/





























































































































































































































































































Автор: Гантмахер Ф.Р.
Теги: общая механика механика твердых и жидких тел механика аналитическая механика
Год: 1966




Текст
Ф РГАНТМАХЕР
Лекции
АНАЛИТИЧЕСКОЙ
МЕХАНИКЕ
Ф. Р. ГАНТМАХЕР
ЛЕКЦИИ
по
АНАЛИТИЧЕСКОЙ
МЕХАНИКЕ
ИЗДАНИЕ ВТОРОЕ,
ИСПРАВЛЕННОЕ
Допущено Министерством
высшего и среднего специального образования РСФСР
в качестве учебного пособил
для высших учебных заведений
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1966
531
Г 19
УДК 531.011 (075.8)
АННОТАЦИЯ
Книга знакомит читателя с методами аналитической
механики и их приложениями в теории устойчивости по
Ляпунову, в теории колебаний и в динамике твердого
тела. Наряду с классическими методами теории коле-
баний излагаются и основы современных частотных
методов. Рассматриваются электромеханические анало-
гии, позволяющие распространить методы аналитиче-
ской механики на электрические и электромеханические
системы.
«Лекции» дают достаточно глубокий фундамент для
изучения специальной теории относительности, кванто-
вой механики и других разделов теоретической физики.
В них подробно освещаются вариационные принципы и
интегральные инварианты механики, канонические пре-
образования и уравнение Гамильтона — Якоби.
Книга предназначена для студентов и аспирантов ме-
ханико-математических и физических факультетов уни-
верситетов, а также для инженеров-исследователей и
других специалистов, желающих расширить и углубить
свои знания в области механики.
Феликс Рувимович Гантмахер
Лекции по аналитической механике
М., 1966 г., 300 стр. с илл.
Редактор Г. М. Ильичева
Техн, редактор Л. А. Пыжова Корректор О. А. Сигал
Сдано в набор 20/IX 1965 г. Подписано к печати 5/П 1966 г. Бумага 84X108Vs2.
Физ. печ. л. 9,375. Услови. печ. л. 15,75. Уч.-изд. л. 14,89. Тираж 25 000 экз.
Т-01459. Цена книги 62 коп. Заказ № 1975.
Издательство «Наука»
Главная редакция физико-математической литературы.
Москва, В-71, Ленинский проспект, 15.
Ленинградская типография № 1 «Печатный Двор» имени А. М. Горького
Главполиграфпрома Комитета но печати при Совете Министров СССР,
Гатчинская, 26,
2-4-2
34-66
Светлой памяти своего учителя
профессора механики
ГАВРИИЛА КОНСТАНТИНОВИЧА
СУСЛОВА
автор посвящает эту книгу
ОГЛАВЛЕНИЕ
Предисловие автора к первому изданию..................... 8
Предисловие ко второму изданию.......................... 10
Глава 1. Дифференциальные уравнения движения произ-
вольной системы материальных точек............ 11
§ 1. Свободные и несвободные системы. Связи и их клас-
сификация .......................................... 11
§ 2. Возможные и виртуальные перемещения. Идеальные
связи............................................... 15
§ 3. Общее уравнение динамики. Уравнения Лагранжа
первого рода........................................ 24
§ 4. Принцип виртуальных перемещений. Принцип Далам-
бера................................................ 30
§ 5. Голономные системы. Независимые координаты.
Обобщенные силы..................................... 40
§ 6. Уравнения Лагранжа второго рода в независимых
координатах......................................... 47
§ 7. Исследование уравнений Лагранжа............... 52
§ 8. Теорема об изменении полной энергии. Потенциаль-
ные, гироскопические и диссипативные силы........... 57
§ 9. Электромеханические аналогии.................. 63
§ 10. Уравнения Аппеля для неголономных систем. Псевдо-
координаты ......................................... 67
Глава II. Уравнения движения в потенциальном поле. . 77
§ 11. Уравнения Лагранжа в случае потенциальных сил.
Обобщенный потенциал. Ненатуральные системы ... 77
§ 12. Канонические уравнения Гамильтона............ 83
§ 13. Уравнения Рауса............................... 91
§ 14. Циклические координаты........................ 93
§ 15. Скобки Пуассона............................... 97
Глава Ш. Вариационные принципы и интегральные
инварианты..............................................103
§ 16. Принцип Гамильтона............................103
§ 17. Вторая форма принципа Гамильтона..............112
§ 18. Основной интегральный инвариант механики (инте-
гральный инвариант Пуанкаре — Картана)............. 113
6
ОГЛАВЛЕНИЕ
§ 19. Гидродинамическая интерпретация основного инте-
грального инварианта. Теоремы Томсона и Гельм-
гольца о циркуляции и вихрях ........................ 122
§ 20. Обобщенно-консервативные системы. Уравнения
Уиттекера. Уравнения Якоби. Принцип наименьшего
действия Мопертюи — Лагранжа..........................127
§ 21. Движения по инерции. Связь с геодезическими
линиями при произвольном движении консерватив-
ной системы......................................... 133
§ 22. Универсальный интегральный инвариант Пуанкаре.
Теорема Ли Хуа-чжуна .................................136
§ 23. Инвариантность объема в фазовом пространстве.
Теорема Лиувилля......................................142
Глава IV. Канонические преобразования и уравнение
Гамильтона — Якоби........................................146
§ 24. Канонические преобразования.....................146
§ 25. Свободные канонические преобразования...........150
§ 26. Уравнение Гамильтона — Якоби....................155
§ 27. Метод разделения переменных. Примеры............162
§ 28. Применение канонических преобразований в теории
возмущений............................................172
§ 29. Структура произвольного канонического преобразо-
вания ................................................174
§ 30. Критерий каноничности преобразования. Скобки Ла-
гранжа ...............................................180
§ 31. Симпле1уичность якобиевой матрицы канонического
преобразования ...................................... 183
§ 32. Инвариантность скобок Пуассона при каноническом
преобразовании ..................................... 186
Глава V. Устойчивость равновесия и движения системы 189
§ 33. Теорема Лагранжа об устойчивости положения равно-
весия ............................................... 189
§ 34. Признаки неустойчивости положения равновесия.
Теоремы Ляпунова и Четаева.......................... 197
§ 35. Асимптотическая устойчивость положения равнове-
сия. Диссипативные системы............................200
§ 36. Условная устойчивость. Общая постановка вопроса.
Устойчивость движения или произвольного процесса.
Теорема Ляпунова .....................................206
§ 37. Устойчивость линейных систем....................214
§ 38. Устойчивость по линейному приближению. .........219
§ 39. Критерии асимптотической устойчивости линейных
систем................................................224
Глава VI. Малые колебания . . . .......................230
§ 40. Малые колебания консервативной системы..........230
§ 41. Нормальные координаты...........................241
§ 42. Влияние периодических внешних сил на колебания
консервативной системы................................244
ОГЛАВЛЕНИИ
7
§ 43. Экстремальные свойства частот консервативной
системы. Теорема Релея об изменении частот с изме-
нением инерции и жесткости системы. Наложение
связей................................................246
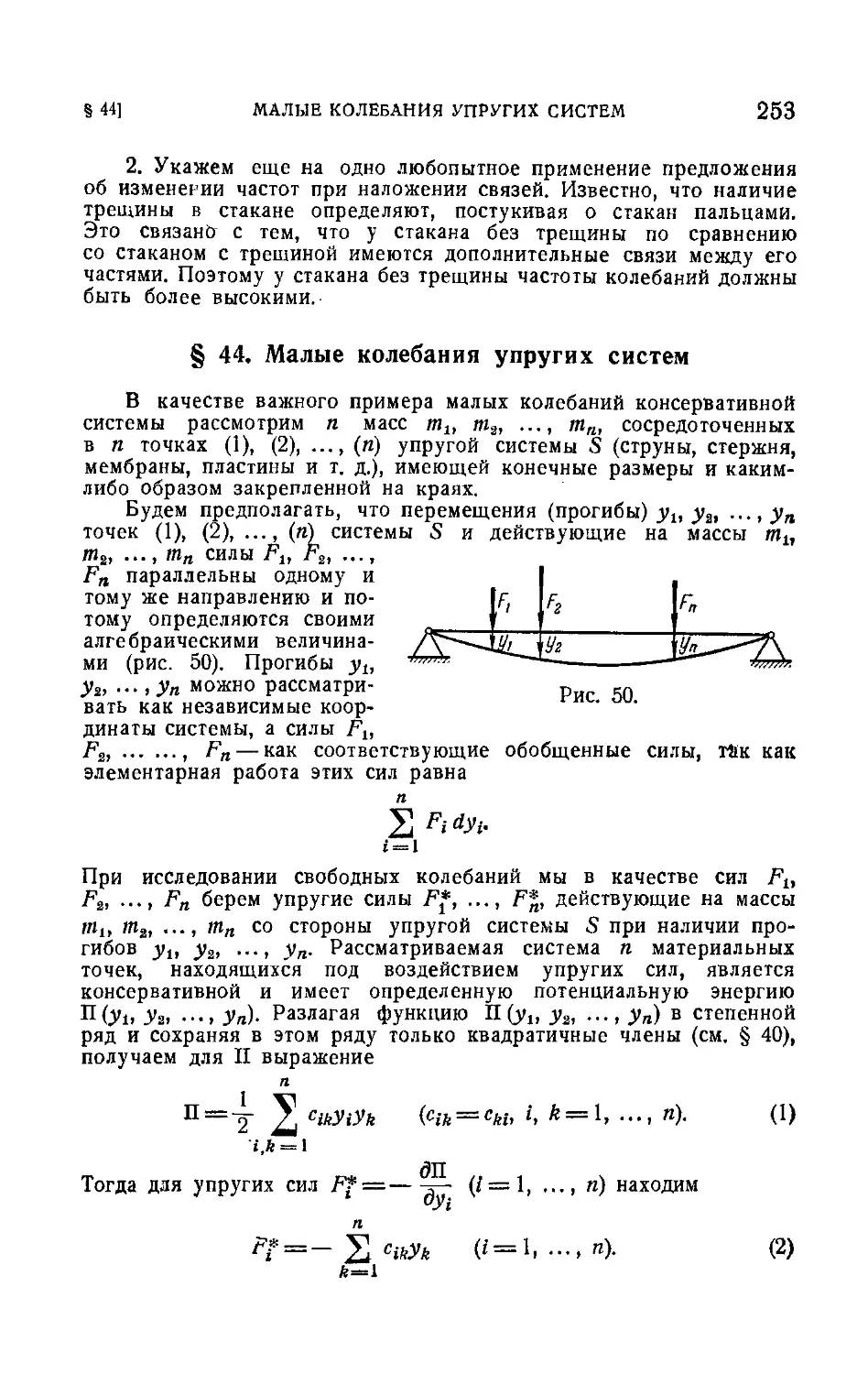
§ 44. Малые колебания упругих систем..................253
§ 45. Малые колебания склерономной системы под дей-
ствием сил, не зависящих явно от времени.............259
§ 46. Диссипативная функция Релея. Влияние малых дис-
сипативных сил на колебания консервативной системы 262
§ 47. Влияние внешней силы, зависящей от времени, на
малые колебания склерономной системы. Амплитудно-
фазовая характеристика .............................. 267
Глава VII. Системы с циклическими координатами...........274
§ 48. Приведенная система. Потенциал Рауса. Скрытые
движения. Концепция Герца о кинетическом проис-
хождении потенциальной энергии....................274
§ 49. Устойчивость стационарных движений..............285
Литература.............................................. 295
Именной указатель.........................................297
Предметный указатель......................................298
ПРЕДИСЛОВИЕ АВТОРА К ПЕРВОМУ ИЗДАНИЮ
В литературе по механике нет единого общепринятого
толкования термина «аналитическая механика». Некоторые
авторы отождествляют аналитическую механику с теорети-
ческой *). Другие считают, что определяющим признаком
аналитической механики является изложение в обобщенных
координатах. Третья точка зрения, из которой исходил автор
этой книги, назвав ее «Лекциями по аналитической механике»,
состоит в том, что аналитическая механика характеризуется
как системой изложения, так и определенным кругом вопро-
сов, в ней рассматриваемых.
Характерным для системы изложения аналитической меха-
ники является то, что в ее основу кладутся общие принципы
(дифференциальные или интегральные) и уже из этих прин-
ципов аналитическим путем получаются основные дифферен-
циальные уравнения движения. Изложение общих принципов
механики, вывод из них основных дифференциальных урав-
нений движения, исследование самих уравнений и методов
их интегрирования — все это составляет основное содержание
аналитической механики.
Аналитическая механика входит как часть курса теоре-
тической механики в программы механико-математических,
физических и инженерно-физических факультетов универси-
тетов и педагогических институтов. В то же время общая
программа по теоретической механике во втузах либо совсем
не содержит аналитической механики, либо содержит только
ее элементы. Между тем современная техника выдвигает
задачи, для решения которых недостаточно основ курса тео-
ретической механики, излагаемых в его традиционных раз-
делах «статика», «кинематика» и «динамика точки и системы».
Инженеры-исследователи, работающие в разнообразных
*) Так, например, известные курсы теоретической механики
Г. К. Суслова и Ш. Ж. Валле Пуссена были названы авторами кур-
сами аналитической механики.
ПРЕДИСЛОВИЕ АВТОРА К ПЕРВОМУ ИЗДАНИЮ
9
областях современной техники, должны владеть и общими
методами аналитической механики, которые дают универсаль-
ный аналитический аппарат для исследования сложных задач,
относящихся не только к чисто механическим, но и к электри-
ческим и электромеханическим явлениям.
Настоящая книга не претендует на полноту охвата мате-
риала по аналитической механике. Книга возникла из курса
лекций, читавшихся автором на протяжении последних шести
лет на 4-м семестре Московского физико-технического инсти-
тута. Это обстоятельство определило отбор материала и
характер его изложения.
Курс аналитической механики является фундаментом, на
который опирается изучение таких разделов теоретической
физики, как квантовая механика, специальная и общая теория
относительности и др. Поэтому в книге подробно осве-
щаются вариационные принципы и интегральные инварианты
механики, канонические преобразования, уравнение Гамиль-
тона — Якоби, системы с циклическими координатами (главы
П, HI, IV и VII). Следуя идеям А. Пуанкаре и Э. Картана,
автор кладет в основу изложения материала интегральные
инварианты механики, которые здесь являются не декоратив-
ным украшением теории, а ее рабочим аппаратом.
Технические приложения связаны с рассмотрением несво-
бодных систем. Эти системы подробно изучаются в главе I.
В специальном параграфе этой главы, посвященном электро-
механическим аналогиям, выясняется возможность распростра-
нения аналитических методов механики на электрические и
электромеханические системы. В главах V и VI даны прило-
жения аналитической механики к теории устойчивости Ляпу-
нова и теории колебаний. Наряду с классическими вопросами
теории линейных колебаний излагаются и элементы современ-
ных частотных методов. Задачи из динамики твердого тела
разбираются в отдельных примерах.
Книга предполагает у читателя знакомство с общими
основами теоретической механики и высшей математики. Книга
предназначается для студентов и аспирантов механико-мате-
матических, физических и инженерно-физических факультетов
университетов, а также для инженеров-иссае^ователей и дру-
гих специалистов, желающих расширить и углубить свои
знания в области механики.
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Второе издание книги подготовлено к печати уже после
смерти ее автора. Работа по подготовке этого издания была
выполнена кафедрой механики Московского физико-техничес-
кого института, которой в течение многих лет руководил
Ф. Р. Гантмахер. Ббльшая часть исправлений и дополнений,
сделанных в процессе этой работы, отражает пожелания и
замечания, высказанные автором сотрудникам кафедры. Не-
которые исправления обусловлены стремлением сделать текст
более доступным для студентов. Внося эти уточнения, кафед-
ра стремилась полностью сохранить специфические особен-
ности книги, в которой строгость выводов основных поло-
жений аналитической механики и лаконичность текста удиви-
тельным образом сочетаются с предельной ясностью изложения.
Август 1965 г.
М. А. Айзерман
ГЛАВА I
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
ПРОИЗВОЛЬНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
§ 1. Свободные и несвободные системы.
Связи и их классификация
Изучается движение системы материальных точек P.t (у =
= 1, А/) относительно некоторой инерциальной (гали-
леевой) системы координат. На положения и скорости точек
системы наложены ограничения геометрического или кинема-
тического характера, называемые связями. Системы с такого
рода связями называются несвободными в отличие от сво-
бодных систем, у которых подобные связи отсутствуют.
Аналитически связь выражается уравнением
/(t, г,, r,)=0‘), (1)
где в левую часть входят время t, радиусы-векторы г, и
скорости = всех точек системы (м = 1, ..., N).
*) Точка, поставленная над буквой, обозначает дифференциро-
вание соответствующей величины по времени. Все радиусы-векторы
строятся из одного и того же полюса, неподвижного в данной
системе координат. Далее, f(t, г,, представляет собой сокра-
щенное обозначение для функции f(t, rl> ..., г№ гх, ..., Гдг). По-
добного рода сокращенные обозначения будут употребляться на
протяжении всей книги. Если xv, у„ zv —декартовы координаты
точки Р„ в рассматриваемой системе координат 0=1, ..., N), то
функцию f можно считать функцией от 6А + 1 скалярных аргу-
ментов t, yv, z„ zv(m=1...............N). Относительно функ-
ции f, как и относительно всех функций, встречающихся в даль-
нейшем тексте, предполагается (при отсутствии соответствующих
оговорок), что эти функции непрерывны вместе с теми своими
производными, которые фигурируют в соответствующих местах
текста.
12
ДИФФЕРЕНЦИАЛЬНЫЙ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
В частном случае, когда скорости г, не входят в уравнение
связи (1), связь называется конечной или геометрической.
Ее аналитическая запись выглядит так:
f(t, г,) = 0. (2)
В общем же случае связь (1) называется дифференциаль-
ной или кинематической. В дальнейшем мы ограничимся
рассмотрением только таких дифференциальных связей, в урав-
нения которых скорости точек входят линейно:
N
+ = (3)
v = I
Здесь Z„r„ — скалярное произведение векторов Z, и г,,
а векторы Z, и скаляр D представляют собой заданные функ-
ции от t и всех (ji, v=l, N). При этом предпола-
гается, что векторы Z, не могут все одновременно обра-
щаться в нуль.
При наличии конечной связи вида (2) система не может
в каждый данный момент времени занимать произвольное
положение в пространстве. Конечная связь накладывает
ограничения на возможные положения системы в момент вре-
мени t. При наличии же только дифференциальной связи
система в любой момент времени t может иметь произвольное
положение в пространстве. Однако в этом положении ско-
рости точек системы уже не могут быть произвольными. Диф-
ференциальная связь накладывает ограничения на эти скорости.
Каждая конечная связь вида (2) влечет за собой как след-
ствие дифференциальную связь, уравнение которой полу-
чается почленным дифференцированием равенства (2):
V=s 1
где ^- = grad„/ (v = l, ..., N) *). Но такая дифференциаль-
ная связь не эквивалентна конечной связи (2). Она эквива-
*) Если г, +z,A, где Z, J, k — взаимно-ортогональ-
ные орты координатных осей, то
У =SF' + sp + ^‘ <’=>...............
§ 1]
СВОБОДНЫЕ И НЕСВОБОДНЫЕ СИСТЕМЫ
13
лентна конечной связи
f(t, Г,) = с, (5)
где с — произвольная постоянная. Поэтому конечная связь
(4) называется интегрируемой.
Заметим, что в прямоугольных декартовых координатах
уравнения связей (1) —(4) записываются так:
/ft *,> У» хч, z,) = 0, (V)
/.ft У» = 0> (2)
.V
£(4Д+в,л+ед+д=о*)> (зэ
V=1
1(^^+^.+<г.) + ^=о. (О
v= 1
Конечная связь (2) или (2') называется стационарной,
если t не входит явно в уравнение связи, т. е. если = 0.
В этом случае левая часть уравнения дифференциальной
связи (4) линейна и однородна относительно скоростей. По
аналогии с этим дифференциальная связь (3) или (3') назы-
вается стационарной, если 0 = 0 и векторы Z, в уравне-
нии (3) [соответственно коэффициенты Дч, Sv, С, в уравне-
нии (3')] не зависят явно от t.
Система материальных точек называется голономной,
если на точки этой системы не наложены дифференциальные
неинтегрируемые связи. Таким образом, голономной является
всякая свободная система материальных точек, а также не-
свободная система с конечными или дифференциальными, но
интегрируемыми связями. У голономной системы все связи
могут быть записаны в конечном виде.
При наличии дифференциальных неинтегрируемых связей
система называется неголономной * 2).
Система называется склерономной, если на нее наложены
только стационарные связи. В противном случае система
называется реономной.
*) Hv, В,, Cv (ч=1, ..., N) — скалярные функции от t, xlt ylt
Z1> ..., xN, yN, zN.
2) Часто и сами дифференциальные неинтегрируемые связи
называются неголономными. Иногда дифференциальные интегрируе-
мые связи называются полуголономными.
14
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. 1
Примеры. 1. Материальная точка может двигаться
только по поверхности. Пусть уравнение этой поверхности
задано в виде
/(г) = 0 (6)
или
/(х, у, г) = о. (6')
Это конечная стационарная связь.
Если поверхность подвижная или деформирующаяся, то в урав-
нение поверхности явно войдет время t:
f(f,r) = Q (7)
или
fit, х, у, 2) = 0. (79
В этом случае связь конечная, но нестационарная,
2. Две материальные точки соединены стержнем постоян-
ной длины I. В этом случае уравнение связи имеет вид
(n-rs)2-/s = 0 (8)
или
(A — х2)2 + (.V! — у 2)s + (zi — z2)8 — Р = 0. (8')
Это голономная склерономная система.
Заметим, что твердое тело можно рассматривать как систему
материальных точек, находящихся на неизменном расстоянии друг
от друга, т. е. подчиненных связям вида (8). С этой точки зрения
свободное твердое тело является частным случаем несвободной
голономной склерономной системы материальных точек.
3. Две материальные точки соединены стержнем переменной
длины I = f(t). Уравнение связи записывается так:
(А ~ А)2-/2 (0 = 0 (9)
или
(X! — х2)3 + (У! — у»2)3 + (Zi — z2)s—fs (t) = 0. (99
Это голономная реономная система.
4. Две материальные точки в плоскости соединены стерж-
нем постоянной длины I и могут двигаться только так, чтобы
скорость середины стержня была направлена вдоль стержня (дви-
жение конька по плоскости). Уравнения связей записываются
следующим образом:
z, = 0, z2 = 0,
(xl — x^-\-(yl—y^ — P^=Q,
а + а __ л+л
А —А 5’1—ь
(10)
Эта система неголономная, так как последнее из уравнений (10)
определяет дифференциальную неинтегрируемую связь.
§ 2] ВОЗМОЖНЫЕ И ВИРТУАЛЬНЫЕ ПЕРЕМЕЩЕНИЯ 15
Наряду со связями вида (1), которые называются удержи-
вающими, в механике рассматриваются также неудерживаю-
щие связи, которые записываются в виде неравенства
f(t, t\, rv)^0. (11)
В качестве примера можно рассмотреть две материальные
точки, соединенные нитью длиной I. Эта связь выражается нера-
венством
/2-(Г1-Г2)3^0. (12)
Если в условии (11) имеет место знак равенства, то говорят,
что связь напряжена.
Движение системы, на которую наложена неудерживаю-
щая связь, можно разбить на участки таким образом, чтобы
на одних участках связь была напряжена и движение про-
ходило так, как если бы связь была удерживающей, а на
других участках связь была не напряжена и движение про-
ходило так, как если бы этой связи не было. Таким обра-
зом, на отдельных участках неудерживающая связь либо
заменяется удерживающей, либо совсем отбрасывается. Исходя
из этого, мы в дальнейшем будем рассматривать исключи-
тельно удерживающие связи.
§ 2. Возможные и виртуальные перемещения.
Идеальные связи
Пусть на материальную систему наложены d конечных
связей
fAt, Г,) = 0 (а=1, (1)
и g дифференциальных ’)
(p=i, .... g). (2)
»=i
Заменим конечные связи вытекающими из них дифферен-
циальными:
2<t’-+T=0 <“='..............."О-
У = 1
*) В уравнениях дифференциальных связей мы вместо rv пи-
шем
16
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
{ГЛ- I
Систему векторов будем называть возможными скоро-
стями для некоторого момента времени t и для некоторого
возможного в этот момент положения системы, если векторы
удовлетворяют d-\-g линейным уравнениям (2) и (3).
Таким образом, возможные скорости — это скорости,
допускаемые связями. Для каждого возможного положения
системы в момент времени t существует бесчисленное множе-
ство систем возможных скоростей. При действительном дви-
жении системы в момент t реализуется одна из этих систем
скоростей.
Систему бесконечно малых перемещений
dr, = v,dt (v== 1, .... A/), (4)
где ®,(v = l, ..., N) — возможные скорости, будем назы-
вать возможными бесконечно малыми перемещениями или
для сокращения просто возможными перемещениями. Умно-
жив уравнения (2) и (3) почленно на dt, получим уравнения,
определяющие возможные перемещения:
<•='......
’ = 1 (5)
N V 7
(p=i......g).
Возьмем две системы возможных перемещений для одного
и того же момента времени и для одного и того же поло-
жения системы:
dr, = v,dt и d'r, = v\dt (v = l, ...; JV).
Как dr,, так и tfr, удовлетворяют уравнениям (б), а разности
or, = d'r, — dr, (v=l, ..., N) (6)
удовлетворяют однородным соотношениям:
n
^-Sr. = O = d),
„ ст
S^8r,=0 (₽ = l,...,g).
V=1
§ 2]
ВОЗМОЖНЫЕ И ВИРТУАЛЬНЫЕ ПЕРЕМЕЩЕНИЯ
17
Разности 3rv = d’r4— dr, будем называть виртуальными
перемещениями. Всякая система векторов Зг„ удовлетво-
ряющая уравнениям (7), представляет собой систему виртуаль-
ных перемещений. Уравнения (7) для виртуальных перемеще-
ний отличаются от уравнений (5), определяющих возможные
перемещения, отсутствием членов ~^dt и Dylt. Поэтому
говорят, что виртуальные перемещения совпадают с воз-
можными перемещениями при «замороженных» связях.
Действительно, при «замораживании» время t, входящее
в уравнения конечных связей, фиксируется, т. е. связь как бы
застывает в той конфигурации, которую она имела в момент I.
Тогда при дифференцировании функций члены ^pdt не
появляются и первые d уравнений (б) совпадают с соответ-
ствующими уравнениями (7). Для дифференциальной связи
«замораживание» означает придание ей стационарного харак-
тера, т. е. отбрасывание D? в левой части уравнений связи
и фиксирование t, явно входящего в коэффициенты После
этого и последние g уравнений (5) совпадают с соответ-
ствующими уравнениями (7).
Можно еще сказать, что виртуальные перемещения пред-
ставляют собой перемещения точек системы из одного
возможного положения системы
в момент t в другое бесконечно
близкое, возможное для того же
самого момента времени t по-
ложение системы.
При стационарных связях
виртуальные перемещения сов-
падают с возможными.
Примеры. 1. Точка движет-
ся по неподвижной поверхности
(рис. 1).
В этом случае любой вектор с,
построенный из точки Р и каса-
тельный к поверхности в этой точке, будет представлять собой
возможную скорость. Соответствующее возможное перемещение
dr = с dt также лежит в плоскости, касательной к поверхности
в точке Р. Разность 8r = d'r —dr двух касательных векторов
в свою очередь представляет собой вектор, касающийся поверхности
в той же точке. Таким образом, любой вектор, построенный из
18 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ [ГЛ. I
точки Р и лежащий в касательной плоскости, можно рассматривать
как некоторое dr и как некоторое 8г. В данном примере связь
стационарна и виртуальные перемещения совпадают с возможными.
2. Связь представляется поверхностью S, которая сама дви-
жется (как твердое тело) с некоторой скоростью а относи-
тельно исходной системы коор-
динат (рис. 2).
В этом случае возможная
скорость ч> получается из про-
извольного вектора каса-
тельного к поверхности, при-
бавлением к нему скорости и:
ч> - -f- и.
Поэтому
dr = v dt = dt + и dt.
Аналогично для другого воз-
можного перемещения
d'г = dt + и dt
и виртуальное перемещение
Ъг — d'r — dr — (®J — Vj) dt
представляет собой, в отличие от dr, вектор, лежащий в плоскости,
касательной к поверхности в точке Р (рис. 3). Вектор 8г предста-
вляет собой возможное переме-
--------------— т» f*1* щение для «остановленной» по-
верхности 8.
X В декартовых коорди-
' натах вектор 8г, характе-
Рис- Зф ризуется тремя проекциями
на оси 8х,, 8j„ 8г, (v =
= 1, ..., N), и уравнения (7), определяющие виртуальные
перемещения, могут быть записаны в следующем виде:
V = 1
N
2 (Xp,8x,4-5₽,8j, + C 8z,) = 0 (р = 1, .... g).
V = 1
Если эти d-\-g уравнений независимы, то среди ЗА/
виртуальных приращений координат 8х,, By,, 8z, будет
5 2] ВОЗМОЖНЫЕ И ВИРТУАЛЬНЫЕ ПЕРЕМЕЩЕНИЯ
19
п 3N — d — g независимых. Число п называется числом
степеней свободы данной системы материальных точек.
Пусть в точках системы приложены соответственно
силы Z\(v = l, ..., N) *). Если бы связи отсутствовали, то,
согласно второму закону Ньютона, между массами уско-
рениями и силами F, имели бы место соотношения m^ise^F^
(м = 1, ..., N). При наличии связей ускорения =
могут оказаться (в данный момент времени t, в данном поло-
жении точек системы г, и при заданных скоростях vv) несов-
местимыми со связями. Действительно, продифференцировав
почленно равенства (3) и (2) по времени, мы получим ана-
литическое выражение для ограничений, накладываемых свя-
зями на ускорения w, точек системы* 2):
О (а== 1, ..., d),
О (? = 1, .... g).
(8)
Ускорения F, могут не удовлетворять этим соот-
ношениям. Тогда материально осуществленные связи действуют
на материальные точки системы с некоторыми дополни-
тельными силами &v(v = l, ..., Д/); эти силы воздействия
связей /?, носят название реакций связей3). Возникающие
реакции таковы, что ускорения, определяемые из уравнений
m^S}^ — F4 (v= 1Л ..., А7), (9)
уже допускаются связями.
В отличие от реакций = ..., N) заранее задан-
ные силы (ч - 1, ..., N) называются активными силами.
*) Под F4 мы понимаем равнодействующую всех сил, приложен-
ных непосредственно к материальной точке (т=1, ..N).
2) Левые части в соотношениях (8) линейно зависят от уско-
рений «!,. Эти левые части, как легко усмотреть после выполнения
дифференцирования, зависят еще и от Г, г,, о., (т= 1, ..N).
•) При наличии нескольких связей есть равно-
действующая всех реакций связей для точки (v=l N).
20
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Активные силы обычно задаются как известные функции от
времени, положения и скоростей точек системы *):
F,=F,(f, r^) (v = l, (10)
Основная задача динамики несвободной системы состоит
в следующем.
Заданы активные силы Fy = F^(t, г^, даД и даны сов-
местимые со связями начальные положения г? и началь-
ные скорости точек системы 0 = 1, ..., N). Требуется
определить движение системы и реакции связей R4
0 = 1, .... А/)3).
Если относительно характера связей ничего неизвестно,
кроме определяющих уравнений (1) и (2), и, следовательно,
ничего неизвестно относительно вызываемых этими связями
реакций R^, то сформулированная выше задача является не-
определенной, так как число подлежащих определению ска-
лярных величин х,, y.t, R..x, R^y, R^ большие числа имею-
щихся скалярных соотношений — уравнений даД, = F,x -{- R.lX,
my^ — T'A-R^, mJSv=F^-\-R^ и уравнений связей (1)
и (2) [6ЛГ>ЗЛ'-|-(/4-Й-
Для того чтобы основная задача динамики стала опреде-
ленной, необходимо иметь какие-то дополнительные 6А^-(ЗЛЦ-
-J-rf-рё') —— g—n независимых соотношений между
искомыми величинами. Эти соотношения мы получим, если
ограничимся важным классом идеальных связей.
Связи называются идеальными, если сумма работ реак-
ций этих связей на любых виртуальных перемещениях
всегда равна нулю, т. е. если
и
2/?>, = 0. (11)
V=1
Это равенство можно переписать и в развернутом виде:
лг
S + Rvfyv + R.JzJ = 0. (1 Г)
V=1
9 В общем случае правые части в равенствах (10) зависят
по.мимо t от всех и (ц = 1.........А).
2) В случае свободной системы задача определения реакций
отпадает и остается только задача определения движения системы.
« 2]
ВОЗМОЖНЫЕ И ВИРТУАЛЬНЫЕ ПЕРЕМЕЩЕНИЯ
21
Среди 37V величин Bjc„ Зу„ В_г„ имеется п независимых
(« = ЗМ— d—g—число степеней свободы данной системы).
Поэтому в равенстве (1Г) можно выразить 3Af—п зависимых
приращений 8х,, 8у„ В^ через п независимых приращений
и приравнять нулю коэффициенты при этих независимых
приращениях. Тогда мы получим недостающие п соотноше-
ний, благодаря которым основная задача динамики несвобод-
ной системы становится определенной.
Естественность и практическая важность выделенного нами
класса связей станут ясными после рассмотрения следующих
примеров идеальных связей.
Примеры. 1. Материальная точка вынуждена двигаться по
неподвижной гладкой поверхности (рис. 4).
В этом случае любое возможное перемещение dr, как и любое
виртуальное перемещение Ъг, лежит в плоскости, касательной
к поверхности в точке Р, а реакция гладкой поверхности напра-
влена по нормали к поверхности в этой точке; поэтому всегда
Rdr — 0 ИЛИ /?6г = 0.
2. Материальная точка вынуждена двигаться по подвижной
или деформирующейся гладкой поверхности (рис. 5).
В этом случае возможная скорость материальной точки и, сле-
довательно, бесконечно малое перемещение dr = v dt уже не лежит
в касательной плоскости (см. пример 2 на стр. 18). Виртуальное же
перемещение 6г, которое представляет собой бесконечно малое
возможное перемещение для «остановленной», или «замороженной»
поверхности, лежит в касательной плоскости. Поскольку реакция и
в случае подвижной или деформирующейся гладкой поверхности
22
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. t
направлена по нормали к поверхности, то Я 8/' = 0 (в то время как
Rdrz£ 0).
Таким образом, гладкая поверхность, как неподвижная, так
и подвижная или деформирующаяся, представляет собой идеаль-
ную связь.
Пример 2 наглядно поясняет, почему при определении
нестационарных идеальных связей необходимо приравнивать
нулю работу сил реакций на
s'*** произвольных виртуальных, а
не возможных перемещениях.
В дальнейших примерах мы
I встретимся уже только со ста-
/С / ционарными связями1).
\ h
„ \ / 3. Две материальные точки
Г|\ / соединены стержнем неизмен-
ной длины с пренебрежимо малой
q массой (рис. 6).
Обозначим через и Ra
"ис- °. реакции связи, приложенные к ма-
териальным точкам Pi и Р2. Тогда
согласно третьему закону Ньютона на стержень действуют силы
Л\ = — и JV8 =— R2. Обозначая через т н w массу стержня
и ускорение его центра инерции, а через I и е — центральный мо-
мент инерции и угловое ускорение, будем иметь:
т — Л\ Nlt h L,
где L — суммарный момент сил Ni и Na относительно центра инер-
ции. Но, по условию, т — 0 и 7 = 0. Следовательно, ^4-^=0 и
L = 02). Из этих равенств следует, что силы Ni и Na, а значит,
и Ri и Rs прямо противоположны, т. е. направлены вдоль стержня.
Далее,
ЯЛЛ + Я28г8 = R1dr1 Radra = Rs (dra — drj = Rad (r8 —
J) Из определения идеальных связей вытекает, что нестацио-
нарная связь является идеальной, если идеальными являются все ее
конфигурации в различные моменты времени, рассматриваемые как
стационарный связи.
а) Если движение стержня не плоскопараллельное, то скаляр-
ное равенство Ii — L заменяется векторным ^-(?и) = L, где 7 —
тензор инерции, а <в — угловая скорость. Из равенства 7=0 снова
следует L — 0.
§2)
ВОЗМОЖНЫЕ И ВИРТУАЛЬНЫЕ ПЕРЕМЕЩЕНИЯ
23
Пусть ^3 = с(г2 — г,). Тогда
«Гт + Л2 = с (rs — rt) d (rs — rt) = -^-d (rg — r,)a = 0,
поскольку (r2 — fj)2 = const.
Можно считать, что абсолютно твердое тело является системой
материальных точек, в которой на любые две точки наложена связь
рассматриваемого типа. Поэтому твердое тело можно считать
системой материальных точек, подчиненных идеальным связям. При
отсутствии других связей, кроме связей, осуществляющих жесткое
соединение точек тела между собой, твердое тело называется сво-
бодным.
4. Два твердых тела шарнирно соединены в точке А (рис. 7).
Пренебрегая массой и размерами шарнира, можно утверждать (как
и в предыдущем примере), что Rt Rs = 0. Но тогда
Rt Ъг + Rsir = (/?! + J?2) 8г = 0.
5. Два твердых тела при движении соприкасаются идеально
гладкими поверхностями. (Трением пренебрегаем!) (рис. 8). В этом
случае снова Z?i+^a = 0. При этом Rt и Ra направлены по об-
щей нормали к поверхностям. С другой стороны, относительная
скорость этих тел в месте соприкосновения ®2 — а значит, и раз-
ность возможных перемещений drs — dt\ = (®2 — ®i) Л лежат в об-
щей касательной плоскости. Поэтому
+ Rs = Rt drt + /?а dra — Rs (dra — dr J = 0.
6. Два твердых тела при движении соприкасаются идеально
шероховатыми поверхностями («зубчатое зацепление»), В этом
случае относительная скорость скольжения равна vs — =® 0. Сле-
довательно, и drs—drl = (vi — Vi) dt~O. Поэтому и здесь
Ri + Rs = Rs (drs — dr J = 0.
Сложный механизм можно рассматривать как систему
твердых тел, которые попарно либо соединены между собой
24
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
жестко или шарнирно, либо соприкасаются своими поверх-
ностями. Если считать все жесткие соединения абсолютно
жесткими, все шарниры — идеальными, все соприкасающиеся
плоскости — идеально гладкими или идеально шероховатыми,
то любой сложный механизм можно трактовать как
систему материальных точек, подчиненную идеальным
связям.
Заметим, что во многих случаях подобная идеализация
не является допустимой. Так, например, пренебрежение си-
лами трения может иногда существенным образом исказить
физическую картину явления. В этом случае условие идеаль-
ности связей следует отбросить и вместо него взять другие
условия, вытекающие из характера связей и законов трения.
Однако можно поступить иначе. Можно и в этих слу-
чаях считать связи идеальными, учитывая при этом только
нормальные составляющие реакций негладких поверхностей
и рассматривая силы трения как неизвестные активные силы.
Появление новых неизвестных компенсируется дополнитель-
ными соотношениями, получаемыми из экспериментальных
законов трения.
При такой трактовке понятия идеальных связей примени-
мость этого понятия становится практически универсальной.
В дальнейшем всегда предполагается, что все связи,
наложенные на систему, являются идеальными.
§ 3. Общее уравнение динамики. Уравнения Лагранжа
первого рода
Для материальных точек несвободной системы имеют место
уравнения
= 0 — 1, ... , N), (1)
где т,— масса v-й точки, — ее ускорение, a F, и /?,—
соответственно равнодействующая активных сил и равнодей-
ствующая сил реакций, действующих на эту точку 0 — 1,..., д/).
Поскольку связи идеальны, то в любом положении' системы
при любых виртуальных перемещениях
2XSrv = 0- (2)
§ 3] ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ 25
Подставляя сюда вместо реакций Rv их выражения из урав-
нений (1) и умножая обе части полученного равенства на
— 1, получаем
n
2 (Л — = (3)
V=1
Равенство (3) называется общим уравнением динамики.
Это равенство утверждает, что при движении системы в любой
момент времени сумма работ активных сил и сил инер-
ции на любых виртуальных перемещениях равна
нулю.
Таким образом, общее уравнение динамики всегда выпол-
няется для любого совместимого со связями движения, соот-
ветствующего заданным активным силам /\(у=1, ..., /V).
Пусть теперь, наоборот, дано некоторое совместимое
со связями движение системы, для которого выполняется
общее уравнение динамики (3); Тогда, полагая
Z?v = (у = 1, .... N),
будем иметь равенства (1) и (2). Таким образом, в любой
момент времени можно подобрать такие реакции Rv, которые
в силу равенства (2) были бы допустимыми для данных свя-
зей и при которых имеют место полученные из второго
закона Ньютона уравнения (1). Мы считаем, что эти реак-
ции R4 в действительности реализуются («гипотеза о реа-
лизации допустимых реакций») и что, следовательно, рас-
сматриваемое движение соответствует данным активным
силам F^(t, Гр Фр.) (у=1, ..., N). Таким образом, общее
уравнение динамики выражает необходимое и достаточ-
ное условие для того, чтобы движение, совместимое
со связями, соответствовало заданной системе актив-
ных сил F„ (у = 1,..., N)1).
Найдем выражения для реакций R^ с помощью так назы-
ваемых неопределенных множителей Лагранжа. Выпишем со-
отношения, определяющие виртуальные перемещения точек
1) При этом не следует забывать, что общее уравнение дина-
мики (3) представляет собой, по существу, не одно уравнение,
а систему уравнений, поскольку для любого момента времени t
в уравнение (3) вместо 6rv(v=l, N) можно подставить произ-
вольные виртуальные перемещения.
26
Дифференциальные уравнения движения
[гл. i
системы (см. § 2):
N
2^Sr’ = 0 (a==1-..., d), (4)
d = 1 *
N
= ° ....(5)
» = 1
Умножая почленно равенства (4) и (б) на произвольные ска-
лярные множители — Ха и — и складывая почленно полу-
ченные равенства с равенствомР (2), получаем:
N / d g \
2 *•- 2х-х~ 2 w8г’=0- <6)
v=l \ а =1 ₽ = 1 /
В развернутом виде это соотношение запишется так:
дг / d g \
v.= l\ ,= 1 ’ Р = 1 /
Здесь мы через {у}, и {г}, сокращенно обозначили выраже-
ния, которые отличаются от выписанного в формуле (6') ко-
эффициента при 8х, заменой букв х, А на у, В или на z, С
соответственно.
Соотношения (7') § 2 позволяют выразить d-\-g из ЗМ
виртуальных приращений 8х,, fry,, 8г, через остальные
n = ^N—d— g приращений. При этом определитель J, со-
ставленный из коэффициентов при «зависимых» приращениях
в уравнениях (7') § 2, отличен от нуля.
Подберем d-\-g множителей Ха и р так, чтобы в равен-
стве (6') коэффициенты при d -}- g «зависимых» приращениях
обратились в нуль. Это можно сделать, и притом единствен-
ным образом, ибо определитель J из коэффициентов при оп-
ределяемых величинах Ха, не равен нулю. После этого в
равенстве (6') остаются только слагаемые с независимыми
приращениями ox,, 8_у„ 8г,. Но тогда и коэффициенты при
этих независимых приращениях также должны быть равны
нулю.
Иначе говоря, 'неопределенные множители Хя и могут
быть подобраны так, чтобы все скалярные коэффициенты
§ 3] ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ 27
в равенстве (6') и, следовательно, все векторные коэффи-
циенты в равенстве (6) обращались в нуль. Но тогда
d g
*= 2 х«>+2 о—1’.... М. (7)
« = 1 0=1
Мы получили общее выражение для реакций идеальных
связей через неопределенные множители Лагранжа Ха, р.
(а = 1, ₽ = 1, g).
Подставляя выражения (7) для в уравнение (1), мы
получим так называемые уравнения Лагранжа первого рода1):
d g
m^ = F^ 2 2 (V==1’ •••>
а = 1 ’ 0 = 1
К этим уравнениям следует еще прибавить уравнения связей:
N
Д(г,) = 0, 2Wv+^ = 0(a = l, ? = 1, ...,g). (9)
v = 1
Заменяя каждое векторное уравнение тремя скалярными,
мы можем считать, что уравнения (8) и (9) составляют систему
из скалярных уравнений с 3A7-|-<Z-]-g неиз-
вестными скалярными величинами _у,, г,, Ла, р.. Интегри-
руя эту систему, мы получаем конечные уравнения движения
и одновременно из равенств (7) — величины реакций связей.
Однако интегрирование такой системы обычно весьма затруд-
нено из-за большого числа уравнений. Поэтому уравнения
Лагранжа первого рода практически мало применяются.
В § 6 и § 10 мы получим уравнения Лагранжа второго рода
для голономной системы и уравнения Аппеля для неголоном-
ной системы; в этих уравнениях число неизвестных скалярных
величин (и, следовательно, число уравнений) равно 3N—d,
т. е. на 2d-\-g единиц меньше, чем в системе уравнений
(8) и (9).
*) Эти уравнения были получены французским математиком и
механиком Ж. Лагранжей в его знаменитом трактате «Аналити-
ческая механика», опубликованном в 1788 г. (русский перевод т. I
вышел в 1938 г., т. II — в 1950 г.). В этом трактате впервые были
изложены основы аналитической механики.
28
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Пример. Две весомые материальные точки Л1, и Л12 с оди-
наковой массой т = 1 соединены стержнем неизменной длины I
с пренебрежимо малой массой. Система может двигаться только
в вертикальной плоскости и только так, что скорость середины
стержня направлена вдоль стержня. Определить движение точек
и Ms.
Пусть х1( У1 и xs, ys — координаты точек и Ма. Запишем
уравнения связей:
1 [(х2-хд* + (Уа-уд*-Р} = о, )
z (W)
(ха — хО (Л + Л) — (А + -*i) (Л — л) = 0. J
Уравнения Лагранжа с неопределенными множителями X и р
имеют вид
и
•^1 — (х2 -*i) Р* (Уг .Vi)»
Л = — S — х (Л — ь) + И (*8 — -«1)
х2 = X (х2 — х0 — р. (j2 — уд,
J’s =—g + х 0's — Л) + Р (ха — Хд-
(И)
(12)
Из уравнений (11) с учетом первого уравнения (10) определим X и р:
О' 1
Х — ~ja (Уа —Уд l(xs хд А Ч" (Уа —.У1).У1]>'
g 1 (13)
р =7г(ха — xi) — -р [(№—Л)А — (ха — хдЛ].
Заметим, что уравнения (12) получаются из уравнений (11), если
в последних заменить X на —X и xIt jij — на xs, ji2. Поэтому,
определяя X и р из уравнений (12), находим
О' 1
х = -уг (Л—л) + -? [(-«з — *j) Л + Су» —У1)ь1,
ОТ 1
Р = (х2 — Х1) — [Су2 —уд л — (х2 — Xj) ji2].
(14)
Приравняв между собой соответствующие выражения для р и X
в формулах (13) и (14), после элементарных преобразований получим
(Л2 — Яд (У а—Уд — (У а — Л) (ха ~ хд = 0,
(А + *д (ха — хд + (& + $д (Уа — Уд + 2^ (Уа — Уд — 0.
Введем сокращенные обозначения:
U = xs— х„ v=ys—yt, Р = Я1-\-Яа, £=Л+Л- О6)
§ 3]
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
29
Тогда уравнения (10) и (15) перепишутся так:
и2 + Vs — Is, )
йо —ut) = 0, f
Pv — Qu = 0,
Ри + Qv + 2gv = 0.
(17)
(18)
(19)
Равенства (17) показывают,
с координатами и, v движется
в начале координат, причем ее
к центру. Но тогда движение
Поэтому
u — l cos ср, v = I sin ср,
что в плоскости («, о) точка
по кругу радиуса I с центром
ускорение все время направлено
этой точки будет равномерным.
$ — а = const, ср = at (20)
Согласно равенству (18) можно положить
Р = = (21)
Подставляя эти выражения в равенство (19) и учитывая равен-
ства (17) и (20), найдем
• 2^ •
/:4--y-v = 0, т. е. /=—2g sin ср.
Тогда
df 1 • 2g . 2g
-4- =—f=--------— sin ср и / = — cos ф2v.
d<f а а т а 1,1
Следовательно, в силу равенств (20) и (21), имеем
Р = 2 fy 4- ~ cos <f\ cos ср, Q = 2 (у 4- — cos cp^ sin cp. (22)
Интегрируя, находим
xi + хг — f Р & = у f Р dfij=
. Р* £Г
= — sin ср 4-— sin ср cos 9+-jj-? 4-28,
(23)
2”Y S
Vi +л =-----------cos ? — р cos2 Ч 4- 2s.
30
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Из равенств (16), (20) и (23) окончательно получим
= 1- sin? + X sin <j> cos ? <f — -L cos <p + 8,
У1 =— ~ cos <p — cos8 <p — ~ sin <p + e,
xa = ^sin? + ^sin?cos<p + ^L<p + -l cos? + 8, ' (24)
y2= — ~~ cos — X cos8 <p + -g-sin <pe,
<p = at p
(a, ₽, 1> *, E — произвольные постоянные).
§ 4. Принцип виртуальных перемещений.
Принцип Даламбера
. Положением равновесия называется такое положение
системы, в котором система будет находиться все время,
если в начальный момент времени она находилась в этом
положении и скорости всех ее точек были равны нулю.
Положение системы г? (ч = 1, А/) будет положением
равновесия в том и только в том случае, когда «движение»
r,(O = rJ(v = l, ..., А/) удовлетворяет общему уравнению
динамики, т. е. когда в этом положении системы
2^Brv = °- (1)
v = l
Равенство (1) выражает собой принцип виртуальных
перемещений.
Для того чтобы некоторое (совместимое со связями)
положение системы было положением равновесия, необ-
ходимо и достаточно, чтобы в этом положении сумма
работ активных сил на любых виртуальных перемеще-
ниях системы равнялась нулю.
Обычно принцип виртуальных перемещений применяют
к стационарным связям. Если связи стационарны, то термин
«совместимое со связями» означает, что положение системы
удовлетворяет конечным связям. Дифференциальные же связи,
будучи линейными и однородными относительно скоростей,
§ 4j Принцип виртуальных перемещений 31
автоматически удовлетворяются, поскольку мы полагаем
®, = 0 (v = l, Д).
Если связи нестационарны, то термин «совместимое со свя-
зями» означает, что они удовлетворяются при любом t, если
в них положить г, = г? и ®, = 0 (v = l.........N). Заметим,
что в этом случае при различных t могут быть различными
и виртуальные перемещения (v = l, ..., N).
В общем случае силы F, зависят от t, г^, N):
F.i = F.l(t, Гр «ц) (v=l,..., N). Тогда предполагается, что
равенство (1) имеет место при любом значении t, если
в выражении для F, положить все Гц = г£, и все ^=<0.
В простейших частных случаях принцип виртуальных переме-
щений (или как его иногда называют в применении к склероном-
ным системам, принцип возможных перемещений) был известен
еще во времена Галилея под названием «золотого правила
механики»1).
Пусть на концы невесомого рычага, находящегося в равновесии,
действуют силы Z=i и Fs. Тогда, обозначая через F( и F't касатель-
ные (к возможным траекториям) составляющие этих сил, а через
Wi и W2 — величины соответствующих элементарных возможных пере-
мещений, мы в силу равенства (1) с точностью до знака будем иметь:
F[ W, = 8Z3,
т. e.
(выигрыш в силе компенсируется проигрышем в перемещении и
наоборот — «золотое правило механики»).
Принцип виртуальных перемещений представляет собой
самый общий принцип аналитической статики. Из него можно
получить условия равновесия любой конкретной механической
системы.
Примеры. 1. Выведем из равенства (1) условия равновесия
свободного твердого тела, обычно получаемые в курсах механики
из соображений геометрической статики. Обозначая через v0 ско-
рость какой-либо точки твердого тела, через w — угловую скорость
тела, через F и Lo-—главный вектор и главный момент относитель-
но полюса О для системы внешних сил, действующих на твердое
1) Галилей приписывал обоснование «золотого правила меха-
ники» Аристотелю. В общей формулировке принцип виртуальных
перемещений встречается впервые у Иоганна Бернулли в 1717 г.
32
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
тело, мы приравниваем нулю выражение1) для элементарной
работы сил, приложенных' к твердому телу на произвольном бес-
конечно малом перемещении этого тела:
8А _ (Лоо 4- £ои) dt = 0. (2)
В силу произвольности векторов v0 и <в равенство (2) может
иметь место тогда и только тогда, когда
Г=0, Ао = 0. (3)
Эти равенства представляют собой необходимые и достаточные
условия равновесия свободного тела.
Аналогично получаются условия равновесия несвободного
твердого тела. Пусть, например, точка О закреплена. Тогда vo = 0
и равенство (2) имеет вид 6А = Lo<& dt = 0, откуда, в силу произ-
вольности вектора <в, получаем искомое условие равновесия: £о=0.
Если тело может только вращаться вокруг неподвижной оси и
(с ортом е), то равенства (2) принимают форму 6А = Lou>e dt = 0,
откуда, в силу произвольности величины и, следует условие равно-
весия La — 0; здесь La = Loe — главный момент внешних сил отно-
сительно оси и.
2. Выведем условия равновесия произвольной несвободной
системы твердых тел, находящихся под действием силы веса.
Обозначим через М сумму масс всех тел и через zc — вертикаль-
ную координату центра тяжести системы тел (считаем ось г на-
правленной вертикально вниз). Тогда, согласно равенству (1), получим:
БА = A'fg' Bze = 0,
и, следовательно, условия равновесия системы имеют вид
4 = 0. (4)
Таким образом, положениями равновесия системы тяжелых тел
будут положения, в которых центр тяжести занимает наинизшее,
1) Равенство BA = (FVp + Lom) dt может быть получено следую-
щим образом. Обозначим через Fi силы, действующие на точки твер-
дого тела, через гг и — радиусы-векторы (проведенные из точки О
тела) и скорости точек приложения сил Fi(l = \, 2,.,.) соответ-
ственно. Тогда, обозначая знаком X векторное умножение, найдем
8А = 2^4 = ^Fividt = ^lFi(v0 + <a xrt)dt =
= ^2] X Fij dt
(замена Вг; на dri = dt законна в силу того, что твердое тело
является склерономной системой; см. стр. 14). Но в силу третьего
закона Ньютона главный вектор и главный момент внутренних сил
в твердом теле равны нулю. Поэтому X Ft = L0.
§ 41
Принцип виртуальных перемещений
33
наивысшее или какое-либо другое «стационарное» положение по
вертикали («принцип Торричелли»),
3. Форма равновесия тяжелой однородной цепи, закреплен-
ной в двух точках. Рассматривая тяжелую однородную цепь как
систему твердых тел (звеньев), можно написать соотношение (4).
Но (см. рис. 9, где Охг— вертикальная плоскость, z— вертикаль)
и поскольку длина однородной цепи
при перемещениях не меняется, то
условие (4) принимает вид
8 z ds = 0. (5)
Это соотношение можно записать
и так:
Как устанавливается в вариационном исчислении, в классе
кривых x=/(z), проходящих через заданные две точки, кривая,
сообщающая интегралу
га
(* „ ! dx X ,
I F 1г, х, —j— dz
J \ dz I
21
экстремальное (точнее, стационарное) значение, для которого
z2
8 j Fdz — 0,
21
должна удовлетворять дифференциальному уравнению *)
d dF dF n f dx\
dz dx’ dx \ dz I'
о г? i /~ -t । f dx\*
В нашем случае F = z I/ 1 + I \ t Поэтому
принимает вид
(6)
уравнение (6)
(7)
*) Это уравнение было получено еще Эйлером. Относительно
его вывода см. стр. 105 и замечание на стр. 107.
2 Ф. Р- Гантмахер
34
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Отсюда
dx
~dz
и
dx___ с
dz ~~ у z* 2 — c2 ’
(8)
где с — произвольная постоянная. Интегрируя, получаем уравнение
цепной линии:
z = y [e(x-a)/c + e_(x~a)/c]=cch^-^ , (9)
где
вий
значения произвольных постоянных с и а определяются из усло-
закрепления концов. Таким образом, форма равновесия одно-
цепи
родной тяжелой
представляет собой цеп-
ную линию J).
4. Неизменная плоская
фигура может скользить
двумя своими точками А
и В по неподвижным кри-
вым, лежащим в той же
плоскости. Выясним, под
действием какой силы F
фигура может находиться в
равновесии (рис. 10).
Помимо активной силы
F на фигуру действуют еще
две реакции, направленные
по нормалям к кривым, и
линии действия этих трех
сил должны пересекаться в одной точке. Другими словами, линия
действия силы F должна проходить через точку пересечения нор-
малей к кривым в точках А и В, т. е. линия действия силы F
должна проходить через мгновенный центр возможных скоро-
стей с фигуры2).
К этому же выводу можно прийти, исходя из принципа возмож-
ных перемещений. Действительно^ обозначим через О какую-либо
точку на линии действия силы F. Тогда из условия 8 А = Fv0 dt = O
заключаем, что v0 I F, откуда и следует, что мгновенный центр
возможных скоростей фигуры расположен на линии действия силы/.
5. Некоторые геометрические приложения. Начнем с предва-
рительного замечания. Пусть в плоскости даны некоторая кривая С
*) Галилей считал, что такой формой равновесия является
парабола. Ошибка Галилея была исправлена Гюйгенсом.
2) При этом величина и направление силы F могут быть произ-
вольными.
§ 4]
ПРИНЦИП ВИРТУАЛЬНЫХ ПЕРЕМЕЩЕНИЙ
35
и точка Р (в частном случае кривая С может выродиться в точку).
Проведем из точки Р нормаль к кривой С и обозначим через г
расстояние по нормали от кривой С до точки Р; таким образом,
г = Р0Р (рис. 11). Приложим к точке Р некоторую силу F, на-
правленную вдоль нормали Р0Р, и будем считать F>0, если
направление силы F совпадает с направлением от Ро до Р, и
Р<0— в противном случае. Элементарная работа силы F равна
М =F(rfro4- dr). Но dr складывается из двух элементарных пере-
мещений: из перемещения вдоль прямой РаР (величина этого пере-
мещения равна dr) и перемещения точки Р, вызванного поворотом
прямой Р0Р. Последнее перемещение, как и dra, перпендикулярно
к прямой Р0Р, т. е. к линии действия силы F. Поэтому
M=Fdr. J (10)
Пусть в одной и той же плоскости расположены п кривых
С1( С2....Сп и точка Р. Обозначим через rn г2> ..., гп расстоя-
ния (по нормалям) от точки Р до этих кривых* 2) (рис. 12 соответ-
ствует случаю п = 2). Рассмотрим в той же плоскости кривую D,
задаваемую уравнением 3)
/(О, г2...г„) = 0. (11)
*) В случае, когда кривая С вырождается в точку, формула (10)
дает выражение для работы центральной силы.
2) Некоторые (или все) кривые Сь С2, ..., Сп могут выродиться
в точки.
а) Каждая из величин гь г.г, .... гп является функцией от двух
декартовых координат точки Р. Поэтому уравнение (11) является
уравнением некоторой кривой в плоскости.
2*
36
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Покажем, как по уравнению (11) построить нормаль к кри-
вой D в точке Р.
При любом бесконечно малом перемещении точки Р вдоль
кривой D получим
п
J,^-4r, = 0. (12)
Теперь приложим к точке Р силы Fi = -^, направленные вдоль
нормалей г/(« = 1, га). Тогда равенство (12) запишется так:
2 Fidrt^Q,
i=i
а это согласно предварительному замечанию означает, что сумма
работ сил Ft, F2, ..., Fn при произвольном перемещении точки Р
вдоль кривой D равна нулю. Но тогда несвободная точка, которая
может перемещаться вдоль гладкой кривой D, будет в равновесии
под действием сил Ft, Fs, ..., Fn. Поэтому равнодействующая
сил Ft, F2, ..., Fn направлена по нормали к кривой D.
Мы получили
очень
простой способ геометрического построе-
ния нормали к кривой D, задаваемой
уравнением (11).
Рассмотрим частные случаи:
a) D — эллипс. В этом случае
Q и С2 — точки (фокусы эллипса),
уравнение (11) имеет вид fj 4-г3—* 2а = О, /?1 = 1, Fs = l и нор-
маль к эллипсу является биссектрисой угла между фокальными
радиусами-векторами (рис. 13).
