/









































































































































































































































































































































































































Автор: Ивашкин В.В.
Теги: техника средств транспорта механика космонавтика космическая техника небесная механика
Год: 1975



Текст
В.В. Ивашкин
ОПТИМИЗАЦИЯ
КОСМИЧЕСКИХ
МАНЕВРОВ
МЕХАНИКА
КОСМИЧЕСКОГО
ПОЛЕТА
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1975
В. В. ИВАШКИН
ОПТИМИЗАЦИЯ
КОСМИЧЕСКИХ
МАНЕВРОВ
при ограничениях
на расстояния
до планет
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1975
6 Т 6
И 24
УДК G29.19
Оптимизация космических маневров при ограничениях на рас-
стояния до планет. В. В. Ивашкин, Издательство «Наука»,
Главная редакция физико-математической литературы, М., 1975,
392 стр.
Исследуются свойства оптимальных маневров космического
аппарата с двигателем большой тяги.
Рассмотрены необходимые условия оптимальности маневриро-
вания при перелете между фиксированными орбитами за заданное
время. Для движения в ньютоновском поле одной планеты дана
классификация и найдены все оптимальные импульсные переходы
между компланарными орбитами со свободной взаимной ориента-
цией и свободным временем перелета. Рассмотрен метод численного
расчета, примененный для оптимизации траекторий в случае фик-
сированной ориентации заданных орбит. Дан параметрический ана-
лиз траекторий пространственного выведения космического аппа-
рата на стационарную орбиту спутника Земли с использованием
влияния Луны.
Книга может быть полезна для научных работников и инже-
неров в области динамики космического полета, а также для сту-
дентов и аспирантов, интересующихся механикой полета и метода-
ми оптимизации.
Илл. 188. Библ. 124 назв.
Вячеслав Васильевич Ивашкин
Оптимизация космических маневров
при ограничениях на расстояния до планет
М., 1975 г-, 302 стр. с и л л.
Редактор А. А. Могилевский
Техн, редактор В. Н. Кондакова
Корректоры Г. В. Подвольская, Н. Б. Румянцева
Сдано в набор 25/Ш 1975 г- Подписано к печати 11/IX 1975 г- Бумага 84хЮ8*/зв
Физ. печ. л. 12,25. Усл. печ. л. 20,58. Уч.-изд. л. 19,74. Тираж 2000 экз.
Т-13179. Цена книги 2 р. 21 к. Заказ № 1959
Издательство «Наука»
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
2-я типография издательства «Наука», Москва, Шубинский пер., 10
Т/Г 31901—129 © Главная редакция
И тк' 169-75 физико-математической литературы
U0o(UZ)-/0 издательства «Наука», 1975.
ОГЛАВЛЕНИЕ
Предисловие............................................. 9
Глава I. Необходимые условия оптимальности косми-
ческого маневра при ограничениях на рассто-
яния до небесных тел................................... 13
§ 1. Движение в произвольном гравитационном поле 14
1.1. Управление с помощью ограниченной тяги (14).
1.2. Импульсная тяга (32).
§ 2. Замена переменных в задаче оптимального манев-
рирования ............................................... 47
2.1. Точечное преобразование координат (47). 2.2. Пре-
образование, не зависящее от времени (52). 2.3. Неза-
висимость радиуса-вектора или вектора скорости от не-
которой переменной хг (52). 2.4. Поворот декартовой
системы координат (53). 2.5. Переход к другому началу
координат. Особенности оптимизации траекторий при рас-
чете по сферам действия (54). 2.6. Примеры криволи-
нейного преобразования координат (62).
§ 3. Случай центрального ньютоновского гравитацион-
ного поля................................................. 70
3.1. Особенности оптимального движения для ограничен-
ной тяги (70). 3.2. Оптимальные траектории импульс-
ного перехода (<4). 3.3. Оптимальное изменение накло-
нения и пери- и аноцентрического расстояния орбиты (9о)
3.4. Оптимальный малый поворот плоскости орбиты (93).
3.5. Случай радиальной ориентации тяги (95). 3.6. Плос-
кий случай оптимального импульсного перехода (99).
§ 4. Приложение. О необходимых условиях оптималь-
ности управления при ограничениях на фазовые
координаты ............................................... Ю7
4.1. Условия оптимальности А. Я. Дубовицкого —
А. А. Милютина (108). 4.2. Некоторые модификации
условий оптимальности (>11). 4.3. Условия оптималь-
ности с непрерывной сопряженной функцией (117).
4.4. «Смешанная» форма условий оптимальности (121).
§ 5. Замечания........................................... 125
Глава II. Оптимальные импульсные траектории перехо-
дов между компланарными свободно-ориенти-
рованными орбитами при ограничениях на
расстояние от центра тяготения .............................. 127
§ 1. Структура оптимальных траекторий рассматри-
ваемого типа............................................. 128
1.1. Постановка задачи. Классификация орбит (128).
1.2. Структура и классификация оптимальных траекторий
(132). 1.3. Характеристика базис-вектора (134). 1.4.
Способ оптимизации (137).
6
ОГЛАВЛЕНИЙ
§ 2. Оптимальные переходы между эллиптическими
орбитами, лежащими внутри кольца...................... 137
2.1. Двухимпульсные апсидальные переходы (138). 2.2.
Анализ многоимпульсиых апсидальных переходов (143).
2.3. Изменение сопряженных функций на оптимальных
траекториях (147)
§ 3. Плоскость скоростей............................... 132
3.1. Кривая rK = const (152). 3.2. Кривая = cons'
(154). 3.3. Фазовые траектории, соответствующие сооб-
щению импульсов (156). 3.4. Связь изолиний GE Ра и
ее Р- (152). 3.5. Разбиение множествг1 начальных
данных траекториями ф|а = Ф;ак> 4>i~ = Фг^к (161).
3.6. Другие способы построения множеств Мj, j = 1,3,
5, 7 (16S)
§ 4. Оптимальные переходы в случае, когда одна из
исходных орбит лежит в кольце......................... 172
4.1. Оптимальные траектории, начинающиеся с внешней
границы Г (173). 4.2. Оптимальные траектории, начи-
нающиеся с внутренней границы у (183).
§ 5. Оптимальные переходы в случае, когда обе исход-
ные орбиты пересекают границы кольца.................. 195
5.1. Случай расположения граничных точек на внешней
границе (196). 5.2. Случай расположения граничных
точек на внутренней границе (211). 5.3. Случай распо-
ложения граничных точек на разных границах кольца
(221).
§ 6. Пары энергетически эквивалентных переходов . 231
§ 7. Выводы............................................ 236
Гл аваШ. Доказательство импульсного характера опти-
мальных траекторий переходов между компла-
нарными, свободно ориентированными орбита-
ми при ограничениях на расстояние до центра
тяготения.................................................. 238
§ 1. Введение ограничений на активные точки траек-
тории перехода (вспомогательная задача) .... 238
§ 2. Некоторые свойства оптимальных переходов рас-
сматриваемого класса.................................. 243
§ 3. О достаточном условии оптимальности траектории
в замкнутом множестве фазового пространства . . 247
§ 4. Оптимальный переход между орбитами типа I, не
пересекающими заданных границ......................... 252
4.1. Анализ возможного характера оптимальной траекто-
рии (252). 4.2. Анализ траекторий с монотонной функ-
цией ra (w) (253). 4.3. Анализ траекторий с немонотон-
ной функцией та (ш) (262).
§ 5. Оптимальный переход между орбитами типа III,
пересекающими внешнюю границу кольца . . . 264
5.1. Конкретизация ограничений на фазовые координаты
и управление (264). 5.2. Оптимизация на множестве
траекторий с монотонной функцией r^w) (265). 5.3.
Случай немонотонной функции rn(w) (273).
ОГЛАВЛЕНИЕ
7
§ 6. Оптимальные траектории перехода между орбитами
типа II, пересекающими внутреннюю границу кольца
6.1. Ограничения на фазовые координаты и управление
(274) 6.2. Случай переходов с монотонной функцией ra(w)
(275). 6.3. Случай, когда функция ra(w) имеет внутрен-
ний максимум (279).
§ 7. Оптимальный переход между орбитами типа IV,
пересекающими обе границы кольца..................
7.1. Характеристика допустимого множества траекторий
(280). 7.2. Оптимизация траекторий (281). 7.3. Предель-
ные случаи переходов (285).
§ 8. Остальные случаи переходов во вспомогательной
задаче ...........................................
8.1. Оптимальные переходы типа Q I (Q = II, III) (290).
8.2. Оптимальные переходы типа Q IV (Q — I, II. III)
(292). 8.3. Оптимальные переходы типа II III (S00)
§ 9. Оптимальные траектории переходов в рамках ос-
новной задачи ....................................
§ 10. Выводы.......................................
Глава IV. Оптимальные переходы между компланарны-
ми орбитами в случае противоположных на-
правлений движения по ним..............................
§ 1. Некоторые свойства оптимальных переходов во
вспомогательной задаче............................
§ 2. Случаи, когда структура оптимальной траектории
та же, что и при прямом движении по исходным
орбитам............................................
§ 3. Однозначно определяемые оптимальные решения
3.1. Оптимальные переходы типа II II (316). 3-2. Оп-
тимальные переходы типа II I (318). 3.3. Оптимальный
переход типа I I (322).
§ 4. Неоднозначно определяемые переходы............
4.1. Оптимальные переходы типа III I (323). 4.2. Опти-
мальные переходы типа III III (324).
§ 5. Оптимальные траектории основной задачи . . .
§ 6. Выводы........................................
Г л а в а V. Численное определение оптимальных импульс-
ных переходов между фиксированными орби-
тами ..................................................
§ 1. Метод численного расчета, основанный на необхо-
димых условиях оптимальности ......................
§ 2. Пример численных расчетов оптимальных импуль-
сных переходов между фиксированными орбитами
2.1. Исходные данные (334). 2.2. Построение краевой
задачи (336). 2.3. Некоторые результаты численны^
расчетов (343). 2.4. Выводы (355).
274
280
289
302
307
309
310
311
316
323
327
328
330
330
334
ОГЛАВЛЕНИЕ
Г лав а VI. Анализ траекторий выведения КА на стацио-
нарную орбиту ИСЗ............................ 357
§ 1. Введение.................................... 357
§ 2. Характеристики выведения, осуществляемого в
иоле тяготения Земли......................... 359
§ 3. Качественный анализ задачи перехода при исполь-
зовании гравитационного поля Луны 364
§ 4. Основные характеристики траекторий выведения
при заданном положении Лупы......................... 370
§ 5. Влияние изменения элементов лунной орбиты и
выбора узла на характеристики перехода .... 374
§ 6. «Точный» расчет траекторий выведения КА на
геостационарную орбиту при близком облете Луны 376
6.1. Метод расчета траектории (376). 6.2. Результаты
расчетов. Сравнение с результатами приближенных рас-
четов (379).
§ 7. Выводы......................................... 381
Список обозначений...................................... 383
Литература.............................................. 386
ПРЕДИСЛОВИЕ
Теория оптимального маневрирования — составная
часть динамики полета космических аппаратов (КА). Она
важна для определения наивыгоднейших траекторий по-
лета КА, требующих минимальных энергетических затрат.
Эта теория находится на стыке практики космических ис-
следований, прикладной небесной механики, математичес-
кой теории оптимального управления. Практика полетов
ракет и космических аппаратов постоянно ставит перед
теорией оптимизации все новые задачи, причем некоторые
из них оказались настолько трудными, что до сих пор не
нашли полного решения. Результаты, полученные небес-
ной механикой, дают методы расчета и позволяют глубже
понять особенности движения КА. Это помогает проекти-
ровать и анализировать оптимальные траектории, строить
более простые модели движения, отражающие существен-
ные стороны движения КА. Кроме того, задача оптималь-
ного маневрирования, сформулированная с учетом прак-
тических ограничений и выбранной модели силового поля,
является математической задачей оптимального управле-
ния. Наоборот, выявление новых, часто неожиданных оп-
тимальных решений иногда позволяет предложить новую
схему полета КА, анализ свойств оптимальных траекторий
может выделить существенные факторы, влияющие на
энергетические затраты, и одновременно поможет отвлечь-
ся от несущественных (на некотором этапе анализа) фак-
торов.
Теория оптимальных движений ракет и космических
аппаратов развивалась параллельно с развитием ракетной
10
ПРЕДИСЛОВИЕ
техники. Так, еще в 1925 г. Хоман [1] предложил для пере-
лета между компланарными орбитами в кеплеровском поле
использовать эллипс, касающийся обеих орбит (так назы-
ваемый эллипс Хомана). Одпако полностью его место среди
оптимальных решений выявлено лишь недавно [2] — [б].
Теория оптимального маневрирования стала быстро раз-
виваться в послевоенное время. Это, например, работы
Д. Е. Охоцимского, Т. М. Энеева, В. А. Егорова, Дж. Лейтма,
па,А.Миеле, Д. Ф. Лоудена, не утратившие своего значения
до сих пор, и ряд других работ ([7] —[13] и т. д.). К настоя-
щему времени опубликовано несколько монографий ([14] —
[21] и др.), много статей по проблемам оптимального манев-
рирования.
В данной книге сделана попытка дать анализ еще слабо
изученной проблемы оптимизации маневрирования в слу-
чае, когда па движение КА влияют ограничения на рас-
стояния до планет. При отсутствии ограничений па расстоя-
ние до притягивающего центра оптимальными могут
быть траектории, проходящие через центр тяготения или
уходящие в бесконечность, так что некоторые параметры
движения претерпевают скачки [22], [23]. Ввиду данной
специфики материала остался нерассмотренным или лишь
затронутым ряд важных результатов и методов теории оп-
тимальных маневров (например, результаты Г. Е. Куз-
мака [24] и Ж. Марека [25] по маневрам на околокруговых
орбитах, интересные результаты по анализу межпланет-
ных перелетов, градиентные методы численного поиска оп-
тимальных траекторий, методы школы В. Ф. Кротова).
Здесь следует указать па хороший обзор Гобеца и Дол-
ла [26].
В первой главе настоящей книги методом А. Я. Дубо-
вицкого — А. А. Милютина выводятся необходимые усло-
вия оптимальности маневрирования при ограничениях
на расстояния до планет. Сначала рассмотрено движение с
конечной тягой, затем — случай неограниченной тяги,
ПРЕДИСЛОВИЕ
И
когда допускаются импульсы скорости. Подробнее анали-
зируется маневрирование в ньютоновском поле одной
планеты, при этом допускается движение в кольце с цент-
ром в центре тяготения. Приводятся необходимые сведе-
ния из теории оптимального управления при ограничениях
на фазовые координаты. Рассмотрены особенности замены
переменных в задаче оптимального маневрирования.
Во второй главе рассматривается маневрирование в
поле одной планеты. Дана полная классификация орбит,
определяются оптимальные импульсные переходы между
компланарными орбитами при незаданности времени пере-
хода и свободной ориентации орбит, в предположении, что
на оптимальной траектории сообщается конечное число
импульсов скорости.
В третьей главе использованием достаточного критерия
оптимальности и рассмотрением расширенной задачи, в
которой допускается пассивное движение вне заданного
кольца, доказывается, что полученные в главе II траек-
тории реализуют абсолютный минимум энергетических
затрат.
В четвертой главе получены оптимальные переходы
между компланарными орбитами в случае, когда движение
КА по ним осуществляется в противоположных направле-
ниях.
В пятой главе рассмотрен метод численного построения
оптимальных траекторий, основанных на необходимых ус-
ловиях оптимальности. Метод применен к анализу опти-
мального импульсного перехода между орбитами с фикси-
рованным взаимным положением, являющегося моделью
заатмосферпого участка выведения КА на орбиту спутника
Земли.
В шестой главе рассмотрен метод параметрической оп-
тимизации траекторий межпланетного перелета на примере
анализа оптимальных траекторий выведения КА на ста-
ционарную орбиту ИСЗ.
12 ПРЕДИСЛОВИЕ
Главы книги делятся на параграфы, которые иногда
делятся тта пункты и подпункты. Помер формулы, леммы
состоит из номера параграфа в данной главе и порядкового
номера в параграфе. При ссылке па формулу пли лемму из
другой главы указывается и номер главы. Номера рисун-
ков и теорем составляются из номера главы и порядкового
номера в главе.
Автор считает своим приятным долгом выразить при-
знательность Т. М. Энееву и В. А. Егорову за ряд советов,
способствовавших улучшению содержания работы, а
также 3. С. Черноскутовой за помощь в оформлении рабо-
ты. Автор будет также весьма признателен читателям, ко-
торые пришлют свои критические замечания по этой книге.
ГЛАВА I
НЕОБХОДИМЫЕ УСЛОВИЯ ОПТИМАЛЬНОСТИ
КОСМИЧЕСКОГО МАНЕВРА ПРИ ОГРАНИЧЕНИЯХ
НА РАССТОЯНИЯ ДО НЕБЕСНЫХ ТЕЛ
В данной главе рассматриваются необходимые условия
оптимальности управляемого полета космического аппа-
рата. При движении КА его расстояния до небесных тел не
должны быть меньше заданных минимальных значений.
Траектория определяется из условия минимума расхода
топлива. Для движения в произвольном гравитационном
поле сил рассматривается управление с помощью ограни-
ченной тяги и с помощью импульсов скорости.
Приводятся особенности анализа, связанные с заменой
переменных при расчете оптимальной траектории.
Условия оптимальности управления, полученные для
произвольного поля, конкретизируются для движения в
кеплеровском поле. Ограничения на расстояния до небес-
ных тел переходят здесь в ограничения на наибольшее и
наименьшее удаление КА от центра тяготения. В плоском
случае оптимального многоимпульсного движения из ап-
сидалыюсти одного внутреннего импульса следует апси-
дальность всех внутренних импульсов. Аналогично, все
внутренние импульсы будут апсидальными, если заданные
условия зависят лишь от расстояния, радиальной и транс-
версальной скорости, или. в общем случае, если сообщает-
ся хотя бы один внутренний импульс на границе. При пере-
ходе между фиксированными орбитами задача требует,
вообще говоря, численного решения. Это облегчается тем,
что сопряженные функции могут быть подсчитаны в слу-
чае кеплеровского поля по конечным формулам.
Приводятся необходимые сведения из теории опти-
мального управления при ограничениях на фазовые ко-
ординаты.
14 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
§ 1. ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ
ГРАВИТАЦИОННОМ ПОЛЕ
1.1. Управление с помощью ограниченной тяги
1.1.1. Постановка задачи. Пусть рассмат-
ривается управляемое движение точки (КА) относительно
невращающейся декартовой системы координат с центром
в центре масс Земли или какого-либо другого небесного те-
ла. Обозначим: t — время, г = (х1, х2, х3) * — радиус-
вектор (* здесь и ниже означает транспонирование матри-
цы), V = (Vх, V2, V3) * — вектор скорости точки, т — ее
массу, 7 = 0, 1, 2, . . . , к — траектории движения
центров масс небесных тел, вблизи которых может осуще-
ствляться движение точки (индекс / = 0 будет приписы-
ваться основному телу, г0 (/) = 0), д (г, t) — вектор уско-
рения, действующего на точку со стороны гравитационного
поля. Функции д (г, /), Tj (t) предполагаются непрерыв-
ными, непрерывно дифференцируемыми достаточное число
раз по совокупности аргументов.
Управление движением осуществляется с помощью ре-
активной тяги Р = PfQ, создаваемой за счет истечения со
скоростью с продуктов сгорания топлива двигательной ус-
тановки, массовый секундный расход которого равен т.
Если Р — модуль вектора тяги, то
Р = — тс, (1.1)
скорость с будет считаться постоянной, а расход т, а с
ним и тяга Р, может меняться в некоторых пределах.
Здесь предполагается, что область управления по тяге
Р — отрезок
0<Р< Ртах, (1.2)
максимальную тягу Ртах считаем пока ограниченной,
Ршах 00•
Потом рассмотрим импульсный случай Ртах
lim §(Р/т) dt<^ оо. Область изменения единичного век-
Ртах-* 00
тора /°, определяющего ориентацию тяги, зависит от
возможностей системы ориентации. Если специально не
оговариваться, будет предполагаться, что возможны любые
направления вектора /°, т. е. единственным ограничением
$
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
15
на управление f° будет условие
|/°| - 1-
(1.3)
Допустимыми управляющими функциями P(t),fQ (t) счи-
таем кусочно-непрерывные функции.
Состояние объекта будем определять комплексом фазо-
вых координат х = (г*, F*, т, t) * = (я1, я2, х3, Vх, V2,
V3, т, £)* = (х\ х2, . . . , Xs)*. Время t = Xs введено в
систему для удобства анализа,— чтобы получить авто-
номную систему. Изменение фазовых координат по вре-
мени описывается следующей системой дифференциаль-
ных уравнений (при Рщак <С °°):
dr~ — у
dt ’
dr , ч । Р z.o
dm Р
dt с ’
dt ____ л
dt ~
(1.4)
В векторной форме система (1.4) запишется в виде
/ = (F*, (<7 + ^-Г)*. - -^.1)*,
и = (Р, f°).
(1-5)
Расстояния от КА до небесных тел должны удовлет-
ворять ограничениям:
hj (г, Z) — — р; (г, t) -|- p;niin < 0, (1.6)
здесь
Pj = r-'Fj (1.7)
— расстояние от КА до центра у-го небесного тела, pjmin —
заданные предельные расстояния подлета к планетам, учи-
тывающие их радиусы, толщину атмосферного слоя, точ-
ность знания движения точки вблизи у-й планеты, и т. д.
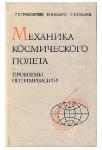
(рис. 1.1). Предполагается, что сферы, соответствующие
ограничениям (1.6), не пересекаются, так что точка не мо-
жет находиться одновременно па различных ограничениях.
16 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
Необходимо осуществить перелет из начальной точки
(в момент £н) с заданными параметрами
r(t„) = rH = r„, V(tu)=rn=-V'H, (1-8)
и условием
т (ZH) = (1.9)
(или
= mE) (1.10)
в конечную точку (в момент /к) с заданными параметрами
(^к) = ^*К = (^к) = Ик = Ик, = (1.11)
При этом значение конечной массы т (tE) = тЕ должно
быть максимальным:
J = — тЕ min. (1-12)
Для системы (1.1) — (1.12) предполагается существова-
ние оптимальной траектории перелета с кусочно-непрерыв-
ным управлением. Предполагается, что оптимальная
Рис. 1.1. Схема полета КА.
траектория прилегает к границам допустимой области
движения (1.6) конечным числом отрезков и точек.
Далее получим необходимые условия оптимальности та-
кой траектории.
Случаи других, по сравнению с (1.8) — (1.12), заданий
начальных и конечных данных и функционала получа-
S 11
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
17
ются введением дополнительных «условий трансверсаль-
ности» (см. п. 4.2.1).
Замечание 1. Условие тп тп часто является
более оправданным, чем простое задание начальной массы
тн = тн ввиду того, что, во-первых, для имеющегося КА
часто бывает задан максимальный начальный вес (в соот-
ветствии с объемом топливных баков), а фактический вес
(фактическая заправка топливом) может быть меньше, во-
вторых, задание слишком большой начальной массы при
фиксированной максимальной тяге 7Jtnax может привести
даже к уменьшению конечной массы тк. Поэтому основ-
ным ниже будет вариант с ограничением тп т^. Глав-
ные результаты не меняются и для случая тп — тн, не-
большие соответствующие отличия будут указываться.
Замечание 2. Приведенная постановка не явля-
ется, конечно, самой общей для задач оптимизации косми-
ческого полета. Однако опа достаточно широка, подходит
для определения энергетически оптимальных траекторий
широкого ряда задач, может быть легко обобщена в более
сложных и специальных случаях. К тому же такая поста-
новка близка к импульсной постановке, которая далее бу-
дет основной.
Замечание 3. Данная постановка близка к поста-
новке Д. Ф. Лоудена [1], отличаясь от нее в основном
ограничениями (1.6).
1.1.2. Необходимые условия опти-
мальност и. Пусть г (Z), V (Z), т (Z) — оптимальная
траектория в рассматриваемой задаче.
Для анализа оптимальности траектории применяем
условия Дубовицкого — Милютина [2] — [4] (см. § 4).
В данном случае, ввиду пепересечения поверхностей
hi = — Р; + Ру min — 0, можно вместо нескольких огра-
ничений (1.6) рассматривать одно ограничение Л (г, t) О,
понимая под ним то из ограничений hj (г, t) 0, которое
существенно на соответствующем отрезке времени (см.
п. 4.2.2).
Для оптимальности траектории г (/), К (/), т (/) и соот-
ветствующего управления п0 (?) необходимо существова-
ние такой сопряженной вектор-фупкции ф (Z) = (фг (£),
ф2 (О, • • • , Фе (0) * и меры а (£) > О (сосредоточенной па
множестве {Z : h (г, Z) = 0}), что на оптимальной траекто-
рии управление п0 (/) почти всюду максимизирует функцию
18 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
(ф, х, и) = (/ (х, u), ф) 0, обращая ее в нуль:
(4? (О, (0, “о (/))(=) max 5^(1!) (О, ^ («). w) ---0*). (1 13^
Функция (t) удовлетворяет системе
4г=-(Л)М + -^-(^)*, ^>0, (1.14)
которая понимается как интегральное уравнение или урав-
нение в обобщенных функциях. В соответствии с видом
функционала
Фиг (^к) = Ф? (^к) 0. (1.15)
Кроме того, если имеет место условие (1.9), то
Фт (*н) > 0,
(1.10)
причем фт (£н) = 0, если тн <С т^.
Если h (Zh) <Z 0, h (£к) 0, то ф (£) ф 0. Везде в даль-
нейшем будем рассматривать нетривиальный случай
Ф (0 Ф °- {
Т-) /л Л / \ / ( д f (я?, w) )
В системе (1.14) ]х = ---—— f— матрица частных про-
I дх J
изводных от правых частей системы (1.4) по фазовым
, ' { dh, dh дЬл 1
координатам, = ~аГ~| —строка про-
изводных от функции h {г, t) по фазовым координатам.
Если па некотором отрезке t± t t2 мера ol (t) =
t
= ds(Z) абсолютно непрерывна по t, то система (1.14) бу-
дет здесь системой обыкновенных дифференциальных
уравнений, в которой о (Z) — daldt — интегрируемая
функция.
В некоторых точках th h (^) = 0, могут быть скачки
меры, а (^) > 0. В этом случае д включает 6-фупкцию
О' (^) 6 (£ — ^). Функция ф (t) будет разрывна в этих
точках:
Дф (^) = ф (^ + 0) - ф (^ - 0) = о(^) hx (^) *. (1.17)
Скачок Дф (ti) направлен вдоль градиента hx (^) *
*) Равенство, выполняющееся почти всюду, будем обозначать
знаком (=).
§ 1]
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
19
Далее будет рассматриваться случай кусочно-непре-
рывного оптимального управления. 13 этом случае условие
(1.13) будет выполняться всюду.
Для дальнейшего нужны будут последовательные про-
изводные от функции/^-(г, Z). Рассмотрим их.
1.1.3. Определение функций hl, hx. Пусть
движение осуществляется вблизи /-го небесного тела,
г//), Vj (/) = Tj (t)—радиус-вектор и вектор скорости его
центра масс Oj. Тогда функция ограничений
h = hj (х) --- — (Г, t) ppnin.
Дифференцируя Д° по х, получим градиент hx (вектор-
строку):
hx = (hr, hv, hin,
(^)*=_р._po; h'v^-0, hm^0,
ht =(РрГ>,--(р"Ж;)=П?
Здесь
(1.18)
— разложение скорости Fj /-го небесного тела на радиаль-
ную (по Ру) и трансверсальную компоненты.
Полная производная от h (х) по времени
dh£} = h1 (х) = hx f (х,и) = h,. V + h't =
= - (p^, V - Vj) = - (p?, Fr’) = -VrP}, (Ы9)
здесь
Vrj = V - F} = V;j + F?
— скорость KA относительно /-го небесного тела, Fp\
F? — ее радиальная и трансверсальная компоненты:
Г? = тЭД = (P?,vr)) р" = Р? (рГ vrj) = (р”рГ) vT1^
= vri - Гр’р" = Vrj + =
= Fr;._(pOpO.)FJ.;=(£,_pOpO.)Fr?>
E — единичная матрица.
Градиент функции hl
hx = ($, hr,hm,h}'),
20 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
где
* ~ - (др-/<?г)* F'7 =-- - (Гг; -
?/рр
(1.20)
(^)* - - Pj, hlm = 0,
h\ - (<?р>, Г-') -I- (р?, й5) - (FTj, F?) г (о", Fj),
в силу соотношений
?
dr Pj dt ' (.
Полная производная от hl(г) по времени
(х,и) = 4 f(x, и)= h^V + hlr (? + 4 /°) + h‘ =
= - (F?, F)/Pi - (p", <f + 4 /°) + (Fxj, FV)/P,- + (p?, K}) =
= - (F?'; F7)/pj - (P? , g - F3- + 4^°)= ~ f + a₽3' ’
L 1 i
(1.21)
где
arj = g - 4 + 4 Г = «7p“ + «V = gri + 4 f°
— ускорение в относительном движении, а'р — его проек-
ция на радиус р®, glj - д -— V — его «пассивная» составля-
ющая.
Функция fe2 зависит от управления, поэтому для данной
задачи наименьший порядок производной от h по t, зави-
сящей от управления, равен п -= 2.
Вычислим производные от К1 по координатам:
Лх = (Л'Г , Л'т, hf ),
§ «1
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
21
Преобразуем
dPL , ₽х -и^ , рХ + ь' Е -
dr dr fJJ. ’
21 (£’ __ у? 21 у‘\
\ dr / pj Pi
Далее
pj
= (р?, Г) Р]т.2 = fej P/m\ Д- == (р?, /»),
= - (У?)’- /zj/p2 - 2 (F?)* (dVrj/dt)/Pj - ( 2£L , arj) _
- (pI g\ - = - (Я3)2 v₽j/p32 - 2 (Ух\ vxj) m<-;2 +
+ (Уг «х3)/Р5 - (p3°, g\ - Fj) + 2 (FZ (F,>),
так как
dV'xj
-аг=Е~РК’
= (H)P?’ + P1H>) Zr3 - (E - р"рП Fj,
dVri л
(ПУ (f;3, f.j) V" - (F-1 (Fj)T).
В точках дифференцируемости управления и (Z) получим
h3 (х, и) = = h2uii + -4 У (У)2 -
pj
На участке Р = const будет
22 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. Г
На участке h = 0, hl = 0, h2 = О, Р = const будет
Pj — Pj min? V^o, i in ill
T 3 P t 0 d^\ h = P?, ~77/ ni \rг dt J —(Vri, a1'1) - (pn, (РР} - —„ /t . P,minV ' V ' dt / " (1-22)
1.1.4. Оптимальное у п р а в л е и и е. Кон-
кретизируем функции ф (Z), Ж (ф, х, и) применительно к
системе (1.4). Обозначим через комплекс (ф1? ф2. ф3) *
переменных, соответствующих координатам .гх, х2. ,г3 ра-
диус-вектора г, через ipr — комплекс переменных ф5,
ф6)*, соответствующих компонентам х4, .г5. х(у скорости Г,
фт = Ф? ? Фг = Фе- Тогда из (1.14) получим
Фг = — (ff r (г, i))‘ -L 5 (<) (hr (Г, 0)\
Фк = ~
Ф< = — (fft (Г, <), 4- 6 (0 ht (г, О,
Ж (ф, х, и) = [(A|)r, V) + (^F, д) + -ф(] +
= Н. (4', х) (t- *, /°)>
Но 0|>, х) = (фг, F) -н (-фу, д) -I- 4;,
ffi (4), х, f°) = (фу, /’) - .
(1-24)
В уравнениях (1.23) д'г = А — матрица частных произвол
ных от компонент ускорениям/ (г, f) по декартовым коор-
динатам точки:
— л _ j2’ О
I я 1
< дх
i,j = 1, 2,3,
g’t — частная производная от вектора д (г, t) по t:
(г, t)
'fl dt ) ’
i = 1,2, 3.
§ п
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
23
Из (1.18) следует, что (hr) * есть единичный вектор
—ру, направленный к центру /-го небесного тела, т. е. нару-
жу из допустимой области движения (рис. 1.2). Производ-
ная dh (г, t)/dt равна составляющей Vpj скорости центра
/-го небесного тела на радиус-вектор —р;- (рис. 1.2).
При j == 0 (рассматривается небесное тело, в центре
которого взято начало координат)
Из изложенного и из (1.17) следует, что компоненты
(1k= СФ4, ф6> Ф?) век-
тора ip, соответствующие век-
тору скорости V и массе тп,
непрерывны. Разрывными мо-
гут быть лишь компоненты
(4г,4/) = (’Рр’Рг- “Фз- 4е), с°-
ответствующие радиусу-век-
тору г и времени t. Если в
некоторый момент tt точка
находится на границе hj = О,
причем мера а имеет поло-
жительный скачок сг(^) > О,
то уравнения (1.23) заменя-
yV
Рис. 1.2. Схема пролета
у ограничивающей сферы.
ются уравнениями для определения разрывов перемен-
ных i|^:
4г & + 0) = 4г & - 0) + Д4>г = 4Г - 0) - о ft) р° ft),
4r (ti+ 0) = 4r (ti — 0),
4mft+0) = 4™ ft-0),
4i ft + 0) = 4< (t, - 0) + A4, = 4\ (k - 0) + о (ti) VFj.
(1-25)
Полная производная по времени от функции ограниче-
ний/^- (г, t) равна радиальной проекции скорости КА отно-
сительно /-й планеты:
_^ = _(Г_Г. р0)
и является непрерывной (при Ртах <С °°) функцией.
В точках контакта траектории с границей hj = 0 функция
hj (0 достигает максимума. Если точка t' контакта не яв-
24 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
ляется началом или концом траектории, т. е. является
внутренней (по времени) точкой траектории, tn <Z t'
то в пей траектория касается границы:
(Г_Г,-,рО)=О.
Отметим также, что рассматриваемая система невырож-
дена в окрестности оптимальной траектории [4]. В случае
вырожденности было бы Ж (гр, х, и) = 0 при всех t, и,
гр ф 0. Однако в данном случае при этом будет Н{} == 0,
Й1 = 0; это возможно лишь при грпг = 0, грГ = 0, гр,. = 0,
гре = 0, т. е. при гр = 0.
Максимизируя функцию (гр, х, и) по и, определим
оптимальное управление Р (t), fQ (t) при условиях (1.2),
(1-3):
Ж (Ч1. X, и) Н() (4?, X) + В1 (1|), X, f°) Н>
Но X) + ^Я1 W, X) = 0. (1.27)
Здесь
Hi (i|>, х) = (ij>, X, /опт) = max Г(-фк, /°) — =
Р L с J
= |ЧЯ-^.
Максимум Ж (гр, х, и) по управлению /°, определяющему
ориентацию тяги, достигается при
(Я>Р, /опт) = |Ч’г|, (1.28)
причем, если | грг | Д> 0, то
/опт ~ 'Фг7| грк |- (1.29)
Следовательно, для оптимального управления тяга на-
правлена вдоль вектора грг, как и в задаче [1] оптимизации
маневрирования без ограничения (1.6). Д. Ф. Лоуденом
этот вектор назван базис-вектором (primar-vector). Здесь
будем его называть так же. Максимизируя Ж по Р,
§ 1]
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
25
получим
опт
если
если
если
Н± (гр, х) О,
1Ц (гр, х) О,
(Ф><г) О-
(1.30)
Ниже предполагается, что множество {Z : Нх = 0} состо-
ит из конечного числа изолированных точек и отрезков.
Управление в изолированных точках — 0 несуществен-
но в данном случае Апак <С • Если Нх = 0 на некотором
отрезке, то оптимальная тяга непосредственно не опреде-
ляется. имеем особый режим управления. Для определе-
ния тяги Р можно, например, последовательно дифферен-
цировать уравнение Нх (гр, х) = 0, = dlHJdi = 0,
1 = 1,2, . . . , п, пока в выражение driHlldtn не войдет
тяга Р. Тогда из уравнения Н[п) = 0 опа определяется.
Для данной задачи, вообще говоря, п = 4. В кеплеров-
ском поле такие особые дуги с промежуточной тягой по-
строены Д. Ф. Лоуденом [5]. Часто они пеоптимальны
[6] ч- [9]. В общем случае вопрос об их оптимальности до
конца неясен. Далее участки Нг = 0 подробно исследо-
ваться не будут, так как основным предметом анализа бу-
дут в дальнейшем траектории с точками сообщения им-
пульсов тяги, соединенными пассивными дугами.
Замечания 1. При движении в более сложных
силовых полях, если ускорение (не обязательно гра-
витационное) равно д (г, V, т, t), в уравнениях, опре-
деляющих dtyldt, появляются дополнительные члены:
—(dgr/dF)* фр — для d^vldt,— (дд!дт, фр) — для грт.
Однако в функцию Ж член g (у, V, т, t) войдет опять
лишь в составляющую HQ, не зависящую от управления.
Вид функции Нг (гр, х, и) и, следовательно, выраже-
ния (1.29), (1.30) для оптимального управления не ме-
няются.
2. Условия оптимальности (1.27), (1.29), (1.30) анало-
гичны обычным условиям без учета ограничения (1.6). Но
следует иметь в виду, что теперь сопряженные функции
определяются по-другому, так как, вообще говоря, мера не
равна нулю, см. (1.23).
Рассмотрим отдельно пассивные участки и участки
Максимальной тяги.
26 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
1.1.5. Пассивный участок. Пассивным на-
зывают участок t ^+1) движения КА, на котором
я1(О = |^(О|-та(°ефт^<о. 1ФН<^, (1.31)
реактивная тяга Р (t) равна нулю. Фазовые координаты х'
и сопряженные переменные фг-, i = 1, 2, . . . , 8, удовлет-
воряют здесь системам (1.4), (1.23) при Р — 0. В частнос-
ти,
На
будет
т (Z) = т (tt) = т = const,
Фт (0 = Фт (^) = Фт = COllSt,
772Л|)т = Const, ti t ti + 1.
пассивном участке, в силу (1.31),
'^>0, фт>0.
На его границах, в точках «переключения», не являющих-
ся началом или концом всей траектории,
1Ц = Н. (W = 0. (1.32)
Если участок примыкает к началу (^ = £п) или концу тра-
ектории (^+1 = £к), то в этот момент выполняется, вообще
говоря, не условие (1.32), а (1.31). Из (1.27) следует, что
на пассивном участке
Яо (ф(«),^(^)) = (фг, F) + (фк, д) + ф( = 0. (1.33)
Множество {/ : h (t) = 0} на этом участке может вклю-
чать отдельные точки или отрезки h (f) = 0, если они до-
пустимы в силу уравнений пассивного движения (как
круговые орбиты в случае центрального ньютоновского
поля).
Пусть h (tf) = 0, причем tt t' <" ^+1, h (0 < 0 в до-
статочно малой окрестности tf. Тогда в этой точке траек-
тория касается сферы ру = pjmm (1.26). Кроме того,
d2h (t')/dt2 0. Отсюда и из уравнения (1.21) следует, что
в данной точке
(УГЛ2
Ч- + (р", <7-Ю)>0.
1 i
Рообще, если будет dkh(t')/dt* = 0, к = 0, 1, . . . , 2т,
§ П
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
27
ТО
d(2’"+1)/i (Г)/Л(2‘”+1) = О,
d^'^h (/')/<Й(,2"‘+2) < 0.
При t ---= tf, вообще говоря, о (/') > 0. Тогда функции
'Фг (0, (0 3Десь терпят разрыв в соответствии с (1.25),
но функция 77 0 (/) останется непрерывной, это видно из
(1.33), можно показать и непосредственно:
дя0 (Г) - II0 (/' + 0) - яц (/' - 0) = ож V) + м =
= о(Оад = 0.
Случай движения по границе h (£) = 0, /г- t /г+1, на
некоторой дуге пассивного полета будет рассмотрен ниже
для кеплеровского поля.
1.1.6. Участок максимальной тяг и.
Участком максимальной тяги будем называть дугу траек-
тории, на которой
яг(0 = I'Фр(01 - т(0(<)>о, |фр|>^,
(1.34)
тяга двигательной установки максимальна, Р = Ртах-
Если этот участок — внутренний на траектории, ZH <С
4Г) <С 42) <С то на его концах
II! (4°) = ях (62)) = о. (1.35)
Если же участок примыкает к одному из конечных момен-
тов перехода £п или то в этот момент выполняется, вооб-
ще говоря, не условие (1.35), а (1.34). Функция HQ (/)
теперь отрицательна: 77 0 (*) <С 0, 41) <Г ^2)- Пере-
менные х, ф определяются из (1.4), (1.23), (1.25) при Р =
= Ртах- 13 частности,
d / . . Р . . Р . , , Р /. , । mipm\ Р и
Tt Ы'т) -- - -Фт + - |ФР | = ^1ФР I - —) = Hv
(1.36)
На участке максимальной тяги будет, следовательно,
0. Из (1.36) следует также, что на участке
28 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
особого управления (Ях (t) ~ 0), как и па пассивном
участке, величина тпл\)т постоянна.
Учитывая отмеченные особенности поведения функции
т^т на различных участках и условие трансверсальности
(1.16), получим:
(1) Функция неубывающая, d (тф7Н) dZ 0;
(2) На всей траектории пг\рП1 неотрицательная.
> 0;
(3) На всех дугах максимальной тяги модуль вектора
фр строго положителен,
I Ч’г (0 I > 0;
(4) Если ф7П (Zn) > 0 или на оптимальной траектории
есть хотя бы один участок нулевой или максимальной тя-
ги, то фт (ZK) > 0;
(5) Условие (ZK) 0 может иметь место лишь при
ф (Z) 0, ZH < t < ZK.
Имеем тривиальный случай, когда задача оптимизации ire
зависит от функционала пгк и уравнений движения.
Замечание. Если задало условие ти = ти, то
результаты (2), (3) останутся верны всюду, кроме, быть
может, начальной дуги максимальной тяги, iiti части кото-
рой может быть фт < 0. В (4) участок максимальной тяги
должен начинаться при t = внутри траектории: tn <'
<С В (5) до точки фт — 0 возможен участок мак-
симальной тяги, внутри которого фш 0.
Рассмотрим множество {t : h (Z) = 0} па дуге макси-
мальной тяги. Пусть Z' GE (ZH, ZK) — изолированная точка
на границе, h (Z') — 0. Тогда в ней выполняется (1.2(5),
кроме того,
(П2 + (рь д - Ц + ^) > °. (1.37)
Вообще говоря, о (Z') > 0. функции фг, ф, терпят разрыв
(1.25). Функция Яо (Z) будет непрерывной. Яо — 0) -
Яо (^ + 0).
Аналогичные условия будут выполняться, если точка
па границе разделяет два участка непрерывной тяги, в
частности участки нулевой и максимальной тяги. Условие
§ il
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
29
(1.26) сохраняется, условие (1.37) будет выполняться для
обоих предельных значений тяги Р (tt — 0), Р 0).
Пусть на отрезке tr t <1 t2 будет h (t) = 0,
| фг (С |> 0, Р ~ Ртах- Ориентация тяги определится
по (1.29).
Найдем условия оптимальности такого участка. Из ус-
ловий h (t) = 0, dhldt = 0, d-h'dt'1 ~ 0 следуют соотноше-
ния
Pj — Ру min, Pj I р — 0,
(Г!?)2
Pj - (- о'-' =• 0, < t < t...
Из последнего равенства определяется радиальная
(в движении относительно /-й планеты) составляющая тяги:
, , n _ (р?. Чр) т [-(ПТ . , •
cosi|> = (р«, f°) -- -р = - F , (д", p")j ,
здесь ф — угол между вектором тяги Р и радиусом-векто-
ром р7-, причем, очевидно, должно быть
cos2 ф .
Функция d2h/dP абсолютно непрерывна, d3h (х (/),
ф (t))/dt‘3 ( ) 0 на данном участке. Преобразуем функцию
d^h/dt3. Если if v ~~ фг/ | h то, учитывая (1.23), получим
VT = - J 1- + М’г (<, 0/1 Фк |,
Й’ tr)/IO.
здесь
А = р; — COS ф-lfr
— вектор, ортогональный к тяге Р, лежащий в плоско-
сти векторов pj, Р (рис. 1.3). Модуль вектора А равен
| sin ф |. Следовательно,
h\x,^)= £[(Л, Чч.)-£]/Ю(=)0, ^<0^2, (1-38)
30 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. |
Функция В (£) абсолютно непрерывна. Покажем, что
функция (Л, фг) непрерывна, тогда она будет и абсолютно
непрерывна согласно (1.38). Действительно, если бы в не-
которой точке t - t* был разрыв функции (Л, фг (£)) за
счет скачка меры,
Д (А, 1рг) = (А, Дг|5г) = — (А, р^о (tt) = —k’sin21|> • з (Q =^0,
то в некоторой окрестности у точки t = t* было бы
A3 (Z) ф 0. Поэтому (Л, ф,.) абсолютно непрерывна,
А3(£) = 0, ^<4 t<Z h- Пусть в некото-
ская связь векторов
Л р, Р«.
рой точке данного участка sin ф = 0,
/0 /о _ = о. Тогда Л = о,
из № = 0 следует В = 0. В случае
кеплеровского поля будет, однако,
Р
В=+ — | фг | =1= 0, так как
и
(₽•. ^9 - (</Z. Р») _
= - р»’ (Е - Зр°р0*) т°7 = 0.
Поэтому при движении по границе в кеплеровском поле не
может быть sin ф = 0. Так как и в общем случае обычно
при движении по границе р7- = pjmin поле близко к кепле-
ровскому, то и для общего случая полагаем sin ф 7^ 0,
Ч ^2- Отсюда и из А (Л, фг) = 0 следует непре-
рывность функции фг (£), tr <4 t < t2. Из условия (1.38)
определяется проекция вектора фг на вектор Л:
фгА = (Фг, Л)/| Л | = В (О/sin ф (t). (1.39)
Отсюда следует, что фгл (t) — абсолютно непрерывная
функция времени на данном граничном участке.
Покажем, что мера а абсолютно непрерывна на (^, £2)-
Пусть фГ1 = фг (^ 4- 0), тогда
t t
фг (i) -= Фп — ^vdt — рО(Ь = (£) — рО (i) S (ij, t).
ti Ы-о
§ 1]
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
31
С (* dp?
Здесь 41 (О = Чп — \ + ) °i (z) ~at dt ~ абсолют-
Z1 <1
i
но непрерывная функция, Oj (t) = б (tlf t) = de (£). От-
/i+О
сюда
Фга (0 = (Фь А0) — <51 (0 Sin ф,
т. е. мера (£) абсолютно непрерывна по t. Функция *4+ (t)
поэтому также абсолютно непрерывна. Дифференцируя
тождество h3 (t) == 0, получим
б = [(Л,фг) — В — (Л, (<7r)*^F)]/sin2 ip, (1.40)
причем должно быть, в силу (1.14),
б > 0, Zi < t < t2.
Условие (Л, фг)— В = 0 может оказаться невыполнен-
ным в начале участка, при t = t± — 0, т. е., вообще говоря,
В (^i) (Л. (^i), фг (^i 0)).
Тогда выполнение условия В = (Л, фг + 0)) обеспечи-
вается скачком меры ст (/J:
(Л, ч; + ДЧг) = (А, 47) - о (G) (Я, Р?) = В (tj.
Отсюда
где ф7 = фг (^i — 0) и, в силу (1.14), ст (^) > 0.
Аналогичная ситуация будет в момент t = t2 окончания
участка.
Таким образом, для оптимальности рассматриваемого
граничного участка с максимальной тягой необходимо
Должны быть выполнены условия h (Zx) = 0, h (^) = 0,
А (^) = 0, условие (1.41) в начале участка, а па самом уча-
стке мера б (£) должна удовлетворять условию (1.40).
32 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
1.2. Импульсная тяга
1.2.1. Особенности движения с и м-
п у л ь с н о й тягой. Движением с импульсной тягой
называют такое движение КА, при котором не ограничен
верхний предел реактивной тяги (Anav = допуска-
ются скачки вектора скорости (будем иногда называть
такое движение импульсным, а скачки скорости — им-
пульсами скорости). Если КА в момент tt сообщается им-
пульс скорости AFi = А 7ifl, то при t — ti радиус-вектор
г непрерывен, а вектор скорости V и масса т терпят
скачки:
г (Ц + 0) = т (ti — 0) = г (ti),
V(ti + Q)=V (^ - 0) + NVifl
Физически импульс скорости можно представить как пре-
дел дуги максимальной тяги Р (t) = Ртак, 4г) <С * 42),
при
/° (t) —> /?, m (t^) m (ti +0), m (£-1}) —> m (t{ — 0).
Тогда
n(i2) 42)
AFi = lim g dt +
Pinax-» J, J
k q q
Скачок массы связан с величиной импульса:
m (Ч + 0) = m (Ч — 0) exp
Предполагаем существование оптимальной траектории,
на которой сообщается конечное число импульсов, между
моментами сообщения импульсов оптимальное управление
Р (t), fQ (t) кусочно-непрерывно, движение осуществляется
в соответствии с обычной системой (1.4). 0 Р (t) С
Оптимальная траектория перелета в импульсном слу-
чае обладает тем свойством, что любой ее кусок оптимален.
Пусть х (\ — 0) = х~, х (t2 Е 0) - << tr < t2 < /к-
Перелет П12 из точки х~ в точку осуществляемый как
И221 f odt\ = fl с In .
§ 1] ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
33
часть оптимального перелета Пт. : хи—>хк (с пезаданной мас-
сой mJ —т(£кЦ-0)), будет также оптимальным перелетом меж-
ду точками х~[ и (mJ—> max). Действительно, пусть суще-
ствует перелет П12 с большим значением массы т2 > т2
и меньшим значением характеристической скорости
~ dt + У (^) “ С 1П у
т ~ mt
tz
tx t^Ltx, м
Тогда заменим в траектории 77пк перелет П12 па П12 и
осуществим остальной перелет по-прежнему (оставив без
изменения импульсы AF (^) и ускорение Р (t)/m (t) —
здесь используется неограниченность тяги Р). В конечной
точке получим прежние параметры г, V, t, но суммарная
характеристическая скорость уменьшится на величину
ip12 — Й712. Соответственно увеличится конечная мас-
са mJ.
Необходимые условия оптимальности траектории, на
которой сообщаются импульсы, можно получить различ-
ными способами.
1.2.2. Условия оптимальности в им-
пульсном случае. Можно, следуя Д. Ф. Лоуде-
ну, рассматривать оптимальную импульсную траекторию
как предел (при Р1Пах —> оптимальной траектории с
конечной тягой, считая, что каждый импульс является
пределом дуги максимальной тяги Р = Ртах- Необходи-
мые условия оптимальности получаются предельным пере-
ходом из условий, соответствующих случаю Ртах <С 00 •
На интервалах (£f, ti+1) между моментами сообщения
импульсов движение осуществляется с конечной тягой,
условия оптимальности будут прежними. Поэтому, в ча-
стности, они состоят из дуг пассивного полета НА О,
Р = 0 и дуг особого управления Н± = 0, Р оо.
Уравнения (1.23) для сопряженных переменных г|)г (£),
'Фи(0, (0 1,0 зависят от тяги Р явно, поэтому они не
меняются и в окрестности точки сообщения импульса.
Тогда из равномерной ограниченности правых частей дан-
ных уравнений и 42) -> ti для импульса следует, что
эти переменные будут непрерывны в точках сообщения им-
пульса, если в этих точках пе сосредоточена положитель-
2 В. В. Ивашкин
34 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
ная мера о (£f), связанная с границей h (х), т. е. ф7-
— 0) = lim 4>J- (41!) = (ti + 0) = lim if, (42)), / ¥= 7.
Если в момент сообщения импульса точка находится па
границе, то функции фг (£), ф/ (/) будут разрывны в этой
точке, при этом скачки Афг, Дф^ удовлетворяют уравне-
ниям (1.25).
Переменная фт будет разрывна в точке сообщения им-
пульса, разрыв определим ниже.
Рассмотрим, во что переходят условия оптимальности
управления на дуге максимальной тяги. Из непрерывности
вектора фр и условия (1.29) (совпадения направлений век-
тора тяги и вектора фг) следует, что импульс скорости
направлен вдоль сопряженного вектора фр:
ДР (Q = ДУ &) 4>r О| 1k | (ti). (1.42)
Поэтому, если под /° (Zj) понимать единичный вектор, на-
правленный вдоль импульса ДРг«, то формула (1.29) будет
справедлива и в импульсном случае. Далее, на границах
участка t 42) максимальной тяги, не совпадаю-
щих с началом или концом всей траектории, выполняются
условия Нх (4П) = Н\ (^2)) =0 (1.35). В силу —>
—> 42) —» ti получаем, что в точке сообщения импульса
функция Н± непрерывна:
Н± (ti - 0) = Н. (ti + 0) = 0.
Отсюда следует, что в этой точке
1 т J С \t.-Q 1 т 1 с р.+0’
поэтому и ввиду непрерывности фр (t) функция игфт не-
прерывна:
(1-43)
тУт |(_0 = т^т р.+0 = mtym
^т-—~
Далее, так как на пассивных и особых участках вели-
чина щу\)т постоянна в силу (1.36), то на всей оптимальной
импульсной траектории она постоянна:
т (0 'Фт (0 = const = q О,
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
35
§ 1]
Если импульс сообщается в начале (или конце) траек-
тории, то Н± (tn + 0) = 0 (или Н1 (fa — 0) =0).
На интервалах (Zf, ti+i) между точками сообщения им-
пульсов функция Н1 = | фр | — (т^т)/с отрицательна
(при Р = 0) или обращается в нуль (при особом управле-
нии). Учитывая (1.43), получаем, что вообще
Я1(0 = |Фи|-^<0.
Следовательно, модуль базис-вектора | фр | в точках tr
приложения тяги и сообщения импульсов достигает мак-
симума, постоянного для всех указанных «активных» то-
чек (как и в обычной постановке Д. Ф. Лоудена):
%! (f) = | фр (О | = max | фр (Z) | = = const.
t с
Если тп^т = 0, то фт (Z) == 0, фр (Z) = 0, ZH t
фг (Z) = 0, фг (Z) = 0, о (Z) = 0, ZH <С Z имеем три-
виальный случай. Поэтому т^(п ф 0. Можно положить
тпфт/е = 1, тогда
хг(^)^|фг(Г)| = тах|фи(0| = = 1, (1.44)
t c
в активных точках базис-вектор является единичным век-
тором вдоль импульса (или тяги).
Из непрерывности функции Но = (фг, F) + (фи, д) +
+ ф^ в точках сообщения импульсов и равенства ее нулю
на пассивных дугах и дугах особого управления следует,
что на всей оптимальной траектории в импульсном случае
(0 = (Фг, V) + (фГ) д) + ф( = 0, ta < t < tK. (1.45)
Замечание 1. Если оптимальная траектория со-
стоит из дуг пассивного полета, соединенных точками сооб-
щения импульсов AFi = ЛТ (1^, i = 1, 2, . . . , N (т. е.
имеем траекторию многоимпульсного перелета), то из
(1.44) следует равенство
I фи (tj) | = I Фи (t2) | = • = I Фи (ti) | = • • • = | фи (tN) I =
= max | фр (Z) | — 1. (1.46)
t
Это условие (вместе с уравнениями движения и уравнения-
ми для сопряженных переменных) последовательно
2*
36 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА 1ГЛ. у
связывает фазовые и сопряженные переменные в точках со-
общения импульсов.
Замечание 2. Вследствие равенства тф^/с
= const = 1 переменную фт можно в импульсном случае
исключить из рассмотрения. Она будет неявно входить в
условия оптимальности через основное условие (1.44).
Кроме того, так как ускорение а = Р/т теперь пеограни-
чено, то можно задачу рассматривать в иной постановке
(эквивалентной). Вместо тяги Р (t) в качестве управления
можно взять ускорение a(t), a (t) > 0 (сообщению импуль-
са в a (t) соответствует 6-функция). Массу (— т) как ми-
нимизируемый функционал можно заменить на харак-
теристическую скорость w = (/) dt = — с In (т/т{/),
В точке сообщения импульса скорость w имеет скачок,
равный модулю импульса Если ф^ — сопряженная
переменная, соответствующая скорости w, то условия
(1.44), (1.46) в такой постановке будут заменены па
ф^ (/) = const < О,
| фг (^) | = max | фр (/) | = — фу, = const = 1.
t
Рассмотрим некоторые следствия из условий оптималь-
ности (1.42), (1.44), (1.45).
1. Пусть импульс сообщается не на границе, h (х (Ц)) '
< 0, о (ti) = 0. Возможны два случая.
а) Момент сообщения импульса не совпадает с нача-
лом или концом траектории, tu <Z^i <С Тогда из (1.44)
следует, что
д|>Мг„>0,
Так как
4 I ^F I2 = — WF’
и функция (фр, фг) непрерывна при t = ti, то в рассмат-
риваемой точке сообщения импульса
41 Ь=г4 = °’ (Фг, фг)(=г. = 0. (1-48)
Следовательно, векторы фр ифг ортогональны в точке со-
общения импульса, аналогично [1].
§ n
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
37
Далее, в силу условия (1.44), должно быть
т. е.
ygjl I2 = II2 ~ (^г’ Я’г)=Я’2+ (Ч’г, (|£) 4>f)<0.
(1.49)
Вторая производная непрерывна и должна быть неполо-
жительна. Если | хрг | = 0, то надо рассматривать третью
производную. Она имеет скачок в точке сообщения им-
пульса, должно быть
|4Н?._0>0, |4к|;.ч0<0, Д|4к|Х0, (1.50)
где
-Г/Чг I2 = 3 Сфг, 4г) — (1рг, 4г) =
= — 3 (фк, ЛЛрг) -J- (г|)Г, (А\|>г)'),
(4г)1 = 2 Л %+з» = С 2, 3,
>=iдх
(4д = _ 2 4>3 + 2 дЛ ч>},
VT 7 у, ю=1 'дхдх дх>д1 / ъ 3 ' дх1 т
Чг = (гр4,%, гр6)’, = (i^, %, гр3)‘.
Последнее из условий (1.50) переходит в следующее:
2 -5^дуЧзнЪ+3-<о
(i,>, fc)=l дх дх
или, в силу (1.42),
3 Э 7
а К: 'Фз+г'Фз! /Фз+fc 0* (1.51)
(г, J, fc)=l °Х °Х
б) Импульс сообщается в начале или в конце траекто-
рии, tt = tn или ti = tK. Тогда из (1.44) будет вытекать
лишь одно из условий (1.47), поэтому
Сфк,^г) ti = t^ (1-52)
(i|)F,ipr) ft)<0, t^t*. (1.53)
38 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. 1
В моменты tu + 0 и tK — 0 переменные ф, х удовлетворяют
также условию (1.45). Поэтому, если FH = V (£н — 0) —
вектор скорости до сообщения импульса AFH = АУнфг (^н)
в начальной точке траектории, то имеем
(фг, ГН + Д^нфр);н + (фр, д (г, t))la + ф, (fH) = о.
Величина импульса ДКН будет удовлетворять условию
(при (фг, фр) > 0)
Д17" “ - КГ'Ы г-} + О'1 +
Аналогично, если FK = V (^к + 0) — конечный вектор
скорости и, (ф,., фк)/к-о <С 0, то
|('*>- г“’+ г) +
2. Точка сообщения импульса лежит на границе,
h (г, t) = hj (г, t) = 0.
Пусть импульс сообщается во внутренней (по времени)
точке траектории, <^г <С Переменные фг, пре
терпевают, вообще говоря, скачок (1.25). Пусть ф7 =
= фг (ti — 0), фг = фг (ti 4- 0). Условия (1.47) сохраня-
ются, поэтому
(фр,фг)<0, (фр, ф£)>0, <з(ti) (фр, hr) > 0.
Отсюда и из условия о!>0 следует, что
б(^) = 0 или б(^) >0, (h'r фр)^ > 0. (1.54)
Из условия h (tt) = max h (t) — 0 следует, что
t
%-\ ^hrV~ + ht>0,
dt k-o 1
поэтому, вычитая, получим
hrkV < 0, (Mp)t- < 0.
Сравнивая это условие с (1.54), видим, что есть две
§ 11
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
39
возможности:
а) oW_0, 4г|,._0>°, Д+,«°-
«) Oft)>o, м-)„ = о.
(1.55)
В частности, всегда будет
б(^) (hr^)V)t. = 0. (1.56)
Общим случаем назовем тот случай приложения им-
пульса во внутренней точке оптимальной траектории
(£н <Oi <С ^к) на границе (h (г (t^, ti) = 0), когда в этой
точке есть скачок меры, о (^) 0. Пусть / — номер пла-
неты, при движении у которой достигается при t = tt
граница hj (г (ti), tt) =0. Из предыдущего следует
Т е о р е м а 1.1. Если во внутренней (по времени)
точке оптимальной траектории перехода на заданной
ограничивающей сфере сообщается импульс скорости, то в
общем случае траектория в этой точке и импульс касаются
этой сферы.
Действительно, из (1.55) следует, что при о (^) 0
будет (р°, Wi) = 0, т. е. импульс ортогонален радиусу-
вектору относительно /-планеты, а траектория касается
граничной сферы, р/ = $ = 0.
Далее, из (1.56) следует, что
и
I I I
di \t.-o
d I 4'р I
dt
= о
*г+°
(<фг, фг\.+0 = 0.
Таким образом, при сообщении импульса на границе во
внутренней точке траектории условие (1.48) сохраняется,
причем функция (t) или непрерывна в случае о (ti) = 0,
или имеет скачок Дфг, ортогональный вектору
Пусть в некоторой окрестности точки tt будет h (t) < 0,
i (t) = 0, t ti. Тогда если a (t^ > 0, то сохраняются
условия (1.49) — (1.51). В случае a (tt) 0 условие (1.49)
40 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. Т
распадается па два:
“У (Ф^) (ti - 0) = (фг + фрА 'фр);.-о 0,
~2~ (Ч’и) + 0) = (Ф2 + ФиА фр)г.+о 0-
Если импульс сообщается в начале или конце траекто-
рии, то имеют место односторонние ограничения, анало-
гичные (1.52), (1.53), при этом под фг понимается фг (tn
+ 0) или фг — 0).
1.2.3. Введение характеристической
скорости в аргумент системы. Необходи-
мые условия оптимальности в импульсном случае можно
исследовать и непосредственно, без связи со случаем огра-
ниченной тяги. Для этого можно, например, перейти к
новой независимой переменной я, которая включает как
время t, так и характеристическую скорость w z-
= — с 1п(т/тн) и относительно которой можно единооб-
разно записать уравнения движения КА на всех режи-
мах полета:
ds = aQdt 4- dw
(здесь я0 — некоторое постоянное ускорение).
Перейдя к параметру .<?, как аргументу уравнений дви-
жения, получим следующую систему уравнений движения:
dr
ds
— Т1И,
До
dV 1
dm т [ dw \
ds с \ ds ^2/ ’
dt __ 71
ds а о
(1-57)
На отрезке <4 s <Z 42) сообщения импульса = 0,
?2 = 1» Ti + ?2 = 1» изменение параметра s равно измене-
нию модуля импульса скорости, ds = dw = | dV | . На
отрезке st <4 .s- << где тяга ограничена, 0 Р <Г ое 1
О < Ti < 1, 0 < у2 < 1, ух -|- у2 = 1,
$ ‘1
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
41
при Р —> 00 будет Ti —> 0, у2 1, в пределе получим ух, у2
для импульса. Поэтому везде
° < Y1 < 1. О < ?2 < i, Т1 г ?2 = (1-58)
В импульсном случае в системе (1.57) управлением можно
считать как(Р, /°),таки(у1? у2, /°) с ограничениями (1.3)
и (1.2) при Ртах = 00 или (1.58) соответственно. В послед-
нем случае тяга Р вообще не рассматривается *).
В соответствии с системой (1.57) на отрезке [,sH, $к]
($к не задано) надо будет осуществить перелет между точ-
ками г = гн, V =ТН, т = ти (ш = 0), t = и г - гк,
V = FK? t = tK с минимальным значением функционала
— тк (или zpk) при наличии ограничений (1.6).
Для оптимальной траектории г (s), V (.v), т (.$•), t (s),
согласно [4], необходимо существование неотрицательной
меры о (5) и сопряженной вектор-функции фг ($), фг ($),
фт (s)> Ф* С9)’ Удовлетворяющей системе
ds
dh (г, t)
dr
ds
dK = (фр, /°)
ds 2 nt
(1.59)
таких, что оптимальное управление (Р ($), /° (s)) почти
всюду максимизирует функцию (ф, х, и) = (ф, /), обра-
щая ее в нуль:
Ж (ф, х, и) = [(фг, F) + (фр, д) + ф(] 4-
[?mb 1
(•фр, /°)----^-=>тах = 0. (1.60)
с J р,р
Функции фг (б‘),фпг (5) будут Непрерывны, фуНКЦИИ фг (^),
Фг (5) разрывны в точках со скачком меры о (.s). Из уравне-
*) Заметим, что система (1.57) может быть применена и для
анализа движения при Ршах < оо, тогда Yi=Vi(P, ^),у2 = 72 (Р, ^).
УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА 1ГЛ. 1
ний (1.58), (1.59) и принципа максимума (1.60) следует
тогда, что на оптимальной траектории в импульсном слу-
чае выполняются условия
/° (s) = ipF/| 'фг |,
--($) = const = 1,
Яо (s) s (4|)r, F) + (M’F, g) + < o,
rmb
Ti = 1 (P = 0), y2 = ° при I Я’*' I < 1,
| (s') | = max | i|)F (s) | = 1 при T2(s')>0,
H0(s) = Q при s<2) s s^\ (1.61)
(4>r(s), i|,F(s)) = 0 при T2(s)>0, si2) <$<$$. (1.62)
Здесь s<2) =sH + AFX, =sK — AVn, причем AFi (AFy) —
импульс, сообщаемый в начальной (конечной) точке,
при t = tH (t = tK), 42) <C s — внутренняя (по вре-
мени) дуга траектории.
Если перейти ко времени t, как аргументу, то отсюда и
из (1.59) получим все приведенные выше, в п. 1.2.2, усло-
вия оптимальности. Однако условия, выраженные через
аргумент 5, полнее прежних условий, выраженных через
время t, так как они дают, вообще говоря, более полную
картину поведения соответствующих функций в процессе
сообщения импульсов.
Из предыдущего следует, что наиболее содержательны-
ми будут условия оптимальности для внутренних (по вре-
мени) точек сообщения импульсов. Поэтому представляют
интерес случаи, когда внутренним оказывается и началь-
ный (или конечный) импульс.
1.2.4. Частный случай системы, не за-
висящей явно от времени. Пусть рассмат-
ривается система, которая обладает следующими свойст-
вами:
а) Гравитационное поле g(r, t) и ограничения hj (г, t)
не зависят явно от времени, д = д (г), hj =hj (г).
б) Конечные (или начальные) условия (и функционал)
не зависят’ явно от времени.
§ 1]
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
43
Рис. 1.4. Случай, когда
оскулирующие орбиты
при сообщении импуль-
са не пересекают огра-
ничение.
При выполнении условий а) и б) сопряженная перемен-
ная ф^ = 0. Рассмотрим некоторую точку Мг сообщения
импульса ДР$, ей соответствует отрезок w(^ w
скорости w. Для любого значения w' на этом интервале
можно взять в точке Mi соответствующие координаты
г сопряженные переменные ф (w) и проэкстра-
полировать их вперед при условии
дальнейшего пассивного полета в
пределах допустимого множества.
Получим промежуточную орбиту
Т (ш') и соответствующую сопря-
женную функцию ф (wf, М), М —
текущая точка орбиты Т (w'Y
ф (wf, Mt} = ф (w'}.
в) Промежуточные орбиты Т (w)
и функции ф (ip, М) на них —
периодические с общим периодом
т (w), движение по промежуточной
орбите удовлетворяет заданным
ограничениям (рис. 1.4).
Пусть Т (u/1’), Т -
промежуточные орбиты до сооб-
щения импульса, после сообщения
части импульса ДР'. = ДР t (и/ —
— w^)/AVi и после сообщения
всего импульса соответственно.
Осуществим перелет из началь-
ной в конечную точку по траектории Т — реализации
исходной траектории Т, отличающейся от нее тем, что
на траектории Т при w = w = w', w = делается
дополнительно по одному пассивному (Р =. 0) обороту
вдоль соответствующей промежуточной орбиты. В конеч-
ный момент перехода /к + ъ (^1}) + т (w') + т (^2)) по-
лучим прежние параметры rK, VK, тк. Конечные условия
выполнены, т. е. траектория р тоже оптимальна. Рассмот-
рим значения ф (ш, Л/\) соответствующей сопряженной
функции в точке Mt приложения импульса ДРг-,
w \ и функцию ф ($) до и после импульса ДР
г) Существуют сопряженные функции ф (ш, М^,
w ^2),ф’(s), 5 42) общие для всего
44
УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. ]
множества реализаций данной оптимальной траектории,
образующихся при дополнительном пассивном движении
по некоторому конечному числу промежуточных орбит,
причем при <^ w М па этих орбитах h = 0 может
быть лишь в точке приложения импульса AF
Условие существования общей функции ф выполнено
заведомо, например, когда функции ф (ш, Мг), ф (.$•)
единственны, т. е. однозначно определяются условиями
оптимальности, что обычно имеет место при мпогоимпульс -
ном переходе. Условие относительно h практически
не ограничивает общности. Действительно, во-первых,
как правило, на промежуточной орбите h (М) <Y 0 при
М Ф Мь ибо если бы при некотором w было бы h (717) — О,
М Ф МI, то в общем случае, из-за dhmax/dw 0, в некото-
рой области значений w стало бы h (Л/) 0, т. е. наруши-
лись бы ограничения. Во-вторых, если бы при h (71/) = О,
717 Ф Mi было су (1/) Х> О, т°, вообще говоря, этот скачок
меры вызвал бы изменение базис-вектора фг (717^), что не-
возможно.
При выполнении свойств а) — г)
1. Импульс АЕ\без ограничения общности можно счи-
тать внутренним.
2. При движении вдоль любой промежуточной орбиты
Т (ш'), <С w' модуль базис-вектора фг (к/,
71/) достигает максимума в точке сообщения импульса:
хх (TI7f) = шах хг (w', 717), <^w' <7 w\\
MEzT(io')
Действительно, па оптимальной траектории Т импульс
AFf включен внутрь траектории перехода. Далее, в силу
условий оптимальности Г, модуль хх достигает максимума
в точке Мi с учетом движения по промежуточной орбите
Т (и/), сопряженная функция на которой совпадает, в силу
свойства г), с экстраполяцией ф (и?', АГ) вдоль орбиты зна-
чения ф (ш') =^ф (w’, Мi\
Следствие. Если заданные ограничения выпол-
няются при движении вдоль промежуточных орбит, соот-
ветствующих лишь некоторой части импульса,
С w w'i М то результаты 1, 2 справедливы
для этой части импульса. Пусть, например, на орбите
Т (ш-1}) нарушаются ограничения, а на орбите Т
§ 1]
ДВИЖЕНИЕ В ПРОИЗВОЛЬНОМ ПОЛЕ
45
они не нарушаются (рис. 1.5). Тогда при сообщении неко-
торой конечной части импульса, при ш* w
ограничения не нарушаются, к ней можно применить ре-
зультаты 1, 2.
1.2.5. Численное определение опти-
мальных мн ого им пульс пых перехо-
дов. Рассмотрим вопрос об использовании приведенных
условий оптимальности для численного определения опти-
мальной траектории много-
импульсного перехода.Пусть,
например,задача такова, что
на концах траектории заданы
все кинематические парамет-
ры ^н), (^К, ^к),
на траектории сообщается N
импульсов AVi (t ~ 1, 2, . . .
. . . , N) в моменты при-
чем первый импульс сообща-
ется в начале, а последний —
в конце перехода, tr =
tN = tK. Пусть, далее, в М
точках —1) в моменты
^j+i> {/} GE
6 {1,2,. . . ,7V}) траектория
касается ограничений, h (fj) =
= 0, о (£•) > 0. Тогда в качест-
Рис. 1.5. Случай, когда оску-
лирующие орбиты при сообще-
нии части импульса не пере-
секают ограничение.
ве неизвестных параметров, определяющих траекторию,
могут быть взяты, папример, следующие: (tn) =
= 'Фгн? 4^ (^н) = — начальные значения сопря-
женной вектор-функции, импульсы AFf (1 t 7V), мо-
менты ti (1 i <С N), fj, скачки о (£}). Им соответствуют
конечные условия г (ZK) = rK,F (7К) = FK, условие (1.45)
HQ =0, условия (1.42) для определения ориентации им-
пульсов AF| = фр (Ц). условия (1.44) ^(ti) = 1,
1 TV, условия (1.48) для внутренних импульсов
(фг, фр)(^) = 0, 1 <f i<^ N, условия для точек контакта с
границами max h (t) = 0 = h (tj). Легко видеть, что
число неизвестных параметров и число заданных условий
равны 4N + 2ТИ -|~ 5.
Таким образом, имеется полная система условий опти-
мальности, и можно, вообще говоря, построить краевую
46 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
задачу для определения указанных параметров траекто-
рии, исходя из необходимости выполнения условий опти-
мальности и граничных условий. Данную краевую задачу
можно строить разными способами. Можно, например, па-
раметры определять все сразу, в рамках единой краевой
задачи, тогда получится (4JV + 2М + 5) — параметри-
ческая задача. Но можно все параметры разбить на не-
сколько групп, выделив одни параметры во «внешнюю»
задачу, внутри которой, «внутренними» краевыми задача-
ми, будут определяться другие группы параметров. Для
указанного выше случая можно, например, определить
«внешней» краевой задачей переменные х = (фгн» ‘Фкн»
АУл/) так, чтобы вектор невязки конечных условий у =
= (г (£к) — гк, V (£к) — FK) обратить в пуль, у = 0. При
этом х1н = | фгн |=1» после задания вектора х перемен-
ная определяется из условия HQ = 0, моменты (1 <
< i < 7V) определяются условиями (фг Gi), фу (^)) = 0,
импульс A ориентируется вдоль вектора фг (^) : AF? =
= Фг (^), его величина AFt определяется услови-
ем == 1, если h (t) <Z 0 при tt << t < или усло-
вием max h (t) = 0, если па отрезке (£ь £И1) есть
точка контакта с границей h — 0, при этом момент t[ за-
дается равенством dh(t\)/dt = 0, а скачок o' опреде-
ляется из условия хх (^+1) = 1. В этой схеме получается
6-параметрическая «внешняя» краевая задача, внутри
которой последовательно работает несколько других крае-
вых задач меньшей размерности. Аналогичная ситуация
будет и в том случае, когда условия на концах отличаются
от рассмотренных выше. Заметим, что после решения крае-
вой задачи надо проверить выполнение вдоль всей траек-
тории условия максимума базис-вектора: | фг (t) | 1.
Если рассматривается система, независимая от времени,
то это условие, может быть, надо проверить и на проме-
жуточных орбитах, соответствующих сообщению им-
пульсов.
Практически краевая задача может быть успешно ре-
шена, конечно, при наличии достаточно хорошего началь-
ного приближения. Существуют разные методы получения
начального приближения. Для этого могут быть исполь-
зованы, например, параметры некоторой траектории пере-
21 ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ
47
лета, относительно которой есть предположение, что она
сравнительно близка к оптимальной, или параметры реше-
ния в некоторой упрощенной, модельной постановке. Со-
пряженная вектор-функция на такой траектории опреде-
ляется из условия, что в точках приложения импульсов
фг (^) = а на пассивных дугах функции фг (?),
фг (/) определяются формулами (1.23) при Р = 0. Пример
конкретного численного определения оптимальной много-
импульсной траектории приведен далее, в гл. V.
§ 2. ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ
ОПТИМАЛЬНОГО МАНЕВРИРОВАНИЯ
2.1. Точечное преобразование координат
Хотя условия оптимальности, полученные выше для
декартовой системы координат, имеют физически нагляд-
ный характер, конкретное решение задачи часто удобнее
провести в других переменных. Как при исследовании
обычных механических задач, проведя замену перемен-
ных, иногда можно лучше отразить свойства симметрии
рассматриваемой системы и легче получить интегралы дви-
жения [10].
Переменные после преобразования будем отмечать
тильдой: х, ф. Опуская общий случай преобразования
координат и сопряженных переменных
X = X (х, ф, S'),
ф = ф (;г, ф, s),
рассмотрим точечные преобразования, которые использу-
ются в дальнейшем (см. п. 4.2.4.). Преобразование пере-
менных может производиться как на всей траектории, так
и на ее некоторой части. На разных частях оптимальной
траектории могут быть сделаны разные замены перемен-
ных, т. е. могут использоваться различные перекрываю-
щиеся системы координат.
В общем случае невырожденное точечное преобразова-
ние, автономное по аргументу s, имеет вид
$ = X (ж) = X' (х1, х\ . . . , хп), i = 1, 2, . . . , п}
(2. Г
48 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
причем якобиан
дХ*
дх^
^0
и функции X (х) е С2 — дважды непрерывно дифференцц
руемые по совокупности переменных а3 в некоторой окрест
пости отрезка траектории, на котором делается данное
преобразование. Тогда существует и обратное преобразо-
вание
х = X (х) (г1, х\ . . . , Л}- (2-2)
Заметим, что хотя данное преобразование автономно, в
нем, вообще говоря, участвует и время t, как одна из коор-
динат xj.
Примером такого преобразования будет переход от де-
картовых координат и компонент скорости КА к некото-
рым другим фазовым координатам, без изменения времени
и массы КА, как координат:
(r,F, и?, Z) —> пг1 f), i — 1, 2, ... , 6.
Здесь
Тогда = X1 (г, V, t), т = т — X7, t = t = Xе. i = 1, 2, . . 6, ' (2-3)
= х7 (.е, /), т = in — X7, t = Г= Xя. i, j = 1, 2, . . 6, ' (2.4)
Преобразования (2.3), (2.4) будут для дальнейшего основ-
ными.
После преобразования координат (2.1) дифференциаль-
ные уравнения для х будут следующими (относительно
аргумента х):
(.г, и) = 2 fj и) = Т1д + t (2.5)
здесь
= АГ д*'г V I эх1 „ , 1
п «о L dr аг 9 1 at J
g 21 ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ
49
_ производная от х1 при пассивном полете, у2 — О,
р __ dXi f о_ dXi т
> л ~ дУ ' дт с
_ производная от 7г- при импульсном режиме, = 0.
Сопряженные переменные фг- удовлетворяют дифферен-
циальным уравнениям
8
= __ 5 dh =
ds .=1 дХ1 3 6 dxi
О ~ ~
- з «л. - га $,+i. . (2.6)
т дх1 дхг
в силу условий
Т1 + Г2=1> Ti = Т1 (Л гп), т2 = у2(Р,т),
дуг д^2 __ Т1?2
дт дт т
(см. п. 1.2.3).
Здесь мера ds та же, что и прежде, так как ограничение
h (х) инвариантно относительно преобразования координат
h (х) =h (х (г)) —1г (т).
Управление и (,s) (Р (s), /° ($)) опять максимизирует
функцию 3t (ф, 7, и) = (х, и):
г
($, X, и) = 2 (Т1/~П + Тг/а) =
i
V? Т х i I V 7 I ЭХ1 т \ л
=Г12^/ц mi’i Ьр-/—Hmax =0.
Очевидно, функция и (s) будет инвариантной относительно
преобразования координат, и (<s) = й (.s). Функция 3^ (ф,
я, и) также является инвариантной при замене пере-
менных .
Если вектор / правых частей уравнений движения ме-
няется как контравариаптпый тензор, то сопряженная
переменная ф, как и при оптимальном движении без
50 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА ।
ограничений [10], меняется при преобразовании (2.1), как
ковариантный тензор (см. § 4):
2=1
В частности,
(2.7)
(2.S)
Коэффициент при тх/а0 в функции есть, как легко видеть
из (2.8) и выражений для /гп, функция Но= а0^> фг-/п =
г
= ('фг, V) -г (фг» ff) + Фе Коэффициент при т2 есть функ-
и V7 / Ж1 -PQ дХ1 т\ , z.ox Фт"2 u
ция Ях = ---э^—) = (Ч’к.Г0)- -7- • В но-
вых переменных хг получим, следовательно, прежние усло-
вия оптимальности, выраженные через новые переменные
£г, ф^. Обозначим
ZL . . . ( 1, ] = к,
0, ^к.
1=1 4 7 J
Матрицы
В = {И), 5-1 = {pj}
есть матрицы частных производных для прямого и обрат-
ного преобразований (2.1), (2.2). Пусть ф = (фп ф2, . . .
. , ф8)*, тогда (2.7) можно записать в матричном виде:
ф = 5*ф.
§ 21
ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ
51
Отсюда получаем
$ =
~ X1 дХг (г) .
г
(dr । \ 1 / dV । \ . dm . . dt , /п п\
+ (2-9)
dxJ / \ dx1 J dx' dxJ
Если в точке st скачка меры переменная гр имеет скачок
д^=(4гУДо^’
то и переменная гр будет иметь аналогичный скачок
Дф = (В-у Дф = (5-1)* (-g-У До (Si) = До (Si).
У C/vC J (Jib
Очевидно, что аналогичным образом осуществляется
изменение переменной гр и при преобразовании недекарто-
вых координат.
Рассмотрим подробнее преобразование (2.3), (2.4).
Уравнения (2.5) для координат х будут следующими:
^=Г = ъЛ + т2К =
Т1 / дХ1 хг , дХ' . дХ1 \ . дХ1 „п • Л о а
= + + + 1=1'2’-'6'
dm _ dm _______________ т ~у _____ ~
ds ~ ds ~ ^2“’ /п— ,
dt dt
ds ds
fl = 0.
Уравнения (2.6) для сопряженных переменных гр прини-
мают вид
dh(x^ , = i 2 б 8
дх*
ds ds т ' т dV /
7=1
Преобразование сопряженных переменных (2.9) будет
52 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. J
выглядеть следующим образом:
~ / dr (£*, t) \ г
\ &х' /
+ (— . Ч’г), г, ] — 1, 2, . . 6,
\ dSJ т ) '(2.10)
%г = 4:'т,
~ . / дг (хг, I) । \ t / dV (.сг, /) \
-I- (—ь— - +1—h-2 - я.
Обратное преобразование:
6
S- / (г, F, О V
—-) ’
г=1 4 '
6
. V -г / v, 0 \*
= 1 Ц—V-2- ’
1=1 4 '
6
I 'Г I V Т (г’
+ 2j ——t-----------------•
1=1
Следовательно, при преобразовании (2.3) все переменные
(кроме вообще говоря, меняются.
Рассмотрим интересные частные случаи точечных пре-
образований.
2.2. Преобразование, не зависящее от времени
Пусть преобразование (2.3) не зависит от времени,
2i = X1 (г, V), = 0. Тогда = Xs (г), = 0, i
v ' dt х /7 dt
= 1,2, . . ., 6. В этом случае временная ком-
понента сопряженных переменных инвариантна относи-
тельно данного преобразования.
2.3. Независимость радиуса-вектора
или вектора скорости от некоторой переменной ос1
Пусть преобразование (2.3) таково, что д^/дГ 0.
Тогда, в силу (2.10),
§ 2]
ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ
53
сопряженная переменная определяется лишь перемен-
ными -фр = (ф4, ф5, ф6)*.
Аналогично, если дУ/дх1 = 0, то
к з
7 ( дг \ х1 &Х3 ।
ti = (-Г - tr) = 2j zrrtr
\дх / . л дх
7=1
Эти обстоятельства имеют место, например, при линей-
ном преобразовании координат и скоростей.
2.4. Поворот декартовой системы координат
Пусть осуществляется переход к новой декартовой си-
стеме координат OXYZ, получающейся из старой системы
OXYZ некоторым поворотом, которому соответствует мат-
рица В = {Ц}. Тогда если х3 — координаты точки в но-
вой системе координат, то
з
х7' = 2 biY' {г = В г},
г=1
здесь г = (х1, х2, х3)* — радиус-вектор в новой системе
координат, г х2, х3)*. Аналогично меняются коор-
динаты вектора скорости
з
ГНЗ = 2 {К == BV}.
г=1
Уравнения движения останутся прежними, векторы тяги и
ускорения также претерпевают поворот.
Обратное преобразование имеет вид
з
г = = в* г Lt = 2 ,
7=1
3
v = B>v^i^= 2 bi?’t3},
1 7=1 J
дх} d (.tj+3, t)
поэтому
dXi+3
54 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. i
Сопряженные переменные меняются следующим образом;
3 • 3
Я'з = S ’Pi = S ьЬЬ bb = в^г},
i=i w i=i
t+3 = S -S Ч’из = S Mipi+3 = B^r}, i, j = 1, 2, 3.
i=l °' i=l
Отсюда следует, что комплексы ф,., фг являются обыч-
ными векторами в декартовой системе координат.
Примером поворота системы координат является, па-
пример, рассмотрение векторов ipr, фг в «местной» системе
координат г0, t°, L°: rQ— вдоль радиуса-вектора, t° —-
вдоль трансверсали, L° — по кинетическому моменту
L — т X V (при 1^0), векторы берутся фиксированны-
ми в некоторый момент времени.
2.5. Переход к другому началу координат. Особенности
оптимизации траекторий при расчете по сферам действия
Пусть (t) — уравнения движения центра масс /-го
небесного тела, в который мы хотим поместить новое нача-
ло координат (при этом координатные оси смещаются па-
раллельно). Формулы преобразования принимают в этом
случае следующий вид:
г = г - г3 (<),
F = F-F3(i), F3 (0 = ^(0-
т = т, t = t.
