/









































































































Текст
М. С. ЯЦУНОВИЧ
ПРАКТИЧЕСКАЯ
АЭРОДИНАМИКА
ВЕРТОЛЕТА
Ми-6
ДОПУЩЕНО
Управлением учебных заведений Ми-
нистерства гражданской авиации в
качестве учебного пособия для лет-
ных училищ гражданской авиации
Библиотека 22 УТО
Инв. ы. /А-ег
"ИЗДАТЕЛЬСТВО «ТРАНСПОРТ»
Москва 1969
ИЗДАТЕЛЬСТВО «ТРАНСПОРТ»
В 1969 Г. ВЫЙДУТ В СВЕТ КНИГИ:
БЛЮГЕР В. Ф., БРЕСЛАВЕЦ В. Г. Справочник авиационного техника по
электрооборудованию. 33 изд. л. Ц. 1 р. 95 к.
В справочнике изложены основные технические характеристики источников
и преобразователей электрической энергии постоянного и переменного тока,
аппаратов, защитных и коммутационных устройств, электрических агрегатов и
механизмов, применяемых на самолетах и вертолетах гражданской авиации.
Приведены сведения о материалах, используемых при эксплуатации авиацион-
ного электрооборудования. Даются краткие сведения об основах организации
технического обслуживания электрооборудования самолетов и вертолетов, харак-
теристики инструмента, установок, стендов и средств, применяемых при эксплуа-
тации авиационного электрооборудования в производственных подразделениях
гражданской авиации.
Предназначен для авиационных техников по электрооборудованию самоле-
тов и вертолетов гражданской авиации. Он может быть использован пилотами
и инженерами гражданской авиации, а также учащимися специальных авиа-
ционных училищ, школ и техникумов.
Q
ЛЕИЗЕРАХ А. А. Сборник задач по самолетовождению. Изд. 3-е, перераб.
В сборнике кратко излагаются теоретические и особенно практические спо-
собы самолетовождения и управления воздушным движением самолетов с порш-
невыми. турбореактивными и турбовинтовыми двигателями при полетах визу-
ально и при невидимости земли. Приведены примеры и решения типовых прак-
тических задач с использованием современного наземного и самолетного
оборудования. В конце книги даны ответы на все задачи, помещенные в сбор-
Книга предназначена для летного и диспетчерского состава гражданской
авиации. Она может быть также использована курсантами летных училищ всех
ведомств.
РАДЧЕНКО И. В., КРАМЧАНИНОВ В. П., ДУБРИНСКИЙ В. П. Само-
лет Ан-2. 33 изд. л. Ц. 1 р. 95 к.
В книге дается краткое описание самолета Ан-2 и его модификаций, устрой-
ства систем и агрегатов, приведены основные технические данные двигателя и
спецоборудования. Изложены мероприятия по предупреждению дефектов и
методика их обнаружения, рекомендации по хранению самолетов в полевых
условиях.
Предназначена для летного и инженерно-технического состава транспортных
подразделений, сельскохозяйственной авиации и авиации спецприменения. Она
может быть также использована учащимися средних авиационных учебных
заведений.
□
Заказы можно направлять в магазины «Транспортная книга» отделений
издательства «Транспорт», а также в центральный магазин «Транспортная книга»
по адресу: Москва, Б-78, Садово-Спасская ул., д. 21, тел. 262-27-33 и 262-25-13.
УДК 629.135.4 : 533.601.3(075.3)
Практическая аэродинамика вертолета Ми-6. М. С. Я Д у-
н о в и ч. Изд-во «Транспорт», 1969 г., стр. I—208.
В книге даны общая краткая характеристика вертолета,
особенности аэродинамики его несущей системы и фюзеляжа,
характеристики газотурбинного двигателя Д-25В и системы
«шаг-газ».
Рассмотрены режимы полета вертолета, особенности их вы-
полнения и летные ограничения для вертолетов Ми-6 с трапе-
циевидными и прямоугольными лопастями несущего винта,
а также вопросы балансировки, центровки управляемости и
устойчивости вертолета и особые случаи в полете. Схемы сил
при режимах полета с поступательной скоростью для упроще-
ния даны без учета крена или скольжения, с которыми верто-
лет должен балансироваться. Эти вопросы изложены при
рассмотрении балансировки вертолета.
Книга предназначена в качестве учебного пособия для лет-
ных училищ гражданской авиации. Она может быть использо-
вана летным составом производственных подразделений верто-
летной авиации. Рис. 110, табл. 15.
3-18-0
107—69
----ВВЕДЕНИЕ
За последние годы газотурбинные двигатели вытесняют порш-
невые не только на самолетах, но и на вертолетах. Установка дви-
гателя большой мощности при малом весе существенно увеличи-
вает весовую отдачу вертолета и повышает его экономичность.
Рис. 1. Вертолет Ми-6
Вертолет Ми-6 (рис. 1) является первым в Советском Союзе
крылатым вертолетом с газотурбинными двигателями. Он создан
в 1957 г., а серийное производство его начато в 1958 г. Это самый
тяжелый вертолет в мире, его максимальный полетный вес состав-
ляет 42,5 Т, а нормальный — 40,5 Т. Он получил широкое примене-
ние в гражданской авиации, экспортируется во многие социалисти-
ческие страны и в некоторые капиталистические.
На этом вертолете был установлен ряд мировых рекордов.
Командир корабля Р. Капрелян в октябре 1957 г. на вертолете
Ми-6 поднял полезный груз 12 004 кГ на высоту 2432 м, побив
3
мировой рекорд, ранее принадлежавший США, а в апреле 1959 г.
поднял полезный груз 10 000 кГ на высоту 4855 м, побив ему же
принадлежавший мировой рекорд.
21 ноября 1959 г. на вертолете Ми-6 был установлен абсолют-
ный мировой рекорд скорости — 262,92 км/ч, ранее принадлежав-
ший США.
В 1961 году летчиком И. Лёшиным на этом вертолете установ-
лен новый мировой рекорд скорости — 320 км/ч на базе 15—25 км.
В сентябре 1962 г. на вертолете Ми-6 установлено 11 новых
Рис. 2. Вертолет Ми-10
мировых рекордов. 11 сентября 1962 г. экипаж под руководством
командира корабля В. Колошенко на этом вертолете с грузом
5140 кГ пролетел но 1000-/си замкнутому маршруту со средней ско-
ростью 284 км!ч, тем самым было установлено четыре мировых
рекорда: рекорд скорости на данном участке пути и рекорд поле-
та на 1000 км с грузом в одну, две и пять тонн, 13 сентября 1962 г.
экипаж под руководством командира корабля Р. Капрслян поднял
груз 20 117 кГ на высоту 2700 м, тем самым было установлено
три мировых рекорда: подъем максимального груза 20117 кГ на
высоту 2000 м и подъем груза 15 и 20 т на высоту 2,7 км. 15 сен-
тября экипаж под руководством командира корабля Б. К. Галицко-
го пролетел по замкнутому 500 и 1000-к.и маршрутам с грузом бо-
лее двух тонн со средней скоростью 300, 377 км/ч по 1 ООО-«ле марш-
руту и со средней скоростью 315, 652 км/ч по 500-к.и маршруту, ус-
тановйв четыре мировых рекорда: скорости без груза по 500 и
1000-к,и замкнутым маршрутам и скорости по ЮОО-кэи замкнутому
маршруту с грузом в одну и две тонны.
В сентябре 1966 г. на вертолете Ми-6 установлен и до сих пор
удерживается новый абсолютный мировой рекорд скорости: эки-
паж командира корабля Б. К. Галицкого пролетел по замкнутому
ЮО-кл маршруту со средней скоростью 340 км/ч. На базе вертолета
Ми-6 в 1960 г. был построен вертолет Ми-10 (рис. 2). Это «летаю-
щий кран», имеющий высокое шасси для перевозки крупногабарит-
ных грузов на внешней подвеске. Вертолет может садиться непо-
средственно над грузом, размещенном на специальной платформе.
С помощью системы гидрозахватов закрепляют платформу за
четыре стандартных шаровых крепления и в течение 2—3 мин груз
может быть подготовлен для перевозки.
Полетный вес вертолета Ми-10 43 070 кГ, максимально допу-
стимый вес груза — 12 Т, дальность полета при этом 250 км, макси-
мальная дальность при заправке основных и дополнительных баков
630 км, крейсерская скорость с платформой без грузов 220 км)ч, с
грузами 180 км)ч по прибору.
На вертолете Ми-10, как и на вертолете Ми-6, установлены два
турбовальных двигателя конструкции П. А. Соловьева мощностью
по 5500 л. с.
На вертолете Ми-10 28 мая 1965 г. летчиком Г. Алфёровым под-
нят коммерческий груз 25 105 кГ на высоту 2840 м, тем самым
установлены два абсолютных мировых рекорда: достигнута макси-
мальная высота 2840 м с грузом в 25 000 кГ и поднят максималь-
ный груз 25 105 кГ на высоту 2000 м. 26 мая 1965 г. экипажем под
руководством мастера спорта В. Колошенко на этом вертолете
достигнута высота 7151 м с грузом 20 000 кГ.
Вертолет Ми-10 демонстрировался перед представителями ино-
странных государств и фирм во Внукове в мае 1965 года, а также
в Париже летом того же года на Международном салоне аэронав-
тики и Космоса.
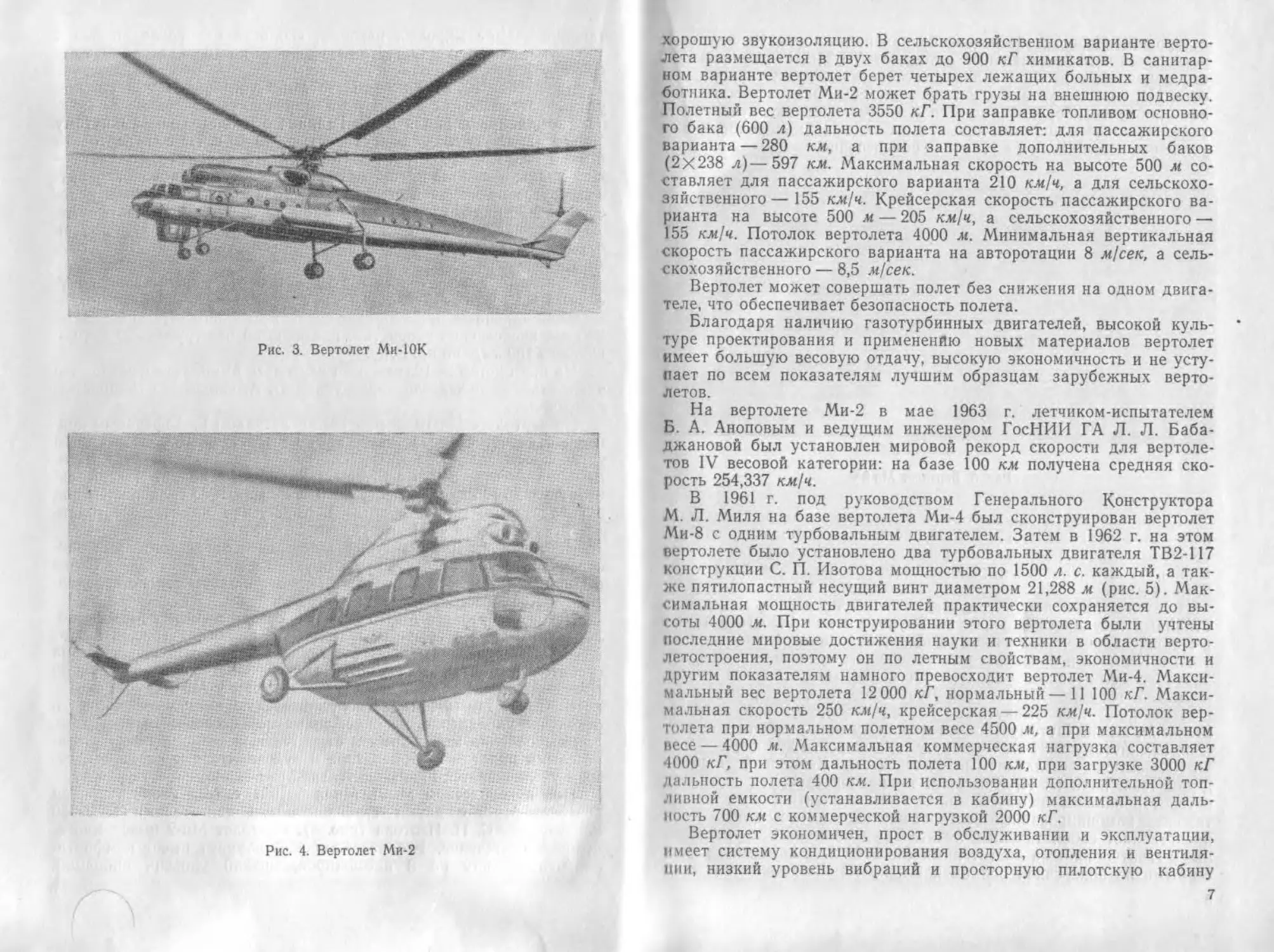
На базе вертолета Ми-10 в 1965 г. создан вертолет Ми-ЮК об-
легченного типа с обычным шасси (коротконогий) (рис. 3). Этот
вертолет предназначен как «летающий кран» для производства
строительно-монтажных работ. За счет облегчения конструкции
грузоподъемность его на 2—3 т больше, чем у Ми-10.