б) D — гйпербола. Уравнение гиперболы: гг— rs — 2а = О,
Fj= 1, F3 = —1, и из построения легко усмотреть (рис. 14), что
касательная к гиперболе есть биссектриса угла между фокаль-
ными радиусами-векторами (а нормаль является биссектрисой
смежного угла).
§ 4]
ПРИНЦИП ВИРТУАЛЬНЫХ ПЕРЕМЕЩЕНИЙ
37
в) D— парабола (рис. 15), Q — прямая (директриса), а С2— точка
(фокус). Уравнение параболы: г,— г2 = 0. Как и в случае гипер-
болы, из построения следует, что касательная к параболе является
биссектрисой угла между фокальным радиусом-вектором гх и
перпендикуляром г2, опущенным
на директрису.
Уравнение (1) для прин-
ципа виртуальных перемещений
представляет собой частный
случай общего уравнения дина-
мики [см. уравнение (3) на
стр. 25]. Однако общее урав-
нение динамики можно рассма-
тривать как уравнение, выра-
жающее принцип виртуальных
перемещений и характеризую-
щее положение равновесия системы, которое получается если
к активным силам F, дополнительно причислить фиктивные
силы инерции —m.pw^ 0=1, ..., N). Таким образом, мы
приходим к принципу Даламбера.
Принцип Даламбера. При движении системы
любое ее положение можно рассматривать как положе-
ние равновесия, если к активным силам, действующим
на систему в этом положении, прибавить фиктивные
силы инерции.
Принцип Даламбера позволяет перенести приемы и методы
решения статических задач на задачи динамики. В частности,
он позволяет статическими методами определять динамические
реакции. Действительно, в положении равновесия реакции R^
отличаются только направлением от F,—
О — = — /?,
Но тогда
otvw„ = F,-|-Z?,
0=1, ...» ZV).
(v = l, ..., N),
т. e. определенные с помощью принципа Даламбера реак-
ции Rv являются искомыми динамическими реакциями. Поэтому
приведенную выше формулировку принципа Даламбера можно
дополнить следующим положением:
Рассматривая силы инерции в качестве дополнитель-
ных активных сил, приложенных к точкам систе-
мы, мы заменяем данную динамическую задачу новой
38
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. !
статической задачей. Статические реакции в новой задаче
совпадают с искомыми реакциями в исходной динамиче-
ской задаче.
Применение статических методов к решению задач дина-
мики проиллюстрируем на следующих примерах.
Примеры. 1. Тендер с водой движется с ускорением w.
Требуется определить форму и положение поверхности воды.
При отсутствии ускорения поверхность воды — горизонтальная
плоскость. Данная плоскость в каждой своей точке перпенди-
кулярна к направлению объемных сил веса, приложенных к воде.
Это статическое положение может быть применено и к случаю
ускоренного движения тендера, если к каждому элементу массы dm
приложить дополнительно фиктивную силу инерции dJ=—dmw.
Поверхность воды будет плоскостью, перпендикулярной к равно-
действующей двух объемных сил: вертикальной силы веса dmg и
горизонтальной силы инерции — dmw (рис. 16). Поверхность воды
„ w
будет наклонена к горизонту под углом <р, где tg <р = —.
2. Напишем дифференциальное уравнение вращения твердого
тела относительно неподвижной оси и (рис. 17). К каждому эле-
менту массы dm приложим фиктивную силу инерции — dmw.
и
Вычислим главный момент сил инерции относительно оси вращения
— J = — ? $ P!rfm — ~ 4?»
где /„ = jp2rfm —момент инерции тела относительно оси враще-
ния и. Обозначим через Lu главный момент внешних сил, прило-
§ 4]
ПРИНЦИП ВИРТУАЛЬНЫХ ПЕРЕМЕЩЕНИЙ
39
женных к телу, относительно оси и '). Тогда согласно принципу
Даламбера тело может находиться в равновесии под действием
суммарного момента La — 1иу. Поэтому (см. стр. 32) этот суммарный
момент должен равняться нулю. Получаем:
1и? = La-
3. Горизонтальный однородный вал равномерно вращается
с угловой скоростью <о.. Перпендикулярно к оси вала на равных
на вал эксцентрично насажен
расстояниях от подшипников
однородный диск. Требуется
определить давления на под-
шипники при вращении вала.
Рассмотрим силы инерции
dm<n* 2r, соответствующие от-
дельным элементам dm диска
(рис. 18). Это сходящиеся силы,
направленные от оси. вала.
Равнодействующая этих сил
равна J=u>2 J rdm = M1u>3rc,
где 44; — масса диска, а гс =
— ОС (О— точка пересечения
плоскости диска с осью вала,
а С — геометрический центр
диска). Применяем принцип
Даламбера и определяем стати-
ческие давления на подшип-
ники, считая, что к оси вала приложены три силы2): 1) сила веса
вала Mg; 2) сила веса диска Mjg и 3) сила J=Ml&2rc.
Давление N на каждый подшипник определяется формулой
N= llM + MJg + ^MpSrC'
Сила N имеет максимальную величину
=4 (м+мл g+4 м^°с
в том положении диска, когда геометрический центр диска С рас-
положен под точкой О.
*) Главный момент внутренних сил равен нулю.
2) Равнодействующая элементарных сил инерции для вала равна
нулю и поэтому не учитывается.
40
ДИФФЕРЕНЦИАЛЬНЫЙ УРАВНЕНИЯ ДВИЖЕНИЯ
(ГЛ. t
§ 5. Голономные системы. Независимые координаты.
Обобщенные силы
Пусть дана голономная система из материальных
точек с радиусами-векторами r^ = x.i ’)
(v=l......N), подчиненная конечным связям
fAt, г,) = 0 (а=1, ..., d), (1)
или (в эквивалентной записи)
Aft х,, у* г,) = 0 (а=1, .... d). (!')
Мы будем предполагать, что d функций /я от ЗМ аргу-
ментов хч, уч, z4 (v=l, N) независимы2); t здесь рас-
сматривается как параметр. Поэтому мы можем из уравне-
ний (Г) выразить d координат как функции 3/V— костальных
и времени t и рассматривать эти 3A;—d координат как
независимые величины, определяющие положение системы
в момент времени t.
Однако не обязательно в качестве таких независимых
координат брать декартовы координаты. Можно все ЗД/
декартовых координат выразить в виде функций от п = 3/V— d
независимых параметров qx, qn и от Г:
.....ЯА, Л = Яъ .... ЯА )
?-,= X,ft Яъ •••- ЯА (*=Ь .... N). J
Эти функции, будучи подставлены в уравнения связей (Г),
обращают последние в тождества. Кроме того, мы будем
предполагать, что любое положение системы, совместимое
со связями в данный момент времени, может быть получено
из равенств (2) при некоторых значениях величин qb ..., qn.
Равенства (2) эквивалентны векторным равенствам
r, = rAt, Яъ Яп) (v=l, .... N). (S')
*) Л J> k—орты осей Ох, Оу, Oz инерциальной системы ко-
ординат.
г) В противном случае, при наличии, например, зависимости
вида
fd = 2 (Л....Л-1, О,
одна из связей (в данном случае — либо противоречила бы
остальным [при й(0, ...,0, Г)з=О], либо была бы следствием
остальных [при 2 (0....0, t) = 6].
§ 5]
Г0Л0Н0МНЫЕ СИСТЕМЫ
41
Скалярные функции (2), а следовательно, и векторные
функции (2') предполагаются непрерывными и дифференци-
руемыми.
Минимальное число величин qb с помощью которых
формулами (2) можно охватить все возможные положения
голономной системы, совпадает с числом степеней свободы
этой системы n — 3N— d (см. стр. 19).
Величины qb ..., qn в формулах (2) или (2') (и —число
степеней свободы) называются независимыми обобщенными
координатами системы.
Для каждого момента времени t между возможными
положениями системы и точками некоторой области в «-мер-
ном координатном пространстве (qb ..., q„) устанавливается
взаимно-однозначное соответствие. Каждому положению си-
стемы в момент времени t соответствует точка в простран-
стве (qu ..., дД, изображающая это положение системы.
Движению системы соответствует движение точки
в координатном пространстве (qb .qn).
Если все связи стационарны (склерономная система!),
то время t не входит явно в уравнения (Г). Тогда всегда
можно выбрать так координаты qb qn,
чтобы и в уравнения (2) время t не входило.
В дальнейшем предполагается, что для Ч
склерономной системы независимые коорди- Д
наты qb qn выбраны именно таким обра-
зом. Тогда для склерономной системы фор- if’X
мулы (2) и (2') принимают вид { \
*, = ?,(?/)> Л = '?,(?/)> A> = Zvtoi) ! \
G = i, ...,М (3) ;
ИЛИ J |^\
= (v = l, ..., N). (3') ' i\
Примеры. 1. Двойной маятник (рис. 19), •
движущийся в плоскости, имеет две степени сво- р
боды. В качестве независимых координат qt и q3 ’
можно взять углы ср и ф.
2. Свободное твердое тело имеет шесть степеней свободы.
В качестве независимых координат можно взять три координаты
хА, za какой-либо точки А тела и три угла Эйлера ф, 0 и <f,
42
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. г
определяющие поворот системы осей неизменно связанной
с телом, относительно неподвижной системы осей координат Oxyz.
Углы Эйлера определяются следующим образом (рис, 20).
Проводим через точку А оси Axit ‘Ayt, Azlt параллельные и одина-
ково направленные с осями Ох, Оу, Oz. Линия AN пересечения
плоскостей Axty, и A&q называется линией узлов ’). Тогда 9— «угол
нутации» — угол между осями Az, и АС; ф—.«угол прецессии» —
угол между осями Ах, и AN; — «угол чистого вращения», обра-
зованный осями AN и АС.
Тремя параллельными сдвигами — вдоль осей Ох, Оу, Oz — со-
ответственно на хА, уА, zA триэдр осей Oxyz переходит в положе-
ние Ах^ри,. Тремя по-
следовательными поворо-
тами— на угол ф вокруг
оси Az„ на угол 0 вокруг
оси AN и на угол <f
вокруг оси АС—-триэдр
Ax^Zj переводится в
положение
Таким образом, вели-
чины хд, уд, 2Д, ф, 0,
определяют положение
триэдра осей отно-
сительно триэдра Oxyz,
т. е. определяют положе-
ние данного твердого
тела относительно исход-
ной системы осей коор-
динат.
Возьмем произволь-
ную точку твердого тела.
Она определяется зада-
нием ее координат £, т), С.
Тогда координаты х, у, z этой точки могут быть представлены
как функции величин хА, уА, zA, ф, 0, у. Так, например, из
рис. 20 легко усмотреть, что
z — 2д -ф- 5 sin у sin 0 -ф- i) cos <р sin 0 -ф- С cos 0.
Аналогичные, несколько более сложные формулы имеют место
для хи у* 2). Эти формулы представляют собой частный случай
формул (2). Они не содержат явно t. Свободное твердое тело
является склерономной системой.
*) Ось AN направляем так, чтобы поворот вокруг этой оси
от оси Az, до АС по наименьшему углу совершался против часовой
стрелки.
2) См., например, Суслов Г. К., Теоретическая механика,
М, — Л., 1944, стр. 77 и 83.
S 51
ГОЛОНОМНЫЕ СИСТЕМЫ
43
Заметим, что при движении твердого тела величины хА, уА>
zA, ф, в, ф меняются и приведенное выше разложение перехода
от Oxyz к на три параллельных сдвига и три поворота дает
представление произвольного движения твердого тела в виде слож-
ного (составного) движения, состоящего из шести простых движе-
ний: трех поступательных (вдоль осей Ох, Оу, Oz) и трех чисто
вращательных (вокруг осей Az,, AN и Ж). Поскольку угловая
скорость в сложном движении равна векторной сумме слагаемых
угловых скоростей, то
<о = <»ф —е»0 —ш<р, (4)
где Иф, we, направлены соответственно вдоль осей Azlt AN,
ЛС, причем — ф, <й0 == 6, ы? = ф.
3. Свободная материальная точка М имеет три степени
свободы. В качестве независимых координат можно взять декар-
товы или какие-либо другие координаты точки. В. случае, когда
в качестве qit qs, q3 берутся цилиндрические координаты г, ф, г,
формулы (2) выглядят так (рис. 21):
х == г cos ф, у = г sin ф, z = г. (5)
В случае сферических координат г, ср, ф (рис. 22) вместо фор-
мул (5) имеем
х = г cos ф sin ф, у = г sin ф sin <р, z = г cos <р. (6)
4. Несвободная материальная точка М находится на по-
движной сфере
(х — at)2 4- (у — Ы)2 4* (г — ct)2 = г3.
44
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Тогда п = 2 и в качестве независимых координат можно исполь-
зовать «долготу» и «широту» на сфере (рис. 23):
х — at г cos cos qa, у — bt 4- rsin qt cos qa, z = ct -f- r sin qa.
Каждой координате соответствует своя обобщенная
сила Qi (Z=l, ..., п). Обобщенные силы определяются
следующим образом. Рассмотрим элементарную работу актив-
ных сил на виртуальных пере-
мещениях
N
(7)
Но виртуальными перемеще-
ниями 8г, являются виртуальные
дифференциалы [т. е. диффе-
ренциалы при фиксированном
(«замороженном») Z] от функции
r,(t>
п
8г
(v = l, ...,JV). (8)
Подставим выражения (8) в правую часть формулы (7)
и выразим элементарную работу активных сил на виртуаль-
ных перемещениях через произвольные элементарные прира-
*) Действительно, функции г, (t, qi) = N), будучи
подставлены в уравнения связей fa(t, г,) = 0 (а = 1, ..., d), обра-
щают эти уравнения в тождества. Продифференцируем почленно
полученные тождества, предварительно зафиксировав t. Найдем:
N
(а=1, •••’d)’ <*)
1
где 8г, (4 = 1, ..., N)— виртуальные дифференциалы. Но уравне-
ния (*) совпадают с первыми d уравнениями (7) на стр. 16, кото-
рыми определялись виртуальные перемещения голономной системы.
Следовательно, виртуальные дифференциалы радиусов-векторов
являются виртуальными перемещениями точек голономной
системы.
9 51
ГОЛОНОМНЫЕ СИСТЕМЫ
45
щения 8у; независимых координат qt (I — 1, ..., и):
»»= 2^. i i (iF- S8’<=ie‘ *’»,9)
V = 1 i=l i = l V = 1 i=l
где коэффициенты при By, —• «обобщенные силы Qt» — опре-
деляются равенствами
N
Qi=2F^ (z==1..........пу (10)
у = 1
Заметим, что на практике при нахождении величины Q( далеко
не всегда пользуются формулой (10); вместо этого системе
дают такое элементарное виртуальное перемещение, при
котором только i-я координата qt получает некоторое при-
ращение, а остальные независимые координаты не изме-
няются. После этого вычисляют работу активных сил 8Л;
на таком специально выбранном перемещении. Тогда 8Аг =
= Qf8y(. и
Примеры. 5. Твердое тело может двигаться только по-
ступательно вдоль оси х. Тогда п=1 и в качестве независимой
координаты можно взять абсциссу х какой-либо точки тела А.
При этом
М = (И)
где X—сумма проекций на ось х всех активных сил, действующих
на тело. Очевидно, что X и есть обобщенная сила для координаты х:
Q=X. (12)
6. Твердое тело может только вращаться вокруг некоторой
неподвижной оси и. Соответствующий угол поворота <р может быть
взят в качестве независимой координаты. Тогда
M==Z.a8y, (13)
где Ltt—суммарный момент всех активных сил относительно оси
вращения и
Q^La. (14)
7. Свободное твердое тело. В качестве независимых координат
возьмем три координаты хА, уА, гА какой-либо точки А тела и три
угла Эйлера ф, 0, <р (см. пример 2 на стр. 41—42). Тогда, со-
гласно равенству (9),
М = Qx Ъх + Qy Ъу + Qsbz+ Зф + <30 80 + (15)
46
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Для определения Qx сообщим телу элементарное перемещение
вдоль оси х. Тогда 8ул = 8хл = 0 и 8ф == 80 = 8<р = 0. Поэтому
8А = Сл8хл. Сопоставление с равенством (11) дает
Qx — X.
Аналогично Qy=Y, Q^==Z. Здесь X, У, Z—проекции на не-
подвижные оси х, у, z главного вектора всех активных сил,
действующих на тело.
Дадим теперь нашему телу такое элементарное перемещение,
при котором изменяется только угол ф, а величины хА, уА, zA, в
и <р остаются неизменными. Тогда
6А = Оф8ф.
С другой стороны, рассматриваемое элементарное перемещение
тела представляет собой поворот вокруг оси Azt. Поэтому в со-
ответствии с формулой (13)
Qtp
где —суммарный момент всех активных сил относительно
оси Azt, вокруг которой совершается поворот на угол ф.
Совершенно аналогично Q$ — L$ и Q,f =L4, где L9 и А»— сум-
марные моменты активных сил относительно осей AN и АС
К тем же выражениям для обобщенных сил можно прийти,
если воспользоваться выражением для элементарной работы актив-
ных сил, приложенных к твердому телу (см. стр. 32) *):
6А=/?8гл-|-£л(оЛ. (16)
Здесь /? и La—главный вектор и главный момент системы сил отно-
сительно полюса А. Поскольку [см. формулу (4)] <в = <0ф + -ф- <оф,
где Шф = ф, <о9 — 8, = £, и проекции вектора LA на направления
векторов (Оф, (Од, (от равны соответственно L^, Le, L^, из фор-
мулы (16) находим
8А =А6хл + УЪуА + ZbzA + £ф8ф -f- Z680 + Lfy. (17'
Сопоставление выражений (17) и (15) дает нам выражения для
обобщенных сил.
Пусть теперь некоторое положение системы является по-
ложением равновесия. Согласно принципу виртуальных пере-
мещений это возможно тогда и только тогда, когда
п
8A = 2Qi^i = 0. (18)
i=l
*) Так как мы здесь имеем дело со склерономной системой,
то вместо знака 8 можно писать знак d, и наоборот. Поэтому
<7гл = 8гл и 8ф == с7ф —,‘^dt, 80 = Sdt и ty = ydt.
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
47
§ 61
Но приращения Sy; независимых координат q, могут быть
совершенно произвольными. Поэтому равенство (18) эквива-
лентно системе равенств
Q,. = 0 (г=1, ....я). (19)
Таким образом, положение голономной системы является
положением равновесия в том и только в том случае,
когда в этом положении все обобщенные силы равны нулю.
Примеры. 8. В соответствии с равенствами (19) условия
равновесия свободного твердого тела запишутся так:
X=Y=Z = 0, L^ = Le = Lr=0 (20)
(см. предыдущий пример). Здесь X, Y, Z—проекции на оси коор-
динат главного вектора /? внешних сил, действующих на тело, а Аф,
L$, L— проекции главного момента LA этих сил на три некомпла-
нарных направления. Поэтому скалярные равенства (20) эквива-
лентны двум векторным:
/? = 0, Лл = 0.
Это необходимые и достаточные условия равновесия свободного
твердого тела, которые уже были установлены на стр. 32.
§ 6. Уравнения Лагранжа второго рода
в независимых координатах
Приступая к выводу дифференциальных уравнений дви-
жения голономной системы в независимых координатах qb ...
..., мы будем исходить из общего уравнения динамики
N
^(F, — m,<w^r, = G. (1)
»=i
Вспомним полученное в предыдущем параграфе выражение
для элементарной работы активных сил
7V п
2 ЛЧ= y^Q^qi. (2)
v = 1 i = 1
где
N
(3)
V—I
48
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Совершенно аналогично можно представить элементарную
работу сил инерции —mqw., (v=l, N):
Mj = ~ У Brv = — У Zi tq{, (4)
v=l i=l
где по аналогии с выражением (3)
„V dr, V rfr, dr,
V =1 V = 1
= «=>......”)• <S)
M = 1 V = 1
Но скорость
'.= 2жг?*+> <6>
*=1
линейно зависит от qk (& = 1, л). Из этой формулы
находим
=^ = ^ (7=1, п; v=l, .... N). (7)
dqi dqi v v
С другой стороны, из того же равенства (6) получаем
V д"г‘ g
dqi ZLdqidqk' dqtdt dt dq, ' }
(7=1, ..., n; v=l, ..., N).
Поэтому выражение (5) для Z, может быть записано и так:
N . 7V
„ d v • drv V • dr.,
2'=л2'“-г-ж"
d dT dT
= ^7--a— (t=l>.(9)
dtdqi d4t
где T — кинетическая энергия системы:
N
T=
v = l
(10)
§ 61
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
49
Общее уравнение динамики (1) нам дает
84-[-84/=О, (11)
или, в силу равенств (2) и (4),
п
2(С,-г;)89(. = 0 (/=!,...,»). (12)
i = 1
Так как qt — независимые координаты и поэтому —
совершенно произвольные приращения координат (1= 1,..., п),
то равенство (12) может иметь место тогда и только тогда,
когда все коэффициенты при 8<?; в уравнении (12) равны
нулю. Поэтому общее уравнение динамики (12) эквивалентно
системе уравнений
Z; = Q; (Z=l, ...,»), (13)
которые, согласно соотношениям (9), могут быть записаны
в следующем виде:
d дТ дТ \ Глл\
dt dqt dqi~Qi С1-1- •••>«)• (14)
Уравнения (14) носят название уравнений Лагранжа вто-
рого рода или уравнений Лагранжа в независимых коор-
динатах.
Величины qt (1 = 1, ..., п) называются обобщенными ско-
ростями. Скорости точек системы ®v = rv выражаются
через обобщенные скорости (а также через независимые
координаты и время) с помощью формул (6). Величины
(ji (Z = l, ..., п) называются обобщенными ускорениями.
В левые части уравнений Лагранжа (14) после выполнения
операции входят время t, обобщенные координаты qit обоб-
щенные скорости qt и обобщенные ускорения (Z= 1,..., и).
Обобщенные силы Qf (Z=l, п), стоящие в правых
частях уравнений Лагранжа, обычно задаются1) как функ-
ции от Z, qk, qk (k=\, ..., п):
= qk, qk) (Z=l, n). (15)
1) См. формулы (3) и (6) этого параграфа, а также формулу (10)
на стр. 20 и формулу (2') на стр. 40.
50 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ [ГЛ. I
Уравнения Лагранжа (14) образуют систему из п обыкно-
венных дифференциальных уравнений второго порядка с п
неизвестными функциями qt от независимого переменного t.
Порядок этой системы равен 2«. Заметим, что система диф-
ференциальных уравнений, определяющая движение голоном-
ной системы с п степенями свободы, не может иметь порядок,
меньший 2и, так как в силу произвольности начальных зна-
чений величин qt и ’qt (/ = 1, ..., ri) решение системы дол-
жно содержать, по крайней мере, 2ц произвольных постоян-
ных. Таким образом, система уравнений Лагранжа в не-
зависимых координатах имеет наименьший возможный
порядок.
В случае несвободной системы подлежат определению
еще реакции (v = l, ..., TV). Реакции не входят в урав-
нения Лагранжа. Это существенное преимущество уравнений
Лагранжа. После того как уравнения Лагранжа проинтегри-
рованы и найдены функции qt(t) (1 = 1, ..., п), определяют
[подстановкой этих функций в формулы (2') на стр. 40]
rv = r,(0 и, следовательно, = wv=r4 и /\(Т, г,, гч)
(м = 1, ..., TV). После этого неизвестные реакции опреде-
ляются из формул
R^mjW' — F., (v = l, ..., TV). (16)
В случае свободной системы материальных точек уравне-
ния Лагранжа представляют собой компактную запись урав-
нений движения в произвольной системе координат.
Примеры. 1. Твердое тело, вращающееся вокруг неподвиж-
ной оси и. В качестве независимой координаты берем угол поворота у.
Соответствующая обобщенная сила Q (см. пример 6 на стр. 45)
равна вращающему моменту Lu. С другой стороны, Т — уТиф2, где
1и — момент инерции тела относительно оси вращения.
Уравнение Лагранжа
dJJ _д^Г_ п
dt di ду “ У
после подстановки
дТ_г. дт-о п-т
di ~ иЪ д^~ °’ Q — Lu
принимает вид
ТВ?=Т-И.
S 61
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
51
Это дифференциальное уравнение «ращения твердого тела
вокруг неподвижной оси.
2. Двойной математический маятник, движущийся в пло-
скости (рис. 24). Составим выражение для элементарной работы
84 = mtg + m^g Bz2,
где Zt = cos <рн cos tfi + ^2 cos <?a-
Вычисляя 8zj и 8z2, находим:
ВД = — (mL + m2) glj sin <pt 8^ — msgl2 sin ®2 Bcpa
и
Qi = — («1 + m^gli sin <pn Qs = — tn., gl3 sin <p2.
С другой стороны,
Т = <pl +
+ у № + Ч 4! + 21Л cos^i ~ 414з1=
= у ('»! + ms) ll f| + mJi!#if3 cos (?1 — <p2) +
+ 4 41-
Первое уравнение Лагранжа
dt df, d<ft
имеет вид
[(ml "b.ma) 4 41 4" ma Va4a cos (?i — ?s)] 4"
+ та/Л?3 sin (<p! — <[>s) =
=—(m, +m8)g/1sin<?1.
Предоставляем читателю составить второе уравнение, соответ-
ствующее координате <f2.
3. Требуется определить дифференциальные уравнения движе-
ния свободной материальной точки в сферических координатах
(см. пример 3 на стр. 43 и рис. 22). Скорость точки равна вектор-
ной сумме скоростей: 1) радиальной; 2) вращательной от вращения
радиуса в плоскости меридиана и 3) вращательной от вращения
плоскости меридиана. Слагаемые скорости попарно ортогональны,
и потому
у mvs — у т (rs + rty -f- г2 sin2;? fs).
Для нахождения обобщенной силы Qr дадим точке перемеще-
ние вдоль радиуса. Тогда 8Дг = /7г8г, где Fr—проекция приложен-
ной силы F на направление радиуса. Отсюда Qr = Fr.
52
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Теперь дадим точке элементарное перемещение по меридиану.
Тогда = Р<рГЦ, где Fv— проекция силы F на касательную
к меридиану 1). Поэтому
Qf — Fvr-
Аналогично
Qty = Ftyr sin ср,
где Fy — проекция силы F на касательную к параллели.
Уравнение Лагранжа для координаты г
£дТ_дТ__Г)
dt fir дг
принимает вид
m (г — г?2 — г sin2 ср ф2) = Fr.
Для координат ср и ф находим уравнения
m (r<? + — г sin <р cos ср ф2) = Fv,
ffl (г sin ср ф + 2 sin ср г ф 2г cos ср ср ф) = F^.
Мы получили три дифференциальных уравнения движения свобод-
ной материальной точки в сферических координатах.
§ 7. Исследование уравнений Лагранжа
Для того чтобы составить уравнения Лагранжа, нужно
предварительно найти выражение для кинетической энергии
в виде функции от времени t, обобщенных координат <?, и
обобщенных скоростей qt (1=1, ..., п). Сделаем это в об-
щем виде:
N N п
V=sl V —1 1=1
п п
= ~2 S 2 ai4i + ао- (1)
/,А=1 с = 1
1) Касательные к меридиану и параллели направляем в сторону
возрастания соответствующих координат <р и ф.
S 7]
ИССЛЕДОВАНИЕ УРАВНЕНИЙ ЛАГРАНЖА
53
Здесь коэффициенты aik, at, ай — функции от t, qt.qn,
определяемые равенствами
aik= У т^-^- (I, k = l, л)1), (2)
Li ’ dqt dqk v ” 4 1
У =1
N
a'=2<'=•-.»). ст
V = 1
N
fl0=l2^®2- <4>
V = 1
Формула (1) показывает, что кинетическая энергия голо-
номной системы представляет собой функцию (многочлен) вто-
рой степени относительно обобщенных скоростей:
7'=7'24-7'14-7'0> (5)
где
п п
^2 — ~2 aik4i^Ik< 7о = а<Ь (6)
i,k=l i’ = l
В случае склерономной системы, как было выяснено в § 1,
время t явно не входит в зависимость между г, и qt, и
потому
^ = 0 ('=!.......W
Но тогда, согласно равенствам (3) и (4),
а0 = О, а( —0 (/ = 1, .... л)
и
п
= ~ 2 aik4i4k-
Таким образом, кинетическая энергия склерономной
системы представляется в виде однородной функции
второй степени (квадратичной формы) от обобщенных
скоростей.
1) Из формул (2) видно, что aift = afti (i,k=l, .... п).
54
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Заметим, что у произвольной (склерономной или реоном-
ной) голономной системы форма 7\ является всегда невыро-
жденной, т. е. определитель, составленный из ее коэффи-
циентов, отличен от нуля:
det(aift)^=i ^0. (7)
Действительно, пусть
det(a,J?ft=1 =0.
Тогда система однородных линейных уравнений
= 0 я) (8)
А = 1
имеет вещественное ненулевое решение.
Умножая систему (8) почленно на Хг, суммируя по I от 1
до п и используя формулы (2), получаем:
Эти N векторных равенств можно заменить 37V скалярными:
п п п
2£'.=и от
1=1 1=1 !=1
(v=l, А/).
§71
ИССЛЕДОВАНИЕ УРАВНЕНИЙ ЛАГРАНЖА
55
Равенства (9') показывают, что в якобиевой функциональ-
ной матрице
dxt dxt
dqi ’ ’ ’ dqn
dyj dyt
^h’ " ’ dqn
dzt dzL
dqt’ " ’ dqn
dxN
dqt’ " ’ dqn
dyN дУх
dqiJ ’ ’ dqn
dzN dzN
dqi’ " ' ’ dqn
(Ю)
столбцы линейно зависимы, т. е. ранг р этой функциональной
матрицы меньше п. Тогда среди ЗЛ? функций хь у\, ...
.... xN, yN, zN от п аргументов qb ..., qn (t рассматри-
вается как параметр) Имеется р независимых, через которые
могут быть выражены все остальные декартовы координаты
точек системы. Мы пришли к противоречию, так как мини-
мальное число независимых координат системы равно числу
степеней свободы п, а р п. Неравенство (7) установлено ').
Свойство коэффициентов квадратичной формы 1\, выра-
жаемое неравенством (7), очень существенно и будет нами
неоднократно использоваться в дальнейшем. Заметим, что по-
скольку всегда (Т% — кинетическая энергия при «за-
мороженных» связях!), то из неравенства (7) следует, что
п
квадратичная форма = у ац&Аь является положи-
U=i
тельно определенной, т. е. Т^^О, причем 7\ = 0 только
тогда, когда все q{ (/=1, п) равны нулю. Поэтому
*) Ранг функциональной матрицы (10) может быть меньше п
в отдельных (особых) точках. В этих особых точках возможно ра-
венство det (a;A)?ft =! = 0. В дальнейшем мы такие особые поло-
жения системы исключаем из рассмотрения,
56
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
для коэффициентов aik имеют место детерминантные неравен-
ства Сильвестра *):
а11 Ян ... Я1„
ап > О,
аи
а21
ап
а22
О,
#21 #22 • • • #2и
0. (И)
&ПХ ап1 • • • апп
Подставив выражение (1) для кинетической энергии
в уравнения Лагранжа
d дТ дТ ,, . ,
57^---д—G=l> •••> я), (12)
dt dqi dqi y > v 7
получим
n
2 aik<jk +(**) = Qi(t, qj, qj) (Z=l, ...» я). (13)
*=1
Здесь через (* *) обозначена сумма членов, не содержащих
вторых производных от координат по времени. Правые части
также не содержат вторых производных, так как предста-
вляют собой в общем случае функции от величин t, qj, qj
(/ = 1, ..., п).
Поскольку det (aift)"ft = 1 0, то уравнения (13) можно раз-
решить относительно вторых производных и представить
в виде
qk, qk) (Z=l, .... я). (14)
Но тогда, как известно из теории дифференциальных урав-
нений, при некоторых предположениях относительно правых
частей Gp которые в механике всегда предполагаются вы-
полненными 2), существует одно и только одно решение
уравнений Лагранжа при произвольных наперед заданных
начальных данных ql, <]1 для t = t0 (Z=l, ..., я). Таким
образом, движение голономной системы однозначно опреде-
ляется заданием начального положения (ql) и начальных ско-
ростей (ql).
') См., например, Г антмахер Ф. Р., Теория матриц, М., 1953,
стр. 248.
а) Например, при существовании непрерывных частных произ-
водных первого порядка у функций G, (» = 1, ..., п).
§ 81 ТЕОРЕМА ОБ ИЗМЕНЕНИИ ПОЛНОЙ ЭНЕРГИЙ
57
§ 8. Теорема об изменении полной энергии.
Потенциальные, гироскопические и диссипативные силы
Если обобщенные силы не зависят от обобщенных скоро-
стей
Qt = Qi(i, Чъ Яп) (1=\, .... п) (1)
и существует функция П(t, qit q„) такая, что
= (2)
то силы Qi называются потенциальными, а функция
П — потенциалом сил или потенциальной энергией. Равен-
ства (2), определяющие потенциал П, можно записать так *):
8A=S <?г8^ = -8П. (3)
i= 1
Рассмотрим теперь общий случай, когда помимо потенциаль-
ных сил, определяемых потенциалом П, на систему действуют
еще непотенциальные силы
Qi — Qi(t, qj, 4j) (i=l,...,n). (4)
Тогда
= + Го
и уравнения Лагранжа принимают вид
d дТ дТ дП । Az., s zz,4
dtdfa dqi~~ dq^(6)
Введем в рассмотрение полную энергию Е, равную сумме
кинетической и потенциальной энергий
П,
(7)
*) При вычислении виртуального дифференциала 8П время t
п
предварительно фиксируется. Поэтому ВП=
i= 1 1
58
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. 1
и вычислим производную Для этого сначала найдем
п
dt Z \dqt 4l dqt 4ij dt~
i — 1
di dqt \dqi dt dqi)^l'dt' '
t = 1 i = 1
Замечая, что T— Тг Л -(- То и используя уравнения Ла-
гранжа (6), получаем *)
п
dT d ,^.г , . дТ . V гдп =. \ .
~dt = -(2Т2 + Л) + Tt + 21 - Qi) 4i =
п
=2f-s^' + ^’+s + ts -®- 2 в* <9>
t = 1
Отсюда с учетом равенства (7) окончательно находим
п
dE V • । d । , дТ । (Л! z1rt.
Tt= 2 ^ + ^(Л + 27'0)-^ + ^. (Ю)
i = i
Стоящее в правой части выражение
п
*) Для однородной функции f(Xi, хп) m-й степени имеет
п
место формула Эйлера 2 xt = mf. Применяя эту формулу
/ = 1 1
к линейной форме и квадратичной форме Га, находим:
п п
It*—..
Z — I i == 1
Справедливость этих тождеств следует также непосредственно из
выражений для Т2 и 1\, приведенных на стр. 53.
§ 8] ТЕОРЕМА ОБ ИЗМЕНЕНИИ ПОЛНОЙ ЭНЕРГИИ 59
где 8А — элементарная работа непотенциальных сил Qit
представляет собой мощность непотенциальных сил Qt (1 =
= 1, ...» п). Слагаемое в правой части
дт + 2Г.)-^ (12)
отлично от нуля лишь для реономной системы (для склеро-
номной системы 7'1 = 7'о = О и ^=о). Последнее же сла-
гаемое отлично от нуля только тогда, когда потенциальная
энергия П зависит явно от времени.
Формула (10) определяет изменение полной энергии
при движении произвольной голономной системы. Рас-
смотрим частные случаи.
а) Система склерономная. Тогда
п
i = 1
б) Система склерономная, и потенциальная энергия
не зависит явно от времени. Тогда
п
(»)
1=1
Для такой системы производная от полной энергии по вре-
мени равна мощности непотенциальных сил.
в) Система консервативная, т. е.: 1) система склеро-
номная; 2) все силы потенциальные и 3) потенциальная энер-
гия П не зависит явно от времени. Для консервативной
системы, согласно равенству (10),
f = °, (15)
т. е. при любом движении системы
Д = const = h. (16)
Полная энергия консервативной системы не изме-
няется при движении системы.
Равенство (16), не содержащее и включающее произ-
вольную постоянную h, определяет первый интеграл уравне-
ний движения. Оно называется интегралом энергии.
60
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Непотенциальные силы называются гироскопическими,
если их мощность равна нулю:
п
2 <3,^ = 0, (17)
г= 1
и диссипативными, если их мощность *) отрицательна или
равна нулю:
п
(18)
i=l
Если потенциальная энергия не зависит явно от t, то из
dE
равенств (14) и (17) следует — =0 и, таким образом, для
склерономной системы, при гироскопических силах также
имеет место интеграл энергии
Е~ const.
1) В случае склерономной системы
w п
^F^dr^ = ^Qidqi,
V=1 4'—1
откуда после почленного деления на dt находим
tv п
У (*)
v = i :=i
Поэтому равенство (17) выражает условие гироскопичности
w
2 F,», = 0,
а равенство (18) — условие диссипативности
tv
v=l
В случае реономной системы равенство (*) может не иметь
места. В этом случае 8rv = rfr,— dt и из равенства
N п N п
8rv = Qi следует F, (v* — Q^.
v = l i = l »=! i = l
§ 8]
ТЕОРЕМА ОБ ИЗМЕНЕНИИ ПОЛНОЙ ЭНЕРГИИ
61
Если же на такую систему действуют диссипативные силы,
то при движении системы
т. е. полная энергия убывает во время движения *). В этом
случае саму систему мы будем называть диссипативной.
В соотношениях (17) и (18) обобщенные силы Q(- в общем
случае зависят от обобщенных скоростей. Рассмотрим важные
частные случаи, в которых эта зависимость линейна и однородна.
1°. Пусть
п
(z = l, ..., в) (19)
*=1
и матрица коэффициентов является кососимметрической:
Ы = (I, й=1, п)*). (20)
Тогда силы (19) являются гироскопическими.
Действительно, в этом случае
SQ,-^= s Ё
i= 1 = l i=l i<zk
Последнее равенство показывает, что кососимметричность
матрицы коэффициентов угА является не только достаточным,
но и необходимым условием для того, чтобы приложенные
к склерономной системе силы (19) были гироскопическими.
Примеры. 1. Кориолисовы силы инерции для склерономной
системы являются гироскопическими силами. Действительно,
кориолисова сила инерции, прикладываемая к точке Р, системы,
определяется формулой
F, = — 2mv (w X ov).
Здесь m, — масса точки Р„ — ее скорость в рассматриваемой
неинерциальной системе осей координат, а <в— угловая скорость
1) При диссипативных силах происходит рассеивание (диссипа-
ция) энергии. Отсюда и термин «диссипативные силы».
2) У кососимметрической матрицы ||77&|| всегда Тп=0
0 = 1....«)•
62
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
вращения этой системы относительно некоторой инерциальной си-
стемы координат (ч=1.....N). Но тогда
N
2 АЛ = 0.
v= 1
2. Пусть на твердое тело с неподвижной точкой О действуют
силы с главным моментом L0 = l(a>1 X <оа), где / — скаляр, и пусть
<й = <»! + <в2— угловая скорость тела. Тогда приложенные к телу
силы являются гироскопическими, так как их мощность равна нулю:
£о <й = 0.
Если твердое тело обладает динамической симметрией, / — момент
инерции относительно оси симметрии, <в«— угловая скорость «чи-
стого вращения», направленная по оси симметрии, а го,— угловая
скорость прецессионного движения, то момент Lo — /(w, X <о2)
называется гироскопическим. Таким образом, силы, создающие
гироскопический момент, являются гироскопическими *).
2°. Пусть
п
Qi = ~ ^bikqk (21)
А = 1
где матрица коэффициентов bik является симметрической
bik = bki (Z = l, ..., п), (21’)
п
и пусть квадратичная форма J1, Ь1кд^к положительна:
i,k = 1
п
S (22)
i,k = 1
Тогда для склерономной системы мощность сил равна
п п
2 = - (23)
( = 1 • i,k—l
и силы Qi являются диссипативными.
В этом случае квадратичная форма
п
я =4 2 b^k (24)
i,k = 1
1) Отсюда и пвоисхождение термина «гироскопические силы».
§ 9]
ЭЛЕКТРОМЕХАНИЧЕСКИЕ АНАЛОГИИ
63
называется диссипативной функцией Релея. Легко видеть,
что обобщенные силы (21) получаются из диссипативной
функции Релея с помощью формул
<2,=-^ (*=1’ (25)
Если система склерономна и потенциальная энергия не зави-
сит явно от времени, то- в силу равенств (14), (23) и (25)
п
= (26)
с/t
i = 1
Последняя формула указывает на физический смысл функции
Релея: удвоенная функция Релея равна скорости убыва-
ния полной энергии.
Если функция Релея (24) является положительно опре-
деленной квадратичной формой от обобщенных скоростей,
то говорят о полной диссипации энергии. В этом случае
систему мы будем называть определенно-диссипативной.
У такой системы, согласно формуле (26), полная энергия
строго убывает.
В качестве примера рассмотрим приложенные к точкам системы
силы сопротивления среды, пропорциональные первым степеням
скоростей точек:
(27)
В этом случае
N
2 = — 2R, (28)
V = 1
где
N
*=4? 2^- (29)
Ч=1
§ 9. Электромеханические аналогии
В этом параграфе мы покажем, каким образом уравнения
аналитической механики могут быть применены не только к
механическим, но и к электрическим и электромеханическим
системам.
Рассмотрим контур, в котором индуктивность L, оми-
ческое сопротивление R и конденсатор с емкостью С
64
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. t
соединены последовательно (рис. 26). Для этих элементов связь
между напряжением и (разность между значениями потенциала
, . I. dq
на концах элемента) и величиной тока i \i=-£, где g— за-
ряд) будет соответственно равна
u = L~, u — Rl, и — \ i dt. (1)
at о j
Если в контуре имеется еще внешний источник э. д. с.
e(t), то, записывая, что величина э. д. с. равна сумме напря-
жений для отдельных элементов, будем иметь
+ + \ldt=e{t), (2)
Wfr О J
или
<3)
Это уравнение является аналогом уравнения механических
колебаний
+ + (4)
При этом индуктивности L
циент (обобщенная масса)
отвечает инерционный коэффи-
а, омическому сопротивлению
Рис. 26.
R— диссипативный коэффициент Ь, коэффициенту X, где
С/
С — емкость, отвечает приведенный коэффициент упругой
силы с, заряд q соответствует обобщенной координате q,
э. д. с. e(t) — обобщенной силе Q(Z).
С другой стороны, в контуре, изображенном на рис. 26,
складываются токи, проходящие через индуктивный элемент,
§ 91
электромеханические аналогии
65
сопротивление и конденсатор, поэтому
ъ+И udt + C^ = i(t). (5)
I\ L-r -I CZ-4
Почленно дифференцируя, получаем:
„ rf2u . 1 du । 1 ___di
CdF'~R~di 'Tl! dT
Здесь мы имеем другую систему аналогий, в которой
координате q соответствует напряжение и и механические
коэффициенты а, Ь, с заменяются на С, р-, обобщенной
_ /хч di
силе Q(r) здесь отвечает величина
Две электрические системы, имеющие одинаковые
(с точностью до обозначений) уравнения, представляют
собой две разные электрические модели одной и той же
механической системы.
Кинетической и потенциальной энергиям, функции Релея,
обобщенной силе у механической системы с одной степенью
свободы
T=^aq\ R = ±bq\ IL = ^cq\ Q=Q(t)
в первой системе аналогий соответствуют величины
R = ~Rq\ П = ^72, e = e(t),
а во второй
7'==2-С“2’ = П~2Гк2> dt'
Таким образом, системы электромеханических аналогий опре-
деляются следующей таблицей:
Мех.: q а Ь С Q T=^a'Q2 R = ^bq*
1-я эл.: q L R 1 с е 2С
2-я эл.: и С 1 R 1 L di dt у ей2 2Lui
3 Ф. Р. Гантмахер
66
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
Рассмотрим в качестве более сложного примера электри-
ческую цепь, изображенную на рис. 27.
Рис. 27.
Составим уравнения Лагранжа, придерживаясь первой
системы аналогий; предварительно вычислим
R=у R&+ 4 R<M + 4 Rrfl ,
П = 2С, 2С72 ~
Кроме того, <?2 = t?3 = 0. Положим
Ci = A sin Qt.
Теперь выпишем уравнения Лагранжа
£171 Rifyi р- q\ — q3 = A sin Qt,
° 12 ''12
— Li3q3 q* — q1==0,
u13 c12
ЦэФз — i-43 + R^3 + = 0-
Эти уравнения и будут уравнениями электрической цепи,
изображенной на рис. 27.
§ 10]
УРАВНЕНИЯ АППЕЛЯ
67
§ 10. Уравнения Аппеля для неголономных систем.
Псевдокоординаты
В этом параграфе мы выведем уравнения Аппеля, опре-
деляющие движение неголономной системы. Пусть на неголо-
номную систему наложены d конечных и g дифференциаль-
ных связей (см. § 1). Использовав сначала только d конечных
связей, мы выразим радиусы-векторы точек системы через
m = 3N—d независимых координат qb ..., qm и время i-.
= qlt ..., qm) (v =, A). (1)
Отсюда
m
'•= 2^’'+'®’ <’='..............<2>
/= 1
и
m
(V=1......<2>)
i = 1
Однако r„ и г, (v = 1, ..., N) удовлетворяют еще диффе-
ренциальным связям *)
SV’ + Df=° (₽=1, ...,g), (3)
V = 1
где /₽, и являются функциями от f и г, (v=l, ..., N).
Подставив выражения (1) и (2) для г, и г, в уравнения
связей (3), мы представим эти’уравнения в виде
т
ХА^ + А^ = ° (?=1. •••>£)> (4)
i = 1
где коэффициенты А$. при q{ и свободные члены А$ являются
функциями от t и qb ..., qm.
Таким образом, для неголономной системы координаты
q{, • > 9т могут принимать произвольные значения, но при
этом обобщенные скорости qb , qm уже не могут быть
*) Функции (1), будучи подставлены в уравнения конечных свя-
зей, обращают их в тождества. Поэтому при использовании пред-
ставления (1) нужно учитывать только дифференциальные связи.
3*
68
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
произвольными; они связаны между собой соотношениями (4).
Считая g связей (4) независимыми, мы можем из уравнений (4)
выразить g обобщенных скоростей, например qn+i,, qm
через остальные (fr, ..., qn (п = т — g=3N—d — g—
число степеней свободы системы; см. стр. 19). Скоростям
<11, ..., qn можно давать произвольные значения, и тогда уже
определятся значения остальных скоростей.
Однако мы пойдем по более общему пути и в качестве
независимых величин возьмем не п (п — число степеней сво-
боды) обобщенных скоростей, а некоторые п независимых
линейных комбинаций этих скоростей *)
т
= S (5= Ъ .... я), (5)
i= 1
где fsi — функции от t и qb qm.
На линейные формы (5) нужно наложить лишь одно усло-
вие: эти п линейных форм вместе с g линейными формами
т
(P = l, ...,g)
i = 1
должны образовать полную систему из т = п-\- g линейно
независимых форм, т. е. определитель, составленный из коэф-
фициентов этих т форм, должен быть отличен от нуля. Тогда
величины fcs(s = l, ..., я) смогут принимать произвольные
значения, так как при любых значениях этих величин мы
найдем соответствующие qt (г—1, ..., т), разрешая систему
линейных уравнений (4) и (б). При этом получим
п
^=2 + (г = 1> .... т), (6)
s = 1
где his a hf — функции от t и qb ..., qm.
Величины tcs, являющиеся линейными формами от обоб-
щенных скоростей, будем называть псевдоскоростями, а сим-
волы ns — псевдокоординатами (5=1, ...,«). В частности,
могут совпадать с некоторыми обобщенными скоростями.
*) Нам удобно обозначать линейные комбинации (5) через £s>
хотя сам символ может не иметь смысла, так как правая часть
равенства (5) может не быть полной производной.
§ 10]
УРАВНЕНИЯ АППЕЛЯ
69
В общем же случае т-\-п величин и связаны зависи-
мостями (5) и (6).
Для того чтобы найти ограничения, налагаемые диффе-
ренциальными связями на виртуальные перемещения 8<у;, нужно
(см. § 2) в уравнениях (4) отбросить свободные члены Л.
и заменить qt на 8^г (I = 1,... , и). Тогда мы получим
т
^№ = 0 (₽=1......g). (4')
г = 1
В соответствии с равенствами (5) вводим обозначения *)
т
Ч = У, fsi ^4i (s=\, .... п). (5')
i = 1
По предположению формы (4') и (5') линейно независимы.
Поэтому 8ws могут принимать произвольные значения, а со-
ответствующие Zqt определятся из системы уравнений (4')
и (5'):
= У, (1=1, (6')
S — 1
Выражение для работы элементарных сил на виртуальных
перемещениях можно представить в виде
т
(7)
« = 1
где, как и для голономной системы,
N
V = 1
Теперь, подставив в равенство (7) вместо 8<?f выражения (6'),
найдем
т п п t т \
s^ = У Qi У *йК= У У Ч>
i = I s = 1 s = 1 \i = 1 /
т. е.
п
ЪА= % Vsfos> (8)
S 1
‘) В случае склерономной системы 8#г = и потому,
согласно формулам (5) и (5’), 8л4 =4 dt.
70
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ, I
где
т mN
Щ= 2 hisQi== 2 2 (s=1- •••>«)• (9)
i = 1 i« I v w |
Величины Щ будем называть обобщенными силами, соот-
ветствующими псевдокоординатам ~s (s=l, п).
С другой стороны, подставляя в равенства (2) выраже-
ния (6) для Ifi, мы получаем
п
г.= + (v= 1, ..., А/)> (10)
s — 1
где evs и е, (v= 1, N; s=l, .... я) — некоторые век-
тор-функции от f и 71, , qm.
Из равенств (10) находим ’)
4 = S 0=1, ДО (И)
S = 1
+ (v==i, ..., N); (12)
s= 1
при этом в правых частях формул (12) выделены лишь члены,
содержащие псевдоускорения (5=1, , п).
С помощью равенств (8) и (11) запишем общее уравне-
ние динамики
N
8Л— 2 /«/,4 = 0 (13)
v = i
в таком виде:
п N
S (ns — S Ч =0- (14)
4 = I 4=1
*) Величины г,, ns и qt связаны соотношениями (2), (4) и (5).
Исключив из этих соотношений величины qi, мы получим фор-
мулы (10). Величины 5г,, br.s и 8^; удовлетворяют однородным
соотношениям (2'), (4') и (5’), которые отличаются от соотноше-
ний (2), (4) и (5) только отсутствием свободных членов. Поэтому
и формулы (11), являющиеся результатом исключения bqt из соот-
ношений (2’), (4') и (5'), получаются из формул (10) заменой г, на
на и отбрасыванием свободных членов е,.
УРАВНЕНИЯ АППЕЛЯ
71
S 101
Так как — совершенно произвольные множители, то от-
сюда следует:
N
У, mJ\e,s = Hs (s= 1, .... л). (15)
V = 1
Введем в рассмотрение «энергию ускорений»
N
^=12 qt, *s, «Д (16)
II й= 1
Замечая, что на основании формул (12)
(^ = 1> •••> М 5 = Ъ .... л), (17)
С/ Tig
мы уравнения (15) можем записать так:
= Щ (s = l..........л). (18)
Уравнения (18) были впервые получены Аппелем и носят
название уравнений Аппеля.
Эти n = 3N—i — g дифференциальных уравнений сов-
местно с g уравнениями связей
т
£Д .?г + Д =0 (₽=1, ...,g) (19)
i= 1
и с л дифференциальными соотношениями
т
(20)
i 1
образуют систему дифференциальных уравнений, определяю-
щих движение неголономной системы.
Запишем уравнения Аппеля в развернутом виде, для чего
в формулу (15) подставим вместо F, выражения (12). Тогда
получим
S «₽Л-Н**)=П, (р=ь «)> <21>
5-1
72
Дифференциальные уравнения движения
[ГЛ. т
где
N
nf = Пр ft, qt, ЛД ufS = us(t, q,) — J] m,e,se^ (22)
V = 1
(p, s=l, ..., ri).
Через (**) в уравнениях (21) обозначены члены, не содер-
жащие псевдоускорений (s = l, .... ri).
Можно доказать, что определитель, составленный из
коэффициентов ufS, не равен тождественно нулю:
det(«ps)",S=i О1)- (23)
Тогда уравнения (21) можно разрешить относительно
псевдоускорений
^s = Hs(t, qit (л=1, п). (24)
С другой стороны, соотношения (19) и (20) также можно
представить в виде, разрешенном относительно qt (1—1,..., т)
[см. формулы (6)].
Таким образом, движение неголономной системы опреде-
ляется системой п-^-т дифференциальных уравнений первого
порядка относительно неизвестных функций qb ..., qm,
*i, . *., %, причем эти уравнения разрешены относительно
производных. Тогда задание начальных данных q\, ..., qam,
. • •, однозначно определяет движение системы. Но с по-
мощью этих начальных данных формулами (1) и (6) задаются
совместимые со связями произвольное начальное положение
и произвольные начальные скорости. Поэтому задание на-
чального положения системы и начальных скоростей,
не противоречащих конечным и дифференциальным свя-
зям, однозначно определяет движение неголономной си-
стемы.
Замечание 1. Если в частном случае в качестве
псевдоскоростей взяты п независимых обобщенных скоростей,
например qb ..., qn, то для определения соответствующих
*) В отдельных точках этот определитель может равняться
нулю. Эти особые точки исключаются из рассмотрения. Обосно-
вание неравенства (23) аналогично обоснованию неравенства
det (aik)n^ fc=i ^0 на стр. 54—55.
9 10]
УРАВНЕНИЯ АППЕЛЯ
73
обобщенных сил Q*, .... Q« нужно в равенстве (7) выра-
зить 8?я+1, Sqm через 8^, ..., 8?я:
т п
hA='^Qibqi=^lQ^qs. (25)
»=1 «=1
В этом случае энергию ускорений U можно представить
в виде функции B(t, qb ..., qm, qlt qn, qt, <?n)
и уравнения Аппеля принимают вид
(S=l, .... п). (26)
° 4 s
Замечание 2. Уравнения Аппеля можно, в частности,
применить и к голономной системе. В этом случае все ско-
рости qt будут независимыми, <Q; — Q* (I = 1, ..., и) и урав-
нения (26) представляют собой другую запись уравнений
Лагранжа второго рода1).
Примеры. 1. При помощи уравне-
ний Аппеля определим движение си-
стемы, описанной в примере § 3 (см.
стр. 28). Это позволит читателю сопо-
ставить два метода отыскания движения
неголономной системы — с помощью
множителей Лагранжа и с помощью
уравнений Аппеля — и убедиться в пре-
имуществах второго. Введем в качестве
независимых координат координаты
центра стержня х, у и угол ср, образо-
ванный отрезком AfpW2 с горизонталь-
ной осью х (рис. 28). Тогда
/ , /
Xt = X-----g- COS ср, Xs — X 4~ -% COS ср,
I . , I .
=У — у 8Ш <?> Уз=У + -2 sin?-
Уравнение дифференциальной связи в новых координатах прини-
мает вид
Л $
COS ср sin ср '
*) Однако уравнения Аппеля в псевдокоординатах примени-
тельно к голономной системе уже дают иные формы уравнений
движения.
74
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. t
Энергия ускорений U, как легко проверить, выразится следующим
образом:
| (Л? + у* + + yf) = +у +1 /'Cf 4-
Введем псевдоскорость А, полагая
л = л cos tp, у = п sin <р;
тогда
£/=й’ + ^^! + -,
где невыписанные члены не содержат ускорений. Определим обоб-
щенные силы. Для этого напишем
Отсюда
8 А — Ц Ьл 4- Ф = — 2g Ъу — — 2g sin <р 6л.
П = — 2g sin <р, Ф = 0.
Составим уравнения Аппеля
dU dU .
дл ’ д? ‘
В данном случае эти уравнения не содержат координат х, у и
имеют вид
л =—g sin <р, <р = 0.
Интегрируя, получаем
?=<»* + ₽.
1 ..
j-==— л
ау а
g . g
— — sin?, л = cos<р4-у.
Найдем х и у:
dx 1.1. g . , т
-Z— = — Х = KCOStp = -2j cos' tp 4- — cos ®,
a-~f a a 1 a’ T 1 a T
dy I . - 1 . . g . , у .
-j- = —у = — Л Sill •? = -„- COSФ Sin <0 4- — sin®.
<fcp a J a T as ‘ ‘ 1 a T
Отсюда
S. / Y Я \
x = h 'P + + 2? cos V sin ? + 6>
(V P \
7 +2as C0Stf7 C0S!f + i’
S 101
УРАВНЕНИЯ АППЕЛЯ
75
Подставляя вместо <р, получаем конечные уравнения движе-
ния, содержащие пять произвольных постоянных: а, (3, 8 и «:
Х = (at +'} + [t + ^ cos^ + ₽)] sin (“* + ₽) + 8-
У = — [у + ^Г cos(a< + ₽)] cos(a< +₽) + ». ? = «< + ₽
2. Покажем, каким образом из уравнений Аппеля могут быть
получены динамические уравнения Эйлера для твердого тела с за-
крепленной точкой О.
Пусть р, q, г — проекции угловой скорости ш на главные оси.
инерции 05, Oiq, 0$. Они, как известно, представляют собой линей-
ные комбинации обобщенных скоростей ф, в, <р, где <р, 0, tf—углы
Эйлера (см. стр. 42—43) *). Поэтому мы можем принять р, q, г за
три псевдоскорости. Вычислим энергию ускорений1 * 3):
2l/= w!fti= j (ex r-f-w X»)' dm*=
— (е X г)3 dm + 2 (в х г) (<о X ®) dm +... =
= j (е X г)3 dm + 2е [г X (ы X г»)] + • • • =
— (в X г)3 dm 4- 2е £u> X Г X v (27)
„ dm 8® , &<•» „ d 8
Заметим, что в = 4-® X и = г • Здесь -г- и --
dt dt dt dt dt
означают соответственно дифференцирование в неподвижной системе
осей и в системе осей, неизменно связанных с телом ’). Поэтому р,
q, г — проекции углового ускорения в на оси 05, От;, ОС
Тогда по аналогии с выражением для кинетической энергии 4)
27= j (® х г)3 dm = Ар3 + Bq* + Or3
1) Выражения для р, q, г мы получаем, проектируя почленно
на оси координат векторное равенство w = ®ф 4“ «9 + <о¥, где
“ф = ф, “9 = 9, “? = <р-
3) Мы здесь используем известное тождество
г X (ю X ®) + ю X (® X г) + v X (г х ю) = 0;
последнее слагаемое в левой части равно нулю, так как ® = ю X г.
Невыписанные члены в формуле (27) не содержат углового уско-
рения в.
*) См., например, ЛойцянскийЛ, Г. и Лурье А. И., Курс
теоретической механики, 1954, т. I, § 73.
4) См. Суслов Г. К., Теоретическая механика, М. — Л.,
1944, § 259.
76
ДИФФЕРЕНЦИАЛЬНЫЙ УРАВНЕНИЯ ДВИЖЕНИЯ
[ГЛ. I
(Д, В и С—моменты инерции относительно главных осей инер-
ции Об, Оц и ОС) мы можем написать
ре X г)а dm = Др8 + Bqa + Or2.
С другой стороны, кинетический момент 0=^ г X ® dm имеет
компоненты Ар, Bq, Сг. Поэтому окончательно получаем следую-
щее выражение для 20:
20= Ара + Вф + Ср + 2 [(С — В) qrp +
+ (Д — С) rpq 4- (В — Д) pqr] + ...
С другой стороны, для элементарной работы внешних сил имеем
&Д = £0<в dt = О р dt q dt 4- О r dt.
Поэтому уравнения Аппеля непосредственно дают уравнения Эйлера
Д^4-(С-5)9г = Ч
Bfz4-H-C)rp = zv
С ^t +(B-A)pq = Lz.
ГЛАВА II
УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ
§ 11. Уравнения Лагранжа в случае потенциальных сил.
' Обобщенный потенциал. Ненатуральные системы
Пусть обобщенные силы Q; являются потенциальными,
т. е. пусть существует потенциал сил (потенциальная энергия)
П = П (t, qt) (см. § 8) и
Q. = —(/=1,(1)
Тогда уравнения Лагранжа
d дТ дТ _ <911 „ _, ч
dt дЬ d4i~ dqi Л—1- •••>«?
записываются в виде1)
где
L=T— П. (3)
Функция L называется функцией Лагранжа или кине-
тическим потенциалом.
Кинетический потенциал L, так же как и кинетическая
энергия Т, представляет собой функцию второй степени
относительно обобщенных скоростей:
L = Ц -|- Ц -f- £о, (4)
‘) Поскольку потенциальная энергия П не зависит от обобщен-
„ , ,, тг dL дТ dL dT ЭЛ
ных скоростей, a L = T — П, то 5-^==-зт~1 а ~э—= ---------------з—
dqi d$i dqt dqt dqt
(i = l, .... n).