Выпишем дифференциальные уравнения движения в новых
координатах:
г = F,
F = F - F3- = g (гЛ) - F,- + ^- (г, t) + f°,
здесь
g(r,t) = g(r
— гравитационное ускорение в новой системе. Новые
сопряженные переменные выразятся через старые
§ 21 ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ 55
следующим образом:
% = %, = 4’т,
й = ^ + \sf - ’ %) = ^'+ (*5- г) + 4>г)-
Рассмотрим частный случай гравитационного поля п
точечных масс Mt, Z = 0, 1, . . . , п — 1. Пусть начало
координат основной системы — в центре масс небесного
тела с номером i = 0. Тогда [И]
здесь Цг =xMi — гравитационная постоянная е-го тела,
Mi — его масса, х— гравитационная постоянная, т — ра-
диус-вектор (в основной системе) КА, г = | г | , Г/с — ради-
ус-вектор &-го небесного тела, г/. = | |, рЛ = г — г/с,
Pit = I р/с I-
Движение нового центра (/-го тела) осуществляется в
соответствии с уравнением
*5 = — (Ио + н) — S р-4- (—-г + ~г) ’
Г3 /с^(0, J) \ lJ/cj ч /
здесь
Р« = Г/с-?> Р^=|Р/С>|-
При переносе начала координат в центр /-го тела получим
g=g-V.= -ИД- Ж Д + ТГ) •
В случае системы двух небесных тел (Z = 0, 1) будет
Г / 01 | Г1 \ .
д = — Рот? - И1 (-4- + -г) - д0 +
\ 11 '1 /
Гг=-(Ро + Р1)4’
Г1
01 (г Г1 \ ~ ,
^ = — P1-J- —Ио (тг —-г) = 0о + 81-
56 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
Здесь е = — Hi + "рг ) ’ 8i = ~ Во ~ /г) ~ век го-
ры отклонения ускорения от кеплеровского вблизи соответ-
ствующего центра. Так как для значительной части многих
реальных траекторий космического полета поправки 8,
бывают достаточно малы, то для приближенного пли
проектного расчета оптимальных траекторий межпланет-
ного перелета часто используется метод сфер действия
(или сфер влияния) [12], [13], [14]. В этом случае при
движении КА внутри сферы действия небесного тела от-
носительно этого тела гравитационное поле считается
кеплеровским, соответствующим гравитационной посто-
янной [Xj = xMj этого небесного тела, т. е. влияпиехм дру-
гих тел пренебрегают. Начало координат системы пере-
носится в центр сферы действия, т. е. в центр /-го тела.
Тогда если р;- — т — т-г то уравнения движения в сфере
действия /-го небесного тела будут следующими:
г = = К,
г = -ад)(.,+4г.
Нестандартность такого подхода с точки зрения анализа
оптимальной траектории (по сравнению с точным пред-
ставлением поля (2.11)) заключается в возможном нару-
шении непрерывности гравитационного ускорения при
переходе из одной сферы действия в другую. Рассмотрим
возникающие вследствие этого особенности (см. п. 4.2.3).
Пусть оптимальная (для такого модельного рассмотре-
ния) траектория проходит вблизи нескольких небесных
тел, пересекая границы их сфер действия с некоторой
ненулевой радиальной скоростью
у-ю^о, р, Ю == р/,
здесь р, — радиус сферы действия /-го небесного тела.
Вся траектория разбивается на несколько участков, каж-
дый из которых проходит внутри некоторой сферы дей-
ствия. Участки склеиваются друг с другом в точках пере-
сечения траекторией соответствующих границ сфер дей-
ствия непрерывно по фазовым координатам г, F, пг, I
(со скачками скорости и массы, если при I = сообщается
импульс).
§ 2J
ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ
57
Гравитационное ускорение, действующее на КА в не-
которой единой системе координат, будет иметь вид
9^ =
' 9
9г{х),
9пН,
i = 2, 3, . . . , тг — 1,
Функция д (я), будучи достаточно гладкой на интер-
валах (^, /1И), вообще говоря, разрывна в момент
пересечения границы сферы действия:
9 (х (/; — ())) Ф д (х (ti + 0)).
Определим соответствующий скачок ускорения. Пусть
сначала при t Ц происходит движение в сфере действия
/-го небесного тела:
9=~ 9 = 9 + Vj, ti — &<Zt<ti,
здесь д — ускорение в основной системе координат. При
переходе в сферу действия следующего (/ -р 1)-го тела
будет
*7=— Ar^Pi+i’ 9 = 9 + Vni, 7i<«<7i + 8.
4+1
Скачок ускорения в точке Ц
&9 = 9 (4 + °) — 9 (4 — 0) =
__ Ну+1 . ту . Hj
Pi" + >'•*+ р’ е< ~ =
= ~tFpw + 4('j + ’4.j- <2-12)
1 J+1 ‘У
где Р;+1 j = Vj+1 — Fj = pj+1 j — скорость (/ + 1)-го тела
относительно /-го тела.
Пример. Система Земля — Луна.
Для простоты рассмотрим случай, когда КА движется
в плоскости орбиты Луны, которую возьмем круговой
радиуса 7?л 385-103 км.
Пусть сначала КА движется в поле притяжения Земли,
Но ~ 398 600 км3/сек3, затем входит в сферу действия Луны
(р-! ~ 4904 км3!сек2, р* 66 000 км) в точке, селеноцен-
58 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
трический радиус-вектор которой составляет угол а =
= 60° с направлением Луна — Земля. Тогда получим сле-
дующие оценки для составляющих величин в (2.12) и
скачка Agr:
| д~ | = ~ 3 • 10~б км/сек2,
|<7+1,1-10 6 км/сек2,
Р
|Р1О| = .Ео±Е£~ 2,7-10“® кл/сек2,
дл
| Д<7 | 1,1 • 10“* км/сек1.
Таким образом, скачок Ддг здесь имеет порядок ускорения
f+-
Пусть
<р3- (х) = — pj (г, 0 + Р* = 0
— уравнения поверхностей (границ сфер действия), па
которых гравитационное поле в данной модели (и правые
части уравнений движения) терпит разрыв. Тогда на
оптимальной траектории, пересекающей в момент /i
эту поверхность (при входе в сферу действия или при
выходе из этой сферы), сопряженная вектор-функция
будет иметь скачок (см. § 4) в направлении градиента
grad <р3- (х) = (<р;-х)*:
А'ф (ti) = ,Ф+ (h) — i|r (t^ = ip (^ + 0) — ip — 0) =
= di ад *, (2.13)
здесь di — некоторая константа. Пусть А/ (t^ = / (ti -ф
+ 0) — f (ti — 0), А/0 — 0 — скачки вектора / правых
частей системы и подынтегральной функции функционала,
/+ (h) = f (^ + 0), f~ (t^ = / (ti — 0), тогда
di = - A/) = -
^jxf ti W
(2.14)
Определим скачок Аф при входе КА в сферу дей-
ствия меньшего небесного тела.
Пусть в момент t = КА входит в сферу действия
у-го тела (рис. 1.6):
Pj (Ц) = Pj, Pj (/i) 0,
§ 2]
ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ
59
При t <^ ti (s движение рассчитывалось в кепле-
ровском поле (/ — 1)-го тела, соответствующее предель-
ное значение сопряженной вектор-функции обозначим
через
^-1 (Q = 6fc(Mr Ч?0-_1Г t(M))-
При t ti (s s(^) движение будет рассчитываться в кеп-
леровском поле /-го тела. Через ф/ (^) обозначим соот-
ветствующее начальное значение век-
тора ф для последующего «гладкого»
расчета в сфере действия /-го тела.
Переход от ф^ к ф,+ осуществим >
путем двойного пересчета. Сначала
сменим начало системы координат,
перейдем от центра Oj_± (j — 1)-го
тела к центру Oj /-го тела без нару-
шения гладкости поля (без введения
скачка ускорения), при этом сме-
нится на Ф/ = (fe $-vj, ф^).
Затем учтем скачок ускорения, фу
перейдет в **
Рис. 1.6. Вхо*Ъ КА в
сферу действия мень-
шего небесного тела.
Гладкий переход к новому началу ко-
ординат осуществляется в соответствии с формулами
p3 = pM-pjM(O,
Frj = Fr0-l)_F.._i
Поэтому
$-• = (Fir %i = % 0-1)’ 0-1) = tn’
t) = t^-l) + t) + (C'j-1’ ^0-1))-
Вектор ускорения становится равным
~ ~ . Ц,-
д- (М = д^ &) - v} м = - -ff- pF1 - v. hl.
60 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [1'Д. j
У чет ска ч к а ускорения
_ ~ Н- М -1
^9 (Q = 9* ~9- - ту Р; Н Pj-> + 1 'j.i-i
производится так.
Вектор ср-* имеет в данной системе координат компо-
ненты
<р.-‘ = (- рГ’ °’’ °’0)'-
Поэтому, в силу (2.13)
= %, -^р-Нр;(М)-Лр°’
(М) Gi-0) *),
% = % = Н7(М) Ь }-v йчм)) +
+ Н'к (J-!))'
(2.15)
Определим постоянную сЦ. Возможны два случая.
Если в момент не сообщается импульс скорости (рас-
сматривается задача с конечной тягой 0 Р Ртах С
сю или в импульсном случае AF (^) — 0), то из (2.14)
получаем
, (гп рО) = У^<0.
(F”, Р?) t- у ₽
Если в момент сообщается импульс скорости AFf -
= AF (^) = AEipr (/0, то из условия HQ ± 0) = О
следует
_ (фг, Afz+A^;.) _ (i|y, Д^-Н AV^.)
*' (Г7, р°)-------’ (2-^7
причем (F2, р") < 0, (У^, Р®) < 0.
Замечание. В данном случае, при сообщении
импульса на границе сферы действия (s^ s s»2')’
условия (1.48), (1.61) (1.62), вообще говоря, не будут вы-
*) Если, в общем случае, при t = сообщается импульс ско-
рости AFi? то 1|??п (ц + 0) = (т (zi - 0).
§ 2]
ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ
61
полниться, хотя модуль базис-вектора и принимает мак-
симальное значение фу = max | фр (/) |. Теперь
t
Но (4Х)- 0) - Но № + 0) == 7/0 (ц + 0) = о,
Яо («) < о, su < 8(i* ’ с; s < < sK,
(Фр, %•)<0, (Фр, Ф^-)>0, (фр, АФ,.;)>0,
(2.17)
Рис. 1.7. Выход КА из
сферы действия меньшего
небесного тела.
причем в формуле для на отрезке сообщения импульса
берется, например, д (s) = д+, фг (s) — фг, <7 s 42)-
Поэтому коэффициент d будет
удовлетворять условию
ЯДФр, Р’)<0.
Остальные условия оптимальности
не меняются.
Пусть теперь в момент Ц КА
покидает сферу действия (/ — 1)-го
меньшего тела, переходит в сферу
действия /-го (большего) небесного
тела (рис. 1.7), при этом
Пусть опять яр(7-1) — предельное
(при t / tt) значение сопряженной
вектор-функции при расчете оп-
тимальной траектории в кепле-
ровском поле (/ — 1)-го тела, — предельная (при t \
сопряженная вектор-функция в поле /-го тела. Тогда
аналогично предыдущему случаю получим
Фр, = Фр (М) = Фр Gi), Фт & + 0) = (т~М+)/{Фт (h ~ 0),
% = ^Г(М) - (Ц--1- Ф; «-и) - (^-1 ?. Фг (М)) +
+3(FM ., poj,
. _ (Чу, Ду + агф;0 1)) _ (4у, Ду Ч- ДРЧ’г,-)
(2.18)
С)2 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА 1ГЛ. т
здесь
(Fi0-11, Р^)>0, Р?_1)>0.
Условие 4|>r),. - 0 заменяется при ДУ (Q >• 0 усло-
виями
ч>;(М)) < о. 0Ь-> %) > °’ di р°-х\ < °-
Случай движения без ограничений и без сообщения иль
пульсов на границе сферы действия рассмотрен в |1Г>|.
2.6. Примеры криволинейного преобразования координат
2.6.1. 1J е р е х о д к полярной системе
координат. Для анализа движения точки в цен-
тральном (или близком к нему) поле сил иногда удобна
«полярная» система коор-
динат, в которой одной из
координат является рас-
стояние до центра масс
главного притягивающего
тела. Рассмотрим следую-
щую систему координат:
Рис. 1.8. Проекция оскулирую-
щей орбиты на единичную сферу.
щей орбиты (предполагается
(рис. 1.8).
Преобразование х = х (х)
времени, имеет вид
х1 = ?•, х2 = Vt,
х3 = Уг, х4 = и,
хъ = /, xQ — Q (2.19)
— соответственно расстоя-
ние до центра, трансвер-
сальная и радиальная ком-
поненты скорости, аргу-
мент шпроты точки, нак-
лонение, долгота восходя-
щего узла оскулирую-
что sin i =^= 0, Vt 7^ 0)
здесь не зависит явно от
Г = г (г, U, Z, Q),
V = V (и, i, vt, Vr),
$ 2j ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ 63
ГДе
Г —. Г Г °,
г° = П° cos u^-b" sin и,
S2° = (cos Q, sin Q, 0)*,
&° = — JD°ycos i + zQ sin i,
L°xy = (sin £1, — cos Q, 0У = S2° x s°, - (0, 0, 1)*,
V = Vtt° + Vrr\
t° = LQ x r°, Ь° = cos i + £%sin i.
Переменная сохраняется. Рассмотрим зависимость но-
вых сопряженных переменных ф?- от основных, соответ-
твующих декартовой системе координат. Имеем, в силу
2.Ю),
=-- Фг = > Фг) = (>’°, ФД
т. е. переменная, сопряженная радиусу г, есть проекция
вектора фг па радиус-вектор.
Заметим, что такое простое выражение для будет
не во всякой системе координат, в которую входит радиус
г. Например, если считать вместо Vt координатой угло-
вую скорость й = Vtb\ то dVldr 0 и в переменную
фг войдет составляющая фу.
Переменная, сопряженная трансверсальной скорости,
^2 — Фу^ — ("ЖГ ’ = ^0’
есть проекция вектора фу на трансверсаль t°.
Переменная, сопряженная радиальной скорости,
Фз = Фуг = (jjF’ ’ Фу) = (г°’ Фу)
равна проекции вектора фу на радиус-вектор.
Переменная, сопряженная углу и,
й = Я’и = > %) = Г (*°’ 'Фг) + <Fn’ Фр) =
= (ь°, К),
есть проекция вектора К — г X V X фу па нор-
маль i° к орбите (Kn — X V),
64 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. 1
Переменные, сопряженные наклонению i и долготе
узла Q, имеют выражения
7 । /dr । \ - /dF , \
= = + =
= г sin и (Е°, фг) + (Иг sin и + Vt cos и) (Ь°, ifF) = (Q°, ZC),
7 । /dr , \ , /dF , \
4'e = > чу) + \jq - -
ГД6 Txy = %® X ^*xyi ^xy X Гч/. ~~ 3-A
Vxy — V — zs°. Переменные ф(/, равны, следова-
тельно, проекциям вектора К на оси L°, £1°, ортого-
нальные плоскостям изменения углов и, i, Q соответ
ственно.
В импульсном случае, Р-+оо, переменные Фи,
фг, Фп будут, вообще говоря, разрывны по времени, если
/п = (/°, L°) 0, вследствие того, что при сообщении
импульса в этом случае меняются направления трансвер-
сали и бинормали. Если /£ = 0, то эти переменные будут
непрерывны.
Обратные формулы фг (фг, ф^), фг (фг,
'фо) имеют вид
, , /dr\* . . . /дРД*
= ^гг° + (F^vr — + 1|>и) Д- +
[, ч —Фи cos iфп 1 го
- (cos и + ф2)-------------н (Sin и + Ф1) , (2.20)
° + ^V(t° + [sin и ^/7^ +Чч cos ~
< л (2'21)
(здесь cpj — е sin со, д,2 - е cos со), так как
du* _ r° COS и д2
дг г > р tg i
PJ
ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ
65
sin и ф1 £0 д&* ___ _
р ’ dr р sin i '
dr ~ dV t dVr glL* sin u jro
dV~ u’ dT dP — *' ’ ~W — ~ IgT Ц ’
di" L(> 3Q‘ sin и L°
n rr COS U ~т~7 •) q ту- — ” : ГТ •
dr Vt dV sin i ] /
Следовательно, если (X, jlx, v), (g, ц, Q — радиальная,
трансверсальная и бинормальная компоненты векторов
<фг и соответственно, то они выражаются через фг,
и т. д. следующим образом:
v =
h = И =
' — cos i • ib rf- ipQ 1
sin и + i|)i cos и /Vt.
(2.22)
sin i
& = ^Г, n = (И^у,. — V, /фУ( + Ipj/r,
Г — cos i-ib + 1
£ = L------STi-------1 (C0S u + Фг) + (sin u+ Ф1)J/P-
(2.23)
Удобство приведенной системы для анализа движения
вблизи планеты состоит, помимо прочего, в том, что огра-
ничение (1.6) при г; = 0 переходит в ограничение на одну
координату — расстояние г, другие координаты не будут
ограничены.
2.6.2. Переход к элементам о с к у ли-
ру ю щ е й орбиты. В предыдущей системе коорди-
нат фигурировали два элемента оскулирующей орбиты:
углы /, Q. Часто удобны системы координат, в которых
элементы оскулирующей орбиты описывают также раз-
меры и форму орбит.
Пусть делается замена
(г, F, Z) -> fe, Z), i - 1, 2, . . ., 6, (2.24)
Причем dq{ (г, F, t)ldt = 0 при i = 1, 2, . . ., 5, (г,
F, t^/dt 0. Например, toJ = {/?, е, со, Z, Q, 7\}, Тп —
момент прохождения перицентра. Переходя в обычных
Уравнениях [И] к аргументу s, получим следующие
3 В. В. Ивашкин
()6 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
уравнения движения (при — 1)
dp/ds = 2р Уp/Игр (Г/Р) Т.
de Ids = У p/Нгр {sinft-S + [cos-ft + (cos ft + e)r/p] T},
d<s)/ds = Kp/Hrp {— (cos-ft/^) S + (sin ft/e) ^1 -|- T —
---------------------------------^-sinn-ctg i-TV), >
di/ds = Ур/цгр (r/P) cos u-W,
dtyds = У р/Нгр (r/P) sin * cosec i • W,
dT^lds = (р2/фгр) (р/рУ [(^А/ sin ft — cos ft) 5 + (р/г)Л?Л,
dt/ds = Yx, dw/ds = y2 (5h $ "C *к <C °°),
(2.25)
здесь 5 =- ух5п + y2S&, T = у^п + y2^a, W = yxWu +
+ ?2^а> W^n) — проекции возмущающего уско-
рения при пассивном движении (на радиус, трансвер-
саль, бинормаль), (5а, Ра, Wa) — направляющие коси-
нусы вектора тяги или импульса,
N (е, Ф) 2 (р/г)* (1С^7сХ)з ’ = 6 + е cos ^Г1’
О
О (/) — истинная аномалия точки, опа связала с време-
нем t уравнением
О
Если
r r {Qb I), V V (qi, t). t — t
— формулы преобразования элементов в декартовы коор-
динаты, то сопряженные переменные в новой системе
определятся через старые следующим образом:
%<=(^Г’ч|1г)+ (2-26)
= \4г’'ь)+(4г’Н^
= С'Ь-Ю + (Я’г.йГк) 4-’р = #0 — Сфг, Д<7), (2.27)
§ 2]
ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ
67
где \д = д — дк = д + г =- 5пг° Tnt° + И-'П’Ь° —
возмущающее пассивное ускорение. Производные dr/dq^
dVIdqt для ряда систем элементов приведены в [16]. В ча-
стности, если q6 — Тк, то
Чт„ = — (tr, V) — дк) =
= — 1Ц -• Ч; + (Чк, &д) Ч< — Ч\- (2-28)
На пассивной дуге траектории /70 - 0, поэтому на ней
- (Ч^, &д), Чгя = Ч< — (Чк. Д{?).
Для кеплеровского поля будет &д — 0. тогда ip, --- 0,
Чт„ = Че
Если точка лежит на границе Л, 0, то переменные
имеют в ней, вообще говоря, скачки:
дч<24 = , дч>-) -^ — 3 _
Дхр, - (Дчрг, F) 4- Дгр, 0.
При г?- = 0 будет Лфт_ -= 0.
Рассмотрим теперь следующую систему:
X = {^, и, О, Z = 1, 2, . . ., 5, (2.29)
dqt (г, F, t)/dt = 0, например, {q{} = {р, с, cd, f, Q},
и — аргумент широты КА,
Положение точки на орбите фиксируется здесь, как и
в п. 2.6.1, аргументом широты и. Тогда
г =- г (qi, и),
V = V (qi, и).
Преобразование не зависит от времени,
68 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА (ГЛ. I
Обратно,
. / дг . \ 1 / дГ , \
ф«= (4г’ М + (4г ’г|,г)= [(F’
= 4-[Яо-^-(ДйГЛг)] = (2.31)
1 у t
так как
5г г Tz 5F г г . д \
Т-— ~V' “аГ _ Т)-— Т)-
Переменная соответствующая углу и в системе (q^
и), отличается от переменной i|9u для угла и системы (г,
Vt, Vr, i, Й, и). Действительно, из соотношений
p-p(r, Vt, Кг),
е = е (г, Vh 7Г),
о -= и — й (г, Vt, 7Г),
I — i, Q = Q, й — и
следует, в силу (2.7),
Фи Фи + фо,, ф; = Ф4, фо = фо (2.32)
(Ф — истинная аномалия точки). Не рассматривая под-
робнее связь переменных i|)7. с ^r, ify, выразим (фр,
%, через (хрг, tpj:
dr 9V. dVr
^ = 4г^ + -7Г^ + тГ^ =
= у- [гфг - 4" + ГгФуг) }
dr dVt dV„
Ч’« = ^Г^ + тм£^, + ^^г =
=----у фг COS ’О' 4- cos ф sjn {}),
. I dr dV. dVr \
(аУ^ + ^Г^ + ^-Фг,.) =
—----— ефг31п4 — sin "O' 4- фу( cos &) (’,
Фи =- фи — фо, (ф,., фу(, фуг).
§ 2J
ЗАМЕНА ПЕРЕМЕННЫХ В ЗАДАЧЕ ОПТИМИЗАЦИИ
69
Обратно,
♦у,” 2т7*’+ул “Н(е2 “1J V+*•+
/ р (2 + е cos О) sin О
+ ' Нгр~ л e(14-ecos^)j
/р • а । 1 /~ 7? COS О’ .
-J—зт&-фе—1/ —!-------— фш,
Игр Г Игр е
Фи = Фи + Фиг
Координаты е, со плохо подходят для анализа около-
круговых орбит. Для этого случая удобна, например,
система х = (р, <pn ср2, г, Q, и, t):
dfpjds = ]/ р/|лгр 1 — S cos и
+ 7’[(1 +'у) sinw+ Тср1]~
— W (р2 ctg i s*n
dtyjds = УР/Нгр |*5 sin и + T j cos и 4- -у-фг]+
+ W (pi ctg i sin и}.
По сравнению с системой (р, е, со, i, Q, и) переменные
фр, Ф-n Фо, фи останутся прежнихми, переменные фе,
заменятся на г|)Ф1, г|)ф2:
фФ1 =----г— фг sin и + ~\/Г(г|)у^ sin и — фу^ cos и) -=
= Фе sin СО 4- (фсо/е) cos со,
Фф2 = ---Г— Фг COS и 4- (Фуг cos и — фуг sin и)
= фе cos со — (фш/е) sin со,
они не имеют особенностей при е = 0.
Не рассматривая более других вариантов, отметим,
’ito Д. В. Брекуэлл рекомендует брать вместо переменной
Р переменную q = In Ур,грр. Тогда = 2рфр, прифг = 0,
70 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
-= 0 легче определяется соответствующая сопряженная
переменная [17].
В заключение заметим, что переменные , сопряжен-
ные к оскулирующим элементам, вообще говоря, не по-
стоянны на дугах пассивного полета. О случаях постоян-
ства их см. п. 3.1.3.
§ 3. СЛУЧАЙ ЦЕНТРАЛЬНОГО НЬЮТОНОВСКОГО
ГРАВИТАЦИОННОГО ПОЛЯ
3.1. Особенности оптимального движения
для ограниченной тяги
3.1.1. Особенности постановки за-
дачи. Обычно большая часть космического полета
протекает в гравитационном поле, близком к кеплеров-
скому. Поэтому анализ движения в кеплеровском грави-
тационном поле вблизи небесного тела имеет важное
значение. Рассмотрим особенности этого случая.
В уравнениях движения (1.4) в качестве функции
д — д (г) надо взять
д (О = — л (З-1)
здесь г — радиус-вектор КА относительно центрального
небесного тела. На участке пассивного полета траектория
будет кеплеровской дугой.
В качестве ограничений (1.6) в данном случае будем
рассматривать следующие:
К (?’) —Г + 7min < 0, (3.2)
(г) г - гп1ах < 0, (3.3)
причем rmin < rmax- Таким образом, движение должно
осуществляться в заданном кольце К — {rmin r "С
гтах} с центром в центре тяготения (рис. 1.9).
Первое условие ограничивает минимальное расстоянние
подлета к центру планеты величиной riniin второе — огра-
ничивает максимальное расстояние отлета от планеты ве-
личиной Гщах-
Задача движения в кольце К, кроме теоретического,
представляет и практический интерес. Действительно,
§ 3]
СЛУЧАЙ ЦЕНТРАЛЬНОГО ньютоновского ПОЛЯ
71
если не ставить ограничений на расстояние от центра
тяготения, то решение задачи оптимального перехода
иногда требует сообщения
г = 0 или г — оо, что не-
осуществимо в действи-
тельности [18], [19]. Слу-
чай rmin 0 важен ввиду
конечности размеров пла-
нет, случай rmax оо
интересен, например, для
рассмотрения движения
КА в сфере действия пла-
неты, для получения тра-
екторий с конечным време-
нем перехода (даже если оно
специально не ограничено)
реактивного ускорения при
Рис. 1.9. Движение КА
в допустимом кольце К.
И т. д.
3.1.2. Выражения
для сопряженных п
тониан системы (ф, ж, и)
глядеть следующим образом
временных. Гамиль-
в данном случае будет вы-
(для аргумента — время):
Ж (Ч>, х, u) = Г) — «г, г") + Ч.' +
1 т у1 х 1 с /
Функция Hq = Ж (Р = 0) имеет вид
Я0(1р,х) = (Ч>Г1К)--^(Я>р,г») + ^. (3.4)
На пассивных участках она постоянна: HQ = 0. Пусть
(X, р, у), (£, т], Q — проекции векторов фг и фг соответ-
ственно на оси подвижной системы координат — радиус,
трансверсаль, нормаль к плоскости движения. Тогда
(3.4) запишется
#0 = ^r + n7f-±^-X + ^-
(3-5)
Вектор (/?;)*, определяющий направление скачка со-
пряженной вектор-функции фг на границе — 0, будет
72 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
следующим
, [ — 1, j = 2, Г = Гтах = ^2?
(hrY = — 8fT°, 8г = 1 л . л
v ' г [ 1, I = 1, Г = rmin = Г1
(см. рис. 1.9), кроме того, h\ = 0. Следовательно, доба-
вочный член б (^г)* в уравнениях (1.23) для производной
фг (и скачок вектора фу) направлен по (или противопо-
ложно) радиусу-вектору г. Если точка находится на внеш-
нем ограничении г = ггаах, то вектор б (Д'г)* ориенти-
рован по г, если же г = rmin, то по (—г). Сопряженная
переменная ф будет удовлетворять системе
dib
—= — Лфг — 68/Г0, б > 0, б/ij = 0,
^ФГ
~ЗГ ~~ ~
cZib р
4п=^1,
dip.
-^- = 0.
dt
В этих уравнениях А — симметричная матрица,
А = Ж} = - Др_ (£ _ ЗгМ‘),
[ dr J гз \ /’
Е — единичная матрица,
/ — (1 — За2)
Зау
зрт
-(1-3V)
(а, В, у) — направляющие косинусы радиуса-вектора
г: го _ г/г _ р, у)*. В силу независимости силового
поля g и ограничений /г^ от времени переменная фг по-
стоянна: ф^ = фш = гр/к = const. Поэтому на пассив-
ных дугах (и на всей траектории при £н <О <С^к в им-
пульсном случае)
('Фг, F) + (\рг, g) --= HQ — = const. (3.7)
На пассивных участках полета при d = 0 система (3.6)
интегрируется (см. [1], [10], [20]—[22] и др.). Это видно
§ 31
СЛУЧАЙ ЦЕНТРАЛЬНОГО ньютоновского ПОЛЯ
73
уже из того, что дифференциальные уравнения (3.6) для
фг, фг совпадают при д'г = (<7г)*, б = 0 с уравнениями
для вариаций — 6F, 6г соответственно, а последние при
Р = 0 интегрируются, как и уравнения движения в кеп-
леровском поле. Для полноты изложения приведем, на-
пример, соответствующие результаты Д. Ф. Лоудена
для непрямолинейного движения. При е 0 составля-
ющие (X, ц, у), (£, ц, £) векторов фг, фг определяются
следующими выражениями:
Х = Acosfl + £esinfl+C7 = А (]/-^-^-1) +
+ BV-^-Vr+CI,
г Игр
Ц = — A sin Ф + В (1 + е cos й) + qj _
1X1 7 1 1 -f- е cos -О' 1
—4/=F(‘+^+
+ 51/-^-7( + D-^ + CJ,
г Игр Р
v = (1 + е cos й)”1 (Е cos О 4- F sin ft),
I = — )/ ^Zlr - в + с4
“ г2 [L 1 4~е cos “О’ J
Л =---[— А (е 4- cos й1) 4- De sin 4 4- С cos О],
Р V Р
£ ---[ — Е sin + (е 4- cos -ft) 74,
Р V р
(3.8)
здесь
I = sin й ____—____=
J sin2 “О' (1 4~ е cos -О')2
= р (2г ~ зу^) — рcos^1’ t = t — тп,
ctg Ф_______. 1 4- е cos -ft
е (1 4" ecos ft) е sin $
[- 3eV/+psin^(l +-4)],
74 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. i
К =
При
е sin2 О — cos 4 / а
——СГ77-;-------------------cosec г? =
е sin v (1 4- е cos'v)2 е
= j/ 1 — 1 -|- r sin'ftj Ip (1 — ^2).
е = О
К = A cos и + В sin и + 2С,
р = — 2Л sin и 2В cos и — ЗСи + D,
v = Е cos и + F sin и,
£ ==---(Л sin и — В cos и + ЗСи — D),
Р V Р S
т] = (4 cos и р sin и д_ Q,
РУР
=------(— Е sin и + F cos и).
РУР
(3-9)
В приведенных формулах А, В, С, D, Е, F — постоян-
ные интегрирования системы (3.6) па данной пассивной
дуге, О' — истинная аномалия, и — угол вдоль орбиты
(например, аргумент широты). Постоянная интегриро-
вания С связана с постоянной i|)f следующим образом:
= (е>0),
(е = 0).
Используя формулы замены переменных (2.9), можно по-
лучить из (3.8) сопряженные переменные и для других
систем координат. Например, для системы г, Vt, Vr, и,
i, Q на пассивном участке будет
Я’г = Фу( = И, Фуг -= х, фи = — е ]/А (е^> 0),
Фи=-]/^С (е = 0),
гЬ cos i — 'фо lx
—sinz- =--5L(7?+^,
Фг = - А), е>0-
$ 3]
СЛУЧАЙ ЦЕНТРАЛЬНОГО ньютоновского ПОЛЯ
75
3.1.3. Условия постоянства функций,
сопряженных к оскулирующим эле-
ментам. Рассмотрим пассивные участки траектории
для кеплеровского поля. Пусть сначала дана система
координат {q{, t} с полным набором шести элементов,
причем dqjdt = 0 при i 5, dqjdt 0 при i = 6.
например, {q{} = {р, е, со, i, Й, Тп}. В соответствии
с п. 2.6.2 будет — Яо, — — HQ + Фь на пассивном
участке или в импульсном случае 'фг 0, —
= const. Для остальных сопряженных переменных на
пассивном участке (ух = 1, у2 — 0) ПРИ отсутствии кон-
такта с границами (3.2), (3.3), согласно (2.6), будет
здесь Д == dqj (Р = O)/dt. Но qj (г, F, t) — интегралы
пассивного движения, поэтому /п = 0. Следовательно,
dtyqddt = 0, фг/. = const. Таким образом, для данной
системы координат все сопряженные переменные фг/.
(i = 1, 2, . . ., 6) суть константы на пассивных дугах, па
которых а = 0. Уравнения
^=2j (—ат------) (—оу-----) К
г=1 1=1
дают, следовательно, полное решение системы (3.6) при
движении по таким дугам, величины можно считать
постоянными интегрирования. В точке контакта с гра-
ницей (3.2) или (3.3) переменные фе для системы (р,
е, со, г, й, 7\) имеют скачки (при е 0):
Д^^Д^ +4^ДК =
= (1 + е)’1 Д(рг_ + (1 — е)’1 Дл|>,.а>
= — р (1 + сГг М-я+ р (1— <?)~2 Д1р,.а,
причем ДфГп = —ст (ti), ДфГа 0, если г-- rmin, и Дфг_ =
— 0, ДфГа = О' (Г;), если Г -- /‘щах.
76 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
Пусть теперь имеется система координат {qt, и, t},
i = 1, 2, . . 5, dqi (г, V, t)/dt = 0, например, {qt} =
= {р, е, со, i, Q}, элемент qQ ( = Тп) заменен аргументом
широты и. Тогда на пассивном участке
dt
'5
2
сГ/6п
В силу условий
V
/6 = du I
' п dt |р=о
dfL
= о, _________——
д (р, е, со)
д (b Q)
будет = const, t|)q = const, а для постоянства пере-
менных грр, хре, необходимо и достаточно, чтобы = 0.
Так как на пассивной дуге — , то это соот-
ветствует случаю = 0 со свободным временем перехода.
В этом случае переменные для обеих систем координат
(^, Тк, Z), (qb и, t) одинаковы.
3.1.4. Один интеграл управляемого
движения. При оптимальном движении в кепле-
ровском (вообще — в центральном) поле, как и при обыч-
ном переходе без ограничений (см. [23] — [29]), имеет
место интеграл
К = (г х г|)г) 4- (F X = const. (3.10)
Докажем это, для общности, в случае центрального поля
с потенциалом U (г):
dU* dU 0 1 dU тт , х
g =----п— -----з— rQ =-------т— г = и1 (г) г,
dr dr г dr 1 v '
иг(г)=
1 v ' г dr
Чтобы сразу учесть и импульсный случай, берем за аргу-
мент параметр 5 (1.57), тогда
Л 1Г
= (Г X фг) + (V X фг).
Далее, так как (берем а0 = 1)
V = T1ST + Т2/°, + <5S (М*,
Г X фг = О, Г X Й* = О,
§ 3] СЛУЧАЙ ЦЕНТРАЛЬНОГО ньютоновского ПОЛЯ
77
то
= — Ti (г х Л’фр) + X 'Фг).
Преобразуем
л = -й- = т + и'Е =
= t71(r)(r"r"') + £Z1E, С7, = г-^-,
Афр = U2 (фг, г°) г0 + Uхфр,
г х Афр = (>* х фр) = д х фр.
Поэтому
=0, К = const.
as
Спроектируем вектор К на оси х, у, я, L3, Й°, д° ~
= LQ X £2°, bQ = z° X Й°. Тогда получим, используя со-
пряженные переменные для системы координат г, Vt,
Fr, i, Q, и:
Kx = Kq cos Q — K~ sin Q =
фп cos i — ib„
= ф; COS Q--------•—:----sin Q = const,
- Г3 1П
£v = £QsinQ + tfb~cosQ= k }
фо cos i — ф„
= фл sin £1 -|----:--:---cos Q = const,
гг 1 Sin I
Kz = i|)q = const,
Kl =
Kci = ip;,
= Nto — 'Фи COS i)/sin i,
ATb = (t|)ncos i — ipj/sin i.
Первые три величины Kx, Ку, Kz являются проекциями
К на абсолютные оси и будут константами управляемого
движения, как и величина Величины Kl, К^, Кь,
ф|, вообще говоря, переменны (при изменении
нормали к плоскости). При плоском движении (в част-
ности, при пассивном полете) они тдк?ке постоянны.
7(8 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
Если К — 0, то фя = ф$ — ф7/ = 0. Поэтому если в конце
перехода заданы лишь параметры (г, V h Fr), а и, z, Q
свободны, то фп -- ф^ = фя = 0 в конце движения, сле-
довательно, К — 0 и в течение всего перехода будет
Фи = Фг = фп = 0.
Если ось Oz направлена по вектору К [25], то Кх
]{у =. = Къ = 0, поэтому ф{ = 0, фп = фя cos г.
Замечание 1. Второй интеграл пассивного кеп-
леровского движения без ограничений [27]
_ it it
М* = — (F X К) — (фг х Ь) - Г) /•
(3.12)
и интеграл движения с импульсной тягой, связанный со
временем (см. [24]),
(фг,Г) —2(г,фг) + |фг| max С In т — Зф^ — Ъ (3.13)
при наличии ограничений будут выглядеть сложнее, чем
(3.12), (3.13)
Замечание 2. На пассивных участках интегралы,
включающие сопряженные переменные фг, фр, эквива-
лентны шести интегралам ф7,. (фг,фр, r, F, /) = С, отра-
жающим факт постоянства сопряженных переменных
(z = 1, 2, . . ., 6), соответствующих элементам орбиты
ср и выраженным через переменные фг, фр согласно фор-
мулам замены переменных (2.26). В частности, для эле-
мента 7б = Тп получаем фт_ = —[(фг, F) + (фр, gr)] —
= const, отсюда следует (3.7). Аналогично, (3.13) можно
получить из выражения для переменной фр, сопряженной
элементу р системы (р, е, со, z, Q. Г-).
4V •-= ЛТ- {4 - -т
Замечание 3. Интегралы пассивных дуг траек-
тории. включающие сопряженные переменные, могут быть
получены также варьированием интегралов уравнений
пассивного движения и последующей заменой Sr, 6F
на фр,—ф?. соответственно. Так, интеграл (3.7) соответ-
ствует интегралу энергии Е — (F2/2) — (|игр/г). Варьи-
руем его
(F, 6F) +(|Xrp/H)(/-»,6r),
§ з)
СЛУЧАИ ЦЕНТРАЛЬНОГО НЬЮТОНОВСКОГО ПОЛЯ
79
отсюда следует (3.7). Из интеграла L = г X V получаем
8L -= 6/’ х Г г у 6F = const
й далее (3.10). Варьированием вектора Лапласа / =
V X L — цгрг0 аналогично получаем (3.12).
3.1.5. Особенности, связанные с дви-
жением по границе. Если в точке t = t' тра-
ектория соприкасается с границей, г (/') = /’min пли
г (tr) --= ^max и в пей сосредоточена мера о (f) 0. то
проекция £ вектора на радиус-вектор терпит разрыв:
+0) - Щ' -0) -о(ОеР (3.14)
Следовательно, радиальная компонента вектора i|)r умень-
шается, если имеет место контакт с внутренней границей
(так как г (tf) = rmin, = 1)» или увеличивается, если
контакт — с внешней границей (так как г (t') = гшах,
= - 1);
Случай движения по границе с максимальной тягой
соответствует уже рассмотренному в § 1 для произволь-
ного поля. Теперь получим (при Р = Ртах), учитывая
упрощения в кеплеровском случае и характер второго
ограничения:
h] = —
-8Л(Г?/г)-аг], аг = --^+^^
fi = (/°, г°), /” = (/°,«°:
На границе, при G будет
г = гй V,-= 0, fr = cos ф = (г°,Я>°г) = (-^------X
далее
5J,
л = г° — cos £ = х1(3 Т-/' + 4г^)’
80 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. Т
Тогда на участке t1 <Z t <2 t2
<з = [(Л, фг) — (Л, дгхрг) — -B]/sin2 ip > 0.
Скачок меры в начале участка
° (*i) = l(A фг) — #]/sin2 ф |G.
В кеплеровском случае дуга /• (t) = т\ = const до-
пустима в силу уравнений пассивного движения, это
плоская дуга круговой орбиты. Поэтому оптимальная
траектория может включать и пассивные дуги г (0 =
= ^min ИЛИ Г (i) = 7’max? *1 < t ^2, на КОТОрЫХ СОСре-
доточена мера о (£). Рассмотрим влияние меры на сопря-
женные переменные вдоль такой дуги.
Для компонент базис-вектора (X, р, у) система урав-
нений (3.6) принимает вид
X" — 2р' — ЗХ == ест' (п),
р" + 2Х' = 0,
v" + v = 0,
здесь аргументами является угол и, е = 1/ . Обо-
^гр
значив
X = Х^ X' = Х2, р = Х3, р' = Х±, V = Хъ, у' = Xq,
перепишем эту систему в виде линейной неоднородной
системы х = Ах + to':
— Х^ч
^2 = 3#i -р 2д74 -р
^3 = ^1,
^5 = ^6,
XQ — -----
(3.15)
здесь 5 — (0, е, 0, 0, 0, 0)*. Матрица Ф фундаментальных
решений однородной системы х' = Ах и обратная к ней
§ з]
СЛУЧАЙ ЦЕНТРАЛЬНОГО ньютоновского ПОЛЯ
81
ф-
матрица Ф 1 будут следующими:
cos и sin и 2 0 — sinu cosu 0 0 — 2 sin w 2 cos и — Зи 1 — 2 cos и — 2sin и — 3 0 0
0 cos и sin и — sin и cos и
и
о
о
о
1
— 3cos и
— 3sin и
2
би
— 2cos и
— 2sin и
1
Зи
— sin и
cos
О
— 2
о
ф-1 =
\ q : cos и — sin и /
\ : sin и COS и I
Общее решение неоднородной системы (3.15) запишется
в виде
гН-0
X (и + 0) = Ф (гг) ф-1 («О X (их) + Ф (и) Ф"1 (s) b (s) dz (s).
th—О
Здесь первое слагаемое (и) есть общее решение однород-
ной системы с начальным значением х (их), оно соответ-
ствует (3.9). Второе слагаемое ха есть добавочный член, ре-
шение неоднородной системы (3.15), обращающееся в нуль
в начальной точке и±. Рассмотрим этот добавок, завися-
щий от меры о* (и). Так как у вектора h (s) отлична от нуля
лишь одна компонента, то подынтегральное выражение
упрощается: Ф-1 (s)b (s) = е (—sin s, cos s, 0, —2, 0, 0)*.
Обозначим компоненты вектора ха через Д^, Да?2, • . •
. . ., Дгг6. Тогда получим
и и
= е (— cos и sin s + cos s sin и) dss= г sin (u — s) das=
U1 Ut-
il—Ui
= 8 sin T
0
и и—щ
Дх2 = & (sin и sin s cos и cos s) dos = 8 cos т
Ui 0
82 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ ГЛ. I
Дх3 = 2Д.г2 — 2б d j 2Дх2 — 2г5х (и),
Дгг4 = — 2Дгг1?
Дт5 — кхь = 0.
и
Здесь обозначено sr(u) d$ (s) ;> 0. Добавочные члены
U1
&Xi полностью определятся, если будут известны инте-
гралы
U—U1 U—U1
sin т do (т) = 6j (u) sin т do = ог (и) S (и),
о о
и—и ~ и—щ,
cos т do (т) = б] (и) cos т do == ох (w) С (w).
о о
Здесь
U — U1
doT = 1, (3.16)
о
С, S — проекции двумерного вектора-интеграла от еди-
ничного вектора 1° = (cos т, sin т) по мере "5 (т) = с^/од (и).
При заданной величине и — иг
и различных распределениях
положительной мерыот, ограни-
ченной условием (3.16), множе-
ство векторных значений интег-
V— Hi
рала Zo(x)doT образует на
о
плоскости (х, у) сектор С —
выпуклое замыкание дуги D
окружности единичного радиуса,
D = у: х = cos т, у = sinr,
0 т <1 и — Wj} (рис. 1.10).
Следовательно, для заданной
граничной дуги (и1? и) суммарное влияние дополнительных
членов в уравнениях (3.15) на сопряженную вектор-функ-
цию (т. е. конечное значение ее) можно определить, если
Рис. 1.10. Множество С при
заданном угле и — их.
§ 3] СЛУЧАЙ ЦЕНТРАЛЬНОГО НЬЮТОНОВСКОГО ПОЛЯ 83
задать три интегральные характеристики меры: (и), С (и),
S (и), причем последние должны быть координатами точки,
взятой из сектора, являющегося выпуклым замыканием
указанной дуги. Если мера о (s) сосредоточена в некоторой
точке и , то 5 = sin (и — и), С — cos (и — и), точка
лежит на самой дуге D. Любая точка сектора С может
быть получена как линейная комбинация двух точек дуги
Z), одну из которых можно, например, взять на конце
дуги, и = и2. Тогда
8 (н2) = sin (и2 — и') 3', 3 (н') = 5' > О, 3 (и2) = 32 > О,
+ 32 = 1,
С (и2) = cos (и2 — и') 3' + 32 = 1 — о41 — cos (и2 — и')],
А#] (и2) = ец1 (и2) 8 = ест (и') sin (и2 — u'Y
Д^2 (и2) = 604 (и2) С (и2) = 8 [or (и2) + О (и) COS (и2 — ZZz) ],
Д^з (и2) = 2804 (^2) (и2) — 1] =
= 2еог (и) [cos (и2 — и') — 1],
Дт4 (и2) = — 28в1(и2)8 (и2) = —2еог (и') sin (и2 — и),
Дя5 (и2) = (и2) = 0.
При этом мера, сосредоточенная в конечной точке и = и2.
влияет лишь на координату х2. Действительно, если
3' = 0, 32 — 1, то 8 = О, С = 1, Дяд = 0 (i Ф 2). кх2 —
= ест (и2).
Координаты х±. х2. х3 определяют базис-вектор ijv-
Координаты £, ц, вектора определятся через
следующим образом [1]:
— g = (X' — ц) й = (х2 — х3),
р V р
J VИгр ч VИгр
и = duldt =-------— =>----7=- ,
Р V Р
— ц = (ц' + X) й = (х^ + хх} VрГр Ip у р,
поэтому добавочные члены для компонент вектора л|?г
84 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I,
I
определяются выражениями ;
—Д£ = и (Д^2 — Дя3) == — й (Д#2 — 2еох (щ)), :
—Дц = й (Дя4 -|- Дях) = йЛх1ч Д£ = 0. !
В частности, если вся мера о сосредоточена в конечной;
точке, 3' = 0, то Д£ = —йез, Дц = Д£ = 0. ;
3.2. Оптимальные траектории импульсного перехода !
Рассмотрим особенности, возникающие при анализе!
движения вдоль оптимальной траектории в кеплеровском-
поле для импульсного случая. ’
В точке приложения импульса (Z = s(2)),-
в которой б (^) = 0, функции фг (^), фг (5) ПОСТОЯННЫ,;
а функции фг (0, фг (0 непрерывны. Если же точка со~;
общения лежит на границе h = 0, причем о > 0, то»
в ней функция фг (t) имеет радиальный скачок (3.14)<-
а функция фг (5) непостоянна, фг (5 0) = фг (4Х) — 0) +•
s-f-0 j
4- \ de (s). Траектория в такой точке касается грани 5
(1) i
si-0 1
цы, Vr (s) = Vr (ti — 0) = Vr (ti + 0) = 0 (ZH<ii<fK').
Положительная функция тпфт на всей траектории
постоянна, можно положить тфт/е = —= 1.
На пассивных участках, лежащих внутри допустимого
множества, т. е. при rmin <4 г (t) <4 гтах, компоненты
(X, ц, у), (J, ц, С) сопряженных функций фг, фг могут
быть определены по формулам (3.8), (3.9). Заметим, что
если момент сообщения импульса сопрягает две такие
дуги, причем о (^) = 0, то, несмотря на непрерывность
при t = ti функций фг (Z), фг (0 в абсолютной системе
координат, компоненты ц (f), у (7), ц (Z), £ (Z), вообще
говоря, разрывны. Это происходит за счет поворота нор-
мали к плоскости орбиты при отклонении импульса от
начальной плоскости движения или изменении направ-
ления движения. В этом случае функции р ($), у (s), ц (5),
£ (s) непостоянны.
При 0 <4 Р <4 оо сопряженные функции определяются
по (3.6). Анализ ряда случаев особого управления про-
веден Д. Ф. Лоуденом и др. авторами, см. [5] — [9],
[30]. Здесь этого анализа касаться не будем.
СЛУЧАЙ ЦЕНТРАЛЬНОГО ньютоновского ПОЛЯ
85
§ 3]
Вдоль всей оптимальной траектории в импульсном
случае выполняется условие Но (s) = 0, $i
Но (0 = 0, <С t <С <С 00• В кеплеровском поле, к то-
му же, ф^ (t) = const, поэтому при t tK выпол-
няется равенство (3.7). Во внутренней по времени точке
сообщения импульса условие Но = 0 примет вид
(Фг» y)tj +о (МтрА*2) Фг = 0* (3.17)
В координатной форме из (3.17) получаем
(£ИГ+ nvt)(i+0 - + Ф( = 0. (3.18)
Если в качестве фазовых координат взять г, Vtl Vr, и, i,
Q, а за сопряженные переменные — фг, фу , . . ., ф^, то
условие (3.17) с учетом (2.20), (2.21) запишется в виде
[фг*\ + (фу^ - фу(7г + Фи) -T-]t.±o ~ Ф^ + Ф« = °-
(3.19)
В точках сообщения импульсов модуль базис-вектора
фг достигает максимума, одинакового для всех импульсов,
являясь единичным вектором, направленным вдоль им-
пульса скорости:
«1 (М = I Фг (<i) | = (X2 + р2 + v2))'+0 = max (Z) = 1,
(3.20)
AFi/AVi = фг («0 = (X, р, v)?.+ 0. (3.21)
Приведем основные следствия из этого условия для
внутренних точек сообщения импульса, tn <С ti <С *к-
Условие (1.48) ортогональности векторов фу (^) и фг (^):
(фг> фг)ц = Х£ + рт] + Ч l/4-ьо = 0,
ИЛИ
фугфг 4—С^еФуг ~ ^гФу( + Фи) + Ч l/j-to = 0, (3.22)
выражения для v, £ приведены в (2.22), (2.23).
Рассмотрим условие d2 | фу | ldt~ Ч 0 (1.49). В подвиж-
ной декартовой системе координат г°, F, Е° будет а = 1,
86 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
Р = у = 0, матрица А (3.7) равна
/2 Al / гз 0 0 \
А = 0 ^гр г3 0
Тогда получим \ 0 0 ^гр / г3 /
1 d |Ч>| 2 | 9 Иг у 2 ^ГР /.,2 L 12\ | __
~2---------= Чг + 2 — ----(И + м |/гьо -
= ^ + ^(-1 + 3V)<0
а2 + т +-to+-уг- (-1 + < О’
[f2 + А (у'^г - У’ЛЬ + £2]'гЬ0 +
-Ь т£г- (— 1 + 3i|)vr)ti < 0.
(3.23)
Следовательно, для оптимальности импульса необ-
ходимо
о < 3^ < 1 - А" / АА у
В частности (как у Лоудена Д. Ф. [1]),
V = cos2/(AF, г) <1/3,
х2 = | т|>г К А (Игр/’-)1'2 (1 - 3V) < А (Вгр/г)1/2.
Для внутренних точек сообщения импульсов можно
записать, таким образом, дополнительные условия опти-
мума. В связи с этим отметим, что внутренней может быть
и точка сообщения граничного импульса — начального
или конечного. Например, рассмотрим некоторые след-
ствия из (3.20) для частного случая оптимального двп-
§ з] СЛУЧАЙ ЦЕНТРАЛЬНОГО НЬЮТОНОВСКОГО ПОЛК 87
^ения при незаданном времени перехода (см. п. 1.2.4).
В данном случае кеплеровского поля и ограничений (3.2),
(3.3) условие а) п. 1.2.4 независимости поля и ограни-
чений от времени выполнено. Условие б) будет выполнено,
если не наложено ограничений на время перехода и эле-
мент орбиты, связанный со временем,— (7\, То), т. е.
в конце перехода заданы ограничения на функции (rK, FK).
При этом ф, = 0. Далее заметим, что в кеплеровском поле
промежуточная орбита является оскулирующей, те-
кущую точку М на ней можно определять, например,
аргументом широты и. Условие в) будет выполнено, если
оскулирующие орбиты при сообщении импульса AFf
(или его некоторой части w\ w w'l) являются эллип-
тическими орбитами, удовлетворяющими заданным огра-
ничениям, при этом и EE[ut, Ui + 2л], ut — и (М^) —
аргумент широты точки Mt сообщения импульса AFt.
Отсюда и из ф^ = 0 следует автоматически, что функция
ф (к?, и) на оскулирующей орбите Т (w) будет 2л-перио-
дической, причем выполняется свойство г) относительно
границы. Предположим также существование функций
ф (ip, w Ф(Д общих для всего мно-
жества реализаций данной траектории (с учетом возмож-
ных пассивных движений по оскулирующим орбитам)*
Тогда из результатов п. 1.2.4 следует, что рассматрива-
емый импульс будет внутренним. Кроме того, максимум
модуля базис-вектора фг достигается в точке сооб-
щения импульса AFZ не только с учетом движения по
переходным дугам траектории, соединяющим точки при-
ложения импульсов, но и с учетом возможного движения
по оскулирующим орбитам, соответствующим сообщению
этого импульса и удовлетворяющим заданным ограни-
чениям:
Х1(Л^) = max (w, и), < w << (3.24)
Если аналогичная ситуация будет иметь место на не-
котором участке траектории с несколькими импульсами,
то условие (3.24) будет сохраняться для всех импульсов
этого участка. На переходных дугах, соединяющих точки
приложения соседних импульсов, справедливо всегда,
вообще говоря, условие (3.20). Если па переходной орбите
88 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [гл. I
Т (м42)), включающей точки приложения соседних импуль-
сов kvi и AFi+1, для которых справедливо условие (3.24),
ограничения hj 0 достигаются не более чем в одной точ-
ке, то предельным переходом по w можно показать, что и
для всей орбиты Т будет выполняться условие (3.24)
при гр = гр (zz?j2) ±0, и).
Пусть на каждой переходной орбите данного участка
hj = 0 не более чем в одной точке. Тогда данные резуль-
таты можно представить эквивалентным образом в другой
форме, перейдя к оскулирующим элементам как коорди-
натам, характеристической скорости как аргументу и
включив аргумент широты точки на оскулирующей орбите
в управляющие параметры задачи на быстродействие (см.
[17], [31] - [37]).
Действительно, перейдем сначала на таком участке
к координатам (#f, и), где (qt) — пять элементов орбиты,
определяющих ее размеры и геометрию, например, =
= Ti, <Р2> и — аргумент широты. Тогда, по
(2.31),
гр, = 30rlVt = (Яо ~ Vt) r/Vt.
Из выполнимости условий а) и б) следует гр^ = Яо = 0,
поэтому гр, — 0. Функция Ж будет равна
шах.
Базис-вектор в новых переменных
В активных точках /° = грр, модуль = | грГ | должен
достигать максимума по углу и на оскулирующей орбите.
Эти условия оптимальности на рассматриваемом участке
эквивалентны условиям оптимальности следующей задачи:
в пространстве переменных (g^), t = 1, 2, . . ., 5, при
аргументе — характеристическая скорость надо осущест-
вить оптимальный по быстродействию переход gH ->
при управлении (/°, и), ограничениях rmin гк га
rmax (в силу сделанного предположения будет е 0
с 91 СЛУЧАЙ ЦЕНТРАЛЬНОГО НЬЮТОНОВСКОГО ПОЛЯ 89
8 J
Лри hj = 0). Для данной задачи
d4i
dw
d%i
dw
да- (г, V)
и),
. dhj (q)
~dq~
d(h
VI / I
2=1
Из оптимальности траектории следует f°= Г 2 %г]0==
2=1 ' J
| | -> max, ipw = —1 = — скачок АфГл = —о
при rn = rmin соответствует скачку Афг = —аг0, скачок
А'Фга = а ПРИ Га = Гтах — скачку Афг = аг°. Получен
прежний результат. Таким образом, на участках траек-
тории, где оскулирующие орбиты нарушают ограничения,
выполняются, вообще говоря, обычные условия оптималь-
ности для движения вдоль дуги г (s), V (s), а на участке,
где оскулирующие орбиты ограничений не нарушают,
принцип максимума верен и для возможного движения по
всем оскулирующим орбитам.
Можно данный результат получить другим способом,
непосредственно, не выводя сначала условий оптималь-
ности для траектории, взятой в форме г (s), V (s), sH
s $к <Г 00• Пусть траектория состоит из двух участ-
ков. На начальном участке (% $ <С 0 ш <f w±)
при пассивном движении по оскулирующим орбитам
ограничения нарушаются, на конечном участке (w1
<2 w <; wK) — не нарушаются. Тогда на начальном уча-
стке рассматривается система (г($), V ($), тп ($)) с управ-
лением (Р, /°), ограничениями rrniri г Гщак, н на ко-
нечном — система (qt (ш), Z = 1, 2, . . ., 5, тп (?г)) с управ-
лением (/°, и), ограничениями rinm rn ra rmax.
Выписав условия оптимальности траектории для такой
задачи, получим прежние результаты. Преимуществом
данного метода анализа является то, что он не требует
предположений о конечности времени перехода (на вто-
ром участке оптимальным может быть, например, сколь-
90 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
зящий режим, требующий для своей реализации беско-
нечно большого времени) и о существовании функций
Ф (.$*), ф(гр), — они здесь вытекают из условий оптимальности.
Замечание 1. Переходная орбита, имеющая две
точки контакта с границами, вообще говоря, тоже может
быть включена во второй участок для анализа системы
qt (ip), тогда в уравнениях для dtyqJdw ей будет соответст-
вовать член з2 Но свойство (3.24) для такой
орбиты при движении между точками контакта не будет
вытекать из этого анализа. Поэтому представляется це-
лесообразным анализировать такую дугу, а также дугу,
для которой hj 0 и е = 0, отдельно, по свойству (3.20).
Замечание 2. Выше свойство (3.24) было уста-
новлено для орбит, оскулирующих при сообщении им-
пульса. Почти без изменений доказательство проходит
и для дуг особого управления. При использовании вто-
рого метода анализа это свойство получается автомати-
чески для всего конечного участка траектории, в том числе
и для дуг особого управления, если они есть [38].
Рассмотрим несколько примеров, иллюстрирующих
применение системы (w).
3.3. Оптимальное изменение наклонения
и пери- и апоцептрпческого расстояния орбиты
Исследование оптимальных импульсных переходов
между некомпланарными круговыми и вообще эллипти-
ческими орбитами с нефиксированной ориентацией по
углам Z, Q проводится в ряде работ, см., например, [39] —
[41]. Оптимальными будут апсидальные переходы, в ко-
торых импульсы сообщаются в апсидальных точках орбит,
причем наклонение меняется при сообщении каждого
импульса.
Для полноты изложения дадим вывод этого результата.
Рассмотрим оптимальный импульсный переход в кепле-
ровском поле между эллиптическими орбитами с задан-
ными элементами L, Е, i (или т\, га, 0- Остальные эле-
менты со, Q, Та не фиксируются, ограничения на рассто-
яние не накладываются. В данном случае удобно за
фазовые координаты взять элементы L, Е, I, со, за
аргумент системы — характеристическую скорость и\
g 3] СЛУЧАЙ ЦЕНТРАЛЬНОГО НЬЮТОНОВСКОГО НОЛЯ 91
уравнения движения будут следующими:
+ VtT 1/ 2Е 4- + ±-1=1 к,
aw 1 \ i f r r2. 1 /
-i = 77 M/cos u r-“ /•’
e ~T~ 1/ ~— I"— S cos ft + (1 J- — 'j T si 11 it)' -
V p, L \ ' p /
— We sin и ctg I j = /ш,
здесь S, T, W — радиальная, трансверсальная и нор-
мальная (к плоскости орбиты) компоненты единичного
вектора /° вдоль импульса. Управлением будет истинная
аномалия текущей точки приложения импульса и век-
тор /°. Уравнение для элемента со добавлено, так как со
входит в производную f где и = й + со. Для упрощения
анализа сначала рассмотрим более широкую задачу,
отбросив уравнение для dtdldw, т. е. считая угол и также
управлением, 0 <1 и 2л. Предполагаем существование
оптимальной траектории перехода, удовлетворяющей
данной системе. Оптимальное управление будет макси-
мизировать гамильтониан
ЗС = Я’сД + Ш + Ч’г/г — 1 = (ФьГ + Т + +
+ ipi — cos и 1/ —— W — 1 •=> max.
' Игр
Обозначим
Нт = № + Hs =
Hw = cos и, Н - Я'Н Hl + 1PV ,
тогда
max (.7^ 4-1) =z Н,
г
S = HsIH, T = HT/H, W ~= IIwiH.
92 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
Максимизируем Н по д, и:
Н- = фЬ-2 + + 'Фе?? 4- ЯрвУг + cos «у ==>
=>max№=2ipLi|)EL+^E2£'+451.-^-+ + ч|>? -Ь) г2 -
= А + — ц_ Ст2 => max.
r н«)
Здесь максимум Н по и достигается при cos2 и = 1,
Рис. 1.11. Схема пространственного трехимпульсного перехода.
sin и = 0. Функция Н (г ('&)) может принимать максимум
лишь при крайних значениях г:
г = rn, д = 0,
Г — Га, 'О’ = л.
В этих случаях sin '0 = 0, Hs = 0, поэтому
S = 0, Т = tyLr + трвУо W = ipi -7- cos zz,
JLt
тяга сообщается в горизонтальной плоскости. Далее, из
sin и = sin 0 = 0 следует sin со = 0, при этом е dw/dw = 0.
Это условие легко выполнить, если тяга (импульсы)
будет прилагаться в апсидальных точках орбиты (sin О =
= 0), причем орбита ориентируется так, что эти активные
точки являются и узлами орбиты (sin и = 0). Оба усло-
вия максимума Zf(O, и), следовательно, согласованы с урав-
нением для со; условия оптимальности, полученные для
более широкой постановки, подходят и для исходной.
§ 3] СЛУЧАЙ ЦЕНТРАЛЬНОГО НЬЮТОНОВСКОГО ПОЛЯ 93
#ри этом = О, = const, Н = const == 1; при
и = const будет г = const, /° = const.
X. Маршал показал далее (см. [39], [40], а также .[41]),
зто при оптимальном переходе будет сообщаться не более
трех импульсов. Оптимальный переход будет двухим-
пульсным лн ак (предполагается, что ган Гхк),
или трехимпульсным лн (max (ган, гак) <ya2<f
оо), или бипараболическим лн -> оо -> лк. На рис. 1.11
приведена схема наиболее общего трехимпульсного пере-
хода, из него при га2 = гак следует двухимпульсный ва-
риант, а при = оо — бипараболический.
3.4. Оптимальный малый поворот плоскости орбиты
Здесь рассматривается задача коррекционного поворо-
та плоскости орбиты вокруг заданного направления в на-
чальной плоскости. Предполагается, что двигатель можно
ориентировать в пространстве в любом направлении, кор-
рекцию можно проводить на заданном замкнутом множест-
ве U моментов t. Введем элементы пассивного движения:
хг —----= (— iz 4- xz )/L = cos Q sin i cos Q6Z,
x2 = LXIL = (—yz yz)IL — sin Q sin i ~ sin Q&t
— компоненты вектора L == X L° = X LIL (в на-
чальной плоскости), направленного в восходящий узел
и определяющего ориентацию орбиты. Ось OZ ортого-
нальна начальной плоскости. Изменение вектора L по
характеристической скорости описывается системой
Берем правые части данной системы вдоль номинальной
орбиты, тогда z = 0, z = 0, Lx = Ly = 0, х = х (£),
У = У (О’ = const. Получаем систему
= L^- = x =
dw dw \ / J - /1 ’
dyz T dxz ,o {
dw “ L dw ~ -1
94 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА |ГЛ. j
допустимым моментам кс
Ее граница F{ состоит из
Рис. 1.12. Получение фигуры
влияния при малом повороте
плоскости орбиты.
в соответствии с которой надо дать приращение А// =
= (Ау1? Ау2)* вектору у = (у1? у2)* при минимальном
значении аргумента, yY L cos Q6Z, у2 — Asin Q6j.
Фигурой влияния F данной системы будет выпуклое замы-
кание кусков траектории г (/) и — г (/), соответствующих
ррекции, t ЕЕ U (рис. 1.12).
дуг траектории г (£) и —г (/)
и отрезков прямых, опираю-
щихся на них. Для оптималь-
ного движения ~ const,
(г (f), ф) /° =-> max. Поэтому
! Д’ I = V/ = ’(/Г/2)
Если луч Оу, направленный
вдоль вектора At/, пересекает
границу Fy в точке у па ду-
ге траектории т (Z) или —r(t),
то оптимальная коррекция
осуществляется приложени-
ем одного импульса в со-
ответствующей точке орбиты,
причем/? = 1,если Oy^f —
=- г (tw) е {г (/)}, и Л' =
= —1, если f == —г (Z(2)) ЕЕ
ЕЕ {-г (£)}, см. рис. 1.12. В
случае, когда луч Оу пересекается с границей Fy в точке
у прямой, опирающейся на две точки + г (^ >), + г (/4\),
то переход будет двухимпульсным. Импульсы прилагаются
в соответствующие моменты ^3), ^4).
Замечание. Если двигатель можно ориенти-
ровать в каком-либо одном направлении, ортогональ-
ном к плоскости орбиты, то будет учитываться одна
из двух симметричных дуг траектории, jz = 1 или
Л = -1.
Частный случай. Пусть рассматриваемая
орбита — эллиптическая, коррекцию можно проводить
в любой ее точке (см. также [42]). Тогда фигурой влияния
будет выпуклое замыкание самого эллипса г (£), по ко-
торому движется КА (па нем /? = 1), и эллипса — г (£),
симметричного с ним относительно притягивающего
центра (/? = —1) (рис. 1.13). Границу Fy будут образо-
§ 3]
СЛУЧАЙ ЦЕНТРАЛЬНОГО ньютоновского ПОЛЯ
95
вывать дуги ВАС и В'Л'С' этих эллипсов (Л, А' — апо-
центры, В, С, В', С' — вершины малых полуосей эллип-
сов) и два отрезка прямых В'С, ВС', соединяющие соот-
ветствующие вершины малых полуосей симметричных эл-
липсов. Все множество корректируемых параметров Ду
Рис. 1.13. Фигура влияния при малом повороте плоскости (случай
движения по всей эллиптической орбите).
разбивается лучами ОС, ОВ, ОС', ОВ' па четыре подмно-
жества Mt (см. рис. 1.13). Если Ду Му U М3, то N = 1;
в Му будет fz = 1, импульс сообщается в восходящем узле
орбиты; в Л/3: fz = —1, импульс — в нисходящем узле-
Если Ду GE Tlf 2 J М4, то N = 2, при этом в М2 для им-
пульса, прикладываемого в точке С, будет fz = 1, в точ-
ке В: fz = —1. Если Ду ЕЕ М4, то для импульса, сооб-
щаемого в точке В, будет fz = 1, в точке С: fz =- —1.
3.5. Случай радиальной ориентации тяги
Выше рассматривались случаи оптимизации маневри-
рования. когда тяга могла быть ориентирована произ-
вольным образом в пространстве (1.3). Однако па ориен-
тацию двигательной установки КА часто бывают наложены
технические ограничения (см., например, [43] — [45]).
В этом случае изложенные выше результаты прямо не-
применимы, надо специально учитывать соответствующие
Условия.
96 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
Рассмотрим случай перехода между орбитами при
радиальной ориентации импульсов
/° = ±г°.
В этом случае, очевидно, можно менять лишь параметры,
определяющие движение точки в плоскости, причем кон-
станта площадей L также остается постоянной,
73 = const
в силу уравнения
Поэтому начальная 7Н и конечная 77к орбиты будут иметь
равные элементы р (L), i, Q. При маневре будут меняться
элементы е, со, Тп. Пусть временная характеристика ТГу
свободна, рассмотрим получение орбиты с заданным экс-
центриситетом е и аргументом перицентра со, или с за-
данными элементами = esin со, <р2 = е cos 03• В силу
уравнений плоского движения
{-Scosu + T^1 + sin» +
5г = {5 siu и + т К1 + v)cos u + V ф2]} ’
поскольку в данном случае Т = 0, будет
^- = - 1/^Scosu, -^1= l/ZE5siriU.
dw У Игр dw У Игр
В плоскости орбиты, где ось ОХ направлена по линии
узлов Q0, элементы (ср2, фх) образуют координаты вектора
е, направленного в перицентр орбиты и имеющего длину
е. В данной задаче удобнее вместо вектора е использовать
вектор у\
повернутый относительно е в плоскости орбиты на угол
§31
СЛУЧАЙ ЦЕНТРАЛЬНОГО ньютоновского ПОЛЯ
97
л/2 по направлению движения. Тогда получим систему
= S cos и = Д,
dw 11
4^- = S sin и = f2,
dm J
Рис. 1.14. Получение фигуры
влияния при радиальной тяге
(случай, когда приложение
тяги допустимо на двух ду-
гах: U± и U2, U3 и щ).
здесь S = ±1, и Ez U, U — замкнутое множество допу-
стимых углов и. Так как fl + fl = 1» то фигурой влияния
F будет выпуклое замыкание
ной окружности, соответству-
ющее углам и ЕЕ U, и сим-
метричного с ним относитель-
но центра О (на рис. 1.14 U
состоит из двух отрезков:
[14р и2] и [и3, uj). Тогда па-
раметры маневра будут опре-
деляться необходимым при-
ращением Дг/ вектора у:
Ьу = У* — Ун-
Пусть у — точка пересе-
чения луча Оу, направленного
вдоль вектора Д?/, с грани-
цей фигуры F, Оу = f, ир —
значение угла и, соответст-
вующее вектору Д?/. Тогда
= | Ау | //. В случае, когда
Up U или Up -р л - U,
оптимальным будет одноимпульсный переход, f = 1,
ДУ = = | Ду |, импульс сообщается при и = ир,
5 = 1, если ир ЕЕ U, или при и = ир — л, 5 = —1, если
ир + я ЕЕ U. В противном случае переход будет двух-
импульсным, N = 2; импульсы сообщаются в точках ор-
биты, соответствующих точкам фигуры влияния, на кото-
рые опирается отрезок границы F, включающий точку у*).
Частный случай. Пусть импульсы (тяга)
могут сообщаться на одной дуге траектории, U = [и1?
и21- Тогда при Ди= и2—uY л фигура F будет выпуклым
*) Замечание. Если импульс может прикладываться лишь
в одном из двух возможных направлений (к центру пли от центра),
то при формировании фигуры влияния будет участвовать одно из
Двух симметричных множеств единичной окружности.
4 В. В. Ивашкин
98 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
и,+ п
Рис. 1.15. Фигура влияния
при радиальной тяге (в
случае, когда приложение
тяги допустимо на одной
дуге иг и иг, причем
U2 -------- Ui < л).
замыканием двух симметричных дуг единичной окруж-
ности, и± и u2, и± + л и u2 + п (рис. 1.15).
Если Ау ЕЕ ир и2,
то N = 1, 5 = 1, имеем одно-
импульсный переход в точке
орбиты, для которой и = ир
(рис. 1.16, где ’эксцентриситет
начальной орбиты ен = 0). Если
At/EzM3, иг + up^u2-]-7i,
то N = 1, S = —1, импульс
сообщается по направлению к
центру тяготения при и = ир~л.
В остальных множествах N=2,
импульсы сообщаются при и — иг
и и = и2. Если At/ е М2,
u2 <С up <С ui + л, то 5 = — 1
при и = иг, S = 1 при и = и2
(рис. 1.17). Если At/ е М4,
1^2 | Л Up 2л, то
5 = 1 при и = и±, 5 = — 1
при и = М2.;
При л 2л множеством достижимости будет
единичный круг, везде / = 1, wK = | |, N = 1.
Рис. 1.16. Одноимпульсный переход с радиальным1 импульсом.
При At/ Мг, и2— л < Up ur + л (рис. 1.18) будет
5 = 1, и = ир\ при At/ ЕЕ М3, и2 <С ир иг + 2л:
5 = —1, и = Up — л. В множествах М2 (и± + л -С
Up (иг ир и2 — л) возможны два ре-
шения: для одного 5 = 1 при и = Up, для другого 5
§ 3] СЛУЧАЙ ЦЕНТРАЛЬНОГО ньютоновского ПОЛЯ
99
= —1 при и = ир ± л. В этом случае переход можно
реализовать и как двухимпульсный: первый импульс,
О AFj < l/2k, сообщается в соответствии с одним ре-
шением (и — ир, S — 1, если At/ GE М4, и = ир — л,
Рис. 1.17. Двухимпульсный переход с радиальными импульсами.
Рис. 1.18. Фигура влияния при радиальной тяге для случая, когда
приложение тяги допустимо на одной дуге иг и иъ, причем
Л U2 ------------------------- Ui < 2л.
S = —1, если At/ е Мъ), а через полоборота дается вто-
рой импульс, AF2 = — AF1? с обратным ^значением S.
При Au = 2л последняя ситуация будет иметь место
для любого угла ир.
3.6. Плоский случай оптимального импульсного перехода
Пусть при движении с импульсной тягой сопряженные
векторы г|эг лежат в плоскости движения, оптимальный
переход является плоским, т.е. оптимальная траектория
лежит в одной плоскости с начальной и конечной орбита-
4*
10О УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
ми, причем она состоит из дуг пассивного полета, соеди-
ненных точками сообщения импульсов. В (3.8), (3.9)
будет Е = F — 0, v — £ 0 [46]. Рассмотрим этот случай
Рис. 1.19. Система
координат для плос-
кого движения.
подробнее. Удобно перейти от векто-
ров ipp, в декартовой системе коор-
динат к сопряженным переменным
в полярной системе координат г, Vt,
Иг, и. Для общности рассмотрим и
тот случай, когда направление дви-
жения по исходным орбитам может
быть противоположным. Централь-
ный угол и будем отсчитывать в оп-
ределенном направлении, например,
против часовой стрелки. Компоненту
скорости Vt будем считать положи-
тельной, если движение КА осущест-
вляется в положительном направ-
лении; Vi <С 0, если движение — в от-
рицательном направлении. За вектор
возьмем единичный вектор в пло-
скости движения, перпендикулярный
радиусу-вектору г, ориентированный
направлению угла и (рис. 1.19), тогда
по положительному
Г(= (F, t«), Vr = (F, r°).
Уравнения движения (1.57) запишутся в виде (ап 1)
rfF, V.Vr
— Y1-7---------T-2c°s ср,
(3.25)
§3]
СЛУЧАИ ЦЕНТРАЛЬНОГО ньютоновского поля
101
Угол ф определяет наклон импульса (при — 0,
у2 ----- 1) к оси f°, cos ф = (t°, AF),sin ф — (г°, АГ) (см.
рис. 1.19). Сопряженные вектор-функциифг, фу выразят-
ся, согласно (2.20), (2.21), через функции фг, фу , фур
фи следующим образом:
фу - фу/° -I-
Фг 4'гг« + (V(1|5V) - Vr^V( + ip„) =-=
= -ф,./'0 +(УП + ,
(3.26)
где обозначено
vn = У(фуг —y,4vz.
г па положительную
Рис. 1.20. Схема приложе-
ния импульса.
Из (3.26) следует, что в данном случае переменные
фу*, фуг суть проекции вектора
трансверсаль t° и радиус-век-
тор г° соответственно,
фу( = (фу, t°) = И sign У|,
фу,. = (фу, г°) = к.
В точке сообщения импульса
величины фу*, фуг суть компо-
ненты единичного вектора, на-
правленного вдоль импульса.
Величина Vn в этой точке есть
составляющая вектора скорости
F, перпендикулярная импульсу
AF (и вектору фу), см. рис. 1.19,
1.20. Она не меняется в процессе сообщения импульса,
поэтому определять ее можно как по скорости V~ до
сообщения импульса, так и по скорости F+ после его
сообщения.
Переменная фг есть проекция вектора фг на радиус
Фг = (>'°, фг) = ё-
Переменные фи, фг постоянны в силу независимости
правых частей уравнений движения и ограничений (3.2),
(3.3) от времени t и угла и:
фи = const, фг — const.
102 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
Если исходить из постоянных А, В, С, D в формулах
Д. Ф. Лоудена (3.8), (3.9), то
/ Ирп \ 1/2
= — е (~у) 4sign7((e>0),
%= — CsignV;(e= 0).
В случае, когда конечные условия не зависят от времени
и (или) от угла и, то будет ф^ = 0 и (или) фи = 0. Для
определения функций фу* (/), фу^ (£),фг (£) на пассивных
участках можно применить формулы (3.8), (3.9), если
известны постоянные А, В, С, D. В точках сообщения
импульсов, не лежащих на границах hi = 0, эти перемен-
ные непрерывны ввиду непрерывности вектор-функций
фг (£), фг (i) и неизменности в этих точках системы коор-
динат (t°, г°). Если точка лежит на границе hj = 0, при-
чем о (f) 0, то переменная фг (£) будет иметь скачок:
фг (Г 4- 0) — 1|>г (Г — 0) = — б («') е{,
1, г (£') = гп = rmin,
Г(О — ra — rmax-
(3.27)
Зная сопряженные переменные фу* = ± р,, фуг — %,
Фг = (Фи + Vn)/r = элементы орбиты и истинную
аномалию ft точки после сообщения импульса, из системы
линейных уравнений (3.8) или (3.9) можно определить
постоянные А, В, С, D для следующего пассивного участ-
ка. Рассмотрим для примера частный случай свободного
времени перехода.
Пример. Время перехода не ограничено, = 0. Тогда
С = 0 в уравнениях (3.8), (3.9) Д. Ф. Лоудена. Определим постоян-
ные А, В, D для случая е+ > 0. Из системы уравнений
. 2 + е cos ft D
— sin ft 4 I a A + ( 1 + e COS ft) В 7—:--------------n- — 11.
1-f-ecosft । v i г i _j_ e cos ft
cos ft • A + e sin ft • В =K
sin ft D ~ o , r____________________
~ 1 + e cos fl A + B + 1 4- e cos fl = ? - Г M
находим
A = % cos ft — (p, — 5) sin ft,
В = [X sin ft + (p — £) cos ft]/e,
D — {p (e -f- cos ft) + A, sin ft — £ [2e + (1 + e2) cos ft]}/e.
(3.28)
§3]
СЛУЧАЙ ЦЕНТРАЛЬНОГО ньютоновского ноля
103
Уравнение для т] будет выполняться тождественно, в силу условия
(tr. *3 + (4>F, ff) = Wr + sign vt - 2^. Л - о,
являющегося следствием (3.17) при = 0.
При е = 0
А = X cos и — (р — |) sin и,
В = К sin и 4- (Ц — £) cos я,
D = - (р - 2|)Г
Рассмотрим, как будут выглядеть условия оптималь-
ности (3.19) — (3.23) в плоском случае.
На всей траектории выполняется условие Но (£) =
= 0, £н <С ^к, которое запишется следующим обра-
зом:
Яо = 4- (уп + Vt/r - 4г Яч + = 0, (3.29)
причем ф^ = const.
В точках сообщения импульсов величина хх = | фр | =
= У фр* + фр^ достигает максимума, одинакового для
всех импульсов:
«1 (*i) = K1l’v. + = maxHi (t) = 1, (3.30)
1 T t
i = 1,2, ...,2V,
импульс сообщается вдоль базис-вектора:
sin ср = фу?(, cos ф = фу*. (3.31)
Во внутренних точках сообщения импульсов (£н
<7К) векторы фг и фр ортогональны, d | фр \ldt ==0, т. е.
Фу
(Vn + %) = 0. (3.32)
Если импульс сообщается на концах, то для начальной
точки t = tn в (3.32) вместо равенства будет знак ^>0,
для конечной точки 0.
Условие неположительности второй производной (3.23)
во внутренней точке сообщения импульса приобретает
ВИД
+ 4 (Vn + 'М2 + 4г (3^,. - ь hi < °’ <ь<
(3.33)
104 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
Кроме того, если условия в конце не зависят от времени,
а оскулирующая (при сообщении импульса) орбита удов^
летворяет всем ограничениям, то условие (3.30) выполня-
ется и для движения вдоль таких оскулирующих орбит.
Рассмотрим теперь подробнее внутренние (по времени)
точки сообщения импульса /н <Г ti <С ^к- Пусть сначала
такая точка лежит на границе h (х) 0, для нее г (ti')
— rmin или г (£f) = rmax. В соответствии с результатами
§ 1, если в этой точке сосредоточена мера, т. е. (£г) > 0,
то точка будет апсидальной, для нее
Уг = у- = уп = о, = 0.
Тогда из (3.32) следует, что % = 0, а из (3.29) следует,
что ярг = 0. Отсюда и из постоянства переменных ярп,
вдоль траектории следует, что ярм = 0, яр/ = 0. Оче-
видно, что данный вывод и результат справедливы, если
на оптимальной траектории сообщается хотя один внут-
ренний апсидальпый импульс. Поэтому справедлива
Теорема 1.2. Если на оптимальной траектории
плоского перехода сообщается хотя бы один внутренний
апсидалъный импульс, то сопряженные переменные яр/,
яри, соответствующие времени и угловой дальности полета,
равны нулю на всей траектории'.
i|>( (£) = 0, ipu (0 = 0.
В этом случае условие (3.29) перейдет в условие
%тг + -^У(--^уг = 0, ta<t<tK.
Формулы (3.8) принимают вид (А = С = 0)
ц = В (1 4- е cos О') + , "—а = I /~ BVt + — г,
г к 1 7 1 1 + ^cosO I/ НГр Р
X = Вл/ -^-Vr,
V
1]= - ^72-^sinl9'= Vr,
pl* Р
(3.34)
§ 3]
СЛУЧАЙ ЦЕНТРАЛЬНОГО ньютоновского ПОЛЯ
105
Последовательные точки сообщения импульсов г = rt,
AV = AFt связаны соотношениями(3.30) — (3.33), (3.27).
Пусть теперь б (^) = 0, причем фу 0. Тогда из
условия (3.32) следует, что
Фу, V 4- *ф
Подставляя это значение нрг в уравнение (3.29), получим
- n|>vr4>t = - ^ + П + ГГ- (3.35)
Условие (3.33) принимает вид
(/n+V + 1^р (_ ! + з^) < о (3.36)
или
0 < Z2< 1 - 3sin2 ср < 1, (3.37)
где
Т = (ГП+ K)2/(^)sin2T.
Этому соотношению можно дать интересную геометри-
ческую интерпретацию. Пусть AF — импульс скорости,
проходящий в плоскости скоростей через конец вектора
скорости F. Сдвигаем его (см. рис. 1.20) параллельно
себе на расстояние фи. Если F — точка пересечения ли-
нии действия этого перемещенного импульса с осью V t,
то I = | Vn + фи | / | sin <р| (Нгр/г)1/г — обезразмеренное рас-
стояние OF от точки/*'до начала координат (см. рис. 1.20).
Условие (3.37) показывает, что I 1, точнее
I У i — 3 sin2 ср.
Иначе его можно интерпретировать как ограничение на
угол ср: sin2 ср (1 — Г2)/3, | sin ср | 1/]/*3, | ср | 35°.
Если фг( = 0, то I есть расстояние I от начала О до точки
пересечения фактической линии действия импульса с осью
Ff, тогда
I У1 — 3 sin2 ср.
106 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. j
Рассмотрим важный частный случай. Пусть фп 0,
фг = 0. Из (3.35) следует тогда
6 = -^-^,. + ^ = 0
(ср. леммы в [47], [48]). Отсюда и из (3.36) получаем
з^МК<о,
что возможно лишь при фуг = 0. Следовательно, если
'Фг = 0, фг/, = 0, то во внутренних точках сообщения ть
пульсов не может быть фу^ Ф 0, всегда будет фу^ = 0.
В этом случае будет, как видно из (3.32), Vr (^ + 0) =
= Vr (k — 0) = 0 (этот результат получен в [48] непо-
средственным варьированием). Получена
Теорема 1.3. Если на оптимальной импульсной
траектории тргс = 0» фг = 0, то все импульсы, сообщае-
мые во внутренних точках траектории < ^к)>
будут апсидальными, радиальная скорость в них равна
нулю до и после сообщения импульса.
Следствие 1. Пусть при компланарном переходе
между нефиксированными (по долготе перицентра со) ор-
битами не заданы время и угол перехода (условия в начале
и конце перехода зависят лишь от г, Vt, Vr). Тогда будет
Фг — 0, Фи — 0- Применяя предыдущий^ результат, полу-
чим, что все импульсы во внутренних точках траектории
будут апсидальпыми.
Теорема 1.4. При оптимальном импульсном ком-
планарном переходе между свободно-ориентированными ор-
битами и при незаданности времени перехода импуль-
сы, сообщаемые во внутренних точках траектории, апси-
далъны.
Следствие 2. Пусть для общего перехода (^за-
крепленными (или ограниченными) временем и углом пе-
рехода) есть хотя бы один импульс во внутренней по
времени точке траектории, сообщаемый на границе кольца
(tn <* <* tu, Д7 (^) > 0). Тогда, если с (^) 0 (име-
ем общий случай), то будет, как показано, Vr (tt + 0) =
= 0, фи = 0, фг = 0, выполнены условия теоремы 1.3.
Все внутренние импульсы будут апсидальными.
Замечание. Уравнения (3.29) и (3.32) можно
использовать и в другой форме. Можно, например,
I 4] о НЕОБХОДИМЫХ УСЛОВИЯХ ОПТИМАЛЬНОСТИ 107
определить из них переменные и rf =
В этом случае условие (3.33) примет вид
61ч - Я2 + тб-п(-1 + 34vr)<0.
\ г'гр / Ггр
Если = 0 (рассматривается, например, переход между
компланарными орбитами с нефиксированным временем),
то получим
V2
или
V2 1
Z2 = п > 1 > л
(р,гр/г) sin2 ф -^1—3 sin2 ф и'
(3.38)
Геометрически условие (3.38) означает, что расстоя-
ние I = OF (см. рис. 1.20) должно быть больше чем (1 —
— 3sin2 ф)“1у2.
Отметим, что ограничения (3.37), (3.38) на угол ф
соответствуют локальному анализу, они не учитывают
выполнимость условия (3.30) вдоль всей траектории и,
может быть, оскулирующих орбит. Поэтому фактический
допустимый диапазон угла ф будет еще уже [40].
§ 4. ПРИЛОЖЕНИЕ. О НЕОБХОДИМЫХ УСЛОВИЯХ
ОПТИМАЛЬНОСТИ УПРАВЛЕНИЯ ПРИ ОГРАНИЧЕНИЯХ
НА ФАЗОВЫЕ КООРДИНАТЫ
Рассмотрим основные факты теории оптимального уп-
равления, которые были выше использованы при анализе
условий оптимальности маневрирования. При этом за
основу возьмем методику А. Я. Дубовицкого — А. А. Ми-
лютина [2] — [4].