Вертолет Ми-ЮК имеет дополнительную кабину — фонарь и
отдельное управление, расположенные под фюзеляжем вертолета,
для выполнения монтажных и строительных работ непосредствен-
но самим пилотом без оператора и руководителя полетов, тем са-
мым увеличивается производительность и экономичность работ.
Под руководством М. Л. Миля в 1961 г. был сконструирован
вертолет Ми-2 с двумя турбовинтовыми двигателями ГТД-350
конструкции С. П. Изотова (рис. 4). Вертолет Ми-2 имеет много-
целевое назначение. Его пассажирский вариант имеет комфорта-
бельную кабину на 8 пассажиров, низкий уровень вибраций,
5
Рис. 4. Вертолет Ми-2
хорошую звукоизоляцию. В сельскохозяйственном варианте верто-
лета размещается в двух баках до 900 кГ химикатов. В санитар-
ном варианте вертолет берет четырех лежащих больных и медра-
ботника. Вертолет Ми-2 может брать грузы на внешнюю подвеску.
Полетный вес вертолета 3550 кГ. При заправке топливом основно-
го бака (600 л) дальность полета составляет: для пассажирского
варианта—280 км, а при заправке дополнительных баков
(2x238 л)—597 км. Максимальная скорость на высоте 500 м со-
ставляет для пассажирского варианта 210 км/ч, а для сельскохо-
зяйственного— 155 км/ч. Крейсерская скорость пассажирского ва-
рианта на высоте 500 м — 205 км/ч, а сельскохозяйственного —
155 км/ч. Потолок вертолета 4000 м. Минимальная вертикальная
скорость пассажирского варианта на авторотации 8 м/сек, а сель-
скохозяйственного — 8,5 м/сек.
Вертолет может совершать полет без снижения на одном двига-
теле, что обеспечивает безопасность полета.
Благодаря наличию газотурбинных двигателей, высокой куль-
туре проектирования и применению новых материалов вертолет
имеет большую весовую отдачу, высокую экономичность и не усту-
пает по всем показателям лучшим образцам зарубежных верто-
летов.
На вертолете Ми-2 в мае 1963 г. летчиком-испытателем
Б. А. Аноповым и ведущим инженером ГосНИИ ГА Л. Л. Баба-
джановой был установлен мировой рекорд скорости для вертоле-
тов IV весовой категории: на базе 100 км получена средняя ско-
рость 254,337 км/ч.
В 1961 г. под руководством Генерального Конструктора
М. Л. Миля на базе вертолета Ми-4 был сконструирован вертолет
Ми-8 с одним турбовальным двигателем. Затем в 1962 г. на этом
вертолете было установлено два турбовальных двигателя ТВ2-117
конструкции С. П. Изотова мощностью по 1500 л. с. каждый, а так-
же пятилопастный несущий винт диаметром 21,288 м (рис. 5). Мак-
симальная мощность двигателей практически сохраняется до вы-
соты 4000 м. При конструировании этого вертолета были учтены
последние мировые достижения науки и техники в области верто-
летостроения, поэтому он по летным свойствам, экономичности и
другим показателям намного превосходит вертолет Ми-4. Макси-
мальный вес вертолета 12 000 кГ, нормальный — 11 100 кГ. Макси-
мальная скорость 250 км/ч, крейсерская — 225 км/ч. Потолок вер-
толета при нормальном полетном весе 4500 м, а при максимальном
весе — 4000 м. Максимальная коммерческая нагрузка составляет
4000 кГ, при этом дальность полета 100 км, при загрузке 3000 кГ
дальность полета 400 км. При использовании дополнительной топ-
ливной емкости (устанавливается в кабину) максимальная даль-
ность 700 км с коммерческой нагрузкой 2000 кГ.
Вертолет экономичен, прост в обслуживании и эксплуатации,
имеет систему кондиционирования воздуха, отопления и вентиля-
ции, низкий уровень вибраций и просторную пилотскую кабину
с хорошим обзором; обеспечена полная надежность. На вертолете
установлен четырехканальный автопилот АП-34Б, обеспечивающий
стабилизацию вертолета в полете по тангажу, крену, курсу и вы-
соте. На вертолете также установлено современное навигацион-
ное приборное оборудование. Все это позволяет эксплуатировать
вертолет на всех широтах ночью и в сложных метеорологических
условиях, в том числе и в условиях обледенения.
19 апреля 1964 г. на вертолете Ми-8 экипажем под командой
командира корабля В. П. Колошенко были установлены два аб-
солютных мировых рекорда: рекорд дальности по замкнутому
маршруту 2465,736 км и рекорд скорости на базе 2000 км —
201,834 км 1ч.
Вертолет Ми-8 демонстрировался перед представителями ино-
странных государств и фирм во Внукове в мае 1965 г., а также
в Париже летом того же года на Международном салоне аэронав-
тики и Космоса и признан соответствующим лучшим современным
зарубежным образцам и конкурентоспособным на мировом рынке.
В 1967 году на вертолете Ми-8 установлены три женских миро-
вых рекорда: по замкнутому 500-к.и маршруту при скорости
273 км!ч, по замкнутому 1000-кл маршруту при скорости 258 км/ч
и по замкнутому 2084-кл< маршруту при скорости 258 км/ч.
Коллектив, возглавляемый лауреатом Ленинской премии,
д-ром техн, наук Н. И. Камовым, также конструирует вертолеты
с газотурбинными двигателями. В этом коллективе был создан
тяжелый комбинированный вертолет-винтокрыл Ка-22 (рис. 6). Он
представляет собой тяжелый летательный аппарат с двумя мощ-
ными газотурбинными двигателями (по 5900 л. с. каждый), разне-
сенными по поперечной оси на крыльях. Каждый двигатель при-
8
водит в движение два винта: один — несущий для создания
подъемной силы, другой — тянущий для создания тяги в поступа-
тельном полете. Винтокрыл имеет преимущество по сравнению с
вертолетами, так как он совершает полет при положительных углах
Рис. 6. Винтокрыл Н. И. Камова Ка-22
атаки, у него меньше сопротивление и расход топлива и больше
дальность полета. В конце 1961 г. на винтокрыле Ка-22 установлен
мировой рекорд скорости на базе 15—25 км 356,3 км)ч. В том же
году на винтокрыле Ка-22 были установлены мировые рекорды
Рис. 7. Вертолет Ка-26. Рядом стоит пассажирская кабина и платформа с гру-
зом. На вертолете установлены штанги опрыскивателя
подъема коммерческого груза 1000, 2000, 5000, 10000 и 15 000 кГ
на 'высоту 2588 м и мировой рекорд подъема максимального груза
на высоту 2000 м— 16 485 кГ.
В этом конструкторском бюро создан многоцелевой вертолет
Ка-26, выполненный по соосной схеме. Отличительная особенность
вертолета в том, что центральная часть машины, расположенная
под несущими винтами, полностью освобождена от конструкции.
Здесь может размещаться различное оборудование в зависимости
от варианта применения: аппаратура для авиационно-химических
работ, или платформа (рис. 7) для перевозки грузов, съемная
кабина на шесть пассажиров, или лебедка для перевозки грузов
на внешней подвеске. Это делает вертолет многоцелевым.
На вертолете установлены два поршневых девятицилиндровых
звездообразных двигателя воздушного охлаждения М-14В26 мощ-
ностью по 325 л. с.
Экипаж вертолета состоит из одного пилота.
Вертолет может применяться в следующих основных вариантах:
грузо-пассажирском, санитарном, сельскохозяйственном с опрыс-
кивателем, сельскохозяйственном с опыливателем, грузовом с плат-
формой и как «летающий кран».
Переоборудование вертолета из варианта в вариант произво-
дится силами эксплуатирующих подразделений (два-четыре чело-
века в течение 1—3 ч) с использованием штатного оборудования
и инструмента.
—... — .. _ - ГЛАВА I
ОБЩАЯ ХАРАКТЕРИСТИКА ВЕРТОЛЕТА Ми-6
§ 1. КРАТКИЕ СВЕДЕНИЯ О ВЕРТОЛЕТЕ
Вертолет Ми-6 с двумя турбовинтовыми двигателями Д-25В по
схеме представляет собой одновинтовой крылатый вертолет с ру-
левым винтом. Несущий винт — пятилопастный, цельнометалличе-
ской конструкции, а рулевой — четырехлопастный с лопастями де-
ревянной конструкции. На вертолетах раннего выпуска установлен
Рис. 8. Вертолет Ми-6:
/ — рулевой винт, 2—концевая балка; 3 — лопасть несущего винта; 4 — втулка несу-
щего винта; 5 — двигатели Д-25В; 6 — кабина экипажа; 7 - передняя стойка шасси;
8 — подвесной бак: 9 — главная стойка шасси; 10 - крыло; 11 — хвостовая балка
несущий винт с лопастями трапециевидной формы, а на последних
сериях вертолета устанавливаются винты с лопастями прямоуголь-
ной формы. Несущий винт с лопастями прямоугольной формы в си-
лу конструктивных особенностей имеет лучшие аэродинамические
свойства, создает при той же заданной мощности большую тягу.
Вертолет Ми-6 состоит из следующих основных агрегатов и си-
стем: фюзеляжа, крыла, стабилизатора, несущего винта, силовой
установки, трансмиссии и вентиляторной установки, управления,
рулевого винта, посадочного устройства, гидравлической системы,
11
воздушной системы, противообледенительной системы, устройству
для наружной подвески грузов, электро-радио-приборного и специ-
ального оборудования (рис. 8).
§ 2. ПЛАНЕР ВЕРТОЛЕТА
Фюзеляж
Фюзеляж вертолета Ми-6 представляет собой клепаную цель-
нометаллическую конструкцию, состоящую из стрингеров, шпангоу-
тов и дюралюминиевой обшивки различной толщины. Он состоит из
четырех частей: носовой, центральной, хвостовой и концевой балок.
В носовой части фюзеляжа размещены кабины экипажа и основ-
ная часть оборудования.
Центральная часть фюзеляжа имеет двигательный и редуктор-
ные отсеки, грузовую кабину и отсеки топливных баков. Пол грузо-
вой кабины представляет собой силовую конструкцию. Под полом
размещены контейнеры восьми топливных баков, остальные три топ-
ливных бака размещены в контейнерах над потолком грузовой ка-
бины. Над грузовой кабиной размещены двигательный и редуктор-
ный отсеки. Грузовая кабина заканчивается створками и грузовыми
трапами, она имеет по правому борту одну дверь, по левому — две,
в полу грузовой кабины находится центральный люк со створками.
Хвостовая балка представляет собой дюралюминиевую клепаную
конструкцию, которая состоит из шпангоутов, стрингеров и обшивки.
