/








































































































































































































































































































































































































































































































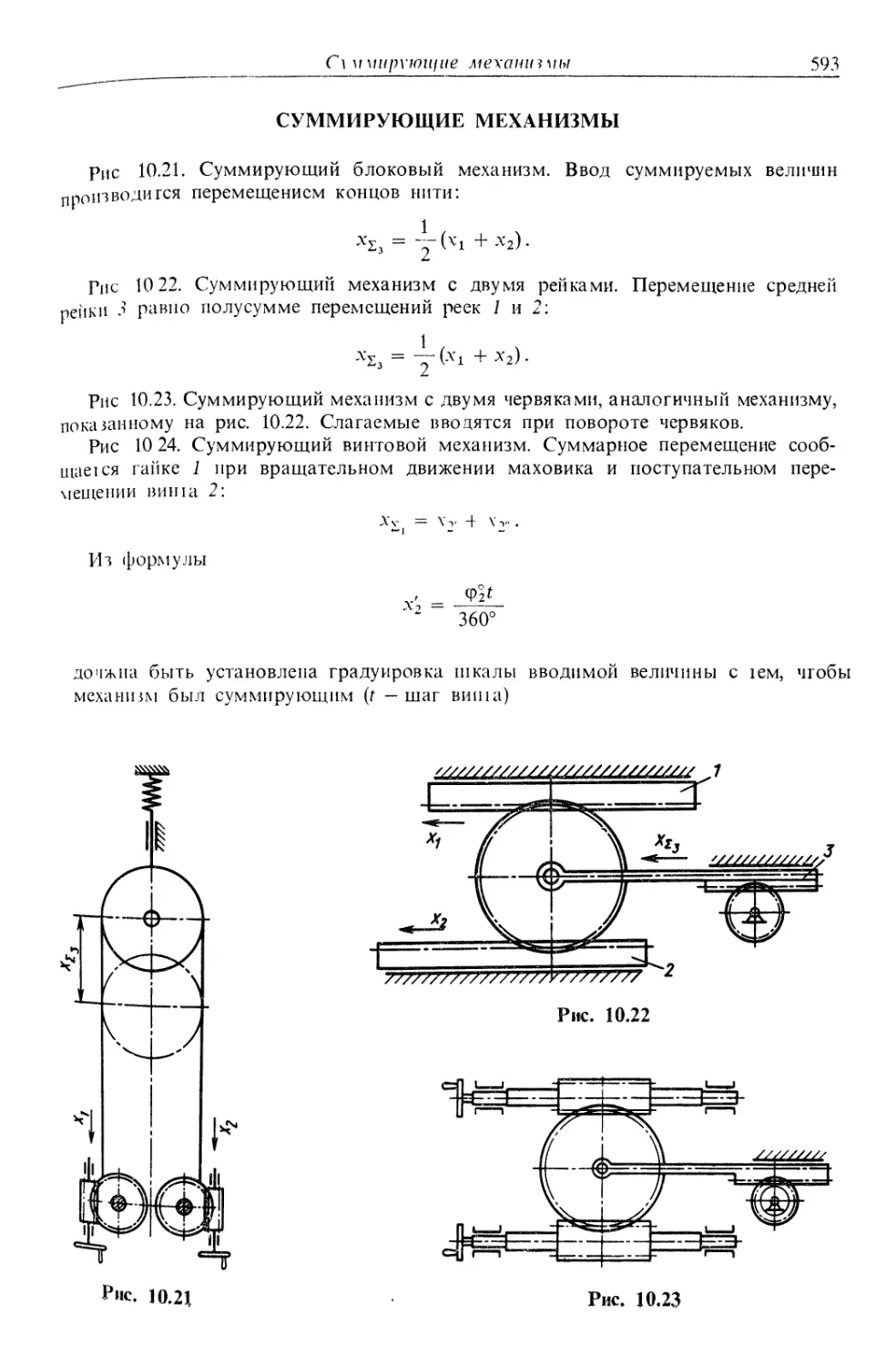







































































































































































Текст
С.Н.КОЖЕВНИКОВ,Я.И.ЕСИПЕНКО,Я.М.РАСКИН
х^хехавшзмы
СПРАВОЧНОЕ ПОСОБИЕ
Под редакцией чл.-кор. АН УССР
С. Н. КОЖЕВНИКОВА
Издание четвертое, переработанное и дополненное
т
МОСКВА
«МАШИНОСТРОЕНИЕ»
1976
6П5.1
К58
УДК 621.01(031)
СЕРГЕЙ НИКОЛАЕВИЧ КОЖЕВНИКОВ,
ЯКОВ ИВАНОВИЧ ЕСИПЕНКО,
ЯКОВ МИХАЙЛОВИЧ РАСКИН
МЕХАНИЗМЫ
Редактор издательства Л. П. Рыжова
Технические редакторы Н. В. Тимофеенко, Л. П. Гордеева, Ф. П. Мельниченко
Корректор О. Е. Мишина
Переплет художника А. Я. Михайлова
Сдано в набор 29/1-1976 г Поаписано к печати 29/Х-1976 г Т-16495 Формат 60x907if, Бумага
типографская № I Уел печ л 49 Уч-изд л 49,4 Тираж 60000 экз. Заказ № 422 Цена 2 р. 78 к.
Издагельство «Машиностроение», 107885, Москва, Б-78, 1-й Басманный пер., 3
Ордена Трудового Красного Знамени Ленинградское производственно-техническое
объединение «Печатный Двор» имени А. М. Горького Союзполиграфпрома при Государственном
комитете Совета Министров СССР по делам издательств, полиграфии и книжной торговли.
197136, Ленинград, 11-136, Гатчинская ул., 26.
Кожевников С. Н., Есипенко Я. И., Раскин Я. М.
К58 Механизмы. Справочник. Изд. 4-е, перераб. и доп.
Под ред. С. Н. Кожевникова М., «Машиностроение»,
1976.
784 с. с ил.
Книга содержит описание около 2000 механизмов и их элементов,
применяющихся в современных машинах различных отраслей
промышленности. В основу расположения материала положена преимущественно
функциональная классификация механизмов. Для многих механизмов приведены
в окончательном виде расчетные формулы, облегчающие проектирование.
Книга может служить справочным руководством для
инженерно-технических работников заводов, технологических и проектных институтов,
а также может быть полезной для студентов при проектировании
механизмов и машин.
31302-034
^ 038(01)-76 ^-'^ ^"^-^
© Издательство «Машиностроение», 1976 г.
СОДЕРЖАНИЕ
Предисловие 6
Раздел 1
СВЕДЕНИЯ ИЗ КИНЕМАТИКИ И ДИНАМИКИ МЕХАНИЗМОВ .... 7
Структурный анализ 7
Кинематика плоских стержневых механизмов 12
Разме1ка положений звеньев и носiроение траекторий точек .... 12
Графическое определение cKopocieii и ycKopcHHii 16
Построение передаточных харакхсрисгнк .... 23
Аналитическая кинематика некоторых С1ержневых механизмов . . 25
Кинематика пространственных механизмов . . . . 28
Некоторые сведения из динамики машин 36
Силы, действующие в машине 36
Силовой расчет плоских стержневых механизмов . ... ... 38
Трение в кинематических парах . ... 42
Приведение масс и сил ... 46
К. п. д. некоторых частных механизмов 48
Уравнение движения механизма 50
Неравномерность хода машин и расчет маховика 52
Уравновешивание механизмов и машин 55
Раздел 2
ЗВЕНЬЯ, КИНЕМАТИЧЕСКИЕ ПАРЫ И СТЕРЖНЕВЫЕ МЕХАНИЗМЫ ... 60
Звенья 60
Кинематические пары 63
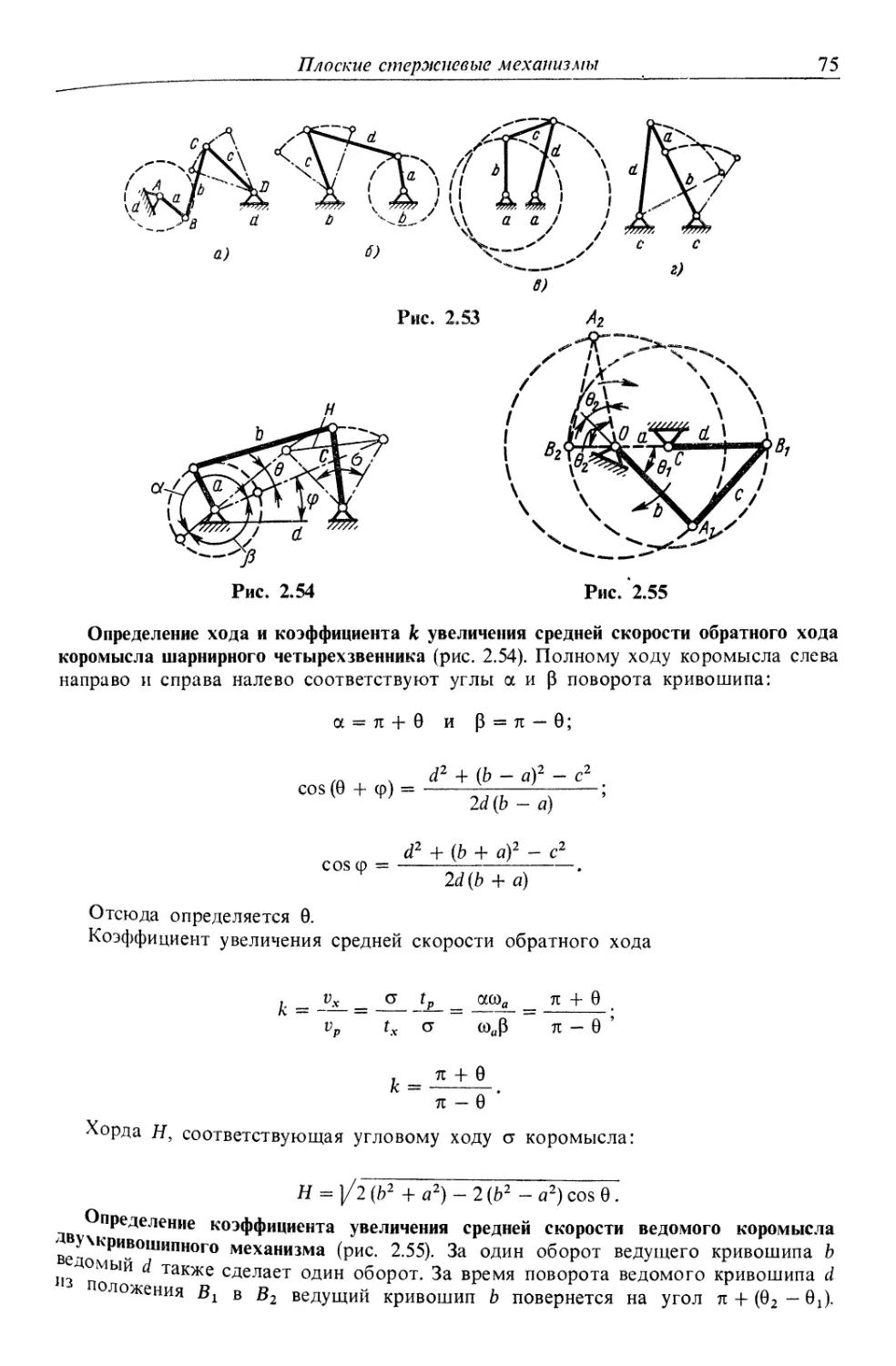
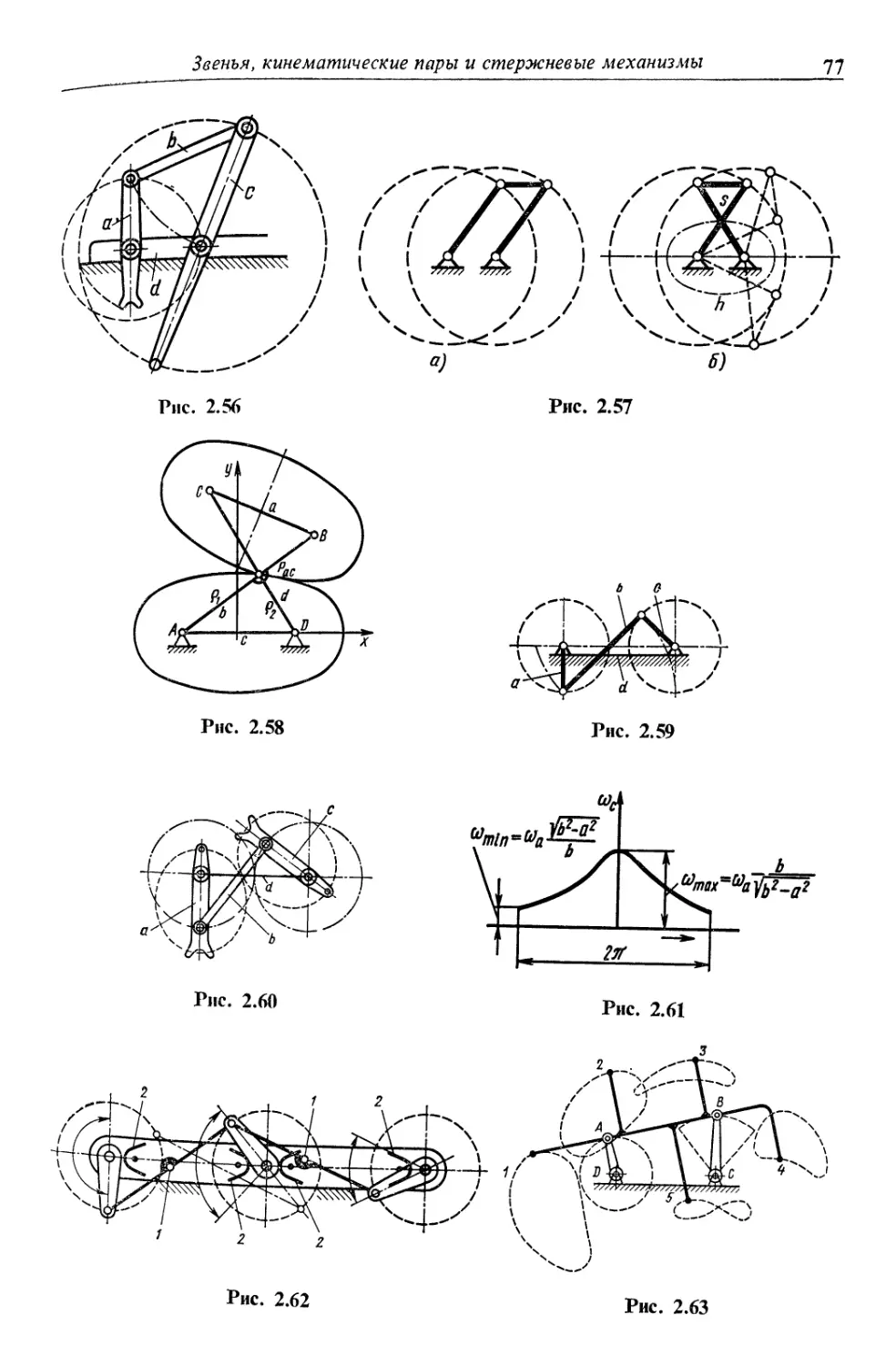
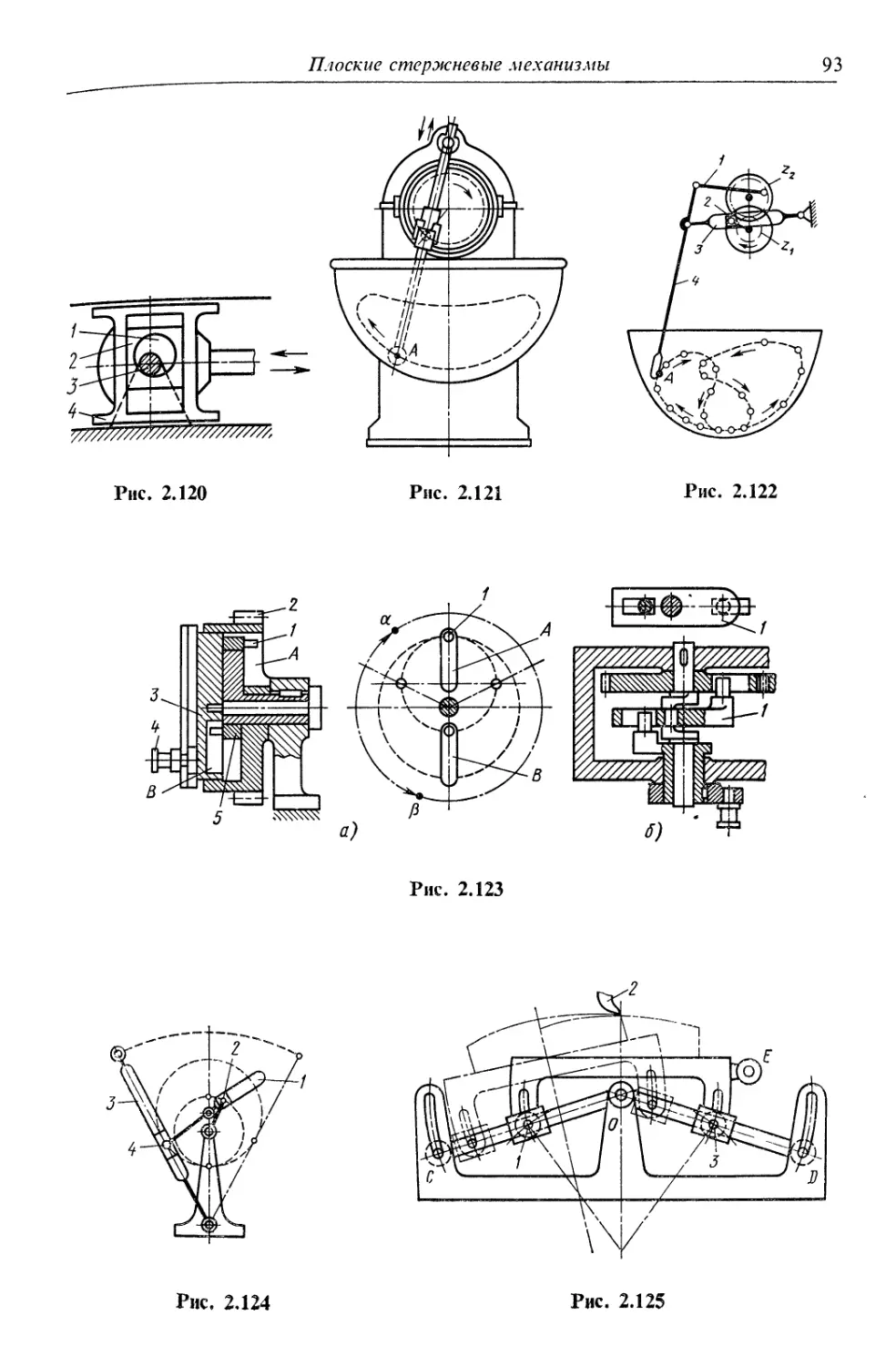
Плоские стержневые механизмы 74
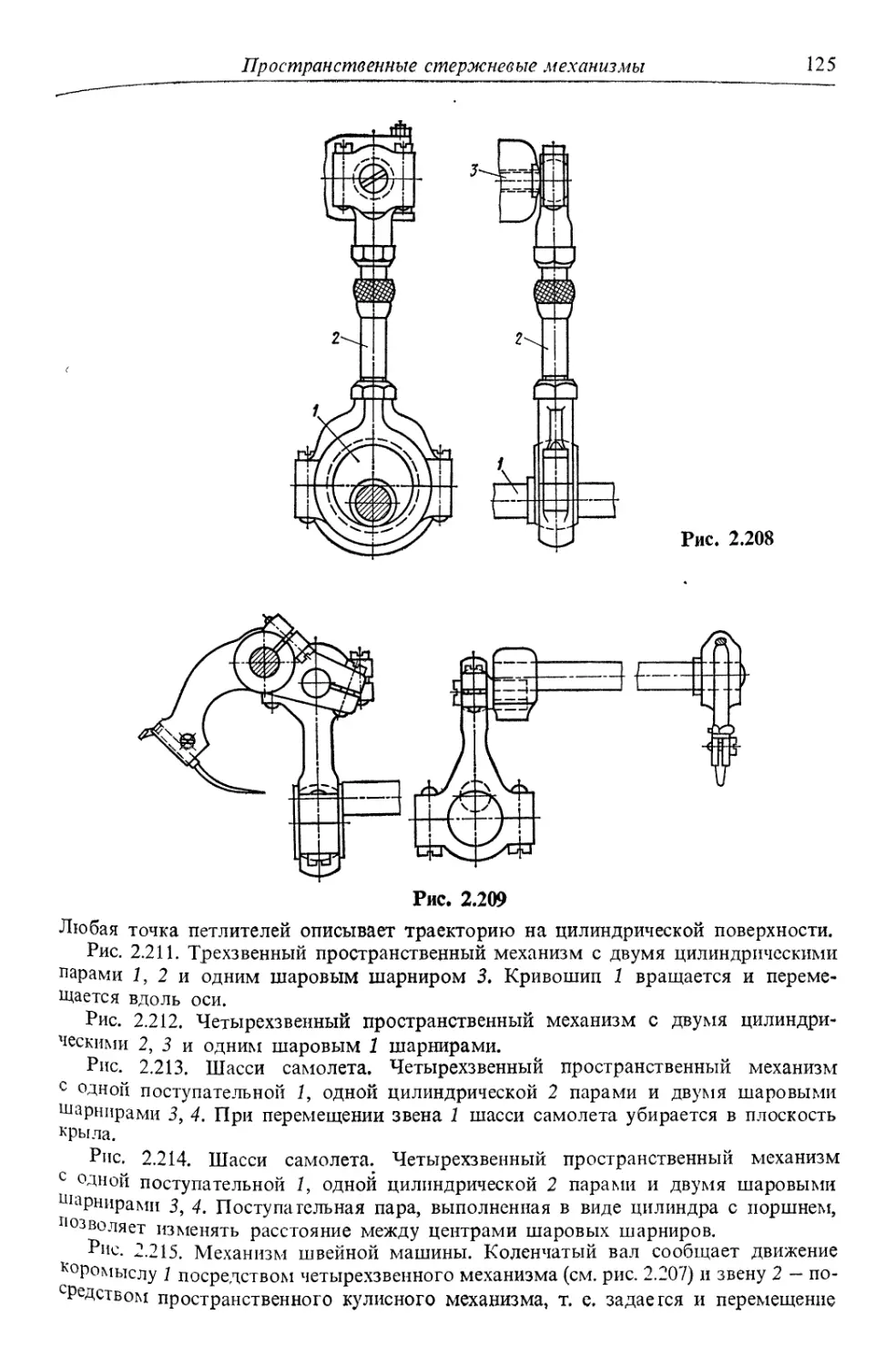
Пространственные стержневые механизмы 121
Винты и винтовые механизмы 132
Раздел 3
ЗУБЧАТЫЕ КОЛЕСА И МЕХАНИЗМЫ, СОСТАВЛЕННЫЕ ИЗ ЗУБЧАТЫХ
КОЛЕС 145
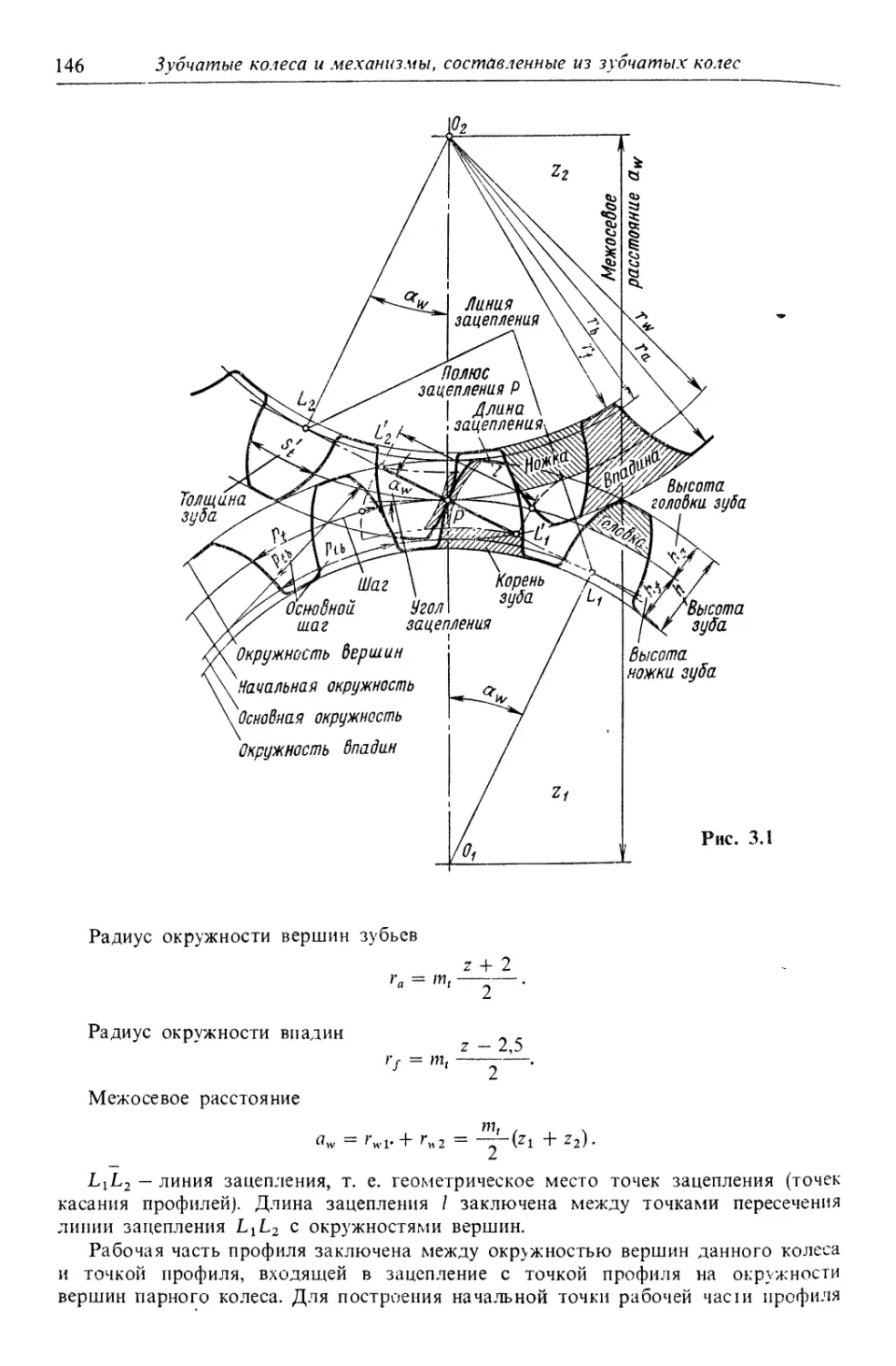
Геометрические элементы . . 145
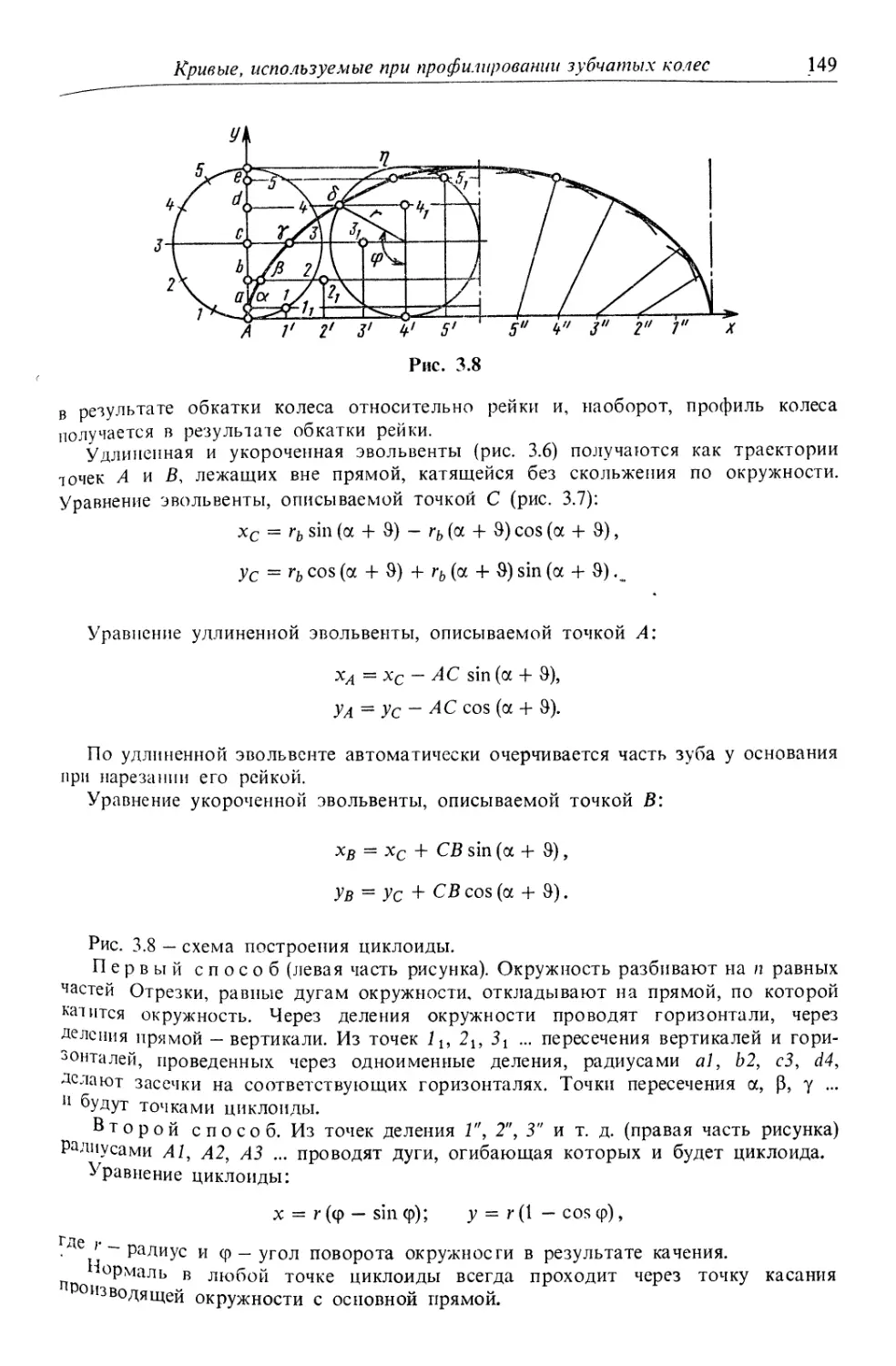
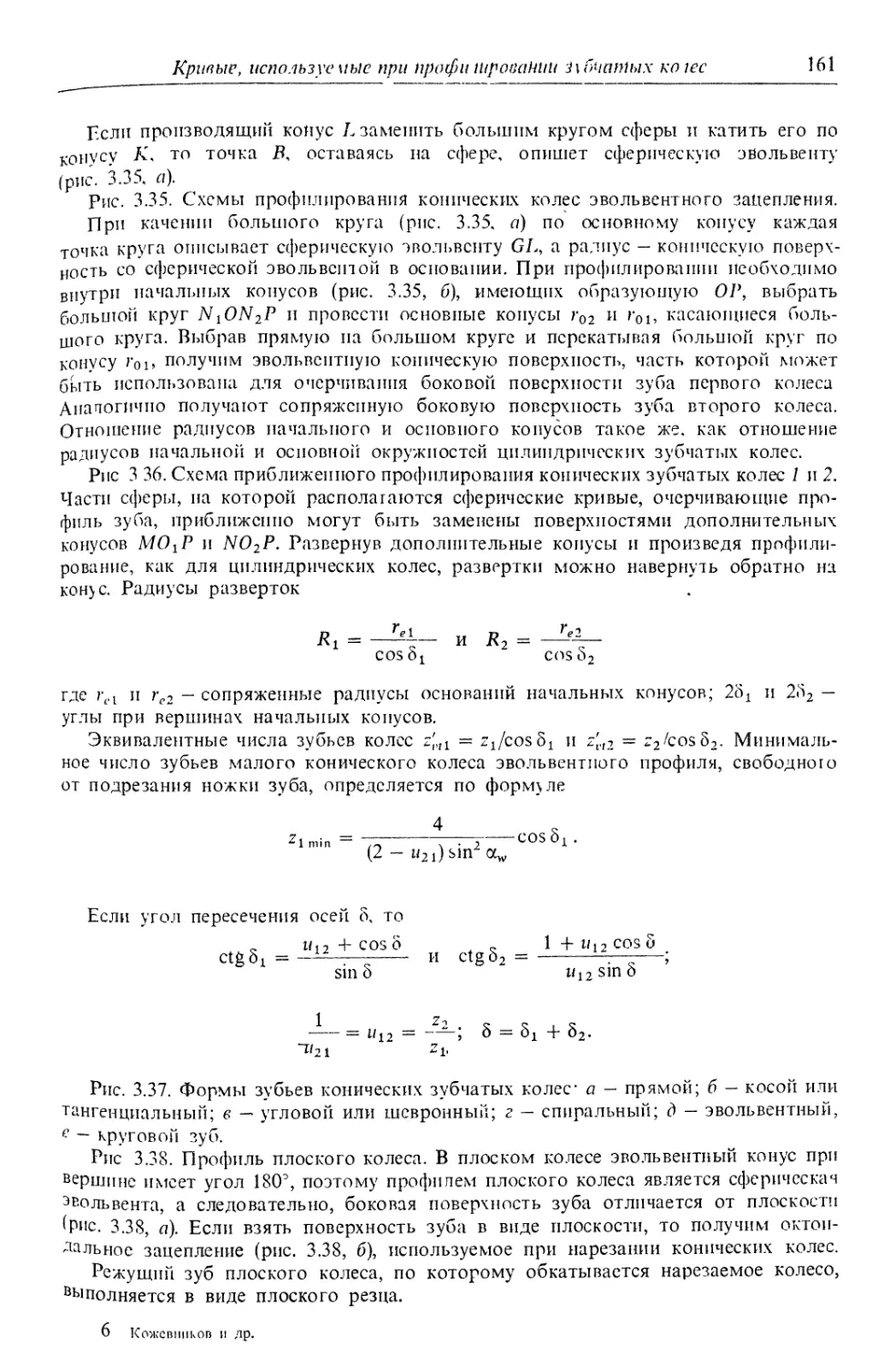
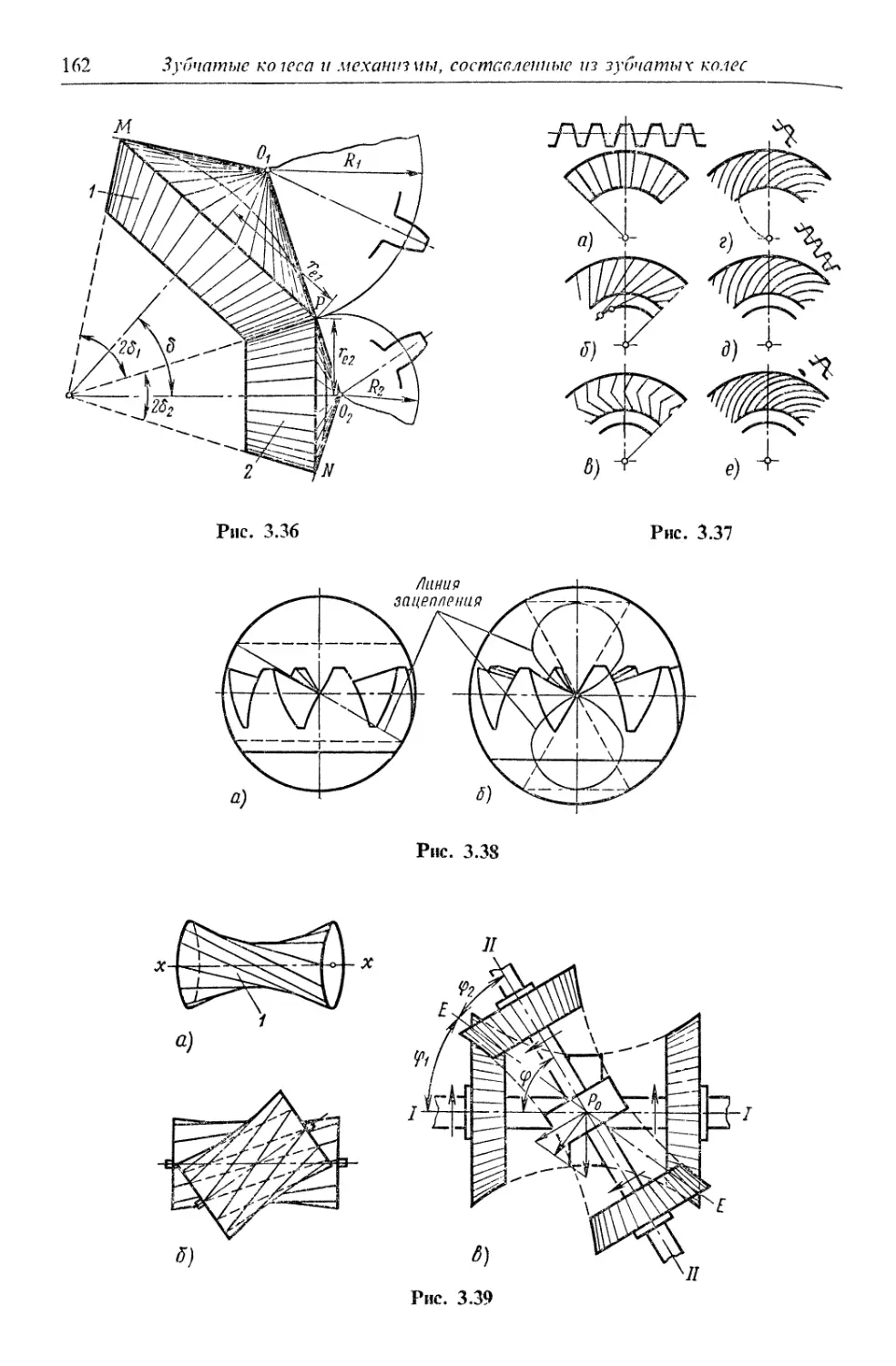
Кривые, используемые при профилировании зубчатых колес .... . 147
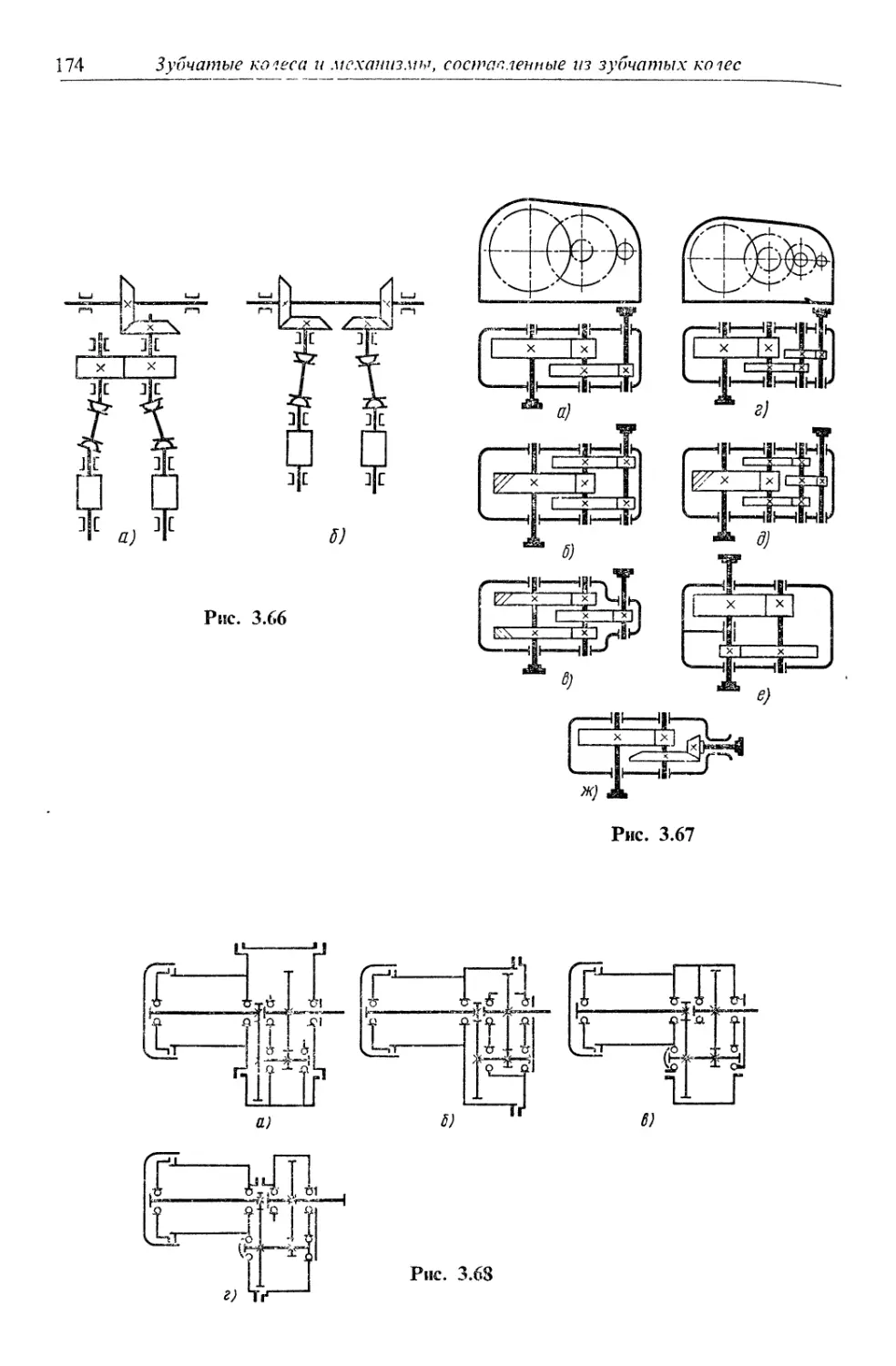
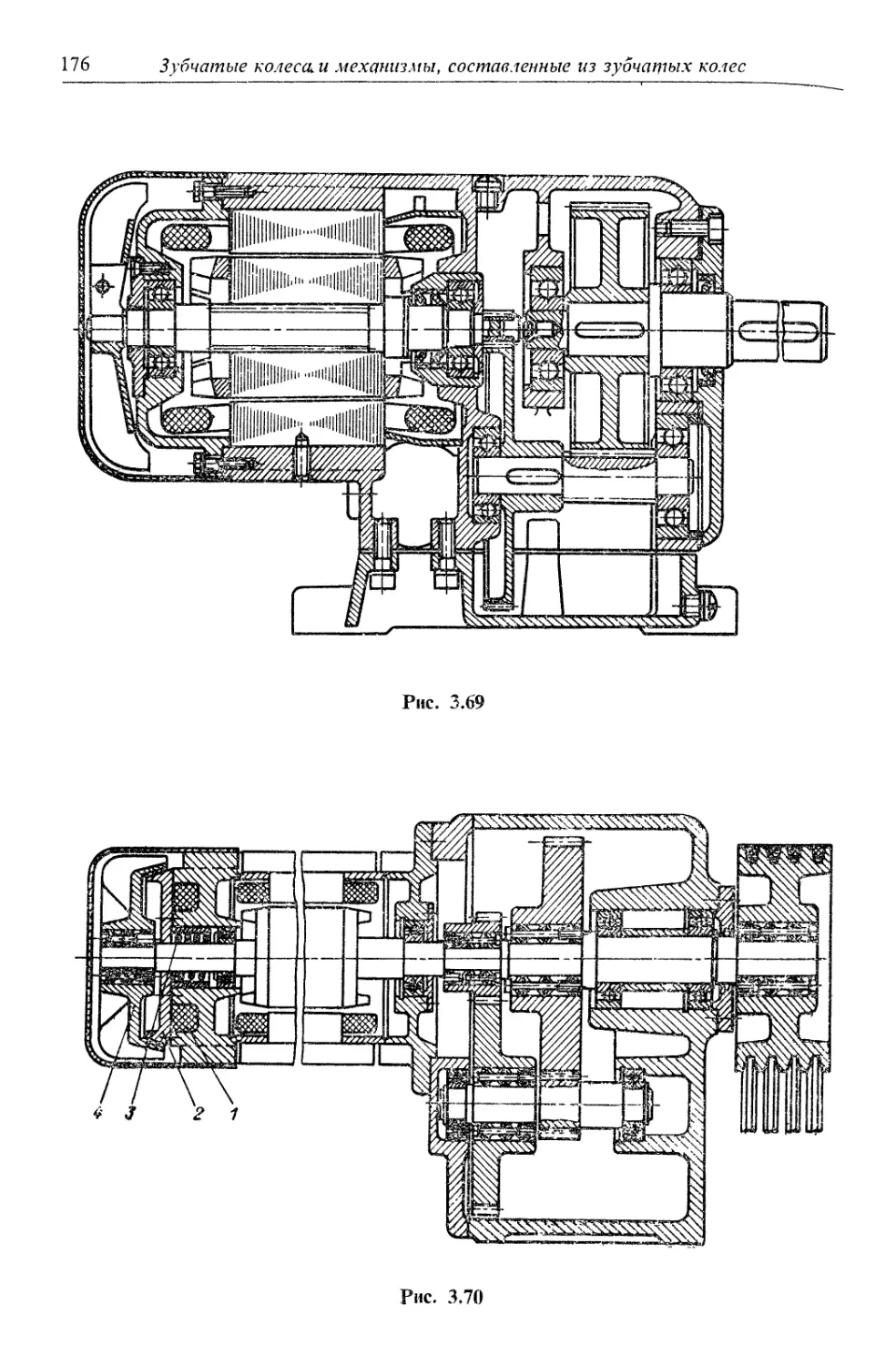
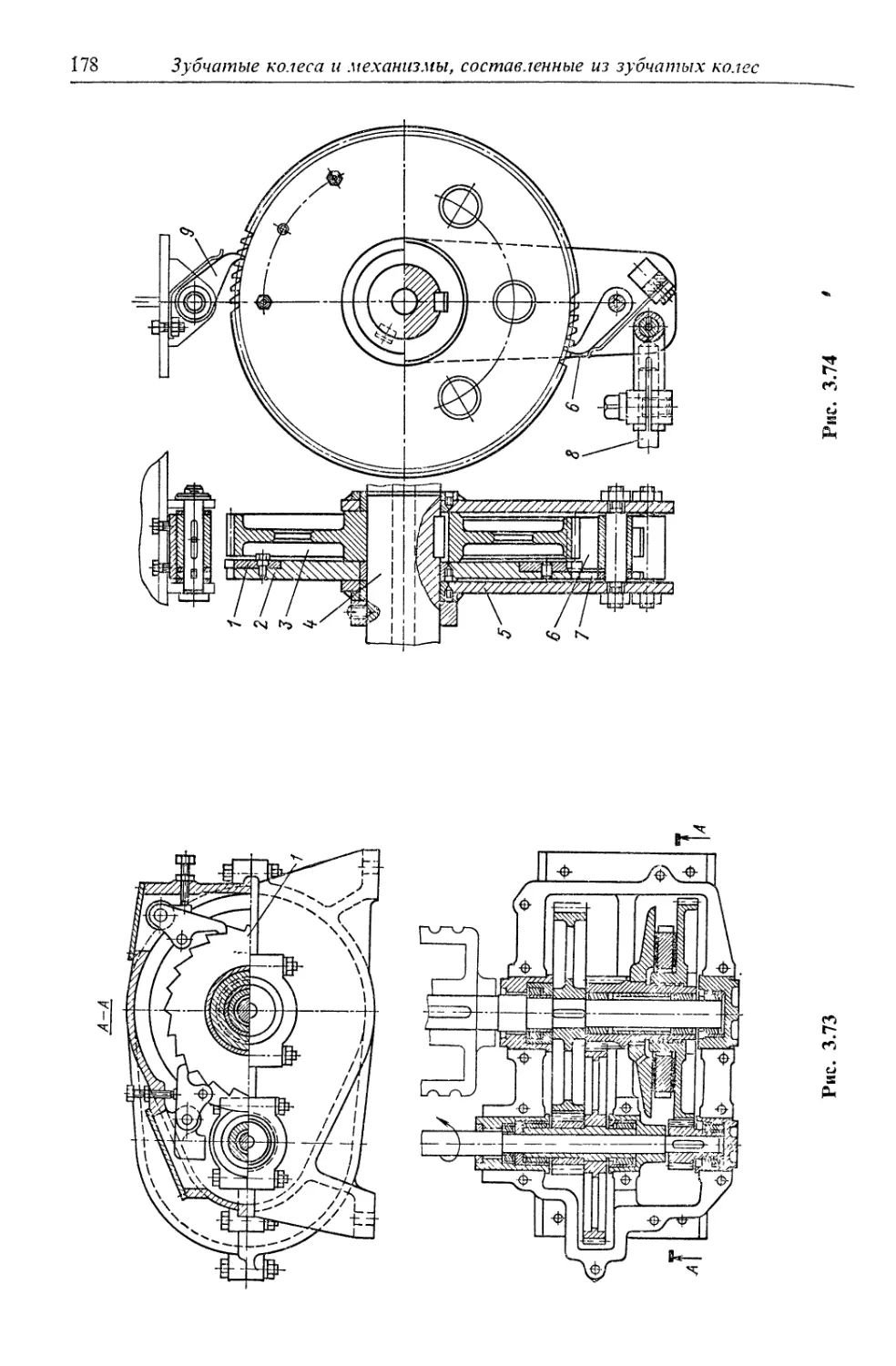
Механизмы, составленные из зубчатых колес 171
Простые передачи 171
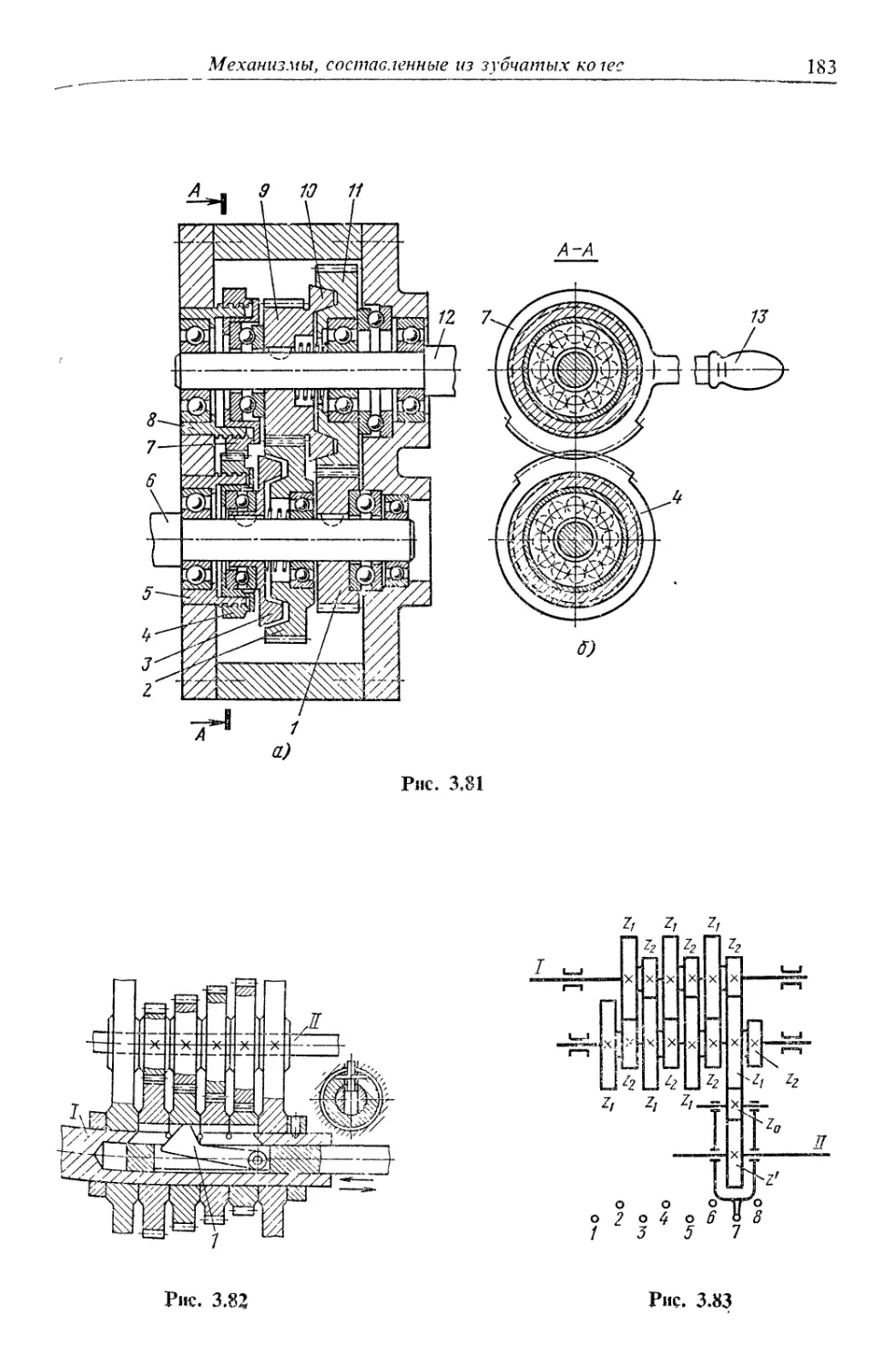
Эпиник.тичсские передачи 188
Плане!арные рсдукюры 193
Эпициклические реверсивные механизмы и механизмы управления 208
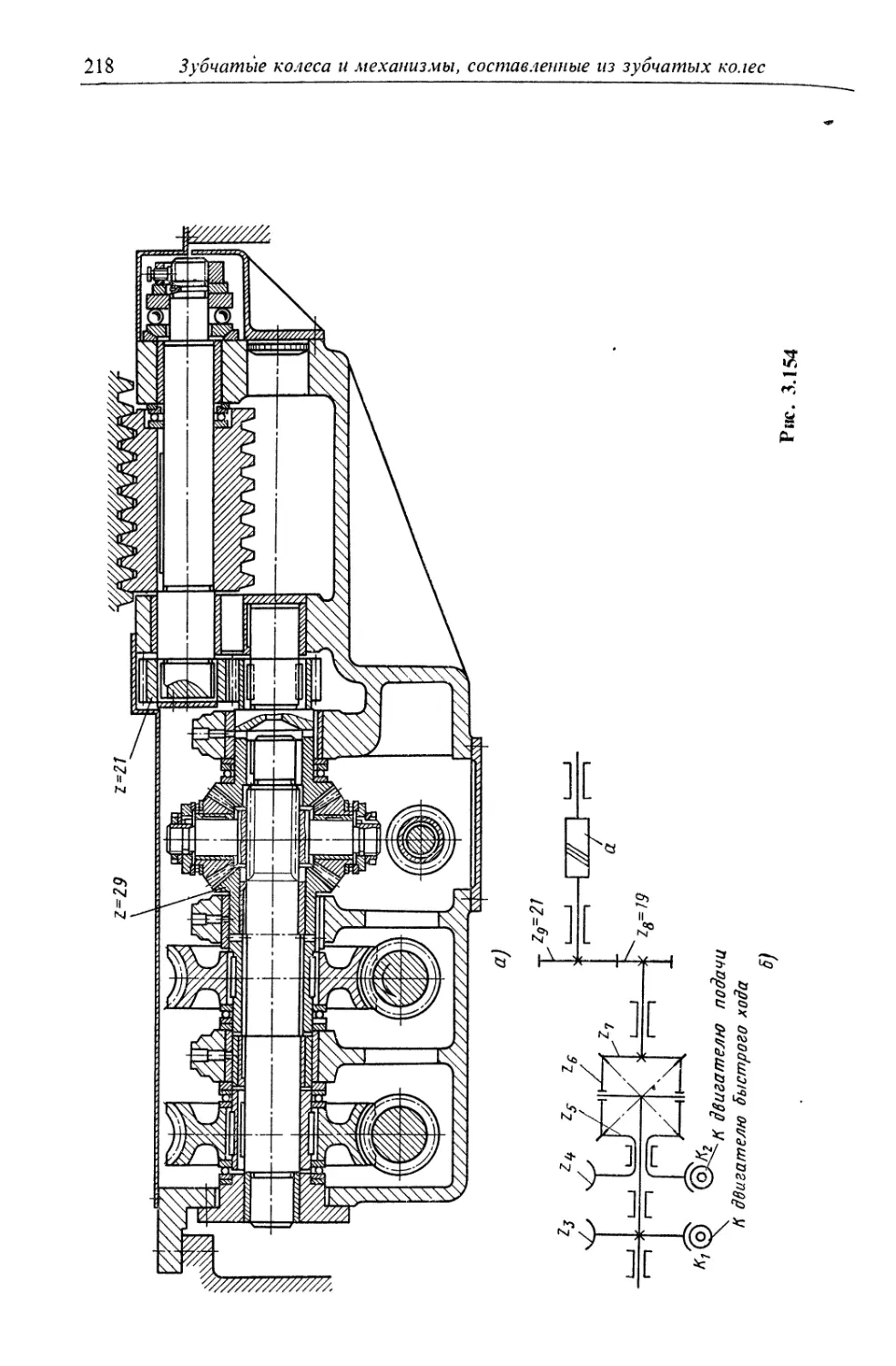
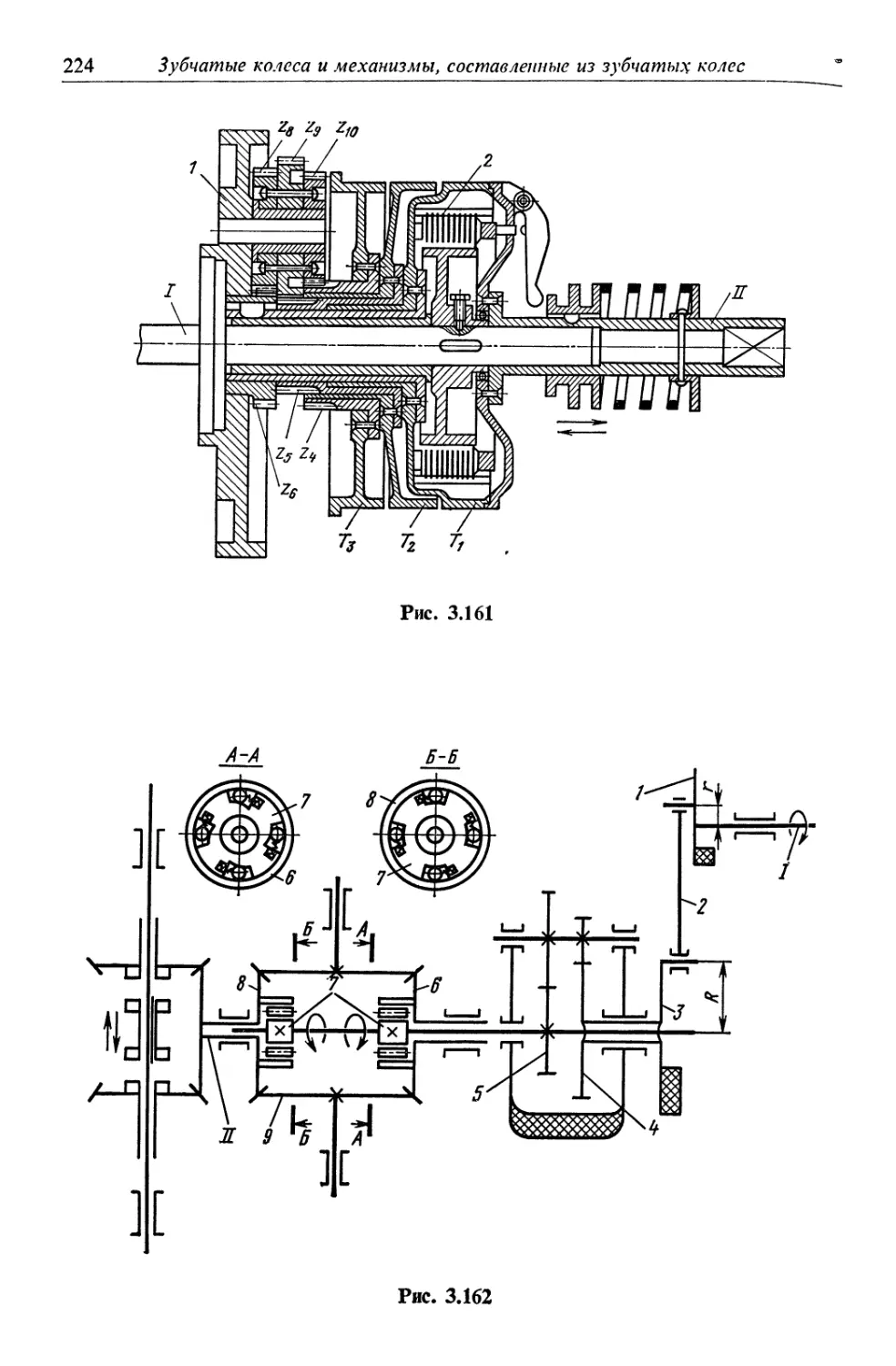
Планетарные коробки скоростей 220
Содерэрсание
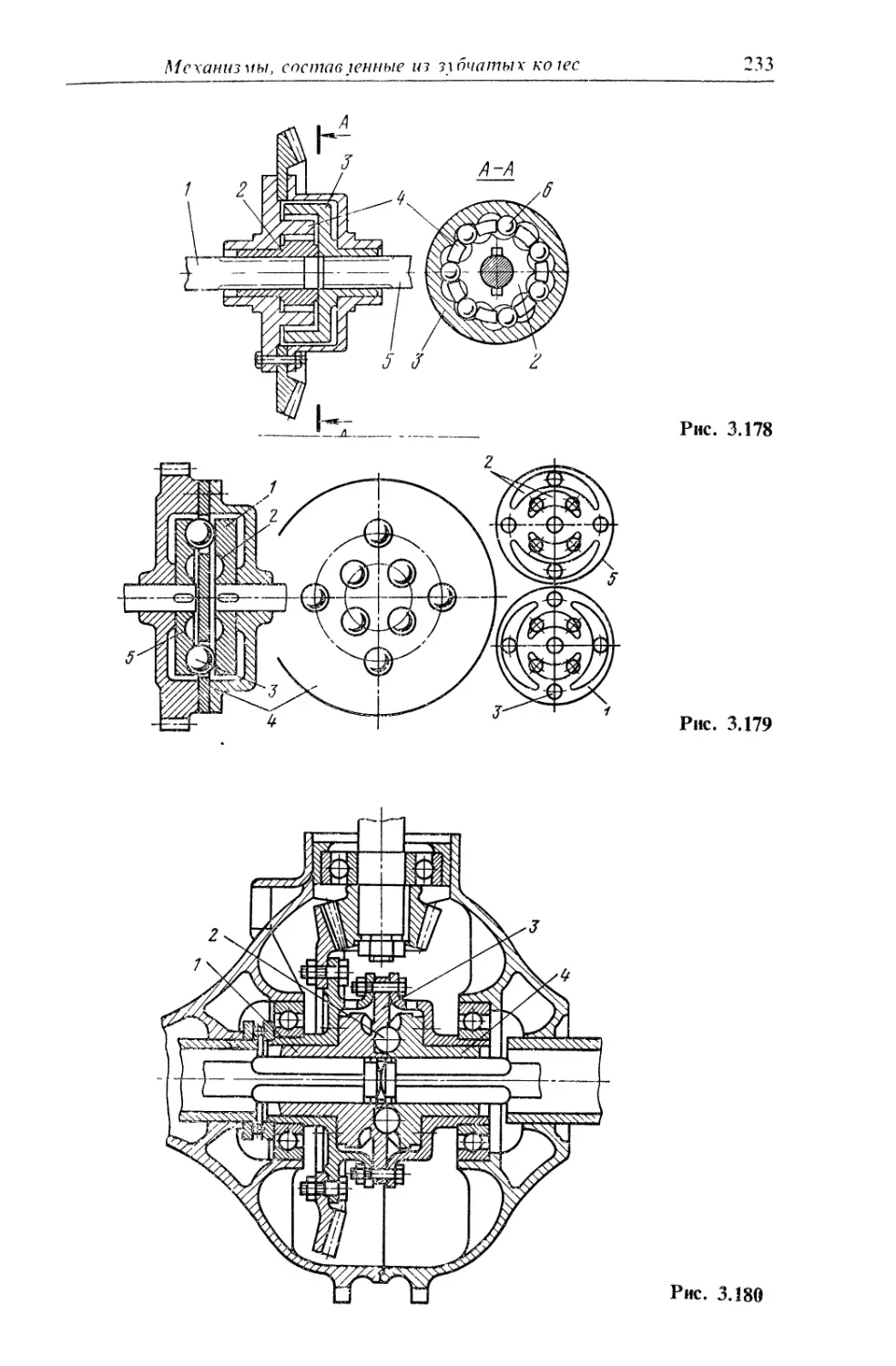
Суммирующие и уравнительные эпициклические механизмы и
механизмы подачи 228
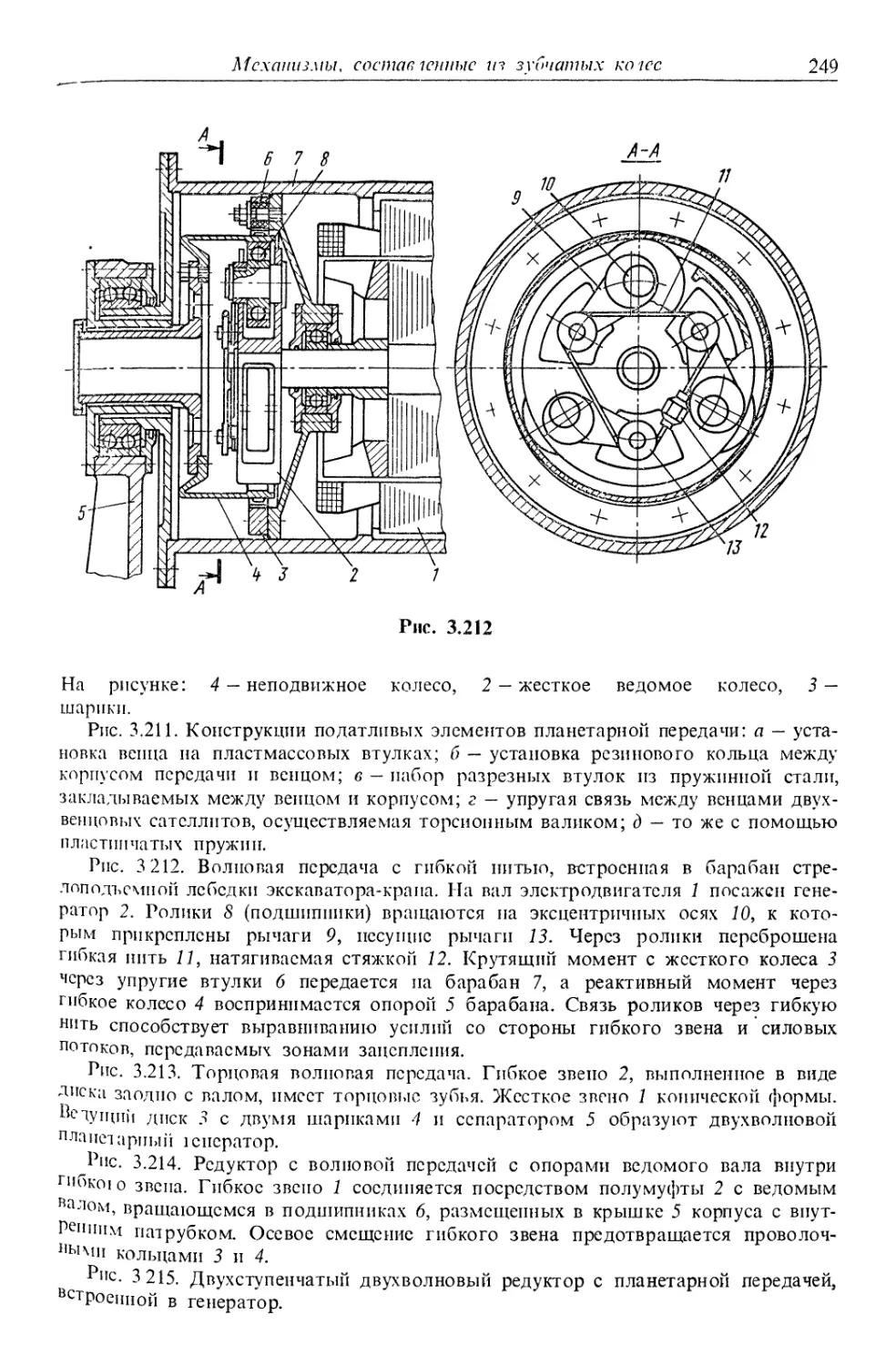
Механизмы грузоподъемных машин 235
Комбинированные механизмы 252
Раздел 4
КУЛАЧКОВЫЕ МЕХАНИЗМЫ .... 268
Общие сведения о кулачковых механизмах 268
Выбор размеров кулачкового механизма 272
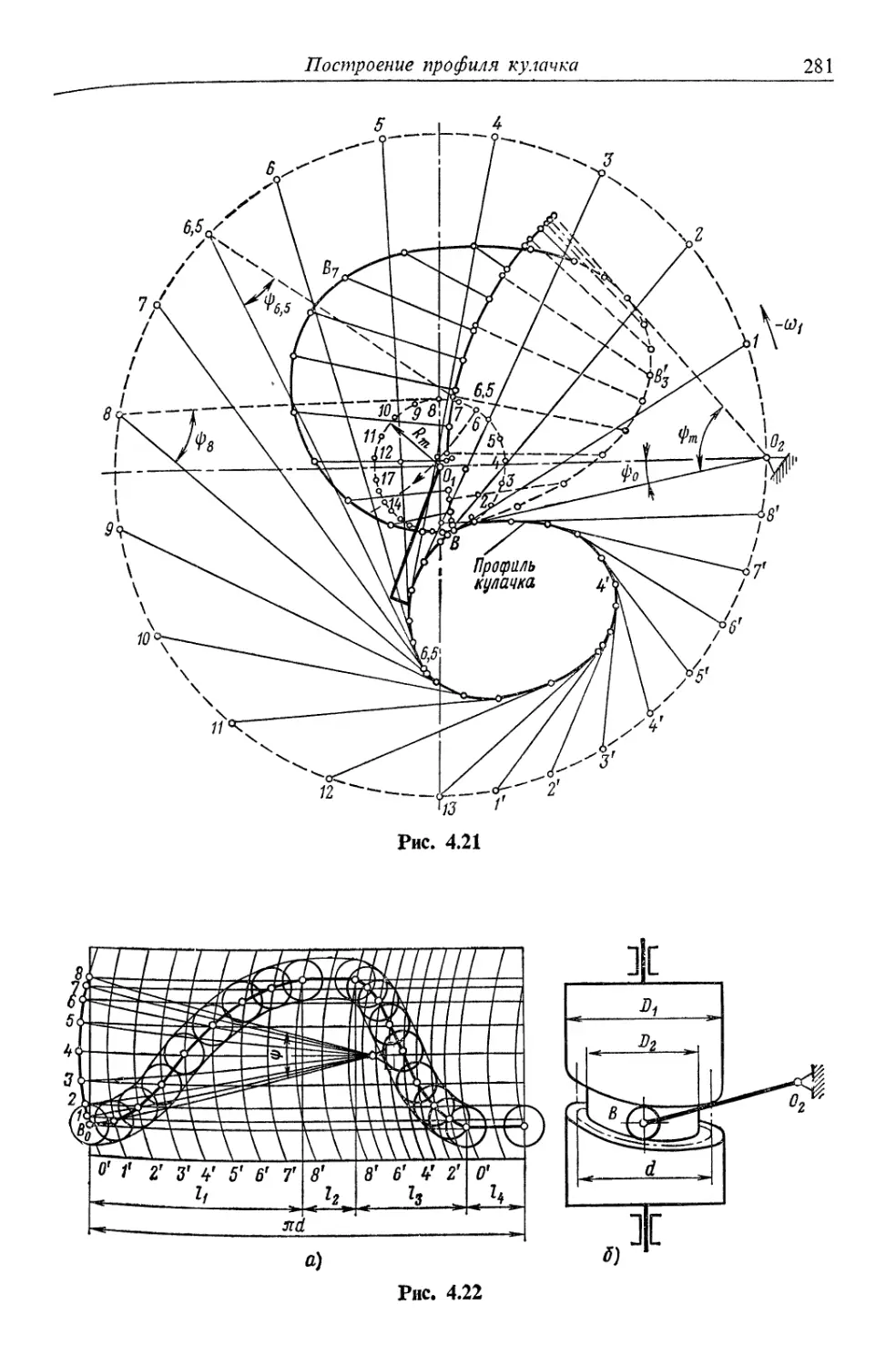
Построение профиля кулачка 277
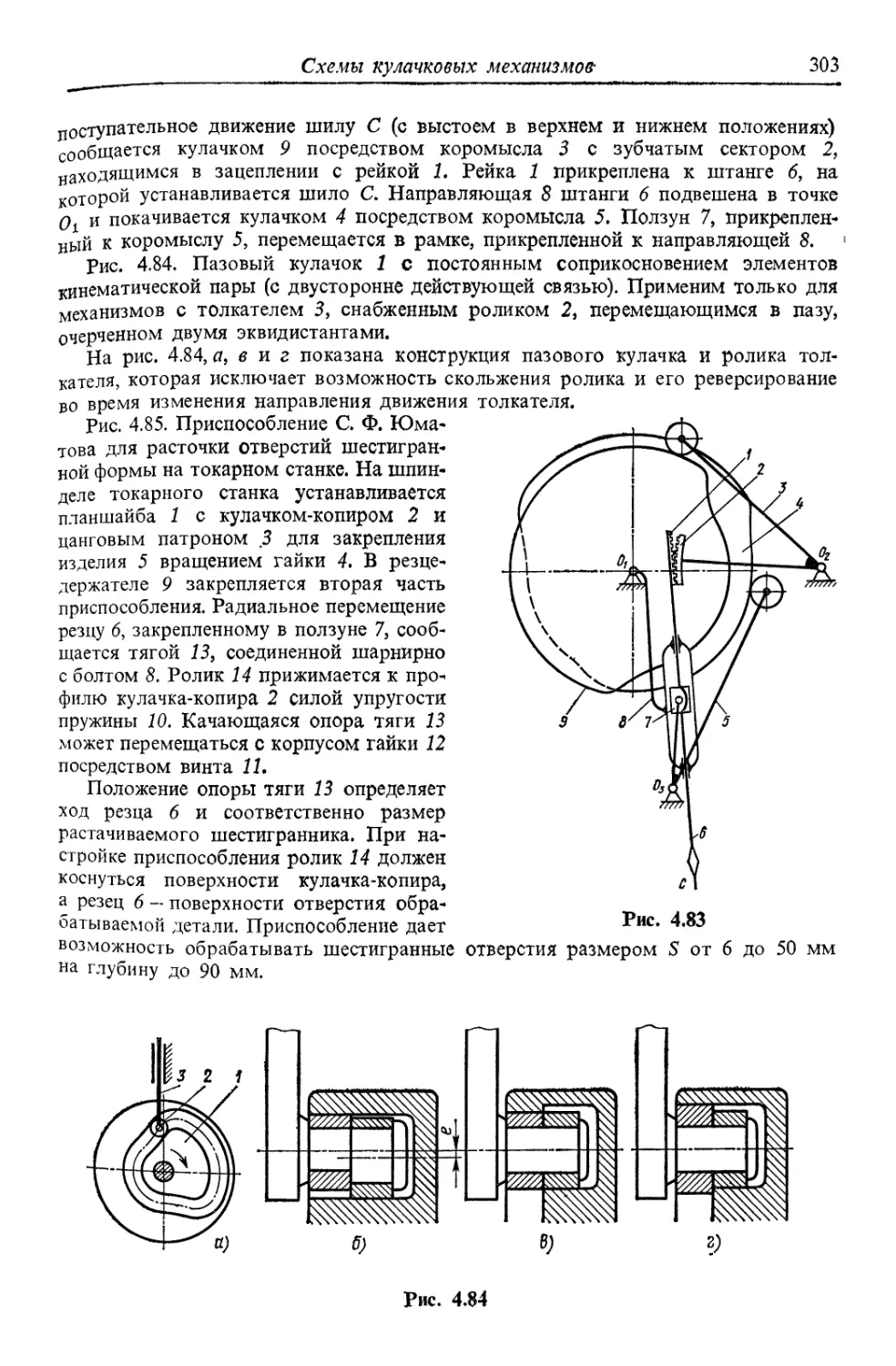
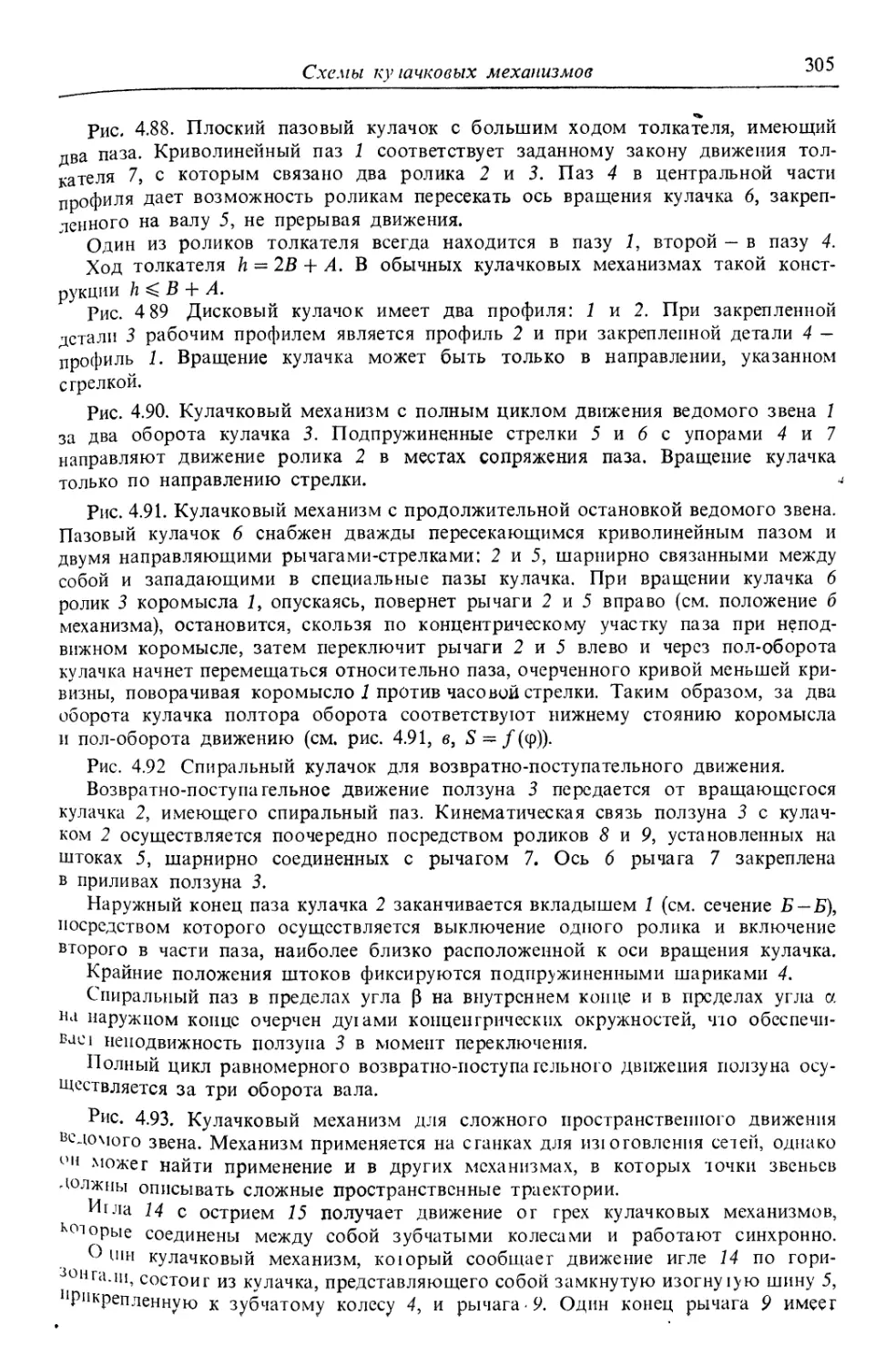
Схемы кулачковых механизмов 283
Раздел 5
ФРИКЦИОННЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ. ТОРМОЗА 315
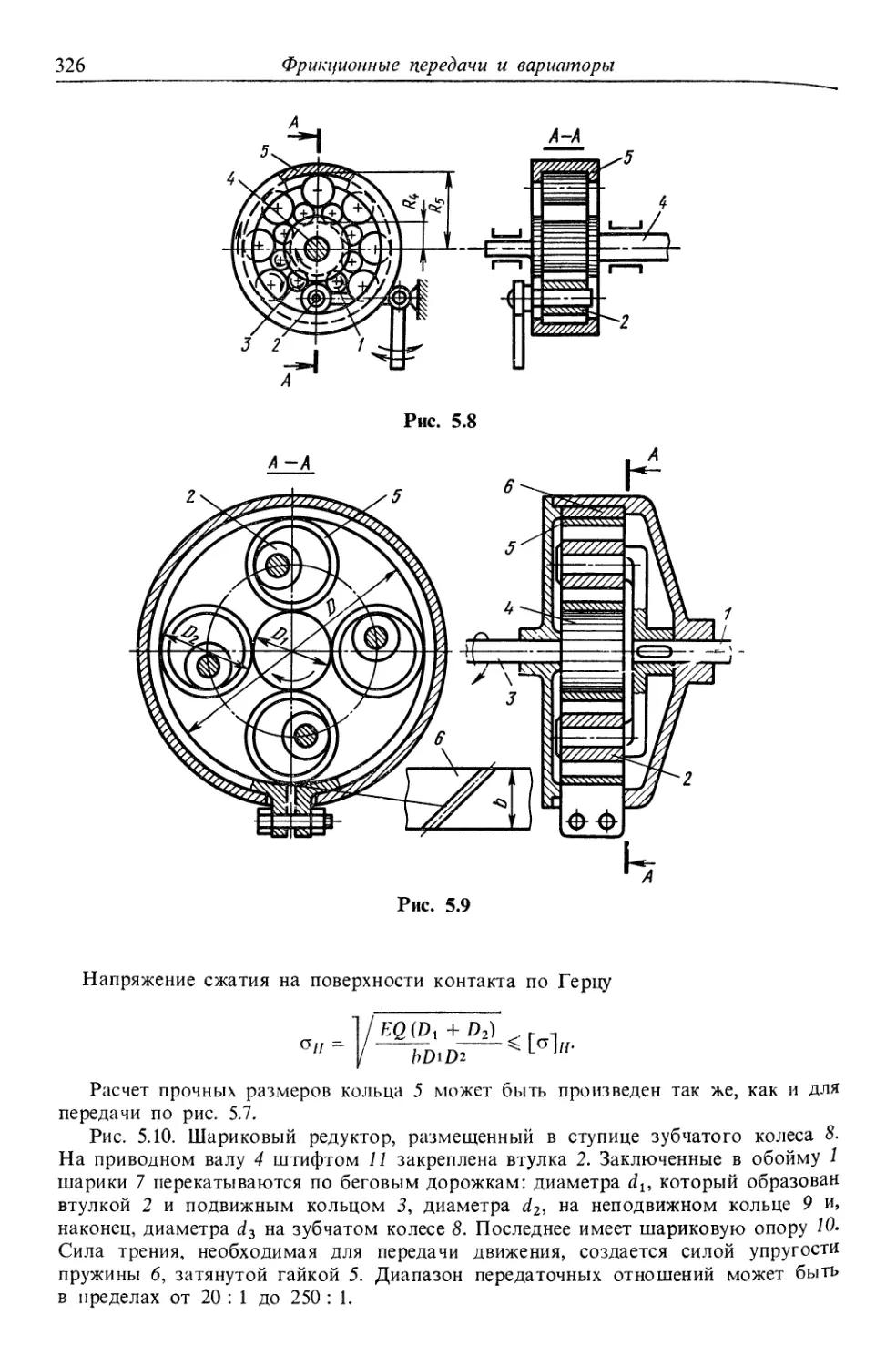
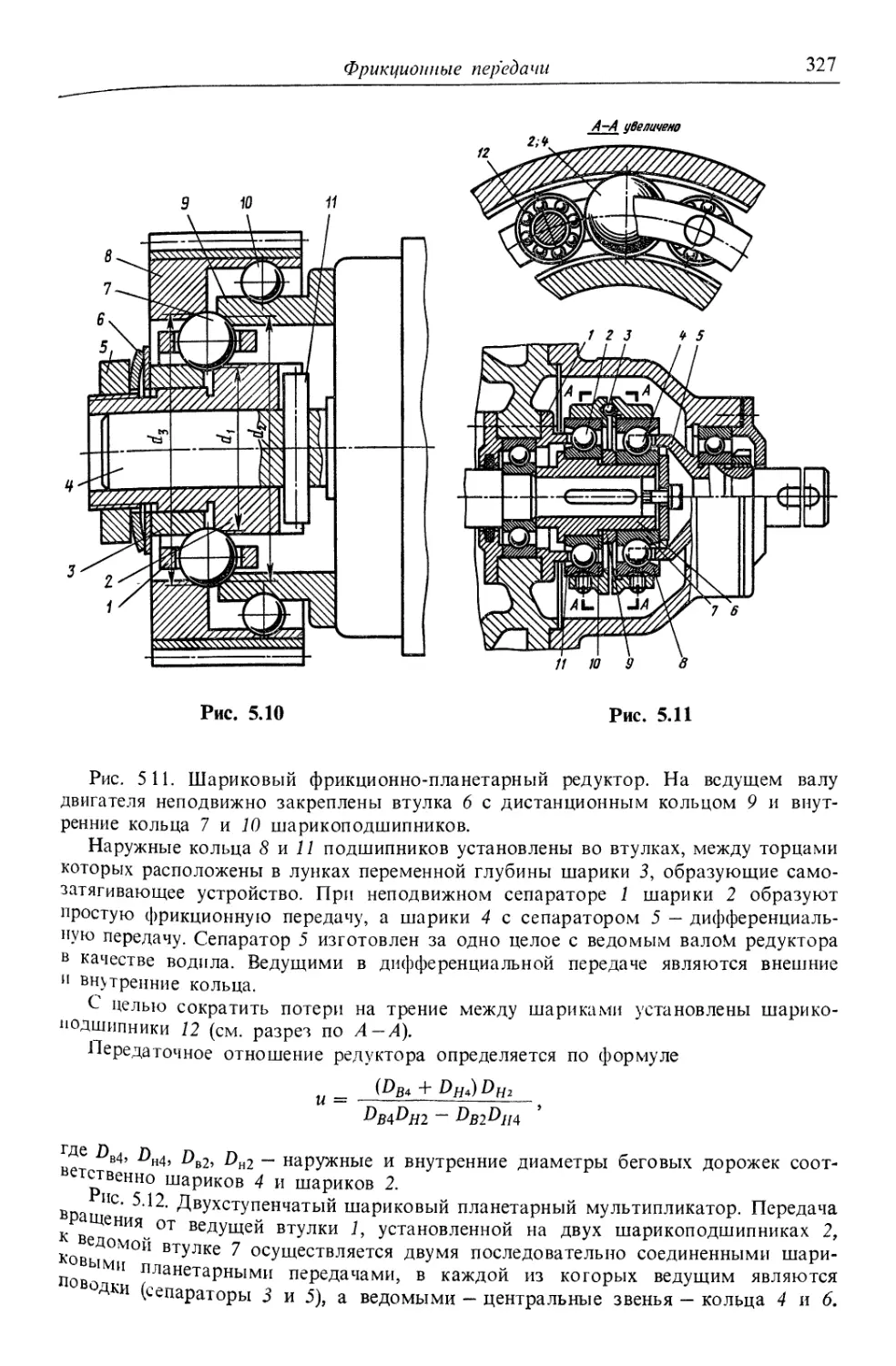
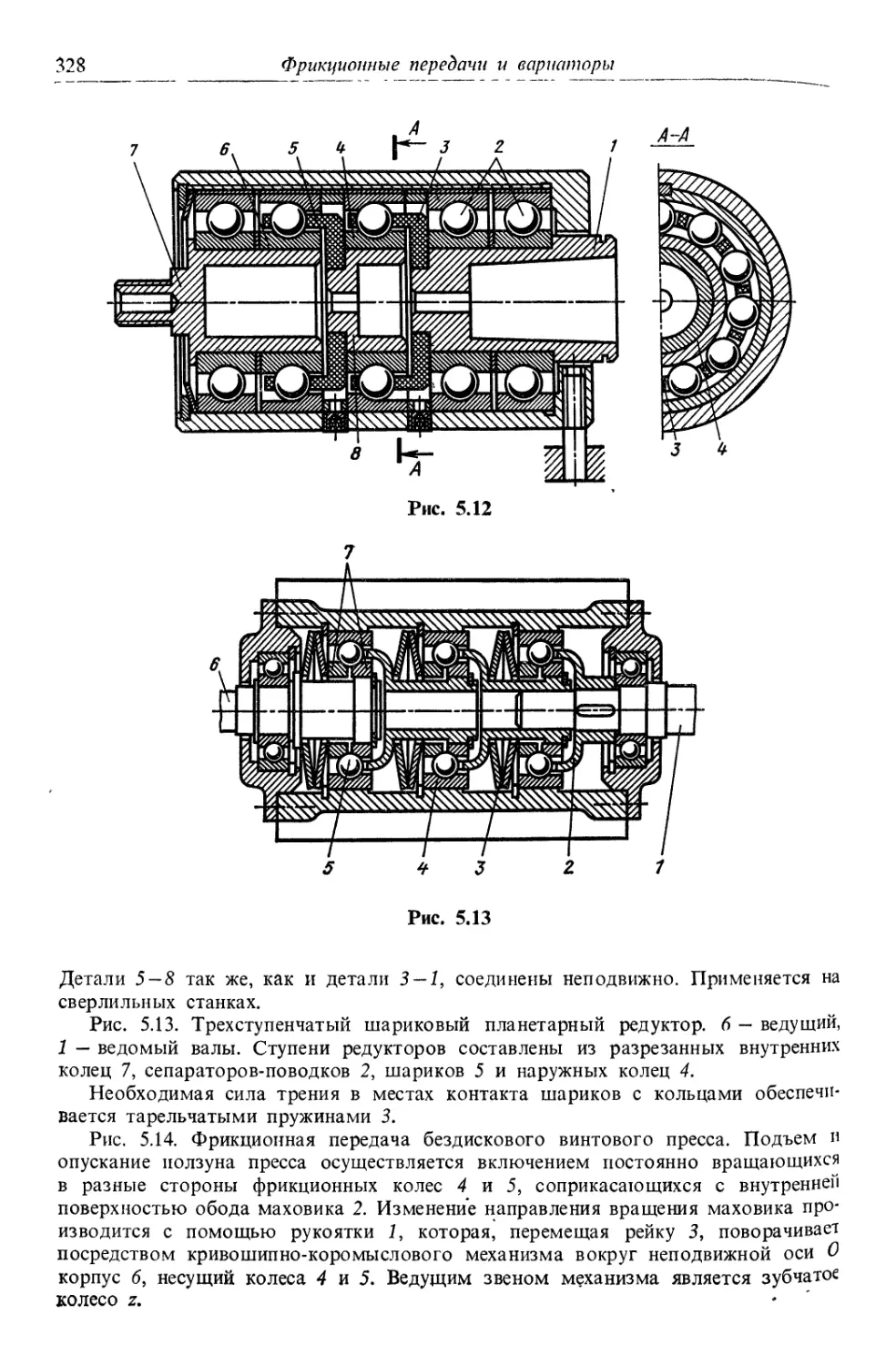
Фрикционные передачи 322
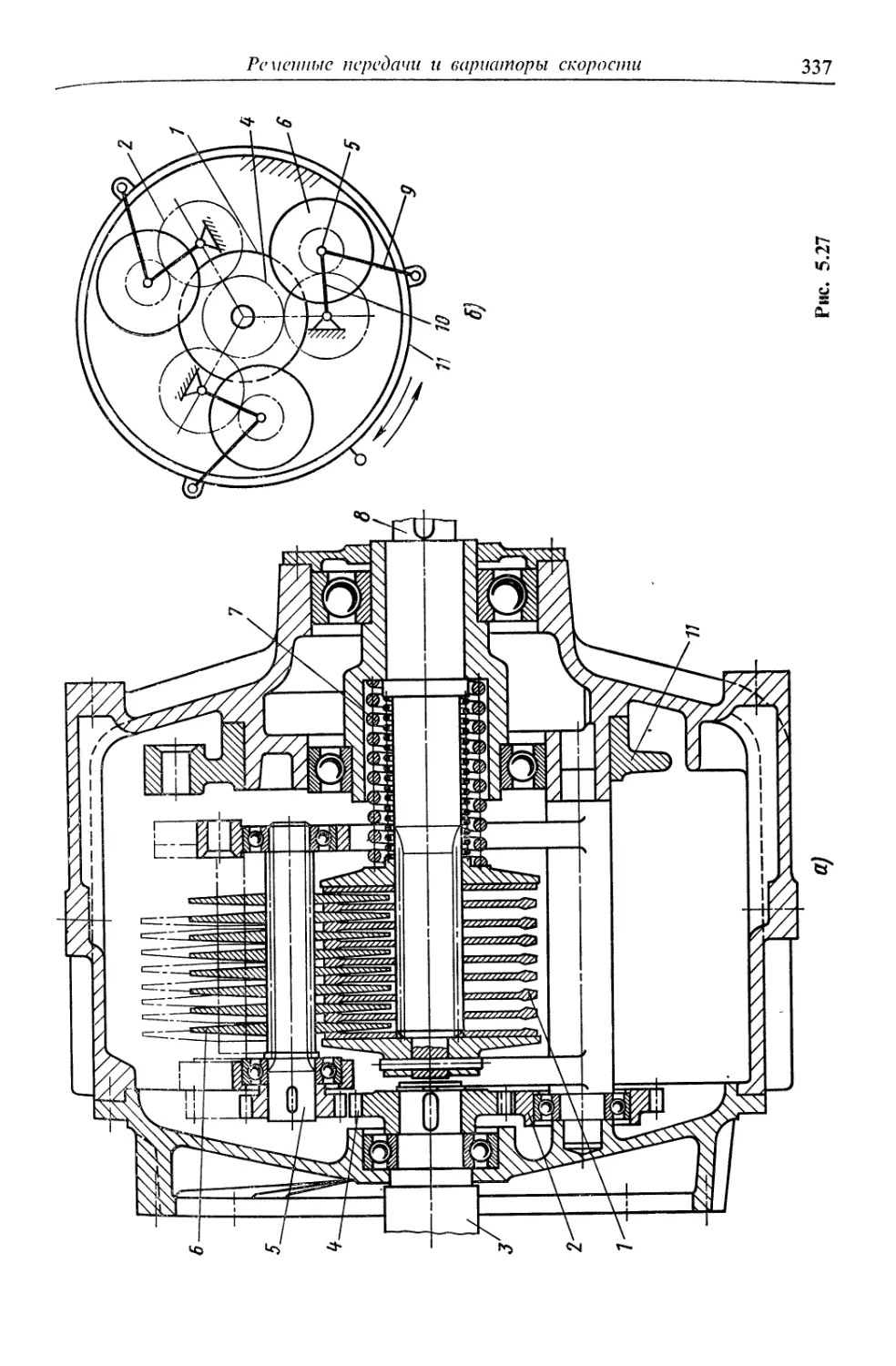
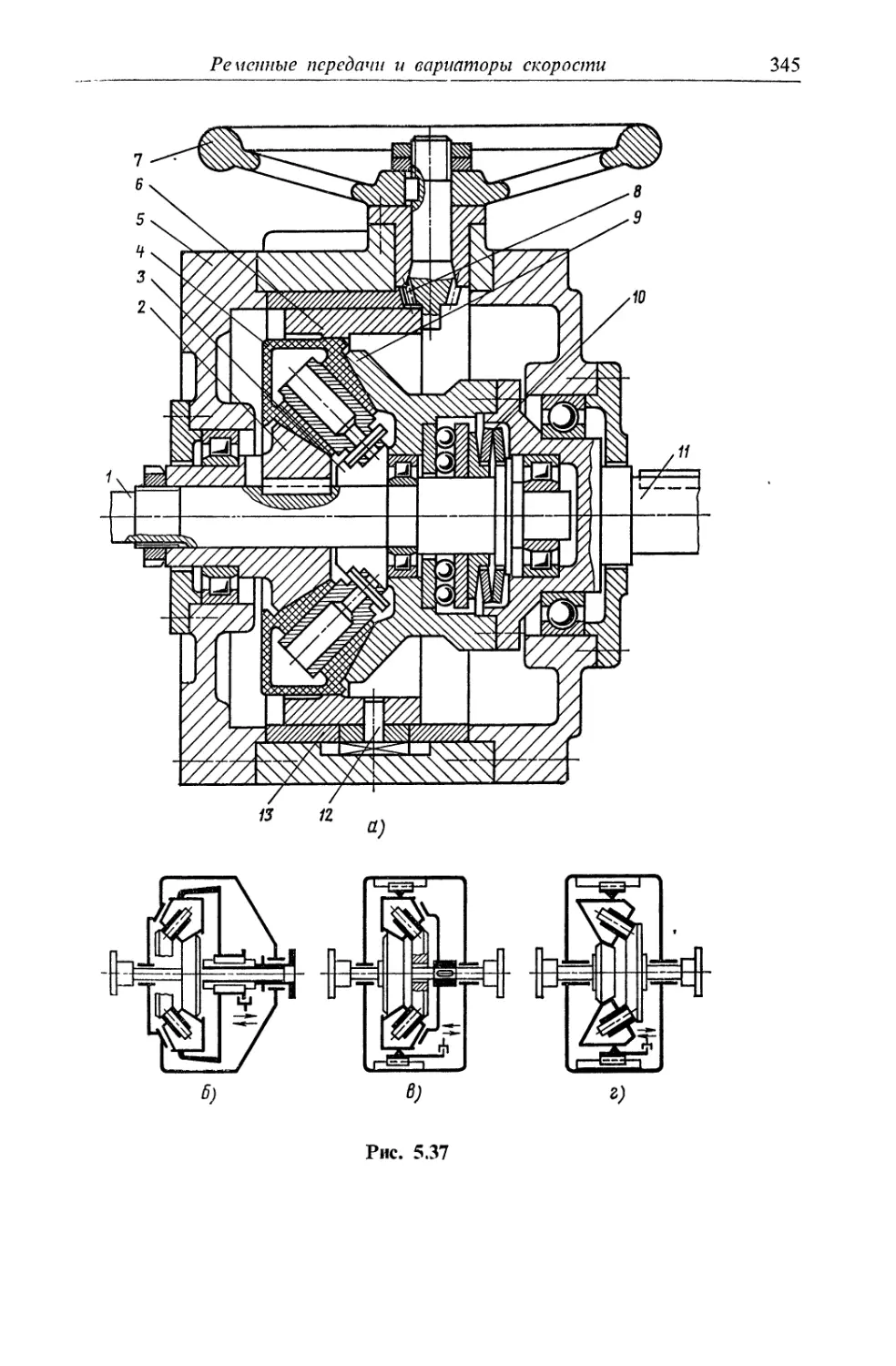
Ременные передачи и вариаторы скорости ... 329
Тормоза ". 367
Раздел б
МУФТЫ 381
Постоянные муфты 381
Управляемые муфты 394
Самоуправляющиеся муфты 408
Раздел 7
МЕХАНИЗМЫ С ПРЕРЫВИСТЫМ ДВИЖЕНИЕМ ВЕДОМОГО ЗВЕНА ... 437
Храповые механизмы 440
Мальтийские механизмы 452
Стержневые механизмы с остановками 459
Кулачковые механизмы с остановками 470
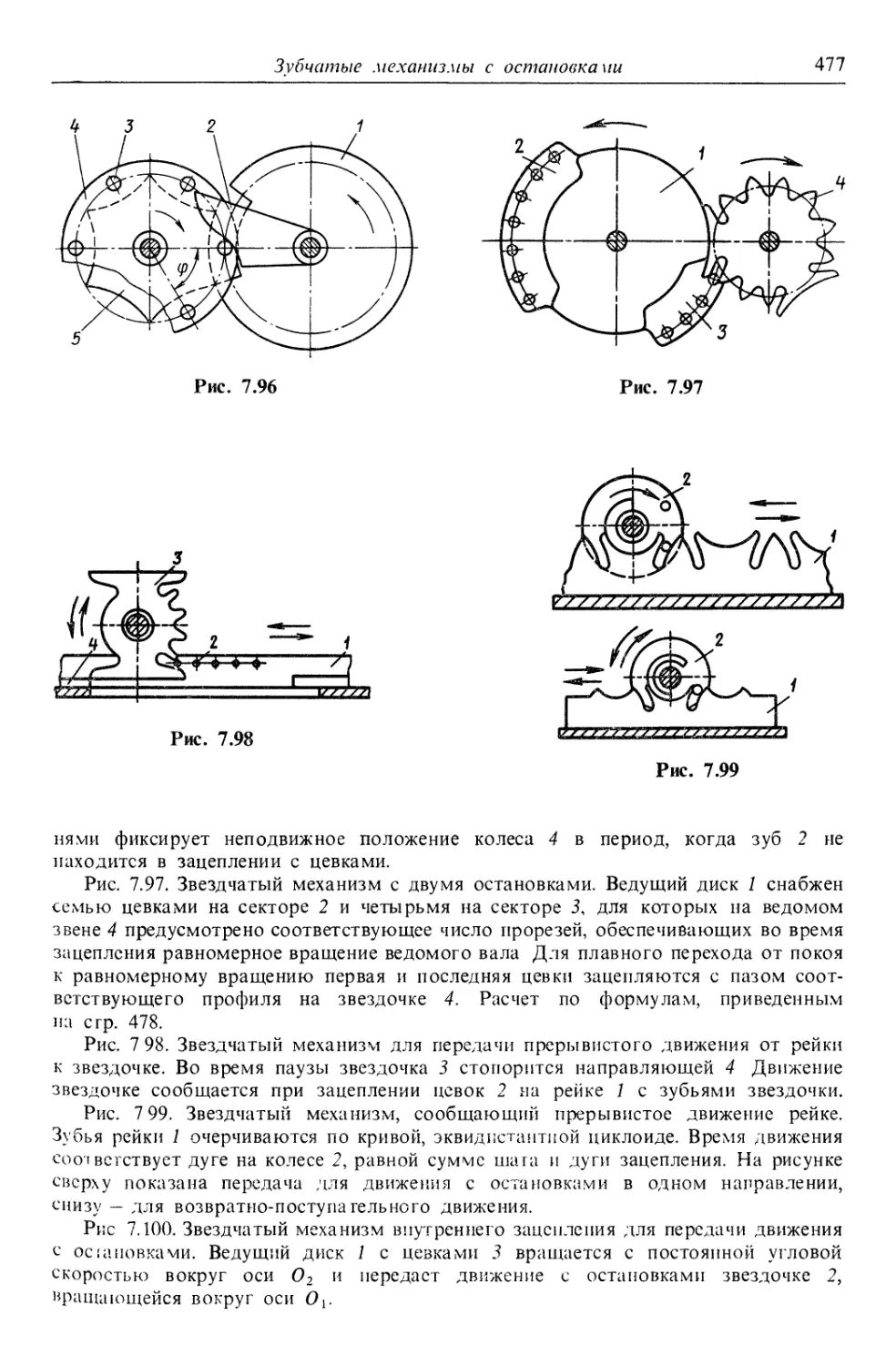
Зубчатые механизмы с остановками 475
Раздел 8
МЕХАНИЗМЫ С РЕГУЛИРУЕМЫМ ХОДОМ, КОМПЕНСИРУЮЩИЕ,
УРАВНИТЕЛЬНЫЕ И ПРЕДОХРАНИТЕЛЬНЫЕ МЕХАНИЗМЫ И УСТРОЙСТВА 489
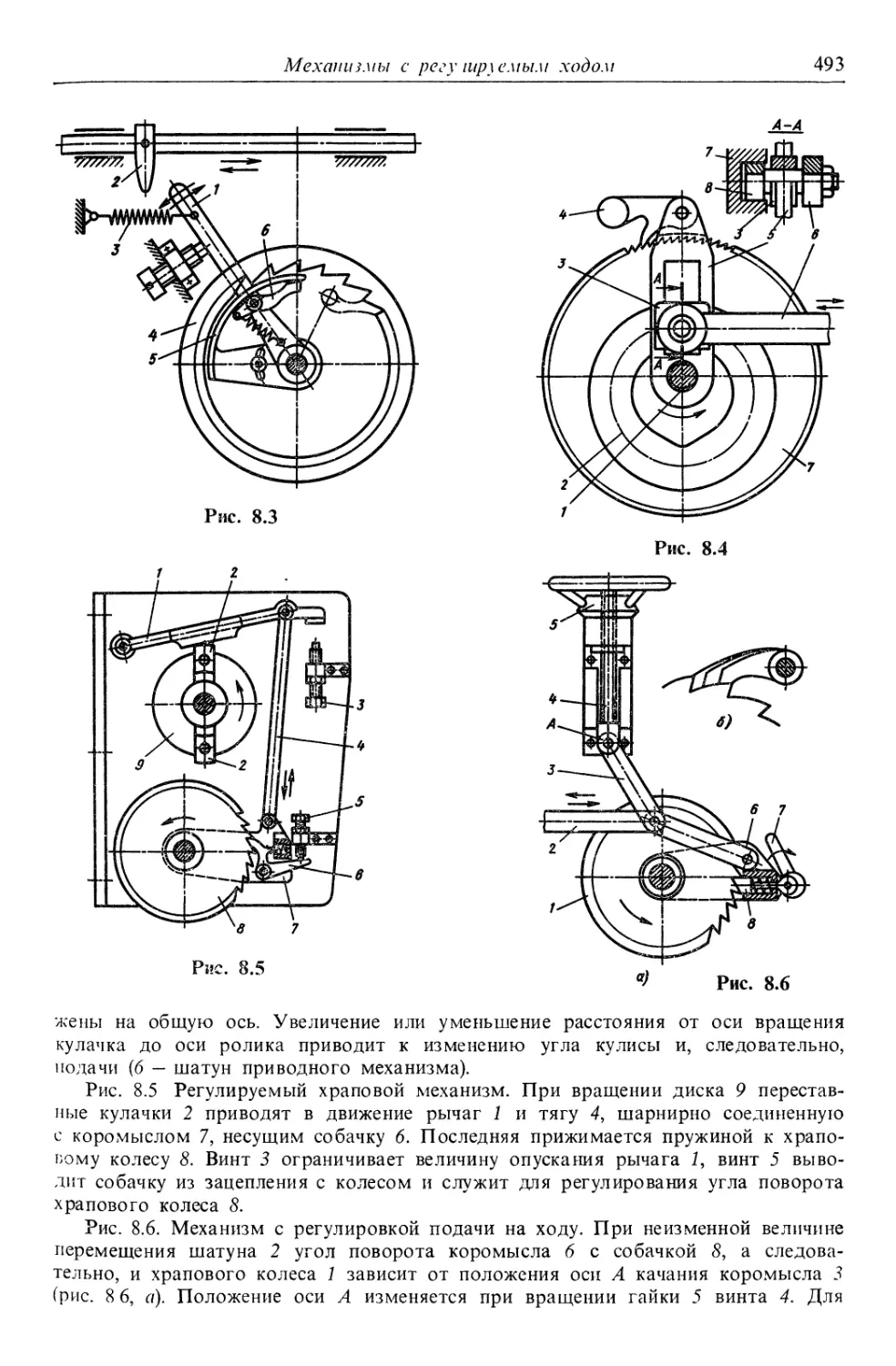
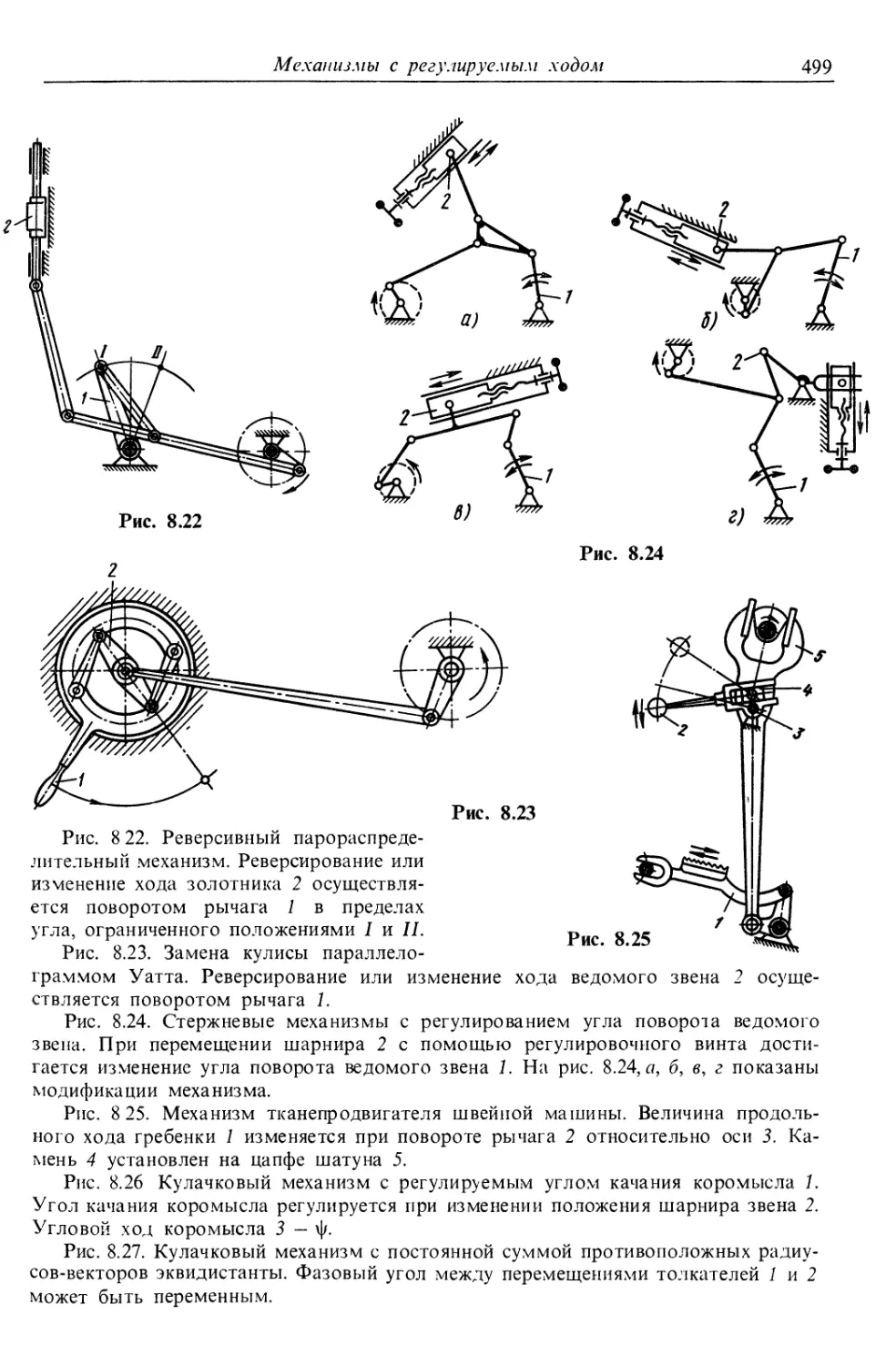
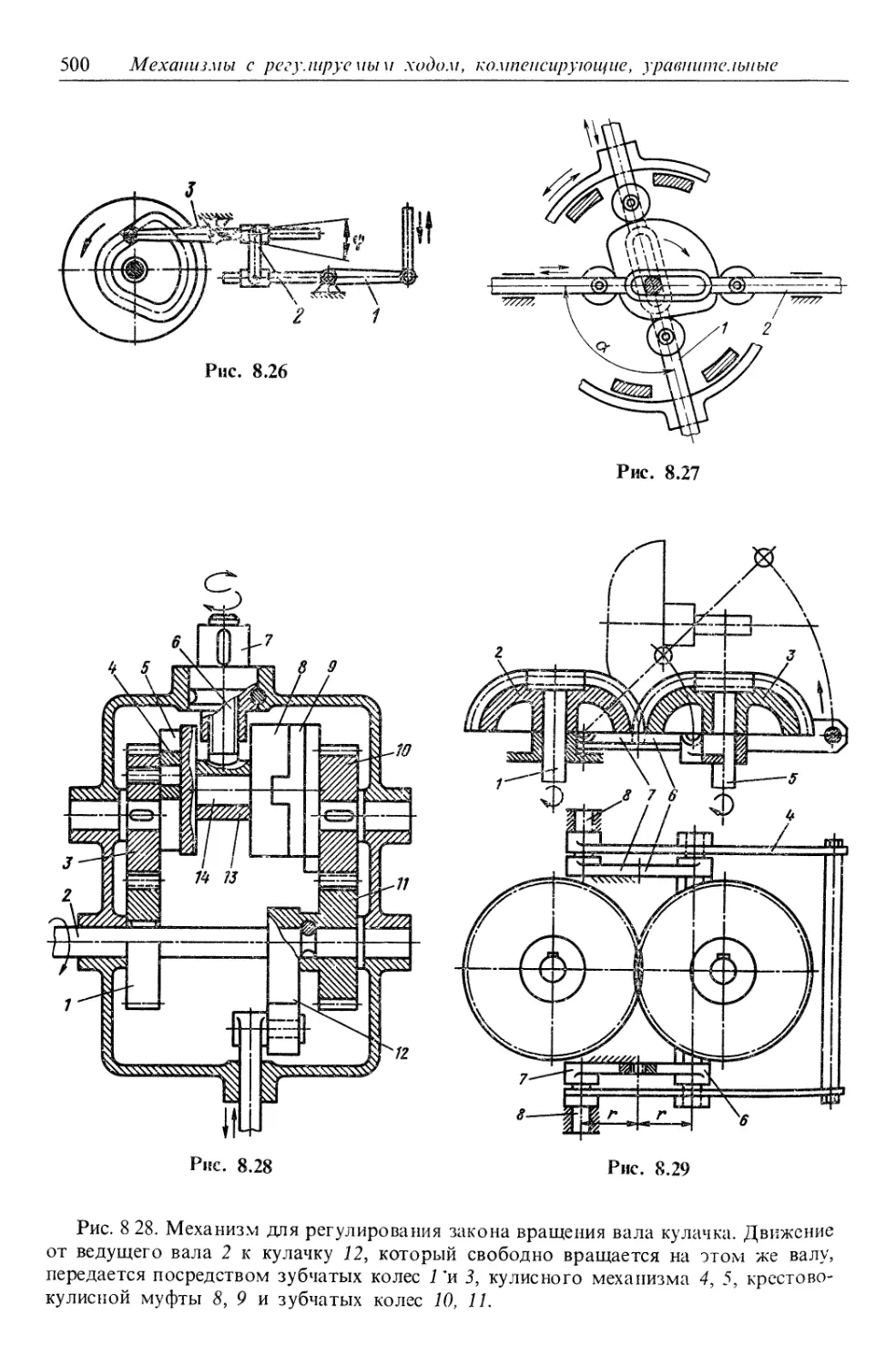
Механизмы с регулируемым ходом 492
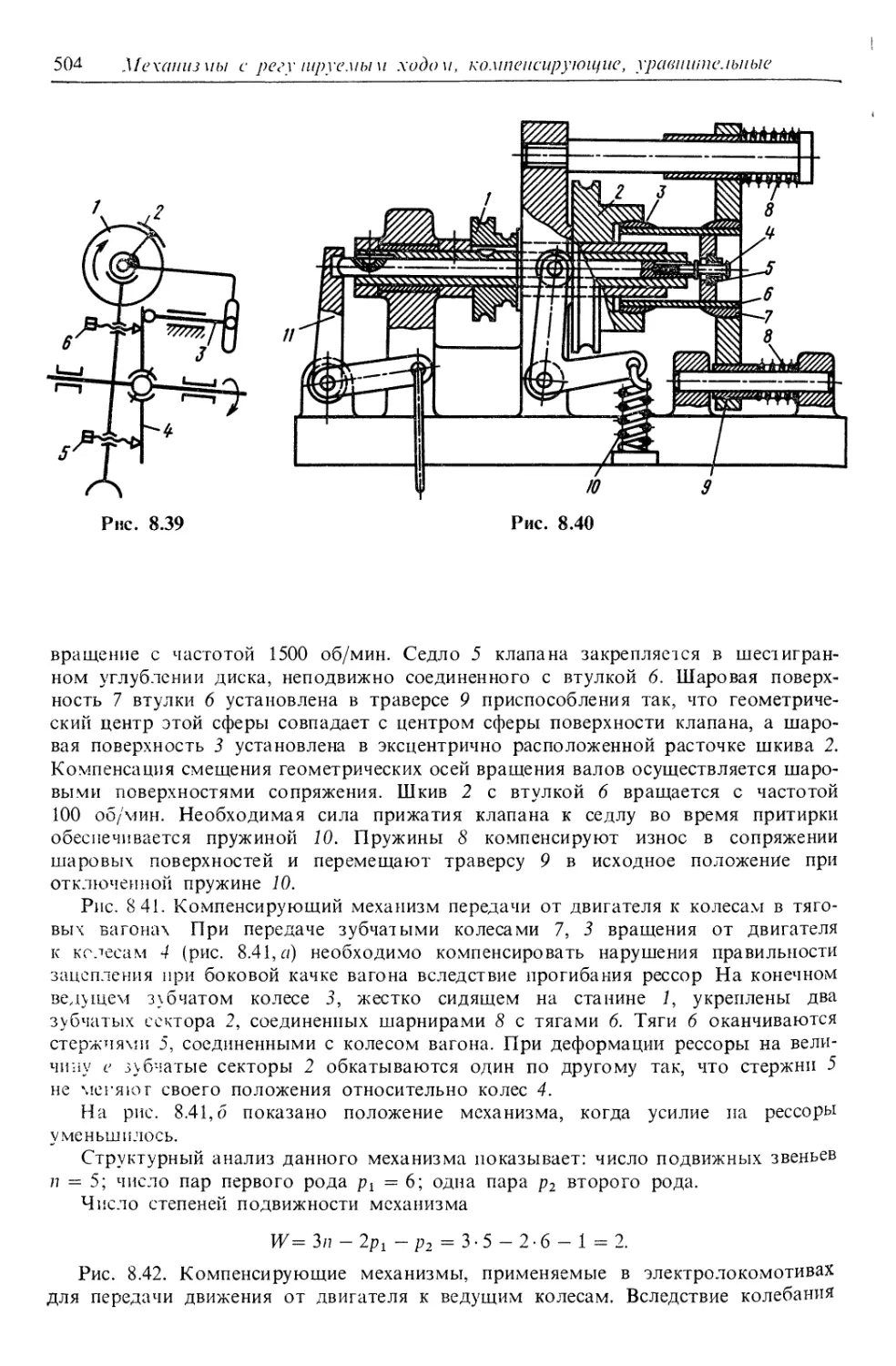
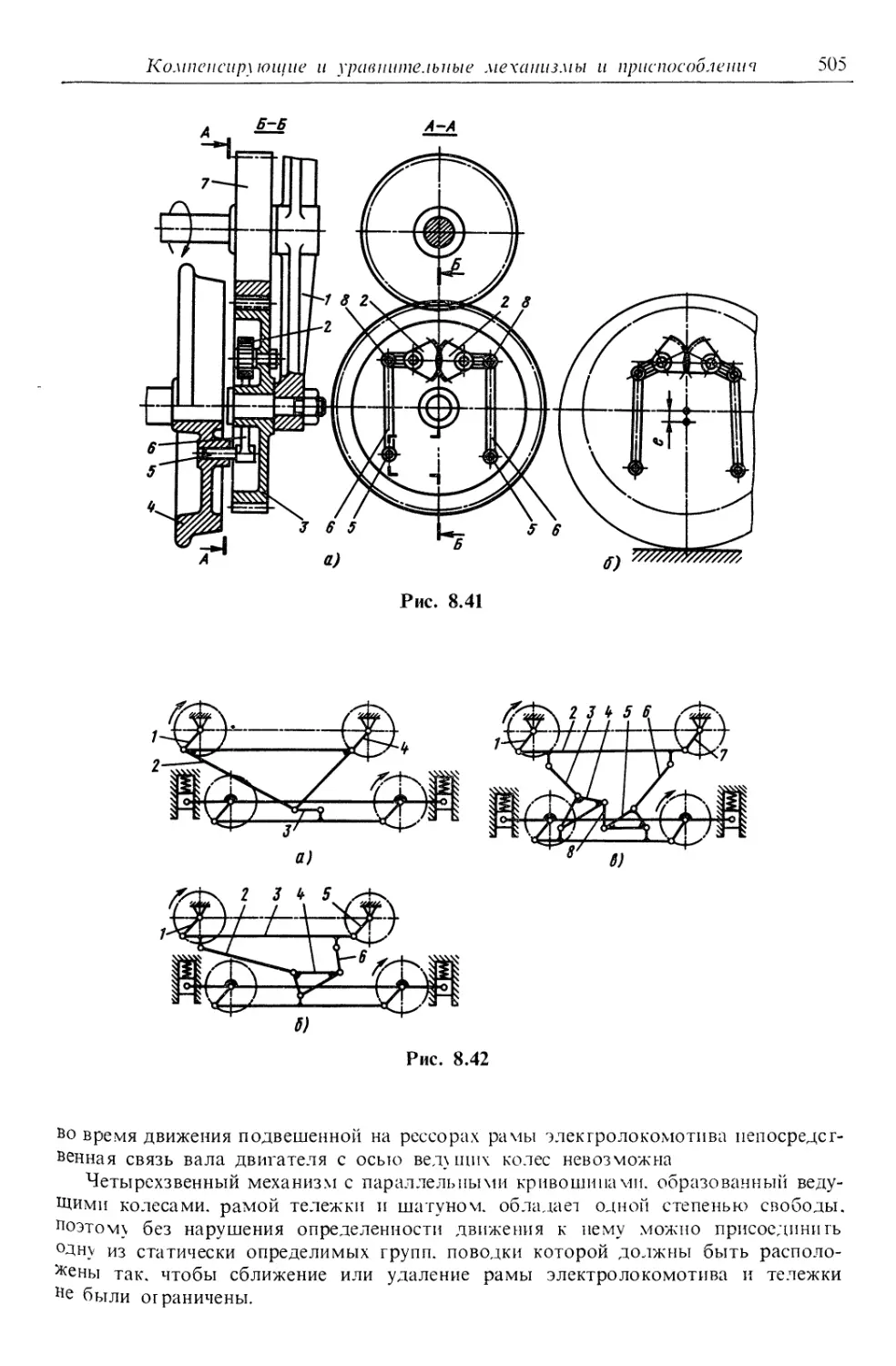
Компенсирующие и уравнительные механизмы и приспособления .... 502
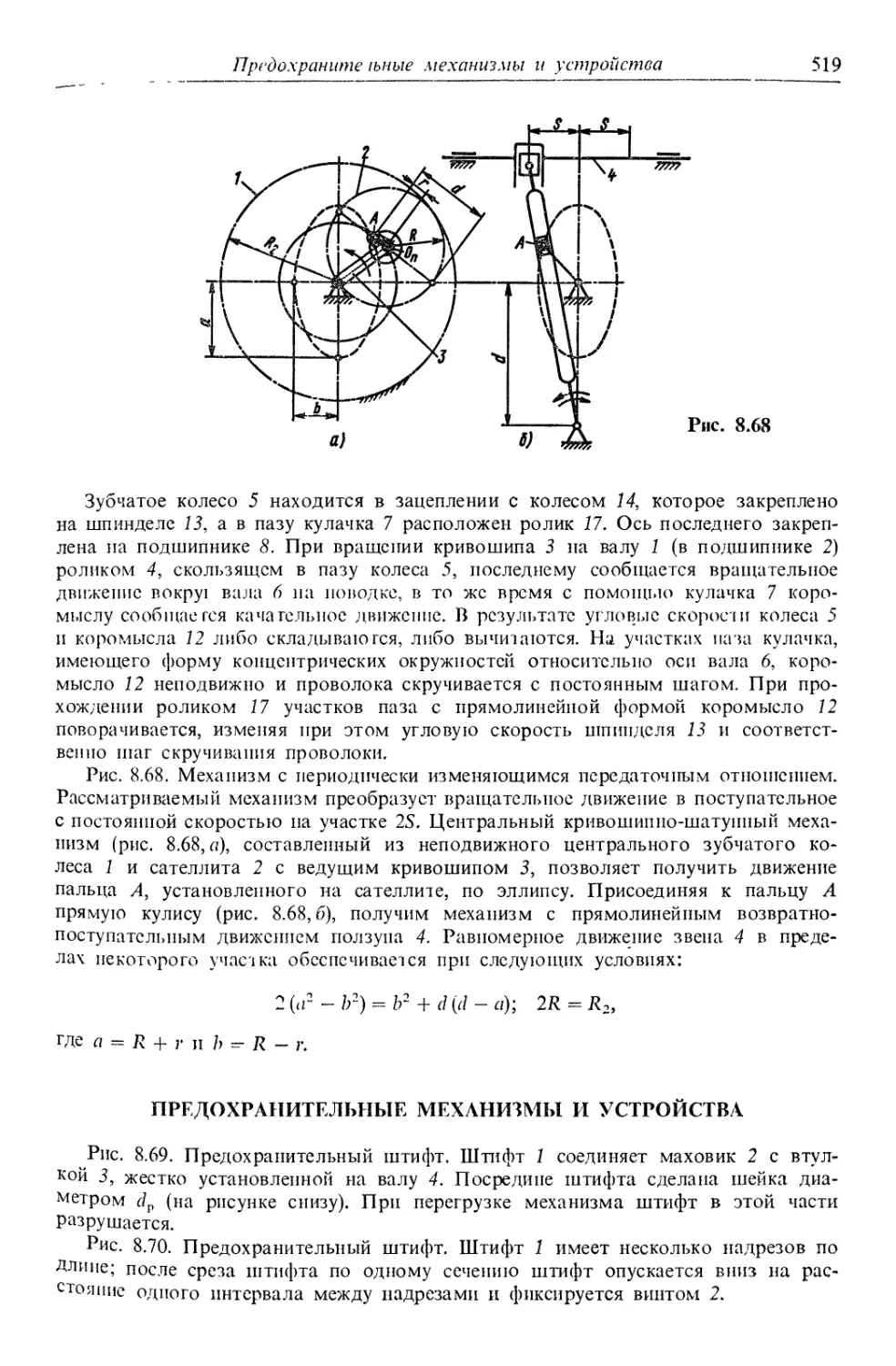
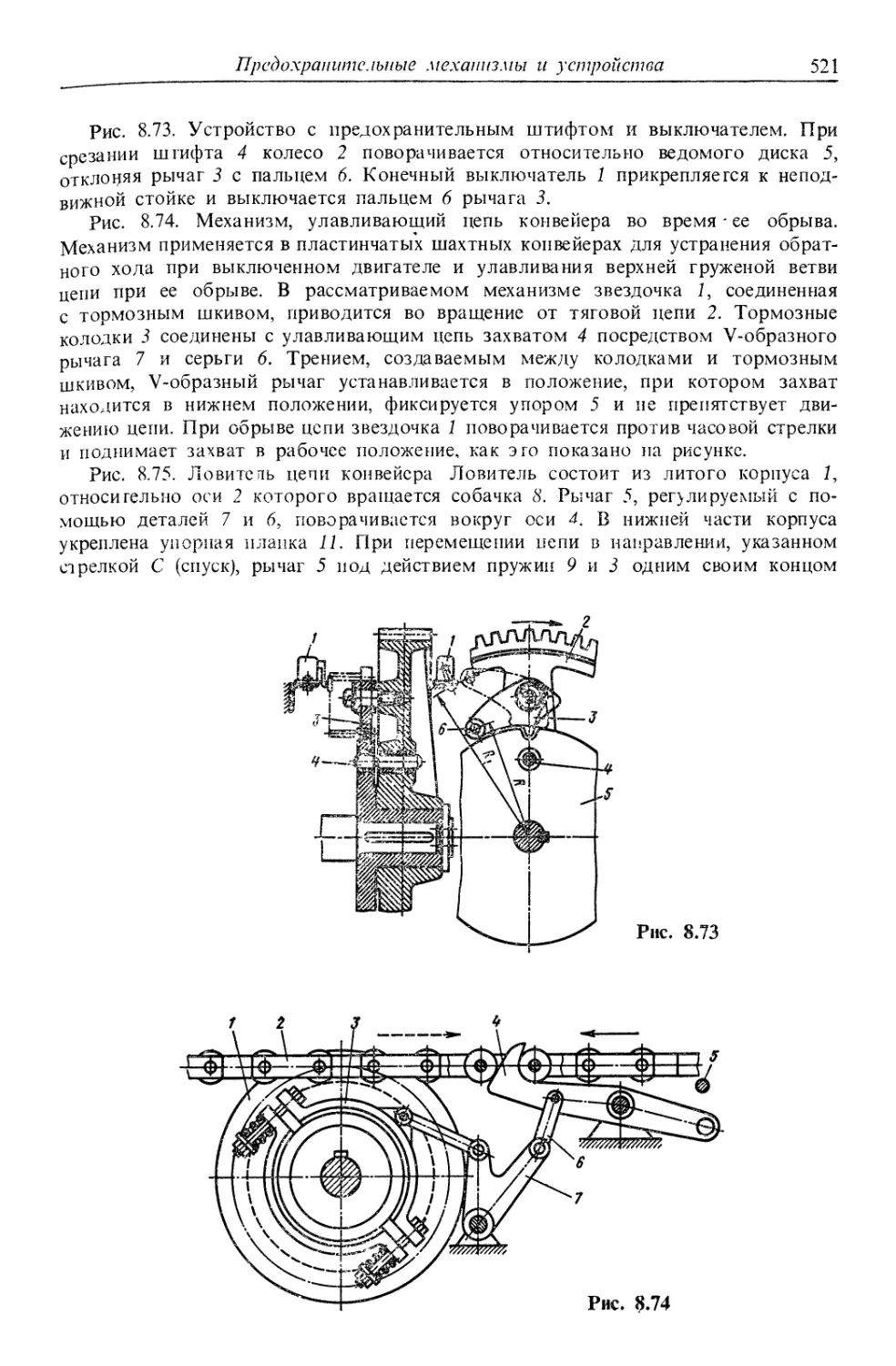
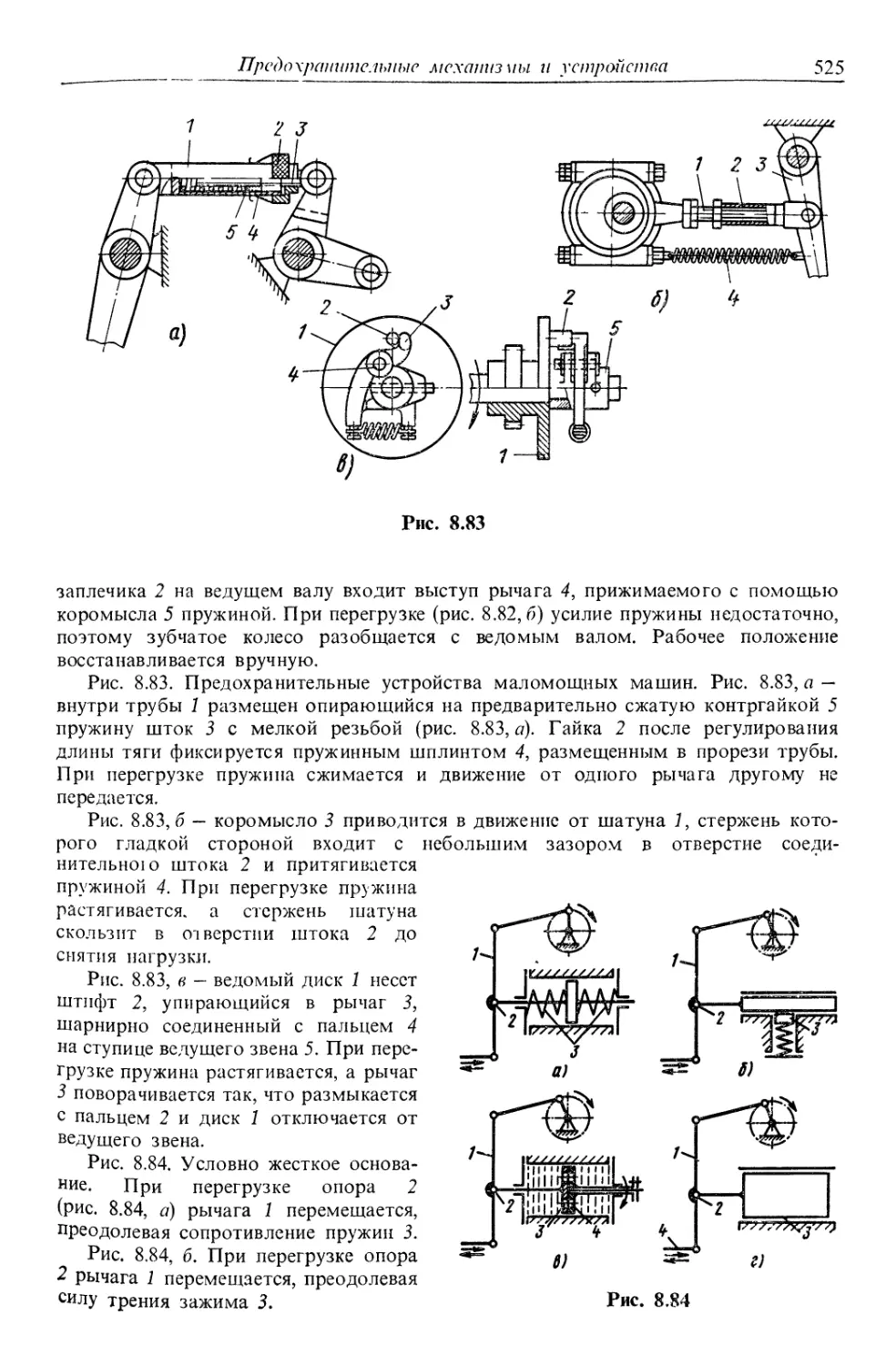
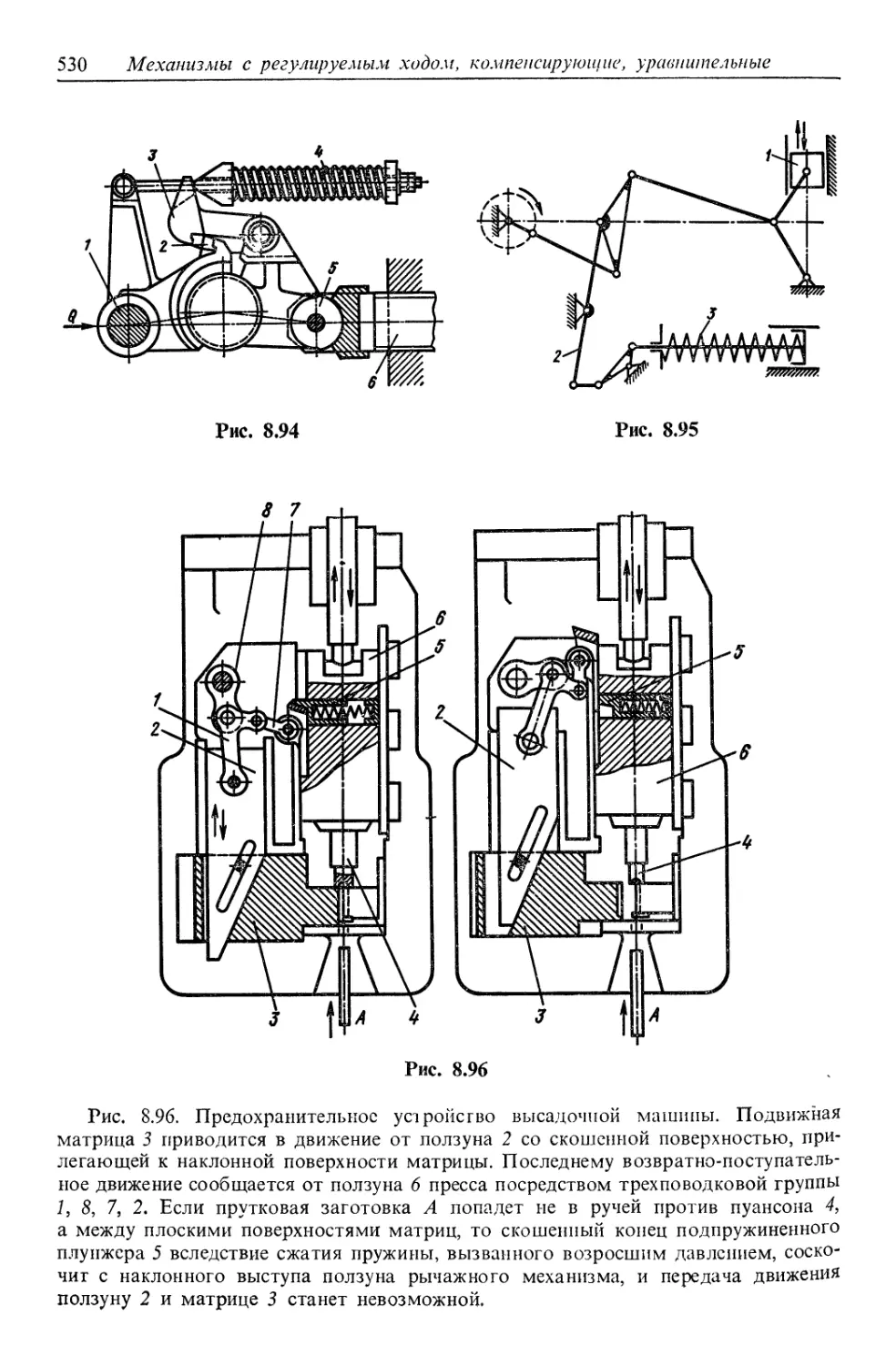
Предохранительные механизмы и устройства 519
Раздел 9
НАПРАВЛЯЮЩИЕ МЕХАНИЗМЫ, МЕХАНИЗМЫ ДЛЯ ПРЕОБРАЗОВАНИЯ
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ ИЛИ
КОЛЕБАТЕЛЬНОЕ, РЕВЕРСИВНЫЕ МЕХАНИЗМЫ, МЕХАНИЗМЫ АВТОМАТИЧЕСКОГО
ВКЛЮЧЕНИЯ И ВЫКЛЮЧЕНИЯ 532
Направляющие механизмы 536
Механизмы для преобразования вращательного движения в поступательное 542
Механизмы для преобразования вращательного движения в колебательное 564
Реверсивные механизмы 569
Механизмы автоматического включения и выключения 579
Содержание
Раздел 10
МЕХАНИЗМЫ ДЛЯ ВЫПОЛНЕНИЯ МАТЕМАТИЧЕСКИХ ОПЕРАЦИЙ И МЕ-
ХАНИЗМЫ ПРИБОРОВ 582
Приборы для вычерчивания кривых 587
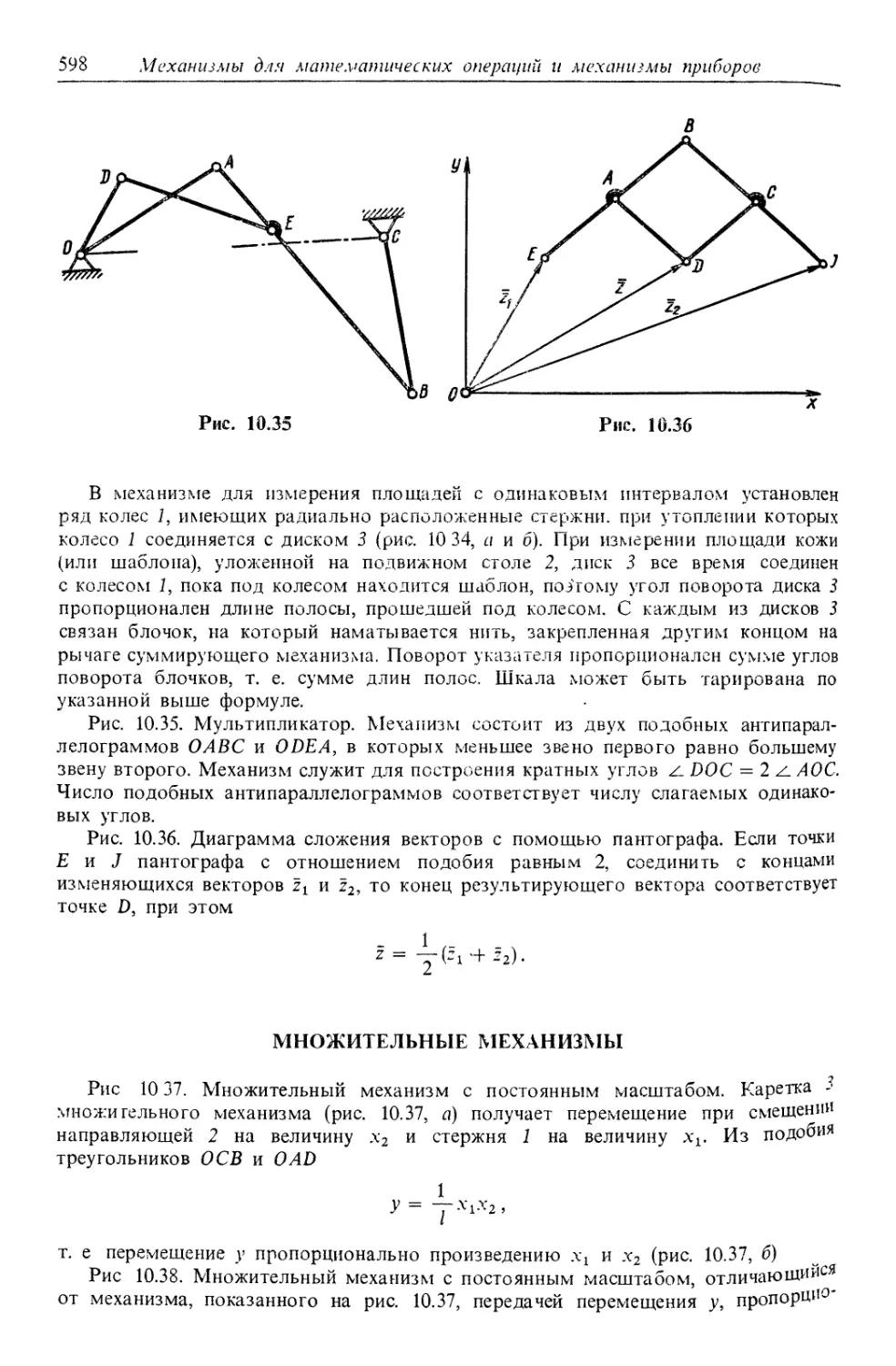
Суммирующие механизмы , 593
Множительные механизмы 598
Механизмы тригонометрических функций 602
Планиметры, интеграторы, гармонические анализаторы 604
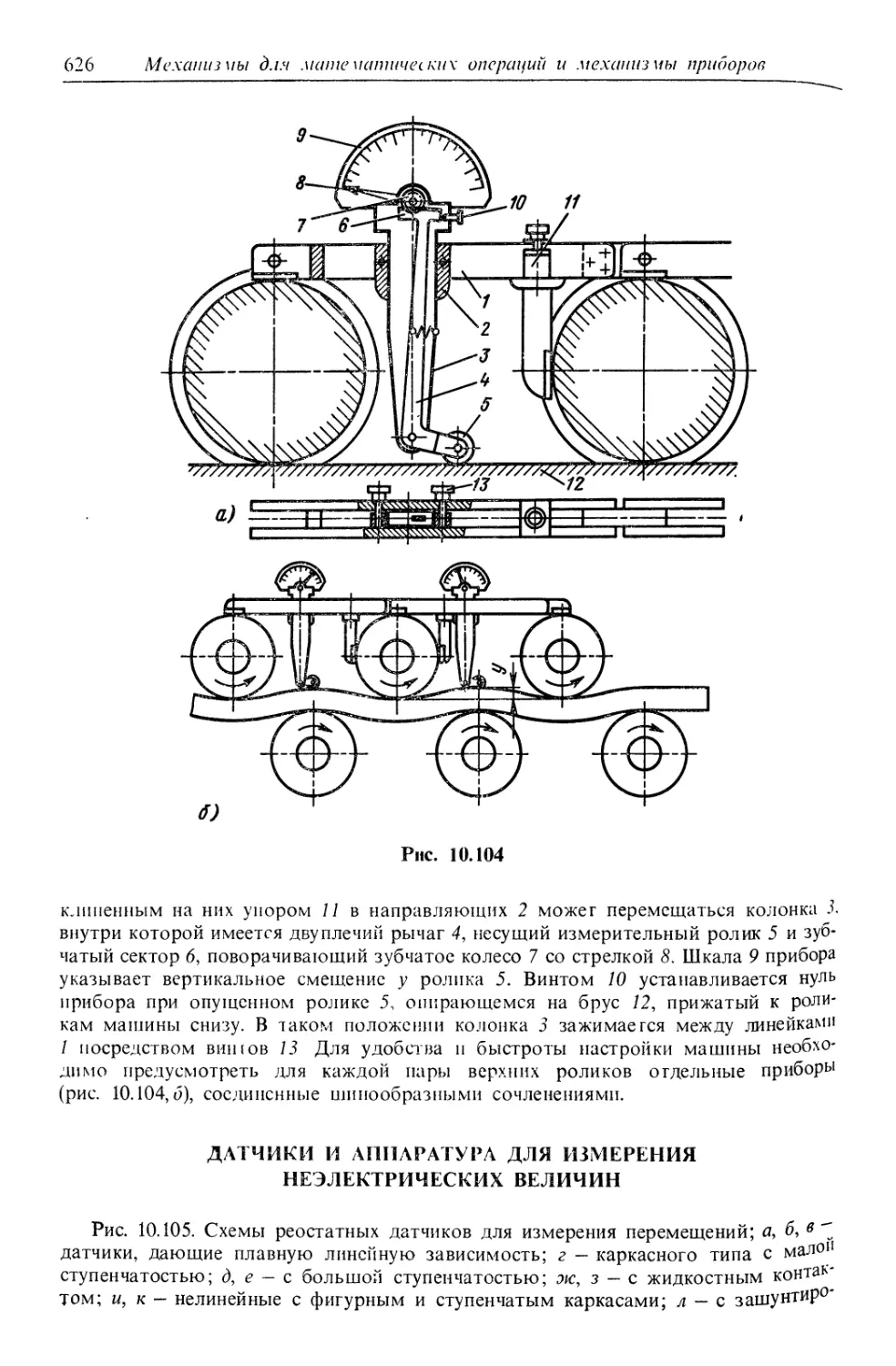
Механизмы приборов ' 612
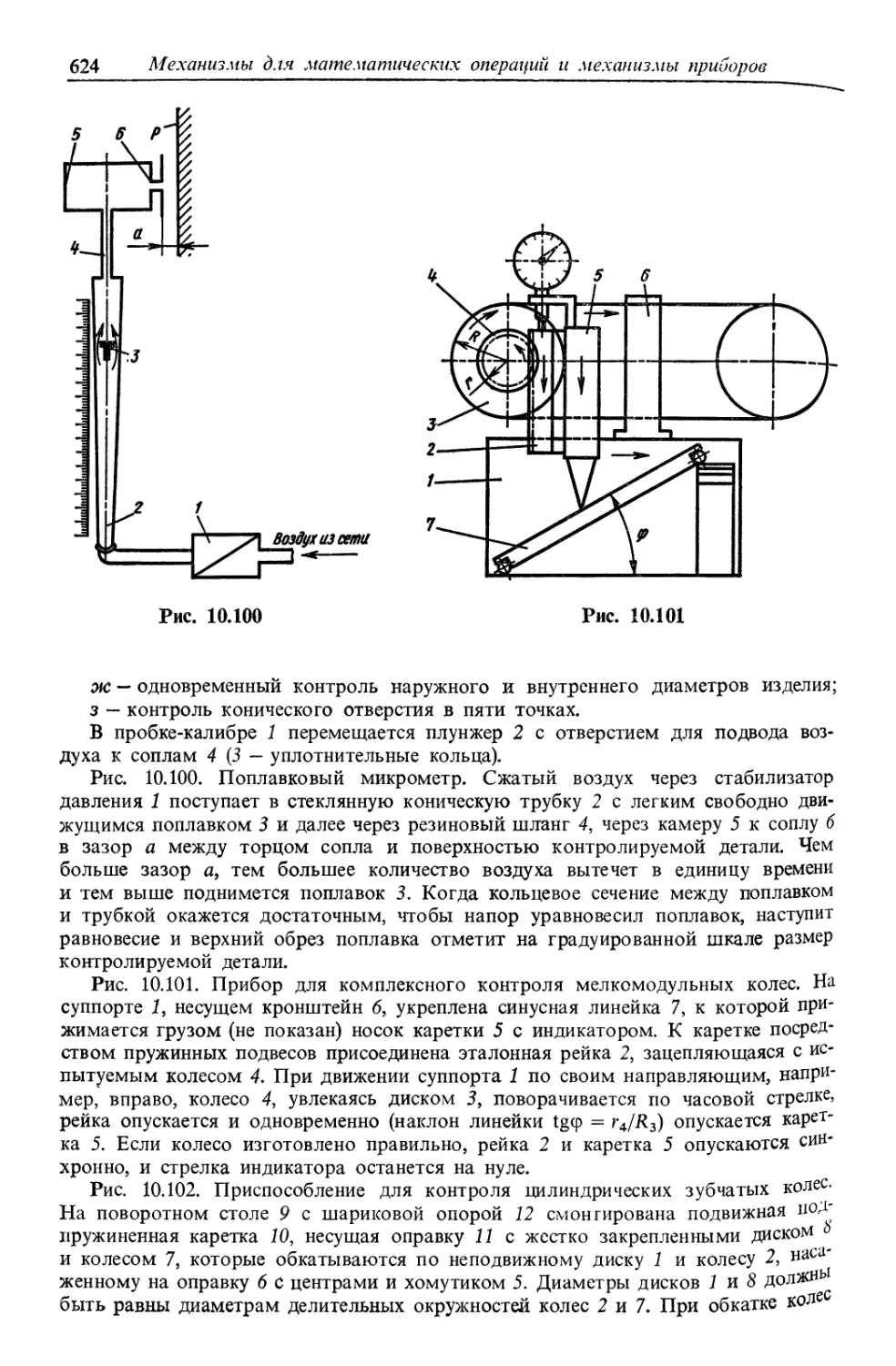
Датчики и аппаратура для измерения неэлектрических величин 626
Раздел 11
МЕХАНИЗМЫ И МАШИНЫ ВИБРАЦИОННОГО И УДАРНОГО ДЕЙСТВИЯ 664
Вибраторы и виброзащитные приспособления 666
Машины вибрационного действия 679
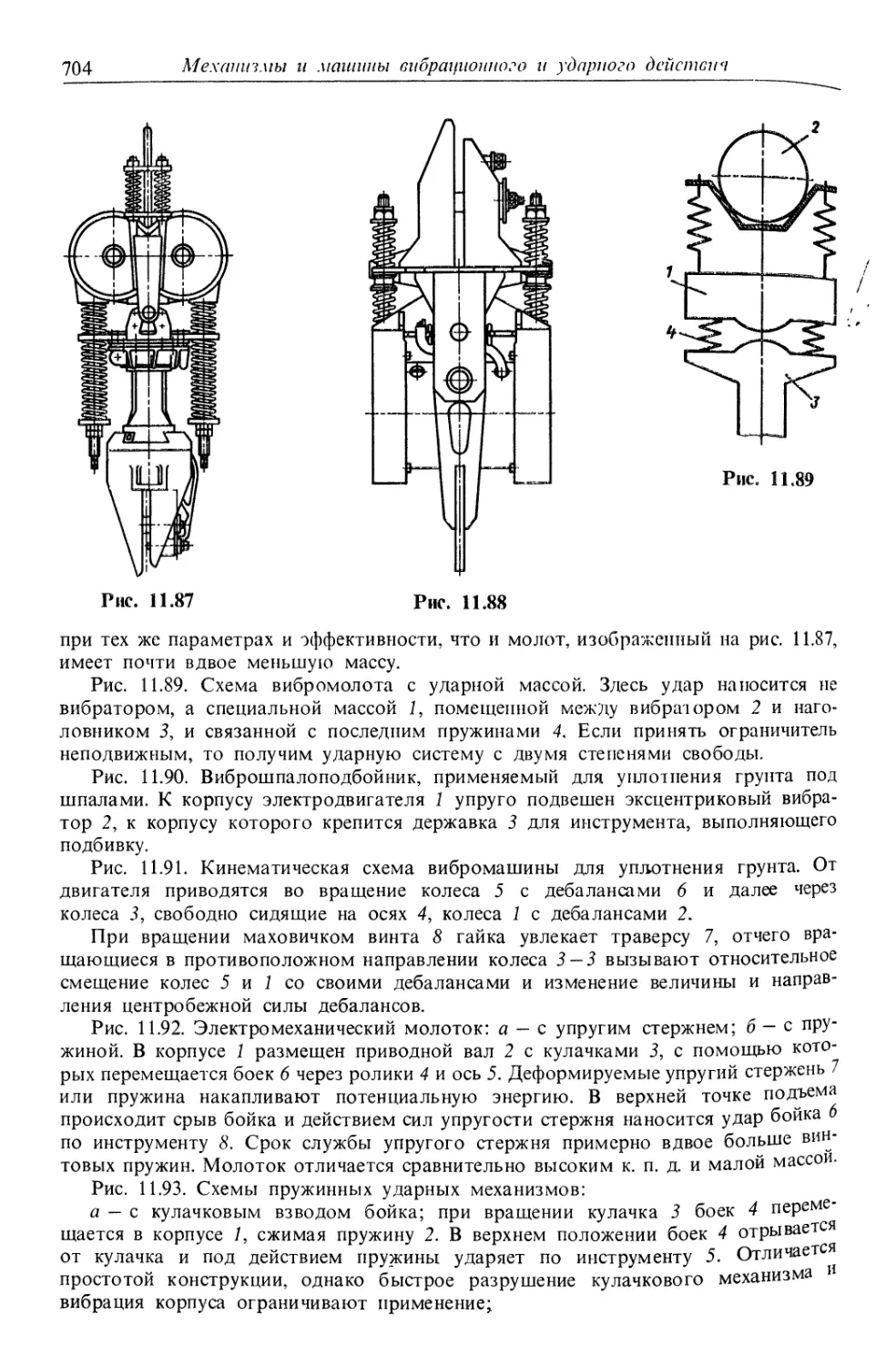
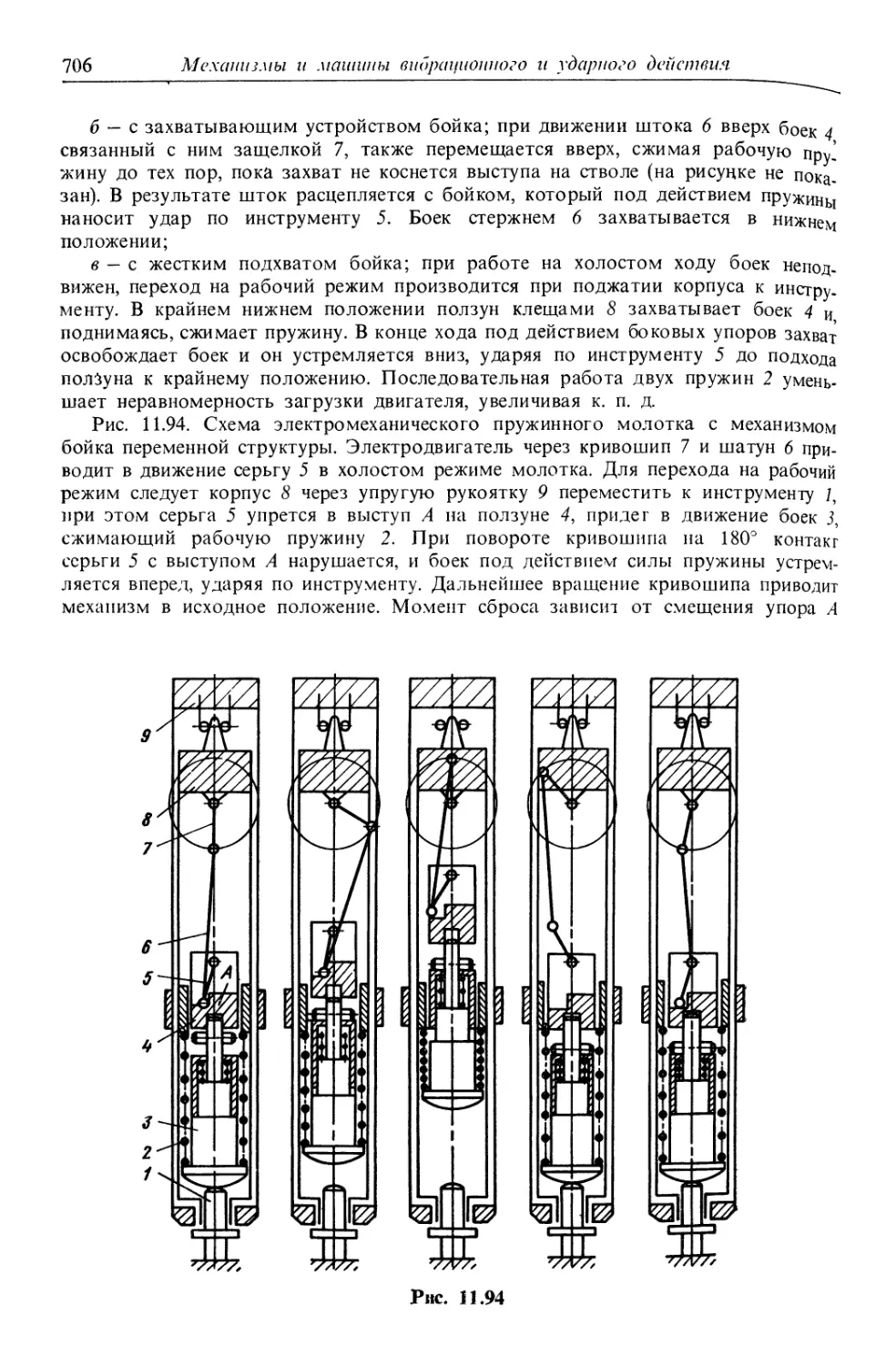
Машины виброударного и ударного действия 702
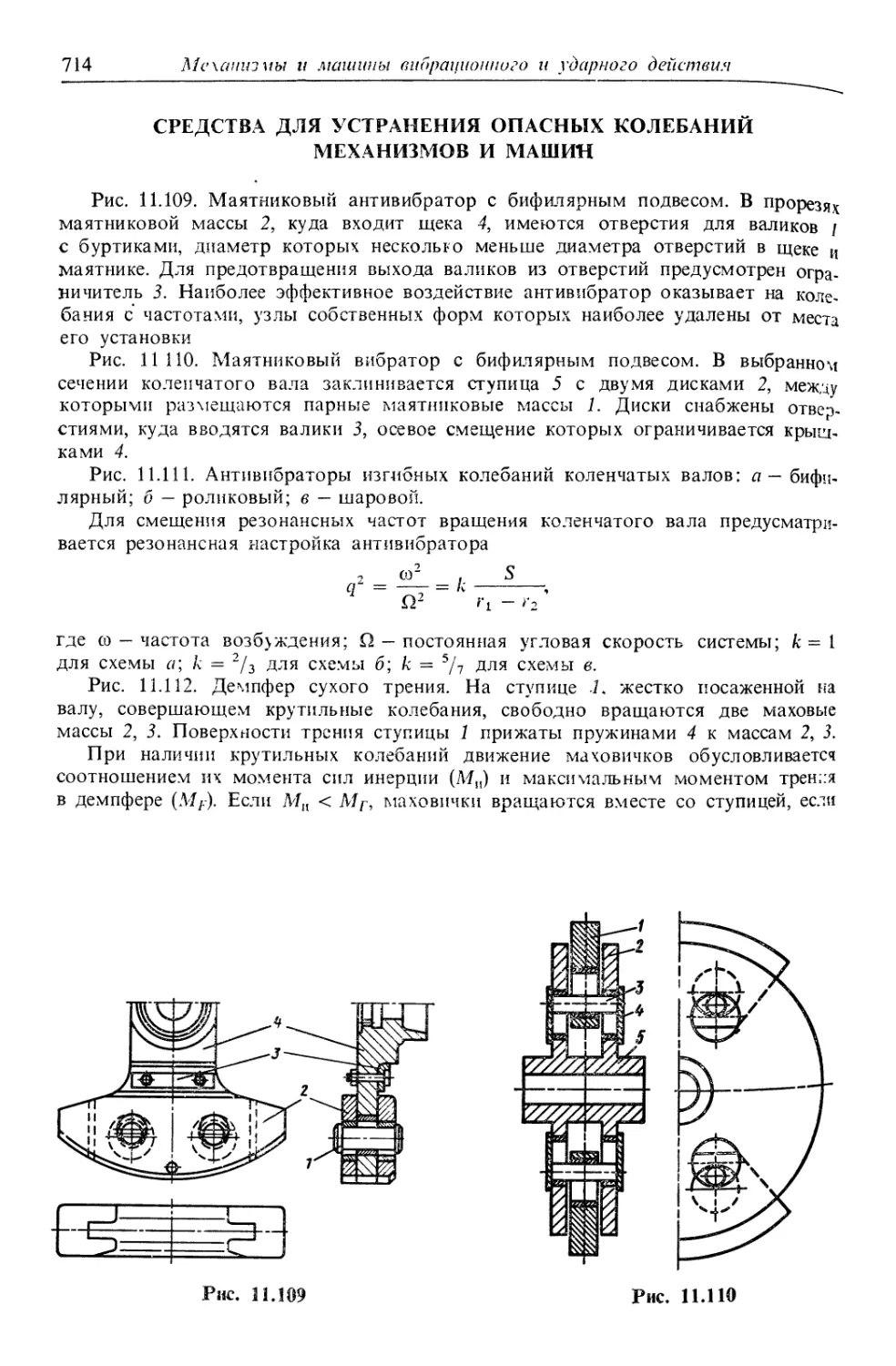
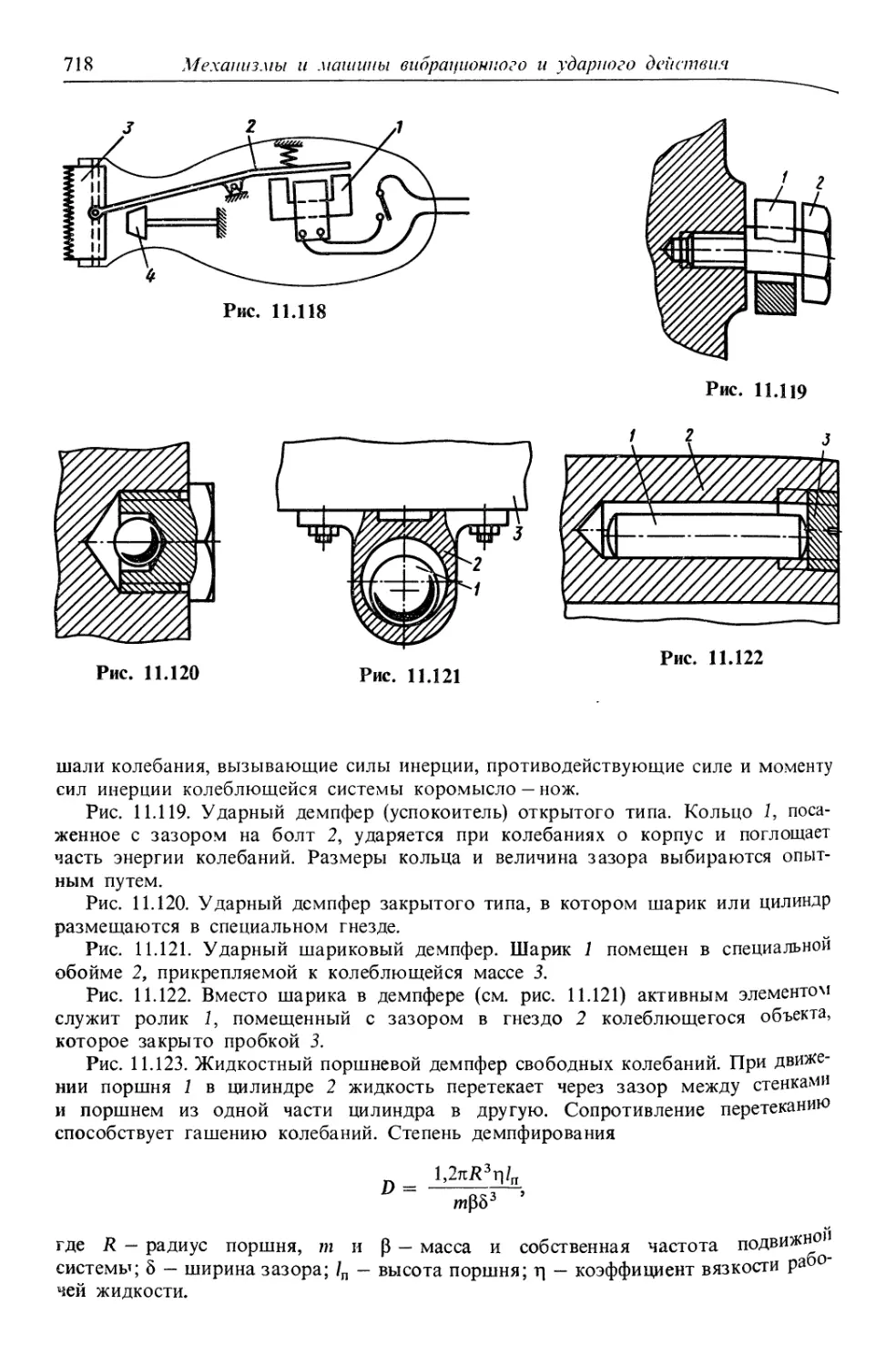
Средства для устранения опасных колебаний механизмов и машин .... 714
Раздел 12
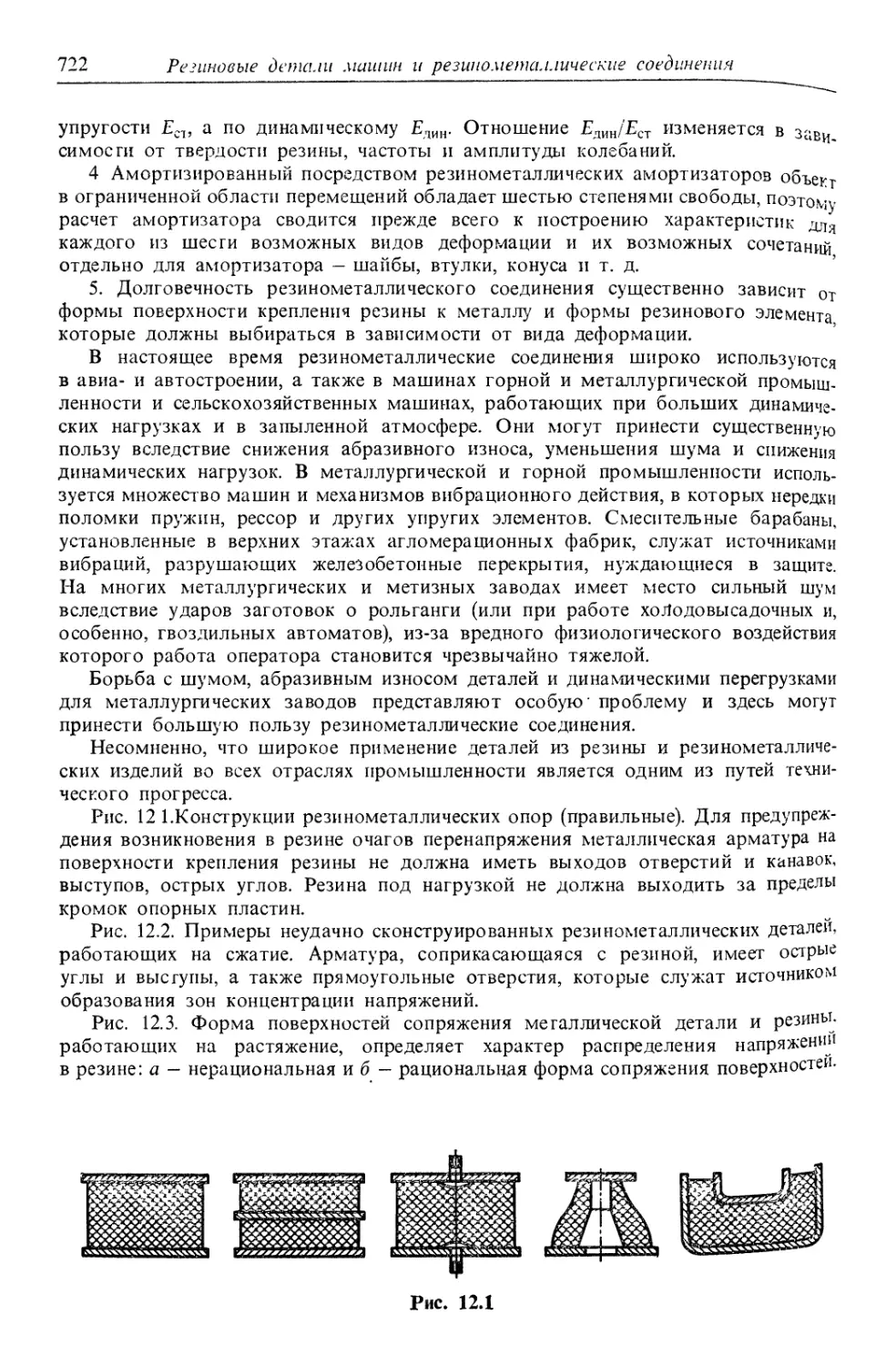
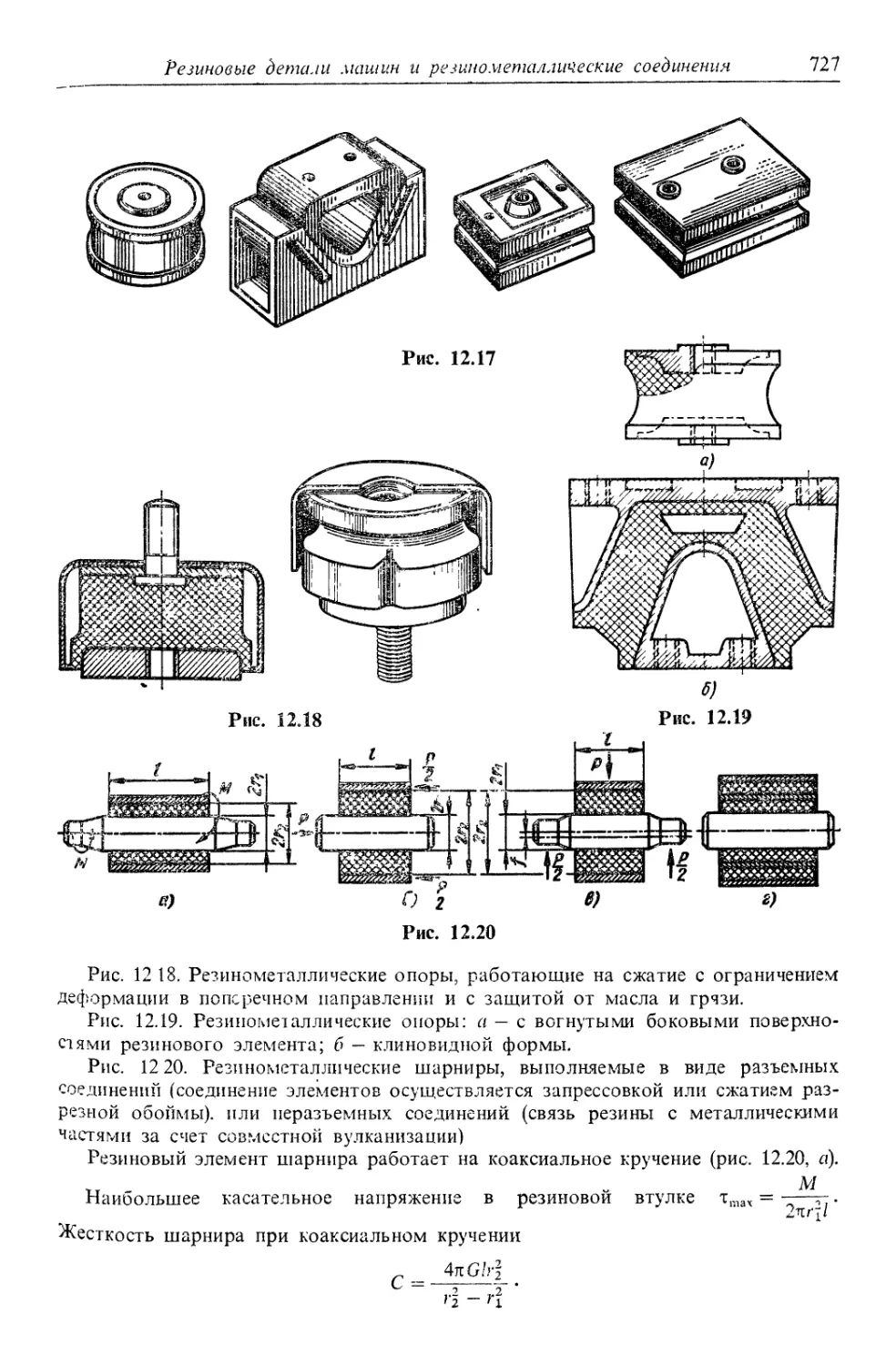
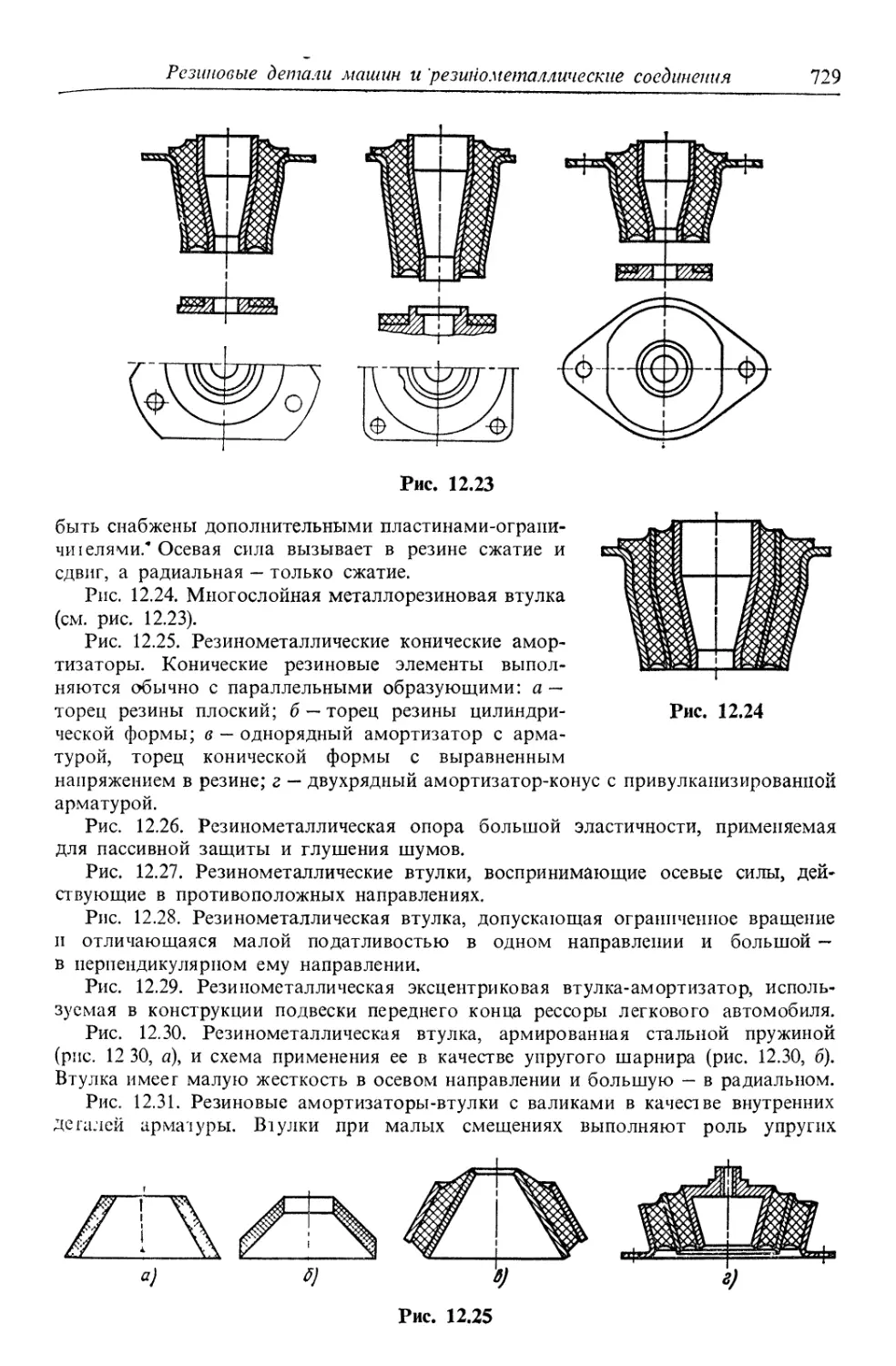
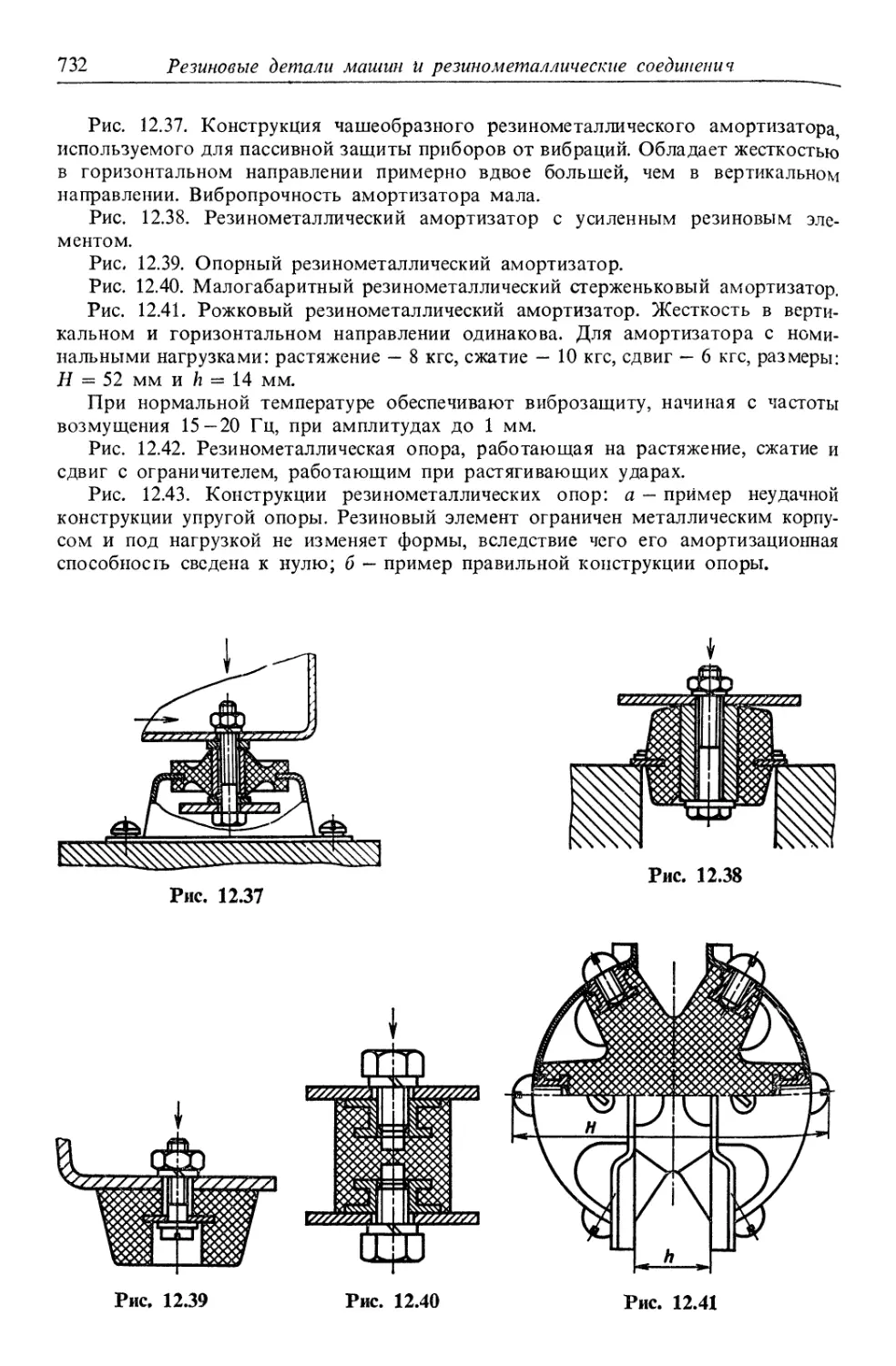
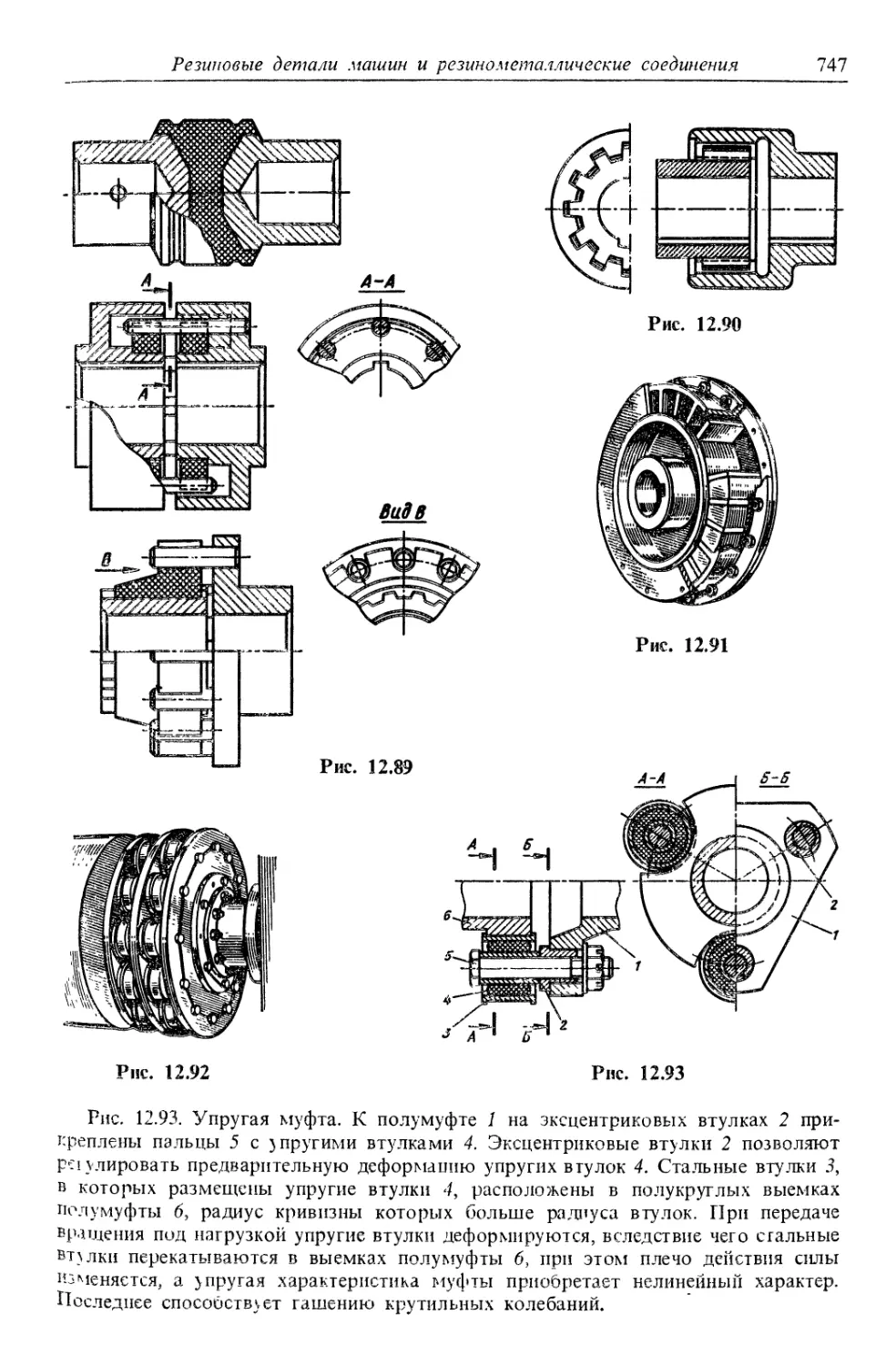
РЕЗИНОВЫЕ ДЕТАЛИ МАШИН И РЕЗИНОМЕТАЛЛИЧЕСКИЕ СОЕДИНЕНИЯ 721
Раздел 13
МЕХАНИЗМЫ ПИТАНИЯ АВТОМАТОВ 753
Механизмы питания автоматов прутковым и полосовым материалом 753
Механизмы дискового и роторного питания 754
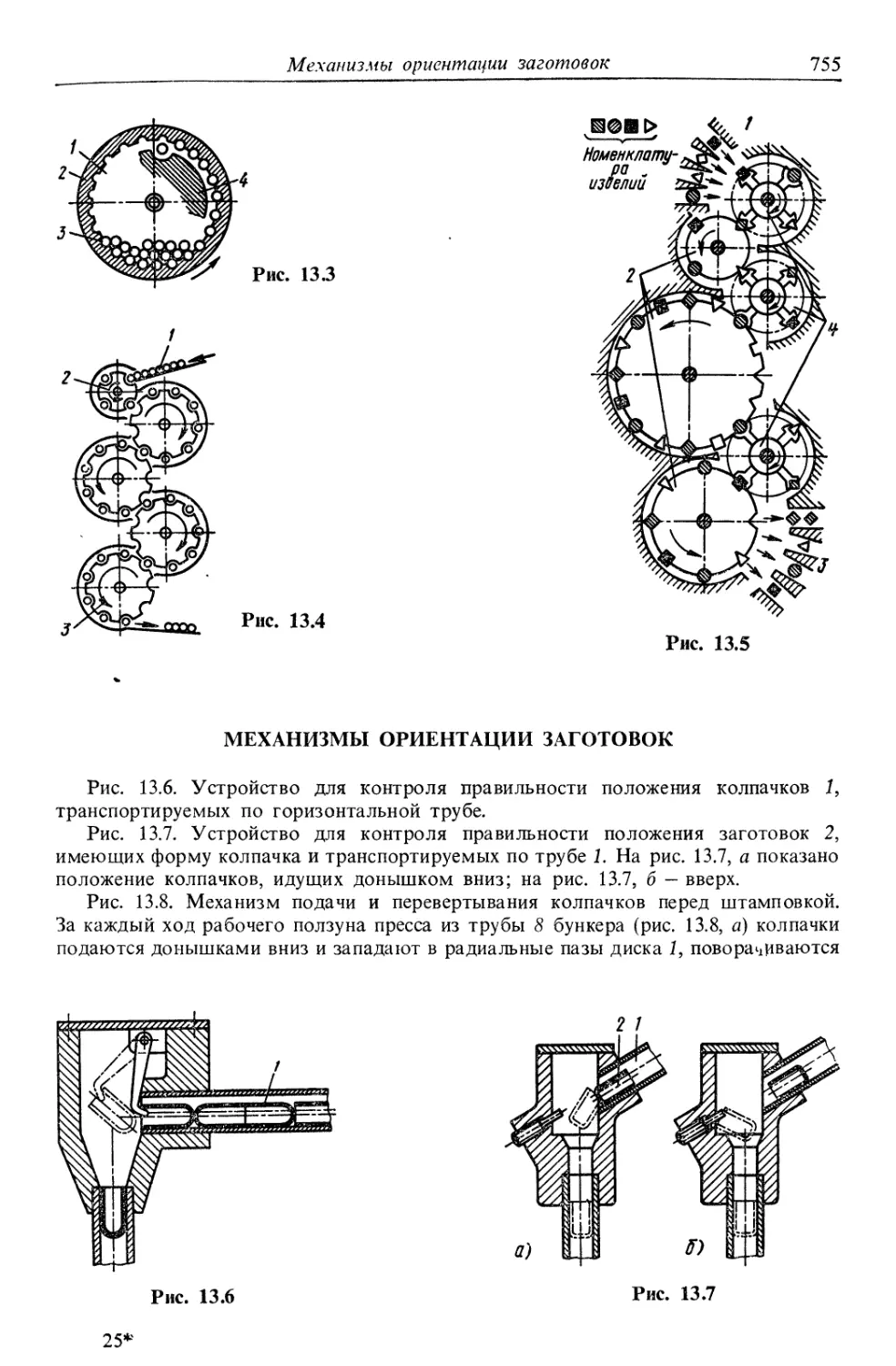
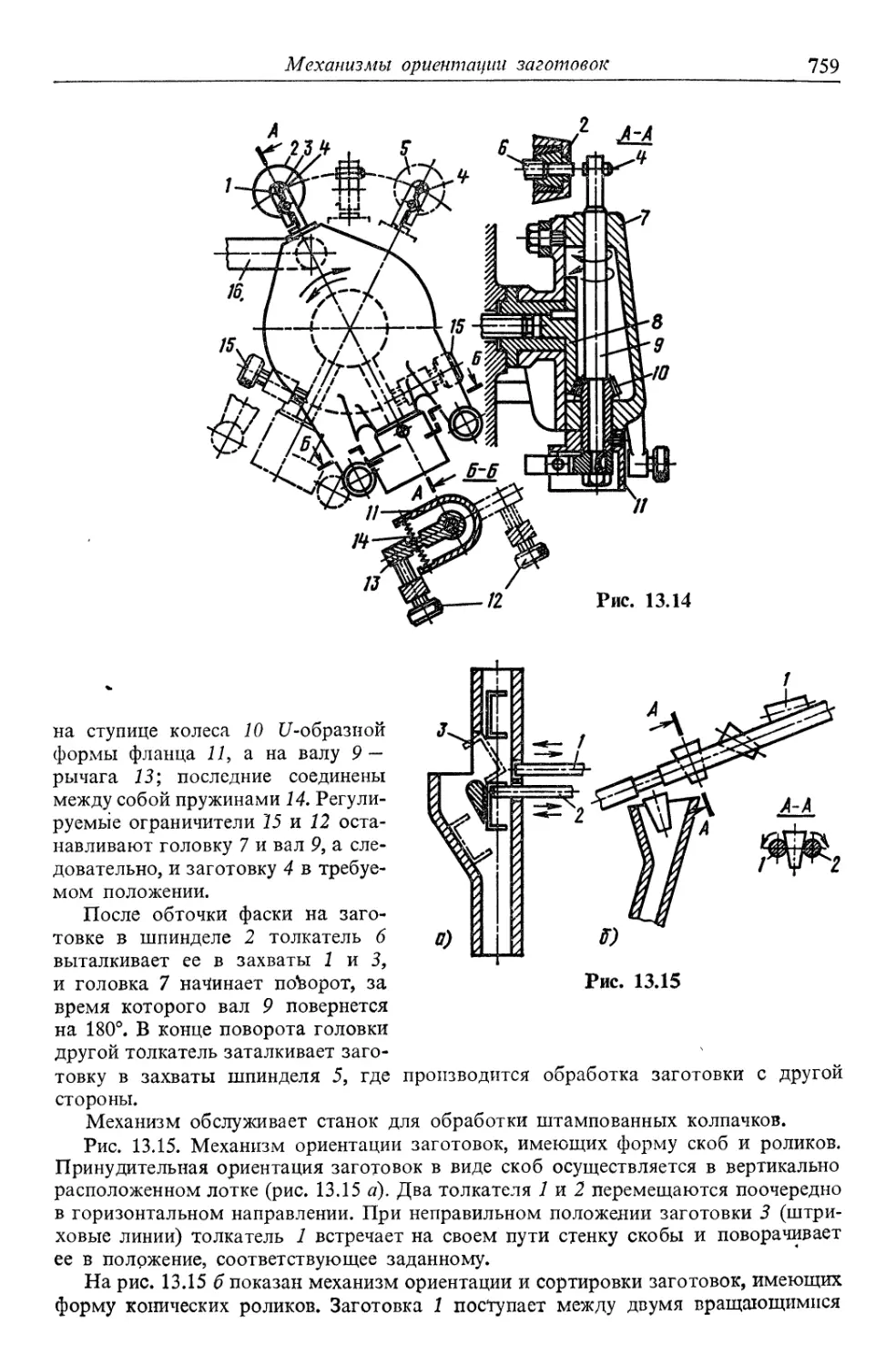
Механизмы ориентации заготовок 755
Отсекатели 760
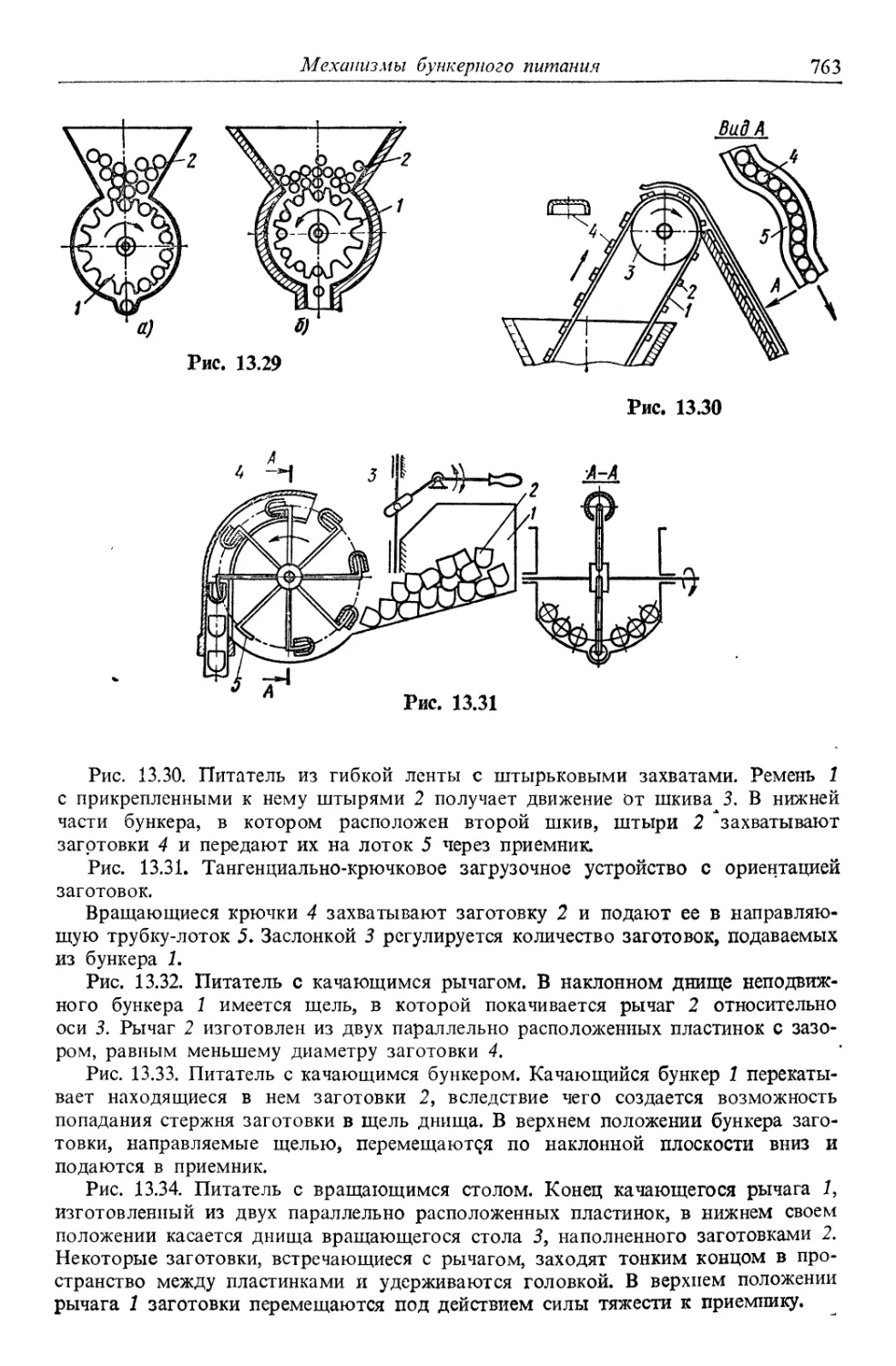
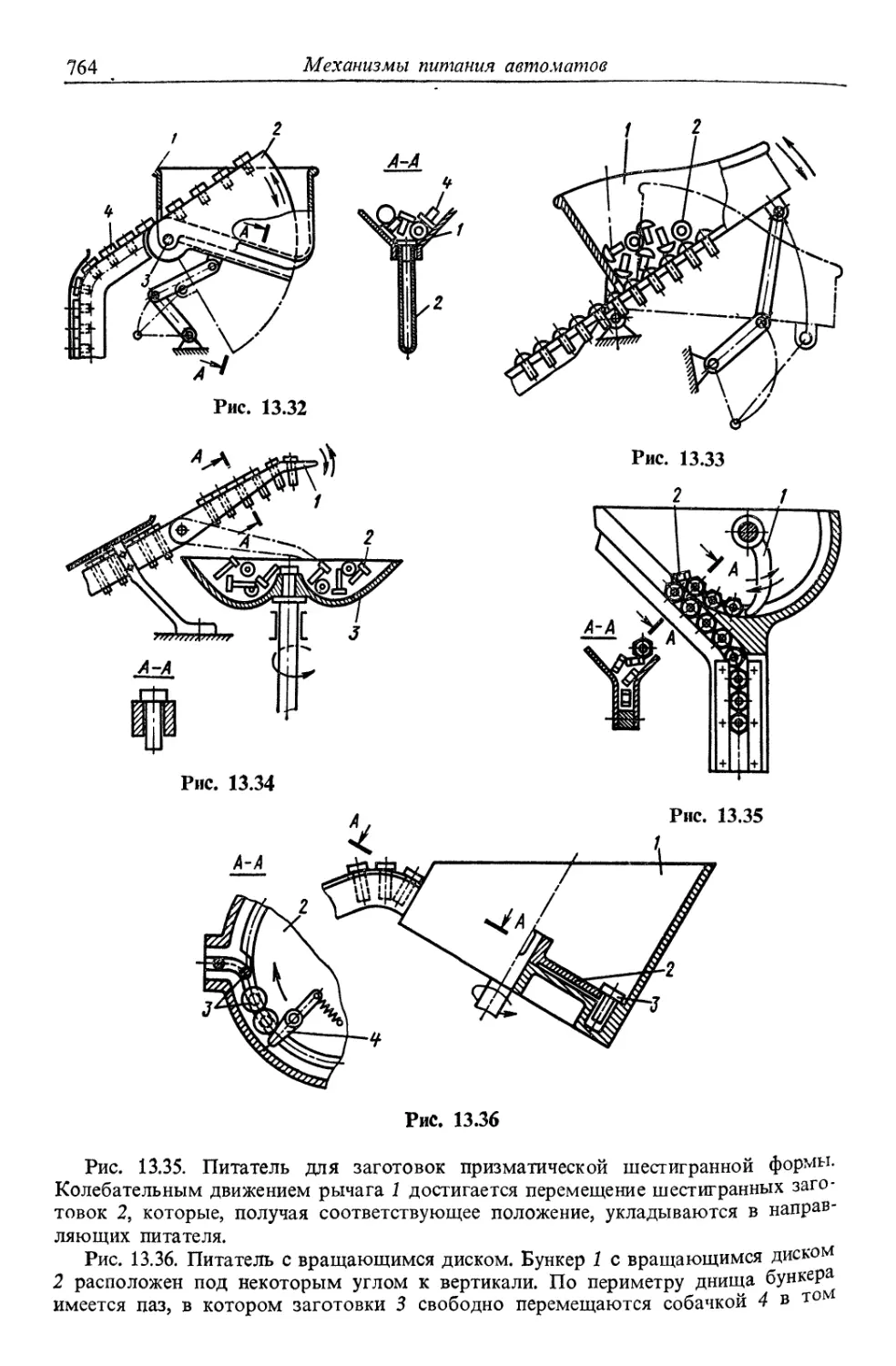
Механизмы бункерного питания 762
Механизмы магазинного питания 769
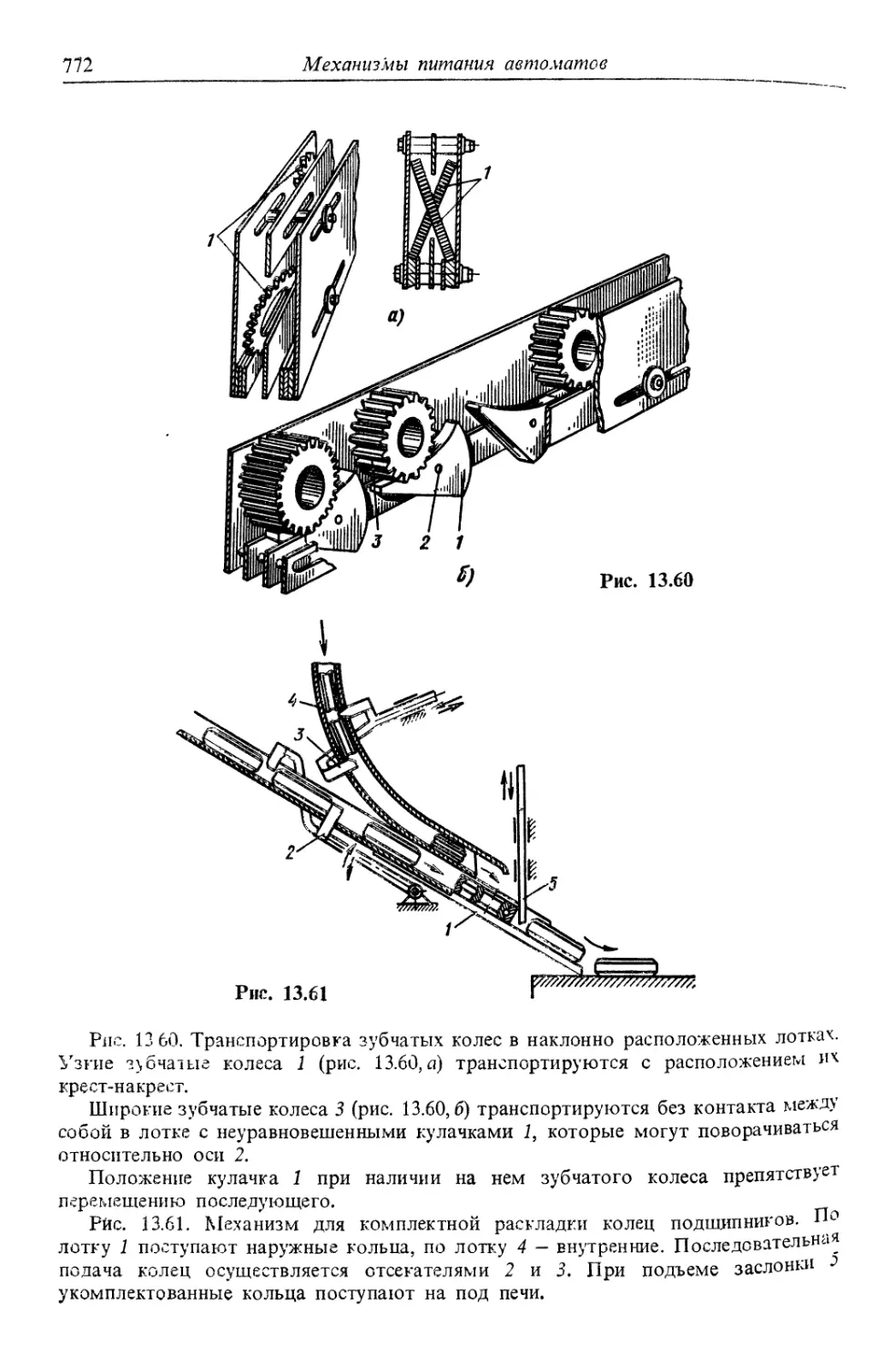
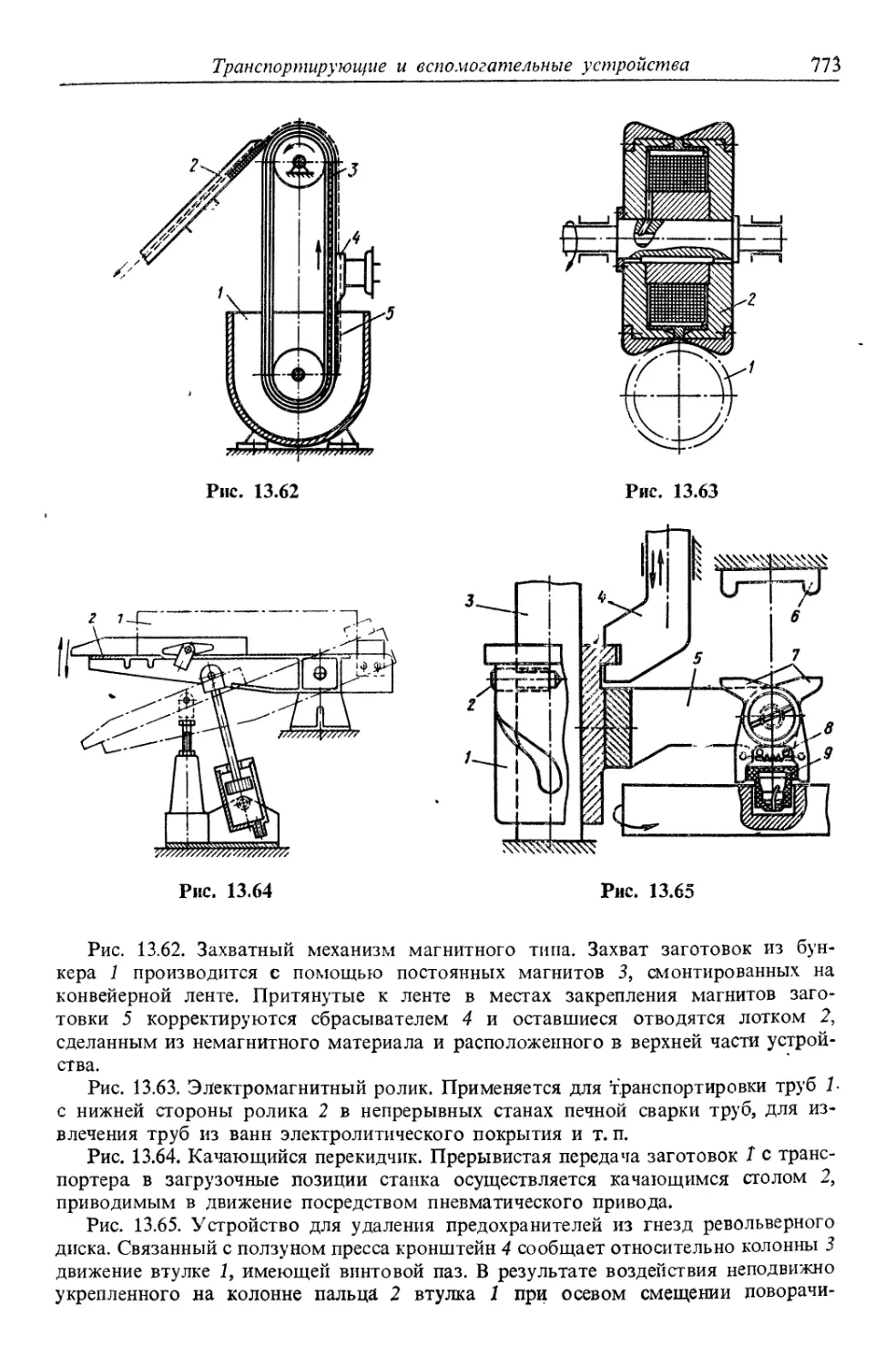
Транспортирующие и вспомогательные устройства 770
Устройства для контроля и сортировки изделий 774
Питатели 776
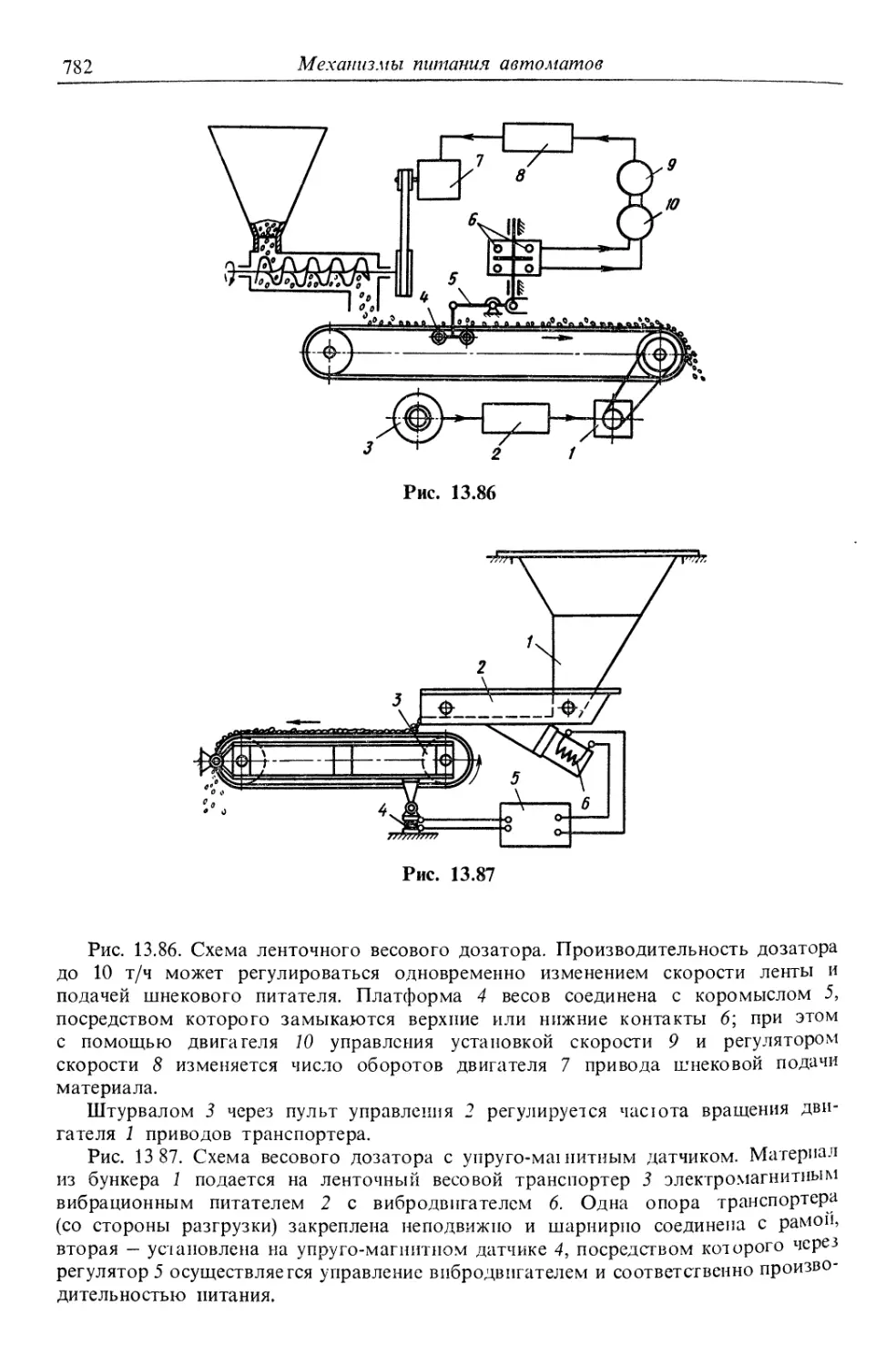
Дозаторы 779
Дозаторы для жидких тел 783
Список литературы 784
ПРЕДИСЛОВИЕ
Современные инженер-конструктор, технолог, исследователь должны в
совершенстве владеть методами расчета и конструирования новых приборов,
быстроходных высокопроизводительных машин, машин-автоматов, автоматических линий,
удовлетворяющих высоким требованиям надежности и точности воспроизведения
перемещений рабочего органа.
