
























































































Автор: Томилов В.Н.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника машиностроение космос полет в космос издательство куйбышев
ISBN: 5-230-16889-7
Год: 1991




ИНДЬНА 1 НУДиви!U КРАСНОГО ЗНАМЕНИ АВИАЦИОННЫЙ ИНСТИТУТ имени С. П. КОРОЛЕВА Ж ж КУЙБЫШЕВ \
ГОСУДАРСТВЕННЫЙ КОМИТЕТ РСФСР
. ПО ДЕЛЛА! НАУКИ И ВЫСШЕЙ ШКОЛЫ
КУЙБЫШЕВСКИЙ ордена толового красного знамени
АВНАЦИОННЫП ИНСТИТУТ имени АКАДЕМИКА С. П. КОРОЛЕВА
В. Н. ТОМИЛОВ
ОСНОВЫ УСТРОЙСТВА
И УПРАВЛЕНИЯ ПОЛЕТОМ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Учебное пособие
КУЙБЫШЕВ 1991
УДК 629.7.02: 629.7.05
Основы устройства и управления полетом летательных
аппаратов: Учеб, пособие / В. Н. Томилов; Куйбышев,
авиац. ин-т, Куйбышев, 1991. 96 с. ISBN 5-230-16889-7.
Рассматриваются вопросы управления полетом летатель-
ных аппаратов и конструктивные особенности органов упрал-
леиия. При этом анализируется движение ЛА как в атмосфере,
так и в ее отсутствие по траекториям, характерным для бал-
листических ракет и ракет-носителей космических аппаратов.
Подробно освещены конструктивные особенности газодинами-
ческих органов управления. Изложены особенности компо-
новки и конструкции некоторых основных типов ЛА. Приве-
дены технические данные, массовые и геометрические харак-
теристики как зарубежных, так и советских типов ЛА.
Пособие предназначено для студентов специальностей
«Ракетостроение» и «Ракетные двигатели».
Табл. 6. Ил. 72. Библногр.: 8 назв.
Печатается по решению редакцйонно-издательского совета
Куйбышевского ордена Трудового Красного Знамени
авиационного института им. академика С. П. Королева.
Рецензенты: доц. О. А. Г о р я ч е в, проф. А. В. С а м а р и и
Томилов Владимир Николаевич
ОСНОВЫ УСТРОЙСТВА И УПРАВЛЕНИЯ ПОЛЕТОМ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Учебное пособие
Редактор Т. И. Кузнецова
Техн, редактор Н. М. К а л е н ю к
Корректор Н. С. Куприянова
Свод. тем. план № 30
Сдано в набор 19.11.90. Подписано в печать 12.03.91.
Формат 60X84 1/16. Бумага оберточная.
Печать высокая. Гарнитура литературная.
Усл.п.л. 5,6. Усл.кр.-отт. 5,8. Уч.-изд.л. 5.3.
Т. 500 экз. Заказ 181. Цена 50 к.
Куйбышевский ордена Трудового Красного Знамени
авиационный институт имени академика С. П. Королева.
443086, Куйбышев, Московское шоссе, 34.
Типография ЭОЗ Куйбышевского авиационного института.
443001 Куйбышев, ул. Ульяновская, 18.
ISBN 5-230-16889-7.
© Куйбышевский
авиационный институт, 1991
ВВЕДЕНИЕ
Внешний облик ЛА, их компоновочные схемы, а также кон-
структивные особенности узлов и агрегатов определяются как
назначением аппаратов, так и свойствами внешней среды, в ко-
торой осуществляется их движение.
Для широкого класса традиционных ЛА (самолетов и вер-
толетов) определяющим условием является наличие атмосферы
Земли. С ростом скоростей полета, изменением целей и задач
технических средств к ЛА стали относить как баллистические,
так и зенитные ракеты (управляемые и неуправляемые), ракеты-
носители (PH) космических аппаратов (КА), а в последние
годы и многоразовые транспортные КА (МТКА).
Траектория движения ЛА состоит из активного и пассивного
участков полета. Конечная скорость разгона ЛА на активном
участке определяется на основе закономерностей движения тела
переменной массы. На пассивном участке траектория, полета
определяется закономерностями движения материальной точки
в поле тяготения Земли. Для зенитных ракет это поле прини-
мается как плоскопараллельное. Для баллистических ракет
(БР) и PH КА, а также для МТКА необходимо учитывать, что
поле тяготения является центральным. При этом движение ЛА
в общем случае происходит по эллиптическим траекториям.
В зависимости от класса ЛА удобно применять различные
системы координат, в которых осуществляется движение ЛА как
материальной точки. Основными системами координат являют-
ся: скоростная, связанная, стартовая, геоцентрическая и по-
лярная.
Особенности движения ЛА на активном н пассивном участ-
ках, в атмосфере Земли и вне ее определяют требования к ус-
тойчивости и управляемости полетом. При движении в атмосфе-
ре с высокой скоростью применяются традиционно эффектив-
ные аэродинамические органы управления (ОУ) — элероны,
роллероны, стабилизаторы, интерцепторы. Для регулирования
полетом на малых скоростях и вне атмосферы, характерным для
БР и PH, широко используются газодинамические ОУ — раз-
3
личные реактивные двигательные установки (ДУ) и сопла (пово-
ротные ДУ и сопла, устройства с несимметричным истечением
газов, устройства с отклоняющимися элементами—газовые рули
и поворотные насадки, интерцепторы, струйные исполняющие
устройства). Все эти технические средства предназначены для
создания управляющих сил и моментов, обеспечивающих стаби-
лизацию ЛА.
Тип ЛА и решаемые им задачи, состав полезного груза, ДУ,
характеристики топлива, система управления и многие другие
факторы определяют выбор конструктивно - силовой схемы
(КСС) и внешнюю компоновку. Для зенитных управляемых ра-
кет (ЗУР), используемых в плотных слоях атмосферы, важное
значение приобретает аэродинамическая компоновка. Для БР
и PH выбор компоновочной схемы определяется требованием
минимальных энергетических затрат при выводе единицы массы
полезного груза на расчетную траекторию. При одинаковой
стартовой массе полезная нагрузка (ПН) многоступенчатых
БР и PH приобретает большую Скорость, чем одноступенчатых.
Однако существует оптимальное количество ступеней, опреде-
ляемое энергетическими характеристиками ДУ и совершенст-
вом их конструкции.
Создание МТКА накладывает свои особенности на конструк-
тивное оформление таких систем. В первую очередь это отра-
жается на КСС и компоновке возвращаемого аппарата — орби-
тальной ступени (ОС), для которой необходимо решить про-
блему защиты от нагрева и маневрирования при входе в атмо-
сферу Земли.
Основой данного пособия послужил курс лекций, прочитан-
ный в Куйбышевском авиационном институте студентам 4 курса
факультета двигателей летательных аппаратов.
В работе использовались материалы как методической лите-
ратуры, так и средств массовой информации, а также разра-
ботки специалистов кафедр 601 и 602 Московского авиационного
института: О. М. Алифанова, А. А. Кузнецова, В. Н. Новикова,
Б М. Панкратова (разд. 1.2); О. Л. Смирнова, В. К- Сердюка
(разд.3).
i. Основные закономерности
движения лл
1.1. СИСТЕМЫ КООРДИНАТ
Для исследования закономерностей движения ЛА наиболее
широко используются следующие системы координат: стартовая,
связанная, скоростная, геоцентрическая и полярная. Ниже при-
водятся краткие характеристики этих систем.
Стартовая система координат. Если движение
ЛА рассматривается в прямоугольной системе координат
OoA'cFcZc, неподвижно связанной с Землей (рис. 1.1,а), то эту
систему называют стартовой. Ось О0Хс — направлена по каса-
тельной к поверхности Земли в точке старта, ось Оо Ус — вверх
по местной вертикали, ось OoZc направлена перпендикулярно
к плоскости вправо от направления полета (правая система ко-
ординат).
Связанная система координат (рис. 1.1,6). На-
чало се помещается в центре тяжести ЛА, ось ОХ направлена
по продольной осн ЛА, осн ОУ и OZ находятся в плоскости,
перпендикулярной продольной осн таким образом, чтобы на
старте плоскость X—У совпадала с плоскостью Хс—Ус старто-
вой системы координат, а ось OZ имела то же направление, что
и O0Zc. Для определения взаимного направления осей связан-
ной и стартовой систем координат вводятся углы fl, в у.
Угол тангажа fl заключен между осью ОХ ЛА и плоскостью
Хс—Zc. Угол Т (рыскания) заключен между осью ОХ ш плос-
костью Хс—Ус. Угол крена у находится между осью ОУ и плос-
костью Хс—Ус. Обе системы (стартовая и связанная) исполь-
зуются в основном при баллистических расчетах и расчетах ус-
тойчивости ЛА.
Скоростная система координат. Она вводится
для удобства ведения аэродинамических расчетов на атмосфер-
ных участках полета. Начало системы расположено в центре
тяжести ЛА. Ось ОХа направлена по вектору скорости (рис. 1.2,а),
ось ОУа — по линии пересечения плоскости, перпендикулярной
касательной к траектории в данной точке, с плоскостью самой
траектории, ось OZa направлена перпендикулярно плоскости
А а Ya.
5
Рис, 1.1 Старк)ВйЯ (а) и Связанная (6) системы кобрдйнй!-
6
Рис. 1.2. Скоростная (а), геоцентрическая (б) и полярная (а) системы
координат: / — Гринвичский (начальный) меридиан; 2 — текущий ме-
ридиан; 3 — экватор
Связанная и скоростная системы координат при полете ЛА
не совпадают. Ось ОХ образует с вектором скорости угол ата-
ки а, а плоскость X—Y — угол скольжения [}.
Геоцентрическая и полярная системы коор-
динат. Для определения текущего положения центра масс
космических и спускаемых аппаратов относительно земной по-
верхности, расчета траекторий баллистических ракет с большой
дальностью полета используется геоцентрическая система коор-
динат (рис. 1.2,6). Начало этой системы располагается в центре
.Земли, положение ЛА задается с помощью радиуса — вектора г.
7
В координатной форме это будет велиМи-на г и два угла: дол-
гота л и широта <р.
Долгота Z (л е [—л; л]) понимается как угол между плос-
костью Гринвичского меридиана (как начало отсчета) и плос-
костью меридиана, проходящего черезтекущую точку. Положи-
тельные значения л соответствуют восточному полушарию, а
отрицательные — западному.
Широта [---------; -—]] — это угол между радиусом-
вектором рассматриваемой точки и плоскостью экватора. Поло-
жительные значения ср относятся к северному полушарию,
отрицательные — к южному.
В данной системе координат высота ЛА над поверхностью
Земли будет определяться моделью для фигуры Земли,
Полярная система координат является простейшей с нача-
лом в центре Земли (рис. 1.2,в). В этой системе ЛА координи-
руется величиной радиуса г и полярным углом х
1.2. ОСНОВНЫЕ СООТНОШЕНИЯ РЕАКТИВНОГО ДВИЖЕНИЯ
Пусть тело с переменной массой т совершает поступатель-
ное движение со скоростью V. Масса тела изменяется во вре-
мени вследствие непрерывного присоединения частиц с относи-
тельной (по отношению к телу) скоростью w. За время At
к телу массой т присоединится некоторая масса Ат со ско-
ростью w. Если принять, что w имеет направление, обратное V7,
то абсолютная скорость массы Ат будет равна (V—w).
Так как изменение количества движения равно импульсу
сил Pi, действующих на систему, то количество движения си-
стемы до присоединения масс равно т V + Am(V—w), а после
ьрисоединения — (т-\-Ат) (V+A V). Тогда можно записать
соотношение
(т + Ат) (V + A V)—mV—Am (V—w) = \/ Z Р .
Здесь S Р, — сумма внешних сил, действующих па систему за
время А /. Отсюда
т А V + А т w \ Am \V == At* Pi.
*
Разделив обе части уравнения на \t и переходя к пределу,
получаем уравнение Мещерского
— (и >
at at
Для неизменной массы получается обычное урав-
нение второго закона Ньютона
8
dV ___у, n.
dt
Таким образом, член w можно рассматривать как силу,
приложенную к телу массой т. Если w имеет направление,
обратное скорости V поступательного движения тела (и»>0),
то сила будет тормозящей (уменьшающей V), если при этом
> 0, т. е. масса тела возрастает. Если же масса будет
уменьшаться О), то сила w будет движущая. Для
ЛА уравнение (1.1 ) можно представить в виде
mdV/dt = wdm/dt+ У, Р/,
V№dm/dt = tn—секундный расход М'ассы; w—скорость истечения.
Определим скорость, которую может получить,,ЛА в идеаль»
ном случае, когда его движение происходит вне'атмосферы и
вне поля тяготения Земли. Имеем соотношение
in dV — dm
• dt dt
dV п *
так как т-уу- = Р, то тяга в пустоте может быть представлена
в виде
Р = m^+Sa Ра ИЛИ Р = т КУе,
S Р
где &’е = w 4- -d - —эффективная скорость истечения;
Sa, Ра—соответственно площадь выходного сече-
ния сопла и давление на нем.
Таким образом, dV = —we — .
1 in
Интегрируя это уравнение при постоянной получим
V = —<£’е(1п т — In С), •
где С — постоянная величина.
При V = 0 m — m0
V = -we In .
Это соотношение носит название формулы Циолковского
для идеальной скорости движения ЛА.
1.3. УРАВНЕНИЯ ДВИЖЕНИЯ ЛА
В общем виде траекторию движения ЛА можно разбить на
три участка: активный, участок свободного полета, участок сни-
9
жения — вход ЛА в атмосферу Земли и полет в ней до встречи
с поверхностью.
Активный участок
Рассмотрим движение
ЛА как материальной
точки. При этом не учи-
тываем вращение Земли,
углом атаки пренебре-
гаем fl = 0 (в общем слу-
чае fl = 0— а, рис. 1.3).
Система уравнений дви-
жения ЛА в стартовой
системе координат запи-
шется следующим обра-
зом:
т = P-X-Gsinfl,
at
clx |/
—т— = V cos ft,
at
= V sin 0,
at
где P — тяга; X — сила лобового сопротивления; 0 — угол меж-
ду направлением вектора скорости и горизонтом; х, у—коор-
динаты активного участка движения; fl — угол тангажа; а —
угол атаки (угол между направлением продольной оси и на-
правлением вёктора скорости).
Из первого уравнения системы имеем
dV = (—------g sin fl— W .
V т ° т /
Введем следующие обозначения:
т . Т шо . тл. Р<\ . rrt1 ,
Ц — » / — —: , ^0 — —~ = —: ,
г т0 tn tn tn
так как
t 111 - filn—tilt _ । t
J1 //?() ni0 7 *
поэтому t = T (1—p) и dt = —Td^.
где p— отношение масс (весов) ЛА (при t = 0 р = 1;
при t = tK р = рк);
Т — время работы некоторого «идеального» двигателя ЛА
(р^О);
10
Ро, Рп — тяга на земле и в пустоте соответственно.
Можно записать
Wotn — Руно wn tn ^Руя. п G
И"'1И W = g РуЫ\ Wn = g Руд. п,
где Рудо, Руд п — удельная тяга на земле и в пустоте соответст-
венно. Из уравнения (1.2) получим m = Ро / g РУАо, тогдд
Т = Р удо / ^о-
Подставляя полученные зависимости в формулу (1.2) и ин-
тегрируя, запишем
V = — Wn In ц — (©„—w0) J у- -------Тg j sin й d, |Л —
> 0 u.
1 M J Ц r
или в безразмерном виде
=_[ing+-L jsint>rfn+
, 1 f clC* a , АРУД f P dtt 1
+ n°p- £ и M + J Po t* 1 •
Здесь слагаемые правой части имеют следующий смысл:
-
= —б”— = — i'ln ц| —безразмерная скорость Циолков-
£ *уд п
ского (идеальная скорость), т. е. скорость движений ЛА при
отсутствии притяжения Земли и сопротивления атмосферы;
V L j f
Ид = 1 sin # t/ p — потери скорости за счет дей-
ствия силы тяжести. Эти потери являются существенными и
могут достигать значения 1000...2000 м/с;
И'а-гм = /?0 рм J -Сх^ с/ц —потери скорости на преодоление
сопротивления атмосферы. Они достигают величины 2—3% от V,
что в количественном выражении составляет 100—150 м/с.
Давление атмосферы с высотой падает, поэтому и тяга будет
изменяться, увеличиваясь от Ро до Рп. Следовательно, Рид =
= —In ц дает завышенное значение скорости. Последний член
уравнения
Г,// _ а т м
v а™ =
« 'уд П
друл f р ,
р---- dМ,
Руд J F0 И
11
представляет поправку, учитывающую это обстоятельство. Та-
ким образом, имеем
У = Рнд —Рд—Ратм » ( 1.3)
ГДе <Ратм ='- РатмЧ~ Р атм-
, Выражение (1.3) определяет значение скорости V в конце
активного участка полета.
Пассивный участок
Всякое тело, брошенное под углом 0О к горизонту со скоро-
стью V = Ро» движется, если не учитывать сил сопротивления
воздуха, по параболе (рис. 1.4). Спустя некоторое время после
Рис. 1.4. Движение тела в плоско-
параллельном поле тяготения
Рис. 1.5. Движение тела в
центральном поле тяготения
начала движения координаты брошенного тела будут представ-
лены следующим образом:
х = VQt cos 0о,
y=Vot sin ©о —
Исключая /, находим уравнение параболы
Здесь предполагалось, что поле земного тяготения плоскопарал-
лслыюе и ускорение g не меняется по времени и по величине.
На самом деле поле земного тяготения центральное, а ускоре-
ние силы тяжести по мере набора высоты изменяется следую-
щим образом:
^-^0(/?з///)2,
где И = /?3 + h (h — высота); R3 — радиус Земли.
12
Этот факт необходимо учитывать при ойределёййй траек+о-
рии полета ЛА, предназначенных для больших дальностей и
высот. t •
Пусть ЛА (рис. 1.5; точка А) движется nd инерций и нахо-
дится в данный момент на расстоянии г от центра Земли: Прй
переходе в точку В его кинетическая энергия /нУ2/2 изменится
на величину d (mV2/2), а потенциальная — на величину d(mgr)-
т. е.
----mgr ) = 0 или —|------gr = const. .
Решение этого уравнения дает известное выражение
г = Ур2 Гр COS2 фр
и2 [1 4- е cos (<р—<Го) ]
р'
или —-— ---------—- ,
1 + с cos ((Г—<ро)
Земли; е— эксцентриситет, // —па-
гдег0—радиус начальной траектории от центра Земли ;.ц2=/Д|.—
гравитационная постоянная
рамётр траектории.
При е < 1 получаем
уравнение эллипса; при
е=1 — уравнение пара-
болы; при е > 1 — урав-
нение гиперболы; при
е = 0 — уравнение окруж-
ности.