Балка стыкуется с центральной частью фюзеляжа по шпангоуту
№ 42. Внутри балки помещается хвостовой вал трансмиссии, тросы
ножного управления и узлы крепления стабилизатора.
Концевая балка является продолжением хвостовой балки и на-
клонена вверх под углом 47° к оси хвостовой балки. В нижней ча-
сти концевой балки установлен промежуточный редуктор, а в верх-
ней — хвостовой, на валу которого монтируется рулевой винт. Конце-
вая балка состоит из трех частей: килевой балки, фиксированного
руля и съемного обтекателя. Килевая балка состоит из наклонного
лонжерона, шпангоутов и дюралюминиевой обшивки. Фиксиро-
ванный руль состоит из нервюр, продольного набора (уголков),
перекрещивающихся лент и обшивки. Нервюры имеют несиммет-
ричный профиль, чтобы в поступательном полете руль создавал
аэродинамическую силу, направленную в сторону тяги рулевого
винта и тем самым разгружал рулевой винт. Со стороны рулевого
винта фиксированный руль обшит дюралюминиевым листом, а с
противоположной стороны — полотном. В верхней части руля слева
установлены жабры для выхода воздуха, охлаждающего промежу-
точный редуктор. Руль крепится к килевой балке винтами и само-
контрящимися гайками. Съемный обтекатель представляет собой
дюралюминиевый каркас, крепящийся к килевой балке и фиксиро-
ванном)' рулю винтами и самоконтрящимися гайками. При снятии
обтекателя обеспечивается доступ к промежуточному редуктору и
узлу крепления амортизационной стойки хвостовой опоры.
12
Крыло
\ На вертолете установлено свободнонесущее крыло размахом
15,3 м и площадью 35 мг. Установочные углы правой консоли 15°45",
лйвой — 14° 15".
1 Крыло состоит из центропланпой балки и стыкованных с ней
правой и левой консолей. Консоль крыла состоит из каркаса и об-
шивки. В каркас входят лонжерон, стрингеры и нервюры. Центро-
плапная балка коробчатого сечения, склепанная из толстого дюра-
люминиевого листа. Верхние и нижние стенки усилены стрингерами
и соединены между собой продольными профилями. Балка прохо-
дит между № 18 и 19 шпангоутами фюзеляжа и крепится шарнир-
но к двум узлам, находящимся на шпангоуте № 18. На нижних
передних узлах балки расположены два ответных узла.
Часть крыла, подвергающаяся нагреву от выхлопных газов, за-
щищена специальным экраном из жароупорной стали. Экран ста-
вится на угольниках из материала с малой теплопроводностью и
крепится болтами и анкерными гайками. Между экраном и обшив-
кой крыла имеется зазор для прохода воздуха. Для плавного сочле-
нения крыла с фюзеляжем имеется зализ.
Стабилизатор
На вертолете Ми-6 установлен управляемый в полете стабили-
затор для обеспечения необходимой управляемости и устойчивости.
Управление установочным углом стабилизатора сблокировано
с ручкой «шаг-газ»: при движении ручки вверх угол установки ста-
билизатора увеличивается, при движении вниз — уменьшается. Ста-
билизатор имеет симметричный профиль NACA-0012 и состоит из
правой и левой половин, расположенных симметрично относительно
хвостовой балки. Обе половины соединены между собой лонжеро-
ном. Каждая половина стабилизатора (консоль) состоит из лонже-
рона, набора нервюр, диафрагм, лобовой дюралюминиевой обшив-
ки, хвостового стрингера, концевого обтекателя и полотняной
обшивки. На стабилизаторе имеются два узла для крепления к
хвостовой балке и один узел для крепления тяги управления стаби-
лизатором. Площадь стабилизатора 4,87 ле2. Угол отклонения отно-
сительно строительной горизонтали вверх 5±1°, вниз 13±1°.
§ 3. НЕСУЩИЙ ВИНТ, СИЛОВАЯ УСТАНОВКА,
ТРАНСМИССИЯ И УПРАВЛЕНИЕ ВЕРТОЛЕТОМ
Несущий винт
Несущий винт вертолета состоит из втулки и пяти лопастей.
Втулка монтируется на вал главного редуктора. Каждая лопасть
крепится к втулке при помощи трех шарниров: горизонтального,
вертикального и осевого (продольного). Вокруг горизонтального
13
шарнира лопасть совершает маховое движение, вокруг вертикально-
го шарнира колеблется в плоскости вращения и, вращаясь относи-
тельно осевого шарнира, изменяет установочные углы. Маховое
движение лопасти вокруг горизонтального шарнира кинематически
связано с вращением лопасти вокруг осевого шарнира при помощи
регулятора (компенсатора) взмаха: при взмахе лопасти вверх уста-
новочный угол уменьшается, при взмахе вниз — увеличивается. Та-
ким образом компенсатор взмаха повышает устойчивость движения
лопастей и улучшает другие характеристики вертолета. Вертикаль-
ные шарниры лопастей имеют гидравлические демпферы, установ-
ленные на втулке винта.
Лопасти винта цельнометаллической конструкции, силовым эле-
ментом является стальной трубчатый лонжерон, к которому крепят-
ся 26 отсеков, не имеющих жесткого соединения между собой. По-
этому при изгибе лопасти отсеки не взаимодействуют между собой,
а лишь передают аэродинамические и инерционные силы непосред-
ственно на лонжерон лопасти.
В 1965 г. созданы новые лопасти прямоугольной формы в плане
с постоянной хордой, равной 1000 мм. Силовым элементом новой
лопасти является также стальной лонжерон, представляющий собой
цельную, холоднокатаную трубу переменного сечения длиной
15610 мм. На лонжероне при помощи специальных узлов закреплен
каркас лопасти, состоящий из 20 отсеков. Отсеки служат для пере-
дачи аэродинамических сил на лонжерон и состоят из носовой и
хвостовой части каждый. Хвостовая часть имеет сотовый заполни-
тель. Прямоугольная лопасть также имеет геометрическую крутку.
Такая лопасть имеет герметизацию лонжерона с системой сигнали-
зации повреждения его. Несущий винт как с трапециевидными, так
и с прямоугольными лопастями имеет диаметр 35 м.
Лопасти обеих конструкций имеют электрическое противообле-
денительное устройство.
Силовая установка
Над грузовой кабиной симметрично относительно продольной
осн фюзеляжа и с наклоном вниз на 5° к оси установлены два тур-
бовинтовых двигателя Д-25В мощностью по 5500 л. с. на взлетном
режиме. Двигатели крепятся к фюзеляжу кронштейнами и регули-
руемыми стойками с резиновой амортизацией. Оба двигателя рабо-
тают независимо друг от друга, что позволяет, в случае необходи-
мости, производить полет с одним работающим двигателем.
Особенностью двигателя Д-25В является наличие в нем свобод-
ной турбины, не связанной кинематически с турбокомпрессорной
частью Двигателя. Наличие такой турбины позволяет устанавливать
число ее оборотов независимо от режима работы турбокомпрессор-
ной части двигателя. Эта особенность дает ряд конструктивных и
эксплуатационных преимуществ: позволяет получить желаемое чис-
ло оборотов несущего винта в зависимости от режима и высоты по-
лета независимо от числа оборотов турбокомпрессора двигателя,
14
тимальный расход топлива при различных условиях эксплуатации
игателя обеспечивает более легкий запуск двигателя, исключает
обходимость иметь в силовой установке вертолета механическую
'фту включения.
Двигатель состоит из следующих основных узлов и систем:
входного корпуса компрессора с коробками приводов агрегатов;
осевого девятиступенчатого (для первой серии двигателя вось-
миступенчатого) компрессора с перепуском воздуха после III и IV
ступеней компрессора и перфорированной полостью над первой сту-
пенью компрессора; перепуск воздуха осуществляется автомати-
чески через отверстия, перекрываемые лентами перепуска;
трубчатокольцевой камеры сгорания с двенадцатью жаровыми
трубами;
одноступенчатой турбины, работающей на привод компрессора;
двухступенчатой турбины, работающей через редуктор на привод
вала несущего винта вертолета;
трансмиссии, передающей крутящий момент от двухступенчатой
турбины на редуктор;
системы топливопитания и автоматического управления двига-
телем;
системы автоматического запуска со стартер-генератором;
системы смазки и суфлирования;
противопожарной системы двигателя;
выхлопной трубы.
Принцип работы двигателя заключается в следующем (рис. 9).
Воздух из атмосферы через специальный тоннель и входной корпус 1
компрессора засасывается девятиступенчатым компрессором, сжи-
мается в нем и поступает в камеру сгорания 4. Часть воздуха, по-
ступающего в камеру сгорания, участвует в сгорании топлива, а ос-
новная часть его смешивается с горячими газами, поэтому темпера-
тура газов перед турбиной снижается до необходимой величины. Из
камеры сгорания поток горячих газов устремляется на турбину. На
одноступенчатой турбине 5 компрессора часть энергии горячих га-
зов (около 50%) преобразуется в механическую, которая расходует-
ся на вращение ротора компрессора и агрегатов. Остальная часть
энергии горячих газов преобразуется на двухступенчатой свободной
турбине 6 винта в механическую работу, которая передается через
трансмиссию 10 и главный редуктор 12 на вал 13 несущего винта.
Энергия струи газов, выходящих из турбины винта, составляющая
примерно 7% от энергии, преобразованной в полезную мощность,
расходуется на создание реактивной тяги двигателя.
Двигатель оборудован автоматической системой запуска от стар-
тер-генератора, питающегося от бортовых аккумуляторов или
наземных источников питания, и автоматизированной системой регу-
лирования подачи топлива по режимам работы двигателя и режи-
мам полета вертолета. Управление всеми операциями запуска авто-
матизировано. Управление двигателем осуществляется при помощи
лишь одного рычага, установленного на насосе-регуляторе НР-23А.
15
Для отвода отработавших газов в атмосферу каждый двигатель
имеет сварную выхлопную трубу 9 с внутренним тоннелем. Черф
этот тоннель проходит трансмиссия двигателя, соединяющая вдл
свободной турбины с главным редуктором. На выхлопную трубу
снаружи устанавливается кожух с приваренными на внутренней по-
верхности профилями, которые образуют спиральные каналы, на-
правляющие поток воздуха для охлаждения выхлопной трубы.
Рис. 9. Схема силовой установки вертолета Ми-6:
I — входной корпус компрессора; 2 — компрессор; 3 — передняя подвеска двигателя; 4 —
камера сгорания; 5 —турбина компрессора; « — свободная турбина (турбина винта); 7 —
корпус турбины винта; 8 —задняя подвеска двигателя: 9 - выхлопная труба; 10 — транс-
миссия; Н —подкосы крепления редуктора: /2 —главный редуктор; 13 — вал несущего
винта; 14 — радиатор; /« — вентиляторная установка
Над двигателями, позади их, в развале между выхлопными тру-
бами смонтирована вентиляторная установка 15 с приводом от глав-
ного редуктора. Воздух, поступающий от вентилятора, продувает
маслорадиаторы, а часть его по трубопроводам подводится к вы-
хлопным трубам, к агрегатам главного редуктора и двигателей, тре-
бующим принудительного охлаждения.
Топливо размещается в 11 мягких баках, разделенных на
5 групп.
Общая емкость основных баков 8150 л. Емкость двух подвесных
баков — 4500 л (по 2250 л в каждом).
16
В каждой группе баков, а также в резервном баке установлены
одкачивающие электронасосы, обеспечивающие перекачку топлива
। создание необходимого давления перед насосами двигателей. Для
замера количества топлива в баках установлены датчики топливо-
меров. Кроме того, на вертолете предусмотрена установка двух до-
полнительных подвесных баков по бортам фюзеляжа и двух таких
же баков внутри кабины. Топливо из подвесных баков самотеком
перетекает в бак № 7. Из баков, находящихся внутри вертолета,
можно заправить любую группу баков бортовым топливозаправщи-
ком только на земле, в полете из этих емкостей можно подавать
топливо только в бак №11.