При создании сложных машин и особенно машин-автоматов или
автоматических линий необходимо, прежде всего, разработать рациональный
технологический процесс, в соответствии с которым конс1руктору и технологу надлежит
проектировать отдельные исполнительные механизмы, механизмы управления,
специальные устройства для контроля точности и отбраковки изделий и др.
По сравнению с предыдущим изданием в книге сделаны значительные
сокращения за счет устаревших механизмов и устройств.
В то же время значительно расширены вводные главы и два раздела,
посвященные механизмам и машинам вибрационного действия п резинометалли-
ческим соединениям.
Для облегчения пользования книгой все описанные механизмы разделены по
функциональным признакам и почти каждый раздел снабжен вводной статьей.
Такое разделение, может быть, и не совсем удовлетворяет требованиям строгой
классификаций механизмов, однако, как подтвердила практика, конструктора
больше всего интересуют функции механизмов и его возможности, т. е.
характеристики.
При подготовке книги к четвертому изданию авторами были учтены все
замечания, которые были получены со времени выхода в свет третьего издания.
Замечания и пожелания просьба направлять в издательство (Москва, Б-78,
1-й Басманный пер., 3).
РАЗДЕЛ 1
СВЕДЕНИЯ ИЗ КИНЕМАТИКИ И ДИНАМИКИ
МЕХАНИЗМОВ
СТРУКТУРНЫЙ АНАЛИЗ
Совокупность деталей, неподвижно соединенных между собой, называется
звеном механизма (рис. 1.1).
Каждое отдельно взятое звено плоского механизма может иметь три
независимых движения: два поступательных — вдоль осей х и у произвольно
выбранной системы координат, и вращательное — вокруг оси z. Звено, движущееся
в пространстве, может иметь шесть независимых перемещений — три
поступательных и три вращательных.
Каждое независимое движение тела называют степенью свободы.
На свободное движение точки или тела можно накладывать различного рода
ограничения (условия связи) — геометрические, кинематические и
динамические. Степени свободы и условия связи — это понятия, взаимно исключающие
одно другое. Число наложенных связей не может превышать пяти. При шести
наложенных связях относительное движение звеньев исключено.
Кинематическую связь осуществляют в механизме гибкие звенья,
динамическую — упругие звенья, муфты и другие устройства. Если геометрические связи
обеспечивают постоянную связь между движениями звеньев независимо от
нагрузки, то при динамической связи соотношение перемещений зависит от нагрузки.
Наряду с жесткими звеньями существуют звенья упругие (рис. 1.2, а) —
пружины, рессоры, металлорезиновые соединения, воздух или газ, заключенные в
пространстве с переменным объемом, и гибкие (рис. 1.2, б) — канаты, ремни, цепи,
пгариковые передачи.
Кинематической парой (рис. 1.3) называется подвижное соединение двух
тел, взаимно ограничивающее их относительное движение.
При образовании кинематической пары звенья теряют свободу перемещения,
и число степеней свободы уменьшается. По числу оставшихся степеней
свободы кинематические пары группируют по родам. Если осталась не
уничтоженной одна степень свободы, то пару относят к I роду (рис. 1.3, а), при двух
оставшихся степенях свободы — ко И роду (рис. 1.3,6) и т.д. (рис. 1.3,в—Э). В
дальнейшем на схемах род кинематической пары обозначается римскими цифрами
I, II и т.д.
Подвижное сочленение звеньев осуществляется часто не с помощью
кинематической пары, а посредством кинематического соединения — введением между
звеньями промежуточных тел (например: подшипники качения (рис. 1.3, е), шари-
ко-винтовые механизмы (рис. 1.3, ж) и др. Сферический подшипник допускает
три вращения, так же как сферический шарнир, радиальный подшипник — одно
вращение, как цилиндрический шарнир. Род кинематического соединения
соответствует роду надлежащей кинематической пары.
Совокупность подвижно соединенных тел образует кинематическую
Ц е п ь — открытую (рис. L4, л) или закрытую (рис. 1.4,6). Механизм может быть
получен из замкнутой кинематической цепи обращением одного из звеньев
в стойку (неподвижно закрепленное звено, рис. 1.5). Число степеней свободы
плоского механизма может быть вычислено по формуле Чебышева:
n^ = 3(fi-l)~2pi-.p2, (U)
Сведения из кинематики и динамики механизмов
Рис. 1.1
^
<ГЬ|. f^m *'4fr . 'W ■ ' ff? ^
>lj> " " чЦ>' ' \L|J; " Л!р ' ■ \Ц> " .\1|У
^;
Рис. 1.2
Структурный анализ
Рис. 1.3
Рис. 1.4
Рис. 1.5
Рис. 1.6
:.^^
10 Сведения из кипематики и динамики механизмов
Pi и р2 — число кинематических-пар I и II рода, а пространственного механизма —
по формуле Малышева: *
W :=^в{п-\)-5р,- 4р2 - Ърг ^ 2р4 - Р5, (1.2)
где л —1—число подвижных звеньев механизма; р^, р^, ру р^ и p^ — 4ViCJio
кинематических пар I —V родов.
При определении числа кинематических пар следует иметь в Виду, что в
случае сложного шарнира (рис. 1.6) число кинематических пар будет на единицу
меньше числа сходящихся звеньев 1, 2, 3.
Для получения определенности движения звеньев механизма необходимо
задавать независимые движения, число которых равно числу степеней свободы. При
Ж = 2 необходимо задавать движение двум звеньям. Наоборот, если
необходимо задать два независимых движения, то механизм должен обладать двумя
степенями свободы. В технике используют преимущественно механизмы с одной
степенью свободы.
Звено механизма, которому задается независимое движение, называют
начальным или входным. В большинстве случаев начальное звено движется
относительно неподвижного, т. е. задается движение одного из звеньев механизма,
связанного со стойкой, однако применяют механизмы, в которых начальное звено
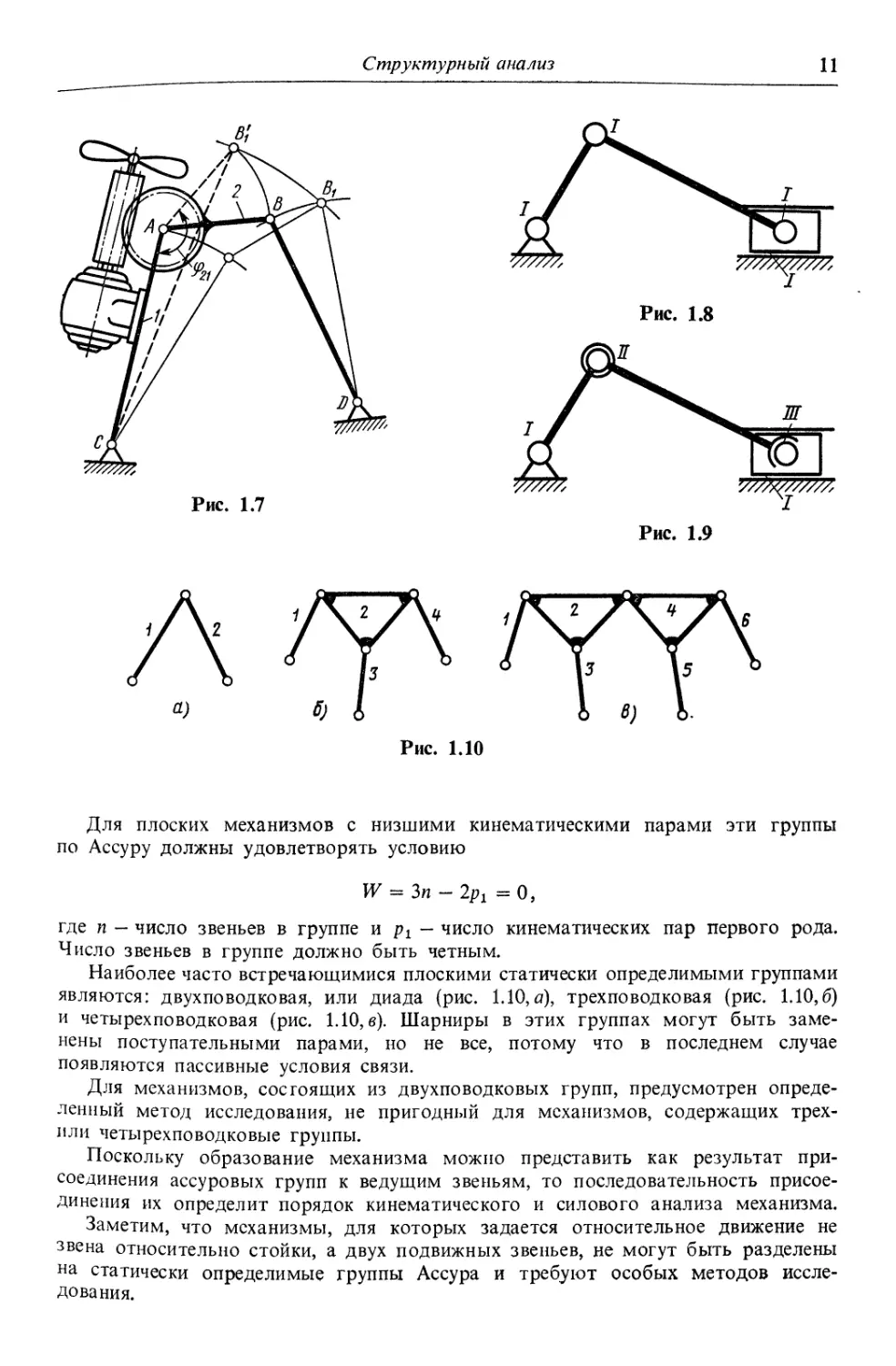
вращается относительно подвижного звена. Например, для механизма
вентилятора (рис. 1.7) задается движение поводку 2 относительно коромысла 1 (угол
Ф21), на котором закреплен электрический двигатель.
Найденное по формуле (1.1) число степеней свободы механизма не всегда
будет соответствовать действительному. В некоторых случаях может оказаться,
что формально учтенные в формулах (1.1) или (1.2) условия связи будут
пассивными, т. е. тождественными с другими. Такие связи не влияют на кинематику,
но вызывают статическую неопределенность.
В механизме могут быть так же лишние степени свободы, не
влияющие на закон движения ведомого звена (вращение ролика толкателя вокруг
своей оси; вращение шатуна вокруг оси, проходящей через центры сферических
шарниров, с помощью которых шатун соединяется с другими звеньями, и т. д.).
Число q пассивных связей можно определить по формуле
g = Ж - 6п + 5pi + 4р2 + Зрз + 2р4 + Р5. (1.3)
Например, для кривошипно-ползуиного механизма (рис. 1.8) имеем п — 3,
Pi = 4, W — \ и, следовательно:
(/=1-6.3 -1-5.4 = 3.
Результат означает, что при сборке из-за неизбежных неточностей
изготовления в последней паре ползун — направляющие могут возникнуть натяги трех
видов. Чтобы исключить этот недостаток, звенья следует соединять посредством
таких кинематических пар, для которых q = 0.
Если в кривошипно-ползунном механизме (рис. 1.9) кривошип со стойкой
соединить посредством пары I рода, кривошип с шатуном — парой II рода,
шатун с ползуном - парой III рода, ползун с направляющей - парой I рода,
то получим
^ = 1-6.3 + 5.2-f 4-1 + 3.1 =0.
Число степеней свободы механизма не изменится, если к нему присоединить
или от него отсоединить статически определимые группы звеньев {W— 0). Это
свойство групп положено в основу классификации Ассура.
Структурный анализ
11
Ш)^////Л
Рис. 1.8
Рис. 1.7
^Щ/////Л
Рис. 1.9
Рис. 1.10
Для плоских механизмов с низшими кинематическими парами эти группы
по Ассуру должны удовлетворять условию
Ж = Зп - 2pi = О,
где п — число звеньев в группе и р^ — число кинематических пар первого рода.
Число звеньев в группе должно быть четным.
Наиболее часто встречающимися плоскими статически определимыми группами
являются: двухповодковая, или диада (рис. 1.10,а), трехповодковая (рис. 1.10,6)
и четырехповодковая (рис. 1.10, б). Шарниры в этих группах могут быть
заменены поступательными парами, но не все, потому что в последнем случае
появляются пассивные условия связи.
Для механизмов, состоящих из двухповодковых групп, предусмотрен
определенный метод исследования, не пригодный для механизмов, содержащих трех-
пли четырехповодковые группы.
Поскольку образование механизма можно представить как результат
присоединения ассуровых групп к ведущим звеньям, то последовательность
присоединения их определит порядок кинематического и силового анализа механизма.
Заметим, что механизмы, для которых задается относительное движение не
звена относительно стойки, а двух подвижных звеньев, не могут быть разделены
на статически определимые группы Ассура и требуют особых методов
исследования.
12 Сведения из кинематики и динамики механизмов
КИНЕМАТИКА ПЛОСКИХ СТЕРЖНЕВЫХ МЕХАНИЗМОВ
Разметка положений звеньев и построение
траекторий точек
При конструировании новых или исследовании действующих механизмов
необходимо знать траектории, скорости и ускорения точек, а также положения,
угловые скорости и ускорения звеньев механизма. Определение указанных
Параметров называется кинематическим исследованием механизма.
Построение положений звеньев механизма и разметку положений точек на
траектории плоских стержневых механизмов можно производить различными
методами. К числу наиболее распространенных относят методы засечек,
круговых линеек и ложных положений. Метод построения положений звеньев
механизма зависит от вида статически определимых групп, определяющих его
структуру.
На рис. 1.11 показан четырехшарнирный механизм, состоящий из начального
звена OiAi, закон движения которого задан, и двухповодковой группы AiBiO^.
Задаваясь рядом положений точки А^ на окружности а, засечками радиуса
А^Вх на окружности р находят соответствующие положения В и Вг и т. д. точки В.
Траекторию промежуточной точки Cj шатуна находят построением на всех
положениях шатуна АВ соответствующей геометрической фигуры и соединением
последовательных положений точки С.
На рис. 1.12 показано построение положений звеньев двухповодковых групп
различных модификаций, в которых некоторые шарниры заменены
поступательными парами.
Индексы О определяют заданное положение группы, а индекс 1 — искомое,
положение точек А^ и Cj задано. Сделав засечки из точек Ai и С^
радиусами, равными длине соответствующих поводков, находят положение точки
Bi (рис. 1.12,4
Новое положение звеньев группы на рис, 1.12,6 найдено построением
касательной к дуге радиуса /ii, проходящей через точку Ci. Положение В^ точки В для
группы на рис. 1.12, в найдено засечкой дугой радиуса АВ на новом заданном
положении средней линии 5i направляющей Sq, Положение звеньев группы на
рис. 1.12,2 при заданных положениях А^ и Si находим построением сначала'
произвольной прямой I'l, составляющей заданный угол р с лиш1ей Si, а затем
параллельной ей прямой ii, проходящей через точку Ai. Положение Bi группы
по рис. 1.12, д определяется пересечением прямых, находящихся на расстояниях
hi и /i2 от направляющих q^ и Si.
Для построения положений звеньев механизма, включающих трехповодковую
группу, необходимо применять метод ложных положений звеньев. На рис. 1.13
изображена схема кулисного механизма, состоящего из двухповодковой группы
5, 6 и трехповодковой группы с центральным звеном 1 и поводками 2, 3 и 4. Для
определения положения золотникового штока предполагаем поводок и кулису
разъединенными в точке F. После этого при поставленном в требуемое
положение двойном эксцентрике 7 задаем произвольные положения одной из тяг 2 или
3 и отыскиваем траекторию ф, точка пересечения которой с дугой радиуса GF
определяет положение точки F кулисы. Затем обычным способом определяем
положение всех остальных звеньев кулисы, в том числе и золотникового штока 6.
Для механизмов, включающих четырехповодковые группы, положение звеньев
строится аналогично. На рис. 1.14 показана схема механизма продвижения ткани
Кинематика плоских стержневых механизмов
13
^ П Bj 3-
Рис. 1.12
14
Сведения из кинематики и динамики механизмов
Рис. 1.13
Рис. 1.14
Рис. 1.15
швейной машины с четырехповодковои группой, составленной из соединенных
между собой центральных звеньев 6 и 7 и поводков 2, 3, 4, 5. При
заданном положении двойного эксцентрика 1, полагая, что точки А )л В
неподвижны, разъединяем в точке Е звенья 6 и 7 и, задавая произвольные положения
точек С и D, строим траектории Ze и ву точки Е. Пересечение этих
траекторий определяет действительное положение точки Е, Такое построение следует
делать для каждого из положений эксцентрика.
Применение механизмов с двумя начальными звеньями позволяет
воспроизвести весьма сложные траектории точек.
В механизме игловодителя обувной швейной машины (рис. 1.15) движение
начальным звеньям i и 2 сообщается с помощью кулачков 5 и 5, укреплен-
Кинематика плоских стержневых механизмов
15
ных па одном валу. При этом профиль кулачка 5 определяет отклонение игло-
водителя 4, а кулачка 3 — перемещение его в подвижных направляющих. В
результате комбинирования этих двух движений воспроизводится траектория,
показанная на рисунке справа. Траектория построена методом засечек при
найденных по профилям кулачков положениях начальных звеньев 1 и 2.
В том случае, когда задается относительное перемещение звеньев, план
механизма необходимо строить несколько иначе, так как разделить механизм на
ipynnbi Ассура не представляется возможным.
Для определения положений звеньев механизма (рис. 1.16) при заданном
yijic Ф21 полагаем звенья 2 и 3 разъединенными в точке В. Повернув звено 2
относительно звена 1 так, чтобы между ними был угол фзь описываем
радиусом СВ\ дугу окружности. После этого задаем ряд последовательных положений
одного из звеньев (4 или 5), находим траекторию (3 точки В четырехзвенного
механизма^ 3, 4, 5. Пересечение кривой р с дугой радиуса СВ\ определяет
положение Bi точки В на неподвижной плоскости, а следовательно, и положение
всех звеньев механизма.
Если в механизме (рис. 1.17) задано перемещение поводка 2 относительно
звена 1, то, полагая звенья 2 и 3 разъединенными, поворачивасхм звено 2
относительно звена 1 до заданного yi ла Ф21, строим траектории (3 и р' точек В и В\ и
находим точку Bi пересечения их. Найденная точка определяет искомые положения
звеньев механизма.
В некоторых случаях необходимо знать только ход ведомого звена, который
определяется его крайними положениями.
Для кривошипно-ползунного (рис. 1.18) или чегырехшарнирного (рис. 1.19)
механизмов крайние положения ведомою звена соответствуют совпадению на-
Рис. 1.16
Рис. 1.18
16
Сведения из кинематики и динамики механизмов
Рис. 1.19
Рис. 1.20
правлений кривошипа АВ и шатуна ВС. Точка Q и Со возврата находятся от
точки А на расстоянии l-hr и /-г. Путь CqCq равен ходу Я (см. рис. 1.18).
Угол поворота ^i (рис. 1.19) соответствует переходу точки С из положения
Со в Со, а ф2 — в обратном направлении. Через угол Э определяется отношение
средних скоростей движения коромысла CD впеоед и назад.
Несколько труднее определять ход ведомого звена в сложном механизме.
На рис. 1.20 показано определение хода поршня бокового цилиндра V-образного
двигателя внутреннего сгорания. Вследствие того что положение кривошипа АВ,
при котором поршень занимает крайние положения, неизвестно, из произвольно
выбранных положений 1, 2, 3 и т. д. точки Е сделаем засечки радиусом ED на
траектории точки D главного шатуна BCD. Проведя через середины дуг Г, 2', 3' и т. д.
кривую до пересечения с траекторией точки /), находим точку />о, в которую
попадает точка D при верхнем крайнем положении поршня. Делая засечку на
оси цилршдра радиусом DE, находим мертвую точку j^o- Аналогично
определяется /)о, а следовательно, и £о. Ход Я поршня равен расстоянию EqEq.
Графическое определение скоростей и ускорений
При проектировании механизма необходимо знать величину и направление
скоростей и ускорений, т. е. их векторы.
Если Р — мгновенный центр вращения тела М (рис. 1.21), то скорости точек
А, В и С, из которых задана, например, скорость v^ точки А, пропорциональны
РА, РВ и PC. Взяв произвольную точку р^, отложим
отрезки р^а, р^Ь, р^с, пропорциональные и
перпендикулярные РА, РВ и PC, получим фигуру р^дЬс,
в которой отрезки Pt,a, p^b и p^,c представляют
собой векторы скоростей точек А, В и С. Фигура
p^,abc подобна фиг\ре РАВС и называется
планом скоростей. Фигура аЬс, CToponaNni
которой являются скорости относительного движения
точек А, В и С, подобная фигуре ABC и повернутая
относительно последней на 90°, называется
картиной относительных скоростей.
Свойством подобия картины относительных скоростей и
перемещающейся фигуры обычно пользуются при
отыскании скоростей промежуточных точек звеньев.
Рис. 1.21
Кинематика плоских стержневых механизмов 17
Обычно при исследовании сложных механизмов, составленных из статически
определимых групп, скорости определяют последовательно, начиная с группы,
присоединенной к начальному звену. Для двухповодковых групп скорости
определяют из условия, что плоскопараллельное движение звена ^южнo
рассматривать как сумму поступательного (вместе с одной из его точек) и вращательного
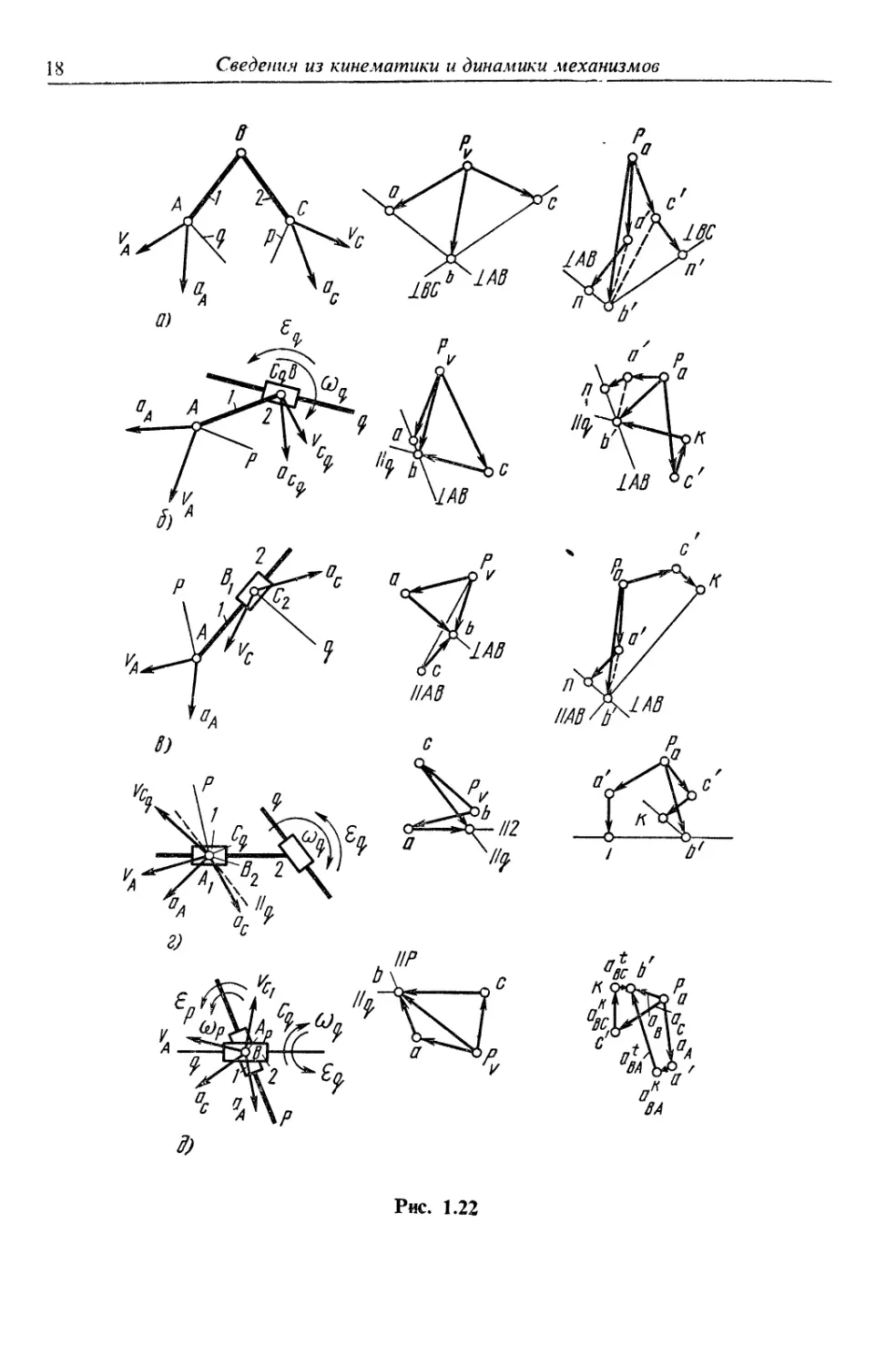
(вокруг оси, проходящей через эту точку) движений. Например, если заданы или
предварительно вычислены скорости точек А и С дв>хповодковой группы
(рис. 1.22,а), то скорость точки В определяется согласно векторным уравнениям:
vb=-va + vba
где V4 'Я vc — скорости переносного поступательного движения для звеньев АВ
и ВС; Vba и vbc -" скорости точки В при вращении звеньев АВ и ВС вокруг
осей, проходящих через точки А и С, перпендикулярные соответственно
отрезкам АВ и ВС. Построение векторных сумм из произвольно выбранного полюса
Ру показано на рис. 1.~22, а.
Угловые скорости группы звеньев 1 и 2 определяются по форм>'лам
©1 =
Ш2 =
УВ4 _ Д^^;
Ub Ub
Vbc Ьск^
^св кв
В случае замены одного из шарниров поступательной парой (рис. 1.22, б)
точка С должна быть взята на направляющей q, по которой перемещается пол-
зушка, а скорость ее относительного движения две на плане должна быть
направлена параллельно направляющей. Уравнения для определения скоростей
остаются теми же, что и для двухповодковой группы с тремя шарнирами.
Индексы у букв планов положений диад указывают, к какому из звеньев
относится точка. На планах скоростей и ускорений эти индексы опущены.
Для остальных модификащш двухповодковых гр>пп по рис. 1.22 угловые
скорости звеньев определяются по формулам:
coi =: —^^ и ©2 = о>5 (рис. 1.22,6); ш^ == Ш2 = со^ (рис. 1.22, г);
и в
<^i = -~- и 0)2 = coi (рис. 1.22, в); ©i = сОр и сэ2 = со^ (рис. 1.22, д).
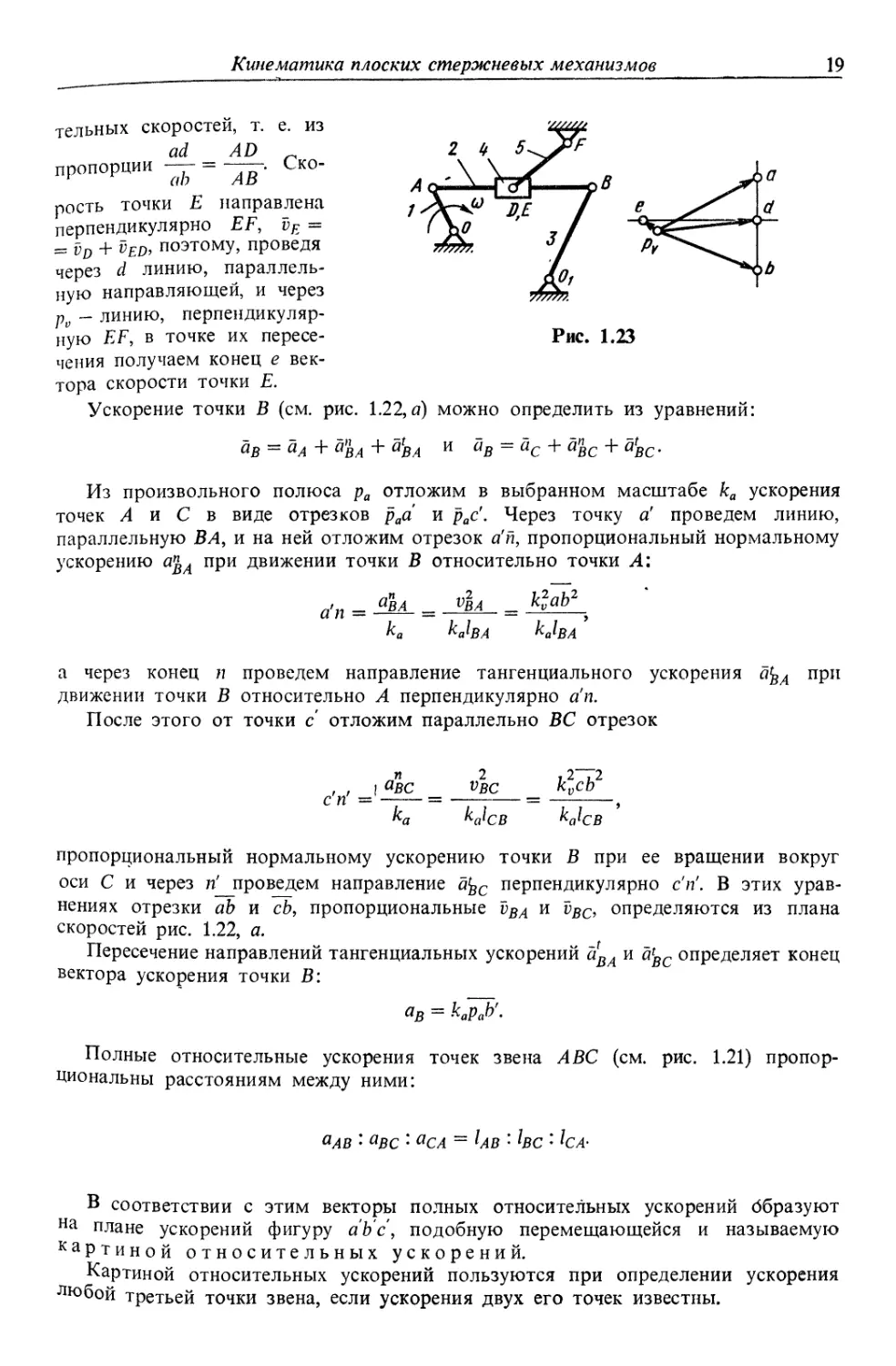
в качестве примера определим скорости точек звеньев механизма (рис. 1.23),
состоящего из диады 2—3, присоединенной в точке А к кривошипу, а в точке
^1 — к неподвижному звену, и диады 4—5, ползун которой скользит по
направляющей АВ.
От произвольно взятого полюса р^ отложим скорость V4 в масштабе /с^
(отрезок р^а) и проведем через p^, линию перпендикулярно 6iB, а через а —
перпендикулярно АВ. В точке b пересечения этих линий лежит конец вектора
Pv^ = -^^1 скороз:;щуточки в. Затем найдем вектор скорости точки D направляю-
Щ^и, пользуясь подобием Перемещающейся фигуры звена и картины относи-
18
Сведения из кинематики и динамики механизмов
Рис. 1.22
Кинематика плоских стермсневых механизмов
19
Ско-
тельных скоростей, т.
ad AD
пропорции -^ = -^.
рость точки Е направлена
перпендикулярно £F, v^ =
= !)£) + ved^ поэтому, проведя
через d линию,
параллельную направляющей, и через
р^ _ линию,
перпендикулярную EF, в точке их
пересечения получаем конец е
вектора скорости точки Е.
Ускорение точки В (см. рис. 1.22, а) можно определить из уравнений:
Рис. 1.23
ав = аА + а^А + й^л
и Gr, = йг + а^п
Из произвольного полюса ра отложим в выбранном масштабе /Сд ускорения
точек Л и С в виде отрезков Pad и РаС'. Через точку а' проведем линию,
параллельную ВА, и на ней отложим отрезок а'п, пропорциональный нормальному
ускорению а^^ при движении точки В относительно точки А;
а'п = -^^ =
^ВА
ВА
kah
klah^
kjRA
а через конец п проведем направление тангенциального ускорения а^^ при
движении точки В относительно А перпендикулярно а'п.
После этого от точки с отложим параллельно ВС отрезок
I Две
2
УВС
kJcB
к.хЬ
knU
а^СВ
пропорциональный нормальному ускорению точки В при ее вращении вокруг
оси С и через п' проведем направление а^(^ перпендикулярно с'п'. В этих
уравнениях отрезки аЬ и сЬ, пропорциональные vq^ и v^o определяются из плана
скоростей рис. 1.22, а.
Пересечение направлений тангенциальных ускорений а^^ и д^^ определяет конец
вектора ускорения точки В:
ав = КРаЬ'.
Полные относительные ускорения точек звена ABC (см. рис. 1.21)
пропорциональны расстояниям между ними:
^лв • <^вс • ^СА - hB • he ' ^СА-
В соответствии с этим векторы полных относительных ускорений ббразуют
на плане ускорений фигуру аЬ'с\ подобную перемещающейся и называемую
картиной относительных ускорений.
Картиной относительных ускорений пользуются при определении ускорения
любой третьей точки звена, если ускорения двух его точек известны.
20
Сведения из кинематики и динамики механизмов
Рис. 1.24
Если одна из вращательных пар двухповодковой группы заменена
поступательной парой, то ускорение точки В (см. рис. 1.22,6) может быть определено
по уравнениям
«5 = ^Л + Й'Ьл + ^ВА И ^5 = ЙС + 4с + ^i
^^вс
Смысл первого уравнения прежний, что касается второго, то в нем ас —
ускорение точки С направляющей, совпадающей в данный момент времени с точкой В\
а^с — кориолпсово ускорение, появляющееся при вращательном переносном
движении, равное 2(0qVgc и по направлению совпадающее с вектором v^c,
повернутым на 90° в направлении со^.
Аналогично составляются векторные уравнения и формулы, необходимые для
определения ускорений точек звеньев различных модификаций диад на рис. 1.22.
Если в механизм входит трехповодковая группа, то для- определения
скоростей и ускорений точек ее звеньев следует применять метод ложных положений
ка|5тин относительных скоростей и ускорений или особые точки Ассура.
Метод ложных положений картины относительных
скоростей заключается в следующем. Допустим, что в результате кинематического
исследования определены скорости центров А, В и С шарниров (рис. 1.24),
которыми трехповодковая группа присоединяется к механизму, и отложены от р^
(рис. 1.24, fl) в виде отрезков р^д, р^Ь и р^с. Для точек D, Е и F можно написать
векторные уравнения Vj) — v^^ + Vj)^; Vf = 1)^ -\- Vfg и i^£ = t^c + ^£0 из которых
следует, что концы векторов v^, vj), Vf должны лежать на перпендикулярах 5, ф
и S к AD, BF и ЕС, проведенных соответственно через точки а, b и с. Кроме того,
известно, что векторы скоростей относительного движения точек D, Е и F
Кинематика плоских стержневых механизмов
21
образуют треугольник, подобный ADEF, с соответственно перпендикулярными
сторонами. Для того чтобы правильно расположить картину относительных
скоростей, строим сначала ее ложное положение d^ej^^, задавшись произвольно
одной из относительных скоростей, например, Vj)^ (отрезок adi на плане). Если
теперь вершины due перемещать по линиям 5 и s, то стороны
треугольника edf будут изменяться пропорционально, причем точка / будет перемещаться
по прямой ф1, проходящей через точки О и /j. Пересечение линий ф и ф^
определяет искомое положение точки /, следовательно и точек end картины
относительных скоростей звена DEF, После определения вектора Pyf скорости
точки F легко определить скорости и остальных точек.
Метод ложных положений картины относительных
ускорений сводится к следующему. Если заданы ускорения а^, а^ и ас точек А, В и С
(рис. 1.24), то ускорения точек D, Е и F могут быть выражены следующими
векторными уравнениями:
«D = ^л + ^Ъа + ^'daI аЕ^асЛ- а\с + «£с; «f = ^в + ^Ъ + ^'fb-
Нормальные ускорения й^^; a^Q\ Щ^ могут быть вычислены после
построения плана скоростей и отложены от концов а\ Ь\ с' векторов ускорений точек
А, В я С в виде отрезков rij)^, прв, п^с-
Через конец каждого из построенных отрезков необходимо провести
направления тангенциальных ускорений aj)^, а^^о ^гв перпенди^сулярно отрезкам
f^DA> ^ЕС и nfB соответственно. Полные ускорения в относительном движении
точек Д £ и F образуют на плане ускорений l^def\ подобный ADEF,
вершины которого соответственно располагаются на прямых 5', s', ф'. Для
удовлетворения этого условия задаемся положением одной точки (например, d\\
находим вторую точку (например, e'l) по уравнению
^£ = а£> + all) + dED (^•'^)
и на полученном отрезке d[e'i строим Ad'ie\f'i, подобный ADEF.
Если теперь перемещать Ad\e\f\ вершинами d\ и е'^ по прямым 5' и s' так,
чтобы сохранялось подобие и удовлетворялось уравнение (1.4), то третья
вершина f\ треугольника будет перемещаться по прямой ф'^, параллельной ф^ на
плане скоростей (см. рис. 1.24). Конец /' вектора ускорения точки F лежит на
пересечении линий ф'1 и ф'. Направление линии ф' можно получить также
построением двух ложных положений d\e\f\ и d^e'if'i картины относительных
ускорений, проведя прямую через вершины f\ и /2. Ускорения остальных точек
теперь определяются по обычным уравнениям.
Покажем еще методику построения скоростей и ускорений для несложного
четырехшарнирного механизма, если задано относительное движение СО21 двух
смежных звеньев (рис. 1.25, а).
Рис. 1.25
22 ' Сведения из кинематики и динамики механизмов
Движение ведущего звена 2 можно представить, как результат сложения
вращения звена 2 вместе со звеном 1 и заданного вращения звена 2 относительно
звена 1 (рис. 1.25,6).
Здесь %21 = ^2\^АВ — скорость точки В при вращений звена 2 относительно
звена ]; v^ = cDi/^ ^ — скорость точки Б, когда C02i=0 и звенья 1 и 2 жестко
соединены.
Поскольку ©1 неизвестна, вычислить v^i нельзя; vq = соз/с/) — скорость точки
В при вращении звена 3 относительно точки С.
Так так coi и соз неизвестны, полюс р^ плана скоростей находим из построения.
Т~7 ^И^АВ
Из произвольной точки М строим отрезок Ь^Ь ■-
К
Через точку Ъ^ проводим перпендикуляр к ОВ, а через точку Ъ —
перпендикуляр к ВС, в пересечении которых получаем полюс р„. Вектор v^ найдем
построением на отрезке pj^i треугольника, подобного треугольнику ОАВ.
Цифры 1—4 на плане скоростей (рис. 1.25, 6) обозначают последовательность
его построения.
Построим план ускорений (рис. 1.25, в), полагая Zii =0. Имеем
-и , -f
ав-^в^^в-
Здесь ci^g^ = p^^bl —— нормальное ускорение точки В при вращении звена 2
^ов вместе со звеном 7;
^Вз ^ ^21^^5 — нормальное ускорение точки В при вращении звена 2
с угловой скоростью 0)21 вокруг оси А\
~к Г~ ^^AB^v^Il
^B2i~ Pf^^i ] кориолисово ускорение, возникающее при движении
юв точки В по вращающейся траектории с центром в точке А;
— k^'
^"в — Pv^ -j^ нормальное ускорение при движении точки В вокруг
^св оси С.
Все отрезки перечисленных нормальных и кориолисова ускорений необходимо
предварительно вычислить. Полюс Рд плана ускорений находим из построения.
Из произвольной точки Mq' строим вектор а^^, направляя его параллельно
ВО от Б к O.JK^ найденному вектору прибавляем ускорение й^ , так как
скорость Vi^_^^= к^^Ь^а направлена на плане скоростей сверху вниз, а соi — против
часовой стрелки, то д^ направляем вправо, а ускорение a"j^ направляем влево,
т. е. от В к А.
Направление неизвестного по величине ускорения «^ проводим через точку
М^; перпендикулярно ОВ. ^
Навстречу векторам правой части векторного уравнения строим векторы левой
части: «^ , направленный вниз параллельно звену J5C и д^ — перпендикулярно
звену ВС. Точка пересечения двух тангенциальных ускорений a^g и а^д служит
полюсом Ра плана. Ускорение а^ ^ м'ка получа4§1У$ построением на отрезке
РаЬ' треугольника, подобного треугольнику ОАВ.
Кинематика плоских стерлсиевых механизмов
23
Построение передаточных характеристик
При проектировании исполнительных механизмов удобно использовать не
абсолютные значения скоростей, а их соотношения, известные под названием
передаточных функций механизмов.
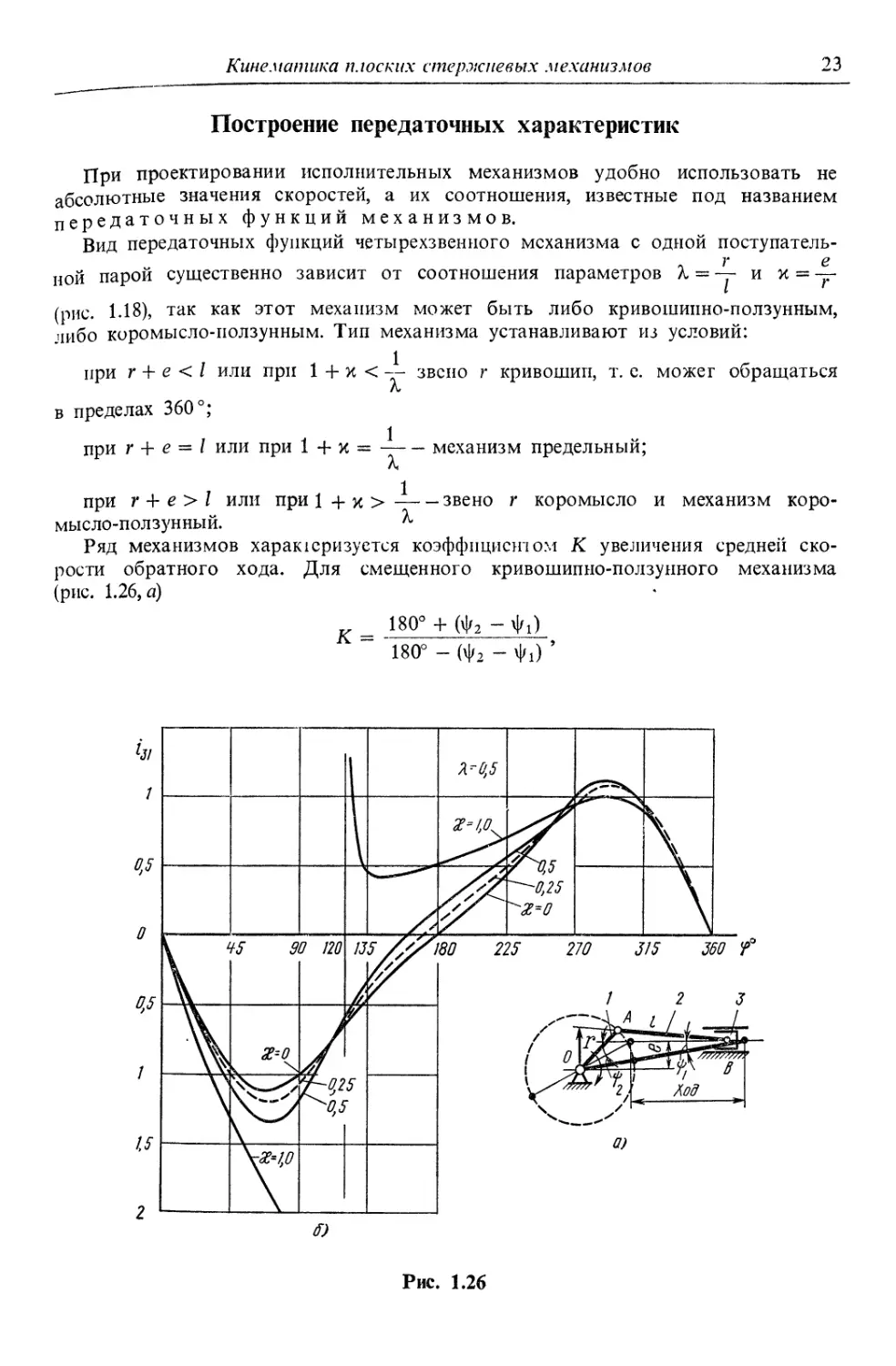
Вид передаточных функций четырехзвенного механизма с одной поступатель-
^ г е
ной парой существенно зависит от соотношения параметров А, = — и х = -у-
(рис. 1.18), так как этот механизм может быть либо кривошипно-ползунным,
иибо коромысло-ползунным. Тип механизма устанавливают из условий:
при г + е < I или при 1 + к < — звено г кривошип, т. е. можег обращаться
в пределах 360°;
при г + е = I или при 1 + >с = механизм предельный;
при г ■\- е > I или при 1 + X > звено г коромысло и механизм коро-
мысло-ползунный. ^
Ряд механизмов харак1сризуется коэффпцистом К yвeJи^чeния средней
скорости обратного хода. Для смещенного кривошипно-ползунного механизма
(рис. 1.26, а)
180^ + (vl/2-xl/i)
К =
180° - (\|/2 - vl/i) '
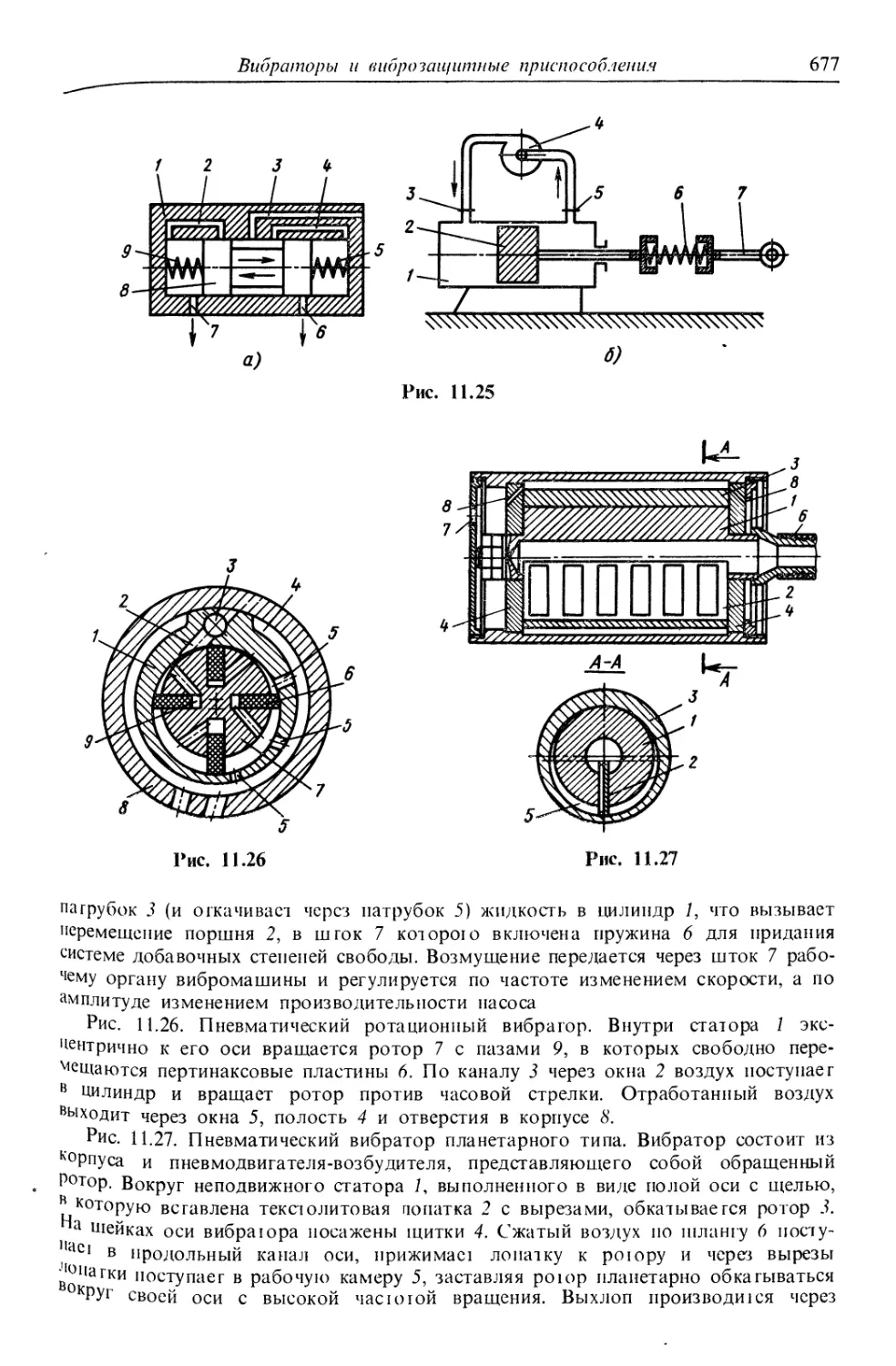
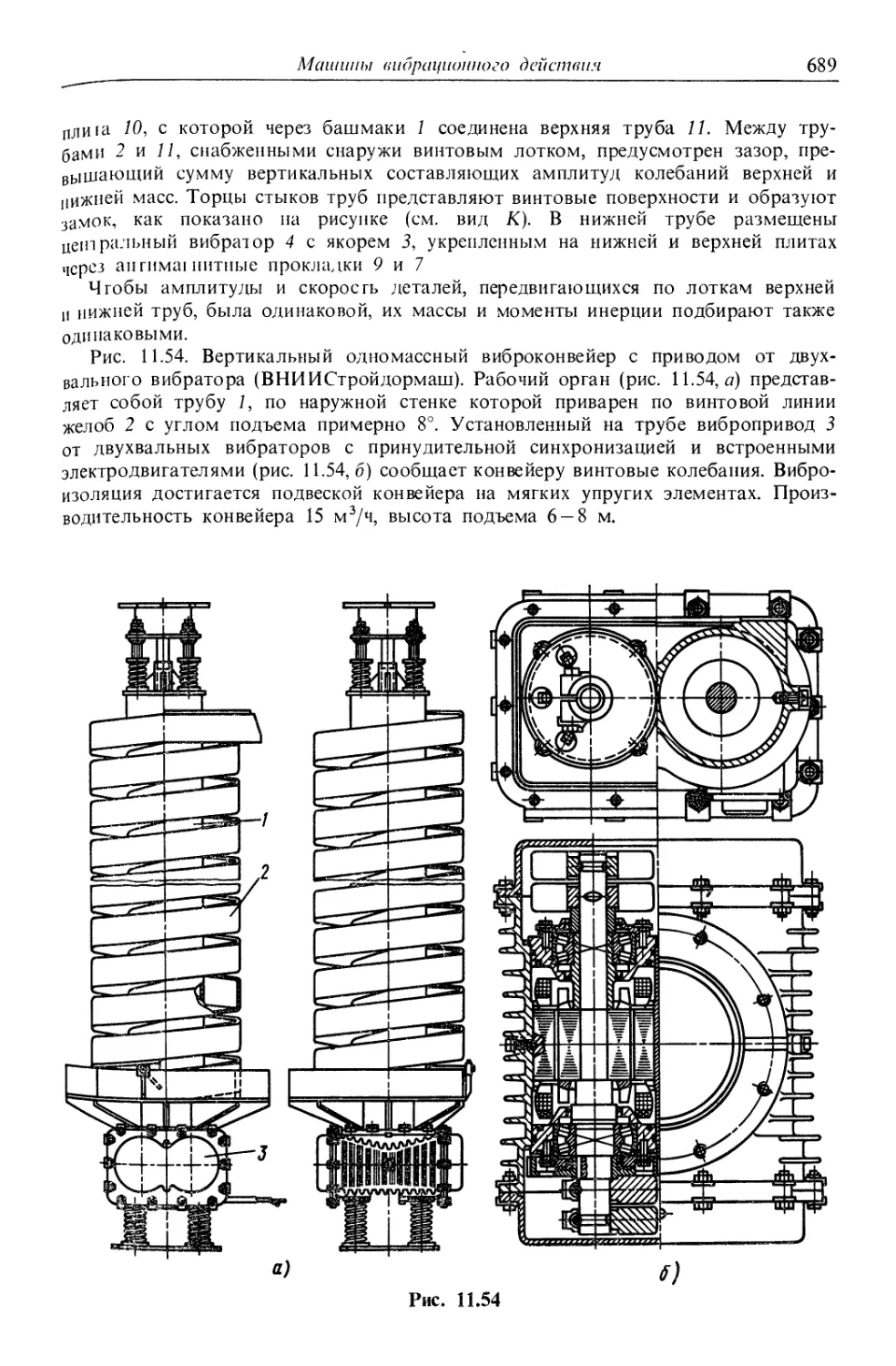
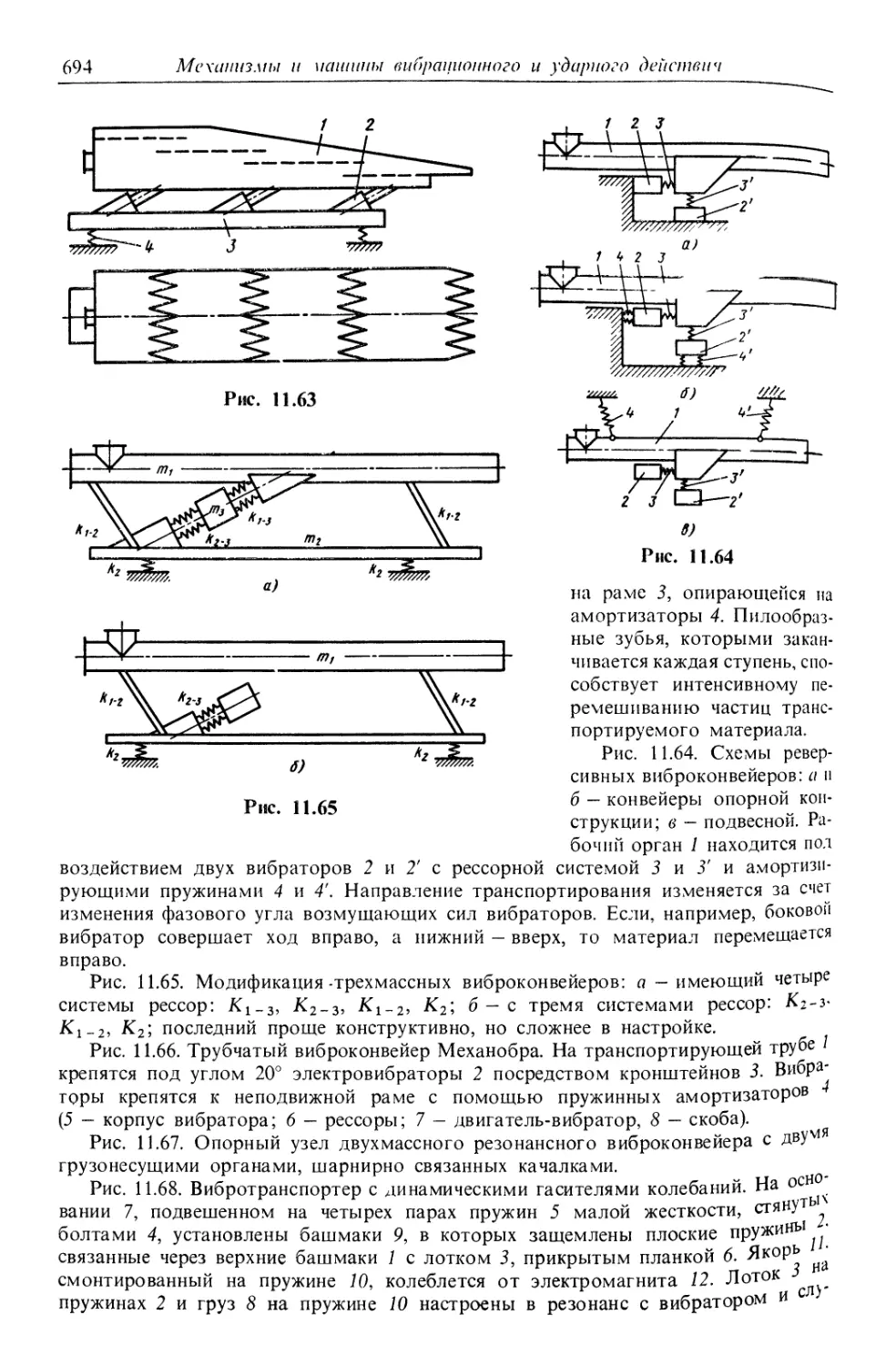
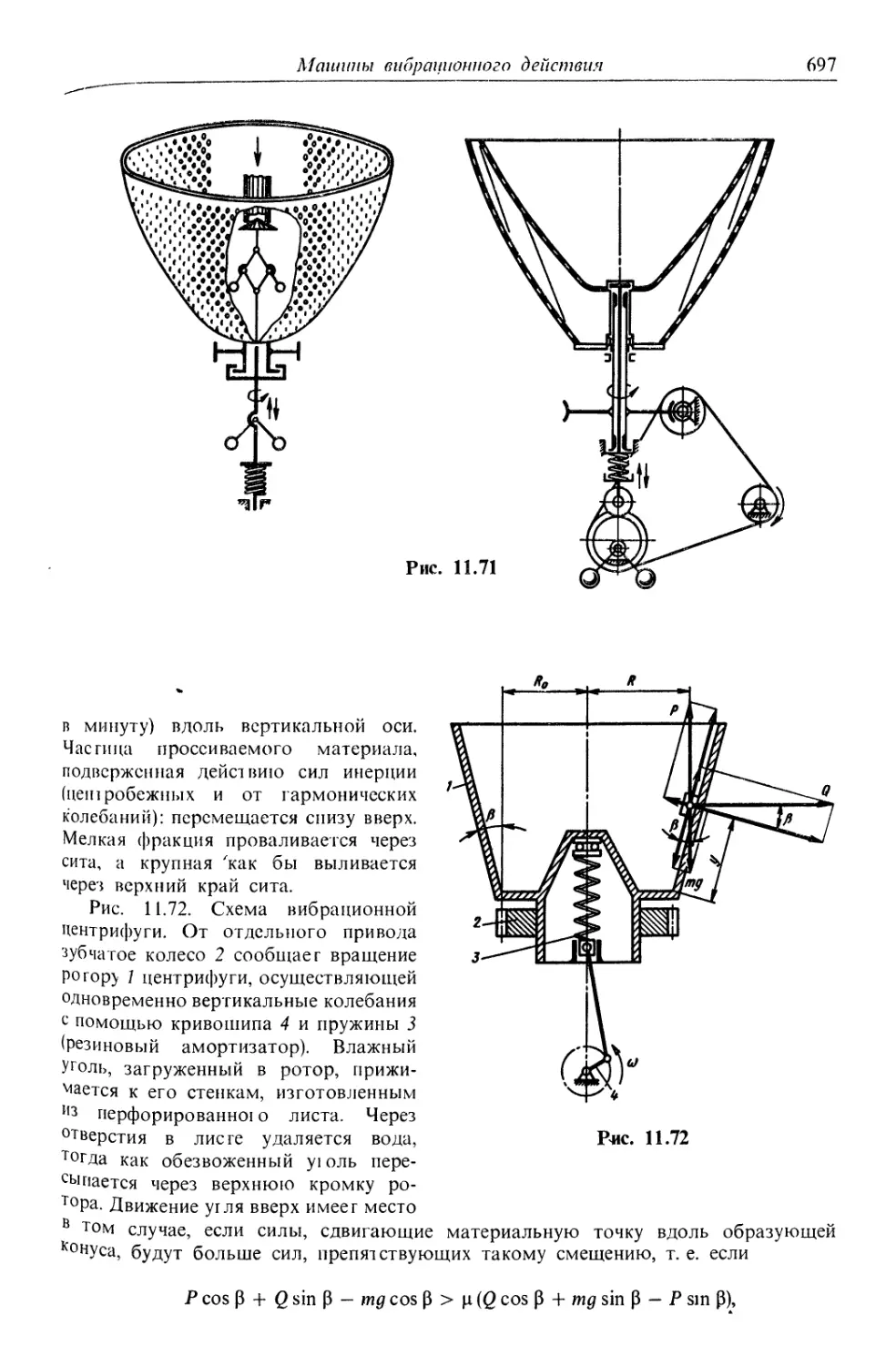
Рис. 1.26
24
Сведения из кинематики и динамики механизмов
К
2
1
03
Х-0^
Щ5\
''"€ ОД 0,5 0J5 IX
Рис. 1.27
^^
Рис. 1.28
где
sin\l/i =
sin \]/2 =
у^Х
1Л-Г
1-г
1 + Х
уХ
1 -X
Графики К в функции X я у. приведены на рис. 1,27.
Например, для кривошипно-ползунного механизма легко найти передаточную
функцию/з1 =-^ (см. рис. 1.26, а) в результате построения повернутых планов
скоростей в масштабе кривошипа в функции параметров X и х.
На рис. 1.26, б приведены передаточные функции кривошипно-ползунного
механизма для А, = 0,5 и нескольких значений параметра х.
Пользуясь графиками fsi и X, можно подобрать по заданным условиям
параметры X и х, а по ним размеры звеньев.
При проектировании исполнительных гидравлических и пневматических
механизмов встречаются случаи, когда х велико, и ведомое звено с неподвижной
осью вращения может перемещаться в пределах ограниченного угла, меньшего
180^ В этом случае полччаем коромысло-ползунный механизм 1, 2, 3 (рис. 1.28),
и кинематический анализ сводится к построению кривых i^^ в функции
параметров А, п X f а иногда и а = —).
На рис, 1.:
показаны графики г^з = -^ и ф в функции перемещения s^ веду-
щего ползуна для 7. = 0,55 и х = 1.
Кинематика плоских стержневых механизмов
25
Рабочий угол фо выбран из условия
cos Фо >
Хус
1 + Х
Кривые iisisg) и ф(5^) несимметричны относительно оси ординат.
Если необходимо, чтобы v^ при v^ — const мало отличались от постоянной,
то, по-видимому, крайние положения кривошипа должны быть несимметричными.
Задавшись процентом превышения v над v^, можно найти ход Я поршня.
Аналогичные характеристики могут быть использованы при проектировании
других механизмов — с качающейся или вращающейся кулисами, четырехшарнир-
ных и т.д.
Аналитическая кинематика некоторых
стержневых механизмов
Для многих практических расчетов точность графических методов
недостаточна, и необходимо применять аналитические методы исследования.
Рассмотрим аналитическую кинематику некоторых широко применяющихся
в технике стержневых механизмов.
Примем в качестве безразмерных параметров кривошипно-ползунного механизма
1, 2, 3 (рис. 1.29)
I '
а за независимые переменные — угол ф в обычном криво шип но-ползунном
механизме, параметр а — в гидро-пневмомеханизмах, угол )j/ - в механизмах с
заданным относительным движением звеньев.
Как видно из схемы механизма,
1
Х = — = —
/ ' г
5^ = rCOS ф + /cos l|/ = г1 COS ф Н C0S\1/
г sin ф = е + / sin \|г,
или в безразмерной форме
ст - >,со5ф = cos\|r, сг + Хф81пф = ~^sinv[r,
X(sin ф - х) = sinxj/, Я,фcosф = \j/cos\l(,
откуда находим передаточные функции
COi ф COS\|/
ф cos\lf
1 cosvl/
л созф
Рис. 1.29
26
Сведения из кинематики и динамики механизмов
1
?21
cos\|/
5Ш(ф + \|/)
С08ф
X sin (ф + \1/) '
'23 == ~
COS ф
sin (ф -f \|/)
^'в
Так как d = f"" ^bij ^ ^ =
-^ = ф/з1 + ф^/з1> то при ведущем звене 1 имеем
точные формулы
и приближенные
sin (ф 4- \|/)
СОЗф
Jj5 = - rODf
С08(ф + \1/) , л СОЗ^ф
COS ф COS^ \j/
vb--
— rcD] ( sin Ф
л sin 2ф — >.x COS ф );
Ад = — rcof (cos Ф + ?i COS 2ф + Xx sin ф).
Для центрального кривошипно-ползунного механизма е = О, х = О, и поэтому
^в
= — rcoi { sin ф Н sin 2ф |; Ajb = "" ''^i (^^s ф + Xcos 2ф),
или в форме тригонометрического ряда*
Vb- - УЩ {Bi sin ф + В2 sin 2ф + В^ sin 4ф + ...);
ав= — г(д\ {Bi cos ф + 2^2cos2ф + 4^4cos 4ф + ...);
здесь В. = -1; В, =-(-|. +^ + .Л B, = AL+^ + ....
Если ведущим служит звено 3 или 2, то формулы
для определения v я а ведомых звеньев при помощи
^ соответствующих передаточных функций /23 и i^^
в первом случае и fi2 и /32. во втором получают
аналогично.
Для кулисного механизма (рис. 1.30), обозначив
X = —, г — длина кривошипа АВ, найдем tg ф =
г sin а sin ot ,. ^
= = ._^ ^^ Кулиса 5 качающаяся, если
е + г cos а л + cos а
г < г, и, вращающаяся, если/ г > ^. Имея в виду,
что 'coi = d и ©3 = Ф> определим угловую скорость
кулисы
1 + ^ cos а
Рис. 1.30
ШЗ = 0ili3 = СО1
1 + 2?1 COS а + Х,^ '
Кинематика плоских стерлснебых механизмов
27
угловое ускоренпе кулпсы при
ведущем звене 1
_ 2 >и (1 - Х^) sin а
^^""^' (l + 2Xcosa + ?.2)2
и то же при ведущей кулисе 3
2 Х{1 - Х^) sin а
S3=-C0l
(1 + X cos а) X
X (1 + 2Х, cos а + Х^)
Для определения относительных
перемещений, скорости и ускорения
камня и кулисы служат формулы
Х23 = Х5 == £?(со5ф + -—cos\|/1;
sin с/.
^2ъ ^ - есоз,
cos\|/'
Рис. 1.31
sma ^
8з + соз
cos\|i
cos ос . COS'
- + Х
COS \|/ COS
т
Для четырехшарнирного механизма (рис. 1.31), задавая угол а поворота
кривошипа, найдем углы у, 5 и Р:
arccos -
2ad cos а — а^ + Ь^ + с^ - rf^
2bc
s о.^+„ bsiny , ^ «sin а
6 = arctg ^ + arctg
с — b cos у
n \ ^^ с . «'
p = arccos cos 6 H
L ^b
d — a cos a '
2 4. ^2 _ ^.2 _ ^2
2flb
Построив положения мгновенного центра р вращения шатуна ВС, определим
угловые скорости со^ и соз шатуна и коромысла:
С02= -
Vc
Щ
'рС
^рВ
СОз = =
с /,
рВ
^рВ
а sin р
с sin у
и при coi = const угловое ускорение 83 коромысла
S3 = COf
, sin 5 cos р sin а sin Р ctg у
ad с
be
sin^y
Аналитическая кинематика многозвенных механизмов может быть сведена к ана-
j^ гичной задаче для отдельных структурных групп. Для механизмов, составлен-
пло ^^ двухповодковых групп, может быть получено точное решение для
скоростей и ускорений.
28
Сведения из кинематики и динамики механизмов
^\
Для двухповодковой группы с тремя
шарнирами (рис. 1.32) при заданных
длинах а VI Ъ поводков и проекциях (х^, у^
и (^в^ Ув) координат концевых шарниров
А и В найдем координаты, скорости и
ускорения точки С.
Имеем
С2 = {хв - Ха? + {уВ - У А? = Ai + У1а;
Ув-Ул Ув4 .
tge =
^В ~ ^А
Рис. 1.32 Хс = хл + Ь COS 0ь; хс^х^- д^Ь sin 9^;
^с - ^л ■" ^ь^ sin 9б - ^Ь cos 0^,;
Ус^Уа + Ь sin 0^,; Ус=^Уа + ^ь cos 0^;
Ус^Уа-^ '^ьЬ cos 0ь -^ dlb sin 0^,;
здесь 9f, = 0 + а; 0^, = 0 + d; 0^, = 0 + а;
0 ^ УвА cos 0 - xg4 sin 0 ,
0 =
j;^^ cos 0 — xqa sin 0 — 2c0
c=:%^cos0 + J5^sin0;
с = Зс^д cos 0 + Ура. sin 0 + c0^;
6' (6 cos a — c)
^c sm a
a ^ ^' № cos (X-- c) — loLcb sin g •- oc^cb cos a — c^
be sin a
Если треВуется определить координаты, скорости и ускорения любой другой
точки звена АС, например, точки Z), то необходимо в приведенных выше
формулах заменить Ь на J и 0^, на 0^ + 5., В шарнире D к звену ACD может
присоединяться следующая двухповодковая группа, поэтому, выполнив расчет,
получим данные для анализа присоединяемой группы.
КИНЕМАТИКА ПРОСТРАНСТВЕННЫХ МЕХАНИЗМОВ
С точки зрения кинематики к пространственным следует отнести механизмы,
отдельные точки звеньев которых описывают пространственные кривые или же
перемещаются в непараллельных плоскостях. Однако с точки зрения статики
пространственным механизмом нужно считать и плоский механизм, если силы^
действующие на его звенья, располагаются не в одной плоскости, или если
на них действуют моменты, направленные неперпендикулярно плоскости движения
точек звеньев механизма. В последнем случае появляется перекос осей шарниров
Кинематика пространственных механизмов 29
и следовательно, на звенья, кроме реакплй, действуют еще реактивные моменты,
векторы которых располагаются в плоскости движения механизма.
Пространственный механизм следует рассматривать как пространственную
Кинематическую цепь с одним неподвижным звеном, звенья которой могут
образовать кинематические пары, допускающие возможное относительное перемещение
с числом подвижностей от одной до пяти.
Ввиду того что свободное твердое тело (звено) в пространстве может
совершать шесть независимых перемещений — три поступательных движения вдоль
координатных осей и три вращения вокруг них — и что в результате
образования каждой из кинематических пар уничтожается от одного до пяти
независимых относительных движений звеньев, нетрудно получить формулу, позволяющую
установить количество W степеней свободы или независимых движений, которое
нужно сообщить звеньям механизма, чтобы перемещения их были
определенными:
W-6(n-l)-5pi~4i72^3i73-2p4-P5, (t5)
Здесь ps ••• Pi ~ "ЧИСЛО кинематических пар, уничтожающих относительные
движения звеньев числом от одного до пяти; и — 1 — число подвижных звеньев. '
Пользуясь приведенной формулой, можно проверить правильность построения
механизма.
Не исключено, что при проектировании не будут учтены вее связи, и тогда
система может оказаться или с лишними степенями свободы, когда
определенность движения звеньев исключена, или статически определимой (или
неопределимой), и движение звеньев окажется невозможным или же будет происходить
за счет их деформации. В последнем случае возможно разрушение наиболее
слабого звена или будет иметь место интенсивный износ трущихся поверхностей.
Формула (1.5) справедлива только для механизма, в котором выпадения
связей не происходит, т. е. для случая, когда все ограничения движений,
налагаемые кинематическими парами, действительные.
Так, если звенья механизма образуют только цилиндрические шарниры, каждый
из которых вносит пять ограничений, то по формуле (1.5) можно определить
число звеньев механизма при одном ведущем звене (W = 1):
W = 1 = б (п -- 1) - 5pi = б (п - 1) - 5?7.
Отсюда п = 7, т. е. в общем случае простейший стержневой
пространственный механизм с цилиндрическими шарнирами будет семизвенным.
Однако возможны случаи, когда ограничения, налагаемые в результате
образования кинематических пар, оказываются пассивными, т. е. не стесняют
движения звеньев.
Представим, что в пространственном механизме (см. рис. 2.220) звено с и
стойка d в шарнире 4 разъединены. Тогда четырехзвенная цепь будет иметь
три степени свободы. Особенностью этого механизма является то, что оси 7, 2 и 5
пересекаются в точке М, следовательно, звенья а, b vi с вращаются вокруг этой
точки как вокруг неподвижного центра. Если ось шарнира 4 направить
произвольно, то кинематическая цепь обратится в дважды статически неопределимую
систему в результате внесения пяти независимых связей. Нетрудно убедиться
S том, что если в указанной кинематической цепи ось шарнира 4 провести
'1ерез точку Л/, то три уравнения связи окажутся тождественныкш, а сакш связи —
^ссивпыми, т. е. не ограничивающими движениями. Таким образом, в случае
пресечения всех осей цилиндрических шарниров четырехзвенной кинематической
30 Сведения из кипе\tamuKU и динамики механизмов
цепи в одной точке происходит выпадение трех условии связи и система из дважды
статически неопределимой обращается в механизм с одной степенью свободы.
Механизмы такого типа получили название сферических, вследствие того,
что любая из точек звеньев механизма описывает траекторию на сфере. При
увеличении радиуса сферы до бесконечности сферический механизм обращается
в плоский.
Некоторые конструктивные разновидности сферических механизмов приведены
на рис. 2.221-2.225.
В пространственных механизмах число пассивных связей, выражающихся
тождественными уравнениями, может быть от одного до четырех.
На рис. 1.33, а показана открытая кинематическая цепь с пяfью
цилиндрическими шарнирами, из которых оси первых трех пересекаются в точке А, а
остальных — в точке В. Точка В пересечения осей шарниров при любом
положении звеньев остается на сфере радиуса /^g с центром в точке А. Присоединяя
звено 6 к неподвижному звену 1 цилиндрическим шарниром с произвольным
расположением оси, вносим пять независимых условий связи и система будет иметь
W = О, т.е. будет неподвижна. Однако, если задаться условием, при ко юром
ось последнего шарнира проходила бы через точку В (рис. 1.33,6), то
независимых условий связи можно внести не пять, а только четыре — в виде двух
координат точки (третья выражается тождественным уравнением сферы, на KOTopoii
располагается точка) и двух уравнений плоскостей, пересечение которых опреде=
ляет направление оси последнего шарнира. В результате происходит выпадение
одного условия связи, и система приобретает подвижность с W = 1.
В пятизвенном винтовом механизме с параллельными не совпадающими осями
винтов происходит выпадение двух условий связи, и система вместо статическо!!
неопределимости в общем случае приобретает подвижность с одной степенью
свободы.
Наконец, если в пространственной трехзвенной системе звенья связаны
поступательными парами, то выпадает четыре условия в том случае, когда
пространственный механизм обращен в плоский.
При проектировании машин, в которые включены пространственные механизмы,
кроме проверки правильности структуры механизма, приходится уточнять
величину хода и определять скорости и ускорения отдельных точек, а также
выполнять кинетостатические расчеты для нахождения реакций в кинематических парах,
величина которых определяет прочные размеры звеньев.
Указанные виды расчетов пространственных механизмов весьма сложны и
практически доступны только для некоторых простейших механизмов.
Основания для кинематических расчетов пространственных механизмов, в
результате которых могут быть определены скорости и ускорения точек отдельных
звеньев, а также угловые скорости и
ускорения их, заложены в известных
теоремах теоре1ической механики.
Предполагая, что положение
звеньев пространственного механизма
может быть построено тем или иным
путем, свяжем с каждым из звеньев
механизма систему координат.
Естественно, что в механизме с т звеньями
одна система координат с началом
в 0„,, связанная со стойкой, будет
неподвижна, а m — 1 систем координат
определенным образом перемешаются
^ЧТ) k т^
д)
Рис. 1.33
9,
Ч
Кинематика пространственных механизмов
31
в пространстве вместе со звеньями
механизма.
Точку Л (рис. 1.34) произвольно
выбранного звена /с механизма можно
координировать радиусами-векторами
п 4 в неподвижной системе координат,
р',"^ - в системе координат, связанной
со звеном 1 и т. д., причем связь
между этими радиусами-векторами
осуществляется при помощи равенств
Рш4 = Й + Pl4J
РЫ =0. + Р2 4;
Р2Л = ^""3 + РЗЛ И Т. Д.
Рис. 1.34
Здесь 7~1, р2» ^3 — радиусы-векторы, определяющие начало последующей
системы координат относительно предыдущей.
Поэтому радиус-вектор р^^, определяющий положение точки в неподвижной
системе координат, может быть представлен суммой
Рш/1 = ^ +Г2 +Гз + ...а + р;^4-
Скорость 1'4 точки А можно выразить равенством
^л
^гЛ J^^A ^.^^,,,^р,д
ih
dt
(1.6)
В свою очередь, скорость выделенной точки А относительно системы
координат с началом в точке Oi определяется равенством
^Рм
dt J,
dri
+ 1^1 +[«2.Р2.].
Аналогичные равенства получим, если будем рассматривать движение в какой-
либо другой координатной систему.
Теперь можно найти выражение для скорости точки Л, когда подвижность
имеет место во всех кинематических парах. Производя последовательно замену
dp\A
производных векторов
dt
в выражении (1.6) найдем
1'Л =
~] + [«1шРм] + (^) + [С021Р2Л] +
+
(-f-)^-b[%.P3.] + ....(f\_^Hc4.->Pu].
(1.7)
31 Сведения из кинематики и динамики механизмов
Индекс у круглых скобок указывает, к какой из систем координат отнесена
производная вектора.
Если подвижность обеспечена только для первой кинематической пары т, 1, то
все члены выражения (1.7) кроме первых двух, исчезают; в случае обеспечения
подвижности только во второй кинематической паре 1, 2 в выражении (1.7) остается
вторая пара слагаемых и т. д.
Обозначим L^-^\ + [0Э1,„Р1л] = ^Л1т;
— 1 + [С021Р2Л] = 1^Л21 и т. д.
Тогда выражение (1.7) можно заменить более простым:
Va = ^Alm + VA2i + VA32- (1-В)
Таким образо]>1, при определении скоростей точек звеньев движение последних
следует рассматривать как результат сложения движений всех звеньев вместе
с кривошипом 1 относительно стойки (скорость D^i„i), движения всех звеньев
относительно кривошипа вместе со звеном 2 (скорость i;^2i) и т. д.
В зависимости от характера условий связи, накладываемых кинематическими
парами, каждое слагаемое в уравнении (1.8) может иметь определенное число
известных параметров.
Вектор в пространстве определяется тремя параметрами, например тремя
проекциями на оси координат, поэтому искомая скорость будет найдена, если
составлено три алгебраических или одно векторное уравнение с тремя
неизвестными параметрами.
Практически для каждой из кинематических пар легко установить число
неизвестных параметров вектора результирующей относительной скорости.
Действительно, если два звена соединяются шаровым шарниром (см. рис. 2.40, 2.41) или
шаровым шарниром с двумя степенями свободы (см. рис. 2.38), то вектор
скорости относительного движения всегда будет располагаться в плоскости,
касающейся сферы, радиус которой равен расстоянию между центром шарнира и
рассматриваемой точкой.
Вследствие того что аналитически плоскость определяется одним уравнением,
вектор искомой относительной скорости имеет два неизвестных параметра.
В случае соединения звеньев цилиндрической парой (см. рис. 2.10, в) вектор
относительной скорости лежит в плоскости, касающейся цилиндра радиуса,
равного расстоянию от оси цилиндрической пары до рассматриваемой точки.
При практических расчетах в некоторых случаях одного уравнения (1.8)
оказывается недостаточно вследствие того, что число неизвестных параметров больше
того, которое позволяет определить уравнение.
_ Если обратиться к уравнению (1.7), то нетрудно заметить, что члены
dr/dt представляют собой не что иное, как скорость поступательного перемещения
системы координат, а члены вида [со,-^ f-i, р,-^] - скорость точки при вращений
системы координат относительно начала, легко определимые при известной
угловой скорости СО;, f-i.
в связи с этим для исследования ряда механизмов необходимо добавить
уравнение, связывающее между собой угловые скорости звеньев:
Кинематика плоских стержневых механизмов 33
Здесь СО/С — угловая скорость рассматриваемого звена относительно
неподвижного; cbi„ - угловая скорость звена 1 относительно звена m и т. д.
Производя дифференцирование уравнения (1.7), можно уравнение для определения
ускорения точки А звена к представить в виде
Здесь aoun^ ^"^02ь ^032 ~ ускорения при поступательном движении системы
координат с началом Oi, О2, О3 и т.д. относительно звеньев w, 7, 2 и т.д.
(fA\nv «Л21 •••• «!4м'-1 И «лЬн. «Л21 И Т. Д. -
нормальные и тангенциальные ускорения при вращении системы координат
относительно начала, при этом
п ^ AtJ-l
Pi 4
Нормальное ускорение направлено вдоль р/^ от точки Л «к началу коорди-
наг Oj.
Тангенциальные ускорения лежат в плоскости, перпендикулярной радиусу р,д.
Кориолисовы ускорения определяются из выражения
в котором СО/ ,_1 — угловая скорость последующего звена относительно
предыдущего, например coj,,,, 0)21, сЬ^2 " т.д.; ?"'^о/— скорость точки А при движении
01носительно начала координат О,-, появляющаяся в результате сложения
относи гельно! о движения всех последующих звеньев, например:
5-2 S = 2
А'Н'Г^^'Ь''^--'^-'^
5 = 3
^■ki — угол между осью вращения f, / — 1 и вектором скорости движения точки А
относителыю начала координат.
Направление вектора кориолисова ускорения определяется направлением ско-
рсхти конца вектора v при вращении его вокруг вектора со как оси.
В дополнение к уравнению (1.10) в некоторых случаях необходимо
использовать еще и уравнение, связывающее между собой угловые ускорения звеньев.
Дифференцированием уравнения (1.9), имея в виду, что каждый из векторов а
отнесен к соответствующей системе координат, получим
Чпг = (eim)m + (£21)1 +£21 + (£32)2 + £32 + ' ' ' (LH)
■^ Кожевников и др.
34
Сведеныч из кинематики и динамики механизмов
Рис. 1.35
Здесь (ciJ,„, (i:2i)i, (§32)1 - относительные угловые ускорения, имеющие ту же
линию действия, что и соответствующие угловые скорости, совпадающие по
направлению с осью относительного вращения; ёзь ^^32? £4з- — добавочные угловые
ускорения, появляющиеся вследствие поворота оси вращения рассматриваемой
пары звеньев относительно оси, принятой за неподвижную.
Величина добавочных ускорений определяется из выражений:
^21
0)1^0)21 smai^;
ез2 = С0210)32 sin а21.
Здесь «1^, «21 — углы между векторами соответствующих угловых скоростей.
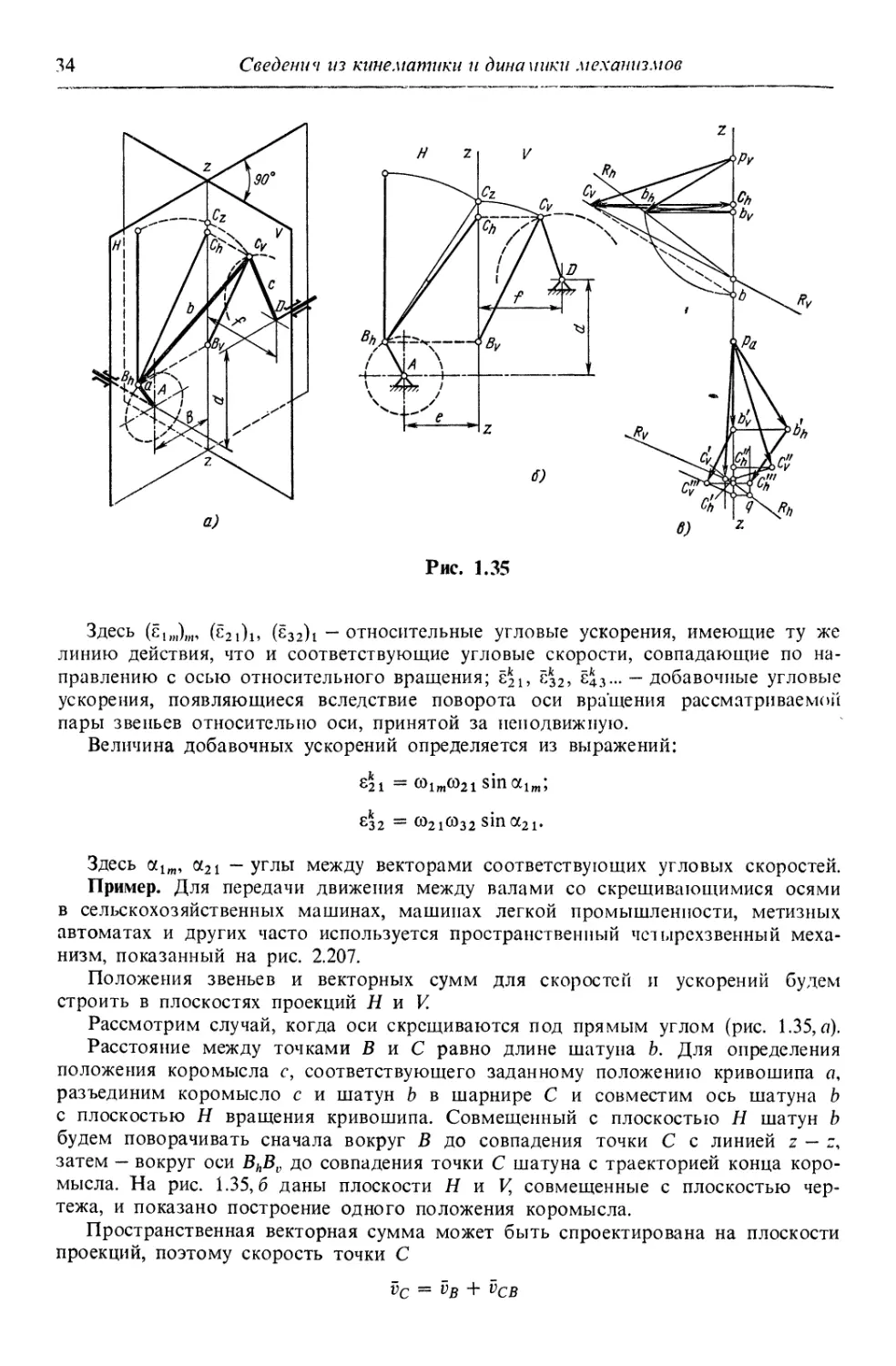
Пример. Для передачи движения между валами со скрещивающимися осями
в сельскохозяйственных машинах, машинах легкой промышленности, метизных
автоматах и других часто используется пространственный чстырехзвенный
механизм, показанный на рис. 2.207.
Положения звеньев и векторных сумм для скоростей и ускорений будем
строить в плоскостях проекций Я и К
Рассмотрим случай, когда оси скрещиваются под прямым углом (рис. 1.35,«).
Расстояние между точками В и С равно длине шатуна Ь. Для определения
положения коромысла с, соответствующего заданному положению кривошипа а,
разъединим коромысло с и шатун b в шарнире С и совместим ось шатуна b
с плоскостью Я вращения кривошипа. Совмещенный с плоскостью Я шатун b
будем поворачивать сначала вокруг В до совпадения точки С с линией z — г,
затем — вокруг оси В^^г ДО совпадения точки С шатуна с траекторией конца
коромысла. Па рис. 1.35,6 даны плоскости Я и К совмещенные с плоскостью
чертежа, и показано построение одного положения коромысла.
Пространственная векторная сумма может быть спроектирована на плоскости
проекций, поэтому скорость точки С
г^с = i^B + ^св
Кинематика п.юскых стержневых механизмов 35
Г rieM определять в тех же плоскостях Н и V проекций, причем vq = coi/^g, пер-
1дикулярна 1ав и лежит в плоскости Н; дев лежит в плоскости,
перпендикулярной ВС; vc перпендикулярна ^со и лежит в плоскости V.
Л1я удобства полюс р^ выбираем на оси z (рис. 1.35, в) и откладываем вектор
-т ^ 1^- k -масштаб плана скоростей. Через точку Ь^ необходимо про-
вести плоскость R, перпендикулярную шатуну, и найти точку ее пересечения
с линией, проведенной через р^ перпендикулярно DC. Следы К,, и R^, плоскости R,
перпендикулярные соответствующим проекциям шатуна, пересекаются на оси z.
Проводим через bh след R^ до пересечения с осью z, а через найденную точку -
с тел R до пересечения с направлением скорости точки С, проведенной через p^^.
Построенная точка с^ определяет конец вектора скорости коромысла. Отрезки
/) ( и hf,Ch представляют собой проектщи вектора скорости относительного
движения. Поворачивая одну из проекций, например, /?/,(,, до положения,
параллельною оси, найдем на1уральную вeJшчинy вектора (показан на рис. 1.35,6
штриховой .чипией).
Рх\чи оси кривотнипа и коромысла скрещиваю 1ся не под прямым углом, одну
И} ичоекостей проекций необходимо совмести 1Ь с н;юскос1ью вращения
коромысла Траектория центра шарнира на кривошипе в таком случае изображается на
ИЧ0СК0С1ЯХ проекций в виде эллипсов.
При ностроетши плана скоростей необходимо сначала определить проекции
скорое 1 и центра шарнира кривошипа, пользуясь правилами начертательной гео-
Meipnn, а затем производить nociроение плана скоросхей так же, как и раньше.
Ускорение точки С определяется равенствами
а^ = ill + at^
а^ = а в + сГсв + а'св^
примем
„ kiJ^'i „ kiVci v'b
«с = -,—; ^св = ——; cjb = 7~-
ФС '5С MB
Нормальные ускорения направлены соответственно вдоль линий CD, ВС и ВЛ,
а ташснциальное ускорение а^св лежит в плоскости, перпендикулярной шатуну ВС;
^''с ч if[ лежат в ПJюcкocти ВС,
2
Из полюса /)д 01кладывасм оiрезки pjy^^ __ - ^^— параллельно
1^^ параллельно Di ^. При nociроении проекции вектора
нормальною ycKopeiHiH a'l^^ нужно дела1ь следующее.
l^-1">ci ючки h]^ и /\, провесш линии, нapaJI.leJпиlыe соо1ве1ствующим просктшям
^^^чуна, и о 1 дожить на них известным способом проекции нормального ускорения
(/? на иыбранщ,1е п;юскости проекций. Через точку Г;/' провести вертикаль
• Р<<'Г1С1п.цо /^„ до пересечения с плоскостью Я в ючке 9, а через найденную
'^''"^У ^/ спел Ru
перпсндикулярпо В^С^, до пересечения с направлением ташен-
С' /Л.!'^^ У^-'корсния ючки С. Последнее должно быть проведено чсре? ючку
м'ь ''"'^^^'""Ь1с проектщи векторов ускорений позволяют получи 1ь величину
искомых ус
ко рений.
36 Сведения из кипе матики и динамики механизмов
НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ДИНАМИКИ МАШИН
Силы, действующие в машине
Задачей динамики механизмов является определение сил, действующих на
элементы кинематических пар, необходимых для подбора подшипников, расчета
деталей и узлов на прочность, выбора рациональной схемы смазки, определения
мощности двигателя по моменту на начальном звене.
К ведущим звеньям машины могут быть приложены силы и моменты сил
движущих (Р, Мр), совершающих положительную работу; силы или момен-сы сил
технологических сопротивлений (g, М^), прикладываемые к ведомым звеньям
и силы механических сопротивлений (F, Mf), главным образом в виде сил
трения, совершающих отрицательную работу; силы тяжести (G, Mq\ работа которых
за цикл равна нулю и, наконец, силы инерции (Р^, М„), возникающие при
неравномерном движении звеньев.
Если звено движется поступательно (ползун, поршень, долбяк), то сила инерции
равна произведению массы и ускорения центра тяжести звена Р„ = — та. Если
звено вращается равномерно вокруг оси, совпадающей с центром тяжести
(уравновешенный кривошип), то сила инерции P,i = О и момент сил инерции М^, = О
Если звено вращается неравномерно вокруг оси, не совпадающей с центром
тяжести S (неуравновешенное коромысло), то налицо и сила Р„ и момент М„ сил
инерции, которые могут быть заменены одной силой инерции Р„, приложенной
в точке К (рис. 1.36, (7) — центре качания физического маятника. Его положение
определяется по формуле
и к =
mln
Здесь Js — момент инерции звена относительно оси, проходящей через центр
тяжести.
Если звено совершает сложное движение (шатун), то элементарные силы
инерции частиц звена приводятся к силе инерции Р„ = — та^, приложенной
в центре тяжесги S звена и к моменту М^, = — eJg- Ускорение as центра
тяжести звена и его угловое ускорение s определяют из кинематического расчета,
предшествующего силовому.
В случае сложного движения можно силу и момент сил инерции также свести
к одной силе инерции, приложив ее в полюсе инерции Т. Рассматривая силу
инерции в виде суммы сил инерции переносного и оТ1юси тельного движения
Л| = Ли + ^n.v 1' находим Ткак точку пересечения направления ускорения точки /1,
приняют! за полюс, проведенною через цстпр тяжести 5, и иаправлеттия ото-
сительною ускоретитя, проведенною через центр качания К физического
маятника (рис, 1.36,6).
При определении сил инерции целесообразно применять метод замещения
масс. РаспределетЩуто массу звена можно заменить системой дискретных масс,
если при нахождении их величины и мест расположения соблюдены условия:
а) сумма дискретных масс равна массе звена;
б) ускорение центра тяжести системы масс равно ускорению центра тяжести
звена;
в) момент инерции массы звена равен сумме моментов инерции
сосредоточенных масс.
Некоторые сведения из динамики машин
Ъ1
Рис. 1.36
Удобно распределенную массу приближенно заменять двумя массами
(рис. 1.36, б), сосредоточенными в концевых шарнирах (статическая замена), и тогда
b а
т^ — т
а +,Ь
и Шв ^ т
а + b
чти двумя массами, одна из которых сосредоточена в центре К (динамическая
замена), и югда
Xi а
т^ = m —--—- и тк = т —--—-.
а + /Ci а + Ki
"^ рис. 1.36,2 показано применение метода. Зная ускорение концевых
шарниров и центра качания, определяем на плане механизма линию действия силы
нерции pjj при статической замене массы и при динамической. Для этого
статочно через точки А и В провести линии, параллельные ад w ciq ъ пер-
м случае, и через точки А и К линии, параллельные а^ и а^ во втором
' отри план ускорений), и в точках Т' и Т их пересечения приложить силу
м та^. При этом погрешность в моменте сил инерции о г статической
^'^мены составит АМ^ = Р^Мг,
38 Сведения из кинематики и динамики механизмов
Силовой расчет плоских стержневых механизмов
Если к звеньям механизма наряду с внешними силами приложить еще и силы
инерции, то на основании принципа Д'Аламбера механизм и отдельные группы
звеньев его составляющих можно рассматривать в состоянии равновесия и
пользоваться уравнениями статики. '
В задачу силового расчета входит определение реакций в кинематических
парах механизма и уравновешивающего усилия (момента). При определении
реакций в каждом шарнире или ползуне имеем по два неизвестных силовь1Х
параметра — величину и направление реакции в первом случае, величину и точку
приложения во втором.
Таким образом, для плоского механизма, содержащего пары первого рода,
число неизвестных сосгавляет 2pi, а число уравнений статики, которое можно
3
написагь для п звеньев ~ Ъп. Задача решается, если 2pi = Ъп или если pi = -—//.
Так как эгому же условию удовлетворяют группы Ассура, то, следовательно,
силовой расчет механизмов можно свести к силовому расчету групп Ассура. При
этом последовательность перехода от одной rpyinibi к другой при выгюлнении
расчета должна совпадать с последовательностью выделения групп Ассура при
структурном анализе.
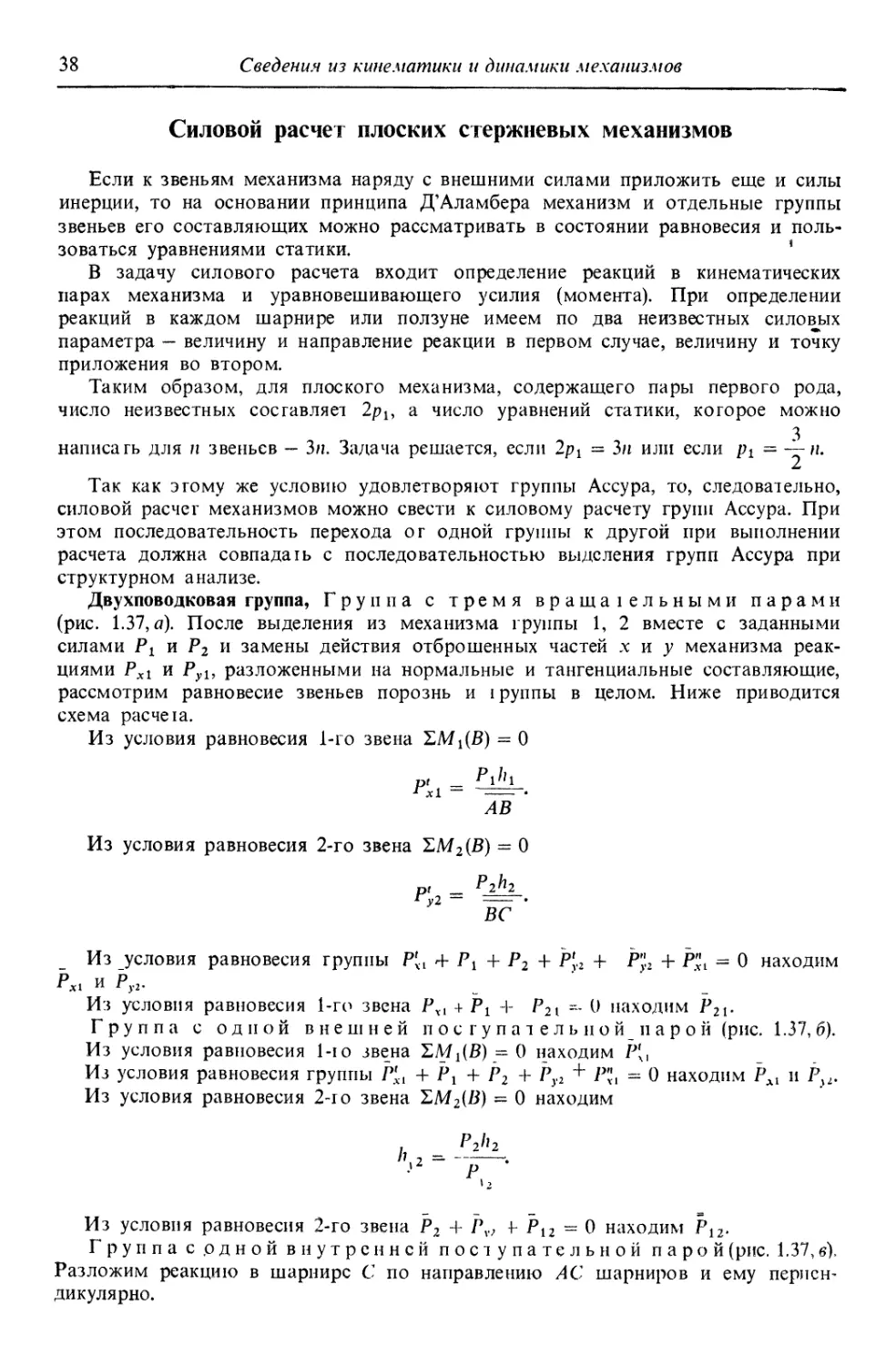
Двухповодковая группа, Группа с тремя вращательными парами
(рис. 1.37,«). После выделения из механизма группы 1, 2 вместе с заданными
силами Fi и Pi и замены действия отброшенных частей хну механизма
реакциями Pxi и Pyi, разложенными на нормальные и тангенциальные составляющие,
рассмотрим равновесие звеньев порознь и ipynnbi в целом. Ниже приводится
схема расчета.
Из условия равновесия 1-го звена LMi(B) = О
П1 =
p,h.
лв
Из условия равновесия 2-го звена l^MiiB) - О
'^ ВС '
Из условия равновесия группы P[i 4- Pi + Р2 + Hz + Руг + P"i = о находим
к и Р,а.
Из условия равновесия 1-го звена Р^., + Pi -\- Pix ^- О находим Р21.
Группа с одной внешней п ос ту п а i ел ь пой парой (рис. 1.37, б).
Из условия равновесия l-io звена IMi(B) = О ттаходим Р^,
Из условия равновесия группы Р^, -\- Р^ -^ Р2 + ^yi "^ ^'"i == О находим Р^, и Р,,.
Из условия равновесия 2-io звена ЪМ2(В) = О находим
. Pihi
Из условия равновесия 2-го звена Р^ + Р,.; +- f'u = О находим Pi2.
Группа с.одной внутренней поступательной парой (рис. 1.37, б).
Разложим реакцию в шарнире С по направлению АС шарниров и ему
перпендикулярно.
Некоторые сведения из динамики машин
39
Рис. 1.37
40 Сведения из кинематики и дина мики механизмов
Из условия равновесия группы ЕМгр(Л) = О находим
Р2/?2 + Plhi
Р\. =
АС
Из условия равновесия 2-го звена Pj,, + Р2 4- Р12 -\- P'li ^ О находим Ру^ и P^j-
Из условия равновесия 2-го звена 1М2(Г) = О находим
^2h2
Если сила Pi2 выйдет за пределы опорной поверхности ползуна, то в паре
фактически действуют две реакции Pi2 и Pi2 нормально к направляющей
(и в сумме равные Pi2), которые могут вызвать заклинивание ползуна.
Группа с одной внутренней вра щ а тельной парой [рис. L37, г).
Из условия равновесия группы Р^, + Pi + Р2 + Руг = О находим Р^, и Р^з-
Из условия равновесия 1-го звена ZMi(B) = О находим
Р
Из условия равновесия 2-го звена SAf2(B) == О находим
Из условия равновесия 1-го звена P^i -V Pi f Р21 = О находим Р21.
Группа с одной в н е hi н е й в р а nun е л ь и о й парой (рис. 1 37, д)
Из условия равновесия 1-го звена Р,, + Pi -f P,u -^ О находим Р^, и Рзь
Из условия равновесия 2-го звена /%2 ^ ^2 + ^ "= ^ находим Р .
Из условия равновесия 2=го звена ЕЛ'/2(С) =^ О находим
Из условия равновесия группы SM,p(C) = О находим
К =
Pilh-^Pzh
Если центры шарниров не смещены относительно осей направляющих
поступательных пар, то возможны упрощения, которые покажем па примере силового
расчета механизма качающегося транспортера (рис. 1.37, £>), нагруженного силой Р^
технологического сопротивления и силами инерции звеньев.
Выделим из механизма группу 4, 5 с одной внешней поступательной парой
и приложим реакцию Pgg направляющей. Из условия равновесия группы и звеньев
5 и 4 получаем:
Е М,р (С) = о, отсюда Р„ = ^'''' Т ^"'^''" ;
Ps + ^^65 + Р45 ~ О, находим Р45;
^54 + Л14. + ^24 = О? находим Р24 = - Р4
Некоторые сведения из динамики машин 41
Выделяем группу 2, 3 с тремя вращательными парами и прикладываем к ней
силу Ра2 силы инерции и реакции Р^2 и Реъ- Находим
P^aKaki - М„2
Р\
12 - /
М ______
Из У Мз (С) = О находим Р^з = "г'-- Из Р^^^ + ^и2 + Р42 + Р^ + ^63 + ^Ь = ^
naxoAHvr Pi2 и Рбз- На звено 3 в точке С со стороны звена 2 действует сила
р _ _р^з. Наконец, сила Р2с, действующая на звено 2 в точке С
^2С = ^32 + hi-
Сила Р21 = - Рц известна, а реакция Pgi = — Р21. Момент, который нужно
приложить к кривошипу 1 для уравновешивания всех сил, действующих на звенья
при равномерном вращении кривошипа:
Мур= -Piihik-
Выполнив расчет, например, для 12 положений, строят график Мур,
необходимый для выбора двигателя, и годографы реакций в каждой из кинематических
пар, которые используют для прочностных расчетов и выбора мест для подвода
смазки.
Если требуется определить только Мур, ю удобно воспользоваться рычагом
Н Е. Жуковского. Из уравнения мгновенных мощностей Pji^i cos а^ + P2V2 cos olj +
+ ... + MiCOi + М2^2 + ••• — ^ можно найти искомый уравновешивающий момент,
если к концам векторов скоростей на повернутом плане скоростей приложить
соответствующие силы и приравнять нулю сумму моментов сил относительно
полюса плана скоростей, рассматриваемого как жесткий рычаг. Если, кроме сил,
к звеньям приложены моменты сил, то необходимо величину момента,
прикладываемого к рычагу, пересчитать по формуле М^ = М2 , ^ направление -
в соответс1вии с направлением приложенной к рычагу пары сил, заменяющей
viOMCHT. На рис. 1.37, (? построен рычаг Жуковского для того же механизма
грохота. Из суммы ^юмcнIOв ^ М^,^ = Р.^.е + PJi,^ + М;,з + Р,2/^„2 + М'и2 - ^^ур^ = О
находим урав-новешивающую силу Рур и уравновешивающий момент
Чр -Рур^в- Здесь М;,2 = М,2 -^ и М'.з = М„з -^.
^вc he
АЛЯ группы Ассура высших порядков силовой расчет удобно выполнять с
помощью особых точек Ассура. Покажем схему силового расчета групп 1-го класса
и 4-го порядков, содержащих только вращательные пары.
i ремюводковая группа (рис. 1.38, а). Строим особую точку Ассура пересечением
направлени!! двух поводков и далее:
из условия равновесия звеньев 2, 4, 5 находим Р\2, PU, -^65;
из условия равновесия всей группы XA^rpW_=0 находим Pgs;
из тою же условия Y.i\ = О находим PU и Р;2;
из условия равновесия звеньев 2, 4, 5 находим Pg, Рс, Р^
Чегырехповодковая группа (рис. 1.38,6). Строим две точки Ассура: Li и L2,
^^к показано на рисунке, , ; F д >F i 2
42
Сведения из кипе матики и динамики механизмов
Рис. 1.39
щий момент Ml
-М,
Рис. 1.38
Из условия_ равновесия поводков i, 5, 5, 6
находим ?[)!, Р'т^Р'пъ. Не-
Расчленим в шарнире М группу на две части:
/ и // и прикладываем по направлению LiLj и ему
перпендикулярному составляющие реакщ1и Р42 и
-Р42 = ~ ^24-
Из условия ^M(ijp)Li =0 находим P^z-
Из условия Х^(Пгр)^2 =0 находим Р'-уб-
Из условия Y.Pi{ii гр) = 0 находим F75 и Р24.
Из условия "^Pjiiip) = 0 находим Р73 и Pqi.
Из условия равновесия каждого поводка
находим Pj:, Pf, Pyv» Рр- Переход к следующей группе
Ассура, а также стагика кривошипа не
отличаются от изложенною выше для двухповодковых
групп.
Силовой расчет механизмов с заданным
относительным движением звеньев. Пусть для механизма
по рис. 1.39 заданы силы Pj, Р2, Р3 и требуется
найти реакции в шарнирах и неизвестный вращаю-
Приводим схему решения.
Из условия равновесия 3-го звена ^Мз(В) = О находим Р4з._
Из условия равновесия группы 1, 2 ^M^piB) = О находим Р!ц.
Из условия равновесия механизма P^i + Pi + Р2 + Р3 + Р43 + Р'лз + PI
находим PJi и Р43, т. е. Р41 и Р43.
Из условия равновесия 1-го звена: ^М^О = О находим М21.
Трение в кинематических парах
Предельное значение силы сопротивления смещению принято называть силой
трения покоя, а ее отношение к нормальной силе — коэффициентом трения. Сила
трения при трогании с места несколько Оольше силы трения при движении,
Некоторые сведения из диначики машин
43
Риг. 1.40
В поступательной паре результируюнщя сила трения F зависит не только от
материапов трущихся поверхносгей, учитываемых коэффициентом трения ц, но и
or точки приложения и направления силы и размеров ползуна. При действии
на ползун силы сопротивления Q сдвигающая сила Р, составляющая с осью
ползуна угол а (рис. 1.40, «), определяется по формуле
Р-
cos
а - ц sin а I 1 +
2х — |Д(7
~\
и булет тем меньше, чем 'больше длина / ползуна и чем меньше а и х. Если
t?'-/ ^
j,(i + ^i^
или X ^
/
1
^\%1
--1 +
lifl
то ползун заклинится и его движение станет невозможным.
Если сдвигающая сила параллельна оси ползуна (рис. 1.40, в), то движение
возможно, когда — > |х и невозможно при ^ < 1^- Отсюда можно выбрать
размеры а и / направляющей втулки, например тарельчатого толкателя (рис. 1.40, б)
так, чтобы его движение было возможным, или размеры втулки траверсы ра-
диальносверлильного станка (см. рис. 1.40, в) так, чтобы она не смогла скользить
вниз под действием силы тяжести. Поскольку условием самоторможения будет
^ D
— < и или р < р,
2/
то достаточно построить угол р( tgp = —) и угол трения p(tgp = ц). Если центр
тяжести S траверсы окажется в заштрихованной зоне самоторможения, то
самопроизвольное сползание траверсы будет исключено.
Теория наклонной плоскости имеет большое прикладное значение. Сила Р,
игающая груз Q вверх по наклонной плоскости (рис. 1.40, г), может быть при-
ена под углом р к направлению плоскости, и тогда из силового треугольника
i' = e
sin (g + р)
cos (р - Р) *
44
Сведения из кинематики и динамики механизмов
Если же Р параллельна наклонной плоскости (р = 0), то
sin (а + р)
? = е
cos р
наконец, если Р параллеш>на основанию наклонной плоскости (р — — а), то
Р =- е tg (а н р).
Приведенные формулы могут быть использованы для расчета винта, если
приближенно считать, что усилие распределено по средней линии винтовой
поверхности, а винтовая линия получена в результате навертывания треугольника на
цилиндр.
Во вращательной паре с зазором (рис. \Л\,а) при установившемся движении
точка контакта А втулки и цапфы смещается относительно линии действия
внешней силы Р на величину h — |лг, называемую радиусом круга трения.
Момент трения М^ в цапфе с зазором:
Мр = Р/7 = РГЦ.
В приработавшейся цапфе длиной / при равномерно распределенном уде.пьном
давлении q (рис. 1.41,6)
7Г/2
Мг
rd¥ = — Рф
2
и при косинусоида льном изменении q (рис. 1.41, в) на поверхности соприкосновения
М/г = — Рф.
я
в реальной вращательной паре полная реакция с учетом сил трения должна
быть направлена касательно к кругу трения, если цапфа несамотормозящая, и
должна проходить внутри круга трения, если цапфа самотормозящаяся, что
часто используют на практике. С помощью кругов трения можно определить
«мертвые» положения. Пренебрегая трением в цапфах В и С, для кривошипно-
ползунного механизма (рис. 1.42, а) при движущей силе, приложенной к ползуну.
Рис. 1.41
Некоторые еведеиия из динамики машин
45
Рис. 1.42
имеем две диаметрально противоположные мертвые зоны, определяемые углом
Фо = Ц
^'^■
который достигает максимального значения при X, = О, т. е. для синусного
механизма (/ = 00).
Если трением в цапфе В пренебречь нельзя, как это имеет место, например,
в эксцентриковом механизме с уширенной цапфой В (рис. 1.42,6), то угол 'фо
зоны мертвых положений определяется по формуле
'^'~ /лв(1+^)
Определение зоны мертвых положений кривошипа четырехзвенника при
движущем моменте, приложенном к коромыслу, показано на рис. 1.42, е. Сила Р,
направленная вдоль шатуна в предельных положениях, ограничивающих зону
^-^'моюрможения, должна касаться круга трения /i^, если трением в цапфе В можно
чренебречь и касаться двух кругов трения с радиусами h^ и /?д, если необходимо
\ месть трение в цапфах А и В.
В высших кинематических парах возможно не только скольжение элементов
П'фы, но и качение (верчение). Сопротивление, оказываемое телом при чистом
качении, называется трением качения или трением второго рода и обусловлено
лавным образом деформацией и несовершенством упругости материалов
перекатывающихся тел (гистерезис), а также возможным появлением впереди катя-
егося тела упругой волны материала. В результате имеем несимметричную кри-
Ую удельных давлений (рис. 1.43, а) с равнодействующей, смещенной на величину 5.
личина смещения 5 (в см) определяет коэффициент трения качения.
Для равномерно движущегося катка весом Q сдвигающая сила Р = — Q, Она
УДет тем меньше, чем больше диаметр катка.
46
Сведеиич из кинематики и динамики .механизмое
Рис. 1.43
Если Р < F пли 1-1 > имеем качение, если Р > F или \i < — имеем сколь-
)' У
жение.
При перемещении груча Q па платформе посредством катков (рис. 1.43, б)
сила тяги Р (без учета jviaccbi GJq платформы) вычисляется по формуле
Р ^ _9_(5 4- 5').
d
Скольжение платформы по каткам отсутствует, если Р < F или если диаметр
катка выбрать исходя из неравенства
, 5 + 8'
d > -.
\^
Тяговая сила при перемещении груза Q на тележке (рис. 1.43, в)
5 + цг
р = е
R
Масса тележки не учтена.
Приведение масс и сил
при исследовании механизма допустимо заменить его эквивалентной моделью,
если кинетические энергии Е механизма и модели будут одинаковыми и если
элементарная работа dA всех сил, приложенных к звеньям механизма, будет равна
элементарной работе силы, приложенной к модели:
Некоторые сведения из динамики машин 47
fe 2 fc ^ к к
11 11
Указанные условия эквивалентности позволяют найти приведенную массу
(момент инерции) и приведенную силу (момент сил)
I 1
Lj\ «^1ф
к к
^пр = / Pi --^cos ЩЛ-) Mi —^-
Lj l^iip Lj l^np
Lj \ Wrip 1 Ll \ w„p /
Mnp = у P/ -^ cos Щ + у Л//, -^.
1 1
Здесь /?;„p и Jnp --~ приведенные масса и момент инерции массы; Р^р и Мпр -
приведенные сила и момент сил; v^^^ и сОпр - линейная и угловая скорости звена
приведения.
Как показывают полученные формулы, приведенные масса и момент инерции
всегда положительны и не зависят от скорости.
Для зубчатой передачи с неподвижными осями (рис. 1.44, а), содержащей только
звенья, вращающиеся с постоянными скоростями,
^пр. = /.+.. (f-)^ -. Н [^^ = л Ч- 7. (-^J + .3 (f )^ = con.t.
Для планетарной передачи (рис. 1.44,6) при р сателлитах
•^пр, = J. + J. (|-^)' Р + т, (^J р + Jh [^ = const.
Для синусного механизма 1, 2, 3 (рис. 1.44, в\ если массой ползуна 2-пренебречь:
JiiPi = ^^1 + тз (-^ I = Ji + шз ( --^^^^^ ^) = ^1 + /"з/?,,! sin- ф,
•^является периодической функцией угла ф.
езультат дан в виде графика (рис. 1.44, г).
48
Сведения из кинематики и динамики механизмов
^3jb
Рис. 1.44
К. П. Д. некоторых частных механизмов
к. п. д. г| для частных механизмов равен отношению работы, производимой
силами сопротивлешиа на ведомом звене независимо от ее характера, к работе,
производимой силами, приложенными к ведущему звену.
Наклонная плоскость. К. п. д. наклонно!! плоскости зависит от того, движется
тело вверх или вниз по наклонной плоскости (рис. 1.45, а). Для наиболее важного
частного случая, когда сила Р направлена параллельно основанию наклонной
плоскости,
_ Qh _ tgoc
"^^^^^---Ps - tg(a + p)-
При опускании груза вниз по плоскости
Лвниз
Ps _ tg(a-p)
Qh tga
Для определения оптимального угла а плоскости при подъеме груза вверх
необходимо, чтобы
^Л
вверх
dOL
dOL
[tg а ctg (а + р)] = О,
откуда
^вверх
При опускании груза необходимо, чтобы
d
dOi
[tg(а - р) ctg а] = 0,
откуда
п о
V — . 1_ J_
Некоторые сведения из динамики машин
49
4;
'{Шг, 1
Ю 30 50 70 90 ее''
а)
б)
Рис. 1.45
Зависимость г| (а) для подъема и опускания груза показана на рис. 1.45, а.
Эпициклические зубчатые передачи. Для зубчатой пары с неподвижными осями
на практике пользуются значениями к. п. д., полученными опытным путем.
Вычислять к. п. д. эпициклических зубчатых передач целесообразно, если
передача силовая и нагрузка приложена длительное время.
Используем метод инверсии, г. е. сообщим всей передаче (рис. 1.45,6)
вращение с угловой скоростью, равной угловой скорости водила, но в противоположном
направлении, тогда водило представится остановивщимся, а передача обратится
в простую соосную. При этом предполагаем, что работы сил трения в заданном
механизме и в обращенном пренебрежимо мало отличаются одна от другой.
При наличии потерь на трение в передаче связь между моментами на валах
центральных колес имеет вид
Мз
М1^1зЛ{з,
где г| 13 — к. п. д. обращенной передачи с неподвижными осями, к — ±\.
Если для передачи с ведущим колесом Zi в обращенной передаче колесо z^
останется ведущим, то к — +1, в противоположном случае /с = — 1. Критериями
при выборе к служат следующие соотнощения:
^ = + 1, если ^ <^±_^ Jli4 L > о или если щ^> \ и щ^ < 0.
^- = - 1,
если
Wi4
coi_- (04 ^ Ц>4 - 1 ^ Q или если О < i/^ < 1-
Из условия равновесия эпициклической передачи имеем;
Ml -Ь Мз + М4 = 0.
^огда для плапсгарной передачи с ведущим колесом z^
М4 = - Ml - Мз = - Ml [1 - (1 - М14) пЬ];
50
Сведения из кинематики и динамики механизмов
Л14 =
М4(04 1 - (I - М1з)Л13
MiCOi
Wi4
Для планетарной передачи при ведущем водиле 4
Л41
MiCOi
М4СО4 1 - (1 - «14) Л13
Рабочие формулы сведены в таблицу:
, Передача
Zi — ведущее
Звено 4 — ведущее
Wi4> U i'l4<0
1-(1-Mi4)lli3
Л14 =
Hl4
Mi4
1 - (1 - t/i4)^13
0<t/i4<l
П14 =
Л41 =
1 - (1 - Wi4)T|i3^
Mi4
Wi4
1 -(1 -Ui4)lli3
Полученные формулы показывают, что при ведущем колесе z^ к. п. д.
планетарной передачи можег быть равен пулю или меньше пуля (самоторможение).
Действительно, r|i4 ^ О, если 1 - (1 - Wj4) Ли ^ О, откуда найдем условие
самоторможения 1 — Г) 1^1 < Wi4 < 1 — Лв-
На рис. 1.45,6 представлены графики r|i4 и r|4i в функции персдаточно!о
отношения Wi4 планетарной передачи, которые показывают, что при ведущем
колесе Zj и при малых «14 передача будет самотормозящейся. При
отрицательных значениях и^^ к. п. д. планетарной передачи всегда меньше к. п. д. простой
обращенной; при положительных значениях Mi4 к. п. д. планетарной передачи
может быть больше к. п. д. обращенной. При ведущем водиле TI41 > Ли Д-^^я
^ • Л13
всех положительных значении ^ы > -^—.
1 + Ли
Для дифференциала (силового) при ведущих центральных колесах Zi и. z^
Л13.4 = -
1 -"1зЛ1з
MiCOjL + М3СО3
0^1
С04
«3 ^k
^13 Л13
'04
СОд
Для дифференциала при ведущих колесе Z3 и водиле 4
MiWi 1
Л34Д =
^13 Л13 i (А - "1зЛ1з)
МзСОз + М4СО4
При ведомом водиле в дифференциале возможно самоторможение.
Уравнение движения механизма
Заменим механизм приведенной к начальному звену массой и будем искать
закон ее движения - тем самым найдем закон движения начального звена, а затем
скорости и ускорения любой точки исследуемого механизма.
Некоторые сведения из динамики магиин 51
Наиболее простой формой уравнения движения будет уравнение движения
р форме «жшых» сил.
£ - Ео = ^'- - -^^ = Л (ф) = 1 {Мр + Мо) г/ф.
■^2 о ~
Здесь /о " '^'^о — приведенный момент инериии и угловая скорость начального
звена, соответствующие началу отсчета угла ф;
/I (ф) - избыточная работа приведенных к начальному звену моментов Мр
сил движуиц1Х и моментов Mq сил сопротивления.
Угловая скорость звена приведения
^2Л(ф) , Л,со?
+
Так КПК при установиви1е\тся движении начальная угловая скорость щ
неизвестна, то точное решение уравнения движения невозможно и приходится
ограничиваться приближенным ренгенисм, полагая щ — со^р = - -. При разгоне щ — О,
поэтому можно найти точное решение в результате интегрирования.
Можно составить уравнение движения с помощью уравне11ия Лагранжа. Для
системы с одной степенью свободы, состоящей из твердых тел, уравнение
движения можно написать в виде
(It \ Ло) / с'ф
После дифференцирования получим
J + --:= М.
dt 2 d(p
На основании принципа Д'Аламбера М — - M„, и тогда
" 2 ^ф dt осн "доб'
т.е. движение начального звена можно представить состоящим из основного
движения с постоянной угловой скоростью, обусловленного изменением момента
инерции J:
М., = (со = const, е = 0)
"осн 2 ^ф
и добавочного движения с J = const, в результате которого порождается
момент сил инерции:
^и,,. = -^-^ (при С0=0 и 8
М ■\-М^
'«доб- " dt V ------ J
^акон движения начального звена можно определить с помощью энерго-мас-
ои диаграммы [Е, J]. Пусть при известной начальной кинетической энергии Eq
для установившегося движения построена диаграмма [£, J]. E = Eq^- А (ф)
52
Сведения из lame матики и динамики механизмов
AkE
Рис. 1.46
(рис. 1.46). Чтобы для любого положения
начального звена найти угловую скорость со, достаточно
найти углы \1/; наклона лучей, проведенных через
известные из построения последовательные точки
О, 7, 2 ... на кривой, соответствующие углам
поворота (ро, Ф1, Ф2 ..• начального звена:
1ч
tg ^h •
Здесь к I и kf - масштабы кривой по осям Е и J.
Построив v|/n,^,^ и \|/nii,„ легко определить
экстремальные значения угловой скорости начального
звена.
Неравномерность хода машины и расчет маховика
Несоответствие между приведенными к начальному звену моментами сил
движущих и сил сопротивления и периодическое изменение приведенного момента
инерции J механизма вызывают при установившемся движении машины
периодические изменения угловой скорости, приближенно оцениваемой коэффициентом
неравномерности
где сос,
+ «min
— Средняя угловая скорость.
Пренебрегая изменением J, можно считать, что экстремальные значения
кинетической энергии соответствуют ю^.^^ и cOmin, тогда цо закону изменения
кинетической энергии
J o^L. - o^L^ ^ 5 2, ^ ,
Поскольку сОср и Л^ах заданы, то для уменьшения 5 надо увелитать
приведенный момент инерции J механизма, установив добавочную массу в виде
маховика, аккумулирующего энергию, когда налицо положительная избыточная работа
{Мр > MqX и отдающего ее, когда избыточная работа внешних сил отрицательна
(Мр < Mq).
Если заданы кривые приведенных моментов сил движущих и сил
сопротивления в функции ф, то, определив площадь, соответствующую максимальной
избыточной работе Л^ах = ^тах^м^'ф. найдсм при заданном 5 момент инерции
маховика (рис. 1.47, а)
—- — Jo •
5со4
Здесь Jq — среднее значение приведенного момента инерции звеньев механизма.
Для некоторых машин (в частности, для машин ударного действия),
приводимых от электродвигателя [Мр = М (со)], представляется возможным найти Умахов»
рассматривая работу двигателя с маховиком.
Некоторые сведения из динамики машин
53
Пусть Mq = М (О задан в виде нагрузочного графика (рис. 1.47, б). Вначале
пля заданного числа оборотов вычисляем номинальную мощность двигателя
N,-
—-~, где Мн = (1,25 - 1,15) —"^-^-^ ^^^-^-^
975 ^ L,
л выбираем по каталогу двигатель (например, асинхронный). Затем по данным
/ Л/ \
кагапога NVh, "н» "с ^ ~ —^^^-) строим рабочий участок характеристики
двигателя, мало отличающейся от прямой и удовлетворяющей уравнению
Мр = Л/д = М' ~ hoy,
1
М' = М„ ^ и /) = Af „ -
со. - соя (Не - со„
Здесь сОн и сОс •"* номинальная и синхронная угловые скорости двигателя.
Теперь воспользуемся уравнением движения электромашинного агрегата при
J - const:
Mp-Mo^J -—; М' -boy-Mn^J ^^
^ dt
dt '
и, обозначив М' - Mq== М^, получим
М^ - Ьсо = J
^(0
(1.12)
г^
_1
,
„ !
ч
Г"
f t,.x
. *«
/
<0
в^
.^
\
%
"
'
Аах
X % ^^-^ ^
Рис. 1.47
54 Сведения из кияематики и динамики мехашамов
При интегрировании полученного уравнения следует иметь в виду, что в фазу
рабочего (р. х.) и в фазу холостого ходов (х. х.) работа электроман1инного
агрегата протекает по-разному. Если нагрузочный график задан, то изменение момента
двигателя в дозволенных пределах может быть обеспечено соответствующим
выбором момента инерции Jp х системы, с увеличением которого перепад момента
двигателя уменьшается. В гечение фазы холостого хода происходит разгон ротора
двигателя до со,^^^, причем время разгона увеличивается с увеличением момента
инерции системы.
Для того чтобы удовлетворить требованиям для двух указанных фаз,
необходимо уравнение (1.12) решить для каждой из них отдельно, определив значение
*^р X и Jx X» при которых будут соблюдаться Гр X и Гх х-
В таком случае после интегрирования и преобразований найдем
bfp.x
1« •'*^ш'т •'^^р X
•'•^тах •'^р.х
И
«^Х X '""
bt^.x
In f"^^ ^ ^
■^max И Mmin МОЖНО принимать В предслах:
Мп,ах ^ (0,8 - 0,85) Мн; Mn,i„ ^ (0,2 - 0,3) М„.
Если в результате окажется, что Jp х < Л.х> то момент инерции маховика
•'махов ~ Jp.x "■ JpoT "~ Jq •
Если Jp X > Jx X» TO угловая скорость за время Гх.х холостого хода не
восстанавливается, и необходимо мощность двигателя увеличить, а расчет повторить.
Для определения Jmexob графическим способом необходимо по импульсу
результирующего ^юмента
{Мр- MQ)dt^Jdai
определить необходимый момент инерции:
|(Мр-Мд)Л
, '1 Fkuki
Определив М^ах и М^^т двигателя, как было указано, переносят точки,
соответствующие Mjnax И MjTiin характеристики двигателя, на нагрузочный график
(рис. 1.47, б). Полученные точки А и В соединяют экспонентой (допустимо прямой)
и получают необходимую площадь F, представляющую импульс момента.
Если нагрузочный график задан в виде Mq = М (ф), то
Мр ~ Мп = J —г- = »^<J^ ~,—»
^ dt d(p
'^i(Mp--MQ)d(?
J =
Ютах - CO^j„ 0)2^^
Некоторые сведения из динамики машин 55
Площадь F находится аналогично изложенному ранее.
Покажем определение основных размеров маховика.
Для маховика, выполненного в виде сплошного диска (рис. 1.47, в)
5
D
32^7^,
Для маховика, выполненною в виде колеса с тяжелым ободом (рис. 1.47, г):
D -
5
махов
Здесь Y -" удельный вес материала маховика;
\|/= ^—■ и "^ — ~7: отношения ширины и высоты сечения обода,
которыми надо задаться по конструктивным соображениям.
Заметим, что маховик целесообразно устанавливать на быстроходном валу, при
этом окружная скорость для маховиков из чугуна не должна превышать 30 м/с.
Установка маховиков на длинных, гибких валах может привести не к снижению
неравномерности хода, а к ее увеличению.
Уравновешивание механизмов и машин
Движение с переменными скоростями вызывает появление сил инерции,
порождающих дополнительные давления в кинематических парах, передающиеся на
станину и фундамент, соседние машины, здания и сооружения. Для устранения
вредного влияния сил инерции их необходимо уравновесить, что особенно важно
для быстроходных машин.
При равномерном вращении тела вокруг оси у (рис. 1.48, с/) к каждой
элементарной массе т приложена центробежная сила инерции Р = тгсо^, которая отно-
сигельно осей х м z (плоскость xOz совпадает с центром масс S) создает моменты
М^ = jP/cos ф = mrco^/cos ф и М^^ = F/ sin ф = mrco^/ sin ф,
откуда полный момент
М = ]/м1 + Ml = /мг/со^.
Вектор ~ момент М и вектор — сила Р инерции взаимно перпендикулярны.
^Результирующие ^Р и ^М вычисляются по формулам
Е Р = со^ 2 miYi = со^ [тг5] и Е М = со^ Е mfili — a^^Jxz •
Десь m?s ~ статический момент массы; J^^ — центробежный момент инерции массы
ена относительно осей xz системы координат в центре масс S.
Масса уравновешена, если Г5 = О и J^^ = О, т. е. ось вращения проходит через
Р тяжести и является главной осью инерции.
56
Сведения из кинематики и динамики механизмов
Рис. 1.48
Пусть дано несколько неуравновешенных вращающихся масс, центры тяжести
которых лежат в одной плоскости, перпендикулярной оси вращения (рис. 1.48, б).
Тогда из равенства нулю геометрической суммы всех сил инерции имеем
но, так как
EP^ = Pi +Р2 + ^з +Рур = 0,
-riCO^ то G^}\ + С2Г2 + ОзГз + СурГ^р = 0.
После построения векторного многоугольника статических моментов весов GiT\
находим величину и расположение противовеса G,p.
Если центры масс лежат в параллельных плоскостях, перпендикулярных оси
вращения (рис. 1.48, б), то для полного уравновешивания необходимо, чтобы
ЕР^^О и 2Ми = 0.
Реакции опор в этом случае равны нулю.
При соблюдении первого условия центр масс совпадает с осью вращения
^'s = 0), и система масс уравновешена статически, при соблюдении второго условия
ось вращения совпадает с одной из главных центральных осей инерции, и система
уравновешена динамически. При соблюдении обоих условий имеет место полное
уравновешивание.
Покажем, как уравновесить вращающиеся массы.
После переноса всех сил инерции в плоское!ь / уравновешивания и
приложения соотвегствующих векгоров-моменгов складываем геометрически сначала
мо.менгы сил, затем силы
Ml + Мг + Мз + Муря = 0; G^r^a^ + 02Г2<^2 + ^з^зйз + ^цГца = 0.
Некоторые сведены<i из динамики машин
57
Для удобства отыскания направления гц противовеса Сц, расположенного
в плоскости // уравновешивания необходимо при построении векторного
многоугольника моментов проводить векторы-моменты по направлению сил Р (если
имеются массы слева от плоскости /уравновешивания, то векторы моментов М
проводятся противоположно силам Р). Из векторного многоугольника находим
QuT\\0 а, зная а и задавшись 7*jf, находим Gjj.
Теперь необходимо сложить силы икергцти:
или
Pi + Р2 + Рз + Рц + Piyp = О
GiTi + С2Г2 + ^зГз + СцГц + Grypfj^p - 0.
После построения \шогоугольника сил находим Gi противовеса, который
помещаем в плоскости /.
Таким образом, полное уравновешивание требует установки двух противовесов.
При уравновешивании сил инерции стержневого механизма необходимо знать
положение его центра тяжести и, если считать массу каждого звена
сосредоточенной в центре тяжести его, то можно легко найти положение центра тяжести
механизма.
Для четырехзвенника (рис. 1 49, а) имеем
7«1 + т2 -\- т^ ^ т;
гпх}\ + nurj + ?Нз?'з = iiifsl
Рис. 1.49
58 Сведения из кинематики и динамики .механизмов
miSi + m2li + W3/1 , 7П2^2 + fn^h , пц82
rs == ■ Н г •
т т т
fg ^ hi + h2 + /"73.
Здесь hi — главные векторы звеньев.
Четырехзвенный механизм статически уравновешен, если его центр тяжести
неподвижен, а это имеет место, если
А_ = _-%- = Аз_
h "/2 /3 '
т. е. фигура, образованная главными векторами, будет подобна плану механизма.
Кривошипно-ползунный механизм при соблюдении указанного условия
оказывается неуравновешенным. Механизм будет уравновешен, когда /ii = /?2 = О, т. е.
когда Г5 = О и центр тяжести механизма совпадает с осью вращения кривошипа.
На рис. 1.49 приведены схемы статического уравновешивания простейших
стержневых механизмов. Для четырехзвенника (рис. 1,49,6) после разноса масс
имеем
т^ — 1Щ —~ + W2 -^-т—^ и тв - mi —г- 4- Шз -" ^-
h h " М2 ^ /3
Противовесы можно установить на кривошипе и коромысле (рис. 1.49,6), при
этом их массы
mi = ша -^ и шщ = тв -^,
или на шатуне 2 и кривошипе 1 (рис. 1.49, в).
Массы противовесов в этом случае
, h h
mi = m^ —• и шц — тв —^, где т^ = "М + Щ + '"и-
П Гц
Установка противовеса на шатуне практически применима только для тихоходных
машин.
Для кривошипно-ползунного механизма (рис. 1.49, г) после разноса масс имеем
bi bi ^2
7)|д == пц — \- mi —— и тв = т^ Л- mi —— •
'1 h '2
Масса 7?;4 легко уравновешивается противовесом
mi = шл —.
Массу Wj5 можно уравновесить либо противовесом, установленным на шатуне,
прп этом mi = w'a —= -^ (/72^ + Wjs + 7?7j[), либо, если механизм быстроход-
ный, приходится ограничиваться частичным уравновешиванием сил инерщш
массы тв-
Некоторые сведения из динамики машин 59
Сила инерции массы ш^, движущейся поступательно, определяйся по формуле
РиВ = ^^в^'^1 [^1 ^^^ Ф + ^^^2 cos 2ф + 16^4 COS 4ф + ...] = PjL + F^ + ■^4 + •••;
здесь Pi = А^твга^Х cos ф — сила инерции 1-го порядка;
р^ = 4А2твГ(х>1 cos 2ф — сила инерции 2-го порядка и т. д.