78
УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ
[ГЛ. И
где
п п
/-2 = 4 2 (4')
i,fe —1 zt=l
Здесь коэффициенты cik, cit с0 являются функциями от
координат qn и времени t (I, k = l,..., п). Сопо-
ставление формулы (3) с формулой (5) на стр. 53 дает
£3—Тг, L\—1\, £0—T'q П.
(б)
Заметим, что в случае, когда действующие на материальные
точки активные силы F, = X.J + YJ + Z^k (v=l, ..., N) имеют
потенциал П (Г, л\, у>.„ z.J в декартовых координатах л\, у\, г,
(v== 1, , N), т. е.
дхч ’ “ ду, ’ 1 ~ ~3z^
(.= 1,
М,
эти силы и в независимых координатах ^г(/=1, ..., п) имеют по-
тенциал (обратное утверждение в общем случае неверно!) и этим
потенциалом является тот же потенциал П, но только выраженный
через координаты qlt qn и время t. Действительно,
п N
2 Qi ч-= 2 +z’ =
откуда и следуют равенства (1).
Рассмотрим теперь тот случай, когда вместо обычного
потенциала П ft, qk) существует обобщенный потенциал
V(t, Qk’ Qk)> через который обобщенные силы Q, выражаются
с помощью формул
„ d dV дУ ,, , ч
Qi — ~dt dQt ~dqt —b (6)
Тогда уравнения Лагранжа
й дТ дТ d dV dV . .
dqt dt difo dqt ”
снова записываются в виде (2), где теперь
L= Т— V.
(7)
§ 11]
УРАВНЕНИЯ ЛАГРАНЖА
79
Из формул (6) следует:
Л
Q‘= 2вдгЛ+(,,) (,=1...............<8)
k = \
где (**) обозначает сумму членов, не содержащих обоб-
щенных ускорений qk (А = 1, п).
Поскольку в механике мы рассматриваем только тот слу-
чай, когда обобщенные силы Q; не зависят явно от обоб-
щенных ускорений, а зависят лишь от времени, координат
и обобщенных скоростей
= (9)
то, согласно формулам (8), в этом случае все частные произ-
водные второго порядка от V по обобщенным скоростям
должны быть тождественно равны нулю, т. е. обобщенный
потенциал V линейно зависит от обобщенных скоростей:
п
v= У, ПЛ,:4-п= Vi-|—п, (ю)
i=i
где Пг (1—1, п) и П — функции от координат qlt,.., qn
и времени t. Но тогда, согласно равенству (7), L снова будет
квадратичной функцией относительно скоростей qt и вместо
равенств (5) будем иметь1)
£0=7-0-П. (11)
Подставляя выражение (10) для
чаем
«<=-«М;[211а+п]=
Й = 1
____ дП , Vi :dHi
dqi"' 2* \Sqk ~
Я = 1
V в формулу (6), полу-
+ (12)
1) Коэффициенты в выражениях для L и Т связаны между
собой. Действительно, при обычном потенциале с; = а{, а при обоб-
щенном потенциале Ci = at — П,- (1 = 1,..., п). В обоих случаях
Cih^aik (i, й=1, ..., ri), с0 = а0—П и £,= 7',— положительно
80
УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ
[ГЛ. И
Формулы (12) показывают, что в случае, когда линейная
часть Vj обобщенного потенциала не зависит явно от вре-
мени t — 0 (Z= 1, ..., , обобщенные силы Qt скла-
оываются из потенциальных сил—(4=1, ..., п) и
гироскопических сил
(i = l, и), (13)
й=1
где
Т»—ft*-'.......«) W
Важность рассмотрения обобщенного потенциала подтвер-
ждается следующим примером.
Пример. На точечный электрический заряд в электромагнит-
ном поле действует сила Лоренца
^i-^-1-’хй], (14)
где V — скорость точки, е — заряд, с — величина скорости света,
а £ и Н—напряженности электрического и магнитного полей. Век-
торы £ и Н выражаются через скалярный потенциал и вектор-
ный 4 с помощью формул ')
1 дА
Е = — grad ср-Я = rot 4. (15)
Найдем обобщенный потенциал V для силы Лоренца F.
Из формул (14) и (15) находим
р г) А р
F~ — e grad <j> - - ~ (v X rot 4) =
= — egrad <р — у —- 4-у [(®v) 4 + ® X rot4) =
= — e grad <р — — + у grad (г<4), (16)
') См., например, Л а н д а у Л. Д. и Л и ф ш и ц Е. М Теория
поля, М.-Л., 1948, стр. 55.
? И)
УРАВНЕНИЯ ЛАГРАНЖА
81
где скорость v в выражении grad (®А) считается вектором, не за-
висящим от точки поля * *).
Отсюда, выбирая в качестве независимых координат декартовы
координаты точки х, у, z и полагая
V = e<j>-е— (®Д), (17)
т. е.
V= e<f — A + JMj, -I- £Аг),
имеем:
_ е dAx dV _ d dV dV
x c dt dx dt dX dx '
Аналогичные формулы имеют место для Fy и F~. Таким обра-
зом, обобщенный потенциал силы Лоренца (14) определяется
формулой (17). Для функции Лагранжа L имеем выражение
1 е
L=T — iz = y mv3 — e<f + ^-(vA). (18)
Классические системы, в которых силы имеют обычный
потенциал П((, q{) или обобщенный потенциал V(t, qt, qt),
мы будем называть натуральными. Для таких систем функ-
ция Лагранжа L является функцией второй степени от обоб-
щенных скоростей, т. е. представляется выражением (4), где
Ц — положительно определенная квадратичная форма отно-
сительно обобщенных скоростей.
В качестве примера ненатуральной системы можно рассмотреть
движение материальной точки в релятивистской теории при отсут-
ствии силового поля. В этом случае движение точки определяется
уравнениями Лагранжа, в которых
Т sh \1/з
£ = —mc’^l—,
$ Л
*) Здесь для выражения (vy) А = vx + vy
используется известная формула векторного анализа
dy +
dA
Vg dz
(vy) А + v X rot А ±= grad (®А),
в которой v рассматривается как постоянный вектор. В справед-
ливости этой формулы легко убеждаемся, сравнивая между собой
проекции на оси х, у, z левой и правой частей равенства. Дей-
ствительно, для оси х
dAx . dAx . dA, . / dAv dA, \
x dx ' " dy 1 г dz ' y \ dx dy /
dAx . dAv . dA,
x dx y dx ' 2 dx
=-&№
Аналогичные формулы имеют место для проекций на оси у н z.
82
УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ
[ГЛ. II
где Vs = Л* 2 Ц-У2 + ^2> а с — величина скорости света. Здесь L уже
не является функцией второй степени относительно скоростей
Я, у, i.
л Vs \Vi
Если в выражении для функции L разложить II-------в ряд
г .
по степеням — и отбросить члены второго и более высокого по-
рядка относительно —, т. е. положить II—-^1 «в 1 —2~с^ ’ Т0
получится «классическое» выражение функции Лагранжа для изо-
лированной материальной точки, а именно:
L — у то2 4- const.
В этой и следующей главах мы будем вести изложение для
систем общего типа *), движение которых определяется урав-
нениями Лагранжа (2) с произвольной функцией L*=L(t, qit q^.
Мы будем лишь предполагать, что гессиан функции L отно-
сительно обобщенных скоростей не равен
нулю8):
тождественно
. , / дЧ. \п ,п
det к. 0.
(19)
Уравнения (2) в развернутом виде могут быть записа-
ны так:
п
2 <20)
где через (**) мы обозначили сумму членов, не содержа-
щих обобщенных ускорений qt (Z=l, ..., л). Поскольку
определитель системы линейных (относительно q^) уравне-
ний (20) отличен от нуля [см. неравенство (19)], то си-
стему (20) можно разрешить относительно обобщенных уско-
рений и записать в виде
?.= (t, q& (z=i,..., n).
*) Те положения, которые справедливы только для натуральных
систем, будут специально оговорены.
дгЬ д'1 Т
2)Для натуральных систем = aik (i, k =
= 1, ..., л) и потому по доказанному в § 7 (стр. 54—55) неравен-
ство (19) выполняется,
КАНОНИЧЕСКИЕ УРАВНЕНИЯ ГАМИЛЬТОНА
83
S 121
Поэтому сделанный в § 7 вывод об однозначном определе-
нии движения системы путем задания начальных данных 9/,
7? (/=1, ..., п) справедлив не только для натуральных
систем, но и для рассматриваемых здесь систем более общего
типа.
§ 12. Канонические уравнения Гамильтона
Лагранж показал, как выписываются дифференциальные
уравнения движения системы, если известен кинетический по-
тенциал (функция Лагранжа) L = L(t, qt, q^.
Будем называть переменные t, q{, qt (Z=l, ..., и), через
которые выражается функция Лагранжа, переменными Ла-
гранжа. Система значений этих переменных характеризует
момент времени и соответствующее состояние системы, т. е.
положение системы и скорости ее точек. Как уже было отме-
чено в конце предыдущего параграфа, задание функции Ла-
гранжа и начального состояния однозначно определяет дви-
жение системы.
Гамильтон предложил в качестве основных переменных,
характеризующих состояние системы, взять величины t, qt, pt
(i = l, ..., и), где pt (1=1, ..., и)— обобщенные им-
пульсы, определяемые равенствами
<i=1......")• (Ч
Переменные t, qt, pt (i=l, ..., n) будем называть пере-
менными Гамильтона.
Поскольку якобиан правых частей равенств (1) по пере-
менным ?,• является отличным от нуля гессианом функции L
[см. условие (19) на стр. 82], то уравнения (1) могут быть
разрешены относительно qt (Z=l, ..., zz):
^=Ф,(^, qk, pk) (1=1, ri). (2)
Таким образом, переменные Гамильтона могут быть
выражены через переменные Лагранжа и наоборот и со-
стояние системы можно характеризовать как системой значе-
ний переменных Лагранжа, так и системой значений перемен-
ных Гамильтона.
84
УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ
[ГЛ. II
В случае натуральной системы L — квадратичная функ-
ция (см. стр. 77—79) относительно обобщенных скоростей и,
согласно равенствам (1), обобщенные импульсы линейно вы-
ражаются через обобщенные скорости:
Pi = S + Ct (г = 1,..., п). (3)
*= i
Решая эту систему линейных уравнений относительно qx ’),
получаем для qt снова линейные выражения
4i= S bikPk + bt (Z= 1, ...,»), (4)
1
где bik и b; — функции от t, qb ... , qn.
Если в натуральной системе силы Q, (7=1, ..., п) имеют
обычный потенциал П(t, q(), то из равенства L=T—П
следует* 2 * *):
дТ
Р‘=ш- <5>
Заметим, что любая функция от переменных Лагранжа
F=F(t, qt,
после подстановки в нее вместо обобщенных скоростей qt вы-
ражений (2) или (4) превращается в некоторую функцию
F(t, q„ Pt) от переменных Гамильтона. Функцию F (t, q(, pt)
будем называть союзным выражением для функции F (t, qit qt).
Пример. Для свободной материальной точки декартовы коор-
динаты х, у, г являются независимыми и в потенциальном поле
П = П (t, х, у, z) функция Лагранжа имеет вид
А = у ш (Я* 4-.у2 + Л- П (t, х, у, г).
*) Как было установлено в § 7, det(afA)"ft=1 т^;0.
2) При силах, имеющих обобщенный потенциал, формулы (5)
неверны. В этом случае [см. равенства (7) и (10) на стр, 78—79J
дТ гг /• т \
^=1^------п« (I = 1....
КАНОНИЧЕСКИЙ УРАВНЕНИЯ ГАМИЛЬТОНА
85
§ 12]
Декартовым координатам соответствуют импульсы
рх — ^ — тЛ, Ру — т$' Pz = mi. (6)
Если мы отсюда определим X, у, i н полученные выражения под-
ставим в L, то получим союзное выражение для L
in № + ру+- П х’ У' z)' 0
Если вместо П (£, х, у, г) имеем обобщенный потенциал
V= П±4- П2у + П32 -|- П,
где П1; Пг, П3, П — функции от t, х, у, г, то из равенства
L = у т (Xs 4- У2 4- **) — IM — П2у — П32 — П
находим
Рх = ^ = т-*“'пь ру — т$ — П21 pz^=m£ — П8, (6')
и союзное выражение L имеет вид
Г= i^ + ^ + PP-i^i + ^ + nb-n. (7')
Гамильтон ввел в рассмотрение функцию H(t, qit pt),
определяемую равенством
п
н=
i = 1
(8)
и показал, что с помощью этой функции уравнения
движения могут быть записаны в виде следующей системы
2п обыкновенных дифференциальных уравнений первого
порядка:
dq, дН dpi дН .. , .
dt dpi ’ dt dq, ‘’ П)'
(9)
86
УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ
[ГЛ. П
Эти уравнения называются каноническими уравнениями или
уравнениями Гамильтона ’). Функция Н(t, qit pt),' опреде-
ляемая равенством (8), называется функцией Гамильтона.
Вывод канонических уравнений Гамильтона будет опи-
раться на следующую математическую теорему.
Теорема Донкина2). Пусть дана некоторая функ-
ция X(хь ... , хп), гессиан которой отличен от нуля:
(10)
и пусть имеется преобразование переменных, «.порождае-
мое» функцией Х(хь ... , хп):
= (*=1> (П)
Тогда существует преобразование, обратное преобразова-
нию (11), которое также порождается некоторой функ-
цией У (у,....упу.
дУ
Xi==^ (z=1> •••-«); (12)
при зтом порождающая функция Y обратного преобра-
зования связана с порождающей функцией X прямого
преобразования формулой 3)
Y^^xyi-X. (13)
i = l
Если функция X содержит параметры ... , лт,
т. е. Х=Х(хъ ... , х„; аь ... , am), то Y также содер-
жит эти параметры, т. е. Y =Y (у1( ..., уп; ab ..., a,„) и
дУ дХ ,. . ч ....
(/=1>-.-,^)- (И)
Доказательство. Гессиан функции X совпадает
с якобианом правых частей в уравнениях (11). Поэтому усло-
вие (10) показывает, что из уравнений (И) можно выразить
*) Впервые эти уравнения в общем виде были получены англий-
ским математиком У. Гамильтоном в 1834 г.
а) Philosoph. Trans., 1854. Переход от переменных xt к пере-
менным yz (i = l.я), о котором идет речь в теореме Донкина,
часто называют преобразованием Лежандра.
3) Предполагается, что в левой части формулы (13) все х, вы-
ражены через у,-, т. е. что Y*=*Y(ylt ... , у„).
S 121
КАНОНИЧЕСКИЕ УРАВНЕНИЯ ГАМИЛЬТОНА
87
переменные х1у ... , х„ через _j>i._уп:
Xi ~fi (У1, • • , уп) (1=1, , п). (15)
Пусть функция У (ylf ..., уа) определяется формулой (13),
в которой переменные Х{ заменены выражениями (15). Тогда
дУ
dyt
п п п
д I V „\ v dxk । V дХ дх,
dyi Х^к X) dy.yk-i-Xi QXk Qy
k s®* 1 1 k 1 Д* — I
Но, согласно равенствам (11), две суммы, стоящие в правой
части этого равенства, взаимно уничтожаются и, следова-
тельно, имеют место формулы (12).
Пусть теперь X содержит помимо переменных хъ ... , хп
еще параметры а1( ... , ат. Тогда эти параметры фигури-
руют в прямом преобразовании (11), а следовательно, и
в обратном:
Xi=fi(yi, ... , Уп, ....®<п) (1=1,
Функция У определяется равенством (13), в котором х(- заме-
нены на fi (>!, ... , у„; аь ... , а„); поэтому
<ЭУ д / V v\
-д— =-3- 7 ХЛ; — X =
От; да, \ ‘ /
i ж 1
_ у дх‘„ у дх dxt дХ дХ ,. . .
Теорема Донкина доказана полностью.
Используем теорему Донкина для перехода от переменных
Лагранжа к переменным Гамильтона, заменяя в теореме функ-
цию X на L, переменные хь ... , хп — на qx, ... , qn, пара-
метры аь .,., ат — на ..., qn, t, переменные уь ..., уп —
na pi, ... , рп и, наконец (с учетом примечания 3 на стр. 86),
п п
функцию У= У х$1 — X — на Н= У рД- — L. Тогда
i=i <=1
дУ
*) При вычислении производной ч—
иву
величины ylf ...
Уп рас-
сматриваются как постоянные,
88
УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ
[ГЛ. II
по теореме Донкина (гессиан функции L относительно
qt (Z= 1, , и) не равен нулю!) из формул (1) следует:
dH 4 ~ dpt’ dL dH .. . v <>,Г ('^1 ">• <1е) — — OIL ну) dt dt • 00
Равенства (16) и (17) представляют собой тождества,
являющиеся следствием связи (1) между обобщенными ско-
ростями и обобщенными импульсами. Но уравнения Лагранжа
могут быть, в силу (1), записаны так:
dpt
dt
dL
dqt
(i = l, ... , ri).
(18)
Эти уравнения совместно с равенствами (16) и приводят нас
к каноническим уравнениям Гамильтона
dqi dH dp; дН
dt dpt ’ dt dqt
(19)
Помимо уравнений Гамильтона мы получили тождество (17),
которое будет использовано в дальнейшем.
Из уравнений (19) следует тождество
dH VI IdH dqt , dH dpt\ , dH dH
dt h \dqi dt "T" dpi dt J ' dt dt ' *
i = 1
Назовем систему обобщенно-консервативной, если функ-
ция Гамильтона Н не зависит явно от t, т. е. если
Н=Н{Ч1> Pi).
В этом случае = 0 *) и, следовательно, в силу тожде-
ства (20), ^ = 0, т. е. при движении системы
H(qi, Pi) = const — h, (21)
*) Из равенства (17) следует, что для обобщенно-консерватив-
ной системы е, t не входит явно и в функцию Ла-
гранжа L.
§ 12) КАНОНИЧЕСКИЕ УРАВНЕНИЯ ГАМИЛЬТОНА
89
где h — произвольная постоянная. Функцию Н будем назы-
вать обобщенной полной энергией, а соотношение (21), не
содержащее q или р и включающее произвольную постоян-
ную h, — обобщенным интегралом энергии.
Для того чтобы пояснить эту терминологию, рассмотрим
натуральную систему. Тогда L является квадратичной функ-
цией [см. равенство (4), § 11]
L = Li Lj Lq
и
г === 1 i=l
Но по теореме Эйлера об однородных функциях1)
<22>
i = l i = 1
Поэтому окончательно для произвольной натуральной системы
Я=?2 —£0- (23)
Пусть Т= 7а 7) То. Если силы имеют обычный потен-
циал П = П(Г <?,) или обобщенный потенциал V— Vj -|- П,
то Z-а = ?>, Го = — П, и поэтому
H=Ti— Го + П. (24)
Если система склерономна, то Т— Т.г, Та — 0, и потому
Я=Т-|-П. (25)
Таким образом, для склерономной натуральной системы
функция Гамильтона Н представляет собой полную
энергию2), выраженную через переменные Гамильтона.
Рассмотрим теперь консервативную систему, т. е. нату-
ральную склерономную голономную систему с не зависящим
явно от времени обычным потенциалом сил.
*) См. примечание на стр. 58.
2) При наличии обобщенного потенциала 1/=У1 + П мы по-
прежнему называем полной энергией величину 7 —]- П, а не
90
УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ
[ГЛ. II
В этом случае время t не входит явно в выражение (25)
для полной энергии Н и потому, согласно равенству (21),
имеет место закон сохранения энергии
7’+П = й. (26)
Консервативная система является частным случаем обоб-
щенно-консервативной, и в этом частном случае обобщенный
интеграл энергии переходит в обычный.
Если система склерономна и силы имеют обобщенный
потенциал 1/=У14-П, в котором П не зависит явно от
времени t ^^- = 0^, то снова функция Н определяется
формулой (25) и не зависит явно от t. Поэтому и в этом
случае система является обобщенно-консервативной и имеет
место интеграл энергии (26) *).
Пример. Горизонтальная рейка вращается около вертикаль-
ной оси, а вдоль рейки движется груз массы т. Сила, действующая
на груз, имеет потенциал П (г), где г — расстояние груза до оси
вращения.
Обозначим через <р угол поворота рейки, а через I—ind*— ее
момент инерции относительно вертикальной оси вращения. Тогда
г и ? — независимые координаты системы и
Г=Ц/<р2 +’т (г2 + г2*2) = | т [г2 + (г2 + d2) П
Отсюда
дТ . дТ . . . „ .
= = p¥ = ^ = m(r8 + d2)<P.
Поскольку система консервативна, то
1 / р2 \
Я=ГЧ-П = ^- р2 + -г-г +П(г).
2т \ г г14- d2/ v
Канонические уравнения в данном случае имеют вид
dr Ж? __ Pv
dt^ т ’ di ~~ т (г2 d‘) '
OLr =-----грч _ п. ?Ря_ __ о
dt m(rs4-d2)a dt ’
а интеграл энергии записывается так:
о8
Р* + rs + 2/пП (г) = й, (Jit = 2mh).
s) См. примечание 2 на стр. 89.
УРАВНЕНИЯ РАУСА
91
§ 13]
§ 13. Уравнения Рауса
Раус предложил взять в качестве основных переменных,
характеризующих состояние системы в момент времени t,
часть переменных Лагранжа и часть переменных Гамильтона.
Переменными Рауса являются величины
Яи Я* 4i, Ра. (*=1.........а = от-|-1, ... , л) (1)
(здесь т — произвольное фиксированное число, меньшее л).
Для того чтобы от переменных Лагранжа перейти к этим
переменным, нужно все выразить через величины рл
... , и), используя для этой цели соотношения
= (а = от-4-1, ... , л). (2)
Допустим, что гессиан функции L относительно обобщен-
ных скоростей qa («малый гессиан») отличен от нуля *):
det #0. (3)
Тогда, применив доказанную в предыдущем параграфе
теорему Донкина, получим преобразование, обратное преобра-
зованию (2), а именно
= (а = от-|~1> ... , л), (4)
*) В общем случае это неравенство не следует из неравен-
ства (19) на стр. 82, а является дополнительным условием. Для
натуральной же системы неравенство (3) вытекает из того, что
п
La=-^ ars4rtis — положительно определенная квадратичная
r,s =1
форма. В этом случае главный минор, составленный из коэффи-
циентов квадратичной формы:
det (-Я = det (а„»□. i ,
\ ддад^ )«,? = от + 1 v ~ т + 1
должен быть положителен.
92 УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ [ГЛ. П
где R = R(t, qit
мая равенством
4t> pj —функция
п
R= S р^л—Ц
а = m + 1
Рауса, определяе-
(5)
здесь знак означает, что все цл выражены через рл.
При этом переменные t, q{, q^ qt (l=\, ... , m;
a = m 4~ 1.....n) рассматриваются как параметры и потому,
в силу той же теоремы Донкина,
dR__ _dL^ (i—\
dq, dqt ’ d^i d$t ' ’
dL , । , 4
5— — — (a = m -4- 1, .,. , и),
dR —^^L
dt dt ’
(6)
(7)
(8)
Уравнения Лагранжа для координат qt в соответствии
с равенствами (6) перепишутся так:
d dR dR g
dt dfa dqt
(I — 1, ... , m).
(9)
Уравнения Лагранжа для координат qa
dp*____dL
dt dq~a
(a = tn 1, ... , n)
совместно с формулами (4) и (7) дают
dq„ dR ___^R
dt dpa ’ dt dq^
(а=от-|- 1, ... , n). (10)
Уравнения (9) и (10)
d dR____dR_____q
dt dq, dqt
dga dR dp„ dR
dt dpa ’ dt dqa
(Z=l......tn),
(a = 1, ... , n) .
(11)
образуют систему уравнений Рауса. Она состоит из т диф-
ференциальных уравнений второго порядка типа Лагранжа и
s uj
ЦИКЛИЧЕСКИЕ КООРДИНАТЫ
93
2 (и — т) дифференциальных уравнений первого порядка
типа Гамильтона, причем функция Рауса в первых уравне-
ниях играет роль функции Лагранжа, а во вторых — функ-
ции Гамильтона1).
§ 14. Циклические координаты
Координата дл называется циклической, если она не вхо-
дит явно в функцию Лагранжа L, т. е. если |^ = 0.
При выводе уравнений Гамильтона и уравнений Рауса
были установлены равенства
dq^ dq/
(1)
dL
Из этих равенств следует, что частные производные ,
дН dR х
и могут обращаться в нуль только одновременно.
Поэтому циклическая координата может быть также опреде-
лена как координата, не входящая явно в функцию Гамиль-
тона И или в функцию Рауса R. Все эти определения экви-
валентны.
Обобщенный импульс, соответствующий циклической
координате q*, во время движения сохраняет постоян-
ное значение. Действительно, из канонических уравнений
следует:
= 0
Й ддЛ
т. е. рЛ = const = са.
Допустим теперь, что имеется г — п — т циклических
координат qa (а = »г-|- 1, ..., п). Циклические координаты qa
не входят явно в И, а соответствующие этим координатам
*) Если мц хотим сохранить связь между обобщенными им-
пульсами и функцией Лагранжа, то следует считать, что в первых
уравнениях (11) роль функции Лагранжа играет функция —R, по-
скольку, согласно формулам (6):
__ dL _<?(-/?)
Pl d<jt dqt
(1=1,
m).
94
УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ
[ГЛ. II
импульсы р„ могут быть заменены постоянными са. Тогда * *)
qt, pi, са). (2)
Выпишем канонические уравнения для нециклических
координат
%=дД, ^ = -д^ (i = l, ...,от). (3)
dt dpi’ dt dqi ' ' v
Из структуры (2) функции H следует, что уравнения (3)
представляют собой систему из 2т дифференциальных урав-
нений первого порядка с 2от неизвестными функциями qt, pt
(i—1, ... , от). Проинтегрировав эту систему, найдем
= с«> ci’ c'i)>
Pt = ^i(t, сл, c'i)
(Z=l, ... от),
(4)
где cit c'i (Z= 1, ... , от) — новые 2 от произвольных постоян-
ных. После подстановки выражений (4) в И мы можем опре-
делить q^ из уравнений
dg*___дН_
dt дсл
(а = от 1, ... , п)
(5)
при помощи квадратур
+ (а = от-Н......п). (6)
Таким образом, по существу все свелось к интегрирова-
нию системы (3), порядок которой 2от меньше порядка
исходной системы 2п на 2г единиц, где г = п — от — число
циклических координат, т. е. наличие г циклических коор-
динат дало возможность понизить порядок системы
на 2 г единиц.
Система уравнений (3) гамильтонова. Покажем, как
при помощи уравнений Рауса можно получить автоном-
ную систему4) из от дифференциальных уравнений второго
*) Индекс i пробегает значения 1, ... , т, а индекс а—значе-
ния т + 1, ... , п.
*) Автономной системой мы здесь называем систему дифферен-
циальных уравнений, не содержащую «лишних» неизвестных функ-
ций, которые должны были бы быть определены предварительно
до интегрирования данной системы уравнений.
§ 14] ЦИКЛИЧЕСКИЕ КООРДИНАТЫ 95
порядка типа уравнений Лагранжа. Действительно, заменив
обобщенные импульсы ра, соответствующие циклическим
координатам qa, через постоянные ся (а = т 1, ..п),
мы функцию Рауса запишем в виде функции от t, qit q, и сл
(1 = 1, .m; а = •••> nf.
R = R(t, qt, qit c J. (7)
Тогда уравнения Рауса для нециклических координат
d dR dR п .. . . /о.
= ° <Z=1.........
образуют искомую автономную систему, а циклические коор-
динаты qa определяются из соответствующих уравнений
Рауса (11) предыдущего параграфа с помощью квадратур
<7a=J^+< (9)
dR
При этом предварительно в все qt и qt заменяются
функциями от аргументов t, ct и ci (1=1, , tn),
получаемыми в результате интегрирования системы (8).
Пример. В примере, рассмотренном в конце § 12,
L = Т— П = 1 т [Л8 + (г2 + rf2) у2] - П (г),
<р—циклическая координата и
pv = т (г2 + ds) у = const = сг
Составим функцию Рауса:
R=p^— L= 1 т [- fs + (г2 4- d2) $2] + П (г) =
1 1 р3
~ ~ 2 mf‘ + 2^ r2 + d2 + П
96
уравнения движения в потенциальном поле
[ГЛ. п
Определение движения сводится к интегрированию одного диф-
ференциального уравнения второго порядка
d dR dR
dt dr dr '
которое в развернутом виде выглядит так:
qa
тГ==т (r2 + d2)2 ~ П’(r)'
Заметим, что это уравнение относительного движения груза
вдоль рейки, поскольку в правой части стоит центробежная сила
с2 ,
<е г
Циклические координаты иногда называют игнорируемыми
или скрытыми координатами. Это название объясняется тем,
что при интегрировании системы уравнений (3) или (8) мы
как бы забываем о существовании циклических координат,
считая рл постоянными параметрами.
В разобранном примере игнорирование циклической коор-
динаты привело к игнорированию вращательного движения
рейки и мы получили дифференциальное уравнение для
относительного движения вдоль рейки.
Само название «циклическая координата» связано с тем,
что во многих задачах механики угол <р, характеризующий
движение по замкнутым траекториям (циклам), не входит
явно в выражение для L и потому является циклической
координатой.
Отметим некоторую аналогию между голономной систе-
мой, имеющей циклическую координату, и обобщенно-кон-
сервативной системой. Для первой системы —0, для
второй -^-==0. Для первой имеет место интеграл рл = const,
для второй системы имеет место интеграл Н= const. Корни
этой аналогии будут обнаружены в дальнейшем при рассмот-
рении основного интегрального инварианта механики.
В заключение заметим, что более глубокое исследование
движения систем с циклическими координатами будет прове-
дено в гл. VII.
S 15]
Скобки пуассонА
97
§ 15. Скобки Пуассона
В этом параграфе будут рассмотрены некоторые свойства
интегралов гамильтоновой системы уравнений движения.
Некоторая функция f (t, qit pi) называется интегралом
уравнений движения
^1 = ^-, % = (f==l, ...,л), (1)
dt opt ’ dt dqi ' ’ 7 v '
если для любого движения данной системы эта функция
сохраняет постоянное значение с *):
/ft Яt, Pi) = c- (2)
Иногда интегралом называют само соотношение (2).
Для обобщенно-консервативной системы интегралом
является функция H(qit pi). Если — циклические коорди-
наты, то интегралом будет рЛ.
Очевидно, что если функции ..., ft являются инте-
гралами уравнений движения, то произвольная функция от
этих интегралов
W- .... Л)
будет также интегралом. Поэтому в дальнейшем нас будут
интересовать только независимые интегралы.
Если известна «полная» система интегралов, состоящая
из 2» независимых интегралов ..., /2„ (п — число степе-
ней свободы системы), то, разрешая соотношения
Aft^-Z’.)-^ ft = i.............2«) (3)
относительно qt и рь получаем конечные уравнения дви-
жения
?i==?ift •••> «ta). Pi = <hft <\> •••> (* 4)
содержащие 2п произвольных постоянных clt ..., с2п.
Таким образом, если известны 2л независимых интегра-
лов, то известны все движения системы. Если нам известны I
независимых интегралов /1( ..., fb где I 2л, то мы имеем
лишь частичное представление о движениях системы, и чем
больше I, тем более полным является это представление.
1) Это значение с может меняться, когда мы переходим от
одного движения системы к другому.
4 Ф. Р. Гантмахер
98
УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ
[ГЛ. И
Поэтому мы всегда заинтересованы в нахождении возможно
большего числа независимых интегралов.
Мы познакомимся здесь с методом нахождения интегра-
лов уравнений движения, предложенным Пуассоном и Якоби.
Пусть f(t, Qi, Pt) — интеграл уравнений (1). Тогда при
подстановке вместо qt, pt- (Z==l, .... п) любого решения
гамильтоновой системы (1) функция f превращается в по-
стоянную с, т. е., согласно уравнениям (1)
df_ У (&_ ___— о
dt dt'£i \dqt dpi dpi dqi /
i = 1
Пуассбн ввел специальное обозначение — скобки Пуас-
сона— для следующего выражения, составленного из частных
производных двух произвольных функций ср (t, Pi) И
Ф(*> <li> Pi)--
ст т/ ^jxdqidpi dpi dqi) ' '
i = 1
При помощи скобок Пуассона равенство (5) — необходи-
мое и достаточное условие для того, чтобы функция f(t, qt,Pi)
была интегралом уравнений (1) — записывается так:
^+(/Н) = 0.
(7)
Отметим следующие свойства скобок Пуассона:
Для любых функций ср(t, qh pt), ty(t, qit pt), yjt, qit р{)-.
1°. (<рф) = — (ф ср);
2°. (с<р ф) = с (ср ф) (с — постоянная);
з°- (<р+ф х)=(? х)+(Ф х);
4°- ((? Ф) х)+((Ф х) ?)+((х <р) Ф)=°;
5°- £(<рФ)=© Ф) + ('Р й-
Тождества 1°, 2°, 3°, 5° получаются непосредственно из
определения (6) скобок Пуассона.
Тождество 4°, которое называют тожбеством Пуассона,
устанавливается при помощи специальных соображений.
Пусть Хи Y — дифференциальные операторы первого
§ 151
СКОБКИ ПУАССОНА
99
порядка над функцией f(xb хт):
т т
Х?=2Х^ (8)
где Xk> Yk (A = l, от)— функции от переменных
хь .... хт. Тогда «коммутатор» Z—XY— YX также будет
оператором первого порядка г)
т
Zf=X(Yf)-Y(Xf) =y[X(Yk)-Y(Xk)]^. (9)
k
Вернемся к скобкам Пуассона (<р /). Эти скобки можно
рассматривать как результат применения линейного опера-
тора Ф вида (8) к функции / от переменных qh pt
(Z=l, ..., и):
Ф/=(?/)=2(-а^+^<). о»)
Этот дифференциальный оператор первого порядка вполне
определяется функцией ср. Аналогичные операторы ЧР\ X опре-
деляются функциями ф и /
Перейдем теперь непосредственно к установлению тожде-
ства Пуассона 4°. После раскрытия сложных скобок любой
член в левой части 4° будет содержать в качестве множителя
частную производную второго порядка от одной из функ-
ций ср, ф, х- Но ((ср ф) х) не содержит частных производных
второго порядка от х, а сумма
((Ф X) ?) + ((X ?) Ф) = (Ф (<? х)) — (<Р (Ф X)) = (Ф’Ф — Ф1‘) X
представляет собой дифференциальный оператор первого
порядка относительно / Таким образом, в левую часть
тождества Пуассона не входят частные производные второго
порядка от х> а значит, в силу симметрии, отсутствуют и
частные производные второго порядка от ср и ф. Другими
словами, все члены в левой части 4° взаимно уничтожаются,
что и требовалось доказать.
*) Непосредственные вычисления показывают, что в правой
части равенства (9) все члены содержащие частные производные
второго порядка от функции /, взаимно уничтожаются.
4*
100
УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ
|ГЛ. II
Докажем теперь основную теорему.
Теорема Якоби — Пуассона. Если f и g — ин-
тегралы уравнений, движения, то (fg) — также инте-
грал этих уравнений.
Доказательство. Требуется доказать, что для функ-
ции (f g) выполняется соотношение (7):
^ + (О^) = 0, (11)
когда такое же соотношение имеет место для каждой из
функций f, g:
^+(/Я)^0, | + fe//) = 0. (12)
Действительно, согласно 5°
I (fg) = (I g) + (/1) = - ((/ Н) g) - (f (g НУ) =
=(W)g) + ((g H)f).
Поэтому, используя тождество Пуассона, получаем
д-Цг + Н)=Н)+((g Н) +(^Hf} &=°’
что и требовалось доказать.
Доказанная теорема дает автоматическое правило, позво-
ляющее из двух интегралов f (t, qit pt), g(t, qt, p^ при
помощи алгебраических операций и операции дифференци-
рования получить третий интеграл:
°' \dqi dpi dpi dqi /'
Взяв скобки Пуассона, например, от / и (f g), мы снова
получим интеграл и т. д. Однако не следует забывать, что
новый интеграл может оказаться или тождественно равным
нулю или функцией от предыдущих известных нам инте-
гралов. Таким образом, только при специальном выборе
независимых интегралов .., ft (l<^ 2ri) можно быть уве-
ренным, что при помощи скобок Пуассона можно получить
недостающие (до полной системы) интегралы /(+1, ..., /<2п.
§ 15]
СКОБКИ ПУАССОНА
101
В качестве примера *) рассмотрим интегралы количеств дви-
жения и моментов количеств движения для свободной и изолиро-
ванной от внешних воздействий системы материальных точек2):
Px — ^iPxt — У Ру, = У Pz,
Мх = ^тх = ^(ур2 — zpy), Му — ^1ту — ^1(грх—хрг),
Мг = У тг = У (хру— урх),
где
рх — тЯ, ру — т$, pz = mi.
Функции Рх, Ру, Р2, Мх, Му, Мг являются интегралами, т. е.
имеют место «интегралы сохранения»
Px==ci> Py^^'zi Pz:==:C^ Mx = ct, Му = съ, M# = Се, (13)
если система изолирована. При наличии же внешнего силового
поля с главным вектором R(X, Y, Z) и главным моментом
Lq (Lx, Ly, Ьг) любой из этих интегралов имеет место, если соот-
ветствующая из величин X, Y, Z, Lx, Ly, Lz равна нулю.
Составим скобки Пуассона для величин, связанных С одной
точкой:
(РхРу)^, (рхту^-д^^ = рг,
. . дтхдту
(тх tnv) — - д-2- -л-^
у х У' dz др2
дтхdmv
д£^~ = ХрУ~УРх = т*‘
Заметим, что скобки Пуассона, в которых одна величина {р или
т) относится к одной точке, а вторая к другой, всегда равны
нулю; поэтому
(РЛ Му) — У (рх Шу) — У Pz = РZ,
(Мх Му) = У (тх Шу) = У tnz = Мг.
(14')
Циклической перестановкой букв х, у, z получаем аналогичные
соотношения
(РуР;)=0, (РгРХ) = 0, 1
(Pv Mz) = Рх, (Рг Мх) = Ру, V (147)
(Л4у Мг) = Мх, (Мг Мх) = Му. J
х) См. Ландау Л. и Пятигорский Л., Механика, М. — Л.,
1940, стр. 151.
'-) Здесь и далее в этом примере суммирование проводится
по всем точкам систем й.
102 УРАВНЕНИЯ ДВИЖЕНИЯ В ПОТЕНЦИАЛЬНОМ ПОЛЕ [ГЛ. П
Шесть законов сохранения (13) не являются независимыми. Из
соотношений (14') и (14"), следует, что если имеют место интегралы
Px = Ci, Мх = с±, Му=съ, (15)
то имеют место и интегралы
Ру Cg, — с3, Мг = с6. (16)
Конечно, все это верно В непотенциальном силовом ; для потенциального поле из равенств силового ПОЛЯ.
х=о, не следуют равенства 1х = 0, £у = 0 (17)
У=0, z=o, £г = 0*). (18)
*) Интегралы сохранения (15) имеют место лишь при выпол-
нении равенств (17). Аналогично интегралы (16) имеют место лишь
при наличии равенств (18).
ГЛАВА HI
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
И ИНТЕГРАЛЬНЫЕ ИНВАРИАНТЫ
§16. Принцип Гамильтона
Рассмотрим произвольную голономную систему с незави-
симыми координатами qb ..., qn и функцией Лагранжа
qt, <h)-
Интеграл
6
W = \ Ldt (1)
/0
называется действием (по Гамильтону) за промежуток
времени (4, fj), а выражение Ldt — элементарным дей-
ствием !).
Так как функция L имеет вид L = L(t, qt, qt), то для
вычисления действия (1) необходимо задать функции qi = qi (t)
(Z = l, ..., п) в интервале времени Другими
словами действие W есть функционал, зависящий от
движения системы.
Если мы произвольно зададим функции qt = qi(t)(l=l, ...
..., п), то получим некоторое кинематически возможное
(т. е. допускаемое связями) движение. В расширенном (л -|-1)-
мерном координатном пространстве, где координатами являются
величины q, и время t, это движение изображается некоторой
кривой. Мы будем рассматривать всевозможные такие кривые—
*) Для натуральных систем L—T—П имеет размерность
энергии. Поэтому размерность действия есть энергия х время = си-
ла х длина х время.
104
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. Ill
«пути», проходящие через две заданные точки пространства
Л1о(^о, 4i) и (см. рис. 29 для л = 2), т. е. все воз-
можные движения, переводящие систему из данного начального
положения (^?), которое она занимала в момент времени f0,
в данное конечное положение (с$), которое она занимает
в момент времени При этом заранее фиксируется началь-
ный и конечный моменты времени tu и tlt начальное и ко-
нечное положения системы.
В остальном движения про-
извольны.
Если система натураль-
ная и несвободная, то рас-
сматриваемые здесь движе-
ния подчиняются лишь
одному ограничению: при
движении системы наложен-
ные на точки системы связи
не должны нарушаться. Это
условие выполняется авто-
матически, когда мы задаем
движение в независимых
координатах, полагая =
=^(0 G=1> •••> «)•
Допустим, что среди рас-
сматриваемых путей имеется
так называемый «прямой»
путь, т. е. путь, по которому может двигаться система
при заданной функции L (т. е. в данном силовом поле).
ДЛЯ ПРЯМОГО Пути фуНКЦИИ (2=1, .«)
удовлетворяют уравнениям Лагранжа
dt dqi dqi
a=i,..., п).
(2)
Все остальные пути, проходящие через точки и ДД, будем
называть «окольными» путями. (На рис. 29 прямой путь
изображен сплошной линией, а окольные пути пунктирными
линиями.)
Мы докажем, что действие W имеет для прямого
пути экстремальное (точнее, стационарное) значение
§ 16]
ПРИНЦИП ГАМИЛЬТОНА
105
по сравнению с окольными путями. В этом и заключается
принцип Гамильтона *).
Рассмотрим произвольное однопараметрическое семейство
путей
qi = qi(t, а)
содержащее в себе при а = 0 данный прямой путь; при
а -ф 0 получаются окольные пути. Пусть все эти пути имеют
общее начало 2И0 и общий конец Му.
<7i(Zo, а) = ?’. qt (ti, a) = qj (—у ==S a ==S Z=l,
Действие W, вычисленное вдоль пути, принадлежащего
этому семейству, представляет собой функцию параметра а
ц
W (а) == I L [Z, qt (Z,a), qi (Z,a)] dt.
ta
Вычислим вариацию действия IF, т. e. дифференциал по а:
<1 б «
8\F= J ZL dt = J 2 Ч‘) dt =
/о 4 г = 1
n ti ti n
v dL * . f V / dL d dL\^ ,,
+ J z fc-SW7)8’,,/'==
i = 1 /о (q i = 1
f1 V ( dL d dL \, ,
— J lAdqi dt dqtrqidt'
Здесь мы преобразовали интеграл при помощи интегри-
рования по частям, использовав для этого перестановочность
*) Этот принцип содержится в работах У. Гамильтона, опубли-
кованных в 1834—1835 гг. (см. сборник «Вариационные принципы
механики», М., 1959, стр. 239). При этом Гамильтон предполагал,
что исходная система склерономна (он исходил из представления
кинетической энергии Т в виде квадратичной формы от обобщен-
ных скоростей). Для общего случая нестационарных связей этот
принцип был сформулирован и обоснован М. В. Остроградским
в 1848 г. (там же, стр. 770—771, 829). В связи с этим данный прин-
цип иногда называют принципом Гамильтона'—Остроградского.
106
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. III
операции варьирования 8 и операции дифференцирования по
d
времени
8^=8 4i = 8я =
=Ш?г(*’а)Ч=48^
Прямой и все окольные пути проходят через фиксированные
начальную и конечную точки в расширенном координатном
пространстве. Поэтому при ) = и при / = вариации
8(/г = 0 и проинтегрированная часть обращается в нуль.
Из равенства (3) видно, что для прямого пути, т. е. при
а = 0, выражение, стоящее под знаком преобразованного
интеграла, в силу уравнений Лагранжа, равно нулю. Поэтому
для прямого пути 3117=0. (4)
Это и есть математическое выражение принципа Гамиль-
тона.
Имеет место и обратное утверждение: если для некото-
рого пути 8117 = 0, то этот путь является прямым. Действи-
тельно, вследствие произвольности вариаций Zqi (Z=l,...,/i)
(они на концах равны нулю, в остальных же точках пути
совершенно произвольны) из условия 8117 = 0, в силу равен-
ства (3), следуют равенства (2), т. е. уравнения Лагранжа
для прямого пути.
Поскольку из принципа Гамильтона вытекают уравнения
Лагранжа в независимых координатах (и наоборот), то прин-
цип Гамильтона может быть положен в основу дина-
мики голономных систем ').
Прямые пути, т. е. «истинные» движения при заданной
функции L, могут быть охарактеризованы как при помощи
дифференциальных уравнений движения в форме Лагранжа,
так и при помощи вариационного принципа Гамильтона.
Однако между дифференциальными уравнениями движения
и вариационными принципами имеется одно принципиальное
различие.
*) Приведенная выше формулировка принципа Гамильтона пред-
полагает (в случае натуральной системы) существование потен-
циала сил. Более общая формулировка принципа, охватывающая
и случай непотенциальных сил, будет дана ниже [формула (9) на
§ 161 ПРИНЦИП ГАМИЛЬТОНА 107
Дифференциальные уравнения движения выражают неко-
торую зависимость, связывающую между собой момент вре-
мени t, положение системы, скорости, и ускорения ее точек
в этот момент. Если эта зависимость выполняется в каждой
точке некоторого пути, то этот путь является прямым. Ва-
риационный же принцип характеризует весь прямой путь в
целом. Он формулирует экстремальное (стационарное) свойство
некоторого функционала, выделяющее прямой путь среди
других кинематически возможных путей. Вариационные прин-
ципы имеют более обозримую и компактную форму и часто
используются в качестве фундамента для новых (некласси-
ческих) областей механики.
Замечание. Дифференциальные уравнения (2) пред-
ставляют собой необходимые и достаточные условия для
того, чтобы равнялась нулю первая вариация 8W7, где интег-
рал W имеет вид (1). В вариационном исчислении уравне-
ния (2) называются дифференциальными уравнениями Эйлера
для вариационной задачи
б
8^ L(t, qt, q^dt — O.
to
Для обоснования принципа Гамильтона были использованы
уравнения Лагранжа в независимых координатах. Сами же эти
уравнения в случае натуральной системы были получены из общего
уравнения динамики
.V
2 (Г, — — (5)
V « 1
Покажем, как принцип Гамильтона может быть непосредственно
обоснован с помощью общего уравнения динамики (5). Тогда урав-
нения Лагранжа сразу получаются из принципа Гамильтона.
Если в выражениях для г,
Г, = r, (t, qt) (v=l,
вместо qt подставить функции qi(t, а), то f\ станет сложной функ-
цией от t и а. Продифференцируем ее по а, т. е. вычислим вариации
п
(v==1....(6)
i = 1
Эти формулы совпадают с формулами (8) на стр. 44, определяю-
щими виртуальные перемещения точек голономной системы. Таким
108
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. tit
Рис. 30.
образом, вариации радиусов-векторов при любом t являются вир-
туальными перемещениями точек системы.
В справедливости этого положения можно убедиться и не
прибегая к формуле (6), а исходя только из определения вариации
и виртуального перемещения. Действительно, вариация B/-v = 8а
представляет собой бесконечно малое перемещение точки си-
стемы Pv, переводящее точку траектории, получающейся при не-
котором фиксированном значении а (для
прямого пути а = 0), в точку смежной
' / траектории, соответствующей значению
/(&<• Sa) параметра а -(-8а (рис. 30). При этом обе
' точки берутся для одного и того же
момента времени t, так как при диффе-
ренцировании по а значение t фиксируется.
Следовательно Вг,, осуществляет переход
из одного возможного положения точки Pv
в момент времени t в другое возможное
положение для того же момента t, т. е.
Вг„ — виртуальное перемещение точки си-
стемы Р„.
Таким образом, в общем уравнении динамики (5) мы можем
считать В/-ч вариацией радиуса-вектора /•„. Но тогда можно изме-
d .
нить последовательность выполнения операции — и операции 5
дифференцирования по а:
Поэтому
W N N
2mZ,Brv= — =
V = 1 V = 1 V — 1
N N N
= 2 «»Мг»~ 2 mJJr.—iT, (7)
V = 1 V = 1 V = 1
где ВТ — вариация кинетической энергии mJ*.
V =а I
Обозначая по-прежнему через ВД элементарную работу актив-
ных сил на виртуальных перемещениях Вгч (ч=1, ... , N), мы
с помощью преобразования (7) записываем уравнение (5) в виде
N
ЪТ + ЪА—^ У mJJr, = 0.
•>= 1
ПРИНЦИП ГАМИЛЬТОНА
109
§ 16]
Проинтегрируем обе части этого уравнения по t в пределах
от t ~ta до t =
Ц N
J (8Т + »А)Л-[2 m’A’8r’]!Z^ = 0’ (8)
to »= 1
Здесь [ означает разность между значениями (при t = tL
и Z = £o) выражения, стоящего в квадратных скобках. Но при t = t0
и t = ti радиус-вектор гч не варьируется, поскольку начальное и
конечное положения системы заранее фиксированы:
r,(io,«)=4 r^(t1,a) = r\ (ч=1, ..., N).
Поэтому 8г„ = 0 при t — t0 и при t — tr. Второй член в равенстве
(8) равен нулю, и это равенство принимает вид
6
^(8Г + »Л)Л = 0. (9)
to
Рассмотрим тот случай, когда силы имеют потенциал П = П(/,#г).
В этом случае
8Д = — 8П,
где 8П— виртуальный дифференциал (вариация) функции П (t, qt)1),
и равенство (9) записывается так:
(ЪТ — 8П) dt = § 8L dt = O,
to to
откуда
ti ti
8U7=6 Ldt= ^SLdt = O.
‘0 to
Таким образом, основное уравнение динамики (5) привело нас к
принципу Гамильтона 6 W — 0, а отсюда, как было? указано выше,
сразу получаются уравнения Лагранжа
d dL dL
dt dqt dqt ' ’ ’ '
n To есть 8П= У ® 8ог.
X. aq-t 41
i = 1
по
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. nt
В случае непотенциальных сил Qi для получения уравнений
Лагранжа следует исходить из равенства (9) [вместо равенства (4)].
ti
Применяя к интегралу § ЪТ dt формулу (3) [с заменой функции L
to
функцией Т (t, qt, ^,)] и используя выражение для элементарной
п
работы активных сил 8Л = Qi мы найдем
i = l
ti п
£дТ
dt dqt
^qtdt = Q.
(Ю)
о
Отсюда, в силу произвольности величин 8<?; (i=l, ... , п),
должны быть равны нулю выражения, стоящие в скобках под зна-
Рис. 31.
ком интеграла (10), т. е. для прямого
пути должны выполняться уравнения
Лагранжа
d дТ дТ _ ...
dtdfa dqi~Qi 0—1. •••,«)
(П)
Выясним, является ли значе-
ние действия для прямого пу-
ти наименьшим по сравнению
с окольными путями.
Рассмотрим в качестве при-
мера движение несвободной ма-
териальной точки, вынужден-
ной двигаться по сфере при от-
сутствии силового поля (дви-
жение по инерции на сфере). Пусть масса точки т=Л.
В сферических координатах (рис. 31)
-.2
£=-2- sin2 ф2).
Для прямого пути
d dL dL n dL ,
— s~ = 0 и — = const
dt д-f
(4 — циклическая координата), т. е.
if — sin ср cos <р — 0, sin2 ср ф = sin3 у0 фо-
§ 16]
ПРИНЦИП ГАМИЛЬТОНА
111
Без нарушения общности можем считать, что для прямого
пути начальная скорость направлена по меридиану
(ф = const), т. е. <ро = О; тогда
ф = 0, ф = const и v2 = = const.
Таким образом, прямой путь представляет собой равно-
мерное движение по дуге большого круга. При этом
б
to
С 1 г
= Vo \ (V — т>0) dt -|- У \ (V — t>o)3 dt 3=
^0 ^0
Vo § (V — 'По) dt = Vo (<50К — опр).
to
Длина дуги большого круга <зпр меньше длины аок любой
другой кривой на сфере, соединяющей те же точки 2И0 и Mj.
Поэтому
W <"W
пр \ w ок*
Однако это справедливо лишь тогда, когда <зпр = ^AfoAG
<^r.R. Если апр^>тс/?, то U7np уже не всегда будет меньше
UZ0lt, а наименьшее значение действия W будет достигаться
на дополнительной дуге большого круга, которая в этом слу-
чае будет представлять собой кратчайшее расстояние между
2И0 и Alp Если будем двигать точку Mi по дуге большого
круга, увеличивая эту дугу, то критической точкой А1* (до
этой точки №пр будет минимумом, а после перехода точки Aft
через М* уже не будет таковым) является точка, диаметрально
противоположная точке А1о.
Аналогично обстоит дело и в общем случае. Доказы-
вается J), что если точка Afi выбрана достаточно близко к AIq,
то через А1о и Mi проходит один прямой путь. Но при до-
статочном удалении точки Ms от Мо через А1о и Mi может
*) См. Бобылев Д. К., О начале Гамильтона или Остроград-
ского и о начале наименьшего Действия Лагранжа, Приложение
к т. LXI Зап. Ак. наук, СПб, 1889.
112
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. Ill
проходить два прямых пути или даже целый пучок прямых
путей. Такое положение М* точки называют сопряжен-
ным кинетическим фокусом для 7И0. Установлено, что
действие вдоль прямого пути имеет наименьшее
значение по сравнению с окольными путями, если на ду-
ге M«Mi нет сопряженного для Л1Й кинетического
фокуса ТИц.
§ 17. Вторая форма принципа Гамильтона
Остановимся еще на одной форме вариационного принципа
Гамильтона. Вместо (п -|- 1)-мерного расширенного координатного
пространства рассмотрим (2п 1)-мерное расширенное фазовое про-
странство, в котором координатами точки являются величины qit
Pi (i== 1, ..., п) и t. В этом пространстве рассмотрим прямой путь,
проходящий через две точки Bl} (qi, pi, То) и В, (q\, pi, t,), а также
всевозможные другие кривые, со-
единяющие эти точки («окольные»
пути; см. рис. 32, п=1).
Функции qi (t) и pi (t) (i =
= 1, ..., n), задающие прямой
путь, удовлетворяют уравнениям
Гамильтона
dqi__дН
dt ~ dpi ’
______(Z=i
dt - dqi (
n). (1)
Введем в рассмотрение функ-
цию от 4п + 1 независимых пере-
менных L* (t, q^ pi, qit pi), опре-
деляемую равенством
L* = J] Pitt — H (t, qt,Pi). (2)
i — 1
С помощью этой функции канонические уравнения Гамильтона (1),
как легко видеть, могут быть записаны в форме Лагранжа:
d dL* dL* d dL* dL* _
dt d$i dqt ~~ ’ dt dpt dpt ~~
(*=1....»). (3)
*) В правую часть равенства (2) величины фактически не
входят. Поэтому функция L* в данном случае от этих величин не
dL*
зависит и —= О (I — 1, ... , п).
dpi ' ’ '
§ 181
ОСНОВНОЙ ИНТЕГРАЛЬНЫЙ ИНВАРИАНТ
ИЗ
Так как прямой путь характеризуется уравнениями (3) типа
Лагранжа, то как было установлено ранее, прямой путь в расши-
ренном фазовом пространстве выделяется среди окольных путей
тем, что для него интеграл
ti
i* (t, qt, Pi, qt, Pi) dt (4)
to
имеет стационарное значение
ti fl n
= ( J? pi fi — H) dt = O. (5)
to to i = 1
С первого взгляда может показаться, что вторая форма (5)
для принципа Гамильтона ничем не отличается от первой ВV7 —О,
поскольку, согласно формуле (8) на стр. 85, выражение L* совпа-
дает с функцией L. Однако это не всегда так. Это справедливо
лишь для движений системы, т. е. для таких путей =
pi=pi(t) (Z=l, ... , п), у которых функции qi(t) и p-t (t) связаны
соотношениями
Pi=^ (/=1,...,п). (6)
Однако при второй форме принципа Гамильтона (в отличие от пер-
вой!) к сравнению допускаются в качестве окольных путей произ-
вольные кривые (2п-|- \)-мерного расширенного фазового простран-
ства, проходящие через точки Во и Для этих путей соотноше-
ния (6) могут не выполняться, и потому в общем случае для иих
L*^L. Если же в формуле (5) ограничиться только теми околь-
ными путями, для которых имеют место равенства (6), то вторая
форма принципа Гамильтона переходит в первую BW7=0.
Заметим еще, что в отличие от точек Af0 и М, в первой фор-
ме принципа Гамильтона точки Ва и й, не могут быть выбраны
произвольно, так как через две произвольные точки расширенного
фазового пространства в общем случае прямой путь провести
нельзя. Точки Ва и Вг выбираются на том прямом пути, для кото-
рого формулируется принцип Гамильтона.
§18. Основной интегральный инвариант механики
(интегральный инвариант Пуанкаре — Картана)
Выведем формулу для вариации действия в общем
случае, когда начальные и конечные моменты времени, так же
как и начальные и конечные координаты, не фиксированы, а
являются функциями параметра а:
<0 = f0(a), ql — q6t (а), 1
Л = Ш = (z-1, .... /0- | (О
114
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. Ш
6
В этом случае, дифференцируя интеграл W— J L dt по па-
to
раметру а и интегрируя по частям, находим
/1 (а)
8№=8 j Ldt—
to (“)
/1 п
= Li - LA + J 2 + =
to i = 1
n n
=la + 2 - 2 p‘ +
»=i i=i
+i' p)
to 1=1
Ч = бЛ (i=l>..->«;k = 0, 1). (3)
С другой стороны, для вариаций конечных координат
ql — ql [lt (а), а] имеем формулы
891 = ^8^ + [-^^1 8а
Отсюда
[8<?г]/ = ti = М — ql 8/1
Совершенно аналогично
М = ^ = 8??-^8/о
(/ = 1, ..., п).
(/ = 1, (4)
(1=1, п). (5)
Подставляя выражения (4) и (5) для ]8<7г]/ = ^ и [8^]/ = to
в выражение (2) для 8U7, выражая, как обычно, через pt
и замечая, что
п
^tPiqi — L = H,
i = l
S 181
ОСНОВНОЙ ИНТЕГРАЛЬНЫЙ ИНВАРИАНТ
115
получаем следующую формулу для вариации действия W
в общем случае:
п it п
W=[-«<];+j Ж-жгг)8’-* <6)
i=l tt> i •— 1
где
= S р} М - М 8Z, - 2 pl iqt + Д> 8f0.
{ =я I 1=1
В частном случае, когда для любого а соответствующий
путь является прямым, т. е. когда qt = qi(t,a) (i= 1, ..., п) —
семейство прямых путей, интеграл в правой части равенства (6)
равен нулю при любом а и формула для вариации действия
принимает следующий простой вид:
(7)
Вместо расширенного координатного («-]-р-иерного про-
странства возьмем расширенное фазовое (2п-|-1)-мерное про-
странство, в котором координатами точки будут величины
qit pt (Z=l, ..., п) и t. В этом пространстве возьмем произ-
вольную замкнутую кривую Со с уравнениями
?(. = $(а), Pi—Pi(P), t = to(p) (8)
(i = l, ..., n; Os^asC/).
Здесь при a = 0 и а = I имеем одну и ту же точку кривой Со.
Из каждой точки кривой Со, как из начальной, проведем
соответствующий прямой путь. Такой путь однозначно опре-
деляется (после задания начальной точки) из системы кано-
нических уравнений Гамильтона. Получим замкнутую трубку
прямых путей (см. рис. 33, л=1)
= Pi=Pi(Aa) (/=!>...,«; 0<a«^/), (9)
где
4i (t, 0) == qt (t, I), p{(t, 0)==pt (t, I) (I = 1, ..., n).
116
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. III
На этой трубке произвольно выберем вторую замкнутую
кривую Ci, охватывающую трубку и имеющую с каждой
образующей лишь одну общую точку. Уравнения кривой Ct
можно записать в виде *)
7; = 4i (*)> Pi =pl (a)>
t = ti(a). (10)
Рассмотрим дейст-
вие W вдоль образующей
трубки от кривой Со до
кривой Ci.
ti (а)
W = 5 Ldt.
to (а)
Тогда при любом а,
согласно формуле (7),
8Г = \Г(а)8а =
i — 1
Интегрируя это равенство почленно по а в пределах от
а = 0 до а = /, получаем
I п
о = W (Z) - W (0) = J [ 2 Pi ^i ~ =
о*7 1 — 1
J) Каждому значению а из интервала 0 a I соответствует
определенная «образующая» трубки (прямой путь), а на этой обра-
зующей имеется только одна точка кривой Поэтому каждому
значению а отвечает только одна точка кривой Сн т. е. координаты
точки кривой Сх явл'яются функциями параметра а.
