/


















































































































































































































































































































































































































Автор: Павлов А.В. Котик М.Г. Пашковский И.М. Щитаев Н.Г.
Теги: техника средств транспорта авиация самолетостроение самолеты
Год: 1968




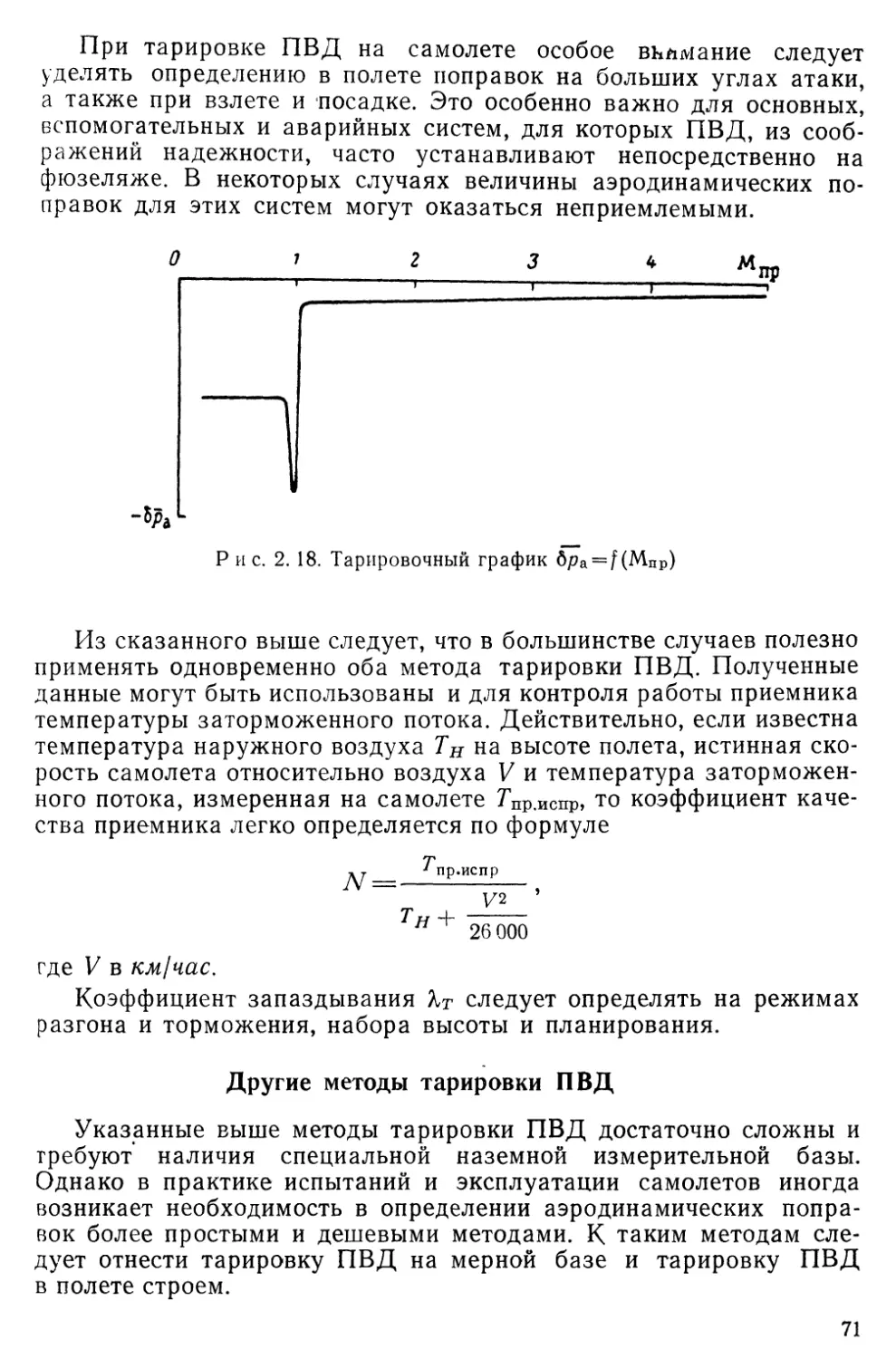
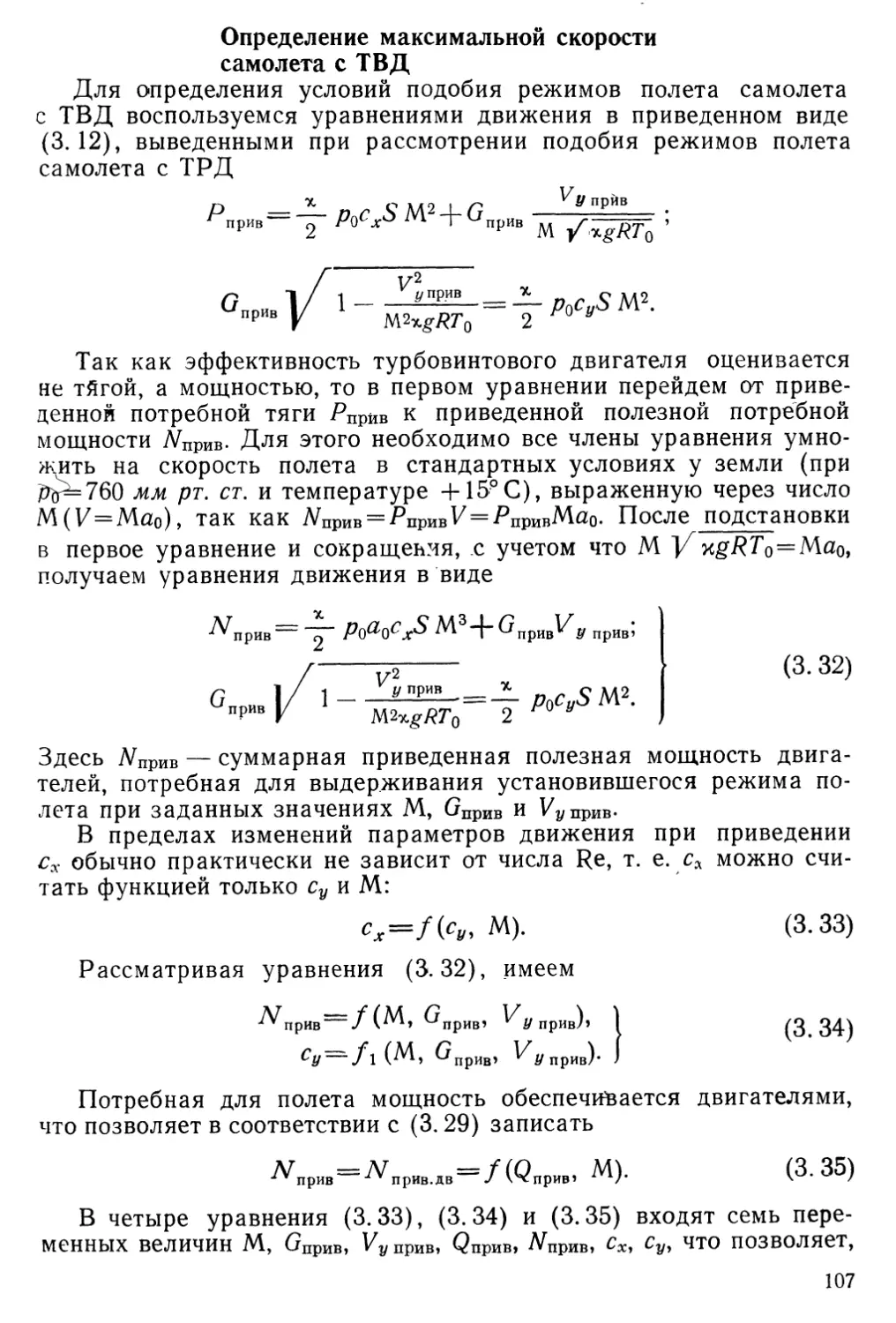
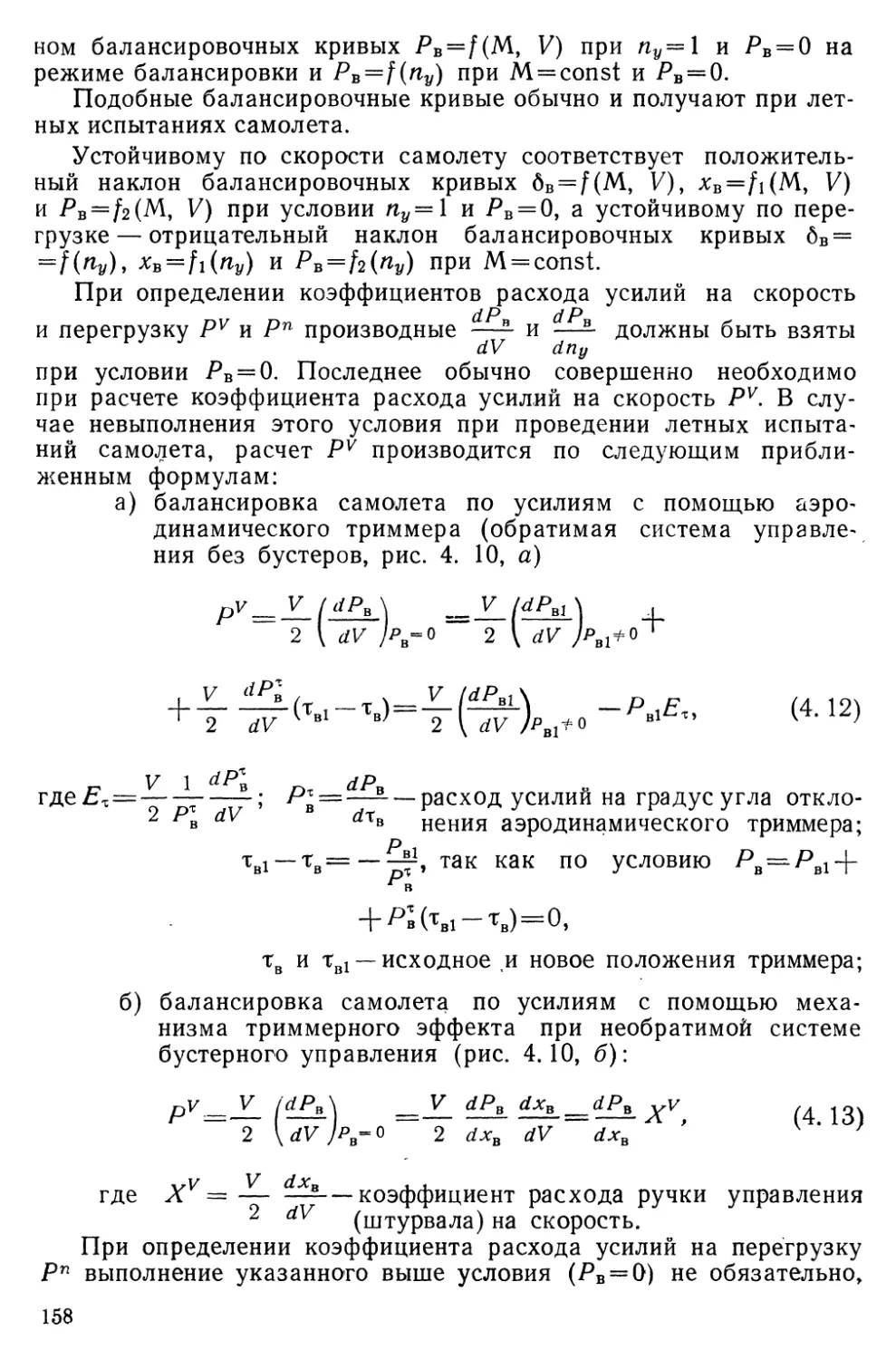
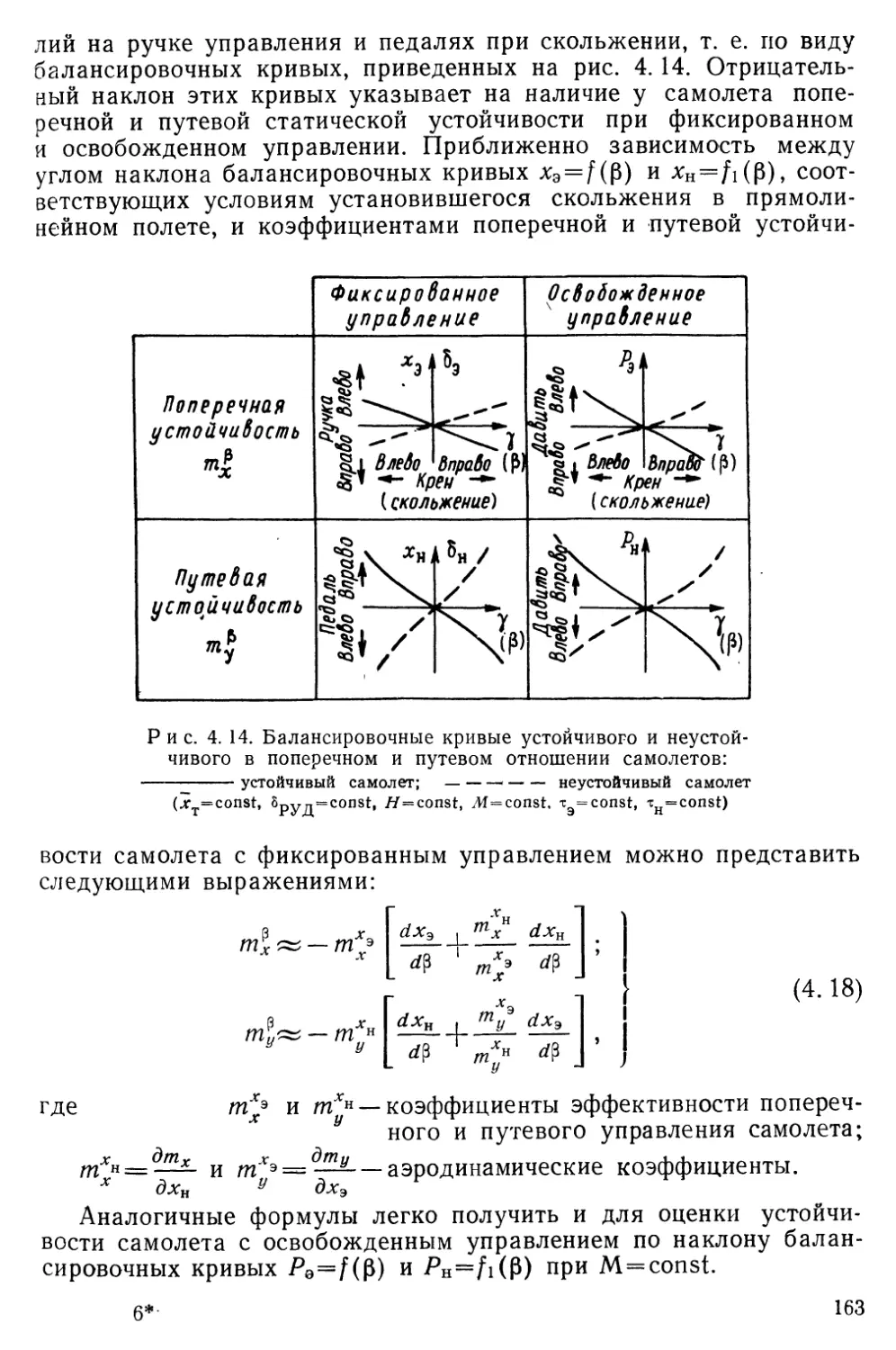
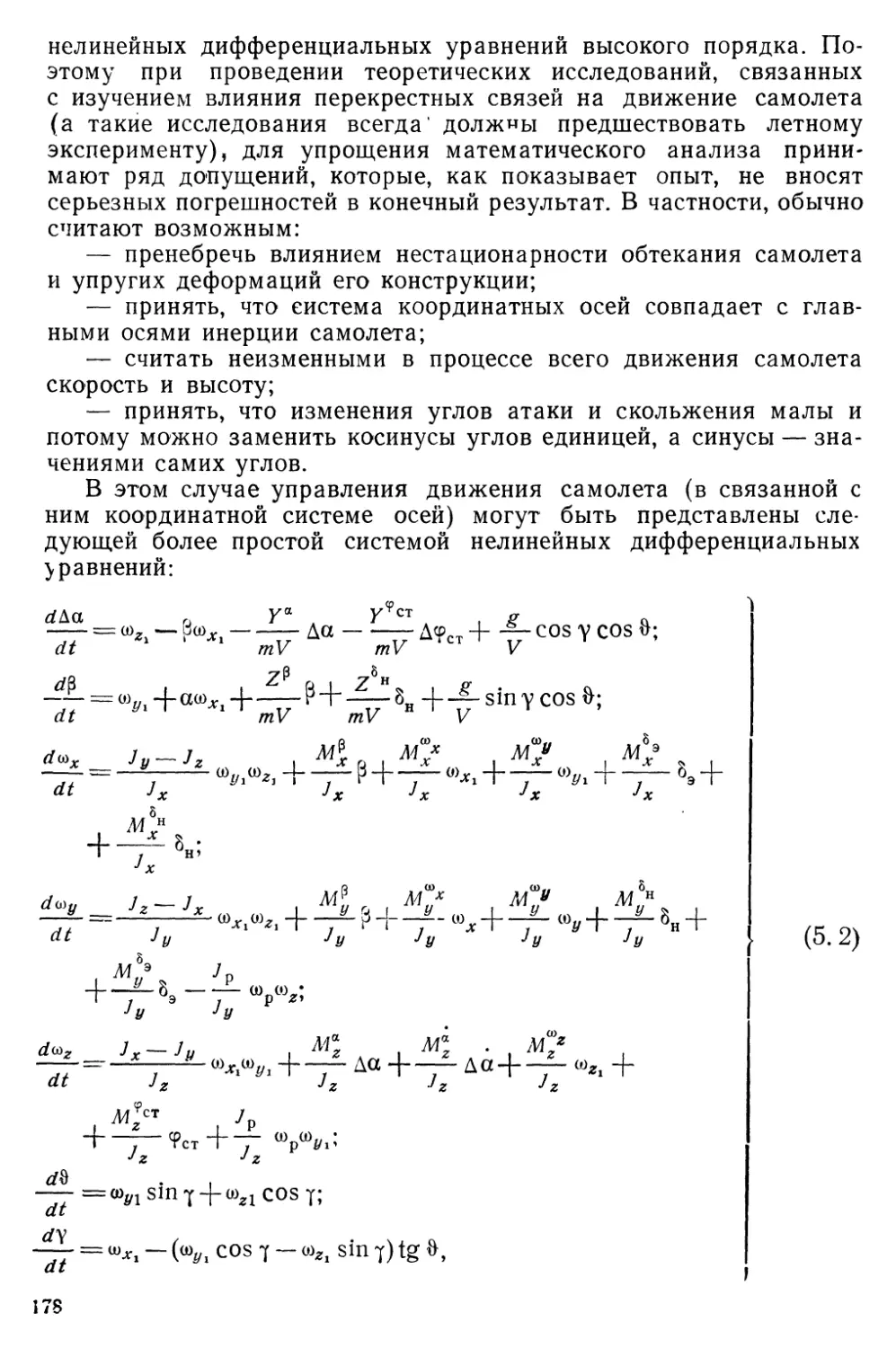
Текст
М. Г. КОТИК, А. В. ПАВЛОВ,
И. М. ПАШКОВСКИЙ,
Н. Г. ЩИТАЕВ
ЛЕТНЫЕ
ИСПЫТАНИЯ
САМОЛЕТОВ
Издание 2-е,
переработанное и дополненное
ИЗДАТЕЛЬСТВО „МАШИНОСТРОЕНИЕ"
Москва 1968
УДК 629.Т35.2.001.4
2-4-3
146-68
В книге изложены современные методы определения мак-
симальной скорости, скороподъемности и дальности опытных
и серийных самолетов, их взлетно-посадочных характеристик,
характеристик устойчивости, управляемости и маневренности,
характеристик управляемости на предельных режимах полета
и при выводе 1^з штопора.
Приведены теоретические основы методики летных испыта-
ний и обработки материалов летного эксперимента с примене-
нием современных методов измерений с помощью самопишу-
щей аппаратуры, телеметрии, радиолокаторов и кинотеодо-
литов.
Книга предназначена для инженеров и летчиков, связанных
с летными испытаниями и эксплуатацией современных само-
летов, вместе с тем она будет полезна студентам авиационных
институтов, а также слушателям и курсантам учебных заве-
дений ВВС. Иллюстр. 192, Табл. 4. Библиогр. 30 назв.
Рецензент канд. техн, наук
заслуженный летчик-испытатель СССР М. Л. Галлай
ПРЕДИСЛОВИЕ
Благодаря трудам ученых, летчиков-испытателёй и инженеров
'Гечеетвенная методика летных испытаний самолета получила все-
торойй^е развитие и уже в 30-х годах стала одним из самостоя-
ельныИ-направлений на стыке различных авиационных наук.
Хаждйй6 новый (опытный) самолет проходит с момента его созда-
ли и до внедрения в массовую эксплуатацию ряд испытаний:
— Обработку на летающих лабораториях наиболее ответствен-
| <ых установок и агрегатов опытного самолета;
— заводские испытания опытного самолета;
— государственные испытания опытного самолета;
j ’ — аиеплуатационные испытания опытной серии самолетов и
лспытайкя лидерных самолетов серий;
— Испытания модифицированных и головных серийных само-
. летов;
? j
я
Л
— испытания, проводимые по специальным программам (ре-
* рсные испытания, испытания различных видов оборудования и
згрегатов и т. д.);
— контрольные испытания серийного самолета.
Однако условия проведения летного эксперимента, диапазоны
. ^следуемых скоростей полета, высот, углов атаки и чисел М, коли-
гство характеристик и объем информации на этих испытаниях,
щечно, различны и определяются обычно теми задачами, которые
зпосредственно решаются в каждом виде летных испытаний само-
ета.
I Так, например, целью заводских испытаний обычно является
п доводка опытного самолета до состояния, обеспечивающего безопас-
ность, выполнения полетов, комплексная оценка и отработка систем
. его бортового и наземного оборудования, определение основных
летно-технических и эксплуатационных характеристик и наконец
4 передача самолета на государственные испытания. Главной зада-
. чей последних является выявление и регламентация условий, обес-
печивающих наибольшую безопасность и простоту пилотирования
самолета, определение соответствия техническому заданию реаль-
ных летно-технических данных и основных эксплуатационных ха-
i пактеристик самолета для решения вопроса о запуске его в серий-
, юе 'производство.
Наконец, основная цель эксплуатационных испытаний самолета
состоит в выявлении всех наиболее характерных особенностей его
наземной и летной эксплуатации, пригодности и совершенства вспо-
могательного оборудования и технических средств, в выявлении
и регламентации условий, обеспечивающих наибольшую регуляр-
ность и экономичность полетов на новом самолете в зависимости
от назначения последнего. В ходе испытаний проверяются и уточ-
няются регламенты технического обслуживания самолета, руковод-
ства по его летной эксплуатации и технике пилотирования и раз-
личные инструкции. Уточняются трудоемкость обслуживания само-
лета, потребная численность технического персонала, способы его
эксплуатации и обслуживания и многие другие вопросы.
Специальные испытания проводятся в необходимых случаях
с целью изучения отдельных вопросов, которые могут возникать
в процессе государственных или эксплуатационных испытаний
самолета, а также и в ходе его летной эксплуатации.
Методика летных испытаний самолетов непрерывно совершен-
ствуется по мере появления новой авиационной техники и особен-
ностей ее применения, а также по мере дальнейшего совершенство-
вания как измерительной аппаратуры, так и методов машинной
обработки результатов летного эксперимента.
Учитывая поступившие в издательство пожелания от летно-
исследовательских и испытательных организаций, а также от от-
дельных специалистов, в новое издание книги дополнительно вклю-^
чены:
— особенности испытаний самолетов с ТВД;
— определение причин ухудшения летных характеристик само-
летов;
— испытания тяжелых самолетов с мощной механизацией
крыла на режимах предпосадочного планирования;
— влияние упругих деформаций проводки в продольном и попе-
речном каналах управления на продольную устойчивость и управ-
ляемость тяжелого самолета с обратимой системой управления;
— наземные способы тренировки экипажа;
— методы определения моментов инерции самолета.
Вместе с тем, из нового издания исключены характеристики
околоземной атмосферы, оценка погрешностей измерений при лет-
ных испытаниях, а также специальные виды исследований и изме-
рений при летных испытаниях самолета на устойчивость и управ-
ляемость.
Главы I, IV, V, VI написаны канд. техн, наук И. М. Пашков-
ским, гл. II — инж. А. В. Павловым, гл. III — инж. Н. Г. Щитае-
вым и гл. VII, VIII, IX, X — канд. техн, наук М. Г. Котиком.
Авторы приносят глубокую благодарность М. Л. Галлаю, вни-
мательно просмотревшему рукопись книги и сделавшему ряд цен-
ных замечаний.
Авторы с признательностью примут все замечания по данной
книге. Отзывы и критические замечания следует направлять в из-
дательство «МАШИНОСТРОЕНИЕ» по адресу: Москва, И-51,
Петровка, 24.
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
а— скорость звука;
/д—средняя аэродинамическая хорда (САХ) крыла;
с
~Ь
— относительная толщина профиля крыла;
G—полетный вес самолета;
<7прив— приведенный вес самолета;
^привЯ— приведенный вес самолета в фактических условиях;
^лрив.ст— приведенный вес самолета в стандартных условиях;
Ост—значение веса, принятое за стандартное;
g—9,81 м!сек2 — ускорение силы тяжести;
Н — высота полета;
Нр—барометрическая высота (высота по давлению);
//Ст—стандартная высота, принятая при приведении летной ха-
рактеристики к стандартным атмосферным условиям;
//Практ—высота практического потолка в стандартных атмосферных
условиях при заданном режиме работы силовой установки;
G
тп~ — — масса самолета;
g
п—перегрузка самолета;
пх\ nibnz—продольная, вертикальная и боковая проекции вектора пе-
регрузки и;
п—обороты двигателя в фактических атмосферных условиях;
Яприв— приведенные обороты двигателя;
ИнЬм—обороты на номинальном (или принятом за номинальный)
режиме работы двигателя;
^ном.ф—номинальные обороты в фактических условиях;
Ne—эффективная мощность двигателя;
' N3KB—эквивалентная мощность двигателя;
^еизб—избыточная мощность силовой установки;
Р—тяга силовой установки;
Рв\ Рэ‘, Рн—усилия, прикладываемые летчиком к рычагам управления,
для отклонения руля высоты, элеронов и руля направления;
Рн—атмосферное давление, соответствующее барометрической
высоте Нр\
Рст — давление, соответствующее значению высоты 7/Ст, приня-
той за стандартную;
Pq— атмосферное давление в стандартных условиях на уровне
моря (760 мм. рт. ст.);
q — скоростной напор воздушного потока;
Q — часовой расход топлива;
Рприв— приведенный часовой расход топлива;
Qct—часовой расход топлива, приведенный к заданным стандарт-
__ ным условиям по давлению и температуре;
^ст—относительный километровый расход топлива в стандартных
условиях;
5
ъ / Jz
rz~\/ —радиус инерции самолета относительно поперечной оси;
У т
S—площадь крыла;
Т — период собственных колебаний самолета;
Тп—абсолютная температура воздуха в фактических атмосфер-
ных условиях;
Гст—абсолютная температура воздуха в стандартных атмосфер-
ных условиях для заданного значения стандартной вы-
соты //ст’,
Tq—абсолютная температура в стандартных атмосферных усло-
виях на уровне моря;
Гприв— приведенная температура;
V — истинная скорость полета;
Упр—скорость полета по прибору;
Vi—индикаторная скорость полета;
Vi з — земная индикаторная скорость полета;
УСт— истинная максимальная скорость относительно воздуха
в стандартных условиях при заданном режиме работы си-
ловой установки;
хв; хэ; хн—линейные перемещения рычагов управления относительно
исходного нейтрального положения рулей, соответствующего
условию срст=О; бв = 0; бэ = 0 и бн = 0;
Ут
Ут_ ~ __ £j
ЬА' т ~ ЬА
— хн
хн~ — — нейтральная (в отношении продольной статической устойчи-
Ьа
вости) центровка самолета (в % САХ);
__ хт
хт~——продольная центровка самолета в % САХ, отсчитываемая
Ьа
от носка САХ;
— относительные координаты смещения центра тяжести само-
лета по высоте от плоскости САХ и вбок от плоскости сим-
метрии самолета (в % САХ);
а—угол атаки;
р — угол скольжения;
у—угол крена;
Д— знак конечного приращения соответствующего параметра,
например, Ддв = (бв)конеч—(бв)исх’, Дф=Р; Д(Ох = (0х;
\tZy = H,y ПуО—Пу 1 И Т. Д.
М?ст1; &н—углы отклонения соответствующих рулевых поверхностей:
руля высоты (стабилизатора), элеронов и руля направления;
& руд—положение РУД —рычага управления двигателем;
—угол отклонения посадочных щитков (закрылков);
&ВеТ—угол отклонения воздушных тормозов;
6 — угол наклона траектории полета к горизонту;
О—угол тангажа;
X — удлинение крыла;
q— массовая плотность воздуха;
т — угол отклонения триммера (тв, тэ, тн);
X—угол стреловидности крыла;
ф — угол рыскания;
МУ> —соответственно угловые скорости крена, рыскания и тан-
гажа (проекции на оси самолета вектора угловой скорости
вращения самолета со).
Глава I
НАЗЕМНАЯ ПОДГОТОВКА
ЛЕТНЫХ ИСПЫТАНИЙ.
ПЕРВЫЙ ВЫЛЕТ ОПЫТНОГО САМОЛЕТА
1. 1. ХАРАКТЕР ПРОВОДИМЫХ РАБОТ
До начала летных испытаний на самолете должен быть выпол-
нен большой комплекс наземных работ. По своему характеру эти
работы весьма многообразны. Поэтому проводятся они группами
специалистов различного профиля под руководством ведущего
инженера по летным испытаниям.
Наземные работы необходимы как для предполетной отработки
силовой установки самолета, его систем, оборудования и доведения
их до вполне работоспособного состояния, так и для установки
на самолете контрольно-записывающей испытательной аппаратуры
и подготовки экипажа к первому вылету и последующим испыта-
тельным полетам.
В ходе наземной подготовки самолета к летным испытаниям
должны быть по-вВозможности выявлены и устранены все наиболее
серьезные производственные и конструктивные дефекты самолета,
его систем и оборудования.
К числу обязательных видов наземных работ, проводимых на
самолете до начала летных испытаний, относятся:
а) изучение особенностей аэродинамической и весовой компо-
новки самолета, кабины летчика, системы управления, силовой
установки, всех самолетных систем и оборудования, а также пред-
ставленных конструкторским бюро (КБ) материалов и технической
документации. Особое внимание при этом уделяется изучению под-
готовленных КБ рекомендаций по летной и наземной эксплуатации
самолета, указаний по действиям летчика и экипажа в особых
случаях полета, установленных КБ для самолета летно-эксплуата-
ционных ограничений по прочности, управляемости и работе сило-
вой установки для всех возможных вариантов загрузки и конфигу-.
рации самолета. Кроме того, соответствующие специалисты тща-
тельно просматривают обобщенные материалы продувок модели
в аэродинамических трубах, данные аэродинамического расчета
ожидаемых летных характеристик самолета, расчета прочности,
стендовых испытаний наиболее ответственных систем и моделиро-
вания движения самолета на электронных машинах;
7
б) составление программы наземных и летных испытаний само-
лета;
в) разработка системы измерений. Одновременно уточняются
подлежащие регистрации параметры, потребные диапазоны изме-
рений и точность, тип контрольно-записывающей аппаратуры
(КЗА), места ее размещения на самолете. Уточняются наиболее
важные параметры, измерение которых необходимо дублировать,
а также перечень основной и вспомогательной КЗА для каждого
испытательного полета;
г) отладка и контрольные опробования всех самолетных систем,
специального оборудования и силовой установки самолета. При
опробовании работы двигателей, кроме того, уточняются последо-
вательность выработки топлива из баков и величина невырабаты-
ваемых остатков топлива в баках;
д) практическое освоение летным экипажем своих рабочих мест
в самолете;
е) нивелировка и контрольный обмер самолета;
ж) оборудование самолета контрольно-записывающей аппара-
турой, тарировка аппаратуры, подготовка дешифраторов. При не-
обходимости производится также оборудование самолета аппара-
турой для киносъемки спектров обтекания крыла (или других ча-
стей самолета) и замера упругих деформаций конструкции;
з) контрольные тарировки штатной бортовой аппаратуры;
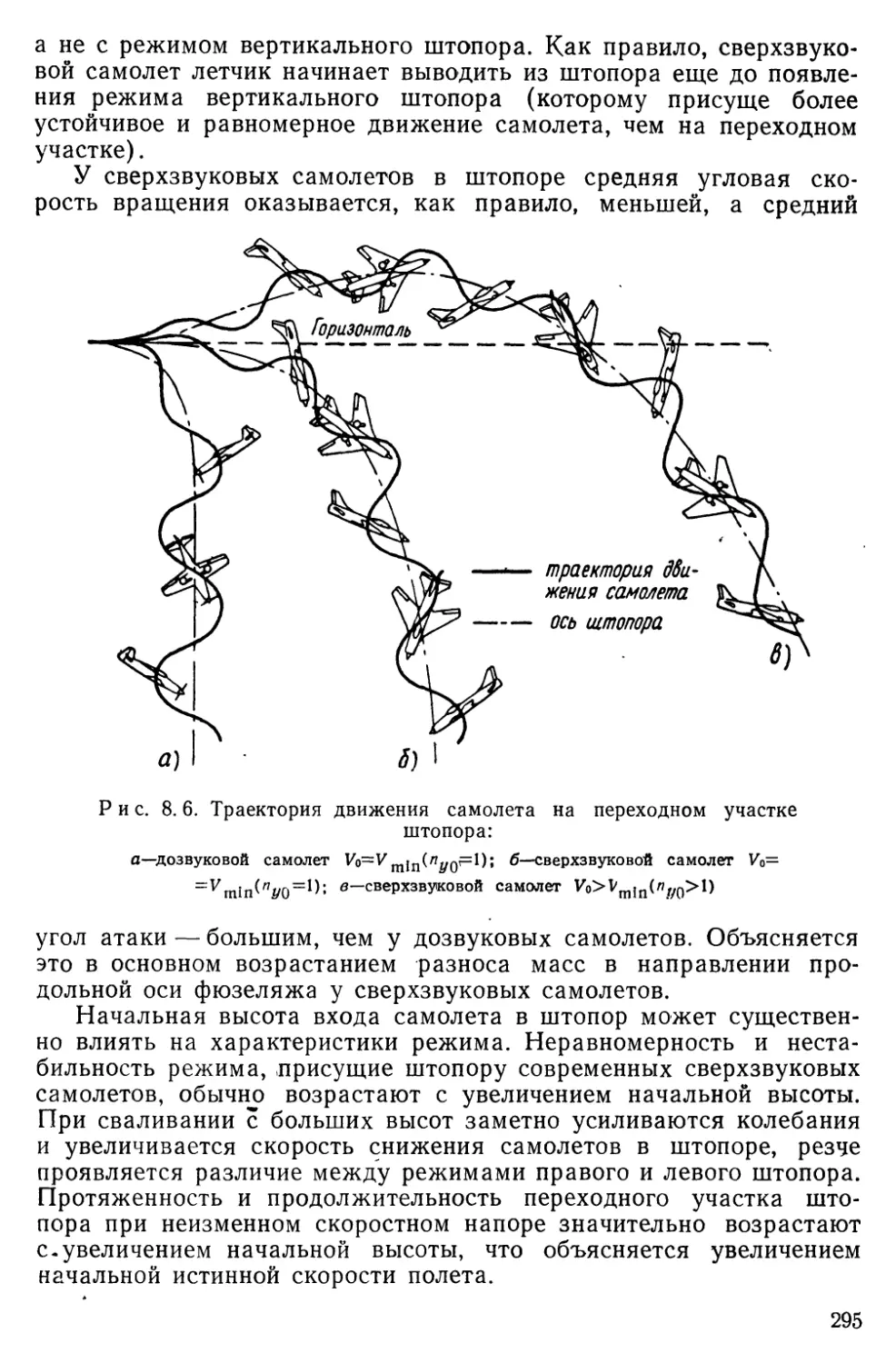
и) контрольная проверка по паспорту и технической докумен-
тации основных характеристик бустеров, включенных в систему
управления (величины располагаемого тягового усилия, максималь-
ной скорости перекладывания рулей, характера зависимости вели-
чины тягового усилия бустера от скорости отклонения руля);
к) контрольные определения основных характеристик системы
управления рулями самолета;
л) контрольные определения основных характеристик системы
автоматической стабилизации самолета (передаточных чисел, зави-
симости их от режима полета, частотных характеристик системы,
максимальных перемещений штока исполнительного механизма);
м) определение положения центра тяжести (ЦТ) самолета по
отношению к средней аэродинамической хорде крыла (САХ) хт, у?
(а в некоторых случаях и относительно плоскости симметрии само-
лета zT) при различных, возможных в эксплуатации вариантах за-
грузки самолета топливом, съемными грузами, пассажирами и т. д.
Определение зависимости изменения положения ЦТ самолета в по-
лете при выработке топлива из баков;
н) фотографирование самолета с различных точек (спереди,
сзади, сверху, сбоку, 3/4 спереди, 3/4 сзади) при убранных и откло-
ненных закрылках и воздушных тормозах, с наружными подвес-
ками и без них. Кроме того, фотографируются кабина летчика и ра-
бочие места других членов экипажа, а также все наиболее интерес-
ные и оригинальные места на самолете, дающие более полное пред-
ставление о его аэродинамических и конструктивных особенностях.
8
Наиболее характерные фотографии в дальнейшем помещаются
в отчет по летным испытаниям самолета;
о) оценка устойчивости и управляемости самолета при движе-
нии его от места стоянки к старту, а также в процессе разбега
и пробега по ВПП.
Цель и характер указанных выше работ достаточно очевидны.
Однако некоторые из них все же нуждаются в более подробном
разъяснении, так как от тщательности и полноты их проведения
во многом зависит качество испытаний самолета в целом и безопас-
ность проведения летного эксперимента. Такими видами наземных
работ являются: разработка программы испытаний самолета (на-
земных и летных) и системы измерений, определение фактической
центровки реального самолета, его моментов инерции и характери-
стик системы управления, наземные тренировки летного экипажа,
выполнение рулежек, пробежек и подлетов.
1.2. ПРОГРАММА ЛЕТНЫХ ИСПЫТАНИЙ САМОЛЕТА
Программа летных испытаний определяет цели, объем, условия
и методы проведения на самолете большого комплекса работ, обес-
печивающих всестороннюю оценку нового изделия. К их числу отно-
сятся: наземная подготовка самолета к испытаниям, рулежки,
пробежки и подлеты, первый вылет и доводочные полеты, определе-
ние характеристик самолета,-оценка соответствия его техническому
заданию (ТЗ), выявление особенностей летной и наземной экс-
плуатации самолета.
Программа испытаний обычно освещает следующие основные
вопросы:
— цель проведения работы;
— краткие сведения об объекте испытаний и его особенностях;
— методику проведения испытаний;
— перечень испытательной аппаратуры, устанавливаемой на
самолет;
— ббъем наземных испытаний (перед началом и в процессе
проведения полетов);
— объем летной работы с указанием условий проведения экспе-
римента (скорости, высоты, центровки, полетного веса, режима
работы двигателей, допустимого минимума погодных условий
и т. п.), количества полетов, их продолжительности и последова-
тельности проведения;
— основные летные ограничения.
Кроме того, к программе прикладываются указания экипажу
о действиях в особых случаях полета (при отказе двигателя или
самолетных систем, неблагоприятных изменениях устойчивости и
управляемости и т. п.).
Программа составляется ведущим инженером по летным испы-
таниям самолета совместно с ведущим летчиком-испытателем и
специалистами КБ, принимавшими участие в создании аппарата.
9
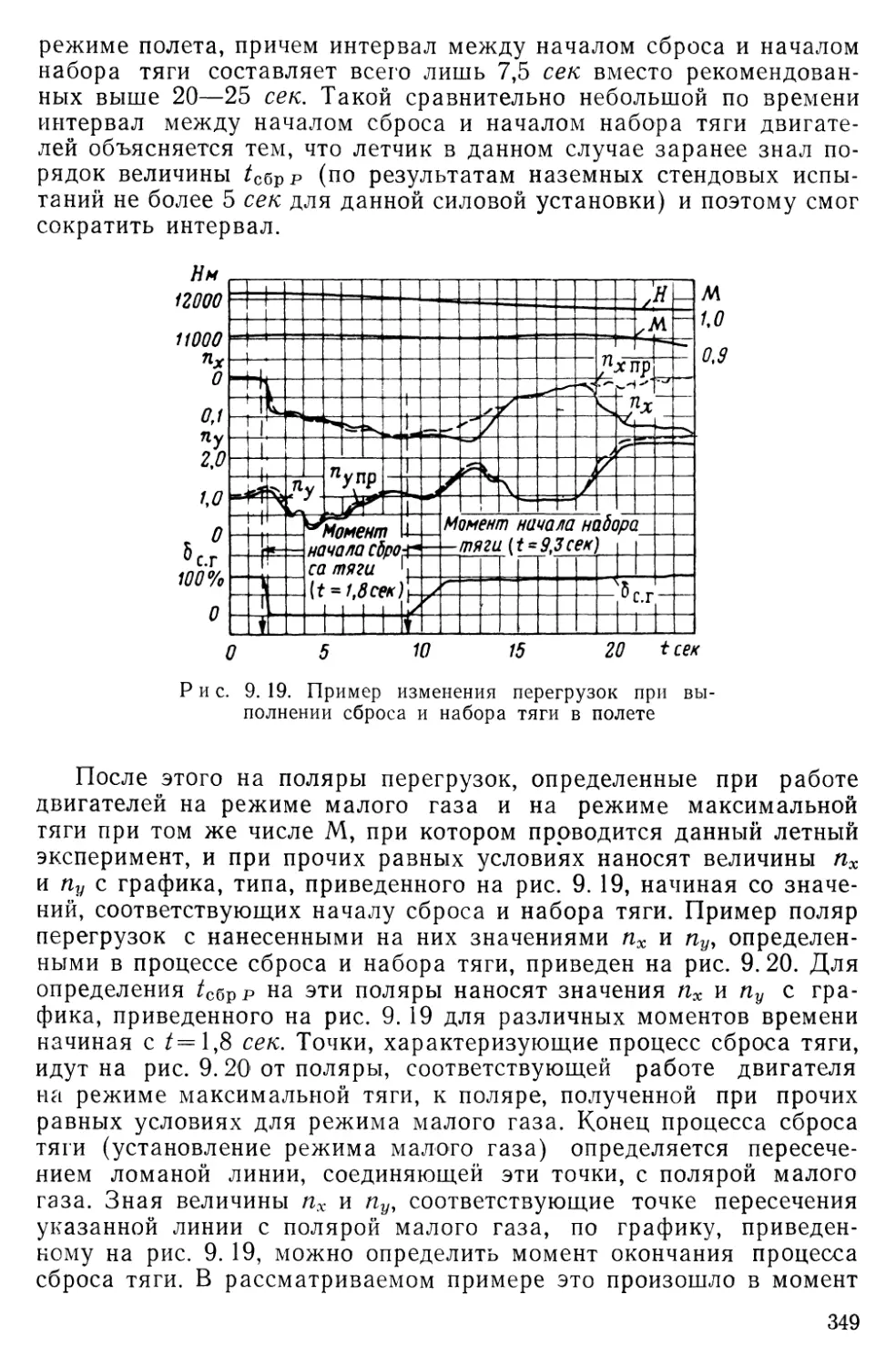
В процессе проведения испытаний на каждый полет состав-
ляется полетный лист, содержащий конкретные задачи, которые
ставятся перед летчиком. В полетном листе указываются приборы,
необходимые для проведения испытания, и содержатся методиче-
ские указания по проведению полета.
На первом этапе испытаний обычно* производится предваритель-
ная оценка характеристик и летных данных самолета. На этом
этапе экипажем осваивается самолет, изучаются его особенности,
выявляются и устраняются различные дефекты, мешающие нор-
мальному выполнению полетов, проводятся доводочные работы,
необходимые для обеспечения как безопасности полетов, так и со-
ответствия основных характеристик испытываемого самолета тех-
ническому заданию.
На втором этапе после окончательной регулировки агрегатов,
работа которых влияет на летные характеристики, определяются
в необходимом объеме все основные летно-технические данные,
а также характеристики устойчивости, управляемости и маневрен-
ности самолета.
Основным и наиболее важным требованием при проведении лет-
ных испытаний является соблюдение принципа постепенного пере-
хода от простого задания к сложному и последовательного обсле-
дования летных и других возможностей самолета, особенно в диа-
пазоне околозвуковых и больших сверхзвуковых скоростей полета,
вблизи предельных углов атаки, а та^же скоростей и высот, на ко-
торых полет производится впервые. Только постепенно расши-
ряются диапазоны обследуемых в полете скоростей, высот, чисел М
и углов атаки-. Перегрузки (постепенно доводятся до максимальных
эксплуатационных, а скорость V и число М до наибольших значе-
ний, установленных Генеральным конструктором.
1.3. ОБОРУДОВАНИЕ САМОЛЕТА
КОНТРОЛЬНО-ЗАПИСЫВАЮЩЕЙ АППАРАТУРОЙ
Оборудование самолета аппаратурой начинается с разработки
основной технической документации: электрических схем (силовой
и измерительной), схемы размещения аппаратуры и установочных
чертежей.
Управление аппаратурой обычно осуществляется дистанционно,
при помощи специального переключателя, установленного в кабине
летчика или экспериментатора. На тяжелых самолетах нередко
применяются специальные щитки экспериментатора, позволяющие
при необходимости включать или выключать отдельные группы при-
боров и обеспечивающие набор различных программ регистрации,
При разработке схемы размещения аппаратуры стремятся мак-
симально сократить длину проводок от места измерения до датчика
и от датчика до регистратора.
Излишне длинные коммуникации, как правило, приводят
к уменьшению точности работы аппаратуры. Например, с увеличе-
10
нием длины проводки к приборам, измеряющим давление, возра-
стает запаздывание в показаниях при быстро меняющихся во вре-
мени процессах, т. е. завышаются или занижаются высота полета,
число М, скорость, давление.
Для уменьшения погрешностей многие приборы при установке
необходимо ориентировать строго по осям самолета (например,
приборы, регистрирующие проекции перегрузки, угловые скорости,
углы наклона самолета относительно горизонта и т. п.).
Приборы для измерения перегрузок регистрируют их непосред-
ственно в месте установки, и поэтому должны находиться как
можно ближе к центру тяжести самолета.
В настоящее время измеряемые параметры, как правило, реги-
стрируются комбинированными оптическими самописцами, осцил-
лографами, магнитными самописцами и радиотелеметрическими
станциями (РТС).
Измеряемые параметры преобразуются в ток или напряжение'
специальными датчиками. При испытаниях обычно регистрируется
большое число параметров (скорость, барометрическая высота,
отклонение рулей, перегрузки, угловые скорости, усилия на ручке
или штурвале и педалях, обороты двигателя, расход горючего,
углы атаки и скольжения, углы тангажа, крена и курса, давление
и температура в различных точках самолета и двигателя, темпера-
тура наружного воздуха, деформации конструкции, амплитуда
и частота вибраций, ток и напряжение в автоматических и полу-
автоматических системах и т. п.).
При выборе аппаратуры необходимо знать пределы изменения
измеряемых параметров на земле и в полете, а также точность за-
мера. Следует обязательно ознакомиться с характеристиками
аппаратуры и техническими требованиями к ее установке и эксплу-
атации, выяснить возможные варианты размещения аппаратуры
на самолете и с учетом технических требований к ее установке
выбрать оптимальный вариант. Диапазон работы датчика прини-
мают примерно на 10—15% большим предполагаемого диапазона
изменения измеряемого параметра. Если диапазон измеряемой
величины на нерегистрируемых режимах значительно больше, чем
на регистрируемых, то используют датчики с упором, допускающие
их перегрузку. Наиболее ответственные измерения необходимо дуб-
лировать двумя различными регистраторами.
Чтобы не возникали промахи при обработке полетных записей,
до и после каждого полета на земле производятся контрольные
включения самописцев. Такие контрольные отметки, называемые
контрольными точками, обязательно получают на регистраторах
скорости, высоты, углов отклонения рулей, перегрузки и т. д. По
полученным подобным образом контрольным точкам осуществ-
ляется текущее наблюдение за состоянием тарировочных графиков
я шаблонов. Если в качестве регистратора используется радиоте-
леметрическая аппаратура, то контрольные точки регистрируются
непосредственно с датчика или согласующего устройства путем
11
измерения величины напряжения или относительного напряжения,
пропорционального измеряемой величине.
При снятии контрольных точек с датчика или самописца скоро-
сти давление подают в динамическую камеру ПВД (приемника воз-
душного давления), а величину давления измеряют по указателю
скорости летчика или контрольному прибору. Обычно регистрируют
3—5 точек на рабочем диапазоне прибора. Герметичность системы
проверяют в течение 3 мин при максимальном рабочем давлении.
На герметичность проверяется также и статическая система ПВД
при давлении в ней, меньшем атмосферного на 5—10 мм рт. ст.
Герметичность статической! системы также проверяется в течение
3 мин. В начале и в конце проверки записываются показания дат-
чиков при помощи регистраторов. Системы должны быть герме-
тичны.
Контрольной точкой для регистратора барометрической высоты
является запись барометрического давления у земли. Величину
барометрического давления следует брать в контрольной лабора-
тории или на метеорологической станции. В величину барометриче-
ского давления должны быть внесены все необходимые поправки.
Расхождение между барометрическими высотами, полученными
по записи прибора и по давлению, не должно превышать предель-
ной погрешности прибора.
Правильность работы приборов, контролирующих угловое поло-
жение рулей, во многих случаях достаточно проверить по нейтраль-
ному и крайним положениям рулей.
Для контроля работы приборов, регистрирующих перегрузки,
обычно бывает достаточно произвести записи нулевых значений при
стоянке самолета. При этом необходимо измерять углы наклона
датчиков перегрузки относительно горизонта.
Углы наклона, образованные осями датчика перегрузок (или
самописца перегрузок) с горизонтом, определяют величину пере-
грузки, зарегистрированную прибором при стоянке самолета. Для
горизонтальных компонентов величина перегрузки
nx = sinai и nz = —sinai,
где ai — угол наклона, образованный соответствующей осью при-
бора с горизонтом.
Для вертикального компонента
Пу = COS OL2,
где «2 — угол наклона, образованный основанием прибора с гори-
зонтом.
В процессе наземной подготовки контрольно-записывающей
аппаратуры получают также исходные данные для оценки попра-
вок, вносимых:
— запаздыванием передачи статического давления от прием-
ника (ПВД) в корпусы регистраторов давления, скорости и чи-
сла М;
12
— установкой датчиков (самописцев) перегрузок не в центре
тяжести самолета;
— несоответствием плеча и веса динамометрической ручки уп-
равления, устанавливаемой взамен самолетной при летных испыта-
ниях для измерения усилий летчика;
— упругими деформациями проводки управления в случае
установки датчиков на некотором расстоянии от руля, отклонение
которого должно регистрироваться в полете *.
Поправки, обусловленные запаздыванием передачи статиче-
ского давления от ПВД в корпусы регистраторов, возрастают при
увеличении общего количества подключенной к системе аппара-
туры, внутренних объемов статических камер каждого прибора,
протяженности и уменьшении проходного сечения воздушной про-
водки, а также и при более быстром изменении во времени высоты
полета (давления). С повышением высоты полета величина попра-
вок возрастает. Методика учета поправок на запаздывание дана
в гл. II (см. стр. 55).
При значительных угловых скоростях крена, рыскания и тан-
гажа и больших угловых ускорениях в полетные записи перегрузок
приходится вводить поправки, учитывающие погрешности, вносимые
установкой самописцев (датчиков) на некотором плече %о, г/0,
от центра тяжести самолета:
Пх пр + Д^Х>
Пу—Пу Пр 4” №у.
ttz = ttz Пр 4“ Д^г»
(1.1)
где яхпр, ^пр, ягпр~полетные значения продольной, нормальной
' и боковой перегрузок самолета, региструе-
мые прибором;
Д/гх, ЪЛу* Д^ —поправки, определяемые^из следующих вы-
ражений:
Д«х » 0,102 [(о>® + ад®)х0 — Wo~Wo +
I d^z d<&y "1
4—-Уо-------~zo ;
1 dt ™ dt
Lrty^.0,102 [(«>2 4-ш2) yQ — ШуШгг0 — юхшух0—
(1.2)
» 0,102 [(«>2 -(- 0)2 Zq _ а>Л(ОгХ0 — +
* Необходимость введения указанных поправок вызывается тем, что рас-
шифровка полетных записей производится по тарировкам, полученным на земле
при ненагруженной аэродинамическими силами и, следовательно, недеформиро-
ванной проводке управления (на самолетах без бустеров).
13
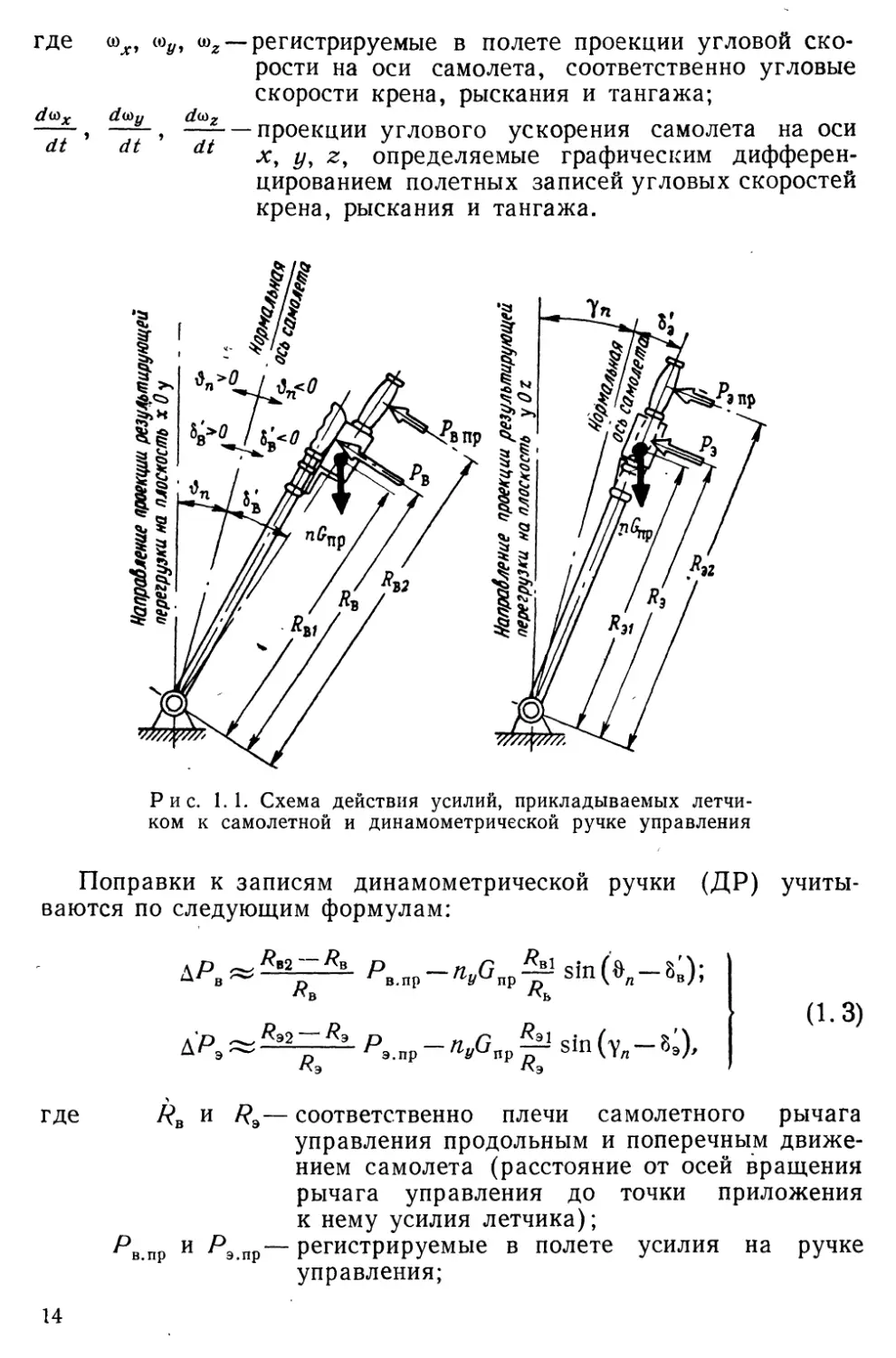
где о)х, (oz — регистрируемые в полете проекции угловой ско-
рости на оси самолета, соответственно угловые
скорости крена, рыскания и тангажа;
d(nu du>7
---, —— , —-—проекции углового ускорения самолета на оси
dt dt dt х, у, z, определяемые графическим дифферен-
цированием полетных записей угловых скоростей
крена, рыскания и тангажа.
Рис. 1.1. Схема действия усилий, прикладываемых летчи-
ком к самолетной и динамометрической ручке управления
Поправки к записям динамометрической ручки (ДР) учиты-
ваются по следующим формулам:
^в2 #в
pB.np~nyGnp^ sin(&„-8;);
д'Рэ«Р9.пр - «,Сяр sin (Y„ - в;),
(1.3)
где 7?в и /?э— соответственно плечи самолетного рычага
управления продольным и поперечным движе-
нием самолета (расстояние от осей вращения
рычага управления до точки приложения
к нему усилия летчика);
Р и Рэ пр— регистрируемые в полете усилия на ручке
управления;
14
Gnp— вес динамометрического прибора с системой
крепления его к самолетному рычагу управле-
ния (если при установке динамометрического,
прибора снимается верхняя часть самолетной
ручки управления, то ее вес вычитается из ука-
занного выше веса динамометрического при-
бора) ;
/?вь ^в2, ^?э1 и ^э2— расстояния от осей вращения ручки управле-
ния при ее продольном и поперечном переме-
щениях соответственно до центра тяжести
динамометрического прибора с креплением и
до точки приложения к динамометрическому
прибору усилий летчика;
$п и уп—углы (см. рис. 1.1), определяемые расчетом:
tg^=-^ и tgY„=--^;
ПУ пУ
&в и Bg —угловые положения рычага управления с ди-
намометрическим прибором, показанные на
рис. 1.1.
Для введения в полетные записи углов отклонения рулей попра-
вок, вносимых упругими деформациями проводки управления,
используются тарировочные графики
^в.упр=/(^в); ^э.Упр = /(^э)
И
Д^н.Упр = /(^н),
где Д3вупр, Д&э.Упр, Д&н.Упр—поправки, вносимые в результаты рас-
шифровки полетных записей упругими
деформациями проводки управления
рулем при нагружении усилием Рв, Ро
и Рн (приведенным к рычагу управ-
ления соответствующим рулем);
Рв, Рв— усилия, прикладываемые летчиком к
рычагам управления.
Эти зависимости обычно получают одновременно с определе-
нием характеристик упругости системы управления (см. ниже
стр. 24). Учет поправок производится по формулам
5в=^в.пр + Д§в.упр;
^э.пр + Д^э.упр»
~ ^Н.пр + Д^Н.УПр,
(1.4)
где Вв, оэ, 8Н— действительные величины углов отклонения руля
высоты, элеронов и руля направления в полете;
15
&в.-пр> ^э.пр> SH.np— углы отклонения руля высоты, элеронов и руля
направления, полученные при расшифровке по-
летных записей с использованием тарировок, сня-
тых на земле при ненагруженной проводке управ-
ления.
1.4. НИВЕЛИРОВКА, ОБМЕР, ВЗВЕШИВАНИЕ.
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ
САМОЛЕТА И ЕГО МОМЕНТОВ ИНЕРЦИИ
Нивелировку и обмер самолета производят для проверки пра-
вильности его сборки и уточнения как фактических регулировоч-
ных данных, так и основных геометрических размеров самолета.
Основными измерительными инструментами при этом являются:
нивелир, отвесы, рулетка и металлическая линейка. Работы выпол-
няются в закрытом помещении с ровным полом, на самолете, уста-
новленном в линию полета без крена. Последнее осуществляется
при помощи нивелира по специальным отметкам (так называемым
реперным точкам) на фюзеляже и крыле. Инструкции по преведе-
нию указанных работ и нивелировочная схема прикладываются
заводом-изготовителем к формуляру самолета.
В некоторых случаях при определении геометрических разме-
ров самолета производится также и контрольная обкатка крыла
в нескольких симметричных сечениях по размаху для уточнения
формы профилей (дужек) и сравнения их с теоретическими.
Результаты нивелировки самолета и измерений основных его
линейных размеров, а также последующего расчета (планиметри-
рования) площадей крыла, вертикального и горизонтального опере-
ния, рулей, боковой поверхности фюзеляжа, воздушных тормозов
и закрылков оформляют в виде специального акта.
Взвешивание и определение положения центра тяжести произ-
водят для установления точного веса и центровки самолета при
летных испытаниях.
В ходе подготовки самолета к первому вылету обычно опреде-
ляются:
— положения центра тяжести самолета при нормальном ва-
рианте его загрузки с полностью заправленными топливными ба-
ками, а также пустого самолета с несъемным оборудованием;
— фактическая зависимость изменения положения центра тя-
жести самолета в полете от выработки топлива из баков.
При проведении этих работ составляется специальный протокол
взвешивания.
Метод определения центра тяжести самолета базируется на из-
вестном из механики положении, что центр тяжести твердого тела
является той точкой, через которую всегда проходит равнодейст-
вующая сил тяжести, независимо от ориентации тела в простран-
стве, а само направление равнодействующей при этом совпадает
с земной вертикалью. Это обстоятельство дает возможность найти
16
центр тяжести путем взвешивания самолета на специальных двух-
платформенных весах при двух-трех положениях его относительно
земной вертикали для каждого варианта загрузки. Самолет при
этом должен быть установлен на весы таким образом, чтобы основ-
ные колеса находились на одной платформе, а носовое (хвостовое)
колесо — на другой, отдельной платформе весов (рис. 1.2). Опре-
делив направления линий действия равнодействующей сил тяжести
в связанной с самолетом координатной системе осей для каждого
его положения при взвешивании, в точке пересечения линий
находят ЦТ самолета. Для каждого из положений самолета взве-
шиванием определяют силы, действующие на основные (Росн)
и переднее (хвостовое) колеса шасси. Одновременно с помощью
нивелира, отвесов, измерительной линейки и рулетки определяют
указанные на рис. 1.2, а линейные величины, как основные —
Ла, hB и Л, так и контрольные — т и п. Контрольные размеры
тип при всех положениях самолета должны сохраняться неизмен-
ными.
Определение центра тяжести самолета производится путем гра-
фического построения,схема которого представлена на рис. 1.2,а*.
При построении центровочного чертежа положение центра тя-
жести самолета определяется относительно средней аэродинамиче-
ской хорды (САХ) крыла, а не хорды обмера АВ. Поэтому на
центровочный чертеж должна быть нанесена САХ, положение ко-
торой относительно хорды обмера известно.
Обычно центровка самолета выражается относительной величи-
ной координат хт и г/т центра тяжести самолета в % длины САХ:
100% САХ и ^т = —100% САХ, (1.5)
ЬА ЬА
где хт— продольная координата ЦТ самолета относительно нос-
ка САХ (положительна в случае, когда ЦТ находится
позади носка САХ);
уТ—нормальная координата ЦТ самолета относительно САХ
(положительна, когда ЦТ находится ниже САХ).
В некоторых случаях необходимо также знать боковое смеще-
ние ЦТ самолета относительно плоскости симметрии самолета zT
(это существенно, например, знать для самолетов вертикального
взлета и посадки или при неодинаковом распределении грузов
вдоль правой и левой половин крыла на обычном самолете). Опре-
делив путем взвешивания самолета силы, действующие на правое
* Место пересечения перпендикуляров (точка ЦТ на рис. 1.2, а) определяет
положение центра тяжести самолета. Вследствие возможных погрешностей при
проведении измерений й построения чертежа восстанавливаемые из точек О2
и О3 перпендикуляры не всегда пересекаются в одной точке, а образуют иногда
небольшой треугольник. Если треугольник небольшой, то за координату ЦТ при-
нимают центр тяжести получившегося тругольника.-В тех случаях, когда тре-
угольник велик, следует проверить исходные данные и построение. При отсут-
ствии в них ошибок необходимо повторить взвешивание самолета.
17
и левое колеса основного шасси и замерив расстояние хш от плос-
кости симметрия самолета до точек опоры правого и левого колес,
как это показано на рис. 1.2,6, простым построением определяют
поперечную центровку самолета
гт = —100% САХ, (1.6)
Ьа
где — боковое смещение ЦТ самолета от плоскости симметрии
(положительное, когда ЦТ самолета сдвинут в сторону
левого крыла).,
Положение ЦТ самолета с убранным шасси, а также при дру-
гих вариантах загрузки самолета, учет изменения центровки при
выгорании топлива GTOn, обычно определяются расчетным спосо-
бом с использованием исходных результатов взвешивания самолета.
Моменты инерции самолета обычно определяются расчетным
путем относительно главных осей инерции, проходящих через его
центр тяжести (так называемых главных центральных осей инерции
Рис. 1.2. Схема измерений и графического
тяжести
а—в плоскости симметрии относительно САХ (хт и г/т);
(?)
построения при определении координат центра
самолета:
б—относительно плоскости симметрии— zт
18
19
самолета) *. Для этого самолет условно разбивают на большое
количество элементарных частей, каждая из которых имеет свою
определенную массу тг (рис. 1.3). Расчет производится по следую-
щим формулам:
п п
jx= 2 mt +"S т‘ &
/=1 Z~1
п п
л=2 т/(х)л?+ 2 z*;
1 = 1 i = 1
(1-7)
п п
Jz=^ mt (х) х, 4- 2 (у) у],
Z = 1 л=1
где mz(x); mz(r/); mz (г) —соответственно средняя масса рассматри-
ваемого элемента, расположенного вдоль
одной из главных осей инерции (осей
самолета) на расстоянии xh yt или zz
от ЦТ самолета (рис. 1.3);
/ — порядковый номер элемента;
/г —общее количество элементов в самолете,
на которые он был условно разбит.
Иногда, в силу различных причин, например, при большой весо-
вой неоднородности самолета, когда бывает трудно разбить его
на конечное (небольшое) число частей с примерно постоянной ве-
совой плотностью и невозможно точно определить их координаты
относительно ЦТ самолета, расчетный метод не обеспечивает необ-
ходимую точность определения моментов инерции. В этом случае,
если позволяют вес и размеры самолета, моменты инерции при
необходимости могут быть определены экспериментально. Практи-
ческие методы определения моментов инерции (относительно трех
осей самолета) базируются на регистрации колебаний самолета
на многонитной подвеске, совершаемых в горизонтальной плоско-
сти, либо на регистрации колебаний самолета, подобных плоскому
движению двухстепенного маятника, совершаемых в вертикальной
плоскости**. Первый такой метод позволяет определить момент
* Как известно, момент инерции является мерой инерции тела при его вра-
щении. Численно он равен сумме произведений масс всех элементов тела на квад-
раты их расстояний до оси, относительно которой вычисляется момент инерции.
** Теоретическая сторона методики экспериментального определения моментов
инерции самолета подробно освещена в следующих трудах:
В. П. В е т ч и н к и н, Методы экспериментального определения' моментов
инерции твердых тел при помощи многонитного подвеса, Тр. ЦАГИ, вып. 1922
(1920).
В. П. Ветчинкин и Н. Г. Ченцов, Плоский маятник о двух степенях
свободы и определение при помощи его высоты центра тяжести и момента инер-
ции твердого тела, Тр. ЦАГИ, вып. 3, 1923.
Ю. А. Победоносцев, Экспериментальное определение моментов инер-
ции самолета, Труды всесоюзной конференции по аэродинамике, 1931, Тр.
ЦАГИ, вып. 201, 1935.
20
инерции относительно вертикальной оси самолета (Jy). Для опреде-
ления моментов инерции относительно поперечной (Л) и продоль-
ной (Л) осей самолета он неудобен, так как потребовал бы под-
вески самолета боком и вертикально. Второй метод наиболее удо-
Р и с. 1.3. Схема расчета моментов инерции
самолета /х, Jy, Jz
бен для определения моментов инерции самолета относительно
поперечной (Л) и продольной (Jx) осей, так как при этом не тре-
буется изменять исходного горизонтального положения самолета.
При определении моментов инерции Д, Jy, Jz самолет подвеши-
вается в горизонтальном положении с помощью специального лег-
кого устройства (рамы) на двух параллельно натянутых стальных
тросах со сферическими (карданными) шарнирами на концах
21
(рис. 1.4). Верхние концы тросов с карданной подвеской закреп-
ляются на мостовой ферме грузового крана (либо на силовой балке
ангара, кабель-кране и т. п.). Нижние концы тросов шарнирно свя-
зываются с фермой, к которой непосредственно подвешивается
Рис. 1.4. Схема двухнитевой подвески самолета при определении его моментов
инерции методом крутильных колебаний
и методом плоского маятника с двумя степенями свободы:
а — поперечная подвеска самолета при определении моментов инерции Jу и /б — продоль-
ная подвеска самолета при определении моментов инерции Jy и / х
самолет. Верхние и нижние точки крепления тросов должны при
этом находиться в одной плоскости и быть симметрично разнесены
относительно ЦТ самолета.
При определении момента инерции осуществляется так назы-
ваемая продольная схема подвески самолета на тросах, при кото-
22
рой точки крепления тросов разнесены вдоль продольной оси само-
лета, а при определении момента инерции Jz осуществляется попе-
речная схема подвески самолета (точки крепления тросов разно-
сят вдоль размаха крыла, рис. 1.4).
Для определения моментов инерции самолета относительно трех
осей необходимо произвести эксперимент при двух вариантах под-
вески его на тросах (по продольной и поперечной схеме). Замеряя
период крутильных колебаний самолета в горизонтальной плоско-
сти (относительно вертикальной оси), определяют момент инер-
ции Jy. Замеряя периоды двух типов колебаний самолета в попе-
речной плоскости (z/Oz), находят момент инерции Jx. Аналогичным
образом при поперечной схеме подвески самолета на тросах, по
величине периода крутильных колебаний относительно вертикаль-
ной оси определяют момент инерции Jy, а по величине периодов
двух типов колебаний самолета в продольной плоскости (хОу)
находят момент инерции Jz.
Для определения момента инерции Jy создают колебания само-
лета в горизонтальной плоскости (т. е. относительно вертикаль-
ной оси) с амплитудой не более ±15° (закручивая самолет одно-
временно за оба крыла или за концы фюзеляжа) и, регистрируя
время 20—25 циклов, определяют средний период Ту крутильных
колебаний самолета в горизонтальной плоскости на тросовой под-
веске. Дальнейший расчет момента инерции относительно верти-
кальной оси (для продольной и поперечной схем подвески само-
лета на тросах) производят по формуле
т2 г
Jy=— — R\
У 4л2 Hq
где G —вес самолета;
770 —длина троса;
R — расстояние от троса до вертикальной оси, проходящей
через ЦТ самолета (на рис. 1.4 R~RZ или /^=/?х).
Для определения моментов инерции Jx и Jz поочередно соз-
даются два типа колебаний самолета в одной из вертикальных пло-
скостей (в плоскости, перпендикулярной продольной оси самолета,
либо в плоскости симметрии, в зависимости от осуществленной
схемы подвески самолета на тросах) и регистрируется время 20—
25 циклов для определения среднего периода этих колебаний. Пер-
вый тип колебаний создается постепенным раскачиванием самолета
из одной стороны в другую в заданной вертикальной плоскости. Он
характеризуется тем, что ЦТ самолета и точки подвески самолета
к тросам одновременно проходят через вертикальное положение
равновесия и перемещаются при этом в одном направлении. Второй
гип колебаний создается путем постепенного раскачивания само-
лета с крыла на крыло (при продольндй схеме подвески) или по
гангажу (при поперечной схеме подвески) таким образом, чтобы
одновременно развивались колебания самолета в заданной верти-
23
калькой плоскости, и относительно точек подвески его к тросам.
Эти колебания происходят с более высокой частотой. Их характер-
ной особенностью является то, что в процессе колебаний ЦТ само-
лета и точки подвески самолета к тросам одновременно проходят
через вертикальное положение равновесия, но в отличие от первого
типа колебаний перемещаются при этом в противоположных на-
правлениях.
После определения периодов двух типов колебаний самолета
в вертикальных плоскостях дальнейший расчет моментов инерции
/х и Jz производится по следующим формулам:
у12 у 2
Л=Gg —kJk ~ 0,0063G — т\ ;
Но (4л2)2 Но z г
Jx—Gg — ^0,00630 — 71 т1 ,
х & Но (4л2)2 Но х х
где G— вес самолета;
Hq—длина троса ;
hx и hz— соответствено расстояния от точки подвески троса
до соответствующей оси самолета (х или z), проходя-
щей через ЦТ;
7"i иГ2 —соответственно периоды первого и второго типов коле-
х . баний самолета в плоскости zOy\
T\z и 7\—соответственно периоды двух типов колебаний само-
лета в плоскости уОх.
1.5. ОПРЕДЕЛЕНИЕ ОСНОВНЫХ ХАРАКТЕРИСТИК
СИСТЕМЫ УПРАВЛЕНИЯ
Количество характеристик системы управления, определяемых
в процессе наземной подготовки самолета к испытаниям, зависит
от типа системы, наличия в ней бустеров, загрузочных устройств,
автоматических устройств, регулирующих в полете кинематические
и силовые характеристики системы, демпферов и т. п.. Однако не-
зависимо от конструктивных особенностей системы управления
в процессе наземных работ должны быть определены следующие
ее характеристики (рис. 1.5):
а) кинематические параметры системы:
— законы кинематической связи рулей с соответствующими
рычагами управления, т. е. зависимости вида
<рст=/(*в);
8B=/W;
%=/(x9);
\=fM;
24
Рис. 1.5. Характеристики системы управления, определяемые в процессе наземных испытаний самолета:
=--------коэффициент передачи между углом отклонения рулевой поверхности и линейным перемещением соответ-
57,3 dx
ствующего рычага управления; в* Э’ н """ коэффициенты передачи соответственно для продольного, поперечного и
~ dP „ х
путевого управления самолета; Рл =— —градиент изменения усилий по ходу соответствующего рычага управления; Р в =
dx в
dP* х dPs X dPH
= я*. ’ ”73”» ? н== 3 ~ градиенты изменения усилий на ручке управления и педалях по ходу; Р—величина уси-
э н 1Р
лий, прикладываемых к рычагу управления для преодоления сил трения в системе управления; PTDB, РтреЭ» Ртр.н~ве’
личины сил трения в системе продольного, поперечного и путевого управления самолета.
— коэффициенты передачи от рулей к соответствующим рыча-
гам управления:
Ашв=—— 1/ле (продольное управление рулем высоты);
57,3 dxB
£ш.в=_2_ (продольное управление стабилизатором);
э=-2-_ \ /м (поперечное управление);
Ашн=-— 11м (путевое управление),
57,3 dxn
где <рст, 8В, 8Э) 8Н —утлы отклонения соответствующих рулевых
поверхностей в град (стабилизатора, руля вы-
соты, элеронов и руля направления);
хв, х3, х„ — линейные перемещения рычагов управления
(в м) относительно исходного нейтрального
положения рулей, соответствующего условию
<Р =0; 8=0; 8. = 0 и 8=0;
— закон регулирования в полете кинематических характери-
стик системы управления, т. е. зависимости вида
*Ш = /(М, Я);
— предельные отклонения ручки управления и педалей (как
с летчиком: в кресле, так и без него) ;
б) силовые характеристики системы:
— величина усилий в (кГ), прикладываемых к ручке управле-
ния (штурвалу) и педалям, для преодоления сил трения в системе
продольного, поперечного и путевого управления при стоянке само-
лета на земле
р р и р
'в.тр? * э.тр п 1 н.тр>
— закон изменения усилий на рычагах управления от загрузоч-
ных механизмов, пружин и балансирных грузов, т. е. зависимости
вида
где Рв, Рэ и Рн —усилия, прикладываемые летчиком к ручке
управления (штурвалу) и педалям;
— градиенты изменений усилий по ходу соответствующего ры-
чага управления (силовая характеристика загрузочного механизма
26
системы управления, указывающая, какое усилие необходимо при-
ложить к рычагу управления для смещения его на 1 см):
Рхв — ^^- кГ[см;
в dxB
Рх^ = ^- кГ1см;
Рх«=±^ кГ1см;
н dxH
— закон регулирования в полете загрузки рычагов управления,
т. е. зависимости вида
Рх=—=/(М, Я);
dx
в) характеристики упругости системы:
— величина- линейного смещения рычага управления (в см)
под действием приложенного к нему усилия при жестко зафиксиро-
ванном руле, обусловленного упругими деформациями проволоки,
в виде зависимости AxynP=f(f>) (на самолетах с обратимой систе-
мой управления);
— величина упругой просадки руля (в град) под действием при-
ложенного к нему искусственно созданного шарнирного момента Л4Ш
при фиксированном положении силового штока бустера в виде за-
висимости Дбупр=f(Л1Ш) (на самолетах с необратимой системой
бустерного управления);
г) динамические характеристики системы:
К динамическим характеристикам системы управления, опреде-
ляемым при проведении комплекса наземных работ на самолетах
с необратимой системой бустерного управления, относятся:
— запаздывание по фазе в отклонении ручкой управления
(штурвалом) и педалями соответствующего руля при колебатель-
ных, близких к синусоидальным, перемещениях рычага управления
с различной частотой и примерно постоянной амплитудой (см.
рис. 1.5)
?Х5 = /
\ 1 в /
где Тв — период колебаний (циклических перемещений) рычага
управления;
— 'запаздывание цо фазе между отклонением соответствующего
руля и прикладываемым для этого к рычагу управления усилием
в зависимости от частоты синусоидальных колебаний рычага управ-
ления с постоянной амплитудой
— f [тГ">
\ 1 в-/
27
— запаздывание по фазе между перемещением соответствую-
щего рычага управления и прикладываемым к нему усилием при
колебательных, близких к синусоидальным, перемещениях рычага
управления с различной частотой и примерно постоянной ампли-
тудой
Методы определения характеристик системы управления приве-
дены в специальных инструкциях.
При проведении наземных работ на самолете с необратимой
системой бустерного управления тщательно проверяют устройства,
искусственно загружающие по определенному закону рычаги
управления, а также меняющие в полете закон кинематической
связи рычага управления с рулем.
Необходимо также оценить величину так называемой «зоны
нечувствительности» у ручки управления (штурвала) и педалей.
Зона нечувствительности определяется величиной люфта, т. е. сво-
бодного смещения рычага управления при неподвижном руле.
Измерения производят в месте приложения к рычагу управления
усилия летчика.
На самолетах с обратимой бустерной системой управления не-
обходимо оценить, кроме того, так называемый коэффициент обра-
тимости системы, характеризующий степень уменьшения усилий
на рычаге управления при включенном бустере по сравнению с уси-
лиями при выключенном бустере.
После завершения указанных выше работ при удовлетворитель-
ных результатах наземных испытаний переходят к выполнению
рулежек, пробежек и подлетов.
1.6. НАЗЕМНЫЕ ТРЕНИРОВКИ ЛЕТНОГО ЭКИПАЖА.
РУЛЕЖКИ, ПРОБЕЖКИ, ПОДЛЕТЫ САМОЛЕТА
Наземные тренировки летного экипажа преследуют две цели:
— выявить все подлежащие устранению до первого вылета не-
достатки самолета;
— приобрести всем членам экипажа практические навыки ра-
боты в кабине самолета путем «проигрывания» в наземных усло-
виях основных этапов полета.
В ходе наземных тренировок производится всесторонняя оценка
экипажем своих рабочих мест и кабины в целом, в том числе
и удобств посадки в кресла, обзора и управления в летном обмун-
дировании. Производится также оценка средств аварийного поки-
дания самолета.
Ведущий летчик-испытатель должен при этом практически
освоить свое рабочее место, управление рулями самолета, двигате-
лями, механизацией крыла, воздушными тормозами, шасси, всем
специальным оборудованием кабины и систематическими трениров-
28
ками выработать необходимый автоматизм в своих действиях.
Соответствующую тренировку проходят также и другие члены
летного экипажа.
После успешного завершения указанных тренировок и устране-
ния выявленных недостатков в компоновке рабочих мест экипажа,
а также завершения на самолете всех подготовительных работ
переходят к выполнению рулежек, пробежек и подлетов.
Выполнение рулежек, пробежек и подлетов является важным
и совершенно необходимым элементом подготовки к первому вы-
лету экипажа и самолета, так как позволяет изучить особенности
движения самолета по земле к месту старта, в процессе разбега
и пробега, а также поведение его в первые секунды после отрыва
от ВПП и в момент приземления. Это чрезвычайно важно для под-
готовки экипажа к выполнению наиболее трудных этапов первого
вылета — взлета и посадки самолета. Кроме того, при выполне-
нии рулежек, пробежек и подлетов проверяют надежность работы
материальной части опытного самолета, его систем и оборудова-
ния.
При выполнении пробежек и подлетов летчик уточняет взлетное
и посадочное положение самолета (по положению переплетов
остекления фонаря относительно горизонта и земли), практически
осваивает и проверяет работоспособность как основного, так и ава-
рийного управления всеми системами и агрегатами самолета. По-
путно производится окончательная подгонка парашютов, привяз-
ных ремней, кислородного оборудования, положения кресел летчика
и членов экипажа, а также проверка возможности отклонения всех
рулей в крайние положения.
На этом этапе испытаний самолета узловыми вопросами яв-
ляются:
— оценка управляемости и устойчивости движения самолета
по земле при отсутствии ветра и при боковом ветре;
— приближенная оценка условий балансировки самолета в про-
цессе его движения с поднятым носовым (хвостовым) колесом и
эффективности его рулей;
— качественная оценка величины усилий на рычагах управле-
ния и устойчивости самолета при скоростях, близких к взлетно-
посадочным;
п одбор взлетных положений триммеров (триммерных меха-
низмов) ;
— оценка работы тормозов и тормозных устройств (основной
и аварийных систем);
— оценка работы амортизации шасси;
— оценка характера вибраций оборудования и конструкции,
вызываемых работой силовой установки и неровностями грунта
при движении самолета по земле;
— оценка работы материальной части, особенно управления,
энергопитания и силовой установки.
29
Пробежки и подлеты выполняются при взлетном весе самолета,
центровке и положении механизации, которые приняты для пер-
вого вылета.
Перед началом пробежек и в особенности подлетов необходимо
убедиться (расчетным путем) в достаточности длины ВПП для
проведения подобных испытаний (требуется не менее чем 20% за-
пас длины ВПП с учетом возможности частичного отказа средств
торможения при пробеге).
Экипаж самолета готовится к выполнению пробежек и подле-
тов так же, как и к выполнению первого полета.
Скорость самолета при выполнении пробежек наращивается
постепенно. При каждой последующей пробежке по сравнению
с предыдущей скорость увеличивают на~50—30 км!час.
Пробежки и подлеты, как правило, дважды не повторяются без
анализа результатов предыдущего опыта и тщательного осмотра
всего самолета (в особенности его посадочных устройств). Коли-
чество пробежек и подлетов (если последние выполняются) обычно
не ограничивается; они проводятся в таком количестве, которое
необходимо для того, чтобы убедиться в полной готовности само-
лета и экипажа к первому вылету. Важно, чтобы у летчика перед
выполнением первого полета была полная ясность в удовлетвори-
тельной устойчивости и управляемости самолета, уверенность как
в надежности работы материальной части, так и собственной готов-
ности к выполнению первого вылета.
По результатам пробежек и подлетов уточняется потребное
отклонение всех триммеров (триммирующих устройств) для пер-
вого вылета. Должно быть подобрано такое положение триммеров,
при котором обеспечивались бы приемлемые по величине усилия
на рычагах управления при-разбеге и отрыве самолета от ВПП,
а также при наборе высоты и после уборки газа двигателей.
Результаты наземных испытаний оформляются актом о готов-
ности самолета к полетам. К этому же времени заканчивается
оформление необходимых для получения разрешения на первый
вылет заключений по прочности, аэродинамике, средствам аварий-
ного покидания самолета, летным ограничениям.
1.7. ПЕРВЫЙ ВЫЛЕТ САМОЛЕТА
Для выполнения первого вылета выбирают хорошую погоду,
с видимостью не менее 5—7 км без низкой облачности и порывис-
того бокового ветра.
Учитывая специфические условия первого полета на новом
самолете, объем полетного задания и число членов экипажа сокра-
щают до минимума.
Полет производится с минимально возможным весом, чтобы мак-
симально уменьшит^ скорость отрыва и сократить длину разбега,
а также улучшить условия пилотирования.
30
Топливо в баки заливается в количестве, необходимом для по-
лета в течение заданного времени и безопасного возвращения на
свой аэродром (т. е. с некоторым запасом).
Время пребывания в воздухе легкого самолета при первом вы-
лете обычно не превышает 30—40 мин, тяжелого самолета 1,0—
2,0 часа.
Первый взлет производится при работе двигателей на взлетном
или максимальном режиме. При этом летчику задается скорость
отрыва самолета несколько большая, чем расчетная для данного
веса. При первом полете самолет отрывается от ВПП при угле
атаки, несколько меньшем расчетного. Это облегчает летчику
управление самолетом в первые секунды после отрыва от ВПП,
уменьшает величину потребных для балансировки самолета откло-
нений рулей и тем самым обеспечивает несколько больший запас
в отклонении рулей как для парирования внешних возмущений, так
и исправления возможных ошибок пилотирования. Кроме того, при
этом обеспечивается летчику возможность переводить самолет
в набор высоты практически без предварительного разгона его
вблизи земли (выдерживания), а также исключается необходимость
«играть» продольным углом, что может оказаться опасным, напри-
мер, в случае, если у самолета обнаружится склонность к раскачке
или иные дефекты динамических характеристик.
В первом полете летчик оценивает:
— устойчивость и управляемость самолета, простоту выполне-
ния на нем разворотов, небольших скольжений, взлета й посадки;
— работу силовой установки;
— работу оборудования, необходимого для пилотирования.
В этом полете на безопасной высоте летчик оценивает также
условия выполнения посадки и уточняет скорость захода на посадку
(по фактической скорости отрыва, которая может существенно от-
личаться от расчетной), а также и режим балансировки самолета
по усилиям.
Планирование самолет^ на посадку выполняется по пологой
глиссаде на уточненной в полете скорости.
Посадка производится на скорости, большей расчетной на 30—
40 км)час, что улучшает управляемость и повышает запас откло-
нений рулей.
Глава II
МЕТОДЫ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПОЛЕТА,
БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ,
КООРДИНАТ САМОЛЕТА В ПРОСТРАНСТВЕ,
ТЕМПЕРАТУРЫ ВОЗДУХА И ЧИСЛА М
2.1. ТЕОРИЯ ПРИБОРОВ, ИЗМЕРЯЮЩИХ СКОРОСТЬ,
ВЫСОТУ И ЧИСЛО М ПОЛЕТА
Методы измерения скорости относительно воздуха, барометри-
ческой высоты и числа М полета тесно связаны между собой. При-
боры для измерения барометрической высоты, скорости относи-
Рис. 2.1. Схема работы высотомера, указателя скорости и указателя
числа М:
/—динамическая камера; 2—обогрев; 3—статическая камера; 4—отверстия, соединяю-
щие статическую камеру с атмосферой; 5—корпус ПВД; манометрическая коробка;
7—анероидная коробка
тельно воздуха и числа М полета включаются в пневматическую
систему приемника воздушного давления (ПВД) (рис. 2.1).
Приемник воздушного давления состоит из камеры полного дав-
ления 1 (динамической камеры), обогрева 2, статической камеры 5,
соединенной с атмосферой с помощью отверстий 4, и корпуса 5,
32
В приборах для измерения скорости чувствительными элемен-
тами являются манометрические коробки 6, во внутреннюю полость
которых подается полное давление рн о.пр. В корпус датчика, по-
дается статическое давление Рн-пр.
В приборах для измерения барометрической высоты приме-
няются анероидные коробки 7, из которых откачан воздух. В корпус
датчика подается статическое давление Рнпр.
При изменении давления в приборе коробка деформируется
и через передаточно-множительный механизм поворачивает
стрелку.
Указатель скорости, так же как и датчик для измерения скоро-
сти или самописец, в горизонтальном полете фактически измеряет
разность давлений, подаваемых по трубопроводам из динамической
и статической камер ПВД. Величина разности давлений опреде-
ляется по формуле
#пр Рн о.пр РН пр* (2* 1)
Высотомер, так же как и датчик для измерения высоты или
самописец, в горизонтальном полете фактически измеряет давле-
ние рнпр, а указатель числа М показывает отношение давлений
Рн о.пр/Рн пр«
Согласно стандартной атмосфере (СА) (ГОСТ 4401—64) каж-
дому значению атмосферного давления рн соответствует определен-
ная барометрическая высота Н. В качестве нулевой высоты в СА
принята высота, которой соответствует давление, равное 760 мм
рт. ст. За нормальные атмосферные условия приняты: атмосферное
давление ро = 76О мм рт. ст. (при температуре ртути, равной 0°С
на широте 45° на уровне моря), температура Г0=288,15оК и плот-
ность воздуха qo—1,2250 ка/л«3== 0,12492 кГсек21м*. Используя СА,
на шкалу высотомера наносят величины барометрической высоты.
Связь между скоростью полета Упр.испр и разностью давлений 7пр,
а также между числом Л4пр.испр и отношением давлений рно.пр/рнпр
будет рассмотрена ниже.
Необходимо иметь в виду, что величины, считываемые с по-
мощью стрелок со шкал приборов, не соответствуют точным зна-
чениям <7пр, Рн тгр и Рно.пр/Рнпр. Это объясняется прежде всего тем,
что при изготовлении приборов шкалы рассчитываются для сред^
них характеристик мембранных коробок, а вследствие производст-
венных допусков их характеристики имеют некоторый разброс.
Для получения скорости Упр.испр, соответствующей ^пр, барометри-
ческой высоты Япр.испр, соответствующей значению рнпр и числа
Мпр.испр, соответствующего отношению поданных в прибор давле-
ний, в показания приборов 7Пр, #пр и Мпр необходимо внести инст-
2 598 33
рументальную поправку, получаемую путем тарировки приборов
в лаборатории, по формулам
V = V 4-д1/ •
пр.испр v пр пр’
“^пр.испр ^пр4" А^Пр’
^пр.испр МПр4~ДМпр» ,
(2.2)
где дУпр, Д//пр и дМпр —инструментальные поправки.
Поскольку в приборе для определения числа М в работе уча-
ствуют одновременно две коробки (см. рис. 2.1), то поправки
ДМПр для разных барометрических высот получаются различны-
ми. Для увеличения точности измерения с помощью указателя
числа М необходимо его тарировку производить для высот,
на которых будут производиться полеты. Приборы самописцы и
датчики для измерения высоты и скорости при наличии индиви-
дуальных тарировок инструментальных поправок не имеют. В этом
случае значения Упр.испр и Япр.испр или Рнпр считываются непос-
средственно с тарировочных графиков, соответствующих данным
номерам приборов. При расчетах на вычислительных машинах
часто бывает удобно пользоваться графиком, построенным
по рн пр.
Работа указателя скорости и высоты
в несжимаемом газе
Возьмем идеальный приемник воздушного давления (ПВД),
у которого в полете давление в динамической камере равно пол-
ному давлению Рн о.пр = Рн о и давление в статической камере равно
атмосферному статическому давлению Рнщг=рн- Предположим,
что идеальный ПВД работает при стационарном движении само-
лета в несжимаемом воздушном потоке. В этом случае работа
высотомера не нуждается в особом пояснении, так как каждому
значению давления рн согласно стандартной атмосфере будет со-
ответствовать определенное значение барометрической высоты
^пр.испр. Для выяснения принципа действия указателя скорости
необходимо найти связь между скоростью полета самолета и раз-
ностью давлений, регистрируемой указателем скорости.
Напишем уравнение Бернулли для несжимаемого газа
Атеу = Рл+ей (2.3)
где ри q и V\ — давление, плотность и скорость в относительном
потоке непосредственно перед приемником;
рн, qh и V—давление, плотность и скорость потока далеко
перед самолетом, т. е. атмосферное статическое
давление, плотность окружающего воздуха и
скорость полета.
34
Скорость потока на входе в динамическую камеру ПВД равна
нулю, т. е. Vi = 0. Следовательно, давление в динамической камере
ПВД Р1 = рно будет
1 V2
Рн<У=Рн+вц у (2-4)
При идеальном приемнике воздушного давления с учетом фор-
мулы (2.4) формула (2.1) примет вид
V2
Q~Phq~ Ph=Qh • (2.5)
Величину разности давлений q обычно называют скоростным
напором воздушного потока. Как видно из уравнения (2.5), ско-
ростной напор q зависит не только от скорости полета самолета V,
но и прямо пропорционален плотности воздуха qh. Плотность воз-
духа зависит от атмосферного статического давления и темпера-
туры, которые сильно изменяются с высотой. Расчет величины ско-
ростного напора для шкалы указателя скорости производится при
Qh = Qo, т. е. при Н = 0 по СА. Следовательно, только при нормаль-
ных атмосферных условиях и идеальном ПВД значение приборной
скорости соответствует истинной скорости самолета относительно
воздуха.
При полете на высоте Н величину скорости, которую зарегист-
рирует прибор, работающий с идеальным ПВД при плотности воз-
духа qh и скорости V, называют индикаторной скоростью Vi.
Согласно формуле (2.5) скоростной напор
_ V2 __ V]
Я — Qh Qb »
откуда истинная скорость полета самолета равна
v=yt 1/
где
д=^- = 0,3793^-
ео тн
(рн в мм pm. cm).
Из формулы (2. 6) следует .
V { — У ]/д.
(2.6)
(2.7)
(2.8)
Полученная взаимосвязь скорости и скоростного напора дейст-
вительна только при очень малых скоростях полета, так как при
2*
35
больших скоростях (V> 100 км/час) будет сказываться влияние
сжимаемости воздуха, а при полете со скоростью больше скорости
звука и скачка уплотнения, на величину воспринимаемого ПВД
скоростного напора.
Работа указателя скорости в сжимаемом газе
Отношение истинной скорости полета самолета к скорости звука
в воздухе называется числом М:
М=-^-, (2.9)
где
« = 1/ х-^-= 1/^7=20,04631/7» 20/7 м}сек-, (2.10)
V QH
х=—= 1,40.
cv
При дозвуковой скорости полета энергия набегающего на само-
лет потока, затормаживаемого в динамической камере ПВД, будет
расходоваться не только на создание скоростного напора, но и на
сжатие воздуха. В этом случае для определения величины полного
давления рНо вместо уравнения Бернулли для воздуха необходимо
воспользоваться уравнением теплосодержания
У? 172
срТг 4-А-^-=срТн-\-А^— —const, (2.11)
2g F 2g
где A — механический эквивалент теплоты.
В динамической камере ПВД скорость потока равна нулю, т. е.
Vi = 0 и Т1 = Гно. Подставляя указанные величины в уравнение
теплосодержания и преобразовывая, получим
где Тно — температура полностью заторможенного потока.
С другой стороны, при адиабатическом торможении
РНо _ ( Тно V-1
Рн \Тн ) '
откуда
Рн.о = Рн •
36
Используя известное уравнение термодинамики
AR^cp-cv=cp^~-
и учитывая уравнение состояния газа рн=§QhRTн, получим
х —1 У2
2 igRTH
х — 1 ея V2 \х—1
*Рн
Следовательно, при полете самолета с дозвуковой скоростью
и при наличии идеального приемника воздушного давления мано-
метрическая коробка указателя скорости будет деформироваться
под действием разности давлений
(2.12)
Из сравнения формул (2.5) и (2.12) видно, что связь между
скоростным напором и истинной скоростью при работе идеального
ПВД в реальных условиях дозвукового полета значительно слож-
ней, чем при его работе в несжимаемом газе (при скорости полета
менее —'100 км/час). Величина скоростного напора с учетом сжи-
маемости воздуха //с» зависит не только от истинной скорости и
плотности воздуха, но и от атмосферного статического давления рн.
Из формул (2.9), (2.10) и . (2. 6) следует, что
М2
V2
а2
Q„V2 _ СоУ2
хря •
(2. 13)
хр
Подставляя значение 1/2=М2——, полученное из формулы (2.13),
в формулу (2.12), получим
9сж Рн
(2.14)
Используя равенство (2.13), формулу (2.12) можно записать
в следующем виде:
Чех. Рн
у-1 г
(2.15)
При сверхзвуковой скорости полета перед ПВД образуется ска-
чок уплотнения (рис. 2.2), в котором скачкообразно изменяются
кдк полное,, так и статическое давление. После скачка уплотнения,
который будем считать прямым, скорость V) становится дозвуковой,
37
воздух уплотняется и статическое давление становится равным р2,
а полное давление р20. Влияние скачка распространяется на четыре-
пять калибров трубки и у статических отверстий идеального ПВД
скорость потока и давление воздуха соответственно равны V и рн-
Рис. 2. 2. Скачок уплотнения перед ПВД при
сверхзвуковой скорости
Согласно формуле Релея отношение полного р2о и статического
рн давлений равно
^2o_=='Xl+Jm2 f (% + 1)2М2 «-1 /л
Рн 2 [ 4хМ2 — 2(х — 1) J 1 '
Используя уравнение (2.13), формулу (2.16) можно записать
в следующем виде:
Г eov?
qov? (x+ )2 . f2 17)
ph -'-ph Qov] ( ' }
4———2(x-l)
L J
Следовательно, при полете самолета со сверхзвуковой скоростью
и при наличии идеального приемника воздушного давления, мано-
метрическая коробка указателя скорости будет деформироваться
под действием разности давлений
Ясж — Р^О Рн — Рн
ео^/
рн
л Q°V2‘
4--------
р 2(% —о
рн
или согласно формуле (1.16)
Рн I 2
(х+1)2М2 1*-1 J I
4хМ2 —2(х—1) ] J ’
-1}
(2.18)
(2.19)
х + 1
2 ^7
38
Как следует из формул (2.15) и (2.18), величина скоростного
напора </сж зависит как от индикаторной скорости Vi, так и от атмо-
сферного давления на высоте полета рн. Как уже указывалось
выше, расчет шкалы указателя скорости производится при нор-
мальных атмосферных условиях, т. е. при £=15° С, рн=Ро=
760 мм рт. ст. = 10332,2 мм вод. ст. и q<>=0,12492 кГсек?1м*. Под-
ставляя значения р0 и q0 в формулы (2.15) и (2.18), а также учи-
тывая, что для воздуха х=1,4 и согласно формуле (2.6) Vi = V,
получим
<7сж=Ро [(1 + 0,13334.10-4/2)3,5-1]; (2. 20)
Г 0,8584.10-6^7 1
9сж Ро 072—214 277)2’5 ]’ ( • )
где V в км/час.