Сила инерции того или иного порядка может быть уравновешена с помощью
вращающихся противовесов. Если со станиной механизма связать два диска с
грузами гПу (рис. 1.49, д), вращающихся в разные стороны с одинаковыми угловыми
скоростями со^., то они нагрузят станину горизонтальной силой
Ру = 2о)у гПуГу cos ц) у.
Чтобы уравновесить силу инерции Р^ l-io порядка, необходимо выполнить
условие
р^ = AiiUj^ivri cos ф = —2(0уП1уГу соь фд,,
01 куда
ct),(i) = ©1; ф,ц) = 180" + ф; (т/Д^ - Ш__±^
Для уравновешивания силы инерции Рг 2-го порядка необходимо, чтобы
Pz = ^А2П1вгщ соь 2ф = - 2а)р'уП1у cos ф^,
= 2coi; ф,(2) = 180^ + 2ф; (ш/Д^) = ^^^
откуда
(и^(2) == ^Wi , ф^,(2) = ХОи -t- ^Ф; ^//1д7У(2)
Анало1ично рассчитываю 1ся противовесы для уравновешивания сил инерции
4, 6-го и других порядков.
Коэффициенты А, с достаточной для инженерных расчегов точноегью, могут
быть приняты равными:
А -\- 4 ~ ^ + ^'. л ^ ^'. А ^'
4 ' 16 ' " 64 ' ^' ^ 512 •
Здесь X ^ ^
I
Схема уравновешивания сил инерции 1 и 2-го порядков показана на рис. 1.49, е.
Уравновешивание спаренных кривошипно-ползупных механизмов, например,
в рядных двшагелях достигается за счет фазового сдвига кривошипов. Так, в шести-
Цилиндровом /шигахеле с взаимным углом заклинивания кривошипов 120^ ока-
зываю1ся уравновешенными силы инерции всех порядков, кроме 6-го и кратного
шесиг.
РАЗДЕЛ 2
ЗВЕНЬЯ, КИНЕМАТИЧЕСКИЕ ПАРЫ
И СТЕРЖНЕВЫЕ МЕХАНИЗМЫ
ЗВЕНЬЯ
Звенья в механизме и машине служат для перс'хачи движения и силы от одного
звена (ведущего) к другому (ведомому). В качестве звеньев механизма могут быть
использованы твердые, упругие и гибкие тела. Звенья механизма при условии
отсутствия значительных деформаций от действующих сил должны быть
достаточно жесткими. Однако во многих случаях, в частности, когда машина
подвержена ударным нагрузкам, звенья механизма должны быть упругими для
амортизации и предохранения их от разрушения. Упругие звенья с ограниченной
жесткостью применяют также для предохранения машин от вибрации и
колебаний. Например, упругий вал позволяет сообщить весьма большую частоту
вращения ротору турбины без опасности разрушения его при колебаниях.
В последнее время получили широкое применение гидравлические передачи,
в которых движение ведомым звеньям механизма сообщается посредством
находящейся под давлением жидкости — минерального масла или воды.
В пневматических устройствах движением отдельных звеньев управляет
синхронизатор, открывающий доступ воздуху в соответствующие цилиндры. В этих
механизмах, обычно составленных из твердых, иногда упругих тел, нагнетаемый
компрессором воздух играет роль рабочего тела, так же как и расширяющиеся
в цилиндре двигателя газообразные продукты сгорания.
Рис. 2.1. Кривошипы и их условные обозначения на схемах: а — спаренные
эксцентрики; б — одноколейный вал с противовесом; в — трехколенный вал; г —
четырех коленный вал.
Рис. 2.2. Шатуны и их условное обозначение на схемах: а — двухшарнирный;
б я в — трехщарнирные.
Рис. 2.3. Конструкция шатуна.
Рис. 2.4. Поршневые головки шатунов: а — с втулкой; б — с игольчатым
подшипником; в — со сферическим сочленением.
Рис. 2.5. Валы: а — гладкий; б — гибкий вал; в — гибкий вал из шарнирных
звеньев.
Рис. 2Л
Звсиьч
61
Рнс. 2.2
Рис. 2.3
Рис. 2.4
62
Звенья, кинематические пары и стержневые механизмы
<^)
Рис. 2.5
Рис. 2.6
Рис. 2.7
Кинематические пары 63
Рис. 2.6. Пружинные упругие звенья: а — с направляющим корпусом; б — из
клиновидных колец; в - с двухсторонней пружиной; г - со специальными ревер-
^. ^ _ амортизаторы с продольной пружиной; е — амортизаторы с
поперечной пружиной; ж — амортизаторы с нелинейной характеристикой Р(Х).
Рис. 2.7. Шариковая передача.
КИНЕМАТИЧЕСКИЕ ПАРЫ
Выше было указано, что кинематические пары вносят при подвижном
соединении звеньев от одного до пяти условий связи, лишая звенья в относительном
движении соответствующего числа их степеней свободы. В зависимости от числа
оставшихся степеней свободы кинематические пары разделяют на пять родов.
К первому роду относят пару, в результате образования которой уничтожаются
пять степеней свободы, и к пятому роду — если уничтожается одна степень
свободы. В плоском механизме могут быть только кинематические пары первого
и второго родов.
К парам первого рода отьюсят подвижные соединения, допускаюпще
винтовое, одно поступательное или одно вращательное движение.
К парам второго рода относятся подвижные соединения, допускающие два
вращения или одно вращение и одно поступательное движение.
К парам третьего рода относятся подвижные соединения, допускающие
три вращения, два вращения и одно поступательное движение и, наконец, два
поступательных движения и одно вращение.
К парам четвертого рода должны быть отнесены такие, в которых
допускаю гея два вращательных и два поступательных движения или три
вращательных и одно поступательное движение.
К парам пятого рода относятся такие подвижные соединения, в которых
допускаются три вращательных и два поступательных движения при взаимном
касании в точке.
Каждое из указанных здесь движений должно быть независимым. Например,
винт в гайке совершает поступательное и вращательное движения, но эти
движения связаны одно с другим и задать произвольно можно только одно движение.
Кинематические пары делятся на низшие и высшие. В низших
кинематических парах соприкосновение элементов кинематических пар происходит по
поверхностям, а в высших — по линии или в точке.
Низшие кинематические пары обратимы, т. е. характер траектории
относительного движения точек звеньев не зависит от того, с каким из звеньев считаем
связанной систему координат. Например, все точки ползуна относительно
направляющей движутся по прямым так же, как и точки направляющей при ее дви-'
^-ении относительно ползушки. Высшие пары свойством обратимости не обладают.
Лостоянный контакт элементов кинематической пары должен быть обеспечен
геометрическим замыканием, осуществляемым конструктивной формой элементов,
входящих в пару, или силовым замыканием путем использования сил тяжести,
упругости пружин и пр.
Характер элементов кинематических пар существенно влияет на точность работы
Машины, ее долговечность, связанную с износом, а также стоимость изготовления,
Поэтому следует обращать внимание на конструктивную реализацию кинемати-
^^еских пар.
Во многих случаях необходимое простое относительное движение звеньев может
ыть воспроизведено сочетанием звеньев, образующих фактически несколько кине-
атических пар. Например, обычный цилиндрический шарнир может быть заменен
64 Звенья, кинематические пары и стержневые механизмы
шариковым или роликовым подшипником. Поступательная пара может быть
заменена сложной кинематической парой.
Рис. 2.8. Кинематические пары первого рода: д — цилиндрический шарнир;
б — поступательная пара с призматической направляющей; в — сдвоенная
направляющая; 2 — винтовая пара; д — поступательная пара с комбинированной
направляющей.
Рис. 2.9. Конструкция упругого «Hjapitnpa», применяемого в приборах, с весьма
малым рассеянием энергии.
Рис. 2.10. Кинематические пары второго рода: а ~ зубьяцилршдрических колес;
б — цилиндрический фланец в пазу; в — стержень, который может скользить и
вращаться; г — призма, которая может скользить по ребру и поворачиваться;
д — сфера с пальцем в пазу, которая может совершать два вращения; е, Э1С, з —
пары, допускающие вращение вокруг двух взаимно перпендикулярных осей.
Рис. 2.11. Кинематические пары третьего po/ta: (7 — шар в оправе, пара
допускает три вращения; б — призма в пазу, пара допускает два поступательных
и одно вращательное движения; в — пара, допускающая два вращательных и одно
поступательное движения; г — шар в специальной оправе; {) — призма на плоскости.
Рис. 2.12. Кинематические пары четвертого рода: а — цилиндр на плоскости
имеет два вращения и два поступательных /движения о'шосителыю плоскости; б —
шар в трубе имеет три враи^еиия и одно поступательное движетгае относительно
трубы; в — призма относительно плоскости имеет два поступательных и два
вращательных движения.
Рис. 2",13. Кинематические пары пятого рода.
Рис. 2 14. Регулируемый оксцентриковый подшипник {е — 1кс(1еитриситет).
Рис. 2 15. Нерегулируемый конический подипшнпк, в котором осевое давление
воспринимае1Ся в плоскости / — /.
Рис. 2.16. Подипнишк с пятью радиальными шариками и шестым в качестве
подпятника; цапфа -- цилиндрическая, зазор можно ретупировать, подбирая шарики.
Рис, 2.17. Нестандартный подшипник, применяемый из-за ограниченности
габаритов (например, в затворах аэрофотоаппарагов). Дорожка апя шариков счелана
непосредственно тта валике.
Рис. 2.18. Коническая тщнфа с разт^рузкой от осевьтх сил посредством колпачка 5
на ттеподвижтто!! оси, шарика 2 и упорного вита 1 на вращатоидейся части. Центр 3
вставлен в ось 4 для ее правизп>ной обработки.
Рис. 2.19. Ноднпшник для вер шкальной оси; ось направляется упорным шарико-
подишпником 1 бопьнюго дт1аметра, а цетгтрируется тремя упорами 2, один ттз
которых снабжен пружиной.
Рис. 2.20 Подшиштшс качсттия для поступательно-возвратного движения. Между
направляемтлм стержнем 1 тт на1Травля1ощей трубой 3 введетта обойма 4 с окнами,
в которые заложены отрезки цилиндрических пружшт 2. При переметцении стержня
относителглю трубтл пружинтл вратцаются вокруг своих ocei'i, одновременно пере-
кат1>1ваясь по панравляюнцтм поверхностям деталей 1 и 3.
Рис. 2.21. Упортплй подшипник крана па колонке, воспринимающий больише
осевые усилия. Для т^етрирования нагрузки последняя передается на подшипник
через сферическуто пяту 2 и подпятник L
Рис. 2.22. Комбииироватттп.тй радиально-уиорный роликовый подшипник для
тяжелтлх вертикал1>т1ых валов. Радиальный подшипник — на цилиндрических
роликах, упорный — на конических.
Рис. 2.23. Упорный подшипник для кранов, монтируемых на колонке.
Сферический подпятник применен для центрирования нагрузки.
Рис. 2.24. Опоры для больших нагрузок: а — роликовая; б — сегментная.
Кинематические пары
Рис. 2.9
Рис. 2.10
Ко'лс!
спттпкоп It лр.
66
Звеиьч, кинематические пары и стержневые механизмы
а) б) в)
Рис. 2.12
Рис. 2.13
Рис. 2.14
Рис. 2.15
Рис. 2.16
Рис. 2.17
Кинематические пары
67
2 3
Рис. 2.18
Рис. 2.20
Рис. 2.21
Рис. 2.22
Рис. 2.23
68
Звенья, кинематические пары и стержневые механизмы
W^
f\
а) б)
Рис. 2.24
ьо^'-аоо
msswwss^
а)
Рис. 2.25
Кинематические пары
69
/ ^)
Рис. 2,26
I ис 2 25. Призмагические и цилиндрические направляющие: ^/~ Т-образная;
f> -- V-образная, в — Ы-образная, г — с накладными регулирующими планками; д ~
•'loopaiорного 1ина, с — регулируемая комбинированная; ,7/с — цилиндрическая на-
фавляюпщя, в которой призма перемещается ог рейки с шестерней; j - кони-
чссксИ! направляющая. Зазор f принимается равным 0,5-2 мм.
г^ис. 2.26. Направляющие: а — шариковые с односторонней связью; б — шари-
'^Ь1с замкнутые, в —с двумя рядами шариков; г — роликовые; () - открьпыс
м-1иковые, карегка 1 с пятью роликами 2 катится по ттанравляющей J; е —
jiKTiyrbic роликовые, каретка 1 направляется шестью или восемьто роликами 2
!^^^^^ ^^'^'^^ роликов до;гжньт допускать регулировку эксценгриситета е оси
" ^''^' •^'^'~ роликовые, ползун 1 с помощью десяти роликов 2 катится 1Т9
Ь в ля то щей 3, 3 ~ наттравляюший механизм на шарТ'Тках,
70
Звенья, кинематические пары и стерлсневые механизмы
Рис. 2.27. Гайка-муфта на шариках (для уменьшения трения) для длинных
винтов. Муфта состоит из двух половин и снабжена каналами для обратного
отвода шариков.
Рис. 2.28. Двухвинтовой гидравлический двигатель. Винтовая нарезка чаще всего
делается трапециевидного профиля. Угол подъема винтовой линии должен быть
больше 30°, т. е. больше двойного угла трения.
Рис. 2.29. Червяк с рейкой, представляюший собой одну из модификаций гайки.
Рис. 2.30. Бесконечный винт 1 с правой и левой резьбой. В той части, где
осуществляется переход ползушки 2 гайки с правой резьбы на левую,
устанавливается автоматическая стрелка 3. На рисунке показаны три последовательных
положения в момент перехода ползушки 2 гайки с правой резьбы на левую.
Рнс. 2.27
Рис. 2.28
OL. „„ Г1„„
шин "iiiii
Рис. 2.29
Рис. 2.30
Рис. 2.31
Рис. 2.32
Кинематические пары
71
^У/////////////////)(////У///////Л
Рис. 2.33
Рис. 2.34
Рис. 2.36
Рис. 2.35
Рис. 2.37
Рис. 2.38
Рис. 2.31. Внутреннее зубчатое зацепление. Оси'вращений 0^ и О2.
Рис. 2.32. Зацепление колеса с рейкой.
Рис. 2.33. Винтовые зубчатые колеса. Касание боковых поверхностей зубьев
(развертывающийся геликоид) происходит в точке. Кинематическая пара,
многократно повторяясь вследствие зацепления нескольких пар зубьев, не вносит
дополнительных связей.
Рис. 2.34. Гиперболоидальные зубчатые колеса i и 2, имеющие аксоиды в
относи гельном движении в виде гиперболоидов.
Рис. 2.35. Конические зубчатые колеса. S — общая вершина начальных конусов.
Рис. 2.36. Внутреннее червячное зацепление.
Рис. 2 37. Радиально-упорные роликовые подшипники для небольших осевых
давлений, действующих в обе стороны, выполненные, как пара по рис. 2.10, е.
Рис. 2.38. Головка шатуна, образующего с кривошипом кинематическую пару
ис. 2.39. Цилиндрическая направляющая (рис. 2.39, а), налагающая такие же
и, как и пара по рис. 2.10, в. Геометрическая замкнутая цилиндрическая пара
Рчс^ 2.39, б) и пара с силовым замыканием (рис. 2.39, в).
ис 2.40. Рычаг I управления соединяется со стойкой 2 шаровым шарниром.
щ ^' •^^- Головка шатуна, соединяемого с кривошипом посредством шарового
кран ^^ п Сферический подпятник 5 гибкой ноги 2, несущий мост I рудного
Аодпятник допускает поворот моста относительно гибкой ноги и наклон
11
Звенья, кинематические пары и стержневые механизмы
Рис. 2.39
Рис. 2.40
Рис. 2.41
Рнс. 2.42
Рис. 2.43
ноги в вертикальной плоскости, что необходимо для компенсации температурных
изменений размеров моста.
Рис. 2.43. Шаровой шарнир. Деталь 2, имеющая размеры а и d,
устанавливается в прямоугольном окне детали 1 и во время сборки поворачивается на
90°. К детали 2 кренится звено механизма.
Рис. 2.44. Шаровой подшипник для быстровращающихся валов, допускающий
вращение вала в цилиндрическом отверстии внутри шара и отклонение оси вала.
Рис. 2.45. Подшипники под сферические цапфы вращающейся призмы.
Рис. 2.46. Шаровой подшипник трубы дальномера, качающегося вокруг центра
шарового шарнира О, удерживающего трубу от осевого перемещения.
Кипе матичсские пары
73
Рнс. 2.44
Рис. 2,45
Рис. 2.46
Рис. 2.47
Рис. 2.48
Рис. 2.49
Рис. 2.50
Рис. 2.51
Рис. 2.47. Шаровой подшипник червяка, позволяющий поджимать червяк в
сторону червячного колеса для компенсации износа зубьев и ошибок при расточке
корпуса. Левая опора 2 червяка перемещается по вертикали с помощью вин га I.
Рис. 2 48 Самоустанавливающиеся и1ариковые и роликовые подшипники со
*-фсричсскп\щ опорными кольцами.
Рис. 2 49. Радиальный и упорный самоусганавливающиеся подшипники,
установленные совместно Центр О сферы радиуса R подкладного кольца 1 должен
'^1\одигься на оси вала в точке, через которую проходит средняя JПIния радиаль-
''^^'^^ подшипника.
^ Il^^ 2.50 Кинематическая пара по рис. 2Л2, а чс1вер10го рода,
использованная в
•'^^еханизме привода челнока швейной машины.
"С 2.51. Кинематические пары четвертого рода: а — две точки одного звена
гюверхности второго звена; б — шар в желобе.
74 Звенья, кинематические пары и стерж:невые механизмы
ПЛОСКИЕ СТЕРЖНЕВЫЕ МЕХАНИЗМЫ
Стержневые механизмы, звенья которых образуют вращательные или посту-
пате пьные пары, применяются в рабочих машинах и двигателях грузоподъемных
и других машин. При проектировании машины к механизму могут быть предъ-
явпены различные требования, например: при вращательном движении ведущего
звена ведомое звено должно совершать возвратно-поступательное движение при
определенной величине хода. Дополнительно может быть предъявлено усло1ше,
чтобы средние скорости при движении ведомого звена вперед и назад были
различны и чтобы некоторые из точек звеньев описывали точно или приближенно
заданные траектории или в определенные промежутки времени занимали
заданные положения в плоскости. Могуг быть заданы и более сложные условия. Удов-
петворить поставленные при проектировании маитны требования полностью или
частично можно выбором типа механизма и расчеюм соответствующих размеров
его звеньев.
Кинематическое и динамическое исследования механизма, которые необходимо
проводить при проектировании машины, во многих случаях облегчаются, если
сложный механизм удается упростить и свести его схему к более простой, для
исследования которой потребуется меньшая затрата времени. Во многих случаях
полезно использовать метод постановки механизма на новое звено (метод
инверсии механизма), заменить расширенную цапфу обычным шарниром,—
ведущее звено — другим и, наконец, поступательную пару — вращательной.
При постановке механизма на новое звено необходимо из данного механизма
получить сначала кинематическую цепь путем освобождения закрепленного звена,
а затем поставить механизм на новое звено, т. е. закрепить заданное звено.
В процессе расчета постановка на новое звено является условной. Что касается
реальных механизмов, используемых в различных машинах, то некоторые группы
их можно считать получившимися в результате закрепления различных звеньев
одной и той же кинематической цепи. На рис. 2.52 показана чстырехзвенная
шарнирная кинематическая цепь, а на рис. 2.53 — механизмы, полученные постановкой
этой кинематической цепи на различные звенья:
кривошипно-коромы еловый механизм (рис. 2.53, д), цепь
поставлена на звено d; звено а будет кривошипом, т. е. может совершать полный оборот,
если удовлетворяются условия
а + b < с + d; а + с < d -{- b; а + d < с + b»
При этом
а <Ь; а < с; а < d;
кривошипно-коромы еловый механизм (рис. 2.53, б), цепь
поставлена на звено Ь; а — кривошип; с — коромысло; d — шатун;
двухкривоп1ипныйчетырехзвенный
механизм (рис. 2.53, в), цепь поставлена на звено
а; d и b — кривошипы; с — шатун;
двухкоро мы еловый четырехзвен-
ный механизм (рис. 2.53, г), цепь поставлена
на звено с; d и b — коромысла; а — шатун.
Движение от двигателя может быть сообщено в случае,
если двигатель закреплен на коромысле d или b
и приводит шатун а. Условия существования кри-
Рис. 2.52 вошипа те же, что и для механизма по рис. 2.53, а.
Плоские стержневые механизмы
75
Л1
Рис. 2.53
Рис. 2.55
Определение хода и коэффициента к увеличения средней скорости обратного хода
коромысла шарнирного четырехзвенника (рис. 2.54). Полному ходу коромысла слева
направо п справа налево соответствуют углы аир поворота кривошипа:
а = 71 + е и р=7г~е;
d^ -Vih- af - с"- ,
cos (9 + ф) =
С08ф =
2d(b -а)
^2 + (Ь + af - с^
2d{b^a)
Отсюда определяется 6.
Коэффициент увеличения средней скорости обратного хода
Vp tx G (О^Р 71-6
к =
я + 6
тс -е
^орда Я, соответствующая угловому ходу а коромысла:
Н :=]/2{Ь^ + а^) - 2{Ь^ - a^)cosQ.
пределение коэффициента увеличения средней скорости ведомого коромысла
ведо*^^"^^^''""^*^^ механизма (рис. 2.55). За один оборот ведущего кривошипа b
т и^^^^ также сделает один оборот. За время поворота ведомого кривошипа d
сложения Bj в В2 ведущий кривошип b повернется на угол тг + (02 - 6i).
76 Звенья, кинематические пары и стержневые механизмы
Отношение средних скоростей ведомого звена при переходе из положения В2 в В^
и из Вх в В2 равно
^_ 7u + (92-e,),
cos9i = -^^ ; cos 82=-
2h{d + a) 2b(d-a) ^
Рис. 2.56. Механизм неравномерного движения (шарнирный четырехзвенник)
с приспособлением для перехода через мертвую точку. Одно из условий
существования кривошипа в виде неравенства обращается для этого механизма в
равенство а + b == с + d, вследствие чего ведомое звено при переходе через линию
центров будет иметь мертвое положение.
Рис. 2.57. Четырехшарнирный параллелограмм (а) и антипараллелограмм (б),
точка S (пересечения двух кривошипов) которого движется по эллипсу.
Рис. 2.58. Схема определения неподвижной центроиды шатуна а четырехшар-
нирного антипараллелограмма при неподвижном малом звене с. Пусть известны
радиусы кривошипов b и d я длина шатуна а.
Мгновенный центр вращения Р^с шатуна а лежит в точке пересечения криво-
пппюв b и d.
Треугольники DCB и BAD, РасСВ и Pac^D попарно равны, поэтому Р„сВ —
— PacD, т. е. Pi + Р2 = Ь = const, следовательно, точка Р^с описывает эллипс с
фокусами в точках А и D.
Уравнение эллипса:
Если стойкой сделать звено а, то полюс Р^с опишет такой же эллипс с
фокусами в точках С и Б. Таким образом, подвижная и неподвижная центроиды
звена а четырехшарнирного параллелограмма представляют собой эллипсы.
Рис. 2.59 — 2.61. Четырехшарнирный антипараллелограмм с кривошипами,
вращающимися в противоположных направлениях. Движеьше звеньев а я с можно
получить, если представить движение катящихся один по другому эллиптических
катков, связанных с этими звеньями. Если механизм по рис. 2.58 поставить на
большое звено b или d, то подвижная и неподвижная центроиды шатуна а
механизма обращаются в центроиды относительного движения (эллиптические катки).
Для вывода механизма из двух мертвых положений могут быть использованы
пальцы на концах малых отрезков большой полуоси эллипса (рис. 2.60). На
рис. 2 61 показан закон изменения угловой скорости со^, звена с для механизма,
поставленного на звено d.
Рис. 2 62. Спаренные-четырехшарнирные параллелограммы с приспособлениями
1 м 2 для вывода из мертвою положения.
Рис. 2.63. Шарнирный четырехзвенник. Характер траектории точек звеньев
четырехзвенника зависит от отношения длин звеньев АВ, AD, ВС и
расстояния между шарнирами С и D. Для любой точки кривошипа DA и коромысла СВ
траекторией является окружность. В зависимости от выбора положения точек 1—5
на шатуне получается та или иная кривая. Отдельные участки некоторых
шатунных кривых мало отличаются от прямых или дуг окружностей. Эти точки могут
быть использованы для построения спрямляющих механизмов (прямила) или
механизмов с остановками.
Звенья, кинематические пары и стержневые механизмы
77
6)
Рис. 2.56
Рис. 2.57
Рнс. 2.58
Рис. 2.59
Рис. 2.60
Рис. 2.61
Рис. 2.62
Рис. 2.63
78 Звенья, кииематичсскис пары и стсрмсисвыс мехатпмы
Рис. 2.64. Увезшчеппая цапфа. Если размеры элемспюв Брапииелы1ых
кинематических пар А и В меньше расстояния между центрами А к В шарниров
на звене, то цапфа неувеличенная (см. рис. 2.64, а). Радиус цилиндрических
поверхностей (элементы кинематической пары) можно увеличить (рис. 2.64, б) по
сравнению с радиусом А В, показанным на рис. 2.64, а, при этом па одном из звеньев
можно взять только часть цилиндрической поверхности (рис. 2.64, в). При
неизменном АВ движение точки В остается тем же, что и для механизма,
показанного на рис. 2.64, а. Радиус цилиндрической поверхности можно взять больше
АВ, что на относительное движение не будет влиять (рис. 2.64, с). Звено АВ в этом
случае называют эксцентриком. При вращении звена в пределах иекотоцого угла
можно ограничиться липп> частью эксцентрика (рис. 2.64, з, .о/с). Если радиус АВ
увеличить до бесконечности, то вращательная пара обращается в поступательную
(рис. 2.64, д, и). При кинематическом исследовании все случаи увеличенной цапфы
(рис. 2.64, б —г и е — з) в кинематических парах следует заменять цапфой,
показанной на рис. 2.64, а.
Рис. 2.65. Четырехзвенная кипематршеская цепь ABCD по рис. '2.52 с
увеличенной цапфой.
Рис. 2.66. Механизмы, полученные из кинематической цепи ABCD по рис. 2.65:
а — кривошипно-ползунный с криволинейной направляющей; б — кулисный с
вращающейся криволинейной кулисой; в — кулисный с криволинейной качающейся
кулисой; 2 — балансирно-шатунный с криволинейной направляющей.
При кинематическом исследовании приведенные на рис. 2.66 механизмы следует
заменять четырехшарнирным механизмом, показанным штриховой линией на
каждой из схем.
Рис. 2.67. Четырехзвенная кинематическая цепь с одной поступательной парой.
Получена из кинематической цепи ABCD по рис. 2.65 при CD = oo.
Рис. 2.68 — 2.71. Механизмы, полученные из кинематической цепи по рис. 2.67
путем постановки цепи на различные звенья. Рис. 2.68 — закреплено звено d,
получен кривошипно-ползунный механизм; рис. 2.69 — закреплено звено а, получен
кулисный механизм с вращающейся кулисой; рис. 2.70 — закреплено звено Ь,
получен кулисный механизм с качающейся кулисой, аналогичный механизму по
рис. 2.80, в котором размеры звеньев с и d иные; рис. 2.71 — закреплено звено с,
получен балансирно-ползунный механизм, в котором звено h не может делать
полного оборота. В качестве начального звена здесь может быть принято звено а
при установке двигателя на звеньях d я h.
Рис. 2.72. Кинематические цепи: а и б — четырехзвенные с увеличенной
цапфой D; в — четырехзвенная с увеличенными размерами цапфы В; г — с
увеличенными цапфами В и С.
Рис. 2.73. Четырехзвенный механизм ABCD с тремя цапфами увеличенных
размеров. Звенья механизма выполнены в виде эксцентриков. Механизм может
быть заменен четырехшарнирным механизмом, показанным штриховыми
линиями.
Рис. 2.74. Четырехзвенный механизм, полученный из механизма, изображенного
на рис. 2.73 увеличением размера CD до бесконечности. Механизм может быть
заменен кривошипно-ползунным механизмом ABC.
Рис. 2.75. Кривошипно-ползунный механизм ABC с увеличенной цапфой С.
Рис. 2.76. Механизм компрессора. Относительное перемещение ползунов 1 я 2
в 4 раза больше радиуса кривошипа.
Рис. 2.77. Схема передачи движения от поршней к коленчатому валу в
двигателе со встречными поршнями.
Рис. 2.78. Схема механизма ромбовидного привода уравновешенного двух-
поршневого двигателя. Симметричные кривошипы 9 соединены зубчатыми колесами 7,
Плоские стерэ1€небые механизмы
79
^^
80
Звенья, кинематические нары и стержневые механизмы
Рис. 2.70
Рис. 2.71
Рис. 2.72
Рис. 2.73
Рис. 2.75
Рис. 2.76
Плоские стержневые механизмы
81
Рис. 2.77
Рис. 2.78
шагуны S и 10 — траверсами 5 и б, к которым прикреплены штоки 2 и 4
поршней 1 м S. Направляющие 11 vi 12 бокового давления не испытываю г.
Рис. 2.79. Шарнирно-рычажные механизмы с упругими элементами: а — гибкий
шатун с продольной упругостью; о — гибкий шатун с поперечной упругостью;
в и г — кривошипно-коромысловый механизм с гибким шатуном в крайних
положениях, не являющихся положениями статического равновесия; д — кривошипно-
нолзунный механизм с упругим шатуном.
Рис. 2.80. Кулисы: а — качающаяся. Прямому и обратному ходу ведомого звена
соответствуют неравные углы поворота кривошипа (а и Р), а > р; б —
вращающаяся. В то время как кривошип / описывает угол а, кулиса II делает
полоборота.
Рис. 2.81. Дуговая кулиса.
Рис. 2 82. Синусный механизм. Перемещение кулисы от среднего положения
^ = г sin ф, скорость кулисы V — rcocos ф, ускорение кулисы а = — гсо^ sin ф.
Синусный механизм можно представить как кривошипно-ползунный механизм с
бесконечно длинным шатуном.
Рис. 2.83. Кулисно-эксцентриковый механизм.
Рис. 2 84. Косая кулиса, перемещающаяся по несимметричному закону.
Рис. 2.85-2.86. Кулисные механизмы поперечнострогальных станков с кулисой,
совершающей сложное движение. Механизмы составлены из кривошипа в виде
ь^улисного зубчатого колеса и трехповодковой группы с кулисой в качестве
центрального звена. Поводками являются: нижний поводок (для рис. 2.86, камень 2),
1^Улиеный камень и ползун 1,
Рис. 2.87. Вращающаяся кулиса. Камень 1 кулисы шарнирно закреплен в стойке;
г^ривод кулисы — в точке В, Если в этом механизме шарнир А соединить не
ша Гуном, а с вращающимся диском, то можно получить неравномерное вра-
Щ^тельное движение ведомой оси.
82
Звенья, кинематические пары и стержневые механизмы
Рис. 2.79
Рис. 2.80
Лс
\^
11
Рис. 2.81
Рис. 2.82
Рис. 2.83
Плоские стержневые механизмы
83
Рис. 2.87
Рис. 2.1
Рис. 2.88. Двойной кулисный механизм. В зависимости от положения точки С
кулиса / будет вращающейся или качающейся. Кулиса будет вращающейся, если
ЛВ < г + /.
Рис. 2.89. Рациональные схемы кривошипно-ползунного механизма. Все пять
схем лишены избыточных связей. Сферический шарнир со штифтом (пара IV,
схемы д и б) имеет линейчатый контакт и для передачи больших сил схема не
применима. Лучше, если цилиндрическая пара IV стоит на пальце кривошипа
(схема в), чем на ползуне (схема г). Пару IV труднее осуществить на
подшипниках качения, поэтому ее следует заменить на пару /// (схема д\ при этом
появится местная подвижность {W = 2) — вращение шатуна вокруг собственной
оси. Схемы гид предпочтительней. Римскими цифрами обозначен класс пары
по числу вносимых условий связи.
Рис. 2.90. Рациональные схемы кривошипно-коромыслового механизма.
Избыточные связи отсутствуют {q = 0), если в механизме при рц = pj = О
удовлетворяется условие 5pv + ^P\w + '^Pin = 1'^- При pv = 2, Piv = 1 и рщ = 1 это условие
соблюдается. Пару IV (схема а) следует избегать в силовой передаче, заменяя ее
парой /// (схема б). Указанное условие при ру = 2, рщ — 1 и piv = О
соблюдается, так как теперь W = 2 я необходимо, чтобы 5ру + Зрщ = 16. Возможна
замена пары IV со штифтом на цилиндрическую IV (схема в), однако во
избежание заклинивания необходимо длину b втулки выбирать из условия: b >
^Y" ^^^ У> ^Д^ ^' "" радиус цапфы, II — коэффициент трения, у — угол пере-
^са пальца кривошипа. Возможна и вторая схема, если размеры звеньев в 50
оолее раз больше размеров кинематических пар, тогда на пальцах кривошипа
Коромысла с учетом зазоров выбирают пары III,
84
Звенья, кинематические пары и стержневые механизмы
Рис. 2.91. Механизм станка для фасонной
обработки. В рассматриваемом механизме
режущий инструмент 4 (/шигатель с
шлифовальным кругом) закрепляется на шатуне
кривошипно-ползунного механизма.
Настройка станка — подбор шатунной кривой
для очерчивания поверхности детали —
осуществляется изменением смещения е
траектории центра пальца ползуна 3 при повороте
направляющей 1 относительно стойки,
изменением длины шатуна (которая
устанавливается фиксатором 2) и изменением положе;^
ПИЯ режущего инструмента относительно
шатуна.
Рис. 2.92. Захват для подьема стопки
вагонных бандажей. Управление механизмом
захвата для подъема нагретых бандаже!!
должно быть дистанционным. При опускании
стопки бандажей, после того как стопка
коснется пола цеха, траверса 2 с изогнутыми
рычагами 4 будет продолжать двигаться вниз
до тех пор, пока рычаги 4 не обхватят
конус 5. При подъеме крюка 1 конус 5
увлекает трубу 11 п с помощью стержневых
шарнирных параллелограммов 10 и 8
сближает планки 9, освобождая стопку бандажей.
Механизм готов для захвата новой стопки
бандажей. При опускании крюка рычаги 6
упираются в верхний бандаж, под действием
силы тяжести захвата планки 9 разводятся.
В результате дальнейшего движения крюка
вниз рычаги 4 обхватывают малый конус 7.
После этого начинается подъем крюка. После
зажима захвата стопки бандажей концы
рычагов 4 вследствие .наличия конусности соскальзывают с конусов 7 и 5 и в
дальнейшем стержнем 3 поднимается все захватное приспособление вместе с бандажами.
Рис. 2.93. Ось захватных щек клещей 7, 2, соединенных с тягой 5 серьгами 4,
установлена на тележке 5. В момент захвата трубы щеки клещей i, 2 сближаются
Рис. 2.89
Рис. 2.90
Плоские cmepytcneebte механизмы
85
Рис. 191
от руки рычажным механизмом с рукояткой б. В дальлтейшем клещи затягиваются
усилиями, создаваемыми при протяжке трубы. Тележка 5 перемещается замкнутой
попью 7, приводимой в движение звездочкой через накидной крюк 8. В
исходное положение тележка возвращается с грузом, который прикреплен к канату,
соединяющему его с тележкой.
Рис. 2.94. Механизм станка для изготовления кабелей, состоящий из ряда
шарнирных параллелограммов.
Диск 3 и кольцо 2, которое
поддерживается роликами i, соединены шар-
нирно посредством кривошипов 4 так, что
при вращении диска оси 5 совершают
поступательное движение по окружности
радиуса R. На осях 5 закреплены бобины
с проволокой для кабеля.
Рис. 2.95. Передача вращения
шарнирными параллелограммами от двигателя
к ведущим колесам электровоза. В этом
механизме ОА = О^В^ = О2В2.
Рис. 2.96-2.98. Шарнирные компенсрг-
РУющис механизмы для передачи
движения от двигателя к ведущим колесам
тепловоза.
Рис. 2.99. Механизм пресса с приводом
от коленчатого вала.
Рис 2 100. Многократно повторенный
^1ехаиизм шарнирного параллелограмма,
спользуемый для создания больших уси-
- ни в длинной прижимной планке при
^1алой мощности привода. Рис. 2.92
86
Звенья, кинематические пары и стержневые механизмы
5-5
Рис. 2.93
Рис. 2.101. Сдвоенный механизм прижимной планки (применяется при большой
длине прижимной планки).
Рис. 2.102. Гидромеханическая система пресса. На средний шарнир распорного
механизма действует поршень 1 гидравлического цилиндра. Поршни 2 служат для
подъема плиты 3 пресса.
Рис. 2.103. Механизм поворота тележки по кривой малого радиуса. В качестве
механизма поворота использован антипараллелограмм по рис. 2.57,6 {R и г—
внешний и внутренний радиусы кольца, в пределах которого может перемещаться
корпус тележки).
Рис. 2.104. Четырехзвенный механизм с двумя кривошипами для передачи
кругового движения при изменении эксцентриситета между параллельными валами.
При небольшом изменении эксцентриситета угловая скорость ведомого вала будет
изменяться незначительно.
Рис. 2.105. Колесо с выступающими лапами-захватами. Главный шатун,
поворачиваясь относительно неподвижного эксцентрика 1, приводит в движение лапы 2,
связанные с главным шатуном с помощью поводков. Точки присоединения
поводков должны быть определены так, чтобы каждая лапа выступала из колеса
в нижнем положении.
Рис. 2.106. Кривошипный направляющий механизм для лопаток гребного
колеса 1. Поворотом эксцентрика 2 изменяют направление лопаток, что, в свою
очередь, изменяет направление равнодействующей гидравлических сил,
действующих на лопатки.
Рис. 2.107. Механизм насоса, лопасти 1 которого приводятся в движение от
одного вращающегося диска 2. В насосе четырехкратно повторен двухкривошип-
Плоские стерjfcнееые механизмы
87
Рис. 2.94
^?^^^
Рис. 2.97
Рис. 2.96
Рис. 2.98
LU_LlJi
Рис. 2.99
Рис. 2.100
Звенья, кинематические пары и стер:}1€небые механизмы
Рис. 2.101
Y////////////////////A
Рис. 2.102
Рис. 2.103
Рис. 2.104
Рис. 2.106
Рис. 2.107
Рис. 2.108
Рис. 2.109
Плоские стержневые механизмы
89
ный механизм. Ось вращения диска 2 расположена в точке О, а в точке Oi —
шарнирное соединение лопастей.
рис. 2.108. Эксцентриковый насос, в корпусе 2 которого полости разделяются
помощью лопаток 3. приводимых в движение эксцентриком 1. Движение
лопаток такое же, как и у поршней кривошипно-ползунного механизма. Лопатки 3
подпружинены.
Рис, 2.109. Пресс с четырехзвенной шарнирной распоркой. Вместо шарнирной
системы и кривошипа для удаления и сближения точек А можно применять винт
с правой и левой резьбой; 1 —кривошип.
Рис. 2.110. Шарнирный многократный параллелограмм. Путь точки Л во столько
раз больше пути точки В, во сколько раз число параллелограммов между
точками С и Л больше числа параллелограммов между точками С я В.
Рис. 2.111. Транслятор из двух параллелограммов. Линейка 1 перемещается
параллельно самой себе по двум взаимно перпендикулярным осям. Схема
применяется в чертежных приборах.
Рис. 2.112. Транслятор. Параллельная направляющая, осуществляемая зубчатыми
колесами. Линейки 2 и 5 движутся параллельно самим себе. Зубчатые колеса 3,
1 и 4 должны иметь одинаковое число зубьев. Число зубьев промежуточных
колес безразлично. Колесо 3 закреплено неподвижно.
Рис. 2.113. Параллелограммный механизм, позволяющий передавать качатель-
ное движение с обходом детали 1, препятствующей передаче движения по
кратчайшему пути. Диск 2 вращается вокруг оси, не имея неподвижной опоры, которая
была бы лишней.
Рис. 2Л10
Рис. 2.111
Рис. 2.112
Рис. 2.113
Рис. 2.114
90
Звенья, кинематические пары и стержневые механиз мы
Рис. 2.116
Рис. 2.117
Рис. 2.114. Строенный параллелограммный механизм, позволяющий передавать
качательиое движение между двумя параллельными валами / и //. Механизм
допускает ограниченный угол поворота. Для увеличения угла поворота необходимо
переставлять спарники.
Рис. 2.115. Строенный эксцентриковый механизм с параллельными
кривошипами, передающий вращение между двумя параллельными валами / и //. Механизм
не имеет мертвого положения.
Рис. 2.116. Направляющий механизм с параллельными кривошипами для
привода во вращение пальцев А.
Рис. 2.117. Механизм увеличения хода. В обычном центральном кривошипно-
ползунном механизме ход Н = 2г, где г — радиус кривошипа. В данном механизме
(см. рис. 2.117, б) ход Я = 4г, где г — радиус кривошипа. На цапфу А кривошипа
(см. рис. 2.117, а) посажены два жестко связанных между собой эксцентрика i и 2
с эксцентриситетом, равным г = АВ — АС. Деталь 3 неподвижна. На рис. 2.117, б
приведена кинематическая схема механизма, которая может быть получена из
рис. 2.111, а постановкой на шайбу.
Плоские стержневые механизмы
91
777777777777777777:
а)
77777777777777777777777777Z
*
Рис. 2.118
Рис. 2.118. Схемы кривошипно-кулисных механизмов штамповки и высадки:
<' - с прямолинейной кулисой. Скорость ползуна v^^ — coiR sin а; б — с наклонной
кулисой V = cOiR (sin а + cos atg 5).
Рис. 2.119. Предельный кулисный механизм. На рис. 2.119, а кулиса совершает
неравномерное вращательное движение; за один оборот кривошипа кулиса делает
также один оборот. Если ось кулисы расположить на окружности, описываемой
кривошипом (рис. 2.119,6), то кулиса будет вращаться равномерно со скоростью,
^ 2 раза меньшей, чем скорость кривошипа. Механизм по рис. 2.119,6 имеет
нсоиределешюе положение при совпадении цешра пальца с центром вращения
ЧУлисы. Механизм может выродиться в двухзвенный.
Для устранения неопределенности движения кулисы но рис. 2.119,6 вводят вго-
РУК) ползушку и кулису выполняют в виде диска с двумя перпендикулярными
назами (рис. 2.119, в), по которым скользят цапфы или ролики, находящиеся на
нцах двуплечего кривошипа ас. Шайба и рычаг вращаются около неподвиж-
JX осей. Шайба при любом числе пазов вращается с числом оборотов, равным
^^оловине числа оборотов кривошипа. При введении новых кинематических пар
Раничений не накладываем, так как вводимые связи пассивны. Такие шайбы
92 Звенья, кинематические пары и cmep.7tcueehie механизмы
стали применять для передачи больших сил. Соединяя два подобных механизма
можно получить компактную бесшумную передачу с передаточным числом 1 : 4.
На рис. 2.119,2 показана шайба с диаметральной прорезью, в KOTOpoli скользит
цапфа двуплечевого кривошипа ас. Две дополнительные прорези Ь и ^ не
являются необходимыми, если переход через мертвую точку обеспечивается каким-
либо другим способом.
На схеме (рис. 2.119, д) показана шайба с тремя прорезями, приводимая
в движение трехплечим кривошипом. Из трех всегда работают только два плеча
кривошипа вследствие неизбежной неточности изготовления. Для любого плеча
нерабочим является положение, в котором оси плеча и прорези составляют угол,
мало отличающийся от 90°.
Рис. 2.120. Кулисно-эксцентриковый механизм: 1 — эксцентрик; 2 — камень;
3 — приводной вал; 4 — кулиса. Механизм представляет собой конструктивный
вариант синусного механизма.
Рис. 2.121. Кулисный механизм тестомесительной машины. Точка Л совершает
движение по траектории в некоторой своей части близкой к дуге окружности.
Рис. 2.122. Механизм тестомесильной машины. К одному из двух сцепляющихся
зубчатых колес z^ прикреплен кривошип, к другому ^2 — шатун 1. На пальце
кривошипа установлен камень 2, скользящий в пазу кулисы 3. Шатун 1 соединен
с кулисой 3 звеном 4, точка А которого описывает сложную кривую.
Рис. 2.123. Двойной кулисный механизм. Зубчатое колесо 2 с прорезью А,
в которую входит палец 1, вращает на эксцентрике кольцо 5, которое
посредством пальца 3, входящего в прорезь В, вращает кривошип 4. Радиус вращения
пальца кривошипа можно изменять, передвигая палец в прорези. Кривошип можно
заменить зубчатым колесом. В то время как колесо 2 описывает дугу а — р,
кольцо 5 делает полоборота. В механизме по рис. 2.123, б кольцо на эксцентрике
заменено кривошипом 1.
Рис, 2.124. Двойная кулиса. Палец 2 кривошипа вращает кулису 1, которая
ползуном 4 соединена со второй кулисой 3.
Рис. 2.125. Приспособление для строгания по дуге круга. Столу, ползушки 1 и 3
которого скользят по направляющим 0D и ОС, сообщается движение с помощью
шатуна, присоединенного в точке Е, Лезвие резца 2 относительно изделия
описывает на выбранном участке улитку Паскаля, мало отличающуюся от дуги круга.
Рис. 2.126. Механизм прибора для регистрации связанных с вращением кри-
вогнигга величин в заданных пределах. Точка С, связанная с пишущим штифтом,
описывает шатунную кривую ус ^ двумя остриями (течками возврата). Вне
области, заключенной между точками Ci и С2 (при обратном ходе), штифт
отходит от барабана. Устройство позволяет снизить шум в приборах и пишущих
машинках.
Рис. 2.127. Передвижной кран для погрузки на судгю.
Рис. 2.128. Ку лис гю-цен и ой привод грейферных лииеск миогопозициоппою
нпамгювочного пресса-авгомата 2500 тс. На ггепях двух ценных передач с
противоположным панраБлением вращения звездочек смонтированы камни 1, которые
сообщают поступательное движение с остановками траверсе-кулисе 2. При
движении камней 1 по участкам ahc звездочек кулиса опускается, при движении
камней между точками с и d, 'л также/ и а кулиса выстаивает, участку clef cooi-
вегс1вует подъем кулисьг вверх. Связь между кулисой и грейферггыми линейками
на схеме ire показана.
Рис. 2.129. Кулачково-кулисный механизм пригюда грейферных линеек листо-
штамповочного пресса. От ведущего диска 7, несущего полз ушку 2, связанную
с камнем б, с помощью неподвижного кулака 3, по которому обкатывается
ролик 5, сообщается поступательное движение с остановками кулисе 4, связан-
Плоские стерснсневые механизмы
93
Рис. 2,120
Рис. 2.121
Рис. 2.122
^Ф---^-
Рис. 2.123
Рис. 2,124
94
Звенья, кинематические пары и стерлсневые механизмы
Рис. 2.126
Рис. 2.127
^
v^ у ^^ ^.^
с *" а а. -6 с
Vy
Рис. 2.128
Vy
/ 777^?-t^'?N;v^ Ч
щ-^
Рис. 2.129
Рис. 2,130
Плоские стер.жисвыс механизмы
95
Ось SbicQdKU —^
Рис. 2.131
Рис. 2.132
ной системой рычагов с грейферными линейками. Пружина 7 прижимает ролик
к кулаку.
Рис. 2.130. Грейферный механизм переноса заготовок. Захватывающие пальцы 7,
шарнирно укрепленные в рамке 2, получают возвратно поступательное движение
о г кулачка 5, связанного с кривошипным валом машины. Угол, поворота пальцев
в раме ограничен упорами, к которым пальцы прижимаются пружинами. Упоры
и пружины на схеме не показаны.
Рис. 2.131. Схема захватывающих призм механизма переноса заготовок (в
сжатом и раскрытом состоянии). Призмы заготовки зажимаются пружинами 7, а
раскрываются при нажатии планки 2 на ролик 5 и повороте связанных с призмами
секторов 4.
Рис. 2.132. Схема механизма подачи обжимной машины. При движении штока 6
вправо зажимы 2, установленные на концах поворотно-телескопических рычагов 5,
подают заготовку 1 в механизм обжатия 8. Зажимы соединены с помощью тяг
4 и 5 со штоком, приводимым в движение от гидропривода 7. Пружины 9
помогают отводить трубу (пруток) обратно после обработки.
Рис. 2.133. Схемы механизмов обжатия рычажных радиально-обжимных машин;
fl — с постоянной степенью обжатия: от электродвигателя приводится во
вращение пара колес i, установленных на эксцентриковых валах, шарнирно
соединенных посредством шатунов 2 с рычагами 3, сообщающими движение штокам 4
с инструментом. Штоки поджимаются к рычагам пружинами 5 и перемещаются
в длинных регулируемых направляющих. Эти механизмы применяют для горячего
обжатия в мелкосерийном и индивидуальном производстве;
б - с переменой степенью обжатия: вал ] с двумя эксцентриками через звенья 2
приводит в движение рычаги 3, несущие бойки 4, ход которых регулируется
смещением эксцентриковых втулок 5 посредством червячной передачи 6, связанной
с шаблоном механизма подачи. На машине фирмы «Cobelux» обжимаются трубы
диаметром до 200 мм с числом обжатий до 575 в минуту при усилии обжатия
до 150 тс;
в — с независимым движением бойков: шатуны 2 с бойками 5, приводимые
5 движение от эксцентриков i, имеют сферические направляющие 3,
допускающие независимость настройки бойков и программирование их работы, что позво-
•^яет обжимать заготовку 4 изделий круглого, квадратного и других сечений.
Рис. 2.134. Схема загрузочного устройства молотковой стружкодробилки. От
Двигателя I через редуктор 2 и ременные передачи 3 приводятся в движение кри-
ошипы 4 и 5. Шатун б, оснащенный граблями, загребает стружку из лотка 7
96
Звенья, кинематические парь: и стерясневые механизмы
.1С. 2.134
в дробилку 8. Сложная траектория движения граблей способствует подаче и
перемешиванию стружки.
Рис. 2.135. Механизм чушколомателя. Ползун 5 давит на ломаемые чушки
с помощью распорного механизма, приводимого в движение от коленчатого вала 1.
Предварительно чушка устанавливается с помощью эксцентрика 7, действующего
на переставной ползун 6. В механизме чушколомателя использована трехповод-
ковая группа, состоящая из звеньев 2, 3, 4 и 5. Справа показана кинематическая
схема механизма чушколомателя.
Рис. 2.136. Механизм для выбивания застрявших чушек из мульд
(корытообразных изложниц). Посредством кулачка i, связанного с ведущей звездочкой 2
машины, отклоняется рычаг 3 и жестко связанное с ним коромысло 4, несущее
груз 5, ударяет по мульде.
Плоские стержневые механизмы
97
Рис. 2.135
Рис '2 137. Схема механизма
шлакового стопора. Приводится в
действие пневматическим цилиндром 1 и
служит для заделывания шлаковой
летки доменной печи.
Рис. 2.138. Схема механизма
шлакового стопора для обслуживания
шлаковых леток доменной печи. От
пневмоцилиндра посредством каната 1
приводится в движение звено 2
шарнирного параллелограмма, связанного
с пробкой 3, снабженной упорным
бур'1 ом. Звенья 4 \1 5 соединены
поводками 6, 7 и 8, 9 с опорной рамой,
прикрепленной к кожуху доменной
печи В рабочем положении стопор
прижимается к фурме посредством контргруза 10 (р — мгновенньи! центр вращения).
Штанга охлаждается водой.
Рис 2.139. Механизм регулирования петли полосы в непрерывных прокатных
станах. В случае одновременной прокатки полосы в двух клетях возникает
необходимость регулирования натяжения во избежание разрыва полосы или ее
захлестывания. Нажатие ролика 1 на полосу производится шарнирным механизмом,
приводимым в действие пневматическим механизмом.
Рис. 2.136
Кожевников н др.
98
Звенья, кинематические пары и стерлсневые механизмы
Рис. 2.140. Схемы механизмов подъемно-опускающихся столов у рабочих клетей
прокатных станов: а — параллельно-подъемный стол для подачи полос длиной не
более 5— 10 м; 6 — подьемно-качающийся стол легкого тина с пружинным уравно-
вещиванием; в — с грузовым уравновешиванием.
Рис. 2.141. Подъемно-качающийся стол стана трио. При вращении валков
в неизменном направлении (рис. 2.141, а) и прокатке полосы между нижним и
средним или между средним и верхним валками качающиеся с голы для задачи
и приемки полосы должны устанавливаться на разных уровнях. В механизме для
согласования работы переднего и заднего столов использован антипараллелограмм.
Рис. 2.137
Рис. 2.138
Рис. 2.139
П юские стерлеиевые механизмы
99
Рис. 2.140
Рис. 2.141
100
Звенья, кинематические пары и стержневые механизмы
Рис. 2.142
Угол поворота столов (рир. 2.241, б)
регулируется изменением длины
коромысла 2 с помощью винта 3.
Длина звена 1 остается постоянной.
Рис. 2.142. Схема
одностороннего пружинного уравновешивания
универсальных шпинделей при
незначительных перемещениях.
Рис. 2.143. Схема смешанного
уравновешивания при большом
подъеме шпинделя 4, Нижний
шпиндель уравновенп1вается
пружинами, а верхний — контргрузом.
Уровень нижнего шпинделя
регулируется гайками 2, положение
верхнего — червячно-винтовым
механизмом 8, для чего ролик 9 при
опущенном шпинделе заводят в
хвостовик 10 рычага контргруза, а затем, смещая ролик 9, изменяют положение
шпинделя при установке в клеть новых валков. Пружины 7 частично воспринимают
вес шпинделя 4 и компенсируют возможные смещения осей шарниров б опорных
траверс 5 {1 л 3 — валки).
Рис. 2.144. Толкатель термических печей. Поддон с деталями устанавливается
на рольганг 1. Поддон подвигается вперед с помощью собачек 2, укрепленных
на общей подвижной тележке 3, приводимой в движение шарнирным механизмом.
Центр тяжести собачек смещен влево от оси вращения, поэтому они С1ремятся
занять положение, показанное на рисунке.
Рис. 2.145. Механизм привода печи с роликовым подом. Кривошипно-коро-
мысловый механизм ОАВС передает движение от редуктора 1 к штанге 5,
связанной с параллельными коромыслами 2. Движение роликам передается через
храповые колеса собачками 4.
Рис. 2.146. Схема механизма сбрасывателя со сталкивающими рычагами для
передачи металла с подводящего рольганга на холодильник. От коленчатого
вала 1, проходящего через всю длину холодильника, приводятся в движение
щитки б, которые с помощью подпружиненной тяги 2 поднимают полосу над
роликами 3 рольганга, а толкатели 4 сбрасывают ее на ходу в желоб настила 5
холодильника; 7 — электродвигатель ролика рольганга.
Рис. 2.147. Схема сталкивателя обрезков у ножниц горячей резки. При
вращении реечной шестерни 1 перемещается тележка 3 и с ней лапа 5,
сталкивающая короткие куски с суппорта нижнего ножа б. При обратном ходе в
результате набегания ролика 4 на копир 2 лапа поднимается, как это показано на
рисунке.
Рис. 2.148. Механизм реечного холодильника для охлаждения прокатанных
полос 5. Направляющие рейки 2 позволяют ей получить только
возвратно-поступательное движение. Направляющие рейки 4 имеют достаточный зазор по высоте
и позволяют ей при перемещении по горизонтали подниматься вверх или
опускаться вниз. Рейке 2 возвратно-поступательное движение сообщается шарнирным
механизлюм с кривошипом 1. Транспортирующая рейка 4 с захватами 8
приводится в движение с паузами при помощи выступов 3 и б. При движении рейки 2
влево захваты 8 поворачиваются по часовой стрелке и рейка 4 поднимается,
принимая на себя охлажденные полосы. После тою клк заъор ме.кчу выtтyпa^ш
3 и 7 реек 2 и 4 выбран, они перемещаются вместе. При оораиюм ходе захваты 8
Пгоские стержневые механизмы
101
Рис. 2.143
УУ^/Г/777/7ЩЩ////////Щ^
Рис. 2.144
Рис. 2.145
102
йвслья, кинематические пары и стерж}1евые механизмы
"0—0"©^ 0 0"
Рис. 2Д46
Рис. 2.147
Рис. 2.148
поворачиваются против часовой стрелки, и рейка 4 опускается, оставляя
охлаждаемые полосы на неподвижных направляющих. Затем, после того как зазор между
выступами 6 и 7 будет выбран, обе рейки перемещаются с одинаковой скоростью.
Число ходов механизма ограничивается появлением ударов после устранения
зазоров. Внизу показана конструкция захвата реечного холодильника.
Рис. 2.149. Рычажный механизм опрокидывателя стола формовочной машины.
Рис. 2.150. Укладыватель остывшего металла на холодильнике. Лотки 1 с
собранным в пачку металлом закреплены на оси сателлита планетарной передачи,
состоящей из трех колес одинакового диаметра. При повороте водила 2 на 180°
(колесо 3 застопорено) лоток 1 с металлом, совершая плоскопараллельное
движение, передает металл на рольганг.
Рис. 2.151. Схема роликового стана холодной прокатки тонкостенных труб.
Цапфы трех роликов 1 постоянного профиля опираются на профилированные
наклонные направляющие планки 2, смонтированные внутри полою корпуса 3,
установленного па катках 4. При ходе каретки вправо ролики, сближаясь, обжи-
Плоские стер,')к;иевые механизмы
103
r\"M-r-
Рис. 2.149
Рис. 2.150
Ход рабочей клети,
Рис. 2.151
104 Звенья, киле иатические пары и стерж:невые механизмы
мают конец трубы, при обратном ходе труба поворачивается вокруг своей оси
на 45 — 60°, подается вперед на 5—10 мм, и цикл повторяется. Механизм поворота
трубы на схеме не показан.
Рис. 2.152. Схема механизма передвижного упора, устанавливаемого за
ножницами и пилами для быстрой фиксированной остановки движущихся по
рольгангу прокатанных полос различной длины. При вращении винта ] каретка 2
упора перемещается вдоль рольганга. Упор б может быть опущен или поднят
с помощью двигателя, червячного редуктора и эксцентрикового вала 5 (рис. 2.152, а
и б). Чтобы предотвратить поломку упора при ошибочном его включении, когда
под ним находится полоса (рис. 2 152, в), в шарнирном механизме предусмотрена
кулиса 4, камень которой может свободно перемещаться, при этом ролик 5
опирается о полосу.
Рис. 2.153. Схема кривошипных ножниц с верхним резом. Штука 1 небольшой
толщины (30 — 60 мм) подается рольгангом слева. В процессе резания приемный
стол 2 с рольгангом опускается под действием веса отрезаемой полосы,
возвращается в исходное положение контргрузом 3.
Рис. 2.154. Схема ножниц с плавающим эксцентриковым валом и
механическим прижимом для разрезания блюмов и слябов. Суппорт 6 нижнего ножа
движется в вертикальных направляющих суппорта 1 верхнего ножа, который, в свою
очередь, перемещается в направляющих станины ножниц. На суппорте 1
смонтирован двухэксцентриковый вал 2, шейка А которого соединяется тягой 5 с
суппортом 6, а шейка Б — с рычагом механизма прижима 4, 7 — буфер. На
рис. 2.154, а показано исходное положение перед резанием, на рис. 2.154,6 —
опускание прижима 4, на рис. 2.154,6 — резание. При запуске двигателей
эксцентриковый вал 2 вращается вокруг центра шейки А и, так как АВ = СБ и ED =
= DO, то верхний нож 1 и прижим 4 опускаются с одинаковой скоростью.
После прижатия полосы к роликам рольганга верхний нож останавливается
и при дальнейшем вращении вала 2 вокруг неподвижной точки С нижний йож
смещается и штука разрезается. Далее нижний нож вместе с прижимом и с
зажатым между ними отрезанным металлом опускаются, нижний, а затем верхний
ножи и прижим занимают исходное положение. Максимальное усилие резания
1000 тс, привод от двух двигателей по 410 л. с, сечения разрезаемых блюмов
350 X 350 и слябов 200 х 900 мм.
Рис. 2.155. Ножницы для резки заготовок. Ползуны с ножами,
перемещающиеся в направляющих, получают движение от шарнирно связанных между собой
рычагов 6 и 7. При вращении коленчатого вала 2 вследствие наличия
сопротивлений сначала перемещается верхний ползун 1 до упора в разрезаемую заготовку.
Нижний ползун при этом остается неподвижным. При дальнейшем вращении
коленчатого вала начинает перемещаться нижний ползун 9, и происходит резание.
Система имеет две степени свободы, поэтому происходит изменение структуры
механизма.
При неподвижном нижнем ползуне работает механизм 2, 5, 5, 4, 7, 8, 6
и 10; при неподвижном верхнем ползуне работает механизм 2, 3, 4, 5, 7 и 9.
Справа показана кинематическая схема механизма ножниц.
Рис. 2.156. Схемы механизмов резания летучих ножниц.
Рис. 2.156, а — ползун 1 перемещается синхронно с движущейся полосой А. При
ее движении слева направо ножи Н и Н' сближаются, и полоса разрезается. После
разрезания полосы рычаги с ножами возвращаются в исходное положение (с
помощью пневмоцилршдра).
Рис. 2.156, б — схема, аналогичная схеме, показанной на рис. 2.156, а. Только
рычаг 2 заменен ползуном 2. Теперь боковой зазор остается неизменным,
а поворот ножей исключается.
IJsWCKue стержневые механизмы
105
J г 1
^-Ф-Ф-Ф Ф Ф Ф-Ф
П
й
-Ф-Ф-Ф-Ф-Ф-Ф
'^ . —©Г
^^^
фнф^^:^^Ф=Фф-
Рис. 2.152
Рис. 2.153
Рис. 2.154
Рис. 2.156, в — показано развитие предыдущей схемы, однако здесь не
исключается поворот ножей относительно полосы.
Рис. 2.156, г — девятизвеннпк 1, 2, 3, 3', 2', Г, 4, 5 с двумя кривошипами 1
" 1, при изменении скорости которых изменяется длина разрезаемых кусков.
Рис. 2.157. Схемы механизмов резания летучих ножниц с двумя кривошипами
"1', с поступательным движением ножей Я и Я', связанных звеньями 2 и 3.
Рис. 2158. Три схемы эксцентриковых летучих ножниц с двумя ведущими
веньями 1 и Г. Ножи Я и Я' укреплены на шатунах четырехзвенников i, 2,
3, 4 и i', 2\ 3\ 4\
Рис. 2.159, Схемы механизмов резания летучих ножниц, выполненные в виде
двоенного кривошипного механизма 1, 2, 3, 4, 5. Выбором размеров звеньев можно
менять траекторию движения верхнего ножа. Привод может быть кривошипный
^'^) и кулачковый (б).
Рис. 2.156
Рис. 2.157
Плоские стерлспевые механизмы
107
Рис. 2.158
Рис. 2.160
Рис. 2.160. Схема двухбарабанных летучих
ножниц, отличающихся уравновешенностью и
простотой. Движущаяся по рольгангу полоса 1 проходит
между ножами Н и Н\ вращающимися вместе
с барабанами 2 и 3, и в момент их встречи
разрезается. Ножницы применяются преимущественно
па непрерывных мелкосортных и штрипсовых
станах.
Рис. 2.161. Схема маятниковых летучих ножниц.
^г двухэксцентрикового вала 1 ножи Я и Я'
солижаются и разрезают полосу 2, при этом оба
ножа поворачиваются вокруг неподвижной оси
'Эксцентрикового вала в сторону движения полосы
возвращаются в исходное положение пружиной 3. Применяются при скорости
полосы не более 1,5 м/с.
ПС. 2.162. Схема рычажнокачающихся паровых (или пневматических) летучих
^^олчниц. В направляющих на коромысле 2 (рис. 2.162, а\ несущем суппорт нижнего
^^^^*а, перемещается суппорт 3 верхнего ножа, шарнирно соединенный шатуном 4
иач"^^°^^"^ ^ первого (пневматического) цилиндра бис коромыслом 1. Перед
отк-ю^^^ резания (положение 1) в просвет между ножами проходит заготовка,
после"^^^ флажок, включающий распределитель пара (воздуха), поступающего
суппопт^?^"^*^™^ сигнала в верхнюю полость цилиндра 6. В результате этого
Р •> перемещается вниз, отклоняя коромысла 1 п 2 влево. Теперь ножи
Рис. 2.161
108
Звенья, кинематические пары и стержневые механизмы
Траектория
JT дерхнего нота
vJt'чЭ" чЭ"
Металл
Траектория
ни того но/на
Рис. 2.162
сблизятся и разрежут на ходу полосу (положение //). При дальнейшем движении
поршня вниз верхний суппорт отклоняется влево полосой (положение ///), а ножи
возвращаются в исходное положение в результате подачи пара (воздуха) в
нижнюю полость цилиндра б.
На рис. 2.162,6 показаны траектории ножей для положений I—III.
Сечение разрезаемой полосы — до 100 х 1000 мм при скорости полосы — до 4 м/с.
Рис. 2.163. Схема механизма однобарабанных летучих ножниц для
мелкосортных станов. Шарнирно связанные с барабаном 4 рычаги 2 несут ножи 1, Ролики 3,
установленные в неподвижных направляющих, в момент реза непрерывно
движущейся полосы воздействуют на рычаги, в результате чего ножи сближаются.
Расстояние между роликами 3 регулируется. На рисунке в пределах механизма ножниц
полоса не показана.
Рис. 2.164. Конструкция однобарабанных летучих ножниц для пореза круглых
и угловых профилей. Заклиненный на вращающемся валу 1 барабан 2 несет
рычаги 3 с ножами б, раздвигаемыми пружиной 8. Справа и слева от барабана
по неподвижным осям 5 могут перемещаться ролики 4, которые, опускаясь
посредством электромагнита, сближают в момент реза клинья 7 с ножами б. Через
определенное число оборотов барабана, соответствующее заданной длине полосы,
счетчик оборотов на валу редуктора привода ножниц подает сигнал на включение
электромагнита. *
Рис. 2.165. Схемы механизмов пропуска реза летучих ножниц. Длину
отрезаемого куска прокатанной полосы увеличивают, уменьшая среднюю скорость
кривошипа механизма реза при неизменной скорости полосы, а кратность длин
получают при пропуске реза. Равенство скоростей ножей и полосы в момент реза
достигается с помощью уравнительных механизмов с неравномерно движущимися
ведомыми звеньями при значительных инерционных нагрузках. В двухбарабанных
ножницах (рис. 2.165, а) неравные угловые скорости ножей подбирают так, чтобы
при равенстве окружных скоростей ножи встречались через два, три и т. д.
оборота ведущего звена. В эксцентриковых ножницах коромысла 3 и 3\ приводимые
от кривошипов 1 и V п шатунов 2 и 2', присоединяются к раме 8 механизма
4, 5, б, 7 пропуска реза (рис. 2.165,6). В верхнем положении рамы происходит
рез, в нижнем — пропуск. Если диапазон длин разрезаемых кусков велик, то
механизм пропуска реза 4, 5, б, 7, 8, Р, 10, 11 делают сложнее (рис. 2.165, в). Резы
Плоские стержпесые механизмы
109
Рис. 2.163
Рис. 2.164
можно пропускать также в случае, если опоры ведущих звеньев 1 и Г (рис. 2.165, г)
будут вращаться внутри эксцентрических вт>'лок (звенья 4 и 4'), в ту же сторону,
что и крршошипы 1 и Г или в противоположном направлении. Комбинируя
значения угловых скоростей кривошипов и втулок, можно получить один, два, три
и более пропусков резания. Ножи Н и Н' связаны с кулисами 2 и 3.
Рис. 2.166. Схема механизма пропуска реза двухбарабанных ножниц ЦНИР1ТМАШ.
Ведущие звенья 1 и Г посредством поводков 2 и 2' сообщают движение бара-
оанам 3 и 3' с заклиненными на них ножами Н и Н'. При вращении
добавочных кривошипов 4 и 4' осуществляется пропуск реза.
Рис. 2.167. Схема механизма пропуска резов летучих ножниц. От упора 2,
закрепленного на барабане 1', посредством рычага 3 приводится в движение
ь^улак 4, поднимающий раму 5 и вместе с ней верхний барабан с ножом.
Рис. 2.168. Схема двухбарабанных летучих ножниц для мелкосортных станов
^ пропуском реза. Полоса 1 задается от подающих роликов в барабаны 3,
оснащенные ножами, получающими вращение от главного двигателя через редуктор,
шпфу 5, зубчатые колеса 6 и серьгу 4. Механизм пропуска реза приводится
^действие от отдельного двигателя посредством эксцентриковых валов 7 и зуб-
-1тых колес 2. Требуемое соотношение угловых скоростей барабанов соб и эксцен-
^Г'Иковых валов щ обеспечивается элеьстрической связью двигателей. Ножницы
2, то будет один
раоотают без пропуска реза при 3_ ^ j ^ Если
пуск реза и отрезаемая длина удваивается.
no
Звенья, кинематические нары и стер.жиевые механизмы
Рис. 2.165
J'
^ V
! -^-2' I
Рис. >.166
Рис. 2.167
/1-А
Рис. 2.168
Плоские cmcpjKHcehie механизмы
III
Рнс. 2.169
Рис. 2.169. Упрощенная схема летучих
ножниц с двухкривошипным механизмом
выравнивания скоростей ножей и полосы
в момент реза. Эксцентриситет е между осью
вращения двухкривошипного вала и осью
вращения кулис 5, 4 регулируется. Ecjhi
требуется увеличить длину разрезаемых
кусков, то частоту вращения п ведущей кулисы
4, приводимой от двигателя 6 и коробки
скоростей 5, уменьшают и подбирают
эксцентриситет е так, чтобы мгновенная угловая
скорость барабанов в момент реза
увеличилась, а линейная скорость ножей
приближенно равнялась бы скорости полосы. (1 —
подающие ролики; 2 — ножницы).
Рис. 2.170. Схема кривошипных летучих
ножниц с радиальным выравниванием
скоростей. Ножевые суппорты 2 свободно
посажены на шейки покоящихся в эксцентричных
втулках 1 коленчатых валов 3, связанных
универсальными шпинделями 4 с двумя
двигателями. Направляющая штанга 7, про-
обеспечивает поступательное движение
ходящая через вхулки суппортов 2
1ЮЖСЙ.
Эксцентриковые втулки 1 приводятся во вращение через зубчатую передачу 6
того же редуктора, что и коленчатые валы 3. Наибольшая д.аина кусков будет
отреза 1ься, если эксцентриситеты е втулок 1 и коленчатых ва.чов 3 совпадаю!
но направлению и тогда радиус R траектории ножей J^^iax = '' + ^'•
Рис. 2.170
112
Звенья, кинематические пары и стержневые механизмы
Наименьшая длина кусков получится, если втулки /
повернуть на 180°, когда R^^^ = г - е. Положение
втулок 1 регулируется при вращении винта 5 червячной
передачи. Поворотом двухкривошипного вала 8
механизма пропуска реза можно периодически раздвигать
корпуса втулок 1. Если cog меньше соз в 2, 3, 4 раза,
то ножи встречаются при каждом втором, третьем
или четвертом оборотах. При —^- — —г наибо$1ьшая
сОз 4
длина разрезаемых кусков И м.
Рис. 2.171. Схема кривошипно-рычажных летучих
ножниц для холодной резки листовых полос с
механизмами пропуска реза и выравнивания скоростей.
Два навстречу вращающихся коленчатых вала несут
суппорты I (с нoжa^ш), шарнирно соединенные с
серьгами 2 (/2 > Ti), подсоединенными к раме 5.
При разрезании кусков длиной 3 — 6 м ножницы
работают с пропусками реза при каждом втором
обороте, для чего рама 3 опускается с помош,ью
рычагов 4^ приводимых в движение от кривошипного
механизма, вращающегося со скоростью, вдвое
меньшей чем скорость ножниц.
При опущенной раме ножи не встречаются.
Ножницы снабжены механизмом выравнивания скоростей
(см. рис. 2.169).
Phic. 2.172. Схема кривошипного трубного пресса переменной структуры.
Фаза I — вращением к-ривошипа опускаются прошивной пуансон / и штеьшель 3
до соприкосновения последнего с заготовкой 2.
Фаза II - штемпель неподвижен, пуансон прошивает заготовку.
Рис. 2.171
Рис. 2,172
Плоские стержневые механизмы
113
фаза 1И — пуансон и штектель опускаются вместе, выдавливая горячий металл
яготовкй в кольцевую щель между п}ансоном и матрицей.
фаза IV — пуансон поднимается, штемпель выстаивает в нижнем положении.
фаза V — пуансон и штемпель, опирающийся на упоры 4, поднимаются.
фаза VI — дальнейший подъем п}ансона и штемпеля, ролики 5 контактируют
с копиром 6.
Рис. 2.173. Механизм шагания экскаватора с переменной структурой и с
заданным относительным движением звеньев: я — момент переноса подвешенной на
шa^^нe 2 лыжи 5 посредством четырехзвенника 7-2-5-4 — корпус экскаватора
неподвижен и служит стойкой; б — начало перемещения экскаватора, лыжа 5
юси\лась грунта (перемена структуры); в — момент переноса корпуса экскаватора
и соотвстств}Ю1цая этой фазе кинематическая схема.
Рис 1174. Схема манипулятора -обжимного стана, с односторонним ^располо-
леиием привода. Со штангами 3, перемещающимися посредством реечных
приводов 2, связаны с помощью клиньев 6 линейки 12 манип}лятора, сблоченные
с пpeдoxpaнитeльны^ш сменными плитами 13. Манипулирование слитков возле
валков осуществляется пoдпpyжинeнны^щ линейками 9- шарнирно соединенными
с основными. Линейки фиксируются фиксаторакш И. Штанги 3 опираются на
тележки 5, защищенные щитками 8, 2 и 7 — аварийные }поры, планки 4
обеспечивают для штанг 3 тепловую защит}', iO — пружины.
Рис. 2.175. Схемы кантователей блюминга и слябинга крюкевого типа. В направ-
1ЯЮЩИХ пазах одной из линеек 1 манип\лягора поворотом вала 2 с пo^ющью
звеньев 3 w 4 могут перемещаться крюки 6 (рис. 2.175, л), нижняя часть которых
размещается между роликами рольганга При подъеме крюков заготовка 5 кан-
т\етсл на 90^ отгюсителыю се ребра. В кантователе пapaллeлoгpaм^п^oгo типа
(рис 2 175, 6) от кривошипа 1 с пo^ющью параллелограмма 2 поднимается
плита 3, по которой перекатываются ролики 4 тележки. Рычаги 6, укреплегшые
на линейке 5 манипулятора, сообщают поступательное движение крюкам,
выполняющим кантование.
Рис. 2176. Крюковый кантователь с раздельным выполнением операций
кантоьки и манипулирования, используемый на устаревших станах, крючья 5
'■^/^v/^^/^^h\w/:^yA'^//^
в) Jy
Рис. 2.173
114
Звеньч, кинематические пары и стержневые .механизмы
^/////У/УУ/////?////] [^/7////7/////а
^^=^5Ф-
Ва/^А
Q
(У-
'■^^^^
Рис. 2Л74
С ]!
Й:=1
il
1^^
а-; '///////Ш/////////////л б)
Рпс. 2.175
Рис. 2.176
П locKue cmejutcneebie механизмы
115
-чнтовагеля вместе с приводом 2 — :> и кулиснорычажпои системой смонтированы
а правой линейке 4 манипулятора. Линейки 1 приводятся в движение от отдельных
зубчато-реечных приводов.
рис. 2.177. Кантователь блюминга, содержапдий защиту рычажной системы
от аварии, которая могла бы произойти при опускании крюка на слиток для
повторной кантовки. В схеме предусмотрено звено 1, которое позволяет
опускающемуся крюку 2 перемещаться в пазах линейки.
Рис. 2.178. Механизм для кантования слитков: л — конструкция механизма;
^-кинематическая схема. Коленчатый вал 7 приводится в движение
электродвигателем и через шатун 2 сообщает колебательное движение рамке 3 реечного
тифференциала. При этом зубчатое колесо 4, обкатываясь относительно
неподвижного зубчатого колеса 5, перемещает рейку 6, вследствие чего крюки 7 кантователя
поднимаются или опускаются. Зубчатое колесо 8 передает двртжепие дифференциалу,
который кинематически связан с зубчатыми колесами 4 w 5 и линейкой
манипулятора.
Рис. 2.179. Механизм для кантования болванки, заготовки и различных сортов
профильного материала: а — эскрп; 6 — кинематическая схема. При повороте вала 1
на некоторый угол вертикальная и горизонтальная стороны угольника 2 принимают
соответственно горизонтальное и вертикальное положения. При повороте угольник 2
опирается роликами 5 на вертикальную стенку направляющей.
Ш/>////////////Ш/?777777Г/
Рнс. 2.177
116
Звенья, кинематические пары и стержневые механиз иы
Рис. 2л 79
Рис. 2.180. Крюковый кантователь,
в котором для гашения толчков,
вызванных работой кантователя, использована
канатная передача или канат взамен
жесткого звена. Канатная передача 1
может быть применена при монтаже части
привода на линейке (рис. 2.180, б) на
фундаменте (рис. 2.180, ^/).
Рис. 2.181. Схема кантователя листов
при их осмотре. Поворотом спаренного
кривошипа 3 (или зубчатых секторов)
лист 1 сначала поднимается, затем
захватывается сближающимися рычагами 2 и
перекладывается вправо.
Рис. 2.182. Схема гидрофицированного манипулятора, в котором неподвижный
плунжер 2 цилиндра 3 рабочего хода служит цилиндром плунжера 1 обратного
хода, а подвеска линеек 4 выполнена на спаренных лямбдообразных механизмах
(рис. 2.182, а). Необходимость применения быстроизнашиваемых реечной передачи,
направляющих, катков, ползунов и т. д. отпадает. При ходе манипулятора L = 480 мм
и заданном уклонении линеек А = + 1,5 мм (рис. 2.182, б) размеры звеньев
Рис. 2.181
находятся так:
Л
г = ра;
/=у(3
Р),
где р и Л определяются через параметр р —
2-1,5
2А
L
Для рассматриваемого случая р
480
0,00625 и по табл. Г. Г. Баранова
(см. Г. Г. Баранов. Курс теории механизмов и машин. Изд. 4-е, М.,
Машиностроение, 1967)
р = 0,58* Л - 2,6, откуда а = 185 мм;
г — 107 мм; I — 224 мм.
Рис. 2.183. Схема кантователя, лишенная обычных крючьев, в которой
надежность кантовки раскатов прямоугольного сечения различной высоты при
минимальном перемещении линеек манипулятора обеспечивается стержневой системой с двумя
Плоские стержневые механизмы
117
В цилиндр одратного хода
Г 1 ^
Рис. 2.183
118 Звенья, кинематические пары и стержневые механизмы
степенями свободы с угловым исполпихсльпым звеном, совершающим возвратно-
вращательное движение с углом 90°. Кантовка слитка осуществляется при повороте
кантующего уголка, приводимого в движение от ги/^роцилиндров 1 и 2,
регулируемых дросселями 3 и 5 и золотником 4. Соотношение скоростей плунжеров
гидроцилиндров 1 1л 2 должно удовлетворять равенству
1-М1+ '^^
tg9
где k = - -~— коэффициент высоты слитка.
4В
Знак плюс принимать при к < 1, знак минус при к> L Углы а и ф показаны
на рисунке.
Рис. 2.184. Схема механизма опрокидывания слитков на приемный рольганг
блюминга (без использования слитковоза). После загрузки слитка (рис. 2.184, а)
клещевым краном в люльку-опрокидыватель 1, опирающуюся на амортизаторы 5,
с помощью четырех плунжерных цилиндров 6 и реечной передачи поворачивается
вал 5. Опрокину! ый с.ииток (рис. 2.184, б) отводится рольгангом к стану,
а люлька гидроцилиндрами возвращается в исходное положение, В
горизонтальном положении люлька не препятствует проходу через нее слитка со стороны
слитковоза к стану, так как днище 4 люльки может отклоняться слитком,
поворачиваясь вокруг оси 2 в положение А.
Рис. 2.185. Схема роликового манипулятора для сортовых станов. Ролики 2
приводятся в движение гидроцилиндром 4 и в нерабочем положении опускаются
ниже уровня рольганга. При подъеме и сближении роликов 2 полоса 3
захватывается, и манипулятор (вместе с кантователем) посредством реечной передачи 1
передвигается в поперечном направлении.
Рис. 2.186. Схема роликового кантователя, устанавливаемого на подъемно-
качающсхмся столе крупносортного стана. Кантующий механизм состоит из роликов
3 и 4, поворачиваемых гидроцилиндрами 6 и 8, смонтированными на раме 9,
перемещаемой по вертикали гидроцилиндром 7 подъема корпуса кантователя.
Рычаг ролика 3 соединен с рамой 9 шарниром '2 и управляется цилиндром 8.
Рычаг ролика 4, управляемый цилиндром б, укреплен на рычаге ролика 3
с помощью шарнира 5. Кантователь перемещается рейкой 1,
На рисунке изображены следующие положения кантователя: а — нерабочее;
б — перед захватом; в — захват с одновременным горизонтальным перемещением
кантователя; г —канговка; () —раскрытие роликов. Недостаток схемы в том, что
вследствие углового сближения роликов надежное соприкосновение их с полосой
имеет место только при фиксированной толщине полосы.
Рис. 2.187. Захват1юе приспособление для подъема изделий со сквозной
щелью: а — положение звеньев при введении (удалении) в сквозную щель; б —
рабочее положение подъема. С тягами 2 шарнирно соединены скоба 3 и рукоятка 1
для крюка подъемника.
Рис. 2.188. Механизмы тканеукладчика.
Рис. 2.189. Ручной шарнирно-рычажный зажим. При повороте рукоятки 1
вокруг оси 6, связанной с кронштейном 7, перемещается соединенная с
рукояткой / шарниром 3 серьга 2. Последняя, соединенная с помощью шарнира 4
с планкой 8, поворачивает ее относительно оси 5 кронштейна 7. При дальнейшем
повороте рукоятки после прохода серьги через мертвое положение зажим детали
под болтом 10 оказывается запертым. Зажим регулируется гайкой Р.
—цЩВ
^ Урод'^иь
Рис. 2.184
Рис. 2.185
Рис. 2.186
Рис. 2.187
Рис. 2.188
/ОЛ
//^
Щ #№
Рис. 2.190
Рис. 2.191
/ «
ttfeT^
Подаш
Рис. 2.192
пространственные стержневые механизмы
121
Рис. 2.193
Рис. 2190. Байонетный зажим. Стержень 1 с нажимным наконечником 4
снабжен канавкой, куда входит хвостовик шпильки 3. При смещении стержня Л
влево и повороте его рукояткой 2 хвостовик входит в спиральный паз с малым
углом наклона. После соприкосновения наконечника 4 с зажимаемой деталью
создается усилие зажима, которое сохраняется вследствие самоторможения. Зажим
применяется при малых зажимных усилиях.
Рис. 2.191. Пневматический зажим. В корпусе цилиндра, состоящем из
штампованных половинок 1 и 2, стянутых болтами 3, размещается эластичная диафрагма 4,
к которой крепится тарелка 5 штока б. При впуске воздуха в левую полость
диафрагма прогибается, толкает шток, осуществляя зажим изделия. При выпуске
воздуха под действием пружин 7 и S диафрагма возвращается в исходное положение.
Рис. 2.192. Схемы механизкюв зажима материала: а — подвижная плашка 1
приводится от кулачка 2 и рычагов 3 я 4; б — колено-рычажная схема; плашка 1
приводится от^ кулачкового механизма 2, 3 и рычагов 4, 5; в—г —зажимная
плашка приводится в движение вместе с кареткой подачи с помощью
многозвенного стержневого механизма.
Рис. 2.193. Схемы механизмов подачи материала (проволоки, прутка, полосы
п ленты): а — с помощью желобчатых роликов; б — плоскими цангами, шариковыми
цангами (схема в\ управляемыми зажимными планками (схема г), клещами
(схема д).
ПРОСТРАНСТВЕННЫЕ СТЕРЖНЕВЫЕ МЕХАНИЗМЫ
Рпс. 2.194. Схема механизма косой шайбы. Шайба 2 вращается на крсом
колене 3 коленчатого вала. Палец 1, скользящий в неподвижном пазу, позволяет
^аибе совершать вращение вокруг оси, совпадающей с осью пальца, и оси,
^^рпендикулярной плоскости рисунка.
1*ис. 2.195. Качающаяся шайба с косым кривошипом. Стержень 2 соединен
ведущим конусом i, который является кривоЩипом.
-Рис. 2.196. Качающаяся шайба с косым кривошипом,
ва ^^' 2-197. Механизм челнока швейной машины. При вращении коленчатого
^3 звено 2 с направляющи\ш плоскостями качается вокруг вертикальной
^ и сообщает колебательное движение коромыслу L
122
Звенья, кинематические пары и стержневые механизмы
Рис. 2.194
Рис. 2.195
Рис. 2.196
Рис. 2.197
Рис. 2.198
Рис. 2.198. Передача движения в двигателе со встречными поршнями от
поршней к валу через наклонную шайбу 1. Движение поршней происходит по
синусоидальному закону.
Рис. 2.199. Передача, состоящая из цилиндрических зубчатых колес с большим
углом наклона зуба, позволяющая получать большие передаточные числа.
Применяется в центрифугах, сепараторах и т. п. Ведущий и ведомый валы I и II могут
быть расположены перпендикулярно и под углом один относительно другого.
Рис. 2.200. Соосная червячная передача, состоящая из трех червячных пар.
Позволяет получать большие передаточные отношения. Если червяки и колеса
одинаковы, то
-т-
Рис. 2.201. Механизм картофелекопалки.
Рис. 2.202. Привод мешалки. Верхний конец мешалки 1 проходит сквозь
косое отверстие в кривошипе. Мешалка укрепляется на качающемся валу 2.
Рис. 2.203. Механизм тестосмесительной машины с траекторией точки й
шатуна 1, соответствующей контуру дежи 2. Перемешивание по всему объему
пространственные cmepotcneebie механизмы
123
остпгается при вращении дежи 2 посредством червячной передачи. Червячное
Q^QQO 3 закреплено на валу тележки 4.
рис. 2.204. Схема тестосмеси гельной машины «Стандарт». Пространственный
механизм месильного органа 1 с шаровым шарниром 2, встроенным в червячное
о^есо 3, обеспечивает перемешивание по всему объему дежи в процессе ее вращения
01 носит ельно оси, установленной на тележке 4.
рис. 2.205. Четырехзвенный просгранственный механизм петлите л я предназначен
Д1Я воспроизведения заданной траектории точки В звена 3 па цилиндрической
поверхности; звено 3 может совершать вращательное и поступательное движения
относительно неподвижной направляющей, поэтому точка В будет всегда находиться
пг ии]ишдрической поверхности. Звенья 2 и 3 связаны сферическим пшрииром Л.
Звено можег только вращаться относительно косого колена коленчатого вала 1.
Рис. 2.200
Рис. 2.201
Рис. 2.202
Рис. 2.203
124
Звенья, кинематические пары и стержневые механизмы
Рис. 2.204
Рис. 2.206
Рис. 2,207
Рис. 2.206; Сферический механизм для передачи движения между валами
с пересекающимися осями. Звенья 1, 2 и 5 со стойкой образуют сферический
механизм, а звенья 4,5 — двухподковую пространственную группу с лишней связью.
Рис. 2.207. Четырехзвенный пространственный механизм, служащий для передачи
вращательного движения между валами со скрещивающимися осями. Допускает
неточность монтажа. Плоскости вращения кривошипов I и 3 ^югyт быть
расположены под любым углом; 2 — шатун.
Рис. 2.208. Конструкщ^я механрома, изображенного на рис. 2.207. Шатун 2
с кривошипом 1 и коромыслом 3 соединяются с помощью шаровых шарниров.
Свободное вращение вокруг оси, проходящей через центры шаров, при больших
скоростях машины должно быть устранено введением кинематической пары
четвертого класса (см. рис. 2. 38).
Рис. 2.209. Механизм игловодителя стегальной машины. Движение игле
сообщается механизмом, изображенным на рис. 2.208.
Рис. 2.210. Механизм петлите лей двухигольной швейной машины двухниточного
цепного стежка. Косой кривошип через промежуточное звено 1 сообщает движение
петлителям 2 и 5, соединенным со стойкой с помощью цилиндрической пары.
Пространственные стержневые механизмы
125
Рис. 2.208
Рис. 2.209
Любая точка петлите лей описывает траекторию на цилиндрической поверхности.
Рис. 2.211. Трехзвенный пространственный механизм с двумя цилиндрическими
парами i, 2 и одним шаровым шарниром 5. Кривошип 1 вращается и
перемещается вдоль оси.
Рис. 2.212. Четырехзвенный пространственный механизм с двумя цилиндри-
'1ескими 2, 3 и одним шаровым 1 шарнирами.
Рпс. 2.213. Шасси самолета. Четырехзвенный пространственный механизм
с одной поступательной 1, одной цилиндрической 2 парами и двумя шаровыми
^^^^pниpaми 3, 4. При перемещении звена 1 шасси самолета убирается в плоскость
^'рыла.
Рис. 2.214. Шасси самолета. Четырехзвенный пространственный механизм
^ одной поступательной 1, одной цилиндрической 2 парами и двумя шаровыми
^^'^Р^"Рами 3, 4. Поступательная пара, выполненная в виде цилиндра с поршнем,
позволяет изменять расстояние между центрами шаровых шарниров.
Рис. 2.215. Механизм швейной машины. Коленчатый вал сообщает движение
коромыслу 1 посредством четырехзвенного механизма (см. рис, 2.207) и звену 2 — по-
РедстБом пространственного кулисного механизма, т. е. задается и перемещение
126
Звсньч, кинематические пары и стержневые лгсханизмы
Рис. 2.211
Рис. 2,210
Рис. 2.212
Рис. 2.213
1
Рис. 2.214
Пространственные стержневые механизмы
127
Рис. 2.216
1
1
1
1
^ г
Т11
1 11
1 ' 1
11
п
''}/////////////}/. 'Т//////////УЛ
Рис. 2.218
Рис. 2.217
Рис. 2.220
точки А, и мгновенное положение оси вращения звена 2. В результате сложения
двух движений точку А можно заставить перемещаться по пространственной
траектории по форме, близкой заданной (вследствие этого механизм называют
пространственным дифференциальным). В механизме имеются две лишние степени
свободы, не отражающиеся на законе движения точки А, Они определяют
возможность независимого вращения шатунов 5 и ^ вокруг осей, проходящих через
центры шаровых шарниров В я С звена.
Рис. 2.216—2.217. Косой ^кривошип. Для предупреждения поворота шатуна 3
^еобходима направляющая *2. В точке 1 следует поставить шаровой шарнир.
По структуре совпадает с механизмом по рис. 2.212. Применим для передачи
возвратно-пос1упательпого движения в направлении, параллельном оси вращения
Рис. 2.218. Пространственный, кривошипный механизм, преобразующий враща-
ельное движение кривошипа 1 в колебательное движение коромысла 2.
■* ис. 2.219.. Пространственный кривошипный механизм, преобразующий враща-
J '*^^^ное движение вокруг оси 00 во вращательное движение вокруг оси О^О^;
' р~~ -^Р^^^ошипы; 2 — шатун.
д ^ ^^^* 2.220. Сферический четырехзвенный шарнирный механизм. Оси всех цилин-
^iccKHx шарниров 1,2, 3 к4 пересекаются в одной точке М, поэтому скольжение
128 Звенья, кинематические пары и стержневые механизмы
звеньев вдоль осей исключено. Каждая точка звеньев а,Ь и с описывает траекторию
на сфере. При увеличении радиуса сферы до бесконечности сферический механизм
обращается в плоский шарнирный четырехзвенник.
Рис. 2.221. Сферический механизм с плоской диадой позволяет преобразовывать
вращательное движение вала 1 в поступательно-возвратное ползушки 2 вдоль оси
вала 1. Оси АО, ОВ и ось вала 1 должны пересекаться в одной точке.
Рис. 2.222.. Коленчатый вал с косыми кривошипами. Вал приводится во
вращение попеременным поворотом рукояток 1 и 2. Механизм представляет собой
последовательное соединение сферических механизмов. *
Рис. 2.223. Модификация сферического механизма. Звено с механизма,
изображенного на рис. 2.220, заменено шаром 1; 2 — вал; 2 — кривошип.
Рис. 2.224. Сферический механизм с трехповодковой группой /, е, с, d.
Цифрами 1, 2, 5... обозначены оси шарниров.
Рис. 2.225. Пространственный механизм сита. От кривошипа 1 сообщается
пространственное движение ситу 2. Точка В описывает кривую, расположенную на
сфере с центром в точке О^. Оси шарниров С, Д О2, О4, если цепи заменить
жесткими звеньями, должны пересекаться в точке 0^.
Рис. 2 226, Механизм двигателя с косой шайбой 2. Поршни 1 перемещаются
по синусоидальному закону.
Рис. 2.227. Схема механизма передачи движения от поршней 1 к коленчатому
валу 2 посредством косых кривошипов и качающихся шайб 3 двигателя со
встречными поршнями.
Рис. 2.228. Двигатель с косым кривошипом 1 'и кулисными направляющими 2.
Рис. 2.229. Качающаяся шайба с автоматически регулирующимся наклоном
и величиной амплитуды качания в зависимости от величины нагрузки. Шариковый
подшипник 5 шайбы соединен с валом 3 двумя шпильками 4, скользящими
в прорезях 2 вала под действием пружины 1.
Рис. 2.230. Пространственный механизм петлителя стегательной машины.
Ловящая вилка 1 на шатуне захватывает после прокола иглой нитку и переносит
ее навстречу игле, которая проходит сквозь образовавшуюся петлю.
Рис. 2.231. Кардан М. И. Лысова, лишенный избыточных связей. Ролик
сферический, а желоб цилиндрической формы. Римскими цифрами показано число
условий связи, вносимых каждой кинематической парой. Из двух степеней свободы
одна лишняя — это вращение шарика относительно направляющей.
Рис. 2.232. Угольниковая передача. Механизм с пассивными связями. Валы 1, 2
с взаимно перпендикулярными осями вращаются с постоянным передаточным
отношением.
Рис. 2.233. Механизм петлителя швейной машины с двухниточным цепным
стежком. Продольное перемещение (качание) петлителя 1 осуществляется четырех-
шарнирным пространственным механизмом 2, 3, 4, а поперечное отклонение —
плоским кулисным механизмом, который на рисунке не показан.
Рис. 2.234. Механизм холодильника для прокатного металла. Остывающие
полосы металла находятся на рейках 1 с зубчатой поверхностью. Рейки через одну
прикреплены к балкам 2 я 3. Балки попарно соединены траверсами 5 п 4,
установленными на стойках б, 7, 9, 10. Т-образные рычаги 11, шарнирно
присоединенные к стойкам, могут поворачиваться относительно горизонтально
расположенных осей 12, при этом одна система реек поднимается с одновременным
перемещением вперед, другая — опускается и одновременно перемещается в
обратном направлении. В горизонтальном направлении каждая система реек получает
движение от вертикального вала 13 посредством тяг 8. Вал 13 я Т-образные
рычаги 11 получают движение от одного общего вала через два кривошипа,
расположенные под углом 90°, и шатуны 14, 15 и 16.
Пространственные стержневые механизмы
129
Рис. 2.221
Рис. 2.222
Рис. 2.223
Рис. 2.224
Рис. 2.225
•^ Ko.fCDHIIKOB И др.
130
:1венья, кинематические пары и стгржнееыг механизмы
zzzzzzzz2z:^77^2zz:?zzJг77]
, .i^^s^5ss>s:^
Z^^ZZZZ
Рис. 2.227
Рис. 2.228
Рис. 2.130
Рис. 2.231
Рис. 2.232
Прост.ранственные стерлсневые механуз.^
131
Рис. 2.233
Рис. 2.234
132 Звенья, кинематические пары и стержневые механизмы
ВИНТЫ и ВИНТОВЫЕ МЕХАНИЗМЫ
Винтовые механизмы необходимо отнести к пространственным, потому что
каждая точка звеньев описывает пространственную траекторию. Винтовые
механизмы отличаются тем, что на каждое их звено наложены общие ограничения,
а именно: устранена возможность поступательного движения вдоль двух осей
координат и вращения вокруг этих же осей, т. е. каждое звено может совершать
и осту на тельное и вращагельное движение вокруг одной и той же оси. В соотвйт-
С1вии с эгим согласно классификации И. PI. Артоболевского число звеньев и
кинематических пар должно удовлетворять условию
W ^2п-р,
гче W- число степеней свободы; п — число подвижных звеньев; р — число винтовых
кинематических пар.
Простейший винтовой механизм пмеет два подвижных звена: п = 2, р~Ъ
при W - \. Винтовой механизм можно усложнить, присоединяя пулевую группу
{п '-- 1, V - 2).
Относительное движение звеньев винтовой нары представляет собой вращение ((р)
звеньев вокруг оси нары и нос тупа 1ельное движение (S) вдоль оси нары, которые
связаны между собой равснсхвом
2к
где S — шаг винтовой пары.
Линейная скорость v и угловая скорость со связаны равенством
со
V = 5——.
2к
Относительные перемещения и относительные скорости звеньев винтового меха-
тшзма,. например, по рис. 2.246, связаны выражением
5зф23 = 5l9l3 + 52Ф21 И Ф23 = ф13 + ф21,
где 5i, 52, 5:3 — шаги винтовых линий; фхз, ф2ь Ф2з — относительные углы поворота
5з%3 = SiC0i3 + ^20)21
и
С023 = C0i3 + G)2l.
Отсюда
^ _5^1_3_ ^ ^Ъ - ^2 _ Ф13
С023 Si - 52 Ф23
нсремен^сние ведомого звена
^ Ф23'^3 ^ ф 13^^21-^3 ^ Д^1 - ^2 5зф2
^^ 271 271 5з - 52 271; *
Рис 2 235. Цилиндрически!! винт с переменным шагом s и углом подъема
резьбы. Скорость пepeмeи^eния шта1ии 1 зависит от угла поворота винта 2 и его
} гловой скорости.
Гис 2 236 Гайка, сос1авлеипая и? лв>'Х частей. Между час1ями 7 и 2 гайки
}С1аиов.1ена спиральная нр}жина J, коюрая увеличивает ipenne между ви1ками
-77?77777///////////У////Г
Рис. 2.235
Рис. 2.237
^'JC. 2.239
Рис. 2.240
Рис. 2.241
134
Звенья, кинематические пары и стерлсневые *лехаиизмы
6)
резьбы винта и гайки, компенсирует износ витков резьбы в осевом направлении
(устраняет люфт), более равномерно распределяет нагрузку между витками.
Рис. 2.237. Плоская резьба^нарезана по спирали на торце конического колеса 2
в кулачковом патроне токарных станков; / — приводное зубчатое колесо.
Рис. 2.238. Винтовой механизм переключения. При вращении винта 1 происходит
одновременное перемещение гайки 2 и вращающейся детали 5.
Рис. 2 239. Уни.версапьный грузовой винт. Гайки / и 2, установленные на
винт 3 с правой и левой резьбой, образуют механизм для подъема или
подтягивания груза. К приливам 4 привязывается канат при подтягивании груза.
Рис. 2.240. Распорный монтажный домкрат с двумя винтами и рукояткой
посередине.
Рис. 2.241. Винтовой подъемник От двигателя / через з>бчатую пару z^—zi
приводится во вращение встроенная гайка 2, перемещающая винт 3 вместе
с грузом Q.
Рис. 2 242. Способы стопорения резьбовых соединений: д — контргайками;
б — винтами; в — при помощи вспомогательных деталей; г — клиньями, кернением,
сваркой.
Винты и еинтовые механизмы
135
Рис. 2.243. Способы стопорения резьбовых соединений деформируемыми и
упругими шайбами или пружиной.
рис. 2.244. Способы стопорения резьбовых соединений за счет упругих свойств
болта или гайки (а). Фиксация соединения шплинтами, штифтами и проволокой (б).
рис. 2.245. Пресс с приводом от спаренных угловых рычагов 2 и винта 1
с правой и левой резьбой.
Рис. 2.246. Трехзвенный винтовой механизм. Передаточное отношение такого
механизма определяется по формуле
«12 =
S2
Пгг
Н - S2
[Яаг S левой резьбы принимается со знаком минус, 1 и 2 — винты; 3 — гайка.
Рис. 2.247. Винтовой и кривошипно-ползунный механизм в сочетании. Может
применяться для преобразования вращения кривошипа 1, с постоянной угловой
скоростью, во вращение реверсивное. Закон преобразованного движения
определяется углом подъема винтовой линии несамотормозящего винта 3 и соотношением
длины шатуна 2 и длины кривошипа 1.
Рис. 2.248. Глобоидальная резьба. Ведомое звено 1 несет четыре вращающихся
диска i, которые попеременно соприкасаются с винтом 2.
Рис. 2.249. Винтовые механизмы для преобразования вращательного движения
в поступательное: а — посредством винта 1 и рейки 2; б — винта 1 и гайки 2
с ползуном 3, который передает движение рамке 4.
Рис. 2.250. Взаимное обкатывание двух тел с винтовыми резьбами разных
диаметров. Тело 1 является винтом, 2 — гайкой, т. е. имеет внутреннюю резьбу.
Отношение частот вращения винта и гайки обратно пропорционально отношению
средних диаметров. Звено 3, заполняющее остающееся пространство в гайке 2,
Рис. 2.243
^) ^^^^
Рис. 2.244
Рис. 2.246
Рис. 2.247
Рис. 2.248
Винты и винтовые механик мы
137
Рис. 2.249
ff) и
Рис. 2.250
Рис. 2.251
неподвижно. Огношение диаметров резьб может быть равно целому числу
13:1, 2:1 и т. д).
Рис. 2 251. Схемы механизмов для передачи вращательного движения or
^И1па к гайке. Винт 1 с гайкой 3 установлен в корпусе 2 на шариковых
нодщипниках (рис. 2251, а). Диаметр резьбы гайки больше диаметра резьбы
винта. Передаточное отношение определяется по формуле
«2
Г2
де 1ц _ частота вращения винта; «2 — частота вращения гайки; Г2 — средний радиус
ьоы гайки; г^ — средний радиус резьбы винта.
На рис. 2. 251, б показано соединение винта с тремя гайками различных
\ ^^^'^етров. Каждая из гаек может быть включена или выключена из зацепления
штом поворотом эксцентричных наружПых колец подшипников на некоторый
1 38 Звенья, кипе матические пары и стержневые механизмы
На рис. 2.251, в показана гайка с переменным диаметром резьбы. Передаточное
отношение достигается поворотом гайки с подшипником.
На рис. 2.251, г гайка соединена с зубчатым колесом внутреннего зацепления,
которое сопряжено с зубчатым колесом 4. Зубчатое зацепление врслючается
поворотом колеса 4 относительно шарового шарнира 5.
Рис. 2.252. Шарнирно-винтовой механизм рулевой машины. При вращении
винта 1 с левой и правой нарезкой траверса 6 посредством ползунов 2 и 3
с гайками и тяг 4 и 5 поворачивает вал 7. ч
Рис. 2.253. Шариковый несамотормозящий механизм с двухсекционной гайкой.
Замкнутая цепочка шариков 5 между винтом 3 и каждой секцией гайки 1 имеет
самостоятельные обводные каналы. Кожух крепится на гайке; 6 — сальник;
2 — отражатель.
Рис. 2.254. Безлюфтовая шарико-винтовая передача с предварительным натягом.
Две полугайки 1 навернуты на винт 3 и соединены посредством фланцев 5
с прокладками, стянутыми винтами 4. Каждая полугайка имеет трубчатый
обводной канал 2 для шариков. Если к винту 3 приложена сила слева направо,
то работает правая полугайка, при реверсировании нагрузки - наоборот. При
изготовлении фланцев и прокладки требуется весьма высокая точность.
Рис. 2.255, Самотормозящий шарико-винтовой механизм. Гайка 3 внутренней
и внешней нарезками различных направлений получает движение от винта 5,
приводимого электродвигателем. Внутренняя пара 5 — 5 — шариковая, внешняя
пара — гайка 3 — корпус 2 — оснащена самотормозящей нарезкой. Винт 5 только
вращается, гайка 5 вращается и движется вдоль оси вместе со штоком; 4 —
подшипники; 1 — обводной канал для шариков. Передаточная функция
«35 = —^= ;
Yls Si + 52
5i И 52 — шаги винтов внутренней и внешней нарезок.
Рис. 2.256. Компактный шарико-винтовой механизм с обводным каналом
в штоке. Шток 2, заканчивающийся ухом 1, в гайке 7 уплотняется сальником 3.
Шарики 5 направляются наружными отражателями, закрепленными с обеих сторон
рабочей части канавки винта (на рисунке не показаны), в обводный канал.
Внутренние отражатели 4 после запрессовки стопорятся винтами б.
Рис. 2.257. Шарико-винтовой механизм. На гайке 2, кинематически связанной
с винтом 1 посредством заполняющих винтовую канавку шариков 5, заклинено
колесо 4. Гайка вмонтирована в корпус 7 и опирается на подшипники 6. Осевая
сила Р, приложенная к винту 1, преобразуется в окружную силу Q, снимаемую
с зубчатого колеса 4. При осевом движении винта шарики попадают цз винтовой
канавки в обводной канал и снова направляются в рабочую канавку. Гайка 2
и зубчатое колесо 4 соединены шпонкой 5.
В случае преобразования поступательного движения во вращательное
2 = Р tg (а - ро), если наоборот, то Q = Р tg (а + Ро), где а - угол подъема нарезки;
ро — угол трения.
Рис. 2.258. Шариковая шпонка, представляющая собой механизм, состоящий
из цепочки шариков 3, перемещающихся в канале, предусмотренном в сопрягаемых
деталях: в муфте 2 с крышками 1 и фланцем 4, стянутых болтами, и в валике 5.
Рабочая часть цепочки z шариков располагается на длине аа. Усилие Pi,
передаваемое каждым шариком и определяемое моментом М:
р м
r^^zk cos р
где к - число шпонок на валу 5 (по рис. к = 4).
Винты и винтовые механизмы
139
Рис. 2.252
Рис. 2.253
Рис. 2.254
^фЕЕ^
Рис. 2.255
Рис. 2.256
Рис. 2.257
Рис. 2.258
Винты и винтовые механизмы 141
Уюл Р определяется зазорами в сочленении, радиусами кривизны профилей
канавок и контактной жесткостью
Рис 2 259 Шариковое многоишопочнос сос-тинение Если чисю ве1вей /v, то
гсичие, передаваемое на кажды11 шарик при равномерном распределении давлений
между ними, определяется по'формуле
Р^ = ^__.
r^^zkcOS, р
Рис. 2 260 Скользящая муфта с тпариковыми пшонками. В муфте 2 с крыпт-
ка\п1 i, стянутыми бол1ами, имеются канавки двух типов: канавки глубиной
порядка 0,5 c/^iiap — для соединения посредством шариков вала 4 с муфтой
(рис. 2.260,^/) и канавки глубиной, равной ^/,иао - Для возвратной цепи. В про-
иессе осевого перемещения муфты шарики 3 на выходе из канавки на валу под-
хва1ываются имеющимся в крышке зубом А, выводятся из канавки на валу и,
пройдя сначала окружную часть возвратного канала в крышке, стенками которого
служат поверхности муфты и крышки, затем вдоль оси в обратном направлении
по каналу в муфте ir, наконец, через окружную часть друюй крьппки, попадаю!
во вюрую рабочую ветвь. На рис. 2.260, б тюказана развертка беговой дорожки
uiapHKOB.
Рттс. 2.261. Схема автоматических ттружинных весов для цемента с шарико-
втпиовым редуктором. Бункер 9 с цементом, связаттньтй ттосредством серьги с
рейкой 8, (рис. 2.261, а) перемещается в направляющих роликах 7 и поворачивает под
действием собственного веса шевронное зубчатое колесо 6. Шариковая шпонка 3
и шарико-винтовой редуктор сметцают винт 4 вдоль оси, сжигчтая тарированттую
пружину 2 весов; 1 — основаттие; 5 — подшипники.
На рис. 2.261, б показан разрез зубчатого колеса б с шарико-винтовым
редуктором.
Рис. 2.262. Передача винт —гайка с помощью магнрттного поля.
Гайка рассматриваемого механизма (рис. 2.262, а) состоит ,из обмотки
магнита 3, заключенной в цилиттдрический корпус 2 с крышками 1 и 4, котортле
замыкают магнитное поле магнита. Винтовая впадина между витками резьбы
винта 6 заполнена немагнитным материалом 5, поэтому винт имеет гладкую
внетншою поверхттость. Между витками резьбы могут быть также установлены
элсктромагнттты или постоянные* магниты 7 (рис. 2.262, б). Внешний диаметр
винта 8 немного меньше вттутреннего диаметра резьбы гайки 9 и связан с ней только
магнитным полем и, как обычно, вращение винта преобразуется в поступательное
движет тис гайки.
При перегрузке винт сменгаегся относительтю гайктт без вращательного движения.
Рис 2.263. Во]тновая витттовая передача с генератором, расиоложентттлм снаружи
гайки, приметтяется ДJтя преобразования вращательного движеттия в очень
медленное поступательное пли, наоборот, — постуттательного во врапигтельттое. Возможтто
^^ редуцирование вращательного движения.
оинт 4 и гибкая гайка 2 с резьбовыми канавками (рис. 2.263, а\ расположенная
средней части трубы 3, имеют разные средние дттаметры резьбы при одном
гом же шаге. Контакт между винтами резьбы на некотором участке в пределах
. la а (рис. 2.263, б) происходит при деформации гайктт 2 генератором 1 эллип-
ескои формы. При неподвижной гайке 2 и вратцеттии генератора I винт 4
^ ' учает постуттательное движение. Скорость и наттравлетттте перемещения винта 4
чи^-^^^ ^^ ^^^^правлеттия вращеттия генератора и параметров винта и гайки. Разность
10(1 ^'^^^Д^^^ рез1>6тл винта и гайки должна быть равна или кратна числу воли
*^рматцти, воюуждаемьтх генератором в гибкой гайке.
142
Зееиьч, кинематические пары и стержневые механизмы
Рис. 2.259
3 А
Рис. 2.260
Рис. 2.261
Винты и винтовые механиз мы
143
^ J S t
Рис. 2.262
Рис. 2.264
144
Звеиьч, кипематические пары и ст<.'рл<.псвыс мемтизмы
Рис. 2.265
Рис. 2.264. Волновая винтовая передача. В рассматриваемой передаче быстрое
вращательное движение преобразуется\в медленное поступательное.
Генератор 1 (рис. 2.264, а) в поперечном сечении имеет форму эллипса.
Тонкостенный винт 2, который имеет первоначальную цилиндрическую форму,
деформируется (в пределах упругости) генератором 1 и также приобретает форму
эллипса. Жесткая неподвижная гайка 5 имеет цилиндрическую форму.
Шаг, профиль и направление резьбы винта 2 соответствуют шагу, профилю
и направлению резьбы гайки 3. Вращая генератор 1, гибкий винт 2, вследствие
разности длин периметров резьбы винта и гайки, перекатываясь без скольжения
по среднему диаметру резьбы, будет'поворачиваться на нсбольпюй угол. Отношение
угла поворота генератора к углу поворота гибкого винта 2 составляет передаточное
отношение механизма, которое зависит от разности размеров осей эллипса
генератора и от среднего диаметра резьбы.
Препятствуя вращательному движению винта 2, вынудим ею совершать только
поступательное движение, причем осевое перемещение винта равно произведению
разности тангенсов уг;юв наклона и шага резьбы. Величина рассматриваемого
перемещения может быть порядка 0,1 —0,0025 мм. На рис. 2.264, 6 показан механизм
с правой и левой резьбой на концах гибкого винта 2. На рис. 2 264, в показана
конструкция механизма с жестким цилиндрическим винтом 2, 1ибкой гайкой 3 и
генератором наружного типа с отверстием эллиптической формы.
Рис. 2.265. Волновая винтовая передача для различных преобразований движений.
Генератор 2 с двухрядным расположением шариков установлен на внешней поверх-
ностп гибкой гайки 3 и приводится во врангенис зубчатым колесом 5 с большой
длиной зубьев. Винт 4 и труба 1 заканчиваются элементами шарнира, посредством
которых в зависимости oi заданных условий, дополнительно можно передавать
на винт и трубу вращательное или колебательное движения.
РАЗДЕЛ 3
ЗУБЧАТЫЕ КОЛЕСА И МЕХАНИЗМЫ,
СОСТАВЛЕННЫЕ НЗ ЗУБЧАТЫХ КОЛЕС
ГЕОМЕТРИЧЕСКИЕ ЭЛЕМЕНТЫ
Цилиндрические зубчатые колеса строят для постоянного и переменного
отношений угловых скоростей. В первом случае они получаются круглыми, во втором —
иекруглыми. По расположению пептроид относительного движения различают
круглые колеса внешнего и внутреннего зацепления, а также зацепления с рейкой.
Кроме того, зубчатые колеса различают по форме зуба: с прямым зубом, если
образующая боковой поверхности параллельна оси колеса; с винтовым или косым
зубом, если образующая составляет некоторый угол с осью колеса; с шевронным
з>бом; с точечным касанием (зацепление Новикова).
Для очерчивания профиля зубьев круглых цилиндрических зубчатых колес
применяют развертку окружности (эвольвенгное зацепление) и циклические кривые
(JПИЦHKлoидy, гипоциклоиду, циклоиду).
Основное преимущество эвольвентных колес (рис. 3.1) перед неэвольвенгными
заключается в возможности осуп^ествления кинематически правильного зацепления
при изменении межцентрового расстояния, в простоте профилирования и контроля
10ЧН0С1И изготовления зубьев.
Окружности, катящиеся одна по другой без скольжения и касающиеся в полюсе Р
зацепления, называются н а ч а л ь н ы м и. Они появляю тся только у колес в собран-
iioii передаче. Радиусы начальных окружностей
'''^ 2% 2 2р ' ^""^ 2к 2 " 2р
Здесь р, — окружной шаг пли дуга начальной окружности, заключенная между
двумя соседними одноименными (правыми или левыми) профилями; ш, =/;,/тс—
модуль зубьев; z^ и Z2 — числа зубьев шестерни и колеса.
., Z 25,4
значения модуля стандартизированы. /; =- --— питч — диа-
с1у^ (в дюймах) nit
'1егральны11 шаг, принятый в странах с дюй\ювой сисгемой мер.
Для некорригированных прямозубых колес принимают:
высота головки зуба h^i = /1^2 = Щ\
высота ножки зуба hj-i = hf2 = 1,25ш,;
полная высота зуба h^ = hj = 2,25ш,
Окружность, разверткой которой образуйся эвольвентный профиль зуба, назы-
'^^1кп основной окружностью. Угол а,^, между линией зацепления и перпендикуляром
^- иптн центров, проведенным через полюс Р зацепления, называют углОхМ
^'^Цоилення
Гы + '*Ь2
cos а,.
а,.
ы и г^2 — радиусы основных окружностей.
^лщина зуба ь'^ и ширина впадины s'l (расчетные) принимаются равными
S' = S" = -А_
' '' 2*
146
Зубчатые колеса и механизмы, составленные из зубчатых колес
Высота
голодна зуба
Высота
зуба
Рис. 3,1
Радиус окружности вершин зубьев
щ-
Z + 2
Радиус окружности впадин
т,
Межосевое расстояние
^w = ^'wi'+ г.
2,5
.2 = -f-(zi4-z,).
L1L2 — линия зацепления, т. е. геометрическое место точек зацепления (точек
касания профилей). Длина зацепления / заключена между точками пересечения
ЛИ1И1И зацепления L1L2 с окружностями вершин.
Рабочая часть профиля заключена между окр\жностью вершин данного колеса
и точкой профиля, входящей в зацепление с точкой профиля на окружности
вершин парного колеса. Для построения начальной точки рабочей част профиля
Кривые, используемые при профилировании зубчатых колес 147
необходимо из центра данного колеса-
например, ^i) описать окружность через точку
пересечения окружности вершин второго колеса
с линией зацепления до пересечения с профилем.
Коэффициент перекрытия s^, указывающий на
среднее количество одновременно находяидихся
в зацеплении зубьев:
/ длина зацепления
г^ = = 3 > 1 •
р^ъ основной шаг рис. 3.2
Удельное скольжение зубьев (рис. 3.2). Пусть ds^ и ds2 — элементарные дуги
на профилях, в пределах которых переместилась точка К зацепления за время dt.
При чистом качении dS)^ = ds2. При скольжении одной точки профиля по другому
профилю одна из дуг равна нулю. При качении со скольжением ds^i^dsi', при
этом дуга качения равна меньшей из дуг (ds^), а дуга скольжения ds^i —
= ds^ - dsi — —dsii.
Удельное скольжение
^^1 ^i ^1 . (OiLiK
Для зубчатых колес относительное скольжение
_ Vi2 = РК (COi ± СО2),
где РК - расстояние между полюсом Р зацепления и точкой К зацепления;
^1 ± «2 = coi2 — относительная угловая скорость вращения колес.
При внешнем зацеплении cui2 равна сумме абсолютных значений coi и cu2, при
внутреннем - разности. При одинаковой высоте головок зубьев для внутреннего
зацепления наибольшее удельное скольжение меньше, чем при внешнем.
КРИВЫЕ, ИСПОЛЬЗУЕМЫЕ ПРИ ПРОФИЛИРОВАНИИ
ЗУБЧАТЫХ КОЛЕС
Эвольвента (рис. 3.3) является разверткой окружности; ее можно также
рассматривать как траекторию точки отрезка прямой NN^ катящейся по окружности
^ез скольжения.
Свойства эвольвенты: 1) нормаль NN в любой точке эвольвенты
касается основной окружности радиуса г^; 2) длина радиуса кривизны эвольвенты
равна длине развернутой дуги окружности; 3) две эвольвенты, а и by полученные
разверткой одной окружности с разными началами эвольвент, — эквидистантны,
асстояние по нормали между ними равно длине развернутой дуги, окружности,
заключенной между их основаниями.
Сравнение эвольвенты в параметрической форме
0 = tga~a и р = ,
cos а
у Р - текущий радиус-вектор эвольвенты; а - угол давления, заключенный между
' .гсом и перпендикуляром, восстановленным из центра окружности к нормали;
^ -^вольвентная функция, для которой составлены специальные таблицы.
Есл ^^^^^^"^^ к^к огибающая семейства эвольвент изображена на рис. 3.4 — 3.5.
^ю неподвижной окружности 2 катить окружность 1, с которой связана
148 Зубчатые колеса и механизмы, составичшые из зубчатых колес
Рис. 3.4
Рис. 3.3
Укороченная
эвольвента
Рис. 3,5
Рис. 3.6
эвольвента Э^ то огибающей семейства
эвольвент 3i будет эвольвента Э2, полученная
разверткой окружности радиуса Гъ2, определяемого
по формуле
42 = ~^4i = /\,2C0sa^
В частном случае, когда 7\,,i = со, эвольвента
обращается в прямую, а зуб становится
трапецеидальным (см. рис. 3.5).
Указанное здесь свойство эвольвенты
используется при изготовлении зубчатых колес
по методу обкатки. В этом случае инструмент
изготовляют в виде червячной фрезы, имеющей
в сечении профиль рейки. Полученные таким
образом кривые являются взаимно
огибающими, т. е. профиль рейки можно получить
Кривые, используемые при профилировании зубчатых колес
149
5
^Г
J 1
^ ч
/^
с
b
а
^
Р\ ^,^^. ^
Г—ут^^^ 1
^4V rN
j^J
рл
"^/
b-=J>-=:l.
^""""'''"^T^*^^^
/1 / / X у\
1 ] / /! ^I_ 1^ , J
L^
z>
5" k" 3" 2" 7"
в результате обкатки колеса относительно рейки и, наоборот, профиль колеса
получается в результате обкатки рейки.
Удлиненная и укороченная эвольвенты (рис. 3.6) получаются как траектории
точек А W В, лежащих вне прямой, катящейся без скольжения по окружности.
Уравнение эвольвенты, описываемой точкой С (рис. 3.7):
хс = ri, sin (а + 0) — riy (а + ^) cos (а + 0),
Ус = rjj cos (а + 0) + г^ (а + 0) sin (а + 0) .^
Уравнение удлиненной эвольвенты, описываемой точкой А:
^А = ^с ~ ^С sin (а + 0),
Уа^Ус- ^Ccosid^-^).
По удлиненной эвольвенте автоматически очерчивается часть зуба у основания
при нарезании его рейкой.
Уравнение укороченной эвольвенты, описываемой точкой В:
^в = ^с + СВ sin (а + 0),
Ув^Ус + С В cos (а + 0).
Рис. 3.8 — схема построения циклоиды.
Первый способ (левая часть рисунка). Окружность разбивают на п равных
частей Отрезки, равные дугам окружности, откладывают на прямой, по которой
катится окружность. Через деления окружности проводят горизонтали, через
деления прямой — вертикали. Из точек ij, 2i, 5i ... пересечения вертикалей и гори-
«^онталей, проведенных через одноименные деления, радиусами al, Ь2, сЗ, d4,
делают засечки на соответствующих горизонталях. Точки пересечения а, (3, у ...
и будут точками циклоиды.
второй способ. Из точек деления Г\ 2", 3" и т. д. (правая часть рисунка)
радиусами А1, А2, A3 ... проводят дуги, огибающая которых и будет циклоида.
^РаВНеНИР ттыг-тт/лчггтт-
'Равнение циклоиды:
X = г(ф — sin9);
г (1 — cos ф),
— радиус и ф — угол поворота окружное ги в результате качения,
ппо '^^^'^■^'^ ^ любой точке циклоиды всегда проходит через точку касания
*^з водя щей окружности с основной прямой.
150 Зубчатые колеса и механизмы, составленные из зубчатых колес
Радиус кривизны р в 2 раза длиннее нормали:
л ' Ф
р = 4г sin -^—.
Ортоциклоида применяется для очерчивания зуба циклоидальной рейки
и участков зуба на рабочей части эвольвентной рейки при обкатывании по ней
эвольвентного колеса.
Эпициклоида (рис. 3.9) представляет собой траекторию точки образующей
окружности, катящейся без скольжения по неподвижной основной окружности.
Уравнение эпициклоиды:
^А = (Ч + '*) sin — ф - г sin ( ф + — ф
У А - {^Ь + ^) COS ф - г COS I ф Ч ф
Нормаль Л'Л' в точке А всегда проходит через точку В касания
соответствующего положения образующей с основной окружностью. Радиус кривизны
4г (г + Г},) sin —
^ г, + 2г '
Построение. Делим окружность радиуса г на и (шесть) равных частей
и на окружности радиуса г^ откладываем 2п таких же частей. Проводим
радиусы Oil; 0^2 ... и из центра Oi через точки 1^; 2^ ... описываем дуги до
пересечения с продолжением радиусов Oil; 0i2 и т. д., при этом получим точки
Г\ 2", 3" и т. д. Дальнейшее построение такое же, как и по рис. 3.8. Полученные
точки при построении являются искомыми точками эпициклоиды.
Рис. 3.10 - схема построения удлиненной эпициклоиды как огибающей кривой.
Точка 5, удаленная на расстояние Я от центра образующего круга / радиуса г
при качении по кругу // описывает удлиненную эпициклоиду. Радиусами Is, 2s ...
из точек ]\ 2^ ... описывают дуги окружностей, огибающая которых является
удлиненной эпициклоидой.
Рис. 3.11- гипоциклоида — траектория точки образующей окружности,
катящейся внутри основной окружности (см. рис. 3.11, а). Уравнение гипоциклоиды
(система координат, как на рис. 3.9):
^А = (гь - г) sin
Гь
.(ф.-^ф),
У А = (Гь -г) COS ф + г COS ( ф ф
Для г < 0,5гь точка по гипоциклоиде перемещается в сторону качения
образующей окружности (см. рис. 3.11, б), а при г > 0,5гь (см. рис. 3.11, в) - в обратную
сторону.
Частные случаи: при г === г^ гипоциклоида вырождается в точку; при г-^0
гипоциклоида стремится обратиться в точку; при г = —r^, гипоциклоида имеет п
п
вегвей (для гипоциклоиды,, показанной на рис. 3.11, б, « = 3); при г = 0,5гь гипо-
Кривые, используемые при профилировании зубчатых колес
151
Рис. 3.9
Рис. 3.10
^1иклоида обращается в диаметральную прямую (рис. 3.11, г). Образующую и
'-''^новную окружности в этом случае называют кругами Кардана. Удлиненная
гипоциклоида показана на рис. 3.11, д.
^ис. 3.12, Построение эвольвентного зацепления. Пусть дано межосевое рассто-
"ие а^ = -—{^х + Z2) и угол зацепления а„, = 20 или 15°.
152
Зубчатые колеса и механизмы, составленные из зубчатых колес
Рис. 3.12
Радиусы основных окружностей,
разверткой которых получаются эвольвент-
ные профили, определяются по
равенствам: гы = Гу,1 cos а,^,, Гь2 = г^,2 COS а^.
Линией зацепления, т. е.
геометрическим местом точек касания профилей
будет общая касательная L1L2 к основным
окружностям. Это следует из того, что
нормаль в точке зацепления профилей
общая, а каждая из эвольвент имеет
нормаль, касающуюся основной окружности.
Следовательно, общая нормаль является
общей касательной к основным
окружностям.
Построение профиля. Через
полюс Р следует провести эвольвенты,
которые строят, как показано на рис. 3.3,
и ограничить эвольвенту окружностью
верпшн.
Тол1Цина зуба по основной окружно-
С1И определяется но уравнению
tga^^ - а^
Толщина зуба по окружности вершин
т„ т,
\)-
здесь
Ша = т^
tg «а - а«; cos (Ха =
гь
г„, COS а„,
где т^ и Wa — кюдули но основной окружности и окружности вершин; R^, ^а ^^ ^а -^
радиус окружности вершин и соответствующие эвольвентная функция и угол
давления; s^i —толщина зуба по начальной окружности.
Формулы применяют последовательно к колесам Zi и Z2.
Если окружность вершин большого колеса пересекает линию зацепления вне
отрезка PLi, то ножка малого колеса во избежание защемления зуба дюлжна быть
подрезана. Подрезать ножку не нужно, если число зубьев малого колеса
определяется из неравенства
, > 4/к
(2 - H2i)sm^ a^v
где /й2 = -^ относительная высота головки зуба большого колеса;
"21
< 1; иц — положительное для внутреннего и отрицательное для
внешнего зацепления.
Для колес нормального зацепления j^г = 1 и а,^, = 20°, тогда
34,2
2-1/21
Кривые, используемые при профилировании зубчаты^ колес
153
Г1 + 22 > (Zi + 22L,,
Рис. 3.13
Для колес, нарезанных со сдвигом инструмента,
^ииима;п^пая возможная сумма чисел зубьев z^^-Zi
^,^,реаеляе1ся из выражения
23mirt
где s^min "'"Р^^*^^^^ минима.1Н>ное значение
коэффициента перекрытия.
Рис. 3.13 Схема корригирования зубчатых колес.
Качественные показатели передачи можно
улучшить, если для профилей зубьев подбирать ттаи-
более подходящие участки эвольвенты.
Практически это реализуется при нарезании зубьев
методом обкатки с коэффициентом относительного смещения х режу1Т1его
инструмента I. Коэффициент смещения х отрицательный, если инструменг придвинут
к центру О относительно нулевого положения, и положительный, если отодвинут.
Оптимальные качественные показатели зависят от выбора коэффициентов
относительного смещения х^ и Х2 малого и болылого колес, х^ и .Х2 можно выбирать
с помощью специальных графиков, получивщих название «блокирующих контуров» *.
На рис. 3.13 показано колесо, подрезанное рейкой. Для устранения подрезания
рейку следует отодвинуть на величину .\ от центра О колеса, при этом толщина
зуба s 1T0 делительной окружности колеса увеличивается, а ширина впадины s"
уменьшается:
S = Шо
-Ь 2txtgao
где /Но - модуль рейки; ао - профильный угол рейки. При х ~ 0. s' = pJ2.
Коэффициент относительного смещения определяется по формуле .х = ,
2о
где Zq - число зубьев колеса, зацепляющегося с рейкой.
В этом случае при нормальной установке рейки подрезания нет, потому что
линия вершины зубьев рейки проходит через точку касания линии зацепления
с эвольвентой; Zq = 17,1 при ао = 20° и Zq = 30 при «0 = 15°; z — число зубьев
нарезаемого рейкой колеса.
Если колеса z^ и Z2, нарезанные рейкой с одним и тем же нормальным
шагом и углом ао, но при х^ и л'2, введены в зацепление, то угол зацепления
определяется по формуле
а - ^('^1 +-^2)tgao . ^
21 + 22
^и. = tg а^, - а„,; Оо = tg do - ао-
Ко )ф
(рфициенты смещения .х^ и .Х2 - операторы, при помощи которых
производи 1ся расчет корригированных колес. Если .х^ = Х2 = О, то нарезаемые колеса
^^^'Д>1 нормальными
а о = о^н ;
ha ^ Wo; Jij = l,25wo •
Konn^*^^*'"'^'^^*^'^^ ^* ^' Болоювскип и. A. и Смирнов В. Э. Справочник по
И'^ктроваппю зубчатых колес. М - Свердловск, 1962, 215 с.
154
Зубчатые колеса и механизмы, составленные из зубчатых колес
При Xi
— Хг получим
■^1 = Wo ( — + 2xi tg ao J;
■si = '^o(y ~ 2x2tgaoj;
/i«i = ^0 (1 - ^2)\ Ki = Wo (1 - Xi);
^^«1 + ^Vi = ^«2 + /1/2 = ^ = 2,25mo.
Такое зацепление применяется, если необходимо сделать колеса равнопрочными
на износ, уменьшить габаритные размеры передачи и в других случаях.
При Xi ф Х2 получим неравносмещенное зацепление.
Рис. 3.14. Внутреннее эвольвентное зацепление.
Рис. 3.15. Цилиндрические зубчатые колеса с косым зубом. Для улучшения
работы цилиндрических зубчатых колес зубья выполняют косыми. На рис. 3,15, а
показана рейка с косым зубом. Если такую рейку обкатывать по начальному
цилиндру колеса (рис. 3.15, б), то
получится линейчатая поверхность
Нормальное
сечение
зуба в виде развертывающегося
геликоида. Пересечение
поверхности зуба с плоскостью,
перпендикулярной оси, дает эвольвенту, а
с концентрическими цилиндрами —
винтовую линию. Колеса
характеризуются углом подъема
винтовой линии по начальному цилиндру.
Торцовый и нормальный модули
связаны равенством т^ cos р = /п„.
'Ч^
Сечение зцбьед
средней плоскостью
Рис. 3.14
Оснодной
цилиндр
.^)ХНОСШЬ
зуба
Плоскость
зацепления
Кривые, 14спользуемые при профилировании зубчатых колес
155
формальный модуль т„ стандартизован. Коэффициент перекрытия s больше, чем
g для цилиндрических колес с тем же числом зубьев:
Pts
Во время работы колеса с косым зубом стремятся сместиться вдоль оси.
Рис. 3.16. Цилиндрические зубчатые передачи с точечным зацеплением системы
М. Л. Новикова. Во время работы передачи точка контакта перемещается по линии
зацепления, параллельно осям колес. Высота зуба может быть весьма малой и даже
равной нулю. Профили в торцовом сечении очерчиваются дугами окружностей
и имеют кривизну разных знаков. Минимальное число зубьев не ограничено
подрезанием, поэтому легко осуществить передачу с очень большим передаточным
отношением.
Нагрузочная способность передачи М. Л. Новикова примерно вдвое больше
соответствующей эвольвентной.
Рекомендуется
а, = 20° - 30°;
р1 = 1,35ms;
Р2 = (1,03-1,10) pi;
Si =(1,3 -^ 1,5) S2.
Угол наклона зуба р = 5 ч- 40°.
Здесь Si и 52 — толщина зубьев по начальной окружности в торцовом сечений;
52 можно выбирать произвольно, причем 5jl + 52 < Pts-
Колеса могут быть не только косозубыми, но и шевронными и могут
применяться для передач с различно расположенными осями.
Рис. 3.17. Схема образования циклоидального зацепления. При циклоидальном
з>бчатом зацеплении профиль зуба получается в виде траектории точки образующего
круга при качении его по начальным
окружностям. При качении образующего
круга Ri по начальной окружности г^
получается гипоциклоида профиля ножки
зуба колеса /, а при качении этого же
круга по начальной окружности yi
Рис. 3.17
156 Зубчатые Ko.ieca и механизмы, составленные из зубчатых колес
получается эпициклоида профиля толовки зуба колеса //. Подобным же обра-^ом -
качением образующего круга ^2 - получаются профили ножки зуба колеса // и
головки колеса /.
Линией зацепления циклоидального профиля являются сопряженные д\ги КР^ ц
I\F образующих окружностей. Усилие, действующее вдоль нормали, проходящей
через точку Р^, меняет свое направление. Зубчатые колеса циклоидального
зацепления весьма чувствительны к изменению расстояния между осями; для
построения сис1емы сменных зубчатых колес применимы мало; подвержены меньшему
износу по сравнению с эвольвептными профилями вследствие того, ч\о во всех
случаях выпуклая часть профиля работает по вогнутой. Циклоидальные профили
не подвержены подрезанию.
Рис. 3.18. Схема построения цевочного зацепления. Приняв JRi = О it R^ — г-,
(см. рис. 3.17), получим эпициклоиду и гипоциклоиду для колеса Z2, выродившиеся
в точки, а дня первого колеса — профиль ножки, выродивншйся в точку. Зуб на
колесе Zj выполняется в виде цилиндра, а на первом колесе очерчивас1ся кривой
(штриховая кривая), эквидистантной эпициклоиде а, получившейся в результате
качения окружности 2 по окружности L
Рис. 3.19. Цевочная передача ,апя больших передаточных чисел Ведомое
колесо I — цевочное. Профилируется аналошчно цевочному зацеплению. Ведущим
явпяется колесо 2 с двумя зубьями.
Рис. 3 20 Цевочная передача дтя больпшх передаточных чисел Ведущее
колесо — цевочное. При образовании циклоидального профиля образующие
окружности приняты равными К^—Г]^; Rj = О (см. рис. 3.17), поэтому профиль зуба
на первом колесе обращается в точку и заменен цевкой, а на втором колесе
имеется только головка. Очертание действительного профиля эквидистантно
эпициклоиде, получившейся при качении начальной окружности 1 по
окружности 2.
Рис. 3 21. Двузубая передача циклоидального профиля. Образована качением
образующих окружнос1ей R^ = R2 = - г^ =—/'2 (см. рис. 3.17). Головка и ножка
зуба очерчены полностью ветвью эпициклоиды и гипоциклоиды. Передача получила
распространение в насосах при параллельной связи обычными зубчатыми колесами
Самостоятельно работать не может из-за самоторможения в некоторых положениях,
поэтому валы соединены между собой обычными зубчатыми колесами с
передаточным отношением, равным единице.
Рис. 3.22. Внецентроидное цевочное зацепление. При качении начальной
окружности / по окружности // центр каждой из цевок колеса 1 описывает укороченную
гипоциклоиду. Действительный профиль колеса 2 следует взять эквидистантным
укороченной гипоциклоиде. Р — hojhoc зацепления
Рис. 3 23. Внутреннее зацепление с передаточным отношением 1:2 и
прямолинейным очертанием профиля зуба колеса с внутренним венцом.
Рис. 3 24. Зубчатое колесо внутреннего зацепления с закругленными зубьями
Число зубьев колеса с внутренним венцом па единицу больше, чем с внешним
Рис. 3.25. Трехплечий рычаг с роликами, катящимися в четырехлучевой
криволинейной прорези. Отношение числа оборотов рычага и диска равно 4:3.
Профилируется как цевочное зацепление
Рис. 3.26. Двуплечий рычаг с роликами, катящимися по трехлучевой
криволинейной прорези Отношение числа оборотов рычага и диска 1 при неподвижно
закрепле1нюй оси О равна 3:2. Профи.гпфуегся как цевочное зацепление.
Рис 3 27. Элл1штические зубчатые колеса Оси вращений колес / и 2 помешены
в фокусы Oi и О2. Передача воспроизводит псрсмепное огношсние угловых
Кривые, используемые при профилировании зубчатых Ko.iec
157
Рис. 3.18
Рис. 3.19
Рис. 3.20
Рис. 3.21
Рис. 3.22
Рис. 3.23
Рис. 3.24
Рис. 3.25
158 Зубчатые колеса и механизмы, составленные из зубчатых колес
Рис. 3.26
Рис. 3.27
Рис. 3.28
Кривые, испо 1ьзуемые при профилировании зубчатых колес 159
скоростей такое же, как в шарнирном анти параллелограмме Передаточное
отношение
Г2 1 + lecos Ф1 + е^
"12
г, 1 - е^
Jдg ^ = С/А — эксцентриситет эллипса
• _ 1 + е _ 1
"l2max - ~; 7' "l2min
(ф1 = 0) 1-6 (Ф1 = я) 1 + в
Каждая пара зубьев имеет особую линию зацепления. Два одинаковых колеса,
нарезанных за один установ, должны иметь нечетные числа зубьев.
Рис. 3 28. Производные зубчатые колеса, полученные из эллиптических: а —
овальные в форме двулистника. Эллипсы в механизме (см. рис. 3 27) катятся
один по другому без скольжения. Условия качения не изменятся, если углы ф^ и ф2,
соответствующие изменению радиусов эллипсов от г^ до г\ и от г2 до г'2
уменьшить в т раз. Задаваясь углами ф^ и соответствующими им углами ф2,
определим для каждой пары углов сопряженные с ними радиусы }\ и Гз; затем
отложим их для углов i^ii'm и ф2/т. Если m = 2, то углу ф' поворота
эллиптических колес (см. рис. 3.27), равному 2 я, в производных колесах будет
соответствовать угол поворота тс. Одному обороту ведущего звена соответствуют два
периода изменения передаточного отношения;
о-в форме трилистника (т = 3). Одному обороту ведущего звена соответствует
три периода (ф'= 120°) изменения передаточного отношения;
в — ведущее колесо в форме двулистника, ведомое — в форме трилистника.
Необходимо на исходных эллипсах выбрать равные дуги РВ^ и РВ2 так, чтобы
опирающиеся на них углы ф1 и ф2 относились как 3:2. Перекатывающиеся
дуги соответствуют некоторым частям эллипсов.
Рис. 3.29. Передача из трех эллиптических колес с высокой степенью
неравномерности.
Рис. 3.30. Логарифмическая спираль. Две одинаковые логарифмические
спирали К и К' {г = ае"'^ вращающиеся в противоположные стороны вокруг своих
полюсов О и 0\ как центров, могут служить сопряженными кривыми, катящимися
одна по другой без скольжения до момента касания спирали К в точке О' или
К' ъ О; Р — полюс.
Рис. 3 31. Зубчатые колеса с переменным передаточным отношением,
начальные цилиндры которых очерчены датами логарифмических спиралей. Период
изменения передаточного отношения равен одному обороту.
Рис. 3.32. Зубчатая передача, аналогичная показанной на рис. 3. 31, с двумя
периодами изменения передаточного отношения.
Рис. 3.33. Колеса, очерченные дугами логарифмических спиралей, образующих
'криволинейный квадрат. Колеса можно выполнить в виде многоугольника. Точки А
^^ А', а также В и В' совпадают в полюсе Р.
Рис. 3.34. Схема образования поверхностей, годных для использования в качестве
рабочей части профиля зубьев конических зубчатых колес* а - сферическая
эпициклоида. При качении производящего конуса L по конусу К точка В, все время
'^'ставаясь на сфере S, опишет сферическую эпициклоиду, точки которой после
'соединения с центром О сферы приведут к линейчатой поверхности, годной для
очерчивания части профиля зуба;
о - сферическая гипоциклоида При качении производящего конуса Lno внутрен-
^и поверхности конуса К точка В на сфере S опишет сферическую
гипоциклоиду.
Рис. 3.29
Рис. 3.31
Рис. 3.32
Рис. 3.33
Рис. 3.34
ю
Рис. 3.35
Кривые, исполъзуе мые при профи шровании Поишпых ко lec 161
Гхлн производящий конус L заменить большим кругом сферы и катить его по
конусу X, то точка jR, оставаясь на сфере, опишет сферическую эвольвенту
(рис. 3.35, а\
Рис. 3.35. Схемы профилирования конических колес эвольвентного зацепления.
При качении большого круга (рис. 3.35, а) по основному конусу каждая
точка круга описывает сферическую эвольвенту GL, а радиус — коническую
поверхность со сферической эвольвентой в основании. При профилировапии необходимо
внутри начальных конусов (рис. 3.35, б), имеющих образуюп1ую 01\ выбрать
больнюй круг N1ON2P п провести основные конусы ?'о2 " ^*оь касаюнн1еся
большого круга. Выбрав прямую па большом круге и перекатывая больпюй круг по
конусу Го1, получим эвольвситпую коническую поверхность, часть которой может
быть использована для очерчивания боковой поверхности зуба первого колеса
Анапогично получают сопряженную боковую поверхность зуба второго колеса.
Отнопюиие радиусов начального и основного конусов такое же. как отношение
радиусов начальной и основной окружностей цилиндрических зубчатых колес.
Рис 3 36. Схема приближенного профилирования конических зубчатых колес 1 и 2.
Части сферы, на которой располагаются сферические кривые, очерчиваюнще
профиль зуба, приближенно могут быть заменены поверхностями дополнительных
конусов МО^Р и NO2P. Развернув дополнительные конусы и произведя
профилирование, как для цилиндрических колес, развертки можно навернуть обратно на
кон>с. Радиусы разверток
^1 = ^- и л, = '''
C0s6i COS 62
где i\.i и ?V2 - сопряженные радиусы оснований начальных конусов; 25^ и 2<'^2 —
углы при вершинах начальных конусов.
Эквивалентные числа зубьев колес z^^ — Zi/cos5i и г;,,2 = ^2^cos52.
Минимальное число зубьев малого конического колеса эвольвентного профиля, свободного
от подрезания ножки зуба, определяется по форм\ле
-cos5i.
(2 - 1/21) sin^ а.
Если угол пересечения осей 6, то
^ 1/12 +cos о . qr 1+1/12 cos 5
5ш5 i/i2smo
— = i'i2 = -—; 5 = 5i + 52-
т/
21 -!•
Рис. 3.37. Формы зубьев конических зубчатых колес* а - прямой; б - косой или
тангенциальный; в — угловой или шевронный; г — спиральный; д — эвольвентный,
^ - круговой зуб.
Рис 3.38. Профиль плоского колеса. В плоском хсолесе эвольвентный конус при
вершине имеет угол 180^, поэтому профилем плоского колеса является сферичсскач
эвольвента, а следовательно, боковая поверхность зуба отличается от плоскости
^Рис. 3.38, а). Если взять поверхность зуба в виде плоскости, то получим октои-
Дальное зацепление (рис. 3.38, б), используемое при нарезании конических колес.
Режущий зуб плоского колеса, по которому обкатывается нарезаемое колесо,
вьшолняется в виде плоского резца.
6 Кожевников и лр.
162 Зубчатые колеса и механизмы, составлеииые из зубчатых колес
а)\- г) '4- %
S}
6)
д)
е)
4-
»^^
i
Рис. 3.36
Рис. 3.37
Рис. 3.38
Кривые, licno 1ьзуемые при профи шровшши зубчатых ко lec 163
Рис. 3.39. Гиперболоид как поверхность, описываемая отрезком 1 прямой
(рис. 3.39, а\ вращающийся вокруг неподвижной оси х — х, скрещивающейся
с перемещающимся отрезком под некоторым углом. Образующие гиперболоида —
прямые линии. Два гиперболоида (рис. 3.39, б) могут соприкасаться по образующим.
Гиперболоидальные зубчатые колеса (рис. 3.39, в). Направления зубьев гипер-
болоидальных колес совпадают с направлением образующих гиперболоида. Так
как образующая гиперболоида — прямая, то и образующая профиля зуба также
прямая, поэтому для образования зубчатых колес можно вырезать участки
и различных час1ях гиперболоида. На практике обычно част гиперболоида,
вырезанные из горловины, заменяют цилиндрами, получая при этОхМ винтовые
колеса (см. рис. 3.41, д)\ части гиперболоида, удаленные от горловин, заменяют
' обычными конусами.
Общая образующая ЕЕ является мгновенной осью относительного вращения
и скольжения гиперболоидальных колес. Угол скрещивания осей / —/ и II— И
и углы ф1 и ф2 наклона образующих с осями колес определяются из равенств
sin© , i/i9si!i9
Hl2 + cos ф " 1+1»12*^^^Ф
Кратчайшее расстояние между осями гиперболоида делится осью мгновенного
вращения и скольжения на части г^ и Г2;
Г1 «2 С02 + 0)1 cos ф tgфl
Г2 (Oi COi + С02СО8ф tg ф2
Для колес, вырезанных из горловины (или приближенных винтовых),
передаточное отношение
— -2 _ ''2 t:OS Ц)2
Zi /'i COS ф1
Торцивыс шаги каждого колеса определяются из равенств
Рп = Psl cos ф1 = р^2 COS ф2 .
Гииерболоидальное заг^епление имеет частные случаи: 1) цилиндрические
зубчатые колеса, если образующая параллельна оси и 2) конические зубчатые колеса,
если образующая пересекает ось.
Рис. 3 40. Цилиндрические колеса с прямым (а), косым (б), шевронным (в)
" елочным (г) зубом.
Рис. 3.41. Гиперболоидальные колеса (частигле случаи), а - конические с прямым
1^ спиральным зубом, б - зацепление пары конических прямозубых колес; б' - за-
иеилсние с плоским колесом; г — зацепление поры конических колес со С1И1раль-
I'biM з}бом; д — винтовая передача; е — гттоидпая пе^хдача.
Рис. 3 42 Способ усграиепия зазора между зубьями колес. Одно зубчатое колесо
-^^^ laeicH Hi двух половин: 1 и 2, смсигеииых одна о1носите]г..ио лру10Й в и.тоскости
Р^1Щсния. Половины KOjieca устпавливают ви[пом 4. В ycianoB юппом иоложс1чп1
^-ioBHUKii колес скрепляют болкьми 3. Подобным же образом можно >странить
^^оор в чсрзячпых передачах, однако при этом износ колеса уве;н1чивае1ся.
не -?'^' ^''^^' ^^^^^^^^^ устранения бокового зазора в зубчатых и червячных
По'"''^''''^" ^^^'*^^'^^^ зазор в зубчатой передаче 1-2 прибора может быть выбран
чс^'^^"^^^^^'''^ ^^'^"^с>гюво10 колеса 3 (рис. 3 43, а\ устанозленното между ме1алли-
'и\н1 колесами 2 с несколько большей шириной зуба, или при усишовке вала
164
Зубчатые колеса и механизмы, составленные из зубчатых колес
Рнс. 3.40
одного колеса на неподвижных подшипниках, а подрпщников второго — на рычаге,
который посредством пружины прижимает одно колесо к другому.
В червячной передаче один из подшипников 1 плавающий, второй 2 (рис. 3 43, б)
скользящего трения прикреплен плоскими пружинами 3 консольно или на двух
опорах к корпусу. Предварительно изогнутые пружины 3 прижимают червяк
к колесу.
Рис. 3.44. Зубчатое колесо, составленное из ступицы / и венцов 3 и 5,
соединенных между собой пальцем 9 и }пруги.\п1 кольцами 2, 4, 7 из э.'Щстичного
материала, которые привулканизованы к колщам 8 и б рбойм. Это |чОлесо может
быть использовано для выравнивания нагрузки по длине зуба и компенсации
зазора.
Рцс. 3.45. Червячное зацецлецце. Передаточное ртнощение
"1 ^2
где -2 ~ число зубьев червячного колеса; z^ — число заходов нарезки червяка.
Кривые, используемые при профилировании зубчатых колес
165
|Сфй
S
Рис. 3.42
Рис. 3.45
А-А
Рис. 3.46
Рис. 3,47
Кривые, используемые при профилировании зубчатых колес
167
К. п. Д- зависит от угла подъема винтовой линии по начальному цилиндру;
при ведущем червяке
tgy
tg (у + р)
при ведущем колесе
ц = -
tg (у - р)
tgy
где у — угол подъема винтовой линии; р — угол трения.
При ведущем колесе передача может работать только при у > р; чаще
применяется в качестве редукционной пары. Опора для восприятия осевого усилия
червяка обяза гсльпа.
Рис. 3.46. Цилиндрическая червячная передача с зубьями в виде роликов i,
установленных для увеличения к п. д. за счет умспьитспия трения.
Рис. 3.47. Глобоидальная червячная передача для передачи больших сил.
Передача получила пазвапие по форме червяка, имеющего начальную поверхность
ц виде глобоида. Глобоид — тело вран^сния, получаемое при врап^еиии круга
вокруг оси, лсжап;сй вис круга и в плоскости круга. Глобоидальные передачи
обладают высоким к. п. д. В настоящее время получили пптрокое применение
в интенсивно работающих передачах, в частности, в тяжелонагруженных
механизмах металлургических машин.
Рис. 3.48. Глобоидальная червячная передача с зубьями в виде роликов 1.
Рис. 3.49. Червячная передача с роликовыми пальцами в рулевом механизме
автомобиля.
. Рис. 3 50. Способ устранения осевого давления на червячное колесо. Червяк 1
враидастся непосредственно от 4?едущего вала, червяк 2 — через зубчатые колеса
zi и Z2. Один из червяков — имеет правый, другой — левый ход. Передача будет
работать без дополнительных нагрузок при достаточно точном изготовлении.
Рис. 3.51. Способ устрапения осевого давления па червяк. Червяки 1 и 2, сидящие
на одном валу, имеют разное направление витков.
Рис. 3.52. Схема последовательного соединения червячных пар / и П для
получения больиюго передаточного числа.
Рис. 3.53. Модель однозубого зубчатого колеса в зацеплении с рейкой.
Рис. 3.54. Зубчатый редуктор с однозубым ведущим зубчатым колесом.
Рис. 3.55. Схема опытного стана для прокатки шестерен. Заготовка 2,
закрепленная на шпинделе i, прокатывается между зубчатыми валками 4,
смонтированными в суппорте 5 и поджимаемыми штоками гидроцилиндров 5 радиальной
подачи. Карданные валы 7, связывающие валки 4 с эталонными шестернями 6,
Рис. 3,48
Гнс. 3.49
Рис. 3.50
168
Зубчатые колеса и механизмы, составленные из зубчатых колес
J I
Рис. 3.52
Рис. 3.53
Рис. 3.54
Рис. 3.55
Рис. 3.56
Кривые, используемые при профилировании зубчатых колес
169
обеспечивают синхронность вращения при
изменении межцентрового расстояния валков.
Рис. ?.5б. Схема прокатки шестерен в
неподвижной обойме с вращающейся зубчатой
матрицей. Нагретая заготовка кольцевой формы
надевается на гладкий валок 5. Поворотом
кулака 4 зубчатая матрица 2 обоймы 1
сближается с валком 3 (схема а), а затем при вращении
валка зубья матрицы, внедряясь в аело
заготовки, форлшруют на последней зубья
(схема б).
Piic. 3.57. Схема комбинированного способа
изготовления зубчатых колес прокаткой и
штамповкой. Нагретая заготовка насаживается на ось
7 и помещается между шестернями-штампами 3
и /, имcющи^пг модуль и число з\бьев прока-
iHBaeMoii шестерни. Давление о г пуансона 6
передается заготовке через диск 5, плиту 4,
шестерпи-штампы 3 и 1. Материал заготовки
течет в радиальном направленпи, а профиль
зуба фop^н^pyeтcя вращающимися нрокатныли^!
(з\бчатылн1) валками 2, укрепленными на цапфах
плиты, получаютцей возвратно-вращательное движение от тяги 8.
Рис 3 58 Схема нарезания некруглых зубчатых колес по способу копирования
При нарезании используется круглая рейка, цеигроила которой обкатывается по
цен1роиде нарезаемого некруглого колеса. Обка1ка дости1ается тем, что ^онир 6,
соо1вс1С1вующин но форме центроиде нарезае>ю1р колеса, связан стальной лентой
с лииейко!! 3, скользящей вдоль полого вала 5. Осевые перемещения онрав^се 2
и фрезе 1 сообщаются через ось О4 понтографа 4, уменьшенными в т раз (см.
рис. 10.16). Обрабатываемое колесо 9 вратцается с такой же угловой скоростью,
как и копир б, а ось Oi, укрепленная на рычаге, oiKJ|oняeicя от центроиды фрезы
на рассюянис, пропорциональное отклонению оси 0^ от линейки. Коэффшщент
Piic. 3.S7
170 Зубчатые колеса и механизмы, составленные из зуочатых ко гее
Рис. 3.59
пропорциональности m такой же, как и для
пан'101 рафа. Замыкание копира и лнненки
производится грузом S. Подача
осуществляется маховичком 7.
Рис. 3.59. СносоГ) нарезания некруглых
зубчатых колес долбяком. Прн1И1.ипиальиая
схема показана на рпс. 3 59, а. В пазу поводка
3, связанною с червячным колесом 5,
скользит ось о копира J, очерчеипого по цсп1роиде
пекруглою колеса. Последний обка1Ывается
без скольжения прп' помощи С1альпых лепт
по диску 4 С диаме'1ром, равным диаметру
начальной окружности долбяка. На оси
копира закреплена заюювка нарезаемого
колеса. Прп малых размерах пекруглых колес
следует прпменя1Ь ирнснособлепие с
пантографом, показанным па рис. 3.59, о. 0^ — ось
вращения червячного колеса 5, приводимого во вращс]И1с червяком I (см рпс. 3.59, а).
Рис. 3.60. Бесшумная п^ередача с высокими дeмпфиpyюп^и^и^ свойсхвами.
Ведущее звено 2 вынолнено в виде MHOionoJnocnoio Mainnia (г^), ведомое звено имеет
большое число фсрромаг1П1гных з>бьев 3 (zj), пзолпроваппых ncMainiirnbhM
материалом 4. Корпус 1 с зубцахлш (rj неподвижен. Необходимое условие: z^ - ~i ^ -2-
Передаточное отношение
Рис. 3.60
Осевые и радиальные силы отсутствуют, погрешнос1ь изготовления зубьев
не имеет значения. Передача можег быть использована в машиносфоенни в особо
точных машинах.
Механизмы, составленные из зуочатых колес ill
МЕХАНИЗМЫ, СОСТАВЛЕННЫЕ ИЗ ЗУБЧАТЫХ КОЛЕС
Простые передачи
Зубчатые передачи строятся не только в виде пары зубчатых колес того или
иного вида зацепления, но и в более сложных комбинациях, образуя рядовое
зубчатое зацепление, возвратный ряд, эпициклические передачи, сложные разветвленные
и замкнутые передачи и др.
По характеру использования в машине зубчатые механизмы обычно *
подразделяют па следующие группы.
Редукторы (мультипликаторы) — механизмы, предназначенные для
уменьшения (увеличения) частоты вращения ведомого вала по сравнению с
частотой вращения ведущего вала. Наравне с редукторами общепромышленного
назначения с раздельным приводом за последние годы быстро развивается производство
встроенных редукторов (рсдукторных электродвигателей), отличающихся малыми
габаритами, массой и стоимостью. Некоторые механизмы в зависимости от
потребности могут быть использованы в качестве редуктора или мультипликатора.
Отдельные механизмы — это относится, главным образом, к червячным и некото-
pi>i\i пчанстарным передачам — вследствие самоторможения могут быть
использованы только в качестве ред>ктора.
Коробки скоростей — механизмы, позволяющие эпизодически изменять
часто!у вращения ведомого вала путем переключения различных цепей зубчатых
колес, образующих рядовые зацепления, эпициклические передачи и др. На практике
получили инфокое распространение коробки скоростей различных типов,
отличающиеся количеством возможных передаточных отношений и конструктивными
особенностями.
Механизмы настройки- всякого рода гитары, коробки передач,
сменные колеса, позволяющие изменять в зависимости от потребности передаточное
отношение.
Реверсивные механизмы — механизмы, позволяющие изменять
направление движения на противоположное.
Суммирующие и компенсирующие уравнительные механизмы
(дифференциалы).
Грузоподъемные механизмы — тельферы, лебедки и др.
Механизмы управления.
Во многих случаях механизм, составленный из зубчатых колес, выполняет
несколько функций одновременно. Например, планетарный редуктор может быть
использован в качестве предохранительного механизма.
По структуре мехатнпмы, составленные из зубчатых колес, разделяются на
простые передачи, в которых оси всех колес неподвижны, и эпициклические,
в которых некоторые колеса (сателлрхты) вращаются вокруг собственной оси и
вокруг центральной оси передачи.
В зависимости от назначения механизмы, составленные из зубчатых колес,
NmryT иметь одну или более степеней свободы, в соответствии с чем должно
задаваться количество независимых движений.
И1прокпс возможности для связи между валами с измеияюни^мся межосевым
P^^ccTOHmicvi и для воспроизведения сложного вида траекторий и трансформаций
-'вилеипя имеют комбинированные механизмы и в первую очередь зубчато-
1Ь1чажиыс сисюмы с круглыми и некруглымп колесами с двумя и более степенями
свободы.
17i 'Зубчатые kowca и механизмы, составленные га зуЬчатых KOACt
В некоторых случаях на практике успешно применяют волновые зубчатые
передачи с мыоГоПарныМ зацеплением, оТДиЧаю11;11еся высокой точностью
воспроизведения передаточргого отношения.
При расчете или анализе механизмов, составленных из зубчатых колес,
возникают задачи двух видов, а именно: определение передаточного отношения через
параметры передачи или определение параметров передачи по заданным
передаточным отношениям или час готе вращения. Первая задача вполне определенная
и имеет единственное решение. При рассмотрении второй задачи возникают
затруднения вследствие большого числа решений, из которых следует выбыть
наиболее целесообразное. Однако в некоторых случаях Точное решение вообще
отсутствует и практически приходится подбирать наиболее близкое решение, при
котором заданное передаточное отношение может быть реализовано с наименьшей
ошибкой.
Передаточное отношение пары колес внешнего зацепления (рис. 3.61)
^hi — — — ~ ~ ~* •
Знак минус принят, потому что колеса вращаются в противоположных
направлениях.
Для внутреннего зацепления (рис. 3.62)
I/ , == -^- = -^^- = -1^:2_ ^ _^
"2 «2 /\vl -i *
Для пары конических зубчатых колес передаточное отношение (рис. 3.63)
Hi 22 sin 62
^12 = = = —":—Г">
П2 Zi SinOi
где 251 и 252 " углы при вершинах начальных конусов.
Полное передаточное отношение рядового зацепления, т. е. отношение частоты
вращения первого и последнего валов передачи, равно произведению простых
передаточных отношений пар з>бчатых колес, связывающих между собой два
каких-либо промежуточных вала
где m - число внешних зацеплений.
Определять знак передаточного отношения имеет смысл только для передач,
составленных из цилиндрических зубчатых колес. Для сооспой (см. рис. 3.65, а и б)
конической передачи знак передаточьюго отношения определяется с помощью
стрелок. Зубчатое колесо (паразитное), одновременно зацепляюпдееся с двумя другими
на величину передаточного отношения не влияет, но меняет знак его на
противоположный. Четное число паразитных зубчатых колес знака передаточного
отношения не меняет.
Рис. 3.64. Возвратный ряд. Оси колес z^ и Zj совпадают.
Рис. 3.65. Возвратные ряды, составленные из конических колес. Для ряда а
Wl3 == - -А
Мехйнизмы, составленные из зубчсИпых колес
\1Ъ
М-х4- -i's;!—^
Flic. 3.61
^2Т
Р-
ы
Рис. 3.62
ж
■щ \
^1
Гис. 3.64
Рис. 3.65
Для ряда 6
Рис. 3.66. Схемы передачи движения вертикальным валкам универсальных
станов. Передача движения от конических зубчатых колес к валкам, положение осей
которых может изменяться, осуществляется посредством шпинделей с
универсальными шарнирами. Передачи отличаются тем, что по схеме б каждый валок имеет
свою пару конических колес, а по схеме а — одна пара конических колес заменена
цилиндрическими колесами.
Рис. 3.67. Схемы наиболее распространенных многоступенчатых редукторов:
С1 ~ двухступенчатый; момент к ведущему валу целесообразно подводить со
стороны более удаленного от шестерни подшипника;
о. в — двухступенчатые с разветвлением силового потока (схема б
предпочтительнее); колеса косозубыс;
^, «^^ — трехступснча тыс (в схеме д колеса косозубые);
^ - соосный; удобен при компоновке, но велики размеры в осевом направлении;
^'с - цилиндро-коничсский.
Рис. 3.68. Рациональные схемы компоновки редукторов с встроенными
электродвигателями:
^ — имеет два соосных фланца, опоры промежуточного вала размещены в кор-
Усе редуктора; соосность фланцевых расточек с осью привода облегчает расточку
"орпуса и монтаж, поворот фланцев вокруг главной оси не вызывает перекосы
^^'^Цеплениях, хорошо используется конструктивная жесткость валов;
174 Зубчатые Koiecct и мсхаиизмь', соста'-.ленные из зубчатых ктес
S)
Рис. 3.66
Г-—<gb-Hgr--H к rf
I—hL—Hit—iiiiJ ^—11
<В1 181 IIS
^
X X
Е
I iBhHiHl
г)
_Xb<JIZx:
^If—н1нн1н1
^
^c\ X ~т
^1
X I X
1 X I
^;
Рис. 3.67
Г
L
И
i
с;
L
>|
/^;
II I:
Г
u^
тН
L
ъШ
9
11
Рис. 3.68
Механизмы, составленные из зубчатых колес 175
5 — правый фланец редуктора служит основной /деталью и вместе с подшип-
нпкамп, валами и колесами его можно собирать отдельно; отличается
минимальной высотой, шириной и массой;
6 — отливка корпуса проста, отверстия под опоры всех валов можно
растачивать за одну установку, погрешности обработки разъемов и сборки не влияют
на качес1во зацепления;
г — при наличии верхикальных разъемов редукюр имеет наименьшие габариты;
при соединении двух часхей корпуса на штифтах расючку люжно производить
совмеспю и раздельно.
Схема рекомендуется при серийном производстве.
Рис. 3.69. Редуктор с встроенным электродвигателем. Особенность
конструкции - одна корпусная деталь, отсутствие разъемов и возможность обработки всех
посадочных отверстий за одну >становку, жесткое 1Ь опор, надежность работы
двухс1уненчатой зубчатой передачи. Бстроенный асинхронный двигахель имеет
впутрениее охлаждение.
Рис. 3.70. Редукюр с встроенным электродвигателем и элект1юмагпитным тор-
^юзoм быстроходного вала. При выключении двигателя электромагнит 1 итпускает
конус 2, который под действием прулсины 3 входит в контакт с охватывающим
кон)сом 4, выполненным в крыльчатке вентилятора, и тормозит ротор. Все колеса
редуктора смонтированы на валах с нo^юш,ью тарельча1ых пружин.
Рис. 3.71. Редуктор с bciроенным элск1родвг11а1елем с двумя тихоходными
ва-1ами, имеющими различные скороехи, предпазначеиный для привода двухваль-
иых мешалок.
Рис. 3.72. Двухстущепчатый зубчатый редуктор с пред ох раните льпой муфтой.
Рис. 3.73. Трехе ту пен чат ьнй зубчатый редуктор с тор!\юзом 1, работающим под
де11С1вием поднпьмаелюго груза. Тормозной диск снабжен храновьглт зубьялш,
зацепляющимися с собачкачш.
Принцип работы тормоза 1 показан на рис. 5.85.
Рис. 3.74. Храповой редукюр. Ка ведомом валу 4 установлены: жестко —
храповое колесо 3 и свободно — колесо 2 с таким же чис.чом зубьев. К колесу 2
прикреплен зубчахый венец 1 с несколько большим пар\жпым диаметром, чем
диаметр колеса 3, и шагом, кратным ш'агу колес 2 и 3. На валу 4 свободно
}С1ановлено коромысло 5 с собачками 6 и 7, которое получает колебательное
движение от тяги 8. Ширина собачки 6 равна суммарной ширине колес 3 и 7,
а ширина собачки 7 — ширине колеса 2. Храповое колесо 2 поворачивается при
каждом рабочем ходе коромысла 5, а храповое колесо 3 поворачивается в тот
период, когда впадины на венцах колес 1 и 3 совпадают и собачка б западает
во впадину колеса 1. При наличии одной впадины на венце колеса 1 (на рис.
показано несколько) зубчатое колесо 3 поверпется одни раз за период nojuioio
оборота колеса 2. Собачка 9 препяхсхвует вращению колеса 3 при xojmcTOM ходе
коромысла 5.
Рис. 3.75. Двухступенчатый редуктор с храповы\и1 колесами. Па Бeдo^юм валу 6
закреплено храповое колесо 7 и свободно вращасхся ведущий шкив 11, закреплеи-
пьт на BiyjiKc 9. Па оси 5 свободно вращается промежуточное храповое kojicco /
и качаехся коромысло 2 с co6a4Koii 12 и роликом 10, прижимающимся к эксцст-
Рику па вт\лкс 9 шкива. Эксцсихрисихет ътулки выбран так, что за один оборо!
Шкива колесо 1 новорачивасхся на один зуб. Эксценхрик 4 BiyjH<n колеса 1 чсре^
ролик 3 сообщает качахельпое движение коромыслу 6' с собачкой, поворачивая
Колесо 7 на одни зуб за по.чный оборот колеса 1.
Таким образом, полное передаточное оi ношение для чисел зубьев колес эюго
Механизма
"11,7 -^1:^7 = 100-75-7500,
176 Зубчатые колеса и механизмы, составленные из зубчатых колес
И
Рнс. 3.69
Рис. ЗЛО
Механизмы, составленные из зубчатых колес
177
Рис. 3.71
Рнс. 3.72
178 Зубчатые колеса и механизмы, составленные из зубчатых колес
Механизмы, составленные из зубчатых колес
179
Л-А
Рнс. 3.75
Ретуктор создает пульсирующее движение ведомого вала при го — const. Однако
это практически на .работу привода не влияет вследствие большого передаточного
отношения.
Рис. 3.76. Редуктор со спиропдной передачей. В конструкции червяк 1 и вал 2
колеса имеют по две опоры.
Рис. 3.77. Редуктор с тороидпой передачей шахтных лебедок.
Движение от ведущего вала 9 к барабану 2 лебедки передается по двум
ступеням. Зубчатое колесо S первой ступени закреплено на ведуп;ем валу 9 и передает
Лвижсиие колесу 5, неподвижно соединенному с червяком 4 тороидпой передачи
^'WTpcHHcro зацепления. Венец 7 тороидпой передачи закреплен на консольной
^lacTH внутренней поверхности барабана 2 лебедки. Блок, составленный из колеса 5
^ червяка 4, установлен на неподвижной оси 6 на шариковых подшипниках,
^порами для барабана 2 лебедки служат шарикоподшипники 5 и i.
180
Зубчатые колеса и механизмы, составленные из зубчатых колес
Рис. 3.76
Рис. 3.77
Механизмы, состпавлетше из зубчатых колес
181
Рис. 3.78
Рис. 3.78. Зубчатый механизм дтя плавного изменения радртУса кривошийа.
Диску 4 с пальцем 2 кривоноша вращение передается колесами 14 я 6.
В полой части диска 4 и его вала 13 установлен механизм для изменения
величины радиуса кривошипа. Ползун 1 пальца 2 прикреплен к зубчатой рейке 3,
соединенной с рейкой на штоке 7 с помощью зубчатого колеса 5. Вращением
винта Ив неподвижной гайке 12 посредством зубчатых колес 8, 9 и 10
осуществляется перемеш,ение рейки 3, следовательно, и изменение радиуса кривошипа.
Рис. 3.79. Зубчатый механизм опрокидывания ковша шлаковоза. Винт 7,
приводимый в движение от электродвигателя 1 (рис. 3.79, а), через муфту 2, редуктор 3
1^ :^}бчату1о пару 6 соединен с гайкой 14, исремещаюн^ей посредством цапфы 13
^^>С)ча1ый СС1МСИТ 12, сцсплспшлй с неиодвижи.ой рейкой 9. На направляющем
Рельсе 8 установлен бегунок 11, жестко соединенный с сегментбм 12 опорного
кольца 10. Радиус бегунка равен радиусу начальной окружности сегмента. При
^'Ращспии вита 7 гайка 14 заставляет сегмент обкатываться по рейке, в результате
^leio бегунок И перемсгцаст опорное кольцо 10 с ковшом. Теперь одновременно
•^ ^''Прокидыванием ковиг сменщется к краю платформы, чтобы шлак выгружался
^ стороне от железнодорожных путей. В конечных положениях ковша командо-
'Чшарат 5, соединенный цепью 4 с винтом 7, выключит электродвигатель 1,
На рис. 3.79, б показан механизм опрокидывания ковша с двумя приводными
бинтами, имеющими один правую, а другой левую нарезки.
Рис. 3.80. Коробка скоростей с переключением ступеней поворотными шпон-
^^^п 2. Все четыре шпонки передвигаются от общего поводка 5 и поворачиваются
^Фужиной так, что выступ А заходит в пазы колес. Между зубчатыми колесами
установлены дистанционные кольца 1,
182 Зубчатые KOieca и механизмы, составАепиые из зубчатых колес
Рис. 3.79
Рис. 3.80
Рис. 3. 81. Зубчатая передача с
переключением скоростей винтовыми
механизмами. Если включить коническою
муфту 3 (рис. 3.81, а), то движение
от ведун^его вала 6 к ведомому 12
будет передаваться парой зубчатых
колес 2 и 9. Если включить муфту 10,
то движение будет передаваться
зубчатыми колесами 1 и 11,
Включение одной из муфт при
одновременном выключении другой
осуществляется винтовыми механиз-
хмами, состоящими из винтов 5, 8 и
гаек 4, 7, кинематически связанных
зубчатыми сегментами и
поворачивающихся на соответствующий угол рукояткой 13 (рис. 3.81, б).
Рис. 3.82. Механизм «заскакивающей шпопки», применяемый в станочных
коробках подач. В зависимости от положения шпонки 1, передвигаемой в прорези
вала 7, соответствующее колесо передает движение колесу, заклиненному на
ведомом валу //. При больнитх усилиях и скоростях ишонка быстро изнанишается.
Рис. 3.83. Восьмискоростная коробка меандр со cry пенями возврата,
применяемая в механизмах подачи токарных станков и состоящая из нескольких одинаковых
блоков зубчатых колес. Первая пара заклинена на ведущем валу /, остальные
посажены на втулке; ведомый вал // получает движение через накидное зубчатое
колесо Zq, Отношение Zi/z2 принято равным 2 и z' — z^. Меандр используют для
изменения диапазона подач в сторону повышения (удвоения) или понижения.
Рис. 3.84. Переключение трехступенчатой коробки скоростей двухпоршневым
цилиндром. На всдун];ем валу 1 (рис. 3.84, а) заклинено зубчатое колесо 2, на ведомом
валу 7 свободно >становлены зубчатые колеса 3, 5 и б, которые соединяются
с валом посредством фрикционных или зубчатых муфт 8 и 9, >становленных на
скользяни1Х нтпонках. На промежуточном валу 10 смонтирован блок из четырех
зубчатых колес. Поршень 11 цнл1Н1дра 4 (рис. 3 84, б) закреплен неподвижно.
При подаче жидкости в левую полость цилиндра 4 с валом 7 соединяется зубчатое
Механизмы, состаоленные из зубчатых Koiec
183
А ^ 9 10 11
Рис. 3,81
II Z; 7/
ш
о
Z/ Zi ^/-d
ft:*
V/ ZZ
1
о о сГ^Гро
о^о^ о S Ь 8
13 5 7
Рис. 3.82
Рис. 3.83
184 Зубчатые колеса и механизмы, состаблеиные уз зубчатых кол
ih^loirffi
\
Piic. 3 84
Рис. гт
Механизмы, состав icinihic из зубчатых ко lec
колесо 5 При подаче давления в правую полость
цилиндра с валом 7 соедин>1Сгся з>6чатое
колесо 3. Действием давления в средней полости
цилиндра пориюнь 12 перемешается вправо, при
этом муфта S соединяет с валом 7 зубчатое
колесо 6 CooTBcrciByioHHie но.'Юження цилиндра
и поршней показаны на рис. 3 84, 6.
Рис. 3 85. Коробка скоростей с непараллель-
HbiNHi осями ведущего и ведомого валов. На
валу /, расположепиом перпендикулярно
шпинделю, заклинен конус зубчатых колес z\ — Г7,
с каждым из которых вводятся в зацепление
конические колеса Zi и z^, скользяпдие по
шпонкам валиков // и ///, фиксируемых аналогично
карегке коробки скоростей с зубчатым конусом
и накидным зубчатым колесом. На концах
валиков // и /// заклинены конические колеса z^ и
Гз, передающие движение на ишиидель и в
коробку подач соответственно.
Рис. 3 86. Селекторная коробка скоростей
с четырьмя скоростями и задним ходом. На первой скорости колесо 1 соединяют
с валом 8, па второй — колесо 2 с валом (S\ на третьей ~ колесо S с валом 6,.
на четвертой — колесо 4 с ведомым валом //. Колесо 5 соединено с колесом 7
на валу / посредством паразитной нюстерни и при включении с валом б вращает
вал // в противоположном направлении (задний ход).