Выработка топлива из баков, последовательность включения и
выключения подкачивающих насосов производятся автоматически
при помощи топливомера СЭТС-230А с таким расчетом, чтобы со-
хранить эксплуатационные центровки вертолета в допустимых пре-
делах. При этом имеется возможность включать или выключать
вручную любой топливный насос и изменять порядок выработки
топлива из баков.
В топливной системе применен нейтральный газ, для чего над
потолком грузовой кабины установлены три восьмилитровых балло-
на с углекислотой.
Отсеки двигательной установки, главного редуктора и топливных
баков оборудованы системой пожаротушения, действующей автома-
тически при получении сигналов от термонзвещателей.
Силовая установка вертолета имеет маслосистему компрессорной
части двигателей и маслосистему главного редуктора, свободных
турбин и трансмиссии двигателей. Маслосистема компрессорной
части двигателей в свою очередь состоит из двух самостоятельных
маслосистем, что позволяет при отказе одной системы другой об-
служивать свой двигатель. Каждая из маслосистем состоит из мас-
лобака, радиатора и системы трубопроводов.
Маслосистема главного редуктора и свободных турбин состоит
из двух маслорадиаторов, двух клапанов перепуска и трубопро-
водов. Масло для этой системы помещается в картере главного
редуктора.
Двигатели, вентилятор и главный редуктор закрыты общим ка-
потом. Капот состоит из заборников воздуха, переднего отсека, про-
тивопожарных перегородок, вентиляторного и редукторного отсеков
и концевого обтекателя. В дальнейшем предполагается ставить ка-
поты на каждый двигатель для удобства обслуживания и уменьше-
ния объема работ при смене одного двигателя. Для предохранения
заборников воздуха от обледенения в носовой части их вмонтирова-
ны электронагреватели. Между наружной и внутренней обшивками
заборников воздуха на ложементах установлены маслобаки комп-
рессорной части двигателей. Для удобства подходов при обслужи-
вании двигателей, редуктора и вентилятора по правой и левой сто-
ронам капота имеются трапы и откидные крышки, открывающиеся
и закрывающиеся с помощью гип,ро£И£темы.
j Ёиблио14..а 22 УТО I 17
I Инв. № |
Трансмиссия и вентиляторная установка
Трансмиссия вертолета предназначена для передачи мощности
от свободных турбин двигателей на несущий и рулевой винты и на
вентиляторную установку. Трансмиссия состоит из главного, про-
межуточного и хвостового редукторов, хвостового и концевого валов,
тормоза несущего винта и привода вентилятора. Главный редуктор
понижает число оборотов свободной турбины и передает крутящий
момент от двигателей на вал несущего винта, хвостовой вал и вен-
тиляторную установку. Кроме того, на редукторе имеются четыре
привода для гидронасосов, два привода для генераторов противооб-
леденительной системы, два привода к датчикам тахометров и два
запасных привода.
На корпусе главного редуктора в задней части у выхода к хво-
стовому валу установлен тормоз несущего винта с разжимными
колодками, барабан которого соединен с фланцем выхода хвосто-
вого вала. Тормоз служит для торможения всей трансмиссии вме-
сте с винтами во время стоянки вертолета.
Главный редуктор и свободные турбины имеют свою маслосис-
тему. Общее количество масла в главном редукторе и его масло-
систсме составляет 260 л.
Хвостовой вал служит для передачи крутящего момента от
главного редуктора к хвостовому через промежуточный редуктор.
Вал состоит из 11 звеньев, девять из которых установлены на вось-
ми опорах до промежуточного редуктора, два установлены от про-
межуточного до хвостового редуктора на одной опоре. Звенья хво-
стового вала имеют между собой шлицевые соединения, что обес-
печивает компенсацию возможных неточностей установки опор и
устранение влияния упругих и температурных деформаций.
Промежуточный редуктор служит для передачи крутящего мо-
мента от главного к хвостовому редуктору, понижения числа обо-
ротов и для изменения направления хвостового вала. Конические
шестерни, имеющие спиральные зубья, обеспечивают наклон оси
хвостового вала под углом 47° вверх. Промежуточный редуктор
имеет две системы смазки: основную с принудительной подачей
масла и дублирующую — барботажную, обеспечивающую смазку
подшипников в случае отказа основной системы. В редуктор за-
ливается семь литров масла. Промежуточный редуктор крепится
к узлам на шпангоуте концевой балки с помощью четырех лап,
установленных на картере редуктора.
Хвостовой редуктор служит для передачи крутящего момента
от промежуточного редуктора к рулевому винту и для понижения
числа оборотов. Редуктор имеет одну пару конических шестерен
со специальным зубом. В редукторе смонтирован механизм управ-
ления шагом рулевого винта. Хвостовой редуктор имеет самостоя-
тельную масляную систему — основную с принудительной подачей
масла и дублирующую — барботажную. В редуктор заливается
26 л масла.
18
, Вентиляторная установка служит для охлаждения следующих
агрегатов: маслорадиаторов двигателей и главного редуктора, ге-
нераторов постоянного и переменного тока, воздушного компрес-
сора, гидронасосов, выхлопных труб двигателей, а также для пода-
чи воздуха в систему вентиляции грузовой кабины вертолета. При-
вод вентилятора осуществляется от главного редуктора через
карданный вал. Количество воздуха, проходящего через вентилятор,
можно регулировать путем изменения угла установки лопаток на-
правляющего аппарата с помощью специального механизма.
Рулевой винт
На вертолете установлен рулевой винт АВ-63Б изменяемого
в полете шага диаметром 6,3 м. Рулевой винт служит для уравно-
вешивания реактивного момента несущего винта, путевого управ-
ления вертолетом и для обеспечения путевой устойчивости. Винт
устанавливается на валу хвостового редуктора при помощи эволь-
вентных шлиц. Управление шагох^ рулевого винта осуществляется
при помощи педалей из кабины пилотов. Максимальный шаг 23°
при положении правой педали на упоре и минимальный шаг — 9°
при положении левой педали на упоре. При нейтральном положе-
нии педалей шаг рулевого винта 4°. Рулевой винт реверсивный:
в полете с работающими двигателями он является толкающим,
так как тяга его направлена влево, а на режиме самовращения не-
сущего винта он тянущий, так как тяга его направлена вправо.
Винт четырехлопастный, лопасти деревянные, имеют металличе-
скую оковку. Лопасти имеют осевые шарниры для изменения об-
щего шага винта и горизонтальные шарниры для маховых движе-
ний. В дальнейшем предусматривается постановка на лопастях и
вертикальных шарниров.
Управление вертолетом
Управление вертолетом относительно трех осей осуществляется
изменением величины и направления силы тяги несущего винта и
изменением величины тяги рулевого винта. Продольное и попереч-
ное управление осуществляется ручкой циклического шага 2
(рис. 10) через автомат перекоса, при отклонении которой изме-
няется наклон аэродинамической силы винта. Путевое управление
осуществляется педалями 1 путем изменения общего шага руле-
вого винта.
Для создания необходимых усилий на ручке управления и пе-
далях, а также для разгрузки их от постоянно действующих уси-
лий при различных режимах полета в систему ручного и ножного
управления включены пружинные механизмы загрузки (трим-
меры) 3, 9, 10. Управление этими механизмами при ручном управ-
лении осуществляется переключателем через электромеханизмы
МП-100М 8. Переключатель расположен на верхней части ручки.
При ножном управлении включение электромеханизма обеспечи-
19
Рие. 10. Схе
Ьается концевыми включателями и гашетками, установленными на
опорных площадках педалей.
Изменение величины аэродинамической силы несущего винта и
Мощности двигателей осуществляется с помощью ручки «шаг-газ» 4.
Управление стабилизатором сблокировано с ручкой «шаг-газ»: при
уменьшении общего шага угол установки стабилизатора уменьшает-
ся и наоборот. Кроме объединенного управления двигателями и об-
щйм шагом несущего винта при помощи ручки «шаг-газ», предус-
мотрено раздельное управление двигателями, т. е. можно произво-
дить опробование каждого двигателя без изменения общего шага
винта, а также установить необходимый режим в случае полета с
одним работающим двигателем.
Управление вертолетом двойное, в основном жесткой конструк-
ции, осуществляется каждым пилотом самостоятельно. Тросовая
проводка управления применена в управлении рулевым винтом и
стабилизатором на участке хвостовой части фюзеляжа и хвостовой
балки. В систему управления подключены двухкамерные гидроуси-
лители, работающие по необратимой схеме. На вертолете установ-
лен трехкапальный автопилот АП-31, стабилизирующий вертолет
в полете по крену, тангажу и курсу. Автопилот работает только от
основной гидросистемы, при ее отказе он автоматически отключает-
ся и управление гидроусилителями переводится на ручное от дуб-
лирующей гидросистемы.
§ 4. ПОСАДОЧНЫЕ УСТРОЙСТВА, СИСТЕМЫ ВЕРТОЛЕТА
И УСТРОЙСТВО ДЛЯ ПОДВЕСКИ ГРУЗОВ
Посадочные устройства
К посадочным устройствам вертолета относятся трехколесное
неубирающееся шасси и хвостовая опора с жидкостно-газовыми
амортизаторами. Колея главных ног шасси равна 7,5 м, база —
9,005 м. Стояночный угол равен —2° (строительная горизонталь
вертолета наклонена вперед и вниз).
Передняя стойка шасси расположена по оси симметрии вертоле-
та и крепится к узлам шпангоута № 1 центральной части фюзеляжа.
Опа имеет два спаренных нетормозных ориентируемых колеса раз-
мерами 720x310 мм. Начальное давление в камере каждого колеса
6 кГ/см2.
Главные стойки шасси пирамидального типа состоят из полу-
осей, задних подкосов и двухкамерных амортизаторов, закреплен-
ных на узлах шпангоутов № 18 и 22 центральной части фюзеляжа.
На полуосях главных ног шасси устанавливаются тормозные ко-
леса размерами 1325x480 мм. Начальное давление в камерах
колес 7 кГ/см2. Тормоз колеса односторонний, камерный. Торможе-
ние колес происходит при помощи пневматической системы верто-
лета. В систему камер высокого давления главных ног шасси уста-
новлен пружинный демпфер земного резонанса с трубопроводами,
соединяющими его с камерами высокого давления.
Хвостовая опора служит для предохранения рулевого винта
и хвостовой балки от случайных ударов о землю при посадке вер-
толета. Она состоит из амортизатора, двух подкосов и опорной
пяты.
В систему амортизаторов и в демпфер заливается рабочая
жидкость АМГ-10. в количестве около 64 л, в том числе: в д'ва
амортизатора высокого давления 40 л, в два амортизатора низко-
го давления — 9,6 л, в амортизатор передней ноги — 6 л, в амор-
тизатор хвостовой опоры —2,25 л, в пружинный демпфер и трубо-
проводы— 6 л. Начальное давление азота в амортизаторах: высо-
кого давления главных пог шасси равно 48 кГ/см2, низкого дав-
ления— 14 кГ/см2, передней ноги шасси 27 кГ/см2 и хвостовой
опоры 60 кГ!см2.
Гидравлическая система
Гидросистема вертолета состоит из основной, дублирующей и
вспомогательной. Основная и дублирующая системы служат для
питания всех гидроусилителей, установленных в системе управле-
ния. Вспомогательная система обеспечивает работу стеклоочисти-
телей, расстопоривание ручки «шаг-газ», регулирование сидений
пилотов по высоте и наклону спинок, автоматическое закрытие ло-
паток вентилятора при пожаре в отсеке редуктора и работу замка
наружной подвески. На земле же эта система обеспечивает откры-
вание и закрывание грузовых створок и трапов, а также трапов ка-
пота.
Насосы основной, дублирующей и вспомогательной систем уста-
новлены на приводах главного редуктора, что обеспечивает нор-
мальную работу систем в случае отказа двигателей и перехода
вертолета на режим самовращения несущего винта.
Гидросистема работает на жидкости АМГ-10 при рабочем дав-
лении 120—155 кГ/см2, температуре окружающей среды от 60 до
—50°С. Жидкость в гидросистему поступает из гидробака, разде-
ленного перегородкой на две полости, каждая из которых питает
раздельно основную и дублирующую системы. Вспомогательная
система питается из верхней части полости бака дублирующей сис-
темы.