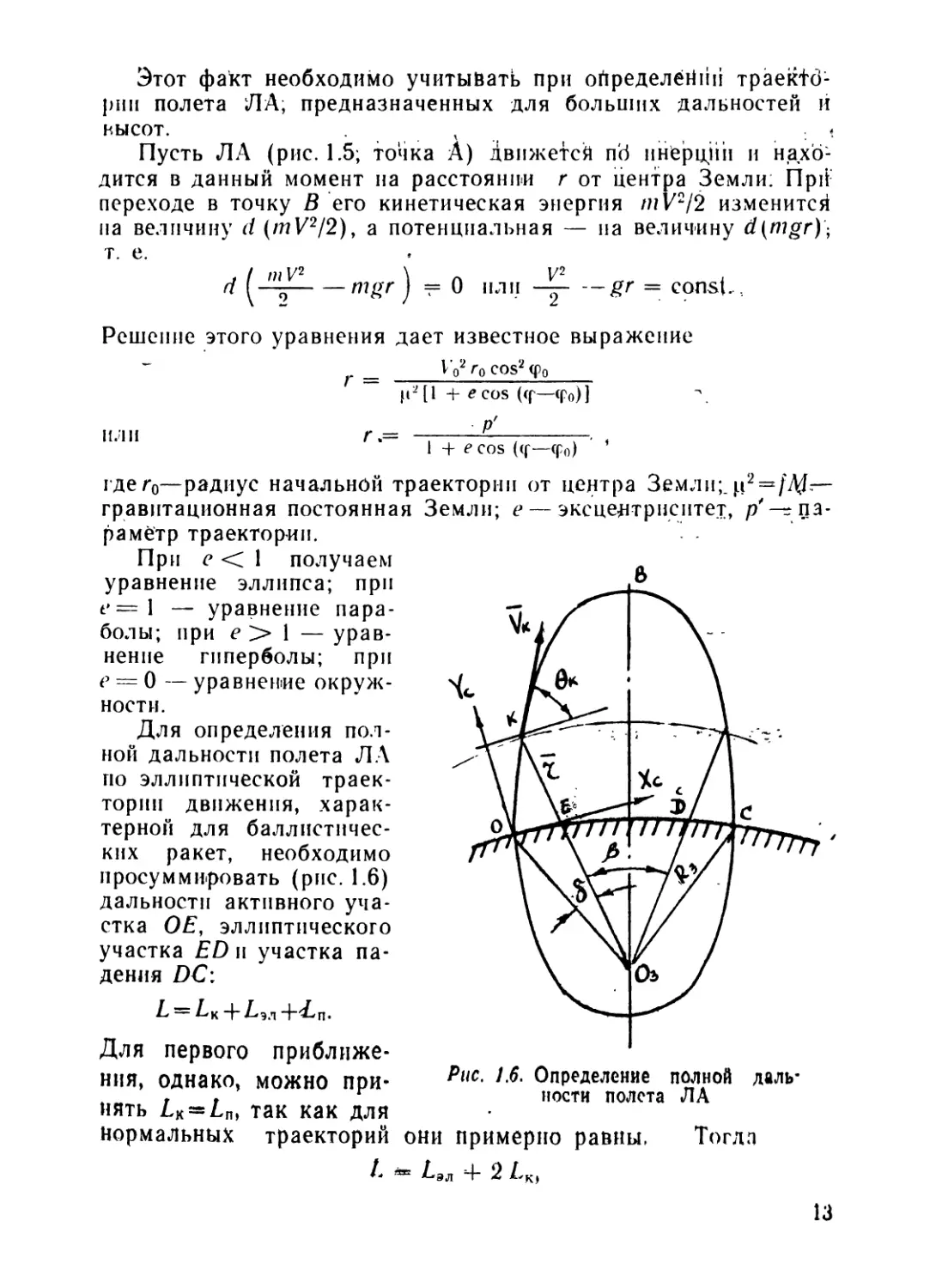
Для определения пол-
ной дальности полета ЛА
по эллиптической траек-
тории движения, харак-
терной для баллистичес-
ких ракет, необходимо
просуммировать (рис. 1.6)
дальности активного уча-
стка ОЕ, эллиптического
участка ED и участка па-
дения DC:
Для
НИЯ,
пять
нормальных
L~LK-\- Еэл +£п.
первого приближе-
однако, можно при-
Ек-ЕП) так как для
траекторий
6
Чс
Рис. 1.6. Определение полной даль-
ности полета ЛА
они примерно равны, Тогда
Е ® Еэл =4- 2
13
где LK — R36, 6 = о ,к , Хк> У* ~ координаты конца актив-
^3 ”1" Ук
ного участка траектории.
Полная энергия ЛА, движущегося на пассивном участке тра-
ектории, представлена как
E = T + U, (1.4)
где кинетическая энергия движения аппарата
или в полярнцх координатах
где GK — конечный вес ЛА в конце активного участка;
г—Яз + у — расстояние от центра Земли до ЛА.
Сила взаимодействия между массой М Земли и массой m ЛА
с с шМ
Е = Ч —
Тогда потенциальная энергия
g г
Решение уравнения (1.4) приводит к выражению
где Л = А. ,2-^- или А= (Ri + yjV,
В = / м.
g
Дальность £эл можно представить в первом приближении в виде
Ьэл = Лз р.
2. УПРАВЛЕНИЕ ПОЛЕТОМ ЛА
2.1. АЭРОДИНАМИЧЕСКИЕ СИЛЫ И МОМЕНТЫ
При движении ЛА в атмосфере на него действует сила тре-
ния (тангенциальная сила) и распределенная нормальная сила.
Из курса теоретической механики известно, что все силы, дей-
ствующие на тело, можно заменить одной равнодействующей,
приложенной в любой точке, и моментом сил относительно этой
точки. Равнодействующая R тангенциальных и нормальных сил
называется аэродинамической силой, а момент М — аэродина-
мическим моментом (рис. 2.1).
Рис. 2.1. Аэродинамическая сила и аэродинамический
момент
Аэродинамическая сила R может быть приложена в любой
точке, в том числе и в такой, где аэродинамический момент М
равен нулю. Такая точка называется центром давления.
В инженерной практике считается, что аэродинамическая
сила R приложена в центре тяжести ЛА. Это справедливо преж-
де всего для случая установившегося прямолинейного равно-
мерного полета, когда аэродинамический момент равен нулю.
При этом отсутствует вращение ЛА, что соответствует рассмат-
риваемому режиму полета.
В аэродинамике, динамике и конструкции удобно применять
Не аэродинамические силу и момент, а их проекции на оси пря-
15
моугольных подвижных- систем координат (скоростную и свя-
занную).
Спроектируем силу R и момент М на оси скоростной си-
стемы (рис. 2.2). Проекция силы R на ось ОХа называется силой
Рис. 2.2. Аэродинамические силы и моменты в скоростной и
связанной системах координат
лобового сопротивления и обозначается Q = —Ха, проекция на
ось OYa — подъемной силой Ya, проекция на ось OZa — боко-
вой силой Za.
Сила лобового сопротивления всегда имеет направление,
противоположное положительному направлению скоростной оси
ОХа. Поэтому для удобства записи отрицательное значение Ха
обозначают другой, положительной величиной Q.
Проекция момента М на ось ОХ связанной системы коорди-
нат называется моментом крена и обозначается Л4Х, на ось OY—
моментом рыскания Му, па' ось OZa — моментом тангажа Мг.
Система координат — правая, поэтому положительное на-
правление моментов выбирается таким, при котором система
вращается вокруг осей против часовой стрелки, если смотреть
на начало координат со стороны соответствующей оси (рис. 2.3).
Момент тангажа, имеющий положительное направление, на-
зывается кабрирующим моментом, а имеющий отрицательное
направление — пикирующим моментом. Соответственно, под
кабрированием понимают такое движение ЛА под действием
кабрирующего момента, при котором угловая скорость тангажа
имеет положительное значение 4 > 0. Под пикированием пони-
мают полет аппарата со снижением, с углом наклона вектора
скорости к горизонту, превышающим 30°, и углом тангажа,
близким к углу наклона вектора скорости. Если же угол накло-
16
Y.
Рис. 2.3. Положительное направление моментов
в правой системе координат
на вектора скорости не превышает 30°, то такой режим назы-
вается планированием.
Величина аэродинамической силы и момента определяется
по проекциям из формул:
R = V Q2 + Ya2 + Z?; М =/ MS + Му2 + М?.
Часто наряду с проекциями аэродинамических сил и момен-
тов применяются безразмерные коэффициенты аэродинамичес-
ких сил и моментов. Тогда аэродинамическая сила
R = CRqS,
где CR— безразмерный коэффициент аэродинамической силы;
q — скоростной напор, q = р Р2/2; р = р<х> — плотность воздуха
в невозмущенном потоке; V = — скорость невозмущенного
потока; S — характерная для ЛА площадь.
Сила лобового сопротивления
Q = Сх q S ,
где Сх — безразмерный коэффициент силы сопротивления.
Подъемная сила
Ya = Су q S ,
где Су — коэффициент подъемной силы.
Боковая сила
Za = Czq S ,
где Cz — коэффициент боковой силы.
Аэродинамический момент
М = m S qly
где in — коэффициент момента; I—какая-либо характерная
для ЛА длина. 17
Проекции вектора аэродинамического момента на осн свя-
занной системы координат представлены следующим образом:
Mx = mxSql\ Му = mySql\ Mz = mzSqb,
где тх — коэффициент момента крена; т/у — коэффициент мо-
мента рыскания; mz — коэффициент момента тангажа; / — раз-
мах крыльев или длина корпуса; Ь — хорда крыльев.
Производные по углу атаки и скольжения соответствующих
коэффициентов сил и моментов обозначаются:
г «- dCy
“ da
4 d tnu
Шу'
mz*=
и т. д.
d Шг
d а
|3_ .
Вышеприведенные формулы
записаны и в случае применения
в таком же виже могут бь^ть
скоростной системы координат.
2.2. УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ ЛА
Движение ЛА можно рассматривать как совокупность двух
движений: поступательного (как материальной точки с массой,
сосредоточенной в центре масс под действием результирующего
вектора всех сил R), и вращательного (относительно центра
масс под действием момента М).
При этом различают установившееся движение, при котором
кинематические параметры (скорость, высота, ориентация), ха-
рактеризующие движение, не зависят от времени (практически
это движение реализуется, когда линейные ускорения и угловые
скорости сравнительно малы), а также неустановившееся дви-
жение, когда кинематические параметры изменяются во време-
ни. Неустановившееся движение определяет летные характерис-
тики аппарата, которые, в свою очередь, характеризуют его ма-
невренные свойства.
Маневренность ЛА — это способность за определен-
ный промежуток времени изменять скорость, направление полета
и положение в пространстве.
В полете ЛА, как абсолютно жесткое тело, обладает шестью
степенями свободы: центр тяжести аппарата под действием сил
может перемещаться по трем взаимно перпендикулярным на-
правлениям (в стартовой системе координат), и весь аппарат
может вращаться вокруг центра тяжести под действием момен-
тов от внешних сил. Вращение также рассматривается относи-
тельно стартовой системы координат. При перемещении центра
тяжести аппарата, учитываются три вида внешних сил: реактив-
18
ные, тяжести и аэродинамические. Каждая сила может образо-
вать момент относительно центра тяжести.
Строго говоря, ЛА является нежестким телом, упругой кон-
струкцией с колеблющимся жидким наполнителем. Эти факторы
оказывают влияние на параметры движения аппарата. Однако
ь ряде случаев можно рассматривать ЛА как недеформируемое
тело. Именно этот более простой случай рассматривается ниже.
Под действием возмущающих сил (обычно кратковременных)
параметры полета могут отличаться от программных, которые
реализуются летчиком пли автоматом. Если приращение кине-
матических параметров, вызванное возмущающими силами,
уменьшается с течением времени, то ЛА считается динамически
устойчивым. В противном случае имеет место динамическая
неустойчивость ЛА. Если при отклонении от начального режима
движения после прекращения действия на него возмущающих
сил появятся силы, возвращающие ЛА к исходному, невозму-
щенному движению, то наблюдается статическая устойчивость.
Наличие статической устойчивости — необходимое условие ди-
намической устойчивости ЛА.
С понятием устойчивости тесно связано понятие управляе-
мости ЛА, а именно: способность быстро и без заметных4 коле-
баний изменять параметры полета в зависимости от перемеще-
ний органов управления. В динамике полета ЛА большую роль
играют понятия его статического равновесия (состояние) и ста-
тической устойчивости (свойство). Состояние статического рав-
новесия характеризуется тем, что сумма моментов сил, дейст-
гующих на ЛА при нулевой скорости его вращения, а также при
постоянном угле атаки и при неизменном положении рулей на-
правления равна нулю. Известно, что равновесие может быть
устойчивым и неустойчивым (рис. 2.4). Характер равновесия
определяется наличием или отсутствием статической устойчи-
вости.
В зависимости от действующих моментов исследуют про-
дольную статическую устойчивость (от момента тангажа Мг),
Рис. 2.4. Механическая интерпретация понятия устой-
чивости тела: а — устойчивое положение; б — неустой-
чивое; в — нейтральное
19
поперечную (от момента крена Мл) и флюгерную (от момента
рыскания Л4У).
Статическая устойчивость связана с понятиями центра дав-
ления и фокуса ЛА. Фокусом ЛА называется точка приложения
приращения нормальной силы при изменении угла атаки с не-
подвижными воздушными органами управления, или точка, по
отношению к которой коэффициент момента аэродинамических:
сил остается постоянным при изменении угла атаки с непод-
вижными органами управления.
В установившемся равномерном прямолинейном полете подъ-
емная сила всего ЛА, управляемого аэродинамическими органа-
ми управления, приложена в центре тяжести аппарата (т. е. центр
давления совпадаете центром тяжести). Если бы этого не было,то
момент аэродинамических сил вращал бы аппарат вокруг цент-
ра тяжести, не давая ему возможности совершать равномерный,
прямолинейный установившийся полет.
Другое дело, когда органами управления ЛА являются
нс воздушные, а например, газоструйные пли какие-либо дру-
гие рули. Тогда в установившемся равномерном прямолинейном
полете полная аэродинамическая сила будет приложена в цент-
ре давления, который может и не совпадать с центром тяжести,
а ее момент относительно центра тяжести будет уравновешен
моментом, создаваемым газоструйными рулями (центр давле-
ния — это понятие, связанное только с аэродинамическими си-
лами).
Чтобы определить, где находится фокус ЛА, необходимо, за-
фиксировав органы управления и сохраняя их далее неподвиж-
ными, изменить угол атаки ЛА. Приращение подъемной силы
будет приложено в фокусе ЛА. В зависимости от того, в каком
положении находится фокус от центра тяжести, приращение
подъемной силы будет создавать момент относительно центра
тяжести того или иного знака. Величина момента определяет
степень статической устойчивости ЛА.
Для пояснения продольной статической устойчивости раз-
личным расположением фокуса относительно центра тяжести
рассмотрим три возможных варианта: либо фокус располагается
за центром тяжести, либо в центре тяжести, либо впереди по-
следнего (рис. 2.5). В первом случае (рис. 2.5,а) при неподвиж-
ном оперении будет создаваться момент относительно оси OZ:
Д Mz = — Д Y(xf—хцт),
который создает тенденцию к уменьшению возмущения по углу
атаки. Аппарат в таком случае обладает продольной статичес-
кой устойчивостью. Во втором случае (рис. 2.5,6) относительно
центра тяжести приращение подъемной силы не будет созда-
вать никакого момента. ЛА статически нейтрален. В третьем
20
ь
Рис. 2.5. Статически устойчивый (а) ЛА; статически нейтральный (б) и ста-
тически неустойчивый (в) ЛА
случае при неподвижном оперении будет создаваться момент
относительно центра тяжести
Д Mz = Д Y(xf—хцт),
который создает тенденцию к увеличению возмущения по углу
атаки (рис. 2.5,в). Аппарат статически неустойчив.
Мерой степени продольной статической устойчивости ЛА яв-
ляется величина отношения Д М2/Д а или математически —
величина коэффициента
шг7 -= дт2/ да
или более удобная величина коэффициента
mzCy = дт2/дСу = дт2/да • да/дСу = /Су.
21
Из рис. 2.5 имеем
А Мг = — A Y (xF—хц т) = — А Су qS (xF—хц т) .
Знак «минус» перед правой частью равенства поставлен потому,
что в рассматриваемом случае момент относительно центра тя-
жести направлен по часовой стрелке, что соответствует для пра-
вой системы координат отрицательному направлению. Но, с дру-
гой стороны
A Mz = A mzqS Ьд.
Тогда
A rnz = —А Су (хf—Хц т),
1Де Xf = Xf/Ьд^ Хц т = Хцт/^.4.
Следовательно,
dmz/dCy = mzcy = — (хг—хцт).
Коэффициент mzcy представляет собой расстояние в дол я к
средней аэродинамической хорды крыла между фокусом и цент-
ром тяжести, причем это расстояние считается положительным,
если оно откладывается в положительном направлении по
оси ОХа.
Путевая или флюгерная устойчивость ЛА характеризуется
величиной коэффициента
ту = dnty / д 3 .
При ту^< 0 аппарат имеет путевую статическую устойчивость,
при ту' = 0 аппарат нейтрален, при > О ЛА неустойчив.
Поперечная статическая устойчивость характеризуется вели-
чиной коэффициента
тх ? = дтх / д$ .
Если тл ?< 0, то аппарат имеет поперечную статическую устой-
чивость, при тх? = 0 аппарат нейтрален, при тх? > 0 аппа-
рат неустойчив. Управление движением ЛА осуществляется соз-
данием управляющих моментов относительно центра масс. Если
эти моменты создаются не для управления, а для сохранения
заданного углового положения ЛА в пространстве, то они назы-
ваются стабилизирующими моментами.
Для создания управляющего и стабилизирующего моментов
используются органы управления и стабилизации. Часто они
бывают совмещены в одних и тех же рулях. К числу наиболее
часто встречающихся органов управления относятся: аэродина-
мические рули, воздушные интерцепторы, роллероны; реактив-
22
Еые органы управления (газодинамические); гироскопические
п др.
Моменты, создаваемые органами управления, часто обозна-
чаются следующим образом:
МХэ = МхсЭ Л4хн = Мх йн6н; = Мгв = Л4гов6в,
где
М/’ = = /иМ/'н = 4^ =
М/" = 4^7 = W/H МГ = -^7 = m^qSbA-
(ш/э, т/н, т /н, тг?>* — коэффициенты эффективности соот-
ветствующих органов управления относительно указанных
осей).
2.3. АЭРОДИНАМИЧЕСКИЕ ОРГАНЫ УПРАВЛЕНИЯ
Рассмотрим основные виды органов управления, которыми
достигается перемещение центра давления относительно центра
масс. К ним относятся воздушные рули, роллероны и интер-
цепторы.
Воздушные рули. Величина момента целиком повора-
чивающегося горизонтального оперения (руля высоты), распо-
Рис. 2.6. К выводу эффективности органов управления
воженного по обычной схеме (рис. 2.6), определяется по фор-
муле
Мгв = — YBZB. (2.1)
Здесь Ув—нормальная сила, развиваемая рулем высоты (про-
екция полной аэродинамической силы на ось OY в связанной
23
системе координат); LB — плечо руля высоты, т. е. расстояние
от центра тяжести ЛА до фокуса или до оси поворота руля
высоты.
Отсюда
У в = Су*а6в qSBl
где Суйв = д СуЪ/д 6В, Сув— коэффициент нормальной силы,
создаваемой рулем (производная Су6в изменяется по числам М
полета; максимальный момент, создаваемый рулем высоты, бу-
дет там, где Су8в^ = тах; SB— площадь руля высоты; 6В —
угол отклонения.