Рис. 3.87. Коробка скоростей. От ведуш^его зубчатого колеса 2 (рис. 3.87, а)
приводится в движение ведомый конический блок 1, в котором постоянная разность чисел
зубьев ступеней составляет 1 пли 2, или 3 и т. д. Допустимое под нагрузкой
переключение скоростей осуществляется смеи1ением зубчатого колеса 2 вдоль оси вала 5,
при этом у каждого конического колеса блока 1 предусмотрены круговые выточки
без з>бьев шириной в —Ь. Сцепление и расцепление колеса 2 с блоком хможет
Рис. 3.86
происходить только по специальным образующим блока U число которых равно
единице, если разность смеж1и,1х ко чес блока — число нечетное, и равно двум, если
четное. Начало и скорость перемещения колеса 2 выбираются так, чтобы в момент
совмещения одной из образующих блока с плоскостью зацепления колесо 2 уже
находилось между двумя смежными колесами блока ]. Для этого необходимо
(рис. 3.87, 6) повернуть рычаги б с валом 7 вокруг оси хх смещением рукоятки 4
(по стрелке Б), в результате чего стержень S, преодолев усилие пружины 8, а,
находящейся внутри него, повернет стрелку 9 на угол, при котором цилиндр 10
захватит и переместит ее влево вместе с кареткой ii и колесом 1 (см. положение /)
на один шаг. После перехода стрелки 9 в смежную кольцевую выточку кулачок 5
возвратит рукоятку 4 в исходное положение, соответствующее положению //
стрелки 9. Гребни цилиндра 10, снабженные левыми и правыми прорезами,
Допускают перемещение колеса 1 относительно вала 3 влево или вправо
(положение ///). Связь между цилиндром 10 \i коническим блоком 2 осуществляется
зубчаты\п1 колесами 12 \\ 13. Чтобы смес1ить каретку 11 с колесом 1 вправо,
надо рукоятку 4 переключить по стрелке А.
Коробка скоростей из1 отопляется для мощностей до 50 кВт с диапазоном
регулирования, т. е. отношением максимальной и минимальной частот вращения
ведомого вала D = zjz^ К 3,5.
186 Зубчатые коп'са и механизмы, состав ионные из зубчатых Koiec
Рис. 3.87
Число ступеней конического блока
D - 1
z, + \.
Наибольшее число зубьев ступени
г„ = /с(л - D + Tj,
1де ^ — перепад чисел зубьев соседних С1\неней:
ш tg о
Рис. 3 88. Коробка скоростей с переключением под нагрузкой. Отличается от
коробки скоростей \ю рис. 3.87 механизмом переключения. 1 Цилиндрическое
зубчатое колесо 2 на ведундем шлицевом валу 1 может перемещаться вдоль осп вала
посредством каретки 3, скользящей по направляющим 4 и имеющей палец 5,
Механиз мы, составленные из зубчатых колес
187
Рис. 3.88
скользящий в профилированном пазу жестко закрепленного на валу 7 барабана 6.
При работе механизму на заданной скорости вал 7 и барабан 6 неподвижны,
а палец 5 при этом расположен в части паза с углом подъема, равном нулю.
Персмещенке колеса 2 при переключении на другую скорость осуществляется
повороюм барабана 6 на 180°, смещающего каретку 5, в пределах зацепления
колеса 2 с блоком конических колес по так называемой образующей перехода
(см. рис. 3.87). Вращение барабану 6 сообщается зубчатым колесом И, скользящим
Моль оси вала 7, причем направление вращения его зависит от того, с каким
^13 колес: 10 или 16 соединено колесо 11 посредством кулачковых муфт. На двух
Диамс1ральпо прогивоположных учас1ках колеса 11 зубья срезаны, что позволяет
^^с\щсс1вигь своболпос псрсмси1С1И1С колеса без зацепления его с блокнрую-
^n\ui колесами 13 и 14, а слсдова1ельио, и осуществихь включение барабана 6
Только в соо1вс1сгвующич условию положениях.
Колеса 10 и 16 соединены с колесом 8, закрепленным на выходном валу 22,
*^истелю1'1 зубчатых передач и свободно вращаются на валу, но в
противоположных направлениях. Блок колес 14 и 15 приводится от.колеса 16, а зубчатый блок
•^ ~~^2 — колесом 10. Выключение механизма переключения осуществляется авто-
-^'^тически перемещением вилок 9 в п'сйтральное положение посредством торцового
^"У-^ачка на венде колеса 10 пли 16. В крайних положениях колеса 2 переключение
188 Зубчатые колеса и механизмы, составленные из зубчатых колес
осуществляется с возвратом его на ту же последшрю ступень или на предше^
ствующую. Барабан б в неподвижном положении фиксируется замком 17 и
соответствующими ему впадинами на барабане. Подпружиненные рычаги замка 17 на
схеме не показаны. Рукоятка переключения 18 и вся система рычагов, связанная
с ней, имеет блокирующее устройство, позволяющее включать механизм поворота
барабана 6 в нужный момент. Ролик 20, катящийся по кулачку 21 барабана,
блокирует тягу 19, связанную с рукояткой 18.
Эпициклические передачи
Образование эцициклической передачц можно представить к^к результат
последовательного присоединения статически определимых групп, состоящих из одного
звена (монады), к звеньям простейшего эпициютческого механизма с двумя
степенями свободы с помощью шарнира и высшей пары и сочетания различных
эпициклических и простых механизмов, составленных из зубчатых колес. Если дан
механизм с двумя степенями свободы, состоящий из поводка и вращающегося
относительно него зубчатого колеса, то, присоединяя к нему монаду z^, получим
механизм по рис. 3.89 или 3.90. В случае присоединения монад по рис. 3.92
требуется обязательное соблюдение соосности. Таким образом, наличие подвижной
оси приводит к механизму, возможное число степеней свободы которого равно
двум.
Звено, несущее подвижную ось сателлита, называют водилом пли поводком.
Будем называть эпициклический механизм с одним водилом простым, а с числом
водил более одного — сложным. Это дает возможность заключить, что число
степеней свободы сложного эпициклического механизма равно 2к — (к — 1) — к + 1,
где к — число водил, совпадающее с числом соединяемых между собой простых
эпициклических механизмов. На рис. 3.103 показан эпициклический механизм
с тремя степенями свободы {к = 2), состоящий из двух простых.
Простые эпициклические механизмы могут быть образованы сочетанием
цилиндрических зубчатых колес с внешним и внутренним зацеплением, конических
зубчатых колес, эллиптических колес, винтовых колес, червячных зацеплений, а также
из фрикционных передач.
Связь между угловыми скоростями или частотами вращения звеньев простой
эпициклической передачи может быть установлена путем обращеьшя
эпициклической передачи' в простую передачу с неподвижными осями колес. Для колес,
имеющих общую неподвижную ось вращения (солнечные пли центральные колеса,
рис. 3.92):
или
щ = wi3"3 + "в(1 -i^iO;
t^i3 = --4(-l)'".
Здесь Ыхъ — передаточное отношение простой передачи, полеченной из
эпициклической цутем остановки породка. В случае включения в эпициклическую передачу
только цилиндрических зубчатых колес знак Нхз определяется числом цар т
Механизмы, составленные из зубчатых Ro.iec
189
ИсШоА
Рис, 3.8
Походок
xJ
Рис. 3.9Q
=—Ж
■^
Рис. 3.91
Рис. 3.92
внешних зацеплений. При четном числе внешних зацеплений и^^ положительно.
В случае включения в эпициклическую передачу конических или других колес знак
Mi3 определяется направлением единичных векторов (см. рис. 3.65).
Связь между угловыми скоростя.чп^ сателлита и центрального колеса устанав-
ливаегся в векторной форме
0)2 — (Or
^2<^2 ~ ^?f^b
Щ — 0)в СОз — tOg
Отсюда
(720)2 = С0з1/23^2 + «в ('\ - ^2^^23)
В сл\чае параллельности осей сателлита и передачи
0)2 = W23CO3 + (1 - М23) ^ъ '
(3 2)
(3.3)
Уменьшение числа степеней свободы простого эпициклического механизма
достигается путем наложения ограничений.
Движение звеньев простого эпициклического механизма будет определенным,
если задать вращение каким-либо двум звеньям передачи. При этом возможны
шесть различных сочетаний; механизм в таком случае называют дифференциалом.
В частном случае одно из звеньев можно сделать неподвижным, в результате чего
получится при неподвижном водиле простая передача или планетарные передачи
в случае ос1аиовки центрального колеса.
Уменьшите числа степеней свободы можно достигнуть также путем введения
кинематических связей в виде простых или планетарных передач,
устанавливающих соотношение между движениями звеньев эпициклического механизма.
Кинематическую связь в этом случае называют замыкающей цепью. В случае сложной
эпициклической передачи ее при расчете следует разделить па простые и для
каждо11 из них написать соответствующее уравнение, связывающее частоту
вращения звеньев. Переход от одного простою эпициклического .механизма к другому
'"^южно осуществить вследствие равенства угловых скоростей соединенных звеньев.
Для статических расчетов эпициклических передач можно воспользоваться
уравнениями, вытекающими из условий статическою равновесия отельных звеньер
или всего механизма (см рис. 3.92):
ьи + Мз + ^^в -о,
(3.4)
>/з --- - У^\^\ъЦуь
(3.5)
190 Зубчатые колеса и механизмы, составленные из зубчатых колес
Здесь л 13 — коэффищ1ент полезного действия простой передачи, полученной из
эпициклического механизма при остановке поводка, но при той же самой
относительной угловой скорости зубчатых колес. Знак плюс или минус определяется
в зависи1\юсти от того, ведущим или ведомым окажется колесо z^ в обращенной
0)1 — СОв ^
передаче. Если Zi в эпициклической передаче ведущее, то при >0оно
остается ведущим и в простой передаче, поэтому в показателе степени необходимо
взять +1. При —^ ^<0 нcoбxoди^ю взять —1. При Zj. вeдo^юм в эпицнкличе-
ской передаче необходимо знак при 1 изменить на противоположный.
Уравнения (3.4) и (3.5) даю г возможность определить два неизвестных момента
по заданному третьему моменту.
Силы, действующие па зубья передачи, могут быть определены по уравнениям,
вьпекающим из равновесия caicjuinra:
Pi + Рз + П = 0;
р,
Рз
г',
Г1
Рз = f в -
1
Pi= -
Рв
i_j:L
где Pi — окружное усилие на центральном колесе z^; Р3 — на центральном колесе
-ъ\ ^в ~ реакция, действующая на ось сателлита; г'2 и г2 — радиусы колес сател-
липюго блока z'l — Z2.
Эи11циклические передачи получили очень широкое распространение в силу того,
что, варьируя связями, налагаемыми па звенья эпициклического механизма, можно
весьма иросю получить различные отношения между числами оборотов ведущих
и ведомых звеньев, суммировать движения, уравнивать перемещения и т. д.
Область применения эпициклр1чсских передач непрерывно расширяется,
изменяйся соответственно их струкхура. Сложные планетарные передачи могут быть
получены последова1е;и>ным соединением простых планетарных передач, созданием
замкнутых передач или uik называемых «бипланетарных» передач, содержащих
узлы «планетарных сателлиюв», включенных в «основной планетарный механизм».
В биплане!арной передаче (см. рис. 3.105, а) имеются сателлиты, несупгие рабочий
инструмент (фрезы Р) и вращающиеся одновременно вокруг трех осей Oj, О2, О3.
При оскпювлснном водиле В и освобожденном колесе Zj» получаем планетарную
передачу, в ко юрой сателлиты Z4b вращаются вокруг двух осей — О2 и О3.
Ес.чи в обычных планетарных передачах точки сателлитов описывают эпи-
цик;юиду или гипоциклоиду, то в бипланетарпой передаче точки сателлитов
описываю! сложные бициююидныс кривые — биэиициклопду, бигипоциклоиду,
гииo:)пицикJюидy, эпшипоциклоиду. Наиболее простые из этих кривых показаны
на рис. 3.105, б.
С точки зрения к. и. д. бипланетарпые передачи не имеют ощутимых иреиму-
щес1в перед обычными мноюрядными или замкнутыми иланегарными передачами,
однако первые позволяю! получить значительно большие передаточные отношения
при малых габаритах в осевом направлении и несколько увеличенных в радиальном.
Эпициклические механизмы применяются в качестве преобразователей — чаще
редукторов, чем мультип]шкаторов. В этой области эпициклические механизмы
получили широкое распространение вследствие того, что дают возможность при
Механизмы, состав юлиые т 1\'очатых ко lec
малом числе колес получить большие передаючные огнонюния (например, /(ля
механизма по рис. 3.121) или механизм с высоким к. н. д. Кроме того,
эпициклические механизмы применяются в качестве суммирутонцгх механизмов (в мехатшз-
мач станков и др.), предохранителыплх механизмов от перегрузки, уравнительных
MCxaiHi3M0B (дифференциалы автомобилей, тракторов и др.), реверсивных
механизмов, бесступенчатых передач с широкими пределами изменения передаточного
отношения, механизмов управления, механизмов, сообщающих эпизодическое
движение валу, совершающему сложное движение, механизмов автоматических и
полуавтоматических коробок скоростей, механизмов грузопод1>емных машин и
в ряде других случаев.
Бипланетарные передачи находят применение в нцттах для проходки тоннелей
метрополитена, в шахтопроходческих манншах и комбайнах, в конструкциях
реактивно-турбинных буров. . .
Кроме того, эпициклические механизмы иногда включаются в качестве составной
части в стержневые механизмы для получения особого вида сложного движения.
Пример 1. Определить передаточное отношение гц i планетарной передачи
{сл\ рис. 3.110), 22 = 98, Z4 = 98, z^ = 96, z^ = 101.
По формуле (3.1)
,, _ "3 - п^ _ м-:
^hi — = •
П2 - Us rj-5
Колесо 2 неподвижно, lu - 0:
- "32"в = '^З - ^в > (1 - ^^2) "в = "3 ,
щ,^,^^^ 1 ~.з. == 1 - ^^= 1 --^-1^^ = 0.0095.
«в Г3Г5 101-96
Хтесь индексы зубчатых колес соответствуют позициям на рис 3 110.
Пример 2. Определить передаточное отношение щ л и ii\ \у для передачи
по рис. 3.102, если в ней колесо 5 сделать неподвижным [п^, ^- 0)
Частоту вращения поводка определяем пз планетарной передачи, состоящей из
ведущего колеса i, сателлита 6-7 м неподвижного колеса 3.
По формуле (3.1) при Пз = О
«13 =
1 — Wi
Частота вра-щения вала IV по формуле (3.1)
^i--^
Щ = «11/41 + Пз (1 - l/4i), Z/41 = - -
V 4- ^ ~ "^1
lacTOTy вращения вала 11 можно определить из рассмотрения планетарной
^ретачи с центральными колесами i и 2 нлн из рассмотрения дифференциаль-
ои передачи с центральными колесами i и 2 и сателлитом 6-7.
192 Зубчатые колеса и мсхатпмы, составленные из зубчатых ко lec
*—*-~:Г^
-II
JTni
Рйс. 3.93
Рис. 3.94
Рис. 3.95
Рис. 3.96
I щ\
xJ
Рис. 3.97
Рис. 3.98
Рис. 3.99
Рис. 3 89 Просте11шая эпициклическая передача с двумя степенями свободы
При закреплении колеса z^ передача (^браидаек^я в паанегарную, а при
закреплении поводка — в npociyio.
f4ic. 3 90 Простейшая эпициклическая передача с дв;>мя cтeпeня^ш свободы.
Отличается от передачи по рис 3 89 папичием внутреннего запепления
Рис. 3 91. Эпициклическая передача с двумя cтeпeня^m свободы и двумя
Поспеловагельпо соединенными сателлитами
Рис. 3.92 Дифференциальная передача с двумя внешними зацеплениями.
Рис. 3.93. Сложная дифференциальная передача с двумя ведущими и двумя
ведомыми звеньями.
Рис. 3.94. Дифференциальная передача, полученная из механизма по рис. 3.90
присоединением одного колеса с внешним венцом.
Рис. 3.95. Дифференциальная передача с двумя внз'тренними зацеплениями
Рис. 3 96 Дифференциальная передача с двумя зубчатыми колесами с
внутренним венном в сателчитс.
Рис 3 97. Диф(|)еренпиальпая передача с блоком сателлитов.
Рис. 3.98. Дифферспциальная передача с двумя ведущими и двумя ведомыми
звеньями
Рис. 3.99. ПростеГпннй эпициклический механизм с двумя степеР1ями свободы
с двумя коническикш колесами.
Рис. 3.100. Дифференциальная передача, составленная из конических колес.
В простой передаче при неподвилсном поводке ы < 0.
Механизмы, составленные из зубчатых колес
193
1
ы
Рис. 3.100
Рис. 3.101
'^
ш'
^'л
I
4 1Т^.
Рис. 3.102
11
Рис. 3.103
xJ
Рис. 3.104
Рис. 3.101. Дифференциальная передача, аналогичная передаче по рис. 3.110,
но с Wi3 > О для простой передачи, полученной при остановке поводка.
Рис. 3.102. Дифференциальная передача с двумя ведущими и тремя ведомыми
звеньями.
Рис. 3.103. Дифференциальная передача с тремя ведущими звеньями: 1, 2, 3;
звено 4 - ведомое.
Планетарные редукторы.
Рис. 3.104. Планетарный редуктор с эллиптическими колесами. Планетарный
редуктор составлен из эллиптических колес с равным значением эксцентриситета е.
Ведущим звеном является водило В. Зубчатые колеса 2 и 3 жестко закреплены
на оси, колесо 4 — ведомое, колесо 1 — неподвижное. Передаточное отношение
определяется формулой
1
М4В =
0)4
©В
1 — в V 7 ФВ
/ 1 + е V • 2 Фв
-и
здесь е - эксцентриситет эллипса; ив - угловая скорость водила В.
п
* Кожевников в др.
194 Зубчатые колеса и механизмы, составленные из зубчатых колес
Рис. 3.105. Плоский бипланетарный механизм. Колеса Z2n — ^4в - ^зв вместе
с малым водилом в получают движение от колес z^ и Z2 и образуют узел
планетарных сателлитов. Большое водило Б, входящее в состав основного
планетарного механизма, получает движение от водила в через колеса Z2b —гзд. С малыми
сателлитами связан инструмент Р. Передаточное отношение при остановленном
водиле В (рис. 3.105, а) и освобожденном колесе z^b'
и 1,3В = "12"сат^2В,35>
где
Щ2 - - ---, t/eax = 1 + ^^, U2B,3B = ^^.
^1 ^2в Z2B
Передаточное отноптение бипланетарной передачи
t/ _ '^1 ^ 1 и^ - 1 J- ^^«^2 Л , ^3«
"1,й = ■ = 1 - Ui^-ув = 1 + 1 + ■
^В ^2В^1 \ ^2в
Передача компактна в осевом направлении и рациональна при 40 < м < 90.
На рис. 3.105, б показаны простейшие траектории точки сателлита па начальной
окружности с одной, двумя и тремя осями симметрии в зависимости от
передаточного отношения.
Рис. 3.106. Модель бипланетарного механизма исполнительного органа
проходческого комбайна. Диски с рабочим инструментом крепятся к малым сателлитам.
Рис. 3.107. Плоский замкнутый бипланетарный механизм. Колеса z[ — z^
замыкает цепь z^b — z\ — z'^ — z^^ ~ z^^^^ — h ~ Zig. Передаточное отнопгенис
Щ „ 1 . ^2 ( ^ЪВ , ^ЗВ^Зв , ^\^3в
■ -. U[ в = 1 + i +
^^В ^1 \ Z2B ^2В^2в 22Z2(j
Передача рациональна при 80 < п < 160.
Рис. 3.108. Пространственная бипланетарная передача. Рабочий орган (например,
фрезы Р) с помощью конических колес соединяется с колесами Z2e — Z2b, а корпус Q
служит водилом, при этом фрезы Р будут вращаться вокруг двух параллельных
осей Oj и О2 и одновременно вокруг перпендикулярной им оси О3. Точки резцов
фрез описывают сложную пространственную траекторию. В проходческих
комбайнах число фрез может достигать 12.
Рис. 3.109. Планетарная передача с поступательно движущимся сателлитом. При
неподвижном колесе z^ колесо Z3 совершает поступательное движение, если z^ = Z3
и 1/31. = -~(-1)^> при этом
Щ =0)4( 1 --^-1 =0.
Рис. 3.110. Планетарная передача с двумя внутренними зацеплениями. Механизм
допускает при двух парах колес очень большие передаточные отнопюния (до
1:6000). Передаточное отношение
Механизмы, составленные из зубчатых колес
195
Рис. 3.105
Рис. 3.106
Рис. 3.107
196 Зубчатые колеса и механизмы, составленные из зубчатых колес
^М-
Рис. 3.109
Рпс. 3.108
^ n^f /
V77777777777777777
Рис. 3.110
Рис. 3.111
При больших скоростях ведущей части эксцентричные массы кривошипа и
сидящих на нем колес должны быть уравновешены контргрузами \.
Рис. 3.111. Планетарный редуктор авиационного двигателя для вращения двух
винтов
1
"4
1-//1
,^Il^
1 - t/i3
«41
- 1.
Рис 3.112. Планетарный рсдукгор в механизме распределения авиационного
двигателя. На валу А сидит эксцентрик В, выполняющий роль поводка. Сателлит
включает колеса z'2 с внешним и Z2 с внутренним венцом
Щв= ^~ ——•.
Z2Zi
Механизмы, составленные из зубчатых колес
197
Кулачки,
Рис. 3.113
Рис. 3.113. Планетарный редуктор. Механизм состоит из двух пар внутреннего
зацепления (по схеме рис. 3.95). Сателлит 2 уравновешен противовесом 3. При
ьедущем эксцсн1рике i передаточное отношение
wii,i = 1
4^1
Рис. 3.114. Схема дифференциально-ipynnoBoro привода многоклстьевого стана.
Угловая скорость валков рабочих клетей образуется суммированием с помощью
дифференциалов 2 скоростей двух независимых трансмиссий i и 3, приводимых
^т двух двигателей - главного [А) и вспомогательного (Б), с помощью которого
южно производить плавное изменение скоростей валков стана. Раздельное регу-
*' '^'P^K^iHHc скоростей но клетям исключено. Станы с дифференциально-групповым
Р^^водом экономичней сгапов с индивидуальным приводом.
198 Зубчатые колеса и мехаииты, составленные из зубчатых колес
Рис. 3.115. Схемы
дифференциалов, которые Moryi на.ити примене-^
нис в приводах редукционных
станов. При заданном моменте
прокатки М„р имеем:
а — валки клетей приводятся от
колеса 1 конического
дифференциала
^'кл = "1 + 2/^1-
б - привод валков от водила Н
конического дифференциала
6'- привод валков о г колеса 3
ци.чпндрического дифференциала.
т-т Zo I
При выгодном —^ = —• здесь и
Zi 2
далее
М, --= 2М,р, М, = ЗА/„р,
//,,, = 2/1з + 3/7,,.
Рис. 3.114
Mi
ш
Рис. 3.115
Механизмы, составленные из зубчатых колес
т
г — привод валков от водила Я
цилиндрического дифференциала
3 ' ^ 3
}ц + 2}u
Рис. 3.116
д - привод валков от колеса 3 цилиндрического дифференциала
3",1 - "I
Ml = -^"l'-, Мн - -^^-
"К1 ==
Легко заметить, чго схемы гиб приводов от водила при больших М„р
наиболее предпочтительные.
Рис. 3,116. Схема дифференциального гидропривода. Здесь главное вращение
передается валкам от общего двигателя 1, вала 2, конических колес 7,
дифференциала 9, а вспомогательное сообщается дифференциалу для каждой клеги ог
индивидуального гидропривода. О г вала 3 приводится гидронасос 4,
производительность которого регулируется сервоприводом 5. Масло от гидронасоса 4
поступает в гидродвигатель 6, откуда трансмиссией 8 вращайся центральное
колесо дифференциала 9, водило которого через выходной вал 10 и редуктор 11
приводит валки рабочей клети.
Рис. 3.117. Планетарный редуктор для передачи движения двум валам,
вращающимся в противоположных направлениях
— W;n — ~ -, "13 — ~'„ J "41 —
"l 1 — «13 22^^ Г2Г4
п^^щщх +?гБ(1 -Щ\)^ "1
«'41 +
1 - "41
1 - "13
У14 ^ I/13H4I - 1
"1 1 -"13
200 Зубчатые колеса и механизмы, составленные из зубчатых колес
'{ V ^
ж
пШ
г—п| Щ
А
Рис. 3.117
Рис. 3.118
Рис. 3.119
Рис. 3.120
Рис. 3.121
Механизмы, составленные из зубчатых колес 201
Валы будут вращаться в разные стороны с одинаковой частотой вращения,
если W 13^^41 = 2-
рис. З.П8. Планетарная передача с противоположным направлением вращения
водила В и колеса z^ при неподвижном z^:
1 ^3 ^1 - Z3
Рис. 3.119. Дифференш^ал с коническими колесами различных размеров.
Рис. 3.120. Редуктор. Ведущее колесо Zi, ведомое z^. Передаточное отношение
1 _ ^3^5
^U _ ■^2-4
1/41 — •
Рис. 3.121. Планетарный редуктор с замкнутой эпициклической передачей
с приводом от ременного шкива. Поводок выполнен в виде шкива /. Колеса zg,
Z5, Z4 и Zi простой эпициклической передачи замыкаются передачей из конических
колес Zi; Z2; Z3: И — ведомый вал
Zi 1 - Мб5
^2
Z^Z-^
1 + "65 -^
^3
W65 = ^^— близко К единице.
Редуктор этого типа дает возможность получить
1
Щ\Л
200 000
Рис. 3.122. Планетарный редуктор с большим передаточным отношением.
Червячные колеса вращаются в противоположных направлениях. При равной
частоте вращения червячных колес ведомый вал // не вращается. Если же частоты
вращения червячных колес разные, то ведомый вал вращается с частотой
^ Щ - Щ _Щ I kg К^\
"^^ 2 2 V^4 ^3^2
^Де /Гд и kg — число заходов червяков. При к^ = кв = 1
^3 - -^4 —^
"II = «1— ^-
2Z4Z3
■^ис. 3.123. Счетчик частоты вращения. На валу I установлены два червячных
олеса 2 и 3, которые одновременно зацепляются с червяком 4. Колесо 2 имеет
зуб и соединено с валом неподвижно, а колесо 3 имеет 100 зубьев и свободно
ращается относительно оси вала. На колесе 3 установлен циферблат с двумя
^чами: внутренней и внешней. Сгрелка 5 укреплена на валу и показывает на
202
Зубчатые колеса и механизмы, составленные из зубчатых колес
Рис. 3.122
"^777777777777777^/
Рис. 3.123
Рис. 3.124
внугренней шкале сотни оборотов на одно деление до 10 000. Стрелка 6
прикреплена к неподвижной стойке 7 и показывает па внешней шкале единицы и
десятки оборотов до 100.
Рис. 3.124. Счетчик частоты вращения. Использование механизма по рис. 3.123
в качестве счетчика неудобно в том отношении, что отсчет производится по
подвижной шкале. Воспользовавшись методом инверсии, колесо 5 можно
остановить, а поводок (стойку 7) вращать с частотой вращения колеса 3, но в
противоположном направлении. Передачу движения к червяку 4 с подвижной осью
вращения М0Ж1Ю осуществить, Как показано на рисунке.
Рис. 3.125. Червячный /щфференциал. Червяк I получает вращение от зубчатой
передачи с ведомым колесом 2. Опоры червяка I смонтированы в рамке 3, которая
вместе с червяком может перемещаться посредством винта 4. Угловое перемещение
червячного колеса 5 равно алгебраической сумме перемещений от вращения
червяка и вин га
Рис. 3.126. rijianeiapnbnl редуктор с плавно ггзменяемым передаточным
отношением. Oi шкива 4 движение сообщается центральному колесу 5 дифференциала,
а через шкивы 3 и 2 и конический барабан I — барабану 8, являющемуся в данной
передаче поводком. Ведомое центральное колесо 7 вращается с частотой
П7 = - /?4 + -^
RiRr
-//4 - "4
Вследствие изменения Ri/Rs при смещении ремня вдоль оси барабана пу
изменяется, б — сателлиты.
Механизмы, составленные из зубчатых колос
203
Рис. 3.127. Планетарный редуктор с цевочным зацеплением. На эксцентрике
вала h "^ роликовых подшипниках, установлен диск 2 с цевкамп 4. На ведомом
рапу закреплена звездочка 3 с полукруглыми зубьями. Звездочка 5 неподвижна.
() - противовес.
рис. 3.128. Планетарный редуктор. На двух, эксцентриках ведущего вала I
вращаются два одинаковых сателлита 2 и 3, находящихся в зацеплении с
неподвижным зубчатым колесом 4 внутреннего зацепления. Вращение ведомому
валу б передается через пальцы 5, которые установлены на диске вала и входят
в отверстия сателлитов. Передаточное число редуктора определяется по формуле
Z2 - Z
где zx - число зубьев сателлита; Z2 - число зубьев колеса с внутренним
зацеплением. На рис. 3.128, а дана схема редуктора, а на рис. 3.128, б — конструкция.
Рис. 3.129. Планетарный редуктор с цевочным зацеплением. На ведущем валу I
установлен сдвоенный эксцентрик 2 со смещением эксцентриситета по фазе на
180'. Звездочка 5 установлена на одном, а звездочка 3 — на втором эксцентриках.
Рис. 3.125
Рис. 3.126
Рис. 3.127
204
Зубчатые колеса и механизмы, составленные из зубчатых колес
Зубья звездочек находятся в зацеплении с цевками 9, оси 4 которых закреплены
в корпусе редуктора. На диске 7 ведомого вала закреплены пальцы 6 с роликами 8.
Ролики 8 входят в отверстия звездочек 5 и 5. Передаточное отношение редуктора
определяется по формуле
где Zi - число зубьев звездочки; zi - число цевок цевочного колеса
(предпочтительно четное).
Рис. 3.130. Конструкция плавающей солнечной шестерни:
а - на. двойной зубчатой муфте; б - на муфте Ольдгейма.
Случай б целесообразно применять при больших передаточных, числах ступеней
(и = 7-11).
Механизмы, составAeinihw из зубчатых ко юс
205
А-А
Рис. 3.129
а)
S)
Рис. 3.130
Рис. 3.131. Конструкция плавающей солнечной шестерни. Продолжением венца
шестерни I служит зубчатый венец полумуфты 2. Вторая полумуфта 3 с наружными
зубьями выполнена на хвостовике ведущего вала, обе полумуфты соединяются
втулкой 4 с внутренними зубьями.
Рис. 3.132. Конструкция плавающих сателлитов со взаимными связями. Оси,
на которых установлены сателлиты, связаны и имеют возможность перемещаться
в пазах, при этом перемещение одного сателлита вызывает определенное переме-
uiCHHe остальных:
<^ - с помощью рычагов. Три сателлита 1 смонтированы на сферических
подшипниках и эксцентричных осях 2, закрепленных в водиле 3. Оси 2 относительно
^^одила могут поворачиваться на подшипниках 4. Рычаги 5 крепятся к осям 2,
а ца-пфами на свободных концах могут свободно скользить в кольце 6, которое
при неодинаковых реакциях Q,-' перемещается, помогая выравнивать нагрузку,
передаваемую сателлитами;
о - с наклонными пазами для нереверсивных передач. Оси сателлитов 2 раз-
ещены в пазах водила 5 и захватываются жестким кольцом 4, которое при
^одинаковых радиальных проекциях Q,- сил Т давления осей сателлитов на водило
206
Зубчатые колеса и механизмы, составленные из зубчатых колес
будет перемещаться, способствуя вырав-
. пиванию усилий па сателлитах;
в — с радиальными пазами для
.реверсивных передач; принцип действия такой
же, как и на рис. 3.132, б.
Рис; 3.133. Конструкция сателлитов,
смонтированных в водиле на упругих
опорах: а — сателлит посажен на
резиновую втулку; б — ось сателлита выполнена
упругой.
Рис. 3.134. Конструкции элементов
планетарной передачи с уменьшенной
неравномерностью распределения нагруз-
Рнс. 3.131
в)
Рис. 3433
Механизмы, составленные из зубчатых колес
207
^^^^>"^^-^^^^^^Z^
шшш ^^
zl
М
Рис. 3.134
ки: {/, о-хибкие венцы, применяемые в быстроходных передачах и в передачах
с двухвснцовыми сателлитами. Ошибки зацепления компенсируются податливостью
элементов передачи; в — сателлит колоколо-
образной формы; г - ось сателлита в форме
оалки равного сопротивления; д — самоусганав-
ли Бающийся сателлит на резиновой подвеске;
^'- ось са1елли1а на упругих опорах в водиле;
^'^\ ^^ - подушки из резины и стальных пружин-
пых ободов для подшипниковых опор; и — зуб-
'''Пый венец из резины с мe'^aлJПlчccким покры-
шем поверхности.
^ п<-^ 3.135. Схема иланегарттот! ттсредачп
фемя caтe.uлтi^a^нr, посаженными на сфсрн-
ескпе подшттпникн, и приводом центрального
лаватощего колеса от одинарного кардана без
"зьыточных связей. Рис. 3.135
208
Зубчатые колеса и механизмы, составленные из зубчатых колес
Л^5
Рис. 3.136
В однородном планетарном механизме без плавающего звена с тремя
сателлитами с цилиндрическими подшипниками имеется восемь избыточных связей, что
требует чрезвычайно высокой точности исполнения и сборки.
Рис. 3.136. Рациональная схема планетарной передачи. Если сферические
подшипники не размещаются внутри сателлитов, то их следует соединить с водилом
посредством качающихся рам. Плавающее звено ставится на двойной кардан.
При шести зацеплениях передача имеет одну избыточную связь в двойном кардане.
Эпициклические реверсивные механизмы
и механизмы управления
Рис. 3.137. Приводной шкив с планетарным реверсом. Центральное колесо 3
неподвижно. При включении муфты 6 шкив 1 соединяется непосредсгвенно
с валом. Реверсирование вала // достигается включением тормоза 7,
соединяющего колесо 2 с валом, который теперь вращается через планетарную передачу
с колесами 2, 5, 4 и 3 с частотой
• «II = «1 (1 - U23) = «1 1 -
Z4Z2
Реверсирование возможно при «23 > 1-
Рис. 3.138. Реверсивный планетарный шкив. Прямой или обратный ход с
увеличенной скоростью сообщается шпинделю переводом ремня на шкивы 2 или 4.
Необходимое при нарезании резьбы медленное вращение достигается переводом
ремня на шкив 3 и остановкой с помощью торцовой кулачковой муфты б
цешрального колеса 5 планетарной передачи. Ведомое колесо 1 вращается
с частотой
Hi = Пз(1-1/10,5) = "з(1--?^
Движение шпинделю сообщается от зубчатых колес z^ и z-j.
Рис. 3.139. Реверсивный планетарный механизм рабочего движения
строгального станка. Конусом фрикциона 1 могут поочередно затормаживаться централь-
Механизмы, составленные из зубчатых колес
209
ные колеса Zi и Z3. Движение сообщается поводку 2, выполненному в виде
червячного колеса, приводимого от червяка /. При торможении колеса Zj ведомый
вал // делает /]// оборотов
"11 = "в(1--^^) = %(1
45-30
= 0,5^5.
Z2Z4 / \ 45 • 60 ,
При неподвижном Z3 осуществляется обратный ход с частотой
^ и = "5 U -
4^4
«Б 1
70-30
20-60
0,15пв.
Рис. 3.137
Рис. 3.138
210
Зубчатые колеса и механизмы, составленные из зубчатых колес
Рис. 3.139
Рис. 3.140. Механизм рабочего
движения в станке для нарезания шевронных
зубчатых колес. При свободно
вращающемся колесе Zg (рис. 3.140, б) движение
от ведущего вала / к ведомому валу //
вследствие большого сопротивления в
замыкающей цепи от z^^ к z-j передается
через планетарную передачу Zi — Z2 — z^,
с неподвижным z^,
щ = 2ли.
В процессе деления Zg, а
следовательно, и Zg затормаживаются, вследствие
чего вводится в действие замыкающая
цепь с коробкой скоростей b — а и второй
эпициклической передачей
При этом
^4 = "II (1 - »4б);
«43
поэтому пц
^4-
П4. --
к
Ч-
iU3«3;
_ «4 _ ^7^^ 2
«1 = «3"i3 + "п(1 - "1з);
Wi3 = - 1 И «46 = 1,
2"(/(4з - 1) '
На рис. 3.140, а дана конструкция механизма.
Рис. 3.141. Механизм подачи электродной проволоки. Подача проволоки
осуществляется рифлеными роликами: рабочим 4, заклиненным на валу 1, и прижим-
'Ч-
Рис. 3.140
Механизмы, составленные из зубчатых колес
211
ным -5' находящимся под
действием пружины 6.
Центральные колеса
дифференциала получают движение от
двух электродвигателей:
колесо 2 - от Асинхронного, а
колесо 5 - от электродвига-
-1еля постоянного тока с
автоматически регулируемым
числом оборотов в
зависимости от тока дуги. При
подаче проволоки с
постоянной скоростью электродви-
хатель постоянного тока
выключается.
Рис. 3.142. Планетарный
редуктор с большим
передаточным отношением.
Редуктор состоит из двух
ступеней планетарных передач.
Первая ступень составлена
из шестерни 7, сателлита 2
и неподвижного колеса 3
с внуфенним зацеплением.
Сателлит 4 второй CTyneinr, блокированный с
па оси свободно вращающегося водила 6,
на ведомом валу 7.
Рис. 3.141
сателлитом 2 и установленный
зацепляется с колесом 5, закрепленным
Передаточное отношение редуктора определяется по формуле
2i + Z3
И =i
5 и 3
Рис. 3.142
и может быть в пределах от 150
до 25 000.
Рис. 3.143. Плане гарный
редуктор с равномерным распределением
нагрузки между сателлитами 4
имеет эластичные гибкие венцы 6
и 5 с внутренним зацеплением.
Движение передается от плаваю-
идего ведущего колеса 1 к ведомому
валу 8, который соединен с
эластичным колесом 6 посредством тонко-
сгенного цилиндра 7. Неподвижный
эластичный венец 5 соединен с
корпусом редуктора тонкостенным
цилиндром 9. Сателлиты 4 смоши-
рованы па осях 3 плавающего
водила 2.
212 Зубчатые ко leca и механизмы, состав.1етше ui зубчатых ко lec
Рис. 3.143
Рис. 3.144
Мехатпмы, составленные из зубчатых ктес
213
Рис. 3.144. Плане! арный
редуктор с плавающим венцом
внутреннего зацепления. При нерав-
HONtepHOM распределении
нагрузки между сателлитами 2,
к'оторая передается
валом-шестерней /, колесо 3, имеющее
зазор с корпусом редуктора,
придет в движение и займет
положение, соответствующее
равномерному распределению
нагрузки. С корпусом соединено
колесо 3 посредством зубчатой
муфты 4, которая препятствует
его вращению.
Рис. 3.145. Сцепная муфта
.чютовоза, имеющая две
скорости, перемена которых
осуществляется торможением
барабана 1 или включением
сцепления 2.
В первом случае колесо z^
неподвижно и передача
планетарная, во втором — передача
работает, как обычная муфта,
при этом все элементы
вращаются как одно целое.
Рис. 3.146. Избирательная
передача для вращения от двух
приводов. Оба привода 1 и 4
(например, двигатели) могут
иметь разную мощность.
Посредством тормозов 3 и 2 можно
плавно переключать механизмы
с одной скорости на дру1ую.
Возможно также вращение от
двух приводов одновременно.
Зубчатое колесо 5 установлено
па ведомом валу.
Рис. 3.147. Механизм поворота. На водиле 1 вращаются два червяка, связанные
с червячными колесами Zi на полуосях и гипоидными колесами Z2 и Z3 с
тормозными барабанами. Вследствие того, что червяки самотормозящие, при опущенных
тормозах обе полуоси вращаются с одинаковой частотой. При включении правого
тормоза 2 гипоидное колесо Z2, обкатываясь по колесу Za, при помощи червяка
сообщит правой полуоси дополнительное движение в обратную сторону, поэтому
''олуоси вращаются с разным числом оборотов.
Аналогичное явление имеет место при включении левого тормоза 3.
Рис. 3.148. Планетарная передача механизма управления автомата имеет
сложный сателлит, состоящий из зубчатых колес 13 и 14, червяка 7 и винтового
колеса 9. При сцеплении муфты i2 со шкивом 10 вал 2 по;?учает быстрое враще-
не. Собачка 6 препятствует вращению колес 5 и 8, вследствие чего поводок 1
Ращается при свободно скользящей собачке 4 по зубьям храпового колеса 3.
214
Зубчатые колеса и механизмы, составленные из зубчатых колес
Рис. 3.146
Рис. 3.147
Рис. 3.148
При выключении муфты 12 движение валу 2 передается через собачку 4, связанную
с храповым колесом 3 поводка L Вал 2 через плане! арную передачу получает
медленное вращение. Червячная передача 7 — 8 должна быть самотормозящейся.
77 — винтовое колесо.
Рис. 3.149. Механизм регулирования скорости распределительного вала автомата.
При движении распределительною вала с уве]П1чепной скоростью движение
червячному валу 5 передается непосредственным соединением его с колесом 2 при
помощи кулачковой муфты 3. Медленное движение (рабочее) с возможностью
регулирования скорости достигается через лобовую фрикпиоиную 7 и планетарную
4 передачи.
Рис. 3.150. Планетарная пере71ача к управляющему валу автомата. Механизм,
аналогичный показанному на рис. 3 149, но с приспособлением для подъема
собачек для устранения щума при их скольжении. Подъем собачек производится
поворотом диска 7 под действием пружины.
Рис. 3.151. Механизм для наматывания бумаги на барабан. При наматывании
бумаги (рис. 3.151, о) диаметр барабана 7 увеличивается, следовательно, часюкя
вращения должна уменьщиться, если линейная скорость бумаги сохраняется.
В рассматриваемом мехатшзме (рис. 3.151, а) барабан 7 соединен с поводком 2
/дифференциала. Солнечное колесо 3 дифференциала соединено с зубчатым
колесом 4 и вращается с возрастающей скоростью, а колесо 5 получает вращение от
вала 6 с постоянной скоростью.
Рис. 3.152. Механизм перемещения суппорта крупного токарного станка.
Ведомому валу // при выключенном вспомогательном двигателе 7 и заторможенной
Механизмы, составленные из зубчатых колес
215
= //4 1 + —
посредством электромагнитного
тормоза 2 кинематической цепи
Q зубчатым колесом z^ движение
сообщается от червячного вала
3 через планетарную
передачу
лц = '^3 = ''4(1 - "3i) =
1
^3
При включенном двигателе 1
передача работает как
суммирующая:
//II = ± //1-^—+ //4(1 - W3i).
^3
Рис. 3.153. Механизм
управления силовой головки
многошпиндельного сверлильного
станка. Вращение шпинделя
сообщается от двигателя с //,,=
= 3600 об/мин через
планетарный редуктор: /7,„ = //„ (1 - и).
Медленное движение головки
при заторможенном рогоре
двигателя Р происходит при
навинчивании гайки I на
неподвижный винт с часто!ой вращения
Рис. 3.149
"б
1 -Щд
1-//7
3,88
^9
27
= - 0,.568.
Piic. 3.150
216 Зубчатые колеса и механизмы, составленные из зубчатых колес
а)
Ю
Рис. 3.151
ш
Uki
к?г^/г////.
wzzzzzz^
^
Т^ г->.П,
2,„=S0
] Г)' ) Т^Щ:
^Л2^/2
I yZ,
K,-J-
tn=J9
If
щ.
iz
T$i:=
\)^.f^<^mm,p -^
=5*
П—\zzzzzzzr
w
/,=/<?
>^=«
Рис. 3.152
Рис. 3.153
Механизмы, составленные из зубчатых колес 217
При прошиоиоложпых направлениях вран^сния колеса Zg и роюра дви1а1сля Р
частотой вращения, равной Пр = 1600 об/мин, 1айка 1 вращается с частотой
вращения (быстрый подвод головки)
+ 580.
При изменении направления вращения ротора двигателя на противоположное
(быстрый отвод головки)
п'С = 3,88 -^ - 580.
^в
Переключение двигателей производится распределительным валиком,
периодически поворачивающимся от распределительного диска с кулачками через храповой
механизм. Распределительный диск, соединенный с Гц, вращается всегда в ту же
сторону, что и гайка 1 с частотой
"и = «о(1 - wii.io) = fh -. —;
^ "~ ^13,10
- ^10
^13, 10 — •
^13
Длина хода головки регулируется положением кулачков на распределительном
диске.
Рис. 3.154. Механизм подачи станка для фрезерования тюбингов.
Поступательное движение рейке (рис. 3.154, б) сообщается червячным валом д, связанным
через колеса zg и zg с коническим колесом z-j эпициклической передачи.
Частота вращения червячного вала
Па = "98^7 = [W75«5 + (1 " "75) "2] «98 = —(-«4 + 2Пз) •
Zg
Рейке сообщается быстрое перемещение вперед и назад при вращении
червячного колеса z^. Двигатели включаются независимо. Червячные пары
самотормозящиеся, поэтому нет надобности устанавливать тормоза. На рис. 3.154, а
показана конструкция механизма.
Рис. 3.155. Планетарный редуктор с большим передаточным отношением.
Два сателлита — один, состоящий из колес 70 и 5 на валике 7, и второй —
из колес 9 и 6 на втулке 8, имеют общую геометрическую ось вращения на
водиле 13. Передача может быть разложена на планетарную с неподвижным
центральным колесом 7, прикрепленным к корпусу 4, и ведущим колесом 12 на
приводном валу 11 и дифференциальную с центральными колесами 12 на
ведущем и 5 на ведомом валу 2.
Первая из указанных передач определяет частоту вращения водила
дифференциальной передачи.
При малой разности чисел зубьев z^q и Zg передача позволяет получить
" = 400^500.
Рис. 3.156. Планетарные передачи с уравнением нагрузки между сателлитами.
Для случая, когда передача имеет два сателлита (рис. 3.156, а),
шарикоподшипники каждого из них устанавливаются на эксцентриковые оси, соединенные
^ежду собой зубчатыми секторами.
218 Зубчатые колеса и механизмы, составленные из зубчатых колес
Ш///////Л
][
N
II
[
\' ч \
л
/К
'^
ШШ/М//////.
Ы
я
ll
O) «^1
4(5/
Механизмы, состав 1снпые из з\ючатых колес
219
Рис. 3.155
Рис. 3.156
220
Зубчатые колеса и механизмы, составленные из зубчатых колес
« 5
При неравномерном распре-
делении нагрузки между
сателлитами зубчатые секторы ново,
рачиваются, причем в разные
стороны и на один угол, пока
не наступит равновесие.
Отклонение эксцентриковых
осей сателлитов от
номинального положения очень мало и
составляет примерно до 25 мкм,
что является допустимым.
При наличии трех
сателлитов (рис. 3.156, б) в диске I
делаются криволинейные пазы,
в которые входят ролики
закрепленных на эксцентриковых
осях сателлитов рычагов 2.
Рис. 3.157. Планетарно-эволь-
вентный редукюр с крестовой
муфтой. В планетарно-эксцент-
риковых редукторах с
внутренним эвольвентным зацеплением
при разности чисел зубьев колес,
равной единице, применяются
механизмы параллельных
кривошипов, создающих вместе с
реакцией зацепления большое
давление на центральный
подшипник сателлита. Указанный недостаток снижается применением крестовой муфты
качения.
Сателлит 2, приводимый в движение от эксцентрика 1 (рис. 3.157, д), и фла-
Т1ец ведомого вала 6 несут по два одинаковых, симметрично расположенных
пальца с подшипниками 4, которые входят во взаимно перпендикулярные пазы
на торцах крестовины 5. К. п. д. такого редуктора при w = — 39 достигает 80%
при долговечности центрального подшипника, превышающего дол1овеч1юсть
подшипника редуктора с механизмом параллельных кривопшпов в 25 раз.
На рис. 3.157,6 показаны детали механизма: 2 — сателлит, 3 — палец, 4 —
подшипник, 5 — крестовина, 6 — фланец ведомою вала.
Планетарные коробки скоростей
Рис. 3.158. Планетарная четырехступенчатая коробка скоростей с
электромагнитным управлением.
Первая скорость — включены тормоза Tj и Тз; Z2 и z^. неподвижны
ЩМ = (1 - "з4)(1 - Wi2); Mi2 = - —; W34 = - -—.
^1 23
Механизмы, составленные из зубчатых колес
221
Вторая скорость - включены тормоза Т^ и Т^; z^
неподвижно; z^ соединено с валом Я;
wi,ii = 1 -^12-
Третья скорость — включены тормоза Т^ и Т^\ z^
неподвижно; Zj и Z2 блокированы;
^^1, II = 1 - W34-
Четвертая скорость — включены тормоза Гз и Т^\ все
передачи блокированы
«1,11 = 1-
Рис. 3.159. Планетарная коробка скоростей с
демультипликатором.
При включенной паре z-^ - Zg демультипликатора:
Первая скорость доспи ается затяжкой тормоза Т^
(колесо Z4 неподвижно):
h Ti Тг h
П:
^2-
^
Рис. 3.158
щ
Щ1
"1,11
^78^12(1 - »14)
"12 - "14
> 1; W78 = -
Вторая скорость достигается затяжкой тормоза Гз (корпус коробки неподвижен)
Z'Z2Z8
"1.11 = -
Z^Z Z-j
Третья скорость достигается затяжкой тормоза Г3. Все зубчатые колеса в
коробке блокируются;
"1,11 =
^8
Скорость обратного хода получается затяжкой тормоза 7^ ^ (останавливается
колесо Гз)
«1,11
"78"12(1 - "13) . „ ^'^3 .
, "13 — 777 '^ ^ *
Wi2 - "13 2iZ
При включенной паре Zj - Ze каждое из четырех передаточных отношений надо
}вел11чи1ь в -"-^^ раз.
"ис. 3.160. Четырехскоростпая планетарная коробка скоростей. Коробка
скоростей из двух планетарных передач, образованных колесами Zj — Z2 — Z3 и
"^ ~~ ^5 - Гб, управляемых кольцевыми электромагнитами 7, 3 и 4, б.
Магниты 3 и 4 жестко соединены с корпусом; магнит I вращается вместе
центральным колесом Z3; магнит 6 вращается с ведомым валом // и соеди-
^ii с водилом, несущим оси сателлиюв Zj. Между электромагнитами 1 н 3, 4 и 6
7j 2f Zz 2jr Г4. 7}
Tf ^o.X ^6
ytszzznzzzz
Рис. 3.159
Рис. 3.160
Механизмы, составленные из зубчатых колес 223
помещены якорь 2, связанный с колесом Zi, и якорь 5, связанный с
центральным колесом Гб. Водило 7 соединено с колесом Z4. / - ведущий вал.
Первая скорость — включены электромагниты 3 и 4:
??! = /7б = 0;
Вторая скорость — включены электромагниты 3 и 6:
}ц = 0; /14 = "1Ь
третья скорость — включены электромагниты 1 п 4:
Z4
Четвертая скорость — включены электромагниты / и 6:
Рис. 3.161. Коробка скоростей. Передаточное отношение в коробке изменяют
включением тормозов Т2, Т^ и муфты 2, в результате чего останавливаются
нейтральные колеса Z4, z^ или блокируется передача. Маховик 1 и вал 1 связаны
между собой. На ведомом валу закреплено колесо Zg.
Первая скорость ~ включен тормоз Т2, колесо z^ неподвижно
",. „ = 'V, = », (1 - ''-'~'
Вторая скорость — включена муфта 2, передача напрямую
Пг1 = п..
Обратный ход. Включен тормоз Тз- колесо Z4 неподвижно
Z4Z8
Тормоз 7] ~ основной тормоз автомобиля.
f^Hc. 3 162. Автоматическая прогрессивная коробка передач. Коробка передач
состоит из четырсхшарнирного механизма 1—2 — 3, приводян^его в движение
^-'олнечное колесо 4 планетарной передачи, инерционной массы (роль которой
Ч^^^ет поводок), автологов противоположного действия и реверсора, составленного
^ конических колес 6, 9 и 8, который передает движение ведомому валу // в одном
^'^правлении независимо от направления вращения втулок автологов 7. При коле-
' тельных движениях колеса 4 водило также совершает колебательные движения,
^ывая через зубья колеса сателлита давление на зубья колеса 5. При доста-
224 Зубчатые колеса и механизмы, составленные из зубчатых колес
^^lI' ^''
Рис. 3.161
Рис. 3.162
Механизмы, составленные из зубчатых ко iec
225
Рис. 3.163
точной величине массы и соответствующем числе оборотов вала / давление на
зубья ко чеса окажется достаточным, чтобы через автологи 7 и реверсор 6-9 — 8
сообщить движение ведомому валу П. Амплитуда колебания водила зависит от
величины сопротивления на ведомом валу, г — длина кривошипа 1; R — длина
коромысла 3.
Рис. 3.163. Автоматическая прогрессивная коробка передач. Колесо 1 на
ведущем палу / вращает сателлиты 3 с инерционными грузами, сообщающие в
процессе враи^еиия колебательное движение водилу 2. Движс1И1е водила в одну
сторону через автолог 4 (подобно рис. 3.162) передается ведомому валу //. При
вращсппи водила в обратном направлении через автолог 5 движение передается
рейке 6 и иорипио катаракта, замедляюп^его движение водила, вместе с чем
увеличивается скорость сателлита. Фаза действия и величина воздействующего
импульса зависят от положения механизма автолога.
Рис. 3.164. Дифференциальный редуктор. Ведущим может быть вал с
закрепленным на нем зубчатым колесом 2 и свободно посаженным колесом 1 или
вал с закрепленными зубчатыми колесами 7 и 5. В последнем случае изменяется
направление вращения ведомого вала.
Передаточное отношение при z^ = Z5
2z<
^2 1
Рис 3. 165. Схема привода нажимных винтов блюминга. От двух двигателей 1
1ерез три шевронные зубчатые колеса и две червячные передачи с помощью
^^^адратных хвостовиков 2 приводятся в движение нажимные винты. Две муфты 3
•^ червячных валах обеспечивают при настройке независимое вращение винтов.
^трслки 7 указателя раствора валков приводятся в движение от одного из чер-
ячиых колес посредством конической передачи 5 и зубчатых передач с цилиндри-
^ескими колесами.
^^ Кожевников и др.
226
Зубчатые колеса и механизмы, составленные из зубчатых колес
Рис. 3.164
^Ь<^7
Рис. 3.165
Для корректировки нуля указателя раствора в связи с износом или сменой
валков и подшипников водилу 6 планетарной передачи сообщается движение от
дополнительного двигателя 4 малой мощности.
Рис. 3.166. Регулируемый дифференщигл для безрельсовых тележек, работающих
на скользких и грязных дорогах.
Центральные зубчатые колеса 4
соединены с корпусом дифференциала
фрикционными многодисковыми муфтами. Диски
2 имеют внутренние соединения И1лицами
1 со ступицами центральных колес 4.
Шероховатые диски 3 с выступами
на внешнем диаметре и чередующиеся
с дисками 2 соединяются с корпусом 5
дифференциала посредством скоб 6.
Шероховатость дисков 3 достигается за счет
специальных покрытий. Каждая из
дисковых муфт прижимается к торцевой стенке
корпуса дифференциала осевым усилием,
возникающим от момента, передаваемого
конической центральной шестерней,
поэтому момент трения муфт
устанавливается в соответствии с моментом,
передаваемым от обода колеса, чем и
ограничивается возможность буксования колес
на скользкой дороге.
Рис. 3.167. Коробка скоростей.
Движение выходного вала 2 дифференциала
Рис. 3.166
Механизмы, составленные из зубчатых колес
227
2s Т-7
Рис. 3.167
228 Зубчатые колеса и механизмы, составленные из зубчатых колес
(рис. 3.167, а) является результатом сложения движений, передаваемых от ведущего
вала 1 конической парой ^г-^ю поводку 3 и через реверсор 4 и далее через
червячную передачу Ze — Zj центральному колесу Zg дифференциала. В зависимости
от положения муфт реверсора 4 могут быть осуществлены две скорости прямого
хода и одна скорость обратного хода. При выключенных муфтах реверсора
и самотормозящейся червячной передаче дифференциал обращается в планетарную
передачу с ведущим поводком 3.
На рис. 3.167,6 дана конс1рукцня редуктора.
Передаточное огношение механизма определяется по формулам:
при выключенном реверсе
и
-10-11
15
при включенном реверсе
Mi5 =
2Z2Z,2
ZiO Z^ZsZ-r
Суммирующие и уравнительные эпициклические механизмы
и механизмы подачи
Рис. 3.168. Дифференциальный механизм с коническими зубчатыми колесами.
Конические колеса 2, 5 соединены с валами i, 6 и находятся в зацеплении
с зубчатыми колесами 3, 7, оси которых укреплены в коробке, имеющей
зубчатое колесо 4, соединенное с колесом ведущего вала /. Механизм применяется
для суммирования вращений или для компенсации разности частот вращения.
Поводок // всегда составляет полусумму частот вращения валов I и 6.
Механизм применяется в автомобилях, тракторах, станках и пр. в качестве
уравнительного или суммирующего механизма. Если дифференциал применен в экипаже
(см. рис. 3.174), то, когда ведущие колеса при движении экипажа по прямой
вращаются с одинаковым числом оборотов, механизм дифференциала, т. е. зубчатые
колеса 2, 5 и 3, 7 вместе с коробкой работают как одно жесткое тело. Если же
колеса начинают катиться по криволинейному пути, то зубчатые колеса 3, 7
начинают вращаться, обеспечивая необходимое различие частот вращения ведущих
колес экипажа.
Рис. 3. 169. Дифференциальный механизм с цилиндрическими зубчатыми
колесами. Каждое из ведомых колес 3 соединено с зубчатыми KOJiecaNUi 1, ось
вращения коюрых укреплена в коробке 2 дифференциала. Колеса i, кроме того,
находятся в зацеплении друг с другом (вид сверху). Механизм применяется для
той же цели, что и дифференциал из конических колес. Передаточное отношение
между цешральными колесалн! при ненодвижном водиле (коробки 2
дифференциала) равно единице.
Рис. 3.170. Привод уравновешивающе-нажимного механизма клети среднели-
стового стана. Рамка И дифференциала жестко соединена с зубчатым колесом
13, от которого движение передается колесу 3 с червяками 5 и 1 червячных
передач нажимных винтов. Центральное колесо 12 получает движение от двига-
Механизмы, составленные из зубчатых колес
229
Рис. 3.169
/"'
\.
■\
f-^-4
у
^-ГВ- tt^il^'tf
1
ч
^
lJ I —L-_J-^-j=lJL
13 12 и 10 9
Рис. 3.170
теля 2, а центральное колесо 9 - от двигателя 6 через зубчатую передачу 7,
Валу А можно сообщить четыре скорости.
Первая скорость — двигатель 6 неподвижен
Вторая скорость — двигатель 2 неподвижен
"4 =
"6 ^13-8
-3^7
Т"ретья скорость - двигатели 2 и б вращаются в одном направлении:
"Г = /4 - ^'4
Четвертая скорость - двигатели 2 и б вращаются в разных направлениях.
IV f П
7?4 = "4 + «4 •
230 Зубчатые колеса и механизмы, составленные из зубчатых колес
Рис. 3.171. Привод уравновешиваюш[е-нажимного механизма клети среднелисто^
вого стана. Рамка дифференциала соединена кинематически с двигателем 3
небольшой мощности. Центральные колеса дифференциала соединены с двигателями
1 и 2 одинаковой мощности. Для параллельного перемещения валка включаются
двигатели J и 2 с направленнсм вращения в разные сюроны. Включением
двигателя 3 можно осуществить выравнивание или перекос валка.
Рис. 3.172. Дифференциальный механизм. Применяется при различных
направлениях вращения ведомых валов в механизмах с параллельными кривошипами.
Корпус дифференциала приводится во вращение ведущим валом через зубчатое
колесо 6. Внутри корпуса дифферегщиала имеется диск 5 с четырьмя лучами,
входящими в соответствующие пазы в корпусе. Зубчатое колесо 2 сцеплено
с колесом внутреннего зацепления 1 ведомого вала. Зубчатое колесо 4
внутреннего зацепления сцеплено с- колесом 3 второго ведомого вала.
Рис. 3.173. Несимметричный дифференциал. Результирующее вращение на водиле
1 не пропорционально сумме чисел оборотов центральных колес Zi и z^.
Вычисление следует производить непосредственно по формуле (3.1) (см. стр. 188).
Может применяться в качестве уравнительного механизма. Зубчатые колеса Z2 и
Z3, а также Z4 и Zs жестко соединены между собой.
Рис. 3.174. Привод колес шсстиколесного экипажа от общего вала. Так как
при движении по кривым наружные колеса описывают больший путь, чем
внутренние, привод должен иметь дифференциал.
Рис. 3 175. Автомобильный дифференциал из конических колес, допускающих
развал осей.
Рис. 3 176. Дифференциал грузового автомобиля.
Рис. 3.177. Дифференциал трактора, позволяющий управлять скоростью
движения гусениц при поворотах. Ес;ш затормозить правый тормозной диск 2, то
коническое колесо Z2 будет обка1ываться по неподвижному z^ и колесам Zt, и
Z3 будет сообщено дополнительное вращение в пpoтивoпoJюжныx направлениях.
В результате этого правый вал 3 будет вращаться медленнее, а левый 4
быстрее. При торможении диска 1 левьп! вал будет вращаться быстрее, а
правый медленнее.
Рис. 3.178. Роликовый дифференциальный механизм. Па ведомых валах / и
5 укреплены чашки 2 и 3 с криволинейными назашг (правый хкиз). Между
чашками находится обойма 4 с прорезями, в которые заложены ролики 6. При
движении по прямой ролики б неподвижны относительно чашек 2 и 5. Несмотря
на то, что плечи приложения крутящих усилий к валам 4 и 5 различны,
передаваемые моменты равны вследс1вне различной кривизны пазов в чашках 2 и
3. При увеличении момента на од1юм из ведомых колес (при движении по
кривым) ролики б начинают вращаться в обойме и катиться по кривым чашек
2 и 3, сообщая при этом колесам разное число оборотов (см. также рис. 3.180),
Рис. 3.179. Дифференциальный механизм с шариками 3. На оси насажены
диски 1 и 5, имеющие дуговые канавки 2 Между половинками корпуса
дифференциала находится пластина 4 с восемью отверстиями, расположенными на двух
окружностях, по четыре на каждой. В эти отверстия вставляю 1ся свободно
шарики. Диски 1 п 5 устанавливаю1ся так, что шарики помещаются между ними
без зазора. Если одно из колес притормаживается, то шарики, до сих пор
неподвижно сидевшие в отверстиях нлас1ины 4, начинают вращагься и ускорять
вращение другого колеса, при этом шарики нонерсменно переходят нз канавок
диска 5 в канавки диска 1 и наоборот.
Рис. 3.180 Шаровой авюмобнльный дифференциал. Дифференциал состоит из
дв>х корпусов 1 и 4, по которым в профилированных желобках перекатываются
шарики 2, заключенные в пазах водила 3. Шарики допускают компенсацнонное
Механизмы, составленные из зудчатых ктес
231
^>////////////У/////^///л
Рис. 3.174
Рис. 3.175
Зубчатые Koieca и механизмы, составленные из зубчатых KOiec
ЬтТу^У/УАУ/У///}^//////.^/^^^^
Рис. 3.177
Механизмы, состав ценные из зубчатых Koiec
233
Рис. 3.178
Рис. 3.179
Рис. 3.180
234
Зубчатые колеса и механизмы, составленные из зубчатых колес
J.'?=^^ /Г беретенам
К катутнам
Рис. 3.181
К патуш.кам
N
Рис. 3.182
относительное вращение ведомых валов. Если какое-либо из колес испытывает
большое сопротивление, то фасонные поверхности корпусов разжимаются
шариками, увеличивая моменч трения между той парой поверхностей, которая
передает момент па вал, пспытывающи!'! большее сопротивление.
Рис. 3.181. Дифферепш1ал банкаброша. Применяется для сообщения
катушкам сложного движения при неизменном числе оборотов веретена. Дифференш1ал
С}ммирует посюянное число оборотов главного вала / и число оборотов
зубчатого колеса //, приводимого в движение от вариатора скорости
"1«з1 + «II (1 - W3i); W31 =
(-1)^
37
\\
18 30
= 1,23.
Рис. 3.182. Дифференш1ал банкаброша. Зубчатое колесо с зубьями, расположен-
нылш с двух сторон, и посаженное на сферическую поверхность поводка,
вращается вместе со втулко11 // и покачивается вокруг оси О под воздействием
торцового кулака jV/iV, приводимого в движение от вариатора скорости.
Вследствие изменения углов при вершинах начальных конусов изменяется передаточное
число планетарно!! передачи.
Рис. 3.183. Банкаброшный дифференщ^ал
ч -3^^ 56-60 - .^
"I == «3«ii + "п (1 - «1з); "13 == -—- = Тз'.'з'о ^
Механизмы, составленные из зубчатых ко lec
235
Рис. 3.183
Рнс. 3.184
Рис. 3 184. Саморегулирующаяся планетарная Передача При нормальной работе
фрикционная муфта 2 включена, ведомый // и ведущий / валы вращаются
с одинаковым числом оборотов
щ = п„.
При перегрузке ведомого вала // кулачковая муфта 3, преодолевая усилие
пружины i, расцепляет фрикционную муфту 2. Планетарная система начинает
вращать ведомый вал // с пониженным числом оборотов
"II
1 +
Zi + 2з
Центральное колесо Zt, удерживается о г вращения собачкой 4. 'i'nop а
препятствует значительному перемещению правого диска муфты 2.
Механизмы грузоподъемных машин
Рис. 3 185. Домкрат с дифференциальным механизмом. В рассматриваемой
конструкции зубчатое колесо 6 посредством колеса 4 соединено со щтангой 1
винтовой парой, а блок зубчатых колес 2 — S соединен со штангой скользящей
шпонкой 8. При вращении рукоятки зубчатое колесо 4 (гайка) сообщает штанге
продольное перемещение, а колеса 7, 3 — то же в обратном направлении, поэтом)
осевое перемещение штанги вызвано разностью указанных движений.
для быстрого опускания груза рычагом 5 поворачивают эксцентричную втулк\
^1 сцепляют колесо 7 с колесом 2, тогда механизм начинает работать как
обычный винтовой домкрат при неподвижном колесе 4.
Рис. 3.186. Дифференциальная лебедка. При вращении ведущего вала / с
эксцентриком барабаны I и 6 вращаются с разностью скоростей, пропорциональной
1 -
1 -
^3
!^' '^'^^'^' Ш^тун АВ механизма с параллельными кривошипами совершает
ступательное движение, поэтому его угловая скорость С02 = 0.
236
Зубчатые колеса и механизмы, составленные из зубчатых колес
Согласно формуле для эпициклических механизмов
"2 - "1
Лз - Л1
Z3 1
= "23 =
при л2 = О
Пз = "i(l - "32).
Рис. 3.188. Лебедка, выполненная по схеме рис. 3.187. Кривошипы 3 четырех-
шарнирного параллелограмма, шатуном которого является колесо 5 с
внутренним зацеплением, через зубчатые колеса 1-2 связаны с ведомым валом //;
частота вращения колеса 4:
«4= -П2-
1 -
Колесо 4 вращается противоположно кривошипам 3.
Рис. 3.189. Лебедка с копич'еским торцовым зубчатым колесом Г2, сидящим
на косом кривошипе. Передаточное отноитепие
«1
- -^-yi — 2j/2iCosa + n^i ; 1/21 =
При малом угле с/, скрещивания осей cos г/. ;^ 1:
«2 .
= 1 -»21 =
COt
^2
Рис. 3.190. Редуктор в полиспасте, состояищй из замкнутой эпициклической
передачи, в которой устанавливается связь между барабаном 4 (поводок) и
центральным колесом 3 при помощи простой передачи из колес 1-2—2',
8 7,6
-пфп-
ш
VZTz:
\л
и та
~^^^
т
т
1 1 3
^z^
м
'^^Ш
I
^ 5
Рис. 3.185
Рис. 3.186
Механизмы, составленные из зубчатых колес
237
Рис. 3.187
Рис. 3.188
3 1+
Z; Z2
Рис. 3.189
Рис. 3.190
При ведущем z^ передаточное отношение
^=l + ii5j.(i + l^
"4 ^1^2 V Z3,
^ НС 3.191. Электротельфер. Связь между барабанами 1 и 2 устанавливается
^немощью каната (рис. 3.191,г;), навивающегося с одинаковой скоростью на оба
^Раоана. Из этого условия может быть определено передаточное отношение
^'б2 между колесом 6 и барабаном 2 (рис. 3.191,6)
'^6 = ^21/63 + «4 (1 - 1/бз); «6 = «1«б8 + 'U (1 - ^бз)» fh = - ^ii.
238 Зубчатые Kowca и механизмы, составленные из зубчатых колес
Рис. 3.193
Механизмы, составленные из зубчатых колес
239
^6
«65 - "68
«68 •
После исключения 714 получаем
?1б _^ «63 (1 - «бв) + «68 (1 - «63)
•«6 3 =
Рис 3.192 Кривошипно-планетарный
механизм полиспаста. Колеса 4 и 5
образуют внутреннее зацепление. С колесом 4
связан блок /. Для устранения вращения
колеса 5 сю высгуиы 2 скользят в
вырезах 3 планки.
Рис 3.193. Электролебедка для
перемещения скреппера. При включении тор-
>юза А работает барабан / с частотой
вращения
Щ
1 - «35
«35 = -
При включении тормоза С работает
барабан // с частотой вращения, которая
может быть вычислена по следующей
сЬор.муле.
nn = Y
KWWW^WWWNWWWW^:^
k\\\\\\>N\^^^^
Piic. 3.194
Колеса z^ и г'з приводятся посредством пары Zj—Zj. Колеса z^ и Zg —
посредством колес Z4 и zi-
Рис 3.194. Механизм тельфера с замкнутой планетарной передачей.
Дополнительной передачей z'^ — zg связь между частотой вращения z^ и барабана,
играющего роль водила, устанавливается cлeдyющи^иI формулами:
"в
= «зв = -
^в
«13 =
Отсюда получим
"2«13 + ?1в(1 - «1з)-
-^ = «13«зв + (1 - «1з)- .
Г*ис 3.195 Волновая зубчатая передача, применяемая для преобразования
частоты вращения Ведущим звеном является генератор колебаний - кулачок 1
эллиптической формы. Ведомым звеном может быть гибкое тонкое кольцо 2
^^ наружными зубьями при неподвижном жестком кольце 3 с зубьями на
внутреннем венце. Разность чисел зубьев Z3 и Z2 должна соответствова1ь числу волн
-деформации (по схеме рис. 3.195, а z^ - z. =2).
240 Зубчатые колеса и механизмы, cocmae.iemihie из зубчатых Koiec
Рис. 3.195
Рис. 3.196
С целью сокращений потерь на трение между кулачком 1 и гибким кольцом
2 могут быть установлены шарики или ролики 4.
На схеме рис. 3.195, б lenepaiop / заменен шарами-сателлитами 2', установ-
ленныхми в водиле Г. Ведущим звеном являс1ся фрикционное колесо 3'.
Передаточное огношсние BOjmoBoii передачи определяется по формуле
1,^3 = ——--== - —
для случая, когда неподвижным является гибкое колесо 2 и
М2
и '
когда неподвижным является жесткое колесо 3 U = 2 — число волн деформации.
Рис. 3.196. Конструктивная схема (рис 3 196, а) двухволновой передачи с
гибким колесом, изготовленным за одно целое с валом (позиции см. рис. 3.195).
На рис. 3.196,6 гибкое колесо 2 с валом соединяется шлицами.
Мехаииз мы, состаа winibie из зубчатых ко lec
241
Рис. 3.197. Трехволновая зубчатая передача. Гибкое колесо 2 (рис. 3.197, а)
с внутренним заценлением. На рис. 3.197,6 гибкое колесо 2 с наружным
зацеплением. Передаточное отношение определяется по тем же формулам, что и для
дву'хволновых передач. Здесь м = Zj — Z2 = 3.
На рисунках 3.197, в и г показаны конструктивные схемы трехволновых передач.
Рис. 3.198. Двухступенчатая волновая передача. Блок гибких колес (рис. 3.198,^0
изгоювлсн с наружным зацеплением и деформируется одним lencpaтором 1.
Передаючное oiношение
242 Зубчатые колеса и механизмы, составлеюше из зубчатых колес
А
Рис. 3.198
Рис. 3.199
Рис. 3.200
Блок гибких колес (рис. 3.198, б) имеет наружное и внутреннее
зацепления:
Wl2"45
Wl2 + W45 + 1
«5
Рис. 3.199. Схема фрикционной дифференциальной дв\'хволновой передачи,
состоящей из генератора волн 7, гибкого звена 2, жесткого звена 3, стойки 4 и
имеющей две степени свободы. При остановленном звене I получим простую
фрикционную передачу между гибким и жестким звеньями. При остановке звена 3
получим планетарный волновой механизм со смежным движением гибкого звена.
Остановив звено 2, получим планетарную передачу между звеньями I и 3.
Рис. 3.200. Схема электромагнитного генератора волн. Гибкое звено,
изготовленное из магнитного материала, испытывает перемещающиеся волны деформации
за счет вращающегося магнитрюго поля, которое усиливается подмагничиванием
Генератор позволяет встраивать волново!! редуктор непосредсгвенно в двигатель
Целесообразно передачу использовагь в приборах из-за малой нафузочной
способности.
Рис. 3.201. Гидромеханический двухво.'иювый генератор. Перемещение волны
деформации гибкого звена осуществляется движением поршней иод действием
давления жидкости. Вращением pacпpeдcJПIleльнoгo валика час1ь диамегрально
противоположных цилиндров поочередно сообщается с полостью высокого, часть —
С полостью низкого давления. Передачи с гидро1енера1ором имеют низкий к. п. Д.
Мсхаииз мы, состав юниые из зубчатых ко юс
243
Рис. 3.202. Пневмомеханический генератор
волн. Деформирование гибкого звена 1
осуществляется газами, выходяпдими под давлением
из отверстий 2 в теле вращаюи1егося щглиндра
5, которое происходит за счет реактивного
момента, создаваемого газами, выходящими из
сопл 4 или 5.
Рис. 3.203. Односгупенчатый волновой
редуктор. С быстроходным валом 2, несущим
крыльчатку 3, связан посредством резиновой муфты 1
генератор 5, представляющий собой жесткий
кулачок. Гибкое звено 8 выполнено в виде
тонкостенного стакана с приваренным дном и
связано с тихоходным валом 9. Между
кулачком и гибким звеном установлен шариковый
подшипник 6 с гибкими обоймами. Жесткое звено 7, представляющее собой обод
с внутренними зубьями, связано с левой крышкой 4 редуктора.
По указанной схеме в США выпускаются редукторы с w = 78 — 260 мощностью
до 3,2 л. с.
Рис. 3.204. Одноступенчатый трехволновой мотор-редуктор фирмы Дюра (США).
Вал 2 двигателя 1 находится во фрикционном контакте с тремя двойными
роликами-сателлитами 4, деформирующими гибкое звено 3 — пластмассовый стакан,
соединенный с ведомым валом 7 посредством шлицевого соединения. Внутри
гибкого звена помещен распорный стакан 5. Жесткое звено выполнено заодно
с корпусом 6 редуктора. Планетарный генератор волн, являющийся как бы
быстроходной ступенью, имеет i^ren = 7, а и^^щ - 448.
Рис. 3.205. Редуктор с двойной волновой передачей. Генератор волн с
промежуточными телами качения 2 деформирует гибкое звено 5, имеющее два
Рис. 3.201
Рис. 3.202
244 Зубчатые колеса и механизмы, составленные из зубчатых колес
k 5 6 7 8
Рис. 3.203
Рис. 3.205
Механизмы, составленные из зубчатых колес
245
Рнс. 3,206
зубчатых венца, один из которых зацепляется с жестким венцом, выполненным
заодно с корпусом 4, а второй — с колесом 6, связанным с выходным валом.
1 - опорное кольцо, 5 - пробка.
Передаточное число редуктора и ^ 100000.
Рис. 3.206. Схема волнового механизма для передачи вращения через
непроницаемую сгенку. Двухволновой генератор 2 с промежуточными телами качения
закреплен на валу электродвигателя 7. Гибкое звено 3 сложной формы закреи-
пено по торцам и имеет в средней части наружные зубья, зацепляющиеся с
зубьями жесткого звена 4, выполненного в виде двух скрепляемых полуколец.
Область внутри гибкого звена герметична и изолирована от внешней среды.
Передача находит применение в приводах космических аппаратов.
Рис. 3.207. Волновая передача, имеющая мопщость 500 л. с, п = 50 и «вщ =
= 53 000 об/мин. Гибкое звено 3 представляет собой колоколообразную оболочку.
Эллиптический генератор 4 представляет одно целое с ведущим валом. Жесткое
колесо 2 выполнено в виде 14 дисков, фиксированных консольными выступами
на ведомом звене I. Сечение выступов изменяется так, что относительное
смещение дисков по окружности в результате деформации выступов соответствует
закручиванию гибкого вала.
Рис 3 208 Волновая передача механизма поворота башенного крана. На валу
элекгродвигагеля 6 закреплен генератор волн (S, ролики 5 которого представляют
собой сферические подшипники. Оси роликов могут свободно перемещаться
R радиальных иазах. Между роликами установлено упругое уравнительное кольцо 7.
Гибкое колесо 2 представляет собой стакан, соединяющийся с ведомым звеном
7 шлицами с зазором. Жесткое колесо 4 установлено в корпусе 9 на
пружинных пакетах 3, демпфирующих колебания. Выходная шестерня 70, заклиненная на
кедокюм звене 7, имеет опорные подшипники, посаженные на ступице корпуса
редуктора внутри шестерни. Волновой редуктор по сравнению с серийным
планетарным для механизма поворота башенного крана примерно в 1,5 раза легче
ч меньню по объему.
Рис 3.209. Опьиная волновая передача МИСИ для механизма поворота
башенного крана. Ролики 3 трехволнового генератора 7, закрепленного на ведущем
246 Зубчатые Koieca и механизмы, еоепштелиые из зубчатых ко lee
Рис. 3.207
валу 7, установлены на эксцентричных осях 4. Оси роликов фиксируются
планками 5. Жесткое колесо (Ч смонтировано на штифтах в корпусе 9. Ведомое
гибкое колесо 2'соединено с выходным валом И. Опорой генератора служит
подшипник 6 и катящиеся по гибкому колесу ролики генератора, вес которого
воспринимается подшипником 10. Целесообразное передаточное отношение 224.
Рис. 3.210. Волновые передачи с гибкими звеньями, составленными из
твердых: а — гибкое колесо состоит из набора зубчатых сегментов 6, которые с
помощью эллиптического генератора 1 с роликами 7 и гибким кольцом 8,
вводятся в зацепление с ведомым колесом 2 и остановленным колесом 5. Пружин-
Механизмы, состав темные из зубчатых koicc
247
Рис. 3.209
ное кольцо 4 прижимает сегменты к кольцу 8, а шарики 3 ограничивают
осевые перемещен11я колес; 6 - цепная вoJHIOвaя передача. Гибкое кольцо 6
охватывает ролики 7, приобретая форму эллингическо!о генератора /, и служит
опорой для зубчатых HJiaciHH 5, соединенных шарнирно. Пласшны допускают при
"^ огностельном noBopoic мaJюe HjMcneinie рассюяния между крайними сосед-
^и.\и1 зубьяли!, что cooiBeiciBveT изменению кривизны гибкого кольца S,
248 3\бцатыс когеса и мс^атпмы, соспюп teiinhie из з\бчатых ко tec
"Ц 2 3^5
f\
1
тш^^т
ЩУ///////Щ
Г 1
а)
и
У
м
Рис. 3.211
Механизмы, состав 1СИИЫС ui зубчатых ко ice
249
■^ 5 7
А-А
На рисунке: 4 — неподвижное колесо, 2 - жесткое ведомое колесо, 3 —
шарики.
Рис. 3.211. Конструкции податливых элементов планетарной передачи: а —
установка венца на пластмассовых втулках; б — установка резинового кольца между
корпусом передачи и венцом; е - набор разрезных втулок из пружинной стали,
закладываемых между венцом и корпусом; г — упругая связь между венцами двух-
венцовых сателлитов, осуществляемая торсионным валиком; д — то же с помощью
пластинчатых пружин.
Рис. 3 212. Волновая передача с гибкой нитью, встроенная в барабан стре-
лоподъсмной лебедки экскаватора-крана. На вал электродвигателя I посажен
генератор 2. Ролики S (подшипиики) вращаются на эксцентричных осях 10, к
которым прикреплены рычаги 9, несуищс рычаги 13. Через ролики переброшена
гибкая нить 11, натягиваемая стяжкой 12. Крутящий момент с жесткого колеса 5
через упругие втулки 6 передается на барабан 7, а реактивный момент через
гибкое колесо 4 воспринимается опорой 5 барабана. Связь роликов через гибкую
нить способствует выравниванию усилий со стороны гибкого звена и силовых
потоков, передаваемых зонами зацеплепия.
Рис. 3.213. Торцовая волновая передача. Гибкое звено 2, выполненное в виде
диски заодно с валом, имеет торцовые зубья. Жесткое звено ] конической формы,
l^ciynuiii диск 5 с двумя шариками 4 и сепаратором 5 образуют двухволновой
планет арпы1'1 i сисратор.
^Рис. 3.214. Редуктор с волновой передачей с опорами ведомого вала внутри
гиокою звена. Гибкое звено 1 соединяется посредством полумуфты 2 с ведомым
'^лом, вращающемся в подшипниках 6, размещенных в крышке 5 корпуса с внут-
Р^ппим патрубком. Осевое смещение гибкого звена предотвращается проволоч-
пы\п1 кольцами 3 и 4.
Inc. 3 215. Двухступенчатый двухволновый редуктор с планетарной передачей,
^т^Роеиной в генератор.
250
Зубчатые колеса и мехалтмы, состав.iciiiibie из зубчатых Koiec
и
Рис. 3.213
Три сателлита 2 находятся в зацеплении с зубчатым колесом 1L
закрепленным на ведущем валу 1 и центральным колесом 5 с внутренним зацеплением
(рис. 3.215, л). Оси 3 сателлитов закреплены на ступице ведомого жесткого колеса
8 с внутренним зацеплением, которое входит в кинематическую цепь волновой
передачи. Колесо 5 соединено с фланцами 4 посредством шпилек и вместе с ними
имеет эллиптическую наружную поверхность, которая служит опорой для роликов
10 генератора.
Тонкое гибкое кольцо б
охватывает ролики 10, приобретая при.
этом форму эллипса и служит
опорой для зубчатых пластин 9,
соединенных между собой шарнирно и
образующих гибкое зубчатое
колесо волновой передачи. Оси
шарниров пластрш допускают при их
относительном повороте весьма
малое изменение расстоя1П1я между
крайними соседнихп! зубьями.
Малый относительный поворот
пластин соответствует изменению
кривизны гибкого кольца 6, у которого
размеры малой и большой
полуосей эллипса отличаются немного
больше, чем на высоту зуба.
Пластины 9 гибкого колеса,
расположенные слева, зацепляются
Рис. 3.214 ^ ведомым жестким колесом 5,
Механизмы, составленные из зубчатых колес
251
Рис. 3,215
П11ТГ7
а пластины, расположенные справа - с неподвижным колесом 7. Между плоско-
CTHNHi стыка колес 8 \\ 7 расположены ншрики, образующие радиально-упорный
подшипник трения кауения. На схеме волновой передачи (рис. 3.215, б) гибкое
кольцо 6 и ролики 10 не показаны.
Рис. 3.216. Двухступенчатый двухволновый редуктор в комбинации с
планетарной передачей.
На ведущем валу 1 редуктора закреплено центральное солнечное колесо 10,
которое находится в зацеплении с колесом 11 блока сателлитов планетарной
передачи. Блок сателлитов 12 и 11, вращающийся па оси 9 водила, находится в
зацеплении с двумя солнечными колесами внугреннего зацепления, одно из них —
колесо 8 — ирикреплепо неподвижно к корпусу, а второе — к двухволновому
генератору 13 На овальной наружной иовсрхносги генератора 13 устаьювлены
ролики 2 и тонкое гибкое кольцо 4, на котором расположены зубчатые сегменты
-^ BojHioBoii передачи. В вьпочки зубчатых сегментов вставлены пружинные кольца
^« прижимаюнщс cci менты к пюкому кольцу 4. Сегменты и зубья жестких колес
-'' п 7 зацеплены в зоне больших осей эллипса и полностью расцеплены в зоне
'"^lajibix осей.
Рассюяния по ду1е начальной окружности между боковылш поверхностями
*-егментов и крайними зyбья^ш должны быть выполнены точно, так как шаг зубьев
252
Зхбчатые колеса it механизмы, состаренные из зубчатых Koiec
7 2 5^^6
6 5
8 9
Рис. 3.216
сегментов равен шагу зубьев жестких колес 5 и 7. Сегменты должны быть
взаимозаменяемы.
Угол наклона боковых поверхностей сегментов подобран так, чтобы в местах
выхода и входа в зацепление имело место полное их прилегание по всей плоскости.
Для увеличения передаточного отношения волновой передачи числа зубьев
колес 5 и 7 имеют небольшую разность, соогве1ственно и кольцевые участки
cei ментов 5, зацепляющихся с колесами 5 и 7, имею г разное суммарное чиcJЮ
зубьев.
Передаточное отношение редуктора определяется по формуле
где Wj — передаточное отношение планетарной передачи,
^5-37
«5 7
^5^37 "~ -^7^35
1<5 7 — передаточное отношение волновой передачи (между колесами 5 и 7)
Ведомым звеном редуктора является колесо 7 при неподвижных колесах 5.
Если принять Z5 = 122, z-i = 126, суммарное число зубьев сегментов 3,
зацепляющихся с колесом 5, z^s = 120, и с колесом 7 z^j = 124, io
W57
122-124
122-124 - 126-120
= 1891.
Комбинированные 1\1еханизмы
Рис 3 217. Механизм поворота вращающихся с водилом 5 лопаток 4 с по-
^ющью огибающей цепи 3. Диаметр зубчатого колеса 1 равен половине диаметра
колеса 2.
Рис. 3 218. Механизм для сообщения вращательною движения Всшам с
параллельными подвижными осями. Водило / и вал / могу г вращагься независимо.
При неподвижном z^ и одинаковых числах зубьев на колесах z^ и Z2 каждое из
Механизмы, состав iciiubie из зубчатых kuicc
253
Рис. 3.217
Рис. 3.219
колес Zj и лопатки 2, прикрепленные к их осям, совершают поступательное
движение
Рие 3 219. Применение механизма по рис. 3.109 для параллельно-кругового
вращения лопаток 1. Наклон лопаток ьюжно изменять поворотом центрального
з>Г)чагого колеса Zj посредством самотормозящейся червячной передачи 2.
Рис. 3 220. Применение механизма но схеме рис. 3.109 для
параллельно-кругового движения гребных лопаток L Механизм состоит из зубчатых колес с
неподвижно закрепленным центральным колесом Zj.
Рис. 3 221 Механизм месильно!! машины, в коюрой мешалки / совершают
сложное вращение. Перемещением блока зубчатых колес z^ — Z3 осуществляется
изменение скорости мешалок. В од1Юм из ноложений нсвращающееся колесо Zj
сцепляс1ся с колесом z^, в другом z^ с z-,.
Рис. 3 222. Картофелекопатель с иланетарными эллиптическими колесами, имею-
^^пми малую раз1юсть полуосей. Эл;н1птические колеса введены для сообщения
Лопаткам наклона, изменяющегося относительно вертикали в небольших пределах.
254
Зубчатые Koieca и механизмы, составленные из зуочатых колес
Рис. 3.220
"7777777^
Рис. 3.221
Jj-^^
I
1
Х2£
/7777777777/ uL
Ш1
4
щ
\
о о о
к
Траектория точки
Рис. 3.222
Рис. 3.223. Направляющий механизм для параллельно-кругового движения
лопаток с неподвижно закрепленным центральным зубчатым колесом и двумя
промежуточными колесами.
Рис. 3.224. Направляющий механизм для лопаток гребного колеса. Лопасти /
установлены на диске 2. Лопасти, вращаясь с диском как одно целое, вместе с тем
поворачиваются вокруг своих осей при неподвижном зубчатом колесе 3.
Поворачивая центральное зубчатое колесо 5 червячной передачи 4 и системы колес,
люжно изменять направление лопастей. Диаметр колеса 6 должен быть в 2 раза
меньще диаметра центрального колеса 3.
Рис. 3.225. Привод для мещалки с дополнительным вращением мещалки
относительно собственной оси. На державке мещалки укреплено зубчатое колесо 2,
обкатывающееся по колесу 1, неподвижно укрепленному на станине привода;
3 - пространственный шарнир.
Рис. 3.226. Механизм для увеличения ДJШны хода. Кривошип / передает
движение ползуну 2, который соединен с зубчатым сектором 3. Ход точки а больше
хода ползуна.
Мехаииз мы, составленные из зубчатых колес
255
Рис. 3 227. Кривоншино-ползунный механизм
с прибниженно постоянной скоростью ползушки
в одном направлении. Кривошип 2 приводится
в движение через пару эллиптических колес 1 и 3.
Кривая скоростей ползуна 4 при его движении
справа налево приб;шжается к горизонтальной.
Рис. 3 228. Механизм, сообщающий ползушке 3
приближенно равномерное движение; 1 — ведущее
зубчатое колесо, 2 — овальное колесо.
На диаграмме справа приведена кривая
скорости V ползушки 3 в функщн! угла поворота ведущего
вала и кривая пути S.
Рис. 3.229. Кривошипный механизм с
планетарным зубчатым колесом. Колесо Z2 неподвижно
относитезплю шатуна. Движение ползушки 1 (схема а) неравномерное. Сообщая
всей системе вращение с угловой скоростью — озз, равной угловой скорости
кривошипа 2, получим мехаршзм по схеме б с равномерно вращающейся с угловой
скоростью 03^ кулисой: СО4 = — соз- Колесо Zi вращается с угловой скоростью
032 = <^2 " ^^2,^ которая определяется по формуле
Рис. 3.223
С02 = СО4 -
1 +Х^ Л- IkcosoL
1 -f X COS а
or. = 180° - (ф -Ь ф);
1 /?
sin ф = -— sin ф; X = (см. схему б);
к е
Oi = CO2W12; COjL = COj - СО2; W12 = -
0)i = CO2W12 + ГОз (1 - W12).
0^2 определяется как угловая скорость шатуна кривошипно-ползунного механизма.
Угловая скорость coi ведомого колеса складывается из постоянной скорости
о)з;(1-1/^2) = 0)3 ^^^t±i_„
3 и периодически изменяющейся скорости а^г^^и- За 1ц обо-
^1
ротов кривошипа колесо z^ сделает п^ — п^,
+ 2
— оборотов.
Рис. 3.224
256 Зубчатые колеса и механизмы, состаташыс из зубчатых ко ice
)(ид точка а
Рис. 3.22)6
Рис. 3.225
(
>7
^ г/
{
"\
Рис. 3.227
'•>ва
**»•.
'•-
.-'
VS
^t*»
Рис. 3.228
Рис. 3.229
Механизмы, составленные из зубчатых колес
151
М--^^/
Рис. 3.230
Рис. 3.231
Рис 3 230 Кривошипно-ползунный планетарный механизм. Со стойкой 1
связано неподвижное колесо 2, вокруг которого вращается сателлит 4 с осью на
поводке 3. Шатун 5 связывает сателлит 4 с ползуном 6. В зависимости от
отношения числа зубьев колес 2 и 4 можно получить различного характера траекторию
точки Л (удлиненная или укороченная эпициклоида), следовательно, и закон
перемещения ползуна.
Рис. 3.231. Планетарный кулисный механизм. В результате вращения звена 1
сателлит Zi обкатывается по неподвижному колесу z^ и приводит в движение
звено 5. Сателлит 2 вращается вокруг мгновенной -оси Р с угловой скоростью
С02 = СОо(1 - W2l) = Щ
2i + Z2
Угол ф2 = фо(1 - t<2l)-
Механизм можно рассматривать как кулисный с переменным радиусом р
кривошипа, вращающегося с изменяющейся угловой скоростью. Радиус г относительно
радиуса R координируется углом
\^= 180^ -Фо^21;
р2 = ^2 _^ ,.2 _ 2Rr COS vj/ = jR^ + r^ + IRr cos W2i9o-
Рис. 3 232 Реверсивная передача с зубчатым сектором, приводимым в
движение от кривошипа /. Обратный ход колеса И совершается с большей скоростью,
чем прямой
Рис. 3.233 Реверсивная передача с качающейся кулисой в виде зубчатой
рейки 1. За один оборот ведущего вала I колесо 2 сделает приблизительно _!J—
7СГ2
оборотов В одну и другую стороны.
Рис 3 234. Механизм для протирания стекол автомобиля. К вращающемуся от
'-лектродвигателя 5 диску 1 прикреплена шарнирно-зубчатая рейка 3, которая
на-одится в зацеплении с колесом 2. Ролик 4 обеспечивает постоянное
зацепление рейки с зубчатым колесом.
1^ис. 3 235. Шарнирный параллелограмм в соединении с планетарной
передачей Колесо 2з прикреплено к шатуну неподвижно. Если кривошипы 1 —
ведущие, а колесо Z2 — ведомое, то передаточное отношение
1
1 - «23
Z2 4-Z3
258 Зубчатые колеса и механизмы, составленные из зубчатых колес
А-А
Рис. 3.233
Рис. 3.234
Рис. 3.235
Рис. 3.236
Рис. 3.237
Рис. 3 236. Шарнирный параллелограмм с колесом внутреннего зацеппения на
шатуне. Передаточное отношение
Wi2 =
Рис. 3 237. Шарнирный параллелограмм с передачей внутреннего зацепления.
Если ведут кривошипы, то передаточное отношение
Щ\
Zi - 1г
Мехаитмы, состав leimbie из зубчатых Koiec
259
Рис. 3 238. Передача с эксцентричным круглым ведущим колесом Колесо Zj
изготовлено за одно целое с шатуном 2 и установлено на эксцентрике 7
Степень неравномерности зависит от величины эксцентриситета. Колесо Zj огноси-
гельно шатуна 2 движется с угловой скоростью соз - сог*.
Шз - 0)2 = (coi - СО2) {/31; i<3i = - —-.
СО3 == ОЭ1Ы31 + 0)2 (1 - "31)-
Рассматривая колесо как сателлит на поводке 4, ^южeм написать
t03 = W5M35 + 034 (1 - «35); "35 = - -—;
23
Угловая скорость ведомого вала II
(О, Nil
СО5 - —-— + 0)2-
0)4-
W35
СО2 и (04 определяются из аналшза четырехшарнирного механизма.
Рис 3.239. Механизм с круглыми зубчатыми колесами для неравномерного
движения: а — вид спереди; б — вид сбоку в фазе наименьшей скорости вращения
вала //; в — промежуточное положение механизма; г — фаза наибольшей скорости.
Скорость ведомого вала // равна нулю, если ось вращения колеса 4 проходит
через начальную окружность колеса 2. Если центр колеса 4 расположен вне или
внутри начальной окружноеги колеса 2, то колесо 3 вращается в одну или дру-
1\ю с'юрону. I — ведущий вал.
Угловые скорое ги коромысла CD и шатуна
ВС определяются как для четырехшарнирного
механизма.
%C = t.)li'21 +0)лв(1
»21 =
0)4 - (07; С04 = 0)з"43 + ^DC (^ " "4з);
Z4 '
^Ь - b.)if/2i -f o)^^^^ (i - i/2i) - ^DC (^ - ''43)] .
''43
У///////////////////77.
Рис. 3.238
2 J
-'л"==^
\fN
m
1/
R
//7///7Z
a)
5)
г)
9-^
260 Зубчатые колеса и механизмы, составленные из зубчатых колес
Рис. 3.240. «Римская передача». Характер движения ведомого звена II зависит
от размеров плеч шатуна i и от передаточного отношения зубчатых колес. Если
2j/z2 = а, где а — целое число, то период кривой перемещения равен времени
t за а оборотов ведущего зубчатого колеса z^. I — ведущий вал.
Рис. 3.241. Комбинированный зубчато-рычажный механизм для воспроизведения
сложного закона движения ведомого звена. Ведомое колесо 2з з}бчатой передачи
(рис. 3.241, а) получает движение ог ведущего колеса Zi, вращающегося
относительно эксцентричной оси, через колесо Zj на коромысле четырехзвенника д, Ь, с, d.
Подбирая размеры звеньев четырехзвенника и числа зубьев колес, можно пол\чить
(рис. 3.241,6) непрерывное вращение колеса z^ с заданной неравномерностью
(кривая i), движение с остановкой (кривая 2), движение вперед с частичным
возвратом (кривая 3).
Рис. 3.242. Зубчато-рычажный дифференциал. Если заданы угловые скорости
(Oi и (Од колеса 1 и звена а (система с дв\мя степенями свободы) и
необходимо найти 0)4, то, полагая механизм в виде двух дифференциалов с водилами
а и с и блоки колес 2 и 3 разъединенными, имеем
U21 =
Z2 '
соз - Щ
0)2 - 0)^,
Щъ =
СОд — СО^
соз - со.
2'2
^3
Г4
И кроме этого
откуда
0)4 = COil/21^32^43 + ^а [(1 " "ll) 1^32^43 + (1 - W32) ЩъЩа + (1 " ^4з) М ,
где Wfca = сОь/сОд и Ыса = ю^сОд — извсстные для четырехшарнирного механизма
передаточные функции.
Если колесо z^ блокировано с кривошипом (coi = coj, то
©4 = Сй« ["32^43 + (1 - 1^32) ^АъЩа + (1 " ^Аъ) ^cal ♦
Рис. 3.243. Кулачково-планетарный механизм. На поводке 1 трехзвенного
планетарного механизма размещена общая ось для коромысла 2 кулачкового
механизма и колеса 3, совершающего планетарное движение. Ролик 5 обкатывается
по неподвижному кулачку, а колесо 3 зацепляется с ведомым колесом 4. Если
ролик катится по цилиндрической поверхности кулачка, то ведомое колесо
вращается с такой же угловой скоростью, как и поводок. При качении ролика по
части профиля с переменным радиусом-вектором коромысло с колесом 3
получает зависящее от профиля кулачка дополнительное вращеш1е вокрзг собственной
оси Два вращения суммируются колесом 4. Изменяя профиль ктлачка, можно
получить самые разнообразные законы движения ведомого звена при равномерном
вращении ведущего вала.
Рис. 3.244. Кулачково-планетарные механизмы:
а — ведущее колесо Zj дифференциала вращается с постоянной скоростью. На
оси сателлитов Zi — z'l закреплен кулачок 5, взаилюдействующий с роликом 6,
имеющим неподвижную ось. Профиль кулачка определяет закон движения водила
4 дифференниала, вследствие чего ведомое колесо Zj движется по требуемому
закону, и, в частности, с периодической остановкой;
Механизмы, составленные из зубчатых ко^ес
261
Рис. 3.240
i
/
'/
//
-~\
Ь
W
V/
\ (
И
о so 180 Z70 ср"
Рис. 3.241
Рис. 3.242
Рис. 3.243
6 5
d) 6)
Рис. 3.244
Рис. 3.245
262 Зубчатые Koieca и механизмы, составlewwie из зубчатых колес
б — при движении ведушего водила 5 планетарной передачи кулачок 5,
закрепленный на оси сателлита Z2, воздействуя на ролик 6, сообщает ведомому
коромыслу 4 соответствующий закон движения.
Рис. 3 245. На поводке 5 трехзвенного планетарного механизма размещена
общая ось сателлита Z2 и коромысла кулачковою механизма, ролик 4 коюрого
обкатывается по неподвижному кулачку 5.
При качении ролика по цилиндрическому участку профиля с центром в 0^
coi = соз- В пределах фазовых углов с переменным радиусом-вектором кулачка
сагеллит Z2 получает добавочное движение вокруг собственной оси, и два
вращения суммируются ведомым колесом z^.
Рис. 3.246. Колебательный привод для шлифовальных и полировальных станков.
На ведущем валу укреплено зубчагое колесо 2 и эксцентрик, соединенный со
стержнем 3. Колесо 2 сцеплено с колесом 7, на валу которого также укреплен
эксцентрик, соединенный со стержнем 5. Стержни 5 и 5 соединены шарниром
в точке А, В точке Б стержня 5 укрепляется обрабатывающий инструмент (на
рисунке диск 4). Числа зубьев колес 2 и 2 — простые числа. Обрабатывающий
инструмент совершает полный цикл движений за время, пока колесо 2
совершает число оборотов, равное числу зубьев колеса 1.
Рис. 3.247. Механизм с неравномерным вращением ведомого вала. На ободе
шкива 1 неподвижно установлен палец 2 с закрепленным на нем зубчатым
колесом Zj. Движение от колеса Zj к колесу z^ передается посредством колес Z2, Z3 и Z4,
оси которых установлены на шатуне 3. Колеса Z3 и z^ жестко соединены между
собой.
Рис. 3.248. Механизм Ропера. Колесо Z2 с внешним венцом посажено на
ведущем эксцентрике. Рамка 3, в пазах которой скользят пальцы, укрепленные на
колесе Z2, перемещается относительно ступицы эксцентрика и удерживается от
вращения неподвижным пальцем 4, т. е. совершает поступательное движение.
Вследствие этого скорость на начальной окружности колеса Zj равна скорости
центра О эксцентрика. При малой разности чисел зубьев возможно получение
больших передаточных отношений:
WiO = -^= ^ ^ ^1 - ^2 ^
По Г1 Zi
Рис. 3.249. Зубчатый кулисно-реечный механизм. Механизм позволяет
суммировать постоянную скорость, передаваемую парой зубчатых колес Z3 и Zg
центральному колесу Z5 эпициклической передачи, и скорость, изменяющуюся по
синусоидальному закону, передаваемому поводку 4 от синусного механизма ), 2, 9 с
кривошипом 2 посредством рейки 9 и зубчатого колеса 10. Результирующее
движение сообщается через колеса z^ центральному колесу Zg. Механизм может быть
использован в копировальных станках для обработки кулачков с профилем,
обеспечивающим синусоидальный закон движения ведомого звена при
соответствующем расчете зубчатых колес и радиуса кривошипа синусного механизма.
Слева показана кинематическая схема механизма.
Рис. 3.250. Зубчатый эксцентриково-реечный механизм. Механизм дает
возможность суммировать движение с постоянной скоростью и движение,
воспроизводимое кулисным механизмом с вращающейся кулисой Зубчатое колесо 4 при
неподвижной рейке 2 относительно маховика 7 приобретает угловую скорость
coi. Вследствие того, что рейка 2 помещается в пазу 3 маховика и при
вращении маховика получает относительное перемещение в результате связи с
неподвижным эксцентриком 6 при помощи шатуна 3, к указанной постоянной скорости
Рис. 3.251
Рис. 3.252
Рис. 3.254
Рис. 3.255
Механизмы, составленные из зубчатых ко tec 265
прибавляется угловая скорость, определяемая относительной скоростью ползушки
кулисного механизма
рис. 3 251. Зубчатый эксцентриково-секторный механизм, работающий aHa,iorH4Ho
механизму рис. 3.250. В механизме производится суммирование постоянной
скорости зубчатого колеса / с переменной скоростью шатуна 5 двухкривошипиого
четырехзвенного механизма 2, 3, 4, 5 относительно колеса 1.
Рис. 3 252 Механизм для сообщения поступательного движения каретке. При
вращении ведущего вала 2, соединенного с червяком скользящей шпонкой, коробке
/ сообщается движение от вращающегося червячного колеса 5, связанного со
стойкой 3 шатуном 4. Скорость движения коробки переменная.
Рис. 3.253. Механизм для протягивания специальной канавки с переменным
шагом. При вращении винта / каретка 4 перемещается влево. В результате качения
спирального колеса 3 по сопряженной рейке 2 изделию, закрепленному на
каретке, сообщается дополнительное вращение с переменной скоростью при
постоянной скорости каретки. Спиральное колесо представляет собой винтовое колесо
с зубьями, смещенными относительно плоскости чертежа.
Рис 3 254. Редуктор с предельным кулисным механизмом.
Оси ведущего вала 2 и ведомого 5 (рис. 3 254, а) смещены на величину е. На
торце ведущего вала 2 по диаметральной кривой симметрично, на расстоянии 2е
закреплены пальцы 1 с установленными на них ползунами 4. На торце диска 3
ведомого вала 5 (рис. 3.254,6) сделаны пазы, в которых скользят ползуны 4 со
специальными направляющими 6 на них. Передаточное отношение редуктора
равно двум.
Рис 3.255. Мальтийский механизм с планетарной передачей. От ведущего
водила 1 и серьги 2 (рис. 3, 255, а\ несущей цевку 3, сообщается эпизодическое
движение кресту 4. С осью А связано зубчатое колесо 5, обкатывающееся вместе
с колесом 6 по неподвижному колесу 7.
Для и — пазового креста (рис. 3.255,6) отношение—— — . Необходимо,
Z5 П - 2
чтобы R i- г = Bsin — и радиус цевки был меньше радиуса кривизны ее траектории
п
для момента входа. В схеме по рис. 3.255, а сравнительно с обычными мальтийским!^
механизмами значительно ниже со^ах и г^^^ (для четырехпазовых крестов до
40 и 47% соответственно), а гакже значительно снижаются давление Р^ах цевки
на паз креста, средний момент и потребная мощность. Еще более благоприятной
оказывается схема с внутренним зацеплением (рис. 3.255, в).
Схему целесообразно применять при п < 6.
На рис. 3.255, с/ показано конструктивное устройство механизма.
Рис. 3.256. Реверсивный двухскоростной мальтийский механизм состоит из
зубчатой передачи с передаточным отношением 2:1 и мальтийского креста.
Ведущим звеном механизма является зубчатое колесо 1 с прикрепленным к нему
кривошипом 7, ведомым - мальтийский крест 5 с тремя пазами, расположенными
под углом 60^
^ ^Считая положение механизма, изображенное на рисунке, начальным и вращая
->очатое колесо 1 против часовой стрелки, получим следующий цикл движений:
ролик 6 кривошипа 7 выходит из паза а креста 5, а ролики 4 п 3 зубчатого колеса
пп '^^'^^^^^^^•^'^^"о входят в пазы в и с креста 5 и дважды поворачивают его на 60^,
ри этом колесо 2 повернется на 240^, а колесо 1 на 120^ В послед>ющий
266 'Губчатые ко id а и ме\анизиы составленные из зубчатых ко icc
Рис. 3.256
Рис. 3.257
период движения ролик 8 кривошипа 7 войдет в паз а и повернет крест 5 в
начальное положение со скоростью, вдвое большей, чем при прямом ходе.
Рис 3.257. Кантователь слябинга. Рейка 7 приводится в движение от колеса б
на рычаге 5, которому движение передается от двигателей 1 через редуктор 2 и
кривошипно-ползунный механизм 3 — 4, и от рейки 8, связанной с приводным
колесом 9. При кантовании полосы центр колеса 6 должен опережать рейку 8,
в таком случае зуб 10 кантователя поднимается и кан1)ет заготовку.
Мехаииз мы, состав leuubie из зубчатых колес
267
Рис. 3.258
Справа показана кинематическая схема механизма реек кантователя.
Рис. 3.258. Кантователь с дифференциальной реечной передачей. Кантователь
обжимных станов работает согласованно с манипулятором (на схеме не
показан), задачей которого является перемещение слитка в направлении,
перпендикулярном оси прокатки. В приведенном механизме движение манипулятору
сообщается от двигателя I через колеса 6. В этом случае вся система получает
поступательное движение. В случае необходимости кантования слитка включается
двигатель 2, приводящий в движение через редуктор 5 и кривощипно-коромысло-
вый механизм 4—5—9 реечное зубчатое колесо 8 и рейку 7, поднимающую или
опускающую крюк 12 на валу 13 манипулятора. Таким образом, при
неподвижной обойме 9 крюк также неподвижен. 10 и 11 — промежуточные зубчатые
колеса. Числа зубьев колес 6, 6\ 11 и 10 одинаковые.
РАЗДЕЛ 4
КУЛАЧКОВЫЕ МЕХАНИЗМЫ
ОБЩИЕ СВЕДЕНИЯ О КУЛАЧКОВЫХ МЕХАНИЗМАХ
При конструировании машин приходится подбирать тип механизма или серии
механизмов, включаемых в состав машин, исходя из тех процессов, которые
должны быть воспроизведены в машине во время ее работы, т. е. механизмы
приходится подбирать jaK, чтобы ведомое звено совершало движение по
заданному закону.
Очень часто закон изменения скорости или ускорения ведомого звена не имеет
существенного значения, а важно лишь воспроизвести его ход определенной
величины. Это имеет место, например, в рабочих механизмах тепловых двигателей,
в которых поршень должен иметь ход заданной величины, в поперечно-строга-
тельных станках, печатных машинах и др В этих случаях выбор типа
механизма и определение его размеров не вызывают затруднений, причем можно
применять механизмы с низшими парами — такие, как кривошипно-шатунный,
кулисный, четырехшарнирный и др.
Но в тех случаях, когда перемещение, а следовательно, и скорость и ускорение
ведомого звена должны изменяться по заранее заданному закону, и особенно
в тех случаях, когда ведомое звено должно временно останавливаться при непре-
рывнЬм движении ведущего звена, наиболее просто вопрос решается при
применении кулачковых механизмов.
На рис. 4.1 как пример кулачкового механизма показан механизм привода
поршней топливного насоса звездообразного девятицилиндрового двигателя.
Поршни 2 приводятся в движение кулачком 4, который установлен на
коленчатом валу двигателя. Кулачок действует на толкатели 3, расположенные в кольце i,
вращающемся в направлении, обратном направлению вращения кулачка, со
скоростью, равной Vs его скорости. При этих условиях поворот кулачка на 720°
соответствует повороту кольца с толкателями в противоположном направлении на 90°.
Следовательно, кулачок за два оборота поочередно переместит все девять
поршней, вернувшись в исходное положение при повороте кольца на 90°. Порядок
впрыскивания топлива: 1, 3, 5, 7, 9, 2, 4, 6, 8 (цифры указывают порядковые номера
цилиндров).
Двргжеиие ведомому звену сообщается в том случае, если элемент
кинематической пары толкателя касается части профиля, имеющей переменный радиус-
^-'Сктор Если часть профиля очерчена дугой окружности с центром, совпадающим
с осью вращения, то при касаьши элементов кинематической пары в пределах
указанной дуги профиля ведомое звено неподвижно.
Выбирая тот или иной закон изменения радиуса-вектора профиля кулачка,
можно получить самые разнообразные комбинации движений ведомого звена.
При анализе кулачковых механизмов требуется по заданному профилю кулачка
и размерам механизма определить закон движения ведомого звена. В процессе
сир1теза кулачкового механизма необходимо выбирать размеры и установить
очертание профиля кулачка. Различные типы кулачковых механизмов приведены ниже.
При исследовании кулачковых механизмов и построении профиля кулачка для
упрощения расчетов в большинстве случаев применяется метод инверсии, т. е.
Ooufue сведения о кулачковых механизмах
269
всему механизму сообщается угловая скорость, равная угловой скорости кулачка,
но в противоположном направлении При этом кулачок остается неподвижным,
а толкатель вращается вокруг оси кулачка.
На рис. 4 2 показан способ определения закона движения толкателя 2, который
считается вращающимся вместе с направляющей по часовой стрелке, а кулачок
J, в действительности вращающийся против часовой стрелки, - неподвижным.
Положения центра В ролика на траектории движения его относительно кулачка
(эквидистанты) отмечены кружками, которые не обозначены цифрами.
При проектировании кулачковых механизмов могут быть заданы следующие
условия:
1) фазовые >тлы — углы поворота кулачка — и закон движения ведомого звена;
2) фазовые утлы и /i — полные перемещения в пределах каждой фазы. Закон
движения ведомого звена внутри каждой фазы может быть выбран произвольно.
Для второй комбинации условий
законы движения обычно применяются
в одной из следующих форм:
а. Параболический закон движения
(рис. 4 3 и 4.4). Ускорение на отдельных
участках остается постоянным, скорость
изменяется линейно, а перемещение S —
по параболе.
Для несимметричного закона (см.
рис. 4.4) в течение первой части ф'х
фазы ф^:
2/1(1 Л-к,) ^_
2
dS lh{\-Vk,)
с1ц>
ki4>l
О < ф < ф1;
О < ф < ф1;
Рис. 4.1
Рис. 4.2
270 Кулачковые механизмы
cfS 2h(\+k,)
dip ki(p
2 ' 0 < Ф < ф; ;
1
^i=—T-' Ф1 + Ф1=Ф1-
Ф1
Здесь 5^ — обобщенное перемеп^екие; h — обобщенный ход ведомого звена
(линейное или угловое перемещение); фх —фазовый угол.
При симметричном законе движения (рис. 4.3) ki — 1.
При параболическом законе движения в кривой ускорения имеют место
разрывы, что влечет за собой нежесткие удары (мгновенное приложение силы)
в процессе работы механизма.
б. Синусоидальный закон движения (рис. 4.5)
-<
dS __
<:/ф
d'S
dip"-
Ф
Ф1
/7
Ф1
-О
2/771
1 . 2я \
— sin ф :
2тс Ф1 У
2я \
— cos ф ;
Ф1 J
: . 2%
-sm ф;
Ф1
в. Косинусоидальный закон движения (рис. 4.6). В случае симметричности
кривой ускорений
dS _
^ф
d^S
d(?^
h
2
тс
Ф1
2ф?
-sin
cos
n
Ф1
7C
Ф1
-ф;
Ф.
Можно построить несимметричную относительно середины фазы кривую
ускорений, которая будет отличаться от показанной на рис. 4.6.
Максимальные ускорения л = со^ —г- ведомого звена для приведенных выше
йф
законов находятся в отношении (ход и величина фазы одинаковы)
1:у:-^-1:1,57:1,23.
Синусоидальный закон следует предпочесть всем остальным вследствие
отсутствия разрывов в кривой ускорений и получающихся при этом динамическич
напряжений в звеньях наименьшей величины.
Обшш' (ведения о ку Майковых механизмах
271
Рис. 4.3
Рис. 4.4
S А
vy
Рис. 4.5
О 1 2 ^Л 4 .^^ ^ ^>7 <? 9/10 11 у^г-0 ср
^4..a.ibi:
Nx^>^
-^ dcp
Рис. 4.6
1^ Закон движения - трапецеидальный (рис 4 7). Кривая ускорений сосгавлена
IIJ >часгков прямых, кривая скоростей - из отрезков прямых и сопряженных с ними
г'росгыч парабол, кривая перемещений - из сопряженных участков простых (2 и
^) и к>бимески\ (/, ,^, 4 и 6) парабол.
л Закон движения - линейный (рис. 4.8). Нередко необходимо воспроизвести
'•о \час1кам посгояппую скорость ведомого звена Тогда участки кривой, очерчи-
f^aiouieii профиль, не сопряжены, и механизм пспытывас! удары Во избежание
lapoB следует вписывагь переходные кривые, приняв изменение )скорення для
272
Кулачковые механизмы
Рис. 4.7
Рис. 4.8
участков перехода по одному из приведенных выше законов. Приняв
синусоидальный закон, получаем путь в переходную фазу:
^ 2со '"
Ф
1 . 7Г
— sm—-ф );
71 ф '
где CD — угловая скорость вращения кулачка.
Точки а, Ь, е и d на диаграмме — точки сопряжения участков закона движения.
Выбирать ф' следует из условия, чтобы л„
заданные пределы.
d'S
не выходило за
ВЫБОР РАЗМЕРОВ КУЛАЧКОВОГО МЕХАНИЗМА
Профиль кулачка не должен иметь особых точек или, иначе говоря,
интерферирующих участков, пересекающихся в особой точке 1 (рис. 4.9). Для плоских
кулачковых механизмов с внешней цилиндрической поверхностью на ведомом звене
в качестве элемента кинематической пары (например, поверхность ролика или
гриба) особые точки будут отсутствовать, если при всех положениях механизма
радиус кривизны Ry.p траектории движения центра ролика (центра кривизны дуги
гриба) относительно кулачка больше радиуса ролика (дуги гриба). Этому
условию можно удовлетворить подбором радиуса ролика. При кривизне поверхности
на ведомом звене, равной нулю (плоский толкатель), необходимо определить
минимальный радиус-вектор профиля.
В случае качающегося коромысла минимальный
радиус кулачка R^i^ (рис. 4.10) должен быть определен из
неравенства
i
-Rmin > Ь^^О:
sin ф + —- COS \|/
ah
(4.1)
Рнс. 4.9
Выбор размеров ку шчкового механизма
273
В формуле (4.1) Ьо^Ог'~ межцентровое расстояние; \|/ — угол поворота коромысла,
g _ угловое ускорение коромысла; л = coi - 2щ\ Z? - Oi - ©2; сОд - угловая
скорость коромысла.
Все величины должны соответствовать данному значению
^=/(9).
При определении R^-.^ целесообразно применять графические способы,
принимая угловую скорость кулачка cOi = 1.
Рис» 4Л0
По заданному закону движения
коромысла строим диаграммы:
Е =
Щ
= /(ф);
= /(ф);
^/=/(ф).
Затем строим квадрат (рис. 4.11),
сторона которого с = (Oi/A'^,^, а на
продолжениях сторон квадрата
откладываем перпендикулярные им отрезки:
Рис. 4.11
274 Кулачковые мехаииз мы
где к^^ = /с^^ = 7с — масштабы угловой скорости кулачка 1 и коромысла 2 при
угловой скорости cOi = 1 и /Cg = 1/с — масштаб углового ускорения коромысла.
Соединяя точки Q с полюсом Р и проектируя на прямую QP точку S,
соответствующую концу отрезка d, получаем точку Т.
Проектируя на вертикальную прямую TG отрезок/, получаем точку Н и соот-
BerciBCHHO прямую PHL^ расположенную под углом Q.
Из подобия треугольников QFP, TSP, LNP, HGP получаем
ab
Подставляя полученное значение — в формулу (4.1), имеем
аЬ
^тш ;
"^o,o,sin[(il/ + n)^in].
Минимальное значение (\1/+ fi)min определяется наложением графика П=/(ф)
на график \1/ = /(ф). Для этой цели необходимо выполнить указанные графические
построения для всего периода движения коромысла (рис. 4.12).
Для принятого закона движения коромысла \|/ = /(ф) минимальное значение
(ф + П)^,„ соответствует повороту кулачка на угол ф^ (рис. 4.13) между точками
11 и 12, д, минимальный радиус
получается положительным.
Однако не исключается условие, при котором ми1шмальный радиус кулачка
получится отрицательным. Это условие показано на рис. 4.14. Здесь (\|/ — Q)„iin
соответствует началу подъема коромысла и имеет положительный знак. Последнее
относится к кулачковым механизмам с плоским толкателем, когда для всех его
положений должно быть
На рис. 4.15 показан график при S^j^ = 60 мм и
cC-S
V' -''-•
max
В случае кулачкового механизма с ведомым звеном, снабженным роликом,
налагается дополнительное условие, а именно: угол давления О не выходит за
заданное значение 0„,^х iJ" при одном из положений кулачка. Угол давления
образуют: направление скорости центра ролика и направление нормали в точке
профиля для данного но]южения кулачка. Эго условие может быть
удовлетворено при заданном законе движения ведомого звена соответствующим
выбором /?„^i„ эквидисганты (граектории центра ролика относительно кулачка).
Выбрав произвольно точку О2 — центр вращения коромысла — по заданному
закону движения строят его положения и вдоль каждою из них в масштабе
Выбор раз меров ку тчкового механизма
275
S- t>x VO tv5 >^С5)
5 \| I 1-1 ! ' !' ^
276
Кулачковые механиз мы
t^ I
Рис. 4.13
1/6,5 8 9 10 11 12 13 (р
Р
Рис. 4.14
Рис. 4.15
г/ ^"
Рис. 4.16
Рис. 4.17
Построение профиля кулачка Til
lis
механизма откладывают соответствующие значения хк^ = ~— = у^^^
(рис. 4 16). Если coi/co2 > О,
то отрезок X в масштабе механизма следует откладывать от центра ролика
в направлении к центру вращения коромысла, а если C0i/(02 < О, то в
противоположном направлении. Через конец каждого из отрезков проводится прямая
под углом 90° — Oniax к соответствующему направлению коромысла и строятся
их огибающие для каждой из фаз ф^ и фз отдельно. Если взять центр Oi
вращения кулачка внутри угла /Oi//, то поставленное условие удовлетворяется. Обычно
достаточно провести две прямые под углом 90° — О^ах соответствующие
наибольшим значениям dS^/d^) и dS-. d(p, заменяющие огибающие, и центр вращения
взять аналогично предыдущему В случае поступательно движущегося толкателя
отрезки X параллельны (рис. 4 17) Вместо огибающих следует взять касательные
к кривой {dS/d(p, S), проведенные под углом 90° — О^ах к горизонтали. Размер е
соответствует смещению оси толкателя. Bq — нижнее положение центра ролика.
ПОСТРОЕНИЕ ПРОФИЛЯ КУЛАЧКА
Механизм со смещенным поступательно движущимся толкателем (рис. 4.18).
В — центр ролика, е — смещение, h — ход толкателя.
Построение. Выбираем точку Bq — нижт1ее положение центра ролика.
Согласно описанию к рис. 4.16-4 17 определяем положение центра Ох вращения
кулачка и описываем из этого центра окружности радиусов е и Rmin'
Касательная к окружности е пересекается с окружностью К^^ы в точке Bq, От точки
Во вдоль касательной откладываем перемещения Sp, соответствующие равным
интервалам изменения угла ф поворота кулачка. Делим окружность R^-^^ на
части, соответствующие фазам, а каждую фазовую дугу — на выбранное число
интервалов (на рисунке восемь интервалов). Через точки деления окружности
^min проводим касательные к окружности е, затем от окружности /?„;„ вдоль
касательных откладываем соответствующие значения S. Соединяя найденные
точки, получаем эквидистанту. Радиусом ролика из произвольных точек экви-
дистанты описываем дуги, огибающей которых будет профиль кулачка.
Механизм с коромыслом (рис. 4 19). Радиусами К^,,,, и Iq^q^ описываем
окружности и делим окружность радиуса /^^Оз ^а части, пропорциональные фазовым
}глам. Из точек /, 2, 3 и т. д. деления фазовых дуг окружности радиуса J01O2 ^•^^^'
^^ои Iqb коромысла описываем дуги и на каждой из них делаем засечку дугой
с центром в 0^, проведенной через соответствующие положения центра ролика на
^го траектории. Полученные точки пересечения дуг лежат на эквидистанте.
Профиль кулачка находим аналогично предыдущему.
Механизм с плоским толкателем (рис. 4.20). Радиусом R^-^n описываем
окружать, делим ее на части, пропорциональные фазовым углам, и через каждую
точек деления фазовой дуги проводим лучи, соединяя их с центром 0^. От
Р}жности R^.^ вдоль лучей откладываем соответствующие значения S и через
денные точки проводим перпендикуляры к лучам Огибающая перпендикуляров
^^ляется профилем кулачка (на рис. 4 20 огибающая не показана). На рис. 4 20
g роены профили двух кулачков, вращающихся относительно одной оси О^
ответствии с графиком (см. рис. 4.15). Один из них (больший) имеет
0\
rr
s
«<5 «O
00
Построение профиля кулачка 279
положительный радиус i^min» второй (меньший) — отрицательный К^т- Путь и закон
движения плоского толкателя будут одинаковыми независимо от того, с каким
из построенных кулачков (толкатель) будет соприкасаться.
Механизм с плоским коромыслом (рис. 4.21). Из центра 0^ радиусами Я,^!^
(отрицательный) и Lq^q^ описываем окружности и делим их на части,
пропорциональные фазовым углам. От касательной L^,^, проведенной к окружности
минимального радиуса Rm\n^ откладываем максимальный >тол v|/„, качания
коромысла и делим его на части в соответствии с заданным законом движения.
Из точек деления фазовых углов ), 2, 3 и т.д., расположенных на окружности
радиуса Lq о •> проводим касательные к окружности радиуса R^.^^ (показана
штриховой линией только для положения 6, 5 и 8) и строим углы vj/,
соответствующие данным точкам. Огибающая найденных положений коромысла будет
искомым профилем кулачка.
Положение точки В касания профиля с профилем кулачка, перемещающейся
по линии коромысла, можно определить для каждого из его положений по формуле
i^o.B = —— (cos ф ]/l1^o^ - Rl^^ - i?^;„ sin v|/).
Траектория точки В проходит через точки Б'з — B-j. Рассмотренная методика
построения профиля кулачка сохраняется и для случая, когда минимальный радиус
кулачка R^.n положите ль ньп1.
Построение профиля кулачка барабанного типа с качающимся коромыслом
приведено на рис. 4.22. На развертке основания среднего цилиндра диаметра
(схема б) d — (D^ + Di)/! (Di — диаметр барабана, Dj — диаметр впадины канавки)
откладываем фазовые дуги 1^ —r(pi; /2 = гц)2', h = ^Фз и т. д. (схема а) и строим
положения коромысла (точки Bq 1, 2 и т.д.), соответствующие равным
интервалам изменения угла поворота кулачка в пределах каждой фазы (точки 0\ Г, 2',
3' и т. д). Через точки /деления {0\ Г, 2' и т. д.) радиусом коромысла \qq^
описываем дуги окружностей и проектируем на них соответствующие положения
центра ролика; на первую дугу положение 1 ролика, на вторую дугу —
положение 2 ролика и т д. Соединяя последовательно найденные точки, получаем
траекторию центра ролика при движении его относительно среднего цилиндра
кулачка.
На рис. 4.23 показана схема построения конического кулачка с поступательно
движущимся толкателем. Развертка конуса с центральным утлом р = ^= 2к sin а.
Фазовые углы ф' на развертке с действительными фазовыми углами
^-вязаны равенствами ф^ = фlSina; фз = ф2sina и т.д. Радиус R^^^ на развертке
оиределяс1ся как г^^^^ для плоского кулачка на среднем конусе г^^ш =-^min ^ii^ <^-
Профиль строится аналогично показанному на рис. 4.18 при ^ = 0.
Рис 4 24. Кулачковый механизм, состоящий из круглого эксцентрика,
заменяющим механизмом которого является: для случая а — нормальный (без смещения,
^ ~ 0) кривошипно-шатунный механизм с постоянной длиной кривошипа г и ша-
>на /; для случая б — кривошипно-шатунный механизм со смещенным
направлением движения HCHipa пальца ползуна-толкателя.
Перемещения Sq or верхнего крайнего положения могут быть определены
аналишчсски
для сличая а
S = (г + /) - rcos ос - /
г
-г- sm а;
280
Кпачковые чехаииз\^ы
Рис. 4.20
для сл)чая б
5 ^ у (г Л- If ~ е^ - rcosoi- I + —sin^ а + ■ : + —
/ 2/
Скорость и ускорение для обоих случаев:
У в - coi/' (sin а + cos а tg Р); tg р =
г sm а + в
/ / rsmof + е
^в "= ®Р' ^^^ ^ +
/cos^p
sinatgp .
Построение профиля кулачка
281
Рис. 4.25
Рис. 4.26
Рис. 4.27
Схемы кулачковых механизмов 283
СХЕМЫ КУЛАЧКОВЫХ МЕХАНИЗМОВ
Рис. 4.25. Кулачковый механизм, в котором эксцентрик 1 (схема а) заключен
рамке 2 между двумя параллельными прямыми.
Заменяющий механизм (схема б) - прямолинейно движущаяся кулиса.
Формулы перемещений, скорос1ей и ускорений ведомого звена 2 определяются
из выражений
5 = г sin а;
V = coircos а;
а = — cofrsina.
Рис. 4 26. Двойной круговой сегмент в треугольнике. Длина / сегмента 1 равна
высоте тре\1ольника. При перемещении сегмента 1 так, что его крайние точки
с и d скользят по сторонам треугольника 2, центр а сегмента описывает
траекторию по дуге окружности.
Рис. 4 27. Кулачок, представляющий собой правильный криволинейный пяти-
1ранник, вращающийся в щесгиугольпой рамке. Вершины пятиугольника 1 скользят
по стенкам рамки 2. Схема используется в механизме для сверления
шестигранных отверстий.
Рис. 4.28. Треугольный кулачок 1, очерченный дугами радиуса R. Рамке 2
сообщается движение с остановками. Вершины треугольника а скруглены
радиусом г. Ход рамки равен R — г.
Рис 4 29. Равносторонний криволинейный треугольный кулачок 1 сопряжен
с квадратной рамкой 2. При вращении центра а треугольника вокруг центра b
квадрата, или наоборот, вершины треугольника скользят по стенкам паза.
Кулачок / установлен на эксцентриковом валу 3 свободно.
Схема используется для сверления квадратных отверстий со скругленными
вершинами с помощью трехперого сверла.
Рис. 4.30. Раздвижной кулачок, состоящий из двух частей: 2 и 2,
применяемый для изменения фаз движения ведомого звена путем поворота детали 1
относительно детали 2 с последующей фиксацией.
Рис. 4.31. Двойной кулачок, в котором геометрическое замыкание осуществ-
-■1яется с помощью особого замыкающего кулачка 3. Ведущим служит кулачок 1.
Профиль замыкающего кулачка определяется из условия постоянства «диаметра»
к\ лачков, т. е. любое диаметральное сечение кулачков i и 2 обеспечивает постоянное
расстояние между линиями контакта кулачков с роликами 2 и 4, которое равно
•^ - (/, 1де d — диаметр роликов.
К\лачковый механизм с переменным профилем кулачка (рис. 4.32, с/). Ход
толкателя 5 определяется размерами выступающей части пластин 3, которые
З^-^гановлены между дисками 4 на болтах 1.
Пластины 3 с круговым пазом 6 устанавливаются в заданном положенш!
Рчс^4.32, б) и фиксируются затяжкой болтов 2.
^'с, 4.33. К\лачок с с>ммируемым профилем. Деталь 3 поворачивается отно-
с-1ьно оси О и фиксируется гайкой 2. Диск 1 определяет Riy{xn- Ось О может
^1^^Рс^Х1С1цаться по пазу диска 1.
,,"^' ^^^- ЬСреплепие быстросменных дисковых кулачков на валу. Кулачок 2
'" ''^тся на лыску вала 1 так, чтобы пазы к\лачка совпали со шчюночными
явками на валу. Втулка 3 перемещается вдоль оси вала и закрепляет кулачок
284
Кулачковые механизмы
Рис. 4.29
Рис. 4.31
Рис, 4.32
Схемы кулачковых механизмов
285
2 1
♦ J
Рис. 4.33
Рис, 4.34
J 2
Рис. 4.35
Рис. 4.36
щ
щ
zp
El
Рис. 4.38
Рис. 4.39
"1Р}мя выступающими концами скользящих шпонок б, которые прикреплены
^^ вт}лке винтами 5, Рабочее положение вт>лки фиксир}ется па валу щтифтом 4.
На piic}HKc показан также комплект деталей кулачка, снятых с вала.
Рис. 4.35. Крепление сменного кулачка 1 на валу посредством шайбы 2 и
^аики 3. Кулачок от проворачивания удерживается силами грения между запле-
'П1К0М вала и шайбой 2.
Рис, 4 ?6. Крепление сменного кулачка 1 посредством м}фт 2 с мелким тор-
Довым з\6ом
Рис. 4 37. Крепление кулачка / барабанного типа к валу посредством штифта 2.
Рис. 4 38. Кулачковый механизм с регулировкой времени выстоя, подъема и
*^П}скания толкателя.
286 Кулачковые механизмы
В уширенной части толкателя 2 имеется криволинейный Т-образный паз, в
котором могут перемещаться и фиксироваться оси роликов 1 и 3. Одновременный
контакт кулачка 4 с двумя роликами позволяет перестановкой их осей регулировать
время нижнего и верхнего выстоя, а также в незначительной степени время подъема
и опускания толкателя.
Время выстоя толкателя регулируется изменением расстояния А между осями
роликов, а время подъема и опускания толкателя — перестановкой роликов по
пазу без изменения расстояния А между ними.
Рис. 4.39. Кулачковый механизм с автоматическим регулированием хода
толкателя.
Толкатель 7 после каждого оборота кулачка, составленного из двух дисков
1 и 2, постепенно изменяет величину хода h от максимального значения до нуля.
Такое движение достигается профилем дисков 2 и 2 и одновременным
вращением их с некоторым относительным смещением вследствие разности чисел
зубьев зубчатых колес 5 и 6. Колесо 6 имеет 104 зуба и жестко соединено
с диском 1 посредством вала 5, а колесо 5 с 105 зубьями соединено с диском 2.
Оба колеса находятся в зацеплении с ведущей шестерней 4.
Механизм применяется в автомате для изготовления бумажных трубок.
Рис. 4.40. Кулачково-эксцентриковый механизм. Долбяк 8 станка получает
возвратно-поступательное движение от шатуна 2, приводимого в движение
пазовым кулачком 7, прикрепленным к зубчатому колесу i, и ползуном 3, шарнирно
соединенным с шатунами 2 и 4.
Шатун 4 приводится эксцентриком 6, который соединен с зубчатым колесом 5,
находящимся в зацеплении с колесом 1. Комбинированное движение шатуна 2
от кулачка 7 и эксцентрика 6 увеличивают ход долбяка.
Рис 4.41. Параболический кулачок. За один оборот кулачка толкатель совершает
два двойных хода /i. Обратный ход — под действием силы Q.
Рис. 4.42. Кулачковый механизм с большим ходом толкателя при малом угле
давления Шайба кулачка 10 (рис. 4.42, <:/) закреплена на валу L В направляющем
пазу шайбы установлен ползун 8 со сквозной прорезью для вала 1.
Профилированные концы ползуна образуют выступы, расположенные в
различных плоскостях, поэтому один из них можег быть в контакте только с
роликом 72, а второй — только с роликом 3. Ползун 8 удерживается в положении,
показанном на чертеже пружиной 9.
Ось ролика 12 установлена на неподвижной станине i/, а ролик 3 с деталью 6
прикреплен к толкателю 4, который перемещается в направляющих станины 2.
Ход толкателя 5 определяется высотой выступающей части ползуна,
соприкасающейся с роликом 3, и величиной перемещения ползуна <S' по направляющим
шайбы, которое происходит вследствие контакта неподвижного ролика ]2 с вы-
С1упающсй частью ползуна, расположенной в другой плоскости.
Для обычной конструкции кулачка при данном ходе h толка 1еля
выступающая часть профиля показана штрихпунктирной линией 7, а верхнее положение
pojiHKa — окружностью 5.
На рис. 4.42,0 и в показаны варианты кулачковых механизмов с >величенным
ходом толкателя без увеличения угла давления.
Плавающий кулачок 4 скользит по ведущему валу 1 и опирается на
неподвижный ролик 3. Перемещение толкателя 2 состойг из суммы
перемещений: кулачка относительно неподвижного ролика и толкателя относительно
кулачка.
Рис 4 43. Кулачковый механизм с авюматическим изменением высоты подъема
толкателя. Каждому обороту кулачка соответствует один ход толкателя 7
Схемы кулачковых механизмов
287
Рис. 4.40
Рис. 4.41
Рис. 4.42
288 Кулачковые механизмы
с роликом 5, причем длина хода толкателя после каждого оборота кулачка
изменяется, а после четырех оборотов цикл движений толкателя 7 повторяется.
Поставленное условие выполняется кулачком, который состоит из диска К)
и ползуна 4, установленного в диаметральном пазу диска. На валу 1, неподвижно
закреплены: диск U) кулачка и зубчатое колесо 2, а зубчатое колесо 11^
неподвижно закрепленное на ступице кулачка 9, установлено на валу 1 свободно.
Ролик 8, прикрепленный к ползуну 4, проходит сквозь паз диска 10 и
находится в постоянном контакте с кулачком 9. Вращение от зубчатого колеса 2
к колесу и передается промежуточными зубчатыми колесами 5 и 6, которые
свободно вращаются на осях» прикрепленных к станине 12. \
Передаточное отношение от вала 1 к зубчатому колесу 11 равно четырем.
Профиль кулачка 9 в пределах четырех равных участков очерчен дугами окруж-
}юсгей разных радиусов с плавным переходом на границах этих участков. Таким
образом, за один оборот вала 1 кулачок 9 получает четверть оборота и
устанавливает ползун 4 с роликом 8 на определенном расстоянии от центра вала,
которое соответствует данному радиусу кривизны профиля кулачка 9. Высота
выступающей части ползуна 4 определяет ход толкателя 7.
Рис. 4.44. Кулачковый механизм с эксцентрическим зубчатым колесом. В
рассматриваемом механизме, который применяется в зажимном приспособлении пресса,
кулачок б соосно расположен с валом 1 и получает один оборот за семь оборотов
последнего.
Механизм устроен следующим образом: на валу 1 закреплена втулка 2 с экс-
иентриком; на эксцентрике установлен рычаг 3, нижний конец которого
соединен с пальцем 9 посредством паза; палец 9 закреплен неподвижно на
приливе станины; в верхней части рычага 3 прикреплено зубчатое колесо 8 с внут-
peitfiHM зацеплением, которое имеет 32 зуба; на концентрической поверхности
втулки 2 подвижно установлено зубчатое колесо 7 с 28-зубьями, ^кoтopoe
неподвижно соединено со сдвоенным кулачком 6.
Профили кулачков находятся в постоянном контакте с толкателями 4 и 5 и
сообщают им движение по различным законам.
За один оборот вала 1 зубчатое колесо 7, а с ним и кулачок 6
поворачиваются в противоположную сторону на угол, соответствующий разности зубьев,
т. е. на 32 — 28 = 4, и соответственно после семи оборотов вала 1 сделает один
оборот.
Рис. 4.45. Схема кулачкового механизма горизонтально-ковочной машины. На
валу 5, приводимом в движение от двигателя, установлены два геометрически
замкнутых кулачка 3 и 2. Движение ползуну 6 в правую сторону передается от
кулачка 3 через ролик Jf.
Рис. 4.46. Механизм для подачи и поворота трубы стана холодной прокатки
труб. Фазовые углы геометрически замкнутого кулачка 1 механизма подачи трубы,
соответствующие перемещению рамки 2 направо и налево, равны 50^ От рамки 2
через систему рычагов движение передается муфтам обгона 3 и 4. Муфта обгона 3
посредством системы зубчатых колес (на чертеже не показаны) передает движение
переднему и заднему патронам трубы. Муфта обгона 4 передает движение
механизму подачи трубы с передним патроном.
Рис. 4.47. Механизм с кулачком треугольного профиля. Механизм применяется
в тех случаях, когда перемещение ведомого звена — толкателя значительное и
период выстоя — продолжительный. Кулачок 2 с треугольным пазом движется
возвратно-поступательно в направляющих. Толкатель 1 перемещайся в
вертикальной плоскости с выстоем в нижнем положении.
В местах перехода паза из горизонтального положения в наклонное установлены
стрелки 6 и 4, которые перемещаются в направляющих 3 и 7 и прижимаются
Схемы кулачковых механизмов
289
// /J
Рис. 4.43
f 2
3 Ч
У/У//>///А
Wy / [|Ц|
^/W///M
^^u^
X
^
Рис. 4.44
10
Кожевников и др.
Рис. 4.45
290
Кулачковые механизмы
Рис. 4.46
Рис. 4.47
к внутренней стенке паза пружинами. Возможные перемещения ролика 5 в пазу
показаны круговыми стрелками.
Рис. 4 48, Кулачковый механизм для перемещения шпинделя по квадратному
контуру. Ведущим звеном механизма является кулачок 3, перемещающийся внутри
рамки 4, с квадратным отверстием и приливом с подшипниками для шпинделя 5.
Рамка 4 связана с кронштейном 6 звеньями i, 2, 7, образующими
параллелограммы, которые позволяют рамке перемещаться поступательно в плоскости,
параллельной плоскости чертежа. Профиль кулачка 3 обеспечивает движение рамки
с шпинделем 5 по траектории А, имеющей форму квадрата.
Отвер^:тия шарниров в звеньях параллелограмма и цапфы на осях, их
соединяющих, изготовлены коническими с возможной регулировкой зазора посредством
гаек 8.
Схемы кулачковых механизмов
291
Механизм применяется в
деревообрабатывающей
промышленности.
Рис. 4.49. Кулачковый
механизм молотка гвоздезабивной
обувной машины: а - схема
кулачкового механизма. Кулачок 2
вращается относительно оси О
по часовой стрелке. Толкатель 1
жестко связан со штангой 3
молотка. Сила удара
осуществляется закрученной пружиной 4,
фетровая подушка 5 служит для
смазки трущейся поверхности
кулачка; б-конструктивная
схема механизма молотка; в —
разметка траектории точки
толкателя.
Рис. 4.50. Цилиндрический
кулачок 1 с переменной высотой.
Величину рабочего хода
изменяют от /i = О до /г = S
передвижением ведомого звена с
роликом 2 вдоль оси кулачка.
Рис. 4.51. Цилиндрический
кулачок 1 с переменным
рабочим профилем. Для изменения
характера движения и фазового
угла ведомое звено с роликом 2
передвигают вдоль оси кулачка.
Рис. 4.52. Кулачковый
механизм. Кулачок 1 с внутренним
профилем, вращаясь по часовой
стрелке, передает движение коромыслу 2.
Рис. 4.53. Перекатывающийся рычаг с подвижной осью вращения. При
перекатывании рычага 1 по неподвижному основанию 2 соотношение плеч изменяется.
Перекатывающийся рычаг, замыкающий кулачок, профилируется так, чтобы
устранить скольжение между рычагом 1 и основанием 2. Для этого необходимо, чтобы
мгновенный центр относительного вращения всегда совпадал с точкой касания а.
Рис. 4.54. Перекатывающийся рычаг с неподвижной осью вращения.
Криволинейный рычаг 1 перекатывается по прямолинейному рычагу 2. При чистом
катании рычагов точка а соприкосновения рычагов должна совпадать с мгновенным
центром относительного вращения рычагов, лежащим в точке пересечения линии
^^ь О2, соединяющей неподвижные оси вращения с общей нормалью к
сопряженным профилям в точке а касания. Этому условию показанный механизм не
>довлетворяет.
Рис. 4.55. Перекатывающийся рычаг, обкатывающийся по неподвижному осно-
^^анию 2 без трения. Точка а рычага 1 движется прямолинейно, если радиус г
перекатывающегося рычага равен половине R радиуса кривизны основания.
Рнс. 4.56. Кулачковый механизм с двусторонним замыканием плоского коро-
' ''|^-'а. К>лачок 1 находится в постоянном контакте с коромыслом 3, а кулачок 4
^^оромыслом 2, коромысла 2 и 3 жестко закреплены на валу.
Рис. 4.48
10*
Рис. 4.49
Рис. 4.50
Рис. 4.51
Рис, 4,52
Рис, 4.53
Рис. 4.54
Рис. 4.55
1'"с. 4.56
Рис. 4.57
294 Кулачковые механизмы
Рис. 4.57. Выталкиватель, встроенный в ползун многошпиндельного пресса.
В отверстии ползуна 1 установлена штанга 2, которая кинематически связана
с кулачком 3. Ось вращения кулачка установлена на ползуне. При перемещении
ползуна кулачок 3 встречается с неподвижным роликом 4, поворачивается и
штангой 2 выталкивает изделие. Кронштейн 5 с роликом 4 может перемещаться
параллельно оси ползуна и фиксироваться в заданном положении.
Рис. 4.58. Механизм качания гребенок ткацкой машины. На валу б закреплен
эксцентрик 5, к которому прижаты ролики 4 \\ 7 шатуна 3. Механизм дает плавное
качание коромыслу 2 и соответственно валу 1 гребенок при повышенной частоте
вращения (220—250 об/мин).
^ис. 4.59. Кулачковый механизм, использованный в механизме
картофелекопалки. Кольцо 2, несущее оси 3 качающихся рычагов, вращается относительно
неподвижного кулачка 1. На концах коротких рычагов закреплены ролики 5,
которые соприкасаются с кулачком, а лопаты укреплены на концах длинных рычагов 4
и поочередно копают.
Рис. 4.60. Кулачковый механизм с двойным роликовым коромыслом. При
профилировании кулачка 1 размер А между центрами роликов 2 должен оставаться
постоянным.
Рис. 4.61. Пример кулачкового механизма, использованного в двухплунжерном
топливном насосе, приводимом от одного кулачка 1 и двух толкателей 2.
Рис. 4.62. Кулачковый механизм. Шатун / является толкателем кулачкового
механизма и ведущим звеном при кинематическом анализе четырехзвенного
механизма.
Рис. 4.63. Кулачковый механизм, применяемый в приспособлении для
гофрирования железных полос. От кулачка 9 движение передается посредством
роликов 1 w 6 Г-образному рычагу 3 с осью качания 7 на полз ушке 2,
перемещающейся в направляющих типа ласточкина хвоста станины. Ползушка 2 имеет
поперечный паз, в котором движется пуансон 4, связанный пальцем 5 с рычагом 3.
В момент начала подъема ползушки 2 ролики 6 и jf соприкасаются с профилем
кулачка, очерченным минимальным радиусом, при этом пружина 8 удерживает
пуансон 4 в крайнем правом положении. Затем осуществляются подъем ползушки 2
и чередующийся за ним поворот рычага 3 влево. После небольшого верхнего
выстоя ползушка с изделием опускается вниз. Поворотом рычага 3 вправо и
продолжительным нижним выстоем заканчивается цикл работы механизма.
Рис. 4.64. Кулачковый механизм с мгновенным перемещением коромысла вниз.
Коромысло 1 (схема а) поворачивается относительно оси 5 посредством
кулачка б и передает движение исполнительному звену механизма тягой 4.
Пружина 8 обеспечивает постоянный контакт между роликом 2, установленным на
оси 3, и кулачком б.
В соответствии со схемой а перемещение коромысла 1 вниз до упора 9 можно
разделить на две фазы: в начале медленное и последующее быстрое.
В кулачковом механизме (схема б) невращающаяся ось ролика 2 заканчивается
квадратной головкой 20, а на вал 7, кроме кулачка б, устанавливается
вспомогательный кулачок 5, жестко соединенный с кулачком б. Ролик 2 находится в
контакте с кулачком б, а головка 10 оси ролика — с вспомогательным кулачком 5.
При таком сочетании элементов весь период опускания коромысла происходит
мгновенно.
Рис. 4.65. Кулачковый механизм с прямолинейным движением центра ролика
коромысла. Рассматриваемый механизм применяется в автоматах для выпиливания
прорезей в язычковых иглах вязальных машин.
Схемы кулачковых механизмов
295
1 ^
Рис. 4.63
296
Кулачковые механкзмы
„Ч'^ЩгГ^ W
Рис. 4.64
В случае, когда ось 4 качания коромысла 3 неподвижна, ролик 2 перемещается
по дуге окружности и при обратном ходе коромысла стремится выйти из контакта
с кулачком 1, особенно при большой частоте вращения последнего.
Это явление не наблюдается, если ось 4 коромысла 3 сделать подвижной,
установив ее в пазу стойки 5, и соединить коромысло 3 со стойкой 5 при помощи
звена 6, приняв расстояние h равным R.
Траектория центра Oi пальца ролика 2 в этом случае
близка к прямой А—А.
Рис. 4.66. Механизм с регулируемой длиной
хода ползуна. Коромысло 4, соединенное с
ползуном посредством шатуна 3, получает качатель-
ное движение от вращающегося кулачка б.
Постоянный контакт ролика 5 с кулачком 6
осуществляется силой упругости пружины,
приложенной к шатуну 3 (пружина и ползун на
рисунке не показаны).
Коромысло 4 соединено со звеном 1
вращательной парой с осью 7, а пружина 8 удерживает
звенья в неподвижном положении относительно
этой оси.
Посредством винта 2, который установлен
в приливе станины, регулируется крайнее левое
положение звена 1.
В начале перемещения из крайнего правого
положения Ai в положение Л2 (схема 6)
коромысло 4 и звено 1 поворачиваются как одно
целое относительно оси 9, затем звено 7,
встречаясь с винтом 2, останавливается (схема а) и
коромысло 4 продолжает поворачиваться отно-
Рис. 4.65 сительно оси 7. •
Схемы кулачковых механизмов
297
Рис. 4.66
Рис. 4.67
Рис. 4.68
Изменением положения винта 2 регулируется суммарная длина пути точки А
и соответсгБснно длина хода ползуна.
Рис. 4.67. Кулачковый механизм с увеличенной длиной пути коромысла
посредством зубчатой рейки. К толкателю 2 шарнирно присоединено коромысло 1.
Нижнее плечо коромысла выполнено в виде зубчатого сектора, который
зацепляется с рейкой 3, прикрепленной к станине.
Кулачок 6, вращаясь относительно кронштейна, сообщает через ролик 7
ьозвратно-иостунательное движение толкателю 2.
Лосюяпный контакт между роликом 7 и кулачком 6 обеспечивается
пружиной 5. Длина пути / точки коромысла равна пути толкателя h и горизонтальной
проекции дуги, описанной этой точкой при повороте коромысла на угол 20.
^пс. 4 68. Кулачковый механизм с изменяемым временем опускания коромысла.
кулачок 4
имеющий возможность поворачиваться относительно ступицы 1 с двумя
ограничителями 3 и 8, снабжен выступом 5.
298 Кулачковые механизмы
Контакт между кулачком и роликом 6, установленным на коромысле 7,
осуществляется растянутой пружиной (пружина на схеме не показана).
В результате этого в начале фазы опускания коромысла к\лачок обгоняет
ступицу флянца 2, пока выступ 5 не упрется в болт 2. Угол поворота кулачка
относительно ступицы определяется положением болта 2.
Опускание коромысла 7 с момента соприкосновения прилива 5 с болтом 2
происходит точно так же, если бы кулачок 4 был неподвижно соединен с валом.
В начале подъема коромысла кулачок, встречая сопротивление вращению,
занимает исходное положение, показанное на рисунке.
Рис. 4.69. Кулачок, вращающийся непрерывно только при определенной
скорости. При вращении кулачка 1 по стрелке с заданной скоростью центр ролика 3
Б процессе сближения коромысла 2 и кулачка перемещается по траектории,
показанной штриховыми линиями и определяемой из уравнения маятника.
При скорости кулачка меньпле или больше заданной ролик 3 упирается во
внутренний или внешний выступ паза. Механизм должен иметь амортизацию для
смягчения ударов. Может использоваться для контроля скорости.
Рис. 4.70. Кулачковый механизм с чередующимися переменными законами
движения коромысла.
Кулачок 3 с разным профилем на отдельных участках установлен свободно
на ступице вращающегося рычага 5 с собачкой 2, захватывающей пальцы 4 на
кулачке и сообщающей последнему движение в пределах угла 90°.
При зацеплении пальца 4 с собачкой 2 последняя скользит своей тыльной
поверхностью по дуге неподвижной опоры 1. Вывод собачки 2 из зацепления
с пальцем осуществляется пружиной (на схеме пружина не показана). На участке
пути рычага 5, равном 270^, к} лачок не вращается. Упор 6 ограничивает отклонение
собачки.
' Рис. 4.71. Храповый механизм с приводом от кулачка 5. При неподвижном
храповом колесе 2 на валу 1 кулачок 5 через палец 4 и коромысло 6
корытообразной формы изгибает пружину 3, так как это показано на рисунке штрих-
пунктиром. Рабочий ход храпового колеса 2 осуществляется за счет сил
упругости пружины, работающей в течение этой фазы на продольное сжатие.
Рис. 4.72. Кулачково-эксцентриковые механизмы. На схеме а дана схема
механизма, передающего движение долбяку долбежного станка. Шатун 3 шарнирно
соединен с пазовым кулачком 2 и пальцем 1 кривошипа, вращение которых
осуществляется находящимися в зацеплении з>бчатыми колесами. На схеме б кулачок
и кривошип заменены эксцентриками 4, что упрощает изготовление механизма.
Рис. 4.73. Копировальное приспособление для фрезерования кулачков заданного
профиля. Копировальная шайба 1 равномерно вращается вокруг оси 0^ и
посредством ролика 2 поворачивает рычаг 3 и далее через зубчато-реечную передачу
перемещает ось 4 вращающейся фрезы 5. Вокруг оси Ог вращается заготовка 6,
отфрезерованный профиль которой будет зависеть от профиля кулачка.
Рис. 4.74. Кулачковый механизм возвратно-поступательного движения с
подвижной осью коромысла толкателя.
Движение толкателю 1 передается кулачком 7 в течение выстоя ролика 3 на
концентрических дугах окружности профиля кулачка 4 радиусов ri, г2 и Гз- Кулачки
связаны зубчатой передачей 6 —5 с передаточным отношением 1 : 4. Фазовые углы
подобраны таким образом, что при расположении ролика 3 на окружностях
радиусов I'l и г2 (рис. 4.74, а) толкатель совершает по одному дополнительному
движению, а при обкатывании дзги радиуса г^ (рис. 4.74, б), опирающейся на
угол IBS'" — толкатель 1 совершает два дополнительных движения, 2 —
направляющая толкателя.
Схемы кулачковых механизмов
299
Рис. 4.69
Рис. 4.71
Х"^! ^
/ /
Рис. 4.72
300
Кулачковые механыз мы
Рис. 4.75. Кулачково-эксцентриковый механизм упаковочной машины. На
ползуне i, оснащенном гребнями, последовательно укладываются и сжимаются
транспортируемые изделия 2. Ползун 1 совершает движение подъема и опускания
с помощью эксцентрикового и рычажного механизмов 8, 10, 12, 11 и примерно
горизонтальное движение по направляющей 13 посредством кулачково-рычажного
механизма 3, 4, 5, 6, 7. Эксцентрик 8 и пазовый кулачок 6 заклинены на
ведущем валу 9. Траектория движения ползуна дана на схеме /. На схеме //
приведена траектория, которая соответствует движению сдвоенного кулачкового
механизма.
Рис. 4.76. Схема регулируемого кулачкового механизма с приводом от двух
кулачков 5 и 6. Реечное зубчатое колесо 2 одновременно находится в зацеплении
с зубчатыми рейками 1 и 3. Рейка 3 — ведомое звено. Радиус R коромысла 7
регулируется. Толкатель 4 перемещается в направляющих. На рис. 4.76, а и б
показаны варианты графиков перемещения ведомого звена: 1 — подвод; 2 —
рабочий ход; 3 — отвод.
Рис. 4.77. Механизм выталкивания двухударного холодно-высадочного автомата.
Кулачок 3 передает движение толкателю 5 посредством коромысла 4 с кулисой.
Ошибки профиля кулачков компенсируются пружиной 6, обеспечивающей силовое
замыкание механизма; 2 — обратный кулачок; 1 — ролик.
Рис. 4.78. Кулачково-рычажный механизм выталкивания двухударного холодно-
высадочного автомата. Кулачок 1 сообщает движение подпружиненному
коромыслу 2 с кулисой. Ползун 5, положение которого регулируется винтом 3,
соединен с выталкивателем шатуном 4.
Рис. 4.79. Механизм выталкивания
обрезного автомата. Сдвоенный кулачковый
механизм с компенсирующей пружиной 2,
установленной между рычагами
коромысел 1 и 10, передает движение кулисе 7.
Винтом б регулируется положение
ползунка 3 и соответственно ход толкателя
4. Пружина 5 обеспечивает постоянный
контакт между кулачками 8 и 9.
Рис. 4.80. Механизм ножа. На ведущем
валу закреплены два эксцентрика 5 и 2,
которые смещены на 180° и расположены
в параллельных плоскостях.
Направляющие кулисные рамки расположены под
У////////АШ//,
Рис. 4.73
Рис. 4.74
Схемы кулачковых механизмов
301
углом 90^ и составляют одно
целое со звеном 3, к которому
крепится нож 4. С
противоположной стороны ножа 4 звено
5 имеет направляющий паз;
палец 1 неподвижен.
Рис. 4 81. Механизм отрезки
заготовок автомата для
штамповки шариков. К рычагу 7,
который качается относительно
оси О, прикреплен нож 2.
Кулачок 5, соприкасаясь с роликом
б, обеспечивает рабочий ход,
а кулачок 4 с роликом 3 —
обратный ход.
Рис. 4.82. Механизм для
упаковки с периодически
вращающимся столом. На ведущем валу
1 закреплены два кулачка 2 и 3,
приводящие в движение
механизм поворота стола (звенья
5 - 6 - 9) и механизм прессования
(звенья 4 — 7—8). Поворот стола
10 относительно оси вала О
осуществляется храповым меха-
Ш13М0М.
Рис. 4 83. Механизм шила
обувной машины. Механизм
выполняет прокол отверстия для
шпильки и перемещает каблук
на расстояние, равное шагу
шпилькования. Возвратно-
ж
'^2y^J.^:iyZlyt2.n
k
к.
1
1* ■*
^
z\
1*
1
1
*
3
* ■*
^^
i 0L
"7///^////////////////////////////.
^/VxVy/'/Vy/'/'A
Рис. 4.76
302
Кулачковые механизмы
Рис. 4.77
Рис. 4.78
Рис. 4.81
Рис. 4.82
Схемы кулачковых механизмов-
303
поступательное движение шилу С (с выстоем в верхнем и нижнем положениях)
сообщается кулачком 9 посредством коромысла 5 с зубчатым сектором 2,
находящимся в зацеплении с рейкой Jf. Рейка 1 прикреплена к штанге б, на
которой устанавливается шило С. Направляющая 8 штанги 6 подвешена в точке
Oi^ и покачивается кулачком 4 посредством коромысла 5. Ползун 7,
прикрепленный к коромыслу 5, перемещается в рамке, прикрепленной к направляющей 8. '
Рис. 4.84. Пазовый кулачок 1 с постоянным соприкосновением элементов
кинематической пары (с двусторонне действующей связью). Применим только для
механизмов с толкателем 5, снабженным роликом 2, перемещающимся в пазу,
очерченном двумя эквидистантами.
На рис. 4.84, а, в и г показана конструкция пазового кулачка и ролика
толкателя, которая исключает возможность скольжения ролика и его реверсирование
во время изменения направления движения толкателя.
Рис. 4.85. Приспособление С. Ф,
Юматова для расточки отверстий
шестигранной формы на токарном станке. На
шпинделе токарного станка устанавливается
планшайба 1 с кулачком-копиром 2 и
цанговым патроном 3 для закрепления
изделия 5 вращением х-^айки 4. В
резцедержателе 9 закрепляется вторая часть
приспособления. Радиальное перемещение
резцу б, закрепленному в ползуне 7,
сообщается тягой 13, соединенной шарнирно
с болтом 8. Ролик 14 прижимается к
профилю кулачка-копира 2 силой упругости
пружины 10. Качающаяся опора тяги 13
может перемещаться с корпусом гайки 12
посредством винта 1L
Положение опоры тяги 13 определяет
ход резца 6 и соответственно размер
растачиваемого шестигранника. При
настройке приспособления ролик 14 должен
коснуться поверхности кулачка-копира,
а резец 6 - поверхности отверстия обра-
батываекюй детали. Приспособление дает
возможность обрабатывать шестигранные отверстия размером 5 от 6 до 50 мм
на глубину до 90 мм.
Рис. 4.83
Рис. 4.84
304
Кпачкивые механиз мы
Рис. 4.85
Рис. 4.86
Рис. 4.87
Рис. 4.86. Пазовый кулачок 1 с пазом, представляющим собой пересекающуюся
кривую. За два оборота кулачка ведомое звено 2 соверщает полный цикл
движения. Вместо ролика механизм снабжен «корабликом» 5, очерченным двумя дугами
окружности.
Рис. 4.87. Однооборотный реверсивный кулачковый механизм. Пазы для двух
роликов 2 и 4 толкателя 3 сделаны с обеих сторон кулачка 1, причем профиль
паза подобран так, что расстояние между центрами роликов толкателя
сохраняется постоянным Полный цикл заканчивается за один оборот кулачка. Обратный
ход толкателя осуществляется изменением направления вращения кулачка. №
проекции слева толкатель 3 не показан.
Схемы ку шчковых механизмов ^^^
Рис. 4.88. Плоский пазовый кулачок с большим ходом толкателя, имеющий
два паза. Криволинейный паз 1 соответствует заданному закону движения
толкателя 7, с которым связано два ролика 2 и 5. Паз ^ в центральной части
профиля дает возможность роликам пересекать ось вращения кулачка 6,
закрепленного на валу 5, не прерывая движения.
Один из роликов толкателя всегда находится в пазу 7, второй — в пазу 4.
Ход толкателя h = 2B + А. В обычных кулачковых механизмах такой
конструкции h^ В + Л.
Рис. 4 89 Дисковый кулачок имеет два профиля: 1 и 2. При закрепленной
детали 3 рабочим профилем является профиль 2 и при закрепленной детали 4 —
профиль 1. Вращение кулачка может быть только в направлении, указанном
стрелкой.
Рис. 4.90. Кулачковый механизм с полным циклом движения ведомого звена 1
за два оборота кулачка 3. Подпружиненные стрелки 5 и 6 с упорами 4 и 7
направляют движение ролика 2 в местах сопряжения паза. Вращение кулачка
только по направлению стрелки.
Рис. 4.91. Кулачковый механизм с продолжительной остановкой ведомого звена.
Пазовый кулачок 6 снабжен дважды пересекающимся криволинейным пазом и
двумя направляющими рычагами-стрелками: 2 и 5, шарнирно связанными между
собой и западающими в специальные пазы кулачка. При вращении кулачка 6
ролик 3 коромысла 1, опускаясь, повернет рычаги 2 и 5 вправо (см. положение б
механизма), остановится, скользя по концентрическому участку паза при
неподвижном коромысле, затем переключит рычаги 2 и 5 влево и через пол-оборота
кулачка начнет перемещаться относительно паза, очерченного кривой меньшей
кривизны, поворачивая коромысло i против часовой стрелки. Таким образом, за два
оборота кулачка полтора оборота соответствуют нижнему стоянию коромысла
и пол-оборота движению (см. рис. 4.91, в, 5==/(ф)).
Рис. 4.92 Спиральный кулачок для возвратно-поступательного движения.
Возвратно-поступагельное движение ползуна 3 передается от вращающегося
кулачка 2, имеющего спиральный паз. Кинематическая связь ползуна 3 с
кулачком 2 осуществляется поочередно посредством роликов 8 и 9, установленных на
штоках 5, шарнирно соединенных с рычагом 7. Ось 6 рычага 7 закреплена
в приливах ползуна 5.
Наружный конец паза кулачка 2 заканчивается вкладышем 1 (см. сечение Б —Б),
посредством которого осуществляется выключение одного ролика и включение
второго в части паза, наиболее близко расположенной к оси вращения кулачка.
Крайние положения штоков фиксируются подпружиненными шариками 4.
Спиральный паз в пределах угла р на внутреннем конце и в пределах угла а
на наружном конце очерчен дугами копцепгрических окружностей, чю обеспечи-
B^i^-M неподвижность ползуна 3 в момент переключения.
Полный цикл равномерного возвратно-поступагсльного движения ползуна
осуществляется за три оборота вала.
Рис. 4.93. Кулачковый механизм для сложного пространственного движения
ведочюго звена. Механизм применяется на станках для изюговления сетей, однако
•^^'1 ^южeг найти применение и в других механизмах, в которых ючки звеньев
'должны описывать сложные пространственные траектории.
Игла 14 с острием 15 получает движение о г грех кулачковых механизмов,
^^юрые соединены между собой зубчатыми колесами и работают синхронно.
^> UIH кулачковый механизм, коюрый сообщает движение игле 14 по гори-
^^нп1ли, состоит из кулачка, представляющего собой замкнутую изогну 1ую шину 5,
фикрепленную к зубчатому колесу 4, и рычага-9. Один конец рычага 9 имеет
306
Кулачковые механизмы
Рис. 4.J
Рис. 4.89
Рис. 4.90
Рис. 4.91
форму вилки с пазом 7, который скользит по призматической направляющей,
установленной на валу 6. Постоянный контакт ролика 8 с кулачком 5
осуществляется пружиной (пружина на чертеже не показана).
Второй кулачковый механизм состоит из пазового кулачка, образованного двумя
шинами 21, прикрепленными к зубчатому колесу /, и рычага 18 с пазом 19 и
роликом 22; этот механизм перемещает иглу 14 ъ вертикальном направлении.
Рычаги 9 vi 18 соединены между собой шарнирно осью Ji, а в результате
сложения движений формируется траектория острия иглы, проекция которой
показана на рисунке.
По условию перемещение острия иглы от точки 2' до точки 3' должно иметь
отклонение в направлении, перпендикулярном плоскости чертежа. Это движение
осуществляется третьим механизмом, смонтированным на рычагах 9 и 18 и
приводимым системой зубчатых колес 20 и 23, 17 и 10.
Ступица зубчатого колеса 10 одновременно является торцовым кулачком 16,
осуществляющим посредством рычага 13 перемещение иглы 14 в направлении,
перпендикулярном плоскости чертежа, 2 — промежуточный вал.
Схемы кулачковых механизмов
307
Рис. 4,92
Рис. 4,93
308 Кулачковые механизмы
Рис. 4.94. Движение от кулачка к рабочему органу при весьма легких нагруз,
ках осуществляется шариковой передачей, которая упрощает конструкцию меха-
пизма. При более высоких нагрузках между шариками устанавливаются вкладыши l
(рис. 4.94, а) или применяется так называемая сильфонная передача (рис. 4.94, б).
Передаточным звеном в сильфонной передаче служат гофрированные коробки 1
и 3 с трубкой 2, наполненные маслом и герметически закрытые.
Рис. 4.95. Пространственный кулачковый механизм с двумя толкателями. Одно-
пазовый кулачок 9, вращаясь, передает возвратно-поступательное движение
толкателям 4 и б в противоположных направлениях.
Ползуны толкателей 2 и 8 расположены в неподвижных направляющих 3 и 7
и соединены с кулачком посредством роликов i и 5.
Рис. 4,96. Кулачковый механизм с канавкой горообразной формы. Вместо ролика
к>лачкового механизма здесь используется шарик 1 с отверстием для пальца на
толкателе 2. Использование шарика вместо ролика дает возможность уменьшить
влияние ошибок при изготовлении кулачков 3 на работу механизма. Шарик 1
заводится в паз через специальное уширение канавки.
Рис. 4.97. Механизм возвратно-поступательного движения с переменной длиной
хода.
Кулачки 2 и 7 свободно вращаются на валу 1 и вместе с ним могут
совершать осевое перемещение, осуществляемое кулачком 7 с роликом 8. Перемещение
ведомого толкателя 5 равно сумме перемещений вала In ролика 3 относительно
кулачка 2. Максимальный ход толкателя равен сумме ходов вала 1 и ролика 5
относительно кулачка 2, минимальный равен разности этих ходов. Величина хода
и закон движения меняется в течение каждого оборота вала вследствие того, что
кулачкам 2 и 7 сообщается вращение от колес 4 и б, имеющих соответственно
100 и 101 зуб.
Рис. 4 98. Автоматическая стрелка для переключения пазов кулачка.
Кулачок 9 барабанного типа имеет замкнутый паз, пересекающийся в средней
части под углом 90°. Полный цикл движения толкателя 1 завершается за два
оборота кулачка.
Чтобы избежать ударов н быстрого износа деталей в той части, где происходит
пересечение паза, установлена стрелка 2, направляющая ролик толкателя в
соответствии с заданным движением.
Стрелка 2 автоматически поворачивается на угол 90"^ при каждом обороте
кулачка. В рабочем положении стрелка 2 фиксируется штифтами 3. Радиальное
перемещение стрелки относительно кулачка и поворот ее на 90° осуществляются
неподвижным кулачком 5 и упором 6, зацепляющимся с закругленными зубьями 4
детали 8 на стрелке. Кулачок 5 и упор 6 смонтированы на кронштейне 7, который
крепится к стойке.
Рис. 4.99. Кулачковый механизм с регулируемой длиной хода ведомого звена.
Регулирование осевого хода барабана 4 осуществляется перестановкой на рычаге 1
пальца 2 ползушки 5, т. е. изменением передаточной функции кулисного механизма.
Рис. 4,100. Кулачковый механизм, допускающий переключение роликов ведомого
звена 2 в пазах, определяющих два различных закона движения: 1-й — при
сопряжении ролика 1 с пазом Л, 2-й — при сопряжении ролика 4 с пазом Б.
Переключение роликов осуществляется вращением зубчатого колеса 3.
Рис. 4.101. Дифференциальный кулачковый механизм применяется в тех случаях,
когда требуется увеличить длительность цикла при большой частоте вращения вала
кулачка. На валу 1 с жестко закрепленным кулачком 4 устанавливается гильза 5,
которая вращается в том же направлении, что и кулачок, но с незначительной
разностью угловых скоростей. Ось ролика 2 закреплена в гильзе 5. Продолжи-
/ z
J If
у^^^^ш^^^"""
9 8 7
Рис. 4.95
7 6 5 it , 5 Z i
Рис. 4.96
Рис. 4.97
5 6
Рис. 4.98
Рис. 4.100
Рис. 4.101
S If
Рис. 4.104
Рис. 4Л05
Рис, 4,106
312
Кулачковые механизмы
Рис. 4107
Рис. 4.108
Рис. 4.110
Рис, 4.111
Схемы кулачковых механизмов
313
Рис. 4Л12
Рис. 4Л13
К
И
[
Ь4
Рис. 4.114
тельность цикла t равна времени полного оборота гильзы относительно кулачка.
Вращение кулачку и гильзе передается от вала привода посредством зубчатых
колес: Zi, Z2, Z3, Г4. Муфта 1 предназначена для выключения вращения гильзы 5
при холостом ходе. Переключение муфты осуществляется упорами каретки 3.
Продолжительность цикла при рабочем ходе определяется формулой
t-
^1^3
Щ {Z^Z^ - Z1Z3) '
где щ - частота вращения гильзы. К. п. д. дифференциального кулачкового
механизма ri = 0,01 ч- 0,2.
Рис. 4.102. Глобоидальные кулачки 1 с различным расположением ролика
качающегося коромысла 2\ а — сверху; б — сбоку; в — снизу.
Рис. 4.103. Пространственный кулачок барабанного типа, применяемый в
станках-автоматах. Отдельные накладки 1 (рис. 4.103, а), представляющие рабочую часть
профиля кулачка, легко укрепляются и сменяются на барабане. На рис. 4.103,6
дана развертка кулачка, «настраивающегося» на различные законы движения
ведомого звена. Отсутствие переходных кривых вызывает удары и быстрый износ
механизма.
^ Рис. 4.104. Кулачок барабанного типа с роликами 1, устанавливаемыми в Т-
ооразных пазах по образующим барабана. Ведомое звено 2 отклоняется роликами,
а силовое замыкание осуществляется пружинами 5.
Рис. 4.105. Косая шайба. На внешней боковой части шайбы 2 имеется канавка,
в которую заходят ползуны или ролики штанг i, совершающих прямолинейно-
возвратное движение. Схема часто применяется в многоплунжерных насосах.
Рис. 4.106. Механизм с косой шайбой. На валу 2 устанавливается круглая
П1айба 1, угол наклона которой регулируется винтом 5, находящимся в зацеплении
с зубчатым сектором на ступице шайбы. Ведомое звено 5 с двумя штифтами 4
Получает прямолинейно-возвратное движение. Величина перемещения звена 5
зависит от угла наклона шайбы.
Рис. 4.107. Кулачковый механизм. Кулачок 1 выполнен в виде фасонной шайбы,
ведомые звенья 5 имеют два ролика 2.
На рис. 4.107, а, б, в показахшх ведомые звенья: качающиеся, движущиеся
поступательно и вращательно.
314
Кулачковые механизмы
Рис. 4.115
Рис. 4.108. Механизм поворота вала на 90"^ и фиксации. Кулачком 1 с
двуплечим рычагом 2 осуществляется поворот вала 3, а кулачком 5 с толкателем 4 -
фиксация.
Рис. 4.109, Пространственный кулачковый механизм с прерывистым движением
ведомого диска 3 при постоянной угловой скорости кулачка 1. Характер движения
диска 3 с цевками 2 зависит от профиля паза кулачка 1,
Рис. 4.110. Пространственный кулачковый механизм (рис. 4.110, а) с коническим
барабаном 2, в котором толкатель 1 перемещается в направлении образующей
конуса. Профилирование следует производить как и для кулачка по рис. 4.23,
вращающегося в пределах угла развертки конуса. jR^^in равен минимальной длине
образующей. Механизм следует рассматривать как частный случай
гиперболического кулачка (рис. 4.110,6), профиль средней линии которого вычерчен на
поверхности гиперболоида вращения.
Рис. 4.111. Кулачковый механизм барабанного типа с рабочей поверхностью
на торце кулачка.
Рис. 4.112. Кулачковый механизм с рабочей поверхностью на торце конусной
шайбы.
Рис. 4.113. Привод поршней 1 с помощью торцового кулачка 2.
Рис. 4.114. Двойной лобовой клин, сообщающий движение детали 1 поворотом
рукоятки 2.
Рис. 4.115. Центральный кулачковый механизм с двумя степенями свободы.
Перемещение S толкателя 1 является функцией угла поворота ф перемещения
кулачка вдоль оси z и конструктивных параметров механизма (рис. 4.115, я). На
рис. 4.115,6 оси вращения кулачка 1 и коромысла 2 параллельны.
РАЗДЕЛ 5
ФРИКЦИОННЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ. ТОРМОЗА
Фрикционные передачи. Фрикционные передачи применяются для
передачи движения от одного вала к другому, оси которых расположены параллельно
или под углом. Вращение передается трением, которое возникает вследствие
прижатия катков друг к другу.
Фрикционные передачи можно разделить на следующие группы:
а) передачи с параллельными и пересекающими осями валов;
б) передачи с непосредственным касанием ведущего и ведомого звеньев;
в) передачи с промежуточным жестким звеном;
г) передачи с промежуточным гибким звеном;
д) передачи с регулируемым передаточным отношением (бесступенчатые
передачи или вариаторы).
Ременные передачи. Для передачи движения между валами с
параллельными и непараллельными осями, расположенными на большом расстоянии,
применяются гибкие звенья в виде ремней, канатов, нитей. Связь между ремнем
и шкивом устанавливается в виде силы трения F, распределенной по площади
касания ремня и шкива и препятствующей скольжению ремня по ободу шкива.
Если передаваемый момент М, то момент силы трения должен удовлетворять
неравенству
М = РЯ = Mf = R (5i - S2) = FK; Р < F,
где 5i и Sz - натяжения на ведущей и ведомой ветвях ремня, характер изменения
которых показан на рис. 5 15, S^ = Зге^""; Р - окружная сила; F - сила трения
на ободе; а - угол охвата; е — основание натуральных логарифмов;
^1
е^ ~ 1 ^ е^'" - 1'
Для быстроходных ременных передач сила трения уменьшается вследствие
действия центробежных сил на элементы ремня при огибании шкива. Если учесть
указанные силы, то
5,=F-^-+i^;
' е^^'' - 1 ^
5. = F-i—+^;
qv^ \ е^^" - 1 ,
F = 5i -
9 J е^*
Де i; - окружная скорость в м/с; q - масса 1 м ремня.