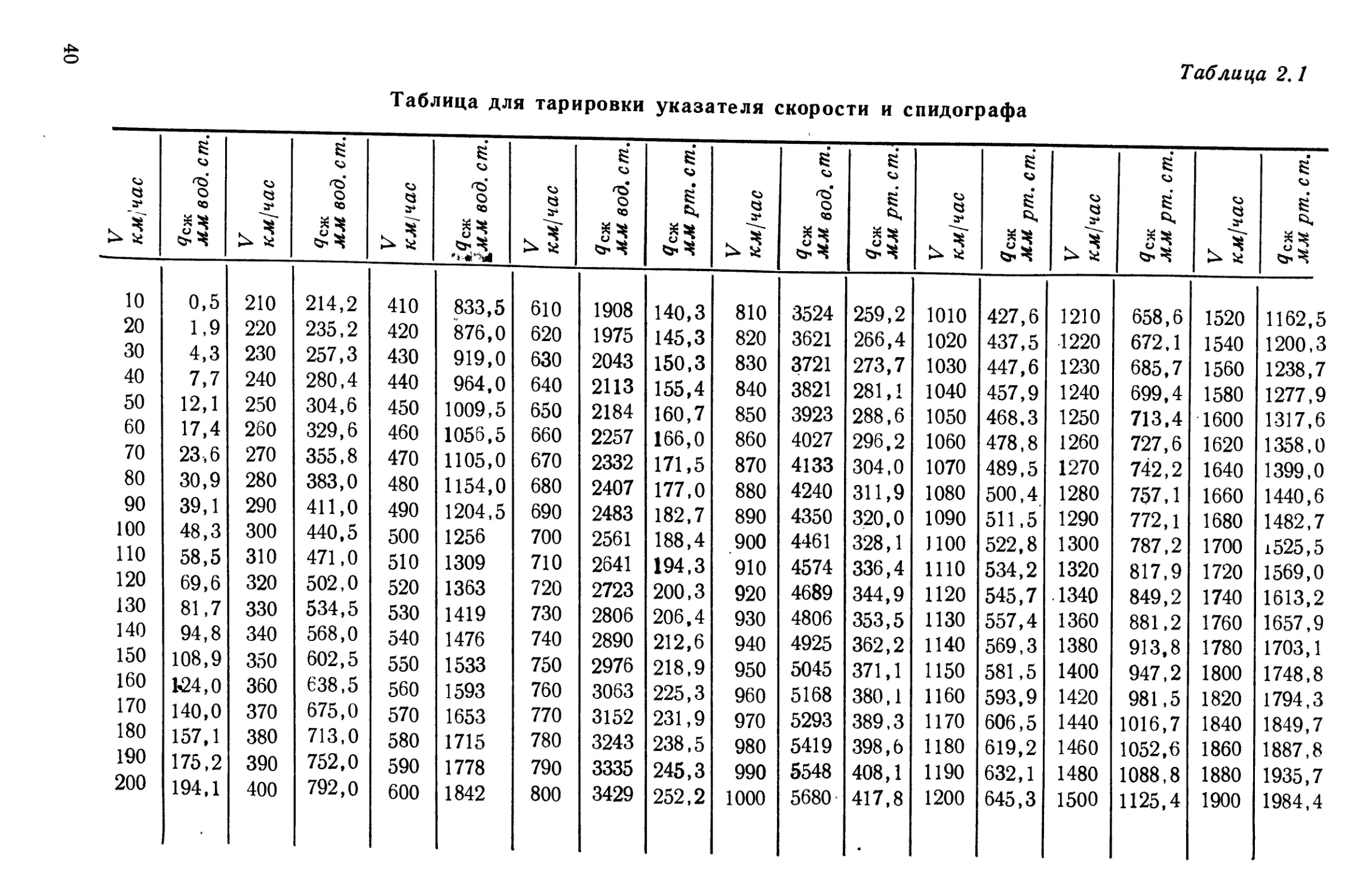
Значения qC7K при М^1, рассчитанные по формуле (2.20), и при
М.^1, рассчитанные по формуле (2.21), для скоростей от 10 до
1900 км/час приведены в табл. 2.1. Необходимо иметь в виду, что
значения 7Сж, данные в мм вод. ст. или в мм рт. ст., были получены
при определенной плотности жидкости. Удельный вес чистой ртути,
равный 13,595 г/см3, может быть получен при 0°С, на широте
Ф = 45°, на уровне моря и при нормальном давлении, а удельный вес
дистиллированной воды, принятый за единицу, определялся при тех
же условиях, но при +4°С. Тарировка (градуировка) указателя
скорости в лаборатории всегда производится при условиях, отлич-
ных от указанных выше, вследствие чего, при использовании жид-
костных дифференциальных манометров, необходимо вносить по-
правки на изменение плотности жидкости. Эти же соображения
необходимо иметь в виду и при тарировке (градуировке) высото-
мера.
Для обеспечения возможности градуировки указателя скорости
было принято рн = Ръ, что безусловно усложнило задачу измерения
скорости в полете. Из сравнения формул (2.15), (2.20) для М^1
(1/^1224,72 км/час) и (2.18), (2.21) для М>1 видно, что при
полете на одной и той же индикаторной скорости Vi при pQ и при
Рн(р^Рн) значения будут разными, и наоборот, при одинако-
вых значениях 7Сж, а следовательно, и одинаковых исправленных
значениях приборной скорости, индикаторные скорости будут
оазличными. Обозначим это значение приборной скорости через
1Л3 и будем называть эту величину земной индикаторной ско-
ростью. Следовательно, при горизонтальном полете самолета и при
наличии идеального приемника воздушного давления, земная инди-
каторная скорость будет равна исправленному значению приборной
скорости.
Из сказанного выше следует, что разность между индикаторной
скоростью и земной индикаторной скоростью определяется различ-
ным влиянием сжимаемости воздуха при различных значениях
39
Таблица 2,1
Таблица для тарировки указателя скорости и спидографа
Г • 1 км/час I 7сж мм вод. ст. V км)час (7сж мм вод. ст. V км[час »/7сж £мм вод. ст. V км)час Ясж мм вод. ст. Я сж мм рт. ст. V км!час <7сж мм вод. сиг. *7сж мм рт. ст. V км1час Ясж. мм рт. ст. V км)час *?СЖ мм рт. ст. V км!час Я сж мм рт. ст.
10 0,5 210 214,2 410 833,5 610 1908 140,3 810 3524 259,2 1010 427,6 1210 658,6 1520 1162,5
20 1,9 220 235,2 420 876,0 620 1975 145,3 820 3621 266,4 1020 437,5 1220 672.1 1540 1200,3
30 4,3 230 257,3 430 919,0 630 2043 150,3 830 3721 273,7 1030 447,6 1230 685,7 1560 1238,7
40 7,7 240 280,4 440 964,0 640 2113 155,4 840 3821 281,1 1040 457,9 1240 699,4 1580 1277,9
50 12,1 250 304,6 450 1009,5 650 2184 160,7 850 3923 288,6 1050 468,3 1250 713,4 1600 1317,6
60 17,4 260 329,6 460 1056,5 660 2257 166,0 860 4027 296,2 1060 478,8 1260 727,6 1620 1358,0
70 23,6 270 355,8 470 1105,0 670 2332 171,5 870 4133 304,0 1070 489,5 1270 742,2 1640 1399,0
80 30,9 280 383,0 480 1154,0 680 2407 177,0 880 4240 311,9 1080 500,4 1280 757,1 1660 1440,6
90 39,1 290 411,0 490 1204,5 690 2483 182,7 890 4350 320,0 1090 511,5' 1290 772,1 1680 1482,7
100 1 1 Л 48,3 300 440,5 500 1256 700 2561 188,4 900 4461 328,1 1100 522,8 1300 787,2 1700 1525,5
по 1 ПЛ 58,5 310 471,0 510 1309 710 2641 194,3 910 4574 336,4 1110 534,2 1320 817,9 1720 1569,0
120 f ОЛ 69,6 320 502,0 520 1363 720 2723 200,3 920 4689 344,9 1120 545,7 1340 849,2 1740 1613,2
130 81,7 330 534,5 530 1419 730 2806 206,4 930 4806 353,5 ИЗО 557,4 1360 881,2 1760 1657,9
140 1 кА 94,8 340 568,0 540 1476 740 2890 212,6 940 4925 362,2 1140 569,3 1380 913,8 1780 1703,1
130 1 РЛХ 108,9 350 602,5 550 1533 750 2976 218,9 950 5045 371,1 1150 581,5 1400 947,2 1800 1748,8
10U 1 7 Л 1-24,0 360 638,5 560 1593 760 3063 225,3 960 5168 380,1 1160 593,9 1420 981,5 1820 1794,3
1 /0 1 Qn 140,0 370 675,0 570 1653 770 3152 231,9 970 5293 389,3 1170 606,5 1440 1016,7 1840 1849,7
1о0 157,1 380 713,0 580 1715 780 3243 238,5 980 5419 398,6 1180 619,2 1460 1052,6 1860 1887,8
1У0 Плл 175,2 390 752,0 590 1778 790 3335 245,3 990 5548 408,1 1190 632,1 1480 1088,8 1880 1935,7
ZUU 194,1 400 792,0 600 1842 800 3429 252,2 1000 5680 417,8 1200 645,3 1500 1125,4 1900 1984,4
атмосферного давления. Эта величина поправки на сжимаемость
равна
^Cs=v(-V(3. (2.22)
Связь между индикаторной скоростью и земной индикаторной
скоростью легко получить из указанных выше соображений. Дей-
ствительно, если полет происходил при М^1 с индикаторной ско-
ростью Vi при атмосферном давлении рн, то #Сж определится из
формулы (2.15) , а полученное по указателю скорости исправленное
значение приборной скорости при наличии идеального ПВД, будет
равно Vi3. Поскольку разбивка шкалы указателя скорости произ-
водилась согласно формуле (2.20), то приравнивая значения #Сж,
полученные по формулам (2.15) и (2.20), будем иметь
откуда
(»— 1) ео
Аналогичное равенство
В этом случае необходимо
лам (2.18) и (2.21):
может быть получено и для М^1.
приравнять дС1К, полученные по форму-
х + 1 QoVl Г (х+1)2Оо^
Рн 2 *рн 4*Qovr~ 2х(х — \)РН
РО^з Г (x + OWL
х/>о 4xq0V?3— 2х(х — 1) рн
(2. 24)
Внесение поправок бУСж обычно производится по заранее со-
ставленным номограммам. По оси абсцисс откладываются значе-
ния земной индикаторной скорости Vi з, а по оси ординат — по-
правки 6Усж. Параметром сетки кривых служит барометрическая
высота (рис. 2.3). Как видно из номограммы, величина поправки
бУСж при H>0(pH<pQ) всегда отрицательна. На номограмме нане-
сены также и кривые М=?= const. Ниже будет показано, что число М
есть также функция Via и барометрической высоты Нр.
41
Определение числа М полета
Число М полета можно определять следующими способами:
а) по истинной скорости полета самолета относительно воздуха
и температуре воздуха на высоте полета;
б) по индикаторной или земной индикаторной скорости полета
самолета и атмосферному статическому давлению на высоте по-
лета;
в) по отношению полного и статического давлений.
5^сж км/час
Рис. 2. 3. Номограмма для определения поправок на сжимаемость
Если какими-либо методами измерены истинная скорость по-
лета относительно воздуха V и температура воздуха на высоте
полета Тн, то число М просто определяется по формулам (2.9)
и (2.10):
м=—
а
v ~_=у 1/-В"
72,2 УТН V 'Рн
(2.25)
где V в км/час.
Подставляя
получим
значение скорости V согласно формуле (2.6),
(2. 26)
42
Если Vt выражено в км/час, а рн в мм рт. ст., то
М ——
44,4 И Ри
(2. 26')
Если индикаторную скорость Vi выразить через земную индика-
торную скорость Vi3 для М<1, пользуясь формулой (2.23), и для
W bUU BUU 1UUU 1ZUU ШЮ IbUU MJUZUUU ZZUU ШЮУцкм/ча(
Земная индикаторная скорость
Рис. 2. 4. Номограмма для определения числа М
М^1 —равенством (2.24), из формулы (2.26) получим достаточно
сложную зависимость числа М от Viz и рн-
M = f(Vl3, Рн). (2.27)
Так как зависимость (2.27) имеет достаточно сложный вид, то
на практике для определения числа М пользуются номограммой.
По оси абсцисс откладываются значения земной индикаторной ско-
рости Viz, а по оси ординат—числа М (рис. 2.4). Параметром
сетки кривой служит барометрическая высота. Значения Viz и Нр,
43
снятые с данной номограммы при М = const, нанесены на номо-
грамму рис. 2.3 для определения 67Сж-
Для определения зависимости числа М от отношения полного
и статического давления при М^1 преобразуем формулу (2.14),
имея в виду, что рн о=Рн+!?сж, тогда получим
РНо
рн
Л , X— 1 адЛ*-1
1 Н----М2
\ 2 )
Согласно формуле (2.16) отношение полного и статического дав-
ления при М^1 равно
Р2о Р Но
х + 1м2Г <х + 1)2М2
2 |_4хМ2—2(х —
н
Подставляя %=1,4, получим
=(1 +0.2М2)3-5
РНо _ 166.92М7
Рн (7М2—I)2,5
при ЛА<1,
при М>-1.
(2. 28)
Как видно из формул (2.28), число М является функцией отно-
шения полного давления к статическому и не зависит от темпера-
туры воздуха.
Приборы для определения числа М
и истинной скорости полета
Для определения числа М непосредственно на борту самолета
применяются указатели числа М. Для объяснения принципа работы
простейшего указателя числа М приведем формулы (2.28) к виду
1+-^- = (1+0,2М2)3-5 при М<1
рн
! I ^сж _ 166,92М7
Рн ~ (7М2 — 1)2’5
при М 1.
Как уже указывалось выше, величина скоростного напора ^Сж
может быть измерена с помощью манометрической коробки, а атмо-
сферное давление рн — с помощью анероидной коробки. Следова-
тельно, механизм прибора должен осуществить деление хода мано-
метрической коробки на ход анероидной коробки. Принципиальная
схема указателя числа М показана на рис. 2.1.
Для тарировки указателя числа М в лабораторных условиях
вначале из динамической и статической камер откачивается воз-
дух до давления, соответствующего данной высоте, а затем в дина-
44
мической камере увеличивается давление. Отсчет показаний конт-
рольных приборов и указателя числа М обычно производится на
целых делениях указателя при ступенчатом увеличении (прямой
ход) и уменьшении (обратный ход) давления в динамической ка-
мере. Соответствующее число М определяется по формуле (2.28)
или по табл. 2.2.
Таблица 2.2
Таблица для тарировки указателя числа М
м рНо рн м рНо РН м рНо рн
0 1 1,10 2,1318 2,50 8,5332
0,10 1,0070 1,15 2,2650 2,60 9,1735
0,25 1,0444 1,20 2,4075 2,70 9,8522
0,30 1,0644 1,25 2,5569 2,80 10,5820
0,35 1,0884 1,30 2,7130 2,90 11,2975
0,40 1,1166 1,35 2,8770 3,00 12,0773
0,45 1,1491 1,40 3,0480 3,10 12,8729
0,50 1,1862 1,45 3,2284 3,20 13,674
0,55 1,2288 1,50 3,4130 3,30 ' 14.558
0,60 1,2755 1,60 3,8052 3,40 15,377
0,70 1,3870 1,70 4,2247 3,50 16,247
0,75 1,4524 1,80 4,6707 3,60 17,283
0,80 1,5244 1,90 5,1440 3,70 18,1028
0,85 1,6038 2,00 5,6401 3,80 18.911
0,90 1,6928 2,10 6,1652 3,90 20.1326
0,95 1,7874 2,20 6,7204 4,00 21,0305
1,00 1,8928 2,30 7,2940
1,05 2,0079 2,40 7,8989
(2.25) легко получить значение
формуле
Зная число М, по
истинной скорости полета самолета относительно воздуха. Однако
в этом случае в прибор необходимо дополнительно вводить значе-
ние температуры воздуха Тн, что значительно усложняет конструк-
цию прибора. Для упрощения конструкции прибора можно восполь-
зоваться предположением, что температура Тн и давление воз-
духа рн изменяются с высотой по стандартной атмосфере и, следо-
вательно, функционально связаны между собой. Тогда для учета
изменения температуры Тн с высотой достаточно измерять давле-
ние рн> Такой способ учета температуры дает достаточно точные
результаты только в том случае, когда давление и температура
45
изменяются с высотой в соответствии со стандартной атмосферой.
При отклонении от принятого закона в показаниях прибора по-
явятся систематические ошибки, хотя и меньшие, чем если бы в при-
боре вовсе не учитывалось изменение температуры. Такое прибли-
женное значение истинной скорости полета самолета можно полу-
чить по тонкой стрелке комбинированного указателя скорости.
Принципиальная схема прибора не отличается от схемы указа-
теля числа М, показанной на рис. 2. 1. Упрощенные приборы по-
добного типа обычно называют указателями истинной воздушной
скорости с неполной температурной компенсацией.
Лабораторная тарировка прибора производится так же, как
и тарировка указателя числа М. Для получения величины истин-
ной скорости необходимо число М, полученное по контрольным
приборам и таблице 2. 2, умножить на скорость звука а в км/час,
взятую по СА для высоты, на которой производилась тарировка
прибора.
Аэродинамические поправки ПВД
Рассмотренный выше идеальный приемник воздушного давле-
ния в практике измерений на самолете как правило реализовать
не удается. Это объясняется в основном двумя причинами: несо-
вершенством аэродинамических форм самого приемника воздуш-
ного давления и влиянием отдельных частей самолета на поток
воздуха, окружающий приемник. Правильно сконструированный
приемник воздушного давления измеряет полное давление без
искажений в диапазоне углов атаки или скольжения, равных
±12-4-15°. Поправка к статическому давлению зависит от углов
атаки, скольжения и числа М. Величина поправки вследствие влия-
ния отдельных частей самолета на поток воздуха, окружающий
приемник, в основном определяется местом установки приемника
на самолете и режимом полета. Эти поправки в практике летных
испытаний получили наименование аэродинамических.
ПВД на самолете устанавливается в самых различных местах,
но чаще всего перед фюзеляжем или крылом самолета. В некото-
рых случаях статическое давление берут с боковых поверхностей
фюзеляжа, а приемник полного давления устанавливают на фюзе-
ляже. Место расположения отверстий на фюзеляже определяется
по данным продувок модели самолета в аэродинамической трубе
или по данным, полученным в полете непосредственно на самолете.
При полете с дозвуковой скоростью (М<1) перед фюзеляжем,
крылом и другими частями самолета образуется зона повышенного
давления. Эта зона повышенного давления настолько велика, что
вынести на штанге ПВД за ее пределы практически не удается.
Поэтому в статическую камеру ПВД подается местное статическое
давление, большее по величине, чем атмосферное статическое дав-
ление воздуха. Полное давление рн о остается неизменным, так как
в динамической камере ПВД поток полностью заторможен, а по-
46
грешности приемника в указанном диапазоне углов атаки или
скольжения равны нулю. Следовательно, можно считать, что пол-
ное давление воспринимается приемником без искажений * и оши-
бки получаются только вследствие неправильной регистрации ста-
тического давления. Следует также иметь в виду, что вследствие
обтеканйя самолета воздушным потоком, вблизи самолета линии
тока воздуха несколько искривляются и местные углы атаки прием-
ника в 1,5—2 раза больше углов атаки самолета.
Аэродинамические (поправки в зоне перехода через скорость
звука носят совершенно своеобразный характер. Если приемник
воздушного давления расположен впереди самолета, то при увели-
чении скорости и переходе головной волны, возникающей впереди
фюзеляжа, за статические отверстия ПВД, местное давление будет
возрастать, а затем падать. Естественно, что такое изменение мест-
ного давления приводит к своеобразному изменению аэродинами-
ческих поправок. Полное давление в этом случае будет восприни-
маться без искажений.
При сверхзвуковой скорости полета величина аэродинамиче-
ских поправок, как правило, меньше чем при дозвуковой. С увели-
чением скорости величина поправки обычно монотонно убывает.
Следует отметить, что величина аэродинамической поправки на
сверхзвуковых скоростях в основном определяется характеристи-
кой приемника воздушного давления. Однако это не избавляет от
необходимости проводить тарировку ПВД в полете на больших
числах М, так как неизвестны углы, при которых будет работать
на самолете приемник воздушного давления. Например, невозможно
точно учесть угол поворота конца штанги крепления ПВД под
воздействием аэродинамических сил.
При установке приемника воздушного давления на крыле само-
лета и при полете на М>1 на его работу оказывает влияние голов-
ной скачок уплотнения, возникающий впереди фюзеляжа самолета.
Этот скачок уплотнения может оказать влияние не только на изме-
рение статического давления, но и на измерение полного давления.
Величины поправок в основном определяются числом М полета и
местом расположения ПВД относительно фюзеляжа и крыла.
Обозначим поправку, равную разности полного давления рНо
и давления в динамической камере ПВД рно.пр, через 6ра.о, а по-
правку, равную разности между атмосферным статическим давле-
нием рн и давлением в статической камере ПВД рнпр, через 6ра,
тогда можно записать
^Ра.о РНо 7?//о.пр» 1 /0
^Pa = Pf7-Pffnp‘ J
Из формул (2. 1) и (2. 12) или (2. 18) и (2.29) следует, что
7сж - <7np = Spa.o - ВРа = ^сж* (2- 30)
* Это допущение становится неверным при больших, чем названные, углах
атаки — когда и динамическое давление воспринимается с искажениями.
47
Знак поправки дра.о всегда положителен. Величины поправок
ЙРа.о и Spa в основном определяются величиной скоростного напора,
поэтому на практике часто используют относительные поправки,
равные
Spa.o=-^; — ; Ч=»= —• (2-31)
#пр (Гпр <7пр
Величины поправок 6ра.о и бра определяются путем тарировки
ПВД на самолете в полете. Методы тарировки ПВД будут изло-
жены ниже.
Как уже указывалось выше, значению разности давлений, опре-
деляемой по формуле (2.1), соответствует скорость УПр.испр, а фак-
тической величине скоростного напора qCm соответствует индика-
торная земная скорость У<3. Следовательно, величина суммарной
аэродинамической поправки по скорости будет равна
8^ = ^3-^пр,испр. (2.32)
Связь между поправками б^сж и бУаЯ легко получить из уравнения
(2.20), имея в виду, что V=Vi=Vis, так как при Н=0 6КСЖ=О.
<7сж=Д> [(1 + 0,13334.10-4/L)3’5 -1].
С учетом формулы (2.32)
<7пр=А> {[1+0,13334-10-б(1//3-SVaB)2]s.5 — 1).
Подставляя полученное значение в формулу (2.30), получим
{(1 + 0,13334.10-6Г?з)3’5-
-[1+0,13334.10-6 (I/, 3 - 81/ аЯ)2]з-5}. (2.33)
Аналогично из уравнения (2.21) найдем значение 6</Сж для
сверхзвуковых скоростей
-П^Я4 1П-6„ / _____________(^з-ЬУаД)7 |
Ясж ’ pQ I (v?3— 214 277)2’5 [(Vi з — SVas)2— 214 277]2’5 J ‘
(2. 34)
Значение бУав легко получить и из табл. 2.1 или графика, по-
строенного по этой таблице. Зная qC7K, находим по таблице значе-
ние Vi3, а по значению (/пр величину Упр.испр. Затем по формуле
(2.32) определяем 6Vas.
При полете на дозвуковых и сверхзвуковых скоростях с прием-
ником воздушного давления, вынесенным впереди самолета, почти
для всего диапазона углов атаки самолета, поправка на полное
давление дра.о равна нулю. В этом случае ЬдСж = —Ьра- Это обстоя-
тельство дает возможность упростить методику внесения аэроди-
48
намических поправок в показания указателя скорости и высотоме-
ра. Тогда формула (2.32) примет вид
^а-^з-^пр.испр, (2.35)
где 8Уа —аэродинамическая поправка по скорости при
8<7сж = -8Л-
Величину поправки к барометрической высоте f>Ha можно
получить из уравнения статики атмосферы
dp Рн
ан RT ’
откуда, переходя к конечным величинам, будем иметь
8Яа=-^-8А.
рн
Истинное значение барометрической высоты
Н р— ^пр.испр +
(2. 36)
(2. 37
Как видно из формул (2.36) и {2.35), аэродинамические по-
правки 6Va, б//а определяются величиной поправки бра, что дает
возможность определять одну из этих поправок, а другую вычис-
лять. На практике связь между поправками 6Va, бЯа и бра выра-
жают в виде номограммы, показанной на рис. 2.5. Вследствие не-
линейности связи бра и 6Va, значение 6Va будет зависеть от знака
бра, поэтому на номограмме для каждого значения Vnp даны две
кривые: пунктирной линией—для положительного значения бра,
при этом поправка 6Va будет отрицательна, и оплошной линией —
для отрицательного значения бра, при этом поправка 6Va будет по-
ложительна. Нелинейность связи между бра и б/7а хотя и сущест-
вует, однако при данных масштабах построения графика обе кри-
вые сливаются в одну. Необходимо также иметь в виду, что при
положительном значении поправки бра, поправка б/7а согласно
формуле (2. 36) отрицательна.
Указатель числа М, как видно из формул (2.28), также имеет,
кроме инструментальной, аэродинамическую поправку, зависящую
от бра,0 и бра. Возьмем логарифмические дифференциалы обеих
частей уравнения (2.28), и, принимая брно = бра.о, брн = бра,
получим
f ^Pa.o _ 8 Pa > , 1 +0,2M2 тттлтл ЛЛ 1 •
OiVL 1 при /VI. 1 у
< РНо PH > ’ 1,4M
(2.38)
8М=( f ^Pa.o __ 8Pa ' i M (7M2 —1) при M 1.
PH о Ph > / 7(2M2—1)
49
Запишем формулы (2.38) в следующем виде:
8М=— kn,
Р
(2.39)
где с учетом формулы (2.31)
Ър Ьра.о Ъра 5Pa.offnp ^>Ра Япр _
Р РНо РН РНо РН
1 +0.2М2 1,4М при £1
М(7М2—1) при >1
м — 7(2М2—1)
(2.40)
50
Коэффициент /гм легко определяется из графика, показанного
на рис. 2.6. При малых значениях 6М можно принять М=Мпр.испр}
при больших значениях 6М следует воспользоваться методом после-
довательного приближения.
Рис. 2.6. График для определения коэффициента &м
Во многих случаях бра.о = 0 и, следовательно,
?>Р_______________________Ъра
Р РН
В этом случае для определения аэродинамической поправки
обычно используют номограмму, приведенную на рис. 2. 7. Необхо-
(2.41)
димо иметь в виду, что согласно формулам (2.39) и (2.41) знак
поправки 6М противоположен знаку 6ра. Истинное значение чис-
ла М равно
М = Мпр,спр-ВМ. (2.42)
51
2.2. ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ ВОЗДУХА В ПОЛЕТЕ
Измерение в полете температуры наружного воздуха произво-
дится с помощью приемника температуры заторможенного потока.
Необходимость изготовления специального приемника вызвана сле-
дующими обстоятельствами.
В полете приемник будет обтекаться потоком воздуха и вслед-
ствие адиабатического разогрева его, термочувствительный элемент
будет иметь температуру выше температуры наружного воздуха.
Очевидно, если торможение потока упорядочить, подобно тому, как
это производится в динамической камере ПВД, то и температура
заторможенного потока будет подчиняться определенным законо-
мерностям. Возьмем уравнение теплосодержания (2.11)
Л-+
AVl
Cp2g
AV2
cP2g
В критической точке, где Vi = 0, имеем температуру полностью
заторможенного потока
<2-43>
где Тн — фактическая температура воздуха;
V — истинная скорость самолета в км/час.
Для уменьшения запаздывания в .приемнике в камере полного
торможения потока (рис. 2. 10) приходится создавать некоторую
вентиляцию воздуха, вследствие чего скорость Vi не равна нулю.
Тогда температура термочувствительного элемента будет равна
г. V2
Т — Т -к 8
'пр.испр ' я I". 26000 ’
где р — коэффициент приемника.
Однако коэффициент |3 зависит от числа М, поэтому удобнее
пользоваться коэффициентом качества N, который практически не
зависит от числа М:
(2.44)
Н о
где ТНо — температура полного торможения потока.
Во время измерения температуры при неустановившейся ско-
рости полета самолета, например, при разгоне или торможении
температуру полного торможения следует определять по формуле
dT
7пр.испр4"
Г„.=---------. (2.45)
где Хг —коэффициент запаздывания приемника;
dT
-----изменение температуры по времени.
52
Коэффициент запаздывания приемника Хт и коэффициент каче-
ства N опеделяются при продувках термометра в аэродинамической
трубе и контролируются при проведении летных испытаний. При-
мерная зависимость Кт=ННр) для приемника температуры полного
торможения, показана на рис. 2.8.
Из формулы (2.43} следует, что
Тц0 г ЛУ2
Тн cplgTH
х___— 1
Учитывая, что а2=хр7?Г и AR=c„---------, получим
== 1 4- м2 = 1 + 0,2М2,
Тн 2
откуда
ТНо=Тн(\ + 0.2М2). (2.46)
Подставляя значение ТНо, полученное из формулы (2.44),
в формулу (2.46), будем иметь
Гпг.испр
н У(1+0,2М2) '
По формуле (2.47) определяется температура наружного воз-
духа Тн для любого значения числа М.
Значение ТПр.испр определяется только для приборов, имеющих
шкалу по формуле
7’пр.испр=Г"Р + Д7’, (2.48)
где 7\р —показания прибора, снятые с помощью стрелки со шка-
лы прибора;
ДГ —инструментальная поправка, определяемая путем тари-
ровки прибора в лаборатории.
Следует иметь в виду, что для точного определения температуры
наружного воздуха Тн необходимо учитывать аэродинамические
поправки (в том числе и для числа М).
Для определения Тн можно использовать номограмму, построен-
ную по формуле (2.47) для данного типа приемника (рис. 2.9).
На рис. 2.10 показан приемник температуры полного торможе-
ния, применяемый при летных испытаниях самолета. Приемник
состоит из камеры полного торможения /, имеющей вентиляцион-
ные отверстия 2 и теплочувствительный элемент 3, выполненный
из проволоки; корпуса 4 с основанием для крепления штепсельного
разъема 5.
Приемник устанавливается непосредственно на фюзеляж или
крыло самолета, в местах, где нет затенения потока другими вы-
ступающими частями самолета. Для уменьшения погрешности заме-
ра температуры между основанием приемника и местом крепления
53
НР
Рис. 2.8. Зависимость коэф-
фициента запаздывания кг от
высоты полета при М=const
Рис. 2.9. Номограмма для определения фак-
тической температуры по показаниям термо-
метра
Рис. 2. 10. Приемник температуры с камерой
торможения потока:
/—динамическая камера; 2—отверстия для вентиляции
камеры; 3—термочувствительный элемент; 4—корпус;
5—штепсельный разъем
54
Р и с. 2.11. Принципиальная
схема приемника температуры
с неполным торможением по-
тока
следует прокладывать теплоизоляционую прокладку. Коэффици-
ент качества N для такого типа приемника при V>0 примерно
равен 0,999.
Основной недостаток данного приемника заключается в его ма-
лой надежности, так как даже небольшие по своим размерам твер-
дые частицы, попадающие при взлете или посадке в камеру пол-
ного торможения, могут оборвать проволоку теплочувствительного
элемента.
Такого недостатка не имеет прием-
ник, показанный на рис. 2.11, однако
для него характерна большая инерт-
ность и он может применяться только
на тяжелых самолетах. Работа этого
приемника сводится к следующему.
Профиль сопла выполнен так, что при
достижении определенного минималь-
ного перепада давления воздушного
потока между входом и выходом при-
емника, в наиболее узкой части сопла,
устанавливается постоянная скорость течения воздуха. С увеличе-
нием скорости полета самолета, а следовательно, и скоростного
напора, скорость течения воздуха в критическом сечении сопла не
меняется. В месте постоянной скорости течения воздуха намотана
никелевая проволока термоприемника диаметром 0,05 мм. Для
предохранения от повреждения, проволока закрыта защитным по-
крытием. Коэффициент качества приемника при М>0,3 примерно
равен 0,978.
При изменении Тно изменяется и
которое обычно измеряется с помощью
стратора.
сопротивление проволоки,
мостовой схемы и реги-
2.3. ОШИБКИ ИЗМЕРЕНИЯ СКОРОСТИ И ВЫСОТЫ,
ВЫЗЫВАЕМЫЕ ЗАПАЗДЫВАНИЕМ*
В тех случаях, когда давление рно и рн не изменяются, передача
этих давлений к чувствительным элементам приборов производится
без искажений. Однако при изменении давлений рн 0 и рн с неко-
торой скоростью в передачах их к чувствительным элементам при-
боров происходит существенное запаздывание.
Для качественной оценки параметров, влияющих на запаздыва-
ние, рассмотрим задачу с перетеканием воздуха из атмосферы
с давлением рНар в сосуд объемом W через трубопровод диаметром
d и длиной I (рис. 2. 12).
* Излагаемые методы учета запаздывания были разработаны О. Н. Хари-
ной и Б. В. Смирновым.
55
Согласно закону сохранения массы имеем
qVT+е «4/t=(q+(/q) W,
где Q —плотность;
т —время;
и — скорость перетекания воздуха по трубопроводу,
откуда
(2.49)
е
Лар^нар
udx.
4W
Рис. 2. 12. Схема перетекания воз-
духа в камеру прибора
Запишем уравнение состояния газа
p=QgRT.
Возьмем логарифмические дифференциалы от обеих частей
dp dQ । dT
p e т
При медленном перетекании воздуха температура ТН~Т, тогд
и ^=^1.
т р е
Подставляя полученное значение в формулу (2.49), получим
dp nd2 ,
—=----- udx.
р 4W
Согласно закону Пуазейля
___________________________ 64р,/н
Рнар““ Р— »
где ц — коэффициент динамической вязкости,
откуда
(2.50)
(Рнар Р)
11 =----------------
64р./
56
Подставляя и в уравнение (2.50) и преобразовывая, получим
. 256p.ZIF d р
р-"“р+'-^г
или
Аар = />+^. (2.51)
где
. 256fxZlT
Л==-------.
nd^p
Как видно из формулы (2.51), коэффициент запаздывания Л
прямо пропорционален объему № и длине трубопровода I и обратно
пропорционален диаметру трубопровода в четвертой степени d4,
следовательно, чем дальше находится прибор от ПВД, чем больше
подключено приборов в пневматическую систему и чем меньше
диаметр трубопровода, тем больше запаздывание.
Коэффициент запаздывания X зависит также и от ц, р и dpfdx.
Если положить, что у земли будем иметь Х3, ц3, рз и Т3, а на вы-
соте Хн, цн, рн и Тн, то согласно формуле (2.51) отношение коэф-
фициентов запаздывания будет равно
Как следует из кинетической теории газов, для тропосферы,
стратосферы и мезосферы можно считать, что динамический коэф-
фициент вязкости зависит только от температуры. Эта зависимость
выражается следующей формулой:
_ /(Тн\3 Г3+ 110,4
|/ к Т’з / тн + 110,4 •
Следовательно, формулу (2.52) можно записать в следующем
виде:
= Х3 Гз +110,4 . /(. (2.53)
Рн Тн +110,4 у к Т3 ) 7
При летных испытаниях коэффициент запаздывания Х3 опреде-
ляется экспериментальным путем для статической и динамической
системы ПВД при соответствующих значениях р3, Т3 и различных
значениях dp/dx, а также других параметров системы (числа при-
боров, диаметров трубопроводов и т. п.). Значение коэффициента
запаздывания для высоты Н при полученном значении dpfdx,
определяется по формуле (2. 53), а величина фактического давле-
ния рнар — по формуле (2.51).
Следует иметь в виду, что у приборов, включенных в одну пнев-
матическую систему, но имеющих разные объемы W, коэффициенты
57
запаздывания X будут различны. Прибор, находящийся ближе
к ПВД или имеющий больший диаметр трубопровода и входного
штуцера, при остальных равных условиях будет иметь коэффициент
запаздывания меньший, чем у других приборов. Большие искаже-
ния при измерениях вносят тройники, особенно имеющие изгиб
под углом в 90°, применяемые для разветвления пневматической
проводки к нескольким приборам. Тройники следует делать так,
чтобы они резко не изменяли направление скорости потока в тру-
бопроводе. При больших значениях коэффициента запаздывания X,
Рис. 2.13. Запись прибора при опреде-
лении запаздывания в пневматической
системе
вследствие отклонения от
зависимостей, принятых в
формулах (2.51) и (2.53),
погрешность определения
фактического давления рНар
получается достаточно боль-
шой. Поэтому для уменьше-
ния X приборы разбивают
на группы и подключают
к различным ПВД или, если
наибольший коэффициент
запаздывания получается в
статической системе, то к
различным статическим си-
стемам.
При определении коэф-
фициента запаздывания Х3
пневматической системы
ПВД на самолете закрывают заборные отверстия приемника и со-
здают в статической системе вакуум, а при проверке динамической
системы — давление. Затем, включив приборы самописцы, откры-
вают отверстия приемника. Прибор запишет изменение давления
по времени в виде кривой, показанной на рис. 2.13. Заметим, что
в данном случае рНар есть величина постоянная, a Z = X3. Запишем
формулу (2.51)
Это линейное уравнение с постоянными коэффициентами имеет
X
общее решение р = рНар+се Хз-
В начальный момент при т = 0 будем иметь р = рНар и с = рнач—
—Рнар. Следовательно,
Р Рнар “F (/^нач /?нар) &
ИЛИ
т
Р Рнар (Л1ач Рнар) 3>
58
т куда
Т Рнач /’нар
^•з Р /’нар
Для произвольных моментов времени Ti и тг, при которых дав-
ления соответственно равны pi и р2, а т=тг—Ti, получим
Т2~Т1 (2.54)
Р\ /’нар
In---------
Р2 /’нар
2.4. ИЗМЕРЕНИЕ ПАРАМЕТРОВ ТРАЕКТОРИИ
ДВИЖЕНИЯ САМОЛЕТА В ПРОСТРАНСТВЕ
Для измерения траектории и путевой скорости при летных испы-
таниях самолетов и аэронавигационных систем * применяются три
основных метода: радиолокационный, кинотеодолитный и фазовый.
Эти методы получили широкое распространение и практически
вытеснили все другие методы. Основная аппаратура, используемая
цля измерений, устанавливается на земле.
Радиолокационный метод
Радиолокационный метод основан на посылке зондирующих
радиоимпульсов малой длительности в окружающее пространство
с определенной частотой повторения и на приеме отраженных от
самолета или ретранслированных ответов. Дальность от радиолока-
тора до самолета определяется по интервалу времени тр между
моментом посылки зондирующего радиоимпульса и моментом
приема отраженного от самолета радиоимпульса.
Полагая скорость распространения радиоволн с постоянной
и учитывая, что радиоволна проходит путь от локатора до самолета
и обратно, легко получить формулу для определения дальности до
самолета D:
D = —.
2
При приближенных расчетах скорость распространения радио-
волн можно принять равной округленному значению скорости света
с = 300 000 км!сек. Среднее значение скорости распространения
радиоволн в различных условиях, полученное из опытов, примерно
равно 299 740 км!сек. Частота посылки зондирующих радиоимпуль-
сов определяется предельной дальностью Отах, на которую рассчи-
тана радиолокационная станция. При постоянной частоте посылки
необходимо, чтобы отраженный сигнал пришел к станции до мо-
мента посылки следующего зондирующего импульса.
59
В импульсных радиолокационных станциях для определения
местоположения самолета используются дальность и углы азимута о
и места у (рис. 2.14). Эти углы можно определить только при
Рис. 2.14. Определение координат
при помощи радиолокатора
использовании антенн направ-
ленного действия, позволяю-
щих определить направление
и различать самолеты, близ-
кие по направлению. Однако
направленные антенны не мо-
гут одновременно обнаружи-
вать самолеты, летающие в
зоне радиуса действия радио-
локационной станции. Вслед-
ствие этого необходимо про-
сматривать заданный сектор
пространства поворачиваемым
зондирующим радиолучом.
С увеличением остроты
диаграммы направленности
антенн повышается точность
определения углов, однако
пропорционально возрастают трудности просмотра заданного сек-
тора пространства.
Различают два вида радиолокаторов — обзорные и точные из-
мерительные. Обзорные радиолокаторы работают в режиме обзора,
точные измерительные радиолокаторы — в режиме сопровождения
самолета.
Обзорные радиолокаторы
Обзорные радиолокаторы предназначены в основном для про-
смотра пространства вокруг радиолокационной станции. Обычно
используется метод простого обзора, при котором антенна вра-
щается на 360°, а на индикаторе кругового обзора выдаются даль-
ности D и азимут о каждого самолета, находящегося в сфере дей-
ствия радиолокатора. При наличии второй антенны, излучающей
узкий радиолуч в вертикальной плоскости, для отдельных самоле-
тов можно определять также и угол места. Радиолокационная
станция кругового обзора может использоваться также и в соче-
тании со специальной станцией, определяющей угол места
самолета.
В качестве индикатора обычно используется электронно-луче-
вая трубка, на которой самолет изображается светящейся точкой
Для наблюдения за обстановкой в воздухе и определения двух ко-
ординат самолета на экране электронно-лучевой трубки автомати-
чески наносится сетка целых значений углов азимута пив виде
окружностей целые значения дальности D. Экран электронно-луче-
60
вых трубок можно фотографировать и после обработки получать
траекторию полета самолета. Погрешность в определении траекто-
рии достигает нескольких километров.
Точные измерительные
радиолокаторы
Измерительным радиолокатором одновременно определяются
дальность от радиолокатора-до самолета D, углы азимута о и ме-
ста у (рис. 2. 14).'Точные измерительные радиолокаторы имеют
остро направленные антенны (отсутствует широкий обзор) и вслед-
ствие этого, как правило, не могут обнаружить самолет без спе-
циальных указаний о его ориентировочном местоположении, полу-
чаемых от оператора обзорного радиолокатора.
После обнаружения самолета, траектория которого должна из-
меряться, антенна радиолокатора может быть переведена на ре-
жим автоматического сопровождения самолета.
При работе с радиолокатором можно использовать как пассив-
ный, так и активный метод. При пассивном методе радиолокатор
принимает отраженную волну от самолета, мощность которой за-
висит от дальности и размеров самолета,
При активном методе на самолете устанавливается приемоот-
вегчик, который усиливает и ретранслирует принятый сигнал.
Преимуществом активного метода являются увеличение дальности
действия радиолокатора и обеспечение уверенного автоматического
сопровождения самолета антенной радиолокатора. При активном
методе необходимо учитывать время задержки сигнала в приемо-
отвегчике. Формулы для определения координат самолета легко
получают из рис. 2.14. Из треугольников OiFC и OxCd имеем
0=£>sin(y + -|-);
sin а,
2
(2.55)
где
•2R J’
R — радиус Земли для данной местности.
Погрешности в определении координат будут равны
8i/='pf(6£) siny)24-(8yZ)cos у)2;
8х=У (8£) cos у cos <з)24-(8у£> sin у cos a)2-|-(8aZ) cos у sin о)2;
(2. 56)
(8£) cos у sin о)2 (8yZ) sin у sin a)2 (8o£) cos у cos a)2,
где 8£), 8y, 8a —случайные погрешности измерения дальности D
и углов у и <3.
61
Как видно из формул, погрешность в определении координат
зависит от положения самолета относительно радиолокатора и ле-
жит в пределах от 15 до нескольких десятков метров.
Вблизи земли зона действия радиолокатора сильно ограничена
влиянием отраженных сигналов от зданий, леса и т. п.. Радиолока-
торы ограничены также и по максимальному углу места ушах (над
локатором существует «мертвый конус»).
Кинотеодолитный метод
Кинотеодолитный метод' основан на одновременной засечке са-
молета двумя кинотеодолитами, установленными на расстоянии
(базе) В друг от друга — в точках Ох и О2 (рис. 2. 15). В момент
засечки самолета регистрируются два угла азимута Hi, о2 и два угла
места Yi, Y2-
У
Рис. 2.15. Определение координат при помощи кино-
теодолитных станций
Размер базы В точно измеряется геодезическим способом. Возь-
мем начало координат в точке Оь ось х направим вдоль базы,
ось у — вертикально вверх, ось z — перпендикулярно к ним. Обо-
значим текущие координаты самолета через х, у, z. Из треугольни-
ков O\CD и O2CD имеем
z=xtg aj = (В — л) tg (180 —о2),
откуда
х=В ------------= В sinq2cosai.. (2. 57)
tg «2 — tg°l sin(a2—°i)
z^B....= B si-n °2-^-. • . (2.58)
tg°2~ tg °1 sin(a2— aj)
62
Из треугольника O^FC имеем
где
У=В
sin о2 sin
sin (о2—oj) cos(yj 4- fj)
(2. 59)
z В sina2
cpi =------------------------;
R sin a! R sin (a2— <*j)
R— радиус Земли для данной местности.
Для уточнения данных при определении высоты у с помощью
кинотеодолита используется второе выражение для координаты у,
полученное из треугольника O2FC:
I ?2 \
sin oj sin I у2 + -у)
y=B--------------------—----FA*/, (2.60)
Sin(o2— Я]) cos (уг + ^г)
где
z В sin <ji
Ф2 = --------—-----------£--- •
R sin о2 R sin (о2—oj)
\у — превышение второго кинотеодолита над первым.
При определении погрешности измерения координат следует
иметь в виду, что база В измеряется с высокой точностью. Следо-
вательно, погрешностью в измерении базы можно пренебречь, при-
няв 6В = О. Принимая 6о1 = 6о2 = бу = бо, легко получить выражения
для определения погрешностей при измерении координат:
8х='---™------]/sin2 2ох sin2 2<з2=
2 sin2 (a2 —
=~ V[(x- B) (x2+г2)]2 + {x [(x- 5)2 + г2])2;
82=si^Oj-f-sin4 a2 =
Sin2(a2— aj
=4 ]/(х2 + г2)2 + [(х-Д)2+г2]2;
D
(2. 61)
sin2 (o2'~ °i)
o2 COS2(a2-31)+ sin2 a,] + s-^°2- ^n2-<°2~_°L>=
C0S4 Y!
(х2+1/2+г2)В2га
1/2 (X2 + г2) ’
где do — случайная погрешность в измерении углов.
Как видно из формул, погрешности определения координат тем
больше, чем больше база В и погрешность измерения угла эти
63
погрешности также зависят от положения самолета относительно
базы.
Для точного измерения углов в кадрах кинотеодолитов одно-
временно фотографируются углы положения оптических осей объ-
ективов а0 и уо и положение самолета. Для внесения поправок на
положение самолета относительно оптической оси объектива кино-
теодолита каждый кадр обрабатывается на специальном оптиче-
ском устройстве — компараторе.
После определения поправок рассчитываются фактические
углы визирования кинотеодолита на самолет по формулам
°=ао+
Y —Yo + YA,
где а0 и у0 —углы, характеризующие положение оптической оси
объектива кинотеодолита;
Да и ду—-поправки на положение самолета по углам азимута и
места.
Точность измерения углов в зависимости от типа кинотеодолита
и применяемого объектива лежит в пределах от 20 сек до 2 мин.
Размеры кинотеодолитных баз выбирают исходя из задач, кото-
рые ставятся перед кинотеодолитной базой. Для определения по-
правок приемников воздушного давления создаются кинотеодолит-
ные базы длиной в 15—20 км. Эти базы обычно используются и для
регистрации рекордов скорости и высоты. Для определения взлетно-
посадочных характеристик самолетов создаются базы длиной по-
рядка 3 км.
Кинотеодолиты, применяемые на малых базах (3 км), имеют
объективы с фокусным расстоянием до 1—1,5 м. Кинотеодолиты,
применяемые на больших базах, имеют объективы с фокусным рас-
стоянием до 3 м.
В зависимости от типа кинотеодолитных станций киносъемка
производится с частотой 1—4 кадра в секунду или 10—30 кадров
в секунду. Частота съемки задается точными часами.
При больших кинотеодолитных базах кинотеодолиты на само-
лет наводятся при помощи измерительного радиолокатора и спе-
циального согласующего (учитывающего паралаке) устройства,
управляющего одновременно несколькими кинотеодолитами.
Связь между кинотеодолитами, согласующим устройством и ра-
диолокатором обычно осуществляется при помощи специального
кабеля; при временной установке кинотеодолитов используется ра-
диосвязь.
Радиолокатор только наводит кинотеодолит на самолет, а за-
тем операторы самостоятельно следят за самолетом, наблюдая за
ним в специальные визирные трубы, установленные на кинотеодо-
лите. При работе на малой базе оператор производит самостоя-
тельно поиск самолета. При хорошей видимости самолета опера-
тор может его сопровождать и фотографировать на расстоянии до
64
30—35 км. Если фотографирование необходимо производить при
больших расстояниях, то на самолете устанавливают специальные
трассеры (пороховые шашки, оставляющие за собой при горении
хорошо видимый с земли огневой факел), которые включаются
летчиком по команде с земли.
Точность измерения координат на малых базах лежит в преде-
лах от долей метра до нескольких метров, а на больших базах —
от нескольких метров до нескольких десятков метров.
Фазовый метод
Фазовый метод измерения основан на измерении разности фаз
радиоволн, излучаемых с самолета и принимаемых антеннами на-
земной станции. В принципе метод определения траектории при по-
мощи фазовой аппаратуры аналогичен кинотеодолитному методу и
отличается от него только тем, что измеряет другие углы. Для
Рис. 2. 16. Определение координат при помощи фазовых
пеленгаторов
определения местоположения самолета устанавливаются фазовые
пеленгаторы на расстоянии В друг от друга в точках и О2
(рис. 2. 16). Фазовые пеленгаторы определяют направляющие коси-
нусы cos (31, cos (32, cos (З3 и cos р4. Эти косинусы углов связаны
с углами сг и у, измеряемыми при помощи кинотеодолита, следую-
щими соотношениями:
cos pj = COS с?! cos Yf,
cos 32 = sin cos Yi;
cos p3 = C0S a2 COS Y2;
cos p4=sin o2 cos y2;
cos Yi = Vcos2 pj 4- cos2 p2.
3 598
65
Расчетные формулы для определения координат траектории при
помощи фазовых пеленгаторов аналогичны формулам для кинотео-
долитов и могут быть получены в следующем виде:
х=^ COS 3j COS р4 в
COS 31 cos 34— COS 32 COS Рз ’
z==g COS fa cos ft 4.
COS Pi COS p4— COS З2 COS З3
COS У1 — C0S2 3j — COs2p2 +
U = В COS З4 —-----------------7- -- '7 ,.z: . Л-
/ У 1— COS2 3J— COs2£2 \
\ У C0s2Pj + COs2p2 /
+ sin — У C0s2 31 4- C0s2 З2
X (cos 3j COS З4 — cos 32 COS Зз) ’
где
___ В cos p4 cos2 3j 4- cos2 p2
‘ 1 В COS Pi cos p4 — cos p2 COS P3
(2. 62)
R — радиус Земли для данной местности.
Фазовый метод является активным методом и позволяет без
специального поиска зафиксировать положение самолета, излучаю-
щего радиоволны определенной частоты. Для излучения радиоволн
на самолете устанавливаются генератор и антенна. Недостатком фа-
зового метода является недостаточная точность на малых высотах.
Определение скорости движения самолета
по траектории
Зная координаты х, у и z как функции времени т, легко подсчи-
тать скорость самолета по приближенной формуле
VT Vv^+v^v}, (2. 63)
ах
^7 __ хп хп — \ ,
^п—1
у __ ___Уп Уп—1 ,
V At Tn—Tn-!
у zn zn~l ,
ДТ Xn~ Tn__!
Дх, Аг/, Аг — приращения координат самолета за время Ат.,
66
Таким способом определяется скорость в земной системе коор-
динат, а при Vy = 0 — путевая скорость, т. е. скорость относительной
земли, а не относительно воздуха.
Точность определения составляющих скорости в основном опре-
деляется точностью измерения координат, так как при измерениях
траектории должны применяться точные часы, обычно кварцевые,
погрешностью которых можно пренебречь.
Погрешности в определении скоростей Vx, Vy и Vz будут равны
V' х=------j/"&х2п -J- Ьх2п^1;
^п— 1
81/у=—1—У i;
^п—1
----!---У Ъг\ +
Tn Trt—1
Как видно из формул, погрешность в определении составляющих
скорости тем больше, чем меньше выбранный интервал дифферен-
цирования по времени. При полете самолета с постоянной скоро-
стью интервал времени следует выбирать как можно большим.
Погрешность определения результирующей скорости
Ыт = А У (2.64)
Относительная погрешность в определении скорости равна
^т0 = ~ = ^, (2.64')
V т L
где ________________________________
= (^Л ХП~ 1)" 4“ гл-1)24" (<Уп Уп—1)2^
в L = у- К - хл-1)2 (&4+ах2и-1) 4- - ^-42 (*4 + *4-0 4-
v 4- (уп - //л-1)2 (* 44-*4-1) •
2.5. МЕТОДИКА ОПРЕДЕЛЕНИЯ
АЭРОДИНАМИЧЕСКИХ ПОПРАВОК ПВД
Необходимость определения аэродинамических поправок во
всем диапазоне скоростей полета самолета привела к созданию
ряда методов тарировки ПВД в полете. Однако, несмотря на их
разнообразие, все они сводятся к определению зависимости аэро-
динамических поправок для статической д/?а и динамической бра.о
камер ПВД от числа М полета или, для малых скоростей полета,
01 Приборной СКОРОСТИ Кпр.испр.
Основными методами тарировки ПВД являются: метод тари-
ровки по скорости и барометрический метод.
3*
67
Метод тарировки приемника воздушного давления, в основу
которого положено определение аэродинамической поправки к ско-
ростному напору д7сж = 6ра.о—бра путем сравнения истинной ско-
рости полета самолета относительно воздуха со скоростью, изме-
ренной на тарируемом самолете, называют методом тарировки ПВД
по скорости.
Метод тарировки приемника воздушного давления, в основу
которого положено непосредственное определение аэродинамиче-
ской поправки бра к статической системе приемника, называют
барометрическим.
Тарировка ПВД обычно производится в горизонтальном полете
при различных числах М. При этом с помощью точных приборов
самописцев регистрируются скорость Упр.испр, высота Япр.испр(рН11р)
и температура заторможенного потока ТПр,испр.
Измерение геометрической высоты над данным уровнем Яг, ско-
рости полета самолета V и ее направления срс производится с по-
мощью радиолокаторов, кинотеодолитов или фазовых пеленгаторов.
Для определения зависимости истинного значения температуры
наружного воздуха Тн, скорости ветра IF, ее направления cpw
и атмосферного статического давления рн от геометрической вы-
соты Нг используются два метода:
1) зондирование атмосферы с помощью шара-зонда. При этом
измеряется температура наружного воздуха Тн, скорость W и на-
правление фту скорости ветра. Геометрическая высота Яг шара-
зонда измеряется указанным выше способом;
2) зондирование атмосферы с помощью эталонного самолета,
аэродинамические поправки которого известны. При этом опреде-
ляется температура наружного воздуха Тн, скорость W и направ-
ление фиг ветра и атмосферное статическое давление рн на высоте
полета. Геометрическая высота Яг эталонного самолета измеряется
указанным выше способом.
Зондирование атмосферы производится в районе высот полета
тарируемого самолета, до или после его полета. Необходимо, чтобы
интервал времени между зондированием атмосферы и полетом тари-
руемого самолета был минимальным.
По полученным данным строят графики изменения измеряемых
параметров в зависимости от геометрической высоты TH=f(Hr)t
Фуу=ДЯг), W=f(Hr) и рн=ЦНг). По данным графикам и геомет-
рической высоте полета тарируемого самолета определяются истин-
ные значения указанных параметров атмосферы.
Метод тарировки ПВД по скорости
В данном случае, прежде всего определяется путевая скорость
самолета FnyT, которая согласно формуле (2. 63) равна
и- &L _____ F'(хп xn_Li)24- (zn 4~ (уп j/n—1)2
v nvT . _ _ ’
«Т Тп — 1
при этом Vy~0.
68
Зная путевую скорость самолета УПут, ее направление, скорость
ветра W и ее направление, используя теорему косинусов для косо-
угольных треугольников, легко определить истинную горизонталь-
ную скорость самолета относительно воздуха
V = у 1/2пут + М72-2и/1/путс05а, (2. 65)
где а — угол между векторами путевой скорости самолета и -ско-
рости ветра.
Индикаторная скорость самолета Vi определяется по фор-
муле (2. 8)
где А — относительная плотность в фактических условиях полета,
определяемая по формуле (2.7)
А = 0,3793-^-.
Тн
Земная индикаторная скорость определяется по формуле (2. 22)
vi3=vt-wcx.
Вычитая из найденной земной индикаторной скорости Vi3 пока-
зания прибора самописца или указателя скорости УПр.испр, получим
искомую аэродинамическую поправку, определяемую по фор-
муле (2. 32)
8VaS = l/Z3— VnpHcnp,
или, используя таблицу 2. 1 и формулы (2. 1) и (2.30), можно опре-
делить значения скоростных напоров qcm, ?пр и б#Сж.
Для тихоходных самолетов, используя номограмму (см. рис.
2.5), строят тарировочные графики поправок 6Va=/(Упр.испр) и
бЯа=/(Уприспр, Нр) (рис. 2.17), определяемых по формулам
(2.35) и (2.37).
Для скоростных самолетов строят тарировочный график зависи-
мости отношения б^Сж = —от числа М. Необходимо отметить,
#пр
что с помощью данного метода тарировки ПВД определяется сум-
марная поправка к скоростному напору б^Сж, поэтому для скорост-
ных самолетов, имеющих поправку бра.о к измеряемому полному
давлению, невозможно определить аэродинамические поправки
бЯа и 6М, так как для их определения необходимо знать поправку
бра к измеряемому статическому давлению. Метод определения
последней дан ниже.
69
Барометрический метод тарировки ПВД
При барометрическом методе тарировки необходимо прежде
всего знать истинное атмосферное давление рн и давление в стати-
ческой системе приемника Рнпр- Тогда по формуле (2.29) можно
будет определить поправку 6ра. = Рн "
Истинное атмосферное давление рн можно определять двумя
способами: непосредственным измерением атмосферного давления
рн с помощью эталонного
самолета, аэродинамиче-
ские поправки которого
известны, и путем опреде-
ления статического давле-
ния рн по формулам
(2.28) или табл. 2.2, зная
полное давление рНо и чи-
сло М полета. Во втором
случае полное давление
рн о может измеряться не-
посредственно на тарируе-
мом самолете с помощью
специального точного при-
бора самописца и выне-
сенного впереди самолета
ПВД.
Если скорость самоле-
та была рассчитана по
формуле (2.65) и температура наружного воздуха на высоте по-
лета была определена с помощью шара-зонда, то число М может
быть определено по формуле (2.25). /И - '
Независимо от способа определения атмосферного давления рн
аэродинамическая поправка бра определяется по формуле (2.29).
ЬРь = Рн~Рнщг
Зная поправку bqcm, определяемую методом тарировки ПВД
по скорости, легко получить поправку дра.о по формуле
8Ра.о = 8?сж + 8Аг
5
км/час
Ю
ЬОО испр км/час
400 600
О
200
200 -
150 ‘
100 •
60 “
Q ---1—
200 400 600 800 Упр.испр^/^
Рис. 2.17. Тарировочный график д!/а —
= f ( Vnp. и с п р ) и д/7а =f( Рпр.испр; Н р)
'а.о
(2. 66)
Для скоростных самолетов строят тарировочные графики за-
висимостей отношений и =1?*- от числа Мпп.
_ <7пР <7пР пр
Примерная зависимость &ра=/(Мкр) для ПВД, вынесенного впе-
реди самолета, дана на рис. 2.18. Значение Мпр определяется по
77//пр + ^ПР
отношению------------ и табл. 2. 2.
Р Н пр
Следует отметить, что характер изменения поправки дра в за-
висимости от числа Мпр, показанный на рис. 2. 18, зависит не только
от числа М, но и от положения ПВД относительно фюзеляжа.
70
При тарировке ПВД на самолете особое внимание следует
уделять определению в полете поправок на больших углах атаки,
а также при взлете и посадке. Это особенно важно для основных,
вспомогательных и аварийных систем, для которых ПВД, из сооб-
ражений надежности, часто устанавливают непосредственно на
фюзеляже. В некоторых случаях величины аэродинамических по-
правок для этих систем могут оказаться неприемлемыми.
Р и с. 2. 18. Тарировочный график dpa = f (МПр)
Из сказанного выше следует, что в большинстве случаев полезно
применять одновременно оба метода тарировки ПВД. Полученные
данные могут быть использованы и для контроля работы приемника
температуры заторможенного потока. Действительно, если известна
температура наружного воздуха Тн на высоте полета, истинная ско-
рость самолета относительно воздуха V и температура заторможен-
ного потока, измеренная на самолете 7Пр.испр, то коэффициент каче-
ства приемника легко определяется по формуле
т
J пр.испр
26 000
где V в км!час.
Коэффициент запаздывания Кт следует определять на режимах
разгона и торможения, набора высоты и планирования.
Другие методы тарировки ПВД
Указанные выше методы тарировки ПВД достаточно сложны и
требуют наличия специальной наземной измерительной базы.
Однако в практике испытаний и эксплуатации самолетов иногда
возникает необходимость в определении аэродинамических попра-
вок более простыми и дешевыми методами. К таким методам сле-
дует отнести тарировку ПВД на мерной базе и тарировку ПВД
в полете строем.
71
Тарировка ПВД на мерной базе, часто именуемая километра-
жем, производится в горизонтальном полете на различных скоро-
стях на высоте 50—150 м относительно земли. Последнее условие
сильно ограничивает возможности применения данного метода.
Для его осуществления необходимо иметь мерную базу с удоб-
ными подходами и линейными ориентирами. В случае отсутствия
естественных ориентиров (река,, железная дорога, шоссе и т. п.)
вдоль базы устанавливаются хорошо заметные столбы. На точно
вымеренном расстоянии, строго перпендикулярно к базе, попарно
Рис. 2. 19. Схема заводов при тарировке на мерной базе
устанавливаются створы одинаковых размеров. Самолет летит
вдоль базы на заданной скорости и наблюдатели засекают время
его прохождения между створами. Для уменьшения влияния ско-
рости ветра база проходится на каждой заданной скорости по при-
бору дважды: один раз в одном направлении (прямой заход) и дру-
гой раз в обратном (обратный заход) (рис. 2. 19). Способы засечки
могут применяться самые разнообразные. Простейший способ за*-
сечки, часто называемый методом петель, заключается в засечке
первым наблюдателем времени пролета самолетом большой петли
(Л, В, С, D, E)ti и вторым наблюдателем — малой петли (В,
С, Р)т2. В этом случае средняя путевая скорость самолета на базе
будет равна
^ПУТ 1,2ср , (2-67)
Т1 — т2
где L — длина базы.
На многоместных самолетах при хорошей тренировке наблю-
дателя можно производить засечку времени т пролета длины базы
L непосредственно с самолета. В этом случае включение секундо-
мера производится наблюдателем при совпадении первых двух
створ, а выключение — при совпадении вторых двух створ. Путе-
72
вые скорости самолета определяются раздельно для прямого и
обратного заходов по формуле
^пут=4- <2-68)
т
Средняя путевая скорость самолета на базе будет равна
IZ — Упут1 + Упут2 го ДСП
^путъг —-----------• Ь9)
Если наблюдатели, находящиеся у створ, связаны телефонной
связью, то аналогичную засечку времени т можно получить путем
подачи команд первым наблюдателем на включение секундоме-
ров и вторым — на выключение.
Лучшим способом засечки является одновременное фотографи-
рование створ, самолета и секундомера. По фотографии самолета
относительно створ и его размерам можно ввести поправку на
запаздывание или опережение момента фотографирования и более
точно определить время т.
Описанный метод тарировки ПВД, при котором отдельно опре-
деляются скорости при прямом и обратном заходах, называют
методом односторонних засечек.
При выборе длины базы L необходимо, чтобы среднеквадра-
тичная погрешность измерений не превышала определенной вели-
чины. На основании формулы (2. 68) среднеквадратичная погреш-
ность измерения скорости на мерной базе определяется выраже-
нием
^0 = у = |/ (т)2 + 0Г- (2’70)
Максимальная погрешность в определении 6ЕО будет при
tmm=—-—• Погрешность в измерении длины базы 6А при пра-
Ещах
вильном проведении геодезических измерений очень мала и ее
можно принять равной нулю. На основании имеющихся экспери-
ментальных данных можно считать, что предельная погрешность
ручной засечки времени одним наблюдателем примерно равна
0,25 сек. Если засечку у одной створы ведут одновременно два на-
0 25
блюдателя, то погрешность засечки бт = = 0,18 сек.
V £
Принимая 6ЕО = 1 % и подставляя значения т, 6L и бт в фор-
мулу (2.70), после преобразования получим
A==^L_0,005 Umax (2.71)
0V 0
где Vmax—максимальная скорость полета самолета в км/час.
Обычно длину базы выбирают равной 3 км, для самолетов
со скоростью полета до 600 км/час и 5 км, для самолетов со ско-
ростью полета до 1000 км/час.
73
В течение всего времени пролета базы на самолете с помощью
точных приборов самописцев регистрируются скорость, высота и
температура заторможенного потока. При достаточно точном вы-
держивании скорости по прибору средняя приборная скорость
полета самолета по базе определяется обычным способом
I/ __^пр.испр! + ^пр.испр2 zQ
V пр.испр1,2 2 ’
Среднюю путевую скорость самолета, подсчитанную по фор-
мулам (2.67) или (2.69) принимают равной истинной скорости
полета тарируемого самолета относительно воздуха (УПут1,2= V).
Среднюю индикаторную скорость самолета, равную у земли зем-
ной индикаторной скорости (Vi = Vts), определяют по формулам
(2.8) и (2.7). Давление на высоте полета определяют по формуле
Рн = Р3~УзН^р3—~=-Н = р3(\ -
KJ з \ KJ з /
где р3 — давление, измеренное на земле по барометру;
у3 — удельный вес воздуха при Н = 0;
Н — разность высот полета самолета и места измерения дав-
ления и температуры;
Т3—температура, измеренная в том же месте.
Высота полета самолета определяется на глаз либо по показа-
ниям радиовысотомера, а разность высот между мерной базой и
местом установки барометра определяется по геодезическим от-
меткам. Температура на высоте полета Тн определяется по пока-
заниям термометра на самолете.
Учитывая, что высота полета самолета мала, часто величину Л
вычисляют по значениям давления и температуры у земли по фор-
муле А = 0,3793 р- .
Зная среднюю земную индикаторную скорость самолета Vi3
и среднюю приборную скорость Vnp.ucnp 1,2, определяют искомую
аэродинамическую поправку
3 пр. ис пр 1,2*
По результатам тарировки ПВД, используя номограмму (рис.
2.5), строят графики поправок f)Va=f(Упр.ИСпр) и d//a = f(Упр.испр,
Нр) (рис. 2.17), определяемых по формулам (2.35) и (2.37).
Влияние ветра на точность тарировки (за исключением метода
петель) легко получить из формулы (2.65). При направлении ско-
рости ветра вдоль базы угол а равен 0° или 180° и при устойчивой
величине скорости ветра его влияние исключается, т. е. VnyTi,2=V-
При применении метода петель ^пут1э2ср^ V -ф —— и, следова-
тельно, относительная погрешность в измерении скорости равна
У2
74
При направлении скорости ветра поперек базы и при полете
самолета параллельно базе относительная ошибка будет равна
1 1Г2 „
------.Однако, если летчик ведет самолет вдоль базы по магнит-
2 У 2
ному курсу, т. е. со сносом, влияние ветра исключается, так как
время пролета базы не зависит от сноса. Следовательно, относи-
тельная ошибка из-за влияния скорости ветра не превзойдет вели-
чины . Максимальная относительная погрешность будет при
минимальной скорости полета; обычно эту погрешность принима-
ют равной 1 %. Тогда допустимая скорость ветра
V^o„ = 0,ll/mln. (2.73)
Поэтому при проведении километража пренебрегают поправкой
на ветер, но запрещают километраж при скорости ветра больше
доп*
Тарировка ПВД в полете строем требует наличия эталонного
самолета, аэродинамические поправки которого должны быть
точно определены одним из указанных выше методов. При тари-
ровке строем оба самолета должны лететь в горизонтальном по-
лете рядом на нескольких последовательно изменяющихся скоро-
стях. При этом записываются и сравниваются показания приборов,
установленных на обоих самолетах. На малых скоростях полета
лучше сравнивать показания самописцев скорости (спидографов),
а на больших — самописцев высоты (барографов).
Необходимо отметить, что выбор метода тарировки в первую
очередь определяется имеющимися возможностями, а во вто-
рых— точностью. При равных возможностях искомая поправка
определяется методом, дающим наибольшую точность.
Сравнение различных методов тарировки ПВД
При применении метода тарировки ПВД по скорости, истинная
скорость самолета относительно воздуха определяется по формуле
(2.65). Относительная погрешность в определении истинной ско-
рости будет равна
8^0 = V = 7^ I >пуТ - W cos а)2 У’уЖ.пут +
VnyTcos a)2lW‘ •{- sin2aUW*yTa28ao, (2. 74)
где c>W0 — относительная погрешность в определении скорости
ветра;
Ва0— относительная погрешность в определении угла а;
SVo.nvT ~ определяется по формуле (2.64').
75
Принимая погрешность в определении земной индикаторной
скорости равной погрешности индикаторной скорости 3.o = dV/ о
и используя формулу (2.8), получим
^з.о«8^о = |/ + (2.75)
Из формулы (2. 32) следует, что абсолютная погрешность опре-
деления аэродинамической поправки по скорости равна
8 (8Уаа)=|<8У?з4-8^р. (2. 76)
Из формул (2.76) и (2.75) следует, что
8(8Иаа)=| / M+-L + +
V L 4 \ рн / 4 \ 1 н / J
(2. 77)
Поскольку величина поправки 6Vas обычно не бывает большой,
то можно в данном расчете принять Vz-3=Vnp.
При барометрическом методе тарировки аэродинамическая
поправка определяется по формуле (2.29),
откуда
8(8а)=/^+^пр.
(2. 78)
При тарировке на мерной базе погрешность в определении аэро-
динамической поправки d(6Vas ) можно подсчитать по формуле
(2.77). В данном случае погрешность в определении истинной ско-
рости, с учетом формулы (2.70) и погрешности, вносимой ско-
ростью ветра, будет равна
= + (2.79)
Wnp J
При выводе формулы (2.79) считаем 6Л = О, a У=УПр.
Для сравнения различных методов тарировки в табл. 2.3 при-
ведены среднеквадратические погрешности в определении аэроди-
намических поправок, рассчитанные при следующих условиях и
среднеквадратичных погрешностях:
1) для скоростного и барометрического методов
^//о==0,3%, 8/?Яо=0,25%, = 0,333 мм рт. ст-
&1/пр = 1,3 км/час, 0,5, а = 90°, U7=10 км/час и BU7o = 0,l;
2) для километража В/?я = 0,1 мм рт. ст., ВГя = 0,17°,
Вт —0,18 сек и о!/пр = 1,3 км/час,
L = 3 км, рн = ро=^78О мм рт. ст.,
Тн--= 70 = 288°К и UZ=10 км/час.
76
Как видно из таблицы, на больших скоростях точность тари-
ровки ПВД по барометрическому методу выше, чем по скорост-
ному. На малых скоростях полета погрешности при километраже
и при скоростном методе примерно равны.
Таблица 2,3
Среднеквадратичная погрешность
Метод тарировки
Приборная
скорость Упр скоростной барометрический 1 километраж
км/час
Wa) 8(&Va) | | Wa2)
км!час мм рт. ст. КМ) час
100 1,4 0,47 1 1,7
200 1,7 0,47 3 1,9
300 2,1 0,47 2,1 2,2
400- 2,6 0,47 1,6 3,2
600 3,6 0,47 1 6,2
800 4,5 0,47 0,67 10,6
1000 5,7 0,47 0,47 17
1200 6,8 0,47 0,33 —
1400 7,8 0,47 0,27 .—
1600 9 0,47 0,24 —
Глава III
ОПРЕДЕЛЕНИЕ ЛЕТНЫХ ХАРАКТЕРИСТИК
САМОЛЕТОВ
3.1. ЛЕТНЫЕ ХАРАКТЕРИСТИКИ
СОВРЕМЕННЫХ САМОЛЕТОВ
Летные характеристики (летные данные) определяют техниче-
ские возможности самолета — максимальную скорость, статиче-
ский (практический) потолок, дальность и продолжительность по-
лета, наивыгоднейшую скорость набора высоты, вертикальную
скорость и время набора высоты при наивыгоднейшей скорости.
Максимальной скоростью полета называется скорость, которую
самолет способен развивать в горизонтальном установившемся
прямолинейном полете. Для тяжелых дозвуковых самолетов наи-
более характерна максимальная скорость при номинальном или
максимальном режиме, для самолетов-истребителей — максималь
ная скорость при форсажном режиме работы силовой установки.
Максимальная скорость Утах определяется истинной скоростью
полета относительно воздуха (в км!час), индикаторной скоростью
или числом М.
Статический потолок определяет максимальную высоту, на ко-
торой самолет способен выполнять горизонтальный полет без из-
менения скорости при заданном режиме работы силовой установки.
При летных испытаниях определяют практический потолок. За
практический потолок принимают высоту, на которой самолет имеет
вертикальную скорость набора высоты 0,5 м!сек.
Дальность полета определяется расстоянием, которое способен
пролететь самолет относительно воздуха, израсходовав распола-
гаемый запас горючего. Максимальная дальность достигается при
выдерживании наивыгоднейшего профиля полета по скорости и вы-
соте, когда расходуется минимальное количество горючего на ки-
лометр пройденного расстояния.
Различают техническую дальность, получаемую при полной
выработке горючего, и практическую дальность, получаемую при
сохранении в баках минимального гарантийного остатка топлива.
Такой остаток, составляющий 5—10% запаса топлива, обычно за-
дается тактико-техническими требованиями к самолету.
Максимальная продолжительность полета определяется време-
нем пребывания самолета в воздухе на таком режиме полета по
78
скорости и высоте, при котором обеспечивается минимальный
часовой расход топлива.
Наивыгоднейшей скоростью набора высоты называют такую
скорость, на которой при заданном режиме работы силовой уста-
новки избыток мощности будет наибольшим. Это обеспечивает
набор высоты с максимальной вертикальной скоростью, возмож-
ной в полете с сохранением неизменного уровня кинетической
энергии.
Вертикальная скорость определяется как изменение высоты Н
за одну секунду:
Vy=— м/сек. (3.1)
dt
Вертикальная скорость положительна при наборе высоты и от-
рицательна при снижении. Так же как и максимальная скорость,
вертикальная скорость и наивыгоднейшая скорость набора высоты
могут определяться для номинального, максимального и форсаж-
ного режимов работы силовой установки.
Значение любой летной характеристики, замеренной в полете,
зависит от большого количества условий, которые в той или иной
степени влияют на сопротивление самолета, тягу (мощность) и эко-
номичность силовой установки. К таким условиям в первую оче-
редь относятся:
— конфигурация самолета (наличие внешних подвесок баков
либо вооружения, положение воздухозаборников, шасси, закрыл-
ков и т. д.);
— режим работы силовой установки и его соответствие техни-
ческим условиям по параметрам, определяющим тягу и расход
тсплива;
— полетный вес самолета;
— атмосферные условия (давление и температура);
— запас топлива (для характеристик дальности и продолжи-
тельности полета).
Кроме того, ряд случайных причин могут вызывать изменения
летных характеристик (отклонения в регулировке двигателей, ка-
чество выполнения обводов и окраски самолета, ступеньки в сопря-
жениях отдельных элементов обшивки и створок люков и др.).
Влияние изменения перечисленных условий полета на летные
характеристики может быть значительным. В связи с этим при
испытаниях самолета практически всегда возникает необходимость
пересчета характеристик для приведения их к стандартным или
заданным условиям полета. Это позволяет сопоставить характери-
стики однотипных самолетов или самолетов разных типов, полу-
ченные при различных атмосферных условиях. Часто необходим
и обратный пересчет, для того чтобы оценить летные возможности
самолета при фактических условиях полета (высота, температура,
полетный вес и др.).
79
Летные возможности самолета по скорости и высоте полета
характеризуются границей максимальной скорости и потолка, опре-
деляющей предельные сочетания скорости и высоты, при которых
самолет, используя располагаемую тягу силовой установки, может
выполнять длительный прямолинейный горизонтальный полет.
Существует несколько подходов к определению этой границы,
каждый из которых имеет определенный смысл и практическое зна-
чение. Такую границу можно получить, например, из рассмотрения
уравнений установившегося движения самолета для ряда задан-
Р и с. 3.1. Изменение по числу М потребных и
располагаемых тяг самолетов с поршневым двига-
телем (ПД), турбореактивным (ТРД) и ТРД,
снабженным форсажной камерой (ТРД + ФК):
1—сверхзвуковой самолет; 2—дозвуковой самолет; 3—са-
молет с ПД
располагаемой тяги на горизонтальную плоскость при соответ-
ствующем режиме работы двигателей, для которого определяется
максимальная скорость или потолок, уравновешивается сопротив-
лением самолета, а вес самолета уравновешивается суммой подъ-
емной силы и проекции тяги на вертикальную плоскость. Это усло-
вие выполняется в точках пересечения кривых потребных и рас-
полагаемых тяг (рис. 3. 1). Угол пересечения этих кривых опреде-
ляет характер влияния приращения тяги (±ДРрасп), либо сопро-
тивления (±АРПотр) на Vmax(Mmax). Для сверхзвуковых самолетов
и самолетов с поршневыми двигателями и ТВД, характеристики
потребных и располагаемых тяг которых пересекаются под острым
углом, приращение тяги (сопротивления) заметно меняет макси-
мальную скорость. На дозвуковых самолетах с ТРД, имеющих
максимальную скорость в области волнового кризиса (рис 3.1),
характеристики которых пересекаются под углом, близким к пря-
мому, значительное изменение тяги мало меняет максимальную
скорость.
80
Граница максимальной скорости и потолка часто определяется
также из рассмотрения условия обращения в нуль продольного
ускорения самолета в горизонтальном полете при номинальном
(максимальном, форсажном) режиме работы двигателей. Кривую
максимальной скорости и потолка можно определить и
ницу сочетаний скорости и высоты полета, на которой
накопления полной энергии V* равна нулю:
v*=vy+?-^-.
v У g dt
как гра-
скорость
Режим наивыгоднейшей скороподъемности самолетов характе-
ризуется скоростью, на которой обеспечивается максимальный
избыток мощности силовой установки. Последний определяется
избытком тяги и скоростью. Избыток тяги (см. рис. 3. 1) равен
разности величин располагаемой тяги Ррасп, на режиме работы дви-
гателя при котором выполняется набор высоты, и потребной для
горизонтального полета тяги РПотр- Избыток мощности New& и из-
быток тяги Ризб связаны следующей зависимостью:
ДТ Р ______________ Р \
1 v е изб V расп потр/
75
(3. 2)
Кривая Л/еизб=/(М) самолета с ТРД в
с поршневыми двигателями (рис. 3.2) имеет
отличие от самолетов
пологий максимум, что
определяет сохранение практически
одинаковых значений максимальной
вертикальной скорости в достаточно
широком диапазоне скоростей по-
лета. У самолетов с поршневым дви-
гателем, напротив, максимум на кри-
вой четко выражен и это требует бо-
лее точного определения наивыгод-
нейшей скорости набора высоты и
выдерживания ее в полете.
Наивыгоднейшая скорость набо-
ра высоты Кпр.наив (по указателю
скорости) самолетов с ТВД или пор-
шневым двигателем (ПД) сохра-
няется примерно постоянной до гра-
Р и с. 3. 2. Избыток мощности
и наивыгоднейшие скорости
набора высоты дозвуковых са-
молетов с ТРД (/) и ПД (2)
ницу высотности или ограничения
мощности. Выше этой границы наивыгоднейшая скорость умень-
шается на 8—10 км/час на каждые 1000 м высоты. Для дозвуковых
самолетов с ТРД скорость Упр.наив уменьшается на 10—15 км/час
на 1000 м высоты полета. Часто наивыгоднейшую скорость набора
высоты задают значением истинной скорости (по тонкой стрелке
указателя) или числа М, постоянным до определенной высоты по-
лета, что облегчает пилотирование.
Характер изменения наивыгоднейшего числа М набора высоты,
а также границы максимальной скорости и потолка современных
81
околозвуковых и сверхзвуковых самолетов с ТРД показан на
рис. 3. 3.
У околозвуковых самолетов (кривая 1 на рис. 3.3) максималь-
ная скорость вблизи земли обычно дозвуковая (М< 1); максималь-
ное число М, редко превышающее М=1,5, достигается на высоте
10—13 км. С дальнейшим увеличением высоты максимальная ско-
рость резко падает. Высота статического потолка достигается при
Рис. 3. 3. Характер изменения по высоте границы максималь-
ной скорости, потолка и наивыгоднейших скоростей набора
высоты самолетов с ТРД
дозвуковом чисдте М. Режим скороподъемности таких самолетов —
дозвуковой, обычно с сохранением в большей части высот (до вы-
соты, соответствующей Япракт) практически постоянного значения
числа М.
У сверхзвуковых самолетов максимальная скорость вблизи
земли может быть сверхзвуковой (кривая 2). С увеличением вы-
соты эта скорость быстро растет и достигает максимальных значе-
ний на высотах 12—17 км. Кривая статического потолка имеет
обычно два максимума — дозвуковой и сверхзвуковой, с некото-
рым провалом в области чисел М= 1,1—е—1,3. Наибольшая высота
статического (практического) потолка обычно достигается на
сверхзвуковой скорости полета. Поэтому сверхзвуковые самолеты
82
имеют два режима скороподъемности — первый при скоростях,
несколько меньших М= 1 (Унаив i), второй — сверхзвуковой
(Унаивг) (см. рис. 3.3). В последнем случае, как это видно из
рис. 3.3, набор высоты до наивыгоднейшей высоты разгона * вы-
полняется на дозвуковом режиме, затем производится разгон са-
молета до сверхзвуковой скорости и переход на сверхзвуковой
режим набора.
Для сравнения на рис. 3. 3 приведены кривые 3, характеризую-
щие максимальную скорость дозвукового самолета с ТРД.
Для современных самолетов, особенно транспортных, сущест-
вует ограничение скорости по 7тах на малых высотах, что не позво-
ляет пользоваться на этих высотах максимальной скоростью, кото-
рая обеспечивается располагаемой тягой силовой установки.
Таким образом максимальные скорости могут быть определены
только на высотах, превышающих высоту ограничения Яогр, уста-
новленную для данного самолета по скорости. Эта высота ограни-
чения иногда достигает 5—11 км.
На маневренных сверхзвуковых самолетах используется об-
ласть динамических режимов, лежащая выше границы макси-
мальной скорости и потолка (см. рис. 3.3).
В связи с тем, что в эксплуатации сверхзвуковые самолеты
легко могут превышать высоту практического потолка, понятие
«практический потолок» становится условным. Однако практиче-
ский потолок остается важной характеристикой при сравнений-
самолетов разных типов и при контроле качества серийного произ-
водства самолетов.
3.2. ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ ПОДОБИЯ
РЕЖИМОВ РАБОТЫ ТУРБОРЕАКТИВНЫХ ДВИГАТЕЛЕЙ
Летные характеристики, полученные в фактических условиях
полета, приводятся к стандартным атмосферным или заданным
условиям полета. Для этого необходимо знать, как влияет на тягу
и расход топлива изменение условий полета (давления, темпера-
туры и скорости).
Основные характеристики турбореактивных двигателей — тяга
и часовой или удельный расход топлива—зависят от следующих
параметров: оборотов двигателя п, атмосферного давления рн,
абсолютной температуры воздуха Тн, числа М полета (или скоро-
сти полета V), работы форсажной камеры. Тяга и расход топлива
также зависят от изменения положения устройств, регулирующих
подачу воздуха в двигатель и выход газов из двигателя.
При выключенной форсажной камере и неизменном положении
устройств, регулирующих проходные сечения газовоздушного
тракта, тяга и расход топлива однозначно определяются первыми
четырьмя параметрами п, рн, Тн и М (или V).
* Подробнее см. разд. 3. 7.
83
Для определения связи между изменением названных парамет-
ров такого турбореактивного двигателя обычно применяют теорию
подобия режимов работы. Она дает возможность получить так
называемые критерии подобия, определяющие характер взаимо-
связи между изменением условий работы двигателя, тягой и рас-
ходом топлива. Подобие режимов работы турбореактивного дви-
гателя определяет взаимосвязь между его характеристиками и из-
менением условий полета по числу М, давлению и температуре.
Так, для турбореактивных двигателей с нерегулируемым соп-
лом (т. е. с постоянным проходным сечением реактивного сопла)
в соответствии с теорией подобия при изменении условий работы
и соблюдении постоянства отношений nj Тн и V/ УТн все пара-
метры рабочего процесса двигателя, его тяговые и расходные ха-
рактеристики изменяются в соответствии с вполне определенными
соотношениями.
Наиболее важным для пересчета характеристик двигателей
является сохранение в этом случае постоянства величин: Р!рн—
отношения тяги Р к статическому давлению рн', Qb/рнУ Тн—
отношения произведения расхода топлива Q на коэффициент пол-
ноты сгорания * б к произведению статического давления на корень
квадратный из абсолютной температуры Тн.
При обработке результатов летных испытаний вместо отноше-
ния п/ У Тн удобнее применять пропорциональные ему величины
(3.3)
(где /гНом — номинальное или принятое за номинальное число обо-
ротов двигателя), называемые соответственно приведенными обо-
ротами и приведенной температурой.
По тем же соображениям вместо отношения Р!рн применяется
величина
Л,рИВ = ^^, (3.4)
называемая приведенной тягой, и вместо отношения —- -= ”
рн V тн
пропорциональное ему выражение
(з.5)
называемое приведенным расходом топлива.
* Коэффициент полноты сгорания б характеризует соотношение между дей-
ствительным количеством тепла, полученным при сгорании топлива, и макси-
мальным количеством тепла, которое при этом могло бы быть получено в случае
полного сгорания.
84
В выражения (3.3) — (3.5) входят фактические величины абсо-
лютной температуры воздуха Тн, атмосферного давления рн и ча-
сового расхода топлива Q, а также температура воздуха TQ и атмо-
сферное давление pQ на уровне моря в стандартных атмосферных
условиях (ро = 76О мм рт. ст., Т0 = 288°К).
Величина 6 в выражении (3.5) обычно опускается, так как
коэффициент полноты сгорания топлива практически постоянен
в широком диапазоне высот, и чаще пользуются выражением
(3. 5) в виде
(3.5а)
у 1 н
Однако последнее допущение может оказаться неверным для
больших высот, где горение заметно ухудшается. Это часто яв-
ляется причиной уменьшения тяги на больших высотах по сравне-
нию с определяемой характеристикой двигателя.
\ , Как было отмечено выше, подобие режимов работы турбореак-
тивного двигателя с нерегулируемым соплом соблюдается в слу-
чае постоянства отношения V/ УТН, пропорционального числу
М = —. (3.6)
а
Поэтому в качестве критерия подобия режимов работы турбо-
реактивного двигателя можно принять число М.
Пользуясь выражениями связи параметров работы двигателя
в приведенном виде: (3.3), (3.4), (3.5) и (3.6), получаем, что тяга
и расход топлива ТРД с нерегулируемой геометрией газо-воздуш-
ного тракта определяются только двумя величинами — числом М
и приведенными оборотами, либо приведенной температурой
^прив f (М, ^прив)’
ИЛИ
‘ Рприв = f1(М, 7"прив)»
QnpHB ^прив)>
ИЛИ
0прив = /з(М’ ^прив)-
(3. 7)
При этом QnpHB и /гПрив связаны строго определенной для данного
типа двигателя зависимостью (рис. 3.4).
Использование приведенных величин упрощает пересчет харак-
теристик двигателей, а также методику приведения летных данных
к стандартным условиям. Так, пользуясь приведенными оборотами
и приведенным расходом топлива, можно легко сверить паспорт-
ные характеристики двигателя с замеренными характеристиками
на земле (по основным параметрам — расходу топлива и оборо-
там). Для этого необходимо замерить при нескольких значениях
85
оборотов п расход топлива QH в фактических атмосферных усло-
виях при рн и Тн и, пользуясь выражениями (3.3) и (3.5), для
каждого значения оборотов подсчитать приведенные значения
^прив и QnpHB и нанести их на график (рис. 3.4).
Совпадение (в пределах точности измерений) эксперименталь-
ных точек с характеристикой свидетельствует о правильной регу-
лировке двигателя.
Рис. 3.4. Характеристи-
ка приведенных расходов
топлива турбореактивно-
го двигателя по приве-
денным оборотам
Рис. 3.5. Высотно-ско-
ростные характеристики
расхода топлива турбо-
реактивного двигателя
Точно так же, как и для наземных условий, характеристики
двигателя могут быть пересчитаны для любого сочетания вели-
чины атмосферного давления и температуры при сохранении по-
стоянства числа М полета.
Имея характеристики расхода топлива по числу М и высоте,
легко проверить соответствие им расхода в фактических полетных
условиях. Для этого необходимо при нескольких значениях вы-
соты и числа М и постоянном режиме работы двигателя, для кото-
рого имеются высотно-скоростные характеристики (рис 3.5), за-
мерить расход топлива в установившемся прямолинейном полете,
а также высоту, скорость и температуру наружного воздуха. Под-
считав значение <2Прив по формуле (3.5) с заменой в ней р0 и То
ближайшими стандартными значениями давления и температуры
(Рнст и ТНст, Для которых имеется характеристика), наносят на
график (см. рис. 3.5) полученные экспериментальные точки для
вычисленных по высоте и скорости значений числа М. При этом
необходимо убедиться в том, что температура газов по высотам
сохраняется в заданных пределах.
86
При определении основных летных данных самолета важно,
чтобы расход топлива, обороты, температура газов на номиналь-
ном (максимальном) и форсажном режимах, а также на экономи-
ческом режиме соответствовали характеристикам, полученным при
испытаниях опытного двигателя (с учетом особенностей компо-
новки его на самолете).
3.3. ПОДОБИЕ РЕЖИМОВ ПОЛЕТА
И ПРИНЦИПЫ ПРИВЕДЕНИЯ ЛЕТНЫХ
ХАРАКТЕРИСТИК К СТАНДАРТНЫМ (ЗАДАННЫМ)
УСЛОВИЯМ
Для различных типов самолетов и двигателей влияние измене-
ния условий полета на тягу и аэродинамическое сопротивление не
одинаково и подчиняется разным закономерностям. Поэтому тре-
буется определенная методика выполнения испытательных режи-
мов в полете, позволяющая произвести все измерения, необходи-
мее для приведения летных ха-
рактеристик к стандартным или
заданным условиям полета.
Приведение летных данных
к заданным (стандартным) ус-
ловиям можно выполнять раз-
ными методами. Каждый ме-
тод имеет те или иные преиму-
щества и недостатки, позволяю-
щие наиболее эффективно при-
менять его только в определен-
ных условиях.
Методы приведения можно
разделить на четыре основные
группы:
1) использующие подобие
м
М.
Лр=const + допуск на отклоне-
ния при замере
Допуск на погрет-
ое т и изготооле-
ния и измерений
'PQhuJZ
Рис. 3. 6. Зависимость Мтах от тем-
пературы
режимов полета для получения
сеток характеристик, определяющих связь между изменением усло-
вий полета и летными характеристиками;
2) использующие дифференциальные зависимости между изме-
нением условий полета и летными характеристиками;
3) использующие определенные закономерности (связи летных
данных и условий полета), которые позволяют полученную харак-
теристику отнести к эквивалентной высоте, где ее значение в фак-
тических условиях равно соответствующему значению в стандарт-
ных условиях;
4) являющиеся комбинацией первых двух методов.
Иногда вообще не приводят полученные летные характеристики
к стандартным условиям, а используют специальные сдаточные
графики, широко применяемые на серийных самолетостроительных
заводах (рис. 3.6). Подобные графики позволяют проверить соот-
87
ветствие характеристики самолета, полученной в фактических усло-
виях (при фактическом весе, давлении и температуре), требуе-
мому ее значению по техническим условиям на приемку серийного
самолета, подсчитанному для этих же условий полета заранее
с учетом влияния возможных погрешностей измерений и отклоне-
ний в изготовлении самолета и двигателей. Использование сдаточ-
ного графика позволяет с минимальной затратой времени оценить
летные данные серийного самолета и соответствие его эталонному
образцу, по результатам испытаний которого составляется сда-
точный график.
Подобие режимов полета является более широким понятием,
чем подобие режимов работы двигателя, и определяет связь изме-
нения условий полета с летными характеристиками в целом, с уче-
том всех особенностей силовой установки и аэродинамики само-
лета. Для подобия режимов необходимо обеспечить при измене-
нии условий полета подобие не только режимов работы двигателя,
но и действующих на самолет сил, что определяется в первую оче-
редь постоянством его коэффициента подъемной силы су. Для этого
вводится понятие приведенного веса
G = G
прив л
(3.8)
Постоянство этого параметра определяет подобие действующих на
самолет сил, в частности, постоянство величины су,
В соответствии с выражением (3.8) для сохранения постоян-
ства приведенного веса при изменении полетного веса G необхо-
димо изменять высоту полета (статическое давление рн)- Сохра-
нения постоянства приведенного веса, однако, еще недостаточно
для обеспечения подобия режимов полета, так как при су = const
соответствующий ему коэффициент лобового сопротивления сх мо-
жет быть неодинаков вследствие изменения числа М полета.
Уравнения движения самолета в плоскости симметрии имеют
вид
P = cxSqV2+ G sin 9; '
G cos 0 = ~ cySQV2,
(3. 9)
где P — суммарная тяга двигателей;
S — площадь крыла;
О — угол наклона траектории полета к горизонту.
Заменим sin 9 в уравнениях (3.9) отношением VyIV—верти-
кальной скорости Vy к скорости полета V, которые более точно за-
88
меряются в полете, скорость полета V произведением М а и ско-
ростной напор его развернутым выражением через число М
^=-._1_е1/2=ух/>ям2,
так как аэродинамические характеристики (су, сх) и характери-
стики двигателей определяются числом М полета. Одновременно
выразим cos 0 через sin 9 (cos 0 = ]/ 1—sin2 0 ) и скорость звука
через параметры воздуха
а=у *-bL=V*gRTH,
с р
где х = — = 1,4—-показатель адиабаты;
Су
g = 9,81 м]сек2~ ускорение силы тяжести;
/? = 29,27 кГм[кг-град — газовая постоянная воздуха.
.После замены скорости полета V и скоростного напора q через
параметры, определяемые числом М и условиями полета рн и Тн,
умножив правые и левые части уравнений (3.9) на отношение
pdpH и подставив Го вместо Тн в формулу для скорости звука (что
равносильно переходу от скорости звука на высоте к скорости
звука в стандартных условиях, для которых градуируются шкалы
приборов, замеряющих скорость и число М полета), получим сле-
дующие выражения:
Vv
рсSbtfA-G —----
Рн 2 х ' Рн М
(3. 10)
G^-
рн
у2_Г0_
v ТН с SM.2.
M^gRT0 2 10 у
Вводя дополнительно понятие приведенной вертикальной скорости
Vу прив Vу
(3. 11)
аналогичное понятию приведенных оборотов, и заменив в уравне-
ниях (3. 10) тягу Р, вес G и вертикальную скорость Vy соответст-
вующими приведенными значениями этих величин, получаем урав-
нения движения в приведенном виде:
* О А АО I ПрИВ
прив — PoCxS М + прив м
V2
у прив
pocuS М2.
(3. 12)
I
89
Здесь потребная для полета тяга РПрив должна быть равна тяге
двигателей, зависимость которой от условий полета была показана
выше, см. (3. 7).
^рив=/(М, «прив) ИЛИ Рприв=Л(М, Гприв). (3. 13)
Если считать, что коэффициент лобового сопротивления сх не
зависит от числа Re, что достаточно близко к истине в пределах
Рис. 3.7. Сетка обобщенных харак-
теристик установившихся режимов
полета (точками отмечены режимы
горизонтального полета)
возможных изменений пара-
метров движения при приве-
дении, то он определяется
только величинами су и чис-
ла М полета:
г^Ж.М). (3.14)
В четыре уравнения
(3.12), (3.13) и (3.14) вхо-
дят семь величин: М, су, сх,
Сприв, ^прив, ^прив И Еуприв*
Следовательно, четыре вели-
чины, причем любые, могут
быть представлены функцией
трех других.
Если выбрать в качестве
независимых переменных
критерии подобия 6Прив, М, ГпрИв, что наиболее удобно при прове-
дении летных испытаний самолета, то все остальные можно одно-
значно определить следующими зависимостями:
У Приз f (^прив, ^ПрИВ’ М),
./^(^ПрИв» ^прив’ М),
Су УгС^ПрИВ» ^прив» М),
(3.15)
^прйв f3 прив’ ^прив, М).
Графически взаимосвязь величин, определяемых выражениями
(3.15), можно представить сетками обобщенных характеристик.
Представленная на рис. 3. 7 сетка кривых Vy прив — f ( Сприв, Тприв»
М) определяет связь величин на режимах горизонтального полета
и набора высоты. Точки при VVhphb = 0 определяют ГПрив для режи-
мов горизонтального полета; точки на максимумах кривых
Гтуприв = ^(М) определяют наивыгоднейшие скорости набора вы-
соты (Мнаив) ДЛЯ соответствующих значений Гприв, Оприв, pH-
Подобная сетка (или часть ее), полученная обработкой изме-
ренных в полете значений Vy, скорости полета (числа М), темпе-
ратуры и оборотов двигателей на режимах установившихся набо-
ров высоты или разгонов, позволяет привести полученные харак-
теристики к стандартным (или иным заданным) атмосферным
условиям и заданному полетному весу.
90
Для самолетов, имеющих двигатели с форсажными камерами
и переменной геометрией воздухозаборника и выхлопного сопла,
подобие режимов полета может обеспечиваться в ограниченном
диапазоне скоростей и высот, определяемом особенностями схемы
регулирования двигателей. Для такого двигателя возможность
использования принципа подобия режимов при приведении летных
характеристик должна определяться с учетом названных и дру-
гих возможных особенностей (срезка топлива по Т и т. п.), влияю-
щих на тягу и расход топлива в разных условиях полета по М,
Рн и Тн, в связи с чем возникает необходимость наличия других
методов приведения.
Менее трудоемким и более универсальным является приведение
летных данных к стандартным условиям по методу дифферен-
циальных поправок. Сущность метода заключается в том, что на-
ходят поправки к измеренному в полете значению летной харак-
теристики, учитывающие отличие условий испытаний от стандарт-
ных. При этом одна из фактических величин (температура или
давление) принимается за стандартную. Характеристика (условно
обозначим Хф) приводится к стандартным (заданным) Хст усло-
виям полета по формуле
Хст-^Лф+дЛ, (3.16)
где АХ — поправка, рассчитываемая при помощи дифференциаль-
ных соотношений, устанавливающих связь летной ха-
рактеристики с изменением того или иного условия
полета (температуры, давления, полетного веса, оборо-
тов двигателей или расхода топлива), не принятого
в качестве стандартного.
Величина поправки AXW к летной характеристике, учитываю-
щей отклонение того или иного параметра от его значения в стан-
дартных условиях, определяется по формуле
^Xw = X*bW, (3.17)
где X — летная характеристика;
W — соответствующий параметр, влияющий на летную ха-
рактеристику самолета (температура, давление, полет-
ный вес);
A IF — отклонение величины этого параметра от стандартного
значения;
Xw — соответствующий безразмерный показатель:
У _ W дХ
X dW
Величина показателя Xw определяет на сколько процентов из-
меняется летная характеристика при изменении соответствующего
параметра на 1%. Например, для оценки влияния на максималь-
(3. 18)
91
ную скорость (Mmax) отклонения температуры, полетного веса и
оборотов турбореактивного двигателя от принятых за стандартные
применяются соответствующие показатели Мт, MG и Мп, опреде-
ляемые выражениями
Т ЭМ G dh\ п ЭМ
-----; Мо =----; Мл=-----.
М дТ и MdG п М дп
(3. 19)
Отклонения условий и показатели определяют поправку, равную
сумме отдельных поправок, каждая из которых учитывает влияние
только одного «своего» фактора. Расчет проводится по формуле
дм = Мг — LT + Мо— ДО 4- М„ — Дга.
Т G п
(3. 20)
Таким образом поправка ДХ для приведения к стандартным
условиям соответствующей летной характеристики самолета опре-
деляется путем алгебраического суммирования отдельных попра-
вок AXw, каждая из которых учитывает отклонение от стандарт-
ных условий только одного параметра:
Как видно, ценным качеством метода дифференциальных по-
правок является независимость отдельных поправок друг от друга
(без учета влияния связанных величин, например р и Т).
Величины показателей могут быть определены расчетом, что,
однако, не всегда удается, либо определены в полете эксперимен-
тально для каждого типа самолета (с помощью сеток характери-
стик или другим методом). Последнее, конечно, потребует прове-
дения дополнительных специальных полетов. В целом метод диф-
ференциальных поправок более универсален и менее трудоемок,
чем метод сеток характеристик. Он применяется как при пересчете
характеристик максимальной скорости, так и при определении ха-
рактеристик скороподъемности и потолка. Такой метод особенно
целесообразно применять при оценке характеристик серийных
самолетов, для которых обычно имеются сетки показателей.
При определении стандартных значений максимальной скоро-
сти иногда пользуются и так называемым методом эквивалентной
высоты. Соблюдение подобия режимов по М, GnpHB, 7прив при из-
менении атмосферного давления и температуры воздуха позволяет
подобрать такую эквивалентную высоту ЯСт, на которой
^(^т, Тн).
Это дает возможность летную характеристику (например, мак-
симальную скорость), полученную в полете на фактической высоте
Нр, отнести к другой высоте ЯСт, которой она соответствует при
переходе от фактических к стандартным условиям полета. Так, для
самолетов с турбореактивными двигателями, входные и выходные
каналы которых не регулируются, подобие сохраняется, если за
эквивалентную высоту принять такую, на которой выполняется
92
условие ТСч = Тн- Поэтому полученное при рн и Тн значение мак-
симальной скорости может быть отнесено к другой высоте, назы-
ваемой эквивалентной, на которой Тст = Тн, без какого-либо пере-
счета.