108 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ.
4.1. Условия оптимальности А. Я. Дубовицкого —
А. А. Милютина
Кратко воспроизведем вывод условий оптимальности
из [4]. Пусть функции (t), и° (£), конечный момент
времени дают минимум функционала
J (х, и) = fQ(x, u)dt (4.1)
при ограничениях
dxjdt = / (х, и), х (tR) = хн,
% (^к) —
(4.2)
х (t) при tR t tR — непрерывная функция, х ЕЕ Е11,
и (t) — измеримая функция со значениями из ограничен-
ного множества D ЕЕ Ег. Функции /° (х, и), / (х, и), h (х)
и их частные производные по х — непрерывные функции
аргументов, причем hx Ф 0, если h (х) = 0.
Далее осуществляется переход к новой задаче с дру-
гой независимой переменной т, 0 т 1, и управлением
v (т) > 0 — как ограниченной измеримой функцией—,
при этом
Цт) = tR + и (т) dx.
о
В пространстве W пар (х (т), v (т)), где х (т) — непре-
рывная вектор-функция, a v (т) — измеримая функция,
функции х° (т), v° (т) доставляют минимум функционалу
1
Л (х (т), v (т)) = v (т) /° [х (т), 'й0 (т)] dx (4.3)
о
при ограничениях
-^ = р(т)/к(т),-й°(т)], х(0) = а;н,
х(1) = жк, fe(a;)^0, р(т)^0.
(4.4)
Если v° (т) =£= 0, то и0 (т) = и0 (t (т)). На интервалах,
где V0 (т) = 0, и0 (т) = ut е D, t (т) =tt. Множество
^4] О НЕОБХОДИМЫХ УСЛОВИЯХ ОПТИМАЛЬНОСТИ 109
пар (tb Ui) берется всюду плотным в |7Н, £к] X D. Пусть
Д(т), v (т) — вариации траекторий и управления. Тог-
да, если система (4.4) невырождена в окрестности
/>уг), г?° (т) и /°, /^'одновременно не равны тождественно
нулю, то при любых Ж, v выполняется уравнение
Эйлера:
1 1
с0 + /^) ЬхХдЯх — к (у) +
о о
~Ь (^)) ~Ь #)т=1 = 0. (4.5)
1
Здесь с0 § (v°fx% + /*>) dx — линейный функционал, пеот-
о
рицательный на конусе запрещенных вариаций, уменыпаю-
1
щих функционал с0 0; —hxXd6x — линейный функ-
0
ционал, неотрицательный на конусе вариаций, допусти-
мых по ограничению h (х (т)) 0, мера неотрицательна
и сосредоточена на множестве {т: h (х (т)) = 0}; —% (г?)—
линейный функционал, неотрицательный на конусе ва-
риаций, допустимых по ограничению v (т) > 0; — X (у)
0, если v (т) 0; % (у) = 0, если v = 0 на множестве
интервалов {т: vQ (т) = 0}; с0, бт, К (у) не равны нулю
одновременно; I (х — X' (г?)) — линейный функционал, ис-
чезающий на подпространстве X = Хг (у):
— v (т) f (rc°, uQ) + р° (т) /х (я0, и0) Ж', X' (0) = 0; (4.6)
(с, я)т=1 — линейный функционал, исчезающий на под-
пространстве х (1) = 0.
Берется X = X' (F), тогда I (X — Хг (у)) = 0, уравнение
Эйлера принимает вид
1 1
с0 § [Z2°/X X’ (z?) + fv] dx — J hxX'dcx — X (у) + (с, х')х==1 = 0.
о о
Вводится функция ф (т) такая, что (4.7)
ф (1) = с — Дхб(1),
= - v° [(4)4 + (4)* с0] +
110 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
— в смысле обобщенных функций или в смысле интег*
рального уравнения
z = -V° [(f'xy (Z + у) + (/?)’Col,
т—0
y(<) = § (h'x)* dax.
0
Тогда уравнение Эйлера приводится к виду
$ [(Ф, /) + со/°1 v dx = X (v). (4.8)
О
Из (4.8) после перехода ко времени t как аргументу сле-
дует принцип максимума для исходной задачи: существуют
такие с0 0 и неотрицательная мера б, сосредоточенная
на множестве {t: h (х (t)) = 0}, что почти всюду на
(^Н5 М оптимальное управление и0 (t) максимизирует
функцию = (ф (£), / (я0, и)) + с0/° (гс°, и), обращая ее
в нуль:
(ф? / (ж0, и0)) + с0/° (я0, и0) (=) шах УС (ф, я0, и) = 0,
ueD
(4-9)
причем
4г ="-</>*-»•
Ч5 (^к) “ с & (^к) (^х (^к)) •
Если в точке траектории, лежащей на границе, есть
скачок меры, о (£) > 0, то в ней функция ф (t) терпит
разрыв:
Дф (t) = ф (£ + 0) — ф (£) = о (tyC, б (t) > 0»
h (х (0) - о.
Траектория в этой точке касается границы [3]. В случае
кусочно-непрерывного оптимального управления uQ (t)
максимум в (4.9) достигается всюду:
5^ (ф (£), xQ (£), izQ (£)) = max Ж (ф, я0, и) = 0.
Если h (^н) <Z 0, h (^к) <С 0, то с0, ф не равны нулю одно-
временно,
(4.10)
\ 4] 0 НЕОБХОДИМЫХ УСЛОВИЯХ ОПТИМАЛЬНОСТИ Ц1
\ Когда на некотором интервале точка движется внутри
допустимого множества h 0, т. е. h (£)) < 0, а <
t b, то функция ф (£) удовлетворяет обычной сис-
теме
\ 4г =- К/хГ Ф + (/х)‘ Со],
зде0ь имеем обычный принцип максимума [49].
В случаях, когда уравнение Эйлера (4.5) записать
нельзя, можно сохранить принцип максимума. Если
/° (х° (О, и (t)) = о, /х (х° (*), и (0) = 0, t е [iH, £„],
и (t) ЕЕ D, то формально получается принцип максимума,
если с0 = — 1, о = 0, ф = 0. Случай вырожденности
системы (4.4) в окрестности оптимального решения х° (т),
v° (т) удовлетворяет принципу максимума при с0 = 0,
о = 0, при этом будет
(ф (/), / (xQ (/), и (/)) = 0, и (t) е D, ф (2) =/= О,
i ЕЕ [^Н>
4.2. Некоторые модификации условий оптимальности
Сделаем некоторые замечания относительно случаев
решения задачи оптимизации при постановке, несколько
отличающейся от рассмотренной выше.
4.2-1. Условия трансверсальности.
Пусть
J = Фо (ян, хк) + $ /° (я, и) dt (4.11)
— минимизируемый функционал. На фазовые коорди-
наты в начале и конце движения наложено п± ограниче-
ний в виде равенств
Фг (ян, як) = О, i = 1, 2, . . . , nt. (4.12)
Непрерывно дифференцируемые функции Фг считаются
независимыми, матрица частных производных от Фг по
по а4, Хк имеет максимальный ранг г = пг. Задано также
п2 ограничений в виде неравенств
фг (хн, хк) О, i = Mi + 1, • • Hi + Пг- (4-13)
Вводя в уравнение Эйлера (4.5) дополнительные члены,
учитывающие условия (4.11) — (4.13), получим, что со-
112 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА 1ГЛ. I
храняются условия оптимальности, приведенные для слу-
чая Фо = 0, заданных точек £н, меняются лишь ус-
ловия на граничные значения сопряженной вектор-функ-
ции ф (t). Теперь
— ФСн -1-0) ==
” Фн — zLi ( "dz-" I 6 0п) 0н)? 0-1 Z|)
1=0 \ 11 /
Ф — о) = ф; = 3 fei
1=0
ЭФА*
~^Г I 3 (£к) hx 0к),
(4.15)
причем
fcf Ь[Ф^ — 0, I — 72j Д 1, ^1 Ч~ 2, . . . ,721“]"^2*
Примеры. 1. Пусть для задачи оптимального ма-
неврирования максимизируется конечная масса тк:
J = — = — jjk,
в начале и конце движения заданы все фазовые коорди-
наты х\ i = 1, 2, ... 8, кроме х^ = т1{:
Ф, = Хн — = 0, 1 < I < 8,
Фг = 4~8 - <‘8) =о, 9 < I < 14,
Ф15 = tK - tK = о.
(4.16)
Тогда из (4.15) следует
Ф?К — фтк — ^о > 0. (4.17)
Если вместо условия Ф7 == тн — тн = 0 задано
< 0,
то, кроме (4.17), будет
Ф?н = фтн — — Ьу 0.
2. Пусть в предыдущей задаче вместо (4.16) ограни-
чено время прихода в конечную точку:
®15 = 0.
Тогда будет, кроме (4.17),
— ^15 0,
J 4] О НЕОБХОДИМЫХ УСЛОВИЯХ ОПТИМАЛЬНОСТИ ИЗ
причем, если /к опт (в частности, при — оо, опт <z
<3^>), то : 0.
Ц.2.2. Н а л и ч и о нескольких о г р а и и ч е-
ний на фазовые координаты. Пусть фазо-
вые координаты должны удовлетворять нескольким огра-
ничениям hj (х) 0, j = 1, 2, . . . , I. Тогда в уравнении
1
Эйлера (4.5) вместо одного функционала — hx$dz будет I
о
i 1
функционалов — 2 § hjX$d3j. Соответственно в уравнении
j=i о
(4.10) для ф будет I добавочных членов:
4г = - К/х)’ +(/*)* со] + 2 Ы. (4.18)
;=1
Пусть ограничения hj 0 таковы, что их границы до-
стигаются оптимальной траекторией в разные интервалы
времени, так что меры а,- сосредоточены на непересекаю-
щихся множествах. Тогда уравнение (4.18) можно упрос-
тить:
-%Г = ~ [(/;.)* ip + (/“')* е0] + б (hxy,
подразумевая под h (я) функцию hj (х), которая соот-
ветствует ограничению, существенному на данном отрезке
времени, при этом о = б,.
4.2.3. Случай разрывных правых час-
тей. Пусть на поверхностях
cpj (х) = 0, у = 1, 2, ... , т,
нарушается непрерывность по х правых частей / (х, и)
системы (4.2) и производных fx (х, и), причем непрерыв-
ность сохраняется при движении между данными поверх-
ностями, см. также [50]. Такая ситуация может возник-
нуть, например, при моделировании реальной системы
уравнений движения с непрерывными и гладкими правыми
частями более простой, но кусочно-непрерывной системой
(в частности, это имеет место при упрощенном расчете
траекторий КА с помощью сфер действия).
Предположим, что оптимальная траектория х" (Z) пе-
ресекает поверхности ср,- (х) конечное число раз, оптималь-
114 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
ное управление — кусочно-непрерывно, в точках t —
пересечения q>'jX (х) ^=. О, пересечение поверхности осу-
ществляется с ненулевой скоростью, например, положи-
тельной:
dtp • /
-JT (ti ± 0) = Ф?х/ (X, и)1.±й > 0,
Ф; (* (М) =
1 = 1, 2, ...,
причем ф7- (х, и) > 0 при || х —- х (^) || е, и ЕЕ D.
Траектория разбивается на несколько участков, на
каждом из них функции / (х, и), fx (х, и) удовлетворяют
обычным условиям непрерывности по аргументам:
/ (х, и) = fj (х, и), f'x (х, и) = fjx (х, и},
Осуществляя переход к аргументу т, 0 т 1, dtldx =
= v (т), закрепим при варьировании значения т^, соот-
ветствующие моментам tt. Тогда вариация X' (т) удов-
летворяет обычной системе (4.6), причем каждому участку
соответствуют свои^функции / (гг°, и0), fx (я0, и0).
Вариации X (т^) удовлетворяют условиям типа равенства:
ФДж) = <р;хг|т. =0, 1 = 1,2,...,^, т0 = 0, (4.19)
''«4+1 = 1 •
Предполагая, что рассматриваемая система невырож-
дена в окрестности оптимального решения, т. е. множест-
во, образуемое вариациями {ф7 (X' (т^)), Xr (1)} при воз-
можных вариациях v (т), есть все пространство EW1+n,
получим прежнее уравнение Эйлера, лишь добавится член
• J
— 2^Ф^(гг), соответствующий ограничениям (4.19):
1=1
1 1
со § (/°^ + Л^°) dt — hxX d<5x — X (у) + I (^ — (^)) +
о о
771i
+ (с, г (1)) — 3 (т{) = 0
1=1
при всех X, v. Принимая Х~х'(у), получим А, (г?) =
§\41 О НЕОБХОДИМЫХ УСЛОВИЯХ ОПТИМАЛЬНОСТИ Ц5
\ 1
= g (СФ,/) + с0/°)г7йт и отсюда принцип максимума, при-
чем\ф(£) удовлетворяет условиям
- 1(/хУ Со (/°х )*] + б (^У, ti<t< *i+1,
t (ti +0) = гр (ti) + di (ф;х (ti)Y + б (ti) (hx (ti)Y,
Ф (^k) = C <5 (tK) hx (tK).
Пусть в точке tt пересечения траектории с поверх-
ностью ср (я) = 0 будет h (х) 0, о (^) = 0. Определим
коэффициент df.
М° + (Ф, /)] ч-о = М° + (Ф, /)] V0’
Ф (h + 0) = ф (^-0 — 0) + dtf)'*.
d. = __ со (/0+ - /°-) + (Ф-, /+ - /-) =
Фх<
= - Со(/0+-/°-) + (Ф+, /+-/-) (4 20)
Фх/
здесь
/±=/(^±0), /0± =/°(^±0), ф±=ф(^±О).
4.2.4. Замена переменных в задаче
оптимального управления. Одна и та же
задача оптимального управления, как правило, может
рассматриваться в различных системах координат. Пусть
на отрезке [^, t2], t2 осуществляется пе-
реход от исходных координат х к координатам 'S, причем
функции
X (х)
дважды непрерывно дифференцируемы по х в некоторой
окрестности рассматриваемого отрезка траектории, пре-
образование невырождено, обратное преобразование х (х)
обладает такими же свойствами. Уравнения движения,
функционал и ограничение в переменных х запишутся
116 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ.
I
в виде
= x'xf (х, и) = f (х, и), х (h) = % (х (tj),
J = J (^Н> ^1) + J (^1? ^2) + J (^2> ^к) =
#2
= J (tB, Q + /° (х (г), и) dt + J (t2, tK) =
tl
ti
— J (^h? ^1) + J ^k) ~F /°(^’
ti
h(x) = h (x (#)) = h (x).
1
Функционал Х(гУ) = ^(ф, f)v dx в уравнении Эйлера запи-
о
шется теперь следующим образом:
М*>) =3 [(ф, /) + с0/°] vdx +
о
+ $ (]я£ф, f) + с0/°] г> dr + § [(Ч>, /) + с0/°] v dx =
Т2
= j КФ, /) + с0/°] V dx + § КФ, f) + cof°] vdx +
О Tl
1
+ 5 КФ> /) + Со/0] v dx, ф = (х-)’ф-
^2
Принцип максимума сохраняется на отрезке (t1,
в новых переменных
cQf0 (т, и) + СФ, f ^)) => max = О,
и
причем новая сопряженная переменная ф равна
ф = х~ (О Ф (0> ^2* (4 21)
Преобразуя к обычному виду (4.10), получим
= - [(О* Ф + Со (/;)’] + б (^Л Ф (^) = X- Ф (Z2).
О НЕОБХОДИМЫХ УСЛОВИЯХ ОПТИМАЛЬНОСТИ
117
Сопряженная переменная гр преобразуется, таким обра-
зом, как ковариантный тензор, а функция SK — (ф, /) +
4- d0/° является инвариантом. Случай без ограничений
см. в [51].
4.3. Условия оптимальности с непрерывной
сопряженной функцией
Для полноты изложения приведем связь рассмотренной
выше формы условий оптимальности с другими формами.
Сначала рассмотрим условия оптимальности с непрерыв-
ной сопряженной функцией.
1—0
Преобразуем с учетом (4.6) интеграл IQ = § hxx' d$x
о
в уравнении Эйлера (4.5).
а) Проинтегрируем 70 по частям:
1-0 1
Л d<jx = |т=1 ^1 (Ьх$ ) $Х ==
о о
1 1
= ^h'xX' |т=1 — § dx — dx,
о о
г—°
где обозначено (т) = dzx, h1 (х, и) == = W (^, а)
о
(А (а:) = Д°(а;)). Тогда, подставляя это выражение для 10
в уравнение Эйлера (4.5), получим, что
1
$ KM’S /) + со/° + ^зЛ1] dx = А, (г), (4.22)
О
где абсолютно непрерывная функция ф1 (т) удовлетворяет
системе
4г = -р0 [(4)’ t1+(Л')’ + (А1Уь
Ip1 (1) = с — [бх + б] h* (!)•
Отсюда, после перехода ко времени t, следует принцип
Максимума:
= (ipi, /) + с0/° + sji1 (=>) max = 0, (4.23)
wen
118 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
причем абсолютно непрерывная функция ф1 (t) удовлетво-
ряет системе
- - К/х)‘ + со (/х )*] - бх (0 №)* , | (4 24)
Ф1 (tK) = с — (б + 6i) hx (£к), I
непрерывная слева функция ах (t) — неотрицательная, не-
убывающая, изменение ее осуществляется на множестве
{*: h (х (0) = 0}:
бг (t) = ^йб(£)>0, йб(£)>0, h (x(t)) de (t) = 0.
Функция Ox (t) разрывна в точках где сосредоточена
мера о (t), о (^) > 0. Обозначим прежнюю сопряженную
функцию и гамильтониан в условиях Дубовицкого —
Милютина через ф°, ^0. Тогда функция ф1 будет связана
с ф° соотношением
ф° (t) = ф1 (t) + Ox (t)hx (0,
как следует из (4.23), (4.24).
Условие (4.23) похоже на прежнее условие (4.9), если
h1 = h1 (х), Oh1/ди = 0. В этом случае оптимальное управ-
ление максимизирует функцию (ф1, /) + с0/°. В системе
(4.24) добавочный член — сГх (^)* У=0 и при движении
внутри допустимого множества h (х) <С 0 после первого
прохождения участка на границе, где сосредоточена поло-
жительная мера j йб (t).
б) Пусть д№1ди = 0, интеграл /0 взят I раз по частям,
1 I где п — порядок|наименыпей производной от
h по t, которая^зависит от управления (предполагается
существование и непрерывность соответствующих произ-
водных). Тогда
I i 1
^0=2 (— k=i 4“ 2 У (— +
к=1 о
1
+ (— 1)Z§ hlxx'6tv° dx,
о
О НЕОБХОДИМЫХ УСЛОВИЯХ ОПТИМАЛЬНОСТИ
119
ГДе к
X 1(х) I
Мг) = 5v°3fc-i(T)dT = 5
0 *н
Используя это соотношение, из уравнения Эйлера (4.7)
получим
1 i
ь (*) = $ ро/° + ОН, /) + 2 (- I)*'1 бХ] * dx,
о L fc=l J
отсюда следует принцип максимума, выраженный через
абсолютно непрерывную сопряженную функцию фг:
i
Я? = СФг, /) + Со/0 + 2 (- 1)^4 (=») max = 0, (4.25)
fc=l u&D
Ш* + Со (/“')*] + (- 1)' (/£)* ог,
I
(^к) — с + 2 (— 1) ) С/£ (^к) — (fix) <5 (^к)1
к=1
где
t
&к (0 =
(4.26)
— неубывающая, неотрицательная, непрерывная (при к
1) функция. Из (4.26), (4.25) следует, что функция ф*
выражается через ф° (t), ф1 (t) следующим образом:
i
(о = (о + 2 (-1)*-1 Os
к=2
I
г (о = (о + 2 (-1)*'1 бк <-1)у.
к=1
I
При I < п добавочный член 2 (—l)^1 в функции^
к=1
не зависит явно от управления, максимизация по
управлению и G D сводится к максимизации функции
= (ф!, /) + Со/°. Лишь при I = п в функции SV1 по-
120 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. t
является добавочный член (— 1)п-1апЛ7?, зависящий явно
от управления. Оптимальное управление н° максимизи-
руст в этом случае функцию
= (фп, /) + Со/0 + (- 1)п~1 опЛп Н) шах. (4.27)
и&)
Система (4.26) для ф неоднородна и при h (х) 0, если
пройден участок на границе с положительной мерой.
Рассмотрим случай, когда управление и° (£) кусочно-
непрерывно. Условия (4.23), (4.25), (4.27) будут выпол-
няться всюду. Пусть х° (^) — изолированная точка опти-
мальной траектории, лежащая на границе. В ней функция
(t) имеет, вообще говоря, скачок о^ (^ +0) — ox (^ —
— 0) = o'(tt) 0. Функции о1 (£), 1 < I п, будут не-
прерывны. Функция ф° (t) будет разрывна, ф° (^ + 0) —
— Ф° (^) = о (h))*. Функции ф* (t), 1 < I < п,—
непрерывны. Функции hl (х (t)), 0 I п — 1, непре-
рывны в данной точке, причем hl (х (tt)) = 0, 0 I
к п — 1 (если к < п — 1, то А + 1 четно, /?+1 (tt) <
<С 0 [52]). Отсюда и из (4.23), (4.25), (4.27) следуют усло-
вия
1(Ф', /) + Со/0]Ч-0 = [(/, V) + co/°]/i+o, 0 < I < п - 1,
I( /) + Со/0 + (- I)"-1 =
= [(Г, /) + с0/° + (-
Пусть £н о t b tK — дуга на границе, на ней
h* (х (t)) = 0, 0 < к < п — 1, hn (х (0, и (t)) = 0. В на-
чальной и конечной точках этой дуги t = а и t = Ъ функ-
ции hk (х (t)) непрерывны (0 к п — 1), так как они
не зависят от управления и там будут выполняться
условия:
при о I п — 1
V, /) + Co/°L-O = [('Ф1, /) + Со/"1а+о,
Цфг, /) + Со/°)ь+о = 1(Ф', /) + Со/Нб-О,
1(фп₽/) + со/° 4- (- 1)п-1оп/гп]о-0 = [(Фп, /) + со/°]а+о,
[(Фл, /) + с0/°Vo = [(фп, /) + Со/0 + (- I)11-1 а„/^]ь+о.
§ 4] О НЕОБХОДИМЫХ УСЛОВИЯХ ОПТИМАЛЬНОСТИ 121
Если граничный участок h (х) = 0 примыкает к некото-
рому концу траектории t = tu или t = 0, то выполня-
ется лишь одно из этих условий (во внутренней концевой
точке участка).
Указанную форму условий оптимальности при 1
I п будем называть второй формой. Условия опти-
мальности, аналогичные условиям случая I = п, приве-
дены также в [53].
4.4. «Смешанная» форма условий оптимальности
В некоторых работах ([49, [54] — [55] и др.), на участ-
ках h (х) 0 применяется обычный принцип максимума
задачи без ограничения на фазовые координаты [49],
аналогичный в этом случае основной форме условий оп-
тимальности:
= ф = — [(/х)‘4 +с0 (/”')*], (i|\/)+с0/°=»тах,
при движении же по границе применяются некоторые
условия оптимальности, аналогичные условиям второй
формы при I = п:
= /) + с0/° —ХДп=Фтах, ]
чео (4.28)
Ф - - [(/«)’ + Со (/"')*] + Ь С)‘- ।
Такую форму условий оптимальности условно назовем
«смешанной». Предполагаем, что множество {t: h (х (t)) =
= 0} состоит из конечного числа изолированных точек
и отрезков.
Функция ф (0 будет разрывной, но ее скачки отличны,
вообще говоря, от скачков функции ф° (0. Если траектория
прилегает к границе изолированной точкой х (0), то в
окрестности ее будет ф = ф°, функция ф (0 имеет при
t — tQ тот же скачок, что и ф° (0:
Дф (0) - ф (0 4- 0) - ф (tQ - 0) = Дф° = о (0)(/0)*.
Рассмотрим дугу па границе, 0 t 0. Пусть на ней
ф = ф". Тогда ф (/) имеет скачок в начальной точке tx
(точке выхода на границу) и конечной точке 0 (точке
122 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
схода с границы):
AWi) = Wi)~ Wi~0) =
= - з (- мо -
/с=1
ДФ(/2) = Ф°(/2 + 0)-фп(г2) =
= 2 (“ 1 + 0) (h^x )f2-
к=1
В остальных точках траектории функцияф (t) непрерывна.
В уравнении (4.28) функция % равна
Z = (- 1)пап.
Покажем, что на дуге h (х) = 0 можно выбрать функцию
ф (t) более общим образом так, чтобы удовлетворить не-
которым специальным условиям скачка. Например, в [49]
в точке стыка tr вектор ф (£х + 0) берется касательным
к поверхности h (х) = 0, в [54] функция ф (t) непрерывна
при t = t2, в [52] рассматривается возможность осущест-
вления скачка в произвольной точке граничной дуги.
Рассмотрим на дуге h (х) = 0, tr t t2, специаль-
ные функции (£), которые аналогичны функциям (£),
но определяются в предположении do (t) = 0, t± t <4 t2.
ОДО = бю, 31 = 0,
t
<52 (0 = <520 -p <5i 6Й = 62q 4" ^10 — Q, <52 = <5i,
t
(0 ~ ^n0 4“ <3n-1 “
io
(t____________________io)71”1 ~
= 4- 5(n_D0 (t — tQ) 4- . . . 4“ (510 _ 1), , 6n = Cri-n
где 5i0, <52o, • • • , 5n0, tQ — некоторые постоянные.
Пусть на дуге tr t t2 функция ф {t) определяется
выражением
п
ip (о = (о + 2 (_ i)'-1 (о
1=1
р] О НЕОБХОДИМЫХ УСЛОВИЯХ ОПТИМАЛЬНОСТИ 123
forfla легко показать, что ф (/) удовлетворяет на i Е
g Gn ^2) системе (4.28), причем
^ = (- l)n Z = (- 1)" (б„ - 0п). (4.29)
Максимизируемая функция выраженная через функ-
цию ф (0, будет иметь вид
Г1 = с0/о + (ф - 2 (- 1)г-15, (С1У)’, /) 4-
п
+ 2 (- i)M =
1=1
= Со/0 + (Ф, /) + 2 (- 1)г-1 (б/ - 0,) hl =
Z=1
= Со/0 + (Ф, /) + 2 (- I)'"1 сХ =» шах = О,
1=1 U^D
ог (0 = ог (0 — У (О-
Следовательно, надо максимизировать по управлению
функцию^ (гр, х, и) (4.28) с тем же значением X (4.29).
Подбором констант 5Z0, tQ можно менять скачки функции
ф(0 на концах дуги.
Рассмотрим частные случаи.
а) Берем tQ = Si0 = ог (^i), 1 < I < n. Тогда,
учитывая, что Sz (^ + 0) = oz (^), получим
Ф (^i + 0) = фп (^) Ц- 2 (—1) 1 (^i 0) (^х =
= гро^1_О) = г|)(^1-О),
функция ф (Z) непрерывна в точке В точке t2 будет
скачок:
Ф - 0) = Ф” (i2) + 2 (- I)'-1 У (М ,
1=1
124 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. j
Aip (Z2) — гр° _|_ 0) — ip (Л2 — 0) —
?7
— zL (--- 1/ 1 (5/ (fl + 0) - (fl)} (^X )<2 =
Z=1
n
= 2(-nM?/('2 + o) (^-nv,
/-1
где (С 4- 0) — о (Z2) + Зх (£2) ~ зх (^2)» (М = (^2) з, (^)>
1 <4 I п, причем б/ > 0, 5Z = б/ — 3/ = б/-1 — б/-! > 0,
б0 = з > 0, sign X = sign (— l)n.
б) Пусть t{} — t2, о10 04 (Z2 4- 0), o/0 — Of (£2), 2
<1 I n. Тогда
Я’ (t2 - 0) = 1|>" (z2) 4- i (- I)'*1 s, (t, + 0) (h"~xY)tt =
= W2 + 0) = Ш + 0),
функция гр (t) непрерывна в точке t = t2 [54]. Скачок
при t = tr равен
= + 0)-ш-0) =
= - 2
(=1
где (—l)'oz (0 > 0, Z (— 1) ё„> 0, о, = аН1 — 3Н1 = 3, _г
Аналогично можно построить функцию гр (£), непрерывную
на обоих концах граничной дуги и имеющую, вообще го-
воря, разрывы внутри дуги.
в) Пусть 3/() -- 0, 5/ = 0, I < п. ( —1)п‘х Зп0 = С ^--0.
Тогда
гр = грп 4- С (/zln~1)) *, t± < t < t2.
Таким путем можно в некоторой точке дуги обратить
в нуль компоненту вектора грп, нормальную к по-
верхности --- 0. Например, пусть
4'’г^) = а1<-1)')УЬФ, е~1ГП. - 0
(здесь гр — касательная компонента).
ЗАМЕЧАНИЯ
125
§ 5]
Тогда, взяв С — —а1? получим
Ф (Z) = ф" — аг )\ /4”“1Гф Ci + °) •= °,
х = (-1)"ап + С, к = (-IfOn-p
sign А, -- sign (—l)n.
Для случая п — 1 так делается в [49]. В общем случае
возможность добавления к функцииф (t) члена С
указана в [54].
§ 5. ЗАМЕЧАНИЯ
1. Наиболее просто определяется оптимальная траек-
тория, если она имеет импульсный характер, т. е. состоит
из конечного числа дуг пассивного полета, соединенных
точками приложения импульсов.
Часто эту траекторию удобно использовать как началь-
ное приближение для получения оптимальной траекто-
рии и при ограниченной тяге. В силу важности получе-
ния оптимальной многоимпульсной траектории интересны
следующие вопросы, на которые до сих пор нет доста-
точно полных ответов: а) при каких условиях оптималь-
ная траектория будет иметь импульсный характер? б) как
достаточно эффективно оценить проигрыш в функционале
траектории, оптимальной в классе TV-импульсных (N за-
дается), по сравнению с абсолютно оптимальной (может
быть, неизвестной) траекторией? в) существует ли верх-
няя оценка числа импульсов для оптимальной траектории,
имеющей импульсный характер? г) каковы наиболее эф-
фективные методы численного расчета оптимальной тра-
ектории?
2. Приведенные выше необходимые условия оптималь-
ности (Н.У.О.) траекторий позволяют получить полное
аналитическое решение задачи лишь в некоторых срав-
нительно простых задачах (см., например, гл. II, III,
IV). Иногда Н.У.О. позволяют решить аналитически
часть задачи, упростив ее, например, сведя к задаче с не-
сколькими параметрами; далее задача может быть решена
численно. Но и в других случаях Н.У.О. (кроме того,
что дают представление о некоторых качественных осо-
бенностях оптимального управления) помогают решить
ряд задач анализа оптимальных траекторий, например:
126 УСЛОВИЯ ОПТИМАЛЬНОСТИ КОСМИЧЕСКОГО МАНЕВРА [ГЛ. I
а) проверить на оптимальность заданную траекторию.
Для многоимпульсных траекторий это часто можно сде-
лать, построив сначала в точках приложения импульсов
векторы фр = AF/AV, затем по ним векторы фг. Этот
прием можно применить, например, к анализу задачи,
решенной в гл. VI методом параметрического анализа;
б) улучшить по функционалу данную неоптимальную
траекторию и численно определить оптимальный переход.
Это можно сделать иногда варьированием параметров
перехода и сопряженных функций с уменьшением не-
вязок условий оптимальности — как в рамках имеющей-
ся схемы перехода, так и с введением новых импуль-
сов в точках, где функция | фр | — 1 достигает поло-
жительного максимума;
в) построить семейство оптимальных траекторий, если
известна одна траектория этого семейства. Оптимальную
траекторию, близкую (по элементам исходных орбит)
к известной, можно найти, варьируя параметры перехода
и сопряженные функции. Пример такого построения дан
в гл. V.
ГЛАВА II
ОПТИМАЛЬНЫЕ ИМПУЛЬСНЫЕ ТРАЕКТОРИИ
ПЕРЕХОДОВ МЕЖДУ КОМПЛАНАРНЫМИ
СВОБОДНО-ОРИЕНТИРОВАННЫМИ ОРБИТАМИ
ПРИ ОГРАНИЧЕНИЯХ НА РАССТОЯНИЕ
ОТ ЦЕНТРА ТЯГОТЕНИЯ
В данной главе определяются оптимальные (по мини-
муму расхода топлива) траектории переходов между комп-
ланарными, свободно-ориентированными орбитами в
центральном ньютоновском гравитационном поле. При
переходе наложены ограничения на минимальное и макси-
мальное удаление точки от притягивающего центра.
Таким образом, орбита здесь задается двумя элемента-
ми — константой площадей и константой энергий, фик-
сирующими форму и «размеры» орбиты, например, ее
пери- и апоцентрическое расстояния, но не определяется
положение ее в пространстве и движение КА вдоль ор-
биты по времени. Эта группа переходов, хотя и образует
лишь частный случай всех переходов в кеплеровском
поле, важная для практики маневрирования в космосе.
Далее, в данной задаче удается дать практически полный
анализ оптимальных решений, их можно затем исполь-
зовать для получения численного решения задачи в общем
случае, например, с помощью изложенных в гл. I необ-
ходимых условий оптимальности маневрирования. Кроме
того, представляется, что полученные оптимальные реше-
ния методически интересны для общей теории оптималь-
ных маневров. Здесь будет предполагаться, что на опти-
мальной траектории сообщается несколько импульсов.
В гл. III будет доказано это предположение.
Изложим кратко содержание разделов. В § 1 на осно-
вании теоремы об апсидальности внутренних точек сообще-
ния импульсов (гл. I) дается анализ структуры оптималь-
ных траекторий, приводится их классификация. Далее,
в § 2, получается решение задачи оптимального перехода
между эллиптическими орбитами, лежащими в заданном
кольце. Используя этот результат, легко построить ал-
горитм оптимизации и в случае, когда исходные орбиты
пересекают заданные границы. Предварительно, в § 3,
дается изложение свойств плоскости скоростей, которая
128
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
(ГЛ. II
часто удобна для графического представления результа-
тов оптимизации. В § 4 определены оптимальные пере-
ходы между орбитами второго класса, когда лишь одна
из исходных орбит пересекает границы кольца. В § 5 полу-
чены оптимальные решения для переходов третьего клас-
са, в этом случае обе исходные орбиты пересекают гра-
ницы. Далее, в § 6, дан анализ одного интересного свой-
ства полученных решений, касающихся существования
пар эквивалентных (по функционалу) оптимальных пере-
ходов. В § 7 дан краткий обзор свойств полученных опти-
мальных переходов.
§ 1. СТРУКТУРА ОПТИМАЛЬНЫХ ТРАЕКТОРИЙ
РАССМАТРИВАЕМОГО ТИПА
1.1. Постановка задачи. Классификация орбит
Рис. 2.1. Траектория перехода
между орбитами в заданном
кольце К.
Рассматривается задача определения оптимального
импульсного перехода между компланарными орбитами
в центральном ньютоновском гравитационном поле. При
переходе удаление г (t) дви-
жущейся точки от притяги-
вающего центра должно удов-
летворять ограничениям
T'min Г (t) fmax?
(1-1)
т. е. траектория перехода
должна лежать в заданном
кольце (рис. 2.1)
К = {rmjn Г ^шах}*
В начальный момент пере-
хода t = tn точка должна
находиться на начальной ор-
бите 7Н, для которой заданы
два элемента, определяющие
ее размер и геометрию, например, константы энергии
и площадей £н или пери- и апоцентрическое расстояния
Гхн-
Аналогично, в конечный момент t — tK точка должна
находиться на конечной орбите с элементами 2?к,
§ 1] СТРУКТУРА ОПТИМАЛЬНЫХ ТРАЕКТОРИЙ 129
(или Гл к, гак). Естественно, что если начальная или конеч-
ная орбита пересекает обе границы кольца, то учитывает-
ся только некоторая ее заданная связная часть, принад-
лежащая кольцу. Начальную и конечную орбиты будем
называть также исходными.
Направление движения по обеим орбитам считается
одинаковым (например, против часовой стрелки). Огра-
ничений на взаимное положе-
ние линий апсид и на время
перехода не накладывается.
При переходе допустимо
приложение произвольного
(нефиксированного) числа
импульсов AFi (i = 1,2, . . .
. . ., TV). Траектория, осуще-
ствляющая переход между
заданными орбитами в коль-
це К, будет оптимальной по
расходу топлива, если для
нее сумма величин импульсов
N Рис. 2.2. Деление орбит на раз-
w , _ V ду. (1.2) ные типы в зависимости от ха-
к 1 V ’ / рактсра пересечения ими гра-
2-1 ниц заданного кольца.
равна точной нижней грани
этой величины (inf шк) на множестве всех допустимых
траекторий, осуществляющих данный переход. Предпо-
лагая существование оптимальной траектории перехода
с конечным числом импульсов, определим оптимальный
переход.
Оказывается, что одним из важных факторов, опреде-
ляющих структуру оптимального решения, является то,
как исходные орбиты пересекают границы кольца К. Да-
дим классификацию орбит по характеру пересечения ими
этих границ. Заметим, что она годится, вообще говоря,
и в общем случае перехода между некомпланарными, фик-
сированными орбитами. Ниже будет предполагаться,
если специально не оговаривается, что rmin > 0, гшах <
< оо. Случаи rmin = 0 или rmax = оо см. в [1] — [5].
Будем различать у орбит граничные точки — началь-
ную (Ми) и конечную (Мк) среди точек, соответствующих
Движению в кольце в выбранном направлении (если это
5 В. В. Ивашкин
130
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[гл. п
можно однозначно сделать, т. е., в данном случае, если
орбита пересекает хотя бы одну границу кольца), и внут-
ренние точки — все точки орбиты в кольце, кроме на
чальной и конечной.
Классификация орбит. Разобьем орбиты
на следующие типы по характеру пересечения ими границ
кольца К,
Тип I — орбита не пересекает границ кольца
(рис. 2.2). Параметры орбиты удовлетворяют условиям
T’min Гх Плах* (1-3)
Орбита этого типа — эллиптическая; точка, движущаяся
по ней, всегда принадлежит заданному кольцу.
На орбите типа I, ввиду непересечения ею границ коль-
ца и незаданности времени перехода, нет начальной и ко-
нечной точек, все точки будут внутренними.
Тип II — орбита пересекает только внутреннюю гра-
ницу кольца (см. рис. 2.2). Для параметров орбиты спра-
ведливы условия
0 Г л Г min, min 7* а Г шах* (1.4)
Орбита — эллиптическая, начальная Мн и конечная Мк
точки ее лежат на внутренней границе у (г = гт-1П) коль-
ца К. При ra > rmln в точке Ма будет г — Т* min? vr > о,
в точке Мк: г = rmln, Vr < 0. Если ra = rmin, то эти
точки совпадают, Мп = Мк, в них Vr = 0. Из апсидаль-
ных точек орбиты лишь апоцентр а принадлежит коль-
цу К. Если г- / rmin, то в пределе получаем орбиту ти-
па I, ДЛЯ которой Гн = Гшп-
Тип III — орбита пересекает только внешнюю гра-
ницу кольца (см. рис. 2.2). Элементы орбиты удовлетво-
ряют условиям
Tmin Гщах, < $naxt (1*^)
здесь и далее *)
rа. , $тах = rmax*
*) Параметр sa = г~1 = I __—I иногда использовать
удобнее, чем апоцентрическое расстояние га, тем, что он непрерывно и
монотонно убывает, если к онстанта энергии h возрастает (при
г == const) от отрицательны х до положительных значений,
§ 1] СТРУКТУРА ОПТИМАЛЬНЫХ ТРАЕКТОРИЙ 131
в этом случае как начальная, так и конечная точки ор-
биты принадлежат внешней границе Г (г = rmax): Мп ЕЕ
Г, Мк Е Г, в УИН будет г = rmax, Vr < 0, в Мк :
г = Ппах, Vr 0. Из апсидальных точек орбиты лишь
перицентр л лежит в кольце. Если sa / 5max, то предель-
ной будет орбита типа I, для нее sa = smax (ra = rmax).
Тип IV — орбита пересекает обе границы кольца,
см. рис. 2.2. В этом случае будет
~ < 7* min? 5max.
(1-6)
Для кеплеровской орбиты такого типа множество
точек в кольце несвязно, имеются две части (ветви), при-
надлежащие кольцу. Пассивный переход между ними
по данной орбите возможен лишь за пределами кольца.
Следовательно, в рамках поставленной выше задачи
переход с одной ветви на другую требует затраты функци-
онала (1.2). Поэтому каждая из двух данных ветвей играет
роль самостоятельной орбиты и будет называться в даль-
нейшем орбитой. Одной присвоим тип IVa, другой — IV6:
IVa соответствует движению от внутренней границы у
к внешней Г, на ней Vr 0. При этом Ми ЕЕ Т, Мк ЕЕ Г,
IV6 соответствует движению от внешней границы Г
к внутренней у, на ней Vr 0, Мн ЕЕ Г, Мк ЕЕ Т-
Для орбит этих типов в кольце нет апсидальных точек.
Если / rmin, то в пределе получаем орбиту типа III,
для нее = rmin, sa < smax. Если sa / smax, то пре-
дельной будет орбита типа II, sa = smax. Если же одно-
временно 7\ / Гт1п, $а z Srnax, ТО ПОЛуЧИМ Орбиту Типа I,
7*л = Т'а = Гщах»
Если исходные орбиты — начальная и конечная —
типа i и у соответственно, то переход между ними обозна-
чим ij. Например, если i = I, j = IVa, то переход будет
типа I IVa.
Рассмотрим в плоскости (гл, sa) множества, соответст-
вующие орбитам указанных типов (рис. 2.3). При sa 0
точки плоскости соответствуют эллиптическим орбитам,
при sx = 0 — параболическим, при < 0 — гиперболи-
ческим орбитам. Кривая АВ, для которой
r-sa = 1,
будет представлять круговые орбиты. Симметричная с ней
относительно оси кривая FGH (г^ = — 1) представ-
5*
132
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИЙ
1ГЛ. Ц
ляет гиперболические орбиты с бесконечно большой энер-
гией (прямолинейные траектории, удаленные на расстоя-
ние г- от притягивающего центра). Множество АВС
соответствует орбитам типа I, множество BEDC (без при-
мой ВС) — орбитам типа II. Прямая ВС представляет
Рис. 2.3. Множества в плос-
кости (гГк, sa), соответствую-
щие орбитам разных типов.
предельные орбиты типа 1,
гг. = rmin. Множество ACGF (без
отрезка АС и дуги FG) соот-
ветствует орбитам типа III.
Точки на АС изображают пре-
дельные орбиты типа I,
= гГпах- Множество DCGH (без
CD, CG и GH) соответствует
орбитам типа IVa и IV6. Точка
С изображает предельную ор-
биту типа I, гГи = rmin,ra = Ггпах,
интервалы (DC) и (CG) — пре-
дельные орбиты типа II (ra -
= Гшах) и III (rn = rmin) соот-
ветственно.
Иногда для простоты и пол-
ноты изложения будем и пре-
дельные орбиты включать в ор-
биты рассматриваемого типа,
т. е. допускать знаки равенства
в условиях (1.4), (1.5), (1.6).
Предельные орбиты, соответст-
вующие границе FGH, формально тоже можно включить
в рассмотрение, но по существу они никогда не участвуют
в переходе, так как, очевидно, требуют бесконечно
больших затрат энергии.
1.2. Структура и классификация оптимальных траекторий
В силу незаданности угла и времени перелета в данной
задаче оптимизации перехода будет % = 0, 1|д =0 (гл. I).
По теореме 1.3 (см. гл. I, п. 3.6) все внутренние точки оп-
тимальной траектории, в которых сообщаются импульсы,
будут апсидальными. Неапсидальными могут быть лишь
начальная или конечная точки траектории перехода,
в которых сообщаются импульсы, т. е. точка схода с на-
чальной орбиты и точка прихода на конечную орбиту.
§ 1J СТРУКТУРА ОПТИМАЛЬНЫХ ТРАЕКТОРИЙ 133
Не уменьшая общности, за начальную точку траек-
тории перехода возьмем начальную точку начальной
орбиты 7ИН ЕЕ Тп (если эта точка однозначно выделяется,
т. е. орбита принадлежит к типам II, III, IV), ее будем
также обозначать через Мп. Если начальная орбита ти-
па I, то точку схода с нее назовем квазиначальной 7Ии,
так как в силу пезаданности времени переход можно бы
считать начавшимся из любой предыдущей (по времени)
точки начальной орбиты. Аналогично, за конечную точку
траектории перехода возьмем конечную точку 7ИК ЕЕ К
конечной орбиты, если эта орбита типа II, III, IV; ее
также обозначим через А/н. Если эта орбита типа I, то
переход можно считать закончившимся в любой ее точке,
следующей (по времени) после точки прихода на ко-
нечную орбиту. Точку 7ИК назовем квазиконечной. Все
точки траектории перехода, кроме однозначно выделяе-
мых начальной Мп и конечной 7ИК, будут внутренними.
В частности, если соответствующая исходная орбита типа I,
то при Мн (или Мк Мн) точка Мн (или Мк)
будет внутренней. Начальную и конечную точки траек-
тории перехода будем называть также граничными или
исходными точками.
Все импульсы оптимального перехода разобьем на
две группы:
а) Импульсы, сообщаемые в начальной точке Ми или
конечной точке Мк траектории перехода; такие импульсы
назовем граничными, они могут быть, если соответствую-
щие исходные орбиты принадлежат к типам II, III, IVa,
IV6.
б) Остальные импульсы — сообщаемые во внутренних
точках траектории перехода; их будем называть внутрен-
ними. По предыдущему, эти импульсы сообщаются в ап-
сидах сопрягаемых орбит.
В зависимости от числа граничных импульсов все
переходы можно разбить на 3 класса.
1 класс. Обе орбиты — типа I, имеем переход I I.
В этом случае все импульсы и точки их сообщения — внут-
ренние, апсидальные, граничных импульсов нет.
2 к л а с с. Одна из исходных орбит — типа I, другая
пересекает хотя бы одну границу кольца. Это переходы
III, III I, IVa I, IV6 I (переходы типа I II, I III и т. д.
134
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
сводятся к выписанным путем изменения направления
движения). Переходы этого класса имеют не более чем
один граничный импульс, сообщаемый в точке пересе-
чения соответствующей исходной орбиты с границей
кольца.
3 класс. Обе исходные орбиты пересекают границы
кольца. Это переходы:
II II, II III, II IVa, II IV6,
III III, III IVa, III IV6,
IVa IVa, IVa IV6, IV6 IVa
(остальные переходы эквивалентны этим). Для таких
переходов может быть два граничных импульса: как в на-
чальной, так и в конечной точке траектории перехода.
1.3. Характеристика базис-вектора
Прежде чем приступить к анализу траекторий различ-
ных классов, приведем вспомогательные данные, характе-
ризующие изменение сопряженной вектор-функции для
рассматриваемого случая. При пассивном движении вдоль
орбиты компоненты р, X, ц, % векторов фр, фг будут опре-
деляться в соответствии с (3.34) гл. I. Тогда модуль базис-
вектора равен
«1 = /н2 + - К Со + (Сх/г) + С2г2 =
где
= 1/тг-1в - y^)2J'Zi’ (1 -7)
у Игр
Со = 2BD + -^-А52,
Игр
Сх = 2Б2л C2 = D2/p2,
V(F = —~р~ — £рГ 2|-irpC2/C:
— — sign (D/В) = sign V(f,
СТРУКТУРА ОПТИМАЛЬНЫХ ТРАЕКТОРИЙ
135
функция Xj (г) может достигать максимума лишь на кон-
цах диапазона [г1? г2] изменения расстояния г. При рас-
смотрении всех точек орбиты предельные расстояния
fi будут следующими:
Г1 = Гя, г2 = Г
для орбиты типа I,
Г1 = rmill, г2 = га для
7*1 Г2 — Гтах ДЛЯ
Г1 — Гщуп, Г2 — Гтах ДЛЯ
орбиты типа II,
орбиты типа III,
орбиты типа IVa, IV6.
Орбиту, соединяющую две точки сообщения импульсов
(точку выхода на нее и точку схода с нее), будем назы-
вать промежуточной или переходной.
Пусть для такой орбиты г1? г2 — расстояния в точках
сообщения импульсов, тогда (^) = (r2) = max хх (и).
Если же рассматриваемая орбита — исходная (в этом
случае, точнее, имеется в виду часть орбиты, входящая
в траекторию полета) или оскулирующая (при сообщении
некоторого импульса), лежащая в кольце К, то макси-
мум функции Xj (г) может достигаться при одном из край-
них расстояний: при г = rx, хх (j\) > (г2) или при
г = r2, Xi (l\) < Xj (r2).
Рассмотрим разность
Д%1 — Xi (r2) Xi (rj) — С2 (г2 — Г1) — С\ ---------------——
Если
§ = [Г1Гз (Г1 + С1-9)
то будет Xj (гх) = Xj (г2), как в случае промежуточной ор-
биты. При этом
Т7 Г Ч’Р Т/2
+ (1-1»)
ер = sign VIF = — sign (D/В) — +1.
В случае
Сг / Сз V
(1.11)
136
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. Ц
будет %! (г2) < (Г1). Если же
ТО %! (r2) > Xj (rj.
£2.^ /Ж
Cl \ с J
U-1-)
В точках сообщения импульсов компоненты (р,, k)
базис-вектора суть направляющие косинусы вектора
Рис. 2.4. Схема сообщения импульсов в плоскости скоростей.
импульса. Пусть ср — угол наклона импульса к трансвер-
сали. Тогда из формул (3.34) гл. 1 следует
COS(p = |A = l/"-7-Ж + -^-r '-у/11'’- , (1.13)
J/ Ггр I v 1
sin ip = А, = еф уу - В |/-Ж Vr, (1.14)
е, = sign В, VF = [V2 + (V, - ViF)T2 = 1/4г >
величина VtF приведена в (1.8), (1.10).
В плоскости скоростей Р = {Уь VJ, построенной
для точки сообщения импульса, импульс скорости AJ
направлен коллинеарно (если = 1, В > 0) или анти-
коллинеарно (если 8Ф = — 1, В < 0) вектору FV, при-
чем точка F находится на оси Vt, имеет координаты (У/к, 0)
(рис. 2.4). В приведенных формулах считается В 0.
Если В = 0, то
- 0, С2 ф 0, ОО,
(^2) > xi (rih А = 0, рс = ± 1.
§ 21 ПЕРЕХОДЫ МЕЖДУ ОРБИТАМИ, ЛЕЖАЩИМИ В КОЛЬЦЕ 137
1.4. Способ оптимизации
Оптимизация перехода может быть проведена различ-
ными способами. Можно непосредственно искать траек-
торию перехода, удовлетворяющую всем необходимым
условиям оптимальности. Можно было бы (при предполо-
жении об импульсном характере решения) провести пара-
метрическую оптимизацию, минимизируя функционал
(1.2) по параметрам, характеризующим импульсы и точки
их приложения. Такой путь сложен, так как число пара-
метров быстро возрастает с увеличением количества
импульсов.
В данной задаче удобным оказывается смешанный
метод параметрической оптимизации на множестве пере-
ходов, удовлетворяющих части необходимых условий.
А именно апсидальность импульсов во внутренних точ-
ках их приложения сильно сужает множество переходов,
подозреваемых на оптимум. Далее, после оптимизации
переходов 1-го класса, будет показано, что оптимальная
траектория полностью определяется заданием граничных
импульсов, zpk = (AFt, AF^). Если же учесть свойст-
ва (1.13), (1.14), (1.10) этих импульсов, то число парамет-
ров сокращается еще более. В результате определение
оптимальных траекторий оказывается возможным довести
до конца аналитически.
§ 2. ОПТИМАЛЬНЫЕ ПЕРЕХОДЫ МЕЖДУ ЭЛЛИПТИЧЕСКИМИ
ОРБИТАМИ, ЛЕЖАЩИМИ ВНУТРИ КОЛЬЦА
Переходы данного класса отличаются тем, что все
точки сообщения импульсов будут внутренними точками
оптимальной траектории и, следовательно, апсидальными.
Импульсы будут сообщаться в апсидах оскулирующей
орбиты (апоцентре или перицентре) вдоль или противо-
положно скорости. Отсюда следует далее, что в данном
случае не только исходные, но и все оскулирующие орби-
ты оптимальной траектории лежат в кольце К:
T'rnin
Га
Г шах*
(2-1)
Проведем анализ различных схем апсидальных переходов
по величине суммарной характеристической скорости.
138
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
1ГЛ. I1
2.1. Двухимпульсные апсидальные переходы
Будем считать здесь, что ган гак. Возможны a priori
четыре вида двухимпульсных ансидальных переходов.
а) Первый (ускоряющий) импульс сообщается в
перицентре лн начальной орбиты,
Рис. 2.5. Схема двух-
импульсного перехода
вида лн ак (при ган<
< га^-
так что га увеличивается до гак,
далее КА движется по промежу-
точной орбите Т' в ее апоцентр,
совпадающий с конечным апо-
центром ак, где сообщается второй
импульс ДР2 (рис. 2.5). Этот пере-
ход, в соответствии с указанными
точками сообщения импульсов и
направлением движения по проме-
жуточной орбите, обозначим ус-
ловно следующим образом:
л„ -> ак. (2.2)
Аналогичным образом будем обоз-
начать переходы и в других случа-
ях. На рис. 2.6 схематично приве-
дены соответствующие зависимо-
сти гп (ш), га (ш). Для промежуточной орбиты 7', ,
будет = Глн, Га = Гак.
Рис. 2.6. Зависимости г_ (г/;), га (ю) для перехода вида лп — ак.
б) Переход из начального перицентра в конечный:
Лн ft к ч
апсидные расстояния промежуточной орбиты равны г~н
и гпк (рис. 2.7, 2.8).
j 21 ПЕРЕХОДЫ МЕЖДУ ОРБИТАМИ, ЛЕЖАЩИМИ В КОЛЬЦЕ 139
в) Переход из начального апоцентра осн в конечный
перицентр лк (рис. 2.9):
0Сн ЗТк‘
Апсидные расстояния промежуточной орбиты суть
гат глк. Зависимости (п?), га (п?) приведены на рис. 2.10
(гяк < Ган), рис. 2.11 (гяк > га„).
Рис. 2.7. Схема двух-
пмпульсного перехо-
да вида лп лк.
Рис. 2.8. Зависимости rn (w), ra(w)
для перехода вида лн —> лк.
Рис. 2.9. Схема двухим- рис. 2.10. Зависимости (ш), ra(u>)
пульсного перехода вида ПСреХ()да~ВИда1| лк
а,1“*Лк’ при ГЯК <га11.
г) Переход из начального
(рис. 2.12):
в конечный апоцентр
ап аи.
I
140
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. П
Параметры промежуточной орбиты Т суть гп = гап,
Га = Гак (рис. 2.13).
Лу Тинг получил, что условиям оптимальности удов-
летворяет лишь переход лп сск [6]. Здесь непосредст-
венно покажем его оптимальность аналогично [7].
Рис. 2.11. Зависимости гп (ш),
га (ш) для перехода вида ан
лк при ггл. > / ан.
Рис. 2.12. Схема двухим-
нульспого перехода вида
ап - ак.
Заметим, что во всех случаях, кроме перехода ли -> ак
точка сообщения одного из
импульсов (или обоих) по-
очередно будет то пери-
центром, то апоцентром
оскулирующей орбиты. На-
пример, для перехода
ли -> лк (глИ > глИ) имеем
(^) ПРИ
II ГяК = (w) при w"
<Z 'С Переход, реа-
лизуемый посредством со-
(йобщения такого импуль-
и ап л,( (при гяК < гап),
Рис. 2.13. Зависимости гг (ш), га
для перехода вида ап — ак. са, можно представить как
двухимпульсныйапсидаль-
ный переход. Сравним переходы ли->ак и аи -> лк (r4K<C
< гаН), не допускающие такого представления, Пусть
сначала гпН <
§ 2] ПЕРЕХОДЫ МЕЖДУ ОРБИТАМИ, ЛЕЖАЩИМИ В КОЛЬЦЕ 141
Для перехода лн «к сумма импульсов равна
w* = (- УяН + VJ + (Уак - УД (2.3)
где Ул, Уа — скорости в пери- и апоцентре промежуточ-
ной орбиты Т = {гп = гяН, га = гак}« Для перехода
ан^Лк (при гяк < ган) получим
wi = (у: - уан) + (уЛк-уд
здесь Уп, Уа — пери- и апоцентрические скорости соот-
ветствующей переходной орбиты Т” = {гГи = гяК, га =
= гаН}- При гяН = глК оба перехода эквивалентны:
AlPK = — l^K = 0.
В общем случае, при глН < гяК, получим
а^к = - (у; - у") - (у: - у;) + (ул11 - уаи) +
+ (УЛк - Уак).
Рассмотрим зависимость Aiz?K (глК):
AwK
dAw^
dsnK
= Г 5лк - уак
Т2Й77 1(«лк + «ак)''2
— Ф ^сск) Ф C>7tK, A'an)>
Sn,; ,S'a-2~] + const,
(S7tK + sau)
где s„K = r;i, saH(K) = (K),
ф (Skk, s) = (s™ + 3&)/2 (sr.K + s)3'2.
Функция ф (z, у) является монотонно возрастающей по
у при 0 < у < х:
дф _ 3 (g — у) . q
дУ ~ 4 (х + у)5/г
Поэтому ф(б'г.к, «ак)<ф(»-к, 4«н) ГфИ SaK < San < «тгк>
— <0, Д^>0, <<<•
Если гГкН>^яК, то аналогично получим
w'K = (К - Пп„) + (К - Val(),
(^•4)
«;к-(7ан-Уа) + (Уяк-УД
Ди,Е= (К+ у") 4- (Упк+ Уак) + (Уяя 4 Упн) - (У, у Уя).
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. (I
flpfl Гкк = г^н будет Ашк = 0. Уменьшаем г-к:
Дг^к (5г.к) = [($-к + $аК) 12 — ($7ГК 4“ 5ан) 4 + COHSt,
dAw„ Л1 .<
2 -г— = («ЯК + «ак) '* — (*кк + -«ап) ' ’ > 0.
(lSnH
При уменьшении глК от
Рис. 2.14. Схема двухим-
пульсного перехода вида
ан “* Як (ПРИ гап > 7ак)-
гяИ величина AwK увеличивается,
Ашк 0. Следовательно, всегда
переход лн -> ак экономичнее
(по wK) перехода ан->лк. Ис-
пользуя этот результат, легко по-
казать далее, что и все осталь
ные двухпмпульсные апсидальпые
переходы менее экономичны, чем
переход лп -> ак. Например, в
случае перехода лн -> лк (при
глк > глН, см. рис. 2.8) его ко-
нечную часть w' w об-
разующую переход с промежуточ-
ной орбиты Т' на конечную
орбиту Тк (обозначим его через
Т' -> Тк), можно рассматривать
как двухимпульспый переход
а' -> лк- Его заменим, с уменьшением функционала,
переходом л' -> аи, для которого будет
Г (w) = Гг, ГлИ, COS ср (iv) = 1, wf < w < w",
r (w) = ГаК, COS ср (w) = 1, w" < w < iv'K.
Так как первый импульс AFX этого перехода (wr < w <Z
< w") сообщается на одном расстоянии и в однОхМ направ-
лении с импульсом ДР\ перехода Ти -> Тг между орбита-
ми и Т', то оба импульса объединяются в одни им-
пульс + AFi, сообщаемый в начальном перицентре
вдоль скорости. Переход становится двухимпульспым:
г (ir) = Гян, COS ср (w) = 1, 0 W < w,f,
г (ш) raK, cos ср (ш) = 1, w" <Z IV wl{.
Аналогично и другие случаи сводятся (с уменьшением
£ГК) к переходу лп -> ак.
Следствие. Если га11 4> гаК, то оптимальный
двухимпульспый переход имеет вид аи-> ли (рис. 2.14).
§ 21 ПЕРЕХОДЫ МЕЖДУ ОРБИТАМИ, ЛЕЖАЩИМИ В КОЛЬЦЕ 143
Рнс. 2.15. Схема трехим-
пульспого перехода.
2.2. х4нализ многоимпульсных апспдальных переходов
Лу Тинг [8] показал, что многоимпульсные апсидаль-
ные переходы сводятся к двух- или трехимпульсным.
Для полноты изложения приведем соответствующий ана-
лиз и примением его к рассматриваемому случаю с огра-
ничениями.
В дальнейшем, при рассмотрении многоимпульсных
переходов, иногда будем нумеровать переходные орбиты.
Если, двигаясь по пассивной дуге
орбиты 7\ КА приходит в точку
сообщения импульса AF\ (i = 1,
2, . . ., N), то и орбите Т при-
своим номер ц обозначим ее че-
рез 7\. При i — 1 имеем началь-
ную орбиту 7\ — 7 п, после сооб-
щения последнего импульса ДТЛу
получаем конечную орбиту Т1{ =
= N+1*
Рассмотрим трехимпульсный
апсидальный переход (N = 3)
с использовапиехМ промежуточ-
ных орбит Т2, 7'3, условно изоб-
раженный на рис. 2.15. Пусть
max rai = raK, I =- 1-н4. Тогда
г
Т2 Тк осуществляется по схеме л2 ак, рассмотренной
выше, для него г^з гл2, га3 = гаК. Двухимпульсный пе-
реход Т3 будет иметь вид лн а3 ( = ак), гл2 — глП,
га2 = газ- Орбиты 7’2, Т3 совпадают, сливаются в одну
орбиту Т2, гл2 = гпи, га2 гаК, весь переход вырожда-
ется в двухимпульсный переход ли «к- Пусть г * —
= шах > гак, например, га3 - г*. Тогда двухимпульс-
i
ный переход 7Н -> Т3 осуществляется по схеме ли -> а3.
Поэтому гл2 - / лн< г^2 га3 --- г*. Рассматривая пере-
ход с орбиты 7\ на орбиту 7\, получим глз -- глК. Весь
переход остается трехимпульсным:
ли -> а2 лк, (2.5)
для него
^л2 ~ глН) z’a2 гаЗ > глз ~ (2-6)
Таким образом, трехимпульсный переход не вырожда-
двухимпульсный переход
144
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
1ГЛ. II
Рис,
2.16. Схема четыр<
пульсного перехода.
ется в двухимпульсный, только если апоцентрическое
расстояние переходных орбит больше апоцентрических
расстояний исходных орбит.
Пусть N = 4 (рис. 2.16). Предположим сначала, что
max rai = Тогда трехимпульсный переход
г
по предыдущему, вырождается в двухимпульсный пере-
ход л2 для которого max rai = гаК. Рассматривая
i
весь теперь уже трехимпуль-
сный переход Тп -> Тк, опять
М видим, что он вырождается
/ в двухимпульсный переход
\ Лц—
г7? Пусть г* max rai > raK,
А г
I например, газ = г* > гаК.
/ 2 Рассматривая двухимпулъс-
ные переходы Тп-+- Т3 и 73—►-
Тк, получим, что гя2 "
— ^а2 = ^аз = ^Л4
= гяК. Переход между орбн-
)хим- Тами Т2 и Т4 осуществится
приложением одного импуль-
са в общем апоцентре. Весь
переход Тн-> Тк будет трехимпульсным (2.5), (2.6).
Далее индукцией легко доказывается, что любой мно-
гоимпульсный переход с числом импульсов N 4 сво-
дится к двухимпульсному, если max rai = или трех-
1
импульсному, если max rai гак.
i
Рассмотрим теперь однопараметрическое семейство
трехимпульсных переходов (2.5), (2.6). Параметром будет
апоцентрическое расстояние га2 = газ промежуточных
орбит, причем, в силу заданного ограничения, будет
И1ЯХ (ган, гак) га2 гтах.
При минимальном значении ra2 = max (ган, гак) будет
га2 =газ^ = гсск, ДУ3 = 0, получаем двухим-
пульсный переход. Поэтому, рассмотрев данное семейство,
получим оптимальную траекторию на множестве всех
апсидальных многоимпульсных переходов. Для этой
$ 2] ПЕРЕХОДЫ МЕЖДУ ОРБИТАМИ, ЛЕЖАЩИМИ В КОЛЬЦЕ 145
траектории характеристическая скорость минимальна:
(гаг) => min.
Справедлива [8]
Лемма (Тинг Лу). Функция (га2) монотонна или
имеет внутренний максимум.
Следствие. Функция
минимум лишь при крайних
может быть
(т'о^опт — max (raII, raK ) (2.7)
ИЛИ
(^а2)опт = 7*тах’ (2-8)
В первом случае оптималь-
ный переход будет двухим-
пульсным (2.2), во втором
случае оптимальным будет
трехимпульсный переход
(2.5), (2.6), (2.8):
ли —> Г —> Лк, Гл2 = ^лн,
ra2 ~ra3 = rmax, глЗ = глк,
(2.9)
(гаг) может принимать
значениях аргумента, т. е.
Рис. 2.17. Схема трехимпульс-
ного перехода вида лн —>
лк.
причем промежуточный импульс сообщается на внешней
границе кольца (рис. 2.17).
Докажем лемму. Пусть, для определенности, глн глН
(условие гап гак при этом отбрасывается). Тогда сум-
марная характеристическая скорость равна
(гаг) — (^л2 — ^лн) + (^аз Vа2) + (КпЗ ^лк) —
= (^л2 — 4’ (^ссЗ + ^лз) ~ (^п Н ^лк)-
Обозначим
г"н _ Г 1 г~н _ g 1
-- •’пк 1 ? _ — да 1 •
1пк Га2
Тогда ____
4-46
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
И\1.
рассмотрим функцию wK (sa):
U’k (^a)
»’k
l^-Prp/'nn
а + У »г.к «а + const.
Vl+?a
d,+ = ~ (3 T- +) V ^k+ К + (i + ^.)3'2
<4 2(1+ ^)’/2Kk+V''2
рроизводпая dwK/d^ может обращаться в пуль при
-3(1 + +к) + 2|/з-2;лк
Если хя < 1/9, то 5(
dwK/d~sa < 0 при ~sa
максимума функции
(га2)опт = (ra2)min- ЕСЛИ 5Л
> 0, dwi{/d<sa 0 при 0 sa С х*,
5а. Точка является точкой
('^а)? (^0,2)опт — (^а2)тах ИЛИ
Рис. 2.18. Области оптимальности
двух- и трехимпульсного перехо-
дов между круговыми орбитами.
1/9, то <sa 0. В этом случае
при За>0 будет dwK/d*a<^
< 0, функция wK (.sa)
монотонно убывающая,
(У а2)опт — (У a2)min- ЛвММЯ,
а с пей и результаты (2.7),
(2.8) доказаны.
Области оптимальности
обоих переходов легко
определяются при перехо-
де между круговыми ор-
битами, ен = ек = 0. Если
отношение радиусов гк/гп
меньше г 11,94, то оп-
тимальным всегда будет
двухимпульспый хомапов-
ский 19] переход (2.2),
N = 2 (величина х ----- г 1/2
есть корень уравнения хл -]- х2 — (2 |/ 2 1) х -|- 1 - 0).
В другом крайнем случае, при гк/гн /> г ж 15,56, опти-
мальным будет трехимпульсный переход (2.9) Штерпфель-
да [10], N = 3 (г”1 = 4 cos 40° — 3). В промежуточном
случае г С гк/ги << г существует предельное значение
Лпах (гн, гк) такое, что при гП1ах < /~гпах будет 7V011T 2,
§ 2] ПЕРЕХОДЫ МЕЖДУ ОРБИТАМИ, ЛЕЖАЩИМИ В КОЛЬЦЕ 147
а при ггпах > Fmax — Агопт — 3. Области оптимальности
обоих переходов и зависимость гн/Лпах от гн/б< приведены
на рис. 2.18.
В общем случае, при гшах < оо, е(н)к ф 0, тип опти-
мального перехода, по-видимому, целесообразно устанав-
ливать непосредственным сравнением по функционалу,
если относительно простые критерии не подходят (один
критерий приведен выше): гяК/глн 9, несколько других
будет указано далее).
2.3. Изменение сопряженных функций
на оптимальных траекториях
Имея в виду возможность применения излагаемых результатов
для численного получения решения в случае произвольных (фикси-
рованных) орбит, рассмотрим изменение сопряженных
функций вдоль полученных оптимальных траекторий. В данном
случае, ввиду свойства (2.1), анализ можно провести двояким обра-
зом — по переменным, соответствующим оскулирующим элемен-
там (например, аналогично работам [17], [31] —[37] гл. I) или по
переменным ц, X, д, соответствующим кинематическим парамет-
рам. Здесь воспользуемся вторыми переменными, при необходимо-
сти можно легко осуществить переход к первым.
Пусть сначала N = 2, переход — двухимпульсный, ган < гак.
Для переходной орбиты Г2 будет г_2 = г_н, гаО = гак. В силу ус-
ловий оптимальности в точке Мн сообщения первого импульса
будет (соответствующие величины снабдим индексом «1»):
Нгп
‘01 = 0, И1 - 1, Z1-0, щ --о, ТУ", п-гГкН, (2.10)
а в точке Мн сообщения второго импульса ДИ2 аналогично:
Л, 112 -- St<rn (г_к — 7-_и),
/.2 о , '-2 (2.11)
] 2
Из условий (2.10), (2.11) и (3.34) гл. I определим постоянные В, D
Для орбиты Г2:
1 1 — е2
2 2 Г
1 1—^9
Вг , D2 — —------------------— , если рг = — 1.
2^2 2^2
148
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
ГГЛ. II
В остальных точках на орбите
g1? Е,2 имеют вид
L2 /
& - —Вч +
Г1 \
Т> будет x1(#) < 1. Компоненты
р-2 = 1,
р,2 = — 1,
На начальной орбите (и оскулирующей в точке Мн), согласно (3.28)
гл. I, будет
В=Л_ (1-1), D -- 1+е [1 - (1 + к) 11-
е е
62.
На этих орбитах максимум модуля базис-вектора достигается
в точке сообщения начального импульса, при 0 = 0. Действительно,
кроме точки 0 = 0 максимум хт(0) мог бы быть достигнут при О = л,
здесь хх = | р,|. Рассмотрим эту точку. Пусть сначала |n2 = 1. Тогда
Иа = Н(^ = «) =(1-е)В + _£—,
~ /1-4- 62 у 12 С2 \ г----
здесь £ = ' 1 g = C/V 1 + е. При 0<е2<1 будет
1/j/*2< С< 1. Тогда р,а = —1 будет при £ = 1/2, что невозможно при
О < е < ^2 < 1. Случай р,а = 1 возможен лишь при е = е2. При
е < е2/ будет хх = | р| < 1. Пусть (и2 = — 1, | = [(1 + е2)/4 (1
4- е)Г 2. Случай ра = — 1 возможен при е — е2; случай ра = 1
невозможен при 0 е е2 < 1. При е< е2 будет [ р | < 1. Следо-
вательно, при 0 w < всегда максимум xi (О) достигается
дишь при 0 = 0.
На конечной (и оскулирующей в точке Мк) орбите будет
I
В = - — (иа-и, -—[|12-(1-е)Г1 ,
§ 21 ПЕРЕХОДЫ МЕЖДУ ОРБИТАМИ, ЛЕЖАЩИМИ В КОЛЬЦЕ 149
рассмотрим величину ц при ф =0:
ЦЯ=МО -0) - 2? (1 + е) + - иг - 2
1 -f- в r 1 4- £
Пусть р2 — 1, е < е2. Случай = 1 возможен лишь при е = е2\
р,п = — 1 будет при | = 1/2.
е= е* (е2) (рис. 2.19):
е* = 1 -(1 ~ е2) (2 +е2)2,
е* 1 ~s*
2 14-5*’
$* — 4 cos 40° — 3 ^0,066,
4^0,88.
(2.13)
Поэтому при е*< е2, ек <
< е*(е2) будет | р_ | > 1, N =3.
При е2 < с* или е* < ек < е2
и е2 > е* будет | рл | < 1.
Последнее имеет место при е* е2
Рис. 2.19. Зависимости критиче-
ских эксцентриситетов е* и е**
конечной орбиты, соответствую-
щих случаю р (й = 0) = —1, при
ускоряющем (р2 = 1) и тормозя-
щем (р2 = — 1) действии второго
импульса соответственно, от эк-
сцентриситета е2 переходной ор-
биты.
р_ < — 1, следовательно, в этом
Пусть р2 = —1, е > е2.
Случай ря = 1 возможен лишь
при е — е2, при е = <?**(е2)
будет р_ = — 1. Если <С е <
< <?**(е2), то — 1 < р^ < 1.
Величина с** (в2) удовлетво-
ряет уравнению (2.13), если в
нем сделать замену е* -> <?2,
е2 е** (см. рис. 2.19). При
е>?* модуль базис-вектора
в точке й = 0 превысит единицу,
случае N = 3.
Рассмотрим теперь траекторию трехпмлульсного перехода.
Здесь считается, без ограничения общности, что гяк ггп. Сопря-
женные переменные на начальной орбите Гп, на орбите Т2 = {гл2 —
= гтш ’ га2 = гшах} и на окулирующих при 0 < w < А Рх орбитах
определяются так же, как и в случае двухимпульсного перехода
при р2 = 1. На них всегда будет хх (й) < 1. Для орбиты Т3 {гл3 =
= '•«к- гаЗ = rmaJ бУДет
= л> Ц2 = 1, Х-, = О, щ = о, х1 с» = л) = 1,
= 0, цз = —1, Х3 = 0, Т)з = 0, Xi (О=0)= 1.
Отсюда следует
1 п 1 “
в* = - - 2е3
(2.14)
150
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
При sin Ф =f= 0 на орбите Т3 будет хх (ft) < 1. Для конечной орбиты
(и оскулирующих в конечной точке орбит) переменные будут теми
же (с точностью до знака), что и в случае N = 2 для начальной
орбиты при р,1 = р,2 = —1. Это получается после обращения
Рис. 2.20. Зависимость
движения. Поэтому на J них будет
xi (Ф) < 1 при О =/= 0.
Рассмотрим точку сообщения им-
пульса W2, лежащую на внешней гра-
нице Г, Д < w < Д Vi Ц- ДП2. В этой
точке ц = 1, X = 0, т| = 0. Сопряжен
ная переменная 5 (0 будет разрывна:
= £- + °
здесь а (f2) >0 — мера, сосредоточен
ная в данной точке. Из (3.34) гл. I,
(2.12), (2.14) получим
критического значения
р* параметра р2 = Е,+
/г,пах, соответствующего
нулевой мере a (f2), от
параметра Р1 = глн/гтах.
£2
~ —2---- [(^2/1 — с2)+ £2] -
гтах
V
= _^^(2 + е2),
max
-------[(£з/1 -Ъ) + В3] -
гтах
2 г max
Условием оптимальности будет выполнение неравенства
> Г или Га3 - Та2 (2 + е2) > 0. (2.15)
Если это условие выразить через эксцентриситеты с2, е3. то полу-
чим, что должно быть
е* (е2), причем с2
здесь е* удовлетворяет уравнению (2.13). Выразим условие (2.15)
через расстояния гги, гяк, г111ах. Обозначим рх = г-н'гт‘лх' Р2 ~
= гг.к/гтах (° < Pi < 0 < Р2 < 1). Тогда получим условие
Р2
1 + pi
pi
1 + pi
; b (pl),
Р2>Р2' (рО
62(pi)
1-&НР1)
2
На рис. 2.20 приведена зависимость pj (рх). Если Рг < Р2 (Pi), то
будет, следовательно, N = 2, так как условие (2.15) нарушается.
§ 2J ПЕРЕХОДЫ МЕЖДУ ОРБИТАМИ, ЛЕЖАЩИМИ В КОЛЬЦЕ 151
При выполнении условия (2.15) на оскулирующих орбитах при
U\ ~ 1Г АГ] -р ^2 ~ Н’2
всегда существует неубывающая функция ст (а>). Действительно,
пусть (цл) — значение компоненты £а = £ ($ = л), соответст-
вующее переменным ца = ц ($ = л) = 1 и = ц = 0)?
— 1 < |1Л 1, на оскулирующей орбите. Функция £а (рл):
L
(1 г) / 1пах
/ £ \
1 — е2
D --—47- [! + < - (1 - 01
— монотонно возрастающая при всех L, е (0 < в < 1), £а (jlu =
— — 1) < £а < £а (p,n = 1). Далее, ее крайние значения |а (р- —
Ш! ш' IU" Ц)
Рис. 2.21. Изменение сопря-
женной переменной ?а = 5
(тЭ1 = л) по характеристической
скорости.
= — 1) и £а (р_ = 1) монотонно
возрастают по w (рис. 2.21):
= V(2 + ")/2га,
так как при w / : е \ , Va / , га ~-
= const. При w = ю£ будет ga (рл =
= 1) = Г > (Нл = — !)- ПРИ
w = Wi : g- < ga (ц_ = — 1) —
= g+ < ga (ц„ = 1). Поэтому су-
ществуют ш', w" также, что £а (цл~
= 1, ш') = g+, ga (цп = — 1, w") --= кривые £а (цд = 1, zr)
л ga (р,л = — 1, ш) пересекаются с уровнями $ = £+ и £ = внут-
ри отрезка wr w W2 в точках А', А". Искомая функция ст (iv)
может представляться кривой А~А'А+ или А~А"А+ или некоторой
другой кривой между ними с неубывающей функцией £a (w). Если
w' <Z w", то простейшими из этих функций будут кусочно-постоян-
ные:
ga (?р) = I , ц\ < 1Г
(ir) = t;f, tr <Z го С ^2, w' w w".
152
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
1ГЛ. II
§ 3. ПЛОСКОСТЬ СКОРОСТЕЙ
Ниже для анализа и геометрического представления
результатов оптимизации будет часто использоваться
плоскость скоростей Р. Пусть рассматривается плоское
движение КА, причем выбрано положительное направле-
ние вращения вокруг центра О. В соответствии с этим
Рис. 2.22. Трансвер-
сальная н радиальная
компоненты вектора
в каждой точке г можно выбрать по-
ложительное направление трансвер-
сали t° (рис. 2.22). Тогда, если дви-
жение по орбите осуществляется в по-
ложительном направлении, то транс-
версальная компонента скорости
будет положительной: Vt =(F
> О, L = rVt О, в противном
случае L <Z 0, Vt < 0. Для движения
вдоль радиуса-вектора L = 0, Vt = 0.
Плоскостью скоростей Р будем
называть плоскость, координатами
точки в которой является трансвер-
сальная V( и радиальная VT компо-
ненты скорости V КА, соответствую-
скоростп. щие заданному радиусу-вектору т
или заданному расстоянию г от центра
тяготения. Точку в этой плоскости будем обозначать
так же, как и соответствующий вектор скорости V, Рас-
смотрим некоторые свойства плоскости скоростей Р,
нужные для дальнейшего.
3.1 Кривая гя= const
Геометрическим местом точек в плоскости Р, соответ-
ствующих орбитам с заданным перицептрическим рас-
стоянием гя(0<гл<г), является гипербола Rn 111]
(рис. 2.23):
I7? V2
t Г л
(3.1)
Игр 2 \ 1 2
г 1 -j- J ’
§ з]
ПЛОСКОСТЬ СКОРОСТЕЙ
153
Ее эксцентриситет равен еп, фокусы — левый F1Jt и пра
вый F2n — лежат на осн Vt, на расстоянии
(3-2)
велпчл-
Рис. 2.23. Кривая в плоскости
скоростей, представляющая
орбиты с постоянной
ной г .
образом
компо-
от начала координат. Если срас — угол наклона асимпто-
ты к трансверсали, то cos »
фас =e~l = гп/г. Правая ветвь
гиперболы R* (V0) соот-
ветствует прямому движению
по орбите, левая — обрат-
ному. На рис. 2.23 OR =
= (РтрЛ)‘/г.
Параметр на гиперболе Rn
можно ввести по-разному.
Можно, например, взять рас-
стояние Фгл = FV точки
V до фокуса F(для крат-
кости расстояние Ф/л часто
будем обозначать через Ф^)
или угол cpfjl между вектором
FinV и осью У/, или уголФл,
определяющий (при гл > 0) (
непты скорости КА:
Vt = sec Фл,
Vr = tg Фл,
для прямого движения — л/2 < Фя < л/2.
Точкам в плоскости /?, лежащим между ветвями гипер-
болы Rn (Vf <сгл (1+У2/тл)), соответствуют орбиты с
меньшим перицентрическим расстоянием, чем на 7?л.
В остальной части плоскости (У2 а2 (1 + У?/т2)) пе-
рицентрическое расстояние больше заданного на /?л.
При гл 0 гипербола в пределе сливается с осью
OVr, при этом сгл —> 0, т~ оо, OF/л —оо. Если гл —> г,
то гипербола 7?л вырождается в два луча на оси OV(,
уходящих из точек (± (цгр/г)1/2, 0) в бесконечность,
= ол = (НгрА)1/2’ -= °- При уменьшении гл от
г до нуля семейство непересекающихся кривых Rn сплошь
154
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
заполняет плоскость Р, причем точки внутри круга
(2цгр/г)1/2 соответствуют эллиптическому движению, а вне
его — гиперболическому (этот круг показан штриховой
линией на рис. 2.23).
3.2 Кривая const
Геометрическим местом точек в плоскости скоростей,
соответствующих орбитам с фиксированным апоцентри-
ческим расстоянием га, при г га оо является эллипс
Яа [И] (рис. 2.24):
УЖ + УЖ = 1,
Эксцентриситет эллипса равен еа, большая полуось ог/
расположена на оси OVt, малая та — на оси OVr. Фоку
сы — левый Р\а и правый 1<\а — лежат на оси OVt, на
расстоянии OFia\
2Мтр
г
Ofia - easa — Sa - Г ( r_f
+ еа
(3-4)
от начала координат, причем OF< У< оа.
Параметром на кривой 7?а можно взять расстояние
ф-а = FiaV точки V до фокуса 1^/а(это расстояние будем
часто обозначать для краткости через Фг) или угол ср/а.
образуемый вектором F iaV с осью OVt, или угол Фа,
определяющий компоненты скорости следующим образом:
Vt = ua cos Фа, Vr = ra sin Фа,
причем для прямого движения — л/2 Фа л/2.
Точкам, лежащим внутри эллипса Ra _ {И: га -
--= гаД}. соответствуют орбиты с меньшим апоцентричео
ким расстоянием, чем данное для Яа. Вне эллипса величи-
чина % — г'1 меньше заданной на Иа. Если га — г, то
эллипс вырождается в отрезок прямой между точками
§ 3]
ПЛОСКОСТЬ СКОРОСТЕЙ
155
(± (Игр/г)Ч 0). Для параболического движения (га =
= оо, Е = 0) эллипс Ra становится кругом радиуса
(2|лГрЛ)1,2 (на рис. 2.24 он дан штрихом). Начало коор-
динат характеризует орбиту, для которой скорость в дан-
ной точке на расстоянии г, равна нулю, гл == 0, га —. г.
Для полноты изложения укажем, что при га < 0
кривые второго порядка 7?а = {У: ra — const} заполня-
ют сплошь часть плоско-
сти Р, лежащую вне круга
{F : га=оо}.
Замечали е. Если
рассматривается простран-
ственное движение, то мож-
но ввести пространство
скоростей (Уг, Vt, Vl), где
OVt, OVl — каким-либо
образом выбранные взаим-
но ортогональные направ-
ления в плоскости, пер-
пендикулярной радиусу-
вектору. Например, если
имеется некоторая опорная
траектория, проходящая
через данную точку, то
за оси ОУ/, OVl можно
взять трансверсаль и би-
нормаль, соответствующие
Рис. 2.24. Кривая в плоскости
скоростей, изображающая орбиты
с постоянной величиной
этой траектории. Тогда гео-
метрическим местом точек, для которых тп — const и
ra =_ const, будут поверхности, образованные вращением
соответствующих рассмотренных выше кривых в плоскости
(Уг, У/ вокруг оси OVr). Поверхностью гл =_ const будет
однополостный гиперболоид вращения
+ V'l
ал, тл приведены в (3.1). Поверхностью г_ const при
ra 3> г будет эллипсоид вращения
оа, га указаны в (3.3).
156
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ Ц
Далее будем рассматривать свойства плоскости Р при-
менительно к задаче перехода между свободно-ориенти-
рованными орбитами, когда движение определяется за-
данием параметров г, У/, Vr.
3.3. Фазовые траектории, соответствующие сообщению
импульсов
Плоскость скоростей Р можно считать фазовой плос-
костью, ибо задание точки в ней полностью определяет ор-
биту = rVt, Е = = у (V* + и последую-
щее движение КА по ней. Обратно, задание элементов
орбиты (конечно, такой, что движущийся по ней КА в не-
который момент пройдет от центра притяжения на рас-
стоянии г, для которого строится плоскость Р, т. е. долж-
но быть гя г, sa г-1) определяет соответствующую
точку в Р с точностью до симметрии относительно оси
/ 7 2 2ll \ V
OVt, Vt = L/r, Vr = (2E -±- sign Vr. Знак
sign Vr определяется тем, для какой ветви орбиты — вос-
ходящей или нисходящей — проводится построение точ-
ки в плоскости Р. Если знак радиальной скорости несу-
ществен при анализе фазовой траектории, то для однознач-
ности будем характеризовать орбиту точкой V ЕЕ Р, для
которой Vr 0, и построения проводить в первых двух
квадрантах плоскости Р. Построения в нижней полуплос-
кости будут симметричны относительно оси OVt.
При пассивном движении, когда элементы орбиты не
меняются, орбита изображается в плоскости Р, построен-
ной для фиксированного расстояния, неизменной фазовой
точкой. Если же осуществляется маневр и орбита меняет-
ся, то, пока орбита достигает заданного для Р расстояния
г, соответствующая точка в Р будет описывать некоторую
фазовую траекторию, по ней можно следить за измене-
нием орбиты. При сообщении импульса AF на том же
расстоянии г, для которого построена плоскость Р, фазо-
вой траекторией в Р будет отрезок прямой AF (или сим-
метричный относительно оси OVt отрезок AF), исходящий
из начальной точки. Если же импульс сообщается на
другом расстоянии от центра, то фазовой траекторией
будет отрезок некоторой кривой второго порядка. Дейст-
§ 31
ПЛОСКОСТЬ СКОРОСТЕЙ
157
вительно, компоненты скорости Vtl, Vrl и Vt2, Vr2 на рас-
стояниях т\ и г2 соответственно связаны одним линейным
и одним квадратичным соотношением:
r\Vи -- Г?Уt%~
П + = V?2 + П - = 2Е.
Г1 Г 2
Поэтому прямая в одной плоскости будет, вообще говоря,
кривой второго порядка в другой плоскости. Наиболее
интересные случаи этого отображения рассмотрим позднее.
Ниже плоскости скоростей будут, как правило,
строиться в граничных точках траектории на расстояниях
г = Тпип и г = гтах (эти расстояния иногда будут обозна-
чаться также через т\, г2). Плоскость скоростей при г =
= т\ = rmin обозначим через Ра, а плоскость при г =-
= Г2 = rmax — через Ря.