316 фрикционные передачи и вариаторы
Для клиноременных передач при определении натяжения ветвей следует брать
приведенный коэффициент трения |л' = ц/sin у, где 2у ~ угол между образующими
конусов канавок для ремня Jcm. рис. 5.16).
При огибании ремнем шкива происходит вытяжка ремня и скольжение его
относительно обода, что влияет на изменение передаточного отношения. При
отсутствии скольжения передаточное отношение
„ ^ "1 _ ^2
«2 Х<1
где Ki п i?2 - радиусы шкивов.
В случае передачи движения упругой лентой
^\2 = Wi2 (1 - ФХ '^ ■
где /с — полезное зсилие, отнесенное к 1 см ширины ремня; а'— коэффициент
удлинения ремня; 5 — толщина ремня.
При открытой передаче длина ремня L равна
L = 2Л (sin а — а cos а) + 71D2;
D2-D,
cos а = •
2А
где а — угол обхвата на малом шкиве; А — межцентровое расстояние; D^ —
диаметр меньшего шкива; D2 — диаметр большего шкива.
Уравнение для L трансцендентное, поэтому решение затруднено. Обычно
пользуются приближенным уравнением
L = 2Л + 7t(Ki + R2) + ^^'^^'^ ,
При проек'1Р1ровании мноюсгупенчатой передачи, приняв L = const,
определенное для какоР1-либо из ступеней, можно найти соответствующие сопряженные
диаметры шкивов.
Вариаторы скорости. Вариаторами скорости называются устройства,
которые позволяют при постоянной частоте вращения ведущего вала плавно
изменять в определенных пределах частоты вращения ведомого. Таких передач в
настоящее время имеется большое количество; они применяются в б\мажной,
текстильной, стекольной и других отраслях промышленности, а также в транспортной
и станкостроительной технике.
Классифицируя существующие конструкций механических вариаторов скорости,
можно разделить их на две основные группы:
1) вариаторы скорости с принудительным регулированием скорости;
2) вариаторы скорости с автоматическим регулированием скорости.
К первой группе вариаторов относятся все конструкции, которые позволяют
плавно изменять скорость при ручном управлении. Сюда должны быть отнесены
фрикционные вариаторы скорости и жесткие вариаторы скорости.
Во фрикционных вариаторах скорости может быть непосредственно касание
рабочих тел качения, через промежуточные жесткие (ролик, кольцо и т. п.) или
гибкие (ремень) звенья.
фрикционные передачи и вариаторы 317
К жестким вариаторам скорости относятся все те, принцип действия которых
построен на заклинивании деталей механизмов, специально для этого предназ*
наченных, и те, у которых передача движения осуи;ествляется непосредственным
нажатием выступов рабочих тел вариатора.
Вариаторы скорости с клинчатыми ремнями и раздвижными шкивами,
составленными из дисков, получили широкое применение в промышленности, так как
в большинстве случаев они просты по конструкции, бесшумно работают, не
требуют большого первоначального натяжения ремня, надежны в работе, легко и
просто (на ходу) во время работы вариатора регулируется скорость ведомого вала.
Большое разнообразие существующих конструкций шкивов, различные сочетания
сдвоенных вариаторов скорости, а также сочетания клиноременного вариатора
с различными схемами зубчатых передач позволяют легко выбрать наиболее
рациональную схему в соответствии с заданной мощностью и необходимым
диапазоном регулирования скорости*
Принципиальная схема наиболее простого вариатора показана на рис. 5.38.
Шкив 2 - раздвижной, состоит из двух дисков, шкив 1 — постоянного диаметра.
Регулирование угловой скорости со осуществляется изменением расстояния А
между осями шкивов при постоянной длине ремня путем перемещения одного
113 валов, обычно вала двигателя, в результате чего ремень 5, натягиваясь,
разводит диски раздвижного шкива и переходит на окружность меньшего диаметра.
При уменьшении межосевого расстояния ремень под действием пружин 4
переходит на окружность большего диаметра. Сила трения между ремнем 2 и
шкивами, необходимая для передачи движения, обеспечивается силами упругости
пружин 4.
Клинчатый ремень 3 можно заменить цепью (см. рис. 5.39). Движение в этом
случае также передается трением, которое возникает при заклинивании роликов 1
между гладкими поверхностями клинчатых шкивов. Ролики 1 вмонтированы
в звенья цепи 2.
Число рабочих витков пружины 4 (см. рис. 5.38 и 5.45) приближенно можно
определить по формуле
Здесь R^^^^ и JRj,,|„ — максимальный и минимальный радиусы раздвижного шкива;
G-модуль упругости махериала пружины при сдвиге; ^-диаметр проволоки
1фужины; Z — число пружин; ц' = p./sin у — приведенный коэффициент трения; Зу —
>гол желоба шкива; М^р^ — крутящий момент, передаваемый шкивом; р —
коэффициент надежности; D — диаметр пружины.
Формула, определяющая / удовлетворяет условию, при котором нормальное
Д'Шление между диcкa^ш и ремнем при R^ — Лт1п и i?;, = R^,,^^ равно
необходимому, а при любом другом радиусе — несколько больше.
Диапазон рехулироваиия вариатора при двухдисковых шкивах на ведущем и
ведомом валах опредсляе1ся по формуле
318 Фрикционные передачи и вариаторы
Здесь vb - jRamin/^mln - передаточнос отношение вариатора при работе ремня
на наименьших радиусах шкивов;
"» h
«= 2tgY
где ^0 ~* ширина ремня по наиболее растянутому слою; h — высота сечения ремня'
^min ~ минимальный радиус меньшего шкива; Rzmin ~ минимальный радиус
большего шкива.
Для вариатора с трехдисковыми шкивами (см. рис. 5.41)
1 + ur 4и^
Д^1+2и ^ + • .
ив ив
Тормоза. В современных машинах находят широкое применение тормозные
устройства, правильное конструирование которых имеет важнейшее значение для
бесперебойной и производительной работы машин. Во многих случаях тормозные
устройства необходимы для обеспечения безопасности в грузоподъемных
механизмах и транспорте.
Величина тормозного момента может быть определена из уравнения движения
тормозных масс. Если моменты постоянные, то движение тормозных масс равно-
замедленное:
Мр + Мс
е=--
и СО = соо •"• £^'
Здесь 8 — угловое ускорение; со — угловая скорость тормозного вала; Jnp —
момент инерции тормозных масс, приведенных к валу тормоза; соо — угловая
скорость тормозного вала к моменту начала торможения; t — время торможения;
е Мр + Мс
Приведенный к тормозному валу момент инерции масс может быть найден
из формулы
Jnp='Jo+)m-;t)+J^
Ж^'
где Jo — момент инерции масс, вращающихся с тормозным валом; о — угловая
скорость тормозного вала приводимой массы; Ж/ — масса деталей, движущихся
поступательно со скоростью i;,-; М^г — момент сил трения на тормозе в кгс-м;
Мс — момент сопротивляющихся сил в кгс-м, приведенный к тормозному валу;
^'^^Е'^'Ш+Е^'^^^^™-
Величина тормозного момента зависит от места установки тормоза в машине.
Наименьшее его значение получается при установке тормоза на быстроходном
валу. Расчетный момент Мр определяется как произведение максимального
рабочего момента на тормозном валу и коэффициента запаса р > 1.
фрикционные передачи и вариаторы ^1^
Размеры тормоза могут быть найдены пз следующих соотношений:
для дискового тормоза (см. рис. 5.84)
Мр = рМ =^% (Rl - Rl) R,piq\i = NR^pi\i;
для тормоза с конической поверхностью трения
Мр = рМ - 2KRl^q[i = Ш^;
sin а
для тормоза с разжимными кольцами
Мр = рм = InR'^bqii,
где i - число пар трущихся поверхностей; N — сила нажатия; р — коэффициент
запаса сцепления; R^, R2, Rep — наружный внутренний и средний радиусы трущихся
поверхностей; Ь — ширина поверхности трения, см; ос — угол наклона конусной
поверхности трения; q — удельное давление, кгс/см^; ц — коэффициент трения.
При точных расчетах в уравнении движения следует учитывать также
изменения \i в зависимости от скорости, давления и температуры.
Наибольшее распространение тормоза получили в грузоподъемных машинах,
на транспорте и в автомобилях.
В грузоподъемных механизмах процесс торможения перемещающегося груза
разделяется на ряд этапов, определяющих характер торможения и назначение
тормоза:
а) поднятый груз должен оставаться неподвижным. Для этого необходимо,
чтобы тормозной момент Mf был больше Mq — М^, где Mq — приведенный
момент полезной нагрузки; Mj^ — приведенный момент силы трения в механизме.
Тормоз действует как остановочный:
Mf>Mq- Mr;
б) фаза разгона; тормозной момент Mf должен быть резко уменьшен, чтобы
груз получил заданную скорость
в) фаза установившегося движения; при равномерном движении груза
тормозной момент Mf должен быть равен
Mq - Mr.
Тормоз, принимая на себя работу падающего груза, действует как спускной
Mf = Mq - Mr;
г) фаза торможения до полной остановки; тормозной момент плавно
возрастает, ц тормоз действует как стопорный.
Существующие тормозные устройства можно подразделить на колодочные
тормоза, ленточные, пластинчатые и конические.
Применяемый для небольших тормозных моментов ручной тормоз (см. рис. 5,77
и 5^2) создает на тормозном шкиве 1 силу трения |iN > Р и iV > Р/\х.
Уравнение справедливо для малого угла обхвата колодки 2, когда распреде-
ение давления'можно принять равномерным. Для создания необходимой силы N
320 Фрикциоииые передачи и вариаторы
надо приложить к рукоятке 3 силу
h ± \ic
N ■
Если ось О вращения рычага расположена на касательной к тормозному шкиву, то
а
Сила Рн обычно равна 15-20 кгс.
Двухколодочный тормоз (см. рис. 5.78) рассчитывается также из условий
равновесия системы.
При заданной окружной силе Р сила нажатия на одну колодку 2 равна
2^1
Диаметр тормозного шкива 1 определяется величиной мощности трения
75 75 '
где S - проекция площади колодки на диаметр.
Если принять хорду колодки равной с1/2, то площадь поверхности трения
S=2 —Ь = ^Ь
2
и тогда
75Л
d
qV\ib
По опытным данным величина qV\i ^ 30, а работа трения Л < (25 ~ 30)10^ кгс-м.
Здесь V - скорость скольжения, м/с; Ъ - ширина колодки, см; |Л- коэффициент
трения.
Ленточный тормоз представляет собой шкив 1, охватываемый стальной лентой 2.
В простых ленточных тормозах (см. рис. 5.79) натяжение S^ воспринимается осью
рычага 3, а полезное сопротивление создается лишь натяжением 52. Тормозная
сила на шкиве
где
•^1 =
где е - основание натуральных логарифмов; а - угол обхвата.
фрикционные передачи и сариаторы 321
Сила натяжения
Если тормозной шкив меняет направление вращения, то сила P^^ нажатия также
меняет знак и равна
е'^" - 1 '
Si < 5,.
В дифференциальных ленточных тормозах (см. рис. 5.80) натяжение Si
способствует затяжке тормоза. В этом случае
_ S2b - S,a
/
Если SiG > ^2^, а iSi = ^гв^'" то, следовательно, сила нажатия Р„ может
обратиться в нуль, тогда тормоз превратится в стопорный механизм.
При угле обхвата ленты а = 250° плечо b принимают равным За.
Для ленточных тормозов с изменяемым направлением вращения тормозного
шкива 1 (см. рис. 5.81) усилие па рукоятке 2 должно оставаться постоянным по
величине и направлению. Для этого
_ a(Si +S2)
/
в простых тормозах момент трения Мр изменяется при изменении направления
вращения:
Mf 1^1.1
М^ ' е"^ "" 5 * 6 *
Дисковые тормоза (см. рис. 5 84) имеют поверхность трения на торце, огра-
иичепиую радиусами ^2 " -^^i- /U^^ уменьшения осевого и удельного давления
в тормозе предусматривают несколько дисков, связанных через один с валохм и
с тормозным кожухом.
Сила нажатия
где Р ~ тормозная сила на среднем радиусе поверхности трения, равном
2 Rl-Rl
"3" Rl-RV
■~ число пар поверхностей трения.
•Ч Кожевников и др.
322 Фрикционные передачи и вариаторы
Для тормозов с клинчатыми поверхностями трения (см. рис. 5.82) тормозное
усиление на конусе среднего радиуса
sin «о
где «о - половина угла конуса; Q — усилие нажатия.
ФРИКЦИОННЫЕ ПЕРЕДАЧИ
Рис. 5.1. Фрикционная передача с цилиндрическими катками. Передаточное
отношение без учета скольжения определяется по формуле
СО2 П2. Ri
Сила нажатия
Р MiP Af2p
\i ^Ri )ЛК2
где \х — коэффициент трения скольжения; р — 1,5 -^ 2 — коэффициент запаса
сцепления.
Рис. 5.2. Фрикционная передача с клинчатыми катками. Сила нажатия
М, sin а
Передаточное отношение без учета скольжения
Ri ^н "i
W12 = — = — = —•
Ri СО2 «2
При работе передачи наблюдается скольжение поверхностей в зоне контакта.
Рис. 5 3, Фрикционная передача с коническими катками (вершины конусов
совпадают). Сила нажатия определяется по формуле
Misinai M2sina2 gisina2p
61 = ^ Р и Q2^ Р-
yiRi ^i?2 sinai
Углы Oil и с/2 зависят от передаточного отношения
Ri СО2 }i2 sinai*
откуда
Wi2sinPo
tgaa
1 + cos po '
где
Po =^ «1 + «2.
фрикционные передачи
323
Рис. 5.1
Рис. 5.2
^7-^-^
Рис. 5.3
^
ш
м, п,
L^
"П^
■V
^1
Рис. 5.4
Hic. 5 4 Лобовая фрикшюнная передача. Передаточное отношение определяется
по формуле
^ п, ^ К
пг Ri '
еремещением катка 1 вдоль оси вала изменяется передаточное отношение.
bia нажатия
Q =
\iR, '
iV^
324 Фрикционные передачи и вариаторы
Рис. 5.5. Фрикционная передача с автоматическим регулированием величины
нажатия. В схеме важен правильный выбор углов аир, особенно наибольшею
из них. Для нормальной работы механизма, в процессе которой произойдет
заклинивание ролика 2 между дисками 1 и 3, значение углов ос и р определяется
формулой
^. а+ р .
где ат^О и рт^О; \i — меньший из коэффициентов трения.
Рис. 5.6. Фрикционная передача с упругим кольцом. Каток 1 — ведущий, 2 —
ведомый. Промежуточный ролик / - для разгрузки осей. Передача движения
возможна, если (ai + а2)/2 < р, где р — угол трения
sinai i?3 — ^2
sina2 R3 - Ri
При этом соотношении углов или размеров кольцо 3 под действием сил трения
будет вовлекаться в движение и расклиниваться на связуемых катках.
Максимальные значения углов ад и а^
. а + cos 2р
ьш 2р
Необходимое расстояние Л между центрами ведущего 1 и ведомого 2 катков
2i?3 - (R2 +Ri)> А > (Кз - Ki)cosai -Ь (Kj - К^) cos ад.
Рис. 5.7. Фрикционная передача с caмoзaкJпшивaющпмcя кольцом. Упр>гое
кольцо 4, надсюе с натяюм, охватывает ведущее 1 и ведомое 2 колеса и
промежуточный ролик 3. Сила уиругост, с коюрой кольцо сжимает ведомое и
ведущее колеса, пропорциопальпа момепху на ведомом BcUiy 5; при увеличении
передаваемого усилия кольцо занимает эксцентричпос положение, сжимая колеса.
Напряжения а в любой точке сечения кольца 4, взятой на рассгоянии х ог
главной оси инерции, перпендикулярной к плоскости действия внешних сил 2,
определяются из уравнения
Ри М X
СУ = -;.- +
F FpX х+ р •
Наибольшие напряжения возникают в точке с/, для которой
2 2 р '
FpX — момент кривизны и X = л'о/р, 1де Xq — расстояние центра тяжести сечения
кольца до не11тральной оси;
M„=-fp[l--
+ X)KJ
фрикционные передачи
325
Рис. 5.5
Рис. 5.7
Рис. 5.6
Передаточное отношение определяется по формуле
Rl П2 C02
«i> == -г—=
Рис. 6.8. PoJHIKoвaя передача. Ведущий вал — 4. Ведомое кольцо 5 может быть
использовано как шкив ременной передачи или как венец зубчатого колеса.
Давление, необходимое для передачи движения, осуществляется нажатием
включающею pojuiKa 2 на два соседних ролика 1 и 3, которые передают нажатие всем
ocuijibHbiM роликам. Если ролик 2 вывссчи из соприкосновения с роликами 1
и -^, 10 вс|о\плй и ведущий валы разъединяются. Каждый из роликов вращается
только около своей оси. Передаточное отношение
Rs ^4
Rat «5
Рис. 5.9. Фрикционная планетарная передача с упругими кольцами. В процессе
вращения ведущего вала 3 с колесом 4 упругие кольца 5 увлекают ролики 2,
связанные с води лом, на ведомом валу 1, и передают ему движение. Кольца 5
^юнтированы с предварительным натягом. Диаметр D кольца 6 с косым разрезом
рег>г„фус1ея болгами.
Псрс7даточное отношение определяется по формуле
D
+ 1.
326
Фрикционные передачи и вариаторы
Рис. 5.8
Рис. 5.9
Напряжение сжатия на поверхности контакта по Герцу
а//-
EQ(D, +D2)
У
Ь0Ф2
[^1я.
Расчет прочных размеров кольца 5 может быть произведен так же, как и для
передачи по рис. 5.7.
Рис. 5.10. Шариковый редуктор, размещенный в ступице зубчатого колеса 8.
На приводном валу 4 штифтом 11 закреплена втулка 2. Заключенные в обойму 1
шарики 7 перекатываются по беговым дорожкам: диаметра di, который образован
втулкой 2 и подвижным кольцом 3, диаметра dj, на неподвижном кольце 9 и,
наконец, диаметра d^ на зубчатом колесе 8. Последнее имеет шариковую опору Ю»
Сила трения, необходимая для передачи движения, создается силой упругости
пружины 6, затянутой гайкой 5. Диапазон передаточных отношений может быть
в пределах от 20 : 1 до 250 : 1.
фрикционные передачи
327
А-А (/вешаемо
Рис. 5.10
Рис. 511. Шариковый фрикционно-планетарный редуктор. На ведущем валу
двигателя неподвижно закреплены втулка 6 с дистанционным кольцом 9 и
внутренние кольца 7 W 10 шарикоподшипников.
Наружные кольца 8 и 11 подшипников установлены во втулках, между торцами
которых расположены в лунках переменной глубины шарики 3, образующие
самозатягивающее устройство. При неподвижном сепараторе 1 шарики 2 образуют
простую фрикционную передачу, а шарики 4 с сепаратором 5 —
дифференциальную передачу. Сепаратор 5 изготовлен за одно целое с ведомым валом редуктора
в качестве водила. Ведущими в дифференциальной передаче являются внешние
и вн\тренние кольца.
С целью сократить потери на трение между шариками установлены
шарикоподшипники 12 (см. разрез по Л-А).
Передаточное отношение редуктора определяется по формуле
^ВА^т - ^В2^1М
в4» ^н45 ^>в2» J^h2 - наружные и внутренние диаметры беговых дорожек соот-
етственно шариков 4 и шариков 2.
враш"^ ^^^* Д^У^^'^^Уп^и'^^тый шариковый планетарный мультипликатор. Передача
^ ^Щения от ведущей втулки 1, установленной на двух шарикоподшипниках 2,
KoBbf^'^^" втулке 7 осуществляется двумя последовательно соединенными шари-
пово " ^^^нетарными передачами, в каждой из когорых ведущим являются
^ *и (сепараторы 3 и 3), а ведомыми — центральные звенья — кольца 4 н <5.
328
Фрикционные передачи и вариаторы
А-А
ii#ii|PilE;feiii#ili#)i -i
iii
' hr
Рис. 5.12
J 4
Детали 5-8 так же, как и детали 5-1, соединены неподвижно. Применяется на
сверлильных станках.
Рис. 5.13. Трехступенчатый шариковый планетарный редуктор, б — ведущий,
1 — ведомый валы. Ступени редукторов составлены из разрезанных внутренних
колец 7, сепараторов-поводков 2, шариков 5 и наружных колец 4.
Необходимая сила трения в местах контакта шариков с кольцами
обеспечивается тарельчатыми пружинами 3.
Рис, 5.14. Фрикционная передача бездискового винтового пресса. Подъем и
опускание ползуна пресса осуществляется включением постоянно вращающихся
в разные стороны фрикционных колес ^ и 5, соприкасающихся с внутреннеи
поверхностью обода маховика 2. Изменение направления вращения маховика
производится с помощью рукоятки J, которая, перемещая рейку 5, поворачивает
посредством кривошипно-коромыслового механизма вокруг неподвижной оси О
корпус 6, несущий колеса 4 Vi 5. Ведущим звеном механизма является зубчатое
колесо Z.
Ременные передачи и вариаторы скорости
329
r^^f№
Непрадильно
Рис. 5.14
Рис. 5.16
РЕМЕННЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ СКОРОСТИ
Рис. 5.15. Схема нагрузки ременной передачи. Шкив 1 — ведущий, 2 - ведомый.
Рис. 5.16. Сечение обода шкива клиноременной передачи и расположение ремня.
Рис. 5.17. Надевание бесконечного ремня на шкив, расположенный между двумя
подшипниками. Одна из опор имеет щель, расположенную частично в корпусе
и частично во втулке I (рис. 5.17, д). В щель затягиваются две ветви ремня, после
чего втулка J поворачивается таким образом, чтобы одна ветвь ремня осталась
в щели, предусмотренной в корпусе (рис. 5.17,6). После поворота втулки 1 на
360° обе ветви ремня вытягиваются в направлении стрелки (рис. 5.17, в), а затем
ремень натягивается на второй шкив, установленный на валу консольно.
Рис. 5.18. Передача коническими катками. Изменение передаточного отношения
^^12 = «i/».^. вариатора осуществляется перемещением ведущего катка \ вдоль общей
образующей катков. Вследствие несовпадения вершин конусов налицо только одна
нескользящая точка К, Во всех остальных точках касания происходит неизбежное
скольжение и износ катков.
Радиус }\ окружности нескользящей точки катка 2 определяется по формуле
Здес;
1 +
Ъ sin бо
1 __ bsin52
4г..
ь г. -,
средний радиус ведомого катка 2; Ь — длина контактной линии; В =
Ы^ sin 5 '^ коэффициент надежности; М^ - крутящий момент на ведомом валу;
330
фрикционные передачи и вариаторы
Рис. 5.17
Й2 — осевое усилие, прижимающее каток
2 к катку 1; б2 - угол образующей
ведомою катка; |,i — коэффициент трения
скольжения.
Знак минус относится к случаю, когда
вершина 0^ ведущего конуса 1
расположена на образующей ведомого, и знак
плюс — когда вершина О2 ведомого
конуса 2 расположена на образующей
ведущего.
Радиус окружности Yq нескользящей
точки ведущего катка 1 соответственно
будет определяться по формуле
''о — ^'ос
1 +
bsin5i
1 _ bsin6i
J ^ 4го. ■
По геометрическим параметрам радиус
/• о окружности определяется в
соответствии со схемой
sin5i
Го = (r^j^ Д sin 62) . _ .
sin 02
Передаточное отношение
Гд. sin 82
(г^ + asin52)sin6i
Рис. 5.18
Ременные передачи и вариаторы скорости ^^^
формулы справедливы также для случая, когда 6i + 62 ^ 90°.
Рис. 5.19. Лобовой вариатор скорости. Вращением маховичка 5, соединенного
катком 2 посредством тяги 4 и штифта 5, осуществляется перемещение катка 2
относительно вала 1. Сила трения, необходимая для передачи движения,
обеспечивается пружинами 7, встроенными в ступицу диска 6:
Ro
Рис 5 20. Вариатор скорости с регулируемым давлением между коническими
катками (рис. 5 20, а). Необходимое прижатие катков 7 w 8 обеспечивается
пружиной 6 с предварительным натягом, осуществляемым посредством
относительного поворота и последующей фиксащ1ей на валу 10 зубчатых колес 1 и 2.
Рету.пфование скорости производится одновременным перемещением катков
7 II 8, установленных в полой части валов 5 и 9 и соединенных с ними шли-
цевыми соединениями. Механизм передвижения катков (рис. 5.20,6) составлен из
зубчатых реек 3 и 4, сцепляющихся с колесами 1 и 2.
Нормальное давление N между катками сохраняется постоянным, если
выполнено равенство
2im„iCOSp2
tg§2 = -,
Z2W„2 COS Pi
1де г, ш„ Ир — соответственно число з>бьев, нормальный модуль и угол наклона
зубьев колес 7 и 2.
Рис. 5.21, Вариатор для изменения скорости на ведомом валу по заданному
закону. На ведущем барабане 1 делается вигок, угол наклона ф винтовой линии
которого соответствует заданному закону движения диска 2. Передачу можно
применять при малых крутящих моментах и в гех случаях, когда проскальзывание
дисков не влияет на работу машины.
Передаточное отношение
COj X
со,, R '
Рис 5 22. Вариатор типа Вебо. На ведущем валу двигателя установлен диск /,
на ведомом — диск 2. Регулирование скорости выходного вала 4 осуществляется
перемещением двигателя по вертикали.
Пружина 3 обеспечивает необходимую силу трения между дисками.
Рис. 5 23. Вариатор с коническими барабанами. Цилиндрические пружины 2-4
служат для обеспечения нажатия между барабанами 1-5 и промежуточным
роликом 3. Изменение положения ролика осуществляется посредством системы
рычагов Переменное передаточное отношение
Di ns
сое ^'^^' ^^^^^^^^ вариатор конструкции ЦНИИТмаш (рис. 5.24, а). Вариатор
OKD ^^"^^^ ^^ дисков, у которых образующей рабочих поверхностей является дуга
^^ружности. Ведущий вал 3 и ведомый 6 расположены соосно. На ведущем валу
про^"^^" ^^^^ ^' "^ ведомом-диск 5. Средняя плоскость рабочих поверхностей
с ли ^''^^^^^^"^^^ роликов 4 смещена относительно оси их поворота и не совпадает
етральной плоскостью образующей. Регулирование скорости осуществляется
фрикционные передачи и вариаторы
Рис= 5.19
Рис. 5.20
Рис. 5.21
PcMCJUihie передачи и ааршипоры скорости
т
Рис. 5.22
Рис. 5.23
334
Фрикщюииые передачи и вариаторы
Ременные передачи и вариаторы скорости 335
изменением угла наклона роликов 4. Диски прижимаются авюматически
самозатягивающим механизмом 2 так, что сила прижатия дисков зависит от величины
^^путящего момента на ведомом валу.
Схема механизма регулирования скорости показана на рис. 5.24, б. Два
промежуточных ролика 4 монтируются в рамке 7, которая щарнирно связана с
траверсой 15 и может перемещаться, скользя по направляющим 14, создавая таким
образом равномерное распределение давления между роликами 4. Механизм
поворота ролика 4 приводится в движение маховичком 12 и состоит из щестерни 11,
которая находится в зацеплении с рейкой 70, прикрепленной к ползуну 13,
скользящему по прямолинейным направляющим. Движение от ползуна 13 к осям 8
передается посредством сухарей 9. Диски на схеме не показаны. Диапазон
регулирования 6 — 8.
Рис. 5.25. Вариатор скорости с разгруженными от изгиба валами. Ведущий
диск 1 установлен на входном валу и передает движение ведомому диску 2.
Частичное уравновещивание дисков осуществляется промежуточным диском 8 и
роликом 3. Изменение частоты вращения выходного вала осуществляется
перемещением диска ] вдоль оси вала. Ось ролика 3 смонтирована в полом цилиндре 4,
который с увеличением крутящего момента на ведомом валу может
поворачиваться, так как установлен в корпусе вариатора на ходовой посадке. Нажатие
дисков осуществляется автоматически через диск 8, который связан с осью ролика 3
механизмом из звеньев 5, 6, 7.
Рис 5.26. Лобовой вариатор с биконическими роликами. Движение от ведущего
диска 2 к ведомым 5 передается трением посредством биконических роликов 3,
установленных на гайках винта 4 с правой и левой резьбой, вращением которого
регулируется частота вращения выходного вала 6.
Сила нажатия между дисками осуществляется самозатягивающимся механизмом
с шариками /, перекатывающимися в канавках переменной глубины на диске 2.
Рис. 5.27. Соосный многодисковый вариатор скорости. На ведущем валу 3
(рис. 5.27, а) установлено зубчатое колесо 4 которое передает через паразитную
шестерню 2 движение промежуточному валу 5 с коническими дисками 6.
Конические диски 6 расположены между дисками ] с ободом и прижаты пружинами 7
с силой, достаточной для преодоления крутящего момента на ведомом валу 8.
Промежуточных валов 5 с дисками 6 может быть несколько, но не менее двух.
Регулирование скорости (рис. 5.27, б) осуществляется смещением промежуточных
валов 5 посредством вращения кольца И. Рычаги 9, 10 и кольцо 11 соединены
между собой щарнирно. Оси колес 2 неподвижны.
Рис. 5 28. Вариатор скорости с раздвижными коническими дисками. На ведущем
многошпоночном валу 4 и ведомом 6 расположено по два конических диска 2, 3 и
9, 7. Между дисками зажато стальное кольцо 8, которое трением передает
движение от ведущего вала к ведомому. Нормальное давление и сила трения
возбуждаются за счет упругости кольца 8. Изменение передаточного отношения
осуществляется перемещением втулок 5 и 1 с коническими дисками 9 и 3 посредством
штурвала 10.
Рис. 5.29. Вариатор с шарами, вращающимися на осях. Движение от ведущего
диска 1 к ведомому 3 (рис. 5. 29, а) передается посредством шаров 4, которые
ращаются на осях 5. Равновесие шаров поддерживается свободно вращающимся
Дьцом 2. Передаточное отношение регулируется изменением угла наклона осей 5
^Ров. Необходимая сила нажатия между шарами и дисками обеспечивается
^затягивающимся устройством с шарами 6, перекатывающимися в канавках
ременной глубины. Оси пяти шаров поворачиваются диском с криволинейными
ами. На рис. 5.29, б дана схема вариатора.
336
фрикщюииые передачи и вариаторы
Ш
Ременные передачи ii вариаторы ciwpoeimt
337
ч^ ч»
338
Фрикционные передачи и вариаторы
Ременные передачи и вариаторы скорости 339
Передаточное отношение определяется по формуле
coi Rt, sin (а + y)
»i3 = =
(O3 i?2 sin (a ~ \S)
Рис 5 30 ШариковыГс вариатор с самоустанавливающимися дисками. Ведущие
диски 14 с тороидчыми или коническими (см. нижнюю часть разреза, рис. 5.30, а)
рабочими поверхностями смонтированы на гайках 72, установленных на втулке 16
с правой или левой резьбой. В гулка 76 соединена с ведущим валом 1
направляющими шпонками.
Промежуточные втулки 17 и кольца 13 (рис. 5 30, 6) позволяют дискам 14
самоустаиавливаться, кроме того, они передают осевое усилие, возникающее при
передаче крутян^его момента от гаек 12 к шарикам 9, прижимая itx к
прямолинейной поверхности нажимного самоустанавливающегося диска 7 и
криволинейной поверхности ведомого диска 8, изготовленного за одно целое с валом 10.
Радиус кривизны рабочей поверхности ведомого диска несколько больнхе радиуса
шарика Перемещением точки контакта шарика 9 по рабочей поверхности ведомого
диска S осуществляется изменение передаточного отношения.
При реверсивном вран^снии вала 1 в гулка 76, вращаясь в raiiKax 72,
перемещается вдоль оси вала со птицами. Везшчина перемещения втулки 16
ограничивается неподвижно закрепленными гайками И.
Pel улирование передаточного отнонтення осуществляется перемещением
нажимного диска 7 посредством врап1епия червяка 5, паходятцегося в зацеплении с
колесом 2, которое закреплетю на винте 4 направляющей шпонкой. Кольца б и 5
с тиаровыми поверхностями (рис. 5.30, в) обеспечиватот самоустаповку пажимтюго
диска 7 Шарики 9 заключеньх в сепаратор 15.
Рис. 5 31. Трехступенчатый шариковый вариатор. Движение от ведущего диска 1
к ведомому 5 передается посредством шариков 8, расположенных между дисками.
С целью увеличить общее передаточное отношение вариатора установлены про-
межуточнтле диски 4.
Шарики 8 заключены в сепараторы, составленные из дисков 2 и 3. Диски 3
имеют прямолинейные радиальные пазы, а пазы дисков 2 очерчены по винтовой
линии. Поворотом рукоятки 9, которая соединена с дисками 3, осуществляется
изменение диаметра D^ окружности центров шариков 8, а следовательно, и
изменение передаточного отношения, которое определяется по формуле
R^ + р cos
Rx — 9 cos ф
где р - радиус шарика; <р — угол наклона образующей дисков; к — число
фрикционных дисков; R^ - радиус центров шариков.
Диапазон регулирования
л =
(^х min + Р COS ф) [R^ „ах " Р COS ф)
L if^x min - Р COS ф) {R^ „ач + Р COS ф) _
силие нажатия между дисками регулируется пружиной 6 посредством болтов 7.
^^ ис. 5.32. Вариатор с дифференциалом. Диск 1 — ведущий, ролики 2 радиуса Г2
аны с центральными колесами конического дифференциала. Водило 5, соеди-
ое с валом 4, ведомое. Расстояние между роликами 2 выбрано так, что при
340
Фрикционные передачи и вариаторы
Рис. 5.29
любом положении кожуха — каретки 3 они расположены по обе стороны ведущего
диска.
Угловая скорость cOg ведомого вала определяется формулой
со^ = coi —,
где X — перемещение каретки 3 от среднего положения роликов.
Рис. 5.33. Вариатор с диффсрепщшлом и широким диапазоном регупировакпя
скорости.
Диски 5 1\ 3 приводятся от связанных колесами Zi и Z2 лобовых дисков 1 м 2
и могут перемещаться вдоль оси полого вала со шлицами, на котором
закреплены центральные конические зубчатые колеса дифференциала.
Винты 6 и 4 могут вращаться независимо друг от друга или быть связаны
между собой. В общем случае радиусы R дисков 5 п 3 могут быть различными.
Передаточное отношение вариатора при расположении дисков 5 и 3 слева
относительно осей валов зубчатых колес coj 2R
«12 = •— = .
Г1-Г2 ■
Ременные передачи it вариаторы скорости
341
Изменение положения любого из дисков относитепьно оси вала зубчатого
колеса соогисгственно изменяет знак перед г.
рис. 5.34. Вариатор скорости системы Е. И. Пирожкова состоит из двух
расположенных симметрично относительно вертикальной оси механизмов. Движение
от ведущего диска 2 к ведомому кольцу 7, вращающемуся относительно
центральной оси, передается через ролики-сателлиты 6. Форма и размеры роликов с
касанием в точках Л, Л, Су D обеспечивает их полное равновесие. Сепаратор 3
с осяхн! 4 роликов поддерживает заданное расстояние между роликами по
окружности. Диск 5 неподвижен. Б точке А правые ролики соприкасаются с левыми
и катятся без скольжения.
Рекомендуемое число роликов в одной плоскости вращения равно шести.
Регупирование скорости осуи1ествляется перемещением колец 7 посредством винта S.
Силы трения между роликами обеспечиваются пружинами 1.
Равномерное распределение нагрузки между левым и правым вариаторами
может осун1ес1вляться дифференциалом с коническими колесами z^ и Z2- При
)ц - 3000 об/мин, /7,^ = ± 1600 об/мин.
Рис. 5.35. II пане гарный вариатор. К водилу ведомого вала 1 планетарного
вариатора скорости прикреплены диски 3 посредством шатунов 2. Число дисков 3
может быть от 3 до 32.
Рис. 5.30
342
Фрикционные передачи и вариаторы
^:i^z±^;:^
щтг^тшй
Рис. 5.32
Рис. 5.33
Рис. 5.34
Рис, 5.35
344
Фрикционные передачи и вариаторы
П'^ г ,А ^ Т г/ ifi,
i^;
Рис. 5.36
Передаточное отношение вариатора определяется положением диска 5, которое
регулируется вин i ом 4.
Достаточная сила трения между дисками обеспечивается пружинами б. Вариатор
строится для мощностей от 0,2 до 22 кВт с диапазоном регулирования Д
от 4 до 6.
Рис. 5.36. Планетарный вариатор с шаровыми сателлитами. На ведущем валу
закреплен диск 1 (рис. 5.36, а\ который передает движение ведомому диску 2
посредством шаровых сателлитов 5, обкатывающихся по неподвижному кольцу 6.
Оси шаров расположены в направляющих поводках 4^ свободно вращающихся-
относительно центральной оси вариатора. Передаточное отношение изменяется
поворотом осей шаровых сателлитов. Последнее достигается перемещением (вдоль
оси валов) полой тяги 7, соединенной шарнирно с осями сателлитов.
Сила нажатия в зоне катка рабочих поверхностей обеспечивается пружиной 3.
Передаточное отношение вариатора определяется по формуле (рис. 5.36, б)
1 +
i?6 cos а
ri sin (а + р)
R^ sin (ф — g)
R2 sin (a + P)
Рис. 5.37. Фрикционный планетарный вариатор скорости. На ведущем валу 1
закреплено колесо 2 с внешним конусом, а на ведомом 11 — колесо 9 с внутренним
конусом (см. рис. 5.37, а). Между колесами 2 и 9 зажахы pojmKH 4 с двойным
конусом, которые соединены между собой сепаратором 3. Ролики 4 находятся
также в контакте с выступающей внутренней кольцевой поверхностью кольца о.
Нормальное давление по линии контакта, достаточное для передачи движения
трением, обеспечивается тарельчатыми пружинами 10. Регулирование скорости
ведомого вала осуществляется перемещением кольца 6 в корпусе 5 посредством
вращения маховичка 7, соединенного с шестерней 8 конической передачи. Колесом
этой пары является цилиндр 13 с винтовым пазом, в котором расположен
ползун с пальцем 12'
Pesiemibie передачи и вариаторы скорости
345
13 П
а)
346
Фрикционные передачи и вариаторы
Рис. 538
дисков ремни перемещаются в боковом направлении
На рис. 5.37, а, б, б и г показаны схемы
различных модификаций рассматриваемого
вариатора.
Рис. 5.38. Схема клиноременной передачи
с регулируемым передаточным отношением.
Описание принципа работы дано на стр. 317.
Рис. 5.39. Шарнирная цепь с роликами,
заменяющая клинчатый ремень. Движение
в этом случае также передается трением,
которое возникает при заклинивании роликов
1 между гладкими поверхностями дисков
раздвижных шкивов. Ролики 1 вмонтированы
в звенья 2 цепи.
Рис. 5.40. Раздвижной пткив клиноремен-
ного вариатора скорости. Регулировка
осуществляется гайками 1 м 2 при неподвижном
вале привода.
Рис. 5.41. Трехдисковый шкив вариатора
скорости с регулировкой от руки.
Перемещение дисков осуществляется вращением
маховичка U Винт 2 с гайкой 4 и
контргайкой S установлены для регулирования
предельного смещения диска 5 относительно
диска 7, при котором совмещаются
образующие конусных поверхностей.
Сила упругости пружин 8 должна
обеспечить силу трения между дисками 6 и 7 без
их дополнительной деформации. Следует
иметь в виду, что в шкивах рассматриваемой
конструкции при регулировании положения
Рис* 5.39
Ременные передачи и вариаторы скорости
347
Рис. 5.40
Рис. 5.41
Рис. 5.42
Рис^ 5.42. Регулируемый шкив клиноременнои передачи с предохранительной
^ Уфтой. Положение ремня между двумя дисками шкива регулируется вращением
маховичка 4 и фиксируется контргайкой 5. При перегрузке зубчатая предохра-
ительная муфта с зубьями 2 и 5 разъединяет шкив с валом, сжимая при этом
Фужину 6. Шум, создаваемый зубьями при выключении муфты, сигнализирует
о перегрузке вала 1.
348 Фрикционные передачи и вариаторы
Рис. 5,43. Четырехдисковый шкив клиноременного вариатора скорости.
Внутренние диски 7 закреплены на валу 14 направляющей шпонкой 13. Наружные
диски 6 установлены на ступицах внутренних дисков и соединены с валом 14
той же направляющей шпонкой 13 посредством шайб 1 со шпоночным пазом.
Шайбы 1 прикреплены к ступицам дисков 6. Положение ремня 8 относительно
оси вала зависит от расстояния между левыми и правыми дисками, которое
регулируется посредством механизма (на схеме не показан), соединенного с
дисками 6,
При перемещении внешних дисков 6 в сторону их сближения вместе с ними
будут перемещаться и внутренние диски 7 до тех пор, пока фиксирующие
шарики 5 и i2 не войдут в пазы 9 и 70. При этом рабочие поверхности
ремня 8 полностью перейдут на конические поверхности внешних дисков. В
дальнейшем будут перемещаться только внешние диски. Увеличивая расстояние между
дисками, вначале перемещаются только внешние диски, а затем внешние вместе
с внутренними. Посредством винтов 4, ограничивающих перемещение собачек 5,
регулируется совмещение образующих дисков 6 и 7 по одной прямой. Шайбы 2
и винты 11 ограничивают перемещение дисков 6 и 7 до максимального.
Рис. 5.44. Раздвижной шкив клиноременного вариатора скорости, управляемый
электромагнитом. Рекомендуется для работы при частых пусках п остановках
цвигателя.
На валу двщателя 1 закреплен конический диск 2. Перемещение диска 4 вдоль
ступицы диска .2 осуществляется элекфомагнигом 7 через Г-образный рычаг 5.
Ремень 3 при выключенном элскфомагнитс провисает свободно. При включении
jjiCKrpoMai пита ремень 3 сначала прижимается дисками 2 и 4 на малом диаметре
и, следовательно, при большом окружном усилии.
В процессе разгона роюра ремень под дейс1вием растянутой пружины 6
переходит па окружность большего диаметра, увеличивая часто!у вращения
ведомого вала вариатора.
Рис. 5.45. Двухдисковый шкив клиноременного вариатора скорости. Описание
изложено на стр. 317.
Рис. 5.46. Шкив клиноременного вариаюра с пазами вдоль образующих конусов
дисков 2 и 5, позволяющий получи 1Ь большой диапазон регулирования. Пружина 1
обеспечивает силу нажатия.
Неблагоприятные условия работы ремня на выступах снижают срок службы
ремня.
Рис. 5.47. Шкив клиноременного вариатора скоросш с раздвижными диcкa^пI 2.
Увеличивая межцентровре расстояние шкивов, ремень 3 уходш на меньший диаме1р,
деформируя при этом резиновые диафрагмы 1.
Диафрагмы 1 выполняют роль пружины и обеспечивают досгаючную силу
I рения между ремнем и дисками.
Рис. 5.48. Раздвижной шкив клиноременного вариатора скорости с резиновой
диафрагмой (рис. 5.48, а). Диафрагма 7, изготовленная из каучука с включением
корда, имеет форму, обеспечивающую более благоприятную характеристику по
сравнению с пружиной из стали (рис. 5.48, б).
Отсутствие излишнего давления на ремень, особенно на малых диаметрах,
увеличивает срок службы ремня.
Рис. 5.49. Раздвижной шкив клииорсмспиого вариатора скорости с автомати-
ческо11 peгyJшpoвкoй силы бокового зажима рсмия.
Диски 4 шкива установлены на одной общей В1улке 5 и подвижны только
в осевом направлении. Одновременное симметричное перемещение двух дисков
обеспечивается двумя направляющими пальцами 7. Торцы ступиц дисков 4 изго-
Ременные передачи и вариаторы скорости
349
Рис. 5.43
Рис. 5.44
Рис. 5.45
Рис. 5.46
10В.1СНЫ но винтовой поверхности (на схеме показаны нириховон линией) с подь-
^'^К)м в прошвоположную сторону вращения вала. Такие же винтовые поверх-
iJ<J^-in имеются на юрцах синиц боковых крышек 2, которые жестко соединены
^I^-'>кл> coooii Bi>jiKoii I. Диски 4, поворачиваясь опюснтельно крышек 2 за
*-'1^1 1'срсмсщсния по Битовым поверхностям, изменяют силу сжатия пружин 3,
^скшавливая при эюм силу зажима ремня, соответствующую дан1юму крутящему
Моменту.
350
Фрикционные передачи и вариаторы
Рис. 5.50. Трехдисковый шкив клино-
ременного вариатора скорости. Диск в
шкива закреплен на ступице 3 неподвижно
диски 9 и 7 подвижны в осевом
направлении. Вначале при принудительном
увеличении расстояния между центрами
ведущего и ведомого шкивов перемещается
диск 7 справа налево, диск 9 при этом
остается неподвижным. Крайнее левое
положение диска 7 определяется
совмещением клинообразной круговой канавки
на пальце 5 с выступом фиксатора /. При
дальнейшем увеличении расстояния между
центрами шкивов начнет перемещаться
диск 9 слева направо. Фиксатор / при
этом поднимется вверх, освободив палец
11. Диск 9 и палец И соединены между
собой фасонной шайбой 4. Силы
упругости пружин 2 и 10 должны быть
достаточными для передачи крутящего момента трением между дисками и ремнем
Рис. 5.51. Двухручьевой шкив клиноременного вариатора скорости. Диск 3
соединен со ступицей диска 1 через дистанционную трубку 7 неподвижно. Диски 2
и 4 тоже соединены между собой и перемещаются на скользящей шпонке вдоль
оси вала посредством вращения винта 6 в невращаю щей ся, но перемещающейся
гайке 5. Регулирование положения дисков осуществляется во время работы
вариатора.
Рис. 5 52 Шкив клиноременного вариатора скорости составлен из дисков
с радиальными выступами и впадинами, что позволяет увеличить диапазон
Рис. 5.47
Рис. 5.48
Ременные передачи и вариаторы скорости
351
регулирования. Диски 2, 4 и 6 соединены
между собой через дистанционные трубки
жестко и перемепдаются относительно
неподвижных дисков /, 3, 5 посредством
гайки 8 с замком 7.
Pei улирование осупдествляется при
остановленном варпаюре.
Рис. 5.53. Регулируемый шкив клино-
ременного вариатора скорости с холостым
ходом Перемещением диска / вдоль оси
вала регулируется положение ремня 3
между дисками I \\ 4 \\ соогвегственно
передаточное о i ношение вариаюра.
В крайнем нижнем положении ремень 3
охвагывас! холосюй шкив 2 и не передает
движения.
Рис. 5 54 Многоременной шкив с
увеличенным диапа'юном регулирования.
\\d С1упице I П1кива установлены два
диска 2 и один 5 и соединены с пей
неподвижно посредством втулок и тайки
7. Подвижные диски 6 соединены между
собой п прикреплены к В1улке S посредством болтов и дистанционных трубок.
Подвижные диски 3 также соединены между собой и прикреплены к втулке 9.
Диски 3 удерживаются в крайнем левом по]южении пружинами 4, а диски 6 — сжатой
пружиной 12 посредством винта 73 и шайбы 1L Увеличивая межиентровое
Рис. 5.49
А-0-6
Д-Д £-£
Рис. 5.50
352 Фрикционные передачи и вариаторы
1 г J ^f
11 J « 5 6
Рис. 5.51
Рис. 5.52
расстояние между пгкивами, ремни уходят на меньший диаметр и, сжимая
пружину 12, перемещают диски 6 с втулкой S вправо. При этом диски 3 с
втулкой 9 удерживаются пружинами 4 и не перемещаю 1ся. Фиксатор /О,
расположенный в отверстии втулки 8, перемещается вдоль оси вала по круговому пазу на
ступице i. Как только ремни переместятся в положение, соо1ветствуюп1ее
совмещению рабочих поверхностей конусов дисков 5 п б по одной прямой, фиксатор iO
поднимается вверх, выйдя из круговой канавки ступицы I и войдя в круювую
канавку втулки 9. Последующее перемещение ремней на меньший диаметр
сопровождается одновременным персхме-
щением дисков 3 и б вправо.
Сокращая межцентровое
расстояние шкивов вариатора, ремни
по;^ действием пружины 12 уходят
па большой диаметр, а подвижные
диски при этом перемещаются
влево в последовательности,
обратной той, которая изложена вьпне.
Рис. 5.55. Раздвижной шкив
вариатора с клинчатыми ремнями.
Шкив передачи состоит из набора
дисков 7, жестко связанных меж чу
собой и закрепленных на валу
посредством шпонок и дисков 2,
перемещающихся одновременно
вдоль оси вала, изменяя при этом
диаметры, по которым
соприкасаются ремни с дисками.
Изменение передаточного о i
ношения передачи осуществляется
вращением винта 4. Гайка 3
удерживается от вращения рычагом б.
Ввиду того, что при регулирований
Рис. 5.53
Ремеииые передачи и вариаторы скорости
353
/J /2
Рис. 5.54
положения дисков 2 ремни перемещаются в боковом направлении, необходимо
предусматривать такое же перемещение ведомого шкива, сблокировав управление
им цепной передачей 5.
Рис. 5. 56 Вариатор с клинчатыми
ремнями. Передача движения
осуществляется двумя последовательно
расположенными клиноременными
передачами, промежуточным звеном
которых является рассматриваемое
>стройство. Изменение скорости
ведомого вала осуществляется
поворотом рукоятки 1, шарнирно связанной
с качающимся подшипником 6, в
котором смонтирован вал с
раздвижными шкивами для клинчатых ремней.
Во время изменения скорости вал 7
^ дисками 2 и 5 перемещается вдоль
оси относительно дисков 3 и ^, в
результате чего диаметр окружности
касания ремня одного шкива будет
увеличиваться, а другого -
уменьшаться. Оси шарниров, относительно
которых перемещается подшипник 6,
расположены под углом к оси вала
^ак. что при различных положениях
-Устройства клинчатые ремни остаются
в одной и той же плоскости.
Рис. 5.55
^^ Кожевников и др
iffHN
Все детали "^
условно изофатень/
в плосноста
чертежа
Рис. 5.56
Рис. 5.57
Ременные передачи и вариаторы скорости 355
Рис. 5 57. Конструкция широкого ремня с колодочками. Колодочки 1 из
твердой древесины (рис. 5.57, а) прикрепляются с одной или с двух сторон
к ремню 2 и обеспечивают жесткость ремня при сжатии его с боковых сторон.
На рис 5 57, 6 показаны конструкции соединений концов ремня.
Рис 5 58. Пластинчатая цепь для фрикционных вариантов скорости с
раздвижными коническими шкивами. Звенья цепи соединяются полуроликами / и 2,
4 и 5. охватывающими ось 6. В средней части оси 6 между полуроликами
надето кольцо 3 со скошенными торцовыми поверхностями.
В набегающих точках передачи звенья цепи поворачиваются относительно оси
шарнира, при этом создается распорное усилие, прижимающее торцы полуроликов
к рабочим поверхностям дисков шкивов. При выходе шарнира из рабочей зоны
цепь выравнивается, и полуролики устанавливаются в исходное положение.
Рис. 5.59. Вариатор скорости с широкой гибкой лентой с колодками.
Регулирование скорости осуществляется вращением винта 1 с правой и левой резьбой, при
этом рычаги 2 и 4, шарнирно соединенные с гайками винта, изменяют расстояние
между дисками так, что если на одном валу это расстояние увеличивается, то
на др>гом уменьшается. Пружины 3 создают натяжение ремня и компенсируют
разницу между необходимой переменной длиной ремня и постоянной,
установленной на вариаторе.
Рис 5.60. Схема цепного вариатора скорости (рис. 5.60, а). Цепь состоит из
плоских звеньев / (рис. 5.60, б), в которые вставлены магазины 3 со стальными
пластинками 2, свободно передвигающимися в боковом направлении. Заполняя
впадину .между зубьями или охватывая зуб в соответствии с его профилем,
пластинки передают усилие с одного вала на другой. На рис. 5.60, в показана
др\гая конструктивная схема цепи.
Рис 5 61. Импульсный вариатор скорости с пульсирующим движением ведомого
вала Эксцентрик 1 закреплен на ведущем валу вариатора и вращается с
постоянной скоростью. Шатун 2 соединен с коромыслом 4 и шатуном 3 общим
шарниром, второй шарнир коромысла 4 установлен на неподвижной опоре 5, а второй
шарнир шатуна 3 соединен с барабаном 6 муфты свободного хоДа, звездочка 7
которой соединена с ведомым валом. Регулирование скорости осуществляется
изменением положения неподвижного шарнира 5 с последующей его фиксацией.
Для более равномерного вращения ведомого вала применяется несколько
механизмов со смещенными по фазе эксцентриками.
Рис. 5 62. Импульсный вариатор скорости с роликовой обгонной муфтой.
Вед\щий вал 5 вариатора получает движение от вала двигателя 2 посредством
клиноременной передачи и может поворачиваться относительно оси ). Опоры вала
\10г\ г фиксироваться в заданном положении. На валу закреплены кулачки 3,
смещенные по фазе на 180^. Рычаги 6 с установленными на них роликами 4
прижимаются к кулачкам 3 пружинами 10 и во время вращения вала 5 получают
колеоательное движение. Это движение передается ведомому валу 9 муфтами
свооодного хода 8 с роликами 7. Максимальный угол поворота рычага 7, а
следовательно, и передаточное отношение вариатора зависит от размеров кулачка
и положения оси вала 5 относительно оси вала 9. Регулирование передаточного
отношения вариатора достигается изменением положения вала 5.
ис 5 63. Вариатор скорости с муфтами свободного хода. Четыре эксцентрика /
: /^^^овлены на ведущем прямоугольного сечения полом валу 2 со смещением
центриситета по фазе на угол 90°. Движение передается ведомому валу 5 через
ромысла 7, соединенные с муфтами свободного хода б. Регулирование частоты
с н^^"^ ведомого вала 5 осуществляется перемещением штанги 4 управления
лонно расположенными лысками вдоль оси, в результате чего сухари 3
12-^
фрикционные передачи и вариаторы
В Ч
5 1 6
А-А
^"П|пЧ ГШГП
^шш
'-4-IMJ
1_Ш_1
Рис. 5.58
Рис. 5.59
Рис. 5.60
Рис. 5.61
Рис. 5.62
358
Фрикционные передачи и вариаторы
Рис. 5.64
передвигают эксцентрики I в радиальном направлении. Эксцентриситет всех
эксцентриков при данном положении штанги 4 одинаков.
Рис. 5.64. Кривошипно-шатунный вариатор с постоянной скоростью зубчатой
рейки на среднем участке пути. Палец I кривошипа вращается вместе с колесом гз и
перемещается вдоль радиуса кривошипа кулачком, связанным с колесом Г4.
Отношение чисел зубьев равно Zj/zi = 3; 24/22 = !. Профиль кулачка подобран
так, что зубчатая рейка 2 на большом участке пути перемещается с постоянной
скоростью. Ход рейки изменится перемещением ползуна 3 вдоль коромысла ОА
Рейка 2 соединяется с колесом (на рисунке не показано), которое через муфт\
обгона передает движение ведомому валу. Для плавной передачи движения ведомом)
валу необходимо установить два и более симметрично расположенных механизма,
ведущие кривошипы которых смещены один относительно другого на один и тот же
угол.
Ременные передачи и вариаторы скорости
359
Рис 5 65. Кривошипно-ша-
т\нный вариатор. Ведущий
двухколенчатый вал и вращаясь,
сообщает посредством щатунов
^ колебательное движение
промежуточным, симметрично
расположенным относительно оси
вала /, валам 3. Кривощипно-
коромысловыми механизмами 5,
6. 7 передается пульсирующее
вращение валу 8 посредством
дв\х муфт свободного хода 4.
' Изменение частоты вращения
ведомого вала осуществляется
изменением положения ползу-
шек в пазах кулис 5 посредством
вращения щтурвала 9. Винт \7
тягой 73 изменяет положение
пальца кривощипа в пазах кулис
5 Второй механизм изменения
радиуса кривощипа соединен
с первым цепной передачей со
звездочками /О и П и работает
с ними синхронно.
Изменение частоты вращения
ведомого вала может быть
осуществлено от нуля, когда оси
пальцев кривощипов совмещены
с осями 3 до максимального
значения, соответствующего
максимальному радиусу
кривошипа.
Рис. 5.66. Вариатор скорости
с зубчатым зацеплением. Зубча-
1ЫИ венец i, который
посредством винта и щтурвала может перемещаться вдоль оси передачи, набран
из тонких пластинок Т-образной формы в специальном ободе. В местах, где
нет сцепления с планетарным зубчатым колесом 2, венец представляет собой
'ладкий обод, а в местах сцепления зубья планетарного зубчатого колеса 2
»ь1жимают соответствующие им впадины. После прохождения планетарного колеса
пластинки устанавливаются в первоначальное положение специальными пружинами.
\олесо 3 с внутренним зацеплением и щестерня 4 обычной конструкции.
Переса точное отношение
Рис. 5.65
1
чаюше Вариатор скорости с программным управлением. На валу 4, полу-
Движение от ведущего вала 2 через зубчатую передачу 7-3, установлены
^^<>^^///<^л
Ь^
^^^
Рис. 5.66
26 25 2^ Ц 23 22
Рис. 5.67
d 2
Рис. 5.68
Ременные передачи и вариаторы скорости 361
на скользящей шпонке кулачки 9 и 10. Ведомый вал 5 вращается посредством
TBVX муфт свободного хода, состоящих из общего барабана 7, связанного с валом
к\ лачковой муфтой, и свободно качающихся звездочек 6 муфты, соединенных с
рычагами 29 При подъеме рычагов 29 вверх ролики 8, заклиниваясь, передают
вращение барабану 7, при опускании рычагов, барабан вращается независимо. При
смещении кулачков 9 и )0 по фазе на 180° вал 5 вращается пульсирующим
движением. Автоматическое регулирование скорости вала 5 по заданному
закону производится перемещением кулачков 9 w 10 вдоль оси вала 4. Спрофи-
тированная по заданным условиям щайба 21, вращаясь, передает движение вилке 13,
причем для удобства настройки коромысло составляется из двух частей 19 и 20,
поворачивающихся взаимно винтом 18. Шайба 21 получает вращение от вала 4,
эксцентрика 26, сдвоенного храпового механизма 25 —23 и червячной передачи 22 — 28.
Для быстрого вращения вала 5 с постоянной скоростью надо сцепить
колеса /2 и 16 посредством рукоятки 17 и вилки И. Реверсирование вала 5
достигается сцеплением колес 12 — 14 — 15, при этом муфта свободного хода
вращается вхолостую. Рукояткой с торцовым кулачком 24 механизм автоматического
регулирования скорости отключается. Пружинами 27 обеспечивается постоянный
контакт между роликами и кулачками 9 и 10.
Рис. 5.68. Вариатор с автоматическим регулированием передаточного отнощения
(вал 1 - ведущий, 2 — ведомый).
С увеличением крутящего момента на ведомом валу 2 (рис. 5.68, а) диск 3
смещается по резьбе вправо и сжимает пружину; радиус г^ уменьшается.
Крутящий момент Мо при щ = const изменяется по параболе
- JL- ^
t\ со
Mq = МЛ + ] - Ml —.
V г г, ^,, 7 г
Здесь постоянная
Л = —^'
Gd"" rotg(a + p)
определяется жесткостью пружины и углом а подъема резьбы; Го — средний
радиус резьбы; п — число витков пружины; G — модуль сдвига; р — угол трения
материалов винта и гайки.
Указанный недостаток непостоянства крутящего момента и мощности на
ведущем валу не имеет места, если изменить принципиальную схему вариатора так,
чтобы ведомый диск получал перемещение не только за счет деформации пружины,
но также и за счет перемещения опоры пружины в осевом направлении. Кон-
<^труктивная схема узла вариатора с перемещением опоры пружины показана на
Р"с 5.68, б. Диск 3, перемещаясь вдоль оси по нарезанной части вала, сжимает
1Р>жину 2 и поворачивает ее опору. Дополнительное перемещение ^д, диска 3
^'чет перемещения опоры пружины определяется из равенства
/ л ж л , h ^' А ■'^'О'х max
^v = f'x max - M^A + MqA -
0 - номинальный крутящий момент на ведомом валу при ;\- = г^,
362
Фрикционные передачи и вариаторы
Рис. 5.69. Бесступенчатая передача с автоматическим регулированием
передаточного отношения. Передача вращения от ведущего 1 к ведомому диску 6
производится через диски 2, вращающиеся относительно поводка-обоймы 3. Ведомый
диск 6 с увеличением нагрузки перемещается к центру диска 2, навинчиваясь
на неподвижный в осевом направлении винт. При уменьщении момента диск 6
возвращается пружиной. Под действием суммы окружных усилий, действующих на
диски 2, поводок-обойма 3 поворачивается и увлекает в движение ролики 5,
катящиеся по рессоре 4, имеющей форму изогнутого -клина. В результате этого
нажатие на диски 1 w 6 увеличивается. Кривизну рессор 4 можно регулировать
болтами 7. Крутящий момент Mq на ведущем валу остается постоянным в случае
дополнительного компенсационного перемещения к^ пружины:
: У^ + M'qA - М^А -
МоУт
М^
где Л^о - номинальное значение момента М^ при правом крайнем положение
диска 6;
Л =
1
8//D^
Gd^ rotg(a+p)
п — число витков пружины, а — угол подъема нарезки винта (см. рис 5.68).
Рис. 5 70. Вариатор с автоматическим регулированием передаточного отношения
От ведущего диска 1 к ведомому валу 4 (рис. 5.70, а) движение сообщается
через фрикционные конические диски 7 и 2, а также колеса Zj и Z2. При увели-
Рис. 5.69
Ременные передачи и вариаторы екороети
ЪвЪ
Рис. 5.70
чении нагрузки диск 2 смещается вдоль оси 3 влево, сжимая пружину и
поворачивая поводок 5. Нажатие между дисками 1 и 2 производится за счет
реактивного момента М^ на поводке. Таким образом, при увеличении момента на ведо-
^ю\1 валу увеличивается сила трения и передаточное отношение i/i4 = "lAu-
Кр\тящий момент на ведущем валу
Ri Л tg-a ^ R^Atg^ (х
Ry
Riro
Rir,
где V/q - номинальное значение момента Mq при 1/14 = ^2/^1;
А =
Gd""
податливость пружины;
^ = -А^ [Р'^ - ^) -21/Ц^- 1)
^0 tg' ос L
Мп
364 Фрикционные передачи и вариаторы
к = Мо/М) - коэффициент перегрузки;
а — угол образующей конуса дисков
Wo
R,P
7*0 — средний радиус ведомого диска;
Р— 1,1 -^ 1,2 — коэффициент запаса сцепления.
При условии, если радиус ведущего диска 1 будет постоянным и равен г^,
а радиус ведомого диска 2 — переменным и
^ 8/Ш^ R,ro RJo
Gd"" Mo tg2 a Mo tg a
где / = To/tg a — предварительная затяжка пружины, то
Mo = Mo = const.
Ha рис. 5.70, б показана конструкция вариатора.
Рис. 5 71. Вариатор скорости для малых мощностей
iV = 10 - 12 Вт.
Передача движения от вала двигателя к ведомому валу 2 осуществляется
передачами: фрикционной — с коническим диском 1 и роликом 7 и червячной
передачей 3. Регулирование скорости производится перемещением вилки 6
посредством вращения винта 5, соединенного с червячной передачей 4.
Рис. 5.72. Вариатор скорости для малых мощностей (до 0,3 кВт).
Каждый из двух валов вариатора может быть ведущим или ведомым. Между
коническими дисками 1 и 4 с одинаковым углом образующей (р = 45°), которые
закреплены на валах, установлен щарик 2. Скорость ведомого вала регулируется
перемещением щарика 2 посредством движка 3, при этом изменяются радиусы
точек касания щарика с дисками. Максимальный диапазон регулирования Д = 5.
Рис. 5.73. Планетарный щариковый вариатор для небольщой мощности. Ведущий
вал 1 соединен с конусом 3, ведомой частью является водило 7 с выходным
валом 9. Шарики 5, выполняя роль сателлитов, перекатываются по беговой
дорожке, составленной из двух конических поверхностей втулок 4 и 6.
Регулирование скорости осуществляется вращением крышки 2 корпуса вариатора
с соответствующим перемещением конуса 3. Изменение радиуса беговой дорожки
на конусе 3 автоматически изменяет радиус беговой дорожки конических
поверхностей втулок 6 и 4, которые сжаты пружинами 8.
Рис. 5.74. Схема вариатора с регулированием скорости посредством двух роликов
Движение от диска 4 к диску 3 передается посредством двух смещаемых
роликов 1 и 2:
- ^_ И.
Рис. 5.75. Фрикционный щариковый вариатор. От ведущего диска 1 ведомом)
барабанчику 6 движение передается посредством щариков 2 и 5, установленных
свободно в рамке 4. Правильное положение щариков поддерживается роликами 3.
свободно установленными на осях рамки.
Рис. 5.76. Механическая система автоматического регулирования скорости
ведомого вала вариатора. Рассматриваемая схема применяется в приводе механизма
Ременные передачи и вариаторы скорости
36:
Рис. 5.71
Рис. 5.72
5^567 8
Рис. 5.73
366
фрикционные передачи и вариаторы
Рис. 5.77
Рис. 5.76
намотки стальной ленты непрерывного листопрокатного стана Шариковая муфта 9.
передающая момент от полумуфты на диске 10 вариатора к полумуфте на втулке
бобины 8, создает осевое усилие А2, действующее на диск 10.
При постоянном натяжении ленты по мере увеличения диаметра намотки
возрастает момент на втулке бобины 8 и соответственно увеличивается осевое
усилие А2, которое, перемещая диск 10 влево, устанавливает цепь 12 на
больший диаметр. При этом цепь 12 на шкиве ведущего вала 11 уходит на меньший
диаметр, перемещая диск 1 влево. Кулачковый механизм с кулачком 5, грузом 6
и роликом 4, установленным на раме 3, создает замыкающую силу Л^ рычажной
системы. Рама 5 поворачивается относительно цапф неподвижной траверсы 2.
Профиль кулачка 5 соответствует условию, при котором мощность на валу 7
сохраняется постоянной.
Тормоза
367
ТОРМОЗА
Рис. 5 77. Одноколодочный ручной тормоз с цилиндрической поверхностью
грения (описание на стр. 319).
Рис. 5.78 Двухколодочный тормоз (описание дано на стр. 320).
рис 5 79. Простой ленточный тормоз (описание на стр. 320).
Рис 5.80. Дифференциальный ленточный тормоз (описание на стр. 321).
Рис. 5.81. Ленточный тормоз для вала с реверсивным движением (описание
на cip. 321).
Рис 5.82. Одноколодочный тормоз с клинчатыми поверхностями трения
(описание па стр 319)
Рис 5 83. Фрикционный останов. Диск 2 неподвижен. Вал 1 с поводком 5
и прикрепленной к нему тормозной колодкой 3 может вращаться только в
направлении стрелки В\ в обратном направлении вал не может вращаться вследствие
заклинивания колодки 3. Пружина 4 обеспечивает постоянный контакт между
колодкой 3 и диском 2
Рис. 5.84 Тормоз с переменным давлением от груза. На валу 2 жестко
закреплен диск 1 и свободно — храповое колесо 3. На винтовой нарезке среднего
радиуса г^-р вала 2 установлен диск 4, выполненный за одно целое с зубчатым
колесом 5. Резьба с углом подъема ос на валу 2 должна быть в таком
направлении, при котором во время подъема груза храповое колесо 3 зажато между
дисками 1 и 4. Для обеспечения надежности работы тормоза необходимо соблюсти
неравенство
^1+^2 tg(a + p)
> Гер •
2 \i
Рис 5 85 Аварийный тормоз эскалатора. Бесшумный храповой механизм,
который входит в систему тормоза, на чертеже не показан. При нормальных условиях
работы привода звездочка 3 с гайкой I и барабаном 2 вращаются как одно
целое, а в случае нарушения кинематической связи между звеньями привода
собачка храпового механизма останавливает барабан 2 При неподвижном бара-
Рис. 5.78
Рис. 5.79
368
Фрикционные передачи и вариаторы
Рис. 5.80
а) /У/Щ
Л
Рис. 5.81
Рис. 5.82
Тормоза
369
Рис. 5.83
А-А
Рис. 5.84
оаме 2 иод действием нагрузки звездочка 3 продолжает вращаться, при этом
гайка I навинчивается по резьбе ступицы звездочки, сжимает пружины 4 и
с большей силой прижимает трущиеся поверхности барабана и звездочки до
момента полной остановки. Гайка / с барабаном 2 соединена шлицевым
соединением
Рис 5 86, а и б. Схемы двухколодочных тормозов. Замыкание тормоза ос\-
шествляется грузом 7, размыкание — с помощью электромагнита 2
Рис 5.87, а и б. Двухколодочные тормоза с уравнительным механизмом
чя выравнивания силы нажатия со стороны обеих колодок 1 и 2. Замыкание
'^^рмоза осуществляется грузом 4 (рис. 5.87, а), или пружиной 4 (рис. 5.87, б),
Р^1змыкание — электромагнитом 3. Общий недостаток заключается в затруднении
геплоотвода и защиты от пыли и грязи.
Рис. 5.88. Двухколодочный тормоз. Тормозной диск 2 жестко соединен с валом I
1'Меет по окружности обода клиновидную канавку. Рычаги тормоза 4 с колод-
^ и J прикреплены к стойке валиками 5. Торможение осуществляется поворотом
■" ^^^^^ ^' соединенного с рычагом 8. Растормаживается тормоз пружиной 7.
370
Фрикииоиныс передачи и вариаторы
Рис. 5.85
Рис 5 89. Двухколодочные тормоза на два колеса с общим управлением.
Тормоза можно привести в действие поворотом рычагов / или 2 по направлению
стрелок.
Рис 5.90. Тормоз с внутренними колодками 2. прижимаемыми к обод\ ^
поворотом кулачка /.
Рис. 5 91 Колодочный тормоз с плавающи\и1 колодками 6. щарнирно
связанными регулировочными винтами 7 правой и левой нарезки. Колодки разводятся
сухарями У, 2, сидящими на пальцах 5 щайбы 3. поворачиваемой кривошипом -/
Колодки снабжены овальными отверстиями, через которые проходят упорные
пальцы 5 При разжатии колодок они повернутся относительно барабана 8 ю
упора одной из них в неподвижный палец 5 Появившаяся сила трения исполь-
з\ется для увеличения нажатия на другую колодку
Рис. 5 92. Пневматический тормоз с параллельным перемещением колодок
К диску 4 посредством серег 3 прикреплены колодки /, которые могут
посредством двух пневматических цилиндров 6 перемещаться поступательно по дв>м
штырям 2, что обеспечивает равномерное прилегание колодок к гормозном>
барабану, 5 - пружины.
Рис. 5.93. Автоматический тормоз с муфгой свободного хода. В
рассматриваемом тормозе муфта свободного хода используется только в момент ею
включения.
Top моза
371
Рис. 5.87
372
Фрикционные передачи и вариаторы
Рис. 5.8
Рис. 5.89
/ А-А
Рис. 5.92
Рис. 5.93
Тормоза
373
Спицы 5 жестко закреплены на валу 3, диск / вращается свободно,
звездочка 2 и барабан 11 прикреплены к станине неподвижно. Вал 3 может
передавать движение диску 1 посредством спиц 5, прижатых к трем упорам 4. При
вращении вала 3 в другую сторону в начальный момент диск 1
притормаживается шариками муфты свободного хода, затем посредством рычагов 7 w 8
спицы 5 прижимают три колодки 9 к неподвижному барабану И и
затормаживают вал 3 с большим моментом трения, разгружая, таким образом, шарики
муфты от чрезмерной нагрузки. Пружины 10 служат для более равномерного
прижатия колодок 9. Ось 6 рычага 8 установлена на щеке тормозной колодки 9,
а ось колодки - на диске ].
Рис. 5.94. Ножной колодочный тормоз. На вертикальных пальцах 1 чугунного
корпуса установлены двуплечие рычаги 2 и 4 с тормозными колодками 3 При
нажатии на педаль 8 вертикальным клином 7 разводятся концы рычагов 2 и 4
и колодки 3 прижимаются к ободу маховика. Пружина 5 отводит педаль 8
в исходное положение, а пружина 6 отводит тормозные колодки.
Рис. 5.95. Суммирующий ленточный тормоз при равных плечах а с
уменьшенным усилием на рычаге. Концы ленты тормоза крепятся к цапфам 7 и 3
рычага 2 В щеках 4 для пальцев профрезерованы параллельно расположенные
сквозные пазы. При вращении тормозного диска 5 в направлении стрелок / или II
одна из цапф, к которой прикреплена лента с большим натяжением,
устанавливается в крайнее положение и становится неподвижным шарниром рычага.
Сечение А-А увеличено.
Рис 5.96. Конструкция простого ленточного тормоза, приводимого в действие
весом груза /, для одного направления вращения тормозного шкива 5. Тормоз
растормаживается электромагнитом 2. Болтами 3, расположенными по дуге обхвата,
регулируется равномерный зазор между лентой 4 и тормозным шкивом в период
растормаживания. При перемене направления вращения тормозной момент
уменьшается в е^"' ^ 5,5 раза
Рис. 5.94
374
Фрикционные передачи и вариаторы
Top MOJci 375
Рис. 5 97 Короткоходовой ленточный тормоз с пружинным замыканием.
Неподвижные концы лент 4 и 6 соединены шарнирно на подпружиненной оси 5,
подвижные концы лент соединены рычагами 7 и 8 с общей осью вращения //.
Тормоз замыкается пружиной 3 и растормаживается якорем 12 электромагнита
с соленоидом ), который встроен в корпус 2. Регулирование рабочего положения
якоря 12, который жестко соединен с рычагом 8 и поворачивается относительно
неподвижной оси 9, осуществляется гайками винта 10.
Рис. 5.98. Ленточный тормоз, применяемый в прессах. Натяжение ленты
регулируется сжатием пружины 1. Торможение осуществляется пружинами 2 и 3,
выключение - сжатым воздухом, поступающим через трубопровод 6 в
пневматический цилиндр 5; 4 — порщень
Рис 5 99 Ленточный тормоз с предохранительной муфтой. Тормоз применяется
в ковочных мащинах Натяжение ленты / во время торможения осуществляется
силой упругости пружины 5. Освобождение ленты производится пневматическим
механизмом с цилиндром 2, в верхнюю полость которого подается сжатый
возд\х Предельный момент однодисковой предохранительной муфты с диском 5
рсг\лир\ется силой затяжки щпилек 4
Рис 5 100 Тормоз с электромагнитным управлением, устанавливаемый на конце
вала двигателя или рабочей мащины Диски трения 5, прикрепленные к ст\пице 2,
соединены с валом 3 посредством втулки / со щлицами и могут перемещаться
вдоль оси вала. Диск 4 установлен неподвижно.
Нажимной диск 9 при включении тормоза перемещается рычагом 10 под
действием усилия сжатой пружины 8.
При выключении сердечник 7 электромагнита 6 поворачивает рычаг 10
относительно оси //, сжимая при этом пружину
Рис 5.101 Дисковый тормоз с гофрированной поверхностью трения.
На неподвижном валу / закреплен кольцеобразный цилиндр 2 с трубками 5 и 9
При торможении кольцеобразный поршень 4 перемещается направо вдоль оси вала
иод давлением жидкости, подводимой в полость поршня через отверстие 8
Гофрированный диск 5, прикрепленный к поршню, своими внутренними
выступами опирается на его гладкую кольцевую поверхность с радиальными пазами 10
и образует круговые каналы, через которые проходит охлаждающая жидкость
01 трубки 3 к трубке 9. Вращающийся диск 7 тормоза соединяется с полумуфтой
на валу привода посредством пальцев 6 Достоинствами тормоза являются увс-
шчениая поверхность трения, малая толщ1'1на охлаждаемого элемента, интенсивный
01 вод тепла
Рис 5 102 Пневматический тормоз с резиновым баллоном Тормозной диск /
закреплен шпонкой на вращающемся валу. Резиновый баллон 3 с колодками 2
присоединен к неподвижному барабану 4. Торможение осуществляется наполнением
оаллона сжатым воздухом через ниппель Тормоз не рекомендуется применять при
частых включениях и значительных нагрузках.
Ряс 5 103. Четырехроторный насос-тормоз Конструкция применяется как демп-
'Рер кр\тильных колебаний, наличие четырех роторов 2 позволяет уменьшить
^1'1гр\зки на их опоры. При передаче движения от вала / к валу 4. который
Фикреплен к корпусу 6, величина тормозного момента регулируется перемещением
т>лки 3 с золотником ^5, перекрывающими отверстия, через которые перекачивается
\1асло
ис 5 104 Схема гидротормоза с наклонным диском В неподвижном корпусе 3
продольными и поперечными ребрами 4 на внутренней поверхности вращается
^ ^'Скрепленным на нем наклонным диском 2 Пространство корпуса
-1няется жидкостью Тормозной момент, развиваемый вследствие сопротивления
0^
«г!
Тормоза
Ъ11
Рис. 5Л00
Рис. 5.101
рабочей жидкости, зависит от частоты вращения вала /, формы ребер.
Рис 5.105. Схема наиболее распространенного гидродинамического тормоза.
На валу / закреплен диск 2, в торовой полости 5 которого размещены лопатки 3.
В корпусе статора расположены чашки 4 с лопатками, которые по своей форме
сходны с лопатками 3. Торможение
происходит в результате воздействия лопаток
диска на заполняющую статор жидкость
и в результате увлечения силами трения
жидкости, омывающей лопатки диска.
Рис. 5.106 Гидродинамический тормоз.
Ротор 2 вращается в статоре 3, закрытом
крышками I и 5. выполненными как
неподвижные рабочие колеса. Ротор по
отношению к статору расположен экс-
-L^^ Г ^|[j F центрично (е = 6 мм), что способствует
и] у Ш-й- хорошей циркуляции воды из корпуса
^ ||' ' 41 I II III г в холодильник. Ребра 4 на ободе ротора
также способствуют внешней циркуляции
воды Положение лопаток гидротормоза
показано на разрезе Л—Л. Встречный
наклон лопаток создает большой
тормозной момент при вращении ротора в одну
сторону и незначительный момент при
вращении в противоположном направле-
Рис. 5.102 НИИ.
378
Фрикционные передачи и вариаторы
А-А
Рис. 5.103
5-
Г\ L-l
ijrn
1
а
^
ш\ у///>
Рис.
5.1
05
L\
Рис. 5.104
Рис. 5 107. Пружинный тормоз одностороннего действия, заменяющий колесо
свободного хода. Внутренний диаметр пружины выполнен на 0,2 — 0,3 мм меньше
диаметра вала. При вращении рукоятки 2 в направлении, указанном стрелкой,
т. е в сторону, обратную направлению витков, пружина / раскручивается, и вал
вращается свободно. Если вращать рукоятку в обратную сторону, то пр\жина.
один конец которой прикреплен к стойке, вследствие трения захватывает вал и
препятствует ему вращаться.
Рис. 5.108. Пружинный тормоз для приборов с постоянным моментом трения
при вращении вала 2 в разные стороны. При вращении вала 2 один из концов
пружины \ прижимается к упору 3, что способствует проскальзыванию с трением
между валом и пружиной.
Рис. 5.109. Пружинный тормоз для приборов с различными мо.ментами трения
при вращении вала 3 в разные стороны. Когда вал вращается в направлении,
указанном стрелкой, пружина 2 с разным диаметром по длине плотно
затягивается на валу и проскальзывает в заточке зубчатого колеса 7. При вращении
Тормоза
Ъ19
Рис. 5.109
Рис. 5.110
380
Фрикционные передачи и вариаторы
М Z
€3W
4-
а)
' Ю
вала в обратном направлении пружина 2 прижимается к поверхности расточки
зубчатого колеса и проскальзывает на валу.
Рис. 5.110. Реверсивный пружинный тормоз. Концы пружины 2 перекрещиваются
подобно ножницам, поджаты к неподвижному упору 1 и удерживают с
определенным усилием шпильку, прикрепленную к качающемуся рычагу 3.
Рис. 5.111. Тормоз с автоматическим регулированием скорости при спуске
груза. Автоматическое регулирование скорости опускающегося груза осуществляется
вспомогательным асинхронным балансир-двигателем М (схема а\ якорь которого
соединен с валом 1 тормозного диска 3. Статор двигателя М, установленный
в подшипниках поддерживающих кронштейнов, соединяется с тормозом системой
звеньев 6, 7 и 8 (схема б). Полное торможение диска 3 обеспечивается
пружиной 5. При опускании груза включается вспомогательный двигатель М, якорь
которого вращаться не может, так как жестко соединен с тормозным диском.
Вследствие этого статор двигателя М стремится вращаться в сторону,
противоположную моменту якоря, и посредством звеньев 6, 7, 8 растормаживает тормоз.
С увеличением частоты вращения тормозного диска, а следовательно, и ротора
двигателя М момент статора уменьшается и диск 3 затормаживается пружиной 5.
Колебания в работе статора и тормоза с пружиной 5 будут происходить
до тех пор, пока момент, создаваемый на тормозе, не уравновесится моментом,
создаваемым опускающимся грузом, гарантируя определенную скорость спуска
груза. Скорость опускающегося груза можно изменить до нужной величины,
присоединив к рычагу статора пружину 9 соот,ветствующих размеров (схема в).
2 — тормозные колодки, 4 — барабан.
РАЗДЕЛ 6
МУФТЫ
Муфты служат для соединения валов и передачи движения от ведущего вала
к ведомому. В некоторых случаях муфты служат предохранительным устройством,
защищающим механизм от перегрузки, или устройством для автоматического
включения или выключения ведомого вала
По конструкции муфты можно разделить на три группы.
1. Постоянные, не допускающие разъединения валов в процессе работы машины.
Эти муфты, в свою очередь, делятся на:
а) глухие, жестко соединяющие концы валов;
б) подвижные, допускающие продольный или поперечный сдвиг и угловое
смещение осей валов.
2. Управляемые или сцепные, позволярощие разъединять валы или детали
механизма в процессе работы машины. Эти муфты также делятся на:
а) кулачковые;
б) зубчатые;
в) фрикционные.
3. Самоуправляющиеся, разъединяющие валы автоматически при изменении
условий работы элементов, соединяемых муфтой. К этим муфтам относятся:
а) центробежные;
б) муфты свободного хода;
в) предохранительные.
ПОСТОЯННЫЕ МУФТЫ
Рис 6.1. Цепная муфта. Компактна, обладает ограниченной упругостью. Доп>с-
кает незначительную подвижность в осевом направлении и перекос валов
Рис 6.2. Компенсирующая муфта для соединения валов с параллельно
смещенными осями. (Рис. 6.2, а). В шайбах 1 и 3, насаженных на концы валов,
имеются диаметральные впадины. Между шайбами свободно лежит диск 2, на обеих
сторонах которого имеются диаметральные выступы, расположенные перпендику-
-тярно и имеющие профиль, соответствующий профилю впадин на шайбах 1 и 3.
Муфту можно применять при переменном параллельном смещении осей валов.
Компенсирующая муфта в разобранном виде показана на рис. 6.2, б.
Рис. 6.3. Шарнирная муфта, обеспечивающая постоянную скорость валов,
расположенных под углом.
Постоянство угловых скоростей валов 3 и 4 обеспечивается тем, что ось у —у
симметрии муфты проходит через точку а пересечения осей валов.
При постоянном угле между осями валов пальцы 1 только поворачиваются
отверстиях ползушек 2, а при изменении расстояния между центрами О и Oi
ворачиваются и скользят вдоль осей отверстий.
ис. 6 4. Универсальный шарнир с крестовиной 1 (рис. 6.4, а) применяется
передачи движения от ведущего вала / к ведомому //, оси которых распо-
382
Муфты
Рис. 6.1
а)
Ю
Рис. 6.2
Посто.чииыс муфты 383
10жены под углом у (см. рис. 6 4, 6) При cOi = const ведомый вал врашается
неравномерно ((О2 — Var) Отношение угловых скоростей определяется по формуле
(02 cos у
coj sin' а + cos^ а cos^ у
1де а — угол поворота ведущего вала, отсчитываемый от вертикальной оси
Неравномерность вращения ведомого вала зависит ог угла у межд\ осями валов
1
i'l2min — cosy, Wi2max — •
cosy
Рис 6.5. Универсальный шарнир. На внутренней поверхности обоймы 1 и
наружной поверхности тела 3 вала 4 имеются шесть меридианальных канавок, в которые
заложены шарики. Шарики расположены в плоскости, проходящей через центр
uiapHHpa При повороте вала 2 на угол у шарики перекатываются в канавках
«2 ж;
—-^ = Var
СО1
Рис. 6 6. Универсальный шарнир со смещенными центрами канавок. При таком
смещении канавок плоскость, в которой лежат шарики, приближается к той, которая
делит угол между осями валов пополам.
Рис. 6.7. Универсальный шарнир с шариками. При изменении угла между
осями валов 1 и 5 направляющий палец 2 устанавливает сепаратор 3 с
шариками 4 так, что плоскость, в которой лежат шарики, делит угол а между
осями валов на равные части
Рис 6.8 Двойной универсальный шарнир. При равномерном вращении ведущего
нала / частота вращения ведомого вала // может быть равномерной при условии,
что вилки шарниров / на промежуточном валу 2 расположены в одной плоскости
(как показано на рисунке), а оси валов / и // с валом 2 в плоскости чертежа
образуют равные углы у. Если вилки шарниров промежуточного вала расположены
в перпендикулярных плоскостях, то ведомый вал будет вращаться неравномерно
с максимальной угловой скоростью, в 2 раза большей, чем при одинарном
универсальном шарнире. Для компенсации осевых перемещений ведущего и ведомого
валов промежуточный вал выполняют телескопическим.
Рис 6 9. Угловой шарнир с постоянным отношением угловых скоростей. На
^-^оединяемых валах, которые могут быть расположены параллельно, со смещением
осей (рис 6 9, а) или под углом (рис. 6.9, б), установлены ступицы 1 и 6 шарнира
^ отверстиями для пальцев 2 и 5, посредством которых соединяготся: ступица /
^" бронзовой вилкой 3 и ступица б — со стальным гребнем 4. Рассматриваемый
^иарнир работает в условиях более благоприятных, чем конические колеса, и без
^JJ>Ma Передаточное отношение и = 1 = const. Угол у между осями валов может
"вменяться от О до 1lO^
Рис. 6 10. Гибкое соединение двух валов / и 2, расположенных под углом
средством пружины 3. Может найти применение для передачи малых крутящих
^'оментов.
ис. 6.11. Зубчатая муфта. Муфта состоит из двух полумуфт 1 и 2 с внут-
^ нними зубчатыми венцами, которые входят в зацепление с внешними зубчатыми
g Ц^ми втулок 3 и 5. Полумуфты и втулки имеют одинаковое число зубьев.
Уфту заливают масло, которое удерживается уплотнительными кольцами 4.
Рис. 6.6
Рис. 6.7
: .*/ _,/
Рис. 6.8
7 Z 3 4 5 6
Рис, 6.9
й
с^.
-о
Рис. 6.10
Кожевников и др.
Ш Муфпш
Муфта допускает смещение и перекос осей валов при условии, что угол между
втулкой и полумуфтой в каждом занеплении не препьпиает 30'.
Рис. 6.12. Шариковая подвижная муфга. Пространство между шариками 1
заполняется смазочным материалом.
Рис. 6.13. Шарнирное соединение валов, переда1они1х болыние крутянию моменты.
На внутренней сферической поверхности полумуфпл 4 имеются два паза, которые
служат опорами для роликов 3, установленных на оси 2, подвижно
соединенной с валом 1. Это соединение допускает значительный перекос осей валов.
Для сокращения потерь на трение муфта обильно смазывайся через отверстие
в цапфе вала 5. Отработанное масло стекает в бак через отверстие 6.
Рис. 6 14. Шарнирное соединение валов. Усгройс1во, назначение и принцип
работы муфты такой же, как и муфты, показанной на рис. 6.13. Муфта обильно
смазывается и от загрязнения защищена уплотни тельным кольцом 1, которое
прижимается к шаровой поверхности вала 3 пружинами 2.
Рис. 6.15. Быстро разбираемая муфта, допускающая большой (до 10°) угол
перекоса осей валов; состоит из двух полумуфт 1 w 2 с коническими зубьями.
Движение от вала 4 полумуфте 2 передается шарнирным соединением (см. рис.6.13).
Сжатая пружина 3 обеспечивает постоянный контакт зубчатою зацепления.
Рис. 6.16. Втулочная упругая муфта. В корпусе муфты сделана выемка ]
с одной стороны цилиндра и две поперечных прорези 2, вследствие чего в средней
части муфты образуется упругий элемент, поддерживаемый сжатой пружиной 3.
Рис. 6.17. Упругая подвижная муфта. Упругие пальцы 2 муфты, изгоювленные
из тонкой стальной проволоки, удерживаются кольцами 1 и 3.
Рис. 6.18. Упругая подвижная муфта. Большая упругость муфты достигается за
счет кривизны пальцев 7, изготовленных из стальной проволоки.
Рис. 6.19. Упругая подвижная муфта с зигзагообразной плоской пружиной.
Полумуфты i и 5 (рис. 6.19, а) снабжены зубьями, между которыми помещается
плоская зигзагообразная пружина 3, состоящая из нескольких частей. Полумуфты
с пружиной закрыты кожухами 2, 4.
Размеры пружины 3 определяют по формулам (рис. 6.19, б).
3£\ шах ' b],.S^ '
где Pi
^кр.
Ушах - максимальный прогиб пружины; z — число зубьев на диске полумуфты;
г — радиус диска; М^.р — крутящий момент, передаваемый муфтой.
l^^H + S\ £ = 2,15-10бкгс/см2;
[а]„ = 4500 -^ 5000 кгс/см1
Рис. 6 20. Упругая пальцевая муфта. На каждом пальце 2, закрепленном на
полумуфте i, монтируются два комплекта конических колец, распираемых пр\-
жиной 9. Кольца 3, 4, 5 и 7, установленные на пальце, имеют конусы, обращенные
один к другому вершинами, средние кольца 6 и 10, установленные в отверстиях
полумуфты 8, имеют внутренний конус. При достижении некоторого предельною
значения момента кольца, смещаясь одно относительно другого, сжимают пружину.
ч
А~А
_^^тц
Ш
trri
i
А
Рис. 6.12
У/Ш^Ш(
Рис. 6.13
Рис. 6.14
13-^
Рнс. 6.17
Рнс. 6.18
Рис. 6.19
Рис. 6.21
390 Муфты
Усилие, дейс! [дующее па пааец, при котором срабатывает муфта Р ^ 4Qtg(a+ р),
где О - сила упруюсти сжатых пружин.
Муфта допускас! угловой перекос осей валов не более 1° и параллельное
смещение до 0.5 мм.
Рис. 6.21. Зубчаюе колесо (рис. 6.21, а) с упругой муфгой. Применяется
в на1пс1атсле авиационного двигателя. Обладает нелинейной ломаной
характеристикой жесткости, что позволяет предохранить машину ог вибраци!!. На
рисунке 6.21, б муф1а показана в разобранном виде.
Рис 622 Мя1кий универсальный итарпир с центровкой посредством П'аровото
пальца /. Гибк1!е )лемспты 2 изготовляют и5 пластчпою прочного материала.
Рис. 6.23. Упру1ая муфш. Втулки 1 соединены нривулканизированным
резиновым кольцом 2.
Рпс. 6.24. Подвижное соединение ва.1юв прока 1ных cianoB с эласшчными
прокладками из син1етическо10 материала. Прокладки 1 креня 1ся к муфте 2
установочными болтами 3.
Рис 6.25. Конструктщя крепления My(j)Tbi 1 на валу 2 посредством круглых
ииюпок, составленных из двух стальных вкладышей 3 и пластмассового
сердечника 4. Муфту легко собирать и разбирать.
Шарнирное соединение промежуточного вала 5 с муфтой 1 также эластичное,
бесшумное, с вкладышами 6 из синтетического материала (полиамида, вулколана).
Рис. 6.26. Шаровое шарнирное соединение с резиновыми вкладышами 2 и
уплотнением посредством колпака 1, изготовленного из резины. Зазор между
резиновыми вкладышами 2 и шаром 3 регулируется при вращении крышки 4.
Рис. 6.27. Упругая муфта для гашения вибраций В пространстве между
зубьями полумуфт J и 3 установлены упругие ролики 2 из резины. С увеличением
крутящего момента ролики 2, деформируясь, перекатываются по ножкам зубьев,
что способствует гашению вибраций.
Рис. 6.28. Упругая муфта. • Между выступами полумуфты 3 и впадинами
полумуфты 1 установлены с натягом резиновые шарики 2. При перегрузке муфты
ненагруженные шарики удерживаются на месте за счет предварительного натяга.
Слева на рисунке показано положение полумуфт под нагрузкой при
относительном повороте полумуфт на угол р, справа - при холостом ходе.
Рис. 6.29. Упругая муфта с резиновыми шарами 2 в углублениях полумуфт 1 и 3.
Муфта допускает угловое, радиальное и осевое смещение осей валов.
Рис. 6.30. Шинная компенсационно-упругая муфта. Вариант соединения вала
привода с маховиком 1 двигателя.
Рис. 6.31. Упругая муфта состоит из металлической полумуфты 3 и
полумуфты 1 с резиновым диском 2. Упругость муфты увелггчивается, если
полумуфту 3 изготовить с резигювым кольцом.
Рис. 6 32. Шинная компенсагшопно-упругая муфта состоит из двух одинаковых
полумуфт 1 и шины 3, прижимаемой к полумуфтам KOJibnaNur 2 посредством
болтов 4.
Рис. 6 33. Утгрутая соединительная муфта К полумуфгам / и 6. установленным
на соединяемых валах, прикрепляются круговые эластичные секторы 3 со щекамтг,
входящими в рифления флатщев полу муфт. Секторы прикреплятогся шайбами 2 и 4
посредством винтов 5. Жесткость муфты опрсделяе1ся количеством секторов и
п\ размерами Муфта компенсирует ттесооспость и смспгснис осей ва.иов.
Рис. 6 34. Упругая муфта. Между полумуфгами / и 5 усгаттавливастся упругое
резигговое кольцо 3 и прикрепляется к гтим виттгами, ввинчиваемыми в мектл-
лические кольца 4. Для жесткости внутри угтругого кольца устагтовлеггы
металлические кольца 2 и 6.
Поста чилые муфты
391
А-А
Рис. 6.22
Рис. 6.23
Рис. 6.24
Рис. 6.25
^52
Рис. 6.26
Рис. 6.27
1 2 J
А-А
г"
Рис. 6.28
Рис. 6.29
Рис. 6.30
Рис. 6.31
Рис. 632
1*ис. 633
394
А1у(/)ты
/ 2 J
// У
А А
Рис. 6.35
2 1 5
ш
я
^н^й
|^Ш
ш
Рис. 6.36
Рис. 6.35. Упругая муфта с ограничительным устройством. Полумуфта 5
соединяется с полумуфтой 1 упругими дисками 3 посредством болтов 2 На шайбе ^*
имеются выступы, которые упираются в выступы полумуфты 5 при перегрузке.
Рис. 6.36. Упругая муфта с резиновым кольцом. Форма кольца / (рис. 6.36, а)
обеспечивает равномерное распределение напряжений кручения по всему его объему.
На рис. 6.36, 6 кольцо 1 соединено с шайбами 2 и 3, которые крепятся к
полумуфтам винтами.
УПРАВЛЯЕМЫЕ МУФТЫ
Рис. 6.37. Коническая фрикционная муфга В начале включения (нижняя часть
рисунка), передвигая полумуф1у 7, вводя! конус в соприкосновение с конусом ^^
сосдиценным направляюшими 3 с ведомой декшью 4 3aiCM, ко1да часюха вра
ЩС1ШЯ полумуф1Ы 1 и ведомой де1а;ш 4 почт сравняс1ся, вюпочаюхся кулачки .^
(верхняя часть рисунка).
yiifUKi'iHCмыс муфты
495
Рис, ^' ^^^- Устройство, включаюн^ее
>,,,-ча1П1^м мап1ины дня намо1кп мешллн-
,,еской лепты. Ведомый вал 2, нриводи-
\ibui в движение ог ведун1е10 вала 5 и
кулачк()В(»й муфпл 4, 3, ос1анавливае1ся
при nepe\ieHieinni полумуфты 3 впево до
еисплепия с попумуфтой ], служан1ен
,,.[повременно тормозным барабаном.
( 1яиу|ые боптамн тормозные колодки 6
,1 7 ирикрепленЕЛ к кронштейну подннгн-
лика и пе moi ут поворачиваться.
J*nc. () ^'^)- С'ип\ро1Н1за'10р коробкн
скорое icif. ил нинн^евом валу 1 зубчатое
K(Vfeci) 6 установлено свободно н может
1()пьк1> врапинься относительно его осн.
И(^ и(У)1ке 2, закренленно!! неподвижно
на ваиу 1, можс! перемещаться муфта Л.
Разме1^ы Н1лицев010 соединения В1улки 2
С(-><^твс1ствуют размерам шлиневого со-
Рис. 6.37
/23 ^5
Рис. 6.38
Рис. 6.39
396 Муфты
единения на ступице зубчатого колеса 6. На ступице зубчатого колеса б установлено
упругое кольцо 5 с продольным разрезом. Наибольший диаметр кольца 5
определяется заплечиком зубчатого колеса 6, а перемещение в осевом направлении
ограничено разжимным кольцом 4.
Муфта 3 с внутренней стороны имеет конусную расточку с размерами, соот-
ветствующими размерам конической поверхности упругого кольца 5. В начальный
момент включения сцепляются конические поверхности муфты 3 и кольца 5, затем
кольцо 5, сжимаясь, входит в полное зацепление со П1лицами на ступице колеса 6.
Следует заметить, что коническая поверхность муфты 3 не сразу сжимает кольцо 5,
так как скорости муфты 3 и кольца 5 различные, и вследствие этого наклонные
боковые грани шлицев создают распорные радиалтлше реакции. При достижении
синхронности радиальные усилия на шлицах снижаются, и кольцо 5, сжимаясь,
позволяет войти в зацепление муфте 3 со ступицей колеса 6.
Рис. 6.40. Синхронизирующее устройс1во коробки скоростей.
Вращение зубчатому колесу 2 или 10 (Рис. 6.40, а) передается от вала 1
посредством зубчатой муфты с синхронизирующим устройством. Зубчатые колеса 2
и 10 установлены на валу 1 свободно, а полумуфта 7 с зубьями на ее
поверхности неподвижно. На полумуфту 7 надета втулка 6 с коническими дисками 5
и 8, которая посредством вилки может перемещаться вдоль оси вала. Па ступицах
зубчатых колес 2 и 10 нарезаны такие же зубья, как и па полумуфтс 7. На
внешней поверхности зубьев каждого колеса установлены конические диски 4 и 9
с гладкими отверстиями, а в радиально расположенных отверстиях ступиц колес —
подпружиненные штифты 3 и упругие трубки И со сквозными продольными
разрезами. В начальный момент включения в процессе синхронизации конический
диск 4 или 9 вращается относительно ступицы колеса и сцепляется с ним частично
выступающей поверхностью трубок 11 (рис. 6.40, б), которые при перегрузке
деформируются и позволяют диску поворачиваться относительно ступицы. При
достижении синхронности конический диск 4 или 9, перемещаясь вдоль оси,
сначала сцепляется прорезями с трубками 11 (рис. 6.40, в), а затем зубья
полумуфты 6 сцепляются с зубьями, расположенными на ступице зубчатого колеса.
Штифты 3 устанавливают конические диски в исходное положение после выключения.
Рис. 6.41. Пусковая муфта. Муфта соединяет вал 6 пускового двигателя с валом 1
газовой турбины при ее разгоне.
Полумуфта 2 соединена с валом 1 многозаходной резьбой с большим углом
подъема Р витков резьбы. В начале пуска вал 1 и полумуфта 2 неподвижны,
храповое колесо 4 с внутренними зубьями, закрепленное на диске вала 6,
находится в зацеплении с собачками 3, оси которых установлены на полумуфте 2.
Вал 6, вращаясь, поворачивает посредством храпового колеса 4 и собачек 3
полумуфту 2 относительно вала 1 и смещает ее по виткам резьбы до заплечика
на валу 1. При подходе полумуфты 2 к заплечику вала 7, в зацепление входят
зубья зубчатого колеса 5 с зубьями на полумуфте 2, а собачки 3 выходят из
зацепления с храповым колесом 4. После запуска турбины частота вращения вала 1
будет больше частоты вращения вала пускового двигателя, поэтому полумуфта 2,
вращаясь относительно вала 1 в противоположном направлении, установится в
исходное положение, а собачки 3 выйдут из зацепления с храповым колесом под
действием центробежных сил.
Рис. 6,42. Конусная фрикционная муфта позволяет производить включение и
выключение на ходу. Расчет муфты следующий:
сила нажатия
A/voPsin а
MR
Управляемые муфты
т
/23 \ 5,
^)
Рис. 6.40
Рис. 6.41
Рис. 6.42
39S Муфты
длина образующей конуса
2яЯ sin с/ \с[\ '
где р — 1,1 -:- 2,5 — коэффитщент запаса сцепления; [г/] — удельное дав пение.
Рис. 6.43. Фрикционная пружинная муфта. Движение от шкива 4 к зубчатым
колесам 1 передается трением, создаваемым пружинами 5 между колодками 3
и BHyipeHHHMH поверхностями ободьев шкива и зубчатых ко пес Муфга включается
при сжатии пружин 5 лентой 2, копны которой прикрепчепы к pbmaiy
управления C^.
Рис. 6.44. Двойная коническая фрикционная муфта. Па ведущем валу J
укреплена на пшонке часть попумуф1Ы 7, соединенная с ном()!цью резьбы со второй
частью полуму(|лы 4. Па ведомом валу // укреплена крес(овина 7 со штырями 6,
па которые иадегы фрикционные конусы 2 и .>. Отводка 5 сие i смой рычагов
соединена с нружипа\и1 S, шарнирпо пр1П<ренлсппымц к конусу 2 н посредством
Г-образных рычаюв к конусу 3. При перемещении отводки 5 влево пружины S
прижимают конусы к конусным поверхностям попумуфт 1 и 4.
Рис. 6.45. Муфта с двойным конусом /щя длительной работы вхолостую при
большой частоте вращения. На пальцах 8 полумуфты 6 установлено фрикциошюе
кольцо 4, перемещеиие которого вдоль оси вала вправо ограничено винтами 3,
а перемещению влево препятствуют пружины 5. При включении муфты втулка I
перемещается влево, и рычаги 2 сближают диски 9 и /О, сжимая пружину 7.
При выключении муфты диск 10 перемещается вправо на такое расстояние, при
к'отором обеспечивается достаточный зазор между кольцом 4 и дисками 9 и 10.
Рис. 6.46. Фрикционная муфта с двойным конусом. Отличается от муфты,
изображенной на рис. 6.45, тем, что движение от полумуфты 5 к прлумуфте 1
передается сегментами 2. Когда муфта включена, пружинное кольцо 3 стягивает
сегменты 2, а сжатые пружины 4 между коническими дисками разводят их.
Механизм включения муфты работает аналогично описанному на рис. 6.45.
Рис. 6.47. Планетарная реверсивно-разобщительная муфта с двойным конусом.
При включении на прямой ход конус 5 под действием пружины ) соединяется
с конусом 4, и вся система вращается как одно целое; движение передается от
вала / к валу //. Для включения на обратный ход конус 3 прижимается к
неподвижному диску 2 и останавливается вместе с поводком дифференциала, а движение
передается через конические зубчатые колеса. В среднем положеннп конуса
ведомый вал // неподвижен, а сателлиты дифференциала с конусом 3 врапщются
вхолостую.
В рассматриваемой муфте для более равномерного pacnixделения нагрузки
между сателлитами центральные конические колеса имеют опоры с нтаровой поверч-
иостью и самоустанавливаются. Крутящий момент персдае1ся посредством
кулачков 5.
Рис. 6.48. Фрикционная муфта с распорным фрикционным кольцом. В корпусе 1
муфты находится разрезное фрикционное кольцо 2, укрепленное зубом 6 во втулке -^
сидящей на ведущем валу. При перемещении отводки 4 влево клин 5 входит
в разрез кольца 2 и, разжимая его, прижимает к корпусу 1. Для передачи
большого по величине момента в конструкции между клшюм 5 и кольцом ^
помещают мультиплицирующий рычаг 7 (эскиз справа). Схема часто применяется
в подъемных устройствах, велосипедных тормозах и т. п.
Управляемые муфты
399
rtTj/ / / гГП-^
Рис. 6.43
8 9
12 3 if 5
Рис. 6.46
Управляемые муфты
401
ттг^
5
/j
м
^
Рис. 6.48
Рис. 6.49
Силу трения определяют по формуле Эйлера:
F = Pt -,
где ?1 - сила в плоскости разреза кольца; а — угол обхвата.
Рис. 6.49. Фрикционная муфта с упругим кольцом. Вращение от вала 8
зубчатому колесу 7 передается муфтой (показана в разобранном виде), состоящей
из корпуса i, разрезного кольца 5, собачки 3 и пружины 4, Корпус 1 имеет
два прямоугольных паза и жестко закрепляется на валу 8. Кольцо 5 с выступами б
надевается па ступицу зубчатого колеса 7 и устанавливается в корпусе 1 так,
мтобы выступы 6 входили в пазы корпуса Нижний выступ — прямоугольной формы
закрепляется в корпусе 1 болгамп, а верхний — скошенный устанавливается в пазу
^-вооодпо и врапщк)п;ейся вокруг оси 2 собачкой 3 Зс1жимас1ся так, чю В1улка 5,
^''хва1ывая сгупицу колеса 7, трением персдасг ему движение. Колесо 7 устанавли-
ваехся па валу 8 свободно. Пружина 4, прикрепленная к корпусу 7, удерживает
^ооачку 3 в положении, при котором муфш выключена. Муфта включается кону-
ом, который псрсмещас1ся относительно вала 8 (конус на рисунке не показан).
"ис. 6.50. Фрикционная муфта с зажимом. Принцип действия муфты такой же,
J^J^ и %фты, показанной на рис. 6.49, Корпус 1 муфты закреплен на валу 8
одвижно, зубчатое колесо 7 — свободно. Корпус 1 имеет паз, в котором распо-
вал^^^^ ^Ь1ступы зажима 6, свободно охватывающего ступицу колеса 7. Пазовый
^к 4, жестко связанный с рычагом включения 3, поворачивается относительно
402 ^-^У фты
оси посрсдс1вом отводки 2 с конусом и сжимает зажим 6 на ciynnuc колеса 7.
HpaniCHHc колесу 7 передается трением. При нсремсщепин оiводки 2 направо
му([)1а вюночас1ся, налево- выключается. Болюм 5 регулируе1ся сила загяжки
зажима 6.
Рис. 6 51. Фрикщюнная муфта со спиральной пружиной. Пружина 2, конец
которой прикреплен к ведущему диску J, несколькими внпсами охва1ывасг с
нсбо.чьшпм зазором ведомый барабан <5. К копну пружины шарнирно прикреплен
рычаг 4, поворачивающийся относительно оси 6. Рычаг 4 несег болт 3, упирающийся
при повороте рычага в выступ 7, имеюпишся па предпоследнем втке пружины.
При перемещении диска 5 влево рычаг 4 стягивает крайний вигок пружины на
барабане и под действием сил трения начинает вращаться вместе с барабаном,
увлекая за собой остальные витки и ведомый вал. При неремсщепип диска 5
вправо пружина раскручивается и освобождает барабан. Упор 9 предохраняет
пружину от поломки при ее раскручивании под дейс1вием сил инерции в период
торможения.
Рис. 6.52. Схема многодисковой фрикционной муфты. Диски 1 (рис. 6.52, а)
соединены с барабаном 3 так же, как и диски 2 с полу муфтой 4, ш лицевым
соединением. Все диски свободно перемещаются вдоль оси вала. Крутящий момент
передается трением, возникаемым между дисками при нажатии прижимной
шайбы 5 силой Q.
Момент трения, передаваемый муфтой:
2 Rl- R\
пли приближенно
3 "" Rl - R\
М = 2^/^(^4-1),
где к — общее число дисков.
Диски проверяются на удельное давление
Для увеличения трения в дисках укрепляют пробки 6 (рис. 6.52, 6) из
материала, обладающего большим коэффициентом трения |.i, например медноасбестовое
плетение, ретинакс и др.
Рис. 6 53. Многодисковая фрикционная муфта с компенсатором жесткости
механизма включения. Движение передается от зубчатого колеса 9 с барабаном S
валу 1. Диски 5 соединены шлицами с барабаном, диски 6 —с нажимным 4
и упорным 7 дисками, установленными на валу 1 и подвижными в осевом
направлении. Муфта включается при перемещении отводки 2 вправо, при этом осевое
усилие, создаваемое двуплечим рычагом 3, передается через диски на стакан U
с компенсационной пружиной 10. Жесткость механизма включения компенсируется
перемещением стакана с направляющей втулкой по поверхности гайки 12.
Рис. 6.54 Фрикционная муфта с увеличенным разводом между дисками при
вюночспии В рассматриваемой муфте развод между дисками составляет oi 0,5
до ) мм при норма.иьном ходе вгуцки переключения (пружины, усипювлспныс
для развода дисков, па чср1сжс не показаны) Полуму(!)1а 2 с дисками 4 yci<i'
ноилспа на ведун^см валу, нолумуфта 3 с дисками 5 — па ведомом валу. Включение
и вьнаночение муфты осущес1вляется перемещением диска 6, который отжимаскя
от нолумуфты 3 пружиной 1 (более слабой) и от диска 5 - пружиной 7 (более
Рис. 6.51
113 4
Рис. 6.52
5 6 7 8 9
Рис. 6.53
404
Муфты
S if
Рис. 6.54
^у^//////////////Л
п п п п п п
ш
тщ^т
1
4'
Рис, 6.55
Управляемые муфты
405
^\\\тч\ч\\\^^^^^
Рис. 6.56
сильной), при перемещении втупки 9 вправо через систему рычагов муфта
включается и при перемещении влево - выключается.
Рис. 6.55. Многодисковая муфта с гидравлическим управлением. Гидравлическая
система в муфте используется как для прижатия дисков, так и для выключения
муфты.
На ведомом валу 1 закреплена полумуфта 2 с дисками 5. Диски 4
установлены на ведущем барабане 5. Гидравлический цилиндр 8 с фланцем 7
перемещается относительно неподвижного поршня 9. Полость В сообщается либо с
трубопроводом высокого давления, либо со сливом. В полости А непрерывно
поддерживается слабое давление. При подключении полости В к трубопроводу
высокого давления цилиндр 8 перемещается влево и, прижимая диски 3 и 4, включает
муфту. В этот период из полости Л масло вытесняется через дроссель 6 к
дискам 3 и 4 я охлаждает их. При выключении муфты полость В соединяется со
сливом.
Рис. 6.56. Многодисковая фрикционная муфта с гидравлическим управлением
имеет цилиндр 3, поршень 2 и крышку 4. Под давлением масла, поступающего
'1ерез полость А, поршень 2 перемещается влево и пальцами 1 включает муфту.
При большой частоте вращения муфты в цилиндре создается дополнительное
давление на поршень от центробежных сил вращающейся массы масла. Чтобы
уравновесить его, через полость В подается масло в полость с противоположной
стороны поршня. Через полость В подается также смазка к трущимся поверхностям
дисков. Пружина 5 перемещает поршень 2 в крайнее правое положение.
Л/Г ^^^* ^*^^* фракционная многодисковая муфта с гидравлическим управлением.
Уфта 3 включается при увеличении давления масла, которое из маслопровода 5
подается к цилиндрам порппшй 2 через отверстия в центре вала и наклонные
^ тверстия в детали 1. Движение передается от маховика 4 к валу 9. При вклю-
ении муфты диск 6 дополнительно сжимает пружину 7 и освобождает тормоз 8,
•t^Hc. 6.58. Фрикционная муфга с гидравлическим управлением (слева выключена,
раза — включена). Вращение от вала 1 к зубчатому колесу, состоящему из
ух частей 5 и 2, передается посредством дисков 3 к 4, установленных на валу 1
^соединенных с ним направляющей шпонкой. По одному из отверстий, распо-
ъ,.^^""^^^ параллельно оси вала, нагнетается жидкость (масло), чем и осуществляется
включение
и выключение муфты.
Рис. 6.57
J 4
Рис. 6.58
/ 2 3 if 5 6
^) Рис. 6.59
i\ lipac, 1 чемыс w i (fjiiwi
407
]^nc. 6.59. Схема rn.ipaininuccKoii
jvi\(l)ibi сцепления. 11a ]}c;i\i)U'm валу
(piic. 6.59, o) закреплен крии(^цип, co-
c итсппы!! с 1ремя порпп1Я1\п1 '4 по-
среде 1 BOM niaiynoB 1. lla ведомом
вал> закреп иен кар i ер 5 с дпJПlндpaмн
iiopmneii. Полос in uiunnuipoB сооб-
иипо1ея с ПОЛОС!ями 6 посредством
1 рубок 2 и вентилей 3 с обратными
к lananaMH 7 (рис. 6.59, 6),
допускающими всасывание масла в п^илиндры
и препятствующими перемещению
масла из дилиидров в пoJЮCти б. При
открытых запорных клапанах 8
ведущий вал врапщетея свободно,
перекачивая без больших сопротивлений
масло из полостей 6 в полость
цилиндров и обратно, картер и ведомый вал
при этом не вращаются. При
постепенном перекрытии запорных клапанов
8 создается сопротивление
перемещению жидкости и соответственно
поршням, что приводит к вращению картера
и передаче движения ведомому валу.
Запорный клапан 8 управляется от одного пункта с регулировкой частоты вращения
ведомого вала от нуля до равного частоте вращения ведущего вала.
Рис. 6.60. Шинно-пневматическая муфта. Диск 9 жестко закреплен на валу 8.
На валу 5 закреплен диск 4' с ободьями i и 3 и промежуточной шайбой 2.
Рис. 6.60
Рис. 6.61
408
Муфты
Баллоны б и 7 привулканизированы
к ободьям 1 и 3. Муфта включается
и выключается при подаче воздуха
в баллоны 6 и 7.
Приближенное значение
крутящего момента, передаваемого
муфтой, может быть найдено по
формуле
^ 1118 .10-«п^ (Giri + G^)] цКь
где ^min — наименьшее возможное
рабочее давление в кгс/см^; G^ -
масса подвижной части баллона
в кг; G2 — колодок, накладок
шпилек в кг; Г1 ~ радиус центра
тяжести баллона в см; г2 — радиус
центра тяжести колодок в см; п —
частота вращения в об/мин.
Рис. 6.61. Двухмоторный привод с электромагнитной муфтой. При включении
привода на рабочую скорость движение передается от двигателя постоянного тока
через червячную передачу 5 и далее на вал б при включенном правом
электромагните 4. Для передачи валу 6 движения с другой скоростью запускается
соединенный с валом 1 двигатель трехфазного тока и подключается левый
электромагнит 2, диск 3 притягивается к левой полумуфте, а муфта 4 выключается.
Муфта допускает дистанционное управление и электрическое регулирование рабочей
скорости.
Рис. 6.62. Электромагнитная муфта с неподвижными электромагнитами. Для
реверсирования ведомого вала 4 используются неподвижные магниты,
расположенные внутри полых конических колес 6 и 8, вращающихся в противоположных
направлениях. Корпусы 5 и 9 электромагнитов укреплены на общей втулке 3,
удерживаемой от вращения перегородкой 7, смонтированной на корпусе 11 (1 -
приводной вал; 2 — приводное колесо; 10 — якори электромагнитов)
САМОУПРАВЛЯЮЩИЕСЯ МУФТЫ
Рис. 6.63. Упругая центробежная муфта инженера Рыбчевского. Между
полумуфтами 1 и 3 установлены кольца 2 из прорезиненной ленты. При вращений
кольца прижимаются к полумуфтам центробежной силой и трением передают
крутящий момент.
М = 0fi07q\in^ (Rl + Rll
где q — масса ленты длиной 1 м.
Рис. 6.64. Центробежная фрикционная муфга. На ведущем валу 8 закреплена
втулка 1, вращающаяся вместе с фрикционными дисками 6 и 4, Детали 5 и 7
корпуса установлены на втулке 1 свободно. Во время пуска частота вращения
ведущего вала нарастает и под действием силы инерции грузов 5 диски б и ^
системой рычагов прижимаются к корпусу и вращают его. Диск ведомого вала
соединен с корпусом пальцами 2.
Самоуправляющиеся муфты
409
Рис. 6.63
Рис. 6.64
Рис. 6 65. Обратимая центробежная муфта с плавным включением ведомого
вача. Ведущими валами могу г быть вал 1 или 9. Телами, развивающими ценгро-
Ос/кные сипы, являются колодки 5 па диске 2 с иальпами 4, установленными на
валу /, и четыре конических сектора U) на вачу 9, стяпшаемьге кольцевой
пружиной 7 и вращаемые штифтами S. \icmi везущий вал 1, то в процессе разгона
К0Л0ЛК11 5 воздействуют на барабан бис помощью трения разгоняют вал 9.
Дополнитепьное давление на колодки сообщается после разгона от конических
секторов 10 через диск 3, который на вапу 9 установлен свободно и может
перемешаться впопь оси. Если ведущий вал 9, то сначала под действием пентро-
бе.кных chji конических секторов 10 возбуждаегся момент трения на скошенных
т.'рпах колодок 5, затем между колодками и барабаном 6. Пружины 11
обеспечивают постоянный контакт колодок 5 с диском 3,
Рис. 6 66. Центробежная муфта. Колодки 7 к втупке 2 ведущего вала 1
прижик1аюгся пpyжинa^ш 4, установленными на болтах 3. Пружины 8 на опорах 9
лредочраняют кочодки от перекоса. При соответствующей частоте вращения велуще-
ь^ вала кополки прижимаются к барабану 6 на ведокюм валу 5 центробежной
^'' lou и трением передают ему вращение.
Рис. 6 6/. Двухдисковая центробежная муфта. На ведомом валу 6 жестко
'^Пфеилен диск J, i{a ведущем валу 1 — все осташ^ные детали м;/фты. Трение
^1г/ь- ly T,jj^ клмл ?, -/ и 3 создается под дсйсхвпем пептробежных сип грузов 5.
i"*Hc. ()()S, ЦситробсАиая уируго-фрикциоппая муф1а 1И1женера Р. В. Фопаревой.
^^л\\1уфга 2, закрепленная па валу 1, hmcci че1ыре паза, в которых вставлены
*>-1ачки 6, коюрыс с выступами полумуфпл 2 соединены кольцевой пружиной,
Р^1сположениой в круювой выточке. Под действием центробежной силы кулачки 6,
Реодолевая силу упругости пружины, прижимаются к барабану 5 и трением
^^редают движение полумуфте 5. Между полумуфтой 5 и барабаном 3 установлен
резиновый амортизатор 4.
410
Муфты
Рис. 6,65
Рис. 6.66
Си wo I прав 1 чЮН}нес ч м) фты
411
J //
Рис. 6.67
А~А
^^
Рис. 6.68
l^iH- ()ЬЧ 1Дсн1}кЧ)сжная \;\ф1а для двух*. Kopt)ciHoio дрдиа 1сля к дв>м ме\.1ииз-
^''^^1 На диске 3, коюры!! соединен с валом I ненодвижно, ус1ановлены собачки 8
' '', евобод1ю враиипониюся на осях 5. Пружины 6 и 7 с pa'ЗJHIЧным нредвари-
^-JbiibiM натяжением \держиваюг собачки в исходном нoJЮжeнии, при коюром
-^^ья 9 и /о собачек не входят в зацепление с зубьями hikhbob 2 и 4.
^ ^''оачк!
ч cS и и
не ВХОДЯ! в зацепление с зубьями hikhbob 2 и
соединены с возд>ин1ыми демпферами 12 и 14 paunrnioii
'^^'Р<>ики иосредс1вом иа.п^цсв 13. Собачки имсюг также блокиру1онц1е крючки К,
^'^oiMionuie входи II, в зацсиление со шкивом юлько одпо!! in них.
^^ ^-'Рноначальнос наигжсиие нр>жины и coiipoi ивлсние движению дсктфера
^ Y- ^^'^ ^-^^^бачки рассчигапы laK, что при мало11 час юге вращения первой включаехся
сои '^ ^ ^'•^^^^одной ciyiicHH, а при большой 4acioie враидения (вследс1вис большою
быс ^^'^""^^^^^ движению демпфера тихоходной ступени) первой включается собачка
Р годной ступени. Для переключения шкивов необходима остановка вала 1.
412
Муфты
, Шкие Z снят
.6 ^Лч
А-А
Рис, 6.69
Рис. 6.70
Рис. 6.71
Рис. 6.70. Центробежная М}фта с шapикa^ш. На вед}щий ват М)фты насажена
втулка с юфрированным диском 3, на ведомы!! в an - барабан 2, в который
насыпаны сильные шарики \. При врапдении ведущего вала шарики располагаются
по внутренней поверхности барабана 2, врапи1Я его.
Рис. 6.71. Цеифобежпая пороптковая Myv|)ra. Ведуии'.м звеном является кожух i,
заполненный С1ачьиым порои1ком; ведомым ~ почумуфта 5 с прикрепленными к ней
лопастями 2 CTajn>noH порошок через лопасги coo6nuicr движение ведомому вал)
Рис. 6.72. Бесшумный храповой механизм трансмиссии ременной передачи
обеспечивает передачу движения только в одном направлении. Ведущий шкив -
на валу 1 с ведомым 4 связан храповЫхМ механизмом, собачка 5 которого
зацепляется с храповым колесом 7 ведомого шкива 4. Палец 9 включает, а палеИ ^
выключает собачку. Такой же храповой механизм связывает шкив 4 с вeдoмы^i
валом (храповым колесом б и собачкой 5). Этот механизм может быть
использован для передачи движения от двух источников движения поочередно без остановки
ведомого вала.
Си моуправляющиеся муфты
413
Рис. 6.72
i , 2 5
Рис. 6.73
Рис, 6.74
Рис. 6.73 Мзфта обгона. На одном валу закреплена детать 2 с з}бьями,
"Р'^фи'п, которых соо1ветсгвует зубьям храпового колеса, а на другом — барабан
^ '^падино!! для собачки 7. Вращение храпового колеса 2 относительно барабана 3
^^^iМожно только в направлении, указанном стрелкой.
^ Рис 6.74. Муфга свободного хода. Для собачки 2 в зубчатом колесе 3
^ веются вырезы, а у вала I — сквозной паз, расположенный по диаметру. Холос-
^ ход колеса 3 соответствует вращению вала 1 против часовой стрелки,
роцессе которого собачка 2 совершает в пазу возвратно-поступательное дви-
Pa''"f ("^'^остаток муфты). Вращение вала по часовой стрелке соответствует
^'^ему ходу, при котором собачка не может выйти из зацепления.
414 Ыуфпгы
Рис. 6.75. Фрикционная муфш свободного хода. Ведущий вал 1 муфгы полу,
часг колс6а1сльное движение ог специального механизма. Ведомое зубчатое
колесо 4 увлекается валом 1 при вращении по стрелке в результате
расклинивающею д,с11С1вия сухаря 5, прижимающего рычаг 2 к ободу колеса 4.
Рис. 6.76. Фрикционная муфиь свободною хода. Принцип дейспшя аналогичен
принципу муф1ы, показанной на рис. 6.75. Сухари I к ползунам 2 прижаты
пружинами 3
Рис. 6.77 Фрикционшлй механизм с пульсирующим движением ведомою вала.
При вран1,спни дрюйною эксцен1рика 5, 6, охва1Ываемо10 пазовым кольцом 4,
KOHCJ^ рычага 7 с роликом, расноложешнлм в пазу кольца 4, поднимается вверх,
зажим 8 заклинивается между неподвижными кольцами 1 и 2, а ось 10 рычага 7
с кольцом 3 ведомого вала хюворачивается по часовой схрслке. При втором
полуобороте эксцентрика рычаг 7 опускается, зажим 8 освобождается, а
растяну шя пружина 9 подтягивает его в исходное рабочее положение. Эксцешриситет-
сдвоенного эксцентрика 5, 6 регулируется.
Рис. 6.78. Механизм преобразования равномерного вращения кривошипа 1
в пульсирующее ведомого вала 2 с переменным углом поворота. Поставленное
условие выполняется при эксцентричном расположении оси звездочки 3 муфты
свободного хода. Механизм применяется в приводе подачи полировальных станков
для уменьшения шероховатости полируемых поверхностей.
Рис. 6.79. Муфта свободного хода. Представляет собой усовершенствованную
конструкцию. Для того чтобы удержать внутренние клинья 2 в постоянном
соприкосновении с внутренней обоймой 3, от которой отрывает их центробежная
сила, поставлены пружины. Натяжение пружин регулируется винтом L
Рис. 6.80. Гаечный ключ предельного момента. Вращению кулачка 1,
соединенного с закручиваемой гайкой болта или головкой винта посредством
надставки, препятствует ролик 2, установленный па рычаге 3. Предельный момент,
передаваемый ключом, зависит от силы упругости пружины 5, которая
регулируется гайкой па штанге 4 (на рисунке не показана). Максимальный момент,
необходимый для закручивания, соогветствуег предельно]му моменту ключа, поэтому
в конце за1яжки, когда усилие на ролик превысит усилие пружины, ролик 2
выходит из выемки кулачка 7, и ключ вращается вхо:юсгую.
Рис. 6.81. Кулачковая муфта свободного хода. Для одновременного включения
всех кулачков 2 в период рабочего хода муфта имеет сдвоенный сепаратор 1
и распорные пружины 5. На рис. 6.81, а показано положение кулачков при
свободном ходе; на рис. 6.81,6 — в начальный момент рабочего хода и па рис. 6.81,6
при полной нагрузке.
Рис. 6.82. Муфта свободною хода (рис. 6.82, а) с эксцсн1риковыми роликами,
предназначенная для передачи больших крухяпцгх моменгов. Ро.тики 3 соединены
между co6oii справа и слева випювыми пружинами 2, которые стремятся
повернуть их в рабочее гюJюжeниe (рис. 6 82,6), прижимая к поверхностям колец j
и 4. Па рис. 6.82,6 гюказан эксцентричный ролик с индивидуальной пружиной.
Рис. 6.83. Муфта свободттого хода с аксиадтьным смещением заклинивающих^-^^
шариков. Шарики 4 расположены между KJтиньями 1юлумуф1ы 2, жестко
закрепленной па валу 1, и торт^овтлми канавками дисков 3 и 6 ведомой части. Шарики
4 поджаты Т1ружипами 7, удерживаемыми сепараюром 5: При вратцетшп ттолу-
муф1Ы 2 в направлении сфслки (см. сечение /1—Л) шарики 4 заклиниваюi^-^^'
между паююпными /дорожками п к(^зп>цами 3 и 6 и перс тают движение полу-
муфте 8, Обрат тюе движение холосюс.
Рис. 6.84. Муфта свободного хода с випювыми пружинами. Ведущей частью
муфты является втулка 3, установленная в корпусе 4 на игольчатом и шарико-
/1-/1
нео-
Рис. 6.75
? 3
А-А
Рис. 6.76
Рис. 6.77
Рис. 6.78
416
Муфты
А-А
Рис. 6,79
Рис. 6J0
Самоуправляющиеся муфты
417
Рис. 6.82
во\г подшипниках. Втулка 3 получает
колебательное движение от коромысла
^. К ведомой полумуфге 12,
поддерживаемой двумя игольчатыми иод-
пиппшками, расположенными во В1ул-
^^^ 3, копсольно прикреплены три
1ипповые пружины 7, 8 и 9 посред-
сгвом втулки 10 цангового зажима
с конусом па гильзе 5. Правые концы
^'Р>>К1ш изогнуты и удерживаются
^"И1фта\пг 14, расположенными под
>i io\i 120^ По внутреннему диаметру
^'РУжины поддерживаются плаваюпдей
тр>окой б, что обеспечивает минималь-
l^i^e трение между пружинами и втул-
^^11 при холостом ходе.
7 I ^7
Рис. 6.83
Три винтовые пружины 16, 17 и 18 установлены на конце гильзы 5; правые
онды пружин, смещенные по фазе на 120°, соединены с гильзой 5 штифтами 15,
вые концы пружин изогнуты и служат упругой опорой для концов пружин
' о И Р (см. разрез ло А—А), При- вращении втулки 3 по стрелке В
14 Кожевников в др.
418
Муфты
А-А
пружины 7, 8 VL 9 слегка раскручиваются и трением между втулкой 3 и
пружинами 7, 8 и 9 передают движение валу 13. При вращении в противоположную
сторону пружины 7, 8 и 9 закручиваются и не препятствуют вращению втулки 3
при неподвижном вале 13. Предварительная упругая деформация пружин 7, 8 п 9
создается в процессе монтажа и фиксируется гильзой 5, которая затягивается
с помощью шпильки и и гайки 19. В этот же период закрепляются правые
концы пружин 7, 8 и 9 на полумуфте 12 посредством цангового зажима. Муфта
предназначена для передачи больших крутящих моментов и расположена в
масляной ванне. Насосом 1 осуществляется циркуляция масла и подача его на
трущиеся поверхности пружин и подшипников. На рис. 6.84,6 показан другой
вариант конструкции муфты, в котором опорой для концов пружин 7, 8 и 9 служат
отогнутые концы трех прутиков 20, расположенных под углом 120° и
прикрепленных к гильзе 5 кольцами 21.
Самоуправляющиеся муфты 419
рис. 6.85. Червячный редуктор с пружинной муфтой свободного хода.
Посредством червяка 6 червячное колесо 5, закрепленное на втулке 4, свободно вра-
шается относительно ведомого вала 12. Втулка 5 так же, как и колесо 5,
соединена с втулкой 4 шлицевым соединением. Во внутреннем пазу втулки 3
закреплен конец 7 пружины 8, который соединяет втулку 3 с втулкой 9. Второй конец
10 пружины 8 закреплен в отверстии диска 2, свободно вращающемся
относительно вала 12.
При включенном электромагните 11 диск 2 прижимается к закрепленному на
вапу 12 кольцу 1 и притормаживается, в результате чего пружина 8 закручи-
васюя, и]Ютно прижимается к валу и трением передает ему движение.
Рис. 6.86. Муфта свободного хода составлена из червячного колеса 7,
корпуса 2 и двух несамотормозящихся червяков 3. Во время рабочего хода
самоторможение обеспечивается коническими фрикционными муфтами с конусами 4.
Ведущим звеном может быть корпус редуктора или червячное колесо.
Рис. 6.87. Шкив клиноременной передачи с реверсивной муфтой свободного
хода. Направление вращения, при котором происходит заклинивание ролика 3,
зависит от положения вставки 1 в ступице щкива 2, установленного во втулке 4.
Вставка 1 устанавливается в заданном положении и фиксируется.
Рис. 6.88. Муфта свободного хода с храповиком, имеющим внутренний
зубчатый венец. Вместо собачек в специальных гнездах установлены полуцилиндрики
/, которые посредством пружин (на чертеже не показаны) всегда стремятся войти
в зацепление с колесом 2.
Рис. 6.89. Монтажный ключ с реверсивной муфтой свободного хода для
завинчивания и отвинчивания гаек и винтов без съема в период работы.
Изменение направления вращения корпуса 7, при котором происходит заклинивание
pojiHKOB 4, осуществляется перемещением сепаратора 3 вместе с роликами
посредством рычага 2.
Рис. 6 90 Муфта свободного хода двустороннего действия. Движение от обоймы
/ к ЗВС5ДОЧКС 2 и наоборот передается только в одном направлении (рис. 6.90 а).
Движение от звездочки 2 к вилке 3 и от вилки 3 к звездочке 2 передается
в двух направлениях (рис. 6.90, б и в). Движение вилки 3 в любом направлении
не нерсдасгся обойме /.
Рис 6 91. Двусторонняя муфта свободного хода. Движение валу 1 против или
110 часовой стрелке может передаваться с малой скоростью от колеса 2,
закрепленного на ступице барабана 3, или же с большей скоростью от колеса 5. При
движении колеса 2 по стрелке ролики 7 заклиниваются и вилки 4 с колесом 5
вращаются вхолостую. При передаче движения от колеса 5 в ту же сторону, но
^ большей скоростью вилка 4 передает движение валу 1 через ролики 6,
упирающиеся в выступ звездочки 8. При вращении колеса 5 в направлении,
противоположном колесу 2, вилка 4 передает движение валу 1 через ролик 7. Таким
образом, независимо от вращения колеса 2 валу 1 можно передавать движение
с оольшей скоростью в двух направлениях.
г'ис. 6.92 Двойная муфта свободного хода двустороннего действия. На валу 4
•креплены звездочки 2 и 3, угол заклинивания которых направлен в разные
ро 1ПЯ К^ежду роликами звездочек установлена вилка 7, жестко соединенная
шм 5. Движение о\ обоймы 1 к валу 4 и oi вала 4 к обойме / передастся
^^ чаиравлсниях с кругян^им момспюм, равным расчспюму. В соо1ве1С1вую-
"''чравлсниях нерсдаегся движение и вилке 7, о.цнако сопротивление движе-
lloi ^''''^" 01раничивае1 величину передаваемою момента при ведущей обойме 1.
•иоьом направлении вращения вилки движения обойме 1 не передается.
14*
ITn-n^VnVn^
Flic. 6.87
Рис. 6.86
Рнс. 6.88
Piic. 6.89
Самоуправляющиеся муфты All
Рис. 6.93. Реверсивная муфта свободного хода с автоматическим псреключе-
ттием. На ведущем валу 1 закреплена звездочка 2, которая посредством заклини-
вающихся роликов 4 передает движение обойме 5, установленной на полуоси б
автомобиля. Сепаратор 3 постоянно притормаживается силой трения, создаваемой
сухарем 8, прижатым к сепаратору пружиной 7. С изменением направления вра-
шсиия звездочки 2 сепаратор 3 поворачивается и устанавливает ролики 4 в
рабочее положение, соответствующее заданному направлению враще1шя.
Рассматриваемая система привода обеспечивает передачу движения одному из колес при
повороте автомобиля, когда второе колесо пробуксовывает, и в случае движения
по прямой.
Рис. 6 94. Невозвратная муфта. Вращение может передаваться в двух направ-
тениях, но только от вилки 1 к валу 2 через ролики 5. Втулка 3 неподвижно
закреплена шпонкой 4. Передаче движения от вала к вилке в любом
направлении препятствуют заклинивающиеся во втулке 3 ролики 5.
Рис. 6.95. Муфта свободного хода двойного действия для передачи небольших
крутящих моментов. Плавающая звездочка 1 имеет форму эллипса. Ролики 2 и 3
прижимаются к эллипсу пружинами 4. Крутящий момент от обоймы 5 к
звездочке i так же, как и от звездочки 1 ,к обойме 5, передается в двух
направлениях. Вилке 6, расположенной между роликами, передается ограниченный момент.
Рис. 6.96. Муфта предельного момента. Муфта встроена в червячное колесо
червячной передачи. Предельный момент, который может передать муфта,
регулируется затяжкой пружины 1 с помощью гаек 2.
Рис. 6 97. Однодисковая фрикционная предохранительная муфта, встроенная
в звездочку цепной передачи. Диск 4 с полумуфтой 1 соединен неподвижно
пальцами 2 с упругими кольцами 3. Болтами 5 регулируется предельный момент.
Рис. 6.98. Компенсационно-упругая муфта в соединении с предохранительной
многодисковой муфтой. Болтами 2, ввинчиваемыми в диск 1, регулируется
усилие пружины 3 и соответственно предельный момент, передаваемый муфтой.
Рис. 6.99. Муфта предельного момента. Полумуфты 7 и 3 в осевом паправ-
ЛСН1Н1 удерживаются радиально-упорным подшипником 2. Вращение передастся
шарами 5, установленными в отверстии полумуфты 3 и прижатыми к
профилированным канавкам полумуфты 1 пружинами 4, При перегрузке шары 5
перекатываются в канавках и сжимают пружины. При работе муфты возникает шум.
Рис. 6.100. Коническая фрикционная муфта с предохранительным устройством,
которое может включаться или выключаться на ходу. Ступица 7, два кониче-
^-^ки\ лиска трения 1 и отводка 8 вращаются с одной угловой скоростью. На
рисунке муф1а вюночсна — положение //, положение / — выключена. Вместе с по-
>1>муф1ой 2 вращае1ся профильная шайба 4, смещаемая в осевом направлении
^1 водкой 3 с пальцем 5, Если отводка 3 занимает положение IV, то система
P^iooiaei как обыкновенная фрикционная муфта. При установке огводки 3*в
положение ///, механизм с шайбой 4 и пальцем 6 pa6oiacr как предохранительное
><-ipoiiciBo, выюночающсс муфту в период перегрузки. Авюматчсскос выключение
-'^'Зфпл происходи г следующим образом: ^гри перегрузке муфт пробуксовывает п
|-ис1сма с шайбой 4 вращается относительно сис1смы с пальцем б, прикрсплен-
^^ к 01 водке 8. Профильная шайба 4, с которой соприкасается конец пальца б,
ремещает его направо с отводкой в положение I и выключает муфту. Таким
оразом, износ дисков при перегрузке будет минимальным,
i^jj.. ''^ ^ ^^^' ^<^^1С7рукция предохранительной многодисковой муфхы (Рис. 6.101, а,
2 ^^ °^"^- ^Уфга предназначена для передачи крутящего момента от полумуфты
Но!^^^^"^^""^^^ "^ ^^^^' зубчатому колесу или звездочке неподвижно ус1ановлсн-
на ступице полумуфты 1 со шпонкой 3.
Рис. 6.90
Б-Б
А-А
Рис. 6.91
Рис. 6.92
5~б
А'А
\^5 Рис. 6.93
Рис. 6.94
4^4
Муфты
Рис. 6.96
Рис. 6=97
Рис. 6.98
Itj
Рис. 6.99
Рис. 6.100
Самоуправ ьчющиеся муфты
425
А-А
Рис. 6.101
Соединение многодисковой муфтой двух валов, оси которых расположены
соосно, требует хорошей соосности валов, что не всегда может быть достигнуто
при монтаже привода.
Сдвоенная, многодисковая и цепная МЦ-22 по МН2091-61 муфта показана
на рис. 6.101, а выше оси. Рассматриваемая муфга допускает перекос и смещение
осей соединяемых валов. Полумуфта 4 устанавливается неподвижно на одном из
соединяемых валов, а полумуфта 7 ~ на втором. Средняя полумуфта 5 центри-
р\ется с полумуфтой 7 цилиндрическими поверхностями с бронзовой втулкой
^' фиксируется винтом 6 по круговой выточке. На рис. 6.101,6 дана модифи-
1^ация муфты, изображенной на рис. 6.101,а выше оси. Полумуфты 5 и 7 в рас-
^-^^'сприваемом варианте центрируются одним из соединяемых валов.
ис 6 102. Выключающее устройство в предохранительной муфте двусторон-
^^ о действия. Диски муфты зажаты тарельчатыми пружинами 5 через диск 7.
_^11лие^ пружин регулируется гайкой 4 и фиксируется контргайкой 5. На конце
^^_^- га ^ закреплен зубчатый сектор 6, сцепляющийся с зубьями зубчатого колеса
левх^*^ ^^^^^'^^^ ^' •'^^•^^^"^^^ болгов (через один) имеют правую, а остальные-
м\чЬ ^ ^^^^^У- При перегрузке полумуфта 1 поворачивается относительно полу-
переч^^ ' "^" ^^^^ зубчатые секторы поворачивают все болты и половина из них,
пр\ж- ^^^'^^ '^^^^ '^ вправо, сжимают пружины. Последнее ослабляет силу нажатия
н.жип на диски, и муфта выключается.
^Ь1К1ю Предохранительная мноюдисковая муфта с электромеханическим
^ обычн^^^^^"^ Устройство, выключающее двигатель, может быть применено
ои муфте, работающей на принципе трения. На приставке 3, которая
426
Муфты
Вид А
Рис. 6.102
д Э
Рис. 6.103
Рис. 6.104
прикреплена к полумуфте 1 винтами, на изоляционной прокладке 7, установлены
кольца — токопроводящее б и изоляционное 4. К щетке 5, скользящей по кольцу <^'
подводится ток. Щетка 8, которая скользит по кольцу 4, установлена на пальце У?
прикрепленном к полумуфте 2, и может псрсмси1а1ься вдоль оси. При перегрузке
муфта 1 поворачивается огиоситсльно полумуф1ы 2, при этом щетка 8 через
систему рычагов сдвигается по пальцу 9 с кольца 4 на кольцо 6, замыкает
электрическую цепь и через реле выключается злектродвигатель.
Самоуправляющиеся муфты 427
Рис. 6 И)4. Предохранительная муфта с термическим выключающим элементом,
пру/кины 2 прижимаю г диски муфгы через шаНбЕл 1, изготовленные из
легкоплавкою о иовянисювисмутокальциевого сплава. В период пробуксовки муфты
происходит нагрев дисков и шайб 7, которые расплавляются, и муфта выключается,
так как голнип1а шайб примерно равна величине деформации пружины.
рис. 6.105. Предохранительная фрикционная муфта инженера Н. Д. Вернера
обладает повышенной точностью в отношении величины передаваемого
предельного момента. Крутящий момент от диска 2 к валу 8 передается трением между
щеками 3, 4 и 5, которое создается силой упругости пружины 6. Между дисками
3 и 5 но окружности радиуса г размещены шарики 1 в лунках переменной
глубины. При перегрузке диск 3, преодолевая силы трения, проворачивается, а шарики
;, перекатываясь по канавкам, создают осевую силу Р, разгружая диски 3 и 5
от давления, создаваемого пружиной 6. Гайкой 7 регулируется усилие пружины.
Предельный ьюмент, передаваемый муфтой, ощ-)еделяется по формуле
^ ^ tga^ii^ep№- 1)
где Рп - усилие пружины; к - число пар трущхгхся поверхностей дисков;
г
tga <
i^cp^t'
остальные величины обозначены на чертеже.
Рис. 6106. Предохранительная фрикционная муфта повышенной точности.
Фрикцио1П1ые диски 6, 7 и 8 посажены на шлицах на втулке 2, свободно
проворачивающейся на валу 1. Момент от вала i к указанным дискам передается через
несколько пар цилиндрических колес 9, 10, с центральным колесом 10. На колесе
9 создается момент, под действием которого на винте 5 возникает осевое усилие,
уменьшающее давление тарельчатых пружин 3 на диск 6. При достижении
предельного момента диски пробуксовывают. Гайка-винт 4 с праюй и левой
несамотормозящейся резьбой обеспечивает нормальную работу муфты при реверсивном
ДвиАении. Сила упругости пружины 3 определяется по формуле
Q = M
2{Dl-Dl) . 2zc
Lnfe{D|-£)D Ziodcptg(f
j + Pi)}
где к - число пар поверхностей трения; d — средний диаметр резьбы винта;
V - угол подъема резьбы винта и винта-гайки; D2 и Dj ~ диаметры трущихся
поверхностей дисков.
о частном случае, когда предельные моменты должны быть одинаковыми, прп
реверсивном вращении вала
4р1 tg(v|^ -f pi) = ^/ср2 tg(\|/2 + Р2).
Поп '^^ '^^^' предохранительная фрикционная муфта повышенной точности с рас-
д^Р . ^^'" "1^фиками. В отличие от муфты, изображенной на рис. 6.106, разведение
про! ^^ ^^ ^ ДО ведичины, при которой достигается проскальзывание дисков,
^<ен1 ^^'^"'^ "Р" перемеще1ши втулки 4 по резьбе вала 1. Шарики 5, располо-
^ в отверстиях втулки 4у прижаты с двух сторон фасками ступиц дисков
428
Муфты
А-А
Рис. 6.105
Рис. 6.106
2 и 3 я опираются на коническую поверхность вала 1. При передаче крутяшего
момента втулка 4 перемещается по резьбе вала и выжимает шарики в радиаль
ном направлении, воздействуя таким образом на пружины через ступицы диско
2 и 5.
А~А
Рис. 6Л (У7
Рис. 6.108
430 Муфты
Усилие Q пружины определяется по формуле
3 {Dl - D\) cos р
е-м
■ +
kyi Ф1 - Dl) rfcp tg (v|/ + p) (sin p + Ц1 cos p) (ctg a + ^i)
где M — предельный крутянщй момент; Di и D^ — со ответствен по наружный и
внутренний диаметры диска; ц — коэффипиент трения между дисками; \.i^ — ко1ф,
фициент трения между шариками и соприкасающимися с ними деталями; к — число
пар поверхностей трения; р — угол наклона образующей конической поверхности
вала; а — угол фасок ступиц дисков; ^ср "" средний диаметр резьбы на валу;
р — угол трения винтовой пары; v|/ — угол подъема винтовой линии резьбы.
Рис. 6.108. Предохранительная муфта повышенной точности, не требующая
регулировки после износа дисков. На валу 13 установлена шлицевая втулка 2
с фрикционными дисками 5, ^ и 7. Диски 5 и 6 установлены на направляющих
шпонках полумуфты 1, Сила трения между дисками создаегся упругими силами
пружины 8. Три ролика 9 установлены на пальцах 10, жестко соединенных
с диском 12, закрепленном на валу. Кулачок 11 соединен с нажимным диском 7
резьбовым соединением. Вращая кулачок 11 относительно нажимного диска 7,
регулируют положение паза кулачка относительно ролика 9, затем фиксируют.
Пружина 8 прижимает фрикционные диски муфты с усилием несколько
большим, чем это необходимо для передачи предельного момента. В период перс-
дачи крутящего момента ролики 9 нажимают на рабочие криволинейные
профили пазов кулачка (см. вид Б), а составляющая S нормального давления iV,
направленная параллельно оси вала, стремится переместить нажимной диск 7
в сторону, соответствующую сжатию пружины 8. Результирующее усилие Т= Q — 8,
действующее на диски, соответствует расчетному, при котором момент трения
дисков равен предельному моменту.
При износе дисков нажимной диск 7 перемещается, приближаясь к упорному
диску 3. При этом деформация пружины 8 уменьшается и соответственно
уменьшается сила Q нажатия на диски. Очевидно для сохранения постоянства
предельного момента необходимо изменять величину осевой составляющей при
постоянном усилии Р так, чтобы результирующее усилие Т пружины, действующее па
диски, оставалось бы достоянным, т. е. Т— Q^ — S^ — const. Последнее достигается
изменением угла а наклона профиля кулачка в соответствующей точке касания
его с роликом 9.
Сила упругости пружины определяется по формуле
М / 1 R,
i^c \ k\i Гс tg а
где М — предельный крутящий момент; R^ ^ , ~ средний ради\^
3 (У)^ -~ Dl)
кольцевой поверхности трения; /с — число пар поверхиостей третшя; \х — ктфФ'^'
циент трения скольжения; Гс — средний радиус паза кулпчка; а — угол накпо1П
паза кулачка.
Рис. 6.109. Предохранительная муфта повышенной точное!и с гибкой лсптои-
Барабан 5 муфты неподвижно установлен на одном из соединяемых ваиов.
поводок 14 — на втором. Одна пара одинаковых по консгрукцпи рамок 7 и '"^^
сложенных по типу ножниц, свободно установчсиа на ступице барабана 5, втор^^^^
пара рамок 12 и 13 - на ступице поводка 14, Концы гибких стальных лет ^^
Самоуправляющиеся муфты 431
(Ьппкциоиными обкладками 9 прикрепляются к внснпшм концам рамок. К но-
Боаку ^4 прикреплены пальцы 11 с роликами бочкообразной формы. Один из
пальцев усхановлеп между рамками 7 и 8, второй — между рамками 12 и 13.
]Гпу1ящий момент от одною вала к другому, в jho6om направлении, нсред,ае1ся
силами трения, создаваемыми между обкладками и внугрснпей поверхностью
барабана, пружинами 3,
Усилие пружины 3 регулируется винтом L Расстояние h от оси пружины до
цептра муфты изменяется в такой последовательности: вращая винт 6,
сокращают расстояние между опорами 2 и 4 пружины до величины, позволяющей без
препятствий перемещать ее между зубчатыми рейками рамок. После установки
пружины в заданное положение, винт 6 вращают в противоположном направ-
лепии /ю момента силового замыкания опор пружин с зубчатыми рейками рамок.
Надежность силового замыкания пружин с рамками, с учетом износа обкладок,
обсспечивас1ся дополнительным вращением винта 6 до образования достаточного
зазора между го;ювкой винта и плоскостью ее упора,
Момсш, передаваемый одной парой рамок, определяется по формуле
M„i-r„i/u(^'c + l)fl- -1
1ДС Т;,1 - усилие ОДНО!! из пружин рассматриваемой пары рамок; /ij. — расстояние
от центра муфты до оси пружины, создающей усилие T;^i; /с = -— коэффи-
цпент неравномерности распределения усилии между пружинами; с = отно-
тление рассюяний между осями пружин и центром муфты; е — основание
натуральных локфифмов; )i — коэффициент трения скольжения; а — угол обхвата
обкладкой.
Предельный момент, передаваемый муфтой с двумя парами рамок
М„ = Мщ + Мп2.
В частном случае, при /с = 1 и с = 1,
М„ = 4Г„л(1-^).
Ширина асбестовой обкладки определяется по формуле
b =
DMe"^-l)M '
^ле D ~ диаметр барабана; [q] — допускаемое удельное давление для материала
^^ис 6 110. Гидравлическая муфта предельного момента. На ведущем валу 1
■ ■ i^^bi закреплено коническое колесо 2 дифференциала, на ведомом валу 11 —
лесо 5. Оси сателлитов 3 дифферснтцшла усгановлепы в корпусе 4 муф1Ы. На
момом коленчатом валу И закреплен кулачок 8, к рабочей поверхности которого
нь^^^^ "'^^ ^ ^leibipex сторон) прижаты ролики 7 пружинами 6, вмонтирован-
'^1 в корпус 4 муфты. Шейка коленчатого вала 11 шатунами 9 соединена
432
Муфты
А-А
Рис. 6.109
Рис. 6.110
с поршнями 10, которые также размещены в корпусе муфты. Свободное
пространство в корпусе муфты заполнено маслом. Сила упругости пружин 6 и
отверстия в поршнях 10 рассчитаны так, что при передаче крутящего момента, равного
или меньше предельною, все детали муфты вращаются как одно целое. С У^^'
личением крутящего момента выше предельного корпус муфты проворачиваете
СамоуправАчюыщеся муфты 433
юсительпо вала 7, что приводит к снижению частоты вращения вала 11,
V осматриваемая муфга может быть использована как вариатор скорости с авто-
1тическйм регулированием частоты вращения вала 11.
рис. 6.111. Двухступенчатая реверсивная муфта для работы по циклу: рабочий
_ останов — обратный ход с увеличенной скоростью — останов. Ведущий вал,
которого передается движение муфте клиноременной передачей, работает ревер-
сивно с постоянной частотой вращения. Рабочий ход - при вращении шкивов
4 и 3 против часовой стрелки втулка 2 перемещается вправо по левой резьбе
вата 6 и создает момент трения на поверхности конической муфты 5 вследствие
того, что сумма моментов трения между шкивом 3 и втулкой 2 и между шкивом
4 и втулкой 2 больше момента трения на цилиндрической поверхности резьбы
под действием осевого усилия, возникающего от разности моментов трения.
Шкив 3 вращается вхолостую.
Обратный ход с увеличенной скоростью - шкив 3 вращается по часовой
стрелке с большей скоростью, чем шкив 4, В результате этого заклиниваются
ролики 7 муфты свободного хода, втулка 2 свинчивается влево и зацепляется
с кулачковой иолу муфтой 1. Усилие включения муфты при рабочем ходе
Ml + М2 - Мз
^ср tg (а + р)
где Ml - момент трения между шкивом 3 и втулкой 2; Мг — то же между
шкивом 4 и втулкой 2; Мз — то же между цилиндрическими поверхностями резьбы
вала 6 и втулки 2; d^p — средний диаметр резьбы на валу б; а — угол подъема
резьбы; р — угол трения.
Надежная работа конической муфты обеспечивается при соблюдении условия
H^>tg(a + p),
«ср
где |1 - коэффициент трения скольжения на торце ступицы шкива 4; Dcp —
средний flnaNicTp кольцевой поверхности торца шкива 4.
Рис. 6.112. Кулачковая муфта с автоматом выключения. Ведущей частью муфты
является маховик или зубчатое колесо, соединенное с кулачковой шайбой 12
и вращающееся на валу свободно. Движение от кулачковой шайбы 12 ведомой
части 11 муфты, установленной на направляющих шпонках, передается
следующим образом: посредством педали или рукоятки крючок 3 перемещается вниз,
а вместе с ним перемещаются цилиндр 6 и ролик 10, сжимая при этом пру-
^^^ину 5 Полумуфта 11 под действием пружин 8 перемещается вправо — включается
кулачковая муфта, происходит вращение вала, а выступ Л на детали И отжи-
^"^'ает рычаг 7, который своим нижним концом 1 нажимает на толкатель 2,
отжимает пружину 4 и сбрасывает крючок 3 со штифта цилиндра 6. Припод-
^тыи цилиндр 6 с роликОхМ 10 встречается со скошенной шайбой 9 и, смещая
олумуфту И влево, выключает муфту.
^ ис 6.113. Кулачковая однооборотная муфга. На распределительном валу
клинеи диск 1 с переставным упором 2, приподнимающим конец рычага 3. При
вороге рычага палец 5 опускается и пружина, помещенная внутри полумуфты 4
РУжина на рисунке не показана), перемещает полумуфту вправо, включая кулач-
Mvd ^^ ^'УФ'У- Палец 5 будет находиться на цилиндрической поверхности полу-
^^Фты 4, гак как паз при включении переместится в осевом направлении. После
ДСП ^^^^^"'^^ одного оборота благодаря фигурной выемке в полумуфге, в которую
дает палец 5, полумуфта отожмется влево, осуществляя выключение. С ло-
Рис. 6.111
Рис. 6.112
Си моуиравляющиесч муфты
435
Рис. 6.113
цу,1о рычага 7 и пружины 6 производится
'к,(,хс1ппя поиумуфты 4 при включении.
рлс. 6 114 Механизм выключения
посредством муфгы с поворотной шпонкой. Кулачок
о ЯВЛЯ10Н1ИЙСЯ окончанием ншонки 7, находится
Г кот акте с огводкой 3, связанной с педалью,
rjpjj нажатии па недаль шпонка с кулачком
освобождается и под действием пружины 4
стреми 1ся повернуться. Когда против шпонки
окажется одна из выемок в маховике, последний
соединится с валом пресса. После освобождения
педали отводка 3 сместится вверх и нажмет на
к\ 1ачок 2. После того, как муфта совершит
полный оборот, ншонка выйдет из зацепления,
вал пресса остановится.
Рис. 6.115. Механизм автоматического останова. Эксцентрик б изготовлен как
одно целое с коленчатым валом. Кольцо 5 со штифтом 1, имеющее продольный
разрез, расположено в ступице маховика 4. Между эксцентриком 6 и кольцом 5
размещен клин 3. При нажатии педали останов 2 освобождает штифт 1, кольцо
разжимается пружиной 8, начинает вращаться вместе с маховиком, клин 3 с
усилием входит между кольцом и эксцентриком, увлекая вал. При освобождении.
педали останов 2 упрется в штифт, кольцо сожмется и расцепится с
маховиком. Тормозной участок 7 кольца 5 позволяет коленчатохму валу всегда
останавливаться в верхнем положении.
Рис 6.116. Механизм поворотной шпонки. Механизм поворотной шпонки
управляется рычагом 4, который перемещается вниз посредством педали.
Рычаг 2 включения, соединенный с рычагом 4, сжимает пружину 3 и
освобождает собачку 1 поворотной шпонки. При этом пружина (на схеме не
показана), соединенная с собачкой 1 шпонки, поворачивает шпонку в положение «Вклю-
МахоВик
не /шказан
Рнс. 6.114
436
Муфты
Рис. 6.115
Рис. 6.116
чено». Положение рычагов при
включенной муфте показано шгрихпунктирпыми
линиями.
Система рычагов в исходное
положение возвращается пружиной 5 при
освобождении педали. Пружины 5 и 6 служат
для амортизации ударов и удержания
рычага 2 в его крайних положениях.
Рис. 6.117. Однооборотная муфта
летучих ножниц. Соединение ведущей части 1
муф1ы с ведомым валом 6, на котором
заклинен многогранный призматической
формы барабан 2, осуществляется при
перемещении упора 7 вниз. При
опущенном упоре 7 под действием пружины S
диск 4 с диаметром отверстия больше
диаметра вала, повернувшись вокруг закрепленной на детали 5 оси А, сообщает
движение через ползушки на оси В диску 3 и жестко связанному с ним кольну
с роликами. Ролики, заклинившись между деталями 1 и 2, включают муфту-
Совершив один оборот, диск 4 встретит приподнятый в исходное положение
электромагнитом или пружиной упор 7 и повернется вокруг оси А вместе
с диском 3, растянув пружину 8 и выключив муфту. Муфта оказывается
подготовленной для срабатывания в последующем цикле.
РАЗДЕЛ 7
МЕХАНИЗМЫ С ПРЕРЫВИСТЫМ ДВИЖЕНИЕМ
ВЕДОМОГО ЗВЕНА
в пигоматически и полуавтоматически деиствуюпщх машинах встречается
нсобходимосгь оиизодически сообнипь звеньям механизма движение с последующей
полной остановкой, продолж[1тельность которой может быть неопределенной или
заданной. Для этого могут быть использованы, кроме кулачковых, еще и другие
механизмы, особенно в тех случаях, когда закон движения ведомого звена не
имеет cyniecTBCHHoro значения.
Для сообп1сния прерывистого двиукения ведомому звену в одном направлении
с заданными осгановками могу г быть использованы механизмы с односторонне
действуюн^ей связью: механизмы, вырождаюнп1еся в другие механизмы при
определенных положениях начального звена; механизма, некоторые точки звеньев
которых на отдельных участках траектории описывают кривые, близкие к дуге
окружности или отрезку прямой, и др.
К механизмам с односторонне действующей связью необходимо отнести
храповые и анкерные. К вырождающимся механизмам — мальтийские и звездчатые
неполные зубчатые колеса и др. Храповые и анкерные механизмы, а также
неполные зубчатые колеса не могут быть использованы в быстроходных машинах,
особенно в тех случаях, когда прерывистое движение с остановками создающими
удары валам со значительными массами передается в начале или конце фазы
движения.
Для идеальных мальтийских и звездчатых механизмов, а также для неполных
зубчатых колес можно получить движение без ударов, однако в начале и конце
фазы движения в этих механизмах сила прикладывается мгновенно вследствие
разрыва кривой ускорения в эти моменты времени. При конструировании маший
имеет значение правильный выбор механизмов с прерывистым движением, поэтому
в дальнейшем будет дана краткая их характеристика.
Мальтийские механизмы представляют собой часть кулисного
механизма с качающейся кулисой В зависимости от того, какая из частей, на которые
делится центром пальца кулиса при крайнем ее положении, использована,
получаем мальт1п1ский механизм с внешним (см. рис. 7.33) или внутренним (см. рис. 7.35)
зацеплением. Различные соотношения между фазами движения и покоя могут быть
получены в зависимости от параметров мальтийского механизма, т. е. от
количества цевок на ведущем звене и их расположения, а также количества прорезов
па ведомом звене. Произвольно задаваться этими параметрами нельзя.
При равномерном расположении прорезов мальтийский механизм принято
называть правильным. Если число прорезов к, то угол поворота креста (см.
Рнс 7 33) 2ф = ——. Ось паза при безударном входе цевки в прорез касается
окружности центра цевки, поэтому угол поворота ведущего звена
2а = я — 2il/ = 7c{l —-
^гол поворота, соответствующий фазе покоя креста,
27Г - 2а = 71 ( 1 Н
к
4^8 Мсхшппмы с прерывистым двгтсеиием ведомого звена
Если Т-время одного оборота ведущего звена, Т;, и TJj — время движени
и покоя крес кц то
Так как к - целое число, то Тд = О при к — 2, т. е. число прорезов должно
быть больше 2:
Т Т к'
Если на ведущем звене число цевок т, то
т
m у -Г
.Т Т 2 *^ fc
1
Очевидно, что
1т,
поэтому
о < -Ц;г- < 1,
2
m <
'-f
при к — Зт < 6; при /с = 4т < 4 и т. д.
Полученным соотнонюнием можно пользоваться при определении числа цевок
т, если число прорезов к задано.
Соотношение между pa3MepaNHi правильного мальтийского креста следуюЩ^^^-
JR-/sin~,
где / - расстояние между центрами кривошипа и мальтийского креста; R - раД"У*^
кривошипа.
Механизмы с прерывистым движением ведомого звена 439
■у момснг входа цевки в паз малыийски!! крест правильною безударною
л1ечс1низми M1H0BCHH0 приобретет угловое ускорение
i> =
/COS—-
к
и дIIнa^пlчecкoe давление на цевке
т тс ,1 п п
/cos—- г COS" --
к к
J - ^юмeнг пнсрдии масс, связанных с крссюм.
Закон изменения уиювой скорости и ускорения малыппского креста такой же,
как и для кулиспою механизма (см. рис. 7.30, 0).
В неоднородных мальтийских механизмах (см. рис. 7.37) cooi ношения между
о [ДОЛЬНЫМИ фазами движения и покоя различны. В этом механизме число
прорезов должно бьпь кратным числу цевок: am — к; (л —частота врапдения
ведущего звена за один оборот неправильного малыийского креста).
Кроме тою, должно быть удовлетворено еще полученное выше соотношение
между числом цевок и числом прорезов:
т <
Размеры звеньев могут быть определены из следующих соотношеш1Й;
R'l — I sin 92 и R\ -I sin ф2.
01 дельно следует рассмотреть так называемые ударные мальтийские
механизмы. В сравнении с безударными они имеют следующие особенности.
1. Более широкие пределы относительной длительности рабочих ходов и
периодов покоя креста за счет изменения угла поворота цевки за один полный
оборот креста. Если в безударных механизмах этот угол определяется числом
прорезов п креста, то в ударных при п = const угол поворота цевки может
изменяться в широких пределах варьированием / и Я;
2. Возможность осуществления двухпрорезн-ых механизмов, механизмов с
односторонним вращением креста и цевки при наружном зацеплении, многоцевочных
^1еханизмов с внутренним зацеплением и др.
Вследствие неизбежных ошибок и неточностей изготовления и монтажа
теоретически безударные мальтийские механизмы становятся ударными. Поэтому при их
Проектировании необходимо предусматривать систему упругого звена, включенную
кинематическую цепь механизма.
^^еполные зубчатые колеса (см. рис. 7.111). Вращение ведомого
^^спа, имеющего зубья по всей окружности, будет происходить в пределах угла 6
i^opoui всдуп^сго колеса. Ecjhi ведущее колесо имеет один зуб, то ведомое
Ко i^cci ')Q ^ ^ 2к
за один оборот ведущего повернется на yiол о = ■. Сюнень пере-
Z
440 Механизмы с прерывистым движением ведомого звена
крытия S при отсутствии переходных кривых должна быть кратной числу ]^
зубьев неполного колеса. Для эвольвентного зацепления при /с = 1 8 = 1. fjpj^
/с ^ 2 степень перекрытия при зацеплении промежуточных зубьев может быть
больше единицы, но в этом случае зубья на неполном колесе по высоте
различны, поэтому во всех случаях следует полагать 8=1, подбирая соответствующей
величины высоту головок зубьев колес. Длина рабочей части линии зацепления
аЬ = 8^5 cos ois = t cos a^,
где ^5 — шаг; ols — угол зацепления.
Время движения и покоя при к зубьях на ведущем колесе
__ 5 30tk ^ _ 27CJ-5. г-^-т л-т '
■'д — — "7i > ^п — 3 J— — ■'д'+'-'п»
т. tk ^JL^i^ ^^
Т 2nRj^ Т 2яКх
Механизм работает с ударами в момент входа и выхода зубьев из
зацепления. Для уменьшения ударов колеса иногда снабжают перекатывающимися
рычагами (см. рис. 7.111). Очертания рычагов следует подбирать таким образом,
чтобы угловая скорость ведомого колеса изменялась плавно от нуля до значения,
определяемого отношением радиусов начальных окружностей колес.
ХРАПОВЫЕ МЕХАНИЗМЫ
Рис. 7.1. Храповой механизм-с фигурной собачкой. Собачка 3, скользящая по
неподвижному пальцу 2, при некотором положении рычага 1 входит в
зацепление с храповым колесом 4. Угол качания рычага ограничивается выступом на
собачке 3, упирающимся в зуб храпового колеса.
Рис. 7.2. Храповой механизм, применяемый в быстродействующей телеграфной
аппаратуре. Рычаг 2 приводится в движение от кулачка 1. Положения храпового
колеса 3 фиксируются защелкой 4, так как возможны разные углы поворота
храпового колеса, сообщаемые ему собачкой.
Рис. 7.3. Храповой механизм. Кривошип 2 поворачивает ведомый диск 3,
зацепляясь с цевками 4. Собачка 1 фиксирует диск 3 в момент паузы.
Рис. 7.4. Храповой механизм, в котором двуплечий рычаг 2 зацепляется с
колесом 5 и приводится в движение кулачком 1. Для этого механизма целесообразно
применение защелкивающей пружины 4.
Рис. 7.5. Регулируемый храповой механизм. Собачка 2 укрс41лена на планке L
совершающей возвратно-поступательное движение с постоянным ходом. Рычаг о
имеет лапку 5, по которой вначале скользит носик 4 собачки, а затем собачка
падает на зубья храпового колеса и поворачивает его. Чтобы увеличить угол
поворота храпового колеса, рычаг 6 нужно повернуть вправо, а для того, чтобы
уменьшить — влево и зафиксировать в заданном положении. Механизм встречается
в пишущих машинках.
Рис. 7.6. Спуск-регулятор. В момент паузы (рис. 1.6, а) зуб колеса упирается
в подвижную собачку 1. При повороте регулятора в направлении стрелки Л
собачка 1 освобождается, а зуб колеса стопорится неподвижной собачкой -
(рис. 7.6,6). При отклонении регулятора против стрелки собачка 2 освободит колесо,
храповые механизмы
441
Рис. 7.1
Рис. 7.2
Рис. 7.3
2 1
Рис. 7.4
"Чу^ "Ч/^
Рис. 7.5
а) Ю
Рис. 7.6
442 Механизмы с прерывистым дпыукеиием ведомого звена
которое вновь будет остановлено собачкой 1. Для поворота колеса на один i\f;
регулятор должен сдслагь два качания. Механизм применяется в пишущих мд,
нитках.
Рис. 7.7 Фрикнионный храповой механизм. При покачивании коромысла л
относительно оси вала 5 против часовой стрелки подпружиненная серьга 3 и
башмак 2 зажимают и проворачивают фланец ведомого фрикционного колеса 1. Прц
покачивании коромысла по часовой стрелке — холостой ход.
Рис. 7.8. Храповой механизм с внутренней собачкой!. На оси закпинеп диск 1
несущий собачку 2, заскакиваюп1ую в пазы храпового колеса 3, связанного
с венцом зубчатого колеса. Механизм применяется в цепи подач
продольно-строгальных станков.
Рис. 7 9. Храповой механизм с внутренним зацеплением. Призматической формы
собачки 3 свободно вложены между звездочкой 2 и зубчатым ободом 1. При
вращении звездочки по направлению стрелки собачки выходя! из зацепления, про-
тив стрелки — собачки заклиниваются.
Рис. 7.10. Схема привода шовной машины для шаговой сварки. Движение
ролику-электроду 5 передается от шкива 1 посредством кулачка 2 подачи и
храпового механизма 4. В левом крайнем положении механизма подачи кулачок
3 замыкает цепь 9 обмотки трансформатора, при этом в зоне контакта с
роликами 5, 8, между соединяемыми деталями б и 7 возникает электрическая дуга,
и детали свариваются.
Рис. 7.11. Храповой механизм с тремя собачками. Зубчатое колесо 1, жестко
связанное с храповым колесом 2, получает прерывистое вращение в результате
покачивания заклиненного на валу 3 коромысла с тремя собачками 4 от тяги, не
показанной на чертеже. Радиусы-векторы собачек Схмещены один относительно
другого на угол, кратный ^/з шага, вследствие чего подача может совершаться
с точностью до 7з шага храпового колеса. Ведущей всегда будет та из собачек,
которая в крайнем положении расположена ближе остальных.
Рис. 7.12. Двойной храповой механизм. На ведомом валу 6 закреплено
неподвижно храповое колесо 1. На ступице колеса 1 подвижно установлены храповое
колесо 2 и коромысло 4 с собачкой 5. Ширина собачки равна ширине
храповых колес 1 и 2. Шатун 3 сообщает коромыслу колебательное движение.
При попадании собачки во впадипу колеса 1 (на рисунке сплошными линиями)
валу 6 передается движение. При установке собачки на средней части зуба колеса
2 (на рисунке штриховыми линиями) колесо 1 неподвижно, а колесо 2
поворачивается на один зуб. Колесо 2 может иметь различные числа зубьев, что
позволяет получить различные числа пропусков движения вала 6 при постоянном угле
качания коромысла.
Рис. 7.13. Храповой механизм для автоматического останова. На ведомом
валу 7 заклинено храповое колесо 5, а на втулку 8, свободно вращающуюся отно-
<:ительно вала, посажено вспомогательное храповое колесо 4, изготовленное как
одно целое со щитком 2, перекрывающим три зуба колеса 5. С помощы^
рычага 3 приводятся в движение собачки 1 и 6. Остановка храпового колеса -<
а следовательно, и вала 7 происходит на время перекрытия щитком зубьев колеса -"^
Движение возобновится после того, как собачка 6 переместит вспомогательное
храповое колесо 4 за пределы области зацепления собачки 1 с колесом 5. ИР'
16-зубых храповых колесах остановка вала 7 соответствует Vie оборота хр^'
нового колеса, а движение — ^^/le оборота.
Рис. 7.14. Храповой механизм ручного реечного пресса. На ведущем в^- -^
заклинен рычаг 1, несущий ось собачки 5, и палец 2, на который насажена р>^ ^
ятка 4, снабженная U-образным пазом, охватывающим закрепленный в стапй!^'
Храповые механизмы
443
Рис. 7.7
Рис. 7.8
Рис. 7.9
Рис. 7.10
Рис. 7.11
Рис. 7.12
444
Механизмы с прерывисты\t движением ведомого звена
Рис. 7.13
Рис. 7.115
палец 3. Передача движения от рукоятки на ведомы!! вал 6 птучается дв}"^'
ступенчатой с большим передаточным отношением. Рукоятка 4, 01П1раясь на палеи
5, передает усилие через палец 2 на конец рыча!а i, воздействующий через ХР'^'
повой механизм на ведомый вал.
Рис. 7.15. Храповой механизм, используемый в механизме подачи автомата Д-^^
изготовления железнодорожных костылей. Собачка 2, снабженная с двух сторон
консольными роликами 4, сопрягается с угловыми рычагами i, связанными межД)
собой винтами 5 и рукояткой 8. Рычаги 1, поворачивающиеся вокруг оси '
могут занимать положение /, при котором собачка зацепляется с шестизуоы>
Храповые механизмы 445
лаповым колесом 6, и положение //, когда собачка с роликами 4, опираю-
шм^юя на рыча! и 1, приподнята и покачивается вместе со звеном 3, не
соприкасаясь с зубьями храпового колеса.
рис. 7.16. Механизм прерывистого движения: а — схема механизма, б — схема
твижеиия коромысла 4 относительно цевки 3. С помощью заклиненною на "веду-
шем валу I диска 2 с цевкой 3, находящейся в постоянном контакте с
внутренним профилем отверстия коромысла 4, сообщается качательное движение
последнему вокруг оси 6. Подпружиненная собачка 7, соединенная с коромыслом 4,
периодически поворачивает храповое колесо 5.
Рис. 7.17. Храповой механизм трубоотрезного стана с медленным движением
ползуна в начале и конце хода. От ведущего вала ), несущего кривошипный диск
5 с пальцем 2 и собачкой 5, приводится в движение ползун 4. Кинематика
кривошипного механизма обеспечивает уменьшение кинетической энергии ползуна в начале
и конце хода.
Рис. 7.18. Храповой механизм. При вращении кулачка 4 коромысло 3 с
собачкой 2 воздействует па храповое колесо. К концу поворота храповое колесо
фиксируется зубом I коромысла.
Рис. 7.19. Храповой механизм для прерывистого движения при больших
нагрузках. На ведущем валу 1 свободно вращается храповое колесо 3 и жестко
заклинен эксценфик 2, сообщающий посредством шатуна 5 движение коромыслу
6, несущему ось собачки 4. На длинном плече коромысла 6 имеется пластина 7,
действующая на плоскую пружину 8 и выводящая из зацепления с храповым
колесом фиксирующую собачку 9.
Перед входом в зацепление собачки 4 с зубом храпового колеса пластина 7
поднимает собачку 9 и освобождает колесо. Когда собачка 4 передвинет колесо
на половину шага, собачка 9 опустится на вершину следующего зуба; когда
собачка 4 завершит поворот храпового колеса на шаг, пластина 7 войдет в его
впадину и запрет храповое колесо. При обратном ходе рычага 6 пластина 7
К0С11С1СЯ пружины (S', 01к;юнит ее вверх и включит запорную собачку 9.