Метод эквивалентной высоты менее трудоемок, чем метод сеток
характеристик. Однако он неприменим для условий стратосферы
и в тех случаях, когда эквивалентная высота при пересчете оказы-
вается менее нуля и более 11 км.
3.4. ПОДГОТОВКА К ОПРЕДЕЛЕНИЮ
ЛЕТНЫХ ХАРАКТЕРИСТИК САМОЛЕТА
Подготовка самолета к испытаниям по определению основных
летных характеристик включает:
— оборудование испытательной аппаратурой;
— взвешивание и центровку после оборудования;
— тарировку топливомеров и расходомеров;
— проверку регулировки двигателей по основным параметрам,
определяющим тягу и экономичность как в наземных, так и в лет-
ных условиях;
— тарировку приемников измерителей скорости и высоты.
Испытательная аппаратура ^должна включать:
— приборы контроля скорости, высоты полета и температуры
воздуха;
— приборы контроля режима работы двигателей по тяге, мощ-
ности и экономичности — обороты, расход основного и форсажного
топлива, температура газов за турбиной, положение створок реак-
тивного сопла, положение подвижного конуса воздухозаборника,
для турбовинтовых двигателей — положение задающего рычага
топливного автомата (УПРТ) и давление в измерителе крутящего
момента (ИКМ). Испытательная аппаратура тарируется перед
постановкой на самолет и проходит контрольную тарировку после
проведения испытаний.
Полетный вес GH при испытаниях определяется как сумма
веса пустого самолета, полезной нагрузки, экипажа, остатка топ-
лива и масла в момент выполнения режима. При этом наиболь-
шие погрешности возникают из-за неточного определения остатка
топлива.
Следует учитывать, что как расходомеры так и топливомеры
контролируют объемы топлива. Для пересчета объемного расхода
или остатка топлива в весовой пользуются средним удельным ве-
сом топлива по результатам измерений до и после полета. Вес
определяется обычно по показаниям расходомеров; при большой
продолжительности полета сверяются показания расходомеров и
топливомеров, исправленные по их тарировочным графикам.
Для точного знания расхода топлива в полетах на дальность
производится контрольный слив остатка топлива после полета
с увязкой весов залитого, израсходованного топлива и остатка.
93
3.5. ОПРЕДЕЛЕНИЕ МАКСИМАЛЬНОЙ СКОРОСТИ
ПОЛЕТА САМОЛЕТОВ С ТРД
Для определения максимальной скорости (Мст, VCT) полета
самолетов с ТРД необходимо ее измерить в фактических атмо-
сферных условиях при заданных полетном весе и режиме работы
силовой установки и привести фактические значения максималь-
ной скорости (Мтах, Vmax) к стандартным условиям. Обычно по-
добные измерения производят на 4—5 высотах. Высоты выбирают
с учетом установленного для самолета ограничения по скорост-
ному напору (выше Ногр, см. рис. 3.3).
Для приведения к стандартным условиям максимальной ско-
рости самолетов с ТРД пользуются одним из следующих методов:
— методом оборотов;
— методом виражей;
— методом разгонов;
— методом дифференциальных поправок;
— методом эквивалентной высоты.
Каждый из них имеет свои преимущества, недостатки и воз-
можности применения. Весьма важным в выборе того или иного
метода приведения является применимость к самолету условий по-
добия режимов, что определяется законами регулирования харак-
теристик силовой установки по скорости, температуре и давлению.
Нарушение условий подобия вносит трудности в приведение мак-
симальной скорости к стандартным условиям из-за сложности
определения влияния изменения температуры или давления на
тягу двигателей.
При применении любого метода приведения весьма высокие
требования предъявляются к качеству выполнения летчиком гори-
зонтальных площадок и определению угла снижения при разгонах
со снижением (погрешность в Г при измерении угла может из-
менить величину максимальной скорости на 15—20 км/час).
Обработка полетных записей позволяет построить сетки кри-
вых, по которым находят максимальную скорость для любых усло-
вий полета, или пользуясь условиями подобия, по одной выпол-
ненной площадке, определить эквивалентную высоту, на которой
максимальная скорость в стандартных условиях соответствует из-
меренной скорости, в фактических условиях, либо, наконец, поль-
зуясь дифференциальными зависимостями, внести поправки, учи-
тывающие изменение максимальной скорости при переходе от фак-
тических условий к стандартным (заданным) условиям полета.
Максимальная скорость обычно определяется при среднем по-
летном весе самолета. На тяжелых самолетах иногда определяют
Vmax при двух значениях полетного веса.
Метод оборотов
Метод оборотов основан на рассмотренном выше методе сеток
характеристик, использующем принципы подобия режимов полета
94
по М, Сприв и Гприв. Однозначная связь между тягой Р, оборотами
двигателя п и температурой Т при р = const позволяет отнести зна-
чения чисел М, полученные при летных испытаниях самолета (на
каждом режиме), к вполне определенным величинам приведенной
температуры 7Прив. Для этого необходимо выполнить горизонталь-
ные площадки при установившихся скоростях, различных оборотах
двигателя (4—5 значениях, включая и номинальное) и постоянном
приведенном весе самолета бПрив. Пользуясь зависимостью
Тприв = Тн , для каждого режима полученные значения чи-
\ п /
сел М можно связать с вполне определенными величинами приве-
Р и с. 3. 8. Сетка характеристик режи-
мов горизонтального полета
Р и с. 3. 9. Изменение чис-
ла М и скорости полета
по высоте в стандартных
условиях
денной температуры Тприв. Далее строится график М = /(ТПрив)
для‘постоянного значения приведенного веса (см. рис. 3.8, кри-
вая /), по которому для стандартной температуры, взятой из таб-
лицы MCA (ВСА), по фактической высоте полета принятой за
стандартную, определяется значение максимальной скорости
в стандартных условиях Гст(Мст) для фактического полетного
веса.
Выполнив серии подобных площадок на нескольких высотах,
можно построить полную сетку характеристик (рис. 3.8), по кото-
рой и определяются в дальнейшем значения Мст, VCT. График
Мст=/(Яр) (рис. 3.9) строится по полученным значениям Мст.
Переход от Мст к значению максимальной скорости в стандартных
условиях Уст, выраженной в км!час, выполняется по формуле
1/ст=72,2Мст]/Т;т.
Полученные значения ГСт также наносят на соответствующий
график (см. рис. 3.9).
95
Пересчет максимальной скорости на другой полетный вес осу-
ществляют исходя из условия сохранения постоянства приведен-
ного веса:
^Прив ^ЦрИв.СТ*
Это равносильно тому, что при изменении полетного веса зависи-
мость М = f (7Прив) как бы относится к другой высоте полета:
^н
т. е.
Ро
Рн
G
ст
Рет
GCT
Рс^Рн^-
Он
Далее по этому значению рСт определяют Тст и по графику
M = f(rnpHB), получаемому интерполяцией для нового значения
стандартной высоты, соответ-
Рис. 3.10.
стики Мт
полета
Изменение характери-
по скорости и высоте
у самолета с ТРД
ствующей рст, и новому значению
7СТ, находят Мст, соответствую-
щее измененному весу. Макси-
мальная скорость уменьшается
с повышением температуры и уве-
личением полетного веса.
Аналогично, отклонение оборо-
тов от номинальных /гНом при вы-
полнении режимов можно заме-
нить соответствующим измене-
нием температуры с Тн на Тнприв,
(ТН>ТС1:)
по которой подсчитывается затем
приведенная температура [фор-
мула (3.3)].
Для построения сеток М =
^ПДтрив) в летних условиях
необходимо выполнять режимы при оборотах, превы-
шающих номинальные, так как только в этом случае Тнпрпв ока-
жется ниже 7СТ. Превышение номинальных оборотов разрешается
не на всех типах двигателей, что накладывает определенные огра-
ничения на применение метода оборотов.
По приведенным на рис. 3.8 кривым M = f(rnpHB) легко подсчи-
тать также и показатели Мг для ряда значений ГПрив. Расчет про-
водится по формуле (3.19). Входящие в нее значения Т и М бе-
рутся в соответствующих точках на рис. 3. 8, для которых опреде-
ляются производные дМ/дТ^АМ/АТ.
По полученным значениям Мт строят графики (рис. 3.10), ко-
торые в дальнейшем используются при пересчете максимальной
скорости по методу дифференциальных поправок. Показатель Мт
является функцией числа М и высоты полета, что требует построе-
ния сетки MT = f(M, Нр), позволяющей получать значения Мт для
любых возможных условий приведения.
96
Метод виражей
Метод виражей является разновидностью метода сеток харак-
теристик. Этот метод основан на подобии режимов полета по чис-
лу М, приведенному весу ОпрИв и температуре ТПрив. Он позволяет
при постоянных значениях температуры Тн и давления рн суще-
ственно изменять величину приведенного веса на заданной высоте
путем выполнения виражей при заданном режиме работы двига-
телей с выдерживанием постоянной скорости и перегрузки, вели-
чина которой определяется условием
Сприв=^-^-.
*н
Это позволяет в частности отнести полученную при заданном
режиме работы двигателей скорость на фактической высоте по-
лета Нр к большему полетному весу G'~Gny.
Вводя понятие приведенной перегрузки ^прив=^—---------— ,
Ост Рн
значение которой связано с приведенным весом G соотноше-
ниями GnpHB=^npHBGCT = n!/G-^-, можно рассматривать подобие
Рн
режимов полета с использованием этой величины вместо Сприв.
В частности, принимая Ууприв в первой формуле (3. 15) равным
нулю (полет на постоянной высоте), можно определить зависи-
мость величин пупРив = f (М, ТпРив), графическая взаимосвязь кото-
рых (рис. 3. 11, а) получила наименование сетки приведенных пере-
грузок.
Подобная сетка определяет для выбранных сочетаний числа М
и ТщпВ(Тн) характеристики установившихся предельных виражей:
и позволяет найти значение максимальной скорости Мст (при
пъ—\ и G = GCT), задавшись значением Гн=ТСт, Рст,по ГСт и под-
считав для этого случая н^прив. ст = — (рис. 3. 11,а).
Рст I
Сетки приведенных перегрузок получают обработкой результа-
тов измерений, произведенных при выполнении се$ий установив-'
шихся виражей с 5—6 значениями перегрузки на каждой из трех-
четырех высот при заданных постоянных оборотах двигателей
(номинальных, максимальных). По результатам Измерений Тн,
Via, пу, G, Нр, п и принятому стандартному весу GCT подсчиты-
вают М, Пуприв, Лтрив и строят сетку.
В отличие от метода оборотов метод_виражей не требует со-
блюдения постоянства параметра п/ ]/ Т и допускает наличие до-
полнительных параметров регулирования ТРД, что определяется
постоянством режима работы двигателей при выполнении виражей.
Однако подобно методу оборотов в летних условиях необходима
экстраполяция кривых для определения Мст.
Выполнив горизонтальные сечения сеток приведенных перегру-
зок (рис. 3.11, я) при подсчитанных значениях Пу прив. ст ДЛЯ ВЫ-
4
598
97
Яулрмв
в)
Рис. 3.11. Характер изменения перегрузок
по числу М горизонтального полета:
а—сетка приведенных перегрузок, полученная ме-
тодом виражей; б—характер изменения продоль-
ной перегрузки при разгоне по горизонту-.
(/—для дозвукового самолета; 2 и 3—для сверх-
звукового самолета соответственно на больших и
средних высотах)
бранных значений *рн(Нр), G и пу = 1, получаем зависимости
М = /(ТПрив), совершенно аналогичные полученным по методу обо-
ротов (рис. 3.8), в том случае, если возможно использование пос-
леднего.
Метод разгонов
Метод разгонов основан на измерении в неустановившемся го-
ризонтальном полете действующей на самолет в направлении его
движения продольной перегрузки (пх), либо ускорения (dV/dt),
получаемого графическим дифференцированием по времени записи
самописца скорости.
Переход от перегрузок в связанных осях, регистрируемых в по-
лете самописцем, к перегрузкам в скоростных осях производится
при помощи приближенной формулы
nx^nxl~-~nyl, (3.21,)
где пхХ и пу1 — измеренные в полете значения проекций перегруз^
ки на продольную и вертикальную оси самолета-
а —угол атаки в град.
Метод разгонов не требует подобия режимов работы силовой
установки при изменении условий измерений. Этот метод универ-
сальнее, чем метод сеток, менее трудоемок, но и менее точен из-за
относительно больших погрешностей в измерениях продольного
ускорения. Приведение к стандартным условиям выполняется при
помощи дифференциальной поправки,, учитывающей влияние на
тягу двигателя отклонения температуры от стандартной при неиз-
менных значениях М и Нр, принимаемых за стандартные.
Разгоны выполняются при условии /7 = const от скорости, соот-
ветствующей максимальному качеству самолета, до максимальной
скорости при ГН<ГСТ. На последнем этапе при Тн>Тст разгон вы-
полняется со снижением, с тем чтобы получить график зависимости
пх = /(М) в более широком диапазоне скоростей (по числу М), до-
статочном для приведения. На рис. 3. 11,6 показан характер изме-
нения величины продольной перегрузки пх для дозвукового 1 и
сверхзвукового самолетов (2 и 5). Кривая 3 соответствует средним
высотам, а 2 — высотам вблизи потолка сверхзвукового самолета,
когда при разгоне в горизонтальном полете возможен выход его на
границу потолка (см. рис. 3. 3, кривая 2, высота, отмеченная пунк-
тирной линией).
На участке разгона со снижением значения продольной пере-
грузки пх отрицательны, так как дальнейшее увеличение скорости
обеспечивается не избыточной тягой двигателя, а направленной
вперед проекцией силы веса самолета. В фактических условиях
горизонтального полета значение мх = 0 на режиме разгона соот-
ветствует максимальной скорости. При переходе к стандартным
99
4*
условиям в случае сохранения значений М и Нр изменяется тяга
двигателя на величину
ЬР = РСТ-РН, (3.22)
соответствующую АТ = Тст—Тн, что вызывает изменение продоль-
ного ускорения.
Если принять рн = Ра и МН = МСТ (т. е. при пересчете продоль-
ной перегрузки учитывать только изменение тяги при переходе от
фактических к стандартным условиям), то поправку к пх можно
определить по формуле
^хТ^^хст (3.23)
и
Переходя к приведенным значениям тяги, получаем
(^прив.ст “ ^прив
ИЛИ
ДР=-^- дг. (3. 24)
А) Х^прив'
Подставляя выражение (3.24) в уравнение (3.23), получаем
д^=^тЧ^)ДЛ (3-25)
G Pq \ОГ
прив/
Сместив начало отсчета пх вверх или вниз на величину АпхТ
(рис. 3. 12) в зависимости от знака отклонения температуры АТ,
получим в точке пересече-
ния с кривой nx=f(M)
значение максимальной
скорости в стандартных
условиях Мст. Производ-
ную изменения тяги дви-
гателя по температуре
^^прив/^ТцрИВ в выраже-
нии (3.25), являющуюся
функцией числа М и при-
веденной температуры,
берут по результатам
стендовых испытаний дви-
гателей с учетом допол-
нительных потерь тяги.
Обычно потери тяги, опре-
входных и выходных кана-
лов двигателя, на дозвуковом самолете составляют 2—6%. Поэто-
му для учета потери тяги при переходе от стендовой к самолетной
компоновке двигателя производная полученная по ре-
100
Рис. 3.12. Схема получения Мст по зависи-
мости пх = /(М)
деляемые особенностями
зультатам стендовых испытаний двигателя, должна быть умножена
на коэффициент g=0,94-?0,98. На сверхзвуковом самолете потери
могут быть значительно больше.
Если при изменении оборотов обеспечивается подобие режи-
мов работы двигателя, то величина дРприв/дТприв может быть опре-
делена экспериментально, при помощи метода оборотов. Если у
ТРД выдерживаются постоянные пприв, то при разгоне необходим
учет запаздывания автоматики (см. стр. 112).
Выбор высот выполнения разгонов и методы обработки мате-
риалов после получения Мст ничем не отличаются от рассмотрен-
ных выше (см. стр. 94). Методом разгонов обычно определяют мак-
симальную скорость сверхзвуковых самолетов.
Метод дифференциальных поправок
Выше были рассмотрены принципиальные основы метода диф-
ференциальных поправок. При определении максимальной скоро-
сти метод дифференциальных поправок позволяет, получив на пло-
щадках в фактических условиях (Нр, THi GH) на ряде высот зна-
чения Мн, привести их к стандартным или заданным условиям
путем внесения в результат измерений соответствующей поправки
Мст = Мн + дМ,
где
дМ=МГМ + М„М + М0М — ;
тн Р Рн О
Мт, Мр, MG —показатели, определяющие относительное измене-
ние максимального числа М в зависимости от от-
носительного изменения температуры, давления и
полетного веса;
АЛ т
Мг =--------;
г М дТ
р М. др
АЛ G
Мл =----
° М
ЗМ
dG
Подобным образом учитываются отклонения температуры, дав-
ления и веса от значений, принятых за стандартные.
При проведении летных испытаний для уменьшения погрешно-
стей обычно так выбирают стандартную высоту и полетный вес,
чтобы поправка была минимальной. Например, если принять, что
Рн — рс^ и GH=GCT, то при приведении величина поправки опреде-
ляется только отклонением температуры от стандартного ее зна-
чения
дМ = МгМ—
тн
(дифференциал dTH заменяется конечной разностью АГН =
— Тст—Тн).
101
Если Тн = Тст и GH=GCT, то поправка равна
дМ = МоМ-^,
Рн
где крн— Р^ — Рн (Рст соответствует Тн по таблице стандарт-
ной атмосферы).
Применение метода дифференциальных поправок требует зна-
ния показателей, которые могут быть получены как эксперимен-
тальным путем, так и расчетом. Однако расчет не всегда обеспечи-
вает необходимую точность. Поэтому метод дифференциальных по-
правок применяется главным образом при испытаниях серийных
самолетов, для которых сетки изменения показателей по числу М
и высоте определяются в процессе проведения испытаний опытных
и первых серийных машин.
Метод дифференциальных поправок принципиально позволяет
выполнять приведение максимальной скорости самолетов к задан-
ным условиям при любом типе двигателей. Необходимым условием
является знание производных дР1дТ и дР1дНр в нужном диапазоне
изменения температуры, высоты и числа М.
3.6. ПОДОБИЕ РЕЖИМОВ РАБОТЫ
ТУРБОВИНТОВОГО ДВИГАТЕЛЯ И ОПРЕДЕЛЕНИЕ
МАКСИМАЛЬНОЙ СКОРОСТИ ПОЛЕТА САМОЛЕТОВ
С ТВД
Определение максимальной скорости и других летных характе-
ристик на самолетах с ТВД и ТРД в части подготовки к испытаниям,
выбора высот, выполнения испытательных режимов и первичной
обработки записей имеет много общего. При испытаниях самолетов
с ТВД для пересчета характеристик к стандартным или заданным
условиям (по температуре, высоте, полетному весу, оборотам
двигателей) возможно использование с некоторыми изменениями
методов, используемых для самолетов с ТРД.
Отличия определяются особенностями турбовинтового двига-
теля, создающего тягу на этом самолете с помощью воздушного
винта. Эффективность ТВД по созданию тяги оценивается мощ-
ностью, которая в общем случае является функцией расхода топ-
лива Q, скорости полета V, оборотов двигателя /г, атмосферного
давления температуры воздуха Тн, чисел Re турбины, ком-
прессора и выхлопного сопла ReT.K.c:
N=f(Q, V, Рн. Тн, п, Re,K.c). (3.26)
Для удобства пересчетов при рассмотрении режимов работы
ТВД и приведении летных характеристик самолета с ТВД к задан-
ным или стандартным условиям, так же как и для ТРД вводятся
понятия приведенных оборотов /гПрив, приведенного расхода топ-
102
лива QnPHB, приведенной эквивалентной мощности NeapaB и приве-
денной мощности, создаваемой тягой реактивного сопла Л^рприв,
а скорость полета заменяется числом М.
Здесь:
^Прив
QnP.,B=SQ ^1/— 1/£-
Рн У тн Рн У Тн
(так же как и для ТРД значение коэффициента полноты сгора-
ния 6, близкое к постоянному в диапазоне высот используемых
самолетами с ТВД, в выражении для фприв обычно опускается),
TV =N f
е прив е „ I / т >
Рн У Т"
N —N Ро / _£о_
1 v Р Прив 1}/Р „ 1/ т
Рн У тн
Значение эквивалентной приведенной мощности складывается
из потребляемой винтом Л^вприв и создаваемой тягой реактивного
сопла Л/^рприв’
________дт | прив
е прив ^*вприв~Т"
ЧВ
Значения чисел ReT.K.c турбины, компрессора и сопла одно-
значно связаны с числом Re полета, которым они обычно и заме-
няются.
В соответствии с (3.26) и рассмотренными выражениями вели-
чина эквивалентной приведенной мощности в общем случае яв-
ляется функцией следующих величин:
Ne прив=/(Фприв» М, ^прив»
(3. 27)
В силу несовершенства винта как движителя не вся эквива-
лентная мощность преобразуется в полезную
^прив=пв^прив. (3.28)
Коэффициент полезного действия винта т]в является функцией
коэффициента скорости (относительной поступи) X, коэффициента
мощности р и концевого числа М лопасти винта Мг:
ПВ=/(Х, р, мд
103
В соответствии с теорией воздушного винта* значения этих
величин определяются выражениями
__ V 60 я0М
ncD i ^прив^
75ЛГВ ^75 / 60_\з gR TQ ^вприв .
en®£>5 \ i ) D5 р0 п®рив
м =i/"V2 + “2 —\f w-1 (nDi YПприв
r V igRT V \ 60 J a0 ’
где /гс —обороты винта в-секунду;
/ — передаточное отношение редуктора винта (// = -7—1;
//—окружная скорость конца лопасти винта;
D — диаметр винта.
Подставив значения переменных в выражение для т]в, имеем
^в ^прив> прив)
или, учитывая (3.27),
’lB = /(QnPHB> М, яприв, Re).
Возвращаясь к (3.28), получаем выражение, определяющее
полезную мощность с учетом коэффициента полезного действия
винта через удобные для измерения в полете переменные:
^прив ^в^е прив ^(Рприв’ М, ^прив’ R^).
Для современных ТВД, обороты которых лежат в области мак-
симума к. п. д., изменение оборотов и числа Re в возможных пре-
делах при приведении обычно практически не сказывается на по-
лезной мощности. Вследствие этого при приведении можно считать,
что приведенная полезная мощность является функцией только
числа М и приведенного расхода топлива
^прив~?«2прив, М). (3.29)
Изменение приведенной мощности ТВД, в интересующих пре-
делах при приведении летных характеристик к заданным усло-
виям, практически линейно связано с изменением расхода топлива,
т, е. производная дМприв/дфприв практически постоянна для задан-
ного значения числа М полета. Эта особенность ТВД позволяет
в широких пределах применять метод дифференциальных попра-
вок для учета влияния изменения мощности на летные характе-
ристики.
* См., например, И. В. Остославский, И. В. Стражева. Динамика
полета. Оборонгиз, 1963 г., стр. 127.
104
Максимальный расход топлива ТВД обычно определяется
мощностью, допустимой по прочности редуктора на малых высо-
тах и температурой газов перед турбиной на больших высотах.
Второе условие может ограничивать расход топлива и на малых
высотах при высоких температурах воздуха Тн. Расход топлива
ТВД на высотах ограничения мощности по температуре газов пе-
ред турбиной (рис. 3. 13), при обычно применяемом регулировании
по внешним параметрам (К Р> Т), удобно определять выражением
типа
Q—Д^АС, (3.30)
где Д— постоянный коэффициент, определяемый особенно-
стями типа двигателя;
р*— полное давление на входе в двигатель;
А=/(Т*)—величина, определяемая температурой воздуха на
входе в двигатель;
С— коэффициент, величина которого определяется углом
поворота рычага настройки топливного автомата ав<
контролируемым в полете по положению стрелки
указателя УПРТ (ав по УПРТ).
На высотах ограничения мощности по прочности двигателя рас-
ход топлива определяется выражением типа
Q-(4'+Bpo+B>;-aQ)C. (3.31)
Здесь Д', В, В'—постоянные для данного типа двигателя вели-
чины;
pi—полное давление воздуха на входе в двига-
тель;
• &Q=A'(T*— Т4) —«срезка» топлива — уменьшение расхода топ-
лива, определяемое допустимой температурой
газов перед и за турбиной (Т4).
В результате сочетания разных законов регулирования высота
ограничения мощности меняется (рис. 3.13), увеличиваясь при
температуре ниже стандартной и уменьшаясь при температуре
выше стандартной. Срезка топлива AQ существенно уменьшает
мощность ТВД при высоких температурах воздуха у земли
(рис. 3. 14). Например, для ТВД, имеющего мощность 2700 л. с.,
в стандартных атмосферных условиях срезка топлива уменьшает
мощность на 35—50 л. с. на каждый градус повышения темпера-
туры сверх допустимой для работы без срезки. Таким образом,
расход топлива Q и мощность ТВД меняются в соответствии с при-
веденными закономерностями при изменении полного давления р*,
температуры Т\н на входе в двигатель и положения рычага на-
стройки топливного автомата ав.
105
Рис. 3. 13. Схема изменения мощно-
сти ТВД по высоте полета в стан-
дартных, зимних и летних условиях:
1 — стандартные условия; 2 — температура
выше стандартной; 3—температура ниже
стандартной
Рис. 3.14. Схема ограничения мощности ТВД
по температуре воздуха у земли
106
Определение максимальной скорости
самолета с ТВД
Для определения условий подобия режимов полета самолета
с ТВД воспользуемся уравнениями движения в приведенном виде
(3. 12), выведенными при рассмотрении подобия режимов полета
самолета с ТРД
Рприв = у P^XS М +Сприв м ^,^7^ ’>
V2
у прив
М2х£7?Г0
p0CyS М2.
Так как эффективность турбовинтового двигателя оценивается
не тйгой, а мощностью, то в первом уравнении перейдем от приве-
денной потребной тяги РПрйв к приведенной полезной потребной
мощности Мтрив. Для этого необходимо все члены уравнения умно-
жить на скорость полета в стандартных условиях у земли (при
Х^=760 мм рт. ст. и температуре + 15°С), выраженную через число
М(У=Ма0), так как Мприв = РпривУ = РпривМа0. После подстановки
в первое уравнение и сокращения, с учетом что М ]/ х§/?То = Мао,
получаем уравнения движения в виде
'^прив 2 Pq^qCj^ М. "4” ^прив^# Прив’
V2
v у прив
p^CyS М2.
(3.32)
Здесь Мтрив — суммарная приведенная полезная мощность двига-
телей, потребная для выдерживания установившегося режима по-
лета при заданных значениях М, Оприв и Умирив.
В пределах изменений параметров движения при приведении
сх обычно практически не зависит от числа Re, т. е. можно счи-
тать функцией только су и М:
cx=f(Cy, М). (3.33)
Рассматривая уравнения (3.32), имеем
-^прив ^ПрИВ» Vy Прив)» | (2 24)
Су fl (М, ^прив» У прив)* )
Потребная для полета мощность обеспечивается двигателями,
что позволяет в соответствии с (3.29) записать
^np„B=7VnpBB.B=/(Qnp„B, М). (3.35)
В четыре уравнения (3.33), (3.34) и (3.35) входят семь пере-
менных величин Л4, С?прив» У^/прив» QnpHB, А/прив» су^ что позволяет,
107
приняв за параметры три из них, определить остальные. Наиболее
удобно при испытаниях принять за параметры (критерии подо-
бия)— Сприв, Vy прив и QnpHB. В этом случае, при принятых выше
предположениях о пренебрежении влиянием пприв и Re на мощ-
ность двигателей и сопротивление, для режимов полета на постоян-
ной скорости, включая и режимы набора высоты *, число М опре-
деляется выражением
№ ^(^прив> У прив! QnpHe)’
Для режимов горизонтального полета (УрПРив = 0) число М
определяется как функция только
М=/(Оприв, Рприв). (3.36)
Выведенная зависимость -позволяет определить максимальную
скорость методом сеток, т. е. построением сеток (рис. 3.15), по-
требных для горизонтального полета расходов топлива
QnpHB.потр У1(^> ^Прив)> _
(3. 37)
QnpHB.потр === /2(М, GH, Нр) J
и располагаемых расходов топлива по характеристикам двигате-
лей в стандартных условиях при заданном для определения макси-
мальной скорости режиме их работы
QnpHB.расп /з(М, ^прив)> 1 оо
> (3. Зо)
QnpHB.расп == /4(М, нру J
Значение Мст определяется (рис. 3. 15) в точках пересечения
кривых QnpHB.n0Tp и QnpHB,pacn для соответствующего приведенного
веса GnpHB, либо кривых фприв.потр и Рприв.расп для фактического
полета веса GH на высоте Нр, принятой за стандартную.
Потребные для горизонтального полета расходы топлива опре-
деляются путем выполнения на заданной высоте 5—6 площадок —
режимов установившегося горизонтального полета при выбранных
значениях скорости полета (М), либо положениях рычага топлив-
ного автомата, задаваемых по указателю летчика (ав по УПРТ).
На каждой площадке замеряется скорость, высота, температура
воздуха, фактический расход топлива QH, контролируются пара-
метры работы двигателя и остаток топлива — для определения
* Возможность исключения пПрив из параметров подобия для набора вы-
соты вблизи земли (в частности при выпущенной механизации) или в случае
значительной разницы условий полета при приведении должна определяться
после рассмотрения особенностей законов регулирования двигателей испытывае-
мого самолета.
108
фактического полетного веса. По полученному расходу топлива и
высоте вычисляется QnpuB» либо Q прив по формулам
QuP™=QhVh — iZt2- [кг1час],
Рн \/ тн
Q Прив — Qh4h V/ у,СТ
(3. 39)
Значение ун удельного веса топлива берется средним по изме-
рениям до и после полета (на земле). Расход топлива фприв яв-
ляется потребным для горизонтального полета в стандартных
Рис. 3. 15. Сетка потребных для горизонтального полета и располагаемых
по характеристикам двигателей расходов топлива самолета с ТВД
(±25 кг!час—границы допуска на расход топлива)
условиях при полученном числе М и приведенном весе СПрив =
= GH —; расход топлива ф'прив соответствует этому же числу М,
Рн
но отнесен не к СПрив, а к фактическому весу GH и фактической
(средней) высоте полета Нр. Точка пересечения кривой, проведен-
ной через полученные точки, с кривой располагаемых расходов
топлива, взятой по характеристикам двигателей (рис. 3.15), опре-
деляет максимальную скорость в стандартных условиях (±ДМСТ —
влияние допуска на расход топлива).
Выполнение аналогичных измерений на 4—5 высотах позво-
ляет получить сетки, определяющие изменение максимальной ско-
109
рости с высотой полета (рис. 3. 16). Ограничение мощности на ма-
лых высотах не вносит принципиальных изменений в схему выпол-
нения режимов и в обработку для
получения максимальной ско-
рости. Однако в пределах вы-
сот ограничения мощности мак-
симальная скорость на самоле-
тах с ТВД обычно не опреде-
ляется, так как она оказывает-
ся выше (рис. 3. 16) мак-
симальной разрешаемой инди-
каторной скорости, установлен-
ной для самолета из условий
прочности. Кривая, 'выражаю-
щая зависимость максималь-
ной скорости (Мст) от высоты
полета, проводится через полу-
ченные ТОЧКИ Мст И ТОЧКуЯпракт,
полученную при определении
потолка самолета. Отклонение
располагаемого расхода топли
ва от регламентированного
даже в пределах допуска (см.
рис. 3. 15), существенно влияет
на величину максимальной ско-
рости, в связи с чем особенно
необходимо оценить фактиче-
ские располагаемые расходы
топлива. Это легко сделать на
Рис. 3. 16. Зависимость максималь-
ной скорости полета самолета с ТВД
от высоты
многомоторном самолете, выполнив при 3—4 значениях скорости
горизонтальные площадки с замером расхода топлива при номи-
нальной мощности проверяемого двигателя и задросселированной
мощности других двигателей.
Для определения максимальной скорости самолетов с ТВД
применим метод дифференциальных поправок. В этом случае при
Т дМ и ,,
наличии показателя Мт =-----для Нр и Мн, к замеренному на
горизонтальной площадке значению Мн при фактической темпе-
ратуре Тн прибавляется поправка, учитывающая влияние откло-
нения температуры Тн от стандартного значения Тст для рн=рСч,
соответствующего Нр.
МСТ=М„+МГ-^ д7\
При использовании метода виражей условия подобия режимов
сохраняются, если вместо 6прив берется его значение, умноженное
на величину перегрузки
Gприв = Gнпу•
рн
ПО
Применение метода виражей позволяет, например, оценить влия-
ние на максимальную скорость изменения веса при постоянной вы-
соте полета Нр, так как потребный для полета на вираже расход
топлива соответствует полетному весу в прямолинейном полете,
определяемому выражением
G' — G нпу.
Виражи на самолетах с ТВД и ТРД следует выполнять с на-
бором высоты в 15—20 м за виток, с тем, чтобы поддержать посто-
янство приведенного веса ОпрИв (компенсировать влияние выгора-
ния топлива) и избежать попадания в собственный вихревой след,
которое обычно создает возмущение, срывающее выполнение ре-
жима.
При желании оценить влияние на максимальную скорость
отклонения оборотов необходимо выполнить режимы при постоян-
ном фприв на двух высотах и определить частную производную
<5Л1/дпприв, использовав полученные значения М и Пцрив:
д^прив ЯПрИВ1 ^прив2
Если возможно менять пприв настройкой автоматики, то назван-
ная зависимость может быть получена на постоянной высоте после
определения значёний М, соответствующих двум заданным значе-
ниям приведенных оборотов Мприв при постоянном заданном рас-
ходе топлива (Зприв. В. случае выполнения аналогичных режимов
с выдерживанием постоянного значения числа М возможно полу-
чение производных
dQnpHB_ QnpHBl Фприв2 /Q
'-------------------к О • W)
прив ^прив! ^прив2
при изменении /гприв любым рассмотренным способом.
Для самолетов с двигателями, схема регулирования которых
предусматривает постоянство физических оборотов, выполнив на
двух высотах площадки при постоянном значении приведенного
веса Сприв (разных фактических весах, либо виражи при разных
перегрузках), получаем производную, определяющую влияние из-
менения температуры на максимальную скорость
дМ __М1 —М2
дТ ~ — Т2
Сохраняя соответственно постоянство не <?прив, а числа М (ме-
няя расход топлива), получаем производную
^QnpHB QnpHBl Qnpne2
дТ ~ 7\ — Т2
(3.41)
ш
Следует обратить внимание на необходимость особо тщатель-
ных и точных измерений при испытаниях, связанных с определе-
нием производных
д М д М дфприв ^Фприв
д^прив
так как в этих случаях оцениваются малые влияния приращений
рассматриваемых параметров на большие величины, когда точ-
ность измерений существенно снижается. Имея названные произ-
водные и пользуясь приведенной выше общей схемой метода диф-
ференциальных поправок [см. выражения (3.18), (3.19), (3.20)],
легко подсчитать соответствующие показатели и поправки при
отклонении каждого из рассмотренных условий от интересующего
(стандартного' значения).
Применение метода разгонов на самолетах с ТВД обычно обес-
печивает меньшую, чем другими методами точность, вследствие
малых продольных ускорений и необходимости учета влияния на
расход топлива запаздывания термопатрона топливного автомата
двигателя в процессе разгона [см. (3. 30)]_
Величина этого влияния AQ3an определяется выражением
AQ3an=Q-Q'=-^-^Xr. (3.42)
Здесь Q—-расход топлива на установившемся режиме;
Q'— расход топлива на неустановившемся режиме;
dQ
—— производная, определяющая изменение расхода топ-
лива в зависимости от температуры;
dT
-----скорость изменения температуры;
dt
—постоянная времени датчика температуры топливного
автомата, составляющая обычно 20 — 40 сек.
Величина может быть оценена сопоставлением расходов
топлива при разгоне и на установившихся значениях скорости на
постоянной высоте Нр, что позволяет измерить Q—Q'. Если из-
вестна характеристика — и замерено dT/dt, легко определяем
Величина меняется с изменением условий полета (7, Нр, М),
определяющих быстроту теплообмена между датчиком и воз-
духом. Для других условий Кт может быть получена пересчетом
т \tJ к рм } v 7
Совершенно аналогичные трудности учета влияния запаздыва-
ния датчика температуры на расход топлива при разгоне возни-
кают при определении характеристик самолетов с ТРД, имеющих
схему регулирования по приведенным оборотам и подобный дат-
чик температуры.
112
3.7. ОПРЕДЕЛЕНИЕ НАИВЫГОДНЕЙШИХ СКОРОСТЕЙ
НАБОРА ВЫСОТЫ
Р и с. 3.17. Скорости, при которых вы-
полнялись зубцы (отмечены точками),
и график вертикальных скоростей для
самолетов с ТРД (/) и ПД (2)
Испытания по определению характеристик скороподъемности
и практического потолка самолета делятся на два этапа:
1) определение наивыгоднейших скоростей набора высоты
Унаив, при которых вертикальные скорости максимальны;
2) выполнение набора практического потолка с выдерживанием
наивыгоднейших скоростей Унаив-
Наивыгоднейшие скорости набора высоты определяются мето-
дом «зубцов» либо методом разгонов. Метод зубцов заключается
в выполнении установив-
шихся режимов набора вы-
соты (зубцов) продолжи-
тельностью по 25—30 сек
для замера вертикальных
скоростей при нескольких
значениях установившейся
скорости полета и заданном
постоянном режиме работы
двигателей, на котором пред-
полагается выполнять на-
бор высоты (максимальный,
номинальный либо форсаж-
ный). Скорости выбирают
так (рис. 3. 17), чтобы охва-
тить область ожидаемой по
расчету наивыгоднейшей скорости на средней высоте выполнения
зубцов. Зубцы выполняются на трех-четырех высотах, что позво-
ляет после определения наивыгоднейших скоростей построить гра-
фик их изменения по высоте полета.
При обработке записей для каждого из выполненных зубцов
рассчитывают среднюю вертикальную скорость
где д//р —разность высот на участке установившегося набора
высоты;
д/ —время, затраченное на набор высоты д//р.
Полученные значения Vyp соответствуют средней скорости, при
которой выполнялся набор высоты. Скорость выражается либо
в виде приборной скорости Упр.испр, либо в виде числа М набора
высоты. Сочетания вертикальной скорости и скорости полета опре-
деляют экспериментальные точки (см. рис. 3.17), через которые
проводится плавная кривая. Максимум вертикальной скорости
определяет наивыгоднейшую скорость набора для высоты, на ко-
торой выполнялась серия зубиов. Аналогичным образом опреде-
ИЗ
Рис. 3. 18. Профиль наивыгодней-
ших скоростей набора высоты
0 200 **00 600 000 км/час
ляют наивыгоднейшие скорости набора высоты для других высот,
после чего строят график Упр.наив=/(Нр) (рис. 3. 18), представляю-
щий собой профиль наивыгоднейших скоростей набора высоты.
Обычно при этом выполняется некоторое осреднение, облегчаю-
щее запоминание наивыгоднейших скоростей набора и не влияю-
щее существенно на вертикальные скорости.
Метод зубцов применяется тогда, когда необходима высокая
точность определения вертикальных скоростей и наивыгоднейшей
скорости набора высоты при вер-
тикальных скоростях менее 10—
15 м!сек (на высотах, вблизи
статического потолка, при опреде-
лении наивыгоднейшей скорости
набора высоты в полете с выпу-
щенной механизацией крыла и с
частично остановленными двига-
телями).
Если вертикальные скорости
превышают указанные значения
и продолжительность полета
ограничена, применяют метод
разгонов. Он отличается от рас-
смотренного метода тем, что на
заданных высотах вместо зубцов
выполняются разгоны по горизон-
ту с соблюдением всех других,
определенных выше условий,
продольную перегрузку изме-
В процессе разгонов замеряют
нение скорости по времени, высоту и контролируют работу дви-
гателей. Уравнения движения позволяют по замеренным величи-
нам определить наивыгоднейшую скорость набора высоты и вер-
тикальную скорость. Действительно, для разгона самолета на
постоянной высоте
„ __L dV -P~Q
х g dt G ’
где Q — лобовое сопротивление самолета.
Для набора высоты уравнение продольного движения имеет
вид
(3. 44)
(3. 45)
О dV п г п
—< =Р — О — G sin 9,
g dt
где 0 — угол наклона траектории полета к горизонту (угол набора
высоты); sin 9 = VylV.
При сохранении постоянной скорости по траектории (dV/dt = O)
после деления на G равенство (3.45) можно привести к виду
= (3.46)
G V
114
Сравнивая выражения (3.46) и (3.44), получаем
P-Q Vv .... =J_ dV_
Q V x g dt '
(3. 47)
Рис. 3.19. Схема опре-
деления наивыгоднейшей
скорости набора высоты
Таким образом, при разгоне самолета по горизонту или наборе
высоты продольное движение определяется уравнением, позволяю-
щим перейти от пх или dV/dt к Vy/V. Это дает возможность по за-
мерам любой из первых двух названных величин при разгоне по
горизонту определить как величину вертикальной скорости Vy,
так и наивыгоднейшую скорость, которую будет иметь самолет при
наборе высоты. Для этого, выполнив
разгон по горизонту от скорости, соот-
ветствующей максимальному качеству
самолета, примерно до 0,9Vmax, необ-
ходимо произвести следующую элемен-
тарную обработку полетных записей:
а) разделить запись самописца
скорости на отрезки через 10—15 сек;
б) подсчитать для каждого отрезка
приращение скорости AV; и среднюю
скорость Vi ср (с учетом аэродинамиче-
ских поправок);
в) подсчитать произведение прира-
щения скорости на среднюю скорость
для каждого отрезка AViVicp,*
г) выбрать значение пх при Vi ср и
подсчитать произведение nxV, равное
Vy по (3.47), где V — истинная ско-
рость, соответствующая Vi ср;
д) построить график (рис. 3.19).
Максимумы произведений АКК-ср
и
nxV определяют наивы-
годнейшую скорость набора высоты. При обработке приращений
скорости нет необходимости переходить от индикаторных к истин-
ным скоростям, так как
Vy=—V
g
dV__
dt 1 dt ’
(3.48)
где д==—.
00
Результат без перехода к истинным скоростям отличается от
Vy постоянным множителем 1/А, что не вносит искажений в опре-
деление наивыгоднейшей скорости. По выражению (3.48) можно
подсчитать вертикальную скорость Vy для любого значения ско-
рости при разгоне.
Если эксперимент проведен достаточно тщательно, то наи-
выгоднейшие скорости, определенные обоими методами, должны
отличаться незначительно (не более чем на 10—15 км/час).
115
Выполнение разгонов на малых и средних высотах и зубцов
на высотах, где вертикальные скорости малы, позволяет получить
профиль скоростей набора высоты (из одного или двух отрезков
Рис. 3.20. Зависимость вертикальных скоростей,
скоростей набора высоты и температуры воздуха
от высоты при полете на скороподъемность (номи-
нальный и форсажный режимы работы ТРД)
прямых, см. рис. 3.18). Наивыгоднейшие скорости набора высоты
не приводятся к стандартным условиям и часто задаются значе-
нием числа М, которое меньше меняется с высотой (рис. 3.20).
3.8. ОПРЕДЕЛЕНИЕ СКОРОПОДЪЕМНОСТИ
И ПРАКТИЧЕСКОГО ПОТОЛКА
Полет на определение скороподъемности и практического по-
толка самолета включает взлет, разгон до наивыгоднейшей скоро-
сти на малой высоте (до Я=500н-1000 м), набор высоты с выдер-
живанием профиля наивыгоднейших скоростей и заданного ре-
жима работы двигателей. Набор высоты прекращается при умень-
шении вертикальной скорости до 0,5—1,5 м/сек. При снижении
на 5—6 высотах выполняются режимы горизонтального полета
с постоянной скоростью — «площадки» продолжительностью по
2—3 мин для замера температур воздуха- Тн, необходимых для
подсчета поправок к полученным значениям вертикальной скоро-
сти при приведении их к стандартным атмосферным условиям.
Если продолжительность полета недостаточна для измерения
116
температуры, то применяют малоинертные термометры, позволяю-
щие измерять температуру в процессе набора высоты, или изме-
ряют температуру при помощи другого самолета.
Для выполнения полета выбирается время, когда отсутствуют
интенсивные вертикальные (восходящие и нисходящие) потоки
воздуха/ а также значительные изменения скорости (более 5 м/сек
на 1 км высоты) и направления ветра по высоте, снижающие точ-
ность определения вертикальной скорости.
В полете измеряются скорость и высота, а также регистрируются
величины, характеризующие работу двигателя (обороты, темпе-
ратура газов, расход топлива).
При обработке полетных записей делают отсчеты через отрезки
времени At в 15, 30, 60 или 90 сек в зависимости от величины вер-
тикальной скорости и для каждого отрезка определяют среднюю
высоту Нр ср и среднюю расчетную вертикальную скорость Vyp. (
н = v . (3 49>
р 2 а р ' 7
Затем по результатам измерений строят кривую изменения
фактической температуры по высоте (см. рис. 3.20) в сочетании
с графиком ее стандартных значений, а также получаемые после
приведения кривые изменения по высоте стандартных значений
1/^ст и Мнаб. Характеристики работы двигателей (обороты, темпе-
ратура газов за турбиной 7\, расход топлива и т. д.) используют
для контроля их режима и подсчета расхода топлива при наборе
высоты.
Для приведения характеристик набора высоты к стандартным
условиям средняя высота по давлению на каждом отрезке времени
принимается за стандартную (Нр Ср = Нр ст). При этом условии
к величине вертикальной скорости необходимо добавить поправку
AVy, учитывающую влияние отклонения фактической температуры
Тн от стандартного значения Тст, соответствующего средней вы-
соте Нрср. Поправка &Vy определяется изменением тяги двигате-
лей, вызываемым влиянием отклонения фактической температуры
Тн от ее стандартного значения Тст, и зависит от аэродинамиче-
ских особенностей самолета (нагрузки на крыло G/S, эффектив-
ного удлинения ЛЭф).
В зависимости от особенностей систем регулирования двигате-
лей изменение температуры по-разному влияет на тягу, в связи
с чем несколько меняются расчетные формулы для пересчета лет-
ных характеристик, а также входящие в них коэффициенты.
Однако для приведения характеристик набора высоты к стандарт-
ным условиям, как правило, применяется метод дифференциаль-
ных поправок, позволяющий достаточно точно и просто выполнить
расчеты и учесть влияние возможных отклонений в весе самолета
и режиме работы двигателей от принятых за стандартные. Вели-
117
чину вертикальной скорости для стандартных атмосферных усло-
вий Vy ст находят по формуле
VУ ст— '//Z/p+ &V У
(3. 50)
Величину AVy определяют для каждого типа самолета, учиты-
вая особенности его аэродинамики и влияние отклонения темпе-
ратуры от стандартного значения на тягу силовой установки. Так,
для самолета с ТРД формула для подсчета AVy имеет вид
дУ₽=-0,5
35,7AnG \ТН , iJf / Р П if
MIC tv,
1 /~ н
K^SVi \/
(3.51)
где Vi выражено в км/час-,
. Иприв дР прив о
hn =------------показатель, учитывающий влияние на тягу
Рприв ^прнв двигателя отклонения приведенных оборотов.
При постоянной высоте и скорости изменение тяги АР, вызван-
ное отклонением оборотов Ап и температуры АТН от стандартных,
определяется формулой
Р п п 2 Тст
где
ДГн— 7 стТн.
Знак показателя hn обратен знаку АТН, так что при повыше-
нии температуры вертикальная скорость падает и, наоборот, при
понижении — увеличивается.
Влияние на вертикальную скорость отклонения полетного веса
от принятого за стандартный для самолетов с ТРД можно учесть,
пользуясь формулой
AVy=-lVy-\
36,7G/S \ AG
V ) G
(3. 52)
С увеличением веса вертикальная скорость уменьшается и на-
оборот. Полученные сочетания значений и Нр ср определяют
кривую Vy CT = f(Hp) (см. рис. 3.20), которая проводится через
точки в виде отрезков прямых с изломом на границе стратосферы,
вызываемым изменением закона распределения стандартной тем-
пературы по высоте. Практический потолок ЯпРакт соответствует
высоте, на которой Vy ст = 0,5 м/сек.
Для самолетов схТВД стандартное значение вертикальной ско-
рости Ууст по замеренному значению Vyp подсчитывается по фор-
118
муле, учитывающей те же особенности, что и для самолетов с ТРД.
При принятых условиях, приведения (Нр Ср = Нр ст; GH=GCT)
1/—
Vy „=Vy —— Н--------— F. (3. 53)
»ст i/p х__Кт т \ —
Здесь
d-^прив dQnpHB
\Т КТ АГ\ АТ Т//)
j, ^прив.ст ^*при#/7 С'Ч'прив 01
/\ :
•^прив.ст -^прив.ст
— коэффициент, учитывающий изменение мощности силовой уста-
новки, при отклонении температуры от стандартной;
1 е / с2 \
F = V *РнаИ ст — ( Сх. + ) М3 =
2 UH \ ЛЛэф /
= 2!^ Мз 1_1
2 ОПрИв г Т'о , лэф
— коэффициент, учитывающий влияние параметров самолета
, cXq, су, Хэф^ на потребную для горизонтального полета мощ-
ность. Для упрощения расчетов целесообразно построить рабочие
графики (рис. 3.21), по которым и определяются значения Кт и F
при приведении.
Значение Кт подсчитывается по характеристикам двигателей и
может быть уточнено при летных испытаниях путем выполнения
«зубцов» при нескольких режимах работы двигателей (значениях
ав по УПРТ) на постоянной скорости полета (Мнаив).
119
Г-. “''ПОИВ — ’ у ирив'-* прив
В этом случае определяется производная----------=------------—
дфприв Афприв
по замеренным значениям вертикальной скорости, расхода топ-
лива, полетного веса и высоты после пересчета их в приведенные.
Значения Кт различны для высот ограничения мощности по тем-
пературе газов и прочности редуктора (рис. 3.21) в соответствии
^Рприв г
с разными законами регулирования расхода топлива [см.
(3.30) и (3.31)]. Практически используют две зависимости
Кт = Н^Ту. одну для высот регулирования расхода топлива по
температуре газов, другую по ограничению мощности. В диапазоне
переходных высот регулирования топлива (рис. 3.22) к вычислен-
ному значению VyCT из-за ограничения мощности (расхода топли-
ва) приходится добавлять (учитывая знак) поправку WyQ. Вели-
чина последней определяется по формуле
^yQ
dVУ прив
^QnpHB
AQ прив?
3Vу прив А1^/Прив
причем величина ---------=--------- подсчитывается по результа-
дфприв Афприв
там измерений вертикальной скорости и расхода топлива, вы-
полненных при уточнении значения Кт.
Поправка к вертикальной скорости на отличие полетного
веса от заданного для самолета с ТВД подсчитывается по фор-
муле, учитывающей изменение потребной для горизонтального
полета мощности при измененном весе:
прив _ __ 2я0 _ 1
А^прив Gq’kpqS МлХЭф 21,3G0S МлХЭф
т. е.
Д^=/(М, Дбприв).
Для быстрого внесения этой поправки полезно пользоваться
построенным заранее расчетным графиком (см. рис. 3.21), опре-
деляющим величину AVyG как функцию числа М и отклонения
веса Д^прив*
Колебания скорости в процессе набора высоты относительно
ее заданного значения (на самолете с любым двигателем) вызы-
вают разброс экспериментальных точек вследствие перехода кине-
тической энергии в потенциальную и наоборот. Пользуясь форму-
лой (3.48), это влияние можно учесть, внеся в значение Vyv до-
полнительную поправку
А1/ V dV V bV
LVy=-------------------,
g dt g bt
учитывающую приращение вертикальной скорости, вызванное из-
менением истинной скорости полета AV (м/сек) за отрезок вре-
120
мени Д/ (при увеличении скорости поправка прибавляется, при
уменьшении — вычитается).
Пренебрежение влиянием изменения скорости вблизи потолка
ведет к большим погрешностям в его определении, особенно на
скоростных самолетах.
Для построения барограммы набора (рис. 3.23) разделяют
высоту от земли до практического потолка на интервалы АН че-
рез 500 или 1000 м. Для сред-
ней высоты каждого интервала
по кривой Vy СТ — f(Hp) (см.
рис- 3.20) определяют значе-
ния Vy ст.ср И затем подсчиты-
Р и с. 3. 22. Схема подсчета ДVy в пе- Р и с. 3. 23. Барограммы набора вы-
реходном диапазоне высот регулиро- соты: стандартная (/) и фактиче-
вания мощности и характер измене- ская (2)
ния по высоте вертикальной скорости
самолета с ТВД
вают время, затрачиваемое на набор высоты каждого интервала,
по формуле
V У ст.ср
Последовательным суммированием отрезков времени At, затра-
ченного на набор высоты всех интервалов, лежащих ниже данной
высоты, находят время набора высот
ст ~ + Д^2 + Д^З + • • • +
до практического потолка. По полученным точкам строят баро-
грамму набора (см. рис. 3.23), которая позволяет определить
время набора потолка и промежуточных высот, представляющее
интерес при сравнении характеристик скороподъемности само-
летов.
Следует отличать фактическое время набора высоты от опре-
деленного по барограмме, так как перед началом набора высоты
выполняется взлет и разгон до наивыгоднейшей скорости набора.
121
Сверхзвуковые самолеты разгоняются до наивыгоднейшей ско-
рости после взлета и на высотах 10—13 км при переходе к сверх-
звуковому режиму набора высоты. Для таких самолетов время
разгона, которое составляет до половины общего времени набора
высоты, всегда учитывают при построении барограммы набора.
Высота потолка Япракт заметно зависит от полетного веса. Если
считать, что на высоте потолка приведенный вес постоянен, то дав-
ление на потолке Рнпракт меняется пропорционально изменению
веса:
РН практ2 ^2
Р Н практ!
На высотах более 11 000 м высота потолка самолета изменяется
на 63 м на каждый процент изменения полетного веса.
3.9. ОПРЕДЕЛЕНИЕ ДАЛЬНОСТИ
И ПРОДОЛЖИТЕЛЬНОСТИ ПОЛЕТА САМОЛЕТОВ
С ТРД И ТВД
Дальность и продолжительность полета относятся к наиболее
важным характеристикам самолета.
Целью испытаний по определению этих характеристик является
подбор наивыгоднейших режимов полета самолета и работы его
силовой установки, обеспечивающих максимальную дальность и
продолжительность, а также построение сеток километровых и
часовых расходов топлива, позволяющих рассчитать дальность
и продолжительность полета для любых условий эксплуатации
самолета.
Дальность и продолжительность полета зависят от большого
количества факторов, таких как взлетный вес и запас топлива,
скорость (число М) и высота полета, наличие или отсутствие внеш-
них подвесок, влияющих на аэродинамическое качество самолета,
экономичность двигателей и правильность их регулировки, приня-
тый при эксплуатации минимальный гарантийный остаток топлива.
В процессе испытаний по определению характеристик дально-
сти и продолжительности по этапам полета измеряют расход топ-
лива, время полета, скорость, высоту, величины, определяющие
режим работы силовых установок.
Полученные результаты измерений для режимов набора вы-
соты, полета по маршруту и планирования приводятся к стандарт-
ным условиям и виду, позволяющему использовать их в дальней-
шем для подсчета дальности и продолжительности полета при
эксплуатации самолетов.
Определение расхода топлива и дальности
при наборе высоты и планировании
Расход топлива и пройденное расстояние при наборе высоты
определяются обработкой измерений, выполненных на режимах
122
скороподъемности. При этом используется та же разбивка режима
набора на отрезки по времени. На каждом отрезке времени на-
бора высоты при помощи расходомера определяется израсходован-
ное количество топлива в литрах , которое затем переводится
в килограммы AW# по известному из наземных измерений (перед
полетом) удельному весу топлива у:
AWz//=a$z#y кг.
Для самолета с ТРД по формуле
_ /288
^прив у,
подсчитываются приведенные обороты. Затем по графику QnpHB =
= Ппприв) (см. рис. 3.4) определяются значения приведенного
часового расхода топлива фприв и фприв.ном соответственно для
фактических приведенных оборотов ппРив и номинальных пНом
в стандартных условиях, принимая /гприв = ^ном при р0 и То.
Израсходованное количество топлива на отрезке набора высоты
приводится к стандартным условиям по формуле
LWH ст=9^в-но.- кг. (3.54)
фприв
Для самолета с ТВД непосредственно подсчитывается <?Прив по
результатам замера расхода топлива на отрезке, среднему давле-
нию рн ср, температуре ТНср и времени отрезка А^н’.
q _ А1Уя-ЗС00 ро - /~ TQ
^прив РНЧ V ТН^
Далее приведение израсходованного количества топлива к стан-
дартным условиям выполняется также по формуле (3.54) с ис-
пользованием (Зприв.ном, соответствующего заданному режиму ра
боты двигателей при наборе высоты в стандартных условиях.
На каждом отрезке набора высоты определяется средняя ско-
рость Уст.ср по формуле
_____^пр.ср “t" AVа AVCJK
стср= 7Х;
где Act берется по рн ср,
после чего находят расстояние, которое самолет прошел при
наборе высоты отрезка
AA„ct = I/ctcd^ км. (3.55)
«ст с-1, ср \ /
123
Израсходованное количество топлива и пройденное расстояние
суммируются по отрезкам точно так же, как время набора высоты
Рис. 3. 24. Расход топлива и дальность
при наборе высоты (планировании)
в стандартных атмосферных условиях
при обработке скороподъемно-
сти, в результате чего получа-
ют график (рис. 3. 24) расхода
топлива и пройденного пути
при наборе высоты.
Обработка результатов из-
мерений при планировании ве-
дется таким же способом, как
для режима набора высоты.
График расхода топлива и
пройденного пути при планиро-
вании аналогичен приведенно-
му на рис. 3. 24. В расчет даль-
ности включают планирование
до высоты 1000 м, с которой
самолет входит в зону аэро-
дрома для посадки. Расход
топлива на планировании ча-
сто не приводят к стандартным условиям ввиду его незначительно-
сти в общем весовом балансе топлива.
Определение характеристик дальности
и продолжительности горизонтального полета
Для получения исчерпывающих сведений о дальности и про-
должительности горизонтального полета при любых возможных
в эксплуатации условиях обычно применяется метод сеток, осно-
ванный на теории подобия режимов полета.
Подобие режимов полета самолетов с ТРД и ТВД опреде-
ляется критериями подобия: GnpHB, М и ТПрив или QnpHB. Для само-
летов с ТРД величину ТПрив можно заменить величиной пприв.
При испытаниях самолета важно определить расходы топлива
по высотам, что позволяет рассчитать дальность и продолжитель-
ность при любом профиле полета, а также отыскать наивыгодней-
шее сочетание М, 6Прив и 7Прив или <?Прив, соответствующее режиму
максимальной дальности. Для этого необходимо на 4—5 высотах,
строго говоря, при 4—5 значениях приведенного веса бПрив выпол-
нить кратковременные режимы полета на постоянной скорости —
горизонтальные площадки (продолжительностью по 2—5 мин
в зависимости от типа самолета). На каждой высоте площадки
выполняют при 5—6 значениях скорости (от скорости, соответствую-
щей максимальному качеству, до максимальной либо до скорости
ограничения).
На каждой площадке измеряют скорость, высоту, температуру
воздуха, расход топлива, остаток топлива, температуру газов за
турбиной Г4, обороты двигателя, положение рычага топливного
124
автомата по указателю УПРТ (на самолете с несколькими двига-
телями замеряются соответствующие параметры работы каждого
двигателя). При выполнении режимов необходимо сохранять гори-
зонтальность полета и поддерживать постоянство скорости. Каж-
дую последующую площадку целесообразно выполнять на не-
сколько большей высоте (на 30—70 ж), чтобы компенсировать
выгорание топлива и поддерживать постоянство приведенного веса
бприв для заданной средней высоты полета.
Приведение характеристик к стандартным атмосферным усло-
виям производится при Нр = НрСт! и Мн = Мст, т. е. при приведении
вносятся поправки, учитывающие отличия фактической темпера-
туры Тн от стандартного значения ТСт, соответствующего высоте
Нр по давлению.
По записям приборов прежде всего определяется фактический
часовой расход топлива QH с учетом дарировочных поправок, а на.
самолете с несколькими двигателями — суммарный расход топ-
лива Qhs (в л) .
Часбвой расход топлива в стандартных условиях определяется
по формуле
1/"кг1час. (3. 56)
г 1 н
При этом удельный вес топлива ун принимается средним по ре-
зультатам измерений до и после полета. Полетный вес GH опреде-
ляется обработкой замеров остатка топлива, который суммируется
с весом снаряженного самолета без топлива. Далее подсчиты-
ваются стандартные приведенные обороты и приведенный вес са-
молета, значение числа М полета (по записям скорости и высоты)
и стандартная скорость VCt- Затем определяется относительный
километровый расход топлива для стандартных условий qCT:
- _ Qct
^СТ VCTGH т
(3. 57)
После подсчета всех названных величин по произведенным
в полетах замерам, строятся сетки характеристик (см. рис. 3.25—
3.28), позволяющие рассчитать расход топлива и обороты двига-
телей для любых условий полета и найти наивыгоднейшие режимы
полета на дальность и продолжительность.
Наивыгоднейшие скорости полета на дальность при разных
бцрив на высоте, соответствующей давлению рн= , находят
^прив
по значениям числа М, при которых относительный расход топлива
q минимален (рис. 3.25).
Наивыгоднейший режим дальности определяют по рис. 3.26
как точку такого сочетания числа М полета и Оприв, при котором
относительный километровый расход топлива q минимален. Режим
максимальной продолжительности полета определяется точкой
125
Рис. 3.26. Сетка стандартных отно-
сительных километровых расходов
топлива по приведенному весу и чи-
слу М полета
Рис. 3.25. Сетка относитель-
ных километровых расходов
топлива по числу М полета и
приведенному весу
Рис. 3.28. Сетка приведен-
ных оборотов двигателей по
приведенному весу и числу
М полета самолета с ТРД
Р и с. 3. 27. Сетка приведенных ча-
совых расходов топлива и схема
определения наивыгоднейшего при-
веденного веса и числа М для
максимальной продолжительности
полета
126
(рис. 3.27), в которой стандартный часовой расход топлива QCT
минимален, причем сетка характеристик позволяет получить значе-
ния М и 6Прив, соответствующие этому режиму.
Так как наивыгоднейшему режиму максимальной дальности
соответствует определенное значение приведенного веса Сприа, то
по мере выгорания горючего высоту необходимо увеличивать, под-
держивая это значение постоянным за
ного давления (увеличения высоты'
полета).
Сетка приведенных оборотов для
прямолинейного горизонтального
полета самолета с ТРД (рис. 3. 28)
позволяет подсчитать фактические
обороты, необходимые для полета
при любых возможных сочетаниях
М и бПрйв или, что то же самое, М
и высоты полета при любых возмож-
ных полетных весах.
Километровые и часовые расхо-
ды топлива начинают значительно
счет уменьшения атмосфер-
Р и с. 3. 29. Характер зависимо-
сти относительного километро-
вого расхода топлива от числа
М полета сверхзвукового само-
лета
возрастать при достижении опреде-
ленного значения числа М, определяющего границу экономичных
режимов полета. У сверхзвуковых самолетов относительные кило-
метровые расходы (рис. 3.29) также существенно возрастают при
переходе к сверхзвуковым скоростям, поэтому реж|им максимальной
дальности таких самолетов, как правило, лежит на большой дозву-
ковой скорости.
На сверхзвуковых самолетах часто нет возможности выпол-
нять площадки для замеров расхода топлива, в связи с чем такие
измерения производят на неустановившихся режимах полета. Рас-
ход топлива на запуск, пробу двигателей и рулежку W3, взлет "й^взл
и посадку IVnoc определяют замерами и выбирают средний по ряду
полетов. Минимальный гарантийный остаток топлива определяется
тактико-техническими требованиями к самолету. Невырабатывае-
мый остаток топлива WOct замеряется на земле, а на многодвига-
тельном самолете и в полете — по группам баков.
v Контрольный полет на дальность
Контрольный полет на дальность выполняется для проверки
точности полученных сеток километровых и часовых расходов
топлива. Предварительно расчет дальности ведется по полученным
при испытаниях сеткам характеристик.
Количество топлива, расходуемое на крейсерском режиме
в полете на дальность №r.n, определяется заправкой топлива
^лолн, расходом топлива на пробу двигателей и рулежку W3, рас-
ходом топлива на взлет 1^Взл, набор высоты И7Наб, планирование
127
Гпл и посадку IFnoc, а также минимальным гарантийным остатком
Wr и весом невырабатываемого остатка топлива 1^Ост, т. е.
= W ’ ь — W —W —W—W
При этом расход топлива на разгон обычно включается в 1ГНаб-
Начальная высота крейсерского участка полета, определяемая
величиной бприв.наив и полетного веса (взлетного веса минус рас-
ход топлива на земле и при наборе высоты), подсчитывается после-
довательными приближениями в соответствии с выражением
G — G /?0
иприв—иН >
Рн
решаемым относительно давления на начальной высоте крейсер-
ского полета рн, откуда
= (3.58)
^прив.наив
В выражение (3.58) подставляются значение бПрив.наив и являю-
щееся вероятным значение GH, уточняемое затем по графику
№наб = П^р)• Высота для значений веса в полете по маршруту
рассчитывается из условия сохранения наивыгоднейшего приве-
денного веса по формуле (3.58).
Дальность на крейсерском участке полета подсчитывается либо
по километровому расходу, определяемому для среднего веса на
режиме, либо весь располагаемый для горизонтального полета
запас топлива разбивается йа 3—4 части и подсчитывают даль-
ность полета по отрезкам, определяя для каждого отрезка средний
полетный вес, высоту полета по бприв.наив и километровый расход
^Янаивбер Кг1КМ^
а затем проходимое расстояние находят по формуле
где AW— количество расходуемого топлива на каждом отрезке
полета.
По данным, определяемым для каждого отрезка, получают
техническую дальность полета
^техн==^// + + • • • +
где ALi, ALn— дальность на каждом отрезке крейсерского этапа
полета,
и время полета
/4техн~^я+ Аб + А^+ • • • +
где AL получают делением пройденного пути ALi на скорость по-
лета: kti = \LilV.
По графику nnPHB = f(бпрИв) подсчитываются обороты, которые
должен выдерживать летчик в полете на дальность (рис. 3.28).
128
График контрольного полета на дальность имеет вид, пока-
занный на рис. 3. 30. Перед полетом проверяют надежность и точ-
ность топливомеров и расходомеров путем их тарировки в полетах
и на земле при углах тангажа, соответствующих крейсерскому
режиму полета. Контрольный полет обычно выполняется на даль-
ность, соответствующую расходованию 80—85% полного запаса
горючего. График выполненного контрольного полета со всеми
имевшими место отклонениями
ходу топлива и др. сравнивает-
ся с расчетным, путем их нало-
жения.
По отклонениям режима на
отдельных отрезках пути уточ-
няется расчетный график. Если
расхождения по расходу топ-
лива не превышают 2—3%, то
сетки характеристик дальности
считаются построенными до-
статочно точно.
Характеристики дальности
отдельных самолетов одного и
режима по скорости, высоте, рас-
Р и с. 3. 30. Расчетный профиль полета
тяжелого самолета на максимальную
дальность при постоянстве условий
подобия
того же типа могут несколько
отличаться друг от друга в
силу особенностей регулировки
топливной аппаратуры двига-
телей, а также отклонений в
аэродинамике. В связи с этим сетки характеристик обычно уточня-
ются по результатам испытаний нескольких самолетов.
Полеты транспортных самолетов на авиалиниях обычно выпол-
няются с выдерживанием постоянных высот — эшелонов, разных
для прямого и обратного направлений, при этом средний кило-
метровый расход несколько возрастает. На линиях большой даль-
ности некоторая экономия горючего может быть получена перехо-
дом на более высокий эшелон во второй половине полета; на ли-
ниях малой дальности такой переход может не иметь смысла.
Для уточнения расхода топлива при профиле высот, соответствую-
щем полету по эшелонам, выполняются также контрольные полеты.
Иногда контрольные полеты выполняются для уточнения расхода
топлива на режиме скоростной дальности при скорости порядка
0,9—0,95 Vmax, что важно для боевых самолетов. Подготовка и про-
ведение этих полетов выполняется аналогично полету на макси-
мальную дальность.
3. 10. ОПРЕДЕЛЕНИЕ ПРИЧИН УХУДШЕНИЯ
ЛЕТНЫХ ХАРАКТЕРИСТИК САМОЛЕТОВ
Этот вопрос является в известной степени вечным при сопостав-
лении результатов испытаний серийного и опытного самолетов,
либо опытного самолета с его расчетными характеристиками. Наи-
5 598
129
более часто он возникает при испытаниях самолетов «чувствитель-
ных» к малым изменениям тяги и сопротивления, что определяется
пересечением кривых потребных для горизонтального полета и рас-
полагаемых тяг под относительно острым углом (1 и 3 на рис. 3.1).
В процессе доводки и серийного производства вес самолета,
как правило, возрастает. Одновремено обычно ухудшается его
аэродинамическое совершенство различного рода «непредвиден-
ными» надстройками, неизбежными в производстве и эксплуатации
искажениями обводов и т. п. Характеристики двигателей также
не остаются постоянными, несколько изменяясь, обычно в худшую
сторону, у модификаций с повышенным ресурсом и отличаясь
вследствие отклонений в регулировке. Наиболее часто предприни-
маются поиски «потерянных» максимальной скорости, высоты по-
толка, вертикальной скорости, времени набора потолка, реже —
километровых расходов топлива и дальности полета.
Часто отличие летных характеристик определяется влиянием
нескольких из названных факторов одновременно, что затрудняет
анализ.
При попытке определить причины расхождения характеристик
прежде всего устанавливается степень достоверности сравнивае-
мых результатов измерений, подобие объектов испытаний (по кон-
фигурации, окраске, тяге силовых установок, весу, центровке
и т. д.), порядок величин отличия одной или нескольких назван-
ных летных характеристик одновременно, разница в регулировке
двигателей. Здесь необходимо отметить, что попытка выявления
причин отличия характеристик в пределах точности измерений
обычно кончается неудачей.
Постановка эксперимента требует подбора соответствующей по
точности аппаратуры, качественного выполнения режимов, реги-
страции и учета в обработке всех возможных отклонений условий,
влияющих на величину летной характеристики, тщательной и бес-
пристрастной обработки. Методически наиболее правильно прове-
дение сравнительных испытаний самолета до и после внесения из-
менений, влияние которых оценивается, так как только в этом
случае достигается надежное исключение других возможных при-
чин различия летных характеристик.
Прежде всего целесообразно оценить влияние отклонений в ра-
боте силовых установок — наиболее часто являющихся причиной
отличий летных характеристик.
Приведенные на рис. 3.31 зависимости от высоты полета тяги
ТРД и мощности ТВД на номинальном режиме иллюстрируют
возможность как их завышения так и занижения (/) во всем диа-
пазоне высот. Возможны случаи, когда тяга недодается на малых
высотах и завышена на больших (2) или наоборот. Мощность ТВД
может не соответствовать регламентированной в диапазоне высот
ограничения. Наконец, тяга ТРД начиная с определенной высоты
(15—16 км) иногда резко падает в результате ухудшения полноты
сгорания (3), что сопровождается падением температуры выхлоп-
130
ных газов (Т4). Соответственно меняются максимальная и верти-
кальная скорости, время набора высоты и потолок. При этом мо-
гут иметь место отклонения всех названных летных характеристик
или одной из них в опреде-
ленном диапазоне высот.
Соответствие расхода
топлива, температуры газов
Т4, оборотов двигателей, гео-
метрии воздухозаборника и
реактивного сопла, полноты
сгорания обычно является
главным условием сходимо-
сти летных характеристик-
Следует отметить, что на
многодвигательном самоле-
те соответствие характери-
стик двигателей, регламен-
тированным в пределах до-
пуска одного знака (на тягу,
мощность, расход топлива),
может вызвать весьма зна-
чительное изменение летной
характеристики (см. рис.
3. 15). Отклонение тяги от
регламентированной может
быть вызвано также измене-
нием условий работы датчи-
ков полного давления и тем-
пературы, обеспечивающих
настройку автоматики дви-
Р и с. 3.31. Схема возможных отклонений
в тяге ТРД и мощности ТВД:
/—тяга завышена или занижена; 2—отклонение
тяги меняет знак по высоте; 3—тяга занижена на
больших высотах
гателя.
Качество изготовления
обводов самолета при совре-
менной технологии обычно
не оказывает заметного
влияния на летные характеристики. Плохое качество окраски может
снизить максимальную скорость на 5—15 км/час и одновременно
увеличить километровые расходы топлива. Значительное снижение
максимальной скорости вызывают ступеньки в обводах, вызванные
отсосом или неправильной регулировкой положения створок грузо-
люков и люков шасси, щитков, элементов механизации крыла, при
этом вертикальные скорости набора высоты и дальность ухуд-
шаются менее заметно.
Одновременное значительное несоответствие максимальной
скорости и дальности полета опытного самолета расчетным значе-
ниям обычно является следствием просчетов в определении сопро-
тивления либо тяги силовой установки. Например, наличие мест-
ных срывов потока на мотогондолах и в местах их сопряжений
5*
131
с фюзеляжем может увеличить километровые расходы топлива на
несколько процентов, уменьшить вертикальную и максимальную
скорость полета. Недооценка значительности потерь тяги во вход-
ном канале воздухозаборника или в выхлопном сопле ТРД ведет
к подобному же результату.
На сверхзвуковых самолетах максимальная скорость, даль-
ность полета и потолок уменьшаются при смещении центра тяже-
сти вперед, вследствие увеличения сопротивления, вызванного до-
полнительным отклонением стабилизатора для обеспечения про-
дольной балансировки. Это влияние на потолок приближенно мо-
жет быть оценено по формуле
ПЭТ___
Дхт
63,5 -fe- Г_±_ .
Lr.o L % .
Качество выполнения испытательных режимов в значительной
степени влияет на точность определения летных характеристик.
Изменения скорости, высоты и перегрузки при выполнении пло-
щадок существенно снижают точность определения максимальной
скорости; аналогичное влияние оказывает неучтенное изменение
высоты и перегрузки при выполнении разгона.
Непостоянство скорости (ее уменьшение или увеличение) при
наборе высоты вблизи потолка может дать разницу в его величине
при М = 0,8-г-0,95 на 300—500 м на одном и том же самолете (уве-
личение скорости увеличивает эту разницу, а при М = 0,4н-0,5 она
незначительна), в чем легко убедиться, определив изменение вер-
тикальной скорости в соответствии с формулой (3.47), написав ее
в виде
(3-59)
g \ м }
и прибавив полученное отклонение к значению вертикальной ско-
рости, замеренному при постоянном значении скорости набора вы-
соты (см. рис. 3.20, 3.22). Аналогичное воздействие оказывает
отклонение перегрузки от единицы при выходе на' практический
потолок. В полете с перегрузкой менее единицы в соответствии
с выражением
У G
выведенным из (3.47), возможно получение большей высоты прак-
тического потолка за счет меньшего аэродинамического' сопро-
тивления.
Разная методика приведения результатов измерений к задан-
ным (стандартным) условиям также может быть источником не-
значительного различия в результатах вследствие отличий в допу-
132
щениях, принятых при обосновании методов приведения. Наконец,
возможны грубые просчеты в обработке и разница в аэродинами-
ческих поправках ПВД.
Обычно определяется круг возможных причин ухудшения лет-
ных характеристик, сужая который, методом исключения, всегда
удается найти истинные причины (обычно их оказывается не-
сколько). Следствием работы обычно являются мероприятия,
направленные на восстановление и поддержание на заданном
уровне соответствующих характеристик. Немаловажным является
разумное определение допусков, учитывающих возможный разброс
характеристик двигателей, самолета и погрешности измерений.
Глава IV
ХАРАКТЕРИСТИКИ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ САМОЛЕТА
4.1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ
УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ САМОЛЕТА
Устойчивость и управляемость на всех этапах полета и движе-
ния по земле являются теми необходимыми качествами, без кото-
рых нельзя обеспечить ни безопасности летной эксплуатации само-
лета, ни эффективного использования его летчиком.
Под устойчивостью понимают способность самолета самостоя-
тельно, без участия летчика, сохранять заданный режим полета
и возвращаться к исходному режиму после непроизвольного
отклонения от него под действием внешних возмущений. Устойчи-
вый самолет обладает двумя ценными качествами. Он сохраняет
известную невосприимчивость к воздействию относительно слабых
возмущений, обеспечивающую ему достаточную «плотность хода».
Вместе с тем на более сильные возмущения, способные нарушать
режим балансировки, он отвечает только такими видами движе-
жения, которые обеспечивают быстрое восстановление исходного
режима полета. Поскольку устойчивость прежде всего проявляется
в характере протекания самого возмущенного движения самолета,
обусловленного как действиями летчика (отклонение рулей, управ-
ление двигателем, пользование воздушными тормозами, стрельба,
сброс подвесок, отклонение закрылков, выпуск шасси и т. п.), так
и состоянием атмосферы (турбулентностью), данное выше опреде-
ление устойчивости самолета иногда называют динамической
устойчивостью. Возмущенное движение устойчивого самолета
всегда будет быстро затухающим, периодическим или апериодиче-
ским в зависимости от степени его устойчивости (рис. 4.1, а и б).
Наоборот, нейтральному и неустойчивому самолету свойственны
иные типы возмущенного движения, не обеспечивающие самопро-
извольный возврат самолета к исходному состоянию балансировки
(рис. 4.1,в, г, д).
Хорошая устойчивость исключает самопроизвольный выход
самолета на опасные по прочности и управляемости скорости, пе-
регрузки и числа М, а также неконтролируемое летчиком отклоне-
ние самолета от заданного ему режима. Это не только повышает
безопасность полета, но и обеспечивает лучшую «плотность хода»
134
при выполнении маневра и более высокую точность «хождения»
самолета за рулями. Поэтому устойчивость является необходимым
условием хорошей управляемости самолета, наряду с эффектив-
ностью рулей и характеристиками самой системы управления *.
Под управляемостью обычно понимают способность самолета
выполнять по желанию летчика любой маневр, предусмотренный
техническими требованиями к данному типу самолета, притом
Исходное
раВнобесное
положение
Рис. 4. 1. Основные типы возмущенного движения самолета:
а—апериодическое, быстро затухающее движение; б—затухающие колебания;
в—незатухающие колебания постоянной амплитуды; г—незатухающие колебания
с нарастающей амплитудой; б—апериодическое нарастающее отклонение от ис-
ходного равновесного положения
наиболее просто, с наименьшей затратой энергии летчика (разу-
меется при условии, что рули обеспечивают летчику возможность
беспрепятственно балансировать самолет в полном диапазоне экс-
плуатационных углов атаки и углов скольжения, а также скоро-
стей полета, высот и чисел М). Хорошая управляемость предпола-
гает простые по характеру, гармоничные и легко контролируемые
в полете отклонения всех органов управления и строго созразме-
ренную ответную реакцию самолета на действия летчика, не слиш-
ком резкую, но также и без заметного запаздывания и медленно
затухающих колебаний. Управление самолетом становится тем
* Система управления, разумеется, должна обеспечивать летчику простое
и беспрепятственное отклонение рулей в нужное положение, приемлемые по ве-
личине, хорошо контролируемые и соразмерно меняющиеся при изменении режима
полета усилия на всех рычагах управления, хорошую самоцентрируемость рычагов
управления при их освобождении, отсутствие люфта и заметного запаздывания
между отклонениями рычагов управления и соответствующего руля.
135
проще и точнее, чем быстрее затухает собственное возмущенное
движение самолета, слабее реакция его на случайные, не вызывае-
мые летчиком возмущения и вместе с тем соразмереннее и четче
ракция на сознательные действия летчика. Подобные виды пере-
ходных процессов, обеспечивающие летчику наилучшие условия
управления, могут быть только на устойчивом самолете (рис. 4.2).
Обычно летчик судит об управляемости по реакции самолета
на соответствующие отклонения органов управления, а также по
о)
Рис. 4.2. Переходный процесс при выполнении маневра:
а—продольный маневр:
/—устойчивый самолет; 2—малоустойчивый; 3—неустойчивый;
б—боковой маневр:
/—спирально устойчивый самолет; 2—спирально неустойчивый самолет
величине и характеру отклонений рычагов управления и измене-
нию усилий на них при пилотировании. При этом отклонением ру-
лей он уравновешивает действующие на самолет аэродинамиче-
ские и инерционные моменты.
В зависимости от характера изменения этих моментов в про-
цессе возмущенного движения самолета, отклонения ручки управ-
ления и педалей, потребные для выполнения заданного маневра,
будут меняться по времени и могут оказаться для летчика про-
стыми и легкими или сложными и тяжелыми (рис. 4.3). Различ-
ными окажутся в этом случае и характер самого переходного про-
цесса, а также запаздывание реакции самолета на отклонение со-
ответствующего рычага управления.
На неустойчивом самолете при выполнении маневра, связан-
ного с переходом от одного режима установившегося полета к дру-
гому, летчик вынужден после отклонения ручки управления и
педали в направлении выполняемого маневра тотчас же возвра-
щать их назад и отклонять в противоположную сторону для пре-
136
кращения быстро развивающегося движения самолета. На нейт-
ральном и малоустойчивом самолетах также сохраняется посту-
пательно-возвратный характер отклонения органов управления
при пилотировании, но проявляется значительно слабее. При этом
после завершения маневра на нейтральном самолете рычаги
управления возвращаются в исходное положение, а на устойчивом
остаются отклоненными в прямом направлении. Только при хоро-
шей устойчивости самолета практически отсутствуют поступа-
тельно-возвратные (двойные) движения рулями и сам характер
отклонений рулей при управлении становится наиболее простым
(см. рис. 4.3). Качественно аналогичным образом также меняются
и усилия на ручке управления (штурвале) и педалях.
О~исходное положение ——-----прямой ход у- конечное положение
Рис. 4.3. Характер перемещений рычага управления при
выполнении маневра, связанного с переходом от одного
установившегося режима к другому
Таким образом, простота управления самолетом существенно
зависит от его устойчивости, определяющей в конечном счете
характер (качество) переходного процесса. На устойчивом само-
лете практически отсутствуют двойные движения рулями при
управлении. Устойчивость улучшает реакцию самолета на действия
летчика и уменьшает запаздывание, облегчает летчику контроль
за режимом полета и «дозировку» потребных отклонений рулей
при поддержании необходимого режима полета и выполнении
маневра.
В целом при хорошей устойчивости и управляемости полнее
используются маневренные возможности самолета, обеспечивается
точность и простота пилотирования в обычных и сложных условиях
полета, существенно повышается безопасность летной эксплуа-
тации. При этом существенно разгружается внимание летчика,
уменьшается затрата его энергии й сокращается объем полетного
времени, расходуемого непосредственно на поддержание требуе-
мого режима полета.
137
Устойчивость и управляемость самолета разделяют на продоль-
ную и боковую .сообразно двум возможным видам возмущенного
движения самолета *.
Продольное возмущенное движение самолета обычно является
колебательным и состоит из двух взаимно накладывающихся друг
на друга колебаний с различным по величине периодом **.
Колебания малого периода (Г=1н-5 сек), характеризующие
короткопериодическое движение, возникают при повороте само-
лета вокруг своего центра тяжести и сопровождаются быстрыми
изменениями перегрузки при практически постоянной скорости
полета ***. Поэтому от устойчивости самолета в короткопериодиче-
ском движении зависят безопасность полета и общая оценка само-
лета летчиком. С увеличением высоты и уменьшением скорости
полета период указанных колебаний и время их затухания возра-
стают.
Второй тип колебаний, с периодом более 20—30 сек, характери-
зует длиннопериодическое, или фугоидное, движение самолета.
Эти колебания в основном связ_аны с перемещением в пространстве
центра тяжести самолета и сопровождаются медленным периоди-
ческим изменением скорости полета, высоты и угла наклона траек-
тории. Фугоидные колебания обычно не создают для летчика серь-
езных затруднений при пилотировании самолета. Этот вид возму-
щенного движения развивается медленно, и летчик располагает
временем, чтобы вернуть самолет в исходный режим балансировки.
Боковое возмущенное движение самолета состоит из трех
взаимно накладывающихся друг на друга движений:
а) апериодического, быстро затухающего движения крена;
б) апериодического, слабо затухающего или медленно разви-
вающегося движения по спиралеобразной траектории в направ-
лении действия начального возмущения с постепенно увеличиваю-
щимся углом крена;
в) бокового колебательного движения самолета со сравнитель-
но малым периодом (Г~4ч-8 сек).
Апериодическое движение крена быстро затухает в обычных
условиях полета. Вследствие этого оно не всегда замечается лет-
чиком.
* Основанием для такого деления является симметричная форма самолета
относительно его вертикальной плоскости (плоскости симметрии). В тех случаях,
когда возмущения, действующие в плоскости симметрии, мало влияют на боко-
вое движение самолета, продольное и боковое движения можно рассматривать
раздельно.
** При сильно пониженных запасах статической устойчивости короткоперио-
дическое движение самолета распадается на два апериодических движения.
Однако для летной практики этот случай маловероятен^
*** Это движение развивается практически при постоянной скорости полета
из-за большой инерционности движения центра тяжести самолета и быстрого
затухания короткопериодического движения.
138
Спиральное движение, наоборот, медленно развивается; по-
этому оно также, как правило, не замечается летчиком и не создает
затруднений при пилотировании самолета.
На боковое колебательное движение крена и рыскания, напро-
тив, летчик всегда обращает внимание. Период боковых колеба-
ний сравнительно мал и затухают они медленнее, чем продольное
короткопериодическое движение самолета. Эти колебания, даже
в тех случаях, когда они удовлетворительно демпфируются, зату-
хают лишь после 3—5 полных циклов. Поэтому оценка летчиком
боковой устойчивости самолета в значительной мере определяется
общим характером этих колебаний и степенью их затухания.
Устойчивость самолета меняется в зависимости от того, фикси-
руются или освобождаются его рули в процессе возмущенного
движения. Это обусловливается тем, что аэродинамические силы
и моменты, действующие на рули, обычно стремятся изменить их
исходный балансировочный угол отклонения в сторону уменьше-
ния аэродинамического восстанавливающего момента самолета.
Поэтому устойчивость самолета с освобожденными рулями не-
сколько уменьшается *.
При летных испытаниях самолета на устойчивость проверяют
оба крайних вида связи летчика с управлением, т. е. случай фик-
сированного и освобожденного управления. В соответствии с этим
вводятся понятия устойчивости самолета с фиксированным и
с освобожденным управлением.
Устойчивость самолета меняется также при изменении режима
работы двигателей, скорости полета, высоты и числа М, при исполь-
зовании различных средств автоматической стабилизации и демпфи-
рования, при выпуске щитков (закрылков), воздушных тормозов,
шасси, применении различных внешних подвесок и т. п. **. На ус-
тойчивость самолета оказывают большое влияние упругость конст-
рукции и многие его конструктивные параметры, в частности: поло-
жение центра тяжести, характер распределения грузов, угол попе-
речного V и форма крыла и оперения в плане, взаиморасположение
крыла, оперения и фюзеляжа и т. п.
Следовательно, важными факторами, влияющими на устойчи-
вость самолета, являются:
— условия полета и режим работы двигателя,
— особенности его компоновки,
— конфигурация.
Поэтому при летных испытаниях, оценка устойчивости и управ-
ляемости самолета должна производиться в полном диапазоне
* Исключения возможны в случае применения бустерных систем управления
рулями самолета и при включении пружин и контрбалансиров в обратимую си-
стему управления.
** Изменение положения самолета в пространстве (в земной системе коор-
динатных осей), при сохранении неизменной его ориентации по отношению к на-
бетающему потоку (т. е. неизменных углов атаки и скольжения), разумеется
не влияет на устойчивость самолета.
139
допустимых скоростей полета, высот, чисел М, углов а и р и цент-
ровок, при полной и малой тяге двигателей, с автоматикой и без нее,
при всех возможных конфигурациях самолета.
Кроме понятия динамической устойчивости, существует поня-
тие статической устойчивости. Последняя, хотя и не характери-
зует полностью действительную устойчивость, однако является
необходимым ее условием, так как определяет знак и величину
аэродинамических моментов тангажа, рыскания и крена, возни-
кающих при отклонении самолета от исходного режима баланси-
ровки на заданных углах атаки и скольжения в случае воздейст-
вия на самолет внешнего возмущения *. Эти стабилизирующие
аэродинамические моменты и характеризуют продольную, путе-
вую и поперечную статическую устойчивость самолета.
Следует иметь в виду, что обеспечивая самолету статическую
устойчивость относительно трех осей, даже значительную, мы да-
леко не всегда можем получить хорошие характеристики переход-
ного процесса. Для этого самолет должен обладать вполне опреде-
ленной степенью продольной, поперечной и путевой статической
устойчивости, притом не всегда значительной. В частности, избы-
точная поперечная статическая устойчивость (в сравнении с путе-
вой устойчивостью) не менее вредна самолету, чем и неустойчи-
вость.
4.2. КОЛИЧЕСТВЕННЫЕ ХАРАКТЕРИСТИКИ
УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ САМОЛЕТА
При исследовании динамики, устойчивости и управляемости
самолета обычно пользуются связанной с самолетом правой систе-
мой координатных осей с началом координат в ЦТ самолета и стан-
дартными обозначениями (ГОСТ 1075—41), представленными на
рис. 4. 4. На этом же рисунке указаны знаки положительных откло-
нений рулей, перемещений рычагов управления и прикладываемых
к ним усилий летчика, а также и положительные знаки всех основ-
ных параметров, характеризующих движение самолета. Определе-
ние в полете количественных характеристик устойчивости и управ-
ляемости позволяет произвести широкую сравнительную оценку
каждого нового самолета, выяснить природу тех или иных осо-
бенностей его поведения, наметить наиболее рациональные меро-
приятия по совершенствованию самолета, полнее использовать
его технические и летно-тактические возможности. Поэтому выпол-
нение количественных требований, во всяком случае по ряду ха-
рактеристик устойчивости и управляемости, является необходи-
мым условием допуска нового самолета к массовой эксплуата-
ции.
* Такая устойчивость может быть обеспечена самолету как «естественным»
путем — соответствующей компоновкой самолета, так и средствами автоматиче-
ской стабилизации.
140
Наряду с определением количественных характеристик при
летных испытаниях необходима качественная оценка устойчивости
и управляемости самолета, охватывающая все этапы полета (oi
взлета и до посадки, а также движение по земле). Без положитель-
Р ис. 4.4. Система самолетных осей, обозначения и правило знаков, принятые
при летных испытаниях:
у Хх
nXj>0, если У Xi>0 (пХ1-=—----- , скорость увеличивается); «^<0, если Xi<0 (скорость
I V У1 \
уменьшается); /?^>0, если У, Yi>0 I Пу^ —~—I > лу1^> если У Ki<0, еСЛИ 2
/ у \
( nz — , самолет скользит влево, р<0 I ; лг1<0, если Zi<0 (самолет скользит вправо,
(3>0); Рн=Рн.пр‘"Рн.лев; Рн>0, если Рн.пр>Рн.лев’ Знаки 6э и тэ приводятся к правому элерону.
х—линейное перемещение рычага управления в см, 5р—угол отклонения рычага управления в град
ной оценки летчиком-испытателем устойчивости, управляемости
и техники пилотирования ни один самолет не может быть допущен
к летной эксплуатации.
Прежде чем перейти к рассмотрению количественных характе-
ристик устойчивости и управляемости самолета, сделаем несколько
общих замечаний.
141
Следует иметь в виду, что все требования и количественные
характеристики устойчивости и управляемости должны удовлетво-
ряться, хотя и не в одинаковой степени, но в полном диапазоне
эксплуатационных скоростей, чисел М, высот полета и углов атаки,
при всех возможных в эксплуатации вариантах загрузки самолета
(положения его центра тяжести), различных режимах работы
двигателей, использовании механизации крыла и воздушных тор-
мозов, наличии подвесок и т. д.
В тех случаях, когда это представляется возможным, анализ
устойчивости и управляемости самолета целесообразно проводить
с использованием материалов летных испытаний других однотип-
ных самолетов, а также результатов летных исследований, полу-
ченных на самолетах — летающих лабораториях с изменяемыми
характеристиками устойчивости и управляемости.
Требования к количественным характеристикам устойчивости
и управляемости, разумеется, меняются (а в некоторых случаях
и дополняются) в зависимости от целевого назначения и веса само-
лета, условий эксплуатации и т. п. Маневренные самолеты должны
иметь, например, более легкое и эффективное управление, чем
ограниченно маневренные и тем более неманевренные самолеты.
К пассажирским и транспортным самолетам предъявляются
более высокие требования в отношении безопасности полета и осо-
бые требования к устойчивости и управляемости в крейсерском
полете, при взлете и посадке по сравнению с военными самолетами.
Динамические характеристики и устойчивость таких самолетов дол-
жны обеспечивать пассажирам не только безопасность полета, но и
существенно более высокий уровень комфорта. Самолет должен
обладать определенной невосприимчивостью к действию атмосфер-
ных возмущений, а на значительные возмущения отвечать строго
определенными видами продольных и боковых колебаний, притом
быстро затухающих. Поэтому для пассажирских самолетов необ-
ходима более жесткая регламентация всех характеристик устой-
чивости и управляемости, в том числе и допустимых видов пере-
ходных процессов и степени восприимчивости к действию атмо-
сферных возмущений.
Наконец, особые условия эксплуатации самолета, например са-
молетов вертикального взлета и посадки, ракетопланов и узко-
специализированных самолетов, в свою очередь существенно
влияют как на величину задаваемых характеристик устойчивости
и управляемости, так и на выбор самих характеристик и т. д.
Последнее замечание касается принципа построения самой си-
стемы количественных характеристик для оценки управляемости
самолета. В основу принятой в настоящее время системы характе-
ристик управляемости положен следующий принцип:
а) для оценки управляемости самолета при выполнении манев-
ров, связанных с относительно малыми отклонениями от исходного
режима балансировки
142
Количественная ха-
рактеристика управ-
ляемости
Величина параметра, характеризующего
действия летчика
Изменение параметра, характеризующего
реакцию самолета на действия летчика
б) для оценки управляемости самолета при изменении летчи-
ком режима работы двигателя, использовании механизации крыла,
выпуске шасси, воздушных тормозов, сбросе различных подве-
сок и т. п.
Количественная ха-
рактеристика управ-
ляемости
Потребная величина параметра, характе-
ризующего воздействие летчика на органы
управления для сохранения исходной ско-
рости полета при выпуске шасси, закрыл-
ков, воздушных тормозов, изменении режима
работы двигателя и т. д.
в) для оценки управляемости самолета при выполнении манев-
ров, связанных с выходом на с^доп и п^ах (крайние эксплуатаци-
онные режимы) И СОЗДаНИем (Dxmax
Количественная ха-
рактеристика управ-
ляемости
Потребная величина параметра, характе-
ризующего воздействие летчика на органы
управления для вывода самолета на су доп и
"max’ а также для получения max, Vmax,
^min
здесь гО0П и пэтах— наибольшие допустимые в эксплуатации
значения коэффициента подъемной силы
(су) и перегрузки самолета (п^);
wxmax— максимальное значение угловой скорости
крена при полном использовании элеронов
(бэтах, Либо Хэ max ИЛИ Рэтах) »
1/тах и ^тш—максимальная и минимальная скорости го-
ризонтального полета при неизменном по-
ложении триммера, соответствующем ба-
лансировке самолета в крейсерском полете.
В качестве параметров, характеризующих действия летчика,
обычно принимают усилия на рычагах управления и отклонения
рычагов управления (ДРВ; ДР0; ДРН и Дхв; Дхэ; Дхн).
Реакция самолета на действия летчика характеризуется изме-
нением соответствующих параметров движения самолета, напри-
мер, скорости (V) и числа М, перегрузки (пу и nz), углов крена (у)
или скольжения (£), угловых скоростей (<ох, <о2).
143
Характеристики динамической устойчивости
и управляемости самолета
Необходимым условием динамической устойчивости самолета
является быстрое затухание его возмущенного движения, которое
развивается после отклонения самолета от исходного режима
балансировки. В общем случае это движение может быть колеба-
тельным либо апериодическим. Предпочтительно иметь периодиче-
ское движение самолета — быстро затухающее и с малым забро-
сом или апериодическое движение с малым временем переходного
процесса. Недопустимы, как показывает опыт, возрастающие по
амплитуде колебания малого периода и достаточно быстро разви-
вающееся неустойчивое апериодическое движение. Нежелательны
также медленно развивающееся апериодическое неустойчивое дви-
жение и возвращающее по амплитуде длиннопериодическое (фуго-
идное) движение самолета.
В летной практике из всех рассмотренных ранее видов возму-
щенного движения самолета наибольшее значение для летчика
обычно имеют продольные колебания малого периода (коротко-
периодическое движение самолета) и боковое колебательное дви-
жение крена и рыскания. Этими двумя видами периодического
движения самолета во многом определяются условия его пилоти-
рования, безопасность полета и общая его оценка летчиком. По-
этому важными характеристиками динамической устойчивости
самолета являются степень затухания и период возмущенного дви-
жения. Боковое движение самолета характеризуется, кроме того,
величиной соотношения амплитуд угловых скоростей крена и ры-
скания х=Дц)л,/Л(0^. По величине х можно судить, какой вид дви-
жения — крен или рыскание — преобладает в процессе боковых
колебаний самолета. Летчики отрицательно оценивают динамику
самолета, когда при колебаниях преобладающим оказывается дви-
жение крена.
Продольное короткопериодическое движение самолета, а так-
же и боковые колебания при небольших величинах к=АШх /А^
обычно описываются линейными дифференциальными уравне-
ниями 2-го порядка, вида
+ 2й + k2y=f(/).
dfl 1 dt и '
Параметры возмущенного движения самолета в процессе сво-
бодных колебаний, в случае f G)=0, изменяются по закону
Ьу—у — Уо = Аое~м k2 — h2t — <?) = Aoe~ht sin (у1 — <f) ,
где // — меняющееся во времени значение параметра, опре-
деляющего режим полета, и г/0 — исходное его зна-
чение;
144
Aoe~ht — амплитуда колебательного процесса;
]//г2 — h2t — у—фаза колебательного процесса;
у k2 — h2 =--собственная круговая (циклическая) частота ко-
т лебаний;
До и ср—начальные амплитуда и фаза колебаний;
h—декремент затухания колебаний;
Т — период колебаний;
k—круговая частота недемпфированных свободных
колебаний самолета.
Частота k, период Т, декремент затухания h и амплитуда коле-
баний A (I)' связаны между собой следующим соотношениями:
у._ 2л
h In Лр —In Л (О
t
A(t)=Aoe~M.
Обычно интенсивность затухания колебательного движения са-
молета характеризуется величиной логарифмического декремента
затухания, равного натуральному логарифму отношения двух по-
следовательных амплитуд
hT=1п ,
At + т
где At и At+т — соответственно амплитуды колебаний в моменты
времени, сдвинутые на один период.
Однако при обработке материалов летных испытаний интенсив-
ность затухания колебаний самолета удобнее оценивать непосред-
ственно величиной относительного уменьшения амплитуды за один
период *
h 2тс
= /га .
At + r
Показатель тзат характеризует способность самолета демпфи-
ровать колебания, вызванные воздействием на него какого-либо
возмущения, т. е. рассеивать в окружающее пространство часть
энергии возмущающей силы. При тзат>1 возмущенное движение
самолета с течением времени полностью затухает, причем тем бы-
стрее, чем больше величина этого показателя. При тзат=1 наблю-
даются незатухающие колебания самолета с постоянной амплиту-
* Логарифмический декремент затухания связан с показателем затухания
за период следующей простой зависимостью: 1птзат = ^^-
145
дой, названные автоколебаниями (случай колебательной нейтраль-
ности самолета). Наконец, при тзат<1 движение самолета колеба-
тельно неустойчиво, т. е. с течением времени происходит увеличе-
ние амплитуды колебаний. Слабое затухание и слишком большие
периоды колебаний являются признаком плохой устойчивости
самолета.
Период колебаний и степень затухания возмущенного движения
самолета, а также угловые скорости крена и рыскания могут быть
замерены непосредственно в полете.
С аэродинамическими и конструктивными параметрами само-
лета частота и декремент затухания связаны следующими зависи-
мостями:
а) продольное короткопериодическое движение самолета
где —коэффициент момента продольного демпфирования
самолета;
и tnz — производные коэффициента продольного момента са-
молета по углу атаки а и по безразмерной скорости
изменения угла атаки а = -^----------;
J V dt
Р* —------коэффициент относительной плотности самолета;
т = ——----масштаб времени при приведении уравнений продоль-
ного движения к безразмерному виду;
гг~\/ — — радиус инерции самолета относительно поперечной оси;
I/ т
=-у- —относительный радиус инерции самолета;
А
G
т —-----масса самолета;
g
б) боковое движение самолета относительно вертикальной оси
146
где
m у—
2m
4 ____
/2
m —
4
$Sl
m
4
..
