/








Текст
БИБЛИОТЕКА ПО АВТОМАТИКЕ
Выпуск 155
Ф. А. СТУПЕЛЬ
МАГНИТНЫЕ ЛОГИЧЕСКИЕ
ЭЛЕМЕНТЫ АВТОМАТИКИ
ИЗДАТЕЛЬСТВО «ЭНЕРГИЯ:
МОСКВА 1965 ЛЕНИНГРАД
Редакционная коллегия:
И. В. Антик, А. И. Бертинов, С. Н. Вешеневский, Л. М. Закс,
Н. Е. Кобринский, В. С. Кулебакин, В. Э. Низе, В. С. Малов,
Б. С. Сотсков, А. С. Шаталов
В книге освещаются вопросы теории, оснозы
расчета и построения импульсных магнитных ло-
гических элементов, применяемых в цифровых си-
стемах автоматического управления, телемехани-
ки и вычислительной техники. Рассматриваются
элементы с параллельным включением нагрузки—
трансформаторные: ферродиодные и ферротранзи-
сторные, а также с последовательным включением
нагрузки — дроссельные ферродиодные.
Книга предназначена для инженерно-техниче-
ских работников, занимающихся вопросами авто-
матики и телемеханики, а также для студентов
вузов соответствующих специальностей.
Ступель Файвель Аронович
Магнитные логические элементы автоматики,
М.—Л., изд-во „Энергия", 1965, 136 с. с черт.
(Библиотека по автоматике, вып. 155)
Тематический план 1965 г., № 246
681.142
С 88
редактор Г. Д. Козлов
Техн. редактор Я. А. Бульдяев
Сдано в набор 21/VHI 1965 г.
Т-16101 Бумага 84х1087за
Тираж 16 ООО экз.
Цена 33 коп.
Подписано к печати 22/XI 1965 г.
Печ. л. 6,97 Уч.-изд. л. 6,52
33 коп. Заказ 588
Московская типография № 10 Главполиграфпрома
Государственного комитета Совета Министров СССР по печати.
Шлюзовая наб., 10.
ПРЕДИСЛОВИЕ
Развитие цифровой техники привело к созданию боль-
шого числа всевозможных логических элементов, необ-
ходимых для построения различных узлов устройств
автоматики, телемеханики и вычислительной техники.
Широкое распространение получили импульсные маг-
нитные логические элементы, выполняемые в виде им-
пульсных трансформаторов или дроссельных катушек
с сердечниками из магнитных материалов с прямоуголь-
ной петлей гистерезиса.
Задачей настоящей книги является ознакомление на-
чинающего читателя с основными вопросами работы им-
пульсных магнитных логических элементов (принцип
действия, основы расчета и построения).
Считаю своим приятным долгом выразить благодар-
ность редактору книги Г. Д. Козлову, давшему ряд цен-
ных указаний и советов по содержанию книги.
СОДЕРЖАНИЕ
Предисловие 3
Принятые обозначения 6
Глава первая. Основные понятия 7
1-1. Представление величин 7
1-2. Развитие цифровой техники 8
1-3. Структурные формулы систем управления ... 9
1-4. Основные функции и законы алгебры логики ... 10
1-5. Основные виды логических элементов .... 13
. 1-6. Статические и динамические элементы .... 17
1-7. Примеры построения структурных схем .... 18
Глава вторая. Параметры отдельной магнитной ячейки . . 20
2-1. Импульсы, источники импульсов 20
2-2. Основные параметры магнитных материалов . . 22
2-3. Материалы для сердечников . 23
2-4. Особые свойства материалов с ППГ 30
2-5. Перемагничивание ненагруженного сердечника им-
пульсом тока 32
2-6. Перемагничивание нагруженного сердечника импуль-
сом тока 35
2-7. Перемагничивание сердечника импульсом напряжения 38
2-8. Баланс магнитной энергии 41
2-9. Эквивалентное сопротивление обмотки .... 42
2-10. Допустимая предельная частота срабатываний . 44
2-11. Нагрузочная способность ячейки 45
2-12. Полупроводниковые элементы в схемах ячеек . . 48
Глава третья: Ферродиодные элементы трансформаторного
типа (ФДТ) 49
3-1. Принцип действия отдельной ячейки 49
3-2. Условные изображения в схемах 51
3-3. Управление работой отдельных ячеек .... 54
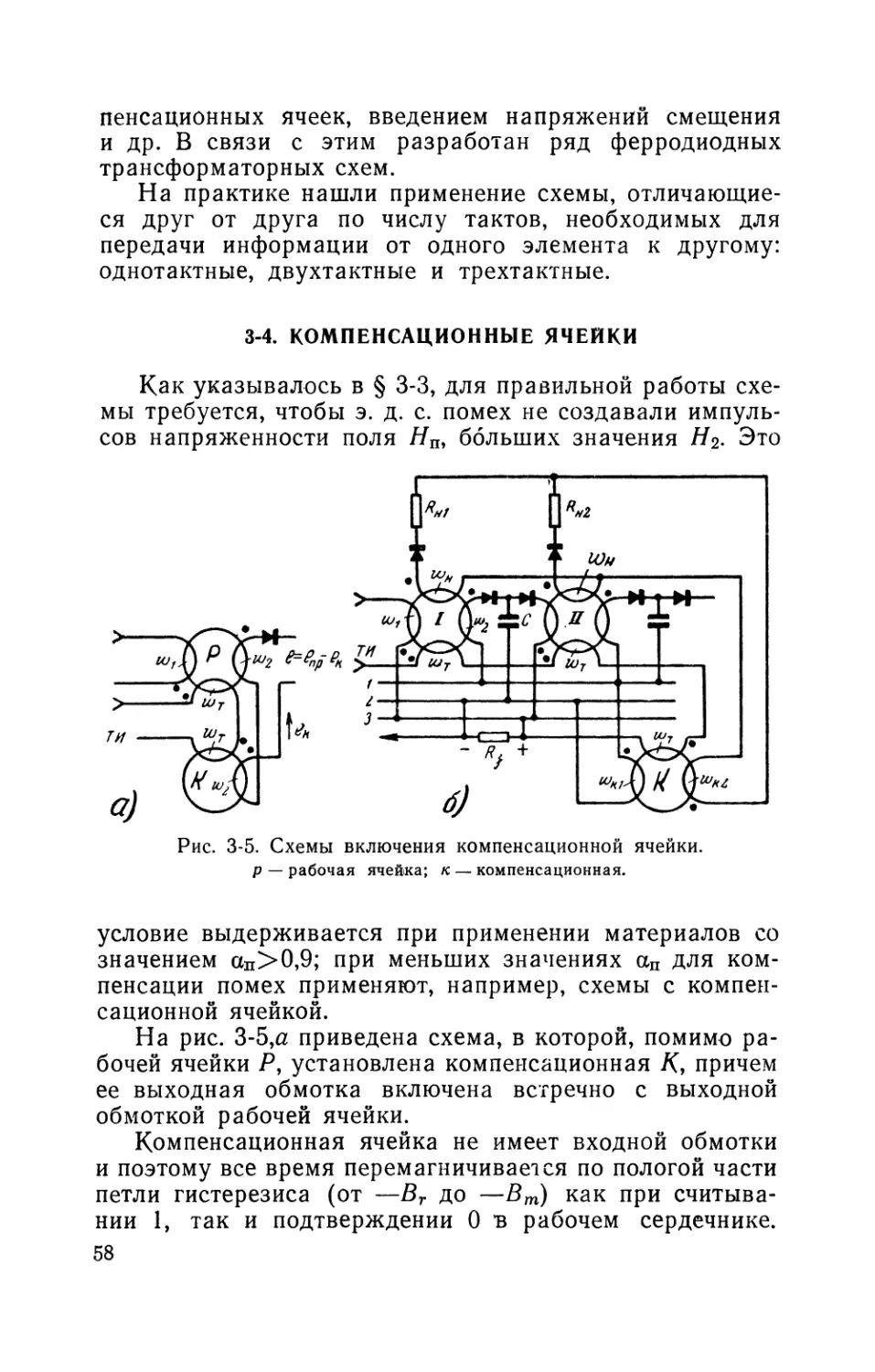
3-4. Компенсационные ячейки 58
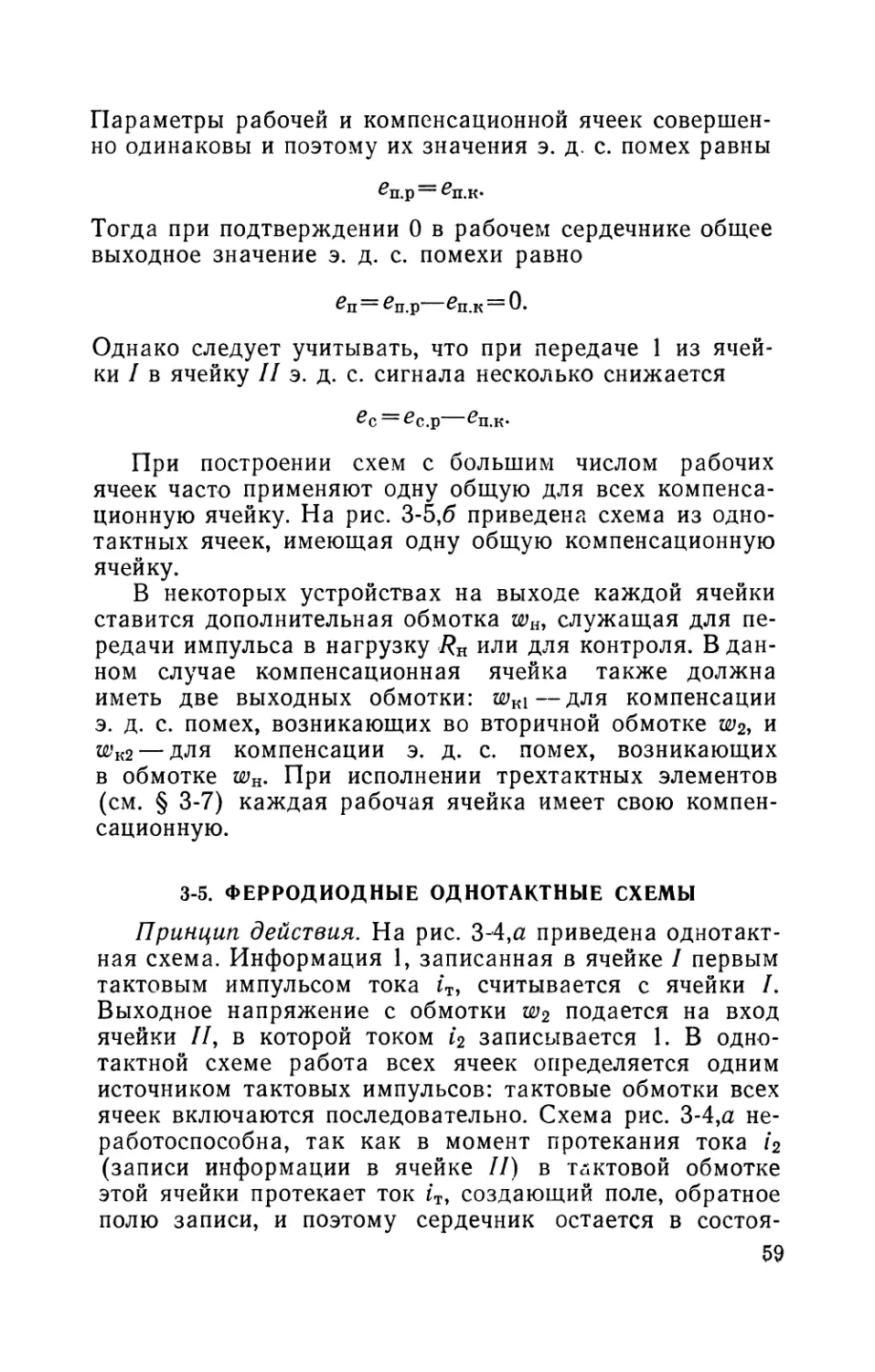
3-5. Ферродиодные однотактные схемы 59
3-6. Ферродиодные двухтактные схемы 67
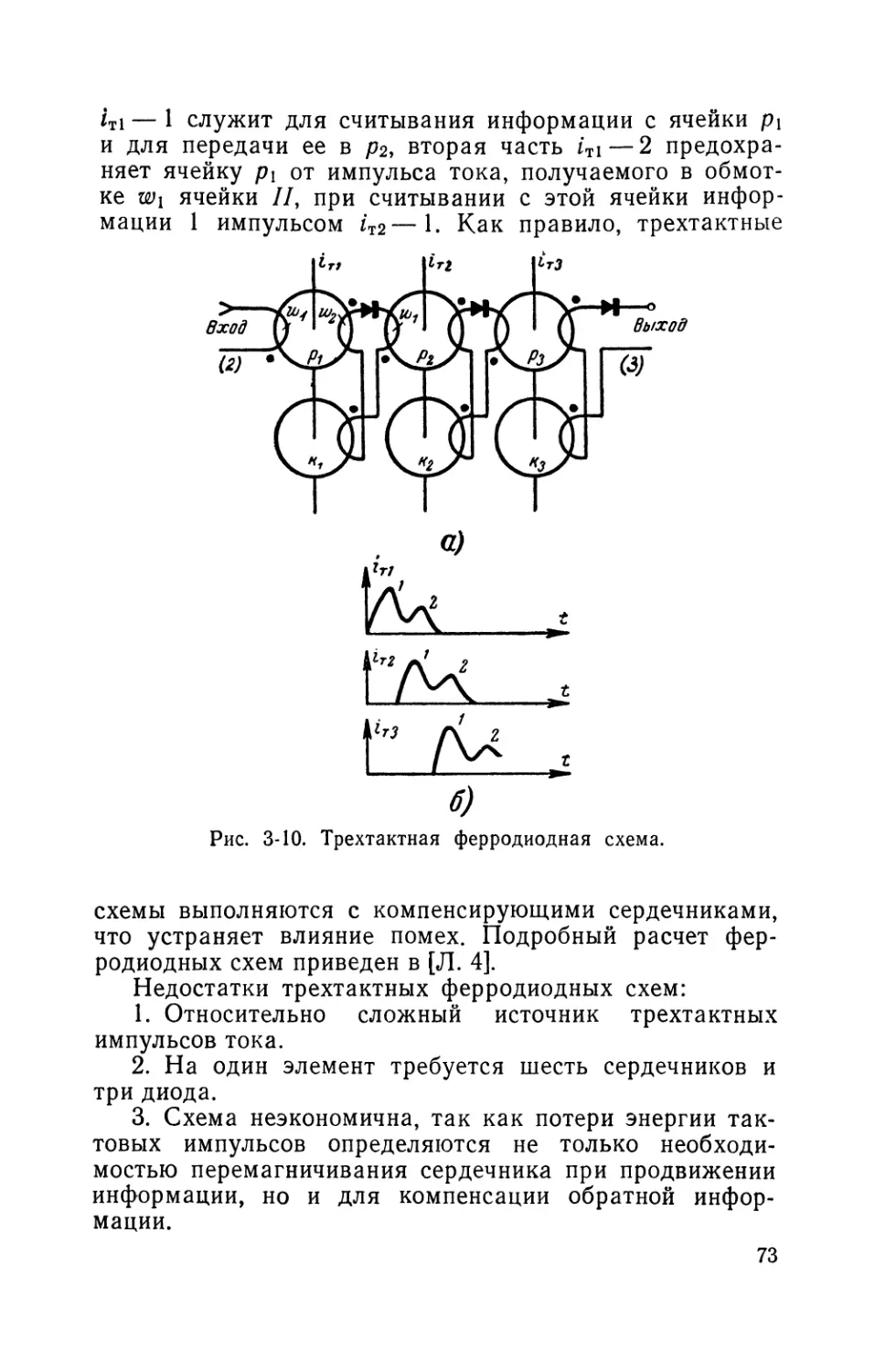
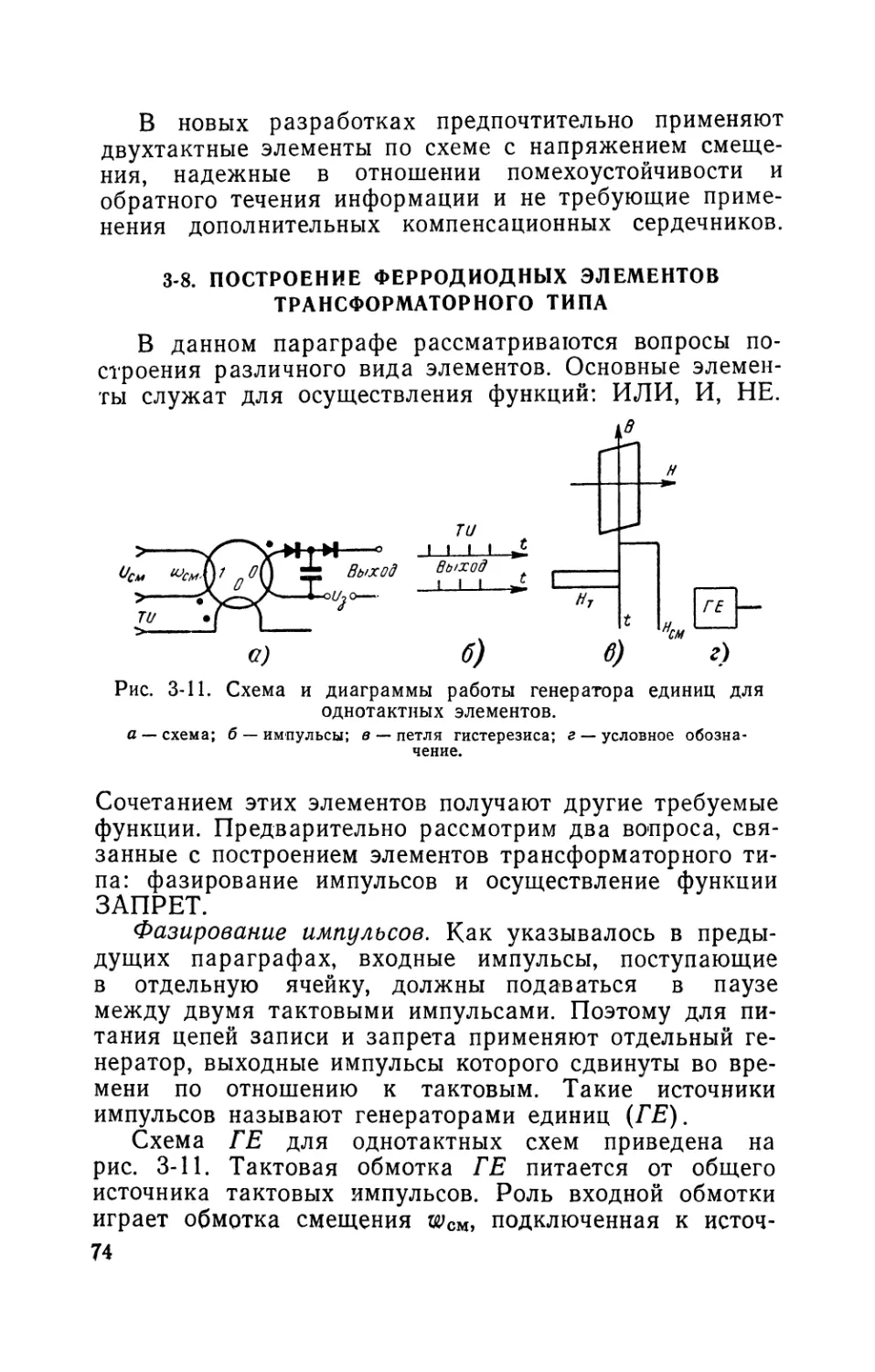
3-7. Ферродиодные трехтактные схемы 72
4
3-8. Построение ферродиодных элементов трансформатор-
ного типа • 74
Глава четвертая. Ферротранзисторные элементы трансформа-
торного типа 81
4-1. Введение 81
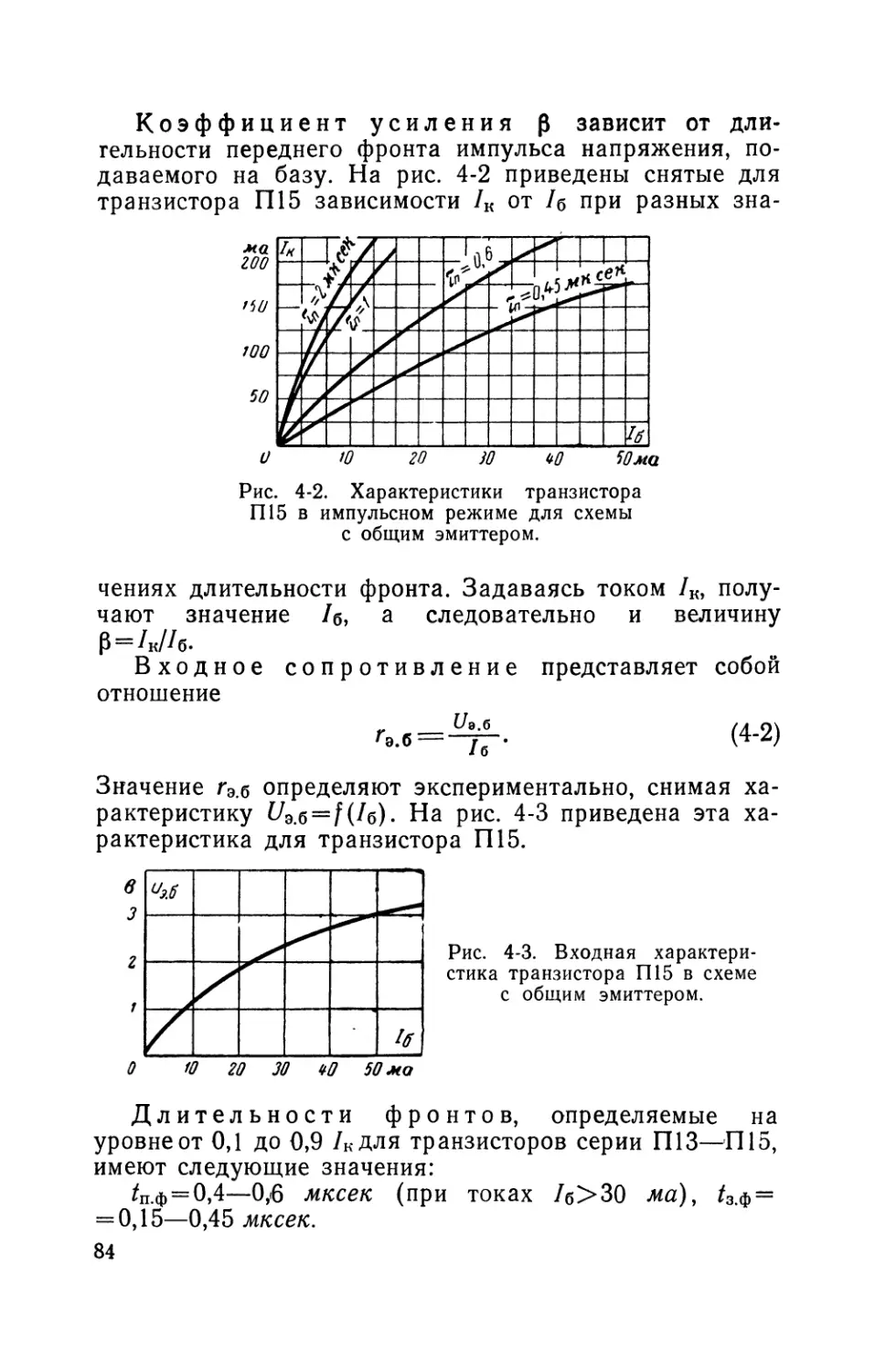
4-2. Транзисторы 82
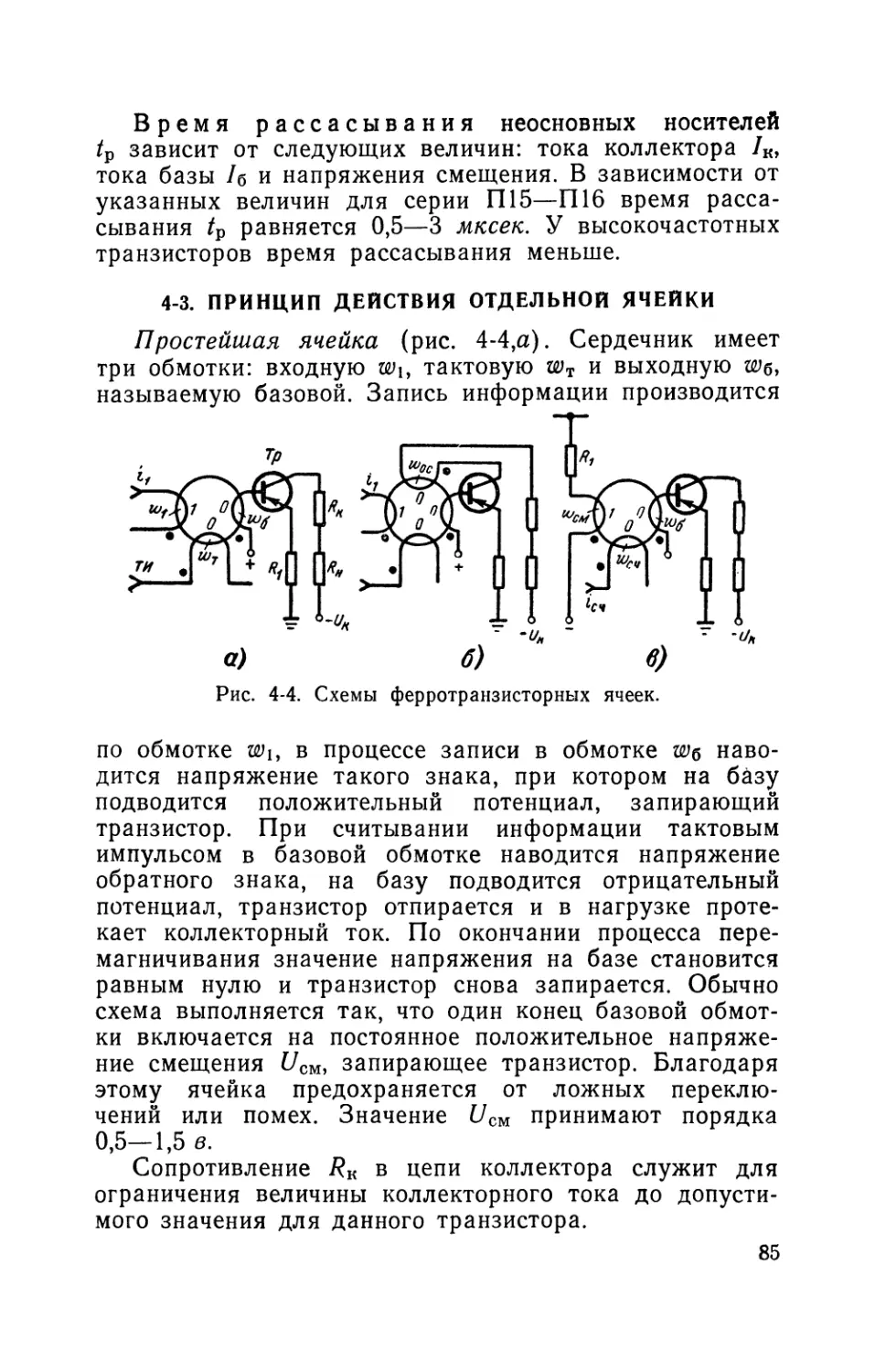
4-3. Принцип действия отдельной ячейки .... 85
4-4. Основные расчетные соотношения 87
4-5. Пример расчета .... 90
4-6. Построение логических элементов 92
Глава пятая. Ферродиодные элементы дроссельного типа . 100
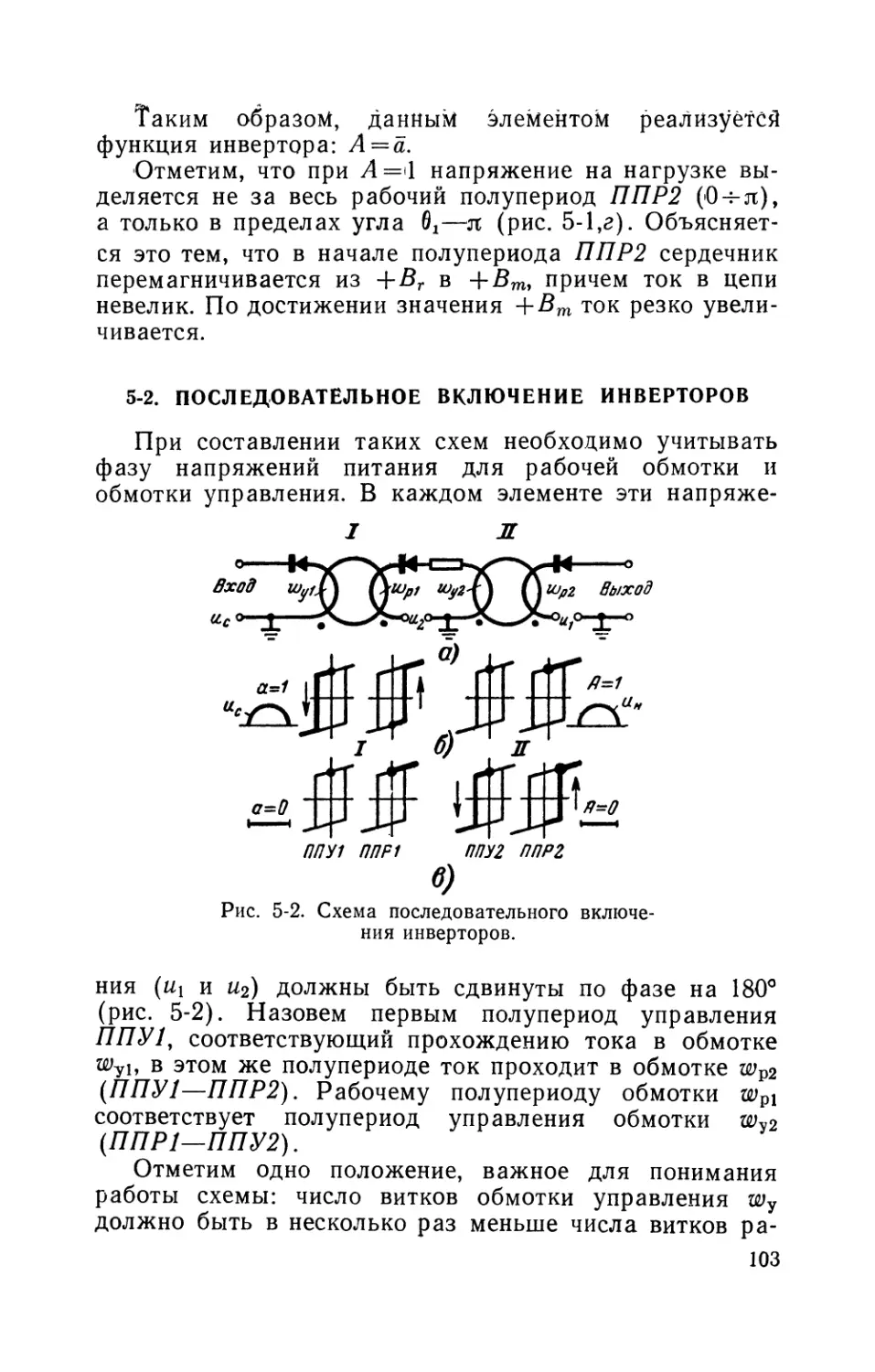
5-1. Принцип действия инвертора 101
5-2 Последовательное включение инверторов . . . 103
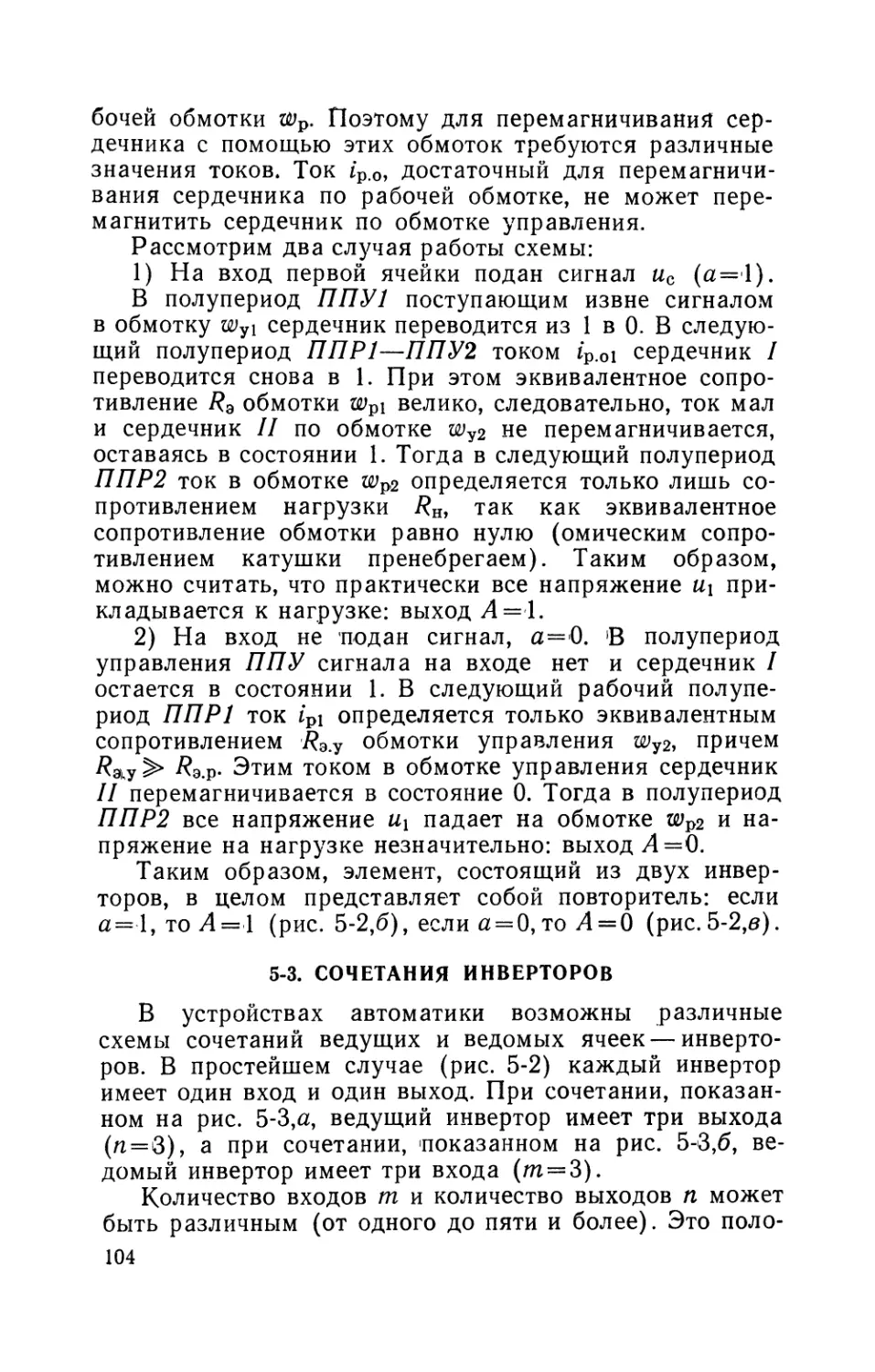
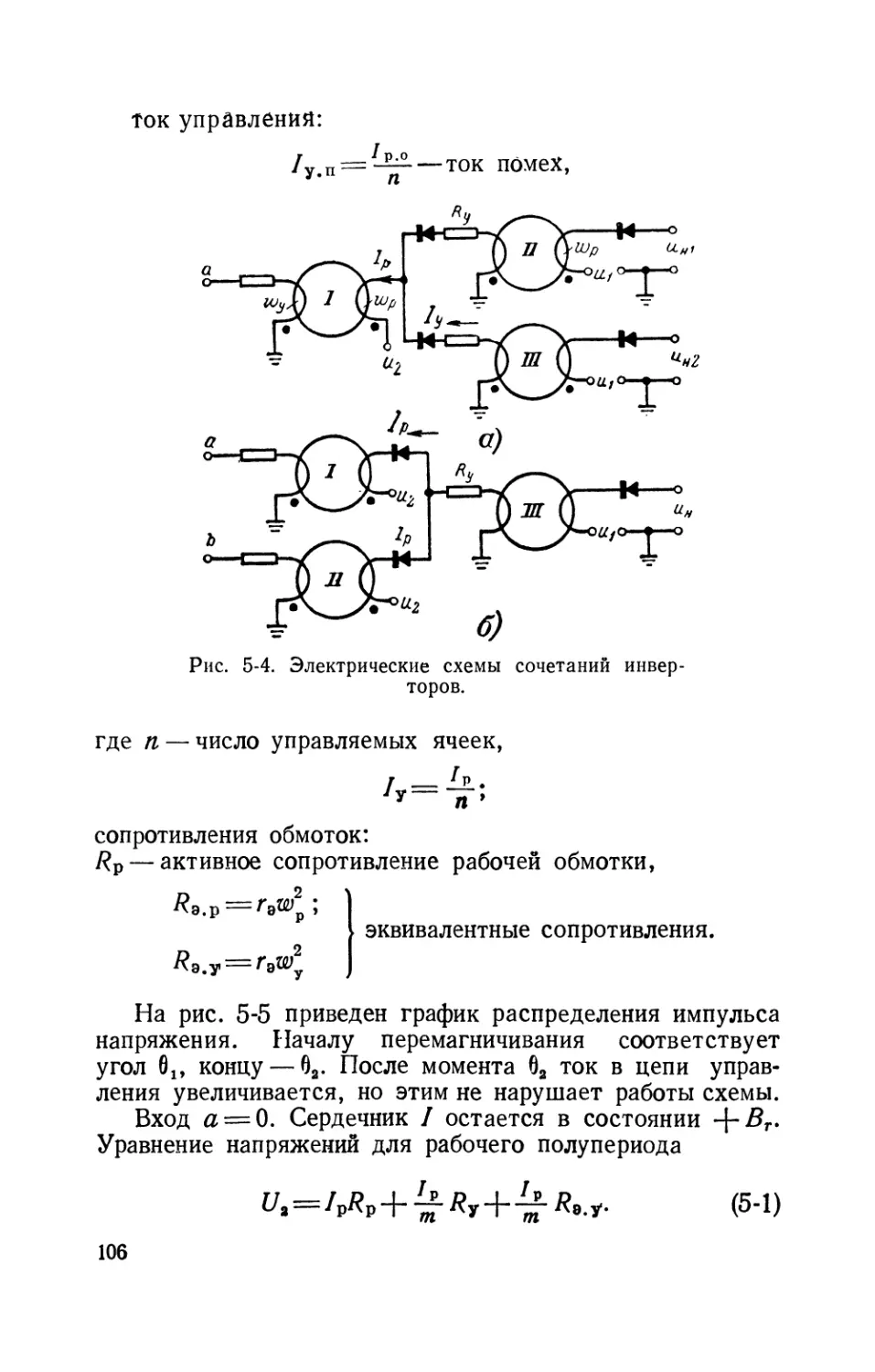
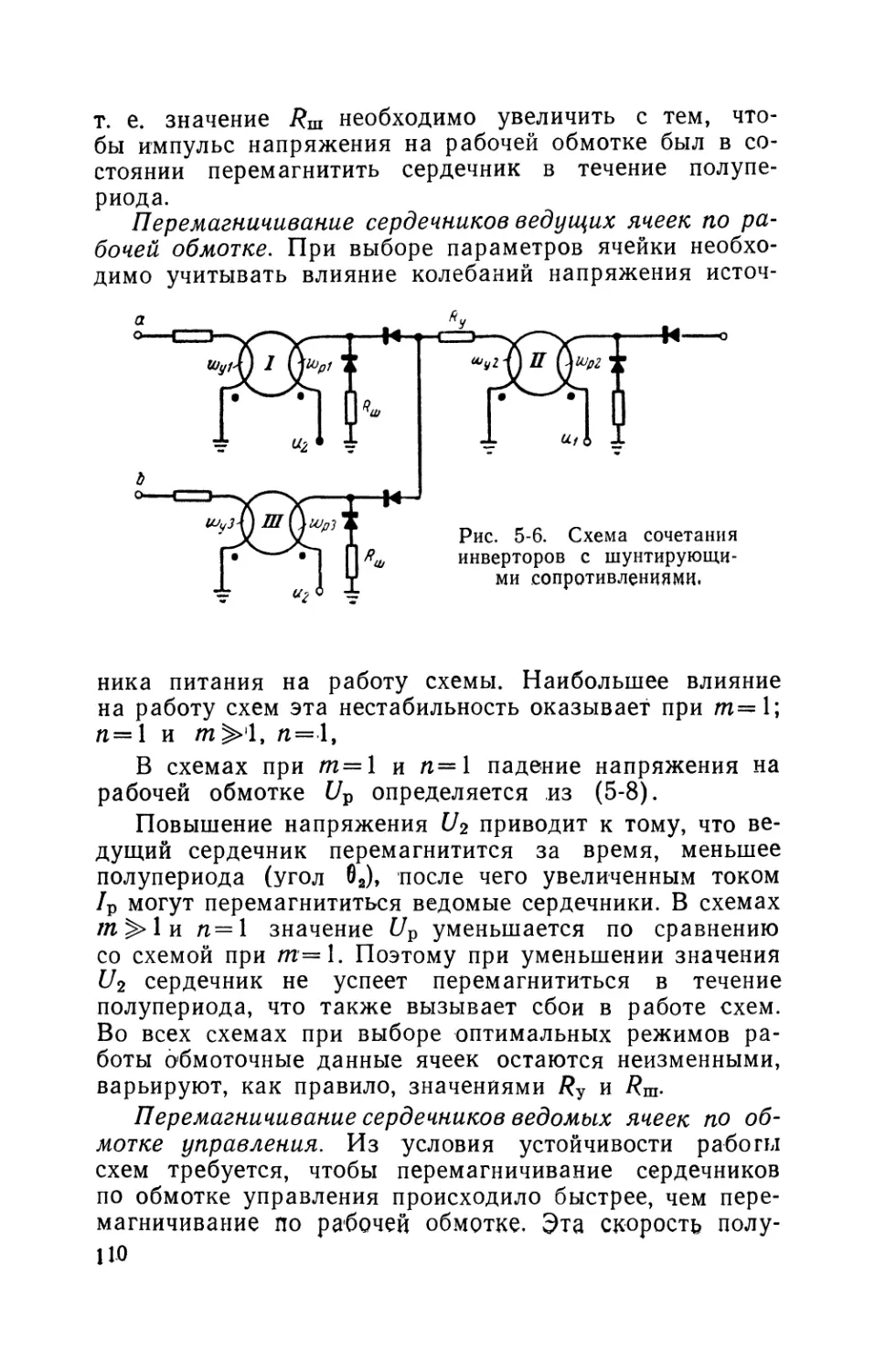
5-3. Сочетания инверторов . . . 104
а) Схемы без шунтирующих сопротивлений . . . 105
б) Схемы с шунтирующими сопротивлениями ... 109
5-4. Основные соотношения для расчета инвертора . . 111
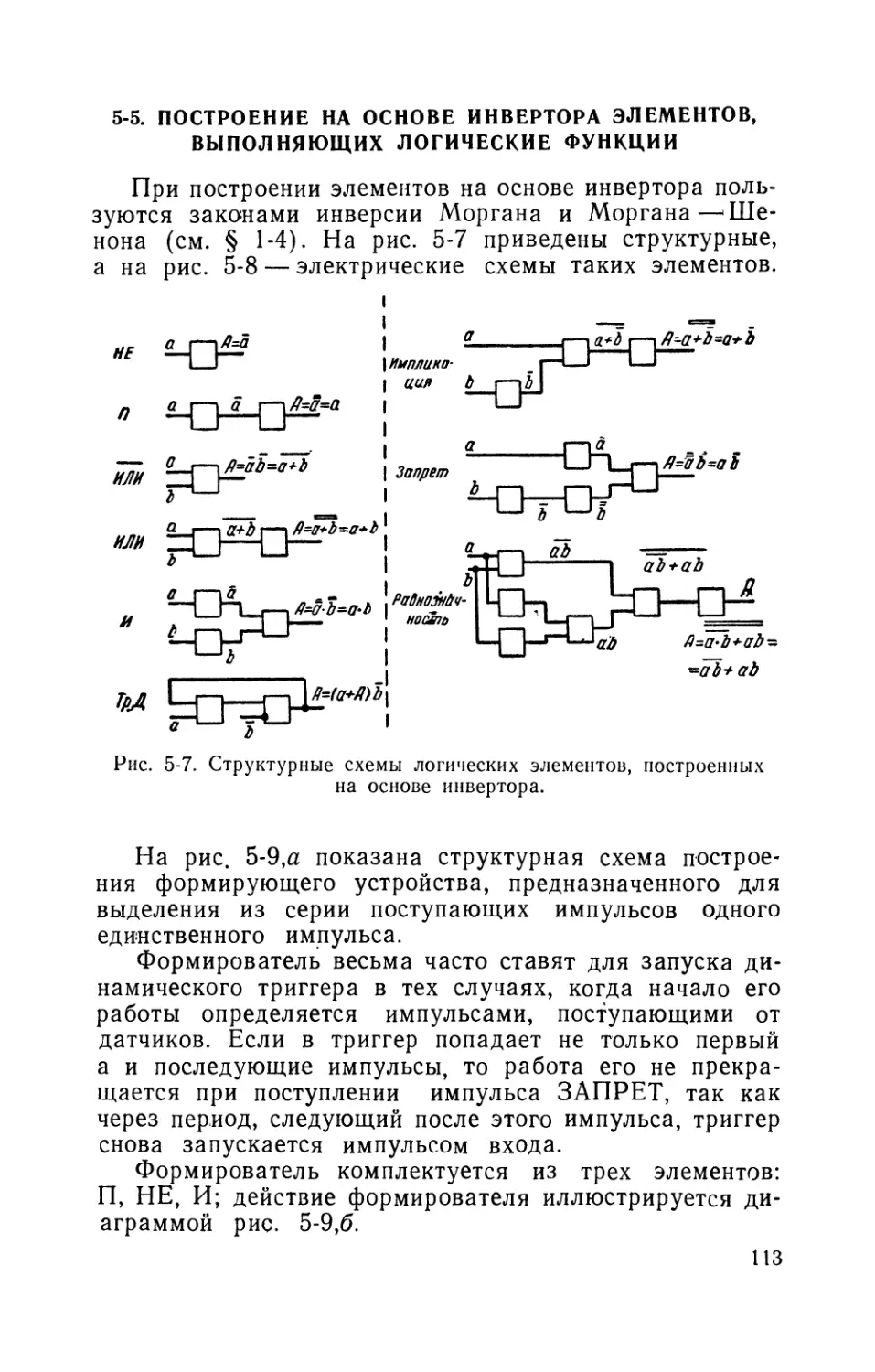
5-5. Построение на основе инвертора элементов, выпол-
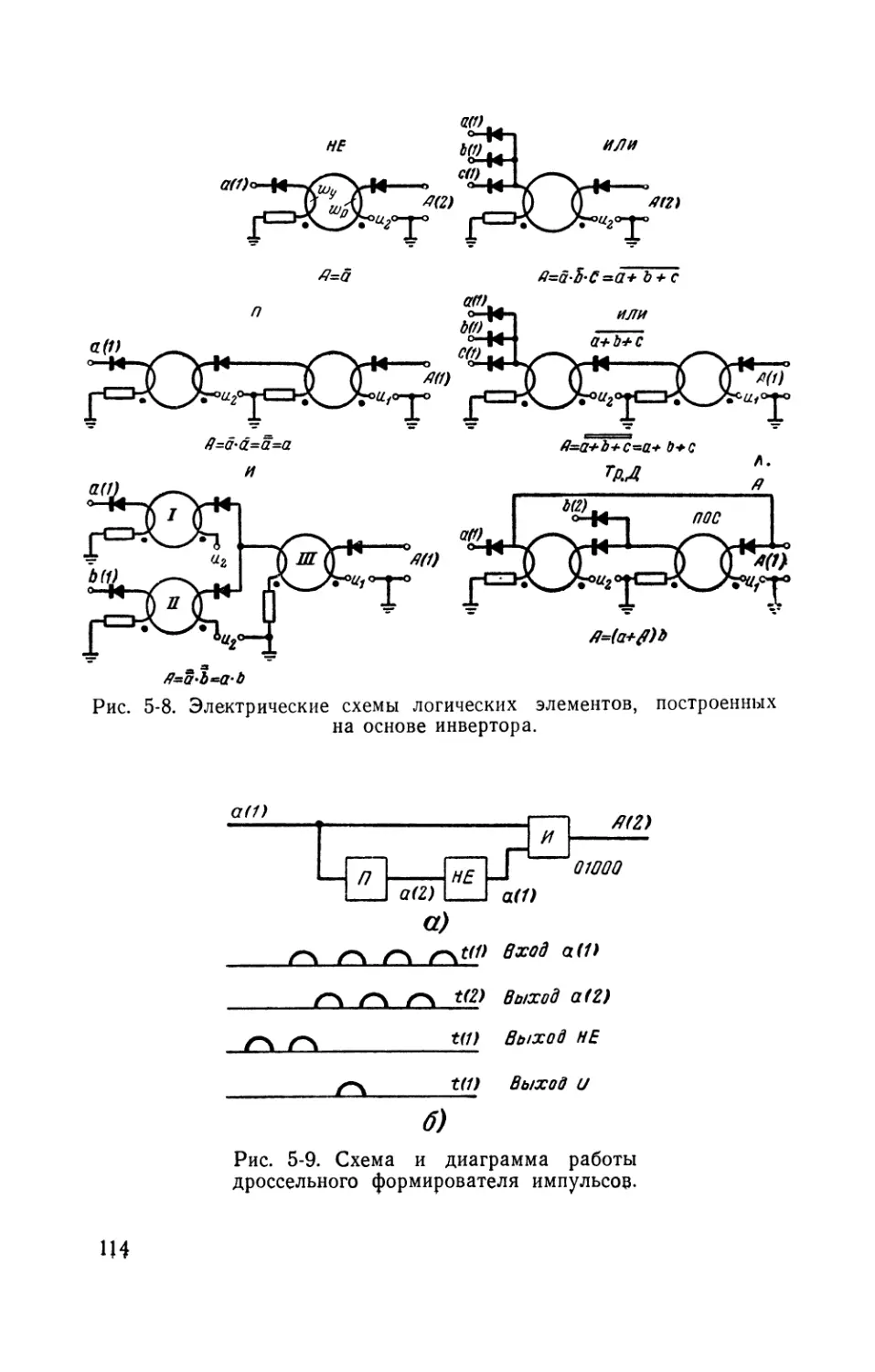
няющих логические функции ....... 113
5-6. Принцип действия повторителя 115
5-7. Последовательное включение повторителей . . . 117
5-8. Построение серии элементов на основе повторителя 120
5-9. Сравнительная оценка схем с инверторами и повто-
рителями 123
Глава шестая. Устройства, выполненные на принципе инте-
грирования импульсов напряжения 124
6-1. Элементы, построенные на дискретном приращении
потока 126
6-2. Элементы, построенные на принципе циклического
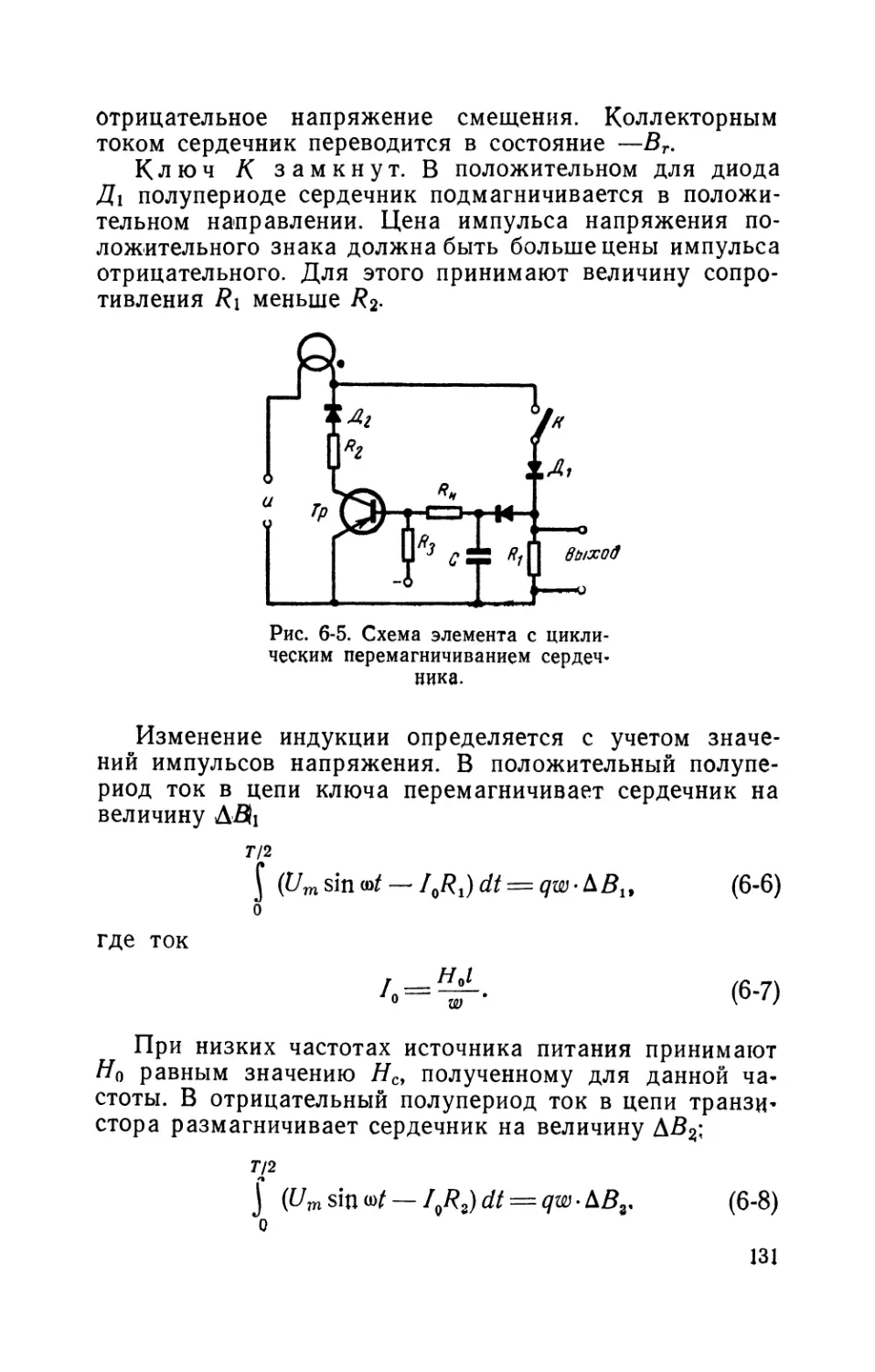
перемагничивания сердечника , 130
Литература 134
ПРИНЯТЫЕ ОБОЗНАЧЕНИЯ
Ф — магнитный поток, вб (1 вб = 108 мкс).