§ 181 ОСНОВНОЙ ИНТЕГРАЛЬНЫЙ ИНВАРИАНТ 117
Таким образом, установлено, что криволинейный интеграл
п
<12>
t=1
взятый вдоль произвольного замкнутого контура, не меняет
своего значения при произвольном смещении (с деформацией)
этого контура вдоль трубки прямых путей, т. е. является
интегральным инвариантом. Интеграл I мы будем назы-
вать интегральным инвариантом Пуанкаре — Кар тана.
Докажем теперь обратное предложение. Пусть известно,
что прямые пути определяются системой дифференциальных
уравнений первого порядка
$ = Qi (t> Яj, Pj), ^ = Pi & Яр Pj) (i = 1 > • •, n). (13)
Такое предположение является естественным, поскольку
движение системы должно определяться однозначно по началь-
ным данным ql, pl (/=1, ..., л). Пусть, кроме того, дано,
что интеграл Пуанкаре — Картана (12) является интегральным
инвариантом по отношению к прямым путям, определяемым
системой уравнений (13), т. е. что для любой трубки этих
путей интеграл Пуанкаре — Картана, вычисленный вдоль
охватывающего трубку замкнутого контура, не изменяет своей
величины при произвольном смещении точек контура вдоль
образующих трубки. Тогда мы докажем, что между функ-
цией Н и функциями Q,:, Р{ имеют место зависимости
p^~Wi «)> <14>
т. е. докажем, что уравнения (13) являются каноническими
уравнениями Гамильтона с той функцией Н, которая входит
в выражение под знаком интеграла I.
Для доказательства введем вспомогательную переменную
(параметр) р, дополнив систему (13) еще одним уравнением:
dqi _dqn dpi _dpn dt
Qi Qn~ Pl =1-— Pn — 1 —K
Здесь it = it (t, qt, p;) — произвольная функция от точки
расширенного фазового пространства. Интегрируя систему
118
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. 1П
(15), мы находим выражения для qs, pt и t в виде функ-
ций от переменной р и от произвольных начальных данных
qt, Pi G=l, п) и (при р = 0):
?°> Pj, t0),
Pi = ^i(W Чь Pj, h), (Z=l, n).
t = 4i> Pi, AO
(16)
Мы получили параметрические уравнения для семейства всех
прямых путей. Так как нам нужны только те прямые пути,
которые образуют данную трубку, то мы должны выбирать
начальную точку 7ИО(<7“, Pj, АО на кривой Са, т. е. в уравне-
ния (16) вместо qj, р'} и А) следует подставить
?}(“)> />}(а), А>(4
Сделав это, мы найдем параметрические уравнения для пря-
мых путей, образующих данную трубку,
Ч1 = Ч1^< «)> Pt=Pi^> “)> *=*(?, а) (17)
(i — 1, ..., л; O^a^Z);
здесь значение а выделяет определенный прямой путь («обра-
зующую» трубки), а значение параметра р фиксирует опре-
деленную точку на этом прямом пути.
Полагая р= const, мы на каждой образующей получаем
точку, а на трубке — замкнутую кривую. Будем считать,
что в интеграле (12) вместо qit pt и t подставлены их выра-
жения (17). Тогда интеграл / будет представлять собой
функцию параметра р и при каждом фиксированном значе-
нии р будет криволинейным интегралом вдоль соответствую-
щей замкнутой кривой р = const.
В силу инвариантности
d!=0,
где буква d означает дифференцирование по параметру р.
Проводя дифференцирование под знаком интеграла, находим:
п
о = £ [ V (dPi *4i+Pi d *4i) — dHU —
§ 181
ОСНОВНОЙ ИНТЕГРАЛЬНЫЙ ИНВАРИАНТ
119
Написав 8 dqt и <>dt вместо d c>qi и dat и проинтегрировав
по частям вдоль замкнутого контура, получим *);
п
о
или, в силу (15), разделив почленно на ф = —
I — 1
<18)
Выражение, стоящее под знаком интеграла, должно быть
полным дифференциалом при произвольном множителе к,
а это возможно только тогда, когда выражение в фигурных
скобках равно нулю. Приравняв это выражение нулю, получим
п дН „ дН . . .
Pi~ dqi’ Qi~~dpi — •••>»)>
что и требовалось доказать 9).
Из доказанного следует, что инвариантность интеграла
Пуанкаре — Картона может быть положена в основу
*) Операции d и 8 можно переставить местами, так как они
представляют собой дифференцирование по различным независимым
переменным р и а. Далее, при интегрировании по частям проин-
тегрированная часть пропадает (равна нулю), так как конечная
точка пути интегрирования совпадает с начальной. Поэтому для
любых двух функций и и о при интегрировании по замкнутому
контуру <^> и Во = — v Ъа.
.. м dH дН
’) Мы получаем еще тождество , которое является
следствием канонических уравнений Гамильтона [см. равенство (20)
да стр. 88].
120
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. III
механики, так как из этой инвариантности вытекает, что
движение системы подчиняется каноническим уравнениям
Гамильтона.
Замечание. При доказательстве мы ввели вспомогатель-
ную переменную р. и использовали то обстоятельство, что интеграл /
не меняет своего значения при переходе от одной кривой семей-
ства р. = const к другой кривой того же семейства. Из-за произ-
вольности функции л (Г, pi) семейство кривых р = const по суще-
ству является произвольным семейством непересекающихся замк-
нутых кривых, охватывающих данную трубку прямых путей. Если
мы не ввели бы параметр р, а приняли бы в качестве параметра
время t, то, повторяя те же рассуждения, мы только частично
использовали бы инвариантность интеграла I (только для кривых
из одновременных состояний t = const) и не могли бы прийти
к нужному результату.
Рассмотрим теперь подробнее структуру интеграла Пуан-
каре — Картана.
В интеграле Пуанкаре — Картана (12) время t входит на
правах координаты qit а роль соответствующего импульса
играет величина — Н, т. е. энергия, взятая с противополож-
ным знаком. Это — далеко идущая аналогия.
Сделаем в интеграле I замену переменных, введя новую
переменную z, связанную со старыми переменными соотно-
шением
z = — (19)
Из этого соотношения выразим рр.
Pi = — K(t,qi.....qn, z, ръ,..., pj. (20)
Тогда основной интеграл I в новых переменных запишется
так:
zBf Ч-рЛвЧ-- • --{-Pntyn. — K^qt. (21)
Таким образом, и в новых переменных интеграл 1 имеет
вид интеграла Пуанкаре — Картана, но только теперь роль
времени играет переменная qb а вместо прежней энергии И
стоит импульс pi, взятый с противоположным знаком, т. е. К-
Поэтому, согласно доказанному ранее, в новых переменных дви-
жение системы должно описываться следующей гамильтоновой
S 1S]
ОСНОВНОЙ ИНТЕГРАЛЬНЫЙ ИНВАРИАНТ
121
системой дифференциальных уравнений:
dt___dK ^_ = _дК
dqt dz ’ dqt dt ’
dqj__ dK dpj_____dK^
dqi др/ dq\~~ dqj
(22)
Здесь независимой переменной является qt.
Проиллюстрируем это на примере линейного осциллятора. Для
него
2m ‘ 2 ’
Составим канонические уравнения, приняв за независимую перемен-
ную q. Для этого положим
,2 «я2‘
z =
откуда
Таким образом, в нашем случае
Соответствующие канонические уравнения (22) запишутся так:
dt
dq
1
dz
=, д-=0.
2 dq
—я
Из второго уравнения г = const —— h. При помощи квадратуры
находим ft
dq
=------а,
Я2
где
а а—произвольная постоянная, или
й><4~а = агс sin
т. е.
q — Дэш
122
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. тп
§ 19. Гидродинамическая интерпретация
основного интегрального инварианта.
Теоремы Томсона и Гельмгольца о циркуляции и вихрях
Для конкретной интерпретации понятия об интегральном инва-
рианте рассмотрим движение идеальной жидкости под действием
внешних сил с потенциалом H(t,x,y,z). Как известно из гидро-
динамики '), уравнение движения частицы такой жидкости имеет вид
а = — grad П---------------------^-gradp, (1)
где а — ускорение частицы, р и р — ее плотность и давление,
а потенциал П отнесен к единице массы.
Примем, что р и р связаны функциональным соотношением
p=f(p) (это в частности имеет место при изотермическом про-
текании процесса). Тогда, положив
П = П+ С
J Р
мы запишем уравнение (1) в виде
e = —gradft. (Г)
Последнее уравнение показывает, что движение частицы
жидкости идентично движению материальной точки с массой т = 1
в потенциальном поле П = П (/, х, у, г). Поэтому для движения
частиц жидкости интегральным инвариантом будет интеграл Пуан-
каре — Картана, который в данном случае имеет вид
/= (j) и tx 4- v Ъу w 8г — Е 8J, (2)
где и, v, w — компоненты скорости частицы [они в данном случае
(при т = 1) представляют собой импульсы pj, Е—энергия, опре-
деляемая формулой
Е = -1(й8-[-о2-1-и2) + Й(^, х, у, г). (3)
Таким образом, интеграл (2), взятый вдоль произвольно замкну-
того контура в семимерном пространстве (t, х, у, г, и, v, w), не
меняет своей величины при произвольном смещении точек контура
в соответствии с движением жидкости. Это движение происходит
‘) См., например, К о ч и н Н. Е., К и б е л ь И. А. и Р о з е Н. В.,
Теоретическая гидромеханика, т. 1, М. — Л., 1948, стр. 48.
§ 19]
ГИДРОДИНАМИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ
123
в соответствии с дифференциальными уравнениями, которые в силу
формулы (Г) имеют вид
du дй dv дй dw dft
dt дх * dt ду ’ dt dz '
Для данного частного случая уравнения (4) представляют собой
канонические уравнения Гамильтона.
Если задано конкретное движение жидкости, при котором поле
скоростей известно, т. е. если известны функции и (t, х, у, z),
v (t, х, у, z), w (t, x, у, z), то интеграл (2) можно рассматривать как
интеграл в расширенном координатном пространстве, т. е. в четырех-
мерном пространстве t, х, у, z. Значение этого интеграла не ме-
няется, если мы точки контура интегрирования произвольно сме-
стим вдоль путей движения частиц, т. е. интеграл
(j) и (t, х, у, z) dx -f- v (t, x, у, z) dy +
C +«'(<, x, y, z) dz — E (t, x, y, z) dt (5)
является интегральным инвариантом в расширенном координатном
пространстве для движения жидкости с заданным полем скоростей.
Если контур интегрирования состоит из одновременных состоя-
ний (t = const), то интеграл (2) принимает вид
и 8х -|- v 8у w Ъг. (6)
С
В гидродинамике этот интеграл называется циркуляцией ско-
рости вдоль контура С. Мы попутно получили теорему Том-
сона о сохранении циркуляции с к о р о с т и: величина
циркуляции (6) не изменится, если частицы жидкости, образую-
щие контур в момент времени tl: перевести в положения, зани-
маемые ими в произвольный другой момент времени ta.
Если частицы жидкости в некоторый момент времени образуют
линию, то эти же частицы в другой момент образуют другую линию.
Мы будем говорить о перемещающейся и деформирующейся со
временем «жидкой линии». Аналогично определяется понятие
«жидкой поверхности».
Теорема о сохранении циркуляции утверждает, что каждой
замкнутой жидкой линии отвечает определенная циркуляция.
Заметим, что согласно формуле Стокса ') интеграл (6) запи-
сывается в виде интеграла по поверхности S, ограниченной кон-
туром С:
f f $ 8у 8z + oz 8х -|- £ 8х 8у, (7)
*) См., например, Фихтенгольц Г. М., Основы математи-
ческого анализа, М., 1956, т. 2, гл. 22, § 4.
124
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
(ГЛ. Ill
где
_ dw____ dv ______ ди _dw_ ? _dv~____ ди /о\
ду dz , r‘ dz дх ’ дх ду
— компоненты некоторого вектора О, называемого вихрем (рото-
ром) скорости или просто вихрем. Интеграл (7) обычно предста-
вляют в виде
f ( 2Л dS, (Т)
где Qn — проекция вектора JJ на нормаль к поверхности, a dS— эле-
мент площади поверхности S. Отсюда видно, что интеграл (7) задает
величину потока вихря через поверхность. Теорема о сохранении
циркуляции скорости переходит в теорему о сохранении
потока вихря: каждой ограниченной жидкой поверхности
соответствует определенная величина потока вихря через
эту поверхность *).
Движение жидкости с заданным полем скоростей определяется
дифференциальными уравнениями
dx \ dy , dz ,, .
~t-z=u(t, х, у, z), =v(t, x, у, г), -- = w(t, х, у, z). (9)
По отношению к интегральным кривым системы (9) интеграл (5)
является интегральным инвариантом.
Поставим вопрос, какие другие системы дифференциальных
уравнений вида
dx _ dy dz _ dt
Р (А х, у, z) Q (t, х, у, z) R (t, х, у, z) U (t, х, у, z) ' '
наряду с системой (9) обладают тем же свойством, т. е. для каких
еще систем интеграл (5) является интегральным инвариантом?
Для того чтобы ответить на этот вопрос, введем на траекто-
риях системы (10) параметр р и приравняем, как это делалось в пре-
дыдущем параграфе, отношения (10) произведению я (Г, х, у, z) dp,
где я — произвольная функция. Рассмотрим трубку интеграль-
ных кривых системы (10) и охватывающий эту трубку замкну-
тый контур С, для которого р = const = с. Заметим, что значение
интеграла (5) вдоль контура С не зависит от величины р = с.
Обозначая буквой d дифференцирование по р и проводя те же
рассуждения, что и на стр. '119, мы получим, опираясь на
*) Отсюда, в частности, следует, что в жидком объеме идеаль-
ной жидкости вихри не могут ни исчезать, ни появляться [если,
конечно, сиды имеют потенциал и имеет место соотношение
Р =/(?)]•
§ 19]
ГИДРОДИНАМИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ
125
формулы (8):
О = d и 8х -1- v Ъу 4- w 8г — £М =
= (^) du 8х + dv Ъу + dw 8г — dE W — Ви dx — %v dy — bw dz -|-
4- 8E гЛ = f — C dy 4- 7] dz 4- [-$- -j- dt | to + [*] 8,У 4*
, r , Г du j dv , dw J . dE , 1
4-МВг4-[-й£--5Гйх—dy---------^dz^-^dt^t,
где коэффициенты при By и Вг получаются из коэффициента при ох
циклической перестановкой.
Заменим dx, dy, dz, dt знаменателями дробей (10), умно-
женными на w(i, х, у, z) dt. Так как при любом выборе функции
л (t, х, у, z) выражение, стоящее под знаком интеграла, должно быть
полным дифференциалом, то оно должно тождественно равняться
нулю. Поэтому выражения, стоящие в квадратных скобках, равны
нулю (после замены в них дифференциалов dx, dy, dz, dt пропор-
циональными величинами Р, Q, Р, U), т. е. имеют место равенства:
tp_w+u=t,,
(11)
{du . dE \ „ , {dv , dE \ Л , / dw . dE \ _ „
Соотношение (12) является следствием равенств (11), если UzfiQ,
и равенств (11) и (Г), если 7/=0.
Равенства (11) совместно с уравнениями (10) определяют все
дифференциальные системы, по отношению к которым интеграл (5)
является интегральным инвариантом. Среди этих систем будем
искать те, для которых U—0, т. е. dt = O. Тогда из (11) найдем:
Р_ _ Р
е ~ ’i ~ с ’
и система (10) примет вид
dx ___ dy __ dz __ dt
g “ т] — ‘ 0 •
Интегральные кривые системы (13) носят название вихревых
линии.
Таким образом, система du(f$epent{uaAbHbix уравнений вих-
ревых линий является eduHcmeeuHOu системой с dt — O, по
126
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. III
отношению к которой интеграл (5) является интегра льным
инвариантом ').
Из этого положения вытекает важное следствие.
Возьмем в пространстве (х, у, z, t) произвольную трубку вихре-
вых линий и два охватывающих ее контура Ct и С2 (рис. 34). В силу
инвариантности интеграла (5) относительно вихревых линий
Ф и 8х + v fry -|- w 8z — Е 8£ = ф и 8х -ф- о 8_у -ф- w 8z — Ebt.
Cl G
Зададим произвольно величину т>0 и переместим любую
точку пространства (х, у, z, t) в точку (х', у', z', t -ф- т), где х',
у', z' — координаты в момент /-|-т той частицы жидкости, которая
в момент t имела координаты х, у, г. При таком сдвиге вдоль
траекторий частиц жидкости вихревые линии перейдут в некоторые
новые линии, которые мы назовем «перемещенными линиями». Взя-
тая нами трубка вихревых линий
перейдет в трубку перемещенных
линий, а контуры и С2 — в кон-
туры Di и D3 (см. рис. 34)2). Так
как сдвиг осуществлялся движе-
частиц жидкости, то при
меняет
нием
сдвиге интеграл (5) не
своего значения:
з
D3
но тогда
(14)
что
Dl Di
Можно считать,
D2 — два произвольных контура,
охватывающих трубку перемещенных линий. Поэтому равенство (14)
выражает инвариантность интеграла (5) по отношению к «переме-
щенным линиям». При этом вдоль каждой перемещенной линии,
как и вдоль вихревой, dt = Q. Следовательно, перемещенные линии
обладают теми свойствами, которыми, как было показано ранее,
могут обладать только вихревые линии. Значит, перемещенные
линии являются вихревыми линиями. При этом время смещения т
является произвольным. Таким образом, любая вихревая линия при
движении образующих ее частиц жидкости остается все время
вихревой.
Мы пришли к теореме Гельмгольца, которую можно
сформулировать и так: вихревая линия есть жидкая линия.
*) Интеграл (5) является интегральным инвариантом и для дру-
гих систем [например, для системы (9)], у которых dt^O.
s) Рассматриваемые здесь трубки вихревых линий расположены
в четырехмерном пространстве (х, у, z, t), но на рис. 34 ось t не
изображена.
Dt и
§ 20]
ОБОБЩЕННО-КОНСЕРВАТИВНЫЕ СИСТЕМЫ
127
Попутно мы получили, что с каждой вихревой трубкой связана
определенная «интенсивность», определяемая интегралом
и Ъх -|- v Ъу -|- w 8z — ЕМ.
(15)
С
Величина этой интенсивности не меняется при движении
жидкости. Если будем брать трубку вихревых линий для одного и
того же момента времени t (W = 0), то интенсивность (15) предста-
вляет собой циркуляцию скорости вдоль контура С
и 8x -f- v Ъу -|- w 8?.
§ 20. Обобщенно-консервативные системы.
Уравнения Уиттекера. Уравнения Якоби.
Принцип наименьшего действия Мопертюи — Лагранжа
Рассмотрим обобщенно-консервативную систему, т. е.
произвольную (быть может, и ненатуральную) систему, для
которой функция Н не зависит явно от времени. Для нее
имеет место обобщенный интеграл энергии
H(qt, Pi) = h.
(1)
Этот интеграл аналогичен интегралу сохранения импульса
р, = с, который имеет место в случае, когда qr
и. „ дН п
циклической координатой, т. е. когда = 0.
Исходя из аналогии между переменной времени
лической координатой, следует ожидать, что с
интеграла энергии (1) удастся понизить порядок
является
t и ЦИК-
ПО мощью
системы
дифференциальных уравнений движения на две единицы.
С этой целью рассмотрим обычное (т. е. нерасширенное)
2и-мерное фазовое пространство, в котором координатами
точки являются величины qt, pt (1 = 1, ..., п). Ограничимся
рассмотрением только тех точек фазового пространства,
координаты которых удовлетворяют уравнению (1) с фикси-
рованным значением постоянной hQ. Другими словами, мы
ограничиваемся рассмотрением лишь тех состояний систе-
мы, которым соответствует заданная величина полной энергии
/7=/7(^,^) = й0.
128
ВАРИАЦИОННЫЙ ПРИНЦИПЫ
1ГЛ. U1
Тогда основной интегральный инвариант 1 представится
в виде п
l=^p.Zqi> (2)
i = 1
поскольку, в силу равенства (1),
W = 0.
Теперь разрешим уравнение (1) относительно одного из
импульсов, например р£
Pi^= — K(qi, .... q„, р^ р„, h^, (3)
и полученное выражение подставим вместо рх в интеграл (2);
тогда
1 =
п
(4)
Но интегральный инвариант (4) снова имеет вид интеграла
Пуанкаре — Картана, если считать, что основными координата-
ми и импульсами являются величины qj и pj (j = 2, п),
а переменная q^ играет роль переменной времени (вместо
функции Н имеем функцию К). Поэтому (см. § 18) движе-
ние обобщенно-консервативной системы должно удовлетворять
следующей гамильтоновой системе дифференциальных уравне-
ний порядка 2л — 2:
dqj _ дК dpj_____ дК.
dq~t~ dpj’ dql~’~~dqj
(j=^2, ...» n). (5)
Эти уравнения были получены Уиттекером и носят название
уравнений Уиттекера.
Проинтегрировав систему уравнений Уиттекера, мы най-
дем величины qj и pj (J = 2, п) как функции от пере-
менной qt и 2л — 2 произвольных постоянных сь с2п_$;
кроме того, интегралы уравнений Уиттекера будут содер-
жать произвольную постоянную h0, т. е. будут иметь вид
qj=b(^i> си ..., c2n_3), pj = tyj(qb ha, су .... с3„_3)
(/ — 2...........................«)• (6)
После этого, подставив выражение (6) в формулу (3), най-
дем аналогичное выражение для
. Л = ci> •••> С2„_2). (6')
§20] ОБОБЩЕННО-КОНСЕРВАТИВНЫЕ СИСТЕМЫ 129
Таким образом определяются все траектории в фазовом
пространстве т. е. геометрическая картина движения.
Зав ’см сть координат от времени t мы получим из урав-
„ dqi дН
нения при помощи квадратуры
dqi I
дН ~г~
dPi
с2п-1>
(7)
при этом в частной производной все переменные выра-
жены через с помощью равенств (6) и (6').
Гамильтонова система уравнений Уиттекера (5) может
быть заменена эквивалентной системой уравнений типа Ла-
гранжа:
= ° (7=2, и),
dq’j dq, и <
(8)
где
зана с
ствомJ)
а функция Р (аналог функции Лагранжа) свя-
функцией К (аналогом функции Гамильтона) равен-
P=P(.4i> .... 4v q\,
п
(9)
/=2
Обратим внимание на то, что система (8)-содержит не п,
ап — 1 уравнений второго порядка. В последней части этого
соотношения импульсы Pj должны быть заменены их выра-
жениями через
а' = ^п_
Чз dqt’ ’ Чп dqi >
которые могут быть получены из первых п— 1 уравнений (5).
Преобразуем выражение для функции Р, исходя из ра-
венств (3) и (9):
п п
= У^ = |(^ + /7). (10)
Jen Ч J лШ V1
/ = 2 1=1
х) См. равенство (8) на стр, 85.
б Ф. Р. Гантмахер
130
ВАРИАЦИОННЫВ ПРИНЦИПЫ
[Гл. ш
В случае натуральной, у. е. обычной, консервативной си-
стемы L~T — П и Н=Т-j-П; следовательно
] 2Т
(И)
причем кинетическая энергия Т может быть записана в виде
Т1=-^ 2 an^i4k = 4\OЧп> Чг>---> Ч*У> (12)
I, * = 1
здесь
°(Ч1....Чп, Ч*> > Чп) = 4 2 (13)
I, А = 1
Из равенств (1) и (12) находим
(14)
и получаем для функции Р следующее выражение:
Р = ^- =2/G(ft —П). (15)
Дифференциальные уравнения (8), в которых функция Р
имеет вид (15) и которые, таким образом, относятся к на-
туральным, т. е. обычным, консервативным системам, носят
название уравнений Якоби *).
Интегрируя уравнения Якоби, мы определяем все траек-
тории в координатном пространстве (<ft,..., <?„):
Ч) = ЫЧъ h’ ci> •••> cin-i)- (16)
Связь координат с переменной времени устанавливается
из соотношения (14) с помощью квадратуры
t — § yf й_^п d4i + (17)
Переходим теперь к установлению принципа наименьшего
действия Мопертюи — Лагранжа. Поскольку уравнения (8)
*) Эти уравнения были выведены немецким математиком
К. Якоби и содержатся в его классических «Лекциях по динамике»,
изданных в 1886 г. (русский перевод ГОНТИ, 1936). В случае не-
натуральной обобщенно-консервативной системы функция Р, входя-
щая в уравнения Якоби, определяется формулой (9).
5 20]
ОБОБЩЕННО-КОНСЕРВАТИЙНЫЙ СИСТЕМЫ
131
являются уравнениями типа Лагранжа, то из них вытекает
вариационный принцип, согласно которому для прямого пути
8№* = 0,
где
W*= J Pdq}
(18)
(19)
— действие по Лагранжу.
ванию» все движения обоб-
щенно-консервативной си-
стемы, которые переводят
систему из заданного началь-
ного положения ql в задан-
ное конечное положение q\
(рис. 35). При этом мо-
менты времени t9 и не
фиксируются и при пере-
ходе от прямого пути к
окольным могут варьиро-
ваться ’).
Выражая в интеграле (19)
функцию Р с помощью ра-
венства (10), нйходим связь
между действием по Лагранжу W* и действием по Га-
мильтону W-.
6 tt
W* = J (L+H)dt= j Ldt-\-h^dt=W-\-h(ti — k). (20)
to to tg
В случае обычной (натуральной) консервативной системы
можно воспользоваться выражением (11) и представить действие
Л Равенство (18) устанавливает, что для прямого пути действие
по Лагранжу имеет стационарное значение. Вопрос о том, когда
Действие У7* Имеет для прямого пути наименьшее значение, ре-
шается с привлечением кйнетичебких фокусов совершенно так же,
как И ДЛй Принципа Гамильтона. Более подробно об этом См. Су-
слов Г. К., Теоретическая мехайика, § 248.
Б*
132
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
(ГЛ. III
по Лагранжу в виде
ц ц л л s*
W* = 2 Tdt= j У, т.у^ dt = j* от,г>, ds.,. (21)
to to •> = 1 ’ = 1 4
Но при этом уже имеется в виду, что «к соревнованию» до-
пускаются только те движения системы, при которых полная
энергия системы имеет одно и то же значение h (изоэнерге-
тичность!).
Полученное выражение для W* показывает, что действие
по Лагранжу W* равно работе векторов количеств дви-
жения точек системы на соответствующем перемеще-
нии системы.
Вариационный принцип (18) носит название принципа
наименьшего действия Мопертюи — Лагранжа *).
В качестве примера рассмотрим сравнение оптического прин-
ципа Ферма с принципом наименьшего действия Мопертюи—Ла-
гранжа 2).
Согласно принципу Ферма свет в неоднородной среде распро-
страняется так, чтобы время пробега
S
io
было минимальным.
Введя в каждой точке среды коэффициент преломления п = —
о
— отношение скорости света с в пустоте к скорости о в данной
среде,— мы преобразуем эту формулу к виду
<s
, 1 С л
t = — \ п ds,
с J
io
где я—функция точки среды. Поэтому принцип Ферма запишется
так:
s
b^nds=Q. (23)
io
*) Впервые в несколько туманной формулировке этот принцип
был сформулирован Мопертюи в 1747 г. Строгая формулировка и
обоснование принципа были даны Лагранжей в 1760 г.
2) См., например, Розе Н. В., Лекции по аналитической ме-
ханике, ч. 1, Л., 1938, стр. 93—94.
§ 211
ДВИЖЕНИЯ ПО ИНЕРЦИИ
133
С другой стороны, для одной материальной точки с массой т
принцип Мопертюи — Лагранжа дает (поскольку */g mv2 -|- П = й)
s s
Ь mv ds = Ут Ь у 2 (й —П) ds = 0. (24)
So So
Траектория светового луча совпадает с траекторией материаль-
ной точки, если [см. формулы (23) и (24)]
П = й — |л!. (25)
Если принять, что вблизи поверхности Земли показатель пре-
ломления п убывает как линейная функция высоты z
n = n0 ( 1 — k^, (26)
где Н — высота атмосферы, то, пренебрегая малыми членами по-
рядка , можно написать
П = й —2ft^-) = c-|-gz, (27)
где
1 Ъп*
c = h--^nl, (28)
Формула (27) определяет потенциал силы тяжести вблизи
поверхности Земли с видоизмененным значением g.
Поэтому если показатель преломления п указанным образом
изменяется с высотой, то свет распространяется по параболе
с вертикальной осью.
§ 21. Движения по инерции.
Связь с геодезическими линиями при произвольном
движении консервативной системы
Пусть дана произвольная склерономная система; ее кинетиче-
ская энергия равна
П
Т=~2 2 fab—. ?»)&&• (1)
I, *=1
Введем метрику в координатном пространстве (qlt ... , qn),
определив квадрат длины дуги ds2 с помощью положительно опре-
деленной квадратичной дифференциальной формы
п
ds2 — У] aik(qu , qn)dqtdqk. (2)
i,
134
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. III
Тогда величина дуги кривой, соединяющей две точки коордйнатного
пространства (д%) и (<?.), определится равенством
(?<) (?;) ____________________
s= J ds = j 1/ aikdgidgk. (3)
(?о) (?;)Г /,*==!
Сопоставляя формулы (1) и (2), найдем, Что При Движений си-
стемы
т. е. что кинетическая энергия системы [при Метрике (2)] всегда
совпадает с кинетической энергией изображающей точки в п-мер-
ноМ координатном пространстве, ’если этой точке приписать
массу т — 1.
Рассмотрим теперь движение системы по инерции (П = 0).
Тогда все возможные при таком движении траектории изображаю-
щей точки носят название геодезических линий [Но отношению
к метрике (2)]. Из интеграла энергии
T=h,
согласно формуле (4), следует, что
ds
di
= /2й,
(5)
т. е. движению по инерцйй (а также любому Движению с Постоян-
ным значением h кинетической энергии) соответствует в коорди-
натном пространстве {gt, ... , gn) равномерное движение изображаю-
щей точки со скоростью У27/.
В соответствии с принципом наименьшего действия геодезиче-
ские линии являются экстремалями *) вариационной задачи
ЙУГ* = О, (6)
где IF* ^действие по Лагранжу. Но в рассматриваемом случае как
для прямого, так и для окольного пути имеет место интеграл энер-
гии T—h с фиксированным значением й; поэтому
t
IF* = {2Tdt = 2h(t— i„)== У Ms, (7)
*0
где —10)—ДЛИНа кривой В координатном пространстве
(91...9л)-
*) То есть кривыми, Для которых 1F* имеет Стационарное зна-
чение.
§ «1
движения по инерции
135
Вариационная задача (6) принимает вид
(8)
Таким образом, геодезическая линия характеризуется тем,
что длина дуга этой кривой имеет экстремальное (точнее,
стационарное) значение по сравнению с дугами других кривых,
имеющими с геодезической одни и те же концы *) (см. рис. 35
на стр. 131).
В случае, когда для прямого пути действие по Лагранжу имеет
минимум, длина дуги геодезической меньше длины любой другой
кривой, соединяющей те же точки, что и дуга геодезической.
Поэтому геодезические линии называются т^кже кратчайшими
линиями в пространстве.
Рассмотрим теперь консервативную систему, т. е. склероном-
ную систему с не зависящей явно от t потенциальной энергией
П = П(^,|, ... , qn). Тогда, согласно формулам (15) и (19) предыду-
щего параграфа,
91 Ч1 / п
w* = 2 \VG(h-Sl)dqi = 2 f 1/ (Й-П) У aikdqidqh. (9)
9°1
Поэтому движение консервативной систему с данным значением
полной энергии й осуществляется в координатном пространстве
вдоль экстремали вариационной задачи (с закрепленными концами)
(Ю)
Сопоставляя формулу (10) с формулой (8), заключаем, что для
консервативной системы траектории прямых путей являются
геодезическими линиями в координатном пространстве с мет-
рикой
п
dsl = (h-n) 2 aikdqidqk. (11)
i, *=1
J) Это всегда имеет место, когда концы дуги геодезической
достаточно близки.
136
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. ш
§ 22. Универсальный интегральный инвариант Пуанкаре.
Теорема Ли Хуа-чжуна
п
Рассмотрим теперь интеграл /= [2/^9/— //St] вдоль
контура С, состоящего из одновременных состояний системы.
Такой контур получается, если трубку прямых путей (см.
рис. 33 на стр. 116) рассечь гиперплоскостью t = const. Для
такого контура 8t —О и основной интегральный инвариант
принимает вид
Л = § ,2j P^4i- (!)
Этот интеграл был впервые введен Пуанкаре. Позже Кар-
тан распространил этот интеграл и на контуры, состоящие
стве (9i, pi, ..., 9„, р„). В
и С' (рис. 33) соответствуют
из неодновременных со-
стояний, введя дополни-
тельное слагаемое —Hit.
к Интегральный инва-
риант Пуанкаре Д не
меняет своего значения,
если контур С смещается
вдоль трубки прямых
путей, переходя в кон-
тур С', состоящий снова
из одновременных состоя-
ний. Интеграл Д удобно
рассматривать в обычном
(нерасширенном) 2п-мер-
ном фазовом простран-
этом пространстве контурам С
контуры D и D’, охватывающие
трубку «прямых» траекторий (рис. 36); при этом
$ S = § 2 P^<li-
Заметим, что один из контуров D и D', например D, можно
выбрать совершенно произвольно. Можно считать, что точки
контура D являются различными состояниями системы в один
и тот же момент времени t; тогда соответствующие состояния
системы в момент времени f составят контур D’.
§22] УНИВЕРСАЛЬНЫЙ ИНТЕГРАЛЬНЫЙ ИНВАРИАНТ 137
Вместо фазового пространства рассмотрим отдельно п
фазовых плоскостей pt) (i—1, п). Спроектируем
произвольный замкнутый контур D, расположенный в фазовом
пространстве, на эти плоскости (рис. 37). Получим контуры Dt
(/==1, п). Тогда для любого i
<j> Pt fy, = § Pi fyi = ± S), (2)
d z?.
где S) — площадь области, ограниченной контуром Dt в пло-
скости (qt, pi) (l — l, ... , n). Направление обхода контура D
индуцирует направление обхода на про-
екции Di. В формуле (2) перед 3) берется
знак плюс, если контур £Д обходится по
часовой стрелке (т. е. в направлении крат-
чайшего поворота оси pt к оси qt), и знак
минус — в противном случае.
Тогда
(3)
J i=l i=l
4i
Рис. 37.
Таким образом, при движении системы меняются контуры D
и Dt, изменяются и площади 5г, но алгебраическая сумма
(3) этих площадей остается неизменной. Это и есть геоме-
трическая интерпретация инвариантности интеграла Пуан-
каре.
В выражение для Ц не входит Н. Следовательно, инте-
грал Пуанкаре Д является инвариантом для любой гамильто-
новой системы. Поэтому интеграл Д называется универсаль-
ным интегральным инвариантом.
Нетрудно доказать и следующее положение.
Если для некоторой системы дифференциальных урав-
нений
^- = Qi(t, qk, Pk), d^=Pi(t,qk,pk) (1 = 1, ..., n) (4)
интеграл Ц является инвариантом, то система (4)
является гамильтоновой.
138
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. III
Действительно, в этом случае
Ч 2 2 (>8«'-аМ=
i=l 1=1
Отсюда следует, что выражение, стоящее под знаком инте-
грала, является полным виртуальным дифференциалом неко-
торой функции — H(t, qk. Ph)1):
2 (Pi ЪЧ1 - Qi Ьр() = - HH(t, qk, Pk),
i=l
t. e.
„ dH дН ч
«- = 3P? p- = ^,>,, <‘=1....”>>
что и требовалось доказать.
Отметим еще следующие термины: интеграл Пуанкаре—
Картана / и интеграл Пуанкаре It называются относитель-
ными интегральными инвариантами первого порядка. Термин
«относительный» означает, что область интегрирования пред-
ставляет собой замкнутый контур; первый порядок означает,
что в выражение, стоящее под знаком интеграла, дифферен-
циалы входят линейно. Заметим, что относительный инте-
гральный инвариант первого порядка Ц при помощи формулы
Стокса может быть представлен в виде абсолютного инте-
грального инварианта второго порядка
п 1,..., п
j, 2 л^= у (О
>) Здесь «Я-2
4 «1
УНИВЕРСАЛЬНЫЙ ИНТЕГРАЛЬНЫЙ ИНВАРИАНТ
136
где интеграл в правой части берегся по поверхности 5, огра-
ниченной замкнутом контуром D.
Эта формула в применении к интегралу Д дает
i-1
Известно, что в фазовом 2п-мерном пространстве существуют
следующие универсальные относительные интегральные инварианты
нечетных порядков и абсолютные интегральнее инварианты
четных порядков,
h = § ^Pt 4i = Л = J j *Pi4i,
=И И 2
4, 4t 4k 4k,
An-i —фН)£Р11411 flPin4in =
— J%n~ J " J ^>1 4ii ••• 4in4in.
В 1947 г. китайский ученый Ли Хуа-чжун доказал единственность
этих универсальных интегральных инвариантов. Он показал, что
всякий Другой универсальный интегральный инвариант отличается
портоянным множителем от одного из перечисленных интегралов *).
Нам в дальнейшем понадобится теорема Ли Хуа-чжуна для
интегрального инварианта первого порядка; поэтому мы фор-
мулируем эту теорему для произвольного п и докажем ее для
п= 1.
Теорема Ли Хуа-чжуна. Если
п
г=§ 2 [А‘ Pk) 3<?;+Bi qk'Pk)
i == 1
—универсальный относительный интегральный инва-
риант, то
Г=с!ь (6)
где с — постоянная, a It — интеграл Пуанкаре.
Доказательство. Пусть
Г = (?) A(t, q, p)Zq-\-В(t, q, p) Ър
') H w a-C hung Lee, Invariants of Hamilton systems and appli-
cations to the theory of canonical transformations, Proc. Roy. Soc.
Edinbourgh, ser. A, v. LXII, 1947, p. 237—247.
140
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
1ГЛ. Ill
— универсальный интегральный инвариант. Интегрирование
ведется по замкнутому контуру в фазовой плоскости (д, р).
Пусть, далее, дана какая-либо гамильтонова система дифферен-
циальных уравнений с функцией H(t, д, р):
dq дН dp дН
dt др ’ dt dq'
Общее решение этой системы имеет вид
q=q(t> qa, р0), p=p(t, q9, Ро)> (8)
где qv р9 — начальные значения д, р при t~tv
Пусть
<7 = ^(а)> Р—Рй&) (9)
[0 а дй (0) = дй (/), рй (0) = р0 (/)]
— уравнения замкнутого контура Do в фазовой плоскости
(рис. 38). Точки, которые в момент t = t9 находились на
контуре Do, в произвольный другой
х \ момент времени t образуют контур D.
t р ( \ Параметрические уравнения этого кон-
X. № Тура получаются из равенств (8), если
J Г у туда вместо дй и р(1 подставить их выра-
/7~7\ jf жения (9). Сделав это, получим:
q = g(t, a), p=p(t,a) (0<a^Z).
(Ю)
-------------
? Подставляя эти функции вместо д
Рис. 38. и р в интеграл Г, мы получим Г как
функцию параметра t. Из инвариант-
ности Г следует, что — 0. Дифференцируя под знаком
интеграла и интегрируя по частям 1), находим
'У См. примечание 1 к стр. 119. В процессе преобразований мы
. дА дД и дВ. дВ
полагаем = з- 8 о 4—г- on, бВ — -г- оо 4- — ър и затем исполь-
dq 41 др dq 4 1 dp r
зуем уравнения (7),
§22]
УНИВЕРСАЛЬНЫЙ ИНТЕГРАЛЬНЫЙ ИНВАРИАНТ
141
= —ЗЛ + —=
J dt 4 dt 1 dt r dt
С Г fdA dB\ dp . dAl s ,
=<nU_^)i+<d8<7+
, Г /дБ dA\ dq , dSl
Л L \dq dp j dt । dt J
= <$>( — Z^ + ^) 8<? + (— +
J \ dq 1 dt / 7 1 \ dp 1 dt ) r
где
„__cL4__dB
dp dq ‘
Последний интеграл равен нулю при любом значении пе-
ременной t, рассматриваемой как параметр, и при произволь-
ном контуре интегрирования. Поэтому выражение, стоящее
под знаком интеграла, должно быть полным дифференциалом
относительно переменных q и р. Отсюда
d_ I_7dH .dA\____df „dH .dB\
dp\ ^-dq'-TtJ-'dqV^-fyA-dt]'
или после элементарных преобразований
dp dq 1~ dq dp ' dt
Так как функцию И можно выбрать совершенно произ-
вольно, то
dJZ_ dZ__ dZ_
dp dq dt ’
t. e.
„ dA dB ,
Z = 5----s- = const = c.
dp dq
Тогда
d(A—cp) _dB
dp dq
и, следовательно, существует функция Ф (t, q, p\ такая, чтоx)
(А-ср)8? + В8^ = ^89+^8д=8Ф.
*) Здесь время t рассматривается как параметр.
142
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. Ill
Но тогда
А 87 -}-В Ър = ср 8Ф
и потому
что и требовалось доказать.
При 1 идея доказательства сохраняется, хотя само
доказательство становится более сложным.
§ 23. Инвариантность объема в фазовом пространстве.
Теорема Лиувилля
Рассмотрим «полный» абсолютный интегральный инвариант
J= J ... J Вд 8?1 ... Ърп lqn.
(1)
Инвариантность этого интеграла означает инвариантность
фазового объема в 2/г-мерном фазовом пространстве и уста-
навливается следующим образом
Запишем конечные уравнения движения, получающиеся
после интегрирования уравнений Гамильтона, в следующем
виде:
qt = qi(t, qk, pl), Pi=Pi(t, 4k, Pk) (1=1, ...,«), (2)
где ql, pl — начальные значения qk, рк при t = f0 (k = 1, ...
Выберем в фазовом пространстве некоторый объем Jo и
примем каждую точку из этого объема за начальную (при
1 = 10). Тогда преобразование (2) к моменту времени t
переводит объем Ja в объем J, При этом
/= ^... С/адад ... 8?Ж, (3)
где
d(?i. Pt, , qn, рп) I
д(Я1, Р[, , Ч9п, Р°п) Г
’) В дальнейшем (см. § 31) инвариантность фазового объема
будет установлена, исходя из общих свойств движения гамильтоно-
вых' систем.
§ 23]
ТЕОРЕМА ЛИУВИЛЛЯ
143
т. е. I является якобианом, составленным из частных произ-
водных от qj, pj по начальным данным qf, pl (Z, / = \,... ,ti).
Без нарушения общности, мы можем считать, что якобиан,
стоящий в равенстве (3) под знаком интеграла, положителен,
и опустить знак абсолютной величины.
При t = tfj этот якобиан равен 1, поскольку при этом
значении t все qk = ql и pk=pr'k. При изменении t якобиан
изменяется непрерывно, не обращаясь в нуль, так как особые
точки, в которых этот якобиан мог бы обратиться в нуль,
исключаются из рассмотрения, т. е. предполагается, что в рас-
сматриваемом объеме таких точек нет. Тогда якобиан поло-
жителен в этом объеме1).
Дифференцируя по t под знаком интеграла, получаем:
'~~h
Подсчитаем производную от якобиана Г.
2п
(=1
где Ц — определитель, получаемый из якобиана дифференци-
рованием Z-й строки. Учитывая теперь, что
при 7ql t-tt fy>j dpi = 0,
при любом Z dqi dpi t-to <>Pi_ dql = 0,
при любом 1 dqt dql i-to fyi dpi = 1, Wo
для
для
I— 1, ..., п
I — п 1, ..., 2 л;
*) В доказательстве на стр. 185—186, упомянутом в предыдущем
примечании, не требуется каких-либо предположений об особых
точках.
144
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
[ГЛ. III
поэтому
2п п
1х<=21'и-.=ш+а-=
1=1 1 = 1
2N
|d?“ dpi
д <W0~|
<М dqi J
V Г д'2Н° д2И« 1 П
L dq] dpi dp} dqi J
Таким образом, f =0. Так как начальный момент f0
можно выбрать совершенно произвольно, то для любого t
Tt=°’ <4)
т. е. величина фазового объема J не изменяется при сдвиге
точек этого объема из состояний, занимаемых в момент вре-
мени t0, в состояния, занимаемые в произвольный другой
момент времени t.
Из инвариантности фазового объема вытекает одна из
основных теорем статистической механики — теорема Лиувилля.
Представим себе, что имеется очень большое число совер-
шенно одинаковых «экземпляров» системы, отличающихся друг
от друга только начальными состояниями ql, pl (1=1, ...
..., п). Все эти «экземпляры» образуют статистический
ансамбль.
Примером статистического ансамбля является совокупность
молекул газа, находящегося в данном объеме.
Каждому элементу объема dV фазового пространства
можно отнести «массу» ф, характеризующую количество
«экземпляров», приходящихся на данный элемент объема dV.
В силу доказанной инвариантности объема в фазовом про-
странстве величина dV не меняется с течением времени. По
своему физическому смыслу не изменяется и величина dp,
так как экземпляры, находившиеся в объеме dV в какой-то
момент времени, будут перемещаться вместе с этим объемом.
Поэтому при движении остается неизменной плотность стати-
§ 23] ТЕОРЕМА ЛИУВИЛЛЯ 145
стического ансамбля
Р(Л Чк = (5)
т. е.
<=»• го
В развернутом виде равенство (6) может быть записано
так (см. § 15):
^- + (PW) = 0, (6')
где (р Н) — скобки Пуассона. Согласно равенству (6) функ-
ция р (t, qt, pi) является интегралом движения.
Таким образом, нами доказ'’"-’ следующая теорема.
Теорема Лиувилля. I пность статистического
ансамбля всегда является интегралом движения.
Так, например, для консервативной системы любая функ-
ция от энергии системы может служить плотностью стати-
стического ансамбля.
ГЛАВА IV
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
И УРАВНЕНИЕ ГАМИЛЬТОНА —ЯКОБИ
§ 24. Канонические преобразования
Преобразование координат в 2л-мерном фазовом про-
странстве (содержащее в общем случае переменную времени t
как параметр)
^i = 4i(t,qk>Pk)
Pi = Pi(t,qk>Pk)
1, ...
я;
Pi, Рп)
д (qt, Pt........ рп)
* о) (1)
называется каноническим, если это преобразование перево-
дит любую гамильтонову систему
dqi дН dpi дН
dt др, ’ dt dqi
(/ = 1, ••>«) (2)
снова в гамильтонову систему (вообще говоря, с другой
функцией Гамильтона Н):
dt dpi’
dpi dH
dt dqi
......«)•
(3)
Важность изучения канонических преобразований связана
с тем, что эти преобразования дают возможность заменить
данную гамильтонову систему (2) другой гамильтоновой си-
стемой (3), в которой функция И имеет более простую
структуру, чем И.
Если в фазовом пространстве последовательно выполнить два
канонические преобразования, то результирующее преобразование
снова будет каноническим. Кроме того, преобразование, обратное
некоторому каноническому преобразованию, всегда является кано-
« 241
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
147
ническим и тождественное преобразование qi==qi, Pt-Pi (i=l,..., л)
есть каноническое. Поэтому все канонические преобразования в со-
вокупности образуют группу.
Примеры. 1. Преобразование
= Pi = $Pi (i=l, ..., n; a^O, ₽^0),
как легко проверить, является каноническим. Оно переводит си-
стему (2) в систему (3) с
Й=а$Н.
2. Преобразование
9/ = “Л> Pi — Hi (/=1, .... п; а^О, Рт50)
будет каноническим. В этом случае
Н = — афН.
3. Преобразование
qi=Pi^t, Pi = 4ittgt 0 = 1......................л)
будет каноническим, так как легко проверяется, что из уравне-
ний (2) всегда получаются уравнения (3) при
п
Н = + -----У qiPi.
sint cost
i=l
Для вывода условий, при которых преобразование (1)
является каноническим, рассмотрим два расширенных
Рис. 39.
(2я-ф- 1)-мерных фазовых пространства и (^г, р;, t),
переходящих одно в другое при каноническом преобразовании
(1), и две трубки прямых путей гамильтоновых систем (2)
и (3) (рис. 39).
148
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. 4V
Возьмем два произвольных замкнутых контура С и С,
которые охватывают эти трубки и соответствуют друг другу
в силу преобразования (1). Кроме того, пере .ечем обе трубки
одной и той же гиперплоскостью t = const. В сечении по-
лучим два «плоских» контура Са и Со. Эти контуры также
переходят друг в друга при каноническом преобразовании (1),
так как при каноническом преобразовании величина t остается
неизменной. Из инвариантности интеграла Пуанкаре — Картана
следует, что
п п
$ [ 2 s?‘‘ - н f 2pi 8?i’’
C Co / = 1
n n
2^8?,—2^8^- (5)
C « = 1 C0« = l
С другой стороны, если в универсальном интегральном
п
инварианте (J) 2 Pt ° Я, перейти к переменным qt, pt (Z = 1,.... л)
с помощью канонического преобразования (1), то этот инте-
грал перейдет в некоторый универсальный интегральный
инвариант первого порядка в 2я-мерном фазовом (^г, /^-про-
странстве; по теореме Ли Хуа-чжуна полученный инвариант
может отличаться только постоянным множителем с от
п
£ 2 Pi ^4i- Поэтому
J i = \
п п
$ 2 Р18^г=с f 2pi *4i' <6)
Сог = ‘ C0i=l
Из равенств (4) — (6) следует, что
(?)
Если в первом интеграле считать, что переменные q< рп
выражены через переменные ..., рп (при этом контур
§ 24].
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
149
интегрирования С заменяется контуром интегрирования С),
то равенство (7) может быть переписано так:
Pt^qt — oj- cf 2 Piz4i — Я8^ = 0. (8)
С i=l i=l
Но С—совершенно произвольный контур в (2п 1)-мерном
расширенном фазовом пространстве. Поэтому, выражение,
стоящее под знаком интеграла в равенстве (8), должно быть
полным дифференциалом некоторой функции от 2п 1 аргу-
ментов qb рь qn, рп и t. Эту функцию нам удобно
будет обозначать через — F (t, qit р,); тогда * *)
S Pi Vii-й - mt) - 8F. (9)
Заметим, что постоянная с в тождестве (9) всегда отлична
п
от нуля, с ф 0, так как выражение У, Д- 8#f— HZt не является
г=1
полным дифференциалом2) и потому не может быть рав-
ным — 8F.
Функцию F будем называть производящей функцией,
а постоянную с — валентностью рассматриваемого канони-
ческого преобразования (1). Каноническое преобразование
будем называть унивалентным, если для него с=1.
Необходимым и достаточным условием каноничности
преобразования (1) является существование производящей
функции F и некоторой постоянной с, при которых ра-
венство (9) тождественно выполняется в силу преобра-
зования (1).
Замечание. Если преобразование (1) является кано-
ническим, то существуют производящая функция F и валент-
ность с ф 0 такие, что имеет место равенство (9) при любой
функции И и соответствующей И. Однако если равенство (9)
п
*) Здесь У +
dPi 1 л
*) По отношению к независимым переменным qpit t, а сле-
довательно, и по отношению к независимым переменным qit pj, t
150 Канонические преобразований [Гд. iV
справедливо для одной пары функций 77 и Н, то преобразо-
вание (1) уже является каноническим1).
Действительно, наряду с Н возьмем произвольную дру-
гую функцию 77t и определим Hi из условия
Hi — H=c(Hi~H).
Умножая обе части этого равенства на о/ и вычитая по-
членно полученное равенство из равенства (9), получаем:
п fl
2 pt 8^-Д Ы=с( 2 Pi ^i ~ Hi it) - 8F.
i = l i=l
Таким образом, равенство (9) справедливо для любой
функции Hi и соответствующей Д.
Канонические преобразования иногда называют также
контактными преобразованиями.
В литературе часто рассматривают только унивалентные
канонические преобразования. Многие авторы ошибочно счи-
тают, что этими преобразованиями исчерпываются все
преобразования (1), переводящие гамильтоновы системы
снова в гамильтоновы. Эти авторы не замечают произ-
вольного постоянного множителя с, который должен фигу-
рировать в общей формуле для произвольного канонического
преобразования.
§ 25. Свободные канонические преобразования
Проведем более подробное исследование так называемых
свободных канонических преобразований. Эти преобразования
характеризуются дополнительно неравенством
«>(₽!..РП)
обеспечивающим независимость величин t, qb ..., qn, qlt ..., qn,
которые теперь могут быть выбраны в качестве основных
*) Однако отсюда не следует, что каноническое преобразова-
ние можно определить как преобразование, переводящее одну за-
данную гамильтонову систему в некоторую другую гамильтонову
систему.
Так, например, произвольное неканоническое преобразование
Я i=qd4k, Рп). Pi = Pdqk, Pk) (» = 1, •••, п) переводит гамильто-
нову систему с /7 = 0 в гамильтонову систему с /7 = 0.
§ 25]
СВОБОДНЫЕ КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
151
переменных1). Действительно, это неравенство позволяет из
первых л уравнений (1) § 24 выразить обобщенные: импульсы
Pi, рп через 2п-\-1 величин t, qt, qt (i = 1, ..., n) и,
следовательно, позволяет представить любую функцию от
переменных t, q,, pt (1 = 1, п) в виде функции от пере-
менных t, qt, (I = 1, ..., л). В этом случае можно счи-
тать, что производящая функция представлена в виде функ-
ции S от этих переменных:
Чь Pi) — S(t, qt, qt).
Тогда основное тождество (9) предыдущего параграфа
запишется так:
я п
'ZiPt^Qi — НМ = с(£ pttyt^- fnt\ — b$(t, qt,
i=- 1
(2)
Приравнивая слева и справа коэффициенты при 8^, bqt
и 8/, получим следующие формулы:
£ = ^ = ~Pi (/=1> •••’«)’ (3)
(4)
Уравнения (3) определяют рассматриваемое канони-
ческое преобразование. Покажем, что они могут быть при-
ведены к виду (1) § 24.
Частные прбйзйодные (1=1, ..., п), стоящие в ле-
вых частях первых п уравнений (3), как функции величин
Чъ •••> Чп независимы, потому что в силу формул (3) зави-
симость 2 *)
n ( dS dS \
’ ”” fy»’ 91’ Чп)~
перешла бы в равенство
2(срь ..., срп, Чь ..., 9’я)==0,
I) В случае несвободного канонического преобразования вели-
чины I, qt, q, (t = l, ..., п) связаны Некоторыми зависимостями.
2) В этой зависимости величины qt, qn рассматриваются
как параметры.
152
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
что возможно лишь при 2 = 0, так как координаты точки
фазового пространства q-t,
величины. Из независимости
рг (Z = 1, ..., п) — независимые
as .
производных (г=1, ..., п),
рассматриваемых как функции переменных дп, сле-
дует, что якобиан этих функций не равен тождественно нулю.
Таким образом, для производящей функции 5 свободного
канонического преобразования должен быть отличен от нуля
определитель
det
dsS
> dq к = l
^0.
(5)
Из неравенства (5) следует, что первые п уравнений (3)
можно разрешить относительно (7=1, ,ri) и таким
образом все новые фазовые переменные pt (Z= 1, ..., я)
выразить через старые переменные qt, pt (Z = l, .... я).
Полученное таким образом преобразование вида (1) будет обра-
д(а,, ..., р„) , п
тимым, т. е. для него —ч-/ "' - ф 0, так как в силу
неравенства (5) последние п равенств (3) можно разрешить
относительно q-t и, следовательно, выразить все qt, pt через
qt, pt (/=1, ..., ri). Таким образом, уравнения (3) опре-
деляют свободное каноническое преобразование с дан-
ной производящей функцией S(t, qt, qt) и с данной ва-
лентностью с ф 0. Формулы же (4) устанавливают простую
связь между функциями Гамильтона Ня Н.
Перебирая различные производящие функции S, удовле-
творяющие условию (5), и различные валентности с ф 0, мы
с помощью формул (3) можем охватить все свободные кано-
нические преобразования ’).
Для унивалентных (с=1) свободных канонических преоб-
разований формулы (3) и (4) принимают более простой
вид
dS __ dS _____ ..__. -. /z?.
-дь^-Pi •••>«) (6)
и
"=»+s- m
x) Для несвободных канонических преобразований существуют
определяющие формулы, аналогичные Эти формулы будут уста-
новлены в § 29.
§25] СВОБОДНЫЕ КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ 153
Последнее равенство показывает, что после применения
одного и того же свободного унивалентного канонического
преобразования к различным гамильтоновым системам во всех
случаях разность между Н и Н будет одной и той же
(равной ^).
Из равенства (4) следует, что Н— сН тогда и только
dS
тогда, когда -^- = 0, т. е. когда производящая функция S
не зависит явно от t. В этом случае в силу равенств (3)
время t не будет входить явно в формулы канонического
преобразования. При таких канонических преобразованиях
функция Н существенно не меняется, она умножается только
на константу с. Поэтому если мы желаем получить новую
систему с существенно более простой функцией Гамильтона,
мы обязательно должны взять свободное каноническое пре-
образование, содержащее время t как параметр.
Примеры. 1. На стр. 147 были рассмотрены три канонических
преобразования:
О 9i ==“?£> Pi = ?Pi', 2) qi = api, Pt — ^qi,
3) %i=Pi*gt, Pi = qtctgt (i = l, ... , n).
Преобразования 2) и 3) являются свободными. Они имеют произ-
п
водящие функции и валентности соответственно S = — р
* = 1
п
с — —сф; S = — ctg £ 2 ЧЙь с~ — 1- Преобразование же 1) не
1—1
является свободным. Для него с = а{1, F=f).
2. Рассмотрим произвольное аффинное преобразование фазовой
плоскости (q, р) (здесь п ~ 1):
? = + j
Р =м + ?1/’ (“?1 —J
Подставим правые части равенств (8) в основное тождество (9)
на стр. 149. Поскольку переменная t не входит в правые части (8),
мы и f будем искать в виде функции, не зависящей от времени t
явно: F—F(q, р}. Тогда основное тождество примет вид
(“19 + ₽1Р) (“ s9 + н ¥) — ср 89 =— Щ
154
КАНОНИЧЕСКИЙ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
ИЛИ
5 (у ч*1<? + у & + (а₽1 — с) р
Левая часть этого равенства будет полным дифференциалом
при условии, что
С = а?1 —«1₽-
Таким образом, преобразование (8) является каноническим с валент-
ностью с, равной определителю преобразования, и с производящей
функцией
F— у + у №i/>2 + ЯР-
Это преобразование будет свободным, если ₽^0.
3. Преобразование § = У q cos 2р, р = У q sin 2р является сво-
бодным унивалентным каноническим преобразованием с произво-
дящей функцией
S = y ?arc cos^-jL — Vq — q2.
Для натуральной системы координаты qlt ... , qn опре-
деляли положение системы, а совместно с импульсами
Pj, ... , рп они определяли состояние системы, т. е. поло-
жение и скорости ее точек. При каноническом преобразова-
нии общего тира эта специфика координат теряется. Вели-
чины qb ... , qn уже не определяют положения системы,
а только вместе с рь ... , рп определяют состояние системы.
Переменные qb ... , qn будут по-прежнему определять поло-
жение системы лишь в частном случае точечного канониче-
ского преобразования, при котором функции qyt, qk, pk)
фактически не содержат импульсов:
qi = 4i(t, <Ik) <7=1.........«)•
Заметим, что в дальнейшем преобразование произвольной
системы Гамильтона к системе с функцией Н простой струк-
туры удается осуществить с помощью свободного канониче-
ского преобразования. Свободное же каноническое преобра-
зование не является точечным. Таким образом, неточечные
канонические преобразования играют существенную роль
в теории гамильтоновых систем.
5 261
УРАВНЕНИЕ ГАМИЛЬТОНА—ЯКОБИ
153
§ 26. Уравнение Гамильтона — Якоби
га-
(2)
(3)
(4)
Теория канонических преобразований приводит нас непо-
средственно к уравнению Гамильтона—Якоби.
Пусть дана голономная система, движение которой под-
чиняется каноническим уравнениям Гамильтона
dqi__дН dpi______ 'дН
dt dpi' dt dqi
Постараемся определить такое свободное унивалентноё
каноническое преобразование, чтобы в преобразованной
мильтоновой системе
dq; дН dp; дН ,, , ч
••• >
функция И была тождественно равна нулю:
Н==0.
Тогда система (2) интегрируется нейосредстйейНо
где аг и рг суть 2л произвольных постоянных. Зйая канони-
ческое преобразование, т. е. связь между qt, (Z=l,
и %i> Pi (i = L • • • > л), мы выразим все qt и pt как функции
времени t и 2п произвольных постоянных ак, МА=1> • ••»«).
т. е. полностью найдем конечные уравнения движения дан-
ной голономной системы [все решенйя системы (1)].
Как же определить нужное нам каноническое преобразо-
вание? Для этого в силу формулы (7) предыдущего пара-
графа необходимо и достаточно, чтобы для производящей
функции 5(Z, qit qi) искомого канонического преобразования
выполнялось равенство
+ qit Р1) = 0. (5)
Это в сочетании с формулами (6) того же параграфа дает
°- (0)
Полученное уравнение в частных производных (б) носит
название уравнения Гамильтона — Якоби. Таким образом,
производящая функция «S'(Y, qlt qt) с основными переменными
156
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
t и qi (qt рассматриваются здесь как параметры) удовлетво-
ряет уравнению в частных производных Гамильтона — Якоби.
