Луноход-1/Под ред. А. П. Виногра-
дова. Мд. Наука, 1971. 128 с.
51. Полежаев Ю. В., Киллих В. Е., Нарожный Ю. Г. Проблемы нестационар-
ного прогрева теплозащитных материалов. — ИФЖ, 1975, т. 29, № 1, с. 39—45.
52. Полежаев Ю. В., Нарожный Ю. Г., Сафонов В. В. О методе определения
теплопроводности высокотемпературных материалов при нестационарном нагре-
ве. — ТВТ, 1973, № 3, с. 609—615.
53. Полежаев Ю. В., Юревич Ф. Б. Тепловая защита. Мд Энергия, 1976.
392 с.
54. Предварительный тепловой расчет входа в атмосферу Сатурна — Астро-
навтика и ракетодинамика, 1981, № 4, с. 14—19.
55. Проблемы лучистого переноса в гиперзвуковой аэродинамике (обзор).—
ТВТ, 1969, № 1, с. 140—165.
56. Самарский А. А. Введение в теорию разностных схем. Мд Наука, 1971.
252 с.
57. Саульев В. К. Интегрирование уравнений параболического типа методом
сеток. М.: Физматгиз, 1960. 278 с.
58. Седов Л. И. Методы подобия и размерности в механике. Мд Гостехиз-
дат, 1957. 302 с.
59. Сихарулидзе Ю. Г. Оптимальное импульсное торможение при входе в ат-
мосферу.— Космические исследования, 1970, т. 8, вып. 2, с. 180—187.
60. Системы спасения экипажа с орбиты. — ВРТ, 1980, № 41, с. 14—26.
61. Смоляков Э. Р. Оптимизация коридора входа в атмосферу. — Космиче-
ские исследования, 1968, т. 6, вып. 1, с. 28—36.
62. Сперроу Э. М., Сесс Р. Д. Теплообмен излучением: Пер. с англ. М.—Лд
Энергия, 1971. 294 с.
63. Сравнение результатов численного и физического моделирования уноса
массы системы теплозащиты космического зонда, входящего в атмосферу Юпите-
ра.— Астронавтика и ракетодинамика, 1980, № 17, с. 8—17.
64. Стасевич Р. А. Оценка безопасности космического полета. — В кн: Изб-
ранные труды 1—5 чтений К. Э. Циолковского. Мд Машиностроение, 1974,.
с. 129—135.
65 Тарасов Е. В. Оптимальные режимы движения космических ЛА. Мд Ма-
шиностроение, 1965. 248 с.
66. Теплообмен и тепловой режим космических аппаратов: Пер. с англ. Мд
Мир, 1974. 294 с.
67. Теплозащита исследовательского зонда КА «Галилео», входящего в ат-
мосферу Юпитера. — Астронавтика и ракетодинамика, 1981, № 17, с. 6—12.
68. Течение излучающего газа в условиях входа в атмосферу планет (об-
зор). — ТВТ, 1969, т. 7, № 3, с. 542—565.
69. Тихонов А. И. Обратные задачи теплопроводности. — ИФЖ, 1975, т. 29,
№ 1, с. 7—12.
70. Тихонов А. И., Самарский А. А. Уравнения математической физики. Мд
Наука, 1972. 735 с.
71. Троицкий В. А. Вариационные задачи оптимизации процессов управления
с функциями, зависящими от промежуточных значений координат. — Прикладная,
математика и механика, 1962, т. 26. Вып. 6, с. 43—56.
72. Фаворский О. Н., Каданер В. С. Вопросы теплообмена в космосе. Мд
Высшая школа, 1965. 240 с.
73. Феодосьев В. И. Основы техники ракетного полета. Мд Наука, 1979.
496 с.
74. Физика космоса. Маленькая энциклопедия/Под ред. С. Б. Пикельнера.
Мд Сов. энциклопедия, 1976. 655 с.
229
75. Фрязинов И. В., Бакирова М. И. Об экономичных разностных схемах ре-
шения уравнений теплопроводности в полярных, цилиндрических и сферических
координатах. — ЖВМиМФ, 1972, т. 12, № 2, с. 353—363.
76. Хейс У., Пробетин Р. Теория гипорзвукового течения: Пер. с англ. М.:
ИЛ, 1962. 323 с.
77. Хохулин В. С. Метод исследования теплового режима конструкции слож-
ной конфигурации. — ИФЖ, 1975, т. 26, № 1, с. 140—145.
78. Черчил Р. И., Райбек И. П. Современное состояние проблем связи при
входе в атмосферу. — ВРТ, 1972, № 9, с. 3—16.
79. Шкадов Л. М., Буханова Р. С., Илларионов В. Ф. Механика оптимально-
го пространственного движения ЛА в атмосфере. М.: Машиностроение, 1972.
240 с.
80. Шленский О. Ф. Тепловые свойства стеклопластика. М.: Химия, 1973.
224 с.
81. Штернфельд А. А. Введение в космонавтику. 2-е изд. М.: Наука, 1974.
240 с.
82. Эккерт Э. Р., Дрейк Р. М. Теория тепло- и массообмена. Пер. с англ.
М.—Л.: Госэнергоиздат, 1961. 680 с.