Знак «минус» перед правой частью в формуле (2.1) постав-
лен потому, что при принятом положительном угле отклонения
руля высоты момент относительно центра тяжести будет направ-
лен по часовой стрелке, т. е. будет отрицательным.
С другой стороны, момент, создаваемый рулем высоты, мож-
но представить в следующем виде:
== гпzb qSbA.
Тогда тгъ qSbA = — YB LB = —Cy^6B q SB LB
ЕЛ И WIzb ~ —С*6b Sb Lb.
Здесь Sb = SB/S; Lb — LB/bA.
Взяв частную производную, получаем
W ^gb — fl jYlZBjд 6B = — С V°B Sb Lb.
Производная Су,в всегда больше нуля (благодаря принятому
положительному направлению отклонения руля высоты), поэто-
му при нормальном расположении органов управления коэффи-
циент /п/в > 0.
В установившемся прямолинейном режиме полета суммарный
момент, действующий на ЛА, представлен как
М 4- 6в = 0,
где М —эффективность руля высоты: величина момента от-
носительно центра тяжести, приходящаяся на единицу угла от-
клонения руля.
В коэффициентах эта формула, называемая основным балан-
сировочным соотношением, записывается следующим образом:
т/а 4- 6в = 0 . (2.2)
Балансировка ЛА — уравновешивание моментов, дей-
ствующих на ЛА в полете, относительно трех, связанных с ним
координатных осей, проходящих через его центр тяжести. Ба-
лансировка бывает продольной относительно поперечной оси OZ;
24
поперечной — относительно продольной оси ОХ; путевой — от-
носительно нормальной оси OY.
Из основного балансировочного соотношения получим
бв = —(т/ /т/в) а.
Так как mz* = тг Су Су* >
то бв = (тгсУ/т/а). Су.
Следовательно, при установившемся прямолинейном режиме
полета увеличение степени статической устойчивости ЛА (т. е.
увеличение коэффициента \т?Су\ приводит к необходимости
увеличения отклонения органов управления при прочих равных
условиях.
При статически устойчивом аппарате (при тгСу <С 0) для
совершения равномерного горизонтального полета нормальная
сила от горизонтального оперения должна быть направлена вниз,
что следует из формулы (2.2).
При статически неустойчивом аппарате (при тгСу > 0) для
совершения того же равномерного горизонтального полета нор-
мальная сила от горизонтального оперения должна быть на-
правлена вверх.
Недостаток воздушных рулей заключается в том, что эффек-
тивность их.зависит от величины скоростного напора. Если ско-
ростной напор мал (в момент старта или при полете на больших
высотах), то и эффективность аэродинамических органов управ-
ления тоже мала.
С понятием центра давления воздушного руля связано поня-
тие шарнирного момента — момента, образуемого нормальными
силами отклоненного воздушного руля относительно оси пово-
рота (рис. 2.7). Величина шарнирного момента руля
Мш = Ув I ,
где /цс? — расстояние от центра давления до оси поворота.
Рис. 2.7. Шарнирный момент руля
25
Подъемная сила руля У3 на большом плече создает большой
шарнирный момент, для уравновешивания которого требуется
большое усилие.
Уменьшения шарнирного момента можно достигнуть уста-
новкой на руль сервокомпенсатора (флетнера, рис. 2.8). Серво-
компенсатор отклоняется автоматически в противоположную от
руля сторону. Он устанавливается на элеронах или воздушных
рулях, целиком не поворачивающихся в потоке, и шарнирно
соединен жесткой тягой с крылом. При отклонении руля тяга
заставляет сервокомпенсатор отклоняться в противоположную от
руля сторону. На сервокомпенсаторе создается подъемная си-
ла Гек. Шарнирный момент сервокомпенсатора (Мшск= Кек/Ск)
пропорционален по действию шарнирному моменту руля.
Рол лероны (рис. 2.9) представляют собой комбинацию
элерона и гироскопа, расположенного в элероне. Ротор гироско-
па раскручивается встречным потоком до 20.000 об/мин. Как
правило, роллероны применяются на снарядах класса «воздух-
26
Рис, 2.9. Схема действия роллеронов
воздух». Когда последний находится на самолете-носителе, рол-
лероны застопорены специальным механизмом. После запуска
двигателя снаряда расплавляется стяжная лента 5 (рис. 2.10),
Рис. 2.10. Конструкция роллсрона: 1 — ротор; 2 — обойма; 3 — сто-
пор; 4 — крыло; 5 — стяжная лента
удерживающая стопор 3. Роллероны освобождаются и начинают
отклоняться, если имеется угловая скорость крена аппарата со>
Вращение аппарата вызывает прецессию ротора гироскопа рол-
лерона. Плоскость ротора гироскопа будет вращаться таким об-
разом, чтобы вектор угловой скорости гироскопа сор совместился
с вектором угловой скорости <ох аппарата. Это приведет к откло-
нению противоположных роллеронов в противоположную сто-
рону. Создается нормальная сила Ур на отклоненных ролле-
ронах: на одном — направленная вверх, на другом — вниз, а
поэтому и наблюдается стабилизирующий момент.
Интерцепторы. Хотя интерцепторы представляют раз-
новидность воздушных рулей, их выделяют в отдельную группу
органов управления из-за некоторых особенностей. Под воздуш-
27
ными рулями понимают хорошо обтекаемые поверхности, по-
ставленные по потоку. Интерцептор же представляет собой
пластину, поставленную поперек потока или в середину профиля
неподвижной части оперения, или на его конец.
При выдвижении интерцептора в поток происходит срыв по-
следнего, торможение его и, как следствие, повышение давле-
ния в потоке. В результате появляется дополнительная состав-
ляющая нормальных сил, направленная в противоположную
выдвижению интерцептора сторону.
Интерцепторы применяются на аппаратах, для которых аэро-
динамическое сопротивление не является существенным отрица-
тельным фактором (управляющие бомбы) или отклоняются тог-
да, когда скорость полета ЛА невелика (например, на самолете,
заходящем на посадку).
Недостатки интерцепторов заключаются в их большом аэро-
динамическом сопротивлении. Преимущества же по сравнению
с обычными рулями состоят в том, что их конструкция чрезвы-
чайно проста, и при отклонении интерцепторов отсутствует
шарнирный момент. В этом случае рулевой машинке, отклоняю-
щей интерцептор (обычно это электромагнит), приходится пре-
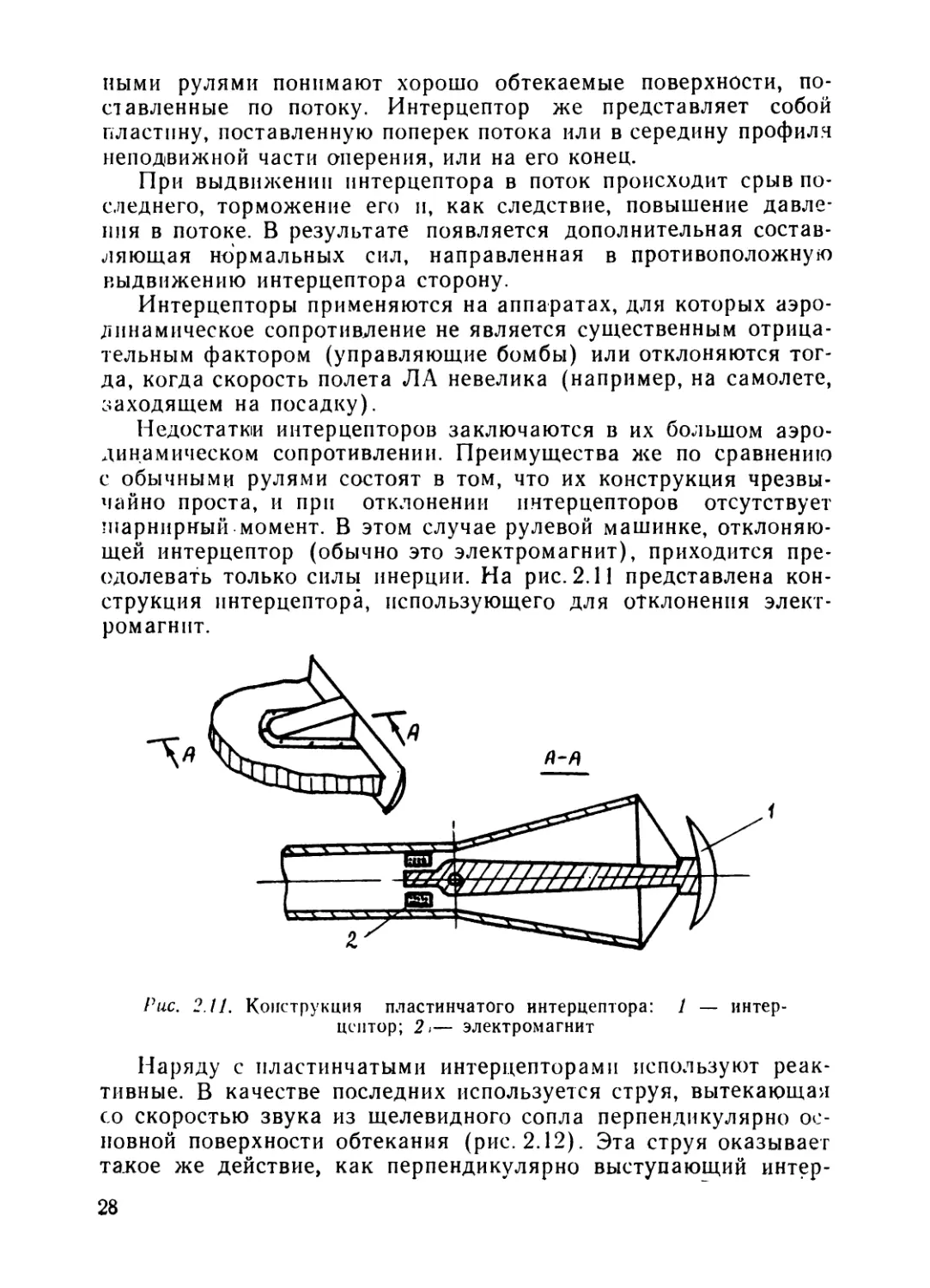
одолевать только силы инерции. На рис. 2.11 представлена кон-
струкция интерцептора, использующего для отклонения элект-
ромагнит.
Рис. 2.11. Конструкция пластинчатого интерцептора: 1 — интер-
цептор; 2>— электромагнит
Наряду с пластинчатыми интерцепторами используют реак-
тивные. В качестве последних используется струя, вытекающая
со скоростью звука из щелевидного сопла перпендикулярно ос-
новной поверхности обтекания (рис. 2.12). Эта струя оказывает
такое же действие, как перпендикулярно выступающий интер-
28
Рис. 2.12. Схема работы реактивного интерцептора: 1 — обтекае-
мая поверхность; 2 — косой скачок уплотнения; 3 — впрыскивае-
мая струя; 4 — зона повышенного давления
иептор, выполненный в виде пластинки. В обоих случаях проис-
ходит клиновидный отрыв пограничного слоя с образованием
косого скачка уплотнения.
2.4. ГАЗОДИНАМИЧЕСКИЕ ОРГАНЫ УПРАВЛЕНИЯ
Газодинамический способ создания управляющих сил и мо-
ментов применяется при больших высотах полета ЛА и в кос-
мическом пространстве, а также при движении в плотных слоях
атмосферы при малых скоростях движения.
Применяются следующие основные виды газодинамических
органов управления:
поворотные ДУ и сопла (поворотные ДУ, поворотные управ-
ляющие сопла, вращающиеся управляющие сопла, разрезные
управляющие сопла);
устройства с несимметричным истечением (сопла с косым
срезом, сопла со скошенным цилиндрическим насадком, устрой-
ства с выдвижными и отклоняющимися щитками, управление
рассогласованием тяги);
устройства с отклоняющимися элементами безотрывного об-
текания (газовые рули, поворотные насадки — дефлекторы);
устройства с отрывными обтекаемыми элементами (интер-
цепторы);
струйные исполнительные устройства.
Схематически создание управляющих сил с помощью неко-
торых видов органов управления представлено на рис. 2.13.
Здесь Руп — управляющая сила, которая для механических ор-
ганов управления является функцией угла поворота Руп = /(б).
Для инжекционных органов управления управляющая сила яв-
ляется функцией расхода массы инжектируемого рабочего тела
Руп — f (jh).
29
Рис. 2.13. Схема создания газодинамической управляющей силы: а — поворот
основной ДУ в кардановом подвесе; б — поворот сопла; в — газовый руль;
г — поворотный насадок; д — вдув газа (впрыск жидкости) в сверхзвуковую
часть сопла
Поворотные ДУ и сопла
Поворотные ДУ. С помощью поворотных ДУ в боль*
ыинстве случаев управление осуществляется по трем каналам:
тангаж, рыскание и крен. При этом достаточно использовать
либо 2 управляющих двигателя, помещенных в кардановых под-
30
весах, — каждая ДУ на два канала, либо 4 двигателя с одной
степенью свободы. Боковое управляющее усилие определяется
в виде Руп = PynpsinS, потери в силе тяги определяются по фор-
муле ДРАГ = РУпр(1—cos 6), управляющий момент Л4у11--=
= Pynp/sinS. Здесь Рупр — тяга управляющей ДУ, 6 — угол
отклонения ДУ, I — расстояние от места приложения Рупр до
центра масс ЛА.
В качестве показателя эффективности подобного устройства
используется коэффициент газодинамического качества поворот-
ной ДУ
К = Рупр / А Рх = sin 6 / (1 — cos б).
Поворотные управляющие сопла, отклоняе-
мые в одной плоскости. Поворотные ДУ и пово-
ротные управляющие сопла для изменения вектора тяги яв-
ляются наиболее экономичными при создании управляющие
усилий. Последние обеспечиваются в результате равномерного
и осесимметричного истечения продуктов сгорания и одновре-
менного поворота докритической и закритической части сопла
(рис. 2.14). Контактная поверхность, по которой осуществляется
поворот, — сферическая, выполнена по высокому классу точ-
Рис. 2.14. Конструкция поворотного сопла с одной степенью
свободы: / — неподвижная крышка; 2 — ось; 3 — уплот-
нение; 4 — поворотное сопло
‘ 31
ности. Недостатком такой конструкции является возможность
прорыва газов к уплотнению, которое при этом может разру-
шиться. В качестве уплотнений обычно применяются кольцевые
и сальниковые уплотнения со свободным скольжение^, реже —
лабиринтные. Материалами уплотнений служат политетрафтор-
этилен, дурестос, кремнекаучук, тефлон, фенольная смола с гра-
фитовым, углеродным или асбестовым наполнителем.
Вращающиеся управляющие сопла. Особен-
ностью конструкции такого сопла является наличие угла между
продольной осью сопла и осью вращения (рис. 2.15). Главным
Рис. 2.15. Конструкция вращающегося сопла: 1 — тер-
моэрозионный вкладыш; 2 — неподвижная крышка;
3 — уплотнение; 4 — подшипник; 5 — вращающаяся
часть сопла
недостатком подобной конструкции является наличие больших
потерь тяги на поворот струи в газовом тракте.
Поворотные сопла с управлением до двум
каналам. Управляющие сопла с двумя - степенями свободы
могут быть выполнены с использованием сферической опоры,
карданового подвеса, жидкостного подшипника и различных
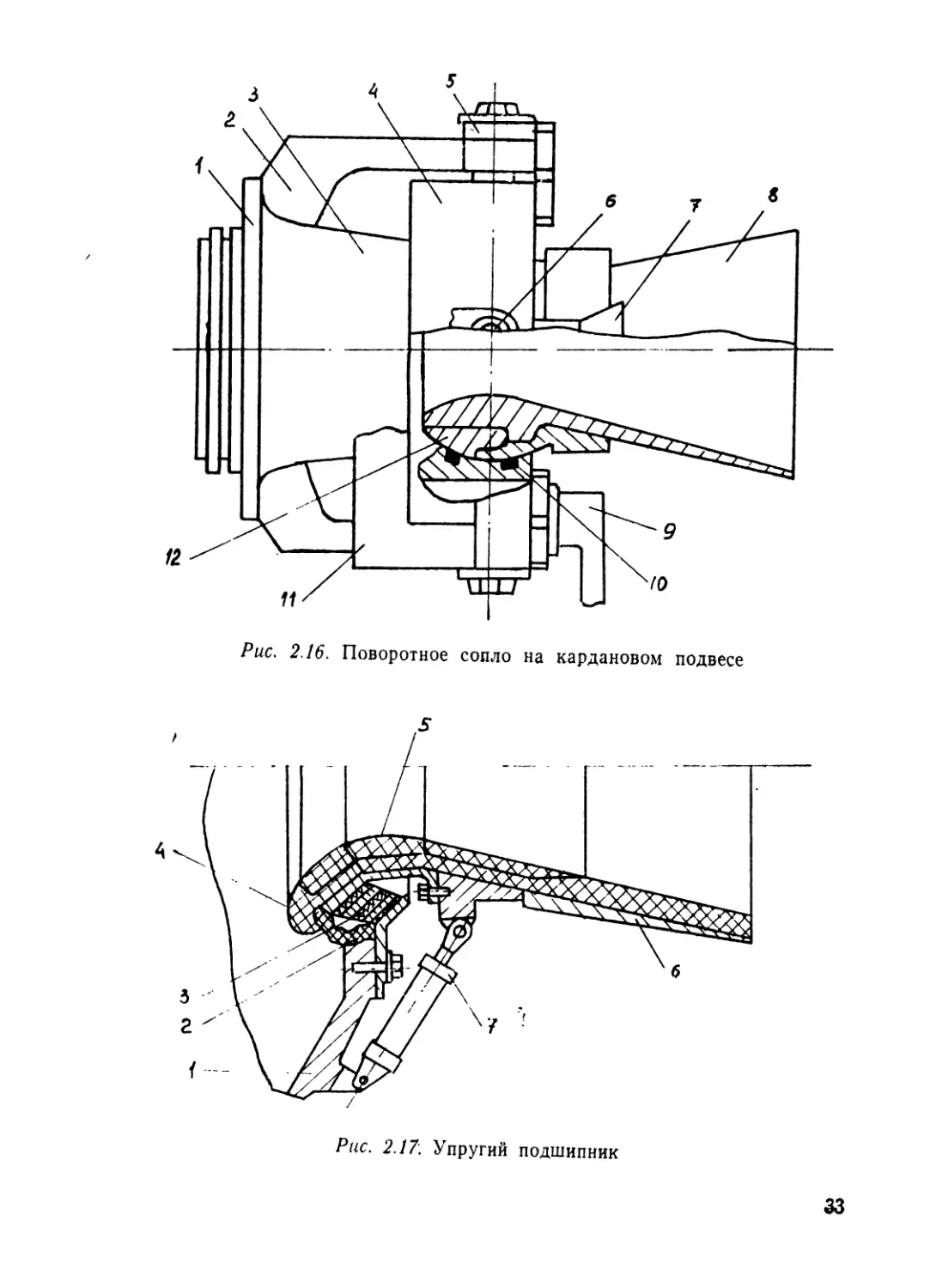
упругих узлов качания. Наиболее распространенным является
сопло со сферической опорой, закрепленной в кардановом
подвесе. На рис. 2.16 изображена конструкция поворотного соп-
ла в кардановом подвесе фирмы Tiokol. Собственно сопло 8
установлено на неподвижном газоводе 3 всферической опоре/2.
Газовод соединен фланцем 1 с корпусом ДУ. Герметизация под-
вижного соединения осуществляется кольцевым уплотнением 10.
3?