7I 'Конечное
/1 V- i значение
значение / < 1 I
параметра J 1 I
_|
—1*8 Г“
-----.-------------—-----------------left
----- 2
/
Рис. 4. 5. Возмущенное движение самолета
после ступенчатого (резкого) отклонения
руля:
7—изменение параметра, характеризующего дви-
жение самолета, например перегрузки (п^ или nz),
УГЛОВОЙ СКОрОСТИ ((0^ ИЛИ (ду И 10^.) и т. п.;
2—руль
коэффициент демпфирующего момента рыскания;
коэффициент путевой статической устойчивости само-
лета;
коэффициент относительной плотности самолета;
масштаб времени при приведении уравнений боко-
вого движения самолета к безразмерному виду;
относительный момент инерции самолета.
Для количественной оценки динамической управляемости само-
лета наряду с характеристиками его статической управляемости
необходимо знать харак-
теристики самого пере-
ходногОпроцесса.
При анализе управляе-
мого движения самолета
качество переходного про-
цесса часто характеризу-
ют величиной относитель-
ного заброса перегрузки
ЛПзаб/А/густ или угловой
СКОрОСТИ Д(0заб/^уст> В
также временем срабаты-
вания 4л в течение кото-
рого при ступенчатом
(резком) отклонении руля
в первый раз достигается
значение перегрузки пуст
или угловой скорости
(Оуст, соответствующее но-
вому балансировочному
положению руля в уста-
новившемся полете (рис. 4.5). В этом случае статические характе-
ристики управляемости не дают правильного представления о том,
как изменяются усилия на рычагах управления и как перемещают-
ся рычаги в процессе неустановившегося движения самолета при
выполнении летчиком произвольного маневра. Например, при рав-
ных по величине усилиях на ручке управления (Рв) в исходном
(прямолинейном) и конечном (после завершения маневра) криво-
линейном установившемся полете с одной и той же скоростью по-
казатель статической управляемости Рп равен нулю, так как рас-
считывается он по следующей формуле:
рп Рв.кон исх
Пу Кон Пу исх
147
Однако равенство нулю показателя Рп (а также и Хп) еще не
означает, что при выполнении самого маневра для изменения нор-
мальной перегрузки самолета летчику не потребуется приклады-
вать к ручке управления значительных усилий и отклонять ручку
управления в ту или иную сторону от исходного положения. По-
этому для количественной оценки продольной управляемости само-
лета в данном случае необходимо знать также и характеристики
самого переходного процесса, например, время срабатывания и
относительный заброс перегрузки Ап3= —.
А Му ст
При летных испытаниях самолетов в качестве показателей ди-
намической управляемости самолета иногда принимают коэффи-
циенты динамического увеличения (\Р и Хх) соответствующих ста-
тических характеристик управляемости и фазовое запаздывание
Фр и фх ответной реакции самолета на действия летчика (Р, х)*.
В основу подобной системы показателей динамической управ-
ляемости Хр и (коэффициентов динамического увеличения соот-
ветствующих характеристик статической управляемости самолета)
положен следующий простой принцип:
Коэффициент дина-
мического увеличе-
ния
Величина показателя управляемости, свя-
зывающего действия летчика с ответной
реакцией самолета, при вынужденных коле-
баниях
Величина соответствующего показателя
статической управляемости
Коэффициенты Хр и позволяют судить о степени относитель-
ного изменения характеристик продольной, путевой и поперечной
управляемости самолета при выполнении реального маневра по
сравнению с их величиной в «статических» условиях, например
в случае очень медленного перехода самолета с постоянной угло-
вой скоростью от исходного установившегося режима полета к ко-
нечному также установившемуся режиму (при V=const).
Не менее важной характеристикой динамической управляемо-
сти самолета является и величина фазового запаздывания фр и фх
реакции самолета на действия летчика :
Фазовое
запаздывание
Величина запаздывания реакции самолета
по времени (например, перегрузки по отно-
шению к прикладываемому к ручке управ-
ления усилию летчика и т. п.)
Период вынужденных колебаний самолета
(Тв).
* Г. С. Калачев, Показатели маневренности, управляемости и устойчи-
вости самолетов, Оборонгиз, 1958.
148
О Частота короткопериодических
колебаний.
Рис. 4.6. Оценка летчиком
устойчивости и управляемости
самолета в зависимости от ча-
стоты его собственных колеба-
ний в короткопериодическом
движении и степени демпфиро-
вания колебаний:
/—самолет практически неустойчив,
реакция очень замедленная; 2—са-
молет нейтрален, реакция повышен-
ная: 3—самолет чувствителен к ма-
лым отклонениям ручки управления
Фазовое запаздывание возрастает при увеличении резкости
выполняемого маневра и уменьшении демпфирования возмущен-
ного движения.
При анализе динамических
свойств, устойчивости и управляе-
мости самолета, уточнении запасов
статической устойчивости, диапазо-
нов изменения собственных частот
и степени демпфирования возму-
щенного движения самолета, прием-
лемых или недопустимых для лет-
ной практики, полезно также иметь
графики, подобные приведенному
на рис. 4.6.
Такие зависимости могут быть
построены для испытываемого са-
молета^™ фактическим данным лет-
ного эксперимента (область возмож-
ных в полете изменений собственных
частот и степени демпфирования
при заданных характеристиках си-
стемы управления с соответствую-
щими оценками летчиков-испытате-
лей). Сопоставление их с более пол-
ными данными летных исследова-
ний, проводимых на самолетах —
летающих лабораториях с изменяемыми характеристиками устой-
чивости и управляемости, позволит правильнее понять причину тех
или иных особенностей в поведении испытываемого самолета и по-
может полнее увязать результаты количественных измерений с ка-
чественной оценкой летчика.
Характеристики продольной статической
устойчивости и управляемости
Статически устойчивым в продольном отношении называется
такой самолет, на котором при нарушении угла атаки либо скоро-
сти полета и числа М изменяется продольный аэродинамический
момент в направлении возврата самолета в исходный режим ба-
лансировки.
Продольный момент самолета Mz является функцией многих
независимых переменных. Он изменяется при изменении угла
атаки, скорости полета и числа М, при появлении угловой скоро-
сти тангажа и скольжения. На продольный момент самолета
влияют также изменение режима работы двигателя, фиксация и
освобождение рулей, изменение центровки, любое изменение внеш-
них форм самолета, обусловленное упругими деформациями его
149
конструкции, отклонением закрылков и воздушных тормозов, вы-
пуском шасси, наружными подвесками и т. д.
Влияние этих факторов на продольную устойчивость самолета
не одинаково и может проявляться по-разному в различных усло-
виях полета. Так, влияние сжимаемости воздуха особенно возра-
стает при около- и сверхзвуковых скоростях полета. Упругие
деформации самолета зависят от степени упругости конструкции
и величины действующих на нее аэродинамических сил. Поэтому
их влияние возрастает с увеличением скоростного напора (т. е. при
больших приборных скоростях Vnp) и перегрузки (пу), а также при
значительном нагреве конструкции (при больших числах М по-
лета). Наоборот, влияние тяги двигателя на балансировку и устой-
чивость самолета обычно становится заметным только при малых
скоростях. Наконец, влияние продольной центровки хт самолета
проявляется при всех скоростях, числах М полета и углах атаки,
причем относительно сильнее в дозвуковом полете, чем в сверхзву-
ковом. Продольная устойчивость самолета увеличивается по мере
смещения вперед центра тяжести. Поэтому при передних центров-
ках самолет обладает большей устойчивостью, чем при задних.
Центровку, при которой самолет становится нейтральным в отно
шении продольной статической устойчивости, называют нейтраль-
ной (хн).
При анализе продольной статической устойчивости самолета
обычно рассматривают только изменение продольного момента,
связанное с изменением угла атаки, скорости полета или числа М,
для фиксированного или освобожденного руля и заданных условий
работы двигателя и положений центра тяжести самолета, шасси,
триммеров, закрылков, воздушных тормозов, наружных подвесок.
При этом степень продольной статической устойчивости самолета
оценивается величиной изменения коэффициента продольного мо-
мента mz, приходящейся на единицу изменения коэффициента
подъемной силы су, т. е. графически наклоном кривой mz=f(cy) *.
Изменением коэффициента подъемной силы самолета су в данном
случае выражается любое отклонение самолета от исходного ре-
жима балансировки, связанное с изменением угла атаки как при
постоянной, так и при изменяющейся (по определенному закону)
скорости полета.
Однако и при таком допущении зависимость mz = f(cy) не всегда
может быть представлена графически одной кривой. Поэтому каж-
дой скорости полета и каждому числу М, как это видно на рис. 4. 7,
соответствует своя кривая mz=f(cy).
* Коэффициент продольного момента mz самолета подсчитывается по фор-
Л4г / qV2\
муле mz= —, где q— скоростной напор lq~ — ;
QSbа \ /
5 и Ьл—соответственно площадь и длина САХ крыла.
150
Степень продольной статической устойчивости самолета оцени-
вают величиной тангенса угла наклона касательной к кривой
mz = f(Cy) в точке mz = 0 и принимают следующие обозначения:
су ^rnz kmz ,
mzy=———=tgv.
dcy Ac у
(4.1)
Величина тси называется коэффициентом продольной статиче-
ской устойчивости, У самолета, обладающего устойчивостью, этот
коэффициент отрицателен. Коэффициент mcv характеризует сте-
пень нарастания восстанавливающего аэродинамического момента
Рис. 4.7. Изменение коэффициента продольного момента тг
самолета в зависимости от су и а при различных М и УПр:
устойчивый в продольном отношении самолет;
самолет
неустойчивый
самолета по мере отклонения его от исходного угла атаки в гори-
зонтальном полете с постоянной скоростью, например, при мгно-
венном воздействии на прямолинейно летящий самолет вертикаль-
ного порыва.
Однако изменение угла атаки обычно сопровождается враще-
нием самолета в плоскости тангажа. В этом случае наряду
с восстанавливающим моментом статической устойчивости, харак-
теризуемым коэффициентом , развивается так называемый
демпфирующий момент. В результате изменения угла атаки гори-
зонтального оперения при вращении самолета вокруг поперечной
оси на оперении появляется дополнительная аэродинамическая
сила, которая и создает демпфирующий момент, препятствующий
вращению самолета. Этот момент повышает статическую устойчи-
151
вость самолета в криволинейном полете по сравнению с устойчи-
востью его в прямолинейном полете при М = const(V=const).
Суммарная степень продольной статической устойчивости само-
лета в криволинейном полете при постоянных значениях скорости
и числа М получила название устойчивости по перегрузке. Развер-
нутое выражение коэффициента устойчивости по перегрузке имеет
следующий вид:
(4. 2)
где — коэффициент продольного демпфирования;
ft----коэффициент относительной
а висящий от высоты полета;
G
т~-------масса самолета;
g
G —вес самолета;
g = 9,81 м1сек2;
плотности самолета, за-
Q —массовая плотность воздуха.
У самолета, обладающего устойчивостью по перегрузке, этот
коэффициент отрицателен, т. е. сгп<0.
Устойчивость по перегрузке характеризует, таким образом, про-
дольную статическую устойчивость самолета при постоянной ско-
рости в криволинейном полете, например, при выходе из пикиро-
вания, вводе в вираж, на горке и т. д. С коэффициентом устойчи-
вости по перегрузке оп непосредственно связаны важные характе-
ристики продольной управляемости самолета:
1) коэффициент расхода усилий на перегрузку (усилие, кото-
рое должен приложить летчик к ручке управления для изменения
нормальной перегрузки самолета на Апу= ± 1, выполняя продоль-
ный маневр с постоянной угловой скоростью тангажа coz при задан-
ной скорости полета и М = const)
Р"
dny
рхч.
(4.3)
2) усилия, потребные для вывода самолета на крайние эксплуа-
тационные режимы при М = const (абсолютное увеличение усилий
на ручке управления при создании максимальной эксплуатацион-
ной перегрузки пэтах или выходе на большие углы атаки, соответ-
ствующие наибольшей допустимой в эксплуатации величине коэф-
фициента подъемной силы самолета с^доп):
Р
птах
и
считая Рп = const;
сАГдоп
р*
сУдоп СУг.Т1
Су г.п
(4.4)
152
3) коэффициент расхода ручки управления (штурвала) на пе-
регрузку (потребная величина хода ручки управления для измене-
ния нормальной перегрузки самолета на Дпу=±1 при <oz = const,
V=const и M=const)
(4.5)
dny п 7
где °лсв и «^—коэффициенты устойчивости по перегрузке
соответственно при освобожденной и фикси-
рованной ручке управления;
~х дРв ДРВ , .
Р —коэффициент расхода продольных усилии
дхт Дхт (величина дополнительного приращения уси-
лий на ручке управления дРв при изменении
центровки самолета на дхт=-^- =1 и сохра-
А
нении исходной скорости полета и М = const);
—коэффициент расхода ручки управления (ве-
дхт Ахт Личина потребного хода ручки управления Дхв
при изменении центровки самолета на дхт = 1
и сохранении исходной скорости полета и
М = const);
^доп —наибольшая допустимая в эксплуатации ве-
личина коэффициента подъемной силы самоле-
та су;
с^гп —значение су в исходном горизонтальном полете.
Устойчивость самолета по перегрузке, естественная или обеспе-
чиваемая средствами автоматики, является важным условием без-
опасности полета. Устойчивый самолет в отличие от неустойчивого
не проявляет стремления к самопроизвольному кабрированию
при маневре с положительной перегрузкой и не стремится перейти
в пикирование при маневре с отрицательной перегрузкой. Пере-
грузка изменяется при этом пропорционально отклонению ручки
управления.
Вторым, также достаточно характерным для летной практики
видом продольного маневра, при котором происходит изменение
угла атаки, является движение самолета по прямолинейной траек-
тории. Однако в этом случае изменение угла атаки сопровождается
изменением скорости полета и числа М, а перегрузка самолета
Y
остается постоянной, т. е. nv= — =const*. Частным видом такого
у G
маневра являются разгон и торможение самолета в горизонталь-
* При прямолинейном движении самолета угол наклона траектории в по-
стоянен, в горизонтальном полете он равен нулю. Поэтому в прямолинейном
полете постоянна и вертикальная перегрузка самолета пу— — = const.
G
153
Область неустойчивости
Рис. 4.8. Изменение коэффициента про-
дольного момента самолета в зависимости
от су в прямолинейном полете на заданной
высоте (Н = const)
ном полете, когда вес самолета G полностью уравновешивается
подъемной силой Y и перегрузка пу=Л.
Продольная статическая устойчивость самолета в прямолиней-
ном полете при постоянной перегрузке (пу = const) в отличие от
полета при постоянной скорости (М = const или V=const, харак-
теризуемой коэффициентами вп и ту) получила название устойчи-
вости по скорости.
Изменение скорости полета и числа М при возмущенном дви-
жении самолета приводит к появлению дополнительного продоль-
ного момента.
Этот момент в зависимо-
сти рт характера его изме-
нения по числу М и скорости
полета может быть как ста-
билизирующим, так и деста-
билизирующим. Полет при
пу=\ и переменной скорости
или переменном числе М ха-
рактеризуется кривой mz =
=f(Cy), которая изображена
на рис. 4.8 более жирной
линией. Эта кривая полу-
чается в результате после-
довательного перехода с
одной кривой М = const на
другую соответственно ме-
няющимся в прямолинейном
полете значениям су и числа
М или скорости полета, свя-
занным между собой следующей простой зависимостью: суМ? =
= const или cyV2 = const. Наклон этой кривой характеризует степень
устойчивости самолета по скорости в прямолинейном полете на
заданной высоте (рис. 4. 8). Развернутое выражение коэффициента
устойчивости по скорости можно представить в следующем виде:
Си . М t/М Си , V dV
= + --- или av = mz-{-mz------, (4.6)
dCy dcy
где mczy — коэффициент продольной статической устойчивости;
и — коэффициенты, характеризующие степень изменения
коэффициента продольного момента соответственно
по числу М или скорости полета.
У самолета, обладающего устойчивостью по скорости, этот
коэффициент отрицателен, т. е. сгу<0. Только в этом случае всякое
отклонение самолета от заданного ему режима балансировки по
скорости (числу М) в прямолинейном полете будет приводить
к появлению восстанавливающего аэродинамического момента
(пикирующего при уменьшении скорости и кабрирующего при уве-
154
личении скорости полета). Наиболее значительные изменения
устойчивости по скорости обычно наблюдаются при около- и сверх-
звуковых скоростях полета (на рис. 4.8 при М>0,6).
С коэффициентом устойчивости по скорости Оу связаны такие
характеристики продольной управляемости самолета в прямоли-
нейном полете, как:
1) коэффициент расхода усилий на скорость (усилие, которое
должен приложить летчик к ручке управления для того, чтобы
изменить скорость исходного установившегося полета на 50%
при пу=\)
Pv = —(<^РЛ = _ 0 р\. (4 7)
2 \dV )рз= ^ и св > \ )
2) усилия на ручке (штурвале) в области минимальных и мак-
симальных скоростей полета при неизменном положении триммера
(тв = const), соответствующем балансировке самолета (Рв = 0)
в крейсерском режиме
₽vml. и Pv^, (4.8)
3) коэффициент расхода ручки управления (штурвала) на ско-
рость (потребная величина хода ручки, управления для изменения
скорости исходного установившегося полета на 50% при пу=1)
XV = = _ 0 х^ , (4. 9)
2 dV .
где Рхч и Xх-* — коэффициенты расхода усилий и хода ручки
управления на центровку.
На самолете, устойчивом по скорости, летчику легче выдержи-
вать точно скорость полета и число М. Такой самолет не проявляет
стремления к самопроизвольному отклонению от заданного летчи-
ком режима балансировки по скорости и числу М. Однако для
безопасности полета более существенна устойчивость по пере-
грузке, чем по скорости. Самолеты с небольшой степенью неустой-
чивости по скорости на неэксплуатационных режимах полета еще
нередко встречаются в массовой эксплуатации.
Это объясняется тем, что возмущенное движение самолета, не-
устойчивого по скорости, в противоположность самолету, неустой-
чивому по перегрузке, всегда развивается медленно, и летчик
располагает достаточным временем, чтобы вмешаться в управле-
ние и соответствующим отклонением руля прекратить движение
самолета.
О наличии у самолета статической устойчивости по скорости
и перегрузке (с фиксированным и освобожденным управлением)
можно судить по характеру изменения балансировочных углов
отклонения руля высоты (стабилизатора), положения ручки
управления и усилий на ней при изменении как скорости полета
155
при пу=1, так и перегрузки при постоянной скорости М = const,
т. е. по виду представленных на рис. 4.9 балансировочных кривых.
В самом деле, соответствующим отклонением ручки управления
(ДХв) летчик уравновешивает восстанавливающий момент про-
дольной статической устойчивости, возникающий при изменении
скорости полета, числа М или перегрузки, обеспечивая тем самым
балансировку самолета на новом режиме.
Фиксированное упраблеЪие
Освобожденное управление
[на режиме балансиродки, приР^О)
Устойчивость
по скорости
xT=const; яу=7;
*В|Д,<Рст бруд=const; Я-const
I
хт - const, Тв-const. 7ly«f;
Я-const; бруд =const
V
(Al)
Устойчивость
по перегрузке
хт «const const,
хВ|бв;(рст Я« const
Xj-const; тв-const; M=const
бруд-const; Я-const
Рис. 4.9. Балансировочные кривые устойчивого и неустойчивого в продольном
отношении самолетов:
---------устойчивый самолет;----------неустойчивый самолет
При этом выполняется условие
2тг==дт2уСТ+Дт2ур==0, (4.10)
где дтгур —уравновешивающий момент руля, численно равный
произведению гп* — коэффициента эффективности про-
дольного управления на Дхв —величину дополнитель-
ного хода ручки управления для балансировки момента
статической устойчивости самолета:
дтгур = т/ дхв;
Дтгуст — восстанавливающий момент статической устойчивости,
возникающий при изменении режима балансировки
самолета по су на величину дс^, численно равный:
(Си М ЯМ \
Д/п т = рп/ + /пг -- Дс»=агД(?8, — для прямоли-
\ dCy )
нейного полета при «p = l=const и
156
&тгуст =1 mzy——I ^Су = ап^су — ^ля криволинейного полета
при М = const и V = const.
Полученная зависимость связывает угол наклона балансиро-
вочных кривых, приведенных на рис. 4. 9, с коэффициентом устой-
чивости по скорости и перегрузке:
\dCy /M = const £*/г.П \dnyJM^ const
a _ mx*(dx*\ _ тгВ V (dxB\ Xv
° J/---nlz I -- ) -------I ----I =---------— ,
\dcy/”y=i Cyr,n 2 \dV]ny~i Xх?
так как
1
I
(4.П)
СУ—ПУСУг.^ СУг.п— »
Я
ХХТ= — с~^-(поскольку сУг пдхт4-т/Дхв=0),
Следовательно, при известной величине коэффициента эффек-
тивности продольного управления т*в наклон балансировочных
кривых
хв=/(М, V) при Пу=1;
хв=fx (tty) при 714 = const,,
8В=/(М, V) или V) при пу=1,
= f (Пу) ИЛИ срст = j\ (Пу) при М = const
однозначно определяет степень продольной статической устойчи-
вости самолета по скорости и перегрузке. Приведенные выражения
для коэффициентов устойчивости по скорости и перегрузке отно-
сятся к условиям полета с фиксированным управлением. Точно
гак же можно получить выражения и для коэффициентов статиче-
ской устойчивости, связывающие устойчивость самолета по скоро-
сти и перегрузке в полете при освобожденном управлении с накло-
157
ном балансировочных кривых PB=f(M, V) при пу=1 и Рв = 0 на
режиме балансировки и PB=f(ny) при M = const и Рв = 0.
Подобные балансировочные кривые обычно и получают при лет-
ных испытаниях самолета.
Устойчивому по скорости самолету соответствует положитель-
ный наклон балансировочных кривых 6B = f(M, V), xB=fi(M, V)
и Рв=/2(М, V) при условии пу=1 и Рв = 0, а устойчивому по пере-
грузке— отрицательный наклон балансировочных кривых бв =
==f(ny), xB=fi(ny) и PB=f2^y) при M = const.
При определении коэффициентов расхода усилий на скорость
d Р d Р
и перегрузку Pv и Рп производные —- и —- должны быть взяты
dV driy
при условии Рв = 0. Последнее обычно совершенно необходимо
при расчете коэффициента расхода усилий на скорость Pv. В слу-
чае невыполнения этого условия при проведении летных испыта-
ний самолета, расчет Pv производится по следующим прибли-
женным формулам:
а) балансировка самолета по усилиям с помощью аэро-
динамического триммера (обратимая система управле-
ния без бустеров, рис. 4. 10, а)
рУ У / ^Рв \ _, У /dP^} \ ।
2 \ dV Х=0 2 \ dV Xi*°
-РЛЕ,, (4.12)
1 2 dV B 2 \ dV Jpb1+o '
„ V 1 dP^ dp
гдегт=--------; PB——- — расход усилии на градус угла откло-
2 Р& dV dxB нения аэродинамического триммера;
р
тв1 —тв=----7» так как по условию Рв = РъХ-\-
^в
+ ^в(тв1-тв) = 0,
тв и тв1 — исходное и новое положения триммера;
б) балансировка самолета по усилиям с помощью меха-
низма триммерного эффекта при необратимой системе
бустерного управления (рис. 4.10, б):
рУ___V (dPB\ _____ V dP3 dxB _dPB 13)
~ 2 \dV “ 2 dxB dV ~dxB ’ V ‘ }
где Xv = — ——коэффициент расхода ручки управления
2 dV (штурвала) на скорость.
При определении коэффициента расхода усилий на перегрузку
Рп выполнение указанного выше условия (Рв = 0) не обязательно,
158
dpB *
так как производная —- обычно мало меняется при изменении
dny
условий триммирования усилий на рычаге управления.
Рис. 4. 10. Различные способы триммирования усилий на ручке управ-
ления:
а—аэродинамическим триммером (при обратимой безбустерной системе управле-
ния); б—триммирующим механизмом (на самолетах с необратимой системой бу-
стерного управления)
Характеристики поперечной и путевой
статической устойчивости и управляемости
Самолеты, у которых при скольжении возникает аэродинами-
ческий момент рыскания Му, стремящийся уменьшить угол сколь-
жения, называют статически устойчивыми, обладающими путевой,
или флюгерной, устойчивостью. Момент относительно вертикаль-
ной оси (момент рыскания) появляется вследствие несимметрич-
ного обтекания потоком фюзеляжа и вертикального оперения
самолета при скольжении.
Для количественной оценки путевой устойчивости самолета
обычно пользуются безразмерным коэффициентом момента рыска-
ния ту=^1 (здесь I — размах крыла).
Изменение этого коэффициента по углу скольжения |3 пока-
зано на рис. 4.11. Наклон приведенной кривой характеризует
степень путевой устойчивости самолета, т. е. величину приращения
коэффициента момента рыскания при изменении на 1° угла сколь-
жения. Степень путевой устойчивости самолета определяется как
величина тангенса угла наклона касательной к кривой
в точке р=0:
пг
р дту
у~ дь
(4. 14)
159
Рис 4.11. Изменение коэффициента момента рыскания ту само-
лета по углу скольжения при М=const:
---------устойчивый в путевом отношении самолет;--------неустой-
чивый самолет
Рис. 4.12. К определению
взаимосвязи угла крена у
с углом скольжения 0:
Y —4 подъемная сила (Y=CyqS), Z—
поперечная сила [Z=czqS}t Gz=
=G sin у и Gy=G cos Y — проекции
силы веса G самолета на оси z и у
160
Величина называется коэффициентом статической устойчи-
вости пути, или коэффициентом флюгерной устойчивости. У само-
лета, обладающего путевой устойчивостью, этот коэффициент
отрицателен. Путевая устойчивость самолета относительно мало
меняется при дозвуковых скоростях полета и существенно изме-
няется в области сверхзвуковых скоростей.
Самолет, у которого при скольжении возникает аэродинамиче-
ский момент крена Мх, действующий в сторону, противоположную
скольжению (например, при скольжении вправо стремится на-
кренить самолет влево), называют статически устойчивым в попе-
речном отношении, обладающим поперечной устойчивостью.
Аэродинамический момент крена появляется при скольжении
вследствие косого обтекания крыла и вертикального оперения са-
молета. Взаимосвязь угла скольжения с креном видна из рис.
4. 12. При накренении самолета на угол у боковая проекция силы
веса GZ=G sin у вызывает скольжение в сторону крена, в резуль-
тате которого появляется поперечная аэродинамическая сила Z.
При этом возникает момент крена того или иного знака (в зависи-
мости от того, устойчив самолет или неустойчив в поперечном
отношении). При установившемся скольжении поперечная аэро-
динамическая сила Z уравновешивает боковую проекцию силы
веса Gz. Между углами крена и скольжения существует при этом
вполне определенная однозначная связь, поскольку величина попе-
речной силы зависит от угла скольжения р, а величина боковой
проекции силы веса — только от угла крена у. Эта связь при малых
углах скольжения и крена выражается следующей формулой:
(4.15)
cz
где — изменение коэффициента поперечной силы самолета, при-
ходящееся на градус изменения угла скольжения.
Обычно с? — постоянная величина в дозвуковом полете, завися-
щая от отклонения руля направления 6Н:
^=(^)Sh=o + ^«^h, (4.16)
Up
где
z <Э8Н ’
Величина с? заметно меняется в области около- и сверхзвуко-
вых скоростей полета.
Для количественной оценки поперечной статической устойчи-
вости самолета пользуются безразмерным коэффициентом момента
крена Изменение этого коэффициента по углу скольже-
ния показано на рис. 4. 13. Наклон кривой mx = f(p) характеризует
степень поперечной статической устойчивости самолета, которая
6 598 161
определяется как величина тангенса угла наклона касательной
к кривой wix=f(0) в точке р = 0:
3 дтх м _
'п'=1Г=:^Г=*'’- (4'17>
Величина называется коэффициентом поперечной статиче-
ской устойчивости самолета. У самолета, обладающего устойчи-
востью, этот коэффициент отрицателен.
Рис. 4. 13. Изменение коэффициента момента крена тх само-
лета по углу скольжения при М=const:
устойчивый в поперечном отношении самолет; — —----------не-
устойчивый самолет
Поперечная устойчивость самолета возрастает с увеличением
конструктивного угла поперечного V крыла и высоты вертикаль-
ного оперения (при обычном расположении киля сверху фюзе-
ляжа). Эффект угла поперечного V эквивалентен различным по
знаку изменениям местных углов атаки правой и левой частей
крыла при скольжении.
Поперечная статическая устойчивость современного самолета
заметно меняется как по углам атаки, так и по числу М. Наиболее
существенные изменения поперечной статической устойчивости
возможны на больших углах атаки, а также при около- и сверх-
звуковых скоростях полета.
Путевую и поперечную статическую устойчивость самолета
с фиксированным и освобожденным управлением можно опреде-
лить по характеру изменения балансировочных углов отклонения
элеронов и руля направления, бокового смещения ручки управле-
ния и изменения положения педалей, а также по изменению уси-
162
лий на ручке управления и педалях при скольжении, т. е. по виду
балансировочных кривых, приведенных на рис. 4. 14. Отрицатель-
ный наклон этих кривых указывает на наличие у самолета попе-
речной и путевой статической устойчивости при фиксированном
и освобожденном управлении. Приближенно зависимость между
углом наклона балансировочных кривых x3 = f(₽) и хн = Л(₽), соот-
ветствующих условиям установившегося скольжения в прямоли-
нейном полете, и коэффициентами поперечной и путевой устойчи-
Факсированное Освобожденное
управление управление
Рис. 4. 14. Балансировочные кривые устойчивого и неустой-
чивого в поперечном и путевом отношении самолетов:
--------устойчивый самолет;-------неустойчивый самолет
(xT=const, 5руд=соп8|:, /7=const, ,M=const, тэ= const, TH=const)
вости самолета с фиксированным управлением можно представить
следующими выражениями:
(4.18)
где тхх3 и тХн — коэффициенты эффективности попереч-
У ного и путевого управления самолета;
и т-гэ==^£._аэродинамические коэффициенты.
х дхн у дхэ
Аналогичные формулы легко получить и для оценки устойчи-
вости самолета с освобожденным управлением по наклону балан-
сировочных кривых Л)=/(₽) и РН=Л(Р) при M = const.
6*
163
Поскольку боковое движение самолета, как правило, происхо-
дит относительно двух осей {Ох и Оу), его характер существенно
зависит не только от абсолютной величины восстанавливающих
моментов крена и рыскания (т. е. знака и величины коэффициен-
тов устойчивости и т|), но и от определенного соответствия
между ними. Чем слабее проявляется у самолета самопроизволь-
ное скольжение (т. е. чем больше путевая устойчивость), тем
большие допускаются запасы поперечной устойчивости (без риска
ухудшить характер бокового движения самолета). При избыточной
поперечной устойчивости реакция самолета на возникающее сколь-
жение становится очень резкой. Он легко отвечает креном на ма-
лые, случайно возникающие в полете возмущения (углы скольже-
ния). С точки зрения летчика такой самолет будет вести себя как
неустойчивый и получит отрицательную оценку. Поэтому чрезмер-
ная поперечная устойчивость так же недопустима, как и неустой-
чивость. Самолет должен обладать небольшой поперечной стати-
ческой устойчивостью с фиксированным и освобожденным управле-
нием, обеспечивающей ему прямую реакцию по крену на отклоне-
ние руля направления и исключающей развитие значительной
угловой скорости крена при одностороннем отказе двигателя или
воздействии на самолет несимметричного порыва воздуха. Попе-
речная устойчивость самолету, конечно, необходима. В случае не-
устойчивости у самолета появляется обратная реакция по крену
на отклонение руля направления и наблюдается стремление
к уходу от заданного режима балансировки, что усложняет пило-
тирование и требует от летчика повышенного внимания и дополни-
тельных корректирующих движений рулями.
При анализе поперечной и путевой управляемости самолета
обычно рассматривают два вида управляемого движения самолета:
установившееся скольжение и вращение вокруг продольной и вер-
тикальной осей в результате отклонения руля направления или
элеронов. В качестве характеристик поперечной и путевой управ-
ляемости в этом случае принимают следующие показатели, непо-
средственно определяемые при летных испытаниях самолета:
1) коэффициенты расхода усилий и ручки управления (штур-
вала) на крен (усилие, которое должен приложить летчик к ручке
управления, и потребная величина ее хода для изменения на 1°
угла крена в прямолинейном установившемся скольжении)
Pl = ^b.. х7,=— (4.19)
dy с</г.п dy
2) коэффициенты расхода усилий и педалей на крен (усилие,
которое должен приложить летчик к педали, и потребная величина
ее хода для изменения на 1° угла крена в прямолинейном уста-
новившемся скольжении)
xtn==—1_^и. (4.20)
dy ' су ау
164
3) коэффициент гармоничности управления (соотношение по-
гребных для балансировки самолета в установившемся скольже-
нии отклонений ручки управления, штурвала и педалей)
= (4.21)
3 dxH
4) коэффициенты расхода усилий и ручки управления (штур-
вала) на угловую скорость крена (усилие, которое должен прило-
жить летчик к ручке управления, и потребная величина ее хода
для создания установившейся угловой скорости крена сох =
= ±1 рад/сек)
= (4.22)
du>x d^x
5) показатели реакции самолета по крену на отклонение руля
направления (усилие, которое летчик прикладывает к педали и ход
педалей при создании угловой скорости крена о)х=±1 рад/сек)
pU>x dPн , ___ dxH
н d(^x ’ н dax
(4. 23)
6) коэффициенты расхода усилий и педалей на угловую ско-
рость рыскания (усилие, которое летчик должен приложить к пе-
дали и потребная величина ее хода для создания угловой скорости
рыскания (0^=1 рад/сек)
хтУ=^~. (4.24)
н d<£y н d^y
Указанные характеристики поперечной и путевой управляемо-
сти самолета связывают усилия на ручке управления (штурвале)
и педалях, а также потребные перемещения рычагов управления,
с такими параметрами движения самолета, как угол крена (или
угол скольжения, однозначно связанный с углом крена) и угловая
скорость крена.
Кроме рассмотренных выше характеристик, при оценке попе-
речной управляемости самолета в режиме вращения с максималь-
ной угловой скоростью крена сохтах принимается в качестве пока-
зателя управляемости потребная для этого величина усилий на
ручке управления (штурвале)
(4.25)
Наконец, в качестве показателей поперечной и путевой управ-
ляемости самолета в установившемся скольжении с наибольшим
углом крена утах принимается величина потребных для этого уси-
лий на ручке управления (штурвале) и педалях
^>этшах —YmaxJ
jD^niax = iDH Ymax.
(4. 26)
Глава V
НЕКОТОРЫЕ ОСОБЕННОСТИ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ СОВРЕМЕННЫХ
САМОЛЕТОВ
5.1. УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ
СВЕРХЗВУКОВОГО САМОЛЕТА
Успешное преодоление «звукового барьера» и освоение сверх-
звуковых скоростей и больших высот стало возможным благодаря
применению реактивных двигателей, существенному изменению
внешних форм самолета, применению управляемого стабилиза-
тора, а также внедрению в систему управления рулями самолета
бустеров (усилителей) и автоматики, регулирующей характери-
стики самой системы и улучшающей затухание возмущенного дви-
жения самолета.
Однако изменение самих условий летной эксплуатации само-
лета и его внешних форм не могло не привести к появлению опре-
деленных особенностей в устойчивости и управляемости сверхзву-
кового самолета. Поэтому для квалифицированного проведения
летных испытаний такого самолета необходимо хорошо изучить
его аэродинамические и конструктивные особенности, а также его
возможности и условия эксплуатации и хорошо знать природу тех
явлений, с которыми летчик сталкивается при выполнении полета
(как в обычных условиях, так и в особых случаях). Следует иметь
в виду, что характеристики устойчивости и управляемости сверх-
звукового самолета современной компоновки, несмотря на относи-
тельное совершенство его аэродинамических форм, не сохра-
няются в желаемых границах для всего диапазона эксплуатацион-
ных скоростей полета, чисел М, высот и углов атаки. В связи
с этим в полете обычно и наблюдается ряд характерных явлений,
которые вносят определенные особенности в пилотирование.
Сущность этих явлений в настоящее время достаточно хорошо
изучена. В основном они обусловливаются:
— сильно возрастающим при около- и сверхзвуковых скоро-
стях влиянием сжимаемости воздуха на аэродинамические харак-
теристики самолета;
— упругими деформациями конструкции, влияние которых ра-
стет с увеличением скоростного напора и числа М полета;
— особенностями аэродинамической и весовой компоновки
самолета;
166
— сильным уменьшением плотности воздуха на больших высо-
тах и в связи с этим ухудшением естественного демпфирования
возмущенного движения самолета.
Особенности в устойчивости и управляемости проявляются тем
заметнее, чем менее совершенна аэродинамическая форма само-
лета и больше его размеры. Поэтому с увеличением габаритов
самолета требования к его аэродинамической компоновке повы-
шаются.
Наиболее высокие требования предъявляются к аэродинамиче-
ской компоновке тяжелого сверхзвукового самолета. К существен-
ным особенностям компоновки и летной эксплуатации тяжелого
сверхзвукового самолета прежде всего относятся:
— более низкие собственные частоты и большой разнос масс
вдоль продольной оси, а также значительная протяженность и
инерционность проводки управления рулями*;
— относительно меньшая жесткость конструкции тяжелого
самолета, подверженного к тому же в крейсерском сверхзвуковом
полете продолжительному воздействию аэродинамического на-
грева. Как следствие этого — возможность более сильного прояв-
ления эффекта упругих деформаций конструкции;
— наличие дополнительных источников возмущения в связи
с необходимостью установки на тяжелом сверхзвуковом самолете
нескольких мощных двигателей, разнесенных, как правило, отно-
сительно плоскости симметрии и не всегда работающих синхронно.
Особенности аэродинамической
и весовой компоновки. Изменение условий
эксплуатации самолета
По внешним формам, аэродинамике и весовой компоновке, по
насыщенности специальным оборудованием и условиям летной
эксплуатации сверхзвуковой самолет сильно отличается от само-
лета дозвукового. У сверхзвукового самолета заметно увеличилась
длина фюзеляжа (£ф), заострилась и сильно вытянулась его пе-
редняя час^гц (Lnep). Относительно уменьшились размах (/), тол-
щина (ё) и удлинение (Л) крыла и оперения (рис. 5.1). Передние
кромки крыла и оперения приобрели значительную стреловидность
(/) и форма их в плане стала иной (стреловидной, треугольной
и др.). В связи с этим сильно изменился также характер распреде-
ления грузов внутри самолета: основная нагрузка сосредоточи-
вается внутри фюзеляжа, а крыло стало относительно легче.
Изменение внешних форм самолета усилило зависимость мно-
гих его аэродинамических характеристик от угла атаки (рис. 5.2),
а продольной устойчивости, кроме того, и от расположения стаби-
* Это не может не повлиять на динамические характеристики тяжелого
сверхзвукового самолета и его управляемость (хотя бы в связи с неизбежным
увеличением запаздывания ответной реакции самолета на действия летчика,
з иногда и ростом трения в проводке управления рулями).
167
лизатора но высоте, заметно усилилр взаимосвязь между продоль-
ным и боковым движением самолета.
Особенностями аэродинамической компоновки сверхзвукового
самолета обусловливаются в частности:
— увеличение с углом атаки его поперечной статической устой-
чивости, так как при косом обтекании (в полете со скольжением)
Самолеты периода 1939-!945гг Современные сдерходукодые самолеты
аэродинамической и весовой компоновки сверхзвукового самолета
(штриховкой отмечены области сосредоточения основных масс
грузов внутри самолета)
крыло со стреловидной передней кромкой (х>0) создает допол-
нительный стабилизирующий момент крена, величина которого
возрастает с увеличением угла атаки (рис. 5.2, а) *. На малых
углах атаки такой самолет обладает сравнительно небольшой по-
перечной устойчивостью, а на больших — его устойчивость возрас-
тает настолько, что нередко для ее уменьшения крылу приходится
* Когда фактическая стреловидность правой и левой консолей крыла стано-
вится различной, крыло с положительной стреловидностью по передней кромке
(Х>0) создает при этом различные по величине подъемные силы, в результате
чего появляется момент крена, действующий в сторону, противоположную сколь-
жению. С увеличением углов атаки различия в величине создаваемых консолями
подъемных сил все более возрастают и, следовательно, возрастает при этом и ста-
билизирующий момент крена.
168
придавать отрицательный угол поперечного V. При этом на ма-
лых углах атаки поперечная устойчивость самолета еще более
уменьшается. Вследствие этого, при пониженных запасах попе-
речной устойчивости, на малых углах атаки у самолета может
появиться обратная реакция по крену на отклонение руля направ-
ления, а на больших углах атаки все же может сохраниться повы-
шенная прямая реакция самолета на малые отклонения руля
(из-за чрезмерной поперечной устойчивости самолета);
Х-0
/3-/7
Повышенная чувствительность
самолета к малым f}
Поперечная
устойчивость
Парат пая реакция га- “
а
Рис. 5. 2. Возможные изменения по углу атаки ряда аэродинамиче-
ских характеристик сверхзвукового самолета
— возможность более сильного, чем на дозвуковых самолетах,
уменьшения на больших докритических углах атаки путевой ста-
тической устойчивости самолета и эффективности его элеронов,
вследствие образования более мощной вихревой пелены в хвосто-
вой части^юзеляжа и на концевых участках крыла (рис. 5.2,6);
— сильная неравномерность изменения скоса потока в зоне
оперения как по высоте и размаху, так и по углам атаки
(рис. 5.2, в);
— более резко выраженное влияние фюзеляжа и перераспре-
деления аэродинамической нагрузки по размаху крыла (в особен-
ности, развивающегося на крыле срыва потока) на продольную
устойчивость самолета.
169
Последние два обстоятельства при недостаточно тщательной
компоновке самолета могут привести к появлению у него на больших
углах атаки неустойчивости по перегрузке (рис. 5.2, г).
Сосредоточение основной массы грузов внутри длинного фюзе-
ляжа и большой разнос их относительно центра тяжести самолета,
а также увеличение общего полетного веса и удельной нагрузки
на крыло при относительном уменьшении веса крыльев привели
к заметному увеличению моментов инерции Jz и Jy относительно
поперечной и вертикальной осей самолета и уменьшили момент
Я км
Истинная скорость полета
(по тонкой стрелке указателя)
Рис. 5.3. Области освоенных авиацией высот и скоро-
стей полета:
/—самолеты с поршневыми двигателями; 2—реактивные самолеты
первых послевоенных леГ; 3—современные сверхзвуковые само-
леты (пунктиром отмечена область возможных скоростей полета
на высотах выше статического потолка)
инерции Jx относительно продольной оси. Последнее в свою оче-
редь не могло не повлиять на некоторые динамические свойства
самолета.
У старых самолетов все три момента инерции Jx, Jy и Jz обычно
имели примерно одну величину, у современного сверхзвукового
самолета они отличаются в семь и даже десять раз (см. таблицу
на рис. 5. 1).
Указанные особенности весовой компоновки заметно повысили
роль дестабилизирующих инерционных моментов в плоскости тан-
гажа и рыскания, возникающих от центробежных сил при враще-
нии самолета. В результате этого на сверхзвуковом самолете зна-
чительно усилилась инерционная взаимосвязь продольного и боко-
вого движений *.
* Подробно этот вопрос рассмотрен ниже (стр. 175).
170
Существенно изменились также и условия эксплуатации совре-
менного скоростного самолета. Сильно расширились диапазоны
эксплуатационных скоростей полета и высот (рис. 5.3). Значи-
тельно увеличились средние скорости, а также высоты, на которых
преимущественно летает современная реактивная авиация. При
этом сам скоростной самолет превратился в более совершенный
по своим аэродинамическим формам летательный аппарат, осна-
щенный сложным оборудованием и автоматикой.
Аэродинамические характеристики
и динамические свойства самолета
В связи с освоением трансзвуковых и сверхзвуковых скоростей
полета сильно возросло влияние сжимаемости воздуха на аэроди-
намические характеристики самолета, в том числе на наиболее
важные для устойчивости и управляемости самолета.
1
о
Цг ‘Положения аэроЗинами ческою
фокуса самолета (jfr)
хн9ЬСАХ
е)
а£у*<<1
«у
М,*7 /Мг»М,
4. ’’
7-а₽)
Рис. 5.4. Изменение устойчивости по перегрузке (/), коэффициен-
тов демпфирования крыла и оперения (2), эффективности горизон-
тального и вертикального оперения (5) и нейтральной центровки хн
самолета с увеличением числа М
Количественные изменения аэродинамических характеристик,
разумеется, весьма сильно зависят от совершенства внешних форм
сверхзвукового самолета. Однако общая тенденция этих изменений
по числу М качественно сохраняется примерно одинаковой у всех
самолетов независимо от частных особенностей их компоновки
(рис. 5.4).
Так, изменение характера распределения аэродинамической на-
грузки по хорде крыла и самолету в целом при сверхзвуковых
171
скоростях приводит к смещению назад равнодействующей аэро
динамических сил (см. рис. 5.4, а), а следовательно, и аэродина-
мического фокуса самолета (его нейтральной центровки). Благо-
даря этому при сверхзвуковых скоростях у самолета заметно воз-
растает устойчивость по перегрузке (кривая 1 на рис. 5.4) и его
нейтральная центровка хн смещается назад (см. рис. 5.4,6). Вме-
сте с тем с увеличением числа М падают демпфирующие свойства
крыла и оперения (кривая 2 на рис. 5.4), так как при этом все
более понижаются их несущие свойства. Последнее приводит при
больших числах М к ухудшению затухания возмущенного движе-
Р и с. 5. 5. Изменение коэффициентов эффективно-
сти и шарнирного момента рулей самолета с уве-
личением числа М:
/—эффективность стабилизатора; 2—эффективность рулей
высоты, направления и элеронов; 3—шарнирный момент
(пунктиром показано изменение аэродинамической нагруз-
ки по хорде руля и неподвижной части профиля в до-
звуковом полете; сплошной линией — в сверхзвуковом полете)
ния самолета. На снижение в сверхзвуковом полете несущих
свойств крыла и оперения указывает меньший наклон кривых
cy = f(a) и £z=/(₽) на рис. 5.4,в, что приводит к уменьшению ве-
личины приращения коэффициентов подъемной силы (Асу) и бо-
ковой силы (Acz) на каждый градус изменения углов атаки Аа и
скольжения Ар. Из-за уменьшающегося с увеличением числа М
приращения подъемной и боковой силы оперения на градус углов
атаки и скольжения при сверхзвуковых скоростях снижается также
и эффективность стабилизатора и вертикального оперения (кри-
вая 1 на рис. 5.5). Особенно сильно падает при сверхзвуковых
скоростях эффективность обычных рулей (кривая 2), так как в от-
личие от дозвуковых скоростей и управляемого стабилизатора (см.
рис. 5.5, я), при их отклонении практически не меняется распре-
деление аэродинамической нагрузки по неподвижной части про-
филя (см. рис. 5.5,6). Шарнирные моменты, наоборот, сильно воз-
растают (кривая 5) из-за смещения назад центра давления при
более равномерном распределении аэродинамической нагрузки по
172
хорде руля (см. рис. 5. 5, а и б). Указанные изменения эффектив-
ности и шарнирных моментов рулей предопределили, как известно,
переход к управляемому стабилизатору и необратимой системе
бустерного управления на современных сверхзвуковых самолетах.
По указанным выше причинам существенно изменяется по
числу М также поперечная и путевая статическая устойчивость
самолета (рис. 5.6). Общая тенденция этих изменений такова, что
с увеличением числа М путевая и поперечная устойчивость само-
лета уменьшаются, причем с увеличением углов атаки обычно уси-
ливаётся падение путевой устойчивости и несколько замедляется
падение поперечной устойчивости. Последнее свойственно само-
летам со стреловидными и треугольными крыльями.
Рис. 5. 6. Изменение коэффициентов путевой т® и попереч-
ной т^. статической устойчивости самолета в горизонталь-
ном (пу = 1) и криволинейном полете (пу>1) с увеличением
числа М
Не менее серьезные изменения претерпевают динамические ха-
рактеристики современного сверхзвукового самолета. На больших
высотах из-за малой плотности воздуха сильно уменьшается отно-
сительная величина его демпфирующих моментов по сравнению
с инерционными, которые не связаны непосредственно ни с числом
М, ни с высотой. Кроме того, по мере роста высоты полета при со-
хранении постоянного числа М уменьшается относительная вели-
чина аэродинамических восстанавливающих моментов самолета
из-за уменьшения скоростного напора, а в некоторых случаях и
вследствие падения самой устойчивости самолета при увеличении
исходных углов атаки на больших высотах. Поэтому на больших
высотах роль инерционных моментов в целом существенно повы-
шается.
Графики, изображенные на рис. 5.7, дают некоторое представ-
ление о том, в каком направлении изменяются по числу М с уве-
личением высоты полета наиболее важные для устойчивости и
точности управления динамические характеристики самолета. Та-
кими характеристиками являются:
а — относительное изменение амплитуды продольных и боковых
колебаний за период тзат (показатель интенсивности затухания
возмущеннЪго движения самолета);
173
б — относительный заброс перегрузки Дя3аб/Л%ст (характе-
ристика переходного процесса при управлении самолетом);
в — соотношение амплитуд угловых скоростей крена и рыска-
ния к (характеристика бокового движения самолета);
г — периоды продольных и боковых колебаний Т.
Для полета со сверхзвуковыми скоростями характерны более
медленное затухание возмущенного движения (продольного и бо-
Р и с. 5. 7. Изменение динамических характеристик самолета по чис-
лу М с увеличением высоты полета:
---------продольное движение-,--------— боковое движение
кового) и увеличение заброса перегрузки (см. рис. 5. 7,а и б). Наи-
более сильно ухудшается затухание возмущенного движения на
больших высотах. В этом случае особенно резко возрастают также
заброс перегрузки и величина соотношения амплитуд угловых ско-
ростей крена и рыскания при боковых колебаниях (см. рис. 5.7,
а, б, в). На высотах, хорошо освоенных авиацией, заброс пере-
грузки уже становится соизмеримым по величине с создаваемой
при маневре установившейся перегрузкой. Вследствие этого ухуд-
шается качество переходного процесса при управлении самолетом,
что усложняет пилотирование. Значительно снижается при этом
точность управления самолетом, в особенности в тех случаях, когда
потребное время переходного процесса (при необходимости рез-
кого пилотирования) становится соизмеримым с периодом собст-
венных колебаний самолета и резко возрастает заброс перегрузки.
174
Величина заброса перегрузки сильно зависит от резкости пило-
тирования самолета летчиком. При относительно плавных движе-
ниях ручкой управления заброс перегрузки всегда оказывается
существенно меньшим, чем при резких движениях, и поэтому дина-
мические свойства самолета на больших высотах и числах М да-
леко не всегда получают отрицательную оценку летчиков.
Характерное для больших высот преобладание движений крена
над движениями рыскания, а также увеличение самих периодов
боковых колебаний обычно усиливает отрицательный эффект сла-
бого демпфирования и ухудшает динамику самолета на больших
высотах. Наоборот, быстрое затухание боковых колебаний заметно
ослабляет эффект этого неприятного явления.
Для улучшения динамических свойств самолетов на больших
высотах последние обычно оснащаются специальными демпфе-
рами. Демпферы являются наиболее простой автоматической си-
стемой из тех, которые применяют на сверхзвуковых самолетах
для стабилизации их возмущенного движения. Назначение демп-
фера — тормозить вращение самолета. Подобно автопилоту (т. е.
без участия летчика), реагируя на угловую скорость, демпфер
вырабатывает и посылает рулям самолета соответствующие
«команды» (через так называемые раздвижные тяги), не действуя
при этом на ручку управления и педали *.
С увеличением высоты полета необходимость применения по-
добных автоматических устройств возрастает, так как естествен-
ное демпфирование возмущенного движения самолета становится
все более недостаточным. В освоенном современной авиацией диа-
пазоне высот и скоростей полета демпферы необходимы главным
образом для повышения точности управления самолетом и обес-
печения большей простоты пилотирования.
5.2. НЕБЛАГОПРИЯТНЫЕ ЯВЛЕНИЯ В УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ СВЕРХЗВУКОВОГО САМОЛЕТА
Аэроинерционное взаимодействие продольного
и бокового движений самолета
К числу таких явлений, которое стало возможным на современ-
ном сверхзвуковом самолете, вследствие изменения его внешних
форм и прежде всего — характера загрузки, относится ухудшение
динамической устойчивости и управляемости самолета в движении
крена при возникновении взаимосвязанных, близких по частоте
форм продольных и боковых колебаний. В летной практике это
явление получило название аэроинерционного взаимодействия про-
дольного и бокового движений самолета.
* Разумеется, в этом случае возрастают как статическая устойчивость само-
лета, так и потребные для его преднамеренного поворота вокруг ЦТ отклонения
ручки управления и педалей.
175
Говоря о взаимодействии продольного и бокового движений,
обычно имеют в виду появление у самолета таких перекрестных
связей между продольными и боковыми моментами, когда при из-
менении угла атаки или числа М наряду с изменением продольного
момента самопроизвольно меняются моменты крена и рыскания,
а в процессе бокового движения самолета развивается также и
продольное движение. Подобные изменения моментов могут обу<
словливаться воздействием на самолет при его движении возни-
кающих при этом аэродинамических, инерционных и гироскопиче-
ских моментов.
б)
НапраВлеиие полета —►
Рис. 5. 8. Два типа вращения самолета:
а—вокруг оси, не совпадающей с его главной осью инерции; б—относительно
продольной оси, не совпадающей с направлением полета
Вот почему мы обычно и говорим, рассматривая это явление,
об аэроинерционном взаимодействии продольного и бокового дви-
жений самолета.
Так, вращение самолета вокруг оси, не совпадающей с его глав-
ной осью инерции (рис. 5. 8, а), в силу особенностей весовой компо-
новки современного самолета приводит к появлению дестабили-
зирующих инерционных моментов тангажа и рыскания, стремя-
щихся увеличить исходные углы атаки и скольжения. Подобный
вид взаимосвязи продольного и бокового движений получил на-
звание инерционной. На современных сверхзвуковых самолетах
роль инерционных моментов особенно отрицательна; они являют-
ся мощным дестабилизирующим фактором.
Гироскопический момент ротора турбореактивного двигателя
также может быть источником взаимосвязи продольного и боко-
вого движений, так как он всегда действует в плоскости, перпенди-
кулярной плоскости поворота самолета. При появлении угловой
скорости рыскания (соу) или тангажа (coz) возникает прецессион-
ный момент, действующий в плоскости, перпендикулярной плоско-
сти поворота самолета, равный по величине
или
MZr=J^y |
МУг=— •Vp0’*’ >
(5.1)
где Ур и сор — соответственно приведенный момент инерции вра-
щающихся частей двигателя и угловая скорость ротора двигателя.
176
Перекрестные связи возникают и при вращении самолета отно-
сительно продольной оси, не совпадающей с направлением полета
(см. рис. 5.8,6). В этом случае происходит взаимосвязанное
циклическое изменение углов атаки и скольжения, причем в проти-
воположных направлениях: один угол возрастает, другой умень-
шается и наоборот. Например, в первые секунды после отклонения
элеронов в силу своей инертности самолет поворачивается непо-
средственно вокруг собственной продольной оси, и только через
Рис. 5. 9. Пример изменения аэродинамических ха-
рактеристик, обусловливающего взаимосвязь про-
дольного и бокового движений самолета
конечный отрезок времени у него устанавливается вращение уже
вокруг иной оси, тоже обычно не совпадающей с направлением
полета. В результате этого циклически меняются также и дейст-
вующие на самолет аэродинамические моменты тангажа, рыска-
ния и крена. Такой вид проявления взаимосвязи можно назвать
кинематическим.
Наконец, источником взаимосвязи продольного и бокового дви-
жений могут быть и чисто аэродинамические причины, например,
характерная для современных треугольных и стреловидных форм
крыла зависимость продольного момента самолета от угла сколь-
жения, а моментов крена и рыскания от угла атаки и числа М
(рис. 5.9). Этот вид проявления перекрестных связей обычно на-
зывают аэродинамическим.
Указанные виды взаимосвязи продольного и бокового движений
могут приводить к появлению ряда характерных особенностей в по-
ведении современного самолета при выполнении продольного и
бокового маневра.
В общем случае динамика самолета с учетом взаимодействия
продольного и бокового движений описывается сложной системой
177
нелинейных дифференциальных уравнений высокого порядка. По-
этому при проведении теоретических исследований, связанных
с изучением влияния перекрестных связей на движение самолета
(а такие исследования всегда' должны предшествовать летному
эксперименту), для упрощения математического анализа прини-
мают ряд допущений, которые, как показывает опыт, не вносят
серьезных погрешностей в конечный результат. В частности, обычно
считают возможным:
— пренебречь влиянием нестационарное™ обтекания самолета
и упругих деформаций его конструкции;
— принять, что система координатных осей совпадает с глав-
ными осями инерции самолета;
— считать неизменными в процессе всего движения самолета
скорость и высоту;
— принять, что изменения углов атаки и скольжения малы и
потому можно заменить косинусы углов единицей, а синусы — зна-
чениями самих углов.
В этом случае управления движения самолета (в связанной с
ним координатной системе осей) могут быть представлены сле-
дующей более простой системой нелинейных дифференциальных
уравнений:
rfAa Уа Ууст о-
-----= — ЙШд. Да — -Дфст + — cos у COS
dt ‘ mV mV Тст V
—L = w _|_ao) 8 —^sinycos ft;
dt y' 1 * mV mV H 1 V
<^х
dt
dt
(5.2)
^x^z.
d^z
dt
J X - J U I 1V1Z , I z
— + —— Да 4--------Д a
'г J z z
, ^CT I У₽
+ -г-?ст+-г «’p0»»,:
•'г J z
— =a>wsin т + а>г1 cosy;
dt
u>Xi — cos *[ — ш21 sin у) tg ft,
I7S
где а=аисх + Ла и р— соответственно углы атаки и скольжения,
измеряемые относительно хорды, совпа-
дающей с главной осью инерции самолета
(«исх — исходный угол атаки самолета);
В- и 7 — углы тангажа и крена;
/р и сор — приведенный момент инерции вращающих-
ся частей двигателя и угловая скорость
ротора двигателя.
Иногда в уравнениях движения опускают также члены, характе-
ризующие влияние силы тяжести и гироскопического момента ро-
тора двигателя и член, содержащий множитель (Jy—Jz).
Главной особенностью системы (5.2) является наличие нелиней-
ных инерционных членов -z——x- (dZ1(da, -х-
J х JУ Jz
кинематических членов рсоХ1 и асоХ1, а также членов, характеризую-
щих перекрестные аэродинамические связи. При малых возмуще-
ниях и равномерном распределении масс вдоль осей самолета
Ux~Jy~Jz) эти члены являются величинами второго порядка
малости. Поэтому ими -пренебрегают и тогда уравнения движения
самолета (5.2) разделяются на две независимых друг от друга
системы линейных уравнений продольного и бокового движений
самолета.
Все входящие в уравнения (5.2) аэродинамические коэффи-
циенты берутся в связанной с самолетом системе координатных
осей.
Анализ возмущенного движения самолета обычно производится
с помощью электронных моделирующих машин и позволяет полу-
чить уже до начала летного эксперимента предварительное пред-
ставление о наиболее существенных закономерностях совместного
продольного и бокового движения исследуемого самолета.
На сверхзвуковом самолете, в силу особенностей его весовой
компоновки, аэроинерционное взаимодействие может приводить
к появлению заметных особенностей в пилотировании, а в отдель-
ных случаях и к временной потере как устойчивости, так и управ-
ляемости в движении крена и даже к выходу на опасные углы
атаки и скольжения. Такое неуправляемое движение крена полу-
чило название аэроинерционного вращения самолета, или про-
сто — инерционного вращения самолета. С подобным явлением
летчик может встретиться, например, при быстром накренении или
вращении самолета вокруг продольной оси, на малых и отрица-
тельных углах атаки, особенно в сочетании с другими видами про-
дольного и бокового маневра. Один из таких случаев для иллю-
страции приведен на рис. 5. 10 (резкое накренение самолета после
небольшой отдачи ручки управления «от себя»). Как видим, про-
изведенное летчиком на восьмой секунде отклонение элеронов про-
тив вращения, не изменило знака угловой скорости крена и не
привело к уменьшению нормальной и боковой перегрузок самолета.
Чтобы лучше понять физическую сущность аэроинерционного
179
взаимодействия продольного и бокового движений самолета, обра-
тимся к классической идеализированной схеме этого явления, рас-
смотренной Филлипсом *. Примем при этом упрощенную модель
самолета, вся масса которого сосредоточена в нескольких фикси-
Р и с. 5. 10. Пример потери попереч-
ной управляемости (/>8 сек) после
небольшой отдачи ручки управления
«от себя» и отклонения ее в бок
осям Xi, z/i, Zi самолета (рис.
5. И). Пусть продольная ось
самолета (точнее, главная
ось инерции самолета) накло-
нена по отношению к оси вра-
щения (имитирующей направ-
ление полета) на угол а в вер-
тикальной плоскости и угол [3
в горизонтальной плоскости.
Очевидно, при вращении само-
лета вокруг такой оси появятся
инерционные моменты тангажа
и рыскания от центробежных
сил. Центробежные силы, обус-
ловленные большим разносом
основных масс самолета вдоль
продольной оси, приводят к по-
явлению значительных деста-
билизирующих инерционных моментов относительно вертикальной
и поперечной осей самолета. Центробежные силы, обусловленные
разносом масс вдоль крыла и вдоль вертикальной оси самолета,
приводят к появлению обратных по знаку и небольших по абсолют-
ной величине стабилизирующих моментов тангажа и рыскания.
Поэтому при вращении современного сверхзвукового самолета
Рис. 5.11. Возникновение инерционных моментов от центро-
бежных сил при вращении самолета вокруг оси 1—/, не сов-
падающей с главной осью инерции (осью Xi)
вокруг оси, не совпадающей с его продольной осью, возника-
ют дестабилизирующие инерционные моменты от центробежных
сил.
В общем случае, при произвольном распределении масс внутри
самолета, действующие на самолет инерционные моменты тангажа
^Phillips, Willi am Н„ Effect of steady rolling on longitudinal and
directional stability, NACA T. N. 1627, June, 1948.
180
и рыскания могут быть представлены следующими выраже-
ниями:
= у)-xr cos a —(у, x)-r/zsina,
7 '7 (5-3)
Лг»ин=27'^х’2)'x/,cos^—2г‘x^'ZisinР’ I
z=l 1=1 J
где Ti(x,y)—центробежная сила, действующая в плоскости
XiOyi на элементарную массу самолета, располо-
женную на расстоянии Xi от центра тяжести (по
продольной оси, см. рис. 5. 12);
Ti(y,x)—центробежная сила, действующая в плоскости
XiOyi на элементарную массу самолета, располо-
женную на расстоянии уг от центра тяжести (по
оси г/i, см. рис. 5. 12);
Tz(x,.z)—центробежная сила, действующая в плоскости
XiOzi на элементарную массу самолета, располо-
женную на расстоянии Xi от центра тяжести (по
оси Xi, см. рис. 5. 12);
Ti(z, х)—центробежная сила, действующая в плоскости
XiO^i на элементарную массу самолета, располо-
женную на расстоянии от центра тяжести (по
оси Zi, см. рис. 5. 12);
а и р—углы атаки и скольжения (проекции угла между
осью вращения самолета и его главной осью инер-
ции на вертикальную и горизонтальную плоскость
самолета);
i— порядковый номер рассматриваемого элемента
массы;
п— общее количество элементов, на которые условно
разбит самолет.
Подставим в (5.3) развернутые выражения центробежных сил:
Тz(x, y')=mi(xY^{x, y)-ri(x, z/) = mz (х)-22(х, z/)-xzsina;
Tt(y, x)=ml(yyQ'i(x,y)-rl(y,x)=ml{yyQ'1(x,y)-yicosa\
(o. 4)
7"z(x, z') = mi(x')*№(x, z)-ri(x, z) = mi (x)-22(x, z)-xz sin8;
T t (z, x) — mi (z)-22(x, z)-rf (z, x) = mi (z)*22(x, z)-zt cos p,
где mz(x), mi(y) и mz(z)—соответственно масса рассматривае-
мого элемента, расположенного вдоль одной из главных осей инер-
ции (осей самолета) на расстоянии х*, Уг или от ЦТ самолета
(рис. 5.12), Q (х, z/)=Q0cosp, Q (х, 2)~Q0cosa, Qo — угловая
скорость вращения самолета вокруг оси, не совпадающей с глав-
ной осью инерции.
181
Вынося из под знака суммы в (5. 3) постоянные множители
2ц cos2 3 sin a cos а = —— sin а • cos а — tg а
cos2 а
И
со2
2о cos2 а - sin р cos 8 = —• sin р cos 3 = 4, tg ? ~ 4/?,
COS2{3
Рис. 5. 12. Схема расчета инерционных моментов от центро-
бежных сил, действующих в плоскости тангажа и рыскания при
вращении самолета вокруг оси /—1, не совпадающей с глав-
ной осью инерции самолета
после небольших преобразований и замены
У (x)-x2i= Jy~''^rni (z)‘Z2i\
z=l i=l
^mi(z)-
Z = 1 Z=1
V ml (x)-x- = Jz - V (г/) •«/?;
Z = 1 Z=1
2«z (г)-4 = /х
z=i <=i j
(5.5)
182
(в соответствии с приведенными на стр. 20 выражениями (1.7) для
моментов инерции самолета), окончательно получим
ин ~ №yi *а*’ 1
(5.6)
Эти моменты и становятся источником инерционного взаимо-
действия бокового и продольного движений самолета *.
При вращении самолета суммарный инерционный момент стре-
мится увеличить исходные углы атаки и скольжения. Как известно,
этому противодействуют аэродинамические моменты продольной и
путевой статической устойчивости самолета.
Если самолет обладает не бесконечной степенью статической
устойчивости, то он балансируется в процессе вращения на углах
атаки и скольжения, отличных от исходных аИсх и рисх в полете без
вращения. При этом, если считать неизменными положения рулей,
скорость полета и число М, будут удовлетворяться равенства:
mz=mz аэр 4“ мг ин 4~ mz г—wSbA №
+(Л-Л)^«+Айрй»=0: (5 7)
2^ = ^аэр+^ин + ^г = аР<7ад +
+ {Jz - Jx) — ^р®р • “г =0,
т"2
где aa = triz-]-Cy—^ = anCy — коэффициент продольной статической
устойчивости самолета (по углу атаки)
в короткопериодическом движении при
наличии демпфирования**;
—коэффициент статической устойчивости
по перегрузке;
= ---коэффициент путевой статической ус-
тойчивости самолета в изолированном
движении рыскания при наличии
демпфирования;
rrTzz и гтГу— коэффициенты демпфирующего мо-
мента самолета в продольном дви-
жении и движении рыскания;
* В дальнейшем во всех выражениях, для простоты, индекс «1» при х, у, z
будем опускать.
** Если пренебречь демпфированием, получим:
mz
dmz
да
У dp ’
183
---коэффициент относительной плотности
А самолета при анализе его продольной
устойчивости и управляемости;
2G > ,,
11=------коэффициент относительной плотности
самолета при анализе его боковой
устойчивости и управляемости;
Л4гаэр и ^аэР—действующие на самолет аэродинами-
ческие моменты;
Л4гин и Л^ин—действующие на самолет инерционные
моменты от центробежных сил;
Mzr и МУг—действующие на самолет гироскопиче-
ские моменты;
«=аИсх+Да;
Мисх + Д?.
Чем больше масса и плечо разнесенных внутри фюзеляжа гру-
зов, а также угловая скорость крена сох и абсолютные значения
углов атаки и скольжения, тем значительнее становятся дестабили-
зирующие инерционные моменты и тем сильнее проявляется
эффект инерционного взаимодействия. Следовательно, тем более
высокая степень продольной и путевой статической устойчивости
необходима самолету для предупреждения самопроизвольного
перехода его в процессе вращения на опасные углы атаки и сколь-
жения. Устойчивость самолета в таком движении сохраняется при
выполнении условий:
(—*1 = — [Л4гаЭп + Л12иН + <г] =
\ da da р
= ^SbA+(Jy-Jx)^ + Jp^ ~~<о;
(5.8)
(^к«=^[Л,'"’4Л,’“+Л"1=
=^9qsi+(Л - J J - jpo>p < 0.
Обобщенные на случай вращения самолета выражения для
коэффициентов статической устойчивости при этом будут иметь
следующий вид:
(Ga)«>x+0 °а "t"
}у~}х 2 I 7рМр ЛшУ
qSbA qSbA da
Jz—Jx
(°₽)<"х*о ~ qgi
qSl d$ •
(5.9)
184
Если пренебречь влиянием гироскопического момента, выра-
жения (5. 9) примут более простой вид:
(°аК*0 — Оа-т ysb х
’ А
Cf 04
(5.10)
У современных сверхзвуковых самолетов вторые члены выра-
жений (5. 10) положительны, поэтому в процессе вращения его
статическая устойчивость понижается. Однако она сохраняется
у самолета при выполнении условий
(aa)cox=# О О И (аз)ц)*=£ О 0* (5. 11)
Потере самолетом устойчивости в процессе вращения соответ-
ствует обращение в нуль обобщенных коэффициентов (оа)а>А.^о и
(арК^о. При этих условиях инерционные моменты Мг ин и Му ин
возрастают настолько, что уже не могут быть уравновешены ста-
билизирующим аэродинамическим моментом. Углы атаки и сколь-
жения интенсивно растут и развивается неустойчивое движение
самолета.
Приближенный теоретический анализ показывает, что такое
движение обычно развивается при совпадении частоты вращения
самолета вокруг продольной оси с одной из частот его собственных
недемпфированных продольных или путевых колебаний.
Угловые скорости крена, при которых самолет теряет устойчи-
вость, названы критическими в отношении инерционного взаимо-
действия. В общем случае у самолета существуют две критические
скорости крена, при которых периоды его вращения вокруг про-
дольной оси совпадают с периодами собственных недемпфирован-
ных колебаний относительно вертикальной или поперечной оси.
Приближенно критические угловые скорости можно вычислить по
формулам
I /" — m^c^qSb т f—nftqSl
V ,Z , А- И (5Л2)
r Jy—Jx Jz—Jx
где m'v и —соответственно коэффициенты продольной и пу-
У тевой статической устойчивости самолета;
с* — приращение значения су на градус изменения уг-
ла атаки а;
ЬА и Z — длина САХ и размах крыла;
Jy, Jг и Jх~моменты инерции самолета относительно его вер-
тикальной, поперечной и продольной осей;
q — скоростной напор.
Индексы «I» и «II» для критических скоростей крена coxi и (охп
приняты произвольно. Обычно первой критической скоростью на-
185
зывают меньшую по абсолютной величине угловую скорость крена,
а второй — более высокую независимо от того, какими видами соб-
ственных колебаний самолета (продольными или путевыми) опре-
деляется каждая из них.
Формулы (5. 12) более точны при малом демпфировании. При
значительном демпфировании критические скорости крена будут
отличаться от значений, определяемых по приведенным выше
формулам.
Упрощенные формулы (5.12) дают представление о том, как ме-
няется величина критической скорости крена в зависимости от
степени путевой и продольной статической устойчивости самолета,
его инерционных характеристик, а также высоты полета и числаМ.
С увеличением степени статической устойчивости самолета, его
момента инерции относительно продольной оси и скоростного
напора q и уменьшением моментов инерции относительно верти-
кальной и поперечной осей самолета (точнее, разности моментов
инерции Jy—Jx и Jz—Jx) повышаются критические скорости крена
(Oxi и (Охп. Наоборот, с увеличением числа М и высоты полета
критические скорости крена уменьшаются (причем одна из них
особенно сильно) вследствие падения путевой устойчивости само-
лета (при больших числах М) и уменьшения с высотой скорост-
ного напора (при М = const).
Теоретический анализ показывает, что опасность неблагоприят-
ного проявления на самолете взаимодействия продольного и боко-
вого движений при маневре становится тем большей, чем меньше
величина первой критической скорости (oxi и выше вторая критиче-
ская скорость (Ох п. Следовательно, на современном сверхзвуковом
самолете тенденция к развитию неустойчивого движения должна
усиливаться с увеличением числа М и высоты полета. При этом
она проявится тем резче, чем больше будут отличаться частоты
собственных недемпфированных колебаний самолета в плоскости
тангажа и рыскания, а следовательно, и фактические запасы про-
дольной и путевой статической устойчивости самолета.
В реальном полете опасность неблагоприятного проявления
инерционного взаимодействия может существенно возрасти или,
наоборот, понизиться в зависимости от того, как будут изменяться
аэродинамические моменты самолета при угловых скоростях крена,
меньших первой критической сох i, т. е. в докритической области
угловых скоростей крена *.
Устойчивость самолета в движении крена при его вращении на
докритических угловых скоростях во многом определяется харак-
тером проявления на самолете аэродинамических и кинематических
форм взаимосвязи продольного и бокового движений. На устой-
* Поскольку в процессе своего вращения самолет подвергается воздействию
не только инерционных, но также и аэродинамических моментов.
186
чивом самолете непроизвольное увеличение угловой скорости (без
дополнительного отклонения элеронов или руля направления)
исключено.
Потеря устойчивости в движении крена, наоборот, приводит к
самопроизвольному переходу самолета на закритические угловые
скорости крена.
Поэтому наряду с рассмотренными выше факторами на пове-
дение самолета в докритической области угловых скоростей крена
существенное влияние оказывают исходные углы атаки и скольже-
ния в момент выполнения поперечного маневра, сам режим полета
и характер выполняемого маневра, т. е. величина и последователь-
ность отклонения рулей, а также степень поперечной статической
устойчивости самолета и изменение ее по углам атаки.
Углы атаки и скольжения в момент отклонения элеронов в из-
вестной мере предопределяют характер развития последующего
движения самолета, дальнейшее изменение его углов атаки и
скольжения и величину инерционного момента.
Не менее существенным фактором подобного аэроинерционного
взаимодействия продольного и бокового движений является попе-
речная статическая устойчивость самолета. Ее роль проявляется
в том, что развивающееся в процессе вращения самолета скольже-
ние приводит к появлению дополнительного момента крена
(Дтх = /п£Др), который либо тормозит вращение, ограничивая
поперечный маневр и достижение самолетом критической скорости
при конечном отклонении элеронов, либо, наоборот, раскручивает
самолет, способствуя тем самым самопроизвольному переходу его
на закритические угловые скорости крена, превышающие по вели-
чине обе критические скорости.
В первом случае устойчивость самолета в движении крена повы-
шается, во втором случае самолет теряет устойчивость при угловой
скорости крена меньшей первой критической сох ь В частности, на
устойчивом в поперечном отношении самолете, при положительных
углах атаки в исходном режиме, в процессе вращения развивается
скольжение, обусловливающее появление дополнительного мо-
мента крена, который препятствует росту угловой скорости крена.
Наоборот, при отрицательном угле атаки в исходном режиме, воз-
никающее после отклонения элеронов скольжение (уже обрат-
ного знака)’, приводит на таком самолете к появлению дополни-
тельного момента крена, действующего в сторону вращения само-
лета.
Для иллюстрации на рис. 5. 13 показан характер изменения
углов атаки и скольжения, а также потребных для балансировки
самолета в режиме установившегося вращения (с различными
угловыми скоростями крена) углов отклонения элеронов при поло-
жительном и отрицательном исходном угле атаки и рИсх = 0- Как
видно, в обоих случаях отсутствует линейная связь между угловой
скоростью крена и углом отклонения элеронов. Однако при поло-
187
жительных исходных углах атаки (аИСх>0) балансировочная кри-
вая 60 = /:(сох) с увеличением угловой скорости крена отклоняется
вниз, что затрудняет получение первой критической скорости. При
отрицательных исходных углах на балансировочной кривой в до-
критической области угловых скоростей крена (coxo<wxi) появ-
Р и с. 5. 13. Балансировочные
кривые d3 = f((0x ), p = f((Ox ) и
a = f(cox ) при M=const для
положительного и отрицатель-
ного исходных углов атаки и
Рисх=0:
wxo-Угловая скорость потери
устойчивости в движении крена
ляется характерная «ложка»
(йбэ/Лох = 0) и далее с увеличением
(ох>(0хо нарастает тенденция к само-
произвольной раскрутке и пе-
реходу на закритические скорости.
Существенно меняется при этом в
зависимости от исходного угла ата-
ки и сама реакция самолета на одно
и то же отклонение элеронов (ве-
личина б/(02/б/6э при V= const) В ДО-
критической области угловых скоро-
стей крена.
На сверхзвуковом самолете наи-
более неблагоприятное проявление
аэроинерционного взаимодействия
более всего возможно при выполне-
нии маневра, связанного с поворо-
том самолета вокруг продольной
оси на малых и отрицательных ис-
ходных углах атаки, либо при от-
клонении летчиком ручки управле-
ния «от себя» в момент отклонения
элеронов, а также при одновремен-
ном с элеронами отклонении руля
направления.
На нейтральном в поперечном
отношении самолете угловая ско-
рость крена практически не зависит
от исходного угла атаки в момент
отклонения элеронов.
В заключение необходимо отме-
тить, что причиной появления зна-
чительных дестабилизирующих
инерционных моментов тангажа и
рыскания может быть не только от-
клонение рулей при маневре. В
сверхзвуковом полете при больших
числах М дестабилизирующие инер-
ционные моменты могут появиться
и без вмешательства летчика в уп-
равление самолетом, например, если произойдет потеря путевой
статической устойчивости, и сваливание самолета вследствие пре-
вышения установленных ограничений по числу М.
188
Другие явления в устойчивости и управляемости,
характерные для сверхзвуковых скоростей полета
и больших высот
Для сверхзвуковых скоростей полета и больших высот к доста-
точно общим особенностям в устойчивости и управляемости само-
лета можно отнести:
— увеличение потребных отклонений всех рычагов управления;
— уменьшение с высотой при одном и том же числе М полета
величины располагаемых нормальных перегрузок самолета при
полном использовании хода стабилизатора;
— увеличение с высотой пикирующего момента при постоян-
ном числе М полета;
— ухудшение на больших высотах и при увеличении числа М
на сверхзвуковых скоростях характеристик переходных процессов,
наиболее заметное на самолетах без демпферов;
— преобладание в процессе боковых колебаний самолета на
больших высотах движений крена, особенно заметное на самоле-
тах без демпферов;
— малые запасы путевой статической устойчивости самолета
при больших числах М полета.
Далеко не все из отмеченных выше явлений, не всегда и не
в одинаковой степени затрудняют пилотирование самолета. Однако
некоторые из них в определенных случаях (например, в сверхзвуко-
вом полете на большой высоте) могут привести к появлению за-
метных особенностей в пилотировании, ограничить маневр само-
лета и даже существенно усложнить полет. Так, рост потребных
отклонений рычагов управления и ухудшение характеристик пере-
ходных процессов( динамики самолета) могут привести к появле-
нию заметных особенностей в пилотировании и даже ограничить
маневр на больших высотах. Малые же запасы путевой статиче-
ской устойчивости могут не только ограничить маневренные и лет-
ные данные самолета, но и сделать небезопасной эксплуатацию
его в определенном диапазоне высот и чисел М полета. Остано-
вимся подробнее на каждом из этих явлений, не касаясь, однако,
ранее рассмотренных особенностей динамики самолета.
На всех современных самолетах при сверхзвуковых скоростях
и на больших высотах заметно возрастают потребные для балан-
сировки отклонения рулей и перемещения рычагов управления.
Особенно увеличиваются при этом отклонения руля высоты (ста-
билизатора), так как в отличие от других каналов управления
они обусловливаются не только снижением эффективности руля
при сверхзвуковых скоростях, но также и увеличением продольной
статической устойчивости самолета (см. рис. 5.4 и 5.5). Последнее
приводит к существенному увеличению градиентов хода руля и
ручки (штурвала) управления на единицу перегрузки Адв/Ап^ (или
при управляемом стабилизаторе Дфст/Ап^) и Xn = kxJ\ny. С уве-
личением высоты исходные значения су в горизонтальном полете
189
(сУг.п) существенно возрастают. Пренебрегая изменением веса
самолета (при выработке топлива) и рассматривая полет на всех
высотах при постоянном числе М, можно получить простую фор-
мулу для расчета с^г.п при переходе с высоты полета на боль-
шую высоту Н2 *
(^г.п)нг=(^Р.п)н,—' (для М —const),
РН,
(5.13)
где pHl и рн2 — статическое давление на высотах Нх и Н2.
Из приведенной формулы следует, что с увеличением высоты
величина с^г.п должна возрастать, если при этом сохраняется по-
стоянным число М 'полета.
Рис. 5.14. Изменение откло-
нений руля высоты и стабили-
затора, потребных для созда-
ния перегрузки при М=const:
д8в1 и Д6в2 —отклонение руля
на высоте Н\ и Я2, потребное для
изменения перегрузки на Д/г^=1
Рис. 5. 15. Изменение величины рас-
полагаемых коэффициентов подъем-
ной силы, а также су в горизонталь-
ном полете у сверхзвукового само-
лета с управляемым .стабилизатором
и у самолета с обычным рулем вы-
соты (пунктир) с увеличением чис-
ла М:
/—наибольшее значение с у при полном
отклонении стабилизатора «на кабрирова-
ние» (фст<0); 2, 3—соответственно наи-
большее и наименьшее значения с у при
полном отклонении руля высоты на кабри-
рование (6R)max<0 и пикирование
(sB)maX<0 (штриховкой отмечена область
больших £ у, при которых возникает пред-
срывная тряска конструкции)
Поэтому на больших высо-
тах (Я2 на рис. 5. 14), где ис-
ходные значения су в горизон-
тальном полете (с2/г.п)//2 суще-
ственно возрастают, для полу-
чения такого же приращения
перегрузки Дпу, как и на ма-
лых высотах (/Л), необходимо при том же числе М полета большее
изменение коэффициента подъемной силы самолета (A^2>A^i)»
а следовательно, и большее отклонение руля высоты или стабили-
затора.
* Формулу легко получить, приведя уравнение равновесия подъемной силы
и веса самолета в горизонтальном полете G = Y=cy T.nqS (где <?=9,52рнМ2 * *)
G 1
к виду су г прнМ2=— = const для высот Я1 и Н2 и приравняв их левые ча-
S 9,52
сти, так как по условию вес самолета G остается постоянным и М=const.
190
Действующая на самолет нормальная перегрузка пу, определяе-
мая отношением Y подъемной силы к G весу самолета
/ Y Су , I &Су \
\пу——=—— =1-|-------— , зависит не только от конечной
\ G СУ г.п Су г.п /
величины су, но и от его исходной величины в горизонтальном по-
лете на данной высоте, т. е. от суг.п.
Для изменения нормальной перегрузки самолета на единицу
(Дмг/= 1) коэффициент подъемной силы самолета су должен быть
изменен на величину, равную исходному значению его в горизон-
тальном полете на данной высоте, т. е. на малой высоте на
^су\= Hl и на большой высоте на Дс2/2 = (^г.п)н2- На малой
высоте для этого потребуется откло-
нить руль высоты на угол Дбвь а на
большой высоте при том же значе-
нии числа М полета — уже на суще-
ственно больший угол ДбВ2-
По этой причине с увеличением
потребных отклонений рулей замет-
но сужается диапазон углов атаки
(и соответственно значений Су), на
которых в установившемся сверх-
звуковом полете балансируется со-
временный самолет йолным откло-
нением руля высоты или стабилиза-
тора (рис. 5.15).
По этой причине при сверхзвуко-
вых скоростях, в особенности на
больших высотах (из-за высоких
исходных значений су в горизонталь-
ном полете), сильно уменьшается
величина располагаемых перегрузок
Рис. 5.16. Изменение распо-
лагаемых перегрузок сверхзву-
кового самолета с увеличением
высоты и числа М полета
(птах ” максимальная допусти-
мая в эксплуатации перегрузка
самолета из условий проч-
ности)
самолета, что снижает возможности
выполнения энергичного маневра. Величина располагаемых пере-
грузок определяется выражением
СУ расп
Пу расп »
Су г.п
(5. 14)
где су расп — наибольшая допустимая в эксплуатации величина су
(либо наибольшее его значение, при котором самолет баланси-
руется в установившемся полете полным отклонением руля);
су г.п — исходное значение су в горизонтальном полете на данной
высоте и скорости полета. Характерно, что при сверхзвуковых ско-
ростях полета величина перегрузок, создаваемых полным откло-
нением ручки управления, сравнительно мало изменяется по числу
М на всех высотах (рис. 5. 16). С увеличением высоты располагае-
мые перегрузки самолета, естественно, уменьшаются. Для случая,
когда полет выполняется при постоянном числе М и вес самолета
191
сохраняется практически постоянным, изменение величины распо-
лагаемой перегрузки при переходе с высоты Нх на высоту Н2
определяется по следующей простой формуле*:
Рн
(«I/pacn)//a = («l/pacn)//1 (5- 15)
Управляемый стабилизатор повышает маневренные возмож-
ности самолета при сверхзвуковых скоростях на больших высо-
тах, но не меняет вида кривых, приведенных на рис. 5.15 и 5.16.
Характер изменения располагаемых перегрузок и значений су по
числу М сохраняется качественно таким же, как и у самолета
с рулем высоты, поскольку на сверхзвуковых скоростях современ-
ный самолет балансируется стабилизатором в довольно ограничен-
ном диапазоне углов атаки и коэффициентов подъемной силы су
(см. рис. 5.15). Последнее рассматривается иногда летчиками как
некая гарантия от непроизвольного выхода самолета на закрити-
ческие углы атаки и срыва его в штопор при перетягивании ручки
управления в сверхзвуковом полете. Однако это справедливо
только в том случае, если самолет обладает достаточно большими
запасами как продольной, так и путевой статической устойчивости,
притом при всех угл^х атаки и скольжения, на которые он может
быть выведен полным отклонением рулей в процессе пилотирова-
ния в условиях воздействия на него не только аэродинамических,
но и инерционных моментов.
Кроме рассмотренных особенностей, на сверхзвуковых скоро-
стях могут наблюдаться и другие более неприятные явления. К их
числу прежде всего относится — весьма значительное снижение пу-
тевой статической устойчивости самолета при больших числах М.
На указанном явлении ввиду его большой важности мы оста-
новимся подробнее.
Снижение эффективности вертикального оперения на сверхзву-
ковых скоростях, причины которого были рассмотрены выше, при-
водит к существенному уменьшению при больших числах М путе-
вой устойчивости самолета. Это объясняется тем, что на современ-
- ном скоростном самолете только вертикальное оперение создает
при скольжении стабилизирующий момент рыскания и тем самым
* Формулу легко получить, воспользовавшись следующим выражением для
Пу расп^
СУ расп
пУ расп— М2,
где
GIS
С»Г.П =----- И q = 9,52/> М2.
q и
192
обеспечивает самолету до определенных чисел М путевую устой-
чивость (рис. 5. 17, кривая 1).
Самолет без вертикального оперения обычно неустойчив в путе-
вом отношении (тем более современный сверхзвуковой самолет
с сильно вытянутой передней частью фюзеляжа), причем дестаби-
лизирующий момент рыскания, возникающий при его скольжении,
слабо изменяется по числу М (рис. 5. 17 кривая 2).
Таким образом, при больших сверхзвуковых скоростях путевая
устойчивость самолета определяется разностью двух соизмери-
мых величин: стабилизирую-
щего момента вертикального
оперения, сильно уменьшаю-
щегося по числу М в этой
Рис. 5. 18. Изменение нормальной и
боковой перегрузок самолета, а так-
же угловой скорости крена в процессе
сваливания (Дбэ~0; Дбн~0; Ддв~0)
Р и с. 5. 17. Изменение величины
стабилизирующего момента от
вертикального оперения (в. о.)
и дестабилизирующего момента
рыскания самолета без верти-
кального оперения, а также
степени путевой статической
устойчивости самолета (для
пу = \ и пу>1) с увеличением
числа М
области скоростей, и дестабилизи-
рующего момента фюзеляжа и кры-
ла, практически постоянного при
всех числах М. Поэтому при сверх-
звуковых скоростях с увеличением
статической устойчивости самолета
числа М степень путевой
(рис. 5. 17 кривая 3) неуклонно понижается, а превышение допу-
стимых в эксплуатации значений числа М может привести к потере
самолетом путевой устойчивости.
При потере путевой устойчивости возникает значительное сколь-
жение и быстро развивается неуправляемое движение самолета
со значительными угловыми скоростями крена (сох) и рыскания
(щу), а также с большими нормальными и боковыми перегрузками
пу и nz, периодически меняющими свою величину и даже знак
(рис. 5. 18).
При больших допустимых в эксплуатации числах М путевая
статическая устойчивость самолета невелика. Ора значительно
ниже, чем при дозвуковых и малых сверхзвуковых скоростях по-
7
598
193
лета. В связи с этим при больших сверхзвуковых скоростях отно-
сительно возрастает влияние на путевую устойчивость самолета
даже сравнительно небольших изменений продольной центровки
самолета, режима работы двигателей и углов атаки, а также упру-
гих деформаций конструкции и внешних подвесок под крылом
и фюзеляжем. Подобных особенностей у самолета обычно не на-
блюдается при достаточно высоких запасах путевой устойчивости.
Внешние подвески чаще всего вызывают смещение вперед точки
приложения суммарной боковой силы самолета, вследствие чего
путевая устойчивость уменьшается.
С увеличением углов атаки из-за более сильного снижения
эффективности вертикального оперения путевая устойчивость само-
лета также уменьшается (см. рис. 5. 17, кривая 3 для пу>1). При
этом в области относительно малых углов атаки устойчивость из-
меняется меньше, чем на средних и больших углах атаки.
Смещение полетной центровки назад и увеличение оборотов
двигателя, а также освобождение педалей при обратимой системе
управления обычно приводят к аналогичному результату, т. е. сни-
жают путевую устойчивость самолета.
Ухудшение путевой устойчивости при задних центровках вызы-
вается уменьшением плеча вертикального оперения и одновремен-
ным увеличением дестабилизирующего эффекта от передней части
фюзеляжа (при смещении назад ЦТ самолета). Отрицательное
влияние двигателей на путевую устойчивость в основном обуслов-
ливается возникновением дополнительной боковой силы в воздухо-
заборнике вследствие искривления потока при скольжении. В слу-
чае расположения воздухозаборника впереди центра тяжести само-
лета эта сила создает дополнительный дестабилизирующий момент
рыскания, который возрастает с увеличением тяги двигателя и
угла скольжения.
Упругие деформации конструкции также снижают путевую
устойчивость самолета. Их влияние возрастает с увеличением ско-
рости полета и уменьшением высоты (при M = const). Дело в том,
что более высокому скоростному напору на меньшей высоте при
постоянном числе М полета и большей скорости в горизонтальном
полете всегда соответствуют и более высокие аэродинамические
нагрузки на конструкцию самолета, а следовательно, и более зна-
чительные упругие деформации. При этом эффективность верти-,
кального оперения уменьшается. Поэтому с уменьшением высоты
и на больших углах атаки фактические запасы путевой устойчиво-
сти при больших числах М обычно еще более снижаются.
Уменьшение путевой устойчивости приводит к большему откло-
нению самолета от исходного режима балансировки под действием
одного и того же по величине возмущения. Самолет при этом ста-
новится более чувствительным к воздействию малых боковых воз-
мущений, обусловливаемых, например, его геометрической и жест-
костной асимметрией, несинхронной работой двигателей и гиро-
скопическим моментом роторов двигателей. Усиливается также
194
взаимосвязь между боковым и продольным движением при воз-
действии на самолет даже относительно небольших по величине
аэродинамических и инерционных моментов, а также гироскопиче-
ского момента двигателя. Односторонний отказ одного из двигате-
лей в сверхзвуковом крейсерском полете при пониженных запасах
путевой устойчивости может сопровождаться скольжением само-
лета, опасным с точки зрения прочности конструкции, сваливания
самолета в штопор или самовыключения остальных двигателей
в результате помпажного срыва потока на входе (так как запасы
по помпажу при больших числах М полета у самолетов обычно
невелики).
Падение путевой устойчивости можно заметить по появлению
у самолета стремления к непроизвольному скольжению, которое
усиливается с увеличением числа М полета и углов атаки. Поэтому
в сверхзвуковом полете при больших числах М летчик внимательно
следит за положением «шарика» указателя скольжения. При боль-
ших числах М одной из возможных причин «увода шарика» из
среднего положения может быть падение путевой устойчивости.
Для получения необходимой путевой устойчивости у сверхзву-
кового самолета устанавливают значительное по площади верти-
кальное оперение или применяют специальную автоматику, обес-
печивающую искусственную путевую стабилизацию самолета на
тех режимах, на которых она не может быть осуществлена обыч-
ными аэродинамическими средствами.
При летных испытаниях до начала массовой эксплуатации про-
изводится тщательная количественная оценка путевой устойчиво-
сти самолета и уточняются допустимые с учетом аэроинерционного
взаимодействия маневры, эксплуатационные центровки и числа М
полета.
Явления в устойчивости и управляемости,
характерные для околозвуковых скоростей полета
К числу неприятных для летчика явлений, характерных для
трансзвуковой области скоростей, прежде всего относятся местные
нарушения продольной, поперечной и путевой балансировки само-
лета. Нарушения балансировки становятся особенно заметными
в тех случаях, когда в процессе разгона или торможения самолета
происходит резкое изменение его статической устойчивости как
во времени и по числу М, так и по абсолютной величине.
Местные нарушения продольной балансировки в узком диапа-
зоне околозвуковых скоростей появляются вследствие потери са-
молетом устойчивости по скорости как в прямолинейном, так и
в криволинейном полете с постоянной перегрузкой (пу = const).
При сверхзвуковых скоростях по этой причине также возможны
небольшие нарушения продольной балансировки самолета.
Нарушения поперечной балансировки самолета в трансзвуковой
области скоростей чаще всего вызываются местными изменениями
7*
195
его поперечной статической устойчивости (главным образом при
стреловидных формах крыла), а также уменьшением эффективно-
сти элеронов. Возникают они в тех случаях, когда полет происхо-
дит со скольжением. Последнее может быть вызвано как предна-
меренными действиями летчика, так и наличием у самолета гео-
метрической или жесткостной асимметрии.
Местные нарушения путевой балансировки в трансзвуковой
области скоростей вызываются обычно небольшим моментом ры-
скания от боковой силы, возникающей вследствие несимметрич-
ного развития волнового кризиса в хвостовой части фюзеляжа по
правой и левой его стороне из-за некоторой асимметрии в обте-
кании.
На современных сверхзвуковых самолетах с последним явле-
нием встречаются сравнительно редко. Значительно чаще летчики
сталкиваются с нарушениями продольной балансировки, которые
однако, как правило, не усложняют пилотирование современного
самолета в трансзвуковой области скоростей.
Более заметные затруднения в пилотирование в отдельных слу-
чаях вносит появление у самолета на околозвуковых скоростях
обратной реакции по крену на отклонение руля направления. Это
явление наблюдается только на неустойчивых в поперечном отно-
шении самолетах (а иногда и на нейтральных). Обратная реакция
по крену на отклонение руля направления ухудшает условия точ-
ного пилотирования, а при недостаточной поперечной управляемо-
сти может усложнить и обычный полет.
Некоторые явления
в устойчивости и управляемости,
характерные для дозвукового полета
К неблагоприятным явлениям в устойчивости и. управляемости
сверхзвукового самолета, наблюдающимся иногда в дозвуковом
полете, относятся:
— местные нарушения устойчивости по перегрузке, главным
образом на больших углах атаки;
— излишняя легкость управления и чувствительность самолета
к малым отклонениям рулей при больших дозвуковых скоростях
полета;
— ухудшение поперечной управляемости при больших прибор-
ных скоростях полета;
— некоторые особенности поведения самолета на посадочных
режимах.
Указанные выше явления обусловливаются обычно отдельными
недостатками компоновки сверхзвукового самолета и его системы
управления. Подобных недостатков не всегда удается избегнуть
при создании сверхзвукового самолета, многие аэродинамические
характеристики которого нередко сильно изменяются как по числу
196
0 бла ст ь
неустойчивости
§ § М=const, const, = const
§ § ^ст т
Перегрузка самолета
Рис. 5. 19. Вид балансировочной кри-
вой самолета при наличии у него
местной зоны неустойчивости по пе-
регрузке
М, так и по углам атаки. Особенно сильно возрастает у самолета
при числах М> 1 продольная статическая устойчивость по пере-
грузке. Последнее, как отмечалось выше, в сочетании с пониженной
эффективностью рулей существенно ограничивает в сверхзвуковом
полете продольный маневр на больших высотах. Учитывая это,
конструктор вынужден ограничивать продольную устойчивость
самолета на сверхзвуковых скоростях, снижая ее и в дозвуковом
полете. Поэтому при числах М полета, меньших единицы, все совре-
менные самолеты обладают сравнительно небольшой статической
устойчивостью по перегруз-
ке. Это обстоятельство иногда
и приводит к появлению у са-
молета (в случае не вполне
удачной его компоновки) мест-
ной неустойчивости по пере-
грузке на больших углах атаки
(в частности, на сверхзвуковых
самолетах с хвостовым опере-
нием, с фюзеляжем, сильно
вынесенным вперед относитель-
но крыла, с крылом, имеющим
значительную стреловидность
по передней кромке и малое
удлинение при не вполне удач-
ном размещении стабилизатора
по высоте)*. При этом на ба-
лансировочных кривых <рст==
=?(пу) появляется характер-
ная «ложка (рис. 5.19).
Неустойчивость по перегруз
нию у самолета стремления к самопроизвольному увеличению угла
атаки в процессе выполнения маневра, после того как летчик не-
сколько отклонит ручку управления на-себя. Подобная тенденция
создает предпосылки для непреднамеренной потери скорости либо
выхода самолета на недопустимо большую перегрузку. Поэтому
неустойчивый самолет всегда требует от летчика повышенного
внимания и большой четкости в действиях рулями при пилотиро-
вании.
С уменьшением высоты полета отрицательный эффект от не-
устойчивости по перегрузке может усилиться, так как он будет
проявляться при большей скорости полета по прибору и более вы-
соких гГерегрузках самолета в условиях повышенной чувствитель-
ности самолета к малым перемещениям ручки управления.
обычно замечается по появле-
* Это наблюдается в тех случаях, когда оперение оказывается в зоне боль-
ших по абсолютной величине скосов потока и наиболее сильных изменений
скоса по углам атаки и скольжения (см. рис. 5. 2, в). С неустойчивостью по пере-
грузке сталкиваются и на дозвуковых самолетах.
197
Совершенно очевидно, что на самолетах, поступающих в мас-
совую эксплуатацию, подобный дефект должен быть по возможно-
сти устранен. Он может быть допущен как исключение только в та-
ких случаях, когда носит сугубо местный характер (т. е. наблю-
дается лишь в очень ограниченном и к тому же не слишком «ходо-
вом» диапазоне углов атаки и чисел М) и проявляется настолько
слабо, что не может стать источником непроизвольного перехода
самолета на опасные режимы.
Второе из рассматриваемых явлений — чрезмерная чувстви-
тельность самолета при больших дозвуковых скоростях к малым
продольным перемещениям ручки управления.
Желание обеспечить достаточно эффективный маневр на боль-
ших высотах и при сверхзвуковых скоростях, как отмечалось выше,
привело к использованию на современном самолете необратимого
бустерного управления, а также управляемого стабилизатора.
В связи с этим на малых высотах при больших дозвуковых скоро-
стях продольное управление самолета становится чрезмерно эф-
фективным и излишне легким.
Кроме того, с увеличением скорости все более уменьшается и
Т — период собственных колебаний самолета. В подобных условиях
период колебаний самолета и время запаздывания реакции лет-
чика Д/летч (при управлении самолетом) могут стать уже одного
порядка и будет все более возрастать относительная величина за-
паздывания в действиях летчика Д^летч/Т’.
При малых периодах собственных колебаний самолета, харак-
терных для больших дозвуковых скоростей полета, когда обнару-
живается заметное запаздывание в действиях летчика, такая си-
стема управления не всегда обеспечивает нормальные условия
пилотирования и иногда может стать причиной непреднамеренной
раскачки самолета летчиком *. Непроизвольная раскачка само-
лета возникает в этом случае при точном пилотировании и резких
и частых вмешательствах летчика в управление, при излишне чув-
ствительной системе управления, когда условия контроля за дви-
жением самолета (по перемещениям ручки управления и измене-
нию на ней усилий) затруднены из-за малых ходов и усилий и зна-
чительного трения в системе.
Большое запаздывание в системе бустерного управления также
может стать причиной «раскачки» самолета летчиком.
Следовательно, излишняя чувствительность самолета к малым
отклонениям рулей и склонность к «раскачке» обусловливаются
неблагоприятным сочетанием статических и динамических харак-
теристик самого самолета и его системы управления при больших
дозвуковых скоростях полета. Отрицательными с этой точки зре-
ния факторами являются:
* Стремясь парировать возмущенное движение самолета и отклоняя для
этого с запаздыванием ручку управления в тот момент, когда у самолета уже
начинается обратный цикл колебательного движения, летчик сам становится
возбудителем колебаний самолета.