ЧГ = хя)Ф — потокосцепление, вб.
Б —индукция магнитного поля, тл (\ тл = 10* гс).
Вг — остаточная индукция.
Вт—максимальная индукция.
ад = — статические коэффициент прямоугольности материала.
т
Я —напряженность магнитного поля, —
4те
л а - 4% \
у ~м~-тш д)
Н0— пороговое значение напряженности поля, при котором проис-
ходит перемагничивание всех слоев сердечника.
Нт—значение напряженности поля, соответствующее индукции Вт,
вгп~вг
ц<д = ~~п —дифференциальная магнитная проницаемость (относительная).
IAq^Itc.IO-9 гн/си— магнитная постоянная.
Sa — коэффициент переключения, ~
I, к . а-сек 4тс \
I — _1 = , ллл э-сек .
\ м м I ООО )
А — энергия, дж (вт-сек).
Р — мощность, вт.
тп — время перемагничивания сердечника,
^—длительность импульса.
/Пф, t3 ф—длительности переднего и заднего фронтов импульса.
гэ —эквивалентное сопротивление (при импульсном перемагничива-
нии) одного витка обмотки, ом.
Rd = rdw*—эквивалентное сопротивление обмотки, ом.
w — число витков обмотки.
f — частота следования импульсов, Т= — —период следования
импульсов.
D, d, Л —наружный диаметр, внутренние диаметр и высота сердечника.
D—d ,
q = —-—Л —площадь прямоугольного сечения сердечника.
D -Ь d
I = тс —- длина средней силовой линии сердечника.
Материалы с ППГ —материалы с прямоугольной петлей гистерезиса.
ГЛАВА ПЕРВАЯ
ОСНОВНЫЕ понятия
1-1. ПРЕДСТАВЛЕНИЕ ВЕЛИЧИН
Импульсные магнитные логические элементы приме-
няются для построения цифровых систем управления.
Ниже приводятся краткие пояснения сущности работы
таких систем и роль логических элементов в этих систе-
мах.
Системы автоматического управления, телемеханики
и вычислительной техники действуют в функции посту-
пающей на вход системы информации — данных от раз-
личных датчиков и устройств. Существуют два способа
представления информации: непрерывный и дискретный
(не непрерывный).
Непрерывные величины. Параметры технологических
процессов, например число оборотов двигателя, угол по-
ворота, температура печи, давление в котле, напряжение
генератора и другие, по своей природе непрерывны и
в каждый момент времени могут отсчитываться по шка-
ле измерительных приборов.
Непрерывные функции часто называют аналого-
выми в тех случаях, когда значение функции пропор-
ционально измеряемому параметру. Так при измерении
температуры термопарой измеренное значение э. д. с.
является аналогом температуры.
Дискретные величины получаются при квантовании
непрерывных величин (квант-порция). Последняя пред-
ставляется в виде определенного числа импульсов, коли-
чество которых пропорционально измеряемому парамет-
ру. Вместо термина «дискретный» применяется также
термин «цифровой».
7
Ё некоторых случаях непрерывные величины выра-
жаются не числом импульсов, а их определенной по-
следовательностью во времени, образующей соответст-
вующий код.
Рассмотрим примеры перехода от непрерывных ве-
личин к дискретным.
Напряжение генератора, изменяющееся от 0 до 200 в,
можно представить в виде какого-то числа импульсов;
принимая, например, цену импульса равной 0,2 в, полу-
чаем при напряжении 200 в цифру 1 000. Размер детали,
обрабатываемой на станке, также можно представить
в виде определенного числа импульсов. Так при цене
импульса 0,005 мм размер 5,565 мм представляется в ви-
де 5,565 : 0,005=1 113 импульсов.
Цифровая форма удобна для передачи приказов или
информации. Каждый приказ или информация коди-
руются в виде определенного числа, которое затем пере-
дается по линии связи. На месте получения это число
дешифруется.
1-2. РАЗВИТИЕ ЦИФРОВОЙ ТЕХНИКИ
Цифровая форма представления величин и информа-
ции обладает значительными преимуществами по срав-
нению с непрерывной, как по скорости обработки инфор-
мации, так и по точности измерения и повышения поме-
хоустойчивости.
Построение цифровых машин осуществляется в ряде
случаев более простыми средствами, чем машин непре-
рывного действия. Все это привело к широкому распро-
странению цифровых устройств.
В системах автоматики цифровые устройства приме-
няются для решения задачи построения сложных схем
управления, построения систем программного управле-
ния металлорежущих станков, прессов и других машин,
построения вычислительных устройств для осуществле-
ния управления сложными агрегатами, например про-
катными станами, мартеновскими и доменными печами
и другими. Цифровая техника внедряется широко в те-
лемеханике: телеизмерении, телеуправлении и телесигна-
лизации, где передача приказов, сигналов и сообщений
осуществляется в дискретной форме в виде определен-
ного сочетания импульсов, образующих требуемый код.
8
Входы
во/ходы
Л
Логическая
схема
В
управления
С
Рис.
ПЛС
1-1. Блок-схема систе-
мы управления.
о. с. — положительная
обратная связь.
Широко развито построение различных цифровых уни-
версальных вычислительных машин.
В настоящее время широко развивается техника по-
строения цифровых измерительных приборов.
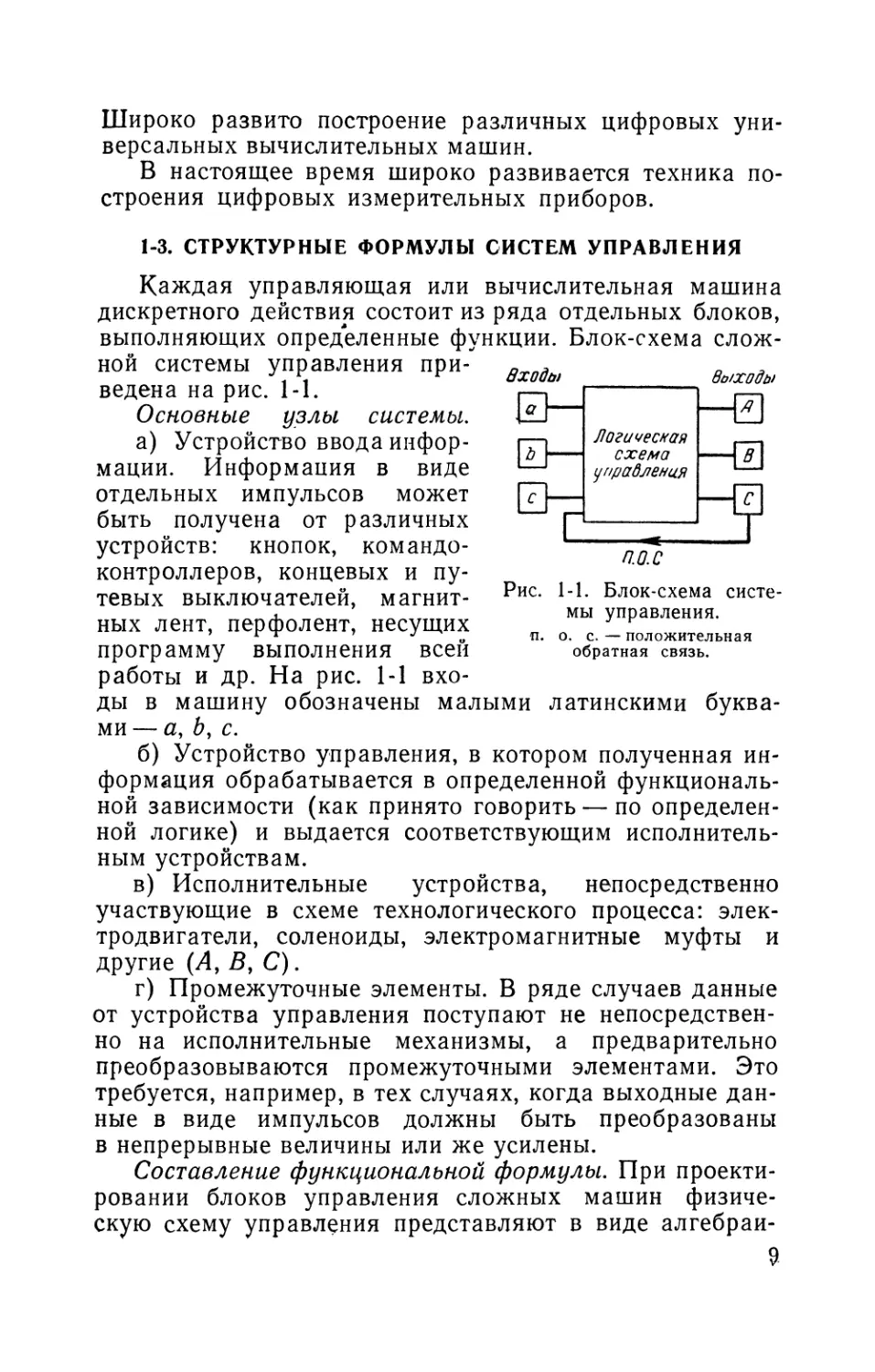
1-3. СТРУКТУРНЫЕ ФОРМУЛЫ СИСТЕМ УПРАВЛЕНИЯ
Каждая управляющая или вычислительная машина
дискретного действия состоит из ряда отдельных блоков,
выполняющих определенные функции. Блок-схема слож-
ной системы управления при-
ведена на рис. 1-1.
Основные узлы системы.
а) Устройство ввода инфор-
мации. Информация в виде
отдельных импульсов может
быть получена от различных
устройств: кнопок, командо-
контроллеров, концевых и пу-
тевых выключателей, магнит-
ных лент, перфолент, несущих
программу выполнения всей
работы и др. На рис. 1-1 вхо-
ды в машину обозначены малыми латинскими буква-
ми— а, Ъ, с.
б) Устройство управления, в котором полученная ин-
формация обрабатывается в определенной функциональ-
ной зависимости (как принято говорить — по определен-
ной логике) и выдается соответствующим исполнитель-
ным устройствам.
в) Исполнительные устройства, непосредственно
участвующие в схеме технологического процесса: элек-
тродвигатели, соленоиды, электромагнитные муфты и
другие (Л, 5, С).
г) Промежуточные элементы. В ряде случаев данные
от устройства управления поступают не непосредствен-
но на исполнительные механизмы, а предварительно
преобразовываются промежуточными элементами. Это
требуется, например, в тех случаях, когда выходные дан-
ные в виде импульсов должны быть преобразованы
в непрерывные величины или же усилены.
Составление функциональной формулы. При проекти-
ровании блоков управления сложных машин физиче-
скую схему управления представляют в виде алгебраи-
ческого выражения — функциональной формулы, пока-
зывающей при каком сочетании входных данных проис-
ходит действие того или иного механизма машины. При
составлении формулы пользуются буквенными обозна-
чениями: а, Ь, с — для входов, Л, В, С — для выходов.
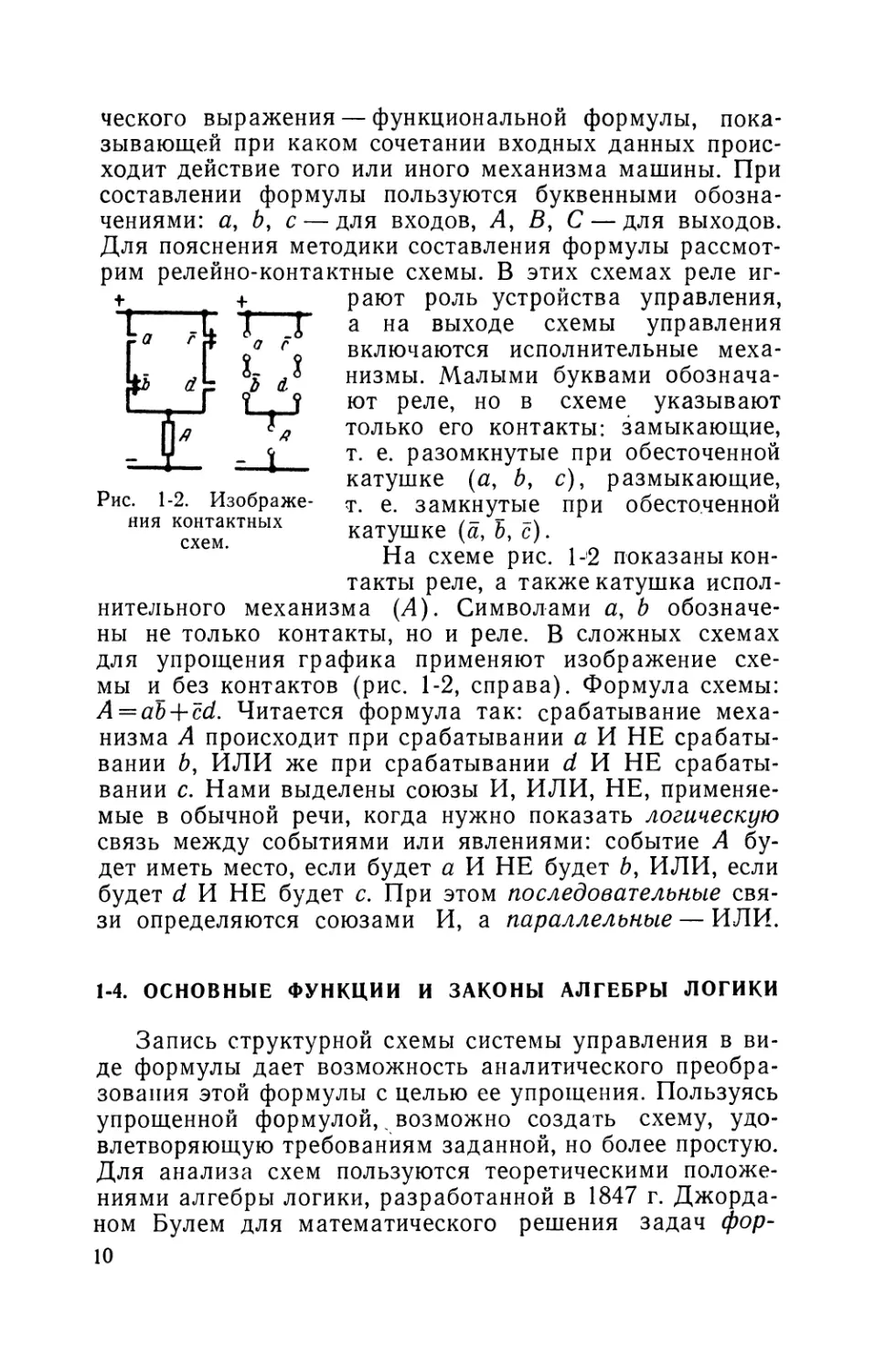
Для пояснения методики составления формулы рассмот-
рим релейно-контактные схемы. В этих схемах реле иг-
3
гт
о с
- \
Рис. 1-2. Изображе
ния контактных
схем.
рают роль устройства управления,
а на выходе схемы управления
включаются исполнительные меха-
низмы. Малыми буквами обознача-
ют реле, но в схеме указывают
только его контакты: замыкающие,
т. е. разомкнутые при обесточенной
катушке (а, Ъ, с), размыкающие,
т. е. замкнутые при обесточенной
катушке (а, Ь, с).
На схеме рис. 1-2 показаны кон-
такты реле, а также катушка испол-
нительного механизма (А). Символами a, b обозначе-
ны не только контакты, но и реле. В сложных схемах
для упрощения графика применяют изображение схе-
мы и_ без контактов (рис. 1-2, справа). Формула схемы:
A = ab + cd. Читается формула так: срабатывание меха-
низма А происходит при срабатывании а И НЕ срабаты-
вании 6, ИЛИ же при срабатывании d И НЕ срабаты-
вании с. Нами выделены союзы И, ИЛИ, НЕ, применяе-
мые в обычной речи, когда нужно показать логическую
связь между событиями или явлениями: событие А бу-
дет иметь место, если будет а И НЕ будет 6, ИЛИ, если
будет d И НЕ будет с. При этом последовательные свя-
зи определяются союзами И, а параллельные — ИЛИ.
1-4. ОСНОВНЫЕ ФУНКЦИИ И ЗАКОНЫ АЛГЕБРЫ ЛОГИКИ
Запись структурной схемы системы управления в ви-
де формулы дает возможность аналитического преобра-
зования этой формулы с целью ее упрощения. Пользуясь
упрощенной формулой, возможно создать схему, удо-
влетворяющую требованиям заданной, но более простую.
Для анализа схем пользуются теоретическими положе-
ниями алгебры логики, разработанной в 1847 г. Джорда-
ном Булем для математического решения задач фор-
10
шальной логики. Две основные функции этой логики: ис-
тинно (да) и ложно (нет) обозначают математически
двумя цифрами 1 и 0.
Для возможности указания действия отдельных эле-
ментов схемы (а, 6, с, А, В ...) формулу пишут в бук-
венном виде, где каждая буква показывает действие дан-
ного элемента. Например, букве а в формуле соответст-
вует подача импульса (1), а — отсутствие импульса (0).
Элементарные функции. Из множества функций ал-
гебры логики выделим ряд элементарных с простой ло-
гической интерпретацией, обычно применяемых в каче-
стве логических связей для построения более сложных:
1) Логическое умножение — конъюнкция (И)
а/\ Ь=А.
Формула читается так: если а— 1И 6=1, то Л=1.
В системах автоматики принято обозначение функ-
ции
ab=A.
2) Логическое сложение — дизъюнкция (ИЛИ)
a\Jb=A.
Формула читается так: если а= 1 ИЛИ 6=1, то А = 1.
Обозначение в системах автоматики
а + 6=Л.
3) Отрицание (НЕ). Понятие НЕ не имеет аналога
в обычной алгебре.
Для обозначения функции НЕ число или буква обо-
значаются с чертой сверху
0 не 0, т. е. 1; 1 не 1, т. е. 0;
если
а= 1, то а = 0; если 6=1, то 5 = 0.
Основные законы. Для упрощения функциональной
формулы управления пользуются различными законами
алгебры логики. Эти законы устанавливают равносиль-
ность разных выражений и возможность их замены.
Приводим некоторые законы алгебры логики:
11
1) переместительный
a + b = b + a,
a-b=b-a;
2) сочетательный
(a+b)+c=a+(b + c); (ab)c = a(bc);
3) распределительный
ac + bc= (a+b)c.
4) Инверсии. Термин «инверсия» заимствован от ла-
тинского слова «inversio» — переворачивание — и при-
меняется для обозначения обратной функции. Ранее ука-
зывалось, что если а=1, то а — О, т. е. а — это НЕ а.
Таким образом, а является инверсией а. Имеется ряд
законов инверсии для функциональных формул, по-
строенных на основе правил Моргана, а также Морга-
на— Шенона.
Рассмотрим простейшие из этих правил.
Сложение
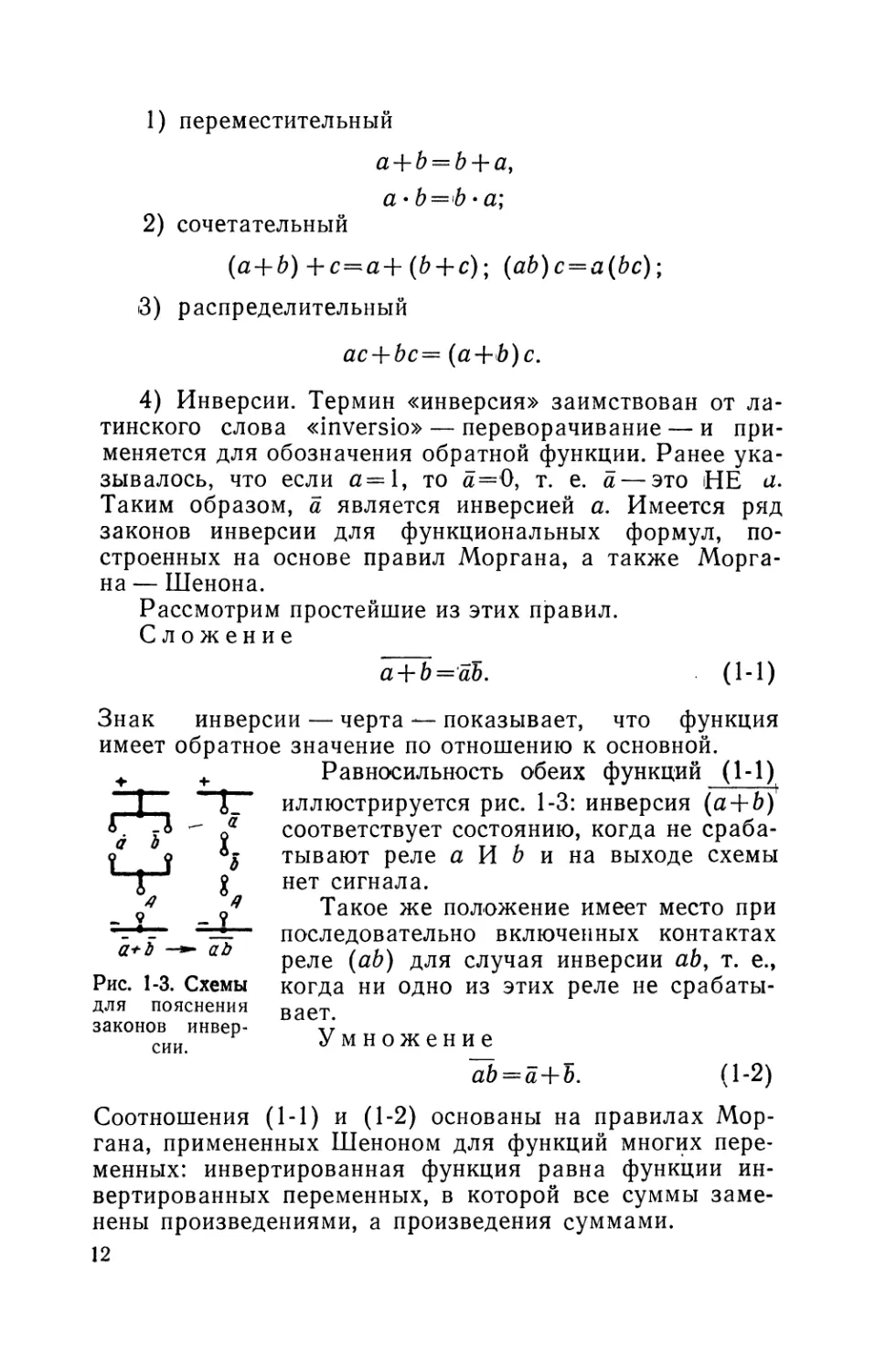
а + Ь=ЪЪ. (1-1)
Знак инверсии — черта — показывает, что функция
имеет обратное значение по отношению к основной.
^ + Равносильность обеих функций (1-1)
{ П~ иллюстрируется рис. 1-3: инверсия (а + Ь)
~ *" о* соответствует состоянию, когда не сраба-
<f <f °g тывают реле а И b и на выходе схемы
J g нет сигнала.
<f ^ Такое же положение имеет место при
в- ~— последовательно включенных контактах
а+ъ аъ реле для СЛуЧая ИНВерсии ab, т. е.,
Рис. 1-3. Схемы когда ни одно из этих реле не срабаты-
для пояснения вает
законов инвер- Лт
сии v Умножение
~ab = a + b. (1-2)
Соотношения (1-1) и (1-2) основаны на правилах Мор-
гана, примененных Шеноном для функций многих пере-
менных: инвертированная функция равна функции ин-
вертированных переменных, в которой все суммы заме-
нены произведениями, а произведения суммами.
12
Двукратная й н в е р с и я — двукратное «опроки-
дывание». При двукратной инверсии получают исходную
функцию
аа = а = а; (a + b) (a + b) = (a + b) =а + Ь.
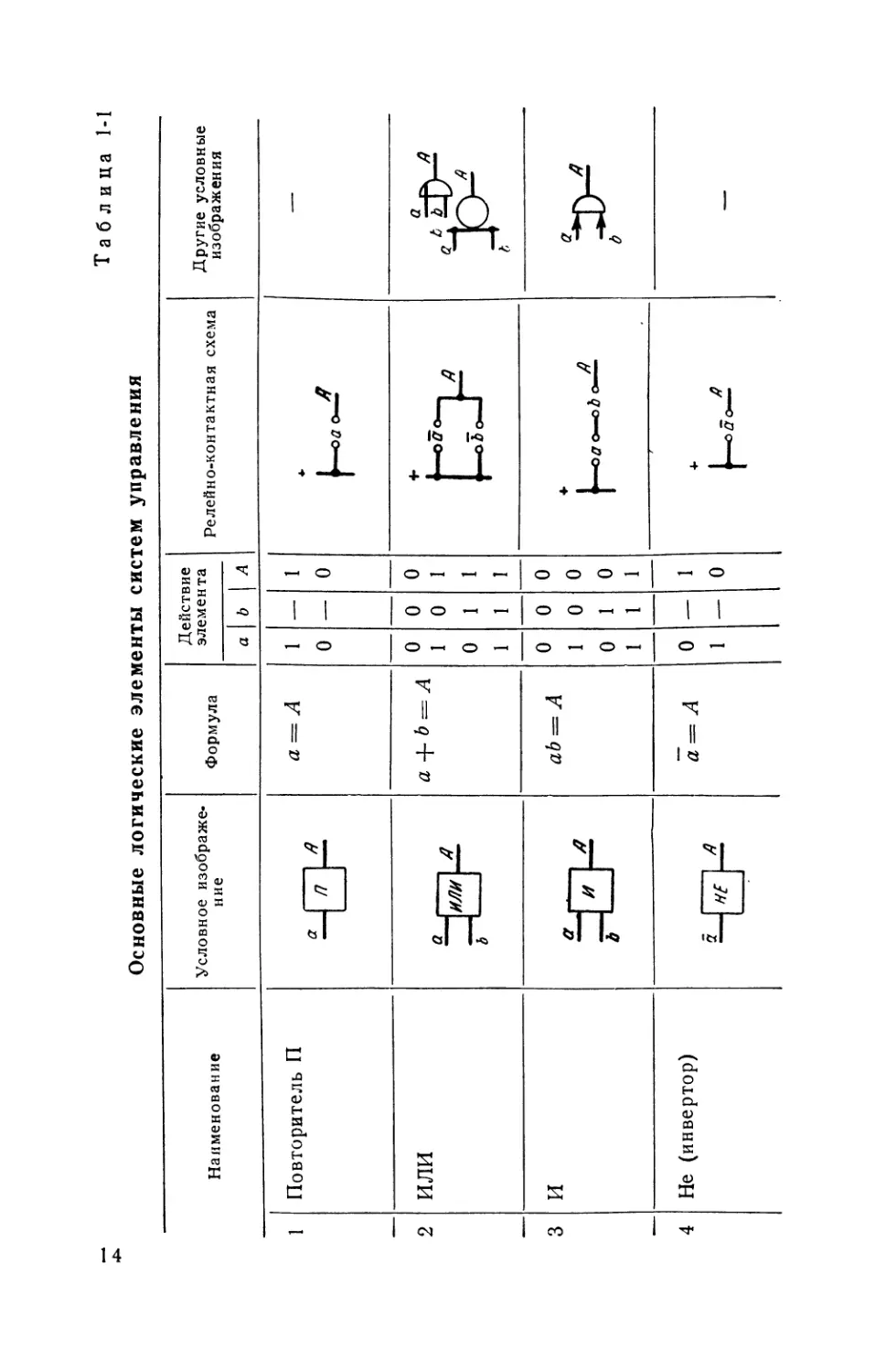
1-5. ОСНОВНЫЕ ВИДЫ ЛОГИЧЕСКИХ ЭЛЕМЕНТОВ
Для построения системы управления требуется ряд
элементов, выполняющих необходимые логические функ-
ции. Такие элементы называют логическими.
Логические элементы могут обладать двумя устойчи-
выми состояниями, соответствующими 1 и 0.
К основным элементам относятся такие, которые вы-
полняют функции ИЛИ, И и НЕ (инвертор).
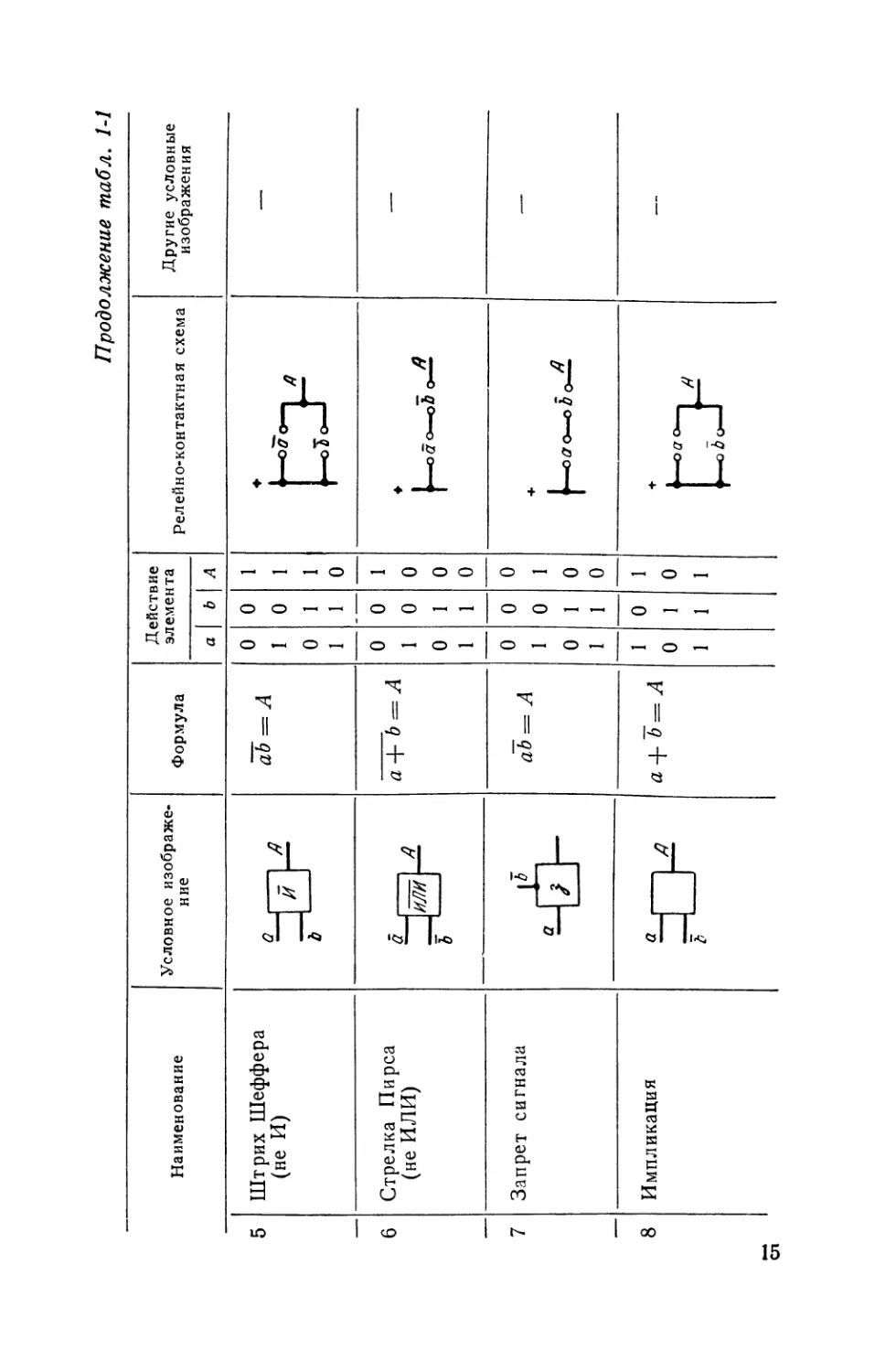
Помимо этих элементов используются и более слож-
ные, являющиеся, как правило, производными от основ-
ных: штрих Шеффера (не И), стрелка Пирса (не ИЛИ)
и др.
В табл. 1-1 приведены данные наиболее часто приме-
няемых логических элементов, пользуясь которыми вы-
полняют схемы управления и арифметические действия
в управляющих и вычислительных машинах.
Условное изображение элемента принято в виде квад-
рата, входы показываются с левой стороны, выходы —
с правой. В некоторых элементах имеются так называе-
мые запрещающие входы (см., например, элемент 7),
сущность которых заключается в том, что при одновре-
менном действии основного сигнала а и запрещающего
Ь сигнал на выходе элемента равен нулю, при отсутствии
запрещающего сигнала (6 = 0) и при а=\ получают на
выходе Л=1. Запрещающие входы изображены в виде
вертикальной линии с точкой в месте пересечения с ли-
нией квадрата. В литературе встречаются и другие обо-
значения, некоторые из них показаны в табл. 1-1. Работа
отдельных элементов поясняется показанными в табл.
1-1 релейно-контактными схемами.