Рис 7 20. Храповой механизм без холостого хода для периодического
поворот изделия па 90°. На валу 3 закреплено четырехзубое храповое колесо 9,
которое находится под воздействием двух собачек 6 и 8, приводимых двух-
поводковыми группами 2 —5 и 7—10. Если палец 1 сместить на определенное
расстояние вниз так, чтобы коромысла 7 и 5 повернулись на 45°, то рабочие торцы
собачек 6 \\ 8 установятся на линии х — х, при этом собачка 8 повернет
храповое колесо па 45°, а собачка 6 войдет в контакт с его зубом Б. При движении
пальца / вверх собачка 6 повернет храповое колесо еще на 45°, а собачка 8,
1ви1аясь обрапю, войдс! в контакт с зубом Л. Дли1Сльнос1ь остановки опрсдс-
'^сгся паузой в ;1вижснии пальца I. Пружины 4 обеспечивают постоянный
контакт между храповым колесом и собачками.
^чс 7 21. Механизм прерывистого движения цепи для транспортировки
окрашенных лекиюй через супгильную печь.
Чрнводиая в гулка J, свободою сидя1цая па валу '/ с заклиненными на нем звсз-
^ '-^ои / II хра[1овым колесом 2, па своем фланце несет ось собачки 6, которая
^риодичсски выводится из зацепления с храповым колесом неподвижной шпиль-
После перемещения цепи на семь звеньев в сушильной камере происходит
ановка продолжительностью, соответствующей времени Vs оборота приводной
с н"'^" (прсдусмо1рс1ю технологией). В каждый шарнир цепи вставлен валик 8
с -'^^^^'*^" слеза для крепления деталей и с роликом 7 справа, соприкасающимся
лег.Л^?^^'^^"'''^^^^'^^*^^ бесконечным ремнем (на рисунке не показан) для поворота
' -'тсц и их равномерной сушки.
446
Механизмы с прерывистым движением ведомого звена
Рис. 7.16
У//////9У///////////////////////////у
Рис. 7.17
Рис. 7 22. Храповой механизм. Ползун 10 посредс1вом пзо1ну1ЫЧ uiaiyn<-||^
1 и 9, коромысел 8 и И, собачек 3 и 6 приводит в движение храповое колесо
заклиненное на ведомом валу 5. При движении ползуна 10 вверх собачка
вращает колесо 4 против часовой стрелки, тогда как собачка 3 проскальзыва ^
При движении ползуна 10 вниз собачка 3 вращает колесо 4 против часов^^*
С1 редки, а собачка 6 нроскальзываск Пружины 2 и 7 прижимаю! собачку к >Р'
новому колесу. Маховик, ускиювлснный навал 5, можс! скиадть псравиомсри*^^'
движения вааа.
Рис. 7.23. PcBcpcinJHbiii храповой механизм IJlaiyn // крпвон1ип1101 о м^^^^'""
через коромысла 10 и 15, свободно сидящие на валах 5 и i, и собачек IS п 6 ир'
XpanoGhie механизмы
447
6 A 7
Рис. 7.19
/ 2 J
6 5'
2 1
Рис. 7.21
448
Мехаииз мы с прерывистыai движением ведомого звсиа
5 6 7 8
Рис. 111
V77/7:w??X77/7777777'/77.
777777Л77/'7'7Г7У777777У777777}7/77у
Рис. 7.24
дит в движение колеса 3 и 4. Колесо 4 зацепляется с рейкой 19,
закрепленной на с голе станка, несущем упоры 9 и 16. Собачки 18 \\ 6 снабжены пазами,
в которых размещены пальцы подпружиненных ползунов 7 и 17, скользящих
в пазах рычагов 14 и 8. Последние связаны шатуном 12, имеющим палец 13. При
возвратно-поступательном движении шатуна И положение собачек, показанных на
рисунке, колеса 3, 2 поворачиваются в направлении стрелок, что вызывает
перемещение рейки 19 вправо с пульсирующей скоростью. В правом крайнем
положении стола упор 9, воздействуя на палец 13у переключит собачки. Теперь рейка
со столом начнет движение в обратном направлении, пока упор 16 стола не
достигнет пальца 13,
Храповые механизмы 449
Рис, 7,24. Храповой механизм прерывистого движения. Движение от ведущего
вала и несущего диск 2 с тремя цевками 3, передается ведомому валу 6 с
заклиненным на нем храповым колесом 4 с помощью свободно сидящего на оси рычага
7 с собачкой 5 Когда очередная цевка 3 коснется собачки 5, начнется вращение
храпового колеса, а вместе с ним ведомого вала и будет продолжаться до момента,
пока палец 8 на собачке, войдя в контакт с упором 9, не выключит собачку Далее
цевка пройдет мимо собачки, рычаг 7 под действием пружины опустится до встречи
с верхней плоскостью упора 9, а ведомый вал остановится. Его движение
возобновится при подходе к собачке очередной цевки.
Рис. 7.25. Механизм поочередного движения двух кареток упаковочной машины.
При движении ползуна 3 с встроенным в него поперечным ползуном I каретки 7 и
и совершают по одному ходу. В положении, изображенном на рисунке, каретка 7
неподвижна, а карегка // связана с ползуном / посредством имеющейся на
поперечном ползуне защелки 2 В конце обратного хода каретки // собачка 6,
встречаясь с зубом храпового колеса <S\ закрепленного на валу 4, поворачивает его
и вместе с ним поворачивает звездообразный кулачок 10. Это приводит к осевому
смещению штифтов 9, а следовательно, к смещению поперечного ползуна влево,
отключению ползуна / от каретки // и соединению с кареткой 7 посредством
защелки 5 При следующем ходе ползуна 3 каретка // остается неподвижной,
а каретка 7 совершает свой ход
Рис. 7.26, Механизм для получения ступенчато-изменяющейся скорости
планшайбы полировального станка. При полировании деталей различного диаметра
на планшайбе со стационарным размещением технологических позиций необходимо,
чтобы расстояние между обрабатываемыми деталями полировальный круг
проходил быстро, I е, планшайба должна в это время вращаться быстрее.
Ведущий вал / посредством мультиплицирующей передачи (/ = 4) 2. 3. 4, 5 и
диска 6 с собачкой 13 приводит в движение храповое колесо // с зубчатым колесом
9, зацепляющимся с колесом 7 планшайбы. В расточке храпового колеса 11
размещается роликовая обгонная муфта, диск cS которой заклинен на валу 1
При полировании деталей большого диаметра собачка 13 включается (отверстия
14 W 15 совмещаются и запираются шпилькой 72), а планшайба вращается
с постоянной рабочей скоростью, так как ведет обгонная муфта.
При полировании деталей малого диаметра собачка 13 в течение пол-оборота
диска 6 заперта, и движение с учетверенной скоростью получает планшайба через
ускорительную передачу 2, 3. 4, 5 от колеса 9 Далее кулачок 10 выводит собачку
из зацепления, а планшайба приводится от диска S обгонной муфты. Через V2
оборота диска 6 собачка вновь входит в зацепление, и цикл повторяется
Рис. 7 27. Однооборотный привод прерывистого движения На ведущем валу /
заклинено непрерывно вращающееся храповое колесо 2 и сидит свободно диск 3,
несущий собачку 5 с пружиной (S' и передвижной упор 4 Диск 3 должен
сообщить один оборот связанному с исполнительным органом зубчатому колесу 10
с последующей паузой. При поднятой штанге 6, удерживаемой в верхнем
положении защелкой 9, заклиненной на управляющем валу 7, собачка 5 выключена,
и диск 3 неподвижен. Когда время паузы исчерпано, вал 7 включается,
поворачивает защелку 9, штанга 6 опускается, вал 7 выключается, а диск 3 начинает
вращение. К концу оборота диска его упор 4 поднимает штангу 6 вверх, вал 7
включается и подает под штангу защелку 9 - диск 3 завершает оборот,
начинается пауза
Рис. 7 28, Механизм прерывистого движения ведомого вала 4 при постоянной
скорости ведущего вала 8 На сдвоенном кривошипе 2 (рис. 7 28, <:/) шарнирпо
закреплены собачка 3 и рычаг 6, соединенные между собой пружиной 9. Упор /
15 Ко
летшков \\
450
Механизмы с прерывистым двилсением ведомого звена
А-А
Рис. 7.25
А-А
Рис. 7.26
Храповые механизмы
451
^ 3
Рис. 7.27
1 г 3
Рис. 7.28
(рис 7 28,6) выключает собачку 3, при этом храповое колесо 5 остается
неподвижным Упор 7 отклоняет рычаг 6 и собачка под действие\1 пружины 9
включается в работ) с храповым колесом. Число пар упоров i и 7 и их
расположение огносительно неподвижной стойки определяет характер прерывисюго
движения ведохюго вала 4 Движение хюжно передавать только в одном направлении.
Рис 7.29 Счегный хмеханизм наборно!! машины предназначен для подсчета
количества строк, поданных в полосу набора Корпус механизма крепится к
кронштейну станины так, чтобы палец салазок, подающих строки, нажимая на рычаг 6
с собачкой /, поворачивая при этом храповое колесо 2 с прикрепленной к нему
Шкалой 8 на одно деление.
IS"-
452
Механизмы с прерывистым двилсением ведомого звена
3 6
Рис. 7.29
Возврат шкалы в нулевое положение осуществляется нажатием на рычаг 3,
изготовленный за одно целое с кулачком 5, выключающим собачки 1 \\ 4. С
помощью спиральной пружины 7 храповое колесо со щкалой возвращается в нулевое
положение. Обратный ход щкалы ограничен упором.
МАЛЬТИЙСКИЕ МЕХАНИЗМЫ
Рис. 7.30. Правильный четырехпрорезный мальтийский механизм. Междулучия
креста 4 профилируются по дугам окружности, обращенным выпуклостью к оси
креста, с радиусом, соответствующим радиусу стопорной шайбы 2, укрепленной
на ведущем валу ]. На ведущем валу укреплена также цевка 3, заходящая при
вращении в прорезы (рис. 7.30, с?). За один оборот ведомого вала крест 4 раза
поворачивается на 74 оборота и 4 раза останавливается. Неравномерное вращение
кресга (см. кривые со и е на рис. 7.30,6) вызывает дополнительную динамическую
нагрузку на него. В случае удлинения прореза креста он обращается в
качающуюся кулису, угловая скорость и ускорение которой показаны на рис. 7.30,6.
Часть кривых, очерченных более жирными линиями, соответствует движению
креста при отсчете ф от верхнего положения на линии центров цевки 3.
Рис. 7.31. Пространственный мальтийский механизм (сферический). Ведущий
и ведомый валы мальтийского механизма расположены под углом 90°. Ведущий
вал с поводком ) вращается непрерывно, ведомый вал 3 с мальтийским крестом
2 — с остановками.
Рис. 7.32. Мальтийский механизм, состоящий из ведущего диска 2 с двумя
цевками 3 и четырехпазовой звездочки 1. Время покоя и движения - одинаковые.
Рис. 7.33. Восьмипрорезной мальтийский крест (/ — ведущий диск, 2 — крест).
Рис. 7.30
А.
bU
А'
1-И
,Д
/
t
-<>-^Р-
/
/ ')
•i
^^^
в-в
А-А
Б-Б
Рис. 7.31
Рис. 7.32
Рис. 7.33
454 Механизмы с прерывистым двилселием ведомого звена
Рис. 7.34, Четырехпрорезной мальтийский крест с двумя различными паузами.
Цевки 2 расставлены под углом X, поэтому одна пауза соответствует углу
поворота ведущего диска 1, равному X — 90", а вторая 270° — X.
Рис. 7.35. Мальтийский механизм внутреннего зацепления. Ведущий диск 2
с одной цевкой и ведомый мальтийский крест 1 вращаются в одну сторону. Поворот
креста на угол ф = соответствует повороту кривошипа на угол у = я + ф.
к
Время покоя 7^1 меньше времени 7^ движения:
^
»1
27Г - \|/
2 • 2к
/ccoi
Т
Т
2
к
где к — число прорезов.
Рис. 7.36. Мальтийский механизм. Ведущий диск 1 с одной цевкой приводит
в движение четыре креста 2. Во время поворота одного креста осташ>ные три
стопорятся.
Рис. 7.37. Неоднородный мальтийский механизм, в котором кривошип 1
сообщает кресту 2 движения неравной продолжительности, пропорциональные
соответственно углам 2(90 — фз) и 2(90 — фг). При построении механизма необходимо
соблюдать два условия:
к 2
а = —; т< —,
к
где т — число цевок; к — число прорезов; а — любое целое число.
Рис. 7.38. Трехпрорезной трехцевочный безударный мальтийский механизм
с внешним зацеплением:
Т
где Тд,„ и Ги„, — время движения и.покоя креста 1 при зацеплении его с т-й
цевкой 2; Т— длительность одного оборота ведущего звена 3.
Рис. 7.39. Мальтийский механизм с нерадиальными прорезами. Цевки 2 ведущего
диска 1 перемещаются в наклонных прорезах креста 3.
Рис. 7.40. Шестипрорезной мальтийский механизм, характеризующийся
теоретически безударным входом цевки в прорез и плавным окончанием поворота креста.
Механизм допускает изменение углов прореза, установку сменных крестов с
различным числом прорезов при неизменных радиусе R цевки и межосевого
расстояния А.
Рис. 7.41. Однородный четырехпазовый дезаксиальный мальтийский механизм
внешнего зацепления. Механизм теоретически безударный при указанном
направлении вращения. При изменении направления вращения вход цевки в прорез будет
теоретически безударным, выход — ударным. Стопорный ролик 6 стопорного
механизма 3, 4, 5, запирающий крест при его неподвижном положении управляется
кулачком 2, имеющим общую с кривошипом 1 ось вращения.
Число цевок
^ 2^
Мальтийские механизмы
455
Рис. 7.34
Рис. 7.35
Рис. 7.36
Рис. 7.37
'yZ^
Рис. 7.38
Рис. 7.39
Рис. 7.40
456 MexamiiMbi с прерывистым дви.лсепксм ведомого звена
При изменении числа прорезов А: ог 3 до практического максимума число цевок
изменяется от 6 до 2.
Рис. 7 42. Однородный дезаксиальный четырехпрорезной мальтийский механизм
внутреннего зацепления. При повороте цевки 1 на угол 2\|/i крест 2 повернется
в ту же сторону на угол 2^\. При повороте цевки на угол 2v|/i крест неподвижен.
Рис. 7 43 Дезаксиальный мальтийский механизм с углом поворота креста 1 на
180° за один оборот кривошипа 2. В мертвых положениях механизма, когда цевки
находятся в средней части паза, реверсивное вращение креста устраняется
переводными стрелками 3.
Рис. 7 44 Мальтийский механизм. Мальтийский крест 2 во время па\зы
фиксируется кулачком 3, вводящим ролик в прорез креста 1. Механизм пригоден для
любого направления вращения ведущего вала.
Рис. 7.45 Мальтийский механизм Ведущий диск 3 снабжен цевкой 2 овального
сечения, а прорезы четырехлучевого креста 1 имеют непараллельные боковые
стенки Механизм позволяет получить поворот креста на ^4 оборота за ^Д оборота
ведущего диска и работает без ударов.
Рис. 7.46. Механизм с остановками Ведомому кресту ] передается прерывистое
реверсивное движение с помондью четырехзвенника с коромыслом 2 рег\лируемой
длины, а остановки изменяются по фазе. За один оборот кривошипа 3 крест
имеет два перрюда движения и два периода покоя.
Рис. 7.47. Мальтийский механизм с неравномерным движением цевки Во время
движения креста на большом участке пути угловая скорость приближается
к постоянной. Отношение времени паузы к времени движения в этом механизме
больше, чем у обычного мальтийского механизма.
Ось вращения ведущего кривошипа 3 и коромысла 2 с цевкой смещены на
величину е.
Рис. 7.48. Мальтийский механизм, в котором угловая скорость креста ]
приближается к постоянной. В механизме, посредством криволинейного паза в копире 2
длина г кривошипа изменяется так, что в положениях, при которых в нормальном
мальтийском механизме угловая скорость креста наибольшая, в рассматриваемом
механизме длина г кривошипа, а также угловая скорость наименьшие.
Угловые скорость (о^.р и ускорение креста с^р мог ут быть найдены по формулам
_ Лр cos у Ч- Лр sin у — р^
«кр-со ^2_2^pcosy + p2 '
[р (р^ - А^) sin у + 2р' {А^ cos у - 2Л р + р^ cos у +
""Р {А^ - 2/4pcosy 4- р^)^
+ Ар' sin у cos у — рр' sin у) -Ь р" (Л^ sin у — 2Ар sin у cos у + р^ sin у)],
где у — угол, определяющий мгновенное положение кривошипа относительно линии
центров; р =/(у) — радиус-вектор кривой, описываемой центром цевки; со — угловая
скорость цевки: А — межосевое расстояние.
Рис. 7.49. Мальтийский механизм с некруговым движением цевки, закрепленной
на шатуне 1 шарнирного четырехзвенного механизма О BCD. Крест 2 вращается
более равномерно, габаритные размеры механизма увеличиваются,, точность
вследствие износа шарниров уменьшается.
Рис. 7 50. Шестипрорезной мальтийский механизм с некруговым движением
цевки 1. Траектория движения цевки задается профилем пазовой шайбы 3 (а —
траектория движения центра цевки). Поводок 2 с прямолинейным пазом установлен
Ma ibmuiicKuc \ie\aiiuj мы
457
Рис. 7.41
Рис. 7.42
J /
Рис. 7.43
Рис. 7.44
Рис. 7.45
Рис. 7.46
458
Механизмы с прерывистым двиэюеиисм ведомого звена
А-А
^^Z^
Рис. 7.47
Рис. 7.48
Рис. 7.49
Рис. 7.50
на валу механизма и в период передачи движения мальтийскому кресту
перемещается в радиальном направлении.
Рис. 7.51. Четырехпрорезной мальтийский механизм, в котором уменьшение
угла поворота ведущего звена 1, необходимого для поворота креста 2. достигается
с помощью шарнирного антипараллелограмма ОАВС, включенного в
кинематическую цепь. Для предотвращения обратного движения звеньев при выходе из
мертвого положения звенья ОЛ и ВС снабжены зубьями.
Стержневые механизмы с остановками
459
Рис. 7.51
Рис. 7.53
Рис. 7 52. Мальтийский механизм, в котором от равномерного вращающегося
вала 3 посредством пары эллиптических колес 5 —4 и кривошипа 2, заклиненного
на валу колеса 5, получает вращение крест 1. Поворот креста происходит при
наиболее высокой скорости кривошипа 2, вследствие чего время поворота креста
уменьшается.
Рис. 7.53. Механизм с д.чительной остановкой. На ведущем валу 7 заклинено
неполное зубчатое колесо 6, несущее рычаг 1 с двумя цевками 2 и 8. Колесо 6
зацепляется с неполным звездчатым колесом 5, на валу которого заклинен
кривошип 4 мальтийского механизма. При непрерывном вращении вала кривошип 4
(часть оборота) остается неподвижным, а остальная часть оборота вращается
с угловой скоростью, значительно превышающей угловую скорость ведущего вала.
Это позволяет получить необходимое время покоя креста 5 без увеличения
времени его поворота.
СТЕРЖНЕВЫЕ МЕХАНИЗМЫ С ОСТАНОВКАМИ
Рис. 7 54. Механизм с длительной остановкой ведомого звена в крайнем
положении. К шарнирному четырехзвеннику О ЛВС присоединена двух поводковая группа
MDF, причем длина звена MD равна радиусу окружности, приближающейся
к траектории точки М на некотором участке. Центр D выбран так, что в крайних
460
Механизмы с прерывистым движ'еиием ведомого звена
положениях звена FD точка D совпадает с центром дуги на траектории точки М,
в результате чего звено FD неподвижно в течение некоторого времени.
Если принять размеры звеньев:
АВ = ВС = ВМ = \: MD = 0,66;
АО = г = 0,305;
FD = 0,8;
СО = а = 0,76;
CF = 1,66;
Ф - 114"
OF = 2,36,
то продолжительность остановок приблизительно равна половине оборота
кривошипа.
Рис. 7.55. Перекидчик для многоярусных хлебопекарных подовых печей, который
автоматически снимает хлебобулочные изделия 2 со стальной ленты 1 (сетки)
конвейера печи верхнего яруса и укладывает их на ленту 6 (сетку) конвейера
нижнего яруса.
Перекидчик состоит из отсекателя 5,
качающегося захвата 4 и шестизвенного механизма 3
(см. рис. 7.54), обеспечивающего качание захвата 4
с длительной его остановкой в нижнем положении
и синхронную работу механизма отсекателя.
Отсекатель 5 и захват 4 расположены внутри
печи, а механизмы, которые приводят их в действие,
сдвоены и расположены с внешних сторон лечи.
Рис. 7.54
\(^>'
^
Рис. 7.55
Стср.жиевые мсхаииты с остановками 461
Рис. 7.56. Механизм с остановкой ведомого звена на полпути. При
непрерывном вращении кривощипа АО коромысло DF совершает колебательное движение
с остановкой в середине рабочего хода, поскольку траектория точки М на
некотором участке мало отличается от дуги окружности, а длина звена MD равна
радиусу этой окружности. Центр F выбран так, что в среднем положении
коромысла точка F приходит в центр этой окружности. Размеры звеньев следующие:
АВ = ВС = ВМ == 1; MD = 1,603;
АО = у = 0,54; FD = 0,695;
СО = а = 1,3; CF = 1,8;
Ф = 80°; OF = 2,78.
Рис. 7.57. Механизм с остановками в крайних положениях. Размеры звеньев
следующие:
АВ = ВС = ВМ = 1; CF = 1,47;
АО = г = 0,4^; Ф=95°;
СО = а = 1,15; FD =0,41;
MD = 3,34; OF = 2,51.
Траектория точки М шатуна АВ четырехзвенника ОАВС имеет два участка
примерно равной кривизны. Длина звена MD равна радиусу окружности,
совпадающей с этими участками. Центр F выбран так, что в крайних положениях
точка D приходит в центры этих окружностей, вследствие чего звено DF в крайних
положениях неподвижно.
Рис. 7.58. Шарнирный механизм с двумя остановками ведомого звена EF.
Остановка произойдет при движении точки D по участкам траектории,
ограниченным углами ф1 и ф2.
Рис. 7.59. Шарнирный механизм с остановкой двух звеньев GF и ED. В этом
механизме остановка одного звена начинается в момент трогания с места второго
звена.
Рис. 7.60. Кривошипно-шатунный механизм с длительной остановкой По
неподвижному колесу 1 катится колесо 2. Отношение диаметров начальных
окружностей колес 3:1. Палец А шатуна АВ описывает гипоциклоиду, ветвь которой
близка к дуге окружности Так как длина шатуна равна ради>су упомянутой
дуги, то ползушка В будет неподвижна в правом крайнем положении. Тот же
эффект будет в случае, если колесо z^ с внутренним венцом заменить колесом
с внешним венцом того же диаметра, соединив широкое колесо Гз (с центром О2)
с колесами Г2 и z^.
Рис 7.61. Кривошипно-шатунный механизм с паузами в середине хода. Ползун 1
перемещается по направляющим 2 станины посредством шатуна 3, соединенного
с кривошипом 4, который свободно установлен на валу ii и на ступице имеет
диск 5 с двумя вырезами.
На валу )/ жестко закреплен рычаг 6 с собачкой 7, которая входит в один
из вырезов диска под действием пружины и передает вращение кривошипу 4.
462
Механизмы с прерывистым двиэюением ведомого звена
Рис. 7.59
Рис. 7.60
Стерлспевые механизмы с остановками 463
К собачке 7 прикреплен палец 8. На неподвижной станине закреплен упор 9,
который выводит собачку 7 из зацепления с диском кривошипа посредством
пальца 8.
В этот же момент фиксатором 10 фиксируется неподвижное положение ползуна 1,
Дальнейшее вращение рычага 6 происходит при неподвижном кривошипе 4 до
встречи собачки 7 со следующим вырезом на диске ступицы кривошипа.
Следует отметить, что в кривошипно-шатунном механизме углы поворота
кривошипа, соответствующие положению ползуна в средней части его пути, разные,
поэтому угол между вырезами не равен 180^.
Рис. 7.62. Шарнирный механизм с остановкой. К точке М шатуна АВ четырех-
звенника О ABC присоединено звено DM, связанное с ползуном. Траектория точки М
на участке M^Mi мало отличается от дуги круга радиуса DM, поэтому
перемещение точки М по этому участку траектории соответствует остановке ползуна.
Рис. 7.63. Механизм прерывистого движения. Участок траектории, описываемой
точкой М шатуна за время поворота кривошипа на угол а, представляет собой
дугу радиуса R, равного длине шатуна MS. При прохождении точки М по дуге
М1М2, стягивающей угол р, ползушка S неподвижна.
Рис. 7.64. Соосный мальтийский механизм. Ведущим звеном этого механизма
является кривошип 1. Четырехпазовый крест 4 приводится в движение цевкой
шатуна 2 кривошипно-шатунного механизма при отношении времени движения
к времени выстоя Vi- Чтобы крест включался безударно, линия ОС должна служить
касательной в точке С к шатунной кривой Ус. После окончания поворота креста
шток 3 вводится в радиальные отверстия в кресте и последний надежно стопорится
(р — мгновенный центр вращения механизма).
Рис. 7.65 Механизм возвратно-поступательного движения с длительными
паузами в крайних положениях. На непрерывно вращающемся с постоянной скоростью
ведущем валу 7 закреплен диск 8 с пальцем, снабженным роликом 9, скользящим
в вертикальном пазу кулисы 6, укрепленной на зубчатой рейке 10, движущейся
возвратно-поступательно. Ход рейки и радиус зубчатого колеса 5 выбраны так,
что последнее совершает поочередно полный оборот по и против часовой стрелки
за один оборот вала 7.
Ведомым звеном механизма является ползун ), который приводится в движение
рычагом 2 с сектором шестипазового мальтийского креста. Кривошип 3 креста
с цевкой 4 совершает такое же движение, как и зубчатое колесо 5, так как
установлен с ней на одном и том же валу.
Перемещение ползуна 1 из одного крайнего положения в другое соответствует
повороту кривошипа 3 на угол 120^, периоды остановки ползуна 1 (в крайних
положениях) соответствуют повороту кривошипа 3 на 240°.
Рис. 7.66. Кривошипно-кулисный механизм с остановками в конце каждого хода.
Кулиса 8 поддерживается в вертикальном положении направляющими камнями 5
и 7 и получает возвратно-поступательное движение от пальца кривошипа 6
с ползуном 9. Вал 10 (рис. 7.66, а) кривошипа 6 установлен в отверстии диска
зубчатого колеса 2 и соединен жестко с зубчатым колесом 4, которое находится
в зацеплении с невращающимся зубчатым колесом 5. Передаточное отношение
колес 3 и 4 равно двум. Ведущим звеном механизма является колесо 1. Центр
пальца кривошипа 6 совершает сложное движение, вращаясь относительно оси
колеса 4, ось которого вращается относительно оси колеса 2. Траектория центра
пальца кривошипа 6 (рис. 7.66, б) с двух сторон в пределах угла, равного 60'',
близка к прямой, поэтому кулиса 8 на этих участках траектории остается
неподвижной.
464
Механизмы с прерывистым дви,мением ведомого звена
Рис. 7.63
г» V V
Рис. 7.65
Стерлсиевые мсхатимы с остановками
465
А-^
Рис. 7 67. Механизм с длительной остановкой, применяемый в кривошипных
прессах для гл\бокой вытяжки. Внутренний ползун I (рис. 7.67, а\ осуществляющий
вытяжку, приводится в движение кривошипно-илатунным механизмом ОАВ,
а наружный прижимной ползун 2 — ог сдвоенного коленно-рычажного механизма
CFDME. Продолжительность остановки наружного ползуна составляет Vs оборота
коленчатого вала 3 На рис. 7 67, б дана зависимость перемещения ползуна 2
ь функции \гла поворота коленчатого вала 3.
Рис. 7.68. Кулисный механизм с остановкой в левом крайнем положении.
Остановка обеспечивается тем, что средняя линия паза кулисы 1 в некоторой
своей части очерчена дугой радиуса, равного длине кривошипа 2.
466
Механизмы с прерывистым движение м аедо \{ого звени
Рис. 7.68
Рис. 7.69, Механизм движения ползуна с паузой
в одном конце хода. Ведущим звеном механизма
является коромысло 2, которое совершает качательное
движение в пределах угла а. В пределах угла качания
Р перемепдается ползун / как при движении коромысла
по часовой, так и против часовой стрелки, а в
пределах угла а — р ползун 1 остается неподвижным, так
как ролик 3 перемещается по дугообразной части
паза, концентричной валу корохмысла. Механизм
применяется в автоматах для накатки цоколя с винтовой
резьбой на корпусе электрической пробки.
Рис. 7.70 Механизм с остановкой ведомого звена
в середине прямого и обратного ходов. В зависимости
от угла поворота кривошипа продолжительность
движения и покоя кулисы распределяется следующим
образом: «i = 90"^ — движение; ccj — 38° — покой; аз =
= 52"" — движение. Обратный ход симметричен
прямому. Конструктивным недостатком механизма
OCFPBM является значительная длина кулисы.
Рис. 7.69
Рис. 7.70
ч
с тер.УС 11 ев ые механизмы с остановками 467
Конструктивным недостатком механизма OCFPBM является значительная длина
кулисы.
Рис. 7.71. Механизм с остановкой. Траектория точки Е шатуна шарнирного
чсгырехзвениика OABD мало отличается от прямой на одном из ее участков.
Кулиса с центром вращения F жестко связана с направляющей, проходящей через
точку Е шат>на. За время движения точки Е по прямой кулиса неподвижна.
Рис. 7 72. Шатунный механизм с остановками коромысла, имеющий nepe?vieHHbie
длины звеньев для изменения длительности выстоя коромысла 3 в задатшых
пределах при неизменном его угловом ходе. Для pei улирования выстоя в шатуне 1
предусмотрен прорез, а звено 2 — переменной длины Длины отрезков АС и CD
и вменяю 1ся одновременно.
Рис. 7.73. Механизм с остановками и переменным ходом рег\лируемого по
длине коромысла ЕЕ при приближенно неизменном положении его выстоя. Длина
звена СЕ при регулировании углового хода коромысла ЕЕ остается неизменной.
Шарнир С устанавливается и фиксируется в заданном положении.
Рис. 7.74. Механизм ОАВС для поступательного движения звена 2 с
остановками. При повороте кривошипа 1 в пределах угла а (угол поворота больше 90^)
точка С будет лежать на прямолинейном участке шатунной кривой, совпадаютцей
с наклонной осью ку;шсы 2, которая будет иметь приближенный выстой
Рис. 7.75. Шатунный механизм с остановками коромысла ЕЕ и переменной
амплитудой ею движения, регулируемой перестановкой оси шарнира D в прорезе
коромысла и одновременным изменением длины шатуна — стяжки CD.
Рис. 7.76. Механизм прерывистого движения OABOiC с остановками и
регулируемым ходом ведомого звена. Изменяя и фиксируя положение звена 4 относи-
1ельно коромысла 3, можно воспроизвести одну или две остановки кулисы 5 и,
кроме того, изменить величину хода и фазу. Величина хода изменяется также
перестановкой пальца В шатуна 2 Ведомое звено — кулиса 5 останавливается при
движении пальца С по круговому пазу. Ведущим звеном является кривошип /.
Рис. 7 77. Механизм движения ведомого звена 5 с остановкой в левом крайнем
положении. Соотношение между величиной и продолжительностью следующих
один за другим ходов звена 5 можно регулировать перестановкой пальца В
шатуна 2 и звена 4 относительно звена 3. Кривошип 1 — ведущее звено механизма.
Рис. 7.78. Механизм, аналогичный предыдущему, соединяющий кривошипно-
коромысловый механизм ОАВО^ с кулисными O^MOj и OiCOi- Перестановкой
пальца В шатуна 2 и звеньев 4 относительно звена 3 регулируется движение
всдохюю звена 5. Ве71\щим звеном механизма является кривошип L
Рис. 7.79. Механизм движения с остановками. На ведущем валу закреплены
кривошип, соединенный шатуном со скользящей по плоскости зубчатой рейкой б,
и кулачок 4, приводящий в движение запирающий ведомую часть во время паузрл
рычаг 5. На ведомом валу жестко закреплены диск 1 с выемками и храповое
колесо 3, собачка которого укреплена на зубчатом колесе 2, свободно сидящем
на ведомом валу и находящемся в зацеплении с рейкой 6. При вращении
ведущего вала одной половине его оборота соответствует рабочее движение ведомого
вала, а другой половине — пауза. Подбирая радиусы зубчатого колеса, кривошипа
и число зубьев на храповом колесе 3, можно за один оборот ведущего вала
получить любой угол поворота ведомого вала.
Рис. 7 80. Механизм с паузой в конце хода ползуна и быстрым обратным
ходом. Ползун 3 с выступами 7, -^ и iO удерживается на станине Т-образной
Направляющей 6. Вал 1 с закрепленным на нем рычагом 9 вращается с
небольшой скоростью и в зацеплении с выступом 10 поднимает ползун 3 до
положения, указанного штриховыми линиями. В этом положении выступ 7 фик-
спр}стся собачкой 8, и ползун остается неподвижным до момента, пока рычаг 9,
468
Механизмы с прерывисты м дви.исением ведомого ^вена
Рис. 7.72
Рис. 7.73
Рис. 7.74
Рис. 7.75
Рис. 7.76
Рис. 7.77
Стержневые механизмы с остановками
469
вращаясь, не повернет собачку
относительно ее оси. Ползун вниз движется
под действием силы тяжести и усилия
сжатой пружины, установленной на
штоке 2. Пружина на схеме не показана.
Упор 5 определяет крайнее нижнее
положение ползуна.
Рис. 7.81. Механизм, сообщающий
ползуну попеременно длинные и короткие
ходы с паузами в конце каждого хода.
Ведущим звеном механизма является
движущийся возвратно-поступательно
ползун 7, ведомым — ползун 3 с роликом 2.
Ролик 2 при перемещении ползуна 1
перекатывается по верхним боковым
поверхностям рычагов 4, 5 и пластины б,
которые смонтированы на ползуне L
Рис. 7.78
Рабочие поверхиосги пластины
и рычага 4 рас'положены
горизонтально и соответствую! периодам пауз,
при перекатывании ролика 2 по
наклонной поверхности рычага 5
осуществляется перемещение ползуна 3 по
вертикали.
Рычаги 4, 5 и 7 соединены шар-
нпрно и образуют параллелограмм
с поступательно движущимся рычагом
4. Изменение высоты подъема ползуна
3 осуществляется автоматически
поворотом кулачка 8 на угол 90"" в конце
рабочего хода посредством упора 11
п звездочки 9, соединенной с кулачком
8. Постоянный контакт выступа
рычага 5 с кулачком 6' обеспечивается
Пружиной ]().
Механизм применяется для
изготовления картонной тары при
изменении длины хода путем смещения
верхней крайней точки ползуна.
Рис. 7.80
470
Механизмы с прерывистым двиэксиием ведомого звена
КУЛАЧКОВЫЕ МЕХАНИЗМЫ С ОСТАНОВКАМИ
Рис. 7.82. Кулиса с приводом от треугольного кулачка, представляющего собой
ограниченный дугами одинакового радиуса равносторонний треугольник. Кулиса
в крайних положениях остается неподвижной в течение времени, соответствующего
повороту ведущего вала на бО"" (рис. 7.82, а). Максимальная длина хода кулисы
равна радиусу, которым очерчен профиль кулачка. График перемещений кулисы
приведен на рис. 7.82, б.
Движение вправо начинается в момент, когда линия Оа займет горизонтальное
положение. В период первой 60"" фазы - поворота кулачка на 60\
S ^ R(\ - со5ф); О" < ф <60\
В период второй фазы, соответствующей углу noBopoia к\лачка еще на 60°,
когда кулису ведет уже точка h:
S = R sin (ф - 30); 60^ < ф < 120^
Кривая скоростей кулисы имеет точку заострения при ф = 60*" на участке
О < Ф <60"
К = cojK sin ф,
а на участке бО'' < ф < 120°
V = со1Ксо8(ф - 30°).
Ускорения на участке 0° < ф < 60°
а = (ojR cos ф
Ку.шчковые механизмы с остановками 471
и на участке бО"" < ф < 120''
а = -со?/? 81п(ф - 30°).
При ф = 60"" кривая ускорений имеет разрыв. Скачок ускорения Аа = (d^R
Такой же скачок ускорения будет в начале и в конце движения кулисы.
Рис. 7.83. Механизм для преобразования равномерного вращательного движения
в неравномерное с остановками. От ведущего диска 7, снабженного
криволинейными пазами 8 и 9, движение с помощью коленчатого рычага 6 и тяги 5
передается угловому рычагу 4 с собачкой 1 и одновременно от рычага 10 и тяги 11 —
собачке 12 с осью качания на станине. Собачки 12 и 1 связаны между собой
звеньями 2 и 13, шарнирно укрепленными на плече 14.
Кривые пазов 8 и 9 подобраны так, что в момент включения собачки I
собачка 12 выключается. Моменту прохождения ролика рычага 6 по участку
кривой, описанной радиусом из центра диска 7, соответствует остановка рычагов
б, 5, 4 и колеса 3. Характер движения колеса 3 меняется с изменением кривых
пазов 8 и 9 и длины звеньев 4 и 6.
Рис. 7.84. Механизм возвратно-поступательного движения с остановкой,
используемый для подачи листового материала из штабеля в машину. Направляющей 5
движение сообщается от кулачка 1 через рычаг 12. Рычаг 3 направляющей 5
может качаться относительно центра 4, сообщая выступу 2 движение подачи листа
в машину. В пазу тяги И перемещается выступ 7 направляющей 5, длина хода
которого регулируется винтом 6. Выступ 7 соединен с рычагом 10 пружиной 8.
При перемещении выступа 7 относительно тяги 11 кольцо 9 сообщает движение
рычагу 10 и, следовательно, рычагу 3 подачи. Оси заштрихованных валов
неподвижны относительно станины.
Профиль кулачка обеспечивает остановку тяги И в конце каждого хода,
а изменяя длину паза можно увеличить продолжительность паузы в движении
направляющей 5.
Рис. 7.85. Механизм привода цепного конвейера с остановкой для переноса
контейнеров и их наполнения. Движение ведомой звездочке 6 приводного вала 3
сообщается через дифференциал, поводок 8 которого качается кулачком 9 и
зубчатыми колесами 1 и 4. Если, например, на каждом отрезке конвейерной цепи,
равьюм длине делительной окружности звездочки, имеется четыре станции
заполнения контейнеров и время пауз, найденное опытным путем, соответствует
Vs оборота вала 3, то необходимо, чтобы за Vs оборота вала 3 кулачок сделал
\^2 оборота [ _1- = 4 ) и обеспечил надлежащее обкатывание колеса 5 по колесу 7
гак, чтобы колесо 7 со звездочкой в течение Vs оборота вала 3 оставались
неподвижными. Известно, что для конического дифференциала, состоящего из
одинаковых колес 2, 5 и 7, одно из центральных колес будет неподвижным, если
скорость водила вдвое меньше скорости ведущего колеса.
Рис. 7.86. Эксцентриковый механизм прерывистого движения конвейера прово-
лочно-свивочной машины. Прерывистое движение барабану 5, несущему звездочку
или зубчатое колесо (на рис. не показано), сообщается с помоид^ю кривошипно-
шатунного механизма с ведущим эксцентриком 1 на валу 5, ползун 6 которого,
являющийся одновременно фиксатором барабана 3, перемещается в направляющих
неподвижного барабана 7. На противоположном конце шатуна 2 шарнирно
> креплен второй ползун 4, движущийся в соосной с барабаном 3 кулисе 2 и
периодически входящий в пазы барабана. В результате за каждый оборот вала 5
a=f((p)
/f/
ГУ,
/
/
'/
0 i 1
/=f«p)
■У\
3 ч\ 5
{
N
\
\
\
\
6
q:
T
7 В
^ J,
120° J^ 60°
1 ^
\
\
s=/(«
N4!
/o| a
<
У
»
1
1
1
1
1
/
«(?»»'
360°
f
0
<P
Рис. 7.82
2 3
A 5 ^
5 ii
Рис. 7.85
Кулачковые механизмы с остановками
473
6-6
А-А
Рис. 7.86
барабан 3, имеющий на горпе z пазов, поворачивается на — оборота приводным
зубом 4 и запирае1ся в пенодвижиом положении фиксирующим з\бом 6
Рис. 7.87. Механизм возвратно-посг>нательно10 движения с остановкой. Плоский
кулачок 4 приводи! ползун 5, сообщающий движение механизмам В профильном
пазе кулачка предус\ютрсн прямой участок. Ролик 3 удержи1шется в пазах 1 и 2
при движении вперед и назад с помощью трения.
Рис. 7 88 Механизм возврагно-ностунательного движения подземка с
остановкой для высадочной машины От шагу па 2 приводится в движе1И1с ползун 7,
который может быть связан или разьединен с ползуном 3 посредством
подпружиненного иальна 12. Эта свя 5ь \с1"атшвливается с помощью диска 11, снабжен-
но!о четырьмя пальпамп 9, п т1рофилирован-
ного скоса. Пр1т воздействии неподвижного
упора 10 на пальцы дт!ска 11 последний
поворачивается па 90 и благодаря палпч1по
скоса 8 сметнается вдоль оси. в1>1водя !1алец
12 из гнезда Т10лз\па 3.
Точность остановкт! ползуна 3 в левом -
крайнем положении обеспечивается
находящимися в односторонне\'1 ко!ттакте захватами
6 и 7 и в правом ттоложении — тюдпружи-
ненным фиксатором 4, входятцим в тнездо 5.
После трех ходов совместного движения
ползун 3 останавлт1вается.
474
Механизмы с прерывистым двилсеиием ведолюго звена
9 11 10
Рис. 7.88
Рис. 7.89
Зубчатые механизмы с остановками 475
Рис. 7.89. Кривошипно-кулисный механизм с паузами по завершении каждого
хода. На ведущем валу S закреплен кривошип 2 с роликом 1 на пальце.
Кулиса 6, которая прикреплена к суппорту 4, перемещается по направляющим
станины 10, имеет два круговых паза 3 и 7, радиус кривизны которых равен
радиусу кривошипа 2. Внешние участки паза ограничены плоскостями. Переход
ролика 1 из прямого участка паза кулисы в круговой и наоборот обеспечивается
стрелкой 5, удерживаемой в положении, показанном на рисунке с по.\ющью
пружины 9.
Ползун с кулисой будет останавливаться в обоих крайних положениях, причем
длительность покоя определяется величиной угла, на который опирается дуга
криволинейного паза.
Механизм применяется для гибки при производстве изделий из проволоки.
ЗУБЧАТЫЕ МЕХАНИЗМЫ С ОСТАНОВКАМИ
Рис. 7.90. Механизм прерывистого движения. Ведущее колесо-cci мен г I с десятью
зубьями находится в зацеплении с обычным дссягизубым колесом 2, снабженны\1
диском с вырезами на десять положений, необходимых для фиксации ведомого
колеса 2 в момент остановки
Рис. 7.91. Механизм прерывистой передачи ^^вижения между скрещивающимися
валами. Ведущее звено 1 выполнено в виде барабана с пазом а. На участке 3
паз выполнен в виде винтовой канавки Колесо 2 поворачивается на \гол, соот-
ветствуьощий одному шагу.
Рис. 7.92. Механизм, в котором диск 1 посредством спирального выст}па
передает движение с остановкой звездочке 3 с цевками 2. Движение звездочки
происходит в период зацепления цевок с выступом, очерченным по спирали
в пределах угла \[/. Остальная часть оборота диска 1 соответствует остановке
ведомой звездочки.
Рис. 7.93 Механизм вращения цепного барабана рашель-маппшы. Шайба 1
торцовыми профилироваиными выступами, жестко закрепленная на равномерью
вращающемся валу 2, находится в односюроннем зацеплении с зубчатым
колесом 3, имеющи\1 фасонные зубья. Колесо 3 и связанный с ним цепной барабан 4
получают црерывисюе движение одною направления.
Рис. 7.94. Механизм пер{1одическо1о движения нижнего барабана рашель-
машины. На вращаюгцсмся вертикальном валу 1 установлена наклонная шайба 2.
сообщающая колебательное движение рычаг\ 3 и, следогштсльно, толкателю 4,
конец которого с выст\пом а проходит в отверстие рычага 5. Рычаг 5 остается
неподвижны\1 до тех пор. пока отводка (S' не повернет толкатель 4 в направ гении
стрелки; при этом выступ а толка геля 4 поднимет рычаг 5 и улитку 6 вверх.
Улитка 6 входггт в зацепление с зубчаылм колесом 7 и поворачивает его на один
зуб
Рис. 7.95. Цевочный механизм внутреннею зацепления с остановками. Ведущее
звено I сообщает эпизодическое вращение в том же направлении г^евочному
колесу 2 с цевками 3. Для предупреждения самопроизвольного поворота колеса 2
звено 1 снабжено запирающей дугой CD, скользящей по соответствуюгцим дугам
колеса 2.
Рис. 7 96. Зубчатый цевочный механизм двггжения с остановкой. Всд\щий диск 1
снабжен зубом 2, воздействугогцим на цевки 3 колеса 4. За 1 оборот диска цевка
повернется на угол, ф = (здесь z - число цевок). Диск 5 полукруглыхп! гра-
Рис. 7.90
Рис. 7.91
Рис. 7.92
Рис. 7.93
J /Z
Piic. 7.95
Зубчатые механизмы с остановками
All
Рис. 7.96
Рис. 7.97
У7777\
Рис. 7.98
Рис. 7.99
нями фиксирует неподвижное положение колеса 4 в период, когда зуб 2 не
находится в зацеплении с цевками.
Рис. 7.97. Звездчатый механизм с двумя остановками. Ведущий диск 1 снабжен
семью цевками на секторе 2 и четырьмя на секторе 3, для которых на ведомом
звене 4 предусмотрено соответствующее число прорезей, обеспечивающих во время
зацепления равномерное вращение ведомого вала Для плавного перехода от покоя
к равномерному вращению первая и последняя цевки зацепляются с пазом
соответствующего профиля на звездочке 4. Расчет по формулам, приведенным
па сгр. 478.
Рис. 7 98. Звездчатый механизм для передачи прерывистого движения от рейки
к звездочке. Во время паузы звездочка 3 стопорится направляющей 4 Движение
звездочке сообщается при зацеплении цевок 2 на рейке ] с зубьями звездочки.
Рис. 7 99. Звездчатый механизм, сообщающий прерывистое движение рейке.
Зубья рейки 1 очерчиваются по кривой, эквидистантной циклоиде. Время движения
соо'твсгствует дуге на колесе 2, равной сумме шага и дуги зацепления. На рисунке
сверху показана передача для движения с остагювками в одном направлении,
снизу - для возвратно-поступагельного движения.
Рис 7.100. Звездчатый механизм внутреннего зацепления для передачи движения
^ ос{ановками. Ведущий диск I с цевками 3 вращается с постоянной угловой
скоростью вокруг оси О2 и передает движение с остановками звездочке 2,
вращающейся вокруг оси О^.
478
Механизмы с прерывистым движением ведомого звена
360°-(pi
Рис. 7.100
Рис. 7.101
Рис. 7.102
Рис. 7.101. Звездчатый механизм внутреннего зацепления с двумя остановками
ведомого звена 2. Колесо ] — ведущее.
Рис. 7.102. Звездчатый механизм, имеющий четыре равных периода движения
и четыре равных периода покоя с постоянным передаточным отношением во вес
периоды движения [R^ и Яг — радиусы начальных окружностей, ф^ и ф2 — углы
поворота звеньев в период движения):
_^1_ ^ _Ф1_,
Т 2тс ' ' ф2 '
При одинаковых углах поворота фз во все фазы движения
2п
Ф2 = —;
здесь т — число фиксирующих дуг;
2яТ,/?1
8 =
Т
S
т
2пТ Т
8 может бьггь выражено также через передаточное отнонюние:
' т \ 4 + 3«12 . П12
8 = —1/12 -::— 1 ) 4- m arcsin
2(1+^12)
здесь Wi2 =
Ri
0)2
Углы ajL и a2, определяющие положение центров и начала эпициклоид на
колесах относительно линии центров в момент начала движения могут быть
найдены из уравнений:
i'l2
2 arcsin
к
У
2(1+1/12)'
, 1 — cosec .
2 V 2
Зубчатые механизмы с остановками
479
Рис. 7.103
Рис. 7.105
Рис. 7 103. Прерывная передача с з>бьями нормального эвольвентного профиля,
снабженная переходными зубьями 3 для устранения удара в начале и в конце
движения ведомого колеса 2 {1 — ведущее колесо). Передаточное отношение
г/12 -0,5
Рис 7.104 Неполные зубчатые колеса. Ведущее колесо 4 (рис. 7.104, а) за один
оборот сообщает ведомому 2 поворот на 180°. Для входа зубьев в зацепление
предусмотрены перекатывающиеся рычаги 3. Положение ведомого звена во время
паузы фиксируется запирающей дугой 1 На рис. 7.104, б показано зеркальное
изображение противоположной стороны колес.
Рис 7 105. Звездчатый механизм обувной машины. За один оборот ведущего
колеса / ведомое колесо 2 поворачивается на ^2 оборота с периодами выстоя,
ускорен1Юго вращения и равномерного вращения.
Рис. J. 106. Зубчатое колесо с изменяемым числом зубьев. Зубья 3 расположены
в радиальных пазах диска 4. Число зубьев и закономерность их расположения
изменяются при вращении шайбы ), имеющей криволинейную прорезь, в которой
скользяг выступы 2 зубьев 3.
480
Механизмы с прерывисты м движением ведо иого звена
Рис. 7.106
Рис. 7.107
Рис. 7.108
Механизм допускает возможность регулирования продолжительности движения
и паузы, он находит применение, в частности, в арифмометрах.
Рис. 7 107. Механизм движения с остановка\П1 Ведомое з\бчатое колесо 1
имеет неполный зубчатый венеп. На общей с hhvi оси находится зубчатый
сегмент 3. При вращении вед>и1ее з>бчатое колесо входит в запепление с cei
ментом, подталкивае\1ым щтифтом ^. колесо же / выходит из заиеилеиия и остается
неподвижным до тех пор. пока cei мент не \прстся в щтифг 7. после чею колесо 1
снова войдет в запепление Для тою чюбы предохрании» колесо 1 от
произвольного вращения, его слегка пртпормаживают тормозо\1 б или фиксируют
остановом, подобно тому, как показано на рис. 7.111. Механизм можно применять
при небольших частотах вращения Ведущий вал 2, ведомый — 4.
^' Рис. 7.108. Механизм, обеспечивающий паузу при реверсироваппи. равную двум
оборотам ведомого колеса От ведущего вала 2 к ведомому 4 вращение пере-
Зубчатые механизмы с остановками
481
дается зубчатыми колесами L 3 и поводками (S, 7 и 5 В процессе реверсирования
механизма, вращая колесо 3 в направлении стрелки, показанной нпри\а\п1, палец 9
в течение первого оборота сначала перемещаечся свободно, а под конец усишав-
ливает поводок (S в положение, показанное тнтриховыми линиями. В течение второго
оборота двусгорон1пн1 пален 6, установленный на поводке 7, подходит к поводку 5
с противоположной стороны и с ')гого момента начнет передавать движение валу 4»
Изменить паузу неподвижною состояния вала 4 при реверсировании можно,
изменяя длину дугового паза па поводке S. для двустороннего пальца 6 на
новодгсе 7 и шггрину h поводков 8 и 5
Рис. 7.109. Мехаггггзм движения с остановками Ведомое колесо 2 n\ieci
неполный зубчатый веггег! с разрывом 3 С противоположной сюроггы имеется впадина,
в которую западает ролик 1 Диаметр ведохгою з\бчагого колеса 2 несколько
больше диаметра ведущего зубчатого колеса 5 В начале движения рычаг 6
захватывает рычаг 4 (рис 7 109. а) и чере^ одшг оборот ведомого колеса ггальцы
занимают положенгге. по казан ггое ira рнс 7 109. б При дальнейгпем врагцении
колеса 5 ведомое колесо 2 гге входгп в зацепление ir фиксируется роликом 1
до тех пор. пока ведущее колесо не займет снова положение, показатпгое па
рис. 7.109, а Тактгм образом, за два оборота г^едущего колеса ведомое сделает один
оборот с остатговкой.
Рис. 7.110 Устройство для умеиьшетгия ударов в скоростном зубчатом механизме
с остановкой. На ведомом валу S свободно тгосажена звездочка 7 с чттслом лучей^
равным числу остановок колеса 5. Лучи звездочки пртгжаты к утгору 1 па ко.тесе 5
пружиной; поворот звездочки по часовой стрелке ограттичеп штифтом 6. Перед
входом колес в точке 2 в зацепление штифт 3 на ведущем неиолттом колесе 4
продвинет луч звездочки вправо, гг пружина, воздействуя на колесо 5, сооб1Г1Ит
ему началытую скорость, смягчая в результате этого удар в момеггт заг^еплетгия.
Рис. 7.110
Рис. 7.109
16 Кожевппко!? и лр
482
Механизмы с прерывисты \i двилсеиием ведомого звена
Рис. 7.111. Механизм движения с остановками, составленный из полного и
неполного зубчатых колес Ведущее звено, имеющее зубчатый сектор 6 и дугу 7,
зацепляется с зубчатым колесом 4 ведомого звена, имеющем запирающую дугу 3
для фиксации положения остановки. Профили перекатывающихся поверхностей
рычагов 5 и 2 представляют собой участки центроид в относительном движении
(р — мгновенный центр вращения). Угловая скорость соз колеса 4 определяется
из уравнения
рЛ
рВ
Удара не будет, если в начальный момент мгновенный центр совпадает
с центром Л вала, а затем будет перемещаться от центра Л к В
Рис. 7.112. Зубчато-кулачковый механизм для преобразования непрерывного
вращения во вращение с остановками. От зубчатого колеса 7 с неполным числом
зубьев и кулачка 3, заклиненных на ведущем валу 2, сообщается колесу 5
с полным числом зубьев, несущему два ролика 4 и закрепленному на ведомом
валу, угловая скорость, изменяющаяся в момент включения от нуля до
постоянной, определяемой передаточным отнощением
1. После выхода колес из
зацепления кулачок 3 продолжает передавать колесу 5 через ролики 4
неравномерное движение с остановкой. Профиль кулачка, выбранный правильно,
обеспечивает безударную работу механизма.
Рис. 7.113. Планетарная передача с остановками. От ведущего вала 4 с
заклиненным на нем зубчатым колесом 5 движение передается сателлитному блоку
2 —7, в котором Z-J = Z5, г. Z2 = \. Однозубое колесо, обкатываясь по
неподвижному колесу 7, сообщает водилу 3. закрепленному на ведомом валу 6, движение
с периодическими остановками
Рис. 7.114. Планетарно-кривощипный механизм с паузами. Центр пальца 7
кривощипа на сателлите 2 описывает укороченную гипоциклоиду А (рис. 7.114, 6),
Рис. 7.111
Рис. 7.112
Зубчатые механизмы с остановками
483
которую можно приближенно описать
дугой окружности. Приняв длину /
шатуна равной радиусу R кривизны
траектории (рис, 7,114, б), можно
осуществить остановку ползуна 4:
соответственно
2 и 3.
где Z2 и 2з
зубьев колес
Механизм применяется для привода
ползуна гибочного штампа и
обеспечивает паузу в конце рабочего хода,
которая необходима для пластического
течения материала изделия под
давлением. На рис. 7.114, б дан график
перемещения ползуна 4.
Рис. 7.113
Рис. 7.114
Рис. 7.115. Механизм скоростной подачи. На цапфах 5 ползуна 4 установлены
эллиптические колеса 7 и 5, которые находятся в постоянном зацеплении с веду-
ишм колесом 6. При постоянной угловой скорости колеса 6 пластина 2,
закрепленная на цапфах ползуна, движется возвратно-поступательно с малыми скоростями
й конце ходов. На пластине устанавливается захватное приспособление для
прерывистой подачи проволоки в одном направлении.
Рис. 7 116. Механизм прерывистого движения. Ведущее звено — барабан 1 —
имеет собачку 3, зацепляющуюся со звездочкой 2 при скольжении ее конца па
копиру 4. Собачка 3 выключается пружиной. За один оборот барабана / ведомое
звено 2 поворачивается на ^б оборота.
16*
484
Механизмы с прерывистым движением вебо\и)го звена
Рис. 7.115
Рис. 7.116
Рис. 7.117 Механизм вращательного движения с ос1ановкой и ускоренными
перемещениями для компенсации паузы. Ведущий вал 3 с червяком 6,
посаженным на скользящей шпонке, передает движение колесу 5. Подвижная
направляющая I находится под действием пружины 2. В положении, приведенном на
рисунке, палец 4 колеса 5, упираясь в рычаг 7 с неподвижной осью, останавливает
вращение колеса, вследствие чего непрерывно вращающийся червяк перемещается
по валу 3 влево вместе с направляющей I до гех пор, пока гайки 8 не отклонят
рычаг 7, освободив таким образом колесо.
После этого колесо 5 получает вращение с увеличенной скоростью вследствие
вращения и поступательного движения червяка под действием пружины 2. При
возвращении червяка в правое крайнее положение вращение колеса 5 происходит
с обычной скоростью.
Рис. 7.118. Механизм для передачи прерывистого движения. На ведущем валу 9
посредством направляющей щпонки закреплена полумуфта 4, прижимаемая к
полумуфте 3 пружиной 8. Совместное вращение полумуфт 4 и 3 силами трения
происходит до тех пор, пока упор 5 не остановит иолумуфту 3 за один из
пальцев 2. В дальнейшем вращение вала 9 с полумуфт ой 4 и рычагом 7
сопровождается скольжением до момента встречи рычага 7 с пальцем на упоре 5
Рычаг 7 отводит упор 5, и полумуфты продолжают вращаться как одно целое
до встречи упора 5 со следующим пальцем 2. Количество пальцев 2 на
полумуфте 3 (выполненной за одно целое с зубчатым колесом) и их расположение
определяют продолжительность времени вращения и остановок ведомого колеса L
Пружина 6 осуществляет силовое замыкание упора 5 с пальцем 2.
Рис. 7.119. Механизм для преобразования непрерывного вращательного
движения в периодическое. Ведущей частью механизма является водило 1 с двумя
собачками 2 и 3, которые могут быть в зацеплении с храповыми колесами 15
и 14, как это показано на рис. 7.119, б. Принятое расположение собачек и зубьев
храповых колес позволяет осуществить передачу движения ведомому валу И
в разных направлениях.
Периодичность движения ведомого вала 11 осуществляется разъединением
собачек с зубьями храповых колес посредством двух шайб 6 и 7, по контуру
Зубчатые мехати мы с остановками
485
Рис. 7.117
Рис. 7.118
486 Механизмы с прерывистым двилсением ведомого звена
1 Z. 3 if 5 6 7 8 9
\\\ \i//A >
Рис. 7.119
Рис. 7.120
Зубчатые .мсханиз мы с остановка ми
487
Ю 9 8
Рис. 7.121
488 Механизмы с прерывистым двилсеиием ведомого звена
которых перекатываются ролики 4 и 5 (рис 7.119, а и б), установленные на осях
собачек.
Шайбы 6 и 7 (рис 7.119, в) ограничены двумя полуокружностя\п1 разных
радиусов При перекатывании роликов 4 и 5 по большому радиус\ храповой
механизм выключен, при перекатывании по меньшему радиусу — включен.
Положение шайбы 7 относительно стойки постоянное и фиксируется скользящим
пальцем 8; положение шайбы 6 может изменяться посредством рукоятки 9 и
фиксироваться фиксатором 10 в отверстиях лимба 13 (рис 7.119, г).
В зависимости от величины перекрытия внешних дуг шайб 6 и 7 определяется
угол поворота ведомого вала ii за один оборот ведущего вала 1. Угол поворота
ведомого вала может быть изменен в пределах от О до 180\ Сместив шайбы 6
и 7 вправо р\кояткой 72. можно получить непрерывное вращение ведомого вала.
Рис 7.120. Механизм для передачи возвратно-поступательного движения
рамке 2 от вращающегося в одном направлении диска 5 с цевками 4, входящими
в зацепление поочередно с верхними 1 и нижни\1и 3 з}бьями рамки
Рис. 7.121. Механизм преобразования непрерывного вращения в периодическое.
Зубчатое колесо 2 вращается непрерывно на неподвижной оси 12 На ст\пице 11
зубчатого колеса 2 на направляющей шпонке 1 посажена полумуфта 4. 5 с 3}бьями
на внешней торцовой поверхности и выступом 10 — на внутренней.
Пружиной 3 полумуфта 4, 5 отжимается вправо и зубьями на внешней
торцовой поверхности входит в зацепление с з\бьями ведомого диска 6, при этом
одни\1 из зубьев полумуфты отжимается фиксатор 7. В конце оборота
вращающийся выступ 10 с наклонной плоскостью встречается с неподвижным выступом 9
пальца 8 (рис. 7.121, б) и под действием осевой составляющей отводит
полумуфту 4, 5 влево, включая ведомый диск 6. Период движения и период остановки
зависит от угла, в пределах которого расположен выступ 9.
Рис. 7.122. Механизм для преобразования возвратно-поступательного движения
во вращательное с переменной скоростью и остановками. Ведущим звеном xiexa-
низма является зубчатая рейка L приводящая в движение зубчатое колесо 2,
закрепленное на валу 10 вместе с кривошипом 3 кулисного механизма Собачка 6,
ось которой закреплена на кулисе 8, приводит во вращение храповое колесо 4,
жестко связанное с валом 5 (7 — сухарь; 9 — тяга, прикрепленная к рейке).
РАЗДЕЛ S
МЕХАНИЗМЫ С РЕГУЛИРУЕМЫМ ХОДОМ,
КОМПЕНСИРУЮЩИЕ, УРАВНИТЕЛЬНЫЕ
и ПРЕДОХРАНИТЕЛЬНЫЕ МЕХАНИЗМЫ И УСТРОЙСТВА
При проектировании машин нередко требуется подобрать механизм с регули-
р\смым ходом ведомого звена в заданных пределах от h^^^ до И^^^ или
определять рациональные размеры звеньев для заданного типа механизма. С такого
рода задачами конструкторам приходится встречаться при проектировании машин,
в которых изменение хода ведомого звена связано с изменением вида или
размеров обрабатываемой детали (длина строгания в строгальном станке, длина
стежка швейной машины и др.), при проектировании механизмов,
устанавливающих течение процесса в машине (распределительные механизмы двигателей и др),
и в некоторых других случаях.
Стержневые механизмы с регулируемым ходохм можно разделить на следующие
1руппы:
1. Механизмы с регулируемой длиной одного из подвижных звеньев.
Пределы изменения длины звена зависят от заданных пределов изменения величины
хода ведомого звена;
2. Механизмы с регулируемым положением центра шарнира, образованного
одним из промежуточных звеньев с неподвижным звеном В частном случае, когда
uiapnnp заменен поступательной парой, перестановка центра шарнира сводится
к изменению положения направляющей, гю которой перемещается полз ушка
(промежуточное звено).
При изменении хода ведомого звена стержневых механизмов первой или второй
1 руппы для отдельных механизмов происходит смещение среднего положения
ведомою звена. Если среднее положение ведомого звена должно сохраняться при
любой величине хода в заданных пределах или если поставлено какое-либо
другое условие, например, необходи\юсть сохранения одного крайнего положения
при любой величине хода ведомого звена, то в механизме должны соответст-
в\ющим образом регулироваться два параметра.
Регулировать ход ведомого звена наиболее просто в случае применения
гидравлических механизмов, реверсивных планетарных меха^шзмов ременных передач
и фрикционных реверсивных механизмов, сообщающих движение ведомому звену.
Обычно ход регулируется перестановкой упоров на ведомом звене, приводящих
в действие специальный механизм, переключающий один из перечисленных меха-
низхюв, примененный для сообщения движения ведомому звену.
Механизмы с регулируемым ходом недостаточно изучены. Известные решения
относятся главным образОхМ к кулисным парораспределительным механрвмам
паровозов.
Безотказная работа механизмов возможна только в том случае, если
независимо от точности изготовления и сборки деталей будут предусмотрены меры
для компенсации неизбежных ошибок
По характеру работы отдельные механизмы должны допускать возможность:
1) компенсации зазоров между элементами кинематических пар, определяющих
мертвые ходы,
2) работы при некоторой несоосности валов;
3) автоматической компенсации поперечных, угловых и радиальных смещений;
490 Механизмы с регулируемым ходом, компеисируюи/ие, уравиите.пупые
4) компенсации эксцентричности и ошибок в профиле зубчатых колес;
5) выравнивание угловых скоростей;
6) равномерного распределения крутящих моментов с похмощью различных
уравнительных приводов и устройств;
7) распределения давления посредством механических разветвлений.
Для устранения мертвого хода в кинематической цепи необходимо \странить
зазоры между элементами кинематических пар всей цепи без изменения
размеров элементов пар.
В качестве примера можно привести синусный механизм с пружиной,
выбирающей зазор и поджимающей все детали в одну сторону (см. рис. 8 32). Если
кинематическая цепь разветвляется, то наилучшим решением является равенство
мертвых ходов (см. рис. 8.41 и 8.42):
A8i = А82,
причем если мертвый ход в одной цепи больше мертвого хода в другой цепи,
го следует или уменьшить больший мертвый ход или увеличить меньший.
Поэтому при проектировании механизмов там, где полностью исключить
мертвый ход нельзя, расходящиеся цепи следует подбирать гак, чтобы ошибки от
мертвых ходов были одинаковыми.
Для передачи усилий между вращающимися валами, оси которых в процессе
работы смещаются или пересекаются под некоторым изменяющимся у1Лом.
жесткое соединение недопустимо.
В этом случае находят применение многочисленные карданные механизмы (см.
рис. 6 9 — 6.13), в которых ведомому карданному валу сообщает переменную
угловую скорость уравнительная муфта, допускающая передачу движения между песоос-
ными валами, и компенсирующий механизм (см. рис. 8,37), допускаюнщй во время
движения перемещение ведомого вала относительно ведущего. Компенсирующие
механизмы для передачи движения от двигателя колесам тяговых вагонов,
установленных на рессорном основании, пре/^ставлены на рис. 8.41-8.42. Во всех
случаях разветвления механизма должно удовлетворяться уравнение, в котором
число ответвлений
/с = 35о + Si 4- 1,
где Sq — число уравнительных дисков без неносредсгвенной шарнирной связи
с поводками; 5i — число дисков с упомянутой связью
Привод, встречающийся в электролокомотивах и показанный на рис 8 42 в трех
вариантах, служит для компенсации смещений моторной рамы относительно
спаренных кривошипов ведущих колес На рис. 8 50, а показан случай, когда /с = 1,
на рис. 8.50, в к = Ъ.
В точных приборах, где недопустимы ошибки отсчета, применяют ко\п1енси-
рующие механизмы (см., например, коррекционное нриспособление рис 8.38 и
8 39).
На рис 8.56 показан уравнительный механизм привода ножниц барабанною
типа, предназначенный для выравнивания скоростей ножей и разрезаемого
материала. Преимущесгво планетарных передач используется только в том случае,
если специальные устройства, компенсирующие зазоры и ошибки зацепления и
монтажа, позволяют достигнуть равномерного распределения крутящего момента
на все промежуточные колеса. Уравнительные механизмы в планетарных передачах
исключают понижение точности колес. Чем хуже изготовлены колеса, тем хуже
работает уравнительный механизм.
Мехииизмы с регулируемым ходом, компенсирующие, уравнительные 491
При двух сателлитах уравнение для определения числа ответвлений
/с = 35о + 5i + 1
удовлетворяется при условии, если водило соединено посредством к соединений,
допускающих поперечные смещения относительно центрального вала по
горизонтали и вертикали.
При /с = 6 возможны четыре зацепления и два шарнира.
В соосных передачах с коническими сателлитами необходимое поперечное
смещение одного из центральных колес или водила должно происходить около
вершины конусов О (см. рис. 8.46). Уравнительные механизмы широко применяют
в планетарных редукторах авиационных двигателей, где компенсация ошибок
зацепления или перегрузки производится или за счет смещения солнечных колес,
пли за счет смещения осей сателлитов в радиальном направлении (см. рис. 8.47).
В работе машины не исключена возможность перегрузки, в результате которой
можег произойти разрушение какого-либо наиболее слабого звена механизма,
и машина в этом случае выйдет из строя. Для предотвращения аварии
целесообразно вводить в кинематическую цепь машины заведомо слабое звено,
достаточно прочное для восприятия нормальных перегрузок и разрушающееся при
перегрузке.
Следует иметь в виду, что электрическая защита предохраняет от
повреждений главным образом электрические цепи и лишь в некоторых случаях
механизмы. При наличии звеньев механизма, обладающих большой кинетической
')нсрп1ей (маховики), и при возможной работе машины на мертвый упор
(заклинивание ведомого звена) электрическая защита не предохраняет звенья машины
0 1 разрушения.
Предохранительное звено механизма конструктивно должно быть достаточно
простым и легко заменяемым. Чаще всего в качестве предохранительного звена
устанавливают срезающиеся шпильки из материала с известной и стабильной
механической характеристикой.
Предохранить машину от перегрузки можно также, введя в кинематическую
цепь автоматически срабатывающие при перегрузке механизмы. Например,
фрикционные предохранительные муфты, планетарные передачи с одним
заторможенным центральным колесом, включающиеся кулачковые муфты, падающие
червяки, механизмы с упругими звеньями и др.
Во фрикционных предохранительных механизмах момент или сила трения
должны быть больше нормального для данного звена момента или силы, но
меньше разрушающего момента. Фрикционные механизмы не всегда надежны
вследствие нестабильности коэффициента трения, зависящего от множества не
учитываемых при расчете параметров.
В механизмах с упругими звеньями, предохраняющими от перегрузки,
деформация предохранительного звена подбирается по тем же показателям, что и для
фрикционных механизмов. При нормальной нагрузке упругое звено напряжено
и сила упругости достаточна для сохранения неизменного относительного распо-
-'южения деталей, на которые она действует. При перегрузке ведомая деталь
предохранительного механизма останавливается, а другая начинает перемещаться
Нагр)зка на звенья механизма определяется силой упругости предохранительного
звена Например, в камнедробилке при защемлении разрушаемых камней между
щеками дробилки ведомая щека останавливается, а деформация пружины
увеличивается j\o тех пор, пока камень не разрушится. Может оказаться, что сила
упрмости пружины недостаточна для разрушения камня и при ее отсутствии
492
Мехаииз мы с регу.труе мым ходом, компенсирующие, уравиите ibubie
появилась бы перегрузка механизма, а возможно и разрущение какой-либо
детали. Кулачковые предохранительные механизмы применимы только при малых
скоростях, потому что возникающие при повторном включении удары, влияющие
на прочность звеньев, могут быть значительными.
При длительной перегрузке фрикционные предохранительные механизмы во
избежание перегрева следует сблокировать с электрическим выключателем,
приводимым в действие после некоторого пробуксовывания поверх1Юсти трения
МЕХАНИЗМЫ С РЕГУЛИРУЕМЫМ ХОДОМ
Рис 8 1. Ре1улируемый храповой механизм Ролик 5 собачки 2 в период поворота
коромысла / встречается с неподвижной щиной 4 и катится по ней, разъединяя
собачку с зубьями храпового колеса 5. Плоскость щины 4 устаьювлена так,
чтобы собачка вышла из зацепления в заданном положении и продолжала свое
перемещение вхолостую. Палец 6 шатуна 7 на коромысле 1 перемеидается при
изменении хода собачки. При ходе собачки в пределах угла а колесо
поворачивается на угол aj.
Рис 8.2 Храповой механизм позволяет регулировать угол поворота
храпового колеса, не изменяя угла а поворота коромысла. Поворачивая щиток 1 и
фиксируя его в желаемом положении посредством фиксатора 3 в отверстиях
неподвижного сектора 2, можно перекрыть один или несколько зубьев храпового
колеса в пределах угла поворота собачки.
Рис. 8 3. Регулируемый храповой механизм с внугренней собачкой Рычаг 7,
несущий собачку 6, поворачивается поступательно движущимся кулачком 2 и
возвращается в исходное положение пружиной 3. Угол поворота колеса 4
регулируется поворотом сегмента 5, перекрывающего часть зубьев храпового колеса
Рис. 8 4 Храповой механизм деревообделочного станка с автоматическим
изменением подачи — грубой в начале обработки и тонкой в конце. На ходовом
винте 1 заклинены кулак в форме паза 2 и храповое колесо 7. получающие
движение от кулисы 5 с собачкой 4 Камень 3 кулисы и ролик S кулачка наса-
Рис. 8.1
Рис. 8.2
Механизмы с регу шруемым ходом
493
А-А
Psic. 8.3
Рис. 8.4
6) <
Рис. 8.5
Рис. 8.6
жены на общую ось. Увеличение или уменьшение расстояния от оси вращения
кулачка до оси ролика приводит к изменению угла кулисы и, следовательно,
подачи (6 — шатун приводного механизма).
Рис. 8.5 Регулируемый храповой механизм. При вращении диска 9
переставные кулачки 2 приводят в движение рычаг 1 и тягу 4, шарнирно соединенную
с коромыслом 7, несущим собачку б. Последняя прижимается пружиной к храпо-
гзому колесу 8. Винт 5 ограничивает величину опускания рычага i, винт 5
выводит собачку из зацепления с колесом и служит для регулирования угла поворота
храпового колеса 8.
Рис. 8.6. Механизм с регулировкой подачи на ходу. При неизменной величине
перемещения шатуна 2 угол поворота коромысла 6 с собачкой 8, а
следовательно, и храпового колеса 1 зависит от положения оси А качания коромысла 3
(рис. 8 6, а). Положение оси А изменяется при вращении гайки 5 винта 4. Для
494 Механизмы с регулируемым ходом, компенсирующие, уравнителыше
Рис. 8.8
тонкой регулировки применима тройная собачка (рис. 8.6, б) с расстоянием между
вершинами зубьев, равным 7з шага зубьев храпового колеса. При повороте
рукоятки 7 храповой механизм выключается.
Рис. 8.7. Храповой механизм с регулированием подачи на ходу От ведущего
диска 1 с ползушкой 3 приводится в движение кулиса 2 с криволинейным пазом,
воздействующая на регулируемый по длине шатун 4 и коромысло 5 с
собачкой 6. Шатун 4 связан с коромыслом 10, ось вращения которого легко
переставляется посредством пружинной защелки 9 и неподвижного сектора (S.
Положение оси вращения коромысла 10 определяет величину угла поворота
коромысла 5 и соответственно храпового колеса 7. Число зубьев храпового колеса 7
и характер их расположения определяется требованиями технологии.
Рис. 8.8. Механизм с регулируемой подачей на ходу. Кривошипный диск 5
привода через палец 6, шатун 4 и рычаги 3 и 7 воздействуют на зубчатую рейку
10. зацепляющуюся со свободно сидящей на оси шестерней 11 и рычагом 1
с собачкой 2. Собачка зацепляется с храповым колесом 12, заклиненным на валу
подачи. Между стержнем 8 и рейкой 10 установлен неподвижный упор 9.
Перемещая фиксируемый стержень 8, можно на ходу изменять величину смещения
рейки 1(7, а следовательно, и подачи.
Механизмы с регулируемым ходом 495
Рис. 8.9. Дифференциальный храповой механизм для сообщения ходовому
винту малых осевых перемещений. Ползун 1 через собачки 4 и 3 вращает
храповые колеса Z4 и z^, из которых одно связано с винтом 5 скользящей
шпонкой, а второе имеет внутреннюю нарезку. Если Z3 — 24 = 1, то осевое смещение S
винта 5 будет мало и равно произведению шага S^ винта на разность частот
вращения крлес Пз и п^. или
-^)s..
-4/
ММ
При Гз = 23 и Г4 = 24 Sfj = 6 мм,
S ^ 0,01
дв. ход
Если собачку 3 выключить, то подача
Ч 24 ДВ. ход
Рис. 8.10. Кулисный механизм с переменны\1 ходом кулисы. Палец 1 укреплен
на малом колесе 2 механизма КарДана {z^: Z2 = 2). Угол наклона р прямой
ТГси по которой перемещается центр пальца 7, изменяется в результате поворота
и последующей фиксации винтом 5 колеса 3. При вертикальном расположении
траектории пальца 1 кулиса 4 неподвижна, при горизонтальном — кулисе
сообщается наибольший ход S^^^.
Рис. 8 11. Гребной винт с поворотными лопастями. Поворот лопастей 1, имею-
Huix зубчатые колеса 2 на осях, осуществляется рейками вилки 3 при ее осевом
перемещении.
Рис. 8.12. Кулисный механизм с регулируемым ходом поршня. Ось камня 2
кулисы прикреплена к ползуну 3. Регулирование скорости V осуществляется
перемещением ползуна 3 в направляющих 1 винтом 4.
Рис. 8 13. Механизм регулировки шага подачи проволоки без остановки машины.
На приводном валу 3 заклинен эксцентрик 2, сообщающий движение кулисе 1.
Смещая винтом 5 ролик 4 кулисного механизма, можно на ходу изменить
траекторию центра шарнира А и, следовательно, ход ползуна, от которого
зависит шаг подачи проволоки.
Рис. 8 14. Эксцентрик с изменяемым эксцентриситетом. На эксцентрике L
который неподвижно соединен с валом 2, установлен эксцентрик 3. Вращением
эксцентрика 3 с последующей фиксацией изменяют величину эксцентриситета.
Наибольший эксцентриситет а + Ь. При а = b эксцентриситет равен нулю.
Рис. 8.15. Эксцентрик с переменным эксцентриситетом. Отвернув гайки ],
вращают вал 5, на конце которого имеется зубчатое колесо 4, находящееся
в зацеплении с рейкой на диске эксцентрика 3. Эксцентрик 3 скользит* по
направляющим диска 2 и изменяет величину эксцентриситета.
Рис. 8.16. Кулисный механизм с возможным регулированием положения мертвой
точки ползуна без остановки привода. Передача движения от ведущего вала 2
к ведомому 11, на котором установлен палец кривошипа 9 кулисного
механизма, не нарушится, если вращением винта 1 сместить ползун 12 и изменить
расстояние А.
Расстояние между осями колес 4 и 6, а. также 6 и 8, связанных поводками
3 и 7, имеющих ось 5, не изменяется При перестановке оси вращения кривошипа
Рис. 8.9
Рис. 8.10
Рис. 8.11
Рис. 8.12
Рис. 8.14
Рис. 8.13
Рис. 8.15
Механизмы с рсгу шрусмым ходом
497
ff 6 7 8 9
Рис. 8.16
Рис. 8.17
на laKoc же расстояние смещаются мертвые точки при сохранении хода
ползуна И)
Рис, 8 17. Механизм с бесступенчатым регулированием длины хода кулисы.
Вс 1}пп!1т вал 1 с жестко закрепленным эксцентриком 5, вращаясь в пазу ползуна
6, сообщает ему поступательное движение по направляющим 2 и 8, которые
закреплены на зубчатых колесах 5 и 7.
Цилиндрическая часть ползуна 6 скользит в рамке 4 кулисы. Угол а,
определяющий положение направляющих 2 и S и соответственно ход кулисы,
регулируется с помощью вала 10 с колесами 9 и И.
498 Механизмы с регулируемым ходом, компенсирующие, уравпителы1ые
Рис. 8.18
Рис. 8.19
Рис. 8.21
Рис 8.18. Кривощипно-шатунный механизм штамповальною пресса,
предназначенный для сообщения заготовке возвратно-посгу па тельного движения. Ход
коромысла 3 регулируется изменением длины кривошипа винтом 1 и длины шатуна,
фиксируемой винтом 2.
Рис. 8.19. Кривошипно-шатунный механизм с регулированием хода поршня при
повороте эксцентрика 2 относительно коромысла 1.
Рис. 8.20. Механизм топливного насоса дизеля с регулированием количества
подаваемого топлива. Движение золотнику 2 передается от вращающегося кулачка 4
посредством коромысла 3 при неподвижном шарнире А. Количество подаваемого
топлива регулируется поворотом рычага 1,. положение которого определяет ход
золотника 2.
Рис. 8.21. Газораспределительный механизм двигателя внутреннего сгорания
с регулированием хода клапана 7, достигаемым поворотом рычага 2.
Механизмы с регу.шруемым ходом
499
Рис. 8.22
Рис. 8.24
Рис. 8.25
Рис. 8.23
Рис. 8 22. Реверсивный парораспреде-
лп1тельный механизм. Реверсирование или
изменение хода золотника 2
осуществляется поворотом рычага 1 в пределах
угла, ограниченного положениями / и 11.
Рис. 8.23. Замена кулисы
параллелограммом Уатта. Реверсирование или изменение хода ведомого звена 2
осуществляется поворотом рычага 1.
Рис. 8.24. Стержневые механизмы с регулированием угла поворота ведомого
звена. При перемещении шарнира 2 с помощью регулировочного винта
достигается изменение угла поворота ведомого звена 1. На рис. 8.24, л, б, в, г показаны
модификации механизма.
Рис. 8 25. Механизм тканепродвигателя швейной машины. Величина
продольного хода гребенки I изменяется при повороте рычага 2 относительно оси 5.
Камень 4 установлен на цапфе шатуна 5.
Рис. 8.26 Кулачковый механизм с регулируемым углом качания коромысла 7.
Угол качания коромысла регулируется при изменении положения шарнира звена 2.
Угловой ход коромысла 5 — ф.
Рис. 8.27. Кулачковый механизм с постоянной суммой противоположных
радиусов-векторов эквидистанты. Фазовый угол между перемещениями толкателей i и 2
может быть переменным.
500 Механизмы с регу.шрусмым ходом, компенсирующие, уравиитаьиые
Рис. 8.26
Рис. 8.27
Рис. 8.29
Рис. 8 28. Механизм для регулирования закона вращения вала кулачка. Движение
от ведущего вала 2 к кулачку 12, который свободно вращается на этом же валу,
передается посредством зубчатых колес 1 'и 5, кулисного механизма 4, 5, крестово-
кулисной муфты 8, 9 и зубчатых колес 10, И.
Механизмы с регулируемым ходом
501
Ш^^
-Е^
Рис. 8.30
Рис. ^3\
Вал 14 механизма свободно вращается в серьге 13, которая может
перемещаться поступательно по вертикали при вращении гайки 7, соединенной с
серьгой 13 винтом 6.
Рис. 8.29. Повороть{ая передача со сферическими зубчатыми колесами. Вал 1
вращается в неподвижно закрепленном подщипнике: положение вала 5 можно
изменять. Сферическое зубчатое колесо 3, сцепленное с колесом 2,
поворачивается с помощью рычага 4 вокруг оси 8, не проходящей через ось вала 1
Зубчатые сегменты 6 закреплены на оси, которая неподвижно соединена с
подшипником вала 5, а сегменты 7 — с невращающимися осями 8. При повороте
рычаг а 4 сегменты 6 обкатываются по неподвижным сегментам 7, и так как
радиусы равны, угловая скорость сегментов 6 в относительном движении равна
удвоенной угловой скорости рычага.
Рис. 8.30. Передача с регулируемой частотой вращения. Частота вращения
ведомого вала 5 изменяется при перемещении установленных на нем муфт
свободного хода 4 и 3 посредством тяги 6. Заклинивание роликов 7 в каждой из
муфт происходит при вращении их в одном направлении, а угол поворота
определяется расстоянием до оси качания кулисы.
При вращении кривошипа 1 кулисе 2 сообщается колебательное движение и
через проушины, расположенные с противоположных сторон на кольцах м\фт,
передается валу 5 пульсирующее вращение.
Рис. 8 31. Механизм с регулируемым углом поворота ведомого коромысла. От
Коромысла 3 коромыслу 1 передается качательное движение через промежуточный
Ползун 2, ось которого установлена в вилке штанги 4.
При неизменном по величине угле качания коромысла 3 угол качания
коромысла 1 регулируется перемещением штанги 4 с ползуном 2 в пределах хода /.
Штанга 4 при передаче движения покачивается в плоскости чертежа.
502 Механизмы с регулируемым ходом, компенсирующие, уравнительные
КОМПЕНСИРУЮЩИЕ И УРАВНИТЕЛЬНЫЕ МЕХАНИЗМЫ
И ПРИСПОСОБЛЕНИЯ
Рис. 8.32. Схема синусного механизма с устранением зазора в кинематических
парах. При наличии зазора" между пальцем 2 кривошипа и пазом каретки 3 синус
угла а поворота кривошипа не будет соответствовать перемещению каретки при
отсутствии компенсирующей пружины I. Пружина, предварительное натяжение
которой больше силы трения в направляющей каретке 3, указанный недостаток
устраняет.
Рис. 8.33. Зубчатое колесо, составленное из двух дисков 1 и 2 и
позволяющее уменьшить зазор в зацеплении между зубьями до минимального при
смещении дисков растянутой пружиной 3.
Рис. 8.34. Зубчатая передача, работающая без зазора в зацеплении. Колесо 5
выполнено как одно целое. Второе колесо состоит из двух деталей 2 и ^ с
пружиной 3, установленной между ними. Шпонка 1 расположена под некоторым
углом к оси вала, поэтому при перемещении детали 2 вдоль оси вала под
действием пружины происходит ее вращение до полного выбора зазора в
зацеплении.
Рис. 8.35. Механизм устранения зазора в винтовой паре. Гайка состоит из
основной 3 и дополнительной 1, ввернутой на мелкой резьбе в основную.
Положение гайки 1 фиксируется пластинкой 2. заложенной в зубья гайки 1, число
которых должно быть достаточно велико.
Рис. 8.36. Винтовая пара (рис. 8 36, л), состоящая из гайки 3 и ходового винта 1
с шариками 4, расположенными по винтовой линии в направляющих, имеет
высокий к. п. д. Шарики 4 укладывают в несколько, но не менее двух замкнутых
рядов. Замыкание осуществляется специальной канавкой, которая имеется во
вставке 2.
В механизмах, не допускающих люфт между винтом и гайкой, применяют
сдвоенную гайку (рис. 8.36, б). Гайки 1 и 3 устанавливаются во вставке 2 на
ходовой посадке и после выборки люфта при вращении фиксируются шлицевым
соединением с треугольным профилем и разным числом (на один) шлицев.
Рис. 8.37. Соединение валов, допускающее смещение их осей в процессе
работы. Движение от коробки скоростей к промежуточному карданному валу
передается соединением, состоящим из зубчатых колес i и ^ с внутренним
зацеплением при одинаковом числе зубьев; применяется в автомобилях.
Рис. 8.38. Схема коррекционного приспособления для устранения влияния
эксцентриситета в червячной передаче точных приборов.
Круглая шайба 2, посаженная с регулируемым эксцентриситетом на ось 4
отсчетного колеса 3, компенсирует эксцентричность е отсчетного колеса за счет
поправочного движения стрелки, указывающей начало отсчета и находящейся на
рычаге 1, который поворачивается вокруг неподвижной оси.
На рисунке справа показана кривая ошибок в отсчетах прибора без
коррекционного устройства (штриховая) и при наличии устройства.
Рис. 8 39. Схема червячной передачи прибора с коррекцией влияния эксцентри-
сигета. Плоская шайба 4 на шаровом подвесе, поворачивающаяся в любой
плоскости посредством регулировочных винтов 5 и 6, может передавать движение
толкателю 3 и индексу 2, качающемуся вокруг оси барабана 1.
Рис. 8.40 Механизм, компенсирующий смещение осей валов при притирке
седел клапанов со сферической поверхностью соприкосновения. Клапан 4
закрепляется в цанговом зажиме посредством рычага 11, соединенного с педалью
тягой Шкив 1, прикрепленный к шпиителю приспособления, сообщает клапану
—D>NAX/VfS\ ^^—r^
Рис, 8.32
Рис. 8.33
Рис. 8.34
2
Z О
/
/
ггтМ"
ч^^Ш
г J
1 ) К^1 ) 1 1
Ш^^
Рис. 8.36
Рис. 8.37
SO" т^
Углы поборота
504 Механизмы с регу труемым ходом, колтепсирующие, уравтипаьныс
Рнс. 8.39
Рис. 8.40
вращение с частотой 1500 об/мин. Седло 5 клапана закрепляется в
шестигранном углублении диска, неподвижно соединенного с втулкой б. Шаровая
поверхность 7 втулки б установлена в траверсе 9 приспособления так, что
геометрический центр этой сферы совпадает с центром сферы поверхности клапана, а
шаровая поверхность 3 установлена в эксцентрично расположенной расточке шкива 2.
Компенсация смещения геометрических осей вращения валов осуществляется
шаровыми поверхностями сопряжения. Шкив 2 с втулкой б вращается с частотой
100 об/мин. Необходимая сила прижатия клапана к седлу во время притирки
обеспечивается пружиной 10. Пружины 8 компенсируют износ в сопряжении
шаровых поверхностей и перемещают траверсу 9 в исходное положение при
отключерпюй пружине 10.
Рис. 8 41. Компенсирующий механизм передачи от двигателя к колесам в
тяговых вагонах При передаче зубчатыми колесами 7, 3 вращения от двигателя
к колесам 4 (рис. 8.41, с/) необходимо компенсировать нарушения правильности
зацепления при боковой качке вагона вследствие прогибания рессор На конечнохМ
вед\щем з\бчатом колесе 3, жестко сидящем на станине J, укреплены два
зубчатых сектора 2, соединенных шарнирами 8 с тягами б. Тяги б оканчиваются
стержнями 5, соединенными с колесом вагона. При деформации рессоры на
величину с з\бчатые секторы 2 обкатываются один по другому так, что стержни 5
не мегяюг своего положения относительно колес 4.
На рис. 8.41,6 показано положение механизма, когда усилие па рессоры
уменьшилось.
Структурный анализ данного механрвма показывает: число подвижных звеньев
/7 = 5; число пар первого рода р^ = 6; одна пара р2 второго рода.
Число степеней подвижности механизма
W=3n-2p, -р2 = 3-5-2.6-1 -2.
Рис. 8.42. Компенсирующие механизмы, применяемые в электролокомотивах
для передачи движения от двигателя к ведущим колесам. Вследствие колебания
Комиеисирующие и уравиителыше механизмы и ириспособяеиия
505
5-5
А-А
Рис. 8.41
Рис. 8.42
Во время движения подвешенной на рессорах рамы элекгролокомотива непосредсг-
венная связь вала двигателя с осью вед\нн1х колес невозможна
Четырехзвенный механизм с параллельными кривошипами, образованный
ведущими колесами, рамой тележки и шатуном, обладает одной степенью свободы,
поэтомч без нарушения определенности движения к нему можно присоединить
одну из статически определимых групп, поводки которой должны быть
расположены так. чтобы сближение или удаление рамы электролокомотива и тележки
^е были ограничены.
506 Механизмы с регулируемым ходом, компенсирующие, уравнителышс
В компенсирующем механизме, показанном на рис. 8.42, а, присоединена трех-
поводковая группа первого класса со звеньями 1, 2, 3 и 4; в механизме,
изображенном на рис. 8.42,6, группа третьего класса со звеньями 1—6; в механизме на
рис 8.42, в — группа третьего класса по классификации Ассура со звеньями 1—8.
Рис. 8.43. Схема уравнительного механизма тормозной рычажной передачи
КВЗ-1 вагонной трехосной тележки. Механизм обеспечивает равномерное
распределение тормозного усилия по тормозным колодкам при торможении с
одновременным отходом колодок от колес при растормаживании. Поставленное
условие выполняется, если число степеней свободы кинематической цепи равно числу
тормозных колодок, соединенных триангелем или балкой.
По формуле П. Л. Чебышева число степеней свободы
W= 3/Z — 2pi — р2-
где п — число подвижных звеньев кинематической цепи (по схеме п = 24); pi —
число кинематических пар первого рода (по схеме pi == 30); р2 — число
кинематических пар второго рода (по схеме р2 ~ 6).
Подставив значения, получим
И^= 3-24-2-30-6 = 6.
Рис. 8.44. Механизм автоматического поддержания постоянного хода поршня
тормозного цилиндра. Применение рассматриваемого механизма исключает
необходимость ручной подрегулировки передачи после износа тормозных колодок.
Авторегулятор (рис. 8.44, а) состоит из двух механизмов: приводного,
подвешенного к головке штока 4 и соединенного шарнирно в точке А с рамой кузова
вагона, и компенсируюгцего, встроенного в горизонтальную тягу С рычажной
передачи. Приводной механизм, шарнирно соединенный с компенсирующим
механизмом тягой 5, состоит из кулисы 1 с закрепленным на ней роликом 2 и кулачка
3, соединенного подвижно с головкой штока в точке Е. Кулиса 1 приводится
в движение штоком поршня с роликом на его головке, при этом центр
шарнира В кулачка 3 описывает траекторию Bq, В^, Бн, -которая является программой
работы компенсирующего механизма. Перемещение ведомой части 8 тяги С
зависит от величины перемещения штока поршня и дополнительного
перемещения, создаваемого компенсирующим механизмом.
Действие компенсирующего механизма заключается в следующем.
Соединительная труба 10 (рис. 8 44,6) на правом конце имеет несамотормозящую нарезку (гайка 9)
для винта 8.
На левом конце трубы 10 жестко закреплены два тормозных диска -
конический /5, исключающий вращение гайки при соединении с конусом 17 под
действием осевого усилия, и плоский И, контактирующий с диском 12. Под
действием предварительно сжатой пружины 14 конусы 15 и 17 стремятся выключиться,
плоские диски 11 и 12 прижимаются один к другому. Кривошипная гайка
6 — 7 совершает вращательное движение под действием соединительной тяги -^
в соответствии с перемещением точки В перекидного рычага кулачка 3 (см
рис 8 44, с/). С невращающейся втулкой 17 гайка 7 связана левоходовой
нарезкой, поэтому может перемещаться вдоль оси, освобождая своим буртом
фрикционный диск 12. Последнему при перемещении гайки 7 по резьбе влево может
сообщаться также вращение с помощью предварительно закрученной фрикционной
винтовой пружины 18 квадратного сечения (см. рис. 8.44,6). Компенсирующий
механизм должен регулировать длину соединительной тяги таким образом, чтооы
вне зависимости от размера колодок ход поршня в цилиндре был постоянным,
т. е. чтобы точка В перекидного рычага кулачка 3 имела возможность описать
Ko\tiiciici{p}ioiifuc и \/)(ia/iume ihfihic механизмы и приспособ ienu4
507
2^ 23 22
21 20 19 18 17
1U1J
Рис. 8.44
'^^UallilI,IiI \час10к Bq. Bj, Б,, нс5а\1кн\ loii фаекгорпи Возможны ipn сл>чая.
'^) iHia нормальной длины, б) тяга короче нормы (новые колотки) и в) тяга
^ чпшес нормы Если при торможении, когда точка В переходи! из положения
"i в В„ и гайка 7, неремегдаясь вправо, освобождает диск /2, а тормозные
•"^-Юдки прижимаются к колесам (гяга короче нормы), когда межд> гюнусами
'^ и /7 еще налицо зазор, то усилие нажатия на фрикционные диски 12 и 11
- ^1^'пьп1ается в резул1>таге смещения диска 12 вправо, и гайка 9 свинчивается
^ BHHia 8, увеличивая длину тяги. При обратном ходе гайки 7 (справа налево)
<^слс снятия осевой нагр>зки и переходе точки В из положения Бц в В^ диски
^' 12 через фрикционную пружину вра1Г1ают гайку в противоположном направ-
•'^нии. и длина тяги сокран^аегся
508
Механизмы с регулируемым ходом, компенсирующие, уравиите.1Ы1ые
При нормальной длине тяги ее удлинение и укорочение в процессе
торможения и растормаживания одинаковы, поэтому ход поршня сохраняется
постоянным вне зависимости от состояния тормозных колодок.
Рис. 8.45. Схема шарнирного соединения с равномерным распределением
нагрузки на ходовые колеса опорной ноги крана. Для равномерного распределения
нагрузки (рис. 8.45, а) и снижения влияния неровностей рельсовых путей нога 7
крана опирается на колеса 5 ходовых тележек через систему сферических
шарниров и ^, (у-, траверсу 2 и балансиры 4 Шарниры 1 и 3 допускают покачивание
вдоль, шарниры 6 — поперек крановых путей.
На рис 8 45,(5 показан разветвленный механизм равномерного распределения
сжимающей нагрузки на пять пар колес крановой тележки через систему
сферических шарниров. Уравнительный механизм в случае суммирования растягивающих
нагрузок показан на рис. 8.45. в Число соединений
к = 3So + Si + 1,
где Sq — число звеньев, не имеющих непосредственного соединения с поводками,
передающими нагрузку; Si - число звеньев, связанных с поводками, передающими
нагрузку
Рис 8 46. Уравнительный механизм авиационного редуктора при шести
сателлитах, \ крепленных по углам шарцирного шестиугольника.
При^пцш действия механизма заключается в гом, что один из сателлитов 3
при пере1рузке под действием осевой силы W перемещается вдоль оси
подшипника и с помощью тяги 1 (рис. 8.46, а), связанной с серьгой 2, изменяет форму
шарнирного шестиугольника (рис 8 46, б), передавая тем самым излишнюю нагрузку
другим сателлитам.
Если допустить, чго вершины шестиугольника перемещаются по осевым линиям
(поперечные смещения отс}тствуют), то
Л'„
т
1 - sm 60°
sin 60'
; 0,15m;
} = т
1 - ( 1 + --- sm- 60^ - 1 + -J^- I cos 60^
m J \ m
Ю
Рис. 8.45
Компенсирующие и уравнительные механизмы и приспособления
509
Рис. 8.46
Анализируя схему перемещения
шарниров шестиугольника (рис. 8.46, б), можно
заметить, что перемещение одного из
сателлитов на величину х возможно при
перемещении двух других (расположенных
под углом 120^) на такую же величину.
При этом остальные три сателлита
перемещаются на величину у Следовательно,
нагрузка на сателлиты будет
распределяться равномерно на каждую группу,
сосгавлснную из трех (через один) с весьма
незначительной перегрузкой на одну из
зтих групп
Рис 8 47 Уравнительный механизм
планетарного редуктора по схеме
инженера Косова В рассматриваемой схеме
все рычат и 1—6 жестко соединены с
эксцентричными цапфами соответствующих
Рис. 8.47
им са1ел1И10в и шарнирно с вращательными парами шестиугольника, за
исключением одной. Рычаг 6 с вершиной шестиугольника соединен вращательной и
поступате.п>ной парами, чго обеспечивает ему, кроме вращательного движения
относительно вершины шестиугольника, еще тт поступательное.
При перегрузке одного из сателлитов контур шестиугольника изменяется так,
что нагрузка на каждую из двух групп сателлитов (через один) распределяется
равномерно с несколько большей нагрузкой на одну из групп.
Рис. 8 48. Механизм компенсации крутящего момента спиральной пружины.
Барабан пружины I соединяется с ведомым валом S цепью 2 или какой-либо
другой гибкой связью, наматывающейся тта спираль (улитку) 3, надетую на
вал 7.
Витки улитки подобраны таким образом, что уменьшение крутящего момента
пружины компенсируется увеличением радиуса витка так, что момент на валу 7
остается постоянным. Для завода пружины на валу 7 имеются квадрат 6 и
храповой механизм 4, 5
510 Механизмы с регулируемым .ходом, компенсирующие, уравпите 1Ы1ые
Рис. 8.49
Рис. 8.50
Рис. 8 49. Схема механизма автоматического регулирования нагяжения ремня
ременной передачи. Двигатель 1 ременной передачи (рис 8.49, б/) установлен на
площадке 2, свободно поворачивающейся на цапфах Ось вала двигателя 1
смещена относительно цапф площадки на величину е Реактивный момент М
отклоняет площадку (рис 8 49,6) от вертикального положения и автоматически
натягивает ремень, изменяя таким образом натяжение Si ведущей и Si ведомой
вегвей.
Рис 8.50 Фрикционная передача с автоматически регулируемой силой нажатия
в зависимости ог нагрузки Вед>щий конус 5 вращасг малый конус 2, внутри
которого расположена многозаходная гайка 5, сопряженная с нарезанным участком
вала 7 и скользящая по внутренним шлицам малого конуса, прижимаемого
пружиной 4 к большому. При вращении ведущего конуса 5 по стрелке и при
перегрузке вал 1 замедляет свое движение (или останавливается), гайка смещается
вниз, давит на пружину, что приводит к возрастанию усилия нажатия,
необходимого для передачи движения.
Рис. 8.51. Рычажно-грузовой механизм натяжения тяговой цени конвертера.
К ползуну 5, который установлен на станине и может перемещаться по
направляющим, прикреплена плита с натяжной звездочкой 4. Один кч)нец рычага 2
соединен с тягой 3, закрепленной на плите, а второй — с грузом б Натяжение цепи
регулируется грузом 6 с помощью гайки 7.
Рис 8.52. Уравнительный двухжелобчатый привод с дифференциалом.
Приводной вал 8, получающий движение от конического колеса 7, вращает с по%ющью
водила 4 и конических зубчатых колес дифференциала: зубчатую пару б, 9 и с ними
приводной блок 1: зубчатую пару 3, U) и с ними приводной блок 2. Если окруж-
Компенсирующие и ypaemuue.ibiibie механизмы и приспособ.leiiu/i
511
лые скорости блоков 1 и 2
несколько отличаются, го колеса 9 и
10 враидаются с различными
скоростями, колеса 5 и 5' начинают
вращахься вокруг своей оси,
выравнивая скорости блоков 1 и 2.
Сходя с приводного блока 2,
канаг огибает б.чок 11, а затем блок
1 и направляющий ролик 12.
Максимальная разность
натяжения ведущей и ведомой ветвей
капа!а, передаваемая приводом:
Р = Р,+Р2= 2to (е^'^о _ 1).
Натяжение сбегающей ветви
каната
р
1Д5Р ,
Рис. 8,51
2(е^'
1)
в то время как в двухжелобчатом жестком приводе
Р
2(е^"о - 1)
1,35 Р.
Преимущество уравнительного привода очевидно.
Рис. 8.53. Схема уравнительного привода с тремя приводными
уравнительными блоками, заменяющая многожелобчатый привод.
Проскальзывание, толчки и повышенное натяжение каната в многожелобчатых
приводах устраняются при применении связанных одножелобчатых блоков с по-
сюянпой окружной скоростью каната на всех блоках.
Опюшенис предельных крутящих моментов на отдельных блоках 1, 2 и 3,
появляющихся при буксовании
Рис. 8.52
512 Механизмы с регу шруемым ходом, ко\тепсируюи/ие, уравнительные
Рис. 8.53
Л^, R, ^,,,^ Мз Къ
А/з ^3
М, Rj
где ао — угол обхвата, обычно одинаковый для всех блоков, j.i — коэффициент
трения
Для уравнительною привода с любым числом блоков одинакового радиуса
V/з V/,
, qM7o^
Рис. 8 54. Уравнительный привод для равномерного распределения круляп^ею
момента и понижения частоты вращения приводного вала.
Шкив / приводится в движение от двигателя Блок 5 является поводком
дифференциала Блок 6 связан с цетрачьным колесом 4, 5 - неподвижная ось
привода.
Моменты, передаваемые блоками
Усилия
р — р
Р, = Л) ■^Р2 = Ро
/'1 + У 7
где Pq — окружное усилие на колесе 2, Р^— давление па пален водила,
связанною с колесом 7, Р2 — окружное усилие на колесе 4 блока 6: М^. hU - моменты,
передаваемые блока\п1 5
I'l-, R\ — ради>сы колес
Рис. 8.55. Механизм регулировки провисания цепи в маните, применяемой
для разрезания цепи на .мерные длины Необходимое и носюянное провисание
цепи огибающей звездочки 1 и 4 поддерживаегся посредством свободно и упруго
подвешенного пласт.массовою ползуна 6. несущего две пары роликов 2 — 2 и 5-5
Если цепь провисает больше или меньше нор\1ы. го ролики 2 или 5, к которым
припаяны проводники соленоида, замыкают ею электрическою цепь и сердечник
соленоида расцепляет муфт> и останавливает х1ашин\ {3 — прпжихшой резиновый
ролик)
Рис 8 56. Схема дифференциальною механизма для выравнивания скорости
ведомою вала Ножницы приводятся в движение от двигателя и рсд>ктора через
конические колеса дифференциала ] и 3. Скорость ведомого колеса 3
складывается из скоростей (Oi и (xij-
СО3 = (О1 + 2(02
Ko\inciicupyioiinic и гравтппспъпые мсхатг^мы к лрипюгобюиич 513
Рис. 8.57
Так как колесо 2 совершает колебательно-вращательное движение, то угловая
скорость ведомого колеса переменна. Изменяя эксцентриситет е и частоту врап^е-
ния п электродвигателя, изменяют скорость колеса 3.
Рис. 8.57. Механизм выравнивания скорости цепи конвейера. Скорость Кцепи 1
будет неравномерной, если звездочка 2 имеет малое число зубьев и вращается
с постоянной угловой скоростью. Скорость V цепи выравнивается цепной
передачей, у которой ведущая звездочка 4 имеет обычную форму, а ведомая звездочка
3 столько граней, сколько зубьев на звездочке 2 (^^ — шаг цепи транспортера;
^2 — шаг цепи цепной передачи).
Рис. 8.58. Механизм периодического регулирования скорости ведомого вала,
соединенного с ведущими зубчатыми колесами.
От ведущего вала 11 к ведомому 1 движение передается посредством зубчатых
колес 6, 5, 4 и 2. Зубчатое колесо 6 закреплено на валу 11, колесо 2 — на.
ведомом валу 1, а блок с колесами 4 п 5 свободно вращается на оси 3 водила 7.
17 Кожевников и др.
514 Механизмы с регулируемым ходом, компенсирующие, уравнителымь
\^Щ
1Ш^
Рис. 8.58
Ркс. 8.59
На ступице водила 7 закреплено червячное колесо 10, которое вручную
приводится во вращение червяком 8 посредством штурвала, закрепленного па валу 9.
При неподвижном червяке S движение вала 11 к валу 1 передается с
постоянной скоростью.
При вращении водила 7 посредством червяка червячной передачи изменяется
частота вращения ведомого вала 1, которая зависит от направления вращения
водила и его угловой скорости.
Рис. 8.59. Механизм намотки ленты с постоянной скорост1,ю. Стальная лента 4
огибает направляющий ролик 5, затем барабаны i и 5 и наматывается на
катушку 7.
Барабан 1 соединен с барабаном 5 зубчатыми колесами 2 и б. На валу S
квадратного сечения на подвижной посадке установлена звездочка 9, которая
получает движение от вала барабана 5 посредством цепной передачи. Диск 10
фрикционной муфты закреплен на валу направляющими шпонками и прижимается
к диску звездочки пружиной 11. Сила упругости пружины, определяющая
натяжение ленты при намотке, регулируется маховичком 12 при его вращении.
Компенсирующие и уравнительные механизмы и приспособichuh 515
вид Б
Рис. 8.61
Рис, 8.62
Рис. 8.60. Механизм преобразования
равномерного вращения в медленное
равномерное и быстрое на каждом
иол-обороте ведомого вала. На
ведущем валу зубчагое колесо I закреплено
эксцентрично и колесо 2 — концснтрич-
ио. Один оборот эксцентрикового
колеса 1 в зацеплении с эллиптическим
сек юром 7 о г зуба 3 до зуба 4
соогветсгвует пол-обороту ведомою
вала 5, а два оборота колеса 2 в
зацеплении с цилиндрическим сектором
6 завершают цикл полного оборота
ведомого вала.
Рис. 8.61. Механизм преобраз}ег постоянную угловую скоросгь ведущего вала /
в переменную ведочюго вала 3 иосредством пазового кулачка 2, закрепленною
iia валу червяка. Может быть псиользован в качестве компенсационного в.
приводе цепного конвейера.
Рис. 8.62. Механизм изменения скорости вращения ведомого звена после
каждою пол-оборота. Вал червяка 6 иоддсрживается двумя подщипниками. Левый
подщинник, в ко юром вал червяка может перемещаться вдоль оси, соединен со
станиной 7 иенодвижно, нравьй? нодшищщк установлен на ползуне, который
перемещается ио направляющим станины.
На приливе ползуна закреплен ролик, катящийся в пазу кулачка 2, связанный
с червячным колесом 3. Вал / червячного колеса является ведомым звеном.
Ведущее зубчаюе колесо 5 находится в зацеплении с колесом 4, неподвижно
закрепленным на валу червяка 6.
Червячное колесо 3 персд<1ет иосрсдсгвом кулачковою механизма возвратно-
лоступательпое движение но.'Г^уиу с червяком 6, поэюму в зависи.\юсги ог
направления перемещения червяка скорость червячного колеса уБелнчнвается или
уменьшается.
17*
516 Механизмы с регу.шрусмым ходом, компенсирующие, уравнительные
rh I ^
Л 5
Рис. 8.63
Рнс. 8.64
При числе зубьев колеса, равном 56, и шаге 6,35 мм валу червяка
сообщается 24 оборота за 3 с. Ползун за этот период времени перемещается
на четыре шага (25,4 мм). Следовательно, при перемещении червяка в сторону
вращения колеса пол-оборота последнего протекает за 3 с и при движении
червяка в противоположную сторону пол-оборота колеса осуществляется за 4 с.
Рис. 8.63. Механизм изменения скорости вращения ведомого вала посредством
кулачка. От ведущего вала 1 ведомому 4 движение передается посредством
зубчатых колес 2, 3, 6 и 8, передаточное отношение которых не равно единице.
Зубчатое колесо 2 закреплено на валу 1, колесо 3 закреплено па валу 4,
а зубчатый блок с колесами 6, 8 и кулачком 7 свободно вращается в
подшипниках водила 5.
Постоянный контакт вращающегося кулачка 7 с роликом 9 обеспечивает
покачивание водила 5 относительно оси валов 1 и 4 и соответствующее
изменение частоты вращения ведомого вала. Закон движения ведомого вала
определяется профилем кулачка и передаточным отношением зубчатых колес.
Рис. 8.64. Уравнительный дифференциальный привод для устранения
неравномерного хода цепей в транспортерах с большим шагом звездочек.
От ведущего вала 5 через конические колеса 3, 4, 6 движение передается валу
2 и далее через зубчатую пару 1 — 13 валу 12 с заклине1П1ым кулачком И,
толкающим ролик водила 7. Изменяя профиль кулачка, можно передать валу 9
через зубчатые колеса 8-10 вращение с переменной угловой скоростью, вырав-
Компенсирующие и уравнительные механизмы и приспособления
517
кивающей неравномерное движение цепи при набегании на звездочку. Угловая
скорость вала 2 складывается с угловой скоростью вала 5 и поводка 7
дифференциала
Рис. 8.65. Механизм, выравнивающий скорость тяговой цепи цепного конвейера.
На ведущем валу 1 неподвижно закреплено водило 7 с сателлитами 2,
которые находятся в зацеплении с невращающимся колесом 3 внутреннего
зацепления. На валах 4 сателлитов 2 закреплены кривощипы, соединенные щарнирно
с ползунами 5, скользящими по направляющим на ведомом валу 6.
При вращении ведущего вала 7 с постоянной угловой скоростью Ю1 ведомый
вал 6 получает неравномерную пульсирующую скорость со^.
При неизменных параметрах зубчатых колес степень неравномерности вращения
ведомого вала зависит от радиуса i\ кривошипа.
Рис. 8.66. Механизм неравномерного вращения ведомого вала. Ведущее колесо /
перелтает равномерное вращение зубчатому колесу 3. Колесо 5 с прикрепленным
к нему зубчатым сектором 9 установлено на валу 4 свободно.
Кривошип 10, закрепленный на валу 4 негюдвижно, имеет палец 8. На
консолях этою пальца с одной сюроны неподвижно закреплено коромысло 6 с
роликом 5, а с друюй — зубчатое колесо 7, ступица которою проходит через
Рнс. 8.65
^ W 7
$ 8 7 S
р-| Рис. 8.66
518 Механизмы с регулируемым ходом, компенсирующие, уравнительные
Рис. 8.67
круговой паз в колесе 5. Зубчатое колесо 7 находится в пос10Я1Н10м зацеплении
с зубчатым сектором 9, а ролик 5 в постоянном контакте с кулачком 2, который
прикреплен к заточке подшипника 11. Контакт между роликом 5 и кулачком 2
обеспечивается реактивным моментом на валу 4, В период, когда ролик 5
перекатывается по той части профиля кулачка, которая описана дугами
концентрических окружностей, вал 4 вращается с постоянной скоростью. При
перекатывании ролика 5 по участку профиля кулачка, соответствующему подъему коромысла
6, вал 4 с коромыслом 10 вращается ускоренно и на учас1ке, соотвегствующем
опусканию коромысла 6, — замедленно.
Рис. 8.67. Механизм с переменным шагом скручивания проволоки.
Скручиваемые проволоки 16 и 15 пропущены через обособленные отверстия в шпинделе IS
и сматываются с катушки 9, прикрепленной к фланцу 10 шпинделя, с
постоянной скоростью.
На выступающей части подшипника И, ^ коюром вращается шпиндель 13,
установлено коромысло 12 с валом 6, свободно вращающемся в отверстии
внешнего прилива коромысла.
На валу 6 закреплены торцовый пазовый кулачок 7 и зубчатое колесо 5
с радиальным пазом. -
Предохраните 1ьные механизмы и устройства
519
Рис. 8.68
Зубчатое колесо 5 находится в зацеплении с колесом 14, которое закреплено
на шпинделе i3, а в пазу кулачка 7 расположен ролик 17, Ось последнего
закреплена на подшипнике 8. При вращении кривошипа 3 на валу 1 (в подшипнике 2)
роликом 4, скользящем в пазу колеса 5, последнему сообщается врапщтельное
движение вокрух вала 6 на поводке, в то же время с помопи»1о кулачка 7
коромыслу сообншегся качагельнос движение. В результате угловые скорости колеса 5
и коромысла 12 либо складываются, либо вычитаются. Hii участках иаза кулачка,
имеющего форму концентрических окружностей относительно оси вала 6,
коромысло 12 неподвижно и проволока скручивается с постоянным шагом. При
прохождении роликом 17 участков паза с прямолинейной формой коромысло 12
поворачивается, изменяя при этом угловую скорость шпинделя i3 и
соответственно пшг скручивания проволоки.
Рис. 8.68. Механизм с периодически изменяющимся передаточным отнонюнием.
Рассматриваемый механизм преобразует вращательное дврокение в поступательное
с постоянной скоростью на участке 2S. Центральный кривошиппо-шатунпый
механизм (рис. 8.68,^)5 составленный из неподвижного центрального зубчатого
колеса 1 и сателлита 2 с ведущим кривошипом 3, позволяет получить движение
пальца А, установленного на сателлите, по эллипсу. Присоединяя к пальцу А
прямую кулису (рис. 8.68,6), получим механизм с прямолинейным возвратно-
поступательным движением ползуна 4. Равномерное движение звена 4 в
пределах некоторого участка обеспечивается при следующих условиях:
2 [а- - }г) = 1г + d (d - а); 2R = R.,
TJic а ^ R -\- г п h =^ R - г.
ПРЕДОХРАНИТЕЛЬНЫЕ МЕХАНИЗМЫ И УСТРОЙСТВА
Рис. 8.69. Предохранительный штифт. Штифт 1 соединяет маховик 2 с втул-
1^ой 3, жестко установленной на валу 4. Посредине штифта сделана шейка
диаметром Jp (на рисунке снизу). При перегрузке механизма штифт в этой части
разрушается.
Рис. 8.70. Предохранительный штифт. Штифт 1 имеет несколько надрезов по
длине; после среза штифта по одному сечению штифт опускается вниз на
расстояние одного интервала между надрезами и фиксируется винтом 2.
520
Механизмы с рсгучирусмым ходом, компенсирующие, уравлитеihiibie
Рис. 8Л0
Рнс. 8.69
Рис. 8.71
Рис. 8.72
Рис. 8.71. Устройство с предохранительным шт1!фтом и специальным
приспособлением для остановки электродвигателя. На втулке звездочки прикреплена
планка 7, которая при срезе штифта 3 поворачивает рычаг выключателя 2,
прикрепленного к звездочке.
Рис. 8.72. Устройство с предохранительным штифтом и выключателем. При
срезе штифта 2 диск 4 поворачивается относительно звездочки 3. Три шарика 1
выходят из местных углублений и выталкивают пальцы 6, которые переключают
рычаг выключателя 5 посредством шайбы 7. Двигатель при этом останавливается.
Предохранительные механизмы и устройства
521
Рис. 8.73. Устройство с предохранительным штифтом и выключателем. При
срезании шгифта 4 колесо 2 поворачивается относительно ведомого диска 5,
откло1^яя рычаг 3 с пальнем 6. Конечный выключатель I прикрепляется к
неподвижной стойке и выключается пальцем б рычага 3.
Рис. 8.74. Механизм, улавливающий цепь конвейера во время - ее обрыва.
Механизм применяется в пластинчатых шахтных конвейерах для устранения
обратного хода при выключенном двигателе и улавливания верхней груженой ветви
цепи при ее обрыве. В рассматриваемом механизме звездочка 1, соединенная
с тормозным шкивом, приводится во вращение от тяговой цепи 2. Тормозные
колодки 5 соединены с улавливающим цепь захватом 4 посредством V-образного
рычага 7 и серьги 6. Трением, создаваемым между колодками и тормозным
шкивом, Y-образный рычаг устанавливается в положение, при котором захват
находится в нижнем положении, фиксируется упором 5 и не препятствует
движению цепи. При обрыве цепи звездочка 1 поворачивается против часовой стрелки
и поднимает захват в рабочее положение, как эго показано на рисунке.
Рис. 8.75. Ловитеть цепи конвейера Ловитель состоит из литого корпуса 7,
относительно оси 2 которого врандается собачка 8. Рычаг 5, рег>лируемый с
помощью деталей 7 и б, поворачивается вокруг оси ^. В нижней части корпуса
укреплена упорная плаика И, При перемещении пени в направлении, указанном
стрелкой С (спуск), рычаг 5 иод действием пружин 9 \\ 5 одним своим концом
Рис. 8.73
Рис. 8.74
522 Механизмы с регулируемым ходом, компенсирующие, уравиителыше
прижимается к уступу в собачке 8, а вторым — к звеньям цепи конвейера. При
обрыве цепи рычаг 5 занимает положение, указанное пунктиром, собачка 8
освобождается и под действием пружины 3 поворачивается относительно своей оси,
заходит между втулками цепи и, опираясь на планку 1U останавливает цепь. При
повороте собачки 8 по часовой стрелке другой ее конец нажимает на рычаг
конечного выключателя 10 и отключает от цепи электродвигатель привода. При
движении цени конвейера по направлению стрелки П (подъем) рычаг 5 отведен
и собачка 8 под действием пружины 3 работает по принципу храпового механизма.
Рис. 8.76. Выключающее устройство, применяемое на волочильных станах
тонкого волочения. Участок проволоки между тянущим барабаном 1 и волокон
(фильером) 3 проходит через ушко выключающего рычага 2. При обрыве
проволоки собачка опускается, запирает храповое кольцо 4 муфты, и мащина
останавливается.
Рис. 8.77. Устройство автоматического останова машины для перемотки
проволоки. Если при сматывании проволоки с барабана 4 на катушку 5
сопротивление разматыванию возрастает, то
тарированного веса рычага 2 с роликом 3
В-в окажс1ся нслос1аточно, и рычаг 1
разобщит приводную муфту.
Рис. 8.76
/ г J
Щ=^
Рнс. 8.75
Рис. 8.77
Предохранительные механизмы и устройства
523
Рис. 8.78. Расцепная муфта машин малой мощности. На ведущем валу 5
(рис. 8.78,(7) закреплена с помощью штифтов втулка 4 с четырьмя кулачками 6,
сцепленными с внугренними кулачками А втулки 8. Ведомая втулка 2 связана
с втулкой 8 четырьмя штифтами 1, допускающими осевое смещение втулки 8.
Между втулками 4 и 2 расположено храповое кольцо 3, жестко соединенное
с кольцом 7 (рис. 8.78,6), снабженным торцовыми кулачками, могущими
зацепляться с кулачками В втулки cS.
При включенной собачке (на рисунке не показана) втулка 8, преодолевая
усилие пружины 9, расценит кулачки В, сдвинется влево и отключит ведомую
втулку 2 от ведущего вала 5.
При выключенной собачке вал 5 вращает втулку 4 и далее втулку 8 и
втулку 2. Мелкие зубья В на втулке 2, служащие для предотвращеш^я ее
поворота после отключения, вызванного силами трения, также захватываются
собачкой (на рисунке не показана). Зубья расставлены так, что входят в контакт с
собачкой только спустя время, необходимое для разобщения звеньев 5 и 2. Выбор
способа выключеьшя муфты и расположения собачек определяется ее назначением.
Рис. 8.79. Предохранительное устройство. От шкива 1, заклиненного па втулке
б, приводится в движение закрепленная на валу 4 подпружиненная муфта —
червяк 5 и далее червячное колесо 2. При перегрузке колеса муфта смеищется
влево, червяк получает винтовое двпжеш1с и отключается от втупки 6, колесо
Рис. 8.79
524
Механизмы с регулируемым ходом, комиеиеируюгиие, уравиитет}>лые
Рис. 8.81
останавливается. Если надо остановить колесо 2 после
одного оборота, то достаточно ввести останов 3, как
показано на рисунке.
Рис. 8.80. Предохранительное устройство. Движение
от колеса 1 сообщается червяку 5 и колесу 6 через
заклиненный на червячном валу 3 фрикционный конус
2. Необходимая для сцепления осевая сила
обеспечивается регулируемым рычагом 4 с пружиной. При
перегрузке червяк смеии1С'1ся влево и фрикцион
выключается.
Рис. 8.81. Предохранительное устройство червячной передачи. На червячном
валу 7 расположен червяк 9, удерживаемый в рабочем положении пружиной 8.
При перегрузке вследствие возросщего осевого давления на червяк происходит
расцепление кулачковой муфты 10, а в результате осевого смещения червяка 9
через кольцо 1 и стержни 2 приподнимается траверса б, что позволяет спиральной
пружине 5 повернуть рукоятку 4 в положение «Выключено». Для возвращения
механизма в исходное положение достаточно повернуть обратно рукоятку 4, Так
как после выключения червяка червячный вал продолжает вращаться, то необходима
установка упорного подщипника 3.
Рис. 8.82. Предохранительное устройство. Движение от ведущего вала 1
ведомому зубчатому колесу 3 передается посредством углового рычага 4 с осью
вращения на диске зубчатого колеса и коромысла 5, нижняя часть которого
выполнена в виде U-образного выступа. В рабочем положении (рис. 8.82, а) в паз
npcdoxpamimc.ihUhw механизмы и ycmpoCicniea
525
Рис. 8.83
заплечика 2 на ведущем валу входит выступ рычага 4, прижимаемого с помощью
коромысла 5 пружиной. При перегрузке (рис. 8.82,6) усилие пружины недостаточно,
поэтому зубчатое колесо разобщается с ведомым валом. Рабочее положение
восстанавливается вручную.
Рис. 8.83. Предохранительные устройства маломощных машин. Рис. 8.83, а —
внутри трубы 1 размещен опирающийся на предварительно сжатую контргайкой 5
пружину шток 3 с мелкой резьбой (рис. 8.83, а). Гайка 2 после регулирования
длины тяги фиксируется пружинным шплинтом 4, размещенным в прорези трубы.
При перегрузке пружина сжимается и движение от одного рычага другому не
передается.
Рис. 8.83,6 — коромысло 3 приводится в движение от шатуна 1, стержень
которого гладкой стороной входит с небольшим зазором в отверстие
соединительною штока 2 и притягивается
пружиной 4. При перегрузке пружина
растягивается, а стержень шатуна ^^^'-^'^t^ ^..--9^^
скользит в отверстии штока 2 до ' "^
снятия нагрузки. /"^ , ^ /^
Рис. 8.83, в — ведомый диск 1 несет
Штифт 2, упирающийся в рычаг 3,
шарнирно соединенный с пальцем 4
на ступице ведущего звена 5. При
перегрузке пружина растягивается, а рычаг ^
3 поворачивается так, что размыкается
с пальцем 2 и диск 1 отключается от
ведущего звена.
Рис. 8.84. Условно жесткое
основание. При перегрузке опора 2
(рис. 8.84, о) рычага 1 перемещается, i,./^^^^;xx/»i i ~ -
преодолевая сопротивление пружин 3. | J ^ \\ ^^^^^^
Рис. 8.84, б. При перегрузке опора ^ g) ^"^
2 рычага 1 перемещается, преодолевая
силу трения зажима 3. Рис. 8.84
^^ Р7?Я1
4^t^
^ д)
г^
526 Механизмы с регулируемым ходом, компенсирующие, уравнительные
Рис. 8.85
^ а
Рис. 8.86
Рис. 8.84, в — при перегрузке опора 2 рычага 1 перемспгается, преодолевая
сопротивление амортизатора. Смещая по фазе поршень 4 относительно поршня 3,
изменяют размер отверстий и соотвстствсппо сопротивление амортизатора.
Рис. 8.84, г — условно жесткое основание для быстроходных механизмов.
Инерция массы 3 преодолевается только при перегрузке опоры 2, при этом
уменьшается ход ведомого звена 4,
Рис. 8.85. Контрпривод 1 подвешен на штанге 2 к ведущему шкиву 3 как
маятник. Тяжелое маховое колесо контрпривода шатуном 5 соединено с
грохотом 4, подвешенным на шарнирных тягах или плоских пружинах. При нормальном
наполнении грохота сила инерции массы контрпривода больше силы, необходимой
для качания грохота, контрпривод остается неподвижным или колеблется с весьма
малой амплитудой, а грохот колеблется с амплитудой, равной (или почти равной)
диаметру кривошипа. При наполнешш грохота сверх нормы потребная сила
становится больше силы инерции массы кривошипа, амплитуда качания грохота
уменьшится, а контрпривод начинает колебаться. Таким образом, механизм привода
предохраняется от перегрузки при чрезмерном переполнении грохота.
Рис. 8.86. Предохранительное устройство. На качающемся валу I свободно
сидит рычаг 2, воздействующий через шатун 3 на ползун (на рисунке не показан)
посредством жестко закрепленного коромысла б, связанного с рычагом 2
подпружиненной защелкой 5.
Если воздействие на шатун 3 возрастает, то покачивание рычага 2 прекратится,
тогда как коромысло 6, продолжая покачиваться, заставит зуб защелки 5
скользить по пластине ^, закрепленной на рычаге 2, зацепляясь и расцепляясь со
впадиной до устранения перегрузки шатуна.
Рис. 8.87. Предохранительное устройство. Рычаг 5 передает ведомому валу 2
качательное движение через коромысло i, заклиненное на валу, и
подпружиненную защелку 4 с закаленным коническим хвостовиком. При перегрузке защелка
поднимается вверх, стопорится фиксатором 3, упирающимся в глубокую лыску
на защелке, и рычаг 5 разобщается с валом 2. После снятия перегрузки необходимо
фиксатор 3 сдвинуть влево, чтобы защелка опустилась в гнездо рычага 5.
Предохранительные механизмы и устройства
527
Рнс. 8.87
Рнс. 8.88
Рис. 8.88. Предохранительное устройство с храповиком. Ведущее коромысло 11
сообщает движение ведомому валу 1 посредством шатуна 5 (с пружиной)
коромысла 4 и храпового колеса 2 с собачкой 3. В случае перегрузки (рис. 8.88,6)
вилка 7 коромысла 11 сжимает пружину 6, а штифт 10 перемещается до верхнего
упора в окне пластины Р, связанной с соединительной тягой, что при обратном
ходе коромысла И приводит к разобщению собачки с храповиком и пажатию
пластины 9 на стержень 8, выключающий приводной двигатель. При установке
пластины 9 в начальное положение (рис. 8.88, а) машина будет подготовлена
к работе, если перегрузка снята.
Рис. 8.89. Предохранительное устройство. Шатун 1, приводимый от коромысла 6,
сообщает возвратно-поступательное движение ползуну (на рисунке не показан). При
перегрузке ползуна плунжер 4, сжимая пружину 3, вытесняется из выемки в
шатуне, при этом движение шатуна прекращается, а головка 2 с плунжером
покачивается вокруг оси 7. После снятия перегрузки плунжер автоматически входит
в выемку, и нормальная работа машины восстанавливается. Кольцо 5
обеспечивает движение шатуна вниз, и поэтому выключение передачи возможно только
при движении шатуна вверх, т. е. ведомый ползун выключается в нижнем крайнем
положении.
Рис. 8.90. Предохранительное устройство. Ползун 5 от вала 3 при перегрузке
Отключается при расцеплении шарнирно соединенной с угловым рычагом 4
защелки 1 с пластиной 2, жестко связанной с валом 3. Рычаг 4 установлен на
^алу 3 на ходовой; посадке.
528 Механиз мы с регулируемым ходом, компенсирующие, уравнительны,е
П 11 10 Э 8
Рис. 8.91
Рис. 8.91. Пружинный предохранитель зажимного механизма ковочной машины.
Ползун 3, получающий движение от кулачков i и 2, соединен с деталью 7
механизмом, звенья которого соединены: с деталью 7 — осью 6, с ползуном 5 —
осью 12 и между собой — осью 9. Исходное положение механизма фиксируется
приливами 10 я и звеньев посредством пружины 5 и стержня 4, прикрепленного
к двуплечему звену. В случае чрезмерной нагрузки, препятствующей перемещению
детали 7, ось 9 поднимается вверх, а кулачки i и 2 совершают полный оборот,
сжимая пружину 5, не испытывая перегрузки {8 - стальной упор).
Предохранительные механизмы и устройства
529
Рис. 8.92. Схема зажимного механизма горизонтально-ковочной машины с бол-
ювым разрывающимся предохранителем. Движение ползуну б сообщается от
четырехшарнирного механизма 1—2 — 3 посредством шатуна 5, который составлен
из двух деталей А и В, шарнирно соединенных в точке Oj, лежащей вне линии
центров О2О3. Детали шатуна жестко соединены болтом 4, который разрывается
в случае перегрузки.
Рис. 8.93. Зажимной механизм горизонтально-ковочной машины с пружинным
рычажно-коленчатым предохранителем. В случае перегрузки звено 1 поворачивается
относительно шатуна против часовой стрелки и посредством звеньев 2 и 3 сжимает
пружину 4.
Рис. 8.94. Пружинный предохранитель. При перегрузке механизма силой Q,
действующей по горизонтали на шарнир 1, расстояние между цапфами шарниров
1 и 5 уменьшается, в результате чего курок 3 сначала сжимает пружину 4, а затем
соскальзывает с клина 2 {6 — установочный винт упора).
Рис. 8.95. Зажимной механизм с пружинным предохранителем. При нормальной
нагрузке на ползун 1 звено 2 неподвижно. В случае перегрузки перемещение
ползуна 1 прекращается, а звено 2 становится подвижным вследствие деформации
пружины 3.
Рис. 8.92
W////////////////^,
Рис. 8.93
530 Механизмы с регулируемым ходом, компенсирующие, уравиителыше
Рис. 8.94
Рис. 8.95
8 7
Рис. 8.96. Предохранительное устройство высадочной машины. Подвижная
матрица 3 приводится в движение от ползуна 2 со скошенной поверхностью,
прилегающей к наклонной поверхности матрицы. Последнему
возвратно-поступательное движение сообщается от ползуна 6 пресса посредством трехповодковой группы
i, 8, 7, 2. Если прутковая заготовка А попадет не в ручей против пуансона 4,
а между плоскими поверхностями матриц, то скошенный конец подпружиненного
плунжера 5 вследствие сжатия пружины, вызванного возросшим давлением,
соскочит с наклонного выступа ползуна рычажного механизма, и передача движения
ползуну 2 и матрице 3 станет невозможной.
Предохранительные механизмы и устройства
531
Рис. 8.97
Рис. 8.97. Регулятор прижима, встроенный в шатун пресса. Шатун пресса
изготовлен из двух частей 1 w 5, подвижно соединенных осью 4. К части 1 шатуна
прикреплен сдвоенный воздушный цилиндр 2, шток 3 поршня соединен с частью 5
шатуна серьгой 6. Касание части 5 шатуна с упором части 1 обеспечивается
давлением воздуха внутри цилиндров 2. При перегрузке пресса части шатуна 1
и 5 поворачиваются относигельно оси 4, а расстояние между осями А м В
уменьшается, поэтому механизм предохраняется от поломки.
РАЗДЕЛ 9
НАПРАВЛЯЮЩИЕ МЕХАНИЗМЫ, МЕХАНИЗМЫ ДЛЯ
ПРЕОБРАЗОВАНИЯ ВРАЩАГЕЛЬНОГО ДВИЖЕНИЯ
В ПОСТУПАТЕЛЬНОЕ ИЛИ КОЛЕБАТЕЛЬНОЕ,
РЕВЕРСИВНЫЕ МЕХАНИЗМЫ, МЕХАНИЗМЫ
АВТОМАТИЧЕСКОГО ВКЛЮЧЕНИЯ И ВЫКЛЮЧЕНИЯ
Прямолинейно-направляющими называют такие механизмы, в которых
некоторые точки звеньев описывают траектории, частично или полностью
совпадающие с прямой линией. В соответствии с этим механизмы делятся на точные и
приближенные прямила. Прямила используют в инсгрументах и приборах. В
современном маиииюстроении эш механизмы вс1речаю1ся редко.
Во многих случаях требуется воспроизвести круговое движение каких-либо трех
точек звена, соверншюн^его сложное движение. Механизмы, удовлетворяющие этому
требованию, называют круювыми паправляюп1ими механизмами.
Среди направляющих механизмов известны так называемые приближенные
лямбдообразные направляющие механизмы П. Л. Чебышева.
В общем случае (см. рис. 9.1) точка М при повороте кривошипа АО на
угол ± а^ проходит участок /, близкий к прямой при условии, что
MB = АВ =^ СВ = 1:
BD = -^^dtg
2 "
AM
tgxl/-
АО
cos^ Фо
- COS фо — АО 1 sin Фо —
— (cosфo —АО)
I 2 COS Фо —АО
С08фо — АО ]
В данном стучае свободными парамстралпг являются радиус кривоншпа АО
и частичное значение фо переменного \гла ф. соответствующее среднему
положению механизма, т. е. когда точка М совпадает с осью симметрии своей
траектории в части, расположенной ближе к точке С. Полный угол 2o(i поворота
кривошипа АО, соответствующий перемепдепию точки М на прямолинейном
участке /, определяется из соотношения
cosa^ =
2 (1 - ту
J2 р _ j2^
1 + 2t sin Фо + t^-
1 - 2T'sшфo + Г^
1
Длина приближенно прямолинейного участка определяется по формуле
/ =
2(2- Т^)
Т - sin Фо 2(1+ 2t sin фо + Г^) г'
Т^ - 1
(1 -t^
Максимальное отклонение от прямолинейности
2(1 + 2rsinфo + t^)t^
(2 sin Фо + 3r + 2r- sin фо -■ t^ '
На}1равляюи1ис механизмы, механизмы длч преобразования двио\сения 53?
где
'2со8фо - АО
Т =
cos(po —АО
а вспомогательное значение величины г определяют из уравнения
2sin фо (1 + f') + f (3 + е) - (1 - t"-) Т= 0.
здесь t — корень этого уравнения, наиболее близко подходящий к нулю.
Если давать различные значения углу фо при одном и том же АО, то можно
получать различные варианты симметричного прямолинейно направляющего
механизма.
В точных направляющих механизмах выбранная точка на звене совершает
движение по прямой, при этом чаще всего звено, на котором взята точка,
совершает поступательное движение. Для получения точных направляющих механизмов
чаще всего используют соединенные в один сложный два или более
симметричных механизма.
В приближенных прямилах выбранная точка звена перемещается по сложной
траектории, отклоняющейся на выбранном участке от отрезка прямой на
величину, не выходящую за пределы заданной. Современное состояние синтеза
позволяет проектировать приближенные направляющие механизмы, удовлетворяющие
этим требованиям.
При проектировании прямолинейно-направляющих механизмов целесообразно
пользоваться методом П. Л. Чебышева, который дал решения симметричных и
несимметричных четырехзвенных шарнирных прямолинейно-направляющих
механизмов (общая схема симметричного механизма приведена на рис. 9.1)
Изыскания в области построения прямолинейно-направляющих механизмов
в свое время были продиктованы стремлением устранить необходимость введения
в механизм направляющих, обеспечивающих прямолинейно-поступательное
движение звену. В результате этого устранялась также необходимость изготовления
сагчшх направляющих, особенно в тех случаях, когда требовались высокая точность
и малый износ элементов кинематической пары при их относительном скольже-
HHii и незначительной величине силы трения. В настоящее время во многих
случаях это не имеет особого значения, потому что техника обработки шюскостей
достигла высокого уровня.
Кроме указанных механизмов Чебышева, известны эллиптические, конхоидаль-
ные, лемнискатные и другие приближенные прямила. В прямилах может быть
использован пантограф (см. рис 10.16), в котором ведомая точка перемещается
по прямой, если ведущая перемещается по другой прямой.
В основу построения точных направляющих механизмов положена инверсия.
Если данная кривая к (рис. 9.2), выражающаяся уравнением г = / (а), с другой
кривой к' связана уравнением г' = m^/f (а), то кривая к' является инверсией
кривой к (ш — коэффициент инверсирования).
Инверсией окружности является окружность или прямая (см. рис. 9.2).
Уравнение окружности при полюсе в точке О и оси О А, совпадающей с диаметром:
Инверсия имеет уравнение
г — d cos а.
dcos а'
534 Направляющие механизмы, мехапизмы для прсобразованич дпюрсеиия
т. е. кривая к' — прямая, перпендикулярная оси ОЛ и отстоянщя от полюса О
на расстояние m^-fd.
Для построения точных направляющих механизмов необходимо, чтобы при
любом положении механизма три точки О, М, М' лежали на одной прямой и
ОМ • ОМ' = const.
В отдельных случаях ведомое звено исполнительного мсха1Н1зма, приводимое
в движение от непрерывно враищюи^егося двигателя, ио условиям заданного
технологического процесса, должно совернкгть возвратно-ностунагсльнос или
колебательное движение с различными законами изменения скорости и пути его
перемещения.
Так, например, в механизме поперечного перемещения ровницы (см. рис. 9.26)
ведомое звено — поводок должно совершать возвратно-пос1унательное движение
с регулируемой переменной длиной хода. Применяются кжжс малогабаритные
механизмы с удвоенным (см. рис. 9.30), четырехкратным (см. рис. 9.31) и
чередующимся увеличением ходи ползуна и ряд других.
На максимальную производительность маншны существенное влияние
оказывает время реверсирования, определяющее продолжительность холостых
непроизводительных ходов машины. Время реверсирования можно уменьнн1ть, если
величина динамических напряжений при этом не превьниает расчетных
/допустимых.
В процессе реверсирования встречаются два вида сопротивлений: силы
инерции приводимых в движение масс и сопротивление трения в механизме привода.
При реверсировании торможение механизма привода может производиться
моментом Ml, представляющим некоторую функцию времени f (t).
В частности, для электромагнитной муфты изменение момента трения с начала
подключения обмотки муфты к сети онредслясюя \рат!С5тем
Mi = М, (1 -с-^'),
где Mj — наибольшее значение момента трения; к — постоянная, зависящая от
параметров муфты (к = 2,5 -:- 3,5).
Торможение механизма рабочего движения осуществляется не только за счет
момента Mj, но и за счет момента М2 сил трения в механизме.
Угловая скорость со реверсируемого вала может быть найдена интегрированием
уравнения движения;
^со Ml + М2
и тогда, например, для торможения с помощью электромагнитной муфты
M.Ji Mr ( 1
со = coi ■ -\ti — • Ь ■—
^ J J \^ к к
где Mj — наибольшее значение момента трения; J = Ji 4--i2 — приведенный к
реверсируемому валу момент инерции всех движущихся масс; J^ и J2 —
приведенные массы на концах реверсируемого вала.
Так как конец торможения соответствует моменту, когда со = О, то время fi
торможения может быть найдено из уравнения
Направляющие механизмы, механизмы для преобразования движ:ения 535
Время торможения следует определять графически или при ic = оо по уравнению
^ Mj + ЛЬ *
Для разгона уравнение движения будет
6^(0 ' Ml - М^
= S = ,
dt J
интегрируя которое, найдем время разгона ti из уравнения
J KJ
Если положить 0) равной угловой скоросхи 0)2 реверсируемого вала при
установившемся движении, полагая к — со, ю
0)2^
Общее время реверсирования найдс1ся как сумма t^ и t^:
t -- ii + t2.
Схематически изменение моменюв сил и угловой скорости вала в процессе
реверсирования показано на рис. 9.66.
Величина затрачиваемой на реверсирование энергии зависит от начально!! и
конечной скоростей ведомого вала и от механизма, осуществляющего реверс.
Кинетическая энергия реверсируемых масс и работа, затраченная двигателем,
полностью поглощаются в процессе торможения трением в механизме рабочего
движения и работой трения в тормозном устройстве.
Работа у4^„ затрачиваемая двигателем за время торможения в процессе
реверсирования (при моменте трения муфты, постоянном во все время реверсирования):
у4,1 = f М1СО2 dt = 0)2^1^-
о
Работа сил трения в механизхме рабочего движения, затраченная за время
торможения:
Ai = |M2CoJ^ = М2фь
о
1де ф1 — угол поворота вала за время торможения.
Если начальная кинетическая энергия реверсируемых частей машины
то работа Ai сил тренпя в торлюзном устройстве определится из формулы
Az == ^м + £^1 - Лх = —coi (2со2 + coi) - ^
г '^ " '' м^ + Мг
536 Направляющие механизмы, механизмы для преобразования движения
Работа сил трения в реверсивном устройстве при буксовании во время разгона
А2 = Л м - £2 - ^1 =
2 М, - Mj
Полагая Mi = О, получим
^2 = —г—(2со2 + coi);
^2 =
2
Полная потеря энергии при реверсировании
А = Ai -\- Л'2 = —(coi 4- 002)'-
Реверсивные устройства мотут быть представлены в виде:
1) работающих поочередно на один вал ременных передач;
2) зубчатых и винтовых механизмов с переключаемыми муфгами;
3) реверсируемых электродвигателей (система Вард-Леонардо);
4) гидравлических ус1ройс1В и др.
НАПРАВЛЯЮЩИЕ МЕХАНИЗМЫ
Рис. 9.1. Лямбдообразный механизм Чебышева. При вращении кривошипа О А
траектория точки М на участке / — прямая линия.
Рис. 9.2. Инверсия кривых. Инверсией окружности является прямая к\ пер-
пcilДllкyJlяpнaя оси О А и отстающая от полюса О на рассюяние nrjd, где
m — коэффициент инверсирования.
Рис. 9.3. Шарнирный направляющий механизм. При за/данном движении точек
С или Е путь ah точки А —прямая.
Рис. 9 4. Прямило Чебышева. Точка G перемсщае1ся по прямой, если
AM 2 : М1М2 : АВ = 2,6:2:1 или AM 2 : М1М2 \АВ=^А:Ъ:\. Можно найти и друше
соотношения длин звеньев, пользуясь следующим построением.
Если оба шарнира А м В шатуна АВ перемещаю 1ся по сим\1С1ричпым вегвям
укороченной цик.'юиды, то средняя ючка G перемсщас1ся по прямо!'! LL .
Заменяя дуит диююид дугами окружное 1ей, можно соедпии1ь со сюйкой ючки
А \1 В Q помощью стержней AM2 и ВМ^. Если заданы АВ и G, то необходимо
а\
Рис, 9.1
Рис. 9.2
Рис 9.3
Направо <mufuc механизмы
537
/ ^
Рис. 9.5
Рис. 9.4
Рис. 9.6
центр окружности взять в G на оси v.v, перпендикулярной IL, ось хх,
параллельную LL, провести через О. Далее проводят АС ± АО; CD || LL до пересечения
в точке D с линией ОЕ (FE = OF = г) и находят Я как точку пересечения
продолжения линии DF с уу. Точка М2 лежит симметрично на продолжении линии АО
и на перпендикуляре к АО, проведенном через Я. Для нормальных соотношений
принимают г = (0,7 ч- 0,8) а.
Рис. 9 5. Обратное прямило Чебышева. Если точку G прямила (рис. 9.4) сделать
неподвижной, то при вращении АВ звено М1М2 будет совершать прямолинейное
поступательное движение.
Рис. 9.6. Схема образования симметричного прямила Чебышева. Если через
точку М прямила ABCD (см. также рис. 9.5) провести линию, параллельную CD,
через точку /)-параллельную СВ, а через точку В^, лежащую посередине МС^
лтшю, параллельную АВ, то точка М симметричного прямила A^B^C^D^
Чебышева с точкой М на продолжении шатуна будет перемещаться по кривой, мало
отличающейся от прямой. При АВ = а, DC = с:
AD=^d = ^{a + b + c); ВС = fe > —д.
3 4
Ход точки М, т. е. длина хорды, заменяющей прямолинейный участок:
5 =
а(4Ь -a)(a + 2b)(5a'-2b)
2а+ b
538 Напрею Iчющие механизмы, механизмы di4 преобразования dcaotcenuH
Параллельные прямые, между которыми заключается дуга траектории точки М,
находятся одна от другой на расстоянии
^ 4 , ,, ,^ ,, (46 - af а
'^^-{а-Ъ)[2аЛ-Ь\
При Ь-^ — а погреш1юсть уменьптается. При а ^- 1; /) = 0,33; 5 ^ 0,64 п 5 = 0,0003.
Рис. 9.7. Приближенные эллиптические прямила. При построении
приближенных эллиптических прямил части траектории какой-либо точки стержня,
скользящего своими концами по сторонам прямого угла, заменяются дугами
окружности. На рис. 9.7, а прямолинейный участок траектории точки А заменяется
дугой AqA'q радиуса О^М, при большей длине которого траектория точки G
близка к прямой. На рис. 9.7,6 точка К стержня GB при перемещении G м В
взаимно перпендикулярным прямым GO и ОВ двпжсюя по эллипсу с
расположением большой оси по вертикали. Дуга эллипса, соответствующая ходу //,
заменяется дугой окружности радиуса КМ.
На рис. 9.7, в дуга эллипса, симметричная дуге эл.чипса, взятой в механизме
по рис. 9.7,6, заменена дугой окружности радиуса КМ. На рис. 9.7, г точка О
взята справа от точки G. На рис. 9.7, д дуга эллипса с большой осью,
расположенной но горизонтали, заменена дугой ВВ^ окружности радиуса ОВ.
Рис. 9.8. Приближенные прямила При соответствующем выборе размеров
получается шатунная кривая точки G шатуна, мало отличающаяся в пределах h
Hanpaen.Hioufue механизмы
539
от прямой. При определении соответствующих размеров можно отыскать в
пределах угла р траекторию точки С, мало отличающуюся от окружности, чтобы
присоединить в ней коромысло длиной, равной радиусу DC кривизны траектории
точки С.
Рис. 9.9. Прямило Липкина, предехавляющее собой симметричный ромбовидный
механизм, в котором 00^ = OiP = с,
PR = RQ=. OS = 5Р = г,
OR=.OS = I
Точка Q перемещается по прямой уу, потому что OPOQ - const. Если 001 — е
и мепыас OiP, то точка Q перемещается по окружности, имеющей центр слева
01 О на расстоянии
т =
е(Р-г2)
и радиус окружности R^ =
с (Р - г^)
при с = ^, i?i = 00, т. е. получаем прямую.
Рис. 9.10. Двухкривошипный ромбоид O2DBO2 в комбинации с шарнирным
параллелограммом О^АВО^. Если размеры звеньев присоединенной двухповодко-
вой группы AGD принять равными: АВ = GA и DB = DG, то получаем прямило,
дающее точное прямолинейное движение оси шарнира G вдоль прямой уу.
Рис. 9.11. Приближенное прямило. Путь h точки G есть прямая при
следующих соо'1 ношениях: АВ = CD;
-^=0,584; —-0,592; — =1Д12.
h h h
Рис. 9.12. Лемнискатное прямило Уатта. При размерах ВС — 0,6/2 и }\ — ?'2 =
= 1,5/г точка G, лежаш,ая посередине шатуна в пределах отрезка /г, движется по
кривой, мало отличающейся от прямой.
Рис. 9.13. Механизм лущильной машины. Точка А механизма движется
параллельно столу.
Рис. 9.14. Приближенные эллиптические прямила в регистрирующем механизме
индикаторов. На вращающемся барабане 1 закреплена бума!а, на которой пером 2
U'-:^-^-
а) §)
Рис, 9.8
Рис. 9.9
540 Направляющие механизмы, механизмы для преобразования движения
Рис. 9.10
\
ч
и^
h
^ 1
wr
1 еЛ \
ВС
- ^
Рис. 9.12
ВЕС ^
Рис. 9.11
Рис. 9.13
Рис. 9.14 Рис. 9.15
записывается давление в ци;п1ндре i. В механизме но рис. 9.14, а использована
схема механизма, изображенного на рис. 9.7,6; в механизме, показанном на
рис. 9.14, 6 — схема механизма по рис. 9.7, а.
Рис. 9.15. Направляющий механизм, состоящий из пары одинаковых зубчатых
секторов, к которым симметрично присоединена диада АСЕ, Точка С ввиду
симметрии иеремещаегся по прямой.
Направляющие механизмы
541
Рис. 9.17
Рис. 9.18
Рис. 9.16. Точный направляющий механизм (эллиптическое прямило). Если
Л и В перемещаются по двум прямым, то любая ючка оiрезка ЛВ о1П1сывает
эл.ципс. Точка С, расположенная посередине отрезка, онисывас! окружность с
центром в точке О. Присоединив кривошип ОС и заставляя точку А перемепинься
по прямой, получим прямолинейное движение точки В, т. е. при условии, что
АВ
кривошип ОС = , точка В перемещается по вертикальной прямой.
Рис. 9.17. Приближенные конхоидальные направляющие механизмы. На
рис. 9.17, а точка М перемещается по некоторому участку конхоиды mm,
приближенно совпадающей с дугой ММ' окружности, описанной из центра О. Точка В
1^ пределах угла а перемещается по прямой. В механизме, показанном па
рис. 9.17, б, ведущая точка М взята между iочками jB и Л. В механизме,
изображенном на рис. 9.17, в, ючка М в}Я1а вне nmmw АВ.
Рис. 9.18. Зубчато-кулисный механизм. Рычаг 1 установлен на пальце
зубчатого колеса 3, которое находится в зацеплении с зубчатым колесом 2. Палец
на колесе 2 входит в криволинейный паз рычага 1. Точка В рычага описывает
Траекторию с прямолинейным участком B^Bj- Рассматриваемый механизм
применяется в киносъемочных аппаратах для подачи пленки.
542 Направляющие механизмы, механизмы для преобразования дви.усения
МЕХАНИЗМЫ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
В ПОСТУПАТЕЛЬНОЕ
Рис. 9.19. Карданная зубчатая передача с наружным зацеплением и
передаточным отношением, равным единице. Центральное зубчатое колесо 4 закреплено
неподвижно. Ведущим звеном является поводок 3. Колеса 1 и 4 имеют
одинаковое число зубьев. Звено 2, жестко соединенное с колесом 1, перемещается
поступательно.
Рис. 9.20. Механизм подачи стола под ползун гидравлического пресса: а —
конструкция, б — кинематическая схема механизма. От кривошипа 2 приводится
в движение шатун i, левый шарнир которого может скользить в продольном
пазу станины 4, а правый сочленен с ползуном 3, имеющим возможность
скользить в поперечном пазу станины. В левом крайнем положении стола 5 происходит
загрузка, в правом — рабочая операция. Механизм отличается компактностью
привода.
Рис. 9.21. Механизм преобразования вращательного движения постоянного
направления в возвратно-поступательное.
Движение зубчатым колесам 4 и 5 передается коническими колесами 7 и 9
и цилиндрическими колесами 1 и 8, Колеса 4 и 5, находящиеся в зацеплении
с двумя рейками 10 и 11, вращаются в разные стороны, и направление движения
реек зависит от того, какое из этих колес включено в кинематическую цепь
механизма.
Действие переключающего устройства основано на соединении и разъединении
колес 1 и 8 с валами, на которых они установлены, посредством круглых
поворачивающихся шпонок 3 и 6 (см. А —А).
При расположении рычагов шпонок 3 и 6 в радиальном направлении колесо
выключено и при наклонном — включено.
Автоматическое переключение шпонок осуществляется упорными винтами 2,
положение которых для минимального времени выстоя регулируется при настройке.
Рис. 9.22. Устройство для преобразования вращательного движения в возвратно-
поступательное. На ведущем валу 6 закреплена наклонная втулка 7 с отверстием,
которая свободно вращается в ступице диска 5. Диск 5 только качается и
удерживается от вращения
соединением карданного типа. В одной
плоскости (рис. 9 22, б) диск 5
качается относительно кольца 3
на цапфах 10, а в плоскости,
перпендикулярной первой, коль-
1^0 3 качается на цапфах 2
(ри.с. 9.22, а), установленных в
корпусе механизма. Качатсльное
движение диска 5 преобразуется
в возвра1но-110С1уиагельнос
посредством кольца 4 с двумя
сферическими подпятниками и
двух штоков 1 с шаровыми го-
.човками. Головки iniоков
фиксирую 1ся ouiocHicjibHo ступицы
диска 5 фланцем 8 и шайбой Я
которая притягивается к ступиД^
диска 5 болтами.
Рис. 9.19
Механизмы для преобразования дви;>и:ения а поступательное 543
jr—
/
'l2=S.
Г
—ш ' ^
Ю 1|
R
1
Рис. 9.20
J 5^
Рис. 9.21
544 Hanpaeinwufue механизмы, мехатпмы dvi преобразования движения
6 7
'^^Ш
6 5 k S г
^) Рис. 9.22
"Кя J с/ «/ V «/ л
Рис. 9.23
Механизмы для преобразования движения в поступательное 545
Длина пути штока при конструктивном изменении соединения диска 5 с валом
может регулироваться углом наклона втулки 7, как это показано на рис. 9.22, в
и г. Как в первой, так и во второй схемах угол наклона втулки изменяется при
перемещении ползуна 1L
Рис. 9.23. Механизм преобразования вращательного движения в возвратно-
поступательное. На ведущем валу 8 (рис. 9.23, а) заклинена звездочка 7 и диски
2 и 6 со скошенными торцами, по которым обкатываются два промежуточных
шарика.
Втулка 1 с шайбой связаны пружинно-кольцевым замком 5, получают
возвратно-поступательное движение в корпусе 3 при перекатывании шариков
в канавках на торцах шайбы 4. При гладкой шайбе 4 (без беговых дорожек при
наличии сепаратора) один цикл возвратно-поступательного движения втулки 1
соответствует двум оборотам звездочки 7, при наличии беговых дорожек отношение
числа циклов ]Уц к частоте вращения п определяется уравнением
п 1х '
где / и /i показаны на схеме (рис. 9.23, а).
Указанные отношения можно изменить дополнительным вращением корпуса 3.
Для этого на валу 8 закрепляется звездочка 10 (рис. 9.23, 6), а на ступице
корпуса 3 — звездочка 11 с одним и тем же шагом, }ю разными числами зубьев;
Гц = 27 и Zio = 28. Зубчатая цепь 9 находится одновременно в зацеплении
с обеими звездочками. Зубья звездочки 10 немного уже зубьев стандартной
звездочки 1L Так как окружная скорость звездочек обратно пропорциональна числам
их зубьев, то при отсутствии беговых дорожек на шайбе 4 одному циклу
возвратно-поступательного движения втулки 1 соответствует 54 оборота корпуса 3.
Рис. 9.24. Механизм, состоящий из винтовых зубчатых секторов, передающий
возвратно-поступательное движение штанге. К коромыслу 3, которое является
ведущим звеном, прикреплен зубчатый сектор 2 однозубого винтового колеса,
который зацепляется с винтовым зубчатым колесом 5, установленным неподвижно
на квадратной штанге ].
При покачивании коромысла 3 в пределах угла, равного 5°, штанте 1
сообщается возвратно-поступа1ельное движение.
Рис. 9.25. Механизм преобразования быстрого вращательного движения в
медленное возвратно-поступательное. От ведущего колеса 2 движение передается
червякам 6 и 8 с правой резьбой посредством зубчатого колеса 1 и соогветственно
зубчатых колес 3 и ^, в результате чего червяки вращаются в противоположных
направлениях. Ось червячного колеса 5, зацепляющегося с червяками 6 и 8,
свободно вращающегося на оси, установленной на ползуне 7, перемещается с малой
скоростью, определяемой разностью шагов червяков.
При шаге червяка 6, равном 4,23 мм, а шаге червяка 8 — 4,25 мм и
передаточном отношении зубчатых колес (от колеса 2 к червякам), равном двум, за
один оборот колеса 2 ползун 7 перемещается на 0,005 мм.
В крайних положениях ползуна 7 механизм переключается, и колесо 2
вращается в противоположную сторону.
Рис. 9.26. Механизм возвратно-поступательного движения с переменной длиной
хода. Рассматриваемый механизм применяется для поперечного перемещения
ровницы в текстильной промышленности.
На эксцентрично расположенных ступицах 1 и 4 червячных колес 2 и 3
установлены головки шатунов 7 и 8, сообщающих возвратно-поступательное движение
поводку 6 посредством рычага 9. Ведущим звеном механизма является червяк 5,
18 Кожевников и др.
546 Направ'итпцис мехаииты, механизмы д 1я прсобразованич движ'спич
Рис. 9.24
Рис. 9.25
зацепляющийся с двумя червячными колесами, числа зубьев которых отличаются
па единицу. График движения поводка 6 показан на рис. 9.26. Длина хода
поводка регулируется перемещением шарниров, соединяющих рычаг 9 с шатунами
и поводком с последующей фиксацией их в заданном положении.
Рис. 9.27. Механизм преобразования поступательного движения с постоянной
скоростью в поступательное со сложным законом изменения скорости.
В направляющем пазу неподвижной станины перемещаются ведущий ползун 1
с постоянной скоростью и ведомый 5, закон движения которого определяется
профилями криволинейных рычагов 4 и 3. Оси роликов 2 закреплены на ползунах,
а оси рычагов — на станине.
Механизмы di4 преобразования двилсеиия в поступателъиое
М7
Рис. 9.26
^J'^JtrWK,,^ I М
^)
Рис. 9.27
В начальный период передачи движения (рис. 9.27, а) скорость полз>на /
оольше скорости ползуна 5, затем, когда точки касания роликов с рычатами и
одного pF,i4aia с дру1 им располагаются по одной прямой, скорости ползунов
и 5 равны. В последующий период движения скорость гюлзуна 1 меньше
^^корости ползуна 5 (рис. 9.27, б).
1К'
548 Направляющие механизмы, механизмы д.1я преобразования движения
■/Т--^^
/'^^г^Уу^<Г^
1 1
щ
ЫФ^
б)
Рис. 9.28
Рис, 9,29
Рис 9.28. Механизм для сообщения точке движения со сложным законом
изменения скорости. Механизм применяется для перемещения проволоки, проходящей
через отверстие в верхней части рычага 4.
Движение ведомого звена 4, шарнирно связанного с ползуном 3, представляет
собой результат сложения движения ползуна и вращения, пропорционального углу
поворота шатуна 2 относительно ползуна 3. На рис. 9.28, с/ и б показан механизм
при различных положениях кривошипа ]. На рисунке показано, что скорость центра
отверстия звена 4 в пределах угла поворота кривошипа от О до 90"" и от 180°
до 270° больше скорости ползуна 3.
Рис. 9.29. Планетарная зубчатая передача с наружным зацеплением для
осуществления прямолинейного движения.
Центральное зубчатое колесо 6 закреплено неподвижно. Сателлит 2 с
прикрепленным к нему кривошипом 3 имеет диамегр в 2 раза меньше диаметра
колеса 6 и зацепляется с ним через паразитное колесо 1. При одинаковых
длинах D поводков и указанном числе зубьев угол ф2 поворота колеса Z2 равен фз,
поэтому центры шарниров образуют равнобедренный треугольник с основанием ЛВ,
направление которого совпадает с линией совмещенных длин поводка 5 и
кривошипа 3, поэтому шатун 4 перемещается по центральной прямой и имеет ход,
равный 4D.
Рис. 9.30. Кривошипный механизм с удвоенной длиной хода. На шейке колена
вала воздунпюго компрессора установлен подпп!пник I с двумя огверсгиями
в боковых приливах (рис. 9 30, а). Одно огверстпе служит щ\я шарнирного
соединения подшипника с шатуном 4, второе- для соединения с коромыспом 2. Ход
поршня 3 равен четырем радиусам кривошипа, что позволяет получить высокую
Механизмы din преобразования д(ишсеиия в поступательное
549
Рис. 9.30
Рис. 9.31
производительность компрессора при небольших его габаритах. На рис. 9.30, б
дана кинематическая схема механизма.
Рис. 9.31. Схема механизма четырехкратного увеличения длины хода ползуна.
Ход каждой подвижной рейки с монтированной на ней осью колеса в 2 раза
больше хода ползуна. При ведущем ползуне 6 колесом 4 производится удвоение
^'Ода рейки 5 и колесом 2 удвоение хода рейки, прикрепленной к ползуну 1;
7 и 3 — неподвижные рейки; 1 и 6 — ползуны. Так, например, если ведущий
ползун 6 переместить на 25 мм, то ползун с рейкой 5 пройдет путь, равный 50 мм,
и соответственно ползун 1 - 100 мм.
Рис. 9.32. Механизм возвратно-поступательного движения с большой длиной
хода. Одно из звеньев цепи 7 цепной передачи с одинаковым числом зубьев
звездочек 3 и 8 снабжено поводком 6, к которому прикреплена ведомая штанга 4.
Расстояние от центра ншрнира 5 до оси цепи 7 равно радиусу начальной
окружности звездочки. При таком соотношении размеров штанга 4, поддерживаемая
направляющим кронштейном 2, получает равномерное возвратно-поступательное
550 Направ гчющие механизмы, механизмы для преобразования дби:>1сения
Рис. 9.32
Рис. 9.33
движение с длиной хода, равной межцентровому расстоянию А. При огибании
звеном 6 звездочек штанга 4 неподвижна. Механизм применяется для направления
проволоки 1 при намотке ее на барабан.
Рис. 9.33. Механизм возвратно-пос1уна1СЛьио1 о движения. Зубчатые колеса i и 2
с одинаковым числом зубьев усыновлены эксцентрично на валах 4 и 6. На
концентричных по отношению к поверхности зубьев колес заючках установлены щеки
S и 7, коюрые соединены между собой болтами 5 и удерживают колеса на
постоянном межцентровом расстоянии. Вал 6 вращается в неподвижных
подшипниках, а вал 4 — ъ подшипниках ползуна 3, перемещающегося в прямолинейных
направляюпщх. Ползун 3, соединенный с ведомым звеном механизма, получает
возвратно-поступательное движение при вращении зубчатого колеса 1 вокруг
неподвижной оси.
Механизмы для преобразовали^ двилсснич в nocmynomeibiioc 551
-.^ 7 8 9
'5 6
Рис. 9.35
Рис. 9.34, Механизм возвратно-поступательного движения с постепенным
изменением длины хода 01 нуля до максимума. Ведуп1ее колесо 7, закрепленное на
валу 8, передает непосредственно вращение колесу 9 и посредством
промежуточных колес 6 колесу 5, у которого числе зубьев на один меньше, чем у колеса 9.
Зубчаюе колесо 5 свободно вращается на оси сюйки, а колесо 9 — 1акже
свободно на оси, усганонленной на ползуне I. На эксцентрично расположенных
ступицах 2 \\ 4 колес 5 и 9 ycianoBjien uiaiyn 3. Вследствие того, что числа
зубьев колес 5 и 9 разные, положение одною эксцен1рика изменяется ошосительно
другою и соответственно изменяйся длина хода ползуна \. MaKcnMajn>Hbm ход
ползуна ], ограниченный допускаемым предельным увеличением межцентрового
расстояния колес 7 и 9 при эвольвентном зацеплении, равен сумме
эксцентриситетов, минимальный — разности.
Рис. 9.35. Механизм с циклическим постепенным, по неравномерным
увеличением и уменьшением длины хода ползуна. На ведущем валу 2 закреплено
зубчатое колесо I и свободно качается поводок 3, несущий сателлиты 4 и 5. На
последних закреплено по кривошипному пальцу 10 и 7. Числа зубьев колес 1 и 4
одинаковые (36), а у колеса 5 - на один зуб больше (37). С пальцем \0 колеса 4
связано коромысло 6, качающееся относительно пальца па станине, а с пальцем 7
посредством шатуна ^ соединен ползун 9.
При вращении колеса I поводок 3 совершает качательное движение
относительно оси вала 2, а ползун 9 получает сложное, возвратно-поступательное
движение. Цикл качательного движения поводка 3 соответствует одному обороту
зубчатых колес 1 и 4, поскольку числа зубьев их одинаковые, а цикл движения
ползуна 9 заканчивается на числе оборотов колеса 1, равном числу зубьев колеса 5.
Рис 9.36. Механизм возвратно-поступательного движения с чередующейся
переменной длиной хода ползуна. Механизм применяется для нанесения делений на
лимб ходового винта. Вращающийся вал 8 с кулачком 7 сообщает возвратно-
поступательное движение резцедержателю 1 посредством коромысла 14,
толкателя 12, втулки и с пружиной 10 и роликом 9, катящимся по профилю кулачка 7.
Пружины 10 и 13 осуществляют силовое замьпсание системы. Приводимый
периодически в движение от вала 8 посредством однозубого колеса 6 барабанчик 5
в нижней части имеет 10 зубьев, а на верхней торцовой поверхности два
диаметрально противоположных паза различной глубины.
Резцедержатель 1 занимает постоянное крайнее верхнее положение, а крайнее
нижнее положение определяется плоскостью касания упора 3 с торцовой плоскостью
барабанчика 5.
552 Направляющие механизмы, механизмы для преобразования движения
Рис. 9.36
При первых четырех оборотах вала 8 упор 3 резцедержателя соприкасается
с верхней торцовой поверхностью барабанчика 5 и па размечаемый лимб 2
наносятся короткие штрихи. На пятом обороте вала 5 упор западает в менее глубокий,
а на десятом обороте — в более глубокий паз барабанчика 5. В соответствии с этим
резец наносит увеличенной длины штрихи.
Изменение длины хода резцедержателя компенсируется деформацией пружины 10.
Стол 4 с лимбом 2 периодически поворачивается на заданный угол
делительного механизма, работающего синхронно с механизмом резцедержателя.
Рис. 9.37. Механизм преобразователя возвратно-поступательного движения
в периодически постоянное.
Рассматриваемый механизм позволяет получить шагообразное регулируемое
движение с точностью до Д.01 мм и может применяться для нанесеьшя делений
линейных размеров.
Вращательное движение кулачка 1 (рис. 9.37, а) преобразуется в возвратно-
поступательное движение штока 4 посредством рычага 2. Силовое замыкание
штока 4 осуществляется пружиной 6. Микрометрическим винтом 5 регулируется
величина хода штока 4. На подвижном штоке 4 установлена втулка 5, на
неподвижном 7 — втулка 8. Втулки 5 и 8 соединены между собой винтом 9.
При перемещении штока 4 вправо (рис. 9.37, б) подпружиненные шарики 13
втулки 5 заклиниваются, а во втулке 8 — расклиниваются, поэтому со штоком 4
вправо перемещаются обе втулки 5 и 8. При движении штока 4 влево шарики 13
втулки 5 расклиниваются, сжимая пружины 14, втулка 8 заклинивается на
неподвижном штоке 7, и все устройство остается неподвижным. Повторные движения
штока 4 перемещают втулки 5 и <^ на один и тот же шаг на расстояние,
определяемое длиной штоков 4 и 7.
Тяга 15 удерживает все устройство против подачи. Свободное перемещение
втулок 5 и 8 влево или вправо при настройке механизма осуществляется тягой Ю,
изготовленной в виде пластинки и соединенной со шпилькой 11, жестко
связанной со втулками 12 и 16. Перемещению вправо препятствует небольшое усилие,
создаваемое тягой 15, а в начальный момент перемещения влево втулки 12 я 16
удаляют шарики i3 из зоны самозаклинивания и затем перемещают втулки 5 я 8
в указанном направлении.
Механизмы ёля преобразования движения в поступательное 553
а) V '-'
1в а
т ^
2 У
Рис. 9.37
А-А
ю
ПЛ
\
, S
' / /
/ г
S
к ' 3
1 ^у Г^^
1 / 'V. i ^
&t
ft4
Tin
"w—
^ 1
Hi
-e-/l
Пи fn
1 /Г
t1 1
rJ 1
^
Рис. 9,38
Рис. 9.38. Механизм для преобразования вращательного движения в возвратно-
поступательное с постоянной скоростью. На направляющей 1 станины механизма
.рис. 9.38, а) установлен ползун 4, который получает движение от цепи 3 цепной
передачи с ведущей 2 и натяжной 6 звездочками. Палец 5, прикрепленный к цепи 3,
расположен в прорези ползуна 2. Ход ползуна S = Л + 2R, где А — межцентровое
расстояние; R — радиус делительной окружности звездочки.
В пределах межцентрового расстояния А скорость ползуна 2 постоянная,
^ в пределах радиуса R звездочки (рис. 9.38,6) изменяется по закону синуса.
554 Направляющие механизмы, механизмы для преобразования deuoicemm
Рис. 9.39. Регулируемый механизм для преобразования вращательного движения
в возвратно-поступательное с постоянной скоростью. Ползун 5 (рис. 9.39, а)
установлен на направляющей 6, которая крепится к станине привода плоскостями I.
Рабочие инструменты могут прикрепляться к ползуну 5 с двух сторон болтами,
расположенными в отверстиях 3. В прорезях направляющей 6 установлены упоры
4 и 7, положение которых регулируется винтом И при вращении его маховичком 10.
В полой части ползуна 5 (рис. 9.39, б) на подшипниках установлена звездочка 12
с неполным числом зубьев, которая сцепляется с роликовой цепью 8, движущейся
с постоянной скоростью (9 — натяжная звездочка).
Звездочка 12, к которой прикреплен направляющий кулачок 13, может
вращаться относительно своей оси или быть неподвижной, последнее осуществляется
муфтой сцепления (на схеме не показана).
В период, когда звездочка 12 соединена посредством муфты с ползуном 5
неподвижно, цепь 8, приводимая в движение ведущей звездочкой 2, перемещает
весь узел по направляющей 6 с постоянной скоростью до встречи с упорами
7 или 4. Здесь муфта автоматически выключается, звездочка 12 поворачивается
вокруг своей оси на 180° и зацепляется с другой ветвью цепи цепной передачи,
которая движется в противоположном направлении.
Рис. 9.39
Механизмы для преобразования движения в поетупателъное 555
S 6 7 в
Рис. 9.40
Рис. 9.41
После поворота звездочки 72 на 180° муфта автоматически включается, и узел
ползуна 5 получает движение до встречи с другим упором.
Профиль кулачка 13 в контакте с роликом, установленным на оси упора,
определяет закон движения ползуна в период переключения (рис. 9.39, в).
Рис. 9.40. Механизм равномерного возвратно-поступательного движения. На
ведущем валу 5, вращающемся посредством шкива 1 ременной передачи,
неподвижно закреплены зубчатое колесо 3 с 20 зубьями и колесо 6 с 19 зубьями.
Вследствие того, что числа зубьев колес разные, происходит относительное
вращение зубчатых колес 2 и 8 с кулачками и в результате равномерное
перемещение вала 9 с кулачком 7 сначала вправо, а затем влево. Профиль кулачков
построен по винтовой линии. Вилка 10 под действием пружины 11 обеспечивает
постоянный контакт между кулачками.
Рис. 9.41. Механизм с прерывистым движением ползуна и непрерывным
обратным ходом. Зубчатый сектор U зацепляющийся с зубчатой рейкой, прикрепленной
к ползуну 2, совершает качательное движение. Ползун 3 со штоком 9 и
пружиной 6, перемещающийся в направляющих ползуна 2, удерживается собачкой 5
на станине 4. При вращении зубчатого сектора 1 в направлении стрелки ползун 2
перемещается вправо, сжимая пружину 6, а ползун 3 остается неподвижным, так
как его движению препятствует собачка. Пройдя путь S, ползун 2 выступом 7
освобождает собачку 5, и ползун 3 под действием сжагой пружины быстро
перемещается вправо. Амортизатор 8 (резиновое кольцо) уменьшает силу удара. При
вращении зубчатого сектора против стрелки ползуны 2 и 3 перемещаются
^ одинаковой скоростью.
Механизм применяется для подачи гаек из бункера в гайконарезном автомате.
Рис. 9.42. Кривошипно-кулисный механизм с быстрым обратным ходом.
Подъем ползуна 1 вверх осуществляется при вращении вала 4 в направлении
стрелки, сила тяжести ползуна при этом направлена в про гавоположную по
отношению к движению сторону и ролики 3 муфты свободного хода заклиниваются.
Скорость подъема ползуна 1 соответствует скорости вращения пальца 5
кривошипа 2.
При опускании ползуна ролики 3 муфты не препятствуют движению ползуна
с большей скоростью, чем та, которая соответствует скорости вращения вала, и
олзун быстро под действием силы веса, перемещается в крайнее нижнее положение.
Рассматриваемый механизм может применяться в тихоходных прессах, при этом
Роизводительность повышается примерно на 30%.
556 Направляющие механизмы, механизмы для преобразования движения
Рис. 9.43. Планетарный механизм быстрого возвратно-поступательного
движения. Коническое колесо 2 с 46 зубьями, установленное жестко на ведущем валу 1,
зацепляется с коническим колесом 3 внутреннего зацепления с 48 зубьями.
Рамка 5, изготовленная за одно целое с колесом 3, соединена шаровым
шарниром 7 с вращающимся маховиком 6 и крестовиной 4 с неподвижной полой
осью 9. Такое соединение позволяет осуществить качательно-круговое движение
колеса 3 при постоянном зацеплении его с колесом 2. Один оборот колеса 2
рассматриваемого механизма вызывает 23 качательных движения рамки 5 с
колесом 3 и такое же число оборотов маховика 6. Рамка 5 соединяется с ножевым
режущим аппаратом косилки элементом 8 шарового шарнира.
Рис. 9.42
Рис. 9.43
Механизмы для преобразования движения в поступательное 557
Рис. 9.44
Рис. 9.45
Рис. 9 44. Кривошипно-рычажный механизм с быстрым
возвратно-поступательным движением ползуна. Рассматриваемый механизм за цикл качания коромысла 2
совершает два рабочих хода ползуна 1 и применяется /щя гофрирования
металлической ленты.