При этом, кроме уравнения Гамильтона — Якоби, для произ-
водящей функции S(t, qit q^ должно выполняться условие
det
' d2S \«
= 1
#0.
(7)
Как только производящая функция S(t, q-t, q^ найдена,
формулы
dS dS ~ .. 1 ч
г?7=_'’‘ <l=1.........”>
определят искомое свободное каноническое преобразование.
Заменив в этих формулах qt на а; и Д на [3;, мы получим
уравнения движения данной голономной системы в конечном
виде. Весь этот процесс удобнее описать, если с самого
начала в S заменить qt на аг (/= 1, ... , п).
Введем определение. Решение S(t, qit аг) уравнения
в частных производных Гамильтона — Якоби, содержащее п
произвольных постоянных <Zj....ал, называется полным
интегралом этого уравнения, если выполняется условие
(8)
Теперь мы можем сформулировать доказанную теорему.
Теорема Якоби. Если S(t, qh az) — некоторый пол-
ный интеграл уравнения Гамильтона — Якоби (6), то
конечные уравнения движения голономной системы с дан-
ной функцией Н могут быть записаны в виде1)
= (9)
где и Р,- — произвольные постоянные (Z=l, ... , п).
Таким образом, знание полного интеграла уравнения
в частных производных (6) избавляет нас от необходимости
J) Здесь мы вместо произвольных постоянных —₽,• пишем про-
сто р(-. В силу условия (8) последние п уравнений (9) можно раз-
решить относительно qi и выразить qt, ... , qn в виде функций от
t И 2л произвольных ПОСТОЯННЫХ pj.
§ 26]
УРАВНЕНИЕ ГАМИЛЬТОНА—ЯКОБИ
157
интегрировать систему обыкновенных дифференциальных урав-
нений (1). Задача интегрирования этой системы заменяется
эквивалентной задачей отыскания полного интеграла уравне-
ния Гамильтона — Якоби в частных производных.
Замечание. Общее решение уравнения в частных
производных зависит от нескольких произвольных функций.
Поэтому полный интеграл уравнения Гамильтона — Якоби
отнюдь не является общим решением. Полный интеграл по
сравнению с общим решением охватывает только небольшую
«горстку» решений. Тем не менее по полному интегралу
можно восстановить исходное уравнение (отсюда и название
«полный интеграл»). Действительно, дифференцируя полный
интеграл, получаем
«*) a=i. ••>«)> (ю)
g^=/o(^> 4k> afc)- (11)
Если известен полный интеграл S (t, qk, afc), то известны и
функции ft(t, qk, aft) (г = 0, 1, ..., и). Из
можно выразить каждое а/г через частные
t и qb поскольку, в силу условия (8),
соотношений (10)
dS
производные
d(fi, /п) _I d2S q
d(an ... , a„) = l
(12)
Подставив полученные выражения для ак в равенство (11),
получим исходное уравнение в частных производных (6) *).
В качестве примера полного интеграла уравнения Гамиль-
тона — Якоби рассмотрим так называемую главную функ-
цию Гамильтона. Для этого вернемся к формуле (7) на
стр. 115 и к рис. 33 на стр. 116. Рассмотрим только частный
случай, когда t0 (a) = const = ta, т. e. примем, что контур Со
состоит из начальных состояний системы при t = t0. Кроме
того, вместо q\, р\, ГЦ будем писать просто t, qb pb И.
Тогда, если W — действие вдоль прямого пути (т. е. вдоль
*) Можно считать, что полный интеграл 8 содержит еще (п-\- 1)-ю
аддитивную произвольную постоянную «л+1, так как в уравнение (6)
входят только производные от S, а не сама функция S.
158
КАНОНИЧЕСКИЙ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
образующей трубки) от начальной точки (t = t0) до конеч-
ной точки, соответствующей данному значению t, то
= S Pi^i - мы - 2 р°м- о3)
4=1 4=1
Если использовать конечные уравнения движения
?4 = ?4^ Р»)> . (14)
Р1 = Ы*> Ph) ...... (15)
и вместо qt (t) подставить в выражение для действия
t
W=\L{t, qit qjdt
их значения (14), то W7 станет функцией от t, ql, pi(i = l,..., я).
Гамильтон предложил, используя конечные уравнения движения
(14), выразить р® через t, q° И и таким образом пред-
ставить действие в виде
W=W(t, qt, qai). (16)
Действие W, представленное в виде (10), т. е. в виде
функции от начальных координат, конечных координат и
конечного момента времени t, называется главной функцией
Гамильтона. Считая, что в равенстве (13) W есть главная
функция Гамильтона, мы на основании этого равенства полу-
чаем
dir dW 0
dqi~Pi' dq°i~~Pi (*—1, ••..«) (17)
и
qit pi). (18)
Из равенств (17) и (18) следует, что главная функция
Гамильтона удовлетворяет уравнению Гамильтона — Якоби
dW , „Д cW\ п
(19)
$26]
УРАВНЕНИЕ ГАМИЛЬТОНА—ЯКОБИ
159
а соотношения (17) представляют собой конечные уравнения
движения, содержащие 2/г произвольных постоянных q}, pl
(/=1, ... , n).
Таким образом, Гамильтон показал, как записываются
конечные уравнения движения при помощи полного интеграла
уравнения (19). Однако этот полный интеграл у Гамильтона не
был произвольным и в нем произвольными постоянными были
начальные значения ql и Получался порочный круг:
для написания конечных уравнений движения (17) нужна
главная функция Гамильтона, а для составления этой функ-
ции, как выше было показано, нужно знать конечные урав-
нения движения.
Заслуга Якоби заключается в том, что, продолжив иссле-
дования Гамильтона, он разорвал этот порочный круг. Он
показал, что конечные уравнения движения могут быть написа-
ны в виде (9) при помощи произвольного полного интег-
рала S(t, qt, а,) уравнения Гамильтона — Якоби.
Вернемся к тождеству (13) и сопоставим его с тождест-
вом (2) на стр. 151. Из сопоставления видно, что формулы (14)
и (15), представляющие собой конечные уравнения движения
и выражающие гамильтоновы координаты q,, pt состояния
системы в момент t через начальные координаты q^, ... , />„,
можно рассматривать как свободное унивалентное каноничес-
кое преобразование от переменных ql, pl (1=1, ... , ri)
к переменным qk, pk (k==l, ri); производящей функ-
цией этого канонического преобразования является — U7,
где W— главная функция Гамильтона1).
Таким образом, преобразование фазового пространства,
осуществляемое с помощью движений любой гамильто-
новой системы, является каноническим (при этом сво-
бодным и унивалентным).
Прим ер. Составим функцию Гамильтона для движения по
инерции свободной материальной точки. В этом случае (полагаем
А> = 0)
Х = Х0 + ^, У=Уо+.М z = 20 + V
*) Для обратного канонического преобразования, в котором
осуществляется переход от переменных qit р, к переменным q\, рЧ
производящей функцией будет главная функция Гамильтона W.
160
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
(ГЛ. IV
и потому
t
W= ~ (-f2 + V2 + Z1'} dt =
о
- W + ^) = 5 К* - хо)2 + (У - Уо)2 + (* - z0)2].
Если исходить из найденной главной функции Гамильтона
w^^t[(х ~x°>s + (У - + <г - *°>ВЬ
t
то уравнения движения получаются по формулам (17), которые
в данном случае выглядят так:
dW
р* = ~дх^т
dW
py=dy=m
dW
p‘=dz=m t
„ dW х — х0
—р,'=— = — т —-—
х дха t
У — У* . _по—д^ — _ ^.У — Уо
t ’ РУ~~ду0~' t
„ д W z — z0
-р^дТ0=~т—г^
Z—Zo _
Пусть мы имеем обобщенно-консервативную систему
^^ = oj. В этом случае уравнение Гамильтона — Якоби
имеет вид
»+"(?• ©=° <20>
и его полный интеграл можно искать в виде
S= — ht-[- V(qi, ... , qn; at........an_b h), (21)
где h и alt ... , a„_j — произвольные постоянные.
Подставляя это выражение для 5 в уравнение (20), мы
получаем для определения функции V следующее уравнение:
(22)
Найдя полный интеграл этого уравнения, т. е. решение
Vffli, ai> ••• > an-1> h), для которого выполняется неравен-
ство
#0 (а„ = й), (23)
S 261
УРАВНЕНИЕ ГАМИЛЬТОНА-ЯКОБИ
161
мы с помощью формул (9) и (21) получим следующие конеч-
ные уравнения движения обобщенно-консервативной системы:
^ = Р| (1 = 1..........п), (24')
а=1........»-1). (2П
где а,-, п—1), й и f — произвольные по-
стоянные.
В силу условия (23) координаты qi, ... , qn могут быть
определены из уравнения (24") как функции от t и 2 л про-
извольных постоянных ау-, ру, h и у. Подставляя полученные
выражения в уравнения (24’), найдем аналогичные выражения
для обобщенных импульсов р, (1=1, .... л) *).
В случае обобщенно-консервативной системы мы заменили
уравнение (6) уравнением (20), в котором число независимых
переменных на единицу меньше. Аналогичное понижение числа
независимых переменных в уравнении в частных производных
можно произвести и в том случае, если одна из координат ци-
клическая.
Рассмотрим сразу общий случай, когда несколько коор-
динат qm+i, ... , q„ являются циклическими. В этом случае
H = H(t, qlt ... , qm, р1г ... , pn), и полный интеграл урав-
нения Гамильтона — Якоби можно искать в виде
5= S + ЯЪ > Чт’ «п > О- (25)
H = m-|- 1
Для нахождения функции So получаем уравнение
О$о । „А dS0 dSa \ „
dt +Н\*’ Яь ••• > Чт> dqi> "->dq^’ am+1.......a») —°-
(26)
Если координаты qm+i, ..., qn являются циклическими
у обобщенно-консервативной системы, то функцию S ищут
*) Из первых п—1 уравнений (24') можно выразить п—1
координат через оставшуюся л-ю координату и 2л—1 произволь-
ных постоянных. Тогда получим уравнения траекторий в коорди-
натном пространстве. Последнее уравнение (24") устанавливает
связь координат с переменной времени t,
6 Ф, Р, Гантмахер
162
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
в виде
s= — M-Y 2 М’иЧ- VoGi> .... qm, «i> ...» а„, й), (27)
H = m +1
где функция Vo определяется из уравнения
"(«................................’")=й- <28’
§ 27. Метод разделения переменных. Примеры
Мы показали, что интегрирование системы канонических
уравнений сводится к нахождению полного интеграла урав-
нения Гамильтона — Якоби. Это положение имеет не только
теоретический интерес. Оказалось, что многие задачи дина-
мики и в том числе задачи, представляющие интерес для
теоретической физики, получают на этом пути свое удобное
практическое решение.
Здесь мы познакомим читателя с методом разделения пере-
менных для нахождения полного интеграла уравнения Гамиль-
тона — Якоби. Этот метод применяется в тех случаях, когда
функция Гамильтона Н обобщенно-консервативной системы
имеет специальную структуру.
1°. Пусть
H=Q\ft (?1, А), ... , fn (qn, />„)]. (1)
В этом случае в выражении для функции Н переменные
разделены: в каждую функцию ft входит только одна пара
сопряженных переменных qt, pt.
Уравнение (22) предыдущего параграфа теперь запишет-
ся так:
G[/1 ‘ ’ fn (?"’ S]= h’ (2)
Положим
fi (qi’ W<)= “г (Z ~ ‘ (3)
где <хь ... , ал — произвольные постоянные. Тогда, согласно
формуле (1), постоянную h можно выразить через постоян-
ные ах, ... , а„ следующим образом:
ft=G(ai, ... , а„). (4)
§27]
МЕТОД РАЗДЕЛЕНИЯ ПЕРЕМЕННЫХ
163
Разрешив равенства (3) относительно , найдем *)
= at) (*=1...........................я),
И
п
v= 2 5 Fd4i> ai)dqt
i=l d
S=~G(alt
В этом случае
п
> <*nK + У f Fi(qi, ^)dq{.
(5)
(6)
d2S _dFt d2S _
dqidai дщ ’ dqida^ ПРИ
l^tk (I, k = 1.....л)
и основное условие
detГ 0 (7)
\dqtdak /i,* = i ’
сводится к неравенству
П£*°-
i= 1
Поскольку соотношение
P«) = *i (8)
эквивалентно уравнению
Pi = Ft{<li> “Д (9)
то
Э?=(ЙГ*° <г = 1’0°)
и условие (7) всегда выполнено. Поэтому формула (6) опре-
деляет полный интеграл уравнения Гамильтона — Якоби.
Конечные уравнения движения
dS dS q ., 1 n
dfr—pi’ д^~ f11)
*) Мы предполагаем, что каждая функция ft (qit pt) фактически
содержит импульс т. е. что^-^О. В этом случае уравнения (3)
А 1 dV
могут быть разрешены относительно р1=-%—; каждая функция Fi
является функцией от двух переменных qi и Z=l, п.
6*
164
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
в данном случае запишутся так1):
дв / । f _ о
<4 ' J (dfi\ —
«,•) (Z = l,
Pi = Fi(Qi> ®i)
»). [(12)
J
Таким образом, нахождение конечных уравнений движе-
ния осуществляется с помощью квадратур.
Пример 1. Рассмотрим осциллятор с одной степенью свободы.
В этом случае
h=pL + c-SL
2т 2
и, таким образом,
а уравнение (2) имеет вид
+ С4 ’
2_^Г+^==А
2т \dq ) 2
Положим й=а; тогда
8 =—at -j- J У~2та — mcqa dq,
и из конечных уравнений движения (И) находим выражение для
импульса ___________
р—У 2та —~mcqa , (13)
а собственно уравнение движения запишется так:
—t + — f _ = ₽, (14)
“ J У A2 — qa
Замечая, что интеграл в формуле (14) равен arc sin-j-,
/1
получаем
уравнение движения в следующем виде:
_________________ q — A sin ш (t ₽). (15)
В формулах (5) и (6) мы под интегралом j F, (qlt а{) dqi бу-
дем понимать интеграл Ft (qh ai) dqi, где постоянная фикси-
И
рована и не зависит от значений произвольных постоянных ак; тогда
п
Д. 2 JFit (qk’ “а) dqk=Д SFi (qh a<) dqi=j ^dqi-
Затем мы используем соотношение (10).
*37]
МЕТОД РАЗДЕЛЕНИЯ ПЕРЕМЕННЫХ
165
2°. Пусть
Н= ёп {• • • ёз ,{й [gi (9i> Pi), Яг, й]> Яз> Рз} • • • Яп, Рп}- (16)
Тогда уравнение для определения V запишется так:
( f г I акт <т
Яг, Яз, -^sj =
Введем произвольные постоянные аь ...» an_t и ал=й
и положим последовательно
/
Ч*’ ^)=ai>
й(аь 9а,^-) = а2, (17)
f dV\
ёп\^п-\, Яп, dqn)~an'
Определяя отсюда частные производные, найдем *)
й!7 „ . .
^=Gi(^ «i)>
dV ~ .
д^ = ^{Яг, <4, а2),
dV ' ' ' ’ ' ‘ \
д^п = 0ЛЯп’ ал-1> “л)-
Отсюда
п
и „
«£= —<М+ 2 j Gi^>’ а‘-1 2 * *’
Здесь
(18)
(19)
dsS =dGi
dqt dai dai ’
^ = 0
dqidak
При
(Z, k = l, n).
Os*
^•^0, т. e. что pi действительно
l) Мы предполагаем, что
входит в функцию gi(qi, Pi).
2) Здесь и далее в этом параграфе под неопределенным интег-
ралом понимаем (как ив п. Г) определенный интеграл с перемен-
ным верхним пределом и фиксированным, не зависящим от at,..., ал
постоянным нижним пределом.
166
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
Поэтому условие (7) сводится к неравенству
п
i=l
которое всегда выполняется, поскольку уравнение
4i> Pi) = o-i (20)
эквивалентно уравнению
Pi = Gt(<Ii, «i-i. “;)> (21)
и потому
!^-г= 0 (Z = 1, .... л). (22)
Для дальнейшего нам понадобятся выражения для
0G'
изводных з—которые находятся из уравнений (20) и
0а»-1
а именно:
/dgi \
dGj I да^ j
<4-i \ d_Ki /
к dpt / Pi=Oi(qi, at_v «р
npo-
(21),
(23)
Подставляя в конечные уравнения движения (11) выраже-
ние (19) и учитывая формулы (22) и (23), получаем оконча-
тельно:
A = O/(?i, ®г-1> «») G=1
(25)
§27]
МЕТОД РАЗДЕЛЕНИЯ ПЕРЕМЕННЫХ
167
Здесь первые п — 1 уравнений (24) являются уравнениями
для семейства траекторий в координатном пространстве; эти
уравнения содержат 2л — 1 произвольных постоянных
ai> • • > Pi> • • •, Рп-1- Последнее уравнение (24) содержит
новую произвольную постоянную р„ и устанавливает связь
координат qt с переменной времени t.
Уравнения (25) после подстановки в них функций
qt(t, ak, рА) (z = l, п), найденных из уравнений (24),
определяют импульсы pt (Z=l, ..., л) как функции от t
и всех произвольных постоянных аг, рг (Z=l, ..., п).
Пример. 2. Рассмотрим кеплерово движение, при котором
материальная точка массы т притягивается к центру с силой, об-
ратно пропорциональной квадрату расстояния до центра.
В этом случае в сферических координатах
7' = ^-(r2 + r202 + r2sin20<i>2), П = — 1 (7>0),
2т \Рг ^г2 г2 sin2 9 ) г
и уравнение для определения V имеет вид
2т\\дг) ^"r2[\d9/ ' sin2 6 \с?ф / Jf г '
Положим
s I “i 1 ! < । Y
= g3=Pf) +sh==a2’ г =».=*,
Тогда, согласно формулам (24), находим:
Ф —“1 t---------7^°- . - = 0i> (26а)
J _,_s Л / . “?
-1 + f у— mdr (26в)
I I / п । 2/П7 а2
I I/ 2maa Н--------------1-
Мы получили, конечные уравнения для кеплерова движения.
168
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
При исследовании этого движения без нарушения общности
можно считать, что начальная скорость лежит в плоскости мери-
диана Ф = const. Тогда в начальный момент ^г = 0 и, следова-
ао
тельно, согласно формуле (26а),
«1 = 0 (27)
и <p = pt = const, т. е. движение плоское. Почленно дифференцируя
равенства (266) и (26в), получаем, что секториальная скорость *)
равна
1 2^9 А
УГ ^=-2^ = const>
т. е. движение в плоскости ф = const происходит в соответствии
с законом площадей.
Наконец, для определения траектории полагаем у = хииз
формулы (266) с учетом равенства (27) находим
С =р_9,
J У c + 2kx—Xs
где
₽=2ГГа₽8. (28)
“2 “S
Вычислив интеграл, получим
arc cos х = 0 —8
/ А2 + с
и, следовательно,
х = А-)- J^A2-)- ccos(8—₽).
„ 1
Наконец, вспомнив, что х = —, получим для траектории урав-
нение конического сечения, в одном из фокусов которого располо-
жен центр притяжения:
Г = 1 4-ecos(0 —₽) ’ (29)
где параметр и эксцентриситет конического сечения определяются
из равенств
/’ = 4 = — , е=1/"1 +4 = 1/1+^-. (30)
А т-,' г 1 А2 у ' m-f v '
Пусть точка описывает замкнутую орбиту (движение планеты,
притягиваемой Солнцем). Тогда эта орбита — эллипс, в одном из
фокусов которого находится центр притяжения (Солнце).
*) То есть производная по времени от площади, описываемой
радиусом-вектором, проведенным из центра.
I 271
МЕТОД РАЗДЕЛЕНИЯ ПЕРЕМЕННЫХ
169
Обозначив через F и а, Ъ (а>Ь) площадь и полуоси эллипса,
„ / Ь*\
найдем (поскольку, как известно, Р = ~1
F3 ^Ь3 ,
а3 а3
Пусть т—период (время обращения), т = . Тогда на основании
V “и
равенств (30)
1 т2 __m2 F2___т.3т‘р___7tsm__л2 / _____
4 а8 а8 а8 а3 у V1 т / ’ ' '
где, согласно закону притяжения Ньютона, величина зависит
только от центра притяжения. Мы получили три закона Кеплера
для движения планет вокруг Солнца: 1) планеты движутся с по-
стоянной секториальной скоростью по плоским орбитам; 2) этими ор-
битами являются эллипсы, в одном из фокусов которых находится
Солнце; 3) отношение квадратов времен обращения к кубам боль-
ших осей орбит для всех планет одинаково.
3°. Рассмотрим еще в качестве примера применения метода
разделения переменных случай, когда
(gi. А) + ••• + /л (?« Рп)
giUi> p,) + — + gn(qn, Рп)'
Тогда основное дифференциальное уравнение
dV
' 9л’ dq,, ’
dqni
может быть записано в следующем виде:
п
2 [Л (9/’ dfi) ~ hgi {qi> =°- (33)
1—1
Положим
л(9г’©“М9’’©=аг (/=1...л)’ (з4)
где оп_1 — произвольные постоянные, а постоянная а„,
в силу уравнения (33) и равенств (34), выражается через аъ ..., an_it
а именно:
(35)
170
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
Разрешим уравнения (34) относительно
производных
^7=Л (?/, аг, й) (/=1.п). (36)
Решение уравнения (33) берем в виде
V
п
2 j Fi (qit <4, fi) dqt.
(37)
Поэтому полный интеграл уравнения Гамильтона — Якоби имеет
вид
п
« = -« + ^Fi(qi, h)dqi.
(38)
Тогда конечные уравнения движения (11) получаются с помощью
квадратур
(* dFs (• dFn . . .. , ,.
W = 0 = 1,..., n-1),
n
2 ^1й d<fi = t + ^>
i=r
Pi = Fi(qi, ait h) (1=1, ...,n)
(“i + “s + • • • + “n = 0).
(39)
Разрешая уравнение ft (qt, pi) — hgt (qit pi) = at относительно
Pi, получаем pt = Fi(qi, ait h) (i = 1, ..., n). Предполагается, что
выполняется условие разрешимости — h^^-^О. В этом слу-
чае производные неявной функции Fi равны
Йаг |_<?Л = ?<(<?,•, А)1
И
dFi_
дй 1[др«
л^1 gitei, л)} „
OPi J = ri(?r “j. А)
(«• = 1....................я).
S 27]
МЕТОД РАЗДЕЛЕНИЯ ПЕРЕМЕННЫХ
171
Уравнения (39) в окончательной форме имеют вид
_СГ^_Л^д] dqn = ?j
i\.0pn' dpn\Pn=Fn{qn,an,h}
(7 = 1..«-!)>
У ( — Л^1 1 £7 (?>> Pi)} „ dqi = t + $n,
Цо?» QPiJ }Pi=Fi(Vi’ ai’A)
Pi=Fi(.Qb ab h) (<=1...«)
(“i +“« + ••• + “л — 0)-
Как частный случай получаем теорему Лиувилля:
Если кинетическая и потенциальная энергии системы име-
ют вид
Т =
Bi®,
п ’
S А‘
i= 1
(41)
где А[, Bi и П;— функции от одной переменной qt (i = l.....п),
то конечные уравнения движения системы могут быть полу-
чены с помощью квадратур.
Действительно, для системы Лиувилля
(42)
но это частный случай формулы (32).
172
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
(2)
§ 28. Применение канонических преобразований
в теории возмущений
Пусть известны движения' системы с данной функцией Н,
т. е. решения
qi = '?i(t> Я* Pk), Pi = tyi(t’ Чь, Рь) ]
[??=(?iW р°=(л)м; /=i,
системы дифференциальных уравнений
dqt _<Ш dpt________________dH .
~dT—dPi’ dt~ dqi
и пусть требуется определить движение «возмущенной» си-
стемы с гамильтоновой функцией Н-]- Hit т. е. определить
решения системы дифференциальных уравнений
dqi д(Н 4-/Л) dp, d(H HJ .. . .
~dt~ Wi ’ dt~ dqt V —!,...,«). (3)
Если в формулах (1) рассматривать qh и ph (k = \, ..., ri)
как новые переменные, то, как было выяснено на стр. 159,
формулы (1) определяют свободное унивалентное канониче-
ское преобразование. Это преобразование переводит гамиль-
тонову систему (2) в гамильтонову систему с функцией /7=0
[см. формулу (13) на стр. 158]
n dPk п ,, 1 .
-^ = 0, ^ = 0 (k = \,...,ri),
а гамильтонову систему (3) — в гамильтонову систему с функ-
цией Н, которая будет равна Hi 1):
d40k_dJh dn__dP!i ... .
dt—dph’ dt — dqnk
Таким образом, новые переменные qh и ph обладают
дующим замечательным свойством: для невозмущенного
(4)
(5)
сле-
дви-
") Это следует из соотношения Н — (Я-|-Я1) = 0 — Н. Левая
dS „
и правая части этого равенства равны где 5 — производящая
функция рассматриваемого свободного унивалентного канонического
преобразования (см. стр. 152).
§ 28]
ПРИМЕНЕНИЕ В ТЕОРИИ ВОЗМУЩЕНИЙ
173
жения они сохраняют постоянные значения, равные начальным
значениям; для возмущенного же движения они представляют
собой функции от времени и начальных значений:
р°) (k=i,...,n), (в)
определяемые как общее решение гамильтоновой системы (5),
в которой функцией Гамильтона является «энергия возму-
щения» Нр Конечные уравнения для возмущенного движения
в исходных координатах qit р{ (1—1, п) получаются
при подстановке функций (6) в формулы для невозмущенного
движения (1) вместо постоянных ql и pl.
Нам удалось, используя теорию канонических преобра-
зований, заменить интегрирование гамильтоновой системы (3)
интегрированием гамильтоновых систем (2) и (5); из общих
решений (1) и (6) этих систем суперпозицией получаем об-
щее решение системы (3)
4i = <Pi ^0] & 9р Pj). P[k} (*> Pj)L
Pi = <]>i[t, q^(t, Pty, P[k](t> 9j, pftl
(1=1, ..., n).
(7)
Мы фактически показали, что «возмущение в энергии»
системы эквивалентно «возмущению начальных данных».
Проиллюстрируем это на
рис. 40.
В расширенном фазовом
пространстве в гиперпло-
скости t — О возьмем фикси-
рованную точку Mf, и про-
ведем из нее невозмущенный
прямой путь, т. е. прямой
путь (1) для системы (2). На
рис. 40 этот путь изобра-
жен жирной линией
В гиперплоскости t — Q сме-
щение.начальной точки, зада-
ваемое функциями (6), изо-
бразим тонкой линией Л4оМо.
Из точки этой кривой проведем невозмущенный
прямой путь M9tNot (на рис. 40 он изображен пунктирной
174
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
линией). На этом пути возьмем точку Р с данным значением ко-
ординаты времени t. Это и будет положение системы в воз-
мущенном движении в момент времени t. При невозмущенном
движении система в момент t занимала положение Q. Таким
образом, возмущение сказалось в «сдвиге» QP. Прямой путь
в возмущенном движении изображен жирной линией Л40Л
Таким образом, возмущенное движение можно рассматривать
как «сложное» движение в фазовом пространстве: точка
движется по невозмущенному прямому пути, но сам этот
путь смещается (в общем случае деформируясь) из-за «воз-
мущения» начальных данных.
§ 29. Структура произвольного канонического
преобразования
В этом и в следующих параграфах этой главы мы при-
ведем некоторые дополнительные сведения о канонических
преобразованиях.
Для произвольного канонического преобразования можно
установить формулы, определяющие это преобразование
с помощью производящей функции и валентности с, подобно
тому как это было сделано в § 25 для свободного канони-
ческого преобразования.
Пусть, например, из 4л величин
4t, Pi> <ii> Pi (*=i,...,«), (i)
связанных между собой каноническим преобразованием
7; = ?/(*> 7*, Pk)> Pi = ^i(t> 4k> Pk) (2)
можно в качестве 2л независимых взять величины
71, • • • > 4l> Pi+ь , Рп, 71, • • •, Чт, Pm+i, .... Рп
(0^/, m^ri).
(3)
§29]
СТРУКТУРА КАНОНИЧЕСКОГО ПРЕОБРАЗОВАНИЯ
175
Тогда с помощью тождеств
п п п
5 Ре ^g ~ 8 ( S Wg) 4g fyg>
g~i+i g=i+i
n n n
S М?л = 8( S 4лРл)— S ?*8^
h = m 4- 1 h = m -|- 1 h = m-j-l
можно основное определяющее равенство (9) на стр. 149
записать в виде
т п
2 ~4^Ph~HU =
J = 1 h — m 4- 1
I n
= c('^iPibqi- 5 4g*Pg-(4)
«=i s=f+i
где
n n
U=F-{- 2 ЯлРь — с 5 qgPs- (5)
Л = m 4-1 g — 14-1
Поскольку все 4я величин (1) выражаются через 2я величин
(3), то мы можем считать, что U есть функция от вели-
чин (3). Тогда из тождества (4) легко находим
dU dU dU . dU ~
д^ = СР1’ dTg = ~C^’ W}=~Pj’ ^ = Чн (6)
(/=1......Z; £•=/-[-1, .л;
/=1, т\ h = m-\-\, л).
Формулы (6) эквивалентны формулам (2) и определяют
рассматриваемое каноническое преобразование с помощью
валентности с и производящей функции U от независимых
величин (3).
Ниже мы докажем математическую лемму, согласно кото-
рой из 4л величин (1), связанных преобразованием (2), всегда
можно выбрать 2и независимых так, чтобы среди выбранных
величин не было ни одной пары сопряженных qt, pt или
176
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
1ГЛ. IV
Чь Pt *)• Тогда при надлежащей перенумерации координат qit
qk (i, k = l, ..., п) и соответственной перенумерации им-
пульсов р{, pk (/, k = \, ..., п) выбранные 2д независимых
величин можно представить в виде (3). Поэтому для произ-
вольного канонического преобразования имеют место
формулы, которые могут отличаться от формул (6)
лишь нумерацией величин (1) а).
Подобно тому как это было сделано в § 25 для свобод-
ного канонического преобразования, можно показать, что
и для произвольного канонического преобразования опреде-
литель порядка п, составленный из смешанных производных
второго порядка от производящей функции U, отличен от
нуля 3). Поэтому первые п уравнений (6) могут быть раз-
решены относительно величин qj, ph (/=1, т-, h =
= z/г —j— 1, ••> «)• После подстановки полученных выражений
в последние п уравнений (6) мы представим уравнения кано-
нического преобразования (6) в виде (2).
Сформулируем и докажем лемму, на которую мы опирались
при получении структурных формул (6) для произвольного канони-
ческого преобразования.
Лемма. Если даны, 2п независимых функций qlt ..., qn,
••• i Pn независимых величин qit ..., q„, plt ..., pn, mo
из An величин q^, pt, qi, pi (f=l, ..., n) всегда можно выбрать
2n независимых так, чтобы среди них не было ни одной пары
сопряженных (q , р ) или (q , pk).
*) В книге Голдстейна (Г о л д с т е й н Г., Классическая меха-
ника, М., 1957, стр. 262) утверждается, что при произвольном кано-
ническом преобразовании в качестве системы 2п независимых вели-
чин всегда может быть взята одна из четырех систем: qi и qi,
qt и Pi, Pi и (ji, Pi и pi (1=1, ... , n). Ошибочность этого утвер-
ждения можно усмотреть из простого примера канонического пре-
образования л. Pi = qi, ~qi=qj, Pj=pj U=2, . я).
а) Это положение приведено Каратеодори в его книге (С a ra-
th ё о d о г у С., Variationsrechnung und partielle Differentialgleichun-
gen erstes Ordnung, 2 Aufl., В. I, 1956, § 96), однако лемма, на кото-
рой основано наше доказательство (см. ниже), установлена Кара-
теодори для частного случая, когда переход от переменных qit pt
к переменным <?,, Pi (i= 1, ..., п) является каноническим преобра-
зованием.
I dsU \л
8) Это условие можно записать так: det ^6 О,
если через гъ ..., rn, rt, ... , гп обозначить соответственно вели-
чины (3) в том порядке, в каком они были выписаны выше (см. (3)).
$ 29] СТРУКТУРА КАНОНИЧЕСКОГО ПРЕОБРАЗОВАНИЯ 177
Доказательство. Допустим противное, т. е. допустим, что
любые 2п из рассматриваемых величин, среди которых нет ни одной
пары сопряженных, всегда зависимы. Тогда выберем п 4- d незави-
симых из данных 4п величин таким образом, чтобы первые п не
имели значка ~, а последние d имели этот значок, причем выберем
эти п -|- d величин так, чтобы среди них не было сопряженных и
чтобы число d имело наибольшее из всех возможных значений.
Согласно допущению d < п.
Поскольку, не изменяя ни условия, ни утверждения леммы,
можно поменять ролями две сопряженные величины q{ и или
qi и pi, а также сделать произвольную перестановку индексов
1, ..., п как у величин pt, так и у величин ^г, pit то можно
считать, что выбранными являются следующие n-\-d величин:
41, , Чп, •••» 4d (d<ri). (7)
Ряд величин (7) назовем максимальным базисом. Очевидно,
ЧТО
?;=/(<7i> > Чп, 41, > ?</)>
(J = d+\, .... п), (8)
Pj—ftiu , Чп, 41, . &/)
где f—знак функциональной зависимости ’).
Не нарушая общности, можно считать, что из величин
Pl, > Рп, > Pd,
не входящих в формулы (8), величины
Pi...Ра, Pi, . Рь {а^п, b^d) (9)
являются функциями от базисных величин (7), а каждая из величин
Ра+1.....Рп, Р Ь+1, •••, Ра (Ю)
независима по отношению к базису. Таким образом,
Pl=f(4i....Чп, 41, •••, Ча)
Pk—f(4i, , Чп, 41, ••• > Ча)
(i= 1, ..., а), |
(й=1......b). )
(Н)
Покажем теперь, что величины qa+i, , Чп, 4b±i, Ча, со-
пряженные «независимым» величинам (10), фактически не входят
!) В разных формулах одной и той же буквой f обозначаются
различные функциональные зависимости.
178
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
в правые части формул (8). Действительно, пусть, например,
(X > а) фактически входит в выражение для некоторого qj Q> d):
, qx, ...).
Тогда система величин qt, qUb , qn, qlt ..., qd, qj
эквивалентна базису (7):
(?i> ••• > ?x-i> ...
«>(&,—, ....?d)> (12)
t. e. каждая из величин, входящих в одну из двух систем, выра-
жается через величины другой и наоборот *). Поэтому п + d -|- 1
величин
?11 > Ix-n Рх> ?X+ii ••• > Яп< Яи
независимы, что противоречит «максимальности» базиса (7).
Таким образом, формулы (8) могут быть записаны так:
•••, Яа, •••, Яь), P}=f(4i, > Яа> Я1, — ,Яъ) (13)
(/==d+1, ••• , п).
Обозначим через qlt ... , q , qlt ..., qb (al^a, Ь^,Ь) все
величины, фактически входящие хотя бы в одну из правых частей
формул (13); тогда
Я)=/(Я1, — . Яае ......9Й1), Р/=/(Я1, , Яае Яг, -,ЯЬ1) (14)
(/=d+l, ..., п).
Покажем теперь, что величины q-,, 5и(Х>а, р>й) факти-
чески не входят в те формулы (11), где i^at, Допустим
противное. Пусть, например, q* (X > а) фактически входит в выра-
жение (11) для р( , где
Ph > Яь —) <!i =^«i> Ь > а).
Но величина qtl фактически входит в одно из выражений (14);
пусть, например, она входит в выражение для qj (J>d);
fy=f(..., qtj, ...) (h^ait j>d).
Тогда
(?i, Pi^ 9/j+n i ?x-i> 7x+ii > Яги ?i> ••• >
^(Я1.....Яп< Я1, ••• , Яа) (15)
1) Если фактически входит в какую-либо функциональную
зависимость, то эту зависимость можно разрешить относительно q^.
§ 29]
СТРУКТУРА КАНОНИЧЕСКОГО ПРЕОБРАЗОВАНИЯ
179
и, следовательно, п + ^+1 величин
71, ••• 7^-1, Pit> 4ii+i< ••• > 7x-i> A, 7x+i, ••• > 7n, 7i...Яа>
независимы, что противоречит «максимальности» базиса (7).
Таким образом,
Рц =f(<h........ 71...7г»), A1=/(7i> ... , 7а, 71...7й) (16)
('1=1.......... *i= 1, , *1)-
Обозначим через qai+l, ... , qa2, qbi+l, ... , те из величин qit
q^ (i>a,, которые фактически входят в правые части
формул (16). Тогда
Ph=/(7i> 7аа> 71, , qbJ (G=l,
Px1=/(7n > 7а2г 7i.7Й2) (*i= 1, •
at; at <[ a2 a),
bi, bt^b^b).
(17)
Теперь покажем, что величины q^, (X > a, p > b) фактически
не входят в выражения (И) для pit pk, где гг£а2, й^й2. Действи-
тельно, пусть, например, q^ (X > а) фактически входит в выраже-
ние для pi (at <Z h sC a2):
A2 =/(••, 7x> ••) (ai<Z2sSa2, X> a).
Но величина q{ фактически входит в одно из выражений (17), на-
пример в выражение для р^. Тогда величина q^ фактически входит
в одно из выражений (14), например в выражение для qj (J>d):
Pii=f(.- , qi2, •••)
, 7/p ••)
('i C aI < /„ < a2),
(11=С"1, j>d).
В этом случае имеет место эквивалентность между системой величин
71» > 7/j—1» Pty Qii+i.7j3-i> A2, 7i2+i> ••• > 7x-i,
7x+i, > 7л> 7i> > 7di (18)
и базисом (7). Поэтому величина р\ независима от величин (18).
Прибавляя р^ к величинам (18), получим базис из п d 1 вели-
чин, что невозможно.
Таким образом,
А2 =/(?i> ••• > Ча, 71, ..., 7й), ^*2 = /(7i, •••, 7а, 71, •• , 7й) (19)
('a = fli+ 1> ••• > аа, k2=bl-{- 1, ... , 7S),
180
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
Обозначим через qas+1, ... , qas, qbs + b , qb.t те из величин
?i, qk (!>аа, k>bs), которые фактически входят в формулы (19).
Равенства (19) запишем так:
Pi2=f{ql, - , Яаа< 91, . 96>)
(‘2 = ai4-b , а2; < а2 < а3 < а),
pk2=f(ai, , 9в„, 91....qbt)
(ks — bi + 1, ... , b2; bt^b^bz^ J).
(20)
Этот процесс можно продолжать до тех пор, пока одновременно
не будут достигнуты равенства as = as+l, bs = bs+1; тогда
P/s=/(9i, ••• , 9а5, 91.9*s)
(is — as-i 4" 1, , as; ...*^ass^a),
Pks=f(Qi, •••, 9as, 9i, ••• , 9as)
(*5=Л-1 + Ь , bs, bt^...^bs^b).
(21)
Вместо формул (14), (17), (20), ... , (21) можно написать
9/=/(9i.....9as, 91, •••, 9fts)
Pj=f(qi, •••, qas< 9i> , 9s5)
Pi=f(<h, •••, 9as, 91, , 9бР
P*=/(9i, , qas, 9i.9ss)
(J=d + 1, .... n), (22)
(i=l...as), (23)
(*=1....bs). (24)
Пусть теперь as > bs. Тогда из формул (23) можно исключить
91, , 9fts и получить зависимость между qi, pi, что противоречит
условию леммы.
Если as^bs, то ал<^4-1. Тогда из формул (22) и (24)
можно исключить все qt и получить зависимость между qb, рь, что
опять противоречит условию.
Таким образом, допущение о существовании максимального
базиса (7), в котором d < п, привело нас к противоречию. Лемма
доказана.
§ 30. Критерий каноничности преобразования.
Скобки Лагранжа
Установим некоторые критерии каноничности, т. е. необходимые
и достаточные условия, которым должны удовлетворять 2п незави-
симых функций [относительно qk, рь (й=1, ... , и)]
9i = ?i(*> 9а, Pk), Л = Ф»& qk, Pk) (‘ = 1.....«) (1)
«301
КРИТЕРИЙ КАНОНИЧНОСТИ ПРЕОБРАЗОВАНИЯ
181
для того, чтобы определяемое этими функциями преобразование
было каноническим.
Пусть преобразование (1) является каноническим. Выпишем
для него определяющее тождество
п.
S Mi - Я и=с (£ Л - я W) - w (t, 4i, Pi). (2)
i=i «=1
Возьмем произвольное фиксированное значение t = t. Тогда из
тождества (2) находим:
2 Pi 4i = с 2 Pi 4i — (1, Яь Pi)- (3)
i = 1 i = 1
Но равенство (3) есть определяющее тождество для преобразова-
ния, не содержащего явно времени,
р*)> Pi=^i(t, qt, Pk) (г = 1,... ,n). (4)
Следовательно, формулы (4) определяют каноническое преобразо-
вание с валентностью с, не зависящей от выбранного значения
t = t-
Пусть теперь, наоборот, дано, что все преобразования, полу-
чающиеся из преобразования (1) после замены переменной t раз-
личными фиксированными значениями ?, являются каноническими,
и притом с одной и той же валентностью с. Тогда, определяя функ-
цию Н равенством
л
/? = <« + <+ 2 й %, И
1=1
мы из равенств (3) и (5) получаем равенство (2), т. е. приходим
к тому, что зависящее от времени t преобразование (1) является
каноническим.
Таким образом, для того чтобы зависящее от времени пре-
образование (1) было каноническим, необходимо и достаточно,
чтобы были каноническими, и притом с одной и той же валент-
ностью с, все не зависящие от времени t преобразования, полу-
чающиеся из преобразования (1) заменой t произвольным значе-
нием t-
Поэтому при установлении критериев каноничности можно
ограничиться каноническими преобразованиями, не содержащими
явно переменной времени Л
<ii = ?i Pk), Pi = 'Pi (qk, Pk) = 1.................. ’^я) o').
\ У wn ••• t Pn) /
(6)
182
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
Для канонического преобразования (6) определяющее тожде-
ство (2) записывается так:
п л
S Mk= с S Pk). (7)
Выразим здесь iqk через и Ър, с помощью формул (1).
Тогда равенство (7) примет вид
2 (Ф, В7; + 8Л) = - W(qk, рк), (8)
J==l
где
п п
*<=2/*^-^ ’''=2М» ('=.....................
Остается записать условия того, что левая часть равенства (8)
является полным дифференциалом, и мы получаем критерий кано-
ничности в виде равенств
dWt—Wi дФ{ _дУк
dqk ~ dqi' Ърк ~ dpt ’ дрк ~~ dq{
(/,*=!..п).
(9)
Подставляя сюда выражения (8'),
образований находим
У №1 дР! о
dqk dqk dqi) ’
У (dqj д-Pj d4i dPi\—Q
V dpi dpk dpk dpi j
j = l
У !dVjdPj dgjdpjX.
Zi \ dqt дрк дрк dqi ) lk
7 = 1
после элементарных пре-
(10)
(/, Й = 1, .... n),
где 8,-j — символ Кронекера: 8/* = 0 при i^k, 8гй = 1 при
i = k (i, k— 1, ..., n).
Условия (10) можно записать в компактной форме, если ввести
так называемые скобки Лагранжа, которые определяются для
§ 31]
СИМПЛЕКТИЧНОСТЬ ЯКОБИЕВОЙ МАТРИЦЫ
183
заданных 2я функций <pi, ф, (/ = 1, .... п) от двух переменных q
и р следующим образом *):
п п
(11’
/=1 ;=1
Использовав эти обозначения и взяв в качестве <рг, фг- функции
qi, pi ((= 1, и), определяемые формулами (6), мы можем запи-
сать условия (10) так:
[?<‘7fel=01 (РгРл] = °. = G, й—1, .... я); (12)
здесь с — валентность канонического преобразования.
Равенства (12) выражают необходимые и достаточные условия
того, чтобы преобразование (6) было каноническим. В случае пре-
образования, зависящего от времени t, условия (12) сохраняются,
только они должны выполняться при любом значении t.
§ 31. Симплектичность якобиевой матрицы
канонического преобразования
Рассмотрим якобиеву матрицу канонического преобразования
dqi dqt " «и «Ji tS ro I'-O dgi " dpn ! d9 dq
dqn dqn dqn dqn
м= dqi ' dqn dpi " dpn _ dq dp
dpi dpi dpi dpi \ dp dp
dqt " dqn dpi dpn \dq dp
дрп dpn dpn dpn
dqt Wn dpi dpn
(1)
Здесь — якобиева матрица я-го порядка 11^1. Аналогично
II oqt |
- да дй до
определяются якобиевы матрицы я-го порядка и
*) Пусть читатель сравнит скобки Лагранжа со скобками Пуас-
сона, введенными в § 15. Там были заданы две функции ю, ф от 2я
переменных qt, pi и скобки Пуассона равнялись сумме якобианов
д (ф» ф) о
. Здесь же даны 2я функций от двух аргументов и скобки
Лагранжа равны сумме якобианов (11).
184
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
Введем в рассмотрение специальную матрицу порядка 2л
О ... О —1 ... О
(2)
О ... 1 0 ... О
где Е— единичная матрица n-го порядка. Рассматривая наряду
с матрицей М транспонированную матрицу М', составим произ-
ведение M'JM и докажем, что в силу соотношений (12) предыду-
щего параграфа это произведение тождественно равно cj:
= (3)
где с — валентность канонического преобразования.
Действительно ‘),
'/дру ______[^Я,]'др_ \
M'JM= д9 dq ^Я др
/др\ дд fdg\' др^ (др\ _ ldg\' dp
Дор/ dq \др) dq \др) др \др) др t
Но
др У dq (dq \
dqj dq \dq) dq
= lll9i ?a]|| = 0-
Проведя аналогичные вычисления для остальных трех блоков,
получим
M'JM = ( 2. ~ п£) = е/>
\ сЕ 0 )
что и требовалось доказать.
*) В случае, когда элементами матрицы являются матрицы-
блоки, умножение выполняется по тем же правилам, как если бы
элементами матриц были числа, т. е. строки первой матрицы-сомно-
жителя умножаются на столбцы второй матрицы-сомножителя (см.,
например, Гантмахер Ф. Р., Теория матриц, § 5).
S 311
СИМПЛЕКТИЧНОСТЬ ЯКОБИЕВОЙ МАТРИЦЫ
185
Для унивалентного канонического преобразования равенство (3)
записывается так:
(4)
Матрицы М, для которых справедливо равенство (4), назы-
ваются симплектическими. Поскольку det /=1, а определитель
произведения матриц равен произведению определителей матриц-
сомножителей, то из (4) находим
detAf = ±l.
Таким образом, симплектические матрицы являются неособен-
ными *).
Матрицу М, удовлетворяющую соотношениям (3), будем назы-
вать обобщенно-симплектической (с валентностью с)2).
Так как соотношения (12) предыдущего параграфа свелись
к условию обобщенной симплектичности якобиевой матрицы М, то
критерий каноничности преобразования может быть сфор-
мулирован так:
Для того чтобы некоторое преобразование qk, pk\
Pi—Pi^t 4k< Pk) (i=l, n) было каноническим, необходимо
и достаточно, чтобы соответствующая этому преобразованию
якобиева матрица М была обобщенно-симплектической с постоян-
ной валентностью с. (В случае унивалентного преобразования
матрица М является обыкновенной симплектической.) При этом
условие симплектичности (3) должно выполняться тождественно
относительно всех переменных t, qit p-t (i = l, ..., и).
В § 26 было установлено, что движение любой гамильтоновой
системы может рассматриваться как свободное унивалентное кано-
ническое преобразование. Следовательно, его якобиева матрица
симплектИчна и ее определитель I (см. стр. 142—143) равен ± 1.
Поскольку в начальный момент /(0) = 4-1, то 7 = 4-1 во все
последующие моменты времени, но именно этот определитель слу-
*) Как легко проверить, произведение двух симплектических
матриц, обратная матрица для любой симплектической и единичная
матрица являются снова симплектическими матрицами. Поэтому
симплектические матрицы образуют группу — симплектическую
группу.
Симплектические матрицы характеризуются следующим свой-
п
ством. В билинейной форме (х^—урс-) подвергнем 2л
1 = 1
переменных xit у; и 2л переменных х-, у- одному и тому же ли-
нейному преобразованию с симплектической матрицей коэффициен-
тов Af. Тогда в новых переменйых xf, yf и xf, yf форма f сохра-
п
нит свой вид: /= (Х*У*'—y'ixi')-
« = 1
2) Все обобщенно-симплектические матрицы (при всех с^О)
также образуют группу. Если М — обобщенно-симплектическая ма-
трица, то detAf = ±c“.
186
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
жит подынтегральной функцией в выражении для фазового объема
в 2я-мерном пространстве (формула (3) § 23).
Это замечание может рассматриваться как отличное от прове-
денного в § 23 доказательство теоремы Лиувилля.
§ 32. Инвариантность скобок Пуассона
при каноническом преобразовании
Представим условие каноничности преобразования, записанное
в форме равенства (3) предыдущего параграфа, в несколько изме-
ненной форме. Умножим обе части этого равенства слева на (М’)~*,
а справа — на М~г. Получим:
(ЖТ1ли-‘=ул (1)
Возьмем обратные матрицы от обеих частей этого равенства, заме-
чая, что J~1 = —J1)'
(4)
= (2)
Равенство MJM' — cJ получается из равенства = путем
замены якобиевой матрицы М транспонированной матрицей М'.
Но эта замена [см. формулу (1) § 31] сводится к замене произ-
dqi dqi dpt dpi
водных -ч22-, -з22-, -3е2-, -3е2- соответственно на производные
dqk ’ dpk ’ dqk dpk
vQk dpk даь dpk «.
. -v-2'. . -з-2-, т. e. в каждой производной меняются ме-
dqi ’ dqt ' dp, ’ dpi ’
стами буквы и индексы, стоящие вверху и внизу2). Поэтому, если
равенство M’JM = cj было эквивалентно системе равенств
\PtPk]=^, lqiPk\ = ctik k = \, .... n), (3)
то равенство (2) будет эквивалентно системе равенств
\qi qk\* = °- [ft Pk]* = 0, [qt pk]* = (I, k = 1...n),
где значок * указывает, что внутри скобки Лагранжа следует
произвести указанную выше замену производных. Но тогда скобки
Лагранжа переходят в скобки Пуассона. Действительно,
п
™ L 2 dqi dqk dqi dqk ) J "
J=1
= V (dqi dqk
dq, dp/
!) Мы пользуемся здесь следующим правилом: обратная мат-
рица произведения матриц равна произведению обратных матриц
в обратном порядке: (ДВС)1 = С~1В~1А~1. Кроме того,
4D (Г »)=-(?
т. е.
2) Значок ~ по-прежнему остается вверху.
dqi dqk
dpj dqf
§ 32]
ИНВАРИАНТНОСТЬ СКОБОК ПУАССОНА
187
где (^i qk)— скобки Пуассона для функций и относительно
независимых переменных qlt ри qn, рп. Совершенно аналогично
(Pi Pk]* — (Pi Pk), [?» Pk]* = (?i Pk)-
Поэтому условия каноничности преобразования (4) могут быть
записаны с помощью скобок Пуассона в следующем виде:
(Qi ?*) = 0> (Pi Pk) = O, (qi Pk) = <$ik (i, k=l, .... n). (5)
Рассмотрим теперь две функции ср и ср от величин q^ р/ (i =
= 1, и) и t. Выражая в этих функциях qi, pi (t = l, n)
через qk, pk (k= 1, ..., ri) с помощью обратного канонического
преобразования, мы можем рассматривать эти же функции как
функции переменных Pk (й=1, --, п)- Соответственно скобки
Пуассона от ср, ср можно вычислить как по отношению к перемен-
ным qt, pi [обозначение (ср ср)], так и по отношению к переменным
Pi [обозначение (ср ср)~].
Докажем справедливость тождества
(ср ср) == С (ср ср)~. (6)
Доказательство этого тождества опирается на известное выра-
жение якобиана от системы сложных функций
d(<f, ф) _ V Г '<?(?, Ф) d(qit qk) g(cp, ср) д (pj, рк)Л
д (qjt pj) La И (Qi, Qk) d (Qj, Pj) ’Г d (Pi, Pk) d (qj, pj) J
l,k = 1
i<k
n
, у Wi, pk)_
d^Ph) d(qj,Pj) 11
l,k = l
Просуммировав почленно эти тождества, получим
п
ltk— 1
i<k
п
+ ,2 >£><’'«
Согласно равенствам (5) отсюда находим
п
188
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. IV
Справедливо и обратное утверждение. Если для любых двух
функций ср и Ф выполняется тождество (7) при одной и той же
постоянной с^О, то переход от 2л переменных qit pt к 2л пере-
менным qi, осуществляется каноническим преобразованием
с валентностью с ').
Для унивалентного канонического преобразования с=1, и
потому
(ср ф) = (ср ф)~.
Другими словами, скобки Пуассона инвариантны относительно
унивамнтных канонических преобразований. Это свойство уни-
валентных канонических преобразований выделяет эти преобразо-
вания среди всех возможных преобразований фазового пространства.
*) Действительно, из равенства (7) вытекает, что
(?« 4k) = с (qt Чь)~ = 0, (Pt pk) — c(PiPk)'= 0,
(qi Pk) = c(qi Pk)' =&ik-
ГЛАВА V
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ
И ДВИЖЕНИЯ СИСТЕМЫ
§ 33. Теорема Лагранжа об устойчивости
положения равновесия
Начнем с определения устойчивого положения равновесия.
Предварительно напомним * *), что положение системы
называется положением равновесия, если система, находя-
щаяся в начальный момент в этом, положении при нулевых
скоростях, все время остается в этом положении.
Пусть положение голономной системы определяется с по-
мощью независимых координат qu ..., qn (п — число степеней
свободы системы). Как было выяснено в § 5, в положении
равновесия (и только в этом положении) все обобщенные
силы равны нулю: Q, = 0 (/ = 1, ..., я) 2). Без нарушения
общности можем считать, что рассматриваемое положение
системы находится в начале координат qx = ... ~qn = Q.
Тогда координаты любого другого положения системы
qb ..., qn характеризуют отклонение этого положения от
положения равновесия и потому сами называются отклоне-
ниями системы.
Положение равновесия qx = ... =qn = G (или состояние
равновесия qt = ... =qn = Q, qt= ... = qn = 0) назы-
вается устойчивым, если при достаточно малых начальных
‘) См. § 4.
*) Если обобщенные силы Qi зависят не только от координат q^
но и от обобщенных скоростей qk(k=A....и), то равенства Qf=0
должны выполняться тогда, когда входящие в выражение для Qt ко-
ординаты qk заменяются координатами положения равновесия, а
обобщенные скорости полагаются равными нулю.
190
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
отклонениях qh и достаточно малых начальных скоростях
ql (/=1, я) система во все время движения не выходит
из пределов сколь угодно малой (наперед заданной!) окрест-
ности положения равновесия, имея при этом сколь угодно
малые скорости qt (1 = 1, ..., л), т. е. если для любого е 0
можно указать такое 8 = 8 (е)^>0, что для всех
выполняются неравенства
1<7/(0Ке> 1^«(01<е (i=l, (1)
коль скоро в начальный момент t=ta
|$|<&> |^|<8 (/ = 1, ...,я). (2)
Неравенства (1) и (2) удобно геометрически интерпретиро-
вать в 2л-мерном пространстве состояний (qh q{). На рис. 41
(для случая п — 1) в плоскости (q, q) изображены две окрест-
ности начала координат О,
соответствующие неравенствам (1)
и (2). Если начало коорди-
нат О — устойчивое состояние
равновесия и для заданного
е^>0 должным образом подо-
брано 8^>0, то любое движе-
ние, начинающееся в момент t0
внутри квадрата с центром
7 в О и стороной 28, будет про-
ходить все время внутри такого
же квадрата со стороной 2е.
____________________Примеры. 1. Тяжелый ша-
рик может двигаться по ободу,
имеющему форму окружности
и расположенному в вертикаль-
1ис- 41 ___________ной плоскости. Имеются два
положения равновесия: наинизшая
и наивысшая точки окружности. Из них первая представляет собой
устойчивое, а вторая — неустойчивое положение равновесия.
2. Линейный осциллятор. Положение равновесия устойчиво.
Действительно, для линейного осциллятора Т = mqs, П = cq3
(т > 0, с > 0) и дифференциальное уравнение движения т q cq = 0
имеет общее решение
q = q0 cos ш — t0) sin <*> (i — /0) (n>* 2 = ^-L
§ 33]
ТЕОРЕМА ЛАГРАНЖА
191
Поэтому
к (О I I <h I + I ?о I < е. I 4 Ф I «е “ I <7о I + Ш < е.
если только | qa | < В, | qa1 < В, где, например, 8 = min
( е сое \
12^’ ТТ
3. Материальная точка массы т может двигаться вдоль
оси х под действием двух сил: восстанавливающей силы, про-
порциональной отклонению —сх, и силы сопротивления среды,
пропорциональной первой степени скорости —2/Л (с>0, />0).
Точка х — 0 будет устойчивым положением равновесия. Рас-
смотрим сначала случай, когда коэффициент силы сопротивления
мал: 0 </< l^mc. В этом случае дифференциальное уравнение
движения тЯ + 2/Х + сх = 0 имеет общее решение
х — е т( ’'pi cos-^(i —10) + С3 sin (i — t0)
где
d = Ymc—f, С, = х0, Cs = ~ (fx0 + тЯ0).
Отсюда при любом значении t
1*(01=ё|С1ЖС2|^(1 + 4)|*о1 + ^ !А1<*
и
। х°1+(*+4) !•*« ।<в-
если | х01 < В, | | < 3, где например,
Если же Yте> то общее решение дифференциального урав-
нения движения тЯ-\-2/х 4- сх = 0 имеет вид
х = Cte~^ + С3е~ ”г
где
/+ Yf — mc с^_»8х0+Х0
192
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
Отсюда при любом значении t
Iх (О I 1 1+ I Са I ===
01 + -^а) 1 -Ур I + 2 | -Уд | | -Уо | + от | j
Н»—''ll
Y fs—тс
< е
И
I * (О I < >11 С. I + 1 с, I -< g^l^ol + fri+.^l-M. =
ns — vi I
_ с Iх01+/|^о |
Y f2— me
если | x01 < 8, | XQ j < 8, где
s . (vfs—mc Vf — mc
8 = mi4 2/ - e’ —2c -£’
Y f*— me
2m
£
В примерах 2 и 3 устойчивость положения равновесия уста-
навливалась с помощью конечных уравнений, полученных
путем интегрирования дифференциальных уравнений движения
системы. Эти конечные уравнения движения давали нам зави-
симость отклонений и обобщенных скоростей qt от времени t
и начальных данных qt, ql (1 = 1, ..., п). В более слож-
ных (в частности, нелинейных) задачах определение этих
конечных уравнений движения и их исследование весьма за-
труднительно. Поэтому представляют интерес критерии устой-
чивости положения равновесия, не требующие предваритель-
ного интегрирования дифференциальных уравнений движения
системы.
Еще Торричелли (1644 г.) было известно, что положе-
ние системы тел, находящихся под действием сил тяжести,
будет устойчивым, если центр тяжести этой системы тел
занимает наинизшее из возможных положений. Лагранж
обобщил этот принцип Торричелли на случай произвольных
потенциальных сил и установил следующий критерий устой-
чивости положения равновесия консервативной системы:
Теорема Лагранжа1). Если в некотором положе-
нии консервативной системы потенциальная энергия
имеет строгий минимум, то это положение является
положением устойчивого равновесия системы.
‘) Эта теорема имеется в «Аналитической механике» Лагранжа
(1-е издание 1788 г.), но строгое доказательство теоремы дал впер-
вые Лежен Дирихле. Поэтому эту теорему часто называют теоре-
мой Лежена Дирихле.
§ .4 31
ТЕОРЕМА ЛАГРАНЖА
193
Доказательство. Не нарушая общности, будем счи-
тать, что в рассматриваемом положении все координаты
tfi, qn и потенциальная энергия Hfot, О'») равны
нулю, т. е. qy = ... = дп = 0 и П (0, ... , 0) = 0 *). Так
как в данном положении системы функция П имеет минимум,
то в этом положении обобщенные силы равны нулю
т. е. точка ql=...^qn = O является положением равно-
весия системы. Далее, из того, что значение П(0, ..., 0) = 0
есть строгий минимум, следует, что в некоторой Д-окрест-
ности положения равновесия
|^|<Д (Z=l, ...,«) (3)
имеет место строгое неравенство
П(?1, ..., <7„)>П(0, ..., 0) = 0, (4)
если только все координаты q-L не равны одновременно нулю.