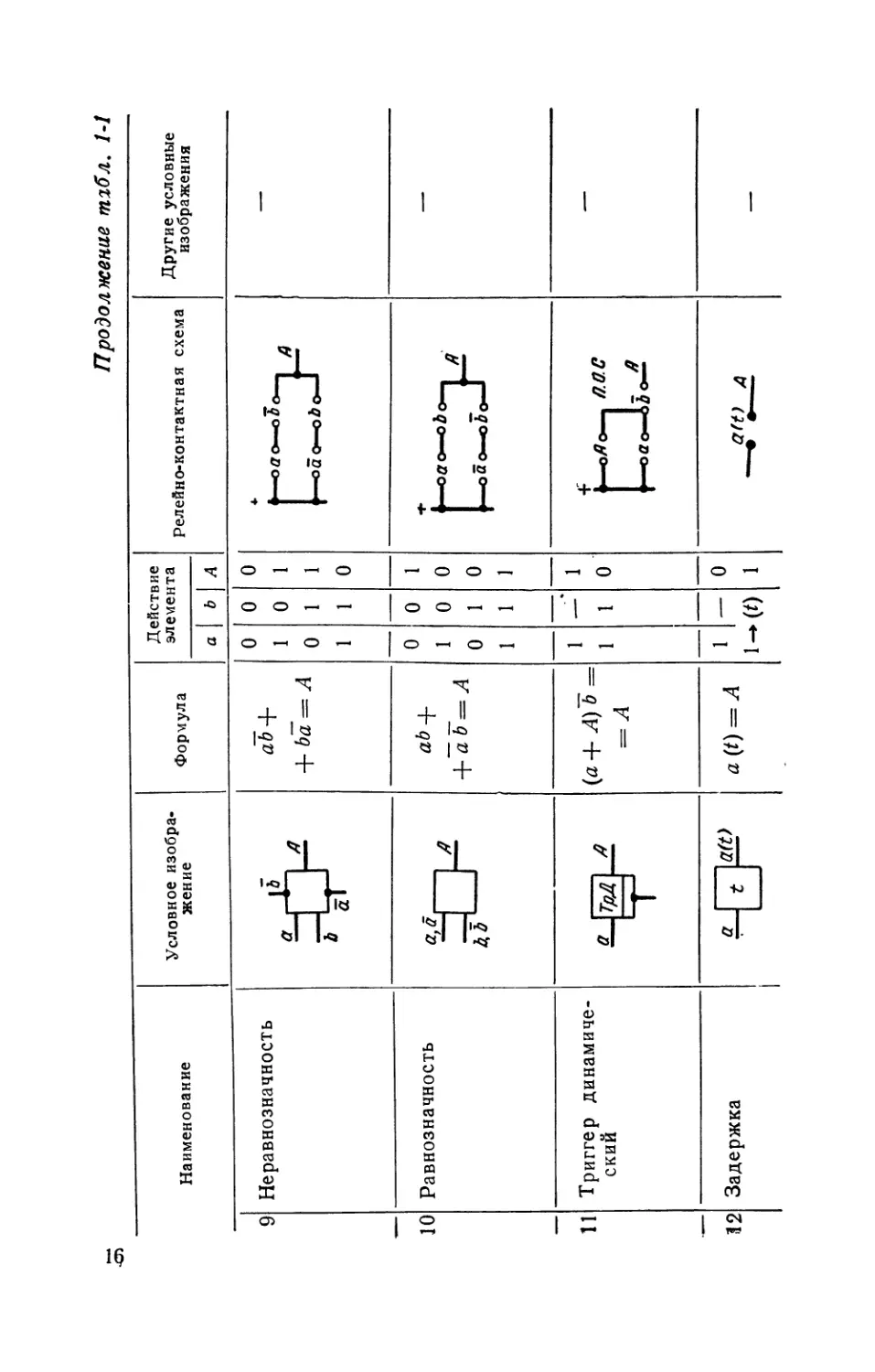
Для примера рассмотрим работу элементов: динами-
ческого триггера и задержки. Подробное изучение этих
элементов приведено в последующих главах.
Динамический триггер отличается тем, что,
запоминая введенную информацию 1 от первого и един-
ственного сигнала (а=1) на входе, он дает на выходе
13
14
а;
о
'■о
о
2
х к
ю s
о х
ч <и
о.53
v со
к н
» X
о £
.1Л
']
1
—' —' о | —• о о о
о —1 о о
о —-
о 0 ^^ч|0 о — —
о о ~ —«
о —< —•
о i-< о —1
о —• о —' | о —1 о —•
~ о ~
II
+
II
+
ч1
J U
11
1
J
ч
Штрих Шеффера
(не И)
Стрелка Пирса
(не ИЛИ)
Запрет сигнала
Импликация
15
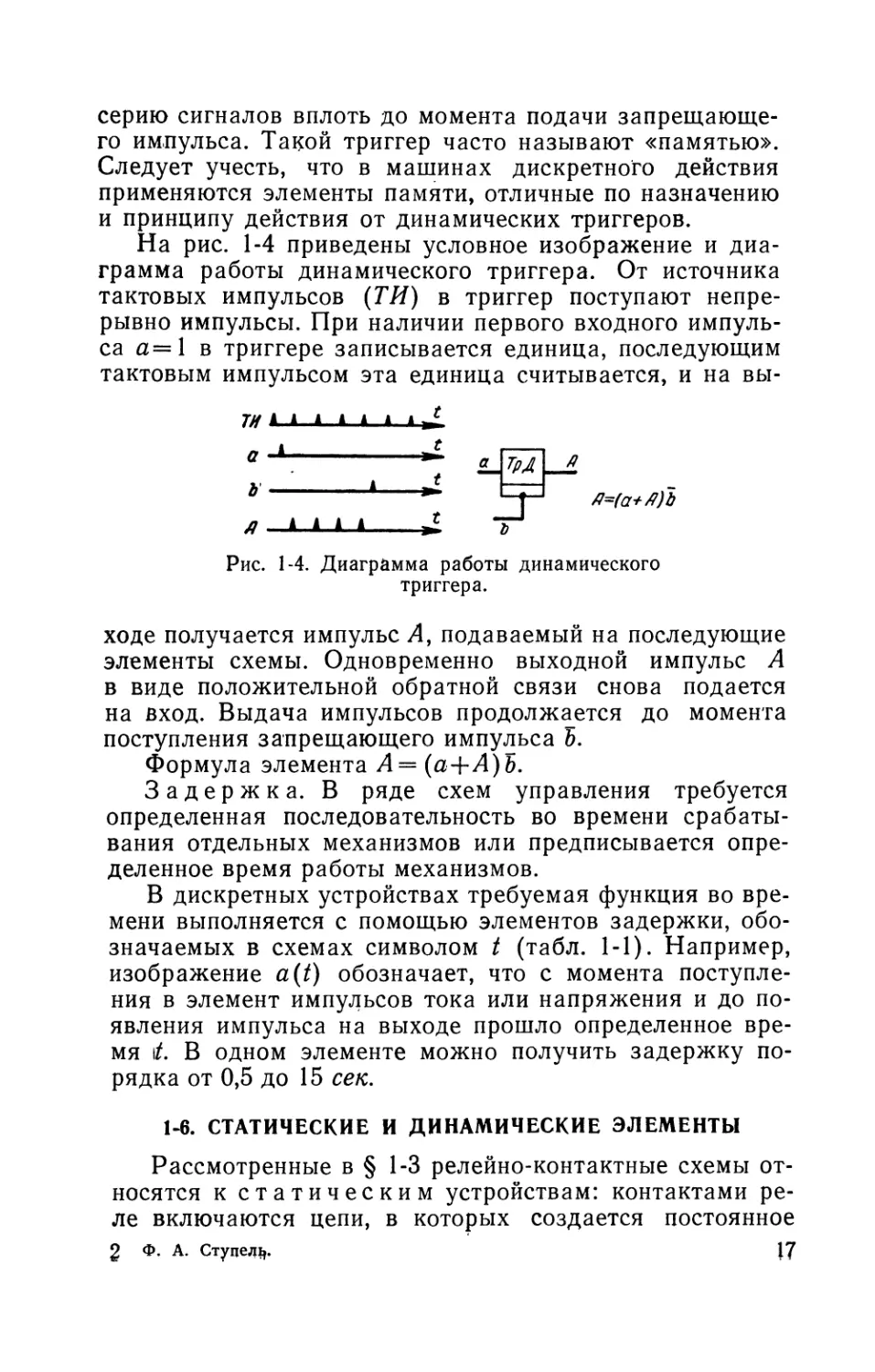
серию сигналов вплоть до момента подачи запрещающе-
го импульса. Такой триггер часто называют «памятью».
Следует учесть, что в машинах дискретного действия
применяются элементы памяти, отличные по назначению
и принципу действия от динамических триггеров.
На рис. 1-4 приведены условное изображение и диа-
грамма работы динамического триггера. От источника
тактовых импульсов (ТИ) в триггер поступают непре-
рывно импульсы. При наличии первого входного импуль-
са а=\ в триггере записывается единица, последующим
тактовым импульсом эта единица считывается, и на вы-
7и * * i i a i a j:
*-i
1 „£
a a a a
SJJpA
Рис. 1-4. Диаграмма работы динамического
триггера.
ходе получается импульс Л, подаваемый на последующие
элементы схемы. Одновременно выходной импульс А
в виде положительной обратной связи снова подается
на вход. Выдача импульсов продолжается до момента
поступления запрещающего импульса Ъ.
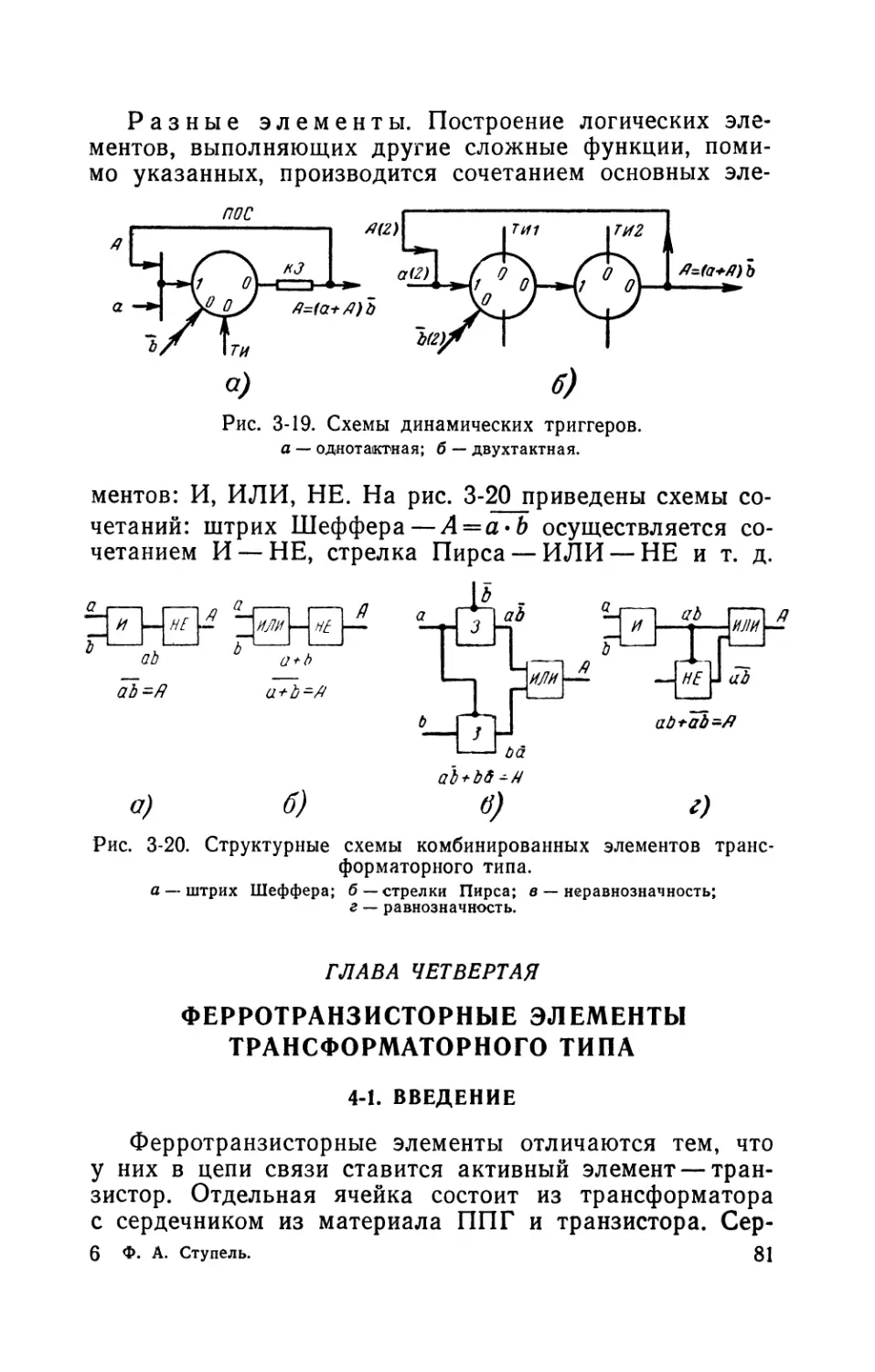
Формула элемента А = (а+А)Ъ.
Задержка. В ряде схем управления требуется
определенная последовательность во времени срабаты-
вания отдельных механизмов или предписывается опре-
деленное время работы механизмов.
В дискретных устройствах требуемая функция во вре-
мени выполняется с помощью элементов задержки, обо-
значаемых в схемах символом / (табл. 1-1). Например,
изображение a(t) обозначает, что с момента поступле-
ния в элемент импульсов тока или напряжения и до по-
явления импульса на выходе прошло определенное вре-
мя \t. В одном элементе можно получить задержку по-
рядка от 0,5 до 15 сек.
1-6. СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ЭЛЕМЕНТЫ
Рассмотренные в § 1-3 релейно-контактные схемы от-
носятся к статическим устройствам: контактами ре-
ле включаются цепи, в которых создается постоянное
2 Ф. А. Стуцед^. 17
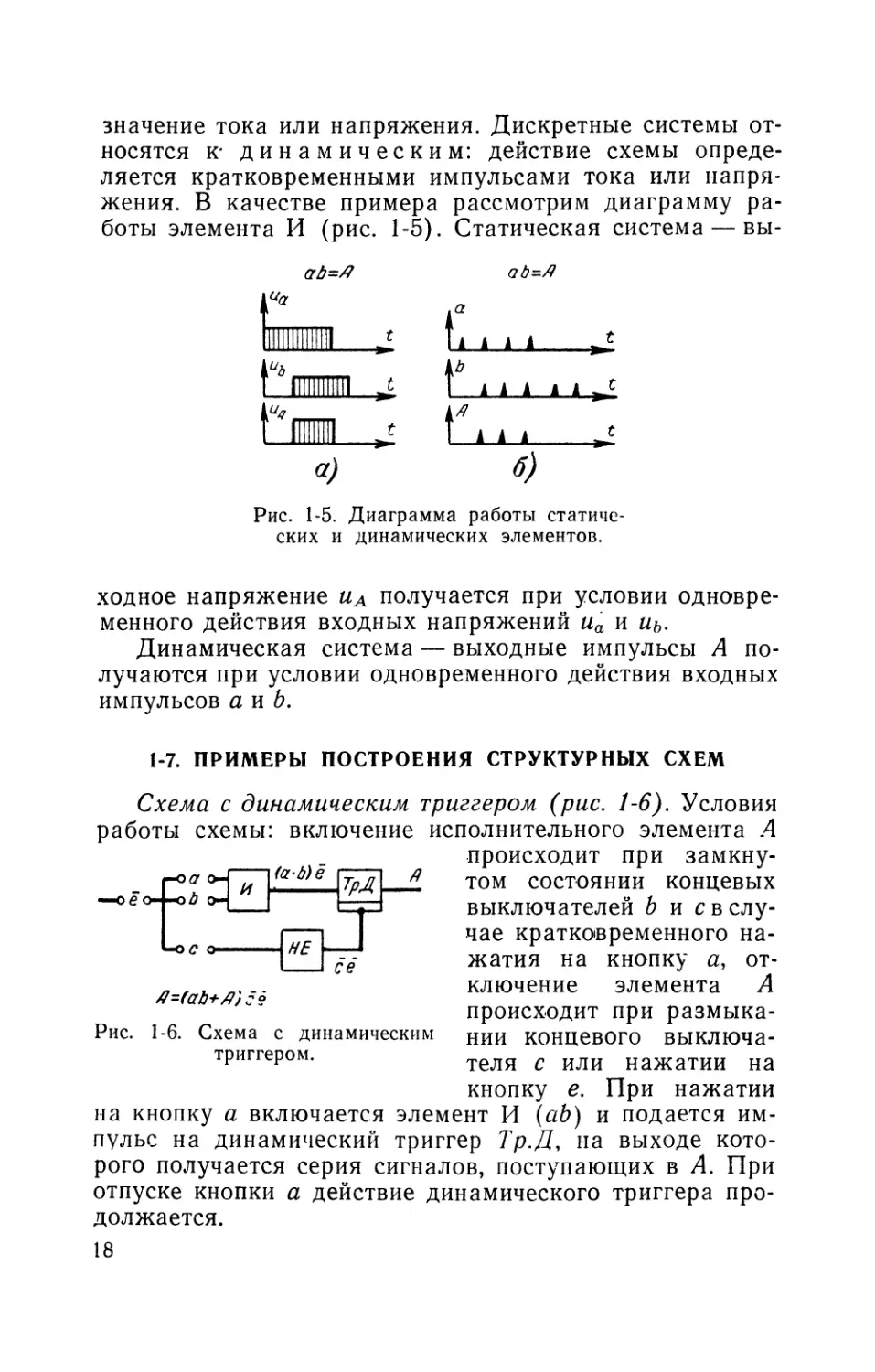
значение тока или напряжения. Дискретные системы от-
носятся к- динамическим: действие схемы опреде-
ляется кратковременными импульсами тока или напря-
жения. В качестве примера рассмотрим диаграмму ра-
боты элемента И (рис. 1-5). Статическая система — вы-
\ к к к к
к к к к к
к к к
б)
Рис. 1-5. Диаграмма работы статиче-
ских и динамических элементов.
ходное напряжение иА получается при условии одновре-
менного действия входных напряжений иа и щ.
Динамическая система — выходные импульсы А по-
лучаются при условии одновременного действия входных
импульсов а и Ъ.
1-7. ПРИМЕРЫ ПОСТРОЕНИЯ СТРУКТУРНЫХ СХЕМ
Га-д)ё
ТрД
НЕ
се
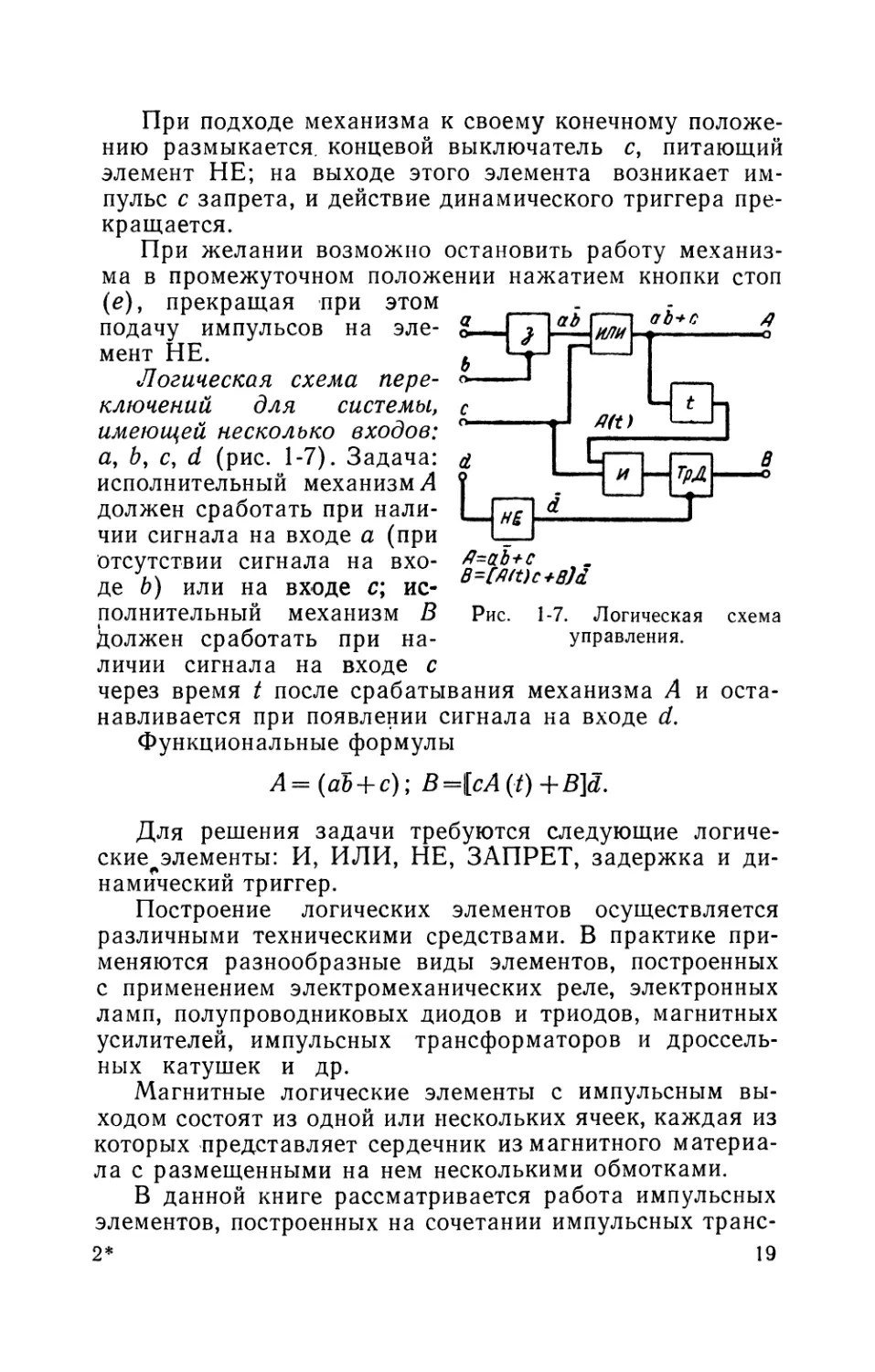
Схема с динамическим триггером (рис. 1-6). Условия
работы схемы: включение исполнительного элемента А
происходит при замкну-
том состоянии концевых
выключателей Ъ и с в слу-
чае кратковременного на-
жатия на кнопку а, от-
ключение элемента А
происходит при размыка-
нии концевого выключа-
теля с или нажатии на
кнопку е. При нажатии
на кнопку а включается элемент И \ab) и подается им-
пульс на динамический триггер Тр.Д, на выходе кото-
рого получается серия сигналов, поступающих в А. При
отпуске кнопки а действие динамического триггера про-
должается.
/7=(аЬ+/7) сё
Рис. 1-6. Схема с динамическим
триггером.
18
При подходе механизма к своему конечному положе-
нию размыкается, концевой выключатель с, питающий
элемент НЕ; на выходе этого элемента возникает им-
пульс с запрета, и действие динамического триггера пре-
кращается.
При желании возможно остановить работу механиз-
ма в промежуточном положении нажатием кнопки стоп
(е), прекращая при этом
на эле-
ад
ИЛИ
ab+c
B=f/Ht)c+sJd
Рис.
1-7. Логическая
управления.
схема
подачу импульсов
мент НЕ.
Логическая схема пере-
ключений для системы,
имеющей несколько входов:
а, Ь, с, d (рис. 1-7). Задача:
исполнительный механизме
должен сработать при нали-
чии сигнала на входе а (при
отсутствии сигнала на вхо-
де Ь) или на входе с; ис-
полнительный механизм В
Должен сработать при на-
личии сигнала на входе с
через время t после срабатывания механизма А и оста-
навливается при появлении сигнала на входе d.
Функциональные формулы
A=(ab + c); B=\[cA(t) + B]d.
Для решения задачи требуются следующие логиче-
ские^элементы: И, ИЛИ, НЕ, ЗАПРЕТ, задержка и ди-
намический триггер.
Построение логических элементов осуществляется
различными техническими средствами. В практике при-
меняются разнообразные виды элементов, построенных
с применением электромеханических реле, электронных
ламп, полупроводниковых диодов и триодов, магнитных
усилителей, импульсных трансформаторов и дроссель-
ных катушек и др.
Магнитные логические элементы с импульсным вы-
ходом состоят из одной или нескольких ячеек, каждая из
которых представляет сердечник из магнитного материа-
ла с размещенными на нем несколькими обмотками.
В данной книге рассматривается работа импульсных
элементов, построенных на сочетании импульсных транс-
2* 19
форматоров и дроссельных катушек с полупроводнико-
выми диодами и транзисторами. Такие элементы назы-
вают ферродиодными и ферротранзисторными.
ГЛАВА ВТОРАЯ
ПАРАМЕТРЫ ОТДЕЛЬНОЙ МАГНИТНОЙ ЯЧЕЙКИ
2-1. ИМПУЛЬСЫ, ИСТОЧНИКИ ИМПУЛЬСОВ
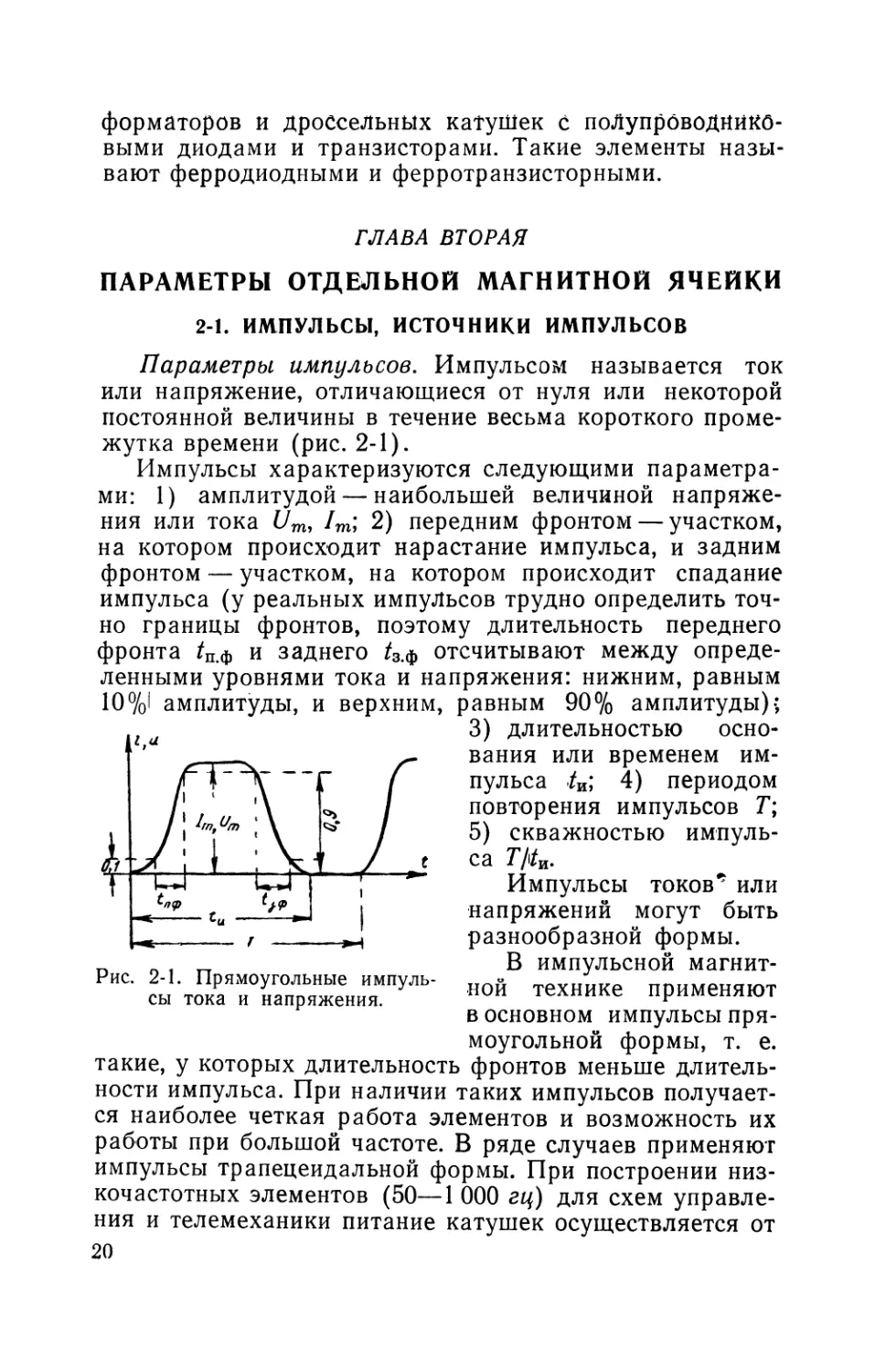
Параметры импульсов. Импульсом называется ток
или напряжение, отличающиеся от нуля или некоторой
постоянной величины в течение весьма короткого проме-
жутка времени (рис. 2-1).
Импульсы характеризуются следующими параметра-
ми: 1) амплитудой — наибольшей величиной напряже-
ния или тока Uту 1т; 2) передним фронтом — участком,
на котором происходит нарастание импульса, и задним
фронтом — участком, на котором происходит спадание
импульса (у реальных импульсов трудно определить точ-
но границы фронтов, поэтому длительность переднего
фронта ^п.ф и заднего /З.ф отсчитывают между опреде-
ленными уровнями тока и напряжения: нижним, равным
10%1 амплитуды, и верхним, равным 90% амплитуды)-;
такие, у которых длительность фронтов меньше длитель-
ности импульса. При наличии таких импульсов получает-
ся наиболее четкая работа элементов и возможность их
работы при большой частоте. В ряде случаев применяют
импульсы трапецеидальной формы. При построении низ-
кочастотных элементов (50—1 ООО гц) для схем управле-
ния и телемеханики питание катушек осуществляется от
20
3) длительностью осно-
вания или временем им-
пульса ./и; 4) периодом
повторения импульсов Т;
5) скважностью импуль-
са Г/|/и.
Импульсы токов* или
напряжений могут быть
разнообразной формы.
Рис. 2-1. Прямоугольные импуль
сы тока и напряжения.
В импульсной магнит-
ной технике применяют
в основном импульсы пря-
моугольной формы, т. е.
сети полупериодами синусоидального тока. Однако для
уменьшения габаритов сердечников синусоидальные по-
лупериоды посредством формирователей преобразовы-
вают в короткие, приближающиеся к прямоугольным,
импульсы той же частоты.
Импульсные источники тока. Различают два вида им-
пульсных источников тока: генераторы напряжения и
генераторы тока, основное отличие которых заключается
в величине их выходного сопротивления. Генератор на-
пряжения обладает малым выходным сопротивлением,
вследствие чего переменное значение сопротивления на-
грузки сильно влияет на амплитуду тока импульса. Гене-
ратор тока обладает большим выходным сопротивле-
нием, поэтому переменное значение сопротивления на-
грузки не вызывает заметного изменения амплитуды то-
ка импульса.
Применение обоих видов генераторов определяется
величиной и характером нагрузки. В высокочастотных
схемах (10—200 кгц) основной нагрузкой является пере-
магничивающая катушка, сопротивление которой резко
(примерно в 20 раз) изменяется в зависимости от того,
происходит ли перемагничивание сердечника посылае-
мым импульсом или же сердечник остается при этом
в исходном состоянии намагничивания. При большом
числе последовательно включенных катушек с перемен-
ным сопротивлением требуется генератор тока, обеспе-
чивающий большую стабильность величины тока при
переменных нагрузках.
В качестве импульсных генераторов тока наиболее
часто применяют блокинг-генераторы, которые за счет
сильной обратной связи могут выдавать импульсы тока
значительной силы.
В низкочастотных схемах автоматики и телемеха-
ники, помимо энергии перемагничивания сердечника
(основной нагрузки), от генератора требуется еще и
энергия для работы промежуточных выходных элемен-
тов. Число последовательно включенных элементов в та-
ких схемах невелико (5—10). В данном случае чаще
пользуются энергией сети, являющейся генератором на-
пряжения.
Для уменьшения влияния переменной нагрузки по-
следовательно с источником напряжения включают до-
бавочные сопротивления.
21
2-2. ОСНОВНЫЕ ПАРАМЕТРЫ МАГНИТНЫХ
МАТЕРИАЛОВ
(1)
"о"
"г
0
(0)
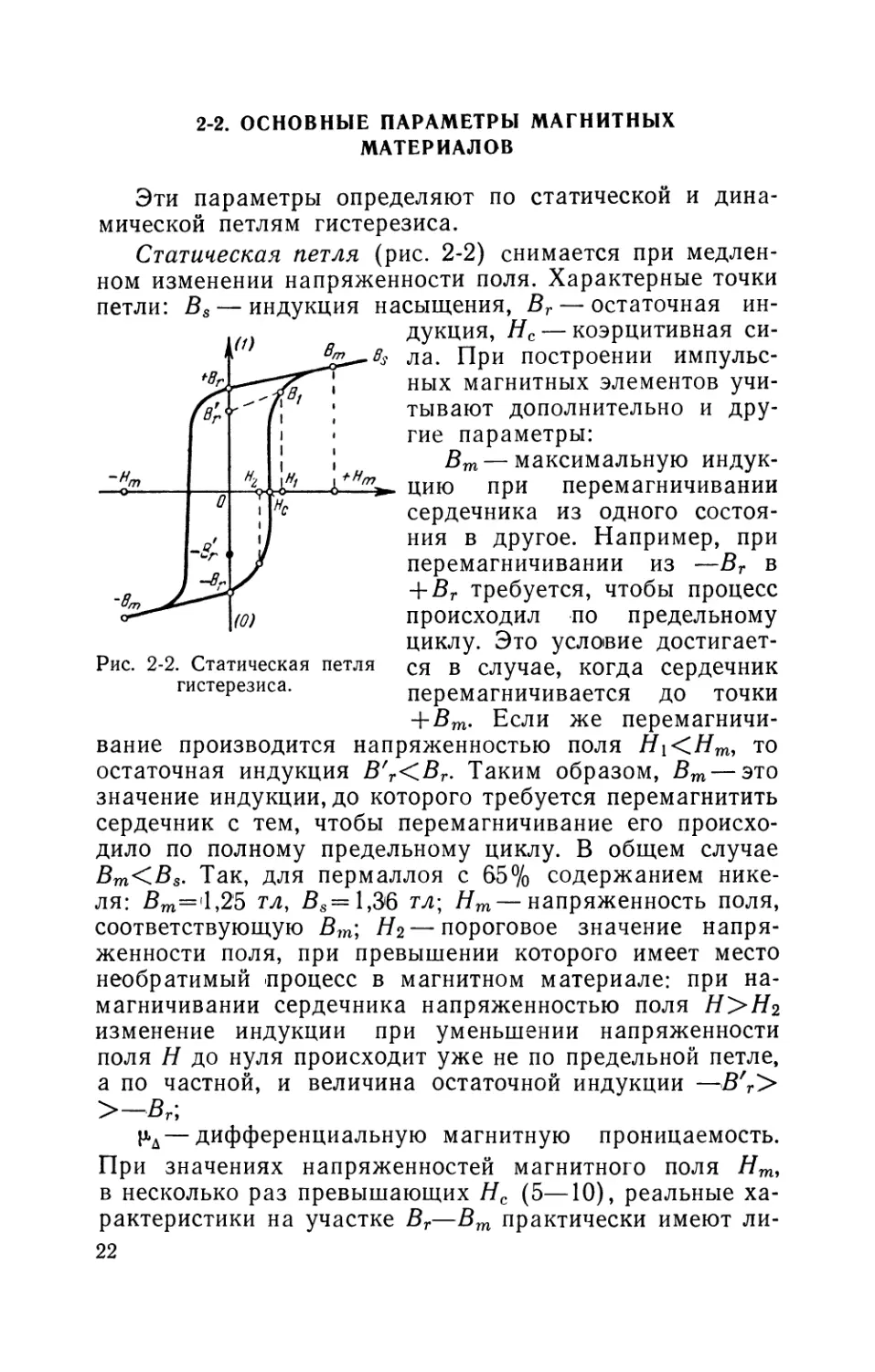
Рис. 2-2. Статическая петля
гистерезиса.
Эти параметры определяют по статической и дина-
мической петлям гистерезиса.
Статическая петля (рис. 2-2) снимается при медлен-
ном изменении напряженности поля. Характерные точки
петли: Bs — индукция насыщения, Вг — остаточная ин-
дукция, Яс— коэрцитивная си-
ла. При построении импульс-
ных магнитных элементов учи-
тывают дополнительно и дру-
гие параметры:
Вш — максимальную индук-
цию при перемагничивании
сердечника из одного состоя-
ния в другое. Например, при
перемагничивании из —Вт в
+ ВГ требуется, чтобы процесс
происходил по предельному
циклу. Это условие достигает-
ся в случае, когда сердечник
перемагничивается до точки
+ Вт. Если же перемагничи-
вание производится напряженностью поля #i<#m, то
остаточная индукция В'Г<ВГ. Таким образом, Вт — это
значение индукции, до которого требуется перемагнитить
сердечник с тем, чтобы перемагничивание его происхо-
дило по полному предельному циклу. В общем случае
Bm<Bs. Так, для пермаллоя с 65% содержанием нике-
ля: Вт='1,25 тл, Bs—1,36 тл\ Ят— напряженность поля,
соответствующую Вт\ Я2— пороговое значение напря-
женности поля, при превышении которого имеет место
необратимый процесс в магнитном материале: при на-
магничивании сердечника напряженностью поля Я>Я2
изменение индукции при уменьшении напряженности
поля Я до нуля происходит уже не по предельной петле,
а по частной, и величина остаточной индукции —В/г>
>—Вг\
1ад—дифференциальную магнитную проницаемость.
При значениях напряженностей магнитного поля Яш,
в несколько раз превышающих Яс (5—10), реальные ха-
рактеристики на участке Вг—Вт практически имеют ли-
22
нейный характер. Поэтому среднее значение дифферен-
циальной магнитной проницаемости в зоне насыщения
учитывают по формуле
Вт — Вг
H-^fr~; (2-d
(хп — статический коэффициент прямоугольности; яв-
ляется характерным параметром материалов с ППГ:
ап=Вг/Вт.
К материалам с ППГ относят такие, у которых ап^0,85.
Величина ап зависит от #т, с ростом которой наблю-
дается уменьшение ап. Принято определять ап при
Нт = Ъ Нс.
Динамическая петля гистерезиса. iB процессе пере-
магничивания магнитных материалов при быстром из-
менении напряженности поля сказывается влияние ин-
дуктированных в стали вихревых токов, а в ферритах—
явление магнитной вязкости. Сущность этого явления
заключается в том, что при быстром перемагничивании.
имеет место запаздывание изменения намагниченности
материала AJ от изменения поля АН.
Свойство запаздывания процесса намагничивания
называют магнитной вязкостью, так как харак-
тер изменения намагниченности сходен с характером
перемещения твердого тела в вязкой среде.
Динамическая петля гистерезиса шире статической
и тем больше, чем быстрее процесс перемагничивания.
Детальное рассмотрение динамических параметров
материалов с ППГ приводится в § 2-4.
2-3. МАТЕРИАЛЫ ДЛЯ СЕРДЕЧНИКОВ
Правильная и надежная работа ячейки и всей схемы
в целом получается при применении сердечников, выпол-
ненных из материалов, характеризующихся прямоуголь-
ной петлей гистерезиса, т. е. обладающих высоким зна-
чением коэффициента прямоугольности. Такие материа-
лы называют материалами ППГ. Применяют два основ-
ных вида материалов ППГ: металлические ферромагне-
тики и ферриты.
Металлические ферромагнетики. Металлические фер-
ромагнетики выполняются в виде лент. Для этой цели
23
применяются сплавы железо — никель (пермаллой) раз-
ных марок: 79НМ, 50НП, 65НП, 34НКПМ. Эти сплавы
обладают относительно низким значением удельного
электрического сопротивления
р = 10~4— 10"5 ом-см.
Для уменьшения потерь на вихревые токи сердечники
выполняют из тонких металлических лент. Такие сердеч-
ники называют ленточными. При высоких частотах,
порядка 50 кгц и выше, применяют сверхтонкие ленты
толщиной 2—10 мк, и сердечники из таких лент назы-
вают микронными. Ленты изготовляются изотроп-
ными, т. е. такими, которые обладают одинаковыми маг-
нитными свойствами во всех направлениях и незначи-
тельной величиной коэффициента прямоугольности. При
дополнительной термической обработке с медленным
охлаждением в магнитном поле эти материалы становят-
ся анизотропными (текстурованными). При этом резко
повышается значение коэффициента прямоугольности
в направлении проката листа. Так для сплава'50%'Ni +
+150%'. Fe значение «п равно: у изотропного — 0,37, ани-
зотропного 0,95. Сердечники из текстурованного мате-
риала выполняют в виде витых спиралей.
В низкочастотных устройствах, например при пита-
нии катушек напряжением с частотой 50 гц, применяют
и более дешевые по сравнению с пермаллоем материа-
лы, например электротехнические текстурованные стали
(97%!F§+3% Si). Эти стали обладают относительно
низким значением <ап (порядка 0,7), но при некоторых
схемных усложнениях получают удовлетворительные ре-
зультаты работы ячеек в отношении помехоустойчиво-
сти.
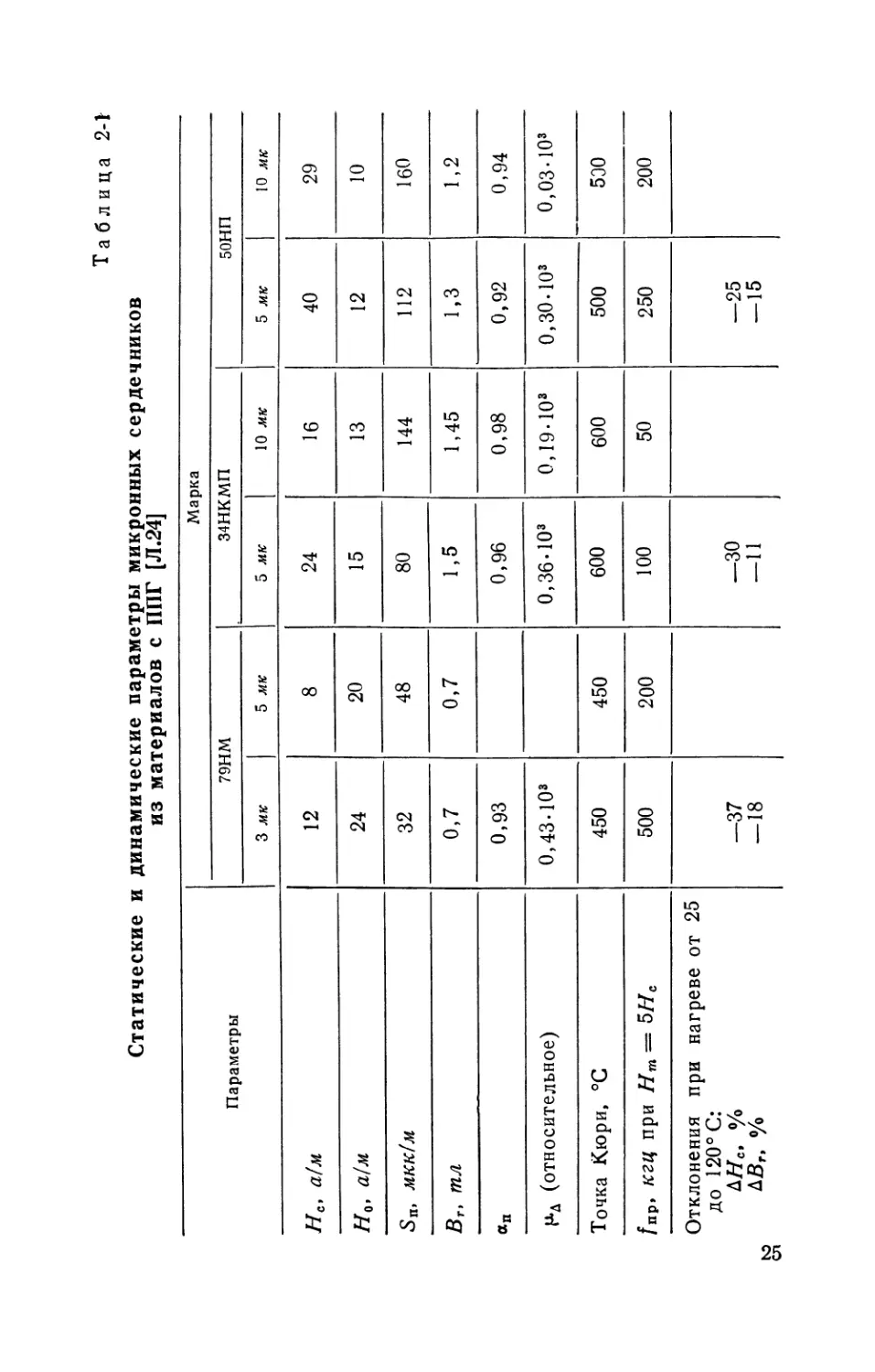
В табл. 2-1 приведены некоторые данные микронных
сердечников.
Ферриты. Феррит представляет собой неметалличе-
ский материал на основе окиси — закиси железа
(FeO—Fe203), в котором двухвалентные атомы железа
замещены атомами других материалов: марганца, маг-
ния, цинка, никеля, кобальта, меди.
Общая формула ферритов: МеО—Fe203. Здесь МеО—
символ двухвалентных металлов. В соответствии с на-
званием металла, замещающего двухвалентное железо,
ферриты называют никелевыми, цинковыми и т. д. Еслц
24
1=3
vo
й
о
ss
я
в*
ф
о
3
X
X
о„
S3 «
2 в
2*°
£ «
sb s
я
к
к
s
н
3
сп
о
о
co
о
о
о
со
о
я»
о
о
о
о
о
см
os
о
cd
сп
cd
о
со
о
о
о
ю
о
о
cd
о
о
cd
00
о
см
00
тр
о
о
ю
TF
о
о
см
со
см
Tf<
СМ
см
СО
о
0,93
0,43-к
о
ю
^
о
о
ю
00
СО —
1 1
ю
см
н
о
ю
лонения при нагреве
} 120° с:
АЯС, о/о
а/м
мкк/м
(относительное)
о
о
к
Он
Я
03
кгц при Ят —
о
4:
а
со
0q
в
8
<
о
н
о.