3.4. Связь изолиний JRa GE Pa и Rn ЕЕ Рп
Рассмотрим орбиты, достигающие обоих граничных
расстояний rmin и rmax, для них гл < rmin, sa < sniax.
В этом случае свойства орбит можно исследовать, проводя
построения в плоскостях Ра и Это удобно при ана-
лизе двухимпульсных переходов, когда плоскости скоро-
стей строятся в двух точках сообщения импульсов.
В плоскости Ра построим эллипс 7?а = {V: га =
= ^тах}, а в плоскости Ря — гиперболу = {F:
гп = rmin}. Тогда еа = e~l = rm[n/rmax, поэтому
~ OF^ — Afmin,
т. е. большая ось эллипса 7?а равна расстоянию между
фокусами гиперболы и, наоборот, действительная ось
158
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. 11
гиперболы Rn равна расстоянию между фокусами эллип-
са Ra. Пусть F(1\ V <2) — фазовые точки в плоскостях
Ра и Рп, относящиеся к восходящей ветви одной и той
же орбиты:
от фазовой точки VW до фокуса
параболическую прямолинейную
Для нее
+ AVLx = Д(2К)2
'max
Рассмотрим расстояние
Fia. Возьмем сначала
орбиту L = О, Е = 0.
(F«Fia)2 = ^£P +АЧ1П =
'min
в силу определения А. Отсюда и в общем случае будет
(V(1K)2 - 8FArmln)2 + (.2Е + =
\ 'min / \ 'min rmin 7
= - 28FAA + 2Е + + A2r^J = (У(2)7АА2-
\ rmin тш/
Следовательно, всегда расстояние от фазовой точки до
некоторого фокуса одно и то же в обеих плоскостях:
VWFla = VWln, VWF2a = V^F2n, (3.5)
его будем часто обозначать через Фг и Ф2 соответственно.
В дальнейшем будет показано, что граничные импульсы
часто сообщаются так, что линии их действия проходят
через фокусы Fили F in.
Рассмотрим соответствующие фазовые траектории.
В каждой из плоскостей Ра, Рп проведем через фиксиро-
ванную конечную точку Т^€ЕРл по четыре
фазовые траектории (рис. 2.25, рис. 2.26). Две из них
соответствуют сообщению импульсов при г = rmin, при-
чем так, что линии их действия проходят в плоскости
Ра через фокусы Fla и F2a. В плоскости Ра — это прямые
ПХПХ и П2П2, проходящие через конечную точку fL1}
и фокусы Fla, F2a соответственно под углами cpfaK к оси
. 3J
159
Рис. 2.25. Разбиение фазового множества в плоскости Р
иножества с помощью траекторий П1Г (/= 1 2 3 Нй П0д’
щих через конечную точку и фокусы F ’ F. ЭЛЛ1’Ш’ ’ ’ п₽0ХОДя-
лы R* соответственно. а гипербо-
Рис. 2.26. Разбиение фазового множества в плоскости Рг на под-
множества с помощью траекторий ПуП^ (/ = 1, 2, 3, 4), проходя-
щих через конечную точку и фокусы F-a, Fiiz эллипса и гипер-
болы 7?г соответственно.
J 60
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. И
В плоскости Рг они будут гиперболами ПхПр П2П.^:
ZL ,
c;Armill<'a A*4hl (t-ea)2(i + c2)
K/n ~ , U, — -----------------------
1-^ + ^а (1-^ + ф2
Ь2 _ !-< + <
а2 “ .2 ’
са tg 4>i«K = - eFArmin)-
Две другие фазовые траектории соответствуют сообще-
нию импульсов при rmax так, что линии их действия
в плоскости Рп проходят через фокусы Fi:l. Они являются
прямыми П3П3, П4П4 в Рп (проходящими через точку
Vk? и фокусы Pln, F2n соответственно под углами фгЯк
к оси OVt).
В плоскости Ра эти траектории будут кривыми второго порядка
П3П3, Щ114: параболой
если с_ — tg ф|-к =1^1 —е'^еа (прямая параллельна асимп-
тоте кривой /?_), эллипсом
У Г + (^ + М*)2(1 - 4 - Суа) - с2,
если с2 < (1 —е1)/еа (прямая ЩЩ пересекает обе ветви Rn при
Vr > 0), гиперболой
- У2 + {vt + &FB)2 (- 1 + 4 + 44) -= 4’
если с* > (1 — еа2)/4 (прямая пересекает лишь одну ветвь 7?я).
Эти фазовые траектории, проходящие через конечную
точку FK и соответствующие сообщению импульсов при
г = rmin и г = Гщах, разбивают все допустимое множество
(ГЯ < rmin, Sa < Гтах) начальных скоростей Fh1) в Ра
(И(„2) В Рп) на подмножества Mt ЕЕ Ра ЕЕ Р^-
Рассмотрим их.
$ з]
ПЛОСКОСТЬ СКОРОСТЕЙ
161
3.5. Разбиение множества начальных данных
траекториями ф*а = qpiaK, ф^л = ф^лк
Здесь подойдем к вопросу о разбиении с другой, бо-
лее конструктивной стороны. Покажем, что кривые
ПА (ПА) в случае общего положения 0, 7?(2) О
пересекаются лишь в исходной точке (FfK2)) и делят
все множество начальных данных на восемь подмно-
жеств (М^, соприкасающихся по линиям разбиения
ЩП'г (П.Щ).
При анализе удобно точку в плоскости Ра (и Рл)
задавать углами <pfa (фг-л), образуемыми векторами
(FinV^) с осью OVt, 0 < cpfa < л, 0 < сргл < л
(см. рис. 2.23, 2.24):
Vj1) — 8р.Лп — eF Ага
COS фш = у(1) , cos (pin = у(2) •
В частности, на кривой ПХПХ (ПХПХ) будет ср1(Х = фХаК = =
= const, па П2П2 (П2П2)д ср2а = ф2аК, на П3П3 (П3П3).
<Р1я = Ф1як, на П4П4 (П4П4): ф2л = ср2лК. Обозначим че-
рез (ё7-и) кривую в плоскости Ра (Рп), на которой угол
Ф7У (/ = 1 или / = 2, р, = а или ц = л) сохраняет посто-
янное значение ф;у. Эту кривую можно строить, естествен-
но, в любой плоскости: Ра или Рп, независимо от индек-
са р, но в плоскости кривая будет прямой, прохо-
дящей через фокус F7^.
Пусть задана некоторая кривая е7у (с;у). Будем сме-
щаться вдоль нее. В этом случае в качестве параметра на
кривой удобно взять расстояние Ф7 от точки до фокуса
FjV, Ф7- = V^Fja = V&Fjn. При смещении вдоль е7у
угол фуре, по определению е7у, остается постоянным, а ос-
тальные три угла фр, будут, вообще говоря, меняться:
= ф;х (фуц, Фу). М
Дальше понадобятся знаки производной от ф/х по Ф7-
при условии ф7-|л = const. Обозначим ее через б?срг-х/б?Ф7-р1:
Из определения
d4i-K _
^Ях ~
ср =const
71х
кривой e7y, величины
Ф7-, плоскостей
6 В. В. Ивашкин
162
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГД. ц
Рп следуют соотношения
= Ф{ sin cpia? 4- Ф- cos cpia,
v(r2) = ф{ sin (Pin, V(t2) = 8F.Ar2 + Ф{ COS <piJt;
sin. cp.x
tg ~ cos Фд + (8р.Ф3х/Ф^) ’
Фза = 2ЛГ1, Ф37Г = 2Лг2
еа COS cpia — COS cpin = Ср.Фзл (1 — (3.6)
Ф37Т 1 /
COS (pin = |^F. (1 + <£) + еаФ5 cos cpiaJ I Фь
Фу > Фу min = Фзк (1 — ety/2 (1 + &Fea cos cpya),
Ф-f = [Фу + Фза -|- 2е^ФуФза COS фуа] =
= [Ф? 4- Фз\ + 2ер.фуф3, cos срул],/г,
определяющие функции (piX (фур., Фу).
Отсюда получаем следующие знаки для производных:
d<Pla = о, Ча >о, Ча <о, Ча >0,'
^2« Ч" ч
‘Ча < 0, > 0, Ча = 0, >0, Ча <о. = 0, Ча
‘гФ1а Ч- -*Ф2а Чп ч, Чя ч Ча 4> и, > о, • (3.7)
<*ф1а ЙФ2а Чя ч.
<0, Чп <0, Ча <0, Ча = 0. ,
(1ф7~ 1а Ча ^Фщ Чп
Замечание. Производная (Рр^/сИФ^ обращается
в нуль, лишь если sin <piX = 0, т. е. точка лежит на
оси Vt.
Из (3.7) следует, что вдоль кривой фдл = const (если
гп =4= rmin, ra 7^ Гщах) остальные углы <pfX меняются мо-
нотонно. Следовательно, четыре кривые <piX = const,
проходящие через исходную точку, пересекаются лишь
в этой точке. Если гл = rrnin, то сливаются кривые <pfa =
= const, если же га — ггаах, то — кривые q)fJt = const.
Это, в частности, имеет место для кривых (ПДТ$),
проходящих через точку (^к2))-
|3]
ПЛОСКОСТЬ СКОРОСТЕЙ
163
Опишем теперь подмножества в Ра, Рп, порождаемые
кривыми ЩПЪ рассмотрев сначала случай о,
Кгк > 0- Прямые ЩЩ и П2П2 делят множество Ма =
{jn1) : sa Smax} G Ра на четыре подмножества
М123 — {F^: (р1а Фак, ф2а Фгак, $а 5max},
М4 = {F^: ф1а Ф1ак,
М567 = {F<X): ф1а Ф1ак,
М8 = {F^Z ф1а Ф1ак,
(рис. 2.27), причем Л/123 U
М4 U М567 U М8 = Ма, эти
подмножества лишь сопри-
касаются по границам ЩП'.
Образы этих множеств на
плоскости Рп будем обозна-
чать так же, снабжая вол-
ной: М123 и т- Д-, их объе-
динение равно всему множест-
ву Mn={V&: гя<ггаШ}еР..
Аналогично, множество
Мп ЕЕ Рп делится прямыми
П3П3, П4П4 на подмножества:
М2 = {F(2): ф1я < ф1як,
Фгл Ф2лк, rmiu}j
М345 = {F<2^: ф1я < ф1лк,
Фгл Ф2лк> rmin}»
ф2а Фгак» $а ^шах}?
Ф2а Фгак, ^а ’$max},
Рис. 2.27. Разбиение фазового
множества в плоскости Ра тра-
екториями ПуП(/ = 1,2), про-
ходящими через конечную точ-
ку и фокусы J?ia эллипса Яа.
м6 = {F(2): (jp1Jt > ср1пк, ср2л > Ф2ЛК> гл < Пшп},
$181 —• ф1я Ф1лк, фгл Ф2лк> гл rinin}>
М2 U М345 U [J М781 = Мя(рис. 2.28). Образы этих
множеств на плоскости Ра обозначим через ТИ2, М345
и т. д., их объединение равно Ма.
Возьмем луч 7к2)11з, одну из границ множества М781,
для точек F(a2) на нем ф1л = Фщк,
FlnV? = Ф, > Ф1К = FlstV^. (3.8)
Из произвольной точки этого луча проведем дугу
6*
164
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
кривой ф1а _ const, на которой
<1>, > (1\ (Г(;').
(3.9)
Проделаем такое построение для каждой точки луча.
Рис. 2.28. Разбиение фазового
множества в плоскости тра-
екториями Ир1- (/— .3, 4), про-
ходящими в срез конечную точку
и фокусы 1<_ гиперболы 7?_.
<ф;<фь т. е. V^M
Множество точек, образован-
ное семейством таких дуг,
обозначим через 7Й\, а соответ-
ствующее множество в Ра —
через Мх (рис. 2.29). Для лю-
бой точки из Мх (7Й\) будет
Ф1а Ф1ак> Фга Ф2ак> Ф1л^
> Ф1лк> ф2л < Ф2ЛК, как сле-
дует из (3.7) — (3.9). Следо-
вательно, Д/123 П M7s1.
Обратно, если некоторая точ-
ка FO) ЕЕ 3/123 р| М781, то из
условий ф1а < (р1ак, ф^ >
> ф1лК и из (3.6), (3.7) легко
следует, что кривая ф1а
= const пересекается с кривой
ф1лК = const, так что в точке
пересечения F(1) будет Ф1К
L. Следовательно, Мх = М781 (Д
Q Л7123, причем это множество вполне определяется ус-
ловиями {ф|а < ф1ак, <Р1л > Ф1лк}- Границами его будут
кривые Ц> п' (ф1я Ф1яК), 7^ П' (фш = Фшк) и (если
П3П3 пересекает ветвь И*) кривая 7?^.
Аналогично, из точек отрезка Ук2) П3, на котором
Ф1 < Ф1К> Ф1ТС — Ф1Л1О проводим дуги кривых ф1а = ф^а?
Ф1 Ф1- Полученное множество точек этих дуг обозна-
чим М5 е Рп> Мь G Рау Для него Мь = Q УИ345,
оно определяется условиями {ф1сс > ф1аК, Ф1Я Ф1лк}«
Точно так же множество М\ = М181 П М567 =
= {F(1): ф2а > ф2ак, ф2л<ф2лк} будет образовано ду-
гами кривых ф2а = const = ф*а, Ф2 > Ф2, ИСХОДЯЩИХ
из точек У(й2) луча 7(к2) П4, для которых ф*л = Ф2як» Фг >
> Ф.2К. Сменив знаки неравенств на обратные, получим
множество J/3 j/123 р Л7345 (А73 = М12з П М345)-
На рис. 2.30, 2.31 в плоскостях (ф1а, Ф1Я), (ф2а, Фг*)
приведены множества 71/17 Л/5, М3, Л/7 для случая, когда
§ 3]
ПЛОСКОСТЬ СКОРОСТЕЙ
16а
| cos <рг-як | ea, прямые (pZn =-- (piJlK пересекают обе вет-
ки кривой 7?л.
Покажем, что введенные множества 71/1 (,l) J, I —
1=1, 2, . . ., 8, не имеют общих внутренних точек, они
I
Рис. 2.30. Построение множеств
Мг, Мь В ПЛОСКОСТИ (ф1а, €р1л).
Рис. 2.31. Построение множеств
М3, М- В ПЛОСКОСТИ (<р2а, (р.,-)’
лишь соприкасаются по общим границам — дугам кри-
вых Пг-П; (Пг-П^, и их объединение равно всему допусти-
мому множеству Ма (Мл). Сначала покажем, что М8 ЕЕ
€Е М781. Любую точку из М8 можно получить следующим
166
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. Ц
образом: сдвигаемся из F^ по линии ф1а = ф1аК до точки
В НеЙ Ф1 > Ф1К, ф?а < ф2ак, Ч\л> Ф1ЛК» <₽2* <
Фглк, согласно (3.7), далее — по линии ф2а = ф*а до
данной точки F<1}, в ней Ф2 > Ф2, ф17Г > ф]я, ф2я
< Ф*п, Ф1а > Ф1а. Следовательно, ф1л > ф1яю ф2я <
Фглк, т. е. М8 ЕЕ М781. Аналогично получаем, что
М4 е М345. Далее, из условий M7S1 = Ма Q М781, Ма =
— -^123 U ^4 U ^567 U ^8» ^123 П -^781 = ^1’ ^4 П
М781 = ИД М667 П >781 = >„ Ма П >7.1 = >8 еле-
дует, что М781 Мг U М7 (J М8. Аналогично, М345 =
= м3 и м, и мъ, м123 = м, и м2 и м3, =
= М5 J 7И6 J М7. Следовательно.
м« = и мп= и
1=1, 2,..., 8 1=1, 2,..., 8
Легко видеть далее, что множества Mt не имеют внутрен-
них общих точек. Например, внутренние точки из М3
удовлетворяют условиям ф1а > ф1аК, ф2а < ФгссК, Ф1л >
> Ф1ЛК, Ф2Л < ф2лк, а точки Мг : ф1а < ф1аК, Ф1л >
> Ф1ЛК, ф2а < ф2ак, ф2л < Фглк, эти множества лишь
соприкасаются по дуге F£x) ZTj кривой ф1сс = ф1аК- Так
же обстоит дело с остальными подмножествами
Каждое из них, очевидно, будет связным, односвязным
множеством в Pa (PJ. Таким образом, кривые ф/а =
= Фгак, Ф1л = Фглк разбивают множество допустимых
точек в Ра (Рл), соответствующих орбитам, достигающим
обеих границ кольца, на восемь подмножеств причем
Мл = • Ф1а Ф1ак, Ф17Т > Ф17тк}»
М2 = {F( : ф1л Ф17ТК 1 ф2п Ф27ТК7
М3 = {F . ф2а ф2ак, Ф27Т > фгтгк}?
^4 = {F : ф1а Ф1ак> ф2а Ф20СК7 Sa^Sniax}^ ,
а остальные множества МI =5 — 8, получаются, если
сменить знаки неравенств, связывающих углы ф7-х, ф7-Хк
в определении множеств М^_4, на обратные.
Рассмотрим случаи F^ = 0 или 7<2к> = 0, VtK > 0.
Пусть 7$ = 0, лк — т'гпш- Кривые П-^Пх и П2П2 ели-
§ з]
ПЛОСКОСТЬ СКОРОСТЕЙ
167
ваются с осью Vt в Ра, с кривой в Ря. Поэтому мно-
жества Mi (Mi), i = 1—4,8, сливаются с дугой ос-
таются невырожденными множества М5, М6, М7 (рис. 2.32,
2.33). Если УГк = 0, гаК = т'тах? то П3П3 п П4П4 сливают-
ся с осью Vt в Рп, с кривой Ra в Ра. Множества М{,
Рис. 2.32. Подмножества Mi в
плоскости при rnK = rmin.
Рис. 2.33. [Подмножества в
плоскости^ Рп при rnK = rmin.
Рис. 2.34. Подмножества Mi в
плоскости Рп при г .. = Г1ПЯ„.
U, А (Л 111ЛЛ
Рис. 2.35. Подмножества Mi в
плоскости при г. = гтя„.
'и 1 СС1\ IlldX
i=2 — 6, сливаются с дугой 7?а, остаются множества
Л77, М8 (рис. 2.34, 2.35).
До сих пор построения множеств Мt (Mi) проводились
для случая, когда исходные орбиты достигают обоих
предельных расстояний rmin, гтак. В противном случае
можно использовать лишь одну плоскость скоростей,
168
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. П
Ра пли Рл. Пусть, например, как и прежде, фиксирована
орбита Гк типа TV. Тогда, если Г лн Г min? ГаН rinaY)
то обе орбиты пересекают границу у, их можно характе-
ризовать точками в Ра. В плоскости Ра множество на-
чальных точек {га Ггпа\’} разбивавТСЯ прямыми FiaV]^,
па три подмножества:
X {^(1): Фзсс < <Р2«К,
X {F(1>: ср1а < (р1аК,
Л/,5 = {F^.* ср1а Ф1аК?
rа rmax } ?
Ф*2а > Ф2ак,
Г а r max } ?
Га
Г max
примыкающих к соответствующим подмножествам Мh
рассмотренным выше, см. рис. 2.25, 2.27. Аналогично,
если гл11 > rmin, <9аН Ящах? то построения можно про-
вести в плоскости 7\, см. рис. 2.26, 2.28. Получаем под-
множества
= {Г<2>: <р1л > <р1лК, rn > rmiin},
Ж = {F'-<: <р1л < ф1лК, ф2я < ф2як. r„ > rmin},
Ж = {F<2>: ф,я > ф2лк, гл > rmin},
если Vt > 0, или, если Vt < 0, множества Л7;, / = 5, 6, 7,
которые получаются из Л7;_4 сменой знаков неравенств,
связывающих углы ср7-л, <рУлк в определении М/_4, на обрат-
ные. Множества М±, М7 непусты, если прямые ^дП;’
и /ч.чЩ пересекают обе ветви гиперболы 7?л = {У<2):
Г я — Г min } •
3.6. Другие способы построения
множеств Мj, j = 1, 3, 5, 7
Покажем теперь, что множества М j (М/ =1,3,5, 7,
можно образовать иначе, чем принято выше. Множество
(Л72) получим следующим образом. Из точки F^ (F(K2))
сдвигаемся по линии ср1а = ср1аК (прямой в Ра) от фокуса
Fla до некоторой точки F**, в ней > Ф1к, ср** =
= Ф1сск? Ф1- > Ф1лк, см. рис. 2.29. От этой точки движем-
ся по линии (р1л = (р1я (прямой в Рл) опять в сторону
возрастания Ф4 (при удовлетворении условий rn rmin,
§ з1
ПЛОСКОСТЬ СКОРОСТЕЙ
169
sa < Smax): Ф1 > Ф?, Ф1а < Фвх- Как видно, получим
точки из Mr (АД). 11 обратно, если точка K(1) СЕ АД,
то в нее из F^ можно попасть, следуя вдоль такой траек-
тории. Оба способа, следовательно, эквивалентны. Ана-
логично, множества Мj — 3, 5, 7, можно получить,
сдвигаясь из конечной точки сначала вдоль изолинии
Рис. 2.36. Различные траектории перехода из точек множеств Mi
(i = 1, 3, 5, 7) в фиксированную конечную точку плоскости Ра.
<pia = ф/ак, ДО точки F**, затем — вдоль изолинии
Ф?л = фг:д.
Обратив направление перемещения точки в фазовой
плоскости Ра (Ря), получим фазовые траектории переме-
щения из точек множеств Mj (АД), / = 1, 3, 5, 7, в задан-
ную конечную точку Fk0 (Fk2)). Из существования двух
способов построения этих множеств Mj. следует наличие
двух траекторий перехода из точек F(1) ЕЕ АД в точку
F(K1}. Одна траектория: сначала точка движется по прямой
(в Ра) cpia = const до точки F* пересечения с линией
= <р/лК, затем — по этой линии (прямой в Рп) до
конечной точки FK. Эта траектория соответствует двухим-
пульспому переходу между орбитами типа IVa IVa, в ко-
тором первый импульс (его фазовая траектория в Ра —
отрезок ус^уФ) сообщается при г = а второй им-
пульс (И2)Ск2) р„) — при г = гП1ах. Другая траск-
тория: по прямой (в Рп) = const точка движется до
точки F** пересечения с линией срга = фгак, затем по ней
(прямой в Ра) до точки FK. Здесь имеем тоже двухимпульс-
ный переход (типа IV6 IV6), но первый импульс Ук2)У*2)
170 Переходы при свободной ориентации [гл.
сообщается при г = гшах, второй импульс — при
г = rmin (рис. 2.36, 2.37, здесь F<x) = F^, F<2) = F<H2)).
Рис. 2.37. Различные траек-
тории перехода из точек мно-
жеств Mi (i = 1, 3, 5, 7) в
фиксированную точку F^ в
плоскости Рг.
Определим величины Ф**, Ф*
при заданных точках FK((PiaK,
Ф^к), V (ф/а, ф.-л). Из (3.6)
следует для точек FK, F*:
COS Cpia COS фгтхк ==
eF Ara (1 — e2a)
= < ’
отсюда получаем
o;=....efiAr.m».(1~_eL .(34i)
ea C0S <Pia “ C0S Фглк V J
Аналогично,
_ ** eF^rmax (1 “ еа)
Ф, =-------------------.
? еа cos <Ргак “ C0S Фгп
В частности, Фг«, ФгК, Ф*,Ф** связаны
соотношением
1_, 1 _ 1_1
V V
В этих формулах
£ = 1,
i= 1,
i = 2,
Ф1<(ф*ь фГ)<Ф1к,
ф2<(ф;, фГ)
2К,
i = 2, ф2 > (Ф2, ф: ) > ф2К
если Р(1) Е Мь
если F(1) Mit
если F(1) 6= Ms,
если F(1) е М7.
Указанные две фазовые траектории, приводящие из
точки FK в одну и ту же точку FH 6= А/у, 7 = 1, 3, 5, 7,
образуют границу кривого четырехугольника, целиком
лежащего в этом множестве Мсм. рис. 2.36, 2.37. В пло-
скости (cpia, cpin) ему соответствует прямоугольник
(ф<ан — Фшк, Ф1лн — ф;лк), СМ. рис. 2.30, 2.31. Теперь лег-
ко получить и другие способы построения этих подмножеств
§ 3]
ПЛОСКОСТЬ СКОРОСТЕЙ
171
Mj, j = 1, 3, 5, 7. Очевидно, любая фазовая траектория,
состоящая из отрезков кривых срга = const и ср/я = const,
такая, что знак изменения расстояния на ней постоя-
нен, приводит в Mj в соответствии с (3.13). В плоскости
(<Pfa, <Pin) такая траектория предстает многоступенчатой
«лесенкой». По всем отрезкам cpZa = const точка движется
в некотором постоянном направлении (вверх, О,
если е Mr U М3 или вниз, < 0, если F^1) е
GE М5 U М7). На отрезках = const точка также дви-
жется в фиксированном направлении (вправо, <pia О,
если FW еМ5 U М7, влево, cpia < 0, если е Мг (J
U Л73), см. рис. 2.30, 2.31. И обратно, в любую точку
РО) Mj, j ЕЕ (1, 3, 5, 7), можно прийти из по про-
извольной (до точки пересечения с границей указанного
выше кривого четырехугольника) траектории такого типа.
Эти траектории сплошь заполняют четырехугольник
е Ра (F(2)Fw7(2)F(2) е
Далее, рассмотрим фазовую траекторию, удовлетво-
ряющую почти всюду системе с управлением в форме сколь-
зящего режима:
2
S - 2
1=1
1=1
у(О 0, = 1-
(3-14)
Здесь имеется два базовых управления. Они соответству-
ют Сообщению ТЯГИ При Г = 1\ = Гт1п И Г = Г2 = Гтах-
Если взять в качестве базовых единичных векторов вдоль
тяги векторы
/0(1) = 8tp/?iaV(1)/^aV(1),
= е^>2)/^пГ(2)
(где I, постоянны на траектории) и в качестве функций
у(О — любые допустимые измеримые функции, то полу-
чим опять траекторию в некотором множестве Mj, где
ПЕРЕХОДЫ при свободной ориентации
[ГЛ. II
172
С2 (1 3, 7)- Действптельн°, Вдоль траектории будет
_ V т(0 • (') _ т(2) d(Pia
—--Фш-ZjT Фг«-т да-еф)
1111 1=1 27Х
(ilb 1=1 пх
Эти производные сохраняют вдоль траектории знаки,
ибо у(0 > 0, i — const, 8Ф — const, а знаки величин
Лрга/б/Ф7Л, dqi:Jd®ix в силу (3.7) постоянны. Поэтому
Фгс7> 0< Фг- <" 0, если вер = - eF. = 1, F(1> (= М7 и 8^
_ 8f — —1, F(1) ЕЕ М7. Аналогично, ф/а <ф 0, фг- О,
если КФ ЕЕ - гр. — 1, и Н1) ЕЕ Л73, 8^ = 8/?.
= -1.
Если y(Z) (к?) — кусочно-постоянные функции со зна-
чениями (0, 1), то траектории состоят из отрезков <pia 1
= const п (р7Л •= const.
Обратив движение по траекториям (3.14), получим
траектории, переводящие точки из множеств М j, j — 1, 3,
5, 7, в фиксированную конечную точку. Они удовлетворя-
ют той же системе с прежними базовыми управлениями,
лишь параметр 8Ф меняет знак па обратный. Например,
при движении из точки К(1) ЕЕ Мг в конечную точку
будет 8ср = 8р = —1. Заметим, что для всего множества
данных траекторий перехода между фиксированными на-
чальной и конечной точками изменение аргумента w
одно и то же:
Аш — 8^(Ф7ЛК Фг-н)?
так как для соответствующего управления
§ 4. ОПТИМАЛЬНЫЕ ПЕРЕХОДЫ В СЛУЧАЕ, КОГДА
ОДНА ИЗ ИСХОДНЫХ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ
Здесь будут рассмотрены оптимальные траектории 2-го
класса. Считается, без ограничения общности, что на-
чальная орбита 7’н пересекает хотя бы одну границу коль-
ца К, а конечная орбита лежит в кольце. Тогда в на-
§ 4] СЛУЧАЙ, КОГДА ОДНА ИЗ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ 173
чальной точке Мп траектории перехода сообщается, вооб-
ще говоря, начальный импульс ДТ7!. Остальные импульсы
будут апсидальными. После сообщения второго импульса
получается орбита 7’3 типа I, лежащая целиком в кольце К.
Если число импульсов больше двух, то далее осуществ-
ляется переход между орбитами Т3 и Тк типа I I, он рас-
смотрен в § 2.
Сначала, в п. 4.1, рассмотрим случай, когда начальная
точка лежит на внешней границе, Л/н 6= Г, это будут пере-
ходы типов III I, IV61 (saH <С 5гпах). Эти случаи могут встре-
титься, например, при рассмотрении участке! траектории
в сфере действия планеты назначения при прилете к ней
с другой планеты.
Затем, в п. 4.2, получаются переходы типов II I, IVa 1
(^н rmin), начальная точка принадлежит внутренней
границе, 7ИН 6= у. Эти случаи на практике могут иметь
место, например, при рассмотрении заатмосферпого участ-
ка траектории выведения КА с Земли на орбиту спутника
или при экономном (по расходу топлива) аварийном воз-
вращении на орбиту спутника в случае неудачного отлета
от планеты.
4.1. Оптимальные траектории, начинающиеся
с внешней границы Г
Сначала рассмотрим оптимальный переход т и-
П a III I, Г]П1п 7*rnav> *^ап $тах 14], [12] [15].
4.1.1. Схема перехода. Из апсидальиостп
внутренних точек сообщения импульсов и свойств опти-
мального перехода типа I I следует, что оптимальный пе-
реход типа III I будет, вообще говоря, четырехимнульс-
ным вида
Л7Н —> л2 ~лк.
В начальной точке Мп сообщается первый импульс ДГЬ
получается орбита ЗГ2, для которой rmin ^'л2 ^тах,
5<х2 5тах- В ее перицентре л2 сообщается второй, тормоз-
ной импульс AF2, ДУ2 = Vn2 — ['лз, уменьшающий апо-
центрическое расстояние до гШах? получается орбита Z3,
а Г. В апоцентре этой орбиты, на внешней грани-
це Г, сообщается третий импульс ДК3, ДУ3 = (Va4 —
— уаз) sjgn (7’лК — гл2), изменяющий перицентрпческое
174
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. Ц
расстояние до конечного значения гяк, гл4 = глк, га4
= '’max- Далее, в перицентре полученной орбиты Т4 при-
кладывается четвертый импульс AF4, AF4 = Сл4 — Улк?
уменьшающий га до гак, получается конечная орбита
(рис. 2.38).
4.1.2. Оптимальное направление началь-
ного и м п у л ь с а. В точках 71fH, л2, аз Г, лк сооб-
щепия импульсов должно
быть Xj. = 1, причем [X (л2) =
= —l,p.(a3)=sign(rKK —гл2),
р (лк) = — 1. Рассмотрим
дугуЛ/н^г орбиты Т На кон-
цах ее %! = 1, внутри %! 1,
Г1~Гл2, 7’2 = Гmax- Из (1.8),
(1.9) следует, что для импуль-
са AFi, г = г2, будет
VfF =
= — (2цГр r2h\ (ri + г2)11/г X
?< sign (JD/B) = ± OF 1Л.
Импульс AFX сообщается так,
что линия его действия в
Рис. 2.38. Схема перехода
между орбитами типов III, I.
плоскости скоростей Рл проходит через точку F, лежащую
на оси Vt на расстоянии | Vt? | от начала координат. Точка
F является, как видно из (3.2), одним из фокусов F in ги-
перболы 7?л = {F: гл = гл2}. Импульс AFX направляется
к фокусу, если еф — sign В = —1, или от фокуса, если
е<р = 1. Знаки = sign В, г? = —sign {DIB) следуют
из дальнейшего анализа компоненты р в перицентре л2.
Ниже они будут получены иначе. Условия (1.13), (1.14),
(1.10) оптимальности начального импульса можно полу-
чить и непосредственно, из анализа функционала. Наи-
более простым, по-видимому, является следующий гео
метрический вывод. Суммарная скорость перехода (4.1)
равна
= Д7г 4- (Уя2 - 7ЯЗ) +
-г (Ва4 — Tza3) sign (гяк — гя2) + (Тя4 — Ряк) = + w2.
Функционал шк есть функция двух переменных: элемен-
тов орбиты Т2, например, га2, гп2. Разбиваем wK на две
§ 41 СЛУЧАЙ, КОГДА ОДНА ИЗ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ 175
части о?! и ю2.
(^л2,Таг) — АР j 82Р л2> 62 — i 1,
^2(^2) = — Глз г + ЛИ4,
для перехода III I будет е2 -~= 1, случай к2 —1 понадо-
бится в анализе других типов переходов. Зафиксируем
Рис. 2.39. Оптимальное сооб-
щение граничного импульса в
плоскости Рп npHrn2(N)<rrtH(K).
ние граничного импульса в плос-
кости рп при rri > Глн (к).
Рис. 2.40. Оптимальное сообще-
сначала гл2 и минимизируем функцию iv1 (га2). Геометри-
чески в плоскости скоростей, построенной в начальной точ-
ке Мн, надо на гиперболе -= {F: гл = гл2, Vt > 0}
найти точку F2 (F/2, Уг2), минимизирующую функцию
w1 (F2), F2EE/?i (рис. 2.39, 2.40). Так как эксцентриси-
тет еп этой гиперболы 7F равен гшах/^л2 = то
= УНГ2 -F е2е-|/\2.
В силу свойств гиперболы
елУt2 = ir.V2 tfjt - /* 2-Г2 "I
где F1}1, F2n — левый и правый фокусы гиперболы /?л,
— ее действительная полуось. Поэтому
= \ НГ2 4“ е2 (/' 17ХI 2 — “ НИ 2 ~г е2 № 2л 2 'Г ^л)*
Пусть е2 = 1. Если гл2 < глн (начальная точка Fн лежит
правее положительной ветви /?i), то точки F171 и Fн лежат
17(5
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
(ГЛ. II
по разные стороны от ветви 7?^, всегда существует прямая
соединяющая их и пересекающая ветвь lit в одной
точке К2, причем sign Vr2 = sign VrH, см. рис. 2.39. Из
треугольника 1/1{Р1гУ2 следует Пн72 4- FlnP2 н,
поэтому и\ | ’ИК2 4- (А^172 — <*л) > ^1л17и- Од inf и\.
Этот минимум w1 -= 7'4-17п — о*л реализуется при
УНИ2|| V2b 1Я, в этом случае импульс сообщается в на-
правлении к фокусу /чд, см. рис. 2.39. Получим
Сер = ег = —1,
4»’. = г. ». - W. - =
В случае гя2}> гя11 точки F 27t иКн лежат по разные сто-
роны ветви существует прямая F2-FH, соединяющая
их и пересекающая ветвь lit в точке V2, F2^ V2 4~ В2ВН =
= Поэтому
^х ГпИ2 г F2J?2 + ол > 4- (Bi = min iz?!.
Минимум реализуется при || V2F2n, поэтому теперь
оптимальный импульс сообщается в направлении к фо-
кусу А2я (см. рис. 2.40):
8^ = —8/? —1,
<5, (4 — 1)
W1 = F.^vu + 5., A Vi - F2kVr - .
1 ~ 11 1 1 1 u 1 + en cos ф
Аналогично, для случая 82 — —1 легко показать, что
при гл2 < r-R будет
8^ = Щ? = 1,
импульс сообщается в направлении от фокуса F2ji, см.
рис. 2.39. При гл2 > глн
8-р = 1,
импульс направлен от фокуса Fln, см. рис. 2.40. В послед-
них двух вариантах линия действия импульса должна
пересекать ветвь YfJ, в противном случае К2опт —> оо,
эта ситуация не может встретиться в оптимальном пе-
реходе.
§ 4] СЛУЧАЙ, КОГДА ОДНА ИЗ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ 177
Объединяя результаты, можно записать, что оптималь-
ный импульс AF! определяется условиями
ДД- , AFr = - Z^F^, (4.3)
ЛДн г COS ф г" Иу ’ Х 7
= —е2, е2 sign (гл2 — 7’лн), Р2 — sign (гл2 — глП),
(4.4)
= е2?\г.Ги оп sign (гл2 — гГА1). (4.5)
Замечание 1. Если глП — гл2, Гп ЕЕ lit, то, оче-
видно, Р2 = Ей, ДЕ1 = 0, можно взять произвольно
sign (гл2 — глН) — ± 1.
Замечание 2 . Если рассматриваемая исходная
точка — конечная (например, для переходе! типа I III),
то соответствующий импульс будет последним. Он опре-
делится совершенно аналогично, лишь индексы «2», «н»
сменяются па «А'», «к» и направление импульса (параметр
бф) — на обратное, см. рис. 2.39, 2.40.
Замечание 3. При постоянной исходной скорости
FH сравним оба решения для V2 при с2 ~ ± 1. Тогда
У12 (е2 — 1) Уt2 (е2 — 1)?
причем точка И ЕЕ^Л, ближайшая к Vн па кривой /?л,
заключена между ними.
4.1.3. Определение о п т и м а л ь н о й ве-
личин ы гл2 перицентр и ческого расстоя-
ния пе реход ной орбит ыТ2. Рассмотрим зави-
симость и?к(/'л2), предполагая, что для заданного значения
гл2 переход оптимизирован в соответствии с (4.3) —(4.5).
Для данного перехода (е2 = 1) получим
= Fir.VH + — (F„3 + 6Fa3) + const =
= FinVn + (3 - 6 - ея) [2HrpSmax/(l + ея)\^ + const
6 = sign (глк — сл2).
Обозначим штрихом дифференцирование по ел:
WK = - 4 [2цГр*тах/(1 + с.)3]'2 [М2 + er.) cosTp +
+ 2 + p-6 + enJ,
cos Ф = (Fin — efen<J„)/Z<’inF,I = cos cp = cos ср1ЛН.
178
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. П
Пусть гя2 > max (гян, гяК), тогда [3 = — 6 = eF = 1,
и>к-= — В2 [(2 - ел) cos Ф + 4 + ел] < О, В2 = ‘ гр П1;,— .
2(1-р '’я' ‘
Поэтому (гя2)опт < max (гяН, гяК). Возьмем min (гяК, гпа) <
< rnz < max (гпн, глк). Если гт < гл2 <Z гпп, то р = б =
= ер = —1,
ц>к = — в2 (2 + ея) (1 — cos ф) < 0.
В случае гян < гл2 < глК будет р = б = ер = 1,
= — в2 (2 + ея) (1 + cos ф) < 0.
Поэтому (гя2)опт < min (гяН, глк)- Пусть, наконец,
rmin < гл2 < min (гпн, гяк), (4.6)
тогда Р = ер = —б = —1,
= — В2 [—(2 + е„) cos ф + ея].
При еп < 2 будет всегда w'K > 0, (ея)опт = (en)min, гл2 =
= min (гяН, гяК). При ея > 2 имеется стационарная точка,
для которой
С = cos ф = ея/(2 + ея), ея > 2.
Рассматривая в ней вторую производную
w'k = —В2 [1 — cos ф — (2 + ея) cos ip'],
sin2 ср
cos ф = — 8f F" ’
н
В' = (еяоя)' = в2 (2 + ея),
легко показать, что w"K 0 (на рис. 2.41 приведена зависи-
мость Wk = w'k/В2 от ^д1). Стационарная точка есть точка мак-
симума функции wK(rn2)- Следовательно, минимум этой
функции может иметь место лишь на концах отрезка (4.6),
т. е. будет
(гл2)опт — rmin, (4*7)
или
(Gi2)oht = min (Гпн, ^к) (4.8)
(—82 = ₽2 = = —1, начальный импульс направ-
лен к фокусу Fln). В случае (4.7) оптимальный переход
4] СЛУЧАЙ, КОГДА ОДНА ИЗ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ 179
Сбудет четырех импульсным вида
У Г —> лк, гл2 — rmjn, (4-9)
оптимальная траектория достигает обеих границ кольца К
(рис. 2.42). Если глН < глК,
то в случае(4.8) траектория
будет трехимпульсной вида
Лн Г —> Лк, Гл2 —
(4.10)
(рис. 2.43), все три импуль-
са — апсидальные, гранич-
ного импульса в начальной
точке нет. Если жеглк<^лн,
то при (4.8) оптимальная
траектория будет двухим-
пульсной (при глК
будет Д71 = 0):
7ИН —> лк, гп2 — Гпк (4.11)
глн Рис. 2.41. Зависимость второй
производной от параметра е"1
для стационарных точек.
(рис. 2.44), при этом опять — 82 р2 = _ 1.
Рис. 2.43. Оптимальный трех-
импульсный переход вида лн —*
Г -+ лк между орбитами ти-
пов III, I (случай гпн < гяк).
Рис. 2.42. Оптимальный четы-
рехимпульсный переход вида
Мн —> у Г -» лк между ор-
битами типов III, I.
Следствие. Пусть min (глп, глК) = rmin. Тогда
(гл2)опт = ^min. В частности, если rnH = г min, то переход
будет трехимпульсным вида (4.10).
180
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
4.1.4. Переход типа IV6 I отличается от только
что рассмотренного тем, что глн <С rmin- После сообщения
первого импульса в начальной точке Мп должна
Рис. 2.45. Оптимальные пере
ходы типа IVa I и IV6 I.
Рис. 2.44. Оптимальный двух-
импульспый переход вида
7ИН —» лк между орбитами ти-
пов III, I (случаи гг[< < г_и).
получаться орбита7\, для которой гл2 > Anin- В про
цессе сообщения этого импульса, при некотором зна-
чении х а р актер истине с к о й
Рис. 2.46. Фазовые траекто-
рии в плоскости Рг для опти-
мальных переходов типа IVa
I п IV6 I.
скорости, будет гл = гП||11.
Соответствующую орбиту ти-
на III обозначим через 7
Остальной переход, с орбиты
Т2 (гЛ2= Anin) па орбиту 7’к,
типа III I, рассмотрен выше.
По следствию он будет трех-
импульсным, J12(tF у)->Г—>л1:.
Весь переход -> Ту б\-
дет четырехимпульсным вида
(4.9). Начальный импульс
AFx определяется по форму-
лам (4.3), (4.4), причем в дан-
ном случае е2 = 1, гл2—глН>9.
Поэтому в плоскости скоро-
стей построенной при
/• = Ппах, импульс AFi сооб-
щается в направлении от на-
чальной точки Fn к фокусу (см. рис. 2.40.). На рис. 2.4 л
показан такой переход Ту, осуществляемый по пере
§ 4] СЛУЧАЙ, КОГДА ОДНА ИЗ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ 181
ходным орбитам Т^\ у^6). На рис. 2.46 приведена фа-
зовая траектория е Рп части -> всего
перехода. Из (4.2), (4.5) получаем, что функционал шк будет
равен wK=FZKVH—ar. (е„—1) + w = F 2KVя — F ZnV^&)+w,
где l42(6) = Раз — скорость в апоцентре орбиты Т^0’,
w = АИ3 + АК4 — суммарная характеристическая ско-
рость перехода -> Тк.
4.1.5. Пример. Задача схода с орбиты. Пусть
в начальный момент КА движется по эллиптической орбите: rmin
< глн ^ган^ rmax- Необходимо перейти на гиперболу с заданной
константой энергии Ек, константа площадей свободна (см. [19],
[40], [48] гл. I). Исходя из физических соображений, легко пока-
зать, что не должно быть импульса в конечной точке на внешней
границе Г (г = rmax). Покажем это формально. Так как
Е = (Р? + ^г)/2 - Дгр/г,
то из условия трансверсальности следует для конечного момента
времени
4V( - bid/<:/dVt - = •фуг = bidE!dVr - 6iFr,
% = bidE/dr .= Ь1|Хгр/г2, !|)Ц ~ 0, ф( -= 0.
Сравнивая полученные выражения для сру , <ру с формулами (3.34)
гл. I, видим, что на пассивной дуге, предшествующей конечной точ-
ке, должно быть D = 0. Тогда па пей
Отсюда следует, что максимум функции (г) и точка приложения
последнего импульса могут быть лишь па минимальном расстоя-
нии, т. е. в перицентре лк, а на внешней границе Г импульса пет.
Поэтому оптимальная траектория типа I III будет или одпоимпуль-
сной (импульс прилагается в начальном перицентре лн = лк)
при < 7* = V2цгр/гшах, или трехимпульсной вида лн -> Г ->
-* лк, причем Глк = rnlin — при Уж > V* и rmin < глк < —
при 7ТО = 7*.
4.1.6. Изменение с о и р я ж е и и ы х функций вдоль
полученных оптимальных траекторий. Рассмотрим сначала переход
(4.9) с четырьмя импульсами. На дуге Мнл2 орбиты Тч в начальной
точке 7ИН будет ц = — cos ср17 X = — sin ф1? эти компоненты
определяются по (4.3), причем rn2 = rmin, е2 = — = — ер = 1,
182
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
£гл. Ц
Z=l. Постоянные В, D равны
В2 = к/е sin ft = (Hrp/p)V2V7r>
D2 — (1 + е cos 'в) [Р- “ ^2 (1 + е cos ft)] =
= -TF7(^-nFr) = —
причем элементы г = e2, p = p2 берутся для орбиты T2, а парамет-
ры ft =f> 1, г, Vr, Vt, Vn, р, %—для начальной точки Мнна орбите
Т2 (после сообщения импульса AFX). В перицентре л2 GE у орбиты
Т2 будет р = р2 = — 1, А, = О, О’ =0? = 0, ц = 0, £ =
Компонента £•“ равна
£
52 = — (Р2 — В2е cos 02), (4.12)
причем L — L2, е = е2, г = rmin.
На дуге л3а3 в точке л3 будет р = — 1, X = О, т] = 0, £ = £•+,
в точке а3: р, = р3 = 1, X = 0, ц = 0, £ = £“. Постоянные В, D
здесь равны
В3 = - (2г)-1, D3 = (1 - е*)/2е,
причем элемент е = г3 берется для орбиты Т3. В точке л3 компо-
нента 5г = £2 равна
= — £/2г2 = — VrJ2r, (4.13)
здесь Vn = VK3, г = rmin. Должно быть Q = — а (л2) < 0.
Компонента равна
Z,
£3 “ г2 (И В^е cos ~ ^аз/2гтах •
На дуге а4лк орбиты £4 в точке будет р, = 1Д=0, ц = 0, £ = £3,
в точке лс р,= — 1, % = О, Ц = 0, £ = Постоянные В, D,
определяются аналогично В3, В3, причем е = ei. Компонента £3
равна
^3 = ^а4 /2гтах ’
всегда = п (а3) > 0. Вдоль оскулирующих орбит в про-
цессе сообщения импульса A V3 в а3 максимум модуля базис-вектора
достигается в апоцентре:
Х1(д = л) = 1 (О), АУХ + АУ2 < ш<АУх 4- АУ2 + АУ3,
О < 2л.
Компонента ^4 равна
£4 = -
§ 4] СЛУЧАЙ, КОГДА ОДНА ИЗ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ 183
дри сообщении импульса АР* максимум тахк1('О') достигается в
а
перицентре Ф = О для всех оскулирующих орбит.
В случае перехода (4.9) с орбиты типа IV6 при определении ком-
понент pix, надо взять i = 2.
Для двухимпульсного перехода (4.11) на дуге Л/Нл2 сопряжен-
ные переменные определяются, как и выше, лишь теперь гл2 = глк
Я в (4.12) г = глк. Кроме того, компонента постоянна
при сообщении импульса AF3 в л2, ив этой точке достигается мак-
симум шах (О) для всех оскулирующих орбит, у которых г„ (w) <
а
rmax*
Для трехимпульсного перехода (4.10) изменение сопряженных
переменных после прохождения точки л2 такое же, как и в пере-
ходе (4.9). В точке л2 переменная g2 постоянна и равна §2 (4.13),
причем г = rn2 = rnir Постоянные В, D на дуге Л/нлн определя-
ются через компоненты р2 = — 1, £2 по (3.28) гл. I:
В=
14-е - г2
D = ——~[и + (1 + е)ад, $2 = — ?2,
причем е — ен, г = глн, L = LH. На дуге Л/нлн при < 2л
должно быть (Ф) < шах хх (О') = 1, (2л) = 1.
а
4.2. Оптимальные траектории, начинающиеся
с внутренней границы у
Сначала рассмотрим оптимальный переход типа II I.
Общая структура такого перехода будет следующей.
После сообщения в начальной точке Мя первого импульса
AFj получается орбита Г2типа П, для которой гя2 "С rmin-
В ее апоцентре а2 прикладывается второй, ансидальный
импульс AF2, увеличивающий гп до гтщ- Далее осуществ-
ляется оптимальный двух- или трехимпульсный переход
типа I I, с полученной орбиты Т3 (гя3 = rmin, Лхз = гаг)
на орбиту Тк (рис. 2.47). Суммарная характеристическая
скорость перехода будет равна
= АГ, + (7аз - Уа2) + W, (4.14)
здесь w — сумма импульсов перехода Т3 -> Тк. Весь
переход полностью определяется заданием первого им-
пульса AFx (A7f, А72) или элементов орбиты Т2 (гя2, ^2),
184
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. Г1
(гЯ2, га2). Поэтому оптимизация перехода сво-
дится к минимизации функции (гл2, га2). Зафикси-
руем сначала апоцентрическое расстояние га2 переходной
орбиты Т2 и определим начальный импульс AF1? миними-
зирующий Затем определим оптимальное значение га2.
^-оптимизация. На дуге Мна2 переходной орбиты
будет (Мн) = 1, Xi(a2) = 1 (тд = rmin,r2 = ra2), в осталь-
ных точках будет Хх <2 1. Тогда из общей теории § 1 сле-
дует, что линия действия
Рис. 2.47. Схема перехода
типа II I.
начального импульса в плоско-
сти скоростей проходит через
точку F, лежащую на оси Vp.
VtF = ёгГ! [2р,Гр/г1г2 (т*! + г2)]’<
Из (3.4) видно, что эта точка —
один из фокусов эллипса 7?а =
= {И: Га = га2} е соответ-
ствующего орбитам с апоцент-
рическим расстоянием га2. По-
лучим непосредственно этот ре-
зультат, заодно — и параметры
е^, eF.
В функционале wK от пере-
менной гп2 зависит лишь состав-
ляющая w1 = ДР\ — Уа2. Для
общности и использования в других типах переходов
рассмотрим функцию
Wi — AV\ ~| е21' сс2> е2 1,
в переходе II I будет с2 = —1. Преобразуем выражение
для wly используя построения в плоскости скоростей Ра’.
Wi = VHV2 + &2У t2 — VhF2 4" /2,
7 a2
ea = rmin/ra2 — эксцентриситет эллипса Ra. Из свойств
эллипса следует
еаИ/2 = Flay2 — oa = — F2aV2 + aa,
где Fia G = 1? 2) — левый и правый фокусы эллипса /?а,
Оа — его большая полуось, 0а = 12цГр/гт1п (1 + еа)Г
Поэтому
u>i (F2) = FhF2 + (Flx V2 - аа) =
= ИНИ2 + 8 2(—F%aV2 + оа).
4] СЛУЧАЙ, КОГДА ОДНА ИЗ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ 185
Пусть е2 = —1. Тогда, если гаН < га2, то начальная
точка FH лежит внутри эллипса 7?а, существует прямая,
проходящая через FH иР1а, пересекающая Ra в точке V2.
Имеем
1Г1 = Vн2 — R iap2 “I" Йа =
= О’а 1аР*2 Р^нР'г) — Fla^H,
так как
Р 1аУ 2 — Ун^2 ^loFH-
Этот минимум реализуется при F2 = V2, при сообщении
Рис. 2.48. Оптимальное сообщение граничного импульса в плоско-
сти ра при raH(K) < ra2(/V).
импульса вдоль прямой, проходящей через фокус Fla
и точку FH (рис. 2.48):
£ф = Ер = 1,
ДУх = aa _ тг1аун.
1 — Ca cos ср
Если га2 <^ган ($а2 $ан при Еи 0), то начальная точ-
ка FH лежит вне эллипса Ra (рис. 2.49). Берем шг в виде
= Бн172 “I" 2aР72 —
Так как Р2а^2 + Г2ТН >-^2аГн, mm Шх = F2ayH — <та,
этот минимум достигается при сообщении импульса по
направлению к фокусу F2X:
Еф = — £f = —1,
ДГ1 =^2аГн — иа (1 —е«)/(1 — еа cos ср).
186
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. П
Аналогично легко показать, что при е2 = 1 в случае ган
< га2 будет
еф = — 1,
в случае гаН > га2
= sf = —1,
см. рис. 2.48, 2.49.
Объединим результаты. Минимум функции (гл)
равен
Wi = (—FiaVH + Ра) sign (saH — sa2), (4.15)
при этом
7ПГ Г а (1 — е2)
f = 8 _JfL2L , ДУХ = еф -А2-------< - , (4.16)
7 ЛаГн L1 + егесцс°8 Ф J v
еф = 3 = sign (saH — sa2), ef = е20. (4.17)
Замечание. Если рассматривается граничный
импульс, сообщаемый в конце движения (в переходах
Рис. 2.49. Оптимальное сообщение граничного импульса в плоскости
Ра ПРИ 5ан(к) С sa.2(N)'
типа I II и др.), то, очевидно, его характеристики опреде-
лятся, как и в рассмотренных случаях, лишь в формулах
(4.15) — (4.17) надо сменить начальную скорость FH на
конечную FK, орбиты Тн, Т2 — на Тк, Ту, индексы «н»,
«2» — на «к», «А», направление пмпульса — на обрат-
ное.
§ 4]
СЛУЧАЙ, КОГДА ОДНА ИЗ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ ]87
Определение оптимальной вели-
чины га2. Используя полученное выражение для
и результаты оптимизации перехода I I (для определения
составляющей w в (4.14)), рассмотрим функцию (га2).
Если га2^гак (и оптимальный двухимпульсный переход
Т3 -> Тк имеет вид у ак) или оптимальным переходом
Т3 —> Тк будет трехимпульсный вида у —> Г -> лк, то
® (Гаг) = vni — Ияз (ro2) + const,
U>K (га2) = — + ₽0а + Va3 — Vn3 + const =
= -pF;a7H + аа (P + - 1) const, (4.18)
, dw„ d (еъЛ da , , _
«zk=^- = (1 + P8Fcos<p)-^ + (P-1)^, (4.19)
причем
~ d («а°а)
—-3----= — eF cos q> —j--, cos ср = еф cos cp — cos ф,ан,
-rf(!aSa) = Vo ,--+ £a >0, Vo = 1 / , (4.20)
dea Y2 (1 + еа)/г V '‘niin
~ ^o/K2 (1 + ea)3/2 < 0. (4.21)
Если же ra2 )> raK и оптимальным переходом Т3->-Тк
будет двухимпульсный вида а3 -> лк, то
= (Vai - Fa3) + (ГЯ4 - Гпк),
= -рла7н + ₽Оа + (Га4 + Ул4) - VnK, (4.22)
= Рер^^ cos ф + р4| + ^(Vai + Уя4). (4.23)
Пусть сначала Гщщ < ra2 < min (ган,, Гак), Р = —1,
8р = 1. Тогда из (4.19) — (4.21) видно, что w’K > 0, (гаг)опт >
> min (raH, Пусть min (ган, гак) < ra2 < max (гаН,
гаК)- ЕслигаН < гак, то Р = 1, i = 1, = —1. Из (4.19)—
(4.21) следует, что и?к > 0. Если гаК <( гаН, то р = —1,
i = 2, 8р = 1. В случае, когда переход Т3 -+ Тк — трех-
импульсный, wK, w'K определяются по (4.18), (4.19),
188
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
будет > о, как и при ra2<min (raH, raK). Пусть wK, iz/
определяются по (4.22), (4.23). Так как
Va4 4“ Гл4 — j/"2 Vо “Н — Гmin /
ТО
, 1 — (2 4- с J cos ф
^/Vo = y2(1 + fj>/2 + t2 4 + e™)J '2 >
> (2 + ea) (1 - cos ф)//2 (1 + ^)’/2 > 0.
ПОЭТОМУ (га2)опт HiaX (7\н? ^ак)*
Пусть
max (raH, raK) < ra2 < rmax, 8^ = £ = i = —zF = 1.
(4.24)
Если переход T3 —Тк — трехимпульспый, то Wk 0,
(^а2)опт = rmax, весь переход Тн -> Тк становится трехим-
пульсным Ми -> Г лк. Пусть переход Т3 -> Тк — двух,
импульсный а3’-> лк. В этом случае весь переход Гн Т}[
будет трехимпульсным Мн->- а2 -> Як, % = —8^ = 1, спра-
ведливо (4.22), (4.23):
— FмУн 4~ <за 4~ Vo |/2 (еа елк) — Тлк, (4.25)
wvlV 270 =
1 4- С (2 + еа) j
(1 + + ’
С = cos ср =
~F V
1а v н
В отличие от других случаев, теперь возможна стационар-
ная точка, в которой iv'K = 0,
cos ср = С* =
~ (1 + еа)3/2
.К + <\к)1/2
1 /(2 + еа),
причем должно быть еа С* 1, еа екк.
Рассмотрим, при каких значениях параметров еа, екк
возможны стационарные точки. Пусть фиксировано еа.
При максимальном значении сяК = еятах величина С*
будет минимальна, равна еа, С* (еп = елтах) = еа; отсюда
max (^а) (1 ^а) 1
(4.26)
§ 4] СЛУЧАЙ, КОГДА ОДНА ИЗ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ 189
С увеличением еа величина еятах монотонно уменьшается.
Из условия определяется диапазон по еа:
О ^атах, ^лтах (^а ^агпах) ^ашах» ("^•^7)
/3-1 , п
max — g 0?36о).
При ea>eainax, елк>елтах будет wK < 0, минимум (га)
имеет место при га = max (ган, гаК).
Рис. 2.50. Множество АВ CD стационарных точек в плоскости
(еа’ е-у)-
Минимальные значения епк соответствуют условиям
С* 1, еа епк. Поэтому ограничению С* 1 соответ-
ствует условие екК еп1, причем
1-6еа-Зе2а
ел1 (3 + ^)2
0 ^(Х.1
еп1 (^а — ^а) — ^а,
Поэтому
(
еп min = ।
еа = 4 cos 40°—3 ж 0,064.
0<еа<е* (С* = 1),
*
max*
(4.28)
При елК < <?Л1 (0 < еа < 4) будет С* > 1, шк > 0, опти-
мальным будет трехимпульсный переход Ма -> Г -> лк,
(Лх2)опт = '’max- На множестве A BCD (рис. 2.50) еЯПип (<?а)
< ₽nmax (ба), функция wK (еа) имеет стационарные
точки.
190
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
Рассмотрим вторую производную в стационарных
точках:
" _ l_ tc+ (2 + е«} g,] (l+'’a)-3[l+g(2+ea)]/2 __
WK ~ ~~ /2 1 (l+«a)S/2
- 1 I Vo U'
2(ea + ^K)3/*J /2
C = d cos <f/dea = — еф ---------
Оценим максимум a?K по FfaPH (при фиксированных еа,
еп, сойф). Он имеет место, когда Т^Рн минимально, т. е.
7о
Рн ЕЕ = {Р• /*а = /’аг}» Фтах«
этом случае
^1аРн =
Gr. (1 —е^) г— 1 — е?
—------= /2 Vo f- . . -----------
1 - еа cos ф У1 + еа (1 — еаС)
(1 _ С2) (1 _ еаС) (2 + еа)
2(1-^) (1 +еа)
На рис. 2.51 приведено множество ABCD соответствующих
значений фтах (еа, елк) для величин (еа, епк) из области су-
ществования стационарных точек. Везде фтах <С 0, <
0, поэтому стационарные точки суть точки максимума
функции шк (еа). Минимум этой функции может быть
лишь на концах отрезка (4.24):
(^а2)опт = шах (ган, гак), (4.29)
или
(^а 2)0 пт =^тах- (4.30)
В случае (4.30) оптимальный переход будет трехимпульс-
ным (рис. 2.52):
Мн -> Г лк, (4.31)
для него
= Р = = &F — &2 = Р еа = 7’min/т’тах»
определяется по (4.25). В случае (4.29) оптимальный пе-
реход будет двухимпульсным. Если ган <С /’ак» то он имеет
вид
Мп CtK, Га2 — /’ак» (4.32)
§ 4] СЛУЧАЙ, КОГДА ОДНА ИЗ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ 191
Рис. 2.51. Множество значений функции фгпах (еа, епК).
Рис. 2.52. Оптимальный
трехимпульспый переход
вида Мн Г лк между
орбитами типов II, I.
Рис. 2.53. Оптимальный
двухимпульспый переход
вида Мп —> ак между ор-
битами типов II, I (слу-
чай ган < гак).
192
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. Ц
первый импульс сообщается в начальной точке 7ИН, по-
лучается переходная орбита Т2, касающаяся конечной ор-
биты в ее апоцентре, здесь прикладывается второй
импульс (рис. 2.53). Для этого перехода
~ Лтп/Гак» Z = р — 8^ = 8р — 82 —
И’к = la^H й'д, -j- Как.
Если гаК < гап, то в случае (4.29) осуществляется переход
0Сн • > Лк, И’к =f ~\/~2цгр (ган 4- Гг,к) Уан Vак, (4.33)
первый импульс прикладывается вдоль скорости в началь-
ном апоцентре, получается переходная орбита, касающая-
ся конечной орбиты в ее перицентре, здесь сообщается
Рис. 2.54. Оптимальный
двухимпульсный переход
вида ан —> лк между ор-
битами типов II, I (слу-
чаи гаН ^>> гак)*
Рис. 2.55. Сообщение на-
чального импульса при
га2 гтах 00 •
второй импульс (рис. 2.54). В начальной точке Мн в этом
случае импульс отсутствует, все импульсы — апсидаль-
ные. Параметры траектории перехода определяются, как
и в двухимиульспом переходе типа II.
Частные с л у ч а и. 1. Пусть rmax —> сю, в пределе
нет ограничений на наибольшее удаление от центра при-
тяжения (см. также [16]).
Тогда в случае
(СтДопт 30 ?
строго говоря, оптимальный переход не существует. Пре-
§ 4] СЛУЧАЙ, КОГДА ОДНА ИЗ ОРБИТ ЛЕЖИТ В КОЛЬЦЕ 193
дельный (для семейства трехимпульсных переходов при
стремлении оо) переход будет бипараболическим.
Первый импульс сообщается вдоль начальной скорости
(рис. 2.55), получается параболическая орбита. В
бесконечности «нулевым» импульсом меняется перицент-
рическое расстояние до глК (рис. 2.56). Далее точка дви-
жется по параболе к перицентру конечной ^орбиты,
Рис. 2.56. Зависимости (ш), (ш)
для трехимпульспого перехода типа
11 1 ПРП rmax = 00 •
Рис. 2.57. Оптимальный
бппараболическпй переход
типа II I (пригтах = оо).
где сообщается тормозной импульс, переводящий точку
на конечную орбиту (рис. 2.57):
== 2 2|Лгр/гmin VH V'tck*
П р и м е р. В начале перехода КА находится на поверхности
планеты, Vn = 0, rH = rmin. Конечная орбита — круговая, ра-
диуса Имеем переход типа II. I, гяН = 0, гап = = гак =
- rmil1 Пусть, для определенности, rmin -= 1, ргр = 1, rmaK = оо.
Определим оптимальный переход. В данном случае двухпмпульс-
пый переход вырождается в одноимиульспып, импульс сообщается
но горизонтали, увеличивая скорость от пуля до конечной. Для
= W(V = ук — jzn = 1. Трехпмпульснып переход будет
здесь бипараболическим, = 21^2 — 1 ~ 1,83. Следова-
тельно, для данной задачи оптимальным будет одноим-
пульсный переход. Учитывая, что характеристики двух- и трехим-
пульспых переходов непрерывно зависят от параметров задачи, и
вспоминая, что одпоимпульсное решение есть вырожденный вариант
двухимпульсного, получим, что и при орбитах, близких к рассмот-
ренным (г„н « 0, ган ж глк » гак ~ rmln), оптимальным будет
двухимпульспый переход, NoaT = 2. Пусть, например, Тн = О,
rzK = гак = гк > rmiir Тогда Хопт = 2 при rK < prmin ~ ll,94rmln.
7 В. В. Ивашкин
194
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
2. Пусть /’мах птах (гаН, Гак) или глк — гП11П’ Тогда
га2 = max (гап, ?-ак), оптимальный переход будет двух-
импульсным.
Рассмотрим переход типа IVa I, для него
1<?ан < $гЛах, глП <Г rmin- После сообщения в начальной точке
Ми первого импульса получается орбита Т2, для кото-
рой га2 гП1ах* В процессе сообщения этого импульса,
при некотором значении характеристической скорости,
будет га = Ггпах- Соответствующую орбиту и возьмем за
7\, для нее гл2 rmin. Оптимальный переход Т2-+
по следствию 2, будет двухпмпульсным вида
СС2 Г) Лк-
Весь переход Тп -> Тк станет трехимпульсным:
> 1 —> Лк, ?'а2 ~~ 7’аз = Т’тах» 7’лз — ГпК,
для него = —1, i --= 2,
= Д17! -Р (Раз — Рао) + (РпЗ — Р^к) =
~ 7у2аРц гр(.S‘Iliax -|- .S‘-K) РкК =
— I12аРн '^а (1 <?а) — Т^дРн F2дРз(б) “У
здесь w — характеристическая скорость перехода между
орбитами Тз0) {гл = rmin,
7’а ~ /’max} И Тк, Рз(б) СКО-
РОСТЬ в перицентре орбиты
7зО) при г — rinin-
В плоскости скоростей Ра
первый импульс напра-
влен от начальной точки к
фокусу F2a до пересечения
С кривой /?а = {Р: 7’а = Ппах},
см. рис. 2.49, 82 = — 1- На
рис. 2.45 приведена схе-
ма оптимального перехода
-> типа IVa I, осу-
ществляемого по орбитам T(2d),
Т(2}. На рис. 2.58 (рис. 2.46) в плоскости /\ (Рл) показана
фазовая траектория Рнр2(а)Уз(б) Для перехода
И-г°з = r(nin, ?аз = Ттах, образующего начальную часть
всего перехода } -> 7К.
Рис. 2.58. Фазсвые траектории
в плоскости Ра для переходов
типа IVa I и IV6 I.
§5] СЛУЧАИ ОРБИТ, пересекающих: ГРАНИЦЫ КОЛЬЦк 195
Сравнивая приведенное выше выражение для с
формулой для функционала перехода типа IV6 I и учи-
тывая формулу (3.5), видим, что переходы типов IVa I и
1V6 I энергетически эквивалентны при равных элементах
исходных орбит.
Рассмотрим изменение с о и р я ж о иных ф у н к ц и й
вдоль оптимальных траекторий типов II I, IVa I. Если оптималь-
ный переход — двухимпульсный вида аи —* лк, то сопряженные
функции определяются, как в переходе типа I I. На дуге 717нап ('О’д'С
'С л) будет %! С xi (О' л) -- 1. На оскулирующих орби-
тах, для которых r_ (и>) rfI|i!1, будет (О) 1, 0^0^ 2л.
Пусть переход—трехпмпульслый (4.31). На дуге Мна2 орбиты
Тг в точке Мп будет ^ДЛ/,,) 1, X = 2^ = - sin ср1? ц = jij = cos <р15
в точке CL2- О = О2 = л, X -- 0, ц -- ц2 -= 1, £ = $7. Постоянные
Во, Dz определяются, как в переходе тина 11 I, н. 4.1, причем в
(4.12) будет г = га2, в данном случае г = г111ах. На дуге а2лк си-
туация аналогична той, что была в переходе I I вида лп —> Г —* лк
(2.14), (2.15). Опять должно быть 0. Для перехода
7ИН ак в формуле (4.12) надо взять г = га2 = /*ак, функция £ (и>)
постоянна при сообщении импульса ДГЛ2. Вдоль всех оскулирую-
щих орбит, лежащих в кольце, будет f>) 1.
§ 5. ОПТИМАЛЬНЫЕ ПЕРЕХОДЫ В СЛУЧАЕ, КОГДА
ОБЕ ИСХОДНЫЕ ОРБИТЫ ПЕРЕСЕКАЮТ ГРАНИЦЫ КОЛЬЦА
При переходах третьего класса обе исходные орбиты,
начальная 7^ и конечная 7\, пересекают границы кольца
К. Поэтому существуют и однозначно определяются обе
граничные точки траектории перехода — начальная точка
Мп и конечная точка М1{. лежащие на границах кольца и
являющиеся начальной точкой орбиты 7’н и конечной точ-
кой орбиты 77к соответственно [17]. Через Ги (7/н, ^гн),
ИгК) обозначим соответствующие начальный и
конечный векторы скорости.
В переходах типа HI Ill, III IVa, IV6 IVa обе гранич-
ные точки лежат па внешней границе кольца, Ма G= Г,
Мк G Г, san(K) < «max- Эти переходы будут рассмотрены
в п. 5.1.
В переходах II II. II 1V6, IVa 1V6 граничные точки
лежат на внутренней границе кольца. Л/н ре у, Мк ЕЕ у,
/•яН(к) < ''min- Эти случаи рассмотрены в и. 5.2.
7»
196
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
1гл. II
В п. 5.3 рассмотрены переходы II HI, IVa IVa, II IVa,
IVa III, для них Мн Мк е Г, гяН < $ак < $тах-
Для сокращения изложения в данном разделе не про-
изводится вывод выражений для сопряженных перемен-
ных. Их легко можно получить, исходя из параметров
граничных импульсов и переходных орбит, аналогично
тому, как это сделано выше.
5.1. Случай расположения граничных точек
на внешней границе
5.1.1. Рассмотрим сначала переход типа III III,
исходные орбиты 7Н и пересекают лишь внешнюю гра-
ницу кольца,
7’iiiin Г шах? 5ан < ^тах>
J’iniii лк ^’тах? 1<*ак < ^тах«
Без ограничения общности примем, для определенности,
что
/’лк гян-
а) П е р е х о д с граничными импульс а-
ми. Переход между данными орбитами можно осуществить
с помощью одного импульса, сообщаемого или в начальной
точке 7ИН (при этом импульсом AF = FK — FH сразу вы-
равниваются начальные скорости исходных орбит и дви-
жение в кольце происходит по конечной орбите Тк), или
в конечной точке Мк (при этом движение в кольце про-
исходит по начальной орбите ZH, в конечной точке
импульсом AF = FK — FH выравниваются конечные ско-
рости исходных орбит). Здесь FK = (F<K, — FrK), FH = (Vtu,
— FrIJ), | AF | = | AF |. Можно оба эти перехода (энергети-
чески эквивалентные между собой) реализовать в более
общей, двухимпульсной схеме, сообщив первый импульс
AFX в точке Ми, как некоторую начальную часть импульса
AF, и второй импульс AF2 в точке Мк, как часть импульса
AF (рис. 2.59, 2.60):
= х (FK - Fn), AF2 = (1 - х) (FK - FH), (5.1)
причем величина x — степень дробления импульса и пе-
рицентрическое расстояние/ л орбиты перехода удовлетво-
§ 5J СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 197
ряют условиям
о X 1’ rmin глК r:i Глц.
Г0.2)
Последнее неравенство (5.2), вообще говоря. неочевидно.
Оно будет доказано ниже. При % - 1 п / 0 получим
рассмотренные сначала одпоимпульспые переходы. Сум-
марная характеристическая скорость тг<* за висит от
Рис. 2.59. Двухимпульсный пере-
ход между орбитами типа III (оба
импульса — граничные).
Рис. 2.60. Схема дробле-
ния импульса па две
части.
величины % и равна скорости одноимпульспого перехода
wK - ДЕХ + ДУ2 = I FK - Ки I - I Гк - FH |. (5.3)
Поэтому такие переходы иногда будем условно называть
одноимпульсными.
б) П е р е х о д ы с граничными и о д н и лг
а п с и д а л ъ н ы м импульсом. Если при переходе,
кроме граничных, сообщается лишь один апспдальный
импульс, то переход будет, вообще говоря, трехпмпульс-
ным вида
Ми-^ л2 + (3.4)
в начальной точке 71/п сообщается первый импульс ДГР
далее КА по промежуточной орбите 73 движется в ее пе-
рицентр л2, где сообщается второй, апспдальный импульс
ДК2, затем по переходной орбите 7’3 — в конечную точку
7ИК, где сообщается последний импульс AF3 (рис. 2.61).
198
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. И
Сумма величии импульсов будет равна
М’к = ДЦ 4- I У:т2 — Тя3 I -Г- ДГ3 •= wx + w2, j
wx = е27я2 + ДЦ, ?i’2 = Д73 Н- е37яз. J ' "У
Здесь коэффициенты 8.,, 83 удовлетворяют условиям
е2 --- —е3 - ± 1, е2Ул2 |- е3Уяз ДУ2 > 0. (5.6)
Рис. 2.61. Трехимпульснып
переход (вида Ми —> у —* Мк)
между орбитами типа III при
гтт2 rmin-
Если ДУ2 0, то получаем рассмотренную выше двухим-
пульсную реализацию одпоимпульспого перехода (5.1) —
(5.3). Пусть
ДУ2 > 0. (5.7)
Тогда при заданной величине
7*л перицентрического рассто-
яния орбит Т2и Т3 оптималь-
ные импульсы АР\ и АГ3
минимизируют функции
w.2, они определяются в соот-
ветствии с результатами и.
4.1, по формулам (4.3) — (4.5)
(с учетом замечаний к ним).
При этом величины е2, 83 надо
выбрать из двух возможных
вариантов (5.6) так, чтобы бы-
ло выполнено условие (5.7).
Если же в обоих вариантах
задания 82, 83 после миними-
зации функций г/;1? w2 получается ДУ2 0, то переход (5.4)
при условии (5.7) не может быть оптимальным при данном
значении гя, необходимо рассмотреть случай ДУ2 — 0,
получим прежнюю одпоимпульсную схему.
Дадим аналитическое условие существования решения
(5.4), (5.7). Пусть сначала 82 = — 83 = 1. Импульсы
AFX, AF3 минимизируют функции го1 (7-а2) — ДУХ
ы2 (газ) = — Vn3. Если У/2, Vl3 — трансверсальные
компоненты скоростей F2, V3 после сообщения оптималь-
ного импульса AFX и до сообщения оптимального импульса
AF3, то, в силу условия Гл2 > Уя3, для оптимальных ре-
шений будет
и(2 - >Vt3 - 143.
max max
§ 5] СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 199
В плоскости скоростей Рп. построенной при г = гтах»
эти скорости Р2, Р3 соответствуют сообщению импульсов
так, что линии их действия будут проходить через неко-
торые фокусы Fin кривой = {К: гя — гп2}. Пусть
Vt2, Vt3 — компоненты скоростей Р2, П3? соответствую-
щих проведению импульсов через другие фокусы.
Тогда, в силу свойств минимума функции ДУ + еУя,
будет Vt2 < Vi2, Vi3 У<3. следовательно, оба решения
Vt2, Vi2, соответствующие точке Рн, больше решений У/3,
У/з, соответствующих точке Vt2 > Vt2 Vt3 > У/3-
В общем случае, если индексом «-|-» («—») снабдим вели-
чины, относящиеся к той точке Ри пли FK, для которой в
оптимальном решении (5.4), (5.7) будет --= 1 (е^ — — 1),
то должны выполняться условия
у;+ > vt+ > vt_ > vi.
(5.8)
Поэтому анализ области существования этого решения
можно провести следующим образом. ПолучИхМ для каждой
точки Рн и Рк при заданной величине гп числа
VtAFin), Vt2(F2n), Vl3(Fln), Vt3(F2n)
(в скобках указаны фокусы, через которые проходят ли-
нии действия соответствующих импульсов). Далее срав-
ниваем их. Если
max (V l2 (Fln), V(2 (F2n)) < min (7(3 (Fln), Vl3 (F2n)\
(5-9)
to 82 = —1? e3 — 1; если же
max (Vt3(Fln), Vt3 f/’2jT)) < min (V l2 (U V(2 (Л2л)), (5.10)
то 83 = —1, 82 =- 1. Если не выполняется пп одно из ус-
ловий (5.9), (5.10), то для данного значения гл2 переход
(5.4), (5.7) не может быть оптимальным.
Дадим геометрическую иллюстрацию условия (5.8)
в плоскости скоростей Рп. Проведем через каждую гра-
ничную точку Рн и Рк и оба фокуса Fin гиперболы 7?л =
= {V: гл = ?л2} прямые. Они вырежут из ее ветви
дуги /)н, DK, см. рис. 2.39. Левая точка каждой дуги соот-
ветствует сообщению импульса при е2(3) — 1, правая —
при е2(3) = —1 (она может быть в бесконечности). Опти-
мальный переход может быть трехимпульсным (5.4),
200
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
(5.7), если проекции дуг 7)н и DK на ось Vt не пересекают-
ся. Тогда для левой дуги и соответствующей граничной
точки будет 8 — —1, для правой е = 1 (для случая,
изображенного на рис. 2.39, будет 82 = —1, 83 = 1, Vi2 <
< vt3, ду2 - Vn3 - Vn2).
Определим теперь оптимальное значение расстояния
= г"2 па множестве трехимпульсных переходов. Ис-
пользуя выражение для оптимальных значений w2,
для суммарной характеристической скорости получим фор-
мулу
W = (р2 + Рз) °л + 8аФн + езФк,
здесь
р2 sign (гя — глП), р3 = sign (гл — гяк),
Фн - - [С + (VtH - е2р2еяая)2]1/2,
Фк = = [Fr2K + (7iK - езРз^я)2]*/’.
Для определения оптимальной величины гп рассмотрим
производную от по ел:
у _ _ (fc + Рз) + (2 + еп) (fc C0S Фн + З3 C0S Фк)
Г2(1+е„)’/г
здесь Фн = Фгян, фк = Фгяк — углы, образуемые вектора-
ми FiHnVH и FiK„vZ с осью Vt.
Пусть сначала r„ > max (гян, г„к). Тогда 02 = 03 = 1.
Возьмем, для определенности, случай 82 = —83 = 1,
V„>Vt3, \Vr2]>Vr3,
начальному импульсу соответствует фокус #2я, конечно-
му — фокус 7?1л, см. рис. 2.40. Зафиксировав точку F3,
сдвигаем точку V2 по Rt до точки F2 = F3 (Vt3, —7r3),
уменьшая | Vr2 | до Гг3, cos фн до cos фн-
Так как
cos Ф5 < cos фн.
• - VT3 . — угз
S! )' фк = < Sin фн =
J 1-и 3 г 27Г •
вследствие условия 2<тл 0, то будет
COS фк | COS Фн | > —cos Фн.
§ 51 СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 201
Поэтому
COS фк + COS фн > 0,
следовательно, w* < 0. Оптимальным на данном множест-
ве будет минимальное значение гя = max (гяН, гяк).
Пусть теперь гяК < гп < гян, тогда —02 = 03 = 1-
Если е2 = —е3 = 1, то е2(32 = езРз ~ —1, линии дейст-
вия импульсов проходят через фокус Л’1Я. Если е2 = — е3 =
= —1, то импульсам соответствует фокус /^2л. Во всех
случаях будет, вследствие условия (5.8), выполняться не-
равенство
COS фк COS фн*
Отсюда вытекает, что
02 COS Фн + ₽з cos фк > 0,
и поэтому »к < 0, Гяопт < гяк.
Остается рассмотреть множество rnlin <1 гя гяК.
В этом случае 62 = (З3 = — 1, возможны стационарные
ТОЧКИ, В которых w'K = 0. В НИХ
COS Фн 4- COS фк = —2/(2 + ея). (5.11)
Импульсу, для которого е — 1, соответствует фокус /\я;
если е = —1, то фокусом будет точка ?'2я (см. рис. 2.39).
Опять будем обозначать соответствующие величины ин-
дексами «Ц-» и «—», кроме того, С4(_) = cos ф+(_), S =
= sin ф+(_). Тогда (5.11) запишется в форме
С+ + С_ = -2/(2 + ея), (5.12)
причем
ё? < cos ф < ея/(2 + ея), —1 < cos <р.
Отсюда следует, что стационарные точки возможны при
0 л ^’тах/2? ^л
в противном случае будет dwjden > 0, гя0Пт = глк- По-
кажем, что в стационарной точке, если она есть, функция
wK (ея) принимает максимум. Тогда наименьшее значение
функции будет на одном из концов отрезка [rmin, min (гян,
гяк)], поэтому будет
Глопт = или гяопт = min (гян, гяк) = Гяк. (5.13)
Вторая производная d2vj^de\ = при условии (5.12)
202
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. П
равна
л f ^гр |L <>п
- J / —!------7^--------7- =
у 7 так 1^2 (1 Ч- (>_) '2
___________2 , /~ ^гр 2 + 7 (_£+ __ _£z.
(2 + fJ2 1 |/ гтах /2(1 + «л)3/2 С1>-
Зафиксируем углы ф+, <р_. тогда это выражение макси-
мально, когда величина Ф+ минимальна, а Ф_ — макси-
мальна, т. е. когда гяН = гяК = В этом предельном слу-
чае будет
Wk = (2 + ^)2 2 (1 + ^)2 —iy t1 — ~
Если учесть, кроме того,
Рис. 2.62. Оптимальный двух-
импульсный переход между
орбитами типа III (один им-
пульс — апсида л ьный).
условие (5.12), то получим,
что Wk < 0. Отсюда следует
(5.13).
В случае (гя2)опт=т1П
г«) = гпк будет АГ3 =-• о,
общий переход (5.4) вырож-
дается в двухимпульсный
вида
лк,
— AFi +1 "^л2 — Ия3 Ь
’лк глн?
(5.14)
первый импульс сообщается
в начальной точке 7ИН, в0"
личина гл уменьшается до
/•лК, затем в общем перицентре
лк переходной и конечной ор-
бит сообщается второй, по-
следний импульс (рис. 2.62). Сравним этот переход с од-
ноимпульсным (5.1)— (5.3). В плоскости Ря скоростей
при г = гтах построим гиперболу 7?л = {F: гл = глК} (рис.
2.63). На ней лежит точка Кк, определяющая конечную
скорость. Правее В~ — точки, определяющие скорости
на начальной орбите: при Гг 0 — начальную скорость
§ 51 СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 203
Гн, при Vr > 0 — конечную скорость Гн. которую будем
обозначать здесь через Гн2) = (V/н, | ИгН|). Приведем че-
рез конечную точку Гк и оба фокуса /"iTt прямые. Дуга
здесь будет точкой. Множество допустимых точек
разбивается на три подмножества Mi, i = 1, 2, 3:
X = ф1я > ф]лк, Гл гпк},
Я'2 - {F<2>: ф1я < ф1як. ф-2п < Фалк},
Л73 = {Р(2); ф2я > (р2пк. гп гяк}.
Если F„2) ЕЕ Мг, то F(K < Т(> < 'z/2 (F2jt). если же
Fh’ е М'я, то Vt2 (Fln) < Vl2 (/%я) < F;K. В этих случаях
двухимпульсный переход (5.14) может быть оптимален,
Рис. 2.63. Области в плоскости соответствующие одно- и двух-
импульспым п( ] сходам типа III III.
причем он будет экономичнее одноимпульсного пере-
хода, для него
&2 — 1 6^ = = 1, WK = F\t(Vyl
если У(н2) (= (5.15)
е2 = —1, = 1, ?ГК = /*2л^7к —
если l42) М3. (5.1р0
Если же F(h2) ее 70^2, то
v,2 (Лл) < VlE < Vt2 (F2J.
204
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
Это область одноимпульсного перехода (5.1), здесь двух-
импульсный переход (5.14) не может быть оптимальным.
На прямых, разделяющих области апсидальный
импульс AF2 будет нулевым, оба перехода эквива-
лентны.
В случае (гл2)опт = ?’min переход будет трехимпульсным
вида
мн Мк, р2 = Рз = -1, (5.17)
для его оптимальности необходимо выполнение условия
Рис. 2.64. Области существования трехимпульсного перехода типа
III III.
(5.7) или (5.8). Дадим геометрическую интерпретацию ус-
ловия существования такого решения. Пусть в плоскости
Рп скоростей при г = гтах построена гипербола Rn =
— {?' гл 22=2 rmin} (рис. 2.64). Проведя через конечную
точку VK и оба фокуса Fin прямые, получим дугу 7)к ~
= (К3+, 73_) е= Rn. Через концы этой дуги и фокусы
Fin проведем новые прямые F2jiV3+. Тогда легко
видеть, что решение (5.17) возможно, если начальная точ-
ка F(h} лежит во множестве в котором Vt2 (F2n) >
Vt2 (/\л) > Vl3(F2n) > Vt3(Fln), или во множестве Л?3,
в котором Vt2 (F\J < Vt2 (F2n) < Vt3 (Fljr)< 7f3 (F2n).
В первом случае для перехода (5.17) будет
е2 1Л^Н ^2л^К — 2о’я.
§ 5] СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 205
во втором случае
е2 = 8з = 1» W — 2ая.
Величины граничных импульсов определятся теперь по
формулам (4.3), (4.4).
в) Переходы с граничными и несколь-
кими апсидальными импульсами. По-
кажем теперь, что переходы, в которых сообщается более
одного апсидального импульса, неоптимальны. Пусть по-
сле сообщения первого апсидального импульса AF2 в
перицентре л2 промежуточ-
ной орбиты Т2 получается
переходная орбита Т3, для
которой гя3 гя2, газ =-
= ^шах- Дальнейший пере-
ход Т3 —> Тк типа I III
известен. Весь переход бу-
дет, вообще говоря, пяти-
импульсным, Мн —>л2~>
—>Г->л4—(рис. 2.65).
Оптимизируя переход
Тп Т4 типа III I, полу-
чим, что гя2 — гя3 < гя4,
а из рассмотрения перехо- Рис. 2.65. Переход между орбита-
да Т3 следует, что ми типа III (с несколькими апси-
гя4 < гяз. Следовательно, дальними импульсами),
после оптимизации будет
= Спз = = >л5, А73 = 0. В перицентре л2 после-
довательно сообщаются тормозящий импульс AF2 и
ускоряющий импульс AF4. Объединяя их в один им-
пульс, уменьшим суммарные энергетические затраты,
при этом получим переход (5.17) с одним апсидальным
импульсом.
Таким образом, оптимальный переход между орбитами
типа III может быть одноимпульсным (5.1) (с возможной
двухимпульсной реализацией), двухимпульсным (5.14),
трехимпульсным (5.17).
Следствия. 1. Пусть min (гяН, гяК) = rmin. Тогда
оба последних перехода совпадают. Оптимальным будет
одно- или двухипульсный переход.
2. На множестве переходов, для которых гя > гяК,
будет г (t) Можно взять rmin 'оптимальный
206
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. П
переход будет одно- или двухимпульсным (5.1), (5.14).