Составим выражение для полной энергии системы:
Е(?i, ... , qn, qi, , qn) — Т-ф-П =
п
= 2 2 aik (Яь • • • > ?л) Я} Як + П (?1. • • • ’ (5)
i, k = 1
Из неравенства (4) и из того, что 7'^>0, если хотя бы
одна из обобщенных скоростей q, не равна нулю2), следует,
что при выполнении неравенств (3) всегда
Д>0,
если только все 2и величин qt, qt (Z=l, ..., п) не рав-
ны одновременно нулю, т. е. полная энергия Е(дь fa),
*) Потенциальная энергия П определяется с точностью до
произвольной аддитивной постоянной. Эту постоянную подбираем
так, чтобы значение П в положении равновесия было равно нулю.
2) Это справедливо, если Д-окрестность начала координат О
в координатном пространстве не содержит особых точек (см. приме-
чание на стр. 55). Мы предполагаем, что точка О, в которой функ-
ция П имеет минимум, не является особой. Но тогда и некоторая
Д0-окрестность точки О не содержит особых точек. Мы выбираем
А <4-
7 Ф. Р. Гантмахер
194
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
обращаясь в нуль в начале координат О 2п-мерного
пространства состояний, имеет в этой точке стро-
гай минимум (равный нулю).
Выберем теперь произвольно число е, подчинив его лишь
ограничению 0<^е<^Д, и рассмотрим значения полной энер-
гии Е на границе е-окрестности, определяемой неравенствами
ШО> 1й1<®
(Z = 1, , п)
(6)
(рис. 42). Поскольку эта граница представляет собой замк-
нутое множество точек, то непрерывная функция Е дости-
гает на этой границе своего минимума Е*. Так как на гра-
нице е-окрестности все значения Е по-
ложительны, то положителен и минимум Е*.
Таким образом, на границе е-окрест:
ности
fiSs=£*>0.
(7)
С другой стороны, поскольку непре-
рывная функция Е обращается в нуль
в начале координат О, то всегда сущест-
вует такая 8-окрестность точки Ох), в ко-
торой
£<£*. (8)
Поэтому если начальные координаты и начальные скорости
удовлетворяют неравенствам (2), то начальная энергия Ей<^Е*.
Но при движении консервативной системы ее полная энер-
гия сохраняет свою начальную величину Ео и, следовательно,
во все время движения Е<^Е*. Поэтому при движении си-
стемы точка, изображающая это движение в пространстве
состояний, не может достигнуть границы е-окрестности,
на которой Е^Е*, и находится все время внутри этой
окрестности.
Теорема доказана.
К доказанной теореме мы сделаем два замечания.
Замечание 1. Теорема Лагранжа остается спра-
ведливой для неконсврвативной системы, которая полу-
чается из консервативной добавлением гироскопических
Поскольку в В-окрестности выполняется неравенство (8),
то В е.
ТЕОРЕМА ЛАГРАНЖА
195
§ 33]
и диссипативных сил. Действительно, заметим прежде всего,
что положение равновесия сохранится, если к системе допол-
нительно приложить гироскопические или диссипативные силы
Q,(%, Qk)- Для этих сил
Ы<Д, Ш<Д.
v = l
Выберем, как и ранее, за начало координат пространства
состояний положение равновесия и предположим, что среди
функций Q, есть хотя бы одна Qj такая, что Qy(O)^O.
Тогда по непрерывности Qj ф 0 и в Д-окрестности начала
координат. Но поскольку qtl и qk независимы, их значения
в этой окрестности всегда можно выбрать так, что
п
У §ЛЯк> Qk)Q,>0>
а это противоречит условию диссипативности или гироско-
пичности сил. Поэтому предположение о существовании
Qj (0)^0 приводит к противоречию, т. е. все $11(0) = 0,
ч = 1, ..., и, а это и свидетельствует о том, что добавление
гироскопических и диссипативных сил не нарушает равно-
весия.
Гироскопические силы не нарушают закона сохранения
полной энергии (см. § 8), и потому все доказательство тео-
ремы Лагранжа остается без изменения и при наличии гиро-
скопических сил. При диссипативных силах полная энергия
Е = ТП убывает при движении системы, и, следовательно,
во время движения вместо равенства Е==Ей имеет Место не-
равенство Е Еа. Но отсюда также следует, что во все
время движения Ё<^Е*, если Е9<^Ё*. Поэтому и здесь
с этим небольшим изменением доказательство теоремы со-
храняется.
Замечание 2. Положение равновесия консервативной си-
стемы будет устойчивым и в том случае, когда в этом положении
потенциальная энергия П имеет нестрогий минимум, но в любой
s-окрестности положения равновесия существует замкнутая гипер-
поверхность
/(«Ъ -..,Уй) = 0, (9)
содержащая положение равновесия внутри себя и обладающая тем
свойством, что на этой гиперповерхности значения потенциальной
7*
196
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
(ГЛ. V
энергии строго больше, чем значение П в положении равновесия.
Действительно, пусть по-прежнему в положении равновесия
= О и П(0...................0) = 0. Кроме того, пусть уравнение
гиперповерхности (9) выбрано так, чтобы для точек, расположен-
ных внутри замкнутой гиперповерхности (9), выполнялось нера-
венство
f(4i, — > 9и)>0- (Ю)
Тогда это неравенство вместе с неравенствами
|?*1<са (0<сА<е; й=1, ...,я) (11)
определяет в 2п-мерном пространстве состояний область (конеч-
ный «гиперцилиндр») G, расположенную внутри е-окрестности (6).
На границе области G либо /=0 (тогда П>0, Г^>0), либо хотя
бы при одном k имеет место
равенство | 4k I — с* (тогда
Г>0, П^О). Поэтому на
границе области G всегда вы-
полняется строгое неравенство
Е= Г4-П>0.
В рассматриваемом случае
минимум функции Е на гра-
нице е-окрестности (6) может
равняться нулю. Тогда при
доказательстве теоремы Ла-
гранжа нужно вместо е-окрест-
ности взять расположенную
внутри нее область G. На гра-
нице области G минимум пол-
ной энергии £*>0. После
этого остальная часть доказа-
тельства остается без изменения.
При п = 1 замкнутая ги-
перповерхность (9) вырождается
в совокупность двух точек на оси q, расположенных по разные
стороны от начала О, а область G — в прямоугольник, расположен-
ный внутри s-окрестности точки О (рис. 43).
Изложенные в замечании 2 соображения сохраняют свою силу
и тогда, когда к системе дополнительно приложены гироскопиче-
ские и диссипативные силы (см. замечание 1).
Если точки, в которых функция II имеет минимум П = 0, за-
полняют сплошную кривую, исходящую из положения равновесия,
то это положение равновесия может быть и неустойчивым. В ка-
честве соответствующего примера можно взять движение свобод-
ной материальной точки с потенциальной энергией, не содержащей
одйой из координат, например х: П = П (у, z), причем Ц (0, 0) = 0
и П (у, z) > 0 При у2 + г2 > 0. В этом примере точки минимума
заполняют ось х. Положение равновесия л=у=г=0 неустой-
чиво, так как при сколь угодно малой по величине начальной
скорости, направленной вдоль оси х, точка будет совершать равно-
мерное движение вдоль оси х.
$ 341 ПРИЗНАКИ НЕУСТОЙЧИВОСТИ 197
В приведенных на стр. 190 примерах 1 и 2 рассматривается кон-
сервативная система, а в примере 3 (стр. 191) на точку действует
и диссипативная сила. Потенциальная энергия имеет строгий мини-
мум в примере 1 в наинизшей точке окружности, а в примерах 2
и 3 при.г = 0. Поэтому эти положения равновесия являются устой-
чивыми.
Пример 4. Консервативная система с одной степенью сво-
боды. имеет потенциальную энергию П = qK sin2 [дополнительно
определяем: П(0) = 0]. В соответствии с замечанием 2 положение
9 = 0— устойчивое положение равновесия.
§ 34. Признаки неустойчивости положения равновесия.
Теоремы Ляпунова и Четаева
Еще в 1892 г. А. М. Ляпунов в своей знаменитой диссертации
«Общая задача об устойчивости движения» поставил вопрос об
обращении теоремы Лагранжа. Этот вопрос до сих пор полностью
не решен. Частичное решение этого вопроса дают две теоремы
Ляпунова и теорема Четаева, в которых устанавливаются некото-
рые достаточные условия для неустойчивости положения равно-
весия.
Пусть по-прежнему в положении равновесия qr = ... =qn = 0
и П(0, ... , 0) = 0. Напишем разложение потенциальной энергии
в ряд по степеням координат («отклонений»):
п = пт (91, , 9)4- П,„+1 (91, ..., 9п) + ...
[nOT(9!...9«) ^0, m^2[, (1)
где Щ.(91, ..., 9„) — однородная функция fe-й степени (k = m,
m-f-1, ...), а наинизшая из степеней членов, фактически входящих
о [дИ \ п
в разложение, т£г2, так как в положении равновесия все = 0.
Теорема Ляпунова I. Если потенциальная энергия
П(91, ...,9Я) консервативной системы в положении равновесия
не имеет минимума и это обстоятельство можно усмотреть
из членов второй степени П2(9Ь ... , q„) в разложении (I)1), то
данное положение равновесия неустойчиво.
Доказательство. В выражении для кинетической энергии
Т=~2 aik<lrfk разложим коэффициенты й(>(91.........9„).в ряд
по степеням координат и обозначим через а^ свободные члены
*) То есть щ = 2 й Щ — квадратичная форма, принимаю-
щая отрицательные значения (быть может, наряду с положи-
тельными).
198
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
(т. е. значения функций ...» qn) ПРИ 44 = — ?л = °)-
п
Тогда, полагая Т0 = у aikit$k> буДем иметь
/,* = 1
Г=Т0 + (*), П = П2 + (*);
здесь и далее через (*) обозначаем сумму членов, имеющих более
высокий порядок малости относительно координат и скоростей, чем
выписанные ранее члены. Так как То— положительно определенная
квадратичная форма с постоянными коэффициентами, то при по-
мощи неособенного линейного преобразования переменных можно
одновременно привести две квадратичные формы 7'0 и П2 к сумме
квадратов, после чего разложение для Т и П в новых переменных
61( ..., 6Я примет вид
п п
2 и+(*>. п=4 2 хл+(*)- (2)
Й=1 Й=1
Поскольку квадратичная форма П3 принимает некоторые отрица-
тельные значения, то, Но крайней мере, одно Хй<0.
В координатах 6^ уравнения Лаграйжа запишутся так:
в*=-хле*+(») (й = 1,(3)
Рассмотрим вспомогательную квадратичную форму
п
* = 1
+ (1+Wy)n], (4)
где е& = 1 при и eft = — 1 при X*<О (й=1,
а число р. > 0.
Непосредственно проверяется, что в силу уравнений (3) и ра-
венства (4) при движении системы
Не нарушая общности, будем считать, что Х]<0 и что X,—
наибольшее число из отрицательных Хй. Положительное число р
выберем так, чтобы одновременно выполнялись неравенства
Хх + ^<0,
(6)
*) Координаты 01, .... 6„ носят название нормальных или глав-
ных координат. Более подробно они будут рассмотрены в § 41.
« 341
ПРИЗНАКИ НЕУСТОЙЧИВОСТИ
199
Из первого неравенства следует, что сумма в правой части
равенства (5) представляет собой положительно определенную ква-
дратичную форму. Но тогда при достаточно малых (по абсолютной
величине) 0А и 0А
|в4|<Д, |0А|<Д (й = 1, ...,п) (7)
правая часть равенства (5) будет всегда положительна, т. е.
откуда
И>
или
И> (8)
Положим все начальные значения 0^ (й = 1, ••• > и) рав-
ными нулю, за исключением 0J, которое возьмем по модулю мень-
шим Д. Тогда, используя выражение (4) и второе неравенство (6),
находим VB > 0. Но при этом движение обязательно выйдет за пре-
делы окрестности (7), как бы мал ни был {0? |, так как в против-
ном случае из неравенства (8) следовало бы, что lira И = со,
/-*00
а квадратичная форма V в окрестности (7) ограничена.
Теорема доказана.
В случае, когда в разложении (1) т>2, можно применять
следующие две теоремы, которые приведем без доказательства *).
Теорема Ляпунова II. Если потенциальная энергия П
консервативной системы, при qt= ... = <7„ = 0 имеет строгий
максимум и это обстоятельство может быть определено, ис-
ходя из членов наинизшей степени II т (qlt ..., qn) (т^2) в раз-
ложении (I)2), то положение qt = ... —q„ = 0 является неу-
стойчивым положением равновесия системы.
Теорема Четаева. Если потенциальная энергия П кон-
сервативной системы является однородной функцией отклоне-
ний qlt .. , qn и в положении равновесия qi = — не
имеет минимума, то это положение равновесия неустойчиво.
Примеры. 1. Пусть П = А(1— cosa^); п=1. Функция П
в точках ?8л = -^- имеет строгие минимумы, а в точках q^k-i —
{2k—1)л ,, , „ . „
= i—— -------строгие максимумы (А = 0, ± 1, ±2,...). При этом
9 Доказательства читатель может найти в следующих книгах:
Ляпунов А. М., Общая задача об устойчивости движения, 1935,
§ 16 и 25; Четаев Н. Г., Устойчивость движения, 1965, § 17;
Малкин И. Г., Теория устойчивости движения, 1952, § 14 и 17.
2) То есть в некоторой окрестности начала координат (исклю-
чая само начало) всегда Hm(gj, ..., qn)<0. Это возможно только
при четном т.
200
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
(ГЛ. V
последнее обстоятельство следует из вида члена наинизшего по-
рядка в разложении по степеням отклонений
а*
Тогда, согласно теоремам Лагранжа и Ляпунова, точкам q,h соот-
ветствуют устойчивые, а точкам о.ь.—неустойчивые положения
равновесия.
2. H=Aqt ... qn. Из теоремы Четаева следует, что положение
qt = ... =^л = 0 является неустойчивым положением равновесия.
§ 85. Асимптотическая устойчивость положения
равновесия. Диссипативные системы
Введем теперь понятие об асимптотически устойчивом
положении равновесия. Положение равновесия называется
асимптотически устойчивым, если оно устойчиво и если,
кроме того, при достаточно малых по абсолютной величине
начальных отклонениях и начальных скоростях все отклоне-
ния и скорости при неограниченном возрастании времени t
стремятся к нулю, т. е. если существует такое число 80 0,
что
lim ^(/) = 0, lim #,(f)=eixO (/=!,...,«) (1)
всякий раз, когда удовлетворяются неравенства
|??|<80, |#|<80 (1=1, ...,п). (Г)
При геометрической интерпретации (рис. 44) это означает,
что в пространстве состояний '(qt, дг) все траектории, начи-
нающиеся в 8й-окрестности начала
координат О, асимптотически при-
ближаются (при t — оо) к точке О.
В рассмотренных на стр. 190—192
примерах 1, 2 и 3 только в примере 3
устойчивое положение равновесия яв-
ляется асимптотически устойчивым.
Мы будем рассматривать склеро-
номные системы, находящиеся под
воздействием потенциальных сил — - и непотенциальных
°?;
сил Qi (i=l, ..., ri), и будем предполагать, что потении-
АСИМПТОТИЧЕСКАЯ УСТОЙЧИВОСТЬ
201
§ 35]
альная энергия П и непотенциальные силы Qt не зависят
явно от времени:
П=П(?Д Qi^Qi(qk, (1^=1, п). (2)
В этом случае время t не входит явно в уравнения Ла-
гранжа, которые могут быть записаны в следующем виде
(разрешенном относительно обобщенных ускорений) (см. § 7,
стр. 56):
Ы (/=1,...,/г). (3)
В рассматриваемом случае полная энергия Е склероном-
ной системы не содержит явно времени:
E = E(qk, Ъ)- (4)
Вычисляя ее полную производную по времени при движении
системы, находим:
л
« <в>
i «=1
Таким образом, в каждой точке пространства состояний
(?л> #л) не только полная энергия, но и ее полная произ-
водная по времени имеют определенные значения.
Если силы (Z=l, п) являются диссипативными
(см. § 8), то при движении системы 0, т. е. функция
Е' (qk, qk) в рассматриваемой области пространства состояний
принимает лишь неположительные значения.
В случае определенно-диссипативной системы (см. § 8)
dE
— = Er(qi, qt) обращается в нуль только в тех точках про-
странства состояний (qt, iji), где все ^,»==0, 1=1, ..., п.
Будем предполагать, что положение равновесия системы
является изолированным, т. е. в его окрестности нет других
положений равновесия ‘). Тогда имеет место
*) На это обстоятельство не было обращено внимания в первом
издании книги, и теорема об асимптотической устойчивости в той
форме, как она была там сформулировала, неверна (см. Г а н т-
махер Ф. Р., Замечание по книге «Лекции по аналитической
механике», Физматгиз, Москва, 1960, Прикладная математика и ме-
ханика, т. 26, вып. 2, 1962).
202
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
Теорема об асимптотической устойчивости.
Если потенциальная энергия П склерономной определенно-
диссипативной системы, в некотором положении равно-
весия имеет строгий минимум и это положение равно-
весия является изолированным, то положение равновесия
асимптотически устойчиво.
Доказательство. Пусть снова в положении равно-
весия
£1 = ^= ... =^ = 0 и П(0) = 0.
Как и при доказательстве теоремы Лагранжа, выберем в про-
странстве состояний е-окрестность начала координат О,
в которой энергия Е положи-
выбрана в В-окрёстности
тельна,
9/)>0, (6)
во всех точках, отличных от О,
и в которой нет состояний равно-
весия, отличных от О.
Так как согласно теореме
Лагранжа положение равновесия
91 = ... = 9Л 0 устойчиво, для
любого s 0 можно указать
В(е)^>0 такое, что все движения
протекают внутри е-окрестности
точки О, если начальная точка
(рис. 45). В качестве 80-окрестно-
сти возьмем окрестность, в которой выполняется условие
(8) § 33 (8osgS). Рассмотрим какое-либо из движений, на-
чинающихся в В0-окрестности. Поскольку при движении энер-
гия Е убывает, то
lim Е (£) = Е<х> 0,
t -ют
причем Е (t) ^Ет k). Допустим сначала, что Ею 0, т. е.
Д»>0, и рассмотрим последовательность значений времени
ts оо и последовательности значений фазовых координат
*) Этот предел существует в силу того, что Е (t) — непрерыв-
ная монотонно убывающая неотрицательная функция.
I 351
АСИМПТОТИЧЕСКАЯ УСТОЙЧИВОСТЬ
203
Так как вся траектория лежит в s-окрестности, то при всех
з и I выполняются неравенства
юо то
В силу леммы Больцано — Вейерштрасса из бесконечных огра-
ниченных последовательностей и можно выбрать схо-
дящиеся подпоследовательности qff> и qff. Пусть
lim ^ = ^*, Иш q^ = q*v 1=1, ... , п; (7)
k —* со /г —> со
при ЭТОМ
ItTIO IT'FI<s> i=i,
Но тогда, в силу непрерывности E(t),
E(qf, qf) = lim E(q™, ^>) = £'ет>0.
А —от
По предположению точка (qf, qf) не совпадает с началом
координат, где E=Q.
Примем точку (qf, Iff), 2 = 1, ... , п, за начальную точку
движения при t = ff Так как эта точка не совпадает с, точ-
кой О, т, е. не является положением равновесия, то при
движении системы хотя бы одна из обобщенных скоростей
dE
qt будет отлична от нуля и потому -^-<^0. Но тогда при
некотором t = ti будет выполняться неравенство E<ffEm.
Рассмотрим, далее, движение системы, начинающееся при
t = to из точки (§<*), #<*)). В силу (7) значения q^ и (ff1 при
достаточно больших k будут сколь угодно близки к значе-
ниям qf и qf соответственно. Следовательно, при достаточно
больших k будут сколь угодно близки и значения фазовых
координат при t = tx у движений, начинающихся при t=t0
из начальных точек (cff\ qW) и (qf, qf) (решения систем
дифференциальных уравнений являются непрерывными функ-
циями начальных данных). Поэтому для движения, начавше-
гося при из точки (qff cff), прИ t = tx будет выпол-
няться неравенство так как полная энергия Е
представляет собой непрерывную функцию фазовых координат.
Но в силу единственности решений уравнений Лагранжа,
состояние в момент t = i\ системы, вышедшей при t = t^ из
204
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
начальной точки (q№, Z == 1, ... , п, совпадает *) с со-
стоянием в момент 44-Zi системы, вышедшей при t = t9
из начальной точки ($”, $”), /=»1, ... , п; поэтому инте-
ресующее нас значение энергии E(tk-]-ti) должно удовле-
творять неравенству
а это невозможно, так как £'(Z)^F0O при любом Z^>Z0.
Итак, мы пришли к противоречию, допустив, что Е^, 0,
следовательно,
Еоо — 0 и lim E(t) = O.
t -► со
(8)
Так как в силу неравенства (6) равенство £==0 имеет
место только в точке О, то из равенства (8) вытекает, что
при Z->oo точка, изображающая систему в пространстве
состояний, стремится к началу координат, т. е. имеют место
соотношения (1). Теорема доказана.
В примере 3 на стр. 191 Е = -у mX2 -f- -i- сх2 и
— = mXJt exx = {тх Ц- сх)Х = — 2/л'2 < 0,
поскольку />0. Система определенно-диссипативная, и положение
равновесия является изолированным, что следует из уравнения
движения при подстановке решения х » const. В силу теоремы
положение равновесия асимптотически устойчиво.
Исследование движения склерономной определенно-дисси-
пативной системы в окрестности ее асимптотически устойчи-
вого положения равновесия будет дано в § 46.
Ляпунов доказал теорему, которая обобщает теорему
Лагранжа. Он обратил внимание на то, что при доказа-
тельстве теоремы Лагранжа можно вместо энергии Е
взять любую непрерывную (с непрерывными частными
производными первого порядка) функцию V (qk, qk), имеющую
*) Так как в уравнения движения (3) время t явно не входит,
то выбор начала отсчета времени не играет роли. Поэтому, если
вместо q^', q’f1 за начальное состояние принять qW, Z = 1,..., п,
то в дальнейшем система будет проходить те же состояния, что
и в исходном движении, но в иные моменты времени.
АСИМПТОТИЧЕСКАЯ УСТОЙЧИВОСТЬ
205
§ 351
в состоянии, равновесия строгий минимум и не воз-
растающую при любом движении системы.
Вычислим производную по времени от функции V, исполь-
зовав при этом уравнения движения (3):
<9>
i = 1
В частности, из этой формулы следует, что в начале коор-
динат О пространства состояний функция V' обращается
в нуль, так как точка О соответствует состоянию равновесия,
в котором все 4г = 0 и все qi = Qi = Q. Если функция V
не возрастает при любом движении, то yft)sg:0.
В этом случае функция V’ в состоянии равновесия О имеет
максимум. Если же этот максимум строгий, то в окрестности
точки О (за исключением самой точки О) У'<^0 и при дви-
жении системы в пределах этой окрестности функция V
строго убывает.
Теперь можно почти дословно повторить доказательство
теоремы Лагранжа, используя вместо Е функцию V. В случае
асимптотической устойчивости (например, для диссипативной
системы) доказательство будет даже более простым, если
потребовать, чтобы производная имела в положении рав-
новесия строгий экстремум противоположного типа по отно-
шению к экстремуму функции V *).
Заметим еще, что при формулировке критерия устойчи-
вости можно поменять местами слова «минимум» и «макси-
мум», так как замена функции V на функцию —V возвра-
щает нас к прежней формулировке.
Таким образом, можно считать доказанной следующую
теорему:
Теорема. Если дано положение равновесия склеро-
номной системы, находящейся под действием сил, не
зависящих явно от времени, и существует непрерывная
‘) При доказательстве теоремы об устойчивости диссипативной
dE
системы производная —не имела в положении равновесия строгого
максимума. В связи с этим нам пришлось специально оговорить,
что положение равновесия является изолированным.
206
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[гл. v
вместе с частными производными первого порядка функ-
ция V(qk, qk), имеющая в данном состоянии равновесия
строгий экстремум, в то время как производная V от
V по времени (вычисленная в силу уравнений движения)
имеет в этом же состоянии экстремум противополож-
ного типа, то рассматриваемое положение равновесия
устойчиво. Если при этом экстремум производной также
является строгим, то положение равновесия асимпто-
тически устойчиво.
Функцию V(qh, qk), о которой идет речь в теореме, при-
нято называть функцией Ляпунова.
§ 36. Условная устойчивость. Общая постановка вопроса.
Устойчивость движения или произвольного процесса.
Теорема Ляпунова
В неравенствах (1) и (2) на стр. 190, определявших устой-
чивость положения равновесия, фигурировали все отклоне-
ния q, и все обобщенные скорости q^ Однако во многих
вопросах мы встречаемся с условной устойчивостью, когда
указанные неравенства выполняются для некоторых из 2л
величин qb ... , qn, (fa, , qn или в более общей постановке
для некоторых функций Xt, ... , хт от этих величин:
Xi=fi(4k> 4k} (1 = 1, ..., т). (1)
При этом предполагается, что все функции (1) обращаются
в нуль при
qk^Q, qk = 0 (A=l, ... , л), т.е. /г(0, ..., 0) = 0,
и удовлетворяют автономной *) системе обыкновенных диф-
ференциальных уравнений первого порядка2)
^=Xl(xi, ... , хт, t) (i = \,,,.,m), (2)
*) См. примечание к стр. 94.
®) При исследовании условной устойчивости склерономных си-
стем функции Xi (1=1, ... , т) не зависят явно от t. Мы вписали
t в качестве аргумента в правых частях, имея в виду несклеро-
номные системы и дальнейшие обобщения.
§ 361
УСЛОВНАЯ УСТОЙЧИВОСТЬ
207
где Xi(xt, ... , хт, 0 (/ = 1, , хгс) — непрерывные функ-
ции в области
|x;|sgA, i^ste — (3)
0о — фиксированный начальный момент времени).
Состоянию равновесия отвечает нулевое решение х, = 0
0 = 1, ... , т) системы дифференциальных уравнений (2).
Наличие такого решения предполагает, что правые части урав-
нений (2) удовлетворяют условию
ХДО, ... , 0, 0 = 0 (/ = !, ... , т). (4)
С математической точки зрения речь идет об устойчи-
вости нулевого решения системы дифференциальных уравне-
ний (2), причем эта устойчивость определяется так: для любого
е^>0 существует такое 8 = 8(е)^>0, что при любом ^^0
коль скоро
|Х;0)|<®
I xt (to) | < 8
0=1, ..., т),
0=1, ... , tn).
(5)
(6)
Для геометрической интерпретации неравенств (5) и (6)
используются s- и 8-окрестности начала координат в хя-мер-
ном пространстве (хъ ... , хт). В случае асимптотической
устойчивости дополнительно требуется существование такого
8«^>0, что
Нтхг(0==О 0 — 1, ...,от), (7)
t -* со
если только
I xi (to) | <Z
0 = 1, ...,W). (8)
Если исследуется устойчивость положения равновесия
(не условная!), то в качестве хь ... , хт можно взять вели-
чины qb ..., qn, qt ..., qn или qit ..., qn, pt)..., pn. В пер-
вом случае уравнения (2) представляют собой уравнения Ла-
гранжа, записанные в виде системы 2п дифференциальныхурав-
нений первого порядка с неизвестными функциями qb ... , qn.
Во втором случае уравнениями (2) являются канонические
уравнения Гамильтона
Л = дг1 а = 1 п\ (9)
dt dpi’ dt dqt (*—г, ...,xz;. (У?
208
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
(ГЛ. V
Рассмотрим два важных частных случая системы уравне-
ний (2), которые часто встречаются в приложениях.
1°. Стационарный случай, когда t не входит явно
в правые части Xt уравнений (2), т. е. когда
т=° .....
2°. Периодический случай, когда правые части X,
имеют период t относительно переменной t\
Xt(xt, ..., хт, ... , хт, t) (г = 1, ..., т).
В этих случаях устойчивость нулевого решения системы диф-
ференциальных уравнений (2) определяется с помощью тео-
ремы, являющейся непосредственным обобщением теоремы,
приведенной в конце § 35.
Теорема Ляпунова. Если в стационарном или
в периодическом случае существует непрерывная вместе
с частными производными первого порядка в области (3)
функция V(Xi, .... хт, t), которая при любом t, рас-
сматриваемом как параметр, имеет в точке хх«= ...
...=*хт=10 строгий экстремум, в то время как
в той же точке снова при любом t ее производная по
п
„ у/'/ /X v dv v , dV
времени V (Xi, .... хт, = £ имеет экстре-
мум противоположного типа, то нулевое решение си-
стемы (2) устойчиво. Если при этом экстремум произ-
водной V также является строгим, то нулевое решение
системы (2) асимптотически устойчиво. При этом пред-
полагается, что в стационарном случав функция V не
зависит явно от t, а в периодическом эта функция перио-
дична относительно t а периодом т [т — период правых
частей уравнений (2)].
Доказательство этой теоремы достаточно провести для
периодического случая, так как стационарный случай можно
рассматривать как частный случай периодического с любым т.
Доказательство состоит в повторении рассуждений, приведен-
ных ранее при доказательстве теоремы Лагранжа и теоремы
об асимптотической устойчивости со следующими изменениями;
вместо Е теперь используется разность
V(xv ... , хт, f) — V(0, ... , 0, t),
§ 36]
УСЛОВНАЯ УСТОЙЧИВОСТЬ
209
а вместо пространства (qu берется /«-мерное простран-
ство (хь ... , хт). Величину t, входящую в V, рассматриваем
как параметр. В силу периодичности этот параметр можно
изменять в конечном интервале £0 < £0-|-т. Благодаря
этому обстоятельству наличие в V переменной t не вызывает
каких-либо осложнений при доказательстве теоремы.
Заметим, что в общем (нестационарном и непериодическом)
случае на функцию Ляпунова нужно наложить более жесткие
условия Щ.
Отметим один частный случай теоремы Ляпунова, который
часто используется в качестве критерия простой (неасимпто-
тической) устойчивости.
Пусть функция V(xb ... , хт, t) является интегралом си-
стемы дифференциальных уравнений (2), т. е. функция V при
подстановке в нее любого решения системы (2) превращается
в постоянную. В этом случае V' (xt, .... хт,
и можно считать, что функция V в точке хг = ... == хт — 0
при любом t имеет максимум и минимум (конечно, нестрогий).
Поэтому имеет место такое следствие из теоремы Ля-
пунова:
Следствие. Если система дифференциальных урав-
нений (2) имеет интеграл V(хь , хт, t) [не зависящий
от t в стационарном случае и периодический относи-
тельно t с периодом х в периодическом случае} и этот
интеграл в точке х^ = ... = хт = 0 при любом фикси-
рованном t имеет строгий экстремум, то нулевое реше-
ние системы (2) устойчиво.
Заметим, что при доказательстве теоремы Лагранжа 'для
консервативной системы используется интеграл энергии Е.
Рассмотрим теперь движения или более общие процессы,
описываемые системой дифференциальных уравнений первого
порядка:
dz •
..., zm, f) (i=l, ... , от), (Ю)
где правые части — непрерывные функции в некоторой области
изменения переменных zlt ..., zm при t^t^, удовлетворяю-
щем., например, Чета ев Н. Г,, Устойчивость движения,
гл. Ц.
210
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
щие условиям существования и единственности решения по
заданным начальным данным гг(4) (1=1, ... , т).
Пусть (t) (i = 1, ..., т) — решение системы уравне-
ний (10), определяющее некоторый процесс. Для выяснения
вопроса об устойчивости этого процесса введем вместо неиз-
вестных функций zlt ..., zm новые неизвестные функции —
«отклонения»
Xi = Zi~ Zi(t) (Z==l, ... , от). (11)
Тогда в новых переменных система дифференциальных урав-
нений (10) запишется в виде системы (2), где
zY; = Zf [Хх + (0, .. •, хт + ~zm (0] - X, [2х (0, ..., zm(t)].
(12)
Решению zi = zl(t) (Z=±=l, ... , от) системы дифференциаль-
ных уравнений (10) в новых переменных соответствует нуле-
вое решение хг = ... = хт = 0 системы дифференциальных
уравнений (2). Это обстоятельство позволяет свести вопрос
об устойчивости процесса zi (f) (1=1, , т) к изученному
нами вопросу об устойчивости нулевого решения системы
дифференциальных уравнений (2). Другими словами, решение
д(. = 2г(£) (1 = 1, ..., от) системы (10) называется устойчи-
вым (соответственно асимптотически устойчивым), если устой-
чиво (соответственно асимптотически устойчиво) нулевое
решение xt = ... =хт = 0 системы уравнений в отклоне-
ниях (2) при правых частях, определяемых формулами (12).
Все это открывает широкое поле для применений приведен-
ной в этом параграфе теоремы Ляпунова. Эта теорема может
быть использована не только для определения устойчивости
положения равновесия, но и для определения устойчивости
движения и вообще любого процесса, определяемого систе-
мой обыкновенных дифференциальных уравнений.
Пример. Рассмотрим вращение по инерции твердого тела
имеющего неподвижную точку О. Динамические уравнения Эйлера
в этом случае имеют вид
A^^(B-C)qr, В^ = (С-А)Гр, C^ = (A^B)pq.
U!r UL Ul>
(13)
Здесь p, q, r—проекции угловой скорости <в на главные оси инер-
ции тела Ot, От), 04; Д, В, С — моменты инерции относительно этих
осей.
$ Зв]
УСЛОВНАЯ УСТОЙЧИВОСТЬ
211
Уравнения (13) допускают следующие три частных решения,
определяющих перманентные вращения тела относительно главных
осей:
Г ^=:г- = 0, р = const =/»0;
2° г=р — 0, q — const — q^;
3° p — q = Q, r = const = r0.
Мы ограничимся выяснением устойчивости вращения Г, по-
скольку 2° и 3° могут быть записаны в виде 1° при другом обозна-
чении осей. При этом устойчивость решения 1° уравнений Эйлера
(13) будет определять условную устойчивость вращения 1° относи-
тельно угловой скорости <ах).
Составим уравнения в отклонениях, положив х{ —р — р0, х3 = q,
dxi В — С
~М~- А ХгХ>’
dx„ С — А
-dF=~B—
dx3
~dt С
А—В . . .
Х2 (Xj +р0).
(14)
Пусть вдоль оси 01 исследуемого перманентного вращения рас-
положена большая или малая ось эллипсоида инерции. Поскольку
величины А, В и С обратно пропорциональны квадратам осей эл-
липсоида инерции, это означает, что А < В, С или А > В, С. Возь-
мем в качестве функции Ляпунова функцию
V = (Axf + Bxl + Cxf 4- 2 Ap.xrf ±[В(В ~А)х1+С(С — А) л*],
где знак «+» берется в случае А<.В, С, а знак «—»—в случае
А > В, С.
Функция V обращается в нуль при xt = ха = х3 = 0 и положи-
тельна в окрестности этой точки, т. е. функция V имеет в этой
точке строгий минимум. С другой стороны, как легко проверить,
dV
= 0 в силу уравнений (14), т. е. функция V является интегра-
лом системы дифференциальных уравнений (14). Поэтому, согласно
следствию из теоремы Ляпунова, перманентное вращение отно-
сительно большой или малой оси эллипсоида инерции устойчиво.
Можно было бы показать, что перманентное вращение относи-
тельно средней оси эллипсоида инерции неустойчиво, но для этого
следовало бы воспользоваться критерием неустойчивости Четаева 8).
1) Устойчивость относительно <в означает, что малое изменение
начальной угловой скорости <о0 влечет малое изменение вектора со
во все время движения. Другими словами, это устойчивость отно-
сительно отклонений xt—p—ра, х, — /], х3 = г. Разумеется, углы
Эйлера при этом непрерывно растут.
8) Четаев Н. Г., Устойчивость движения, изд. 3, 1965,
стр. 37.
212
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
2. Рассмотрим в качестве примера задачу об устойчивости вра-
щательного движения снаряда *).
Примем для упрощения задачи, что центр тяжести снаряда С
движется прямолинейно вдоль горизонтальной оси х с постоян-
ной .скоростью v = const Пусть Сху—вертикальная плоскость
стрельбы. Положение оси снаряда (оси динамической симметрии)
определяется двумя углами: углом а, образованным проек-
цией Cxt оси С5 на плоскость Сху с осью Сх, и углом р между
Сх, и С£ (рис, 46). Последовательными поворотами на угол а и на
угол р триэдр осей Cxyz пере-
ходит в триэдр Дополни-
тельный поворот на угол <р
вокруг оси С$ переводит три-
эдр в триэдр осей, неиз-
менно связанных ео снарядом.
Поэтому угловая скорость сна-
ряда ш состоит из трех состав-
ляющих:
<0 = О»! 4- <0в + <о8,
где a>t = я, = р, м3 = ф. Про-
екции угловой скорости на
главные оси инерции С5, Су, CZ
определяются формулами
р = ф -|- я sin р,
q=— р, r = acosp.
Обозначая через А аксиальный, а через В экваториальный
момент инерции снаряда, получаем для кинетической энергии вы-
ражение
Т = у [Ар* + В (92 + г2)] = 1 [Д (4 + « sin Р)2 + В (р2 + я2соэ2 Р)].
Будем считать, что помимо силы тяжести к снаряду приложена
в точке D на оси снаряда (в «центре давления») сила лобового
сопротивления воздуха R, постоянная по величине2) и направлен-
ная в сторону, противоположную скорости V, т. е. в отрицательном
направлении оси х. Пусть l = CD, а у — угол между осями Сх
и Ci. Тогда момент силы R относительно С равен Rl sin 7, а эле-
ментарная работа силы R будет
8 А = Rl sin 7 87 = — 8 (Rl cos 7),
*) Решение этой задачи было дано Н. Г. Четаевым и опубли-
ковано в «Прикладной математике и механике», т. X, вып. 1, 1946.
2) Величина R есть функция от v, R=f(v), поэтому из о =
— const следует /? = const.
S 36] УСЛОВНАЯ УСТОЙЧИВОСТЬ 213
поэтому в качестве потенциала сил можно принять функцию ‘)
П = RI cos 7 = RI cos a cos р.
Колебания оси снаряда характеризуются изменением углов а
и 3- Для определения устойчивости вращательного движения сна-
ряда будем исходить из трех интегралов движения:
1) Т + П = const; 2) Gx = const; 3) Gj = Ар » const.
Первый интеграл представляет собой интеграл энергии; Gx и
G? — проекции кинетического момента Ос на оси Сх и С$. Постоян-
ство Gx при движении системы следует из того, что момент силы R
относительно оси Сх равен нулю. Третий интеграл выражает по-
стоянство обобщенного импульса Ар, соответствующего цикличе-
ской координате <р. Заметим, что (см. рис. 46)
Gx — G$ cos (хб) 4* G^ cos (хт;) 4- G; cos (xt) =
= Ap cos (x?) + Bq cos (хг() 4- Br cos (xC) =
— Ap COS a COS P 4- В (p sin a — a COS a COS P sin p) 2).
Комбинируя первые два интеграла с третьим и используя получен-
ные выражения для Т, П, Gx, находим следующие два инте-
грала движения и, Wt, обращающиеся в нуль при я = р==а =
= 3 = 0:
W, = у В (a2 COS2 Р 4- р'2) 4- RI (cos a COS P — 1) = COHSt,
W2 = В (P sin a — a COS a COS P sin P) -|- Ap (COS a COS P — 1) = const.
Будем искать знакоопределенную линейную комбинацию инте-
гралов движения Предварительно определим в
члены наинизшей степени относительно малых величин а, р, 4, р:
=1 в (42 4- Р8) -у (“* + Р8) 4-
= 5 (Pa - aP) —1 Др (а2 4-р2) 4-...;
*) Дуги а, р, 7 на сфере с центром в С образуют прямоуголь-
ный сферический треугольник с «катетами» а, р и «гипотенузой» т.
Для такого треугольника имеет место формула cos 7 = cos a cos р.
Справедливость формулы следует из элементарных геометрических
соображений.
8) Дуги a, у4~Р и (•*£) образуют прямоугольный сферический
треугольник с «катетами» а и у 4- Р, поэтому
/тс
cos (хС) = cos a cos I у 4- P1 = — cos a sin p.
214
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
тогда
W, — X W, = у [Да8 + 2ВХ4? + (АрХ — RI) ?8] +
+4- 1^в—2в^а+Ю
а
Для того чтобы каждое из выражений в квадратных скобка^
было положительно определенным, достаточно, чтобы выполнялось
неравенство
В8Х8<В(АрХ — Rt).
Сокращая на В и преобразуя, получаем
BIA — АрКRl<f).
Для того чтобы последнее неравенство имело место при неко-
тором вещественном X, нужно, чтобы квадратный трехчлен в левой
части этого неравенства имел вещественные корни, т. е. должно
иметь место неравенство
А8р8 > 4BRI.
Это и есть условие, обеспечивающее устойчивость вращатель-
ного движения снаряда (при «отклонениях» а, 0, а, р‘), так как при
выполнении этого условия можно подобрать вещественное значе-
ние X, при котором интеграл — XIF2 будет иметь при a = f =
= 4 = ^ = 0 строгий минимум, равный нулю.
§ 87. Устойчивость линейных систем
В предыдущем параграфе было показано, что исследова-
ние устойчивости любого процесса, определяемого системой
обыкновенных дифференциальных уравнений *), сводится
к исследованию устойчивости нулевого решения системы урав-
нений в отклонениях.
Пусть дифференциальные уравнения в отклонениях линейны
и имеют постоянные коэффициенты
п
dX; V!
aikXk •••> П). (1)
*= 1
Будем искать частное решение этой системы в виде
Xi=*uteu (/=1, ..., я; 2 |и,.|2>0), (2)
1 = 1
*) Как известно, обычно такая система может быть записана
в виде системы дифференциальных уравнений первого порядка,
разрешенных относительно производных. Для системы уравнений
Лагранжа такая запись возможна всегда (см. § 7),
§ 37] УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ
215
Подставляя выражения (2) в уравнения (1) и сокращая
на еи, получаем соотношения, связывающие искомые вели-
чины ui и X:
У! агА = Хи; (г=1, ..., л), (3)
й = 1
или
л
S (flik - uk = О (Z = 1, ..., л), (4)
й = 1
где — символ Кронекера
(В;А = 1 при I = k, ?>ik = 0 при I k).
Так как в искомом решении (2), по крайней мере, одна
из постоянных ut должна быть отлична от нуля, то опреде-
литель системы однородных уравнений (4) должен равняться
нулю:
йц — X а1г ... а1л
а21 • • • й2п
= 0. (5)
a„i ant ... аяд — X
Таким образом, для определения X мы получили алгебраи-
ческое уравнение л-й степени относительно X.
Уравнение (5) называется характеристическим или ве-
ковым уравнением для матрицы коэффициентов
а11 аМ • • • а1 л
л _ аИ • а2л
anl • • • &n.n
Корни характеристического уравнения называются характе-
ристическими числами матрицы А.
Взяв в качестве X какое-либо характеристическое число
матрицы А, мы найдем соответствующие этому Числу по-
стоянные ut из системы линейных уравнений (4).
Для дальнейшего нам удобно будет ввести матричную
запись как для исходной системы (1), так и для Систем
соотношений (2) и (3).
216
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
Тогда вместо равенств (1) — (3) и (5) можно написать1)
Й = (1')
х = иеи, (2')
Аи = \и (и ф 0), (3')
det (А —ХЕ) = 0. (5')
Здесь Е = ||— единичная матрица.
Столбец Иу4 0, удовлетворяющий вместе с числом X соот-
ношению (3'), называется собственным вектором матрицы А,
соответствующим характеристическому числу X. Таким обра-
зом, в каждом решении системы (V), имеющем вид (2'),
X — характеристическое число матрицы А, а «— соответ-
ствующий собственный вектор.
Рассмотрим сначала тот случай, когда характеристическое
уравнение (5) имеет п различных корней Х/; (Л = 1, ..., ri).
Каждому характеристическому числу ХА соответствуют соб-
ственный вектор uk и частное решение системы (1) вида u-kelk(.
Линейная комбинация этих решений с произвольными постоян-
ными коэффициентами
п
х= S ckuke^ (6)
* = 1
снова будет решением системы (1).
Для того чтобы показать, что формула (6) охватывает
все решения системы (1), предварительно докажем, что
*) При умножении квадратной матрицы А на столбец х мы эле-
менты i-й строки матрицы А умножаем на соответствующий эле-
мент столбца х и все эти произведения складываем. Полученная
таким способом сумма является i-м элементом столбца-произведе-
dx
ния Ах. Производная от столбца получается дифференцирова-
нием каждого элемента столбца х.
§371 УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ 217
векторы-столбцы Ui, и.2, ., ип, соответствующие различным
характеристическим числам Xt, Х3, ..., Х„, линейно независимы.
Пусть
п
S сЛ = 0. (7)
А— 1
Умножим обе части равенства (7) слева на матрицу А. Тогда,
используя равенства
ЛяА = ХАя* (я*#0, 4^1, я),
находим:
У = 0. (8)
к = 1
Исключим из соотношений (7) и (8) постоянную qi
п
У} (X; — Xt) C}Uj == 0. (9)
/=2
Это равенство опять умножим слева на Л и используем по-
лученное равенство совместно с (9) для исключения с4 и т. д.
В конце концов получим:
О'п — М 0>п — М • • • 0'п — ^п-1) спип = 0’ (10)
откуда с„ = 0. Так как в равенстве (7) все слагаемые равно-
правны, то
с2 = с., =... = сп = 0,
т. е. никакой зависимости вида (7) между собственными век-
торами иг, ..., ип не существует и эти векторы линейно
независимы.
Положив в формуле (6) t = Q, найдем:
п
Хо= 2 с*и*- по
к 1
Произвольно задавшись начальным вектором х0, мы из равен-
ства (11), в силу линейной независимости векторов иъ ..., ип,
однозначно определим Ck я). Таким образом,
формула (6) охватывает решения системы (1), удовлетворяю-
щие любым начальным условиям х(О) = хо, т. е. охватывает
все решения системы (1).
218 устойчивость равновесия и движения [гл. v
В курсах по теории дифференциальных уравнений дока-
зывается, что в случае кратных корней формула (6) несколько
усложняется. В этой формуле могут появиться так называе-
мые «вековые члены», содержащие вместо постоянного век-
тора ик полином относительно t- ик-\- • • • В общем
случае произвольное решение системы дифференциальных
уравнений (1) определяется формулой
п
х=^Ск(и, + ^Г- •)<&. (12)
k = 1
Из формул (6) и (12) непосредственно получаются важные
следствия.
1°. Если все характеристические числа матрицы А
имеют отрицательные вещественные части, т. е.
max Re '/.k — — о. О,
1 k п
то Нт х(() = 0 и нулевое решение системы дифферен-
t —► со
циальных уравнений (1) асимптотически устойчиво ’).
Пусть теперь RekA^>0 хотя бы для одного k. Тогда
система (1) имеет ненулевое решение х = Скике^ь(, которое
стремится к бесконечности при t -> оо. В то же время началь-
ное значение (при t = E) xti = Ckuk может бы'гь сколь угодно
малым, поскольку Ck — произвольная постоянная. В этом слу-
чае решение х = 0 неустойчиво. Таким образом, имеет место
предложение:
2°. Если хотя бы одно характеристическое число
матрицы А имеет положительную вещественную часть
(Re 0), то нулевое решение системы дифференциаль-
ных уравнений (1) неустойчиво 3).
Пример. Положение равновесия линейного осциллятора
в среде с сопротивлением, пропорциональным первой степени ско-
рости, будет асимптотически устойчивым. Действительно (см. при-
мер 3 на стр. 191), дифференциальное уравнение движения
*) Число а 5> 0 иногда называется степенью устойчивости.
в) Если все (fe=l, ..., и) и хотя бы в одном из этих
соотношений имеет место знак равенства, то решение х = 0 будет
устойчивым, если в формуле (12) во всех слагаемых, где ReXft = 0,
будут отсутствовать вековые члены. В противном случае реше-
ние х = 0 будет неустойчивым.
S 38]
УСТОЙЧИВОСТЬ ПО ЛИНЕЙНОМУ ПРИБЛИЖЕНИЮ
219
тЯ + 2fx + сх — 0 (т, с, />0) может быть записано в виде си-
стемы двух дифференциальных уравнений первого порядка, если
положить х,=х, х2 = Я:
dx,
~- = х
dt
21
dx, с „ f
=----------xt — 2 — х2.
dt т 1 т
Характеристическое уравнение
— X
с
т
1
т
= Х2+2^Х+— =±=0
' т т
имеет корни с отрицательной вещественной частью —что и
обеспечивает асимптотическую устойчивость положения равновесия.
§ 38. Устойчивость по линейному приближению
В системе дифференциальных уравнений (нелинейных!)
= хп, t) (Z = l, ...,я) (1)
разложим правые части в ряды по степеням отклонений
xlt , хп:
п
§ = (i = l, я), (О
А = 1
где ft — сумма всех членов разложения начиная с членов
второго порядка относительно Xi, ..., хп (/==1, я).
В стационарном случае aik — постоянные коэффициенты,
а функции /г зависят от хъ ..., Хп и не зависят от t.
В периодическом случае а1к — периодические функции от t
с периодом и, а нелинейные члены хп, t)
также периодичны относительно t с периодом т.
Если в уравнениях (!') отбросить все нелинейные члены /г,
то получим линейную систему дифференциальных уравнений,
которая называется линейным приближением для нелиней-
ной системы (1).
В конце прошлого века в исследованиях Пуанкаре и
Ляпунова было установлено, что как в стационарном, так и
в периодическом случае об устойчивости нулевого решения
нелинейной системы (1) можно судить по линейному прибли-
220
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
жению, а именно из асимптотической устойчивости нуле-
вого решения линейного приближения следует асимпто-
тическая устойчивость нулевого решения нелинейной си-
стемы *). Это положение находит широкие применения,
поскольку исследование линейных систем значительно проще,
чем исследование нелинейных систем.
Мы ограничимся рассмотрением стационарного случая и
в этом случае для доказательства высказанного .утверждения
запишем систему (Г) в матричном виде:
/У v
^ = Лх+/(х). (1")
Здесь А = || aik ||" k = 1 — квадратная матрица с постоянными
элементами, a f(x) — столбец с элементами fi(xb ..., хп)
(Z=l, п). Поскольку по предположению нулевое реше-
ние линейного приближения асимптотически устойчиво, то
(см. § 37) все характеристические числа ..., матрицы А
имеют отрицательные вещественные части
max ReXft = — ж^О. (2)
Условимся через | z | обозначать «длину» вектора-столбца z
с компонентами zk, ..., zn:
п Vs
• (3)
Л = 1
Поскольку каждый элемент столбца /(х) начинается с
членов второго измерения, то
1/(х) I е | X |, (4)
где постоянное число е 0 может быть выбрано сколь угодно
малым, если ограничить изменение переменных xj, ..., хп
достаточно малой окрестностью |х|<^Д.
*) При этом предполагалось, что правые части X, (хг, , хп, t) —
непрерывные функции. В настоящее время выяснено, что следует
понимать под линейным приближением при разрывных правых
частях Xi, и установлен соответствующий критерий устойчивости
по линейному приближению как в периодическом случае, так и
в некоторых непериодических случаях. См. Айзерман М. А. и
Гантмахер Ф. Р., Прикладная математика и механика, т. 21,
вып. 5, 1955 и Ливартовский И. В., там же, т. 23, вып. 3, 1959,
§ 38]
УСТОЙЧИВОСТЬ ПО ЛИНЕЙНОМУ ПРИБЛИЖЕНИЮ
221
Доказательство *) утверждения Пуанкаре и Ляпу-
нова можно построить, опираясь на следующую лемму.
Лемма. Линейная система дифференциальных урав-
нений = Ах с помощью линейного неособенного преоб-
разования переменных
x — Uy (det U 9^0) (5)
может быть приведена к «треугольному» виду 2)
= Kyi + Ь^уч -j-... -j-
... -j- Ьгпуп,
где Хь ..., Х„ •— характеристические числа матрицы А,
а модули «недиагональных» коэффициентов bik
могут быть сделаны сколь угодно малыми за счет над-
лежащего выбора преобразования (5)3).
Преобразование (5) применим к нелинейной системе (1").
В новых переменных система (1") запишется так:
---4.У1 “Г • • • “Т КпУп ~т Si О),
<v2
dt
Ку-l “Г • • • 4“ КпУп 8i О’) >
(7)
dt
hyn+gnty)’
где столбец g(y) с элементами •••> 8п(У) опреде-
ляется равенством
g(y)^=U^f(Uy) (8)
1) См. Стокер Дж., Нелинейные колебания в механических
и электрических системах, М„ 1952.
2) В результате преобразования (5) матрица коэффициентов А
заменяется матрицей (Л1 AU, которая имеет треугольную форму.
3) Доказательство леммы приводится далее на стр. 223—224.
222
УСТОЙЧИВОСТЬ РАВНОЗВСИЯ и ДВИЖЕНИЯ
[ГЛ. V
и удовлетворяет неравенству *)
(9)
где число т] (как и число е) может быть сделано сколь угодно
малым за счет выбора достаточно малой окрестности | х |<^Д
(и соответственно IjK^Aj).
Тогда в соответствии с уравнениями (7) и неравенствами
(2) и (9) найдем 2):
п
. . d I у I 1 d . 1 d VI _
i = 1
i = 1 i = 1
n
+ у 2 + bikykyt) 4~ у 2E' + &У‘}
i < Й
t. e.
откуда
GO)
*) Если определить норму матрицы А = [| aih \\fk = j равенст-
n 1/з
вом || А || =( У I I2) > то легко проверяется справедливость
в «i 1
неравенства
|4х|<||4|||х|.
Поэтому из неравенства (4) и равенства (8) следует, что
и, таким образом, в неравенстве (9) можно положить
^ = ||t/||||t/-«||e.
s) Через yk мы обозначаем число, комплексно сопряженное
с Ук (*=1, п).
в 38]
УСТОЙЧИВОСТЬ ПО ЛИНЕЙНОМУ ПРИБЛИЖЕНИЮ
223
Выберем положительные числа 8 и т; так, чтобы выпол-
нялись неравенства а — 8^>0 и т]<^а — 8; тогда из нера-
венства (10) следует, что
|j|sg|jol и Нт J (0 = 0,
/->00
(И)
т. е. решение j = 0 системы (7) асимптотически устойчиво.
Но векторы х и у связаны между собой линейным преобра-
зованием (б); поэтому и решение х = 0 системы (1) асимп-
тотически устойчиво1).
Доказательство леммы. Покажем сначала, что с по-
мощью преобразования x — Ull> 2 вида (5) можно привести систему
дифференциальных уравнений
<12>
к виду, в котором: 1) первая переменная z, не входит в правые
части всех уравнений, начиная со второго, и 2) в первом уравне-
нии коэффициент при zL равен характеристическому числу
матрицы А, т. е. к следующему виду:
= Mi + b'lSlzs +... 4- b'lnzn,
dz, ,, , , ,,
= &22z2 4-... 4" b2nzn,
= Ъ’и.ЧгЧ + • • • + Ъ'пп2п-
(13)
Для этого достаточно в качестве первого столбца матрицы
взять собственный вектор ult соответствующий характеристическому
числу Xj (4Hj = Х1В1, в^О), а остальные столбцы матрицы а2, ..., ип
выбрать так, чтобы вместе с и,, они были линейно независимы
(тогда det £Z(n т^О).
Действительно, преобразование х = и^2 может быть записано
и так:
х = «^ 4-a2z2 4-... 4-«„zn, (14)
где «1, zn — координаты вектора х в базисе ult а2,ип.
Система (12) имеет решение
х=д1еХ1/. (15)
*) В соответствии с примечанием 1 на предыдущей странице из
равенства (5) вытекает неравенство
224 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ [ГЛ. V
Поэтому преобразованная система дифференциальных уравнений
п
It(‘-=1................«)> (16)
согласно равенству (14), имеет решение
z8 = ... = z„ = 0, (15’)
что возможно лишь тогда, когда &ц=Х] и Ь'2у =— Ь'пУ — О,
т. е. когда система (16) имеет вид (13).
Так как при линейном неособенном преобразовании характери-
стическое уравнение матрицы А не изменяется ‘), то матрица || bjt,
имеет своими характеристическими числами остальные и—1 харак-
теристических чисел (Х8, ..., Х„) матрицы А.
Применяя аналогичное преобразование к системе последних га—1
уравнений (13) и т. д., мы в конце концов с помощью неособенного
линейного преобразования приведем исходную систему дифферен-
циальных уравнений к виду
tiz
= *1*1 + &l's*3 + ... + b\nZn,
-yf— X2z, Ц- ... + bin2n,
Наконец, сделаем последнее преобразование переменных
= (р.> 0; й= 1, ..., га).
Тогда система (17) заменится системой (6), в которой недиагональ-
ные коэффициенты blk = Р^Ь^ (1<Ь) могут быть сделаны сколь
угодно малыми по модулю, если выбрать число и. > 0 достаточно
малым. Лемма доказана.
§ 39. Критерии асимптотической устойчивости
линейных систем
В предыдущих двух параграфах было установлено, что
в стационарном случае нулевое решение произвольной
1) Характеристические уравнения матриц А и U-1AU (см. при-
мечание 2 к стр. 221) совпадают, так как
U~l (А —ХЕ) U^U^AU — XE,
и поэтому
det (IT1 AU— ХЕ) = det U~l det (4 — XE) det U= det (4 — XE)
(E— единичная матрица).
§ 39]
КРИТЕРИИ АСИМПТОТИЧЕСКОЙ УСТОЙЧИВОСТИ
225
(нелинейной) системы дифференциальных уравнений в отклоне-
ниях асимптотически устойчиво, если все корни характеристи-
ческого уравнения, составленного для матрицы коэффициентов
линейного приближения, имеют отрицательные вещественные
части. Поэтому приобретают большую практическую значимость
необходимые и достаточные условия для того, чтобы
все корни алгебраического уравнения с вещественными
коэффициентами
/ (X) = а0Х”njX" 1а„ = 0 (По^>О) (1)
имели отрицательные вещественные части.
Обозначим через Х/г (А = 1, g) вещественные, а через
I . /. -< п. — £\
tj ±iSj ( / = 1, ..., —— комплексные корни уравне-
ния (1) и предположим, что в комплексной плоскости все
эти корни лежат слева от мнимой оси, т. е. что
^<0. о<0 (а=1, .... (2)
тогда
n—g
g 2
/(X) = а0 У, (X — Хй) П (' — О — 1sj) & — rJ + isj) =
*=i j=i
n—g
g 2
= а0 П(Х-Х,) П(^-2гуХ + г}+^. (3)
fe=i ;=i
Так как, согласно неравенствам (2), каждый множитель
в последней части равенства (3) имеет положительные коэф-
фициенты, то и в уравнении (1) все коэффициенты положи-
тельны. Положительность всех коэффициентов — необхо-
димое (при аа 0), но отнюдь не достаточное условие
для того, чтобы все корни уравнения (1) были располо-
жены слева от мнимой оси.
В 1875 г. уже известный читателю английский механик
Раус дал алгоритм, с помощью которого по коэффициентам
многочлена /(X) можно узнать, является ли он «устойчивым»,
т. е. имеют ли все его корни отрицательные вещественные
части. В 1895 г. немецкий математик Гурвиц независимо от
*/47 Ф. Р. Гантмахер
226 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ и ДВИЖЕНИЯ [ГЛ. V
Рауса установил тот же критерий в видоизмененной форме
с помощью определителей («определителей Гурвица»)
...............«л
(Здесь всюду следует положить ар = 0 при р^>п.)
Условие Рауса — Гурвица1). Для того чтобы
все корни уравнения (1) имели отрицательные веществен-
ные части, необходимо и достаточно, чтобы имели место
неравенства
Д1>0, Д2>0, Д„>0. (5)
Если коэффициенты уравнения (1) заданы как числа,
то условия (5) легко проверяются, рели же коэффициенты
уравнения (1) содержат буквенные параметры, то вычисле-
ние определителей ДА при большом k уже вызывает затруд-
нение.
Поэтому представляют интерес другие условия, установ-
ленные в 1914 г. французскими математиками Льенаром и
Шипаром. В этих условиях число детерминантных’ неравенств
примерно вдвое меньше, чем в условиях (5) Рауса — Гурвица.
Условия Льенара — Шипара. Для того чтобы
многочлен f (X) zx-: UqTJ1 аДп 1 ... —J— апД —|— an при a§ 0
имел все корни с отрицательными вещественными ча-
стями, необходимо и достаточно, чтобы
1) все коэффициенты многочлена /(X) были положи-
тельны
ах ~Д> 0, л2 0, ..., ап 0; (6)
2) имели место детерминантные неравенства
А^1>0,
А„_3>0, ...
(7)
*) Относительно вывода условий Рауса — Гурвица см., например,
Г а н т м а х е р Ф. Р., Теория матриц, гл. XV, § 6; А й з е р м а н М. А.,
Лекции по теории автоматического регулирования, изд. 2, гл. Ill, § 1.
5 391
КРИТЕРИИ АСИМПТОТИЧЕСКОЙ УСТОЙЧИВОСТИ
227
(здесь, как и ранее, ДА обозначает определитель Гурвица
k-го порядка1)).