е
н r-
о
25
в процессе замещения участвует один металл, то полу-
чается простейший феррит. Большинство изготовляю-
щихся ферритов представляет собой смешение двух или
более простейших ферритов. Такие ферриты обладают
улучшенными магнитными свойствами.
Ферриты изготовляют спеканием смесей окислов со-
ответствующих металлов. Эти смеси изготовляют из го-
товых высокодисперсных порошкообразных окислов или
же из гидроокислов и солей, которые переводятся в окис-
лы путем термического разложения.
Смеси окислов брикетируют и обжигают при темпе-
ратуре 800—1 000° С, размалывают в порошок и затем
прессуют в виде сердечников нужной формы и размера.
Готовые сердечники подвергаются обжигу при 1 250—
1 400° С на воздухе, в нейтральной среде, вакууме или
углекислом газе.
Различают три основные вида ферритов: магниго-
твердые, магнитомягкие высокочастотные и с прямо-
угольной петлей гистерезиса (ППГ).
Магнитотвердые ферриты с большой коэрци-
тивной силой получают из минерала РЬО • 6 Fe203 при
замене свинца барием, стронцием или кальцием. Такие
ферриты называются ферроксдюр. Применяются они
для изготовления постоянных магнитов.
Высокочастотные ферриты обладают высо-
ким значением максимальной магнитной проницаемо-
сти \imy высоким значением р (которое бывает поряд-
ка 102—108 ом-см), но имеют низкий коэффициент пря-
моугольности.
Основным характерным параметром таких ферритов
является значение начальной магнитной проницаемости
^нач, т. е. значение магнитной проницаемости при слабых
магнитных полях, что играет большую роль при построе-
нии фильтров, магнитных антенн и других радиотехни-
ческих элементов.
Выпускаются ферриты определенных марок: никель-
цинковые Ф100 до Ф2000 (цифра обозначает значение
М<нач). Сердечники из ферритов выпускаются различного
исполнения: в виде шайб, цилиндров, трехстержневые
и др.
Высокочастотные ферриты применяются в устройст-
вах автоматики и вычислительной техники для дроссель-
ных катушек и промежуточных трансформаторов.
26
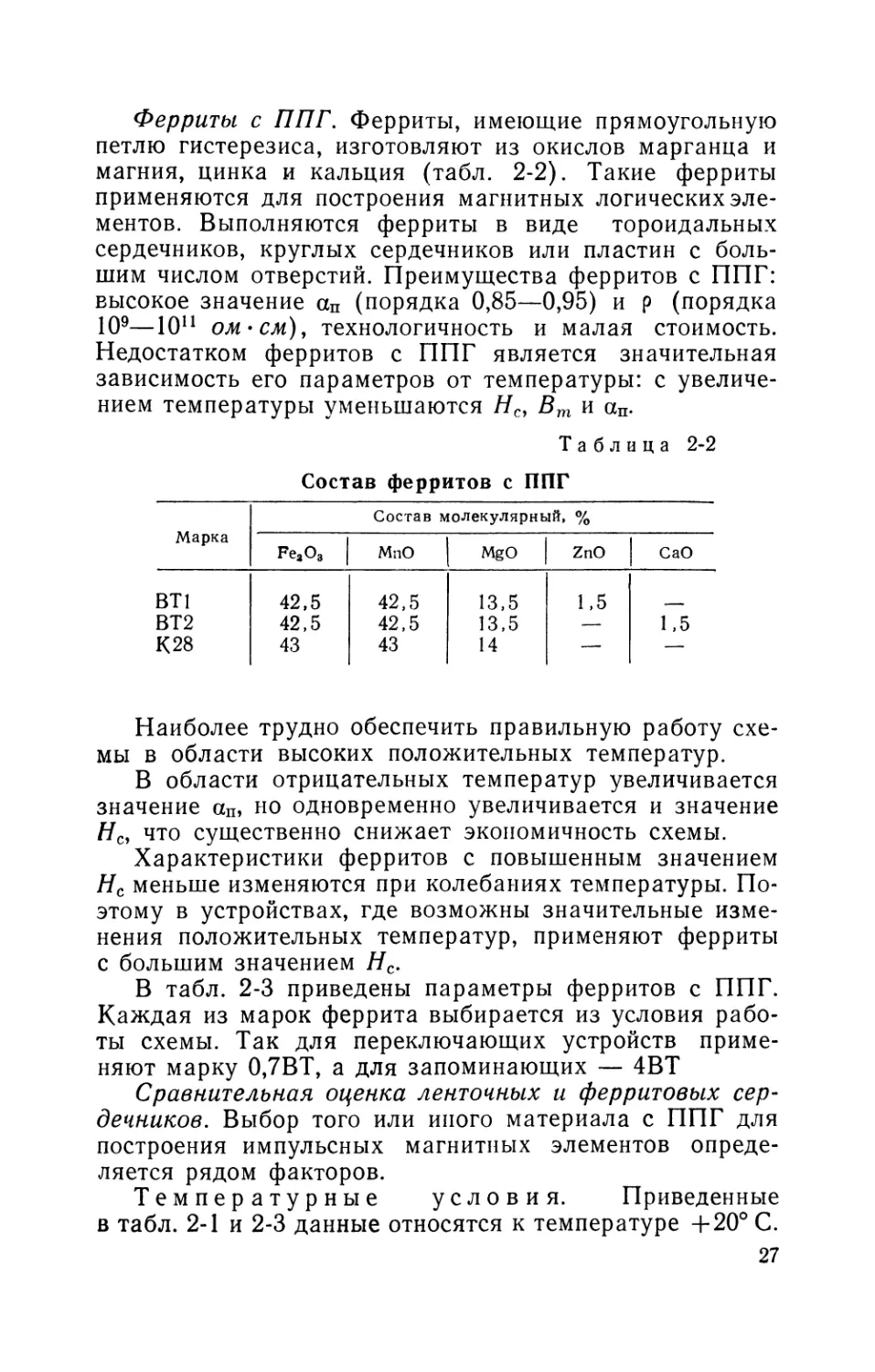
Ферриты с ППГ. Ферриты, имеющие прямоугольную
петлю гистерезиса, изготовляют из окислов марганца и
магния, цинка и кальция (табл. 2-2). Такие ферриты
применяются для построения магнитных логических эле-
ментов. Выполняются ферриты в виде тороидальных
сердечников, круглых сердечников или пластин с боль-
шим числом отверстий. Преимущества ферритов с ППГ:
высокое значение ап (порядка 0,85—0,95) и р (порядка
109—10й ом-см), технологичность и малая стоимость.
Недостатком ферритов с ППГ является значительная
зависимость его параметров от температуры: с увеличе-
нием температуры уменьшаются #с, Вт и ап.
Таблица 2-2
Состав ферритов с ППГ
Марка
Состав
молекулярный,
о/
/0
Fea03
МпО
MgO
ZnO
CaO
ВТ1
ВТ2
К 28
42,5
42,5
43
42,5
42,5
43
13,5
13,5
14
1,5
1,5
Наиболее трудно обеспечить правильную работу схе-
мы в области высоких положительных температур.
В области отрицательных температур увеличивается
значение аш но одновременно увеличивается и значение
НСУ что существенно снижает экономичность схемы.
Характеристики ферритов с повышенным значением
#с меньше изменяются при колебаниях температуры. По-
этому в устройствах, где возможны значительные изме-
нения положительных температур, применяют ферриты
с большим значением Яс.
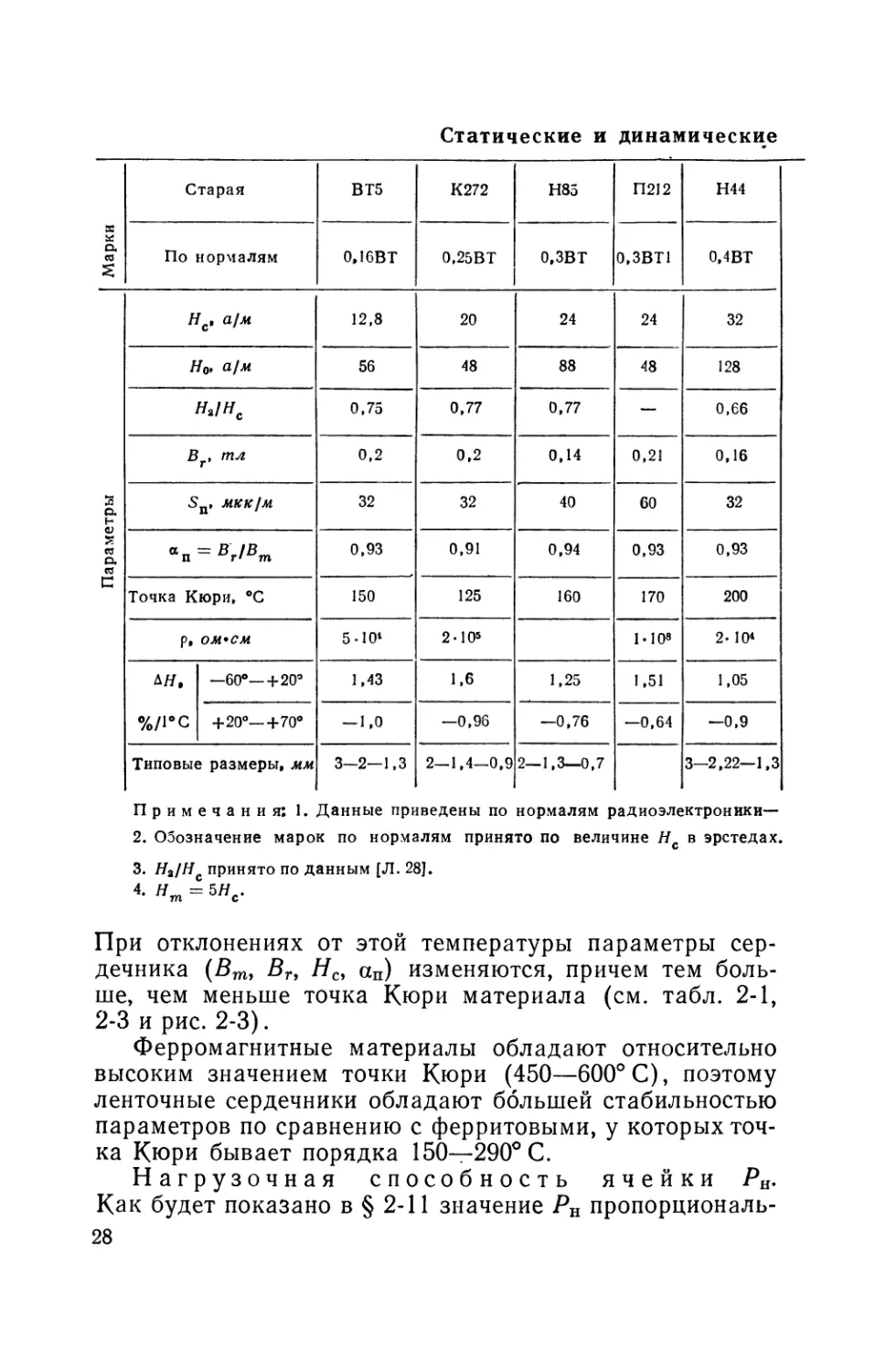
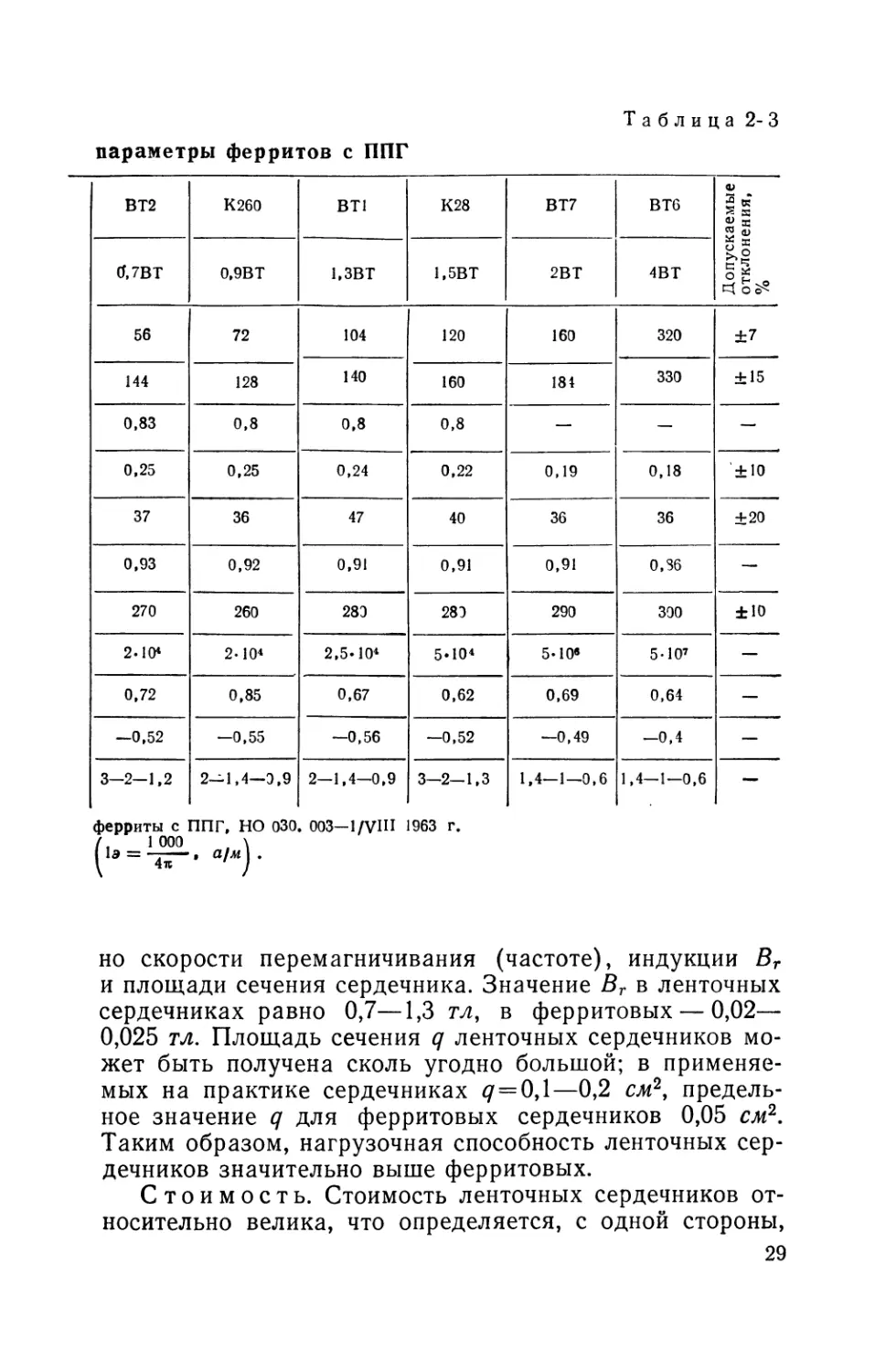
В табл. 2-3 приведены параметры ферритов с ППГ.
Каждая из марок феррита выбирается из условия рабо-
ты схемы. Так для переключающих устройств приме-
няют марку 0,7ВТ, а для запоминающих — 4ВТ
Сравнительная оценка ленточных и ферритовых сер-
дечников. Выбор того или иного материала с ППГ для
построения импульсных магнитных элементов опреде-
ляется рядом факторов.
Температурные условия. Приведенные
в табл. 2-1 и 2-3 данные относятся к температуре +20° С.
27
Статические и динамические
| Марки
Старая
ВТ5
К272
Н85
П212
Н44
По нормалям
0.16ВТ
0,25ВТ
О.ЗВТ
0,ЗВТ1
0.4ВТ
Параметры
Яс. а/м
12,8
20
24
24
32
Н0, а/м
56
48
88
48
128
wc
0,75
0,77
0,77
~
0,66
Вг, тл
0,2
0,2
0,14
0,21
0,16
5Д, мкк/м
32
32
40
60
32
0,93
0,91
0,94
0,93
0,93
Точка Кюри, °С
150
125
160
170
200
р, ОМ'СМ
5-Ю*
2-105
1-108
2- 104
АЯ,
%/1°С
_60°—+20°
1,43
1,6
1,25
1,51
1,05
+20°—+70°
— 1,0
—0,96
—0,76
—0,64
—0,9
Типовые размеры, мм
3-2—1,3
2—1,4—0,9
2—1,3—0,7
3-2,22—1,3
Примечания: 1. Данные приведены по нормалям радиоэлектроники—
2. Обозначение марок по нормалям принято по величине #с в эрстедах.
3. Яа/Яс принято по данным [Л. 28].
4. Ят=5Яс.
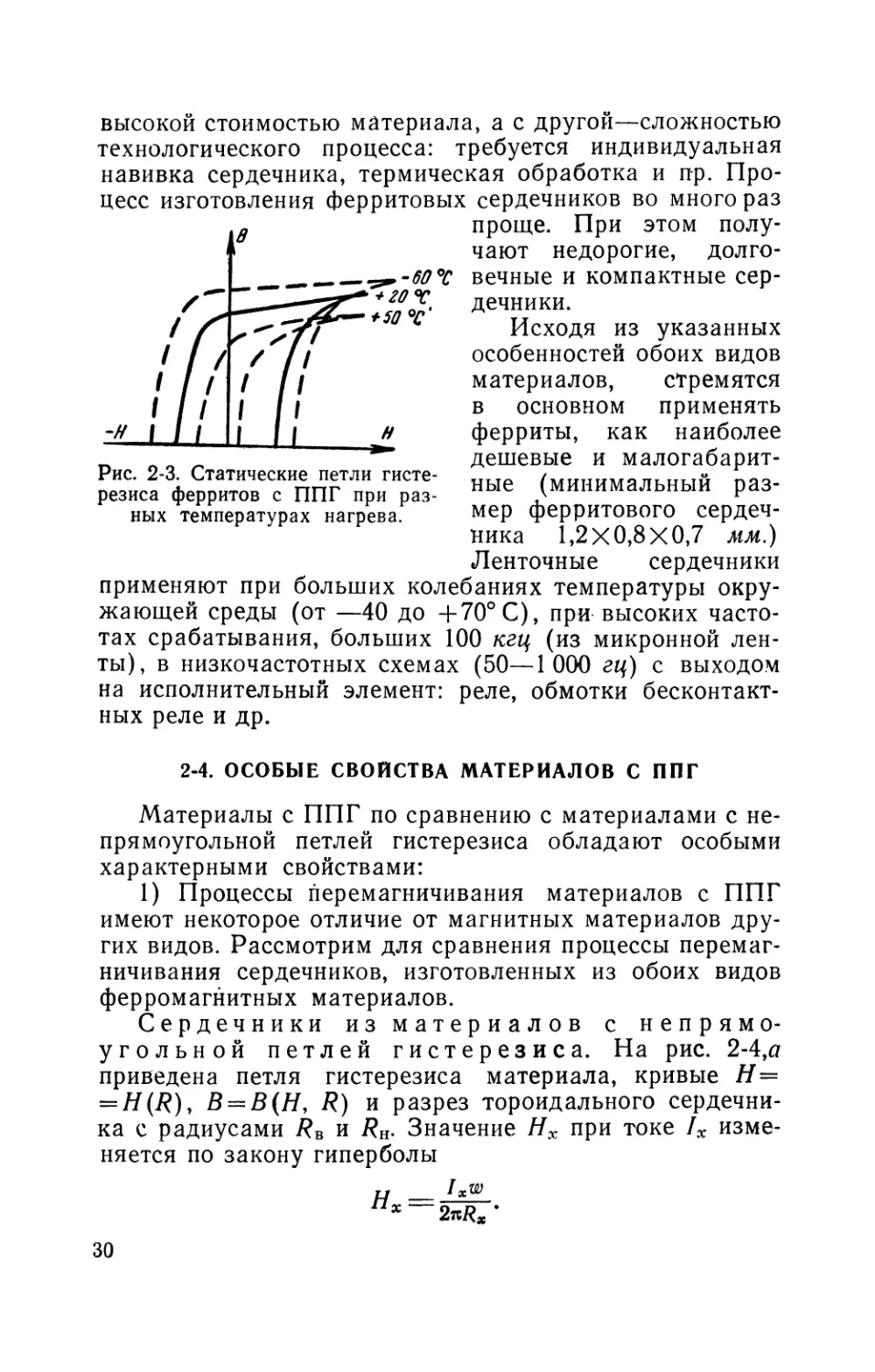
При отклонениях от этой температуры параметры сер-
дечника (Вт, Вг, #с, ап) изменяются, причем тем боль-
ше, чем меньше точка Кюри материала (см. табл. 2-1,
2-3 и рис. 2-3).
Ферромагнитные материалы обладают относительно
высоким значением точки Кюри (450—600° С), поэтому
ленточные сердечники обладают большей стабильностью
параметров по сравнению с ферритовыми, у которых точ-
ка Кюри бывает порядка 150—290° С.
Нагрузочная способность ячейки Рн.
Как будет показано в § 2-11 значение Рн пропорциональ-
28
Таблица 2-3
параметры ферритов с ППГ
ВТ2
К260
ВТ1
К28
ВТ7
ВТ6
:аемые
ения,
0*,7ВТ
0.9ВТ
1,ЗВТ
1.5ВТ
2ВТ
4ВТ
Допуск
отклон
/О
56
72
104
120
160
320
±7
144
128
140
160
184
330
±15
0,83
0,8
0,8
0,8
-
-
0,25
0,25
0,24
0,22
0,19
0,18
±10
37
36
47
40
36
36
±20
0,93
0,92
0,91
0,91
0,91
0,36
-
270
260
283
28Э
290
300
±10
2.10*
2-10*
2,5.10*
5*10*
5-10«
5-Ю7
-
0,72
0,85
0,67
0,62
0,69
0,64
-
—0,52
—0,55
—0,56
—0,52
—0,49
—0,4
-
3—2—1,2
2—1,4—0,9
2-1,4—0,9
3—2—1,3
1,4—1—0,6
1,4—1—0,6
-
ферриты с ППГ, НО 030. 003—1/VIII 1963 г.
/, 1 000 . \
(1э = —'
но скорости перемагничивания (частоте), индукции Вг
и площади сечения сердечника. Значение Вг в ленточных
сердечниках равно 0,7—1,3 тл, в ферритовых — 0,02—
0,025 тл. Площадь сечения q ленточных сердечников мо-
жет быть получена сколь угодно большой; в применяе-
мых на практике сердечниках # = 0,1—0,2 см2, предель-
ное значение q для ферритовых сердечников 0,05 см2.
Таким образом, нагрузочная способность ленточных сер-
дечников значительно выше ферритовых.
Стоимость. Стоимость ленточных сердечников от-
носительно велика, что определяется, с одной стороны,
29
высокой стоимостью материала, а с другой—сложностью
технологического процесса: требуется индивидуальная
навивка сердечника, термическая обработка и пр. Про-
цесс изготовления ферритовых сердечников во много раз
проще. При этом полу-
чают недорогие, долго-
вечные и компактные сер-
дечники.
Исходя из указанных
особенностей обоих видов
материалов, стремятся
в основном применять
ферриты, как наиболее
дешевые и малогабарит-
ные (минимальный раз-
мер ферритового сердеч-
ника 1,2X0,8X0,7 мм.)
Ленточные сердечники
применяют при больших колебаниях температуры окру-
жающей среды (от —40 до +70° С), при высоких часто-
тах срабатывания, больших 100 кгц (из микронной лен-
ты), в низкочастотных схемах (50—1 000 гц) с выходом
на исполнительный элемент: реле, обмотки бесконтакт-
ных реле и др.
Рис. 2-3. Статические петли гисте-
резиса ферритов с ППГ при раз-
ных температурах нагрева.
2-4. ОСОБЫЕ СВОЙСТВА МАТЕРИАЛОВ С ППГ
Материалы с ППГ по сравнению с материалами с не-
прямоугольной петлей гистерезиса обладают особыми
характерными свойствами:
1) Процессы перемагничивания материалов с ППГ
имеют некоторое отличие от магнитных материалов дру-
гих видов. Рассмотрим для сравнения процессы перемаг-
ничивания сердечников, изготовленных из обоих видов
ферромагнитных материалов.
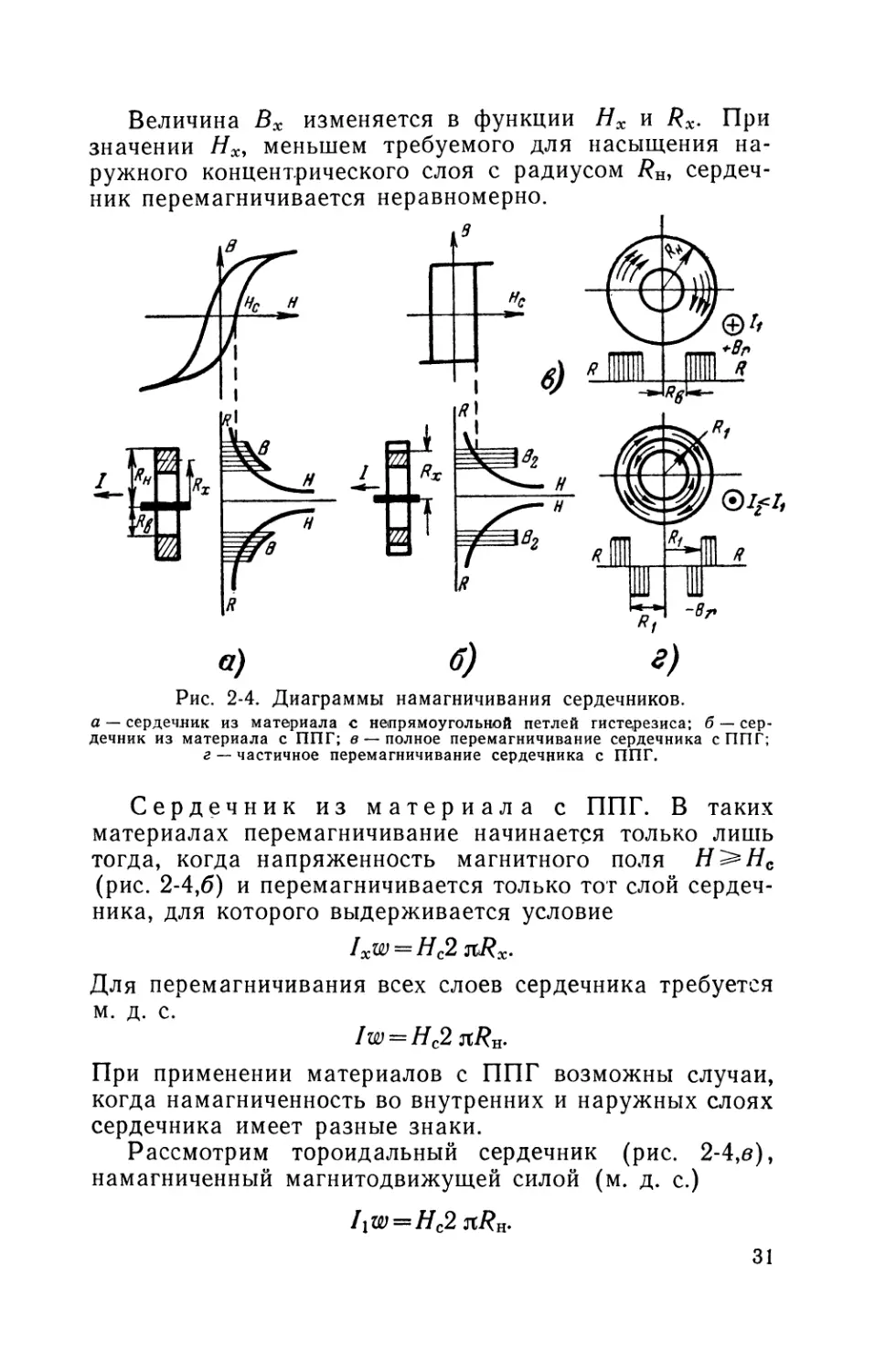
Сердечники из материалов с непрямо-
угольной петлей гистерезиса. На рис 2-4,я
приведена петля гистерезиса материала, кривые Я=
= H(R), В = В(Н, R) и разрез тороидального сердечни-
ка с радиусами RB и RH. Значение Нх при токе 1Х изме-
няется по закону гиперболы
и Ixw
30
Величина Вх изменяется в функции Нх и Rx. При
значении Нх, меньшем требуемого для насыщения на-
ружного концентрического слоя с радиусом /?н, сердеч-
ник перемагничивается неравномерно.
Рис. 2-4. Диаграммы намагничивания сердечников.
а — сердечник из материала с непрямоугольной петлей гистерезиса; б — сер-
дечник из материала с ППГ; в — полное перемагничивание сердечника с ППГ;
г — частичное перемагничивание сердечника с ППГ.
Сердечник из материала с ППГ. В таких
материалах перемагничивание начинается только лишь
тогда, когда напряженность магнитного поля #>#с
(рис. 2-4,6) и перемагничивается только тот слой сердеч-
ника, для которого выдерживается условие
Ixw = Hc2 jtRx.
Для перемагничивания всех слоев сердечника требуется
м. д. с.
/ш = #с2я/?н.
При применении материалов с ППГ возможны случаи,
когда намагниченность во внутренних и наружных слоях
сердечника имеет разные знаки.
Рассмотрим тороидальный сердечник (рис. 2-4,в),
намагниченный магнитодвижущей силой (м. д. с.)
Ixw=Hc2 я/?н.
31
В этом случае линии магнитного поля во всех слоях,
от RB до Ri имеют одно направление — по часовой стрел-
ке. Если же после этого пропустить в катушке ток /2<
<1\ обратной полярности, то в обратном направлении
перемагничивается только слой с наружным радиусом
Ri (см. рис. 2-4,г)
—I2w = —Hc2nRu
а остальные слои (от Rx до RH) остаются неперемагни-
ченными. Этим свойством материалов с ППГ пользуются
для построения элементов с разветвленными магнито-
проводами (трансфлюксоры).
2) Долговременным «запоминанием» значения индук-
ции в любой точке остаточного намагничивания сердеч-
ника.
3) Суммирующим действием, т. е. значение остаточ-
ной индукции суммируется при дискретном приращении
потока. Этим свойством пользуются для построения эле-
ментов, основанных на принципе интегрирования им-
пульсов напряжения (см. гл. 6).
4) В области насыщенного участка от Вг до Вт пет-
ля гистерезиса имеет наклон, значительно меньший, чем
у обычных магнитных материалов.
2-5. ПЕРЕМАГНИЧИВАНИЕ НЕНАГРУЖЕННОГО СЕРДЕЧНИКА
ИМПУЛЬСОМ ТОКА
Работа импульсной магнитной ячейки определяется
режимом перемагничивания ее сердечника из одного со-
стояния в другое: например, от —Вг до +Вт, от +ВГ
до — ВШу от —Вг до —Вт и т. д.
Характер этого процесса зависит, с одной стороны,
от формы импульса и величины нагрузки и, с другой сто-
роны, от свойств материала сердечника.
В ленточных сердечниках на процесс перемагничи-
вания оказывают влияние индуктируемые в стали вихре-
вые токи, а в ферритах — явление магнитной вязкости
(см. § 2-3), вследствие чего имеет место запаздывание
изменения магнитной индукции от изменения напряжен-
ности поля, и на перемагничивание сердечника из одного
состояния в другое требуется определенное время тп,
называемое временем перемагничивания.
Коэффициент переключения. На основе эксперимен-
тальных исследований установлено, что динамический
32
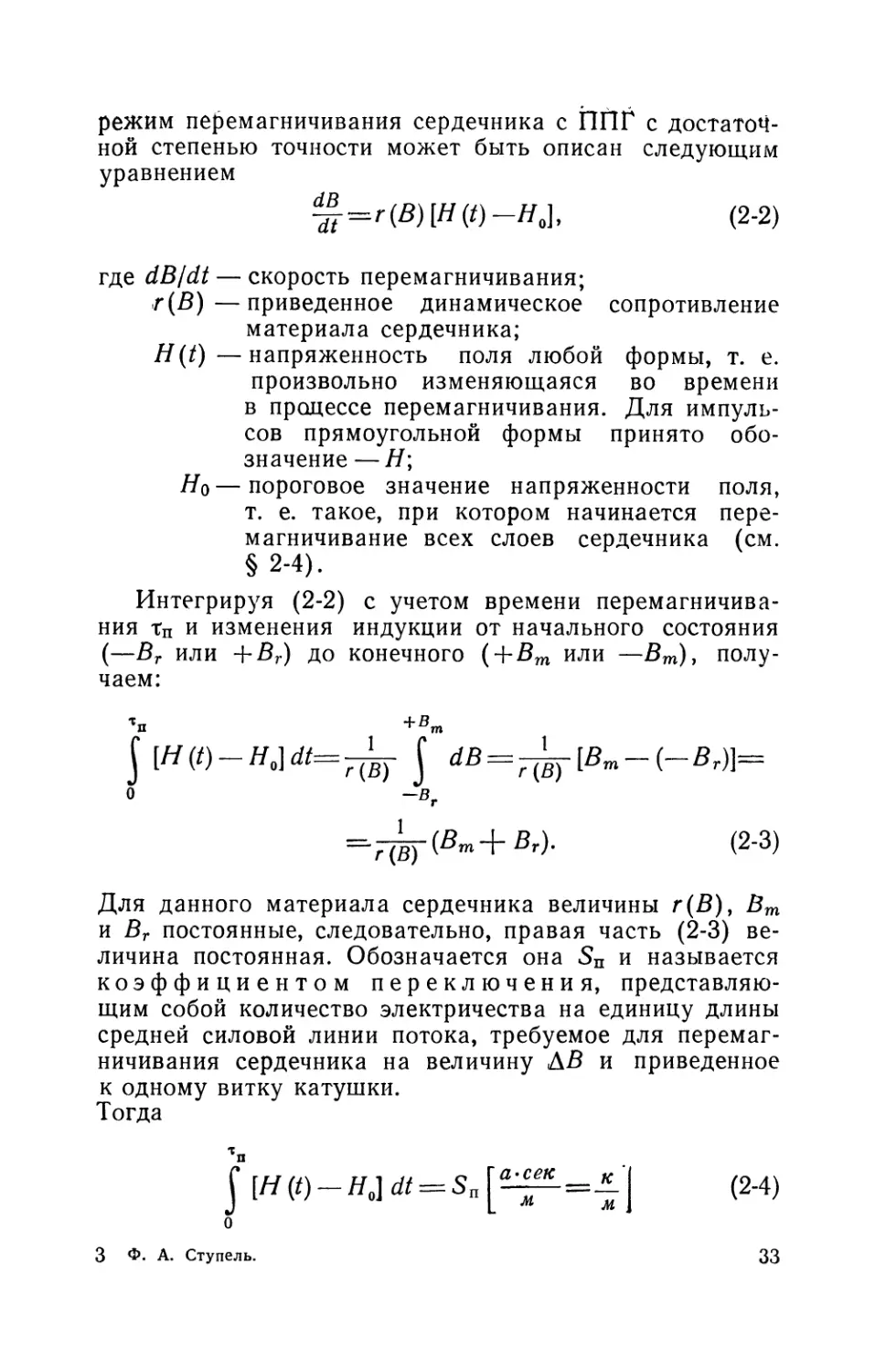
режим перемагничивания сердечника с ППГ с достаточ-
ной степенью точности может быть описан следующим
уравнением
%=r(B)[H(t)-H0], (2-2)
где dB/dt — скорость перемагничивания;
г (В) —приведенное динамическое сопротивление
материала сердечника;
Н (t)—напряженность поля любой формы, т. е.
произвольно изменяющаяся во времени
в процессе перемагничивания. Для импуль-
сов прямоугольной формы принято обо-
значение — Н\
Но — пороговое значение напряженности поля,
т. е. такое, при котором начинается пере-
магничивание всех слоев сердечника (см.
§ 2-4).
Интегрируя (2-2) с учетом времени перемагничива-
ния тп и изменения индукции от начального состояния
(—Вг или +ВГ) до конечного ( + ВШ или —Вт), полу-
чаем:
j [H(t)-H0]dt=7±y j* dB = 7^[Bm-{-BT)\=
о -вг
(2-3)
Для данного материала сердечника величины г(5), Вт
и Вг постоянные, следовательно, правая часть (2-3) ве-
личина постоянная. Обозначается она Sn и называется
коэффициентом переключения, представляю-
щим собой количество электричества на единицу длины
средней силовой линии потока, требуемое для перемаг-
ничивания сердечника на величину АВ и приведенное
к одному витку катушки.
Тогда
J* [Н (t) - Н0] dt = 5П [~^=± | (24)
о
3 Ф. А. Ступель.
33
В справочниках приводятся данные Su в микрокуло-
нах. В некоторых литературных источниках коэффициент
переключения обозначается Sw.
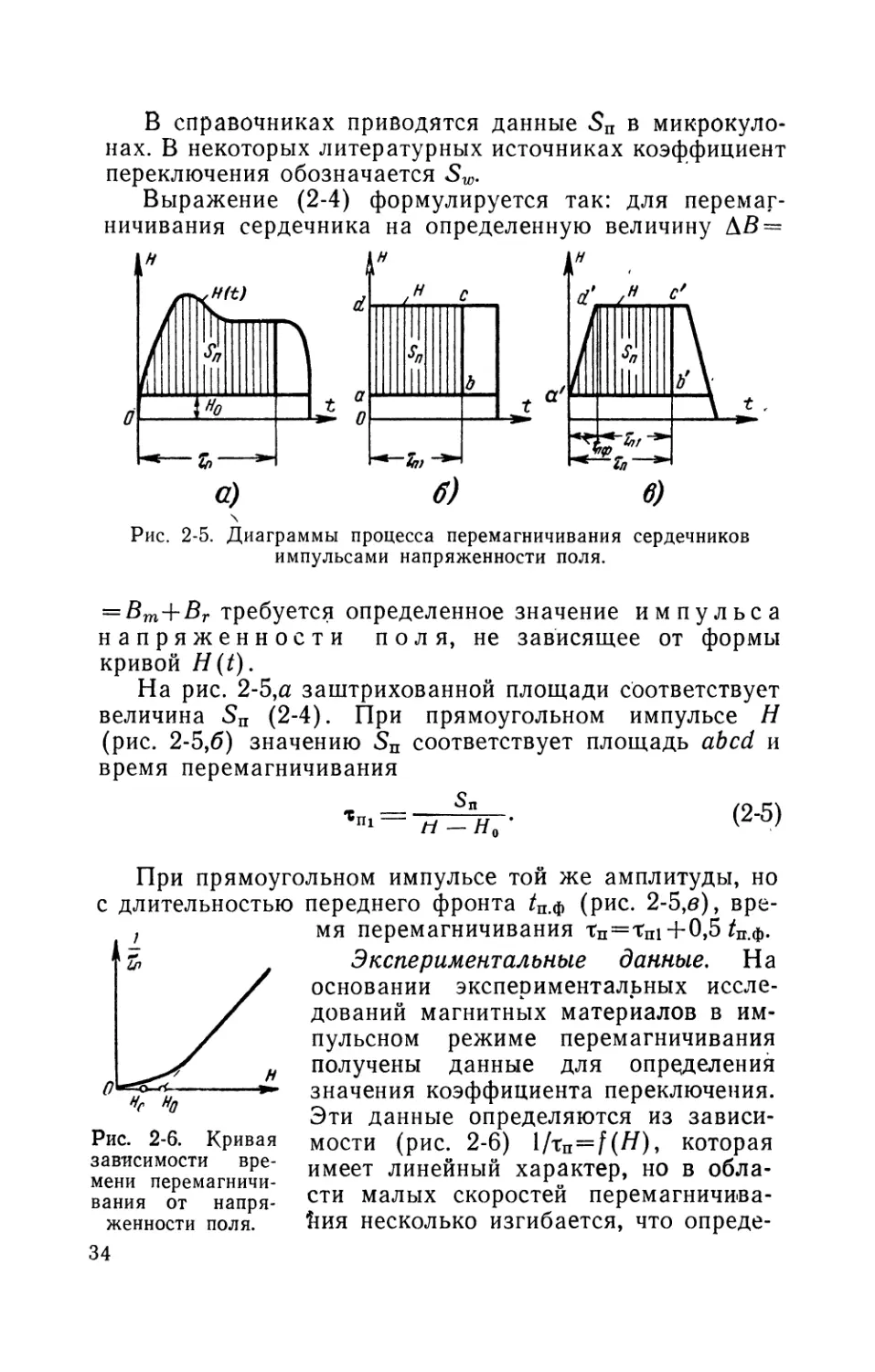
Выражение (2-4) формулируется так: для перемаг-
ничивания сердечника на определенную величину АВ =
Рис. 2-5. Диаграммы процесса перемагничивания сердечников
импульсами напряженности поля.
= Вт+Вг требуется определенное значение импульса
напряженности поля, не зависящее от формы
кривой H(t).
На рис. 2-5,а заштрихованной площади соответствует
величина Sn (2-4). При прямоугольном импульсе Н
(рис. 2-5,6) значению Sn соответствует площадь abed и
время перемагничивания
х - S"
(2-5)
При прямоугольном импульсе той же амплитуды, но
с длительностью переднего фронта £п.ф (рис. 2-5,в), вре-
мя перемагничивания тп=тП1+0,5 £п.ф.
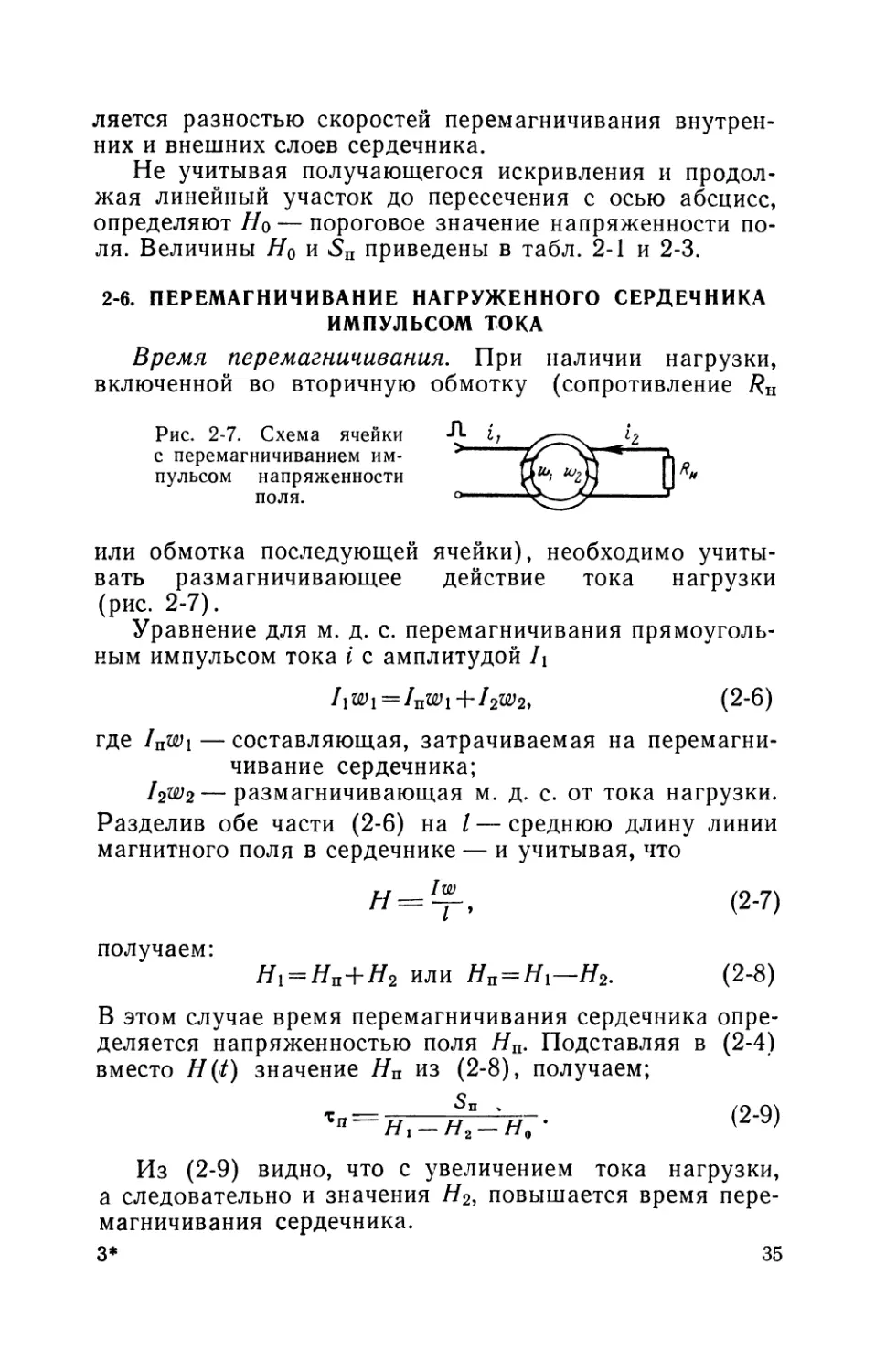
Экспериментальные данные. На
основании экспериментальных иссле-
дований магнитных материалов в им-
пульсном режиме перемагничивания
получены данные для определения
значения коэффициента переключения.