На рисунке показаны три положения механизма, соответствующие одному циклу
движения ползуна.
Рис. 9.45. Механизм с удвоенным числом циклов возвратно-поступательного
движения. Коромыслу 2, на ступице которого жестко закреплено колесо 3,
штоком 1 сообщается качательное движение. Колесо 3 зацепляе1ся с колесом 5,
cидяп^eм на одной оси с кривошипом 7, палец которого скользит в пазу кулисы 9.
Числа зубьев колес 3 и 5 одинаковые.
Кривошип 7 и кулиса 9 расположены так, что в процессе перемещения штока 1
и соответственно кривошипа 7 из одного крайнего положения (рис. 9.45, а) в
другое (рис. 9.45, б), кулиса 9 и шток 8 совершают полный цикл движения.
Второй цикл движения осуществляется при движении штока 1 в исходное
положение. Оси 6 к 4 механизма смонтированы на кронштейне.
Рис. 9.46. Механизм поочередного привода двух ползунов от одного вала.
Ползуны 4 и 3, движение которых ограничено пальцем 5, перемещаются в двух
направляющих, расположенных по обе стороны станины 2, и приводятся в
движение: ползун 3 — от коромысла 8 и шатуна 10, соединенного с осью сателлита 9;
ползун 4 — от ведущего колеса 7, кривошипа ОВ на сателлите 9 и шатуна 1.
Пружина 6 стремится удерживать подвижно установленное на валу коромысло 8
в крайнем правом положении. Механизм имеет в общем случае две степени
свободы, поэтому движение звеньев определяется приложенными к ползунам нагруз-
I'^aNHi. При вращении колеса 7 и правом крайнем положении ползуна 3, огранн-
чепиом неподвижным пальцем 5, сателлит 9 поворачивается относительно ненод-
1^ижиой оси О, и приводит в движение ползун 4. Если ползун 4 будет остановлен
пальцем 5, то ось сателлита, преодолевая сопротивление пружины 6, отклонится
1^лсво, при этом будет перемещаться ползун 3.
При длине паза в ползунах меньше удвоенной длины радиуса кривошипа и
наличии пружины 6 движение ползунов будет поочередным. Механизм переменной
структуры применяется в упаковочных машинах.
Рис. 9.47. Механизм для горизонтального и затем вертикального перемещения
изделия. Горизонтальное перемещение изделия 1 осуществляется толкателем 2,
Приводимым в движение кулисным механизмом и кулисой 3, имеющей часть паза
РУговой формы, обеспечивающего остановку кулисы.
558 Напрап I'ljoiiinc мехатпмн, механизмы di/i преобразования движения
Рис. 9.46
Вертикальное перемещение груз 1 получает от штока 7 кулачково-рычажного
механизма с пазовым кулачком 5.
Синхронное перемещение изделия в горизонтальном и вертикальном
направлениях достигается соединением ведущих звеньев двух механизмов зубчатыми
колесами 4 vl 6.
Рис. 9.48. Механизм, сообщающий реверсивное вращательное и возвратно-
поступательное движение. Поступательное движение валу 1 сообщается круглой
зубчатой рейкой 2 и вращение - винтовым пазом, в котором скользит ролик 3
с неподвижной осью.
Механизмы для преобразования движения в поступате ibuoe
559
Рис. 9.49. Механизм, осуществляющий винтовое возвратное движение. Шатун 3
сообщает валу 1 возвратно-поступательное движение через втулку, расположенную
между стопорными кольцами, одно из этих колец (кольцо 2) большего диаметра,
ролик 4, установленный на ползуне 5, входит в винтовую канавку вала 1. При
движении ползуна 5 вместе с валом, когда штанга 6 ведется кольцом 2 через
упоры 7, вал не вращается. Вал вращается при перемещении кольца между упорами.
Угол поворота и его фазу можно изменить, переставляя упоры.
Рис. 9.50. Механизм для перемещения и поворота полосы на гибочной машине.
На ползуне 4 кривошипно-шатунного механизма подвижно прикреплено
зубчатое колесо 1, обкатывающееся по подпружиненной рейке 5. Угол поворота
колеса 1 ограничивается пальцем 3 на ползуне и пазом на колесе. В крайних
положениях пальца в пазу колесо не вращается, а подпружиненная рейка движется
вместе с ползуном, при этом одна из втулок 6 неподвижна, а вторая
перемещается с рейкой. Несущий полосу А рычаг 2 в это время совершает
поступательное движение. Машина оборудуется парой синхронно работающих механизмов,
захватывающих полосу А за оба конца (в крайнем левом положении) и
перекладывающих ее в крайнем положении.
Рис. 9.51. Механизм для одновременного привода ползуна и толкателя.
Движение Г-образному рычагу 9 — 8 с неподвижной осью 10 (рис. 9.51, а)
сообщается пазовым кулачком 11. Ползун 1 и голкагель 5 приводятся oi
Рис. 9.48
Рис. 9.49
560 Направляющие механизмы, механизмы для преобразования движения
рычага 9 соответственно через автоматизированный шатун 7 и поводок 6. При
подходе к упору 12 ползун останавливается, а толкатель продолжает перемещаться,
подводя изделие 4 по плоскости толкателя 1 к приемнику 3 с листом бумаги 2
для обвертки.
Для уменьшения динамических усилий, возникающих при наличии
амортизатора, к рычагу 9 (рис. 9.51,6) жестко присоединяется косынка 14 с роликом 13,
который перемещается в профилированном пазу кронштейна 15 на ползуне,
обеспечивающем выстой последнего.
Рис. 9.51
Механизмы для преобразования двиэ/сения в поступатаыюе 561
Рис. 9.52
А-А
Рис. 9.53
Рис. 9.52. Механизм возвратно-поступательного движения двух ползунов с
приводом от одного KpHBOuLinna. Ползун I рассматриваемого механизма перемещается
в направляющих на ползуне 2. Ползун ] получает движение от кривошипно-
шатупного механизма с шатуном 5, а ползун 2 от шатуна 6 кривошипно-коро-
мыслового механизма с коромыслом 4. Оба механизма имеют общий кривошип.
Ползуны имеют мертвые положения, несколько сдвинутые по фазе.
На рис. 9.52, а показано правое предельное положение механизма, а на
рис. 9.52, б — схема в промежуточьюм положении. Ход ползуна 2 больше хода
ползуна 1. Механизм применяется для гибки изделий из проволоки.
Рис. 9.53. Механизм для преобразования возвратно-поступательного движения
поршня двигателя во вращательное. На валу 6 двигателя на некотором расстоянии
562 Направляющие механизмы, механизмы для преобразования дви:>1€ения
один от другого неподвижно закреплены кулачки 5, значительный момент инерции
которых выполняет роль маховика. На том же валу 6 на подвижной посадке
между кулачками установлена направляющая 4, имеющая прямолинейный паз для
ползуна 5, который соединен с нижней головкой шатуна 2. Ролики пальца 7,
соединенного с ползуном 3, скользят по профильному пазу кулачков.
За период полного перемещения поршня I и шатуна 2 вниз пальцы 7,
воздействуя на кулачки 5, поворачивают вал 6 на 90^. Дальнейшее вращение вала 6
на 90° соответствует подъему поршня до верхнего мертвого положения под
действием профиля кулачка. Плечо приложения силы к валу в период всего цикла
движения остается постоянным, шатун расположен все время с одной стороны
вала.
Рис. 9.54. Пространственный механизм передачи йозвратно-постунательного
движения.
От шатуна / движение передается ползуну 6 посредством сдвоенного
коромысла 5, тяги 3, Г-образного рычага 7 и звена 8. Шарниры Гука 2, 4 и 9 однотипны
по своему конструктивному оформлению.
Рис. 9.55. Механизм, сообщаюицш поступательное движение вращающемуся
валу, состоит из неподвижной рамки 2 (рис. 9.55, а\ качающейся рамки 3 с
роликом 4 и ремня 5. Изменяя угол поворота оси рамки 3, изменяют перекос ремня 5
и соответственно скорость К поступательного движения вала I как по величине, так
и по направлению. На рис. 9.55, 6 показан механизм, у которого рамка 3 непод-
Рис, 9.§4
Механизмы dvi прсовразовапич deu.^iceiiUH в nocmvnamcibnoc 563
0
2 ;
a)
][
Ǥ
Piic. 9.55
Piic. 9.56
вижна, a рамка 2 поворачивается относительно оси и перекашивает ремень.
Механизм может найти применение для перемещения шпинделя в сверлильных
станках небольшой мощности.
Рис. 9.56. Механизм привода конвейера с преобразованием вращательного
движения в прямолинейное. Обе цепи ковшевого конвейера перемещаются
собачками 7, которые шарнирно закреплены на дисках двух зубчатых колес 3. Профиль
неподвижного кулачка 2 определяет положение собачек, которые поочередно вхо-.
^^'^ в зацепление с пальцами 4, прикрепленными к пластинам цепи, и перемещают
^^ по направляющим шинам. Привод непригоден для реверсивного движения.
564 Направляющие механизмы, механизмы для преобразования движения
МЕХАНИЗМЫ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
В КОЛЕБАТЕЛЬНОЕ
Рис. 9.57. При повороте вала 3 шарнир С рычага 1 воспроизводит
пространственную кривую, соотвегствующую профилю вкладыша 5. Между внутренней
поверхностью вкла71ьш1а 5 и рычагом 1 усгаповлеи пшрик 2, осуществляющий
постоянный контакт между ними посредством пружины 4. Механизм может
применяться для протирания передних стекол автомобиля.
Рис. 9.58. Сферический кулисный механизм для преобразования вращательного
движения в качательное. Кривошип 1 с пальцем 2 закреплен на ведущем валу
и совершает вращательное движение. Палец 2 входит в круговой паз сектора 3
коромысла 4, качающегося относительно оси 5.
Рис. 9.59. Механизм, сообщающий качательное движение ведомому валу при
непрерывном вращательном движении ведущего.
Ведущий вал 3 изогнут. К ведомому валу 7 посредством дисков 5 и 6
прикреплены цевки 1 и 2. Закрученная пружина 4 притормаживает вал 7 и обеспечивает
постоянный контакт между валом 3 и цевками 1 и 2. Вал 3 вращается в одном
направлении (рис. 9.59, а, б, в, г) и сообщает качательное движение валу 7. При
изменении формы кривизны вала 3 изменяется закон движения вала 7.
Рис. 9.60. Механизм для преобразования вращательного движения в
колебательное. Вращение передается ведущему валу 1 с двумя эксцентриками, которые
смещены по фазе на 180°. Сателлиты 2 и 5 с двойными зубчатыми венцами имеют
одинаковые размеры и свободно установлены на эксцентриках вала 1. Одни из
венцов сателлитов 2 и 5 находятся в зацеплении с внутренними зубьями
центральных колес 7 и 6, другие — с зубьями колеса 3, которое является ценгральным
колесом второй ступени механизма.
Колеса 6 и 7 имеют выточки, а колесо 3 — заплечики, которые расположены
концентрично с делительными окружностями зубчатого колеса. Колеса соединены
между собой подшипниками (на схеме не показаны). Наружные цилиндрические
поверхности колес 3, 7 и 6 эксцентричны.
При вращении вала 1 с сателлитами 2 и 5 колесо 3 с шатуном 4 совершает
колебательное движение относительно колес 7 и 6.
Рис. 9.61. Кривошипно-зубчатый механизм для преобразования вращательного
движения в колебательное. Ведущий кривошип 4 шарнирно соединен с шатуном 2.
Колесо 1 находится в зацеплении с зубчатой рейкой шатуна 2 и получает колеба-
Рис. 9.57
тг
^
л../^
^^^
Рис. 9.58
Рис. 9.59
Рис. 9.60
Рис. 9.61
566 Ha}ipani4ioufue механизмы, механизмы d'ln преовразовапич движении
юлыюс движение. 11а1!раиляюпи1я J свободно новорачиваехся опюсихельио вала
колеса 1.
Угол поворота р колеса в зависимости от угла поворота 6 кривошипа при
больших A/R и r/R определяется по формуле
Ua^r)- 1Л-^Т^^з;Г -н ^^'^f;^°-°^^
где
Го = г + х;
S = Го + К sin 9;
С = X + Rcose.
Рис. 9.62. Механизм для передачи вращательного или колебательного движения
ведомому валу.
От ведущего вала двигателя, на котором установлено колесо 7, движение может
передаваться к ведомому валу 5 или посредством кулачковой полумуфты 3 при
зацеплении ее с полумуфтой 2 (в этом случае ведомый вал 5 вращается
непрерывно со скоростью вала двигателя), или посредством передаточного механизма,
составленного из зубчатых колес 1, 10, 8, 9, 4 и зубчатого сектора 6 с шатуном 7.
В последнем случае полумуфта 3 соединяется с кулачками колеса 4, которое
получает колебательное движение от зубчатого сектора 6, свободно установленного
на валу И.
Числа зубьев колес и зубчатого сектора 6, приводимого шатуном от пальца
кривошипа на колесе 9, подобраны так, что колесо 4 поворачивается на угол 180'^
при прямом и обратном ходе через каждые восемь оборотов вала двигателя.
Рис. 9.63. Механизм для преобразования вращательного движения в
колебательное с выключением без остановки ведущего вала.
Ведущий кривошипный вал 4 с радиусом кривошипа, равным а, посредством
шатуна 3 передает движение коромыслу 2, установленному на оси 8. Коромысло 2
и рычаг 6, фиксируемый на ведомом валу 7 клеммным зажимом, соединены между
собой подпружиненной защелкой 5 с конической цапфой.
Необходимая степень подвижности звеньев мехаьпвма обеспечивается овальным
отверстием 1 в коромысле 2.
Ведомый вал 7 отключается при перемещении зан1елки 5 влево посредством
рычажного механизма с тягой 9, рычагом 10 и штоком 11. В выключенном
положении образовавшийся зазор между конической цапфой защелки 5 и
сопряженным отверстием в коромысле 2 обеспечивает свободное качание коромысла
при неподвижном вале 7. Механизм применяется для малых колебаний ведомого
вала.
Рис. 9.64. Механизм, сообщающий колебательное движение рычагу, параметры
движения которого регулируются. Кривошипно-шатунным механизмом 5, 10, 1U
приводимым от шкива 3, сообщается поступательное движение ползуну 12,
скользящему по цилиндрической направляющей 5 и соединенному шаровым шарниром 4
с качающимся рычагом 1. Приливы на.ползуне 12, расположенные с двух сторон
направляющего выступа кронштейна 6, исключают его вращение относительно
штанги 5.
Рычаг 1 прикреплен к осп 2 неподвижно и поворачивается вместе с ней
в подшипнике 8. Цапфы 13 подшипника усыновлены в пазах кронштейна /•
Механизмы длч преобразовапия дви.женич б коleoameгьное 567
Стопорные кольца 9 препятствуют перемещению оси 2 в отверстии подшипника 8.
Регулировка угла поворота рычага 1 осуществляется изменением радиуса
кривошипа 10, а угол наклона рычага / — перемещением цапф подшипника 8 в пазах
кронштейна 7 с последующей фиксацией стопорных колец 9.
Рис. 9.65. Механизм подзаводки пружины часовою механизма. При ]Юворо1е
рукоятки 4 по часовой стрелке движение зубчатым колесам 1 и 2 передается
через упор 5, прикрепленный к колесу /. При вращении рукоятки против часовой
стрелки вращение колесам передается через упор 5, прикрепленный к колесу 2.
Направление вращения колес под действием рычага не зависит от направления
его движения. От одного из зубчатых колес движение передается на валик
пружины часового механизма, которая закручивается в одном направлении. Пружина 6
возвращает зубчатые колеса 1 и 2 с неполным числом зубьев в исходное
положение,
в 7
Рис. 9.64
Рис. 9.65
Реверсивные механизмы
569
РЕВЕРСИВНЫЕ МЕХАНИЗМЫ
Рис. 9.66. Механизм изменения моментов сил и угловой скорости вала в
процессе реверсирования (см. с. 535).
Рис. 9.67. Быстро переключающаяся двухскоростная ременная передача.
Двухступенчатый шкив 2 закреплен на ведущем валу i, а шкив 7 - на ведомом валу 10.
Лвижение от ведущего вала к ведомому передается ремнями 3 и 13, которые
попеременно натягиваются с достаточной силой посредством роликов 4 и 12. Оси
П01ИК0В 4 и 12 смонтированы на двухплечем рычаге, составленном из щек 5 и il
и рукоятки 8.
Рычаг свободно поворачивается на стаканах 6 и 9 подшипников. Положение /
соответствует медленному вращению ведомого вала, положение // — быстрому его
вращению.
Рис. 9.6;
Цепная передача с автоматическим изменением направления движе-
ния цепи.
Ведущая звездочка 2 установлена кон-
сольно в неподвижной опоре и соединена
с ведомыми звездочками 4 и 5 цепью 3.
В замкнутый контур цепи 3 введен мостик
1, представляющий собой звено с шагом
больп1е наружного диаметра звездочки 2
(рис. 9 68, о).
Пос.асдовательность положения
мостика 1 в зоне ведущей звездочки и
соответствующие изменения направления
движения цепи с учетом ее натяжения пока-
Рис. 9.66
Рис. 9.67
570 Haupoe.'i.uioufue механизмы, механизмы д 1я преобразования двиэ1сения
8)
Рис. 9.68
заны на рис. 9.68, е. Началом движения следует принять положение мостика i,
показанное на рис. 9.68, а
Рис. 9.69. Механизм синхронного вращения двух валов в противоположных
направлениях.
Ведущий 2 и ведомый 5 валы с закрепленными на них кривошипами
расположены соосно и соединены между собой шарнирами 1 посредством коромысла 4.
Коромысло 4 соединено со стойкой 3 шаровым шарниром, а его плечи свободно
скользят в отверстиях шаров шарниров 1.
В рассматриваемом механизме оси валов 5 и 2 можно расположить под
некоторым углом (например, под углом 90''), при этом плечи коромысла 4 должны
быть расположены под тем же углом.
Рис. 9.70. Зубчатый механизм реверса, состоящий из цилиндрических колес,
известный под названием трензеля. Направление вращения вала 2 изменяется при
повороте рукоятки 3 трензеля. В среднем положении рукоятки ведущий вал I
и ведомый 2 разомкнуты.
Рис. 9.71. Реверсивный механизм шепинга, состоящий из двух поочередно
работающих планетарных передач. Движение от двигателя посредством зубчатых
колес Zi и Z2 передается блоку колес 4, несущему сателлиты двух планетарных
передач. В зависимости от положения муфты 1 блоку сообщаются различные
частоты вращения. По обе стороны блока расположены планетарные передачи,
центральные колеса которых z^ и Z4 заклинены на ведомом, реверсируемом
валу 6. Колеса Z3 и zg поочередно затормаживаются тормозами 5 и 5, вследствие
чего ведомый вал получает прямой или обратный ход с различными скоростями.
90У
t
>ЯГР
[
i «А
^ь^
r^^TV
Рис. 9.69
в J
1_г
.Zs « А,
LJ
^
^4-^ii-
4Р-
J
^2j
Рис. 9.71
57'2 Направляющие механизмы^ механизмы для преобразования дви:)1сения
Рис. 9.72. Реверсивный механизм.
Вариант 1. Ведущий вал 2 с помощью кулачка 1 сообщает червячку б
возвратно-поступательное движение, складывающееся с вращением, сообщаемым
червячным колесом 5. Червячная пара не должна быть самотормозящейся.
Вариант П. Ведущий вал 3 передает движение валу 4 с передаточным
отношением и = z^jz^. Вращающийся кулачковый вал 2, перемещая червяк 6 вдоль
оси вала 5, изменяет угловую скорость колеса 5. Если ход кулачка обозначить /?,
то поступательное перемещение h^ червяка за один оборот ведущего вала можно
найти по формуле
b
дополнительный угол поворота колеса 5
о , (2%ка\ о 360а/г
00^=4: или а° = ;
\ bzstp/ bzsfp
дополнительная средняя угловая скорость колеса 5
'2^_ п 2nha
0)5 - _ j^ - -^ Yz^'
где 71 —часто 1 а вращения вала 3\ Z5 — число зубьев колеса; fp — осевой шаг
червяка 6; 0,5Г— время движения червяка вперед или назад.
Рис. 9.73. Реверсивная передача с винтовыми зубчатыми колесами.
Посредством зубчатой передачи с ведущим колесом 1 движение передается
винтовым парам с колесами 2 и ^, которые вращаются свободно на валу 5
]j разных направлениях. Муфта 3, соединенная с валом 5 направляющей шпонкой,
перемещается при изменении направления вращения вала.
Рис. 9.74. Механизм изменения направления вращения ведомого вала 2 без
пауз. Механизм пригоден для передачи небольших крутящих моментов. Торцовое
зубчатое колесо 3, заклиненное на ведущем валу 1, имеет зубья на половине
окружности.
Рис. 9.75. Регулируемый реверсивный механизм с остановками в каждой точке
реверсирования. Шатун 6 кривошипно-шатунного механизма (кривошип на схеме
не показан) сообщает коромыслу i, закрепленному на оси 7, качательное движение.
На ободе коромысла 1 имеется выступ в форме ласточкина хвоста для венца
зубчатого сектора 4, перемещение которого относительно обода ограничено
упорами 2 и 5.
При колебательном движении коромысла 7, сообщаемого шатуном б, колесо 3
неподвижно до тех пор, пока зубчатый венец не будет увлечен соответствующим
упором. Паузу в крайних положениях можно регулировать перестановкой упоров.
Рис. 9.76. Мехаьшзм для реверсирования вращательного движения винта без
пауз. Неполные зубчатые колеса 5 и б на валу 1 периодически зацепляются
с колесами 3 и 4, из которых первое заклинено на винте 2. Зубья венцов
расположены таким образом, что в конце выхода из зацепления зуба одного сектора
зуб второго сектора входит в зацепление. В механизме возможны большие
динамические нагрузки вследствие наличия жесткого удара при встречном движении
масс.
Рис. 9.77. Устройство для реверсирования вин1а. Реверсирование винта 4 осуше-
ствляется изменением положения диска 2. В правом крайнем положении диска ^
L f
fh
M f
^
<!»|
W^ JL
^—
—•■
1 \ 1'
/11
T
r
eJ
^ —1 H» J^»^i—^
7==^*^
^^^""""'^X^
^^4^:;
^;^=4J
/^
1—^^
1
й"—^
Ш-—
i ' r-4
^
fj=^
Рис. 9.72
Рис. 9.73
Рис. 9.74
Рис. 9.75
Рис. 9.76
574 Направляющие механизмы, механизмы для преобразования двис^1сения
Рис. 9.79
Рис. 9.80
вращение винту передается через фрикционное колесо 3, в левом — через
фрикционное колесо 1.
Рис. 9.78. Реверсивный механизм для передачи больших усилий при небольших
скоростях. Изменением числа зубьев секторов можно регулировать
продолжительность паузы в конце прямого хода. В конце и начале зубчатого венца колес 1 и 4
имеются увеличенные зубья, которые обеспечивают правильность включения и
зацепления (3 и 5 — ведущий и ведомый валы; 2 — ведущее колесо).
Рис. 9.79. Реверсивный механизм. Ведущий зубчатый сектор 2 сообщает левое
и пра'вое вращение ведомому валу от заклиненных на нем конических зубчатых
колес / и 3.
Рис. 9.80. Реверсивный механизм с автоматическим переключением с прямого
на обратный ход. Ведомое зубчатое колесо 2 вращается в одном направлении
до тех пор, пока штифт 3, поворачивая рычаг 4, не переключит муфту с помошью
падающего рычага 5, поддерживаемого упорами 6, закрепленными на вилке 7
механизма реверса. Ведущее колесо 1 вращается непрерывно в одном
направлении, а колеса, находящиеся в зацеплении с ним и >становленные на валу свободно,
вращаются в разных направлениях. Муфта 8 закреплена па валу направляюшсп
шпонкой.
Рис 9.81. Реверсивная передача с разными скоростями прямого и обратного
хода. Ведущие! барабан 1 с неполным числом зубьев венцов внецшего и
внутреннего зацепления приводит ведомое колесо 2. Если работают зубья венца
внутреннего зацепления, то колесо 2 вращается в направлении ведущего вала с большей
скоростью. При зацеплении зубьев венца внепшсю зацепления с ведомым колесом -
направление вращения изменяется на противоположное. Вращение происходи
с меньшей угловой скоростью.
Реверсивные механизмы
575
Рис. 9.82
Рис. 9.81
Рис. 9 82. Реверсивный механизм привода рейки. От ведущего колеса 1,
вращающегося в направлении ciредки, с помощью колеса 2 (оба с nenojuibiM числом
зубьев) рейка 3 перемещается влево, затем захватывается зубьями 4 колеса I и
перемещается вправо. Изменяя число зубьев колеса i, можно регулировать
продолжительность паузы в конце прямого хода.
Рис. 9.83. Планетарные передачи для реверсирования движения В планетарном
реверсе с центральным колесом 3, которое закреплено на ведущем валу
(рис. 9.83, а и б), движение передается колесу ) с внутренним зацеплением
посредством сателлитов 2, вращающихся свободно на осях водила 4 (рис. 9.83, а
водило не показано). При заторможенном колесе 1 ведомым звеном является
водило, вращающееся в ту же сторону, что и колесо 3, а при заюрможенном
водиле ведомым является колесо 7, вращающееся в противоположную сторону
относительно колеса 3. Если ведущим звеном является водило 4, ю
реверсирование осуществляется при торможении колес 1 или 3.
Рис. 9.84. Механизм для реверсирования рейки. На кронштейне 2 смонтированы
колеса: Zj, Z2, Z3 и z^. В зависимости от положения кронштейна, который
поворачивается посредством тяги 3 относительно оси ведущего колеса Zj, движение
рейке I передается с помощью колес Z2 или Z4, вращающихся в разные стороны.
Механизм применяется в пишущих приборах.
Рис. 9.85. Реверсивный механизм, применяемый в пишущих машинках. В схеме,
Изображенной на рис. 9.85, а, переключение производится при сдвиге вала 1
^ продольном направлении, в схеме, показанной на рис. 9.85, б, - при повороте
ала 2 до зацепления с колесом 3 или 1. Переключение может производиться как
вручную, так и автоматически.
Рис. 9.86. Механизм реверсирования движения ведомого вала через восемь
Оборотов ведущего.
Колеса 7 и ii на валу 12 приводятся во вращение двусторонней кулачковой
Уфтой 9 поочередно и в зависимости от ее положения ведомый вал ) с колесом 13
576 Направляющие механизмы, механизмы для преобразования движения
]|
^
]|
щ
В^"—Ч-
Рис. 9.85
W 11
Рис. 9.86
Реверсивные механизмы
511
изменяет направление врап1ения. Переключение кулачковой муфгы 9 (реверс)
осуществляется автоматически рычагом 2, крайние положения которого фиксируются
собачками 6 и 6'. При нажатии пальцев 8 и 10 на выступы собачек соо1ве1Ствую-
ицхя собачка переключает кулачковую муфту и устанавливает в рабочую позиги^ю.
Для исключения удара в механизме предусмотрены амортизирующие плоские
консольные пружины 15, прикрепленные к рычагу 2 и действующие на палец 3
рычага 4, соединенного с кулачковой муфтой поводком 5.
К рычагу 4, который поворачивается относительно оси 17, прикрепленной
к корпусу 14 механизма, щарнирно прикреплена сжатая пружина 18. Шарниры 16
и 19 крепления пружины 18 расположены так, что рычаг 4 удерживается ею
в одном из крайних положений относительно оси. Если колесо 13 нмеег 128 зубьев,
а колеса 7 и // по 16 зубьев, то через восемь оборотов ведущего вала механизм
переключается. Механизм может найти применение в стиральных и других машинах.
Рис 9.87. Реверсивный цевочный механизм, в котором зубчатое колесо 1,
обкатываясь своей осью по криволинейному пазу 2 рамки 3, огибает рейку с
цевками 5, изменяя при этом направление ее движения. Неподвижная кулиса 4
является направляющей колеса 1.
Рис. 9.88. Механизм, преобразующий вращательное движение в прямолинейное
возвратно-поступательное. Зубчатому колесу 3, установленному па свободно
качаюн^смся коромысле 4, передается непрерывное вращение в одном направлении
посредством цепной передачи 5. Рамка 2 имеет бесконечный паз, в котором
скользит цапфа 6 вал-а колеса. В крайних положениях рамки цапфа 6 огибает
рейку с цевками 7 и изменяет направление ее движения. Крайние положения
ведомых звеньев 1 регулируются при изменении угла р наклона направляющей 8
рамки.
Рис. 9.89. Реверсивный механизм с
цевочным зацеплением Ведущее колесо 1 вращает
диск 2 с цевками и криволинейным пазом 4
вокруг оси О2. В момент обкатывания по
кривой малого радиуса ось ведущего колеса
перемещается в прорези неподвижной Kyjnicbi
3, занимая крайние положения Oi и 0^.
Рис. 9.90. Реверсивный механизм с
цевочным зацеплением. На валу 2
рассматриваемого механизма (рис, 9.90, а) закреплено
зубчаюе колесо 1, зацепляющееся с цевками Рис. 9.87
77777777
V/V/^/V
уП Рис. 9.88
19 Кожерпиков и
578 Направляющие механизмы, механизмы для нреодразования движеиич
колеса 4, установленного на ведомом валу 5
неподвижно.
Валу 2 вращение передается гибким валом
или промежуточным валом в соединении
с шарнирами Гука, поэтому при встрече
с направляющей 5, прикрепленной к колесу
4, ступица колеса 1 перемещается в пазу
кулисы 6 на противоположную сторону и
изменяется направление вращения колеса 4.
На рис. 9.90, б показана схема
рассматриваемого механизма с цевками,
расположенными не по дуге окружности, а по эллипсу,
что обеспечивает неравномерное вращение
ведомого вала. На рис. 9.90, в дана схема
реверсивного механизма, в котором ведомый
вал, вращающийся с переменной скоростью,
описывает угол более 360°.
Рис. 9.91. Механизм для реверсирования
вала с разной скоростью при вращении
в разных направлениях. Колесо 2 в
рассматриваемом механизме снабжено зубьями, расположенными по всему контуру
зацепления с колесом L
Рис. 9.89
Рис. 9.91
Механизмы автоматического вк.1ючет{.ч и выключетш
579
Цапфа вала колеса 1 направляется пазом 5, чем и обеспечивается постоянное
зацепление колес 1 и 2.
В соответствии с радиусами Kj и ^2 вращение колеса 2 в направлении
стрелки А происходит быстрее, чем вращение в направлении стрелки Б.
МЕХАНИЗМЫ АВТОМАТИЧЕСКОГО ВКЛЮЧЕНИЯ И ВЫКЛЮЧЕНИЯ
Рис. 9.92. Механизм быстрого выключения муфты падающим грузом: а —
муфта включена; б — выключена. Когда ведомое звено мащины (полз}н) достигает
заданного положения, рычаг 2 поворачивается, освобождая рычаг 1 с грузом,
вслстствие чего муфта выключится [3 — ограничитель).
Рис. 9 93. Устройство для регулирования ^юмeнтa остановки качающегося вала.
Рчривошип 2, скрепленный с регулируемым валом 1, ведет кулисный механизм
с кулисой 4. Конец ползуна 3 оснащен регулируемым резиновым амортизатором 6.
Угол размаха и момент остановки вала 1 можно регулировать, смещая
амортизатор 6 или подщипники 5.
Рис. 9.94. Механизм быстрой остановки ползуна в верхнем положении.
Приводной вал 6 сообщает от электродвигателя через эксцентрик 5 быстрое возвратно-
пост>пательное движение крейцкопфу 3 с щарнирно прикрепленными к нему
зaxвaтa^щ 13 и 10 и далее ползуну 2, несущему верхний нож 1. Если нажать на
подпружиненную педаль 7, то щток 9 сместится вверх и регулируемым бащма-
ком 8, несуищм щтифты 11 и 12, окажет воздействие на верхние концы захватов
13 и 10 (рис. 9.94) и освобожденный полз\н 2 с ножом / будет отведен
прзжииой 4 в верхнее положение. После освобождения педали 7 башмак 8
опустится вниз, захваты 13 и 10 под действием пружин войдут в выемки
ползуна — произойдет включение.
Рис. 9.95. Быстродействующий останов Поворотом рукоятки 2. заклиненной на
валу 5, натяжной ролик / отводится влево, при этом уменьшается натяжение
ремня. Защелка 4, установленная на рычаге 5, упирается в штифт 7 эксцентрика 9,
поворачивает его и, натягивая тормозную ленту 8, тормозит диск б до его
остановки. Устанавливая рукоятку 2 в исходное положение, нагяжение тормозной
ленты уменьшают, а натяжение ремня ременной передачи увеличивают, создавая
таким образом нормальные условия для передачи движения.
Рис. 9.93
А "А
Рис. 9.94
Рис. 9.95
Рис. 9.96
Механизмы автоматического вкиоченич и выключении
581
рис. 9.96. Механизм
автоматического выключения подачи шпинделя
сверлильного станка. Движение подачи
шпинделя 12 осуществляется
посредством фрикпиона 9-8, червячной
передачи 10 с зубчатым колесом и рейки И
на шпиндельном стакане. Движение
подачи прекрашается, когда установ-
пеннос на требуемой высоте кольцо 5,
возденет вуя через защелку 3 на систему
рычагов /, 2, 4, вал 6 и втулку 7,
выключит фрикцион 8, 9 Компенсация
износа фрикционных дисков
осуществляется установочным вит ом 13.
Рис 9.97. Механизм
автоматического выключения подачи шпинделя
cBepJHiJibHoro станка. При движении
шпинделя 1 с прикрепленной к нему
Рис. 9.97
8 7
6 3
^^^^Ж
^^^^^^^.
Рис. 9.98
планкой 2 вниз ее переставной выключающий упор 5, воздействуя на хвостовик
собачки 6 (который при этом толкнет пружину 5), запрет храповое кольцо 7 муфты,
и движение станка прекратится Отвод собачки и включение муфты производится
упором 4. На рисунке показано положение звеньев после выключения подачи
шпинделя станка.
Рис. 9 98. Механизм точного останова пружинно-завивочного станка после
поворота на заданное число оборотов. Вал 8 получает движение от шкива 1
ч^^рез фрикцион 2 и передает его диску 5 с отверстием для заправки конца
проволоки. Диск 5 своим штифтом 6 воздействует на штифт 4 соседнего слева диска
и далее, пока штифт 3 не упрется в штифт 7, который застопорит весь набор
дисков и остановит вал 8. Навивка прекратится. Затем навитая из проволоки
пружина снимается, механизму сообщается обратное движение. Регулировка фрик-
Диона осуществляется гайкой 9.
РАЗДЕЛ 10
МЕХАНИЗМЫ ДЛЯ ВЫПОЛНЕНИЯ МАТЕМАТИЧЕСКИХ
ОПЕРАЦИЙ
И МЕХАНИЗМЫ ПРИБОРОВ
Эти механизмы получили широкое распространение при выполнении всякого
рода вычислительных операций и геометрических построений. Применяются
механизмы для суммирования (вычитания) величин, «вводимых» в механизм
эпизодически или непрерывно, для умножения (деления), возведения в степень и извлечения
корня, для отсчета показательных функций по заданному аргументу. Применяются
также механизмы, позволяющие построить тригонометрические функции по
заданному аргументу и, наоборот, по заданной функции построить аргумент, разложить
периодическую функцию в ряд Фурье и т. д. Простые механизмы могут войти
в состав более сложных, комплексных механизмов, позволяющих производить
сложные математические операции. Например, в машине для интегрирования
дифференциальных уравнений применяются интеграторы, суммирующие,
множительные механизмы и другие, связанные между собой определенным образом.
, Ниже перечислены приборы, нашедшие практическое применение.
Трансляторы, применяемые для переноса фигуры из одной части плоскости
в другую. Механизм обычно составлен из двух параллелограммов и обладает
двумя cтeпeня^ш свободы. Широко применяются в чертежных приборах.
Пантографы, спужаш.ие для пропорционального изменения фигуры
(преобразование подобия) с поворотом или без поворота. Применяются в стекольной
промышленности, граверном деле и др.
Механизмы для вычерчивания кривых: эллипсографы, параболо-
графы, гиперболографы, коникографы (приборы для вычерчивания кривых
конического сечения), эвольвентные циркули и пр.
Механизмы для огибания кривых и воспроизведения их
по дер, синтезируемые для некоторых частных случаев на основе связи между
уравнениями кривой в точечных и в тангенциальных координатах.
Механизмы для огибания кривых их касательными применяются для
разметочных и чертежных работ, в узлах машин-автоматов, в приборах и счетно-решающих
устройствах.
Трансформаторы, служащие для преобразования одной кривой в другую
по какому-либо определенному закону. Механизм должен обладать двумя
степенями свободы с тем, чтобы при вынужденном обводе кривой определенные точки
звеньев описывали вполне определенные траектории.
Инверсоры — механизмы*. воспроизводяш,ие такое соответствие по точкам,
при котором соответственные точки лежат на одном Л}че, выходящем из
постоянной точки, а произведение расстояний соответственных точек от центра постоянно.
Суммирующие механизмы, служащие для сложения скаляров или
векторов. Суммирующие механизмы обладают числом степеней свободы,
совпадающим с числом счагаемых линейно независимых параметров. Частичные перемеше-
нич ведомого звена пропорциональны вводимым величинам, т. е. механизмы
должны облапать постоянным передаточным отношением при исключении все к,
кроме одной, степеней свободы. Приведенные масштабы суммирующих механизьюн
лсганавливаютсч в зависимости от назначения механизма. Действие суммируюши?'
механизмов основано на формуле x^ciiXi -i-ciz^i + ^h^z-
Механизмы для мате матических операций и механизмы приборов
583
В суммирующих механизмах применяются зубчатые, рычажные, блочные и
другие механизмы.
Множительные (мультипликаторы) и степенные
механизмы, служащие для перемножения скаляров или возведения их в степень,
В механизмах с постоянным масштабом используется подобие двух треугольников,
из которого следует
^^1
^2
к
или Хз
ч^^
где Xi, Х2, Хз w к — стороны треугольника, одна из которых (/с) неизменная, две
(xi и Хг) изменяются независимо, а Хз изменяется вынужденно пропорционально
произведению XiX2. При установлении связи вида Xi = Х2 множительный механизм
^южeт служить для возведения в степень.
Механизмы логарифмических и показательных функций получаются из
фрикционных множительных механизмов. В результате введения связи устанавливается
вполне определенное соотнощение между перемещением ведоьюго и
промежуточного звеньев.
Планиметры — приборы для измерения площадей Планиметры в
зависимости or ведущей кривой разделяют на полярные, у которых ведущая кривая -
окружность, и линейные, у которых ведущая кривая — прямая линия. Планиметр
(рис. 10 1) служит для измерения, основанного на следующем принщше.
Стержень ЛВ длиной / на своем продолжении на расстоянии а от точки В
снабжен роликом R (рис. 10.1, а). Когда точка А обегает измеряемый контур С,
точка В принужденно остается на некоторой ведущей кривой С, при этом
прямая АВ опищет дважды покрытую площадь (положительную и отрицательную,
т. е. равную нулю), за исключением площади внутри контура С. Следовательно,
площадь, описанная прямой АВ, равна площади контура С.
584 Механизмы для математических операций и мехаииз мы приборов
Площадь элемента АЛ'В'В = dF (рис. 10.1, б)
dF = Ids sm а+ —^-^.
2
-Элемент пути, описываемый роликом R (рис 10 1, в),
dS sin (х = da sin (х' + а d(p = г dj + а d(p,
поэтому
JF- Irdf + (al-\- --Ь/ф.
Если обход начать с начальными значениями /о и фо, то после окончания
обхода фигуры получим на ролике /i, тогда как исходное положение прямой ЛВ
останется прежним, поэтому
F = lrifi~fo).
Если контур С окружает кривую С (рис. 10.1, р), то угол поворота ЛВ равен 2к,
и тогда площадь, заключенная между контурами, составит
И, наконец,
Fc = Fc + /r(/i - /о) + ial + -^1 2тг.
Механизмы тригонометрических функций, позволяющие
получить перемещения точки механизма, пропорциональные sin ф, cos ф, tg ф, ctg ф или
какой-либо их комбинации.
Гармонические анализаторы, позволяющие определить
коэффициенты ряда Фурье:
Л = —
+ п
1
/ (х) COS nxdx.
1
/ (х) sin пх dx.
Приборы применяют при исследовании периодических процессов.
И нтег рафы — приборы, позволяющие вычертить интегральную кривую по
заданной кривой. Действие прибора основано на одном из способов
приближенного интегрирования. Если интегральная функция F (х) ~f(x)dx получает прир^
щение AF {х) (рис. 10.2), то
ff , dFjx) ^ ^ AF(x-)
/ (.х) = — = tg а :^
^л* А.Х
Механизмы д.т математичсчкил операций и механизмы приборов
585
т е.
ff(x)ax=F(x)
AF (л) =f(x) Ах = Ах tg а;
Рис. 10.2
f(x) будет линией тангенса угла а, если
1ИНИЮ котангенса принять равной
единице.
Для получения интегральной
кривой необходимо от точек /, 2, 3... оси
абсцисс кривой f{x) отложить влево
отрезок а, равный единице, соединить
конец его 1" с концом Г
соответствующей ординаты кривой J (х) и тогда
построенная линия будет параллельна
касательной к кривой F{x) в точке,
соответствующей середине интервала
Л\- Проведя через заданную точку /'" интегральной кривой линию, параллельную
1учу 1"1\ до пересечения в точке 2'" с вертикалью, проведенной через
середину 1—2, а через полученную точку - прямую, параллельную лучу 2"2\
до пересечения с вертикалью в точке 3'" и т. д., получим ряд точек интегральной
кривой. В приборе должно быть механически воспроизведено построение
касательных интегральной кривой, параллельных лучам ТА при постоянной линии
котангенса.
Механизмы, позволяющие интегрировать
дифференциальные уравнения. В этот класс механизмов входит большое количество
сложных механизмов, позволяющих при определенной настройке решать
дифференциальные уравнения или системы уравнений.
Для проведения исследований и контроля работы машин и сооружений
имеются специальные механизмы и устройства, позволяющие измерять различные
механические величины, закон изменения которых характеризует работу машины.
Такими механическими величинами являются силы, моменты и давления (газа или
жидкости), перемещения отдельных звеньев абсолютные или относительные и
деформации звеньев, перемещения, возникающие во время упругих колебаний
звеньев или систем звеньев, скорости линейные и угловые, ускорения линейные
и угловые.
Вполне естественно, что тип и устройство прибора зависят от того, какую
величину, постоянную или переменную, необходимо измерять и в каком диапазоне.
В приборах для измерения сил используются условия равновесия рычажной
системы, в которых измеряемая сила уравновешивается грузом. Кроме того,
используется деформация калиброванного звена измерительного прибора, по
величине которой судят о величине измеряемой силы (динамометры, месдозы).
В рычажных механизмах — весах — уравновешивание производится или при
постоянном плече, но переменном грузе (гири), или при постоянном грузе, но
переменном плече (маятниковые весы). Применяются также комбинированные
^'еханизмы, в которых возможно изменение величины груза и плеча. В приборах
для измерения сил с упругим измерительным звеном должен быть использован
^^^кой-либо способ для отсчета деформаций, зависящих от величины измеряемой
силы Для этого применяются рычажные механизмы, перемещение ведомого звена
оторых зависит от деформации калиброванного звена и, следовательно, от
^Меряемой силы. Кроме того, в настоящее время для измерения параметров,
Меняющихся во времени, широко используются различные физические способы
я измерения деформации упругого звена. К ним относятся методы, основанные
586 Механизмы для математических операиий и механизмы приборов
на изменении емкости, сопротивления, на фотоэлектрическом эффекте, изменении
магнитной индукции, пьезоэффекте и др.-При выборе типа прибора необходимо
иметь в виду, что регистрирующий прибор должен в точности следовать за
измеряемой силой или моментом. Это условие будет соблюдено при периодически
изменяющейся силе или моменте в том случае, если частота измеряемой величины,
по крайней мере, в 10 раз меньше собственной частоты прибора. Если измеряется
импульсивно действующая сила, то время нарастания или снижения действующей
силы должно быть больше периода Т собственных колебаний прибора. Если это
условие не соблюдено, то в показаниях прибора могут появиться отклонения
вследствие баллистического эффекта.
Перемещение q ведомого звена с переменной силой связано равенством
г
^=-^-~ \Q'(x)cosk(t-T)dT,
о
где с — жесткость упругого звена к = 2к/Т- цикловая частота регистрирующего
механизма прибора.
Прибор дает точные показания, если интеграл равен нулю.
В основу приборов для измерения скоростей положен принцип измерения
какой-либо величины, зависящей от скорости: центробежной силы, силы трения
в жидкости, наведенной электродвижущей силы и пр.
Для измерения средней скорости применяются оптические приборы, основанные
на стробоскопическом эффекте, и часовые механизмы, позволяющие измерять
перемещение звена в определенный промежуток времени.
В приборах для регистрации ускорения (акселерометры) использ>ется принцип
измерения силы инерции Р„ = — ш%, пропорциональной ускорению, или получения
производной от скорости с помощью дифференцирующих устройств. В первом
случае для отсчетов могут быть использованы те же методы, что и при измерении
сил, а во втором — электрические методы измерения. Требования, предъявляемые
к измерителям ускорений в отношении частотности, такие же, как и для
динамометров.
Для измерения перемещений звеньев применяются суммирующие счетные
механизмы — хронографы, а для малых перемещений и деформаций — тензометры
и тензографы.
Для измерения колебаний применяются вибрографы, торсиографы и
частотомеры.
В вибрографах корпус прибора соединяется с исследуемым объектом и
с инертной массой с помощью пр>жины. Период собственных колебаний по
сравнению с измеряемым должен быть значительно больше. При колебаниях
корпуса инертная масса стремится по инерции оставаться неподвижной.
Относительные перемещения инертной массы и корпуса прибора, связанного с объектом,
регистрируются указывающим или пишущим устройством.
Экспериментальная техника за три-четыре последних десятилетия быстро
развивалась. На смену старым неэлектрическим методам измерений приходили новые
и это, прежде всего, электрические способы измерений. Появились и быстро
совершенствуются приборы и аппаратура для измерения параметров колебании,
для исследования ударных процессов, для бесконтактной регистрации параметров
с объектов, удаленных на большие расстояния, для создания систем непрерывного
контроля и автоматического регулирования и т. д.
приборы д.1я вычерчивания кривых
587
ПРИБОРЫ ДЛЯ ВЫЧЕРЧИВАНИЯ КРИВЫХ
Рис. 10 3. Гиперболический циркуль. Дано положение ^^зокусов и вершины.
В одном из фокусов / устанавливают ось подвижной линейки Л, в другом фокусе
"крепляют нить, второй конец которой укрепляют на линейке в точке с. Натянув
нить карандашом так, чтобы часть ее Ъс плотно прилегала к линейке,
поворачивают линейку, сохраняя часть нити от фокуса / до острия карандаша натянутой,
и прочерчивают кривую. Hoci роение основано на свойстве радиусов-векторов
шперболы г — I'l = 2а = const. Вторая часть гиперболы строится аналогично.
Рис. 10.4 Параболический циркуль. Даны фокус /, вершина и директрисса р/2.
Один конец нити укрепляют в фокусе параболы, а другой закрепляют на
угольнике, коюрый \южет скользить вдоль дирекгриссы. Поместив в точку b нити
карандаш и передвигая угольник вдоль дирекгриссы, прочерчивают параболу.
Это построение основано на свойстве параболы/i =/2.
Рис. 10 5. Эллиптический циркуль, для которого использован механизм
Кардана. Точка А описывает эллипс с горизонтальной большой полуосью
Г
= 1,
(с + af ..
а точка В описывает эллипс с вертикальной большой полуосью
х^
Г
-= 1,
(Ь + cf
где с - расстояние между шарнирами на камнях.
Рис. 10 6. Механизм Кардана. Точки А w В отрезка прямой скользят в
прямолинейных направляющих. Неподвижной полоидой в этом случае будет основной
круг Кардана, а подвижной полоидой - образующий круг.
Рис. 10.4
Рис. 10.5
588
Механизмы для математических операций и механизмы приборов
Рис. 10.6
Рис. 10.7
Рис. 10.8
Рис. 10.7. Механизм Кардана. Не обязательно, чтобы направляющие для
ползушек были перпендикулярны, как показано на рис. 10.6. Угол а между прямыми,
соединяющими центр образующего круга с центрами пальцев ползунов, равен
удвоенному углу (3 между направляющими: а = 2р.
Рис. 10.8. Приспособление для обтачивания гю эллипсу. На планшайбе 4,
вращаемой валом шпинделя, укреплен стол для обрабатываемой детали. Стол 5
может скользить в пазу шайбы. К столу болтами 8 привернуты две планки 9,
охватывающие направляющую 3, которая вращается на кольце 7 траверсы ^•
Траверса 2 укреплена на станине станка 1,
Перемещая винтом 6 траверсу, изменяют эксцентриситет кольца 7 относительно
оси вала станка и отношение большой и малой осей эллипса обрабатываемой
детали.
Рис. 10.9. Приспособление для обработки по квадрату. В станине 1 (рис. 10.9, ^)
ведущий вал 2 с помощью крестовой муфты 3 приводит во вращение трехгранное
призматическое тело 6, расположенное в четырехгранной полости станины. Пр^
Приборы д.14 вычерчивалич кривых
589
движении призмы 6 ucHip ее описывает относиюльпо оси hojIocih круг сг, ось
призмы вращается в направлении, противоположном направлению обкатывания
призмы по граням полости. В патроне 5 укреплен обрабатывающий инструмент 4,
коюрый повторяет движение призмы 6. Так как двухгранный угол призмы равен
120 (рис. 10.9, б), то с помощью этого приспособления нельзя получить четырех-
траипое отверстие с точными углами; углы всегда будут закруглены радиусом,
равным приблизительно 0,15 стороны квадрата. Если при заданной величине
радиуса круга а увеличить размеры инструмента 4, то получится квадрат
с выпуклыми сторонами. Для того чтобы получить вместо квадрата шестигранник,
сверло 4 следует сделать пятигранным Для обработки больншх квадратных
отверстий вместо сверла можно применять три резца 7, 8, 9 (рис. 10.9, в и г).
Движение державки инструменга, соо1вегсгвующее движению ио кругу h (рис. 10 9, б)
получается при вращении державки по эксцентричной окружности с (см. рис. 109, в
и г). Для изменения величины получаемого в изделии квадрата следует изменить
диаметр круга а, что может быгь достш нуто, если вместо крестовой муфты
применить устройства, допускающие изменение эксцентриситета.
Рис. 10.10. Рычажно-зубчатый эллипсограф Основой схемы служит щарнирный
параллелограмм ABCD с двумя одинаковыми колесами 1 и 2. Колесо 1 жестко
связано со звеном АВ регулируемой длины, колесо 2 шарнирно укреплено на
шатуне ВС и несет рычаг ЕМ. Необходимо, чтобы
AB=:CD=f; АО = ВЕ; ЕМ ^ h.
Точка М опишет эллипс, при этом
X = (f Л- Ь) cos ф, у = if - h) sin ф.
Рис 10 11. Шарнирно-рычажный механизм эллипсографа. Необходимо, чтобы
АВ = ВС, BD = BE, DM = ЕМ.
Рис. 10.9
590 Механизмы д.1я математических операций и механизмы приборов
Рис. 10.10
Рис. 10.11
Рис. 10.12
Рис. 10.13
Рис. 10.14
Точка М описывает эллипс, если АС совместить с больиюй его осью.
Рис. 10.12. Параболограф Антонова. Угловой рычаг ЮМ с направляющики!
при повороте обеспечивает движение точки М оси ползунов по параболе,
удовлетворяющей уравнению у'^ = 1рх. Положение вертикальной направляюпдей
определяется абсциссой X — 2р.
Рис. 10.13. Гиперболограф, выполненный по схеме антипараллелограмма ABCD.
Необходимо, чтобы
MD = MB и МЛ - MD = АВ - const.
Точка М описывает гиперболу с фокусом в точке D.
Рис. 10 14 Прибор для вычерчивания лемнискаты, выполненный по с^еме
антипараллелограмма. Точка Л/ середины звена СВ описывает лемнискату Необходимо,
чтобы
АО = СМ = MB, AB = CD и ВС = 4D.
Рис. 10 15 Механизм Кемпбелла для вычерчивания кривых конических сечении
Механизм содержит (рис. 10 15, а) четырехщарнирный poivio и звенья РК и Л<^
с нaпpaвляющи^п^ для ползушек. Особенность механизма в том, что во время
движения MB = MD = const. Точка Л/ прибора опишет эллипс (рис. 10.15, б),
параболу (рис. 10.15, в), гиперболу (рис. 10.15, г), если прибор и его точку ^^
располагать, как показано на рисунке. Для вычерчивания шперболы звено Р^
должно скользить концом Р по прямой ЕЕ, оставаясь все время перпендикулярным
к ней.
Рис. 10.16. Пантограф для подобного преобразования геометрических фигур
и кривых. При неподвижной точке О отношение подобия ОС/ОЕ = ОА/ОВ = const.
Приборы для вычерчивания кривых
591
Рис. 10.16
Рис. 10.17
При неподвижной точке С отношение подобия СЕ/СО = АВ/АО = const, но фигуры
Ьуд\т повернуты (см. рис. 10.18). Пантограф чаще применяется для уменьшения
фиг>р.
Рис. 1017. Пантограф для подобного изменения фигуры с поворотом;
ЛСВЕсчзДлоВ. Повернув тре}гольник DBE вокруг D на }тол у. сделаем
стороны ОА \\ BE параллельными, следовательно, Z.DAO =^ ^ЪвЕ= Z.OCE.
Тре\гольник
отк\'да
т.е.
ЛОЛО(х:ЛОВ£счзАОС£,
-2? -^R^-AR^. ^^ _ ^^
ое~ос'~~аК' ~od~^
AODEcsoAABD.
Отношение подобия OE'OD = AB/AD, а >тол поворота фигуры р.
592
Механизмы д 1ч математических операций и механизмы придорос
Рис. 10.18. Пантограф гравировального станка для подобного преобразования.
В основе схемы пантограф, изображенный на рис. 10.16 при неподвижной точке С.
Передаточное отношение и указывает величину отношения линейных размеров
фигур, описываемых точками О и Е. Обычно с точкой Е связывается ндуц^
с точкой О — инструмент. Ось С неподвижна. Для станочных панго1рафов
ОС
ое'
Если неподвижная ось расположена между точками Л и Е, то изображение
относительно шаблона получается перевернутым. Положение оси С и точки Е
\с1анавливается по заданному отношению с помон1ью Н1кал и ползушек 1 и 2.
Рис. 10.19. Пантограф. Щуп В и инструмент А расположены по одну сторону
оси О. Механизм снабжен нолзушками /, 2 и 3 для установки необходимого
отношения подобия.
Рис 10.20. Пантографное устройство для алмазной правки боковых сторон
эвольвентного профиля круга 5убон1Лифовального станка. А^ и А2 — заправляемые
профили круга, Bi и ^2 - профили копиров. Правка круга осуществляегся при
покачивании рычага.
Рнс. 10.18
Рис. 10.19
Рис. 10,20
С\ w пирующие механизмы
593
^1з = ~-~(^"1 +'^2)-
СУММИРУЮЩИЕ МЕХАНИЗМЫ
Рис 10.21. Суммирующий блоковый механизм. Ввод суммируемых велиадн
производи гея перемещением концов нити:
1_
~2
Рис 10 22. Суммирующий механизм с двумя рейками. Перемещение средней
рейки .^ равно полусумме перемещений реек 1 \\ 2:
Рис 10.23. Суммирующий механизм с двумя червяками, аналогичный механизму,
показан1Юму на рис. 10.22. Слагаемые вводятся при повороте червяков.
Рис 10 24. Суммирующий винтовой механизм. Суммарное перемещение
сообщает ся гайке I при вращательном движении маховика и поступательном
перемещении BHHia 2:
Ph ([)ормулы
\S- -+ Y.
Ф2^
360°
дочжиа быть установлена градуировка hi калы вводимой величины с leM, чтобы
механизм был суммирующим (t — щаг вита)
V//////^^^ZUC6uC///////^Z^ J
Рис. 10.22
I'hc. 10.21
Рис. 10.23
594
Механизмы di.4 математических операций и механизмы приборов
Рис 10.25. Суммирующий червячный механизм. Поворот червячного колеса 1^
несущего датчик 2, соверщается вследствие основного перемещения — вращения
червяка 3 с помощью поводкового патрона 4 и корректирующего — осевого
смещения червяка вместе с опорами с помощью винта 5 и гайки 6
Рис. 10.26. С>ммир>ющий червячный механизм. Ввод слагаемых производится
при вращении и смещении червяка 2 вдоль оси. Суммарный л гол поворота
червячного колеса I
Ф1,
к Xi
ф2 — + -^,
где ^с — число заходов червяка; г,,^ —радиус начальной окружности колеса; z ~~
число зубьев колеса.
При использовании механизма как суммирующего необходима
соответствующая градуировка шкал.
Рис 10 27. Суммирующий рычажный механизм. Вводимые слагаемые величины
пропорщюнальны перемещениям рычагов 1 и 2.
-^2 - -^'Ез
^1з^
а + b
+ Х2
а
а ■}■ b
J^^
2 _r^1
Рис. 10,24
Рис. 10.26
Рис, 10.27
Суммирующие механизмы
595
Если а = Ь, то суммарное перемещение Ху ==
1 '
= — (xj + Х2). При а ^ b масщтабы для вводи- Рис. 10.29
мых величин должны быть обратно пропорщю-
нальны соответствующим плечам.
Рис. 10.28. Суммирующий механизм с коленчатым рычагом. Ввод слагаемых
производится при повороте рукоятки, смещающей винтом рамку 2, и при
перемещении кулисы 1. Суммарное перемещение каретки 3
^Ея = ^^1 ~ + Х2 .
^ а
Механизм может быть суммирующим при а — b или разных масштабах к для
вводимых величин. Если /^2 = 1, то и
J b . ki а
ki — = 1, т. е. — = —.
а к2 b
Рис. 10.29. Суммирующий механизм с тремя вводами. Три слагаемые величины
могут быть заданы в виде перемещений трех стержней (рис. 10.29, а). Уравнение
прямой AD (рис. 10.29, б)
)"2 - yj
Х2 - Ха
Уравнение прямой СВ
^3 - '^1
условие перпендикулярности прямых AD и СВ:
Уз-У1 V2-\d
= -1.
От
'^ьэда при xi =: У2 =0
^3 - A'l Л-2 - Xj
^d == ^1^1 + ^2 - «зУз .
596
Механизмы для математических операций и мехаииты приборов
Градуированием шкал 1, 2 и 3 можгю получить сумму
^ = bi 4- Ьз + Ьз-
Рис. 10.30. Суммирующий механизм с тремя вводами, схема которого приведена
на рис. 10.29. Слагаемые вводятся при вращении рукояток 1, 3 и 6, связанных
с винтами, которые сообпщют движение гайкам. Перемещение последних отсчи-
тывается с помощью градуированных шкал 7, 2 и 5. Сумма отсчитывается по
шкале 4.
Рис. 10.31. Суммирующий механизм с коническими колесами. Угол поворота
поводка 2
Ф1 + ФЗ
Ф2-—^~-.
Слагаемые пропорциональны углам поворота колес 1 и 3.
Рис. 10.32. Суммирующий механизм с хщлиндрическими колесами. Такого типа
механизм может быть построен по любой из схем, изображенных на
рис. 3.92 — 3.98. Ввод слагаемых можно производить при вращении двух любых
звеньев из числа 1, 3 и 4. Суммирующий механизм требует тарировки шкал
по формулам
«1 = "1зПз + П4(1 - 1/1з);
Рис. 10.30
Е тГ
Ц^
UJ
Рис. 10.31
Рис. 10.32
Су ммирующие механизмы
597
1 -и
"з
«4
13
1 — W,
Wi3
»13
i'l3 - 1
-щ;
-"з-
Звено 4 — водило; 2 - сателлит.
Рис. 10.33. Суммирующий блочный механизм
с любым количеством вводов Число п вводимых
слагаемых определяется по формуле
п = 2^
(о 1 ( <Ь ]
1 <ь 1 ( о 1
mfl
Рис. 10.33
где /с — число последовательно включенных суммирующих механизмов; /с = Ig n/\g 2,
т. е. п не может быть любым числом, а должно изменяться в геометрической
прогрессии.
Рис. 10.34. Механизм для измерения площади. Если измеряемая площадь раз-
к
делена на полосы шириной Ах (рис. 10.34, в), то площадь F^Ax^m,-, где mt — чи-
1
ело шагов, укладывающихся в длинах yi полос на измеряемой площади.
9 ч& 9 9 <UP у
0»-^^ 0-^-0 f-'V^ f"^^
ж]|Л\^ р ta/Jiti
Рис. 10.34
598 Механизмы для мател-штических операций и механизмы приборов
Рис. 10,35
Рис. 10.36
В механизме для измерения площадей с одинаковым интервалом установлен
ряд колес 1, имеющих радиально расположенные стержни, при утоплении которых
колесо 1 соединяется с диском 3 (рис. 10 34, а и б). При измерении площади кожи
(или шаблона), уложенной на подвижном столе 2, диск 3 все время соединен
с колесом ], пока под колесом находится шаблон, поэгому угол поворота диска 5
пропорционален длине полосы, прошедшей под колесом. С каждым из дисков 3
связан блочок, на который наматывается нить, закрепленная другим концом на
рычаге суммирующего механизма. Поворот указателя пропорционален сумме углов
поворота блочков, т. е. сумме длин полос. Шкала хчюжет быть тарирована по
указанной выше формуле.
Рис. 10.35. Мультипликатор. Мехагшзм состоит из двух подобных
антипараллелограммов О ABC и ODEA, в которых меньшее звено первого равно большему
звену второго. Механизм служит для построения кратных углов z. DOC = 2 z. ADC.
Число подобных антипараллелограммов соответствует числу слагаемых
одинаковых углов.
Рис. 10.36. Диаграмма сложения векторов с помощью пантографа. Если точки
£ и J пантографа с отношением подобия равным 2, соединить с концами
изменяющихся векторов z^ и Z2, то конец результирующего вектора соответствует
точке D, при этом
МНОЖИТЕЛЬНЫЕ МЕХАНИЗМЫ
Рис 10 37. Множительный механизм с постоянным масштабом. Каретка -•
множительного механизма (рис. 10.37, а) получает перемещение при смещении
направляющей 2 на величину л"2 и стержня 1 на величину х^. Из подобия
треугольников ОСВ и OAD
У =
I
т. е перемещение у пропорционально произведению .\i и Х2 (рис. 10.37, б)
Рис 10.38. Множительный механизм с постоянным масштабом, отличаюшийся
от механизма, показанного на рис. 10.37, передачей перемещения у, пропорЦй*^'
Множительные механизмы
599
нального произведению перемещений х^ и Х2 на широкое зубчатое колесо 2
и отсчетом по шкале 1.
рис. 10 39 Множительный рычажный механизм. Вводимые множители
пропорциональны перемещениям гайки ] и стержня 2. Перемещение стержня 3
/
В вертикальном отверстии тела гайки 1 пропорционально произведению Xj и Х2.
Последовательность ввода сомножителей безразлична.
Рис 10.40. Множительный фрикционный механизм. Вводимые сомножители
пропорциональны перемещению р середины ролика от центра диска 1 и углу а
поворота диска. Угол поворота ролика 2
рос
г
т.е. ^1 пропорционально произведению'р и а. Последовательность ввода
сомножителей определенная. В первую очередь изменяется р, а затем а (г — радиус
ролика).
Рис. 10.41. Множительный фрикционный механизм. Множители подводятся
к звену 3 в виде расстояния Xj от каретки 2 — 2' до оси вращения звена I и
к звену I в виде угловой скорости coi.
Рис. 10.37
Рис. 10.38
Рис. 10.39
Рис. 10,40
600
Механизмы din математических операций и механизмы приборов
Произведение пропорционально СО4:
С04 =
R
Перемножение может производиться непрерывно.
Рис. 10.42. Множительный механизм зетового типа. Ввод сомножителей
производится при перемещении стержней 1 и 2. Из подобия треугольников DBA и СЕЛ
Положив
/ - Л-,
/•
получим Z = XiM. Механизм должен иметь для и неравномерную шкалу.
Применяется для получения произведения сложной функции и простого сомножителя
и обладает большей точностью по сравнению с другими типами механизмов.
Рис. 10.43. Множительный комбинированный механизм, состоящий из механизма
1, 3, 4 зетового типа по рис. 10.42 и кулачка. Механизм применяется в случаях,
когда один из сомножителей и — сложная функция oi V:u = J(V). Из предыдущего
(см. рис. 10.42) смещение толкателя 2
f{V)
Х2 = /-
-=/-
1 +W 1 +/(Ю
По этой формуле рассчитывается профиль кулачка. Перемещение ползушки 4
^14 =
/ - Л'2
^•l/(n.
Задаются Xj и V, для которых шкалы равномерные.
Рис. 10.44. Механизм для возведения в квадрат. Если в механизме,
показанном на рис. 10.42, связать между собой стержни i и 2, т. е. принять Xj = Х2, то
V = х^/1. Механизм может быть использован для извлечения квадратного корня,
если задавать v, а отсчитывать х = ]//v.
Рис. 10.41
Рис. 10.42
М]10Э1сителы1ые механизмы
601
Рис. 10.43
Рис. 10.44
Рис. 10.45 Рис. 10.46
Рис. 10 45. Фрикционный механизм для возведения во вторую степень.
Устанавливая связь между углом поворота колеса 1 и перемещением .\'2
промежуточных роликов 2 и 2' каретки с помощью зубчатой передачи 1-4 и винта 3,
получим >гол поворота барабана 5, пропорциональный ф^:
^^2 = Ф1 -^^^ = Ф1^;
Z4
^Ф5 = (^2 + dx)
^ф1 Х2^ф1
R
Ф5 =
R
= ^1ф?.
где t — шаг винта; z^ и Г4 — числа зубьев колес 1 и 4.
Рис. 10.46. Механизм логарифмических и показательных функций. Перемещение
промежуточных роликов 2 и 2' каретки с помощью винта 4 и зубчатой передачи 3
пропорционально углу поворота барабана 5. Если задавать угол поворота
барабана, то
1 In <^(Ф5 - Ф5о) + С'
Ф1о = -;^1п
^'^с С и С — постоянные, зависящие от параметров прибора.
Если задавать угол поворота диска 7, то угол поворота барабана 5 ^ показа-
"^ельная функция аргумента ф^.
602
Механизмы для математических операций и механизмы приборов
МЕХАНИЗМЫ ТРИГОНОМЕТРИЧЕСКИХ ФУНКЦИЙ
Рис. 10 47. Синусный механизм. Аргумент задается углом у поворота барабана
с косым срезом. Перемещение у стержня 1 пропорционально sin у:
у = JR tg р sin у,
где R tg р — коэффициент пропорциональности.
Рис. 10.48. Синусный механизм. Отсчет угла ф поворота кривощипа
производится по верхней шкале. Нижняя шкала служит для отсчета sin ф.
Рис. 10.49. Косинусный механизм. Перемещение Х2 ползушки 2 пропорционально
cosф:x2 = р cos ф, а перемещение ползушки 1 пропорционально х^ — р sin ф.
Рис. 10 50. Механизм для получения функции синуса и косин}'са. Плоские
толкатели i и 2 перемещаются по двум взаимно перпендикулярным направлениям.
Перемещение в направлении толкателя i будет пропорционально е sin х,
толкателя 2-е cos Л' Переменная х задается углом поворота ф эксцентрика.
Рис. 10.47
Ц-г^
Рис. 10.50
Механизмы тригоио метрических функций
603
Рис. 10.51
Рис. 10.52
Рис. 10.51. Синусный механизм. На диске 7, вращающемся вокруг неподвижной
оси, укреплен эллиптический щшиндр 2, имеющий в сечениях, перпендикулярных
оси вращения, окружность. Перемещая вверх каретку 3, несущую толкатель 4,
можно изменять амплитуду е синусоиды, которой описывается закон перемещения
толкателя 4. Схема представляет собой развитие схемы, изображенной на рис. 10.50.
Рис. 10.52. Синусный механизм для получения интегральной функции. Ролик 1
вeдo^югo вала приводится грибовидным фрршционом от двигателя с постоянной
частотой вращения. Переменный радиус г малого круга сферы равен К sin а,
следовательно, угловая скорость ведомого вала пропорциональна sin а: Oj =
= СО2К sin а. Сообщая перемещение оси грибовидного ролика с пo^ющью
синусного механизма (показанного в нижней части рисунка), ползущка которого пере-
, ^Ф . 7 ^Ф Ч
>тещается со скоростью к —— (где к — постоянная и — вводимая скорость),
at at
пол}чим }глов}ю скорость ролика /, пропорциональною интегральной ф}нкции ф
от вводимого параметра. Из рисунка
г. ^^ , dip „ / . . ч , /
Ki ■——cosa =/с——- или Kj (sin а - sinao) =/с(ф — фо).
at at
Найдя отсюда sin а, получим
kR(u2 I . к(ро
0)2^-
Последнее выражение показывает, что ©i — линейная функция ф. В частном
С1>чае выражение в скобках может быть равным нулю, тогда ф пропорционально coi.
Рис 10 53. Тангенсный механизм для механического построения тангенса по
^J инному зглу или угла по заданному тангенсу tgф = л;/.
- ис. U) 54. Тангенсный механизм для механического отсчета тангенса угла на
-^3106ой шкале.
^'ис 10.^5 Комплексный механизм, позволяющий воспроизвести или решить
^ впсимости sinD'i/sina2 или cosai/cosa2. В этом механизме шатуны i и 2 шар-
^^"^'"^ "^Ц>'1'1лелограммов связаны подвижной крестовидной ползушкой, имеющей
"алец
который входит в паз коленчатого рычага 3. Из подобия греуголытков
^^-1 и ОБЕ
АВ
1 sin Oil
г sill а^
х = 1-
604 Механизмы д ья матенатических операций и механизмы приборов
Рис. 10.53
Рис. 10.54
Рис. 10.55
Рис. 10.56
В механизме возможны ошибки из-за зазоров в кинематических парах, и
пределы искомого отношения sinai/sina2 ограничены.
Рис. 10.56. Комплексный механизм, воспроизводящий функцию j ^^/cosa^-
H-btga. При Ь = 0 в механизме перемещение у пропорщюнально секансу.
При е = О механизм обращается в танг^нсный по рис. 10.54.
ПЛАНИМЕТРЫ, ИНТЕГРАТОРЫ, ГАРМОНИЧЕСКИЕ АНАЛИЗАТОРЫ
Рис. 10.57. Планиметр - прибор для измерения площадей. Острие А рычага
(рис. 10.57, а) неподвижно; острием В обводится контур измеряемой плоШ^Д^^
Отсчет площади производится на счетном колесе 2. Масштаб отсчета плошаД*
изменяется с увеличением или уменьшением плеча ВС. На рис. 10.57, б показа
общий вид прибора, а на рис. 10.57, в счетный механизм с нониусом. Пр
расположении измеряемой площади вне круга радиуса АС измеряемая плошад
F = /r(pi - Ро),
П кшиметры, интеграторы, гармонические анализаторы
605
Рис. 10.57
Рис. 10.58
где / — длина плеча ВС; г — радиус ролика; Ро и (3i — начальный и конечный углы
поворота ролика, отсчитываемые по нониусу.
Масштаб инструмента изменяется при варьировании величины /. Если
измеряемая площадь охватывает площадь круга радиуса рычага /, то
Р = 1уф1-е^о) + (а1+ 4 )2я+тс|2,
^ж-
Рнс. 10.58 Планиметр «Топорик». Периметр измеряемой площади обводится
Штифтом А (рис. 10.58, а). Точка В при этом, благодаря наличию колесика
'-острым ребром, направленным через точку А, опишет кривую преследования
^^лЕ (рис. 10.58, б). Площадь Q, описанная линией АВ:
^ Положение дуги BqB^ выбирается таким, чтобы 5i + ^2 - S3 = О, при этом
^^i^a Aq будет располагаться вблизи центра тяжести площади F и тогда
Q = F.
^ 'в„в, ^Aв■
606
Механизмы для математических операций и механизмы приборов
Рис. 10.59. Гармонический
анализатор Малера. В анализаторе применен
механизм для перемножения
разлагаемой в тригонометрический ряд
периодической функции /(х) и sin к — х или
а
cos/с X. Искомые произведения не-
а
обходимы для определения
коэффициентов при sin и cos, через которые
выражается разлагаемая в ряд
периодическая кривая; |/(л') sin /с -^^-х
измеряется с помощью планиметра.
Прибор состоит из каретки 7,
перемещающейся в направляющих, угло-
Рис. 10.59 вого рычага 3 и зубчатой рейки 2,
приводилюй в движение угловым
рычагом. Острие планиметра устанавливается в точке С или В сменного колеса 4,
зацепляющегося с рейкой. Разлагаемая в ряд Фурье кривая f{\) обводится острием
А в пределах периода так, что острие после обвода кривой возвращается по оси х
в начальное положение, при этом острие планиметра, установленное в точке С или
Б, описывает замкнутую кривую. Счетное колесо планиметра отмечает площади
Fr =
Inrk
fix) cos I -
\ ^
x dx = nrkAv
fB =
2nrk
f{x) sin I -^^-x I dx = nrkB,^,
где
Ink
mRi
-iRk — радиус сменного зубчатого колеса для определения /с-й
гармоники; m — переменное плечо.
Для гармоники /с-го порядка
Rk==
Ink'
здесь Af^ vi В^ — коэффициенты ряда Фурье; г — радиус ролика планиметра.
Рис. 10.60. Гармонический анализатор, предназначенный для определения
коэффициентов ряда Фурье. Кривая а — а обводится штифтом 1 в пределах
периода. Двргжок 2 перемещается относительно рамки 3-3 в направлении оси
и вместе с рамкой в направлении оси у. Перемещение движка 2 относительно рам^и
посредством серебряных канатиков и шайбы 6 передается оси интегратора -•
поворачивая ее на угол у = пх.
При движении рамки 3-3 вращающаяся ось катков 4-4 передает движение
посредством шайбы 7 и стеклянного шара 5 измерительным колесам 8 и ^0. ^^^
поворота колес 8 и 10, оси которых взаимно перпендикулярны, пропорцпональн
sinx'^x и Qosxdx,
Планиметры, интеграторы, гармонические анализаторы
607
S 6 7
Рис. 10.60
^
1^
\Ш ш\
'Jsa
а
Р
J-^
КГ^
— '' »
ri 1
X
У2а
Рис. 10.61
Показания измерительных колес 8 1л 10 будут соответствовать:
2%
-fj
sin {пх) dx
ъ.
а^ ==
cos(«x) Jx.
Прибор делается обычно с несколькими интеграторами для определения не-
^^ольких гармоник различного порядка.
1^ис. 10.61. Интегратор для определения статических моментов инерции фигур
относительно оси х~х. Статический момент площади ¥ относительно оси х
и
{Y^ -y'^)dx.
608
Механизмы для математических ouepaifuit и механизмы приборов
Но У= ?sina vi у = /sinai. После подстановки значений У и у в формулу для М
получаем
4
(1 - cos2a)Jx + — F I (1 - cos2ai)^x ==
= —Р
4
sm I 2а I dx Н /^ sin I 2а, I dx.
Момент инерщти фигуры F относительно оси х
h
1
J =
iY'-y')dx
при У= /sina я у — /sinai выражается равенством
^7 h
4 12
sin За Jy +
sin За, б/\-
Интегратор имеет два колеса 2 и 2 радиуса R, зацепляющиеся с зубчатыми
секторами радиусов 2R и 3R. Если стержень АВ составляет угол, а с осью х,
то ось колеса 1 составляет угол я/2 — 2а, следовательно, поворот колеса 1 при
обводе острием А по контуру фигуры пропорционален
b
sin ( 2а I dx,
J \2 J
a
a на счетном колесе 2
sin3a Jx.
Рис. 10.62. Интегратор для определения статических моментов и моментов
инерции фигур. Принцип действия тот же, что и в интеграторе, показанном на
рис. 10.61. По раме 1—1 перемещается рамка 6. При перемещении рамки 6 колесо
9, катящееся по рейке, через конические колеса 10 и 5 сообщает поворот диску S.
пропорциональный перемещению х. С диском 8 сцеплены счетные колеса 4, И и /•
оси которых укреплены на колесах с центрами О2, 0^ и О. Отношение
радиусов колес 3:2:1. Наибольшее колесо 4 соединено тягой 3 с рычагом АВ и
образует при этом параллелограмм. При обводе штифтом 2 контура кривой
показания счетных колес будут пропорциональны площади, статическому моменту и
моменту инерции площади.
Рис. 10.63. Схема интегратора. Если между сидящим на оси 1 диском 2,
роликами 5 и 3' и барабаном 4 (рис 10.63, а) скольжения нет, то
СО4 ■
R
■ХС02 или (Р4 — Ф04 =
X #2-
Планиметры, интеграторы, гармонические анализаторы
609
S 9 \\\ W 11
Рис. 10.62
а)
1 1
1 1
J—I ^
"j4
Z
/
/
т
f 1 ' '
iPr3' ^
й ■—'
J
■^ ^-
[
V
л ^
У
Рис. 10.63
^УУ/У/У////
//////////
Если л: = /(фг), то угол поворота ф барабана 4 будет пропорционален
интегралу функции /(фз)
ф = ф4 - фо4 =
1
/ (ф2) ^Ф2
На рис. 10.63,6 показана измененная схема интегратора. Здесь ролики 3 и 3'
не смещаются вдоль оси, а диск 2 вращается и перемещается вместе с коробкой 1.
^ис. 10.64. Фрикционный механизм для получения первой производной функ-
и. Вводимая функция ф^, а ее первая производная d(^ildt = (it^, щ — постоян-
ая угловая скорость диска 1. Движение барабану 5 передается через ролики 2
> смещающиеся вдоль оси винта 3 при вращении зубчатых колес, имеющих
20 Кожевников и
др.
610 Механизмы для математических операций и механизмы приборов
передаточное отнощение и и связанных с поводком дифференциала 4. Если
со ^ coi, то поводок вращается с угловой скоростью —(оз — со^), а ролики 2 и 2'
перемещаются параллельно оси винта 5, имеюптего ход //, со скоростью
ilo и . S h
- -- == — (со - со,) —.
(It 2 '^ 2к
Угловая скорость барабана со = o^op/R. Отсюда
СОо \ 1Ш (It 1 (h
По значению р о величине производной dcpjdt — «i можно судить, если коэф-
с1)ициент при (Jp/dt мал. Если coi = const, то через некоторый промежуток времени
в'юрое слагаемое обращается в нуль; центральные колеса дифференциала при этом
вращаются противогюложно. Вместо дифференциала можно установить следящий
механизм, приводящий в действие сервомотор для вращения винта.
Рис. 10 65. Механизм для получения второй производной. Сдваивая дифферен-
цируюнщй механизм по рис. 10.64, можно построить механизм для
воспроизведения перемещения ф2, пропорционального второй производной вводимой функции.
Вследствие тою, что d(p^/dt = coqPi//?, получаем
J-(Pi ^ СОо dpi
'"dr"~ R dip '
Рис. 10.64 '^^
Таким образом, угловая скорость
винта для перемещения каретки
роликов первого механизма пропорцио-
2тс с/р1
на льна dp^/dt, т. е. С02 =
2kR сРф!
dt'
h dt
и равна угловой
скорости на вводе второго дифс1)еренциру-
ющего механизма.
Рис, 10.65
<V"
Планиметры, интеграторы, гармонические анализаторы
61]
Следящие механизмы сообщают перемещения каждой из кареток роликов
(hmim'AOHOB сразу же, как только угловые перемещения звеньев ввода
становятся не равными угловым перемещениям барабанов.
Если, например, вводится параболическая функция, то винт первого дифферен-
пируьощего механизма вращается с постоянной скоростью, а винт второго
механизма — неподвижен.
Рпс. 10.66. Механизм для выработки функции трех переменных. Поверхность
коноида 1 отображает собой функцию двух переменных .х и у; х^ = кх — пере-
Рис. 10.66
Рис. 10.67
20*
612 Механизмы д 1я математических операций и механизмы приборов
мещения толкателя 2 в направлении оси винта 5, пропорционального вводимой
на винте неременной х; у — пропорциональной углу поворота коноида. С помощью
рейки на толкателе и колеса 4 /(v, у) преобразуется в угол поворота второго
коноида 5, поверхность которого отображает f{x, у, z). Отсчет искомой функции
производится по перемещению толкателя 7 или по углу поворота колеса 6 при
заданных л;; у и z.
Рис. 10.67. Механизм для выработки функции трех переменных (вариант схемы,
изображенной на рис. 10.66). Толка!ель 2 коноида 1, воспроизводящий функцию
двух переменных х и у, осуществляет» продольное перемещение свободно
сидящего на толкателе коноида 4. Третья переменная z задается вращением коноида
от фрикционного валика 3. Функция трех переменных снимается щупом-рейкой 5
и передается колесу б.
МЕХАНИЗМЫ ПРИБОРОВ
Рис. 10.68. Маятниковые весы. К станине 1 весов на стальных лентах
прикреплены секторы 3 с гирями 4. За одно целое с секторами 3 выполнены
секторы 2, очерченные по дугам окружности радиуса, отличного от радиуса
секторов 3. Секторы 2 стальными лентами соединены с траверсой 6, соединяющейся
с чашкой весов. К траверсе 6 прикреплена зубчатая рейка 5, вращающая колесо,
соединенное со стрелкой 7. При взвешивании траверса 6 передает усилие на
секторы 2, которые поворачиваются до тех пор, пока момент от сил тяжести
гирь 4 не уравновесит момент от сил тяжести взвешиваемого груза.
Рис. 10.69. Балансирная динамомашина со статором, качающимся на
подшипниках. При измерении мощности объекта определяется момент статора,
приближенно равный моменту ротора. Уравновешивая статор, например, гирями Р на
чашке весов с плечом /, можно определить крутящий момент и мощность
объекта.
Рис. 10.70. Гидравлический дисковый тормоз для определения монцюсти
быстроходных двигателей. Вал тормоза с закрепленными на нем одним или
несколькими дисками 3 соединяется эластичной муфтой 1 с валом испытуемого
двигателя. Корпус 2 установлен на
шарикоподшипниках. Поступающая в корпус по трубе 5
вода отбрасывается центробежной силой
к периферии и выходит через трубу б.
Количество поступающей воды регулируется
краном 4. Вследствие трения воды о диски
при вращении вала тормоза корпус 2
стремится повернуться вместе с дисками 3.
Для определения тормозного момента,
по которому находят мощность двигателя,
к корпусу прикрепляют чашку весов с
установленными на ней уравновешивающими
гирями.
Рис. 10.71. Гидравлический тормоз для
испытания двшателей. На вал тормоза
насажен барабан 3, на поверхности которого
по окружности укреплены квадратные
пальцы, между ними (по ширине) размещены
такие же пальбы корпуса 5. При вращении Рис. 10.68
Механизмы приборов
613
^^^^b
Рис. 10.69
Рис. 10.70
Рис. 10.71
ротора образуется вихревое движение воды около пальцев, создающее момент
сопротивления, передающийся на корпус тормоза. Для испытания мощных дви-
I а гелей тормоз делают с несколькими рядами пальцев. Уравновешивая корпус
одним из способов, указанных на рисунке (десятичными весами 1, пружинным
динамометром 2, гирями 4), определяют величину крутящего момента, по которому
подсчитывают мощность двигателя.
Мощность трения в тормозе N^ (л. с.)
N =
[ijn
75 • 30^ . 5 д
■i(Rl
Rl),
1де у/д ~ плотность воды; ц — коэффициент трения воды о диск; / — чиcJЮ рядов
пальцев; R^ и i?2 — внутренний и внешний радиусы дисков.
Количество воды, проходящей через тормоз в 1 ч.
G =
632АГз
где ^2 ~ fj — разность температур входящей и выходящей из тормоза воды.
Рис. 10.72. Дифференциальный динамометр с цилиндрическими колесами.
Измеряемый момент передается на вал колеса 7, воздействующего окружной силой
12 на зубья колеса 2. нагруженного силой Р^г, создаваемой колесом 3 за счет
<^рмоза 5. Ось колеса 2 испытывает суммарное давление, равное 2Рз2> Уравно-
^пнваемое установленным на сбалансированном рычаге 4 грузом.
614 . Механизмы для математических операций и механизмы приборов
Момент и мощность (л. с.) на валу определяют по формулам
Mi =
Plr^
N =
______ J_.
716,2*
Здесь r^i, Гн,2 и 7\,з -радиусы начальных окружностей колес, м; Г| -к.п. д.
динамометра; / — плечо силы Р.
Рис. 10.73. Зубчатый динамометр с коническими: колесами. Колесо 2,
приводимое в движение от испытуемого объекта, вращает колеса 3 и б и далее колесо 8
ведомого вала. Ось колес б и 3 расположена в подвижной коробке 9, которая
стремится повернуться от реактивной пары сил. Равновесие приторможенной
тормозом 7 коробки 9 восстанавливается грузом 1 и указывается стрелкой 4. Малый
груз 5 уравновешивает коробку с рычагом.
Условие равновесия коробки
М^ —-.
2п
11 — КПД динамометра.
Рис. 10.74. Тормозной дифференциальный динамометр. Зубчатое колесо 2
внутреннего зацепления сидит на ведущем валу 1, колесо 5 — на ведомом валу б.
Вращение водила 8, несущего на себе сателлит с колесами 3 я 4, ограничено
пружинами 7. При нагружении ведомого вала стрелка водила на неподвижной
шкале указывает крутящий момент привода.
-&4\
7Т=Т
Рис. 10.72
''^ '^>
Г/»-^
t)
Nr
Рис. 10.73
Рис. 10.74
Механизмы приборов
615
Момент на ведущем валу
Mg
1 -"25Л25
Ib5 =
^5^3
Чувствительность динамометра уменьшается с приближением Uis к единице.
Передаточное число t/25 зубчатой передачи выбирается близким к единице для
того, чтобы момент, вращающий водило 8, был невелик, так как иначе пружины
получатся слишком большими.
Рис. 10.75. Стенд для исследования деформаций и сил, действующих на зубья
зубчатых пар без применения скользящих контактов к датчикам. Зубчатое колесо 8
соединено неподвижно со станиной ). Зубчатое колесо 3 с коромыслом 2 и
подвешенными грузами G можег поворачиваться в подшипнике станины. Колеса 4
и 7 закреплены на торсионном валу 6 и вращаются с картером 5 посредством
вала 9. Нагрузка па зубчатые колеса регулируется грузами G.
Рис. 10.76. Ротационный торсионный динамометр. Между ведущим и ведомым
концами двух валов 1 и 9 расположен тарированный стержень 4, передающий
вращающий момент посредством насаженных на него втулок 2 и 8. Вал 1 жестко
соединяется с валом 5 посредством полумуфты 3, а вал 9 — через фланец 7 с
диском 6 При закручивании стержня 4 диск 6 со шкалой на целулоидном кольце 11,
скрепленный с ведомым валом," сместится относительно дисков 12 и 15,
связанных посредством полого вала 5 с ведущим валом. Подсвеченная лампой 10
шкала диска И наблюдается в щель А диска 12 посредством зеркала 14, и глаз
отмечает угол закручивания (см. изображение В), пропорциональный моменту сил
упругости вала.
Рис, 10.75
А II Ю
Рис. 10.76
616
Механизмы для математических операгщй и механизмы приборов
Рис. 10 77. Центробежный тахометр с четырьмя массами. При вращении вала i
массы 2 расхоая1СЯ, в резупьгаге чего посредством звеньев 4, 5, 6 поворачи-
ваегся сек юр 7 и колеса S, 9, К). Пружина 3 возвращае! механизм в исходное
положение. Измеряемая угловая скорость со нспьпуемою ваиа / проноршюнальнц
углу поворота колеса 10 со cipejncoii: •
ml^ sin 2(p
8 7
>ГПТГТ^
Рис. 10.77
здесь С — жесткость пружины; т — масса
грузов; фо — угол наклона оси АА при
со = 0.
Рис. 10.78. Центробежный тахометр.
Инерционная масса 1 имеет форму кольца
(рис. 10.78, а). В передаче от ползуна 2
к стрелке А имеется зубчатый сектор 3,
поворачивающий зубчатое колесо 4,
соединенное со стрелкой. Стрелка снабжена
воздушным демпфером-крыльчаткой
(рис. 10.78, б), приводимой в быстрое
вращение от оси стрелки колесом 4 через
две пары зубчатых колес 4', 5, б и 7.
Рис. 10.79, Тахометр «Пионер». При
измерении скорости ведущий валик 1
соединяется с испытуемым объектом.
Вращение передается вертикальному валу 4,
а через него грузам 3. При удалении
грузов от оси вращения при увеличении
угловой скорости муфта 2, преодолевая
сопротивление возвратной пружины 5,
поднимается и перемещает указатель 6.
Вся система занимает положение,
соответствующее угловой скорости
испытуемого объекта.
Рис. 10.78
Механизмы приборов
617
Рис. 10.80
Рис. 10.81
Рис. 10.79
Рис. 10.80. Тахограф Гейгера.
Вращающийся от испытуемого вала корпус 1
несет инерционные массы 4, качающиеся
на осях 3 и соединенные пружиной 2,
Инерционные массы расходятся до такого
положения, при котором их центробежные
силы инерции уравновешиваются силой
упругости растягиваемой пружины.
Величина расхождения грузов с помощью
рычагов 5, б, 7, 8 передается на перо 9
пишущего механизма.
Рис. 10.81. Центробежный тахометр
АТ-1. Вращение вала двигателя передается
через ведущий вал тахометра вертикальному валу /. Кольцевая масса 2
поворачивается, стремясь стать нормально к оси вращения, и посредством рычага 3
заставляет муфту 4 перемещаться вдоль вала. Поводок 8, связанный с муфтой,
поворачивает зубчатый сектор 9, который соединен со стрелкой. Для успокоения
колебаний стрелки служит воздушный демпфер, состоящий из рычага 7,
связанного с сектором 9, поршня 5 и цилиндра 6.
Рис. 10.82. Дистанционный центробежный тахометр. Связь между датчиком и
Приемником осуществляется посредством сжатого воздуха. С валом 1, который
соединяется с испытуемым валом, имеющим на конце поршень 4, перемещаю-
п^^^ися в цилиндре 9, шарнирно соединены рычаги 2, снабженные грузами 3.
Цилиндр 9 заполнен сжатым воздухом, нагнетаемым насосом 10. Трубка 8
соединяет датчик с приемником, выполненным в виде манометра, состоящего из мем-
Раны 7, серьги 5 и стрелки 6 с градуировкой шкалы на число оборотов. Центро-
>кная сила инерции грузов перемещает поршень 4, перекрывающий отверстия
' ^^ерез которые воздух выходит наружу. Равновесие наступит при равенстве
Р^^^веденной к поршню силы инерции грузов и силы давления сжатого воздуха.
618 Механизмы для математических операций и механизмы приборов
Рис. 10.82
Рис. 10.83
Рис. 10.83. Дистанщюннын
тахометр Аскания. Прибор
выполнен в виде вращающегося
вокруг оси О картера 6,
снабженного двумя цилиндрами. В
одном цилиндре помещен поршень
1 насоса, шарнирно
закрепленный па шатуне 2, в другом
ци;пп1Дрс, снабженном отвер-
С1ием а, расположен порнюнь 4
/щтчика. Воздух, нагне1аемый
насосом, при вращении картера
от испытуемого двигателя по-
сгупает по трубке 5 в цилиндр
датчика. Давление воздуха урав-
новеншвает центробежную спл>
поршня 4. В центре картера
расположено выходное
отверстие, через которое воздух по
трубке 3 поступает в приемник
Рис. 10.84 Манометр отградуирован на
частоту вращения, пропорциональную давлению.
Рис. 10.84. Тахоскоп 1-го часового завода. Вал /, приводимый в движение от
испытуемого объекта, передает вращение через червячную передачу и
автоматический реверс (через зубчатые колеса 3 и 2 или 3, 4 и 5) колесу б, фрикционно
связанному со свободно вращающимся колесом 7. Движением колеса 7 унравляе!
часовой меха1П13м посредством кулачковой шайбы 13 с собачкой 14. Нажатием
кнопки 9 заводится пружина. При освобождении кнопки 9 заведенная пружина
повернет сектор 8, колесо 12 и храповую шайбу //, связанную с помощью
собачки со спусковым колесом 10, сидящим на одной оси с шайбой 13, которая-
нажимая на собачку 14, освобождает колесо 7. С колесом 7 фрикционно
связана стрелка 15, поворачивающаяся на определенный угол, пропорциональны
скорости вала 1 за время (6 с) вращения колеса 7. Для установки стрелки на н)-
служит рычаг, управляемый кнопкой 16.
Механизмы приборов
619
Рис. 10.85. Тахометр с грибовидным фрикционом. Грибообразной формы диск 1
^1ожет вращаться вместе со своей осью около оси О. При установившемся
положении прижатого к грибку ролика 2 угол поворота грибка а, зависящий от
угловой скорости испытуемого объекта, определяется из равенства
г С
sin с/ ^ -- — (л)1
Переменный радиус грибка К^ :=/^sma. Шкала прибора неравномерная.
Рис 10.86. Поплавковый гидравлический тахометр. При вращении сосуда вокруг
вертикальной оси YY поплавок 1 опускается.
// -
%
h - С(о-,
где h - высота уровня жидкости в спокойном состоянии. Параметр S
характеризует упювую скорость вала.
Рис 10 87. Гидравлический дистанционный тахометр. Связанная с испытуемым
валом крыльчатка 2 засасывает масло из резервуара 4 и нагнетает жидкость
в резервуар 7, оказывая давление на воздух, который по трубке 3 поступает
к манометру со шкалой, градуированной на частоту вращения.
Рис 10 88 Гидравлический вязкостный тахометр Диск 2 с отверстиями, сидящий
на ведуи1ем валу /, расположен внутри герметически закрытого сосуда,
заполненною р1у1ью. При враще1ши диска 1 ртуть увлекает легкий диск 3, удержи-
наемый от вращения пружиной 4. Угол поворота диска 3 со стрелкой 5
соответствует скорости вращения испытуемого объекта.
Рис. 10 89. Вибрационный тахометр. Состоит из большого числа
отградуированных по частоте консольных пружин 1 одинакового поперечного сечения, но
защемленных па разной длине (рис. 10.89, ^/). На концах пружин укреплены
грузики 2. Около каждой пружины имеется электромагнит, питаемый током о г дат-
Рис. 10.85
620 Механизмы для математических операций и механизмы приборов
Рис. 10,89
Рис. 10.90
чика-генератора. Генератор вращается от маншны, частота вращения которой
измеряется. Ток генератора подается в электромагниты, якорями которых являются
пружины 1, Под действием тока пружины начинают колебаться с различныМ11
амплитудами (рис. 10.89,6). Наибольшая амплитуда будет у пружины, собственная
частота колебаний которой известна и соотвегствует частоте тока, а следовательно.
и частоте обьекта.
Рис. 10.90. Электротахометр. На валу 1 посажен магнит 2 с шестью
полюсами. На статоре укреплены обмотки 3. Во время вращения вала, связанного
с испытуемым объектом, создается переменное магнитное поле, наводящее в оо-
мотке 3 э. д. с, пропорциональную угловой скорости вала.
Рис. 10.91. Стробоскопический тахомегр с механическим затвором. Двигате. '
постоянного тока снабжен диском 1 с отверстиями 2. Диск помещается м^^'^
испытуемым валом и неподвижным экраном, имеющим узкую щель.
Частота врап^ения двигагеля регулируется реоскиом 5 и доводится до совпа.^^^
нпя с частотой вращения объекта действием электромапштного тормоза в в
Механизмы приборов
621
Рис. 10.91
Рис. 10.92
<<f]^
магнита 3, в поле которого вращается диск 1.
Частота вращения диска фиксируется индукщь
онным тахометром 4.
Так как наблюдатель видит испытуемый вал
лишь в момент совпадения щели с одним из
отверстий диска, то при равенстве или кратности
скоростей диска и вала последний будет казаться
неподвижным.
Рис. 10.92. Передача счетчика частоты враихе-
ния. За один оборот ведущей оси 7, несущей
■эксцентрик, цифровое колесо счетчика — колесо
единиц 2 должно повернуться на 7io оборота.
Для этой цели служит планетарная передача
с 22 зубьями на внутреннем и 20 зубьями на Рис. 10.93
внешнем зубчатом колесе. Движение к колесу 2 передается пальцем 3. Передаточное
отношение механизма
_ ^20 ~ ^22 1__
Z20 10*
Рис. 10.93. Прибор для измерения скорости газа. Пользуясь зависимостью
между давлением газа и скоростью при истечении его через отверстие К =],//;,
измеряют давление. Перемещение поплавка для получения отсчетов по
равномерной шкале передается стрелке прибора гибкой нитью с помощью криволинейного
диска.
Рис. 10.94. Тензометр для измерения натяжения тросов. Прибор определяет не
>Длинение участка троса, где установлен прибор, а силу, необходимую для откло-
еиия троса от его прямолинейного направления на некоторую величину,
зависящую от натяжения троса. Прибор укрепляется па тросе захватами 4 и 6. Рычаг
' И'^еющий на конце пруукину 5, упирающуюся в ролик 7, прижимается рукой
Испытуемому тросу опорой 3. При этом сектор 1 вращает зубчатое колесо 8
" Грелку 9.
622 Механизмы для математических операций и механизмы приборов
Рис. 10.94
y///////////777Z^77777777777777^
Рис. 10.95
Рис. 10.97
1
Рис. 10.96
Рис. 10.95. Тензометр с электролитом.
Электролит между электродами 1 и 2
разделен язычком 5, перемещение
которого, вызванное деформацией образца,
изменяет сопротивление электролита. Это
изменение можно регистрировать
осциллографом с помощью мостиковой схемы.
Рис. 10.96. Струнный тензометр. На испытуемом образце 1 натянута струна /•
Струна возбуждается от звукового генератора до резонанса. Зная собственные
частоты до и после деформации образца, вычисляют изменение натяжения и Д^'
формацию струны (3 — возбудитель, 4 — приемник).
Рис. 10.97. Индикатор для грубых измерений при контроле поковок и отливок
Измерительный стержень 8 с поперечиной 5 и штифтом 4 перемещается в
отверстии корпуса 7. Штифт 4 воздействует на короткое плечо рычага 2, длинное плечо
которого {и = 10) перемещается относительно шкалы / с ценой деления 0,2 м^^-
Измерительное усилие создается пружиной 6, прибор защищен кожухом 3. ПреД^-
измерения 10 мм.
Рис. 10.98. Схема прибора для контроля размера изделия бесконтактным пне ^
матическим способом. Из резервуара 1 в резервуар 2 через калиброванное отвер
Механизмы ирибороа
623
стие di, сопло 5 с отверстием di, зазор z поступает воздух под неизменным
давлением. Так как зазор z зависит от контролируемого размера h изделия 4,
то по давлению в резервуаре 2, контролируемому манометром 5, можно оценить
изменения размера h изделия.
рис. 10.99. Пробки-калибры для контроля размеров пневматическим способом:
а - контроль 'отверстий большого диаметра осуществляется поршнем 1, Воздух
проходит через калиброванные сопла 3 и выходит в отверстия 2;
б — контроль отверстий контактным способом. В корпусе головки 1
запрессована втулка 2 с подпружиненным плунжером 5. Коническая часть плунжера
перекрывает отверстия, через которые выходит воздух. Чувствительность пробки-
калибра регулируется изменением конусности плунжера 5;
в — контроль цилиндрических
изделий 1 осуществляется в отверстии
корпуса 2. Воздух поступает по
трубопроводу к соплам 3 и выходит через
отверстия 4\
J-контроль толщины плоского
изделия i между головками 2 с соплами
для выхода воздуха;
Ь - контроль расстояния L между
отверстиями;
е - контроль сферических
поверхностей (оптических линз). Установка
размера осуществляется вращением
опорного кольца 1 относительно
сопла 2; Рис. 10.98
"^////////////////////JZ^
Рис. 10.99
624 Механизмы для математических операций и механизмы приборов
5 6 Р
|.
\>
О
I ^ уЛ Воз^
Воздух из сет
Рис. 10.100
Рис. 10.101
ж — одновременный контроль наружного и внутреннего диаметров изделия;
3 — контроль конического отверстия в пяти точках.
В пробке-калибре 1 перемещается плунжер 2 с отверстием для подвода
воздуха к соплам 4 {3 — уплотнительные кольца).
Рис. 10.100. Поплавковый микрометр. Сжатый воздух через стабилизатор
давления 1 поступает в стеклянную коническую трубку 2 с легким свободно
движущимся поплавком 3 и далее через резиновый шланг 4, через камеру 5 к соплу б
в зазор а между торцом сопла и поверхностью контролируемой детали. Чем
больше зазор д, тем большее количество воздуха вытечет в единицу времени
и тем выше поднимется поплавок 3. Когда кольцевое сечение между поплавком
и трубкой окажется достаточным, чтобы напор уравновесил поплавок, наступит
равновесие и верхний обрез поплавка отметит на градуированной шкале размер
контролируемой детали.
Рис. 10.101. Прибор для комплексного контроля мелкомодульных колес. На
суппорте i, несущем кронштейн б, укреплена синусная линейка 7, к которой
прижимается грузом (не показан) носок каретки 5 с индикатором. К каретке
посредством пружинных подвесов присоединена эталонная рейка 2, зацепляющаяся с
испытуемым колесом 4. При движении суппорта 1 по своим направляющим,
например, вправо, колесо 4, увлекаясь диском 5, поворачивается по часовой стрелке,
рейка опускается и одновременно (наклон линейки tg9 = Г4/Я3) опускается
каретка 5. Если колесо изготовлено правильно, рейка 2 и каретка 5 опускаются
синхронно, и стрелка индикатора останется на нуле.
Рис. 10.102. Приспособление для контроля цилиндрических зубчатых колес
На поворотном столе 9 с шариковой опорой 12 смонтирована подвижная по-^'
пружиненная каретка 10, несущая оправку ii с жестко закрепленными диском
и колесом 7, которые обкатываются по неподвижному диску 1 и колесу 2,
насаженному на оправку 6 с центрами и хомутиком 5. Диаметры дисков i и ^ должнь
быть равны диаметрам делительных окружностей колес 2 и 7. При обкатке кол^
Механизмы приборов
625
идеальной геометрии зацепления индикатор 5 не отклоняется, в противном
«лучае угловые отклонения колеса 2 через хомутик 5 передадутся через рычажок 4
YX индикатор 3. Прибор позволяет обкатать пару колес или проверить одно
ко песо, заменив второе эталонным.
рис. 10.103. Схема контроля постоянству передаточного отношения при и = I
^^ помощью так называемой автоколлимационной трубки и двух равных п-гран-
ных стеклянных призм. На колесах (или шкивах) 1 укреплены многогранные
призмы 2. Пучок параллельных лучей из
трубки 3 попадает на призму 4, а затем
па призмы 2 и, отразившись от их граней,
зозБращается на сетку трубки. Разность
^рдов поворота осей изображается на сетке
трубки как расстояние между штрихами
двух перемещающихся бликов.
На рис, 10.103, а — случай и — — 1 и оси
параллельны; б — случай и = +1; в —
случай пересекающихся осей; г — сетка
трубки, при п = 72 достаточно нанести шкалу
0-200'.
Рис. 10.104. Прибор для настройки
роликоправильной машины и контроля
действительных деформаций штуки
(рельса) при правке с учетом прогибов валов
роликов и зазоров в подшипниках. Между
двумя линейками 1 (рис. 10.104, л), с за-
Рис. 10.102
Рис. 10.103
626 Механизмы для математических операций и механизмы приборов
^777T/77^77r/r/////^^/V^^^^^
Рис. 10.104
клппенным на них упором // в направляющих 2 можег перемещаться колонка 3.
внутри которой имеется двуплечий рычаг 4, несущий измерительный ролик 5 и
зубчатый сектор 6, поворачивающий зубчатое колесо 7 со стрелкой 8. Шкала 9 прибора
указывает вертикальное смеш.ение у ролика 5. Винтом /О устанавливается нуль
прибора при опущенном pojn^Kc 5, 01П1рающемся на брус /2, прижатый к
роликам ManjHHbi снизу. В таком положении колонка 3 зажимается между линейками
/ посредством вин[Ов /3 Для удобства п быстроты настройки мащины
необходимо предусмотреть для каждой napi>i верхних роликов отдельные приборы
(рис. 10.104,(5), соединенные шинообразныхми сочленениями.
ДАТЧИКИ И АППАРАТУРА ДЛЯ ИЗМЕРЕНИЯ
НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
Рис. 10.105. Схемы реостатных датчиков для измерения перемещений; ^, б, ^ "^
датчики, дающие плавную линейную зависимость; г — каркасного типа с малой
ступенчатостью; д, е - с большой ступенчатостью; э^с, з — с жидкостным
контактом; и, к - нелинейные с фигурным и ступенчатым каркасами; л - с зашунтирО'
Датчики и аппарат}ри д.1Я ис)АС1<п]рических величии
627
gj^HbiMH секциями; м — синусно-косинусный; н - с перекатываюпдимся фигурным
контактом.
На рис. W и к приведены графики сопротивления датчика в функции пере-
мешеиия х ползунка
Рис 10.106 Схемы измерений с помощью реохордных датчиков: а - хода
ползуна, о — прогиба пружины; в — давления, г — перепада давления; д — угла
ii(,BOpoia, с - силы, ж - ускорения
/, - скопьзящип контакт, о — выводы к осциллографу
рис И) 107. Схема измерения линеЙ!!ыч перемен1ет1Й Датчиком саужпт про-
ролочное сопротивление — реохорд /, по которому скользит связанный с
поступательно движущейся деталью ползунок 2, нарушающий равновесие мостика по-
сюяниою тока. Разбалансировка мостика регистрируется с помощью стрелочного
а -^dh i^
L '^- Jl
0 0
Рис. 10.105
6?S Механизмы для математических операций и механизмы приборос
Рис. 10.106
Рис. 10.107
прибора 3 или шлейфа 4.
i?i, R2, R^, i?4 -
сопротивления плеч мостика; г -
балансировочный реостат.
Наибольшая
чувствительность достигается при
равенстве плеч мостика. Ток в
измерительной диагонали
мостика
AR
2{Rd + R)
(AR)'
2R
R ^= Ri =^/?2 '^ R?, ~ ^4'
где / — ток питания; Rp — сопротивление измерительной диагонали.
При R/AR ^ 10 погрешность измерения вследствие нелинейности не
превышает 1%.
Рис. 10.108. Схема измерения линейных перемещений датчиком с двумя Р^^"
хордами. Контакт 1-1 одновременно скользит по двум реохордам. Чувствитель^
ность мостика по сравнению со схемой рис. 10.107 удваивается, и балансира
Датчики и аппаратура д 1Я неэ 1ектрических величин
629
1
2R
2R
у^ ^[^^ншлейфи
jf—-ч
Рис. 10.108
вечный реостат отсутствует. Нелинейность схемы исклю-
чаегся. При / = const//) линейно зависит от АК.
Сопротивления плеч могут приниматься меньшими и питающий
ток / будет достаточным при меньнлем значении
напряжения батареи:
/п-/
АК_
Рис. 10.109. Схемы измерений перемещений с помощью
металлических скоб: нтн (рис. 10 109, <:/), вызванных
зазором в сочленении (рис. 10.109, б), витков пружины
(рис. 10.109, в). Чувствительность измерительного
устройства может быть увеличена путем уменьшения высоты
скобы или увеличением жесткости ножек и углов скобы. Рис. 10.110
Рис. 10.110. Бесконтактный индукционный датчик для измерения угловых
перемещений Плоский железный сердечник 4, очерченный по архимедовой спирали,
вращаясь между полюсными наконечниками магнитопровода с тремя обмотками
^' 2, 3, вызывает изменение индуктивности катушки. Посредством неподвижного
железно! о сер/^ечника 5 выравниваются начальные Mai нитные проводимости систем.
Одинаковые обмотки 1 и 3 питаются переменным током.
Рис 10.111. Схема датчика линейных перемещений объекта, передаваемых от
'•роса 6, ролика 5 и валика 3 ползунку 2 неподвижного реостата 7. На валике
заклинен кулак-ограничитель хода 4 и возвратная пружина 7. Изменение
сопротивления реостата, включенного в мост, регистрируется осщ^ллографом.
Рис 10112. Датчик контроля изменения дщаметра бурящих скважин. При
Перемещении датчика но оси скважины производится ощупывание ее стенок посред-
^'вом фсхрычажной сдвоенной ромбовидной системы 7 с тремя роликами-щу-
^ми 2, расположенными под 120^, вследствие чего изменение диаметра вызывает
630 Механизмы для математических операций и механизмы приборов
Рис. юли
Рис. 10.112
^^^
Рис. 10.113
Рис. 10.114
Рнс. 10.115
смещение ползунка реохорда R. Диапазон измеряемых диаметров D порядка
100-730 мм.
Рис. 10.113. Схема прибора для замера угловых перемещений с помощью
реохорда. По поверхности измерительного вала укладывается изолированная от вала
проволока 1 реохорда, концы которой подаются на контактные кольца 2.
Неподвижный контакт 3, скользящий по реохорду при вращении вала, вызывает раз-
балансировку мостика.
Рис. 10.114. По неподвижно укрепленному реохорду 1 скользит ползунок -
жестко связанный с испытуемым валом 5, вращающимся в пределах некоторого
угла. Перемещение ползунка вызывает разбалансировку мостика и ток в измерь''
тельной диагонали, пропорциональный угловому перемещению вала.
Рис. 10.115. Схема датчика углов поворота зондной лебедки для контрол^
уровня шихты в доменных печах. Поворотом оси лебедки посредством муфтЫ -'
зубчатой передачи и кулачка сообщается поступательное движение сердечни У
Датчики и аппаратура для неэ 1ектрических ее тчии
631
Рис. 10.116
Рис. 10.117
индуктивного датчика. Нулевое
11о;южс1И1С датчика устанав;и1ва-
е1ся вин ЮМ I При
значительном \1лс поворота кулачка
характеристика ноказа1П1Й jH-ineri-
ная.
Рис. 10 116 Схема датчика
для регистрац!Н1
неравномерного вранюиия, состоящего из
лиска / с зубьями,
установленною на исследуемом валу, н
неподвижно! о мамина 2, в ка-
1уткс5 коюрою индук1нруе1ся
ГОК, pCI ПСГрИруСМЫЙ 0СЦИЛ]Ю-
1рафом 4.
В моменты, ко1да впадины
Рис. 10.118
з>оьсв располагаются напротив магни1а, кривая рсгисфируемою тока пересекает
нулевую линию При неравномерном вращении диска 1 расстояния между этими
точка\и1 различны и по ним легко определить время прохождения зубцов
относи 1ельно магнита, а следовательно, закон изменения угла поворота
исследуемого вала
Рис. 10 117 Индуктивный датчик скорости угледобывающих машин. С
упирающимся в машину штоком 1 жестко связан латунный цилиндр 2 с обмоткой на
повсрхносги, который перемещается между сердечником 3 электромагнита с обмот-
^^ой 5 и 1рубой 4. В результате в обмотке наводится з. д. с, пропорциональная
скороеIи штока.
Рис 10 118. Датчик для измерения у1ловых скоростей (унигюлярная машина)
^слсм1ый ротор 2, смонтированный изолированно от корпуса, вращается в
сильном MaiHHTHOM иоле, создаваемом обмотками возбуждения 5. Напряжение, прямо
пропорциональное угловой скорости ротора, снимаегся щетками /. Уступая в
чувствительности коллекторным генераторам, униполярная машина отличается зна-
"^нтельно меньшими габаритами, отсутствием пульсаций тока, не требует
фильтров и т. д.
Рис 10.119. Схемы датчиков контроля размеров: а — индуктивный; б —
емкостный, в - реле толщины.
Рис. 10.120. Двухконтактное реле массового автоматического контроля размеров.
Ри изменении размера детали 3 (на 3 мкм и более) измерительный шток 2 сме-
632 Механизмы для математических операций и механизмы приборов
ши
П^Л
а)
Ц Е^О vJ (3=
Рис. 10.119
щается и замыкает отрегулированные
винтами I на заданный размер контакты
А и Б, управляющие сигнализацией (см. р^^^ jq |2л
рис. 10.123) * '
Рис. 10.121. Схема прибора для измерения разностенности труб. Держатель 9
с испытуемой трубой 4, размещенный в корпусе 7, может перемещаться с
помощью микрометрического винта 70 и пружин 3. Труба 4 через камеры 5 и 8
и щели 2 облучается у-лучами. Внутренние электроды 6 и 7 присоединяются
к сетке лампы. Перед измерениями в держатель 9 ставят эталон, шкала винта
10 и стрелка прибора 11 устанавливаются на нуль. При установке разностенной
детали интенсивность лучей, попадающих в камеры 5 и 8, будет различной и
стрелка измерителя отклонится. Если вращать деталь до получения показаний
наибольшей разностенности, а затем сместить держатель винтом 10 до
возвращения стрелки прибора 11 на нуль, то шкала винта покажет величину половины
разностенности.
т\1'
-ф—I у-
■х-
Рис. 10.121
Датчики и аппаратура для неэлектрыческих величин
6^3
Рис. юл22
Рис. 10.123
Рис. 10.124
Рис. 10.122. Индуктивный датчик контроля толщины ленты холодного
проката. Отклонение в толщине ленты, пропускаемой между роликами 7,
регистрируется дифференциальным датчиком 5, в котором якорь связан с одним из
роликов. Установка размера производится микрометрическим винтом 2. Для лент
толщиной 0,1 — 5,5 мм диапазон измеряемых отклонений составляет + 0,1 мм при
скорости ленты до 8 м/с.
Рис. 10.123. Головка для автоконтроля размера изделия по его предельным
значениям с электронным реле для двухсигнального светофора. Хомутик 5,
соединенный с измерительным шпинделем i, воздействует на контактный рычаг 4,
замыкающий один из рабочих контактов 6. Винтами 5 регулируются допускаемые
отклонения размера (см. рис. 10 120). Световые сигналы подаются неоновыми
лампами 9, включенными в анодные цепи сдвоенной электронной лампы 8. При
нейтральном положении рычага 4 рабочие контакты разомкнуты, на сетки лампы 8
^'брез сопротивления 7 подается запирающее лампу отрицательное смещение.
Замыкая один из контактов 6, сетка соответствующей половины лампы 8 соеди-
•^яется с катодом и при положительном полу периоде пройдет ток, зажигающий
неоновую лампу.
Рис. 10.124. Принципиальная схема прибора для бесконтактного
автоматического контроля толщины прокатываемого металла методом рентгеновского излу-
'^ения. Лучи рентгеновской трубки 1 направляются через движущуюся
контролируемую по толщине ленту 2, через образцовую пластинку 3 и эталонный клин 4,
634 Механизмы для математических операций и механизмы приборов
которые изготовлены из того же металла, что и лента 2 В дальнейшем лучи падают
на флуоресцирующие экраны 5 и 6 и визируются фотоумножителями 7 и 8.
Измерение весьма малых толщин может производится без образцовой пластинки 3
Фототоки фотоумножителей на выходе имеют форму импульсов рентгеновского
излучения и направлены навстречу друг другу. Результирующий фото ток
усиливается усилителем 9 и подается на обмотку /О двухфазового конденсаторного
двигателя U. Обмотка /2 включена в сеть последовательно с конденсатором
В зависимости or знака амплитуды сигнала меняется амплитуда тока в обмотке,
двигатель вращается и приводит в движение кт\\\ 4 до MOMCfrra, пока разность
потенциалов па выходе схемы не будет равна пулю.
Рис. 10.125 Индуктивный однокатундечный датчик для измерения расстояния
6i or поверхности детали ] до поверхности листа 2 обншвкп (рис. 10.125,л). При
изменении расстояния 5i между стальным сердечником 4 датчика и стальным
контрольным стержнем 3, специально заделанным в неметаллическую деталь /,
изменяется индуктивное сопротивление катушки 5, регистрируемое
микроамперметром 6 (рис. 10.125,6). Тарировка датчика производится по эталону. Шкала
микроамперметра может быть отградуирована для определения величины зазора
между деталью и обшивкой.
Рис. 10 126. Индуктивн1>1Й датчик для контроля размеров деталей 1, 2, 3 и
4-го классов точности, а также для контроля размеров деталей при их
обработке на станках.
В процессе измерения перемещение измерительного стержня 5 изменяет
соответственно положение якоря 2 между магпитопроводами 1 и 5, при этом
изменяется индуктивное сопротивлеттие катутнек 6, включенных в мостовую схему. По
разбалансу судят об изменетши размера Пружиной 4 создается измерительио^'
усилие, ттружиттой 7 обеспечивается свободнт^тй ход.
Рис. 10 127. Индуктивный датчик. Измсрителытт^тй стержень 3 в процессе изМ1-'*
рения перемещается по вертикали с закрепленными на нем дттсками 4, при этом
соответствентю меняются индуктивности катутиек 2, что ведет к дебалансу моста
схемы. Корпус 1 служит экратюм.
Рис. 10.128. Индуктивный датчик для измерения перемещений порядка Д^
2-3 мм. При перемещении в процессе измереттия стержня 3 с закрепленными '^'
нем катушками 2 относительно кольцевых выступов в отверстии корпуса I "^"^^^
няется индуктивное сопротивление катушек, что приводит к изменению ток^
в измерительной цепи мостовой схемы, регистрируемого прибором.
Датчики и аппаратура д
1я не электрических ве.шчин
635
Рис. 10.126
Рис. 10.127
Рис. 10.128
Рис 10.129. Емкостный датчик для измерения больших давлений. К корпусу 3
и мембране 2 датчика привернуты пластины 5 и 1 конденсатора,- изолированные
от корпуса эбонитовыми пластинами 4 и 6. Нагрузка от испытуемого объекта,
прикладываемая через нагрузочные пяты 8 и 7, вызывает упругую деформацию
корпуса датчика и изменение воздуппюю зазора между пластинами 5 и 1, в
результате чего происходи! изменение cmkociii конденсатора. Включенный в мостико-
вую схему датчик нарушает равновесие мостика. О величине давления судят по
величине силы юка в измсри1ельнон диагона;н1 мостика.
Рис. 10 130 Дифференциальны!! !!1!дукц!1011ный датчик для измерения больших
У^-^ил!11!. Между сердечниками 4 п 2 рас!10ложен якорь 5. 1южка 5 которого
>П!1рас1ся в дно Kopi!yca 6 датчика. При измерениях Kop!iyc датчика иод нагруз-
•^011 дсф;(^рмируе1ся, перемещая якорь. После сняшя на1рузки якорь возвращается
^ исходное положсн!1е иружшюй 1. Датчик включается в мостиковую схему
'1*-Т'^мен!!0!о юка.
Рис 10 131. Тснзодат чик из медио-никслевой фолы и толщ!1!!ОЙ 10 мкм,
изготовленный путем печашния рисунка датчика кислотоупорным составом на фольге
и вытравливания иепропечатанных мест. Толщина поперечных полосок примерно
^ 5 раз больше толщины продольных, что снижает сопротивление неактивной
^^стп и чувствительность датчика к поперечной деформации. Большая поверхность
^ирикосновения фольги с испытуемой деталью допускает большую плотность тока
'>^' дет к увеличению чувствительности.
636 Механизмы для математических операций и механизмы щтбиров
Рис. 10.130
Рис. 10.131
Рис. 10.132
Рис. 10.132. Фольговый тензодатчик, наклеиваемый на круглые мембраны.
Рис. 10.133. Схема расположения проволочных датчиков на испытуемой детали
(рис. 10.133, д) и схемы подключения их для измерения различных деформаций. Пр»
измерении деформаций растяжения и сжатия (рис. 10.133,6) датчик Kj,
наклеиваемый на испытуемую деталь, и датчик-компенсатор Rj, наклеиваемый рядом на
недеформируемый металл, включаются в соседние плечи мостика. При измерении
деформации изгиба (рис. 10.133, в) датчики R^ и ^2 включаются в соседние плечи
и наклеиваются на противоположные стороны испытуемой детали (Ri vl Ra^
температурные компенсаторы). Равные продольные деформации при этом искл10'
чаются, а чувствительность мостика удваиваегся. При измерении касагсльиЫ"^
напряжений закручиваемого вала (рис. 10.133, г) исключение изгибных дcфop^w^^^^''
достигается наклейкой датчиков R^ и Kg таким образом, чтобы их оси состав
ляли с осью испытуемого вала 45°. Датчики включаются в противоположны
Датчики и аппаратура для иеэлектричсских величин
637
Для мостина
потенциометра
Рис. 10.133
-ф^
-<
1 -<
т—
•i
1 -«
И
Р'
к"
i /
Г"
,л
3»- 1
р
/
h —f-
1^
2»- 1
3»- »
/ 2 0
Рис. 10.134
б) г)
Рис. 10.135
плечи мостика, при этом изгибные деформации исключаются, а касательные —
суммируются.
Рис. 10.134. Схемы применения ненаклеиваемых проволочных датчиков (1 — про-
ьолока, 2 — изолятор); Р и Мр — деформирующие сила и момент. «
Рис. 10.135. Способы получения сигнала в безынерционных фотоэлектрических
'^^1чиках: а — интенсивность луча изменяется за счет изменения действующей
поверхности зеркала; б - движущийся объект служит подвижной ширмой; в —
-Дифференциальная схема с подвижной призмой; г — схема со сдвоенной решеткой;
^ пружина; 2 — щшрционная масса; 3 - источник света; 4 - экран со щелью;
5 -
зеркало или призма; р — решетки; Ф — фотоэлементы.
638 Mi'\ainu\ihi для математических операций и механизмы приборов
V////////////777FZ.
■=^1
'////У//////////Л
. 0
У)////////////У/У//Л
Рис. 10.137
Рис. 10.138
Рис. 10.136. Схемы датчиков с графитовыми сюлбиками, предназначенные для
измерений: а, б — силы растяжения или сжатия; в — ускорения; г — крутящего
момента; д — давлений; е — малых деформаций; \ — корпус; 2 — угольные столбики.
Рис. 10.137. Электронно-механический датчик. Механические колебания через
рычаг 3 воздействуют на анод 2 лa^ulы через упругую перегородку 4 (или силь-
фои). Изменение расстояния между анодом 2 и неподвижным катодом I привоД^^^
к изменению а1Юдного тока / во внешней цени
/=-234-10 ''К-^
'S
где V — приложенное напряжение; S - действующая площадь электродов; d -V
стояние между электродами.
Рис. 10.138.
сдвоенным анодом
Дифференциальная схема электронно-механического датчика ^^
.ом 2 (обозначения тс же, что и на рис. 10.137). При смс1ись -
„_,, „ „,. „.ч ,_ „ с^ 1"/ от ^^'^^
; ОД зазора между двумя электродаnhi нелинейность не превышает 1% ^^
Датчики и аппаратура для неэлектрических величии
639
Рис. 10.139
Рис. 10.140
симального отклонения, а чувствительность
обеспечивает измерения 0,1 мкм без усиления.
Рис. 10.139. Датчик контроля массы
бурового инструмента. Силой тяжести F бурового
инструмента натягивается канат 1 и
изгибается сменная рессора 2, вследствие чего
псремеи^ается якорь индукционного датчика
5, 4 — плоская пружина.
Рис. 10.140. Динамометр, применяемый
в подъемно-транспортной технике, содержит
рычажное устройство (рис. 10.140, а), позво-
."якицее передать месдозе 4 усилие по
направлению 1—2^ зависящее от того, в какой
точке {Л или Б) смонтирован шарнир рычага
3. Тензометрическая месдоза (рис. 10.140, б)
представляет полый цилиндр 3 с наклеенными
датчиками 4, Усилие передается через
опорный сегмент i, установленный в корпусе 2.
Рис. 10.141, Датчик усилия с угольными
столбиками. Усилие, воспринимаемое корпусом 7, передается ввиду прогиба его
стенки толицнюй 5 угольному столбику 3, предварительно затянутому винтом 2.
Рис. 10.141. Датчик усилия с угольными столбиками. Усилие, воспринимаемое
корпусом 7, передается ввиду прогиба его стенки толщиной 5 угольному
столбику 3, предварительно затянутому винтом 2.
Рис. 10.142. Месдозы для измерения силы: а — измерительный шатун; о —
^ Штанге толкателя; в — на подшипнике; г — динамометры растяжения и сжатия;
Рис. 10.141
д^
измерители давлений жидкости и газа.
Рис. 10.143. Схема динамометра для измерения осевого усилия на подшипник
Редуктора. На внутренней и внешней поверхностях стального кольца,
нагруженного радиальной силой со стороны подшипника, наклеены тензодатчики, вклю-
'Снные в измерительный мост. Датчик крепится длинными шпильками, которые
'^''^меняют болты для крепления крышки подшипника.
^ис. 10.144. Месдоза с жидкостным сопротивлением. В гетинаксовом корпусе 6
веется полость с выступом в виде призмы. Между корпусом 6 и крышкой 2
^навливаются: стальная мембрана 3, кольцо 8 и резиновая прокладка 9. Не-
640 Механизмы для математических onepaifuii и механизмы приборов
Рис. 10.142
4 5 5 7 ^
Рис. 10.144
Рис. 10.145
Датчики ti аппаратура di.4 пеэлектрических aemimni
641
''ольшой зазор 5 между прокладкой и призмой и пространство под призмой
^яполняется раствором 7 азотнокислого свинца, а в боковые стенки корпуса
аателаны электроды 5 из свитка и выводы 4 для подкзпочения в мостиковую
с'хему- Усилие, передаваемое от резца 1 на мембрану 5, деформирует ее, меняет
зазор, определяющий сопротивление электролита, что и регистрируется
осциллографом.
Рис. 10.145. Месдоза для измерения давления р жидкости или газа. На
корпусе 1 навинчена мембрана-) айка 3, уплотненная резиновым кольцом 2. Газ или
жидкость, действуя на мембрану, воздействует па датчики Di — D^, наклеенные на
верхней стороне мембраны и закрытые крышкой 4,
Рис. 10.146. Месдоза для измерения сил порядка нескольких десятков тонн
с «мощными» датчиками. Измеряемое усилие через прокладки 1 и 2 со сферп-
xiecKHM контактом передается на пластину 3 с радиально наклеенными на нее
с двух сторон шестью проволочными датчиками 4, Ток в измерительной
диагонали моста
J ^ AR п
Id — 1 —•
Я 8
может быть увеличен при числе активных плеч моста п = 4 за счет тока
питания. Для силы 70 тс D = 112 мм, d = 92 мм, 6 = 12 мм, г — 6 мм и тогда
напряжение изгиба в пластине 3 составит 90 кгс/мм^ Если сопротивление R датчика
принять равным 30 Ом, и в каждое плечо включить параллельно три датчика,
то сопротивлеиие плеча моста составит 10 Ом и при мощном питании моста
усилитель не потребуется. Применение фольговых датчиков сделает месдозу еще
более эффективной.
Рис. 10 147. Схема автоматического программного нагружения. Силовое
воздействие воспринимается жидкостью в цилиндре 1 и передается испытуемой детали.2
через кольцевой динамометр с двумя парами тензодатчиков Z), включенных в два
плеча моста. Два других плеча образуют нормальный тензометрический комплект,
основанный на нулевом методе со второй ветвью из сопротивлений R^^ и R\^2-
Выход через усилитель 3 подведен к реле 4 и далее к электромагниту, якорь
'которого связан с золотником 5. Если .мост не уравновешен, то выходной сиг-,
нал преобразуется с помощью реле в перемещение золотника 5 .и жидкость
начнет поступать в цилиндр 1, динамометрическое кольцо сожмется, и датчики
изменят сопротивление. Так будет продолжаться до тех пор, пока мост не
уравновесится, реле обесто-чится и поступление жидкости прекратится. Вместе с пере-
ключенисхМ золотника 5 переключатель 6 выключит одно из сопротивлений, что
IZJ-^
Рнс. 10.146
21
Кожевников и
Рис. 10.147
642 Механизмы для математических операиий и механизмы приборов
вызовет обратный разбаланс моста Теперь жидкость поступает с другой стороны
поршня, деталь 2 разгрузится, а переключатель 6 изменит положение на обратное.
Последовательным'включением нескольких сопротивлений R' или R" можно
получить ступенчатое нагружение по заданной программе.
Рис. 10.148. Розеточные датчики для определения главных напряжений при
неизвестном плоском напряженном состоянии: а — «двухобмоточная розетка»,
применяемая при известных направлениях главных деформаций; б — «розетка 45'»;
в и 2 — «розетки бО'"», треугольник и звезда; д и ^ — чстырехобмоточные розетки
с одной дополнительной обмоткой.
Для розетки, показанной на рис. 10.148,6,
= Е
Si + Sin
1
л/'i
2(1-ц) ^/2(l + ^l)
у (si - ЦхУ + (sii - siiir
Для розеток, изображенных на рис. 10 148, в и г,
= £
..-1^
3 (1 - ц) 3 (1 + ц)
Для розетки, данной на рис. 10.148, д,
= £
Sl + SlV ^ 1
[2(1-и) - 1 + ц
— (8, -gjv)^ +y(SlII -4\f
Датчики и аппаратура di4 яеэлектрических величин
643
Здесь £ и |л — модуль упругости и коэффициент Пуассона; S; —
относительные деформации по осям соответствующих датчиков I, II, III, IV.
рис. 10.149. Схема включения датчиков для измерения крутящего момента.
Четыре датчика Д составляющие измерительный мостик, наклеены на
измерительный вал, нагруженный крутящим моментом, под 45"" к оси попарно на
диаметрально противоположных сторонах. Для уменьшения влияния переходного
сопротивления скользящего контакта целесообразно предусмотреть пять токосъемных
колец для подключения к усилителю балансировочных сопротивлений.
Рис. 10.150. Схема датчика для регистрации крутящего момента. При перс-
даче ^юмeнтa М^ вследствие относительного смещения обода и ступицы
специального шкива изменяется зазор о индуктивных датчиков.
К клеммам 1 подключается источник переменного тока, к клеммам 2 — рсги-
стрир>юший прибор.
Рис. 10 151. Схема датчика для измерения крутильных колебаний Сильный
магнит 1 связан с ферромагнитным корпусом 2 пружиной (на рисунке не
показана) Катушка 5 механически связана с корпусом приемника. Если корпус 2
вместе с катушкой 5 находится в состоянии крутильных колебаний, то магнит 1
вследствие большой инерционности остается неподвижным, возбуждая в катушке
3. д с, пропорциональн}ю производной от угла поворота.
Рис. 10 152. Динамометр-вставка конструкции ЭНИМС для измерения
крутящих моменгов шпинделей и полых валов. Вставка соединяется с валом
посредством двух разжимных цанг 1, скрепленных со стянутыми тягой 2 конусами 5 и 6
cтoпopны^ш винтами 4.
3 - проволочный датчик.
Рис. 10Л49
Рис, 10.150
Рис. 10.151
Рис. 10.152
21*
644
Механизмы для математических операций и механизмы приборов
Рис. 10.153. Схема электромагнитного прибора для исследования крутильных
колебаний. Две пары катушек 1, 2 и 6, 7 (рис. 10.153, а) установлены на непод,
вижных постоянных магнитах 5. При прохождении стальных стержней ц
(рис. 10.153,6), укрепленных на дисках 8 и 10, вращающихся вместе с валом 9
между торцами сердечников 1, 2 и 6^ 7 (рис. 10.153, а) сопротивление магнитному
потоку падает, а при прохождении промежутков между стержнями 11 растет
вследствие чего в катушках индуктируется периодически изменяющаяся э. д. с.
Подключая каждую пару катушек на отдельные и однотипные шлейфы
осциллографа 3 и устанавливая гайкой 4 одинаковые э. д. с. в обеих парах катушек за
счет установки определенных зазоров между полюсами, что допускается упру.
гостью магнитов 5, получим при отсутствии крутильных колебаний вала
сливающиеся кривые э. д. с. и сдвинутые при наличии колебаний. Величина сдвига
между кривыми э. д. с. будет пропорциональна углу закрутки.
Рис. 10.154. Токосъемное устройство с охватывающей проволокой. Для
измерения крутящего момента на вращающемся валу 1 устанавливается изолированное
от вала токосъемное латунное кольцо 3, охватываемое медной отожженной
проволочкой 2, которая натягивается пружиной 4. Применение целесообразно при
окружной скорости кольца, не превышающей 1 м/с.
Рис. 10.155. Токосъемное устройство с серебряными дисками. На эбонитовой
вгулке i, посаженной на испытуемый вал 2, нагруженный крутящим моментом,
монтируются изолированные друг от друга полированные серебряные диски 3.
Контакт осуществляется парой пружинящих пластин 4 с серебряными напайками.
Применение целесообразно при окружной скорости точки контакта,
достигающей 3 м/с.
Рис. 10.156. Ртутное токосъемное устройство. В неподвижной части 1
устройства, изготовленного из изоляционного материала, предусмотрены заполненные
ргутью кольцевые выточки, на дне которых уложены контактные пластины 4.
Подвижная часть 2, вращающаяся вокруг вертикальной оси и соединяемая
с испытуемым валОхМ гибкой связью, несет металлические стержни 5,
обеспечивающие через ртуть контакт между подвижной и неподвижной частями.
Недостатком устройства является непостоянство передаваемого через упругую связь
момента и разбрызгивание ртути при большой угловой скорости вала.
Рис. 10 157. Токосъемник с индукционным питанием. В неподвижном корпусе 2
с крышкой 3 укреплена катушка 1, питаемая от генератора тензоустановки и
образующая вместе с вращающимся валиком токосъемника магниюпровод. Мост,
собранный из наклеенных на вращающейся детали тензодахчиков, питается от
Рис. 10.153
Рис. 10.154
Датчики и аппаратура для неэ 1ектрических ее гичин
645
Рнс. 10.155
Рис. 10.156
11 12 9 7
6 78
Рис. 10.157
Pi5C. 10.158
вторичной обмотки, помещенной в катушке 5. Контакты токосьемника состоят из
^-'^Рсоряных колец 6 и латунных щегок 7, прижимаемых резинками 8,
уложенными в вырезы текстолитовой втулки 9. Токосъемное >стройство размещено
^ корпусе 10 с вводом И, закрываемым крышкой 12. Провода подводятся к
кадушке и кольцам через осевые сверления в исследуемом валу и валике 4.
Рис. 10 158. Токосъемное устройство с ртутным контактом. Медные амальга-
^^ироваиные кольца 4 с припаянными к ним проводниками 5 от датчиков
вращаются вместе с испытуемым валом, находясь в постоянном контакте с полостью
' заполненной ргутью и ограниченной с боков кольцами 3 из нержавеющей
I'l 11! Piyrb снаружи запирается неподвижным медиы\1 кольцом 2 с выводом,
Н'и)же:1ным отверсшем для заполнения ртутью, закрытым пробкой 1. Съемник
^"Реип
1ся к вращающейся детали фланцем, несущим зажимы для питания датчиков.
646 Механизмы для математических операций и механизмы приборов
Рис. 10.159. Электросхемы токосъемных устройств. На рис. 10.159, а показана
схема, в которой все четыре токосъемных кольца включены в мост и переходные
сопротивления контактов практически не влияют на результат измерения. На
рис. 10.159,6 дана схема токосъема с увеличенным числом скользящих контактов.
Сопротивления R^ — Rg должны быть равны сопротивлениям R^ — R4. тензо-
датчиков. Схема пригодна для токосъема при скорости не более 40 м/с.
Рис. 10 160. Датчик для измерения крутящего момента без контактного
устройства системы ЛПИ. Испытуемый вал соединяется с валом jf, на котором
насажены три медных кольца 2-8 — 11, несущие кольца ротора 3 — 7—10, снабженные
зубьями (на рисунке снизу). Опоры 15 вала крепятся в боковых крышках 14
корпуса 5. Магнитный поток катушек 6, надетых на щеки 12 — 4—9 статора,
замыкается через стаканы 13. При скручивании вала измеряемым моментом зазоры
между зубьями с одной стороны кольца 7 уменьшаются, с другой —
увеличиваются, изменяя с различными знаками длину воздушных зазоров, образованных
зубьями, а следовательно, и индуктивность обеих катушек. При угле закр>-чи-
вания, равном 72^, индуктивность каждой катушки может составлять до 30%
начальной. Датчик включается в мостиковую схему, индикатор — в измерительную
диагональ мостика.
Рис. 10.161. Схема бесконтактного метода снятия показаний датчиков с вала
турбины. В вал турбины встраивается компактный передатчик 2 на
полупроводниках, передающий промодулированный колебаниями лопатки сигнал тензодатчика
1 (частота 18 мГц) на кольцевую антенну 9, вращающуюся вместе с валом
турбины. В корпусе турбины на изоляторах смонтирована приемная антенна S,
соединенная посредством кабеля с приемником 4, который настраивается на частоту
передатчика. Усиленный сигнал подается на осциллограф 5, ламповый вольтметр
7 и шлейфовый осциллограф 6. Переключателем 3 (показан условно)
дистанционного управления, вмонтированным вместе с передатчиком в вал турбины,
поочередно подключается требуемый номер тензодатчика.
Рис. 10.162. Индукционный виброщуп завода «Электросила». Сменный шток 7,
опирающийся на вибрирующий объект, смещает удерживаемую пружинами 2
ось 1 с демпфером 6 и одновременно каркас с катушкой 5 относительно
магнита 5, расположенного в магнитопроводе 4. Индуктивность катушки изменяется
пропорционально измеряемой вибрации.
Рис. 10.159
Датчики и аппаратура длч неэлеутрических величин
641
Рис. 10.160
648
Механизмы для математических операций и механизмы приборов
Рис. 10.163. Схема стационарного виброщупа. Штифт 5, прикрепленный к
основанию 1 прибора, прижимается пружиной 2 к исследуемому объекту 4 и рег^.
стрирует посредством связанного со штифтом пером кривую вибраций объекта на
движущейся ленте 3. Сила нажатия пружины должна превышать силу инерции
массы штифта, испытывающей ускорение объекта.
Рис. 10.164. Ручной контактный виброграф. Испытуемый вал 1 опирается на
полосу 3 с тензодатчиком 4, закрепленную в опоре 2 и свободно лежащую
в опоре 5. Накладки 6 ограничивают перегрузку полосы при чрезмерном
прижатии вибрографа к валу.
Рис. 10 165. Жидкостный виброскоп. Заполненный ртутью корпус 2, несущий осве-
титель 3 и окуляр 4, устанавливаются на вибрирующий объект 1. Наблюдая через
окуляр волнистость ртути, можно определить вибрацию при амплитуде, начиная
с порядка 0,5 мкм.
Рис. 10.166. Схема ручного вибрографа. Нажатием штифта 1 на исследуемый
объект приводится в движение перо 2, которое прочерчивает на бумаге кривую.
Одновременно другое перо (на рисунке не показано), связанное с
электромагнитом, питаемым от батареи, делает каждую секунду отметку времени.
Рис. 10.163
Рис. 10.104
Рис. 10.165
Датчики и аппаратура д^я иеэ^ектричсских ветчин
649
2 3 \
^77777?л7777777777777?7Р^\7777;^^
1 J 5
Рис. 10.167
6
Рис. 10.169
Рис. 10.167. Индуктивный виброметр.
Устанавливаемое на вибрующий объект основание 5
прибора со стойками 4 несет подвешенный на пружинах
3 постоянный магнит 2, перемещающийся
относительно пластмассового каркаса 1 с обмоткой.
Достоинство прибора — низкая собственная частота
(ниже 1 Гц), недостаток — большие габариты.
Рис 10.168. Принципиальная схема
фотоэлектронного вибрографа. От источника света 1 выходят
два луча и, отражаясь под прямыми углами от
зеркал 2, проходят между образующими
исследуемого вала 3 и краями передвижной шторки 4 и
далее попадают на поверхность фотоэлементов.
При наличии колебаний вала изменяется величина
ссетового потока между образующими вала и
краями шторок, что вызывает изменение фототоков,
усиливаемых усилителями 5 и регистрируемых
осциллографом б.
Рис. 10.169. Резонансный виброскоп Н. В. Колесника для измерения
амплитуды, частоты и фазы вибраций. Собственные колебания индикатора 5, имеющего
форму массы, закрепленной на защемленной одним концом плоской пружине,
настраиваются в резонанс с колебаниями объекта (на который устанавливается
и крепится прибор) вращением маховичка 4, вызывающего смещение гайки 7
относительно шкалы частот б. Веерообразная тень от колеблющегося вибратора на
шкале 3 амплитуд позволяет найти размах колебания.
Для измерения фазы резонансное колебание индикатора 5 ограничивают
поворотом маховичка 1 с контактом рычага 2. В момент контакта включается в сеть
постоянного тока неоновая лампа и, если на торец исследуемого вала нанести риску
и осветить ее неоновой лампой, то вследствие стробоскопического эффекта вал
будет казаться неподвижным. Стробоскопическое положение ориентира отмечается
чертой на неподвижной части машины. Если аналогичные измерения вибраций
произвести для другой части машины, то новое положение ориентира определит
фазовый сдвиг измеряемых колебаний. Приб'ор применяется при балансировке.
1^ис. 10.170. Схема установки (ЧССР) для исследования динамических
характеристик^ привода фрезерного станка. Ротор двигателя 1 постоянного тока,
используемый в качестве крутильного вибратора, установлен на столе станка на
угольке и соединен со шпинделем 3 через крутильный динамометр 2, снабженный
JJ ^"^^емником 4. Колебания скорости шпинделя измеряются при помощи магкит-
^ диска .5 и магнитофонной головки б. На роторе приводного двигателя 7
650
Механизмы для математических операций и .механизмы приборов
Рис. 10.170
>становлен зубчатый диск 5 с
индукционным дarчикo^l 9, измеряющим колебания
ротора. Сигналы от гочовки 6 и датчика 9
сртвниваются фазометром 10, и l резуль-
таю определяются от1Юситетьные
колебания скорости между входныгчи и выход,
ными звеньями привода.
Рис. 10 171 Р1ндукционные вибро-
графы Катупн-а 3 вместе с медным
демпфером-цилиндром б на соединительном
стержне 5, подвешенном на пружинах 1
псремещаеюя относительно постоянного
Mai нита 4. скрепленного с корпусом 2
прибора (рис. 10.171, й). На рис. 10 171,6 показана констр>кш1Я вибрографа,
в которой в качестве инерционной массы применен постоянный магнит 1 с
полюсными наконечниками 2, пр11крепленными восемью пружинами 6 к каркасу 8
прибора, оснашенному катушками 7. Демпфером служит жидкость, заполняющая
каркас, закрываемый крышкой 5 со штуцером 4 для вывода конн.ов катушек
и крышкой 10. Прибор закрывается навинчиваемой на стальной корп}С~экран 9
крышкой 3 Если прибор используется как стационарный, в корпус ввршчивается
фланец 12, если используется как ручной — ввинчивается наконечник //.
Рис. 10.172. Индукционный виброметр с направляющей осью. Магнит / с по-
люcны^н^ наконечниками, сжатыми пpyжинa^ПI 2, перемещается вдоль оси 3
относительно каркаса 4 с двумя встречными обмотками Кожух 5 крепится
хомутиком к вибрирую»щему объекту.
Рис. 10.173 Индукционный микровиброметр Р1нерщ1онный элемент 4,
подвешенный на четырех плоских пружинах 6, колеблется вместе с корпусом i, уста-
Датчики и аппаратура для иеэлектрических величин
651
навливаемым на испытуемый объект. Раз-
мах колебаний элемента 4 контролируется
Q помощью микроскопа с окуляром 7,
3 поле зрения которого измеряется
ширина размытой щели^ предусмотренной
в экране, связанном с массой 4, и осве-
шаечюй лампой 2 Дехплфирование
осуществляется нажатием вин га 8 на пружину
5 При гранспортированни прибора масса
4 арретируется вингом 9. Для регистрации
вертикального компонента освобождается
винт 3^ удерживающий подпя! пиковую
пружину, и прибор поворачивается на 90^.
Рис 10 174. Сейсчшческий датчик для
измерения крутильных колебаний сголов
и шпинделей зубофрезерных станков На 2 1
концах отбалансированного силуминового
коромысла 1 укреплены гр>зы 2 из бронзы •^"^* 10.173
и имеются стальные демпферные пластины 3. перемещающиеся в зазорах катушек 4.
Коромысло в центре соединено с основанием посредством крестового пружинного
подвеса На грузах 2 укреплены сердечники, входящие в катушки 5 датчиков,
Рис. 10Л74
включенные в мостовую схему,
сбалансированную в среднем по.чоже-
нии коромысла, колебания
которою определяются парой
инерционных сил, вызванных ускорением
стола станка
Рис 10 175. Фотомеханический
генератор напряжения с заданной
формой сишала На'^вал рс1ули-
Р>е\юго двигателя насаживается
Г'розрачный барабан с вставленной
^ него фогорепрод>цированной
с оольшою чертежа дпаграм?уюп 1
(рис 10 175. а), на которой
изображена требуемая зависичюсть напря-
Ж'^ния от времени При вращении
-^5имо щелей осветительных систем
(рис. 10.175, 6) фотодиаграмма
^G 00000000000 оТЩ
652 Механизмы для математических операций и механизмы приборов
моделирует световой поток на фотоэлемент 5, затем полученное напряжение
усиливается и подается к электромоделирующей установке.
Рис. 10 176. Принципиальные схемы магнигоупругих датчиков, основанных на
изменении магнитных характеристик хматериала:
а — датчик дроссельного типа, основанный на изменении сопротивления катушки
7, питаемой переменным током. В чувствительном элементе 3, к которому
приложено измеряемое сжимающее усилие, изменяются его магнитные
характеристики, преобразуемые в изменение выходных электрических параметров;
б — датчик электрического сопротивления. К чувствительному элеЯ1енту 5
посредством электродов 2 подводится переменный ток, а с помощью электродов
1 измеряется падение напряжения. Приложенное усилие изменяет магнитную
проницаемость, а следовательно, и электрическое сопротивление чувствительного
элемента;
в - датчик мостового типа. Магнитные оси катушек 1 взаимно
перпендикулярны. Под действием приложенного усилия к чувствительному элементу 3 его
магнитные характеристики в направлениях, совпадающих с магнитными осями
катушек (и их сопротивления), изменяются по-разному.
Рис. 10.177. Принципиальные схемы магнитоупругих датчиков, основанные на
изменении магнитной анизотропии материала:
а — катушечный магнитоанизотропный датчик. Магнитная ось измерительной
катушки 1 расположена перпендикулярно к оси кат>т11ки возбуждения 2. При
отсутствии измеряемой нагрузки и полной магнитной изотропности материала
чувствительного элемента 3 потокосцепление с измерительной катушкой
отсутствует. Под нагрузкой магнитное поле чувствительного элемента становится асим-
Рис. 10.176
а)
Рис. 10.177
Датчики и аппаратура для иеэлектрических величии
653
Рис. 10.178
мстричным, появляется составляющая магнитного потока, сцепленная с
измерительной катушкой, в которой наводится э д. с. как функция измеряемого усилия;
б - электродно-катушечный анизотропный датчик. При пропускании через
чувствительный элемент 3 переменного тока внутри его создаются циркулярные
магнитные потоки. При его скручивании в измерительной катушке 2 наводится
э д. с, как функция приложенного момента М^;
в — датчик дифференциально-трансформаторного типа. Магнитный поток
катушки возбуждения 1 разветвляется на потоки в магнитопроводах 3" и 3' с
различными характеристиками при действии измеряемой нагрузки. При внецентраль-
ном загружении магнитопровода коэффициенты взаимоиндукции катушки 1 с
катушками 2" и 2' изменяются на различную величину, наводимые в этих
катушках э. д. с. становятся неравными и появляется выходное напряжение как функция
измеряемого усилия.
Рис. 10.178. Измерительная схема с магнитоупругими датчиками дроссельного
типа. Питание схемы осуществляется через стабилизатор напряжения 3. Датчик
•5 — активный, датчик 1 — компенсационный. Для компенсации начального сигнала
разбаланса моста, измеряемого прибором 4, служит резистор 2.
К недостаткам схемы относится низкая помехозащитность при передаче
информации на большое расстояние.
Рис. 10.179. Магнитоупругий датчик серии ДМУ Киевского института
автоматики. Чувствительный элемент 1 в виде прямоугольного пакета из листов стали
Э41 толщиной 0,35 мм с обмотками 2 устанавливается внутри корпуса 3. На-
^РУзка передается через стальной сферический сегмент 4, прижимаемый крыш'кой
•5. Высота датчика регулируется крышкой-гайкой 6.
Датчики применены в аппарате защиты скиповых подъемников.
Рис. 10.180. Магнитоупругий датчик сжимающих усилий трансформаторного
типа. Чувствительным элементом 1 датчика служит пакет пластин с четырьмя
отверстиями. Для обеспечения изотропности параллельно и перпендикулярно сжа-
^ио в пакете чередуются пластины, штампованные вдоль и поперек проката.
^Рез отверстия в пакете по диагонали намотаны катушка возбуждения 3 и
измерительная 4. Измерительное усилие прикладывается к выступу чувствительного
■''^^^^нта. Перемещением балансировочного магнитопровода 2 можно получить
Различные характеристики преобразования. 5 — стяжные болты.
654 Механизмы для математических операций и мехатгзмы приборов
/ J
Рис. 10.181
Рис. 10181. Магнитоупругий датчик
для измерения усилий при прокатке. Через
массивную крышку 2 усилие передается
на многосекционный чувствительный
элемент i, >становленный на толстой плите 3.
Рис. 10.182. Магнитоупругий датчик
крутящего момента СКБ Министерства
геологии СССР. Два кольцевых магнито-
провода 1 я 2 охватывают вал —
чувствительный элемент 6, Выступы 7 и S
магнитопроводов образуют внутри
датчика две полости. В верхней полости раз-
меп^ена катушка возбуждения 3 и одна из
измерительных катушек 4. В нижней
полости размещена вюрая измерительная
катушка 5, соединенная с катушкой 4
последовательно встречно. Возникающий
при включении в катушку 3 переменного
тока магнитный поток Ф, разделяется на
поток Ф^, замыкающийся через выст>иы
7 и 8, и воздушный зазор между ними,
и поток Ф2, замыкающийся между чув'
ствительным элеменюм б и зазорами
между последним и кольцевыми полюсами магнигопроводов 1 и 2. Под
действием крутящего момента М^ ма1нитное сопрогивление чувствительного
элемента 6 вдоль ею оси изменяйся, потоки Ф^ ц Ф2 перераспределяются и p^i^-
ность э. д. с. в измерительных катушках 4 я 5 служит выходным сигналом
датчи?са.
Рис. 10183. Cxeva датчиков для измерений линейных ускорений, снабженных
плоской пружиной из бронзы с наклеенными датчиками и ребольшим стальные
шариком или гр>зом другой формы. Выбор да1чика < 1ределяется частотой
высшей гармоники кривой измеряемого процесса. Собств иная частота датчика
может быть доведена до 250 Гц и поэтому можно per ррировать ускорения
с частотой высшей гармоники не более 75 Т]\.
Рис. 10.182
Датчики и аппаратура для неэлектрических ветчин
655
Рис. 10.183
Рис. 10.184. Схемы датчиков для изменения ударных ускорений: а и б —
высоксчасготные датчики, в которых упругая чувствительная часть растянута
И - собственная частота Гсоб = 1^ кГц) или сжата (б); в — цельный ста.чьной или
бронзовый овал с прикрепленным к нему грузом в средней части, на боковой
внешней или внутренней поверхности наклеены тензодатчики (/^соб ДО 5 кГц);
^ - стальной или бронзовый датчик бочкообразной формы с несколькими про-
ПИД1МИ на боковой поверхности и грузом в верхней части; датчик из бронзы
Д^иметром 45 х 40 и грузом 150 г имеет /соб = Ю кГц; д — датчик с
чувствительным элементом из пьезокерамики (титанат бария). Между двумя керамиче-
<^кими дискали! А диаметром 10 х 4 расположена лат>нная фольга с
изолированным выводом. Сила нажатия пружины должна превышать силу инерции при
}дарс {f^,^,^ --= 20 кГц и ч}встБительность до 20 мБ/^). Недостаток — добавочные
^<^леиания. вносимые корпусом и пружиной; е — датчик с кералтческим элементом
Диаметром 25 х 2,5 с грузом, прижатым изолированным винтом.
Рис. 10 185. Схемы пьезодэтчиков:
<^ — пьезоэлсмент / и инерционный элемент 2 поджаты пр>жинсй 3, констр^тс-
^iия нецентрированная, что благоприятствует возникновению паразитной чувствц-
тельности;
ь^в Механизмы для мателиттчвских •опсратш^ы механизмы приборов
б — пакет пьезоэлсментов, соединенных электрически последовательно.
Суммарное электрическое напряжение, снимаемое с датчика, увеличивается, но
одновременно уменьшается емкость и увеличивается сопротивление, что неблагоприятно
при измерении низких частот. При параллельном соединении обкладок емкость
возрастает, но снимаемое напряжение равноценно одной пластине;
в — пакет пластин, у которых использован поперечный пьезоэффект;
г — кольцевой пьезоэлемепт, конструкция центрированная, отличается
прочностью и хорошими характеристиками;
д — центрированный тандемдатчик. Шайбы соединены последовательно, отли-
час1ся взаимокомпенсацией поперечной чувствительности;
е — да1чик с биморфным пьезоэлементом высокой чувствительности,
работающий в условиях изгиба. Датчик состоит из двух одинаковых склеенных пластин
с металлической обкладкой между ними. Один конец биморфного элемента
зажат;
.VC — центрированный пьезодатчик с пьезоэлементом, работающим на изгио,
и с упругим подкреплением, что снижает влияние резонансных частот корпуса.
Рис. 10.186. Пьезоэлектрический датчик ускорений, работающий при деформация^
сдви1а. К внутренней поверхности укрепленного в корпусе 2 кольца / из керамики
ипаната бария приклеена инертная масса 3, сила инерции которой при измерениях
1'.а1ружас1 кольцо па срез. Заряд снимается с цилиндрических поверхностей,
где
он возникает из-за пьезоэффекта в керамике при деформации сдв'Га. Датчик н
чувствителен к поперечным составляющим колебания. / ,
Рис.- 10.187 Виброакселсрометр с пьезоэлементом Кольцевой /ьезоэлемент >^
с приклеенным к нему инерционным элементом 3 вмонтиро;in и прикл
D расточке корпуса 1 прибора, который укрепляется на колеб///щемся объек
//
Датчики и "аппаратура din иеэлектрических величии
657
работа прибора основана на пьезоэффекте от действия на пьезоэлемент возни-
j^^jouiHX при колебаниях объекта сил (4 и 6 — выводы, 2 — места склейки).
рис. 10 188. Пьезоакселерометры для измерения вибраций сооружений.
Пьезоэлемент (рис. 10.188, fl) представляет собой стопу пластинок 3 сегнетовой соли,
опирающуюся на инерционный элемент 4, укрепленный на мембране 5, и
поджимаемую пробкой 1. Прибор с пьезоэлементом показан на рис. 10.188,6. Здесь
инерционный элемент 2, связанный мембранами 1 с корпусом 3, сочленяется
с пьезоэлементом 4 через шарик, что снижает влияние боковых вибраций.
рис. 10.189. Акселерометр с воздушным демпфированием и малой собственной
частотой. Поршень 2 со стержнем 4, подвешенный в корпусе 3 на плоских
пружинах 2 и 7, служит одновременно и инерционной массой. При смещении поршня
акселерометра изменяется давление в камере б, и воздух выходит через выхлоп-
н)Ю щель 5 с проходным сечением, зависящим от перемещения массы. В
положении равновесия стержень 4 почти полностью перекрывает щель 5. Чем больше
отклонится масса, тем больше проходное сечение и меньше силы сопротивления.
Схема имитирует вязкое демпфирование и избавляет систему от нелинейпосги.
Рис. 10.190. Пьезодатчик ускорений с конусным инерционным элементом.
В корпусе 1 размещен пьезоэлемент 2 в виде полого усеченного конуса и инер-
цио1п^ый элемент 3, Торцовые б и боковые поверхности пьезоэлемепга имсюг
серебряные покрытия. Датчик закрыт крышкой 4 с кабелем 5. При воздействии
на датчик ускорения вдоль оси z пьезоэлемент испытывает растяжение — сжатие
и сдвиг. Электрические заряды на боковых и юрцовых поверхнос1ях суммируются.
/ 2 3
Рис. 10.186
Рис. 10.187
Рис, 10.188
658 Механизмы для математических операций и механизмы прибора'?
J 2
Zk 36 5
Рис. 10.189
Рис. 10.190
Рис, 10.191
Рис. 10.192
Рис. 10.191. Пьезодатчик для регистрации крутильных колебаний с би^юpфнымн
элементами на упругих пластинах.
Рис. 10 192. Пьезодатчик ударных ускорений односторонней направленности
Чувствительный элемент 2 из титаната бария опирается па сферическую стальи;-!^'
пяту 1. Инерционный труз 3 помещен в корпусе 7, поджат пр\жиной 5 и
изолирован с помощью втулки 6. Заряд с пьезодатчика снимается через прокладки /'
винт 4 и штеккерный разъем 9. Уплотнительные прокладки 8 компенсируют зазоры
и обеспечивают герметичность.
Рис. 10 193. Пьезодатчик ударных и вибрационных ускорений с кольиевьП
пьезоэлементами. работающими на сдвиг. Металлизированные обкладки нанесен
на цилиндрические поверхности.
Pidc. 10.194. Пьезодатчик с дополнительным грузом, применяемый при o^t;^
делении ускорений и статической тарировке. Чтобы определить измеряем)ю
перегрузку к по известной ординате ур исследуемого процесса [к = \^рЬ ^ ^'
ходимо знать приведенную массу т^^ датчика и масштаб \хр записи при
Датчики и аппаратура для неэяектрических ееяичии
659
Рис. 10.193
Рис. 10.194
Рис. 10.195
Рис. 10.196
ческой тарировке. Для датчиков с одним пьезоэлементом и нежесткой пружине
^'^пр можно найти, записывая процесс датчиком без дополнительного груза массой
'"jon (амплитуда v'l) и с дополнительным грузом (амплитуда >'2). Тогда т^^ =
-т ^1
"лоп ■
- Необходимо применение усилителей постоянного тока.
^ Аис. 10.195. Датчик ускорений с сейсмической массой 1 и упругим кресто-
©оразным «шарниром», состоящим из двух плоских стальных пружин 3 с наклеен-
HbiMH на них с двух сторон четырьмя тензодатчиками 2. Демпфирование осу-
^^^'^т'влягтся постоянным магнитом. Возможный диапазон измеряемых ускорений —
ло 15 3
Рис 10 196. Датчик угловых ускорений. С концом вала соединяется упруго
' "ск 1 с изгибающимися под действием ускорения пружинами 2. Наклеенные на
Р>жины тензодатчики 5 включены в мостиков)ю схему.
Рис, 10 197. Датчик для измерения угловых ускорений. Небольшой диск 2,
^^одно вращающийся в центре датчика на агатовых подшипниках, жестко связан
-Щмя балочкахш i и 5 с наклеенными на них тензодатчиками. Свободные
J-нцы балочек шарнирно соединяются с корпусом датчика При неравномерном
Шении датчика балочки изгибаются под действием момента сил инерции диска.
причем
схемы
стрелка прогиба пропорциональна iico/^r. На рисунке дано два варианта
настройки измерительного моста.
660 Механизмы для математических операций и механиз мы приборов
Рис. 10.197
Рис. 10.198
н.
J]
щ
Рис. 10.200
щ
Рис. 10.198. Принципиальная схема фотоэлектрического датчика угловых
ускорений. При закручивании вала 8, вызванного угловым ускорением, связанный
с валом пружиной 7 маховик 1 с диском 2 сместятся относительно диска -^•
снабженного прорезами 4, отчего изменится средняя освенденность фотоэлемента -"^
лампой 6. Освещенность будет пропорциональна измеряемому угловому ускореник^
Рис. 10.199. Максимальный электроконтактный акселерометр с разрывным
контактом. Пружинный контакт 2 замыкает цепь до тех пор, пока сила инерш'''
не превысит силы нажатия на контакт 1. При разрыве цепи шлейф 3 осциллограф^^
находится под напряжением все время, пока значение ускорения (см. стрелку) "
станет меньше установленного.
Рис. 10.200. Высокочастотный датчик-акселерограф. В корпусе 1 на двух пр>
жинах 2 укреплена масса 3. Между корпусом и массой на изолированных штиф
тах натянуты четыре связки тензометрической проволоки. Собственная '^^^^'^ j
прибора может достигать 500 Гц при диапазоне измеряемых ускорений до i"^^
Рис. 10.201. Высокочувствительный измеритель усилий при ударе. Пьезоэ ^^
мент 8 с помощью изоляционной шайбы 7 и гайки 9 крепится на подставке ^^
укрепленной на дне корпуса i, заполненного ток онепро водя щей жидкостью
Датчики и аппаратура для иеэлектрических вепичии
661
закрытого упругим элементом 2, который прижат гайкой 4 с притертым торцом.
rjQpmneBoe устройство 6 и заглушка 5 служит для выдавливания остатков
воздуха п'5 резервуара после закрепления упругого элемента 2, на который падает
\'1аря1ощая масса. Датчик удобен для исследования удара массы о преграду.
' Рис. 10.202. Датчик ускорения второго порядка. На консольной балке 1 из
бериллиевой бронзы (pHt. 10.202, а\ выполненной в форме бруса равного сопро-
хивления и зажатой верхним концом в дюралевом корпусе 2, наклеены прово-
хочные датчики. На нижнем конце балки расположен сделанный из латуни
инерционный элемент 3, нижняя часть которого имеет цилиндрическую поверхность
радпусй' равного длине балки. В основании корпуса сделана цилиндрическая
выемка. В зазор между инерционным элементом и корпусом вводят несколько
капель селикона для демпфирования балочки, которая может служить датчиком
шнейпых ускорений (х). В инерционный элемент датчика вставлен постоянный
магии г, а на станине укреплена катушка 4, в которой наводится э. д. с,
Рис. 10.201
5)
Рис. 10.202
662
Механизмы для математических операций и мехат1змы приборов
пропорциональная скорости перемещения инерционного элемента, и поскольку э-ri
перемещения пропорциональны ускорениям, то ток в катущке будет пропорцр,^^
нален х.
На рис, 10.202, б показаны осциллограммы .х и "х штанги кулачкового
низма. Масштабны
Здесь /Сд
коэффициент к^
, а величина "х — рк\\
можно вычислить по
формуле
( м/с^
\ мм
и к,-
с
мм
масштаоы .\' и времени, а отклонение луч^
р (мм) и площадь Fp (мм") показаны на рисунке.
Рис. 10.203. Схема установки для измерения параметров удара — ударного
ускорения и времени соударения. Стержень 1 с акселерометром поднимается
кулачком и свободно падает на балку 2 с фиксированной жесткостью. Запись
производится с помощью катодного осциллографа с механической разверткой.
Рис. 10.204. Схема регистрации удара груза о балку. При ударе падающего
груза 1 о балку 4 с наклеенным на нее тензо датчиком 5 замыкается контакт 6.
и катодный осциллограф 7 зафиксирует деформацию балки одновременно с замы-
5?!^^^5те9?!5К^«?М^
Рис. 10.203
Рис. 10.204
Датчики и аппарат] pa для неэ,7ектрических величии
663
Рйс. 10.206
Рис. 10.207
Рис. 10.208
канием контакта. При регистрации
\силия при ударе применяется
связанный с грузом 1 датчик 8 (2 -
осветитель: 5 - фотоэлемент; Ли В — каналы
осциллографа; С - к синхронизатору).
Рис 10 205. Схема измерения
начальной скорости Vq соударения при
ударной тарировке и принудительном
разгоне сборки с датчиком Масштаб
зарегистрированного ускорения |i„ ==
= l^o/HfS'f где |д, - масштаб времени,
а 5^ - площадь под осциллограммой
ускорений от начала процесса до
времени т, соответств>ющего
максимальному }скорению. Чтобы найти Vq,
используется контактное устройство в виде пластин 2 и 3 из фольги,
расположенных на расстоянии /q, включенных в схему, питаемую от генератора. Когда
сборка 1 с датчиком коснется пластины 2, включится осциллограф, при замыкании
пластины 3 выход генератора шунтируется, и луч прочертит прямую. По частоте
генераторе! опрспеляется время fo пробега /о, и тогда Vq =/qAo-
При удп}ч.<)и тарировке возможно применение усилителей переменного тока,
стабильность работы которых легко обеспечивается.
Рис. 10 206 Схема камертонного отметчика с ртутным контактом. От
электромагнита 2 колеблются перья камертона 1, отчего игла 3, укрепленная на нижнем
пере, периодически касается ртути 4, замыкает и размыкает цепь электромагнита,
что регистрируется осциллографом в виде отметок времени, а ~ клеммы источника
питания 4-6 В; б - контакты к шлейфу.
Рис. 10.207. Схема камертонного щелевого отметчика времени. С помош^ю
электромагнита 2 с контактным прерывателем 4 колеблются перья камертона.
Шторки 3 со щелями перекрываются, открывая путь лучу света, попадающему
^а пленку; а — клеммы источника питания 4 —б В.
Рис. 10 208. Схема вибрационного щелевого отметчика времени. Пластина 2
"^ элинвара, один конец которой закреплен в державке 3, несет контакт I
прерывателя, якорь с регулировочным грузом 7 и шторку 6 со щелью, перекрываю-
^^^\ю пучок света от лампы 5. Постоянный ток (клеммы а и б) питает элек1ро-
^^лгнит 4, притягивающий якорь, скрепленный с пластиной 2, отчего контакт \
Размыкается, и обмотка обесточивается. Теперь пластинка вследствие упругости
^тклонлетсл (вместе со щелью) обратно, контакт I замыкается, и цикл повторяется,
клемма б служит для запуска отметчика,
РАЗ ДЕЛ 11
МЕХАНИЗМЫ И МАШИНЫ ВИБРАЦИОННОГО
И УДАРНОГО ДЕЙСТВИЯ
При проектировании и эксплуатации современных быстроходных машин
возникает необходимость не только предвидеть возникновение опасных колебаний
и принимать меры для их устранения, но и использовать в ряде случаев
колебания и удар для решения технологических задач с помощью машин
вибрационного и ударного действия.
Область применения вибрационных машин и машин ударного действия
непрерывно растет и в настоящее время широко охватывает строительную индустрию
транспортную технику, горную промышленность, литейное производство,
машиностроение и металлообработку и другие отрасли техники.
В строительном деле эффективно используются вибромоторы, уплотнители и
тромбовки, вибропогружатели, виброкатки, машины для разрушения бетона и
кирпичной кладки, для вскрытия асфальтобетонных покрытий, сборки
металлоконструкций, забивки костылей, подбивки шпал и других работ.
В горной и горнорудной промышленности нашли применение
горнодобывающие, проходческие, обогатительные и погрузочные вибромашины — виброкомбайны,
виброструги, виброклины, вибронасосы, а также машины для бурения шпуров и
скважин, для забивки и извлечения обсадочных труб, отбойные молотки для
разрушения горных пород и полезных ископаемых.
В технике широко применяются горизонтальные и вертикально-винтовые
виброконвейеры, дозаторы, фильтры, сушилки, вибропитатели, сепараторы, побудители,
смесители, уплотнители, вибромельницы и многие другие машины.
В машиностроении вибрация и удар применяются при штамповке, клепке
запрессовке, обрубке, насечке, очистке деталей, в испытательных ударных стендах.
при создании мощных ледоколов. Успешно ведутся исследования по применению
вибрации при точении и фрезеровании, при закалке сталей, перед заливкой
металла в изложницы и в целом ряде других случаев.
Таким образом, в настоящее время практически все отрасли промышленности
сельское хозяйство, строительство, транспорт, судостроение, медицина и научные
лаборатории в той или иной мере используют вибротехнику, возможности которс^и
безграничны. С помощью вибрации можно увеличить плотность среды или, наооо-
рот, повысить степень ее разрыхления, изменять структуру среды или отдельньк
частицы связывать в единое целое, производить тонкое разделение или пере^'^
шиваьйие разнородных материалов, выполнять грубую голтовку поковок и отливо
или точные доводочные операции хонингования и полирования Вибрация у^"^^
вызывать заболевание человека или, наоборот, оказывать лечебное воздепств '^^
Высокая эффективность вибрационных машин объясняется тем, что их тех
логическое воздействие на обрабатываемую среду носит характер высокочастот ^^^^
импульсов, отличающихся при малых перемещениях значительными cKOpoci
и ускорениями. Под влиянием колебаний рабочего органа с малой ампли .^^^^
и большой частотой во многих случаях обрабатываемая среда приобретает ^^^^^^
бые свойства - она становится более подвижной, уменьшается эффективный ^^^^^^
фициент внутреннего трения среды, отчего уменьшается сила сопротив^
перемещению и интенсивность износа рабочего органа.
MexaitiiSMbi и машины вибртщоииого ii ударного действич 665
Теория вибрационных машин включает два тесно примыкающие вопроса: спе-
шфику среды, находящейся под воздействием вибраций и динамику собственно
1ашииы вибрационного действия.
Сравнительно простые по конструкции вибрационные машины представляют
собой динамическую систему, в которой форма траектории, закон изменения ско-
оости и ускорения рабочего органа зависят не от геометрических размеров, звеньев,
от динамических параметров машины: величин масс и жесткостей упругих
эпементов, характера возмущения, создаваемого приводом, факторов
демпфирования и г. д.
проектирование пли динамический анализ вибрационной машины требует
составления и рептения линейных, а зачастую нелинейных дифференциальных
уравиений и предсишляет часто значительные трудности, разрешаемые в
настоящее время с помоп^ью электронно-моделирующих установок.
Расчет электромеханических и пневматических машин ударного действия
эффективно выполняется с помощью теории подобия при наличии функщ^ональрюй связи
между целыми комплексами величин, определяющих явление, когда не требуется
оценка влияния на процесс каждого параметра и можно распространить
результаты однократного физического эксперимента на указанные явления в целом.
Дифференциальные уравнения, описывающие рабочий процесс, служат основанием для
сое явления критериев подобия, а условиями однозначности определяются границы
распространения единичного опыта.
Существенно важным конструктивным элементом вибрационных машин
-являются вибраторы.
Различают:
а) мехаТ1ические инерционные вибраторы, создающие вращающуюся или
направленную возмущающую силу за счет вращения неуравновешенных масс (дебалансов);
одно- и многомассовые, простые и самоцентрирующиеся, с постоянной и
регулируемой величиной возмущающей силы и частоты колебаний;
б) пневматические и гидравлические вибраторы, нерегулируемые и регулируемые;
в) электромагнитные вибраторы - однотактные и двухтактные, резонансные и
ударного действия, питающиеся переменным током, пульсирующим выпрямленным
током, прерывистым постоянным током, переменным и постоянным током
одновременно;
г) эксцентриковый привод — неуравновешенный, с пусковым маховиком и
увеличивающимся при пуске эксцентриситетом, с регулируемой и нерегулируемой
амплитудой колебаний.
Для низкочастотных вибрационных машин целесообразно применять
регулируемый эксцентриковый привод, создающий большие возмущающие силы при
^1алой скорости вращения. При повышенных частотах колебаний эксцентриковый
^1ривод используется только в уравновешенных машинах, работающих в
резонансном режиме.
При менение инерционных вибраторов в низкочастотных машинах требует
увеличения неуравновешенных масс, а для высокочастотных машин приводит к пере-
РУзке подшипников. В крупных мощных вибрационных машинах, эксплуатируемых
''^ средних частотах, инерционные вибраторы незаменимы, так как позволяют при
•J^ibix габаритах и массе создать значительные возмущения. Вследствие значи-
'J-bHoro времени пуска и выбега применение инерционных вибраторов в пита-
^- 1ЯХ и точных дозаторах ограничено.
г'аиболее совершенным является электромагнитный привод. Он применяется
'^'я высокочастотных вибромашин (питателей, дозаторов, грохотов). Этот тип при-
обеспечивает непосредственное воспроизведение возвратно-поступательного
666
Механизмы и машины вибрационного и ударного деустсия
движения, лишен трущихся пар и подшипников, допускает синхронизацию несколь.
ких приводов на одной машине и регулирование режима работы.
Пневматические вибраторы также целесообразно применять для высокочастот-
ных машин и особенно во взрывоопасных условиях (шахтных виброконвейерах)
хотя синхронизация работы вибраторов в многоприводных установках затруд^
нительна.
Не менее важное значение для нормальной работы вибрационной машины
имеют упругие элементы и опорно-поддерживающие устройства, влияющие на
сроки службы, эксплуатационную надежность и энергоемкость машины. Упругие
элементы подразделяются на основные и амортизирующие. Различают
металлические упругие элементы, выполненные в виде винтовых пружин, плоских рессор
и упругих стержней; резинометаллические, выполняемые в виде прокладок, ци.
линдров, шаров, пакетов и работающие в зависимости от конструкции на
растяжение — сжатие и на сдвиг; пневматические упругие элементы, состоящие из
резинокордовой оболочки, в которую накачивается сжатый воздух. Находят
широкое применение комбинированные упругие элементы.
Конструкции опорно-поддерживающих устройств содержат винтовые пружины,
устанавливаемые либо вертикально (грохоты с круговой вибрацией), либо в
направлении транспортирования (виброконвейеры). Применяются также рессорные упругие
элементы направленного действия и рессоры, изогнутые в форме овала
(инерционные виброгрохоты), весьма удобны упругие элементы в виде торсионных
стержней, а также резинометаллические элементы.
ВИБРАТОРЫ И ВИБРОЗАЩИТНЫЕ ПРИСПОСОБЛЕНИЯ
Рис. 11.1. Схемы генерирования одночастотных возмущений посредством
центробежных вибровозбудителей: а, б, в — круговая сила; г, д, е — синусоидально
изменяющаяся прямолинейно направленная сила; :>ic — эллиптическая сила; з —
синусоидально изменяющийся момент, направленный перпендикулярно плоскости
рисунка; и — круговой момент; к — синусоидально изменяющийся момент, перпен-
Рис. 11.1
Вибраторы и виброзащитиые приспособления
667
О
1
1
л
||
luJ
Г
^
Рис. 11.2
дикулярный осям вращения и лежащий в плоскости рисунка; л - круговой момент
и круговая сила.