В основной системе имеются два гидронасоса НШ-2С, а в дуб-
лирующей и вспомогательной гидросистемах по одному. В каждой
системе имеется гидроаккумулятор, автомат разгрузки насоса
(ГА-77), фильтры грубой и тонкой очистки, манометр, электрокран
и другие агрегаты. Гидроаккумуляторы всех трех систем заряжа-
ются техническим азотом.
Общее количество жидкости в гидросистеме составляет около
120 л, в том числе в каждой полости гидробака — по 55 л.
Гидросистема обеспечивает дублирование работы всех агрега-
тов, установленных в системе управления за исключением автопи-
лота.
Воздушная система
Воздушная система вертолета служит для торможения колес
главных ног шасси, управления механизмами перепуска воздуха
из компрессоров двигателей и управления заслонками трубопровода
горячего воздуха системы отопления кабин. Сжатый воздух нахо-
дится под давлением 50 кГ)см2 в баллонах, в качестве которых
используются полости верхней части амортизационных стоек глав-
ных пог шасси. Наполнение баллонов воздухом производится ком-
прессором АК-50Т, установленном на левом двигателе. На земле
баллоны заряжаются сжатым воздухом от аэродромных баллонов
через бортовой зарядный штуцер, установленный на специальной
панели агрегатов воздушной системы.
Противообледенительная система
Противообледенительная система предназначена для защиты
вертолета от обледенения. Противообледенительные устройства
имеются на лопастях несущего и рулевого винтов, в носках возду-
хозаборников н па стеклах кабины пилотов и штурмана. Все
противообледенительные устройства, кроме противообледенитель-
ного устройства рулевого винта, выполнены по принципу элек-
тротеплового действия. Лопасти несущего винта имеют льдосбра-
сывающие противообледенители, работающие циклически, а
заборники воздуха, стекла кабин пилота и штурмана — противооб-
леденители с постоянным нагревом, предупреждающие льдообра-
зование. Лопасти рулевого винта имеют жидкостную противообле-
денительную систему.
Для питания противообледенительных устройств применяется
трехфазный переменный ток напряжением 280 в. Источником тока
служат два генератора СГС-90/360. На вертолете имеется система
сигнализации начала обледенения.
Устройство для внешней подвески грузов
Вертолет оборудован специальным устройством, предназначен-
ным для крепления и перевозки крупногабаритных грузов, подве-
шиваемых снаружи. Для этого в грузовой кабине вертолета над
центральным люком устанавливается специальная ферма, на кото-
рой монтируется гидрозамок. Внутри кабины по краям люка ста-
вится ограждение для обеспечения безопасной работы, а в нижней
части фюзеляжа устанавливается кольцо, чтобы трос не касался
стенок люка. При загрузке и подвеске грузов используется лебед-
ка ЛПГ-3, установленная в передней части грузовой кабины.
В зависимости от условий подцепка грузов может осуществ-
ляться как с посадкой вертолета рядом с грузом, так и при висе-
нии вертолета над грузом. Подцепка груза при висении над ним
вертолета может осуществляться с помощью замка-сцепки или пу-
тем непосредственного соединения скобы тросов подвесной систе-
мы с крюком основного троса, который предварительно устанавли-
вается на гидрозамок. Последний метод обеспечивает наиболее
быструю и надежную подцепку груза и поэтому им рекомендуется
пользоваться, если позволяют условия.
В случае необходимости груз можно сбросить в полете. Для
надежной работы системы сброса груза на вертолете выполнено
раздельное управление открытием замка-вертлюга: два электро-
крана с проводкой тактического сброса и аварийного сброса. Что-
бы осуществить тактический сброс, необходимо’ нажать на кнопку
«Тактический сброс», которая находится на ручке «шаг-газ» лево-
го пилота. Если отказала система тактического сброса (выход из
строя крана или электропроводки), можно использовать аварий-
ный сброс, для этого надо нажать на кнопку «Аварийный сброс»
на ручке «шаг-газ» левого пилота. В случае же отказа электрогид-
росистемы можно сбросить груз с помощью системы ручного ава-
рийного сброса, что выполняет оператор. Для этого необходимо по-
вернуть рукоятку «Сброс» в крайнее нижнее положение и открыть
замок-вертлюг путем перевода рукоятки аварийного открытия
замка вниз, не снимая амортизатора с этой рукоятки.
§ 5. ЭЛЕКТРО-, РАДИО-, ПРИБОРНОЕ И СПЕЦИАЛЬНОЕ
ОБОРУДОВАНИЕ
Электрооборудование
Электрооборудование вертолета Ми-6 обеспечивает работу пи-
лотажно-навигационной аппаратуры, приборов контроля работы
двигателей, радиоустановок, сигнальной аппаратуры, освещения,
системы запуска двигателей, противообледенительного устройства,
противопожарной системы, электрооборудования гидросистемы и
работу электромеханизмов и электрокранов.
На вертолете имеются источники постоянного тока и источники
питания переменного тока. Источниками электроэнергии постоян-
ного тока являются два стартер-генератора типа СТГ-12ТМ и два
аккумулятора типа 12САМ-55, состоящие каждый из двух полу-
батарей, расположенных в четырех контейнерах. Электрическая
сеть постоянного тока состоит из основной, аварийной и аккуму-
ляторной.
Источниками переменного тока на вертолете являются два ге-
нератора трехфазного тока СГС-90/360 мощностью 90 кет каждый
с напряжением 360 в. Для питания навигационного и радиообору-
дования переменным током используются преобразователи
ПО-1500, ПТ-500Ц, ПАГ-1ФП и ПО-250. Управление источниками
электроэнергии постоянного и переменного тока сосредоточено на
приборной доске бортмеханика.
24
Радиооборудование
Радиооборудование, установленное на вертолете, состоит из
двух основных групп: радиосвязного и радионавигационного. Ра-
диосвязное включает в себя радиостанцию 1-РСБ-70 (Р-807) с
приемником УС-9, командную радиостанцию и переговорное
устройство СПУ-7. К радионавигационному оборудованию относят-
ся автоматический радиокомпас АРК-5, радиовысотомер РВ-2 и
маркерный радиоприемник.
Питание радиоаппаратуры осуществляется от сети постоянного
тока напряжением 27 в, и от сети однофазного переменного тока
напряжением 115 в через преобразователь ПО-1500. В случае вы-
хода из строя основного источника питания ПО-1500 предусмотрено
ручное переключение питания переменным током от генераторов
СГС-90/360 через понижающие трансформаторы.
Приборное оборудование
Вертолет оборудован полным количеством пилотажно-навига-
ционных приборов, приборов контроля работы двигателей и конт-
роля работы отдельных систем, позволяющих выполнять пилотиро-
вание и решать задачи аэронавигации при полете вертолета днем,
ночью и в сложных метеоусловиях. Указатели приборов и аппара-
туры размещены на приборных досках и рабочих местах пилотов,
штурмана, радиста, бортмеханика и медработника.
Отопление и вентиляция
На вертолете имеется воздушная система отопления и вентиля-
ции кабины экипажа и грузовой кабины. Система отопления кабин
двухконтурная. Для отопления используется горячий воздух, по-
ступающий из кожухов выхлопных труб двигателей, который, про-
ходя через воздуховоздушные радиаторы, подогревает холодный
воздух, нагнетаемый вентилятором из грузовой кабины или из ат-
мосферы. Подогретый воздух по трубопроводам поступает в каби-
ны. Количество теплого воздуха, подаваемого в кабины экипажа,
может регулироваться каждым членом экипажа.
Трубопровод системы отопления может быть использован для
вентиляции кабин вертолета. Кроме тбго, грузовая кабина венти-
лируется воздухом, нагнетаемым вентиляторной установкой. Воз-
дух по специальному коробу поступает в вентиляционные устрой-
ства, находящиеся на обоих бортах фюзеляжа. Для создания
местной циркуляции воздуха в кабинах пилотов, штурмана, борт-
механика и радиста установлены вентиляторы ДВ-3.
:ГЛАВА II
ОСОБЕННОСТИ АЭРОДИНАМИКИ НЕСУЩЕЙ СИСТЕМЫ
И ФЮЗЕЛЯЖА ВЕРТОЛЕТА
§ 6. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ НЕСУЩЕЙ
СИСТЕМЫ
Геометрические характеристики несущего винта
Диаметр. Несмотря на то, что вертолет Ми-6 имеет большой
полетный вес, диаметр его винта относительно невелик и составляет
всего 35 м. Известно, что потребный диаметр несущего винта для
вертолета определяется по формуле
Как видно из формулы, диаметр несущего винта у вертолета
заданного веса может быть уменьшен только за счет увеличения
удельной нагрузки. Делать винт большего диаметра нецелесообраз-
но, так как это неизбежно привело бы к еще большему увеличению
веса несущей системы и уменьшило бы весовую отдачу вертолета.
Профиль лопасти является важной геометрической характери-
стикой несущего винта. У вертолета Ми-6 по длине лопасти подо-
браны различные профили для улучшения аэродинамических харак-
теристик несущего винта и улучшения летных и других свойств вер-
толета.
Трапециевидная лопасть от 2 до 20-го отсека имеет профиль
NACA-230M, а от 22 до 27-го — специальный скоростной профиль
ЦАГИ П-57-9.. Отсек 21 является переходным (профиль
NACA-230M плавно переходит в профиль ЦАГИ П-57-9).
У лопастей прямоугольной формы отсеки 1—17 имеют профиль
NACA-230M, а отсеки 19 и 20 (конец лопасти) профиль
ЦАГИ П-57-9, отсек 18 является переходным.
Концевые части лопастей имеют скоростной профиль, так как
у них большие окружные скорости по сравнению с лопастями дру-
гих вертолетов. Так, например, даже при минимально допустимом
числе оборотов несущего винта (78% по указателю числа оборотов,
пли 113 об/мин несущего винта) окружная скорость конца лопасти
будет равна 207 м/сек, а при максимально допустимом числе оборо-
тов (по указателю оборотов 90%, кратковременно, или 130 об/мин
несущего винта) окружная скорость конца лопасти достигает
238 м/сек.
26
Профиль П-57-9 имеет большее критическое число М (Мкр) по
сравнению с профилем NACA-230M. Так, если у профиля
МАСА-230М при угле атаки нулевой подъемной силы Мкр = 0,72,
а при су =0,6 Мкр=0,64, то у профиля П-57-9 соответственно кри-
тические числа М будут 0,772 и 0,665. Поэтому, если лопасти будут
работать при углах атаки, соответствующих cv=0,6, то критическая
скорость при полете у земли в нормальных атмосферных условиях
будет равна
VI!P=а 0,665 = 341,1X 0,665 = 227 м/сек.
Следовательно, при скорости менее 227 м/сек не будут появляться
скачки уплотнения и дополнительное волновое сопротивление.
При числе оборотов несущего винта от минимально допустимо-
го до рекомендованного на всех режимах полета (78—83%) окруж-
ные скорости концов лопастей соответственно будут 207 и 220 м/сек,
что ниже критической скорости (227 м/сек). При больших числах
. 2 3 4 5 6 7 8 9 io" II 12 15 /4 15 16 1718 1320 2122 2321252627
•у ГI .цхДттаггггп^^
Ь==-----------------17500 ---------------
Рис. 11. Форма лопастей в плане:
а — трапециевидная; б —прямоугольная
оборотов или в поступательном полете скорость обтекания лопастей
в азимуте 90° будет больше, при полете на больших высотах крити-
ческая скорость будет уменьшаться вследствие уменьшения скоро-
сти звука, поэтому в указанных условиях лопасти будут обтекаться
со сверхкритическими скоростями, появятся скачки уплотнения и
дополнительное волновое сопротивление, что и учитывается при аэ-
родинамическом расчете потребных мощностей для полета вертоле-
та (явление «сжимаемости»).
Форма лопасти в плане. На вертолете Ми-6 применяются лопа-
сти трапециевидной формы в плане и новые лопасти — прямоуголь-
ной формы. Трапециевидная лопасть состоит из 26 отдельных отсе-
ков (со 2-го по 27), укрепленных на стальном лонжероне при помо-
щи специальных узлов. Корневой участок лопасти от 2 до 7-го
отсека (от г=2,650 м до г=7,480 -и) имеет прямоугольную форму
в плане с хордой 1,248 м, концевой участок от 8 до 26-го отсека —
27
трапециевидную форму с минимальной хордой у концевого теоре-
тического сечения 0,62 м (рис. 11, а).