Эти данные определяются из зависи-
Рис. 2-6. Кривая мости (рис. 2-6) 1/тп = /(#), которая
зависимости вре- имеет линейный характер, но в обла-
мени перемагничи- r„ г
вания от напря- сти малых скоростей перемагничива-
женности поля. йия несколько изгибается, что опреде-
34
ляется разностью скоростей перемагничивания внутрен-
них и внешних слоев сердечника.
Не учитывая получающегося искривления и продол-
жая линейный участок до пересечения с осью абсцисс,
определяют Я0 — пороговое значение напряженности по-
ля. Величины Н0 и 5П приведены в табл. 2-1 и 2-3.
2-6. ПЕРЕМАГНИЧИВАНИЕ НАГРУЖЕННОГО СЕРДЕЧНИКА
ИМПУЛЬСОМ ТОКА
Время перемагничивания. При наличии нагрузки,
включенной во вторичную обмотку (сопротивление /?н
Рис. 2-7. Схема ячейки £,
с перемагничиванием им-
пульсом напряженности
поля. о—
или обмотка последующей ячейки), необходимо учиты-
вать размагничивающее действие тока нагрузки
(рис. 2-7).
Уравнение для м. д. с. перемагничивания прямоуголь-
ным импульсом тока i с амплитудой 1\
JxWi =/nWi + I2W2, (2-6)
где InW\ — составляющая, затрачиваемая на перемагни-
чивание сердечника;
I2w2— размагничивающая м. д. с. от тока нагрузки.
Разделив обе части (2-6) на / — среднюю длину линии
магнитного поля в сердечнике — и учитывая, что
// = т". (2-7)
получаем:
Н1 = Нп+Н2 или Ни = Н1—Н2. (2-8)
В этом случае время перемагничивания сердечника опре-
деляется напряженностью поля Яп. Подставляя в (2-4)
вместо H(t) значение Яп из (2-8), получаем;
Хп=:Н1-Н^Н~' (2"9)
Из (2-9) видно, что с увеличением тока нагрузки,
а следовательно и значения Я2, повышается время пере-
магничивания сердечника.
3* 35
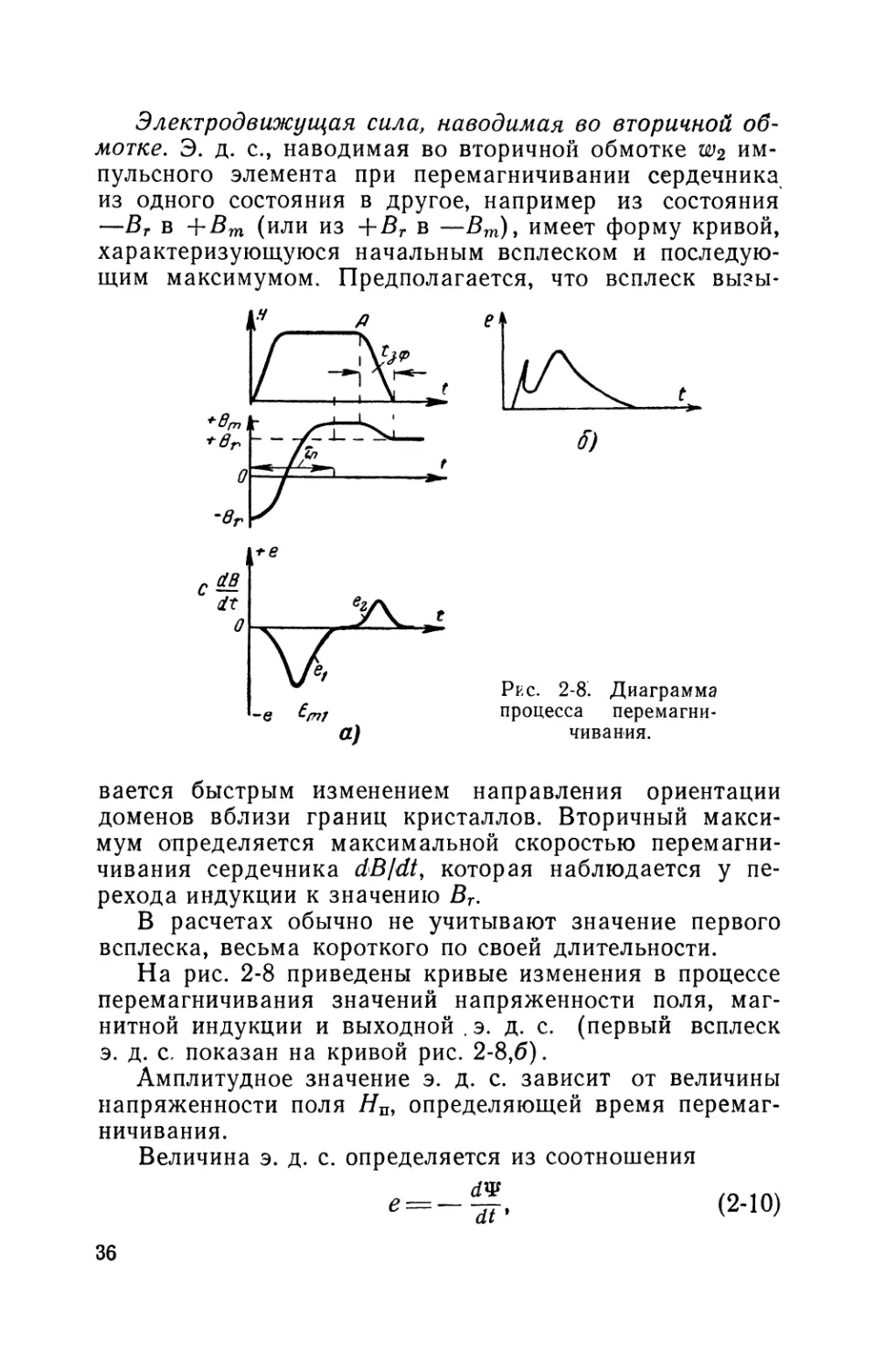
Электродвижущая сила, наводимая во вторичной об-
мотке. Э. д. с, наводимая во вторичной обмотке w2 им-
пульсного элемента при перемагничивании сердечника
из одного состояния в другое, например из состояния
—Вт в +Вт (или из +ВГ в —Вт), имеет форму кривой,
характеризующуюся начальным всплеском и последую-
щим максимумом. Предполагается, что всплеск вызы-
вается быстрым изменением направления ориентации
доменов вблизи границ кристаллов. Вторичный макси-
мум определяется максимальной скоростью перемагни-
чивания сердечника dB/dt, которая наблюдается у пе-
рехода индукции к значению Вг.
В расчетах обычно не учитывают значение первого
всплеска, весьма короткого по своей длительности.
На рис. 2-8 приведены кривые изменения в процессе
перемагничивания значений напряженности поля, маг-
нитной индукции и выходной . э. д. с. (первый всплеск
э. д. с, показан на кривой рис. 2-8,6).
Амплитудное значение э. д. с. зависит от величины
напряженности поля Яп, определяющей время перемаг-
ничивания.
Величина э. д. с. определяется из соотношения
Рис. 2-8. Диаграмма
процесса перемагни-
чивания.
dt •
(2-10)
36
где W — потокосцепление вторичной обмотки
4r=W2$> = w2qB. (2-11)
Из (2-10) и (2-11)
e = -wzq^. (2-12)
В практических расчетах учитывают усредненное
значение Е этой э. д. с. Принимая линейный закон изме-
нения индукции во времени, можно заменить дифферен-
циалы конечными величинами АВ и At.
Рассмотрим два отрезка времени процесса перемаг-
ничивания:
1) Перемагничивание от —Вг до +5т, при этом
АВ\ — ВШ—(—Br) =Bm+Br; A/i — тп.
Из (2-12)
Ех = - *>« %Г= -ЩЧ ^=^. (2-13)
Отношение усредненного значения Е к амплитудному
значению Ет получается порядка 0,55—0,65.
2) Перемагничивание от +Вт до +ВГ (по окончании
импульса Яп). Длительность этого процесса определяет-
ся величиной заднего фронта импульса. В данном слу-
чае
АВ2=Вт—Вг; Д*2=4ф; (2-14)
Ez = -w2q^f=^-. (2-15)
* з.ф
Ввиду относительно небольшого значения омического
сопротивления обмотки w2 в расчетах принимают вме-
сто э. д. с. (Ей Е2) усредненные значения напряжений
([/).
Знаки напряжения. При перемагничивании сердечни-
ка от —Вг до +Вт выходное напряжение имеет отри-
цательное значение, так как при этом имеет место поло-
жительное приращение индукции. При частичном раз-
магничивании от +Вт до +ВГ или от —ВТ до —Вш
знак напряжения положительный, так как при этом
имеет место отрицательное приращение индукции.
37
2-7. ПЕРЕМАГНИЧИВАНИЕ СЕРДЕЧНИКА ИМПУЛЬСОМ
НАПРЯЖЕНИЯ
При подключении сердечника к источнику с малым
внутренним сопротивлением — генератору напряжения—
ток в цепи в значительной степени зависит от сопротив-
ления нагрузки.
Рассмотрим случай подключения сердечника к источ-
нику напряжения u(t); символом (t) характеризуется
источник с любой формой импульса напряжения: прямо-
угольной, синусоидальной и др. Последовательно с об-
моткой включают добавочное сопротивление 7?д для
ограничения тока в обмотке, значение которого резко
повышается по окончании процесса перемагничивания.
Составим уравнение цепи:
и (о=w+^r=iR(2-i6)
где /? = /?д + /?к; RK—омическое сопротивление обмотки.
Интегрируя (2-16) с учетом изменения индукции от на-
чального значения Вн до конечного Ви, получаем
t \t вк
J и (t) dt = J iRdt + wq^ dB. (2-17)
о 6 вн
Выражение (2-17) формулируется так: для перемаг-
ничивания сердечника на величину
А В = Вк—Вп
требуется определенное значение импульса напря-
жения (в*сек), причем это значение не зависит от
формы кривой напряжения. При перемагничивании сер-
дечника от —Вг до +Вт за время тп требуется состав-
ляющая Ua импульса напряжения, получающаяся из
полного импульса за вычетом потерь в активных сопро-
тивлениях:
f [и (t) - iR] dt = wq (Bm + Br). (2-18)
о
На рис. 2-9 заштрихованной площадке соответствует
значение Ua. Изменение тока в цепи определяется режи-
38
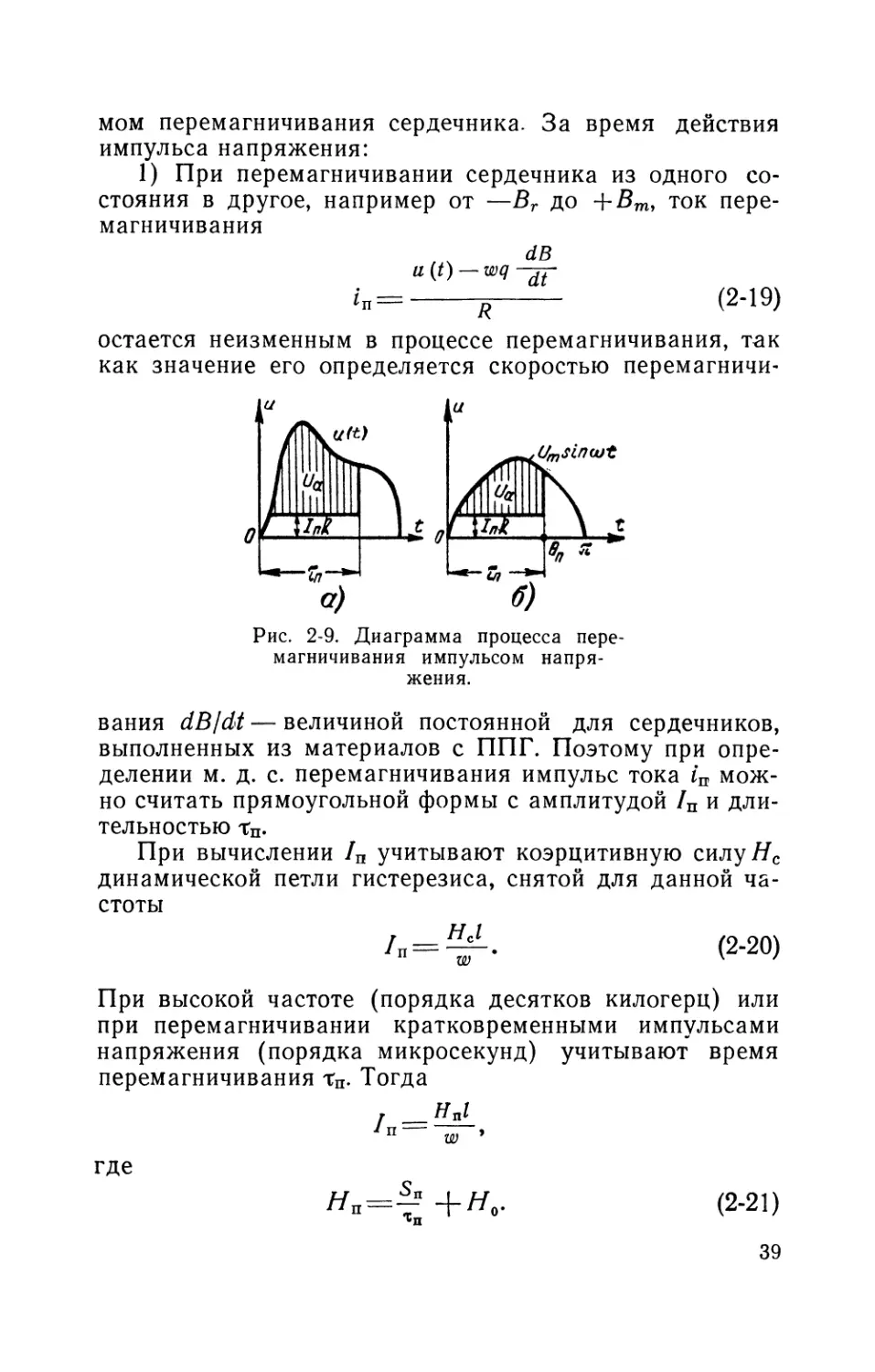
мом перемагничивания сердечника. За время действия
импульса напряжения:
1) При перемагничивании сердечника из одного со-
стояния в другое, например от —Вг до + Вт, ток пере-
магничивания
dB
in= £ (2"19)
остается неизменным в процессе перемагничивания, так
как значение его определяется скоростью перемагничи-
и
i
f
и
/1 lllii
Г Ш
\ г
б)
Рис. 2-9. Диаграмма процесса пере-
магничивания импульсом напря-
жения.
вания dB/dt — величиной постоянной для сердечников,
выполненных из материалов с ППГ. Поэтому при опре-
делении м. д. с. перемагничивания импульс тока iu мож-
но считать прямоугольной формы с амплитудой /п и дли-
тельностью тп.
При вычислении /п учитывают коэрцитивную силу#с
динамической петли гистерезиса, снятой для данной ча-
стоты
/п=^. (2-20)
При высокой частоте (порядка десятков килогерц) или
при перемагничивании кратковременными импульсами
напряжения (порядка микросекунд) учитывают время
перемагничивания тп. Тогда
1 п — "»
где
Яп=4" +Я0.
(2-21)
39
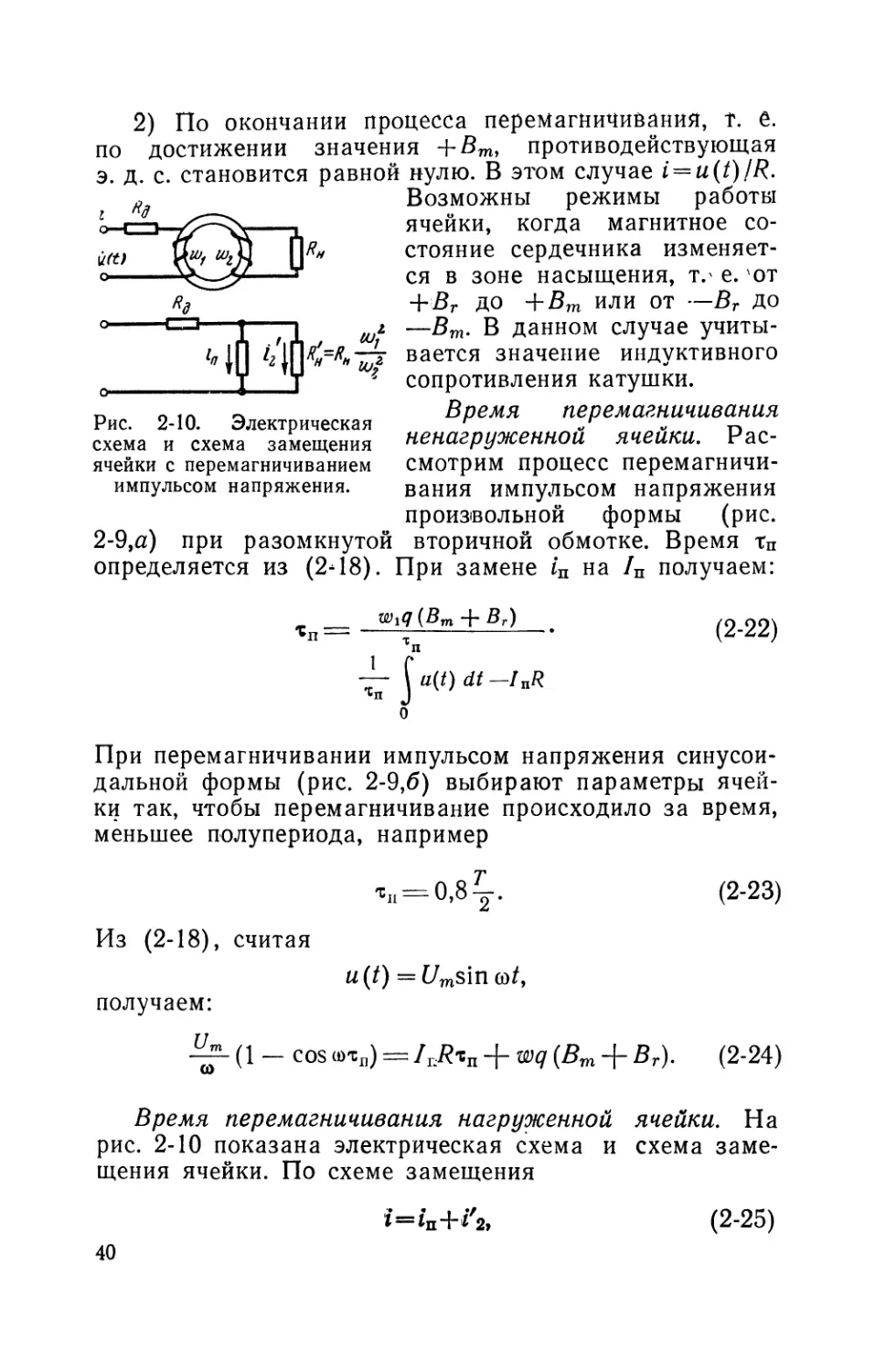
2) По окончании процесса перемагничивания, т. е.
по достижении значения + Вту противодействующая
э. д. с. становится равной нулю. В этом случае i = u(t)/R.
Возможны режимы работы
ячейки, когда магнитное со-
стояние сердечника изменяет-
ся в зоне насыщения, т.* е. от
+ ВГ до +ВШ или от —Вг до
—Вт. В данном случае учиты-
вается значение индуктивного
сопротивления катушки.
Время перемагничивания
ненагруженной ячейки. Рас-
смотрим процесс перемагничи-
вания импульсом напряжения
произвольной формы (рис.
2-9,а) при разомкнутой вторичной обмотке. Время тп
определяется из (2-18). При замене /п на /п получаем:
Рис. 2-10. Электрическая
схема и схема замещения
ячейки с перемагничиванием
импульсом напряжения.
Wiq (Вт + ВГ)
dt—InR
(2-22)
При перемагничивании импульсом напряжения синусои-
дальной формы (рис. 2-9,6) выбирают параметры ячей-
ки так, чтобы перемагничивание происходило за время,
меньшее полупериода, например
(2-23)
Из (2-18), считая
получаем:
u(t) = f/msino)/,
(1 - cos m<cn) = 1Л%П + wq {Bm + Br). (2-24)
Время перемагничивания нагруженной ячейки. На
рис. 2-10 показана электрическая схема и схема заме-
щения ячейки. По схеме замещения
* = 1п + /'2,
(2-25)
40
где i — ток в обмотке,
/п — ток перемагничивания;
if2 — приведенное значение тока нагрузки.
Уравнение напряжения
u{t)-iuR-i\R = wiq^, (2-26)
i\ = wxq^ \R\
R'u = Rh —
W0
(2-27)
Интегрируя (2-26) с учетом (2-27), изменения индукции
на величину ДБ = Вш-{-Вг и времени перемагничивания
хп, получаем:
wMBm + Br) (1 + 3*,). (2-28)
1 Г
т* J
о
(t)dt-InR
Сравнивая (2-22) и (2-28), видим влияние нагрузки:
с увеличением нагрузки, т. е. с уменьшением приведен-
ного сопротивления R'Hi значение тп увеличивается.
Для получения требуемых параметров ячейки варьи-
руют значениями тп, u(t), RR и W\.
2-8. БАЛАНС МАГНИТНОЙ ЭНЕРГИИ
Процессы, протекающие в ячейке, определяются
энергией Ас, забираемой от источника тока или напря-
жения
t
Ac^^uidt [дж]. (2-29)
о
Уравнение напряжения — падение напряжения на зажимах
катушки
и = /Я„ + ^, (2-30)
где i — ток в катушке,
RK — омическое сопротивление катушки.
Умножив (2-30) на /, получаем:
ш dt ^PR^di+idW. (2-31)
41
Левая часть соотношения (2-31) представляет собой
энергию, забираемую из сети,
i2RKdt— энергия потерь в омическом сопротивлении
катушки;
idW— магнитная энергия системы.
Потерями в омическом сопротивлении катушки —
величиной относительной малой — обычно пренебрегают.
Тогда
uidt=i(P¥. (2-32)
Интегрируя (2-32) с учетом перемагничивания сердеч-
ника от —Вг до +ВШ за время t, получаем:
t
Ас — [ ui dt = Iwq (Вт -f- Br).
о
Приняв I = Hljw, объем сердечника I7-=<?/,
имеем:
Ac = H(Bm + Br)V. (2-33)
Таким образом, энергия, забираемая из сети, а сле-
довательно и магнитная энергия сердечника, пропор-
циональны объему V сердечника. В случае ненагружен-
ной ячейки вся магнитная энергия расходуется на пе-
ремагничивание сердечника, при нагруженной ячейке
часть энергии отдается нагрузке. По окончании импуль-
са, когда индукция уменьшается от Вт до Вг, часть
энергии возвращается в сеть. Энергия возврата
Лв = ±H(Bm-Br)V. (2-34)
Пример. Определить баланс магнитной энергии ячейки при пе-
ремагничивании сердечника (материал — феррит) без отдачи энер-
гии в нагрузку. Параметры сердечника: ^=1,125 -Ю-6 м2; I —
= 1 • Ю-2 л; V= 1,125- Ю-» мз. £т = 0,25 Тл\ Вг=0,22 тл\ Я=400 а/м.
Из (2-33)
Лс = 400(0,25 + 0,22) 1,125- 10-8 = 2,1 - 10"6 дж.
Из (2-34)
Ав =у 400(0,25 — 0,22) 1,125-Ю-8 = 6,75-Ю-8 дж.
2-9. ЭКВИВАЛЕНТНОЕ СОПРОТИВЛЕНИЕ ОБМОТКИ
При расчете импульсных магнитных элементов
с сердечниками из материала с ППГ требуется иметь
данные о величине входного сопротивления обмоток
42
в переходном режиме. Это сопротивление относительно
велико в процессе перемагничивания сердечника, напри-
мер при переходе от —Вг до +ВГ, и значительно мень-
ше при подмагничивании в зоне насыщения, т. е. при
переходе от + Вг до + Вт-
Рассмотрим способы определения значений обоих
сопротивлений.
Сопротивление катушки при перемагничивании сер-
дечника. Энергия, забираемая из сети в процессе пере-
магничивания в пределах от —Вг до +JBr, определяет
активные потери, поскольку эта энергия не возвращается
в сеть. Поэтому сопротивление катушки в этот период
считают активным. Вводится понятие — эквивалент-
ное сопротивление катушки R2. Это такое со-
противление, на котором при токе / в катушке получа-
ются потери, равные Ас—Ав. Учитывая (2-33) и (2-34),
получаем с некоторым приближением:
/2#эТп=А с—А в = 2HBrql. (2-35)
Подставляя в (2-35) I = Hl/w, получаем:
Удельное эквивалентное сопротивление гэ одного
витка катушки
rQ = [ом/виток2]. (2-37)
Значение г9 зависит от размеров и параметров сердеч-
ника.
Сопротивление катушки при подмагничивании сер-
дечника. Энергия, затрачиваемая в процессе подмагни-
чивания, например при переходе от -lrBr до +Вт, воз-
вращается в сеть. Поэтому сопротивление катушки
в этот период времени считается индуктивным. Если
известна длительность t перемагничивания от состояния
+ ВТ до +Вт, то индуктивное сопротивление
В процессе перемагничивания, когда импульс тока
начинает уменьшаться, индукция в сердечнике умень-
43
шается от +Вт до +ВГ, причем время этого перехода
определяется длительностью заднего фронта импульса.
В этом случае
Х=-±~. (2-39)
Пример. Найти эквивалентное сопротивление катушки. Пара-
метры сердечника приведены в примере § 2-8. Число витков катуш-
ки до = 10; время перемагничивания тп=2« Ю-6 сек.
Из (2-36) находим Яэ=6,2 ом.
При определении параметров элементов значением
X пренебрегают, так как эта величина значительно
меньше Яэ. \В схемах замещения #э изображается как
омическое сопротивление (см. рис. 2-ГО).
2-10. ДОПУСТИМАЯ ПРЕДЕЛЬНАЯ ЧАСТОТА СРАБАТЫВАНИЙ
При каждом срабатывании ячейки потери, связан-
ные с перемагничиванием сердечника, вызывают нагрев
сердечника. С повышением частоты срабатываний /
увеличивается температура нагрева сердечника. При
этом изменяются его магнитные параметры 5Г, Яс, 5Ш
аш что сказывается на работе ячейки в целом: умень-
шается ее нагрузочная способность и помехоустойчи-
вость. Поэтому при определении значения допустимой
предельной частоты срабатывания /Пр учитываются тем-
пературный режим ячейки и допустимые отклонения ее
параметров. Необходимо принимать во внимание пре-
дельное значение температуры окружающей среды. Ис-
ходное соотношение для установившегося режима на-
грева
Яп.с = Рт.о, (2-40)
где Рп.с — потери в сердечнике;
Рт.о — теплоотдача сердечника.
Потери в омических сопротивлениях катушек незна-
чительны и ими можно пренебречь.
Потери в сердечнике. Определенной частоте сраба-
тывания f соответствует период времени Г=1//, в тече-
ние которого сердечник должен перемагничиваться два
раза: при записи информации и ее считывании. Время
перемагничивания тп должно быть не более 0,5 Т (при-
нимают тп=0,4Г).
44
Потери в сердечнике при одном перемагничивании
Среднее значение потерь за период
Рп.е = У*£[вт]. (242)
Теплоотдача сердечника. Уравнение теплоотдачи
сердечника можно записать следующим образом:
Ят.о = ^т5с9, (243)
где jiT — коэффициент теплоотдачи; по данным [Л. 4]
* = 20 + 30[^];
5С — поверхность охлаждения сердечника,
Sc = *(D + rf)A.10-e [м2]
(D, d и h — размеры сердечника в миллиметрах);
б — допустимое превышение температуры.
где бт — максимальная допустимая температура нагрева
сердечника;
60— предельная температура окружающей среды.
Совместным решением (240), (242) и (243) при за-
данных бш, 60 и 6 находят 7\
2-11. НАГРУЗОЧНАЯ СПОСОБНОСТЬ ЯЧЕЙКИ
На выходе каждой ячейки включается определен-
ная нагрузка. В высокочастотных схемах этой нагруз-
кой являются входные обмотки последующих ячеек, об-
мотки обратной связи или же входные цепи усилителей,
в низкочастотных (50—1 ООО гц) — обмотки реле, обмот-
ки управления магнитных усилителей и др. Нагрузоч-
ную способность ячейки рассмотрим раздельно для
ячеек трансформаторного и дроссельного типа.
45
Ячейка трансформаторного типа (рис. 2-7). Энергия,
отдаваемая в нагрузку, равна разности энергий: заби-
раемой из сети и затрачиваемой на перемагничивание
сердечника.
При времени перемагничивания тп значение энергии,
выделяемой в нагрузке при импульсе тока прямоуголь-
ной формы, равно
Лн = [ Н - ^ + н0) ] (Вт + Вг) V. (2-44)
Практически благодаря наличию переднего фронта им-
пульса /п.ф энергия, отдаваемая в нагрузку, снижается.
В целях повышения отдаваемой мощности стремятся
увеличивать значение Я. Необходимо учитывать, что
при относительно больших значениях Н длительность
переднего фронта резко увеличивается.
В низкочастотных схемах внешняя нагрузка подклю-
чается к специальной вторичной выходной обмотке, при-
чем параллельно нагрузке приходится ставить конден-
саторы. Это требуется потому, что выходной импульс
вторичной обмотки имеет малую длительность и, следо-
вательно, в цепи питания реле получается большая
скважность. Так при частоте 50 гц и длительности вы-
20
ходного импульса 0,1 мсек скважность равна ^-у =200.
При такой скважности реле не успевает срабаты-
вать. Выбор значения напряжения на нагрузке J7H (на
выходе w2) и емкость С определяются по данным реле:
минимальной мощности срабатывания РСр и време-
ни срабатывания /.ср. Необходимо, чтобы энергия заря-
женного конденсатора несколько превышала требуемую
для реле
си2
2 ^ ср^ср»
Например, при Рср=0,2 вт, fcp=5-10-3 сек и запасе
энергии 40% имеем
CU2
—!L = i,4Pcpfcp. (2-45)
Если при этом С = 2 мкф, то из (2-45) получаем £/н=
=37,4 в; принимаем £/н=40 в.
46
При нагрузке в виде обмотки управления бескон-
тактного реле или магнитного усилителя требуемую
энергию определяют за период.
Ячейка дроссельного типа с включением нагрузки
последовательно с выходной обмоткой (рис. 5-1). В вы-
сокочастотных схемах с частотой порядка десятков ки-
логерц нагрузкой ячейки являются входные обмотки
(обмотки управления) последующих ячеек с сердечни-
ками таких же размеров. По условиям работы схемы
в целом последовательно с рабочей обмоткой ячейки
включают до 5—10 обмоток управления сердечников
(см. § 5-3). Размеры Сердечника выбирают с учетом по-
требляемой мощности перемагничивания управляемых
ячеек. В низкочастотных схемах, например с частотой
/=50 гц, на выходе последней ячейки схемы включают
нагрузку в виде обмотки реле, магнитного усилителя
и др. В данном случае размеры сердечника выбирают
из условия получения требуемой выходной мощности
Рн = 2,22fBmq0k0qkcA, (2-46)
где q0 — площадь сечения окна, м2;
k0 — коэффициент заполнения окна;
q — площадь сечения сердечника, м2;
kc — коэффициент заполнения стали;
Д — плотность тока, а/м2.
Из (2-46) определяют q0q:
р
q°q = 2,22fBlk0kcA • <247)
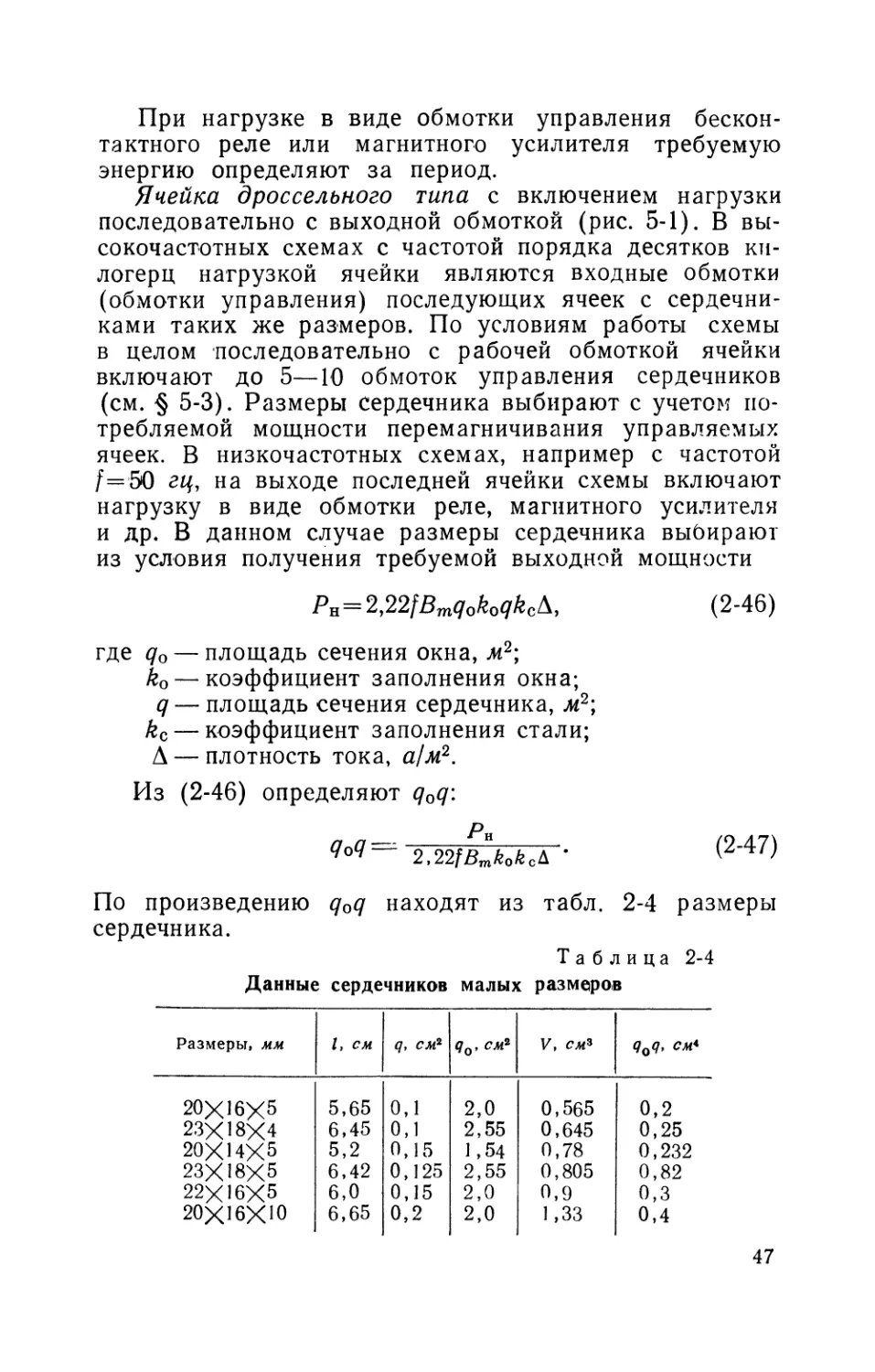
По произведению q0q находят из табл. 2-4 размеры
сердечника.
Таблица 2-4
Данные сердечников малых размеров
Размеры, мм
/, см
q, см2
Я0,см*
V, см*
qQq, см*
5,65
0,1
2,0
0,565
0,2
23X18X4
6,45
0,1
2,55
0,645
0,25
20XUX5
5,2
0,15
1,54
0,78
0,232
23X18X5
6,42
0,125
2,55
0,805
0,82
22X16X5
6,0
0,15
2,0
0,9
0,3
20Х16ХЮ
6,65
0,2
2,0
1,33
0,4
47
Пример. Дано Ри— 1 вг,/=400 гц, материал — пермаллой 50НП,
Вm = 1,35 тл\ Л=3- 10б а/ж2, Ajc=0,9, £о=0Д5.
Из (2-47) получаем ^О^=0,216 • 10~8 м\
Принимаем сердечник с размерами 23x18X4 мм.
2-12. ПОЛУПРОВОДНИКОВЫЕ ЭЛЕМЕНТЫ
В СХЕМАХ ЯЧЕЕК
Схемы отдельных импульсных магнитных ячеек со-
держат в себе, помимо сердечников с определенным
числом обмоток, еще и полупроводниковые элементы:
диоды и транзисторы. Работа этих элементов детально
описывается в специальной литературе. В этом парагра-
фе рассматриваются только отдельные вопросы, связан-
ные с применением полупроводниковых диодов в схемах
ячеек (о транзисторах см. § 4-1).
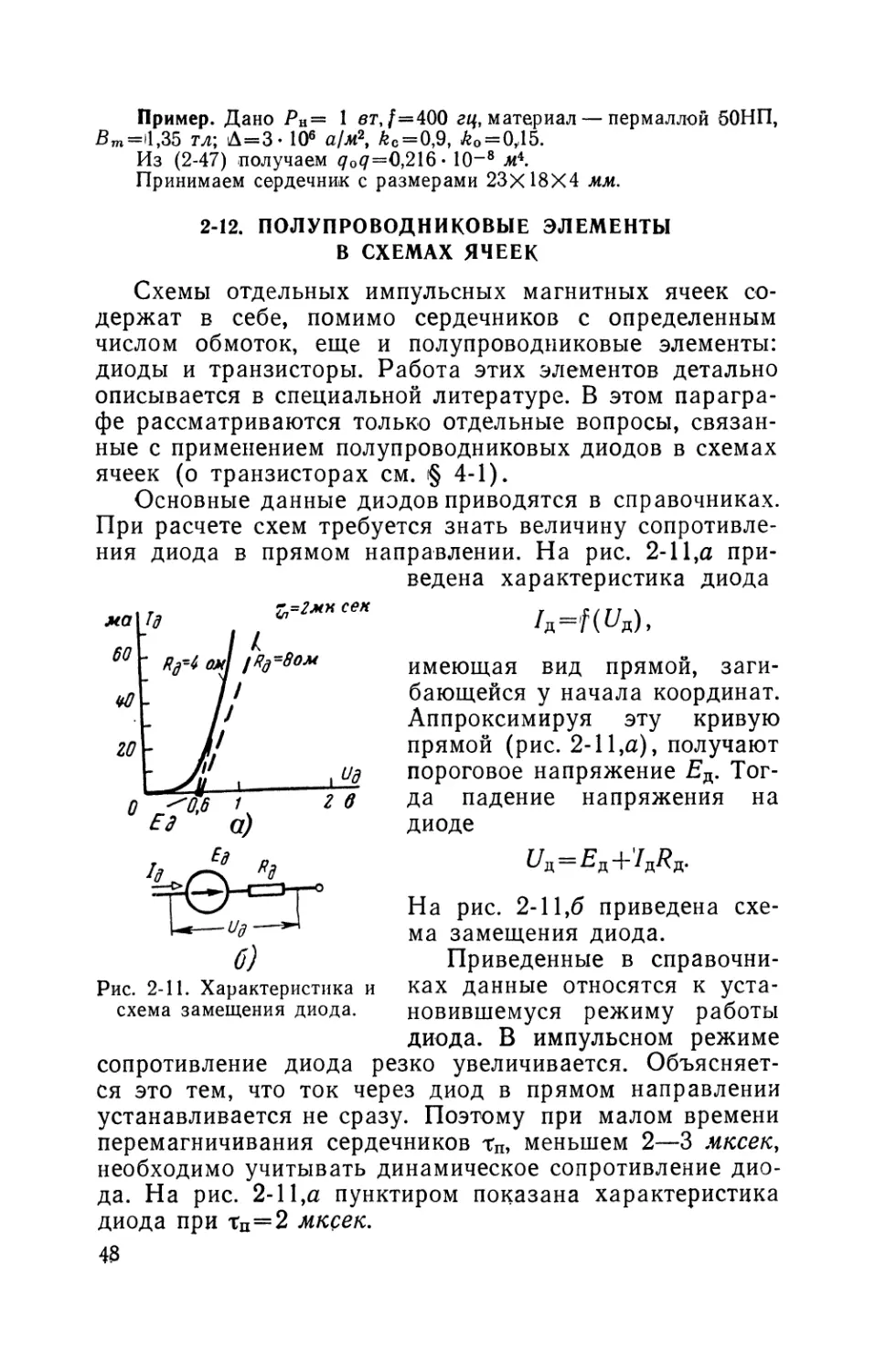
Основные данные диодов приводятся в справочниках.
При расчете схем требуется знать величину сопротивле-
ния диода в прямом направлении. На рис. 2-11,а при-
ведена характеристика диода
ма
имеющая вид прямой, заги-
бающейся у начала координат.
Аппроксимируя эту кривую
прямой (рис. 2-11,а), получают
пороговое напряжение Яд. Тог-
да падение напряжения на
диоде
£/д = £д+'/д/?д.
На рис. 2-11,6 приведена схе-
ма замещения диода.
Приведенные в справочни-
ках данные относятся к уста-
новившемуся режиму работы
диода. В импульсном режиме
сопротивление диода резко увеличивается. Объясняет-
ся это тем, что ток через диод в прямом направлении
устанавливается не сразу. Поэтому при малом времени
перемагничивания сердечников тп, меньшем 2—3 мксек,
необходимо учитывать динамическое сопротивление дио-
да. На рис. 2-11,а пунктиром показана характеристика
диода при тц^=2 мксек.
Рис. 2-11. Характеристика и
схема замещения диода.
43
По данным [Л. 4] для диодов Д9Б: £^ = 0,6 в, #д—
статическое — равно 4 ом, динамическое: при тп=
= 3 мксек равно 6 ом, при тп=2 мксек—8 ом, при
тп=1 мксек—13 ом.
Для упрощения расчетов диод учитывают только
лишь в виде сопротивления #д при рабочей величине
тока /д. Так /?д для диода Д9Б при /д = 50 ма равно
0,6 + 4-0,05 1С
R* = —0Ж~ = 16 °^
ГЛЛВЛ ТРЕТЬЯ
ФЕРРОДИОДНЫЕ ЭЛЕМЕНТЫ
ТРАНСФОРМАТОРНОГО ТИПА (ФДТ)
3-1. ПРИНЦИП ДЕЙСТВИЯ ОТДЕЛЬНОЙ ЯЧЕЙКИ
Импульсные магнитные элементы состоят из- одной
или нескольких ячеек. Отдельная ячейка состоит из
трансформатора с сердечником из материала с ППГ и
диода, включенного в цепь выходной обмотки.
Простейшая схема отдельной ячейки с питанием от
генератора тока приведена на рис. 3-1,а.
Основные определения. Сердечники из материалов
с ППГ могут сколь угодно долго оставаться в двух ма-
гнитных состояниях: +ВГ или —lSr. В качестве исходно-
го магнитного состояния принимается —Вг, условно
обозначаемое 0. При этом считается, что в ячейке не
записана информация (см. рис. 3-1,6).
Ввод информации происходит при подаче им-
пульса во входную обмотку 101 от какого-то элемента,
например от датчика (а, Ь ...). Сердечник переводит-
ся из состояния 0(—Вг) в состояние 1 ( + ВГ). Ячейка
запоминает эту записанную информацию: а=1.
Считывание информации производится им-
пульсом тока по тактовой обмотке wT. При этом ячей-
ка переводится из 1 в 0, т. е. из состояния +ВГ в —Вт
с одновременной передачей энергии или в нагрузку /?н,
как показано на рис. 3-1,а, или во входную обмотку сле-
дующей ячейки.
Подтверждение 0 получается в том случае,
когда сердечник находится в состоянии 0 (—5Г), а по
4 Ф. А. Ступель. 49
обмотке wT проходит импульс тока, также стремящий-
ся перевести его в 0.