Рис. 11.2. Схемы центробежных возбудителей: а — с одной неуравновешенной
массой; 6 - самоцентрирующийся, эксцентриситет вала равен амплит}де колебаний
рабочего органа: в — направленного действия; г — самобалансный, с двумя
эксцентричными массами, эксцентриситеты которых смещены на 90"*; д —
маятниковый; е - с тремя дебалансами и независимой регулировкой фаз и
эксцентриситетов, допз'скающий получение переменной вращающейся силы; ж — четырехмас-
еовый. направленного действия, на двух валах. Если соседние дебалансы сместить
один огносительно другого на 90^ а сидящие на одном валу — на 180^ то воз-
'М}щаю1пая сила будет направлена по вертикали; з - бегунковый, планетарного
типа, ц _ поводковый планетарный; к — поводковый с серьгой; л — планетарный
^ вн\трент1ей обкаткой.
Рчс. 11.3, Конструкции дебалансов: а — формы дебалансов с минимальными
MoNienraNm инерции, О — ось вращения; б — раздвижные со ступенчатой
регулировкой статического момента, состоящие из неподвижной части, посаженной на
^^понке на дебалансном валу и подвижной, поворачивающейся на угол ф и сто-
Л'^рлщейся относительно неподвижной; в — раздвижные с плавной регулировкой
статического момента; г — со ступенчатой регулировкой статического момента
сьемнымн грузами; д — выдвижные. Изменение статического момента достигается
с^'^^ещением выдвижного стакана 2 с последующей фиксацией гайкой /. Пружина 3
^•^Дбирается так^ чтобы перемещение дебаланса от центра под действием
центробежной силы начиналось после прохода резонансной зоны при зап>ске, а перемещение
668 Механизмы и машины euopatfuowioBO и ударного действия
Рис. 11.3
дебаланса при остановке вибромашины под действием пружины имело ^^''
место до прохождения резонансной зоны.
Рис. 11.4. Схема регулируемого стержневого вибратора. В отверстия отбала'^-
сированного диска 2, заклиненного па валу I вибратора, вставляют один ^^^'^
несколько стержней 3.
Возмущающая сила представляет собой результирующую центробежных си
создаваемых отдельными стержнями.
Рис. 11.5. Схема регулируемого эксцентрикового вибратора. На утолшенн;
часть вала 7, эксцентрично расположенную относительно оси вращения, наса>^
вается эксцентричная масса 2, закрепляемая на валу под изменяемым утяо^^
как показано на рисунке. Возмущающая сил Р = 2mco^ecos —.
Вибраторы и виброзащитиые приспособ пени ч
669
Рис. 11.5
Рис. 11.4
Рис. 11 6 Эксцентриковый
регулируемый вибратор. В
разъемном корпусе 1—3, стянутом
болтом 2, смонтированы соеди-
" пенные зубчатыми колесами 9
лва вала Н с заклиненными на
1HIX дебалансами 11 w две втулки
7 с такими 2ке дебалансами 70,
которые можно поворачивать
маховичком 6 относительно
валов 8. Взаимное смещение де-
балансов контролируется по
шкале диска 4 с помощью
\казателя 5.
Рис. 11.7. Схема электромеханического вибратора с круговыми колебаниями.
8 корпус 1 вибратора запрессован статор 2 асинхронного электродвигателя. На
консолях вала ротора 3 заклинены дебалансы 4. С помощью вибраторов такого
типа (серии ИВ-24) можно создать возмущающую силу до 3000 кгс при частоте
колебаний в минуту 2800.
Рис. 11.8. Схема вибратора с круговыми колебаниями и консольным
расположением ротора. Такое исполнение облегчает ремонт, позволяет ввести
принудительную смазку подшипников, но усложняет расчет установки вибратора на
исполнительном механизме. В опытном вибраторе В1-438 предусмотрена частота
вибраций 1430 колебаний в минуту, максимальная возмущающая сила 3500 кгс.
Рис. 11.9. Бегунковый глубинный вибратор поводкового типа, в котором
связанный с приводным валом поводок 3 обкатывает бегунок 1 по цилиндрической
беговой дорожке корпуса 2 вибратора.
Преимущество схемы — возможность установки в корпусе встроенного высоко-
^JacTOTHoro электродвигателя.
Рис. 11.10. Механический вибровозбудитель. Ротор дебаланса 2 с переменным
^«^Ружным радиусом, заклиненный на валу 3, вращается в корпусе /, отчего
в зазоре Л, имеющем форму кругового клина, создается зона повышенного дав-
• ения воздуха, перемещающаяся вместе с дебалансом со смещенным центром
яжести и уравновешивающая его центробежную силу. Возбудитель отличается
овышенным сроком службы и низким уровнем шума.
670
Механизмы и машины вибрационного и ударного действия
Рис. 11.7
Рис. 11.8
Рис. 11.9
Рис. 11.10
Рис. 11.11. Планетарный вибратор большой мошности. В корпус 1
вмонтирована вал-шестерня 3, которая приводит в движение дебалансное кольцо 2,
обкатывающееся по внутренней поверхности корп>са 1. Вибратор может найти
применение в мощных вибростендах, в уплотняющич, сепарирующих и т. п. машину-
Рис. 11.12. Высокочастотный вибровозбудитель направленных колебании,
приводного ремня 5 приводится в движение дебаланс 3, обкатывающийся и*^'
расточке в боковой крышке 4 и направляющей в крышке 2, связанных с кор
пусом 1. Частота генерируемых колебаний
1
1
1 -
р^
d^
Вибраторы и еыброзащитные приспособления
671
Возбудитель целесообразно применять
^пя создания мошных колебаний большой
частоты Ею срок службы определяется
основном сроком службы ремня.
Рис 11.13. Кулачковый вибратор На
павном валу 1. приводимом от двигателя,
-чглинен кулачок 2, который посредством
J промысла 5 сообшает движение стержню
4 Еоздейсгвуюшему на рабочий орган.
рис 11 14. Принципиальная схема
маятникового возбудителя. К основанию i,
кестко связанному с вибрируемым телом
2 подвешивается маятник 5, несущий
дебаланс 4. Пружины 5 помогают
удерживать маятник под определенным углом
] вертикали Система приближенно
считается центрированной, если соблюдается
одно из главных условий* в среднем
положении маядника центр тяжести S2
тела 2, ось О качания, центр тяжести S^
маятника и ось к^. вращения дебаланса
лежат на одной прямой, при этом тело 2
1 2 J
Рис. 11Л1
А-А
Рис. 11,12
Рис. 11.13
^^ Рис. 11.14
672
Механизмы и машины вибрационного и ударного действие
Рис. 11.15
-совершает прямолинейные колебания при малых угловых колебаниях маятника,
если ось дебаланса 4 помещена примерно в центре качения физического маятника:
s^h '
'""^^os.
где Шз и J^ "~ масса и момент инерции маятника.
Рис. 11.15. Схема двухмассового маятникового вибратора. Корпус
электродвигателя 1 с дебалансами 2 присоединен с помощью шарнира 3 к траверсе 4,
которая посредством шарнира 5 (оси шарниров 3 и 5 взаимно перпендикулярны)
присоединена к основанию 6, монтируемому на рабочем органе вибромашины
(рис. 11.15, д). Массы вибратора подбираются так, чтобы ось дебалансного вала
проходила через центр качания физического маятника, имеющего ось подвеса
в шарнире 5, тогда горизонтальная составляющая центробежной силы не
передается основанию. Можно допустить совпадение центра тяжести двигателя с осью
шарнира 3, при этом горизонтальная составляющая вектора-момента также не
передается основанию и уравновешивается моментом сил инерции, возникающим
при качании дебалансного вала вокруг оси шарнира 3. Виброприемник
испытывает (рис. 11.15,6) силу
Р = 22о cos у cos cot
и момент
М — IQ^a sin у cos соГ,
вызывающие винтовые колебания. . ^^,
Рис. 11.16. Конструкция двухмассового маятникового вибратора. На приь'1 ^^
ленной к виброприемнику через резиновую прокладку двухшарнирной "^Р^^^Р^р.
установлен двигатель J, несущий на своем валу секторные дебалансы 4 со в ^^^
ными пальцами 2. Один из дебалансов может поворачиваться и фиксирова
Вибротары и виорозонштные приспособ leiiun
673
тпфтом. вредное дейс1вие раскачивания двигателя при его запуске и остановке
. <<и\Чс\с{<^'л. резиновой прокладкой и противотоком, ко1да о) двига1еля проходит
!^фез резонанс с одной из собственных частот.
рис. И 17. Конструкция маятникового вибратора. На консольных частях вала
5paiopa установлены выдвижные подпружиненные дебалансы 1. При
определенной частоте вращения вала вибратора дебалансы выдвигаются, чем снижается
Рис. 11Л6
Рис. 11.17
о^евников и др.
674
Механизмы и машины вибрациоииого и ударного действия
вредное влияние резонансных явлений при его пуске и остановке. Перестановк ^
опорных колец 6 в пазах стакана 7 регулируется величина возмущающей силь
Корпус вибратора болтами прикреплен к кронштейну 3 маятниковой подставки 4
несущей маятниковую ось 2. Резиновые амортизаторы 5 позволяют вибратоп\
совершать угловые колебания вокруг оси 2 и препятствуют опрокидыванию маят
пика. Измене1!ие направления линии дейсгвия возмуноющей силы на ± 45° досги.
гается поворотом оси 2 относительно подставки 4.
Рис. 11.18. Схемы распространенных электромагнитных вибраторов:
а — реактивный однотактный, состоящий из статора электромагнита i, якоря *>
упругой системы 3. Вибратор питается о г сети с частотой 50 Гц.
При возрастании магнитного потока якорь притягивается, при убывании -.
возвращается назад упругой системой, поэтому частота возмущения равна удво-
енной частоте питающего тока, т. е. 6000 колебаний в минуту;
б - двухтактный с питанием через выпрямитель 4. Частота колебаний якоря
в 2 раза меньше и составляет 3000 колебаний в минуту;
в — с постоянным магнитом. Схема магнитной полярности показывает наличие
двух сил притяжения якоря и двух сил отталкивания. При питании без
выпрямителя частота колебаний равна 3000 в минуту.
Рис. 11.19. Электрическая схема однотактного электровибродвигателя возвратно-
поступательного движения. Якорь 7, укрепленный на скобе 2, связанной с пакетом
пружин-рессор 3, притягивается к сердечнику 4, питаемому обмотками 5
постоянного и переменного токов. При сложении переменных и постоянных токов
возникают пульсирующие потоки и синусоидальная сила притяжения якоря.
Рис. 11.20. Электрическая схема двухтактного электровибродвигателя. Два
одинаковых электромагнита с разобщенной маггпгтнон системой установлены
противоположно один другому. Я кори и сердечники порознь жестко связаны. Тяговое
усилие увеличено. Обозначения те же, что и на рис. 11.19.
Рис. 11.21. Электромагнитный вибратор. Электромагнит 1 с обмотками 4 и
якорем 2, соединены пружинами 5, расположенными по обе стороны опорного
кронштейна Н. Междуполюсный зазор регулируется гайками 6 Питаются обмотки
от навитых в виде пружин проводников 3 Настройка вибратора производится
грузами 7, устанавливаемыми на статор.
Рис И 22. Электромагнитный вибратор ударного действия, используемьп! в
конструкциях бункерных возбудителей. Корпус 7 с якорем 7 и каркас 5 с
сердечником 4 и катушкой 2 соединены посредством пружин 3 и рессор 6, средние
части которых скреплены с каркасом, а концы опираются на корпус.
Вибраторы и виброзащитные приспособ гения
675
а<\>0
§ 0 со 0
"Чп
КЬт!
2 J
R i В (h !^
п?^
^
Рис. 11.19
Рис. 11.22
22'^
676
Механизмы и машины вибрациоииого и ударного действия
Амплитуда колебаний — до 1,2 мм, частота — 3000 колебаний в минуту, потреб,
ляемая мощность 900 Вт.
Рис. 11.23. Поверхностный вибратор с полрессорной пригрузкой.
Рис. 11.24. Вибратор для возбуждения крутильных колебаний (схема а).
Ведущее цeнtpaльнoe колесо (схема б) приводит два одинаковых зубчатых колеса
с одинаковыми дебалансными массами т, расположенными как показано на рисунке
На корпус, в котором вращаются колеса, будет действовать возмущающий момент
Мв = 2Fm = Imod^ra sin cof.
При установке второй пары дебалансных колес амплитуда удваивается.
Если начальное положение одного из двух расположенных противоположно
эксцентриков (в плане) изменить, то вибратор будет создавать возмущающий
момент и вертикальную возмущающую силу, способные возбудить винтовое
движение. Изменением эксцентриситетов дебалансов достигается изменение как
амплитуд силы и момента, так и их соотношения. Эффективность вибратора
значительно выше обычного.
Рис. 11.25. Схемы поршневых
пневматических и гидравлических вибраторов
Пневматический вибратор (рис. 11.25, и]
Воздух из сети поступает по каналам 3
и 4 в правую полость поршня 8, который,
сжимая пружину 9, смещается влево и
вытесняет воздух из левой по;юс1И через
отверстие 7 в атмосферу. Вблизи левото
крайнего положения поршня 01верстие 7
и канал 4 закрываются, канал 2 и отверстие
6 01крываю1ся, движение поршня рсвср-
сируе1ся. Часто! а колебаний портим
(часто!а возмуп!енпя, 1!среда!шсмая
вибромашине через пиJ!индp У) pciyj!HpycicM
давлением воздуха и измс!1снием жсстко-
стей пружин 5 и 9.
Гидравлический вибратор (рис. 11.25, о)
Насос 4 периодически подает через
Рис. 11.23
5) "-Ч-^
Рис. 11.24
Вибраторы и виброзащитиые приспособления
677
f 2 3 if.
б)
Рис. 11.25
у^^уу^^у^уууууууууу^^^ууТТ
DDDDD
А-А
Рис. 11.26
Рис. 11.27
патрубок 3 (и откачивает через патрубок 5) жидкость в щишндр /, что вызывает
перемещение порщня 2, в щгок 7 которою включена пружина 6 для придания
системе добавочных степеней свободы. Возмущение передается через щток 7
рабочему органу вибромащины и регулируется по частоте изменением скорости, а по
амплитуде изменением производительности насоса
Рис. 11.26. Пневматический ротационный вибратор. Внутри статора 1 экс-
пентрично к его оси вращается ротор 7 с пазами 9, в которых свободно пере-
■^ещаются пертинаксовые пластины 6. По каналу 3 через окна 2 воздух поступает
^ цилиндр и вращает ротор против часовой стрелки. Отработанный воздух
выходит через окна 5, полость 4 и отверстия в корпусе S.
Рис. 11.27. Пневматический вибратор планетарного типа. Вибратор состоит из
•корпуса и пневмодвигателя-возбудителя, представляющего собой обращенный
ротор. Вокруг неподвижного статора /, выполненного в виде полой оси с щелью,
Которую вставлена текстолитовая гюпатка 2 с вырезами, обкатывается ротор 3.
"^ Шейках оси вибратора посажены щитки 4. Сжатый воздух по питангу 6 посту-
^^^ в продольный капал оси, прижимает лопатку к роюру и через вырезы
^|^чатки 1юступаег в рабочую камеру 5, заставляя роюр плапетарно обкатываться
'^РУг своей оси с высокой час i о той вращения. Выхлоп производи 1ся через
678
Механизмы и машины вибрационного и ударного действич
Рис. 11.28
Рис. 11.29
разгрузочные отверстия 7 — 8. Участок
пути за время перекрытия ротором
отверстий и до следующей подачи
воздуха ротор пробегает по инерции
В конструкции подщипников нет.
Вибратор применен в литейных
машинах и имеет большие
преимущества перед вибраторами плунжерною
типа.
Рис. 11.28. Высокочастотный пнев-
модвигатель вибратора. Статор 2 в
виде полой оси несет разделительную
лопатку 5. Ротор в виде втулки-
бегунка 4 приводится во вращение
сжатым воздухом, поступающим в рабочую пoJЮCть пневмодвигателя через
отверстие в оси, обкатываясь вокруг оси статора. Отработанный воздух выпускается
через щели 3 в щитах корпуса I.
Рис. 11.29. Пневмоупругая связь с жестким центром хшя легких резонансных
машин. В стальной стакан /, закрытый гибкой резино-кордной оболочкой 2 с
жестким центром 3, через канал 4 подается сжатый воздух, что вызывает изгиб ооо-
лочки. Для смещения центра необходимо приложить силу, которая при выбрани^"'
эффективной площадке оболочки и известном прогибе ее будет зависеть толь
от давления р в камере. Регулируя давление воздуха, можно изменять жесткое
связи в широких пределах. ^
Рис. 11.30. Секционированная пневмоупругая связь. Гибкие оболочки 1 при^^^ ^
к
зажаты с помощью дистанционных трубок 6 и шайб
Рис. 11.30
корпусу 4 с помощью фланцев 2 и трубы 3. В центральной части оболо
5 установленных '
' ^ - возД)^
стержне 7, связанном с подвижной частью вибрационной машины. Сжатый ^^^
через отверстия 8 подается в полость А. Полость Б через отверстия 9 сообша
с атмосферой.
Машины вибрационного действия
679
1<аждая секция состоит из двух пневмоупругих связей с жестким центром,
^ число секций в одной связи неограниченно. Жесткость одной секции пневмо-
у{^ругой связи можно определить по формуле
(t + Р)'
1 +
1 + р + р'
где V " гидростатическое давление; Wq — выпуклость центра оболочки; р = Гг/гх;
г и /'2 "" радиусы наружной заделки оболочки и жесткого центра. При заданной
амплитуде а циклической нагрузки и конструктивно оправданных
р ^ 0,3, Wo ^ 2М г ^ 4Wo
условную жесткость пневмоупругой связи (она нелинейна) приближенно находим
по формуле
С = 20,ЗяАр.
МАШИНЫ ВИБРАЦИОННОГО ДЕЙСТВИЯ
Рис. 11.31. Виброштык (игла) для глубинного вибрирования бетонной смеси
в гусюармированных конструкциях В корпусе 2 (рис. 11.31, (Я), снабженном
наконечником 5 и буксой 7, в подшипниках 4 вращается вал с эксцентричной массой 5
удлиненной формы. В верхней части иглы (рис. 11.31,6) монтируется
электродвигатель.
Между двигателем и иглой амортизаторы не требуются, так как конец иглы
совершает маятниковые вибрации около центра тяжести иглы.
Рис. 11.32. Вибростержень вибратора, применяемого при выполнении бетонных
работ. В корпусе-трубе 1 смонтирован вал 2 с эксцентричной массой, хвостовику
которого сообщается вращение.
Рис. 11.33. Вибростержень с планетарным эксцентриком. В корпусе / размещен
сердечник 2, по конической поверхности которого обкатывается эксцентрик 3.
Стержень эксцентрика соединен шарнирно со шпинделем 4.
Рис 11.34 Ручной глубинный вибратор ИВ-60. В герметически закрытом
корпусе 1 с встроенным высокочастотным электродвигателем 7~8 смонтирован
в подшипниках 2 дебалансный вал 4 вибратора с дебалансом 3. К верхней части
корпуса приварена штанга И с нижней рукояткой. Штанга состоит из двух
частей, соединенных резиновым амортизатором 10. Под верхней рукояткой 13
крепится пакетный выключатель 12. В вибраторе применена жидкая циркулирующая
Рис. 11.31
680
Механизмы и маишпы виврспщоипого и ударного дсйствич
fTt^
Ж
Машины вибрационного действич
681
f^
смазка подшипников. Масло из нижней части корпуса засасывается и по
наклонному каналу 5, через радиальные огвсрс1ия 6 нос гу пае г к подшипникам
Вибратор ИВ-60 массой 29 кг с создас! 5800 колебаний в минуту с возмущающей
силой 800 кгс от двигателя мощностью 1,1 кВг.
Рис. 11.35. Вибролопата, состоящая из металлического корпуса 4 электродви-
I а геля, на полый вал 8 ротора 7 которого насажен дебаланс 3. Разъемные части
•корпуса стянуты болтом 9, закрываемым навернутым' на корпус ребристым
наконечником 7, препятствующим проворачиванию лопаты во время работы. Корпус
-юпаты крепится к щтанге посредством муфты, стя1 иваемой хомутами 5 {2 -
иодшинник; 6 - статор).
Рис 11.36. Вибратор виброрейки с регулируемой амплитудой Ротор
электродвигателя несет три эксцентрика: жестко закрепленные эксцентрики / и 2 и
регулируемый эксцентрик 3. При повороте щтурвала 4 муфта вместе с подшипником 5
смещается вдоль оси, вызывая поворот эксцентрика 3, насаженного на вал с неса-
^'отормозящейся нарезкой. При совпадении эксцентриситетов эксцентриков 2 и 3
'Амплитуда вибраций наибольшая.
Рис. 11.37. Конструктивная схема ковша с вибрирующими зубьями. В ковш /
^Ьычного очертания вмонтированы подвижные зубья 3, на которые воздействуют
два вибромо.'юга 2, направленного (по линии резания) возмущения (по два зуба —
^'^ каждый вибромолот). При разработке мелового карьера мощность, погреб-
Дяемая дви1ателем экскаватора, снизилась на 30-50% при почти удвоенной
^лщине стружки по сравнению с ковщами без вибрирующих зубьев.
682
Механизмы и машины вибрациогтого и ударного действия
wm^^m^^A
Рис. 11.38
Рис. 11.38. Схемы вибромашин для бестраншейной прокладки труб путем
прошивки (прокола) грунта: а - труба 2 жестко соединена с наконечником I и
вибровозбудителем 3\ 6 — наконечник встроен в вибровозбудитель.
Рис. 11.39. Схемы установки вибраторов:
а - на конических бункерах; при необходимости в двух вибраторах их
устанавливают на различной высоте;
б - на параболических бункерах; вибратор монтируют вблизи выпускного
отверстия (как показано на рисунке);
б - на прямоугольных бункерах с воронкообразным днищем. Вибратор
монтируют на наклонной стенке;
г - в воронках с наклонной течкой; вибратор устанавливают под воронкой.
() - в прямоугольных или цилиндрических бункерах с центральным отверстием,
вибратор устанавливается на боковой стенке у края воронки, образуемой сыпучим
материалом при угле естественного откоса.
Рис. 11.40. Внутренний бункерный побудитель с электромагнитным вибраторов-
установленным внутри стального сварного колокола и подвешиваемого на кан
тах внутри бункера: а — схема установки; б — колокол с вибратором; вибрацио
ное воздействие непосредственно на материал весьма эффективно и незначитель
на несущие конструкции бункера.
Рис. 11.41. Схема установки побудителя с вибролистом: а - на бетонном У
кере; б - на металлическом; листы размещаются на противоположных стен
бункера, вибраторы укрепляются вблизи выпускного отверстия на расстоя
равном 7з высоты бункера.
Манаты вибрационного дсйствич
683
рис. 11.42. Принципиальные схемы осуществления направленной вибрации
в питателях (чтобы заготовка перемещалась по вибрационному лотку, необходимо
обеспечить направление вибраций под углом р бросания):
а - лоток подвешен на наклонных рессорах (\|/ ^ IS""). Возможные направления
возбуждения вибраций — вдоль лотка (i), перпендикулярно ему (3), перпендикулярно
рессорам (2);
б - свободная подвеска лотка на цилиндрических пружинах. Направление
возмущения - под углом р к лотку создается вибратором, ориентированным
должным образом;
в - свободная подвеска лотка с двумя взаимно перпендикулярными
вибраторами Регулируя относительные амплитуды и направления колебаний вибраторов,
можно получить требуемый угол бросания и реверсирования транспортируемого
объекта;
г - чаша бункера со спиральным лотком подвешивается на наклонно
расположенных рессорах. Возможные направления возмущения — вертикальное (7), кру-
1 ильные от тангенциальных вибраторов (2), перпендикулярно подвескам (3);
д - чаша бункера со спиральным лотком опирается на цилиндрические
пружины, а возмущение осуществляется от одного или нескольких вибраторов,
сообщающих винтовые колебания с заданным углом подъема.
Рис. 11.43. Расчетная схема вибропитателя (рис. \\АЪ,а)\ mj •-масса чаши;
/?ь - масса основания питателя; Cj и С2 - жесткости упругих подвесок чаши и
амортизационных пружин. На каждую массу действуют равные и
противоположные по фазе возмущающие силы с частотой со. Так как С2 <^ С^, то, приняв
С2 = О, найдем собственную частоту р. Если принять неупругие сопротивления
d
<
^
м
•—' <
}
^
д)
Рис. 11.39
а) 6)
Рис. 11.40
Рис. 11.41
684
Механизмы и манпты аиораииопиого и ударного действии
=t^
сЯ^
'> —Ы
(рис. 11.43,6) пропорциональными первой степени скорости, появляющиеся за счет
демпфера D, то коэффициент динамичности
к.-
\/(1 - X^f + 4X^5-
где X = со/р; 5 = /7/р; р
—; h — декремент колебаний.
Чтобы снизить влияние затухания на амплитуду колебаний вибропитателя,
надо его настраивать на предрезонансный режим (к = о)/р < 1), так как
увеличение количества загружаемых заготовок снижает р, приближает систему к резонансу,
что должно бы увеличить амплитуду, однако увеличение затухания ведет к
обратному, и таким образом обеспечивается стабильная работа питателя почти при
любой загрузке При X > 1 оба фактора (снижение р и увепнчение 5) ведут к
снижению амплитуды колебаний и производигельности.
Рис. 1144. Вибродозаюр с динамометром Mai ниюупругого действия. Из
бункера 1 (рис. 11.44, с/) материал подается на лоток питателя 2, оснащенный
вибратором 3, и далее на раму 4 дозатора, опирающуюся с одного конца на магнито-
упругий динамометр 5, воздействуюнщй на регулятор 6 вибропитателя. На
рис. 11 44, 6 дана схема динамометра. Неподвижный феррорезонансный стержень
помещается в намагничивающую обмотку 2 электромагнита 3, включени\н>
в уравновешенный мост переменного тока. {S - источник переменного тока, ^ '^
выпрямители, 7-9 - сопротивления, 4 — уравнигельрюе сопротивление). Под Д^*''
ствием сжимающей стержень нагрузки Р изменяется магнитное сопротивление,
мост выходит из равновесия, и прибор 5 указывает величину нагрузки. Прибор
практически безинерционен, ошибка взвешивания - до 0,2%.
hUiuiuuhi euopamiomiopo дсиствич
685
Рис. 11.45. Бункерный вибро-
iniaieJH> с мноюслонными подвес-
,а\4И Д-^'^ небо.гилних заготовок.
М11ИИ1С 3 чаши 1 с винтовым лог-
ком 2 опирается на три наклонные
плоские подвески (пакеты рессор) 4
,1 песет якорь электромагнита 7.
В ценI ре массивного основания 5,
()ПИра1он1егося на амортизаторы 8,
укреплен электромагнит 6. Произ-
иодигельпость регулируется
изменением HHraioHiero тока
посредством реостата 9, а резонансная
настройка - числом пластин в
пакетах поавесок 4.
Рис 11.46. Бункерный вибро-
Рис. 11.43
Рис. 11.44
686
Ме\аииз\1ы и машины виоршщопиого и ударного действия
Рис. 11.47
питатель с подвеской чаши на трех наклонных упругих стержнях. Чаша 12
с внутренней винтовой канавкой вместе с конусом И смонтирована на днище 10,
опирающемся на упругие стержни 2, укрепленные зажимами в верхнем 1 и нижнем
5 башмаках. В центре днища 10 через алюминиевую прокладку 3 крепится якорь
13 вертикального электромагнитного вибратора, сердечник которого состоит нз
набора пластин 9 с катушкой 8. Виброизоляция питателя осуществляется
посредством трех цилиндрических пружин 4 малой жесткости, установленных в плите 7.
Регулируемой длины стержни 2 размещены так, что их горизонтальные
проекции перпендикулярны радиусам в точках крепления к днищу. Вертикальная
возмущающая сила, приложенная к якорю 13 вибратора, вызывает винтовые
колебания чаши 12, вследствие чего заготовки, лежащие на поверхности конуса 1U
будут подниматься вверх по винтовой канавке.
Для предотвращения намагничивания заготовок под днищем установлена
алюминиевая прокладка 3. Уменьшение подвижности питателя на пружинах 4
обеспечивается с помощью имеющегося в основании питателя стержня 6 с резиновой
втулкой.
Рис. 11.47. Бункерный вибропитатель для мелких часовых деталей,
использованный в счетно-расфасовочных автоматах. Съемная чаша 9 из оргстекла с
винтовой канавкой внутри по форме загружаемых деталей с коническим днищем 1^
скреплена болтом 11 с основанием 12, подвешенным на трех наклонных
стержнях 5, которые башмаками 3 и Н прикреплены к плите 4 и основанию 12. Маг-
нитопроводом являются стакан 6 с продольными пропилами и сердечник с катуШ'
кой. Якорь 7 крепится к основанию 12. Виброизоляция осуществляется за счет
двойных пружин 14, регулируемых гайкой 13. Горизонтальная устойчивость
создается осью 1 и втулкой 2, прикрепленной к плите 4.
Рис. 11.48. Вибропитатель с регулированием скорости движения заготовок.
Кольцевой формы плита 5 питателя, к которой прикреплены упругие стержни «
связана со шпильками 7, относительно которых может скользить основание
Машины вибрациоииого действич
687
Рис. 11.48
с элекфомагнпюм 3. При вращении
муфгы 4 воздушный зазор между элекгро-
магниюм 3 основания 6 и якорем /,
прикрепленным к днищу чаши, будет
измени 1ься. Чем больше зазор, тем меньше
сила притяжения якоря и скорое 1ь
перемещения заюговок по випговому лотку.
Рис. 11.49. Вибропигатель с косо
расположенными вибраторами. На плите I
с тремя опорами 2 установлены чри
плоские рессоры-подвески 3. На опорах
- смонпфованы кронштейны 9 с электро-
MaiHHiaMH 8, а на подвесках 3 — плига 5
с якорями 4. Днище 6 чаши 7 крепится
1< плите 5. Питание электромагнитов
осущсс1вляется через селеновпй
выпрямитель 10 Амплитуда колебаний
регулируется изменением напряжения, а также
изменением зазора за счет смещения
кронштейна 9 на опоре 2. Р"^* ^^-^^
Рис 1150. Вибропитатель с предбункером для загрузки деталей типа дисков,
Колец и др. (развитие конструкции, показанной на рис. 11.46). Для уменьшения
размеров чаши при большом объеме загружаемых заготовок над чашей укреп-
«^яется на регулируемых винтах предбункер 2. Опрокидыватель 5 служит для
688
Механизмы и машины вибраииоииого и удариого действия
Рис. 11.53
Рис. 11.52
ориентации заготовок, двигающихся по
днищу, например, в вертикальном
положении.
Виброизоляция питателя достигается
за счет пружинных амортизаторов 1
малой жесткости. Излишняя подвижность
амортизированного питателя
ограничивается зазором между осью 4 и втулкой 3
Рис 11.51. Виброподъемник с четырсх-
массовым двухзальным вибратором
К нижней .части трубы с винтовым
логком У, подвспюнпой на пружине 4
(рис. 11.51, а), крепится чегырсхмассоиыи
вибратор 3, приводимый от двигателя 2
Вибратор (рис. 11.51, б) состоит из дв\\
ва;юв I с дебалалсами 2, вращающимися
от двигателя и зубчатой передачи.
Вибратор крепится в основании трубы 5
спиральною желоба виброподъемника.
Рис 11 52. Конструкция вибропо и>-
емника с тангенциальными вибраторам"
К ipy6e / с винтовым наборным желобом крепится кольцо i, опирающееся на
три наклонных упругих стержня 4. Нижние концы стержней закреплены на плите-•
на которой установлены три электромагнитных вибратора, сообщающие тру^^^-
крутильные колебания. Изгибные колебания стержней создают винтовые колеоа*
ния. В плиту 6 запрессована стойка 2, перемещающаяся в защищенных крышко!
подшипниках. Амортизагщя подъемника обеспечивается пружинами 7. Шум ^^
движущихся по лотку заготовок снижается благодаря резине /, выложенной "'
рабочей поверхности лотка.
Рис. 11.53. Виброподъемник с двумя рабочими массами для подьсма загот^н^ ^
игл топливного насоса в автоматической линии. К нижней пли1е 6, несущей чаШУ -
и трубу 2, на упругих, наклонно расположенных стержнях 8, подвешена верх!
Манаты вибрационного действия
689
njiHia 10, с которой через башмаки / соединена верхняя труба 11. Между тру-
5ами 2 и 11, снабженными снаружи винтовым лотком, предусмотрен зазор,
превышающий сумму вертикальных составляющих амплитуд колебаний верхней и
нижней масс. Торцы стыков труб представляют винтовые поверхности и образуют
замок, как показано па рисунке (см. вид X). В нижней трубе размещены
центральный вибратор 4 с якорем 3, укрепленным на нижней и верхней плитах
через ангимаиштные прокладки 9 и 7
Чтобы амплитуды и скорость деталей, передвигающихся по лоткам верхней
и нижней труб, была одинаковой, их массы и моменты инерции подбирают также
одинаковыми.
Рис. 11.54. Вертикальный одномассный виброконвейер с приводом от
двухзального вибратора (ВНИИСтройдормащ). Рабочий орган (рис. 11.54, а)
представляет собой трубу /, по наружной стенке которой приварен по винтовой линии
желоб 2 с углом подъема примерно 8°. Установленный на трубе вибропривод 3
от двухвальных вибраторов с принудительной синхронизацией и встроенными
электродвигателями (рис. 11.54,6) сообщает конвейеру винтовые колебания.
Виброизоляция достигается подвеской конвейера на мягких упругих элементах.
Производительность конвейера 15 м^/ч, высота подъема 6-8 м.
Рис. 11.54
690
Механизмы и машины вибрациоииого и удариого действия
Рис. 11.55. Схема резонансного двухмассного вер1Ика;шно-вингового виорокон.
вейсра. Машина состоит из грузонесущего органа [а) в виде опертой на амортц.
заторы 11 и 12 трубчатой колонны 1 со спирально-винтовой рабочей поверх,
ностью 15 и уравновешивающей рамы 2, поставленной на амортизаторы ю
Колонна / и рама 2 с помощью кронштейнов 9 связаны упругой системой,
состоящей из пружин б, рессор 7 и резиновых буферов 8 Ппикт конвейера (б)
осуществляется парой смонтированных на par ..л^..1ч^«ых механизмов, упругие
шатуны 3 которых через резиновые связи 4 соединены с кронштейнами 5 грузо-
несущего органа. Эксцентриковые валы 16 привода получают движение от
двигателей 17 и ременной передачи 18. Валы 16 соединены посредством колес 2/,
вала 20 и муфт 19, чем достигается синхронность и синфазность вращения
эксцентриковых механизмов (13 — загрузочная точка, 14 — разгрузочная).
В стационарном резонансном режиме каждая точка рабочей поверхности 15
совершает приближенно гармонические колебания по винтовым траекториям.
Виброконвейер типа КВВР 1-14 с диаметром колонны 1,4 м и номинальной высоте
транспортирования 14 м при частоте колебания 65-68 рад/с имеет производи-
тельносгь до 40 м^ч сыпучих материалов.
Рис. 11.55
Рис. 11.56
Рис. 11 56. Схема
вибрационной транспортирующей машины
со следящей жесткостью пнев-
моупругих связей. Oi
эксцентрикового вала 1 через упруШ'^
шагун 2 приводится в движение
лоток 3, опирающийся на
поддерживающие 4 и
секционированные приводные пневмоупр)'
гие связи 5, в которых давленное
воздуха зависит от амплитуд ^
колебаний лотка. Машина отЛ1^
чается высокой стабильность
амплитуды колебаний грУ
Мишины виорацыоллого действыч
691
Рис. 11.57
/ 2
несущего органа при изменении приведенной массы в широком диапазоне за счет
'Автоматического изменения жесткости основных упругих связей при изменении
'Амплитуды Динамический режим работы вибромашины поддерживается без ее
остановки
Рис. 11.57. Виброударный грохот, в котором колебания ситу 1 сообщаются
электромагнитным вибратором 2 {3 — натяжное устройство сита)
Рис. 11.58. Простой вибрационный двухситный грохот. Короб 1 с ситами 2
опирается через рессоры 3 на раму 4 (рис. 11.58, <^). Закрепленные на коробе
Подшипники 6 (рис. 11.58,6), несут рабочий вал 5 (вибратор) с маховиками-
-^ббалансами 7. Вал приводится от двигателя. Ось 00 проходит через центр
Тяжести S системы. Достоинства грохота — простота и малое воздействие вибра-
^^ий на опоры. Недостаток — зависимость амплитуды вибраций от нагрузок
692
Мехаииз мы и машины виоратюлиого и ударноро действия
Рис 11.59 Виброгрохот для отсева коксовой мелочи Посредством канатов j
и пружин 5 наклонный короб 1 с сигами 2 и 3 подвешивается к коксово^х
бункеру 11. Вал 6 грохота, приводимый hikhbom 8 от дви1агеля 9 и ремепиоп
передачи 10, вращается в прикрепленных к коробу 1 подшипниках с экс1;ентри1|.
ными В1улками, свободно сидящими на валу и приводимыми во вращение высц.
пами, входящими в прорезы во втулках, закрепленных на валу 6 маховиков ;
с дебалансами. Пальцевая завеса 12 возле выходною oiBencruo г. -^^^ ^^
обеспечивает равномерный погок кокса.
Рис 11.60. Колосниковые вибро! рохоты:
а - двухступенчатый на пружинах;
б — 1рехсгупенчагый на двухполостных пнсвмобалпопах, защищающих подипщ^
НИКИ и короб rpoxoia or ударов больших кусков при их падении на колосники
Рис. 1161. Схемы виброфанспоргеров-лотков для подачи загоювок из буи
керного вибропигателя в рабочий орган машины.
а ~ одномассный, состоящий из лотка 1 и подвесок 3. Вибратор 2 жестко
укреплен на (|)ундаменге; ко ic
бания осущес1Вляются по \\с
тоду направленной подвески и
не зависят о г направления
возмущающей силы;
6 — одномассный со свобод^
ной подвеской 4, не впияющей
па направление колебаний; ipc»
буемые колебания логка обус-
лов пены возму[цаюп1ей сплои
приложенной под уиюм
бросания,
в — двухмассный- одной
массой служит вибратор 2, другой -
лоток 1; направление колебаний
лотка определяется наклоном
подвесок;
Рис. 11.59
Рис. 11.60
Машины виорацыониого действйч
693
0-) у^л ^^ тж
Li Ub| -\"
в)
Рис. 11.61
'to^ ^
^
")
Оеееев
^
«;
^^^
Рис. 11.62
^ - двухмассный: одной массой служит лоток /, другой — вибратор 2, массы
^Вязаны пружинами 3; пружины-амортизаторы 4 могут иметь малую жесткость,
Фундамент разгружен
Рис. 1162. Конструктивные схемы виброконвейеров:
« — желобчатый, подвесной конструкции; о — трубчатый, подвесной; в — желоб-
^^тый, опорный; г — трубчатый, опорной конструкции.
Рис. 11.63. Схема вибрационного конвейера-смесителя. Состоит из желоба 1
^0 ступенчатым днищем, возбуждаемого электровибраторами 2, смонтированными
694
Механизмы и машины вывраииоииого и ударного действич
Kui
^ w^////.
6)
Рис. 11.65
' VjW////.
на раме 3, опирающейся па
. амортизаторы 4. Пилообраз-
I—UJ- J ные зубья, которыми закан-
I ^ " "" ^^ " I чивается каждая ступень,
способствует интенсивному пе-
ремещиванию частиц
транспортируемого материала.
Рис. 11.64. Схемы
реверсивных виброконвейеров: а и
б — конвейеры опорной
конструкции; в — подвесной.
Рабочий орган / находится пол
воздействием двух вибраторов 2 и 2' с рессорной системой 3 и 5' и
амортизирующими пружинами 4 и 4'. Направление транспортирования изменяется за счет
изменения фазового угла возмущающих сил вибраторов. Если, например, боковой
вибратор совершает ход вправо, а нижний — вверх, то материал перемещается
вправо.
Рис. 11.65. Модификация-трехмассных виброконвейеров: а -имеющий четыре
системы рессор: Xi_3, ^2-3, ^1-2^ ^i\ б - с тремя системами рессор: Кг-з-
Ki_2, Х2; последний проще конструктивно, но сложнее в настройке.
Рис. 11.66. Трубчатый виброконвейер Механобра. На транспортирующей трубе /
крепятся под углом 20° электровибраторы 2 посредством кронштейнов 3.
Вибраторы крепятся к неподвижной раме с помощью пружинных амортизаторов
(5 — корпус вибратора; 6 - рессоры; 7 - двигатель-вибратор, 8 - скоба).
Рис. 11.67. Опорный узел двухмассного резонансного виброконвейера с дву^
грузонесущими органами, шарнирно связанных качалками.
Рис. 11.68. Вибротранспортер с динамическими гасителями колебаний. На осн
вании 7, подвешенном на четырех парах пружин 5 малой жесткости, стянут
болтами 4, установлены башмаки 9, в которых защемлены плоские пружины •
связанные через верхние башмаки / с лотком 3, прикрытым планкой 6. Якорь ^
смонтированный на пружине 70, колеблется от электромагнита \2. Лоток ^
пружинах 2 и груз Ъ на пружине 10 настроены в резонанс с вибратором и
Машины вибрагщоииого действич
Рис. 11.66
Рис. 11.68
696
Механизмы и машины аиораиио/того и ударного действие
Рис. 11.69
жат динамическими гасителями колебаний
основания 7. Груз S и якорь и демпфированы
резиновыми буферами. Настройка транспортера
осуществляется перемещением груза 8 и якоря
]/ на пружинах 10 и изменением длины пружин 2
Рис. 11.69. Конструкция двухмассного
транспортера. Два желоба 1 и 4, служащие
продолжением один другого, подвешены на наклонных
плоских пружинах 5 малой жесткости. Якорь <S'
крепится к одному желобу, а электромапип
7-к другому. Желоба / и 4 связаны ynpyioii
системой, состоящей из пружин 10 и 12,
стального стержня 3 и упоров И и 13. Так как желоба
колеблются в противофазе, то помимо
продольных колебаний они должны иметь возможное!ь
смещаться в вертикальном направлении, а упр>'
гая система 10-12 должна обладать большоп
податливостью в поперечном направлении. Зазор
между якорем 8 и электромагнитом 7, состоящим из сердечника 15 с катушкой п
регулируется винтами 2. Днище лотка покрывается резиной 14, и тогда допустить
транспортировка деталей вверх под углом до \2'\ Для виброизоляции логк^
основание 9 крепится к опоре посредством резиновых амортизаторов б.
Рис. 11.70. Инерционная конусная дробилка. От двигателя 1 через карданны
вал 2 приводится в движение дебаланс 3, заставляющий дробящий конус 4 оок^
тываться по чаше 5, упруго подвешенной к перекрытию 6.
Дробилка дробит руду от крупности 150-200 мм до крупности 3-5 м^^
питает вибромельницу. .i,
Рис. 11.71. Кинематическая схема (два варианта) центробежной вибросориФ^^
сыпучих материалов Ситовой чаше, имеющей форму параболоида, в ^^'^^^',.
подается по трубе исходный материал, сообщается вращение вокруг и вибраи ..
ное с малой амплитудой (до 2,5 мм) и большой частотой (до 1000 коле
Рис. 11.70
Манаты вибрациоилого действия
697
Рис. 11.71
R минуту) ВДОЛЬ вертикальной оси.
Часгица просеиваемого материала,
подверженная действию сил инерции
(цен1робеж1!ых и от гармонических
колебаний): перемещается снизу вверх.
Мелкая фракция проваливается через
сита, а крупная 'как бы выливается
через верхний край сита.
Рис. 11.72. Схема вибрационной
центрифуги. От отдельного привода
зубчатое колесо 2 сообщает вращение
рогору / центрифуги, осуществляющей
одновременно вертикальные колебания
с помощью кривошипа 4 и пружины 3
(резиновый амортизатор). Влажный
уголь, загруженный в ротор, прижи-
"^ается к его стенкам, изготовленным
^^3 перфорированно! о листа. Через
отверстия в листе удаляется вода,
"гогда как обезвоженный уюль
пересыпается через верхнюю кромку
ротора. Движение угля вверх имеет место
том случае, если силы, сдвигающие материальную точку вдоль образующей
*^нуса, будут больще сил, препятствующих такому смещению, т. е. если
P4IC. 11.72
Р cos р + Q sin Р - тд cos р > |i (Q cos р + mgf sin р - Р sin Р),
698
Механизмы и машины вибрационного и ударного действия
^^^z.
Рис. 11.73
здесь Р = »?(OiX - сила инерции рогора; Q-
= mo^^R - цепгробежная сила; R = Rq -\- у sm \] —
переменный радиус; wq - сила гяжести материаль-
НОИ точки; X = г —^^—г"^^" ^i^ ~ амплитуда вы-
] ^
—. «и.
б)
Рис. 11.74
нужденных колебаний; (3
С
собственная частота; С - жесткость
амортизатора 3; /??! — масса ротора с углем; г и o)i — радиус и угловая скорость
кривошипа; со - угловая скорость рогора; \.\. - коэффициент трения покоя.
Рис. 11.73. Схема вибрационной шаровой мельницы с дебалансным приводом.
От двигателя ) с помощью муфты 2 движение сообщается валу 4 вибратора
с дебалансами 6, возбуждающими колебания корпуса 3 мельницы, опирающегося
на амортизагоры 7. Загруженные в корпус мелющие тела 5 и измельчаемый
материал соударяются при колебаниях корпуса, материал дробится и измельчается
Рис. 11.74. Схема движения самопередвигающейся виброплиты. На стальной
плите смонтирован вибратор. Над плитой на упругой подвеске - рама с
двигателем внутреннего сгорания, приводящим вибратор через ременную передачу (на
схеме не показано). Самопередвижение плиты влево достигается наклоном деба-
лансов 1 по схеме а, работа на месте - по схеме б, движение вправо - по схеме в.
Виброплита Д-491 общей массой 5 i с двигателем 65 л с. совершает колебания
с частотой до 1485 в минуту.
Рис. 11.75. Механизм виброударного кагка.
Рис. 11.76. Вибровалец прицепного вибрационного катка с резино-металлическим
амортизатором Дебалансный вал S со шкивом 6 смонтирован в подшипниках -
размещенных в расточках лигых дисков 2, приваренных к пустотелому
барабану 1 Подшипники снаружи закрыты крышками-цапфами 9 (одна глухая) и
смазываю 1ся маслом, заливаемым в карманы 7 через отверстия 3. Валец через
амортизаторы 4 опирае1Ся на раму посредством двух опор, ступицы которых насажены
на наружные обоймы подшипников.
Вибратор катка Д-631 массой 12 т (валец диаметром 1800 х 1800) создает
возмущающую силу 38 тс с частотой 200 колебаний в минуту и амплитудой 3 м^
Рис. 11.77. Вакуум-вибромашина для отсасывания воды и воздуха из ^^^5^,
при вибрировании. Под плитой вибромашины смонтирован решетчатый коро
днище которого обтягивается парусиьюй и полость которого с помощью
гибких
шлангов 2 и 3 и бачка 4 сообщается с вакуум-насосом. В процессе уплотне ^^
на выгруженную порцию бетона устанавливают вакуум-вибромашину и одно у
Машины вибрационного действия
699
Рис. 11.75
,y>SSSSS41
vSSSSSSSW
700
Механизмы и машины вибрационного и ударного действия
менно включают вибратор и насос. Через 20 — 30 с вибратор выключают, а насос
продолжает работать еще 2 мин, после чего машину переносят на новое место
Рис. 11.78. Схема виброплощадки с горизонтальными колебаниями для формовки
плит пакетом (I — форма для плит; 2 — вибратор).
Рис. 11.79. Схема формирования крупных железобетонных изделий с пом' ^^
пакета глубинных вибраторов (i — вибропакет; 2 - форма с арматуро^'^'
Рис. 11.80. Схемы изготовления железобетонных изделий:
а — виброштампованием —
виброштамп и оснащенный вибратором
направленного действия, выдавливает
часть бетона в незаполненное
пространство формы; применяется для
изготовления ребристых плит и других
фигурных изделий;
б — вибропрокатыванием — цепной
поддон 2 с бетоном, находящийся под
воздействием вибробалки i,
перемещается под валком 3;
в — вибропоршневым способом -
вибропоршень 1 с вертикально
направленными колебаниями воздействует
на бетонную массу, заполняющую
форму 2.
Рис. 11.77
Рис. 11.78
Рис. 1Ь79
Рис. 11.80
Машины вибрационного действии
701
^s
щутт
Рис. 11.82
Ни
Рис. 11.83
Рис. 11.81. Ударпо-вибрационная машина для изютовлсния
лигейных форм и стержней. Вибратор / с ударником 6
подвешен под столом 2 с наковальней 7 на пружинах 3,
подобранных на ударный резонанс. На столе укрепляется модель 4
и опока 5 с формовочной смесью При надлежащем подборе
зазора (натяга) между наковальней и ударником, последний
будет наносить периодические удары. Одновременно с
формовкой действием ударов и вибраций можег осуществляться
прессование, если предусмотреть податливую упругую подушку 9.
Пружины 8 служат амортизаторами машины.
Рис 11.82 Схема виброуплотнителя для угля в вагонетках
На верхней площадке, опирающейся на пружины 1,
направленные стержнями 2, устанавливается вагонетка. Вертикальная
соскшляюитая ценгробежных сил инерции грузов 3-4 вибратора
C03/UICI паиравлспные колебания п;юн1адки, следовательно, и
BaioHCiKH
Рис 1183. Вибрацио1ннлй насос с вибровозбудитслсм мая г
^^овою гипа. К колонне труб, погруженных в воду, сверху присоединен вибро-
*ис. 11.84
702
Механизмы и машины вибрационного и ударного действия
возбудитель, сообщающий ей вертикальные колебания. В трубе имеются нескольк
клапанов, пропускающих воду только вверх. Вследствие инерции столб воды на-»
клапаном периодически отрывается от него и освобождающееся простран^
заполняется водой, засасываемой из скважины.
Рис. 11.84. Схема водоподъемной виброустановки ВПУ-1 с электром .'хитным
вибровозбудителем. В погруженной в скважину обсадной трубе ^ ^размещены
трубы 2 и 4, соединенные фланцем 3. Труба 4 несет клапан 5. В верхней части
установки смонтирован электромагнитный вибровозбудитель 1 на 3000 колебаний
в минуту. Производительность установки до 3 м^/ч.
МАШИНЫ ВИБРОУДАРНОГО И УДАРНОГО ДЕЙСТВИЯ
Рис 11.85. Схемы вибромолотов: а — пружинный с одновальным
вибровозбудителем; б — пружинный с двухвальным вибровозбудителем; в — беспружинный;
2 — трансмиссионный беспружинный.
Наиболее эффективны молоты, изготовленные по схеме а и б.
Рис. 11.86. Схема вибромолота с ограничителем. Снабженный бойком 1
вибратор 2 посредством пружин 3 прикреплен к наголовнику 4, жестко связанному
с погружаемым элементом 5. Подбирая жесткость пружин и зазор между бойком
и наголовником, можно установить режим ударов бойка по наголовнику,
передаваемых нагружаемому элементу. Так как на наголовник, кроме того, передаются
периодические реакции пружин, вызывающие вертикальные возмущения, то,
следовательно, вибромолот одновременно осуществляет основное ударное действие
и добавочное - вибрационное.
Для вибромолота с одной степенью свободы при неподвижном ограничителе
скорость в конце удара может быть найдена по формуле
Q
соФ,
здесь Mj - момент эксцентриков, равный произведению их силы тяжести на
эксцентриситет; (О — цикловая частота; q — сила тяжести ударной части вибратора.
Ф — скоростная функция:
Sf±
Ф =
1-к
1+/^
^ €
ч
б)
Рис. 11.85
Машины виороударного и ударного действия
703
где
/ =
1 + /с ctg %ki
s=-J-(xo + .x.);
}v = Рвпбр/^^ "■ отношение частот собственной к возмущающей;
^ = 7 vд/7'вoзм ~ отношение периода ударов к пер1юду
возмущений, к — коэффициент восстановления скорости; л'о — зазор
начальный между бойком и наголовником (со знаком плюс
при натяге и знаком минус при зазоре); x^.^ - статический
прогиб пружин от массы вибратора.
При заданных S w Х скорость вибромолота может иметь
два значения. Условия существования периодических ударов
зависят от параметров 5, X, А, т и выбираются по
специальным графикам. Для вибромолотов можно рекомендовать
следующие параметры:
Рис. 11.86
X
1
2
3
4
'X
0,4 -0,6
0,25 -0,3
0,19 -0,22
0,125-0,17
5
> -1, < -1
< -1
< -1
< -1
Ф
4
2,6
2,5
2,5
В действительности ограничитель подвижен, что должно сказаться на скорости
удара.
Если тяжелый элемент погружается легким вибромолотом и собственная
частота р2 вибратора мала по сравнению с частотой Pi погружаемого элемента,
т. е.
Р2^Рь
Ф
1 + /с 1 ctg пХх ^
1 -к 1 + ц X '
здесь
Р? =
QxlQ
Qilc) Qi
^1 и С2 - жесткости грунта и пружин, соединяющих вибратор с наголовником;
^1 и О, - масса погружаемого элемента и подвижной части вибратора.
Для другого предельного случая погружения в весьма слабые грунты, когда
р2 » Pi, подвижность ограничителя можно во внимание не принимать.
Рис 11.87. Вибромолот С. Я. Цаплина для погружения металлических шпунтов
^ направленным возмущением при двух несвязанных самосинхронизирующихся
двигателях. Масса ударной части до 700 кг, глубина возможного погружения до
^4 м в песчаные грунты и до 7 м в глинистые.
Рис 11.88. Вибромолот В. Н. Туликова с направленным возмущением при
^Дном электродвигателе и двух эксцентриках по обе стороны ротора. Вибромолот
704
Мехатпмы и машины внбрш^нотюго и ударного дсйстсич
Рис. 11.87
Рис, 11.89
при тех же параметрах и эффективности, что и молот, изображенный на рис. 11.87,
имеет почти вдвое мерн^шую массу.
Рис. 11.89. Схема вибромолота с ударной массой. Здесь удар наносится не
вибратором, а специальной массой 1, помещенной между вибратором 2 и
наголовником 3, и связанной с последним пружинами 4, Если принять ограничитель
неподвижным, то получим ударную систему с двумя степенями свободы.
Рис. 11.90. Виброшпалоподбойник, применяемый для уплотнения грунта под
шпалами. К корпусу электродвигателя I упруго подвещен эксцентриковый
вибратор 2, к корпусу которого крепится державка 3 для инструмента, выполняющего
подбивку.
Рис. 11.91. Кинематическая схема вибромашины для уплотнения грунта. От
двигателя приводятся во вращение колеса 5 с дебалансами 6 и далее через
колеса 3, свободно сидящие на осях 4, колеса 1 с дебалансами 2.
При вращении маховичком винта 8 гайка увлекает траверсу 7, отчего
вращающиеся в противоположном направлении колеса 3 — 3 вызывают относительное
смещение колес 5 и i со своими дебалансами и изменение величины и
направления центробежной силы дебалансов.
Рис. 11.92. Электромеханический молоток: а — с упругим стержнем; б — с
пружиной. В корпусе 1 размещен приводной вал 2 с кулачками 3, с помощью
которых перемещается боек 6 через ролики 4 и ось 5. Деформируемые упругий стержень 7
или пружина накапливают потенциальную энергию. В верхней точке подъема
происходит срыв бойка и действием сил упругости стержня наносится удар бойка о
по инструменту 8. Срок службы упругого стержня примерно вдвое больше
винтовых пружин. Молоток отличается сравнительно высоким к. п. д. и малой массой.
Рис. 11.93. Схемы пружинных ударных механизмов:
а — с кулачковым взводом бойка; при вращении кулачка 3 боек 4
перемещается в корпусе и сжимая пружину 2. В верхнем положении боек 4 отрывается
от кулачка и под действием пружины ударяет по инструменту 5. Отличаете
простотой конструкции, однако быстрое разрушение кулачкового механизма
вибрация корпуса ограничивают применение;
Машины виброударного и ударного действия
705
Рис. 11.90
^ш^
<^/
Рис. 11.91
Рис. 11.92
23
Рис. 11.93
Кожевников и
др.
706
Механизмы и машины вибрационного и ударного действия
б — с захватывающим устройством бойка; при движении штока 6 вверх боек 4
связанный с ним защелкой 7, также перемещается вверх, сжимая рабочую пру!
жину до тех пор, пока захват не коснется выступа на стволе (на рисуцке не
показан). В результате шток расцепляется с бойком, который под действием пружины
наносит удар по инструменту 5. Боек стержнем 6 захватывается в нижнем
положении;
в — с жестким подхватом бойка; при работе на холостом ходу боек
неподвижен, переход на рабочий режим производится при поджатии корпуса к
инструменту. В крайнем нижнем положении ползун клещами 8 захватывает боек 4 и
поднимаясь, сжимает пружину. В конце хода под действием боковых упоров захват
освобождает боек и он устремляется вниз, ударяя по инструменту 5 до подхода
ползуна к крайнему положению. Последовательная работа двух пружин 2
уменьшает неравномерность загрузки двигателя, увеличивая к. п. д.
Рис. 11.94. Схема электромеханического пружинного молотка с механизмом
бойка переменной структуры. Электродвигатель через кривошип 7 и шатун 6
приводит в движение серьгу 5 в холостом режиме молотка. Для перехода на рабочий
режим следует корпус 8 через упругую рукоятку 9 переместить к инструменту ],
при этом серьга 5 упрется в выступ А па ползуне 4, придет в движение боек 3,
сжимающий рабочую пружину 2. При повороте кривошипа па 180° контакт
серьги 5 с выступом А нарушается, и боек под действием силы пружины
устремляется вперед, ударяя по инструменту. Дальнейшее вращение кривошипа приводит
механизм в исходное положение. Момент сброса зависит от смещения упора А
Рис. 11.94
Машины ви6ро\дар11ого и ударного действия
101
/
Рис. 11.95
относптельпо оси бойка и трения в шарнирах.
MoJoioK использован в универсальной машине для
строи гельно-монтажиых работ и при массе 5,4 кг
и мощности лвига1еля 270 Вт, обеспечивает энергию
удара 0,9 кгс-м при частоте 1050 ударов в минуту.
Рис 11.95. Механизм ударной высадки с
упругим звеном конструкции И. Б. Свирского. Боек 4
с пуансонодержателем 7 (рис. 11.95, а) получает
движение за счет энер1ии сжатой пружины 3 и
кривошипно-Ползунною механизма 14, 13, 1. При
движении ползуна 4 слева направо его ведет выступ
на игюке 2 кривошипно-ползунного механизма.
При обратном ходе роликами 5 рычагов 8, шар-
нирно закрепленных на блоке упоров 9, ползун 4
останавливается, в результате чего происходит
зарядка пружины 3, Закрепленный на ползуне клин
i2. наезжая на поджатые пружинами 10 ролики П,
освобождает боек 4, который, разгоняясь пружиной,
производит высадку.
Диаграммы перемещений 5„ и S^ ползуна и
бойка показаны на рис. 11.95, б. Достоинства
механизма — разгрузка коленчатого вала 14 от
усилий высадки, возможность регулирования энергии
Удара, а также подстройки с помощью гайки .6
и клина 12 движения механизма высадки к
циклограмме автомата.
Идея ударной (скоростной) высадки принадлежит
С. Н Кожевникову. P"C. 11.96
Рис. 11.96. Схема устройства для виброизоляции рукоятки механизированного
инструмента ударного действия. К рукояткам рамки 2, опирающейся через
резиновую прокладку 5 на буртик 3 инструмента 4, прикладывается усилие Рр
оператора. Корпус 1 инструмента, перемещающийся внутри рамки 2, отжимается
амортизирующей пружиной 6, и под действием реактивного импульса поднимается
^ьерх, сжимая пружину 6. Далее под действием пружины 6 корпус опускается
^^ ударяет о буртик 3 инструмента 4. Если жесткость пружины 6 подобрать так,
'^тобы Рр > Р^р + F-rp, то рамка 2 за время удара бойка остается неподвижной.
777777Ш7777>
23*
708
Механизмы и машины вибрационного и ударного действия
'Гак как сумма усилий Fp — Fnp + F^p, действующих на рамку, постоянно колеблется
то последняя совершает некоторые колебания.
Схема была испытана на костыльном молотке ЭПК-3 с энергией удара 2кгс.м
при частоте 24 Гц. Вибрация рукоятки по сравнению с неамортизированной сщь
зилась в 4 раза.
Рис. 11.97. Схема упругой рукоятки ручного
ударного инструмента. Упругая система (рис. 11.97 а)
состоит из пружины сжатия 1, боковых
пластинчатых пружин 2 и двухзвенника 3; 4,
уравновешиваемых усилием Q, зависимость которого от
перемещения X точки А дана на графике (рис. 11.97, б)
в безразмерном виде для начального угла «о = 25'
(Fq — предварительный натяг пружины i; с^ _
жесткость пружины). Схема позволяет обеспечить
заданное усилие нажатия g, в том числе и
Q = const при минимальной жесткости.
Рис. 11.98. Конструкции малогабаритных упругих
рукояток с постоянным усилием нажатия для
виброизоляции ручных машин ударного действия.
а — рессорная; в корпусе 1, оснащенном
резиновыми буферами 7, на оси 2 посажен рычаг 3,
к которому на осях 4 подвешены две рессоры 6,
упирающиеся в корпус 8 молотка вместе с
предварительно затянутыми пружинами 5. При
надлежащем выборе параметров можно получить
нулевую жесткость, т. е. постоянное усилие нажатия
рукоятки, не зависящее от относительного
перемещения корпуса молотка:
б — клиновая, перемещение корпуса 8 молотка
относительно рукоя1Ки 7 ограничивается клином б,
б)
Q-2Fo
Ив
0,7
0.S
0.5
/ 0^
f иг
0J
i 1 1
\
,....1 5—1—i-*
'll^-qj'tl2'H/ о 0,1 0,2 0,iQ,(t f
Рис. 11.97
•9-7
и
ь
И 1^
У J ^
С "
/ Z
3
'^i^' л I
у ^ ^ ^ ^ > j^
77-n [Tr и
1 .«1*--п!1г^И
^;
Рис. 11.98
Машины виброудариого ii ударного действич
709
контактирующим с роликами 5 каретки 4, перемещающейся в корпусе 3 с пру-
^'ннами 2, предварительный натяг которых регулируется гайками 1.
Подбирая форму клина, можно получить любой наклон \пругой характеристики
рукоятки.
Рис. 11.99. Схема кулачкового ударного узла машины вращательно-ударного
бурения. При вращении кулачковой шайбы 1 ролики 5, накатываясь на торцовый
кулачок 6, взводят пружину 4, затем срываются с кулачков, в результате чего
прз'жина восстанавливается, и боек 2, скользя в направляющих корпуса 3, наносит
удар по инструменту 7.
Привод кулачковой шайбы осуществляется через дифференциальный механизм,
связывающий ударный узел с механизмами подачи и поворота бура.
Рис. 11.100. Способы получения возвратью-поступательпого движения бойка
в электромагнитных молотках:
а — пружинный однокатушечный; перемещение 5 бойка в одну сторону
осуществляется электромагнитными силами катушки X, а в другую силами упругости
пружин;
б - двухкатушечные; ра- 7 6 5
бочий ход совершается под
дейс гвием электромагнитных
сил катушки К^ и сил
упругости пружины, а холостой
ход - электромагнитных сил
катушки К2\
6 — ^юлoтки со
свободным выбегом бойка; пере-
мещенг1е бойка в сторону
пружины до положения
магнитного равновесия идет
действием электромагнитньгх
сил катушки К, а в сторону
/
2 3
Рис. П.99
инстр) мента этими же силами вместе с силами упр\госги пр>жины.
Удар по пружине
1*ис. 11.100
710
Механизмы и машины виораииоииого и удариого деиствич
Рис. 11.101
На диаграммах S{t) и i(t), f^i и г„2 означает время отключения катушки при
холостом и рабочем ходах соответственно.
Рис. 11.101. Электромагнитный молоток Беви с одной катушкой, работающей
без переключателей и выпрямителей. При протекании импульса тока
электромагнитные силы катушки 1, преодолевая упругие силы предварительно затянутой
гайкой S пружины 4, втягивают боек 2. При уменьшении тока силы упругости
пружины, преодолевая электромагнитные, толкают боек, ударяющий по инструменту
За один период переменного тока боек сделает два удара или 6000 ударов
в минуту.
Молоток отличается низким к. п. д. и малой энергией удара.
^. Рис. 11.102. Резонансный молоток А. И. Москвитина. Под действием
магнитного потока катушки 3 (магнитопровод 5) движется расслоенный текстолитовыми
пластинами боек 6 и наносит удары по инструменту 8. Пружина 1 ограничивает
обратный ход бойка. Кожух молотка состоит из колпаков 2 и 7, стянутых
болтами 4. При совпадении частоты колебаний бойка около среднего положения
магнитного равновесия с частотой магнитного потока катушки, проходящего
поперек бойка, наступает резонансный режим работы.
Рис. 11.103. Двухкатушечный молоток МС-20 хо свободным выбегом бойка,
разделенным диамагнитны^ии звеньями. Инструмент 1 крепится в патроне 2, между
буртом которого и корпусом размещены поворотные шайбы 3. Боек 7,
разделенный в середине звеном из нержавеющей стали, помещен в направляющей тр}бе <Ь
из такой же стали и перемещается в магнитном поле, создаваемом двумя
катушками 5 с полюсами 4, 6 и ярмом 9. В задней части корпуса размещено буферно
устройство.
Рис. 11.104. Принщшиальные схемы электропневматических машин ударног
действия:
а — пневматический молот; поршень 4, получающий движение от
электродвигателя через кривошипно-ползунный механизм 1, 2, 4, сжимает и разряжает в^^^-
в пространстве 5, вследствие чего боек 3 то всасывается вверх, то отжимае
вниз, нанося удар по заготовке 6. Для компенсации утечек и регулировки возД, •
прступает из атмосферы через компенсирующее отверстие 7;
Машины виброударного и ударного действия
711
Выключено
Включено 1/23
If 5 6
Рис. 11.104
712
Механизмы и машины вибратюнного и ударного действия
Рис. 11.105
Рис. 11.106
б — ручной молоток, работающий по тому же принципу, что молот, показанный
на схеме а;
в — пневматический молот с двусторонним действием воздушной связи;
г — ручной молоток, работающий по тому же принципу, что молот,
показанный на схеме в. На рис. 11.104,6, виг позиции те же, что и на рис. 11.104, я.
У тяжелых стационарных пневмомолотов к. п. д. выше, чем у ручных пневмо-
молотков, но у последних большее число ударов в минуту и выше показатель к
с
использования активной массы: к — —""'"""^ .
''^'моаотка
Рис. 11.105. Схемы механизмов для испытаний деталей на ударные сотрясения.
Посредством приводимого от двигателя кулачка (рис. 11.105, ci) коромысло с
испытуемым изделием приподнимается и падает под действием силы тяжести на
прокладку фиксированной жесткости, которая регулируется вместе с высотой падения.
Схема аналогичного механизма, но с пружиной, показана на рис. 11.105,6.
Механизм при большой частоте вращения кулачка ограничивает подбрасывание
коромысла вверх, чего не обеспечивает механизм, изображенный на схеме на рис. 11.105,^.
Рис. 11.106. Схема машины для создания хаотических ударных сотрясений.
Рабочая платформа с объектом непрерывно возбуждается от двух кулачков,
выполненных в виде дисков с большим числом граней, различных по длине. Привод
с -кулачками монтируется на балансной плите, подвешенной на смежных
амортизаторах, определяющих характер сотрясений.
Рис. 11.107. Эксцентриковая машина МУУ-1 для испытаний на ударную
усталость. При вращении эксцентрика 3 корпус 2, несущий боек 7, поднимается по
своим направляющим, сжимая пружины 7, зуб защелки входит в паз в корпусе ^^
фиксируя его (схема а). При дальнейшем повороте .эксцентрика последний нажимае^
на один из штифтов 4 регулировочной пластины 5, палец защелки S выходи^
из паза (схема б), и корпус 2 устремляется вниз, ударяя по образцу 6 (схема б)
Под действием упругих сил образца и пружин 1 корпус 2 подбрасывается вверу
. Эксцентрик, повернувшись на некоторый угол, подхватывает корпус 2 с боико>.,
поднимает его, и далее цикл повторяется. ^
Масса ударной части машины - 6 кг, число ударов в минуту 500-^50,
энергия удара 0 — 2 кгс • м.
Рис. 11.108. Пневматическое устройство для уравновешивания сил инерции клех
стана холодной прокатки труб. С клетью 2, приводимой в движение шатунами '
связаны штоки 9 и 16 поршней 10 и 73, перемещающихся в цилиндрах И и
Машины виброударпого и ударного действия
713
Рис. 11.108
иолости которых связаны трубопроводами 12 и 15. Возд\х в цилиндры поступает
^13 магистрали через редукционный клапан 6 и клапанное зстройство 4, >прав-
ляемое копиром 5. Так как каждому числу ходов клети соответствует опреде-
•^енная сила инерции клети, для уравновешивания которой требуется
определенное давление воздуха в цилиндрах, то в устройстве применен редукционный
клапан 6, который кулачком 8 и толкателем 7 соединен с валом контроллера 5
двигателя главного привода. Таким образом, на клеть с одной стороны будет
действовать сила инерции массы клети, а с др}гой — равная силе инерции и обратно
Н"-Правленная сила давления воздуха в щлппдрах уравновешивающего устройства.
714
Механизмы и машины виораииоиного и ударного действия
СРЕДСТВА ДЛЯ УСТРАНЕНИЯ ОПАСНЫХ КОЛЕБАНИЙ
МЕХАНИЗМОВ И МАШИН
Рис. 11.109. Маятниковый антивибратор с бифилярным подвесом. В прорезях
маятниковой массы 2, куда входит щека 4, имеются отверстия для валиков /
с буртиками, диаметр которых несколью меньше диаметра отверстий в щеке и
маятнике. Для предотвращения выхода валиков из отверстий предусмотрен
ограничитель 3. Наиболее эффективное воздействие антивибратор оказывает на
колебания с частотами, узлы собственных форм которых наиболее удалены от места
его установки
Рис. 11 НО. Маятниковый вибратор с бифилярным подвесом. В выбранном
сечении коленчатого вала заклинивается ступица 5 с двумя дисками 2, между
KOTopbivui размещаются парные маятниковые массы /. Диски снабжены
отверстиями, куда вводятся валики 3, осевое смещение которых ограничивается
крышками 4.
Рис. 11.111. Антивибраторы изгпбных колебаний коленчатых валов: а — бифи-
лярный; 6 — роликовый; в — шаровой.
Для смещения резонансных частот вращения коленчатого вала
предусматривается резонансная настройка антивибратора
о со- , 5
к
где со — частота возб>ждения; О - постоянная угловая скорость системы; к = 1
для схемы а; к = ^/з для схемы б; к = 7? Д^я схемы е.
Рис. 11.112. Демпфер сухого трения. На ступице J, жестко посаженной на
валу, совершающем крутильные колебания, свободно вращаются две маховые
массы 2, 3. Поверхности трения ступицы 1 прижаты пружинами 4 к массам 2, 3.
При наличии крутильных колебаний движение маховичков обусловливается
соотношением их момента сил инерции {M^^) и максимальным моментом трен;:я
в демпфере (My). Если М„ < Mf, маховички вращаются вместе со ступицей, если
Рис. 11.109
Рис. 11.110
Средства д.1я устранения опасных колебаний механизмов и машин 715
Ш
т
_1_
1
f—'
^Г"^
Шт^
Ряс. 11.111
б?
Рис. 11.112
Рис. 11.113
^и ^ Mf, то маховички проскальзывают. Изменяя затяжку, можно получить
наибольшее рассеивание энергии. Недостаток — расстройка демпфера вследствие износа
^поверхности и изменения коэффициента трения.
Рис. 11.113. Демпферы сухого трения автомобильного двигателя. Маховички 2,
распираемые пружиной 3 (рис. 11.113, а), насажены на ступицу шкива 1 привода
вентилятора и ограничены от сползания крышкой 4. В схеме по рис. 11.113, б
Предусмотрена регулировка силы прижатия маховиков в процессе эксплуатации.
Демпфер устанавливается в местах наибольших амплитуд.
716
Механизмы и машины вибрационного и ударного действия
Рис. 11.114
Рис. 11.115
Рис. 11.114. Поглотители крутильных колебаний. В пружинном поглотителе
(рис. 11.114, а) }пр}го подвешенный маховичок 1 свободно вращается' на
хвостовике вала 2. Поглотитель может быть настроен только па одну фиксированную
частоту возмущения. В маятниковом поглотителе (рис. 11.114, б) центробежное
силовое поле подобно гравитационному для обычного маятника. Если в формуле
для определения частоты р ■■
заменить напряжение g поля тяжести на
напряжение поля центробежных сил гсо^, то частота р = со 1 / — станет
пропорциональной угловой скорости и, следовательно, поглотитель будет самонастраиваться на
любую частот) возмущения.
Рис. 11.115. Поглотитель колебаний — «жидкий маховик». Втулка 1 насаживается
на вал, совершающий крутильные колебания. Маховик 2 насажен свободно нл
втулку 3. В зазор между кожухом 4, приваренным к втулке 1, и маховиком 2
заливается жидкость, мало изменяющая вязкость от температуры (жидкий
препарат кремния). Относительное движение маховика вызывает рассеивание энергии
колебаний. Вязкое трение обеспечивается нормированной величиной зазора между
кожухом и маховиком, количеством и консистенцией рабочей жидкости. Наилучшее
затухание имеет место, когда
С = Jmax«>-
При этих \слоБиях в расчете на колебание системы с демпфером он заменяется
эквиваленпюй \iaccoii
= Лт +
♦^тах
где Jut ~ NrcNreHT инерции втулки с кожухом; С — вязкость жидкости.
прибор следует устанавливать в такой точке вала, где амплитуда крутильны
колебаний велика.
Рис. 11.116. Демпфер вязкого трения. Камеры, разделяющие область, заполнен
ную вязкой жидкостью, попарно соединяются трубками 1 с дросселями 2. Всле^^
ствие наличия \плстнеппй между лопатками и телами маховичка и ступннь-,
Средства для устранения опасных колебаний механиз\'ов и машин
111
перетекание жидкости происходит по трубкам 1. Настройкой дросселей 2
регулируется перетекание жидкости, а следовательно, и гидродинамическое сопротивле-
liiic. Недостаток конструкции — расстройка демпфера при изменении температуры.
На рис. 11.117. Динамический гаситель колебаний с жидкостным
демпфированием. В заполненный маслом силумииовый корпус 1, закрепленный на шпинделе 7
стайка, вставлен посаженный на подшипнике стальной маховик 5, соединенный
с корпусом посредством плоских пружин 3, которые одним концом защемлены
в корпусе, а другим вставлены между штифтами 4 на маховике. Демпфирование
определяется вязкостью масла и зазором между маховиком и корпусом,
регулируемым винтами 2 и 6. Испытания гасителя на вертикально-фрезерном станке
в условиях резонанса показали снижение амплитуды в 2 — 3 раза.
Рис. 11.118. Поглотитель колебаний в машинке для стрижки волос. С помощью
электромагнита 1, питающегося от сети
(50 Гц), и подпружиненного коромысла 2,
нож 3 совершает колебания с частотой
100 Гц. Чтобы центр тяжести свободного
в пространстве корпуса и главные оси
инерции оставались неподвижными,
корпус должен совершать колебания (в про-
тивофазе), ^ito создает неприятное
ощущение 71ЛЯ рук парикмахера
Динамический поглотитель 4,
настроенный на 100 Гц, частично устраняет
колебания кожуха в месте установки
массы поглотителя. Полное устранение
колебаний требует установки двух
поглотителей так, чтобы прямая, соединяющая
центры тяжести их масс, была
перпендикулярна движению лезвия, а массы совер- ^ ^ ^
Рис. 11.116
Рис. 11.117
718
Механизмы и машины вибрационного и ударного действия
Рис. 11.118
Рис. 11.119
]
/ г
W' ш-~-;~М
Рис. 11.120
Рис. 11.121
Рис. 11.122
шали колебания, вызывающие силы инерции, противодействующие силе и моменту
сил инерции колеблющейся системы коромысло — нож.
Рис. 11.119. Ударный демпфер (успокоитель) открытого типа. Кольцо 7,
посаженное с зазором на болт 2, ударяется при колебаниях о корпус и поглощает
часть энергии колебаний. Размеры кольца и величина зазора выбираются
опытным путем.
Рис. 11.120. Ударный демпфер закрытого типа, в котором шарик или цилиндр
размещаются в специальном гнезде.
Рис. 11.121. Ударный шариковый демпфер. Шарик 1 помещен в специальной
обойме 2, прикрепляемой к колеблющейся массе 3.
Рис. 11.122. Вместо шарика в демпфере (см. рис. 11.121) активным элементом
служит ролик 7, помещенный с зазором в гнездо 2 колеблющегося объекта,
которое закрыто пробкой 3.
Рис. 11.123. Жидкостный поршневой демпфер свободных колебаний. При
движении поршня 1 в цилиндре 2 жидкость перетекает через зазор между стенками
и поршнем из одной части цилиндра в другую. Сопротивление перетеканию
способствует гашению колебаний. Степень демпфирования
D =
1,2лЯ^Л/п
где R - радиус поршня, т и р - масса и собственная частота подвижно!
системы; 5 - ширина зазора; /„ — высота поршня; Г[ — коэффициент вязкости ра
чей жидкости.
Средства d.vi устранения опасных кояеваиий механизмов и машин 719
Рис. 11.124
Рис. 11.123
У//////?/А
Рис. 11.125
Рис. 11.126
. Рис. 11.124. Демпфер (см. рис. 11.123) с регулировкой коэффициента успокоения
посредством капилляра 3, проходное сечение которого регулир>ется винтом 4
(i — поршень; 2 — цилиндр). Степень демпфирования
D
.2i?4
irR
2шР
пШ'
6ri/n ^Л/к
здесь г и /к - радиус и длина капилляра.
Рис. 11.125. Воздушный демпфер с мембраной 2. Прилив \ служит для
присоединения демпфера к чувствительному элементу. Воздушный демпфер лишен
недостатков жидкостных, так как воздушное демпфирование почти не зависит от
Колебаний температуры окружающей среды.
Рис. 11.126. Воздушный демпфер с сильфоном. Масса т чувствительного
элемента с капилляром радиуса г расположена на сильфоне, имеющем жесткость
^2 и поддерживается рессорой с жесткостью к^.
Рис. 11.127. Воздушный крыльчатый демпфер. Крыло h жестко связанное
с подвижной частью прибора, свободно перемещается в закрытой камере 2.
Вследствие малости зазоров между крылом н стенками камеры при движении
^^рыла создается перепад давлений на обеих его сторонах, и возникает сила
сопротивления. Строго линейное успокоение затруднительно. По эмпирической
720
Механизмы ii машины вивраииоииого и ударного действия
Рис. 11.127
Рис. 11.128
зависимости степень демпфирования
2 jp
D
0,248
+ 0,169
где а и Ь — длина и ширина крыла, см; 2? — расстояние от оси до центра крыла;
J — момент инерции подвижной системы; 5 — зазор, равный 0,3 — 1 мм.
Рис. 11.128. Электромагнитный секторный демпфер, работа которого основана
на действии зихревых токов, тормозящих движение металлического сектора 1,
связанного с колеблющейся подвижной системой прибора в поле постоянного
магнита 2.
При малой массе создаются значительные демпфирующие силы, строго
пропорциональные первой степени скорости подвижной системы.
РАЗДЕЛ 12
РЕЗИНОВЫЕ ДЕТАЛИ МАШИН
И РЕЗИНОМЕТАЛЛИЧЕСКИЕ СОЕДИНЕНИЯ
За последние годы получили широкое распространение резиновые детали
машин и различного рода резинометаллические соединения в виде разнообразных
конструкций амортизаторов, шарниров и подвесок, упругих муфт, демпферов и т. д.
Используемая в 20-х годах резина в виде прокладок во многих случаях не
служила эффективной защитой машин от высокочастотных колебаний и поэтому
были созданы резинометаллические соединения, обладающие вследствие высокого
коэффициента внутреннего трения резины большой демпфирующей способностью
при любых амплитудах колебаний.
Применение резинометаллических изделий становится особенно необходимым
в современных облегченных конструкциях, в которых вследствие замены тяжелых
чугунных деталей деталями из легких сплавов и высокопрочных легированных
сталей снижается демпфирующая способность и повышается чувствительность
машины к высокочастотным вибрациям.
Резинометаллические изделия используются в качестве гасителей
высокочастотных вибраций и звукоизоляторов, упругих несущих элементов, заменяющих или
дополняющих* пружины, в качестве амортизаторов, буферов-ограничителей и
поглощающих аппаратов, снижающих динамические нагрузки в звеньях
механизмов, упругих универсальных шарниров, в качестве несмазываемых элементов
шарнирных сочленений с ограниченными лршейными или угловыми перемещениями,
лишенными трения и абразивного износа, в качестве элементов, компенсирующих
неточность сборки и ошибки размерных цепей.
Нередко резинометаллические соединения выполняют ряд функций
одновременно.
Существенное значение при создании резинометаллических соединений имеет
способ крепления резины к металлам. Применяют преимущественно горячие
способы крепления резины к металлу. При этом имеется в виду крепление
в процессе вулканизации соприкасающейся с металлом резиновой смеси. Известны
способы крепления резины к металлу с помощью латуни под большим давлением;
посредством эбонита, который крепится к металлу лy^пцe резины, а резина
к эбониту лучше, чем к металлам; посредством клея на каучуковой основе и др.
При расчете деталей из резины и резинометаллических соединений надо иметь
в виду их специфические особенности. Отметим некоторые из них.
1. Резинометаллические амортизаторы работают при относительных
деформациях сжатия до 50%, и поэтому использование закона Гука дает результат первого
приближения.
2. Упругость резинового амортизатора существенно зависит от формы
резинового элемента и конструкции металлических деталей, его крепления к арматуре
п возможности свободного формоизменения резины. Известны случаи, когда
изменение толщины резинового элемента вдвое изменяло его податливость в четыре
раза вследствие влияния толщины элемента на условия выпучивания свободных
боковых поверхностей резины.
3. Нелинейная жесткость резинового амортизатора зависит от скоростей
деформации при колебаниях и должна рассчитываться не по статическому модулю
24 Кожевников и др.
722
Резиновые детали машин и резинометаллические соединения
упругости Ест? ^ по динаштческому Един- Отношение Един/-Ест изменяется в зави
симосги от твердости резины, частоты и амплитуды колебаний.
4 Амортизированный посредством резинометаллических амортизаторов объект
в ограниченной области перемещений обладает шестью степенями свободы, поэтому
расчет амортизатора сводится прежде всего к построению характеристик длч
каждого из шести возможных видов деформации и их возможных сочетаний
отдельно для амортизатора — шайбы, втулки, конуса п т. д.
5. Долговечность резинометаллического соединения существенно зависит от
формы поверхности крепления резины к металлу и формы резинового элемента
которые должны выбираться в зависимости от вида деформации.
В настоящее время резинометаллические соединения широко используются
в авиа- и автостроении, а также в машинах горной и металлургической
промышленности и сельскохозяйственных машинах, работающих при больших
динамических нагрузках и в запыленной атмосфере. Они могут принести существенную
пользу вследствие снижения абразивного износа, уменьшения шума и снижения
динамических нагрузок. В металлургической и горной промышленности
используется множество машин и механизмов вибрационного действия, в которьсс нередки
поломки пружин, рессор и других упругих элементов. Смесительные барабаны,
установленные в верхних этажах агломерационных фабрик, служат источниками
вибраций, разрушающих железобетонные перекрытия, нуждающиеся в защите.
На многих металлургических и метизных заводах имеет место сильный шум
вследствие ударов заготовок о рольганги (или при работе хоЛодовысадочных и,
особенно, гвоздильных автоматов), из-за вредного физиологического воздействия
которого работа оператора становится чрезвычайно тяжелой.
Борьба с шумом, абразивным износом деталей и динамическими перегрузками
для металлургических заводов представляют особую' проблему и здесь могут
принести большую пользу резинометаллические соединения.
Несомненно, что широкое применение деталей из резины и
резинометаллических изделий во всех отраслях промышленности является одним из путей
технического прогресса.
Рис. 12 1.Конструкции резинометаллических опор (правильные). Для
предупреждения возникновения в резине очагов перенапряжения металлическая арматура на
поверхности крепления резины не должна иметь выходов отверстий и канавок,
выступов, острых углов. Резина под нагрузкой не должна выходить за пределы
кромок опорных пластин.
Рис. 12.2. Примеры неудачно сконструированных резинометаллических деталей,
работающих на сжатие. Арматура, соприкасающаяся с резиной, имеет острые
углы и выступы, а также прямоугольные отверстия, которые служат источником
образования зон концентрации напряжений.
Рис. 12.3. Форма поверхностей сопряжения металлической детали и резины,
работающих на растяжение, определяет характер распределения напряжении
в резине: а — нерациональная и б — рациональцая форма сопряжения поверхностей.
Рис. 12.1
Резиновые детали машин и резинометаллические соединения
723
Рис. 12.2
Как показывают графики, снижение
напряжения в резине достигается надлежащим
сочетанием формы сопряжения и внешнего
очертания резины
Рис. 12.4. Резиномегаллические
амортизаторы сжатия а — цилиндрический сплошной;
о-в форме усеченного конуса; в — с
отверстием; 2 — сборный.
Наличие осевого отверстия повышает
эластичность амортизатора, улучшает тепло-
отвод Сборный амортизатор отличается
повышенной продольной устойчивостью, а его
жесткость легко изменяется при
присоединении новых элементов.
Рис. 12.5. Резиновые a^юpтизaтopы с от-
верс1иякп1 нрялюугольной и овальной формы
в ненагрз^женном и нагруженном состоянии.
Овальная форма предпочтительней.
Рнс. 123
P^^J^^^
^^^i^^^^i^^
Щ^Щ
h)
vV]^
^v!^w>^y^
1 lVx>
iS^>^»J>^a>^
=J
^и^^^^^Ш
^^^^Lj«
^^^s
Рис. 12.4
24*
Рис. 12.5
724 Резиновые детали машин и резино.металлические соединения
Рис. 12.6
Рис. 12.7
Рис. 12.6. Амортизатор для гашения эпизодических ударных нагрузок,
прямоугольного сечения с конусообразной свободной поверхностью и камерой,
заполняемой асфальтом. Энергия удара гасится в большой мере за счет перемещения
частиц наполнителя. Под нагрузкой амортизатор принимает вид, показанный
на рисунке.
Рис. 12.7. Полый амортизатор, применяющийся для установки оборудования
с наличием вертикальной и горизонтальной вибраций. Амортизатор имеег
поперечную жесткость значительно меньшую, чем продольную и применяется для
упругих опор при бесфундаментной установке.
Рис. 12.8. Полые амортизаторы, применяющиеся для установки оборудования
с ясно выраженной вертикальной вибрацией. Амортизаторы, показанные н^^
рис. 12.8 а VL 6, отличаются конфигурацией резинового элемента снаружи и вну1ри.
При установке металлических пластин 2 между резиновыми конусами 1 (рис. 12.8, а)
жесгкосгь амортизатора может быть увеличена. Эти амортизаторы оыичаюгся
слабо выраженной нелинейной характеристикой жесткости.
Рис. 12.9. Амортизаторы для виброизоляции приборов с уменьшенной
жесткостью за счет полости, предусмотренной внутри резинового элемента.
Рис. 12.10. Конструкции резиновых буферов. Резиновый элемент в виде диска
или шайбы привулканизирован к металлической пластине для крепления. СплоШ-
Резиновые детали машин и резипометаигтеские соединения 725
^фг ^<к^^д[|ччкчУ(Ж^^ц|[|..^.У^
Рис. 12.9
Рис. 12.10
С
Рис. 12.11
Рис. 12.12
Hoii резиновый буфер снабжен буртолг, который накидным кольцом прижимается
к опорной поверхности.
Рис. 12.11. Пневмобуфера с существенно нелинейной характеристикой жесткое!и.
По буферу 1, выполненному в виде резиновой камеры с отверстием, наносит удар
упор 2, отверстие закрывается, и сжимающийся в камере воздух создает
необходимую упругую силу (рис. 12.11, а). На рис. 12.11, б показан буфер, в камеру
которого предварительно подается воздух под некоторым давлением, что увели-
ми вас г жесткость системы. Регулирование жесткости описанных буферов на ходу
машины практически исключено.
Рис. 12.12. Пневмоподушка в виде резинокордного замкнутою баллона 1
с регулируемым давлением подаваемого воздуха. Применяется в консфукциях
момкратов, противоударных устройств на пирсах, для крепления шахтных выра-
00 юк и в других аналогичных случаях.
Рис. 12.13. Схема упругого упора самолетного paдщoJюкa^opa. Харак1еристика
сжимаемого резинового буфера с момента прилегания его к корпусу резко
изменяется (рис. 12.13, а).
Если на буфер 1 насадить V-образное резиновое кольцо 2, упирающееся
ь CiCHKy корпуса 5 (рис. 12 13, б), то характеристика жесткости отклоняется от
ломаной, и буфер будет хорошо воспринимать ударные нагрузки. В нагруженном
726
Резиновые деташ машин и ре зияю металлические соединения
1
1
V*-iL^
М
i
Сжатие AL
а)
Рис. 12.13
Рнс. 12.15
Рис. 12.14
состоянии буфер показан на рис. 12.13, в. Жесткость
буфера С = ^-— (рис. 12.13, г). Рекомендуется
J-/
Di = 0,7/); D2 = l,12Di. Е ~ модуль упругости
резины.
Рис. 12.14. Два конических последовательно
смонтированных резинометаллических буфера, поз- Р"с. 12.16
воляющие значительно снизить собственную частоту вертикальных колебании
амортизируелюй машины.
Рис. 12.15. Пластинчатая резинометаллпческая опора, работающая на сдвиг
и сжатие и отличающаяся большой демпфирующей способностью. В ненагружен-
ном состоянии форма боковой поверхности резиновой прокладки вогнутая,
в нагруженном состоянии кривизна ее уменьшается и при перегрузке может
измени гь знак.
Рис. 12.16. Мощная резинометаллпческая опора, собранная из пластинчатых
опор (см. рис. 12.15), образующих поверхность клина.
Рис. 12.17. Различные типы упр>гих резиноме1алличсских опор: плоских,
круглых, V-образных, комбинированных.
Резиновые детали машин и резинометаллические соединения
727
Рис. 12.20
Рис. 12 18. Резинометаллические опоры, работающие на сжатие с ограничением
деформащп! в поперечном направлении и с защитой от масла и грчзи.
Рис. 12.19. Резинометаллические опоры: а — с вогнутыми боковыми
поверхностями резинового элемента; б — клиновидной формы.
Рис. 12 20. Резиногчтеталлические шарниры, выполняемые в виде разъемных
соединений (соединение элементов осуществляется запрессовкой или сжатием
разрезной обоймы), пли неразъемных соединений (связь резины с металлическими
частями за счет совместной вулканизации)
Резиновый элемент шарнира работает на коаксиальное кручение (рис. 12.20, а).
Наиоольшее касательное напряжение в резиновой втулке т,,,а
Жесткость шарнира при коаксиальном кручении
^ — 1 л *
InrJ
728
Резиновые де^тали машин и резинометаллические соединения
Резиновый элемент работает на осевой сдвртг (рис.
12.20, б). При относительно малой толнцтие втулки
0*2 — ^*i) < ^ максимальные касательные напряжения и
осевая жесткость могут вычисляться по формулам
Р ^ 2яС/
^1иах —
2%г^1 '
С =
1п-
Г2_
нагружен
Рис. 12.22
Резршометаллический шарнир
силой (рис. 12.20, в).
Радиальная жесткость С шарнира при
радиальной
/
C===^TiGl
ri + Г2
->6.
Шархгар с двухслойной резиновой втулкой (рис. 12.20, г). Так как радиальная
жесткость шарнира обратно пропорциональна кубу толщины резинового элемента,
то, разделив его металлической втулкой, получим учетверенную радиальную
жесткость по сравнению с одинарным шарниром двойной толщины. Жесткости
обоих шарниров при коаксиальном кручении мало отличаются одна от другой.
Рис. 12.21. Резинометаллические втулки-амортизаторы: а — с выпуклыми
торцами; б, в — с коническими и гиперболическими торцами; г, Ь — с буртом.
Выпуклым торец втулки а получается, если резиновая втулка не крепится
к арматуре, а запрессовывается. Втулки б позволяют при односторонней осевой
нагрузке снизить напряжения растяжения на кромках при сдвиге. Втулки в
отличаются равенством напряжений во всех точках при осевом сдвиге. Втулки г и ^
отличаются переменной характеристикой жесткости при значительном ее
возрастании после упора бурта в сопрягаемую деталь.
Рис. 12.22. Резинометаллическая втулка, допускающая параллельное и осевое
смещения, а также небольшой поворот внугренней металлической втулки
относительно внешней. Жесткость соединения в осевом направлении значительно
меньше, чем в радиальном. Для втулки размером 18 х 40, / = 42 допускается:
угол поворота осей втулок — до 3°, закручивание моментом 2,5 кгс-м —1^»
параллельное смещение силой 400 кгс — 0,6 мм, осевое смещение силой ПО кгс -
2Д мм. Применяется для амортизации от ударных нагрузок, для уменьшения шум^
лри изменении знака зазора, для уменьшения износа деталей, работающие
3 запыленной атмосфере, для компенсации ошибок монтажа и т. д.
Рис. 12.23. Резинометаллические втулки для восприятия радиальной и осевой
darpy30K в различном исполнении фланцев. В случае необходимости втулки могу^
Резиновые детали машин и резинометаллические соединения
729
Рис. 12.24
Рис. 12.23
быть снабжены дополнительными пластинами-ограпи-
чигелями." Осевая сила вызывает в резине сжатие и
сдвиг, а радиальная — только сжатие.
Рис. 12.24. Многослойная металлорезиновая втулка
(см. рис. 12.23).
Рис. 12.25. Резинометаллические конические
амортизаторы. Конические резиновые элементы
выполняются обычно с параллельными образующими: а —
торец резины плоский; б — торец резины
цилиндрической формы; б — однорядный амортизатор с
арматурой, торец конической формы с выравненным
напряжением в резине; г — двухрядный амортизатор-конус с привулкапизировашюи
арлматурой.
Рис. 12.26. Резинометаллическая опора большой эластичности, применяемая
для пассивной защиты и глушения шумов.
Рис. 12.27. Резинометаллические втулки, воспринимающие осевые силы,
действующие в противоположных направлениях.
Рис. 12.28. Резинометаллическая втулка, допускающая ограниченное вращение
и отличающаяся малой податливостью в одном направлении и большой -
в перпендикулярном ему направлении.
Рис. 12.29. Резинометаллическая эксцентриковая втулка-амортизатор,
используемая в конструкции подвески переднего конца рессоры легкового автомобиля.
Рис. 12.30. Резинометаллическая втулка, армированная стальной пружиной
(рис. 12 30, я), и схема применения ее в качестве упругого шарнира (рис. 12.30, б).
Втулка имеет малую жесткость в осевом направлении и большую — в радиальном.
Рис. 12.31. Резиновые амортизаторы-втулки с валиками в качестве внутренних
деталей арматуры. Втулки при малых смещениях выполняют роль упругих
730
Резиновые детат машин и резииомета иические соединения
Рис. 12.26
Рис. 12.28
Рис. 12.27
Рис. 12.29
Рис. 12.30
Рис. 12.31
Рис. 12.32
Рис. 12.33
Резиновые детали машин и резгтометаллические соединения
731
шарниров, лишенных трущихся деталей. На рис. 12.31, а изображено неподвижное
соединение валика с сопрягаемой деталью посредством штифта, на рис. 12 31, б —
то же, но посредством клина.
Рис. 12 32. Упругий резинометаллический кронштейн.
Рис. 12.33. Двойные U-образные резинометаллические опоры, допускающие
смешения в вертикальном и горизонтальном направлениях и ограниченное
вращение вокруг вертикальной оси. Могут быть использованы, например, для установки
центрифуг, где балансировка ротора вследствие неравномерного и неопределенного
характера загрузки материала исключается.
Рис. 12.34. Комбинированный клинчатый резинометаллический амортизатор
с двумя шайбами, расположенными под углом, используемый в констр>тсции
подвески заднего конца рессоры легкового автомобиля. Опора обладает шестью
степенями свободы и применяется для уменьшения шума и для виброизоляцин
машины при неопределенном направлении возмущений.
Рис. 12.35. Резинометаллический подшипник. Резиновый вкладыш имеет
винтовые канавки для охлаждения и смазки водой. Размер и форма канавок зависят
от условий работы, твердости резины, толщины вкладыша и выбираются опытным
путем. Число канавок зависит от диаметра вала и удельных нагрузок, обычно оно
кратно четырем (8, 12, 16, 24, 32, 36). В турбостроении при диаметре вала порядка
1500 мм число канавок принимают равным 32, 36. Применение наиболее
эффективно при больншх окружных скоростях.
Рис. 12.36. Резинометаллические вкладыши подшипников, применяемые в
гидротурбинах малой мощности: а — к поверхности латунной втулки привулканизиро-
ван резиновый вкладыш, имеющий по окружности сегментные выступы. Впадины
между cei ментами образуют канавки, по которым протекает вода для смазки и
охлаждения; б — сборный резинотехнический вкладыш с замковым соединением
типа ласточкина хвоста. Из-за сложности обработки применение ограничено..
Рис. 12.34
Рис. 12.35
Рис. 12.36
732
Резиновые детали машин и резинометаллические соединения
Рис. 12.37. Конструкция чашеобразного резинометаллического амортизатора,
используемого для пассивной защиты приборов от вибраций. Обладает жесткостью
в горизонтальном направлении примерно вдвое большей, чем в вертикальном
направлении. Вибропрочность амортизатора мала.
Рис. 12.38. Резинометаллический амортизатор с усиленным резиновым
элементом.
Рис, 12.39. Опорный резинометаллический амортизатор.
Рис. 12.40. Малогабаритный резинометаллический стерженьковый амортизатор.
Рис. 12.41. Рожковый резинометаллический амортизатор. Жесткость в
вертикальном и горизонтальном направлении одинакова. Для амортизатора с
номинальными нагрузками: растяжение — 8 кгс, сжатие — 10 кгс, сдвиг — 6 кгс, размеры:
Я = 52 мм и /i = 14 мм.
При нормальной температуре обеспечивают виброзащиту, начиная с частоты
возмущения 15—20 Гц, при амплитудах до 1 мм.
Рис. 12.42. Резинометаллическая опора, работающая на растяжение, сжатие и
сдвиг с ограничителем, работающим при растягивающих ударах.
Рис. 12.43. Конструкции резинометаллических опор: а — пример неудачной
конструкции упругой опоры. Резиновый элемент ограничен металлическим
корпусом и под нагрузкой не изменяет формы, вследствие чего его амортизационная
способное 1ъ сведена к нулю; б — пример правильной конструкции опоры.
Рис. 12.37
Рис. 12.38
Рис, 12.39
Рис. 12.40
Рис. 12.41
Рсчиповые дета lu матии и рспиюмстси тчсские сосдиисиич
733
а) 6)
Рис. 12.43
Рис. 12.42
1
111Л
' 1 1
^1
■туг
3
Рис. 12.45
Рис. 12 44. Конструкции предварительно напряжсипых резинометаллических
опор для знакопеременной нагрузки, в которых оба резиновых элемента работают
на сжатие; а — затяжка резиновых элементов не ограничена; б — загяжка
ограничена втулкой надлежащих размеров.
Рис. 12 45. Конструкция резинометаллического амортизатора для тяжелых дви-
1ателей. Внутренняя арматура представляет собой плавно очерченную штампован-
н\ю деталь с опорным фланцем. Наружная арматура снабжена отверстиями для
крепления к раме.
Рис. 12.46. Маслостойкий резинометаллический амортизатор судового типа
в двух исполнениях — без козырька (рис. 12.46, а) и с козырьком (рис. 12.46, о).
При разрушении резинового элемента разъедание металлических деталей и срыв
амортизатора с фундамента исключаются.
734
Резиновые детали машин и резинометалличесглш соединения
Рис. 12.47. Конструкция резинометаллической опоры с боковым подрессори-
ванием.
Рис. 12.48. Упругий резинометаллический фарфоровый изолятор, в котором
удачно использованы изоляционные свойства резины, исключающие утечки тока
при увлажнении и загрязнении поверхности изолятора: 1 — резиновый элемент;
2 — металлический элемент; 3 — фарфоровая чашечка; 4 ~ винты для крепления
изолятора.
Рис. 12.49. Пневмоупругие связи с резиновыми оболочками, допускающие
регулирование жесткости на ходу машины: а — без жесткого центра до
деформации оболочки подвижным упором; б — то же после внедрения упора.
Соприкосновение упора с оболочкой и его удаление сопровождается трением и нагревом
резины, что быстро выводит ее из строя. Применяются при эпизодическом или
не частом нагружении.
Рис. 12.50. Эластичные валопроводы с резиновыми элементами: а — соединение
хвостовиков, валов 2 и 3 (с накаткой) посредством резиновой трубы 2, концы
которой стягиваются хомутами 4\ б — концы валов 1 и 2 снабжены стальными
дисками 3 и 4, к торцам которых привулканизирован резиновый диск 5.
Рис. 12.51. Пример использования втулочного амортизатора для шарнира
подвески.
Рис. 12.52. Резинометаллический сферический шарнир, состоящий из сферических
металлических деталей 1 с завулканизированным между ними резиновым слоем 2,
Рис. 12.47
Рис. 12.48
K^wwww
^^^
чЧЧЧЧЧЧЧЧУ
Bn
«;
Рис. 12.49
Резиновые детали машин и резииометал.шческие соединения 135
Рис. 12.50
Рис. 12.51
Рис. 12.52
D С
Рис. 12,53
толщина которого ограничивает угловое смещение. Шарнир допускает большие
радиальные нагрузки. На рис. 12.52, а показан шарнир перед сборкой, на
рис. 12.52, б - то же после запрессовки в направляющее гнездо до соприкосновения
металлических колец, вследствие чего резина получает предварительную затяжку
(3 — головка шатуна).
Рис. 12 53. Комбинированный амортизатор для гашетшя нестационарных
колебаний с )дарами и толчками. Корпус 1 (рис. 12.53, а) соединен с ротором 2
с помощью резиновых вкладышей 3. При повороте роюра рычагом 4 (рис. 12.53, б)
вкладыши деформируются, их жестрюсть повышается. Демпфирующая способность
амортизатора увеличивается за счет вязкости масла, перетекающего через
дросселирующие отверстия.
736 Резиновые детали машин и резипомёталтческие соедилеиич
Рис. 12.54
Рис. 12.55
Рис. 12.5
Рис. 12.54. -Полый конусообразный
резинометаллический амортизатор с
нелинейной характеристикой жесткости.
К резиновому элементу J, снабженному
' кольцевыми канавками, лривулканизиро-
Рис. 12.57 ваны металлическая втулка 2 и пластина 5.
Рис, 12.55. Резинометаллический шарнир с двойным конусом для подвески
заднего моста грузового автомобиля. Шарнир отличается большой жесткостью
в радиальном направлении, слабо деформируется в осевом направлении, допускает
большой угол закрутки и малый угол перекоса.
Рис. 12.56. Схема центробежной муфты с резинометаллическими шарнирами,
обеспечивающая надежную работу соединяемых агрегатов при значительной
несоосности валов. Выбирая величину закручивания резиновой втулки 3, приклеенной
(иривулканизированной) к обойме 1 и оси 2 шарнира, можно изменять
податливость муфты. При трогании с места крутящий момент передается только за счет
сил упругости шарниров, затем с увеличением частоты вращения появляется
центробежная сила звена Рц, и шарниры разгружаю!ся, при установившемся режиме
передаваемый момент М^р уравновешивается мрментом Мц центробежных сил и
упругими моментами Мщ шарниров А ж В.
Рис. 12.57. Конструкция рсзинометаллического амортизатора двигателя
легкового автомобиля. Резиновый элемент 1 значительной толщины с выемками - ^
промежуточным кольцом 3 допускает сдвиг и сжатие, снижает шум. Выемки
снижают жесткость амортизатора в желаемом направлении.
Резиновые детали машин и резииомстаотческие соединения
137
Рис. 12.58. Конструкция узла
подвески двигателя автомобиля М-20 на
трех резинометаллических
амортизаторах, из которых два передних (узлы Б
и В) установлены наклонно^ задний
узел (ciyi. разрез А —А) — горизонтально.
Рис. 12.59. Пример использования
резинометаллических опор для упругой
подвески траверсы автомобильного
двигателя: а — общий вид; 6 — разрез
опорной части конструкции.
Рис. 12.60. Конструкция узла
крепления рессоры к заднему мосту
автомобиля М-20 с резиновым буфером-
ограничителем.
Рис. 12.61. Конструкция узла
крепления конца передней рессоры
автомобиля ЯАЗ-200 посредством
шарообразного резинового сочленения.
Рис. 12.62. Крепление амортизаю-
Рис. 12.58
Рис. 12.60
Рис. 12.61
738
Резиновые детали машин и резинометал.шческие соединения
ров-втулок в узлах подвески автомобиля М-20: а - узел передней подвески;
6 — крепление конца рессоры; в — крепление рессоры на сережке.
Рис. 12.63. Применение резинометаллического щарнира в конструкции
промежуточной опоры карданного вала aвгo^юбиля: а — балансирное коромысло,
поддерживаемое двумя резиновыми втулками; б — шарикоподшипник,
поддерживающий карданный вал, вместе с корпусом помещен во втулку, являющуюся частью
резинометаллического шарнира, который своим наружным фланцем крепится
к раме.
Рис. 12.64. Разрез конической резинометаллической опоры 2 двигателя с
боковыми выемками и oгpaничитeля^пI I и 3, вступающими в работу при ударах.
Резиновый элемент отличается большой жесткостью в i оризонта льном направлении
и сравнительно малой в вертикальном направлении, что придает хорошую
амортизационную способность подвеске. Ось 4 параллельна продольной оси
двигателя.
а)
Рис. 12.64
Резиновые детали машин и резинометаллические соединения
739
Рис. 12.65
Рис, 12.66
Рис. 12.65. Конструкция и характеристики резинометаллического амортизатора
для кабин автомобилей. Амортизатор, выполненный в виде буксы большой
эластичности с ограничителем приобретает квазиломаную характеристику
жесткости, позволяющую защитить амортизируемый объект от ударов.
На графике приведены упругие характеристики амортизаторов из резины
с твердостью по Шору 45, 60, 75.
Рис. 12 66. Конструкция резинометаллического соединения втулочного типа,
применяемая для .защиты от вибраций тяжелых прессов, быстроходных
двигателей и др.
Рис. 12.67. Конструктивная схема упругой подвески лап двигателей 2
трамвайных вагонов (экипажей) посредством двух расположенных соосно и предварительно
затянутых конических резинометаллических элементов 1, На рис. 12.67, а: 3 —
колесо; 4 — рельс; 5 — рама экипажа.
На рис. 12.67, б показан разрез амортизатора; на рис. 12.67, в — вариант
подвески, состоящей из кольцевых резиновых элементов; жесткость подвески может
быть изменена при изменении числа-колец и твердости резины. В
противоположность амортизатору, изображенному на рис. 12.67, б упругая подвеска не способна
воспринимать горизонтальные нагрузки.
Рис. 12.68. Конструкция резинометаллической рессоры трамвайного вагона,
^'величение длины резиновых втулок рессоры с уменьшением их диаметра
обеспечивает равенство напряжений сдвига в различных слоях резины. Тонкие втулки
арматуры и коническая форма рессоры придают резинометаллическому
соединению устойчивость и почти исключают изгиб резины.
740
Резиновые детат машин и резинометаллические соединения
^Ь
щ^
^
t^^
. J
Рис. 12.68
Рис. 12.69
Рис. 12.69. Резинометаллические
подвески для ручных тележек.
Колесо 3 (рис. 12.69, а)
поддерживается четырьмя амортизаторами U
расположенными по углам рамы ^.
Ось 4 двух колес тележки (рис.
12.69, б) поддерживается наклонно
расположенными амортизаторами
5. Жесткость подвески в
продольном направлении больше, ч<^^^
жесткость в поперечном; подвеска
отличается большой
грузоподъемностью, допускает значительные
вертикальные прогибы и хорошо
амортизирует толчки в горизо
тальной плоскости.
Рис. 12.70. Трехрядный
пластинчатый резипометаллический амор-
Раиновые детали машин и pciwioметаллические соединения
741
тизатор буксы железнодорожного подвижного состава, состоящий из последо-
вательно соединенных пластинчатых амортизаторов.
Рис. 12.71. Резинометалл1'1чсская рессора для осей неприводных кояес электро-
течежек. Поворотная ось 1 колеса 2 (см. рис. 12.71, б) прикрепляется к подвеске
с помощью резинометаллического амортизатора 5, обладающего большой
грузоподъемностью и одинаковой жесткостью во всех направлениях по горизонтальной
плоскости при малой жесткости в вертикальном направлении. На рис. 12.71, а
показан вариант амортизатора.
Рис. 12.72. Шевронные резинометаллические подвески осей колес шахтных
вагонеток, допускающие нагрузки во всех направлениях.
Рис. 12.73. Виброизолирующая резинометаллическая опора ОВ-30. Жесткая
станина 6 устанавливаемой машины массой до 10—15 т через регулятор 5 высоты
установки (от 8 до 25 мм) и верхнюю крышку 3 амортизатора опирается на
резиновый элемент 2 из маслостойкой резины, имеющий в основании крышку /
и кольцевые фрикционные выступы 4, обеспечивающие хорошую сцепляемость
с поверхностью пола. На опорах ОБ-30 осуществляют бесфундаментную установку
большинства типов металлорежущих станков, кривошипных прессов, а также дру-
1ИХ машин и приборов. Срок службы опор не менее 10 лет.
Рис. 12.70
Рис. 12.71
Рис. 12.72
742
Резиновые детат машин и резинометалтческие соедииеиич
Размеры опоры D = 105 4- 180 мм, Я - 43 -f- 50 мм, J = Ml2 - М20.
Частота собственных вертикальных колебаний/^ ^ И Гц при нагрузках до
5000 кгс, декремент колебаний 6 = 0,6 ч- 0,7. Вертикальная жесткость большз
продольной в 1,5-3.0 раза.
Рис 12.74. Равночастотная виброизолируюшая резинометаллическая опора
ОВ-31 конструкции ЭНИМС, в которой жесткость растет пропорционально
нагрузке. Сжимающая нагрузка со стороны станины 8 прикладывается через
регулятор высоты 7 к верхнему 4 и нижнему 1 основанию с фрикционными
выступами 2, между которыми заключен резиновый упругий элемент 5 с
внутренними пазами (зазор А2) и ребрами жесткости 3. С ростом сжимающей нагрузит
резина выпучивается, зазоры Лх и А2 выбираются, растет жесткость опоры.
Увеличение демпфирования достигается за счет демпфера 6 жидкостного трения.
Размеры опоры D = 155 мм, II = 44-- 50 мм, d = М16. Один типоразмер
опоры применим для установки многих станков и кузнечно-прессовых машин.
Постоянство собственной частоты/, опоры в диапазоне Pmax/^min = 15 н- 25
составляет от ±10 до 20%, декремент колебаний 5 = 0,5-^ 0,7, /г = ±20 Гц и
Р = 250 4- 4000 кгс, при этом вертикальная жесткость больше поперечной
примерно в 2,5 раза.
Рис. 12.75. Виброизолирующие резиновы® коврики КВ-1 (рис. 12.75, а) и КВ-2
(рис. 12.75, б), предназначенные для
установки под железобетонные
фундаментные блоки высокочастотных
станков с недостаточно жесткими
станинами, молотов и других
кузнечно-прессовых машин с резкими
реверсами узлов. Бетонный блок
монтируется на коврике, покрытом
гидроизоляционной бумагой и
листом кровельного железа. Жесткость
в вертикальном направлении
больше, чем в продольном в 0,85-
1,5 раза для КВ-1 и 1-1,7-для
КВ-2. Собственная частота коврика
КВ-1 fz>\i Гц, при укладке
ковриков в п слоев fz уменьшае1ся
в \^п раз.
Рис. 12.74
А-А
Рис. 12.75
Резиновые детали машин и резино металлические соединения
743
Рис. 12.76. Резинометаллический амортизатор с нелинейной характеристикой
жесткости для установки оборудования, отличающегося широким частотным
спектром колебаний. Привулканизированный к металлическим обоймам 2 и 4
резиновый элемент 1 снабжен кольцевыми выточками, которые под нагрузкой
сближаются и увеличивают жесткость. Нижняя обойма 4 имеет выступы 5,
препятствующие скольжению, на верхнюю обойму 2 устанавливается фундаментная
плита 5 машины.
Рис. 12.77. Равночастотный демпфированный амортизатор. В качестве >т1р}гого
элемента использована спиральная коническая пружина 1 с нелинейной жесткостью,
Б качестве дe^пIфнpyюшeгo элемента - резиновый баллончик 2, который опирается
на фланец, снабженный калиброванным отверстием. Изменение величины
колеблющейся массы не изменяет собственной частоты системы. Демпфирование создается
во время колебаний за счет трения при прохождении воздлха через отверстие 3,
размером которого можно регу;шровать степень демпфирования. Диапазон
рабочих температур от —60 до +70"С.
Рис. 12.78. Равночастотный амортизатор с фрикционным демпфированием,
в котором упр>гими элементами служат две предварительно затянутые конические
прзжины 1. Демпфирование достигается за счет трения о внутреннюю стенку
корпуса 2 резиновой диафрагмы 5, прижимаемой к стенке распорной пружиной 4.
При горизонтальной вибрации демпфирование осуществляется за счег трения
стальных шайб 5 о поверхности диафрагмы.
Рис. 12 79. Резинофрикционные амортизаторы сжатия, состоящие из комплекта
резиног%1еталлических элементов: а — для предотвращения выпучивания резиновых
элементов 1 предусмотрены направляющие планки 2; б — форма резиновых
элементов нодобрана так, что комплект
защищен от выпучивания, а элементы
надежно фиксируются; в — верхний
резинометаллический элемент имеет
уменьшенные размеры, что снижает
сопротивление в начале хода, после выбора зазора
Л жесткость амортизатора повышается.
Рис. 12 80. Пример использования
рези нометаллических втулок при монтаже
И1>дшипниковых опор для компенсации
неточностей сверления отверстий под
бол1Ы и для защиты подшипников от
вибраций.
Рис. 12.76
Рис. 12.77
Рис. 12.78
744
Резиновые детаги машин и резина мета i тчсские соединения
Рис. 12.79
Рнс. 12.80
Рис. 12.81
Рис. 12.82
Резиновые детали машин и резшюмета иические соединения 745
ssssssbssss
Рис. 12.83
Рис. 12.84
Рис J2 81. Приводная уп-
ру1ая связь. Резиновые
элементы в виде шайб, раио-
'1ающие по припнипу
мембран, применяются в вибра-
пионных машинах для
соединения шатуна привода
(например, эксцентрикового) с
колеблющейся массой.
Рис. 12.82. Пневмоупругий
этемент баллонного типа.
Внутренняя полость пневмо-
баллона, состоящего из
гофрированной секционирован- . .
ной резиновой оболочки, ' ^
прикрепленной к крышкам 2, Р"^* 12.85
и стяжек 3, заполняется газом с начальным давлением. Подъемная сила регулируется
изменением давления газа в камере. Досгоинства — малая жесткость и сравнительно
большая несущая способность, широко применяется в качестве амортизаторов
вибромашин и подвесок автомобилей. Характеристика жесткости со слабой
нелинейностью.
Рис. 12.83. Пневмоупругие элементы диафрагменного типа. Между крышкой 2
и поршнем 1 заключена резиновая диафрагма 3, которая под нагрузкой
перекатывается по направляющей 4 (рис. 12.83, а), или принимает иную форму под
давлением воздуха, если направляющей нет (рис. 12.83, б). Область применения
та же, что элемента, показанного на рис. 12.82. Допускают перекосы и не
требуют точной установки. ' '
Рис. 12.84. Пневмоупругая связь рукавного типа, в которой под нагрузкой
происходит перекатывание оболочки с малым радиусом перегиба. Отличается
характеристикой жесткости со слабой нелинейностью.
Рис. 12.85. Резинометаллические упругие элементы. Резиновая пружина 1
прикреплена к металлическим фланцам 2 и 3 и резино-кордному пневмоэлементу 4
(схема а). Резиновая пружина под нагрузкой не меняет жесткость, а жесткость
746
Резиновые детали машин и резинометаллические соединения
пневмоэлемента, а следовательно, и грузоподъемность регулируются. Резиновая
пружина может быть заменена стальной (схема б).
Рис. 12.86. Гибкое соединение валов с помощью резиновых элементов,
допускающее ограниченное смещение осей валов, раздвижку и взаимный угол поворота.
Рис. 12.87. Муфта с резиновыми элементами, допускающая относительный
поворот валов до 15°, угловые смещения — до 4°, радиальные — до 6 мм, осевые -
до 8 мм. Муфта допускает разъем без демонтажа упругого элемента.
Рис. 12.88. Упругая резинометаллическая муфта со сферическими сегментами.
При соединении внешних сферических металлических частей (см. эскиз справа)
создается предварительный натяг резиновых элементов. При достаточной толщине
резинового слоя допустимая сумма углов закрутки и перекоса достигает ±30^
Не требуется центрирования половинок муфты даже при больших скоростях.
Рис. 12.89. Три конструктивных разновидности резинометаллических муфт,
отличающихся высокими упругими свойствами при малых габаритах. Качество
муфты в большой мере определяется формой упругого элемента.
При нормальных моментах муфты допускают: относительный угол поворота
полумуфт 6 — 8°, угловые перекосы валов до .3 — 5°, радиальные смещения 5 мм
и более.
Рис. 12.90. Муфта с резинометаллическими элеме}ггами, предназначенная для
тяжелого режима работы при необходимости компенсации угловых и радиальных
смещений, а также уменьшения шума. Одна из поздумуфт несет на боковых
поверхностях шлицев привулканизированную резину. Муфта отличается простотой
и легкостью монтажа.
Рис. 12.91. Муфта с резиновыми элементами для передачи большой мощности
(до 1000 л. с), применяемая при ударных и резко меняющихся нагрузках, а также
при запылении. Не боится влаги, масла, не требует смазки.
Рис. 12.92. Двойная упругая муфта с большим числом резинометаллических
элементов, применяемая для судовых приводов. Резиновые элементы привулкани-
зированы к металлическим дискам, и поэтому эластичность муфты значительно
выше эластичности пальцевых муфт.
Муфта хорошо отфильтровывает
высокочастотные колебания, возникающие при работе двигателей
внутреннего сгорания и аналогичных им машин.
Рис. 12.86
Рис. 12.87
Рис. ПХ
Резиновые детали машин и резинометаллические соединения 1А1
Рпс. 12.92
Рнс. 12.93
Рис. 12.93. Упругая муфта. К полумуфте / на эксцентриковых втулках 2
прикреплены пальцы 5 с зпругими втулками 4. Эксцентриковые втулки 2 позволяют
ре!улировать предварительную деформацию упругих втулок 4. Стальные втулки 3,
в которых размещены упругие втулки 4, расположены в полукруглых выемках
полумуфты 6, радиус кривизны которых больше рал1туса втулок. При передаче
вращения под нагрузкой упругие втулки деформируются, вследствие чего стальные
Втулки перекатываются в выемках полумуфты 6, при этом плечо действия силы
IU^Ieняeтcя, а }пругая характеристика му4'ты приобретает нелинейный характер.
Последнее способствует гашению крутильных колебаний.
748
Резиновые детали машин и резиномета1 тческие соединения
Рис. 12.94
Рис. 12.95
Рис. 12.96
Рис. 12.97
Рис. 12.94. Приводная эластичная муф1 а-демпфер, образованная двумя кон\сами
с привулканизированной к ним резиновой прокладкой. При сравнительно Мс>лых
габаритах муфта передает большой крутящий момент. Муфта, имеющая габариты
0220 X 115 мм передаст осевую силу 2000 кгс и момент 180 kic-m.
Рис. 12.95. Резинометаллические демпферы крутильных колебаний в виде
тонкостенного фигурного диска, соединяемого с концом вала, подлежащего
демпфированию, и массивного диска, связанного с резиновой прокладкой фигурною
очертания.
Демпфирующая способность устройс1ва зависит о г качества и сорта резины
Рис. 12.96. «Бесшумная» шестерня с резиновыми элсмен1ами между ступииеи
и венцом предназначена для передачи ударных нафузок в приводах, где
применение специальных упругих муфт не желательно.
Рис. 12.97. Универсальный резинометаллический шарнир фирмы «Готцеверк
(ФРГ) для соединения скрещивающихся валов, допускающий изменение угла ^^Р
щивания, параллельное и осевое смещение при высокой демпфирующей спос
Резиновые детали машин и резинометаллические соединения
749
пости. Шарнир представляет собой предварительно напряженный посредством
металлического бандажа резиновый элемент (рис. 12.97, а) с шестью завулканизи-
рованными втулками, в отверстия которых вставляются по три пальца (через один)
or поводков ведущего и ведомого валов.
Элементы шестиугольника при передаче момента М^р могут через один
догружаться и частично или полностью разгружаться, отчею предварительно сжатые
элементы могут оказаться растянутыми (рис, 12.97, 6)."
Рис. 12.98. Связь между деформацией определенного вида и вызывающей ее
нагрузкой для шарнира (см. рис. 12.97): а - передача крутящего момента (Мкр);
6 — осевое смещение (/) силой Р^(.\ в — угловое смещение (а^з) действием
изгибающего момента Миз; г — параллельное смещение валов {у) под действием силы Ррдд.
Шарнир имеет жесткую характеристику, угол закрутки колеблется в пределах
8-12°, осевой сдвиг — до 12 мм, угол скрещивания 6-12". При последовательном
соединении нескольких шарниров люжно ось вращения повернуть на 180^.
20
16
г^
/
/
/
f J
r^
70i
effJ
№<
^io
oh
p=
\/
Y,
j^^^^^^_
8 fZ 16 20 alp
80
60
W
lU
^
7~"
/
fi
//
У ^
^
Y
Y
L
1 1 70/
66><
7^
5
i
0
rj
7~
/
^
;
/
'
i2_
/^
1 tf 6 8 10 12f,MM
J'
/
/ л
к
У"
у^^
^
70s,
'УС
^
-%''
-г
1
J_
н
8 12 16 aiy О
Гис. 12.98
J ^/W
750
Резиновые детали машин и резинометаллические соединении
Шарниры больших размеров допускают передачу момента до 600 кгс • м при удар,
ном воздействии.
Характеристики шарнира, приведенные на рисунке, даны для резины с
твердостью по Шору 50-70 единиц.
Рис. 12.99. Резинометаллический виброгаситель. В случае работы резиновых
элементов в основном на сжатие между полым квадратным сердечником 2
укрепленным на стойке i, и квадратной обоймой 3 (рис. .12.99, а) вставлены четыре
предварительно сжатые резиновые подушки 4, из которых две работают на сжатие
и две на сдвиг. В случае работы всех резиновых элементов на сдвиг квадратные
серлечники двух виброгасителей должны быть связаны жестким звеном 5
(рис. 12 99, б). Ноконеи, в случае комбинированного нагружения резиновых
элементов сердечники еле пуст крешпь к фланцам 6 (рис. 12.99, е), при этом обоймы
между собой соединены шарнирно связанными звеньями 7.
Рис. 12.100. Цельнометаллический амортизатор для защиты оборудования,
работающего с ударами в тяжелых климатических условиях. Бт}лка / (рис. 12.100. а)
опирается на пружину 3 и дe^шфep-пoдyшкy 2, выполненную в виде сетки из
нержавеющей стали. В корпусе 5 предусмотрены вспомогательные
амортизирующие подушки 4 и 6, ограничивающие ход и смягчающие удары. На рис. 12.100, б
показана конструктивная разновидность амортизатора, а на рис. 12.100, в - графики,
показывающие сравнительные демпфирующие свойства цельнометаллического
амортизатора и резинового.
Рис. 12.101. Конструкция опытного поглощающего аппарата для
железнодорожных вагонов с комплектом (26 шт.) рсзинометаллических элементов 4, помещенные
между корпусом 3 и крышкой 1, рабочее движение которой направляется винтом 2
Рис. 12.102. Конструкция опытного резинофрикционного поглощающею
аппарата автосцепки, состоящего из комплекта фрикционных клиньев I и комплекта
резинометаллических элементов 2. Наличие фрикщюиной части обеспечивает
высокое сопротивление толчкам при малом количестве резины. Предварительная сила
затяжки — 200 кгс. Максимальная сила сопротивления при полном сжатии (70 мм) -
150 тс (а = 45^ р = 11°, у = 2°)-
Рис. 12 103. Облицоваитюе резиной сито, применяемое в виброгрохотах,
отличается высокой износостойкостью, малым уровнем шума, простотой констр>'кции.
Увеличение грузоподьемности достигается за счет двухслойной конструкции
с нижним более жестким слоем резины и верхним мягким высокодемпфирующим.
Колебания свободной поверхности сита при просеивании способствуют его салю-
очищению, что позволяет перерабатывать липкий и влажный материал. Для
просеивания крупно кускового материала применяют стальные колосники с резиновым
покрытием.
г 1 1 1 1 1 t i 1 1 1 I
!^ [Л. L ITjlJJ iJifti 11 У11 r-LL 1 ] LJ L LJ. J I
**■? Г|Т 1 l*^^#T^ ["l"^
'^ 4 1 Ч Ч i- ЦА \ 1 1 Г Щ M 1 [X\~\
ЖН'Ш
II—1—Г" 1 г li 1 олор^ I—j».^|u..., „.„
lJjLJU.,,m.l.l,, 1,1111 M 1 M 111 hii 1
6)
Piic. 12.100
Рис. 12.101
Рис. 12.102
■"oBi'i 'Mil
Рис. 12.103
Рис. 12.104
752
Резиновые детали машин и резино металлические соединения
Рис. 12.105
Рис. 12.104. Конструкция колеса
трамвая с резиновой амортизацией.
Между ступицей 2 и бандажом с
диском 1 размещено восемь пар резиновых
дисков-амортизаторов 3. Износ гребня
обода снижается, ход становится мягче,
ослабляются толчки на стыках,
снижается шум.
Рис. 12.105. Разновидности
конструкций амортизированных колес
трамвайных вагонов.
Рис. 12.106. Конструкция колеса
моторного вагона: <я - схема
вентиляции; б — поперечный разрез; 1 —
ступица; 2 — прижимной диск; 3 — бандаж
с диском; 4 — распорный болт; 5 — ре-
зинометаллический амортизатор; 6--
кабель.
РАЗДЕЛ 13
МЕХАНИЗМЫ ПИТАНИЯ АВТОМАТОВ
Механизмы питания относятся к механизмам целевого назначения и по
принятой классификации разделены на две основные группы
К первой группе отнесены механизмы, применяемые в автоматах, обрабатываю-
цгих полуфабрикат в виде штучных изделий, ко второй группе отнесены меха-
низглы, применяемые в автоматах, обрабатывающих сыпучие и жидкие тела.
Кроме того, механизмы первой группы делят на:
Механизмы питания автоматов прутковым и полосовым материалом.
Механизмы дискового и роторного питания.
Механизмы ориентации заготовок.
Отсекатели.
Механизмы бункерного питания.
Механизмы магазинного питания.
Транспортирующие и вспомогательные устройства.
Устройства для контроля и сортировки изделий.
Механизмы второй группы подразделяют на:
Бункеры.
Питатели.
Ооьемные и весовые дозаторы сыпучих тел.
Объемные дозаторы жидких тел.
МЕХАНИЗМЫ ПИТАНИЯ АВТОМАТОВ ПРУТКОВЫМ
И ПОЛОСОВЫМ МАТЕРИАЛОМ
Ри'^ 13 1 MevaHH3Mbi подачи пруткового материала:
с1 - рычажный; ползун 3, на котором установлены подпружиненный зажим 5
и уппр 4, перемещается возвратно-поступательно по направляющим 2. При
перемещении ползуна 3 направо зажим 5 захватывает пруток 1 и перемещается вместе
с нигл, при перемещении ползуна налево — пруток 1 неподвижный;
б — шариковый; подпружиненный зажим 5, установленный в патроне 2, имеет
три радиальных отверстия со свободно установленными в них шариками. В период
Перемещения патрона 2 направо шарики заклиниваются и перемещают пруток J.
Г^ри перемещении налево — пруток неподвижен;
6 - роликовый; пруток 1 перемещается вращающимися роликами 2 и 5. Опоры
Одного из роликов подпружинены.
Рис. 13.2. Механизм подачи полосы 1 при работе штампа последовательного
Действия. В период перемещения штампа 3 вниз собачка 2 перемещает полосу 1
^^ расстояние t между пуансонами.
25 Кожевников и др.
754
Механизмы питания автоматов
Рис. 13.2
МЕХАНИЗМЫ ДИСКОВОГО И РОТОРНОГО ПИТАНИЯ
Рис. 13.3. Дисковый питатель. Заготовки 3, расположенные в нижней части
диска и укладываются в канавки 2 по внутренней части обода. В положении выше
горизонтальной оси заготовки поддерживаются щитком 4 с желобом для приеме!
заготовок.
Рис. 13.4. Питатель из нескольких роторов. Заготовки 1 транспортируются
по сложному пути с последовательной передачей от ротора 1 к ротору ^'
На каждом роторе может осуществляться технологическая операция.
Рис. 13.5. Схема механизма роторного питателя при обработке изделий раз ли -
ной номенклатуры. В пункте 1 осуществляется загрузка изделий, в пункте 3 -
выгрузка, '4 — транспортирующие роторы, 2 — рабочие роторы.
Механизмы ориентации заготовок
755
^ФВ>
Рис. 13.4
Рис. 13.5
МЕХАНИЗМЫ ОРИЕНТАЦИИ ЗАГОТОВОК
Рис. 13.6. Устройство для контроля правильности положения колпачков 1,
транспортируемых по горизонтальной трубе.
Рис. 13.7. Устройство для контроля правильности положения заготовок 2,
имеющих форму колпачка и транспортируемых по трубе 1. На рис. 13.7, а показано
положение колпачков, идущих донышком вниз; на рис. 13.7, б — вверх.
Рис. 13.8. Механизм подачи и перевертывания колпачков перед штамповкой.
За каждый ход рабочего ползуна пресса из трубы 8 бункера (рис. 13.8, а) колпачки
подаются донышками вниз и западают в радиальные пазы диска 1, поворачиваются
Рис. 13.6
25*-^
756
Me хаи из мы питаню
я автоматов
Рис. 13.8
на \/б оборота посредством тяги 3, рычага 2, собачки 6 и шестизубого храпового
колеса 5. Храповое колесо свободно сидит на валу и передает вращение диску 1
через фрикпион (на рис}нке не показан).
В револьверный диск 4 колпачки попадают донышком вверх. Щиток 7 защищает
колпачки от выпадания.
На рис. 13.8, 6 показано устройство для загрузки и ориентации колпачков.
Колпачки из бункера через трубу 4 поступают в 12-позиционный кольцевой
питатель 5, совершающий посредством храпового механизма /, б, 7, 8 прерывистое
враи^ение, и здесь \держиваются от падения под действием силы тяжести плоской
прзжиной, поджимающей колпачки к боковой стенке гнезда (на рисунке не
показана).
Колпачки ориентированные, как положено, донышком вверх, сталкиваются
плунжером 5 в отверстие неподвижного цилиндра 2, вмещающего шесть
заготовок, и далее в гнездо револьверного диска 9. Если колпачки ориентированы
донышком вниз, то плунжер 3 не касается донышка колпачка и последний вместе
с кольцом 5, сделав пол-оборота, попадает при проталкивании потока колпачков
в диск 9 донышком вверх.
Кольцо 5 питателя и храповое колесо 8 связаны фрикционной м>фтой.
' Рис. 13 9. Механизм ориентации деталей. В корпусе 3 размещен неподвижньп1
диск 7/ с котьцевой канавкой 2 и эпизодически поворачиваюшийся от храпового
колеса 8 диск 4. В диске И имеется упор 6 и подпружиненный пружиной Ю
штифт 9, отстоящий от упора 6 на один угловой ход диска. Если детапь 5
поступает из бункера правильно (тонким концом вперед), то вшпшле она коснется
упора б, затем тонким концом опус1И1ся в кольцевой паз 2 и в следующей
позиции при повороте диска 4 на 60"", не касаясь штифга 9, проскочи! че^'^з
диаметральный паз 7 в трубу 7, подведенную к станку. Если детачь попала в паз
диска 4 неправильно, то она удерживается подпружиненным штифтом 9 и не
попадает в диаметральный паз 7 сверху. После поворота диска 4 на ISO" деталь
свободно проходит в трубу.
Механизмы ориентации заготовок
757
Рис. 13.10
Рио* 13.10. Механизм загрузки и ориентации
плоских деталей крючкообразной формы. Если
деталь 2 попадет из бункера в наклонно
расположенный вращающийся диск 3 неправильно
(крючком в сторону большого диаметра), то
выступ 1 крышки 4 предотвратит попадание
детали сверху в диаметральный паз
выступающей цилиндрической части крышки и далее
в лоток. После поворота диска 3 на 180° от
контрольной позиции задержанная деталь
свободно проходит в лоток.
Рис. 13.11. Механизм загрузки и ориентации
деталей типа крышек или колпачков. Детали 2
поступают из бункера в пазы вращающегося
составного диска, оснащенные выступами 1. Если
деталь попала в паз донышком вправо (как это
требуется), то сразу же по диаметральному
пазу 4 попадет к машине, если же донышком
влево, то деталь 2 вместе с диском 3 провернется относительно контрольной
позиции на 180^ и в нижней позиции попадет в лоток ориентированная донышком
вправо.
Рис. 13.12. Механизм ориентации посредством магнита. В корпус механизма
встроен магнит /. Неправильно ориентированная деталь 2 (острием вниз)
удерживается магнитом и поэтому может попасть в лоток машины только в
нижнем положении вращающегося диска 3. Правильно ориентированная деталь
(острием вверх) не удерживается магнитом и проскакивает сверху по
диаметральному пазу 4. Вращающийся диск 3 и деталь с пазом 4 изготовлены из
немагнитного материала»
Рис. 13.11
758
Механизмы питания автоматов
дА J ¥ 5 6 7 \Ъ8 9 Ю
Рис. 13.12
Рис. 13.13
Рис. 13.13. Механизм загрузки и ориентации заготовок штамповочного пресса.
Ползун 25, соединенный головкой 14 с шатуном, совершает поступательное
движение и может останавливаться в фиксированной точке. На ползуне укреплены:
стакан 10 с текстолитовой втулкой 11,^ внутри которой перемещается
подпружиненный плунжер 9 и стакан 6 со скалкой 4, снабженной выемкой, в которую
входит защелка 3, последняя относительно ползуна 15 может поворачиваться.
При ходе ползуна вправо неподвижный упор 7 останавливает скалку 4 и при
соприкосновении торца стакана 6 с утолщенной частью скалки 4 ползун
остановится. Если теперь заготовка 8 попадает из лотка в пространство между скалкой
4 и стаканом 10 вогнутой стороной влево, то при движении ползуна влево
подпружиненные штифты 5 прижмут ее к плунжеру 9, вследствие чего замыкается
цепь электромагнита 1, и уступ А его якоря 2 отойдет с пути защелки 3.
Далее, перемещаясь с ползуном 75, защелка 3 встретится с упором В и,
поворачиваясь относительно оси, отожмет скалку 4 влево, при этом заготовка
падает в канал 12 и далее в лоток 16, как это требуется, вогнутой стороной
вверх. Как только заготовка проскочит, электромагнит обесточится, и при
возвращении ползуна в исходное положение защелка 3 отпустит якорь 2.
Если заготовка вышла из лотка вогнутой стороной вправо, то плунжер 9 не
коснется заготовки, цепь электромагнита не замкнется, и защелка 3, встречаясь
с упором А, освободит ее над каналом 15, откуда заготовка падает на лоток 16
вогнутой стороной вверх. Таким образом, все заготовки будут ориентированы
вогнутой стороной вверх.
Рис. 13.14. Механизм параллельного переноса и ориентации заготовок. Головка
7 механизма переноса, несущая в подпружиненных захватах 1 и 3 заготовку 4,
с помощью шатуна 16 поворачивается и переносит ее от оси шпинделя 2
на ось шпинделя 5. Изменение ориентации заготовки во время движения головки
осуществляется посредством неподвижного коническою зубчатого сегмента 8,
находящегося в зацеплении с зубчатым колесом 10, и установленных неподвижно
Механизмы opuewnaifim заготовок
759
на ступице колеса 10 ^/-образной
формы фланца 11, а на валу 9 —
рычага 13; последние соединены
между собой пружинами 14,
Регулируемые ограничители 15 и 12
останавливают головку 7 и вал 9, а
следовательно, и заготовку 4 в
требуемом положении.
После обточки фаски на
заготовке в шпинделе 2 толкатель б
выталкивает ее в захваты 1 я 3,
я головка 7 начинает по1ворот, за
время которого вал 9 повернется
на 180°. В конце поворота головки
другой толкатель заталкивает
заготовку в захваты шпинделя 5, где производится обработка заготовки с другой
стороны.
Механизм обслуживает станок для обработки штампованных колпачков.
Рис. 13.15. Механизм ориентации заготовок, имеющих форму скоб и роликов.
Принудительная ориентация заготовок в виде скоб осуществляется в вертикально
расположенном лотке (рис. 13,15 а). Два толкателя I я 2 перемещаются поочередно
в горизонтальном направлении. При неправильном положении заготовки 3
(штриховые линии) толкатель I встречает на своем пути стенку скобы и поворачивает
ее в положение, соответствующее заданному.
На рис. 13.15 б показан механизм ориентации и сортировки заготовок, имеющих
форму К01шческих роликов. Заготовка 1 поступает между двумя вращающимися
760
Механизмы питания автоматов
Рис. 13.16
в разных направлениях валиками 5 и 2, занимая при этом положение с
расположением вершины конуса вниз. Валики в части, расположенной над лотком, имеют
выточки, между которыми ролик проваливается и попадает в лоток.
Заготовки с размером, меньше необходимого, выпадают выше расположения
выточек и с большим размером ~ ниже выточек.
Рис. 13.16. Механизм ориентации конических заготовок. На площадке 3
механизма имеется паз с порогом 4; ширина паза соответствует меньшему диаметру
заготовки L
Поступившая из бункера заготовка с расположением вершины конуса вниз
попадает в паз и сбрасывается толкателем 2 в трубку 5 с поворотом на 180°.
Заготовка, поступившая на площадку 3 с расположением вершины конуса
вверх, в паз не попадает и сбрасывается толкателем в том же положении.
Рис. 13.17. Схема изменения ориентации деталей при транспортировке их
в лотках.
На рис. 13.17, а показано устройство для транспортировки деталей 1 ступенчатой
формы в лотке 2. На рис. 13.17,6 —то же для деталей 1, имеющих форму
гладких колец.
ОТСЕКАТЕЛИ
Рис. 13.18. Отсекатель с возвратно-поступательным движением. Питатель Зу
совершая возвратно-поступательное движение в направляющей 2, подает за один
двойной ход одну заготовку 1 в кайал.
Рис. 13.19. Отсекатель с возвратно-поступательным движением. Количество
заготовок 1, поступающих из магазина 2 в питатель 3 с последующей подачей
их к станку посредством толкателя, регулируется числом ходов питателя. Верхняя
площадка питателя перекрывает канал магазина.
Рис. 13.20. Отсекатель с колебательным движением питателя. В крайнем правом
положении, питателя 3 заготовка 1 падает из магазина 2 в приемную часть
и удерживается рычагом 4 под действием пружины. В левом крайнем положении
питателя заготовка выталкивается и подается к месту обработки.
Отсекатели
761
Рис. 13Л8
Рис. 13.19
Рис. 13.20
Рпс. 13.21
Рис. 13.22
Рис. 13.23
Рис. 13.21. Отсекатель с колебательным движением питателя. В рассматриваемом
механизме толкатель работает непрерывно, а заготовки должны подаваться к станку
партиями по 4 шт. с паузами между партиями. В положении, показанном на
рисунке, четыре заготовки 1 последовательно выталкиваются через отверстие в
нижней части питателя 5. При повороте питателя по часовой стрелке на 45°
находящиеся в магазине 2 заготовки заполняют его очередной партией.
Рис. 13.22. Отсекатель с вращающимся диском. По окружности вращающегося
диска 1 изготовлены профильные канавки, в которые западают заготовки 2 из
магазина. Упор 3 выталкивает заклинившиеся заготовки.
Рис. 13.23. Отсекатель с вращающимся диском. Заготовки 1 из магазина
подаются в лоток 5 посредством вращающегося диска 2 и выталкиваются.
Рис. 13.24. Отсекатель с двумя вращающимися звездочками. Диски i и 2
поочередно подают разные заготовки 3 и ^ в один канал из двух магазинов.
Рис. 13.25. Отсекатель с возвратно-поступательным движением. Лоток 2 с
заготовками 1 расположен под углом а к горизонту. Отсекатель 5 за один двойной
ход освобождает одну заготовку, которая под действием силы тялсести
перекатывается к месту обработки.
Рис. 13.26. Отсекатель с колебательным движением. Принцип действия
механизма такой же, как и механизма, изображенного на рис, 13.25. Шарнир от-
секателя 1 расположен за пределами сечения дотк^.
762
Механизмы питания автоматов
Рис. 13.24
/19=^
Рис. 13.26
Рис. 13.25
\';:'::^:^ч'^^^
Рис. 13.27
Рис. 13.28
Рис. 13.27. Отсекатель для крупных заготовок, транспортируемых по
горизонтальному лотку. Трение между заготовками 2 и горизонтальными направляющими
преодолевается грузом 2. Отсекатель 3 выталкивает заготовку при перемещений
вниз.
Рис. 13.28. Отсекатель для заготовок, имеющих форму колпачка. Заготовки i,
расположенные в вертикальной направляющей 2, подаются к месту обработки
отсекателем 3 при перемещении его справа налево.
МЕХАНИЗМЫ БУНКЕРНОГО ПИТАНИЯ
Рис. 13.29. Бункерный магазин с дисковым питателем. На вращающийся диск 1
питателя (рис. 13,29, а) укладываются заготовки 2, которые при своем нижнем
положении по одной сбрасываются в лоток и подаются к станку через
отверстие в бункере толкателем.
На рис. 13.29,6 показан бункерный магазин с дисковым питателем, в которо ^
исключено образование сводов. Бункер имеет большое выходное отверстие,
перекрываемое питателем 1. При вращении питателя заготовки 2 приходят в движени
и препятствуют образованию свода.
Механизмы бункерного питания
763
Вид А
Рис. 13.30
Рис. 13.31
Рис. 13.30. Питатель из гибкой ленты с штырьковыми захватами. Ремень 1
с прикрепленными к нему штырями 2 получает движение от шкива 3. В нижней
части бункера, в котором расположен второй шкив, штыри 2 "захватывают
заготовки 4 и передают их на лоток 5 через приемник.
Рис. 13.31. Тангенциально-крючковое загрузочное устройство с ориентацией
заготовок.
Вращающиеся крючки 4 захватывают заготовку 2 и подают ее в
направляющую трубку-лоток 5. Заслонкой 3 регулируется количество заготовок, подаваемых
из бункера 1,
Рис. 13.32. Питатель с качающимся рычагом. В наклонном днище
неподвижного бункера 1 имеется щель, в которой покачивается рычаг 2 относительно
оси 3. Рычаг 2 изготовлен из двух параллельно расположенных пластинок с
зазором, равным меньшему диаметру заготовки 4.
Рис. 13.33. Питатель с качающимся бункером. Качающийся бункер 1
перекатывает находящиеся в нем заготовки 2, вследствие чего создается возможность
попадания стержня заготовки в щель днища. В верхнем положении бункера
заготовки, направляемые щелью, перемещаются по наклонной плоскости вниз и
подаются в приемник.
Рис. 13.34. Питатель с вращающимся столом. Конец качающегося рычага 1,
изготовленный из двух параллельно расположенных пластинок, в нижнем своем
положении касается днища вращающегося стола 3, наполненного заготовками 2.
Некоторые заготовки, встречающиеся с рычагом, заходят тонким концом в
пространство между пластинками и удерживаются головкой. В верхнем положении
рычага 1 заготовки перемещаются под действием силы тяжести к приемнику.
764
Механизмы питания автоматов
Рис. 13.36
Рис. 13.35. Питатель для заготовок призматической шестигранной формн.
Колебательным движением рычага 1 достигается перемещение шестигранных
заготовок 2, которые, получая соответствующее положение, укладываются в
направляющих питателя.
Рис. 13.36. Питатель с вращающимся диском. Бункер 1 с вращающимся диском
2 расположен под некоторым углом к вертикали. По периметру днища бункера
имеется паз, в котором заготовки 3 свободно перемещаются собачкой ^ в то
Механизмы бункерного питания
765
случае, когда они занимают положение, показанное на рисунке. В верхней части
питателя заготовки направляются в приемник.
Рис. 13.37. Питатель для дисков и шайб. В корпусе бункера 2 с наклонно
расположенным днищем вращается тарельчатый диск 3 с перегородками 4 и
гнездами 5 (разрез А—А). Наклонное положение диска 5 позволяет транспортируемым
шайбам 6 устанавливаться в гнезда на ребро. При вращении диска шайбы
перемещаются вверх, где они выкатываются по наклонной плоскости в
приемник 1, а затем по лотку — в питатель.
Рис. 13.38. Питатель для цилиндрических заготовок. Бункер 1 вращается со
скоростью, при которой заготовки 4 удаляются от центра и прижимаются к
боковой поверхности бункера центробежной силой. Рычаг 5, прикрепленный к бункеру,
встречаясь с неподвижным кулачком 2, отбрасывает заготовки к центру, и часть
из них попадает в отверстие вертикально расположенного приемника.
Рис. 13.39. Питатель для заготовок, имеющих форму колпачка. Стержень 1
совершает возвратно-поступательное движение. Заготовки 2, подхватывасхмые
стержнем 1 донышком вверх, поступают в трубу приемника с пружинным замком 3.
Рис. 13.40. Механизм захвата и ориентации заготовок сложной формы. В
бункер 1 барабанного типа, приводимый от ременной передачи, через воронку 2
подаются заготовки 5 П-образной формы. При вращении барабана с внутренними
Рис. 13.37
Рис. 13.38
Рис. 13.39
766
Механизмы питшшч автоматов
5
Ш ОН
Рис. 13.40
Рис. 13.41
5-я
Вид/^
Рис. 13.42
Рис. 13.43
ребрами заготовки попадают па наклонный нож 4, связанный (справа) с
вибратором 5.
Рис. 13.41, Питатель с качающимися рычагами. Рычаги 1 w 2 качаются
синхронно и подают коро1Кис цилиндрические загоювки 4 к толкателю 3 в
ориентированном положении.
Рис. 13.42. Загрузочное устройство для резьбонарезного станка. Гайки
загружаются в бункер i, в котором посредством щибера 2. совершающего
возвратно-поступательное движение, направляются в желоб 4. Из желоба гайки подаются
к метчику толкателем 3.
Рис. 13.43. Питатель для круглых тонких заготовок. Ползун 4, приводимый
от кривошиппо-шатунного механизма, движется в пазу, имеющем сверху скос, куд^
западают заготовки 5 из бункера 3. При опускании ползуна заготовки попадают
на наклонный лоток 1, Равномерную подачу заготовок регулирует враи1аюшееся
колесо 2 с пружинящими лопатками.
Механизмы бункерного питания
161
Рис. 13.44. Питатель
периодического действия.
Вращающийся диск 2
(рис. 13.44, а) имеет
двенадцать радиальных
пазов. Размеры паза
соответствуют размерам
плоских заготовок б. Диск 2
вращается с остановками
посредством 12.-пазового
мальтийского креста 5
с кривошипом 5. Во время
остановки паз диска 2
совпадает с выступом на
торцовой части
неподвижного вала 4 и лотком 1,
Для улучшения
условий соскальзывания
заготовок диск 2 делается
коническим (рис. 13.44, б).
Рис.- 13.45. Бункер с
возвратно-поступательно
движущимися отсекателя-
ми. Отсекатели б и 7
(рис. 13.45, а) для плоской
заготовки 8. приводятся
в движение посредством
рычагов ^ и 5 кулачкового
механизма с валом 2 и
эксцентриками i и 5.
Эксцентрики смещены по
фазе на угол 180^ Для
увеличения
производительности в верхней части
вкладышей (рис. 13.45, б)
делают углубления,
соответствующие размерам
заготовки.
Рис. 13.46. Бункер с
качающимся сектором.
Подача заготовок 4 из
бункера 1 на лоток 3
осуществляется
качающимся сектором 2.
Заготовки западают в паз
сектора в нижнем его
положении и частично при
подьеме вверх. В момент,
когда дно паза сектора
совпадает с дном лотка 3,
заготовки перемещаются
вниз.
Рис. 13.44
Рис. 13.45
Рис. 13.46
768
Механизмы питания автоматов
Рис. 13.47
Рис. 13.48
Рис. 13.47. Бункер с
вращающимися лопастями. Плоские
заготовки в виде дисков, шайб,
гаек и другие из щели корпуса 1
бункера подаются в загрузочный
лоток 5 вращающимися на валу
3 лопастями 2. Собачка 4
предохраняет выпадание заготовки
из верхней части лотка 5 при
незагруженной его нижней левой
част. Пружина б фиксирует
собачку.
Рис. 13:48. Бункер для подачи
и транспортировки круглых
заготовок к сортировочному
механизму. Заготовки 2, которые
загружаются в чашу 1 бункера
с вращающимся конусным дном
4, попадают в кольцевой паз 3
и силой трения
транспортируются к механизму сортировки.
Рис. 13.49. Бункер
карманного типа. Ребра 2,
прикрепленные к наклонно расположенному диску 3, образуют карманы 5. При вращении
диска 3 в направлении стрелки заготовки 7, загруженные в кожух / бункера,
западают в карманы 5 и через отверстия в щитке 4 выпадают в лоток -о.
На рис. 13.49, 6 показана форма карманов для звеньев цепи.
Рис. 13.50. Загр\зочное устройство для подачи длинных стержней. Из бункера /,
снабженного вибратором 2,- стержни 3 поступают в пазы цилиндра 4
револьверного станка. Цилиндр 4 поворачивается периодически. В положении А стержень
удерживается зажимами (на рисунке не показаны) и в нем сверлится отверстие,
в положении Б стержень из паза выпадает в контейнер.
Рис. 13.49
Механизмы магазинного питания
^69
Рис. 13.51
Рис. 13.51. Питатель для подачи цилиндрических заготовок. В неподвижном
бункере 4 с заготовками движется полз>и 3 (с приводом, обеспечивающи?у1 паузы
в крайних положениях), несущий две различной высоты стальные пластины 2,
образующие полку. В верхнем положении полз>на заготовки 5 скатываются
в тр>бу L
МЕХАНИЗМЫ МАГАЗИННОГО ПИТАНИЯ
Рис. 13.52. Трубчатый магазин для подачи круглых или близких к ним по
форме деталей, транспортир)емых в направлении оси их вращения: а - витой;
о — жесткий со щелью для наблюдений.
Рис. 13.53. Схема линейного магазина с вертикальными элеваторами для
хранения заготовок. По приемному лотку 1 заготовки постз'пают на неслщие
устройства 2 элеватора и передаются на следующие элеваторы через отверстие
в кожухе 5. Конечный элеватор передает заготовки на лоток 4 выдачи.
Элеваторы работают синхронно от одного привода с цепной передачей 5.
Рис. 13.53
770
Механизмы питания автоматов
Рис. 13.54
Рис. 13.54. Шахтный магазин.
Заготовки 2 по приемному лотку 1
поступают на несупдие устройства
элеватора и передаются на наклонные
плоскости 3 накопителя. Отсекатель 4
выдает заготовки на транспортер 5.
Рис. 13.55. Схема фрикционного
питателя для тонких плоских
заготовок. Вращающийся диск 7,
изготовленный из войлока или резины и
установленный на валу эксцентрично, силой
трения выталкивает верхнюю деталь 5
из стопки, собранной в накопителе 2.
Рис. 13.55
Пружина 4 удерживает стопку в соприкосновении с верхним упором. Заслонкой 2
регулируется высота щели для выхода заготовки. Питатель применяется для
полуавтоматов.
ТРАНСПОРТИРУЮЩИЕ И ВСПОМОГАТЕЛЬНЫЕ УСТРОЙСТВА
Рис. 13.56. Автоматическая перегрузка деталей с конвейера на ленточный или
пластинчатый транспортер. Детали 5, подвешанные на крючках 4 конвейера I,
автоматически перегружаются на ленточный транспортер 2. Скорость ленточного
транспортера F^ должна быть больше скорости конвейера У^ на 30 — 40%.
Рис. 13.57. Транспортер с захватами для транспортировки изделий на станочной
линии Иночкина. Захваты 2 шарнирно соединены с цепью \ транспортера. На
груженой ветви захваты устанавливаются перпендикулярно цепи и поддерживают
транспортируемые изделия 3, на негруженой ветви захваты устанавливаются
параллельно цепи.
Рис. 13.58. Устройство для транспортировки круглых заготовок, состоящее из
двух вращающихся валков: цилиндрического 2 и конического I. Верхние образующие
валков расположены параллельно в горизонтальной плоскости. Перемещение
заготовок 3 осуществляется за счет составляющей силы трения, возникающее
вследствие разности окружных скоростей.
Транспортирующие и вспомогательные устройства
11\
Рис. 13:57
Рис. 13.58
t1t*2^7^ / /
Рис. 13.59
Рис. 13.59. Схема шагового транспортера для транспортировки круглых
заготовок. Заготовки 1 транспортируются по лотку 2 посредством штанги 5 с
подпружиненными собачками 6. Штанга 5 получает возвратно-поступательное движение
от гидравлического цилиндра 7. В местах разгрузки установлены питатели 4 с общим
приводом, который состоит из цилиндра S и зубчато-реечных передач.
772
Механизмы питания автоматов
Рис. 13.61
Г 1
Рис. 13 60. Транспортировка зубчатых колес в наклонно расположенных лотках.
З/'зкие зубчатые колеса 1 (рис. 13.60,а) транспортируются с расположением мч
крест-накрест.
Широкие зубчатые колеса 3 (рис. 13.60,6) транспортируются без контакта между
собой в лотке с неуравновешенными кулачками i, которые могут поворачиваться
относительно оси 2.
Положение кулачка 1 при наличии на нем зубчатого колеса препятствует
леремешениьэ последующего.
Рис. 13.61. К1еханизм для комплектной раскладки колец подшипников. По
лотку 1 поступают наружные кольца, по лотку 4 — внутренние. Последовательная
подача колец осуществляется отсекателями 2 и 3. При подъеме заслонки
укомплектованные кольца поступают на под печи.
Транспортирующие и вспомогательные устройства
773
Рис. 13.62
Рис. 13.63
Рис. 13.64
Рис. 13.65
Рис. 13.62. Захватный механизм магнитного типа. Захват заготовок из
бункера 1 производится с помощью постоянных магнитов 3, смонтированных на
конвейерной ленте. Притянутые к ленте в местах закрепления магнитов
заготовки 5 корректируются сбрасывателем 4 и оставшиеся отводятся лотком 2,
сделанным из немагнитного материала и расположенного в верхней части
устройства.
Рис. 13.63. Электромагнитный ролик. Применяется для транспортировки труб 1-
с нижней стороны ролика 2 в непрерывных станах печной сварки труб, для
извлечения труб из ванн электролитического покрытия и т. п.
Рис. 13.64. Качающийся перекидчик. Прерывистая передача заготовок 1 с
транспортера в загрузочные позиции станка осуществляется качающимся столом 2,
приводимым в движение посредством пневматического привода.
Рис. 13.65. Устройство для удаления предохранителей из гнезд револьверного
диска. Связанный с ползуном пресса кронштейн 4 сообщает относительно колонны 3
движение втулке 1, имеющей винтовой паз. В результате воздействия неподвижно
укрепленного на колонне пальца 2 втулка 1 при осевом смещении поворачи-
774
Механизмы питания автоматов
вается. К втулке прикреплен кронштейн 5 с шарнирно укрепленными и
подпружиненными захватами 7.
При опускании ползуна возле нижнего крайнего положения захваты сжимают
предохранитель 9, в начале подъема ползуна извлекают его из гнезда, затем
рычаг поворачивается, и при встрече захватов с неподвижным упором 6
предохранитель освобождается и опускается в лоток. Центрирование захватов
относительно предохранителя осуществляется штифтами 8,
УСТРОЙСТВА ДЛЯ КОНТРОЛЯ и СОРТИРОВКИ ИЗДЕЛИЙ
Рис. 13.66.Вращающиеся барабаны для сортировки трубок. Два барабана 4 и 5,
расположенных под некоторым углом а к горизонту, вращаются с одинаковой
скоростью и служат для сортировки длинных и коротких трубок. {1 — длинные
трубки; 2 — короткие трубки; 3 — отверстия во внутреннем барабане; 6 — шнек
для более быстрого перемещения длинных трубок к лотку).
Рис. 13.67. Схема транспортирующего устройства при автоматическом контроле
размеров изделия. В случае несоответствия размеров изделия 1, определяемых
прибором, который на схеме не показан, вилка 2 устанавливается справа от
траектории падения, и бракованное изделие падает в лоток. Годные изделия
захватываются вилкой 2, которая в этом случае устанавливается слева,
передаются на диск 5 и далее во второй лоток.
Рис. 13.68. Транспортирующее измерительное устройство с движением изделия
по ломаной линии. Толкатели 4, совершая возвратно-поступательное движение,
поднимают изделие 1 до уровня наклонной плоскости 2 следующей измерительной
позиции; изделие или проходит между измерительными губками 3 и падает в лоток
через канал 5, или транспортируется на следующие позиции. Расстояние между
измерительными губками (при настройке) последовательно увеличивается.
Рис. 13.69. Устройство для транспортировки и сортировки шариков по
размерам. По двум линейкам i и 2, расположенным наклонно и под некоторым
углом одна к другой, катятся шарики 3, проваливаясь между линейками
в соответствующий лоток.
Рис. 13.70. Автоматический прибор для сортировки и подачи подшипниковых
шариков на конвейер. Шарики, поступающие из бункера 1 на конвейер и имеющие
размеры больше заданного, задевают за конец заслонки 2, открывают
подпружиненный люк 3 и падают в ящик 4 для бракованных изделий.
5 ♦
Рис. 13.66
Рис. 13.67
Устройства для контроля и сортировки изделий
lis
Рис. 13.68
Рис. 13.69
Рис. 13.70
Рис, 13.71. Устройство для сортировки изделий по высоте. Установленные на
звездочку 1 изделия 2 сбрасываются упорами 5, 4 и 5, расстояние между
которыми и плоскостью звездочки постепенно уменьшается.
Рис. 13.72. Транспортирующее устройство с калибром для сортировки игл по
длине. Иглы 1 подаются из бункера в канавки транспортирующего диска 4,
который вращается между двумя К01шческими дисками 2 калибра. В
зависимости от длины иглы заклиниваются между дисками на различных расстояниях
от оси вращения калибра, поэтому каждый ручеек отсека 3 заполняется иглами
определенного размера.
Рис. 13.73. Транспортирующее устройство при автоматическом контроле размеров
изделий. Транспортировка контролируемых изделий от позиции / к позиции //
и т.д. (рис. 13.73, а) осуществляется захватами i, которые, совершая колебательное
движение относительно оси вала 2 (рис. 13.73, б), захватывают изделие по торцам
с двух сторон. Рейка 3 в зацеплении с зубчатым колесом 4 (рис. 13.73,сг и б),
которое присоединено к валу 2, совершает возврагно-поступахельпое движение. ^
Вращению захватов 1 (рис. 13.73,6) по часовой схрелке препягсгвую! пружины 5,
поэтому при вращении колеса 4 в том же направлешш вначале происходит
776
Механизмы питания автоматов
Рис. 13.72
Рис. 13.71
Рис. 13.73
сближение захватов по левой и правой резьбе на валу 2 до тех пор, пока
изделие не будет зажато с достаточной силой, а затем — поворот с изделием 7.
При повороте против часовой стрелки захваты / задерживаются защелками б,
которые находятся в зацеплении с кулачкаьш 8. После поворота колеса 4 на
некоторый угол захваты расходятся, освобождают изделие и, отключаясь от
защелок б, возвращаются в исходное положение.
ПИТАТЕЛИ
Рис. 13.74. Питатель с приспособлением для удаления металлических включении.
Сыпучий материал 2 из бункера 1 поступает на стол 3 и транспортируется
цепью 4 в направлении стрелки. А. У края стола расположен электромагнит Я,
который при прохождении через его магнитное поле металлических включении
влияет на работу элерстронного устройства, управляющего электромагнитом о-
Электромагнит 8 на короткий промежуток времени открывает заслонку 6 стола -^
и металлические детали с небольшим кол11чеством материала попадают в яшик •
Питатели
111
3 Ч
Рис. 13.74
Рис. 13.75
Рис. 13.75. Питатель с автоматической регулировкой производительности.
Питатель смонтирован на раме i, которая выполняет роль весового коромысла,
качающегося относительно шарнира 7. Материал, расположенный на ленте 6,
уравновешивается контргрузом 2. Рычаг заслонки 5 шарнирно соединен с
неподвижно установленным бункером 4 и кинематически связан с рамой питателя
посредством шатуна 3. В случае, когда на ленту подается материал в
количестве, большем необходимого, рама 1 поворачивается по часовой стрелке, при
этом заслонка 5 уменьшает выходное отверстие бункера и наоборот. Положение
контргруза 2 на раме определяет производительность Го1тателя.
Рис. 13.76. Электромагнитный вибрационный питатель для сыпучего материала.
В отверстиях тяжелой металлической плиты б установлены пакеты пластинчатых
пружин 2, соединенных с лотком I посредством щек 5. Якорь 3 электромагнита
прикреплен к лотку, а катушка 4 электромагнита — к плите б. Когда
электромагнит находится под током, якорь 5 с лотком 1 перемещается под некоторым
углом вправо, сжимая пружины 2; при этом транспортируемый материал за этим
движением не следует. В момент обесточпвания электромагнита лоток 1 под
действием пружин 2 возвращается в исходное положение, транспортируя материал
в направлении стрелки Б.
Рис. 13.77. Пневмовибропитатель для плохосыпучих порошковых материалов.
Бункер 1 с лотком 2 закреплены на раме б посредством двух плоских рессор 4.
Пневматический вибратор 5 возбуждает вибращюнное движение бункера. К
вибратору сжатый воздух подводится через штуцер 8. Опорами для рамы б служат
амортизаторы 7. Производительность питателя регулируется размером выходного
отверстия 5, частотой и амплитудой вибрации бункера.
Рис. 13.78. Лотковый пневматический вибропитатель для сыпучих материалов
смонтирован на литой раме 2, которая установлена на четырех амортизаторах 7.
778
Механизмы типания автоматов
2 J и ё г
Рис. 13.76
Рис. 13.77
Рис. 13.78
Дозаторы
779
Плита 5 с вибратором 4
прикреплена к раме 2 двумя
рессорами 5. Материал
транспортируется по лотку 7, вдоль
которого может перемещаться и
фиксироваться приемный
лоток б.
Рис. 13.79. Дисковый
питатель для сыпучих материалов.
Производительность питателя
зависит от частоты вращения
стола 5, положения манжеты 1,
которая устанавливается на
заданной высоте вращением вин га
2 и положения скребка 4.
Рис. 13.79
ДОЗАТОРЫ
Рис. 13.80. Схема дозатора для прессования сыпучих материалов.
Поворачивающийся относительно оси бункера 1 рукав 5 устанавливается при подаче
материала на отверстие матрицы 3, а затем отводится в сторону (2 — пуансон,
4 — выталкиватель, положение которого определяет дозу).
Рис. 13.81. Дозатор для сыпучих материалов. Дозирующая коробка,
получающая возвратно-поступательное движение от пневматического привода 1, состоит
из двух частей 4 я 2. Перемещением части 2
относительно 4 посредством вращения
зубчатого колеса 5, зацепляющегося с рейкой,
регулируется объем дозы, принимаемой из
бункера 3.
Рис. 13.82. Бункерный дозатор. Затворы
двух бункеров 1 и 2, расположенных один
над другим, приводятся в действие
пневматическими цилиндрами 4 и 3, работа которых
сблокирована так, что при одном открытом
затворе второй закрыт.
Рис. 13.83. Вращающийся погрузочно-
распределительный барабан. Сыпучий
материал подается из бункера в барабан 2
через лоток 1 и дозами засыпается в ковш 3
цепного конвейера.
Рис. 13.84. Весовой дозатор с
автоматическим управлением с помощью
фотоэлемента. Пустая тара 3 посредством
вращающегося стола подается на чашу весов 7 и
наполняется сыпучим материалом из
бункера 1 посредством вибрационного пиш-
^^еля 2. Рис. 13.80
780
Механизмы питании автоматов
Рис. 13.81
Рис. 13.82
5'^
Б А-А
Рис. 13.83
Дозаторы
781
Рис. 13.85
При достижении баланса весов флажок-экран б перекрывает световой поток,
действ} ющий на фотоэлемент 5, срабатывает фотореле 4, и прекращается подача
продукта.
Рис. 13.85. Ленточный весовой дозатор. Производительность дозатора ^южeт
одновременно регулироваться скоростью ленты транспортера и подачей питателя
в пределах от 9,0 до 900 кг/ч. Привод дозатора (на рис}нке не показан) имеет
вариатор скорости и счетчик, который показывает количество погонных метров
ленты 1 при любой ее скорости.
Питатель — вибращюнный с эксцентриком 5, приводимый во вращение от
общего привода.
Производительность питателя регулируется изменением амплитуды перемещения
лотка 2 посредством резинового клина 5, связанного с коромыслом 4 весов.
Так например, при малой массе материала на ленте коромысло с клином
опускается, амплитуда лотка возрастает, и производительность дозатора
увеличивается.
782
Механизмы питания автоматов
^^1^^^^^тп1|
Рис. 13.87
Рис. 13.86. Схема ленточного весового дозатора. Производительность дозатора
до 10 т/ч может регулироваться одновременно изменением скорости ленты и
подачей шнекового питателя. Платформа 4 весов соединена с коромыслом 5,
посредством которого замыкаются верхние или нижние контакты 6; при этом
с помощью двигателя 10 управления установкой скорости 9 и регулятором
скорости 8 изменяется число оборотов двигателя 7 привода шнековой подачи
материала.
Штурвалом 3 через пульт управления 2 регулируется частота вращения
двигателя 1 приводов транспортера.
Рис. 13 87. Схема весового дозатора с упруго-матнитным датчиком. Материал
из бункера 1 подается на ленточный весовой транспортер 3 электромагнитным
вибрационным питателем 2 с вибродвпгателсм 6. Одна опора транспортера
(со стороны разгрузки) закреплена неподвижно и шарнирно соединена с рамой,
вторая — установлена на упруго-магнитном датчике 4, посредством которого через
регулятор 5 осуществляется управление вибродвпгателем и соответственно
производительностью питания.
Дозаторы для жидких тел
783
ДОЗАТОРЫ ДЛЯ ЖИДКИХ ТЕЛ
Рис. 13.88. Автоматический регулятор уровня жидкости. В резервуаре 1
регулирование уровня жидкости осуществляется поплавком 2, который прикреплен
к рычагу механизма клапана 3. С увеличением уровня жрщкости в резервуаре 1
поплавок 2 поднимается и через систему рычагов перемещает клапан 3 вниз,
перекрывая входное отверстие.
Рис. 13.89
Рис. 13.88
Рис. 13.89. Дозатор для жидкой смазки.
Центральное отверстие поршня 2,
установленного неподвижно в штуцере 1,
перекрывается клапаном 6 и сообщается с
резервуаром масленки радиальным отверстием 4*
Рабочая полость цилиндра 8 перекрывается
клапаном 7. Цилиндр 8 насоса получает
возвратно-поступательное движение от
вращающегося (посредством электродвигателя
10) кулачка 9 и сжатой пружины 12,
Направляющая планка 5 и винт 5 препятствуют
вращению цилиндра и ограничивают его
перемещение по вертикали вверх.
Смазка из полости цилиндра 8 подается
в трубку 11 и затем на смазываемую
доверхность подшипника.
Объем дозы подаваемого масла
регулируется вращением вштта 5. *
Рис. 13.90
7S4
Механизмы питания автоматов
Риг. 13.90. Разливочное устройство с мерным сосудом и золотниковым
затвором. Мерный сосуд i, установленный в резервуаре 2 с разливаемой жидкостью,
периодически перемещается по вертикали кулачковым механизг>юм на величину Я.
В крайнем нижнем положении сосуда 1 происходит его наполнение, при этом
отверстие 4 зонтика б перекрывается направляющей втулкой 8. В крайнем
верхнем положении сосуда 1 отверстие 4 совпадает с отверстием во втулке 3,
и жидкость по трубке 5 вытекает в тару.
СПИСОК ЛИТЕРАТУРЫ
I. Ллабужев П. NF., Стихановский Б. И.,
Шплгельб^рд И. Я. Введение в теорию
удара Новосибирск, НЭТИ, 1970 157 с.
2 Артоболевский 11. И. Механизмы в
современной механике. В 3-х т. Т. 1-3. М.,
<.Наука^ 19"0-1973.
3 Артоболевский И. И. Теория
механизмов и машин М, «Наука», 1975. 638 с
4 Биргер И. А., Иосилевич Г. Б.
Резьбовые соединения. М., «Машиностроение»,
1973. 256 с
5 Вибрационные машины в строительстве
и производстве. Справочник. Под ред
В А. Баумана, И. И. Быховского и
Б. Г Гольдштейна. М, «Машиностроение»,
1970 54S с.
6. Гевондян Т. А., Киселев Л. Т. Приборы
для измерения и регистрации колебаний.
М, Машгиз, 1962 467 с.
7 Джонс Ф. и Хортон X. Механизмы
автоматического действия. Пер. с англ М.,
Машгиз, 1961. 767 с.
8. Детали машин. Справочник в 3-х т.
Под ред. Н. С. Ачеркана. М.,
«Машиностроение». Т. 1, 1968. 440 с. Т. 2, 1969.
408 с. Т. 3, 1969. 471 с.
9. Детали и механизмы станков. В 3-х т.
Под ред. Д. Н. Решетова. Т. 1, М.,
«Машиностроение», 19*^2 664 с.
10. Есипенко Я. И. Механические
вариаторы скорости. Киев, Укртехиздат, 1961.
220 с.
II. Есипенко Я. И., Паламаренко А. Ж.,
Афанасьев М. К. М\фты ограничения
нагрузки. Киев, «Техника», 1972. 168 с.
12. Заблонский К. И., Шустер А. Е.
Встроенные редукторы. Киев, «Техника», 1969.
175 с.
13. Иориш Ю. И. Виброметрия. Изд. 2-е,
М, Машгиз, 1963. 771 с
14. Кожевников С. Н. Теория механизмов
И машин. Изд. 4-е, М., «Машиностроение»,
1973. 591 с.
15. Кожевников С. Н., Пруслин М. М.
Механика швейных машин. М.—Л., Гиз-
легпром, 1948. 316 с.
16 Колебания сложных механических
систем Вильнюс, «Минтис», 1969. 24^ с.
Авт : Рагульскис К М, Кубайтис 3 И,
Кушпикас А Л, Гецевичюс Ю Ю, Бак-
шис А. К.
V. Королев А. А. Конструкция и расчет
машин и механизмов прокатных сганов
М, «Металлургия», 1969 462 с
18 Кудрявцев В. Н. Планетарные
передачи. Л, «Машиностроение», 1966. ЗО'' с.
19. Литвин Ф. Л. Теория зубчатых
зацеплений. М., «Наука», 1968 328 с.
20 Новроцкий Г. А. Кузнечпо-штампо-
вочные автоматы, М., «Машиностроение»,
1965 418 с.
21 Потураев В. И. Резиновые и резино-
металлические детали машин. М,
^'Машиностроение», 1966 299 с
22. Повилайло В. А., Силин Р. И., Ши-
гель В. А. Вибрационные устройства в
машиностроении. М-Киев, Машгиз, 1962
ПО с.
23. Поляков В. С. и Барабаш И. Д.
Муфты Л, «Машиностроение», 1973. 336 с.
24. Редукционные станы. М.,
«Металлургия», 1971. 255 с. Авт.: Анисифоров В. П.,
Зельдович Л. С, Курганов В. Д., Шпигель-
ман Р. М, Ивоботснко В. А.
25. Решетов Д. И. Детали машрш Изд 3-е,
М., «Машиностроение», 1974 655 с
26. Решетов Л. Н. Конструирование
рациональных механизмов. Изд 2-е. М,
«Машиностроение», 1972. 254 с
27. Рогбарт Г. А. Кулачковые механизмы
Пер. с англ. Л, Судпромиздат, 1960.
336 с
28. Раевский И. П. Датчики механических
параметров машин. М, Изд-во АН СССР,
1959. 187 с.
29. Рагульскене В. Л. Виброударные
системы. Вильнюс, «Минтис». 1974, 1974.
320 с
30. Часовников Л. Д. Передачи
зацеплением. М., «Машиностроение», 1969. 488 с.
31. Юдин В. А. Механизмы приборов.-
М., Машгиз, 1952. 482 с.