Рис. 2.16. Поворотное сопло на кардановом подвесе
33
Подвижное сопло соединено с кольцом карданового подвеса 4
при помощи внутреннего кронштейна 7 и цапфы с подшипни-
ком 6. Кольцо 4 с помощью цапф 5 и кронштейнов 2 соединено
с неподвижным газоводом. Внутренние и наружные цапфы
располагаются на кольце карданового подвеса во взаимно пер-
пендикулярных плоскостях. С помощью двух пар гидравличес-
ких приводов 11 и клапанов 9 сопло может отклоняться в задан-
ном направлении. Прокладки кольцевых уплотнений могут быть
выполнены из кремнекаучука, тефлона, фенольной смолы с на-
полнителем.
Соединение подвижной части с неподвижной может быть
выполнено различным образом. В частности, применяются жид-
костные подшипники, представляющие собой кольцевую замкну-
тую емкость из эластичного материала, заполненную жидкос-
тью. В качестве жидкости используются силиконовое масло,
совместимое с резиновым покрытием оболочки.
Аналогичным по принципу работы является упругий подшип-
ник (рис. 2.17). Упругий элемент 3 состоит из набора металли-
ческих и эластичных шайб сферической формы. Подвижное
сопло 4 выполнено из несущей оболочки 6 с набором термоэро-
зионных элементов 5 и с помощью рулевых машинок 7 может
перемещаться относительно днища 1 ДУ. Полость упругих эле-
ментов предохраняется от действия газов упругим чехлом 2.
Подобное устройство обладает жесткостью в осевом направле-
нии и допускает боковые перемещения.
Существенным недостатком рассмотренных конструкций яв-
ляется уязвимость зоны раздела подвижной и неподвижной час-
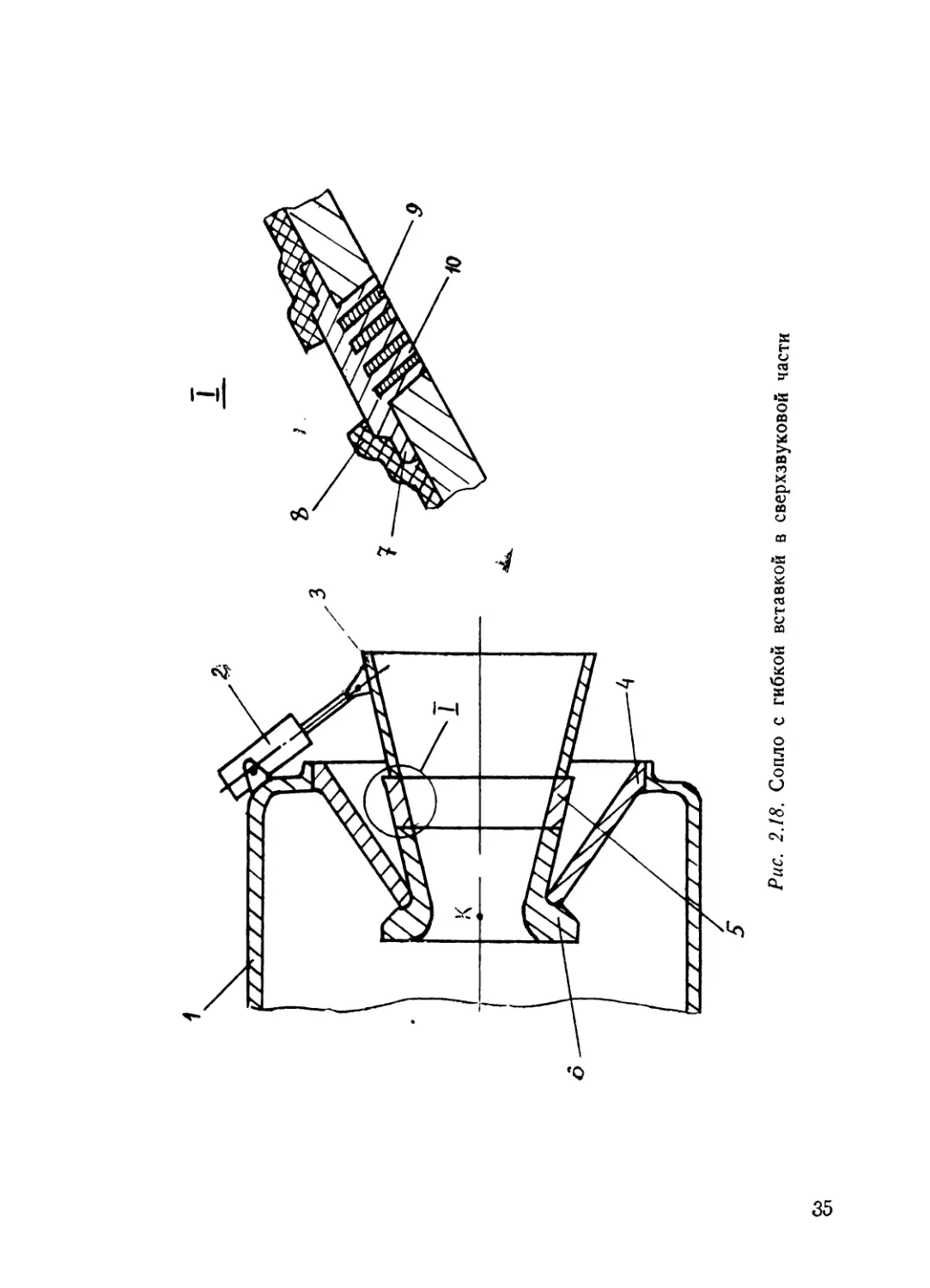
тей к воздействию продуктов сгорания. На рис. 2.18 представ-
лена схема сопла с гибкой вставкой в сверхзвуковой частя, ко-
торое может отклоняться при непрерывной кривизне внутренней
поверхности. Сопло 3 с гибкой вставкой 5 установлено в непод-
вижной крышке 4 конусной формы. Крышка с помощью резьбо-
вого соединения стыкуется с корпусом 1 ракетного двигателя
на твердом топливе (РДТТ). Угол раскрытия конуса крышки
больше, чем угол раскрытия конуса сопла. Это позволяет от-
клонить последний на некоторый угол с помощью рулевого при-
вода 2. Гибкий элемент 5 состоит из скрепленных между собой
кольцевых слоев эластичного материала 10 и слоев жесткого
материала 9, расположенных в поперечном направлении. Жест-
кий материал с пониженной теплопроводностью может быть
выполнен из углеродной ткани, пропитанной фенолформальде-
гидной смолой. Гибкий материал изготавливается из эластомер-
ного материала с отбортовками 7, которые прикреплены намот-
кой из стеклоткани 8 к входной 6 и выходной 3 частям сопла.
Жесткие элементы имеют сферическую поверхность, концент-
34
Рис. 2.18. Сопло с гибкой вставкой в сверхзвуковой части
5
ричную относительно центра вращения К. Эта конструкция
характеризуется большим шарнирным моментом и требует мощ-
ных рулевых приводов.
Шарнирный момент — наибольший суммарный мо-
мент сопротивления повороту органа управления на некоторый
угол б с заданными скоростью б и ускорением б. В общем
случае этот момент можно определить в виде
МШ = Мпоз (б) + Мас + 2 ^тр(б)/ + Мдф (е/ б / dt) +
+ Л4дИС + -Мин (d2 б / dt2) + Мупл (б) •
Здесь: Мпоз(б) — позиционный момент, пропорциональный углу
поворота б; Мас — момент асимметрии, обусловленный нали-
чием перекоса и смещением осей неподвижной и подвижной час-
тей органов управления, технологическими неточностями в изго-
товлении различных узлоъ, неравномерным полем давления по
газорасходному тракту РДТТ из-за неодинакового разгара эле-
ментов, неравномерной внешней нагрузкой на подвижные эле-
менты; S ЛТтр(б)/ — суммарный момент трения во всех соеди-
нениях той или иной конструкции органа управления.
При этом
£М1Р(б)/ = 2/?ш (rffI/2)^Z = v мтр/,
где Rm - нагрузка на шарнир, dn — диаметр подшипника, f —
приведенный коэффициент трений, i = аш/б — передаточное
число, а угол поворота шарнира, б — угол поворота органа
управления. M^(d8/dt) — момент демпфирования газовой
струи при отклонении ее с угловой скоростью db/dt.
В свою очередь
Мдф (d&/dt) = mrLp2 (rf6/rf/),
где thr — секундный расход газов через поворотное сопло, Lp—
длина поворотной части (раструба).
Момент дисбаланса МДИс, обусловленный перегрузками,
возникающими при полете на подвижных элементах органа уп-
равления, представлен в следующем виде:
Мдис = Мк£/г(Пх8’тб ± пу cos б),
где Мк — масса конструкции подвижных элементов, k — рас-
стояние от оси вращения до центра масс подвижного элемента,
пх, пч — продольная и поперечная перегрузки.
Момент инерционных сил подвижных частей
MHH(d26/dt2) = ( i h ) (d2&/dt2),
\ /=1 /
36
где Л — приведенный к оси поворота момент инерции подвиж-
ного узла органа управления.
Мупл(6) — момент сил упругого сопротивления гибких свя-
зей (уплотнений). Мас и Мулл определяются экспериментальным
путем.
Снизить действие шарнирного момента можно, используя
силу давления газов на стенку сопла (рис.2.19)ь
F = Рк SBx + Ро,
где SBX — площадь входной части сопла, PQ — тяга ДУ, Рк —
давление в камере сгорания.
Рис. 2.19. Схема сопла с двойным упругим уплотнением
Обычно сила PkSbX направлена вдоль оси ДУ, Ро — по оси
сопла. Пересечение векторов происходит в центре поворота соп-
ла, поэтому сила F не создает момента. Однако имеется возмож-
ность расположить центр поворота сопла таким образом, чтобы
через него не проходила линия действия силы F. В этом случае
сила F создает газодинамический момент Мг = АД^Если центр
поворота находится впереди линии действия силы F, то момент
Мг сопротивляется перемещению сопла, являясь газодинами-
ческой составляющей шарнирного момента. При расположении
центра поворота за линией действия силы F момент Мг поможет
отклонению сопла.
В конструкции такого сопла имеется 2 упругих уплотнения и
2 центра поворота О| и О2. Одно уплотнение с передним рас-
положением центра поворота Oi более мягкое. Поворот сопла
относительно этого центра осуществляется рулевым приводом,
преодолевающим и газодинамическую составляющую шарнир-
ного момента Мц = F\х. В результате создается отрицатель-
37
ный газодинамический момент Мг2 = —А Аг, который превышает
:,юмент Afri и самостоятельно отклоняет сопло.
Разрезные управляющие сопла—это профили-
рованные или конические сопла с разъемом в сверхзвуковой
части, где реализуется М = 1,5 ...2. Подвижная часть устанав-
ливается на кардановом подвесе и приводится в действие руле-
выми машинками. Основное отличие разрезных сопел от пово-
ротных состоит в том, что управляющее усилие получается за
счет газодинамического воздействия струи, истекающей из не-
подвижной части сопла на внутреннюю поверхность отклонен-
ного раструба. При этом на поверхности раструба возникает
косой скачок уплотнения, интенсивность которого убывает вдоль
оси сопла. Значение боковой управляющей силы зависит от угла
поворота подвижного раструба (рис. 2.20). Достоинства рас-
сматриваемой конструкции следующие: простота; надежность
Рис. 2.20. Разрезное управляющее сопло в кардановом подвесе: 1 —
корпус неподвижной части сопла; 2 — система уплотнения; 3 — сфе-
рическое кольцо; 4 — рулевой привод; 5 — раструб; 6 — вкладыш с
термопоглощающим элементом
38
работы, так как линий разъема находится в области малых дав-
лений газа и относительно низких температур; линейная зави-
симость управляющей силы от угла поворота; небольшие потерн
в тйге при высокой эффективности в работе.
Недостатком конструкции является повышенный газодина-
мический момент, требующий мощных рулевых приводов.
Важным моментом при проектировании разрезных управ-
ляющих сопел является оформление линии разъема. Ошибки
в выборе формы кромок приводят к возникновению отрывного
течения и появлению застойных зон. Выявление указанных де-
фектов возможно при продувках моделей сопла. Уплотнитель-
ные устройства разъема делаются простыми, типа гибких «ман-
жет», или вообще не ставятся. Гибкие «манжеты» практически
не создают трения. Материалами для них служат различные
негорючие ткани из стеклянных, асбестовых, углеродных
волокон.
Устройства с несимметричным истечением
Основными достоинствами этих устройств являются незначи-
тельные потери тяги, небольшие шарнирные моменты и прос-
тота конструкции.
Сопла с косым срезом. В соплах с несимметрич-
ным истечением газовой струи возникновение боковой силы про-
исходит за счет статического давления на косой срез (выдвиж-
ной или отклоняющийся щиток). Косой срез сопла может быть
обеспечен применением цилиндрического насадка (рис. 2.21).
Цилиндрический, кососрезанный насадок 1 закреплен на на-
правляющих 2, расположенных на выходном срезе сопла 3. На-
садок имеет возможность свободно перемещаться вдоль сопла и
вращаться относительно той же оси.
Достоинством такой конструкции являются простота и мини-
Рис. 2.21. Схема сопла с цилиндрическим насадкОхМ
39
мальныё потери силы тяги, практически равные нулю. Коэффи-
циент газодинамического качества такого устройства стремится
к бесконечности.
Устройства с выдвижными и отклоняющи-
мися щитками. Принципиальная схема такого устрой-
ства изображена на рис. 2.22. Оно содержит три (четыре) щит-
ъ
Q
Рис. 2.22. Схема устройства с выдвижными (а) и отклоняющимися
(б) щитками
ка /, равномерно расположенных вокруг сопла 5. Сопло вы-
полнено с недорасширением для обеспечения радиального рас-
ширения струи и ее взаимодействия со щитками. Перемещение
щитков осуществляет привод 3, прикрепленный к крышке 4 ка-
меры сгорания. Шток 2 каждого привода соединен с одним
щитком непосредственно (рис. 2.22,а), или через кривошипно-
шатунный механизм 8, 9, 10 (рис. 2.22,6). В первом случае щи-
ток перемещается параллельно оси 6 сопла, во-втором — от-
клоняется относительно оси 7 щитка и вводится в газовую струю
под небольшим углом. Поверхность щитков, обращенная к соп-
лу, облицована графитом.
Управление рассогласования тяги отдель-
ных сопел. Для управления ЛА с многосопловым двига-
телем можно использовать рассогласование тяги отдельных
сопел или, как еще называют, дифферент тяги. В РДТТ рас-
согласование тяги производится изменением площади критиче-
ских сечений отдельных сопел, при этом суммарная площадь
этих сечений должна оставаться постоянной. Это необходимо
для сохранения заданного режима работы ДУ. Площадь крити-
ческого сечения сопла может изменяться в зависимости от пере-
40
мешения центрального тела («груши»), расположенного в соп-
ле, или от перемещения сопла относительно «груши».
Управление тангажом и рысканием производится рассогла-
сованием тяги сопел в соответствующей плоскости. Аналогичным
образом осуществляется управление креном ЛА с помощью со-
пел, установленных под небольшими, противоположно направлен-
ными углами к плоскостям тангажа и рыскания. Для управле-
ния креном в соответствии с требуемыми направлением, вели-
чиной момента суммарная тяга одной из пар сопел увеличи-
вается, а другой — уменьшается. При этом общая тяга ДУ
не изменяется.
Устройства с отклоняющимися элементами
безотрывного обтекания
Газовые рули. Наиболее простым устройством для уп-
равления вектором тяги являются газовые рули. Впервые они
были применены на жидкостных ракетах Фау-2.
Газовый руль представляет собой профилированную деталь,
которая закрепляется на оси и консольно устанавливается в га-
зовом потоке. Находясь в высокотемпературном, сверхзвуковом
потоке с твердыми частицами, газовый руль подвергается силь-
ному эрозионному воздействию. Это вызывает необходимость
увеличения толщины профиля пера руля и притупления перед-
ней и задней кромок. Кроме того, подбираются термоэрозион-
ностойкие материалы*: графит, пиролитический графит, молиб-
ден и др.
Газовые рули создают газодинамическое сопротивление,
вызывающее уменьшение тяги ДУ. В процессе работы перо руля
постепенно разрушается, что необходимо учитывать при выборе
геометрических размеров и форм в плане. Важным положи-
тельным свойством газовых рулей является линейность их рабо-
чих характеристик. На двигателе с одним соплом устанавливают
4 руля в двух взаимно перпендикулярных плоскостях. Это обес-
печивает создание боковых векторов тяги для управления ЛА
по тангажу, рысканию и крутящих моментов для управления
по крену. При эксплуатации ракеты в плотных слоях атмосферы
возможно использование газовых рулей в комбинации с аэро-
динамическими органами управления. В этом случае сущест-
венно упрощается конструкция и уменьшается масса системы
управления.
Газовый и аэродинамический рули располагаются на одной
оси, при этом используется одна рулевая машинка. При дви-
жении с малыми скоростями (в момент старта) эффективными
являются газовые рули. По прошествии некоторого времени
(1—2 с) они разрушаются, в это время скорость ракеты дости-
41
тает таких значений, при которых становятся эффективными
аэродинамические рули.
Газовые рули работают в условиях безотрывного обтекания
в том случае, если их угол наклона к направлению скорости
газового потока на срезе сопла не превышает критического зна-
чения: б < бкр. При обтекании отклоняющегося элемента в га-
зовом потоке реализуется присоединенный косой скачок уплот-
нения (рис. 2.23).
Ра.
8
А Рх
Рис. 2.23. Схема безотрывного обтекания отклоняюще-
го элемента
Сила избыточного давления Ду, действующего на отклоняю-
щий элемент, создает боковую силу и силу, уменьшающую
тягу ДУ:
Pn = (Pi—Р'н)5г р; Py = PN cos б; А Рх = Pv sin б,
где р\ — давление за косым скачком уплотнения, р'н — давле-
ние за отклоняющим элементом, Srp — площадь поверхности
газового руля, воспринимающего избыточное давление.
Давление рассчитывается по формулам косого скачка
уплотнения в зависимости от параметров потока на срезе сопла
и угла наклона б отклоняющего элемента. Давление р'н при-
нимается равным давлению окружающей среды рн или стати-
ческому давлению на срезе сопла рг. Боковая сила и потеря,
силы тяги могут быть определены по формулам аэродинамики
для подъемной силы и сопротивления крыла в воздушном
потоке:
Ру = Су (р Va2/2)Srp; А Рх = СДр Va2/2)Srp,
где р, Va — плотность п\ скорость газового потока на срезе
сопла. Коэффициенты подъемной силы и сопротивления С\, Су
тазового руля определяются по формулам аэродинамических
коэффициентов крыла и зависят от геометрических параметров
руля. На рис. 2.24 показаны наиболее распространенные формы
газовых рулей: прямоугольной формы с «языком» (а), стрело-
видный (б), трапециевидный (в) и руль с переменной стрело-
видностью (г). Конструкция газового руля приведена на
рис. 2.25.