В частности, если при этом глП — ?лК, то будет Л = 1,
импульс прикладывается в общем перицентре.
3. При оптимальном одно- или двухимпульсном пере-
ходе функция (г/;) монотонна, глК < >л М < До-
статочно рассмотреть случай N = 1, так как для N = 2
при втором импульсе гл (w) = глК. Сначала заметим, что
в силу выпуклости множества {V^: rr, глК, Vt > 0}
прямая Fh1zk не может выйти во множество {гл < глК},
поэтому /я (w) > глк. Если на функции гл (w) ость внут-
ренний максимум, то па некотором участке импульса бу-
дет гл (гг) г-* на концах его rn (w) —- г-. Но тогда этот
участок, по предыдущему, должен быть заменен отрезком
гл (w’) — z‘-' с уменьшением функционала. Если же на
функции гл (ш) есть внутренний минимум, то на некотором
отрезке будет гл (w) < гп, а на концах его гл (w) ~
Это противоречит выпуклости множества {V^:
V{ 0}- Следовательно, функция rn (w) монотонна, в ча-
стности, справедливо (5.2).
5.1.2. Рассмотрим переход т и п a III IVa, saK <С
< глк <С /’ниц. В этом случае, как и в предыдущем,
Рис. 2.66. Области оптимальности одно-, двух- и трехимпульсных
решений для переходов типа III IVa и III IV6.
Мн ЕЕ Г, Мк е Г. В силу граничных условий до сообще-
ния импульса AF# в конечной точке Мк для промежуточ-
ной орбиты TN должно быть /’min- Без ограничения
§ 5] СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 207
общности МОЖНО ПОЛОЖИТЬ
гп V ~ z*rnin (5.18)
(если бы былогяу > rinill, то в процессе сообщения послед-
него импульса AFу при некотором значении ?// было бы
гя (w') = rinin, соответствующую орбиту Т' и рассматри-
вали бы как орбиту Ту). Весь переход Тн Тк будет со-
стоять из двух частей: перехода Тн -> Ту типа 111 Ш и од-
ноимпульсного перехода Ту Тк. Переход Тп -> Ту,
в силу (5.18). будет одно- или двухимпульсным. Весь
Рис. 2.67. Оптимальные мно-
гоимпульсные переходы типа
III IVa и III IV6.
Рис. 2.68. Двухимпульспый пере-
ход типа III IVa (оба импульса—
граничные).
переход Тн Тк становится одно- или трехимпульсным.
В первом случае возможна двухимпульсная реализация
(5.1), (5.3), причем теперь
Гп (%*) = /’min < ГЯ2 < 'лн- (5.19)
Трехимпульсный переход вида
Мн —* Y -*" Мк, гЯ2 — т"лз — f'miin ДИ2 = I лз Гл> |
(5.20)
определен, если GE U М3 (рис. 2.66). Для него
е2 = — е3 = 1, eF = е2р2 = е3р3 = — 1,
wK = Л’1ЛТЯ — V», ГНЕ 171, (5.21)
е2 = — е3 = 1, eF = е2р2 = е3|33 = 1,
Wk = Т’глТк — Т’глГц, Гн ЕЕ (5.22)
208
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
1ГЛ. П
В силу выражения для функционала в данных множествах
трехимпульсный переход (5.20) — (5.22) будет оптимален.
На рис. 2.67 показан этот переход Тн -> типа III IVa,
он осуществляется с использованием переходных орбит
Т^\ Tf*. На рис. 2.66 приведены фазовые траектории
данных переходов. Если Fh2) Е= то эта траектория
будет кривой
В множестве М2 (см. рис. 2.66) оптимальным будет
одноимпульсный переход (5.1), (5.3), (5.19):
---- I FK - FHI , FH e Я'. (5.23)
Он может быть реализован и по двухимпульсной схеме
(рис. 2.68).
5.1.3. Рассмотрим переход типа IV6 IVa, для
него 7ИН ЕЕ I , ЕЕ Г, ^лн(к) T’niin» $ан(к) $гпах* Дан~
пый переход может быть осущест-
влен приложением одного импуль-
са на внешней границе Г, в на-
чальной точке Мн = Мн (рис.2.69):
AF = FK - FH,
WK = \ Vk~ Fn |.
Необходимым условием оптималь-
ности этого решения является
выполнение неравенства
(го) < rmin, 0 < го < wK,
Рис. 2.69. Однопмпульс-
ный переход на внешней
границе Г.
т. е. импульс AF не должен пересекать в плоскости ско-
ростей Рп кривую — {F: = rrnin}. Кроме того, пе-
реход может осуществляться с приложением внутренних,
апсидальных импульсов. В этом случае легко показать,
как и в предыдущем разделе 5.1.2, что переход принимает
вид (5.20), будет двух- или трехимпульсным, А К > 0-
Для трехимпульсного варианта будет |32 = |33 = 1. Он
может быть реализован и может быть оптимальным, если
конечная точка лежит во множествах Л, С (рис. 2.70),
л = {Г: Vt3 (Fln) < Vi2 (F2n)}, С = {V: Vl3 (F2„) >
> Vt2 (Лл)}, ПРИ ЭТОМ
e2 ~ 1» WK — --- 2<ТЯ, VK G C,
e2 = 1, wK — F2n\ h — к — 2оя, V к ЕЕ A .
§ 5J СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 209
Если точка Ик лежит в промежуточном множестве В, то
условие (5.7) не может быть выполнено, переход (5.20)
вырождается в двухимпульсный вида
Мн —Y Мк, ДИ2 — Vn3 Vn2 — 0, --- + АУ3.
(5.24)
В этом случае подлежит определению орбита Т2 пли поло-
жение характеризующей ее точки Г2 GE /?я - {И: гя
= /’min } •
П2 (/'2Я)< г,2<
причем при сообщении обоих импульсов должно быть
(™) < /’min- (5.25)
Пусть т°, п° — единичные векторы в плоскости скоростей
Рл, касательная и нормаль к 7?я в точке F2, (т°, г °) 0,
Рис. 2.70. Области существования двух- и трехимпульсных реше-
ний для перехода типа 1V6 IVa.
(п°, t°)<0, ссн, «к — углы, образуемые векторами
Р21/н и РоГк с т°, бп, 6К— углы, образуемые этими век-
торами с п9, см. рис. 2.70. Из условия (5.25) следует, что
sin осн 0, sin ак 5> 0.
Для определения оптимальной точки К2 рассмотрим про-
изводные от по длине дуги s кривой 7?я, отсчитываемой
в направлении т°:
а’к = — (cos ан -г cos ак),
„ sin ctH sin2 зк (sin ан -f- sin 2<к)
210
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. П
Минимум функции (F>), F2EE достигается в точке
F2, где
cos аи = -- cos ак.
Фазовая траектория I ПГ2! к будет траекторией светового
луча, идущего из точки Уп вдоль вектора ИНИ2, отражаю-
щегося от кривой и следующего в конечную точку
FK вдоль импульса ДУ3, см. рис. 2.70. При этом угол па-
дения бн равен углу отражения 6К:
бн — бк-
Если конечная точка FK лежит на прямой, проходя!цей
через точки F2n и F2(Fln), то V2 — V2 C^in), если же
FK CZ Fln V2 (F2n), то F2^F2(A2ji). Если обе исходные
Рис. 2.71. Зовы оптималь-
ности одно- п двухимнуль-
сных решении для перехода
типа IV6 IVa в случае, ког-
да исходные орбиты имеют
равные элементы L, Е.
точки FK и FH лежат на одном
перпендикуляре к 7?л, то F2 есть
проекция точек FK HFHHa Rn.
Части ыйслучай. Ес-
ли элементы L, Е исходных ор-
бит одинаковы, т. е. Тн и Тк
суть две ветви одной орбиты,
пересекающей обе границы коль-
ца, то FH = к.Тогда 7)н = />к,
трехимпульсный переход (5.20),
для которого ДУ2 0, опти-
мальным быть не может. Опти-
мальным будет одно- или двух-
импульсный переход (5.23),
(5.24). Для двухимпульсного
перехода (5.24) оба импульса
равны между собой. Величина
каждого из них равна расстоя-
нию в плоскости скоростей
от исходной точки FH (пли FH)
до кривой {/*л =- /’min}. Однопмпульсиый переход осущест-
вляется приложением радиального импульса
AF FK - FH, ДУ = 2FrK
в начальной точке Л7И. В зависимости от параметров орбит
оптимальным может быть как тот, так и другой переход.
§ 5] СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 211
Пусть для точек кривой ВАЁ ЕЕ Рп расстояние до оси Vr
равно расстоянию до гиперболы /1Л (рис. 2.71). Тогда,
если точки FH, FK лежат в области ВАЁ, то будет N — 1,
если же они находятся вне ее, то N = 2. На границе ВАЁ
оба перехода эквивалентны. При rmax -> оо функционал
стремится к нулю, гск-> 0, AVj -> О, ДУ2 -> 0.
5.2. Случай расположения граничных точек
на внутренней границе
Для переходов, которые здесь будут рассмотрены,
как начальная, так и конечная точки траектории перехода
будут находиться на внутренней границе кольца, ЕЕ у,
Мк ЕЕ у. В п. 5.2.1 будут получены переходы типа II II,
в п. 5.2.2 — переходы типа II IV6, в п. 5.2.3 — переходы
типа IVa IV6.
5.2.1. Рассдютрим переход типа II II. т. е.
переход между эллиптическими орбитами, пересекающими
лишь внутреннюю границу кольца,
Етн Enin. < Enin /‘ак Енах-
Не ограничивая общности, предположим, что
а) Оптимальный переход может не содержать внутрен-
них, апсида л ьных импульсов. Тогда, он будет одноим-
пульсным (5.1), (5.3). При 0 < / < 1 получится двух-
импульсная реализация, тогда импульсы сообщаются в
обеих граничных точках Мн. Мк (рис. 2.72):
б) Возможен трехимпульсный переход вида
Мн —> (Х2 Мк,
(5.26)
при котором сообщается один внутренний апсидальный
импульс AF2, в апоцентре а2 промежуточной орбиты Т2
(рис. 2.73). Суммарная скорость перехода будет равна
шк = A Vi + | Ра3 — Va21 + Al з -~
- ai\ :-c2va2 + 83Ba3 + лк,,
212
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
причем коэффициенты е2, е3 удовлетворяют условиям
е2 = —83 = 4=1, — е2^сс2 4“ е3^сс3 (5-27)
Если Д V2 0, в условии (5.27) выполняется строгое
неравенство, то для заданного апоцентрического расстоя-
ния га2 определение импульсов AFj и ДУ3 производится
раздельно, минимизацией функций — AFj +
Рис. 2.72. Оптимальный двух-
импульсный переход между-
орбитами типа II (оба импуль-
са — граничные).
Рис. 2.73. Схема трех-
импульсного перехо-
да между орбитами
типа II.
w2 = ДЕз+ 83Газ. Это выполнено в п. 4.2, (4.15) — (4.17),
применим полученные результаты к решению данной за-
дачи.
Геометрически в плоскости скоростей Ра, построенной
при г — /’min, оптимальный граничный импульс (ДТ^ или
ДК3) сообщается вдоль прямой линии, проходящей через со-
ответствующую граничную точку (FH или FK) и один из фо-
кусов эллипса 7?а, соответствующего орбитам с заданным
апоцентрическим расстоянием га2. Проведем через каж-
дую граничную точку и оба фокуса Fia прямые. Они вы-
режут из эллипса Ra (в той же полуплоскости Vr О
или Vr 0, в которой лежит соответствующая граничная
точка) дуги DH и Рк. Левый конец (с меньшим значением
Vt) каждой дуги соответствует случаю е = 1, а правый
(с большим значением Vt) — 8 = — 1. Тогда условие (5.27)
будет выполнено и данный переход (5.26) может быть кан-
дидатом на оптимальность, если проекции дуг Z>H и
§ 5] СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 213
на ось Vt не пересекаются (на рис. 2.48 изображен слу-
чай, когда проекция дуги Пн лежит левее проекции дуги
, в этом случае е2 = —1, ез = !)•
Аналитически условие (5.7) будет выполнено, как и
выше, в случае перехода типа III III, если справедливо
неравенство (5.8). Пусть
^f2 (^1а)» ^2 С^2а) и ^3 С^1а)> ^13 (^2а)
— проекции на ось Vt концов дуг DH и £>к, соответствую-
щие прохождению линий действия импульсов через ука-
занные в скобках фокусы. Тогда, если
max (Vt2 (Fla), Vl2 (F2a)) < min (Vt3 (Fla), Vt3 (F2a)),
то будет e2 = —1, e3 = 1, если же
max (V(3 (Fla), Vt3 (F2a)) < min (Vt2 (Fla), Vt2 (F2a)),
то будет e2 = 1, e3 = —1. Если же не выполняется ни од-
но из этих условий, то трехимпульсный переход (5.26)
не может быть оптимальным.
Пусть выполнено условие (5.7). Используя результаты
п. 4.2, получим, что для данного перехода
wK (га) = (р2 + Рз) Оа - (Р-гФн + РзФк). (5.28)
Здесь
р2 = sign (saн — sa2), Рз = sign (%Н —
Фн = = UZ>2H + (F(H — e2p2eaGa)2]‘\
Фк = ЛВЛ = [^2к + (F(K — езрзеааа)2]‘^.
Для определения оптимального значения га2 (и еа) рас-
смотрим производную
= уо^7=-г-------+ Рз) + (2 + еа)(е2 cos <pH-|-83coscpK)].
V 2 (1 + еа) '2
ЗдесьФн^ <PtqH, Фк = сргак — углы, образуемые вектора-
ми Fi^V’h, FivaVK с осью Vt в плоскости Ра.
Пустьra < min (ган, гак), р2 - рз =- -1 (см. рис. 2.49).
Тогда 82 cos фн + е3со8фк > 0. wK --= const [2 + (2 +
+ еа) (е2 C0S Фн + е3 COS Фк)1 (ла2)опт > mill ГаК).
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ [ГЛ.
Если 7-а11 < /•«> < 'ак, то f>2 - —03 - 1. Ив этом случае
Wlt > 0, (/«2)0117 птах (/’«н- гак) ~~ гак-
Пусть J> шах (/’ан* /’ак), [% Рз — 1- этом слу-
чае С-2 COS Фп !- S3 cos фк < 1 Са, Wl{ < 0, /’а ОПТ гак- Из
Рис. 2.74. Оптималь-
ный двухимпульсный
переход типа II II
(одни импульс — ап-
сида л ъпьтй).
Рис. 2.75. Области оптимально-
сти одно- и двухимпульсных пе-
реходов типа II II.
проведенного анализа следует, что для перехода (5.26)
оптимальным значением расстояния га2 будет
(/’а2)опт — Шах (/’г<н- /’с/ к) = Г,к-
В этом случае общая трех импульсная схема перехода вы-
рождается в двухимпульсную, пропадает импульс в ко-
нечной точке /|/к. Переход принимает вид
—> ССК
(5.29)
(рис. 2.74). Дуга D}{ стягивается в точку FK (рис. 2.75).
Рассмотрим области существования такого перехода,
когда зафиксирована конечная точка FK GE Ra = {V'. га —
~~ гак}ЕзРа. Если е2 — 1, т. е. дуга£>п справа от точки FK,
то линия действия импульса AF1 проходит через фокус
F2a, 2, начальная точка F„ лежит во множестве М3:
М3 {V: 0 ср.2« < ф2аК, Га < гак},
в этом случае
— ^гаТк — С2о.Ии. 02 — е.2 — s/? = e-f = 1, FH G М3.
(5.30)
§ 5] СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИНЫ КОЛЬЦА 215
Если е2 = —1, т. о. дуга/Эи — слева от точки Гк, то линия
действия импульса Д1Д проходит через фокус /Да, in -= 1.
Начальная точка Кп будет лежать во множестве Л/5:
-^5 “ 0 • Ф1ак Ф1а> а ?ак)?
при этом
“ |32 СЕ -- — —1,
Гн (Е М\. (5.31)
Рпс. 2.76. Схема перехо-
да типа II II с несколь-
кими апспдальиыми им-
пульсами.
Внутри промежуточного множества М4 = {V: 0 <1 <р1а
< Ф1ак, ф2ак < ф2а < л} переход (5
тимальным, так как не выполнено
условие (5.7). Это область одио-
импульсного перехода (5.1), (5.3)
с возможной двухимпульсной ре-
ализацией.
в) Рассмотрим случай, когда
при переходе типа II II сообщает-
ся более одного внутреннего ап-
сидального импульса. Переход
будет, вообще говоря, пятним-
пульсным (рис. 2.76) вида
Ми -> а2 -> 7 -> а4 -> МЕ,
причем для него орбиты Т3, Т4
типа I, Гл3 = гя4 = rmin. Однако,
оптимизируя переходы Гн-> Г4,
Т3 -> типа II I и I II, полу-
чим, что га2 = га3 = га4, тогда ДП3
ДР2, ДУ4 объединить в один, то данный переход улуч-
шается, причем он сводится к трсхимпульсному (5.26).
Поэтому полученные выше одно- и двухпмпульспые
переходы являются оптимальными решениями в общем
случае.
Следствие. Пусть га11 — гак. Тогда оптимальный
переход осуществляется приложением импульса в общем
апоцентре.
Замечания. 1. Для указанных переходов зави-
симость ra (tv) является монотонной, причем
не может оыть оп-
= 0. Если импульсы
Гац < Га (ш) < Гак.
216
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
2. Указанные переходы будут оптимальными и при
ограничении
га (ш) < max (гаЯ, гаК).
Действительно, полученные решения удовлетворяют это-
му условию и являются оптимальными при более слабом
ограничении г (Z) гГ)1ах.
5.2.2. Рассмотрим переход типа II IV6, для
Рис. 2.77. Фазовые оптимальные траектории переходов типа II IVa,
II IV6.
оптимального перехода типа II II сразу следует, что пе-
реход типа II IV6 будет одно- или трехимпульсным. Для
одноимпульспого перехода (5.1), (5.3) теперь при двух-
импульсной реализации
° < X < X*, га (%*) = г,пач > га2 ган.
Трехимпульспый переход (5.26) — (5.28) в данном случае
имеет вид
Мн ~> Г —> ra2 : Gz3 ~~ Гтак, АУ2 = I Fa3 —' ^а2 | О*
(5.32)
Его граничные импульсы AFX, AF3 определяются анало-
гично переходам II I, I II, см. § 4, (4.15) — (4.17); для
импульса AFх будет р = р2 = 1, е2 = ± 1 для AF3 —
Р = Рз = = —е2- Сравним оба перехода в пло-
скости скоростей Ра. Разобьем все множество допустимых
начальных скоростей FH на три подмножества Л/3,
§ 51 СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 217
проведя прямые через фиксированную точку F(KX) — FK =
== (Т/К)— 7ГК) и фокусы Fla эллипса На - {Г: га = г,|1ах}
(рис. 2.77). Тогда, если FH Я7;! или Гп М:> (когда это
множество непусто), то будут выполнены условия реали-
зуемости трехимпульсного перехода (5.32). Для функцио-
нала шк и параметров е. справедливы результаты (5.30),
(5.31), этот переход здесь экономичнее одноимпульсного
Рис. 2.78. Схема оптимальных мно-
го импульсных переходов типа II IVa,
II IV6.
Рис. 2.79. Одноим-
пульсный переход па
внутренней границе у.
и будет оптимальным. На рис. 2.78 изображен этот пере-
ход Тп -> Гк0), он осуществляется по орбитам Т^\
Если же FH Мь, то условие (5.7) не удовлетворяется,
здесь оптимальным будет одноимпульсный переход (5.1),
(5.3). На рис. 2.77 в плоскости Ра изображены также фа-
зовые траектории этих переходов (если FH ЕЕ М3, то траек-
торией будет кривая
Заметим, что зависимость ra (w) при сообщении импуль-
са AFX для обоих вариантов решений будет монотонной.
5.2.3. Рассмотрим теперь переход типа IVa IV6,
^лн ^min? ^так, SaK <5 $тах*
Как и прежде, легко получить, что оптимальный пе-
реход в данном случае может быть одноимпульсным,
осуществляемым приложением импульса в начальной точ-
ке Мн (рис. 2.79):
AF - FK - Ги, г И -- r.Hin, (5.33)
а также двух- и трехимпульсным вида (5.26) — (5.27).
Ecnif будет выполнено условие (5.7), то последний переход
218
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
будет трехимпульсным (5.32). Для него
Е рз -1.
Рассмотрим условия его реализуемости. В плоскости
скоростей зафиксируем точку FH, определяющую на-
чальную орбиту, получим дугу Dr (Р2+, У2_) Ra =
= {К: га = г1Пах} (рис. 2.80). Проведя прямые через ее
Рис. 2.80. Области существования двух- и трехимпульсных
переходов типа IVa IV6.
концы и фокусы разобьем множество конечных дан-
ных на три подмножества Л, В, С:
J — {I : (Z^2a) (-^irz)? 5GC $max}>
В = {F: Vt2 (Fla) < V(3 (F2J,V\2 (Fia) > Vt3 (Fla), sa <
^max}?
/2 (^la) > Vt. (2/2ah sa Sinax}-
Если FK EE J или FK О С. то условие (5.7) выполняется,
переход (5.26) будет трехимпульсным, причем
е2 —£3 ~ 1, —2сгл F1CCFH ~г ^2аРк> Vп GE С,
г2 “ Ез * 1’ wr> -- 2ол -I- Ь2aVн 4" ^1аЕк, 1ЛН El.
Если JZK ЕЕ В, то условие (5.7) не выполнено, переход
(5.26) вырождается в двухимпульсный, в котором точка
§ 5J СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 219
Рис. 2.81. Области оптимальности
одно- и двухимнульсных решений
для перехода типа IVa IV6 в слу-
чае, когда исходные орбиты име-
ют одинаковые элементы L, Е.
достигает верхней границы Г:
Мн -> г -> Мк, Га = 7-так, АЦ = Va3 - V «2 - 0.
(о.34)
Легко показать, что в этом случае импульсы АЦ, АК3
в граничных точках Мн, М1{ сообщаются так, чтобы угол
паденияён луча, следующего вдоль импульса AFX, на эллипс
7?а был равен углу отражения бк луча, следующего вдоль
вектора AF3 (АУзП —АУЗГ) в точку FK, см. рис. 2.80.
Что касается одиоим-
пульсного перехода (5.33),
то необходимым условием
оптимальности является
выполнение неравенства
sa (^)<$max, Т. е. ИМИуЛЬС
AF в плоскости Ра не дол-
жен пер ес ек ат ь э л л in re a R а.
В противном случае этот
переход сводится, с умень-
шением ipk, к указанному
выше двух- или трехим-
пульсному решению.
Частные случаи.
1. Пусть исходные орбиты
Тн, суть две ветки од-
ной кеплеровской орбиты,
пересекающей обе границы
кольца, Ln = ~Z?K, FK ^FH. В этом случае FK ЕЕ/?,
оптимальным может быть решение (5.33) пли (5.34). Для
двухимпульспого перехода
= 2VHVH,
где FH — проекция начальной точки FH на эллипс /?а,
для одноимпульсного
= 2VrH.
Пусть кривая ВАЁ есть геометрическое место точек па
/?а, равноудаленных от эллипса /?а п оси Vt (рис. 2.81).
Тогда для точек FH, лежащих выше кривой J/?, будет
VHVH < 7ГН, оптимальным будет решение (5.34), N ~ 2.
Для точек FH, лежащих между кривой л В и осью Vt, будет
220
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
VHVH> Vrn, оптимальным будет решение (5.33), 7УОпт = 1-
Па кривой J В оба решения эквивалентны. В частности,
если V щ < Оа — Vо [27’И1ах/(7'|1|1|1 -ц ?’тах)] ,2> ТО А опт 2,
2. Пусть г111ал — оо. Тогда еа — 0, Fia 0. Множест-
во В вырождается в луч, проходящий через конечную точ-
ку FK н идущий вне круга /?а. Граничные импульсы ДТ\
Рис. 2.82. Кривые ДО* = const, определяющие зоны оптимально-
сти одно- и двухимиульспых решений для перехода типа IVa IVб
при Лп = Ли, Ен = Е[{, гшах = оо.
и ДК3 для решения (5.32) сообщаются вдоль соответствую-
щих скоростей,
wK = -2/2 Vo + VH + 7К,
промежуточный импульс ДУ2 будет пулевым, а переход-
ные орбиты Т2, Т3 — параболы. Двухимпульсное решение
(5.34) реализуется, если граничные скорости наклонены
одинаково к трансверсали, 0П = | 0К |. Однако, в сущности,
в этом случае оба решения (5.32), (5.34) совпадают. Если
FH = FK, то уравнение кривой АВ (см. рис. 2.81) будет
следующим:
Vr + Уп/2 = Ц/2УП, Vn = /2 Ц = / 2цгр/ггп1п.
В общем случае различных исходных орбит одноимпульс-
ный переход экономичнее бинараболического, если
cos Д0 Д> 2 (,г -|- у — ху) — 1 = cos Д0*,
здесь Д0 0П — 0К, х = ViJVn, у — VJV^.
§ 5] СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 22
На рис. 2.82 в плоскости {х, у} приведено семейство
кривых Д0* const. Если АО --- АО*, то оба решения
эквивалентны. При ДО > АО* (х, у) оптимальным будет
переход через параболу, N 2. При ДО < ДО* (х, у)
будет N = 1. Обратно, если зафиксирован угол ДО =
= Д0ц, то для точек плоскости {х, у}, лежащих выше и
правее кривой ДО* — Д0д, будет N = 2. Для точек, ле-
жащих ниже и левее этой кривой, будет N — 1.
Сравнивая переход типа IVa IV6 с переходом типа
1V6 IVa видим, что эти переходы, вообще говоря, энер-
гетически неэквивалентны.
5.3. Случай расположения граничных точек
на разных границах кольца
Здесь будут рассмотрены переходы типов II III,
II IVa, IVa III, IVa IVa, для них начальная точка ле-
жит на внутренней границе у, а конечная —- на внешней
Г, Ми GE у, Мк ЕЕ Г. Оптимальный переход может осуще-
ствляться без приложения внутренних, апсидальпых им-
пульсов. Тогда он будет одно- или двухпмпульсиым вида
Мп -> Мк. На траектории перехода могут, кроме того,
сообщаться внутренние импульсы.
Рассмотрим сначала случай, когда оптимальный пе-
реход является двухимпульсным вида Мн Мк. Затем
будут проанализированы траектории с внутренними им-
пульсами. Последние, как будет показано, не могут умень-
шить функционал, поэтому оптимальные переходы будут
находиться среди одно- или двухимпульсных.
5.3.1. Оптимальный д в у х и м п у л ь с н ьт й
переход вида Мп -> Мк- Пусть сначала Мп ЕЕ у,
Мк ЕЕ Г, оба импульса ДК17 ДГ2 ~~ ненулевые, переход
не вырождается в одпоимпульспый. В этом случае модуль
базис-вектора (г) достигает равного максимума в обеих
точках сообщения импульса при движении по переходной
орбите Т2:
Xj (Г Г1) = (Г ' 'Э,
здесь = rinin, г2 = гшах. Согласно (1.13), (1.14), (1.10)
линия действия начального импульса AFх в плоскости
скоростей Ра при г — гшп, проходит через одну из
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ ГГЛ. ц
точек 1'’г-а(екУ(а,0),
Vta ^1*^ 1 2Игр^*2 (^1 "Ь ^*2)^ 2’
еа = г1/г2> s г -= — sign (B/D),
являющихся фокусами эллипса /?а {V: га г2 г111ах).
Направляющие косинусы импульса Д1Г1 определяются вы-
ражениями
V “ М'/а Г
созерцав.,,--тг-р—sin <p„ =-- 8,- , 8^= sign 5,
7 laV г ja*
здесь в качестве скорости V можно взять начальную ско-
рость Fn или скорости F2L) Гп ДК2, полученную после
сообщения импульса ДКГ Диалогично, направляющие
косинусы второго импульса
...... vr
COS Срк — 8^ ур у , Slil фк — 8^ р у ,
л i~ л in
где V = V}< или V — - Vu — Д1Л2. Линия действия
импульса ДК2 в плоскость скоростей при г -- г(Пах так-
же проходит через одну из точек Fг-я (еуУ/л, 0),
Vtn = - /2Д - (гх -и г2)Г\
ел г*г1 =
являющихся фокусами гиперболы Rn = {F: гя = rmin =
= гг}. Так как В, D — константы вдоль орбиты Т2, то
величины 8^, 8^, определяющие выбор фокуса (левый или
правый) и направление сообщения импульса (от фокуса
или к фокусу), одинаковы для обоих импульсов. Следова-
тельно, линии действия обоих импульсов проходят через
одноименные фокусы, в одном направлении. Используя
свойство (3.5) плоскостей и Рп:
р. т/'Л = р.
г г а 2 г i л г 2 ,
определим характеристическую скорость оптимального
двухимпульсного перехода
= ДТ i -|- ДТ72 -~
= (^ laV 21) — /а I н) - Г е<Р (-^i-T7 к Ь гтУ 2 ^) “ / -
= 8, (Bi.VE - FiaVn) - е, (Ф|к - Ф{н), ’°'
Ф,.< - Fi-Vv, Фш^/ЛЛ’,,
§ 6J СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 223
(иногда вместо Ф/к, ФгН будем ппсать^Фк, Фп). Если хотя
бы одна из исходных орбит пересекает обе границы коль-
ца, то ее образ существует в обеих плоскостях Ра и ]\.
есть граница г г,, которую пересекают обе исходные
орбиты. Уравнение (5.35) тогда можно записать в форме
wK -= е,
где Fij =- Fia, если / = 1, =- Fln, если j = 2,
Fh> — скорости на границе г — ту, соответствующие ко-
нечной и начальной орбитам. В этом случае переход меж-
ду исходными орбитами можно осуществить и путем при-
ложения одного импульса — на этой границе г = rj.
Однако соответствующая характеристическая скорость
превышает скорость рассмотренного выше двух-
(3.11)
импульсного перехода:
если последний переход может быть реализован (что не
всегда возможно, как будет видно далее).
Получим величины импульсов AF2. И3
и условия
еа (У/н + ДУ1 cos срн) = Vtx — ДЕ2 cos фк
следует
ДУТ — ер (ф* — ф^н) =
cos срк
cos фк - са cos фп
т cos фк — С'
--= — 8^ФН----------—-------5----
COS Cpj, — Са COS грн
с - еа cos фн
ДР, е-.(Ф;к — ФО ~ м;к
2 V \ 2h I / К cos __ cos Ср^
,т, Ск - C0S <Рн
8фСаФк ------------------ ,
Ф С'Л- Фк - соь <ги
где
С - (1Лк~^Уэ1)^к,
н
и,
8 -А
-
ф’ = FiyVP = F^V^ - — £.^f------------1 h(1 "~-2----
1 1J- “ г‘" L COS фк — Ca COS ipH
(5.3/)
(5.38)
221 ПЕРЕХОДЫ ПРИ СВОБО игоп ОРИЕНТАЦИИ [ГЛ. II
Если начальная орбита Ти пересекает и внешнюю границу
Г, то величина 8ФСН будет косинусом угла ф/лИ, образуемо-
го вектором F^V^1 с осью V/. В случае, когда точки F
Vn\ лежат на одной прямой, будет cos <ри — Go Ф? ”
— Ф/н’ АТ^ — О, wK -= AF2. Аналогично, если конечная
орбита — тина IVa, то вфС'к есть косинус угла <piaK, обра-
зуемого вектором FiaV'^ с осью Vt. При Ск = cos срп
(точки Fia. Vu лежат на одной прямой) будет Ф{ =
= Ф/к, AF2 = 0, = AFr
Замечали е. Пусть рассматривается переход,
для которого ЕЕ Г, 7lfK ЕЕ у (например, переход типа
1V6 IV6). Аналогично получим
“- 8р (Фгк Ф/н)> Ф/к “ Ф/к = -^za^K?
(5.39)
АТ^-е.ДФ, -Фш)-
С - ca cos фк
= --------------------
cos(Tlt — ea cos фк
ДЦ = еДФ{к - ФД =
_ . ’от^--г
cos <рн — с cos (
8?Фк
Г,.
ф
Ji
/к еЕ1
п>
cos <РК - сн
cos фи — ra cos фк
cos фн - ск
COS ф„ — Ca cos фк
(5.40)
(5.42)
ф/ ...
8_р8р , ,
cos ср.н — Ра cos фк
₽т\п " 8FyH
COS fpH 8/ . -Ъ------------ ,
VIK - eFVfa
c<Wk -f.------------ф------•
К
Л-Ън
п
" к
-- 8-
1 ф
§ 5] СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 225
Рассмотрим теперь вопрос об определении постоянных
еф, Cf и о соотношении функционалов одно- и двухимпульс-
ного решения для различных типов переходов.
Переход типа II III, га11 < г|11ах, гяК > r[nin.
Для двухимпульспого перехода в этом случае должно быть
= 1, 6f = — 1
(иначе было бы га2 < Гшах, Гт> r»nin). Всегда будет
Рис. 2.83. Начальная часть фазо
вых траектории (в плоскости Ра)
для перехода типа II III.
Рис. 2.84. Конечная часчь фа-
зовых траекторий (в плоскости
Рп) для перехода типа II III.
COS фк — еа COS фн > О, Ск — COS фн > 0, Сп COS фк,
А1\ > О, АУ2 > 0. Импульс AFX — РнР^а) сообщается
в плоскости Ра в направлении от фокуса Fla, импульс
AF2 = F22(a)^K (в плоскости Ря) — от фокуса Fln
(рис. 2.83, 2.84),
— ф1К Ф]н — Ла7н. (5.43)
На рис. 2.85 изображена схема этого перехода, осущест-
вляемого по орбите (см. также [18|, [19]).
Переход типа II IVa, ralI sC /’шах, обе орбиты
пересекают внутреннюю границу у, > 0. Рассмот-
рим условия реализуемости двухимпульспого решения,
N = 2. Для него будет 8ф = 1, В силу условия sa2 Smax-
Если Ск > COS фн, ТО ДОЛЖНО быть COS фк — еа COS фн 0,
так как ДУ2 > 0, тогда из (5.38) следует 8f = — 1, ф1аК <
"С Ф1аН, Обратно, ИЗ условий 8Ф = —6F = —1»
8 В. В. Ивашкин
226
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. П
FH М5 следует Д71>0, ДУ2 > О, N = 2. Следователь-
но, в множестве М5 получаем двухимпульсное решение
8ср = 8г 1, Wk = Ф1К Ф1Н ~ FiaFH,
FHe Му
Аналогично, если Ск < cos фн, то будет еу = 1, фгак >
> ср2аН, получаем другое множество точек в Ра, соответст-
вующее решению N = 2:
Сер 8f 1, — Фгк Ф2Н — F2a7H,
Fh е м2.
В остальных точках, FH^M4, условия существования двух-
Рис. 2.85. Оптимальные двух-
и четырехимпульсные переходы
между орбитами типа II III.
импульсного решения не
выполняются, получаем од-
ноимпульсное решение
1Рк = THv", Fh е X.
Замечаем, что переходы типа
II IVa и II IV6 энергетиче-
ски эквивалентны. Дадим ге-
ометрическую иллюстрацию
результата в плоскости Ра,
г = rmin. Пусть F£> — точка,
определяющая конечную ор-
биту, она лежит вне эллипса
Ra = {F: Га = Г тах}, СМ.
рис. 2.77. Соединяем ее с обо-
ими фокусами/1^ этого эллип-
са. Множество начальных
данных, лежащее в первом квадранте внутри эллипса, раз-
бивается на три подмножества 7И3, М4, Мь. Для точек, ле-
жащих в множествах М3 и М3, оптимальных из рассмат-
риваемых решений будет двухимпульсное (если Fн ЕЕ М3,
то его фазовая траектория — кривая Ун^(а) V^), для
точек из Mi — одноимпульсное с фазовой траекторией
VhFk1^ В плоскости Рл можно проследить лишь за частью
^2(б)^2(1)Ук фазовой траектории, для которой sa < smax.
§ 5] СЛУЧАЙ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 227
На рис. 2.78 изображен этот переход Гн-> Гка) типа II IVa,
осуществляемый по орбите Т^\
Вместе перехода типа IVa III рассмотрим экви-
валентный и обратный ему переход типа III IV6
(это удобно для сравнения с уже изученным переходом ти-
па III IVa). В этом случае 7ИН ЕЕ Г, Мк ЕЕ у, двухимпульс-
ный переход имеет вид 7ИН Мк, надо использовать фор-
мулы (5.39) — (5.42). Обе исходные орбиты пересекают
внешнюю границу Г, а внутреннюю — лишь начальная
Тп, поэтому > 0. Из условий ГяН > /'min, Гяк < /'min
следует, что возможны два варианта: еф = 8f = ± 1.
Рассмотрим условия их реализуемости. Из (5.42) следует,
что cos фн — <?а cos фк < 0. При 8Ф = 1 будет cos фн —
— С*к < 0, Фк Фг Фн, Фглн фглк, ЕЕ СМ.
рис. 2.66. При 8Ф = —1 будет = —1, cos фн — Ск 0,
Фн > Фг* > Фк, Ф1ЛН > Ф1ЛК, G Если Же Fh’ €=
ЕЕ: ТИ2, то будет N = 1, оптимальный двухимпульсный
переход невозможен. Поэтому для рассматриваемого слу-
чая будет
= 8f = 1,
WK = Ф2К - Ф2н = ЛяЙ?’ - ЛяЕн, Fh е м’3,
8Ф = ер = — 1,
п>к = Ф1Н - Фхк = ЛлЕн - лХг), Ен е Л?;,
Шк = Кг)Ун, FH €=
На рис. 2.67 изображен этот переход Тн -*• Т%\ осущест-
вляемый по орбите Т^°\ Сравнивая функционалы данного
перехода и перехода типа III IVa (5.21), (5.22), (5.23),
видим, что они энергетически эквивалентны.
Переход IVa IVa, обе исходные орбиты пересе-
кают как внутреннюю, так и внешнюю границы. Рассмот-
рим области существования двухимпульсного перехода
(5.35) — (5.38). Для него будет 8ФСН = cos фг-ян, 8ФСК =
= cos Фшк, F(2r) — В соответствии с результатами
§ 3 этот переход возможен в следующих случаях (см.
8*
228
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. Ц
рис. 2.25, 2.26, 2.36, 2.37):
eQ = —е/г = '1,
wK = - фш = V" - ЛоЛ1’ =
---= F1Х—- ЛМг’. ^>1 е
8^ = 8// = 1,
= Ф2К - Ф.2П - F2aV^ - ^2а7(н1} =
8^ = 8f = — 1,
Wk = Ф1Н — Ф1К — F — F la^K^ ~
= FlnV^~F1^\ V^M,,
8Ф = — 8F = — 1,
l^K = ф2п — Ф2К = F2а^н^ — F2ay к' ==
= ^M2)-^X2\ FHeM7.
(5.44)
На рис. 2.86 приведена схема этого перехода Т7^ ?к}
типа IVa IVa, осуществляемого по орбите 7ч2а).
В остальных множествах Мt переход будет одноимпульс-
ным. Обозначим через Д7П = | | (AFK ~
= | Vjf — F(H2,|) величину импульса, который надо при-
ложить в начальной точке Л7Н (конечной точке 7ИК), чтобы
осуществить одноимпульспый переход между данными
орбитами. Тогда
\V2K — АТн = 2Ф/кФгН (cos Аф/а — cos Acpijr),
где
Аф/а Фгак ф/ан? Афг-Я = фглк Фглн«
Так как О | Дф1-а(л) | л, то Д7к > Д^к тогда и толь-
ко тогда, когда | Дф/а | < | Дф/Я | для I = 1, 2, и нао-
борот. На границах ф/С6 = ф/аК множеств М4, Ms
будет, очевидно, ДГН С ДТК, так как па них Дф/а = 0.
Для остальных точек из 7174, М8 также | Д ф^л | >
l>il Афга |, ДФП < Д7К. Во множествах М2, MQ будет
§ 5] СЛУЧАИ ОРБИТ, ПЕРЕСЕКАЮЩИХ ГРАНИЦЫ КОЛЬЦА 229
> (5.45)
хода с
Рис. 2.86. Оптимальные двух-
импульсные переходы типа
IVa IVa и IV6 IV6.
| Д<ргя I < I Дф,-а |, Д7К < Д7П. Поэтому
Г (и>) = rmin, = I ДГНI = I V™ - Р(н1’ |,
если П<н1)еЛ/4 J М„,
г (^) ~ rтах< г^к “= | ДГк | — | F<i> |,
если НрЕЕ я2 и я в-
5.3.2. Анализ траекторий пере
внутренними а п с и д а л ь и ы м и импуль-
сами. Рассмотрим случай,когда при переходе сообща-
ются, кроме граничных, и
внутренние апсидальные им-
пульсы. Тогда, очевидно, пе-
реход имеет вид
Мн >• (^2 (5.46)
причем, в силу свойств опти-
мальных переходов типа II I,
IVa I и I III, I IVa, элемен-
ты га2, глз должны быть равны
га2 = гшах> Гл3 = rmjn.
Начальный импульс ДКг и
конечный ДК4 будут опреде-
ляться в соответствии с ре-
зультатами п. 4.1 и п. 4.2,
причем для импульса (4.16), (4.17) параметр е2 равен
—1, для импульса ДГ4 (4.3), (4.4) 8iV = 1. Функционал
будет равен
— Рг^га Ин Ь 0>а (Р2 — 1) + (1 + P.v) + Fi:iVu.
Сразу отметим, что в этом решении липин действия гранич-
ных импульсов, как и в двухимпульсном решении, про-
ходят через некоторые фокусы кривых Ra = {V: га —
— ^шах} €= Ра, : гл == r1Tlin} ЕЕ Рл.
Для перехода типа II III будет р2 = 1, (3V = 1,
= —1. Линии действия граничных импульсов прохо-
дят через левые фокусы Fla, Fln. Функционал равен
шк = FlnVu — Сравнивая с (5.43), видим, что
в данном случае четырехимпульсный переход (5.46)
230
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. II
энергетически эквивалентен двухимпульсному решению
(5.35)—(5.38). В данном случае, следовательно, оптималь-
ное решение всегда неоднозначно, N = 2 или N 4.
На рис. 2.85 изображены оба перехода, четырехимпульс-
ный переход
Мн Г у -> Мк (5.47)
осуществляется по орбитам
Частный с л у ч а й. Пусть
'’ан — rmax,
гяК '’min, этот частный случай перехода типа II III яв-
ляется предельным для перехода типа IVa IVa и входит
Рис. 2.87. Предельный случай
переходов типа II III при
ган гтах> г-к rmin’
составной частью в произ-
вольный переход (5.46). Для
него решение (5.46) вырожда-
ется в двухимпульсное ап-
сидальное вида ап ->• лк
(рис. 2.87). Энергетически
оно эквивалентно обычному
двухимпульсному неапси-
дальному решению вида
МнМк (5.35—5.38), для
КОТОРОГО = —&F = 1, ЛИНИИ
действия импульсов ДР1? AF2
проходят через фокусы Fla,
Fln соответственно.
В общем случае переход
между орбитами Т2 и У4,
образующий, часть всего перехода Гн —>- вида (5.46),
является апсидальным вариантом оптимизации только
что рассмотренного случая га2 = ггпах, гя4 = rmin- За-
меним эту часть всего перехода (5.46) на эквивалентный
неапсидальный двухимпульсный переход с импульсами
AF2, Д^з, сообщаемыми в точках Мн и Мк. Объединим
пару импульсов ДК4 и ДР2 в начальной точке и пару им-
пульсов ДКз, AF4 в конечной точке соответственно в им-
пульсы ДКП AF2:
ДРг = ДГ4 + ДР;,
af2 = др; + ДР4.
Получен двухимпульсный переход вида Мн -> Мк.
§ 6] ПАРЫ ЭНЕРГЕТИЧЕСКИ ЭКВИВАЛЕНТНЫХ ПЕРЕХОДОВ 231
Функционал при этом не возрастет, так как
АР\ < AVj + А72, ДГ2 < ДКз + AF4.
Следовательно, оптимальный переход (5.46) обладает не
меньшим значением функционала iz?K = п?к , чем оптималь-
ный одно- или двухимпульспый переход, для которого
обозначим = ^к2)-
Равенство здесь возможно, только если граничные им-
пульсы AF1? AF/перехода (5.46) коллинеарны импульсам
AF2| AF3 неапсидального решения для перехода Г2 Т4
(и граничным импульсам AFH, AFK рассмотренного выше
двухимпульспого решения (5.35)—(5.37)):
AFi/AVi = AF;/A7; = AFH/A7H,
AF4/A74 = AF3/A^ - AFK/A7K.
В противном случае будет < Шк4)-
Для перехода II III имеет место эта коллинеарность,
оба решения эквивалентны. В остальных же случаях
(в переходах II IVa, IVa III, IVa IVa), как легко видеть,
направления граничных импульсов переходов Тп -> Тк
и Т2 не совпадают. Решение (5.46) будет неопти-
мально.
Таким образом, оптимальный переход между орби-
тами, граничные точки которого лежат на разных грани-
цах кольца, будет одно- или двухимпульсным (лишь для
перехода типа II III одноимпульсное решение отсутству-
ет, зато всегда есть четырехимпульсное решение, эквива-
лентное двухимпульсному).
§ 6. ПАРЫ ЭНЕРГЕТИЧЕСКИ ЭКВИВАЛЕНТНЫХ ПЕРЕХОДОВ
Выше только что было показано, что для перехода типа
II III всегда имеется два энергетически эквивалентных
решения: двух- и четырехимпульсное, см. рис. 2.85.
Существует несколько других пар эквивалентных (по
функционалу) переходов. Прежде чем перейти к ним,
сделаем некоторые замечания относительно двух реше-
ний перехода II III. На рис. 2.88 и 2.89 приведены условно
232
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. и
фазовые траектории и зависимости гя (w), ra (w) (для
случая гак > 0) для обоих решений. Фазовые траектории
этих решений совпадают в начале перехода, при 0^
<; w", до момента w" достижения оскулирующим апо-
центром внешней границы
Г,
для
2.88. Фазовые траектории
перехода типа II III.
Рис.
Рис. 2.89. Зависимости г~ (ш), га (ю)
для перехода типа II III.
Га (W") = Гшак (Г = Z'6’
па рис. 2.83—2.85), и в
конце перехода, при
w' w начиная
с "момента w' отрыва
оскулирующего пери-
центра от внутренней
границы у, гл (и/) = rniiI1
(Г = 7^), га (ш) <
< Гтах при W < ш",
Гл М > Tmin При W > ш'.
На отрезке [w", w'] осу-
ществляется предель-
ный переход типа II III,
решения расходятся.
ЕсЛИГаН = Гтах И ГяК =
~ Tmin, ТО будет w" = О,
= wK. В этом случае
оба'оптимальных реше-
ния Ма -> Мк и ан -> лк
(см. рис. 2.87) можно
интерпретировать сле-
дующим образом. Пере-
ход Мн —> Мк можно
рассматривать как пере-
ход типа IVa IVa (5.35) между восходящими ветвями
Мпап и лкМк исходных орбит, па которых Vr > 0. А пе-
реход ан -> лк можно считать переходом IV6 IV6 (5.39)
между нисходящими ветвями анМкн и Мпклк, на которых
Vr < 0.
Видим, что в данном случае оптимальные переходы
типов IVa IVa и IV6 IV6, порожденные одними и теми же
кеплеровскими орбитами, энергетически эквивалентны,
хотя п имеют различную реализацию. Интересно выяс-
нить, сохраняется ли данное свойство в общем случае
переходов IVa IVa и IV6 IV6? Априори ответ ниоткуда
не следует. Неэквивалентность переходов IVa IV6 и
IV6 IVa подтверждает, что, вообще говоря, восходящая
§ 6] ПАРЫ ЭНЕРГЕТИЧЕСКИ ЭКВИВАЛЕНТНЫХ ПЕРЕХОДОВ 233
Рис. 2.90. Фазовые тра-
ектории для переходов
типа IVa IVa и IV6 IV6.
и нисходящая ветви одной орбиты играют различную роль
в оптимальном переходе. Однако оказывается, что пере-
ходы IVa IVa и IV6 IV6 обладают интересным свойством
энергетической эквивалентности (если, конечно, их соот-
ветствующие орбиты имеют равные элементы А, А, т. е.
являются различными ветвями одних орбит).
Действительно, пусть Тн\ и — восхо-
дящие и нисходящие ветви орбит 7ТП, типа IV, пересе-
кающих обе границы кольца, см.
рис. 2.86. Тогда переход
между восходящими ветвями будет
переходом типа IVa IVa, а пере-
ход Т\^ -> А(кб) между нисходящи-
ми ветвями — переходом IV6 IV6.
В обоих случаях начальная точка
(F(H2)) принадлежит одному
и тому же множеству Mt (Л7/),
оптимальные переходы будут
одноимпульспыми (с одинаковой
фазовой траекторией) или двухимпульсными (с различными
фазовыми траекториями, по одинаковыми параметрами ер,
еф, рис. 2.90). Характеристическая скорость перехода
будет одна и та же и при N 2, как следует из анализа
переходов типа IVa IVa, IV6 IV6 (5.35), (5.39). Действи-
тельно, в случае перехода IV6 IV6 будет FinVn = FinV^\
Fiay^ = FiaVu\ а для перехода IVa IVa — А/лУк-=
7\лУк2), FiaVn-— FiaV^\ Поэтому, учитывая (3.5), полу-
чим
= е, (FiaV(K6> - FinV(°>) - s, (FlaV? - FiaV™) =
= e. (FinV<? - FiaV?) = (FinV™ - FiaV^ = ufr.
Указанное свойство доказано. Заметим, что при N= 2 фа-
зовая траектория перехода IVa IVa в плоскости Fa
(или 7\) является границей }V(1)V^1) (Гц2’02)1^2}) кри-
вого четырехугольника, порожденного различными воз-
можными путяхми прихода из точки Г(нп в точку
Ц1 (VV V(K2)) при = const, ер — const, см. рис. 2.36,
2.37, 2.90. Аналогично, траектория перехода IV6 IV6
234
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. If
образует другую границу Fh F^F^ (F^F^F^) этого
множества.
При ган-^гГПа\, Глкrmin переход типа IV IV вы-
ливается в переход типа II
ность переходов IVa IVa и
валентности д в у х-
ных решений пере
Рис. 2.91. Предельный слу-
чай переходов типа IVa IVa
и IV6 IV6 при = гтяу.
ОС п. IlldX •
III, а указанная эквивалент-
ов IV6 приводит к экви-
-и чет ы р е х и м пул вс-
хода типа II III. Другие
частные случаи перехода
IV IV приводят к другим
эквивалентным парам опти-
мальных переходов. Рассмот-
рим их.
Рис. 2.92. Фазовые траектории
для переходов типа II IVa и
II IV6.
Пусть только raH-^rrnax, получаем переходы типа
II IVa и II IV6, причем raH =rmax, F^ е (М'3 U X U
U МБ) р| 7?а, см. рис. 2.77. В первом случае переход
Тн -> будет неапсидальным вида Мп М(к\ он по-
рождается переходом типа IVa IVa (рис. 2.91). Во втором
случае переход Тп имеет вид ан он поро-
ждается переходом типа IV6 IV6. Если N = 2 (FH ЕЕ
ЕЕ М3 U то первый импульс AF(i6), сообщаемый в
апоцентре ан, будет апсидальным, см. рис. 2.91. Эквива-
лентность этих переходов является причиной экви-
валентности переходов типа II IVa и
II IV6 в общем случае, при гаН < Гтах, так как каждый
из них расчленяется на два частичных перехода: на одно-
импульсный переход 1 ’н Т" и одно- или двухимпульспый
переход Т” -+ Ти только что рассмотренного вида,
П = rmax, г; < rmiI1 (см. рис. 2.77, 2.78, где Г = Т<б)).
§ 6] ПАРЫ ЭНЕРГЕТИЧЕСКИ ЭКВИВАЛЕНТНЫХ ПЕРЕХОДОВ 235
При N > 1 переходы TR -> и Тп -> общего
случая имеют вид Мп -> и Мп -> Г -> соот-
ветственно, см. рис. 2.78, 2.92.
Пусть глН rmin, в пределе получаем переходы типа
III IVa и III IV6, F„ е (Я1 □ Я-z и п 7?„, см.
рис. 2.66. Переход типа III IV6 будет неапсидальным
вида Мн -> М(кб). В переходе III IVa вида лн -> Яка),
Рис. 2.93. Предельный слу-
чай переходов IVa IVa и
IV6 IV6 при Ггн = rmln.
при N = 2, первый импульс,
сообщаемый в начальном
перицентре лн, будет апси-
дальным (рис. 2.93). Такие
Рис. 2.94. Фазовые траектории
для переходов типа III IVa и
III IV6.
переходы образуют конечную часть Т' ZK пере-
ходов типа III IVa и III IV6 в общем случае, при
Гян > Гтщ = rmin, Sa < «max, Т' = На рИС. 2.66,
2.67), которые поэтому будут также энергетически экви-
валентны. В случае N > 1 переходы Тн —> и Тп
имеют вид Мп М(к0) и -> у соответственно,
см. рис. 2.67, 2.94.
Если теперь raK -> гтах, глК rmin, то получаем
переходы типа IVa I, IV6 I, €= М7, см. рис. 2.46,
2.58. Их оптимальные траектории будут двухимпульсны-
ми Мн}ак и Мн} -> лк соответственно (рис. 2.95),
при этом второй импульс всегда апсидальный. Эквива-
лентность этих переходов, образующих начальную часть
Тп-> Т* переходов типа IVa I и IV6 I в общем
Случае, при ГаК ^тах? Т’лк ^min (Гд: — ^min? ~ Плах)
приводит к эквивалентности (по функционалу) этих
236
ПЕРЕХОДЫ ПРИ СВОБОДНОЙ ОРИЕНТАЦИИ
[ГЛ. П
ходов вида Мн ’ -> Г лк и’ М(нб ’ -> у -> Г -> лк соот-
ветственно, см. рис. 2.45, 2.46, 2.58, 2.96, где Т* = Дп'.
Таким образом, переходы типов I IVa и I IV6, II IVa и
II IV6, III IVa и III IV6, IVa IVa и IV6 IV6, двух- и
Рис. 2.95. Предельный слу-
чай переходов IVa IVa и
IV6 IV6 при Глк = rrain,
четырехимпульспые решения
для перехода II III образуют
пары энергетически эквива-
лентных оптимальных реше-
Рис. 2.96. Фазовые траектории
для переходов типа IVa I и
IV6 I.
гак гтах
В качестве следствия из указанного свойства энерге-
тической эквивалентности переходов IVa IVa и IV6 IV6
получаем также, что оптимальная характеристическая
скорость перехода типа IVa IVa (как и перехода IV6 IV6)
не зависит от того, какая из заданных исходных орбит
считается начальной, а какая — конечной. Таким обра-
зом, в этом случае переходы 7Н и 77к -> 7ТН экви-
валентны (по ггк), хотя их фазовые траектории, вообще
говоря, различны (и образуют вместе замкнутую кривую).
§ 7. ВЫВОДЫ
Дана классификация и получены все оптимальные
траектории переходов в заданном кольце К между компла-
нарными, свободно ориентированными орбитами, в пред-
положении, что на них сообщается конечное число им-
пульсов. Структура этих траекторий следующая: в началь-
ной и конечной точках траектории сообщаются обычно
граничные неапсидальные импульсы, остальные импуль-
выводы
237
§ 7]
сы будут апсидальпыми. Интересна геометрическая ин-
терпретация оптимального сообщения граничных импуль-
сов. Во многих случаях линия действия граничного им-
пульса в плоскости скоростей проходит через некоторый
фокус кривой второго порядка, являющейся геометриче-
ским местом точек, соответствующих траекториям, для
которых = const или ra = const. Общее число им-
пульсов в данной задаче не превышает четырех. При
Гпах < оптимальные переходы осуществляются за ко-
нечное время. Решение задачи оптимизации перехода
типа II III определено неоднозначно, всегда есть два
эквивалентных (по минимизируемому функционалу) ре-
шения. В остальных случаях, как правило, оптимальное
решение определяется однозначно. С другой стороны,
существуют пары энергетически эквивалентных переходов.
А именно пары переходов типов I IVa и I IV6, II IVa и
II IV6, III IVa и III IV6, IVa IVa и IV6 IV6 имеют оди-
наковую минимальную характеристическую скорость (если
соответствующие исходные орбиты имеют равные элемен-
ты L, £), даже если их оптимальные фазовые траектории
различны. Глубокий смысл этого интересного свойства,
а также факта появления двух решений в переходе типа
II III выявляется в гл. III.
ГЛАВА III
ДОКАЗАТЕЛЬСТВО ИМПУЛЬСНОГО ХАРАКТЕРА
ОПТИМАЛЬНЫХ ТРАЕКТОРИЙ ПЕРЕХОДОВ
МЕЖДУ КОМПЛАНАРНЫМИ, СВОБОДНО
ОРИЕНТИРОВАННЫМИ ОРБИТАМИ
ПРИ ОГРАНИЧЕНИЯХ НА РАССТОЯНИЕ
ДО ЦЕНТРА ТЯГОТЕНИЯ
В данной главе доказывается, что па оптимальных тра-
екториях переходов меду компланарными, свободно ори-
ентированными орбитами при ограничениях на расстоя-
ние до центра тяготения сообщается конечное число им-
пульсов. Доказательство проводится решением вспомо-
гательной задачи, в которой ограничение на расстояние
наложено лишь для точек приложения импульсов или
тяги. Приводятся свойства оптимальных решений во
вспомогательной задаче, достаточный критерий оптималь-
ности. Сначала решается задача оптимизации перехода
между орбитами, не пересекающими заданных ограниче-
ний. Затем определяются оптимальные переходы в слу-
чае, когда хотя бы одна из исходных орбит пересекает
ограничения. Во вспомогательной задаче решение часто
бывает неединствеппым, при этом из всего множества
оптимальных траекторий (эквивалентных по функцио-
налу) выделяются две траектории, реализуемые (и опти-
мальные) в основной задаче. На основании решения
вспомогательной задачи определяются оптимальные пе-
реходы основной задачи. Они все имеют импульсный
характер.
Поэтому на траекториях мпогоимпульсного перехода,
полученных в гл. II, достигается абсолютный минимум
функционала — суммарной характеристической скорости.
§ 1. ВВЕДЕНИЕ ОГРАНИЧЕНИЙ НА АКТИВНЫЕ ТОЧКИ
ТРАЕКТОРИИ ПЕРЕХОДА (ВСПОМОГАТЕЛЬНАЯ ЗАДАЧА)
Назовем сформулированную в главе II, § 1, задачу
основной. Определяющим для нее является ограничение:
ГпНп (0 7'тах • (I-1)
Эту задачу для краткости иногда будем называть зада-
чей (1). Множество переходов между заданными орби-
§ и
ВВЕДЕНИЕ ОГРАНИЧЕНИЙ НА АКТИВНЫЕ ТОЧКИ
239
тами, удовлетворяющих условиям основной задачи, обо-
значим через
Наряду с этой основной рассмотрим близкую задачу,
которую назовем вспомогательной. Она отличается от
основной следующими двумя факторами.
1) Ограничение па расстояние до центра тяготения
накладывается теперь только
траектории, в которых сооб-
щается импульс или прила
гается реактивное ускорение
(тяга). Такие точки, дуги
будем называть активными
точками, участками траек-
тории. Только па них ме-
няется характеристическая
скорость и элементы орбиты.
Пассивные дуги траектории,
на которых тяга и импульсы
не прилагаются и на которых
элементы орбиты, характеря-
в тех точках (или дугах)
Рис. 3.1. Траектория перехода
между орбитами в рамках вспо-
могательной задачи.
стическая скорость не меня-
ются, могут выходить за пре-
делы кольца К {rnlill
<г<г1Пах} (рис. 3.1).
2) Допускается многооборотное движение по орбите,
даже если она незамкнута, т. е. Е 0 *).
Пусть текущая характеристическая скорость получает
малое приращение от w до w + dw (div = | dV | или
div — fdt) в активной точке М (w) на расстоянии г (ш).
Тогда вместо условия (1.1) теперь, во вспомогательной
задаче, будем иметь условие
rmin < Г (w) < Гшах,
О tv
(1.2)
Математически переход от основной ко вспомогатель-
ной задаче означает изменение аргумента: аргументом
движения становится вместо времени характеристическая
скорость (или расход топлива). Фазовыми координатами
*) При Е'^ 0 это предположение имеет чисто математический
смысл, приводя к возможности включения двигательной установки
(ДУ) на любой (восходящей или нисходящей) части орбиты в коль-
це независимо от того, где было предыдущее включение ДУ.
240 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
теперь будут элементы орбиты, например, константы
площадей L и энергии Е, х — (L, £). Траектория движе-
ния определится вектор-функцией х (ш), 0 w
В переменных />, Е движение будет описываться систе-
мой
= г (u) T.f (ш) = /г. (х (ш), и («’)),
4^ = Vr И И- Г( И т.9 (w) ~ //.; (х (w), и (?/•)).
(1-3)
Здесь ср — угол наклона реактивной тяги (импульса или
ограниченного реактивного ускорения) к трансверсали,
= cos ср, S? = sin ср — трансверсальная и радиальная
компоненты единичного вектора вдоль реактивной тяги
(иногда индекс «ср» будем у них опускать),
П + = 1, (1.4)
— радиус, трансверсальная и радиальная компоненты
скорости в активной точке, T# = cos й, S$ = sin 'О’,
й — истинная аномалия,
П + - 1. (1.5)
Заметим, что в уравнениях (1.3) можно считать, без
ограничения общности, что Vr (w) 0. Действительно,
если в некоторой точке
Vr = v'r <0, Vt - Vh г = г', Т - Г, S = S',
то, взяв
Vr - -V'r, S = -S', T = Г, Vt = Vi г = г',
получим те же значения производных /ь, /е, т. е. элемен-
ты L, Е изменятся одинаково при сообщении одного и
того же импульса dw как на нисходящей, так и на восхо-
дящей ветви орбиты. Это соответствует сообщению тяги
в точке орбиты, симметричной с исходной относительно
§ 1] ВВЕДЕНИЕ ОГРАНИЧЕНИЙ НА АКТИВНЫЕ ТОЧКИ
241
/ /2 211 л \ ’>2
линии апсид. Тогда Vr 0, Vr— ( 2Е-------|-----. По-
этому точку на орбите, в которой сообщается тяга, можно
однозначно определить расстоянием г (ю).
Управляющими параметрами будут параметры, опре-
деляющие на орбите положение активной точки и наклон
тяги к трансверсали. Можно взять, например, и (г, ср),
или и (г, £ф, 7\>), или и (й, ср), или и -- (5&,
Sep, Лф). Управление и (w) есть кусочно-непрерывная
вектор-функция. Параметры удовлетворяют един-
ственному условию (1.4). На параметры г, S&, Т&, кроме
(1.5), наложено ограничение, вытекающее из (1.2):
max (гл, r1Ilin) < г (w) < max’1 (sa, r^x). (1.6)
Начальным фазовым состоянием будет точка
х (0) = хп = (Лн, Лн), (1.7)
конечным
X (lZ7K) = Як = (Лк, Лк). (1.8)
Будет рассматриваться задача оптимального по быстро-
действию перехода точки из начального и конечное со-
стояние.
В переменных х = (р, е) движение будет описываться
системой (при е 0, р 0)
х (0) = хн = (рп, ен),
х (п?к) = хк = (/?к, ек).
Иногда в разных частях фазового множества будем ис-
пользовать разные координаты.
Вспомогательную задачу будем называть иногда для
краткости задачей (2) по основному ограничению (1.2).
заменяющему условие (1.1). Множество переходов между
заданными орбитами, удовлетворяющих условиям этой
задачи, обозначим через Л(П).
242 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. Ill
Пусть для перехода между заданными орбитами в
рамках основной задачи обозначено
inf wK =
т(1)
а для вспомогательной задачи, при тех же исходных ор-
битах,
• г (И)
inf ’
7(11)
Каждый переход основной задачи удовлетворяет усло-
виям вспомогательной задачи, поэтому
7(1) 7(П\
следовательно,
(i.io)
Предположим теперь, что найдена оптимальная траекто-
рия /опт вспомогательной задачи, причем для нее
(И) (I)
Если вся траектория этого
т. е. зависимость г (Z) для
(1.1), то
перехода лежит в кольце К,
него удовлетворяет условию
Т™ С TV,
(П) \ (I)
WK > Wk '
Следовательно, в этом случае
(П) (I)
w« =
полученная траектория будет оптимальной и для основ-
ной задачи.
Получена
Теорема 3.1. Если оптимальная траектория вспо-
могательной задачи (2) удовлетворяет условию (1.1), то
эта траектория будет оптимальной и для основной за-
дачи (1).
Этот результат оправдывает рассмотрение задачи (1.2)
при анализе основной задачи. Преимущество вспомога-
тельной задачи состоит в том, что анализ ее провести
легче. Размерность фазового пространства уменьшена,
к тому же можно теперь не пользоваться временем t при
задании ограничений и в формулировке уравнений дви-
§ 2] НЕКОТОРЫЕ СВОЙСТВА ОПТИМАЛЬНЫХ ПЕРЕХОДОВ 243
жения. Кроме того, сообщение импульсов и конечной тяги
описывается в задаче (2) одной системой обыкновенных
дифференциальных уравнений (см. [17], [31] —[37] гл. I).
Далее будет показано, что в большинстве случаев зада-
ния исходных орбит (для всех типов переходов, кроме
IVa IV6 и IV6 IVa) обе задачи имеют одни и те же опти-
мальные траектории, управление на которых осуществля-
ется приложением конечного числа импульсов. Отсюда
будет следовать импульсный характер оптимальных пе-
реходов в основной задаче.
План изложения будет следующим. В § 2, 3 будут рас-
смотрены общие свойства оптимальных решений вспомо-
гательной задачи. Далее, в § 4—8 будут получены опти-
мальные траектории для всех типов переходов задачи (2).
Наконец, в § 9 эти результаты будут использованы для
анализа тех переходов основной задачи, которые не полу-
чены в рамках вспомогательной задачи.
§ 2. НЕКОТОРЫЕ СВОЙСТВА ОПТИМАЛЬНЫХ ПЕРЕХОДОВ
РАССМАТРИВАЕМОГО КЛАССА
Установим ряд свойств оптимальных переходов во
вспомогательной задаче, полезных для дальнейшего (не-
которые из них, как будет ясно по изложению, справед-
ливы и для основной задачи).
Лемма 2.1. Пусть перицентрическиерасстояния ис-
ходных орбит равны между собой (и направление движения
по обеим орбитам одинаково):
^лн = ^*лк = Птп f’max- (2-1)
Тогда на множестве переходов, для которых
г (ш) > г15 (2.2)
оптимальным будет одноимпульсный переход, осуществляе-
мый приложением тангенциального импульса в общем пе-
рицентре исходных орбит:
г (w) = rn (ш) = О, (ш) = sign (£к — Ен), (2.3)
при этом
rn (w) гг (2.
Доказательство. Возьмем в качестве фазо-
вых координат элементы Е, гл. Тогда для производной
24zi ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
dEldw справедлива оценка
| dEldw | = | V cos а К V < (2Е + (2^^/^))^,
здесь а — угол между векторами тяги и скорости. Сле-
довательно, суммарная скорость wK удовлетворяет усло-
вию
wK > I (2ЕК + (Зцгр/Г!))’^ — (2А’ц + (гцтр/г!))'^ | --
(получаемому из предыдущего интегрированием). Этот
минимум inf wK достигается только при управлении (2.3),
которое и будет осуществлять оптимальный переход (2.4).
Граничные условия (2.1) выполнятся в данном случае
автоматически.
Замечание. Условие (2.2) будет выполнено, если
при переходе наложено ограничение
гя (ш) > Гр
Лемма 2.2. Пусть для исходных орбит {направле-
ние движения по ним может быть как одинаковым, так и
различным)
^ан — ГаК “ ^2’ rmin 2 7'тах- (2.3)
Тогда на множестве переходов, для которых
Г (to) < г2,
(2.6)
оптимальным будет одноимпульсный переход, осуществля-
емый приложением апсидального импульса в общем апоцен-
тре исходных орбит:
г (w) = г2, (w) = О, Т? (w) =sign (LK — Ln), (2.7)
для него
ra (w) г2. (2.8)
Доказатс л ь с т в о. Возьмем за фазовые коор-
динаты элементы L, га. Тогда для производной dLldw
получим оценку
| dLldw | = | гТ | г г2.
Следовательно,
2ун)/г2 _ - inf wE.
Минимум inf wl{ достигается при управлении (2.7), и
только при этом управлении. Граничное условие (2.5)
автоматически выполняется в данном случае. Поэтому
указанный одноимпульсный переход (2.7), (2.8) и будет
оптимальным.
§ 21 НЕКОТОРЫЕ СВОЙСТВА ОПТИМАЛЬНЫХ ПЕРЕХОДОВ 245
Замечание. Условие (2.6) будет выполнено, если
при переходе будет наложено ограничение
(ip) < г2.
Из приведенных лемм следуют свойства функций
rn (w), ra (zz?) в отношении максимумов и минимумов на
них.
Л е м м а 2.3. Пусть для некоторого перехода на от-
резке w1 w ш2 будет
Тогда, если функция гп (ш) внутри этого отрезка дости-
гает максимума, то данный переход можно изменить,
уменьшив конечную характеристическую скорость.
Действительно, пусть существует некоторый отрезок
[z^i, zz^L > и\, ш> < w2, на котором
г л (^i) = (^г) Гр
г л М > гл W, ^2).
Обозначим орбиты при w — w1 и w = w2 через Ди Т2
соответственно, Vnl, Рл2 — их перицентрические скоро-
сти. Рассматривая орбиту 7\ как начальную, а Т2 — как
конечную, оптимизируем переход между этими орбитами
в соответствии с результатами леммы 2.1. Оп будет осу-
ществляться на отрезке
С С ! | Ил2 — Рлз | < ш2.
Функция 7\л (ш) будет на нем постоянна, см. (2.4). Оставив
без изменения последующий переход между орбитами
Т2 и Тн, получим утверждение леммы.
Пусть Dr — множество допустимых переходов между
заданными орбитами, каждый из которых обладает сле-
дующими свойствами:
а) если множество {iv\ /'min (ш) С Гтах} не-
пусто, то оно есть точка пли один отрезок, причем если
Ища ^лн Пшп 'лк Fmax, TH ^л
^тах* 0 ,7/’ О'н' если 0 Глц ^’rnin* ^niin ^лк
< Гтах, ТО Гл (ш) < /’tniri llJUl U' < гл (w) = [r,Ui„, Пим!
246 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
при ш ЕЕ шк], если
Г лн < Г min, Г лк Г min?
ТО Гл (w) < Tmin, 0 < W < Шк,
б) на этом отрезке функция гл (ш) монотонна или до-
стигает один раз минимума (внутреннего).
Поясним свойства множества Л1. Условие а) означает,
что не может быть ситуации, когда два отрезка, па кото-
рых rmin гл (w) <; rmax, разделены интервалом, где
гл (^) < rmin. При этом возможны три случая. Если пе-
рицентры обеих исходных орбит лежат в кольце, т. е.
rmin < Глн(к) < rmax, то и для любой оскулирующей
орбиты перицентр не выйдет за пределы кольца. Если же
для одной из исходных орбит, папример начальной, будет
< rmin, то весь переход можно будет разделить на две
части: на начальной будет rn (ip) < Гщт, на конечной —
rmin ^л (^). Наконец, если для обеих исходных орбит
< rmin, то и для любой текущей орбиты перицентр не
войдет внутрь кольца. Условие б) означает, что внутри
отрезка, на котором rmin гл rmax, функция
гл (w) не может достигать максимума.
Из непрерывной функции гл (w), из лемм 2.1, 2.3 легко
следует следующий результат.
Лемма 2.4. При оптимизации переходов между ор-
битами во вспомогательной задаче достаточно рассма-
тривать множество переходов Dr.
Рассмотрим теперь функцию ra (w).
Лемма 2.5. Пусть для некоторого перехода между за-
данными орбитами на некотором отрезке w± w w2
будет
rmin < ra (ш) rmax»
Тогда, если функция ra (ш) внутри этого отрезка дости-
гает минимума, то данный переход можно изменить,
уменьшив конечную характеристическую скорость wK.
Действительно, если функция ra (w) на некотором от-
резке, лежащем внутри отрезка [ipv ир>], достигает мини-
мума, то
га (^1) = га (и>г) = г2,
ra (W) < Г2 при W е (Шх, ipj).
Пусть апоцентрические расстояния орбит Тх и при
w = Wi и w — ир> соответственно равны Еа1 и Va2. Опти-
§ 3]
О ДОСТАТОЧНОМ УСЛОВИИ ОПТИМАЛЬНОСТИ
247
мизируем переход между орбитами 7\ и Т2 в соответствии
с леммой 2.2 и замечанием к ней. Он станет одноимпульс-
ным, будет осуществлен на меньшем отрезке
< W < W2 = + I Va2 — Val I < wi
Функция ra (ш) на нем постоянна, см. (2.8). Остальной
переход Т2 -> Тк не меняем, тогда весь переход Тп ->
будет осуществлен при меньшем значении скорости =
= Шк — (г^2 — • Лемма доказана.
Пусть теперь D2 — множество переходов между дан-
ными исходными орбитами, каждый из которых обладает
следующими свойствами:
в) если множество {w: rmin га (^) Гтах} не-
пусто, то оно есть отрезок или точка, причем если
Ган G [гmin» Гшах], ГаК £= iTmin, Гтах1, ТО Г& (м>) ЕЕ
& [rmin, Гтах], 0 < W < Ши, еСЛИ ГаН I^min, Гтах1,
$ак < $тах, ТО Га (ш) [rmin, Гтах] При 0 < W < U\,
(^) < 5тах При < W < Шк, ССЛИ $аН < $тах,
% к < $тах, ТО 5а (w) < Smax, 0 < W < WK.
г) на этом отрезке функция га (w) монотонна или до-
стигает один раз внутреннего максимума.
Свойство в) переходов D2 относительно функции ra (w)
аналогично свойству а) множества D± относительно функ-
ции гя (w). Свойство г) означает, что внутри отрезка, на
котором rmin Га (w) гшах, фуНКЦИЯ Га (ы) не МОЖвТ
достигать минимума.
Из непрерывности функции sa (w), лемм 2.2, 2.5 следует
Лемма 2.6. При оптимизации переходов во вспомо-
гательной задаче достаточно ограничиться рассмотрением
множества D2.
Анализ оптимальных траекторий надо, следовательно,
проводить на множестве D± Q D2 переходов, обладающих
свойствами а) — г) множеств D± и D2.
§ 3. О ДОСТАТОЧНОМ УСЛОВИИ ОПТИМАЛЬНОСТИ
ТРАЕКТОРИИ В ЗАМКНУТОМ МНОЖЕСТВЕ
ФАЗОВОГО ПРОСТРАНСТВА
Существует ряд критериев оптимальности в форме до-
статочных условий. Это условия Веллмана, Болтянского,
Кротова и др. ([1] —[5] и др.). Ниже будет применен кри-
терий оптимальности в форме Веллмана — Болтянского,
248 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. Ш
несколько измененный применительно к траекториям рас
сматриваемого типа, лежащим в замкнутом множестве фа-
зового пространства. Для определенности будет рассмо-
трен двумерный случай, нужный для дальнейшего.
Пусть G — открытое связное многкество на плоскости,
Г — его граница, G = G U Г — замыкание G, хк GE G —
фиксированная точка. Граница Г состоит из нескольких
гладких кусков (дуг) Гг-. Если xt — соответствующие пара-
метры на граничных дугах, то
® = Ч>{ Сч)> Til Oi < Т<2,
— уравнения_этих дуг.
Пусть в G осуществляется управляемое движение
х (£), х (t) е= G, 0 t /к, я (0) = Хн, х (£к) = як,
ян ф #к- Аргумент t условно будем называть временем.
Траектория х (t) переводит фазовую точку из начального
состояния ян в конечное состояние як. Минимизируемый
функционал — время перехода iK. Движение в G проис-
ходит в соответствии с системой уравнений:
dxldt — xt = f (я (i), и (£)), и (£) ЕЕ U (я (£)), (3.1)
здесь и далее штрихом будет обозначаться производная по
аргументу (или компонентам векторного аргумента), ука-
занному в нижнем индексе. При этом движение по гра-
ничной дуге rf будет описываться уравнением
Ху — фг (Xi (/), и (£)), и (t) е Ui (Xi (£)), (3.2)
порождаемым (3.1). Функции / (я, и), фДТг, и) непрерывны
по совокупности аргументов, функции и (7) принадлежат
некоторому допустимому классу измеримых функций,
например, кусочно-непрерывны, U (я), Ui(xi)—ограничен-
ные замкнутые множества. Рассматривается управляемый
процесс, обладающий по условию следующим свойством:
а) Если некоторая допустимая траектория я (£),
0 t имеет на границе Г множество, более богатое
чем конечное число отрезков, то при любом е 0 управ-
ление можно изменить так, что новая траектория х (/),
0 <3 £ (0) = я (0), х (£к) = я (£к) останется допу-
стимой и будет иметь на границе Г не более чем конечное
число отрезков, причем
?к + £•
(3.3)
О ДОСТАТОЧНОМ УСЛОВИИ ОПТИМАЛЬНОСТИ
249
§ 3]
Для данного управляемого движения будем отыскивать
оптимальные по быстродействию траектории перехода из
точек множества G в заданную конечную точку хк ЕЕ G.
Справедлива следующая теорема.
Теорема 3.2. Пусть на множестве G построена
непрерывная функция со (х), х G, такая, что
со <Хк) = 0, (3.4)
в G функция, со (х) непрерывно дифференцируема по х,
причем для любой точки х ЕЕ G
sup сох (.?)/ (х, и) = 1, (3.5)
u(=U(x)
внутри граничных дуг функция со (х (rf)) непрерывно
дифференцируема по причем для любого значения
<С тг- <С тг*2>
sup (я (ti)) Ipi (Тъ и) < 1. (3.6)
Пусть для любой точки хп ЕЕ G существует допустимая
траектория я* (t), 0 t ZK, для которой tK = —со (ггн),
х* (0) = я* (*к) = #к- Тогда эти траектории х* (Z)
осуществляют оптимальный по быстродействию пере-
ход в G.
Доказательство будет аналогичным доказательству
В. Г. Болтянского достаточного признака оптимально-
сти [5], будут лишь дополнительно рассмотрены особен-
ности, связанные с движением по границе допустимого
множества.
Сначала докажем вспомогательную лемму.
Лемма 3.1. Для любой допустимой траектории
х (Z), переводящей точку из начального состояния хн в ко-
нечное Хк и имеющей конечное число дуг на границе Г,
справедливо неравенство
ZK > — со Сгн). (3.7)
Доказательство. Весь временной промежу-
ток [О, ZK] разбивается на N отрезков Ij — [t^j, t2j],
] ••= 1, 2, . . ., N, причем
/ц — 0, t2j = ^i(j+i), • • •> ^2^ ~ ^к- (3.8)
250 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
Внутри одних отрезков траектория лежит в области G,
на других — проходит по граничным дугам 1\. В первом
случае со (х (/)) будет дифференцируема по t почти всюду
внутри соответствующего отрезка 7/, < t < Z2,, при-
чем, в силу (3.5), сщ (#(/)) = (я (0)/ U (/), и (£)) 1.
Следовательно, изменения функции со (х (£)) на данном от-
резке удовлетворяют условию
W (^27) 03 (^lj)
(3.9)
Аналогично, во втором случае, для дуги траектории на
границе 1\, функция со (т;- (/)) будет дифференцируема
почти всюду внутри отрезка t1}‘ < t t2j, причем,
в силу (3.6), со) (Т; (/)) = <xf (0№ (Ту (<), и (t)) < 1.
Интегрируя это неравенство, опять получим условие
(3.9). Так как
N
СО (ZK) — со (0) = 21“ (*2>) — ® ((1;)] -
7=1
то, суммируя условие (3.9) с учетом (3.8), получим
со (хк) — со (х’н) < tK.
Отсюда и из (3.4) следует (3.7).
Рассмотрим теперь произвольную допустимую тра-
екторию х (t), 0 t /к, проходящую на множестве G.
Она или уже имеет вид, используемый в лемме, или,
в силу свойства а) управлений, может быть приведена
к такому виду: £ (/), 0 7К,—с уменьшением или
сколь угодно малым увеличением функционала. Тогда
Гк > —со (^н), — е > —со (хн) — е. В силу про-
извольной малости е 0 отсюда следует (3.7).
На траекториях д?* (/) достигается равенство в усло-
вии (3.7), поэтому на них реализуется точная нижняя
грань времени перехода в конечную точку:
— со(^н) = inf_£K = 4
Теорема доказана.
Замечание. Если па границе 1\ непрерывно-диффе-
ренцируема не только функция со(Т;), но и функция со (я),
то выполнимость свойства а) на пей можно было бы не
предполагать.
§ 3J О ДОСТАТОЧНОМ УСЛОВИИ ОПТИМАЛЬНОСТИ 251
Приведенная теорема может служить для проверки на
оптимальность некоторого класса траекторий в G. Для вы-
яснения вопроса о единственности этих оптимальных тра-
екторий можно использовать, например, следующий ре-
зультат. Пусть известно, что в G для любой начальной
точки х ЕЕ G существует оптимальная траектория х* (Z),
О <4 t ЕЕ G, ей соответствует допустимое управление
н* (t). Обозначим со (х) — ti{ (л), где /к — минимальное
время перехода из точки х в конечную точку хк. Предпо-
лагаем, что функция со (х) обладает указанными выше свой-
ствами непрерывности, непрерывной дифференцируемо-
сти. Пусть х* (/) — произвольная оптимальная траекто-
рия перехода пз точки в точку причем на интервале
(Zv t2) она проходит в области G.
Теорема 3.3. Для оптимальности траектории
х* (Z) необходимо, чтобы почти всюду на (Z1? Z2) было вы-
полнено условие
со'х (** (Z))/ U* (0, (0) =- 1, х* (0 G. (3.10)
Доказательство аналогично доказательству теоремы 1.1
Веллмана — Болтянского [5]. Пусть I — правильная точ-
ка управления н* (/) (см. [49], гл. 1), для нее
Ах = / (х* (t), и* (/)) Az + о (AZ). (3.11)
Сдвигаемся по траектории от точки х* (Z) к точке х* (Z) +
+ Ах. В силу оптимальности траектории получаем
— со (^* (Z)) AZ — о (х* (Z) Ах).
Функция (о (х) непрерывно дифференцируема по х, по-
этому
(О (х* (/) + \х) - ® (х* (<)) -г- Их (х* (/))Дж + 0 (|| \х II).
Тогда
AZ — (Dx (z* (j))Ax -г о (|| Ах ||) -= 0.
Отсюда и из (3.11), при At -> 0, следует (3.10).
Следствие. Пусть в некоторой окрестности точ-
ки т G G уравнение
ох (х) f (х, и) -- 1, и ЕЕ U (х),
имеет единственное решение и* (.т), причем оно является
непрерывным по х, а функция / (х. н* (х)) удовлетворяет
252 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. Щ
условию Липшица
II / (х, и* (х)) — / (х. и* (х')) || < к || х — х' ||.
Тогда через точку Т проходит единственная оптимальная
траектория х* (/).
Действительно, оптимальная траектория х* (/) в ок-
рестности точки х описывается системой (3.1). в которец
управление w* (/) удовлетворяет уравнению (3.10). т. о.
к* (/) - w* (х (/)). Но система
Х( = / (х (/), й* (х (Z)), х (?) = .г,
имеет единственное решение на некотором интервала
Г — А/ < I <f 1 /\i [6]. Поэтому через точку г прохо-
дит единственная оптимальная траектория.
§ 4. ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА I.
НЕ ПЕРЕСЕКАЮЩИМИ ЗАДАННЫХ ГРАНИЦ
4.1. Анализ возможного характера
оптимальной траектории
В данном случае и начальная, и конечная орбиты не
выходят за границы кольца:
/‘min ^’лн z’cch Лпах,
^’min 7 лк ^ак Anav
На основании лемм 2.4, 2.6 при оптимизации перехода
можно считать, что оскулирующая кеплеровская орбита
будет всегда лежать в кольце К:
T’min < l'n (w) < Га (w) < Ггпах, 0 < W < WK. (4.1)
Поэтому в течение всего перехода точка не выйдет за пре-
делы кольца, будут выполняться условия (1.1). Управляю-
щий параметр r(w) удовлетворяет, в силу (1.6), (4.1), усло-
вию
гп М < Г М < Га (^)-
Множества 76) и 7<п) будут совпадать. Траектория, оп-
тимальная во вспомогательной задаче (2). будет оптималь-
ной и в основной задаче (1).
Согласно лемме 2.6 при оптимизации можно ограни-
читься рассмотрением переходов, для которых функция
§ 4] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА I 253
га (w) монотонна пли имеет один внутренний максимум.
В первом случае достаточно рассмотреть оптимальный
переход между исходными орбитами на множестве тра-
екторий, для которых
>'а (w) < max (/•„,„ raK). (4.2)
Рассмотрим сначала в п. 4.2 этот случай. Затем в п. 4.3
рассмотрим случай, когда допускается неравенство
га М > max (raH, га„).
4.2. Анализ траекторий с монотонной функцией га(м)
Не ограничивая общности, будем считать, что
7’ан 7’ак- (4-3)
В первую очередь разберем переход между орбитами,
для которых
7*inin GcH 7‘лк, (4-4)
затем — случай
7 7’лн ган С (^•’))
Покажем, что при условиях (4.2), (4.3) оптимальным
будет двухимпульсный переход лп -> ак. Для него пер
вый импульс (0 w Wj) — ускоряющий, сообщается
в перицентре начальной орбиты, получается промежуточ-
ная орбита, перицентрическое расстояние которой равно
начальному 7’л11, апоцентрическое — конечному расстоя-
нию гаК. Второй импульс (w1 w wK) сообщается
в апоцентре этой орбиты, он изменяет перицентрическое
расстояние до конечного/’лК- В случае (4.4) он будет уско-
ряющим, в случае (4.5) — тормозящим:
Г„М = г (w) = rnn, T9(w) = 1,
0< w < wr (ra (и\) = raK)> (4-6)
ra (w) = r (w) = 7-aK, (w) = sign (r„K — ГяН),
wi w ‘C u;k- (4-7)
4.2.1. Рассмотрим сначала вариант
Гп!1 < /’лк- (4.8)
Обозначим через G следующее множество в фазовой
плоскости {гл, 7’а}? на котором надо найти оптимальный
254 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
переход между заданными орбитами (см. рис. 3.2):
7’min
а
(4.9)
Сразу отметим, что в
Рис. 3.2. Фазовые мно-
жества в плоскости
данном случае М.8) рассмотрение
можно ограничить траекториями,
для которых
гя (w) < гпк.