Теперь мы познакомимся с геометрическим критерием
устойчивости.
Заменим в равенстве2)
/(Х) = аоП(Х-к*)
ь = 1
к на to и будем изменять ш от —оо до -}-оо. Вычис-
лим соответствующее приращение угла
fl —arg /(гы):
Д±” 9 (ш) = л+” агё
fc=i
Теперь заметим, что3) (рис. 47)
A±£arg(to-Xft) =
тс, если Re О,
— тс, если Re 0.
Поэтому, обозначая через I и г число Рис 47
корней, лежащих слева и соответ-
ственно справа от мнимой оси (Z—|—г=л), будем иметь:
Д±“ 9 (<«) = (/— г) тс.
Рассмотрим кривую, описываемую аффиксом4) комплекс-
ного числа f (1<л) при изменении «> от —оо до -|-оо. Эта кри-
вая распадается на две ветви: на одной и>^>0, на другой
ш < 0. Одна ветвь получается из другой зеркальным отображе-
нием относительно вещественной оси, поскольку f(lw) и
/(— 1и>) — комплексно сопряженные числа. Поэтому, обозначив
через Ло° приращение при изменении ® от 0 до оо, получим
Д0оо9(ш)=1д±^9(ш) = (/-г)~. (8)
*) Вывод условий Льенара и Шипара, а также некоторые дру-
гие варианты этих условий можно найти в цитированной книге
«Теория матриц», гл. XV, § 3.
2) Здесь п корней многочлена /(к) обозначены через кь ..., \п.
*) Мы предполагаем здесь, что ни один из корней \k не лежит
на мнимой оси.
4) Аффиксом комплексного числа z называют соответствующую
точку комплексной z-плоскости.
ЧГ
228
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ
[ГЛ. V
Отсюда видно, что все корни будут расположены слева от
мнимой оси (Z=n, г = 0) тогда и только тогда, когда
Ао“0(а)) = л|.
(9)
Геометрический критерий устойчивости1).
Для того чтобы многочлен /(X) был устойчивым, т. е. чтобы
•все его корни были расположены слева от мнимой оси,
мент 6 изменяется монотонно
Это следует из формулы
необходимо и достаточно-.
1) чтобы годограф f (iu>)
при изменении <о от 0 до
-j- оо не проходил через
нулевую точку*) и
2) чтобы для этого
годографа
ДОО д л
а 0 = «2-,
где п — степень много-
члена /(X) (см. рис. 48
для и = 6).
Заметим, что для устой-
чивого многочлена3) аргу-
при изменении ш от 0 до оо.
п
е(®)= 5 arg(iw —
*=1
поскольку для такого многочлена каждое слагаемое в правой
части является монотонно возрастающей функцией от <о.
Пример. Пусть /(Х) = Х5 + 5Х4+10Х5-|-1П24-7Х4-2. Тог-
да /(i®) = U(a) 4- il/(о>), где
6/(со) = 5<04 — 1I®2 + 2, У (ш) = а> (со4 — 10®2 4- 7).
4) Этот критерий впервые был применен А. В. Михайловым для
исследования систем автоматического регулирования. Поэтому
в технической литературе геометрический критерий устойчивости
часто называется критерием Михайлова.
2) Условие 1) означает, что /(X) не имеет чисто мнимых корней.
8) Устойчивый многочлен называют также многочленом
Гурвица.
§39]
КРИТЕРИИ АСИМПТОТИЧЕСКОЙ УСТОЙЧИВОСТИ
229
Для построения годографа /(?<>) замечаем, что 47(0) = 2 и V(<о)
обращается в нуль при <о = 0 и при а> = «1, <л = ш, (0<ш1<ш3);
квадраты и а>| определяются из квадратного уравнения:
«1 = 5-/18^0,76; «1 = 5 4-/18=^9,24.
Нетрудно убедиться в том, что U(«J < О, U(ш.) > 0. Кроме того,
И(0) = 7>0.
Таким образом, годограф при « = 0 начинается на положитель-
ной вещественной оси, идет сначала вверх, пересекает положитель-
ную мнимую ось, затем отрицательную вещественную-ось (при <> =
отрицательную мнимую ось и, наконец, снова положительную веще-
ственную ось (при а> = <о2). При а> > годограф не пересекает осей
координат и уходит в бесконечность в пятом квадранте (47>О,
Таким образом
А“в = 5у,
т. е. /(к)—устойчивый многочлен.
К этому же выводу можно было бы прийти, исходя из критерия
Льенара — Шипара, поскольку в /(к) все коэффициенты положи-
тельны и
О
О
2 0
7 0
11 2
10 7
И
10
5
1
*/о8 Ф. Р. Гаитмахер
ГЛАВА VI
МАЛЫЕ КОЛЕБАНИЯ
§ 40. Малые колебания консервативной системы
Если в начальный момент времени положение склероном-
ной системы выбрано достаточно близким к положению
устойчивого равновесия и начальные скорости по абсолютной
величине достаточно малы, то на протяжении всего движения
будут малыми по абсолютной величине как сами отклонения
от положения равновесия, так и обобщенные скорости. Это
обстоятельство позволяет сохранить в дифференциальных
уравнениях движения только линейные члены относительно
отклонений и скоростей, а члены более высокого порядка
малости отбросить. Тогда дифференциальные уравнения дви-
жения становятся линейными, т. е. задача «линеаризуется».
В этом параграфе рассматривается линеаризация уравнений
движения для случая консервативной системы.
Кинетическая и потенциальная энергии консервативной
системы с п степенями свободы выражаются через независи-
мые координаты qt и обобщенные скорости (fa (Z = 1, ..., л)
следующим образом:
п
2 П = П(^, qn). (1)
»,А = 1
Как и в предыдущей главе, примем, что начало коорди-
нат qi=.. , = qn = 0 является положением равновесия и
что в этом же положении П = 0. Разложим коэффициенты
aik (Яъ •••’ Яп) в ряды по степеням координат:
счАЧъ 4n) = aik-\-... (i, Л = 1, ..., л), (2)
§40] КОЛЕБАНИЯ КОНСЕРВАТИВНОЙ СИСТЕМЫ 231
где aik = aik (0, ..., 0) (aik = ak!; i,k=l,..., n) — посто-
янные. Подставляя эти выражения для коэффициентов в фор-
мулу (1) для кинетической энергии, получаем
7~=у 2 ai^^k + <**)> (3)
/,Л = 1
где через (**) мы обозначили сумму членов третьего и более
высоких порядков относительно qt и qt (г=1, л).
Разложим также и потенциальную энергию в ряд по сте-
пеням координат:
i = 1 1,к = 1
По условию По = О. Кроме того, в положении равновесия
обобщенные силы равны нулю
®=®.=° ('=1.................
Поэтому, введя обозначения
= = i,k=l, (4)
мы и потенциальную энергию представим в виде
п
11 = У 2 CikQi4k + (**)• (5)
i,k=l
Отбрасывая в формулах (3) и (5) члены третьего и более
высокого порядков малости относительно qt и мы пред-
ставим кинетическую и потенциальную энергии в виде квад-
ратичных форм с постоянными коэффициентами
^“У 2 aikqi4k’ '^==У 2 C4f4i4lP (^)
i,k = \ i,k = \
где aik — aki, cik — cki (I, k=l, ..., n).
Из физического смысла кинетической энергии ясно, что
всегда 7'Э=0. Поскольку мы предполагаем, что положение
‘/«8*
232
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
равновесия не является особой точкой1), то всегда Т^>0,
если только не все обобщенные скорости равны одновременно
п
нулю, т. е. квадратичная форма 2 aik4i4k = 2Т является
i, й=1
положительно определенной:
п 1 п \
S S^>° • (7)
i, k= 1 4 = 1 /
Далее, для того чтобы обеспечить устойчивость данного
положения равновесия, потребуем, чтобы (в соответствии
с теоремой Лагранжа) в положении равновесия потенциальная
энергия имела строгий минимум. Поскольку По = О, то это
означает, что в некоторой окрестности начала координат
п
I, k = 1
cik4i4k>Q
(п
1 = 1
(8)
о
Но квадратичная форма (8) представляет собой однородную
функцию второй степени относительно координат. Поэтому
неравенство (8) имеет место во всем пространстве, за исклю-
1ением начала координат, где эта форма обращается в нуль.
Другими словами, потенциальная энергия также представлена
в виде положительно определенной квадратичной формы
относительно координат2).
Составим уравнения Лагранжа, исходя из выражений (6)
для Т и П:
п
+ (г=1, ..., и). (9)
k = i
Будем искать частное решение этой системы линейных диф-
ференциальных уравнений в виде
qt = пг sin (at -ф- а) (/=1, ..., п), (10)
*) См. примечание к стр. 55.
2) Конечно, возможны случаи, когда функция П(qt, ... , qn) до
отбрасывания членов (**) имеет в начале координат строгий
минимум, а после отбрасывания этих членов имеет в этой же
точке нестрогий минимум (например, П = с2 (?i+ ...+^л)24-
+ ^a(7i+ ••• + С>Д ^>0). Н° такие случаи мы будем
считать особыми и исключим из рассмотрения. В этих особых слу-
чаях отбрасывание членов (**) в выражении для П не оправдано.
Оно может резко исказить картину движения.
§ 401
колебания консервативной системы
233
т. е. в виде гармонических колебаний с одной и той же
частотой <о и с одной и той же постоянной а для всех ко-
ординат.
Подставляя выражения (10) для qt в дифференциальных
уравнениях (9) и полагая
X = w2, (И)
получаем после сокращения на sin (<of а) следующую систему
алгебраических уравнений, линейных относительно ампли-
туд щ1):
S - ^ik) uk = 0 (1=1, (12)
k = 1
Так как все амплитуды и; искомого колебания не должны
обращаться в нуль, то определитель системы однородных
уравнений (12) должен быть равен нулю:
С11 Хвц С12 Хв12
Cgl Хп2| С22 Х(?22
Ст — fain
С2П ^а2П
= 0.
(13)
СЛ1 ^аП1 СП2 ••• Спп
После раскрытия определителя мы получим в левой части
многочлен л-й степени относительно X. Таким образом, ква-
драт частоты Х = <в2 искомого гармонического решения (10)
должен удовлетворять алгебраическому уравнению л-й сте-
пени (13). Уравнение (13) называется вековым уравнением
или уравнением частот.
Каждому корню X уравнения (13) соответствует частное
решение (10) (при произвольном постоянном а) системы диф-
ференциальных уравнений (9). В этом решении u)=j/X.
Запишем приведенные выше формулы в матричной форме.
Введем в рассмотрении две симметрические положительно
х) Величину «, мы называем амплитудой гармонического коле-
бания (10) координаты лг, хотя фактически амплитудой является
абсолютная величина | ut); начальной фазой (при t — 0) гармониче-
ских колебаний (10) является либо величина а (при Л/>0), либо
величина —а (при Uj<0).
8 Ф. Р. Гантмахер
234
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
определенные матрицы *)
4 —1| aik || —
аи а1П
ат ••• апп
си ••• cin J
......... (14)
СП1 спп II
C = ||Cift|J =
и векторы-столбцы
ч=
(15)
(в — амплитудный вектор). Тогда система дифференциальных
уравнений (9) запишется в виде
Л?-]-С0 = О. (16)
Частное решение (10) будет выглядеть так:
q — и sin -L а), (17)
а результат подстановки решения (17) в уравнение (16), т. е.
система алгебраических уравнений (12), имеет вид
(С —М)« = 0 (Х = ш2). (18)
Уравнение частот запишется так:
det.(C —ХЛ) = 0 (л = ш2). (19)
Для того чтобы выяснить, что корни X векового урав-
нения (19) всегда вещественны и положительны, рассмотрим
предварительно некоторые свойства квадратичных форм
е вещественными коэффициентами.
п
Каждой квадратичной форме У\ aihUiUk соответствует
i,k = 1
п
некоторая билинейная форма У, aikUjVk, для которой
i,k = 1
*) Симметрическая матрица A=||e,-ft||i называется положи-
тельно определенной, если соответствующая ей квадратичная
п
форма 2 OiMitk является положительно определенной.
«,А = 1
§ 40,
КОЛЕБАНИЯ КОНСЕРВАТИВНОЙ СИСТЕМЫ
235
введем сокращенное обозначение
А (и, Ф)= 2 aikuA>k<
i, 1
тогда квадратичная форма запишется так:
А (а, а) — 2 aikUitik-
i, k= 1
Легко проверяются следующие свойства билинейной формы:
1 °. A (Ui -j- в2> ®) = («1, ф) -ф- А (и2, ф).
2°. А (Хи, v) — ХЛ (и, ф) (X — скаляр).
3°. А (и, ф) = А (ф, и)1).
Покажем еще, что для любого комплексного вектора и
4°. А (и, а) — вещественное число 2).
Действительно, полагая и = Ф-(-гш (ф и w — веществен-
ные векторы-столбцы), в силу 1° — 3°, найдем:
А (и, и) = А (Ф -j- iw, ф — iw) =
= A(v, ф) — М(ф, w)-\-iA(w, ф)-ф-A(w, w) =
= А(Ф, ф)-|- A(w, w). (20)
Последнее выражение явно вещественно.
Из равенства (20) следует также
5°. Если А (и, и) — положительно определенная квадратич-
ная форма, а и 0 — произвольный комплексный вектор, то
А (и, «)ф>0 (й^О). (21)
В самом деле, полагая и = ф-ф-/и>, имеем Л(ф, ф)^0,
A (w, w) 2s 0. В одном из этих соотношений имеет место
знак ф>, так как из и ф 0 следует, по крайней мере, одно
из неравенств ф 0, w А2 0, Тогда из равенства (20) следует
равенство (21).
*) В отличие от равенств Г и 2° равенство 3° справедливо
только для билинейной формы с симметрической матрицей коэф-
фициентов.
2) Чертой мы отмечаем переход к комплексно сопряженным
величинам. Свойство 4° справедливо только для симметрической
матрицы с вещественными элементами.
8*
236
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VT
Докажем теперь
6°. Если X — корень векового уравнения det (С — ХА) = О,
а и — соответствующий ему амплитудный вектор [см. (18)]
Си = \Аи (и^О), (22)
то при любом векторе ф
С (и, ф)==ХА(и, ф). (23)
Действительно, в скалярной записи равенство (22) прини-
мает вид
У ctk^k — У ^ik^k G — Д п). (22)
k=i * = i
Умножив обе части l-го уравнения (22') на ф,- и просуммиро-
вав по I, получим:
S = x У atkviuk>
I, k — 1 i, k — I
т. e. равенство (23).
Покажем теперь, что для любых двух амплитудных
векторов и и и,', соответствующих различным корням
векового уравнения X и X' (Xs X'), выполняется соотно-
шение *)
А (и, аг) = 0. (24)
Действительно, согласно 6°, имеют место два равенства:
С (и, и') = \Д(и, и'), С (и, и') = ),'А(и, и'). (25)
Но X ф X'. Поэтому из равенств (25) следует соотношение (24)2).
*) Если ввести в га-мерном пространстве 4-метрику, т. е. под
квадратом длины вектора и понимать величину квадратичной
формы
А (и, а)= 2
it k = 1
то А (и, и') — «скалярное произведение» векторов и и и' в этой
метрике. Поэтому равенство (3) выражает собой следующее свой-
ство амплитудных векторов: амплитудные векторы, соответ-
ствующие различным корням векового уравнения, всегда орто-
гональны между собой в А-метрике.
*) В силу равенств (25) одновременно с равенством А (а, «’) = 0
имеет место и равенство С (и, и') = 0.
§ 40] КОЛЕБАНИЯ КОНСЕРВАТИВНОЙ СИСТЕМЫ 237
Докажем теперь, что из симметричности матриц А
и С и из положительной определенности матрицы А
следует, что вековое уравнение (13) [или (19)] имеет
только вещественные корни.
Действительно, пусть X — комплексный корень векового
уравнения (X X) и ему соответствует комплексный век-
тор и ф. 0. Тогда X также корень векового уравнения
с амплитудным вектором й. Поскольку X X, то, по дока-
занному, А (и, а) = 0, что противоречит неравенству (21).
Если X вещественно, то и соответствующий ему ампли-
тудный вектор и 0 может быть выбран вещественным.
Тогда, полагая в (23) v — u и замечая, что А (и, «)^>0,
находим
Но в нашем случае квадратичная форма С (а, и) = У, с^ирц
i, k = 1
также является положительно определенной. Тогда не только
А(а, в)^>0, но и С(«, в)^>0. Следовательно, Х^>0.
Таким образом, вековое уравнение (13) имеет п положи-
тельных корней Ху, которым соответствуют вещественные
положительные частоты Шу = "j/Ху и вещественные амплитудные
векторы «у (/=1, .... л).
Рассмотрим сначала случай, когда все корни векового
уравнения различны. Каждому Ху соответствует частное ре-
шение
д = Иу81п(шу/ -|—ау) (и)у = ]/гХу) (27)
с амплитудным вектором «у, координаты которого и^,.... unj
должны удовлетворять системе линейных уравнений
п
S (cin — ^ut)uitj = 0 (f = l, ...,л), (28)
* = 1
или в матричной записи
(С —ХуЛ)иу = 0. (29)
Так как система дифференциальных уравнений (9) [или (16)]
линейна, то линейная комбинация с постоянными коэффи-
циентами решений (27) есть снова решение этой системы.
238
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
Поэтому
9= S Cy«zsin(a)/ + a7) (шу = }<Ху; / = 1, ...,«) (30)
7=1
при произвольных постоянных Ср <ху (у = 1, п) является
решением системы (9) или (16). Мы покажем, что формула
(30) охватывает все движения системы.
Докажем предварительно, что п амплитудных векторов
«у (/' = 1, .... п) линейно независимы1). Действительно,
пусть
У CjUj=^d.
Тогда при любом фиксированном k (iszkrszn)
0 = A\uk, £ с/»/)== 2 CjA(uk, (31)
\ / y=i
Ho A(uk, иу) = 0 при k+j и А(пь, «у)>0 при k=j.
Поэтому из равенств (31) следует:
ck — 0 (k= 1, ..., ri),
т. е. между векторами и1; ..., «„ не может быть линейной
зависимости.
Подберем теперь в формуле (30) значения произвольных
постоянных Cj, &] так, чтобы удовлетворялись произвольные
наперед заданные начальные условия
?i(0) = ?I0> ^(°)=^о (* = 1, ...,я),
или в матричной записи
g(O) = g0, g(O) = go.
Из формул (30) находим
п
q9= У Сj sin a.j Up
п
<7о = У, 4>jCj cos ау Uj.
i='
(32)
(33)
(34)
*) Для частного случая, когда А — единичная матрица, это
предложение было доказано в § 37.
КОЛЕБАНИЯ консервативной системы
239
«4й]
В силу линейной независимости векторов и?- (/ = 1, п)
отсюда однозначно определяются произведения Су sin а; и
UjCj cos a.j и, следовательно, поскольку а>ут^0, однозначно
определяются значения произвольных постоянных Су и ау
(/=1, п)1).
Таким образом, при отсутствии у векового уравнения
кратных корней формула (30) охватывает все колебания
системы 2).
Если же уравнение частот имеет кратные корни, то можно
утверждать, что решений вида и sin (put -ф- а) будет во всяком
случае т, где т — число различных корней Xу векового
уравнения.
Лагранж считал, что в случае кратных частот общее
решение системы (9) уже не представляется в форме (30) и
что в правой части (30) появляются так называемые вековые
члены вида
(й —и t —и -ф- ...) sin (а)^ —ct).
Однако Лагранж ошибся. Как доказал позже Вейерштрасс,
каждому корню X р-й кратности соответствует ровно р
линейно независимых решений системы линейных уравне-
ний (12), т. е. для каждого корня Ху р-й кратности можно
найти р линейно независимых амплитудных векторов. Таким
образом, и в случае кратных частот существует п ли-
нейно независимых амплитудных векторов и составленная
с их помощью формула (30) дает общее решение и в этом
случае.
Колебания
q = CjUj sin (шу/ —|— ay) (j = 1, ..., n), (35)
из которых складывается произвольное колебание системы,
называются главными колебаниями системы.
Строгий вывод формулы (30) в общем случае (т. е. и
при наличии кратных частот) с помощью так называемых
*) а,- определяются с точностью до слагаемого, кратного 2л.
8) Для амплитудных векторов «у выполняются соотношения
п
A{ttj,ah)= 2 в1й««/цАЛ = ° J,h=l, ..., п).
i.k = 1
240
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
«нормальных» координат будет дан в следующем параграфе.
При этом выводе случай кратных корней векового уравнения
не выделяется особо.
Пример. Связанные маятники. Точки подвеса двух одина-
ковых математических маятников с массой т и длиной I располо-
жены на одной горизонтальной прямой. Точки этих маятников,
отстоящие от точек подвеса на расстоянии h (0 <Zh^l), соединены
между собой пружиной жесткости 7; пружина находится в нерастя-
нутом состоянии, когда маятники занимают вертикальное положение.
Требуется определить колебание системы в вертикальной плоскости.
В качестве независимых координат возьмем углы <рх и <ра, обра-
зованные маятниками с вертикалью (рис. 49). В положении равно-
весия <р! = :р2 = 0. С точностью до малых величин высшего порядка
удлинение пружины равно h | sin <ps — sin <pt | «а й | <p2 —«?* |. Поэтому
в данном случае
П = mgl (1 — cos «pi) О — cos Ts) + '
= ут£/(<р? + <р!) + у7Й2(<р3—<?!)’+ ...
Сохраняя в П только квадратичные члены, окончательно будем
Рис. 49.
иметь
Г=|в(М,
П = у С (?1 + <Р«) — ^Р1?2>
где
а == ml2, с = mgl + ^й2,
b = -ths.
Напишем уравнение частот
с — Ха —b
— b с — Ха
(X = to2)
и одно из двух уравнений для определения амплитуд в главных
колебаниях (эти два уравнения зависимы)
(с — Ха) и,—bua = 0, т. е. — =—.
v 1 ’ и2 с — Ха
Из уравнения частот находим
=
c — b_g
а I ’
g 1 С + *
= Ад = -------5---
2 2 а
I + т 1г '
§ 41] НОРМАЛЬНЫЕ КООРДИНАТЫ 241
Соответственно для первого главного колебания и1 = и2 = С1 и
?i = Ci sin (<o^-f-at), <f2 = С\ sin (<pi = <p2),
а для второго u2 =— u2 = C2 и
<р, = C2 sin (оъ/Д-a2), ?2 = —C2 sin(<o2£-f-a2) (<pj= — <p2).
В первом главном колебании оба маятника все время находятся
в одной фазе, пружина не растянута и маятники не оказывают
никакого влияния друг на друга. Во втором главном колебании
маятники находятся все время в противоположных фазах.
Произвольное колебание получается наложением двух главных
колебаний:
ср! = Ct sin (oiji a,) C2 sin (ш2< a2),
<ря = C, sin at) — C2 sin (<o2t a2).
§ 41. Нормальные координаты
Две квадратичные формы
A(q, q) = £ aikqiqk и C(q, q) = £ c^q-^, (1)
l, * = I i, * = 1
из которых хотя бы одна, например A(q, q), является поло-
жительно определенной, всегда можно одним и тем -же
(неособенным) преобразованием переменных
п
qt=ZiuiA (/=1> •••>«; («</)"/=!Фо) (2)
/=1
привести к «сумме квадратов» *)
A(q, q)= 2 6}, C(q, q)= £ Xy9J. (3)
7=1 7=1
При этом все Ху^>0, так как (см. § 40) форма C(q, q)
также является положительно определенной.
Поскольку обобщенные скорости qt и бу связаны между
собой такими же соотношениями, какими- связаны qt и 9у:
п
9.==^^ (/ = !,.,.,«),
7=1
*) См., например, цитированную на стр. 226 книгу «Теория
матриц», гл. X, § 6.
242
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
то в первом из равенств (3) можно заменить д{ и 9; на и бу,
после чего для кинетической и потенциальной энергий полу-
чаем следующие выражения:
а^=4^
i,k=~l 7 = 1
л п
П = | У
i, k = 1 7=1
Переменные 91; ..., 9„ называются нормальными или
главными координатами. Формулы перехода (2) от произ-
вольных координат к нормальным в «векторной» записи
могут быть представлены так:
Л
(5)
где
(7=1, ••>»)•
Так как преобразование координат (2) является неособенным,
то соответствующий определитель отличен от нуля:
det («,7)7>/=1^0,
т. е. векторы и1г ..., ип линейно независимы.
Используя простые выражения (4) для Т и П в нормаль-
ных координатах, составим уравнения Лагранжа в этих коор-
динатах:
НЦ=° и). (6)
Каждое из этих уравнений содержит только одну неизвестную
функцию. Общие решения уравнений (6), как известно, опре-
деляют гармонические колебания
0/=<7/sin(a>y£-j-оу) (J=1,...,n), (7)
где Cj и a; — произвольные постоянные (/=1, ..., л). Под-
ставляя эти выражения в формулу (5), получаем" общую фор-
мулу для колебаний
Я = S С7»7 sin W + “А (8)
/=1
НОРМАЛЬНЫЕ КООРДИНАТЫ
243
§ 44
Таким образом, строго установлено, что эта формула
в самом общем случае охватывает все малые колебания кон-
сервативной системы ’).
Полагая в формуле (8) все произвольные постоянные,
кроме С, и ay, равными нулю, получим /-е «главное» гармо-
ническое колебание
q = CjUj sin (Wjt -ф- ay). (9)
(В нормальных координатах это колебание осуществляется,
когда все 6,- = 0 при / j и изменяется только координата 9у.)
В предыдущем параграфе было установлено, что квадрат
частоты Ху = шу удовлетворяет уравнению частот. Так как
других гармонических колебаний вида (9), кроме тех, которые
входят как слагаемые в общую формулу (8), для q не суще-
ствует, то \j — Wj (у = 1, ..., п) — все корни векового урав-
нения. Кроме того, если какой-либо корень повторяется
здесь р раз, то ему соответствуют р линейно независимых
амплитудных векторов «у, определяемых из системы линейных
уравнений (28) или (29) предыдущего параграфа.
Таким образом, мы снова доказали, что все корни Ху веко-
вого уравнения вещественны и положительны и установили,
что п частотам <иу^]/"Ху соответствуют п линейно независи-
мых амплитудных векторов «у (у=1, ..., ri).
Подставив в формулу А (д, q) вместо q его выражение (5),
получим:
(п п \ п
У 0у«;> s 0а«а = s A(uj, uh)^h. (10)
у=1 А = 1 / /, А=1
С другой стороны, „
A(q, Ч)=^^. (11)
7=1
Сопоставляя равенства (10) и (11), получаем для амплитудных
векторов Uj (J = l.....и), с помощью которых по фор-
муле (5) осуществляется переход к нормальным координатам,
соотношения 2):
f 1, i=j,
A(Ui, »у) = 8уу =| Q (/,у = 1, ..., ri). (12)
*) В предыдущем параграфе эта формула была установлена
лишь для случая, когда вековое уравнение не имеет кратных корней.
а) Другими словами, векторы tij (у = 1, ..., п) ортонормиро-
ваны в A-метрике (см, примечание 1 на стр. 236).
244
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
§ 42. Влияние периодических внешних сил
на колебания консервативной системы
„ <Я1 „
Пусть помимо потенциальных сил — на систему дей-
ствуют некоторые силы Qi = Ql (t) (i=l, п). Перейдем
к нормальным координатам с помощью формул
G = 1......«; det(И<7)^= i^'O). (1)
/=1
Силам Qt в координатах q( (1=1, п) соответствуют
силы 0; в координатах f)j (j=l, я). Установим связь
между Qt и 0у, исходя из равенства выражений для эле-
ментарной работы сил:
s S @>80л (2)
i=i /=i
Замечая, что в силу формул (1)
(1=1, .... п), (3)
/=1
и подставляя эти выражения для в равенство (2), получаем
п п п
j=l < = 1 у = 1
Отсюда, приравнивая коэффициенты при независимых при-
ращениях нормальных координат 89у, находим
(J=1, ..., п). (5)
(=1
Таким образом, если «старые» координаты qt выражаются
через «новые» 9у при помощи матрицы С7=||н{у ||:
91 = ни®1 М1Д + • • • + И1Л9„,
<71 = М1 + Мз + --- + ^Л- {д = Ш, det U^O), (6)
Чп — ипА + -ф-... + ипп6п
§ 42]
ВЛИЯНИЕ ПЕРИОДИЧЕСКИХ ВНЕШНИХ СИЛ
24.5
то «новые» обобщенные силы 07 выражаются через «ста-
рые» обобщенные силы Q; при помощи транспонированной
матрицы U'\
0j = WnQ] Q2 • • • Ч- И«1 Qn>
02 = W12 Qt -{- «22 Qi + • . . + ИП2 Qn> (Q _
=uinQi Ь ^nQt Ч- • • • + unnQn
Сопоставляя матричные формулы q = Ub и Q = (U’)~i Q,
мы видим, что при переходе от координат к силам матрица
преобразования U заменяется ’) матрицей (i/')1-
Это обстоятельство выражают словами: обобщенные силы
преобразуются контравариантно по отношению к коор-
динатам 2).
После того как мы научились определять 0у по задан-
ным Q;, напишем уравнения Лагранжа в нормальных коор-
динатах, используя для Т и П выражения (4) из предыдущего
параграфа:
0У +(0)9^ = 040 (;=1, .... „). (8)
Обозначим через 9*(/ = 1, ..., п) произвольное частное
решение уравнения (8). Тогда общее решение уравнения (8)
будет
9y = Cysin(<fl/4-ay)4-9; (/=1......п). (9)
Пусть 0; (f) — периодическая сила и притом синусоидаль-
ная с частотой 2:
0у (t) = Aj sin Qt. (10)
Тогда, как нетрудно видеть, в качестве 6* можно взять
’/•=^га>81"2'- (”>
Если Qi(t) (Z==l, ..., п), а следовательно, и &j(f)
(J—1, ..., п) — произвольные периодические силы с перио-
1) Если U=|| Uy||« — ортогональная матрица, то (Z7')-1 = £7 и
силы преобразуются так же, как и координаты.
2) В общем случае, когда преобразование координат нелинейно,
обобщенные силы преобразуются контравариантно по отношению
к дифференциалам координат.
246
МАЛЫЙ колебания
[ГЛ. VI
дом t и частотой 2 = —, то &j(t) можно разложить в ряд
Фурье
СО
М)= 2 (J=l, П). (12)
т=0
Тогда, в силу линейности уравнений (8),
СО
9*= 2^J^fesin(/wS#+^ (7=1,(13)
m=0 1
Если некоторое mQ совпадает с ioj и соответствующее
Ajm ф 0, то для координаты бу имеет место явление резонанса.
Подставляя выражения (9) для бу в формулу
4 = S
/“1
получаем:
Ч — Ч + 9*. (14)
где
п
q= У CjUj sin (wy^-j-ay) (15)
7=1
— свободные колебания, а
9* =2 6>у-
/=1
— вынужденные колебания системы, «у — амплитудный век-
тор С КООрДИНаТаМИ Щу, lfay, .И„у (/=1, ..., п).
§ 43. Экстремальные свойства частот
консервативной системы. Теорема Релея
об изменении частот с изменением инерции
и жесткости системы. Наложение связей
В § 41 мы рассматривали линейное неособенное преобразо-
вание координат
9=2 Мл 0)
/=•1
? «I
ЭКСТРЕМАЛЬНЫЕ СВОЙСТВА ЧАСТОТ
247
или в скалярной записи
<11= S М/ (/==1> det(«,-X=i ^°)> (П
/=1
осуществляющее переход к нормальным координатам
....9П, в которых квадратичные формы ’)
A{q, 9)= S aih4t<lk’ C(q, q)= cikqiqk (2)
z,fe=l i,fe —1
имеют простой («канонический») вид:
A(q, q)=Z 9J, C(q, q)=% (3)
/-1 ;=1
В дальнейшем будем предполагать, что главные колебания
занумерованы так, что их частоты идут в возрастающем
порядке
о)! -С ш.. -С... -С <1>л. (4)
Рассмотрим отношение квадратичных форм (3)
C(q, + + ••• + <«
A(q,q) ef + 9| + - + 0«
при любом q^AQ или, что то же, при любых значениях
91, ..., 9„, не равных одновременно нулю. Заменяя в числи-
теле дроби (5) все со) на меньшее или равное им число wj,
найдем
с (g, g)
А (я, д)
(6)
С другой стороны, из формулы (5) непосредственно видно,
С (а. а)
отношение . , \ • достигает
A (q, q)
что при ftj ==
= 9л = 0
’) C(q, д') — удвоенная потенциальная энергия, а А (д, д) полу-
чается из выражения для удвоенной кинетической энергии А (4, д)
заменой в нем q на q.
248
МАЛЫЕ КОЛЕБАНИЯ
(ГЛ. VI
значения <о|. Следовательно ’),
Наложим теперь на систему линейную однородную связь2):
Z19T + 4^2 + • • • + 1пЧп — 0 ( S > о) • (8)
i = 1
Выражая здесь qlt qit ..., qn через нормальные коорди-
наты с помощью преобразования (1), мы в нормальных коор-
динатах снова будем иметь линейную однородную связь
+ ...4-zX=o (£z;2>o). (83
/=i
Связь (8) или (83 будем сокращенно обозначать так:
L—0.
Всегда можно найти такие значения 9t и 9.2, которые вместе
с 93= ... =9„ = 0 удовлетворяют уравнению связи (83-
Для соответствующего q, согласно формуле (5),
С (q, д)__Ч02 + “I02 „.а
A(q, q)— e? + 0i
3 Если мы на числовой оси отложим точки и2, <о|, а>Д и
сосредоточим в этих точках массы m1 = 02, т2 = 0|, ..., тд = 0^,
то, согласно формуле (5), величина будет координатой
центра этих масс. Отсюда сразу следуют соотношения (6) и (7),
поскольку центр масс всегда расположен между крайними массами
и совпадает с одной из крайних масс тогда, когда все остальные
массы равны нулю.
2) Если дана нелинейная связь и положение равновесия удо-
влетворяет уравнению этой связи, то в разложении левой части
уравнения связи в степенной ряд
п
+ 47s + ••• + 1пЯп-\- Vj kh4i4k + -.. = 0
i,* = 1
нет свободного члена. Кроме того, мы предполагаем, что линейные
п.
члены действительно имеются, т. е. что У /?> 0. Тогда, отбрасывая
i = i
члены второго и более высокого порядков малости, мы представляем
уравнение связи в виде (8).
§ 43]
ЭКСТРЕМАЛЬНЫЕ СВОЙСТВА ЧАСТОТ
249
Поэтому И1)
min
1 = 0
С (д, д)
А (д, д)
(9)
<4
Будем теперь варьировать связь L = 0. Тогда левая часть
в неравенстве (9) будет изменяться, оставаясь все время
меньшей или равной <о|. Но при связи 9Х = 0 (здесь
1'1 = Гъ= ... = 4 = 0) отношение С.^’ задается фор-
А (д, д)
мулой
С(д, 9)_“lel+- + “F«
А (д, д) 0Н-+®»
и потому
Таким
[по аналогии с формулами (5) и (7)]
min Р = ш|.
^0А(д,д) 2
образом, среди всех связей вида L = 0 величина
• С(д, д)
min
z=o А (д, д)
достигает своего наибольшего значения <о| при связи 91 = 0.
Следовательно,
шахйта=4 (10)
Вместо одной связи L = 0 можно накладывать на систему
несколько связей Lx = 0, ..., Z.A_, — 0. Аналогично тому,
как это было сделано в частном случае одной связи, можно
показать, что
<4 = max min ~ (h = 2, ..., п). (И)
£i=o а (д, д>
4-i=°
Формулы (7) и (11) выражают экстремальные свойства
частот консервативной системы. Эти свойства иногда назы-
ваются максиминимальными.
*) Символ, стоящий в левой части неравенства (9), обозначает
С (д, д)
минимум отношения при условии, что рассматриваются
только векторы д^0, удовлетворяющие уравнению связи (8).
250
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. V!
(7')
(11')
Вместо формул (7) и (И) легко получить аналогичные формулы:
, С (д, д)
<ЛЭ = max -^-7:
А(д, д)’
“n A = min max (A=L , n— 1).
п-л z1=o A (g, g) v '
zA = o-
Экстремальные свойства главных частот, выражаемые равенствами
(7') и (11'), иногда называют минимаксимальными *).
Наряду с данной системой рассмотрим еще одну консер-
вативную систему с кинетической и потенциальной энергиями
у Л (9, д) = 4’ 2 ~аМъ> yC(g, g) = y 2 (12)
i.k = l i.k = i
и с главными частотами
«>1 О>2 . "SJ <й„. (13)
Для этой системы
= min (14)
(g, g) 1 7
- max min4 (h = 2, ri). (15)
£i=o A(q,g)
ZA-1=°
Пусть новая система имеет большую жесткость при
той же инерции, т. е. при любом q
A (q, q) = A (q, q), С (q, <7) >= C (q, q),
или меньшую инерцию при той же жесткости
A{q, q)^A(q, q), C(q, q) = C(q, q).
В обоих случаях при любом q 0
g) C(g. g) c,
A(g, g) "A(g, g)'
!) Экстремальные свойства частот были установлены немец-
кими математиками Е. Фишером [Monatshefte ffir Math, und Phys.,
16 (1905), 234—249) и P. Курантом [Zeitschrift fur angew. Math, und
Meeh., 2 (1922), 278—285J.
в «1
ЭКСТРЕМАЛЬНЫЕ СВОЙСТВА ЧАСТОТ
251
Но тогда и минимумы и максиминимумы этих отношений
будут связаны между собой таким же неравенством, т. е.
из неравенства (16), в силу формул (7), (11), (14) и (15),
следует:
(/’=1, •••> л)- (17)
При этом хотя бы в одном из этих соотношений имеет
место знак , если только не выполняется тождество ’)
с(д, д) _с(?, д)
а (д> д) А (д, д) ‘
(18)
Мы пришли к теореме Релея2):
При увеличении жесткости системы или уменьшении
ее инерции главные частоты увеличиваются*).
Выясним, как влияет наложение связей на величины глав-
ных частот toj со„ консервативной системы.
Наложим на систему s независимых линейных связей
7-1 = 0, 7,2 = 0, ..., 7,^ = 0.
Пусть полученная таким образом консервативная система
сп — s степенями свободы имеет главные частоты ш* to*
При этом
С (д, д)
o)*2 = min .
t=°
(19)
Сопоставляя формулу (19) с формулами (7) и (И) (при
h — 1 = s), находим:
OJj < о>* < 0>i+1.
(20)
’) Действительно, согласно формуле (5), в случае a>j = aj
(/=1, п) имеет место тождество (18).
2) Эта теорем“а была установлена английским физиком Релеем
в 1873 г. (Релей Дж. В., Теория звука, М., 1955, т. 1, § 88).
’) В первом случае по разности С (д, д)— С (д, д), а во вто-
ром— по разности А (д, д) — А (д, д) можно оценить, насколько уве-
личиваются главные частоты (см. Г а н т м а х е р Ф. Р. и К р е й н М. Г.,
Осцилляционные матрицы и ядра и малые колебания механических
систем, изд. 2, 1950, гл. 3, § 10).
252
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
Точно так же при любом h^n — s
шГ = max
fl = 0,
Л1=о,
min
С (Я, Я)
А (Я, Я)
(21)
Здесь связи Zj = O, Ls = 0 фиксированы, а варьируются
связи Lj = O, La_! = 0. Сопоставляя равенства (21) с ра-
венствами (11) и с формулой
, . С (я, я)
юл+^max ш
Lfl+S-l °
в которой варьируются все $ h — 1 связей, будем иметь
<о>л<(h = 1, л — $). (22)
Формулы (22) показывают, что при наложении s не-
зависимых связей каждая из первых п — s главных
частот увеличивается, не превосходя при этом старую
главную частоту, номер которой на s единиц больше
номера данной частоты.
1. В качестве приложения последнего предложения можно
показать, что корни X, 5g Х3 ... Хя векового уравнения
Д (X) = det (сй — ХагА)? А=1 = 0 разделяются корнями X* ... Х*_ j
уравнения
Д, (X) = det(qft-XaM)^li = 0‘),
т. е.
(23)
Действительно, уравнение Д^ (X) = 0 является вековым уравне-
нием для консервативной системы, получающейся из исходной
наложением одной связи ^„=0. Поэтому, полагая Xft=m|(fe= 1,..., и),
X? = a>J2 (/=1, ..., п — 1), мы сразу из неравенств (22) получаем
неравенства (23) при з=1.
l) Д, (X)—главный минор (п—1)-го порядка в определителе
Д (X). Иногда говорят, что неравенства (23) выражают «теорему
разделения» для корней векового уравнения. Неравенства (23)
могут быть использовгны для нахождения нижних и верхних границ
корней векового уравнения (см., например, Бабаков И. М., Тео-
рия колебаний, Гостехиздат, 1958, стр. 106—107).
§ 44] МАЛЫЕ КОЛЕБАНИЯ УПРУГИХ СИСТЕМ 253
2. Укажем еще на одно любопытное применение предложения
об изменении частот при наложении связей. Известно, что наличие
трещины в стакане определяют, постукивая о стакан пальцами.
Это связано с тем, что у стакана без трещины по сравнению
со стаканом с трещиной имеются дополнительные связи между его
частями. Поэтому у стакана без трещины частоты колебаний должны
быть более высокими.
§ 44. Малые колебания упругих систем
В качестве важного примера малых колебаний консервативной
системы рассмотрим п. масс mlt т2, ..., тп, сосредоточенных
в п точках (1), (2)....(п) упругой системы S (струны, стержня,
мембраны, пластины и т. д.), имеющей конечные размеры и каким-
либо образом закрепленной на краях.
Будем предполагать, что перемещения (прогибы) _у2, ...,уп
точек (1), (2), ..., (и) системы S и действующие на массы т1г
т2, ..., тп силы Fit Fs, ...,
Fn параллельны одному и
тому же направлению и по-
тому определяются своими
алгебраическими величина-
ми (рис. 50). Прогибы
у2, j Уп можно рассматри-
вать как независимые коор-
динаты системы, а силы F\,
Fs,....., Fn — как соответствующие обобщенные силы, тДк как
элементарная работа этих сил равна
У Л^Уй
» = 1
При исследовании свободных колебаний мы в качестве сил Ft,
F2....Fn берем упругие силы /'*, ..., F*, действующие на массы
tni, m2, ..., тп со стороны упругой системы S при наличии про-
гибов ylt у,,, ..., уп. Рассматриваемая система п материальных
точек, находящихся под воздействием упругих сил, является
консервативной и имеет определенную потенциальную энергию
П(уь у2, ..., Уп). Разлагая функцию П (ylt ys, ..., уп) в степенной
ряд и сохраняя в этом ряду только квадратичные члены (см. § 40),
получаем для П выражение
n
i,k = 1
Тогда для упругих сил Ff —
(.Cik = cki, i, k = l, ..., n).
(О
— -з— (1 = 1, ..., п) находим
ЧУ»
П =
п
(' = 1.....................«)• (2)
/»=1
264
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
Считая положение равновесия _у,= ... =_уп = 0 устойчивым, при-
нимаем, что квадратичная форма (1), выражающая потенциаль-
ную энергию как функцию прогибов, является положительно
определенной:
п п
1] Wjyft>o (S>!>°). (3)
<’,4 = 1 » = 1
Кинетическая энергия системы имеет простой вид:
п
Т=^"ЧЯ- w
i=l
В поисках гармонического колебания yi = Uj sin (ш£ 4" “) (как
это мы делали в § 40) приходим к уравнению частот
С11 С13 С1Л
Cgi c2g ... Cgn
= 0 (X = u>2) (5)
cni см
слл тп?
и алгебраическим уравнениям для определения амплитуд
л
2 (cis — Wife)«A = ° (i=l, ...,n). (6)
4 = 1
Система имеет п частот
“1 «S=£ ... "С
(7)
и соответствующие амплитудные столбцы alt ие, ... , ип; свободные
колебания определяются формулой
п
У = У (8)
/= 1
где С] и <у(/=1, ... , п) — произвольные постоянные, определяе-
мые из начальных условий.
Пусть внешние силы Ft, ... , Fn вызывают статические про-
гибы ylt ..., уп. Тогда силы F} уравновешиваются упругими си-
лами Ff (Fi = — Ff’, i — 1, ... , n), и потому,согласно равенствам (2),
Ъ= Л сИгУь (« = 1, ... , п). (9)
4= 1
При исследовании упругих систем большую роль играет матрица
G = И/4II" обратная1) для матрицы С = || c;ft Ц":
G — C~l.
*) Матрица С не является особенной (det так как
квадратичная форма (3) является положительно определенной.
§ 44]
МАЛЫЕ КОЛЕБАНИЯ УПРУГИХ СИСТЕМ
255
С помощью матрицы О можно разрешить систему соотноше-
ний (9) относительно прогибов yt, ... , уп и представить ее в виде
= S gikFk (/=!,..., я). (Ю)
fe= 1
Величина равна прогибу в точке (/), вызванному единичной
внешней силой, приложенной в точке (k), и называется коэффи-
циентом влияния точки (й) на точку (i) (i, й = 1, ... , я). Из
симметричности матрицы С следует симметричность обратной
матрицы G, составленной из коэффициентов влияния 1)
gik=gki («, А=1, ..., я), (И)
а из положительной определенности формы (3) следует положи-
тельная определенность квадратичной формы
G(F, F)= 2 g«FZFA>0 (2 (12)
i,k^\ t=l
n
поскольку квадратичная форма 2 переходит в форму (12)
i
при преобразовании переменных (10):
п п п
п = у 2 = Т 2 Fi5,i==T 2 SikFiF* (13)
i,k = 1 i = 1 i,fe = 1
Рассмотрим линейную упругую систему 3 — струну или стер-
жень при обычных закреплениях концов. Можно показать, что
в этом случае матрица коэффициентов влияния G обладает сле-
дующими свойствами.
1°. Все миноры (не только главные!) любого порядка матрицы G
неотрицательны:
sitkp
=2 0
” 8lPkP
(Osg^sg ... ^Ip^n; Og^g... ^kps^n; p=l....... я).
2°. gik > 0 при 11 — A|<1 (i, fe==l, ... , я).
3°. Определитель det G= ] gik |” > 0.
Матрицы, обладающие свойствами 1°, 2° и 3°, называются
осцилляционными.
*) Равенство (11) выражает так называемый принцип взаим-
ности Максвелла: «прогиб в точке (г) под действием единичной
силы, приложенной к точке (й), равен прогибу в точке (k) под
действием единичной силы, приложенной в точке ((')».
256
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VT
Заметим, что для всякой положительно определенной матрицы О
выполняются свойство 3°, а также неравенства Г для главных
миноров и неравенства 2° для диагональных элементов^; (/=1,п).
Однако неотрицательность неглавных миноров любого порядка р *)
и положительность элементов gl2, , gn-i. п представляют собой
специфические свойства матрицы коэффициентов влияния линейной
упругой системы.
Из осцилляционности матрицы коэффициентов влияния выте-
кают следующие основные «осцилляционные» свойства упругих
колебаний линейной системы.
Г. Все частоты различны:
“1 <“>2 < ••• <“л.
2°. Все амплитуды ни, а2Ь ... , ип1 в первом главном колеба-
нии (с частотой «,) отличны от нуля и имеют одинаковые знаки.
3°. Среди амплитуд н1;-,
(1) (2)____________(п) usj... unj в /-м главном колеба-
I I нии (с частотой <оу) имеется ровно
7— 1 перемен знака (/г= 1,2,..., и)
----- рис. 51).
/у=/1 Исследование осцилляцион-
J ных матриц и обоснование осцил-
Рис. 51.
W (2) (I) (М)
Рис. 52.
ляционных свойств упругих колебаний выходит за рамки настоящей
книгиs).
Пример, Рассмотрим классическую задачу о колебании
струны конечной длины I с закрепленными концами в случае,
когда вся масса струны сосредоточена в п равноудаленных (между
собой и от концов) точках, причем сосредоточенные массы равны
между собой (и равны т) (рис. 52).
Удлинение <-го участка (между точками с прогибами yt и у;+1)
выразится (с точностью до малых четвертого порядка) следующим
*) В частности, неотрицательность недиагональных элементов
матрицы О (gih 3= 0 при i k).
s) Читатель найдет этот материал в книге: Г а н т м а х е р Ф. Р.
и Крейн М. Г., Осцилляционные матрицы и ядра и малые коле-
бания механических систем, изд. 2, М., 1950,
S«]
МАЛЫЕ КОЛЕБАНИЯ УПРУГИХ СИСТЕМ
257
образом:
V (тгкг) + (yi+1 ~yi} 2 ~ ^тт =
у 1 + —) (Я+1 ~уй — я» -gp (Уг+1—м)
Считая натяжение струны а постоянным *), получаем выраже-
ние для потенциальной энергии:
П={2(Л+‘-Л)‘ (з'о = У«+1=О; c = 3(”+1)V (14)
i = o
Кинетическая энергия имеет простой вид:
п.
г=т 2yl (15)
i=i
Для нахождения главных частот и соответствующих амплитуд-
ных векторов изберем косвенный путь3). Напишем уравнения (6)
для амплитуд, используя выражения (14) и (15) для П и Г. Каждое
из полученных уравнений (6) разделим почленно на с и введем
сокращенное обозначение:
1—^a? = cos0, (16)
где 0-—вспомогательная величина. Тогда уравнения (6) для ампли-
туд примут следующий вид:
«й-i—2uftcos0-|-aft+1 = O (А = I....л),. (17)
где
«о = «л+1=О. (18)
Алгебраическим уравнениям (6) можно удовлетворить, поло-
жив 3)
uft = sinA6 (А = 0, 1, ... , и + 1). (19)
При этом первое из «граничных» условий (18) удовлетворяется
автоматически, а второе дает условие для определения искомых
частот:
sin (л+ 1)6 = 0. (20)
*) Это предположение оправдано тем, что рассматриваются
только малые прогибы _у2, ... , уп.
3) См. Крейн М. Г., Математический сборник, т. 40, 1933,
стр. 455—466.
8) При подстановке выражения (19) в уравнения (17) получаем
тригонометрические тождества
sin (k— 1) 0 —2 sin АО cos 6 + sin (ft + 1) 6 = 0 (A = 0, 1, ..., n).
§88
Малый колебаний
|Гл. vt
Отсюда 0у =
венству (16),
(/=1, ... , п) и, следовательно, согласно ра-
2с
т. е.
<>.•= 2 \/ — sm -У- = 2 1/ — sin —1—rv
J fm 2 Ут 2 (n-f-1)
I. , (п 4- 1) сА
[_/ = !, ... , и; с = -—i j
(21)
Для нахождения амплитуд/-го главного колебания и^, и^,..., «пу
полагаем в равенствах (19) 0 —8у:
aft/=sin*0y=sin-^p (k, J=l, ... , п). (22)
Произвольное свободное колебание системы определяется фор-
мулой
п
Ук = с/“*/sin =
;=1
п
= У С/ sin sin [2 sin „ , • 1/^ * + Д/У (23)
Li 1 n +1 \ 2 (n 1) У m 1 • ’
7=1
Из формул (21) и (22) сразу видно, что полученные главные
колебания обладают осцилляционными свойствами Г — 3°.
Лагранж показал, как из найденных формул предельным пере-
ходом можно получить свободные колебания однородной струны
(с закрепленными концами), масса которой уже не сконцентриро-
вана в п точках, а распределена равномерно вдоль струны, имеющей
плотность р.
1-1 р/
Полагая в рассмотренной задаче /п = -^-г находим дискретный
аналог для однородной струны с главными частотами
ЦЯ) = Т j/7- « (» + 1) sin (/ = 1...Я). (24)
< г Р \п -f- V
В пределе при п—-со получим для частот шу однородной закре-
пленной струны известные выражения:
ш/=>т'|/'у О'=1.....«)• (25)
Эти формулы выражают закон Мерсенна, согласно которому все
частоты являются целыми кратными частоты основного тона
§ «1
СИЛЫ, НЕ ЗАВИСЯЩИЕ ЯВНО ОТ ВРЕМЕНИ
259
«4 = у jZ" — и каждая аз частот прямо пропорциональна
корню квадратному из натяжения и обратно пропорциональна
длине и корню квадратному из плотности.
Представим j-e гармоническое колебание однородной струны
в виде
yj(х, <) = Uj(х) sin -J-aj) (O^x^l), (26)
где Uj(x)— амплитудный прогиб в этом колебании.
Считая, что амплитудный прогиб Uj(x) может быть получен
из величин (22) предельным переходом
при п —> оо и
Uj (х) = lim ukj
kl
-j—у—»х, мы из формулы (22) найдем:
M;(x) = sin^ (/==1, 2, ..,).
Тогда свободное колебание однородной струны, которое полу-
чается линейной суперпозицией главных колебаний (26), выразится
формулой
со
у(х, t)— Cj sin sin (a>jt + aj),
у = 1
где Cj и aj (/=1, 2, ...) — произвольные постоянные.
§ 45. Малые колебания склерономной системы
под действием сил, не зависящих явно от времени
Напишем уравнения Лагранжа для склерономной системы
в случае, когда обобщенные силы Q; зависят только от ко-
ординат и скоростей:
d дТ дТ _ . . . .. , . ...
= ......”)• W
Пусть начало координат является положением равновесия.
Тогда (см. § 40) кинетическая энергия с точностью до членов
третьего порядка малости относительно qt и (fa (i = 1, ... , п)
может быть представлена квадратичной формой с постоян-
ными коэффициентами
п
2 аМь' (2)
t,fe= 1
где aik — aki (I, k = 1, ... , п).
260
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
Разложим теперь обобщенные силы Q; (qk, qk) в степенные
ряды относительно qk и qk-.
о,=в,.+ j[Ggv>+ <3>
k = 1
Так как начало координат является положением равнове-
сия, то при нулевых координатах и скоростях все обобщен-
ные силы должны равняться нулю, т. е.
Qi0 = 0 (Z = 1........и). (4)
Введем следующие обозначения:
(AS='........")• ®
После этого, отбрасывая в разложении (3) все члены вто-
рого и более высокого порядков малости, будем иметь:
Q> = — S (^кЯк^Г с1к<!к) (^ = 11 •••> »)- (6)
fe = l
Подставляя в уравнения Лагранжа fl) выражения (2)
и (6) для кинетической энергии и для обобщенных сил, полу-
чим линейные дифференциальные уравнения движения для
малых колебаний склерономной системы
У, (aikQk~\-^ik4k~\-cik<ik) = ^ G==l, •••, п). (7)
Обозначим через А, В, С квадратные матрицы *)
Л = ||а,-А|]« В = Ы, С=|Ы|?>
а через q — столбец из qlt , qn. Тогда система дифферен-
циальных уравнений (7) в матричной записи будет выгля-
деть так:
Aq —Bq —|— Cq = 0. (8)
Будем искать решение системы (8) вида
q = иер\ (9)
*) Заметим, что А — положительно определенная симметриче-
ская матрица (это обстоятельство здесь не используется).
§ 45]
СИЛЫ, НЕ ЗАВИСЯЩИЕ ЯВНО ОТ ВРЕМЕНИ
261
где и — столбец с постоянными элементами щ, ... , ип,
a fi — число.
Подставляя выражение (9) в матричное уравнение (8) и
сокращая на е^‘, получаем:
(V + ^ + C)« = 0, (10)
или в развернутой записи
п
У GW2 + W4~Qa)«a=o G=i...............п). (io')
4 = 1
Для того чтобы система (10) или (10') имела ненулевое
решение и, необходимо и достаточно, чтобы определитель
этой системы был равен нулю:
A([x) = det(H[i2 + fiii + C) = 0, (11)
или в развернутом виде
Д([Х) =
аиР-2 ~Ь + си ••• а1п112 4- -|- cln I
у:::::::::::::::::::::::: =о. сп
anlPS + ^Л1Р + СП1 ••• аллР2 + ^ллР + СПП I
Уравнение (11) называется вековым уравнением для дан-
ной системы. Это алгебраическое уравнение степени 2и отно-
сительно |Л.
Ограничимся рассмотрением только основного случая,
когда все корни векового уравнения [ij, ..., различны
между собой. Каждому корню [лл соответствует некоторое
ненулевое решение ah~(ulfl, ..., unh) системы однородных
алгебраических уравнений (10) и, следовательно, частное
решение системы дифференциальных уравнений (8)
(/г = 1, .2л). Общее решение этой системы дифферен-
циальных уравнений получится как линейная комбинация
(с произвольными постоянными коэффициентами) этих частных
решений:
2п
(7 = 2 Chuhe^. (12)
Л=1
Особо важным является тот случай, когда все веществен-
ные части корней р.л отрицательны:
Кер.л<^0 (Л = 1, 2л).
262
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
В этом случае положение равновесия системы является асимпто-
тически устойчивым не только для линеаризированной си-
стемы (8), но и для исходной нелинейной склерономной си-
стемы с дифференциальными уравнениями (1) (см. § 38).
В заключение отметим, что для консервативной системы
В=II ^ik ||? = 0, а А = || aik и С —1| cik ||f — симметрические
положительно определенные матрицы. Вековое уравне-
ние det (Ли.2 4- С) = О переходит в уравнение det (С — ХЛ) = О
из § 40, если положить p = i ]/к (1 = ^—1). Но, как было
показано в § 40, уравнение det (С — ХЛ) = 0 имеет только
положительные и вещественные корни. Поэтому уравнение (11)
в случае консервативной системы имеет чисто мнимые корни.
§ 46. Диссипативная функция Релея.
Влияние малых диссипативных сил
на колебания консервативной системы
Отметим важный частный случай, когда асимптотическая
устойчивость положения равновесия предопределена и нет
необходимости прибегать к критериям устойчивости, изло-
женным в § 39.
Пусть в выражениях для обобщенных сил [см. равенство (6)
на стр. 260]
п п
Qi=- 2 (z=i,...,«), (i)
й=1 й=1
составленные из коэффициентов матрицы Z? = ||[|f и
C=|[cfft|]7 являются симметрическими и положительно
определенными.
Тогда, вводя в рассмотрение потенциальную энергию П
и диссипативную функцию Релея R (см. § 8), которые
задаются положительно определенными квадратичными формами
п. п
А = 1 i, k =“ 1 /ОЧ
п п
i=l i=l
S 46]
ДИССИПАТИВНАЯ ФУНКЦИЯ РЕДЕЯ
263
мы формулы (1) перепишем так:
Qi = — ~ — (Z=l.............п). (3)
dqt a^i v 7 v ’
„ 6П .
На систему, помимо потенциальных сил —(i~ 1, ..., ri),
,, 67?
действуют еще диссипативные силы —определяемые
функцией Релея. В § 8 было выяснено, что в этом случае
система является определенно-диссипативной. Так как, соглас-
но первой из формул (2), потенциальная энергия в положе-
нии равновесия имеет строгий минимум и положение равнове-
сия является изолированным, то (см. теорему на стр. 202)
положение равновесия является асимптотически устойчивым.
Таким образом, диссипативные силы, определяемые функ-
цией Релея, не только не нарушают устойчивости положения
равновесия консервативной системы, но и делают (в некото-
рых случаях) это положение асимптотически устойчивым.
В рассматриваемом случае можно установить простые
формулы для оценки корней векового уравнения. Будем
снова искать решение вида ие^. Для определения столбца а
получаем уравнение [см. стр. 261]
(Ир.8Яр. + С) и = 0,
(4)
или в развернутой записи
+W + ^)«s = 0 (1 = 1, ..., и). (4')
fe=i
Умножая обе части i-ro уравнения (4') на йг (й,- — величина,
комплексно сопряженная с и,) и суммируя по I, находим
п п п
и2 У, aikaiuk4-р- У ^nfliuk~[~ У (:ikaiuk=^>
i, А=1 I, fe = l i, ft=l
или в сокращенных обозначениях
А {а, й)р8-|-Д(в, й)р + С(и, й) = 0, (5)
где А (а, й)>0, В (в, «)^>0 и С (a, w)>01)-
1) См. 5° на стр. 235.
284
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
Таким образом, любой корень р векового уравнения
удовлетворяет квадратному уравнению (5) с положительными
коэффициентами. Отсюда сразу следует, что Rep<^0.
Если вековое уравнение имеет комплексный корень
= т0 это же уравнение имеет и комплексно сопря-
женный корень — /8. Числа р и р— корни квадратного
уравнения (5). Поэтому, полагая u = v-~~lw, u — v — iw
(v, w— вещественные векторы-столбцы), можно написать1):
21^=1'+|‘=-л>то=
В (v, у)В (w, w) Q
А (и, у) -j1 A (w, w) ’
_ С (а, и) _ С (у, v)+C (w, w)
A (a, a) A (v, v) A (w, w)'
(6)
Комплексно сопряженным корням р и р соответствуют комп-
лексно сопряженные колебания ие^ и Сумму соответ-
ствующих членов в выражении для q [см. формулу (12) на
стр. 261] можно привести к вещественному виду при ком-
плексно сопряженных значениях произвольных постоян-
ных c=y(F+/Q), c=l(F—toy
Сие** Сйе^ = 1 (Л + iQ) (® iw) е(*+’’{) 1 +
+ у (F — iO) (v — iw) e(T“Z8) 1 =
= Re {[F® — Gw I (Fw G®)] e1* (cos i sin 8/)} =
= ev [(F® — Gw) cos 8t ~(Fw Gv) sin 8^]. (7)
Если мы имеем два вещественных корня р и р' и соот-
ветствующие им столбцы обозначим через и и и', то, умножая
обе части z-ro уравнения (4') на zz< (вместо й(), получаем
вместо равенства (5) следующее равенство:
А (и, а') ра В (и, и') р С («, и') = 0. (8)
*) См. формулу (20) на стр. 235.