Рис. 2.24. Наиболее употребительные формы газовых рулей
Рис. 2.25. Конструкция газового руля: / — кронштейн; 2 — корпус
подшипника; 3 — фланец; 4 — подшипник; 5 — ось руля; 6 —его
основание; 7 плоскость руля ДЗ
Разновидностью газовых рулей являются внеструйные газо-
вые рули (периферийные, секторные, заслонки). Они устанавли-
ваются на срезе сопла таким образом, чтобы в нерабочем поло-
жении не попадали в газовую струю. Управляющее усилие соз-
дается только тогда, когда руль вводится в газовый поток путем
отклонения на некоторый угол. При этом на внутренней поверх-
ности руля повышается давление. Конструктивно такой руль
выполнен в виде части цилиндрической или другой более слож-
ной поверхности. К достоинствам этой схемы можно отнести
простоту устройства и большее время работы руля. Кроме того,
уменьшаются потери в осевой тяге ДУ, газовый поток на срезе
сопла не деформируется, почти полностью исключены потери
при выводе руля из струп. Недостаток заключается в значитель-
ных шарнирных моментах и широкой зоне нечувствительности
при работе в плотных слоях атмосферы, что связапо с размы-
тостью границы струи за счет смешения продуктов сгорания с ат-
мосферой.
Поворотные насадки (дефлекторы) представляю!
собой устройства кольцевого типа, устанавливаемые на срезе
сопла. Они могут выполняться в виде профилированного коль-
ца, кольца с цилиндром или конусом различного удлинения. Па
рис. 2.26 показан дефлектор кольцевого типа. В нерабочем поло-
жении дефлектор не имеет контакта с газовой струей.
Рис. 2.26. Сопло с дефлектором: 1 — привод; 2 — уп-
лотнение; 3 — корпус дефлектора; 4 — теплопоглощаю-
щий слой
44
При повороте на угол 6 часть кольца вводится в газовую струю.
На поверхности контакта возникают силы, которые использу-
ются для управления ЛА.
Эти устройства напоминают разрезные поворотные сопла,
однако отличаются от них простотой конструкции, отсутствием
сложных (или вообще любых) уплотнений в шарнирных соеди-
нениях. Так как длина поворотных насадков невелика, то и уп-
равляющие силы при повороте на угол 6 сравнительно неболь-
шие. Устройства работают в относительно легких условиях по
температуре и давлению.
При вводе насадка в газовый поток возникает косой скачок
уплотнения. Перед преградой образуется зона давления, имею-
щего высокие значения, за преградой — зона с пониженным
давлением.
Рис. 2.27. Схема сил, действующих на сопло с отклоненным
насадком
Силы, действующие на сопло при отклонении насадка, пока-
заны на рис. 2.27. Здесь Ру — управляющая сила, Рх — осевая
сила, Ро — сила тяги двигателя без насадка, Рс — сила сопро-
тивления струи в неотклоненном насадке, хд — точка приложе-
ния управляющей силы.
Устройства с отрывными обтекаемыми
элементами (интерцепторы)
Интерцепторы — устройства, которые представляют
собой щитки, вводимые в газовую струю под углом 90°, т. е.
угол наклона к направлению газового потока больше крити-
ческого. Различают внешние интерцепторы, располагаемые на
45
срезе сопла, и внутренние, которые устанавливаются в одном из
сечений сверхзвуковой части сопла (рис. 2.28).
При введении интерцептора в сверхзвуковой газовый поток
происходит отрыв струи с образованием косого скачка. Перед
Рис. 2.28. Характер взаимодействия интерцептора со сверхзвуковым
и газовым потоком: а — внешний интерцептор; б — внутренний ин-
терцептор; / — скачок уплотнения; 2 — зона отрыва; 3 — интер-
цептор
щитком образуется зона повышенного давления, за ним — зона
пониженного давления. Таким образом, стенки сопла нагру-
жаются в области ввода щитка перепадом давлений, что обус-
ловливает появление силы.
Боковое усилие, создаваемое щитком, можно определить
как
Ру = Су ^отр *ЬотР ,
где Су — коэффициент подъемной силы, создаваемой поверх-
ностью сопла в зоне отрыва, г/Отр — скоростной напор в зоне
отрыва, Sotp — площадь поверхности сопла в зоне отрыва (об-
ласть АВС на рис. 2.29). В свою очередь
Рис. 2:29. Схема течения потока при вводе щитка в струю
46
Votp ~ (pa Va^) / 2,
где pa, Va — параметры газового потока на срезе сопла.
Аналогично зависимость для определения сопротивления,
создаваемого щитком, выразится в виде
РX = Сх А'отр
где Сх — коэффициент аэродинамического сопротивления, опре-
деляемый повышением давления в результате возникновения
скачка перед щитком; Sx — площадь обрыва скачка, проектируе-
мая на плоскость среза сопла (область AFBD),
Струйные исполнительные устройства
Общие сведения о струйных органах управ-
ления (СОУ). Эти устройства являются инжекционными.
К ним относятся устройства с вводом вторичного рабочего тела
в сверхзвуковую часть сопла пли выдувом газа на поверхность
ракеты.
Инжекционные СОУ нашли широкое применение на ракетах
«Титан - ЗС», «Минитмен - 2», «Минитмен - 3», «Поларис - АЗ»
(США), МВМ-1 (Франция) и др. Это объясняется рядом поло-
жительных свойств по сравнению с другими исполнительны-
ми ОУ. К ним относятся простота конструкции, надежность, ра-
ботоспособность, быстродействие. Все это связано с отсутствием
подвижных устройств, находящихся в газовой струе сопла или
вводимых в нее. Вместе с тем необходимость иметь на борту
ЛА дополнительные емкости для хранения инжектируемого газа
или жидкости и сложные клапанные устройства создает опре-
деленные технические трудности.
Принцип работы СОУ основан на взаимодействии вторич;
ного рабочего тела с газовым потоком, протекающим по рас-
ширяющейся части сверхзвукового сопла. Впрыскиваемая жид-
кость и вдуваемый газ взаимодействуют с потоком аналогично,
поскольку жидкость быстро испаряется и поэтому вызывает тот
же эффект, что и вдуваемый газ. Инжектируемое рабочее тело
является для основного потока препятствием, приводящим к пе-
рераспределению давления на внутренней поверхности раструба
сопла. Физическая картина процесса выглядит следующим об-
разом. Сверхзвуковой поток,.набегая на инжектируемую струю,
отрывается от стенки сопла (рис. 2.30). Перед отверстием обра-
зуется незамкнутая застойная зона с двумя вихрями. За отверс-
тием также возникает застойная зона с одним вихрем. Непо-
средственно перед вдуваемой струей возникает слабая ударная
волна АВ. Перед верхней частью границы струи возникает кри-
волинейный скачок уплотнения DB^ За ударной волной образу-
47
Рис. 2.30. Схема взаимодействия основного потока
со струей рабочего тела: 1 — слабая ударная волна;
2 — ударная волна; 3 — хвостовая ударная волна;
4, 5 — застойные зоны
ется система волн разрежения. В области присоединения вто-
ричного потока к стенке сопла образуется хвостовой скачок
уплотнения CF.
В области отрыва (перед отверстием) давление резко повы-
шается; за отверстием давление понижается. Таким образом,
боковое усилие при инжектировании вторичного рабочего тела
образуется в результате реакции вдуваемой струи и неуравно-
вешенного избыточного поля давления в зоне возмущения. На
форму и интенсивность возмущенной зоны, кроме параметров
сопла, оказывают влияние расход и параметры основного пото-
ка; расход и термодинамические свойства инжектируемого
вещества; параметры, определяющие дробление струи; реакции
между потоком и инжектируемым веществом.
Для управления вектором тяги применяются следующие
основные инжектируемые вещества: инертные газы и жидкости;
жидкие и газообразные компоненты, химически взаимодейст-
вующие с продуктами сгорания основного потока; жидкие двух-
компонентные топлива. К вторичным рабочим телам предъяв-
ляются следующие основные требования: обогащенность окис-
лителем, высокая удельная теплоемкость и плотность, высокая
теплота парообразования, низкое давление насыщенных паров,
малый коэффициент вязкости. Эти требования направлены на
получение максимального бокового импульса.
Наибольшую боковую силу создают устройства с вдувом
в сопло горячего газа, меньшую — устройства с вдувом холод-
ного газа или впрыском легковоспламеняющихся веществ типа
48
фреона -12. Наименьшая боковая сила получена при впрыске
холодной воды.
Ввод вторичного рабочего тела в сопло производится через
очковые сопла, сопла в виде щели или группы отверстий. Выбор
формы сопел и их количества' зависит от требований техничес-
кого задания, применяемого вторичного рабочего тела, приня-
той конструкции сопел и других факторов. Сопла устанавли-
вают на расстоянии
0,3...0,4 длины сопла
от среза, под углом
ПО... 130° к оси соп-
ла навстречу потоку.
Эффектив н о с т ь
устройств с вдувом
или выдувом оцени-
вается коэффициен-
том усиления Ку,
равным отношению
боковой силы Ру к
реактивной силе вто-
ричной струи Рв при
ее расширении до
числа Ма на срезе
основного сопла.
Ку = Ру/Ръ.
Устройства с
выдувом вто-
ричного рабо-
чего тела на по-
верхность ЛА.
Подобные устройст-
ва эффективны при
движении в атмос-
фере. Они, в част-
ности, позволяют
осуществить крутой
разворот ракеты пос-
ле ее пуска с носи-
теля, что невозмож-
но при использова-
нии только аэроди-
намических органов
управления.
Рис. 2.31. Схемы взаимодействия вторичных
струй с внешним потоком: а — образование
скачка уплотнений; б — область растекания
вдуваемой струи; 1 — место отрыва набегаю-
щего потока; 2 — выдуваемое рабочее тело;
3 — волны возмущений в рабочем теле; 4 —
застойная зона с одним вихрем; 5 — место
присоединения рабочей струи; 6 — криволи-
нейный скачок; 7 — ударная волна в рабочем
теле; 8 — хвостовая ударная волна; 9 — зо-
на возмущения; 10 — слабая ударная волна;
11 — передняя застойная зона с повышенным
давлением
49
Принцип работы устройства основан на взаимодействий
внешнего воздушного потока со струей вторичного рабочего
тела (жидкости или газа). При истечении струи вторичного газа
передней образуется отрывная зона (рис. 2.31) в виде так на-
зываемого «жидкого клина». На отрывной зоне происходит
отклонение сверхзвукового потока и повышение давления за
скачком уплотнения. Имеющиеся на ракете стабилизаторы огра-
ничивают внешний поток, и он становится близким к плоскому.
Возмущенная зона перед струей расширяется в боковом на-
правлении и занимает все пространство между стабилиза-
торами.
В целом газодинамическое управление является более гру-
бым, чем аэродинамическое. Расположение аэродинамических
рулей вблизи реактивных струй повышает эффективность
рулей.
3. КОМПОНОВКА, КОНСТРУКТИВНО-СИЛОВЫЕ СХЕМЫ
И КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ
ОСНОВНЫХ ТИПОВ ЛА
3.1. ОБЩИЕ ТРЕБОВАНИЯ К КОМПОНОВКЕ
Современные ЛА — сложные технические системы, состоя-
щие из большого числа подсистем элементов (агрегатов, аппа-
ратуры, приборов, оборудования и конструкции), обеспечиваю-
щих, при прочих равных условиях, выполнение поставленной за-
дачи.
Оптимальная компоновка этих элементов (подсистем) заклю-
чается в наиболее рациональном пространственном (в объеме,
ограниченном внешней оболочкой аппарата) размещении агре-
гатов и систем ЛА без нарушения их режима работы, эксплуа-
тации (в полете и на земле), надежности, безопасности экипа-
жа и других основных требований, зависящих от схемы и типа
ЛА и решаемых им задач.
Компоновка ЛА определяется типом аппарата; составом и
назначением полезного груза; типом ДУ (жидкостный ракетный
двигатель (ЖРД), РДТТ, ядерный ракетный двигатель (ЯРД),
воздушно-реактивный двигатель (ВРД) и характеристиками
топлива; системой и органами управления.
Кроме того, компоновка ЛА должна (для заданного типа ап-
парата) обеспечивать:
рациональное сочетание аэродинамических характеристик,
массы, центровки ЛА. Взаимное расположение центров масс и
давления в известной степени определяют основные размеры и
форму ЛА;
максимальную плотность размещения агрегатов, ДУ, аппа-
ратуры (пределы плотности компоновки зависят от удобства
эксплуатации, обслуживания, надежности, исключений вредных
взаимных влияний агрегатов, минимальной массы и габаритов
ЛА и пр.);
возможность применения наиболее простых в технологичес-
ком отношении форм агрегатов и элементов конструкции, т. е.
возможность замены при прочих равных условиях, например,
51
эллиптических Днйщ баков сферическими, параболических но-
совых отсеков коническими и т. д.;
возможность применения наиболее простых (надежных) си-
стем управления, подачи топлива, запуска ДУ, особенно в усло-
виях невесомости или отрицательных перегрузок (для носите-
лей КА) и т. д.;
наличие необходимого количества технологических и эксплуа-
тационных разъемов;
минимальное число связей ЛА с наземным комплексом и ми-
нимальное число предстартовых операций;
заправку топливом ЛА в заданное (минимальное) время;
безопасную эксплуатацию и обслуживание аппарата на
стартовой позиции.
Аэродинамическая компоновка ЛА. В зави-
симости от типа ЛА аэродинамическая компоновка в значитель-
ной степени обусловливает геометрические формы и обводы ап-
парата и, в свою очередь, оказывает влияние на его параметры
и управляемость. Влияние аэродинамической компоновки па ос-
новные характеристики ЛА выражается через:
составляющие аэродинамического сопротивления, которые
определяют потери скорости на преодоление сопротивления ат-
мосферы;
распределенные аэродинамические нагрузки, определяющие
совместно с поперечными (массовыми) силами и усилиями ор-
ганов управления величину изгибающего момента, действующе-
го на корпус ЛА;
нормальное аэродинамическое давление, эпюры распределе-
ния которого по поперечным сечениям корпуса определяют (в
случае каркасных отсеков) нагрузки на шпангоуты;
аэродинамический нагрев поверхности аппарата;
силовое и тепловое воздействие струй работающих ДУ на
донную часть блоков и отражательные устройства при «горя-
чем» разделении PH КА, массовые характеристики аэродина-
мических рулей и т. д.
Величина составляющих аэродинамического сопротивления
в значительной степени связана с удлинением ЛА.
Она влияет на сопротивление трения на всем авктивном
участке, вплоть до выхода ЛА из плотных слоев атмосферы, а
на волновое сопротивление — с момента достижения аппаратом
сверхзвуковой скорости. Увеличение площади миделя может
вызвать возрастание донного сопротивления, возникающего за
счет эжектирующих действий в донной части набегающего пото-
ка и струи ДУ. Так как большая часть полета в плотных слоях
атмосферы происходит при сверхзвуковых скоростях, то целе-
сообразно таким образом выбирать обводы ЛА, чтобы они при
52
прочих равных условиях обеспечивали минимальное волновое
сопротивление. Это возможно, например, в том случае, когда
головные части ЛА выполнены таким образом, что возникающие
косые скачки уплотнения имеют малые потери энергии (прямо-
линейные конические обводы головной части с малым углом по-
лураствора конуса и т. д.). В последнем случае может возрасти
сопротивление трения. Оптимизация интегральных потерь за
счет волнового сопротивления трения приводит к оживальной
форме головной части (рис. 3.1), обеспечивающей уменьшение
О+им-льиц <1
коническая
Цилиндрически -коническая
Рис. 3.1. Некоторые формы головных частей
волнового сопротивления. Эта форма является более сложной
для производства по сравнению с конической и может быть-за-
менена двумя-тремя вписанными в ее обводы коническими по-
верхностями. При этом лобовое сопротивление практически нс
меняется, а технология изготовления существенно упрощается.
Центральная часть корпуса ЛА или его блоков выполняется,
как правило, в виде тела вращения цилиндрической или кони-
ческой формы, что не вызывает существенного увеличения вол-
нового сопротивления, но обеспечивает улучшение моментных
характеристик.
Хвостовая часть ЛА может иметь вид тел вращения с прямо-
линейными или криволинейными обводами, также бывает и бо-
лее сложной формы. Обводы хвостовой части в основном опре-
деляют величину донного сопротивления и сказываются па мо-
ментных характеристиках ЛА.
Стабилизирующие аэродинамические устройства делятся на
стабилизаторы (решетчатые или перьевые) и конические стаби-
лизирующие «юбки». Вариантом последних являются аэроди-
намические щитки с регулируемым углом установки. Конкрет-
ный выбор стабилизирующих устройств зависит от компоновоч-
ной и конструктивной схем ЛА, а также других факторов и оп-
ределяется в каждом конкретном случае. Аэродинамическая
компоновка в значительной степени влияет на общую компонов-
ку ЛА (размещение агрегатов, систем и т. д.) и, как следствие,
на центровку аппарата. Последняя, в свою очередь, оказывает
влияние как на компоновку ЛА, так и на его аэродинамические
формы.
53
Различают следующие аэродинамические схемы ЛА
(рис. 3.2):
а) обычная схема — несущие поверхности располагаются
впереди горизонтального оперения;
Рис. 3.2. Аэродинамические схемы ЛА
б) «бесхвостка» — горизонтальное оперение отсутствует;
в) «утка» — горизонтальное оперение устанавливается впе-
реди несущих поверхностей.
Для сверхзвуковых ЛА наиболее приемлема схема «бесхво-
стка», как имеющая меньшее аэродинамическое сопротивление.
По количеству крыльев и их расположению на фюзеляже
различают (рис. 3.3): а — низкоплан; б — среднеплан; в — вы-
1 Рис. 3.3. Расположение крыльев на фюзеляже
сокопл ан; г----h -образное; д — х-образное пространственное
расположение крыльев. Варианты г и д широко применяются в
зенитных управляемых реактивных снарядах (ЗУРС), когда не-
обходимо обеспечить высокую маневренность ЛА при догоне и
поражении цели.
Профили и форма крыла в плане определяются прежде все-
го скоростью полета ЛА (рис. 3.4, 3.5). Важнейшими геометри-
ческими характеристиками профиля крыла являются:
относительная толщина профиля с = с/b, где с—максималь-
ная толщина профиля, b — его хорда. Для дозвуковых профилей
с = 0,12...0,16, сверхзвуковых с = 0,03...0,04;
54
Рас. 3.4. Сверхзвуковые профили крыла: а — шестигранный; б —
клиновидный; в — чечевицеобразный; г — ромбовидный
Рис. 3.5. 'Форма крыла в плане: а — прямоуголь-
ная; б — эллиптическая; в — треугольная; г —
трапециевидная; д — стреловидная; е — об-
вальная
средняя аэродинамическая хорда крыла 6а = SKP//, проходя-
щая через центр тяжести площади консоли крыла. Здесь SKp —
площадь крыла, I — размах крыла.
Важными характеристиками крыльев являются:
стреловидность по передней кромке — угол х между перед-
ней кромкой и перпендикуляром к плоскости симметрии крыла;
1 /2
относительное удлинение крыла X = -у- _ . При Х^З
имеем .крыло малого удлинения; —
сужение крыла т] = Ь0/Ьк, где Ьо, Ьк — соответственно хорда
профиля крыла в плоскости симметрии (центрального сечения
крыла) и хорда профиля концевой части.
В качестве основных геометрических параметров фюзеляжа
рассматриваются (рис. 3.6): длина фюзеляжа /ф, длина носовой
части фюзеляжа /н, длина цилиндрической части фюзеляжа
?цил, диаметр фюзеляжа Оф, диаметр донного среза фюзеляжа
t/ф, площадь миделя Зм (максимальная площадь поперечного
сечения), удлинение корпуса Хф =/ф/Оф, удлинение носовой
55
Рис. 3.6. Геометрические параметры фюзеляжа
части Хн = /н/^фл удлинение хвостовой части Ххв = /хв/Оф, суже-
ние хвостовой часта т]хв = d$ID$.