(4.10)
Действительно, функция гл (w)
не имеет внутренних максимумов,
гл (0) /л (wK). Отсюда следует
(4.10). Поэтому для оптимизации
перехода в G при условии (4.8)
достаточно вместо G рассмотреть
его подмножество G± (см. рис. 3.2):
(4.11)
Его границу Г разобьем па гладкие куски:
Г1 — {/*л — Гццп, /’min 7’а 7’ак}>
Г*2 — {7’а — гаК' 7’min 7'л 7’лк}>
Г3 {7 л 7 лк? 7 лк 7ак}?
Г*4 — — 0, /’miи Р 7'лк } •
Через Gr обозначим открытое множество GJT -= {rmin с
< гп < глк, /*л < га < гак}- Движение точки в фазовой
плоскости {L, Е} удовлетворяет системе (1.3), в перемен-
ных (р, е) при е 0, р > 0 — системе (1.9).
Обобщение этих уравнений на случай скользящего
режима [3] очевидно.
Проверим, что для данного управляемого движения
в Gr выполняется условие а). Из лем^м 2,1—2.3 следует,
что справедливы следующие утверждения, доказывающие
свойство а) для дуг Гг, Г2, Г3.
1. Если в двух точках w и w" траектория выходит
на границу {гл = rmin}, то оптимальный переход между
соответствующими орбитами Tf и Т" совершается с по-
мощью одного апсидального импульса в перицентре, при
§ 4] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА I 255
ЭТОМ
(w-’) = rmln*
w' W w” w".
Отсюда следует, что па границе Г\ может быть лишь один
отрезок.
2. Если в некоторой точке w' траектория выходит на
границу {га — гак}, то дальнейший оптимальный пере-
ход в конечную точку совершается с помощью одного
апсида л ьного импульса в апоцентре, при этом
ra (ir) = z’cck-
Поэтому на границе Г2 и границе Г5 {га =- гаК, глН
гак} может быть лишь один отрезок (замечание
относительно границы Г5 относится к случаю (4.5)).
3. Если траектория х (w) из области Gx выходит на
границу т\ — глК, то в дальнейшем переходе должно быть
Гл (w) = Гяк,
иначе функция гя (w) будет иметь внутренний максимум.
Поэтому оптимальная траектория может иметь не более
одного отрезка (или двух, если гяН = гяК) на границе Г3.
Лемма 4.1. Для любой допустимой траектории
х (w), 0 w u’K, любого 8 > 0 существует допустимая
траектория х (w), 0 w wK, такая, что х (0) = х (0),
X (wK) X (шк), ё (w) > 0 при 0 < W < и Sk<Cwk4-8.
Доказательство. Пусть х (w), w Ez I =
= [0, wK] — произвольная траектория перехода. Для
нее и (w) — управление, R = {го: е (w) — 0} — множество
точек с нулевым эксцентриситетом. Пусть сначала 8н^>0,
ек > 0, шах е (го) — е* 0. Возьмем произвольное ма-
гу
лое число 8, 0 < 8 < min (ен, ек). Тогда Р = {w\ 0
е (го) < 8} — не более чем счетное множество интер-
валов Ц (w'i <w<. zz/-), покрывающих R, причем если
ц/\ — w'i — длина интервала 7\. то
2 "х11 к •
На множестве ИР будет е (w) > е > 0. Построим новую
траекторию перехода х (w), для которой ё (w) > 8 > 0.
Пусть w'i w w'i — отрезок 7\. па его концах L (w'i) =
= L (w'i) = Li, e (w'^ = e (w'i) = 8. Без ограничения
256 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
общности можно считать, что L] L\. На интервале /•
заменим в управлении и (w) функцию О' (и?) новой О (w)
так, чтобы
de/dw ~ sin й -|- ^1 —т—^ Т cos fl* е ~ О
(если управление на О имеет вид скользящего режима [3],
то указанным образом выбираем каждое базовое управ-
ление й<>)). Тогда на отрезке 7/ будет ё (?г) =- е. При этом
можно считать, что функция L (w) монотонна, например,
Li L (w) <1 Li. Поэтому, в частности, весь новый пе-
реход осуществляется в кольце, выполняется ограниче-
ние (4.1). Элемент Л к моменту w'i будет несколько отли-
чаться от Li. так как теперь изменилась производная
dLldw. Оцепим изменение dLldw (с помощью (1.3)):
d (- -^) I dw = 77(1 + е cos 0),
7’ Т ______ rpz (<7е) cos -ft — cos-О’
[ Я COS -0 1 F С COS ft (1 _!_ е cos ф) _|_ е cos Ф)
Нгр/2^) ^(-НГр/О 2 2 __
div dw < 6 (1 — е)2 ' 8 (l-eo)2
— е е0.
Отсюда получим
В момент w'l ' ' w'i {w’i < и\. если равенство L L'l дости-
гается до момента w'i) получена орбита Г-. для кото-
рой е- е, | L'l — El | < С2е (?/Д — w«), С2 — константа.
Вследствие произвольной малости е орбита Т\ близка
к Ti. Осуществим теперь хомановский переход между
орбитами Ti и Ti с помощью двух малых импульсов с сум-
марной величиной Дг/’j, при этом будет
ё (?л?) > е,
С3 | Li — Li \ = (w\ — w'i)
и выполняется ограничение (4.1).
§ 4] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА I 257
Таким образом, переход между орбитами 1\ и Ti, осу-
ществляемый по траектории х (ie), заменили другим пе-
реходом, для которого е > е. он удовлетворяет наложен-
ным ограничениям, реализуется на отрезке w
< «4 + (ir'i — ir'i).
Проведем аналогичную процедуру со всеми отрезка-
ми I,. Общее увеличение суммарной скорости составит
2 Aw; < С4е 2 ("'1 ~ w’i) < С48Н'к.
Для новой траектории получим
’"к < «к и- С4Еа-к - (1 -|- С4е>к
(4.12)
Аналогично можно доказать утверждение (4.12) и в слу-
чае ен = 0 (ек = 0). Па проварьированной траектории
будет е — 0 лишь при w -- 0 (го ~ wK). Однако в послед-
нем случае, при наличии отрезка е (ы) = 0, легко дока-
зать более сильное утверждение: переход е (го) ~ 0 менее
экономичен (по характеристической скорости ггк), чем
двухимпульспый хомановский переход, для которого
е = 0 лишь в начальной и конечной точках. Этим доказана
справедливость леммы и выполнимость свойства а) управ-
ления, постулированного при формулировке теоремы
о достаточном признаке оптимальности.
Перейдем к анализу функции со (гг). В качестве такой
функции рассмотрим характеристическую скорость двух-
импульсного перехода лп ак. взятую со знаком минус:
со (х) = —(х),
через R обозначено конечное апоцептрическое расстоя-
ние гак, УаК — скорость в апоцентре конечной орбиты.
? В-В- Ивашкин
258 ИМПУЛЬСНЫЙ ХАРАКТЕР оптимальных переходов [ГЛ. III
В конечной точке со (л;к) = 0. Рассмотрим функцию
и) = w). Учитывая (1.3), получим
Ж = сок/ь + + <ok [VtT + VrS). (4.15)
Здесь и для дальнейшего полезна
Лемма 4.2. Если со (х) = со (L, Z?), то функция
(х. и) -- ($xf (х. и) максимальна пои - (г, ср) при одном
из крайних значений допустимого диапазона (1.6) расстоя-
ния г.
Определим max,4#':
S, Т
К = ТПт +5Я«<(Ят |-/П'),% 1
, , , ? (4.16)
Пт = (Or/ + meL/г, 11$ = &еУг. J
Этот максимум имеет место при
И- Т1т
S = —, т = —-—Чгт- ,
причем
шах.1^ = [2сок (Йсок + кл-О/,) |- (сок)2 г2 + (сок)2 2|Лгр/г]
S, т
Подкоренное выражение образует вогнутую функцию г,
которая может быть максимальна лишь при крайних
значениях расстояния г.
В данном случае, для перехода типа I I максимум
будет иметь место при
?• гп - р/(1 ! е)
или
?• ra - p/(i — е).
В обоих вариантах будет
Гг = 0, Hs = 0, 5 = 0, Г = ±1 = sign Нт,
М = \НТ\ = ТНт,
L' — Т\(а)7\ Е' — Vп(а)Т, р' = 2
д^г"лТ'
“'-2/Ч J:
г --- Г-,
Г = г,-
$ 4] ОПТИМАЛЬНЫЙ переход между орбитами типа 1 259
Для определения max SK рассмотрим два выражения:
г, Я, т
11Л - I Нт ('• /л) | - | о>Ья -I- «ГЫгп |,
Яа | IIv (/• - га) | = | о) га -|- |.
Определим производные соЕ, сой (при е 0):
Е7 /О/И-Згл)1 L
Рг г'-J2 j ^гр'''- ’
1% Н (R3rJ 11
Если г — 7*д, Ж = IIя, то
Следовательно, при минимальном расстоянии г =--- гя
max.^f (г - г-) — 1, 0^")
S, т
он достигается при
8 0, Т - 1. (4.18)
Пусть теперь г 7-а, 3% На. В этом случае, после не-
больших преобразований, получим
11т -= [(2Я//4- е - 3]/( 1 - е),
0 < е < е2 < 1,
А - (2 — е.,)/1 -I- е.г.
Так как dA/de., — Зе2/2|/Ч + «2 < 0, то максимум
Нт соответствует минимальному значению е2. При
е= е2 (ra = Н) будет Н а ----- Т 1. Минимальное значение
Нт соответствует предельному значению е2 = 1, при этом
Нг - [(2/2//Г+7) + е - ЗП(1 - ё).
Оно превышает —1 при е<1. Поэтому
-1 <НТ (г = ra) < 1 (4.19)
при е < е2, га < ]{. Из (4.17), (4.19) следует, что в
2*
260 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. Ш
области
maxG)x/(x, и) = 1,
г, S, 7’
(4.20)
он достигается при приложении ускоряющей тяги в пе-
рицентре (вдоль скорости):
г G0 rn (w), S (tc) - 0, Т (ю) - 1. (4.21)
Рассмотрим изменение функция со (х) па границах 1\.
На границе га = гаК эта функция вырождается в следую-
щую:
(О (/ я, / а /?) I а I сек?
так как здесь р2 = р, е2 е, Va = (ргр/р)12(1 — ё).
Возьмем за элементы системы L. га. тогда, в силу условия
га — гак = Н, элемент L будет параметром на грани-
це Г2, и получим
(IV Г
Ж = ul/l = -rfrT = -i- 7Х 1-
aij ?ак
Максимум равный единице, mieeT место при г — га --
— гаК, Т = 1, т. е. при сообщении ускоряющей тяги
в апоцентре. Аналогично, па других границах будет
Функция со (х) удовлетворяет, таким образом, усло-
виям теоремы 3.2. Рассмотрим траектории х* (tv) двух-
импульспого апсидального перехода (4.6), (4.7) вида
Ли —> СХК-
Для любой начальной точки в G± фазовая траектория та-
кого перехода идет полностью в G± (см. рис. 3.2). Она
состоит из двух дуг: по первой дуге (гл — гян) точка идет
до границы га гак, по второй дуге (га = гак) фазовая
точка доходит до конечной точки х^. Если е{1 J> 0, ек 0,
то вся траектория лежит во множестве е 0. Если ен — 0
или ек = 0, то лишь в соответствующих граничных точ-
ках траектория лежит па границе е — 0. Для такого пе-
рехода суммарная характеристическая скорость
— (^л2 Tiii) а*’) “ ^н)•
Из^теоремы 3.2 следует, что эти траектории оптимальны
в G±) где 7яН гяК. и, в силу первоначального замечания
§ 4] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА I 261
о связи оптимальных решений в G и (для случая (4.8)),
они оптимальны в G, т. е. при ограничении (4.2).
Далее из единственности решения и* (х) уравнения
max .%" (rr, и) = 1 следует, что данные оптимальные тра-
ектории единственны в рассматриваемой задаче.
С л е д с т в и я. 1. Если гл11 = /-лИ, то вся оптималь-
ная траектория идет по границе гп /’лК. При / лИ < /--1;
оптимальная траектория выходит на эту границу лишь
в конечной точке.
2. На оптимальной траектории в G эксцентриситет
е = 0 может быть лишь в начальной точке (если — 0)
или в конечной точке (если = 0). _
4.2.2. Случай гян > гяк. Обозначим через G2 следующее
подмножество G (см. рис. 3.2):
Т’лк 7 л: 7 аК) Ос а Ок* (4.22)
Его граница состоит из кусков: Г3 — {/я = 7\к, Oik
а Ок}’
Г5 {/ а О К’ Ст к ? л Ох. 7 а к },
Гб = {е =- о, 7-лк < р < 7-ак}.
По предыдущему следствию 1 оптимальная траектория
из точки, лежащей на Г3, идет ио этой границе в конеч-
ную точку х^. Поэтому в данном случае оптимальная тра-
ектория, начинаясь во множестве 6>, не выйдет из него.
Поэтому все рассмотрение можно провести в G2, этого до-
статочно, чтобы определить траекторию, оптимальную в G:
inf г/’к = inf ггк, г-н>Гкк- (4.23)
x(4-)GG2
Решение задачи проведем аналогично предыдущему
случаю. Свойство а) управления доказано выше. Берем
функцию Веллмана в следующем виде:
® (*) = ]/ (1 +е) - 21/дг -I- 0) = °-
Функция со (х) непрерывно дифференцируема в и на
границах Г3, Г5. Можно показать, аналогично тому, как
это сделано выше, что в области выполняется условие
(4.20), причем максимум в любой точке х ЕЕ С2 достига-
ется при единственном управлении (4.21). Па границах
262 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. Ill
также Ж (т, и) 1, причем при га ?*аК будет <7^ — 1,
если
/*(?/’)=- га к- Г(гг)--=—J,
т. е. при сообщении тормозной тяги в апоцентре.
Функция со Ст) обладает, таким образом, нужными свой-
ствами.
Траектории двух импульсного перехода лц ак (4.6),
(4.7) в данном случае осуществляют перевод точки из
любого начального состояния в множестве G-2 в конечное
состояние. Для этого перехода сумма импульсов равна
WK =- —(О (х„).
При сообщении первого импульса (если га11 < ган)
точка движется в фазовой плоскости по тсуге гп -- гяН до
дуги га — 7*аК, далее, при сообщении второго импульса
(если 7*лн 7,лН) точка движется по граничной дуге
1 а ~ к •
В силу теоремы 3.2 эти траектории оптимальны для
перехода в G2 и, в соответствии с (4.23), оптимальны во
всем множестве G при условии (4.2). Кроме того, из един-
ственности решения и* (х) уравнения
Slip СЩ (x)j (тг. и)=- 1
и
для любого х ЕЕ С2 следует, что эти траектории представ-
ляют единственное решение рассматриваемой задачи опти-
мизации.
Следствия. 3. Если гак = 7’шах, то, в силу (4.9),
оптимальная траектория будет удовлетворять условию
(4.2). Она поэтому будет только что рассмотренной тра-
екторией двухимпульспого перехода лц ак.
4. Пусть, в отличие от (4.3), будет гап 7> гаК. Тогда
оптимальный переход с начальной по конечную орбиту
будет обратным только что рассмотренному, вида ап --> лк.
4.3. Анализ траекторий с нелоиотонной функцией ra(w)
Пусть радиус внешней границы кольца превышает
эпицентрические расстояния исходных орбит, /’1Пах 3>
шах (/-аи, /ак). Снимем ограничение (4.2), тогда апо-
центрическое расстояние оскулирующей орбиты сможет
§ 4] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИЛА I 2G3
превышать исходные значения /’аП, /-аК, удовлетворяя лишь
ограничению (4.1). Тем самым мы фактически включим
в рассмотрение траектории перехода, для которых функ-
ции го (?о) имеют один внутренний максимум.
Рассмотрим множество траекторий, которые осущест-
вляют переход между заданными орбитами и для которых
/(„ах > шах ra (и-) --- /’ > шах (ган, гаК) -- 11. (4.24)
Фиксируем сначала R и определим среди этих тра-
екторий ту. для которой конечное значение характери-
стической скорости минимально. Пусть Т* — некото-
рая промежуточная орбита произвольной траектории
этого множества, для которой апоцептрическое расстоя-
ние равно /д. Переход Тн Т* осуществляется в силу
(4.24) па множестве {га га}. Оптимизируем ею. В со-
ответствии с результатами предыдущего раздела 4.2 этот
переход должен быть двухимпульсным лп—>-а*. После
сообщения первого, ускоряющего импульса получается
орбита 7\, для которой гя2 га2 = Примем ее
теперь за орбиту 71*. Дальнейший переход 71* —ZK,
осуществляемый опять па множестве {/а 7’а}, будет так-
же двухимпульсным вида -> лк. Весь оптимальный
переход 7"п -> будет трехимпульсным, он осуществля-
ется по схеме
ОТ jj —ОС 2 —Л к.
В гл. II, § 2, рассмотрены такие решения и показано, что
должно быть
г* = max (raII, raK)
или
га ~ Г1Па^.
Поэтому оптимальными траекториями переходов между
орбитами типа I будут рассмотренные в гл. II, § 2, двух-
импульсные траектории вида
Лн 0Ск
и трехимпульсные вида
ОТ jj —1 л к.
В частных случаях они могут выродиться в одноимпульс-
ные. Как уже указывалось, эти траектории будут опти-
мальны и во вспомогательной, и в основной задаче,
264 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. ТП
§ 5. ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА III.
ПЕРЕСЕКАЮЩИМИ ВНЕШНЮЮ ГРАНИЦУ КОЛЬЦА
5.1. Конкретизация ограничений на фазовые координаты
и управление
Пусть начальная и конечная орбиты будут орбитами
типа III, т. е. они пересекают внешнюю границу кольца,
а перицентры их лежат в кольце:
Лп1п ^max* ^’inin ^лк ^тах? (5.1)
$ан < $тах = rmax? ^ак < $гпах* (*е2)
Имеем переход типа III III. Рассмотрим его оптимальные
траектории во вспомогательной задаче.
Из условия (5.1) и леммы 2.4 следует, что в рассматри-
ваемом случае перицентр текущей (оскулирующей) ор-
биты всегда лежит в кольце К\
Гл (ю) GE bmilb max (/•_„, гяк)], 0 < w < wK, (5.3)
причем зависимость тп (ы) монотонна или имеет один
внутренний минимум. Из условия (5.2) и леммы 2.6 сле-
дует далее, что в данном случае при оптимизации можно
рассматривать лишь переходы, для которых оскулирую-
щая орбита всегда достигает внешнюю границу кольца:
sa (ю) < Sinax, 0 < w < wK. (5.4)
Из (5.3), (5.4) следует, что расстояние г (w) в точках при-
ложения тяги (импульса) должно удовлетворять условию
Тп И < г (w) Т’гпах- (5.5)
Таким образом, оптимальная траектория будет оп-
ределяться па множестве управляемых движений, осуще-
ствляющих переход между исходными точками (5.1),
(5.2) в соответствии с системой (1.3), причем фазовые
координаты (ер), (w) удовлетворяют ограничениям
(5.3), (5.4), а управление г (w) — ограничению (5.5).
План решения задачи будет следующий. Сначала рас-
смотрим оптимальный переход на множестве траекторий
с монотонной функцией (ip); для них
min (глп, глк) < гл (ip). (5.6)
Затем рассмотрим траектории, для которых функция
гп (гр) имеет один внутренний минимум.
§ 51 ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА ПТ 265
5.2. Оптимизация на множестве траекторий
с монотонной функцией rn(w)
5.2.1. Допустимое множество началь-
ных точек. Пусть, для определенности,
7*лк глк < так*
Тогда условие (5.6) перейдет в следующее:
Гяк < rn (w). (5.7)
Замкнем множество начальных данных, допустив в (5.2)
равенство, тогда
,?ан ^тах» 5сск ^С^’тах-
Тем самым будут включены в рассмотрение и орбиты типа
I, предельные для орбит типа III. В фазовой плоскости
точка будет лежать в множестве G:
Многие последующие построения становятся более
наглядными, если их иллюстрировать на фазовой плос-
кости Рп. Опа является плоскостью скоростей, коорди-
натами Vt, Vr в ней являются компоненты скорости
той точки па орбите, для которой расстояние равно гшах.
В силу условий (5.3), (5.4) на текущей орбите всегда есть
точка, лежащая на внешней границе кольца, для нее г —
= гтах. Поэтому построения в плоскости Рп всегда имеют
смысл. Для обеспечения взаимной однозначности со-
ответствия (Л, £)<-> (Уь Уг) будем при построении в плос-
кости Рп брать компоненты скорости в той точке, в кото-
рой Vr 0, т. е. использовать компоненты PTf2), Tz7(2) (см.
п. 3.4 гл. II). Плоскость Ря (Ff(2), Уг2)) будет фазовой
плоскостью. Начальная орбита характеризуется точкой
F(H2) = FH = (И/н, —Кги), а конечная — точкой F«2) —
= Р’к = (И/к, ИгК). Пусть Лл {F: гл = гяК} — гипер-
бола в плоскости Рп (cat. рис. 2.63), соответствующая ор-
битам с одним и тем же перпцептрпческим расстоянием,
равным гяк, F in — ее фокусы. Конечная точка F(K2) лежит
на правой ветви R* этой кривой, а множество G началь-
ных точек — в верхней полуплоскости Рп, будучи
266 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ Г ГЛ. Ш
ограничено слева ветвью кривой /?_ (см. рис. 2.(53,
где F(K2) = FK).
Ниже докажем, что в данной задаче оптимальными бу-
дут одно- или двухпмпульсные переходы, полученные в
гл. II.
5.2.2. Свойство у п р а в л е и и я. Проверим на-
личие свойства управления, постулированного при фор-
мулировке теоремы 3.2. Докажем конечность дуг траекто-
рии, лежащих на границе Г множества G.
Пусть траектория х (ш) в некоторой точке w вышла на
границу {гя = глК}. В силу леммы 2.1 дальнейший пере-
ход будет совершен оптимальным образом, если прило-
жить тангенциальный импульс в перицентре, при этом
Г (ш) = ГлК, Ci И Ск, Ш < Шк.
Поэтому на границе 1\ — {гп глК} будет один отрезок.
Пусть некоторая траектория в двух точках w', ш" вы-
ходит па границу Г2 — {У7(2) — 0}, здесь га _ г1Пах
I т;(2) 1 / ^Tp it <->
при V\ < I / -—- или гл = гшах. Если в каждой из
\ Г Снах/
этих точек га (п/) — га (ш") — г111ах, то оптимальный пе-
реход между соответствующими орбитами (типа II) будет
одноимпульсным, для него г (ш) га (ш) = гшах Вся
траектория на отрезке w' w w" будет лежать па гра-
нице Г2.
Если в каждой из точек w', w" глн = rn (wf)
= гл (w") = гшах, то и на всем отрезке w' w w" бу-
дет гл (ш) = гп (ш) гл (w") (см. лемму 2.6).
Пусть теперь г^(ш") = гша>х, глН = (ш)
w' < w". Обозначим и/ = sup w', ш" = inf w". Если ic
-- и/', то па отрезке [wr, w"\ траектория лежит па границе.
Если w' < w", то при w' w w' и w" w w" бу-
дет Vr2) (ш) = 0, при w' < w < w" будет ТД2) 0.
Отсюда следует конечность числа дуг траектории, ле-
жащих на границе.
5.2.3. Построение ф у н к ц и и о (х). Пусть
Л/i, i —1,2, 3,— подмножества множества начальных
точек в плоскости скоростей Рд, определяемые конеч-
ной точкой Fk\ см- рис. 2.63. В соответствии с результа-
тами п. 5.1 гл. II определим функцию оз (х} следующим
§ 5J ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМII ТИПА III 267
образом [7]:
<о (х) = сох (х) = - (FlriV(2) - FlnV^, если Г(2) е '
® (х) = 0)2 (х) ~ если F(2) ЕЕ Л?г,
со (ж): (,)3 (х) -= (Г2кУ(2) - F^V™), если К(2) е ЛД .
(5.9)
Здесь обозначено через Fi?lV^ расстояние в плоскости
Рп от фокуса Fдо фазовой точки
=кеу+(г® - 8F.vinnx)^- *«
- 2 (Е - 8М L) -|. AV2lilxT \ (5.10)
'max
— [2ргр/гя:КГ1Пах (г лК j Г max
(—1, если Z — 1,
£/г =)- 1, если i — 2.
В частности,
Л^;2) = Г2 (А’к - eFXLK) + 1^ - A >LX
' max
Величина
(5.11)
(5.12)
= const.
F(2T(2) = [(У)2) - r,i;)2Щ2> - 7,к)2]4 (5.13)
есть расстояние в плоскости /?я между топками F<2) и Fjf.
В конечной точке хк (при Т'(2) F^f) будет
со (тк) = 0.
Очевидна непрерывность со (х) па G, непрерывная диффе-
ренцируемость в G. внутри отдельных кусков границы.
Рассмотрим теперь функцию ,%* — соХ (.г, и)
и со'/.; (т, ?/) в G. Выражения для функции (0 (д) в
подмножествах Л/17 Л73. где подозреваемый па оптималь-
ность переход является двух импульсным, близки друг к
другу. Поэтому рассмотрим общую форму такого выраже-
ния, что будет нужно и для дальнейшего.
5.2.4. А и а л и з функции со (д’), связанной
с д в у х и м и у л ь с н ы м п е р е х о д о м. Пусть функ-
ция ы (т) имеет следующий вид:
со (х) = 8, (Ф?> (L, Е) - ФЙ), (5.14)
268 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
где константа 8^ = 1 или 8Ф = —1 фиксирована,
Ф{(Л (L, Е) = = [ 7р2 4 (TP — eFA*r’)2]’A =
- [2 (Е - ег А*Л) 2 (Игр/rJ) -'г А*%->, (5.15)
фр г= фр (Лк, Ек),
Г-1, i = 1,
8i? = ( 1, i = 2,
A* =...- [2j.iPll/rir2 (p -I- r2)]‘^. (5.16)
Индекс j (j = 1 или j = 2) будет выбран позднее. Здесь
И70) — компоненты скорости для текущей орбиты
(L, Е) в точке па расстоянии г = г].
Пусть при фиксированных фазовых координатах (ZL,
Е) (= G па управляющие параметры (г, 5, Т) наложены
ограничения
У2-: 7^=1, (5.17)
т\ (L, E)^r(w) < г2 (Л, Е), (5.18)
причем предельные значения т\ и г2 удовлетворяют усло-
виям
Г1 > Г1 (ИЛИ Г1 = ^), Г2 Г2 (ИЛИ г2 — г2), (5.19)
так что хотя бы в одном из этих ограничений всегда вы-
полняется равенство, а г1? г2 — константы, фигурирую-
щие в определении А*. Если
гг =р, (5.20)
то рассматривается случай
j 1, F\' = /’Ф, г] = Р, (5.21)
тогда предполагается, что L, Е удовлетворяют условию
гл (£, £) < р, sa (L, Е) < s2 = (г2)-!.
Если же
г2 = г*2, (5.22)
то
/ = 2, Fp = F?\ r* = (5.23)
при этом
•5а < 4 = (4)~\ Г„ < Гх.
§ 5] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА III 269
Оба условия (5.19) могут выполняться в виде равенств
Г1 = Г1, Г., Г>, Гя < 7’1, 8а < S2. (5.24)
Тогда можно рассматривать для / любое из значений / = 1
или ] = 2, при этом
как следует лз результата (3.5) гл. II, доказанного для
случая Ti - rlllitl, = rIliax.
Приме р. Пусть переход типа III III осуществля-
ется па множестве траекторий и управлений, удовлетво-
ряющих условиям (5.8), (5.5). Тогда будет
Следовательно, в данном случае
/ 2, Ф(/} - Ф-2) - - F^V{2\
При 8^-1 получил! функцию о) (,г) для области U3,
при = —1 — для области М
Рассмотрим выражение
Ж (х, и) = 0)L (х) /ь (х, к) -Ь (Об (х) /е (х, II) =
(d^(F '0 , , ч , аФФ(г, Е) \
= е’ (н-----------------эё—м))
(при Ф-7) > 0). Из формулы (5.15) для Ф-7) следует
аФ(.?)
“57Г
фй) ’ дк
Тогда, учитывая (1.3), получим
(*, и) - II (х, п)/Ф(Д (5.25)
где
Н (гг, и) = \ Vr (^ r)S < (Vt (х, г) - 8кЛ*г)П (5.26)
Л е м м а 5.1. Для функции со (х) вида (5.14) для фик-
сированного фазового состояния х Е) при условиях
(5.17) — (5.19) max II (х, и) = Ф-7) и достигается при
и
270 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
управлении'.
г = гь если
г = г2, если
г = Г1, г = г2, если
j = 1, п = Г1, г2 < гг.
j = 2, г2 = г2, т\ > гг
Г1 = Г1, г2 = г2.
(5.27)
S = е-Х’М’, Т = 8, (7((л - еМДО/фД (5-28)
Из леммы (5.1) и формулы (5.25) для 3% (.г, и) следует
Лемма 5.2. Для функции со (х) вида (5.14) для фик-
сированных (А, Е) при условиях (5.17) — (5.19) макси-
мум по и функции ЗК (х, и) равен единице и достигается
при том же управлении, что и максимум функции Н (х, и).
Для краткости изложения укажем лишь идею доказа-
тельства леммы 5.1. После максимизации Н (х, и) по S, Т
получим, что Н2 (х, и) есть вогнутая функция расстояния
г, она может достигать максимума при г = иг — г2.
Рассматривая далее функцию Н2 (г = гг) — /I2 (г = г.>),
получаем утверждение леммы.
Применим полученные результаты к рассматриваемому
случаю (5.7) перехода III III. Как показано выше в при-
мере, здесь будет / = 2, г,- = гтах, причем
еф = 1, 1=2, гр = 1, если ЕЕ М\,
8<р = —1, i = 1, гр = —1, если F(2> ЕЕ Мг.
Согласно лемме 5.2, если F<2) ЕЕ Мх J М3, то
max (х, и) = max оц/ (х, и) = 1. (5.29)
и и
Если точка находится в области Мг, то этот максимум
соответствует сообщению тяги в направлении к фокусу
Fln (в плоскости Ря). Если же VW е Л73, то максимум
соответствует сообщению тяги в направлении от фокуса F2n.
Рассмотрим теперь множество Л72- Здесь функция
со (х) равна (по модулю) величине импульса, сообщаемого
на постоянном расстоянии гтах. Функции такого вида бу-
дут и далее встречаться, поэтому рассмотрим общую фор-
му такой функции.
5.2.5. Анализ функции со (х), связанной
с о д н о и м п у л ь с н ы м переходом. Пусть рас-
§ 5J ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА Ш 271
стояние г (ш) в активных точках траектории перехода
удовлетворяет тем же условиям (5.18) — (5.19), что и в
предыдущем п. 5.2.4.
В качестве функции со (х) здесь рассматривается сле-
дующая:
®(х) = —V^V^
= [(Ц;) - 7$2 + (Рр - РЙ)2Г-( (5.30)
равная (по модулю) величине импульса, сообщаемого на
Рис. 3.3. Изображение импульса в
плоское’и скоростей
расстоянии г = при переходе с текущей орбиты на ко-
нечную. Пусть OF^ — расстояние в плоскости скоростей
Р(» (г = rj) от начала координат до точки пересечения
прямой, проходящей через точки F(K/} и Fo), с осью OVt
(рис. 3.3). В точках дифференцируемости функции о) (х)
рассмотрим функцию .7^ (х, и).
Л е м м а 5.3. Для функции со (х) вида (5.30) для фик-
сированного фазового состояния (L, Е) при условиях (5.17) —
(5.19), наложенных на управление и = (г, 5, 7),
max Ст, и) = 1, если
д*г* при / 1, т\ --= г? г-2, (5.31)
ОР(2) > Л*г2 при / = 2, г2 = r2, > гг. (5.32)
Этот максимум достигается при (единственном, если хотя
бы в одном из условий — (5.31) при j 1 или (5.32) при
/ = 2 — выполняется строгое неравенство) управлении
г (W) = г’, 5 (<о) = (Ei? - V^)/F(JW,
(5.33)
272 ЙМПУЛЬСЙЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЁХОДОВ [ГЛ. lit
Замечание. Здесь, как и выше, величина А*
определена в (5.16), величина А*гх будет расстоянием в
плоскости скоростей РЮ — Ра (г = гх) от начала коор-
динат до фокуса эллипса — {F(l); га г2), а величи-
на А*г<2 будет расстоянием в плоскости скоростей Рл (г =
= г2) — Р^ от начала до фокуса гиперболы = {F<2):
* 1
г Л = ^11-
Доказательство леммы 5.3 проводится так же, как и
леммы 5.1.
Применим полученный результат к анализу функции
со (х), когда в рассматриваемом случае перехода III III
точка VW находится в множестве ЛТ2, F<2)y=F(K2).
Тогда будет
max г (w) Г31 ZE Агшах,
max — ^2 > ^лк — Г1 -> ] — 2-
На основании леммы 5.3 везде в этом множестве G р| М2
будет выполняться условие шах (х, и) = 1, причем
этот максимум по и реализуется при управлении (5.33).
Следовательно, везде в G построенная функция со (х)
удовлетворяет условию (5.29). Легко показать далее, что
при движении по границам также (я, u) 1, причем
на границе гл = гяК достигается равенство.
5.2.6. Анализ оптимальных т р а е к т о-
р и й. Рассмотрим траектории перехода для рассматри-
ваемой задачи, полученные в гл. II. В множестве Мх [J
и Я3 переход будет двухнмпульспым вида
Мп —лк,
первый импульс сообщается на наибольшем расстоянии
г = г max, второй — в перицентре лк. Его фазовая тра-
ектория в плоскости Рл — кривая F^F^F^, см. рис.
2.63, где FK = F£\ Точка V{? (конец первого импульса)
есть пересечение прямой, проходящей через F in и F(2),
с кривой Rt (i = 1, если ее Я^ и I = 2, если F^2) (=
ЕЕ М3). Лишь при F^ - F2я она определяется неодно-
значно, F22) ЕЕ ЛР{2). В Я-2. переход — одноимпульсный,
§ 5] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА ill 273
его траектория в 1\ — отрезок Эти траектории
осуществляют переход из любой точки множества G в
конечную точку для них (до-
выполнены все условия теоремы 3.2, поэтому указан-
ные решения являются абсолютно оптимальными в G.
Везде, кроме точки /?2л, они будут и единственными опти-
мальными решениями, так как в любой точке множества G
уравнение (5.29) имеет единственное решение и* (х).
3 а м е ч а н и я. 1. Пусть теперь гл11 < глК. Тогда
переход 7’н относится к рассмотренным выше, а
данный переход 7’н Тк будет обратным ему. Фазовая
траектория не изменится, но будет проходиться в обрат-
ном направлении. В двухимпульсном случае первый им-
пульс сообщается в начальном перицентре, второй —
на внешней границе Г (г = rmax). Функция гл (ш) будет
монотонно возрастающей.
2. Во вспомогательной задаче каждый импульс может
быть реализован в виде нескольких импульсов, сообщае-
мых последовательно через оборот. Кроме того, импульс,
сообщаемый на внешней границе Г, может быть приложен
в каждой из точек пересечения орбиты с внешней границей
кольца. Указанные выше одно- и двухимпульсные пере-
ходы являются, очевидно, простейшими реализациями
оптимальных управлений, позволяющими, к тому же, осу-
ществить движение в рамках основной задачи. В частнос-
ти, фазовая траектория однопмпульсного перехода может
быть реализована с помощью перехода с двумя импульса-
ми на границе (см. рис. 2.59).
5.3. Случай немонотонной функции гД//;)
Рассмотрим теперь переходы Ти —> Тк, для которых
функция гл (ш) имеет внутренний минимум, причем
rmin < min rn (w) < глк < гян, 0 < w < wK.
w
Возьмем произвольный переход такого вида. Обозначим
г* = min гл (ш). Множество {w: rn (w) г-} есть точка или
w
отрезок. Возьмем произвольную точку этого множест-
ва, пусть 71* — соответствующая орбита. Весь переход
7\ —> Т1{ представим как последовательное осуществление
двух переходов 77н71*, 71* 7’к. Для первого из них
274 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. Ш
функция гп (w), 0 w iz?*,— монотонно убывающая,
ГП (^) глп- Для второго функция гл (ip), ZZ7*
w zpk,— монотонно возрастающая, rl гл (гр)
глк. Каждый из этих переходов относится к рассмот-
ренным в предыдущем разделе. Будем считать, что они уже
являются соответствующими одно- или двухимпульсными
оптимальными переходами на множестве гл > К. Па всем
переходе Тн -+ Тк будет сообщаться до трех импульсов.
Кроме рассмотренных одно- и двухимпульспых траекто-
рий, траектория может быть трехимпульсной вида Мп ->
—л* —> Мк, она также реализуется в основной задаче.
В гл. II показано, что в этом случае должно быть =.
— Киш- Следовательно, полученные в гл. II траектории
перехода типа III III оптимальны и для вспомогательной,
и для основной задачи.
§ 6. ОПТИМАЛЬНЫЕ ТРАЕКТОРИИ ПЕРЕХОДА
МЕЖДУ ОРБИТАМИ ТИПА II,
ПЕРЕСЕКАЮЩИМИ ВНУТРЕННЮЮ ГРАНИЦУ КОЛЬЦА
6.1. Ограничения на фазовые координаты
и управление
Здесь будут получены оптимальные траектории пере-
хода между орбитами типа II (во вспомогательной задаче).
В этом случае исходные орбиты пересекают внутреннюю
границу кольца, их апоцентры лежат в кольце К:
Ктнп Кн
Глк Knin ак
(6.1)
Включив в рассмотрение орбиты, для которых гл — rinin,
мы замыкаем это множество исходных данных. Тем самым
будут учитываться и орбиты типа I, для которых гл —
= Гпнп, они являются предельными для орбит типа II.
Применим результаты § 2 к данной задаче. Из лемм
2.3, 2.6 и условий (6.1) следует, что при оптимизации мож-
но ограничиться рассмотрением следующего класса пере-
ходов:
а) апоцентр текущей орбиты всегда лежит в кольце К,
min (raH, raK) < ra (iz?) < гшах, (6.2)
§ 6] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА it 275
б) текущая орбита всегда пересевает внутреннюю Гра-
нину кольца (иля касается ее),
Г.1 М < ЛпЬ1, (6.3)
в) функция га (ш) монотонна пли имеет один внутрен-
пий максимум.
Из (6.2), (6.3) следует, что для фиксированной орбиты
расстояние в активной точке будет удовлетворять условию
Fmin < Г (ш) < ra (w). (6.4)
Сначала, в и. 6.2, рассмотрим оптимальные траекто-
рии па множестве траекторий с монотонной функцией
ra (iv). Далее, в п. 6.3, будет сделан анализ общего слу-
чая, т. е. будут учтены траектории, для которых функция
ra (w) немонотонна, max ra (w) max (ralI, raK).
6.2. Случай переходов с монотонной функцией ra(w)
Пусть, для определенности,
'’ап С гап max (ra„, гак), гаК > rmill. (6.5)
Тогда, если при переходе функция ra (w) монотонна, то
будет выполняться условие
Г а И < raK, (6.6)
при этом
ГпИп < г (ш) < га (ш) < ГаК. (6.7)
Зафиксируем конечную орбиту ZK. Начальная же орбита
и текущая орбита перехода могут быть произвольными
точками множества G:
(в этом разделе, п.6.2, будем допускать и обратное движе-
ние по начальной орбите, для такой орбиты считаем L <
<0, г„<0).
В качестве фазовой плоскости рассмотрим также плос-
кость скоростей Ра, построенную при г = rinin. Коорди-
натами в ней являются компоненты УР, скорости
в точке пересечения орбиты с внутренней границей
276 ПМПУЛЬСПЫП ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ (ГЛ. Ш
кольца:
Такая точка всегда существует, в силу условия (6.3). На-
чальная орбита характеризуется в точкой F(nl) = (V/и,
У?п) - Fn, а конечная — точкой Гк — (1цн<
— Т?к). Построим в плоскости эллипс (см. рис.
2.75), соответствующий орбитам с фиксированным эпи-
центрическим расстоянием га, равным гаК. Нго фоку-
сы — (—rllli(lA1? 0), Р2а (rmill А1? 0), где
f^Prp/^inin^aK (^inin Т ^ак)1 2 ~ (^-^)
оа — большая полуось эллипса 1?а, еа =- rII1in/raK —
его эксцентриситет. В плоскости Ра конечная точка F^
лежит па эллипсе 7?а. Начальная же точка и траектории
перехода в данном случае (6.6) будут принадлежать мно-
жеству G F2 Ра (6).8), ограниченному снаружи дугой
эллипса /?а: {ra --raK, Fr > 0}, и отрезком А'ОА оси
OVt, па нем {Fz 0, ra raK} (см. рис. 2.75).
Легко показать, как и в § 5, что при оптимизации дос-
таточно рассматривать лишь траектории, имеющие конеч-
ное число дуг па границе множества G.
Проведем анализ функции Веллмана со (^). Как и преж-
де, опираясь на конечную точку F^ в плоскости Ра, ра-
зобьем допустимое множество Й- па составляющие части.
Соединяем точку Fk1) с фокусами F(см. рис. 2.75). Мно-
жество G разбивается на подмножества Л/р i = 3, 4, 5
(см. гл. II, п. 5.2.1).
В качестве функции — со (х) в G рассмотрим характе-
ристическую скорость одно- и двухимпульспых пере-
ходов типа II II, полученных в гл. II (п.5.2):
(0 (л-) 0)3 (.г) = 7АаТ/(1) - /^Ц0, VW е м'л, (6.10)
<0 (т) == W4 (.1) = — РПЦ1'. J7(l) е Л/д, (6.11)
со (х) = со5 (У) = FlaT'(i) _ Rd) е= м;. (6.12)
Здесь
W(1) [Е(1)2 + (ГД - efAjr,,,!„)-] 1 * =
AXni А'
L 'min J
§ 6] оптимальный переход между ОРБИТАМИ ТИПА II 277
— расстояние в плоскости Ра от точки до фокуса
Fi„
У(1)И<1) - [(Цп - Ий2 + (У((1> - Р,Т)2Е
— расстояние в Ра между точками У1) и TF(J\ В конечной
точке со (zH) — 0. Легко показать_далее, что определенная
так функция со (z) непрерывна на С, непрерывно дифферен-
цируема в G, вдоль граничных участков.
Рассмотрим теперь inax,^ (z, и). Для этого восполь-
и
зуемся результатами, изложенными в § 5 (леммы 5.1,
5.2). ТГа множествах Л/3. Л73 функция со (.г) имеет форму,
рассмотренную в лемме 5.1. Сравнивая (6.10), (6.12),
(6.6) с (5.14), (5.18) — (5.21), видим, что в данном случае
будет
еР = —1,
ер = 1,
Г* = Oilin, г2 = ra, г? гак.
Л* = Aj, (6.13)
i=l, если VW е дЛ,
i=2, если 7
Из леммы 5.2 следует, что для любой точки F(I) ’Ч
М3 U Л73 будет max (ад и) = 1. Этот максимум
реализуется при следующем (и единственном при га <
< гак) управлении
бД Г Л - К,.-Лет,,,..,,
г№ = гш1п, 7»- ’
(6.15)
причем величины /, соответствуют (G.14).
Данное управление соответствует сообщению тяги на
минимальном расстоянии г = rrnin. В плоскости скорос-
тей Ра тяга (импульс) действует по прямой, проходящей
через фиксированный фокус F ia и текущую точку F(I),
в направлении от фокуса к эллипсу /?а.
На множестве ЛА4 функция со (z) = со4 (z) является
частным случаем рассмотренной в лемме 5.3.
Пусть F — точка пересечения прямой, проходящей
через точки и с осью OV t в Ра, Vt (F) — ее абс-
цисса.
278 ИМПУЛЬСНЫЙ ХАРАКТЕР оптимальных переходов 1гл. ш
В данном случае, в силу (6.13), (6.9), в области бу-
дет OF = | Vt (F) A^min = A^i. Поэтому, по лем-
ме 5.3, опять max Ж (х, и) = 1. Причем этот максимум
и
достигается при единственном управлении
у(1)_у(1) yd) _ yCD
’« = '... 6» = -^аГ. (<И6)
Это управление соответствует сообщению тяги на мини-
мальном расстоянии г = rniin, в направлении от текущей
к конечной точке в плоскости скоростей Ра. Далее легко
показать, что на граничных участках 1, причем ес-
ли га = гак, то будет max = 1, при этом г (w) = гаК.
Т (w) = sign (гяк — rn), S (w) =-- 0.
Рассмотрим множество траекторий, полученное в гл. II,
п.5.2., позволяющее осуществить переход из любой на-
чальной точки Е G в конечную точку ЕЕ Управ-
ление на этих траекториях соответствует тому, которое
максимизирует функцию (х, и). Если хп ееМ±, то весь
переход будет одноимпульсным (с учетом замечания 2 к
п.5.2). Для него фазовая траектория в плоскости Ра —
отрезок Если хн е м'3 и М6, то переход бу-
дет двухимпульсным вида Мн —> оск. Первый импульс
сообщается на минимальном расстоянии г — rmin в нап-
равлении от фокуса Fia. При этом апоцентрическое рас-
стояние монотонно увеличивается до гаК. После этого в
апоцентре ак сообщается второй импульс. Параметры z,
приведены в (6.14). Фазовая траектория этого перехо-
да — кривая см- рис. 2.75, где FH = Точ-
ка F2 ЕЕ Ра есть точка пересечения прямой, проходящей
через Fia и с эллипсом Ra = {V: га = гаК}. Опа опре-
деляется однозначно везде, кроме случаев F^} = Fla
(при этом F2 s A' и F^ = F2a (здесь F2 е F(K44).
Выполнены, таким образом, все условия теоремы 3.2.
Построенное семейство траекторий является оптималь-
ным в G. Из единственности управления zz* (х), макси-
мизирующего SK (я, и) в G, следует единственность по-
лученных оптимальных траекторий в G везде, кроме то-
чек Fia.
§ б] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЁЖДУ ОРБИТАМИ ТИПА И 279
Замечание 1. Пусть у начальной орбиты апо-
центрическое расстояние больше, чем у конечной:
Г ак < Г ан*
Оптимальный переход Ти -> Тк на множестве
Га («>) < Г«н
будет обратным рассмотренному.
Замечание 2. Если гян = rmin, 0 < гяК
Лшп, гак > ^ан, то имеет место переход типа I II,
V(R Е= М3. Оптимальный переход в G будет хомановским,
двухимпульсным вида лн -> ак.
Замечание 3. Изложенные в данном разделе ре-
зультаты справедливы для случаев одинакового и проти-
воположного направления движения по исходным орби-
там. Если по конечной орбите движение осуществляется
в прямом направлении (Лк 0), а по начальной — в
обратном (Лн < 0), то FHG U М5.
6.3. Случай, когда функция ra(w) имеет
внутренний максимум
Рассмотрим теперь переходы, для которых движение
по обеим исходным орбитам осуществляется в одном,
прямом направлении, а функция ra (гр) немонотонна,
имеет внутренний максимум, больший, чем max (ган, гаК):
max га (zp) = г* > max (?-аН, гаК).
W
Зафиксируем г*. Пусть га (zp*) = г*, орбиту при w =
= zp* обозначим через Z*. Весь отрезок 0 w zpk со-
стоит из двух участков монотонности функции ra (w). На
первом участке 0 w <; zp* функция ra (w) не убывает,
ган га (^) rl- На втором участке iv* w wK
функция ra (zp) не возрастает, г* > Лх (^) гак- Переход
с начальной орбиты TR на орбиту Т* относится к рассмот-
рению в п.6.2. Он будет одно- или двухимпульсным,
осуществляется по схеме MR -> а*. Аналогично, переход
с орбиты Т* на Тк будет одно- или двухимпульсным вида
сс*-^Мк. Объединим оба импульса в апоцентре в один. Весь
переход между орбитами Тп и Тк будет двух- или трех-
280 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. Ш
импульсным вида
В гл. II, п. 5.2, проведен анализ таких переходов и пока-
зано, что если Lu 0, 0, то в этом семействе гаК
Га rmax оптимальным будет переход, соответствую-
щий =^ак- Поэтому полученные в гл. JI решения бу-
дут абсолютно оптимальны как в основной, так и во вспо-
могательной задаче.
7. ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА IV,
ПЕРЕСЕКАЮЩИМИ ОБЕ ГРАНИЦЫ КОЛЬЦА
7.1. Характеристика допустимого множества траекторий
Пусть начальная и конечная орбиты перехода — типа
IV, каждая из исходных орбит пересекает обе границы
кольца. Параметры таких орбит удовлетворяют условиям
Гщ1п, Яшах» ] „ .
. G-1)
1 лк ^min? 5ак \ 5max* J
Замкнем множество начальных данных, допустив ра-
венства гя11 = rIIlin, гаП = г1пах- Направление движения
по исходным орбитам может быть как одинаковым, так и
противопо ложным.
Применим к данному случаю результаты § 2. Из лемм
2.4, 2.6 следует, что при оптимизации переходов между
данными орбитами достаточно рассмотреть траектории,
для которых выполняются условия
Гя (w) < rIIlin, Sa (ip) < «S’max, 0 < w < ipk. (7.2)
Поэтому в процессе перехода оскулирующая орбита будет
всегда пересекать обе границы кольца (или касаться их).
Для таких траекторий расстояние г (w) в активных точ-
ках удовлетворяет условиям
rmin < Г (ш) < гшах. (7.3)
Условия (7.2), (7.3) определяют множество фазовых коор-
динат и управлений для решения задачи оптимизации
траекторий, удовлетворяющих системе (1.3) и осуществ-
ляющих переход между исходными орбитами (7.1).
§ 7] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА IV 281
7.2. Оптимизация траекторий
Как и прежде, будем рассматривать в качестве фазо-
вых пространств плоскости скоростей. Теперь ими будут
плоскости Ра и Р построенные при г _ rtlli!1 и г = гшах
соответственно. В силу (7.2) применение обеих плоскос-
тей корректно. Кроме того, для однозначности во вспо-
могательной задаче орбиту обычно будем определять ско-
ростью F(1) в плоскости Ра (или скоростью F<‘2) в плоскости
Рл) для той точки орбиты па границе г = rinin (или г --
= Гтах), ДЛЯ КОТОрОЙ Vr 0.
Построим в Ра эллипс Па — {F: га гшак}; (ек-
• A*rinin._0) — его фокусы, i — 1,2 (см. рис. 2.25). Мно-
жество G лежит в верхней полуплоскости Ра, ограничен-
ное снизу дугой АЛ' эллипса 7?а и осью Vt. В плоско-
сти Ру строится гипербола 1?л = {F: гл — rmin};
Fin (е/гА*гтпх, 0) — ее фокусы (см. рис. 2.26). Фазовое
множество G здесь ограничено снизу отрезком АЛ' (| Vt |
ал, Vr ----- 0) оси OVt и дугами ЛВ и Л'В' (гл = rmill,
| FJ > сгл, V, 0)_г1тперболы 7?л.
Зафиксируем в G конечную орбиту 7К и, следователь-
но, соответствующие точки V^^.Py, У^ 6Е Кривыми
n;nj, j = 1,2,3, 4, на которых ср/а =jp/aK или <р,л =
= <р?лК, I ^1,2, разбиваем множество G на подмножест-
ва Mi (Mi) (см. гл. II, п. 3.5). Пусть сначала 0,
Ф 0, тогда i = 1—8.
Ниже покажем оптимальность траекторий перехода
из любой точки х ЕЕ G в заданную конечную точку, по-
лученных в гл. II, п. 5.3. Характер перехода будет зависеть
от того, в каком из множеств Mt находится начальная
точка.
Рассмотрим следующую функцию точки (функцию Велл-
мана) со (х):
© (х) = ®48 (х) = -7(1)ЦД если VW е Mt и
© (х) = ®2в (х) = -В(2)ЦД если F(D е Мг IJ М6,
и (х) = ©j (х)'= Ф1К — Фц если
©(х) = ю3(х) = — (Ф2К — ф2), если 1'г<1’еМ3,
©(х) = ©5(х) = — (Ф1К — Ф]), если F:11E'W5,
© (х) = ®7 (х) - Ф2К — Ф2, если Р(1)еМ7. ,
(7-4)
(7-5)
(7-6)
282 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ 1ГЛ. TIT
Легко доказывается непрерывность о (.г) па (7, непре-
рывная дифференцируемость со (я) в G/rrK, внутри гладких
кусков границы G, свойство управления в отношении ко-
нечности дуг траекторий па границах G.
Рассмотрим max Ж (х, и). Пусть F(1) ЕЕ Л74 J Мя.
Для любой точки F(1) будет OFa OF/а, поэтому здесь,
согласно лемме 5.3, max (х, и) — 1, причем этот мак-
симум достигается при (единственном внутри этих множеств
М4, Ms) управлении
Г (w) = rmln, /° = (7.7)
соответствующем сообщенью импульса на внутренней гра-
нице кольца у. Если V® ЕЕ М2 [J то OF^ > OFгл.
Согласно лемме 5.3 опять будет max rff (.г, и) = 1. Соот-
ветствующее управление
Г М^Ппах, Г = (7.8)
определяет одноимпульсный переход па внешней границе1
кольца Г.
Пусть теперь V(l) EF Мг J 71/3 |J ТИ5 (J ]\Т1. Функции
со (х) в этом случае имеет форму
ю (х) = еф (Ф; — Фгк), (7.9)
рассмотренную в леммах 5.1, 5.2, причем
еф = — 1, i — 1, 8;? = — 1, если Fd)( = M.,
еф = 1, i = 2, 8/7 = 1, если F(i) ( = M3,
еф = 1, i = 1, 8f = — 1, если m (7.10)
еф = — 1, i= 2, = 1, если Fd) ।
Во всех вариантах граничные расстояния постоянны:
— Г min,
*
^2 = ^2 = •
(7.11)
Согласно лемме 5.2 в этом случае max (rr, u) = 1. Эточ
и
максимум реализуется одновременно при каждом пз
$ 71 (ШТИМАЛЬНЫП ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА IV 283
управлении:
G И - '-nun, f"w (и?) t-^V{V/FiaV(1\
г2 (w) - /-шах, /'0(2) (W) = ^F~J7(2)/F^V(2\
Для скользящего режима
d/j/div ---- У\ 7(/)г[Т^\
Z- L
2 >
dF/dw 2 ЬЕ(/Т(/)),
I --1
(7.12)
(7.13)
(7.14)
опирающегося на оба указанных управления, как па ба-
зовые, при произвольных уШ, У’2) (0 у(1><1 , у(2) = 1 _ y(D)
будет max?# (.г, и) = 1.
Траектории перехода типа IVa IVa, IV6 IV6, получен-
ные в гл. II п. 5.3, осуществляют переход из любой точки
хн ЕЕ 5 в заданную конечную точку Рк, причем для них
—- оз (Д'н) •
Условия применимости теоремы 3.2 выполнены, ука-
занные выше траектории оптимальны в G. Это траек-
тории одпопмпульсного перехода при г = rinin, если
ЕЕ М4 U Мё, одноимпульспого перехода при r = rmax,
если F(Hl) ЕЕ М2 [J 7И6, двухимпульсного перехода, если
F(Hn е мх ил/з и мъ им7.
Заметим, что если начальная точка перехода ле-
жит внутри множества Ml = М2 [J М4 Q М6 IJ М8, то
решения уравнения 3d (х, и) = 1 единственно. Данные
траектории (одноимпульспого) перехода будут единствен-
ными оптимальными траекториями. На границах П^П|
этого множества с множеством Мп = Мг (J U U
U М7 появляется второе управление, максимизирующее
33 (.г, и), но опо уводит точку внутрь множества М1. По-
этому и на границах одноимпульсные траектории
(7.7), (7.8) единственны. Если этот импульс сообщается
при Vr 0, то получим переход типа IVa IVa в основной
задаче, если же — при Vr <Е 0, то имеем переход типа
IV6 1V6. Внутри MlL есть два решения уравнения
284 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. Щ
(а и) _ 1, поэтому оптимальная траектория иеедпн
ствеппа во вспомогательной задаче. Оптимальными будут,
кроме двухимпульсиых решений типа IVa IVa, (V6 IVo
(гл. II, п. 5.3), любые многоимпульсные пли, вообще говоря,
скользящие режимы, опирающиеся на базовые управ-
ления (7.12), (7.13) п приводящие фазовую точку из на-
чального состояния в конечное. При этом параметры ег.
постоянные па каждой траектории, зависят от под
множества Л1 ь в котором лежит начальная точка (и вся
траектория). Внутри соответствующих множеств
функции уй) (^) могут быть любыми допустимыми. В част-
ности, если взять их кусочно-постоянными, принимающи-
ми значения 0 пли 1, то получим многоимпульсный пере
ход. Минимально возможное число импульсов будет рав-
но двум, если начальная точка в плоскости Ра по лежит на
границах ГЦП^. При этом возможны два случая:
а) 1, 0 w < ДПР, 1
, , ? (7.15)
7(1) (w) — О, w wK, j
первый импульс AF(ta) сообщается при г =- rmin, второй
д>4а) — при г =-. г 1Пах* Имеем двухимпульспый переход
между восходящими ветвями и исходных ор-
бит — переход типа IVa IVa (см. ф-лы (5.35), (5.36)
гл. II и рис. 2.86);
б) T(D (ш) - 0, 0 < w < AV1G), I
(7-ш
y(D (^) — 1, АИ1° w <3 |
первый импульс АК(г0) сообщается при г = г1Пах, второй
AFT — при г rniill. Если при этих импульсах Vr < 0.
то получаем переход между нисходящими и 7'\\"
ветвями орбит типа 1V6 IV6 (см. ф-лы (5.39) — (5.41) гл. ]1
и рис. 2.86). Решения (7.15), (7.16), очевидно, эквива-
лентны по функционалу. Остальные оптимальные решения
вспомогательной задачи требуют для своей реализации
выхода за пределы кольца.
Если при переходе будут участки, где (w) 0 и
У2) (w) 0, то получим скользящий режим. Можно,
например, с произвольными допустимыми функциями
(^), V2) (^) двигаться до конечной точки пли до кривой
§ 7] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРЕНТАМИ ТИПА IV 2(85
П/П;, соответствующе!! импульсному управлению (7.12)
или (7.13) и проходящей через конечную точку, затем со-
общить соответствующий импульс. Траектории в плос-
кости Ра (7\), соответствующие всем этим управлени-
ям (и эквивалентные но функционалу' шн), заполняют
сплошь кривой четырехугольник, ограниченный траек-
ториями двухпмпульспых управлений (7.15). (7.16), про-
ходящими через граничные точки Гц0 и (Кн2) и Гк\
см. рис. 2.36, 2.37.
3 а м е ч а и и е. Можно показать, используя необ-
ходимые условия оптимальности, что других решений
данной задачи, кроме приведенных выше, нет (см. 117]
гл. II).
7.3. Предельные случаи переходов
Из анализа оптимальных траекторий рассмотренного
тина легко получить ряд следствий, характеризующих
предельные случаи данных переходов.
7.3Л. Если Пк 0, 1 !к 0, то оптимальная траек-
тория имеет дугу, лежащую на границе r:x /’min лишь в
случае ЕЕ Л/11. глН /’.nin- причем па начальном участ-
ке траектории перехода сообщается импульс при г =
— 7’niii6
гя (w) --: rmill, — 1, 0 < »!
Аналогично, па границе га г1иах траектория имеет
дугу лишь в случае 'Гц > GE Л/11, ган = /’шах, причем
7’сс М 7’шах, Y(1) (ш) 0, 0 < W <
При дальнейшем переходе, а также в остальных случаях
начальных условий орбита будет пересекать границы
кольца.
7.3.2. Пусть начальная орбита — предельная типа II,
г<хн = Ппах- Тогда, если Т^ЕЛЛПЛа, 7?а = {F:
га = гшах}, то оптимальный переход — единственный, он
будет одноимпульсным при ?• — см. рис. 2.25, 2.77.
Если же Гц) (Л/3 (J J/5) р /га, то оптимальное реше-
ние во вспомогательной задаче неоднозначно. Двухимпульс-
ное решение (7.15) реализует в основной задаче переход
286 ИМПУЛЬСНЫЙ ХАРА КТЕР ОНТИАГАЛЬТТЫХ ПЕРЕХОДОВ [ГЛ. Hi
II IVa, осуществляемый по схеме Мп —> iff, см. ряс.
2.91 (его фазовая траектория в плоскости Ра — кривая
к’, см. рис. 2.77, в данном с.чучае Г^б) Гц)-
Двухимпульсное решение (7.16) реализует в основной за
даче переход тина 11 1\б, осуществляемый по схеме
ан —> М^ (его фазовая траектория в — кривая
Iх2(6)1:(бД/(к\ саг. рис. 2.77), здесь первый импульс —
апспдальный, саг. рис. 2.91. Остальные оптимальные ре-
шения вспомогательной задачи не реализуются в основ-
ной задаче.
7.3.3. Пусть начальная орбита — предельная тина
III. Если' Гн’ е м'6) П Иг., Hr. -- {V: гя
= саг. рис. 2.26, 2.66, то оптимальный переход — од-
ноимпульсный, осуществляется приложением импульса
при г гшах (в случае F(H2) ЕЕ MG имеет место обратное
движение по начальной орбите). Если же Р^2) ЕЕ (Мх U
и Яз и IJ М7) р /?л, то оптимальное решение не
однозначно. При этом двухимпульсное решение (7.15).
имеющее фазовую траекторию I !2Ы)11ы)1 к} ЕЕ /\ (саг.
рис. 2.66, где в данном случае pff = ЕЕ Мх), бу-
дет соответствовать переходу типа III IVa (вида лп ->
-> Л7к\ саг. рис. 2.93) в основной задаче. Для пего пер
вый импульс А1Д, сообщаемый в начальном перицентре,
при г - глп = /’min, будет апсидальным. Второй импульс
прилагается на внешней границе кольца; при этом и ме-
няется направление движения, если по начальной орбите
точка двигалась в отрпцательнодг направлении. Двухим-
пульспое решение (7.1(5), имеющее фазовую траекторию
Ц&Д’ад ИГе /\ (СМ. рис. 2.66. где ' Г<?> Г$)£;
ЕЕ Mi), будет реализовывать в основной задаче переход
Мн типа 111 1V6, если оба импульса сообщить в
тех точках орбит, где Vr 0. В этолг случае оба импуль-
са — неапсидальиые.
7.3.4. Пусть начальная орбита — предельная типа 1,
для нее I 7\и | = rillin, гаН = гшах. Это точки А М3.
А' ЕЕ вершины эллипса 7?а ЕЕ Ра 11 гиперболы 7?л Е.
ЕЕ Рл, см. рис. 2.25, 2.26, 2.66, 2.77. Имеем переход типа
I IV. Двухимпульсное решение а), реализующее переход
типа I IVa основной задачи, аналогично переходу типа
III IVa предыдущего п. 7.3.3. Другое двухимпульсное
§ 7] ОПТИМАЛЬНЫЙ ПЕРЕХОД МЕЖДУ ОРБИТАМИ ТИПА TV 287
решение б) реализует в основной задаче переход типа I
IV6, он аналогичен переходу типа II IV6 п.7.3.2. Первые
импульсы в обоих случаях — апсидальные.
7.3.5. Пусть конечная орбита — предельная типа I,
II, III (Ик = 0 или У™ = 0). Тогда изложенные резуль-
таты сохраняются. Следует лишь иметь в виду, что неко-
торые из множеств Мь построенных по конечной орбите,
вырождаются.
Если raK = 7’||1ах, то Г(?к = 0 (см. рис. 2.34, 2.35).
При этом, если начальная орбита — типа IV, то опти-
мальная траектория может быть получена обращением
рассмотренных в п. 7.3.2 траекторий. Если гап = гак =
= Гтах, I Гпп | < rinln, е (Мt |J М7) R„, то переход'бу-
дет одноимпульспым, осуществится приложением апси-
дального импульса в апоцентре, при г = rmax (и при
разных направлениях движения на исходных орбитах).
ЕСЛИ Глп = 7’min, $шах Д п (Л/i (J Мт) А -^л), ТО
имеем частный случай перехода III II (глП = 7’min,
гак = гП1ах), оптимальное решение неоднозначно. Двух-
импульсное решение а) (его фазовая траектория — кривая
FH47K, см. рис. 2.34, 2.35 при Ап > 0) будет в этом слу-
чае осуществлять в основной задаче апсид ал ьный переход
JtH ОСк,
Г я (м>) = Гт1п,
Га И = Г1Пах,
0 < W < (га = Гтах),
W1 w "С
Двухимпульспоо решение б) (его фазовая траектория при
Ан > 0 — кривая см. рис. 2.34, 2.35) будет
реализовывать в основной задаче переход между теми же
орбитами, если импульсы сообщать в точках орбит, где
VT 0. Он будет уже неапсидальлым вида
Л/н л/к.
В этом случае, таким образом, оба двухпмпульспых реше-
ния вспомогательной задачи реализуют в основной зада-
че переход между одними и теми же орбитами. В основной
задаче для перехода типа III II (г-п rmin, гаК — гтах)
всегда есть поэтому два эквивалентных по шк оптимальных
решения (на рис. 2.87 представлены эти решения для об-
ратного перехода типа II III, при Ан >0, Ак > 0).
28S ИМПУЛЬСНЫЙ ХАРАКТЕР оптимальных переходов [гл. ш
Пусть теперь гяк = /'min (см. рис. 2.32, 2.33). Если на-
чальная орбита — типа IV, то оптимальная траектория
получается обращением траекторий типа III IV, рас-
смотренных выше, в п. 7.3.3.
Если ?’ан = Ппа\, I /’лн I <" /'min, то имеем предельный
переход типа II III (raH = /’max, г-к = /’min); он полу-
чается обращением рассмотренного выше перехода III
II. Из множества его решений следуют два эквивалентных
решения для основной задачи: апсидальный переход вида
(Хн —> лк,
его фазовая траектория в Ра — кривая А(см.
рис. 2.32), и неапсидалышй переход вида
Мн -> Мк,
его фазовая траектория в плоскости Ра — кривая
(см. рис. 2.32).
Пусть
/’лн ~ /'min, San Sinax*
Если направление движения на обеих орбитах оди-
наково (Лн ^>0, Лк > 0), то оптимальный переход
между ними — одноимпульсный, совершается приложе-
нием апсидального импульса в перицентре, при г = /min-
Если же направление движения по исходным орбитам
противоположно (Лк ^>0, Лн < 0), то решения будут
различными в зависимости от множества i = 5, 6, 7,
к которому принадлежит фазовая начальная точка, см.
рис. 2.33. Решения аналогичны случаю перехода типа
III IV,LH<0, см. п. 7.3.3. При Fk2’ е (Я5 П
решения, реализуемые в рамках основной задачи, при-
нимают вид лн -> Мк и Мн -> лк, образуя эквивалент-
ные (по шк) переходы типа III III.
В основной задаче направление движения всегда меня-
ется при сообщении импульса па внешней границе, при
г = /'max- Интересно, что одноимпульсный переход, осу-
ществляемый в перицентре при г = rmin, в этом случае
неоптимален.
Если raH = /'max, | /’лн | = /’min (переход типа I III),
то при Лн > О, Лк > О будет N = 1, а при Лн <С 0, Лк > 0
имеем множество решений, как и в рассмотренном выше
§ 8J ОСТАЛЬНЫЕ СЛУЧАИ ВО ВСПОМОГАТЕЛЬНОЙ ЗАДАЧЕ 289
случае reH = /’max, | г-н I < гш||1. Теперь лишь F^a) =
= П3, FH = А', переход Л'1п —Мк принимает вид лн ->
-> Мк, дуга УдТш) е Яй, см. рис. 2.33.
7.3.6. Из полученных результатов следует, что в рам-
ках основной задачи оптимальный переход между орби-
тами типа IVa IVa или IV6 IV6 определяется однозначно,
он будет одно- или двухимпульсным. Этот результат со-
храняется и в том случае, если лишь одна из исходных
орбит будет предельной типа III (гя = rrnilI), II (га =
= /’max), I (гя = /’min, га = Гтах), а также если для обе-
их ИСХОДНЫХ орбит Га = Гтах ИЛИ = ГШт (LH > О,
LK > 0). Если же одна из исходных орбит — предельная
типа III, а другая — предельная типа II или I или III
(с противоположным направлением движения по исходным
орбитам в двух последних случаях), то в основной задаче
получается два эквивалентных решения.
§ 8. ОСТАЛЬНЫЕ СЛУЧАИ ПЕРЕХОДОВ
ВО ВСПОМОГАТЕЛЬНОЙ ЗАДАЧЕ
В данном разделе рассмотрим переходы между разно-
типными орбитами. Анализ этих переходов можно было бы
проводить, как и прежде. Однако здесь мы поступим ина-
че. Оптимальные решения получим, используя результа-
ты оптимизации переходов I I, II II, III III, IV IV меж-
ду однотипными орбитами (§§ 4, 6, 5, 7).
Сначала, в п.8.1, рассмотрим переходы типа (Л, где
Q = II, III, т. е. переходы с орбиты, пересекающей ка-
кую-либо одну границу кольца, па орбиту, не пересе-
кающую границ. Оптимальные решения здесь будут оп-
ределяться, как правило, однозначно. Они могут быть
реализованы в рамках основной задачи.
Затем, в п.8.2, рассмотрим переходы типа Q IV, где
Q = I, II, III, т. е. переходы на орбиту, пересекающую
обе границы кольца. Оказывается, что составным элемен-
том такого перехода будет переход типа IV IV. Поэтому
оптимальное решение может быть неоднозначно. Отсюда
будут следовать оптимальные переходы типа Q IVa и Q IV6
для основной задачи.
Наконец, в п.8.3, проводится анализ перехода II III.
Оптимальное решение как во вспомогательной, так и в
основной задаче здесь неоднозначно.
10 В. В. Ивашкин
290 ИМПУЛЬСНЫЙ ХАРАКТЕР оптимальных переходов [гл. ш
8.1. Оптимальные переходы типа Ql (Q = II, III)
8.1.1. Переходы типа III I. В данном случае
Г min Г —н 7* шах? SaH \ Smax
(8.1)
Г min Г-к ак Г max*
(8-2)
Структура оптимальной траектории определится следую-
щим результатом.
Лемма 8.1. Оптимальная траектория типа III I
состоит из двух частей', оптимального перехода {предель-
ного, типа III III) с начальной орбиты Тп на промежуточ-
ную орбиту Т', параметры которой суть га = гтах,
= г_к, и оптимального одноимпульспого перехода {ти-
па I I) с орбиты Т' на конечную орбиту Тк.
Доказательство. Из лемм 2.4 и 2.6 следует,
что при оптимизации перехода между данными орбитами
(8.1), (8.2) достаточно рассматривать лишь траектории,
на которых
(ш) > '’min,
а множество {ш: га (ш) = ?’тах} есть точка или отрезок.
Зависимость sa {w) непрерывна, поэтому на любой траек-
тории, осуществляющей данный переход, существует та-
кая точка w", что ra{w") = rmax, при 0 w" будет
Set (^) < sinax, при w" < W < будет ra < rmax.
На отрезке w" w текущая орбита — типа I.
Обозначим орбиту при w = w" через Т”, для нее га (ш") —
— '’max, гп (ш") = г~. Оптимальный переход с этой ор-
биты Т" на конечную Тк типа I [ будет двухимпульсным
Г -4- лк (см. п. 4.2, следствия 3, 4). При сообщении перво-
го, апсидальпого импульса в апоцентре а", на отрезке
w" w и/, апоцептрическое расстояние остается пос-
тоянным, равным rmav, перицептрическое расстояние ме-
няется от г'г. до конечного значения г-к (если гяк):
г (ш) = Та {w) = rmax, Т (ш) = sign {ггл — 7\) при w” <
w wr (гя {wr) = глк). При сообщении второго, тор-
мозного импульса в перицентре, при w' w шк, рас-
стояние га уменьшается до гак:
г (w) = rn (w) = гпк, т (W) — 1,
wr W 1РК. V0,0'
Обозначим орбиту при w = w' через Г', для нее ry\wr) -
~ Гшах» rn {w') = '’-к- Одпоимпульспый переход Т' —>
§ 8] ОСТАЛЬНЫЕ СЛУЧАИ ВО ВСПОМОГАТЕЛЬНОЙ ЗАДАЧЕ 29'1
77к (см. (8.3)) определяется лишь параметрами конеч-
ной орбиты и будет заключительной фазой оптимального
перехода типа III I.
Для оптимизации всего перехода 77п 7\< осталось
рассмотреть его начальную часть — переход с начальной
орбиты Тн па промежуточную орбиту Т', 0 w wr.
На этом отрезке текущая орбита будет орбитой типа III
или предельной орбитой типа 111 (/-а - - г(Пах). Переход
Тн —> 77' есть предельный тина Hl III, его оптимальные
траектории рассмотрены в § 5. Лемма доказана.
Оптимальный переход между орбитами 77н и Тг, сог-
ласно § 5, будет двух- или трехимпульсным, причем он
реализуется в рамках основной задачи. Следовательно,
весь переход Тп -+ Тк будет многоимпульсным, осущест-
вляемым и в рамках основной задачи. Из леммы 8.1, един-
ственности почти всюду оптимальных решений 77н -> Тг,
Т' -> 77к следует единственность (почти всюду) оптималь-
ной фазовой траектории типа III I *). Оптимальными бу-
дут переходы вида 71ZH —лн или Л7П -> у —> Г -> лк, или
Ли -> Г -> лк (Л/п ЕЕ К — начальная точке! орбиты 7^),
см. гл. II, п.4.1, рис. 2.42—2.44. Здесь указаны лишь те
оптимальные переходы вспомогательной задачи, которые
имеют (для данной фазовой траектории) минимально воз-
можное число импульсов, допускают реализацию в основ-
ной задаче, поэтому и для нее являются оптимальными
переходами. Аналогичные решения будут приводиться ив
последующих задачах.
8.1.2. Переходы типа III. Исходные орбиты
в переходах данного типа удовлетворяют условиям
Г пн <\ Г пин Гац Г max?
7’miii ГаК Гщах*
(8.4)
(8.5)
Структура оптимальной траектории определяется в дан-
ном случае следующей леммой.
Лемма 8.2. Оптимальный переход типа II I со-
стоит из оптимального перехода (предельного, типа II II)
с начальной орбиты Тп на промежуточную орбиту Т' с
*) Решение может быть неединственным (могут быть энергети-
чески эквивалентны два перехода) лишь на границах раздела обла-
стей фазового пространства, в каждой из которых оптимальный
переход определяется однозначно.
10*
292 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. II]
параметрами гл /’min, rx = i\ г1Пах и последующего
оптимального перехода (munal I) между орбитами Тг и 7\..
Д о к аз ат е л ь с т в о. Из леммы 2.6 следует, что
при оптимизации переходов между данными орбитами
(8.3), (8/1) можно ограничиться траекториями, для кото-
рых 7’пйп >’а (^) 'шах, Причем ЗаВИСИМОСТЬ Га (ы)
не имеет внутренних минимумов. Из леммы 2.4 следует
существование такой точки wr, что
г л (wr) = 7’min,
(w) rniin При 0 </ W Wr,
rn (ip) > rmilI при wr < w < WK.
Обозначим через Tr орбиту в точке w = и/, она будет ор-
битой типа I или предельной орбитой типа II, для нее
га (т/) = 'V- Переход Тн-> Т' будет предельный типа
II II, он рассмотрен в § 6, для него существует оптималь-
ная (двухимпульсная) траектория. Переход Т' Тк —
типа I I, он также может быть оптимизирован (см. § 4),
получим двух- или трехимпульспую траекторию. Меняя
га' в допустимом диапазоне, получим оптимальную траек-
торию всего перехода Ти -> Т^. Лемма доказана.
Отсюда и из свойств составных частей перехода сразу
следует, что оптимальное решение для перехода III мно-
гоимпульсное, его фазовая траектория единственна (поч-
ти всюду), допускает реализацию в рамках основной за-
дачи. Это переходы вида 71/н -> или ан -> лк, или
Г -> лк. Опп являются и оптимальными решениями
основной задачи (см. гл. II, п. 4.2, рис. 2.52—2.54).
8.2. Оптимальные переходы Q IV (О = I, 11, III)
Сначала рассмотрим переходы между орбитами типов
I и IV. Для удобства сравнения с результатами п.4.1 и
п.4.2, гл. II, без ограничения общности, здесь рассмотрим
переход IV I.
8.2.1. Переходы т и п а IV I. В этом случае ис-
ходные орбиты удовлетворяют условиям
San Sniax»
(8-6)
7’lllill
н 7’aII Г max-
(8.7)
§ 8] ОСТАЛЬНЫЕ СЛУЧАИ ВО ВСПОМОГАТЕЛЬНОЙ ЗАДАЧЕ 293
Характер оптимальной траектории дачного перехода оп-
ределяет
Л е м м а 8.3. Оптимальный переход типа IV I со-
стоит из оптимального перехода (предельного, типа IV IV)
с начальной орбиты Тп на промежуточную Т* с парамет-
рами = '’min, 'а = '’max и последующего оптимального
перехода (типа I I) с орбиты Т* на конечную орбиту Тк.
Доказательство. Рассмотрим произвольный
допустимый переход между данными орбитами (8.6), (8.7),
удовлетворяющий условиям § 2. Тогда из результатов
лемм 2.4, 2.6 следует существование таких точек и/, w",
что
гя (и/) = rmin,
гя (w) < rmin
гя (w) > rmin
sa (^) 5max
'a W < '’max
'’a (^") = '’max,
при W и/,
при w w',
при w <T w",
при w > w".
Если w' = w", то орбита при w = w' будет искомой орби-
той T*.
Пусть w' w", sa (w') smax. При w = w' имеем
орбиту Tr типа III, = 7’Illin, s'a < sinax. Оптимизируем
переход T' -> Тк типа III I. Он будет трехимпульсным
вида у —> Г -> пк. При сообщении в перицентре пг ЕЕ
ЕЕ у первого, тормозного импульса гя (w) — г (w) = rIllin,
Т (w) = —1, wr < w <1 w* (га (ш*) = '’max), величина sa
монотонно уменьшается до smax. В результате при w =
= w* получается орбита Т*.
Пусть w" < и/, r- (w") < 7\ (w") - 7’max. При
w — w" имеем орбиту Т" типа II. Оптимизируем переход
Т"-+- Тк типа II 1. Он будет двухимпульсным вида Г -> лк.
При сообщении первого, ускоряющего импульса в апо-
центре а" £ Г будет г (w) = ra (w) = 7’шах, Т (w) = 1,
перицентрическое расстояние монотонно увеличивается
от < 7’min до глк > '’min* При некотором промежуточ-
ном значении характеристической скорости w = w* ста-
нет гя (w*) = 7’mjn, получится орбита Г*.
Следовательно, при оптимизации перехода типа IV I
достаточно ограничиться траекториями, содержащими
промежуточную орбиту Т*, которая касается обеих гра-
ниц кольца. Поэтому, проведя оптимизацию перехода
294 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
Тп—~>Т* (предельного перехода типа IV IV) и перехода Г*—>
7'к (типа I I) и соединив их в одни переход, получим
оптимальную траекторию переходов между данными ор-
битами. Лемма доказана.
Переход 7* 7\ будет двухимпульсным апсид а л иным
вида
Г -> л к
(см. п. 4.2.). Начальный переход Тп -> 7’*, а вместе с
пим и весь переход 1 н —> 7ТН имеет, как показано в § 7,
множество эквивалентных по функционалу оптимальных
решений (см. рис. 2.46, 2.58, 2.95, 2.96, где 7* = ?1б)).
Эти решения (вообще говоря, скользящие режимы)
удовлетворяют системе (7.14), причем
eF - 1 G = 2), с,. = -1. (8.8)
В плоскостях скоростей Ра и 7J~, построенных при г =
= rmin и г = Гщах, их фазовые траектории заполня-
ют сплошь кривые четырехугольники
И Гз(бМ(б) (Ь(б) = Г*) соответственно (см.
рис. 2.46, 2.58). Отрезки границ этих четырехугольников
Лс, Рп представляют со-
бою фазовую траекторию двухимпульсного решения
Г -> у (7Нн) я*). Весь переход Тн —> будет в этом
случае четырехимпульсным вида
Мб) -> у -> г -> лк. (8.9)
Он реализует в основной задаче переход } -> Тк типа
IV6 I с нисходящей ветви Т^ начальной орбиты на ко-
нечную орбиту Тц (см. рис. 2.45). Отрезок границы
ИнТгса^зда е Ра есть оптимальная фа-
зовая траектория другого двухимпульсного решения для
перехода между орбитами Гн и 7* вида у -> Г ->
-> а*). Весь переход Тп -> Тк будет трехимпульсным
вида
лк. (8.10)
Это решение представляет в основной задаче переход
-> Тк типа IVa I с восходящей ветви Т{^ начальной
орбиты на конечную орбиту Тк (см. рис. 2.45). Оба решения
§ 8] ОСТАЛЬНЫЕ СЛУЧАИ ВО ВСПОМОГАТЕЛЬНОЙ ЗАДАЧЕ 295
(8.9), (8.10) эквивалентны (по характеристической ско-
рости шк). Остальные решения не реализуются в рамках
основной задачи.
Замечание. Приведенные результаты справедли-
вы и для обратного движения по начальной орбите (Ан <
<0, Лк > 0).
8.2.2. Переходы типа IT IV. В данном случае
элементы исходных орбит удовлетворяют условиям
\ min ?’ан 7’inax,
7’як \ min,
(8.11)
(8.12)
Структура оптимальной траектории будет опреде-
ляться следующей леммой.
Л е м м а 8.4. Оптимальный переход типа II IV со-
стоит из оптимального перехода (типа II II) с начальной
орбиты Тн на промежуточную Т", для которой га = гшах,
и последующего оптимального перехода (предельного, типа
IV IV) с орбиты Т” на конечную орбиту Тк.
Доказательство. Если 7\н = z-inax, то исход-
ная орбита — предельная типа IV, соответствующий
переход рассмотрен выше, в § 7. Лемма выполняется, при-
чем начальная фаза перехода отсутствует. Пусть гап
<С гтах- Рассмотрим произвольную траекторию, осу-
ществляющую переход между данными орбитами и об-
ладающую свойствами, указанными в § 2, | rn (w) |
rmin, 0 w Обозначим через w” характеристи-
ческую скорость, ДЛЯ которой 7’а (w”) = 7’max, (^) <
<С гтах При 0 W < w", Sa (w) Smax при w" << W
wK, через T" — соответствующую орбиту, rr. (w“) =
= Гд. На отрезке 0 w w" осуществляется переход типа
II II между орбитами Тп и 71", па отрезке w" w шк —
переход типа IV IV между орбитами Т" и Тк. Для полу-
чения оптимальной траектории необходимо и достаточно
оптимизировать, в соответствии с результатами § 6 и
§ 7, эти составляющие переходы, затем выбрать элемент
г", минимизируя суммарную характеристическую скорость
ivK. Лемма доказана.
Оптимальный переход 7'н Т" будет одно- или двух-
импульспым, причем первый импульс ДРХ сообщается
на внутренней границе у, при 7* = 7’min, после сообщения
этого импульса будет ra = rniax. По втором случае
296 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
сменим величину w", взяв за w" момент окончания первого
импульса. После этой процедуры переход Т”
будет одноимпульсным: г (ш) = rmin, 0 ip ip". В
плоскости скоростей Ра, построенной при г = rmin, рас-
смотрим эллипс Ra = ra = rmax}. Начальная точка
лежит внутри эллипса, конечная F^ — вне его, точ-
ка F", характеризующая орбиту Т”, — на/?а (см. рис. 2.77,
где F" = FH).
Рассмотрим оптимальный переход Т" —> Тк- Если
F" ЕЕ Р| Ra, то он осуществляется приложением од-
ного импульса AFi = Р"Р£} на внутренней границе у.
При других положениях точки F" переход Т” —> Тн, а
с ним и весь переход Тп -> Тк будет неединственным (см.
рис. 2.77). Решения удовлетворяют системе (7.12) — (7.14),
причем
8F = 1 (j = 2), сф = 1, если F" е М3 П Яа, (8.13)
eF = -1 (i = 1), сф = 1, если F" Е<П Ла. (8.14)
Простейшими решениями будут два двухимпульсных пере-
хода. Один осуществляется по схеме у —> Г (ему соответ-
ствует фазовая траектория Р^Р^Рк^ е Ра на рис. 2.77,
где F" = F^q), другой — по схеме Г -> у (его фазовая
траектория — кривая Р^Р^Рк* Ра на рис. 2.77).
Для последующего выбора оптимальной точки F" будем
применять двухимпульсную реализацию перехода Т” ->
—> Тк, осуществляемую по схеме у —> Г. Его начальный
импульс, сообщаемый, как и импульс AFX перехода Тп ->
—> Т", на внутренней границе кольца у, обозначим через
AFX. В плоскости Ра линия действия этого импульса
проходит через соответствующий фокус и точку F".
Склеивание обоих частичных переходов Тн -> Т" и
Т"в общий переход Тн -> Тк и выбор точки F"
(и элемента проведем, исходя из условия, чтобы им-
пульс AF1 перехода Тп —>- Т" в плоскости Ра был коллине-
арен импульсу AFi перехода Т" -> Гк, осуществляемого
по схеме у —> Г:
ДГх = ЖДГх-
§ 8] ОСТАЛЬНЫЕ СЛУЧАИ ВО ВСПОМОГАТЕЛЬНОЙ ЗАДАЧЕ 297
Из этого условия точка V" (и вся орбита Т") легко опре-
деляется однозначно.
Если F(h} ЕЕ М4, то V” будет точкой пересечения пря-
мой F^Ek^ с эллипсом 7?а, V" ЕЕ ТИ4 Q 7?а (см. рис.
2.77). Весь оптимальный переход Тп Тк определяется
однозначно (за исключением двух случаев F ia = F^).
Он осуществляется приложением на внутренней границе
у одного импульса, = Е^ Е^. Если при этом Vr (w)
0, то получаем переход Тн типа II IVa на вос-
ходящую ветвь орбиты Тк в основной задаче. Если же
Ег (гр) 0 (или рассматривается двухимпульсная реали-
зация Мн -> Мк\ как на рис. 2.72), то в основной задаче
имеем переход Тп -> Тк) типа II IV6 на нисходящую
ветвь Тк.