198
— малые периоды собственных колебаний самолета, близкие
по величине к 1 сек, при которых летчик, воздействуя на ручку
управления со свойственным человеку запаздыванием в 0,25—
0,5 сек, сам того не желая, возбуждает колебания самолета (свое-
образный физиологический порог по управляемости);
— малые градиенты усилий по ходу рычагов управления при
малых их перемещениях;
— повышенное трение и люфт в системе управления.
Рис. 5. 20. Изменение по числу М и высоте характеристик про-
дольной управляемости Хп и Рп самолета, оснащенного системой
АРУ (толстые линии), а также без АРУ (/) и без бустера (2).
Внизу показан закон регулирования кинематических (а) и сило-
вых (б) характеристик системы управления
Для улучшения динамических свойств и управляемости само-
лета при больших дозвуковых скоростях полета, а также и на
больших высотах (где потребные отклонения рычагов управления
и усилия, наоборот, могут стать непомерно большими) на всех
сверхзвуковых самолетах осуществляется в той или иной форме
искусственное регулирование кинематических (&ш.в) и силовых
(dPBldXb) характеристик системы управления в зависимости от
скорости, высоты и числа М полета. С помощью специальных авто-
матических устройств (автоматов регулирования управления АРУ)
увеличиваются потребные перемещения ручки управления и уси-
лия, когда они становятся чрезмерно малыми, и уменьшаются,
если они слишком велики.
Для примера на рис. 5.20 показано изменение по высоте и
числу М двух важных характеристик продольной управляемости
Хп и Рп (коэффициентов расхода ручки управления и усилий на
перегрузку) на самолете, оснащенном системой АРУ, и таком же
199
самолете без автоматики. Там же показано изменение градиента
усилий Рп по числу М на самолете с обратимой Системой управ-
ления без бустеров. В нижней части рис. 5.20 на двух графиках
показано, в каком направлении осуществляется регулирование
передаточного числа системы управления (k ——-—и гради-
\ 57,3 dxB J
ента усилии по ходу ручки управления —М при изменении ско-
V dxB J
рости и высоты полета.
Нормальная работа автоматической системы регулирования
обеспечивает летчику удовлетворительные условия управления
самолетом на всех высотах при любых эксплуатационных скоро-
стях полета и числах М.
Одной из задач летных испытаний на устойчивость и управляе-
мость и является оценка приемлемости осуществленного на само-
лете закона регулирования в полете характеристик системы управ-
ления.
Одновременно производится общая оценка управляемости само-
лета и эффективности поперечного управления в полном диапа-
зоне эксплуатационных скоростей полета, высот, чисел М и углов
атаки. Такая проверка необходима прежде всего на самолетах со
стреловидным крылом, на которых чаще, чем на других самолетах,
наблюдается ухудшение поперечной управляемости при больших
приборных скоростях. Последнее обычно обусловливается более
сильным проявлением на таком крыле эффекта упругих деформа-
ций конструкции.
О влиянии упругих деформаций конструкции на путевую устой-
чивость самолета упоминалось выше. Еще более заметное влияние
оказывают они на эффективность элеронов. Под действием на-
грузки, изменяющейся при отклонении элеронов, их эффектив-
ность падает. Наиболее неблагоприятным в этом отношении ока-
зывается тонкое стреловидное крыло нормального удлинения,
жесткость которого относительно невелика. На стреловидном
крыле не только деформации кручения, но и деформации изгиба
меняют его местные углы атаки по размаху. При прямой стрело-
видности (консоли сдвинуты назад) эти деформации ослабляют
эффект отклоненных элеронов. Например, у крыла, на котором
элерон опускается, прогиб увеличивается и, следовательно, умень-
шаются углы атаки сечений (от .изгиба). При этом плоскость
с опущенным вниз элероном под действием возникающего допол-
нительного крутящего момента закручивается в сторону уменьше-
ния углов атаки. Таким образом на упругом крыле наряду с увели-
чением подъемной силы от отклонения элерона происходит умень-
шение ее от деформаций изгиба и кручения крыла, которые
действуют в одном направлении.
Аналогичная картина наблюдается и на другой плоскости,
у которой элерон отклонен вверх: изгиб и упругая закрутка крыла
(на (положительные углы атаки) также ослабляют эффект подня-
200
того элерона. Поэтому на стреловидном крыле эффективность эле-
ронов оказывается меньшей, чем на таком же прямом равножест-
ком крыле с тем же элероном.
Отрицательное влияние упругих деформаций наиболее сильно
проявляется на средних и малых высотах при больших приборных
скоростях, когда действующие на конструкцию нагрузки стано-
вятся особенно значительными *. По этой причине при больших
приборных скоростях на некоторых самолетах со стреловидным
крылом значительно снижается эффективность поперечного управ-
Р и с. 5.21. Влияние упругих деформаций крыла на эффектив-
ность элеронов и условия пилотирования самолета при скоростях,
близких к критической скорости реверса элеронов VpeB:
§
/—абсолютно жесткое крыло; т э —- коэффициент эффективности элеронов,
(Од,—угловая скорость крена; бэ и §н—углы отклонения элеронов и руля
направления
ления, а в случае превышения установленных ограничений по при-
борной скорости возможен даже реверс элеронов (рис. 5.21). Ско-
рость полета, при которой элероны полностью теряют свою
эффективность, названа критической скоростью реверса (VpeB).
При превышении этой скорости реакция самолета на отклонение
элеронов становится обратной, т. е. самолет кренится на крыло
с опущенным элероном. Так, на рис. 5.21 отклонение летчиком на
31-й сек ручки влево (60>О) не только не парировало возникшее
у самолета правое кренение (сох>0), но, наоборот, заметно усили-
вало его. Отклонение же элеронов «по крену», произведенное лет-
чиком на 32—33-й сек, приостановило развитие правого крена
(о)х~0). Однако реакция самолета на отклонение элеронов при
этом остается еще весьма вялой, хотя и обратной по знаку.
Явление реверса при отсутствии у самолета заметной асиммет-
рии не исключает возможности полета на скоростях, близких к кри-
тической скорости реверса и, конечно, не может быть поставлено
в один ряд с явлением потери самолетом путевой устойчивости и
* Так как при прочих равных условиях величина аэродинамических
сил, действующих на конструкцию, возрастает пропорционально квадрату ско-
рости полета.
201
аэроинерционным взаимодействием. Как видно из приведенного на
рис. 5.21 графика, уменьшив скорость прлета (/>37 сек), летчик
легко может восстановить нормальную реакцию самолета на откло-
нение элеронов и таким образом уйти с опасного режима. Однако
реверс элеронов опасен в тех случаях, когда ему предшествует,
например, появление у самолета обратной реакции по крену на
отклонение руля направления или когда на самолет действует зна-
чительный кренящий момент.
При нормальной эксплуатации самолета выход на критическую
скорость реверса, естественно, не допускается. Для этого либо
ограничивается предельно допустимая скорость полета, либо соот-
ветствующим выбором аэродинамических и жесткостных характе-
ристик крыла повышается критическая скорость реверса.
В заключение коротко остановимся на некоторых особенностях
поведения сверхзвукового самолета на посадочных режимах, обу-
словливаемых аэродинамической схемой современного самолета,
применением крыла малого удлинения со значительной стреловид-
ностью по передней кромке. Все это приводит к тому, что такой
самолет на посадочных режимах обладает повышенной степенью
поперечной статической устойчивости в сравнении с малыми и сред-
ними углами атаки. Отдельные недостатки в аэродинамической
компоновке сверхзвукового самолета нередко еще более усиливают
эту тенденцию. В таких случаях поперечная устойчивость сверх-
звукового самолета на посадочных режимах может оказаться
чрезмерной и в его поведении появится ряд характерных особен-
ностей. К ним прежде всего можно отнести повышенную реакцию
самолета по крену на небольшие внешние возмущения и малые
отклонения руля направления, а также повышенную чувствитель-
ность самолета к боковому ветру на посадке.
Особенно плохую оценку летчики дают такому самолету в тех
случаях, когда одновременно наблюдаются повышенная реакция
по крену на отклонение руля направления и сильно пониженная
эффективность элеронов. Чем совершеннее аэродинамическая ком-
поновка сверхзвукового самолета, тем слабее проявляются на нем
указанные выше особенности поведения на посадочных режимах.
Поэтому устойчивость и управляемость на посадочных режимах
также тщательно анализируются и проверяются при летных испы-
таниях сверхзвукового самолета.
5.3. ВЛИЯНИЕ УПРУГИХ ДЕФОРМАЦИЙ ПРОВОДКИ
НА УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ
ТЯЖЕЛОГО САМОЛЕТА С ОБРАТИМОЙ СИСТЕМОЙ
УПРАВЛЕНИЯ РУЛЯМИ
При проведении летных испытаний маневренных самолетов
обычно не возникает необходимости учитывать влияние упругих
деформаций проводки управления рулями на их устойчивость и
управляемость. На таких самолетах протяженность проводки
202
управления и действующие на нее силы относительно невелики.
Многие самолеты к тому же оснащены бустерами, воспринимаю-
щими полностью (при необратимой системе управления) или ча-
стично шарнирный момент руля. Иначе обстоит дело на тяжелых
самолетах с простой обратимой системой управления при прямой
механической связи рулей со штурвалом и педалями (осущест-
вляемой через систему тяг, тросов и качалок, притом достаточно
протяженную) и значительными по площади рулевыми поверхностя-
ми. В этом случае эффект упругих деформаций проводки становит-
ся уже заметным и должен учитываться при анализе материалов
летных испытаний тяжелых самолетов на устойчивость и управ-
ляемость. Упругие деформации проводки обычно обусловливают:
— нарушение «жесткой» однозначной связи между углом от-
клонения руля и положением штурвала и педалей, т. е. изменяют
в зависимости от условий полета и угла отклонения триммера на
руле как балансировочные положения штурвала и педалей (при
бв = const и бн = const), так и предельный угол отклонения руля
при полном отклонении соответствующего рычага управления
(рис. 5.22);
Р и с. 5. 22. Изменение в полете вида взаимосвязи между
углами отклонения руля (дв) и соответствующими им
отклонениями штурвала (ручки управления), а также
предельных углов отклонения руля (dB max) в зависи-
мости от величины градиента dPvIdXv на самолетах
с обратимой упругой системой управления. Ниже пока-
зан характер зависимости градиента dPyJdXb от скоро-
сти полета при неизменном положении аэродинамиче-
ского триммера
203
— самопроизвольное отклонение правого и левого элеронов
вверх или вниз (названное упругой «просадкой» или «всплыва-
нием» элеронов) неодинаковое по величине и знаку в различных
условиях полета (при различных V, а, тэ) и неконтролируемое
летчиком.
Вследствие этого уменьшаются, притом по-разному в различ-
ных условиях полета, предельные (так называемые располагае-
мые) моменты рулей, создаваемые в полете полным отклонением
рычагов управления, что может ^граничить продольный и боковой
маневр, а также управляемость. 1<роме того, оказываются различ-
ными и характеристики устойчивости самолета, а также характе-
ристики управляемости. Особенно существенным может оказаться
влияние деформаций проводки в системе управления рулем вы-
соты и элеронами на характеристики продольной устойчивости и
управляемости тяжелого самолета. Учитывая практическое значе-
ние этого вопроса, остановимся на нем подробнее.
Влияние упругих деформаций проводки
в продольном канале управления
на характеристики статической устойчивости
и управляемости самолета
Усилия, прикладываемые летчиком к штурвалу (ручке управ-
ления) для балансировки шарнирного момента руля при пилоти-
ровании самолета, вызывают деформации проводки управления.
При этом изменяются исходные балансировочные положения штур-
вала хв и величина его линейных перемещений dxB, потребных для
отклонения руля (рис. 5.23). Линейные перемещения штурвала
(ручки управления) в этом случае можно представить следующим
двучленом:
*в = *во + хХ. (5- 16)
где x*=-rfXB'y—----коэффициент упругости проводки управления
рулем высоты;
Рв — усилие, прикладываемое летчиком к штурвалу
для отклонения руля в балансировочное поло-
жение (бв). При обратимой системе управления
его величина зависит от шарнирного момента
руля Мш и передаточного отношения km системы
хв0 — линейное перемещение штурвала (ручки управ-
ления^, измеряемое от нейтрального положения
при абсолютно жесткой (недеформируемой)
проводке, т. е. при х* = 0
^-*-в0 g \
~~ db3 *)'
204
При упругой проводке линейные перемещения штурвала (руч-
ки управления) возрастают, становятся более размашистыми. Как
это следует из (5. 16) они зависят не только от фактических углов
отклонения руля (6В), но также и от величины прикладываемых
Рис. 5.23. Схематическое представление упругой связи штурвала (ручки
управления) с рулем высоты:
1—положение штурвала, соответствующее исходному положению руля высоты; 2—поло-
жение штурвала, соответствующее отклонению руля на угол с?бв при абсолютно жест-
кой проводке управления; 3—фактическое положение штурвала при отклонении руля
на угол с?бв при упругой проводке управления
к рычагу управления усилий (Рв). Поэтому нежесткость проводки
(х*=/=0) снижает эффективность продольного управления1 * * * * *.
Связь между коэффициентами эффективности продольного
управления т** и m*BQ самолета с реальной (упругой) и абсолютно
жесткой (недеформируемой) проводкой управления, а также коэф-
фициентом эффективности руля высоты может быть представ-
лена следующей простой формулой:
mS= = Dm'*, (5. 17)
дбв rfxB0 dx3 z z 7
где кш*=------.—- — передаточное отношение от руля к штурвалу
57,3 dxB() (ip^);
1 Эффективность продольного управления оценивается величиной изменения
коэффициента продольного момента Amz при линейном перемещении штурвала
(ручки управления) на единицу длины, например Ахв = 1 см, т. е. производной
ха dmz
mz в = —---.
дх3
205
—множитель, характеризующий жесткость про-
dx* водки управления (для недеформируемой про-
водки Z?=l).
Формулу для расчета этого множителя легко получить, про-
дифференцировав выражение (5. 16) и выполнив простые преобра-
зования. Она имеет следующий вид:
__ dxB§
dxB
_1_______________
* d-Рц
в dxBQ 1+<
(5.18)
1
о
Получим выражения для количественной оценки влияния упру-
гих деформаций проводки на характеристики продольной управ-
ляемости самолета, а также его устойчивость по скорости и пере-
грузке.
* К числу таких характеристик продольной управляемости пре-
жде всего относятся критерии 1 * * Хп и Xv, Получить их можно, вос-
пользовавшись выражением (5.16). Продифференцировав его,
получим
Х'-7^=/- Ubo+*b>b)=^o +*>;
dny dny
(5.19)
xv==v_ _d_( +x.
2 dV 2 dV 4 80 1 B/ 1
где
__dxM и pn dPB .
dny dny ’
Xo = -L и [^s-
2 dV 1 J 2 [ dV jx
при tb = const, в общем случае при Рв^0, т. е. не обязательно
на режиме балансировки при Рв = 0.
Из формул (5.19) следует, что нежесткость проводки управле-
ния приводит к увеличению Хп (так как Рп =dP3ldny одного знака
с Xn = dXbldny), а величина Xv может существенно меняться
в зависимости от заданного режима балансировки самолета по
усилиям, т. е. положения аэродинамического триммера тв
(рис. 5.24).
V
2
dxB
dV
dxB
dny
коэффициент расхода штурвала на скорость для прямо-
линейного полета при пу = 1;
коэффициент расхода штурвала на перегрузку при
М=const и V = const.
206
Роль триммера может быть представлена более наглядно, если
в формулы (5.19) вместо градиента [PF]t=— ввести в яв-
2 [ dV Jt
ном виде критерий продольной управляемости =
Для этого напишем выражение, характеризующее изменение уси-
лий на штурвале (ручке управления) при V=const в зависимости
от положения аэродинамического триммера (см. рис. 5.24):
Рв=Рв1+РТв(тв-тв1), (5.20)
где Ръ — исходная величина усилий при тв = const;
Pm — новая величина усилий при той же скорости полета и
Tbi = const (tbi¥=Tb);
dPB
dxn
Рв
определяемый при летных испытаниях самолета по-
казатель эффективности аэродинамического трим-
мера (численно равный величине приращения усилий
на рычаге управления от отклонения триммера на
один градус).
Рис. 5.24. Характер изменения
усилий на штурвале (ручке управ-
ления) от руля высоты при обра-
тимой системе управления и раз-
личных углах отклонения аэроди-
намического триммера гв
Дифференцируя (5.20) по V и накладывая на (5.20) требова-
ние балансировки самолета по усилиям при новом положении
триммера твь т. е. условие PBi = 0, после небольших преобразова-
ний и умножения всех членов на ~ , получим
V №1 _ V (dPBi\ I у Рв dpl
2 [ dVjz 2 (. dV ]PBl-o "t" 2 P; dV ’
откуда
+ (5.21)
где
(*b-tbi)=-~;
E - — 1 dP*
x—2pf ~dV~Pl ~c& ‘
207
Коэффициент Ех учитывает влияние изменения условий обте-
кания аэродинамического триммера на характеристики продоль-
ной управляемости самолета по усилиям на штурвале (ручке
управления) в прямолинейном полете.
Из формулы (5.21) следует, что величина градиента [Pv]x при
V=const должна изменяться в зависимости от угла отклонения
триммера на руле высоты, поскольку при этом меняется величина
усилий Рв на рычаге управления (рис. 5.24).
Формулы для расчета коэффициентов продольной статической
устойчивости самолета по скорости и перегрузке с фиксированным
управлением можно получить, отправляясь от приведенных
в гл. IV (стр. 157) выражений:
xv хп
г И г ’
Л * X т
(5. 22)
где индекс «х» при коэффициентах av и ап означает, что указанные
характеристики устойчивости определяются при условии хв = const.
Подставив в формулы (5.22) выражения (5.19) и выполнив
ряд преобразований с использованием формул (5.16) и (5.18),
получим
п 0
~п,х 7
Uo1
*
:в
1.=Оои._[1_о]Щ
о ) Р т
рп. I рп
=/х,8+[1-г>] 4-,
Хот) Р т
(5. 23)
(5. 24)
v---- ---D
О t *
—+ ^в
т
О
так как
d
*
о
г0
D '
1 ~9. и рп— dP*_,
рХТ tin у
dP в
dxy
Здесь оГ)Х и сгп,х — значения коэффициентов устойчивости по ско-
рости и перегрузке, определенные при условии хв = const (при фик-
сированном положении рычага управления),
Ov, 6 и crn,s — значения коэффициентов устойчивости по скорости
и перегрузке, определенные при условии бв = const (при фиксиро-
ванном руле высоты).
Устойчивость самолета при фиксированном рычаге управ-
ления (хв = const) будет отличаться от устойчивости самолета
при фиксированном руле высоты (dB = const). При этом из формулы
208
(5.23) следует, что характеристики устойчивости по скорости
с фиксированным управлением (хв = const) будут зависеть от ре-
жима балансировки самолета по усилиям, т. е. от положения аэро-
динамического триммера на руле высоты. Для того чтобы более
наглядно оценить эффект аэродинамического триммера, заменим
[Р1Ъ в формуле (5.23) выражением (5.21). Выполнив подста-
новку, после небольших преобразований получим
-11- D]
PV+PBEX
рхи
(5. 25)
31лН
В формуле (5.25) величина Рв при постоянной центровке
(хт = const) самолета и заданной скорости полета определяется
только положением аэродинамического триммера (тв) и может
иметь как положительный, так и отрицательный знак. Следова-
тельно, с помощью аэродинамического триммера на руле высоты
можно воздействовать на характеристики продольной статической
устойчивости по скорости с фиксированным управлением.
Как видим, эффект упругих деформаций проводки в продоль-
ном канале управления проявляется весьма своеобразно. Он раз-
личен в прямолинейном и криволинейном полетах, неодинаков при
малых и больших скоростях полета. На самолетах с реальной
проводкой управления нарушается однозначная связь между ба-
лансировочными отклонениями рычага управления и руля, а также
характеристиками устойчивости и управляемости, определяемыми
при условиях хв = const и 6В = const. Указанное обстоятельство дает
ключ к пониманию целого ряда необъяснимых для жесткого само-
лета несоответствий между характеристиками устойчивости и
управляемости, наблюдающихся при обработке материалов летных
испытаний. В частности, в этом нередко кроются причины несоот-
ветствия между запасами устойчивости по скорости и по пере-
грузке, а также наличия известных «ножниц» по скорости между
характеристиками, полученными при фиксированных рулях и фик-
сированных рычагах управления, на самолетах с обратимой си-
стемой. Рис. 5. 25 дает качественное представление о возможных
при этом изменениях вида соответствующих балансировочных кри-
вых самолета, коэффициентов статической устойчивости по ско-
рости и перегрузке, с фиксированным управлением (хв = const),
а также характеристик управляемости в прямолинейном и криво-
линейном полете. Рис. 5.26, кроме того, иллюстрирует случай,
когда упругие деформации проводки приводят не только к количе-
ственным изменениям характеристик устойчивости и управляемо-
сти, но и становятся причиной потери самолетом управляемости на
больших углах атаки (вследствие невозможности полностью откло-
нить в полете руль высоты на максимальный угол для предотвра-
щения непроизвольного кабрирования при наличии местной зоны
неустойчивости по перегрузке).
209
Рис. 5.25. Возможные изменения балансировочных кривых xB=f(V, пу)
самолета, а также его характеристик продольной статической устойчи-
вости и управляемости огп, Хл, Gv,XV при упругих деформациях про-
водки управления
Рис. 5.26. Пример, когда упругие дефор-
мации проводки могут стать причиной по-
тери продольной управляемости на само-
лете, неустойчивом по перегрузке в неко-
торой области углов атаки (на графике эта
область пу отмечена стрелками):
а—балансировочная кривая усилий; б—балансиро-
вочные положения штурвала (ручки управления)
при различной степени упругости проводки управ-
ления;
/—абсолютно жесткая проводка управления (Xr =
=0): 2—относительно жесткая проводка управле-
ния; 3— упругая проводка управления
Влияние упругих деформаций проводки
в поперечном канале управления
на продольную балансировку
и статическую устойчивость самолета
по скорости и перегрузке
Упругие деформации проводки в поперечном канале управления
самолета приводят к одновременной просадке вниз, либо всплы-
ванию вверх как правого, так и левого элеронов. Величина упру-
гой просадки (всплывания) элеронов и ее направление опреде-
ляются действующим на элерон шарнирным моментом и жестко-
стью проводки управления. В конечном счете оба элерона зани-
мают такие новые положения, при которых приложенные к тягам
И качалкам внешние силы и силы упругости взаимно уравновеши-
ваются. При этом меняются не только подъемная сила крыла и ха-
рактер распределения ее по размаху, но и действующие на само-
лет моменты относительно поперечной и продольной оси. Послед-
нее наблюдается, в частности, на самолетах со стреловидным
крылом, т. е. в тех случаях, когда элероны находятся на значи-
тельном удалении от оси Ozi, проходящей через центр тяжести
самолета (рис. 5.27).
Одинаковая по величине и направлению просадка (всплыва-
ние) правого и левого элеронов приводит к изменению продоль-
ного момента самолета. При различной по величине просадке
(всплывании) элеронов появляется, кроме того, и момент крена.
Эти моменты становятся тем значительнее, чем больше скорость
полета, величина упругих деформаций проводки и разница в углах
отклонения правого и левого элеронов, а также, чем больше плечо
от элерона до центра тяжести самолета и площадь самих элеронов.
В дальнейшем опускание правого и левого элеронов вниз от
исходного балансировочного положения будем именовать просад-
кой. Отклонение элеронов вверх — будем называть всплыванием
211
или отрицательной просадкой. Соответственно шарнирный момент,
обусловливающий просадку элеронов вниз, — будем считать поло-
жительным по знаку, а действующий в направлении отклонения
элеронов вверх — отрицательным.
При принятой системе знаков средняя просадка элеронов, обу-
словливающая изменение продольного момента самолета, составит
* А^упр.прав + А^упр.лев
Д8уПр=----------2------.
где дВупрправ —величина упругой просадки правого элерона;
Д\пР.лев“величина УпРУг°й просадки левого элерона.
В случае одинаковой просадки правого и левого элеронов
(АбуПр = Абупр.прав= Абупр.лев) момент крена не возникает; при этом
новое балансировочное положение обоих элеронов будет равно
Вэ = Вэ исх +
Возникающий в результате этого дополнительный продольный
момент самолета в аналитической форме может быть представлен
следующим выражением:
ДЛ1г=т^5дд-Д8упр, (5.26)
5 dmz о л
где — показатель, характеризующий изменение коэф-
фициента продольного момента самолета от от-
клонения обоих элеронов вверх или вниз на один
градус;
V2
q — Q---скоростной напор (л^Г/м2);
S—-площадь крыла (л/2); -
ЬА — средняя аэродинамическая хорда крыла ,(л/).
Для парирования указанного выше момента летчику потре-
буется изменить исходное балансировочное положение руля вы-
соты, отклонив его дополнительно на величину
тэ
Д*в=-----Ь Д8УПР- (5-27)
Здесь /п/ — коэффициент эффективности руля высоты.
Балансировочное положение штурвала (ручки управления)
при этом изменится на величину, равную
A V - 5э А' А°упр
тт? J*п 57,3^ш ZAJ I
где
ь _ 1
ш 57,3 dxB
212
Прикладываемые летчиком к рычагу управления усилия (для ба-
лансировки самолета) в случае обратимой системы управления при
этом также изменятся на величину
дрв=_р^д8упр, (5.29)
mzB
гл 5 d Р» о
где нв =—- — расход усилии на градус отклонения руля вы-
соты при заданных условиях полета, т. е. при
V = const и Н = const.
Таким образом, балансировочные положения руля высоты и эле-
ронов, а также усилия от них на рычаге управления в общем слу-
чае должны быть различными при нагруженной и ненагруженной
проводке управления элеронами *.
Опыт показывает, что с достаточной для целей практики точ-
ностью можно принять линейную связь между величиной упругой
просадки элеронов и действующим на них шарнирным моментом,
положив
Д\пр—>ш.э, (5.30)
где у»— характеристика упругости проводки управле-
ния, град!кГ • м\
= —шарнирный момент элерона;
тш.э—безразмерный коэффициент шарнирного мо-
мента элерона;
5Э и Ь3— площадь и средняя хорда элерона.
При заданной геометрии элеронов (SQbQ = const) их шарнирный
момент, как известно, не является постоянной величиной. Он суще-
ственно изменяется при изменении скорости, высоты полета, чис-
ла М, углов атаки и скольжения, угла отклонения элеронов и по-
ложения аэродинамического триммера на них.
Следовательно, и величина упругой просадки элеронов также
будет меняться при изменении скорости и числа М, высоты полета,
углов атаки и скольжения, положения аэродинамического трим-
мера на элероне и угла отклонения самих элеронов.
Поэтому упругая просадка элеронов может стать причиной на-
рушения не только продольной балансировки самолета, но также
и его устойчивости и управляемости. Изменяются при этом (в той
или ной степени) все характеристики устойчивости и управляемо-
сти, т. е. устойчивость по скорости и перегрузке с фиксированным
и освобожденным управлением, а также характеристики продоль-
ной управляемости в прямолинейном и криволинейном полете,
* Например, в полете с включенными и отключенными бустерами, если пос-
ледние находятся непосредственно вблизи элеронов.
213
ьо
Рис. 5.28. Возможные изменения продольной статической устойчивости и балансировочных кривых самолета
в прямолинейном и криволинейном полете при упругой просадке (всплывании) элеронов
связанные с усилиями на штурвале и перемещением штурвала
(ручки управления). Естественно, и сам вид балансировочных кри-
вых, характеризующих изменение продольной балансировки само-
лета в зависимости от скорости горизонтального полета и пере-
грузки при постоянной скорости,- при этом окажется различным
в случае полета со сбалансированным и несбалансированным шар-
нирным моментом элеронов, т. е. при ненагруженной и нагружен-
ной проводке управления.
Рис. 5. 28 дает качественное представление о ‘ характере воз-
можных изменений (по скорости и перегрузке) как степени упру-
гой просадки элеронов и соответствующих балансировочных кри-
вых, так и коэффициентов статической устойчивости самолета
в указанных выше случаях.
Как видим, эффект от отклонения элеронов, обусловленный
упругостью проводки, отнюдь неоднозначен и притом неодинаков
по величине при малых и больших скоростях полета и углах атаки.
Он может как повышать, так и понижать устойчивость самолета
в зависимости от характера изменений по скорости и перегрузке
балансировочных углов отклонения элеронов, т. е. конечного вида
балансировочных кривых 69=f(V, пу).
Например, при положительной по скорости просадке элеронов
(т. е. положительном наклоне кривой A6ynp=f(V) при пу=\ и ро-
сте пикирующего момента от элеронов с увеличением скорости
полета) и отрицательной по перегрузке просадке элеронов при по-
стоянной скорости (т. е. отрицательном наклоне кривой ДбуПр =
= f(ny) при V=const и росте кабрирующего момента от элеронов),
эффект будет отрицательным и устойчивость самолета по скорости
и по перегрузке понизится. Наоборот, в случае отрицательной про-
садки элеронов по скорости и положительной по перегрузке, —
продольная устойчивость самолета возрастает.
Во всех рассмотренных случаях, когда конструктором не при-
нимаются специальные меры, влияние упругой просадки элеронов
на балансировку самолета и его устойчивость резко усиливается
с увеличением скорости полета (см. рис. 5.28). Меняются при этом
также и характеристики продольной управляемости самолета.
Приближенные формулы для количественной оценки воз-
можных в этом случае изменений характеристик устойчи-
вости и управляемости самолета в дозвуковой области скоростей
можно получить из выражений (5.27), (5.28) и (5.29),
если пренебречь изменением по V, углу атаки и числу
6 5 5 тгЭ
М коэффициентов mz3 и тшв, т. е. считая -у- и яш — кон-
стантами, а Рв — зависящим только от q.
При таких допущениях изменения характеристик продольной
управляемости самолета определяются следующими простыми
выражениями:
215
1
ДХ«=~(ДХВ)
dny
bPn=~W\\
dny
т1э
5
mzB
mz3
mzB
1
57,3£ш
<1Ъ3
dny
r>8 .
* в i
dny
mz3 1
m 57,3Z?m
2
(5.31)
v
2
dV ’
^pV=^~^ [д^в+^дтв]рв-о
t___ ™Z £)8 V d^3 | A p rp p 1
— —-p* — —+^PA^-EA,
m- dV
где дтв==--^- — потребное для компенсации дРв отклонение
р« триммера на руле высоты;
d Р
Рв=—-—изменение усилий на штурвале при отклонении
rfTe триммера на дтв = 1°,
=21 1 .
~ 2 Р*в dV ’
=21 1 rfPB
2 Pl dV '
Изменение характеристик продольной статической устойчивости
самолета по скорости и перегрузке с фиксированным и освобож-
денным управлением определяется следующими выражениями:
V dl3
еу г.п 2 dV
1 G/S
(5. 32)
mz3
Дал св~
СУ Г.П
8 Q л
—- — т-2-8
dny z G/S
п
э>
где ^г.пи V— значения коэффициента подъемной силы самолета
в горизонтальном полете и скорости (в м1сек) на
режиме балансировки самолета;
216
____ V db3
Og _ ---------
2 dV
наклон касательной к балансировочной кривой
8э=/(1/) при пу=\ и р = 0 в точке балансировки
по скорости;
s» n d^3
оэ-----------
driy
наклон касательной к балансировочной кривой
при V =const и р = 0 в точке баланси-
ровки по пу.
В тех случаях, когда не удается полностью устранить отрица-
тельное влияние упругой просадки элеронов на балансировку и
устойчивость самолета, необходимо принять все меры к тому, чтобы
максимально ослабить ее влияние на устойчивость по перегрузке.
Следовательно, надо стремиться к тому, чтобы при увеличении угла
атаки не возникало отрицательной просадки элеронов и не появ
лялось у самолета тенденции к кабрированию.
Глава VI
МЕТОДЫ КОЛИЧЕСТВЕННОЙ ОЦЕНКИ
УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ
САМОЛЕТА
6.1 ТИПОВЫЕ ЭЛЕМЕНТЫ ПОЛЕТНОГО ЗАДАНИЯ.
ПОСЛЕДОВАТЕЛЬНОСТЬ ПРОВЕДЕНИЯ ИСПЫТАНИЙ
Методика летных испытаний самолета на устойчивость и управ-
ляемость предусматривает выполнение в полете при заданных
исходных условиях ряда специальных маневров, которые и яв-
ляются обязательным содержанием полетного задания летчика.
Так, для качественной и количественной оценки динамической
устойчивости и управляемости самолета обычно выполняются:
— импульсы рулей, представляющие собой резкое кратковре-
менное (в сравнении с периодом собственных колебаний самолета
и временем переходного процесса) отклонение поочередно одного
из рулей и быстрое возвращение его назад в исходное положение,
при неизменном положении двух других рулей. Импульсы рулей
выполняются для записи приборами последующего возмущенного
движения самолета до полного его затухания;
— дачи рулей, т. е. резкое ступенчатое отклонение одного руля
на некоторый постоянный угол с сохранением его в течение 3—
5 сек, при неизменном положении остальных рулей. Дачи рулей
производятся для записи приборами переходного процесса после
ступенчатого отклонения руля;
— поступательно-возвратные отклонения поочередно каждого
из рулей с постоянной амплитудой и заданными частотами при
неизменном положении остальных рулей. Подобными движениями
рулей создаются вынужденные колебания самолета с различной
частотой.
Действия летчика и характер изменения параметров движения
самолета при выполнении таких маневров показаны схематически
на рис. 6. 1. Подобные маневры повторяются на нескольких высо-
тах при различных скоростях полета и заданном режиме работы
двигателя (6РУД = const). Кроме того, в условиях, приближаю-
щихся к эксплуатационным, производится запись неустановивше-
гося движения самолета при выпуске и уборке закрылков, шасси,
воздушных тормозов, а также при изменении режима работы всех
двигателей и имитации одностороннего отказа двигателей.
218
При определении статических характеристик устойчивости и
управляемости самолета могут быть применены два принципиально
различных метода, в основу которых положены различные виды
маневров:
1. Непосредственная регистрация бортовой аппаратурой в уста-
новившемся полете величины усилий летчика, положения ручки
управления (штурвала) и педалей, а также балансировочных углов
Исходные услоВия:
//«const; const; /«const; JcT«const; 5pyA=const
Рис. 6.1. Основные виды маневров при определении
динамических характеристик устойчивости и управляе-
мости самолета:
а—импульс рулей; б—ступенчатое отклонение руля («дача»);
в—вынужденные колебания
отклонения рулей при различных, но постоянных в момент записи,
значениях параметра, определяющего тот или иной вид продоль-
ного или бокового движения самолета.
Типовыми маневрами для этого случая являются:
— прямолинейный установившийся полет с различной ско-
ростью (от 1,1 Vmin до Vmax ) вблизи заданной высоты поочередно
при максимальной и минимальной тяге двигателя. В летной прак-
тике этот наиболее старый метод проведения эксперимента полу-
чил название «зубцов»;
—' установившиеся скольжения с различным углом крена (как
вправо, так и влево) при постоянной заданной скорости полета на
219
заданной средней высоте и постоянном режиме работы двигателя
(8РУД = const);
— фиксация исходного установившегося режима полета в те-
чение 3—5 сек и последующее энергичное отклонение руля высот,
руля направления или элеронов на постоянный угол на 3—6 сек при
сохранении двух других рулей в исходном положении (дача руля).
2. Регистрация бортовой аппаратурой неустановившегося дви-
жения самолета, в процессе которого летчик плавно меняет один
из исследуемых параметров с последующим введением при обра-
ботке полетного материала соответствующих поправок на неста-
ционарность.
Типовыми маневрами для этого случая являются:
— разгоны и торможения самолета в горизонтальном полете на
заданной высоте соответственно при максимальной и минималь-
ной тяге двигателя;,
— скольжения с плавно меняющимся углом крена при постоян-
ной скорости полета и заданном режиме работы двигателя;
— виражи-спирали с плавно нарастающей перегрузкой от
пу=1 до п^доп при постоянных заданных значениях скорости по-
лета (числа М) и заданном режиме работы двигателя.
Действия летчика и характер изменения основных параметров
движения самолета при выполнении этих маневров показаны схе-
матически на рис. 6. 2. Подобный эксперимент проводится на не-
скольких высотах и охватывает полный диапазон эксплуатацион-
ных скоростей полета, чисел М и углов атаки, а также и все воз-
можные варианты конфигурации самолета (полетную, взлетно-
посадочную и т. п.). Продольное движение самолета обычно реги-
стрируют при двух-трех центровках (£т), боковое — при одной.
Первый метод, несмотря на кажущуюся простоту обработки
полетных записей *, обладает существенными недостатками, основ-
ными из которых являются:
— трудоемкость летного эксперимента и большая затрата по-
летного времени (для получения каждой балансировочной кривой
летчику необходимо выполнить не менее 5—6 установившихся
режимов);
— погрешности при обработке записей, обусловленные непо-
стоянством веса G и центровки хт самолета (меняются вследствие
выгорания топлива), а также неточностью выдерживания летчиком
как средней высоты полета, вблизи которой должны производиться
измерения на всех «зубцах», так и тяги двигателя (точки дРУД —
положения РУД — рычага управления двигателем) для каждого
режима, а при выполнении установившихся скольжений с различ-
ными кренами, кроме того, и скорости полета.
* При обработке установившихся режимов не требуется строгая синхрониза-
ция по времени всех произведенных в полете измерений и расшифровка полетных
записей по времени, достаточно замерить средние величины для всего режима
(«зубца», «площадки», «скольжения»).
220
Поэтому для повышения точности эксперимента следовало бы
все экспериментальные точки приводить к условиям полета, соот-
ветствующим G = const; хт = const; V= const; бруд = const и т. п.
О
а)
t сек
/.ММЪууД #cp*con$t
’—
t сек
б)
(М,У,ЯСр, 5руд)
б)
О Рн>хнЛн) tee*
ж)
Рис. 6.2. Основные виды маневров при определении стати-
ческих характеристик устойчивости и управляемости самолета:
а—«зубцы»; б—установившиеся скольжения в прямолинейном полете
вправо ц, влево; в—«дачи» руля высоты и элеронов; г—разгон и тормо-
жение; о—скольжения с плавно меняющимся углом крена; е—-вираж-
спираль с плавно нарастающей перегрузкой; ж— «дача» руля направ-
ления
Второй метод более прост в отношении техники пилотирования
самолета, существенно сокращает потребное для эксперимента
полетное время, допускает совмещение (комплексирование) не-
скольких полетных заданий, позволяет получить балансировочные
221
кривые не для осредненных значений полетного веса, центровки,
скорости и высоты, а при условиях, практически постоянных для
всех экспериментальных точек на балансировочной кривой. Нако-
нец, этот метод позволяет получить более полный материал для
качественной оценки и количественного анализа устойчивости и
управляемости испытываемого самолета. Однако первичная обра-
ботка записей неустановившегося движения самолета обычно ока-
зывается более трудоемкой, так как при этом необходимы тщатель-
ная синхронизация по времени всех регистрируемых в полете пара-
метров, предварительная оценка погрешностей, вносимых нестацио-
нарностью, и учет поправок при построении балансировочных кри-
вых (если поправки оказываются значительными).
В летной практике применяются оба метода. Методом устано-
вившихся режимов чаще пользуются при летных испытаниях тяже-
лых нескоростных самолетов. Второй метод определения характе-
ристик устойчивости и управляемости самолета широко приме-
няется при летных испытаниях скоростных самолетов, а также и
многих нескоростных самолетов.
Полетные записи движения самолета при выполнении летчи-
ком типовых маневров являются исходным материалом для полу-
чения динамических характеристик и балансировочных кривых
испытываемого самолета. Балансировочные кривые вида пред-
ставленных на рис. 4.9 и 4.14 необходимы для количественной
оценки статической устойчивости и управляемости самолета. По-
добные кривые показывают, как меняются балансировочные углы
отклонения рулей (и соответственно положения ручки управления
и педалей, а также усилия на них) при различных установившихся
режимах полета в зависимости от изменения одного из парамет-
ров, определяющих этот режим. Такими параметрами могут быть,
например, скорость полета V, число М, коэффициент подъемной
силы су самолета и перегрузка пу, углы атаки а и скольжения р,
угол крена у и т. п.
Остальные факторы, влияющие на балансировку самолета, его
устойчивость и управляемость, сохраняются при этом неизмен-
ными. К ним относятся центровка самолета (rrT = const), режим ра-
боты двигателей (6РУд =const, nSB = const), режим работы включен-
ной в систему управления автоматики (автопилота, демпфера,
АРУ), положения триммирующих устройств в системе управления
(например, аэродинамических триммеров, т = const), посадочных
щитков (6щ = const), шасси, воздушных тормозов (6в.т = const), на-
ружных подвесок и т. п.
К параметрам движения самолета, хорошо контролируемым
летчиком, относятся скорость полета, перегрузки, углы крена и тан-
гажа, а также угловые скорости и ускорения. Поэтому при обра-
ботке материалов летных испытаний в качестве параметров, опре-
деляющих режим полета, принимают:
а) для продольного движения самолета — скорость и число М,
нормальную перегрузку пу;
222
б) для бокового движения самолета — боковую перегрузку
угол крена у и угловые скорости крена и рыскания со* и соу.
Испытаниям самолета Ба устойчивость и управляемость пред-
шествуют полеты по менее сложным заданиям, не связанным с вы-
ходом на крайние режимы. При таких полетах, необходимых также
и для приобретения летчиком некоторого опыта и уверенности,
проверяется надежность работы всех самолетных систем и сило-
вой установки, производится тарировка приемника воздушного дав-
ления для определения аэродинамических поправок. Испытания
на устойчивость и управляемость обычно начинают с подбора наи-
лучшего режима балансировки аэродинамическим триммером
(триммирующим устройством) и оценки поведения самолета на
средних высотах и при средних эксплуатационных центровках.
При испытаниях определяются также минимальные скорости
и оценивается поведение самолета на малых скоростях и при сва-
ливании. Исследование поведения самолета на критических углах
атаки и при сваливании иногда совмещают с испытаниями само-
лета на штопор (см. стр. 284). Если программа летных испытаний
не предусматривает доведение самолета до сваливания (выхода
на су свал), то эксперимент может проводиться и без предваритель-
ных испытаний самолета на сваливание и штопор. Однако в этом
случае предельные допустимые значения коэффициента подъемной
силы (Судой) должны быть строго регламентированы такой вели-
чиной угла атаки (меньшей критического), на котором появляются
только первые признаки выхода самолета на большие углы атаки.
Такими признаками могут быть, например, предупредительная
тряска конструкции, некоторое снижение эффективности рулей,
легкая тенденция к кабрированию или другие достаточно заметные
явления, указывающие на ухудшение устойчивости и управляемо-
сти самолета.
В ходе летных испытаний самолета на устойчивость и управляе-
мость постепенно расширяется диапазон скоростей, высот, углов
атаки и полетных центровок самолета. Далее исследуется поведе-
ние самолета на предельных режимах при больших числах М по-
лета, больших скоростных напорах (больших Vnp) и на больших
высотах при резких перекладываниях руля направления, элеронов
и создании перегрузки. Затем, если это предусматривается про-
граммой испытаний, определяются характеристики продольной
устойчивости и управляемости при передних и задних центровках
самолета на одной-двух высотах. После завершения этого этапа
испытаний определяются характеристики боковой устойчивости и
управляемости* и характеристики устойчивости и управляемости
с различными вариантами внешних подвесок.
Характеристики устойчивости и управляемости определяются
как в специальных полетах, так и в полетах, выполняемых по дру-
гим заданиям. Например, в полетах на определение характери-
стик маневренности (разгоны и торможения) могут быть получены
балансировочные кривые самолета при пу—\. В полетах на оценку
223
эффективности работы воздушных тормозов получают данные
о влиянии их на продольную балансировку самолета и величину
усилий на ручке управления. В полетах на проверку общей проч-
ности конструкции оценивается поведение самолета на больших
углах атаки в криволинейном полете с максимально допустимой
в эксплуатации перегрузкой. При проверке местной прочности кон-
струкции оценивают поведение самолета и условия пилотирования
его при больших приборных скоростях (больших скоростных на-
порах q).
Описанный выше порядок проведения полетов отнюдь не яв-
ляется единственно возможным и его скорее следует рассматри-
вать лишь как некоторую иллюстрацию. В каждом отдельном слу-
чае в зависимости от частных особенностей самолета и поставлен-
ной задачи он может быть изменен.
Кроме количественных измерений, по результатам проведен-
ных полетов, а также на основании специально выполненных обле-
тов летчик дает качественную оценку устойчивости и управляемо-
сти самолета. В своем отзыве он отмечает основные достоинства
и недостатки самолета, существенные как с точки зрения безопас-
ности летной эксплуатации (доступности самолета летчику средней
квалификации), так и эффективности использования самолета лет-
чиком по прямому назначению в простых и сложных условиях
полета.
6.2. МЕТОДЫ ОБРАБОТКИ
ЭКСПЕРИМЕНТАЛЬНОГО МАТЕРИАЛА
Определение динамических характеристик
устойчивости и управляемости
Записи свободных колебаний самолета после импульса соответ-
ствующим рулем и переходного процесса при ступенчатом откло-
нении ручки управления или педалей позволяют определить основ-
ные характеристики динамической устойчивости и управляемости
самолета в продольном и боковом движении. Если указанные за-
писи произвести на двух-трех высотах при нескольких значениях
числа М, охватывающих весь диапазон эксплуатационных скоро-
стей и высот полета, то по результатам обработки можно составить
достаточно полное представление о динамических свойствах
и управляемости самолета. Выполняя «импульсы» и дачи при двух-
трех центровках (хт), можно также оценить и степень влияния про-
дольной и путевой статической устойчивости на характер возму-
щенного движения самолета. Для количественной оценки влияния
фиксации рулей на динамическую устойчивость самолета свобод-
ные колебания должны быть зарегистрированы как при фиксиро-
ванном, так и при освобожденном после «импульса» управлении
самолета. Последовательность дальнейшей обработки полетных
записей схематически представлена на рис. 6.3.
224
ОС
Продольное движение
т —► Т=^(ЧДЯу)
m зат - —►«эат=/(МЛ. «у)
+т
о
t, —
J
т
боковое движение
-* т=/г(ад
Отзат =К^+7*тзат =^<М,Я)
Х = (1Г^)
\^ЛШу/^вС0п5| I
ж _ ^пгзав
Дп23аБ= Дпгср“*’ЛП'
гзаь ~f.
V
Рис. 6.3. Последовательность обработки полетных записей при определении динамических харак-
теристик устойчивости и управляемости самолета
Непосредственно по записям продольных и боковых свободных
колебаний самолета определяются:
1) величина периода Т свободных колебаний, т. е. время, в те-
чение которого завершается полный цикл изменения одного из па-
раметров, определяющих продольное или боковое движение само-
лета при колебаниях (пу, coz, а, (ох, со^, nz, ₽ит. п.);
2) степень уменьшения амплитуды At колебаний за период
тзат = ^-; (6-1)
3) величина относительного заброса параметра, определяющего
движение самолета при ступенчатом отклонении руля, и время сра-
батывания /в:
(6.2)
— h Л >
где Дя3аб и Заб—абсолютная величина заброса соответственно
нормальной и боковой перегрузок при откло-
нении ручки управления и педали;
Д^уст и Anzcp—изменение величины нормальной и боковой
перегрузки вследствие перехода на новый ре-
жим балансировки, заданный ступенчатым
отклонением руля;
/2— момент времени, соответствующий достиже-
нию перегрузки п^ст после ступенчатого (рез-
кого) отклонения руля (см. рис. 6.3);
/1— фактическое время в момент отклонения руля
(см. рис. 6.3);
4) соотношение амплитуд угловых скоростей крена и рыскания
при боковых колебаниях самолета:
(6.3)
‘ юу
По результатам обработки полетного материала строятся зави-
симости типа изображенных на рис. 5.7. Эти зависимости дают
представление об изменении динамических характеристик, устой-
чивости и управляемости самолета по высоте и числу М.
Коэффициенты и Хх, характеризующие отношение величины
изменения соответствующего параметра движения самолета в ста-
тических условиях к величине его изменения в динамических усло-
виях при одной и той же величине изменения усилия на рычаге
управления или его отклонения, и фазовое запаздывание реакции
самолета на действия летчика определяют при проведении более
226
широких исследований. При этом коэффициенты и опреде-
ляют по результатам обработки записей вынужденных колебаний
самолета. Для случая продольного криволинейного движения при
неизменной скорости полета
/В \ /\
; /О)#=0 Л ___ /со =г О
ЛР"~ ’
где со — частота вынужденных колебаний самолета.
Величина фазового запаздывания реакции самолета на дейст-
вия летчика рассчитывается при этом по формуле
^ = 57,3 2я, (6.4)
где индексом «л» обозначен параметр, характеризующий действия
летчика (Р, х, S), а индексом «с» — параметр, характеризующий
реакцию самолета;
2
Тв=------период вынужденных колебаний самолета;
ю
Д/Зап—величина запаздывания ответной реакции самолета по
времени.
Определение статических характеристик
продольной устойчивости и управляемости
Балансировочные кривые (рис. 6.4 и 6.5), полученные путем
первичной обработки записей разгонов и торможений самолета
/сек
Рис. 6. 4. Последовательность обработки полетных записей при по-
строении балансировочных кривых самолета (прямолинейный гори-
зонтальный полет без скольжения)
//-const; Яу-7; nz«/7
хт=const; tB«const
М Укм/час
МУ км/час
о - полная тяга двигателя
ъ- минимальная тяга
при пу=\ (или зубцов), а также спиралей с плавно нарастающей
перегрузкой от пу=1 до пудоп при M = const. (либо продольных дач
8*
227
ручки управления), служат исходным материалом для определения
статических характеристик продольной устойчивости и управляе-
мости самолета.
Для определения характеристик устойчивости и управляемости
гю скорости при пу= 1 необходимо иметь балансировочные кривые
вида (см. рис. 6. 4)
хв=/(М, У); ?ст( 8В=/1(М, У) и РВ=/2(М, V),
полученные при следующих условиях:
^=1, Н = const, xr = const,
ВруД—-const, const, тв=-const*.
Рис. 6.5. Последовательность обработки полетных записей при
построении балансировочных кривых самолета (криволинейный
полет без скольжения при М = const)
Для определения характеристик устойчивости и управляемо-
сти по перегрузке при М = const необходимо иметь балансировоч-
ные кривые вида (см. рис. 6. 5)
Хв = fitly ИЛИ Су)-, <рст, 8в=./1(«4, ИЛИ Су) И Рв=:/2(Пу ИЛИ Су),
полученные при условии
М = const, JCT = const, // = const,
Вруд = const, Вщ--= const, тв-const.
* Здесь друд — положение рычага управления двигателем;
бщ — положение посадочных закрылков (щитков);
тв — положение аэродинамического триммера руля высоты (трим-
мирующего устройства в продольном управлении).
228
Если балансировочные кривые получают путем обработки за-
писей неустановившегося движения самолета (разгонов, торможе-
ний и спиралей), то необходимо предварительно определить вели-
чину погрешностей, связанных с нестационарностью режима и,
если они окажутся значительными, привести замеренные в полете
фактические значения хода ручки управления, усилий летчика на
ней и балансировочного угла руля высоты (<рСт или 6В) к условиям
установившегося полета.
Значения хв, Рв и <рст, соответствующие статическим условиям
балансировки самолета, определяют по формулам
•^в (*^в)ф ^^в.нест»
7°в^:(7°в)ф +А^в.нест;
^ст (<Рст)ф 4" Афст.нест*
где индексом «ф» отмечены фактические величины, замеренные
в полете; Ахв.Нест, АРв.Нест и Афв.нест — соответствующие поправки
на нестационарность режима.
Формулы для расчета таких поправок на нестационарность ре-
жима можно получить, отправляясь от уравнения равновесия мо-
ментов относительно поперечной оси самолета:
(6-5)
Если рассматривать при этом только плавные маневры, то при
расчете усилий на ручке управления и ее отклонений можно пре-
небречь слагаемыми, связанными с первой и второй производными
по времени от скорости полета
fz <*У хг (PV
V =----- и V =-----.
dt dfl
В этом случае получают приближенные выражения, характе-
ризующие изменение балансировочного угла отклонения руля вы-
соты Адв, перемещение ручки управления Ахв и изменение усилий
на ней АРВ, обусловленные нестационарностью режима и отклоне-
нием самолета от заданных условий балансировки*:
* Подробный вывод этих выражений имеется в следующих работах:
И. В. Остославский и Г. С. Калачев, Продольная устойчивость и
управляемость самолета, Оборонгиз, 1951, стр. 275—282.
В. С. В е д р о в и М. А. Т а й ц, Летные испытания самолетов, Оборонгиз,
1951, стр. 299.
И. В. Остославский, Аэродинамика самолета, Оборонгиз, 1957,
стр. 422—429.
Г. С. Калачев. Показатели маневренности, управляемости и устойчивости
самолетов. Оборонгиз- 1958, стр. 63—73.
229
+ ^-+ Р^Пу+PV АдУ;
atz at V
AXB(0 = ^2 ^- + ^1 А^ + ^«д«;+^ А Д^;
at1 at V
д8в(/)=8«^ +8« ^ + 8"Д/г, + 8Л А ду,
atz at V
(6.6)
где Рп2, Р", Рп, Pv, Хп2, Xi, Хп, Xv, 8", Si, 5" и 8V - постоян-
ные величины, в развернутом виде определяемые следующими
приближенными формулами:
- г2 I
p2«=_T2P-t^_L;
Ь~А »Су
- , / г2
Р" — — xPxi А_ I с* -X- — т“г _ т»
2СВ гСВ
(6. 7)
ss^ V
о = — о тд — —
V 2
dV ’
230
В формулы (6.7) входят следующие аэродинамические и кон-
структивные параметры самолета:
ххт и — соответственно коэффициенты
расхода продольных усилий,
хода ручки управления и руля
бу
т =-----масса
g
2т
2т
Т —-----
qSV
высоты на центровку;
(£ =
самолета
= 9,81 jw/сек2);
коэффициент относительной
плотности самолета;
масштаб времени, принятого
при приведении уравнений про-
дольного движения самолета
__ к безразмерной форме;
rz~l/ ~—радиус инерции самолета отно-
V т сительно поперечной оси (Zz—
момент инерции самолета отно-
сительно оси г);
и к Сц it
=—~~—-—производная коэффициента су
да Ла подъемной силы самолета по
Z св
св
со
mzZ
углу атаки;
коэффициенты момента про-
дольного демпфирования само-
лета при освобожденном (св)
и фиксированном управлении
а
Z СВ
и
mz
т
= —— производные коэффициента
да продольного момента самолета
по безразмерной скорости из-
~ da
менения угла атаки а = ^- при
освобожденном и фиксирован-
/“ ^Ada\
ном управлении I а = );
°лсв и ап—коэффициенты продольной ста-
тической устойчивости по пере-
грузке при освобожденном и
фиксированном управлении;
°ксв и av—коэффициенты продольной ста-
тической устойчивости по ско-
рости при освобожденном и
фиксированном управлении.
231
Если на неустановившееся продольное движение самолета на-
dlbnu dnu ~ ,
дожить дополнительно условие -----— =—— = 0 (т. е. условие
dfl dt
/^=const), то выражения (6.6) существенно упрощаются и прини-
мают следующий вид:
+ А AV; '
Дхв® Xn\ny-\-Xv ДУ;
(6. 8)
д1/.
При этом основные погрешности будут определяться только вели-
чиной отклонения фактической перегрузки от заданной пу=1. При
нарушении условия ny=i в фактические значения замеряемых
в полете величин вводятся поправки
ДРВ = Р,(^__1); ’
дхв = А''’(/гг,-1);.
дйв = Ь"(пу -1).
(6. 9)
На практике для получения балансировочных кривых оказывается
достаточным задать неустановившееся движение самолета усло-
виями 0=0, и dny]dt = Q. Выполнение указанных условий даже
на отдельных этапах неустановившегося движения, т. е. в отдель-
ные моменты времени, обычно позволяет получать балансировоч-
ные кривые PB = f(M, V), %В=Л(М, V), dB = f2(M, V) непосредст-
венно из полетных записей.
Техника пилотирования самолета в процессе разгона от мини-
мальной скорости (Vmin) до МаКСИМЗЛЬНОЙ Vmax и при торможе-
нии его от Vmax до Vmin значительно проще, чем выполнение уста-
новившихся по скорости режимов (зубцов). Метод разгона и тор-
можений, кроме того, более универсален, чем метод зубцов, так
как может быть применен для определения характеристик устой-
чивости по скорости в криволинейном полете с заданной перегруз-
кой = const, а на самолетах с большой тяговооруженностью
и при условии п = п<2х~^ ^2 = const (например, при /г =
После первичной расшифровки полетных записей дальнейшая
обработка при построении балансировочных кривых сводится к на-
хождению на них таких участков, для которых удовлетворяются
условия пу= 1 и dny!dt = 6, a nz^0. Обрабатывая подобным обра-
зом записи разгона и торможения, можно без особого труда полу-
чить достаточное количество экспериментальных точек для по-
строения двух балансировочных кривых, соответствующих полной
и минимальной тяге двигателя.
232
Отправляясь от уравнения (6.5), можно вывести выражения и
для расчета поправок на нестационарность режима полета при
получении балансировочных кривых PB = f(ny, су), су) и
Ьъ—12\пу, су) при M = const из неустановившихся виражей-спира-
лей. Если вираж-спираль выполняется при постоянной скорости
полета по траектории (М = const), то причинами погрешности могут
быть:
1) непостоянство угла атаки и, следовательно, неравенство
/ / «
(,)г-А (,)гтР (т- е- отличие угловой скорости тангажа (Dz==~ от Уг“
о ^9 g А
ловои скорости вращения траектории тр = — — кпу на ве-
личину — =а^-0, поскольку $ = 0-{-а, где —угол тангажа,
dt
О —угол наклона траектории и а —угол атаки). Вследствие этого
меняется величина демпфирующего.момента самолета.
Если принять линейную зависимость момента от угловой ско-
рости, то поправки на нестационарность режима по углу атаки
(а=#0) будут иметь следующий вид:
(при обратимой системе
управления);
- Ь л
_А
в V
(при необратимой сис-
теме управления);
(6.10)
/п“г+< .
а
СУ
где а ~ ~"рП—скорость изменения угла атаки;
hy =^L — скорость изменения перегрузки по вре-
dt мени;
нр
—2- — характеристика загрузочного механизма
dx* необратимой системы бустерного управ-
ления;
2) угловое ускорение (при d^zldt ф 0).
Поправки, обусловленные угловым ускорением, можно исклю-
чить, если при обработке полетных записей отсчет фактических
величин Рв, и 6в производить только в моменты времени, когда
233
d($zldt = Q (т. e. угловая скорость имеет постоянную величину
со2 = const).
При обработке полетного материала, прежде чем приступать
к подсчету поправок, следует убедиться в правильности записи
аппаратурой угловой скорости тангажа и перегрузки самолета.
Для этого необходимо проверить равенство co2 = (DZTp на таких ре-
жимах, где пу = const и dny]dt = Q, а следовательно, и а = 0. Затем
после первичной расшифровки полетных записей неустановившихся
виражей-спиралей находят на графиках такие участки, для кото-
рых удовлетворяются условия d^zldt=Q и М = const и учитывают
для них только погрешности, обусловливаемые неравенством
й)2=/=(о2Тр. Обработав подобным образом полетные записи, можно
получить необходимое количество экспериментальных точек для
построения балансировочных кривых Ръ = 1(пу, су), xB = fi(ny, су)
и (>B=f2(ny, Су) при М = const и заданном режиме работы двигателя.
Последовательность дальнейшей обработки балансировочных
кривых для определения характеристик статической устойчивости
и управляемости по скорости и перегрузке схематически представ-
лена на рис. 6. 6.
Все основные характеристики продольной управляемости по
скорости и перегрузке Рп, Хп, Pv, Xv определяются непосредст-
венной обработкой соответствующих балансировочных кривых. При
\ Диапазон эксплиатацион-
ных центровок ж
г д ¥ Фиксированное
'° АЛ/ Освобожденное
/ / [\УпРа^ыие
Рис. 6. 6. Последовательность обработки балансировочных
чивости и управляемости по скорости и перегрузке (для
летов принято сГп¥=сГп св,
хн“%САХ
-РПК2ь\
-Хпсн
О
-6ri
^Фиксированное tinnne яоииа
ХМжденное^^
J \_____-^^Диапазон
.^эксплуатационных
> центровок
-----*---------------м Q
Хп const -.Н= const
= т --------------
Н= const
const
рл.
fi -рп
кривых при определении статических характеристик устой-
данного самолета в отличие от многих современных само-
(Jr=#(Jv св) и Pn~const при М<1)
234 235
этом показатель управляемости Pv= — (dPB/dV)р*=о для каждой
скорости определяется по балансировочной кривой PB = f(M, V)
при условии балансировки самолета по усилиям, т. е. при Рв = 0.
Коэффициенты статической устойчивости по скорости (оу и
Оу св) и перегрузке (сгп и сгпСв), а также нейтральные центровки
самолета определяются последующей обработкой балансировоч-
ных кривых (см. рис. 6.6). _
Нейтральные центровки xHv, гЁнусв, Хн и £н.св, при которых
самолет теряет устойчивость по скорости и перегрузке в- полете
с фиксированным и освобожденным управлением, определяются
условием обращения в нуль коэффициентов статической устойчи-
вости
xv „ Pv л
<v=-----Г=о и —у=0;
А"' т Р т
: (б.и)
Хп п Рп п I
ал=^- = 0 И з„св=^- = 0.
X' I*
Так как коэффициенты расхода усилий и ручки управления на
центровку РХт и ХХг всегда являются конечными величинами, из
выражений (6.11) следует, что условием статической нейтрально-
сти самолета является обращение в нуль показателей управляе-
мости:
Xv = — — Q- pv =z \ __q.
2 dV 2
Хп ——О’ =
dny ’ dny
Следовательно, получив из полета при двух-трех центровках
соответствующие балансировочные кривые, можно построить зави-
симости вида
Pv=f{xr\ А'1/=/1(хт)
для нескольких значений V=const при Рв = 0 путем соответствую-
щей обработки балансировочных кривых PB = f(M, V) и хв =
= /i(M, V), а также зависимости вида
Рл = /(хт), (хт)
для нескольких значений V=const путем соответствующей обра-
ботки балансировочных кривых PB = f(ny, су) и xB=fi(nyy су).
Учитывая линейный характер изменения показателей Pv, Xvy
Р71 и Хп от центровки хт, можно определить нейтральные цент-
ровки самолета путем графической экстраполяции до нуля указан-
ных зависимостей (второй вертикальный ряд графиков на рис. 6. 6).
Подобным образом определяются нейтральные центровки самолета
235
по скорости и перегрузке при полете с освобожденным и фиксиро-
ванным управлением для всего диапазона эксплуатационных ско-
ростей и высот (следующий вертикальный ряд графиков на
рис. 6.6). Для определения приведенных на рис. 6.6 кривых коэф-
фициентов устойчивости по скорости и перегрузке, как это следует
из выражений (6.11), кроме показателей управляемости Хп, Рп и
Xv, Pv (крайний ряд на рис. 6.6), необходимо знать коэффициенты
расхода усилий и ручки управления на центровку' (Рл? и Xхт).
Последние можно определить непосредственно по балансировоч-
ным кривым PB = f(M, V) и хв=Л (М, V), полученным при двух-
трех центровках (при условии М = const или V=const). Кроме того,
эти коэффициенты можно определить расчетом по следующим
формулам:
__еУг.п .
mzB
Рхт = 1^^-} Ххт (для самолетов с необратимой системой бустер-
\^в / ного управления);
х G тш
Р т = — ^ш.в т <Vb (для самолетов с обратимой системой),
о * mz
где /ихв— коэффициент эффективности продольного управ-
z ления;
су г.п—коэффициент подъемной силы самолета при задан-
ных условиях (М = const, V=const) установивше-
гося прямолинейного полета;
dPB
----- характеристика загрузочного механизма необрати-
dx* мой системы управления стабилизатором (рулем
высоты), указывающая, какое усилие необходимо
приложить к рычагу управления для смещения его
на 1 см;
GfS—удельная нагрузка на крыло в кГ1м2;
Z. 1 -1- Л-
77-7----коэффициент передачи между углом отклонения
57,3dxn руля высоты и линейным перемещением рычага
управления (кинематическая характеристика си-
стемы управления самолета);
тш = —коэффициент шарнирного момента руля высоты;
mzB = коэффициент эффективности руля высоты;
SB и Ьв— соответственно площадь и средняя хорда руля вы-
соты.
Коэффициент оп приближенно можно определить из выражения
4л27г
^'УЬА^
(6. 12)
237
без выполнения полетов с несколькими центровками по полетным
записям короткопериодических колебаний самолета при фиксиро-
ванном и освобожденном управлении, если они позволяют опреде-
лить период Т колебаний и известен момент инерции Jz самолета
относительно поперечной оси. Так как обычно короткопериодиче-
ское движение быстро затухает, такие записи могут быть получены
только на больших высотах.
В этом случае величину нейтральной центровки самолета
с освобожденным и фиксированным управлением приближенно
определяют следующим образом:
хнххт~т^у,
(6. 13)
где я? — центровка, при которой произведена запись коротко-
периодических колебаний самолета.
Определение статических характеристик поперечной
и путевой устойчивости и управляемости
Исходным материалом для определения статических характе-
ристик поперечной и путевой устойчивости и управляемости яв-
ляются балансировочные кривые, полученные путем обработки ре-
жимов установившихся скольжений с различными кренами при
постоянной скорости полета (М = const) и записей движения само-
лета при ступенчатом отклонении элеронов и руля направления.
Для определения характеристик поперечной устойчивости и
управляемости необходимо иметь балансировочные кривые вида
Хэ=П₽ или Y) и или У), а также зависимости xd=f(<s)x) и
^э = /1(сох), полученные при следующих условиях:
М — const, Н ж const,
^руд'—’ const,
const,
тэ = тн = const*,
хт const.
Для определения характеристик путевой устойчивости и управ-
ляемости самолета требуются балансировочные кривые вида
Xn = f($ или у) и PH = fi(₽ или у) и зависимости хн=/:((Ох, Ыу) и
Л1=71((ох, соу), полученные при тех же условиях, что и характери-
стики поперечной устойчивости и управляемости, обработкой ре-
* Здесь тэ и тн — углы отклонения аэродинамического триммера соответ-
ственно на элероне и руле направления (положения триммирующих устройств
в системе поперечного и путевого управления самолета).
238
жимов установившихся скольжений и специально выполняемых
для этого ступенчатых отклонений (дач) руля направления. После-
довательность дальнейшей обработки указанного материала при
определении статических характеристик поперечной и путевой
устойчивости и управляемости самолета схематически представ-
лена на рис. 6.7.
Статические характеристики поперечной и путевой управляемо-
сти самолета
р1= dP3 dy ’ 1 dx3 cyr.n dy
р1 = dP н Xl = 1 dx^
dy ’ cy dy
dP3 X‘''* = dx3
э du>x Э
Р*х = dPK xw*= dxn
н d^>x H du>x
(^тах Л* 10Д'max,
где
______-^этах
wx max а) ’
*эХ
определяются непосредственной обработкой соответствующих
балансировочных кривых, полученных при средней центровке само-
лета на двух-трех высотах для нескольких значений числа М.
Количественные значения коэффициентов поперечной и путевой
статической устойчивости самолета не всегда определяются при
летных испытаниях. Достаточность поперечной и путевой устойчи-
вости самолета обычно оценивается косвенно:
а) по знаку и величине наклона балансировочных кривых
р3=НУ или Р) и хэ=/(у или Р),
ря=/(Ч или Р) и XH=/(Y или ₽)
при М = const. У самолета с поперечной и путевой статической
устойчивостью при фиксированном и освобожденном управ-
лении наклон ^указанных кривых должен быть отрицательнььм
/dP^ < Q ^э_ q Q dx^_ q\ и тем большим по абсолют-
\ tZY «Y rfY «TY /
ной величине при данной эффективности элеронов и руля направ-
ления, чем больше статическая устойчивость. Кроме того, на наклон
кривых усилий влияют степень аэродинамической компенсации
руля при обратимой системе управления и характеристики загру-
зочного механизма при необратимой системе управления рулем;
239
240
P и c. 6.7. Последовательность обработки полетных записей для определения статических характеристик
поперечной и путевой устойчивости и управляемости
б) по знаку и величине соотношения потребных для баланси-
ровки самолета в режиме установившегося скольжения отклоне-
ний элеронов и руля направления dbQldb^ перемещений рычагов
управления dxjdx^ а также усилий на рычагах управления
dP^dP^.
При устойчивости самолета знак должен быть положительным
так как----=—-—a —-<<0и—. Величина указанных
dbH dy I JY flfy dy /
соотношений при правильно подобранных запасах поперечной и пу-
тевой устойчивости самолета должна быть невелика;
в) по знаку и интенсивности реакции самолета по крену на
отклонение руля направления, оцениваемой показателем
d^x
а^>н Дбн
где Д(ох — конечное приращение угловой скорости крена при от-
клонении руля направления на угол А6Н.
При прямой реакции самолета по крену на отклонение руля
направления (т. е. появлении крена в сторону отклоненного руля
направления) знак показателя d^xfdbn положителен.
Знак и интенсивность реакции самолета по крену на отклоне-
ние руля направления зависят от степени поперечной статической
устойчивости самолета. Эта зависимость может быть представлена
следующим выражением:
где
dmx
d^x ^3
mYX ---T
X d^
dmx в I 6 t/Su
d$ x 1 x d$
—коэффициент поперечной статической устойчивости само-
лета;
т^.п — приращение коэффициента момента крена при отклонении
руля направления на 1°;
т/ — коэффициент аэродинамического демпфирующего момента
крена Добычно и
Интенсивная прямая реакция самолета по крену на малые
отклонения руля направления появляется вследствие повышенного
запаса поперечной устойчивости. Наоборот, появление у самолета
обратной реакции по крену на отклонение руля направления
241
(б/сохЛ/6н<0) указывает на неустойчивость (или недостаточную ус-
тойчивость) самолета в поперечном отношении;
г) по характеру бокового движения самолета и величине соот-
ношения амплитуд угловых скоростей крена и рыскания х =
= Ао)х/ АШу, котореое находится в прямой зависимости от отношения
коэффициентов При правильно подобранных запасах попе-
речной и путевой устойчивости х<1;
д) по характеру изменения путевой балансировки самолета по
скорости и числу М при разгоне.
Появление у самолета тенденции к непроизвольному скольже-
нию при больших числах М часто является признаком уменьше-
ния путевой устойчивости. В подобных случаях количественная
оценка путевой устойчивости необходима и может быть произве-
дена по формуле
« 57,372 Sql град
(6. 14)
где Jy — момент инерции самолета относительно вертикальной оси;
' Т — период свободных боковых колебаний самолета.
Необходимые для расчета данные могут быть получены из по-
летных записей боковых колебаний самолета с фиксированным
и освобожденным управлением. Точность определения коэффи-
циента т$ по формуле (6. 14) достаточна для практических целей.
На больших высотах она выше. Поскольку формула получена из
рассмотрения «чистого» движения рыскания, без крена, расчет
будет более точным для тех самолетов, которые обладают малыми
/ Л, \
запасами поперечной устойчивости 1т%.^0 и х=-у^-^01.
\ <*>у /
В тех случаях, когда необходима более полная количественная
оценка поперечной и путевой устойчивости самолета, летные испы-
тания должны проводиться по специальной программе *.
Определение характеристик взаимосвязи
продольного и бокового движений самолета
Возмущенное движение самолета не всегда разделяется на изо-
лированные друг от друга виды продольного и бокового движений.
Это известно было давно. Однако практическое значение вопрос
о взаимосвязи этих движений приобрел лишь в последние 10—
15 лет в связи с освоением сверхзвуковых скоростей полета и боль-
ших высот, а также изменением внешних форм самолета. В настоя-
щее время это явление теоретически достаточно хорошо изучено.
Тем не менее существующие методы расчета позволяют предста-
вить лишь примерную схему данного явления, правильно понять
его механизм, но не могут воспроизвести точную количественную
* Например, методом, описанным в гл. VII книги «Летные испытания само-
летов» [9].
242
картину проявления его на реальном самолете. Объясняется это
тем, что при проведении расчетов не всегда известны фактическая
нелинейность изменения целого ряда аэродинамических коэффи-
циентов продольного и бокового движений самолета, а также дей-
ствительная зависимость аэродинамических моментов крена и ры-
скания от угла атаки и числа М, а продольного момента — от угла
скольжения. Кроме того, коэффициенты, полученные на основе
продувок жесткой модели в аэродинамических трубах, могут рас-
ходиться с полученными при летных испытаниях реального само-
лета. Поэтому наиболее точно охарактеризовать особенности про-
явления взаимосвязи продольного и бокового движений в полете
можно лишь при натурных испытаниях самолета.
При проведении подобных испытаний необходимо оценить:
а) зависимость аэродинамических моментов крена и рыскания
от параметров, определяющих продольное движение самолета
(угла атаки, числа М, скорости полета, перегрузки), а также за-
висимость продольного момента от угла скольжения;
б) влияние гироскопического момента ротора двигателя на бо-
ковое и продольное движения самолета при маневре;
в) влияние инерционных моментов тангажа и рыскания при
вращении самолета вокруг продольной оси.
Кроме того, следует убедиться в отсутствии значительной жест-
костной асимметрии самолета, так как она может приводить к по-
явлению боковых моментов при продольном маневре.
Исходным экспериментальным материалом при этом являются
полетные записи, полученные как при летных испытаниях самолета
на продольную и боковую устойчивость и управляемость, так и при
выполнении специальных маневров (например, несколько более
продолжительных отклонений вбок ручки управления).
Обычно нормальная и боковая перегрузки регистрируются при
летных испытаниях не в центре тяжести самолета, а на некотором
плече х0, //о, от него. Поэтому при значительных угловых скоро-
стях крена, рыскания и тангажа в полетные записи необходимо
вводить поправки \пу и Anz, учитывающие погрешности, вносимые
установкой самописцев (датчиков) на некотором плече х0, уо, zQ
от центра тяжести. Учет поправок производится по формулам
(1.1) и (1.2), приведенным в гл. I (см. стр. 13).
Используя результаты обработки записей разгонов, дач рулей
и скольжений, можно получить следующие зависимости:
— из записей разгонов с освобожденными педалями и продоль-
ных дач ручки управления (штурвала)
при Рн = 0; Д£э = 0; пу = const
«г=/(М, V);
— из записей продольных дач ручки управления (штурвала)
при Д8В = Д8Э = О; М —const
243
— из записей разгонов и продольных дач ручки управления
(штурвала)
при пу = const; у^О; ДВН = О
Рэ, х9, 8Э=/(М, V);
при Пу = const; /г2^0; д8э = 0
Л., Ю;
— из установившихся скольжений с различными кренами
вправо и влево
. при М = const
xB=f(y, Р), PB=f(y, ?);
— из комбинированных дач ручки управления и педалей
при М = const и различных исходных пу = const
x3 = f(t\ Хв=/(/); Хв=/(/); °>x=/(z); у,г=/(0; «г=/(0;
— из режимов, так называемых, установившихся вращений
самолета при М = const и различных исходных пу = const.
=/(“<); «г=/Ю; ny=f(^x).
Некоторые из указанных выше зависимостей приведены на
рис. 6. 8.
При проведении специальных летных исследований получают
также зависимости m$x=f(cy) и = f(cy) при M = const.
Взаимосвязь (продольного и бокового движений проявляется
заметнее при пониженной путевой устойчивости и некоторой асим-
метрии самолета. При малых запасах путевой устойчивости воз-
действие на самолет небольших возмущений (обусловливаемых,
например, геометрической и жесткостной асимметрией самолета,
гироскопическим моментом двигателя и т. п.) обычно сопровож-
дается появлением заметного скольжения и развитием боковых
колебаний. Одним из признаков относительно малой путевой устой-
чивости может служить появление несоразмерно больших боковых
перегрузок и колебаний самолета при незначительных отклонениях
руля направления, а также при выполнении продольного маневра.
О боковой асимметрии самолета свидетельствуют, в частности,
отклоненные элероны («ножницы») и руль направления (дц=^=0)
в прямолинейном полете без крена с симметричной тягой двига-
телей.
Момент сил инерции ротора двигателя, называемый гироскопи-
ческим моментом, при вращении самолета относительно вертикаль-
ной и поперечной осей в подобных случаях также может оказать
244
Исходные условия-.
.хт=const
^ьуд* const
И = const
Р3кГ^ 5Н» const
РнКГи
хцсм
8°
ии
О'
45yZ7, nz*O
nz\ Р^О,
М« const
Р и с. 6. 8. Кривые, характеризующие взаимосвязь продольного
и бокового движений самолета
245
Рис. 6.9. Взаимосвязь продольного и бокового движений,
обусловленная гироскопическим моментом ротора двига-
теля Л4Г:
1 — направление движения носа самолета (от летчика) при про-
дольном маневре с угловой скоростью ; 2—направление вращения
ротора двигателя; 3—направление движения носа самолета (от лет-
чика) под действием гироскопического момента; 4—положение «ша-
рика* указателя скольжения; (Ор — угловая скорость вращения ротора
двигателя
246
заметное влияние на характер возмущенного движения самолета.
Так, при выполнении «чистого» продольного маневра действие ги-
роскопического момента приводит к самопроизвольному повороту
самолета вокруг вертикальной оси, в результате чего появляются
скольжение и боковая перегрузка (рис. 6.9). В частности, при
отклонении стабилизатора (<pCT на рис. 6.9) «на кабрирование» и
левом вращении ротора двигателя (против часовой стрелки, если
смотреть по направлению полета) гироскопический момент Мг
обусловливает самопроизвольный разворот самолета влево. Это
приводит к появлению правого скольжения и, следовательно, отри-
цательной боковой перегрузки самолета nz — Z!G<Q (где Z — боко-
вая сила, возникающая при скольжении, G — вес самолета). При
правом вращении ротора двигателя или отклонении стабилизатора
«на пикирование» знак боковой перегрузки будет обратным. По
этой же причине при отклонении летчиком руля направления у са-
молета наряду с движением рыскания появится и продольное
движение.
Оценку влияния гироскопического момента ротора двигателя
на продольное и боковое движение самолета удобнее всего произ-
вести по характеру бокового движения самолета в процессе про-
дольных перекладываний ручки управления при постоянной ско-
рости полета, М=const и различных оборотах двигателя.
Взаимосвязь между продольным и боковым движением приво-
дит к появлению и других характерных особенностей в поведении
самолета, например, при выполнении маневров, связанных с вра-
щением вокруг продольной оси. Прежде всего нарушается линей-
ная связь между угловой скоростью крена и углом отклонения
элеронов. Кроме того, реакция самолета на одно и то же откло-
нение элеронов оказывается существенно различной в зависимости
от исходной величины нормальной перегрузки (угла атаки) в мо-
мент отклонения элеронов. Наконец, при вращении самолета отно-
сительно продольной оси может произойти ухудшение динамиче-
ской устойчивости самолета вследствие образования взаимосвя-
занных, близких по частоте форм продольных и боковых
колебаний.
Поэтому при летных испытаниях необходимо обследовать доста-
точно широкий диапазон угловых скоростей крена, а также и ис-
ходных углов атаки и скольжения. Особенности поведения само-
лета в режиме установившегося вращения целесообразно изучать
в горизонтальном полете, в криволинейном полете с положительной
и отрицательной -яерегрузкой, в полете со скольжением.
Летному эксперименту должна предшествовать тщательная
подготовка. Необходимо провести расчеты и определить критиче-
ские угловые скорости крена g)xj и сохц (см. стр. 185). Рекомен-
дуется также выполнить моделирование движения самолета на
электронных моделирующих установках для получения предвари-
тельных данных о возможном поведении самолета в процессе вра-
щения его вокруг продольной оси во всех указанных случаях.
247
6.3. ОЦЕНКА ПОВЕДЕНИЯ САМОЛЕТА
ПРИ ОДНОСТОРОННЕМ ОТКАЗЕ ДВИГАТЕЛЯ
И УСЛОВИЙ ПРОДОЛЖЕНИЯ ПОЛЕТА
С АСИММЕТРИЧНОЙ ТЯГОЙ *
При летных испытаниях многодвигательных самолетов всегда
производится количественная оценка их поведения при односторон-
нем отказе двигателя, а также возможностей и условий продолже-
ния полета с асимметричной тягой. Такая оценка прежде всего
необходима потому, что в подобных случаях могут возникать зна-
чительные скольжения и углы крена.
\ Левый крайний двигатель
Момент отказа 1
левого двигателя
Рис. 6. 10. Движение самолета при одностороннем отказе
двигателя (левого)
Коротко рассмотрим, какова физическая картина явлений,
сопутствующих отказу двигателя на многодвигательном самолете,
и какие особенности в пилотирование вносит полет с несимметрич-
ной тягой.
Как это видно из рис. 6. 10, при отказе двигателя самолет, про-
должая в силу инерции поступательное движение в исходном на-
правлении, одновременно начнет разворачиваться в сторону оста-
* Физическая сущность явлений, происходящих с самолетом в случае частич-
ного отказа его силовой установки и при последующем полете с асимметричной
тягой двигателей, изучена М. Л. Галлаем. Его книга [5] является первым таким
исследованием, наиболее полным и систематизированным.
248
новившегося двигателя. Поэтому в первый момент после отказа
двигателя у самолета развивается скольжение в сторону работаю-
щих двигателей, причем тем большее, чем большим по величине
оказывается возмущающий момент от неуравновешенной тяги
симметрично расположенного работающего двигателя М^н.т и
меньше степень путевой статической устойчивости самолета.
На самолетах с турбовинтовыми двигателями возмущающий
момент Afj/H.T может оказаться особенно значительным, так как он
создается не только за счет появления неуравновешенной тяги ра-
ботающего двигателя (при отказе симметричного двигателя), но и
вследствие значительного роста сопротивления остановленного
двигателя. Это сопротивление в ряде случаев соизмеримо по вели-
чине с тягой работающего двигателя.
Скольжение, развивающееся при одностороннем отказе двига-
теля, и может стать причиной ряда неприятных явлений, например
таких, как:
— появление значительных моментов крена;
— остановка других двигателей в результате помпажного
срыва потока на входе в воздухозаборник;
— срыв потока с вертикального оперения, обусловливающий
появление тряски самолета, снижение эффективности руля и из-
менение знака шарнирного момента (в случае обратимой системы
управления при этом существенно меняется характер изменения
усилий на педалях при скольжении).
На устойчивом в поперечном отношении самолете будет разви-
ваться крен в сторону отказавшего двигателя (прямая реакция
самолета по крену на скольжение, см. рис. 6'10), на неустойчи-
вом — в сторону работающих двигателей (обратная реакция само-
лета на скольжение). На нейтральном самолете крен в данной
ситуации практически не возникает. На самолетах -с ТВД заметный
момент крена в сторону отказавшего двигателя может возникать
и на нейтральном или слабоустойчивом в поперечном отношении
самолете, вследствие неодинаковой обдувки его правого и левого
крыла струей воздуха от винтов (работающего и авторотирую-
щего). Поэтому от характера бокового движения при асимметрич-
ном отказе двигателя существенным образом зависит безопас-
ность летной эксплуатации многодвигательного самолета. С прак-
тической точки зрения критическими условиями для исследования
поведения самолета при асимметричном отказе двигателя обычно
является полет на малой скорости с полной тягой всех двигателей.
Потребные для балансировки самолета отклонения руля направле-
ния в этом случае становятся особенно значительными. Если счи-
тать, что момент, создаваемый неуравновешенной тягой работаю-
щего двигателя в этой области скоростей, практически постоянен
(Л4У н.т~ const), а аэродинамический момент, создаваемый рулем
направления (Му) бн = Л1°н Абн при dH = const меняет свою величину
пропорционально скоростному напору, то можно получить выра-
249
жение, связывающее потребное отклонение руля направления
со скоростью полета
<для "^onst), (6. 15)
т*~Sl
где т5н — коэффициент эффективности руля направления (констан-
та при заданных условиях полета) и
Ж8н=т’н^-5/.
У У 2
Поэтому в области малых скоростей, где отклонения рулей зна-
чительны, поведение самолета при одностороннем отказе двигателя
и условия продолжения полета с асимметричной тягой должны
быть изучены особенно тщательно.
Подобные исследования необходимо провести и в сверхзвуко-
вом полете при больших числах М, если и в этих условиях можно
ожидать каких-либо особенностей в поведении самолета при одно-
стороннем отказе двигателя, например при пониженных запасах
путевой устойчивости самолета.
Для безопасности полета при одностороннем отказе двигателя
необходимо, чтобы при всех скоростях полета, начиная от скорости
отрыва, удовлетворялись следующие условия:
а) возмущенное движение самолета не развивалось быстро до
момента сознательного вмешательства летчика в управление и не
приводило к появлению значительных углов крена и значительного
скольжения уже в первые секунды после выключения двигателя;
б) самолет сохранял необходимую устойчивость и управляе-
мость, а эффективность рулей и усилия на рычагах управления
обеспечивали летчику возможность балансировки самолета в по-
лете без крена (или, по желанию летчика, с небольшим креном)
при малых скоростях полета;
в) триммирующие устройства обеспечивали возможность полета
без крена (или, по желанию летчика, с небольшим креном) с осво-
божденным управлением до минимальной эволютивной скорости.
Рассмотрим некоторые наиболее характерные особенности пи-
лотирования самолета с несимметричной тягой. Для продолжения
полета летчику приходится компенсировать тягу отказавшего дви-
гателя переводом остальных двигателей на повышенный режим.
Последнее приводит к тому, что в установившемся полете абсолют-
ная величина действующего на самолет момента несбалансирован-
ной тяги обычно оказывается большей, чем в момент отказа дви-
гателя.
Для балансировки самолета в полете с несимметричной тягой
летчику необходимо отклонением руля направления в сторону ра-
ботающих двигателей устранить образовавшееся при отказе двига-
теля значительное скольжение (в сторону работающих- двигате-
250
лей), а возникающий при этом момент крена (вследствие наличия
у самолета поперечной устойчивости) погасить отклонением эле-
ронов. Соответствующим отклонением рулей летчик может сба-
лансировать самолет как в полете без крена, так и с креном в сто-
рону работающих или неработающих двигателей. Наибольший
интерес, однако, представляют следующие три характерных спо-
соба пилотирования самолета с асимметричной тягой (рис. 6.11):
1) установившийся прямолинейный полет без крена (у = 0) —
наиболее распространенный способ пилотирования многодвига-
0\ у^О
Рис. 6. 11. Возможные способы продолжения установившегося полета с асиммет-
ричной тягой после отказа правого двигателя:
а—полет без крена (v=0); б—полет без скольжения (Р=0); в—полет со скольжением и кре-
ном на работающий двигатель при Рн=0 ; ЦД—точка приложения боковой аэродинамиче-
ской силы Zb возникающей при косом обтекании самолета потоком (со скольжением). Внизу
показаны положения «шарика» указателя скольжений при различных способах продолжения
полета с асимметричной тягой двигателей
тельного самолета с отказавшим двигателем, особенно рекомен-
дуемый при полете в сложных условиях (см. рис. 6. 11, а);
2) установившийся прямолинейный полет без скольжения (см.
рис. 6. 11,6);
3) установившийся прямолинейный полет с креном и скольже-
нием в сторону работающих двигателей (см. рис. 6. 11, в).
Наиболее простым для летчика, в особенности в сложных ме-
теорологических условиях и ночью, является полет без крена.
В этом случае самолет летит с небольшим скольжением в сторону
остановленного двигателя. Поэтому с аэродинамической точки зре-
ния такой полет менее выгоден по сравнению с полетом без сколь-
жения (р = 0). Кроме того, в этом случае для балансировки само-
лета относительно вертикальной оси требуется отклонить руль на
251
правления на больший угол, чтобы компенсировать дополнитель-
ный момент, возникающий от боковой силы и действующий в ту
же сторону, что и момент Л1?ун.т от работающего двигателя. При
этом боковая аэродинамическая сила
Z^Z^Ap, (6.16)
возникающая вследствие косого обтекания самолета потоком, урав-
новешивается в установившемся полете без крена боковой аэро-
динамической силой
Zh = Z5„a8h^^a&h, (6.17)
Дон
возникающей на вертикальном оперении при отклонении руля на-
правления (см. рис. 6. 11, а).
Без скольжения (р = 0) установившийся прямолинейный полет
с асимметричной тягой двигателей возможен при создании неболь-
шого крена в сторону работающих двигателей. Величина угла
крена при полете без скольжения с несимметричной тягой опреде-
ляется из следующего выражения:
sin(V)p=0=P+AXaB^> (6.18)
G ^в.о
где Р — тяга работающего двигателя;
дХдв — дополнительное приращение лобового сопротивления
выключенного двигателя;
гдв —расстояние от оси двигателя до продольной оси самолета
(плечо);
Лв 0 — расстояние от ЦТ самолета до точки приложения боко-
вой аэродинамической силы ZH, возникающей на верти-
кальном оперении при отклонении руля направления
(см. рис. 6. 11, б).
Это выражение можно легко получить совместным решением урав-
нений равновесия моментов (Р + ДХдв)2дв+2н£в.о = 0 относительно
вертикальной оси и сил G sin y + ZsH Лдн = 0, действующих на само-
лет вдоль оси z в полете без скольжения (см. рис. 6. 11,6).
Полет с небольшим креном, но без скольжения аэродинамиче-
ски более выгоден (так как лобовое сопротивление самолета будет
меньше), чем полет со скольжением или полет без крена со сколь-
жением. Кроме того, для балансировки самолета в таком режиме
требуется меньшее отклонение руля направления, а на самолетах
с ТРД — и элеронов. На самолетах с ТВД при значительной об-
дувке крыла струей от винтов и малой степени поперечной стати-
ческой устойчивости балансировочные углы отклонения элеронов
при этом, наоборот, возрастают с увеличением угла крена на рабо-
тающие двигатели.
252
Отклонения руля направления еще больше уменьшаются, если
полет выполняется с небольшим скольжением в сторону работаю-
щих двигателей. В этом случае момент рыскания от боковой силы
противодействует моменту от несбалансированной тяги
двигателя М?ун.т и для парирования разворачивающего момента
летчику потребуется меньшее отклоне-
ние руля направления (см. рис. 6. 11, в).
Таким образом, в зависимости от спо-
соба пилотирования самолета в устано-
вившемся полете с отказавшим двигате-
лем балансировочные отклонения рулей
существенно меняются. По мере увели-
чения углов крена в сторону работающих
двигателей потребные для балансировки
самолета отклонения руля направления
все более уменьшаются, а отклонения
элеронов — уменьшаются на самолетах
с ТРД (и чаще всего возрастают — на
самолетах с ТВД).
Примерный вид балансировочных
кривых хэ, Р0=/(у) и хн, PH = f(y) само-
лета с ТРД для этого случая изображен
схематически на рис. 6. 12. Отрицатель-
ный наклон кривых хэ, Лэ=/(у) и
хн, Рн = Цу) свидетельствует о попереч-
ной и путевой устойчивости самолета
в полете с асимметричной тягой. У не-
устойчивого самолета наклон балансиро-
вочных кривых будет обратным (поло-
жительным) .
При летных испытаниях проверяют
как поведение самолета при внезапном
одностороннем отказе двигателей и не-
вмешательстве летчика в управление
в течение определенного времени, так и
Рис. 6.12. Вид баланси-
ровочных кривых хэ =
=f(v), P»=f(y) и хя =
=fW> P«=fM при
М, V=const для случая
полета с выключенным
правым (/) или левым
(2) турбореактивным
двигателем (положение
триммеров элеронов и
руля направления соот-
ветствует балансировке
самолета в полете с
симметричной тягой дви-
гателей (Тэ.исх И Тд.исх)
возможность продолжения полета с асим-
метричной тягой двигателей и выполнения при этом простейшего
маневра. Одной из задач таких испытаний является разработка
мероприятий, обеспечивающих безопасность эксплуатации много-
двигательного самолета при отказе одного или нескольких дви-
гателей.
Методика пр(Тведения летных испытаний принципиально
остается одной и той же для двух- и многодвигательных самолетов
при любой комбинации из работающих двигателей.
Для проведения испытаний самолет оборудуется контрольно-
записывающей аппаратурой, которая регистрирует параметры
движения самолета (скорость V, высоту Я, угловые скорости
крена сох, рыскания со^, тангажа coz, перегрузки по осям самолета
253
nx, пу, nz, углы крена у и скольжения р), действия летчика (уси-
лия на рычагах управления Ръ, Рэ, Рн, их отклонения хв, хэ, хн,
углы отклонения рулей 6В, бэ, бн, перемещения рычага управления
двигателем 6РУд, положение триммирующих устройств тв, тэ, тн),
режим работы каждого двигателя (обороты пдв, давление топлива
Ртоп, температуру газов £Газ, работу автоматики управления поворо-
том лопастей винтов и т. д.).
В ходе летных испытаний поведение самолета при односторон-
нем отказе двигателя проверяют на взлетных режимах и в крей-
серском полете (включая и режимы крейсерского сверхзвукового
полета при больших числах М, когда это необходимо), а также
в режиме набора высоты и предпосадочного планирования.
На самолетах с турбовинтовыми двигателями испытания прово-
дятся как с зафлюгированнымй винтами остановленных двигате-
лей, так и авторотирующими (в тех случаях, когда это возможно).
Вначале отказ двигателей имитируется простым переводом их
на режим малой тяги, а затем при положительных результатах
летного эксперимента — полным выключением (например, отсеч-
кой подачи топлива).
Типовыми элементами полетного задания при летных испыта-
ниях являются:
— установившиеся скольжения с различными кренами в сто-
рону работающих двигателей;
— имитации одностороннего отказа одного и нескольких двига-
телей в режиме установившегося прямолинейного полета без крена
с освобожденным управлением при заданных условиях (в отноше-
нии скорости полета, режима работы двигателей, механизации
крыла, взлетно-посадочных устройств и т. д.);
— зубцы при V=const в полном диапазоне скоростей горизон-
тального полета с асимметричной тягой двигателей.
Техника проведения летного эксперимента заключается в сле-
дующем. После выключения двигателя на одной стороне крыла и
дачи полного газа двигателю на противоположной стороне крыла
летчик по вариометру устанавливает сначала максимальную ско-
рость горизонтального полета без крена с асимметричной тягой,
затем скорость наивыгоднейшего набора высоты и, наконец, мини-
мальную скорость горизонтального полета без крена. Одновре-
менно оценивается возможность выполнения полета без крена при
скорости, близкой к минимальной Vmin в полете с асимметричной
тягой двигателя. Если возможности выполнения полета без крена
при V~l,2Vmin с отказавшим двигателем ограничиваются полным
отклонением руля направления, то определяют минимальную вели-
чину угла крена в сторону работающих двигателей, при котором
обеспечивается балансировка самолета на этой скорости. При этом
усилия на педалях и штурвале максимально уменьшаются трим-
мирующими устройствами.
Затем оценивается влияние угла крена на балансировку само-
лета. Этот эксперимент проводится с положением триммирующих
254
устройств, соответствующим балансировке самолета по усилиям
в полете без крена с полной тягой всех двигателей.
На режимах установившихся скольжений поведение самолета
исследуется при всех возможных углах крена в сторону работаю-
щих двигателей, а если это допустимо, то и в противоположную
сторону. Скольжения выполняются при нескольких скоростях по-
лета с асимметричной тягой двигателей.
Завершающим этапом испытаний самолета являются имитации
внезапного отказа двигателей на одной стороне крыла. Для этого
в исходном режиме полета с симметричной тягой самолет балан-
Д^пред “/(И
Д^рпред в/(И
Рис. 6.13. Последовательность обработки полетных записей
для определения характеристик поведения самолета при одно-
стороннем отказе двигателя
при Рп~0\Р3-0\
хниа тэисх
сируется по усилиям на скорости (1,2—1,4) Vmm. Затем управление
освобождается и имитируется отказ правой или левой групп дви-
гателей. Летчик не вмешивается в управление самолета до исте-
чения заданного ему времени либо достижения заданного угла
крена. Обычно, после того как крен самолета достигнет 25°—40°,
летчик выводит самолет в нормальный режим полета без крена.
Такой эксперимент проводится на безопасной высоте.
В результате обработки полетных записей, последовательность
которой указана на рис. 6. 13 и 6. 14, могут быть определены сле-
дующие характеристики поведения самолета и его управляемости
при асимметричном отказе двигателей:
1) время Д/Тп ед и Д/р д , в течение которого самолет выхо-
дит на предельные углы крена и скольжения после отказа правых
или левых двигателей в полете с освобожденным поперечным и пу-
тевым управлением, а также усилия и отклонения рычагов управ-
ления, потребные для возвращения самолета в режим полета без
крена с выключенными на одной стороне крыла двигателями;
2) диапазон скоростей горизонтального полета без крена с не-
симметричной тягой двигателей при убранных шасси и закрылках;
3) величина угла крена, при котором осуществляется полет без
скольжения с асимметричной тягой;
255
4) величина угла крена на скорости 1,2 Vmin, при котором обес-
печивается балансировка самолета по усилиям с положением
триммирующих устройств, соответствующим условиям баланси-
ровки в полете с симметричной тягой;
5) градиенты усилий, хода педалей и ручки (штурвала) управ-
ления по углу крена-^^, также величина уси-
J J r ay ay ay ay /
лий на рычагах управления и их перемещения, необходимые для
р О
1> _н_>
хл см
Рз кГ т.
Выключен правый двигатель
________________________
х^см
кГ т.
кг
см
гк-
1сек
_________
Г-
₽•_
с)
•Чл.&н
о
#ср
О_____
----
о
ООО Симметричная
тяга двигателей.
iW Выключен правый
двигатель
• •• Выключен левый
двигатель
Р3ь кг
1~ гн ИСХ % см исх
О
О
км/час
км/час
Г ------
П о - J,
Выключен правый. двигатель
,у
з)
т °’ч° Z9
хй ,хэ --- - — -
рИл&£*^2±:=
ХугО'^-О *н;хэ
Рн’°;г°
^^рнтпах
---
км/час
^нтах
, Рэ’0'. Т°
^^,гэтпах
—
км/час
Тзтпа1
£J=
и
Ч
О
Рис. 6.14. Последовательность обработки полетных записей для
определения характеристик движения самолета с асимметричной
тягой двигателей:
а—скольжение с различными кренами (у) при М, V—const; б—торможение в
полете без крена (Y=0); в—полет без крена с освобожденными педалями
(Рн=0) и штурвалом (Рэ=0) с различной скоростью
осуществления балансировки самолета в установившемся прямо-
линейном полете без крена на скорости максимальной скороподъ-
емности с асимметричной тягой при положении триммирующих
устройств, соответствующем исходному полету с полной тягой
('Сн.исх И Тэ.исх) >
6) возможность прямолинейного полета без крена с освобож-
денным управлением на режиме наивыгоднейшей скороподъемно-
сти с асимметричной тягой двигателей.
255
6.4. ИСПЫТАНИЯ ТЯЖЕЛЫХ САМОЛЕТОВ
С МОЩНОЙ МЕХАНИЗАЦИЕЙ КРЫЛА
НА РЕЖИМАХ ПРЕДПОСАДОЧНОГО ПЛАНИРОВАНИЯ
При летных испытаниях тяжелых самолетов должна произво-
диться оценка их устойчивости и управляемости в области малых
(околонулевых) углов атаки на режимах предпосадочного плани-
рования. Это необходимо делать прежде всего в том случае, когда
мощные щитки-закрылки позволяют выполнять планирование и
посадку на малой скорости, а эффективность рулей на малых ско-
Рис. 6.15. Пример возникновения срывного обтекания стабилизатора на режи-
мах предпосадочного планирования с повышенной скоростью при отклоненных
закрылках
ростях становится недостаточной. На таком самолете летчики пред-
почитают планировать на посадку с повышенной скоростью, при
которой рули еще сохраняют хорошую эффективность. Полет при
этом происходит на малых углах атаки при несколько меньшей
величине потребного су. Скос потока в зоне оперения остается
однако большим, так как су достаточно велик. В подобных усло-
виях, из-за значительного скоса потока за крылом, углы атаки
стабилизатора становятся отрицательными и близкими по величине
к критическому (по срыву потока с нижней его поверхности,
рис. 6.15). Кроме того, как показывает опыт, при образовании
льда вблизи носка стабилизатора безотрывное обтекание оперения
может нарушиться и при меньших отрицательных углах атаки опе-
рения *. Поэтому проверка поведения самолета на режимах пред-
* Данные о влиянии обледенения на летные характеристики самолета, его
устойчивость приведены в книге О. К. Трунова, Обледенение самолетов и сред-
ства борьбы с ним, Машиностроение, 1965.
9 598
257
посадочного планирования должна производиться также и в слу-
чае недостаточно надежной защиты горизонтального оперения от
обледенения, при том с установленными на стабилизаторе имита-
торами льда либо в условиях естественного обледенения при вы-
ключенной противообледенительной системе.