Ко н с т р у к т и в н о - с и л о в ы е схемы (КСС) ЛА.
Компоновочная схема тесно связана с КСС, определяющей на-
пряженно-деформируемое состояние элементов конструкции ЛА
под действием внешних и внутренних нагрузок при наземной
эксплуатации и в полете. От их сочетания зависит один из ос-
новных показателей качества ЛА — его масса.
Принято различать несущие и не несущие элементы конст-
рукции. Несущие элементы воспринимают внутренние и внешние
нагрузки, не несущие их не воспринимают и практически замет-
ного влияния на несущую способность ЛА в целом не оказывают.
Совокупность несущих элементов в основном и составляет
КСС ЛА в целом и определяет массу его конструкции. Поэтому
при проектировании необходимо стремиться к тому, чтобы коли-
чество и масса не несущих элементов были минимальными.
3.2. ОСОБЕННОСТИ КОНСТРУКЦИИ
ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ
Компоновочная и КСС зенитных управляемых ракет (ЗУР)
определяются особенностями их применения, главными из кото-
рых являются:
движение в плотных слоях атмосферы;
наличие больших продольных и поперечных перегрузок;
оперативность применения.
Движение в воздушной среде с большой скоростью предпо-
лагает, прежде всего, наличие соответствующей аэродинами-
ческой компоновки и применение материалов, способных выдер-
жать аэродинамический нагрев при сохранении их прочностных
свойств.
Продольные и поперечные перегрузки, обусловленные тре-
бованиями высокой маневренности при догоне и поражении це-
56
ли, требуют применения жесткой КСС. К органам управления
и стабилизации в этом случае предъявляют дополнительные
требования, которые в целом сводятся к повышению их чувстви-
тельности при изменении программы полета.
И, наконец, оперативность применения предъявляет требо-
вания к сокращению предстартовой подготовки, что приводит к
необходимости применения РДТТ. Однако небольшой удельный
импульс твердых топлив ограничивает их применение и застав-
ляет искать пути использования ДУ на жидких компонентах. В
свою очередь, применение ЖРД ограничивается требованиями
предстартовой подготовки.
На рис. 3.7 представлен вариант решения проблемы приме-
нения ЖРД на ЛА класса «воздух—поверхность», использую-
щего газовытеснительную систему с пороховым аккумулятором
давления (ПАД). Камера сгорания 1 и ПАД 4 размещаются
внутри топливных баков и охлаждаются компонентами топлива.
Топливные баки 2 и 5 заполняются высококипящими компонен-
тами. При этом заправочные горловины обычно запаиваются,
благодаря чему предотвращается протечка топлива из баков и
не требуется дополнительный контроль при хранении.
ПАД запускается с помощью воспламенителя 6. Образую-
щиеся при запуске газы перемещают поршень 3, закрывающий
форсуночную головку камеры сгорания, и прорывают раздели-
тельные мембраны, чем обеспечивают поступление компонентов
в камеру сгорания.
Наиболее наглядно конструктивные особенности беспилотных
ЛА, движущихся в атмосфере, представлены в схеме двухсту-
пенчатой ЗУР на рис. 3.8. В общем случае ракета состоит из
стартового ускорителя / и второй ступени 11. Ускоритель обеспе-
чивает быстрый разгон аппарата до высоких скоростей, и после
запуска ДУ второй ступени происходит его отделение. Управле-
ние полетом ЛА на начальном участке траектории обеспечива-
ется наземным оборудованием. Затем вторая ступень переходит на
программное управление, и при захвате цели в зоне действия
бортового радиолокационного комплекса происходят самонаве-
дение ЗУР на цель и ее поражение. Аэродинамическая компо-
новка с применением стабилизаторов 1 и крыльев 4, располо-
женных в двух взаимно перпендикулярных плоскостях, обеспе-
чивает высокую маневренность ракеты. На стартовом ускорите-
ле используется РДТТ, а на второй ступени — ЖРД 2 с вы-
теснительной подачей компонентов топлива из баков горючего
5 и окислителя 6. Управление полетом на начальном и марше-
вом участках обеспечивается аппаратурой, расположенной в
приборном отсеке 3. Захват цели осуществляется с помощью
головки самонаведения, расположенной в носовом, радиопро-
57
6
Рис. >3.7. Двигательная установка ЛА класса «воздух—поверхность»
58
Ли34
Рис. 3.8. Компоновочная схема зенитной управляемой ракеты
зрачном обтекателе 9 и приборном отсеке 8. Эти же приборы
обеспечивают подрыв боевого заряда 7 при попадании цели в
зону поражения или самоликвидацию ракеты при промахе.
Один из вариантов системы самонаведения (в данном случае
инфракрасной) изображен на рис. 3.9. Здесь цифрами обозна-
Рис. 3.9. Инфракрасная система самонаведения
чены: 1 — поток тепловых лучей от цели, 2 — обтекатель из
кварца (или кристаллической окиси магния), 3, 4 — зеркала,
5 — фотосопротпвленне, 6 — усилитель сигнала, 7 — счетно-ре-
шающее устройство, 8 — рулевой привод, 9 — устройство опре-
деления величины и направления углового рассогласования
между линией визирования цели и продольной осью ЛА. В за-
висимости от рассогласования блок 7 выдает команду управле-
ния на рулевой привод для осуществления самонаведения.
Инфракрасные головки селектируют поток тепловых лучей
с длиной волны 0,75... 10 мкм от нагретых частей цели на фоне
атмосферы. Длина волны зависит от температуры тела. Так, в
газовой струе ракетного двигателя максимальная длина волны
л,пах = 3 мкм, для поршневого двигателя /. = 4 мкм. Поверх-
ность тела с Т = 373° К излучает волны длиной 8 мкм.
Основным преимуществом тепловых систем самонаведения
по сравнению с другими (в частности, радиолокационными) яв-
ляется их высокая разрешающая способность. Например, при
дальности 8 км приемник селектирует отдельную ДУ на самоле-
те. Кроме того, они имеют меньшие габариты и массу, чем ра-
диолокационные, являются устойчивыми к помехам.,
Основным недостатком таких систем является их зависимость
от погодных условий, времени суток и слабая эффективность
при больших расстояниях.
Переменные по величине и направлению перегрузки, возни-
кающие при полете беспилотных ЛА, предопределяют особен-
но
ности конструкции топливозаборных устройств. К важнейшим
из этих особенностей относятся применение вытеснительной си-
стемы подачи топлива и использование поворотных топливоза-
борников.
Один из вариантов конструкции бака, используемого в вы-
теснительной системе подачи топлива, представлен на рис. 3.10.
I
Рис. 3.10. Топливный бак с разделительной мембраной
Он состоит из сваренных между собой днищ 1 и 2. внутри кото-
рых расположена разделительная мембрана 3, изготовленная
из алюминиевого сплава. При подаче давления воздуха
через штуцер 4 в полость 5 мембрана, распрямляясь, вытесняет
топливо в магистраль ДУ через штуцер 6. Использование такой
системы обеспечивает постоянную, бесперебойную подачу ком-
понента топлива в камеру сгорания.
Конструкция поворотного заборника представлена на рис
3.11. Он состоит из заборного патрубка 1, который может вра-
щаться во всех направлениях относительно осей I I, II—II.
Тефлоновые прокладки 2 обеспечивают герметичность соедине-
ния. В качестве материала заборника используйся кислото-
упорная сталь. Подобная конструкция эффективна в случае воз-
никновения поперечных перегрузок. Поворотный заборцик
(патрубок /) отклоняется вслед за оттоком массы топлива в ту
или иную сторону под действием перегрузки.
61
Рис. 3.11. Поворотный заборник топлива
В общей компоновочной схеме ЛА баковые отсеки занимают
наибольший объем, Наряду с тем, что баки могу г изютавливать-
ся в виде отдельных узлов (см. рис. 3.10), они выполняются по
несущей схеме. Типовой элемент такого бака представлен на
риг. 3.12. Здесь цифрами обозначены: 1 — обечайка бака, 2 —
стыковой шпангоут с соседним отсеком, 3 - днище бака, изго-
товленное из двух частей, сваренных всшк аргонно-дуговон
сваркой. Материал шпангоута — АК-6, обечайки и днищ бака —
АМГ-3 (АМГ-6). Обечайка 1 с днищем 3 соединяются ролико-
вой сваркой.
62
Сэ
Рис. 3.13. Крыло ЛА класса «земля—воздух>
Особенности конструкции крыла беспилотного ЛА изображе-
ны на рис. 3.13. Крыло крепится к корпусу в трех точках, причем
конструкция, изображенная на рисунке, обеспечивает быструю
установку и снятие крыла. Обшивки крыльев изготавливаются
из сплавов титана. Это обусловлено сильным нагревом крыльев
при движении аппарата в плотных слоях атмосферы.
3.3. КОМПОНОВОЧНЫЕ СХЕМЫ БАЛЛИСТИЧЕСКИХ РАКЕТ
И РАКЕТ-НОСИТЕЛЕЙ КОСМИЧЕСКИХ АППАРАТОВ
Компоновочные схемы БР! и PH с ЖРД. Не-
зависимо от применяемого двигателя различают одно- и много-
ступенчатые (или-составные) ракеты. Ракеты, у которых масса
конструкции при их движении на активном участке траектории
остается постоянной, называются одноступенчатыми. Ракеты, у
которых масса изменяется ступенчато (дискретно) по мере от-
брасывания частей конструкции, не нужных при дальнейшем
движении, — многоступенчатые. Под ступенью понимают после-
довательно движущиеся ракеты, в которых каждая последую-
щая ступень является полезной нагрузкой для предыдущей. От-
деляемая часть называется ракетным блоком (РБ) предыдущей
ступени. При одинаковой стартовой массе полезная нагрузка
многоступенчатых БР и PH приобретает большую скорость, чем
Одноступенчатых, поскольку в ходе полета отбрасываются не-
нужные для дальнейшего движения части конструкции. Однако
существует оптимальное количество ступеней, при превышении
которого не происходит прироста скорости. Количество и-соот-
ношение масс ступеней зависят от энергетических характеристик
ДУ и совершенства конструкции ступеней. Компоновочные схе-
мы многоступенчатых БР и PH можно разделить на три груп-
пы (рис. 3.14):
с последовательным расположением РБ и их поперечным
разделением — схема «тандем» (рис. 3.14,а);
с параллельным расположением блоков — схема «пакет» и
продольным разделением ступеней (рис. 3.14,6);
с параллельно-последовательным расположением блоков —
комбинированная схема (рис. 3.14,в).
По двум последним схемам запуск ДУ РБ первых ступеней
может производиться на старте одновременно. Питание ДУ мо-
жет быть как автономным (из собственных баков каждого РБ),
так и смешанным (перекачка топлива из боковых блоков в цент-
ральный при движении 1-й ступени PH. В схеме «тандем» за-
пуск ДУ РБ 1-й ступени производится на старте, последующих
ДУ — при движении на активном участке траектории до или
после отделения РБ предыдущей ступени. Если маршевая ДУ
64
Рис. 3.14. Схемы компоновок ракет-носителей: 1 — головная часть;
2 — центральный РБ, РБШ ступени; 3 — центральный РБ после сбро-
са боковых РБ, используемый как блок II ступени; 4 — боковые РБ
очередной ступени запускается до выключения маршевой ДУ
предыдущей ступени, то происходит «горячее» разделение сту-
пеней. При этом необходимо предусмотреть меры безопасности
при разделении (постановка экрана на предыдущую ступень).
При «холодном» разделении ступеней маршевый двигатель
следующей ступени использует режим глубокого дросселирова-
ния, либо используются небольшие рулевые или вспомогатель-
ные двигатели (РД), работающие до включения маршевых ДУ.
В обоих случаях связи между отработавшим носителем и
последующей ступенью обычно разрываются по сигналу на от-
сечку его ДУ, а само разделение происходит после уравнивания
ускорений этих частей.
БР и PH с ракетными двигателями на
твердом топливе (РДТТ). ЛА с РДТТ имеют следую-
щие основные особенности: топливный отсек аппарата в этом
случае одновременно выполняет и функции камеры сгорания.
В связи с этим (из-за высокого давления в камере порядка
60-104 Па стенки отсека (корпуса ЛА) должны быть достаточ-
но толстыми; время работы ДУ относительно мало. При транс-
портировке и хранении ЛА с РДТТ необходимо предусматри^
65
вать термостатирование — установку теплоизоляции, чехлов,
заглушек и т. д. Эти меры предосторожности необходимо при-
менять для обеспечения в топливном отсеке заданных стабиль-
ных условий для компонентов твердого топлива (температура,
влажность, давление и т. д,).
Выключение ДУ можно производить сбросом давления в ка-
мере сгорания (например, сброс сопла). РДТТ успешно исполь-
зуется как на небольших ракетах, так и на больших транспорт-
ных системах (например, «Титан-111С», на первой ступени ко-
торой установлены РДТТ). Иногда используются гибридные
ракетные двигатели (ГРД), работающие на топливах в смешан-
ном агрегатном состоянии (сочетание твердых и жидких компо-
нентов). Подобные системы по сравнению с РДТТ имеют опре-
деленные преимущества (увеличивается удельная тяга, возмож-
но ее регулирование и т. д.).
Компоновка приборных и топливных отсе-
ков БР и PH. Выбор формы приборного отсека (ПО) за-
висит от общей аэродинамической и КСС ЛА и его размещения
на носителе.
Для ЛА, использующих ДУ на химическом топливе, находя-
щемся на борту, объем топливных отсеков может составлять
70—80% от общего объема ЛА, а масса (без компонентов топли-
ва)— до 30 % от «сухой»
массы ЛА. Топливные отсе-
ки представляют собой баки
для размещения окислителя
и горючего. Баки различа-
ются по КСС (подвесные и
несущие), по форме, систе-
мам подачи компонентов
(баки с турбонасосной или
вытеснительной системами
подачи) и т. д. При одина-
ковых объемах и равной
а
Рис. 3.15. Схемы компоновок
с совмещенными днищами: а —
баки с внутренними трубопро-
водами подачи топлива; б —
периферийная (внешняя) про-
кладка трубопроводов
прочности сферические баки
(при прочих равных усло-
виях) всегда имеют мень-
шую массу, чем баки другой
формы. Однако в топливном
отсеке с такими баками
остается незаполненным большое пространство и компоновка его
получается неплотной. Для увеличения плотности компоновки
можно использовать баки с совмещенными днищами, размещать
ДУ в топливных отсеках или баках, а также сочетать баки раз
личных форм (рис. 3.15, 3.16, 3.17).
66
Рис. 3.16. Схемы компоновок топливных отсеков: а, б, в — с несу-
щими баками; г — с подвесными баками
Формирование общей компановки БР и PH очень наглядно
можно проследить на примере создания межконтинентальной со-
ветской БР Р7, которая стала базовой при создании основной
PH в СССР. С помощью этой PH, которая в зависимости от вы-
Рис. 3.17. Размещение двигателей в топливных отсеках (а) и баках (б)
водимого полезного груза именовалась соответственно «Спут-
ник», «Восток», «Союз» и др., были осуществлены все основные
космические программы.
В свою очередь, Р7 -была создана в ходе модификаций бал-
листических ракет Р1, Р2, Р5.
Дальняя баллистическая ракета Р1 разрабатывалась под ру-
ководством С. П. Королева в 1947-1948 гг. Прообразом ее яви-
67
лась немецкая БР «Фау-2» (или проект А-4). Необходимость
срочного ввода в действие средства доставки для атомной бом-
бы, призванной ликвидировать монополию США на ядерное
оружие, во многом обусловила схожесть Р1 и Фау-2. Но уже в
это время в КБ Королева были определены основные направле-
ния значительного улучшения конструкции.
Основными особенностями конструкции Р1, которые в даль-
нейшем были учтены в других модификациях, были неотделяе-
мая головная часть, не несущие баки окислителя и горючего,
большие стабилизаторы, стальной корпус.
Следующей модификацией явилась ракета Р2. Несмотря на
внешнюю схожесть с Р1, она имела уже существенные конструк-
тивные отличия от последней, а именно: отделяемая головная
часть (ГЧ), несущий бак горючего, ДУ повышенной тяги, улуч-
шенная система управления.
Одним из главных достижений в конструкции Р2 явилось
применение алюминиевых ^сплавов для изготовления корпуса.
Это стало возможным вследствие реализации принципа отделяе-
мой ГЧ. Теперь уже не было необходимости стабилизировать
полет всей ракеты при ее входе в плотные слои атмосферы и
обеспечивать при этом жесткость и целостность корпуса. В ре-
зультате при увеличении массы конструкции всего на 500 кг
дальность полета была увеличена вдвое при той же массе бое-
вого заряда в 1 т.
Следующим шагом по реализации конструкторских идей
явилось создание ракеты Р5. В этой конструкции уже отказа-
лись от больших стабилизаторов, не нужных при использовании
отделяемой ГЧ. В Р2 этот шаг не был сделан лишь потому, что
в целом не влиял существенно на улучшение конструкции, а сро-
ки создания были очень жесткими. Для дальнейшего увеличе-
ния дальности необходимо было изыскивать уже все резервы
снижения массы. Другим конструктивным улучшением БР Р5
по сравнению с Р2 было изготовление топливных баков как еди-
ного отсека, который был несущим. Это позволило при сниже-
нии массы конструкции повысить массу топлива на 60% по
сравнению с Р2, что в итоге вдвое увеличило дальность полета.
7 ноября 1957 года Р5 была впервые показана во время во-
енного парада на Красной площади как «первая стратегическая
ракета».
Схемы ракет Р1, Р2, Р5 показаны на рис. 3.18. Каждая из
них имеет свои достоинства и недостатки. К этим трем схемам
можно добавить четвертую — размещение приборов «россыпью»,
т. е. вблизи своих потребителей. В этом случае кабельная сеть
может быть минимальной. Однако при этом трудно, а порой и
невозможно для всех приборов обеспечить заданные условия
68
Рис. 3.18. Компоновочные схемы советских БР Pl, Р2 н Р5
„работы (температуру, давление, влажность, отсутствие вибра-
ций и т. д.). Все это снижает надежность приборов. Здесь циф-
рами обозначены: 1 — БЧ, 2 — система управления ПО, 3 —
бак горючего, 4 — теплоизоляция, 5 — бак окислителя, 6 —
магистраль горючего, 7 — ДУ, 8 — стабилизаторы, 9 — газо-
струйные рули, 10 — воздушные рули.
Основные данные этих ракет представлены в табл. П1.
В июле 1954 г. под руководством С. П. Королева начались
проектные работы над многоступенчатой межконтинентальной
ракетой Р7. Необходимость ее создания диктовалась дальней-
шим ростом ядерной углозы со стороны США, разработкой тер-
моядерного оружия.
Рис. 3,19. Компоновочная схема БР
Р7: 1 — головная часть; 2 — бак
окислителя 2-й ступени; 3 — бак го-
рючего 2-й ступени; ’4 — бак окисли-
теля бокового блока; 5 — бак горю-
чего бокового блока; 6 — ДУ; 7 —
силовой шпангоут; 8 — кронштейн
подвески боковых блоков; 9 — ого-
ловок бокового блока; 10 — опор-
ная мачта стартовой позиции; 11 —
окно для выхода газов; 12 — сопло-
вая крышка
В схеме Р7 был исполь-
зован разработанный еще
Циолковским в 1903 г. и ис-
пользованный М. Тихопра-
вовым в 1948—1949 гг. прин-
цип разделения ступеней.