Если s М3 U Mi то V" — точка пересечения
прямой, проходящей через фокус Fia и начальную точку
Fh\ с эллипсом ВV" ЕЕ (М3 U М5) р| 7?а (в частном
случае F^ = F2а (Fla) решение не определено однознач-
но, точка F" может быть любой точкой дуги ЛП2 (ЩЛ'))»
см. рис. 2.77. Фазовая траектория в этом случае определе-
на однозначно лишь на отрезке 0 w w" (кроме ва-
риантов с F<f = Fia). Далее, на отрезке w" w грк
она неоднозначна (см. рис. 2.77, 2.92, где Т" = Т2б)),
удовлетворяет системе (7.12) — (7.14), с учетом (8.13),
(8.14), wK = Fia ?£> - FiaVH.
Если этот переход Т" -> Тк будет двухимпульсным
вида у -> Г, то и весь переход Тн -> Тк будет двухимпуль-
сным вида Мя 71/(ка) (см. рис. 2.78). В рамках основной
задачи это переход Тя -> Z(Ka) типа II IVa (его фазовая
траектория — кривая ЕнЕ2(б) Еад Ек1} G Ра на рис. 2.77,
где F(h} = FH ЕЕ М3). Если переход Т" Тк будет
двухимпульсным вида Г у (а" -> М^), то весь переход
будет трехимпульснымвида Мп-+- Г ->М(К°\ см. рис. 2.78.
Он является переходом Тп -> Т(£) типа II IV6 в
основной задаче (его фазовая * траектория — кривая
^нЕ2(б)Ез(б) Е(к1} ЕЕ Ра, см. рис. 2.77). Остальные опти-
мальные решения вспомогательной задачи не приводят
к переходам основной задачи.
298 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. ill
3 а м еч а н и е. Все полученные результаты спра-
ведливы и при обратном движении по одной из исходных
орбит, например началыюй.
8.2.3. П е р е х о д ы т и п a III IV, для них
7’тхн П1Цгм 5ан 5!Пах,
| | ^ак *^inax-
Л е м м а 8.5. Оптимальный переход типа Ill IV со-
стоит из оптимального перехода (типа III III) с началь-
ной орбиты Тп на промежуточную орбиту Тг, для кото-
рой = rmin, и последующего оптимального перехода
(предельного, типа IV IV) с орбиты Т' на конечную ор-
биту Гк.
Доказательство. Не ограничивая общности,
рассмотрим случай /\п Возьмем любую допусти-
мую траекторию перехода между данными орбитами,
удовлетворяющую условиям § 2. Пусть для нее w' — наи-
меньшее значение аргумента ш, для которого г- (w) =
= Лшп, Т' — соответствующая орбита, 7\ — 7*min, 5а
51Пах. Оптимизируем переход Гн-> Т' типа III III
в соответствии с результатами § 5. Тогда, заменив, если
потребуется, величину w' на меньшую, получим, что
переход Гн —> Тг будет одпоимпульсным, причем импульс
(обозначим его через AFJ прикладывается на внешней гра-
нице Г, при г = 7’шас<- Оптимизируем далее переход Т' —>
-> Тк — предельный переход типа IV IV. Выбрав затвлМ
оптимальную величину si, получим оптимальную траек-
торию всего перехода. В случае г-п — гтт первая фаза
перехода будет отсутствовать.
Лемма доказана.
Для получения оптимальной траектории надо рассмот-
реть переход Т' -> Тк и соединить оба частичных перехо-
да в один.
Переход Т' —> Тк будет одпоимпульсным при г =
= г1Пах или будет иметь множество эквивалентных реше-
ний. Рассмотрев в последнем случае двухимпульсное ре-
шение вида Гу (М^-^М^), из условия коллинеар-
ности его первого импульса AFj и импульса AFi перехода
Гп->- Т' легко определим орбиту Т' (и соответствующую
скорость V' ЕЕ РД оптимального перехода. Если Fh2) ЕЕ
§ 8] ОСТАЛЬНЫЕ СЛУЧАИ ВО ВСПОМОГАТЕЛЬНОЙ ЗАДАЧЕ 299
€Е М2 (см. рис. 2.66), то Vr есть точка пересечения отрез-
ка Р’н2) Е(к2) с кривой Rn = (V: гп = г1Пт}, весь переход
будет однопмпульспым при г = /’max* Если при этом
Vr 0, то получаем переход 7^-> 7^а) типа III IVa на
восходящую ветвь Z(Ka) орбиты в основной задаче; при
Vr <Z 0 имеем переход —>- ) на нисходящую ветвь
Zk ) (двухимпульспая реализация Л/п -> Л/к° также дает
эквивалентный переход типа III IVa, саг. рис. 2.68). При
Fh2) €= Мг U М3 точка V' есть точка пересечения прямой,
проходящей через фокус F in и точку F{2), с гиперболой
7?л (см. рис. 2.66), при этом
eF = -1 (f = 1), 8ф = -1, еСли У(н2) Л71,
8f = 1 (i = 2), 8,р = 1, если К(и2) е= М3.
Фазовая траектория перехода Т' -+ 77к и, следовательно,
всего перехода Ти -> 7К, в этих случаях не единственна
(см. рис. 2.66). Если для части Тг -+ взять двухим-
пульсное решетите Г у (Мп М(°}), то весь переход
будет также двухимпульсным Ои реализует
в основной задаче переход' Тп -> типа III IV6 (см.
рис. 2.67). Его фазовая траектория в Рл — кривая
здесь V' (см. рис. 2.66). Если
же для переходе! Тг — > 7\. взять решение у —Г (л' -+
—А/^), то получим трехимиульснын переход Мн—>
-> у —являющийся в основной задаче переходом
7Н -> 7к1) типа III IVa (см. рис. 2.67). Его фазовая тра-
ектория — кривая V н 1(a)! з2а)Т/2 ЕЕ (см. рис. 2.66).
Остальные решения (на отрезке Т' 7\- они сплоить
заполняют кривой четырехугольник I 2(a)! до)! к^'зео)
не позволяют осуществить движение в рамках основной
задачи (см. рис. 2.66, 2.94).
Замечание. Все изложенные результаты спра-
ведливы для обратного движения по одной из орбит
(с 7>к <С 0). В этом случае переход Гн -> Тг будет совер-
шаться при прямом движении на текущей орбите. На-
правление движения будет меняться при переходе
300 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
8.3. Оптимальные переходы типа И III
Исходные орбиты будут удовлетворять условиям
Г пн Г min Г ан /’шах?
Гmin Глк Гmax? $ан ^тах-
Лемма 8.6. Оптимальный переход типа II III со-
стоит из трех частей', оптимального перехода (типа II II)
с начальной орбиты Тп на промежуточную орбиту
Т" с Га = /’max? оптимального перехода (предельного, типа
IV IV) с орбиты Т" на промежуточную орбиту Тг с
Гл = rmin и оптимального перехода (типа III III) с ор-
биты Т' на конечную орбиту Тк.
Доказательство. Рассмотрим произвольную
допустимую траекторию данного перехода, удовлетворяю-
щую условиям § 2. Пусть ы" — наименьшее значение ско-
рости w, для которого ra (w) = /max? Т" — соответствую-
щая орбита, г а = /’max? G — ее параметры. Оптимизиру-
ем переход Гн -> Т" типа II II или II I. Уменьшив, если
нужно, величину w”, получим, что оптимальный переход
Тп-+Т" будет осуществляться приложением одного им-
пульса AFX на внутренней границе у, при г = rmin,
rmin- В плоскости скоростей Рач построенной при г =
= rmin? точка V", соответствующая орбите Т”, будет
лежать на дуге Dn ЕЕ Ra = {F: ra = rmax}? заклю-
ченной между точками пересечения прямых, проходя-
щих через начальную точку FH и фокусы Fс эллипсом
Ra (см. рис. 2.83).
Пусть и/ — наибольшее значение скорости w на тра-
ектории Т” —Гк? ДЛЯ которого Гя (w) = rmin (w' w"),
Т' — соответствующая орбита с параметрами r'n = rmin?
^гпах-
Уменьшив, если надо, значение wK — w', получим,
что переход Т' -+ Гк будет осуществляться приложением
одного импульса AF2 на внешней границе Г (при г =
= Гщах)- В плоскости Ря точка F', характеризующая
орбиту Т', будет лежать на дуге DK GE Rn, заключенной
между точками пересечения прямых, проходящих через
конечную точку FK и фокусы Fin, с гиперболой Rn
= {^: гп = '’min}, СМ. рис. 2.84.
Переход Т" —> Т' будет предельным типа IV IV. Пос-
ле оптимизации этого частичного перехода, в соответствии
§ 8] ОСТАЛЬНЫЕ СЛУЧАИ ВО ВСПОМОГАТЕЛЬНОЙ ЗАДАЧЕ 301
с результатами § 7, и оптимизации всего перехода по па-
раметрам гл, s'a орбит Т" и Т' получим оптимальную тра-
екторию перехода Тп -> Тк. Лемма доказана.
Оптимальный переход Т" -> Т (предельный типа IVIV),
а с ним и весь переход ТнТ}{ будет не единствен-
ным (см. рис. 2.88, 2.89, 2.83, 2.84, здесь V" =
V ~ F^q), Т” — Г(20), Т' = Т(4б)). Соответствующие
решения удовлетворяют системе (7.12) — (7.14), причем
для них = —1 (f = 1), 8ср = 1. Линия действия им-
пульса или тяги проходит в плоскости Ра (Рп) через фо-
кус ^1а эллипса Ra = {V: га = ггаах} (фокус F17Z гипер-
болы Rn = {Р: гл = rmin}), причем импульс направля-
ется от фокуса. Простейшим из этого множества будут
два двухимпульсных перехода, осуществляемые по схе-
мам у -> Г и Г -> у. На рис. 2.83, 2.84 приведены фазо-
вые траектории этих переходов для случая V” = Р^б? Р' =
~ Рцб)- Эт° —кривая F^F^F^) ЕЕ Fa, F^F^F^q ЕЕ
е Рп для первого перехода у -> Г, кривая F^^F^^F^) е
е Ра, v^}v^ е рп для второго перехода Г -> у.
Для определения точек Р", V воспользуемся переходом
Т” -> Т' вида у -> Г. Линия действия его первого им-
пульса АРг в плоскости Ра проходит через фокус Р1а
и точку V", линия действия второго импульса АР2 в плос-
кости Рп проходит через точки Fln и Р'. Соединяем
частичные переходы 7Н -> Г", Т" -> Т', Т' -> Гк в один
переход Тн Гк. Так как импульс ДРг перехода Тн —>
-> Т" должен быть коллинеарен импульсу ДРХ перехода
Т" -> Г', то точка V” будет точкой пересечения прямой,
проходящей через начальную точку Рн и фокус Р1а,
с эллипсом 7?а (см. рис. 2.83):
V" = (Fla) =
Аналогично, точка V' будет точкой пересечения прямой,
проходящей через конечную точку и фокус Fln, с гипербо-
лой Лл (см. рис. 2.84):
V = VN(Fln) = Р^б).
Этим полностью определяются орбиты Т" и Т' и все мно-
жество оптимальных переходов между данными орбита-
ми Гн И Тк.
302 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
Если переход Т" -> Т' будет двухимпульсным вида
у -> Г, то и весь переход Тп -> 7’к станет двухимпульс-
ным вида
Мн->Мк (8.15)
(см. рис. 2.85). Получили двухимпульсный переход меж-
ду орбитами Тп и Тк типа II III в рамках основной
задачи. Фазовая траектория для части Тп -> Т' этого
перехода изображается кривой Ра,
для части Т" -> — кривой ЕЕ Рп
(см. рис. 2.83, 2.84). Соответствующие зависимости rn (w),
ra (w) условно показаны на рис. 2.89 (для га 0) штри-
ховыми кривыми на отрезке w” w w'.
Если переход Т" -> Т' будет двухимпульсным вида
Г -> у, то весь переход будет четырехимпульсным вида
7lfH —> Г
(8.16)
(см. рис. 2.85), он также реализуется и в основной задаче.
В данном случае для перехода Гн -> Т' фазовой траекто-
рией будет кривая е Ра, для перехода
кривая Ш)1Т(б)1/мб)ГкеРл (см. рис. 2.83, 2.84),
зависимости гп (w), ra (w) показаны условно сплошными
кривыми па рис. 2.89.
Для перехода II III, таким образом, из всего множест-
ва оптимальных решений вспомогательной задачи выделя-
ются два эквивалентных решения, реализуемых в основ-
ной задаче.
Замечание. Приведенные оптимальные решения
для перехода типа II III годятся как при прямом, так и
при обратном движении по начальной орбите, £п Sg 0 (счи-
тается, что LK ^>0). В случае LH < 0 направление дви-
жения меняется при переходе Тп -> Т” или при переходе
гр/г rpf
§ 9. ОПТИМАЛЬНЫЕ ТРАЕКТОРИИ ПЕРЕХОДОВ
В РАМКАХ ОСНОВНОЙ ЗАДАЧИ
В результате оптимизации переходов в рамках вспомо-
гательной задачи (§§ 4—8) получены оптимальные траек-
тории в основной задаче для всех случаев, кроме перехо-
дов типа IVa IV6 и IV6 IVa. Для этих исходных орбит обе
задачи должны приводить, очевидно, к существенно отлич-
§ 9J
ОПТИМАЛЬНЫЕ ПЕРЕХОДЫ В ОСНОВНОЙ ЗАДАЧЕ 303
ным результатам. Действительно, пусть, например, на-
чальная Ди конечная Тк орбиты будут различными вет-
вями одной и той же орбиты, пересекающей обе границы
кольца. Тогда во вспомогательной задаче, в которой раз-
решается пассивный выход за пределы кольца, можно
совершить переход между орбитами, вообще не требую-
щий затрат топлива (wK 0). В основной же задаче это
невозможно.
Используя полученные выше результаты, рассмотрим
оставшиеся переходы IVa 1V6 и IV6 IVa в рамках основ-
ной задачи. В предположении, что в процессе этих пере-
ходов сообщается конечное число импульсов скорости,
задача решена в гл. II. Здесь покажем справедливость
этого предположения. Пусть, для определенности, имеет
место переход типа IVa IV6 (Л/н G у, Ргн 0, Мк ЕЕ
G у, Игк < 0, saH < sinax, saK < smax). Аналогично тому,
как сделано в п.1.2.3 гл. 1, возьмем за независимую пере-
менную величину
s = aQt + w, <?н 5К,
здесь t — время, w — характеристическая скорость, aQ —
некоторое фиксированное ускорение, sH = $к =
= aQtK + — предельные значения этого параметра 5.
При использовании этого аргумента уравнения движения
на различных участках управления записываются едино-
образно, имеют ограниченные правые части (см. формулы
(1.57) гл. 1).
Лемма 9.1. Для произвольного перехода в кольце К
(с конечным числом импульсов и участков ограниченного
непрерывного ускорения f (/)) функции
t (s), w (s), r (s), Г( (s), Vr (s), rn (s), sa (s), L (s), E (s)
будут непрерывными и кус очно-гладкими.
Доказательство проводится, например, рассмотрени-
ем различных участков управления: пассивных, импульс-
ных, с ограниченны^! ускорением.
Рассмотрим теперь некоторый переход типа IVa IV6
с произвольным конечным числом активных участков,
Г («н) = rmin, Vr (sa) > 0, Vr (sK) <0, r (sK) = rmin.
Если на нем функция г ($) постоянна: г (s) = rmm, 5н <
то переход сводится (с точки зрения минимума
304 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ.III
характеристической скорости) к одпоимлульсному пере-
ходу с импульсом
ДГ-=ГК-Г„. (9.1)
Импульс будет сообщаться па внутренней границе у.
Пусть
шах г (s) = /’* > Г* < Гтах.
Не ограничивая общности, положим г* /’1П<ах- Пусть
5* — множество тех значений переменной 5, для которых
г (5) = 7’*.
Лемма 9.2. На множестве S* существует хотя бы
одна точка $*, для которой
Vr(s*) - 0. (9.2)
Действительно, если точка s ЕЕ 5* лежит на дуге
/ (Z) — 0 или па дуге 0</ (/) < оо, или разделяет такие
дуги, то в ней Гг (s) = 0, в силу условия
= I-/).
sign(^-^ = signVr. Пусть точка sEE 5* принадлежит отрезку
5ii<4l)< 42) < $к импульсного управления, гранича-
щему с дугами 0 / < оо, па нем г ($) — /*, 4Х) s $<2).
Тогда па левом конце отрезка будет Vr (4П) > 0, на пра-
вом — yr(s^) 0. Поэтому на этом отрезке существует
точка $*, для которой выполняется условие (9.2). Лемма
доказана.
Пусть 7’* — кеплеровская орбита, соответствующая
кинематическим параметрам при s — s*. Для нее гл ($*) ~
f'r. • ra ($*) ~ га • В силу УСЛОВИЯ (9.2) При S = S* ДВИ-
жущаяся точка М ($*) --- М* будет находиться в некото-
рой апсиде — перицентре л* или апоцентре а* — этой
орбиты Г*.
Возможны три случая.
1) Пусть
' — ' а , ’ - ' шит
Орбита Т* будет орбитой типа II. Оптимальный переход
между орбитами Тн и 71* (типа IVa II) будет одно- или
двухимпульсным. В первом случае ои осуществляется
§ 9] ОПТИМАЛЬНЫЕ ПЕРЕХОДЫ В ОСНОВНОЙ ЗАДАЧЕ
305
приложением импульса в начальной точке Мн. Во втором
случае он происходит по схеме Ми а*, первый импульс
сообщается в начальной точке второй — в апоцентре
а* ЕЕ Г. Этот переход между орбитами одновременно ре-
ализует оптимальный переход из начальной точки Мп
в точку 717*. Аналогично, оптимальный переход Т7* Тк (ти-
па II IV6) будет одноимпульсным, осуществляемым в ко-
нечной точке Мк, или двухимпульсным вида а* —Мк. Он
будет также оптимальным переходом из точки 717* в конеч-
ную точку Мк. Оптимизируем, в соответствии с этими ре-
зультатами, оба составляющих перехода Тн -+ Т7*, Т7* ->
-> и соединяем их в один переход Весь пере-
ход будет двух- или трехимпульсным, осуществится по
схеме
Мп а* Мк, (9.3)
причем промежуточный импульс в апоцентре а* Г мо-
жет отсутствовать. Выбрав теперь оптимальное значение
элемента г* орбиты 77*, получим оптимальный импульсный
переход данного типа (соответствующие решения рассмот-
рены в п. 5.2 гл. II)
2) г* = г*, г* rinin.
Орбита Т7* будет орбитой типа I. Оптимальный переход
Тп Т7* типа IVa 1 будет двухимпульсным вида Мп
а*. Второй импульс его является апсидальным, уско-
ряющим. Оптимальный переход Г* —Гк будет также двух-
импульсным вида а* 717к. Его начальный импульс яв-
ляется апсидальным, тормозным. «Склеиваем» оба перехо-
да в один суммарный, объединяя при этом оба импульса,
сообщаемые па внешней границе Г, в один импульс. Пос-
ле этого получим двух- или трехимпульсный переход
вида (9.3), причем г- < rinin. Следовательно, после улуч-
шения по ггк данный случай переходит в предыдущий.
3) г* — — гтах.
Орбита Т7* будет орбитой типа III. Оптимальный переход
77н —> Т7* (типа IVa III) будет одноимпульсным, осуществ-
ляемым в точке л* ЕЕ Г, или двухимпульсным Ми ->
-> Г. В последнем случае после приложения первого им-
пульса получится орбита Г2, ДЛЯ которой ra = Г* /’max,
< Anin 5 второй импульс будет апсидальным, ускоряю-
306 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. Ш
щим. Аналогично, второй переход 71* Т}< является
одноимпульспым, осуществляемым в л*, или двухимпульс-
пым Г М1{. Объединяем оба перехода в суммарный пе-
реход Тп 7\. Получаем опять переход (9.3) варианта 1)
или переход с одним импульсом па внешней границе,
который, очевидно, после варьирования сведется к дру-
гим, рассмотренным выше вариантам.
Произвольный переход типа IVa 1V6 сводится, таким
образом, к какому-либо многоимпульспому: одно-, двух-
или трехимпульсному. Среди них и будет поэтому нахо-
диться оптимальный.
Пусть теперь осуществляется некоторый переход типа
1V6 IVa, для него Мп е Г, VrH < 0, гяН < Мк е
€= г, ИгК 0, ?’яК < /’min- Если па этом переходе
г ($) = rmax, sH < $ < *к,
то он сводится к одноимпульсному (9.1), осуществляемому
приложением импульса в начальной точке Л7Н. Пусть
г* = min г ($)< Гшах, так что можно положить г* = rmin.
Лемма 9.3. На множестве 5* — {s: г (s) = ?•*} су-
ществует точка $*, для которой Vr ($*) = 0.
Обозначим через Т* кеплеровскую орбиту, определяе-
мую параметрами движения при s = s*. Движущаяся точ-
ка М* в этот момент будет находиться в некоторой апсиде
л* или а* орбиты Т*.
В случае 1) г* --= гя*, sa*< smax орбита Т* будет ор-
битой типа 111. Оптимальный переход между орбитами
Тп и Т* (и между точками Мп и М*) будет одпоимпульс-
пым, осуществляемым в начальной точке 7ИН, или двух-
импульсным вида Мнл*. Переход Т* —> 77к также бу-
дет одноимпульспым, осуществляемым в конечной точке
7ИК, или двухимпульсный вида л* 7ИК. Весь переход
Т’н —> Тк станет двух- или трехимпульсным вида
Мп у Мк, (9.4)
причем промежуточный импульс (в перицентре л*) на
внутренней границе у может отсутствовать.
Остальные варианты:
2) > Smax, 3) Г* = Га* ПРИВОДЯТСЯ К уже
разобранным.
Оптимальный переход типа IV6 IVa будет поэтому од-
но-, двух- или трехимпульсным (9.1), (9.4).
выводы
307
§ 10]
§ 10. ВЫВОДЫ
Проанализированы, таким образом, все оптимальные
переходы для рассматриваемой постановки в рамках ос-
новной и вспомогательной задал.
В основной задаче все оптимальные траектории имеют
многоимпульсный характер, поэтому на полученных в
гл. II решениях достигается абсолютный минимум функ-
ционала. В процессе осуществления оптимальных перехо-
дов сообщается до четырех импульсов.
Для переходов типов I\ а 1V6 и IV6 IVa решения в ос-
новной задаче отличны (по фазовой траектории и функ-
ционалу) от решений вспомогательной задачи.
В остальных случаях решения в основной задаче обра-
зуют часть множества решений вспомогательной задачи,
имея с ними одинаковый функционал и. может быть, фа-
зовую траекторию. Эти переходы можно разбить на две
группы.
Для переходов первой группы — типов I I, II II,
III III, II I, III I — во вспомогательной задаче оптималь-
ные фазовые траектории определяются, в общем случае,
однозначно. Эти траектории могут быть реализованы при
управлении с помощью приложения некоторого конечно-
го числа импульсов (до четырех). При этом сам переход
будет осуществлен за конечное время в процессе реально-
го движения точки в пределах заданного кольца /<, т. е. в
рамках основной задачи. Тем самым из решений вспомога-
тельной задачи получаются оптимальные переходы соот-
ветствующих типов в основной задаче (см. таблицу, в ко-
торой показано, из каких решений вспомогательной зада-
чи следуют решения основной задачи).
В переходах второй группы — типов IV IV, (HV (Q ~
= I, II, III). II III — во вспомогательной задаче может
существовать множество оптимальных фазовых траекто-
рий, эквивалентных по функционалу. Теперь оптимальная
траектория вспомогательной задачи или, в случае не-
единственности решения, две траектории из множества
оптимальных траекторий могут быть реализованы в рам-
ках основной задачи как два различных многоимпульсных
перехода. Так для основной задачи получаются все оп-
тимальные переходы типов IVa IVa и IV6 IV6, Q IVa и
/?IV6 (Q = I, II, III), II III (двух- и четырехимпульсные
308 ИМПУЛЬСНЫЙ ХАРАКТЕР ОПТИМАЛЬНЫХ ПЕРЕХОДОВ [ГЛ. III
варианты), см. таблицу. Одновременно становится понят-
на природа одного интересного свойства ряда оптимальных
Вспом.з. | ОсноЬ.з. Веном 3. Основ. з.
II —* I I IIIV < II IVa // IV b
IIII —// II
III III —III III . /// iv < 1 Vlll IVa ^IIl IV5
II I —+ 11 I
III I —+ 111 I 1 II III < ^7V-4I
• ' L/K? IVa IV IV <C IV6
IVa IV5
Lz IVa 11V <^/ IV6
IV 5 IVa
переходов в основной задаче. Если в указанных выше па-
рах переходов исходные орбиты имеют равные элементы
L, Е, то их оптимальные траектории эквивалентны по
характеристической скорости. Причина этого факта яс-
на — данные пары реализуют одно оптимальное решение
или входят в множество оптимальных решений (эквива-
лентных по функционалу) во вспомогательной задаче.
ГЛАВА IV
ОПТИМАЛЬНЫЕ ПЕРЕХОДЫ
МЕЖДУ КОМПЛАНАРНЫМИ ОРБИТАМИ
В СЛУЧАЕ ПРОТИВОПОЛОЖНЫХ НАПРАВЛЕНИЙ
ДВИЖЕНИЯ ПО НИМ
Здесь будет рассмотрена задача оптимизации переходов
между орбитами, аналогичная рассмотренной во II,
III главах. А именно будут определены оптимальные (по
минимуму расхода топлива) траектории плоских перелетов
между компланарными орбитами в центральном ньютонов-
ском гравитационном поле. При переходе должны вы-
полняться ограничения на расстояние г от КА до центра
тяготения (см. формулу (1.1) гл. II), управление осуще-
ствляется импульсной тягой. Взаимное положение ис-
ходных орбит, время перехода — не заданы. Единствен-
ным отличием будет то, что движение по исходным орбитам
происходит в противоположных направлениях. В плоско-
сти движения выбирается положительное направление
вращения вокруг центра, например, против часовой
стрелки. Оно определяет положительную ориентацию тран-
сверсали tQ в каждой точке и знак трансверсальной ком-
поненты вектора скорости Vt = (F,t°). Если Vt О, L —
= rVt 0, то движение будет прямым, I = 0 [1 ]; если же
Vt < О, L — rVt < 0, то движение будет обратным, I = л;
случай Vt = О, L — 0 соответствует радиальному движе-
нию по прямолинейной, или «центральной» траектории.
Здесь перицентрическому расстоянию орбиты с L < О
будем приписывать знак «—», т. е. считать для нее г~ < 0.
Обычно будем полагать направление движения по началь-
ной орбите обратным, LH < 0, а по конечной — прямым,
> 0.
Как и прежде, наряду с основной задачей оптимизации
перехода, осуществляемого в кольце К, рассмотрим вспо-
могательную задачу оптимизации с ограничениями на
активные точки приложения импульсов или тяги.
310
СЛУЧАЙ ПРОТИВОПОЛОЖНЫХ ДВИЖЕНИЙ
[ГЛ. IV
§ 1. НЕКОТОРЫЕ СВОЙСТВА ОПТИМАЛЬНЫХ ПЕРЕХОДОВ
ВО ВСПОМОГАТЕЛЬНОЙ ЗАДАЧЕ
Сначала рассмотрим вспомогательную задачу (см. § 1
гл. III). Будем определять оптимальные (по быстродей-
ствию) траектории перехода между орбитами, определяе-
мыми элементами ZH, Еи и Лк, Е1{, причем траектория
.г (w) удовлетворяет почти всюду системе
- гИ'/’И,
(wyr И н Т,.М5(№),
rc (0) = (£н, Еи), х = (LK, Ен),
max (rmin, г- (^)) < г (w) < max'^^L, г? (ir)),
где величины T (w), Vt(w) — L/r определяются как проек-
ции единичной тяги /0(и?) и скорости V (ы) па положитель-
ную трансверсаль. Радиальную скорость Vr (w) можно, как
п прежде, считать положительной. Можно рассматривать
и выпуклое замыкание этой системы, включая в рассмот-
рение скользящие режимы. Структура оптимальной тра-
ектории будет вытекать из следующего результата.
Лемма 1.1. Пусть Ln = = 0 (гян = г-к = 0),
rmiiH ^ак Тогда оптимальный переход меж-
ду орбитами осуществляется приложением радиального
импульса на внутренней границе кольца, при этом
г (w) = rinin, L (iv) ~ 0, r- (w) = 0.
Доказательство проводится анализом оптимального (по
быстродействию) изменения константы энергии Е.
Отсюда п из результатов гл. Ill следует
Лемма 1.2. Оптимальный переход между орбитами
с противоположными направлениями движения (Ан < 0,
Д> 0) состоит из двух частей — из некоторого пере-
хода с обратным движением (L (w) 0) и перехода с пря-
мым движением точки (L (w) > 0).
Следствие. Среди оптимальных переходов между
орбитами с противоположным направлением движения
всегда имеются переходы, осуществляемые приложением
конечного числа импульсов.
S 21
СЛУЧАИ С ПРЕЖНЕЙ СТРУКТУРОЙ ТРАЕКТОРИИ 311
Хотя структура оптимального решения этим полностью
определена, будут полезны дополнительные свойства функ-
ций r-(w), (w). Во-первых, ясно, что на каждом частич-
ном переходе, на котором направление движения сохра-
няется, справедливы леммы 2.1, 2.3, 2.4 гл. III относи-
тельно функции rn (w). Далее, леммы 2.2, 2.5, 2.6 гл. III
относительно свойств функции ra (w) справедливы и в дан-
ном случае для всего перехода.
Используя эти результаты и результаты, полученные
ранее для переходов между орбитами с одинаковым на-
правлением движения, рассмотрим в §§ 2—4 поставленную
вспомогательную задачу. Заодно будем исследовать не-
посредственно вытекающие оптимальные решения основ-
ной задачи. Затем в § 5 рассмотрим те случаи переходов
в основной задаче, которые не вытекают из решений вспо-
могательной задачи.
§ 2. СЛУЧАИ, КОГДА СТРУКТУРА ОПТИМАЛЬНОЙ
ТРАЕКТОРИИ ТА ЖЕ, ЧТО И ПРИ ПРЯМОМ ДВИЖЕНИИ
ПО ИСХОДНЫМ ОРБИТАМ
Для ряда переходов между орбитами с противополож-
ным направлением движения оптимальные траектории
имеют ту же структуру, что и в случае прямого движения
по обеим исходным орбитам. Это переходы типов Q IV
(Q -- I, П, III, IV), II III. Они получены и подробно про-
анализированы в гл. III. Частью этих переходов всегда
является некоторый (возможно, предельный) переход
типа IV IV, поэтому во вспомогательной задаче опти-
мальное решение может быть определено неоднозначно.
Дадим краткий обзор этих решений.
Переходы типа IV IV. Если Ln < О, LK О,
то начальная точка Fh> лежит во множествах Л/5, MQ и,
может быть, М4, М7, Л/8, см. рис. 2.25, 2.26.
Если F(HX) ЕЕ М4 [J М8 (J Л/6, то фазовая траектория
определяется однозначно. Это отрезок прямой
в плоскости Ра (при F^ ЕЕ [J JZ8) или отрезок пря-
мой Ун2)^к2) в ПЛОСКОСТИ Р- (при F(H2) е Л76). Для основ-
ной задачи получаем отсюда одноимпульсные переходы
типа IVa IVa и IV6 IV6 (импульс сообщается навнутрен-
312
СЛУЧАЙ ПРОТИВОПОЛОЖНЫХ ДВИЖЕНИЙ [ГЛ. IV
ней границе у, если F(H1} е М4 J ^8, или на внешней
границе Г, если F^ ЕЕ М6).
Если F(H1} е М5 [J М7, то во вспомогательной задаче
получается множество решений (см. рис. 2.25, 2.26, 2.36,
2.37). Из него выделяются два двухимпульсных перехода
Мн -> Мк типа IVa IVa и IV6IV6 (см. рис. 2.86 для случая
Ai 0)- При сообщении одного из импульсов и меняется
направление движения.
Рис. 4.1. Фазовое множество
траекторий перехода Тн -> Т*
типа IV IV в плоскости Ра.
Рис. 4.2. Фазовое множество
траекторий перехода Тн -> Т*
типа IV IV в плоскости Рп,
Переходы типа IV I. Пусть £н <0, LK 0.
В данном случае оптимальная траектория включает в себя
орбиту 71*, элементы которой суть г* = rmin, г* = rmax
(см. п. 8.2.1 гл. III).
Во вспомогательной задаче, вследствие неединствен-
ности оптимального решения для перехода Тн~+ Т*,
получим множество оптимальных траекторий (на рис. 4.1,
4.2, где в плоскостях Ра, Рл изображаются фазовые тра-
ектории части Ти —> Т* всего перехода, заштриховано
это множество). Для основной задачи из него выделяются
две траектории. Одна реализует переход типа IVa I,
его часть Ти -+ Т* (Тп-+- Т^) изображается кривой
4.1 (4.2);
он будет трехимпульсным вида
Ма) - Г -И лк
(ри<\ 4.3). Для него направление движения меняется при
§ 2]
СЛУЧАИ С ПРЕЖНЕЙ СТРУКТУРОЙ ТРАЕКТОРИИ 313
первом или втором (как показано на рис. 4.3) импульсе.
Другая траектория реализует переход типа IV6 I, его
элемент Гн 7*(7H -> Т^) представляется кривыми
е Pa(V(a2)V^V^V^ е PJ на рис. 4.1 (4.2);
он будет четырехимпульсным вида
-> у Г лк
(рис. 4.4), направление движения меняется при сообщении
первого импульса.
Рис. 4.3. Оптимальный переход
типа IVa I при £н <Z 0.
Рис. 4.4. Оптимальный переход
типа IV6 I и III I при Ln < 0.
Переходы типа II IV. Пусть £н <0, £к > 0,
тогда начальная точка может лежать в подмножествах
М5 плоскости Ра (см. рис. 2.77, п. 8.2.2, гл. III).
Если Fh1} ЕЕ (см. рис. 2.77, где F^ = Z>), то фа-
зовая траектория — отрезок прямой F^V^ в плоско-
сти Ра. Для основной задачи отсюда получаем одноим-
пульсный переход типа II IVa (с импульсом в началь-
ной точке Мн ЕЕ у) и двухимпульспый переход типа
II IV6 (с импульсами в граничных точках MR у,
мк е у).
Если (см. рис. 2.77, где F^ = JE), то
из множества решений вспомогательной задачи следуют
два оптимальных перехода для основной задачи: двух-
импульсный переход MR —Мк типа II IVa и трехимпуль-
сный переход Мн —Г —7ИК типа II IV6 (см. рис. 2,78
для случая LR 0).
314
СЛУЧАЙ ПРОТИВОПОЛОЖНЫХ ДВИЖЕНИЙ [ГЛ. IV
Переходы типа III IV. Пусть Ln О, £к < 0.
Тогда начальная точка J Л72 U Р-
(рис. 4.5).
Если F(h2) е fit'z, то фазовая траектория определяется
однозначно, в плоскости Р- опа изображается отрезком
прямой Fh2)Vk2). Для основной задачи отсюда получаем
одноимпульсный переход типа III IV6 (импульс сообща-
ется в начальной точке Мн ЕЕ Г) и двухимпульсный пере-
ход типа III IVa (с импульсами в граничных точках 7ИН,
Рис. 4.5. Фазовые траектории перехода типа III IV при LH < 0.
Мк ЕЕ Г), причем направление движения будет меняться
при сообщении второго импульса в конечной точке (см.
рис. 2.68 для случая 0).
Если Fh2) ЕЕ U то во вспомогательной задаче
решение пе единственно (см. рис. 4.5). Из всего множества
решений получаем для основной задачи два перехода:
двухимпульсный переход Мн 7И(КО) типа III IV6 (кри-
вая ЕЕ Рп) и трехимпульсный переход
типа III IVa (кривая (= Ря),
см. рис. 2.67 для случая LK 0. В переходе 7ИН —>
—> у направление движения меняется при сообще-
нии последнего импульса.
Переходы т и п а II III. Пусть Ln < 0, Д- > 0.
Опять частью всего перехода будет переход (предельный)
типа IV IV между орбитами Т" и Z'(ra = rmax, Д = rmm)-
§ 21
СЛУЧАИ С ПРЕЖНЕЙ СТРУКТУРОЙ ТРАЕКТОРИИ 315
Рис. 4.G. Фазовые траектории в плоскости Ра для перехода Тп
-» Но) типа II III при г(У1 = rmin, < °-
•4 1 '• 4 111111 7 И
Рис. 4.7. Фазовые траектории в плоскости Р_ для перехода
Тк типа II III.
Рис. 4.8. Двухимпульсный
переход тина 11 111 при £н < О,
£к>0.
Рис. 4.9. Четырехимпульсиый пе-
реход типа II III при Ln <Z О,
LK > 0.
316
СЛУЧАЙ ПРОТИВОПОЛОЖНЫХ ДВИЖЕНИЙ
[ГЛ. IV
Поэтому во вспомогательной задаче имеется множество
оптимальных решений (рис. 4.6 для перехода Тп Т'
Т^\ рис. 4.7 для перехода Т" Т" 7^б)).
Для основной задачи получаем два эквивалентных
решения. Одно реализует двухимпульсный переход Мп
—> Мк (рис. 4.8). Его фазовой траекторией на участке Тп
Т' будет кривая Лс (см- рис. 4.6), на
участке Т" — кривая GE Рг. (СМ.
рис. 4.7). Другое решение реализует четырехимпульсный
переход вида Мн Г (рис. 4.9) с отрезками фазо-
вых траекторий 7н^б)Г^)С>) е Ра,
£= Направление движения может меняться как при
первом, так и при втором импульсе (последний случай
и изображен на рис. 4.8, 4.9).
Остальные переходы вспомогательной задачи разобь-
ем на две группы. Сначала в § 3 рассмотрим случаи, когда
оптимальные решения однозначно определяются, затем в
§4 — случаи, когда решение во вспомогательной задаче мо-
жет быть неоднозначно.
§ 3. ОДНОЗНАЧНО ОПРЕДЕЛЯЕМЫЕ
ОПТИМАЛЬНЫЕ РЕШЕНИЯ
3.1. Оптимальные переходы типа II II,
^min ГлК Гццп, rmin Ган(И) Г1пах
Пусть гак > ган. Как и при прямом направлении дви-
жения, зависимость га (ш) в данном случае может быть
монотонной или иметь один внутренний максимум. В пер-
вом случае проходит без изменения анализ гл. III, п. 6.2.
Если FH ее ЕЕ то будет N = 1, получим одноим-
пульсный переход при г = rmin (рис. 4.10, 4.11, па
рис. 4.10 Яа = {F: га = гак}). Если же FH ЕЕ А75, то
будет N = 2, переход имеет вид Мн -> см. рис. 4.10,
4.12. В случае га = шах га (ш) max (ган, гак) переход
W
принимает вид Мп а* N = 3. В отличие от ва-
рианта прямого движения, теперь возможны у функции
(га) стационарные точки, w'K (г*) = 0. Однако, как легко
показать, в них будет максимум функции шк(г*).
§ з] ОДНОЗНАЧНО ОПРЕДЕЛЯЕМЫЕ РЕШЕНИЯ 317
Рис. 4.11. Однопмпульсный пе-
реход типа II II при Лн < 0.
Рис. 4.10. Области существова-
ния одно- и двухимпульспого пе-
рехода типа II II.
Рис. 4.12. Двухпмпульс-
ный переход типа II II
при Ан < 0.
Рис. 4.13. Трехпмпульспый переход типа
II II при Ln < 0.
Рис. 4.14. Область существования трехпмпульсного перехода типа
II II при Lu < 0.
318
СЛУЧАЙ ПРОТИВОПОЛОЖНЫХ ДВИЖЕНИЙ
1ГЛ. IV
Должно быть /\—шах (га11, гак)илпга = гшах. В первом
случае имеем прежний двухимпульсный переход 37 н —> ак,
во втором — трехпмпульспый переход вида
37 п Г дук
(рис. 4.13). В плоскости /\, где 7?а — {Г: га = гшах},
фазовой траекторией такого перехода будет кривая
Vh К,(7’1а) г3(/'27.) ид С, = П!’еЛ/5" = {V: vt, (/’\J <
Vi3(F2x)} (рис. 4.14). Направление движения мо-
жет меняться в процессе сообщения любого импульса
(при N 1). На рис. 4.10, 4.12—4.14 изображены случаи,
когда ото происходит при втором им пульсе. Все три
решения реализуются в рамках основной задачи.
3.2. Оптимальные переходы типа И I,
min кН ак шах
Рассмотрим опять последовательно случаи, когда
функция rjw) монотонна пли имеет один внутренний мак-
симум. Пусть r-j{w) max (raII, raK), функция ra(w) мо-
нотонна.
Сначала рассмотрим вариант raK > гаИ. Обозначим
через w' такое значение характеристической скорости, для
которого г-(гУ) = пусть Т' —соответствующая
орбита (га11 ra (w') raK). Если г* < raK, то, соглас-
но результатам § 4 гл. Ill, переход Т' 77к типа I I бу-
дет двухимпульсным, при сообщении первого импульса
га увеличивается до raK, г- = гшП1. Поэтому можно взять
для орбиты Т':гл=гаи, г'_ = rmin. Переход 77Н Г
(предельный типа II 11) будет двухимпульсным вида
Л/Н^а'. Так как переход Т 77к осуществляется при-
ложением одного апсидального импульса в апоцентре, то
весь переход 7 п 7\ будет двухимпульсным (рис. 4.15)
вида
Мп —> otK. (3-1)
В плоскости Ра, где эллипс 7?a = {F: га = гаК}, первый
импульс направлен вдоль прямой, проходящей через фо-
кус Flx и начальную точку — от этой точки
Fn до эллипса (рис. 4.16), при этом увеличивается
до raK. Второй импульс — укоряющий, г- увеличивается
от rmin) до Gik- Направление движения будет ме-
§ 3]
ОДНОЗНАЧНО ОПРЕДЕЛЯЕМЫЕ РЕШЕНИЯ
319
пяться при сообщении одного из этих импульсов. Харак-
теристическая скорость равна
Пусть гаП > гаК, г; < гаН. Переход Тп Т’ (предель-
ный типа II II) будет двухимпульсным вида ан -> л'. При
сообщении в начальном апоцентре первого апспдалыюго
импульса ra(zz?) = гаП элемент гп увеличивается до rmin
Рис. 4.15. Двухимпульспый
переход типа III при raH <
<гак, < О*
Рис. 4.16. Фазовая траектория
перехода Тп -> Т' типа II I при
Лп < о.
(рис. 4.17). Полученную орбиту и примем за Т(г'п =
= rmin, = гаН). Переход Т' -> Гк будет двухимпульс-
ным а' лк, тогда весь переход Тп Тк также станет
двухимпульсным вида
осп > лк. (о.2)
При сообщении первого импульса в начальном апо-
центре гя увеличивается (с учетом знака) до глК, одновре-
менно меняется направление движения (см. рис. 4.17). За-
тем сообщается тормозной импульс в перицентре проме-
жуточной орбиты Т2, и ra уменьшается до raK. Сумма им-
пульсов перехода
= У 2цгр (г^к тан) Уац
Пусть теперь функция га(ш) имеет один внутренний
максимум, достигаемый в точке ш*, и га(ш*) = ri >
max (raH, raK). Обозначим орбиту при w — w* через
Т*. Легко показать, что без ограничения общности можно
320
СЛУЧАЙ ПРОТИВОПОЛОЖНЫХ ДВИЖЕНИЙ
[ГЛ. IV
взять
Г* = r~(w*) = rmin, L* > 0-
(3.3)
Например, если 71* — орбита типа II, то на множестве
га(ш) переход Т* -> 7'к будет двухимпульсным вида
а* —лк. При сообщении первого импульса га(ш) == гу
элемент увеличивается о
проходя через rmin. Поэтому
Рис. 4.17. Двухимпульспый ап-
сидалытый переход типа III при
7 ан 7ак’ ^ун О’
Т Гг, <С Г1Гцп ДО ГлК ГП11П,
можно принять за Г* ор-
биту, для которой выпол-
няется (3.3). Аналогич-
но рассматривается слу-
чай, когда Г* — орбита
типа I.
Рассмотрев теперь со-
ставляющие переходы
Т* (предельный типа
II II) и Т*^ТК (типа I I),
получим, что переход
Тп Т'к будет трех им-
пульсным
Мп -> 7? лк. (3.4)
Первый импульс, как и в переходе (3.1) типа II I (г* >
гсаи r*~ =rmin), проходит в плоскости Ра через началь-
ную точку УнП и фокус Flx эллипса 7?а = {V: га = г*}-
Второй импульс — ускоряющий, апсидальный, сообща-
ется в апоцентре сс*, третий — тормозной, апсидальный,
сообщается в конечном перицентре (рис. 4.18). Направле-
ние движения может меняться как при первом, так и при
втором импульсе (па рис. 4.18 оно меняется при сообще-
нии второго импульса).
Суммарная характеристическая скорость такого пе-
рехода
F^VH Д- 2цгр (sy Д- .syH) — (3.5)
Для определения оптимального перехода в данном клас-
се переходов необходимо рассмотреть функцию шк(га),
найти оптимальную величину (пли еа ГтыЛД, соот-
ветствующую наименьшему значению шк. Анализ функции
ipK (^а) производится так же, как и в случае прямого дви-
жения по обеим исходным орбитам, см, п. 4.2 гл. II. Пусть
g 31 ОДНОЗНАЧНО ОПРЕДЕЛЯЕМЫЕ РЕШЕНИЯ 321
Ф1 — угол наклона начального импульса к трансверсали.
Теперь в стационарной точке для величины С* = cos ср{
Допустим больший диапазон: О <Z С* 1 (при cos срг < О
будет ^>0, Goht - Г1пах), <\min < < 1. Опять
в стационарных точках функции шк (еа) будет w"K 0 (на
рис. 2.51 приведено множество соответствующих значе-
ний величины tpmax = ^И^тах (d2w^/del)), эти точки
суть точки максимума. Минимум wK (еа) возможен, как и
Рис. 4.18. Трехимпульсный пе-
реход типа III при Ln < 0.
Рис. 4.19. Фазовая траектория
перехода Тп Т* типа I I при
5н = rmin-
при прямом движении, лишь при крайних значениях:
r* = шах (ган, гак) и г* = rrnax. В первом случае переход
будет двухимпульсным (3.1), (3.2), во втором — трех-
импульсным
МнГ лк, (3.6)
см. рис. 4.18. Заметим, что все полученные оптимальные
решения вспомогательной задачи реализуются н в рамках
основной задачи.
Част п ы й с л у ч а й. Пусть глН rmin. В пре-
деле получим переход типа I I. В этом случае оптимальный
переход будет трехимпульсным вида лп -> Г -> лк, при-
чем угол (р, наклона начального импульса к транс-
версали равен л.
Действительно, в данном случае начальная орбита яв-
ляется предельной для орбит типа II, начальный пери-
11 В. В- Ивашкин
322
СЛУЧАЙ ПРОТИВОПОЛОЖНЫХ ДВИЖЕНИЙ
[ГЛ. IV
центр ли — начальной точкой Мн. Для трехимпульсного
перехода (3.4) при сообщении первого импульса будет
cos <Р1 = — 1, так как 7,.н == 0, | F/H | > У|irp/rmjn >
>OFla (рис. 4.19). Тогда w'K > 0, га*01ГГ = г,№. По-
этому оптимальный переход будет трехимпульсным вида
(3.6). Отсюда и из условия лп Л7Н следует утвержде-
ние. Направление движения будет меняться при сообще-
нии промежуточного импульса па внешней границе коль-
ца. На рис. 4.19 изображена фазовая траектория VHA'V*
части Тп Т* всего перехода (г* rmin, г* = rmax).
3.3. Оптимальный переход типа I 1,
1 miti Г ли ан 7 шах*
Обозначим через w то значение аргумента, для кото-
рого гл(ш/) = rinin, 71'— соответствующая орбита, г; <rmax.
Рис. 4.20. Оптимальный переход
типа I I при /,п < 0.
оптимальный переход Тп-> 7\{
Переход Тп -> Т' (пре-
дельный типа I II) будет,
согласно анализу частного
случая в п. 3.2, трехим-
пульсным вида лн->Г ->nz.
После сообщения первых
двух импульсов AFn AF2
получается орбита Г*, для
которой гп = rinin, га =-
— гшах. Переход 71* -> 7’к
будет двухимпульсным ви-
да Г лк. Объединим оба
перехода 71* и 7’*
—> 7\<. Тогда получим, что
будет трехимпульсным вида
лн —> Г —> лк.
Для него сумма импульсов
— J^2p.rp (sniax Ц- £-н) 2ргр (Slliax Ц- She) (^лн'Ь 1^лк)>
направление движения меняется при втором импульсе
(рис. 4.20). Это решение одновременно реализуется (и будет
оптимальным) и в основной задаче,
§ 4J
НЕОДНОЗНАЧНО ОПРЕДЕЛЯЕМЫЕ ПЕРЕХОДЫ
323
§ 4. НЕОДНОЗНАЧНО ОПРЕДЕЛЯЕМЫЕ ПЕРЕХОДЫ
4.1. Оптимальные переходы типа Ill I
В данном случае
0, 7 in in Г гн ? max, Я а н $тах,
О, Giiin 7 -к а к f max-
J)irc. 4.21. Фазовые траектории
перехода Тн Т± типа III I
при
Л емма. Оптимальный переход типа III I с обрат-
ным движением по начальной орбите состоит из трех
частей: одноимпулъсного перехода Тп -+ Т2 (типа ill III)
с гл2 = —Гшт, перехода Т2 Т* (предельного, типа IV
IV) с г- гИ1Н1, < = Гтах перехода Т* —7\. (типа I I).
Для доказательства лем-
мы достаточно показать, что
в данном оптимальном пере-
ходе промежуточной орбитой
обязательно должна быть ор-
бита 71*, указанная в лемме.
Если затем использовать
структуру оптимального пе-
рехода Тп-+ Т*(предельного,
типа Ill IV), то получим
указанный результат. Пусть,
например, иб < иб' (гп(иб) =-
— ^iniu, 7’a(lP ) — ^maxj, ТОГДа
можно считать, что ха(иб) <
< Smax, ^(иб') > rmin. Опти-
мизируя переход Т - ‘ 7'"
(типа 111 1), после сообщения
са получим орбиту 71*. Аналогичная ситуация будет и при
W" < w', Га(иУ) < Гтах, Гл(^") < ГпПп.
Из структуры оптимальной траектории, указанной
в лемме, следует неединственность определения оптималь-
ного решения во вспомогательной задаче за счет перехода
Т2-+Т*. На рис. 4.21 для перехода 7И -> Т* приве-
дены фазовые траектории (заштриховало множество, за-
полняемое траекториями перехода Т2 ГГ*) в плоско-
сти Рл. Траектория Т2 определяется точкой F22) пере-
сечения прямой У„2)Е2л с левой ветвью кривой /?л =
= {^: | гя|= rmill}. Фазовой траекторией перехода 7"*н —
max*
'МОЗНОГО импуль-
11*
324
СЛУЧАЙ ПРОТИВОПОЛОЖНЫХ ДВИЖЕНИЙ
[ГЛ. IV
будет отрезок Ун2)И'2) прямой Вн2)7<2л. Упитывая особен-
ности оптимальных решений перехода^ Т2 -> Z*," а так-
же то, что переход Т7* 77к будет двухимпульсным вида
Г лк (на рис. 4.21 приведена часть V*V4 его фазовой
траектории, соответствующая сообщению первого импуль-
са на внешней границе Г, после чего получается орбита
Т4 с гл4 = глК, гак = г max), получим оптимальные реше-
Рис. 4.22. Оптимальный переход
типа III I при < 0.
ния для всего перехода.
Из множества оптималь-
ных решенийвспомогатель-
пой задачи выделяются две
траектории, реализующие
переход III I в основной
задаче (их фазовые траек-
тории VfA'V* и
па переходе Т2 -> Т7* обра-
зуют границу всего мно-
жества фазовых траекто-
рий вспомогательной зада-
чи, см. рис. 4.21). Оба
перехода осуществляются
по одной схеме Л/н -> у —
—> Г —лк, однако для них величины первых трех импуль-
сов и фазовые траектории на отрезке различны. Для
одного перехода (его фазовая траектория на участке 77н-> Т4
изображается в Рп кривой F^F^F*!^) направление
движения меняется при сообщении первого импульса
(см. рис. 4.4). Для другого перехода (соответствующая
фазовая траектория — кривая V^V^A'V^ направле-
ние движения меняется при сообщении третьего, апси-
дального импульса (рис. 4.22). Оба перехода эквивалент-
ны по характеристической скорости:
wK = у(н2Чл - vtF2n + VM - V„K.
4«2. Оптимальные переходы типа III III
В данном случае
£н < 0, Г 1Гцп Г л11 Г max» < ^шах»
0, Гщхп Глк Г111ах, ЯаИ <С Ящах-
Пусть точки Fn\ Fi2) в плоскости 7\ определяют па-
§ 4]
НЕОДНОЗНАЧНО ОПРЕДЕЛЯЕМЫЕ ПЕРЕХОДЫ
325
чальную и конечную орбиты Гн, 7\. Если = inf ш,
rn(u’)~-rinin
ip3 = sup w, то всякий переход рассматриваемого типа
r7t (w)= rmin
будет состоять из трех частей: Ти —> Т2 (типа III III),
Т2 —> Т3 (типа IV IV) и Т3 —> Ти (типа III III). Переход
Тп Т2 будет одноимпульспым, точка Г22) лежит ду-
ге 772. Его фазовая траектория в плоскости Рл — отрезок
Ен2)Е22) (рис. 4.23). Переход Т2 —> 7'к (предельный, типа
Рис. 4.23. Фазовые траектории перехода типа III III при Lu < 0.
IV III) рассмотрен выше. Он будет одно- или мпогоим-
пульспым. В последнем случае для анализа соединения
этого перехода с переходом Тп -+ Т2 рассматриваем его
трехимпульсную реализацию Мп —> у —> Мк, в которой
первый импульс сообщается на внешней границе Г. Этот
импульс должен быть коллинеарен импульсу Fn2)V22)
перехода 77п -> 7\. Тогда, если F(H2) е ТИ5, то точка F^2)
будет пересечением прямой 7'11ЛЕ1(2) с ветвью 7?t. Точка
F22) будет пересечением с ветвью прямой, проходящей
через 11 F1JT. Если же Fj2) ЕЕ М7, то Г;2) есть точке!
пересечения с ветвью прямой, проходящей через Fj2) и
F2zi. Тогда точка F22) будет пересечением с /?2 прямой
Ен2)/Л2л. В этих случаях переход определяется неодно-
значно; па рис. 4.23 заштриховано множество, запол-
няемое оптимальными фазовыми траекториями для ча-
стичного перехода Т2 —Т 3. Если F(H2) ЕЕ Л7С, то точки
F(2?, V(? будут точками пересечения прямой Тц2)Е^2)
326
СЛУЧАЙ ПРОТИВОПОЛОЖНЫХ ДВИЖЕНИЙ
[ГЛ. IV
с ветвями 7?t, /?2- Фазовой траекторией будет пряма л
Vh2)Vk2), оптимальный переход осуществляется приложе-
нием тяги на максимальном расстоянии гшах вдоль век-
тора Vh2)^k2)-
Перейдем к основной задаче. Если GE А/6, то полу-
чим, вообще говоря, двухимпульсный переход Л/н -+
(рис. 4.24). Промежуточная орбита 7’2 характеризуется
Рис. 4.24. Двухимпульсный переход
типа III III при LH < 0.
Рис. 4.25. Трехимпульсный
переход типа III III при
Ln < 0.
в плоскости Ря произвольной точкой F2 ЕЕ
если при первом импульсе направление движения не
меняется, или точкой F2 е в противном случае.
Если Fh> ЕЕ U -^7» т0 из множества оптимальных
решений вспомогательной задачи выделяются два трех-
импульсных решения для основной задачи. Соответствую-
щие переходы осуществляются по одной схеме
71/н ~~
но отличаются величинами и ориентацией импульсов.
Суммарная скорость шк у них одинакова:
WK - еДЛХ2) - FглЧЛ,
е, = —ер — 1, если F(„2) е
8/7 —8Ф = 1, если F(H2) е
В одном переходе (его фазовая траектория — кривая
Ин2)Е22а)Ез2)Ек2), если ее $1$, см. рис. 4.23) направ-
§ 5]
ОПТИМАЛЬНЫЕ ТРАЕКТОРИИ ОСНОВНОЙ ЗАДАЧИ
327
ление движения меняется при сообщении первого им-
пульса (рис. 4.25). На другом переходе (для пего фазо-
вой траекторией будет кривая \ если
F„2) ЕЕ Мь, см. рис. 4.23) направление движения меняет-
ся при сообщении последнего (третьего) импульса.
При м е р. Пусть глп = —глн — rinin, Еп = Е«.
Имеем две геометрически одинаковые орбиты, отличаю-
щиеся направлением движения. В плоскости Рл началь-
ная и конечная точки Fj2), F(k2) лежат на разных ветвях
кривой = {V: | гп | = rmin} на одной трансверсали
Рис. 4.27. Схема перехода
типа III III, г~к = —г71ц —
= rmin*
Рис. 4.26. Фазовая траектория
перехода при глк - — глн = rmin.
(рис. 4.26). В этом случае F(H2) ЕЕ М6, оптимальный пере-
ход будет одпоимпульсным. Трансверсальный импульс
прилагается па внешней границе кольца, в начальной точ-
ке орбиты Тп (в этом случае движение в кольце происхо-
дит по конечной орбите 7ТК, рис. 4.27) или в конечной точ-
ке орбиты Тк (движение в кольце К будет осуществлять-
ся по орбите Ти). Величина импульса
2LK
AV = r— = VtK - Vln.
§ 5. ОПТИМАЛЬНЫЕ ТРАЕКТОРИИ ОСНОВНОЙ ЗАДАЧИ
Попутно с нахождением оптимальных решений вспо-
могательной задачи определены все оптимальные перехо-
ды основной задачи, кроме переходов IVa IV6 и IV6 IVa.
Используя полученные выше результаты, легко рассмот-
реть и эти переходы.
328
СЛУЧАЙ ПРОТИВОПОЛОЖНЫХ ДВИЖЕНИЙ [ГЛ. IV
Рассуждая, как и в случае прямого движения по ис-
ходным орбитам (§ 9 гл. III), получим, что переход типа IVa
IV6 может быть: одноимпульспым прн г (w) == гПцП, двух-
или трехимпульсным вида Мн Г 7ИК с Л К2 > 0 (па
рис. 4.28 приведена его фазовая траектория в плоскости
Ра при Л К > 0).
Па переходе типа 1V6 IVa также сообщается от одного
до трех импульсов. В первом случае г (w) = rmax. При
Рис. 4.28. Фазовая траек-
тория трехимпульсного пе-
рехода типа IVa IV6.
Рис. 4.29. Фазовая траектория
трехимпульспого ^перехода ’ти-
па IV6 IVa.
TV 1 переход имеет вид у -> 7ИК, причем A V2 >
> 0. По промежуточной орбите Т2, для которой | гя2 | —
= ^min, может осуществляться прямое или обратное дви-
жение. Если L2 < 0, гя2 — —rmin, то фазовая траектория
(кривая Е= Р^) прилегает к ветви 7?~
(рис. 4.29). Если же Ь2 0, гя2 = rmin, то фазовая тра-
ектория (кривая Ун2) ЕЕ РР) будет прилегать
к ветви Rx кривой R^ = {V: гп = гты},см. рис. 4.29.
Оптимальная траектория может быть найдена сравне-
нием указанных траекторий по функционалу
§ 6. ВЫВОДЫ
Получены все оптимальные переходы для случая,
когда КА движется по одной из исходных орбит в прямом
направлении, а по другой — в обратном.
Во вспомогательной задаче для переходов типа I I.
IT I. II II оптимальная фазовая траектория определяется
д общем случае однозначно (иногда может быть лишь
§ 6]
ЁЫВОДЫ
329
несколько энергетически эквивалентных решений). Эти
траектории реализуются и в рамках основной задачи.
Для переходов типов Q IV (Q = I, II, III, IV), R III
(/? — I, II, III) оптимальная фазовая траектория неодно-
значна на некотором множестве (положительной меры)
начальных данных. Для основной задачи из решений
вспомогательной задачи следуют оптимальные переходы
типов IVa IVa, IV6 IV6 R IVa, R IV6, R III. При этом
для переходов типов R III получим по две энергетически
эквивалентных траектории (для перехода типа III III
эта двойственность имеет место при неединственности
решения вспомогательной задачи).
Все оптимальные переходы в основной задаче, как и в
случае прямого движения по исходным орбитам, осуще-
ствляются приложением конечного числа импульсов. При
переходе может быть сообщено до четырех импульсов, точ-
ки приложения которых разделены дугами пассивного
полета.
ГЛАВ А \
ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНЫХ
ИМПУЛЬСНЫХ ПЕРЕХОДОВ МЕЖДУ
ФИКСИРОВАННЫМИ ОРБИТАМИ
В данной главе рассматривается способ численного
определения оптимальных (по минимуму характеристиче-
ской скорости) импульсных переходов между орбитами
в центральном гравитационном поле. Взаимное положе-
ние орбит фиксировано, при переходе наложены ограни-
чения на расстояние КА до центра тяготения. Метод оп-
тимизации основан на необходимых условиях оптималь-
ности, выборе опорных траекторий в качестве начального
приближения в краевой задаче и построении семейства
траекторий, порождаемого данной опорной траекторией.
Для случая незаданного времени маневра проводится
численный анализ оптимальных траекторий перехода
между компланарными орбитами, одна из которых пере-
секает заданную окружность, ограничивающую рас-
стояние подлета к планете. Структура переходов оказы-
вается весьма разнообразной, число импульсов меняется
от одного до четырех. Для некоторых параметров орбит
оптимальными будут траектории, которые не получаются
непрерывным продолжением перехода, оптимального при
свободной ориентации орбит.
§ 1. МЕТОД ЧИСЛЕННОГО РАСЧЕТА, ОСНОВАННЫЙ
НА НЕОБХОДИМЫХ УСЛОВИЯХ ОПТИМАЛЬНОСТИ
В общем случае перехода между орбитами (реальное
гравитационное поле, фиксированность взаимного поло-
жения исходных орбит, ограниченная тяга и т. д.) опти-
мальная траектория, по-видимому, может быть определена
лишь численными методами.
Для численной оптимизации маневрирования могут
быть применены различные методы. Распространен ы
прямые методы оптимизации, особенно методы параметри-
ческой оптимизации (например, методы расчета двух-
импульсных переходов). Здесь рассмотрим особенности,
возникающие при использовании необходимых условий
§ 1]
МЕТОД ЧИСЛЕННОГО РАСЧЕТА
331
оптимальности для численного определения оптимальной
траектории. Ряд авторов применял необходимые условия
оптимальности для анализа оптимальных импульсных пе-
реходов между орбитами (см. [1] — [6] и др.). В работе
[1] производится оптимизация при использовании эле-
ментов орбиты как фазовых координат, характеристиче-
ской скорости как аргумента; в работе [2| выясняются
требования к ориентации импульсов, сообщаемых в раз-
личных точках орбиты; в работе [3] для двухимпульсной
траектории перехода, определяемой численно решением
задачи Ламберта, строятся сопряженные функции и про-
веряются условия оптимальности; если они нарушаются,
то траектория улучшается параметрически введением до-
полнительного импульса; в работе [5] просмотром (с не-
которым шагом) всех значений сопряженных переменных
делается глобальный анализ траекторий импульсных пе-
реходов между орбитами; синтез оптимальных перехо-
дов строится численно в работе [6].
Здесь будет рассмотрен метод построения оптимальной
траектории при ограничениях на расстояние до центра
тяготения.
Для определенности пиже рассмотрим случай опти-
мизации импульсного перехода между фиксированными
орбитами в центральном ньютоновском гравитационном по-
ле при незаданпости времени перехода. Наложены огра-
ничения на расстояние до центра тяготения:
Г min ^ (^) шах -
Кратко укажем необходимые условия оптимальности (см.
гл. I). Существует сопряженная вектор-функция фг =
= (X, ц. v)*, фг - (£. 1]. £)*, фг " —фг (компоненты век-
торов фг, фг указаны в системе координат: радиус, транс-
версаль, нормаль к плоскости орбиты). Функция фг (0 (ба-
зис-вектор) абсолютно непрерывна, функция фг (/) может
быть разрывна в точках контакта с ограничениями, тогда
g (h ж 0) - Н (С- - 0) - о (^)
о (/) > 0 — скачок меры,
-= 1, если (С) при этом ГД/,) = rmin,
= —1, еСЛИ Г (ti) = при ЭТОМ Га(^-) = Гтах-
332
ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ
[ГЛ. V
На всей траектории выполняется условие
Яо -- д') н- (%., V) = 0, 4't ;= 0, д = — г,
t II I к •
Модуль х1 | г|?р | вектор три достигает в точках сообще-
ния импульсов абсолютного максимума, одинакового для
всех точек приложения импульсов:
хг GO = | Ч’г GO | -= 1 = max (t), tH < t < /K.
Каждый импульс сообщается вдоль базис-вектора в дан-
ной точке
ДГ GO
zwj " *’ и-
Если при сообщении импульса A Vt (или его некоторой
части) оскулирующие орбиты Т (w) не нарушают заданных
ограничений, то указанный максимум достигается в точке
сообщения импульса и с учетом возможного движения по
этим оскулирующим орбитам.
В случае, когда импульс AFf сообщается во внутрен-
ней (по времени) точке траектории перехода, tn < tt <
то в пей
(•фр.'Фг) = — (Ч>< Лг)({= °> (1-1)
Х1(«г±0)<0.
Если в начале и конце перехода параметры заданы не-
полностью (и, может быть, есть ограничения в виде не-
равенств), то добавляются условия трансверсальности.
В нужном для дальнейшего случае, когда в конце перехода
задана орбита (ее пятью элементами, например, р, е, со,
i, Q), не пересекающая границ, а время и угол пере-
хода свободны, условие трансверсальности сводится
к (1.1).
Легко видеть, что данная система условий полная, т. е.
число неизвестных начальных сопряженных переменных
и параметров, определяющих траекторию перехода, рав-
но числу конечных условий и условий оптимальности.
Возникает краевая задача, решение которой дает опти-
мальную траекторию.
§ 1] МЕТОД ЧИСЛЕННОГО РАСЧЕТА 333
Одной из главных трудностей, возникающих при ре-
шении краевых задач, является проблема нахождения
хорошего начального приближения. В качестве началь-
ного приближения будем брать оптимальную (при огра-
ничениях па расстояние) траекторию перехода Пг между
компланарными, свободно-ориентированными орбитами с
заданными элементами гл, га (это было предложено
Т. М. Энеевым), см. гл. II, [7], или некоторые 'другие
достаточно простые траектории перехода ВЦ, i = 2,3, ...,
получаемые аналитически или численно. Постепенно
сдвигаясь от опорной траектории по тем элементам ко-
нечной орбиты, которые надо изменить, следя при этом за
выполнением остальных (неизменяемых) конечных усло-
вий и условий оптимальности, будем получать семейство
траекторий перехода между фиксированными орбитами,
порождаемое исходной опорной траекторией. Такой про-
цесс будем называть продолжение^и опорной траектории
Пь при таком продолжении получаются траектории nt-
семейства St. При этом предполагается, что оптимальные
траектории носят импульсный характер. Из соображений
непрерывности следует тогда, что по крайней мере в неко-
торой окрестности траектории Пт ее продолжение (наилуч-
шее, если оно неоднозначно) будет в случае общего поло-
жения давать оптимальную траекторию. При большом
удалении от Пг продолжение может дать неоптимальную
траекторию. Поэтому сравниваются (по функционалу)
стационарные траектории из разных семейств и определяет-
ся самая экономичная траектория (при заданных началь-
ной и конечной орбитах). Она и далее будет называться
оптимальной траекторией. (Эта траектория может не быть
абсолютно оптимальной, если выбор опорных переходов
был недостаточно полон. Дополнительный анализ опти-
мальности можно провести разными способами, например
выбором других опорных траекторий, сравнением с ре-
зультатами параметрической оптимизации.)
Применение метода построения траектории, основан-
ного на удовлетворении необходимых условий оптималь-
ности, выборе в качестве начального приближения ряда
достаточно простых опорных траекторий и дальнейшем
продолжении этих решений, позволяет построить замкну-
тый алгоритм оптимизации переходов.
334
ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ
[ГЛ. V
§ 2. ПРИМЕР ЧИСЛЕННЫХ РАСЧЕТОВ
ОПТИМАЛЬНЫХ ИМПУЛЬСНЫХ ПЕРЕХОДОВ
МЕЖДУ ФИКСИРОВАННЫМИ ОРБИТАМИ
2.1. Исходные данные
Для экспериментальной проверки метода рассмотрим
импульсный переход типа II I между компланарными
орбитами в центральном ньютоновском гравитационном
поле, см. гл. II. Время перехода не задано, при переходе
наложено ограничение на расстояние до центра притя-
жения. Начальная орби-
Рис. 5.1. Схема перехода П*,
оптимального при свобод-
ной ориентации орбит.
Рис. 5.2. Геометрия сообщения
начального импульса для пе-
рехода П1.
границу у, глн < rmin, ган > ^min- Конечная орбита не
пересекает ограничений rmin глК < гаК < гшах. Этот пе-
реход является, например, моделью заатмосферного
участка траектории выведения КА с Земли на орбиту ИСЗ.
Для определенности взяты следующие значения пара-
метров. Цгр —- 1, Гцпп = 1, Гтах = °°, ГлИ — 0,5, ГаН
= 2 (ен = 0,6), гак = 5. Величина глК будет меняться в
диапазоне rniin < глК< гак (0 < < 2/3). Принятые зна-
чения параметров позволяют провести анализ при больших
эксцентриситетах исходных орбит и существенном по-
гружении начальной орбиты в граничную сферу.
Начальной точкой Мп траектории перехода будет та
точка начальной орбиты, которая лежит па границе у и в
которой радиальная скорость положительна, V)H /> 0,
гн = rIllin. Если долгота перицентра сок конечной орбиты
§ 2] ПРИМЕР РАСЧЕТОВ ОПТИМАЛЬНЫХ ПЕРЕХОДОВ 335
не задана (орбиты свободно ориентированы), то для приня-
тых исходных данных оптимальный переход будет двух-
импульсным вида ЛЛГ -> ак, рис. 5.1 (см. и. 4.2 гл. II). Для
этого перехода 1Д направляющие косинусы начального
импульса (и компоненты базис-вектора в начальной точ-
ке) определяются формулами
cos Ф1 = Р1 = — £геа(Уа)/Фн,
sin Ф1 = = е^7)И/Фн,
г„/гл2 =rmin/rxl!, zx --• у
Фн = [Ен "I' (Г(н e№a3jc)‘J >
sign (га2 " ^*ак) &F^ак*
В данном случае еа -- 0,2. — 1, ер ~ — 1, импульс
AFj проходит через левый фокус Fla эллипса /?а = {Г:
га гаК}, рис. 5.2. Величина первого импульса
Ф, - , Д «Л,.
Этим определяются также параметры гя2, га2, о)2 проме-
жуточной орбиты 75. Второй импульс AF2 сообщается
в апоцентре а2 переходной орбиты вдоль скорости:
АУ2 = Кхк — Va2, cos ср2 -- ц2 — 1, sin (р2 = Х2 -= 0,
тогда функционал
- А V. А У2.
Зная базис-векторы в точках Л/п, а2, определим началь-
ные компоненты 1Ц, вектора фг, его модуль х2 = |фг|,
угловое рассогласование Аф;1 ф;1 — дц:
— -it-уЧа- о,
'н \ ?1 / и
V/1 —- Ш "Т* г1 ~ ^гн
х2 — + Ц1 + s*n €Рг 1 =
Афг1 = ср,-1 — Фг
в = sin ф1 гуЕТ ’
4-М^, (2.1)
7]1
COS фг1 == ,
Х2
336
ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ
[ГЛ. V
В данном случае = 0,50185, Асрг1 --- 1,21448, х2 =
= 0,85645, сок = (Ок = 0,49810 (относительно липин
Рис. 5.3. Схема двухим-
пульсного перехода вида
лн ак (wK = 0).
апсид начальной орбиты).
Для других опорных траекто-
рий функции а[?г (и), -фи (и) строят-
ся аналогично: в точках сообще-
ние импульсов будет фк = ДР/ДК,
из этих условий определяются
функции фк (и), фг (и) на пассив-
ных дугах, соединяющих точки
приложения импульсов. Если точ-
ка лежит на ограничении, то функ-
ция фг (t) может иметь скачок (по
радиальной компоненте), в про-
тивном случае — непрерывна.
Ниже будем также сопостав-
лять оптимальные решения с огра-
ничением г rinin и без него.
В последнем случае оптимальный
переход при свободной ориентации
орбит будет (для взятых параметров) двухимпульсным
переходом ПД вида лн-^ак, сок ~ 0, рис. 5.3.
2.2. Построение краевой задачи
Пусть структура оптимальной траектории аналогична
структуре траектории ГД: первый импульс сообщается в
начальной точке 717п (и = затем осуществляется полет
по переходной дуге Мп М2, в точке М2(и --= и2) сообщается
второй, последний импульс ДК2, получается конечная ор-
бита Гн, рис. 5.4. На рис. 5.5 приведена соответствующая
зависимость хх (и), причем на отрезке (и2, и2 ф 2 л) — для
оскулирующих орбит, для которых rK rIllin. Краевая
задача для получения такой траектории может быть по-
строена различными способами. Рассмотрим вариант,
при котором варьируемыми параметрами будут начальные
значения сопряженных переменных, пли величины <рх
(угол наклона начального импульса к горизонту), Д<рг1
(угол между векторами фк^/Д, Hi)*, фг1 = (Sx, гц)*,
х21 | фгХ |). Тогда модул!.» начального импульса ЛКх
§ 2] ПРИМЕР РАСЧЕТОВ ОПТИМАЛЬНЫХ ПЕРЕХОДОВ
337
равен
ДУ г — II oi/xi,
Л 01 ~ (?1^гН 'И П1^/н)
гн
Х1 - - (?А1 + Под-
компоненты скорости после сообщения импульса опреде-
ляются по (2.1), ими определяется переходная орбита Т2,
константы для определения
сопряженных переменных
вдоль нее. В начальной точке
(и = иг = #п) будет Xj < О,
как и на исходной оптималь-
ной траектории П*. Опреде-
ляется та точка М2 на пере-
ходной орбите Т2, в которой
модуль базис-вектора хДи)
достигает максимума, в ней
и и2, — (Нк + ПИ) О’
хх < 0.
Рис. 5.4. Схема двухимпульс-
ного перехода с одним гранич-
ным импульсом (при сок~ 1,12).
В этой точке вдоль базис-вектора 'фг сообщается импульс
AF2. Параметры
<Р1, Дсрг1,х21, ДУ2
выбираются при решении краевой задачи так, чтобы удов-
летворить условиям
х1(и = и2) = 1,
h (w =
е (w =- шк) :: ек,
СО (w = Шк) = (Ок,
здесь = Д У]. + Д У2 — конечное значение характе-
ристической скорости.
Решается последовательность краевых задач i = 1,
2, 3,... Для первой краевой задачи i = 1 (на первом ша-
ге по элементу сок) берется ^k(i) = (oK(i)= (о«+
6сок (звездочкой обозначены элементы для опорного
ЗЗЙ
ЙИСЛЕЙЙОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ
[ГЛ. \
перехода), начальные значения для параметров краевой
задачи берутся также из исходного перехода Пр Поел*
решения этой краевой задачи делается еще один шаг по
долготе сок и решается вторая краевая задача i = 2. Для
нее
^к(г) = = ^к(г) = £к(г-р =
О)к(г) — Н- <5 CD к ?
начальные значения параметров краевой задачи берутся
Рис. 5.5. Зависимость модуля базпе-вектора от угла и при дви-
жении по переходной орбите Т% и оскулирующим орбитам Т (w>.
из решения предыдущей (t — 1)-й краевой задачи. Ана-
логично решаются последующие краевые задачи. При
этом элементы Ак, остаются фиксированными, а угол
(ок последовательно меняется. Так получается однопара-
метрическое семейство траекторий 111(со1<), порождаемое
опорным переходом ПР Заметим, что при достаточной
базе по параметру сок (при i 2) начальные данные для
решения краевой задачи можно получить экстраполиро-
ванием данных из предыдущих краевых задач.
На исходной траектории и получающихся траек-
ториях П1((ок) вдоль всех оскулирующих орбит, для кото-
рых гя (w) > rmin, будем иметь
хх(гр, и) 1, и2 и и2 + 2л, А У7! + A V2,
Гг. (w*) = rmin.
§ 2]
ПРИМЕР РАСЧЕТОВ ОПТИМАЛЬНЫХ ПЕРЕХОДОВ
339
Иногда удобнее решать краевую задачу, исходя из
сопряженных переменных в точке сообщения конечного
импульса па конечной орбите, т. е. обратив движение.
Если в этом случае взять за параметры величины iz2, х2(и =
~z и2), Д Е2, Д Vj, то переменные р, Л, S, р в точке и = и2
можно определить из условий оптимальности следующим
образом:
__ sio-n р
/l + tg-ф
= |Л I g <Р,
I = ех>р,
и -- — ех-А,
Рис. 5.6. Схема однопмпульсного
перехода (при сок 1,73).
Условия краевой задачи будут следующими:
х1 (и — ut) ---- 1, h (0) — Лн,
е (0) еИ, (о (0) - о)и.
При продолжении траектории Щ можно, сделав пол-
ный оборот по углу сок. дойти до исходной траектории
IE, так что не изменится структура траекторий при всех
углах сок. В этом случае двухимпульсный переход Пх,
в котором первый импульс сообщается в точке 7ИН, яв-
ляется везде кандидатом па оптимальность. Может ока-
заться, однако, что процесс построения семейства Пх((ок)
дойдет до точки, продолжение за которую возможно, но
необходимо для этого изменить структуру траектории,
иначе нарушаются условия оптимальности. Рассмотрим
некоторые простейшие возможные изменения такого рода:
1. Пусть при (Ок ~ (ох импульс ДУХ, сообщаемый в
начальной точке Ми. обращается в нуль: Д V\ —0 при
(Ок (01- При (Ок = (ох и при дальнейшем продолжении
получаем одноимпульсный переход, рис. 5.6.
2. Пусть Дсрг1 -> л/2 при (ок (о2. Точка сообщения
начального импульса отрывается от точки Мн. При
310
ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ
[ГЛ. V
дальнейшем продолжении оба импульса будут внутрен-
ними, причем х^Л/ц) < 1.
3. Пусть x^ipk, u3) / 1 при о)к -> со3. При и = и3 Ф
Ф и2 появляется дополнительный импульс. Дальше пе-
реход будет трехимпульсным (если предыдущий переход
был двухимпульсным) или двухимпульсным (если переход
Рис. 5.7. Схема перехода
с двумя внутренними им-
пульсами (мера а = 0).
через оборот). При пр<
пульспую траекторию bi
был одноимпульсным. А -- 0).
Последний случай представлен
па рис. 5.7.
4. Пусть па двух импульс-
ной траектории 11г будет
Xj (?г*, и3) / 1 при (0к 0)4,
гя(ш*) = r.nin, AVj < <
< ДУХ + ДУ2 = ipK. На оску-
лирующей орбите 7* при и = и3
возникает дополнительный тре-
тий импульс (равный нулю прп
(ок = со4), а импульс ДУ2 дро-
бится на два: начальная часть
ДУ2(ш* — ДУД/ДК и конеч-
ная часть ДУ2(грк — ш*)/ДУ2
переходят в самостоятельные
импульсы — второй п четвертый
(при сок = со4 они сообщаются
(олжепии получаем четырехим-
Мн м2 м3->
(2.2)
рис. 5.8. После сообщения импульса ДУ3 (или ДУ2)
получается орбита Т4 (или Т3), касающаяся границы
г = rniin. При прохождении ее перицентра скачком ме-
няется переменная г|?г. о (£л) > 0. Прп сок = со4 будет
ДУ3 = 0, ДУ9 (со4 + 0) - - ДУР Д У4(со4 - 0) ---
- - п;*. ДУ2(ю4 - 0) - ДУ2(со4 -!- 0) + Д У4 (со4 -(
+ 0). для определенности здесь взят случай, когда угол
(о возрастает при переходе к траекториям (2.2). Если при
продолжении этой четырехимпульспой траектории будет
ДУХ —> 0 при (Ок ~соз, то получаем трехимпульсный
переход вида
М2-> М3-> М4, (2.3)
см. рис. 5.9.
§ 21
ПРИМЕР РАСЧЕТОВ ОПТИМАЛЬНЫХ ПЕРЕХОДОВ
341
Приведем несколько других достаточно простых опор-
ных переходов типа II I, см. табл, на стр. 342. Переход П2
вида лк: для него ищ = ( ~ л), параметры началь-
ного импульса и сопряженные переменные определяются,
как и в переходе П1? если ra2 ~ глк. Двух импульсные пе-
реходы И3 вида ап -> л1;, (ок 0 и П4 вида аи -> ак,
Рас. 5.8. Оптималытая четы-
рех импульсная траектория пе-
рехода, касающаяся границы
(мера а (л;) > 0).
Рис. 5.9. Оптимальная трехим-
пульсная траектория перехода,
касающаяся границы (мера
a(ni) > 0, ЛТ4 = 0).
сок = л: для них все импульсы — апсидальные. Трех-
импульсные апсидальные переходы П5 вида ап у —> ан
и Пб вида ан->у-> лк, о)к = л: для них на границе
у (г = rmin) есть скачок меры о > 0. Трехимпульсные
траектории П7 вида Л/н -> Г -> лк, (о[; = <о7 (~ 0) и П8
вида -> Г ак. сок = cos л): для них первый им-
пульс — неапсидальиый, па границе Г (г ~ г111ах) сооб-
щается мера о. Четырехпмпульсиые переходы Пу вида
-> Г -> Г -> лк и Г11о вида ан у -+ у -+ ан, на ко-
торых имеется промежуточное движение точки по дуге
круговой орбиты на границе (Г или у): для них функцио-
нал шк не зависит от угла со!;, численного построения по-
рождаемого семейства не требуется. При г1Пах = 00 пе-
реходы П7 и Пу эквивалентны, переход П8 неэкономичен.
Если переход отличен от Щ или опорная траектория
отлична от Пр то краевая задача строится аналогично
342
ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ
[ГЛ. V
тому, как это сделано выше. Отметим лишь, что в случае
невозможности продолжения с выполнением всех условий
оптимальности (это имеет место, например, когда опорная
Одозе вид пере х Схеме траектории U)*
М м~а„ сск ий/ ш;
п; мн—пк / ОИ У шг
пр пк 0
ОСр~(Хк п
f zM) 0
Одози вид перех Схема траектории (»к
м а/?/$л\ ( мэм Tt
п7- М~г~лк \ \ Ш7
п; М~Г-оик Ч§/4
к м~г~ ~Г~ПК ^\гГ 1 Г Ч\ 0+ ~2л
П'о а~У~ -у—ос. ( Ш 0- -Zn
траектория не удовлетворяет условиям оптимальности)
можно осуществить продолжение с нарушением некото-
рых условий, так как возможно последующее восстановле-
ние выполнения этих условий. Например, для перехода
П5 на некоторой дуге траектории, примыкающей к началь-
ной точке Мн, будет x-^iz) > 1. При его продолжении в не-
который момент (ок = о)' наступает выполнение условия
xx(u) 1, траектория становится стационарной.
§ 2j ПРИМЕР РАСЧЕТОВ ОПТИМАЛЬНЫХ ПЕРЕХОДОВ
2.3. Некоторые результаты численных расчетов
Опишем результаты численных расчетов для несколь-
ких типичных вариантов перехода типа II I и исходных
данных, указанных в п. 2.1.
Если ек — 0, глк = гак, то траектория Пг двухимпульс-
ного перехода Мн —> ак, оптимальная при свободной дол-
готе (ок, будет оптимальной при (любой) фиксированной
Рис. 5.10. Зависимости характеристической скорости шк1, величин
составляющих импульсов AFi, угла U2, определяющего точку
приложения импульса AF2, для оптимального перехода при
rmin = 1, а также характеристических скоростей iz?K5 (при rrnin = 1,
N = 3), ipk0 (при rmin = 0), (при rrnin = 2) от углового поло-
жения перицентра сок при = 3,5.
долготе, Пх = ПР В этом случае переходы Щ и П2, П3
и Пр П*5 и Пб попарно эквивалентны, из них П1? естествен-
но, имеет наименьшее значение wK.
Аналогично, при гак ган продолжение Пх пе-
рехода 11J сохраняет двухимпульспый вид, АТ^ > 0,
A V2 > 0 (лишь при глк = ган, (ок = л будет ДУ2 = 0),
на соответствующих траекториях выполнены все условия
оптимальности, для них обозначим = шК1. На
рис. 5.10 для г^к = 3,5 (ек ~ 0,18) представлены соответ-
344 ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ [ГД. V
ствующие зависимости шН1(о)к), A V\((oK), А У2(о)к),
u2(wK). Интересно, что в процессе такого продолжения при
wk = <о2 получаем переход П2-
При изменении угла сок характеристическая скорость
монотонно меняется от наименьшего значения (соответ-
rmm О*
ствующего переходу Пг) до наибольшего (для перехода
П2). При этом первый импульс сообщается в фиксирован-
ной (начальной) точке Мн, а точка приложения второго
импульса монотонно движется по конечной орбите. Что
касается продолжений других опорных траекторий, то
они дают большее значение функционала, причем траек-
тории П5 и П6 переходят друг в друга. Наиболее интерес-
но продолжение (трехимпульсное) перехода П5 (зависи-
§ 21
ПРИМЕР РАСЧЕТОВ ОПТИМАЛЬНЫХ ПЕРЕХОДОВ
345
мость 1Рк5(о)к)), па дуге Q3Q± оно приводит к стационар-
ным траекториям (пе являющимся в данном случае, од-
нако, оптимальными), см. рис. 5.9. На отрезках (Q2Q3),
02*2 5) па некоторой дуге траектории, прилегающей к на-
чальной точке 717н, будет (и) 1, условие оптималь-
ности не выполнено. В точках Q3, Q± будет х1(Мн) = 1.
Если rmin < глН, то получаем движение без ограниче-
ния. На рис. 5.10, 5.11 представлена соответствующая
Рис. 5.12. Схема двухим-
пульсного перехода вида
Лд л).
Рис. 5.13. Схема оптимального би-
параболического перехода при отсут-
ствии ограничений.
зависимость функционала zpKo от угла сок, а на рис. 5.11 —
также зависимости составляющих импульсов AV\, АУ2,
расстояний и истинных аномалий в точках приложения
импульсов т\, Од (на начальной орбите Тн) и г2, (на ко-
нечной орбите Тк), перицентрического расстояния гя2
промежуточной орбиты Т2 от угла сок для двухимпульс-
ных переходов. Они оптимальны на отрезке Q& Qq Q2 и
являются продолжением перехода Пп вида лн -> (см.