83. Ярошевский В. А. Приближенный расчет траектории входа в атмосфе-
ру. — Космические исследования, 1964, т. 2, вып. 4, с. 23—29.
ОГЛАВЛЕНИЕ
Предисловие ........................................................ 3
Глава 1.
Спускаемые аппараты 5
1.1. Основные задачи СА и физические условия спуска в атмосфе-
ре Земли ................................................... 5*
1.2. Моделирование облика спускаемого аппарата и использование
САПР....................................................... 13
1.3. Аппараты баллистического, планирующего и скользящего
спуска .................................................... 18:
1.4. Состав и назначение бортового комплекса, систем теплозащи-
ты и посадки СА............................................. 22
1.5. Взаимосвязь критериев и вероятность выполнения СА постав-
- ленной задачи ................................................ 26
1.6. Модель массовых характеристик аппарата................. 29
Глава 2.
Баллистическое проектирование спускаемых аппаратов 33
2.1. Общая постановка задачи................................ 33
2.2. Баллистический спуск СА ............................... 39
2.3. Планирующий спуск (аппараты «скользящего» спуска) . . . 43
2.4. Некоторые задачи выбора оптимальной траектории и управле-
' ния спуском СА......................................... 47
2.5. Особенности спуска СА на некоторые планеты Солнечной сис-
темы ....................................................... 60
2.6. Модель аэродинамических характеристик аппарата......... 66
Глава 3.
Тепловые потоки, действующие на СА 76
3.1. Некоторые проблемы решения задач тепломассообмена при
взаимодействии газовых потоков с поверхностями тел ... 76
3.2. Аэродинамический нагрев................................ 79
3.3. Теплопередача в ламинарном пограничном слое............ 87
3.4. Расчет теплопередачи в турбулентном пограничном слое . . 90
3.5. Приближенная оценка тепловых потоков, действующих на СА
конвективный тепловой поток) , . .................... 91
3.6. Радиационный тепловой поток........................... 94
3.7. Определение температуры стенки. Равновесная радиационная
температура................................................. 97
Глава 4.
Тепловое проектирование систем теплозащиты
спускаемых аппаратов 98
4.1. Общая постановка задачи .............................. 98
4.2. Основные виды теплозащитных систем................... 100
4.3. Пассивные системы теплозащиты........................ 103
4.4. Системы теплозащиты, использующие искусственное уменьше-
ние внешних тепловых потоков, действующих на СА........... 107
' ; 231
4.5. Основные характеристики и возможные области применения
материалов, используемых в системах теплозащиты с разруше-
нием (уносом) вещества....................................... 114
4.6. Некоторые системы охлаждения конструкции СА.............. 121
4.7. Приближенные методики определения основных параметров
теплозащиты спускаемых аппаратов. Моделирование и числен-
ные результаты расчетов........................................124
4.8. Проектирование теплозащитных покрытий СА с учетом много-
мерного распространения тепла в материале ............... 134
4.9. Обратные задачи теплопроводности при исследовании парамет-
ров систем теплозащиты...................................... 143
Глава 5.
Анализ массовых характеристик систем и агрегатов СА 150
5.1. Основные положения расчета систем, агрегатов и отсеков СА
на прочность............................................... 150
5.2. Общая постановка задачи проектирования топливных отсеков
и основные параметры двигательных установок................ 154
5.3. Тепломассообмен в баках при нагреве компонентов топлива . 162
5.4. Отсеки экипажа и приборные отсеки ....................... 169
5.5. Конструкция корпуса....................................... 172
5.6. Анализ массовых уравнений спускаемых аппаратов........ 177
Глава 6.
Моделирование входа искусственных метеоров
в атмосферу Земли 180
6.1. Использование СА для входа искусственных метеоров в атмо-
сферу ..................................................... 180
€.2. Вертикальный разгон тела.................................. 184
6.3. Задача входа искусственного метеора в атмосферу с круговой
орбиты ИСЗ................................................. 186
6.4. Старт с эллиптической орбиты (одноимпульсный переход) . . 188
6.5. Старт с эллиптической орбиты (двухимпульсный переход) . 190
6.6. Некоторые вопросы обеспечения связи при входе СА в атмо-
сферу ..................................................... 199
6.7. Планирование тепловых экспериментов.......................207
Приложение..................................................... 212
Список литературы ............................................ 227
Борис Михайлович Панкратов СПУСКАЕМЫЕ АППАРАТЫ ИБ № 4375 Сдано в набор 15.02.84. Подписано в печать 20.06.84. Т-12444. Формат 60Х90*/1б. Печать высокая. Бумага
Редактор Е. И. Кравченко Художественный редактор В. В. Лебедев Переплет художника В. В. Ле- бедева Технические редакторы Г. И. Андреева и Л. П. Горде- ева Корректор А. П. Сизова типограф. № 1. Гарнитура литера- турная. Усл. печ. л. 14,5. Усл. кр.- отт. 14,5. Уч.-изд. л. 15,93. Тираж 931 экз. Заказ 331. Цена 2 р. 70 к. Ордена Трудового Красного Знамени издательство «Машиностроение», 107076, Москва, Стромынский пер., д. 4.
Московская типография № 8 Союзполиграфпрома при Государственном комитете
СССР по делам издательств, полиграфии и книжной торговли. 101898, Москва,
Центр, Хохловский пер., 7.