Усовершенствованный Коро-
левым, он привел к созда-
нию той компоновочной схе-
мы, которая до сих пор при-
меняется как базовая в PH
КА (рис. 3.19). В этой схе-
ме около центрального груп-
пируются четыре боковых
ракетных блока. При стар-
те работают ДУ всех пяти
блоков. После выгорания
топлива во внешних блоках
происходит их отделение
(рис. 3.20), в то время как
центральный блок вследст-
вие большого запаса топли-
ва продолжает функциони-
ровать как вторая ступень
и обеспечивает полезному
грузу достижение необходи-
мой скорости. При отделе-
нии боковых блоков проис-
ходит вначале разрыв свя-
зей в нижней части блоков,
которые вследствие эксцент-
риситета тяги отходят в сто-
роны. После этого происхо-
дит отставание боковых бло-
ков и их отход от централь-
ного блока в стороны за
счет реактивного импульса в
верхней части боковых бло-
ков. Этот импульс обеспечп-
остатков окислителя из верх-
вается истечением под давлением
ней части бокового блока.
Особенностью ДУ Р7 явилось использование в качестве горю-
чего керосина вместо спирта, применявшегося в ракетах Pl, Р2
и Р5. Основные технические данные Р7 приведены в табл. П 1.
4 окт. 1957 г. модифицированная БР Р7 обеспечила в качест-
70
Рис. 3.20. Отделение боковых блоков ракеты Р7
от центрального блока
Рис. 3.21. Установка 3-й ступени
КА «Восток» на БР Р7: 1 — обте-
катель КА; 2 — КА; 3 — бак
окислителя 3-й ступени; 4 — бак
горючего 3-й ступени; 5 — ДУ
3-й ступени; 6 — переходник; 7 —
приборный отсек PH; 8 — цент-
ральный блок (вторая ступень)
ракеты Р7
ве PH доставку первого искусственного спутника Земли (ИСЗ)
на околоземную орбиту.
22 окт. 1959 г. был осуществлен полет боевого варианта меж-
континентальной ракеты Р7 к цели в районе Тихого океана.
Установка'на Р7 третьей ступени с космическим кораблем
(КК) позволила осуществить полет человека в космос (рис.
3.21). В дальнейшем последняя ступень модифицировалась по-
стоянно, что позволило обеспечить запуск таких аппаратов, как
«Молния», «Союз», «Прогресс».
Рис. 3.22. Компоновочная схема PH
«Протон» в 4-ступенчатом варианте
Для запуска тяжелых ор-
битальных станций (ОС)
была разработана PH «Про-
тон» (рис. 3.22). Она позво-
ляет выводить на орбиту
Земли до 20 т полезного
груза. «Протон» может быть
использован в 2-, 3-, и 4-
ступенчатом вариантах в
зависимости от поставлен-
ной задачи. Например,
15 сент. 1968 г. с помощью
4-ступенчатого варианта
этой PH в СССР был осу-
ществлен успешный запуск
аппарата «Зонд-5» массой
5,5 т для облета Луны. При
этом на Землю была возвра-
щена (приводнилась в Ин-
дийском океане) капсула
массой 3 т.
Основные технические
данные PH «Протон» при-
ведены в табл. П2. Цифра-
ми на рис. 3.22 обозначены:
1 — обтекатель полезного
груза; 2 — спутник связи
«Экран»; 3 — бак окислите-
ля 4-й ступени; 4 — ДУ 4-й
ступени; 5, 6 — соответст-
венно баки горючего и
окислителя 3-й ступени; 7,
8 — баки окислителя и го-
рючего 2-й ступени; 9, 10 —
баки окислителя и горючего
1-й ступени.
72
Рис. 3.23. Межконтинентальная
БР «Атлас»
Рис. 3.24. Ракетно-космический
комплекс «Сатурн-5-Лполлон»
Особенности компоновочных и КСС луших образцов зару-
бежной ракетной техники можно проследить на примерах БР и
PH «Атлас» и «Сатурн-5» (США).
М е ж к о и т и н ем т а л ь н а я баллистическая ра-
кета (МБР) «А тлас» (рис. 3.23) состоит из трех основ-
ных отсеков: 1 — хвостовой; 11 — топливных баков; /// — го-
ловная часть.
Хвостовой отсек, в котором расположены два стартовых дви-
гателя 6, сбрасываемых после прекращения работы вместе с
«юбкой» 5, обеспечивает стабилизацию полета 2-й ступени. На
этой стадии основную тягу обеспечивает ДУ 7. Для управления
полетом камеры сгорания основного и стартового двигателей
73
установлены в шарнирных подвесах, а после сброса стартовых
ДУ для управления по каналу крена используются два рулевых
двигателя 4. Они же обеспечивают доведение скорости до рас-
четного значения после отключения основной ДУ. На старте все
пять двигателей запускаются одновременно.
Баки окислителя 1 и горючего 2 с приборным отсеком 3 вы-
полнены несущими с общим промежуточным днищем и изготов-
Рис. 3.25. Ракетный блок S-I
74
ленк из нержавеющей стали. Толщина стенок баков увеличива-
ется к хвостовому отсеку от 0,254 до 1,02 мм. Столь малая тол-
щина оболочки корпуса бакового отсека обусловила необходи-
мость поддержания в емкостях при хранении и транспортировке
избыточного давления около 0,068 МПа. В качестве компонентов
топлива применяется керосин и жидкий кислород.
Основные технические данные МБР «Атлас» приведены в
табл. ПЗ.
HP «С а тур и-5» (рис. 3.24) — трехсгупенчатая с треть-
ей ступенью двукратного включения, специально разработанная
для программы исследования Луны, предусматривающая пило-
тируемую экспедицию и высадку человека на ее поверхность.
Основные технические данные ракетно-космического комп-
лекса «Сатурн—Аполлон» приведены в табл. П4.
PH выполнена в виде моноблока с разделением ступеней по
«холодной» схеме. Старт — вертикальный с выдержкой на пус-
ковой платформе до момента выхода на расчетный режим тяги
всех ДУ I ступени. Управление полетом при работе I и II сту-
пеней происходит за счет поворота четырех основных ЖРД, ус-
тановленных в шарнирных подвесах (пятая ДУ неподвижна),
при работе III ступени — по каналам тангажа и рыскания с по-
мощью поворота ДУ в кардановом подвесе, по каналу крена —с
помощью вспомогательных ДУ.
В состав PH ,«Сатурн-5» входят три ракетных блока: S-I,
S-П и S-IV В.
Ракетный блок S-I (рис. 3.25) длиной 45 м и диамет-
ром 10 м образован пятью отсеками: передней «юбкой» 1, бакохМ
окислителя 2, межбаковым отсеком 3, баком горючего 4, хвос-
товым отсеком 5 и ДУ 6. Передняя «юбка» и межбаковый отсек
представляют собой оболочку с продольно-поперечным набором,
стрингеры которого расположены с внешней стороны оболочки.
Цилиндрическая обечайка бака окислителя и горючего под-
креплена продольно-поперечным набором, выполняющим так-
же роль демпфера, снижающего колебания зеркала топлива при
работе ДУ. Этой же цели служит четырехлучевая крестовина 7.
В хвостовом отсеке расположены 5 двигателей F-1. Четыре
боковых из них имеют возможность поворачиваться в двух
взаимно перпендикулярных плоскостях на угол 3,5°.
Обшивка стабилизаторов 8, обтекатели 9 выполнены из тита-
нового сплава, остальная конструкция — из сплавов алюминия.
Ракетный блок S-II (рис. 3.26) длиной 25 м и диамет-
ром 10 м состоит из передней 1 и задней 4 «юбок», совмещенных
баков горючего 2 и окислителя 3, конуса крепления 5 ДУ 6.
Особенности конструкции блока обусловлены применением жид-
ких кислорода и водорода в качестве компонентов топлива.
75
Рис. 3.26. Ракетный блок S-II
Топливный отсек блока имеет общее промежуточное днище
баков трехслойпон конструкции. Цилиндрическая обечайка бака
горючего — вафельной конструкции. Снаружи поверхность топ-
ливного отсека теплоизолирована, при этом предусмотрена про-
дувка теплоизоляции гелием для предотвращения конденсации
воздуха. Внутри бака окислителя установлены кольцевые демп-
феры и крестовина на нижнем днище для гашения колебании
уровня топлива.
Для теплоизоляции применяются соты 9 из фенола, пенопласт
10, найлоповая и тадларовая (поз. 11 и 12) пленки. В конструк-
ции всех отсеков применен высокопрочный алюминиевый сплав.
ДУ состоит из пяти двигателей J-2, четыре из которых кре-
нятся в кардановых подвесах, а пятый — неподвижно в центре
блока. Для осадки топлива перед запуском ДУ имеется РДТТ
7 в количестве восьми штук. Четыре тормозных РДТТ 8 служат
для разделения ступеней.
76
Ракетный блок S-IV В (рис. 3.27) в соответствии с
программой «Сатурн-Аполлон» использовался не только в ка-
честве ракетного блока III ступени, но и как разгонная ступень,
что потребовало установки на нем систем дополнительного над-
дува баков и создания начальной перегрузки, обеспечивающих
повторный запуск ДУ.
В состав блока входят передняя «юбка» 1, совмещенные ба-
ки горючего 2 и окислителя 3, рама 4 крепления ЖРД J-2 6, пе-
реходник 5. Для управления по крену имеются ЖРД 7 тягой по
380 Н. ДУ 8 обеспечивают надежный запуск основного ЖРД.
Топливный отсек выполнен из алюминиевого сплава 2914-Т6.
Цилиндрическая обечайка диаметром 6,6 м имеет вафельную
конструкцию внутренней поверхности. Общее днище является
Рис, 3,27, Ракетный блок S-IV £
77
трехслоиным с сотовым заполнителем из стеклопластика высотой
45 мм,
Коническая рама 4 крепления ДУ клепаная, с изменяющей-
ся (от 8,1 до 4 мм) толщиной обшивки вдоль образующей. Тол-
щина днищ и обечайки баков — 0,8 мм.
ЖРД /-2 установлен в кардаповом подвесе и может повора-
чиваться на угол ± 7° для обеспечения коррекции траектории.
В верхней части ракетного блока установлен приборный от-
сек 9. Приборы монтируются непосредственно па теплоотводя-
щих панелях размером 76 X 76 см. В качестве охлаждающей
жидкости используется смесь из 40% воды и 60% метанола. Ос-
новными блоками приборного отсека являются; бортовая вычп-
ЬидЛ
Рис. 3.28. Конструкция продольно-поперечного силового
набора межбакового отсека: / — шпангоут; 2 — стрин-
гер; 3 — обечайка отсека
7§
слительная машина, инерциальная платформа, аналоговые вы-
числительные машины, скоростные гироскопы, акселерометры.
Некоторые конструктивные особенности отсеков БР пред-
ставлены на рис. 3.28 и 3.29.
Рис. 3.29. Стык топливного бака с негермстичпым отсеком: 1 — обечайка
днища; 2 — шпангоут бака; 3 — обечайка отсека; 4 — стрингер; 5 —
шпангоут; 6 — днище бака
С помощью ракетно-космической системы «Сатурн—Апол-
лон» в США в 1969—1972 гг. была осуществлена программа пи-
лотируемых полетов на Луну. Всего было осуществлено 7 экс-
педиций, начиная с «Аполлона-11» до «Аполлона-17». Шесть из
них были удачными. На Луну высадились 12 астронавтов, кото-
рые выполнили широкую программу се исследования, отработ-
ки систем передвижения по ее поверхности, провели физические
эксперименты.
При полете «Аполлона-13» на расстоянии 320000 км от Зем-
ли в служебном отсеке космического корабля произошел взрыв
кислородного бака. После вынужденного облета Лупы астронав-
ты благополучно вернулись на Землю.
В табл. П5 сведены данные по экспедициям па Луну. Следу-
ет отметить, что третий член экипажа всегда оставался на орби-
те ожидания Лупы. Здесь То — исходное время старта с Земли.
3.4. МНОГОРАЗОВЫЕ ТРАНСПОРТНЫЕ КА
Основные требования к космическим транс-
портным системам. Основной причиной, приведшей к
необходимости создания МТКА, можно считать требование ре-
79
гулярного снабжения орбитальных станций, которые должны ос-
таваться на орбите в течение года и больше. Помимо снабже-
ния орбитальные станции МТКА могут осуществляли самостоя-
тельные научные исследования на околоземной орбите и выпол-
нять различные задачи по обслуживанию и запуску ИСЗ И КА.
В состав МТКА входит собственно транспортный КА и систе-
ма вывода его на орбиту. Транспортный аппарат или орбиталь-
ная ступень (ОС) должны иметь возможность входа в атмосфе-
ру п приземления при условии наличия на борту людей.
С помощью МТКА могут решаться следующие задачи:
доставка персонала на орбитальную станцию и возвращение
его на Землю;
спасение экипажа орбитальной станции и пилотируемых КА
в аварийных ситуациях на орбите;
снабжение орбитальной станции расходуемыми компонен-
тами;
доставка экспериментального оборудования па обитаемые
КА для проведения его испытания в условиях космического
пространства;
возвращение с КА на Землю экспериментального оборудова-
ния, использовавшегося в условиях космоса, а также специаль-
ной аппаратуры, требующей доставки на Землю;
доставка новых, взамен вышедших из строя, узлов и блоков
бортовой аппаратуры;
доставка на орбиту деталей и оборудования, необходимого
для монтажа кабельной бортовой сети (КБС);
ремонт и профилактические осмотры автоматических КА на
орбите, а также возвращение их отдельных блоков на Землю;
полет вокруг Земли для выполнения различных наблюдении
и экспериментальных измерений;
проведение экспериментов или технических исследований в
условиях невесомости;
тренировка экипажей ЛА;
выполнение различных военных задач (глобальная разведка
и наблюдение, инспекция и перехват ИСЗ на орбите и др.).
Исходя из перечисленных задач, к МТКА предъявляются
следующие требования:
экономичность доставки на обслуживаемый объект требуе-
мого количества грузов (обеспечение возвращения и повторного
использования);
обеспечение совместимости операций по стыковке на орбите,
при швартовке и доставке грузов;
возможность обслуживания не летным персоналом;
маневренность для обеспечения встречи и стыковки на ор-
бите;
80
возможность входа в атмосферу в пределах широкого кори-
дора и посадки в заданном районе;
высокая надежность, возможность аварийного спасения на
всех этапах полета;
обеспечение требуемых ускорений при старте и посадке;
возможность отстыковки грузовых модулей на орбите;
совместимость с существующим в настоящее время назем-
ным командно-измерительным комплексом;
совместимость с существующими и разрабатываемыми PH.
Компоновка ОС в значительной мере определяется нагревом
при входе в плотные слои атмосферы, соображениями маневрен-
ности и приземления, а также необходимостью многократного
использования.
Целесообразность использования МТКА определяется назна-
чением обслуживаемой орбитальной стаицши, численностью ее
экипажа, типом бортовых систем, в частности, систем обеспече-
ния жизнедеятельности и энергоснабжения. В зависимости от
этого должны выбираться схемы МТКА, часiэта их запусков и
количество экипажа.
Задачи, стоящие перед МТКА, в принципе могут быть решены
одноразовыми средствами, но однозначного мнения о целесооб-
разности использования МТКА не существует.
Наибольшее развитие МТКА получили в США. К началу
1972 г. в результате разработки многочисленных альтернативных
проектов была определена схема МТКА «Space Shuttle» (рис.
3.30). Здесь цифрами обозначены: 1 — подвесной топливный
отсек (ПТО); 2 — твердотопливные ускорители (ТТУ); 3 — ор-
битальная, ступень; 4 — маршевые ЖРД ОС; 5 — ДУ системы
орбитального маневрирования. ОС и ускорители рассчитаны на
Основные технические данные МТКА «Space Shuttle»
Стартовая масса, т 2040
Стартовая тяга ДУ, тс.................. 3080
В том числе ускорителей (РДТТ) . 2 X 1290
Маршевых ЖРД.......................3 X 167
Топливо маршевых ЖРД .... жидкий водород +
4-жидкий кислород
Максимальная масса полезной нагрузки
(ПН), т ...... 29.5
Максимальная возвращаемая с орбиты
масса ПН, т 14,5
Масса «сухой» конструкции, т . . . 296,8
Полезный объем грузового отсека, м3 . 365
Экипаж . . . . . • до 7 человек
Длительность полета ..................7 (30) суток
Дальность бокового маневра ОС при по-
садке , км . . . i . 1770
Кратность использования:
ОС.....................................100 •
марШевЫх ЖРД.......................55
стартовых ускорителей .... 20
Максимальные перегрузки » , . .не более 3 81
3T.2S
Рос. 3 30. Компоновочная ёхеМа МтКА «Space Shuttle*
82
многократное, а топливный бак — на однократное применение.
Типовой график полета выглядит следующим образом:
То —момент запуска маршевых ЖРД при вертикальном
старте;
То + 2 с — запуск ТТУ;
То + 3 с — подъем;
То + 2 мин 5 с — отсечка и отделение ТТУ (Н = 45 км, V —
= 1,38 км/с);
То + 8 мин 4 с — отсечка маршевого ЖРД (Я == 110 км, V —
= 7,8 км/с);
запуск маневренной ДУ (высота Н = 115 км);
операции на орбите (Н = 185—1100 км, V — 7,740 км/с);
вход в атмосферу (Н = 120 км, V = 7,435 км/с);
полет над поверхностью (дальность — 2000 км от аэродро-
ма) ;
приземление Упосад = 335 км/ч.
При спуске с орбиты п входе в атмосферу угол атаки ОС со-
ставляет 30°, при приземлении — 15°. ОС ориентируется для ма-
невра по сходу с орбиты с помощью двигателей реактивной си-
стемы ориентации. Эта система обеспечивает управление до тех
пор, пока скоростной напор не достигнет 97 кгс/м2, после чего
используются аэродинамические поверхности. Вскоре после вхо-
да в атмосферу за счет аэродинамического нагрева вокруг аппа-
рата образуется облако ионизированных частиц, которое пре-
пятствует прохождению радиосигналов, и происходит временная
потеря связи.
Ниже рассмотрены особенности конструкции основных отсе-
ков.
Подвесной топливный отсек (рис. 3.31) состоит
из бака окислителя 1 и бака горючего 2. В момент старта в от-
секе находится около 710 т компонентов топлива. Объем бака
жидкого водорода составляет 1523 м3, жидкого кислорода —
552 м3. В эти объемы включен 3-процентный запас топлива на
испарение. Длина бака — 48 м,.диаметр — 8,4 м, масса конст-
рукции — 35 т.
Оба бака выполнены в виде оболочки из алюминиевых спла-
вов А2219 с продольно-поперечным силовым набором. Межба-
ковый отсек 3 выполнен из алюминиевого сплава А7075. На от-
секе расположены узлы 4 стыковки его с ОС.
Для обеспечения надежной герметичности соединений об-
шивка сварена встык, Напыляемое покрытие из пенопласта на-
носится на всю внешнюю поверхность отсека, включая боковые
стенки и переднее днище. С ОС отсек соединен пятью трубопро-
водами, которые имеют теплоизоляцию. Наддув баков осущест-
вляется гелием под давлением 2,4 Кгс/см2 для бака Водорода И
1,4 кгс/см2 для бака кислорода.