Прямоугольная лопасть состоит из 20 отдельных отсеков. Хор-
да лопасти имеет длину 1 м (рис. 11, б). Прямоугольная лопасть
в аэродинамическом отношении хуже, чем трапециевидная при
прочих равных геометрических параметрах. Но в данном случае
прямоугольная лопасть выгодно отличается по другим геометриче-
ским параметрам (например, относительная толщина профиля, гео-
Рис. 12. Зависимость геометрической крутки (Д<р) и относительной тол-
щины (с%) трапециевидной лопасти несущего винта вертолета Ми-6 от г
Геометрическая крутка лопасти. У трапециевидной лопасти гео-
метрическая крутка выполнена следующим образом. У сечения
№ 2 (г= 2,650 м) угол крутки наибольший — 2*38' затем умень-
шается по линейному закону до 0°35' в сечении № 14, петом опять
увеличивается до 2°13' у сечения № 15 и далее уменьшается по ли-
нейному закону до 0° у концевого теоретического сечения. Ступен-
чатое изменение углов крутки сделано для уменьшения динамиче-
ских напряжений в лонжероне лопасти (рис. 12).
У прямоугольной лопасти крутка равна 5°48', выполнена по
линейному закону без ступеней (рис. 13). Такая большая крутка
существенно улучшила аэродинамические свойства и летные харак-
теристики вертолета: более равномерно распределяется подъемная
сила по длине лопасти, получается общий прирост силы тяги вин-
та, уменьшается потребная мощность для вращения винта, увели-
чивается максимальная скорость полета.
Относительная толщина лопасти как трапециевидной, так и пря-
моугольной к концу лопасти уменьшается, что улучшает аэродина-
мические качества винта вследствие увеличения критической скоро-
сти и Мкр концевых лопастей, что в свою очередь снижает потреб-
ный крутящий момент винта.
28
Относительная толщина трапециевидной лопасти у корня равна
17%, к концу лопасти она ступенчато уменьшается и у 27-го отсека
составляет 9%. Относительная толщина прямоугольной лопасти
v отсеков 1 и 2 составляет 17,5%, у 4, 5 и 6—14,5%, у 8—17—13%
и у 19—20 —11%. Отсеки 3, 7 и 18 являются переходными (рис. 13).
Рис. 13. Зависимость геометрической крутки (Д<р) и относительной тол-
щины (с%) прямоугольной лопасти несущего винта вертолета Ми-6 от г
Удельная нагрузка на ометаемую винтом площадь. Величина
удельной нагрузки влияет па вертикальную скорость на режиме ав-
торотации и на величину тяги на единицу мощности. Чем больше
удельная нагрузка, тем больше вертикальная скорость на режиме
авторотации. Следовательно, выгодно иметь малую удельную на-
грузку. Чем меньше удельная нагрузка на ометаемую площадь, тем
больше тяга несущего винта на единицу мощности, так как
отсюда
Несущие винты вертолетов имеют относительно малую удельную
нагрузку, поэтому они развивают большую удельную тягу на еди-
ницу мощности (4—6 кГ на 1 л. с.), в то время как самолетные вин-
ты, имея большую удельную нагрузку, развивают небольшую удель-
ную тягу (около 1,5 кГ на 1 л. с). Следовательно, и с этой стороны
выгодно иметь малую удельную нагрузку на ометаемую площадь.
Но для этого необходимо иметь винт большого диаметра, а это уве-
личивает вес винта и уменьшает весовую отдачу вертолета. Поэто-
му для вертолета Ми-6 при полетном весе 40 Т установлена доволь-
но большая удельная нагрузка на ометаемую площадь.
G 40 000 ., т г-io
Р =------=--------=41,/ кГ м2.
Fott 960 '
Коэффициент заполнения несущего винта вертолета Ми-6 боль-
ше, чем у любого другого одновинтового вертолета, и для винта
с трапециевидными лопастями равен 0,0864, а для винта с прямо-
угольными лопастями — 0,091. При таком коэффициенте заполне-
ния создается большая тяга и уменьшаются потребные установоч-
ные углы, что отодвигает срыв потока на большие скорости.
Угол установки лопасти (шаг винта). Как и у других вертолетов
конструкции М. Л. Миля на вертолете Ми-6 в кабине пилотов уста-
новлены указатели общего шага несущего винта УШВ-1 (для ле-
вого и правого пилотов отдельно). Диапазон изменения общего ша-
га винта от 1 до 13,5°. Величина общего шага несущего винта,
отмечаемая прибором,— число условное, фактически же установоч-
ный угол лопастей, например, на радиусе, равном 0,7 R, на 4,75°
больше, чем по указателю шага. Поэтому фактический установоч-
ный угол на радиусе 0,7 R будет равен установочному углу по ука-
зателю плюс 4,75°. На других сечениях лопасти эти числа будут
другие за счет крутки лопасти. Такое несоответствие установочного
угла по указателю шага с фактическим не создает неудобств в
пилотировании.
Вес лопасти и несущего винта. У вертолета Ми-6 все лопасти
весят 3575 кГ, втулка несущего винта — 3250 кГ, общий вес несу-
щего винта равен 6825 кГ, что составляет 16% от максимального
веса вертолета. Вес несущего винта современного одновинтового
вертолета должен составлять 9—15% от общего полетного веса вер-
толета. Поэтому увеличивать диаметр несущего винта или вес вер-
толета при том же диаметре винта нецелесообразно, так как это
снизит весовую отдачу вертолета.
Геометрические характеристики крыла
Форма крыла в плане — трапециевидная. Размах крыла равен
15,3 м, корневая хорда — 2,667 .и, концевая—1,809 м, средняя
аэродинамическая хорда 2,35 м. Площадь крыла с подфюзеляжной
частью 35 л2, удлинение крыла —6,7. Профиль крыла симметрич-
ный, марки ЦАГИ П-35-12. Относительная толщина крыла у корня
составляет 15% хорды, у конца крыла 12%. Крыло имеет два про-
тнвофлаттерных груза по 20 кГ, расположенных на правой и левой
консолях в месте 32 нервюры.
Установочный угол правой консоли крыла (между хордой кры-
ла и плоскостью вращения несущего винта) равен 15°45', левой
консоли— 14°Г5/. Деградация в установочных углах правой и левой
консолей крыла на 1,5° уменьшает правый крен вертолета в посту-
пательном полете без скольжения и увеличивает запас поперечного
30
управления на больших скоростях полета. Обе консоли крыла обте-
каются индуктивным потоком от несущего винта несимметрично: ле-
вое крыло обтекается более интенсивно, так как индуктивный поток
у наступающих лопастей в азимуте 90° больше, чем в азимуте 270э.
Поэтому должен создаваться левый крен. Такой эффект и был по-
лучен в результате аэродинамического расчета и испытаний моде-
лей вертолета в аэродинамической трубе.
Поэтому была установлена деградация установочных углов
Крыльев, обратная существующей. Но в результате летных испыта-
ний был получен обратный результат: большой правый крен за счет
большого инерционного момента втулки ввиду разноса горизонталь-
ных шарниров.
До 1966 г. крыло на вертолете Ми-6 было управляемое. Указан-
ные выше установочные углы были предусмотрены для режимов по-
лета с работающими двигателями. На режиме авторотации крыло
переводилось на меньшие установочные углы: для левой консо-
ли — 4°15', для правой — 5°45'. Установлено, что летные свойства
вертолета на режиме планирования с установочными углами, пред-
усмотренными для полета с работающими двигателями, изменяют-
ся крайне незначительно, устойчивость и управляемость сохраняют-
ся. Поэтому для упрощения конструкции и повышения надежности
эксплуатации крыло фиксируется жестко с установочными углами,
указанными выше для полета с работающими двигателями.
§ 7. КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ НЕСУЩЕГО
ВИНТА
Кинематика несущего винта вертолета Ми-6 в принципе не от-
личается от кинематики несущего винта вертолета Ми-4. Несущий
винт вертолета Ми-6, как и вертолета Ми-4, имеет шарнирную под-
веску лопастей. На вертикальных режимах полета и в поступатель-
ном полете лопасти ведут себя так же, как и у вертолета Ми-4:
занимают определенное положение в трех шарнирах, совершают ко-
лебания вокруг них, заваливается конус вращения. Предусмотрен
регулятор взмаха.
Но в кинематике несущего винта вертолета Ми-6 есть некото-
рые особенности, остановимся на них.
Обороты несущего винта и окружные скорости
конца лопасти
Как было установлено ранее, свободная турбина двигателя не
имеет кинематической связи с турбокомпрессорной частью двига-
теля, обе турбины приводятся в движение потоком горячих газов,
поступающих из камеры сгорания. Число оборотов турбины ком-
прессора изменяется от минимального на режиме малого газа
(5500± 100 об/мин) до максимального на взлетном режиме на вы-
31
соте 3000 м (10580 об/мин) (замеренные) *. Двухстрелочный ука-
затель ИТЭ-2 числа оборотов компрессоров двигателя устанавли-
вается на левой панели приборной доски пилотов и на приборной
доске бортмеханика. Шкала прибора градуируется в процентах
чисел оборотов турбокомпрессора от 0 до 100. За 100% принимают-
ся 10640 об!мин турбокомпрессора, тогда цена 1% составит
106,4 об!мин. Следовательно, по указателю минимально допустимое
число оборотов равно 51,5± 1 %, максимально допустимое — 99,5%.
Турбина винта на режиме малого газа развивает
3400—4000 об/мин, на всех остальных режимах, в том числе на
взлетном — 7800—8300 об/мин, кратковременно допускается
9000 об/мин. Указатель числа оборотов свободной турбины (несу-
щего винта) ИТЭ-1 также показывает число оборотов в процентах.
В этом случае 1 % соответствует 100 об/мин турбины винта и пе-
ресчета поэтому не требуется. Тогда минимальное число оборотов
винта па малом газе составит 34—40%, нормальное на всех режи-
мах— 78—83% и максимально допустимое — 90%. Указатели чис-
ла оборотов свободной турбины устанавливают на левой и правой
панелях приборной доски пилотов.
Главный редуктор понижает число оборотов свободной турбины
в 69,2 раза, поэтому число оборотов несущего винта, например, ми-
нимально допустимое на всех режимах работы двигателя составит:
7800:69,2=113 об/мин, максимально допустимое — 8300:69,2 =
= 120 об/мин и максимально допустимое (кратковременно) 9000:
: 69,2= 130 об/мин.
Окружная скорость конца лопасти несущего винта определяется
по следующей формуле:
U=^wR=-^-R,
30
где ы — угловая скорость;
R — радиус несущего винта;
пя — число оборотов несущего винта в мин.
Окружная скорость конца лопасти винта при числе оборотов
113 в минуту (78% по указателю) равна:
J/=bi^l5-17,6=207 м/сек.
Соответственно при числе оборотов винта 120 в минуту (83%) эта
скорость будет равна 220 м/сек, при 125 об/мин (87%) —229 м/сек
и при максимально допустимом числе оборотов 90% кратковремен-
но — 238 м/сек.
Характеристика режима полета
В аэродинамическом расчете вертолета Ми-6 используются от-
носительные скорости: характеристика режима полета вертолета р
* Данные для двигателя Д-25В второй серии с № С3422014.
32
и коэффициент протекания X. Хотя эти скорости в практике полета
це получили применения, но избежать их при рассмотрении многих
вопросов практической аэродинамики не удается.
Характеристика режима полета представляет собой отношение
Скорости полета вертолета к окружной скорости конца лопасти
пинта или отношение диаметра зоны обратного обтекания к ра-
диусу винта
___V cos А V d
' i»R taR R
Для вертолета Ми-6 на режиме висения |i=0, а при максималь-
ной скорости — 0,4. Поэтому скорость полета вертолета будет рав-
на У=ц<й/?.