Тактовая обмотка, wT9 называется так потому,
что синхронизация работы схемы, состоящей из ряда
элементов, осуществляется тактами, т. е. частотой от-
дельного, общего для всех элементов, генератора такто-
вых импульсов (ТИ). Эти импульсы поступают в обмот-
Запись 1
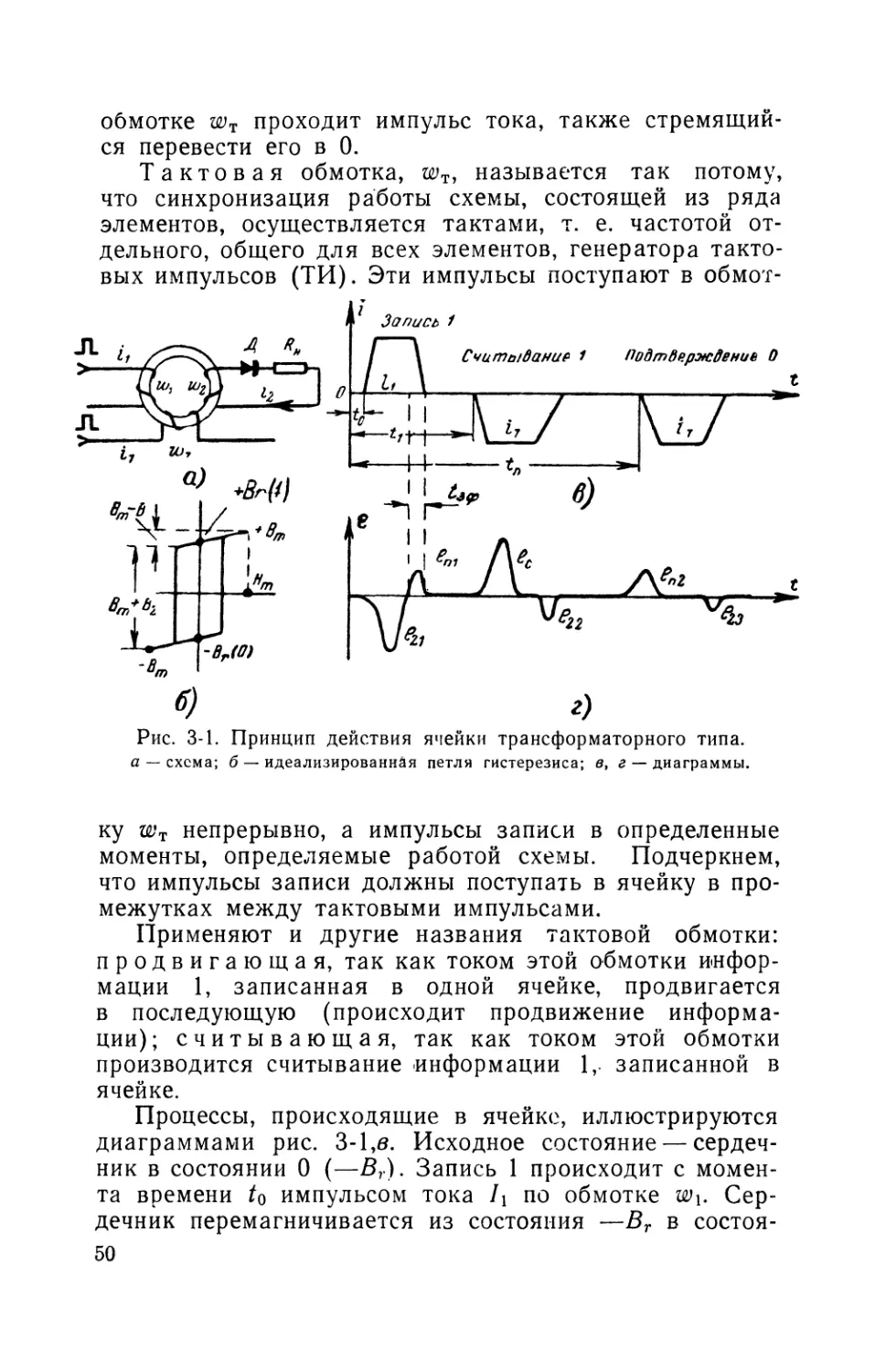
Рис. 3-1. Принцип действия ячейки трансформаторного типа.
а — схема; б — идеализированная петля гистерезиса; в, г — диаграммы.
ку wT непрерывно, а импульсы записи в определенные
моменты, определяемые работой схемы. Подчеркнем,
что импульсы записи должны поступать в ячейку в про-
межутках между тактовыми импульсами.
Применяют и другие названия тактовой обмотки:
продвигающая, так как током этой обмотки инфор-
мации I, записанная в одной ячейке, продвигается
в последующую (происходит продвижение информа-
ции); считывающая, так как током этой обмотки
производится считывание информации I,. записанной в
ячейке.
Процессы, происходящие в ячейке, иллюстрируются
диаграммами рис. 3-1,в. Исходное состояние — сердеч-
ник в состоянии 0 (—Вг). Запись 1 происходит с момен-
та времени to импульсом тока 1\ по обмотке wx. Сер-
дечник перемагничивается из состояния —Вг в состоя-
50
ние + Вт, а по окончании импульса—из + Вт в +ВГ.
При этом в обмотке w2 наводятся э. д. с. е2\ и ет.
Знак э. д. с. е2х таков, что он запирает диод Д
(рис. 3-1,а), и тока в нагрузке не будет.
Электродвижущая сила еп\ называется помехой, так
как при наличии этой э. д. с. возникает ток в цепи об-
мотки w2y хотя по условиям работы ячейки этот ток
должен быть равен нулю (в процессе записи 1 информа-
ция не должна передаваться в нагрузку).
Считывание 1 происходит с момента времени t\ им-
пульсом тока /т, проходящим по тактовой обмотке wT.
Сердечник переводится из состояния 1 ( + ВГ) в состоя-
ние —Вту а по окончании импульса в —Вг(0). При
этом в обмотке w2 наводятся э. д. с. ес, называемая си-
гналом, так как под действием этой э. д. с. создается
ток, протекающий в нагрузке или в последующем эле-
менте (продвигается сигнал 1), и э. д. с. помехи е22, ко-
торая не учитывается, так как этой э. д. с. диод Д за-
пирается. Подтверждение 0 происходит с момента вре-
мени tu импульсом тока /т. Индукция в сердечнике из-
меняется от —Вг до —Вт, а по окончании импульса тока
магнитная индукция сердечника изменяется от —Вт
до —Вг. При этом в обмотке w2 наводятся э. д. с. еи2
и е23.
3-2. УСЛОВНЫЕ ИЗОБРАЖЕНИЯ В СХЕМАХ
Сложные элементы и узлы содержат большое число
отдельных ячеек и поэтому в целях сокращения графи-
ческой работы пользуются упрощенными способами
изображения. Применяются два вида схем: электри-
ческие с подробным указанием расположения обмо-
ток и элементов связи между отдельными сердечниками
и логические — условные — без изображения обмо-
ток и элементов связи.
Электрические схемы. Упрощенное изображение
ячейки приведено на рис. 3-2,а. Сердечник изображает-
ся в виде окружности, а обмотки — дугами. Начало об-
моток обозначено точкой. Если положительный импульс
тока поступает в конец обмотки, то сердечник перемаг-
ничивается от —Вг до +Вт. Это соответствует положи-
тельному значению Н, т. е. вводу информации 1. Им-
пульс тока, поступающий в начало обмотки, перемагни-
чивает сердечник из +ВГ в —Вт. Это соответствует отри-
4* 51
Цатёльному значению Я, т. е. считыванию информации I
или переводу сердечника в состояние 0.
Для выходных обмоток, например ш2, при перемаг-
ничивании сердечника из состояния 1 в 0 ток в выход-
ной обмотке протекает от конца к началу. Цифры внут-
ри окружности указывают назначение обмоток: w.\ —
приводит к 1, wT — к 0, w3 — к 0, ток в выходной обмот-
ке w2 протекает только при переводе сердечника из 1 в О
(обратное .направление тока блокируется диодом Д).
Как правило, при изображении электрических схем, циф-
ры внутри окружности не ставят. О действии импульса
судят по его направлению, указанному стрелкой, и по
обозначению начала обмотки. В телемеханических схе-
мах часто используют способ изображения, приведенный
на рис. 3-2,6.
Условные схемы. Для пояснения принципа работы
и сочетания узлов сложного устройства пользуются ло-
гическими схемами, в которых входы обозначены стрел-
кой, направленной к окружности, а выходы — стрелкой
от окружности. Несмотря на то, что тактовые обмотки
нескольких ячеек включаются последовательно, их
включение в условных схемах выглядит как параллель-
ное (рис. 3-2,в). В ряде устройств применяют дополни-
тельные обмотки до3, служащие для запрещения дейст-
Рис. 3-2. Изображение схем.
а, б — электрических; в, г, д — условных (структурных).
52
ёйя входной обмотки. Так при одновременном действий
импульсов в обмотках W\ и w3 (см. рис. 3-2,а) сердеч-
ник не переводится в состояние 1. Обмотка w3 изобра-
жается или двойной стрелкой, или линией, перечерки-
вающей окружность (рис. 3-2,г и 3-2,д).
Обозначения с использованием зеркальных симво-
лов. Для сложных схем цифровых вычислительных
устройств применяют обозначения с использованием
зеркальных символов (рис. 3-3). Сердечник изображает-
i 'Т
У Н
л'/
1
ч
✓
г
ч
Запись
' 8о/ход
4*
Записи
• выход
-Фт
— Счито/бание
о)
#7
0
Рис. 3-3. Условное изображение схем с применением зеркальных
символов.
ся жирной вертикальной линией, концы обмоток — гори-
зонтальными отрезками линий. Прямая, проведенная
под углом 45° к горизонтали, представляет собой зер-
кальный символ обмотки. Направление действия маг-
нитного поля, созданного током данной обмотки, опре-
деляется путем отражения направления тока в зер-
кальном символе обмотки.
На рис. 3-3,а показаны три сердечника (а, Ь, с) с об-
мотками W\ и дог, имеющими различное направление
намотки. Необходимо отметить, что зеркала обладают
двусторонним действием. Рассмотрим отдельную ячей-
ку. Входным импульсом тока /, направление которого
показано стрелкой, производится изменение магнитного
потока в сердечнике на величину + Фь Направление
потока определяется как отражение стрелки тока от
зеркального символа обмотки.
Знаки э. д. с, наводимых в обмотках w2 при пере-
магничивании импульсом тока i, определяются следую-
щим образом: стрелку потока направляют в обратную
сторону (см. пунктир), и стрелка отражения — d>i от
53
зеркала показывает направление э. д. с. [влево е2—
отрицательное, запираемое диодом (см. схему на рис.
3-2,а), вправо — положительное].
На рис. 3-3,6 приведено условное изображение ячей-
ки, электрическая схема которой показана на рис. 3-2,а.
Если запись 1 производится импульсом тока i\, то вы-
ходная э. д. с. е2— с отрицательным знаком, если счи-
тывание 1 производится импульсом тока /т, то выход-
ная э. д. с. имеет положительный знак.
Схемы с использованием зеркальных символов при-
меняются при изображении устройств автоматики и
вычислительной техники с большим числом элементов.
3-3. УПРАВЛЕНИЕ РАБОТОЙ ОТДЕЛЬНЫХ ЯЧЕЕК
Различные импульсные магнитные элементы и узлы
состоят из ряда взаимосвязанных ячеек, включенных
последовательно, параллельно или последовательно-па-
раллельно. Задача управления заключается в передаче
без искажений информации от предыдущих ячеек к по-
следующим.
Наибольшие трудности возникают при построении
узлов, содержащих большое количество (3—10) после-
довательно включенных ячеек. На рис. 3-4 показана
схема из двух ячеек. Рассмотрим некоторые режимы
работы таких схем.
Режим продвижения информации заключается в том,
что сигнал а=1, введенный в ячейку / тактовым им-
пульсом тока £т, продвигается в ячейку II и так далее.
Как указывалось выше, состоянию 1 соответствует зна-
чение остаточной индукции + ВГ. Возможны случаи, ког-
да после ввода информации значение остаточной ин-
дукции будет меньше, чем +ВГ, например В\. Это бы-
вает при значительном нагреве сердечника или же при
записи 1 импульсом напряженности поля Н<Нт (см.
рис. 2-2). В этом случае при считывании информации
с ячейки 1 на выходе получается неполноценный сигнал,
так как напряжение сигнала меньше требуемого.
ж-1 Вт -J— В л ^ Вт -f~ в г
£сн = w2q m^ <w2q m^ .
Такой неполноценный сигнал записывает в ячейке //не-
полноценную 1, т. е. значение остаточной индукции сер-
54
дечника // получается меньше величины + ВГ. Это при-
водит к уменьшению выходного сигнала ячейки // и
т. д. Таким образом, получается постепенное затухание
значения выходного сигнала, что недопустимо по усло-
виям работы устройства.
Режим подтверждения нуля имеет место в том слу-
чае, когда ни в одной из ячеек не записана информация
и каждым тактовым импульсом все сердечники перево-
дятся из —Вг в —Вш и обратно в —Вт. Возможны так-
о)
Рис. 3-4. Передаточная характеристика трансформаторной схемы.
И — идеальная, Р — реальная.
же случаи, когда значение остаточной индукции равно
не —ВГ1 а —В'г (рис. 2-2), что получается при подмаг-
ничивании сердечника импульсом помех ЯП>Я2 (о зна-
чении #2 см. § 2-2). При этом возрастает значение
э. д. с. помех на выходе ячейки /
f-i Bvfi В' r ^ В in В г
и сердечник // переводится в состояние —В2 и т. д.
В результате по мере продвижения в схеме увеличи-
вающейся э. д. с. помех последние ячейки схемы могут
быть ложно переведены в состояние Ь
Обратное течение информации. При считывании 1
с ячейки / тактовым импульсом тока /т эта информация
передается в ячейку //. Следующим тактовым импуль-
сом эта информация считывается и передается в после-
дующую ячейку. Возникающая э. д. с. во входной обмот-
ке Wi ячейки // имеет такой знак, что током в цепи
55
Wi—w2—D (рис. 3-4,а) сердечник / может снова пере-
магнититься в состояние 1. Такое явление называется
обратным течением информации.
Время перемагничивания. Изменение магнитного со-
стояния сердечника происходит по нелинейному закону
(рис. 3-4,6): при считывании 1 индукция в ячейке I изме-
няется по кривой Л, имеющей пологие участки в начале
и конце процесса перемагничивания (0—1\ и t2—^з)-Вэти
периоды времени э. д. с. в выходной обмотке w2 имеет
малое значение, и ток в цепи w2—wx недостаточен для
перемагничивания сердечника // в состояние +Вт2. По-
этому параметры схемы требуется выбирать так, чтобы
сердечник // перемагничивался быстрее сердечника /
(по кривой Ь).
Условие правильной работы схемы
Тп2<ТП1. (3-1)
Рассмотренные режимы работы элементов и узлов
поясняют требования, которые необходимо учитывать
при проектировании:
1) Надежная передача информации от одной ячейки
к другой: информация (1), считанная с предыдущей
ячейки, должна быть полностью передана в последую-
щую, даже в том случае, если в предыдущей ячейке счи-
тан неполноценный сигнал (неполная 1).
2) Помехоустойчивость, т. е. импульс помехи, полу-
чающийся на выходе предыдущей ячейки, не должен
вызывать перемагничивания (даже частичного) в после-
дующей ячейке.
3) Не должно иметь место обратное течение инфор-
мации, т. е. процессы, происходящие в последующих
ячейках, не должны вызывать изменения магнитного со-
стояния в предыдущих.
4) Работа схемы должна проходить без сбоев при
колебаниях в определенных пределах значений импуль-
сов тока или напряжений, а также при колебании тем-
пературы окружающей среды.
Передаточная характеристика. Выполнение первых
двух условий — надежной передачи информации и поме-
хоустойчивости— проверяют по так называемой пере-
даточной характеристике схемы, причем требуется такая
характеристика, которая обладает способностью улучше-
ния соотношения сигнала к помехе,
56
При графическом изображении этой характеристики
(рис. 3-4,в) по оси абсцисс откладывают изменение маг-
нитной индукции ведущей ячейки /, а по оси ординат —
ведомой //. Полноценной единице соответствуют данные:
АВ\т — В\т+\ВГ1* АВ2т = Вт2 + ВГ2.
Неполноценной единице соответствуют данные:
ABi = 5im+ifii, при B{<BrU
АВ2=Вт2+В2, при В2<Вг2.
Полноценному нулю соответствует
ABi = 0,
т. е. случай, когда сигнал помех равен нулю.
Границей между неполноценным нулем и неполно-
ценной единицей принимается:
АВ1п=0,5АВ1т.
При идеальной характеристике И полное перемагни-
чивание сердечника II происходит в том случае, если
значение величины изменения индукции больше ABin.
При этом обеспечиваются следующие требования:
1) сигнал помехи, пропорциональный величине
ABi<ABln,
не вызывает перемагничивания сердечника II;
2) полное перемагничивание сердечника // обеспе-
чивается даже при поступлении импульса, пропорцио-
нального изменению магнитного состояния сердечника /
на величину АВи причем
ABin<A51<ABlm.
Получение схем с идеальной характеристикой практиче-
ски невозможно, однако всегда стремятся, чтобы реаль-
ная характеристика (Р) приближалась к идеальной. За-
дача решается путем использования материалов с высо-
ким значением коэффициента прямоугольности, а также
при помощи дополнительных средств: добавлением ком-
57
пенсационных ячеек, введением напряжений смещения
и др. В связи с этим разработан ряд ферродиодных
трансформаторных схем.
На практике нашли применение схемы, отличающие-
ся друг от друга по числу тактов, необходимых для
передачи информации от одного элемента к другому:
однотактные, двухтактные и трехтактные.
3-4. КОМПЕНСАЦИОННЫЕ ЯЧЕЙКИ
Как указывалось в § 3-3, для правильной работы схе-
мы требуется, чтобы э. д. с. помех не создавали импуль-
сов напряженности поля Яп, больших значения Я2. Это
Рис. 3-5. Схемы включения компенсационной ячейки,
р — рабочая ячейка; к — компенсационная.
условие выдерживается при применении материалов со
значением ап>0,9; при меньших значениях ап для ком-
пенсации помех применяют, например, схемы с компен-
сационной ячейкой.
На рис. 3-5,а приведена схема, в которой, помимо ра-
бочей ячейки Р, установлена компенсационная К, причем
ее выходная обмотка включена встречно с выходной
обмоткой рабочей ячейки.
Компенсационная ячейка не имеет входной обмотки
и поэтому все время перемагничивается по пологой части
петли гистерезиса (от —Вг до —Вт) как при считыва-
нии 1, так и подтверждении 0 ъ рабочем сердечнике.
58
Параметры рабочей и компенсационной ячеек совершен-
но одинаковы и поэтому их значения э. д. с. помех равны
Тогда при подтверждении 0 в рабочем сердечнике общее
выходное значение э. д. с. помехи равно
Однако следует учитывать, что при передаче 1 из ячей-
ки/в ячейку // э. д. с. сигнала несколько снижается
При построении схем с большим числом рабочих
ячеек часто применяют одну общую для всех компенса-
ционную ячейку. На рис. 3-5,6 приведена схема из одно-
тактных ячеек, имеющая одну общую компенсационную
ячейку.
В некоторых устройствах на выходе каждой ячейки
ставится дополнительная обмотка wH, служащая для пе-
редачи импульса в нагрузку /?н или для контроля. В дан-
ном случае компенсационная ячейка также должна
иметь две выходных обмотки: wK\—для компенсации
э. д. с. помех, возникающих во вторичной обмотке ш2, и
о>к2 — для компенсации э. д. с. помех, возникающих
в обмотке wH. При исполнении трехтактных элементов
(см. § 3-7) каждая рабочая ячейка имеет свою компен-
сационную.
3-5. ФЕРРОДИОДНЫЕ ОДНОТАКТНЫЕ СХЕМЫ
Принцип действия. На рис. 3-4,а приведена однотакт-
ная схема. Информация 1, записанная в ячейке / первым
тактовым импульсом тока £т, считывается с ячейки /.
Выходное напряжение с обмотки w2 подается на вход
ячейки //, в которой током i2 записывается 1. В одно-
тактной схеме работа всех ячеек определяется одним
источником тактовых импульсов: тактовые обмотки всех
ячеек включаются последовательно. Схема рис. 3-4,а не-
работоспособна, так как в момент протекания тока /2
(записи информации в ячейке //) в тактовой обмотке
этой ячейки протекает ток £т, создающий поле, обратное
полю записи, и поэтому сердечник остается в состоя-
59
нии 0. Приходится усложнять схему введением в цепь
связи контура задержки КЗ., роль которого заключается
в задержке по времени энергии выхода ячейки /. Пере-
/ кз Л
« б)
I Ai Лг Л
Выход
тр в)
I ж
г)
Рис. 3-6. Однотактные ферродиодные схемы.
а — с неуправляемой цепью разряда; б — с управляемым
напряжением запрета; в —с управляемым транзистором;
г — условная схема; КЗ — контур задержки.
дача энергии в ячейку // должна проходить только лишь
по окончании тактового импульса, который мешает за-
писи 1. ЭтИхМ реализуется общее правило построения
схем управления: импульс записи информации должен
быть сдвинут по фазе (во времени) по отношению к так-
60
товому, т. е. запись информации должна производиться
в промежутках между тактовыми импульсами тока.
В качестве накопителя выходной энергии ячейки /
применяют емкость С, подключенную ко вторичной об-
мотке (рис. 3-6,а). Такой конденсатор заряжается до
напряжения UCm, а затем разряжается через входную
обмотку ячейки //. Задержка разряда может быть осу-
ществлена индуктивностью L. Однако в такой схеме
имеет место некоторая потеря энергии, так как разряд
конденсатора начинается еще до момента окончания
действия тактового импульса тока. Лучшее решение по-
лучается при использовании схемы связи с управляемой
разрядной цепью конденсатора: эта цепь запирается до
момента окончания действия тактового импульса тока.
Применяют два способа управления: запирающее напря-
жение и запирающий транзистор.
Управление запирающим напряжением.
В цепь тактового импульса включается сопротивление R3j
падение напряжения на котором U3 запирает разрядную
цепь (рис. 3-6,6), и до окончания тактового импульса
конденсатор не разряжается. С момента окончания так-
тового импульса начинается разряд конденсатора по
контуру £>2—W\—b—R3—с—d. Таким образом, процесс
записи информации в ячейке // происходит со сдвигом
во времени по отношению к тактовому импульсу. Сопро-
тивление R3 является общим для ряда последовательно
включенных ячеек, цепи разряда которых включаются
на общие шины бис.
Наличие сопротивления R3 связано с дополнительны-
ми потерями энергии генератора тактовых импульсов.
В тех случаях, когда эти потери влияют на работу гене-
ратора, применяют другую схему управления — с запи-
рающим транзистором.
Управление запирающим транзисто-
ром. В цепи разряда конденсатора D2—W\—b—с
(рис. 3-6,в) включается транзистор Тр по схеме с общим
эмиттером. Нормально транзистор находится в закры-
том состоянии и открывается только лишь при возник-
новении импульса тока в цепи база—эмиттер на время,
необходимое для записи информации в ячейке //.
Логическая схема устройства с однотактным управ-
лением показана на рис. 3-6,г. В этой схеме эле-
мент КЗ — контур задержки.
61
Процесс работы схемы можно разбить на четыре пе-
риода: заряд конденсатора, сохранение заряда до окон-
чания тактового импульса, разряд конденсатора до мо-
мента перемагничивания сердечника и разряд конденса-
тора после процесса перемагничивания этого сердечника
(рис. 3-7). Период 1
(О—ti) —сердечник /
перемагничивается от
+ ВН до —5тЬ кон-
денсатор заряжается,
максимальное значе-
ние иСт получается в
момент перемагничива-
ния до состояния —Вг.
Период 2 (^l—-\U) —
заряд конденсатора
сохраняется, так как
цепь разряда заперта
запирающим напряже-
нием или же транзи-
стором. Период 3
(/2—^з) — по оконча-
нии тактового импуль-
са начинается разряд
конденсатора и сердеч-
ник // перемагничи-
вается от —В г до
+ ВГ. Напряжение ис
снижается по пологой
кривой, так как в те-
чение данного периода
значение тока разряда
ограничивается относи-
тельно большой величиной эквивалентного сопротивле-
ния RQ обмотки W\ второго сердечника. Период 4
(^з—U)—значение RQ невелико, ток разряда увеличи-
вается, сердечник перемагничивается от +ВГ до +Вт.
Время разряда конденсатора tv считается до момента,
когда напряжение ис = 0,1£/Ст. Обратное течение инфор-
мации, которое может иметь место при считывании 1
с ячейки //, блокировано напряжением и3 (рис. 3-6,6)
или транзистором (рис. 3-6,в) в течение времени считы-
вания.
Рис. 3-7. Схема и диаграмма работы
элемента с однотактным управле-
нием.
62
Вопросы расчета. Ниже приводятся соотношения для
предварительного расчета с целью определения пара-
метров ячейки. Используя эти соотношения, можно полу-
чить только лишь приблизительные величины, так как,
с одной стороны, эти соотношения получены при ряде
допущений и упрощений, а, с другой стороны, приводи-
мые в справочниках данные параметров сердечников яв-
ляются усредненными и изменяются от партии к партии.
Поэтому рекомендуется сначала по данным расчета изго-
товить макет и провести экспериментальную проверку
схемы, а уже затем уточнить расчетные параметры. При
выводе соотношений для расчета были учтены некото-
рые общие соображения:
1) Баланс времени. При расчете обычно задаются
временем перемагничивания при считывании информа-
ции тактовым импульсом tni и временем перемагничива-
ния при записи информации тП2- Это определяется тре-
буемым количеством переключений сердечника в секун-
ду. В течение одного периода следования тактовых им-
пульсов должно происходить перемагничивание сердеч-
ников / и //, а также должно быть обеспечено условие
полного разряда конденсатора.
Учитывая возможные колебания амплитуды и дли-
тельности тактовых импульсов, а также разброс пара-
метров сердечников, обычно принимают некоторый за-
пас во времени, например порядка 20%.
Принимая длительность тактового импульса </и, а сво-
бодного разряда конденсатора после перемагничивания
сердечника // /Св.р, получаем соотношение:
Время tni должно быть меньше /и, время тП2 принимают
таким, чтобы к окончанию перемагничивания сердечника
напряжение на заряженном конденсаторе снизилось бы
от максимального UCm до приблизительно 0,3 UCm- Это
условие достигается при выборе тП2 таким, чтобы оно бы-
ло равно постоянной времени контура разряда
tn + ^п2 + ^св.Р .< 0,8 7\
(3-2)
Тп2 —!/?С,
(3-3)
где
|/? = #д+|/?з + /эо£
(3-4)
где Rt
'д — сопротивление диода.
63
U) Баланс энергии заряженного конденсатора. Тре-
буется, чтобы энергия заряда Ас была больше суммы
энергий, затрачиваемых на перемагничивание сердечни-
ка // из 0 в 1 (Лп) и на потери в сопротивлениях /?д и
Яз (Аг),
Ас>Ап+Аг. (3-5)
3) Распределение энергии тактового импульса. Пара-
метры схемы выбирают так, чтобы в процессе считыва-
ния информации основная часть энергии тактового им-
пульса затрачивалась на заряд конденсатора и только
незначительная доля энергии непосредственно на пере-
магничивание сердечника из 1 в 0.
Уравнение м. д. с. (см. рис. 3-7)
/тшт=IuwT+Icw2, (3-6)
где Iu—составляющая тока /т, затрачиваемая на пере-
магничивание сердечника;
1С — ток заряда конденсатора.
В выполненных устройствах
£■-=0,1-0,2.
4) Ток заряда конденсатора. Принимая во внимание,
что в течение времени заряда конденсатора значение
тока заряда 1С остается неизменным, а следовательно
напряжение на конденсаторе увеличивается по линейно-
му закону (рис. 3-7,6), получаем:
vc='ci:- (3"7>
Это положение справедливо для случая, когда тактовая
обмотка питается от генератора тока и основная часть
энергии импульса тока расходуется на заряд конден-
сатора.
Пример предварительного расчета. Определить параметры фер-
родиодной однотактной схемы при частоте тактовых импульсов
/=100 кгц\ токе /т = 0,15 а; /и = 3 шеек и температуре окружаю-
щей среды 90==20°С.
Принимаем сердечник 0,ЗВТ1, параметры сердечника см.
в табл. 3-1.
64
Таблица 3-1
Параметры сердечника
Размеры,
мм
а
м
н0,
а
м
тл
мкк
м
q, м2
/, м
V, м*
3X2X1.3
24
48
0,21
60
0,65.10-в
7,85-Ю-3
5,ЬЮ-9
Баланс времени
Т = -jQg- = 10 мксек.
Время Tni — время считывания информации тактовым импуль-
сом определяем из условия тП1<*и. Принимаем Tni=2 мксек.
Исходя из условия Хп2—ЯС и из условия, что время разряда
конденсатора до значения Uc=0,WCm будет равно 2,4 RC, прини-
маем тП2=2 мксек, /св.р=,1,4 #С=2,8- Ю-6 мксек. Из (3-2) находим:
3 • 10-6+2 • 10-6+2,8. 10-6<0,87\
Таким образом,
тП1=Тп2=Тп=2 мксек.
Расчет проводится, начиная с цепи разряда (рис. 3-7). Цепь раз-
ряда— перемагничивание сердечника // из 0 в 1:
а) Число витков входной обмотки.
Ток разряда конденсатора является током перемагничивания /п.
В соответствии с данными максимально допустимой величины тока
через диод принимаем:
/п=50 ма.
Из соотношений
ГиЩ = Нп1; Яп = ^- + Я0
определяем
60-10-*
2-10-в
• 48^ 7,
85-Ю-3
12.
5-Ю-2
Эквивалентное сопротивление обмотки
R9 = rbw\ = Jfj^~ Щ = 33 ом.
б) Емкость конденсатора.
Величина R9 принимается в пределах (2 — 5)ЯД.
Примем:
Rz = 2#д; /?д (при i = 50 ма) =- 20 ом.
5 Ф* А. Ступель,
65
Из (3-3)
С = 20 ООО пф.
в) Напряжение на конденсаторе UCt
При токе /п = 50 ма, R = 100 ом
(7С =0,05-100 = 5 в.
В процессе перемагничивания это напряжение изменяется от
максимального UCm до 0,3UCm, Из условия получения среднего
значения тока, равного 50 ма, находим среднее значение напря-
жения на конденсаторе:
Cm
= 0,65£Л
2
тогда
UCm — 0,65 7,7 в'
Ас = Си2Ст/2 = 64-\0-8 дж;
потеря энергии на перемагничивание сердечника
2HnBrV = 16,7. Ю-8 дж.
Потеря энергии в сопротивлениях
А- = 12п (Яд + Rs) хп = 30. Ю-8 йю.
Усредненное значение выходного напряжения
U2 = w2q——.
Максимальное значение V2m выше усредненного.
Значение U2 = (0,55 — 0,6)£/2т (см. §2-6). Принимаем U2:
= Q,6U2m- Величина U2m = UCm = 8 е.
Тогда
до2<7-2£г
Тд-0,6
отсюда w2 = 38. Принимаем т2 = 40.
б) Ток заряда конденсатора из (3-7)
2-Ю-8.8 Л _
7С= 2-10~6 = 0'08 а'
в) Число витков тактовой обмотки (из 3-6)
/пЯУт = ^~ +Я0^ /шт =0,61 а,
/сау2 = 0,08-40 = 3,2 а; /тшт = 0,61 + 3,2 = 3,81 а.
При /т = 0,15 а.
3,81
а,т==0Л5=25'4-
Принимаем а;т = 25.
г) Падение напряжения на сопротивлении R3$ определяемое
током тактового импульса
[/з = 0,15.40 = 6 е.
Этим напряжением запирается диод Д2
3-6. ФЕРРОДИОДНЫЕ ДВУХТАКТНЫЕ СХЕМЫ
Принцип действия. При двухтактной схеме питание
тактовых обмоток осуществляется от двух источников
импульсов, сдвинутых по фазе (времени): нечетные ячей-
ки управляются импульсами тока /ть а четные — /Т2
(рис. 3-8,а). Если введена информация в ячейку /, то
последующим тактовым импульсом iTi эта информация
считывается и током i2 записывается в ячейку // (в пе-
риод действия тока rTi). Импульс /Т2 в тактовой обмоТке
ячейки //, смещенный во времени по отношению к /т1, не
препятствует осуществлению этой записи. Таким обра-
&• 67
зом, при двухтактной схеме управления не требуется
включения в цепь связи контура задержки.
При двухтактной схеме для каждого разряда инфор-
мации, поступающей на вход и представленной двоич-
ным кодом, требуется два сердечника, а при применении
компенсирующих сердечников — четыре.
Двухтактная схема питания в ряде случаев позволяет
более гибко реализовать требуемую логику в схеме. Так,
г)
Рис. 3-8. Двухтактные ферродиодные
схемы.
а —- принципиальная; б — с шунтирующим дио-
дом; в — с напряжением смещения;
г условная.
68
например, можно подавать на нечетные ячейки (такт iT\)
входные импульсы управления от такта /Т2 и, наоборот,
можно управляющие импульсы такта /т1 подавать на вхо-
ды четных ячеек. В простейшей схеме (рис. 3-8,а) может
иметь место передача информации в обратном направле-
нии: при считывании 1 с ячейки // током, определяемым
величиной э. д. с, наводимой в обмотке wu в ячейке /
записывается 1. Для уменьшения действия тока обрат-
ной информации число витков W\ берут в несколько раз
меньше чем w2> однако экономичность схемы при этом
снижается. Поэтому в цепь связи устанавливают доба-
R
Рис. 3-9. Схема получения напряжения
смещения в двухтактной системе
управления.
вочный диод Дг (рис. 3-8,6), шунтирующий обмотку w2,
или вводят напряжение смещения UCm, которое препят-
ствует продвижению информации в обратном направле-
нии (рис. 3-8,в).
Как правило, в схемах рис. 3-8,а, б необходимо при-
менять компенсационные сердечники; однако работа
этих схем возможна и без компенсационных сердечни-
ков, но при этом накладываются существенно более
строгие ограничения на форму импульсов тактовых токов
и значение коэффициента прямоугольности материала
сердечников. Схема с напряжением смещения наиболее
проста и допускает работу без компенсационных сердеч-
ников в относительно широком диапазоне изменения
амплитуд тактовых импульсов.
Для получения напряжения смещения применяется
схема, приведенная на рис. 3-9. Напряжение Ucu сни-
мается с сопротивлений У?, по которым протекают токи
тактовых импульсов. Эти токи смещены во времени. При
считывании информации с ячейки / ток обмотки w2 сов-
падает по фазе с током iTb а при считывании информа-
ции с ячейки //, обратный ток ее обмотки W\ совпадает
с током iT2.
69
Величина UCM выбирается из условия, что напряже-
ние смещения должно быть больше напряжения U\9 на-
водимого в обмотке W\ при считывании информации
с ячейки //. Для уменьшения величины (/см, препятствую-
щей протеканию тока сигнала от обмотки w2 первой
ячейки, число витков входной обмотки W\ берут значи-
тельно меньшим (в 3—4 раза) числа витков w2.
Значение /7СМ обычно берется порядка 3—4 в.
Расчетные соотношения. Рассмотрим расчетные соот-
ношения для двухтактной схемы с напряжением смеще-
ния в цепи связи. Значения токов тактовых импульсов
принимают одинаковыми по величине:
При расчете задаются следующими величинами: tni —
время перемагничивания при считывании 1; тП2 — время
перемагничивания при записи 1.
Исходя из условия надежности работы схемы (см.
§ 3-3), принимают:
Составляющая напряженности поля, определяемая
перемагничиванием ячейки / за время тпь
Tn2<tnl.
Считывание 1 с ячейки /. Уравнение м. д. с.
InWT = ITWT—I2WT.
(3-8)
(3-9)
Из (3-8), (3-9) имеем:
(3-10)
В цепи связи
1>
(3-11)
где
(3-12)
а 13 2
и1 = 1™>^Г'
(3-13)
70
Интегрируя (3-11) с учетом перемагничивания сердечника
в пределах 2ВГ за время хП1 имеем:
2Brq К - Wl) = *Л1 (I2R д + f/см). (3-14)
При записи 1 в ячейке // уравнение м. д. с.
I*wx = //пв/ = (А. + я0) /, (3-15)
где хП2 — время перемагничивания сердечника //.
Условие смещения
Полученных соотношений недостаточно для опреде-
ления основных параметров ячейки: числа витков, значе-
ния тока тактовых импульсов и напряжения смещения.
Поэтому дополнительно задаются током /т (по данным
генератора импульсов), током 12 в цепи связи (в соот-
ветствии с допустимой величиной тока через диод).
Пример предварительного расчета. Определить параметры ячей-
ки ферродиодной двухтактной схемы с напряжением смещения (схе-
ма рис. 3-8,0) при частоте тактовых импульсов /=100 кгц, токе
/т=0,6 а, длительности тактового импульса £и=2,б мксек, темпера-
туре окружающей среды 0О =20° С.
Выбираем сердечник 0,ЗВТ1 с размерами 3—2—1,3 мм, пара-
метры которого приведены в табл 3-1. Берем диод Д9Б с допусти-
мым током /=.50 ма.
Задаемся временем перемагничивания сердечника: из 1 в 0 —
tni = 1,8 мксек, из 0 в 1—тп2=1 мксек. При tna=l мксек импульс-
ное сопротивление диода /?д в прямом направлении при токе 50 ма
равно 25 ом.
Определяем число витков входной обмотки из (3-15):
/60. Ю-6 \
ПТо^~ +48 7,85-10-8
ш^Л —L =17.
0,05
Принимаем 0^ = 17 витков.
Определяем напряжение смещения Uсм-
ири считывании информации с сердечника // в обмотке wx на-
водится напряжение
2ВГ 0,42
£/21 = — = 17.0,65.10-в 1>8.10-б =2,59 е.
Из условия (3-16) принимаем
С/См = 3 е.
71
Определяем число витков выходной обмотки из (3-14):
ХП1 (^2#Д + U См) , .е
w2 = op „ ~TWi = 45 витков.
lDrq
Определяем число-витков тактовой обмотки из (3-10):
/ 60-10-6 \
0,05-45 + f 1>8.ю-в +48 J 7,85- Ю-3
q g =4,6 витка.
Принимаем иут=5 витков.
В приведенном расчете получены результаты первого
приближения. Далее необходимо определить потери в сер-
дечниках при их перемагничивании, установить допусти-
мое превышение температуры нагрева б, и уже затем
провести окончательный расчет, принимая во внимание
параметры сердечника при температуре 0т=бо~|-8,
а также скважность импульсов, равную
71 10-Ю-6 о g
9 Я.1П-6 —",о.
xni + i:n2 2,8-10
3-7. ФЕРРОДИОДНЫЕ ТРЕХТАКТНЫЕ СХЕМЫ
При трехтактной схеме питание тактовых обмоток
осуществляется от трехтактного источника импульсов,
сдвинутых по фазе — времени: /тЬ iT2, /тз, как показано
на рис. 3-10.
В таких схемах для каждого разряда информации
требуется три рабочих сердечника (р), а при примене-
нии дополнительных — компенсационных (/с) — шесть
сердечников. Если информация введена в ячейку рь то
последующим тактовым импульсом 1Т\ она переводится
в ячейку р2 и далее импульсом /т2 — в ячейку р3; выход
информации получается после третьего такта.
Разработка трехтактных схем определялась в основ-
ном из условий исключения контура задержки в цепи
связи (как это требуется в однотактном) и устранения
обратной информации. Последнее условие достигается
тем, что тактовые импульсы в какую-то часть времени
перекрывают друг друга (см. рис. 3-10,6). Каждый
импульс состоит из двух частей / и 2. Первая часть
72
/Ti — 1 служит для считывания информации с ячейки р\
и для передачи ее в р2, вторая часть rTi — 2 предохра-
няет ячейку pi от импульса тока, получаемого в обмот-
ке w\ ячейки //, при считывании с этой ячейки инфор-
мации 1 импульсом /т2—1. Как правило, трехтактные
6)
Рис. 3-10. Трехтактная ферродиодная схема.
схемы выполняются с компенсирующими сердечниками,
что устраняет влияние помех. Подробный расчет фер-
родиодных схем приведен в [Л. 4].
Недостатки трехтактных ферродиодных схем:
1. Относительно сложный источник трехтактных
импульсов тока.
2. На один элемент требуется шесть сердечников и
три диода.
3. Схема неэкономична, так как потери энергии так-
товых импульсов определяются не только необходи-
мостью перемагничивания сердечника при продвижении
информации, но и для компенсации обратной инфор-
мации.
73
В новых разработках предпочтительно применяют
двухтактные элементы по схеме с напряжением смеще-
ния, надежные в отношении помехоустойчивости и
обратного течения информации и не требующие приме-
нения дополнительных компенсационных сердечников.
3-8. ПОСТРОЕНИЕ ФЕРРОДИОДНЫХ ЭЛЕМЕНТОВ
ТРАНСФОРМАТОРНОГО ТИПА
В данном параграфе рассматриваются вопросы по-
строения различного вида элементов. Основные элемен-
ты служат для осуществления функций: ИЛИ, И, НЕ.
с) б) в) г)
Рис. 3-11. Схема и диаграммы работы генератора единиц для
однотактных элементов.
а — схема; б — импульсы; в — петля гистерезиса; г — условное обозна-
чение.
Сочетанием этих элементов получают другие требуемые
функции. Предварительно рассмотрим два вопроса, свя-
занные с построением элементов трансформаторного ти-
па: фазирование импульсов и осуществление функции
ЗАПРЕТ.
Фазирование импульсов. Как указывалось в преды-
дущих параграфах, входные импульсы, поступающие
в отдельную ячейку, должны подаваться в паузе
между двумя тактовыми импульсами. Поэтому для пи-
тания цепей записи и запрета применяют отдельный ге-
нератор, выходные импульсы которого сдвинуты во вре-
мени по отношению к тактовым. Такие источники
импульсов называют генераторами единиц (ГЕ).
Схема ГЕ для однотактных схем приведена на
рис. 3-11. Тактовая обмотка ГЕ питается от общего
источника тактовых импульсов. Роль входной обмотки
играет обмотка смещения wm, подключенная к источ-
74
Нйку Постоянного. toKa. Магнитодвижущей силой этой
обмотки сердечник постоянно возвращается в со-
стояние 1.
Очередным тактовым импульсом тока сердечник пе-
реводится в 0, по окончании этого импульса, после кон-
тура задержки, получается импульс, сдвинутый по фа-
зе по отношению к тактовому. После окончания такто-
вого импульса тока током смещения сердечник снова
переводится в состояние 1.
Схема ГЕ для двухтактных схем приведена на
рис. 3-12,а. В данном случае смещение в состояние 1
Рис. 3-12. Схемы генераторов единиц
для двух и трехтактных элементов.
осуществляется током тактового импульса ТИ1, а им-
пульсом ТИ2 сердечник переводится в состояние 0. Вы-
ходной импульс используется в фазе 2 и поступает на
вход требуемой ячейки с тактовой обмоткой фазы 1.
Схема ГЕ для трехтактных схем выполняется анало-
гично (рис. 3-12,6).
Функция ЗАПРЕТ. Каждая из ячеек трансформатор-
ной схемы является повторителем (Я): входу а=1 со-
ответствует выход Л = 1. Для выполнения функции
ЗАПРЕТ (см. табл. 1-2, поз. 7) требуется схему по-
строить так, чтобы сигнал ЗАПРЕТ запрещал сигнал 1,
поступающий в ячейку. В практике применяют два спо-
соба: запрет по току, запрет по напряжению.
Запрет по току. На рис. 3-13,а приведена схема
однотактной ячейки с двумя обмотками: w\ — для вво-
да информации, w3— для запрета. Ток в обмотке ха>\
переводит сердечник в состояние 1, а ток в обмотке w3—
в состояние 0. При отсутствии импульса тока в обмотке
ЗАПРЕТ ячейка работает как повторитель. При одно-
временном действии обоих импульсов суммарное зна-
чение м. д. с. обеих обмоток равно нулю, сердечник
остается в состоянии 0.
75
Схема обладает следующими недостатками: 1) тре-
буется строгая синхронизация сигналов входа и запре-
та; если сигнал запрета заканчивается ранее сигнала
входа, то информация 1 может быть записана в ячейке;
2) при считывании 1 может получиться обратное тече-
ние информации по запрещающей обмотке; для устра-
нения этого явления ставятся дополнительно диод и со-
противление, что приводит к дополнительной потере
энергии тактового импульса.