63
Рис. 3.31. Подвесной топливный отсек
Рис. 3.32. Схема приводнения ТТУ
Cn
Рис. 3.33. Твердотопливный ускоритель
Твердотопливный ускоритель (рис. 3.32 — схе-
ма приводнения, рис. 3.33 — конструкция) крепится к подвесно-
му топливному отсеку с помощью пиротехнических устройств.
При аварии ТТУ приводняется в океан на парашютах. Система
спасения состоит из трех типов парашютов: вытяжного, диамет-
ром 3,5 м, стабилизирующего, диаметром 16,5 м и трех основных
диаметром по 35 м. Для обеспечения целостности конструкции
вертикальная скорость приводнения выдержана в пределах
26 м/с, горизонтальная — 13,7 м/с.
ТТУ состоит из следующих основных частей (рис. 3.33): 1 —
носовой обтекатель, 2 — конус с парашютами, 3 — передняя
«юбка», 4 — передняя цилиндрическая секция, 5 — первая сред-
няя секция, 6 — вторая средняя секция, 7 — задняя секция с
соплом, 8 — задняя «юбка». В носовом неспасаемом обтекателе
/ расположены вытяжной и стабилизирующий парашюты. Для
отклонения сопла при регулировании вектором тяги до ± 8°
(рис. 3.33, а) предусмотрены гидроприводы 10. Отход ТТУ от
МТКА обеспечивается четырьмя задними 9 и четырьмя перед-
ними 11 РДТТ. Тяга каждого из них — 9 тс, время работы —
0,8 с.
Между собой секции крепятся с помощью телескопического
стыка (рис. 3.33,6), в котором используются по 180 штифтов 12.
Для исключения прорыва газов через стык предусмотрено коль-
цевое уплотнение 13. Внутри секции покрыты слоем теплоизоля-
ции 14 из эластомера.
Заряд имеет обычную конструкцию со звездообразным ка-
налом горения в передней литой части й коническим каналом
горения во всех- остальных. Степень уширения профилированно-
го сопла (отношение площади на срезе к Площади критического
сечения) составляет 7, 16.
Основные технические данные ТТУ
Стартовая масса, г • 687
Масса конструкции, т . .83
Масса твердого топлива, г . 504
Тяга, тс................... . 1290
Время работы . . . . . 123 с
Общая длина, м . • > i • » 45,5
Диаметр, м............................3.7
.Максимальное давление в камере сгорания.
кгс/см2................................65,8
Материал корпуса сталь, толщиной . .12,1 мм
Диаметр критического сечения сопла, мм . 1372
.86
ОС (рис. 3.34) состоит из следующих основных элементов:
1 — носовое шасси, 2 — люки носовых ДУ системы ориентации,
3 — кабина экипажа, 4 — иллюминаторы для наблюдения за по-
лезной нагрузкой (ПН), 5 — грузовой отсек, 6 — руль направле-
ния с тормозным щитком, 7 — ДУ системы орбитального ма-
неврирования, 8 — хвостовые ДУ системы ориентации, 9 — ос-
новные ЖРД, 10 — основное шасси.
Рис, 3.34. Орбитальная ступень МТКА
Основные элементы конструкции изготовлены из алюминие-
вого сплава 2219, работающего до температуры 117°С и покры-
ты теплозащитой многократного применения.
Герметичная кабина сварной конструкции состоит из фре-
зерованных панелей со стрингерным набором и внутренней ра-
мы. Фонарь кабины изготовлен из трехслойного стекла.
Верхняя половина средней части фюзеляжа содержит створ-
ки люка грузового отсека, имеющие обычную конструкцию об-
шивки, подкрепленной стрингерами. Каждая створка состоит из
4-х секций, что обеспечивает противодействие скручивающим и
изгибающим нагрузкам.
Хвостовая часть фюзеляжа включает в себя раму основных
ЖРД, а также теплозащитный экран для защиты агрегатов и
систем основной ДУ от воздействия истекающих газовых струй
ЖРД.
В конструкции крыла используются лонжероны с гофриро-
В7
ванными стенками, ферменные нервюры и клепаная обшивка,
подкрепленная стрингерами. Элероны имеют сотовую конструк-
цию и разделены на две секции, что уменьшает шарнирный мо-
мент.
Киль представляет собой коробчатую двухлонжеронную мно-
гонервюрную конструкцию, которая крепится к хвостовой части
фюзеляжа болтовым соединением. Конструкция руля направле-
ния (он же и тормозной щиток) состоит из двух секций (ниж-
ней и верхней). Каждая секция делится в продольном направле-
нии на две части, что позволяет использовать ее в качестве руля
и тормозного щитка.
Объем герметичной кабины экипажа составляет 71,5 м3. Ка-
бина имеет три палубы. Верхняя палуба содержит средства ото-
бражения и органы управления для пилотирования. Здесь же
расположены места для четырех членов экипажа. На средней
палубе размещены жилая зона, оборудование для дополнитель-
ных членов экипажа или пассажиров, кухонный отсек, санузел,
шлюзовая камера и три отсека бортового, радиоэлектронного
оборудования. Нижняя палуба содержит оборудование систе-
мы жизнеобеспечения и регулирования параметров окружающей
среды и легко доступна через подвижные нижние панели.
Два основных передних места (для нилотов) выполнены с
обычной синхронизацией органов управления и дублированием
средств управления, что позволяет пилотировать аппарат с лю-
бого нз двух мест.
ОС имеет гиперзвуковое аэродинамическое качество в сба-
лансированном полете 1,4; на дозвуковой скорости — 6.
Для теплозащиты используется материал многократного при-
менения в виде плиток, общим ^количеством до 40000 на защи-
щаемой поверхности. Наиболее теплонапряженными участками
являются передняя нижняя поверхность фюзеляжа и передняя
кромка крыла. На этих участках теплозащитное покрытие
(ТЗП) изготавливается из композиционного материала на осно-
ве углерода, способного противостоять гораздо большей темпе-
ратуре, чем та, которая ожидается при выведении и входе в ат-
мосферу (1650°С).
Поверхности фюзеляжа и крыла, менее подверженные ин-
тенсивному нагреву (от 340 до 1216°С), защищены высокотем-
пературной теплозащитой многократного применения, которая
наносится прямо на несущую поверхность конструкции с исполь-
зованием подложки из пенистого материала и жесткой проклад-
ки (рис. 3.35). Такая конструкция обеспечивает теплозащиту при
1650°С. Она покрывается' водопроницаемым составом. Сами
плитки 1 состоят на 99% из волокон чистого плавленого кварца.
Размер плиток 15 X 15 см. Сверху на плитки нанесено плавленое
88
Рис. 3.35. Конструкция высокотемпературной многора-
зовой изоляции
боросиликатное покрытие 2 с пигментом, обеспечивающим необ-
ходимое соотношение между температурой излучения и поглоще-
ния. Плитки установлены на подложку 3.
Большая часть боковых и верхних поверхностей фюзеляжа и
верхней поверхности крыла нагревается до температуры, не пре-
вышающей 340°С. Эта часть покрывается низкотемпературной
теплозащитой многократного применения, которая сохраняется
при 340°С, а при более высокой температуре работает в абляци-
онном режиме.
Основная ДУ ОС состоит из трех ЖРД тягой 170 тс
каждый. Тяга двигателей регулируется в диапазоне от 50 до
109% от номинального уровня. Установка двигателей на кардан-
ном подвесе позволяет им отклоняться на 1 1° по тангажу, на
9° по рысканию и обеспечивает управление по крену. Основные
ЖРД работают околю 8 мин. *
Система орбитального маневрирования рас-
положена в хвостовой части, выполненной из титанового сплава.
Опа обеспечивает необходимую конечную скорость ОС, Измене-
ние орбиты, сближение и сход с нее. Суммарный объем топлив-
ных баков этой системы позволяет достичь прироста скорости
на орбите с ПН в 29,5 т, A V — 305 м/с. Элементы системы рас-
положены в двух внешних гондолах в хвостовой части. В каж-
дой гондоле имеются баллон с гелием под высоким давлением,
регуляторы и система управления давлением в баках, баки горю-
чего и окислителя, регенеративно охлаждаемый ЖРД с вытесни-
тельной подачей топлива. Каждый ЖРД создаст тягу в пустоте
2720 кгс при давлении в камере сгорания 8,8 кгс/см2, удельный
импульс — 313,2 кгс-с/кг. В качестве топлива используются чс-
тырехокись азота и монометилгидразин; соотношение расходов
компонентов — 1,65. Система орбитального маневрирования яв-
ляется системой многократного применения.
69
Реактивная система ориентации содержит Ь
составе носового и хвостового блока 40 ЖРД тягой по 408 кгс
каждый и шесть верньерных ЖРД тягой по 11,3 кгс. Система
подачи топлива — вытеснительная. Верньерные ЖРД применя-
ются для ориентации и стабилизации аппарата при продолжи-
тельных во времени научных экспериментах. Три из них уста-
новлены в носовой части. Компоненты топлива те же, что и в
системе орбитального маневрирования.
Манипуляторы грузового отсека используются для об-
служивания ПН и стыковки ОС с другими КА. Они представля-
ют собой длинные рычаги с дистанционно управляемой телека-
мерой и прожекторами для освещения рабочей зоны. Концевое
устройство приспособлено под различные сменные инструменты
и захваты, с помощью которых выполняются операции.
Манипуляторы укладываются на лонжероны грузового отсе-
ка. Они предназначены для работы в условиях невесомости и в
земных условиях не способны выдержать даже собственную
тяжесть.
Основные технические данные орбитальной ступени
Масса (без полезной нагрузки), т . 68
Максимальная стартовая масса, т . . 111
Максимальная посадочная масса, т . 96,2
Параметры крыла с двойной стреловидностью:
относительное удлинение .... 2,19,
относительная толщина, % 8
профиль ....... симметричный
поперечное V, град . . . 3,5
Длина грузового отсека, м . , , . 18,3
Диаметр грузового отсека, м . 4,6
Первый старт МТКА «Space Shuttle» был осуществлен 12 ап-
реля 1981 г. Экипаж состоял из двух человек: Д. Янга и Р. Крип-
пена. Полет продолжался 54 ч 20 мин 52 с. В дальнейшем систе-
ма успешно эксплуатировалась и показала высокую надежность
несмотря на катастрофу в январе 1986 г. МТКА с ОС «Челленд-
жер». Взрыв произошел вследствие прогорания ПТО от струи
горячих газов, прорвавшихся через стык отсеков ТТУ.
В СССР 15 мая 1987 г. был осуществлен запуск новой мощ-
ной PH «Энергия», а 15 ноября 1988 г. — полет МТКА в составе
PH «Энергия» и ОС «Буран».
Основное отличие системы «Энергия—Буран» от «Space Shut-
tle» заключается в возможности выведения большего полезного
груза. Это обеспечивается автономной работой ДУ 11 ступени.
9о
Основные технические данные МТКА «Энергия—Бу ран»
PH «Энергия»:
стартовая масса, т
масса полезной нагрузки, т.
I ступень (четыре боковых
блока:
тяга на Земле составляет
2400 ?
свыше 100
топливом является .
II ступень (центральный блок):
тяга составляет
топливом является .
ОС «Буран»:
стартовая масса, т
длина, м .... k
дальность бокового маневра, км .
масса выводимого полезного
груза, т , ,
16 ЖРД X 200 тс -
= 3200 тс;
Жидкий кислород + ке-
росин
4 ЖРД X 200 тс =
в 800 тс;
жидкий кислород + жид-
кий водород
105
36,4
до 2000 ;
до 30
В таблице приведены некоторые сравнительные характерис-
тики имеющихся МТКА и ракетно-космической системы «Са-
турн-5—Аполлон».
Сравнительные характеристики ракетно-космических систем
Системы Стартовая" масса, т Тяга ДУ на старте, тс Масса ПН, выводимой на околозем ну го орбиту, т Длина, м
«Space Shuttle» 2040 3080 29,5 59
«Энергия—Буран» 2400 4000 100 60
«Сатурн-5— Аполлон» 3000 3405 120 ПО
БИБЛИОГРАФ11ЧЕСКИЙ СПИСОК
Алифанов О. М., Панкратов Б. M.f Хохулин В. С. Летатель-
ные аппараты: Учеб, пособие /Под ред. Б. М. Панкратова. М., 1986. 264 с.
Конструкция и проектирование космических летательных аппаратов:
Учебник для средних специальных учебных заведений /Н. И. Паничкин,
Ю. В. Слспушкин, В» П. Шинкин. Н. А, Яцынин. М,: Машиностроение, 1986.
344 6
Кузнецов А. А. Аэродинамика и конструкция летательных аппара-
тов! Учеб, пособие. М., 1969. 248 с.
МйНохИН Д; Г. Конструкций баЛлиетиНеекй.Ч ракёг: УМеб. Поёобйе;
Казань, 19?7. 136 е.
91
Панкратов Б. М. Динамика и конструкция летательных аппаратов:
Конспект лекций. М,. 1975. 146 с.
Ракеты-носители /Под общ. ред. С. О. Осипова. At: Роениздат, 1981.
315 с.
Смирнов О. А., Сердюк В. К. Особенности консгруктивпо-компоно-
вочных решений многоразовых транспортных космических аппаратов: Метод,
пособие по курсовому и дипломному проектированию. М.; 1976. 151 с.
S t а с h е Р. Sowjetische Raketen: im Dienst von Wissenschaft und Ver-
teidigung. Berlin: Militarverlag der DDR, 1987. 288 s.
Приложение
Таблица П1
Основные тактико-технические данные баллистических ракет PI, Р2, Р5 и Р7
Показатели Pl 1 Р2 | 1 Р5 Р7
Время разработки, гг. 1947—1948 1949—1950 1952-1953 1954—1957
Первый старт 17.09.48 21.10.50 15.03.53 15.05.57
Максимальная дальность, км 300 около 600 1200 6200
Стартовая масса, т 13,5 20,4 28.6 около 270
Стартовая тяга ДУ, кН 267 363 432 3900
Максимальная длина, м 14.65 17,65 20,75 около 33
Максимальный диаметр, м 1,65 1,65 1,66 2,95 (блока)
ДУ 1ЖРД РД-100 1 ЖРД РД-101 1 ЖРД РД-ЮЗ 1 ЖРД РД-108 4- 4 ЖРД РД-107
Топливо спирт 4- О2ж спирт 4- О2ж • спирт 4- О2)К керосин 4- О2ж
Время работы ДУ, с 65 85 120 —
Масса боевого заряда, т 1 1 1 1
Размах стабилизаторов, м 3,56 3,56 3,45 10.3
Скорость в конце активного участ-
ка, м/с 4 к 6300
Принятие на вооруженно, гг. 1950 1952 ' Г956 1959
Таблица П2
Основные технические данные PH «Протон» по ступеням
Параметры I II III IV Значения
Длина, м 21 (центральный блок) 19,5 (боковой блок) 16 7 5,5 (с переходни- ком)
Диаметр, м 4 (центральный блок) 1,7 (боковой блок) 4 4 3,6
ДУ 6 ЖРД РД-253 4 ЖРД Косберга 1 ЖРД Косберга 1 ЖРД Косберга
Топливо НДМГ + NO, НДМГ + no4 НДМГ + no4 керосин 4- С>2Ж
Тяга ДУ, кН 6 X 1474 = 8844 4 X 600 - 2400 600 85
Удельный импульс И • с/кг Максимальная длина, м Максимальный диаметр (первая ступень), м Максимальный полезный груз, т на 200 км круговую орбиту на геостационарную на межпланетную Стартовая масса, т 3100 3430 около 60 7,4 20 - 2 4,6—5,7 700—750
Примечания: 1. PH «Протон» была разработана в 1961 —1965 гг.
2. Первый старт двухступенчатого варианта состоялся 16 июля 1965 года,
трехступенчатого — 16 ноября 1968 года и четырехступенчатого — 10 мар-
та 1967 года.
Таблица ПЗ
Основные технические данные МБР «Атлас»
Показатели Значения
Максимальная длина, м 20,54
Тяга стартовых двигателей, кН 1335
Время работы ДУ, с 140
Тяга маршевого ДУ. кН 267
Время работы маршевого ДУ, с 250
Стартовая масса, т 113,23
Таблица П4
Основные технические данные PH «Сатурн-5»
Показатели Значения
Габаритные размеры (совмест- но с КК «Аполлон»), м: я
длина 111
диаметр 10
размах по стабилизаторам 19,2
Масса конструкции, i
I РБ 131
II — » — 36,2
III — »- 13,3
Тяга ДУ, кН
I ступень 5 X 6900 = 34500
11 — » — 5 X 1040 = 5200
III —» — 925
Стартовая масса, т 2930
Масса полезного груза при вы- ведении на круговую орбиту высотой 190 км, т 137
Примечание. Для 1 ступени компонентами топлива являются жид-
кий кислород + углеводородное горючее RP-1, для II и III ступеней — жид-
кий кислород + жидкий водород.
95
Таблица П5
Лунные экспедиции по программе «Сатурн—Аполлон»
№ п/п Старт с Земли Члены экипажа Посадка на Луну Старт с Луны Возвращение на Землю Примечания
А-11 16.07.69 Н. Армстронг Э. Олдпин М. Коллинз То 4- 102 ч 45 м 40 с .То 4- 124 ч 23 м То 4- 195 ч 17 м 53 с ~
А-12 14.11.69 Ч. Конрад А. Бин Р. Гордон * 7о + 110ч 32 м 35 с То 4- 142 ч 3 м 47 с То 4- 241 ч 36 м 24 с —
А-13 11.04.70 Д. Донелл Ф. Хейс Д. Сгиджерт — — То 4- 142 ч 54 м Взрыв кислороднрго ба- ка от загоревшейся теп- лозащиты при замыка- нии проводов
А-14 31.01.71 А. Шепард Э. Д^итчелл С. Pvca То 4- 108 ч 55 м Го + 142 ч 25 м То 4- 216 ч 06 м —
А-15 26.07.71 Д. Скотт Д. Ирвин А. Уорден То + 104 ч 42 м То 4- 171 ч 38 м То 4- 295 ч 12 м Испытание новых ска- фандров. использование самоходной тележки при скорости 16 км/ч..
А-16 16.04.72 Д. Янг Ч. Дьюк Т. Магтипгли То 4- 98 ч 47 м То + 171 ч 45 »м Гб 4- 290 ч 36 м Три выхода на поверх- ность Луны. Поездки на луноходе
А-17 07.12.72 Ю. Сернан X. Шмитт Р. Эванс 11,12.72 15.12.72 19.12.72 Осуществлен телерепор- таж старта с Луны
ОГЛАВЛ ЕН И Е
Введение . . , • . • . • • , 3
1. Основные закономерности движения ЛА ... 5
1.1. Системы координат......................5
1.2. Основные соотношения реактивного движения . 8
1.3. Уравнения движения ЛА..............,9
2. Управление полетом ЛА......................15
2.1. Аэродинамические силы и моменты . . .15
2.2. Устойчивость и. управляемость ЛА . . .18
2.3. Аэродинамические органы управления . . 23
2.4. Газодинамические органы управления . . 29
3. Компоновка, конструктивно-силовые схемы и кон-
структивные особенности основных типов ЛА . .51
3.1. Общие требования к компоновке . . .51
3.2. Особенности конструкции зенитных управляе-
мых ракет....................................56
3.3. Компоновочные схемы баллистических ракет
и ракет-носителей космических аппаратов . . 64
3.4. Многоразовые транспортные КА . . . .79
Библиографический список..............................91
Приложение , . . . « . . -93