Срыв потока на нижней поверхности стабилизатора оказывает
весьма неблагоприятное влияние на продольную устойчивость и
управляемость самолета. Прежде всего при этом обычно ухуд-
шается устойчивость по перегрузке, в особенности самолетов
Рис. 6. 16. Изменение усилий на штурвале в за-
висимости от величины нормальной перегрузки
самолета при V=const и неизменном положении
аэродинамического триммера на режиме предпоса-
дочного планирования с отклоненными закрылками
(без льда и в условиях обледенения со льдом на
передней кромке стабилизатора), а также при
убранных закрылках
с обратимой системой управления, у которых наиболее сущест-
венно меняется вид балансировочных кривых Рв=Нпу)> Кривые
утрачивают свойственную им в области малых углов атаки линей-
ность (рис. 6.16). Переход на углы атаки, соответствующие
пу ^0,24-0 сопровождается в этом случае уже не ростом давящих
усилий на штурвале, а уменьшением их и даже изменением знака
усилий, т. е. появлением тянущих усилий (рис. 6. 16).
Наиболее тяжелое с этой точки зрения положение создается на
режимах предпосадочного планирования при заходе на посадку
с полностью отклоненными закрылками, наименьшим посадочным
весом самолета и наибольшей эксплуатационной скоростью полета,
когда отрицательные углы атаки оперения становятся особенно
значительными.
258
В ходе летных испытаний самолета необходимо:
а) произвести количественную оценку устойчивости по пере-
грузке и управляемости самолета при работе двигателей на ре-
жиме полной и малой тяги в полном диапазоне допустимых скоро-
стей предпосадочного планирования с отклоненной и убранной
механизацией крыла;
б) уточнить диапазоны допустимых в эксплуатации скоростей
предпосадочного планирования с использованием механизации
крыла (наименьших по управляемости и по запасу су и наиболь-
ших по срыву потока с оперения скоростей планирования);
в) определить наивыгоднейшую скорость захода на посадку,
при которой самолет обладает наилучшей устойчивостью и управ-
ляемостью, а техника выполнения на нем посадки наиболее проста
и безопасна.
Летный эксперимент обычно сводится к выполнению продоль-
ных дач штурвала прежде всего в направлении «от себя», а также
разгонов и торможений в полном диапазоне заданных скоростей
планирования. При этом оценивается характер изменения усилий
на штурвале в прямолинейном полете и при перегрузках меньших
и больших единицы. Необходимо убедиться в том, что усилия на
штурвале изменяются плавно и при всех допустимых в эксплуата-
ции перегрузках меньших единицы на штурвале не появляются уси-
лия, стремящиеся отклонить его вперед. В этом же полете следует
убедиться и в том, что величина усилий на штурвале не выходит
за допустимые границы.
Обработка экспериментального материала производится обыч-
ными методами, описанными ранее в разд. 6. 2.
Глава VII
ИСПЫТАНИЯ НА ПРЕДЕЛЬНЫХ СКОРОСТЯХ
И ЧИСЛАХ М ПОЛЕТА
7.1. ОГРАНИЧЕНИЯ РЕЖИМОВ ПОЛЕТА
При испытаниях на предельных скоростях и числах М опреде-
ляются допустимые в условиях нормальной летной эксплуатации
диапазоны скоростей и чисел М полета, а также оцениваются осо-
бенности поведения и пилотирования самолета на предельных
и близких к ним скоростях и числах М. Диапазон эксплуатацион-
ных скоростей и чисел М в общем случае зависит от высоты по-
лета самолета, его внешней конфигурации, полетного веса и ряда
других факторов.
Предельные скорости (числа М) являются ограничениями диа-
пазонов эксплуатационных скоростей и чисел М полета. Разли-
чают минимальные и максимальные предельные скорости (чис-
ла М) полета.
Минимальной предельной скоростью полета Ущшпред назы-
вается наименьшая допустимая в нормальной эксплуатации при-
борная скорость самолета на данной высоте, при данных внешней
конфигурации (наличии или отсутствии внешних подвесок, поло-
жении органов механизации и т. д.) и полетном весе самолета, ре-
жиме работы двигателей и др.
Минимальную предельную скорость полета выбирают в зави-
симости от назначения и особенностей данного конкретного само-
лета и условий его летной эксплуатации. Часто в качестве мини-
мальной предельной скорости принимается наименьшая допусти-
мая из условий предотвращения непроизвольного сваливания
самолета скорость, называемая минимально допустимой скоростью
полета Утшдоп. Ее определение дано ниже (см. стр. 316). В слож-
ных метеоусловиях для повышения безопасности полета часто при-
нимается Упиппред= 1/ттдоп+ (50н-100) км/час. Это обусловлено
необходимостью предотвращения сваливания при воздействии на
самолет порывов ветра, что особенно важно для пассажирских и
тяжелых (неманевренных десантных, транспортных и т. п.) само-
летов.
Максимальной предельной скоростью полета, или (для крат-
кости) предельной скоростью 7Пред называется наибольшая допу-
стимая в нормальной эксплуатации приборная скорость самолета
260
на данной высоте, при данных внешней конфигурации (наличии
или отсутствии наружных подвесок, положении органов механи-
зации и т. п.) и полетном весе, режиме работы двигателей и др.
Предельным числом М полета Мпред называется наибольшее
допустимое в нормальной эксплуатации число М на данной высоте,
при данных внешней конфигурации (наличии или отсутствии на-
ружных подвесок, положении органов механизации и т. п.) и цент-
ровке самолета, режиме работы двигателей и др.
Рассмотрим основные ограничения по МПред и 7пред, налагае-
мые на режимы полета современных самолетов.
Старые (дозвуковые) самолеты летали с числами М, при кото-
рых влиянием сжимаемости воздуха можно было пренебречь. По-
этому ограничений по числу М для них не было и могли существо-
вать только ограничения по приборной скорости. Наибольшие до-
пустимые величины приборных скоростей полета у дозвуковых
самолетов ограничивались, как правило, условиями прочности или
флаттера, а часто ограничения приборной скорости практически
отсутствовали, так как даже при работе двигателей на максималь-
ных оборотах самолет ни в каком режиме полета не мог разо-
гнаться до этих приборных скоростей.
С переходом к околозвуковым и особенно сверхзвуковым ско-
ростям полета произошли существенные изменения. В настоящее
время факторы, ограничивающие приборную скорость или числоМ
полета у современных самолетов (или даже у одного самолета на
разных высотах) с различными полетными весами, внешними кон-
фигурациями и т. д. весьма разнообразны. Опыт летных испытаний
современных самолетов показывает, что при выборе ограничений
скорости или числа М полета обычно учитываются в основном сле-
дующие факторы:
1. Общая прочность или жесткость конструкции.
2. Вибрации.
3. Устойчивость и управляемость самолета.
4. Особенности поведения самолета, работы его систем и сило-
вой установки, пилотажных характеристик.
5. Аэродинамический нагрев.
Перечисленные факторы могут ограничивать скорость (число
М) полета в тех случаях, когда по своим аэродинамическим дан-
ным и энерговооруженности самолет способен достигать больших
скоростей (чисел М), чем те, при которых возникают указанные
ограничения. Рассмотрим эти факторы несколько подробней.
Ограничение по прочности
Ограничение по прочности определяется величиной скорост-
ного напора, предельно допустимой для данного самолета и уста-
навливаемой обычно из условия обеспечения необходимой местной
прочности конструкции. Это ограничение касается, как правило,
малых и средних высот полета. Величина предельно допустимого
261
скоростного напора 7преД зависит от варианта загружения само-
лета, положения органов механизации, установки на самолете
каких-либо наружных подвесок, метеоусловий (например, при по-
лете в болтанку) и др. Так, при полете с подвесными топливными
баками величина предельно допустимого для данного самолета
скоростного напора может оказаться примерно на 30% меньше,
чем в условиях полета без баков. Для полета тяжелого самолета
в турбулентной атмосфере величина 7пред может заметно изме-
няться, так как полет в неспокойном воздухе является одним из
основных расчетных случаев для прочности тяжелых самолетов.
Предельно допустимый в нормальной летной эксплуатации са-
.молета скоростной напор 7преД определяется по результатам рас-
четов и наземных прочностных испытаний самолета таким обра-
зом, чтобы не допустить появления остаточных или чрезмерно
больших упругих деформаций конструкции в полете (особенно
у тяжелых самолетов).
Перед проведением полетов на предельно допустимый скорост-
ной напор ^пред тщательно изучаются результаты наземных стати-
ческих и динамических испытаний самолета, испытаний динамиче-
ски подобных моделей этого самолета, частотных его испытаний
и т. д., после чего проверяется соответствие расчетных и фактиче-
ских данных самолета. При проведении наземных прочностных
испытаний выявляются наиболее слабые элементы и узлы конст-
рукции самолета и тщательно изучается характер их поведения
перед разрушением. Эти данные требуются для того, чтобы знать,
за какими частями конструкций при летных испытаниях необхо-
димо следить в первую очередь и какие именно их повреждения
сигнализируют о выходе на опасные режимы полета. При прове-
дении предполетных и послеполетных осмотров самолета этим
элементам уделяется особое внимание.
После каждого полета на 7пред проверяются наружные поверх-
ности самолета, нет ли вмятин, выпучиваний, складок, трещин
обшивки, повышенных люфтов в подвижных соединениях, расхож-
дения стыковочных швов, ослабления заклепочных соединений, по-
вреждения лючков и т. д. До и после окончания полетов произво-
дится нивелировка самолета, чтобы определить, нет ли остаточных
деформаций конструкции.
Величину 7преД для данного самолета выбирают при его проек-
тировании. Перед началом летных испытаний на #Пред предвари-
тельно оцениваются характеристики устойчивости и управляемо-
сти самолета на таких режимах. Рекомендуемая для инструкции
по пилотированию данного самолета величина предельной скоро-
сти полета уточняется с учетом характеристик устойчивости и
управляемости самолета. При этом всегда должна быть твердая
уверенность в том, что в нормальных эксплуатационных условиях
летчик надежно может воспрепятствовать непроизвольному выходу
самолета на опасные в отношении прочности скоростные напоры
(имеется достаточный запас по приборной скорости полета). Ни
262
при каких обстоятельствах нельзя допускать в полете выхода
самолета по скорости за пределы прочностных ограничений.
Если в процессе летных испытаний до выхода самолета на за-
ранее намеченную величину приборной скорости полета, которая
предварительно предполагалась предельно допустимой по проч-
ности, в полете возникают какие-либо ненормальности в поведении
самолета или его агрегатов или появляются повреждения само-
лета, допускающие продолжение полета, то летчик должен как
можно более плавно уменьшить скорость. Скорость снижается
с таким расчетом, чтобы ненормальности в поведении самолета
исчезли и можно было продолжить полет с появившимся повреж-
дением. Затем следует немедленно идти на посадку, избегая при
этом резких эволюций самолета. Если заданное летчику в полет-
ном задании значение предельно допустимой скорости было по
каким-либо причинам превышено в полете (например, из-за неис-
правности бортового визуального указателя скорости полета
и т. д.), то перед тем как принять решение о продолжении полетов
на данном самолете требуется произвести подробный анализ при-
чин, вызвавших это превышение скорости, и тщательно осмотреть
весь самолет, все его системы и оборудование.
Классификация вибраций частей самолета
Существуют следующие основные типы колебательных движе-
ний: собственные колебания, вынужденные колебания, параметри-
ческие и автоколебания. Собственными называются колебания,
происходящие в изолированной системе после окончания воздейст-
вия на нее внешнего возмущения. Энергия, необходимая для суще-
ствования собственных колебаний, поступает извне в момент воз-
буждения этих колебаний. Колебания, происходящие под воздейст-
вием периодических внешних сил, действующих независимо от
колебаний системы, называются вынужденными. Характер таких
вибраций определяется особенностями внешней силы и физиче-
скими свойствами самой системы, а необходимая для их сущест-
вования энергия поступает от источника создания внешней силы.
Параметрические колебания — это вибрации, возбуждаемые пе-
риодическим изменением какого-либо параметра системы. Авто-
колебаниями называются самовозбуждающиеся вибрации в си-
стеме, происходящие при отсутствии периодического воздействия
на нее внешних сил. Неотъемлемой частью автоколебательной си-
стемы (системы, В которой происходят автоколебания) является
источник энергии, питающий эти колебания.
На выбор ограничений приборной скорости или числа М полета
могут влиять следующие типы вибраций частей самолета:
а) вибрации, обусловленные взаимодействием набегающего
воздушного потока с частями самолета (флаттер, вибрации орга-
нов управления при околозвуковых скоростях полета, срывные
колебания и т. п.);
263
б) вибрации, связанные с работой силовой установки;
в) автоколебания органов управления, возникновение которых
связано с некоторыми особенностями работы агрегатов системы
управления (бустеров, автопилота и т. п.);
г) акустические колебания.
Рассмотрим несколько подробней отдельные, наиболее важные
или часто встречающиеся разновидности указанных вибраций.
Флаттер
Флаттер — это колебания частей конструкции самолета с возра-
стающей или установившейся амплитудой, возникающие в резуль-
тате взаимодействия упругих, инерционных и аэродинамических
сил при наличии не менее двух степеней свободы (числом степеней
свободы системы называется число независимых переменных, необ-
ходимых для полного описания ее движения). Критической ско-
ростью флаттера называется наименьшая скорость полета (набе-
гающего потока),при которой мозможно возбуждение колебаний
типа флаттер.
В наименованиях отдельных типов флаттера отражаются наи-
менования соответствующих форм колебаний, существенных для
развития этих типов флаттера. Формой колебаний называется за-
кон, в соответствии с которым происходит распределение ампли-
туд вибраций по частям конструкции самолета. Обычно наимено-
вание формы колебаний обусловливается названием того узла или
агрегата самолета, массовыми и упругими характеристиками
которого в основном и определяется наличие данной формы коле-
баний самолета в целом. В зависимости от закона распределения
амплитуд колебаний по узлам и агрегатам самолета, а также ха-
рактера деформаций, присущих этим формам колебаний, последние
классифицируются следующим образом: изгибные и крутильные
формы колебаний крыла, изгибные и крутильные формы колебаний
фюзеляжа и рулевые формы колебаний. В соответствии с этим
существуют такие наименования различных типов флаттера, как
например: крутильно-изгибный флаттер крыла, изгибно-элерон-
ный флаттер.
Возникновение флаттера в полете весьма опасно, так как при-
сущее этим колебаниям резкое возрастание амплитуд вибраций
может приводить к быстрому (иногда практически мгновенному)
разрушению соответствующих элементов конструкции. Наиболее
опасным является крутильно-изгибный флаттер крыла. При появ-
лении в полете рулевых форм флаттера обычно летчик бывает
в состоянии вовремя уменьшить скорость (прекратить флаттер)
и произвести безаварийную посадку самолета. Однако возбуждение
в полете даже рулевых форм флаттера является весьма опасным
и часто приводит к разрушению элементов конструкции самолета.
264
Вибрации органов управления
при околозвуковых скоростях
полета
В некоторых случаях из-за сдвига фаз между отклонением
органа управления (руля или элерона) и обусловленным данным
отклонением перемещением скачка уплотнения могут возникать
автоколебания этого органа управления. Так, например, наблюда-
лись случаи автоколебаний элеронов и руля высоты, возникавших
в результате перемещения скачка уплотнения в области располо-
жения этих органов управления.
Срывные вибрации
При нарушении безотрывного обтекания внешних поверхностей
самолета (появлении развитых областей срыва потока) и образо-
вании вихрей могут возникать срывные вибрации, называемые ино-
гда аэродинамической тряской.
Это наиболее часто встречающийся на самолете вид вибраций.
Они наблюдаются в ряде случаев, как-то: при выходе самолета на
большие углы атаки и скольжения (величины этих углов, при ко-
торых начинаются вибрации, изменяются в зависимости от чисел
М, Re и скоростного напора), возникновении мощных скачков или
систем скачков уплотнения (ударных волн), появлении местных
больших углов притекания струй, неблагоприятной интерференции
частей самолета (влияние диффузорного эффекта и т. п.) и нали-
чии выступающих в поток элементов конструкции самолета.
Срывные вибрации вызываются пульсирующими аэродинами-
ческими силами. В зависимости от характера возбуждающей аэро-
динамической силы различают два вида срывных вибраций:
а) срывные вибрации, появление которых связано с наличием
возбуждающей силы, создаваемой непосредственным воздействием
пульсаций давления в области срыва потока (где нарушено плав-
ное обтекание потоком воздуха поверхности самолета);
б) срывные вибрации, возникающие под действием вихрей, сбе-
гающих с расположенных впереди элементов самолета (например,
бафтинг—вибрации, возникающие при воздействии на хвостовое
оперение сбегающих с крыла дискретных вихрей).
Срывные вибрации обычно оказываются нерегулярными. Их
интенсивность (амплитуды) и периодичность (частоты) могут
существенно изменяться как от режима к режиму, так и по вре-
мени на протяжении одного и того же режима. Возникают они при
достижении так называемых критических значений отдельных
параметров полета или их комбинаций (углов атаки и скольже-
ния, чисел М, Re и скоростного напора). После превышения кри-
тических значений соответствующих параметров интенсивность
срывных вибраций обычно вначале заметно возрастает, а затем
несколько стабилизируется или даже начинает уменьшаться.
265
Иногда причиной появления срывных (аэродинамических) виб-
раций могут оказаться перемещающиеся скачки уплотнения или
скачки уплотнения переменной интенсивности, особенно на около-
звуковых скоростях полета. Частоты аэродинамических вибраций
обычно близки к частотам собственных колебаний элементов кон-
струкции, особенно у тяжелых самолетов, которым свойственны
сравнительно низкие частоты собственных колебаний конструкции
и большие амплитуды этих колебаний, достигающие иногда не-
скольких десятков, сантиметров на концах крыла и стабилизатора.
Поэтому у тяжелых самолетов аэродинамические вибрации могут
проявляться наиболее сильно. У маневренных самолетов кратко-
временное выполнение режимов полета, на которых возникают
срывные вибрации, как правило, не представляет опасности для
вибропрочности конструкции.
Двигательные вибрации
Двигательные вибрации (колебания, связанные с работой сило-
вой установки) классифицируются в основном по способу пере-
дачи их от силовой установки к отдельным частям конструкции
самолета. Различают две группы двигательных вибраций:
а) вибрации, передаваемые через воздушную среду. К ним
относятся вибрации фюзеляжа типа автоколебаний (возникающие
в некоторых случаях при соприкосновении реактивной струи дви-
гателей с бортами фюзеляжа), вибрации хвостового оперения
(возникающие иногда при воздействии реактивной струи двига-
теля или спутной струи воздушного винта на хвостовое оперение)
и вибрации отдельных элементов конструкции (например, высоко-
частотные колебания обшивки, появляющиеся под воздействием
струи реактивного двигателя или воздушного винта, создающих
местные пульсации давления);
б) вибрации, передаваемые непосредственно через элементы
конструкции. Это многочисленные типы вибраций, обусловленных
появлением ненормальностей в работе силовой установки. Диапа-
зон частот таких вибраций бывает достаточно широким. К ним
относятся высокочастотные вибрации (с частотами порядка не-
скольких сот гц), связанные с появлением переменных сил при
статической или динамической несбалансированности ротора дви-
гателя, с возникновением вибрационного горения, а также средне-
частотные вибрации (с частотами порядка 30—80 гц). Частоты
таких вибраций часто оказываются кратными половине числа обо-
ротов двигателя.
К вибрациям второй группы относятся и колебания, возникаю-
щие при помпаже. Помпажные колебания представляют собой
особый случай срывных двигательных вибраций, связанных с по-
явлением областей срыва потока во внутреннем тракте силовой
установки (в воздухозаборнике или в двигателе). Обычно это
низкочастотные колебания (частота порядка 3—8 гц).
266
Эти вибрации отличаются следующими особенностями: при
помпаже резко изменяется обычный звук от работы двигателя, па-
дают обороты, часто растет температура газов за турбиной и по-
вышается давление топлива. С увеличением числа оборотов дви-
гателя усиливается звуковой эффект, вызываемый помпажом. Не-
обходимо отличать вибрации при помпаже от аэродинамических
вибраций, чтобы правильно выбрать способ для устранения коле-
баний.
Автоколебания органов управления
Вибрации, связанные с работой системы управления, могут
быть вызваны автоколебаниями рулей или элеронов. В возникно-
вении автоколебаний существенную роль могут играть, в частности,
такие агрегаты системы управления как бустер и автопилот. При
наличии необратимой бустерной системы управления колебания
могут возникать в случае появления обратной связи, вызывающей
перемещения штока бустера под действием сил, приложенных
к рулю и участку проводки системы управления между рулем и
бустером. Это может иметь место при недостаточной жесткости
крепления бустера, под влиянием упругих деформаций конструк-
ции самолета, люфтов в системе управления и т. п. Колебания
в бустерных системах управления возникают обычно при появле-
нии достаточно больших возмущающих начальных импульсов.
В некоторых случаях при наличии автоматических систем
управления возникают вибрации, обусловленные неустойчивостью
замкнутого контура «самолет—система управления» в набегаю-
щем потоке воздуха. Бустер и автопилот могут быть не только не-
посредственными источниками вибраций системы управления, но
также и тричинами снижения критической скорости флаттера
(изменяя амплитудную, частотную и фазовую характеристики си-
стемы управления).
Если устранение этих вибраций требует слишком сложной пе-
ределки системы управления, которую трудно осуществить на го-
товом самолете, то в некоторых случаях они могут обусловливать
ограничение по скорости (числу М) полета.
Ограничение по вибрациям
Рассмотрим основные вопросы, связанные с возможным уста-
новлением ограничений скорости или числа М полета из-за виб-
раций. Начнем с вибраций типа флаттер.
Ограничение по флаттеру устанавливается в зависимости от
величины наименьшей для данного самолета критической индика-
торной скорости флаттера. У современных самолетов наименьшей
критической скоростью флаттера часто оказывается скорость воз-
никновения флаттера хвостового (обычно горизонтального) опе-
рения.
267
Флаттерные характеристики нового самолета определяются рас-
четным путем, а затем уточняются по результатам испытаний на
флаттер динамически подобных моделей. В отличие от исследова-
ний различных других характеристик результаты наземных и мо-
дельных исследований флаттерных характеристик нового самолета
непосредственно не проверяются в процессе летных испытаний. Со-
ответствие флаттерных характеристик самолета, полученных рас-
четным путем и из летных испытаний моделей, проверяется обычно
лишь косвенно — при частотных испытаниях самолета, обязатель-
ных для всех современных новых самолетов. Однако частотные
испытания позволяют только уточнить исходные данные, на осно-
вании которых проводились расчет и модельные испытания. Мини-
мальная величина критической скорости флаттера и соответствую-
щие ей типы и частоты колебаний непосредственно в полете на
натурном самолете, как правило, не определяются.
Характеристики колебаний самолета и его элементов, получен-
ные в процессе летных испытаний на докритических режимах (при
скоростях полета, заведомо меньших минимальной критической
скорости флаттера), экстраполируются на большие скорости. Зная
тенденции в развитии этих характеристик по скорости, можно
уточнить величины критических скоростей флаттера. По существу,
самолеты испытываются не на флаттер, а на отсутствие флаттера
(в процессе летных испытаний необходимо убедиться в том, что
флаттер не возникает) в эксплуатационном диапазоне скоростей
полета.
Определение критической скорости флаттера можно произво-
дить и в процессе летных испытаний натурного самолета, т. е.
в реальных условиях полета. Однако в практике летных испытаний
опытных самолетов в ОКБ проведение подобных экспериментов
по ряду причин, как правило, не производится. Впервые летные
испытания натурного самолета на флаттер были выполнены
М. Л. Галлаем (на двухмоторном скоростном бомбардиров-
щике «СБ»).
Предельная скорость полета должна быть меньше уточненной
расчетной минимальной критической скорости флаттера ГКр.ф не
менее чем на 20%. Так, например, при Гкр.ф=1560 км!час вели-
чина Гпред должна быть не более 1300 км!час, т. е. в этом случае
ДУф
должно быть ДУф=Укр.ф—Vnpefl^260 км!час, ---------- • 100% >-
У пред
>251.100% =20%.
1300
У современных самолетов ограничения скорости полета из усло-
вий прочности и флаттера обычно имеют место на малых и средних
высотах, т. е. примерно на высотах, меньших статического потолка
на 8—10 км.
При рассмотрении вопроса об установлении ограничений ско-
рости или числа М полета по вибрациям тщательно изучаются
268
характеристики последних, причины и условия их возникновения,
а также исследуются возможности их устранения — с целью мак-
симального расширения диапазонов эксплуатационных прибор-
ных скоростей (скоростных напоров) и чисел М полета.
Определение самого факта возникновения вибраций, а также
весьма приближенная предварительная качественная их оценка
могут производиться по полетным записям акселерографа—по из-
менению нормальной (при вибрациях в направлении оси Оух) или
боковой (при вибрациях в направлении оси Oz{) перегрузок. Для
тщательного (количественного) исследования в полете характера
вибраций на самолете устанавливается специальная измеритель^
ная аппаратура: вибро- и тензодатчики, а также датчики угловых
отклонений. Оборудование самолета указанной аппаратурой про-
изводится таким образом, чтобы в результате измерений оказа-
лось возможным определять амплитуды и частоты колебаний всех
интересующих инженера-испытателя элементов конструкции при
выполнении соответствующих режимов полета. В частности,
необходимо определить амплитуды и частоты основных из-
гибных и крутильных форм колебаний самолета, его органов
управления, характеристики вибраций в местах расположения эки-
пажа и пассажиров и т. д.
При изучении характеристик колебаний конструкции самолета
измерительная аппаратура выбирается таким образом, чтобы обес-
печить возможность замера всех частот основных тонов собствен-
ных колебаний конструкции. У современных самолетов диапазоны
частот основных тонов * их собственных колебаний обычно состав-
ляют примерно:
от 1—2 до 20—25 гц — для тяжелых самолетов
и
от 5 до 45—55 гц — для маневренных самолетов.
При проведении частотных испытаний современных (особенно
тяжелых) самолетов обычно определяют до 40—50 тонов собствен-
ных колебаний их конструкции.
Аппаратура для измерения вибраций располагается на само-
лете таким образом, чтобы свести до минимума влияние местных
упругих деформаций конструкции. При исследовании аэродина-
мических вибраций следует по возможности исключать влияние
вибраций двигателя. Для оценки характера изменения вибраций
по всему самолету желательно устанавливать на самолете не-
сколько вибрографов в различных местах.
На всех эксплуатационных режимах полета на самолете не
должны возникать вибрации, недопустимые в отношении вибро-
прочности конструкции, обеспечения нормальных условий работы
оборудования и систем самолета, силовой установки, а также за-
* Располагая частоты собственных колебаний конструкции в порядке их
возрастания, говорят соответственно о 1, 2, 3-м и т. д. тонах собственных коле-
баний конструкции самолета.
269
грудняющие работу экипажа или нарушающие комфорт пассажи-
ров. Испытания на вибрации должны выявить возможно ли появ-
ление таких вибраций, и, если возможно, то на каких режимах
полета, работы силовой установки и т. д. После этого разрабаты-
ваются мероприятия для устранения этих вибраций. Эти мероприя-
тия проверяются в процессе последующих летных испытаний (до-
водок) самолета. В принципе следует не допускать появления огра-
ничений по вибрациям.
Ограничение по устойчивости и управляемости
Для современных маневренных самолетов характерно ограни-
чение по устойчивости и управляемости, обусловленное падением
путевой статической устойчивости на больших сверхзвуковых чис-
лах М полета. С падением устойчивости появляются нарастающие
колебания угла скольжения, а затем (при появлении путевой не-
устойчивости) возможно и асимптотическое увеличение угла
скольжения самолета, что может приводить к превышению пре-
дельно допустимых в эксплуатации (по условиям сваливания или
даже прочности) боковых перегрузок.
Величину Мпред выбирают с учетом конкретных особенностей
данного типа самолета, его назначения, приборного оборудования,
управляемости и устойчивости, наличия на нем автопилота и т. д.
На самолете с наружными подвесками (подвесными топливными
баками и др.) величина Мпред может существенно уменьшиться.
Как отмечалось выше (см. гл. V), у современых сверхзвуко-
вых самолетов с большим разносом масс в направлении продоль=
ной оси фюзеляжа существенную роль может играть инерционное
и аэродинамическое взаимодействие продольного и бокового дви-
жений самолета. Если дестабилизирующий инерционный момент,
возникающий в результате такого взаимодействия, по абсолютной
величине превышает соответствующий восстанавливающий аэро-
динамический момент, самолет становится асимптотически неустой-
чивым, резко возрастает перегрузка, что может привести к свали-
ванию или даже к поломке самолета (при превышении макси-
мальной эксплуатационной перегрузки). Так, уменьшение степени
путевой или продольной статической устойчивости самолета при
наличии угловой скорости крена (соху=0) может привести к возник-
новению практически неуправляемого движения самолета. Поэтому
для выбранного числа Мпред необходимо определять критические
угловые скорости крена, превышение которых приводит к потере
устойчивости самолета. С этой целью строят графические зависи-
мости изменения критической угловой скорости крена сокр и рас-
полагаемой угловой скорости крена сораСп (создаваемой полным
отклонением элеронор) от числа М для различных условий полета.
Пример такой зависимости показан на рис. 7. 1. Если (орасп>сокр
при числе Мкр<Мпред, то определенную из других условий вели-
чину Мщюд уменьшают до Мпред<Мкр либо вводят дополнительное
270
ограничение, например, по допустимой угловой скорости крена
или по допустимому углу отклонения элеронов в диапазоне чисел
М от Мкр до Мпред (последнее обычно менее удобно).
Помимо указанных, диапазон эксплуатационных скоростей
(чисел М) полета могут ограничивать и другие особенности устой-
чивости и управляемости: потеря эффективности или реверс элеро-
нов, возрастание усилий на рычагах управления (при безбустер-
ном управлении) и т. д.
Воз- Невозможно проявление
св lMOXHot инерционного взаимодействия х Возможно
МпрцМкр
Рис. 7. 1. Критические (окр и располагаемые (орасп угло-
вые скорости крена
Чтобы определить, появляется ли данная особенность устойчи-
вости и управляемости вследствие влияния сжимаемости (числаМ)
или упругих деформаций (скоростного напора, т. е. УПр), необхо-
димо проводить испытания на двух или более высотах полета при
одних и тех же числах М, но при заметно отличающихся величи-
нах Упр (скоростного напора). Если на всёх этих высотах предель-
ные числа М совпадут, значит ограничение обусловлено влиянием
сжимаемости. Если совпадут величины предельного (по этому
явлению) скоростного напора, то причиной являются упругие де-
формации. Иногда может наблюдаться и одновременное действие
обеих причин.
К особенностям самолета, в некоторых случаях ограничиваю-
щим скорость (число М) полета, можно также отнести резко выра-
женное непроизвольное кренение самолета («валежка»), упругую
просадку элеронов, резко выраженную обратную реакцию по крену
на отклонение руля направления, колебания или непроизвольные
развороты самолета, возникновение недопустимо больших усилий
на рычагах управления при переходе на аварийное ручное управ-
ление в случае отказа основной бустерной системы самолета и др.
Так, например, даже из-за незначительной асимметрии конструк-
ции самолета (производственный дефект) скачки уплотнения на
271
правой и левой половинах фюзеляжа иногда возникают неодновре-
менно или располагаются несимметрично по отношению к плоско-
сти симметрии самолета, вследствие чего на некоторых режимах
могут появиться колебания углов рыскания или крена, непроиз-
вольные развороты или броски самолета с крыла на крыло, затя-
гивание в пикирование и т. д.
Ограничение по аэродинамическому нагреву
Нагрев поверхности самолета в полете с большими скоростями
(аэродинамический нагрев) зависит не только от высоты и скоро-
сти полета, но и от теплоемкости и теплопроводности материалов,
из которых изготовлены элементы конструкции самолета, излучаю-
щей способности нагреваемых поверхностей, от времени, в течение
которого осуществляется теплопередача от потока воздуха к эле-
ментам конструкции, и ряда других факторов.
В точке полного торможения температура набегающего потока
больше атмосферной на величину
где Тн — температура атмосферного воздуха в °К.
В полете, особенно на больших высотах, значительное количе-
ство выделяемого тепла излучается поверхностью самолета в окру-
жающее . пространство. Благодаря теплоизлучению температура
поверхности самолета оказывается существенно ниже температуры
полного торможения потока. Однако при больших сверхзвуковых,
а тем более гиперзвуковых скоростях, даже на больших высотах,
где температура наружного воздуха очень низка, конструкция са-
молета может за короткий промежуток времени сильно нагреться.
Нагрев получается наибольшим в тех местах, где происходит наи-
более полное торможение потока, т. е. на поверхностях, располо-
женных по отношению к направлению потока под углом 90° или
близким к нему. Так, существенному нагреву может подвергаться
фонарь кабины летчика и, в первую очередь, лобовое стекло фо-
наря. При чрезмерном нагреве органическое стекло фонаря кабины
размягчается и становится мутным. Чтобы предотвратить разруше-
ние стекла, при первых же признаках его помутнения необходимо
немедленно уменьшить скорость полета. Поэтому при выполнении
разгонов самолета до больших сверхзвуковых скоростей полета
измеряют температуру наружных поверхностей самолета. В ре-
зультате таких измерений и анализа состояния конструкции, си-
стем самолета, условий в кабине летчика и т. п. выбирают пре
дельно допустимую по условиям аэродинамического нагрева ско-
рость полета и устанавливают предельно допустимое время полета
самолета на этих режимах. Указанные ограничения существенно
зависят от высоты полета.
272
Помимо указанных, в каждом частном случае могут возникать
и другие причины, из-за которых приходится ограничивать скорость
полета, например ухудшение работы воздухозаборника ТРД или
сверхзвуковой хлопок, т. е. воздействие системы скачков уплотне-
ния на окружающее пространство. Для избежания вредного воз-
действия сверхзвукового хлопка в некоторых случаях требуется
ограничивать скорость полета, особенно на малых и средних высо-
тах (при полетах над населенными пунктами, промышленными
объектами и др.). Эти причины всегда следует тщательно анали-
зировать.
Ограничение скорости (числа М) полета устанавливается в ре-
зультате исследования всех возможных на данном самолете огра-
ничений с учетом индивидуальных особенностей и назначения дан-
ного типа самолета. Следует всегда помнить, что установленные
для данного самолета на данной высоте полета значения 7Пред или
Мпред могут существенно зависеть от таких факторов как полетный
вес самолета, наличие наружных подвесок, положение органов ме-
ханизации, положение воздушных тормозов и др. В каждом част-
ном случае при изменении какого-либо из этих факторов необхо-
димо исследовать влияние этого изменения на величину Упред
(Мпред) •
7.2. МЕТОДИКА ИСПЫТАНИЙ
Определение предельных чисел М и приборных скоростей по-
лета (скоростных напоров) и исследование поведения самолета на
этих режимах является одним из наиболее ответственных и слож-
ных этапов летных испытаний.
Целью летных испытаний самолетов на предельных и близких
к ним режимах полета являются:
1) проверка особенностей поведения и пилотажных характери-
стик самолета;
2) определение и оценка условий работы силовой установки,
конструкции, оборудования и всех систем самолета;
3) определение характеристик устойчивости и управляемости
самолета на этих режимах;
4) установление ограничений по числу М и приборной скорости
полета для массовой эксплуатации.
Летные испытания самолетов на предельных числах М и при-
борных скоростях полета всегда проводятся с полным комплектом
самопишущей (телеметрической) аппаратуры. Перед испытаниями
производится тщательная тарировка экспериментальной аппара-
туры и бортовых визуальных указателей (в первую очередь указа-
телей числа М, скорости и высоты полета), по которым летчик
выдерживает заданный режим полета. При задании летчику пре-
дельных или близких к ним чисел М и приборных скоростей
полета необходимо определить и учесть все поправки к показаниям
соответствующих бортовых указателей: аэродинамическую, ин-
273
струментальную, поправку на сжимаемость, поправку на запазды-
вание передачи статического давления в системе ПВД, а также
заранее установить, сможет ли летчик определить в полете числоМ
и скорость Vnp по шкалам указателей, установленных на прибор-
ной доске, с достаточной степенью точности.
Перед летными испытаниями предварительно определяются
ожидаемые значения предельных чисел М и приборных скоростей
во всем эксплуатационном диапазоне высот полета. Затем эти зна-
чения Мцред и Упред проверяют и уточняют в процессе летных испы-
таний. В результате летных испытаний предварительные величины
ограничений по числу М полета иногда существенно корректируют,
уменьшая их или увеличивая, естественно, последнее весьма жела-
тельно. Такая корректировка может появиться даже при самом тща-
тельном анализе материалов наземных исследований данного само-
лета и летных испытаний однотипных самолетов. Необходимость
корректировки может быть обусловлена, например, влиянием неуч-
тенного нелинейного' характера протекания аэродинамических ха-
рактеристик по числу М и рядом других факторов. Испытания на
предельных скоростях и числах М полета проводят отдельно или
частично совмещают с полными летными испытаниями самолета
на определение количественных характеристик устойчивости,
управляемости и маневренности.
Предельная приборная скорость полета (предельный скорост-
ной напор) обычно задается по расчету на основании результатов
испытаний специальных моделей в аэродинамических трубах и
в свободном полете, а также по материалам статических испыта-
ний на прочность. Превышение ее в полете недопустимо. Предель-
ное число М оценивается предварительно по результатам продувок
модели самолета.
Если на самолете установлены аэродинамические триммеры
органов управления, то перед полетами на предельные числа М
(приборные скорости) должны быть выполнены полеты на балан-
сировку. Самолеты с безбустерным или обратимым бустерным
управлением балансируются обычно на средних высотах при ско-
рости полета Vnp~0,8 Vmax. Самолеты с необратимым бустерным
управлением, у которых при отказе бустеров возможен переход на
аварийное ручное управление, балансируются аэродинамическими
триммерами таким образом, чтобы при переходе на аварийное руч-
ное управление обеспечивалось наиболее благоприятное изменение
усилий на рычагах управления во всем ожидаемом эксплуатаци-
онном диапазоне чисел М и приборных скоростей полета. При этом
учитывается возможное, нарастание абсолютных величин перегру-
зок при переходе на ручное управление в случае, если летчик по той
или иной причине не в состоянии справиться с возникающими при
этом усилиями на рычагах управления. Полученные балансировоч-
ные положения аэродинамических триммеров сохраняются затем
в дальнейших летных испытаниях строго постоянными. Баланси-
ровочное положение аэродинамических триммеров обязательно
274
контролируется летчиком в полетах (обычно по сигнальной лам-
почке).
Если у самолетов с необратимым бустерным управлением воз-
можен переход на аварийное безбустерное (ручное) управление,
то вначале определяются предельные числа М и приборные скоро-
сти в полетах с работающим бустерным управлением. В этих по-
летах замеряются шарнирные моменты рулей и элеронов. Только
после этого исследуются управляемость и особенности поведения
самолета на этих скоростях в случае отказа бустеров. Если пере-
ход на аварийное безбустерное управление при числах Мпред и ско-
ростях 7Пред определенных в полете с работающими бустерами,
настолько усложняет пилотирование самолета или приводит к та-
ким особенностям в поведении самолета, что это угрожает безопас-
ности полета (особенно на малых высотах), то такие значения
Мпред или Упред должны быть уменьшены. Окончательно для мас-
совой эксплуатации самолетов выбирают значения Мпред и 7Пред,
при которых и в случае отказа бустеров обеспечивается безопас-
ность полета: не возникают большие крены при полете на малых
высотах, большие изменения усилий на рычагах управления, с ко-
торыми летчик может не справиться и которые угрожают безопас-
ности полета и т. п.
Полеты на определение значений Мпред и 7Пред обычно произ-
водятся при работе двигателей на режимах наибольшей мощности
(тяги). При этом надо следить за тем, чтобы такие полеты выпол-
нялись без скольжения и движения рулями были бы плавными.
У современных сверхзвуковых самолетов на больших высотах
обычно ограничены числа М полета, а на малых высотах—при-
борная скорость полета (скоростной напор).
В летных испытаниях, как правило, вначале определяют пре-
дельные числа М полета. Испытания на Мпред начинают на тех
высотах, для которых заранее известно, что приборная скорость,
соответствующая числу М = Мпред, окажется меньше предельной
приборной скорости, определяемой условиями прочности и флат-
тера. Зная предполагаемое предельное число М и расчетную пре-
дельную приборную скорость полета, находят расчетом эти-высоты.
Однако следует отметить, что в некоторых случаях ограничения
по Мпред и Упред на различных высотах могут чередоваться. В этих
случаях также заранее приближенно определяют диапазоны высот,
на которых предполагаемые величины Мпред меньше чисел М, соот-
ветствующих Упред-и вначале на этих высотах проводят летные
испытания по определению Мпред.
Летные, испытания на определение ограничений числа М полета
обычно начинают на больших высотах. Объясняется это тем, что
с увеличением высоты полета при постоянном числе М скоростной
напор уменьшается:
q=^pHM?^0,7pHW, (7.1)
275
где рн — атмосферное давление в кГ/м2\
х=1,4 — отношение удельных теплоемкостей воздуха при постоян-
ном давлении и постоянном объеме.
Меньший скоростной напор обеспечивает меньшие абсолютные
изменения аэродинамических сил и моментов, что облегчает пило-
тирование и повышает безопасность полетов. Кроме того, запас
высоты повышает безопасность полета в случае возникновения
аварийной ситуации.
Летные испытания начинают с определения Мпред на высоте
меньшей статического потолка примерно на 3—6 км, т. е.
Я —Яст.пот—(З-т-6 км). В первом полете на этой высоте производят
разгоны самолета до чисел М, меньших предполагаемого предель-
ного на данной высоте примерно на ДМ = 0,1-н0,3. Разгоны при
испытаниях на МпреД выполняют в прямолинейном горизонтальном
полете, если заданное в разгоне число М^Мтах, либо в прямо-
линейном полете со снижением (с «прижимом» самолета), если
заданное число М>Мтах (с последующим весьма плавным выво-
дом самолета из пикирования). Во втором случае на высоте, пре-
вышающей выбранную по возможности не более чем на 500 м„
производят разгон самолета по Мтах, а затем начинают прямо-
линейное снижение с таким расчетом, чтобы получить заданное
число М на высоте не ниже — 500 м по сравнению с выбранной.
В конце разгона желательно выдерживать установившееся задан-
ное значение числа М в течение нескольких секунд. В одном полете
на заданной высоте летчик последовательно выполняет несколько
разгонов с постепенно возрастающим конечным числом М (обычно
с интервалом ДМ^0,02—0,05). Если после какого-либо разгона
возникают ненормальности в поведении самолета, его устойчиво-
сти и управляемости, в работе систем или агрегатов самолета,
то последующие разгоны не выполняются и производится по-
садка.
После каждого полета с разгоном самолета до чисел М, значе-
ния которых превышают ранее достигнутые на этом самолете, тща-
тельно анализируются полетные материалы и отзыв летчика-испы-
тателя. В зависимости от результатов анализа составляется зада-
ние на следующий полет. При необходимости после полета произ-
водятся соответствующие наземные исследования и доработки (до-
водки) самолета или его систем, после чего выполняется полет
с повторением задания предыдущего полета. Если после такой про-
верки оказывается возможным продолжить испытания с дальней-
шим увеличением числа М, то в следующем полете выполняются
разгоны до чисел М, превышающих уже достигнутые на
ДМ — 0,024-0,1 (величина этого интервала выбирается обычно глав-
ным образом в зависимости от степени ухудшения характеристик
устойчивости и управляемости самолета). Задания на постепенное
приближение к предельным числам М полета целесообразно по
возможности совмещать с заданиями на определение характери-
стик устойчивости, управляемости и маневренности самолета.
276
При подходе к предполагаемому предельному значению числа М
полета конечное число М увеличивается в последних разгонах
с интервалом ДМ = 0,01-4-0,05. Если никаких неприятных особенно-
стей в поведении самолета и его пилотажных характеристиках при
разгоне на предполагаемом предельном значении числа М не на-
блюдается, то в последующих полетах можно продолжать разгоны
до больших чисел М, но, естественно, не превышая предельно
допустимого по условиям прочности и флаттера скоростного
напора.
После установления предельного числа М на данной высоте
полета подобные испытания проводятся еще на одной-двух мень-
ших высотах, на которых предполагаемое ограничение по числу М
оказывается меньше величины числа М, соответствующей предель-
ному скоростному напору на рассматриваемых высотах полета.
После окончания этих испытаний приступают к определению
предельных приборных скоростей полета, обусловленных предельно
допустимым по прочности (аэроупругости) или по флаттеру зна-
чением скоростного напора. Такие испытания проводят обычно не
менее чем на двух-трех высотах (//i, Н2 и Н3). Эти высоты обяза-
тельно должны быть меньше той, при которой предельному значе-
нию скоростного напора соответствует предельное значение числа
М полета (ее обозначают
Первая высота равна примерно Н^ —
“^Mg+(2—3) км,
вторая
Н2 является средней между и Нмд, а третья высота Н3 состав-
ляет около 2—5 км.
Перед началом полета строят расчетную графическую зависи-
мость Епред=/:(^г), определяемую по формуле
^пред = 14,4 /<7пред - 8Уинстр - ЗУа - 81/сж, (7. 2)
где ЗУинстр —инструментальная поправка в км/час;
8Уа — аэродинамическая поправка в км/час;
8УСЖ — поправка на сжимаемость в км/час;
^пред в км/час, дарел в кГ/м2.
В дальнейшем эти величины ЕПред проверяются и при необхо-
димости уточняются по материалам летных испытаний, причем их
можно заменять только в сторону уменьшения найденных по фор-
муле (7.2) значений. Если самолет разгоняется до УПред не в гори-
зонтальном полете^ УПред> Ушах), то необходимо задавать летчику
значения ЕПред с учетом поправок на запаздывание.
В первом полете на определение ЕПред производятся разгоны
самолета до приборной скорости примерно на ЛУПр~10О-н
-7-300 км!час меньше ожидаемой предельной. Наибольшее число М
в этом полете должно быть приблизительно на 0,05—0,15 меньше
предельных чисел М, определенных уже для данного самолета на
больших высотах. Перед следующим полетом анализируют полет-
277
ные материалы, отзыв летчика-испытателя и проводят тщательный
послеполетный осмотр конструкции самолета. Наибольшая зада-
ваемая во втором полете приборная скорость не должна превы-
шать достигнутую в первом полете на А7Пр=20-н50 км/час.
После выхода на предельную скорость в данном полете ника-
ких режимов больше не выполняют. Сразу производится посадка
и начинается осмотр всего самолета.
Определив предельные числа М на высотах H>Hmq и предель-
ные скорости полета на высотах Н<Нмд, производят полеты на
высоте Ям д- Эти режимы являются наиболее ответственными,
сложными и напряженными для летчика и по условиям работы
конструкции самолета, так как на высоте Ям q одновременно дей-
ствуют два ограничения — числа М и скорости (скоростного на-
пора) полета. Такой полет совершается в наиболее сложных усло-
виях в отношении влияния сжимаемости и аэроупругости. После-
довательность действий при проведении этих летных испытаний
выдерживается такая же, как и при определении предельных чи-
сел М полета на больших высотах: первый разгон производится
до числа М, на АМ«0,1-н0,3 меньше наибольшего достигнутого
на этом самолете значения числа М, и т. д.
Чтобы определить характеристики управляемости и устойчи-
вости самолета на полученных предельных значениях числа М и
скорости полета, последовательно выполняются дачи всех трех
органов управления на этих режимах. Особое внимание уделяется
выполнению дач органов управления на высоте Ям д. По полетным
материалам, полученным при выполнении разгонов по МПред и
Упред на различных высотах, строят балансировочные крипые уси-
лий на рычагах управления и отклонений органов управления са-
молета в зависимости от числа М (скорости) полета. .
На рис. 7.2 приведены записи приборов-самописцев, получен-
ные при летных испытаниях самолета на определение предельных
скоростей. Участки лент приборов-самописцев, на которых были
получены эти записи, показаны на рис. 7. 3.
В полете из-за неисправности бортового визуального указателя
скорости была непроизвольно превышена заданная величина пре-
дельной скорости полета, выбранной из условия ограничения по
флаттеру (УПред=Ч150 км/час). При достижении скорости Упр«
«1340 км/час возник флаттер хвостового оперения самолета
(флаттер системы стабилизатор—руль высоты), при котором имела
место сложная форма колебаний хвостового оперения самолета:
изгибные колебания руля высоты на опорах в сочетании с круче-
нием стабилизатора. При этом вибрации хвостовой части самолета
происходили с интенсивно нарастающей амплитудой и частотой
порядка 40 гц (разброс записей на лентах самописцев при вибра-
циях хорошо виден на фотографиях рис. 7.3; на рис. 7.2 он изо-
бражен жирной тушевкой — интервал А/«38ч-49 сек). Для пре-
кращения развития флаттера была уменьшена скорость полета.
278
Рис. 7.2. Записи приборов-самописцев, полученные в полете с непроизволь-
ным превышением заданной величины Упред
279
При проведении летных испытаний на определение УПред вели-
чину запаса по флаттеру АУф=УКр.Ф—Упред следует выбирать
с учетом индивидуальных особенностей самолета (характеристик
разгонов, управляемости и устойчивости при соответствующих ско-
I____________I____________L
25 30 35
—L - 1________I_________1_________।
45 45 50 55 t сек
Р и с. 7. 3. Участки лент приборов-самописцев с полетными записями, полученными
в процессе выполнения режима, показанного на рис. 7. 2:
а—запись самописца перегрузок (трехкомпонентного акселерографа); б—запись самописца
углов отклонения руля направления; запись динамометрической педали
ростях полета и т. д.). Величина АУф, т. е. соответствующая ей
величина Упред, задаваемая при летных испытаниях, должна пери-
одически проверяться и в случае необходимости корректироваться
по мере накопления результатов летных испытаний. Перед каждым
полетом на Упред необходимо проверять работу бортового указа-
теля скорости и снимать контрольные тарировки.
7.3. ОБРАБОТКА И АНАЛИЗ ПОЛЕТНЫХ МАТЕРИАЛОВ
Предельные числа М и предельные скорости полета, получен-
ные из летных испытаний, наносят на график в зависимости от вы-
280
соты полёта (рис. 7.4). На этот график также наносят минималь-
ные предельные скорости полета. Области, ограниченные этими
кривыми, определяют эксплуатационные диапазоны чисел М (см.
рис. 7. 4, а) и приборных скоростей полета (см. рис. 7. 4, б) данного
самолета на различных высотах.
Если зависимость предельных скоростей и чисел М полета от
высоты оказывается сложнее показанной на рис. 7.4, то ограниче-
ния следует по возможности упрощать, например, за счет некото-
рого искусственного сужения диапазона эксплуатационных скоро-
Р и с. 7.4. Зависимость предельных скоростей и чисел М от высоты
полета (шасси, воздушные тормоза и органы механизации убраны;
наружные подвески отсутствуют)
стей (чисел М) на отдельных высотах. Чем проще эта зависимость,
гем легче летчику выполнять полет, легче управлять самолетом,
гем меньше он затрачивает внимания на непревышение предель-
ных скоростей (чисел М) в полете. Пример упрощения такой зави-
симости показан на рис. 7. 5. В этом случае оказалось целесообраз-
ным ограничить эксплуатационный диапазон скоростей (чисел М)
полета на высотах Н<НХ значением приборной скорости Упреди
тогда как по результатам расчетов и летных испытаний на этих
высотах можно было допустить большие приборные скорости
Упредг. Такое упрощенное ограничение показано на рис. 7.5 линией
со штрихами.
Количество ограничений по скорости и числу М полета всегда
стараются свести до минимума. В отдельных случаях и у сверх-
звуковых самолетов удается оставлять только одно ограничение —
величину предельной скорости полета. Это относится к самолетам,
которые на высотах /7>//Мд даже в отвесном пикировании с ра-
281
ботающими на режиме максимальной мощности двигателями не
разгоняются до чисел М = Мпред-
Если самолет может достигать значения Мпред только на высо-
тах, немного превышающих Ям q (например, на АЯм~1~нЗ км),
то иногда целесообразно снизить значение УПред с таким расчетом,
чтобы увеличить высоту Ям д на эту величину АЯм и тем самым
оставить только одно ограничение — по приборной скорости по-
лета.
В некоторых случаях (например, когда Мпред обусловлено паде-
нием путевой устойчивости самолета, а величина ту существенно
уменьшается с ростом угла атаки) на одной и той же высоте уста-
Р и с. 7. 5. Пример упрощения огра-
ничений по числу М и приборной
скорости полета с целью облегчения
работы летчика
Рис. 7.6. Определение диа-
пазонов высот полета, на
КОТОрЫХ Virax^> Упред ИЛИ
Vmax<Vnp, соответствующей
числу М = Мпред
навливаются два предельных значения числа М для двух значений
нормальной перегрузки:
пу= 1 и Пу>\.
Однако такого усложнения ограничений следует .по возможности
избегать.
После того как установлены эксплуатационные диапазоны чи-
сел М и приборных скоростей полета на всех высотах, можно при-
ступать к систематическим летным испытаниям на определение
максимальных горизонтальных скоростей полета. При этом лет-
чику должны быть заданы предельные числа М, предельные ско-
рости полета и высота Ям д.
Величины Ут1ппРед, Мпред и Ям g задаются летчику обязательно
с учетом всех поправок, в том числе и инструментальных поправок,
определенных на данном самолете для данных бортовых визуаль-
ных указателей числа М, приборной скорости и высоты полета.
Указываемые в инструкциях по пилотированию значения УтщпРед.
282
Л4пред, Упред и H^q определяются по материалам летных ис-
пытаний с учетом допустимых на серийных самолетах данного
типа предельных погрешностей соответствующих визуальных ука-
зателей.
Чтобы установить диапазоны высот, на которых требуется про-
водить летные испытания на определение максимальных скоростей
горизонтального полета, значения Утах, полученные из аэродина-
мического расчета (по кривым потребных и располагаемых тяг
для самолетов с ТРД или мощностей для самолетов с поршневым
двигателем), наносят на графики типа, приведенного на рис. 7.4.
Искомые ДИапаЗОНЫ ВЫСОТ определяются условием Утах <5 Упред
ИЛИ Утах^Упр соответствующей числу М = МПред.
На рис. 7.6 показан пример протекания зависимостей Утах =
= Упред = <?(#) и Мпред = Р (Я) для самолета с ТРД. Сплош-
ной линией на графике доказаны проверенные в летных испытаниях
ограничения по приборной скорости и числу М полета (Упред и
Мпред), пунктирной — расчетные значения максимальных скоро-
стей горизонтального полета. Из графика видно, что для данного
самолета максимальные скорости горизонтального полета можно
определять только в диапазонах высот Н\<Н<Н2 и Н>Н3. Штри-
ховой линией показана на рис. 7.6 граница наибольших (допусти-
мых и достижимых) скоростей установившегося прямолинейного
горизонтального полета без скольжения.
Глава VIII
ИСПЫТАНИЯ НА СВАЛИВАНИЕ И ШТОПОР
8.1. ОСНОВНЫЕ ОСОБЕННОСТИ СВАЛИВАНИЯ
И ШТОПОРА СОВРЕМЕННЫХ САМОЛЕТОВ
Сваливание
Сваливанием называется непроизвольное или вызванное откло-
нением органов управления, но не соответствующее обычной реак-
ции на это отклонение апериодическое или колебательное движе-
ние самолета на околокритических углах атаки, возникающее в ре-
зультате появления срыва потока на крыле, с большими, замет-
ными даже для мало тренированного летчика угловыми скоро-
стями или перемещениями самолета относительно хотя бы одной
из трех его осей, характеризуемое потерей (частичной, а иногда
и полной) управляемости самолета.
Современные сверхзвуковые самолеты имеют не меньше пред-
посылок к непроизвольному сваливанию, чем старые дозвуковые
самолеты. Это обусловлено расширением эксплуатационных диа-
пазонов высот и чисел М полета, некоторыми характерными осо-
бенностями устойчивости и управляемости сверхзвуковых самоле-
тов, а также их поведением в особых случаях полета (например,
при отказе бустерной системы управления). Однако при сопоста-
вимых начальных условиях сваливание современных сверхзвуко-
вых самолетов протекает обычно более плавно. Это объясняется
в основном более плавным характером протекания зависимостей
c^ = f(a) в околокритическом диапазоне углов атаки, а также боль-
шими абсолютными величинами моментов инерции Jx у сверхзву-
ковых самолетов.
Кроме того, отклонения ручки управления у современных само-
летов, потребные для выхода на режим су сваливания, оказы-
ваются значительно большими, чем у старых. Поэтому непроиз-
вольные сваливания при малых (близких к Vmin) скоростях прямо-
линейного координированного полета на сравнительно небольших
высотах в нормальных эксплуатационных условиях у сверхзвуко-
вых самолетов происходят значительно реже.
У современных сверхзвуковых самолетов со стреловидным или
треугольным крылом даже небольшое скольжение может суще-
ственно влиять на характер протекания кривой cy = f(a). У самоле-
тов с прямым крылом такое влияние проявляется значительно сла-
бее. Этим и объясняется, что у самолетов со стреловидным крылом
284
сваливание может возникать при меньших углах атаки, чем у са-
молетов с прямым крылом, несмотря на то, что критические углы
атаки при отсутствии скольжения у первых обычно оказываются
значительно большими.
Специфическими для режимов сваливания являются следую-
щие значения углов атаки а и коэффициента подъемной силы само-
лета Су.
а) околокритические углы атаки — сравнительно большие углы
атаки, близкие к акр;
б) критический угол атаки акр — угол атаки самолета на ре-
жиме Су тах;
Р и с. 8. 1. Пример зависимости cy=f (а) у сверхзвуко-
вого самолета (величины су взяты в скоростной си-
стеме осей координат)
в) Сушах—максимальная величина коэффициента аэродина-
мической подъемной силы самолета в координированном полете
на данной высоте и при данном значении числа М (рис. 8. 1);
г) угол атаки сваливания аСв — угол атаки самолета, соответ-
ствующий началу сваливания при данном числе М на данной высоте
полета;
д) Су св — коэффициент аэродинамической подъемной силы са-
молета, соответствующий началу сваливания (величины су без
индекса «1» относятся к скоростной системе осей координат);
е) Vmin—минимальная скорость полета (приборная скорость
прямолинейного полета на режиме су св);
ж) Су 1 св — коэффициент нормальной аэродинамической силы
самолета, соответствующий началу сваливания (в связанной с са-
молетом системе осей координат — индекс «1»);
з) су iTp—коэффициент нормальной аэродинамической силы
самолета, соответствующий началу предупреждающей тряски;
и) су is —коэффициент нормальной аэродинамической силы
самолета, соответствующий полету с полным отклонением ручки
управления на себя;
к) Су 1 доп — предельно допустимое в нормальной эксплуатации
значение коэффициента нормальной аэродинамической силы само-
285
лета (ограничение по тряске либо по устойчивости самолета
и т. п.). Приборная скорость прямолинейного горизонтального по-
пета без скольжения на режиме су i доп называется минимально
допустимой скоростью полета Ущшдоп.
Сваливание может происходить в виде опускания носа самолета
(практически без крена), либо в виде кренения, либо с одновре-
менным опусканием носа и кренением самолета. Последнее обычно
и наблюдается у современных сверхзвуковых самолетов. Обуслов-
лено это несимметричным развитием срыва потока на крыле боль-
шой стреловидности, что при большой скорости распространения
области срыва по крылу вызывает обычно появление сравнительно
больших кренящих, а также и заворачивающих моментов.
Рис. 8.2. Изменение несущих свойств сверхзвукового самолета по
числу М (в данном примере су\ ДОп = Су1 тр)
У дозвуковых самолетов при подходе к режиму с^св на мини-
мальных и близких к ним скоростях полета появляется обычно
предупреждающая тряска, причем значения су сваливания (с^св)
и су тряски (Сутр) заметно отличаются.
- Предупреждающей тряской называется хорошо заметная для
летчика аэродинамическая тряска конструкции, возникающая
вследствие срыва потока при увеличении угла атаки. У сверхзву-
ковых самолетов значения су i Св и су i тр при малых числах М
обычно весьма близки (рис. 8.2) или практически совпадают. Ин-
тенсивность предупреждающей тряски на этих режимах у сверх-
звуковых самолетов, как правило, невелика и даже иногда летчики
ее вовсе не ощущают. С увеличением числа М (увеличением вы-
соты полета при постоянном скоростном напоре) интенсивность
предупреждающей тряски и разность Acyi = cy i Св—су i тр обычно за-
метно возрастают (см. рис. 8.2).
Величина су i Св уменьшается с возрастанием числа М полета.
Выход сверхзвуковых самолетов на режимы сваливания часто со-
286
провождается покачиванием самолета с крыла на крыло (попереч-
ные колебания);
По начальным условиям режимы сваливания разделяются на
три группы: сваливание с минимальной скорости прямолинейного
горизонтального полета, сваливание с Vnp>Vmin в координирован-
ном вертикальном маневре и сваливание с произвольного прост-
ранственного маневра (некоординированного).
Сваливание с режима координированного прямолинейного го-
ризонтального полета при Vnp~ Vmtn^—1) носит название по-
тери скорости. Как указывалось, при таком сваливании современ-
ные сверхзвуковые самолеты обычно самопроизвольно в штопор
не входят. Некоторые современные самолеты не выходят на режим
потери скорости даже при полном отклонении ручки (штурвала)
управления на себя. При скольжении сваливание со скоростью
Vnp~ Vmm происходит более резко и, как правило, приводит к по-
следующему самопроизвольному входу самолета в штопор.
Сваливание с координированного вертикального маневра при
Т/Пр^> Vmin(^?/> 1) происходит боле резко, чем при потере скорости.
Объясняется это большими аэродинамическими нагрузками, дей-
ствующими на самолет при больших приборных скоростях полета.
Наиболее резким и неравномерным оказывается обычно свалива-
ние с больших приборных скоростей при начальном скольжении и
вращении самолета. При сваливании с динамического потолка
возрастает покачивание самолета с крыла на крыло: в этом случае
покачивание начинается обычно на больших приборных скоростях
(меньших су) и происходит с большими амплитудами колебаний
самолета, чем при сваливании с меньших высот. Предпосылок
к сваливанию самолета при полетах на динамический потолок
больше, чем на меньших высотах, главным образом, из-за интен-
сивного уменьшения скорости полета в процессе выхода самолета
на динамический потолок и падения аэродинамического демпфи-
рования на высотах, близких к динамическому потолку.
Штопор
Штопором называется движение самолета по спиралеобразной
траектории малого радиуса на режиме самовращения при закрити-
ческих'углах атаки центральных сечений крыла, характеризуемое
резким ухудшением управляемости самолета и условий ориенти-
ровки летчика. Нормальный штопор — штопор самолета при поло-
жительных углах *атаки. Перевернутый штопор — штопор само-
лета при отрицательных углах атаки. Правый (нормальный или
перевернутый) штопор — штопор с вращением носа самолета
вправо, если смотреть с места летчика. Левый (нормальный uw
перевернутый) штопор — штопор с вращением носа самолета
влево, если смотреть с места летчика.
Современные сверхзвуковые самолеты отличаются многообра-
зием режимов штопора. Даже у одного и того же современного са-
287
молета (в зависимости от высоты полета, центровки и т. д.) могут
быть самые разнообразные виды штопоров. Опыт эксплуатации и
анализ результатов летных испытаний современных самолетов
показывают, что все режимы как нормального, так и переверну-
того штопора разделяются на два основных типа: неустойчивый и
устойчивый штопор (рис. 8.3).
Неустойчивым называется штопор, в процессе которого враще-
ние самолета относительно нормальной и продольной осей .перио-
дически меняет свое направление или приостанавливается. Не-
устойчивый штопор характеризуется неравномерным вращением
с большими амплитудами колебаний параметров движения само-
лета и периодическими его остановками в режиме. При этом само-
лет в отдельные моменты может непроизвольно поднимать «нос»
выше горизонта или опускать его за вертикаль, а также перехо-
дить из штопора одного направления в штопор другого направле-
ния либо из нормального в перевернутый штопор (и наоборот).
У современных самолетов наблюдается три разновидности не-
устойчивого нормального штопора:
а) штопор, протекающий в виде падения листом по спирале-
образной траектории — наиболее часто встречающийся вид не-
устойчивого штопора (пример такого режима приведен на
рис. 8.4, а);
б) штопор, происходящий в виде биений с периодическими на-
растаниями и затуханиями колебаний самолета (рис. 8.4,6);
в) штопор с нарастающими колебаниями самолета (рис. 8. 4, в).
Если начался штопор и летчик определил положение самолета
в пространстве и направление его вращения в режиме (нормаль-
ный или перевернутый, правый или левый штопор), он устанавли-
вает рули по штопору. Отклонение руля высоты (управляемого
стабилизатора) по штопору означает в нормальном штопоре откло-
нение ручки (штурвала) управления на себя, в перевернутом — от
себя. Отклонение руля направления (управляемого киля) по што-
пору означает в левом штопоре отклонение левой педали вперед,
в правом — правой педали вперед. Летчик удерживает рули в по-
ложении по штопору до момента начала вывода самолета из што-
пора.
В большинстве случаев режимы неустойчивого штопора при
отклоненных по штопору рулях могут существовать длительное
время и прекращаться только при установке рулей в нейтральное
положение. Однако в некоторых случаях самолет выходит из не-
устойчивого штопора даже при отклоненных по штопору рулях.
При этом в процессе штопора происходит нарастание скорости
полета. Режим полета самолета с последовательно чередующимися
входами и выходами из области закритических углов атаки при
непрерывном возрастании средних величин приборной скорости
полета и нормальной перегрузки называется прогрессирующей што-
порной спиралью. Нарастание нормальной перегрузки в процессе
288
о
Штопор
шх,у^0\ |осСр|>|асв|
Нормальный
разных знак од >
I пу>0
Перевернутый
» шу одного знака > аср<асв<^’
___________________
Неустойчивый
4t,y,zc„ (П=^г,
в отдельные моменты
может быть равно нулю
Устойчивый
(ibc.ycpf^)^^5^ *°>
лидо\<й*\ и Icvyl плавно
нарастают
। Неус тойчивый ‘
I в отделы
| ные моменты может быть ’
равно нулю______||
^еЛИ°в_ ^2^.аЛ°Ь _ J
Устойчивый
uj^ycplt)^ const * 0, либо
’ I (JDjfl U |0)у|
плавно нарастают
§
<)
<ъ
§ §
2?^
=Г
£
«а
5
<3
Pi
» vl
3
=3 — £
сз
а 1
?>
Метод бы Soda №1
-----
>53'Ч Л<
Б
сз
сз с
— 3
Метод №2
§ S й «
а в
*5> «
сз
£
U
5 и
ft 6
=гв
Метод №3 ] Метод №4 j
с?
сз
I > -«
I'p S
--S’ v> Srf
Рис. 8.3. Классификация режимов штопора
и методов вывода из них современных самолетов
колебаний самолета на таких режимах может достигать весьма
больших величин.
Неустойчивый нормальный штопор наблюдается обычно на
больших высотах или реже — на средних высотах в начале ре-
жима. Неустойчивый перевернутый штопор встречается весьма
редко.
Рис. 8. 4а. Запись прибора-самописца: неустойчи-
вый нормальный штопор, протекающий в виде
падения листом по спиралеобразной траектории
Устойчивым называется штопор, в процессе которого самолет
не изменяет направления своего вращения ни по рысканию, ни по
крену. Устойчивый штопор может быть колебательным или равно-
мерным. Устойчивый колебательный штопор иногда сопровож-
дается большими амплитудами колебаний угловой скорости крена,
однако при этом амплитуды колебаний угловой скорости рыскания
оказываются незначительными, отсутствуют непроизвольные изме-
нения направления вращения и явные остановки самолета (см.
рис. 8.5, а); амплитуды колебаний перегрузок в устойчивом што-
поре значительно меньше, чем в неустойчивом. Устойчивый колеба-
290
Нкм
№ Г
16 -
/4 -
12 -
Ю -
8 -
6 -
б)
Рис. 8.46. Запись прибора-самописца: неустойчивый нормальный штопор, происходящий в виде
биений
Р н с. 8. 4в. Запись прибора-самописца: неустойчивый нормальный штопор с на-
растающими колебаниями самолета
292 .
тельный штопор наблюдается обычно на средних высотах при срав-
нительно малой продолжительности режима.
Устойчивый равномерный штопор происходит при сравнительно
малых (иногда практически нулевых) амплитудах колебаний угло-
вых скоростей вращения и углов наклона самолета. Он характе-
ризуется установившимся интенсивным вращением самолета
с устойчивым выдерживанием исходного направления этого враще-
ния (см. рис. 8.5,6). Устойчивый равномерный нормальный што-
пор возникает на средних и малых высотах, особенно при большой
продолжительности режима, и протекает, как правило, на больших
закритических углах атаки. Устойчивый равномерный переверну-
тый штопор протекает при весьма больших абсолютных величи-
нах угловой скорости вращения с очень малыми колебаниями
самолета.
Осью штопора называется ось спиралевидной траектории движе-
ния центра тяжести самолета в штопоре, а радиусом штопора —
радиус спирали, по которой движется центр тяжести самолета
в установившемся режиме штопора.
Установившимся (вертикальным) режимом штопора назы-
вается штопор с вертикальной или весьма близкой к вертикали
осью, при котором средние значения угла атаки, индикаторной ско-
рости, компонентов угловой скорости вращения и перегрузки по
осям самолета практически не меняются по времени (но с измене-
нием высоты полета меняется истинная скорость полета). Пере-
ходным участком штопора называется неустановившийся участок
режима, начинающийся непосредственно после сваливания и для-
щийся до появления установившегося режима (вертикального
штопора).
У современных сверхзвуковых самолетов переходной участок
штопора оказывается более протяженным (при одинаковых на-
чальных условиях //о, пуп и т. д.), чем у дозвуковых самолетов
(рис. 8.6). Это обусловлено в основном увеличением полетных
весов и минимальных скоростей полета (из-за возрастания удель-
ной нагрузки на крыло и ухудшения несущих свойств последнего)
у сверхзвуковых самолетов. Движение современных сверхзвуковых
самолетов на переходном участке штопора происходит неравно-
мерно, с большими колебаниями, иногда с остановками и даже из-
менениями направления вращения самолета. Основными причи-
нами неравномерности движения самолета на переходном участке
штопора являются^несовпадение оси вращения самолета (оси што-
пора) и вектора скорости полета, изменение скорости и числа М
полета, нелинейный характер протекания аэродинамических ха-
рактеристик по углам атаки и скольжения, а также влияние гиро-
скопического момента ротора двигателя (винта). Ввиду сравни-
тельно большой продолжительности переходного участка штопора,
особенно после сваливания с больших высот, летчикам на совре-
менных сверхзвуковых самолетах при попадании в штопор при-
ходится сталкиваться чаще всего с этим переходным участком,
293
Нкм У^ км/час
Рис. 8.5. Записи приборов-самописцев, полученные
в полете при выполнении устойчивых нормальных
штопоров:
а—устойчивый колебательный штопор; б—устойчивый равно-
мерный штопор
294
а не с режимом вертикального штопора. Как правило, сверхзвуко-
вой самолет летчик начинает выводить из штопора еще до появле-
ния режима вертикального штопора (которому присуще более
устойчивое и равномерное движение самолета, чем на переходном
участке).
У сверхзвуковых самолетов в штопоре средняя угловая ско-
рость вращения оказывается, как правило, меньшей, а средний
Рис. 8.6. Траектория движения самолета на переходном участке
штопора:
а—дозвуковой самолет Vo= V mjn(nyQ=^^I б—сверхзвуковой самолет Vo=
=Vmin^z/0=1^ в—сверхзвуковой самолет Vo>VmJn(л//0>1)
угол атаки — большим, чем у дозвуковых самолетов. Объясняется
это в основном возрастанием разноса масс в направлении про-
дольной оси фюзеляжа у сверхзвуковых самолетов.
Начальная высота входа самолета в штопор может существен-
но влиять на характеристики режима. Неравномерность и неста-
бильность режима, присущие штопору современных сверхзвуковых
самолетов, обычно возрастают с увеличением начальной высоты.
При сваливании с больших высот заметно усиливаются колебания
и увеличивается скорость снижения самолетов в штопоре, резче
проявляется различие между режимами правого и левого штопора.
Протяженность и продолжительность переходного участка што-
пора при неизменном скоростном напоре значительно возрастают
с-увеличением начальной высоты, что объясняется увеличением
начальной истинной скорости полета.
295
С возрастанием начальной приборной скорости значительно
увеличиваются резкость сваливания, а также неравномерность
движения и колебания самолета в начале режима из-за возраста-
ния аэродинамических сил и моментов (увеличение скоростного
напора). При сваливании с начальной перегрузкой nj/>l(VCB>
> Vmin) на начальном участке переходного режима траектория по-
лета отклоняется вверх (см. рис. 8.6), что обусловлено действием
сравнительно большой нормальной силы, направленной верти-
кально вверх до тех пор, пока не развился крен.
На характер штопора может весьма существенно влиять откло-
нение элеронов в режиме как по штопору, так и против штопора.
Отклонение элеронов по штопору в правом нормальном штопоре
соответствует отклонению ручки (штурвала) управления вправо,
в правом перевернутом штопоре—влево; в левых штопорах —
наоборот.
Отклонение элеронов против штопора в правом нормальном
штопоре соответствует отклонению ручки (штурвала) управления
влево, в правом перевернутом штопоре — вправо; в левых штопо-
рах — наоборот.
У современных сверхзвуковых самолетов влияние отклонения
элеронов на штопор заметно возросло по сравнению с дозвуковыми
самолетами. У самолетов с крылом сравнительно небольшого
удлинения при отклонении элеронов по штопору обычно режим
нормального штопора становится менее устойчивым, уменьшаются
абсолютные величины средних угловых скоростей, увеличиваются
колебания самолета, возрастает неравномерность вращения и мо-
жет даже непроизвольно измениться направление вращения само-
лета. Отклонение элеронов против штопора в режиме нормального
штопора обычно приводит к возникновению более устойчивого и
равномерного штопора с меньшими колебаниями и более интенсив-
ным вращением самолета.
Влияние отклонения элеронов может также существенно сказы-
ваться и на характеристиках перевернутого штопора. У современ-
ных сверхзвуковых самолетов при отклонении элеронов по што-
пору в перевернутом штопоре обычно увеличиваются неравномер-
ность движения и колебания самолета, уменьшается устойчивость
движения самолета в режиме, а также могут возникать остановки
или изменения направления вращения самолета. При отклонении
элеронов против штопора в перевернутом штопоре уменьшаются
колебания самолета, вращение становится более равномерным,
и самолет переходит на меньшие по абсолютной величине средние
углы атаки, т. е. самолет опускает «нос» в положении «на спине»,
что иногда приводит к переходу его в режим нормального штопора.
8.2. ВЫВОД СОВРЕМЕННЫХ САМОЛЕТОВ
ИЗ СВАЛИВАНИЯ И ШТОПОРА
Пилотирование самолета при сваливании и особенно в штопоре
отличается от пилотирования его на всех других режимах полета.
296
Обусловлено это в первую очередь тем, что на закритических углах
атаки реакция самолета на действия рулями значительно замед-
ляется и ослабляется, требуются весьма резкие и большие откло-
нения рулей, часто на полный ход (от упора до упора). Кроме того,
действие элеронов в штопоре, как отмечалось выше, обычно про-
тивоположно тому действию, которое они оказывают на всех других
режимах полета. Ощущения и ориентация летчика в штопоре со-
вершенно иные, чем в обычных эксплуатационных режимах полета.
Поэтому и методы пилотирования для вывода самолета из свали-
вания и штопора существенно отличаются от методов пилотирова-
ния на всех эксплуатационных режимах полета.
Для вывода самолета из сваливания или из режима околокри-
тических углов атаки летчик вначале должен действовать только
рулем высоты (управляемым, стабилизатором), отклоняя ручку
(штурвал) управления «от себя». Для парирования кренения само-
лета на около- и закритических углах атаки пользоваться элеро-
нами опасно, так как можно ускорить переход самолета в штопор.
Руль направления при выводе из сваливания также рекомендуется
удерживать в нейтральном положении до тех пор, пока самолет
не перейдет на заведомо докритические углы атаки.
Отклонением рулей на вывод из штопора является отклонение
их против штопора. Отклонение руля высоты (управляемого стаби-
лизатора) против штопора означает в нормальном штопоре откло-
нение ручки (штурвала) управления «от себя», в перевернутом —
«на себя». Отклонение руля направления (управляемого киля)
против штопора означает в левом штопоре отклонение правой пе-
дали вперед, в правом—левой педали вперед. Запаздыванием
выхода из штопора называется время в секундах или количество
витков с момента окончания отклонения руля высоты (управляе-
мого стабилизатора) на вывод до момента прекращения самовра-
щения самолета.
Ввиду многообразия режимов штопора нет какого-либо одного
метода, пригодного для вывода всех современных самолетов из
всех возможных режимов штопора (и даже, как правило, одного
самолета из всех возможных на нем режимов штопора). Поэтому
существуют четыре метода вывода современных самолетов из нор-
мального и три метода вывода из перевернутого штопора.
Методы вывода самолета из нормального штопора схематиче-
ски представлены на рис. 8.7. При выводе самолета из штопора
методом № 1 руль высоты (управляемый стабилизатор) и руль
направления одновременно отклоняются в нейтральное положение
при нейтральном положении элеронов. Вывод из штопора методом
№ 2 начинается с перекладки руля направления полностью против
штопора с последующим (через 2—4 сек) отклонением руля вы-
соты в нейтральное положение (при нейтральном положении эле-
ронов). При выводе из штопора методом № 3 руль направления
перекладывается полностью против штопора, а через 3—6 сек и
руль высоты также полностью отклоняется против штопора (при
297
нейтральном положении элеронов). Метод № 4 отличается от ме-
тода № 3 тем, что одновременно с отклонением руля направления
отклоняются и элероны — по возможности полностью на вывод
(у современных сверхзвуковых самолетов это обычно соответст-
вует отклонению элеронов по штопору).
Нумерация методов вывода самолетов из нормального штопора
ведется, как видно из сказанного, в направлении нарастания их
О
Метод Вывода №1
Штопор ВыВод из штопора
Нейтрально
РН\ 1сек
По штопору к
По штопору j
Элероны нейтрально.
Метой вывода №2
Штопор о
РН.
Элероны
По штопору
Вывод из штопора
Протиб штопора
Нейтрально
t сек
Методу вывода
Штопор § I Вывод из штопора
Против штопора
[ Против штопора
. I - г"Т 1|
Элероны нейтрально ] |[
Jlojumonopy_ J____J
Метод Вывода N°U
Штопор § [3 Вывод из штопора.
Против штопора
РН>
РН.
По штопору
РВ
По штопору^ J
~Элероны
нейтрально
По штопору
По штопору j
'Против_штопора
Эл.нсГвывод "।
~tceK
7 сек
&
Рис. 8. 7. Схематическое изображение действий рулями при выводе
самолета из нормального штопора
«силы» (эффективности). Наиболее эффективным является метод
№ 4. Выбор требуемого метода вывода самолета из штопора опре-
деляется только характером самого режима. Для вывода совре-
менных самолетов из нормального штопора наиболее часто при-
меняют два первых метода.
Наличие четырех методов вывода (вместо ранее рекомендовав-
шегося одного) существенно повышает надежность вывода совре-
менных самолетов из нормального штопора, а следовательно, и
безопасность полета, хотя это и требует несколько большего вни-
мания летчика. Опыт летных испытаний современных самолетов
и в частности отзывы летчиков-испытателей показывают, что с вве-
дением четырех методов работа летчика усложнилась значительно
меньше, чем это может показаться на первый взгляд, так как рас-
сматриваемые четыре метода вывода отличаются один от другого
лишь постепенным «усилением» (увеличением потребных откло-
298
нений рулей и интервалов между их отклонениями), тогда как
прйнцип действий рулями по существу не меняется (только при
пользовании методом № 4 требуется отклонять и элероны). Огра-
ничиться применением наиболее «сильных» (№ 3 и 4) методов,
что, как это иногда ошибочно предполагают, якобы упростит ра-
боту летчика, нельзя. Каждый метод вывода имеет свою область
применения.
М'етод
Штопор
№1
Вывод из
штопора го
°в,н.з
Метод №2
Штопор
вывод из
штопора
+ ^нтах
___
6H=z7 tee*
ь3=0
* ^нтпах
1=0 tee*
П
Ъз-0 |
Метод №3
°вдн * ‘ Штопор Вывод из штопора
+ $втах ^нпшх
-&втпах
Рис. 8. 8. Схематическое изображение действий рулями
при выводе самолетов из перевернутого штопора
Как отмечалось выше, выбор требуемого метода вывода само-
лета из штопора определяется только характером самого режима
и не должен связываться с другими параметрами (например, с вы-
сотой полета), которые могут быть использованы летчиком лишь
в качестве вспомогательных источников информации для облегче-
ния и ускорения правильного определения характера режима.
Во всех случаях при выводе самолета из штопора отклонения ру-
лей должны быть по возможности более энергичными. Медленное,
вялое отклонение рулей ухудшает характеристики выхода, а ино-
гда и приводит к невыходу. Интервал между отклонениями руля
направления и руля высоты (управляемого стабилизатора) лучше
отсчитывать в секундах, а не в витках, так как даже при неболь-
шом изменении характера режима (например, угловой скорости
вращения самолета) очень трудно, а зачастую и невозможно пра-
вильно (без очень грубых ошибок) отсчитывать витки, особенно
при изменениях скорости вращения самолета, при периодических
попаданиях самолета в положение «на спине» и т. п.
299
Методы вывода современных самолетов из перевернутого што-
пора, показанные на рис. 8.8, заключаются в следующем:
1) метод № 1 для перевернутого штопора — вывод из штопора
одновременно перекладкой руля высоты и руля направления в ней-
тральное положение при нейтральных элеронах;
2) метод № 2 для перевернутого штопора — вывод из штопора
отклонением руля направления полностью против штопора с после-
дующим (через 2—4 сек) отклонением руля высоты в нейтральное
положение (при нейтральном положении элеронов);
3) метод № 3 для перевернутого штопора — вывод из штопора
отклонением руля направления полностью против штопора с после-
дующим (через 2—4 сек) отклонением руля высоты также пол-
ностью против штопора (при нейтральном положении элеронов).
Для вывода современных сверхзвуковых самолетов из перевер-
нутого штопора чаще всего приходится пользоваться методом № 2.
8.3. МЕТОДИКА И ПРОГРАММА ЛЕТНЫХ ИСПЫТАНИЙ
НА СВАЛИВАНИЕ И ШТОПОР
Летные испытания на сваливание и штопор проводятся с целью
определения особенностей поведения самолета и работы двигателей
на этих режимах и при подходе к ним, а также с целью выбора ме-
тодов пилотирования, позволяющих предотвратить попадание
самолета в эти режимы, а в случае попадания — надежно его
вывести.
На сваливание и штопор испытываются только маневренные
самолеты, у которых предельно допустимая в нормальной эксплуа-
тации перегрузка nJJmax составляет не менее 3,5. Тяжелые само-
леты испытываются лишь на сваливание, а иногда только на опре-
деление характеристик управляемости и устойчивости вплоть до
больших, но докритических углов атаки (обычно на несколько гра-
дусов превышающих углы атаки, соответствующие значениям су
тряски, но меньших асв).
Влияние сжимаемости (числа М) на возникновение срыва по-
тока на больших углах атаки проявляется обычно заметно уже
начиная с чисел М полета порядка 0,3—0,5 на самолетах, у которых
крыло не обдувается потоком от воздушных винтов, и порядка
0,25—0,3 (при убранной механизации) или 0,2—0,25 (при выпу-
щенной механизации), в случае обдуваемого винтами крыла. Объ-
ясняется это тем, что при больших углах атаки уже и на таких
малых дозвуковых числах М полета местная скорость потока
в области носка крыла может быть около- или даже сверхзву-
ковой.
Это необходимо учитывать при проведении летных испытаний —
особенно тяжелых самолетов, имеющих крыло сравнительно боль-
шой относительной толщины. Указанная особенность в частности
налагает определенные ограничения на высоты выполнения режи-
мов полета на сваливание или с выходом на большие докритиче-
300
ские углы атаки. Так, например, для оценки характеристик свали-
вания самолета в посадочной конфигурации (с выпущенной меха-
низацией) летные испытания на этих режимах (определение харак-
теристик сваливания и методов вывода самолета из него) должны
проводиться на высотах не более примерно 4—6 км. В противном
случае полученные (на больших высотах) характеристики свали-
вания самолета могут существенно отличаться от таковых на ре-
жиме захода на посадку.
Подготовка к испытаниям
Перед летными испытаниями самолета на сваливание и што-
пор обязательно проводятся испытания на штопор свободно што-
порящей динамически подобной модели этого самолета в штопор-
ной аэродинамической трубе. Такая модель обязательно является
и геометрически подобной: она точно воспроизводит геометриче-
скую форму самолета в заданном масштабе. Динамическое ее по-
добие самолету означает, что вес модели и распределение масс
в ней находятся в определенном соответствии с весом самолета и
распределением масс в нем.
Штопорная труба представляет собой вертикальную аэродина-
мическую трубу закрытого типа. Внешний вид и поперечное сече-
ние такой трубы, находящейся в исследовательском центре Лэнгли
(The Langley Research Center) в США, приведены на рис. 8.9. На
рис. 8. 10 показана рабочая часть этой трубы с находящейся в ней
свободно штопорящей моделью.
Оборудование самолета для испытаний
Перед испытаниями самолет оборудуется противоштопорной
установкой (противоштопорные ракеты или противоштопорный
парашют), позволяющей вывести самолет из штопора в случае
невозможности прекращения самовращения с помощью аэродина-
мических рулей.
Существуют два вида расположения противоштопорных ракет
(ПР) на самолете: с вертикальным или горизонтальным направле-
нием действия их тяги. На практике, как правило, применяют
противоштопорные установки с горизонтальным расположением
ракет (рис. 8. 11 и 8. 12).
Пример установки на самолете и схема выпуска противошто-
порного парашюта (ПП) показаны на рис. 8. 13.
При испытаниях на сваливание и штопор самолет обязательно
должен быть оборудован приборами, регистрирующими углы
отклонения рулей и элеронов и усилия на рычагах управления (при
безбустерном или обратимом бустерном управлении), три состав-
ляющие угловой скорости и перегрузки, высоту и скорость полета.
Самописец угловых скоростей (жирограф), устанавливаемый на
самолете для проведения испытаний на штопор, должен иметь
301
Рис. 8.9. Внешний вид и поперечное сечение вертикальной
аэродинамической трубы, предназначенной для испытаний сво-
бодно штопорящих моделей
302
рамки, позволяющие регистрировать значения угловых скоростей
в следующих диапазонах: (0xmax~±3 рад/сек. сортах*5* ±2 рад/сек,
(0г max ~ ± 1,5 рад/свК.
Рис. 8. 10. Внутренний вид рабочей части штопорной аэродинамиче-
ской трубы с находящейся в ней свободно штопорящей моделью
Испытания неманевренных самолетов
на больших углах атаки
Как уже указывалось выше, самолеты, на которых допускается
выполнение маневров с перегрузками не более n^max = 3,5 (так на-
зываемые неманевренные самолеты) на штопор не испытываются.
Однако их обязательно испытывают на больших углах атаки:
вплоть до критических (до сваливания), или до больших докрити-
ческих углов атаки, обычно на несколько градусов превышающих
углы атаки начала предупреждающей тряски (если таковая
имеется), но меньших асв> Величины предельно допустимых углов
атаки при проведении таких летных испытаний определяются
в первую очередь из условий обеспечения безопасности полета —
безопасности работы экипажа испытателей. Целью таких испыта-
ний является определение характеристик сваливания; изучение
особенностей полета, поведения и пилотирования самолета при
подходе к сваливанию; определение характеристик управляемости
и устойчивости самолета на больших углах атаки; оценка возмож-
ности и отработка наилучших методов пилотирования для преду-
преждения сваливания, отработка методов пилотирования для вы-
303
вода самолета из сваливания (если по каким-либо причинам не
удается его предотвратить) и определение количественных харак-
теристик сваливания.
Рис. 8. 11. Пример расположения на самолете противоштопорных ракет (ПР)
с горизонтальным направлением действий тяги, устанавливаемых под крылом
Перед проведением испытаний на больших углах атаки легких,
а тем более тяжелых неманевренных самолетов, производятся про-
верка их прочности и тренировка летчиков-испытателей по выводу
Рис. 8.12. Пример расположения на
самолете противоштопорной ракеты
(ПР) с горизонтальным направле-
нием тяги, устанавливаемой на фю-
зеляже (в хвостовой его части)
самолета из сваливания. Провер-
ка поведения самолета на боль-
ших углах атаки начинается при
нормальном полетном весе для
легких и при малом весе для тя-
желых самолетов. Первые поле-
ты производятся с убранными
шасси и органами механизации —
по возможности при средней экс-
плуатационной центровке само-
лета.
Вначале определяются харак-
теристики управляемости и устой-
чивости самолета при работе
двигателя на режиме малого га-
за — в процессе плавных тормо-
жений самолета в прямолинейном
горизонтальном полете. При до-
стижении в процессе таких тор-
можений скорости, превышающей
ожидаемую (по данным испыта-
ний модели самолета в аэродина-
мической трубе) приборную ско-
рость сваливания примерно на
AVnp = 504-60 км!час, производит-
ся проверка эффективности ру-
лей и элеронов. С этой целью вы-
полняются «покачивания» само-
лета — последовательно каждым органом управления в отдельности.
Последующая проверка эффективности органов управления про-
304
изводится на скорости, меньшей предыдущей примерно на 15—
20 км/час.
Вывод из сваливания производится следующим образом. Вна-
чале отклоняется ручка (штурвал) управления в направлении
от себя до тех пор, пока не прекратится предупреждающая тряска
или (при ее отсутствии) пока летчик не убедится по другим при-
Р и с. 8. 13. Установка на самолете и схема выпуска про-
тивоштопорного парашюта:
/—стреляющий механизм; 2—парашютный контейнер; 3—концевой
колпачок; 4—сдвоенный стальной трос; 5—силовой предохрани-
тель; 6—замок крепления парашюта; 7—нейлоновая стропа-аморти-
затор; 3—противоштопорный парашют; 9—чехол противошто-
порного парашюта; 10—вытяжной парашют; //—пуля; /2—соеди-
ненные между собой вспомогательные устройства
знакам в восстановлении заведомо докритических углов атаки.
По прекращении тряски (при выходе на заведомо докритические
углы атаки) производится плавный вывод самолета в режим гори-
зонтального полета. После этого элеронами окончательно устра-
няется образовавшийся крен. Пользоваться элеронами на около-
критических углах атаки не следует, так как в этом случае эффект
от их действия может оказаться обратным ожидаемому. Действуя
рулем высоты, летчик стремится не допускать значительного опу-
скания носа самолета и повторного его сваливания.
Если выход самолета из сваливания происходит без существен-
ного запаздывания, то при следующем выводе его из этого режима
305
ручка управления плавно отклоняется от себя, но с задержкой ее
в нейтральном положении примерно на 2 сек, или до момента пре-
кращения предупреждающей тряски. В случае плавного свалива-
ния после «перетягивания» ручки (штурвала) управления следует
задержать ее в этом положении (отклоненной в направлении на
себя) примерно до 2 сек, а затем произвести вывод самолета из
сваливания указанным выше способом.
После этого проверяются характеристики устойчивости, управ-
ляемости и особенности поведения самолета на малых скоростях
полета при работе двигателей на номинальном режиме. В таких
полетах скорость уменьшается также постепенно, но уже в режи-
мах набора высоты. Торможение самолета производится до появ-
ления признаков, предупреждающих о приближении режима сва-
ливания, но наименьшая достигаемая при этом скорость полета
не должна быть меньше скорости, полученной в процессе торможе-
ний при работе двигателей на режиме малого газа. Затем на много-
моторных самолетах определяются минимально допустимые ско-
рости полета при несимметричной тяге (с отказавшим двигателем).
Поведение самолета на больших углах атаки (желательно
вплоть, до аСв) при наличии перегрузки (пу>1) определяется «пе-
ретягиванием» ручки управления на режимах планирования.
С этой целью производятся выводы из планирования при работе
двигателей на режиме малого газа (холостого хода). В таких
режимах элероны и руль направления удерживаются в нейтраль-
ном положении. При «перетягивании» ручки управления задержка
ее в положении на себя, а также в нейтральном положении при
последующей отдаче ее от себя (на вывод), производится продол-
жительностью до 2 сек. В качестве верхнего предела максимально
допустимой на таких режимах перегрузки берутся величины
Пу ~ 0,9 Пу max*
В результате проведения испытаний неманевренных самолетов
на больших углах атаки и на сваливание должны быть даны
ответы на следующие вопросы:
1. Значения минимальных и минимально допустимых скоростей
полета.
2. Наличие у самолета предупреждающей тряски и других
признаков, предупреждающих о выходе на критические углы атаки.
3. Устойчивость и управляемость (эффективность рулей и эле-
ронов) самолета на скоростях, близких к скорости сваливания.
4. Особенности поведения самолетов на больших углах атаки
и при сваливании.
5. Наличие тенденции к самопроизвольному кабрированию са-
молета при увеличении угла атаки и перегрузки (при наличии та-
ковой— количественная ее оценка).
6. Возможность предупреждения сваливания: парирования дей-
ствием руля высоты роста перегрузки и угла атаки на любой ста-
дии процесса самопроизвольного кабрирования или начала свали-
вания.
306
7. Влияние небольших отклонений элеронов и руля направления
на характер сваливания.
8. Наивыгоднейший способ вывода самолета из сваливания
(в начале режима и при развившемся сваливании).
9. Характеристики выхода самолета из сваливания (потеря вы-
соты, запаздывание выхода, потребные отклонения рычагов управ-
ления, усилия на них и т. п.).
По полетным материалам, полученным в процессе таких испы-
таний, должны быть построены балансировочные кривые и опре-
делены следующие величины:
а) значения коэффициента подъемной силы, при которых
появляется неустойчивость по перегрузке с^неуст!
б) значения коэффициента подъемной силы, при которых воз-
никает предупреждающая тряска су тр;
в) значения коэффициента подъемной силы, соответствующие
началу сваливания самолета су^;
г) предельно допустимые в нормальной летной эксплуатации
самолета значения коэффициента подъемной силы сУдоп (при раз-
личных режимах работы двигателей, положениях органов меха-
низации и т. п.).
В качестве судоп принимаются наименьшие из всех полученных
в процессе летных испытаний значения с^тр и с^неуст, а соответ-
ствующее ему значение аДОп должно быть ниже угла атаки начала
сваливания асв не менее чем на 2°—3°.
Выполнение полетов на сваливание и штопор
Полеты на штопор производятся только при видимости земли
и облачности менее 5 баллов. Самописец (датчик) перегрузки сле-
дует устанавливать по возможности ближе к центру тяжести само-
лета, так как при размещении прибора далеко от центра тяжести
в случае интенсивного вращения самолета в штопоре в показания
прибора требуется вводить поправки, что затрудняет обработку
полетных материалов и снижает точность результатов.
Объем летных испытаний на сваливание и штопор зависит от
результатов испытаний динамически подобной модели самолета
в штопорной аэродинамической трубе, общих летных данных са-
молета (диапазонов эксплуатационных скоростей и высот полета
и т. д.) и особенностей его летной эксплуатации (с внешними под-
весками или без них). В основном характеристики штопора опре-
деляются при среднем эксплуатационном полетном весе самолета
и соответствующей центровке. Для проверки полученных результа-
тов производятся контрольные полеты при предельных (или близ-
ких к ним) значениях этих параметров.
Различают заводские и специальные летные испытания само-
летов на сваливание и штопор. Заводские испытания проводятся
по сокращенной программе (порядка 4—6 полетов). Целью завод-
ских испытаний самолета на сваливание и штопор является опре-
307
деление основных особенностей поведения его при полете на малых
скоростях, при сваливании и в штопоре, а также выбор потребных
методов вывода самолета из этих режимов.
Заводские испытания самолетов на сваливание и штопор
обычно предусматривают выполнение следующих режимов:
а) определение минимальной скорости полета и особенностей
поведения самолета на малых скоростях и при сваливании. Высота
полета Н~ 104-12 км. Полет без наружных подвесок;
б) определение особенностей поведения самолета при свалива-
нии на повышенной скорости. Высота полета Я~ 10-4-12 км. Полет
без наружных подвесок;
в) определение характеристик нормального штопора и метода
вывода из него. Продолжительность штопора порядка 10—15 сек
(примерно 3 витка). Ввод в штопор с малой скорости на высоте
Н~ 12-4-14 км. При вводе и в режиме элероны удерживаются в ней-
тральном положении. Полет без наружных подвесок;
г) определение влияния отклонения элеронов (по штопору и
против штопора) при вводе и в режиме штопора. Высота ввода
в штопор 12-4-14 км. Полет без наружных подвесок;
д) определение особенностей поведения самолета при свалива-
нии и в штопоре с наружными подвесками. Высота начала свали-
вания Я^ 10-4-14 км.
Программа специальных испытаний самолета на сваливание и
штопор содержит обычно около 25 полетов. В этих полетах опре-
деляются следующие основные данные:
а) минимальные скорости, управляемость, устойчивость и осо-
бенности поведения самолета на больших углах атаки вплоть до
сваливания; склонность самолета к сваливанию и входу в штопор.
При этом сваливания производят с исходных режимов как прямо-
линейного (типа изображенного на рис. 8.14), так и криволиней-
ного полета (обычно с виражей, а также и спиралей, выполняемых
при постоянных числах М) в диапазоне скоростей от Утт и по воз-
можности (с учетом предельно допустимых эксплуатационных пе-
регрузок и эффективности управляемого стабилизатора) до Упред
И Мпред j
б) характеристики нормального штопора продолжительностью
15—40 сек (или от трех до шести витков, если вращение самолета
установившееся) после сваливания как со средних, так и с боль-
ших, близких к практическому динамическому потолку, высот при
нейтральном положении элеронов;
в) характеристики перевернутого штопора при нейтральном
положении элеронов;
г) влияние отклонения элеронов (по штопору и против што-
пора) на характеристики нормального и перевернутого штопора;
д) потребные методы вывода самолета данного типа из всех
возможных на нем режимов сваливания и штопора, а также ме-
тоды пилотирования, позволяющие предотвратить попадание само-
лета в эти режимы;
308
е) влияние наиболее вероятных- ошибок пилотирования на воз-
можность сваливания и попадания самолета в штопор, а также на
характеристики выхода самолета из этих режимов;
ж) особенности работы силовой установки при сваливании
и в штопоре.
По результатам этих специальных испытаний разрабатывается
инструкция летчику по пилотированию самолетов данного типа
при выходе их на большие углы атаки, при сваливании и попада-
нии в штопор.
Рис. 8. 14. Торможение с последующим сваливанием само-
лета с исходного режима прямолинейного горизонтального
полета
Летные испытания на сваливание и штопор начинают с изуче-
ния поведения самолета на околокритических углах атаки и опре-
деления минимальных скоростей полета. С этой целью производят
плавные торможения самолета в прямолинейном полете до свали-
вания. При этом летчик отмечает все характерные явления, пред-
шествующие свалцранию (наличие предупреждающей тряски
и т. п.), характер изменения потребных отклонений рулей и уси-
лий на рычагах управления при подходе к сваливанию и на сва-
ливании, а также (три отсутствии самописца остатка горючего)
регистрирует показания топливомера для определения веса и цент-
ровки самолета на этом режиме. Вначале такие торможения про-
изводят при работе двигателей на режиме малого газа и при
убранных органах механизации. В дальнейшем торможения вы-
309
полняют при различных режимах работы силовой установки и по-
ложениях органов механизации.
Режим работы силовой установки может оказывать весьма
существенное влияние на характеристики сваливания. Это бывает
обусловлено изменением несущих свойств самолета, изменением
условий работы хвостового оперения и эффективности рулей, изме-
нением условий балансировки самолета по моменту и по усилиям
и т. п. — в зависимости от изменения режима работы силовой уста-
новки. Особенно сильно влияние режима работы силовой уста-
новки на характеристики сваливания может проявляться у много-
моторных самолетов с ТВД, у которых изменение режима работы
двигателей приводит в частности к значительному изменению усло-
вий обдува крыла спутной струей винта.
У тяжелых многомоторных самолетов с ТВД, расположенными
на крыле, это может приводить к весьма существенному влиянию
режима работы двигателей на несущие свойства крыла из-за из-
менения условий обдува последнего' спутными струями винтов.
Так, например, в некоторых случаях увеличение числа оборотов
ТВД от оборотов малого газа до максимальных может приводить
к возрастанию величины сусъ на 100% и даже больше.
Характеристики сваливания самолета с выпущенной механиза-
цией также могут существенно отличаться от таковых при убран-
ных органах механизации. Обычно это бывает обусловлено в пер-
вую очередь изменением несущих свойств крыла (значений с^св),
изменением действующих на самолет результирующих аэродина-
мического момента и аэродинамической силы (изменением харак-
теристик устойчивости и условий балансировки самолета), измене-
нием углов скоса потока в области расположения хвостового опе-
рения (изменением эффективности рулей) при изменении положе-
ния органов механизации.
В процессе испытаний оценивают эффективность органов управ-
ления и устойчивость самолета при подходе к сваливанию и на
сваливании, определяют минимальные и эволютивные скорости
полета.
При проведении летных испытаний на штопор летчик должен
строго придерживаться заданного порядка действий рулями на
вводе самолета в штопор и в режиме штопора. Ввод самолета
в штопор с малых скоростей полета производится обычно путем
плавного отклонения ручки управления «на себя» до достижения
скорости, близкой к Vmin. После этого одновременно отклоняются
ручка управления полностью «на себя» (до упора) и руль направ-
ления полностью по штопору (при нейтральном положении элеро-
нов). Ввод самолета в штопор с больших скоростей производится
обычно резкими отклонениями рулей.