Рис. 3-13. Схемы запрета по току.
а — однотактная; б — двухтактная; в — условное изображение.
Условная схема запрета по току для двухтактных
схем приведена на рис. 3-13,6.
Запрет по напряжению осуществляется ком-
пенсацией выходного напряжения, для чего использует-
ся дополнительный сердечник. Выходное напряжение от
этого сердечника включается встречно с выходным на-
пряжением основной ячейки.
На рис. 3-14,а приведена электрическая схема за-
прета по напряжению для однотактных устройств. Сиг-
нал запрета b подается на добавочную ячейку //, вы-
ходное напряжение с которой включено встречно к вы-
ходному напряжению основной ячейки.
При а=1, 6=0 £/вых=£/а;
при а—1, 6=1, UBblx=Ua—Ub = 0.
Аналогично выполняются схемы для двухтактных и
трёхтактных устройств (рис. 3-14,в,г). Схема запрета
по напряжению сложнее схемы запрета по току, но бо-
лее надежна в действии.
В приведенных условных схемах рис. 3-14,6, в, г за-
прещающий сигнал обозначен двумя стрелками.
76
Построение ферродиодных элементов. Повтори-
тель является промежуточным элементом и служит
для построения ряда схем. Формула повторителя а=Л.
В однотактных схемах повторитель выполняется
Рис. 3-14. Схемы запрета по напряжению.
а — электрическая для однотактных элементов; б, в, г — условные для
одно-, двух- и трехтактных элементов.
с использованием одной ячейки; на рис. 3-6 пока-
заны два последовательно включенных повторителя.
В двухтактных схемах повторитель выполняется на
двух ячейках (рис. 3-8), а в трехтактных — на трех
ячейках (рис. 3-10).
Элемент ИЛИ выполняется как повторитель с не-
сколькими входами.
На рис. 3-16 приведена схема однотактного элемен-
та ИЛИ.
Схему элемента ИЛИ можно построить с отдельны-
ми входными обмотками, каждая из которых предна-
77
значена для записи информации a, 6 (рис. 3-15,а), или
же с одной входной обмоткой, но с разделением входов
диодами (рис. 3-15,6). В двухтактных и трехтактных
устройствах входная цепь выполняется аналогично одно-
тактным.
о) б)
Рис. 3-15. Схемы элементов ИЛИ.
Элемент И (однотактный) выполняется на трех сер-
дечниках, и выход информации получается после двух
тактов (рис. 3-16). Сигнал а поступает одновременно на
Рис. 3-16. Условная схема элемента И.
ячейки / и // и записывает в них информацию 1, сигнал
b — поступает только на ячейку / в виде импульса за-
прета.
Для пояснения работы схемы рассмотрим три слу-
чая:
1) а=1; 6 = 0. После первого такта получается два
выхода: от сердечника / на /// производится запрет
(0), от сердечника // на /// — запись 1. Одновременное
действие обоих импульсов — запрета и сигнала — при-
78
водит к тому, что сердечник /// остается в состоянии О
и при последующем тактовом импульсе Л = 0.
2) а = 0; 6=1. Импульсом 6 (запрет) информация
не записывается в сердечнике /, и после первого такта
нет никакой передачи информации в сердечник ///, сле-
довательно, А = 0.
3) а=1; 6 = 1. Сердечник / запрещается импульсом Ь.
Поэтому информация 1 записывается только в сердеч-
ник //. После первого такта информация передается по
цепи сердечников // — /// в нагрузку, Л = 1.
Схемы И с обмоткой смещения. Стремле-
ние к уменьшению числа сердечников привело к разра-
ботке схем с использованием обмотки смещения. Этой
обмоткой создается поле смещения Ясм, перемагничи-
вающее сердечник в 0 (запрет). В качестве источника
тока смещения используют или генератор единиц или
источник постоянного тока. Если выдерживается усло-
вие: напряженность поля каждого из сигналов входа
равна напряженности поля смещения
Яа = Яь = Ясм,
то при наличии одного сигнала на входе информация
в сердечнике не записывается, при одновременном дей-
ствии двух сигналов результирующим полем осущест-
вляется запись 1.
Источник поля смещения должен давать импульсы,
совпадающие по фазе с входными.
На рис. 3-17,а приведена схема однотактного элемен-
та И, на рис. 3-17,6—петля гистерезиса сердечника и
диаграмма импульсов напряженности поля: Яг— гене-
ратора единиц, выполняющего роль источника смеще-
ния; Яа, Нъ — входов а и 6.
При:
1) а=1, 6=0 На — Яг=0;
2) а = 0, 6=1 Нъ — Яг=0;
3) а=1, 6=1 На + Нь — Нг=Н.
На рис. 3-17,0 приведены схемы двухтактных и трех-
тактных элементов И с питанием обмоток смещения так-
товыми импульсами.
Элемент НЕ (инвертор) реализуется с по-
мощью генератора единиц, каждым импульсом которо-
го в сердечнике записывается 1. Импульсом а осущест-
вляется запрет. Суммарная напряженность поля при
79
этом равна нулю, поэтому на выходе элемента инфор-
мация равна нулю. Соответствующие условные схемы
для однотактных и двухтактных элементов приведены
на рис. 3-18.
о) б) 6)
Рис. 3-17. Условные схемы элементов И с обмоткой смещения.
Элемент ТрД (триггер динамический) имеет два
входа: а — для подачи первого импульса с записью 1
(запуск триггера), Ь — для подачи импульса ЗАПРЕТ
(запирание триггера).
ТИ1
нз ти I I I I I I J
ми ° i ' »
«У Тт/v * III t
а)
б)
б)
Рис. 3-18. Схемы элементов НЕ.
тиг
Блок-схема однотактного триггера приведена на
рис. 3-19,а. Первым импульсом а=\ триггер запускает-
ся, после чего с его выхода по цепи положительной
обратной связи (п. о. с.) снова на входе записывается 1.
Процесс выдачи импульсов длится до момента поступ-
ления импульса b (ЗАПРЕТ). Аналогично однотактным
строятся схемы двух- (рис. 3-19,6) и трехтактных триг-
геров.
80
Разные элементы. Построение логических эле-
ментов, выполняющих другие сложные функции, поми-
мо указанных, производится сочетанием основных эле-
а) б)
Рис. 3-19. Схемы динамических триггеров.
а — однотактная; б — двухтактная.
ментов: И, ИЛИ, НЕ. На рис. 3-20 приведены схемы со-
четаний: штрих Шеффера — А = а>Ь осуществляется со-
четанием И —НЕ, стрелка Пирса — ИЛИ — НЕ и т. д.
о) б) в) г)
Рис. 3-20. Структурные схемы комбинированных элементов транс-
форматорного типа.
а — штрих Шеффера; б —стрелки Пирса; в — неравнозначность;
г — равнозначность.
ГЛАВА ЧЕТВЕРТАЯ
ФЕРРОТРАНЗИСТОРНЫЕ ЭЛЕМЕНТЫ
ТРАНСФОРМАТОРНОГО ТИПА
4-1. ВВЕДЕНИЕ
Ферротранзисторные элементы отличаются тем, что
у них в цепи связи ставится активный элемент — тран-
зистор. Отдельная ячейка состоит из трансформатора
с сердечником из материала ППГ и транзистора. Сер-
б Ф. А. Ступель. 81
дечник выполняет роль запоминающего устройства: он
сохраняет введенную информацию, а транзистор усили-
вает выходной сигнал и обеспечивает одностороннюю
передачу энергии по цепи связи.
Полное выходное сопротивление трансформатора
хорошо согласуется со входным сопротивлением тран-
зистора. Размеры сердечника могут быть приняты ми-
нимальными, исходя только из условия размещения
обмоток. К транзисторам, используемым в ферротран-
зисторных схемах, предъявляют по сравнению с обыч-
ными полупроводниковыми схемами менее жесткие тре-
бования в отношении значения коэффициента усиления,
граничной частоты и обратного тока коллектора. Фер-
ротранзисторные схемы нечувствительны к наводкам,
так как связь между элементами осуществляется по то-
ку в низкоомных цепях.
В настоящее время ферротранзисторные схемы вы-
полняются для частот порядка до 250 кгц.
4-2. ТРАНЗИСТОРЫ
Транзисторы применяются в импульсных магнитных
элементах в качестве ключей или усилителей. В обоих
случаях транзистор работает в режиме управляемого
током ключа, т. е. он находится в одном из двух край-
них положений: закрытом — режим отсечки, и откры-
том — режим насыщения.
Статические характеристики различных транзисторов
приводятся в справочниках. Имеются аналитические за-
висимости, на основе которых устанавливают динамиче-
ские характеристики. Учитывая однако большое разли-
чие параметров в одной и той же партии, пользуются
усредненными экспериментальными данными. В импуль-
сной технике чаще всего применяется схема с общим
эмиттером, так как при этом обеспечивается наиболь-
ший коэффициент усиления по току и входное сопро-
тивление транзистора хорошо согласуется с низким вы-
ходным сопротивлением ячейки.
Режим отсечки. При отсутствии импульсов тока пе-
ремагничивания транзистор закрыт и в нагрузке проте-
кает только лишь обратный ток коллектора. Для
устранения этого тока и для повышения помехоустой-
чивости элемента в цепь базы вводится положительное
напряжение смещения ит порядка 0,5—1 е (рис. 4-1),
82
Режим насыщения. Транзистор полностью открыт,
падение напряжения на нем составляет доли вольта, и
амплитуда тока определяется только лишь напряже-
нием источника и сопротивлением нагрузки. Для пере-
вода в режим насыщения на базу подается отрицатель-
Рис. 4-1. Схема и временная диаграмма работы
транзистора.
ное напряжение определенной величины, возникает
ток базы и соответственно токи эмиттера и коллектора.
По окончании сигнала Uq (момент U) прекращается
эмиттерный ток, но по цепи база — коллектор продол-
жает идти ток за счет неосновных носителей, накоплен-
ных на базе. Длительность выходного импульса, опре-
деляемая временем рассасывания /р, зависит как от па-
раметров триода, так и от величины Uq.
Основные соотношения. Предельное значение
тока коллектора /кт приводится в справочниках.
Так для серии транзисторов П13 — П15
IKm = 150 ма.
При большой скважности импульсов значение /кт
увеличивают. Для расчета пользуются соотношением
где Рн — номинальная (по паспорту) мощность, рассеи-
ваемая на коллекторе; Т — период тактовых импульсов;
tji — длительность импульса на нагрузке.
6* 83
Коэффициент усиления р зависит от дли-
тельности переднего фронта импульса напряжения, по-
даваемого на базу. На рис. 4-2 приведены снятые для
транзистора П15 зависимости /к от /б при разных зна-
100
1н
Л*
—
),*■
/-У,\
W 20 )0 ^0 ЧОма
Рис. 4-2. Характеристики транзистора
П15 в импульсном режиме для схемы
с общим эмиттером.
чениях длительности фронта. Задаваясь током /к, полу-
чают значение /б, а следовательно и величину
Р = /к//б.
Входное сопротивление представляет собой
отношение
r»-e=i7r- <4"2)
Значение гэ.б определяют экспериментально, снимая ха-
рактеристику ^э.б = /(/б). На рис. 4-3 приведена эта ха-
рактеристика для транзистора П15.
<J).6
Iff
Рис. 4-3. Входная характери-
стика транзистора П15 в схеме
с общим эмиттером.
О W 20 30 *0 50 ма
Длительности фронтов, определяемые на
уровне от 0,1 до 0,9 /кдля транзисторов серии П13—П15,
имеют следующие значения:
^п.ф = 0,4—0,6 мксек (при токах /б>30 ма), /З.ф =
= 0,15—0,45 мксек.
84
Время рассасывания неосновных носителей
/р зависит от следующих величин: тока коллектора /к,
тока базы /б и напряжения смещения. В зависимости от
указанных величин для серии П15—П16 время расса-
сывания tp равняется 0,5—3 мксек. У высокочастотных
транзисторов время рассасывания меньше.
4-3. ПРИНЦИП ДЕЙСТВИЯ ОТДЕЛЬНОЙ ЯЧЕЙКИ
Простейшая ячейка (рис. 4-4,а). Сердечник имеет
три обмотки: входную W\, тактовую wT и выходную Доб,
называемую базовой. Запись информации производится
Рис. 4-4. Схемы ферротранзисторных ячеек.
по обмотке Wu в процессе записи в обмотке wq наво-
дится напряжение такого знака, при котором на базу
подводится положительный потенциал, запирающий
транзистор. При считывании информации тактовым
импульсом в базовой обмотке наводится напряжение
обратного знака, на базу подводится отрицательный
потенциал, транзистор отпирается и в нагрузке проте-
кает коллекторный ток. По окончании процесса пере-
магничивания значение напряжения на базе становится
равным нулю и транзистор снова запирается. Обычно
схема выполняется так, что один конец базовой обмот-
ки включается на постоянное положительное напряже-
ние смещения Ucu, запирающее транзистор. Благодаря
этому ячейка предохраняется от ложных переклю-
чений или помех. Значение UCM принимают порядка
0,5—1,5 е.
Сопротивление RK в цепи коллектора служит для
ограничения величины коллекторного тока до допусти-
мого значения для данного транзистора.
85
Ячейка с Положительной обратной связью
(рис. 4-4,6) выполняется с добавлением обмотки обрат-
ной связи ш0.с- В начальный период процесса считыва-
ния записанной в ячейке информации перемагничива-
ние сердечника производится только лишь за счет энер-
гии тактового импульса. Возникающим при этом на-
пряжением на базовой обмотке транзистор открывается,
и в дальнейшем перемагничивание происходит под сум-
марным действием м. д. с. обеих обмоток тактовой и
обратной связи.
В такой схеме значительно облегчаются условия ра-
боты генератора тактовых импульсов, поэтому м. д. с.
тактовой обмотки берется меньшей величины, чем в схе-
ме без положительной обратной связи.
Ячейка с самовосстановлением выполняется таким
образом, чтобы после считывания сердечник автомати-
чески возвращался обратно в состояние насыщения.
Элементы, выполненные по такой схеме, называют са-
мовосстанавливающимися или с постоян-
ным насыщением. На рис. 4-4,в приведена схема
такой ячейки. Перевод в состояние постоянного насы-
щения производится постоянным током, проходящим по
обмотке wCM. Импульсом тока считывания iC4 сердечник
переводится в состояние —ВГу транзистор открывается,
и в нагрузке протекает ток. По окончании этого импуль-
са тока сердечник снова переводится в состояние +Вт
напряжением смещения.
Свойство элементов, работающих в режиме постоян-
ного насыщения:
1) Значение сигнала помехи, получающегося в обыч-
ных схемах при перемагничивании сердечника из +Вт
в +ВГ или из —В г в —Вт, сводится к минимуму.
2) Резко снижается зависимость работы схемы от
значения коэффициента прямоугольности аш от искаже-
ний петли гистерезиса, определяемых температурными
влияниями (при отклонении температуры окружающей
среды на 40ЭС величина ап уменьшается в зависимости
от марки феррита на 5—30%). В принципе можно при-
менять сердечники из материала с низким значением
коэффициента прямоугольности.
3) Для увеличения быстродействия элементов мож-
но форсировать процессы перемагничивания, не опа-
саясь возникновения значительных помех.
86
Элементы, работающие в режиме постоянного насы-
щения, обладают высокой надежностью, помехоустойчи-
востью и быстродействием. Эти элементы можно строить
для частот порядка 200—300 кгц, а также для работы
в условиях значительных колебаний окружающей тем-
пературы.
4-4. ОСНОВНЫЕ РАСЧЕТНЫЕ СООТНОШЕНИЯ
1) Предельное значение тока коллектора определя-
ют из уравнения (4-1).
2) Входное сопротивление транзистора. Значение со-
противления эмиттер — база гэ.б нестабильно и поэтому
для его стабилизации иногда включают дополнительно
в цепь эмиттера сопротивление R\. Величину Ri выби-
рают исходя из того, чтобы его включение не приводило
к заметному уменьшению нагрузочной способности ячей-
ки (падение напряжения на Ri не должно превосходить
2—3 в) и обеспечивалась практическая стабильность
полного входного сопротивления гвх при колебаниях ве-
личины гэ.б. Из схемы, приведенной на рис. 4-1,
/б = ^ (4-3)
где Г/б — напряжение на зажимах базовой обмотки.
Учитывая, что /э=/к+/б; /к=р/б,
получаем
Гвх = Гэ.б+(1 + Р)#Ь (4-4)
Стабилизация гвх получается при условии
Гэ.б<(1+Р)#Ь
Величины Гэ.б и р определяют по экспериментальным
импульсным характеристикам (рис. 4-2, 4-3).
3) Напряжение на базовой обмотке
U6=I6rBX+\Ucu. (4-5)
4) Число витков базовой обмотки определяют из
уравнения
т=т. (4-6)
87
5) Число витков тактовой обмотки определяется из
уравнения для м. д. с.
ITwT = IjtWT + IqW6i (4-7)
где /п — составляющая тактового тока, затрачиваемая
на перемагничивание сердечника (см. § 2-6).
Величина /п должна быть достаточно большой для соз-
дания соответствующей напряженности поля в сердеч-
нике
где
Ят = ^-+Я0. (4-76)
При заданной величине /Т из (4-7), (4-7а) и (4-76),
имеем:
w?=^ 1 . (4-8)
6) Число витков входной обмотки 101. В схемах с не-
большим числом последовательно включенных ячеек ток
генератора тактовых импульсов является коллекторным
током выходного транзистора. Обычно принимают зна-
чение этого тока равным коллекторному току транзи-
стора ячейки
/к=/т.
Поэтому число витков входной обмотки принимают рав-
ным числу витков тактовой.
7) Число витков тактовой обмотки при наличии по-
ложительной обратной связи. При наличии п. о. с.
уменьшается требуемая величина м. д. с. тактовой
обмотки и время перемагничивания. При большом числе
витков обмотки обратной связи на тактовой обмотке по-
лучается большое значение противо-э. д. с, что приво-
дит к уменьшению тактового импульса. Поэтому число
витков обратной связи w0,c принимают несколько
.меньшим числа витков тактовой:
w0.c=kwTt (4-9)
где k=0,7—0,9.
88
Из уравнения м. д. с.
/ТШТ + IKW0.c = Л^т + hWb,
с учетом (4-9) и (4-10) получаем:
(4-10)
т= /,(1 +*)
(4-11)
8) Балластное сопротивление RK в цепи коллектора
устанавливается для ограничения тока /к. При опреде-
лении значения RK учитывают условия работы схемы.
Рассмотрим схему рис. 4-5, в которой на выходе веду-
щей ячейки / включены тактовые обмотки трех ячеек.
Сопротивление этих обмоток может быть различным
и зависит от состояния сердечников. Если в сердечнике
записана 1, то током /к производится считывание этой
информации, причем необходимо учитывать эквивалент-
ное сопротивление обмотки /?э. Если же сердечник на-
ходится в состоянии 0, то током /к осуществляется под-
тверждение этой информации, при этом сопротивление
тактовой обмотки невелико и ее величину можно не
учитывать. Таким образом, общее сопротивление в цепи
коллектора может быть переменным. Наиболее тяжелый
режим для транзистора получается в случае, когда все
три ячейки находятся в состоянии 0 и сопротивление
нагрузки в цепи коллектора минимально.
Как правило, в схемах имеется хотя бы одна ячей-
ка, в которой записана 1, и сопротивление /?к опреде-
ляют из соотношения
и
17
Рис. 4-5. Схемы питания нескольких ячеек.
Ri + Rn+Ri
9
(4-12)
89
9) Проверка ячейки на помехоустойчивость. Для то-
го чтобы схема была помехоустойчива, напряжение по-
мехи £/п должно быть меньше напряжения смещения
Uсм- Напряжение помехи возникает при записи 1 или
подтверждении 0, т. е. при изменении индукции от
+Вт до +ВГ или от —Вг до —Вт. Усредненное значе-
ние напряжения помех определяют с учетом длительно-
сти заднего фронта импульса (при записи 1) или пе-
реднего (при подтверждении 0).
Uu = w6q^=-^. (4-13)
4-5. ПРИМЕР РАСЧЕТА
Определить параметры ферротранзисторной ячейки
с положительной обратной связью.
Задано: /=50 кгц; T — 2Q мксек: ^и=1,5х
X Ю-6 сек.
Принимаем:
1. Сердечник — феррит с размерами 4X2,5X1 fi мм>
его параметры: ^=1,13-10"в м2; /=Ы0"2 м; Нс —
= 12—; £т = 0,22 тл; Вг = 0,2 тл;
Я0 = 65^; Нт = 7Н6 = 84%;
5п = 60-10-в —; 60 =20°С.
2. Транзистор П15; его параметры />н = 0,15 вт;
UK=12 в; Rt = 10 ом.
3. Время перемагничивания сердечника
хп = 0,6-10-в сек.
Определяем:
1. Предельное значение тока коллектора из (4-1)
г 0,15-20.10-e 1Л .
/кт = 12,1>Б,10,ш =166-10 а.
Принимаем /к = 150 ма.
90
2. По кривой рис. 4-2 при /кг=150 ма и тп =
= 0,6 мксек, /б = 23 лш; тогда
ft_ °'15 _£ С
По кривой рис. 4-3 при /б = 23 ма
£/э.б = 1,9 в; тогда гэ.б =о^1з=:83
Из (4-4) гвх=83+10(1 +6,5) = 158 ом.
3. Напряжение на базовой обмотке.
Задаемся напряжением смещения £/см=1,2 в.
Из (4-5) £/б= 1,2 + 0,023-158 = 4,74 е.
4. Число витков базовой обмотки из (4-6)
4,74-0,6.10-в _ ~ А
Шб= 1,13.10-^0.4 д6'4'
Принимаем доб = 7.
5. Из условия перемагничивания сердечника за время
тп = 0,6.10-в сек
Ят=^Г + Яо=165^;
Тогда
//e = f^=16,l^; А =0,7.
Ят = -^1^1=106,8^.
1 , / Ж
В схемах с ферротранзисторными ячейками форми-
рователь источника тактовых импульсов, включаемый
обычно на выходе блокинг-генератора, выполняется на
транзисторе того же типа, который применен и в ячей-
ке. Тогда /т = /к=0,15 а;
wT =-/- = 7,1.
1 Т
Принимаем rjyT = 8, число витков в обмотке обратной
связи ауо.<г=0,7- 8 = 5,6. Принимаем до0.с = 6.
6. Число витков входной обмотки равно числу вит-
ков тактовой W\ = S.
91
7. Балластное сопротивление в цепи коллектора из
(4-12)
/?к=7^-(/?1 + гэ^2т).
Из (2-37)
_ 2дВг _ 2-1.13-10-«-0,2 _ft ом
*э~"Ят/тп~" 165.Ы0-2.0,6.10-в —идо вшшш2 '
RQ = 0,456^ = 29 <ш,
/?к =о7^5—10 — 29 = 41 ом.
Принимаем /?к=40 ом.
8. Помехоустойчивость. Длительность заднего фрон-
та импульса записи информации известна из данных
источника импульсов. Примем эту длительность для
импульса тока, изменяющегося в пределах от 0,9 /к до
0,1 /к, равной /8ф=0,6* 10~6 сек.
Из (4-13)
t/n=7-ia3-io-%j);1Q02.6 =0,253 е.
Таким образом, напряжение помех меньше принятого
значения /Усм=1,2 е.
4-6. ПОСТРОЕНИЕ ЛОГИЧЕСКИХ ЭЛЕМЕНТОВ
Основные виды логических элементов: ИЛИ, И, НЕ
и др., а также узлы, состоящие из этих элементов (маг-
нитные регистры сдвига, делители частоты, запоминаю-
щие устройства и др.), выполняются с импульсными
входами и выходами. При построении цифровых систем
и устройств управления, например автоматических ре-
гуляторов, систем программного управления механиз-
мами, требуются элементы, имеющие не только
импульсные, но и потенциальные входы и выходы. Та-
кие элементы выполняют обычно для однократного дей-
ствия по схеме с самовосстановлением (режим посто-
янного насыщения), и считывание в них производится
не от тактового импульса, а от входного (см. рис. 4-4,в).
Схемы управления. Применяются две схемы управле-
ния работой нескольких последовательно или парал-
92
I
Tp1
Л
w,
to
^1 R N
Wj
lb*
wT
"cm X
\rI2
I
a)
Л
выход
Выход
лельно включенных ячеек: однотактные и двухтактные.
При однотактной схеме (рис. 4-6) тактовые
обмотки всех ячеек включаются последовательно. Счи-
тывание информации с
ячейки / открывает
транзистор Тр17 кол-
лекторный ток которого
проходит по входной
обмотке ячейки //. Од-
нако в течение времени
прохождения тактового
импульса запись едини-
цы в ячейку // не про-
исходит, так как одно-
временно действуют
две м. д. с. разного на-
правления (по обмотке
wT—для считывания 1,
а по обмотке W\ — при
записи). Если длитель-
ность коллекторного
тока транзистора Tpl
больше длительности
тактового импульса (за
счет времени рассасы-
вания £р), то сердечник
// перемагничивается
коллекторным током
по окончании тактового
импульса. Надежная
работа схемы получа-
ется при условии
Рис. 4-6. Однотактная ферротранзи-
сторная схема.
а — без обратной связи; б — с обратной
связью; в — временная диаграмма.
где
из
из
/и — длительность тактового импульса,
Tni — время перемагничивания сердечника /
1 в 0;
Тп2 — время перемагничивания сердечника //
0в1.
Величина /р зависит, с одной стороны, от парамет-
ров транзистора (в низкочастотных транзисторах она
больше, чем в высокочастотных), а с другой — от ве-
личины тока базы (с увеличением тока базы время /р
93
увеличивается). Поэтому в однотактных схемах прини-
мают завышенное число витков базовой обмотки для
получения большего напряжения на базе транзистора
и тока базы.
Несмотря на то что однотактная схема получается
весьма простой, она обладает рядом недостатков: тре-
буется тщательный отбор транзисторов, схема критична
к длительности тактового импульса, значение /р неста-
бильно и возрастает с повышением температуры. Поэто-
i л ж
Рис. 4-7. Двухтактная ферротранзисторная схема.
MB — мультивибратор; БГ — блокинг-генераторы.
му однотактное управление применяется лишь при по-
строении отдельных элементов и малоразветвленных
схем.
При двухтактной схеме (рис. 4-7) тактовые
обмотки четных и нечетных ячеек питаются от двух
источников тока, причем эти токи сдвинуты во време-
ни. Источником питания для ферротранзисторных схем
обычно является мультивибратор MB, задающий часто-
ту тактов, и два блокинг-генератора (БГ1 и БГ2), рабо-
тающие в ждущем режиме. При действии одной поло-
вины MB срабатывает БГ1, а при действии другой —
БГ2.
Двухтактные схемы работают значительно надеж-
нее однотактных. Они не требуют специального отбора
транзисторов, некритичны к длительности тактовых
импульсов и времени рассасывания. Двухтактные схемы
можно строить для более высоких частот, чем однотакт-
ные, поэтому в схемах автоматики применяют в основ-
ном элементы с двухтактным управлением.
Элементы с импульсными входами и выходами. При
построении ферротранзисторных элементов, реализую-
щих функции НЕ, ЗАПРЕТ, используют принцип ком-
9
пенсации напряжения. Схема элемента, реализующего
функцию ЗАПРЕТ,
А = аЪ
приведена на рис. 4-8,а,б. Элемент выполнен сочетанием
ферротранзисторной и ферродиодной ячеек. Базовые
обмотки обеих ячеек включены встречно.
а) б)
в)
Рис. 4-8. Схемы ферротранзисторных элемен-
тов ЗАПРЕТ, НЕ.
Цепь обмотки w^2 шинтирована сопротивлением R{
и диодом Д для устранения действия э. д. с. помех, воз-
никающих в этой обмотке. Наведенной в обмотке wq2
э. д. с. при записи 1 импульсом Ь транзистор мог бы
быть отперт, однако этого не происходит, так как цепь
эмиттер — база блокирована встречно включенным
диодом Д.
Работа схемы:
1) а=1; 6=0. При считывании 1 с ячейки / транзи-
стор отпирается э. д. с, наведенной в ее базовой обмот-
ке, Л = 1. Возникающая при этом э. д. с, помехи с ячей-
95
ки // снижает несколько величину импульса входа на
базе.
2) а=1; 6 = 1. Электродвижущие силы, наведенные
в обеих обмотках при считывании тактовым импульсом,
равны и включены встречно, поэтому транзистор остает-
ся запертым, Л=0.
3) а=0; 6=1. При записи 1 э. д. с, наводимая в ба-
зовой обмотке сердечника //, блокирована диодом, при
считывании 1 эта э. д. с. запирает транзистор, Л=0.
Рис. 4-9. Схемы ферротранзисторных элементов
ИЛИ.
Элемент НЕ выполняется аналогично элементу
ЗАПРЕТ с той лишь разницей, что на вход его подаются
импульсы от генератора единиц (рис. 4-8,в).
Элемент ИЛИ может быть выполнен или с несколь-
кими входными обмотками (рис. 4-9,а) или с одной
входной обмоткой, но с диодным разделением входов
(рис. 4-9,6). При наличии только одного входа этот эле-
мент выполняет роль повторителя.
Элемент И, простейшая схема которого с двумя
импульсными входами приведена на рис. 4-10,а, состоит
из двух сердечников и двух транзисторов, включенных
последовательно. Сигнал на выходе элемента получается
лишь при условии, что в обоих сердечниках была про-
изведена запись 1:
а=1; 6 = 1.
В этом случае последующим тактовым импульсом оба
транзистора одновременно открываются. При записи
только одной из величин (а или Ь) открывается лишь
один транзистор и общая их цепь остается запертой.
В приведенной схеме генератор тактовых импульсов
работает в режиме с переменной нагрузкой. Так при
96
наличии только одного входа, например а, в сердечнике
/ записывается 1. В этом случае сердечник перемагни-
чивается тактовым импульсом без участия обмотки
обратной связи, что вызывает резкое возрастание на-
грузки для генератора. Для устранения этого недостат-
ка применяют другую схему (рис. 4-10,6), в которой
при наличии только лишь одного входа ток базы тран-
зистора остается запертым и нагрузка на генератор зна-
<*) б)
Рис. 4-10. Схемы ферротранзисторных элементов И.
чительно уменьшается. В рассматриваемой схеме ток
базы транзистора Tpl управляется транзистором Тр2 и
если последний заперт, то ток базы Tpl равен нулю.
Если же информация записана только в ячейке //, то
при ее считывании тактовый импульс открывает тран-
зистор Тр2 и по обмотке обратной связи создает доба-
вочную м. д. с. перемагничивания.
Элемент с импульсными и потенциальными входами
и выходами (однократного действия). Схема элемента
И — схема совпадения (рис. 4-11) имеет два входа: по-
тенциальный через базу транзистора Tpl и импульсный
через обмотку W\ ячейки. При построении схемы исполь-
зуется свойство транзисторов в насыщенном режиме
пропускать ток в обратном направлении от коллектора
к эмиттеру. Через обмотку смещения адсм сердечник
переводится в состояние +Вт.
7 Ф. А. Ступель. 97
Йри наличии импульсного сигнала на входе сердеч-
ник переводится в состояние — Вг и в базовой обмотке
наводится напряжение Uq. При а=0, 6 = 0 оба транзи-
стора заперты. При а = 0, 6=1 открывается транзистор
Tpl и переходит в режим насыщения, а транзистор
Тр2 остается закрытым, так как разность потенциалов
между его эмиттером и базой равна нулю. При а=1,
6 = 0 закрыты оба транзистора, так как цепь эмиттер —
база транзистора Тр2 разомкнута. При а=1; 6 = 1 от-
Рис. 4-11. Схема И с импульсным и потенциаль-
ным входами.
крывается Tpl и в обмотке наводится напряжение
такого знака, что потенциал эмиттера (точка 1) стано-
вится выше потенциала точки 2. Так как транзистор Тр2
открыт, то ток эмиттер — база Тр2 протекает по цепи
/—2—3—4—5—1 и на выходе элемента появляется
импульс.
Триггер со счетным входом (рис- 4-12) состоит из
цвух ячеек и имеет входы — счетный и сброс, выходы—
импульсные и потенциальные.
Перед началом работы схемы, состоящей из ряда
элементов, осуществляется операция «сброс» для пере-
вода триггера в исходное состояние. Сброс производится
по входам через диоды Дх и Д2,
В процессе работы схемы открыт один из транзисто-
ров триггера. При открытом транзисторе Tpl сердечник
/ по обмотке шК1 переводится в состояние + ВШ, а сер-
дечник // по его обмотке wk2 в состояние —Вш. При
переключении транзистора происходит перемагничива-
ние сердечников: / — 6(—Bm), II — Ь( + Вт).
98
Счетный вход осуществляется импульсом тока
в обмотке wu стремящимся перевести сердечники в со-
стояние —Вт.
Положим, что открыт транзистор Tpl. Сердечник /
находится в состоянии + Вт, коллекторным напряже-
Рис. 4-12. Схема триггера со счетным входом с импульс-
ными и потенциальными выходами.
нием транзистора Tpl положительного знака транзистор
Тр2 запирается по базе, сердечник II удерживается
током обмотки wk2 в состоянии —Вт.
При наличии счетного входного импульса в базовой
обмотке сердечника / возникает напряжение, запираю-
щее транзистор Tpl. В этот момент открывается тран-
зистор Тр2 и происходит перемагничивание обоих сер-
дечников, в процессе которого открывается выходной
транзистор ТрЗ и на выходе появляется импульс 1. При
следующем счетном импульсе картина меняется и вы-
ходной импульс получается от транзистора Тр4. Выход-
ные транзисторы в статическом состоянии триггера за-
перты напряжением положительного смещения. IB этом
состоянии с коллекторов транзисторов Tpl и Тр2 сни-
мают потенциальные выходы,
7*
99
Кипп-реле (рис. 4-13) применяется в схемах авто-
матики как элемент, служащий для формирования по-
тенциальных импульсов различной длительности и для
получения задержки импульсов тока при передаче в дру-
гие импульсные элементы.
Рис. 4-13. Схема кипп-реле.
Перевод обоих сердечников реле в режим постоян-
ного насыщения осуществляется по коллекторным
обмоткам транзисторов: вход — импульсный по обмотке
wu выходы — импульсный по транзистору ТрЗ, потен-
циальные— с коллекторов транзисторов Tpl и Тр2.
Требуемая выдержка времени устанавливается величи-
ной емкости С. Минимальная выдержка получается
порядка 5 мксек, максимальная — ограничивается раз-
мерами конденсатора.
ГЛАВА ПЯТАЯ
ФЕРРОДИОДНЫЕ ЭЛЕМЕНТЫ ДРОССЕЛЬНОГО
ТИПА
Элементы дроссельного типа отличаются тем, что
у них нагрузка и катушка дросселя подключаются
к источнику напряжения последовательно. Сопротивление
катушки дросселя изменяется релейно от максимального
значения до минимального. Схемы дроссельного типа
100
можно выполнить с параллельным включением нагрузки
и катушки дросселя, однако в дальнейшем изложении
эти схемы не рассматриваются, гак как они не получили
практического применения.
Имеются два вида дроссельных элементов: инвертор
и повторитель.
5-1. ПРИНЦИП ДЕЙСТВИЯ ИНВЕРТОРА
Инвертор выполняется, из материала с ППГ в виде
сердечника с двумя обмотками: входной wy, называе-
мой обмоткой управления, и выходной о>р, называемой
рабочей (рис. 5-1,а). Как правило, питание в таких
схемах осуществляется полупериодами синусоидального
напряжения. Работа элемента проходит в два такта:
первый такт — полупериод управления (ЯДУ), в тече-
ние которого ток проходит по обмотке wY, второй такт —
полупериод рабочий (ППР), в течение которого ток про-
ходит по обмотке Шр.
В качестве источника используется понижающий
трансформатор с заземленной средней точкой вторичной
обмотки (рис. 5-1,6). Напряжения щ и и2 сдвинуты по
фазе н-а 180°. Благодаря установленным в схеме инвер-
тора диодам Дх и Д2 в обмотках wY и дор текут однопо-
лупериодные токи.
ППУ1 Ш ПП92 ППР2
ас-0
> I J;
о)
ППУ1 ППР1 ППУ2 ПЛР2
Ф000 г
/7=0
О В, , я
в) г)
Рис. 5-1. Схема и диаграмма работы инвертора.
101
Информация вводится сигналом входа ис — нат
пряжением, полученным от датчиков (а, Ь, с), или с вы-
хода предыдущего элемента. Сигнал ис подается на об-
мотку wy (ППУ).
Выход информации в виде напряжения ии снимается
с нагрузки RH, включенной последовательно с рабочей
обмоткой wv (ППР).
За исходное состояние сердечника принимается со-
стояние + Вг (рис. 5-1,в). Рассмотрим два режима рабо-
ты элемента (рис. 5-1,г):
1) на вход подан сигнал ис (а=1); током этого
сигнала сердечник из +ВГ переводится в —Вг (ППУ1).
В следующем рабочем полупериоде (ППР1) происходит
перемагничивание сердечника из —Вг в +Вт. Ток £ро,
протекающий в цепи wp—RUi при перемагничивании
невелик из-за большого значения эквивалентного сопро-
тивления обмотки wp
• и2
где /?р — омическое сопротивление обмотки wv;
RD=rQ Wp2 — эквивалентное сопротивление обмоткц кур.
Значение R3 во много раз больше суммы /?р+/?н, и
поэтому практически считают, что все напряжение и2
падает на обмотке о>р, а напряжение на нагрузке ин = 0.
Это соответствует выходу А =0;
2) сигнала на входе нет (а=0) (нс=0), поэтому
сердечник остается в состоянии +ВГ (ППУ2). В следую-
щий рабочий полупериод (ППР2) перемагничивания
сердечника не происходит и эквивалентное сопротивле-
ние обмотки равно нулю. Ток увеличивается по сравне-
нию с предыдущим случаем
Падение напряжения на нагрузке будет
Так как RH>Rv» то считают, что практически все
напряжение падает на нагрузке. Это соответствует вы-
ходу А = 1.
102
Таким образом, данным элементом реализуется
функция инвертора: А = а.
Отметим, что при А = \ напряжение на нагрузке вы-
деляется не за весь рабочий полупериод ППР2 (Оч-я),
а только в пределах угла б2—л (рис. 5-1,г). Объясняет-
ся это тем, что в начале полупериода ППР2 сердечник
перемагничивается из +ВГ в + Вт, причем ток в цепи
невелик. По достижении значения +Вт ток резко увели-
чивается.
5-2. ПОСЛЕДОВАТЕЛЬНОЕ ВКЛЮЧЕНИЕ ИНВЕРТОРОВ
При составлении таких схем необходимо учитывать
фазу напряжений питания для рабочей обмотки и
обмотки управления. В каждом элементе эти напряже-
I Ж
ППУ1 ППР1 ППУ2 ППР2
Рис. 5-2. Схема последовательного включе-
ния инверторов.
ния (щ и и2) должны быть сдвинуты по фазе на 180°
(рис. 5-2). Назовем первым полупериод управления
ППУ1, соответствующий прохождению тока в обмотке
куу1, в этом же полупериоде ток проходит в обмотке wv2
(ППУ1—ППР2). Рабочему полупериоду обмотки wvX
соответствует полупериод управления обмотки wy2
(ПЛР1—ППУ2).
Отметим одно положение, важное для понимания
работы схемы: число витков обмотки управления wY
должно быть в несколько раз меньше числа витков ра-
103
бочей обмотки wv. Поэтому для перемагничивания сер-
дечника с помощью этих обмоток требуются различные
значения токов. Ток ip.0, достаточный для перемагничи-
вания сердечника по рабочей обмотке, не может пере-
магнитить сердечник по обмотке управления.
Рассмотрим два случая работы схемы:
1) На вход первой ячейки подан сигнал ис (а=1).
В полупериод ППУ1 поступающим извне сигналом
в обмотку wYi сердечник переводится из 1 в 0. В следую-
щий полупериод ППР1—ППУ2 током /p.0i сердечник /
переводится снова в 1. При этом эквивалентное сопро-
тивление RQ обмотки Wp\ велико, следовательно, ток мал
и сердечник II по обмотке wy2 не перемагничивается,
оставаясь в состоянии 1. Тогда в следующий полупериод
ППР2 ток в обмотке wp2 определяется только лишь со-
противлением нагрузки #н, так как эквивалентное
сопротивление обмотки равно нулю (омическим сопро-
тивлением катушки пренебрегаем). Таким образом,
можно считать, что практически все напряжение и\ при-
кладывается к нагрузке: выход А = 1.
2) На вход не подан сигнал, а=0. 'В полупериод
управления ППУ сигнала на входе нет и сердечник /
остается в состоянии 1. В следующий рабочий полупе-
риод ППР1 ток iv\ определяется только эквивалентным
сопротивлением /?э.у обмотки управления wy2i причем
^ау^ #э.р- Этим током в обмотке управления сердечник
// перемагничивается в состояние 0. Тогда в полупериод
ППР2 все напряжение их падает на обмотке wp2 и на-
пряжение на нагрузке незначительно: выход А =0.
Таким образом, элемент, состоящий из двух инвер-
торов, в целом представляет собой повторитель: если
а=1,тоЛ = 1 (рис. 5-2,6), если а = 0, то А = 0 (рис. 5-2,в).
5-3. СОЧЕТАНИЯ ИНВЕРТОРОВ
В устройствах автоматики возможны различные
схемы сочетаний ведущих и ведомых ячеек —инверто-
ров. В простейшем случае (рис. 5-2) каждый инвертор
имеет один вход и один выход. При сочетании, показан-
ном на рис. 5-3,а, ведущий инвертор имеет три выхода
(я = 3), а при сочетании, показанном на рис. 5-3,6, ве-
домый инвертор имеет три входа (га = 3).
Количество входов т и количество выходов п может
быть различным (от одного до пяти и более). Это поло-
104
жение определяет собой выбор схемы построения инвер-
тора и значений параметров схемы. При этом необхо-
димо учитывать основное положение передаточной ха-
рактеристики: при перемагничивании ведущего сердеч-
ника по рабочей обмотке перемагничивание сердечника
по обмотке управления ведомого не должно иметь место.
Это условие удовлетворяется в большей или меньшей сте-
пени, с одной стороны, схемой управления и, с другой
стороны, количеством входов и выходов.
/7?=;
Рис. 5-3. Условные схемы сочетаний инверто-
ров.
В практике нашли применение два варианта схем
управления: с инверторами без шунтирующих сопро-
тивлений и с шунтирующими.
а) Схемы без шунтирующих сопротивлений
Схемы инвертора с двумя выходами и двумя входа-
ми приведены на рис. 5-4. Напряжения U\ и и2 находят-
ся в противофазе, для чего питание осуществляется от
промежуточного трансформатора с заземленной средней
точкой (рис. 5-1,6).
Схема с двумя выходами (рис. 5-4,а). Все обмотки
ведомых элементов включаются параллельно, а затем
последовательно с рабочей обмоткой ведущего. В цепях
управления включаются балластные сопротивления Ry,
служащие для ограничения тока в рабочей обмотке.
Примем следующие обозначения:
рабочий ток:
)р0 — в случае перемагничивания сердечника из
О в 1,
/р — в случае, когда в рабочий полупериод сердеч-
ник остается в состоянии 1;
8 Ф. А. Ступель. 105
ток управлений:
I
у.п
= — Ток помех,
п
б)
Рис. 5-4. Электрические схемы сочетаний инвер-
торов.
где п — число управляемых ячеек,
/ — Ь..
/у— п >
сопротивления обмоток:
/?р — активное сопротивление рабочей обмотки,
<э.у-
эквивалентные сопротивления.
На рис. 5-5 приведен график распределения импульса
напряжения. Началу перемагничивания соответствует
угол в1э концу — 62. После момента 92 ток в цепи управ-
ления увеличивается, но этим не нарушает работы схемы.
Вход а = 0. Сердечник / остается в состоянии -\-Вг.
Уравнение напряжений для рабочего полупериода
U2=/р/?р + Ry+4г
(5-1)
106
В схеме рис. 5-4 ,а значение т — 2.
Обозначим UY — падение напряжения на обмотке управ-
ления при перемагничивании сердечника
Uy= -^-Яэ.у
Напряжение питания и параметры ячеек принимают
такими, чтобы перемагничивание сердечников по ОбМОТ-
Лу
Рис. 5-5. Диаграммы импульсов напряжения при
исследовании работы дроссельных элементов.
кам управления происходило за время, меньшее полу-
периода. Этим обеспечивается надежность работы схемы
при снижении напряжения сети.