? 46]
ДИССИПАТИВНАЯ ФУНКЦИЯ РЕЛЕЯ
265
Меняя ролями векторы и и и', заключаем, что число р'
также удовлетворяет уравнению (8). Поэтому
г 1 г А (и, и) ’ A (a, a') v ’
Посмотрим теперь, как изменяются главные колебания консер-
вативных систем под действием малых диссипативных сил1).
Введем нормальные координаты 6,...0П. В этих координатах
п п
г=12®‘?1 п=т2“^- <1о>
f=l i=l
П п
^k' (11)
*=! i,k=l
УФ®
где шг (1 = 1, .... п)— главные частоты консервативной системы,
а коэффициенты в выражении (11) для функции Релея рг,
(i, k—\, ..., п; — при i^-k) малы (квадратами и произве-
дениями этих величин можно пренебрегать). Из положительной
определенности квадратичной формы (11) следует, что ₽(>0
(7 = 1, ..., и).
Составим уравнения Лагранжа
п
‘ё<+?А+“>Я-+ 2 Ма=° (<=1..................«)• (12)
*=i
(А ±1}
Подставляя сюда
= (1=1, ...,п) (13)
и сокращая на получаем систему линейных уравнений
п
(Р2 + ?<Р + “2) х« + Р 2 ₽‘АХА = ° (1=1, ...,п). (14)
А=1
(А^О
Приравнивая нулю определитель этой системы, найдем вековое
уравнение
И2 + ₽1Р + ?иР • • • ₽1лр
?21Р Р2 + ₽гР + “! • • • ₽2яР „
₽П2Р • • . Ра + ₽лр + “л
*) См. Уитте-кер Е. Т., Аналитическая динамика, М. — Л.,
1937, § 94.
266
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
Раскрывая этот определитель и отбрасывая члены, содержащие
произведения малых коэффициентов ₽г, представим вековое
уравнение в следующем виде:
л
n<p’ + IW+4)=0-
Й=1
(16)
Корни векового уравнения в первом приближении имеют вид
(й = 1, ...,п). (17)
D
Найдем амплитуды х,, х,, хл для [1=^ = —!у-|-/ш1#
Подставив это значение р в коэффициенты последних п—1 урав-
нений (14) и разделив левые части уравнений на рь получим:
+ ^2 ---- + 2 Х2 + • • + ^2ЛХЛ --О,
Z “1----“2\
£лЛ1 + ?Л2Х2 + •• + ( ?Л----- Pl Н----------- )ХЛ =0-
\ IWj /
(18)
Из этой системы определяем отношение — (k = 2, ..., ri), отбра-
Х1
сывая члены второго и более высокого порядков малости (относи-
тельно p/ft):
= (k = 2...n). (19)
Формулы (19) показывают, что — малые вещественные вели-
чины (ft = 2....ri). Корню pj = — y-f-ioj соответствует «ком-
плексное колебание» (полагаем х,1 = Ае1а, Л>0):
61=х1е|Х1' = Ле 2 + Qk = ekAe 2 ‘е (“1/+а + 2)
(й = 2, ri).
Взяв линейную комбинацию из данного и комплексно сопряженного
колебания, получим «главное» колебание, соответствующее корням
Н=— у + <“1 и й = — у — гЧ:
_ £i t _ £i f . .
Ct=Ae 2 sin (tojia), 6k = skAe 2 sin + «+у) (21)
(й = 2, .... п).
§ «1
ВЛИЯНИЕ СИЛЫ, ЗАВИСЯЩЕЙ ОТ ВРЕМЕНИ
267
Аналогичные выражения мы получим и для других главных
колебаний.
Таким образом, в первом приближении: 1) малые диссипатив-
ные силы не изменяют частот консервативной системы; 2) при
этих силах колебания затухают при t—*co; 3) в j-м главном
колебании все координаты малы по сравнению с j-й коорди-
натой и отличаются от нее по фазе на четверть пе-
риода (/ = 1, ..., п).
§ 47. Влияние внешней силы, зависящей от времени,
на малые колебания склерономной системы.
Амплитудно-фазовая характеристика
Пусть дополнительно к тем силам, о которых шла речь
в § 45, на склерономную систему действуют еще силы
(1=1, ..., и). Тогда уравнения Лагранжа для малых коле-
баний системы будут отличаться от уравнений (7) на стр. 260
только наличием ненулевых правых частей
п
у1, (aik Чь + bik4k cik4k} —Qi(t) (1=1, П). (1)
fe = l
Общее решение этой неоднородной системы дифферен-
циальных уравнений представляется в виде
2п
q=^Chuhe^ -yq*, (2)
Л=1
где первое слагаемое представляет собой общее решение
соответствующей однородной системы, a q* — некоторое
частное решение системы (1).
Мы предполагаем, что положение системы q1=.,.=
= qn = 0 является асимптотически устойчивым положением
равновесия, т. е. что Re0 (h = 1, ..., 2л). Тогда первое
слагаемое стремится к нулю при / —оо1) и при достаточно
больших t общее решение q неоднородной системы практи-
чески совпадает с q*. Поэтому мы в дальнейшем будем
интересоваться только «вынужденными колебаниями» q*, кото-
рые будем обозначать просто через q.
*) Если вековое уравнение имеет кратные корни, то в сумме,
стоящей в правой части равенства (2), могут появиться вековые
члены вида Ch (uh + tt’ht + u^t2 ф- ...)е*хЛ1. Однако и в этом случае
сумма стремится к нулю при t —» оо, если все Re рд <; 0.
268
МАЛЫЕ КОЛЕБАНИЯ
£ГЛ. VI
Поскольку система дифференциальных уравнений (1)
линейна, то общий случай отыскания вынужденных колебаний
сводится (за счет линейной суперпозиции частных решений)
к тому случаю, когда только одна из обобщенных сил Q,- (t)
отлична от нуля.
Пусть, например, Qj (f) уЬ 0, a Qj (0 = 0 (/ = 2, ..., п).
Кроме того, допустим сначала, что Qi (/) — гармоническая
сила, т. е.
Qi(t) = Aeist. (3)
Тогда дифференциальные уравнения (1) запишутся так:
S 9* 4" bikqk -J- Cikqk) — AeiSt,
. (4)
2(aJk4k + bjk4k + cjk4k) = о (/ = 2> л)-
A = 1
Будем искать вынужденные колебания в виде
4k = Bkei2t (£ = !, ..., л). (5)
Подставляя эти выражения для qk (А = 1, ..., п) в диффе-
ренциальные уравнения (4) и сокращая на eist, получаем для
определения величин Bk систему алгебраических уравнений:
У, [aik (^)2 4“ (^) 4“ cik] Bk = А,
(в)
S [fl/A № + bik (i2) 4- 4k\ Bk = 0.
A = 1
(j = 2, ..., n).
Решая эту систему алгебраических уравнений, находим для
k = 1, ..., п:
B^W^A, (7)
где
(8)
— правильная дробно-рациональная функция от IQ с веще-
ственными коэффициентами; годограф этой функции в комп-
лексной плоскости, а иногда и сама функция, носит название
частотной или амплитудно-фазовой характеристики.
$ «1 ВЛИЯНИЕ СИЛЫ, ЗАВИСЯЩЕЙ ОТ ВРЕМЕНИ 269
Тогда «отклик» координаты qk на внешнее воздей-
ствие Q, = Aeiat получается умножением этого воздействия на
частотную характеристику Wlk(lQ)-.
Полагая qk = Wik(lQ)Ae^. (9)
Wlk(lQ) = Rlk(Q)ei'r^w [Rik(Q)>0] (Ю)
(2) — амплитудная, Ф1А.(2) — фазовая характеристика],
перепишем формулу (9) следующим образом:
= (А=1, я). (11)
Пусть теперь
Q1 = Asin2^, (12)
т. е.
Соответствующий отклик будет *)
^=1/?и(2)А{?[а/+^(а)1-е-‘'1а/+^(2)’},
4k = Rik (2) A sin [2Z + (2)]. (13)
Другими словами, при переходе от синусоидальной
силы (12) к соответствующему отклику, т. е. сину-
соидальному вынужденному
колебанию (13), амплитуда
силы умножается на ам-
плитудную характеристику
Rlk (2), а смещение фазы
определяется фазовой харак-
теристикой ЧГ1а(2), взятой
для того же значения 2.
На рис. 53 изображена ам-
плитудно-фазовая характери-
стика Wlk (IQ) (0 2 оо).
Если для данного 2 соответ-
ствующее Rlk (2) очень мало, то амплитуда отклика весьма
мала по сравнению с амплитудой «возбуждения» Asin Qt
1) Так как Wlk (IQ) и Wik(—iQ)—комплексно сопряженные
числа, то Rlk (— S) = Rlk (2) и (— 2) = — (2).
9 Ф. Р. Гантмахер
270
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
данной частоты 2. Наоборот, если при данном 2 соответ-
ствующее /?lft(2) очень велико, то амплитуда отклика велика
по сравнению с амплитудой обобщенной силы Qt. Таким
образом, подбирая систему с надлежащими амплитудными
характеристиками, мы можем гасить колебания на одних
диапазонах частот и увеличивать амплитуды этих колебаний
на других частотах. Это и есть принцип устройства фильтров.
Так как W (Z2)— правильная дробно-рациональная функция
и потому V7(z2)—>0 при 2-»-оо, то любая система практи-
чески пропускает только конечный диапазон частот.
Пусть теперь Qj (t) — произвольная периодическая функ-
ция, задаваемая рядом Фурье
СО
Qi (0 = S Ат sin <рт). (14)
т—0
Складывая отклики на отдельные гармоники этого ряда,
получаем
<х>
Ат sin [OT2^ + ?m + ’Flft(w2)] (15)
т =0
(£=1, и).
Пусть теперь Qt (t) — произвольная непериодическая функ-
ция f(t) от t, которую можно представить в виде инте-
грала Фурье1)
4“СО -f-00
= ~ § elst dQ J f(t)e~istdt. (16)
— CO —CO
Полагая
+ oo
F(2) = f(t)e~‘B/dt,
— co
будем иметь
1Г
Qi=/(0=2^ J F(Q)e*‘dQ.
— co
(17)
(18)
*) См., например, Фихтенгольц Г. M., Основы математи-
ческого анализа, М., 1956, т, 2, гл. 24, § 3,
ВЛИЯНИЕ СИЛЫ, ЗАВИСЯЩЕЙ ОТ ВРЕМЕНИ
271
§ 47]
Функция Р (2) называется комплексным спектром функ-
ции Ql=/(7).
Воздействие
JL/7(S) dQ eiQt
вызовет отклик
Wik(iQ)P(Q) dQ eiSt.
Поэтому, основываясь на принципе линейной суперпозиции
откликов, найдем:
4" со
qk = — J Wlk (IQ) P(Q) e‘st dQ (19)
— 00
(k= 1, ..., n),
т. e. комплексный спектр Wlk (z2) P (2) для координаты qk
получается умножением комплексного спектра воздей-
ствия Q, (7) на соответствующую частотную характеристику
системы №lfc(72).
Пусть при 7<^0 система находится в покое и движе-
ние системы при нулевых начальных условиях вызвано только
внешним воздействием Q(7)e±:0 при 7^>0. Представляя ком-
плексный спектр отклика в виде
Р (2) Wlk (z2) = G(2) -{-IH(2), (20)
согласно формуле (19) будем иметь
+ со
qk—-^~ [G(2)-[-7/7(2)] [cos sin 27] z/2 =
— 00
i V”
="27 \ [G(2)cos27 — /7(2) sin 27] d2
— CO
4-c°
•T \ [G(2) sin + /7(2) cos 27] dQ.
s*
— co
272
МАЛЫЕ КОЛЕБАНИЯ
[ГЛ. VI
Так как qk(f)— вещественная функция, то второе слагаемое
в правой части равно нулю ') и поэтому
+ оо
qk—^ [С(й)созй/— H(Q) sin dQ. (21)
— 00
Предположим теперь, что
Qi(O=o> 1
х , г ПРИ ^<0; (22)
?ft(0 = 0 (k=l, .... л) / У ’
тогда
+<»
0 = i \ [0(2) cos й^—/7(й) sin й£] dQ (при t<^0).
— 00
Заменим здесь t на —t-.
+<»
0 = -2^-\ [С(й) cos й£-[~/7(й) sin й£] йй (при £^>0). (23)
— 03
Складывая почленно равенства (21) и (23), находим
4-00
qk = О (й) cos Qt dQ (при (24)
— 00
Можно показать, что выражение (24) определяет общее
решение устойчивой системы для координаты qh при усло-
виях (22) и при нулевых начальных данных2). Функция и^ДЙ)
строится непосредственно по коэффициентам aik, bik и clk, со-
держащимся в уравнениях (1), а функция P(Q) определяется вы-
ражением (17). После этого задача об определении движе-
ния, описываемого уравнениями (1), сводится с помощью
выражения (24) к одной квадратуре.
Для приближенного определения движения пригоден по-
этому любой метод приближенного интегрирования. Можно,
*) Реальная система не может иметь частотную характе-
ристику, не удовлетворяющую этому условию.
2) Это следует из того факта, что выражение (20) определяет
преобразование Фурье решения при нулевых начальных данных, а
выражение (24) — обращение преобразования Фурье (см., например,
Айзерман М. А., Лекции по теории автоматического регулиро-
вания, изд. 2, Физматгиз, 1958).
§47] ВЛИЯНИЕ СИЛЫ, ЗАВИСЯЩЕЙ ОТ ВРЕМЕНИ 273
например, построить график функции 0(2), заменить его ло-
маной линией и через точки излома провести горизонталь-
ные линии до оси ординат. Тогда функция G(2) приближенно
заменяется суммой функций gy(2), график каждой из ко-
торых представляет собой трапецию (в частном случае тре-
угольник), как показано на рис. 54.
Для одной такой функции gy (2)
интеграл (24) может быть вычис-
лен ’):
00
?А=~- Si (Q) cos 2/ dQ =
Д/ sin 2ycpZ sin Д/
л 2/cp V ’
где 2ycp и Ду показаны на рис. 55, a Aj — площадь трапеции.
Поэтому
1 VI . sin sin Д/
” 4-J J Й/ср д/
j
4k
где суммирование ведется по всем трапециям, полученным
при аппроксимации 0(2) ломаной линией.
При использовании такой аппроксимации для построения
движения могут быть использованы таблицы функции .
') См. стр. 280—282 книги, указанной в примечании 2 на стр. 272.
ГЛАВА VII
СИСТЕМЫ С ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ
§ 48. Приведенная система. Потенциал Рауса.
Скрытые движения. Концепция Герца
о кинетическом происхождении потенциальной энергии
В настоящей главе общие положения, изложенные в гл. II
и в гл. V, используются для исследования движения голоном-
ной склерономной системы с циклическими координатами
qa (а = т Ц- 1, ..., п). Кинетическая энергия такой системы
имеет вид
Т=~5 2 •••, qm)4rqs- О)
Г, 5= 1
Найдем выражение для кинетической энергии в пере-
менных Рауса qb (fa, ра (i=\, т\ а = ..., л).
Для этого выразим все сц через ра (а=лг-(-1, п),
используя исходные соотношения
т п
2 (а=м+1, .... п). (2)
i = 1 ₽= т~\~ 1
Поскольку определитель £> = det(aap)"p==m + i О1), то
из соотношений (2) находим
&= S (а = и+1,...,л), (3)
₽«=т-|-1 \ ( = 1 /
где papp+i—обратная матрица для матрицы ||aap||m+i>
__________________ (4)
Ч См. примечание к стр. 91.
§ «1
ПРИВЕДЕННАЯ СИСТЕМА. ПОТЕНЦИАЛ РАУСА
275
Полагая
Т«/ = S b^a&i (z=1- « = «+1, я), (5)
р = т+1
запишем соотношения (3) в следующем виде:
п т
9а= 2 Ma- (<*=«+Ъ .<•> я). (6)
₽ — r?i4-1 i = l
Здесь ba? и fai — функции от нециклических (или, как их
иногда называют, позиционных) координат qi(l = \, ..., т).
Подставляя выражения (6) для в формулу (1), получаем
выражение Т для кинетической энергии в переменных Рауса:
т п т п
^=4 2 «‘W/+4 2 а*^м+2 2 (7)
i,J= 1 = i = l а = /п-|-1
Замечательным является то обстоятельство (на него обратил
внимание еще Раус), что в этой формуле все o*a = Q, т. е.
выражение Т есть сумма квадратичной формы относительно
позиционных скоростей qb qm и квадратичной формы
относительно обобщенных импульсов рт+1, ..., р^).
Действительно,
—' / п X п
* __ дгТ ____ д V! дТ дфД_________ д у , __„
а,а — dqt дрл~ dqi\ Z dq. ~dp^ j ~ ~д^ Z ’
(8)
п
так как Л Ь^р зависит только от переменных qt и р,
р = тЦ-1 ’ ₽
которые рассматриваются как независимые по отношению
к iji (Z=l, m\ p = 1, я).
J) Использованное здесь преобразование переменных, соответ-
ствующее переходу от переменных q^ к переменным (р, ра, при-
меняется обычно в теории квадратичных форм для приведения
(по методу Лагранжа) квадратичной формы к сумме квадратов.
Действительно, применив несколько раз подобные преобразования,
мы представим квадратичную форму от п переменных в виде
суммы п квадратичных форм, каждая из которых зависит только
от одной переменной, т. е. равна произведению квадрата этой пере-
менной на некоторый вещественный коэффициент.
276
СИСТЕМЫ С ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ
[ГЛ. VII
Вычислим теперь коэффициенты
» _ д*Т_______ д VI V h „ —h
Ф« Фв Фа £ Фв Фа Т? 7 %
г 7 = Я1-|-1 н 7 = т + 1
(а, р = /и-]-1, ..., п). (9)
Аналогично найдем коэффициенты afj1)
аЪ
= д’Т д [дт \ у
фу Фу “ Ф/ Фу "T" Ь
u а = ?л-|-
дТ д$х
dqj
9а =
д Г дГ1 _________д VI ____________ д Г дТ ~] ___
“ Фу L Фуha = - d<ii ^‘Ра ~ фу L Фу J?a = ~
а = т-Н
_ дгТ , Vi dsT ф« _ п__________________ У
ФуФу ' dc/jd^ dqt iJ' Zd
ass/n-j-l и = т-|-1
Используя равенства (б), получаем
п
afj = aij-~ У, b aaja t (I, J==i, ..., m). (10)
a, 3 = 1
A
Но на основании равенства (4) где Apa — алге-
браическое дополнение элемента а?я в определителе D. Исполь-
зуя это обстоятельство, можно вместо формулы (10) написать:
аГу=4
ai, m+i
am+i,m+i
aln
anj an, m+i
ann
.. - i m).
(10')
am±i,J
Таким образом, формула (7) имеет вид
m п
2 2 (11)
i, у= 1 a, ₽=т-Н
*) Здесь и в дальнейшем q% = ... означает, что в выражении,
стоящем в квадратных скобках, все qa заменяются их выраже-
ниями (6).
$ 48] ПРИВЕДЕННАЯ СИСТЕМА. ПОТЕНЦИАЛ РАУСА 277
Здесь коэффициенты afj и b определяются равенствами (4)
и (10).
Пусть силы, приложенные к склерономной системе, имеют
потенциал П = П(£, qt). Тогда L—T—П. Вычислим функ-
цию Рауса (см. § 13):
п
R = R(t, qb Pj = 2
a==OT-^-l
n ( n ГЛ .
= 2 n 2 2^)—7+n==
a=m4-l = i = l '
m n
2 2 b°^°p?+
i,j=\ a, p=m4~l
m , n .
+n—2( 2 (i2>
i = l'a—m-4-1 '
Рассмотрим функцию П* (t, qb ра), которую назовем
потенциалом Рауса ’):
п
п*=п+| 2 <13>
а, ? = 1л4-1
Пользуясь тем, что
b = А«
"Р D ’
где — алгебраическое дополнение элемента а^ в опре-
делителе D, можно записать выражение для потенциала Рауса
еще в следующем виде:
П* = П — 2D 0 Pm+1 Pm+1 ат+1-ггм •• Pn • am+i, n (13')
Pn an,m+i •• ann
*) R о u t h Е. О., The advanced part of a Treatise on the dyna-
mics of a system of rigid bodies, 5th ed., 1892, § 99.
278
СИСТЕМЫ С ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ
[ГЛ. VII
Кроме того, введем обозначение
т
^a^qj. (И)
М=1
Тогда, согласно равенству (12), функция —R, которая
для позиционных координат играет роль функции Лагранжа,
равна
Т* — V, (15)
где V—обобщенный потенциал, определяемый равенством
т / п \
s (16)
i = l\a = m4‘l ‘
Рассмотрим теперь какое-либо движение исходной системы.
В этом движении
const = са (а. = т -ф-1, ..., и), (17)
и изменение позиционных координат q, — qt (t) (г = 1, ..., m)
может быть определено из дифференциальных уравнений (8)
на стр. 95, в которых всюду ра следует заменить на са(а =
= т -j- 1, .. , «)• Но эти уравнения являются уравнениями
Лагранжа (с функцией Лагранжа —R —Т* — V) для некото-
рой вспомогательной натуральной склерономной системы
с т степенями свободы, имеющей кинетическую энергию
т
2 afyqjlj и обобщенный силовой потенциал
I ,i= 1
т , п .
v=— У 9i + n*(t qt, са). Потенциальной
энергией этой системы является потенциал Рауса П* (t, qt, са).
Из формул (11) — (13) следует, что
7’+П= Г*4-П*. (18)
Полученную вспомогательную систему будем называть
приведенной системой.
Таким образом, изменение позиционных координат
Чъ Ят определяет движение приведенной системы
(с т степенями свободы) с кинетической энергией Т* и обоб-
щенным потенциалом V= Ц П*, где П* — потенциал
5 481 ПРИВЕДЕННАЯ СИСТЕМА. ПОТЕНЦИАЛ РАУСА 279
Рауса. При соответствующих движениях исходной и
приведенной системы полные энергии этих систем равны
между собой.
Когда функции (ц — qt (t) (Z=l, ..., т), определяющие
движение приведенной системы, найдены, то изменение со
временем циклических координат q^ — q^t) (а = т-у-\,..., и)
может быть определено из формул (9) на стр. 95, которые
сейчас могут быть написаны так:
Г т “1
f дп*(£, qb ся) V . . . ,, . ,
Чч.— J qc 2 (.4>) Ч] dt-^-c,,
L “ j=i
(а — т -|- 1, ..., и).
(19)
Рассмотрим частный случай, когда выражение кинетиче-
ской энергии исходной системы (1) не содержит произведений
позиционных скоростей qt на циклические скорости q„, т. е.
случай, когда все а1х=0 (г—1, ..., т\ а. = т-\-\, .п).
В этом случае кинетическая энергия Т распадается на две
квадратичные формы, из которых одна содержит только пози-
ционные скорости qh а вторая — только циклические скоро-
сти q„. Такая система называется гироскопически несвязанной.
Для гироскопически несвязанной системы, согласно форму-
лам (5), все 7^1 = 0 и, следовательно, Ц=-0 и У = П*.
Таким образом, если исходная система является гироско-
пически несвязанной, то приведенная система имеет
обычный потенциал П* 1).
Кроме того, из равенств (10) следует, что для гироскопи-
чески несвязанной системы atj = ati т), т. е.
т
(20)
«,у=1
В этом случае исходная система имеет кинетическую энергию
т п
2 aM+i: 2
’) На приведенную систему действуют потенциальные силы
дП»
----ч— и гироскопические силы,' определяемые потенциалом Ц.
В случае гироскопически несвязанной системы И1 = 0 и гироскопи-
ческие силы отсутствуют.
280
СИСТЕМЫ С ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ
(ГЛ. VII
и потенциальную П = П (t, qt), а приведенная — кинетическую
п
энергию atj4tQj и потенциальную
I 1
п
п*=п(/, ?,)+4 2
Мы видим, что часть кинетической энергии исходной
. п .
системы ^«зс«ср) перешла в потенциальную
' а, ₽ —т+1
энергию приведенной системы.
Все сказанное о склерономных системах справедливо,
дп „
в частности, для консервативных систем, у которых -^-=0,
т. е. П = П (д’,-). Приведенная система для гироскопически не-
связанной консервативной системы будет снова консервативной.
Пусть теперь дана произвольная консервативная си-
стема с т степенями свободы, с кинетической энергией
т
Т* — ~2 aij(<h> •••> Qnd4i4j и потенциальной энергией
;,;=1
П* = П* (<у;). Рассмотрим консервативную систему, у которой
число степеней свободы равно т -]-1 и которая имеет т
позиционных координат qb ..., qm и одну циклическую
координату ?т+1.
Пусть у новой системы П = 0, а кинетическая энергия
имеет вид
7'=r + ¥nW^+’ (* = const)-
Тогда
_ k
Pm+i д# Чт+i
И
Но тогда при рт+1 = ст+1=У2й
ПРИВЕДЕННАЯ СИСТЕМА. ПОТЕНЦИАЛ РАУСА
281
*481
Таким образом, у данной консервативной системы кинети-
ческая и потенциальная энергии Т* и П* = П* (г/;), а у новой
«расширенной» системы Т — Т* -|- П* (<у() и П = 0.
Потенциальная энергия данной системы получилась
за счет кинетической энергии «расширенной» системы,
имеющей большее число степеней свободы.
Движения, при которых изменяются только циклические
(скрытые) координаты, иногда называются скрытыми движе-
ниями *).
Выше мы видели, что потенциальная энергия кон-
сервативной системы всегда может быть рассматри-
ваема как кинетическая энергия скрытых движений.
Эта концепция о кинетическом происхождении
потенциальной энергии и, следовательно, о кине- ь- »
тическом происхождении сил, приложенных к те- I '
лам, осуществляющим явные (нескрытые) движе- \
ния, была широко развита Герцем в его «Прин- \
ципах механики» (1894 г.)2).
Пример. Рассмотрим движение твердого тела с за- \
крепленной точкой О в случае Лагранжа, когда на тело \ q
действует сила веса Mg-, существует ось динамической д/л V*-
симметрии и центр тяжести D расположен на этой оси. 12 \
Положение тела будем задавать с помощью трех
углов Эйлера 0, <р, ?, где угол нутации 0 — угол между \
вертикальной осью Oz и осью"динамической симмет- \
рии ОС (рис. 56), ф— Угол прецессии, а <р—угол \
чистого вращения. Пусть l = OD, а А и С—эквато- '
риальный и аксиальный _ моменты инерции соответ-
ственно. Тогда
2Г= Д (р2 + ?2) + Cr2, II = Mg/cos 0, РИС’
где р, q, г—проекции угловой скорости и на главные оси инер-
ции 0$, От], ОС. Но
р2 Ц- q2 = 02 + ф2 sin2 0, г = <р ip cos 0.
Поэтому окончательно
2Т= А (02 -р- ф2 sin2 0) -ф- С (ср Ц- <р cos 0)2, П = Mglcos 0. (21)
*) Ярким примером проявления скрытых движений являются
системы, содержащие внутри себя гироскопы. За счет «скрытых»
движений гироскопов движение таких систем резко отличается от
движения систем без гироскопов.
2) Герц Г., Принципы механики, изложенные в новой связи,
М., 1959; см. также Thomson W. and Tait Р., Treatise on natu-
ral philosophy, Part 1, § 319 и А. Вебстер, Механика материаль-
ных точек, твердых, упругих и жидких тел, М., 1933, гл. V.
282
СИСТЕМЫ С ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ
[ГЛ. VII
Найдем выражения для обобщенных импульсов plf, ру, соот-
ветствующих циклическим координатам <р, ф:
ру = (Д sin2 в С cos2 6) ф 4- С cos в ф, 1
Р<? = С cos 0 4- Сф. J
Разрешив эти соотношения относительно фиф, получим
. Рф-СО5 0Д,
' Д sin2 6 >
— С cos в Др + (Д sin2 в + С cos2 0) р,?
AC sin2 0
Коэффициенты при Др и pv в правых частях равенств (23) й
представляют собой величины Ь^. Выражение для кинетической
энергии в переменных Рауса 0, 0, ру, р? получаем, подставляя
выражения (23) для ф и ф в выражение (21) для 2Т или сразу по
формуле (И)1):
2Г = лё2 4- Cpl ~ 2С cos 0 sinS 0 + С cos2 0> Ар /941
ДС sin2 0 ‘ ( ’
При движении системы импульсы ру и р сохраняют постоян-
ные значения
Рф = а, Р<? = Ь. (25)
Нутационное движение определяется приведенной системой,
для которой
Г* = 1 Д02, П* = Mgl cos 0 + X. (26)
/1 bill и о
Изменение угла нутации 0 = 6 (t) находится из соответствую-
щего интеграла энергии
i- ДО2 4- Mgl cos 0 4- = const = h. (27)
2 1 ' Д sin2 0 1 ’
Введем вспомогательную переменную n=cos0. Умножая обе
2 2
части равенства (27) на (1 — и2) = sin2 0, находим
А /1
Ы=/(и)’ (28)
4 В данном случае твердое тело представляет собой гиро-
скопически несвязанную систему. В этом случае в формуле (11)
a‘ij —atj (i,j — 1, m).
§ 481
ПРИВЕДЕННАЯ СИСТЕМА. ПОТЕНЦИАЛ РАУСА
283
где /(и)—многочлен третьей степени относительно и:
2 2
f{u)=±(h-Mglu)(\-u2)--^(a-buy. (29)
Полагая в этом выражении и = ±1 и и = и0 = cos 0О < 1, находим1)
/(—!)< О, = /(+1)<0.
Тогда многочлен/(и) имеет три вещественных корня и1 = cos 0Ь
tz2 = cos 02 и и':
— 1 < U, < и2 < 1 < и',
и [поскольку /(-)-оо) = 4~о°] график
вид, как показано на рис. 57,
многочлена /(и) имеет такой
Рис. 68.
Так как при движении тела —1 и = cos 0-< + 1
= —г- 5= 0, то величина и = cos 0 должна изменяться
\ at /
вале н, si и =< zz2, т. е. О, Js О 0„. Угловая скорость
определяется из первой формулы (23):
а — b cos 8
A sin2 О
и /(«) =
в интер-
прецессии
(30)
„ а
Если отношение находится вне интервала u, si zz =i гг», то ско-
рость прецессии Ф сохраняет постоянный знак и прецессионное
движение происходит все время в одном направлении. В этом слу-
чае след, оставленный осью (X на неподвижной сфере с центром
в О, описывает кривую, изображенную на рис. 58.
*) Мы здесь предполагаем, что a^bdcb. Особые случаи а = ±Ь
будут рассмотрены ниже. Кроме того, начальное значение 0О вы-
бираем так, чтобы 0о^6О и, следовательно,
284
СИСТЕМЫ С ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ
[ГЛ. VII
с О.
Если же <_ < щ, то скорость прецессии меняет знак при
cos 0* = -|- и след динамической оси описывает на сфере кривую,
показанную на рис. 59.
с а t
Если -j- = и2, то скорость прецессии ф не меняет знака, но
обращается в нуль на верхней параллели S — 93 (рис. 60)'),
Аналитически изменение угла нутации определяется из формул
du
V7w
= t 4- const,
8 = arc cos u.
(31)
Здесь знак «-ф-» берется при изменении fl от значения 02 до
значения 0! и знак «—ъ— при изменении 0 в обратном направле-
нии. Очевидно, изменение угла 0 во времени будет периодической
функцией 0 (t) с периодом
и2
§ FW
(32)
После того как изменение угла нутации 0 = 0 (£) найдено, измене-
ния углов ф и <р определяются по формулам (23).
Рассмотрим теперь движение твердого тела, проходящее через
<особое» положение 0=0. В этой точке кинетическая энергия
задается вырожденной квадратичной формой [см. выражение (21)
при 0 = 0]
2г=а&2-[-С(Ф + ф)2. (33)
’) Можно доказать, что ф не может обращаться в нуль на
нижней параллели.
§ «1
УСТОЙЧИВОСТЬ СТАЦИОНАРНЫХ ДВИЖЕНИЙ
285
Согласно формулам (22) в особой точке 0 = 0 должно иметь
место равенство р^,=р1(, т. е.
а = Ъ. (34)
Предполагая, что произвольные постоянные а и b связаны соот-
ношением (34), мы легко раскрываем неопределенность в выраже-
нии (26) для потенциала Рауса ’):
ттз, гк 1 о2 1 — cos 6
П* = Mgl cos 0 Ц- :-------g-.
1 A 1 cos 0
После этого нутационное движение снова определяется из
интеграла энергии Т* П* = const.
Если движение проходит через «особое» положение 0 = л, то
вместо (34) имеем соотношение
а = —Ъ
и выражение для потенциала Рауса принимает вид
тт* , а , а2 1 4- cos 0
П* = М gl cos 0 4- -у- -г—'-х-.
4 1 — cos 0
В рассмотренных двух «особых» случаях верхняя или соответ-
ственно нижняя параллель на рис. 58—60 вырождается в точку.
§ 49. Устойчивость стационарных движений
Рассмотрим консервативную систему, положение которой
задается при помощи m позиционных координат qt и п — m
циклических координат #а(/=1, т; п).
Движение такой системы определяется каноническими урав-
нениями:
dqr дН dpr дН , , ч .
dt дрг dt dqr ' 7 v '
где полная энергия системы pit р2) имеет вид
п
2 + •••> ЧгЛ (2)
Г, s=l
*) В выражении для II* мы отбрасываем постоянное слагае-
Ь2
286
СИСТЕМЫ С ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ
[ГЛ. VII
причем квадратичная форма, стоящая в правой части этого
равенства, является положительно определенной1). При дви-
жении системы функция Н и обобщенные импульсы рл(а —
= от-|-1, и) не изменяют своих значений, т. е. эти
величины являются интегралами движения:
Н(Vi, Pi> У«) = Н(Чь Pi> Pl)> 1
рл=р1 (а== т + Ъ • ••>»)• J
Движение системы называется стационарным, если при
этом движении все позиционные координаты сохраняют по-
стоянные значения qt = const = ql (Z=l, ..., tri).
При стационарном движении все позиционные скорости
равны нулю и потому, согласно уравнениям (1) и равен-
ству (2),
т п
&=£ cik(qt)PkJr У, •••> т). (4)
Д = 1 а = т-[-\
Из этих соотношений следует3), что при стационарном
движении имеют постоянные величины и все позиционные
импульсы pi — const =р“. Поскольку qt = р, — 0 (г = 1,..., т),
то из уравнений (1) вытекает, что при стационарном движении
дН „ дН
-л— = 0, -д— = 0 0=1, т\ (5)
dqt dpi v v ’
Уравнения (5) представляют собой необходимые и доста-
точные условия, которым должны удовлетворять начальные
значения qi, р°, pl (/=1, от; а=от-|~1> •••> п) Для
того, чтобы движение, определяемое этими начальными дан-
ными, было стационарным.
*) Эта квадратичная форма представляет собой кинетическую
Энергию системы, выраженную через обобщенные импульсы.
г) Соотношения (4) могут быть разрешены относительно пози-
ционных импульсов р/г, так как определитель det [cift (?“)]”^_]
п
отличен от нуля, поскольку квадратичная форма У crsprps
Г, J=1
является положительно определенной.
УСТОЙЧИВОСТЬ СТАЦИОНАРНЫХ ДВИЖЕНИЙ
287
§ «]
Заметим еще, что при стационарном движении имеют
постоянные величины и циклические скорости <?я (а =
= т-\- 1, и), так как в соответствии с (1)
п
Чл= ^ = 2c«^°)/75==const (а = м-Н 1, п). (6)
s= 1
Поэтому
—AO + tfa (а = да + 1, и). (7)
Начальные циклические координаты ql являются произволь-
ными постоянными и в условия (5) не входят.
Таким образом, при стационарном движении пози-
ционные координаты сохраняют постоянные значения,
а циклические координаты изменяются по линейному
закону.
Пример. Регулярная прецессия тяжелого симметричного
гироскопа представляет собой стационарное движение.
Действительно, регулярная прецессия характеризуется равен-
ствами
0 = const = 0о, <р = const, <р = const,
где угол прецессии ф и угол чистого вращения — циклические
координаты, а угол нутации 6 — угол, образованный осью гироскопа
с вертикалью, — позиционная координата *).
Заметим, что согласно соотношениям (6) небольшое изме-
нение начальных величин ql, pl, pl дает небольшое изме-
нение начальных циклических скоростей ql(y = m-\-1,..., и).
Однако небольшое изменение величин $£, согласно форму-
лам (7), дает с течением времени сколь угодно большое
изменение самих циклических координат. Поэтому по отно-
шению к циклическим координатам стационарное дви-
жение не может быть устойчивым.
В дальнейшем под устойчивостью стационарного движения
мы будем понимать устойчивость по отношению ко всем
*) Из формулы (21) предыдущего параграфа видно, что коор-
динаты ф и ф не входят явно в выражения для кинетической и
потенциальной энергий.
288
СИСТЕМЫ С ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ
[ГЛ. VII
импульсам Pi и рхи позиционным координатам q, (1= 1, ...,т;
а = т 1, ., п) *).
Тогда имеет место следующий критерий устойчи-
вости стационарных движений.
Движение с начальными данными qt, pt, pl(i = 1, ..., т;
а = м4-1, ..., ri) будет устойчивым стационарным дви-
жением, если функция H(qi, pt, /Д) в точке qt=ql,
pi=pl (/=1, т) имеет строгий экстремум.
Действительно, рассматриваемое движение будет стацио-
нарным, поскольку из существования экстремума функции
H(qi, pi, pi) следует, что величины qt, pt (i=l, ..., т)
совместно с величинами pl (у = т -ф- 1, ..., п) удовлетворяют
уравнениям (5). Введем отклонения
=qi~ qt, = Pi — pl, 4\a=p<z — pl.
Тогда, используя интеграл движения Pi ~Ь "Чь Pa)
в качестве функции Ляпунова, можно сделать заключение (см.
стр. 209) об устойчивости нулевого решения Вг = 0, ^ — 0
(т. е. устойчивости стационарного движения) в предположении,
что циклические импульсы ра не испытывают возмущений (т. е.
что эти величины для возмущенного движения имеют те же
значения pl, что и для невозмущенного2)).
Однако сформулированный выше критерий устойчивости
сохраняет свою силу и в общем случае, когда для возму-
щенного движения величины т^ — ра-—pl(a.— m-]-l, ..., п)
могут быть отличными от нуля3). Для того чтобы убедиться
в этом, достаточно использовать следствие из теоремы Ля-
пунова (стр. 209), взяв в качестве функции Ляпунова функцию
[Я(^ + е/, + > pl)~ Н(Ф,р?,рЖ+ £ (8)
a=m+l
Эта функция является интегралом движения и имеет при £(=0,
т]; = 0, ?]а — 0 (Z=l, ..., т; ч. — т-\-\, ..., ri) строгий
минимум, равный нулю.
*) Или, что то же, устойчивость относительно величин
qt, qi, рЛ 0 = 1, • • •, т; « = т +1, ..., п).
2) Именно такого рода устойчивость рассматривал Раус.
а) II о ж а р и ц к и й Г. К., Прикладная математика и механика,
т. 22, вып. 2, 1958.
§ «1
УСТОЙЧИВОСТЬ СТАЦИОНАРНЫХ ДВИЖЕНИЙ
289
Установим аналогию между устойчивостью состояния равно-
весия и устойчивостью стационарного движения. Для этого
рассмотрим приведенную систему с т независимыми коорди-
натами qb ..., qm и с потенциальной энергией, равной
потенциалу Рауса:
п
П*(?ьЛ = П(^) + 4 2 ^(qi)plp$ (9)
а,
(см. предыдущий параграф). На приведенную систему помимо
потенциальных сил
дП*
fyi
, т) действуют еще ги-
роскопические силы. Так как стационарному движению исход-
ной системы qt = ql, pa=pi (i=l, ..., т; a = mJrl,..., п)
соответствует положение равновесия приведенной системы, то
величины ql, pi должны удовлетворять уравнениям
дЯ*(Ч1, = о
•tyi
(I = 1,..., т).
(Ю)
(1=1
Это необходимые и достаточные условия существования
стационарного движения. Они, очевидно, эквивалентны
условиям (5) и получаются из последних исключением вели-
чин Pi (/=1, ..., т). Применяя теорему Лагранжа к поло-
жению равновесия qi=ql приведенной системы, получаем
критерий устойчивости стационарного движения в следующей
форме.
Движение с начальными данными ql, ql = 0, pi
(1 = 1,..., т\ а = /и-|-1,..., п) будет устойчивым ста-
ционарным движением, если потенциал Рауса П* (qt, pi)
имеет строгий минимум при qt = ql (1=1,..., т).
Применяя теорему Лагранжа к приведенной системе,
мы фиксировали постоянные значения циклических импуль-
сов рЛ =pi (а = т -f- 1, ..., п). Однако критерий сохраняет
свою силу и при варьировании импульсов pi. Для того
чтобы -установить это, достаточно в качестве функции Ляпу-
нова взять интеграл движения
[Д* (ql + qit pi) - Д* (ql, 0, р»)]2 -|- £ 7]’, (11)
где Е* = Т* -|- П* — полная энергия приведенной системы [она
совпадает с полной энергией исходной системы, выраженной
290
СИСТЕМЫ С ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ
[ГЛ. VII
в переменных Рауса qit qit ра (см. § 48)], а — qt — ql,
Я,, —pi (1=1, ..., т; a = m -|- 1, ..., n) — откло-
нения возмущенного движения (от данного стационарного
движения). Функция (11) имеет строгий минимум (равный нулю)
при £(- = 0, — т]я--0 (1=1,..., т; ot = z«—j— 1, ..., п).
Приведенный здесь критерий устойчивости стационарного
движения в несколько иной форме был установлен Раусом
в 1884 г.
Пример. Определить устойчивые стационарные движения
неоднородного весомого шара на гладкой горизонтальной плоскости,
если центр тяжести шара D отстоит от геометрического центра О
на расстоянии d, масса шара равна М, момент инерции относи-
тельно оси OD равен С, а два других главных центральных момента
инерции равны между собой, А —В (рис. 61) *).
В качестве независимых координат возьмем две горизонтальные
координаты центра тяжести xD, yD и три угла Эйлера <р, ф, 0. При
этом угол <р является углом «чистого вращенияэ вокруг оси дина-
мической симметрии ОС, проходящей через точки D и О', направле-
ние оси ОС совпадает с направлением вектора DO. Напишем
>) Рассматриваемое в этой задаче твердое тело представляет
собой физический маятник, у которого ось подвеса является осью
динамической симметрии, а точка опоры О может свободно сколь-
зить (без трения} вдоль горизонтальной плоскости.
S *91
УСТОЙЧИВОСТЬ СТАЦИОНАРНЫХ ДВИЖЕНИЙ
291
выражения для кинетической и потенциальной энергии:
2Т = А (р2 + <?2) + Cr* + М (ХЬ + j»b + П = MgzD.
Здесь р, q, г — проекции угловой скорости « на центральные оси
инерции. Но
ps qs = 02 -j- ф2 sin2 0, г = <р 4~ ф cos 0, £д = — d cos 0.
Поэтому
2Г= (А 4- Afd2 sin2 0)02 4- Аф2 sin2 0 4- С г2 4- М (xsD 4- fy),
П = — Mgd cos 0.
Координаты xD, yD, ср и ф являются циклическими. Во время
движения соответствующие импульсы сохраняют постоянные значе-
ния, а именно:
px = M^D=a, р=^Муо = й, р,=Cr = t,\
. } (12)
Рф = Афзт20 4-Сгсо8 0 = 0. J
Кроме того,
= (А + Afd2 sin2 0) В.
Напишем выражение для функции Гамильтона в переменных
fl> Рх = а< Ру = $, Рв, Р<р = Ъ Ру = ъ'-
и ^9 I 1 /8— Y COS0 \2 ,
Н~ 2(А + Mda sin2 0) + 2АД sin0 ) ~^rfcos8 +
4- —=--------------~®2---г + П*, (13)
2М А 4-Md2 sin2 6 ~ V J
где
тт* 1 Г® — 7 cos 6 \2 ... „ . а2-]-?2
П* = и-,- -----!—д— — Mg d cos 0 4----n J (14)
2A \ sin0 / ° 1 2M ' '
— потенциал Рауса 4-
Условия существования стационарного движения (5) здесь
имеют вид
4 Мы исключаем из рассмотрения особые значения 8 = 0
И 0 = я. Поэтому sin 0^:0,
292
СИСТЕМЫ С ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ
[ГЛ. VII
Условие устойчивости — наличие строгого экстремума функ-
ции И при = 0 и некотором искомом значении 8 — будет выпол-
нено, если при этом значении 6 функция П* имеет строгий минимум.
Для нахождения этого значения 6 = 0О положим и = cos 6 и
/(«) = ДП* = — ----АГи + const (/< = AMgd).
Найдем:
f (и) - -уВи2 + (у2 + 82)п--уВ _
/W— (1— и2)2
А 4- В2
г (“) — р'-Зцу- о—3^“+3“2—i1"3)-
где *)
_ 2уВ
Iх — 5» •
Допустим, что уравнение —0 имеет корень и такой,
что | и | < 1. Этому значению | и | = cos 6 и соответствует стацио-
нарное движение шара, при котором центр шара перемещается
равномерно и прямолинейно, а углы <р и 6 изменяются по линей-
ному закону.
Для выяснения устойчивости стационарного движения докажем
предварительно, что У" (и) > 0 при | и | < 1. Действительно, если
бы /"(«) = 0 при | и | < 1, то из выражения для f" (а) вытекало бы,
1 Ч-Зи2
“ иг Зи
что р
Отсюда легко усмотреть, что | р | > 1 при [ и | < 1,
что невозможно, поскольку
2у8
Iх — 72-|_S2 •
Следовательно, f" (и) 7= О
при | и I < 1, т. е. f" (и) сохраняет знак в интервале (—1, -f-1).
Но /" (0) = у2 + В2 > 0. Следовательно, f" (и) > 0 при | и | < 1.
Поскольку
d8n*
А = f" (и) sin2 0 —f (и) cos 0 = f" (и) sin2 0 > 0,
то при рассматриваемом значении 0 функция П* имеет строгий
минимум, т. е. соответствующее стационарное движение устойчиво.
Условие существования стационарного движения /’(ы) = 0
можно преобразовать, положив В =ун(1— и2).
х) у2 + В2 > 0, так как при у = В =0 функция П* = — Mg d cos 0
имеет строгий минимум при 0 = 0.
§ 49] УСТОЙЧИВОСТЬ СТАЦИОНАРНЫХ ДВИЖЕНИЙ 293
Если затем в полученное равенство подставить у = Сг =
= С (ср + ф cos 6), то это условие принимает окончательный вид
Ссрср-|-(С—А) <р2 cos 0 -|- Mg d — 0. (15)
Это хорошо известное условие существования регулярной прецессии
под воздействием внешнего момента Ute d sin 0 (момент верти-
кальной реакции N=Mg относительно полюса D).
Рассмотрим отдельно три случая.
1’. Если
Ute d + > I А — С|ф2,
то условие (15) не выполняется ни при одном вещественном зна-
чении 6 и не существует стационарного движения с такими угло-
выми скоростями.
2°. Если | Mg d + Ccptpl < |Д — С | ф2 и величины Afg'd-j-Ccpp
и А — С имеют одинаковые знаки, то при таких угловых скоростях
существует стационарное движение с cos 0 > 0.
3°. Если же | Mg d Серф | < |Д — С | ф2, а величины Mgd-\-
-ф- С<р<р и А — С имеют разные знаки, то при стационарном движе-
нии cos 0 < 0. В этом случае существует устойчивое стационар-
ное движение такое, при котором центр тяжести расположен
выше геометрического центра шара.
Рассмотрим теперь особые случаи.
а) 0о = О. Тогда из формул (12) следует, что ? = В. Поэтому
/ d2H* \ 7s
А \ d^~)е=о = ? (— C0s9o) = (1 Мо)2 + К> 0.
Стационарное движение всегда устойчиво.
б) 0о=л. Из формул (12) находим: -р =— 8. Поэтому
А (-sin0o) = °.
I d2n* V V2 V8
A Wu =f' cos 4 - K-
294
СИСТЕМЫ С ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ [ГЛ. VII
Стационарное движение будет устойчивым при выполнении
условия
которое в подробной записи выглядит так:
C*rs>4AMgd.
(16)
Если неравенство (16) имеет место, то, хотя в рассматриваемом
случае центр тяжести расположен над геометрическим центром
шара, вращение вокруг вертикальной оси будет устойчивым ста-
ционарным движением.
ЛИТЕРАТУРА
Аппель П., Теоретическая механика, т. I и II, перев. с франц.,
Физ м атгиз, 1960.
Бабаков И. М., Теория колебаний, Гостехиздат, 1958.
Булгаков Б. В., Колебания, Гостехиздат, 1954.
Валле Пуссен Ш. Ж., Лекции по теоретической механике,
перев. с франц., Издатинлит, т. I, 1948; т. II, 1949.
Вариационные принципы, сборник статей под ред. Л. С. П о л а к а,
Физматгиз, 1959.
ГантмахерФ. Р., Крейн М. Г., Осцилляционные матрицы и
ядра и малые колебания механических систем, изд. 2-е, Гос-
техиздат, 1950.
Голдстейн Г., Классическая механика, перев. с англ., Гостехиз-
дат, 1957.
Зигель К. М., Лекции по небесной механике, перев. с нем., Из-
датинлит, 1959.
Зоммерфельд А., Механика, перев. с нем., Издатинлит, 1947.
Карт ан Э., Интегральные инварианты, перев. с франц., Гостех-
издат, 1940.
Лагранж Ж. Л., Аналитическая механика, т. I, II, перев.
с франц., Гостехиздат, 1950.
Ландау Л. Д., Лифшиц Е. М., Механика, Физматгиз, 1958.
Л ан ц о ш К., Вариационные принципы механики, перев. с англ.,
изд-во «Мир», 1965.
Ла-Салль Ж., Л е ф ш е ц С., Исследование устойчивости пря-
мым методом Ляпунова, перев. с англ., изд-во «Мир», 1964.
Л о й ц я н с к и й Л. Г., Лурье А. И., Теоретическая механика,
ч. 111, ОНТИ, 1934.
Ляпунов А. М., Общая задача об устойчивости движения, Гос-
техиздат, 1950.
М а к - М и л л а н В. Д., Динамика твердого тела, перев. с англ.,
Издатинлит, 1951.
Малкин И. Г., Теория устойчивости движения, Гостехиздат, 1952.
Мер к ин Д. Р., Гироскопические системы, Гостехиздат, 1956,
Розе Н. В., Лекции по аналитической механике, ч. 1, Изд. ЛГУ,
1938.
296 ЛИТЕРАТУРА
Синг Дж. Л., Классическая динамика, перев. с англ., Физматгиз,
1963.
Суслов Г. К., Основы аналитической механики, изд. 2-е, Киев,
1911—1912; изд. 3, переработанное Н. Н. Бухгольцем и
В. К. Гольцманом под названием: Теоретическая меха-
ника, Гостехиздат, 1944.
Уиттекер Е. Т., Аналитическая динамика, перев. с англ., ОНТИ,
1937.
Че та ев Н. Г., Устойчивость движения, изд. 3-е, изд-во «Наука»,
Главная редакция физико-математической литературы, 1965.
Якоби К., Лекции по динамике, перев. с нем., ГОНТИ, 1936.
Corden Н. С., Stehle Ph., Classical mechanics, Wiley, New
York; Chapman, London, 1950.
Routh E. T., The advanced part of a Treatise on the dynamics of a
system of rigid bodies, изд. 6-e, London Macmillan, 1905.
ИМЕННОЙ УКАЗАТЕЛЬ
Айзерман М. А. 220,
226, 272
Аппель П. 71, 295
Аристотель 31
Бабаков И. М. 252,
295
Бернулли И. 31
Бобылев Д. К. 111
Булгаков Б. В. 295
Бухгольц Н. Н. 295
Валле Пуссен Ш. 8,
295
Вебстер А. 281
Вейерштрасс К. 239
Галилей Г. 31, 34
Гамильтон У. 83,85,
86, 105, 159
Гельмгольц Г. 126
Герц Г. 281
Голдстейн Г. 176,295
Гольцман В. К. 295
Гурвиц А. 225
Гюйгенс X. 34
Даламбер Ж. 37
Дирихле Л. 192
Донкин У, 86
Зигель К. 295
Зоммерфельд А. 295
Каратеодори К. 176
Картан Э. 9, 137,
295
Кибель И. А. 122
Корбен Г. 296
Кочин Н. Е. 122
Крейн М. Г. 251, 256,
257, 295
Курант Р. 250
Лагранж Ж. 27, 83,
132, 192, 239, 295
Ландау Л. Д. 80, 101,
295
Ланцош К. 295
Ла-Салль Ж. 295
.Лежандр А. 86
Лефшец С. 295
Ли Хуа-чжун 139
Ливартовский И. В.
220
Лифшиц Е. М. 80,295
Лойцянский Л. Г. 75,
295
Лурье А. И. 75, 295
Льенар А. 226
Ляпунов А. М. 197,
199, 204, 219,
295
Мак-Миллан В. 295
Максвелл Дж. 255
Малкин 14. Г. 199,
295
Меркин Д. Р. 295
Мерсенн М. 258
Михайлов А. В. 228
Мопертюи П. 132
Остроградский М. В.
105
Пожарицкий Г. К.
288
Полак Л. С. 295
Пуанкаре А. 9, 136,
219
Пуассон С. 298
Пятигорский Л. 101
Раус Э. 91, 225, 275,
277, 288, 290, 296
Релей Дж. 251
Розе Н. В. 122, 132,
295
Сильвестр Д. 56
Синг Дж. 296
Стил Ф. 296
Стокер Дж. 221
Суслов Г. К. 8, 42,
75, 131, 296
Томсон В. 281
Торричелли Э. 192
Тэт П. 281
Уиттекер Е. 128, 265,
296
Ферма П. 132
Фихтенгольц Г. М.
123, 270
Фишер Е. 250
Четаев Н. Г. 197,
199, 209, 211, 212,
296
Шипар М. 226
Эйлер Л. 33
Якоби К. 98, 130,
159, 296
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Ансамбль статистический 144
Аппеля уравнения 71
Вековое (характеристическое)
уравнение 215, 233
Виртуальные перемещения 17
Вихревые линии 125
Вихрь (ротор) скорости 124
Возможные перемещения 16
— скорости 16
Выражение союзное 84
Гамильтона переменные 83
— принцип 104—105
-----, вторая форма 112
— уравнения 85—86
— функция 85—86
----- главная 158
Г амильтона — Якоби уравнение
155
Гельмгольца теорема 126
Геометрический критерий асимп-
тотической устойчивости 228
Главные колебания 239
— координаты см. Нормальные
координаты
Гурвица многочлен 228
— определители 226
Даламбера принцип 37
Движение стационарное 286
Действие по Гамильтону 103
—----Лагранжу 131
Донкина теорема 86
Закон Мерсенна 258
«Золотое правило механики» 31
Импульсы обобщенные 83
Интеграл уравнений движения 97
— энергии 59
•--обобщенный 88—89
Интегральный инвариант абсо-
лютный 138
---относительный 138
---Пуанкаре—Картана 117
----------, гидродинамическая
интерпретация 122
---Пуанкаре универсальный
136—137
Каноническое преобразование
см. Преобразование канониче-
ское
Координаты нормальные 198, 242
— обобщенные 41
— позиционные 275
— циклические 93
Коэффициент влияния 255
Критерий Михайлова см. Геоме-
трический критерий асимпто-
тической устойчивости
— Рауса — Гурвица 226
— устойчивости стационарных
движений 288
Лагранжа неопределенные мно-
жители 25, 27
— переменные 83
— скобки 182—183
— теорема 192
— уравнения второго рода 49
--- первого рода 27
— функция 77
Лежандра преобразование 86
Ли Хуа-чжуна теорема 139
Линии вихревые 125
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
299
Лиувилля теоремы 144, 145, 171,
186
Льенара — Шипара условия 226
Ляпунова теорема о неустойчи-
вости равновесия I 197
-------------II 199
---об устойчивости.движения
208
— функция 206
Мерсенна закон 258
Метод разделения переменных
162—171
Мопертюи — Лагранжа принцип
131—132
Нормальные координаты 198, 242
Обобщенная полная энергия 89
Обобщенные импульсы 83
— координаты 41
— силы 44—45
— скорости 49
— ускорения 49
Общее уравнение динамики 25
Переменные Гамильтона 83
— Лагранжа 83
— Рауса 91
Перемещения виртуальные 17
— возможные 16
Позиционные координаты 275
Потенциал кинетический 77
— обобщенный 78
— Рауса 277
— сил 57
Преобразование каноническое
146
--- свободное 150
--- точечное 154
--- унивалентное 149
— контактное 150
— Лежандра 86
Преобразования канонического
валентность 149
---производящая функция 149
— каноничности необходимое и
достаточное условие 149
Принцип взаимности Максвелла
255
Принцип виртуальных переме-
щений 30
— Гамильтона 104—105
---, вторая форма 112
— Даламбера 37
— Мопертюи — Лагранжа 131—
132
— Торричелли 33, 192
— Ферма 132
Пространство координатное
п-мерное 41
---расширенное (и -f- ^-мер-
ное 103
— состояний 2и-мерное 190
— фазовое 2п-мерное 127
---расширенное (2п-|- ^-мер-
ное 112
Псевдокоординаты 68
Псевдоскорости 68
Псевдоускорения 70
Пуассона скобки 98
— тождество 98
Путь в расширенном координат-
ном пространстве 104
-------------окольный 104
-------------прямой 104
Равновесия положение 30
--устойчивое 189—190
—------асимптотически 200
— свободного тела условия 32
Рауса переменные 91
— потенциал 277
— уравнения 92
— функция 92
Рауса — Гурвица условия 226
Реакция связи 19
Релея диссипативная функция 63
— теорема 251
Связь 11
— дифференциальная 12
--- интегрируемая 12
— идеальная 20
— конечная 12
— неголономная 13
— неудерживающая 15
— полуголономная 13
— стационарная 13
— удерживающая 15
Силы активные 19
300
Предметный указатель
Силы обобщенные 44—45
--- непотенциальные 57
------- гироскопические 60
-------диссипативные -60
---потенциальные 57
Сильвестра критерий 56
Система гироскопически несвя-
занная 279
— голономная 13
— диссипативная 61
— консервативная 59
— натуральная 81
— неголономная 13
— несвободная 11
— обобщенно-консервативная 88
— определенно-диссипативная 63
— реономная 13
— свободная 11
— склерономная 13
Скобки Лагранжа 182—183
— Пуассона 98
Скорости возможные 16
— обобщенные 49
Союзное выражение 84
Степень устойчивости 218
Теорема Гельмгольца 126
— Донкина 86
— Лагранжа 192
— Ли Хуа-чжуна 139
— Лиувилля 144, 145, 171, 186
— Ляпунова о неустойчивости
движения I 197
-------------П jpg
— — об устойчивости движе-
ния 208
— об асимптотической устойчи-'
вости 202
---изменении полной энергии
58—59
— о сохранении потока вихря
124
— разделения корней векового
уравнения 252
— Релея 251
— Томсона 123
— Четаева 199
— Якоби 156
Теорема Якоби — Пуассона 100
Тождество Пуассона 98
Торричелли принцип 33, 192
Углы Эйлера 41—42
Уиттекера уравнения 128
Уравнение вековое 215, 233
— Гамильтона — Якоби 155
— динамики общее 25
Уравнения Аппеля 71
— Гамильтона 85—86
— Лагранжа второго рода 49
----- первого рода 27
— Рауса 92
— Уиттекера 128
— Якоби 130
Ускорения обобщенные 49
Условия Льенара — Шипара 226
— Рауса — Гурвица 226
Устойчивости степень 218
Устойчивость условная 206
Ферма принцип 132
Фокус кинетический 112
Функция Гамильтона 85—86
— Лагранжа 77
— Ляпунова 206
— Рауса 92
— Релея диссипативная 63
Характеристика частотная 268
Циклические координаты 93
Циркуляция скорости 123
Четаева теорема 199
Число степеней свободы 19
Эйлера углы 41—42
Энергии интеграл 59
-----обобщенный 88—89
Энергия обобщенная полная 89
— ускорений 71
Якоби — Пуассона теорема 100
Якоби теорема 156
— уравнения 130