рис. 5.3), который оптимален при отсутствии ограничений
на расстояние г (t) и при свободной долготе сок- Для сок =
= л при таком продолжении получаем апсидальный пе-
реход П12 вида лн -> лк, рис. 5.12. При монотонном изме-
нении угла <ок в диапазоне (0,2л) точка сообщения первого
импульса колеблется около начального перицентра лн,
оставаясь внутри круга г = 1? а точка приложения
34В
ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ
[ГЛ. V
Рис. 5.14. Схема оптимального
перехода при rmin = ган.
второго импульса монотонно движется по конечной ор-
бите. При гяК < г*к (ж 3,9) вблизи значения сок = л есть
отрезок (на рис. 5.11 кривые, относящиеся к двухимпульс-
ному переходу, отмечены здесь штрихом), на котором оп-
тимален бипараболический переход с двумя конечными
импульсами ДР1? ДК4 в перицентрах исходных орбит и
двумя «нулевыми» импульсами в «бесконечности», рис. 5.13.
Для этого перехода wK (сок) = const (см. отрезок QzQzQ^ на
рис. 5.11) нужное значение
угла сок обеспечивается угло-
вой дальностью полета в «бес-
конечности».
Другое крайнее возмож-
ное значение- rmin равно ган:
(^min)max — ГаН( = 2,0). В ЭТОМ
случае только одна точка
начальной орбиты лежит в
кольце К: К = {гГП1п
г Гшах}- Оптимальный
переход в этом случае будет
трехимпульсным вида ан ->
—> М2 -> ак, рис. 5.14. После
сообщения начального уско-
ряющего импульса ДК4 (в апо-
центре ан) получается кру-
говая орбита Z2, гя2 = га2 =
= rmin, КА движется по границе у (г = rmin) до линии ап-
сид конечной орбиты. Далее осуществляется двухимпульс-
ный апсидальный переход М2(= л3) -> ак. Функционал
и?к = ^к(ю) всего перехода не зависит от угла сок, см.
рис. 5.10.
Получение различных значений сок обеспечивается со-
ответствующим подбором угловой дальности \и = и2 — и±
кругового участка: Ди = сок — я.
На рис. 5.15 представлены соответствующие характе-
ристики для варианта гяК = 2,5 (ек = 1/3), rmm = 1.
Зависимости u?Ki(g>k), ДУ^сок), ДУ2(<ок), и2(ык) относят-
ся к двухимпульсным переходам П1(сок), на которых при
всех углах сок выполняются условия оптимальности. За-
висимость и?кб(^к) представляет функционал для перехо-
дов, являющихся продолжением перехода П5(Пб). Каче-
ственное отлцчце от предыдущего варианта заключается
§ 21
ПРИМЕР РАСЧЁТОВ ОПТИМАЛЬНЫХ ПЕРЕХОДОВ
347
в том, что теперь на некоторой дуге (лежащей правее точ-
ки (?3 на рис. 5.15) функционал ггК5(^к) меньше функцио-
нала шк1(й)к). На дуге Q3Q^ это продолжение П5((ок)
(трехимпульсное) стационарно, в точке будет х1(Мн) =
= 1. Дальше из точки устраивается четырехимпульсное
стационарное продолжение П5((ок), см. рис. 5.8, для
него в начальной точке Мн сообщается импульс, AVX О,
х1(Л/н) = 1. На дуге это продолжение дает меньший
функционал, чем П1((ок), П5((ок). Поэтому на дуге Q3Q^
оптимальными будут трехимпульсные траектории П5((ок)
вида (2.3), см. рис. 5.9, на них х1(Мн) < 1, АУХ = О,
глн ~ гл2 < r min, ^лз Г min» Гя4 = r min? О (л4) 0. На
дуге <24(?5 оптимальными будут четырехимпульсные траек-
тории! П5((ок) вида (2.2), см. рис. 5.8, для них AV\ 0,
хДМн) = 1, Гя2 < rmin» Глз < rmin, Гя4 = ГдНп, О (л4) > 0.
При остальных углах сок оптимальным будет двухим-
пульсный переход-Пх (о)к). Зависимости АУД(ок)» иД«к),
348
ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ
[ГЛ. V
о (сок) соответствуют указанным трех- и четырехнмнульс-
ным решениям в области их оптимальности.
Если следовать вдоль кривой опт (сок) --- min (wK*i,
Шкб)» представляющей оптимальные траектории, то в точ-
ках Q3 и (Д сопряженные переменные (взятые, например,
в точке Ми) и параметры траектории перехода терпят
разрыв, траектории П]((ок) и П5(сок) не могут быть полу-
чены непрерывным переходом друг в друга.
Область пеоптимальпости двухимпульспого перехода
3
П1(с0к) соответствует углам сок В этой области для
траектории П1(сок) на оскулирующей (при сообщении вто-
рого импульса) орбите Т (ш*), касающейся границы,
гл(^*) = rmin, есть точка максимума функции хх(н), от-
личная от точки сообщения импульса ДИ2, см. рис. 5.5.
При достаточно больших значениях глК этот максимум
не превышает единицу, по крайней мерс при глК > га11
будет хх(ш*, iz)C 1.
С уменьшением величины глК зона оптимальности
траекторий П5, П5 расширяется, указанный максимум
возрастает, достигая единицы при некотором значении
гяК = г пк, несколько меньшем ган (г^к ~ 1,954), затем
на некотором диапазоне по углу сок будет max хДн;*, и) >>
Д> 1, нарушаются условия оптимальности переходов
П1(сок). Интересно, что при гяК -С семейство траекторий
П5, П5 смыкается с семейством Пх в точках сок. где
таххДн;*, и) -= 1, гл(ш*) -- rIllin.
и
На семейство П5, П5 можно теперь попасть, исходя ио
только из опорного перехода П5, по и из перехода ПР
На рис. 5.16 представлены характеристики переходов
при гяК - 1,5 < гаН, исходные орбиты пересекаются (ек ~
~ 0,54). При продолжении траектории 1Д в сторону уве-
личения угла сок (при этом па начальном участке умень-
шается угол фД получаем двухимпульспые траектории
Пх, Д7Х Д> 0 (см. рис. 5.4), начальный импульс монотон-
но уменьшается до пуля в точке (Д. Далее на небольшой
дуге получается одпоимпульспый переход, им-
пульс ДГ2 которого является непрерывным продолже-
нием второго импульса перехода П1(сок) предыдущего
§ 2J ПРИМЕР РАСЧЕТОВ ОПТИМАЛЬНЫХ ПЕРЕХОДОВ
участка. Соответствующее взаимное положение исходных
орбит (сок ~ 1,7288—1,7340) близко к той ориентации,
при которой начальная и конечная орбиты касаются (см.
рис. 5.6). В точке_(?2 при переходе появляется новый,
О / 2 '6 п 4 5 4 2tL Q)k
Рис. 5.16. Характеристики оптимальных переходов прп гпк = 1,5.
внутренний импульс AF3. На дуге получаем двух-
импульсные траектории, оба импульса AF2, AF3 внут-
ренние (см. рис. 5.7). При сок = л в точке Q3 имеет место
апсидалыгый переход П4 вида ан ак (рис. 5.17). В точке
второй импульс AF3 обращается в пуль, на дуге
опять получаем однопмпульсный переход в районе (сок ~
~ 4,5492—4,5550) второй точки касания исходных орбит
(рис. 5.18). Прп дальнейшем продолжении на орбите, обра-
зующейся после сообщения импульса AF2, появляется
новая точка максимума функции хх(гг), возникает второй
350
ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ
[ГЛ. V
импульс АК3. II а отрезке переход будет двухим -
иульсным.
При смещении от опорного перехода llL в сторону
уменьшения долготы сок получаем двухимпульсный пере-
ход П1? AFj J> 0 (рис. 5.19), для него быстро растет
Рис. 5.17. Схема двухимпульс-
него перехода вида аи • ак
(«к л)-
Рис. 5.18. Оптимальный одпопм
нульспый переход(при о)к ^4,55).
max xL(iv*< и), достигая в точке единицы, далее это двух-
импульсное решение будет нестационарно. Из этой точки
Q9 возможно, однако, четырехимпульсное продолжение,
которое дает траектории П5(сок).
Продолжение П5(о)ь) опорного перехода П5 нестацио-
нарно па отрезке па нем х^Л/ц) J> 1. В точке (Л
будет х1(Л/н) -- 1- Устраивая из этой точки такое продол-
жение, чтобы х1(Л/н) = 1, получим четырехпмпульспые
стационарные переходы П5 (<ок), см. рис. 5.8, оптималь-
ные па дуге (>8(>у. Точки Qq и (?у близки друг к другу (соу
» 6,2673, (о9 ~ 6,2657), (о9 > (Оу При продолжении
траекторий П5 за точку опи подходят к точке где
превращаются в двухимпульсный переход П1? рис. 5.20;
здесь А73 - Ojj - 0, АИ2(П5) + АУ4(П5) - A72(nj.
Переходы Щ и П5, следовательно, могут быть в данном
§ 21 ПРИМЕР РАСЧЕТОВ ОПТИМАЛЬНЫХ ПЕРЕХОДОВ
351
непрерывности зависи-
Рис. 5.19. Оптимальный
двухимпульсный переход
с одним граничным им-
пульсом (при сок ~ 4).
случае получены одним непрерывным продолжением
(с «петлей» в районе точек Если же следовать по
кривой ipkout («к) оптимальных траекторий (сплошная
кривая на рис. 5.20), то при переходе в точке (>9 от двух-
импульспых траекторий к четырехимпульспым траек-
ториям П5 происходит нарушение
мости параметров от долготы cdk.
При продолжении от точки Q8
в сторону уменьшения а)и получа-
ем оптимальные трехимпульсные
траектории П5(сок), х1(Л/’н) < 1, см.
рис. 5.9. В точке Q7 первые два
импульса AF2, AF3 «сливаются»
в один импульс AF2 + AF3 -> AF2,
рис. 5.21, получаем двухимпуль-
сный переход, на котором переход-
ная орбита, образующаяся после
сообщения первого импульса AF2,
касается границы у, в точке каса-
ния будет о (л) 0, рис. 5.22.
Такой переход остается оптималь-
ным на отрезке QgQ7- На рис. 5.16
переменные, соответствующие
двух-, трех- к четырехимпульспым
переходам 115(сон), П5((он), снабжены штрихом (на отрез-
ках QqQ71 Q7Q9, Q8Q^ где о > 0).
Рис. 5.20. Связь переходов 1ГХ, П5, 115 вблизи точек (?8, <?9, (?9.
При отсутствии ограничений па расстояние г (кривая
оптимальные траектории в данном случае также
352
ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ
[ГЛ. V
весьма разнообразны по структуре. Соответствующие ха-
рактеристики переходов приведены на рис. 5.23. На отрез-
ке Q5QqQ\. переход остается двухимпульсным. При удале-
нии от опорной траектории Пп, для которой сок = 0, и
приближении к точкам Q±, Q$ (близким к точкам Q5,
Рис. 5.21. Схема «слияния»
двух импульсов в один им-
пульс.
Рис. 5.22. Оптимальная двухимпуль-
сная траектория перехода,касающая-
ся границы (мера о > 0).
ж 1,7306, 0)5^ 4,5526, рис. 5.24) начальный импульс
уменьшается до нуля. На отрезках QlQ2(N = i),
Q2Q2UV = 2,(^ ж 1,73-1,76), Q^Q^N = 2, cdk ~ 4,52-
—4,55), QiQ'^N = 1) оптимальные траектории те же, что
и при движении с ограничением г (t) rmin = 1. На
отрезке Q2Q3Q^ (в районе сок = л) двухимпульспый пере-
ход уступает по функционалу бипараболическому (см.
рис. 5.13).
На рис. 5.25 представлены характеристики оптималь-
ных переходов для предельного случая гяК = rmin =
= 1 (ек = 2/3). В этом случае последний импульс пере-
ходов П5, П5, увеличивавший гя от rinin до гяК, обращает-
ся в нуль, ДУ4 = 0, на рис. 5.25 приведено предельное
(при гяК \ rmin = 1) значение соответствующего угла
и4. Точки теперь совпадают. При движении вдоль
оптимальных решений от точки Qo в сторону уменьшения
угла G)K траектории П1(сок) в точке непрерывно пере-
ходят в П5(сок), далее в точке — в траектории П5(й)к),
затем в точке Q5 — опять в П^сок), при N = 1. В отличие
от предыдущего варианта, здесь (при < 1,26)
ПРИМЕР РАСЧЕТОВ ОПТИМАЛЬНЫХ ПЕРЕХОДОВ
353
5.23* Характеристики
переходов при г_к = 1,5,
Рис.
оптимальных
rmin •
Рис. 5.24. Зоны оптимальности различных переходов вблизи точек
q\, i = 1, 2. , 5,
2 В. В. Ивашкин
Рис. 5.25. Характеристики оптимальных
переходов при
rmin "
Рис. 5.26. Схема оптимального бппараболического перехода при
глк rmin > гпи>
§2] ПРИМЕР РАСЧЕТОВ ОПТИМАЛЬНЫХ ПЕРЕХОДОВ 355
в районе угла о)н л и при ограничении г > г.пш - 1 по-
является зона оптимальности бипараболпческого перехода
П9(<Ок),Для него и>к(о)к) = const, рис. 5.26. Поворот линии
апсид осуществляется при таком переходе с помощью при-
ложения «нулевых» импульсов и движения в «бескопрч
ноет и».
2.4. Выводы
На основании проведенных расчетов можно сделать
ряд выводов относительно особенностей изложенного ме-
тода построения оптимальных траектории и свойств полу-
ченных решений.
Метод построения траекторий перехода, основанный на
необходимых условиях оптимальности, использовании
достаточно простых опорных траекторий в качестве на-
чального приближения для краевой задачи и продолжении
этих траекторий по долготе перицентра сок, позволил для
всех взаимных положений орбит получить стационарные
траектории, осуществляющие переход между заданными
орбитами при удовлетворении ограничений на расстояние
до центра тяготения.
Использование нескольких разнотипных опорных тра-
екторий часто позволяет получить решения, которые не
получаются непрерывным продолжением траектории, оп-
тимальной при свободной взаимной ориентации орбит,
и увеличивает уверенность в том. что получаются опти-
мальные траектории.
Данный метод удобен для получения информации о ста-
ционарности рассматриваемой траектории, о характери-
стиках импульсов, а также для организации расчета при
изменяющейся структуре оптимального решения.
Изложенный метод, использующий идею продолже-
ния известного решения, удобен для проведения каче-
ственного анализа оптимальных траекторий во всем
диапазоне взаимных угловых положений исходных
орбит.
Неудобством метода является, естественно, необходи-
мость решения довольно сложной краевой задачи, которая
иногда (например, при приближении к точке «слияния»
двух импульсов в один) может медленно сходиться. Остает-
ся неясным до конца вопрос об абсолютной оптимальности
12*
356 ЧИСЛЕННОЕ ОПРЕДЕЛЕНИЕ ПЕРЕХОДОВ [ГЛ V
получаемых траектории. Примененный метод, по-види-
мому. не очень удобен для проведения единичных расче-
тов. так’ как попутно с заданной траекторией придется
определять все семейство оптимальных траекторий, начи-
ная от опорной.
Кратко отметим свойства полученных решений. При
малых эксцентриситетах конечной орбиты для всех зна-
чений долготы перицентра о)к оптимальным, как правило,
остается двухимпульсное решение, близкое к решению,
оптимальному при свободной ориентации орбит. При уве-
личении эксцентриситета появляются трех- и четырех-
импульсные траектории, для которых одна из промежу-
точных орбит касается границы г = rinin, и ряд других
переходов.
Г /I Л В Л VI
АНАЛИЗ ТРАЕКТОРИИ ВЫВЕДЕНИЯ КА
НА СТАЦИОНАРНУЮ ОРБИТУ ИСЗ
В данной главе дан качественный и приближенный ко-
личественный анализ основных (энергетических, геомет-
рических и др.) характеристик траекторий импульсного
выведения КА па экваториальную суточную круговую
орбиту спутника Земли.
Исследуется возможность использования пертурба-
ционного маневра с помощью близкого пролета вблизи
Лупы. Показано, что схема выведения с близким проле-
том у Луны может быть реализована для некоторого клас-
са траекторий полета к Луне, близких к траекториям
минимальной энергии. При достаточно большом накло-
нении начальной орбиты к экватору, большем примерно
30 (в частности, при запуске КА с территории Советского
Союза), выведение с использованием облета Луны эконо-
мичнее обычных двух- и трехимпульсиых схем выведе-
ния в поле Земли.
§ 1. ВВЕДЕНИЕ
Стационарные спутники, висящие почти неподвижно
над некоторой точкой поверх пости Земли, важны для обес-
печения космической связи. В рамках центрального нью-
тоновского поля стационарный спутник должен двигаться
но круговой экваториальной орбите с суточным периодом
обращения. Такая орбита называется обычно стационар-
ной. ее радиус Н 421 (И км.
С баллистической точки зрения получение стационар-
ного спутника имеет ряд особенностей. Его орбита значи-
тельно удалена от поверхности Земли, и получение ее тре-
бует затраты большого количества топлива. Даже при
перелете на стационарную орбиту с промежуточной эква-
ториальной орбиты, близкой к ч Земле (радиуса тх ~
6630 км). минимальная характеристическая скорость
(двухимпульспого хомановского перехода) 3910 м/сек,
358 АНАЛИЗ ВЫВЕДЕНИЯ КА НА СТАЦИОНАРНУЮ ОРБИТУ [ГЛ. VI
т. е. она примерно равна скорости, необходимой для полу-
чения траекторий облета Марса, Венеры. При переходе
же на стационарную орбиту с неэкваториальной промежу-
точной орбиты необходимо менять наклонение, что вызы-
вает дополнительный расход топлива. Так, при начальном
наклонении 50° и использовании двухимпульсного
(«обобщенного хомановского») перехода будет ipk ж
» 4780 м!сек.
Уть осуществлено в США несколько успешных запус-
ков таких спутников, причем начальное наклонение
ir 28°.
Интересно рассмотреть особенности выведения ста-
ционарного спутника при больших начальных наклоне-
ниях, например, при — 45—65°, что характерно для
ИСЗ, запускаемых с территории Советского Союза.
В данной главе будет рассмотрена лишь часть всей
большой задачи выведения спутника в заданную точку
на стационарной орбите. Предполагается, что уже полу-
чена промежуточная круговая орбита, близкая к Земле,
имеющая некоторое заданное наклонение к плоскости
экватора. Будет изучаться импульсный переход с этой
начальной орбиты на конечную стационарную орбиту.
Рассмотрение этой задачи позволит выявить значительную
часть всей необходимой энергетики выведения, энергети-
чески сравнить разные схемы перехода. Некоторые важ-
ные вопросы — такие, как обеспечение выведения в за-
данную точку конечной орбиты (это может быть сделано,
например, коррекциями на конечной орбите), требования,
предъявляемые системами наземного контроля, определе-
ния, коррекции орбит и др.— здесь почти не рассматри-
ваются.
Наибольшее внимание будет уделено переходу с низ-
кой начальной круговой орбиты, имеющей наклонение
= 50° и радиус т\ = 6630 км.
В § 2 дан обзор характеристик обычных двух- и трех-
импульсных переходов, осуществляемых в поле тяготе-
ния Земли.
В §§ 3—6 рассмотрен новый способ выведения на ста-
ционарную орбиту — с использованием близкого облета
Луны.
В § 7 даны выводы о возможности применения и ос-
новных особенностях этой схемы выведения.
§ 2] ВЫВЕДЕНИЕ В ПОЛЕ ТЯГОТЕНИЯ ЗЕМЛИ 359
§ 2. ХАРАКТЕРИСТИКИ ВЫВЕДЕНИЯ, ОСУЩЕСТВЛЯЕМОГО
В ПОЛЕ ТЯГОТЕНИЯ ЗЕМЛИ
Сначала рассмотрим энергетику перехода на стационар-
ную орбиту, осуществляемого в поле тяготения Земли,
которое считаем центральным, ньютоновским.
Подробное исследование нескольких схем двух- и
трехимпульсных переходов между некомпланарными кру-
говыми орбитами и вообще эллиптическими орбитами с
нефиксированной ориентацией по углам cd, Q проведено
в ряде работ, например в [1] — [4]. Оптимальными будут
апсидальные переходы, в которых импульсы сообщаются
в апсидах орбит, причем наклонение меняется при сообще-
нии каждого импульса (см. также гл. I, п. 3.3).
При наиболее общем трехимпульсном биэллиптическом
переходе (N = 3) лн -> а2 лк используются две про-
межуточные эллиптические орбиты. После сообщения в
перигее начальной орбиты первого импульса AFX
получается промежуточная орбита Т2, апогейное расстоя-
ние которой га2 больше, чем конечное апогейное расстоя-
ние гак (ган гак). В апогее орбиты Т2 прилагается вто-
рой импульс AF2, получается орбита Т3. При сообщении
этого импульса осуществляется большая часть суммарного
изменения наклонения, перигейное расстояние меняется
отглн = r„i до гяК = гл4. В перигее орбиты Т3 сообщается
третий, последний импульс AF3:
Gia = глН, гаг = ra3 > max (гаН, гаК),
^лз ^лк?
= о <С <С i2 Ч =
здесь и ниже ij, raj — наклонение, перигейное и апо-
гейное расстояния орбиты Тj (взято in = 0).
Если расстояние га2 от центра Земли до точки сооб-
щения промежуточного импульса AF2 уменьшать до
гаК О гаН),то этот переход вырождается в двухимпульс-
ный, N = 2 (лишь предельное время перехода будет на
половину конечного периода больше времени двухимпульс-
ного перехода). При увеличении га2 до бесконечности по-
лучим в пределе бипараболический переход, AF2 -> 0,
оо.
360 АНАЛИЗ ВЫВЕДЕНИЯ КА НА СТАЦИОНАРНУЮ ОРБИТУ [ГЛ. VI
Характеристическая скорость трехимпульсного пе-
рехода будет равна [1]
з
= 2 АРл &Vj = (4; — Bj cos
7=1
Ai = + П, B. = 2V^V^
Л = П + П, b2 = 2v*2v^
A. = V23 + V2k, 7?3=2|/.3^k,
л . AV i Hz . A . . л . А Из B% . a .
sin Ah = --77- -75- sin Al2, sin ai > = -гут- -5- sm Ш.,,
1 Al 2 B3 2’ 3 АИ2 B3
Ai2 = h — (A^ + Ai3).
Здесь и ниже Ai;- — изменение наклонения при сооб-
щении импульса AF;. Если исходные орбиты — круговые
радиусов гн = т\ и гк = г4, то
Т О 7 - 1 + 6 + 25 А
•- 2Ьд (1 + (1 + к},
-т з 4- к
А з = о Нг ,
3 1 + к ’
здесь Ai — Af/Vx, В/ — Bi/Vh, VH — Цгр/hi, cf —
/с = rK/ra2, tfA = key = Гн1га2. При к = 1 получаем ха-
рактеристики двухимпульсного перехода, AF3 = 0,
Ai3 = 0. При к = 0: А72 = 0, га2 = оо.
Приведем основные результаты численных расчетов
двух- и трехимпульсных траекторий выведения в цент-
ральном поле Земли с начальной круговой околоземной
орбиты на конечную стационарную, rK = R. Радиус на-
чальной орбиты при изменении в небольшом диапазоне
слабо влияет на результаты и был взят постоянным: гх =
= 6630 км.
На рис. 6.1 представлены характеристики двухим-
пульсного перехода (N = 2, ra2 = R) — зависимости
Шк (h) 1 (^1)’ АР2 (h)» Aij (h), AZ2 — Ai4 при
0 h л/2. Суммарная характеристическая скорость
монотонно и при наклонениях, больших примерно
§ *
ВЫВЕДЕНИЕ В ПОЛЕ ТЯГОТЕНИЯ ЗЕМЛИ
361
15°, довольно быстро возрастает с ростом наклонения.
Изменение наклонения при сообщении первого импуль-
са мало: Д^ 3°. Выигрыш за счет пространственно-
сти первого импульса доходит до 6шк х 40 м!сек. При
Рис. 6.1. Зависимости суммы величин импульсов п?к, величин сос-
тавляющих импульсов A Vi, первого изменения наклонения Дг\
от начального наклонения для пространственного двухимпуль-
сного перехода на стационарную орбиту.
= 50° производные dwjd^ —0,31 м1сек*км, dwjdi-^
^29 м! сек-град.
На рис. 6.2 приведены зависимости суммы величин
з
импульсов wK = 2 ДК? трехимпульсного перехода от ве-
7=1
личины к = Н/га2 для нескольких наклонений При к = 0
имеем бипараболический переход, а при к = 1 — двух-
импульсный переход. На рис. 6.3 приведена зависимость
минимальной (среди двух- и трехимпульсных переходов
в поле Земли) суммарной характеристической скорости
от начального наклонения (кривая Шк). При 0
< 38° оптимальным будет вариант N = 2, к = 1,
при 38° < ^сЗв^б — вариант N — 3, 0 < /сОпт < 1 (по
энергетике он практически совпадает с двухимпульсным
переходом), при 38°,6 — вариант к^ = 0, (га2)опт=00.
13 В. В. Ивашкин
362 АНАЛИЗ ВЫВЕДЕНИЯ КА НА СТАЦИОНАРНУЮ ОРБИТУ [ГЛ. VI
Рис. 6.2. Зависимости суммы величин импульсов wK от величины
к = R/r^ при пространственном трехимпульсном переходе для
различных начальных наклонений iv
Рис. 6.3. Зависимости минимальной суммарной характеристиче-
ской скорости шк от начального наклонения для двух схем
выведения: в поле тяготения Земли (ш*) и с использованием пертур-
бационного маневра у Луны (ш*1).
§ 2]
ВЫВЕДЕНИЕ В ПОЛЕ ТЯГОТЕНИЯ ЗЕМЛИ
363
На рис. 6.4 для трехимиульсного, биэллиптического
перехода при начальном наклонении = 50° приведены
зависимости: суммарной скорости wK, составляющих им-
пульсов AV; и соответствующих изменений наклонения
AZj, 7 = 1, 2, 3, времен ?12, г23 полета между точками сооб-
щения импульсов, суммарного времени /к = ^2 + Ъа от
Рис. 6.4. Зависимости основных характеристик трехимиульсного
перехода от расстояния га2 для начального наклонения iY = 50°.
расстояния га2 до точки приложения промежуточного им-
пульса. Характеристическая скорость монотонно умень-
шается (за счет уменьшения величины промежуточного
импульса) с увеличением расстояния га2 и соответственно
времени перехода tK. Начальное изменение наклонения
AZX монотонно уменьшается от значения А^ ж 0,05, ко-
нечное — имеет максимум, А/3 0,035. Оптимальным бу-
дет «бипараболический» переход, га2 —оо, для него
грк ~ 4485 м/сек, АУ2 = 0, Az\ = Аг3 0. Однако
время перехода в этом случае бесконечно велико. При
уменьшении га2 до 400 тыс. км суммарная скорость ц?к
возрастает на 45 м/сек до ж 4530 м/сек, а время пере-
хода будет составлять ж 11 сут. При этом промежуточ-
ный импульс остается еще значительным: АУ2 345 м/сек,
Aix ж 0,006, Ai3 ж 0,014.
13*
364 АНАЛИЗ ВЫВЕДЕНИЯ КА НА СТАЦИОНАРНУЮ ОРБИТУ [ГЛ. VI
Из приведенных данных видно, что использование трех-
импульсных переходов позволяет (при больших накло-
нениях уменьшить суммарную скорость по сравне-
нию с двухимпульсным переходом. Все же опа остается
значительной. Рассматриваемый далее способ перехода
позволяет еще более уменьшить суммарную скорость ivK
при больших наклонениях i±.
§ 3. КАЧЕСТВЕННЫЙ АНАЛИЗ ЗАДАЧИ ПЕРЕХОДА
ПРИ ИСПОЛЬЗОВАНИИ ГРАВИТАЦИОННОГО ПОЛЯ ЛУНЫ
Автором и 11. II. Тупицыным была выдвинута идея
использования поля тяготения Луны при выведении
объекта на геостационарную орбиту [5]. Опа состоит
в том, чтобы с помощью облета Луны осуществить
изменение наклонения и перицептрического расстояния,
выполняемое в трехимпульсном переходе при сообщении
промежуточного импульса ДГ2, и благодаря этому сок-
ратить затраты топлива на выведение. Тогда схема поле-
та будет следующей. После сообщения первого импульса
AFX (в плоскости начальной орбиты 7\) КА переводится
на сильно вытянутую эллиптическую орбиту Т2, по кото-
рой он движется к Луне. После облета Луны и выхода из
ее сферы действия объект движется к Земле примерно в
плоскости ее экватора по орбите 7’3, касающейся конечной
стационарной орбиты. В перигее орбиты Т3 сообщается
второй импульс ДК2, КА переходит на конечную орбиту.
Для подтверждения реальности этой идеи проведен ряд
«точных» расчетов траекторий выведения при указанной
схеме полета (см. также § 6). На рис. 6.5 дана проекция
одной такой траектории на плоскость экватора (облет Луны
осуществлялся 12 мая 1969 года). Для этой траектории
наименьшее расстояние КА от Луны составляет рл ж
ж 3900 км, время полета tl{ 7 сут., суммарная ха-
рактеристическая скорость ipk ж 4,255 км/сек, что зна-
чительно (примерно на 230 м/сек) меньше скорости опти-
мального (бипараболического) перехода и на 520 м/сек
меньше скорости двухимпульсного перехода в поле Земли.
Дадим качественный анализ основных особенностей
указанной схемы выведения. Трудно провести достаточно
полный анализ этой задачи с помощью «точного» расчета,
предусматривающего численное интегрирование и реше-
§ 3] КАЧЕСТВЕННЫЙ АНАЛИЗ ПРИ ИСПОЛЬЗОВАНИИ ЛУН .1 365
ние краевой задачи. Даже представление поля Лупы в
виде сферы действия некоторого конечного радиуса
приводит к громоздкой процедуре вычислений. Для ис-
следования основных особенностей предлагаемой схемы
выведения был применен более простой метод расчета,
Рис. 6.5. Проекция траектории выведения (с использованием облета
Луны) на плоскость земного экватора.
характеризующийся тем, что сфера действия Лупы стя-
гивается в точку (см., например, [6], [7]). Точность этого
метода оказывается достаточной для анализа поставленной
задачи (см. § 6).
Пусть Т2 и Т3 — геоцентрические орбиты движения от
Земли к Лупе и от Луны к Земле соответственно. В со-
ответствии с применяемым методом они соединены, с из-
ломом скорости, в центре Лупы в момент t9 наибольшего
сближения с ней. В этот момент радиусы-векторы точки
и Лупы равны: т2 — г3 = гл, а вектор геоцентрической
скорости точки меняется с V 2 па F3 (рис. 6.6)
Анализ проведем, предполагая, что после облета Лупы
надо получить экваториальную орбиту Т3 с наклонением
ч - 0, (3.1)
касающуюся в перигее конечной орбиты,
гяз - R. (3.2)
Для выполнения условия (3.1) необходимо и достаточ-
но, чтобы радиус-вектор r3 (я3, у3, z3) точки и (Лупы) и
366 АНАЛИЗ ВЫВЕДЕНИЯ КА НА СТАЦИОНАРНУЮ ОРБИТУ [ГЛ. VI
вектор скорости Р3 (,r3, у3, z3) точки после облета Луны ле-
жали в плоскости экватора:
2з == zл ~ О, (3«3)
*з = 0. (3.4)
Здесь ось OZ перпендикулярна плоскости экватора Земли
и направлена в северный полюс мира.
Из условия (3.3) следует, что Луна при ее облете долж-
на находиться в некотором узле своей орбиты относительно
Рис. 6.6. Схема изменения скорости при облете Луны.
экватора Земли. Зафиксируем теперь положение Луны при
облете и селеноцентрическую скорость подлета к Луне
«на бесконечности» = Р2 — Рл, | Р^ | = Уоо, где
РЛ = (#Л, У Л, 2Л)* — скорость Луны при t = tp. При
изменении условий облета Луны (вектора прицельной даль-
ности &2) множество геоцентрических скоростей Р3 после
облета Луны образует в пространстве скоростей сферу
2 радиуса 7». Ее центр смещен от начала координат на
вектор Рл скорости Луны: Р3 = Рл + F03 (где Voc>3 —
селеноцентрическая скорость на «бесконечности» после
облета Луны), аналогично [8]. Условие (3.4) выделяет из
2 множество скоростей, соответствующих экваториальным
орбитам. Оно представляет собой окружность L, яв-
ляющуюся пересечением сферы 2 и плоскости {z = 0}.
Радиус ее равен = [7» — Zji] /2, а центр сдвинут
от начала координат на вектор Рл = Ул — 2л#0> где
§ з] КАЧЕСТВЕННЫЙ АНАЛИЗ ПРИ ИСПОЛЬЗОВАНИИ ЛУНЫ 367
—единичный вектор, направленный вдоль оси z,
рис. 6.7.
Из всего полученного множества экваториальных ор-
бит надо выделить те орбиты, которые имеют заданное
перигейное расстояние (3.2) и движение точки по которым
Рис. 6.7. Схема определения геоцентрической скорости полета от
Луны к Земле.
происходит в том же направлении, что и вращение Земли
вокруг своей оси:
Дгз = ^зУз Уз^з 0. (3*5)
Пусть для геоцентрической орбиты полета к Луне за-
даны элементы (перигейное расстояние), га (апогейное
расстояние) i (наклонение), задана также примерная да-
та облета Луны (и узел, вблизи которого должна при этом
находиться Луна). Далее расчет проводится следующим
образом.
1. Определяетсямомент tp, для которого Луна находит-
ся в выбранном узле своей орбиты. Ему соответствуют ра-
диус-вектор Гд = (#л, Ул, 0)* и вектор скорости =
= (#л, Ул, М * центра Луны в геоцентрической эква-
ториальной системе координат; пусть ад — соответствую-
368 АНАЛИЗ ВЫВЕДЕНИЯ КА НА СТАЦИОНАРНУЮ ОРБИТУ [ГЛ. VI
щее прямое восхождение Луны, г л — расстояние до цен-
тра Лупы.
2. Определяются остальные элементы орбиты Т2 по-
лета к Лупе (предполагаем, что полет к Луне происходит
над северным полушарием Земли, причем только па вос-
Рис. 6.8. Проекция на
единичную сферу траек-
тории Т-2, полета к Луне.
ходящем полувитке геоцент-
рической орбиты, рис. 6.8,
6.9). Если — истинная
аномалия точки М2 на орбите
Т2, для которой г = г2 = Гл,
Рис. 6.9. Схема полета КА
к Луне.
V г2 0, а ^12 — время полета от перигея п2 до точки М2,
Тп2 — момент прохождения перигея л2, то
£^2 OS л “F ГС, ^2 ГС ^2» ^л:2 ^12’
Этим достигается сближение КА с Луной при нахождении
ее в заданном узле.
3. Определяется вектор скорости КА в точке М2,
V(tP) = f2.
4. Определяется селеноцентрическая скорость КА при
подлете к Лупе:
У" - У^ - V2 - Ул, | У~| - Коо.
5. Определяется геоцентрическая скорость КА после
облета Лупы Г3 (Vi3, V13, Vz3). Геометрически она изоб-
ражается точкой пересечения окружности L и положи-
тельной (по Vt) ветви гиперболы Rn = {V : гп 7?}.
В данном случае ее можно определить, например, следую-
щим итерационным способом (в системе координат радиус,
§ 3] КАЧЕСТВЕННЫЙ АНАЛИЗ ПРИ ИСПОЛЬЗОВАНИИ ЛУНЫ 369
трансверсаль, нормаль к плоскости экватора):
Vz:{ -0, _____
vi(i) = , VnW = \/ , Г3 = гл,
7 3 > 1 л,3
^г(г) = &г — 2Л — (У t (г) — Fjl)2]1'^ + Fr;i,
^(г) ~ Vr (j) + V?(i) —’ 1 Р(г) = (Г3^t (г))7рЗ,
^(г) — 1 7
Лг)\г) Г'2 у Г 2Нз
’ v^-[-yr
11/2
-1-^(0 | ,
Гл(г) — Р(г)/(Д 4" ^(г))’
Если | гя(г-) — глз [ > 8, то расчет повторяем, начиная
со счета Ущу (|л3 — гравитационная постоянная Земли).
Если же [ гл(^) — гл3 |^8, то полагаем
ViUy = Vl3, VM = 7r3, VM} = 7Л3.
G. Определяются импульсы и суммарная характеристи-
ческая скорость:
ДКг = Vn2 - Кн, ДЕ3 - 7лз -- 'Идк, - Др; + Д72.
Определяется время полета /2з от Луны до орбиты ста-
ционарного спутника.
7. Определяется селеноцентрическая скорость КА при
отлете от Луны:
VL - Косз - V3 -
8. Определяются параметры траектории облета Луны:
б — угол поворота вектора скорости «на бесконечности»,
Ъ = Ъ2 — вектор прицельной дальности при подлете к
Луне, а — действительная полуось, е — эксцентриситет,
рл — перицентрическое расстояние:
cos 6 - (Fi, V2)IVL,
а " Ил/Fl, Ъ = arctg(6/2), e = sin-1 (6/2),
рл = a {e — 1),
~ ^oo sin d °° C0S
(|1Л — гравитационная постоянная Лупы).
370 АЙАЛЙЗ ВЫВЕДЕНИЯ КА НА СТАЦИОНАРНУЮ) ОРБИТУ [ГЛ. Vt
Замечание. Приведенный алгоритм обеспечивает
выполнение условий (3.1), (3.2), (3.5). Величина ег может
принимать два значения:
ег = + 1.
Соответственно получаются два решения. В плоскости
скоростей {z = 0} они изображаются двумя точками
(F3)x и (^з)г пересечения гиперболы 7?я = {F: Гяз = Я}
с окружностью L. Одно из этих решений, (F3)1? ег1 = — 1,
соответствует движению к Земле после облета Луны, а
другое, (F3)2, er2 = 1, — движению сначала от Земли и
лишь затем — к Земле. Последнее решение не будет рас-
сматриваться ввиду большего времени полета и сильного
влияния на него ошибок прохождения у Луны из-за оши-
бок определения орбиты, коррекций.
Если учесть конкретные характеристики орбиты Луны и
стационарного спутника, то легко убедиться, что нужная
скорость Fз всегда существует. Следовательно, выбором ха-
рактеристик облета Луны (времени и вектора прицельной
дальности) можно найти нужную траекторию выведения
(3.1), (3.2), (3.5) на стационарную орбиту. Чтобы дать окон-
чательный ответ на вопрос о границах реальности данного
способа перехода, надо выяснить еще одно обстоятельство.
После нахождения скорости F3 полета к Земле селеноцен-
трическими скоростями F<x2 и Foog определится селено-
центрическая траектория облета Луны, в частности, мини-
мальное расстояние ря от центра Луны (в периселении).
Может оказаться, что расстояние ря будет меньше радиуса
Луны рл, и тогда данную схему выведения нельзя реали-
зовать. Ниже (§§ 4—6) приведены результаты численных
расчетов, показывающие область применимости данного
способа.
§ 4. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ТРАЕКТОРИЙ
ВЫВЕДЕНИЯ ПРИ ЗАДАННОМ ПОЛОЖЕНИИ ЛУНЫ
Приведем сначала основные характеристики рассмат-
риваемого способа выведения, когда задано положение
Луны при ее облете (задана дата облета). Было принято,
что облет Луны происходит 12 мая 1969 г., когда Луна
находится вблизи восходящего узла своей орбиты, рас-
стояние ее от Земли равно г л ~ 385 тыс. км, наклонение
§ 4]
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ВЫВЕДЕНИЯ
371
плоскости ее орбиты к земному экватору £л~28°,5,
аргумент перигея со л ~ 270°.
На рис. 6.10 приведены для различных начальных на-
клонений зависимости (га2), ря (га2), £12 (га2), ^3 (гаг),
tK (га2), (га2)- Они характеризуют влияние апоцентри-
ческого расстояния га2 траектории полета к Луне на
Рис. 6.10. Зависимости основных характеристик траекторий выве-
дения, использующих облет Луны, от апоцентрического расстоя-
ния га2.
суммарную характеристическую скорость величину на-
чального импульса AV1? минимальное расстояние от Луны
рл, время полета от Земли до Луны £12, время полета от
Луны до конечной орбиты Z23 и суммарное время полета
tK. Из проведенных расчетов можно сделать следующие
выводы.
Характеристическая скорость перехода для тра-
екторий облета Луны меньше скорости биэллиптического
372 АНАЛИЗ ВЫВЕДЕНИЯ КА НА СТАЦИОНАРНУЮ ОРБИТУ [ГЛ. VI
перехода при использовании промежуточной орбиты Т2
той же энергии. Так, при ~ 50°, га2 — 400 тыс. км ско-
рость уменьшается с 4530 м/сек до примерно 4250 м!сек.
Скорость слабо возрастает при увеличении энергии и
наклонения траектории полета к Луне. Так, при =
— 50° с увеличением га2 от 390 тыс. км до 460 тыс. км сум-
марная скорость ipk возрастает на 45 м/сек. Минимальные
энергетические затраты (без учета затрат на коррекцию)
соответствуют полету к Луне по траектории минимальной
энергии. При увеличении начального наклонения от
0 до л/2 скорость п'к возрастает па 60 м/сек. На рис. 6.3
кривая ip” показывает зависимость минимальной (по
?а2) суммарной скорости iz;K данного перехода от накло-
нения Сравним ее с зависимостью (fj) для оптималь-
ного биэллиптического перехода. Видим, что обычный
переход (в данном случае — двухимпульспый обобщенный
хомаповскпй) энергетически выгоднее при 28°. Ис-
пользование облета Лупы становится энергетически целе-
сообразным при больших наклонениях. При 39° <
< 90° выигрыш в скорости при использовании облета
Луны почти постоянен и составляет около (200—280) м/сек
по сравнению с трехимпульспым переходом.
Наименьшее расстояние от Луны рл — основная гео-
метрическая характеристика траектории облета — быстро
уменьшается с увеличением константы энергии h2 (и
расстояния 7\2) траектории движения к Лупе. Естествен-
но, что величина рл не должна быть меньше некоторого
минимального значения:
Рп > p-min = рл + Ар,
где Ар — допуск па влияние поточности определения ор-
биты и исполнения коррекций до облета Лупы. Это усло-
вие выделяет множество траекторий перехода, которые фи-
зически могут быть реализованы, для них
T'amin z'a2 ^aiiiax, Ря О’сс2 " Gxniax) ~~ Рддшп* (4-1)
В частности, при 1г — 50°, если для определенности
принять рлпнп = 2000 км, рассматриваемый переход
можно осуществить при 390-103 км га2 460-103 км.
Время /12 полета к Луне, как известно, быстро умень-
шается с увеличением га2. Множеству допустимых траек
§ 4] ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ВЫВЕДЕНИЯ 373
торий (4.1) будет соответствовать некоторый диапазон
времен полета до Луны:
(^12)min ^12 (^12)тлаХ‘
Так как момент сближения с Луной мало меняется для
всех траекторий выведения вследствие (3.3), то получен
практически диапазон времен отлета от Земли к Луне.
Представляет интерес величина временного интервала
Д^12 = (/12)Гпак — (^i2)min, позволяющая судить о жест-
кости требований ко времени отлета от Земли. Опа тесно
связана также с вопросом о возможности полета к Лупе
вдоль заданной трассы на поверхности Земли. Если до-
пустимый диапазон времен отлета превышает сутки, то
можно реализовать полот по заданной трассе. В данном
случае, при 4 —- 50°, будет (£12)тах /12 (га2 390 х
X Ю3 км) ж 4,4 сут., (£12)inin ж 3,3 сут., Д£12 ж 1,1 сут.,
т. е. здесь допустимый диапазон времен облета превышает
сутки.
Время t23 полета от Лупы до конечной орбиты также
уменьшается с увеличением га2, ио медленнее, чем £12.
Поэтому и суммарное время полета /к = ^2 + ^2з умень-
шается с увеличением га2. При = 50° для всего семей-
ства (4.1) допустимых траекторий полета время £23 ме-
няется в диапазоне от 3,3 сут. до 3 сут., а суммарное время
— от 7,7 сут. до 6,3 сут.
Из приведенных данных следует, что рассматриваемая
схема выведения, использующая близкий облет Лупы, мо-
жет быть реализована при использовании некоторого се-
мейства (4.1) траекторий полета к Луне, близких к тра-
екториям минимальной энергии. Эта схема энергетически
выгоднее, чем биэллиптическая, при наклонении, большем
примерно 30°, и применении любой траектории из указан-
ного семейства.
Замечания. 1. Выше была принята схема выве-
дения с двумя импульсами — в начале и конце полета.
Можно расширить возможности данной схемы выведения
с облетОхМ Луны, допустив сообщение дополнительных про-
межуточных импульсов.
2. Можно провести анализ более общим методом (см.
гл. I), определив оптимальную траекторию выведения с
помощью анализа необходимых условий оптимальности
374 АНАЛИЗ ВЫВЕДЕНИЯ КА НА СТАЦИОНАРНУЮ ОРБИТУ [ГЛ. VI
траектории многоимпульсного перелета при ограничениях
на расстояние подлета к Луне и время полета.
3. Указанная схема выведения, использующая близ-
кий облет Луны, может быть использована, конечно, и
при старте с орбит, близких к рассмотренной, а также для
получения некоторых других орбит спутников Земли.
§ 5. ВЛИЯНИЕ ИЗМЕНЕНИЯ ЭЛЕМЕНТОВ
ЛУННОЙ ОРБИТЫ И ВЫБОРА УЗЛА
НА ХАРАКТЕРИСТИКИ ПЕРЕХОДА
Вследствие эволюции лунной орбиты с течением вре-
мени изменяются параметры движения Луны. Это приво-
дит к тому, что медленно (из года в год) будут меняться
характеристики рассматриваемого перехода. Кроме того,
Луна при облете может находиться не только вблизи вос-
ходящего, но и вблизи нисходящего узла своей орбиты
на земном экваторе.
Рассмотрим влияние этих факторов на характеристики
перехода. Анализ проведем при фиксированном начальном
наклонении = 50°. Определяя орбиту Луны, зададим
постоянными все ее элементы, кроме наклонения /л и
аргумента перигея со л (относительно экватора Земли)
Расчеты проведены для трех значений наклонения iji =
= (18°; 23°,5; 29°), этим был несколько перекрыт реаль-
ный диапазон наклонений. Аргумент перигея со л менялся
в диапазоне [0,2л]. При фиксированных значениях
(дл рассмотрен облет Луны как в восходящем, так и в
нисходящем узле. Для определенности принято, что полет
к Луне происходит над северным полушарием Земли,
причем только на восходящем полувитке геоцентриче-
ской эллиптической орбиты.
Анализ показал, что основные особенности перехода,
рассмотренные в § 4, сохраняются при действии указан-
ных факторов. Несколько меняются лишь его количествен-
ные характеристики.
На рис. 6.11, 6.12 приведены зависимости минимальной
и максимальной (по га2) суммарной характеристической
скорости wKmin и шКщах, минимального и максимального
значения начального импульса AVimin, A^imax, а также
минимального времени полета £Kmin от аргумента сол
для различных наклонений 1д при облете как в восходя-
§ 5] ВЛИЯНИЕ ИЗМЕНЕНИЯ ЭЛЕМЕНТОВ ЛУННОЙ ОРБИТЫ 375
щем (в. у.), так и в нисходящем узле (н. у.), причем для
предельных орбит полета к Луне (4.1) принято (ra2)min =
= гл + 5-103 км, (pn)min = 2000 км. Наибольшее влия-
ние на суммарную скорость шк оказывает выбор узла и
Рис. 6.11. Зависимости минимальной и максимальной суммарной
характеристической скорости wK от элементов лунной орбиты.
Рис. 6.12. Зависимости минимального и максимального значений
начального импульса A V± и минимального времени полета fK min
от элементов [лунной орбиты.
величина сол- Изменение наклонения ijt меняет скорость
z^Kmin в пределах 15 м/сек для нисходящего узла и всего
1 м/сек — для восходящего узла. Диапазон колебания ско-
рости z^min из-за изменения аргумента со л составляет
376 АНАЛИЗ ВЫВЕДЁШ1Я КА ЙА СТАЦЙОНАРЙУЮ ОРБИТУ ; [ГЛ. VI
35 м/сек, а из-за изменения узла — 65 м/сек. Обычно энер-
гетически выгоднее совершать облет Лупы в нисходящем
узле. При фиксированном узле и элементах сол, изме-
нение скорости Дп?к = м?ктах — составляет около
(35—55) м/сек. Полный диапазон скорости за счет влия-
ния всех факторов (га2, сол, iJt, выбор узла) составляет
примерно 100 м/сек, причем (4200—4300) м/сек.
Величина начального импульса меняется в пределах
(3110—3140) м/сек.
Минимальное время полета соответствующее
условию ря = рлтшп, колеблется в диапазоне 5,9—6,9 сут.
Временной интервал Д^12 также слабо зависит от указан-
ных параметров, составляя примерно сутки.
Из полученных данных следует, что выбором соответ-
ствующего узла, энергии траектории и времени отлета
от Земли можно варьировать характеристики данной схе-
мы выведения в довольно широких пределах и выбирать
траекторию полета, удовлетворяя какому-либо из заданных
(энергетических, временных и др.) условий.
§ 6. «ТОЧНЫЙ» РАСЧЕТ ТРАЕКТОРИЙ ВЫВЕДЕНИЯ КА
ПА ГЕОСТАЦИОНАРНУЮ ОРБИТУ
ПРИ БЛИЗКОМ ОБЛЕТЕ ЛУНЫ
Для получения более полного представления об осо-
бенностях рассматриваемого способа выведения КА на
геостационарную орбиту и определения точности приме-
ненного выше приближенного метода проведен «точный»
расчет нескольких типичных траекторий полета КА на
стационарную орбиту ИСЗ, использующих близкий об-
лет Луны.
6.1. Метод расчета траектории
При расчете траектории КА считалось, что полет осу-
ществляется в соответствии с описанной выше (в § 3) схе-
мой. При этом активный участок разгона КА с начальной
орбиты на траекторию полета к Лупе и участок торможе-
ния КА при подлете к конечной орбите заменены точками
сообщения импульсов скорости.
«Точная» траектория КА получается численным ин-
тегрированием системы дифференциальных уравнений
§ 61 «ТОЧНЫЙ» РАСЧЕТ ТРАЕКТОРИЙ ПРИ ОБЛЕТЕ ЛУНЫ 377
движения точки, Луны и Солнца (с учетом главной гармо-
ники возмущений от несферичности Земли) в геоцентри-
ческой экваториальной системе координат.
При решении краевой задачи элементы гя2 = rx, i2 = Ч»
га2 (оскулирующие на момент прохождения перигея Тп2)
для траектории отлета от Земли к Луне фиксировались,
а элементы Тл2, Q2 (долгота восходящего узла), о)2 (аргу-
мент перигея) варьировались. Краевая задача решалась
в три этапа.
На первом этапе сфера действия Луны стягивалась в
точку, гравитационное поле Земли считалось централь-
ным, ньютоновским; методом, рассмотренным выше (в § 3),
определялись приближенно параметры траектории вы-
ведения.
На втором этапе определяется траектория полета от
Земли до Луны. Сама траектория получается численным
интегрированием. Начальные данные для интегрирования
сначала берутся, например, из расчетов первого этапа,
затем определяются решением краевой задачи так, чтобы
в заданный момент наибольшего сближения с Луной
траектория имела тот же вектор прицельной дальности
ди, что и в приближенном расчете первого этапа. При ре-
шении краевой задачи вариация, составленная из прира-
щения вектора прицельной дальности и перемещения
вдоль вектора скорости на бесконечности, приравнивается
к вариации точки М2 в невозмущеппом кеплеровском дви-
жении. В соответствии с этим производные от параметров
в картинной плоскости по варьируемым элементам qj =
= {Гл2, Q2, 03 2} определяются аналитически, по соотно-
шениям для кеплеровской орбиты. Пусть А =
dr 1
—— | — матрица частных производных от радиуса-век-
тора т (Z) по элементам q}- в певозмущенпом кеплеровском
движении (Z, р, е, i фиксированы):
дт дг
Упростим эти общие формулы. Так как в рассматриваемой
задаче КА в момент наибольшего сближения с Луной
находится вблизи земного экватора и точки весеннего или
378 анализ йывёдения йа ЙА СТАЦИОНАРНУЮ ОРБИТУ [ГЛ. VI
осеннего равноденствия (т. е. у2 z2 ж 0, sin Q2 ж 0)
и так как производные достаточно знать приближенно, то
положим у = z = 0, sin Q = 0 и получим
/-7Х 0 0
Л = I — Vy х х cos i
\ — Vz 0 х sin i cos Q
Тогда, если £Рф, 6ф — фактические параметры «точной»
траектории, то для следующей итерации поправки началь-
ных элементов &q = (ДТЯ2, Д^2> Д^2) * определяются сле-
дующим образом:
Aq = Л~хДг2.
Здесь
1
4-!= 0
Уг
6й Vx х sin i
О 0
1 cos i
— — ——
X X sin I
Д^*2 — (^H ^ф) Vоо (tpH Аэф)>
&н = Ьи — (&н, Г°то) П, = sign cos Q.
На заключительном этапе решения краевой задачи до-
биваемся, чтобы в перигее траектории подлета к Земле
после облета Луны выполнялись заданные условия
у± = Lx = yz — zy = 0, у2 = Ly = zx — xz = 0,
Уз = rn — R = 0, Lz > 0.
Параметры Lx, Ly суть проекции вектора кинетического
момента L = г х V на экваториальные оси OX, OY. Вы-
полнение условий Lx = Ly = 0 необходимо и достаточно
для того, чтобы было i = 0; условие гя — R = 0 обе-
спечивает равенство перигейного расстояния заданной
величине R. При выполнении всех трех условий траекто-
рия после облета Луны будет в перигее касаться стацио-
нарной орбиты. В процессе решения этой краевой задачи
вся траектория и производные dyjdqj определялись чис-
ленно.
§ 6] «ТОЧНЫЙ» РАСЧЕТ ТРАЕКТОРИЙ ПРИ ОБЛЕТЕ ЛУНЫ 379
6.2. Результаты расчетов. Сравнение
с результатами приближенных расчетов
При проведении численных расчетов были взяты сле-
дующие константы: Цз = 398600,4 км3/сек2 (гравитацион-
ная постоянная Земли), цд = 4902,65 км3/сек2 (гравита-
ционная постоянная Луны), = гк2 6630 км, ir =
= i2 ~ 50°. Дата облета Луны — 12 мая 1969 года. Рас-
чет проведен для трех значений константы энергии h2,
соответственно га2 х 413-103 км, 427-103 км, 479 • 103 км.
Первая траектория близка к траектории минимальной
энергии для полета к Луне, третья — к траектории с
минимально допустимым расстоянием ря подлета к Луне.
Приведем основные характеристики сходимости крае-
вой задачи. Решение краевой задачи на втором этапе тре-
бовало 3—4 итераций, после этого получались рассогласо-
вания по конечным параметрам Дуг ж (20—40) км21сек,
\у2 ж (5—15)-103 км2/сек, Ду3 ж (5—25) • 103 км. Окон-
чательная сходимость (па третьем этапе) осуществлялась
за 5—6 итераций, при этом Дух < 1 км2/сек, \у2 <
< 1 км2/сек, Ау3 < 1 км.
«Точный» расчет подтверждает основные закономер-
ности, выявленные с помощью приближенного метода,
несколько уточняя их. В таблице для указанных трех ва-
риантов приведены основные параметры траекторий вы-
ведения, соответствующие «точному» (столбец 1 — «точн.
р».) и приближенному (столбец 2 — «I прибл. р.») расче-
там по указанным исходным данным. Заметно хорошее
совпадение энергетических характеристик в обоих мето-
дах. Различие в суммарной характеристической скорости
(за счет изменения величины второго импульса) составляет
всего 7 —9 м/сек. Наименьшее расстояние до Луны (в
периселении) при «точном» расчете больше, чем при при-
ближенном, на 300—2500 км\ время полета до Луны, а с
ним и суммарное время всего полета получается больше
на 0,1 — 1 сут., причем эти ошибки довольно быстро умень-
шаются при увеличении константы энергии h2. Сближение
с Луной происходит через 3,1—4,8жчаса после^момента t0
прохождения ею узла.
Заметное улучшение соответствия обоих методов расче-
та происходит, если учитывать влияние сжатия Земли на
траекторию полета к Луне. Основным здесь будет
Таблица
Основные характеристики траекторий выведения, использующих облет Луны
Величина 1-я траектория 2-я траектория 3-я траектория
Тонн. р. I прибл. р. Пприбл.р. Точн. р. I Приб.1. р. IIприбл. р. Точн. р. I прибл. р. Пприбл. р.
A-zf/1.), км'^/сек'1 —1,90 — 1,90 — 1,96 -1,84 -1,84 —1,90 -1,64 —1,64 -1,70
h^T_ |-3h), f> мг/сек? —1,96 -1,90 —1,96 -1,90 -1,84 —1,90 —1,70 -1,64 -1,70
h-з, км1/сек'1 — 1,30 -1,24 —1,29 -1,26 -1,19 -1,24 -1,09 —1,01 — 1,07
Тм(Гг)> КМ 413-103 413 • 103 400 Л О3 427•103 427 ЛО3 413 Л О3 479 Л О3 479 Л О3 461 Л О3
г7.,(7\ 'г ЗЬ),/.\и 400 ЛО3 413-103 400 ЛО3 413 ЛО3 427 ЛО3 413Л03 461 • Ю3 479 ЛО3 461 Л О3
р_, км 5784 3282 4132 3686 2710 3320 1970 1690 1923
Ь, км 9641 6301 7436 7017 5490 6301 4467 3900 4279
Р’оо, км/сек 0,976 1,055 1,029 1,007 1,071 1,054 1,096 1,160 1,136
w\, км/сек 3,125 3.125 3,122 3,128 3,128 3,125 3,136 3,136 3,133
w-2, км/сек 1,121 1,128 1,122 1.126 1.134 1,128 1.147 1,156 1,149
id., км/сек 4,246 4.253 4,244 4,254 4,262 4,253 4,283 4,292 4,282
*12, СуТ. 4,67 3,75 4,02 3,90 3,56 3,75 3.26 3,17 3,27
*23, СуТ. 3,26 3,20 3,26 3,18 3,13 3,19 2,97 2,97 3,01
«к, сут. 7,93 6,94 7,28 7,08 6,69 6,94 6,23 6,14 6,28
tp —'о, су г. 0,20 0 0 0,18 0 0 0, 13 0 0
380 АНАЛИЗ ВЫВЕДЕНИЯ КА НА СТАЦИОНАРНУЮ ОРБИТУ [ГЛ. VI
выводы
381
§ 7]
изменение константы энергии 7л> траектории 1\ отлета от
Земли. Если приближенно считать, что сжатие Земли
влияет на элементы орбиты при движении точки по ней от
перигея до апогея, то изменение константы энергии [9]
4/.‘2Ч-> (’2 (3 1 - Го)
Д/ь --------------——— (1 — 3 sin2 sin2 (о2), (6.1)
где к2 22 400 км1— коэффициент, характеризующий сжа-
тие Земли. Для данного класса орбит е2 1, со2 0,
так что
Л/ь ------— 0,061 км-/сек-.
Это соответствует уменьшению апогейного расстояния
Дга2 — (12—19)-103 км при /’а2 - (400—500) • 103 км.
Точный расчет подтверждает эти оценки, причем значи-
тельная часть всего возмущения накапливается на началь-
ной фазе полета от Земли, / — Тл < (3—4) час. В столбцах
«II прибл. р.» таблицы приведены параметры траекторий,
полученные в результате приближенного расчета по скор-
ректированной, с учетом (6.2), константе энергии. Рас-
согласование по скорости п’к уменьшается до 1—2 м/сек,
но расстоянию — до 50—1600 км, по времени tK — до
0,05—0,7 сут.
Полученные данные показывают, что рассмотренный
приближенный метод вполне пригоден для качественного
и приближенного количественного исследования данной
задачи.
§ 7. ВЫВОДЫ
Па основании полученных результатов можно сделать
следующие выводы:
1. Схема выведения КА на стационарную орбиту ИСЗ,
использующая близкий облет Луны, может быть реали-
зована в простейшем, двух импульсном (без учета коррек-
ций) варианте для некоторого класса траекторий полета
к Луне, близких к траекториям минимальной энергии.
2. Эта схема выведения энергетически выгодна (по
сравнению с обычным двух- или трехпмпульсным перехо-
дом в ноле тяготения Земли) при начальном наклонении,
превышающем примерно 30'.
382 АНАЛИЗ ВЫВЕДЕНИЯ КА НА СТАЦИОНАРНУЮ ОРБИТУ [ГЛ. VI
При начальном наклонении около 50° использование
облета Луны уменьшает необходимую характеристиче-
скую скорость на 190—320 м/сек по сравнению с оптималь-
ным трехимпульсным переходом и примерно на 500 м/сек
по сравнению с двухимпульсным переходом (без учета
затрат на коррекцию).
3. При использовании указанной схемы Луна в мо-
мент наибольшего сближения с ней находится вблизи
узла своей орбиты относительно плоскости земного эква-
тора. Поэтому в течение месяца имеется два «окна» для
реализации данной схемы перехода.
4. Допустимый диапазон времен отлета от Земли сос-
тавляет (для каждого «окна») около суток. Раннему вре-
мени отлета от Земли соответствуют «слабые» траектории
с большим временем полета к Луне (около 4—5 сут.),
большим расстоянием от Луны в периселении траектории
(примерно 4—10 тыс. км). Позднему времени отлета соот-
ветствуют более «сильные» траектории с меньшим време-
нем полета к Луне (около 3—3,6 сут.), с небольшим рас-
стоянием от Луны в периселении (примерно 2 000 км)
и суммарным временем полета 6—7 сут.
5. Для качественного и приближенного количествен-
ного анализа основных особенно энергетических харак-
теристик траекторий выведения КА с облетом Луны при-
годен приближенный метод, при котором сфера действия
Луны стягивается в точку. Например, суммарные энерге-
тические затраты определяются с помощью этого метода
с точностью 1—2 м/сек.
СПИСОК ОБОЗНАЧЕНИЙ
а — действительная полуось гиперболической орбиты;
b — прицельная дальность;
с — эффективная скорость истечения газов из сопла двигателя
КА;
У* Игр
Е — "— — константа энергии;
е — эксцентриситет;
Fia —фокусы эллипса 7?а, i = 1, 2;
Fin —фокусы гиперболы 7?л, i = 1, 2;
/ (t) — реактивное ускорение;
/ (гг, и) — вектор правых частей уравнений движений КА;
/(°) — единичный вектор вдоль тяги;
д (г, t) — гравитационное ускорение;
hj (r,t) = р; min — pj — функция заданных ограничений;
J — функционал;
i — наклон орбиты к основной плоскости;
— начальный наклон орбиты;
К — заданное кольцо, концентричное относительно центра
притяжения;
к = RJra2 — отношение радиуса стационарной орбиты к апо-
центрическому расстоянию промежуточной орбиты;
L — константа площадей;
Mi (М^ —множества в плоскости скоростей Ра (Рп);
т — масса КА;
N — число импульсов скорости;
О — центр притяжения;
Oj—центр /-го небесного тела;
Р—тяга, плоскость скоростей;
JP — вектор тяги;
Ртах — максимальное допустимое значение тяги;
Ра — плоскость скоростей при г = rmin;
Рп — плоскость скоростей при г = rmax;
р — фокальный параметр;
qi — элементы орбиты;
R — радиус стационарной орбиты;
7?а — эллипс в плоскости скоростей, соответствующий орби-
там с фиксированным расстоянием га;
Rn — гипербола в плоскости скоростей, соответствующая ор-
битам с фиксированным расстоянием гл;
г — радиус-вектор КА;
384
СПИСОК ОБОЗНАЧЕНИЙ
г -— расстояние от КА до центра притяжения;
— радиус-вектор центра Луны;
гз —радиус-вектор центра /-й планеты;
га — расстояние от КА в апоцентре до центра притяжения,
т. е. апоцентрическое расстояние;
гп— расстояние от КА в перицентре до центра притяжения,
т. е. перицентрическое расстояние;
S —проекция вектора /° на радиус-вектор;
sa = г"1 — величина, обратная апоцентрическому расстоянию;
Т — проекция вектора /° на трансверсаль;
Tj — орбита КА;
t—текущее время;
£12 — время полета от начальной орбиты до периселения;
£23 — время полета от периселения до конечной орбиты;
и — вектор управления, аргумент широты, полярный угол
радиус-вектора;
V—вектор скорости КА;
— вектор скорости КА в плоскости скоростей Ра;
—вектор скорости КА в плоскости скоростей Рп;
Vj —вектор скорости центра /-й планеты;
Vr — радиальная проекция вектора скорости;
Уг — трансверсальная проекция вектора скорости;
Va — скорость в апоцентре;
Vn — скорость в перицентре;
— скорость на «бесконечности»;
Кл — вектор скорости центра Луны;
W — проекция вектора /° на нормаль к плоскости орбиты;
w — характеристическая скорость;
— конечное значение характеристической скорости;
х — вектор фазовых координат;
aj—апоцентр орбиты 71;;
Г = {г = rmax} —внешняя граница кольца А’;
У = {г = rmin} — внутренняя граница кольца А;
At- — угол поворота плоскости орбиты при сообщении импуль-
са Дг’;
AVj—/-й импульс (скачок) вектора скорости;
eF— знак трансверсальной скорости для фокуса F;
(£, Л» £) —проекции вектора на радиус, трансверсаль, нор-
маль к орбите;
0 — угол наклона скорости к трансверсали;
й1 — истинная аномалия;
—модуль базис-вектора
х2—модуль вектора фг;
цгр — гравитационная постоянная;
(X, ц, v) — проекции базис-вектора на радиус, трансвер-
саль, нормаль к орбите;
СПИСОК ОБОЗНАЧЕНИЙ
385
ГЦ — опорный переход;
л;—перицентр орбиты Tj\
pj — расстояние от КА до центра /-го небесного тела;
pj inin — наименьшее допустимое расстояние подлета к /-му
телу;
а — мера;
аа — большая нолуось эллипса 7?а;
—действительная полуось гиперболы Rn'
Ф< — расстояние в плоскости скоростей до Z-го фокуса кривой
Ra или 7?_;
ф — угол наклона вектора тяги (или импульса) к трансвер-
сали;
Ф1а —угол наклона вектора 7Ца ) к оси Vt в плоскости Ра;
Ф^_ —угол наклона вектора Fir. К(2) к оси Vt в плоскости Рл;
ф — сопряженная вектор-функция;
фт — функция, сопряженная массе т;
фг — вектор-функция, сопряженная радиусу-вектору г;
Фг — функция, сопряженная времени t\
фг — вектор-функция, сопряженная вектору скорости V, т. е.
базис-вектор;
Q — долгота восходящего узла;
со — аргумент перицентра;
& — гамильтониан.
ЛИТЕРАТУРА
К ПРЕДИСЛОВИЮ
1. Hohmann W., Die Erreichbarkeit der Himmelskorper, Mu-
nich, 1925.
2. Ting L., Optimum orbital transfer by impulses, ARS Journal,
vol. 30, № 11, 1960.
3. Ting L., Optimum orbital transfer by several impulses, Ast-
ronautica acta, vol. 6, № 5, 1960.
4. Ma rec J.-P., Transfects orbitaux economiques (orbites ellip-
tiques coplanaires coaxialles. Duree non limitee), Rech, aeros-
patiale, 1965, № 105, 11—21.
5. Гурман В. И., Об оптимальных переходах между компла-
нарными эллиптическими орбитами в центральном поле, Кос-
мические исследования, т. IV, вып. 1, 1966.
6. Ивашкин В. В., Оптимальный переход между эллипти-
ческими орбитами, лежащими в заданном кольце, Космические
исследования, т. IV, вып. 6, 1966.
7. Охоцимский Д. Е., К теории движения ракет, Прик-
ладная математика и механика, X, вып. 2, 1946.
8. О х о ц и м с к п й Д. Е., Энеев Т. М., Некоторые вариа-
ционные задачи, связанные с запуском искусственного спут-
ника Земли, Успехи физических наук, т. 63, вып. 1а, 1957.
9. Е г о р о в В. А., О решении одной вырожденной вариационной
задачи и оптимальном подъеме космической ракеты, Приклад-
ная математика и механика, XXII, вып. 1, 1958.
10. L е i t m a n n G., On a class of variational problems in rocket
flight, J. Aero-Space Sci. 26 (1959).
11. M i e 1 e A., Minimality for arbitrarily inclined rocket trajectories,
ARS Journal 28, № 7 (1958).
12. Miele A., General Variational Theory of the Flight Paths of
Rocket Powered Aircraft, Missiles and Satellite Curriers, Astro-
nautica Acta 4, № 4, (1958).
13. L a w d e n D. F., Minimal rocket trajectories, ARS Journal 23,
№ 6 (1953).
14. Тарасов E. В., Оптимальные режимы полета летательных
аппаратов, Оборонгиз, 1963.
15. М и е л е А., Механика полета, т. 1. «Наука», 1965.
16. Методы оптимизации с приложениями к механике космического
полета, под редакцией Дж. Лейтмана, «Наука», 1965.
17. Пономарев В. М., Теория управления движением косми-
ческих аппаратов, «Наука», 1965.
18. Лоуден Д. Ф., Оптимальные траектории для космической
навигации, «Мир», 1966.
19. Кротов В. Ф., Букреев В. 3., Гурман В. И., Но-
вые методы вариационного исчисления в динамике полета,
«Машиностроение», 1909.
ЛИТЕРАТУРА
387
20. Алексеев К. Б., Бебенин Г. Г., Ярошевский
В. А., Маневрирование космических аппаратов, «Машино-
строение», 1970.
21. Основы теории полета космических аппаратов, под редакцией
Г. С. Нариманова, М. К. Тихонравова, «Машиностроение»,1972.
22. Ивашкин В. В., Энергетически оптимальные переходы с
гиперболической орбиты при отсутствии ограничений на время
перехода, Космические исследования, т. IV, вып. 1, 1966.
23. Е d е 1 b a u m Т. N., How many impulses? Paper 66-7, 1966,
AJAA, Astronautics and Aeronautics, vol. 5, № 11, Nov. 1967,
pp. 64—69.
24. Кузмак Г. E., Исследование оптимальных многоимпульс-
ных перелетов между близкими квазикруговыми некомпланар-
ными орбитами, Космические исследования, ч. I, т. V, вып. 4,
1967; ч. II, т. V, вып. 6, 1967.
25. Маге с J.-P., Transferts infinitesimaux impulsionels economi-
ques entre orbits quasi-circulaires non coplanaires, Communica-
tion presentee an XVII Congress International d’Astronautique,
Madrid, 1966.
26. Г о б e ц Ф. У., Д о л л Д ж. Р., Обзор импульсных траекторий,
Ракетная техника и космонавтика, т. 7, № 5, 1969.
К ГЛАВЕ I
1. Лоуден Д. Ф., Оптимальные траектории для космической
навигации, «Мир», Москва, 1966.
2. Д у б о в и ц к и й А. Я., Милютин А. А., Задачи на экст-
ремум при наличии ограничений, Доклады АН СССР, т. 149,
№ 4, 1963, стр. 759.
3. Дубовицкий А. Я., Милютин А. А., Некоторые оп-
тимальные задачи для линейных систем, Автоматика и телеме-
ханика, т. XXIV, № 12, 1963.
4. Дубовицкий А. Я., МилютинА. А., Задачи на экст-
ремум при наличии ограничений, Журнал вычислительной
математики и математической физики, т. 5, № 3, 1965.
5. Л о у д е н Д. Ф., Оптимальные участки с промежуточной тя-
гой при полете в поле тяготения, Механика, периодический
сборник переводов иностранных статей, 1—83, 1964, стр. 13.
6. Кэл ли Г., Необходимые условия для особых экстремалей,
основанные на второй вариации, Ракетная техника и космо-
навтика, № 8, 1964.
7. Роббинс М., Оптимальность активных участков промежу-
точной тяги траекторной ракеты, Ракетная техника и космо-
навтика, т. 3, № 6, 1965.
8. Корр Р., Мойер Г., Необходимость условия оптимально-
сти особых экстремалей, Ракетная техника и космонавтика, т. 3,
№ 8, 1965.
9. ГурманВ. И., К вопросу об оптимальности особых режимов
движения ракет в центральном поле, Космические исследования,
т. IV, вып. 4, 1965, стр. 499.
10. Пауэрс, Тэпли, Применение канонических преобразова-
ний при анализе оптимальных траекторий, Ракетная техника и
космонавтика, № 3, 1969.
388
ЛИТЕРАТУРА
11. Д у б о ш п и Г. II., Небесная механика, Основные задами н
методы, «Наука», 1968.
12. Егоров В. А., О некоторых задачах динамики полета к
Луне, Успехи физических паук, т. 63, вын. 1а, 1957.
13. Е г о р о в В. А., Пространственная задача достижения Лупы,
«Наука», 1965.
14. К п с л п к М. Д., Сферы влияния больших плапет и Луны,
Космические исследования, т. II, № 6, 1964, стр. 853.
15. Г л эндор ф, Теория базис-вектора дляршследоваппя траекто-
рий, описываемых сопряженными коническими сечениями,
Ракетная техника и космонавтика, т. 8, № 1, 1970.
16. Аким Э. Л., О и е е в Т. М., Определение параметров дви-
жения космического летательного аппарата по данным траек-
торных измерений, Космические исследования, т. I, вын. 1,
1963.
17. Break \v ell J о li л V., Minimum impulse transfer, AIAA
(Preprints), 1963, .№ 416, 1—3.
18. Ивашкин В. В., Энергетически оптимальные переходы с
гиперболической орбиты при отсутствии ограничений на
время перехода, Космические исследования, т. IV, выи. 1,
1966.
19. Edelbau m Т. N., How many impulses? Paper 66-7, 1966,
AIAA, Astronautics and Aeronautics, vol. 5 Nj 11, 1967, pp.
64—69.
20. Чары ы ii В. II., Об изохронных производных, Co. «Искусст-
венные спутники Земли», вып. 16, Изд. АН СССР, 1963.
21. Д у б о в с к и й С. В., Межорбитальные и межпланетные пере-
леты, Космические исследования, т. V, вып. 4, 1967.
22. Гландорф, Множители Лаграпжа и матрица преобразова-
ния параметров состояния для участков пассивного полета,
Ракетная техника и космонавтика, т. 7, № 2, 1969.
23. Мельбурн, Сойер мл., Оптимальные межпланетные пе-
релеты ракет с ограниченной мощностью, Ракетная техника и
космонавтика, т. 1, 1, 1963.
24. II а й п с, Копстапты движения для оптимальных активных тра-
екторий в центральном силовом иоле, Ракетная техника и кос-
монавтика, т. 2, № 11, 1964.
25. Б р е к у э л л, Гейне, Переход с неограниченным временем
при помощи минимального импульса между соседними пекомп-
лапарпымп эллиптическими орбитами, большие осп которых
перпендикулярны липни узлов, Ракетная техника и космонав-
тика, т. 7, № 7, 1969.
26. М о й е р, Интегралы движения, вычисленные с помощью
теоремы Нетер для задачи импульсного перехода с орбиты
на орбиту, Ракетная техника и космонавтика, т. 8, № 4,
1970.
27. Бер н с, Аналогия между кеплеровскимп питеграламп и ин-
тегралами сопряженной системы уравнений, Ракетная техника
и космонавтика, т. 8, № 4, 1970.
28. Э д с л ь б а у м, П а й н с, Пятый и шестой интегралы для оп-
тимальных траекторий в центральном ноле, Ракетная техника
и космонавтика, т. 8, № 7, 1970.
ЛИТЕРАТУРА
389
29. 1J (* л е ц к п й В. В., Е горов В. А., Межпланетные полеты
с двигателями постоянной мощности, Космические исследова-
ния, т. 11, вып. 3, 1964.
30. Г а б а с о в Р., Кириллова Ф. М., Особые оптимальные
управления, «Наука», 1973.
31. Contensou Р., Etude theorique des trajectoires optimales
dans un champ de gravitation. Application an cas d’un centre
d’attraction unique, Astronautica Acta, Vol. 8, № 2—3, 1962,
134—150.
32. March al G., Transfects optimaux entre orbites elliptiques
coplanaires, Astronautica Acta 11, 432—445 (1965).
33. Cm. [41 к предисловию.
34. См. |5| к предисловию.
35. См. [6] к предисловию.
36. М а г е с J.-P., Transfects infinitesimaux impulsionels economi-
ques entre orbites quasi-circulaires non coplanaires, Communi-
cation presentee an XVII Congres International d’Astronautique,
Madrid, 1966.
37. A r c h c n t i A., M a r e c J. P., On the Optimality of conten-
sou’s singular alternating Arcs in the orbital transfer problem,
Journal of Optimization theory and applications, vol. 8, № 1,
1971.
38. И в a rn к и п В. В., Оптимальное космическое маневрирование
при свободном времени перехода и ограничениях па расстоя-
ние до планеты, Инсштут прикладной математики АН СССР,
препринт AL- 40, 1975.
39. March al С., Transfects optimaux entre orbites elliptiques
(duree indifferente), Communication prlsentee an XVI Congees
International d’Astronautique, Athens, 1965.
40. Г о б e ц Ф. У., Д о л л Дж. Р., Обзор импульсных траекторий,
Ракетная техника и космонавтика, т. 7, № 5, 1969.
41. К р о т о в В. Ф., Г у р м а н В. И., Методы и задачи оптималь-
ного управления, «Наука», 1973.
42. М а г е с J.-P., Transfects economiques entre orbites infiniment
proches, Communication presentee an XVI Congres Internatio-
nal d’Astronautique, Athens, 1965.
43. Дашков А. А., Ивашкин В. В., Об одном замечатель-
ном свойстве пучка гиперболических траекторий, Космические
исследования, т. III, вып. 5, 1965.
44. Ивашкин В. В., Одноимпульсный переход с гиперболиче-
ской на эллиптическую орбиту при радиальном импульсе, Кос-
мические исследования, т. IV, вып. 3, 1966.
45. Кубасов В. Н., Коррекция межпланетных траекторий с
помощью импульсов радиальной гелиоцентрической скорости,
Космические исследования, т. IV, вып. 5, 1966.
46. G 1 а и [ о г d I). В,. Op’imal fixed time orbital transfer with
a radial constrain!, Pli. 0. Thesis. State Univ, of Iowa, Iowa
city, 1967.
47. Чар и ы й В. И., Об оптимальных траекториях co многими
импульсами, Со. «Искусственные спутники Земли», вып. 16,
Изд. АН СССР, 1963.
390
ЛИТЕРАТУРА
48. И в а ш к и н В. В., Оптимальные траектории импульсного
перехода между орбитами при наличии ограничений по радиусу,
Космические исследования, т. IV, вып. 4, 1966, стр. 510.
49. Понтрягин Л. С., Болтянский В. Г., Га м к р е-
л и д з е Р. В., Мищенко Е. Ф., Математическая теория
оптимальных процессов, Физматгиз, М., 1961.
50. Б р а й с о н А., X о Ю-ш и, Прикладная теория оптимального
управления, «Мир», 1972.
51. Новоселов В. С., Преобразование лагранжевых множи-
телей, условий трансверсальности и функции Поптрягина при
замене переменных, Вестник ЛГУ, № 13, 1970.
52. А н о р о в В. П., Принцип максимума для процесса с ограни-
чениями общего вида, Автоматика и телемеханика, 1967,
№ 3, 4.
53. С м о л ь я к о в Э. Р., Канд, диссертация, Некоторые вариа-
ционные задачи динамики полета космических аппаратов, Ин-
ститут прикладной математики АН СССР, 1968.
54. Брайсон, мл., Денхем, Дрейфус, Задачи опти-
мального программирования с ограничениями типа равенство,
I. Необходимые условия экстремальности, Ракетная техника и
космонативка, т. 1, № 11, 1963.
55. Л а с т м е н, Две формулировки задач оптимизации с ограни-
чениями типа неравенств, Ракетная техника и космонавтика,
т. 7, № 7, 1969.
К ГЛАВЕ II
1. Г о б е ц, Оптимальные переходы между асимптотами гипербо-
лических орбит, Ракетная техника и космонавтика, т. 1, № 9,
1963.
2. См. [22] к предисловию.
3. См. [23] к предисловию.
4. Ивашкин В. В., Классификация и анализ оптимальных
импульсных переходов при ограничениях на расстояние от
притягивающего центра, Космические исследования, т. IV,
вып. 6, 1966.
5. М а г с h а 1 С., Transferts Optimaux Entre Orbites Hyperboli-
ques (Rayon Planetaire Non Nul), presented at 17th Internatio-
nal Astronautical Congress, Madrid, Oct. 1966.
6. T i n g L., Optimum orbital transfer by impulses, ARS Journal,
vol. 30, № 11, 1960.
7. Л о у д e н Д. Ф., Импульсный переход между эллиптическими
орбитами, в книге «Методы оптимизации с приложениями к ме-
ханике космического полета», под редакцией Дж. Лейтмана,
«Наука», 1965.
8. Т i n g L., Optimum orbital transfer by several impulses, Astro-
nautica acta, vol. 6, № 5, 1960.
9. H о h m a n n W., Die Erreichbarkeit der Himmelskorper, Mu-
nich, 1925.
10. Ill т e p н ф e л ь д А. А., Искусственные спутники, Гостехиз-
дат, 1958.
ЛИТЕРАТУРА
391
И. Maurice L. Antony, Frank T. Sasaki, On some
single-impulse transfer problems, AIAA Astrodynamics Confe-
rence, 1963, Preprint № 63-421 AIAA.
12. Ивашкин В. В., Оптимальные траектории импульсных пе-
реходов между компланарными орбитами при ограничениях на
расстояние от центра тяготения, Канд, диссертация, М., 1967.
13. И”в а ш к и н В. В., Оптимальные импульсные переходы внут-
ри кольца на орбиты, не пересекающие его границу, Космичес-
кие исследования, т. VI, вып. 4, 1968.
14. И в а ш к и н В. В., Некоторые свойства оптимальной коррек-
ции траектории космического полета для обеспечения последу-
ющего маневра, Космические исследования, т. VII, вып. 5,
1970.
15. Основы теории полета космических аппаратов, под редакцией
Г. С. Нариманова, М. К. Тихонравова, «Машиностроение»,
1972.
16. March al С., Optimization de la phase extraatmospherique
dela montee en orbite, La Recherche Aerospatiale, Nov., 116
and 118, 1967.
17. И в а ш к и н В. В., Оптимальные импульсные переходы в коль-
це между орбитами, пересекающими его границы, Космические
исследования, т. VII, вып. 5, 1969.
18. М u n i с k Н., М с G г i 1 1 R., Taylor С г. Е., Minimisa-
tion of characteristic velocity for two-impulse orbital transfer,
ARS Journal, vol. 30, № 7, 1960.
19. H о r n e r J. M., Optimum two-impulse transfer between orbit -
rary complanar terminals, ARS Journal, vol. 32, № 1, 1962.
К ГЛАВЕ Ш
1. Веллман Р., Динамическое программирование, ИЛ, 1960.
2. Кротов В. Ф., Методы решения вариационных задач на
основе достаточных условий абсолютного минимума, I, Автома-
тика и телемеханика, т. XXIII, № 12, 1962.
3. Кротов В. Ф., Методы решения вариационных задач, II.
Скользящие режимы, Автоматика и телемеханика, т. XXIV,
№ 5, 1963.
4. X р у с т а л е в М. М., О достаточных условиях оптимальности
в задачах с ограничениями на фазовые координаты, Автома-
тика и телемеханика, т. XXVIII, № 4, 1967.
5. Б о л т я н с к и й В. Г., Математические методы оптималь-
ного управления, Физматгиз, 1969.
6. К о д д и н г т о н Э. Э., Л е в и н с о н И., Теория обыкновен-
ных дифференциальных уравнений, ИЛ, 1958.
7. Ивашкин В. В., Построение функции Кротова для неко-
торых задач оптимизации переходов между орбитами, Косми-
ческие исследования, т. VIII, вып. 2, 1970.
К ГЛАВЕ IV
1. Брауэр Д., Клеменс Дж.. Методы небесной механики,
«Мир» 1964,
392
ЛИТЕРАТУРА
К ГЛАВЕ V
1. Breakwell J. V., Minimum impulse transfer, AIAA Pre-
prints, 1963, № 416, 1—3.
2. M о й e p, Необходимые условия оптимальности однопмпульс-
ного перехода, Ракетная техника и космонавтика, т. 4, № 8,
1966.
3. Е ж с в с к и, Р о з с н д а а л, Эффективный метод расчета оп-
тимальных ^-импульсных траекторий, Ракетная техника и
космонавтика, т. 6, № И, 19(58.
4. П р а с с и н г, Пример применения базис-вектора прп решении
задачи орбитального перелета с фиксированным временем, Ра-
кетная техника и космонавтика, т. 6, № 6, 1969.
5. Мойер, Численный обзор траекторий импульсного перехода
типа «эллипс-эллипс», Ракетная техника и космонавтика, т. 9,
№ 2, 1971.
6. Смолл, Минимальные АГ-имнульсные переходы между эллип-
тическими орбитами со свободными временем перехода, Ракет-
ная техника и космонавтика, т. 9, № 4, 1971.
7. См. [21] к предисловию.
К ГЛАВЕ VI
1. Райдер Л., Необходимая характеристическая скорость для
перелета между пекомпланарными круговыми орбитами с по-
мощью импульсов тяги, Ракетная техника, № 3, 1961, стр. 78.
2. М а г с h а 1 С., Transfects optimaux entre orbites elliptiques
(duree indifferente), Communication presentee an XVI Congres
International d’Astronautique, Athens, 1965.
3. Cm. [261 к предисловию.
4. См. [41] к главе I.
5. Ивашкин В. В., Тупицын Н. Н., Об использовании
гравитационного поля Лупы для выведения космического
аппарата на стационарную орбиту спутника Земли, Космические
исследования, т. IX, вып. 2, 1971.
6. См. [12] к главе II.
7. Ильин В. А., Д е м е ш к и н а В. В., Истомин И. А.,
Исследование траекторий близкого облета Луны с возвраще-
нием в атмосферу Земли, I, Космические исследования, т. VIII,
вып. 1, 1970, стр. 48.
8. Е г о р о в В. А., О траекториях возвращения от Луны к Зем-
ле, Космические исследования, т. V, вып. 4, 1967, стр. 483.
9. Krause Н. G. L., Die saekularen und periodischen Stoerun-
gen der Bahn eines kuenstlichen Erdsatelliten, Seventh Inter-
national Astronautical Congress, Rome, September 1956.