Вход а=1. Сердечник / за полупериод управления
перемагничивается в —Вг, а за следующий рабочий
полупериод в +Вт.
Уравнение напряжений для рабочего полупериода
Ua = /р.0 (Яр + + /р.оЯэ.р- (5-2)
Обозначим Up — падение напряжения на рабочей
обмотке в процессе перемагничивания
Up=/р.о {Rp+^?э.р) •
Параметры схемы принимают такими, чтобы значе-
ние было близко к
(/р= (0,7-0,8)1/2.
При числе входов больше одного падение напряжений
в омических сопротивлениях снижается, в этих случаях
практически (Ур=£/2. Окончание перемагничивания сер-
8* 107
дечника по рабочей обмотке должно происходить толь-
ко лишь к концу полупериода
Если же процесс заканчивается раньше, то ток /р.0
увеличивается до значения /р, что приводит к частично-
му перемагничиванию ведомых сердечников. Отклоне-
ние от заданных условий .перемагничивания получается
при колебании напряжения сети или при изменении чис-
ла входов.
Надежность работы схемы обеспечивается тем, что
число витков обмотки управления берется в несколько
раз меньше числа витков рабочей.
Отношение числа витков этих обмоток обозначают:
В практических схемах значение Лв колеблется в пре-
делах 3—10; меньшее значение принимают в схемах
управления одной ячейкой, большее — несколькими.
Из рассмотрения графиков рис. 5-5 видно, что схема
будет критична к колебаниям напряжения сети: при
увеличении этого напряжения ведущий сердечник пере-
магничивается по рабочей обмотке за время, меньшее
полупериода, а при уменьшении напряжения этот сер-
дечник полностью не перемагничивается, что отражает-
ся на дальнейшей работе схемы. В реализованных
устройствах надежная работа схемы получается при не-
больших колебаниях напряжения (5—10%).
Схема с двумя входами (рис. 5-4,6). Рассмотрим
случай, когда на входах
а=1; 6=1.
При этом сердечники I и II перемагничиваются в со-
стояние — Sr, а сердечник /// должен остаться в состоя-
нии +'ВГ, т. е. ток управления в обмотке этого сердеч-
ника в идеальном случае должен быть равен нулю.
В действительности же ток помех /у.п равен /у.п=т/р.0
(в данной схеме т=2). Поэтому при большом числе
входов сердечник /// может перемагнититься током по-
мех. Величина т должна быть значительно меньше зна-
чения kB. Так при &в=6 число параллельных вводов при-
нимают равным двум. Другим серьезным недостатком
108
схемы является исчезновение первого импульса при не-
которых режимах работы схемы. Так, если на входе
одних ведущих ячеек-а=0, то их рабочие обмотки почти
полностью шунтируют рабочие обмотки остальных, на
входе которых &=1. В результате эти сердечники в ра-
бочем полупериоде перемагничиваются из состояния О
только частично. Если в следующем полупериоде на
входе а=0, то на выходе сердечника будет неправиль-
ный сигнал. Поэтому такие элементы не могут приме-
няться в счетных схемах. Более совершенными являют-
ся элементы с шунтирующим сопротивлением, допускаю-
щие большое число входов.
б) Схемы с шунтирующими сопротивлениями
Параллельно каждой из рабочих обмоток включает-
ся шунтирующее сопротивление R!m (рис. 5-6). В такой
схеме ток /р>0 для перемагничивания каждого из веду-
щих сердечников проходит в основном по цепи Rm—wv\
поэтому суммарный ток помех /у.п резко уменьшается.
В данном случае при том же значении kB возможно вы-
полнить схемы с большим числом параллельных входов.
Основные соотношения:
/пЛп—/улЛу; (5-4)
m/p.o = mlm +</у.п; (5-5)
из (5-4) и (5-5)
/у.п= /р.о Rj + mRmfm • (5-6)
Значение Rm принимается тем меньше, чем больше
число параллельных входов. Падение напряжения на
рабочей обмотке в процессе ее перемагничивания опре-
деляется следующим образом:
"р = </.-«/р.ойЙ^. (5-7)
При одном ведущем элементе (т=\) падение напряже-
ния на сопротивлении /?у уменьшается
и» = иш-1*.оя*+%щ . (5-8)
109
т. е. значение Яш необходимо увеличить с тем, что-
бы импульс напряжения на рабочей обмотке был в со-
стоянии перемагнитить сердечник в течение полупе-
риода.
Перемагничивание сердечников ведущих ячеек по ра-
бочей обмотке. При выборе параметров ячейки необхо-
димо учитывать влияние колебаний напряжения источ-
ника питания на работу схемы. Наибольшее влияние
на работу схем эта нестабильность оказывает при т=1;
п=1 и т>1, п=1,
В схемах при т=1 и п=\ падение напряжения на
рабочей обмотке Uv определяется из (5-8).
Повышение напряжения U2 приводит к тому, что ве-
дущий сердечник перемагнитится за время, меньшее
полупериода (угол б2), после чего увеличенным током
/р могут перемагнититься ведомые сердечники. В схемах
/тг>1и п=\ значение Uv уменьшается по сравнению
со схемой при т=1. Поэтому при уменьшении значения
U2 сердечник не успеет перемагнититься в течение
полупериода, что также вызывает сбои в работе схем.
Во всех схемах при выборе оптимальных режимов ра-
боты обмоточные данные ячеек остаются неизменными,
варьируют, как правило, значениями RY и Rm-
Перемагничивание сердечников ведомых ячеек по об-
мотке управления. Из условия устойчивости работы
схем требуется, чтобы перемагничивание сердечников
по обмотке управления происходило быстрее, чем пере-
магничивание по рабочей обмотке. Эта скорость полу-
1Ю
чается максимальной в схемах т>1 и п=\. Падение
напряжения на обмотке управления
Uy = U2-Iv^-fyRy. (5-9)
Минимальная скорость перемагничивания будет соот-
ветствовать случаю, когда т = 1; п = 1,
Uj^Us—IvRv—IjRy. (5-10)
5-4. ОСНОВНЫЕ СООТНОШЕНИЯ ДЛЯ РАСЧЕТА ИНВЕРТОРА
Вначале производится предварительный расчет для
определения параметров ячейки, а затем его уточняют
с учетом схемы включения и колебаний напряжения
сети.
Размеры сердечника определяются по Рн и /
(см. § 2-11).
При выборе величины U исходят в основном из двух
факторов: режима работы полупроводниковых диодов
и обмоточных данных. По условию работы ячеек к дио-
дам схемы прикладывается обратное напряжение, зна-
чительно превышающее рабочее (в 2—3 раза). Таким
образом, определенному значению U требуется соответ-
ствующий тип диода. Например, при температуре окру-
жающей среды, равной 70°, допустимое обратное на-
пряжение для диодов типа Д7Г равно 80 в, а для дио-
дов типа Д7Е равно 125 в. Исходя из этого, рабочее
значение напряжения источника питания принимают
пониженным. Из стандартного ряда напряжений 6, 12,
24, ... в определяющем для выбора оказывается сооб-
ражение, связанное с процессом намотки тороидов. При
станочной намотке допустимая величина диаметра про-
водов 0,11—0,2 мм. Требуемое значение этого диаметра
получают из соотношения
где Д — плотность тока.
Отношение чисел витков
^ = ^-=3^-6.
в Wy
111
Падение напряжения в рабочей обмотке в процессе
перемагничивания сердечника с учетом (5-7)
f/P = t/2-m/,0^_ (5-11)
Практически получают
Up= (0,7-0,8) U2.
Из (5-11) имеем
Число витков обмотки управления:
wy = wv>/kB.
Величина сопротивления RY определяет собой ско-
рость перемагничивания ведомой ячейки из +ВГ в —Вт.
Увеличение этой скорости достигается уменьшением
Ry. Ограничивающим условием при этом является вели-
чина э. д. с, наводимая в рабочей обмотке. Эта величи-
на должна быть меньше допустимого обратного напря-
жения диода. Практически считают, что перемагничива-
ние сердечника должно происходить за время порядка
четверти периода
62 = 40° —50°.
С учетом падения напряжения на диодах и на рабо-
чей обмотке (порядка 10%) получаем:
O,9£/msin02 —
Ry = Гт (5-13)
Значение сопротивления /?ш принимается из условия:
перемагничивание ведущего сердечника не вызывает пе-
ремагничивания ведомого. Вводится понятие коэффициента
помех ky:
£у='-Р; *ш = -***гЬ (5-Н)
* у t «у/св
Ш
112
5-5. ПОСТРОЕНИЕ НА ОСНОВЕ ИНВЕРТОРА ЭЛЕМЕНТОВ,
ВЫПОЛНЯЮЩИХ ЛОГИЧЕСКИЕ ФУНКЦИИ
При построении элементов на основе инвертора поль-
зуются законами инверсии Моргана и Моргана—Ше-
нона (см. § 1-4). На рис. 5-7 приведены структурные,
а на рис. 5-8 — электрические схемы таких элементов.
Рис. 5-7. Структурные схемы логических элементов, построенных
на основе инвертора.
На рис. 5-9,а показана структурная схема построе-
ния формирующего устройства, предназначенного для
выделения из серии поступающих импульсов одного
единственного импульса.
Формирователь весьма часто ставят для запуска ди-
намического триггера в тех случаях, когда начало его
работы определяется импульсами, поступающими от
датчиков. Если в триггер попадает не только первый
а и последующие импульсы, то работа его не прекра-
щается при поступлении импульса ЗАПРЕТ, так как
через период, следующий после этого импульса, триггер
снова запускается импульсом входа.
Формирователь комплектуется из трех элементов:
П, НЕ, И; действие формирователя иллюстрируется ди-
аграммой рис. 5-9,6.
113
Рис. 5-8. Электрические схемы логических элементов, построенных
на основе инвертора.
а(1)
/7(2)
П
а(2) I
а)
\Н£
J а(1)
QWQO
r\ г\ г\ r\t<1) Sxod a(U
Г\ Г\ Г\ t(2) Выход a (2)
Г\ Г\ t(U Выход HE
W) Выход U
б)
Рис. 5-9. Схема и диаграмма работы
дроссельного формирователя импульсов.
П4
5-6. Принцип действия повторителя
Повторитель отличается от инвертора тем, что в схе-
ме повторителя добавляется диод смещения, играющий
роль ключа: в одних режимах диод пропускает ток
в обратном направлении, в других запирает цепь обрат-
ного тока. Этот диод включается на напряжение смеще-
ния U см через добавочное сопротивление Ясм
(рис. 5-10,а). При отсутствии внешних воздействий
Рис. 5-10. Схема и диаграмма работы диода в режиме смещения.
в цепи смещения протекает ток /jCM и на диоде падает
напряжение (/д. В таком режиме диод может пропу-
скать ток в обратном направлении при условии, что па-
дение напряжения, определяемое этим обратным током,
будет меньше напряжения £/д при токе смещения.
Рассмотрим схему (рис. 5-10), в которой вместо об-
моток дроссельной ячейки показаны сопротивления Ri
и R2. Ток 1\ определяется напряжением t/b ток 12—
напряжением U2.
Возможны два режима работы схемы:
1) Значение R\ велико (рис. 5-10,6). В этом случае
ток 1\ мал и падение напряжения на диоде U\, опреде-
ляемое этим током, невелико. Точка А характеристики
диода смещается в А\—диод пропускает в обратном
направлении ток 12.
2) Значение Ri мало; в этом случае (рис. 5-10,в) уве-
личивается падение напряжения на диоде U\, точка А
характеристики диода смещается в А2 — диод запирает-
ся и ток /2=0.
б)
в)
115
Схема повторителя приведена на рис. 5-11. Сигнал
входа Uc поступает от датчиков (я, Ь, с, ...,) или же от
предыдущего элемента. Напряжения Uy\ и Uv\ сдвину-
ты по фазе на 180°.
Рассмотрим два режима работы повторителя:
1) На входе элемента
подан сигнал Uc (а=1).
Этот сигнал больше по
своему значению падения
напряжения f/д на диоде
смещения (рис. 5-10,в) и
запирает его, вследствие
чего запирается цепь тока
обмотки управления и
сердечник остается в со-
стоянии + ВГ. В следую-
щий полупериод ППР1
происходит только лишь
перемагничивание сердеч-
ника от +ВГ до +Вт (пе-
риод 0— г) . и после это-
го эквивалентное сопро-
тивление Дэ обмотки ста-
новится равным нулю. В
ППУ1 ППР1
ППУ 2
ис=0
а=0
ППР1
\и2
Рис. 5-11. Схема и диаграмма ра-
боты повторителя дроссельного
типа.
цепи нагрузки протекает ток
и*
Rp + Rn 9
где Rv — омическое сопротивление обмотки wv.
Напряжение t/H=£/p, в этом случае на выходе имеем
А = 1.
2) На вход элемента не подан сигнал (а = 0). В по-
лупериод ППУ 2 диод Дсм не заперт и по цепи земля —
Дсм—Д\—Щ протекает ток /у, сердечник перемагничи-
вается из +ВГ в —Вш. В следующий полупериод ППР2
происходит перемагничивание сердечника из —Вг
в +Вт, причем эквивалентное сопротивление обмотки
wp велико и все напряжение Up падает на обмотке wv
(&н невелико). В этом случае на выходе имеем Л=0.
Расчетные соотношения. Размеры сердечника опре-
деляются выбранной частотой источника питания и ве-
личиной сопротивления нагрузки, включенной на выхо-
де схемы (см. § 2-11).
116
Число витков рабочей катушки определяется с уче-
том требования: перемагничивание сердечника должно
производиться за полпериода
^ | Um sin (wt)d (Ы) = q-w j* dB,
о -вг
откуда
»р==йгйж)- (5"15)
Напряжение управления берется меньше рабочего с тем,
чтобы оно не запирало диодов смещения.
Число витков шу определяется исходя из требования:
перемагничивание сердечника должно производиться за
время, меньшее полупериода (угол 6 О)
_ i/-2frm(l-cos9) ПЛ6)
Шу/~ щ(Вт + Вг) {Ь
Ниже приведены данные ячеек, выпускаемых отечест-
венной промышленностью: материал сердечника 50НП,
размеры 30-22-10 мм, / = 50 гц\ f/p = 12 в; £/у = 6 в;
£/см = 20 в; шр = 1400— 1600, wy = 320 — 360, диаметр
проволоки 0,15 мм.
5-7. ПОСЛЕДОВАТЕЛЬНОЕ ВКЛЮЧЕНИЕ ПОВТОРИТЕЛЕЙ
На рис. 5-12 приведена схема с двумя последова-
тельно включенными элементами — повторителями (/
и //). При построении таких схем требуется выдержи-
вать следующие условия: напряжения иу\ и uv\ также,
как и напряжения иу2 и ггр2, должны быть сдвинуты по
фазе на 180°, напряжения щ\ и иу2 должны совпадать
по фазе, напряжение смещения исм должно совпадать
по фазе с соответствующим напряжением управления.
Диоды ДСМ1 и Дсм2 в этих схемах играют роль ключей.
Работа схемы:
а=1. Сигналом входа (фазы иу\) запирается диод
Дси сердечник остается в состоянии +ВГ. В следующий
полупериод ППР1 сердечник перемагничивается из +ВГ
в +Вт при насыщении сердечника, основная величина
117
напряжения %i (в цепи земля — ДСМ2—Д2—%i) при-
кладывается к диоду ДСм2, последний запирается и не
пропускает ток намагничивания в обмотку wy2. Таким
образом, в полупериоде ППР1—ППР2 сердечник //
остается в состоянии +ВГ. В следующем полупериоде
tfbixod
ООУ1 fWPl ППР2
ППУ7 ППР1 linPZ
thT. I 1
xlyt ЛПП
• ' ■ ,
\lpi
й=0 4=0 1
a=1 —A=1 ~~
Рис. 5-12. Схема последовательного включения повтори-
телей.
ППР2 сердечник перемагничивается из +ВГ в +Вт,
а после насыщения все напряжение аР2 практически при-
ходится на нагрузку: .4 = 1.
а=0. При отсутствии на входе сигнала (ис=0), в по-
лупериод ППУ1 сердечник перемагничивается в состоя-
ние —Вг, в следующий полупериод ППР1 сердечник пе-
ремагничивается из —Вг в +Вт. Сопротивление катуш-
ки wv\ велико, ток мал, и диод ДСм2 остается открытым.
По обмотке шУ2 сердечник перемагничивается в —Вг и
далее в полупериод ППР2 из —Вг в +Вт. При этом все
напряжение иР2 практически считается приложенным
к катушке, т. е. Ин=0, А=0.
Блок питания
Для получения требуемых напряжений: управления,
рабочего и смещения, отличающихся по величине
и фазе, применяется специальный трансформатор
118
(рис. 5-13) с заземленной средней точкой вторичной об-
мотки. Из схемы видно, что напряжение щх совпадает
по фазе с %2, но сдвинуто по фазе по отношению к на-
пряжению Uy\.
В блоке питания (в цепях питания обмоток управ-
ления) установлен дроссель с сердечником из материа-
ла с ППГ. Назначение дросселя — ограничение значе-
ния тока управления в тех случаях, когда требуется,
чтобы в течение всего полупериода управления ток
управления был равен нулю. В течение полупериода
управления сердечник дросселя вначале намагничивает-
ся и эквивалентное сопротивление его обмотки велико,
что ограничивает значение тока управления. При угле
насыщения дросселя бх эквивалентное сопротивление
падает до нуля и снимается ограничение тока.
Рассмотрим, к примеру, рис 5-12, случай а=1. В по-
лупериод ППР1—ППУ2 ток /р вначале больше тока
подмагничивания. При этом в пределах угла 0—6j диод
Дсм2 не запирается и в обмотке управления протекает
ток. В данном случае сердечник // перемагничивается
частично из + ВГ в + В\(В\<ВГ), и в дальнейшем в по-
лупериоде ППР2 выходное напряжение ин получается
меньше требуемого.
При наличии дросселя это явление не -наблюдается,
так как при изменении синусоидального напряжения
в пределах угла 0—бх цепь обмотки управления прак-
тически запирается.
Рис. 5-13. Схема блока питания и кривая тока
в цепи управления.
119
5-8. ПОСТРОЕНИЕ СЕРИИ ЭЛЕМЕНТОВ НА ОСНОВЕ
ПОВТОРИТЕЛЯ
Рассмотрим метод построения наиболее распростра-
ненных логических элементов:
П—'повторитель (см. рис. 5-11).
входы
ИЛИ; /?=а+Ь+с
Рис. 5-14. Схемы дроссельных элементов
ИЛИ, И.
ИЛИ выполняется на основе повторителя
(рис. 5-14,а), на входах а, 6, с устанавливаются разде-
лительные диоды. При наличии сигнала хотя бы на
одном из входов запирается диод смещения ДСм-
И — диоды смещения устанавливаются на каждом
входе (рис. 5-14,6). При наличии только лишь одного
входа, например. а=1, запирается диод смещения ДСмь
но при этом перемагничивание сердечника происходит
по диодам ДСм2 и Дсмз и выходное напряжение на на-
грузке равно нулю. Сигнал на выходе Д = 1 получается
только лишь при одновременном наличии импульсов
120
на всех трех входах, когда запираются все диоды сме-
щения.
Комбинированный элемент. Комбинирова-
нием расположения диодов входа и смещения реализу-
ют элементы для выполнения различных сложных функ-
St ч +исм
-и-
е о-
-м-
ций. Например, на рис.
5-15 приведена схема эле-
мента, выполняющего
функцию
А = (a + b) {c+d)e.
НЕ — инвертор вы-
полняется по схеме рис.
5-16 (без входа по диоду
Дз)1 При отсутствии вхо-
да Ъ в полупериод управ-
ления сердечник остается
в состоянии 1, напряже-
ние на выходе Uu велико,
т. е. Л = 1. При нали-
чии сигнала Ь напряжением иь по цепи земля —
Дсм—Щ—Д2 сердечник перемагничивается в полупериод
управления. Напряжение на выходе мало, т. е. Л = 0.
Формула элемента А = Ь.
Рис. 5-15. Схема комбинированно-
го дроссельного элемента.
-Уем "£i
ИМПЛИКДЦИЯ; Д=а+Ь
Рис. 5-16. Схемы элементов НЕ,
ИМПЛИКАЦИЯ.
Импликация. На основе элемента НЕ выполня-
ют элемент, формула которого
А = а + Ь.
Для этого к схеме (рис. 5-16) добавляют диод Д3 по
входу а. При а=1; Ь = 0 элемент работает как повтори-
тель.
g Ф. А. Ступель.
121
Равнозначность. Выполняется как импликация
с двумя входами и двумя цепями смещения (рис. 5-17).
Формула элемента
A = ab + ab
Рис. 5-17. Схема элемента РАВНО-
ЗНАЧНОСТЬ.
ЗАПРЕТ. В этом элементе выход А = 1 получается
только при наличии импульса входа и отсутствии им-
пульса ЗАПРЕТ. Формула элемента
А=а-Ь.
Элемент может «быть получен сочетанием двух элемен-
тов И, НЕ. При построении специализированных эле-
ментов задачу решают на одной ячейке добавлением не-
которого количества диодов и сопротивлений (рис. 5-18).
В зависимости от режима работы элемента ток в цепи
иу2
Рис. 5-18. Схема элемента ЗАПРЕТ,
122
обмоток управления определяется напряжением иу\ или
иу2. Параметры обмотки управления и сопротивления
Ri и R2 выбраны так, что неуправляемый ток по цепи
земля — иу\ — R\—wY — R2 — Щ2— земля мал и весьма
незначительно перемагничивает сердечник в полупериод
управления. Таким образом, действие этого тока не ска-
зывается на напряжении выхо-| ^
1) а = 0; Ь = 0. Диод смеще- Хь
НИЯ Дсм открыт И Пропускает Рис. 5-19. Структурная схе-
ТОК В Обратном направлении. ма Динамического триггера.
По цепи земля — Дси—Дъ—
Щ—R2—Uy2 — земля протекает ток перемагничивания,
которым сердечник переводится из 1 в 0: Л=0.
2) а=1; Ь = 0. Импульсом входа иа запирается диод
Дом- Сердечник не перемагничивается по цепи от на-
пряжения %ь По цепи от напряжения иу2 также тока
нет, так как эта цепь разомкнута по входу Ь. На выходе
Л = 1.
3) а=1; 6 = 1. Диод Дсм запирается импульсом вхо-
да. Перемагничивание происходит по цепи земля —
Uy\ — Ri — wY — Д3 — ив — земля.
При параллельном подключении к диоду Д\ несколь-
ких диодов входа получается элемент ЗАПРЕТ с не-
сколькими входами
Динамический триггер можно построить сочета-
нием двух элементов. Имеется несколько вариантов по-
строения. На рис. 5-19 показана схема динамического
триггера, составленная из элементов ИЛИ и ЗАПРЕТ.
5-9. СРАВНИТЕЛЬНАЯ ОЦЕНКА СХЕМ С ИНВЕРТОРАМИ
И ПОВТОРИТЕЛЯМИ
Для построения систем автоматического управления
требуется серия магнитных логических элементов, вы-
полняющих различные функции. Как показано в § 5-5,
на основе одного стандартного элемента — инвертора —
возможно построить такую серию.
Такая серия, состоящая из однотипных элементов,
да элемента.
Рассмотрим следующие
жимы работы:
А = {а + с+й)Ъ.
123
весьма удобна для производства, несмотря на то, что
для выполнения некоторых функций требуется несколь-
ко инверторов.
Особенностью серии, построенной на основе повтори-
теля, является возможность создания элемента со слож-
ной функцией в одном элементе, содержащем сердечник
и большое число диодов.
Так при построении элемента И с тремя входами тре-
буются в серии с инверторами 4 сердечника и 7 диодов,
а в серии с повторителями — 1 сердечник и 10 диодов.
Серия с инверторами применяется обычно при по-
строении элементов с частотой питания несколько кило-
герц и выше. В данном случае можно выполнять ячейки
с ферритовыми сердечниками, стоимость которых неве-
лика. Серия с повторителями применяется при низких
частотах, например 50 гц, когда требуется выполнять
ячейки с ленточными сердечниками, стоимость которых
во много раз превышает стоимость ферритовых.
В данном случае экономией в числе сердечников
окупаются повышенные расходы, связанные с изготов-
лением нестандартных элементов.
ГЛАВА ШЕСТАЯ
УСТРОЙСТВА, ВЫПОЛНЕННЫЕ НА ПРИНЦИПЕ
ИНТЕГРИРОВАНИЯ ИМПУЛЬСОВ НАПРЯЖЕНИЯ
Магнитные материалы с ППГ обладают следующи-
ми свойствами:
1) долговременным запоминанием значения индук-
ции в любой точке остаточного намагничивания сердеч-
ника;
2) суммирующим действием, т. е. значение остаточ-
ной индукции суммируется при дискретном приращении
потока;
3) в области насыщенного участка петля гистерезиса
имеет определенный наклон, значительно меньший, чем
у обычных магнитных материалов.
С учетом указанных свойств из материалов с ППГ
выполняют различные устройства, основанные на инте-
грировании импульсов напряжения, что осуществляется
суммированием дискретных приращений потока в сер-
дечнике до момента его насыщения.
124
Получили широкое распространение магнитные
счетчики — делители частоты, состоящие из ряда после-
довательно включенных суммирующих элементов. Ко-
эффициент пересчета п каждого из элементов соответ-
ствует числу .импульсов, необходимых для намагничи-
вания сердечника до насыщения. Практически з-начение
п принимается в пределах от 5 до 15. Считывание «со-
держания» сердечника производится заключительным
импульсом, переводящим сердечник из состояния 1
в исходное — 0.
Каскадным включением суммирующих элементов со-
ставляют длинные делительные цепи. В начале этой
цепи частота питания сердечника может достигать зна-
чения 100 кгц, а в конце цепи счетчик работает надеж-
но, без потери точности, при 'поступлении в крайний эле-
мент одного импульса й час или в день. Такие счетчики
применяются в устройствах, где требуется отсчет вре-
мени от часов до нескольких суток, а также в качестве
делителей частоты в разных устройствах автоматики и
измерительной техники.
Суммирующие элементы применяются также в систе-
мах автоматики в качестве устройств выдержки време-
ни порядка 0,5—20 сек, требуемой для управления ра-
ботой отдельных узлов системы в определенной по вре-
мени последовательности. К устройствам выдержки вре-
мени не предъявляют жестких требований в отношении
точности их работы, допускают погрешность во времени
в пределах от 1 до 10%. Поэтому такие элементы мож-
но выполнять по более простой схеме (на одном сердеч-
нике), не требующей специальных источников питания.
Так часто используют в качестве источника силовую
цепь с частотой 50 гц. При этом в одном сердечнике
требуется осуществить суммирование большого числа
импульсов. Например, при построении элемента вы-
держки времени на 10 сек с частотой питания 50 гц тре-
буется суммирование 500 импульсов. Практически же
не строят элементов с суммированием числа импульсов
больше 15—20, так как при этом приращение индукции
от отдельного импульса становится соизмеримым с раз-
ностью Вт—Вг, что приводит к нечеткой работе устрой-
ства.
В таких случаях используется принцип цикличе-
ского перемагничивания сердечника: на вход катуш-
125
кй пбдаютсй пбслёдбвательно намагничивающий и раз-
магничивающий импульсы напряжения. Если намагни-
чивающий импульс по своему значению больше размаг-
ничивающего, то происходит перемагничивание по ча-
стным петлям гистерезиса и сердечник постепенно пере-
магничивается до состояния насыщения +Вт. За каж-
дый цикл сердечник перемагничивается на величину
т
bB=^[u+(t)-u-(t)]dt. (6-1)
О
Тогда число циклов, за которое сердечник перемагничи-
вается до насыщения,
* = W-. (6-2)
Число п в зависимости от размеров сердечника и тре-
буемой стабильности может быть принято от 50 до 1 ООО.
Рассмотрим работу обоих видов элементов.
6-1. ЭЛЕМЕНТЫ, ПОСТРОЕННЫЕ НА ДИСКРЕТНОМ
ПРИРАЩЕНИИ ПОТОКА
Принцип действия. В качестве устройств, работаю-
щих по принципу приращения потока, применяются фер-
ротранзисторные элементы (рис. 6-1,а). Примем за на-
чальное состояние сердечника —Вг. На входную обмот-
ку сердечника подается серия одинаковых импульсов
напряжения (рис. 6-1,6) с активной площадью, соответ-
ствующей перемагничиванию сердечника из а в точку Ь\
(рис. 6-2).
АВ' = ^7.Н'- (6-3)
0
По окончании импульса сердечник переходит из со-
стояния Ь\ в а\, т. е. значение индукции несколько умень-
шается, на величину A50=ABBi—А5аь При этом в ба-
зовой и выходной обмотках элемента возникает напря-
жение помех
где /З.ф — время заднего фронта импульса.
126
Значение Un невелико
un<uCMy
и транзистор остается запертым.
Следующим импульсом сердечник переводится из
а,\ в b2i а затем индукция снижается до значения аг,
выход
а)
Импульс возврата'
"л
Г
Входные импулосо!
б)
Рис. 6-1. Схема и диаграмма работы
суммирующего элемента.
и т. д. Последний из серии импульсов переводит сердеч-
ник из an_i(Bi) в dy после чего резко уменьшается экви-
валентное сопротивление обмотки wu ток увеличивается
и сердечник переводится в состояние +Вт(С). По
окончании этого, последнего, импульса значение индук-
ции изменяется от с до е. При этом в базовой обмотке
возникает напряжение, большее напряжения смещения
U* = -qw6 Вт~Вг . (6-4)
*з.ф
Транзистор открывается и по обмотке обратной связи
полностью перемагничивает сердечник в состояние —Вт.
Одновременно с возвратом сердечника в исходное со-
127
стояние —Вг наводится напряжение U2 в выходной
обмотке w2 и ток этой обмотки передается на выход
к другому элементу.
Выбор параметров элемента производится с учетом
ряда условий. Рассмотрим, к примеру, элемент для
суммирования десяти импуль-
сов, т. е. импульс в выходной
обмотке должен получиться
после каждой порции из деся-
ти импульсов, поступающих на
©ход элемента. Каждый из им-
пульсов входа, например тре-
тий, переводит сердечник из со-
стояния а2 в 63, после чего сер-
дечник остается в аз, т. е. для
перемагничивания использует-
ся не весь импульс напряже-
ния, а имеются потери импуль-
са. Для материалов с ППГ эта
потеря составляет в среднем
5% от полного импульса, т. е.
площадь аз&за'з = 0,05 площади
а2Ъ2Ъъа'ъ. Далее для стабильной работы элемента прини-
мают импульс напряжения таким, чтобы сердечник после
девяти импульсов перемагнитился в состояние ап-\(В\),
причем
В! = 0,95ВГ.
В этом случае десятый импульс надежно переводит
сердечник в состояние d, а затем в + Вт(с).
С учетом приведенных выше условий определяют
значение импульса напряжения
и
- 2Brqw1
6-2. Полная и частные
петли гистерезиса.
udt = 1,45-
9,5
(6-5)
Коэффициентом 1,45 учитываются потери площади
петли гистерезиса при десяти импульсах.
Формирователь. Входные импульсы суммирующего
элемента (рис. 6-1,а) должны иметь постоянное значе-
ние
д/
J и dt = const,
о
128
6-3. Схема формировате-
ля импульсов.
В схемах делителей частоты питание суммирующих
элементов осуществляется от элемента — формирова-
теля, выдающего импульсы постоянного значения.
Формирователь может быть построен в виде ферро-
транзисторной ячейки с дополнительным транзистором
Tpl на входе (рис. 6-3). С
помощью такого элемента
производится формирование
выходного импульса, т. е. не-
зависимо от формы входно-
го сигнала получают выход-
ной сигнал, имеющий опре-
деленную форму, величину
амплитуды и площадь.
При подаче из сети им-
пульса на вход транзистора
последний -переводится в
ключевой режим и своим
коллекторным током пере-
магничивает сердечник из состояния —Вг в +Вт. По
окончании импульса тока при снижении индукции от
+ Вт до +ВГ наведенным в базовой обмотке транзисто-
ра Тр2 напряжением он переводится в ключевой режим
и по обмотке обратной связи перемагкичивает сердечник
из состояния +ВГ в —Вт. При этом с выходной обмот-
ки w2 выдается импульс напряжения 6^.
Формирующее действие определяется тем, что при
колебаниях значения коллекторного напряжения тран-
зистора Тр2 соответственно изменяется и время пере-
магничивания сердечника: с уменьшением тока коллек-
тора уменьшается амплитуда выходного напряжения,
но при этом увеличивается длительность импульса и,
наоборот, с увеличением тока коллектора увеличивается
амплитуда напряжения, но уменьшается длительность
импульса. В результате значение импульса выходного
напряжения остается практически постоянным.
Для подгонки величины выходного импульса до
требуемой служит сопротивление Ru шунтирующее
обмотку обратной связи: изменением R\ меняется сте-
пень форсировки перемагничивания сердечника. Отме-
тим, что в схемах делителей частоты, состоящих из ряда
последовательно включенных суммирующих элементов,
каждый из них также должен обладать формирующими
129
свойствами, так как его выходной импульс подается на
вход последующего без промежуточного формирова-
теля.
Суммирующий элемент, схема которого изображена
на рис. 6-1, обладает формирующими свойствами. Регу-
лирование значения выходного импульса производится
шунтирующим сопротивлением R\, причем данные
входной обмотки выбирают из условия частичного
перемагничивания сердечника импульсом напряжения.
Примерная структурная схема делителя частоты при-
ведена на рис. 6-4. Питание схемы осуществляется от
f/W3
LJji-J L-J1_TLJ
ТО
Трг
Сброс
Рис. 6-4. Структурная схема делителя ча-
стоты.
генератора частоты через ключ — элемент И, далее
следует формирователь Ф и делители на 10. Управление
ключом осуществляется триггером Тр2. При импульсе
«пуск» триггер перебрасывается в состояние, при кото-
ром подается потенциал на ключ. По окончании счета,
если требуется остановить схему, подается импульс
«сброс» и ключ запирается.
6-2. ЭЛЕМЕНТЫ, ПОСТРОЕННЫЕ НА ПРИНЦИПЕ
ЦИКЛИЧЕСКОГО ПЕРЕМАГНИЧИВАНИЯ
СЕРДЕЧНИКА
В этих элементах на входную катушку подаются
последовательно положительные и отрицательные
импульсы напряжений, причем значение первых не-
сколько выше вторых. Такие элементы выполняют для
получения выдержки времени.
В виде примера рассмотрим элемент, построенный
по схеме рис. 6-5. Питание обмотки осуществляется от
сети переменного тока. Запуск устройства осуществляет-
ся ключом К — контактным или бесконтактным.
Ключ К разомкнут. В проводящем полупериоде
транзистор открывается, так как на его базе подведено
130
отрицательное напряжение смещения. Коллекторным
током сердечник переводится в состояние —Вг.
Ключ К замкнут. В положительном для диода
Дх полупериоде сердечник подмагничивается в положи-
тельном направлении. Цена импульса напряжения по-
ложительного знака должна быть больше цены импульса
отрицательного. Для этого принимают величину сопро-
тивления R\ меньше R2-
выход
Рис. 6-5. Схема элемента с цикли-
ческим перемагничиванием сердеч-
ника.
Изменение индукции определяется с учетом значе-
ний импульсов напряжения. В положительный полупе-
риод ток в цепи ключа перемагничивает сердечник на
величину АД!
т/2
[ (Um sin Ы — /0/?j) dt = qw-&В19
(6-6)
где ток
w
(6-7)
При низких частотах источника питания принимают
Н0 равным значению Яс, полученному для данной ча-
стоты. В отрицательный полупериод ток в цепи транзи*
стора размагничивает сердечник на величину ДВ2;
т/2
J (Um$m<ut — /9R9)dt = qw-bBz.
(6-8)
131
Тогда изменение индукции за период
ДВ^Д^ —ДДЯ. (6-9)
Перемагничивание происходит по частным цикла. Из
(6-6), (6-7), (6-8) имеем измгнение индукции за период:
ЬВ0=пН°1 {R\-Rl). (6-10)
Полное перемагничивание происходит за п периодов:
„_2£r 2Br<ow*d ,~1П
Выдержка времени
(6-12)
Таким образом, выдержка времени не зависит от
напряжения сети и определяется параметрами устрой-
ства, а также разностью сопротивлений R2 и Ri.
Последним импульсом положительного перемагничи-
вания сердечник переводится в состояние +ВГу а затем
+ Вт.
При этом эквивалентное сопротивление 7?э обмотки
становится равным нулю и ток в цепи ключа равен:
и
Яр + Яд + ^1 '
где /?р — сопротивление рабочей обмотки, RR — диода.
При небольших значениях сопротивления обмотки и
диода все напряжение сети приходится на сопротивле-
ние Ru т. е. напряжение на выходе равно напряжению
сети.
Для устранения качаний устройства, определяемых
размагничивающим действием коллекторного тока
транзистора, последний запирается положительным на-
пряжением конденсатора. После размыкания ключа
конденсатор быстро разряжается, транзистор отпирает-
ся и переводит устройство в исходное положение —Вг.
Данные выполненного устройства: сердечник—мате-
132
риал 65НП, 35X25X10; о; =6500 (проволока ПЭЛШО
диаметром 0,1 мм); /?i = 1800 ом; /?2=2000 ом;
#з=ЮО0 ом; 7?4=Ю ком; С=1 мкф; £/=15 в; / = 50 гц;
Uq = —1,5 в; транзистор П-14; выдержка времени 12 сек.
В [Л. 5] приводится описание и расчет элемента вы-
держки времени, работающего по принципу цикличе-
ского перемагничивания. Элемент исполнен в виде маг-
нитного усилителя с внутренней положительной обрат-
ной связью и с добавочной короткозамкнутой ка-
тушкой.
Пределы выдержки времени 0,5—10 сек.
ЛИТЕРАТУРА
1. Мартынов Е. М., Бесконтактные переключающие устрой-
ства, Госэнергоиздат, 1961.
2. Васильева Н. П., Гашковец И., Логические элементы
в промышленной автоматике, Госэнергоиздат, 1962.
3. Меркулов Н. И., Павликов А. А., Федоров А. С,
Запоминающие устройства БЭСМ-2, Физматгиз, 1962.
4. Авдеенкова Л. М-> Корольков Н. В., Анализ работы
и расчет магнитных ферродиодных элементов, Вычислительный
центр АН СССР, 1962.
5. Билик Р. В.. Жожикашвили Е. А., Митюш-
к и н К. Г., П р а н г и ш в и л и И. В., Бесконтактные элементы и
системы телемеханики с временным разделением сигналов, Изд-во
«Наука», 1964.
6. Лосев Д. П., П о л и с а р о в Г. Л., Филимонов Ю. П.,
Элементы и узлы бесконтактных телемеханических устройств, Суд-
промгиз, 1962.
7. Г у р в и ч Е. И., Щукин А. Б., Ферротранзисторные эле-
менты, Госэнергоиздат, 1963.
8. А р т ю х и н А. Я., X а н и н В. 3., Однотактные магнитные
регистры сдвига, «Автоматика и телемеханика», 1958, № 10.
9. В а с и л ь е в а Н. П., Прохоров Н. Л., Магнитные логи-
ческие элементы для схем автоматического управления, «Автома-
тика и телемеханика», 1959, № Ii2.
Ю.Белявский В. Ф., Поливанов К. М., О динамиче-
ских характеристиках ферромагнитных материалов, Научные до-
клады высшей школы, «Электромеханика и автоматика», 1959, № 2.
11. Романов А. В., Работа однотактных магнитных регистров
сдвига с одновременным перемагничиванием дополнительных сер-
дечников, «Электросвязь», 1959, № 10.
12. Пирогов А. И., Влияние температуры на процесс пере-
магничивания ферритовых сердечников, «Ферриты», сб. АН БССР,
Минск, 1960.
13. Сухов А. Н., Ферротранзисторные элементы для электрон-
ных вычислительных машин, ЦИТЭИ, «Вычислительная техника»,
1960, вып. 9.
14. Бабаев О. Б., О бесконтактных логических элементах для
промышленной автоматики, «Вестник электропромышленности»,
1962, № 1Г.
15. Еремеев И. С, Универсальные магнитные логические
элементы автоматики, «Приборостроение», tJ962, Яг 12,
134
16. Константинов В. П., Ушаков Е. В., Филип-
пов Е. Н., Конструкция и основные свойства ферритовых матриц,
Цифровая техника и вычислительные устройства, Изд-во АН СССР,
1962, сб. № 3.
17. Каминский В. Н., Филиппов Е. Н.,* Отбор магнит-
ных сердечников для матричных запоминающих устройств, «Цифро-
вая техника и вычислительные устройства», Изд-во АН СССР, 1962,
сб. N° 3.
18. Каминский В. Н., Шидловский Р. П., Устройство
постоянной памяти специализированной машины, «Цифровая техни-
ка и вычислительные устройства», Изд-во АН СССР, 1963, сб. № 3.
19. Митюшкин К. Г., Бесконтактные элементы на магнит-
ных сердечниках из стали, «Автоматика и телемеханика», 1961, № 3.
20. М а т о р и н а В. С., Седых О. А., Анализ работы и расчет
элемента выдержки времени с короткозамкнутым витком, «Авто-
матика и телемеханика», 1962, № 1.
21. Фр имен, Магнитный счетчик, работающий на принципе
дискретных приращений потока, «Электроника», 1962, № 24.
22. Юф еров а Е. К., Элементы цифровых устройств вычисли-
тельной техники, выполненные на принципе интегрирования импуль-
сов напряжения, «Автоматика и телемеханика», 1960, № 8.
23. Б а р д и ж В. В., Анализ статических и импульсных пара-
метров ферритовых сердечников с ППГ; «Автоматика и телемеха-
ника», 1963, №11.
24. Бард и ж В. В., Бережной В. Ф., Мохель Л. Л.,
Сметанина В. М., Статические и импульсные свойства микрон-
ных сердечников с ППГ, Сборник статей, Изд-во АН СССР, 1961.
25. Магнитные элементы цифровой техники, Под редакцией
А. Мейергофа, изд-во «Энергия», 1964.
26. К р а й з м е р Л. П., Запоминающие устройства на ферро-
магнитных материалах, изд-во «Энергия», 1964.
27. Ферриты и бесконтактные элементы, Сборник АН БССР,
Минск, 1963.
28. Пирогов А. И., Ш а м а е в Ю. М., Магнитные сердечники
с прямоугольной петлей гистерезиса, изд-во «Энергия», 1964.
29. Gotz Е., Binare Schaltungsalgebra fur ruhenden Steuerun-
gen, AEG Mitteilungen, 1960, № 1/2.
30. H a n d r i e s G. E., Long Time Delays from a Single Magne-
tic Storage Core, Communication and Electronics, 1959, November.
31. Gianola U. F., Integrated Magnetic Circuits for Synchro-
nous Sequental Logic Machine, The Bell System Technical Journal,
1960, March, № 2.
32. Freeman J. D., The Tires and Timer, Astronautic, 1960,
June.
33. Wei z R., Brown D., Low Flux Density Ferrit Memory,
J. Appl. Phys, 1962, № 4.
„БИБЛИОТЕКА ПО АВТОМАТИКЕ"
ГОТОВЯТСЯ К ПЕЧАТИ
Тищенко Я. М., Машлыкин В. Г., Динисторы и тиристо-
ры и их применение в автоматике
Павлов В. В., Полупроводниковые усилители малых сиг-
налов постоянного тока для систем промышленной
автоматики
Щипилло 5. Я., Булатов В. Г., Расчет полупроводнико-
вых систем управления вентильными преобразовате-
лями
Арутюнов О. С, Датчики состава и свойств вещества
Лемберг М. Д., Релейные устройства пневмоавтоматики
Литинский С. А., Автоматическое вождение самоходных
машин
Гачинский Э. Е.у Фицнер Л. Я., Оптимизация простран-
ственного распределения
Иванчук Б. Я., Липман Р. Л., Рувинов Б. #., Электро-
приводы с полупроводниковым управлением. Тири-
сторные управления в схемах электропривода
Куликовский Л. Ф., Зарипов М. Ф., Преобразователи пе-
ремещения с распределенными параметрами
Венчковский Л. Б., Помехи в каналах телемеханики
Куликов С. 5., Управляемые мультивибраторы на тран-
зисторах
Касаткин Л. С, Автоматическая обработка сигналов *га-~
стотных датчиков
Турченков В. Я., Корректирующие цепи следящих си-
стем на полупроводниковых приборах
Васильев Л. Я., Анисимов А. С, Оптимальные процессы
в микроэлектроприводах
Булыга Л. В., Полупроводниковые теплоэлектрические
вакууметры
Кщнельсон О. Г., Эдельштейн Л. С, Магнитная под-
веска в приборостроении