Если выбранный летчиком метод вывода практически не при-
водит к выходу самолета из штопора (запаздывание превышает
примерно 15 сек в режиме неустойчивого штопора или 2 витка
в режиме устойчивого штопора), то рули устанавливают снова по
310
штопору и через несколько секунд повторяют вывод. При повтор-
ном выводе применяют более сильный метод. Так, например, если
самолет из нормального штопора нельзя вывести методом № 2',
го для следующей попытки вывода используют метод № 3.
Летные испытания на перевернутый штопор проводят обычно
после окончания испытаний самолета на нормальный штопор. Обу-
словлено это, во-первых, тем, что обычно вероятность попадания
самолета в перевернутый штопор оказывается значительно мень-
шей, чем вероятность попадания его в нормальный штопор, и,
во-вторых, тем, что вывод самолета из перевернутого штопора про-
изводится легче чем из нормального. Все полеты на штопор выпол-
няют в районе аэродрома, чтобы в случае необходимости можно
было произвести посадку самолета с неработающим двигателем.
Испытания на штопор проводят только после того, как определены
возможность выполнения и характеристики посадки данного само-
лета с неработающими двигателями. В первых полетах опытного
самолета на штопор целесообразно производить киносъемку само-
лета и наблюдение за ним с другого самолета.
8.4. ОБРАБОТКА И АНАЛИЗ
МАТЕРИАЛОВ ЛЕТНЫХ ИСПЫТАНИЙ
После каждого полета на штопор тщательно анализируют по-
летные записи и отзыв летчика-испытателя. Наибольшее внимание
при анализе уделяют особенностям поведения самолета на рас-
сматриваемых режимах. Задание на последующий полет состав-
ляют с учетом результатов предыдущего полета.
На полученных в полете записях приборов отмечают наиболее
интересные (характерные) режимы, подлежащие обработке и ана-
лизу. Обработка полетных записей начинается с расшифровки
и построения графиков параметров движения и управления само-
летом по времени (типа приведенных на рис. 8.4). Для каждого
режима на графике указывают вес и центровку самолета, режим
рабрты двигателей и данные, характеризующие внешнюю конфи-
гурацию самолета (положение органов механизации, шасси и др.).
По материалам, полученным при выполнении торможений, ви-
ражей, спиралей и дач руля высоты, заканчивающихся выходом
самолета на режим сваливания, определяют балансировочные кри-
вые, характеризующие управляемость и устойчивость самолета по
скорости и перегрузке на всех эксплуатационных углах атаки
вплоть до критических.
Для режимов штопора с равномерным установившимся вра-
щением самолета по графикам типа приведенных на рис. 8. 5 при-
ближенно находят средние угловые скорости крена сох ср, рыскания
а)у ср и тангажа coz ср в функции времени (пример определения сред-
них угловых скоростей крена и рыскания в режиме равномерного
штопора приведен на рис. 8.5,6), а по ним определяют среднюю
311
угловую скорость вращения самолета в штопоре wCp при помощи
известного соотношения
СО = 1/~О)2 _4- О)2 -4- (О2 = f (/).
ср у х ср 1 r/cp I zcp J \ )
(8.1)
Графическим интегрированием зависимости coCp = f(O находят
количество витков 7V, выполненных самолетом на рассматриваемом
отрезке времени = —i\ (в течение всего режима или на вы-
бранном его участке):
1 г"
7V- —
2л J
®ср^.
Углы наклона самолета, углы атаки и скольжения и радиус
штопора в режиме вертикального штопора приближенно опреде-
ляют следующим образом. В вертикальном штопоре направле-
ние вектора средней угловой скорости вращения самолета относи-
тельно оси штопора, т. е. направление самой оси штопора, практи-
чески совпадает с земной вертикалью. В этом случае можно вос-
пользоваться следующими формулами:
(flxcp=0)cPsin&;
(Dycp = (flcpC0s&C0SY;
®гср= —“cpCOs Hsiny. ,
(8.2)
Углы крена и тангажа в рассмотренном случае определяются
зависимостями
В-— arc sin
y = arctg
Пг\
пУ\
(8.3)
(8.4)
где
Здесь п — результирующий вектор перегрузки в центре тяжести
самолета;
пуё — вертикальная составляющая вектора перегрузки
в центре тяжести самолета.
Величина касательного ускорения dVIdt в штопоре может быть
найдена по материалам кинотеодолитных съемок траектории дви-
жения самолета.
Радиус вертикального штопора гшт приближенно определяется
по формуле
- __ nf/g-sinft g r\
'шт П 2 °/
COS ft со ср
312
Для этих режимов средние значения угла атаки самолета
в штопоре аср находят по приближенным формулам
(, ,ЛУ ср . I wCp I ГШт\
arctg-----+—р------- , (8.6)
ср у )
ИЛИ
„tp=arc8,„ (, (8 7)
Р \ пу1 + 41 /
где
sin р —- 4г + 1)-
cos₽cp\ g dt /
Здесь рСр — среднее значение угла скольжения самолета в што-
поре.
Осредненная величина угла скольжения самолета рср опреде-
ляется выражениями
₽с =arcsin----
“ср
(8-8)
или
₽cp = arcsin
где
[ 1 dV \ *1/2 2
Пг1± п*« |/ пл + пху
_i_ dv у
. g dt J
(8.9)
пхУ=пх\ cos acp - «1/1 sin acp.
пЛ +
В случае малости величин п.хЪ nzl (когда квадратами их можно
пренебречь) и » 0, из (8.9) получаем
dt
где
Pco^arcsinf—— 1----—к (8.10)
Р \ у п. /
/za=/z^i sin2acp — nyinxl sin 2аср.
Перед радикалом в формулах (8.9) и (8.10) берется знак ми-
нус при nzi>0 и плюс — при nzi<0.
Расчет величин ас<^ и рср по формулам (8.7) и (8.9) произво-
дится следующим образом. Вначале предполагается рср = 0 и для
этого случая по формуле (8.7) находится величина аср первого
приближения. Затем по ней с помощью формулы (8.9) опреде-
ляется величина рср первого приближения и т. д. Как правило,
второе приближение дает уже вполне приемлемые результаты.
Важной характеристикой является время запаздывания выхода
самолета из штопора /зап, определяемое с момента окончания
313
отклонения руля высоты на вывод из штопора до момента прекра-
щения самовращения самолета, как это показано, например, на
рис. 8.5, б.
Для безопасности полета большое значение имеет потеря вы-
соты на выводе самолета из штопора (Д//Выв). Чем меньше вели-
чина ДЯвыв, тем большим запасом высоты может располагать лет-
чик после вывода самолета из штопора. Величина Д/7ВЫв опреде- .
ляется по' записям приборов как перепад высот с момента
окончания отклонения руля высоты на вывод из штопора до мо-
мента выхода самолета из пикирования в горизонтальный полет
(см. рис. 8.4, а). По значениям ДЯВЫВ, полученным для разных
высот начала вывода самолета из штопора ЯНач и определенным
при практически одинаковых значениях су на выводе суВыВ, строят
зависимость ДЯВЫв=^ (#нач).
Фактические значения минимальных скоростей определяются
по полетным записям, полученным из торможений в момент сва-
ливания, характеризуемого непроизвольным возникновением зна-
чительных по величине угловых скоростей крена, тангажа и рыска-
ния, как это показано на рис. 8. 14. Зная фактические минималь-
ные скорости и соответствующие им значения нормальной пере-
грузки пу 1 св и полетного веса самолета, по известной формуле
определяют
У\ св
3,62-2/?уДП^ 1Св РулпУ1св
— ----z----
V2 ,
v mln
Qo^mln
(8.11)
где руц —удельная нагрузка на крыло в кГ/м?; l/min в км/час и
q0 в к Г -сек2/м4.
Значения су i св, полученные при различных величинах числа М в
координированном полете по записям торможений, спиралей и дач
руля высоты, выполненных до сваливания, наносят на график типа
приведенного на рис. 8.2. На этот же график наносят значения
су 1 доп, определяемые аналогичным путем из тех же режимов поле-
та, но только в момент появления предупреждающей тряски или
продольной неустойчивости самолета по перегрузке и других огра-
ничений.
Используя график типа приведенного на рис. 8.2, находят
предельно допустимые в нормальной эксплуатации самолета (из
условий недопущения непроизвольного сваливания) значения нор-
мальной перегрузки пу i доп в зависимости от числа М (скорости)
и высоты полета. Величину %1д0П обычно определяют для двух-
трех значений полетного веса самолета по формуле
я,1дОп=9,52-^^^, (8.12)
Рул
где рн — давление воздуха на рассматриваемой высоте в
мм рт. ст.\
Руд — удельная нагрузка на крыло в кГ/м2-.
314
Пример полученной таким путем зависимости приведен на
рис. 8. 15. На график наносят также предельно допустимые из
условий прочности конструкции самолета значения нормальной
перегрузки п^тах (максимальная эксплуатационная перегрузка)
и предельно достижимые на сверхзвуковых скоростях полета зна-
чения нормальной перегрузки, получаемые при полном отклонении
ручки управления на себя (пу is ) для чисел М полета, при которых
<4 1 доп. Величины Пу is определяются аналогично Пу1ДОп.
Рис. 8. 15. Зависимость предельно допустимой нормальной
перегрузки от числа М и высоты полета
Применяя график типа, приведенного на рис. 8.2, находят ми-
нимальные скорости полета при различных эксплуатационных по-
летных весах самолета и высотах полета в виде зависимости
Vmm = f(G, Н). Пример такой зависимости дан на рис. 8. 16. Мини-
мальные скорости определяются следующим образом.
Для данных высоты полета и удельной нагрузки на крыло на-
ходят зависимость
^.Г.П = ?(М),
где г.п — коэффициент подъемной силы самолета в прямолиней-
ном горизонтальном полете (пу=1):
с'-"=°'105'77^“т<М)
(здесь также руд в кГ)м2, рн в мм рт. ст.).
Рассчитанную по этой формуле зависимость СуГ.п=ф(М) нано-
сят, на график.типа, показанного на рис. 8.2.
Если у самолета величина асв не превышает <-^20°, то прибли-
женно можно считать су i Съ~су св, т. е. cosaCB~ 1 и sinaCB~0 (так
315
Рис. 8. 16. Зависимость мини-
мальной скорости полета от вы-
соты и полетного веса самолета
как сама по себе точность определения величин су i Св из летного
эксперимента сравнительно невелика). В этом случае точка пере-
сечения кривых c!/icB=f(M) и с2/г.п = ф(М) и определяет число
M = Mmin, соответствующее минимальной скорости полета на дан-
ной высоте с данным полетным
весом самолета (см. рис. 8.2).
По величине Mmm находят со-
ответствующее значение Vmin-
При больших углах атаки
асв, когда допущение cos асв^1
и sin «св ~0 становится уже не-
приемлемым, по значениям
пх 1 св и пу 1св, полученным из
полетных материалов, опреде-
ляют зависимость су CB = F(M).
С помощью этой зависимости
находят Ут1п как и в предыду-
щем случае.
работающими на больших оборо-
тах двигателями или при большом угле между вектором тяги дви-
гателей и направлением полета на величину Vmm существенное
влияние оказывает нормальная составляющая тяги, что следует
учитывать при определении значения Vmm (добавляя к величине
коэффициента аэродинамической подъемной силы соответствую-
щую составляющую коэффициента тяги).
Аналогичным путем (по соответствующим значениям с^доп)
МОЖНО Определить И веЛИЧИНу Vmin доп-
При сваливании самолета с
Глава IX
ОПРЕДЕЛЕНИЕ МАНЕВРЕННЫХ
ХАРАКТЕРИСТИК САМОЛЕТА
9.1. ПОНЯТИЕ МАНЕВРЕННОСТИ
Хорошая маневренность является одним из важнейших усло-
вий обеспечения высоких боевых качеств истребителя и перехват-
чика, а также наиболее эффективного использования бомбардиров-
щика и в значительной степени транспортного и даже пассажир-
ского самолета. Смысл любого совершаемого летчиком или авто-
пилотом маневра заключается в том, чтобы исходя из условий
поставленной тактической задачи соответствующим образом пере-
местить самолет из одной точки пространства в другую, т. е. соот-
ветствующим образом переместить центр тяжести самолета в про-
странстве. Поэтому маневренностью называется способность само-
лета изменять за определенный промежуток времени положение
своего центра тяжести в пространстве, т. е. изменять скорость, вы-
соту и направление полета и проходить заданной длины путь в ре-
жиме установившегося прямолинейного горизонтального полета.
Эти параметры могут изменяться как одновременно, так и раз-
дельно. Например, при установившемся вираже изменяется только
направление движения, а скорость и высота полета остаются неиз-
менными; при прямолинейных горизонтальных разгонах и тормо-
жениях изменяется скорость, а высота и направление полета не
изменяются; в установившемся отвесном пикировании изменяется
только высота полета, а направление и скорость полета сохра-
няются постоянными. При выполнении боевого разворота одно-
временно изменяются все три параметра.
В установившемся прямолинейном горизонтальном полете ско-
рость, высота и направление движения самолета остаются неизмен-
ными. При этом маневр заключается в перемещении самолета
из одной точки пространства в другую с постоянной скоростью.
Диапазоны располагаемых величин скорости и продольных уско-
рений на данной высоте полета характеризуют маневренные воз-
можности самолета в рассматриваемом случае.
Способность самолета поворачиваться вокруг своего центра
тяжести (в результате отклонения рулей) характеризует управ-
317
ляемость самолета и является необходимым условием для выпол-
нения маневров.
Маневренность самолета в общем случае определяется распо-
лагаемыми диапазонами скоростей (чисел М), высот полета и пе-
регрузок в центре тяжести самолета, а также возможной быстро-
той изменения этих параметров по времени. Эти величины яв-
ляются общими показателями маневренности самолета. Характе-
ристики отдельных фигур пилотажа или их составных элементов
называются частными показателями маневренности, например
время и радиус виража, продолжительность разгона и торможения,
минимальная и максимальная предельные скорости полета, мак-
симальная скорость установившегося горизонтального полета, ско-
роподъемность самолета и др. Трудно перечислить, а тем более ко-
личественно определить и оценить всю совокупность частных пока-
зателей маневренности, представляющих интерес для всесторон-
него анализа боевых или тактических возможностей самолета и вы-
явления наиболее выгодных для него эволюций. Ввиду этого
оценку и анализ маневренности самолетов следует производить на
основании общих показателей маневренности, позволяющих легко
находить количественные характеристики любого частного ма-
невра. Основы излагаемой ниже методики определения показа-
телей маневренности самолетов были разработаны в 1954 г. про-
фессором Г. С. Калачевым *.
Следует различать предельные и эксплуатационные маневрен-
ные возможности самолета.
Предельные маневренные возможности самолета определяются
характеристиками движения его центра тяжести в пространстве,
найденными расчетным путем по величинам слагаемых результи-
рующей аэродинамической силы (коэффициенты сх, су и cz) и тяги
двигателей при данном полетном весе самолета в пределах скоро-
стей (чисел М) и высот полета, теоретически достижимых на дан-
ном самолете и допустимых по прочности конструкции. При этом
условно считается, что можно мгновенно изменять углы атаки,
крена и скольжения самолета, величину и направление тяги двига-
телей, положение шасси, воздушных тормозов и органов механи-
зации.
Эксплуатационные маневренные возможности самолета опреде-
ляются характеристиками движения его центра тяжести в про-
странстве, реально осуществимыми в полете. Эти характеристики
находят с учетом особенностей управляемости и устойчивости дан-
ного самолета и ограничений по тряске, аэродинамическому на-
греву, а также с учетом фактической скорости изменения величины
и направления тяги двигателей, положения шасси, воздушных
тормозов и органов механизации.
* Г. С. Калачев, Показатели маневренности, управляемости и устойчи-
вости самолетов. Оборонгиз, 1958.
318
Количественные показатели предельной и эксплуатационной
маневренности могут существенно различаться между собой.
Вследствие недостатков управляемости и устойчивости, а также
конечной (иногда сравнительно большой) величины времени вы-
пуска и уборки воздушных тормозов, времени набора и сброса
тяги двигателей, наличия аэродинамической тряски эксплуатаци-
онные маневренные характеристики самолета могут быть заметно
ниже его предельных маневренных характеристик. Предельные
маневренные возможности самолета необходимо знать для того,
чтобы выявить резервы для улучшения эксплуатационной манев-
ренности. Этими резервами могут быть, например, улучшение ха-
рактеристик управляемости и устойчивости, ослабление аэродина-
мической тряски (установкой аэродинамических гребней на крыле,
турбулизаторов и др.), увеличение эффективности рулей и другие
средства, позволяющие расширить диапазон используемых летчи-
ком скоростей (чисел М), высот полета и перегрузок; а также
увеличить возможную быстроту их изменения в полете.
Управляемость и устойчивость самолета влияют как на количе-
ственные, так и на качественные характеристики маневреннос-
ти, в частности, на возможную точность пилотирования самоле-
та, т. е. на точность выдерживания летчиком или автопилотом
заданных траекторий полета при выполнений различных манев-
ров.
Маневренность самолета в целом не может быть охарактеризо-
вана каким-либо одним обобщающим критерием, по величине кото-
рого можно было бы оценивать маневренные качества самолета.
Для оценки маневренных качеств самолета необходимо находить
из летных испытаний характеристики, определяющие общие пара-
метры маневров (максимальные возможности самолета в любых
частных маневрах) и не зависящие от индивидуальных особенно-
стей пилотирования. Использование для оценки маневренности са
молета только частных ее показателей не позволяет производить
анализ летных качеств самолета с необходимой полнотой. Наибо-
лее правильно было бы использовать в качестве критериев для
оценки общих показателей маневренности координаты центра тя-
жести самолета в земной системе осей координат и их производ-
ные по времени. Однако это связано с применением весьма гро-
моздкого математического аппарата, что усложнило бы практиче-
ское решение рассматриваемой задачи.
9.2. ПЕРЕГРУЗКА
Прежде чем приступить к анализу маневренных характеристик
самолета рассмотрим несколько подробней понятие перегрузки.
Перегрузкой называется вектор п, равный отношению результи-
319
рующей всех действующих на самолет внешних сил (кроме сил
тяжести и инерции) к весу самолета:
где R — вектор результирующей всех действующих на самолет
внешних сил (кроме силы тяжести и силы инерции);
G — вес самолета (скалярная величина).
Величина R является геометрической суммой следующих сил:
результирующей аэродинамической силы и тяги двигателей, а так-
же силы натяжения буксировочного или заправочного троса (у са-
молета-буксировщика или самолета-заправщика), силы реакции
земной поверхности (при касании земли), силы удара о посторон-
ний предмет (при столкновении с посторонним предметом, напри-
мер, при попадании в аэродромные улавливатели), силы натяже-
жения лямок тормозного парашюта (посадка с использованием
тормозного парашюта), тяги ускорителей (взлет с использованием
ускорителей), реакции катапультирующего самолет устройства
(взлет с катапульты) и др.
Из приведенной формулы видно, что направление перегрузки
совпадает с направлением результирующей всех внешних сил.
Удобней рассматривать не сам вектор перегрузки п, а его проек-
ции на оси координат. При рассмотрении общих показателей
маневренности самолета пользуются проекциями вектора пере-
грузки на оси скоростной системы координат (xyz). Из материалов
летных испытаний непосредственно получают проекции вектора
перегрузки на оси связанной системы координат (X1Z/1Z1).
Проекции вектора перегрузки на оси Ох или Ох^ будем в даль-
нейшем для краткости называть продольной перегрузкой (соответ-
ственно в скоростной или связанной системе координат). Анало-
гично проекции вектора перегрузки на оси Оу или Оуг будем назы-
вать нормальной перегрузкой, а проекции его на оси Oz или Oz^ —
боковой перегрузкой (также соответственно в скоростной или свя-
занной системе координат).
Таким образом проекции вектора перегрузки на оси скорост-
ной системы координат определяются следующими формулами:
Rx
продольная перегрузка п=— ;
G
Ry
нормальная перегрузка пу — —;
G
Rz
боковая перегрузка —
(9.1)
где Rx, Ry и Rz — проекции результирующей всех внешних сил
соответственно на оси Ох, Оу и Oz.
320
Если на самолет действуют только аэродинамическая сила и
тяга двигателей (в большинстве случаев действуют эти две силы),
то величины Ry и Rz определяются из следующих выражений:
Rx — P cos (а — ср) cos р — cxSq cos р -j- czSq sin р;
^=Pgsin(a — с?) + ^5?;
Rz=—P cos (a — ср) sin p cxSq sin p + czSq.
Здесь ср — угол между направлением тяги двигателей и хордой
крыла.
В частном случае установившегося прямолинейного горизон-
тального маневра в скоростной системе осей координат /?x = /?z=0,
а Ry=G и, следовательно, na = nz = 0, а пу=\. Другой частйый слу-
чай — установившееся отвесное пикирование самолета. В скорост-
ной системе осей координат для этого случая
/fy=nz=0, а пх~ — 1 (так как Rx — — G).
В общем случае криволинейного пространственного маневра,
происходящего с изменением скорости, высоты и направления
полета в вертикальной и горизонтальной плоскостях (например,
боевой разворот)
пх ф 0; пу =f= 0 и tiz ф 0.
Такой вид движения самолета по пространственным траекториям
наиболее распространен в воздушном бою и при выполнении фи-
гур пилотажа.
При проведении летных испытаний часто требуется определять
знак действующих на самолет (летчика) перегрузок в связанной
системе осей координат (их обозначают индексом «1»). В этом слу-
чае можно пользоваться следующим правилом:
пХ1>0 — летчика прижимает к спинке сиденья (разгон
самолета);
пХ1<0 — летчика отрывает от спинки сиденья (торможение
самолета);
ny\>Q — летчика прижимает к чашке сиденья (ввод в горку,
вывод из пикирования);
пу\<0 — летчика отрывает от чашки сиденья (полет на
спине);
nzi>0 —летчика прижимает к левому борту (левое сколь-
жение) ;
nz\<S) — летчика прижимает к правому борту (правое
скольжение).
11 598
321
9.3. УРАВНЕНИЕ МАНЕВРЕННОСТИ
Анализ и расчет характеристик маневренности самолета произ-
водятся при помощи следующей системы уравнений:
1 dV . . с
/гг =-------k-sin 9;
Х g dt
Пу~ E^£._|_cos9cosy;
g
nz=-------- — cos 6 siny;
g
__w^cosY — w^sinY
dt cos 0
J0 . .
—=o)^sm y + ^cos y;
dt
^7 = — Scos Y - °>z sin Y) tg 6;
dx <9-2)
—-=V cos Ф cos 6;
dt
^-=I/sin6;
dt
= — v sin Ф cos 6;
dt
nx~fUgi ^РУД> ^в.т’ ^мех» ^шасси)»
Ugi ^РУД» ^в.т» ^мех’ ^шасси)»
F (M, ygi ^РУД> ^в.т’ ^мех» ^шасси),
M = —,
a
где nx, Пу, nz и озх, (о^, — перегрузки и угловые скорости враще-
ния самолета в скоростной системе
осей координат;
xg, yg и zg— координаты центра тяжести самолета
в земной системе осей координат;
Вруд— перемещение (отклонение) рычага
управления двигателем;
Вв т— перемещение воздушных тормозов;
&мех— перемещение органов механизации;
&Шасси— перемещение шасси.
В уравнениях (9.2) углы между осями земной и скоростной
систем координат определяются тремя поворотами самолета на
эйлеровы углы гр, 0 и у (при условии, что вначале направления
322
соответствующих осей совпадают). Первый поворот (рис. 9.1)
производится на угол яр, второй поворот — на угол 0 и третий —
на угол у. Угол тр называется углом рыскания самолета, угол 0 —
углом наклона траектории полета и у — углом крена скоростной
системы осей координат (в дальнейшем для краткости будем на-
зывать его просто углом крена).
Последние три уравнения системы (9. 2) определяют зависимо-
сти продольной, нормальной и боковой перегрузок от числа М и
высоты (H = yg) полета, от углов атаки а и скольжения 0, а также
от режима работы двигателей 6РУД , положения воздушных тормо-
зов бв.т, положения органов механизации 6Мех и шасси бшасси- Эти
зависимости даются обычно в виде графиков.
Система уравнений (9.2) является системой общих уравне-
ний маневренности самолета, которая позволяет определять траек-
тории движения центра тяжести самолета в любом пространст-
венном маневре. Тринадцать уравнений этой системы содержат
двадцать независимых переменных: М, V, а, р, у, 0, ф, сох, со^, <oz,.
мх, пу, nz, xg9 yg, zg; 6рУД, бв.т, бмех, бщасси- Поэтому при решении
системы уравнений (9.2) нужно заранее задаться законом измене-
ния по времени каких-либо семи из перечисленных независимых
переменных либо получить дополнительные уравнения, описываю-
щие новые связи этих переменных. Так, при рассмотрении манев-
ров в горизонтальной плоскости, выполняемых с убранными шасси,
воздушными тормозами и органами механизации при постоянном
11*
323
режиме работы двигателей, заранее задаются значения следующих
пяти переменных:
yg = const; йруд = const;
__ (Л
°в.т °мех °шасси
Кроме того, в зависимости от характера рассматриваемого ма-
невра задаются дополнительные две связи, например:
М = М(0 и ^=^(M).
В отдельных случаях выражения для перегрузок пх, пу и п2
оказываются более сложными, чем приведенные в системе (9.2).
Для некоторых самолетов при определенных маневрах необходимо
учитывать влияние углов отклонения органов продольного управ-
ления на величины пх и пу. Тогда эти величины выражаются более
сложными зависимостями:
У*1 (М, Ct, р, Z/g, ^руд, ^в.т, ^мех> ^шасси» ^в)»
У%, ^РУД^ ^в.т» ^мех> ^шасси» ^в)»
где 6в — угол отклонения руля высоты (органа продольного управ-
ления) самолета.
Если появляется дополнительная независимая переменная 6В, то
к системе (9.2) добавляют еще одно уравнение — уравнение рав-
новесия моментов тангажа:
dt }z X У-Г х у)'<
Мг(М, a, p, yg, ^руд» ^мех> ^шасси, ^в)
J z
Иногда оказывается необходимым учитывать и влияние аэро-
упругости. В таких случаях анализ маневренности самолета значи-
тельно усложняется.
9.4. ВЫБОР КРИТЕРИЕВ, ХАРАКТЕРИЗУЮЩИХ
ОБЩИЕ ПОКАЗАТЕЛИ МАНЕВРЕННОСТИ
Если известны общие показатели маневренности самолета (рас-
полагаемые диапазоны чисел М, высот полета и перегрузок пх, пу,
nZf а также возможная быстрота их изменения), то при помощи
системы уравнений (9.2) можно рассчитать параметры движения
центра тяжести самолета в любом маневре. Однако эти общие
показатели маневренности зависят от большого количества различ-
ных факторов: числа М (скорости) и высоты полета, углов атаки
и скольжения, характеристик приемистости двигателя, положения
органов механизации и воздушных тормозов, быстроты кренения
самолета и др. Для определения в полете всех этих факторов и всех
324
возможных их сочетаний потребовалось бы затратить чрезвычайно
много летного времени и провести большое количество расчетов.
Для упрощения решения поставленной задачи можно принять сле-
дующие допущения:
1. Величина аэродинамической боковой силы в связанной с са-
молетом системе осей координат и быстрота ее изменения не зави-
сят непосредственно от угла атаки и определяются только ско-
ростью и высотой полета.
*2. Быстрота создания крена и поворота самолета вокруг оси Оух
связанной системы координат зависит только от скорости и высоты
полета.
3. Боковая перегрузка nzl в связанной с самолетом системе
осей координат прямо пропорциональна углу скольжения при лю-
бых значениях скорости и высоты полета.
4. Скольжение самолета не влияет на величину, направление и
быстроту изменения аэродинамических сил в плоскости симметрии
самолета.
Эти допущения позволяют производить оценку маневренных
качеств самолета исходя из рассмотрения двух типов маневров:
а) координированных маневров, в которых
б) некоординированных маневров, т. е. маневров со скольже-
нием, в которых
Пу^пу^\.
Зная характеристики этих типов маневров, на основании при-
нятых допущений можно определять характеристики любых про-
странственных маневров с пу=/=1 и nz=^0 при помощи формул
Пх=Пхт^Пл sinp;
пу—пу^
nz = nzl COS ^ — nxv sinP-
Здесь индексом «к» отмечены перегрузки координированного
маневра, определенные при тех же числах М, высоте полета и ре-
жиме работы двигателей, при которых находят и перегрузки ма*
невра со скольжением (nzi).
Определяющее значение для оценки маневренных качеств само-
лета имеют характеристики координированных маневров, так как
в массовой эксплуатации подавляющее большинство маневров вы-
полняется без скольжения или при малом скольжении, практиче-
ски не оказывающем влияния на характер движения самолета.
Принятые допущения позволили выбрать практическую систему
критериев, характеризующих общие показатели маневренности
самолета. Эти критерии удобны для практического использования
325
и вместе с тем позволяют достаточно полно определять частные
показатели маневренности и характеристики любого пространст-
венного маневра самолета, возможного в массовой эксплуатации.
Критериями, характеризующими общие показатели маневренности
самолетов, являются:
1. Семейства кривых продольной перегрузки в зависимости от
скорости (числа М) полета при различных значениях нормальной
перегрузки в скоростной системе осей координат. Указанные зави-
симости определяются для координированных (без скольжения)
маневров на различных высотах при крайних режимах работы
двигателей, крайних положениях воздушных тормозов, органов
механизации и шасси.
2. Семейства кривых времени накренения самолета на различ-
ные углы в зависимости от скорости (числа М) полета на разных
высотах.
3. Зависимости времени выпуска и уборки воздушных тормо-
зов, шасси и органов механизации, времени набора и сброса тяги
двигателей от скорости и высоты полета, характеризующие в основ-
ном быстроту изменения продольной перегрузки в скоростной
системе осей координат.
4. Зависимости времени создания заданных нормальных пере-
грузок (в скоростной системе осей координат) от скорости и вы-
соты полета.
5. Зависимости предельных боковых перегрузок (в связанной
с самолетом системе осей координат) и углов скольжения от ско-
рости (числа М) и высоты полета.
6. Зависимости времени создания боковых перегрузок (в свя-
занной с самолетом системе осей координат) или углов скольжения
от скорости и высоты полета.
9.5. ОПРЕДЕЛЕНИЕ КРИТЕРИЕВ МАНЕВРЕННОСТИ
В ПОЛЕТЕ
Рассмотрим подробней каждый из перечисленных критериев
в отдельности.
Семейства кривых продольной перегрузки
Для практического проведения анализа и оценки маневренно-
сти самолета удобно строить семейства кривых nx = f(M) при раз-
личных значениях пу как параметра. На рис. 9.2 приведен пример
диаграммы такого типа. Эта диаграмма характеризует маневрен-
ные данные самолета в полете на высоте Н = const при работе дви-
гателей на режиме максимальной тяги, при убранных шасси, воз-
душных тормозах и органах механизации, с заданным полетным
весом G и £T = const. Помимо семейства кривых пх=/(М, пу), на
диаграмму нанесены дополнительные кривые: АЕ — кривая, соот-
ветствующая режимам полета при сутаХ; А'Е'— кривая, соответ-
326
ствующая режимам полета при с^дон; D'C' — кривая, характери-
зующая предельно допустимые в массовой эксплуатации режимы
полета по условиям управляемости и устойчивости самолета. Это,
например, могут быть режимы полета, при которых для создания
соответствующей перегрузки требуются приращения усилий на
ручке управления около 50 кГ (в случае безбустерного управле-
ния) либо из-за падения эффективности руля высоты под влиянием
сжимаемости требуется полностью отклонять руль высоты.
Рис. 9.2. Сетка зависимостей nx = f(M, пу) при ра-
боте двигателей на режиме максимальной тяги
(шасси, воздушные тормоза и органы механизации
убраны)
Область ABCDEA диаграммы характеризует предельные ма-
невренные возможности самолета в рассматриваемых условиях.
Верхняя (ВС) и нижняя (EE'D'D) границы этрй области соответ-
ствуют минимально возможной в нормальном полете и предельно
допустимой (по прочности, условиям поведения самолета и др.)
или предельно достижимой (по кинематической схеме системы
продольного управления, усилиям на ручке при безбустерном
управлении и др.) нормальным перегрузкам. В рассматриваемом
случае минимально возможной является перегрузка пу=0, а пре-
дельно допустимой Аг2/ = ^тах==8 (ограничение по прочности кон-
струкции). Слева область ограничена кривой АЕ, соответствующей
условиям полета с использованием максимальных несущих свойств
самолета, и отрезком АВ, характеризующим режимы полета на
327
минимальной скорости (минимальном числе М). Правая граница
(СССО) представляет собой ограничение по предельному числу М
(предельной скорости) полета.
Эксплуатационная маневренность самолета характеризуется
областью ВСС'Р'Е'А'В, ограниченной слева кривой, соответствую-
щей режимам полета с предельно допустимыми в массовой эксплуа-
тации значениями су, а справа — границей, найденной из условий
обеспечения на эксплуатационных режимах достаточной управ-
ляемости и устойчивости самолета. Заштрихованные на диаграмме
области показывают потери маневренности самолета: слева —
потери за счет разности в максимально достигаемом и предельно
допустимом значениях су, справ,а — потери, обусловленные недо-
статками устойчивости или управляемости, в частности, чрезмерно
большими усилиями на ручке управления, потребными для созда-
ния перегрузки, либо появлением неустойчивости самолета по пе-
регрузке.
На рис. 9. 3 приведен пример такой диаграммы, полученной при
тех же условиях, что и диаграмма рис. 9.2, но только при работе
двигателей на режиме малого газа и с выпущенными воздушными
тормозами.
В полете указанные сетки зависимостей nx = f(M, пу) опреде-
ляются на двух-трех высотах с таким расчетом, чтобы охватить
весь эксплуатационный диапазон высот, чисел М и значений пу для
данного самолета. Полученные на одной высоте зависимости
nx = f(M, пу) могут быть пересчитаны для другой высоты. Однако
изменение влияния упругих деформаций конструкции, обусловлен-
ное различием величин скоростного напора (изменение высоты
полета при М = const), при таком пересчете не учитывается.
Перед проведением летных испытаний на маневренность, свя-
занных с выходом самолета на предельные режимы полета, дол-
жны быть проведены испытания самолета на сваливание и штопор,
а также испытания его на предельных скоростях (числах М) по-
лета. Эти виды испытаний следует по возможности комплексиро-
вать.
Как видно из системы уравнений (9.1), перегрузки пх и пу
не зависят от угла наклона траектории полета и положения осей
самолета (углов наклона самолета) в пространстве. Следова-
тельно, при данных значениях параметров, входящих в последние
четыре уравнения системы (9.2), перегрузки пх и пу в пределах
принятых выше допущений можно считать независящими от типа
маневра. Поэтому зависимости nx = f(M, пу) в полете можно опре-
делять из любых координированных неустановившихся движений
самолета. Однако наиболее точно и быстро эти зависимости можно
получить из следующих координированных режимов полета: спи-
ралей при постоянных числах М с нарастающей перегрузкой; раз-
гонов и торможений самолета как в прямолинейном, так и в кри-
волинейном полете с различными значениями n^-const; дач руля
высоты при различных значениях числа М~const. Из этих же ре-
328
жимов полета одновременно определяются почти все основные
характеристики устойчивости и управляемости самолета, а также
расходы горючего. Такое комплексное определение ряда характе-
ристик самолета и его силовой установки из одних и тех же режи-
мов полета позволяет существенно ускорить и удешевить проведе-
Р и с. 9.3. Сетка зависимостей пх =
= f(M, пу) при работе двигателей на
режиме малого газа и выпущенных воз-
душных тормозах (шасси и органы ме-
ханизации убраны)
ние летных испытаний, что особенно важно для современных сверх-
звуковых самолетов, имеющих сравнительно малую продолжи-
тельность полета из-за больших расходов горючего.
Разгоны и торможения производятся по возможности примерно
в горизонтальной плоскости. При выполнении этих режимов лет-
чик следит за величиной нормальной перегрузки и не допускает
возникновения скольжения. При пу= 1 выполняются прямолиней-
ные, а при пу>1 — криволинейные разгоны и торможения самолета
329
(неустановившиеся виражи с пу\~const, но с переменной скоро-
стью полета). При работе двигателей на режиме максимальной
тяги выполняются разгоны от Мтщ до Мпред (Упред) при двух-трех
значениях пух~const (например, /гУ1~1; 1,5; 2). После каждого
такого разгона, не меняя режима работы двигателей, летчик уве-
личивает перегрузку и производит торможение самолета до Mmm-
Торможения также выполняются при двух-трех значениях
пух^const (например, /^1 — 2,5; 3; 4). В процессе выполнения раз-
гонов и торможений не допускаются резкие изменения нормальной
перегрузки и высоты полета, снижающие точность получения иско-
мых характеристик. В области скоростей (чисел М), на которых
при заданных значениях пуХ величины пх меньше нуля, для опре-
деления характеристик маневренности выполняются обычно только
торможения самолета. Для этого летчик вначале разгоняет само-
лет на высотах, больших заданной, а затем производит снижение
(«прижим») с таким расчетом, чтобы выйти на заданную высоту
с числом М = Мпред (или V= УПред). На заданной высоте летчик
энергично переводит самолет в режим горизонтального прямоли-
нейного полета (для выполнения торможения с пух~1 в случае,
когда максимальное число М прямолинейного горизонтального
полета Мтах<МПред) или энергично создает перегрузку (для вы-
полнения горизонтального криволинейного торможения с n^i>l),
после чего тормозит самолет до пх~0.
При работе двигателей на режиме малого газа с выпущен-
ными воздушными тормозами, а также на режиме максимальной
тяги с убранными воздушными тормозами, но при больших значе-
ниях пу величины пх оказываются отрицательными во всем экс-
плуатационном диапазоне чисел М (скоростей) полета. На таких
режимах полета, естественно, выполняются только торможения
самолета от числа М = Мпред (У= Упред) до выхода его на с^доп или
Сушах, если в данных условиях допустим выход на режим свалива-
ния (в этом случае летчик должен по возможности не допустить
перехода самолета в штопор).
Такие испытания целесообразно комплексировать с полетами на
сваливание и штопор. Продолжительность показанного на графике
разгона составила 160 сек, а продолжительность торможения
70 сек.
Величины пу в направлении скоростей оси Оу, которые должны
быть получены летчиком в полете, всегда пересчитываются
в % Пр — нормальные перегрузки в направлении связанной нор-
мальной оси указателя перегрузки (эта ось должна совпадать
с осью Оух самолета). Эти приборные величины перегрузок указы-
вают в полетном задании летчику (приборные значения перегрузок,
обозначаемые индексом «пр» — это те значения перегрузок, кото-
рые летчик непосредственно видит в полете по бортовому визуаль-
ному указателю перегрузки с учетом соответствующих инструмен-
тальных поправок). Методика выполнения такого пересчета рас-
смотрена ниже.
330
Из этих режимов полета также можно определить и баланси-
ровочные кривые, характеризующие управляемость и устойчи-
вость самолета.
Выполнение координированных торможений самолета при сред-
них и малых значениях пу и координированных разгонов при срав-
нительно больших пу требует большой затраты полетного времени,
так как на этих режимах скорость полета изменяется довольно
медленно. Если летчик, чтобы интенсивно изменить скорость по-
лета, будет соответствующим образом изменять угол наклона
траектории, то высота полета может быстро измениться и, следо-
вательно, снизится точность получения маневренных характеристик
самолета. В этих случаях целесообразно выполнять спирали без
скольжения с постоянными значениями чисел М при непрерывно
нарастающих перегрузках. Продолжительность таких режимов
обычно составляет не более 20—30 сек. При неизменном режиме
работы двигателей выдерживание постоянства числа М требует
изменения угла наклона траектории, т. е. высоты полета, однако
благодаря сравнительно малой продолжительности режима вы-
сота полета по отношению к заданной обычно изменяется нена-
много.
Дачи руля высоты (управляемого стабилизатора) являются
основными режимами для построения графических зависимостей
^i=/(a), % также позволяют получать дополнительный материал
для определения перегрузок. Зависимости cyi = f(a) необходимы
для пересчета перегрузок пх1 и пу1 в связанной с самолетом си-
стеме осей координат на перегрузки пх и пу в скоростной системе
осей координат. Дачи руля высоты выполняются без скольжения
при различных величинах числа М полета. Если на характер про-
текания зависимости ^i = f(a) при постоянном числе М влияет
величина приборной скорости полета (влияние аэроупругости), то
дачи выполняются при одних и тех же значениях числа М на раз-
личных высотах.
При определении зависимостей nx = f(M, могут быть исполь-
зованы как плавные, так и резкие дачи руля высоты (рис. 9.4).
Однако первые позволяют получать искомые характеристики
с большой точностью. Для повышения точности определения пере-
грузок из резких дач следует увеличивать скорость движения ленты
и частоты собственных колебаний приборов-самописцев.
Перегрузки пх и пу определяются из дач, выполняемых как при
работе двигателей на режиме максимальной тяги с убранными воз-
душными тормозами, так и при работе двигателей на режиме ма-
лого газа с выпущенными воздушными тормозами.
Приближение к определяемым прочностью конструкции макси-
мальным эксплуатационным перегрузкам п9у тах и околокритиче-
ским углам атаки производится постепенно — путем последо-
вательного выполнения двух-трех дач со сравнительно небольшим
увеличением перегрузки от режима к режиму. В этом случае лет-
331
чику легче заметить момент появления каких-либо особенностей
в поведении самолета, приближение режима сваливания и т. д. и
своевременно на это прореагировать. Такой постепенный подход,
в частности в случае выполнения дач до пэу max, позволяет летчику
точнее дозировать требуемые отклонения руля высоты, чтобы не
превысить заданную величину пэу max (превышение ее в полете не-
Р и с. 9. 4. Выполнение в полете плавной (а) и резкой (б) дач руля высоты
допустимо). Для выполнения дач руля высоты с выходом на
>4 max необходимо иметь на приборной доске самолета тщательно
протарированный бортовой визуальный указатель перегрузки.
В каждом испытательном полете допустимо выполнение только од-
„ э
нои дачи руля высоты с выходом самолета на n^max, после чего
никакие другие режимы полета, связанные с интенсивным нагру:
жением конструкции аэродинамическими силами, не выполняются.
Если полетный вес самолета может изменяться в широких преде-
лах и различным значением веса самолета соответствуют разные
значения пэу max, то перед выполнением дач руля высоты с выходом
на эти перегрузки следует тщательно определять фактический по-
летный вес самолета по показаниям суммарного расходомера го-
332
рючего либо по времени (для заданного профиля полета). По
окончании каждого испытательного полета с выходом на n^max
производятся тщательный послеполетный осмотр и нивелировка
самолета.
Зависимости cyi = f(a) лучше определять из резких дач, так как
в этом случае значительно сокращается объем обработки полетных
материалов. При выполнении дач руля высоты с выходом само-
лета на околокритические углы атаки для избежания попадания
самолета в штопор (с целью повышения безопасности полета и
ускорения выполнения полетных заданий) следует делать импуль-
сы (так называемые «пикообразные» дачи) — без последующего
выдерживания заданных величин отклонений руля высоты. Дачи
с выходом на околокритические углы атаки рекомендуется выпол-
нять на больших высотах, по возможности не менее Н~ Юн-12 км.
В случае выхода самолета при дачах руля высоты на заведомо
докритические углы атаки целесообразно выполнять дачи «сту-
пенькой» с выдерживанием заданного отклонения руля высоты
неизменным по возможности в течение 3—5 сек. Такие дачи руля
высоты могут быть использованы также и для определения из них
характеристик продольной управляемости самолета по перегрузке.
Примеры выполнения указанных дач руля высоты приведены на
рис. 9. 5.
При скоростях полета, меньших Vmax, дачи руля высоты вы-
полняются с исходного режима прямолинейного горизонтального
(или с набором высоты) полета без крена. При больших, чем Vmax,
скоростях полета дачи выполняются с исходного режима прямо-
линейного полета без крена со снижением. Перед дачей с исход-
ного режима горизонтального полета установившийся режим по-
лета («площадка») выдерживается не. менее ^10 сек. До выпол-
нения дачи в режиме снижения выдерживается такая прямолиней-
ная «площадка» с постоянной скоростью полета по возможности
не менее 5 сек. В этом случае высоту начала режима выбирают
с таким расчетом, чтобы к началу выполнения дачи самолет ока-
зался на заданной высоте.
При скоростях полета, меньших Vnp«2Vinin, при которых
С^исх £ cgmax 4- CyQ , дачи руЛЯ ВЫС0ТЫ МОЖНО ВЫПОЛНЯТЬ КЗК В НЭ-
правлении «от себя», так и в направлении «на себя», чтобы охва-
тить весь эксплуатационный диапазон углов атаки самолета
(рис. 9.6). При скоростях полета, близких к 7тш, дачи руля вы-
соты выполняются практически только «от себя». На скоростях
полета, больших Vnp~2 Vmin, выполняются обычно только дачи
руля высоты в направлении «на себя».
Скорости и числа М полета, при которых следует выполнять
дачи руля высоты, выбирают с таким расчетом, чтобы равномерно
охватить весь эксплуатационный диапазон скоростей (с учетом
влияния сжимаемости). В диапазоне околозвуковых чисел М по-
333
Рис. 9.5. Заалей приборов-самописцев, полученные при вы-
полнении в полете резких дач руля высоты:
а—без последующего выдерживания заданной величины dB=const («пи-
кообразная дача»); б—с последующим выдерживанием заданной ве-
личины dB=const («дача ступенькой»)
аКр а
Рис. 9.6. Схема, поясняющая методику выполнения дач
руля высоты в направлении «на себя» и «от себя» с исход-
ного режима полета, при котором’ коэффициент подъемной
Су max Н" сУ0
силы самолета су Исх=----------------“----
334
лета, где влияние сжимаемости проявляется наиболее резко, интер-
валы между исходными скоростями для выполнения дач выбирают
меньшими.
Семейства кривых времени накренения самолета
Максимальная скорость, с которой летчик практически может
изменять углы крена, является весьма важным показателем ма-
невренности самолета. Чем меньше время, потребное для накрене-
ния самолета на заданный угол крена (^), тем, естественно, выше
его маневренные качества. Для анализа и оценки маневренности
самолета определяются практически минимальные величины вре-
мени накренения самолета на различные углы -крена — вплоть до
максимально допустимых или максимально достижимых на дан-
Рис. 9.7. Зависимости = определенные для двух высот
полета
ном самолете. Эти углы крена берут увеличивающимися на равные
интервалы Лу~10ч-20°. Пример, иллюстрирующий типичный ха-
рактер протекания зависимостей при различных значе-
ниях у, определенных с интервалом Ау = 20°, приведен на рис. 9.7.
Для определения практически минимальных величин в полете
выполняются по возможности предельно резкие дачи органов попе-
речного управления (элеронов, интерцепторов и т. п.). При выпол-
нении таких дач органы поперечного управления отклоняются
либо на максимальный (по данной кинематической схеме системы
поперечного управления), либо на предельно достижимый (по уси-
лиям на ручке управления) или предельно допустимый (из усло-
вий проявления взаимодействия продольного и бокового движений
самолета и т. п.) угол. При определении зависимостей /7=/:(М)
обычно принимается, что величины не зависят от угла атаки,
нормальной перегрузки и режима работы двигателей. Из одних
335
и тех же дач органов поперечного управления определяются как
величины так и общепринятые критерии поперечной управляе-
мости самолета.
Время выпуска и уборки воздушных тормозов,
шасси и органов механизации,
время набора и сброса тяги двигателей
Время выпуска £Вып.т и уборки £Убор.т воздушных тормозов опре-
деляют обычно на двух высотах при различных скоростях (чис-
лах М) полета. Время выпуска и уборки органов механизации, на-
пример закрылков (/вып.з и /убор.з), устанавливают во всем допу-
стимом диапазоне скоростей обычно на малой высоте. Время вы-
пуска /вып.ш и уборки /убор.ш шасси определяют на малой высоте
при околопосадочной скорости и скоростях полета по кругу (при
заходе на посадку). Время набора /Пабр и сброса /Сбрр тяги двига-
телей определяют на двух-трех высотах во всем эксплуатационном
диапазоне скоростей (чисел М) полета.
Время выпуска и уборки воздушных тормозов и время набора
и сброса тяги двигателей характеризуют возможности самолета
в отношении набора и гашения скорости полета, т. е. быстроту из-
менения продольной перегрузки.
В общем случае все указанные величины являются нелинейными
функциями различных параметров (углов выпуска и уборки за-
крылков, воздушных тормозов, положения рычага сектора газа
и т. д.). Однако при оценке маневренных свойств самолета этим
обычно пренебрегают и практически на данной высоте полета нахо-
дят по одной кривой для каждого критерия:
^вып.т = /(М); ^убор.т = ?(М); *c6pP=-.F(M) И Т. д.
Выпуск и уборка воздушных тормозов производятся в режимах
прямолинейного (по возможности горизонтального) координиро-
ванного полета последовательно на различных исходных скоростях
(числах М-) с выдерживанием заданных установившихся положе-
ний воздушных тормозов в течение 3—5 сек. Выпуск и уборка
шасси и органов механизации производятся на взлетно-посадочных
и близких к ним режимах (разгон и набор высоты после взлета,
заход на посадку). Сброс и набор тяги двигателей начинается
с исходного прямолинейного координированного режима полета
при заданных установившихся начальных скоростях (числах 7И).
Перед сбросом тяги летчик выдерживает по возможности в тече-
ние примерно 20—25 сек исходный режим полета при работе дви-
гателей с максимальной тягой, а затем резко отводит рычаг управ-
ления двигателем до упора малого газа. Зафиксировав рычаг управ-
ления двигателем в этом неизменном положении в течение 20—
25 сек, летчик пилотирует самолет таким образом, чтобы все это
время по возможности сохранять неизменным исходное значение
числа М полета. Чтобы определить время набора тяги (от режима
336
малого газа до режима максимальной тяги), в течение 20—25 сек
выдерживается исходный режим полета при работе двигателей на
малом газе. Затем выполняется резкая дача газа — летчик энер-
гично переводит рычаг управления двигателем вперед дЪ положе-
ния, соответствующего режиму максимальной тяги. Далее летчик
поступает так же, как и при определении времени сброса тяги.
Время создания нормальной перегрузки
Время создания нормальной перегрузки (время выхода на нор-
мальную перегрузку) tny вместе с располагаемыми для данного
самолета значениями пу характеризует возможности выполнения
резких маневров, требующих быстрого изменения кривизны траек-
тории полета в плоскости симметрии самолета (горка, вход в пики-
рование, выход из пикирования, начало боевого разворота и т. д.).
Рис. 9.8. Зависимость /П//=Д(М) для одной высоты
полета
Величина tn зависит от величины создаваемой нормальной
перегрузки. Однако обычно определяют по одной осредненной за-
висимости ^=f(M) на двух высотах при изменении нормальной
перегрузки от пу=\ до максимально допустимых (достижимых)
в полете на данной высоте значений пу. Для получения минимально
возможных величин tny в полете выполняются резкие дачи руля
высоты (управляемого стабилизатора) без скольжения. На рис.
9.8 приведен пример зависимости /П^ = ДМ), определенной по ма-
териалам летных испытаний для одной высоты полета.
Предельные боковые перегрузки
и время выхода на них
Создание скольжения в некоторых случаях позволяет сущест-
венно улучшить характеристики отдельных маневров. Однако
некоординированные маневры встречаются реже, чем маневры без
скольжения. Поэтому и характеристики некоординированных ма-
невров определяются в полете менее подробно. Обычно на двух
высотах находят зависимости предельно достижимых (по кинема-
12 598 337
тическои схеме системы путевого управления или по усилиям на
педалях) или предельно допустимых (по прочности, тряске, особен-
ностям поведения самолета и др.) боковых перегрузок и соответ-
ствующих им углов скольжения от числа М полета: nzпРед = /(М) и
Рттгед = ф (М). Типичные примеры таких зависимостей, определен-
ных из летных испытаний на одной высоте, приведены на рис. 9.9,
на котором также показаны отклонения руля направления и уси-
лия на педалях (самолет с безбустерным путевым управлением),
Рис. 9.9. Зависимости
Пг пред = f(M) и ₽ пред — ф(М)
для одной высоты полёта
ния, а на больших скоростях
соответствующие этим значениям
Пг пред И |ЗпРед- ВеЛИЧИНЫ Пг пред В
указанных зависимостях берут в
связанной с самолетом системе
осей координат.
ДЛЯ Определения Мгпред и рпред в
полете на двух высотах при различ-
ных скоростях (числах М) выпол-
няются правые и левые установив-
шиеся и неустановившиеся предель-
ные прямолинейные скольжения са-
молета (ф = 0) либо плоские разво-
роты (у = 0). Из этих же скольжений
определяются и характеристики по-
перечной и путевой управляемости
и устойчивости самолета.
На сравнительно небольших ско-
ростях полета величины пгПред и
Рпред ограничиваются предельно до-
стижимыми при существующей ки-
нематической схеме системы управ-
ления отклонениями руля направле-
(числах М) у самолетов с безбустер-
ным путевым управлением — предельно достижимыми в полете
усилиями на педалях. На скоростях, близких к Vmin, возможны
ограничения, обусловленые особенностями устойчивости и управ-
ляемости самолета.
Скольжения и плоские развороты выполняются с убранными
шасси, воздушными тормозами и органами механизации. Методика
выполнения скольжений описана выше (см. гл. VI). При выпол-
нении плоских разворотов летчик, отклоняя руль направления,
плавно увеличивает угловую скорость рыскания со^ и одновременно
с помощью элеронов удерживает самолет от кренения.
Время создания боковой перегрузки tnz определяется из дач
руля направления, выполняемых при Л2?у~ 1, с фиксацией заданных
отклонений руля по возможности в течение 2—4 сек. Такие дачи
производят также на двух высотах при различных скоростях. Эти
же дачи используются и для получения характеристик путевой
управляемости и устойчивости самолета.
338
9.6. ОБРАБОТКА И АНАЛИЗ МАТЕРИАЛОВ
ЛЕТНЫХ ИСПЫТАНИЙ.
ПРИВЕДЕНИЕ ИХ К СТАНДАРТНЫМ УСЛОВИЯМ
Приведение перегрузок к стандартным условиям
При проведении летных испытаний на маневренность самолет
оборудуется той же контрольно-записывающей аппаратурой, кото-
рая применяется и при проведении испытаний на устойчивость и
управляемость, а также прибором, регистрирующим температуру
наружного воздуха, и самописцем расходов горючего.
Если нет возможности установить акселерограф (или датчик
перегрузок) в центре тяжести самолета, то в его показания вно-
сятся поправки, учитывающие местоположение прибора. С учетом
этих поправок получаем
^Х Ц.Т ^х пр F
Пу ц.т'“ пу пр
Hz ц.т ~ Пг Пр "4“ ^Пг^
(9.3)
где ялпр, /гРпр и лгпр—перегрузки, записанные акселерографом
в полете, в направлении осей акселерогра-
фа, установленного не в центре тяжести
самолета;
яХц.т> ^ц.т и ц.т—перегрузки в направлении осей акселеро-
графа, установленного в центре тяжести
самолета.
Поправки Д/гх, у, z на местоположение прибора определяются
по формулам, приведенным выше (см. стр. 13).
Оси жирографа и акселерографа должны совпадать или быть
параллельны осям связанной с самолетом системы координат.
Если плоскости ХпрО//пр приборов совпадают с плоскостью симмет-
рии самолета или параллельны ей, но оси ОхПр и О//пр приборов не
совпадают с осями связанной с самолетом системы координат Охх
и Оу{ (рис. 9.10), то показания приборов должны быть пересчи-
таны по формулам
пх\ пх ц т cos срцр Пу ц т sin <рПр, | (9 4)
«Ю = ^ц.тСО8'Рпр + «хц.т Sln'Pnp; J
0)xl==,wxnoC0S'?nn —даг/по51П®пО; I
Л1 Л lip • Пр г/ нр • 11 р 7 । /Г\ Г*\
। • । (У • о)
u>Z/l = ^npCOS'?np + “xnpSln'Pnp, J
где пх1 и пУ\—-перегрузки в связанной с самолетом системе осей
координат;
^ц.т и пуц.ч — перегрузки в центре тяжести самолета, определен-
ные по формулам (9. 3), при установке осей Охпр и
Оупр акселерографа под углом <рпр к осям Охх и
Оух связанной с самолетом системы координат;
12*
339
шжпр и пр ~ показания жирографа, оси Охпр и Oz/np которого
не совпадают с осями Охх и Оух связанной с са-
молетом системы координат;
cpnD —угол установки прибора (акселерографа или жи-
рографа) на самолете (см. рис. 9.10).
Продольную и нормальную перегрузки в скоростной системе
координат находят из выражений
пх ф = пхХ cos а — пух sin а;
ф =.•cosa-J-n.^ sin а,
(9. 6)
где а — угол атаки самолета.
Индекс «ф» у значений пх и пу указывает на то, что они опре-
делены для фактических условий, при которых проводился данный
. летный эксперимент.
Непосредственная регистрация
Р и с. 9. 10. Несовпадение осей
прибора Охпр и Ch/пр с осями
связанной с самолетом системы
координат Oxi и Оу\
угла атаки самолета в полете суще-
ствующими в настоящее время при-
борами производится, как правило,
недостаточно точно. Поэтому обыч-
но угол атаки определяется по вели-
чине коэффициента нормальной си-
лы самолета cy\=nyxGISq с по-
мощью графических зависимостей
сУ1=/(а), пример которых показан
на рис. 9. 11. Указанные графиче-
ские зависимости находят из полет-
ных материалов, полученных при
выполнении дач руля высоты мето-
дом графического интегрирования
дифференциальных уравнений дви-
жения самолета. В качестве начальных условий используются дан-
ные, взятые на исходном установившемся режиме полета перед
дачей: Яо, Мо, Vo, Фо, 0О и ао. Значения Но, Мо, Vo и Фо получают не-
посредственно из записей приборов-самописцев. Если нет прибора-
самописца угла тангажа, то величина Фо определяется из формулы
sin^0 — nxQ,
где nxQ — продольная перегрузка в направлении оси Ох\ самолета,
полученная из записей акселерографа.
Угол наклона траектории полета 0о находят из выражения
sine0=r£2-,
° v0
340
в которое подставляется вертикальная скорость найденная по
формуле
и 2±_
at тсг ’
r№dH[dt—величина, определяемая графическим дифференциро-
ванием зависимости H = H(t) на исходном установив-
шемся участке перед дачей;
Гф— фактическая температура воздуха на барометриче-
ской высоте замеренная прибором-самописцем;
7СТ—температура воздуха в стандартной атмосфере на вы-
соте Но.
Рис. 9.11. Зависимости cyi = f(a) при различных
числах М (шасси, воздушные тормоза и органы меха-
низации убраны)
По возможности всегда следует стараться выдерживать в та-
ких режимах величину 0о = О (Vyo = O).
Величину начального угла атаки а0 находят по формуле
Go~^o
Далее весь режим дачи руля высоты разделяют на равные
интервалы времени At— 0,1-4-0,05 сек. Для всех последовательных
значений t, определяемых через указанные интервалы AZ, находя!
значения О графическим интегрированием выражения (t=0 — мо-
мент начала дачи):
t
й=&0-|- wzXdt.
6
12** 598
341
Методом графического интегрирования также определяются
проекции истинной скорости полета на оси земной системы коор-
динат:
V xg = Vo cos б0 -f- g J (nxi cos & — nyl sin &) dt;
Q
t
Vyg = Vo sin % + g J (nxX sin& + cos ft— V)dt.
0
По ним находят
Vxg
V yg
Для каждого момента времени определяется угол атаки
а = & — 0.
Истинную скорость V, число М и высоту полета находят из
формул
2 V .
COS 6
ЛА У
М =—
а
о
Входящий в эту формулу интеграл также определяется графиче-
ским методом.
После этого для тех же моментов времени, для которых опреде-
лялись значения а, находят и величины суХ по формуле
су\
ny\G
Sq
(9. 7)
По полученным данным строят графическую зависимость
сз/1 = f (°0 - Из дач, выполненных при различных значениях чисел М,
определяют семейства кривых cyX = f(a) при этих значениях чис-
ла М как параметра.
Для построения сеток зависимостей = пу) и кривых
пред=^(М) требуется иметь перегрузки пх и пу в скоростной
системе осей координат и nzX в связанной с самолетом системе ко-
ординат, определенные для стандартных- или заданных условий.
Приведение полученных в полете при фактических условиях пере-
грузок к стандартным (заданным) условиям осуществляется в два
этапа. На первом этапе учитываются поправки на отклонение фак-
342
тических веса самолета и температуры наружного воздуха от их
стандартных значений с помощью формул
П>х~ Пхф Оф Ост ДРТ Ост cos (а — а>);
Оф <7СТ 1 М>т ^СТ sin (а — ср); (9. 8)
* Сф
«г1 = «гф GCT
где бф и GCT — соответственно фактический и принятый в качестве
стандартного (заданного) полетный вес самолета;
— Рт-Рст.фДТ1;
Рт — показатель изменения тяги двигателей с измене-
нием температуры;
^ст.ф — тяга двигателей в стандартных атмосферных усло-
виях (найденная по стендовым характеристикам
двигателей) на данной барометрической высоте,
определенной по фактическому давлению наруж-
ного воздуха рф;
Гф — фактическая температура наружного воздуха;
7Ст — стандартная температура воздуха на данной баро-
метрической высоте (соответствующей рф).
Величины пх$ и пу$ находят из формул (9.6), а п2ф = ПгЦ.т,
где Ягц.т определяют из формул (9.3).
Второй этап приведения заключается в учете поправок на от-
клонение барометрической высоты полета, определенной по заме-
ренному в данном режиме полета фактическому давлению наруж-
ного воздуха рф, от принятой в качестве стандартной высоты Нст.
Окончательно приведенные к стандартным условиям перегрузки
находят по формулам
пх= п*х4- ^2*) COS (а - ср);
Рф Ост у Рст Рф /
ПУ=^у
(9. 9)
Рф
где Рст — атмосферное давление на барометрической высоте //Ст’,
Рст — тяга двигателей в стандартных атмосферных условиях
на высоте 77Ст.
12***
343
Р и с. 9. 12. Изменение по времени приборных и приведенных к стандартным условиям
перегрузок пх и пу и числа М полета при криволинейном разгоне с пуПр — 1,9ч-2 и
последующем торможении самолета при пу пр — 2,9-ьЗ,2
Отношения тяги двигателей к давлению воздуха в стандартных
атмосферных условиях Р/р, входящие в формулы (9.9), опреде-
ляются по данным аэродинамического расчета испытываемого
самолета.
Построение сеток зависимостей nx=f(M, пу).
По полученным с помощью формул (9.9) значениям пх и пу
строят графические зависимости типа, приведенных на рис. 9.12
для каждого выполненного маневра. Из ряда таких графиков на-
ходят различные сочетаний значений пх и пу при определенных
величинах числа М, по которым строят поляры перегрузок — кри-
вые пу=<р(пх) при различных значениях числа М как параметра.
Пример таких поляр приведен на рис. 9.13. Для корректировки и
Я-const-, Пд^—const, 8 дд»—сот1$1 , 8 я const =const
-0,4 -0,2 0-0,2-0,/0 0,1 -0.2-0,10 0,1 -02-0.1 0 0.1 пх
Рис. 9. 13. Поляры перегрузок при ряде значений числа М
повышения точности построения поляр перегрузок целесообразно
предварительно строить поляры безразмерных коэффициентов схс
и сус, определяемых по формулам
„ пх@ст
хс Sq
„ Пу@ст
СУС---
Sq
В качестве примера такие поляры cyc=F(cxc) показаны на рис.
9. 14. У поляр безразмерных коэффициентов значительно более
четко проявляется закономерность изменения по числам М полета,
чем у поляр перегрузок, что облегчает их проверку и корректи-
ровку.
По окончательно отработанным полярам самолета cyc = f(^c)
определяются поляры перегрузок пу=у(пх), с помощью которых
легко находить искомые зависимости nx=f(M, пу). Нетрудно ви-
345
деть, что каждая поляра перегрузок позволяет определить все точки
сетки nx=f(M, пу), лежащие на одной вертикали, т. е. относя-
щиеся к данному значению числа М.
Р и с. 9. 14. Поляры безразмерных коэффициентов сх с и су
при ряде значений числа М
Определение времени накренения самолета
Минимальное время накренения самолета на различные углы
крена определяется по приближенной формуле
/^ ----/со —j"
__У°
57,3<ох max
(9.10)
где /со — минимально возможное время создания установив-
шейся максимальной угловой скорости крена Охшах
(с исходного установившегося режима полета при
сох=0) в сек;
«Лхшах — максимально достижимая величина угловой скорости
крена на данном режиме полета, определяемая при
предельном (по усилиям или кинематической схеме
системы поперечного управления) отклонении элеро-
нов, либо максимально допустимая величина сох (опре-
деляемая из условий проявления взаимодействия про-
дольного и бокового движений самолета) в 1/сек;
у° — заданный установившийся угол крена в град.
Величину /с» находят по полетным записям, полученным при вы-
полнении резкой дачи элеронов, как интервал между моментом
начала отклонения ручки управления элеронами и моментом про-
явления практически установившейся величины (Oxmax. Пример
346
определения приведен на рис. 9.15. Зависимости величин от
числа М, определенные на двух высотах полета, приведены в ка-
честве примера на рис. 9.16.
Если оказывается, что <2Л« , т. е. для
получения установившихся величин у0 тре-
буется создать угловую скорость крена
|сох| < |(Охтах|, то вместо формулы (9.10)
для определения Z7 применяется следую-
щее выражение:
yX
07,3(0* тах
Определение времени выхода на
перегрузку
Практически минимальное время со-
здания нормальной перегрузки tn у находят
по полетным записям, полученным при вы-
полнении резкой Дачи руля высоты (управ-
ляемого стабилизатора), как интервал меж-
ду моментом начала отклонения ручки
управления и моментом созданий практи-
чески установившейся заданной величины
Рис. 9.15. Определе-
ние величины из
дачи элеронов
нормальной перегрузки.
Пример определения величины tny по полетным материалам
приведен на рис. 9. 17.
Аналогичным образом определяется и практически минималь-
ное время создания заданной величины боковой перегрузки — из
Рис. 9. 16. Зависимости от числа М, определенные
на двух высотах полета
резких дач руля направления, как это показано в примере, приве-
денном на рис. 9. 18.
347
Определение времени набора
и сброса тяги двигателей
По полученным из летного эксперимента величинам пХПр и
пу Пр находят приведенные к стандартным условиям значения пере-
грузок пх и пу и строят график, изображающий изменение их по
Рис. 9. 17. Определение величины tny
из дачи руля высоты
Рис. 9. 18. Определение вели-
чины tnz из дачи руля направ-
ления
времени (рис. 9.19). Далее по записям прибора-самописца откло-
нений рычага управления двигателем (положения сектора газа
^руд )» нанесенным на этот же график, определяются моменты на-
чала сброса и начала набора тяги. В приведенном примере летчик
выполняет последовательно сброс и набор тяги двигателей в одном
348
режиме полета, причем интервал между началом сброса и началом
набора тяги составляет всего лишь 7,5 сек вместо рекомендован-
ных выше 20—25 сек. Такой сравнительно небольшой по времени
интервал между началом сброса и началом набора тяги двигате-
лей объясняется тем, что летчик в данном случае заранее знал по-
рядок величины /Сбрр (по результатам наземных стендовых испы-
таний не более 5 сек для данной силовой установки) и поэтому смог
сократить интервал.
Рис. 9. 19. Пример изменения перегрузок при вы-
полнении сброса и набора тяги в полете
После этого на поляры перегрузок, определенные при работе
двигателей на режиме малого газа и на режиме максимальной
тяги при том же числе М, при котором проводится данный летный
эксперимент, и при прочих равных условиях наносят величины пх
и пу с графика, типа, приведенного на рис. 9. 19, начиная со значе-
ний, соответствующих началу сброса и набора тяги. Пример поляр
перегрузок с нанесенными на них значениями пх и пу, определен-
ными в процессе сброса и набора тяги, приведен на рис. 9.20. Для
определения /Сбрр на эти поляры наносят значения пх и пу с гра-
фика, приведенного на рис. 9. 19 для различных моментов времени
начиная с t= 1,8 сек. Точки, характеризующие процесс сброса тяги,
идут на рис. 9. 201 от поляры, соответствующей работе двигателя
на режиме максимальной тяги, к поляре, полученной при прочих
равных условиях для режима малого газа. Конец процесса сброса
тяги (установление режима малого газа) определяется пересече-
нием ломаной линии, соединяющей эти точки, с полярой малого
газа. Зная величины пх и пу, соответствующие точке пересечения
указанной линии с полярой малого газа, по графику, приведен-
ному на рис. 9. 19, можно определить момент окончания процесса
сброса тяги. В рассматриваемом примере это произошло в момент
349
Рис. 9.20. Определение времени сброса и набора тяги двигателей
по полярам перегрузок:
а—определение /сбрр; б—определение /пабр
б)
Рис. 9.21. Определение времени выпуска и уборки воз-
душных тормозов
350
^=5,5 сек, т. е. время сброса тяги в данном случае равно /Сбрр=
= 5,5—1,8 = 3,7 сек.
Аналогично определяется и время набора тяги, только в этом
случае точки на графике рис. 9. 20 идут уже в обратном направле-
нии — от поляры малого газа к поляре режима максимальной тяги.
В рассматриваемом примере время набора тяги двигателей состав-
ляет ^набр=19,2—9,3 = 9,9 сек.
Определение времени выпуска
и уборки воздушных тормозов, шасси
и органов механизации
Эти критерии маневренности самолета определяются из полет-
ных материалов непосредственно по записям приборов-самописцев,
регистрирующих положение указанных органов. На рис. 9.21 при-
веден пример определения времени выпуска и уборки воздушных
тормозов по записям прибора-самописца углов отклонения воздуш-
ных тормозов (бв.т). Выпуск и уборка воздушных тормозов в рас-
сматриваемом случае производится на режиме прямолинейного
полета. По отклонениям воздушных тормозов из убранного
(бв.т = 0) в полностью выпущенное положение (бв.т= ЮО°/о) и
обратно в данном примере находим
/выпт — 2,7 сек (/7^12,5 км-, М^1,2);
*убор.т~1,5 сек (Я ^12,5 км\ М«1,14).
9.7. ОПРЕДЕЛЕНИЕ
ЧАСТНЫХ ПОКАЗАТЕЛЕЙ МАНЕВРЕННОСТИ
Зная общие показатели маневренности для ряда высот, можно
сравнительно просто определять по ним любые частные показатели
маневренности. Рассмотрим это на ряде примеров.
Из сеток зависимостей nx=f(M, пу} (см., например, рис. 9.2)
сразу получаем такие частные показатели маневренности, как
Ущт (Almin) , Vmin доп (М-пПп доп) , Vmax(Mmax) И Упред (МПред) •
Минимальная и минимально допустимая скорости прямолиней-
ного горизонтального полета определяются пересечением кривой
ил=/(М) при пу=1 соответственно с линиями ограничений по
с?/тах и доп- Максимальной скорости установившегося прямо-
линейного горизонтального полета соответствует точка пересечения
кривой nx=f(M) при пу=1 с осью абсцисс (пх = 0). Из указанных
сеток легко получить характеристики правильных серийных вира-
жей (правильным называется вираж, выполняемый без скольже-
ния; серийным — установившийся вираж). Этим режимам соот-
ветствуют точки пересечения кривых пх=/(М) при пу>\ с осью
абсцисс, так как при серийном вираже пх = 0. Пример определения
режимов правильных серийных виражей таким способом приведен
351
на рис. 9.22. Зная зависимость п2/в=<р(М), соответствующую ре-
жимам правильных серийных виражей на данной высоте полета,
можно по значениям пу и М определить и остальные характери-
Р и с. 9. 22. Определение характеристик
правильных серийных виражей пу 3 =
= ср(М) с помощью зависимостей
nx = f(M, пи)
стики виражей: скорость 1/в, угол крена ув, радиус виража /?в и
время поворота самолета на 360° Тв из следующих формул:
1/в = Ма;
cos ув=—;
пув
0,102
Ув2
6,28 ,
где а и VB в м)сек.
Помимо указанных с помощью сеток зависимостей пх=/(М, Пу)
легко можно получить еще ряд частных показателей маневренно-
сти: характеристики неустановившихся виражей и виражей со
скольжением, характеристики криволинейных разгонов и торможе-
ний самолета, минимальные и максимальные скорости снижения
самолета.
По имеющимся критериям маневренности данного самолета
с помощью системы уравнений (9.2) можно рассчитать характери-
стики любого пространственного маневра.
352
9.8. ВЫПОЛНЕНИЕ ФИГУР ПИЛОТАЖА
Каждый тип самолета в зависимости от назначения должен
быть в состоянии выполнять определенные маневры. Особенно ве-
лико количество маневров у самолетов типа истребителей: разгоны
и торможения (прямолинейные и криволинейные), виражи, горки,
боевые развороты, перевороты через крыло, бочки, петли Нестерова
и пикирования. Для получения качественной оценки самолета лет-
чиком и дополнительной проверки границ области эксплуатацион-
ной маневренности при проведении летных испытаний выпол-
няются некоторые из этих маневров, представляющие наибольший
интерес для данного самолета.
В качестве примера на рис. 9.23 приведены записи приборов-
самописцев, полученные в полете при выполнении петли Нестерова
с начальной высоты 5 км и начальной приборной скорости
УПр~ 850 км/час, а на рис. 9.24 — при выполнении переворота че-
рез крыло с начальной высоты 16 км и начальной приборной скоро-
сти ЙПр~500 км/час (число М^1,1).
9.9. ЭНЕРГЕТИЧЕСКАЯ ВЫСОТА
И ДИНАМИЧЕСКИЙ ПОТОЛОК САМОЛЕТА
Основные определения
В режиме установившегося набора высоты самолет не может
подняться выше статического потолка. Однако используя кинети-
ческую энергию, накопленную самолетом в процессе разгона,
можно с помощью неустановившегося восходящего маневра на-
брать дополнительную высоту. Высоты полета, превышающие ста-
тический потолок, называются динамическими высотами.
Предельная высота полета, которую можно набрать, расходуя
предварительно накопленный на данном самолете запас его кине-
тической энергии, называется динамическим потолком самолета.
У сверхзвуковых самолетов динамический потолок обычно значи-
тельно превышает статический.
Установившиеся маневры на динамических высотах невоз-
можны. Но на этих высотах можно выполнять различные неуста-
новившиеся маневры: прямолинейные горизонтальные торможения
самолета, виражи, развороты с потерей скорости или высоты.
Сверхзвуковые самолеты могут производить сравнительно продол-
жительный полет на динамических высотах. Выход на динамиче-
ские высоты значительно расширяет тактические возможности
сверхзвуковых самолетов.
Для проведения анализа режимов полета на динамические
высоты воспользуемся энергетическим методом, предложенным
профессором Н. Е. Жуковским, а затем разработанным профессо-
353
Рис. 9. 24. Записи приборов-самописцев, полученные в полете при вы-
полнении переворота через крыло
Р и с. 9. 23. Записи приборов-
самописцев, полученные в поле-
те при выполнении петли Нес-
терова
ром В. С. Пышновым *. Этот метод основывается на рассмотрении
полной механической энергии самолета.
Полная механическая энергия самолета Е представляет собой
сумму кинетической mV2/2 и потенциальной энергии GH. В общем
случае движения самолета даже при неизменном режиме работы
двигателей величина Е не остается постоянной — происходят по-
тери энергии. При маневрах обычно один вид энергии переходит
в другой. Например, при отвесном пикировании часть потенциаль-
ной энергии самолета переходит в кинетическую.
Удобнее пользоваться не самой величиной Е, а отношением
Е/G, характеризующим полную энергию одного килограмма веса
движущегося самолета. В этом случае можно написать
HE^=V±
Е G 2g
Величина НЕ называется энергетической высотой, или уровнем
энергии самолета. Из приведенной формулы видно, что НЕ пред-
ставляет собой наибольшую высоту подъема самолета при движе-
нии с постоянной полной энергией. Очевидно, что чем больше пол-
ная энергия самолета, тем больше л его энергетическая высота.
Высота полета, равная максимальной энергетической высоте (соот-
ветствующей максимальному значению полной энергии самолета),
называется баллистическим потолком, или теоретическим динами-
ческим потолком самолета. Следовательно, теоретический динами-
ческий потолок самолета Ят.д — это максимальная высота полета,
достигаемая при торможении самолета без потерь полной энергии
от максимальной (предельной) скорости до V—0. Расчётным дина-
мическим потолком самолета НД называется максимальная высота,
достигаемая при торможении самолета без потерь полной энергии
от максимальной (предельной) до минимальной предельной скоро-
сти полета. Под минимальной предельной скоростью полета само-
лета на динамическом потолке обычно понимается эволютивная
скорость Vd, обеспечивающая достаточную эффективность аэроди-
намических органов управления самолета на этой высоте. Эволю-
тивную скорость при полетах на динамический потолок, особенно
рекордных, выбирают обычно значительно меньшей, чем при вы-
полнении других маневров.
Практический динамический потолок Нп.Д— это максимальная
высота, достигаемая в реальном полете (с учетом неизбежных по-
терь энергии) при торможении самолета от максимальной (пре-
дельной) скорости до эволютивной.
Расчет динамического потолка
Величина Ят.д определяется расчетом и служит для оценки
предельных возможностей самолета в отношении динамического
* В. С. П ы ш н о в, Энергетический метод рассмотрения движений самолета,
«Вестник воздушного флога», 1951, № 4, 5, 6.
355
набора высоты. Величина Яп.д, определенная вначале расчетным
путем, проверяется в полете. Она характеризует реальные возмож-
ности самолета в отношении набора максимальной высоты, являясь
наибольшей практически доступной днамической высотой полета.
Яп.д обычно оказывается несколько меньше Яд, так как при наборе
высоты в реальном полете энергетическая высота становится
меньше максимальной, т. е. происходит потеря полной энергии са-
Рис. 9.25. Изменение параметров движения само-
лета при полете на динамический потолок
молета, например, из-за увеличения лобового сопротивления само-
лета при создании перегрузки на участке ввода самолета в режим
набора высоты.
Траектория полета самолета на динамические высоты рассчи-
тывается численным интегрированием системы дифференциальных
уравнений:
dV , . dfl (пп— cos fl) £
—=K-sln0)^: —- v ;
dt dt v
— ==Vsin9; M= —.
dt a
(9. 11)
356
При этом задается оптимальный для данных условий закон из-
менения нормальной перегрузки в режиме набора высоты, а соот-
ветствующие значения пх определяются с помощью сеток зависи-
мостей пх=/(М, пу) типа приведенных на рис. 9.2 и 9.3. Система
уравнений (9.11) получена из первого, второго, пятого, восьмого и
тринадцатого уравнений системы (9.2) при условии у = 0.
Пример изменения параметров траектории при полете самолета
на динамический потолок, рассчитанных по описанной методике,
приведен на рис. 9. 25.
Методика летных испытаний
Определенные расчетным путем оптимальный режим набора
высоты для выхода самолета на практический динамический пото-
лок и величина /7п.д проверяются в полете. На высоте, выбранной
в качестве оптимальной для начала ввода самолета в режим на-
бора высоты (на которой полная энергия самолета при разгоне до
Мпред оказывается максимальной), производится горизонтальный
прямолинейный разгон самолета без скольжения до максимального
(предельного) числа М полета. Эта высота обычно значительно
меньше статического потолка. После разгона самолет вводится
в режим динамического набора высоты. Очень важно выбрать та-
кой режим ввода самолета в набор высоты, при котором потери
полной энергии были бы минимальными. Если ввод производится
очень резко, с интенсивным нарастанием нормальной перегрузки
до больших величин, то самолет начинает сразу крутой набор вы-
соты. Однако в этом случае скорость полета (из-за резкого возра-
стания сх) быстро падает, что приводит к сравнительно большим
потерям полной энергии самолета. Если ввод производится очень
медленно, с малым пу, то скорость полета самолета на вводе умень-
шается незначительно, однако и угол наклона траектории полета
увеличивается также очень медленно, что не дает возможности
достигать больших высот полета. Наибольшие высоты достигаются
при среднем, оптимальном темпе создания требуемых величин нор-
мальной перегрузки на вводе. В этом случае обеспечивается, макси-
мально возможное начальное приращение угла наклона траектории
без существенной потери исходной скорости полета. Это обычно
достигается при скорости нарастания начального угла наклона
траектории полета порядка 1° в сек. После ввода продолжается
режим криволинейного полета с набором высоты до Нпя.
Перед проведением летных испытаний на динамический пото-
лок самолет испытывают на штопор во всем эксплуатационном диа-
пазоне высот полета, так как из-за возможных ошибок пилотиро-
вания выход на эволютивную скорость Уэ на больших высотах мо-
жет привести к сваливанию. Предварительно отрабатывают методы
надежного запуска двигателя в полете на возможно больших
высотах и методику посадки самолета с неработающим двига-
телем.
357
На практическом динамическом потолке определяются характе-
ристики управляемости и устойчивости самолета (обычно дается
в основном только качественная их оценка). На больших высотах
полета (у современных сверхзвуковых истребителей величина
/7п.д превышает 40 км) резко уменьшается аэродинамическое демп-
фирование. Это приводит к увеличению периодов свободных коле-
баний самолета и ухудшает затухание этих колебаний, что затруд-
няет точное пилотирование. В связи с плохой видимостью земли
и горизонта и изменением окраски неба существенно, изменяются
условия обзора. Уменьшение плотности воздуха изменяет и усло-
вия работы различных систем и оборудования самолета. На высо-
тах, больших статического потолка, возможны только неустановив-
шиеся режимы полета. Маневренные возможности самолета на
этих высотах заметно уменьшаются — снижаются максимальные
перегрузки из-за падения плотности воздуха. Полет сверхзвуковых
самолетов с ТРД на динамических высотах происходит обычно
с неработающим или с создающим весьма малую тягу двигателем.
Помимо перечисленных, в каждом частном случае возможны
и другие особенности полета на динамических высотах. Все эти
особенности следует учитывать при проведении летных испытаний
и последующей оценке возможности выполнения данным самоле-
том поставленных перед ним тактико-технических задач на дина-
мических высотах полета (например, выполнение полетов на пере-
хват и т. д.). Существенное улучшение тактико-технических данных
самолета на таких высотах может быть достигнуто применением
средств автоматического управления (наведения) и автоматиче-
ской стабилизации самолета.
Глава X
ОПРЕДЕЛЕНИЕ ВЗЛЕТНО-ПОСАДОЧНЫХ
ХАРАКТЕРИСТИК САМОЛЕТА
10.1. ОСОБЕННОСТИ ВЗЛЕТНО-ПОСАДОЧНЫХ
ХАРАКТЕРИСТИК СОВРЕМЕННЫХ САМОЛЕТОВ
Возрастание максимальных скоростей полета современных са
молетов связано с ухудшением их взлетно-посадочных характери-
стик: увеличением взлетных и посадочных скоростей, приводящим
в частности к увеличению длин разбега и пробега. Это затрудняет
расчет и выполнение посадки, взлета, усложняет технику пилоти-
рования самолета и тем самым снижает безопасность полета,
а также требует значительного увеличения потребных размеров
аэродромов (из-за необходимости удлинения ВПП). Увеличение
потребных длин ВПП является наиболее тяжелым последствием
увеличения посадочных скоростей скоростных самолетов. Необхо-
димость увеличения ВПП связана также и с ухудшенными харак-
теристиками взлета современных тяжелых самолетов (значитель-
ное возрастание дистанций прерванного и продолженного взлета
у современных многомоторных самолетов в случае асимметричного
отказа двигателей).
Возрастание потребных размеров ВПП является весьма неже-
лательным как с военной (повышенная уязвимость больших аэро-
дромов, необходимость концентрации вокруг них большого коли-
чества авиационной техники), так и с экономической точки зрения.
Гак, например, по американским данным, стоимость увеличения
длины бетонной ВПП, пригодной для летной эксплуатации совре-
менных тяжелых самолетов (с весом порядка 100 г и более, для
чего требуется бетонное покрытие толщиной порядка 400 мм и
выше), на каждые 200 м составляет около 500 000 долларов.
Поэтому в течение последних двух десятилетий во всем мире
ведутся интенсивные поиски средств улучшения взлетно-посадоч-
ных характеристик самолетов (создания самолетов с укороченными
взлетом и посадкой, а также и самолетов безаэродромной авиа-
ции— вертикально взлетающих самолетов). Для создания самоле-
тов с укороченными взлетом и посадкой, в частности, широка при-
меняются различные средства механизации крыла (отклоняющиеся
•носки, предкрылки, реактивные закрылки и т. д.), системы управ-
ления пограничным слоем, устройства для реверсирования тяги
359
двигателей, специальные вертикальные двигатели кратковременного
использования для взлета и посадки.
В настоящее время существуют самолеты, способные произво-
дить как аэродромные, так и безаэродромные (точнее — без дви-
жения по земле, т. е. без разбега и пробега) взлет и посадку. Однако
современные самолеты массовой эксплуатации предназначены
только для аэродромного базирования, т. е. для их взлета и посад-
ки требуется наличие специально подготовленной летной полосы.
-КПБ- _ ППП _ КПК —
- Dilli MID
ЛП
Рис. 10. 1. Схема летной полосы
Летная полоса (ЛП) состоит из взлетно-посадочной полосы (ВПП)
и концевых полос безопасности (КПБ) (см. рис. 10. 1). Располагае-
мая длина летной полосы (РЛП) представляет собой сумму длин
взлетно-посадочной полосы и концевой полосы безопасности, нахо-
дящейся впереди по направлению движения самолета (в направ-
лении которой производится взлет или посадка).
Схематически аэродромные взлет и посадка самолета в нор-
мальных эксплуатационных условиях представлены на рис. 10.2 и
10.3. Высота, обозначенная на схеме рис. 10.2 и 10.3 символом
v~o
Va
Отрыв
Разбег ---------
*веэ
yen
Подъем
------Выдерживание-----------*4
— взлетная дистанция-----------
у
ипос
'Касание
^пл
#усл
Планирование w Вырабни^ выдерживание (по го- Дараш^г
бание ризонтали)
бание
шарование
Пробег
Посадочная дистанция
Рис. 10.2. Схематическое представление траекторий аэродромных взлета
и посадки старого дозвукового самолета
//усл, является условной высотой препятствий на подходах к аэро-
дрому. Ранее было принято считать условную высоту препятствий
одинаковой для случаев взлета и посадки и равной 25 м. В настоя-
щее время по требованиям Международной Организации Граж-
данской Авиации (JCAO) величина Hycjl считается равной 10,7 м
для взлета и 15 м для посадки. При этом высота //уСл=10,7 м
отсчитывается от уровня ВПП в* точке отрыва самолета на взлете,
360
а //усл=15 м — от уровня ВПП в точке касания самолетом земли
при посадке.
Взлетной дистанцией называется путь, проходимый самолетом
при взлете от линии старта (точки начала разбега) до точки траек-
тории на высоте Яусл (отсчитываемой от уровня ВПП в точке от-
рыва самолета), в которой самолет достигает безопасной скорости
взлета. Безопасной скоростью взлета Убез называется наименьшая
скорость полета, при которой допускается выполнение дальней-
шего набора высоты (по достижении самолетом высоты Яусл).
Рис. 10.3. Схематическое представление траекторий аэродромных взлета
и посадки сверхзвукового самолета
В частности, в случае многомоторных самолетов величина Ибез
является наименьшей скоростью полета, при которой разрешается
производить дальнейший набор высоты в случае продолжения
взлета с отказавшим критическим двигателем, о чем подробней
будет сказано ниже. Безопасная скорость взлета должна превы-
шать скорость сваливания самолета во взлетной конфигурации при
работе двигателей на режиме холостого хода (малого газа) не ме-
нее чем на 20'% — для самолетов, имеющих не более двух двига-
телей, и 15%—для самолетов, имеющих более двух двигателей.
Безопасная скорость взлета должна превышать эволютивную ско-
рость полета не менее чем на 10%.
Посадочной дистанцией (рис. 10.2 и 10.3) называется путь, про-
ходимый самолетом при посадке от точки траектории на высоте
Яусл (отсчитываемой от уровня ВПП в точке касания самолета)
до момента полной его остановки. В процессе выполнения расчета
и захода на посадку скорость полета самолета должна быть не ме-
нее 1,3 Усв (скорости сваливания) при соответствующей внешней
конфигурации самолета и .работе двигателей на режиме холостого
хода (малого газа), а также не превышать предельно допустимую
скорость полета с данным положением органов механизации крыла,
13 598
361
установленную из условий прочности конструкции или устойчиво-
сти и управляемости самолета.
Внешняя конфигурация самолета определяется сочетанием по-
ложений органов механизации крыла, шасси, воздушных тормозов,
наружных подвесок и т. д. Различают три основные конфигурации
самолета: взлетную, полетную и посадочную. Взлетная конфигура-
ция самолета соответствует условиям полета со взлетной меха-
низацией крыла при выпущенном или убранном шасси, полетная —
условиям полета самолета с убранным шасси при положении орга-
нов механизации крыла, соответствующем крейсерскому режиму
полета, посадочная — условиям полета с посадочной механизацией
крыла и выпущенным шасси.
Взлетная
дистанция
_________Начальный набор Высоты
начало уборки
органоб механизаци
КПБ
Линия ограничения препятствий
^УроВень ВЛП 6 точке отрыбо
Линия
старта
1 начало уборки
ВПП Шасси
Располагаемая Илина
летной полосы
Летная полоса
Запас Высоты
над препятствиям!!
Полет по
д’ "маршруту
Рис 10.4. Схема взлета и начального набора высоты (по требованиям
JCAO}
Требованиями JCAO регламентируются не только условия
взлета, но и условия дальнейшего, так называемого начального
набора высоты — до достижения самолетом высоты 457 М, после
чего начинается уже полет по маршруту. Схематически траектория
движения самолета на взлете и в процессе начального набора вы-
соты (полная взлетная дистанция) показана на рис. 10.4. Уборка
шасси начинается в конце взлетной дистанции (в точке /, соответ-
ствующей высоте полета 10,7 м).
По окончании взлетной дистанции наступает этап начального
набора высоты. В точке 2 уборка шасси заканчивается, после чего
начинается участок значительно более интенсивного набора вы-
соты. Так, например, по требованиям JCAO для четырехмоторных
самолетов минимальный уклон траектории набора высоты * в пря-
молинейном полете должен быть не менее 1,3% на участке 1—2 и
3% на участке 2—3. В точке 3 (высота полета 122 м) начинается
* Уклон траектории набора высоты на взлете Чвзл определяется обычно
в процентах из следующего выражения:
dH
Пвзл =tg 0ВЗЛ-1ОО% = — -100% ^0ВЗЛ-ЮО%,
aL
где 0взл—в рад-
352
уборка органов механизации. Далеесамолет продолжает полет по
прямолинейному, или состоящему из отдельных отрезков участку
траектории начального набора высоты, заканчивающемуся на вы-
соте 457 м (точка 4). После этого этап, начального набора высоты
считается завершенным и летчик может приступить к выполнению
полета по заданному маршруту.
У современных реактивных самолетов, обладающих большой
энерговооруженностью (тяговооруженностью), этапы выдержива-
ния и подъема (см. рис. 10.3) сливаются в один — разгон с одно-
временным набором высоты. Скорости отрыва и посадочная у со-
временных сверхзвуковых самолетов значительно выше, чем у до-
звуковых. Это объясняется возрастанием удельной нагрузки” на
крыло, уменьшением несущих свойств крыла, увеличением угла
стреловидности и уменьшением относительной толщины крыла,
а также условиями обзора и конструктивными соображениями,
препятствующими использованию при отрыве и подходе к земле
всего допустимого из условий аэродинамики диапазона углов атаки
(уменьшение удлинения крыла у современных сверхзвуковых са-
молетов обычной схемы приводит к существенному увеличению
критических углов атаки). У сверхзвуковых самолетов из-за умень-
шения аэродинамического качества по сравнению с дозвуковыми
возрастают угол предпосадочного планирования (точнее, сниже-
ния) и вертикальная скорость снижения самолета, что нежела-
тельно. Поэтому самолет снижают при работе двигателей на режи-
ме, соответствующем повышенной по сравнению с таковой на ре-
жиме малого газа тяге (мощности) двигателей. Это облегчает
и повышает безопасность выравнивания самолета, а в случае необ-
ходимости позволяет сразу уйти на второй круг. Однако при этом
возрастает скорость планирования, что приводит к увеличению
длины посадочной дистанции. Скорость отрыва всегда выше поса-
дочной. Длины разбега и пробега сверхзвуковых самолетов значи-
тельно превышают таковые у дозвуковых самолетов.
У реактивных самолетов выдерживание (рис. 10.3) произво-
дится обычно не по горизонтальной, а по наклонной траектории —
с плавным постепенным приближением основных колес шасси
к земле по окончании выравнивания. Участок парашютирования
у них отсутствует. Длина выдерживания реактивного самолета
оказывается обычно значительно большей, чем у самолетов с порш-
невыми двигателями. Поэтому для того, чтобы приземлить реак-
тивный самолет вблизи начала ВПП, летчик должен начинать вы-
равнивание не над самой полосой, а значительно раньше (на под-
ходах к ней).
Самолеты безаэродромной авиации, совершающие вертикаль-
ные взлет и посадку, по положению фюзеляжа на этих режимах
можно разделить на два типа — с горизонтальным или с верти-
кальным положением фюзеляжа. В последнее время безаэродром-
ные самолеты строят, как правило, с горизонтальным положением
фюзеляжа на взлете и посадке. У таких самолетов вертикальная
13*
363
тяга для взлета и посадки создается, например, отклонением пово-
ротного сопла ТРД, ось которого, как и у обычных самолетов,
направлена по продольной оси фюзеляжа, либо с помощью спе-
циальных стартовых ТРД с вертикальной осью или стартовых тур-
бовентиляторных установок, либо поворотом маршевых двигате-
лей и т. п.
На рис. 10.5 и 10.6 для примера схематически показан один из
возможных вариантов вертикальных взлета и посадки самолета
с горизонтальным положением фюзеляжа на этих режимах. У та-
Р и с. 10.5. Схематическое представление траектории верти-
кального взлета самолета с горизонтальным положением
фюзеляжа при отрыве
ких самолетов траектория взлета состоит из двух частей (см.
рис. 10.5): вертикального набора высоты, заканчивающегося вы-
ходом на условную высоту препятствий, которая для обеспечения
большей безопасности полета при вертикальном взлете прини-
мается обычно равной 50 м (вдвое больше, чем при аэродромном
взлете), и взлетного переходного режима, в процессе которого
самолет разгоняется (обычно по наклонной траектории с продол-
жением набора высоты) до эволютивной скорости Уэ, т. е. самолет
переходит от режима висения при V=0 к нормальному полету
со скоростью 7Э.
На первом участке траектории такого взлета тяга двигателей
направлена вертикально вверх, на втором участке направление
тяги изменяется и к концу его тяга оказывается направленной
практически по продольной оси самолета, как это требуется для
нормального полета.
Для выполнения вертикальной посадки самолет снижается
(планирует) и тормозится в режиме нормального полета с таким
364
расчетом, чтобы оказаться вблизи выбранного места посадки
со скоростью Уэ. Посадка такого самолета также состоит из двух
этапов (см. рис. 10.6): посадочного переходного режима, в про-
цессе которого самолет переходит от режима нормального полета
со скоростью Уэ к режиму висения при V = 0, и вертикального сни-
жения, заканчивающегося приземлением самолета.
Р и с. 10.6. Схематическое представление траектории верти-
кальной посадки самолета с горизонтальным положением
фюзеляжа при касании земли
Существуют также самолеты, совершающие безаэродромный
взлет с помощью специальных наземных стартовых устройств
(стартовых катапульт и т. д.), но затем выполняющие обычную
аэродромную посадку.
В настоящее время большое внимание уделяется созданию
самолетов с укороченными взлетом и посадкой (с малыми длинами
разбега и пробега). Это достигается повышением несущих свойств
крыла с помощью систем управления пограничным слоем, приме-
нением дополнительных подъемных двигателей, реверса тяги мар-
шевых двигателей на посадке и т. п.
10.2. ХАРАКТЕРИСТИКИ,
ОПРЕДЕЛЯЕМЫЕ ПРИ ИСПЫТАНИЯХ
При проведении летных испытаний самолетов с аэродромными
взлетом и посадкой определяются следующие взлетно-посадочные
характеристики: длина и время разбега, скорость отрыва, длина
и время прохождения взлетной дистанции, длина и время пробега,
посадочная скорость, длина и время прохождения посадочной ди-
станции, угол наклона траектории и скорость предпосадочного пла-
365
нирования самолета. Длины разбега и пробега, взлетной и посадоч-
ной дистанций, а также углы набора высоты являются основными
характеристиками, определяющими размеры взлетно-посадочных
полос (ВПП), аэродромов и подходов к ним.
Наряду с кинематическими взлетно-посадочными характеристи-
ками, определяются и характеристики устойчивости и управляемо-
сти самолета на этих режимах. Кроме того, на основании отзыва
летчика-испытателя дается качественная оценка взлетно-посадоч-
ных свойств самолета, в которой отмечаются:
а) особенности поведения самолета при отрыве на взлете и при
касании земли на посадке: плавность и легкость отрыва, плавность
касания земли, устойчивость и управляемость самолета на этих
режимах;
б) легкость выдерживания прямолинейности движения и эф-
фективность рулей при разбеге и пробеге, легкость педъема носо-
вого колеса при разбеге самолета с трехколесным шасси (шасси
с носовым колесом), склонность самолета к рысканию, продольной
раскачке;
в) эффективность и рекомендации по использованию тормозов
колес, поведение самолета при перемещениях рычагов управления
двигателями, рекомендации по использованию тормозных посадоч-
ных парашютов, моменту поднятия носового колеса при разбеге
и моменту опускания его при пробеге;
г) особенности поведения и пилотирования самолета на воз-
душных частях траекторий взлета и посадки, легкость выдержива-
ния прямолинейности полета после отрыва, устойчивость и управ-
ляемость самолета на этих режимах, поведение и техника пило-
тирования самолета при выпуске и уборке шасси, органов механи-
зации и включения стартовых ускорителей;
д) особенности взлета и посадки в турбулентной атмосфере,
определение наибольшей скорости бокового ветра, при которой
допустимы взлет и посадка самолетов в массовой эксплуатации;
е) обзор из кабины, общая оценка условий работы летчика
в кабине.
В основном эти взлетно-посадочные характеристики опреде-
ляются и при проведении летных испытаний самолетов.с укорочен-
ными взлетом и посадкой. При проведении летных испытаний са-
молетов с безаэродромными взлетом и посадкой в первую очередь
определяются характеристики режимов висения вблизи земли
(точность выдерживания заданной высоты висения и заданных
вертикальных перемещений самолета, управляемость и стабилиза-
ция самолета при нулевых и околонулевых скоростях полета),
особенности вертикального старта и вертикального приземления
самолета (в частности, средняя вертикальная скорость снижения
самолета перед касанием земли) и точность выдерживания и рас-
полагаемые величины горизонтальных перемещений самолета при
подходе к месту посадки на околонулевых скоростях полета.
Весьма важными являются характеристики переходных режимов:
366
управляемость, стабилизация и особепписги поведения самолета
на этих режимах, а также особенности пилотирования и выбор
оптимальных траекторий полета при разгоне самолета на взлете
от V=0 до V=VQ и при торможении от VQ до V=0 на посадке
(изменение высоты и горизонтальной дальности полета в переход-
ном режиме, характер изменения угла тангажа и скорости полета
и т. д.). Однако ввиду того, что в настоящее время самолетов с без-
аэродромными взлетом и посадкой в массовой эксплуатации нет,
ограничимся в дальнейшем рассмотрением взлетно-посадочных
характеристик только самолетов с аэродромными взлетом и по-
садкой.
10.3. МЕТОДЫ РЕГИСТРАЦИИ ПАРАМЕТРОВ
ТРАЕКТОРИЙ ВЗЛЕТА И ПОСАДКИ
Взлетно-посадочные характеристики самолетов определяются
как путем внешнетраекторных измерений, так и с помощью реги-
стрирующей аппаратуры, устанавливаемой непосредственно на
самолете. Рассмотрим методы, разработанные для определения
взлетно-посадочных характеристик самолетов с обычными аэро-
дромными взлетом и посадкой. Эти методы применимы также и для
самолетов с укороченными взлетом и посадкой.
Наибольшее распространение получили методы внешнетраек-
торных измерений: о п т и ч е с к и е, визуальный и радиоло-
кационный. Основными из них являются оптические методы
определения характеристик траекторий взлета и посадки, обеспе-
чивающие наибольшую точность измерений. В качестве примера
методов, использующих установленную на самолете регистрирую-
щую аппаратуру для определения кинематических параметров
движения самолета, можно назвать метод интегрирования скоро-
стей и перегрузок и метод счетчика оборотов колеса. Часто исполь-
зуются комбинации нескольких различных методов. Подробно ме-
тоды определения характеристик траектории полета изложены
выше (см. гл. II). Здесь разберем лишь специфические особенно-
сти и сравнительные характеристики отдельных наиболее распро-
страненных методов, применяемых для определения взлетно-поса-
дочных характеристик самолетов.