Для рекомендуемого числа максимальных оборотов несущего
винта с трапециевидными лопастями на всех режимах полета до
высоты 3000 м (83% по указателю) окружная скорость конца лопа-
сти винта составляет 220 м/сек. Каждому значению характеристики
режима полета будет соответствовать определенная скорость по-
лета:
[1=0,05 — 40 км/ч;
[1=0,10 — 80 км/ч;
[1=0,15—120
[1=0,20-160 км/ч;
[1 = 0,25 — 200 км/ч;
[1 = 0,30 — 240 км/ч;
а = 0,35 — 280 км/ч;
[1 = 0,40 — 320 км/ч.
Следовательно, можно считать, что в среднем приросту характе-
ристики режима полета на 0,05 соответствует прирост скорости
полета 40 км/ч.
Шарниры лопастей
Горизонтальный шарнир лопастей вертолета Ми-6 имеет такое
же назначение, что и горизонтальный шарнир у вертолета Ми-4.
Возможный максимальный угол взмаха лопасти вверх (верхний
упор ГШ) — 25°, угол свеса при упоре па скобу — 7° (число оборо-
тов несущего винта более 70—80 в минуту), при упоре на собачку
центробежного ограничителя свеса — 2°10' (число оборотов несу-
щего винта менее 70—80 в минуту) *. Разнос горизонтальных шар-
ниров 400 мм (размер б, рис. 14).
Середины проушин корпуса втулки несущего винта смещены
относительно оси вращения вперед по вращению на расстояние а,
которое для вертолета Ми-6 составляет 85 мм. Поэтому горизон-
тальный шарнир оказывается повернутым относительно радиаль-
ного направления на угол у=6°. Расстояние а, а значит, и угол у
выбраны такими, чтобы на основных режимах полета равнодей-
* Механизм центробежного ограничителя свеса срабатывает при раскрутке
несущего винта 80 об/мин, при торможении —70 об/мин.
2—Яцунович 33
ствующая сила N лобового сопротивления лопасти X и центробеж-
ной силы Fn6 лопасти была направлена по оси О|Ог- В этом случае
обеспечивается равномерное распределение нагрузки между иголь-
чатыми подшипниками (М и Н) горизонтального шарнира, повы-
шается их долговечность и уменьшается усилие на упорные под-
шипники того же шарнира.
Регулятор взмаха. Лопасти совершают маховые движения во-
круг горизонтальных шарниров как за счет циклического изменения
шага несущего винта при отклонении автомата перекоса, так и за
Рис. 14. Горизонтальный шарнир
счет несимметричного поля скоростей и аэродинамических сил
по ометаемой поверхности в поступательном полете. За счет махо-
вых движений лопастей в поступательном полете ось конуса вра-
щения несущего винта и его аэродинамическая сила отклоняются
назад и влево. На вертолете Ми-6 предусмотрен регулятор взмаха,
характеристика которого равна 0,4. За счет наличия регулятора
взмаха лопасть совершает колебания вокруг осевого шарнира, т. е.
происходит изменение установочного угла лопасти: при взмахе
вверх установочный угол уменьшается, при взмахе вниз—увеличи-
вается. При этом изменение установочного угла А<р будет равно
произведению угла взмаха р на характеристику регулятора взма-
ха К:
Наличие регулятора взмаха изменяет направление завала оси
конуса вращения и его аэродинамической силы: теперь они завали-
ваются назад и вправо. При завале вправо возникает боковая сила,
уравновешивающая тягу рулевого винта.
Коэффициенты махового движения. Как известно из общего
курса аэродинамики одновинтового вертолета, величина маховых
34
Рис. 15. Зависимость коэф-
фициентов махового дви-
жения от характеристики
режима поступательного
полета:
Ui — запал конуса вращения
назад; 6, — завал конуса вра-
движений характеризуется коэффициентами маховых движений,
которые определяют завалы оси конуса от оси вала назад (ai) и
вправо (&i). Величина этих коэффициентов для вертолета Ми-6 на
режиме горизонтального полета в зависимости от характеристики
режима полета показана на рис. 15. Как видно по рисунку, ось ко-
нуса вращения заваливается назад на крейсерских скоростях
(р, = 0,25—0,30) на угол 8°, вправо —на угол более 3°, на макси-
мальных скоростях горизонтального
полета завал оси конуса вращения бу-
дет еще больше.
Инерционный момент втулки за счет
разноса г.ш. Если конус вращения
несущего винта не отклонен, то цент-
робежные силы лопастей направлены
параллельно основанию конуса вра-
щения и момента не создают (рис.
16,а). При отклонении конуса враще-
ния с помощью ручки циклического
шага или за счет косой обдувки в по-
ступательном полете на втулке винта
создается момент центробежных сил
лопастей, направленный в сторону от-
клонения оси конуса вращения. При
завале оси конуса вращения на угол
а, (рис. 16,6) центробежные силы ло-
пастей Гцб будут направлены парал-
лельно плоскости основания конуса,
между ними образуется плечо с и воз-
никает момент втулки MDT=Fn6C.
Чем больше разнос горизонтальных
шарниров и завал оси конуса враще-
ния, тем больше будет момент втулки.
Момент будет продольным, если про-
исходит завал оси конуса вращения в
продольной плоскости, и попереч-
ным — в поперечной плоскости. Про-
дольный момент втулки в поступательном полете направлен в сто-
рону завала конуса (назад) и является кабрирующим, поперечный
момент втулки в поступательном полете направлен также в сторо-
ну завала конуса вращения (вправо) и создает вертолету правый
крен. Эти же моменты возникают при нарушении равновесия кор-
пуса вертолета относительно конуса вращения, но тогда они будут
демпфирующими и препятствуют дальнейшему нарушению равно-
весия, обеспечивая некоторую статическую устойчивость вертолету
как в продольном, так и в поперечном направлениях.
Вертикальный и осевой шарниры. Лопасти вертолета Ми-6,
кроме горизонтального шарнира, имеют вертикальный и осевой. По
вертикальному шарниру лопасть может перемещаться вперед по
2* 35
вращению на 14° (передний упор В.Ш.) и назад на 18° (задний
упор В.Ш.) от перпендикуляра к оси горизонтального шарнира.
Вертикальные шарниры вертолета Ми-6 имеют гидравлические
демпферы, у которых в отличие от фрикционных более стабильные
характеристики, меньший вес и проще обслуживание и эксплуата-
ция. Вертолет с гидравлическими демпферами вертикальных шар-
ниров меньше подвержен «земному резонансу» ввиду того, что у
таких демпферов момент трения не остается постоянным, как у
фрикционных, а растет с увеличением аплитуды колебаний. Разнос
вертикального шарнира больше разноса б горизонтального шарни-
ра (см. рис. 14).
Рис. 16. Инерционный момент втулки за счет разноса горизонтальных
шарниров
Осевые шарниры лопастей позволяют изменять установочные
углы их для изменения подъемной силы. Установочные углы меня-
ются у всех лопастей на одну и ту же величину изменением общего
шага несущего винта и, кроме того, они меняются беспрерывно за
счет циклического изменения шага винта и под действием регуля-
тора взмаха.
Устранение несоконусности несущего винта
Определение несоконусности вращения несущего винта верто-
лёта Ми-6 производится фотографированием лопастей при работе
винта на земле и в полете специальным фотоаппаратом. Относи-
тельное положение изображения концов лопастей на фотоленте
позволяет определить необходимое регулирование для обеспечения
36
соконусности вращения лопастей винта. Здесь рассматривается ра-
бота по устранению несоконусности несущего винта с лопастями
прямоугольной формы в плане. Эта работа состоит из следующих
этапов: подготовки вертолета к фотосъемке, наземной обработки
Несущего винта, фотосъемки лопастей в полете, обработки ленты и
анализа результатов фотосъемки в полете и, наконец, регулирова-
ния лопастей несущего винта.
Рис. 17. Схема установки фотоаппарата в горизонтальной плоскости
Подготовка к фотосъемке. На среднем закрылке лопасти № 1
(отсек 14) устанавливается на двух болтах специальная пласти-
на— флажок из комплекта фотоаппарата. Длина пластины 160 мм,
ширина — 60 мм. Установка флажка необходима для выделения
лопасти № 1 па фотоленте. Определив изображение лопасти № 1,
можно будет по порядку установить, каким лопастям соответ-
ствуют остальные изображения.
Фотоаппарат на кронштейне устанавливается по правому борту
в грузовой кабине против третьего блистера. Он устанавливается
в горизонтальной плоскости так, чтобы его объектив был направлен
на конец лопасти № 1, находящейся справа спереди под углом 45°
к продольной и поперечной осям вертолета (рис. 17).
Наземная отработка несущего винта. Если на вертолет уста-
навливается новый комплект лопастей, то предварительная уста-
37
новка корпусов осевых шарниров производится регулировкой дли-
ны тяг поворота лопастей на одинаковую величину (320± 1 мм
между нижним торцом стакана верхней вилки и верхним торцом
гайки нижней вилки). Закрылки должны иметь исходный (началь-
ный) средний для каждой лопасти угол отгиба 2° вниз от нижней
поверхности лопасти *.
Средний угол отгиба закрылков для данной лопасти опреде-
ляется по формуле
g ______ ^аакрЛср ^закр.2сп °закр.3ср
лоп.ср— 3
Средний угол отгиба каждого закрылка (например № 1) ** опреде-
ляется по фактическим углам (Я. В, С), замеренным в трех его се-
чениях: крайнем, ближе к корню лопасти, среднем и ближе к концу
лопасти:
а _А + В+С
°закр.1ср— ~ — •
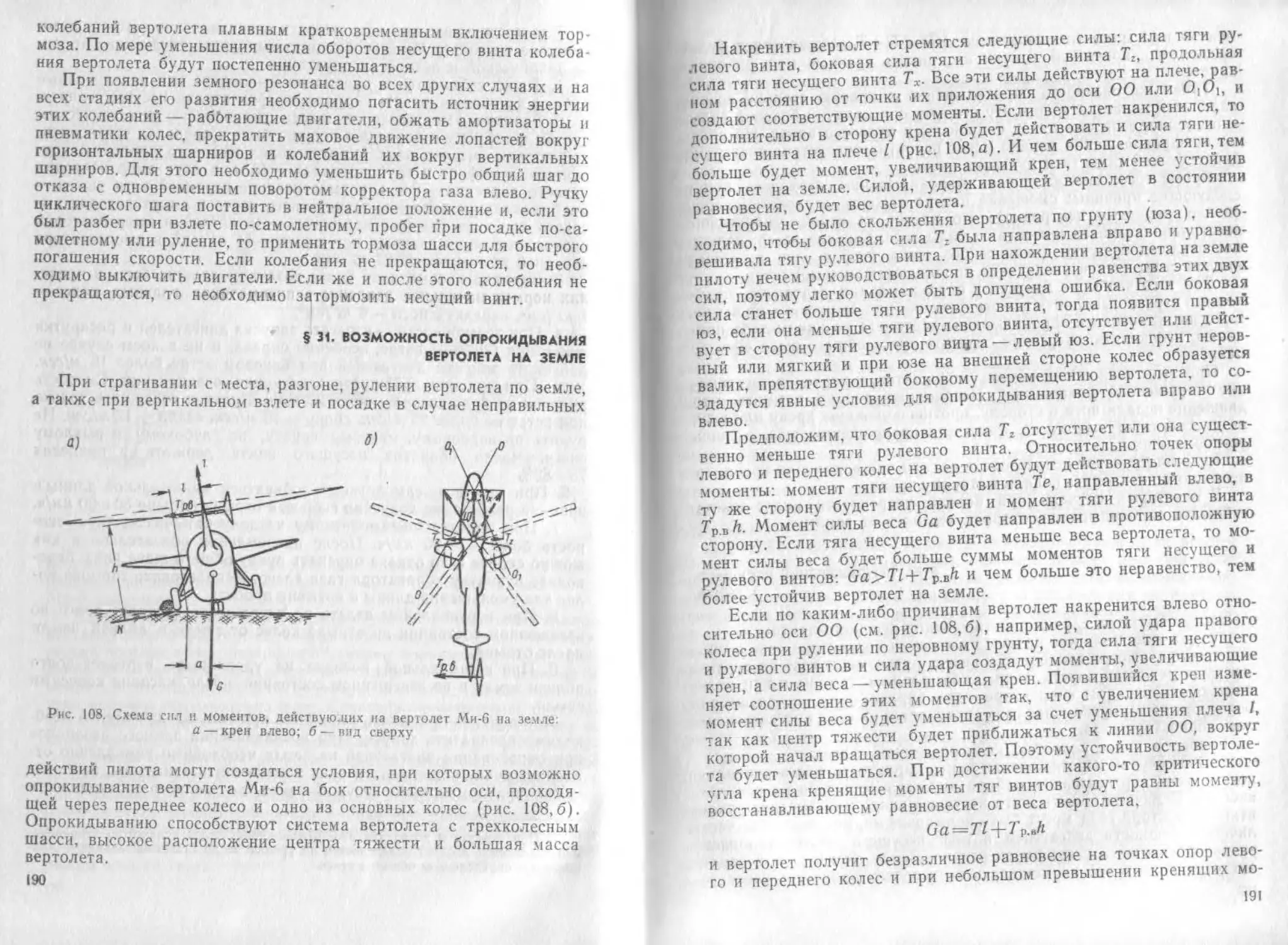
При этом угол отгиба сечений закрылка (Л, В, С) положителен,
если отсчет произведен на участке шкалы угломера, расположен-
ном выше нуля; отрицателен, если отсчет угла произведен на уча-
стке шкалы, расположенном ниже нуля.