Оптические методы
Взлетно-посадочные характеристики самолетов можно опреде-
лять двумя оптическими методами: кинотеодолитным и методом
взлетно-посадочной фотокамеры. Для современных самолетов, как
правило, применяется только кинотеодолитный метод. Этот метод
позволяет определять непосредственно не только взлетно-посадоч-
ные характеристики самолета, но и характеристики траектории
полета после взлета, а также при заходе на посадку с большого
удаления и большой высоты, что очень важно, в частности, при
367
летных испытаниях с имитацией аварийных посадок. Однако при
кинотеодолитном методе применяют весьма сложную и дорогостоя-
щую аппаратуру — кинотеодолитные станции (КТС). Обычно при
проведении испытаний с использованием КТС самолет оборудуется
радиосинхронизатором для синхронизации записей приборов-само-
писцев с данными кинотеодолитных измерений. Моменты отрыва и
касания определяются визуально и фиксируются оператором ближ-
него кинотеодолитного поста нажатием кнопки отметки особых
явлений, а затем уточняются по записям установленных на самолете
приборов-самописцев (при наличии синхронизаций результатов
измерений).
Взлетно-посадочная фотокамера (ВПК) представляет собой
неподвижную фотокамеру с широкоугольным объективом, в кото-
рой размеры кадров определяются отверстием экранирующего кол-
пака, вращающегося относительно проходящей через центр объек-
тива вертикальной оси. При фотосъемке оператор с помощью ви-
зира производит непрерывное ориентирование экранирующего кол-
пака по движущемуся самолету, направляя ось визира все время
на одну и ту же точку, выбранную примерно в середине фюзеляжа.
Съемки производятся с заранее заданными интервалами времени,
устанавливаемыми на часах, подающих импульсы на срабатыва-
ние затвора. На неподвижной фотопленке получается ряд кадров,
характеризующих положение самолета в различные моменты
времени.
При больших длинах взлетно-посадочных дистанций и отсутст-
вии кинотеоделитных установок можно использовать две взлетно-
посадочные фотокамеры, обеспечив синхронизацию их работы.
Применение двух таких фотокамер позволяет повысить точность
измерений.
Существуют и другие оптические методы определения взлетно-
посадочных характеристик самолетов: с помощью фотокамеры,
установленной на линии взлета, либо вращающейся фотокамеры,
оптическая ось которой отслеживает движение самолета. Однако
эти методы в настоящее время применяются очень редко.
Визуальный и радиолокационный методы
Визуальный метод является наиболее простым методом
определения длины и времени разбега (пробега). Измерения ви-
зуальным методом производятся непосредственно наблюдате-
лями-хронометристами. При взлете один наблюдатель находится
на старте, а остальные (4—5 человек) располагаются вдоль ВПП
в месте предполагаемого отрыва на расстоянии около 50 м друг
от друга. В момент страгивания самолета с места наблюдатель
на старте подает сигнал, по которому остальные включают свои
секундомеры. Останавливают секундомеры в момент отрыва по
сигналу одного из наблюдателей. Точку отрыва определяют на глаз,
после чего замеряют длину разбега, например, рулеткой или с по-
368
мощью автомобиля с заранее оттарированным указателем прой-
денного пути. Аналогичным способом определяют время и длину
пробега. Скорость отрыва и посадочную скорость находят по уста-
новленным на самолете приборам-самописцам или по данным лет-
чика, следящего за показаниями бортового визуального указателя
скорости полета. Недостатками визуального метода являются
низкая точность измерений и невозможность определения харак-
теристик воздушных участков траекторий.
Радиолокационный метод, как и кинотеодолитный,
позволяет определять взлетно-посадочные характеристики при лю-
бых длинах дистанций, а также замерять параметры траекторий
полета после взлета и перед посадкой. Преимуществом радиоло-
кационного метода является возможность производить измерения
и при отсутствии прямой видимости (заход на посадку из-за обла-
ков, ночные взлеты и посадки и т. д.), недостатком — потребность
в сложном радиолокационном оборудовании и меньшая точность
измерений по сравнению с кинотеодолитным методом.
Методы счетчика оборотов колеса,
интегрирования скоростей и перегрузок
Это методы, основанные на использовании бортовых самолет-
ных приборов-самописцев.
Сущность метода счетчика оборотов колеса опре-
деляется его названием. По счетчику, соединенному с электроча-
сами, находят число оборотов колеса шасси пк, а следовательно, и
пройденный самолетом путь / = 2лгк^к в функции времени:
Средний радиус колеса шасси самолета гк принимают равным полу-
сумме радиуса колеса при стоянке самолета с данным взлетным
весом и радиуса колеса без нагрузки. Графическим дифференци-
рованием зависимости определяют скорость движения само-
лета относительно земли. Момент отрыва находят по началу замед-
ления вращения колеса, а момент касания — по началу раскрутки
колеса. Эти моменты можно определять точнее по записям уста-
новленных на самолете приборов-самописцев или по наблюдениям
летчика. Из-за систематических погрешностей (например, не учи-
тывается скольжение колеса) данный метод по сравнению с опти-
ческими обладает меньшей точностью измерений.
Методы интегрирования скоростей и перегру-
зок. Методы определения параметров взлетно-посадочных траек-
торий по замеренным непосредственно в полете значениям скоро-
сти (интегрирование скорости для определения взлетной и поса-
дочной дистанций) или перегрузки (интегрированием перегрузки
и для определения скоростей и дистанций взлета и посадки — решая
уравнения маневренности (9.2), в которые в этом случае пере-
грузки пх, пу, nz входят в качестве известных переменных) позво-
ляют замерять достаточно точно как характеристики воздушных,
так и наземных частей траекторий, не требуя для этого сложной и
369
дорогостоящей аппаратуры. При определении характеристик раз-
бега и пробега для записей приборов-самописцев перегрузок харак-
терен весьма большой разброс, обусловленный толчками и вибра-
циями при движении самолета по земле. Однако, как правило, та-
кие записи позволяют легко получать средние значения перегру-
зок, по которым искомые характеристики находят достаточно
точно.
Описанными методами определяются фактические взлетно-
посадочные характеристики самолетов, т. е. характеристики взле-
тов и посадок в фактических условиях данных летных испытаний.
Затем их приводят к стандартным или заданным условиям.
Рассмотренные методы, такие как оптические, радиолокацион-
ный, методы интегрирования скоростей и перегрузок, можно
использовать и при определении взлетно-посадочных характеристик
самолетов безаэродромной авиации.
10.4. ПРОВЕДЕНИЕ ЛЕТНЫХ ИСПЫТАНИЙ
В НОРМАЛЬНЫХ ЭКСПЛУАТАЦИОННЫХ УСЛОВИЯХ
В зависимости от имеющегося оборудования, требуемой точ-
ности результатов измерений и специфических особенностей дан-
ных испытаний выбирают метод (или комбинацию методов) опре-
деления взлетно-посадочных характеристик. Для оценки устойчи-
вости и управляемости на этих режимах самолет оборудуется при-
борами-самописцами, как это описано выше в гл. VI. Перед нача-
лом испытаний необходимо изучить результаты аэродинамического
расчета и предыдущих летных испытаний данного самолета и са-
молетов аналогичных типов.
При определении взлетно-посадочных характеристик исполь-
зуют следующие регламентированные значения веса самолета:
1) нормальный взлетный вес — вес самолета в начале разбега,
при котором достигается заданная максимальная техническая
дальность полета;
2) максимальный взлетный вес — наибольший вес самолета
в начале разбега, допустимый по прочности и условиям безопас-
ности взлета;
3) нормальный посадочный вес — вес самолета перед призем-
лением с полным экипажем, 20%-ным запасом горючего и соот-
ветствующим запасом масла при 50% полного груза (боезапаса);
4) максимальный посадочный вес — наибольший вес самолета
перед приземлением, допустимый по прочности и условиям безо-
пасности посадки.
Взлетные характеристики определяются при нормальном и мак-
симальном взлетных весах с использованием органов механизации
крыла и стартовых ускорителей; посадочные — также при нор-
мальном и максимальном посадочных весах с использованием
механизации и тормозных устройств (тормозных парашютов, ре:
верса тяги и др.). Характеристики предпосадочного планирования
370
находят при нормальном посадочном весе самолета с использова-
нием органов механизации крыла.
При определении взлетных и посадочных характеристик каж-
дый режим повторяется не менее чем в трех кондиционных (в отно-
шении требований, предъявляемых к технике пилотирования само-
лета и к качеству измерений) полетах. Взлетные характеристики
можно определять в полетах по кругу, если нет ограничений по
выполнению посадки со взлетным весом, либо в комплексе с дру-
гими испытательными полетами. Посадочные характеристики
всегда можно находить в полетах по кругу. Характеристики пред-
посадочного планирования определяют обычно в комплексе с по-
летами на устойчивость и управляемость.
Желательно получать взлетно-посадочные характеристики
в штилевых условиях, а затем проверять возможность и особен-
ности взлета и посадки при боковом ветре различной силы. Взлет-
ные (посадочные) характеристики допускается определять при
встречном ветре со скоростью не более одной десятой скорости
отрыва (посадочной скорости). Для приведения фактических
взлетных (посадочных) характеристик к условиям безветрия с до-
статочной точностью необходимо, чтобы боковая составляющая
скорости ветра не превышала 3—5% скорости отрыва (посадочной
скорости).
При испытаниях по данным метеостанции или по анемометру
Фусса определяется скорость ветра у земли, а с помощью флажка
(флюгера) устанавливается направление ветра, точнее, угол между
направлением ветра и осью ВПП. Значения температуры и давле-
ния наружного воздуха берут по данным метеостанции.
Взлетно-посадочные характеристики самолета существенно за-
висят от техники пилотирования, поэтому их определяют на пос-
леднем этапе летных испытаний, когда летчик успевает уже нако-
пить достаточный опыт и отработать оптимальные приемы пило-
тирования данного самолета.
При выполнении испытательных взлетов необходимо иметь
в виду следующее. Перед началом разбега при полностью затормо-
женных колесах шасси летчик должен увеличить обороты двига-
теля от оборотов малого газа до оборотов страгивания, при кото-
рых горизонтальная составляющая тяги двигателей превышает
силу трения покоя (силу трения заторможенных колес шасси
о землю при неподвижно стоящем самолете). Затем колеса растор-
маживаются и начинается разбег. Чем больше тяга двигателей
в момент страгивания самолета с места, тем быстрее устанавли-
вается взлетный режим работы двигателей при разбеге и, следо-
вательно, тем меньше продолжительность разбега (длина разбега
при этом обычно мало изменяется). Если на самолете, стоящем
с заторможенными колесами, увеличить тягу двигателей настолько,
что ее горизонтальная составляющая превысит силу трения покоя
при заторможенных колесах, то самолет начнет скользить — по-
явится «юз», при котором ускорение движения самолета снижается
371
и происходит стирание покрышек. Кроме того, начало разбега при
очень высоких оборотах двигателей может приводить к возникно-
вению рыскания самолета после быстрого растормаживания ко-
лес, что усложняет взлет.
Чем больше сила трения при трогании самолета с места с за-
торможенными колесами, т. е. чем лучше торможение самолета,
и чем лучше приемистость двигателей, тем, естественно, быстрее
устанавливается взлетный режим работы двигателей на разбеге.
Скорость отрыва самолета выбирают из условий обеспечения
нормального пилотирования и безопасности взлета. Завышение
найденной с учетом этих условий оптимальной скорости отрыва
приводит к нежелательному увеличению длины разбега. Занижение
скорости отрыва небезопасно в отношении поведения самолета
в полете у земли с малой скоростью, непосредственно после отрыва.
Обычно в качестве рекомендуемой для данного самолета с дан-
ным взлетным весом скорости отрыва выбирают минимальную без-
опасную скорость отрыва, небольшое (примерно до 5%) случайное
уменьшение которой в массовой эксплуатации не должно приво-
дить к появлению значительных затруднений в пилотировании
самолета при отрыве и на воздушной части взлетной дистанции.
После отрыва летчик пилотирует самолет так, чтобы обеспечить
возможность перехода самолета к режиму установившегося набора
высоты. Как указывалось выше, после отрыва дозвукового само-
лета с поршневым двигателем начинается этап выдерживания
(рис. 10.2)—горизонтальный полет с разгоном самолета от К0Тр
до рекомендуемой скорости установившегося набора высоты, про-
изводимый на высоте порядка 1—2 м. У современных винтомотор-
ных самолетов выдерживание производится с одновременным не-
большим набором высоты. На реактивных легких самолетах уча-
сток выдерживания отсутствует (рис. 10.3). У них после нормаль-
ного (выполненного при нормальной скорости и на незавышенном
угле атаки) отрыва летчик обычно выдерживает неизменным угол
тангажа. При этом самолет разгоняется с одновременным набором
высоты.
Выдерживание винтомоторного самолета после отрыва произ-
водится для удовлетворения двух принципиально не связанных
друг с другом требований *. Первое из них определяется условиями
обеспечения безопасности полета: нельзя начинать набор высоты
на скорости отрыва, так как на этой сравнительно малой скорости
управляемость (эффективность рулей и элеронов) и устойчивость
самолета недостаточны. Второе связано с тем, что просто нецелесо-
образно производить набор высоты на такой малой скорости, при
которой скороподъемность самолета невелика. Набор высоты выгод-
но производить на наивыгоднейшей скорости, при которой самолет
обладает наибольшей скороподъемностью. У винтомоторных само-
* М. Л. Галлай. Особенности пилотирования реактивных самолетов.
Издат-во «ДОСААФ», 1962.
372
летов наивыгоднейшая скорость набора высоты весьма близка
к эволютивной скорости, на которой обеспечивается достаточная
безопасность полета.
У реактивных самолетов эволютивная скорость полета обычно
оказывается намного меньше наивыгоднейшей. Так, например, у са-
молета Ту-104 эволютивная скорость составляет примерно 350—
400 км!час, а наивыгоднейшая — около 600—650 км!час. Выдер-
живание самолета у самой земли для достижения такой большой
скорости наивыгоднейшего набора высоты привело бы к необхо-
димости значительного увеличения располагаемых длин летной по-
лосы, что не только не нужно с точки зрения обеспечения безопас-
ности полета (реактивный самолет разгоняется до эволютивной
скорости полета очень быстро), но даже и является нежелательным
с этой точки зрения (полет с большой приборной скоростью у са-
мой земли). Поэтому взлет реактивного самолета и выполняется
без выдерживания.
На посадке скорость планирования выбирают с таким расчетом,
чтобы обеспечить безопасность выполнения выравнивания и после-
дующего подвода (по высоте) самолета к ВПП, а также получить
сравнительно небольшую длину выдерживания. Касание земли
следует производить на минимальной безопасной скорости, обеспе-
чивающей минимальную длину пробега. Для точного определения
длины пробег должен заканчиваться полной остановкой самолета.
Летчик должен стремиться выдерживать прямолинейность дви-
жения самолета на взлете и посадке. Это повышает точность опре-
деления взлетно-посадочных характеристик. При взлетах со стар-
товыми ускорителями, при посадках с использованием реверса
тяги, тормозных парашютов и др. летчику следует пользоваться
этими устройствами во всех полетах по возможности одинаково.
Определение взлетно-посадочных характеристик
при эксплуатации самолетов с полевых аэродромов
В настоящее время ко многим типам самолетов (особенно бое-
вых) предъявляются требования обеспечения возможности выпол-
нения взлетов и посадок не только с использованием аэродромов,
имеющих искусственное покрытие (бетон, металлические ленты),
но и с полевых аэродромов, имеющих грунтовую взлетно-посадоч-
ную полосу.
Условия эксплуатации самолета на полевом (грунтовом) аэро-
дроме существенно отличаются от таковых на аэродроме со спе-
циальным твердым покрытием. В основном это обычно бывает обу-
словлено наличием на грунтовых аэродромах неровностей, специ-
фическими характеристиками грунтов (прочность, липкость, пыли-
мссть), а также заметными изменениями этих характеристик в йре-
делах длины взлетно-посадочной полосы и под влиянием атмосфер-
ных условий. В зависимости от типа грунта (суглинистый черно-
зем, засоленный серозем, тяжело-суглинистый грунт подзолистой
373
зоны, песчаный несвязный грунт), его состояния (сухой прочный
грунт, сухой малопрочный грунт, влажный грунт, липкий черно-
зем, сыпучий песок, замерзший грунт со снеговым покровом или
без него) и условий погоды износостойкость поверхности полевого
аэродрома под воздействием нагрузки от колес шасси и газовых
струй двигателей самолета может существенно изменяться.
Деформации грунта при движении самолета по полевому аэро-
дрому (образование колеи) создают дополнительное сопротивле-
ние движению и дополнительное нагружение элементов конструк-
ции шасси. В некоторых случаях (неблагоприятное состояние
грунта, большая нагрузка на единицу площади соприкосновения
колес шасси с поверхностью летной полосы) сопротивление движе-
нию самолета значительно затрудняет, а иногда даже и делает не-
возможным выполнение взлета. Разрушения грунта при прохожде-
нии по нему самолета с работающими на взлетном режиме двига-
телями могут приводить к загрязнению или даже местному нару-
шению прочности конструкции, засорению эксплуатационных люч-
ков и зазоров (вызывающему в частности затруднение уборки
шасси после взлета), ухудшению обзора, повышению вибрации
элементов конструкции самолета и его оборудования.
Для решения вопроса о возможности и особенностях эксплуа-
тации данного самолета с грунтовых аэродромов проводятся соот-
ветствующие летные испытания его по специальной программе,
предусматривающей выполнение взлетов и посадок на летные по-
лосы с различными типами и состояниями грунтов в различные вре-
мена года. В процессе таких испытаний оцениваются грунтовые
условия (прочность и структура грунта, наличие на нем снегового
покрова), характер рельефа местности, при которых возможна лет-
ная эксплуатация данного самолета, определяются его взлетно-
посадочные характеристики, особенности работы экипажа, систем
и оборудования самолета в этих условиях. Изучаются особенности
как одноразовой, так и многоразовой (систематической) эксплуа-
тации самолета с грунтовых аэродромов в различных почвенно-
климатических районах страны. По материалам этих испытаний
определяются характеристики разбега и пробега самолета по
грунту, а также разрабатываются инструкции по эксплуатации и
пилотированию самолета на грунтовых аэродромах.
10.5. ИМИТАЦИЯ АВАРИЙНЫХ ВЗЛЕТОВ И ПОСАДОК
Помимо определения взлетно-посадочных характеристик само-
лета, соответствующих условиям нормальной эксплуатации, всегда
оценивают все наиболее вероятные и опасные для данного само-
лета аварийные ситуации на взлете и посадке. По возможности их
более полно имитируют в процессе летных испытаний. Так, напри-
мер, оцениваются возможность и особенности выполнения посадки
однодвигательного самолета с отказавшим двигателем, взлета и
посадки многодвигательного самолета при асимметричном отказе
374
двигателей (особенно при отказе одного крайнего двигателя на
самолете с ТВД), взлета и посадки при отказе основной бустер-
ной системы управления, системы искусственной стабилизации само-
лета и. т. п. Рассмотрим подробнее отдельные наиболее типичные
случаи.
Аварийная посадка однодвигательного
сверхзвукового самолета с отказавшим двигателем
У дозвуковых реактивных самолетов с ТРД при неработающем
двигателе и убранных органах механизации аэродинамическое
качество на планировании в среднем составляет примерно 5—6 при
выпущенном шасси и около 8—10 при убранном шасси. У совре-
менных сверхзвуковых самолетов из-за сравнительно малых удли-
нения и относительной толщины крыла аэродинамическое качество
на этих режимах при убранных воздушных тормозах в среднем
оказывается заметно меньшим: примерно 3—4 при выпущенном
шасси и 6—8 при убранном шасси.
Аэродинамическое качество самолета может заметно умень-
шаться при переходе от посадочного режима работы двигателя
к режиму авторотации (а тем более к полету с заклиненным рото-
ром ТРД, что может иметь место в некоторых аварийных ситуа-
циях). Особенно заметным это может быть у сверхзвуковых само-
летов, у которых тяговооруженность сравнительно велика и тяга
двигателя на планировании (в нормальных эксплуатационных
условиях) оказывается обычно намного больше таковой на режиме
малого газа. Известно, что вертикальная скорость снижения на
планировании возрастает с уменьшением аэродинамического каче-
ства самолета. Поэтому вертикальные скорости снижения сверх-
звуковых самолетов при неработающем двигателе оказываются
заметно большими, что значительно усложняет выполнение посадки
с отказавшим двигателем.
Чтобы повысить безопасность определения посадочных харак-
теристик сверхзвуковых самолетов с ТРД при отказе двигателя,
в начале летных испытаний подбирают режим имитации условий
полета с отказавшим двигателем. Режим имитации обеспечивает
возможность планирования самолета с работающим двигателем
при тех же вертикальных скоростях (т. е. при таком же аэродина-
мическом качестве), что и в полете с отказавшим двигателем. Пред-
варительно режим имитации выбирают на основе материалов аэро-
динамического расчета самолета. Выбор этого режима заключается
в определении условий, позволяющих искусственно повышать лобо-
вое сопротивление самолета в полете с работающим двигателем,
имитируя тем самым уменьшение аэродинамического качества
самолета при отказе двигателя (при авторотирующем или закли-
ненном ТРД). Обычно режим имитации получается при работе
двигателя на оборотах, близких или равных оборотам малого газа,
с выпущенными воздушными тормозами. Соответствие условий
375
полета на выбранном таким образом режиме имитации условиям
полета с отказавшим двигателем проверяют по полетным материа-
лам, полученным при планировании самолета с неработающим
двигателем. Для безопасности такое планирование выполняется
вначале на высотах, обеспечивающих надежный последующий за-
пуск двигателя (порядка 10 км и выше).
На выбранном режиме имитации отрабатывается весь расчет
на посадку, техника пилотирования самолета при заходах на по-
садку и при посадке. При посадке на режиме имитации летчик
может в случае необходимости произвести быструю «дачу газа»
и уйти на второй круг.
Р и с. 10. 7. Схематическое представление траектории
движения самолета при заходе на посадку «с прямой»
Что касается выбора метода захода на посадку, то все случаи
отказа двигателя в полете можно разделить на три группы:
1) отказ двигателя в полете на сравнительно малой высоте,
когда у летчика остается минимальный запас высоты для возвра-
щения на аэродром;
2) отказ двигателя на большой высоте при большом удалении
от аэродрома посадки, когда у летчика имеется достаточный за-
пас высоты для посадки и маневрирования при заходе на посадку;
3) отказ двигателя на средних и больших высотах в районе
аэродрома.
В первом случае при отказе двигателя необходимо сразу же
развернуть самолет в сторону аэродрома, кратчайшим путем
выйти на посадочный курс и заходить на посадку «с прямой» (схе-
матически траектория движения самолета в воздухе и ее проекция
на земную поверхность при заходе на посадку «с прямой» пока-
заны на рис. 10.7 и 10.8). При этом условия захода на посадку
и выполнения самой посадки оказываются для летчика наиболее
сложными, так как возможности маневрирования для внесения
необходимых поправок в расчет на посадку при таком заходе
весьма ограничены.
Во втором случае летчик имеет достаточный запас высоты,
чтобы заходить на посадку «с третьего разворота», примерно на
траверсе дальнего приводного радиомаяка (ДПРМ) под углом
90°±30° к оси ВПП (рис. 10.9 и 10. 10). Это расширяет возможно-
376
Хдпрм
влп
Рис. 10.8. Вид в плане траектории движения само-
лета при заходе на посадку «с прямой»
Рис. 10.9. Схематическое представление траектории дви-
жения самолета при заходе на посадку «с третьего раз-
ворота»
Р и с. 10. 10. Вид в плане траектории дви-
жения самолета при заходе на посадку
«с третьего разворота» (заштрихованные
кружки — контрольные точки на местности)
377
сти маневрирования для уточнения и исправления расчета при
заходе на посадку (изменением угла крена, места начала разво-
рота, отворотами и доворотами самолета), что облегчает выполне-
ние данного режима и повышает безопасность полета.
Рис. 10. 11. Схематическое представление траектории дви-
жения самолета при заходе на посадку «по коробочке»
В третьем случае полета с отказавшим двигателем рекомен-
дуется выполнять заход самолета на посадку «по коробочке»
(рис. 10.11 и 10.12). Это наиболее простой для летчика вариант
посадки самолета с отказавшим двигателем, также позволяющий
подходить к посадочному курсу на траверсе ДПРМ под углом
примерно 90°±30° к оси ВПП и
© обеспечивающий наибольшие воз-
можности для исправления рас-
Р и с. 10.12. Вид в плане траектории
движения самолета при заходе на
посадку «по коробочке» (заштрихо-
ванные кружки — контрольные точки
на местности)
чета.
При заходах на посадку с тре-
тьего разворота и по коробочке
для облегчения расчета и выпол-
нения самой посадки рекомен-
дуется проходить над заранее
выбранной и хорошо известной
летчику наземной контрольной
точкой (заштрихованные кружки
на рис. 10.10 и 10.12). В каче-
стве таких контрольных точек
заранее выбирают характерные,
легко опознаваемые ориентиры
на местности, находящиеся на
траверсе ДПРМ на расстоянии около 10 км от ВПП. Над этими
точками самолет должен проходить на определенной высоте. Конт-
рольные точки намечаются на местности в четырех местах. В каж-
дом конкретном случае при заходе самолета на посадку исполь-
378
зуется только одна из них, в зависимости от направления круга при
заходе на посадку и посадочного курса. При этом предпочтение
отдается тому посадочному курсу, при котором обеспечивается
открытый подход к ВПП и можно использовать аэродромные
«ловушки».
Уточнение расчета на посадку на последней прямой в полете
с отказавшим двигателем летчик может производить выпуском
закрылков, изменением скорости полета (набором высоты для тор-
можения или «прижимом» самолета для разгона), выбором соот-
ветствующего момента для выпуска шасси и т. п. Для приземле-
Р и с. 10.13. Схема выполнения посадки с двумя выравнива-
ниями (численные значения Vy на схеме даны в абсолютных
величинах)
ния в заданной точке посадочной полосы при планировании на
последней прямой следует ориентироваться на контрольную вы-
соту пролета над ДПРМ (//д). Контролем правильности захода на
посадку в этом случае является точка планирования, находящаяся
на заданном расстоянии £п от начала ВПП, т. е. точка на местно-
сти, в которую направлена траектория планирования (рис. 10.13).
Ввиду того, что сверхзвуковой самолет при планировании с от-
казавшим двигателем обладает обычно большой вертикальной
скоростью снижения (Vy~—40н-—50 м/сек), выравнивание реко-
мендуется выполнять в два приема, как это схематически показано
на рис. 10. 13. Первое выравнивание начинается на высоте
ТУ 1 ~ 200-4—250 м. В процессе первого выравнивания траектория
искривляется до обычного угла планирования (при заходе на по-
садку с нормально работающим двигателем) и абсолютная вели-
чина вертикальной скорости снижения уменьшается примерно до
8—10 м/сек. Затем следует этап прямолинейного снижения, в про-
379
цессе которого самолет тормозится с таким расчетом, чтобы к вы-
соте начала второго выравнивания (Я2~ Юн-15 м) уменьшить ско-
рость полета до величины, на которой обычно начинается на дан-
ном самолете выравнивание при посадке с нормально работающим
двигателем. На этом этапе торможения абсолютная величина вер-
тикальной скорости снижения самолета также несколько умень-
шается. На высоте Н2 начинается второе выравнивание, по оконча-
нии которого выполняются выдерживание, парашютирование и,
наконец, касание земли. В этом случае с высоты Н2 посадка само-
лета с отказавшим двигателем по кинематическим характеристи-
кам практически не отличается от обычной посадки данного само-
лета с нормально работающим двигателем.
В процессе летных испытаний на режиме имитации проверяется
возможность выполнения посадки и определяются характеристики
траектории полета при заходе на посадку в трех рассмотренных
выше случаях. Оцениваются возможности маневрирования для
уточнения и исправления расчета при заходах на посадку (расчет
захода на посадку является обычно самым сложным для летчика
при полете с отказавшим двигателем). Определяются оптимальные
для данного самолета высоты пролета над контрольными точками,
скорость планирования, величины Яд и Ln. Полученные при этом
результаты проверяются и при необходимости уточняются в конт-
рольных полетах с отключенным двигателем. В каждом таком по-
лете производится имитация одного из указанных выше трех ва-
риантов отказа: на соответствующем режиме отключается двига-
тель, а затем выполняется посадка с неработающим двигателем.
Одновременно с определением характеристик траектории по-
лета при заходе на посадку и при посадке самолета с неработаю-
щим двигателем проверяется работа оборудования и всех систем
самолета..
Асимметричный отказ двигателей
на взлете многодвигательного самолета
При проведении летных испытаний многодвигательных самоле-
тов тщательно исследуются случаи асимметричного отказа двига-
телей на взлете. Наиболее вероятным случаем является отказ
одного двигателя.
При отказе одного двигателя на взлете многодвигательного
самолета летчик должен уметь принять правильное решение: пре-
рвать взлет — посадить самолет (если отказ произошел после
отрыва) и начать торможение вплоть до полной его остановки или
продолжать взлет — разбег (если отказ произошел до момента
отрыва) или полет (если отказ произошел после отрыва), удержи-
вая самолет от разворота в сторону отказавшего двигателя. Окон-
чательное решение летчик может принять на основании материа-
лов соответствующих летных испытаний самолета.
380
Энерговооруженность (тяговооруженность) современных мно-
годвигательных самолетов такова, что при отказе одного двигателя
тяга ©стальных двигателей обычно оказывается достаточной для
взлета. Но взлет с отказавшим двигателем (продолженный взлет)
нежелателен из условий обеспечения безопасности полета. Есте-
ственно, что при отказе двигателя на разбеге лучше остановить
самолет и устранить причину отказа. Однако не всегда это можно
безопасно сделать.
В процессе летных испытаний в первую очередь всегда иссле-
дуется случай отказа одного критического двигателя. Критическим
называется двигатель, при отказе которого возникают наиболее
неблагоприятные изменения характера поведения самолета, его
управляемости и избытка тяги на взлете. По результатам таких
летных испытаний должен быть дан ответ на следующий вопрос:
обеспечивается ли на данном самолете возможность безопасного
прекращения или продолжения взлета с отказавшим в любой мо-
мент взлета критическим двигателем в любых эксплуатационных
условиях, т. е. при любых возможных при массовой летной экс-
плуатации данного самолета значениях его веса и центровки, тем-
пературы и давления наружного воздуха, ветра, состояния покры-
тия (условиях торможения самолета) и уклоне летной полосы.
В случае положительного ответа на этот вопрос на основании
опыта данных летных испытаний разрабатываются рекомендации
по технике пилотирования, обеспечивающей наилучшее (наиболее
безопасное) выполнение указанных режимов.
Для решения поставленного вопроса требуется знать значения
дистанций прерванного (£прерв) и продолженного (АпрОд) взлета
в зависимости от величины скорости отказа критического двига-
теля, а также характеристики управляемости и устойчивости само-
лета в обоих упомянутых выше случаях, Дистанцией прерванного
взлета называется длина пути, пройденного самолетом с момента
начала разбега до момента полной его остановки в случае прекра-
щения взлета при отказе критического двигателя. Расстояние, про-
ходимое самолетом с момента начала разбега до момента выхода
его на условную высоту препятствий (отсчитываемую от уровня
точки отрыва самолета) с достижением безопасной скорости
взлета при выполнении продолженного взлета с отказавшим кри-
тическим двигателем, называется дистанцией продолженного
взлета.
Торможение тяжелого многодвигательного самолета после от-
каза двигателя на разбеге при сравнительно большой скорости мо-
жет приводить к весьма большой длине пробега самолета до пол-
ной его остановки. Дистанция прерванного взлета может оказаться
намного больше длины ЛП. В таком случае необходимо произво-
дить продолженный взлет, так как при прерванном взлете самолет
выкатится за пределы ЛП.
У тяжелых многодвигательных самолетов, особенно с ТВД,
при отказе критического (обычно крайнего) двигателя на разбеге
381
Дистанция продолжен-
о И0?° взлета
Твзл=const
Длина разбега
продолженного
взлета
L
Дистанция
прерванного
взлета
—д---о-----
Котр ^ьез ^отк
Рис. 10.14. Примерный характер изме-
нения длины разбега, длин дистанций
прерванного и продолженного взлета
в зависимости от скорости отказа дви-
гателя (Votk)
О
могут возникнуть весьма большие разворачивающие, а также кре-
нящие моменты. Это объясняется большим расстоянием от край-
него двигателя до центра тяжести самолета, значительной величи-
ной обратной тяги, создаваемой отказавшим ТВД, изменением
лобового сопротивления и падением подъемной силы из-за умень-
шения обдува полукрыла, на котором расположен отказавший
двигатель. Для парирования разворота такого самолета с трех-
колесным шасси при асимметричном отказе двигателей на разбеге
(удержания самолета на прямой) летчик может использовать руль
направления, торможение
основных колес шасси (со
стороны крыла с нормально
работающим двигателем) и
поворот управляемого носо-
вого колеса в сторону, про-
тивоположную отказавшему
двигателю. Чтобы создать
момент, парирующий разво-
рот самолета с помощью
управляемого носового ко-
леса, разбег следует по воз-
можности выполнять в трех-
точечном положении само-
лета, поднимая носовое ко-
лесо перед самым отрывом.
Отклонение штурвала уп-
равления «от себя» при
отказе двигателя также спо-
собствует парированию раз-
ворачивающего момента, так как при этом возрастает нагрузка
на переднее колесо, а следовательно, и сила трения его о землю.
Скорость, начиная с которой в случае внезапного отказа кри-
тического двигателя летчик может сохранять направление движе-
ния самолета (выдерживать прямую), сбалансировав возникаю-
щие разворачивающие и кренящие моменты только с помощью
аэродинамических рулей (продолжать начатое прямолинейное дви-
жение без уменьшения тяги остальных двигателей, использования
тормозов колес шасси и перебалансировки самолета по усилиям),
называется минимальной эволютивной или минимальной по управ-
ляемости скоростью на земле (когда рассматривается отказ двига-
теля на разбеге) или в воздухе (в случае рассмотрения отказа
двигателя после отрыва) (Vynp). После отказа одного двигателя
можно продолжать взлет только в том случае, если скорость от-
каза превышает Уупр.
Дистанция прерванного взлета существенно возрастает с уве-
личением скорости, на которой произошел отказ двигателя
(рис. 10.14). Длина разбега и дистанция продолженного взлета
оказываются тем больше, чем меньше скорость отказа двигателя.
382
Скорость движения самолета в момент отказа критического двига-
теля, при которой дистанция прерванного взлета равна дистанции
продолженного взлета, называется критической скоростью отказа
(VKp). Критическая скорость отказа является наибольшей достижи-
мой на взлете скоростью, при которой в случае отказа критического
двигателя возможны как безопасное прекращение взлета (с тор-
можением самолета до полной его остановки в пределах распола-
гаемой длины летной полосы), так и продолжение взлета с этим
отказавшим двигателем (когда VKp>Vynp).
Рис. 10.15. Примерный характер изменения параметров прерванных и про-
долженных взлетов в зависимости от скорости отказа критического двигателя:
а~^упр<^К1,; б~^упр>17ир
Если КкрЖупр (см. рис. 10. 15, а), то дистанция прерванного
взлета, соответствующая критической скорости отказа, определяет
собой минимально необходимую для эксплуатации данного само-
лета с данным взлетным весом длину летной полосы. Длина взлет-
ной дистанции, при которой обеспечивается возможность как пре-
кращения, так и продолжения взлета после отказа критического
двигателя на скорости VKp, называется сбалансированной длиной
взлетной дистанции или сбалансированной длиной летной полосы
(аэродрома). Обозначается она ЛСб (рис. 10. 15, а). Иными сло-
вами, сбалансированная длина взлетной дистанции определяется
условием равенства дистанций прерванного и продолженного
взлета при отказе критического двигателя:
•^сб ^прерв (ПРИ 1/0Тк ^.р) ^прод (при ^кр)*
Чем больше взлетный вес самолета, тем больше и величина Лсб.
Для прекращения взлета при отказе критического двигателя на
скорости V0TK<VKp и продолжения взлета при отказе критического
двигателя на скорости 70Тк> Екр требуется длина ЛП меньше £сб.
383
Для самолетов, у которых Уупр>УкР, минимально необходимая
располагаемая длина ЛП определяется величиной дистанции пре-
рванного взлета при скорости Уупр (величина £упр на рис. 10. 15,6),
так как нельзя продолжать взлет при отказе критического двига-
теля на скорости меньше Vynp.
Перед летными испытаниями на определение характеристик
прерванных и продолженных взлетов по данным аэродинамиче-
ского расчета строят зависимости типа приведенных на рис. 10. 15.
Задаваясь различными скоростями отказа критического двигателя,
находят для каждой из них дистанцию прерванного взлета, длину
разбега и дистанцию продолженного взлета. Длину дистанции
продолженного взлета определяют при полной взлетной мощности
(тяге) всех двигателей до скорости отказа, а на больших скоро-
стях— при меньшей суммарной мощности (тяге) (с неработающим
критическим двигателем). С помощью найденных зависимостей на-
ходят расчетные значения минимально необходимых располагае-
мых длин ЛП (по величине £Сб в случае Vynp<VKp или по величине
Lynp в случае Vynp>VKP, т. е. по соответствующим расчетным зна-
чениям дистанций продолженного или прерванного взлета) для
различных взлетных весов — вплоть до максимального взлетного
веса самолета. Исходя из полученных данных выбирают аэродром
для предстоящих испытаний.
Аэродром, пригодный по своим размерам для безопасной мас-
совой летной эксплуатации данного многодвигательного самолета,
выбирается следующим образом. Расстояние от линии старта до
конца летной полосы на этом аэродроме должно быть не меньше
соответствующих значений Lcq или £упр, определенных по резуль-
татам летных испытаний. При этом имеется в виду, что отрыв са-
молета от земли в случае продолженного взлета должен происхо-
дить не менее чем за 50 м до конца ВПП. Указанные требования
должны выполняться при любых возможных (заданных для этого
самолета) эксплуатационных условиях.
В процессе летных испытаний тяжелых многодвигательных са-
молетов при взлете стремятся наиболее точно имитировать внезап-
ный отказ двигателя. Продолженные взлеты выполняются с посте-
пенным уменьшением скорости имитации отказа двигателя от по-
лета к полету. Отказ критического двигателя на взлете ими-
тируется вначале после отрыва, а затем и до отрыва (на разбеге),
но на достаточно большой скорости, с которой, судя по предвари-
тельным данным, уверенно можно будет продолжать взлет. Далее
отказ двигателя имитируется на разбеге при меньших скоростях —
до скорости, при которой летчик будет уже не в состоянии удер-
жать самолет от разворота и кренения. В каждом случае из лет-
ного эксперимента определяются длина разбега и взлетная дистан-
ция. Полученные характеристики продолженных взлетов наносят
на график типа, приведенного на рис. 10. 15.
Прерванные взлеты выполняются с постепенным увеличением
скорости имитации отказа критического двигателя. Замеренные
384
^пр
км/час
° 10 20 30 ЬО 50 60 70 80 90 t сек
Рис. 10.16. Записи приборов-самописцев, полученные при выполнении прерванного взлета с ими-
тацией отказа (отключением) крайнего (критического) двигателя на самолете с ТВД
при этом величины дистанций прерванного взлета наносят на тот
же график в зависимости от скорости отказа. График строят для
одного постоянного взлетного веса самолета. При этих испытаниях
определяются критические скорости отказа и минимальные
по управляемости скорости Гупр. Значения VKp и ЛСб получают
пересечением кривых, соответствующих дистанциям прерванного
и продолженного взлетов. Поэтому летные испытания следует про-
Р и с. 10. 17. Изменение скорости движения самолета по
длине взлетной дистанции при выполнении прерванного
взлета с имитацией отказа крайнего двигателя на самолете
с ТВД (записи приборов-самописцев, полученные в этом ре-
жиме, приведены на рис. 10. 16)
водить таким образом, чтобы скорости отключения критического
двигателя при выполнении прерванных и продолженных взлетов
по возможности перекрывались. Так из летных испытаний находят
характеристики прерванных и продолженных взлетов. В качестве
примера записи приборов-самописцев и результаты кинотеодолит-
ных измерений, выполненных в процессе летных испытаний на опре-
деление характеристик прерванных и продолженных взлётов, при-
ведены на рис. 10. 16—10.19.
Отказ управления на взлете и посадке
При бустерном управлении всегда проверяются особенности
поведения самолета и изменение его пилотажных характеристик
при отказе бустерного управления на взлете и посадке. Если
имеется аварийное ручное управление, то оценивается наличие
у летчика возможности «удержать» самолет после отказа (в со-
стоянии ли летчик справиться с возникающими при этом в виде
ударных нагрузок усилиями на рычагах управления), т. е. влияние
изменения усилий на рычагах управления в момент отказа бустер-
ного управления на условия пилотирования и особенности поведе-
ния самолета в момент отказа, а также влияние повышенных люф-
тов и трения на управляемость при ручном управлении. При нали-
чии аварийной бустерной системы управления проверяют
достаточность скорости перекладки бустеров и продолжительность
386
_____________ . t__________. ♦ _____________!_________
О Ю 20 30 40 50 t сек
Рис. 10.18. Записи приборов-самописцев, полученные при
выполнении продолженного взлета с имитацией отказа
(отключением) крайнего (критического) двигателя на само-
лете с ТВД
387
их работы в случае отказа основной бустерной системы управле-
ния. У аварийной электрической системы управления оценивается
достаточность скорости отклонения рулей и в первую очередь до-
статочность скорости отклонения руля высоты для выполнения
посадки при отказе основной бустерной системы управления. Пере-
ход на аварийную систему управления может заметно изменять
характеристики управляемости и тем самым усложнять пилотиро-
вание самолета.
Рис. 10.19. Изменение высоты и скорости полета по
длине взлетной дистанции при выполнении продолжен-
ного взлета с имитацией отказа крайнего двигателя на
самолете с ТВД (полученные в этом режиме записи при-
боров-самописцев приведены на рис. 10. 18)
Если на самолете имеются основная бустерная, дублирующая
и аварийная системы управления, то проверяются возможность и
особенности выполнения взлетов и посадок после отказа основной
бустерной системы в двух случаях:
а) при переходе на дублирующую;
б) при переходе на аварийную систему управления.
Чтобы обеспечить безопасность летных испытаний на устойчи-
вость и управляемость самолета при отказе основной бустерной
системы на взлете и посадке, исследование начинают с определения
наземных характеристик дублирующей и аварийной систем управ-
ления. После этого оценивают управляемость и устойчивость само-
лета с дублирующей и аварийной системами управления в режи-
мах, близких к взлетно-посадочным, но на достаточно больших
высотах. Далее переходят к имитации посадки самолета дубли-
рующей, а затем и аварийной системой управления на безопасных
высотах — производят посадки на «облако», по результатам кото-
рых предварительно оценивают возможность и особенности по-
садки самолета при отказе основной бустерной системы.
388
Испытания заканчивают контрольными взлетами и посадками
самолета как с дублирующей, так и с аварийной системой управ-
ления, а также взлетами и посадками с отключением основной
бустерной системы в различные моменты непосредственно уже
в процессе выполнения взлетов и посадок.
10.6. ПРИВЕДЕНИЕ
ВЗЛЕТНО-ПОСАДОЧНЫХ ХАРАКТЕРИСТИК
К СТАНДАРТНЫМ (ЗАДАННЫМ) УСЛОВИЯМ
Условия приведения
Взлетно-посадочные характеристики одного и того же самолета
могут существенно изменяться в зависимости от его веса, атмо-
сферных условий (температуры и давления воздуха), скорости и
направления ветра, уклона ВПП и др. Характеристики взлета су-
щественно зависят также от величины скорости отрыва, а характе-
ристики посадки — от величины посадочной скорости. Поэтому
взлетно-посадочные характеристики самолета, определенные из
летных испытаний, проведенных в разное время или в различных
условиях, могут сильно различаться.
Для получения унифицированных данных и возможности срав-
нения взлетно-посадочные характеристики различных самолетов
приводят к стандартным или заданным условиям. Обычно взлетно-
посадочные характеристики приводятся к расчетным атмосферным
условиям (РАУ), в качестве которых, как правило, принимаются
стандартные атмосферные условия на уровне моря (ро = 76О мм
рт. ст., = а также к следующим стандартным (заданным)
условиям: отсутствию турбулентности атмосферы (безветрию),
горизонтальной ВПП, регламентированному весу самолета (нор-
мальному и максимальному взлетному, нормальному и максималь-
ному посадочному), а также к определенным (обычно средним для
данного самолета) значениям скорости отрыва (точнее — заданным
значением с^отр) и посадочной скорости (точнее — с^пос). Вели-
чины скоростей отрыва (V0Tp) и посадочной (УПос) для одного и
того же самолета в одинаковых условиях зависят также от инди-
видуальных особенностей летчика, его техники пилотирования. По-
этому по результатам летных испытаний выбирают средние значе-
ния Уотр и Vnoc, отбрасывая отдельные выпадающие (нетипичные
для данного самолета) экспериментальные точки. К этим средним
значениям и приводят все результаты летных испытаний.
Описываемый ниже метод приведения позволяет не только при-
водить взлетно-посадочные характеристики самолета к стандарт-
ным условиям или пересчитывать их на любые другие заданные
условия, но также и оценивать при необходимости влияние изме-
нения различных параметров на эти характеристики.
389
Взлетно-посадочные характеристики приводят к стандартным
(заданным) условиям при следующих допущениях:
а) самолет пилотируется таким образом, что при изменениях
атмосферных условий (температуры и давления воздуха) индика-
торные скорости при отрыве и касании земли и прохождении услов-
ной высоты препятствий 25 м (конец взлетной и начало посадоч-
ной дистанции) остаются неизменными;
б) углы атаки (а следовательно, сх и су) с изменением веса
самолета при отрыве и касании земли и прохождении условной вы-
соты препятствий 25 м не меняются.
Принятые допущения достаточно хорошо согласуются с прак-
тикой летных испытаний современных самолетов
Приведение взлетных характеристик
к стандартным атмосферным условиям
Из дифференциального уравнения движения самолета на взлете
легко получить приближенные зависимости для длины (Лр) и вре-
мени (/р) разбега, а также длины (/в) и времени прохождения (тв)
воздушной части взлетной дистанции:
V2 отр 2^Дт) ’ (Ю.1)
'₽= ^от р /Д ’ (Ю.2)
/в= У 2 __ V2 _ к без отр (10.3)
2^Д£
(Ю.4)
У без — V стр
g^ Vb
где lz6e3 —безопасная скорость взлета (индикаторная скорость
полета самолета в конце взлетной дистанции на вы-
соте Яусл);
V'отр — скорость отрыва (индикаторная скорость отрыва);
Л —среднее на участке движения самолета в момент раз-
. „ Р~ (?+(Г—G)f
бега значение продольной перегрузки ---J,
G
которое может быть представлено в виде т| = е — р.;
/ р \
е= — —средняя на участке разбега тяговооруженность самс-
\ /сР лета;
~ ----------------------------------
\ G /ср
f — коэффициент трения колес шасси о землю;
390
* £ = е—ц*— среднее на воздушной части взлетной дистанции
P — Q t
значение разности продольной перегрузки ----- и
G
синуса угла наклона траектории полета sin 0,
где
Приблизительно средние значения сил, входящих в выражение
для ц, могут быть найдены как полусуммы их значений в начале
и конце разбега, т. е. при стоянке и отрыве:
„ 0 4“ QotP QoTp отр G
Vcp ~ 2 ~ 2 ~ 2/Сотр ~ 2Котр
[(G-.y)/]cp~^-°=^-.
т. е.
отр
где Лотр — аэродинамическое качество самолета во взлетной кон-
фигурации при угле атаки отрыва, определяемое с уче-
том влияния земли.
Значения f зависят от покрытия аэродрома (ВПП) и типа
шасси (колесное, гусеничное, лыжное и др.). В случае колесного
шасси при взлете с сухой бетонной ВПП коэффициент трения со-
ставляет примерно 0,03—0,05, при взлете с твердого грунта — при-
мерно 0,06 и при взлете с травянистого грунта — порядка 0,10—
0,12. Наименьшие и средние величины f для самолета с трехколес-
ным шасси при различных поверхностях ВПП приведены
в табл. 10, 1.
Таблица 10.1
Значения коэффициента трения f при разбеге самолета
с трехколесным шасси в зависимости от поверхности ВПП
Состояние поверхности ВПП Наименьшее значение Среднее значение
Мокрое бетонное покрытие 0,02 0,03—0,04
Сухое бетонное покрытие 0,03 0,05
Сухой твердый грунт 0,035 0,06—0,07
Сухие твердые травяные кочки 0,04 0,07—0,10
Мокрая трава 0,06 0,10—0,12
Покрытая снегом или льдом ВПП 0,02 0,10—0,12
391
Так при аэродинамическом качестве /СоТр = 9 и коэффициенте
трения f = 0,04 получаем
(Л» — f— 4- 0,04^ « 0,075.
2 \ 9 /
Для некоторых самолетов приближенно можно считать
если среднее значение sin 9 на воздушной части взлетной дистан-
ции несколько меньше величины f/2, а среднее значение Q на этой
части взлетной дистанции несколько больше, чем на разбеге. Сред-
нее значение sin 0 можно оценить приближенно, полагая, что дви-
жение самолета после отрыва происходит по прямой, соединяющей
точку отрыва и конец траектории взлета (точку на высоте Яусл).
В эг.л! случае, при 1Г ... -=25 м,
(sin 6)ср»-|^.
*в.
25
Например, при/в = 1500 ж (sin0)cp~ —jr- =0,0167.
1500
Более точно величину ц* можно определять по данным летных
испытаний или аэродинамического расчета самолета.
Рассмотрим вначале приведение длины разбега к стандартным
атмосферным условиям.
При фактических значениях давления и температуры наруж-
ного воздуха длина разбега приближенно определяется из фор-
мулы (10.1). Длину разбега при стандартных атмосферных усло-
виях Лет.а можно найти по формуле (10. 1) после подстановки зна-
чения А=1 и соответствующей условиям стандартной атмосферы
величины
П=Т) =£ --Ц = -^СТ‘а-у,.
1 'ст.а ст.а г* q » ’
т. е.
(10. 5)
Разделив правые и левые части формул (10.5) и (10.1) соот-
ветственно друг на друга и заменив значения г) и т]Ст.а их развер-
нутыми выражениями, получим формулу для определения Лст.а че-
рез фактическую величину Lp:
Ю.а=М О»- 6)
ест.а Р*
Скорость отрыва в эту формулу не входит, так как по принятому
выше допущению индикаторные скорости отрыва при взлете в фаю
тических и в стандартных атмосферных условиях одинаковы.
Входящую в формулу (10.6) величину Лр определяют непс
средственно из замеров в процессе летных испытаний. Относител
392
ную плотность воздуха находят по известным величинам р и Т. Зна-
чение ц может быть определено приближенным способом (см.
стр. 391). Среднюю тяговооруженность самолета на разбеге е
в фактических атмосферных условиях можно выразить через из-
вестное из аэродинамического расчета данного самолета среднее
значение тяговооруженности в стандартных атмосферных усло-
виях. Способ такого пересчета зависит от типа силовой установки
испытываемого самолета. Рассмотрим это на примерах самолетов
с поршневыми двигателями и ТРД.
Для самолетов с поршневыми двигателями приближенно можно
считать величину ц пропорциональной Д. В этом случае формула
(10.6) значительно упрощается:
Г д2
2^ст.а •
Для самолетов с ТРД можно воспользоваться приближенной
зависимостью для определения тяги двигателей в условиях дан-
ного летного эксперимента через значение тяги в стандартных
атмосферных условиях:
hn
р___р Р /Лгг.а \ 2
* 7 ст.a It1) ’
Рст.а \ * /
где р и Т — соответственно давление и температура наруж-
ного воздуха в фактических условиях;
Лт.а и ^ст.а-*те же параметры, но в стандартных атмосферных
условиях;
/7Пр ^Рпр
hn =-----------показатель изменения тяги при изменении обо-
РПр дппр ротов двигателя;
/гпр и Рпр — соответственно приведенные обороты и приведен-
ная тяга двигателей.
Величина hn определяется по зависимости РПр=/(^пр) Для дан-
ной силовой установки при соответствующем числе М. В первом
приближении при М~0 для всех двигателей можно считать /гп~3
в области номинальных чисел оборотов.
Для самолетов с ТРД получаем
ест.а
Тяговооруженность самолета на взлете при стандартных атмо-
сферных условиях 8ст.а = Рст.а/0 определяют, как правило, очень
точно. Ошибка в определении величины ц/ест.а в формуле (10.7)
аже в 1,5 раза приводит к возрастанию погрешности определения
1Чст.а не более чем на 3—4%. Поэтому величину ц можно находить
• оиближенно.
598
393
Рассмотрим способ пересчета времени разбега.
Из выражения (10.2) получаем формулу для определения вре-
мени разбега самолета в стандартных атмосферных условиях:
4т.а = — • (10.8)
^Лст.а
Разделив почленно формулу (10.8) на формулу (10.2), нахо-
дим выражение для определения времени разбега самолета в стан-
дартных атмосферных условиях по полученной из летных испыта-
ний при фактических атмосферных условиях величине /р:
^ст.а — А
£ —И
£ст.а Р'
(10.9)
Отсюда для самолетов в ВМГ получаем /ст а = /р)/д3, для са-
молетов с ТРД
Р / ^ст.а \ 2 Р-
Ст.а = ^р 1/ — Д- —---------------------------— • (Ю- Ю)
у .Агт.а * ст.а Р'
ест.а
Сопоставление формул (10.1) и (10.3) с формулами (10.2) и
(10.4) показывает, что структура выражений для определения
длины и времени прохождения воздушной части взлетной дистан-
ции оказывается такой же, как и у соответствующих выражений
для наземной части взлетной дистанции — разбега. Поэтому и
приведение длины /в и времени тв прохождения воздушной части
взлетной дистанции к стандартным атмосферным условиям выпол-
няется таким же образом, как и приведение величин Lp и /р. Так,
например, длину воздушной части взлетной дистанции в стандарт-
ных атмосферных условиях /Ст.а находят по приближенной фор-
муле, аналогичной формуле (10.6):
^сг.а
£ --- fl*
6 ст. а Р-*
Формулы (10.7) и (10.10) часто приближенно представляют
в упрощенном виде с помощью показателей. При этом формулы
становятся наглядней и, если пользоваться вспомогательными гра-
фическими зависимостями, проще по технике вычисления, не-
смотря на дробные показатели степени.
Обозначим
р.
£ст.а
394
откуда
г
н ____________
ест.а 1 + Г
Введем еще одно обозначение:
6
При небольших отклонениях р и Т от рСт.а и ТСт.а величина д
мала по сравнению с единицей.
Заменив в последнем сомножителе формулы (10.7) отношение
p/ест.а его выражением через г, можно представить этот сомножи-
тель приближенно (с учетом малости д) в виде
14-(1 + г)8~(1+&)1+г =
Р
Рст.а
г,
М'+г
:т.а \ 2
г /
При этом вместо (10.7) получаем следующее приближенное выра-
жение:
^ст.а ^'р
Р \aL
Рст,а /
/ Тст.а \&L
\ т }
где
aL = ^r-
Аналогичным способом находят и упрощенное выражение
ДЛЯ /ст.а*
где
az = l,5 + r; ^z=0,5+(l+^.
При проведении массового летного эксперимента для ускоре-
ния вычислений целесообразно заранее построить вспомогательные
графические зависимости (р/рст.а)a = f(a) для всех возможных
в данных условиях значений plp^.z и (7ст.а/Г)ь = (р(&) для всех
возможных в данных условиях значений Гст.а/Г.
Приведение взлетных характеристик
к заданному весу
Этот этап приведения заключается в пересчете характеристик,
полученных при фактическом весе самолета G, на регламентиро-
ванное или любое другое заданное значение веса самолета GCT,
В соответствии с принятым выше допущением полагаем, что в ха-
14* 395
рактерных точках траектории взлета углы атаки самолета при из-
менении его веса не меняются. Тогда индикаторная скорость 1/гст,
соответствующая полету с принятым для приведения весом GCT,
выражается через индикаторную скорость в фактических условиях
Vi при полетном весе самолета G следующей зависимостью:
= 1/ (Ю.11)
у а
Длину разбега при стандартных атмосферных условиях и приня-
том для приведения весе самолета LCT g находим с помощью фор-
мулы (10.5):
V?
(10.12)
2£Пст
где Vg — индикаторная скорость отрыва при принятом для приве-
дения весе самолета GCT;
ncT = eCT-tx=^-H.
Cjct
Выразив VG через Готр на основании зависимости (10. 11) и раз-
делив почленно (10. 12) на (10.5), с помощью несложных преобра-
зований получим
1—*-
4тО=4т.а(->У--------(ю. 1-3)
\ о / _ р.
£ст
Аналогичным путем находим и выражение для определения вре-
мени разбега в стандартных атмосферных условиях при весе само-
лета G ст •
1—
£ст.э
ест
(10. 14)
Таким же способом могут быть получены и приведенные к стан-
дартным атмосферным условиям и весу самолета GCT длина и время
прохождения воздушной части взлетной дистанции.
Приведение взлетных характеристик
к штилевым условиям и заданной скорости отрыва
При наличии ветра скорость самолета относительно земли
равна где V — скорость самолета относительно воздуха;
W—проекция скорости ветра на направление движения самолета
396
при взлете. Знак «—» берут при встречном ветре, — при по-
гГутном.
Заменяя в формулах (10.1) и (10.2) индикаторную скорость
отрыва истинной, получаем выражение для определения длины
Lw и времени tw разбега при наличии ветра:
_ (V + V Т IT
— •
Средняя продольная перегрузка т], входящая в эти выражения, за-
висит от веса самолета и действующих на него внешних сил, на
которые ветер практически не влияет.
При штиле (1У=0)
j — V2 „ / _ У
и ^w=o —
2gn £4
Разделив соответствующие равенства почленно друг на друга,
находим
Lw и / _ lw
(1 Т wf W=° 1 т w ’
где
V
Длина и время разбега, приведенные к стандартным атмосфер-
ным условиям при отсутствии ветра (точнее, составляющей ско-
рости ветра в направлении взлета) и при весе самолета GCT, опре-
деляются по формулам
Аст
^ст G
^ст
(1 ? Г)2 ’
t r-
_ CT Cr
"1 т vr'
(10.15)
(10.16)
Скорость ветра вблизи земли возрастает^ высотой. В формулы
(10. 15) и (10. 16) подставляется значение W, замеренное у земли.
При пересчете характеристик воздушной части взлетной дистан-
ции, если отсутствуют экспериментальные данные о градиенте ветра
по высоте, в соответствующие формулы подставляется значение
Ту* —1,Зри.
Как указывалось, в процессе летных испытаний определяются
средние значения скорости отрыва, получаемые обычно из боль-
шого количества полетов, выполненных летчиком, хорошо освоив-
шим технику пилотирования данного самолета. Взлетные характе-
ристики, полученные при несколько отличных от этих средних зна-
чениях скорости отрыва, пересчитываются на среднюю скорость
(среднее значение суОтр). Приведение характеристик взлета к дру-
397
гой скорости отрыва производится следующим образом. Из формул
(10.1) и (10.2) видно, что длина разбега пропорциональна квад-
рату, а время разбега прямо пропорционально скорости отрыва.
Следовательно, длина разбега А, соответствующая среднему (или
принятому при пересчете) значению скорости отрыва VCp, опреде-
ляется по известной величине £Ст, найденной для скорости отрыва
с помощью формулы
А Лст
Аналогичным способом находят время разбега t. соответствующее
скорости отрыва VCp*.
Взлетные характеристики, полученные при скорости отрыва,
намного отличающейся от типичной для данного самолета средней
скорости отрыва, не пересчитываются на среднюю скорость, так
как указанный способ пересчетам этом случае может приводить
к большим погрешностям из-за существенного изменения средней
нормальной перегрузки (способа пилотирования) самолета на
разбеге.
Приведение посадочных характеристик
С помощью дифференциального уравнения движения самолета
на посадке, поступая аналогично тому, как это было сделано при
получении зависимостей (10.1) — (10.4), можно найти прибли-
женные выражения для длины Лпр и времени /Пр пробега, а также
для длины /в.п и времени прохождения тв.п воздушной части поса-
дочной дистанции (планирование + выравнивание+ выдержива-
ние + парашютирование):
' У2
L = (Ю. 17)
= (ЮЛ8)
Р gi У А
у2 — у2
1 _ *пл пос
ВП^ 2^ДХ
у2___у2
пл у пос
вп~ оГД
(10.19)
(10.20)
где VnOC —индикаторная посадочная скорость;
Ипл — индикаторная скорость полета самолета в начале
планирования (на высоте Л/усл);
393
/-—среднее на участке пробега значение абсолютной ве-
-Q + (K-G)/np
личины продольной перегрузки ---------------:
G
Q+(G-Y)f^
1 = ------------- ;
G ср
X — среднее на воздушной части посадочной дистанции значе-
ние абсолютной величины разности продольной перегрузки
и синуса угла наклона траектории полета:
z=|-2--sin&| .
I G Icp
Приблизительно величину i можно оценивать по полусумме
абсолютных величин продольных перегрузок в начале и конце
пробега:
Q пос + Q/np 1 / 1
1 2G “Т \
где Кпос — аэродинамическое качество самолета в посадочной
конфигурации при посадочном угле атаки, определяе-
мое с учетом влияния земли;
/пр — среднее значение коэффициента трения на пробеге.
При пробеге самолета с трехколесным шасси по сухой бетон-
ной ВПП в случае нормального его торможения обычно величина
/Пр лежит в пределах 0,22—0,28 (в среднем 0,25). В некоторых слу-
чаях автоматы торможения позволяют получать при пробеге по
сухой бетонной ВПП большие величины /пр (порядка 0,4—0,5).
Так, при /Спос=Ю и /пр = 0,25
Абсолютная величина среднего значения sin 0 приближенно
определяется по формуле (при /7уСл = 25 м)
|sin9|cp^^.
Если / — 1000 м, то | sin 6 |со ^-^- = 0,025.
в.п , । icp 1000
Средняя величина отношения Q/G на воздушной части поса-
дочной дистанции приближенно может быть найдена как
Qcp ]
где Кср — среднее аэродинамическое качество самолета в посадоч-
ной конфигурации. Для самолетов с ТРД Кср —Зн-5. Для самоле-
тов с ТВД величина Кср может составлять даже 10 и более. Если
399
планирование производится с двигателем, работающим на повы-
шенных по сравнению с режимом малого газа оборотах, в выраже-
ние для х вместо Q входит разность Q—Р, а величина ЛСр возра-
стает. Более точно отношение Qcp/G можно определять по полет-
ным записям самописца перегрузок.
Рассмотрим вначале приведение длины пробега к стандартным
атмосферным условиям. В силу принятого выше допущения о по-
стоянстве индикаторной посадочной скорости, а следовательно, и
посадочного угла атаки самолета при изменении давления и тем-
пературы наружного воздуха из выражения (10.17) получаем
длину пробега в стандартных атмосферных условиях в виде
пр-а ' 2gi *
Разделив почленно это равенство на (10.17), находим
£пр.а = Л.Л (10.21)
Аналогично находим и выражение для определения времени про-
бега самолета в стандартных атмосферных условиях, используя
величину времени пробега, полученную в фактических условиях
^р.а=Лр VA- (10.22)
Выше было принято допущение о независимости посадочного
угла атаки, а следовательно, и аэродинамического качества от
веса самолета. Это допущение оправдывается тем, что величина
посадочного угла атаки данного самолета определяется в основном
требованиями безопасности полета, а также особенностями управ-
ляемости и устойчивости самолета на посадке. Поэтому знамена-
тель в формуле (10. 17) приближенно можно считать независящим
от веса самолета. При таком условии получаем с помощью выра-
жений (10.11), (10.17) и (10.21) формулу для пересчета длины
пробега на принятый при приведении вес самолета GCT в виде
т ____ т ^ст
ьпрС ьпр.а у
где LnpG — длина пробега в стандартных атмосферных условиях
при весе самолета GCT.
Аналогичным способом находим приведенное к стандартным
атмосферным условиям и весу самолета GCT время пробега
Приведение посадочных характеристик к штилевым условиям
аналогично приведению взлетных характеристик. Длина и время
400
пробега, приведенные к стандартным атмосферным условиям, весу
самолета GCT и условиям безветрия, определяются формулами
(Ю.23)
/пр.сТ=^. (Ю.24)
Приведение параметров воздушной части посадочной дистан-
ции, как это видно из формул (10.19) и (10.20), нужно, строго
говоря, производить с учетом изменения среднего угла наклона
траектории полета — среднего значения sin 9. Однако для боль-
шинства современных самолетов характерно соотношение слагае-
мых в выражении для % такого же порядка, как и в рассмотрен-
ном выше примере:
(sin6)cp 25/<Ср 25-5
--------------------=-------= 0,125 или
Qcp 6?.п woo
12,5%.
G
В этом случае членом (sin 0)ср в выражении для / можно в первом
приближении пренебречь и производить вывод формул приведения
параметров воздушной части посадочной дистанции так же, как
это было сделано для наземной ее части. Иными словами, для при-
ведения полученных из летных испытаний фактических величин
/е.п и Тв.п К стандартным (заданным) условиям можно пользо-
ваться формулами (10.23) и (10.24), подставляя в них вместо W
величину ТГ*, если не известен фактический градиент скорости
ветра по высоте. Приведение посадочных характеристик к опреде-
ленной посадочной скорости выполняют аналогично приведению
взлетных характеристик к заданной скорости отрыва.
Приближенно время и продолжительность разбега, пробега,
взлетной и посадочной дистанций можно приводить к стандартным
пли любым другим заданным условиям, считая эти взлетно-поса-
дочные характеристики обратно пропорциональными средним зна-
чениям продольной перегрузки. Так, например, из формулы (10. 1)
легко получить, что величина длины разбега самолета в заданных
условиях (индекс «здн») связана с величиной длины разбега этого
самолета в фактических условиях, при которых был проведен дан-
ный летный эксперимент (индекс «ф») следующим приближенным
соотношением:
^р.ЗДН ^р.ф
ПФ
Лздн
Аналогичные выражения могут быть получены и для остальных
указанных выше характеристик. Пересчет средних значений про-
дольной перегрузки ц на заданные условия производится с по-
401
мощью формул, приведенных выше. Если, например, разбег про-
изводился со средней тягой двигателей Рср, а нас интересуют его
характеристики в тех же атмосферных условиях, но при средней
тяге двигателей /)здн = /)ф+Д/), то величина т]здн в этом случае опре-
др
деляется как т]здн = т]ф+Дт|, где Дт] = еД =—. В этом случае
G
^р.злн-^р.ф 1 + -ф;
Ф Пф
Приведение характеристик
предпосадочного планирования
Приведение скорости предпосадочного планирования к весу
самолета GCT производится с помощью соотношения (10. 11) в пред-
положении о постоянстве угла атаки и угла наклона траектории
планирования 0Пл. Так как Vy= V sin 8ПЛ, а 0Пл = соп81, то и пере-
счет вертикальных скоростей снижения самолета на другой вес
производится по формуле, аналогичной (10.11):
V yG —
где VyG — вертикальная скорость снижения самолета при плани-
ровании, пересчитанная на вес самолета GCT;
Vy — барометрическая вертикальная скорость снижения са-
молета при планировании с фактическим весом само-
лета G.
Вертикальная скорость планирования Vy определяется для
средней высоты планирования Яср из выражения
у м
где ^Н = Н2 — Нх — потеря высоты (барометрической) на устано-
вившемся участке планирования;
Д/ — 4 — G — время потери высоты д//;
//СР=ЯЯ ш
2
Истинную вертикальную скорость планирования для нулевой
стандартной высоты при весе самолета GCT находят по формуле
VУ ст
т
л ст
где Т — фактическая температура наружного воздуха на высоте
ЯСр, определяемая по полученной для данного полета
зависимости Тф=/(Я);
402
„ТСт — температура воздуха на высоте ЯСр, определенная по
стандартной атмосфере;
Д = 0,379 — ;
т
р — фактическое давление воздуха на высоте Яср, определен-
ное по полетным записям прибора-самописца, в мм
рт. ст.
Приведение характеристик разбега и пробега
к горизонтальной ВПП
Если ВПП горизонтальна, то длина разбега самолета прибли-
женно определяется по формуле (10.1). В этом случае среднее
ускорение движения самолета на разбеге равно gq. Если ВПП
имеет уклон v, то под действием составляющей силы веса Gv сред-
нее ускорение при разбеге изменится на величину Gvlm = gv и ре-
зультирующее ускорение будет равно g(q±v). Подставляя уско-
рение g(q±v) вместо gq в формулу (10. 1), найдем длину разбега
самолета при движении его по ВПП с уклоном v:
, У2отр
pv ^g (n ± v)
Получив из этой формулы выражение для q и подставив его в фор-
мулу (10. 1), находим формулу для пересчета длины разбега само-
лета по наклонной ВПП на соответствующую длину разбега по го-
ризонтальной ВПП:
Перед вторым слагаемым в знаменателе данной формулы берут
знак «—», если разбег производился в направлении уклона ВПП
(самолет двигался вниз по ВПП), и знак « + », если разбег проис-
ходил со встречным уклоном.
Пример. Исходные данные: VOTp = 70 м/сек-, =1000 м; Д=1; v = 0,0175-
уклон по движению самолета.
Решение:
г 1000
р~ 2-9,81-1-0,0175 ~ 107° М'
1----------------- 1000
т. е. даже в таких неблагоприятных условиях (наклон ВПП 1°) поправка к длине
1075 — 1000
разбега составляет -----------100% —7,5%.
Обычно эти поправки сравнительно невелики, однако в некоторых случаях
их все-таки приходится учитывать.
403
Аналогичным способом также пересчитывают длину пробега
самолета, если летные испытания проводились при наличии уклона
ВПП.
Следует еще раз отметить, что все полученные выше формулы
приведения являются приближенными. Поэтому при изменении
конструктивно-аэродинамических параметров самолетов, их сило-
вых установок, систем управления, методов пилотирования и др.
эти формулы следует проверять и в случае необходимости вводить
в них соответствующие коррективы.
10.7. ОКОНЧАТЕЛЬНАЯ ОБРАБОТКА
РЕЗУЛЬТАТОВ ЛЕТНЫХ ИСПЫТАНИЙ
По приведенным к стандартным условиям взлетно-посадочным
характеристикам, определенным на каждом режиме полета не ме-
нее трех раз, строят семейства траекторий взлета и посадки. Из
этих траекторий находят осредненные траектории взлета и по-
садки данного самолета с данным регламентированным весом
и данным положением средств механизации. По осредненным тра-
екториям определяют средние для данного режима полета пара-
метры: длины разбега и пробега, скорость отрыва и посадочную
скорость.
Если в каком-либо полете летчик неправильно пилотировал са-
молет (взлет с «подрывом», посадка с «козлом», удлиненный раз-
бег, посадка на завышенной скорости), то значения отдельных па-
раметров в этом полете могут заметно отличаться от полученных
из ряда полетов средних их значений. Такие параметры пересчи-
тываются, например, на среднюю скорость отрыва или среднюю
посадочную скорость. Затем анализируется сходимость получен-
ных пересчетом значений с аналогичными осредненными величи-
нами данного параметра. Если значения параметров, полученные
по данным такого полета, существенно отличаются от средних их
значений, то этот полет считается некондиционным и результаты
его не используются. Полетные данные бракуются, если длина на-
земной части взлетной (посадочной) дистанции отличается от
осредненного для ряда полетов ее значения более чем на 10%,
а длина воздушной части траектории — более чем на 20%.
На рис. 10.20 и 10.21 приведены графики взлетных и посадоч-
ных характеристик, полученные на основе обработки полетных за-
писей, в которых регистрация параметров траекторий взлета
и посадки производилась кинотеодолитным методом. На графиках
даны зависимости высоты полета при взлете (посадке) от расстоя-
ния по горизонтали до места старта (остановки) // = <р(Л), а также
зависимости путевой скорости (1/Пут = W) от этого расстояния
VnyT=f(£) и от времени взлета (посадки) VnyT = ^(0- На таких
графиках обязательно указывают характеристики поверхности
ВПП: сухой или мокрый бетон, травянистый или твердый грунт,
покрытая льдом или снегом ВПП. Помимо этого, на графиках
404
Рис. 10.20. График взлетных характеристик (материалы летных испытаний, полученные по
данным КТС)
Нм
!aS = ^*•0 о II II II
—
_ J
1 L др — iuwm по= 41,5 сек V Касание
Т
-ч 1
О nil ш.1 11Г11.Ш lit l.iltl't tTTTn 111 111 It ИНГИ IF! 11II.-- ..-14 It 11 -rt"t t M 41II Irtl ll-Dj
<<500 WOO 3500 3000 2500 2000 1500 1000 500 OLm
ИЛут км/час
Рис. 10.21. График посадочных характеристик (материалы летных испытаний, полученные по
данным КТС)
отмечаются все основные параметры и характеристики взлета
(посадки): вес самолета, положение средств механизации, режим
работы двигателей, длина разбега Ар, время разбега /р, длина
взлетной дистанции ЛВзл.
Характеристики предпосадочного планирования находят по за-
писям инклинографа, спидографа и барографа. Угол наклона траек-
тории планирования 0Пл можно
определять с помощью известно-
го соотношения
где
V = l/nP + 8l/a + 8V'CJK км’[час\
Vnp — приборная скорость
планирования в км/час-,
Vy ст — истинная вертикальная
скорость планирования
в м/сек.
Рис. 10.22. Зависимость вер-
тикальной скорости снижения,
угла планирования и аэроди-
намического качества самолета
от скорости планирования
Для пользования этим соот-
ношением требуется достаточно
точно знать величины 6Va на
рассматриваемых режимах по-
лета.
Можно также определить 9Пл через перегрузки. Из рассмотрения
горизонтальных проекций сил, действующих на самолет при пла-
нировании, легко получить
Пу
Зная угол планирования, находят и аэродинамическое качество
самолета на этом режиме:
а tg|%|
По результатам испытаний строят графические зависимости
вертикальной скорости снижения, угла планирования и аэродина-
мического качества самолета от приборной скорости планирова-
ния: V у = /(Vnp), ^пл~ <p(Vnp) И /Са = Р (Vnp) •
Пример таких зависимостей приведен на рис. 10.22.
По записям приборов-самописцев, установленных на самолете,
оценивают управляемость и устойчивость самолета на взлете и по-
садке (см. гл. VI), а также определяют скорость отрыва и поса-
дочную скорость. На рис. 10.23 и 10.24 приведены примеры таких
записей, полученных при выполнении посадки и взлета самолета-
в штилевых условиях. На этих графиках обязательно указывают
вес и центровку самолета, положение средств механизации и
407
использование тормозного парашюта при посадке. Момент касания
самолетом земли находят по началу разброса записей акселеро-
графа (показан стрелкой на рис. 10.23), а момент отрыва — по
концу разброса этих записей (стрелка на рис. 10.24). Разброс за-
Р и с. 10. 23. Записи приборов-самописцев, полученные при
выполнении посадки
писей обусловлен наличием вибраций и толчков при движении
самолета по земле. По записям самописца скорости в моменты
касания и отрыва определяют приборные скорости, являющиеся
приближенными величинами посадочной скорости и скорости
отрыва. В приведенных примерах Vnoc~200 км/час (в момент
/ = 47 сек, см. рис. 10.23) и VOTp~215 км/час (Z = 3,7 сек, см. рис.
10.24). Более точно величины УПос и V0TP находят оптическими ме-
тодами.
408
Записи самописца отклонений руля высоты, полученные на
взЛете и посадке, осредняют, как показано на рис. 10.23 (штрих-
пунктирная линия). Осредненное значение угла отклонения руля
Рис. 10.24. Записи приборов-самописцев, полученные при
выполнении взлета
высоты при балансировке самолета на посадке в момент касания
земли называется расходом руля высоты на посадке (бв.пос)« Отно-
шение расхода руля высоты на посадке к максимальному (по кине-
матической схеме системы управления) отклонению этого руля
409
бв max называется относительным расходом руля высоты на по-
садке. Обозначается он через бв.пос:
8впос=='Ьд££ Ю0%.
°в max
Величина 8зап — fflax~ 5в-пос 100% называется запасом руля
&в max
высоты на посадке. Во всем эксплуатационном диапазоне центро-
вок самолета запас руля высоты на посадке должен быть не
меньше 20% для самолетов с хвостовым колесом и 10% для само-
летов с носовым колесом (с трехколесным шасси). Эти величины
бзап должны иметь место и в случае отказа автоматических уст-
ройств в системе продольного управления самолета. Для данного
самолета величина бзап оказывается обычно наименьшей при по-
садке с предельной передней центровкой.
Определение запаса руля высоты на посадке с предельно пе-
редней центровкой начинают с перерасчета результатов летных
испытаний, проведенных при средней или нормальной посадочной
эксплуатационной центровке самолета, а затем полученные таким
путем данные проверяют на посадке с предельно передней цент-
ровкой. При недостаточном запасу руля высоты требуется повы-
шать эффективность руля или делать более «задней» предельно
переднюю эксплуатационную центровку самолета (или то и другое
одновременно).
Для оценки усилий на ручке управления при взлете и посадке
положение аэродинамического триммера руля высоты или меха-
низма триммерного эффекта системы продольного управления со-
храняется по возможности неизменным. В примере, приведенном
на рис. 10.23, самолет сбалансирован по усилиям механизмом
триммерного эффекта на планировании при Vnp~270 км)час и
в дальнейшем положение механизма триммерного эффекта не ме-
нялось. Это относится также к триммерам элеронов и руля направ-
ления в случае взлета (посадки) с боковым ветром.
Если взлет производится со «вздыбливанием» (с увеличением
длины стойки передней ноги шасси) или с «приседанием» (с умень-
шением длины стойки задней ноги шасси) самолета для повыше-
ния угла атаки с целью уменьшения длины разбега, то эти измене-
ния длины стоек шасси фиксируются приборами-самописцами
и наносятся на график типа приведенного на рис. 10.24. По таким
записям судят о том, в нужный ли момент и на требуемую ли вели-
чину происходит изменение длины стойки (угла атаки). Чтобы по-
высить безопасность проведения испытаний, у самолетов с таким
взлетом особо тщательно проверяют запасы устойчивости на боль-
ших углах атаки.
Для облегчения определения взлетно-посадочных характери-
стик самолета в зависимости от значений влияющих на них факто-
ров, по материалам аэродинамического расчета и летных испыта-
410
ний удобно строить номограммы, графически представляющие эти
зависимости. На рис. 10.25 в качестве примера приведена номо-
грамма для определения характеристик разбега самолета. Анало-
гичые номограммы могут быть построены и для характеристик про-
бега, а также воздушных частей взлетной и посадочной дистанций.
Для наглядности проиллюстрируем правило пользования этой
номограммой следующим примером.
Заданы вертикальная взлетная тяговооруженность самолета
Сперт = 0,7, удельная нагрузка на крыло руд=400 кГ/м2 и с?/отр=1,0-
Для этих условий по номограмме рис. 10.25 находим (идя в на-
правлении стрелок на штриховых линиях) скорость отрыва само-
лета (Уотр), равную 158 км/час (точка С на нижней ветви левой
вертикали номограммы). На верхней ветви левой вертикали нахо-
дим точку А, соответствующую данным условиям. При горизон-
тальной тяговооруженности еГор = 0,7, КОтр=Ю и f = 0,05 получаем
среднее ускорение самолета при разбеге в рассматриваемом слу-
чае /р = £ц = 6,1 м/сек2 (точка В на правой вертикали). Соединяя
точки А и В прямой, находим в точке пересечения ее со шкалой
отсчета длин разбега искомую величину £р = 158 м. Аналогично
в точке пересечения линии СВ со шкалой отсчета времени разбега
находим для данного случая Zp = 7,2 сек. Вертикальная, горизон-
тальная и общая тяговооруженности самолета на взлете (послед-
няя обычно называется просто «тяговооруженность» определяются
выражениями
_ ^ropsin аотр 4" Рверт COS Оотр
сверт 7- ’
<7ВЗЛ
Р гор cos аотр Р верт sin ^отр
£гор= Q ’
ивзл
У р* + р2
е =---(отношение результирующей величины вектора
^ВЗЛ
тяги силовой установки к весу самолета),
где аотр— угол атаки самолета при отрыве;
РГОр—горизонтальная составляющая суммарной тяги сило-
вой установки (направленная по продольной оси само-
лета) ;
РВерт— вертикальная составляющая суммарной тяги силовой
установки (направленная по нормали к продольной оси
самолета).
При отсутствии на самолете вертикальных стартовых двигате-
лей -^-«гГОр.
С^взл
Построение подобных номограмм производится следующим
образом. Номограмма рис. 10.25 представляет собой графическое
изображение зависимостей, определяемых формулами (10.2) и
411
(10.1). Входящая в них величина УОтр определяется известным
выражением
(10.25)
У &СУ отр
Два графика в левом нижнем квадранте номограммы и служат
для определения величины Готр в соответствии с формулой (10.25):
верхний из них отображает зависимость руд(1—еВерт) =f (Руд; &верт),
а нижний — зависимость Г0Тр=А[f (руд; 8верт); ^отр]. Входящие
сюда значения относительной плотности воздуха и тяги двигателей
находятся при принятых РАУ, для которых и строится номограмма.
График в левом верхнем квадранте номограммы представляет со-
бой зависимость Готр =<р[/(руд; вверт); с уотр], получаемую возведе-
нием в квадрат левой и правой половин формулы (10.25). Шкала
величин ГдТр? которая нужна была только для построения данной
номограммы и не нужна при пользовании ею, показана на графике
без масштаба.
В правой части номограммы приведена графическая зависи-
мость jp=gv[ = Ф(8ГОр; КотР; f), построенная в соответствии с при-
ближенным выражением для т), полученным выше при рассмотре-
нии формул (10. 1) и (10.2). Соединяя нуль шкалы Г^тр и шкалы
/р, находим линию отсчета величин Ар (верхняя наклонная линия
в средней части номограммы, которая для уменьшения высоты
последней сверху оборвана — не доведена до нуля шкалы /р, как
это было сделано при построении данной номограммы). Градуи-
ровка шкалы для отсчета Ар производится следующим образом.
Соединяем попарно различные точки шкал Г° и /р прямыми ли-
ниями и находим простым делением соответствующие этим парам
^от
значений Г£ и /р выражения —. Разделив их на величину 2Д,
J’p
получаем значения Ар для данных величин Г^тр и /р. Эти значения
Ар и наносятся в виде шкалы на указанную линию отсчета в точ-
ках ее пересечения соответствующими прямыми линиями. Анало-
гично производится и градуировка шкалы для отсчета величин /р,
которая наносится на линию их отсчета, проводимую между нулями
шкал Готр и /р.
Подобные номограммы строятся по указанным выше прибли-
женным аналитическим зависимостям, которые по необходимости
должны корректироваться в соответствии с результатами летных
испытаний данного самолета.
По требованиям JCAO, для оценки соответствия взлетно-поса-
дочных характеристик гражданских самолетов нормам летной
годности * следует строить графические зависимости изменения
* Provisional Acceptable Means of Compliance Standardization of Approved
Aeroplane Flight Manuals. International Civil Aviation Organization, Montreal,
Conada. JCAO Circular 65—AN/59; 1963.
412
•Рис. 10. 25. Номограмма для определения длины и времени разбега самолета с ТРД (пример)
этих характеристик от различных факторов — в виде стандартных
номограмм. Эти же номограммы используются затем для опреде-
ления взлетно-посадочных характеристик самолету в различных
эксплуатационных условиях — в первую очередь с целью обеспе-
чения возможности выбора потребных аэродромов (потребных
величин располагаемых длин ЛП и допустимых препятствий в зо-
нах подходов) и оценки максимально допустимого взлетного веса
самолета в данных условиях эксплуатации.
Номограммы строятся по данным, полученным из материалов
летных испытаний самолета с отказавшим критическим двигателем
и приводимым к рассматриваемым условиям. Основными из этих
номограмм являются таковые для определения характеристик на-
земных, воздушных участков траекторий взлета и начального на-
бора высоты.
Примеры отдельных номограмм даны ниже. На рис. 10.26 при-
ведена номограмма, отражающая зависимость максимально допу-
стимого взлетного веса от барометрической высоты расположения
аэродрома и температуры наружного воздуха на нем. Определяе-
мые по этой номограмме значения 6Д0п.взл являются наибольшими
величинами взлетного веса самолета, обеспечивающими удовлетво-
рение требований норм летной годности по условиям обеспечения
необходимого минимального градиента (угла наклона траектории)
при начальном наборе высоты на взлете. Такие номограммы
строятся с учетом всех факторов, существенно влияющих на усло-
вия выбора величин Сдоп.взл- В данном примере, в частности, пока-
зана дополнительная сетка номограммы, позволяющая учитывать
влияние применения противообледенительной системы. Порядок
пользования номограммой показан штриховыми линиями со
стрелками.
Номограмма, отражающая зависимость градиента наклона
траектории полета цн.в на этапе начального набора высоты от
высоты аэродрома, температуры наружного воздуха и полетного
веса самолета, показана на фиг. 10.27. Приведенные здесь вели-
чины т]н.в выражаются в процентах по формуле
пнв=— ioo%=tgeHB 100% » 6 юо%
(здесь величина 0н.в берется в радианах).
Номограммы для определения величины критической скорости
взлета VKp в заданных условиях (высота аэродрома //а, температура
наружного воздуха Гн.в и вес самолета) приведены на рис.
10.28 и 10.29. В начале по графику типа рис. 10.29 находится ве-
о о Т7 Укр
личина относительной критической скорости взлета VKp = —---
(отношение критической скорости взлета к минимальной скорости
подъема носового колеса), а по ней — величина VKp (рис. 10.28).
На номограмме рис. 10.28 слева имеются два графика, обозна-
ченные буквами А и Б, по которым находятся значения Vnmin в за-
413
висимости от заданных величин Яа, Тяъ (график Л) и G (гра-
фик Б). Для определения искомой величины Гкр принимается боль-
Рис. 10. 26. Номограмма для определения максимально допустимого
взлетного веса самолета в зависимости от высоты аэродрома и тем-
пературы наружного воздуха
шее из двух полученных по графикам А и Б значений Vnmin (в рас-
сматриваемом случае оно определяется величиной G — график Б).
На рис. 10.30 показана номограмма, отражающая зависимость
максимально допустимого взлетного веса самолета Сдоп.взл от
414
Р и с. 10.27. Номограмма для определения градиента наклона траектории при начальном наборе высоты в зависимости
от атмосферных условий и веса самолета
4^
416
Рис. 10.28. Номограмма для определения критической скорости взлета
Вверх' Вниз
Уклон летной
полосы i я п °/о
встречный ветер Попутный
ветер
Скорость ветра Wo м/сек
U/кпли пптипн Ггпппгтк Romnn ПТл м /при
Рис. 10.29. Номограмма для определения относитель-
ной критической скорости
Зак. 598.
Рис. 10. 32. Номограмма для определения допустимого взлетного веса при различных высотах препятствий
Зак. 598.
Р и с. 10.30. Номограмма для определения максимально допустимого взлетного веса самолета в зависимости от
сбалансированной длины взлетной дистанции
00
270 280 290 300 310 320 66 68 50 52 54 56 58 60 6Z 66 66 15 10 5 0 5 10 15 20
Температура наружного воздуха Тн в °К ^ес самолета G т Попутный ветер Встречный ветер
Скорость ветра Wo м/сек
Градиент набора высоты Пн.в %
Рис. 10.31. Номограмма для определения градиента набора высоты
сбалансированной длины взлетной дистанции ЛСб при различных
атмосферных и эксплуатационных условиях. Эта номограмма по-
зволяет находить максимально допустимую величину веса само-
лета, при котором возможно выполнение продолженного или пре-
рванного взлета с длиной взлетной дистанции, равной ЛСб. Вели-
чина £Сб определяет собой потребную величину располагаемой
длины летной полосы.
Пример номограммы для определения одной из важнейших
характеристик воздушной части взлетной дистанции и начального
набора высоты — градиента набора высоты — представлен на
рис. 10.31.
Для оценки возможности маневрирования самолета на участке
начального набора высоты с учетом всех имеющихся в зоне под-
ходов к аэродрому реальных препятствий необходимо определять
в каждом частном случае максимально допустимый вес . самолета
Сдоп.взл. Эта величина зависит от заданных условий полета, в част-
ности, от высот препятствий, расстояния до них и атмосферных
условий. Пример такой зависимости приведен на рис. 10.32. Вы-
соты препятствий /7Преп отсчитываются от самой низкой точки по
всей длине ЛП (поэтому уклон ЛП на этом графике отдельно не
учитывается). Расстояние до препятствия АПреп — это горизонталь-
ная дистанция, отсчитываемая от точки на линии старта до точки,
в которой находится данное препятствие высотой /fnpen-
Номограмма на рис. 10.32 строится для нулевой высоты аэро-
дрома (Яа = 0— уровень моря) при условии, что имеющаяся на
самолете антиобледенительная система выключена. Пример поль-
зования этой номограммой показан на графике стрелками. В .дан-
ном примере получено, что при превышении фактической темпера-
туры наружного воздуха над стандартной на уровне моря
(7\ = 288,15° К) на 15° К, при наличии препятствия высотой 30 м
(отсчитываемой от наинизшей точки ЛП), удаленного от линии
старта на 1180 ж, и встречном ветре со скоростью 7 м/сек наиболь-
шим допустимым из условий безопасности полета взлетным весом
для рассматриваемого самолета является вес 134 т.
В случае, когда высота аэродрома //а отлична от уровня моря,
в получаемые с рис. 10.32 величины 6д0П.взл необходимо вносить
дополнительные поправки. С этой целью расчетным путем опреде-
ляется величина производной ^доп<взл. , а затем вносится соответ-
ствующая дополнительная поправка (со своим знаком):
^доп.взл*"" (^доп.взл)с рис. 10.32 4“ А^ДОП.ВЗл»
где
__^Одоп.вЗЛ и
А^доп.вЗл дуу 11 а*
При необходимости частого использования этих поправок целе-
сообразно построить дополнительный график зависимости
ОДоп.взл = /(7/а), определяемой указанным расчетным путем.
Л ИТЕРАТУРА
1. А д а м о в и ч Н. В., Г а л л а й М. Л., 3 а х а р о в Н. П., 3 и м и н Г. В.,
Калачев Г. С., Капрэлян Р. И., Котик М. Г., Микоян С. А., Пет-
ро а С. В., Седов Г. А., Соколов А. Б., Т а т а р е н ч и к Г. С., Щ е р б а-
к о в А. А., Летчику о практической аэродинамике, Военное издательство МО
СССР, 1961, под. ред. Седова Г. А. и Реброва М. Ф.
2. Ведро в В. С., Динамическая устойчивость самолета, Оборонгиз, 1938.
3. Ведро в В. С., Т а й ц М. А., Летные испытания самолетов, Оборонгиз,
1951.
4. Галлай М. Л., Особенности пилотирования реактивных самолетов,
Изд-во «ДОСААФ», 1962.
5. Т а л л а й М. Л., Полет самолета с неполной и несимметричной тягой,
Редиздат Аэрофлота, Москва, 1961.
6. Егоров Б. Н., Летные испытания самолетов, Изд. БНИ ЦАГИ, 1941.
7. Калачев Г. С., Показатели маневренности, управляемости и устойчиво-
сти самолетов, Оборонгиз, 1958.
8. Котик М. Г., Критические режимы сверхзвукового самолета, Машино-
строение, 1967.
9. Котик М. Г., Павлов А. В., Пашковский И. М., Сарданов-
с к и й Ю. С., Щ и т а е в Н. Г., Летные испытания самолетов, Машиностроение,
1965.
10. Остославский И. В., Аэродинамика самолета, Оборонгиз, 1957.
11. Остославский И. В., Стражева И. В., Динамика полета. Устой-
чивость и управляемость летательных аппаратов, Машиностроение, 1963.
12. Павлов А. В., Аппаратура и методы измерений при летных испытаниях
самолетов, Машиностроение, 1967.
13. Пашковский И. М., Особенности устойчивости и управляемости ско-
ростного самолета, Военное издательство МО СССР, 1961.
14. Пышно в В. С., Динамические свойства самолета, Оборонгиз, 1951.
15. Пышнов В. С., Аэродинамика самолета, Оборонгиз, 1943.
16. Рабкин И. Г., Безопасность полетов, Военное издательство МО СССР,
1962.
17. Чес ало в А. В., Испытания опытных самолетов, Тр. ЦАГИ, вып. 358,
1938.
18. Эткин Б., Динамика полета, Машиностроение, 1964 г., пер. с английского.
19. Air Registration Board. British Civil Airworthiness Requirements, 1962.
20. D e c k e r, James L. The Human Pilot and the High—Speed Airp-
lane. Journal of the Aeronautical Sciences, vol. 23, No 8, pp. 765—770, August
1956.
21. Flying characteristics, Rep. of the Symposium on Supersonic Transport,
London, 12—14 November, 1963, part 1, London, 1963, pp. 69—110 (Internal. Febera-
tion of Air Line Pilots Associations).
420
22. ICAO. Provisional Acceptable Means of Compliance 1962.
23. M i 1 1 i к e n W. F. Dynamic Stability and Control Research. Presented
at the Third International Joint Conference of the R. Ae. S—I. A. S., Brighton,
England, September 3—14, 1951.
24. Penzose H. Test flying during the century. RAS, 1966, I, vol. 7, No. 661,
pp. 188—196.
25. P h i 11 i p s, William H. Effect of Steady Rolling on Longitudinal
and Directional Stability. NACA Technical Note 1627, June 1948.
26. P i n s к e r I. G. Critical flight conditions and loabs resulting from
inertia cross—coupling and aerodynamic stability deficiencies. „ARC Techni-
cal Report“, С. P. 1958, No. 404, 27 p.
27. R.o у M., Sur l‘etube theorique et experimentale de la stabilite des
regimes de vol des avions. „Bull, de lAssociaticn techn. marit. et aeron.“, 1931,
N 35, pp. 619—640.
28. S e a m a u s R. C. Jr., Beasingame В. P. and Clementson G. C. The
Pulse Method for the Determination of Aircraft Dynamic Performance. Journal
of the Aeronautical Sciences, vol. 17, January, 1950.
29. Lt. Colonel Chrles Yeager. High Speed Test Flying. US, 1956.
30. Zalovcik, John A. A Radar Method of Calibrating Airspeed Installati-
ons of Airplanes in Maneuvers at High Altitudes and at Transonic and Super-
sonic Speeds. NACA Repor. 985, 1950.
ОГЛАВЛЕНИЕ
Стр.
Предисловие............................................................ 3
Основные обозначения................................................... 5
Глава I. Наземная подготовка летных испытаний. Первый вылет опыт-
ного самолета.......................................:.................. 7
1.1. Характер проводимых работ..................................... 7
1.2. Программа летных испытаний самолета........................... 9
1.3. Оборудование самолета контрольно-записывающей аппаратурой 10
1.4. Нивелировка, обмер, взвешивание. Определение положения центра
тяжести самолета и его моментов инерции........................... 16
1.5. Определение основных характеристик системы управления ... 24
1.6. Наземные тренировки летного экипажа. Рулежки, пробежки, под-
леты самолета..................................................... 28
1.7. Первый вылет самолета........................................ 30
Глава Й. Методы определения скорости полета, барометрической высоты,
координат самолета в пространстве, температуры воздуха и числа М 32
2. 1. Теория приборов, измеряющих скорость, высоту и число М полета 32
2.2. Измерение температуры воздуха в полете....................... 52
2.3. Ошибки измерения скорости и высоты, вызываемые запаздыванием * 55
2.4. Измерение параметров траектории движения самолета в про-
странстве ........................................................ 59
2.5. Методика определения аэродинамических поправок ПВД ... 67
Глава III. Определение летных характеристик самолетов................. 78
3. 1. Летные характеристики современных самолетов................. 78
3.2. Основные положения теории подобия режимов работы турбо-
реактивных двигателей............................................. 83
3.3. Подобие режимов полета и принципы приведения летных харак-
теристик к стандартным (заданным) условиям........................ 87
3. 4. Подготовка к определению летных характеристик самолета ... 93
3.5. Определение максимальной скорости полета самолетов с ТРД 94
3.6. Подобие режимов работы турбовинтового двигателя и определе-
ние максимальной скорости полета самолетов с ТВД................. 102
3.7. Определение наивыгоднейших скоростей набора высоты .... 113
3.8. Определение скороподъемности и практического потолка ... 116
3.9. Определение дальности и продолжительности полета самолетов
с ТРД и ТВД...................................................... 122
3. 10. Определение причин ухудшения летных характеристик самолетов 129
Глава IV. Характеристики устойчивости и управляемости самолета . . 134
4. 1. Некоторые сведения из теории устойчивости и управляемости
самолета......................................................... 134
422
Стр.
4.2. Количественные характеристики устойчивости и управляемости
самолета..............................................-....... 140
Глава V. Некоторые особенности устойчивости и управляемости совре-
менных самолетов..................................................... 166
5. 1. Устойчивость и управляемость сверхзвукового самолета .... 166
5. 2. Неблагоприятные явления в устойчивости и управляемости сверх-
звукового самолета................................................ 175
5. 3. Влияние упругих деформаций проводки на устойчивость и управ-
ляемость тяжелого самолета с обратимой системой управления
рулями............................................................ 202
Глава VI. Методы количественной оценки устойчивости и управляемости
самолета........................................................... 218
6. 1. Типовые элементы полетного задания. Последовательность про-
ведения испытаний................................................. 218
6.2. Методы обработки экспериментального материала ............. 224
6. 3. Оценка поведения самолета при одностороннем отказе двигателя
и условий продолжения полета с асимметричной тягой* .... 248
6.4. Испытания тяжелых самолетов с мощной механизацией крыла
на режимах предпосадочного планирования........................... 257
Глава VII. Испытания на предельных скоростях и числах М полета . . 260
7. 1. Ограничения режимов полета................................. 260
7.2. Методика испытаний.......................................... 273
7.3. Обработка и анализ полетных материалов...................... 280
Глава VIII. Испытания на сваливание и штопор......................... 284
8. 1. Основные особенности сваливания и штопора современных
самолетов......................................................... 284
8.2. Вывод современных самолетов из сваливания и штопора . . . 296
8. 3. Методика и программа летных испытаний на сваливание и штопор 300
8.4. Обработка и анализ материалов летных испытаний.............. 311
Глава IX. Определение маневренных характеристик самолета 317
9. 1. Понятие маневренности...................................... 317
9. 2. Перегрузка................................................. 319
9. 3. Уравнения маневренности.................................... 322
9 4. Выбор критериев, характеризующих общие показатели манев-
ренности ......................................................... 324
9. 5. Определение критериев маневренности в полете................326
9.6. Обработка и анализ материалов летных испытаний. Приведение
их к стандартным условиям......................................... 339
9.7. Определение частных показателей маневренности............... 351
9.8. Выполнение фигур пилотажа................................... 353
9.9. Энергетическая высота и динамический потолок самолета . . . 353
Глава X. Определение взлетно-посадочных характеристик самолета . . 359
10. 1. Особенности взлетно-посадочных характеристик современных
самолетов......................................................... 359
10.2. Характеристики, определяемые при испытаниях................. 365
10.3. Методы регистрации параметров траекторий взлета и посадки 367
10. 4. Проведение летных испытаний в нормальных эксплуатационных
условиях.......................................................... 370
10.5. Имитация аварийных взлетов и посадок........................ 374
10.6. Приведение взлетно-посадочных характеристик к стандартным
(заданным) условиям............................................... 389
10.7. Окончательная обработка результатов летных испытаний . . . 404
Литература............................................................ 420
Михаил Григорьевич Котик, Алексей Васильевич Павлов,
Игорь Михайлович Пашковский, Николай Григорьевич Щитаев
ЛЕТНЫЕ ИСПЫТАНИЯ САМОЛЕТОВ
Редактор С. Б. Геллер
Техн, редактор Т. С. Старых
Художник Л. А. Витте
Корректор Ж. Л. Суходолова
Г-57284
Формат 6OX9O'/’i6
Бум. л. 13,63
Цена 1 р« 53 к.
Сдано в набор 26/11-1968 г. Подписано в печать 17/VI-1968 г.
Печ. л. 27,25 в т. ч. 2 вкл. Уч.-изд. л. 26,68
Бумага № 2 Тираж 6500 экз. Изд. зак. 1888
Тем. план 1968 г. № 146
Издательство «Машиностроение», Москва, Б-66, 1-й Басманный пер., 3.
Московская типография № 8 Главполиграфпрома
Комитета по печати при Совете Министров СССР,
Хохловский пер., 7. Тип. зак. 598
Замеченные опечатки
Стр. Строка Напечатано Следует читать
59 1 сверху т куда откуда
178 18 сверху управления уравнения
178 1-е уравне- ние систе- мы (5.2) g + ~cos Y cos ft; g +y(cos У cos & — cos ftHCX);
Заказ 598/1888