Если на вертолет устанавливается комплект лопастей, эксплу-
атировавшихся и отрегулированных ранее на другом вертолете, то
длина тяг и углы отгиба закрылков должны соответствовать дан-
ным, записанным в паспорте данного комплекта.
Фотосъемку лопастей на земле необходимо производить в без-
ветренную погоду или при скорости ветра не более 4 м!сек, вер-
толет загрузить до нормального полетного веса или пришварто-
вать его.
После указанной подготовки запускаются и прогреваются дви-
гатели. Устанавливается общий шаг несущего винта 5° и число
оборотов свободной турбины 78°/о. Фотоаппарат наводится и за-
крепляется по вертикали так, что концы лопастей при их вращении
проходят '/з высоты рамки видоискателя от ее верхнего края. На
установившемся режиме двигателей при неподвижных органах
управления по команде лица, производящего запуск и опробование
двигателей, нажимается пусковая кнопка фотоаппарата на 5—беек
и производится съемка.
Затем останавливаются двигатели, снимают с фотоаппарата
кассеты с лентами, проявляют их и просушивают. По полученным
снимкам определяют имеющуюся при работе на земле несоконус-
ность лопастей винта. Каждый миллиметр смещения конца лопасти
* Угол отгиба определяется специальным угломером, закрылок отгибается
специальным приспособлением.
** На каждой лопасти три закрылка, первым принято считать тот, который
расположен ближе к корпю лопасти.
38
на фотоленте соответствует вертикальному смещению конца лопасти
в натуре примерно на 45 мм. Относительное смещение концов ло-
пастей (несоконусность) не должно превышать 1,5 мм на ленте,
что соответствует 70 мм в натуре. Если есть несоконусность, вы-
ходящая за указанные пределы, то необходимо ее устранять сле-
дующим образом: лопасть, которая проходит на ленте выше
«базовой» лопасти (или группы лопастей), имеет больший уста-
новочный угол, поэтому тягу управления этой лопастью надо уко-
ротить; лопасть, конец которой проходит ниже «базовой» лопасти,
имеет меньший установочный угол, поэтому тягу ее надо удлинить.
Для смещения конца лопасти на ленте на 1 мм необходимо тягу
повернуть на три грани.
t После того как будет устранена несоконусность, необходимо
.произвести такую же проверку соконусности фотографированием
при числе оборотов свободной турбины 83% и при том же общем
шаге — 5°.
Фотосъемка лопастей в полете. Фотосъемка лопастей в полете
производится после выполнения в£ех указанных выше регулировоч-
ных работ на земле.
Съемка производится на установившемся режиме горизонталь-
ного полета на высоте 300—500 м, при числе оборотов свободной
турбины 79%, скорости по прибору 150, 200 и 300 км/ч. Такой по-
лет необходимо совершать в спокойной атмосфере. Во время съем-
ки все рычаги управления должны быть неподвижны. В установив-
щемся горизонтальном полете на одной из вышеуказанных скоро-
стей включается фотоаппарат на 2 сек,, и затем повторяется фото-
графирование на всех указанных скоростях.
Обработка ленты и анализ результатов фотосъемки. Просушен-
ную ленту располагают так, чтобы изображение концевых участков
лопастей находилось внизу, а корневых вверху, начало ленты дол-
жно находиться слева, а конец — справа, тогда вертикальные сме-
щения концов лопастей на ленте по направлению соответствуют
натурным смещениям и отсчет лопастей производится справа нале-
во (рис. 18, а). На ленте также указываются режимы полета и по
флажку определяется лопасть № 1.
По расположению концов лопастей на фотопленке, полученной
при фотографировании на земле или в полете на крайних режимах
(V= 150 и 300 км/ч), определяется «базовая» лопасть или группа
лопастей, которые выбираются из соображений возможно меньшего
потребного регулирования. Концы «базовой» лопасти (на рис. 18, а
лопасть № 5) аккуратно соединяются прямыми линиями через каж-
дый оборот. Относительно проведенной линии определяется смеще-
ние концов других лопастей.
По полученным величинам смещений в миллиметрах концов
лопастей от «базовой» лопасти строится график отклонения их по
скорости полета (рис. 19). По полученному графику выбирается
наиболее рациональный вариант регулирования: в указанном при-
мере все лопасти должны регулироваться для сближения концов
39
отклонения их от «базовой» лопасти № 5. По графику также опре-
деляются величины отклонения каждой лопасти в диапазоне скоро-
стей от 150 до 300 км/ч. Если величина отклонений конца лопасти
на всем диапазоне скоростей не превышает ±0,5 мм относительно
конца «базовой» лопасти, то эта лопасть не регулируется (лопасть
б)
Рис. 18. Образцы фотолент:
а — неотрегулированный несущий винт: б — отрегулированный несущий винт
№ 1). Если отклонение конца лопасти во всем диапазоне скоростей
не меняется или с увеличением скорости увеличивается и при ско-
рости 300 км/ч будет на 10—20% больше, чем при скорости
150 км/ч, то такие лопасти регулируются только изменением длины
Рис. 19. График от-
клонения концов ло-
пастей несущего вин-
та по результатам
фотосъемки в гори-
зонтальном полете:
/ — лопасть №1:2 — ло-
пасть № 2: 3 — лопасть
№ 3; 4—лопасть № 4: 5—
лопасть № 5 («базовая»)
тяги управления лопастью (лопасти № 3 и 4). Если эта разность
будет больше 10—20%, то при малых скоростях лопасти необходи-
мо регулировать изменением длины тяг, а на больших — отгибом
закрылков. Если же наблюдается «перебегание» лопастей, т. е. на
скорости 150 км/ч лопасть находится выше «базовой», а при скоро-
40
стн 300 км/ч ниже «базовой» (лопасть № 2), или наоборот, то такая
лопасть регулируется отгибом закрылка и изменением длины тяги.
Регулирование лопастей несущего винта производят изменени-
ем длины тяг управления лопастями и отгибом закрылков. Один
поворот тяги изменяет ее длину на 3 мм, при этом угол установки
ее меняется на 0°27', а конец лопасти при скорости 150—300 км/ч
смещается на 90—100 мм в натуре, что соответствует 2 мм на ленте.
Изменение угла отклонения закрылка на 0,5° смещает конец лопа-
сти на 20—25 мм при полете со скоростью 150 км/ч (на ленте
0,5 мм) и на 40—50 мм при полете со скоростью 300 км/ч (на ленте
на I мм).
В процессе регулирования соконусности несущего винта пре-
дельно допустимые средние углы отгиба закрылков должны изме-
няться в пределах — 0 — 4° вниз. Длина тяг управления лопастями
(между торцами наконечников) должна быть в пределах
305—320 мм.
После проведенного регулирования выполняется контрольный
полет с фотографированием лопастей на тех же режимах. Относи-
тельное смещение концов лопастей не должно превышать 1,5 мм на
лепте, или 70 мм в натуре.
§ 8. АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ НЕСУЩЕГО
ВИНТА
Аэродинамические характеристики профилей лопасти
На рис. 20 представлены аэродинамические характеристики
профиля NACA-230M при различных числах М: на рис. 20, а пока-
зана зависимость коэффициента подъемной силы су от углов атаки,
а на рис. 20, б — поляры профиля NACA-230M при различных чис-
лах М. Как видно по кривым, аэродинамические характеристики
профиля при изменении чисел М до малых значений, на которых
работает основная часть лопасти, ухудшаются незначительно.
На рис. 21 представлены аэродинамические характеристики про-
филя ЦАГИ П-57-9 (скоростного). На рис. 21,а даны кривые зави-
симости коэффициента подъемной силы от углов атаки для разных
чисел М (от 0,30 до 0,74), на рис. 21,6 показаны поляры того же
профиля на тех же числах М. Здесь коэффициент сопротивления
взят лишь для профильного сопротивления без учета индуктивного.
Как видно по кривым, при увеличении числа М до больших вели-
чин, на которых работают концевые части лопастей, аэродинами-
ческие характеристики профиля ухудшаются: уменьшается су, уве-
личивается схр.
Поляра несущего винта на режиме висения
В аэродинамическом расчете характеристика всего несущего
винта на режиме висения представляется в виде поляры. Полярой
несущего винта называется кривая, показывающая зависимость
41
коэффициента тяги tv и коэффициента крутящего момента Шкр от
величины общего шага несущего винта <р. Коэффициент tv аналоги-
чен коэффициенту подъемной силы крыла cv, а коэффициент т„р
аналогичен коэффициенту лобового сопротивления крыла сх. По-
fl)
Рис. 20. Аэродинамические характе-
ристики профиля NАСА-230 М:
а — зависимость коэффициента подъ-
емной силы от угла атаки; б — поля-
ры профиля
Рис. 21. Аэродинамические характе-
ристики профиля ЦАГИ П-57-9:
a — зависимость коэффициента
подъемной силы от угла атаки; б —
поляры профиля
42
ляра несущего винта на режиме висения для вертолета Ми-6 пред-
ставлена на рис. 22. Из рисунка видно: чем больше общий шаг
Несущего винта, тем больше коэффициент крутящего момента. Сле-
довательно, чем больше крутящий момент несущего винта, тем
больше коэффициент тяги и тяга несущего винта на режиме ви-
сения.
Тяга несущего винта на режиме висения
В Тяга несущего винта на режиме висения определяется в общем
случае по формуле Н. Е. Жуковского
7'=(33,25тю j/AUW,)2'3,
где 33,25 т(0 — коэффициент Вилльнера;
1 Д=-^Д----относительная плотность воздуха;
₽о .
; — коэффициент использования мощности;
D — диаметр винта;
Ne — мощность двигателя.
г Из формулы видно, что тяга несущего винта изменяется не про-
порционально мощности, а медленнее — по закону степени */«.
Для вертолета Ми-6 тяга несущего винта на режиме висения
определялась согласно поляре по следующей формуле:
Т=0,5р/7омз(и>/?)2
где Рои — площадь, ометаемая несущим винтом;
о — коэффициент заполнения несущего винта:
и/? — окружная скорость конца лопасти;
ty—коэффициент тяги. С увеличением высоты тяга, разви-
ваемая винтом на висении, как видно по обеим формулам
уменьшается.
Максимальные тяги, развиваемые винтом вертолета Ми-6 с ло-
пастями трапециевидной формы в плане на режиме висения в зави-
симости от высоты, полученные расчетом, показаны на рис. 23.
Здесь тяги даются для двух режимов работы двигателей: взлетного
К боевого без учета влияния земли и с учетом влияния близости
земли (воздушной подушки). Как видно по кривым, на высоте
уровня моря на взлетном режиме двигателей без учета влияния
земли винт развивает тягу более 38 000 кГ. с учетом влияния воз-
душной подушки — 42 000 кГ. На боевом режиме работы двигате-
лей тяга будет меньше как без учета, так и с учетом влияния бли-
зости земли. С увеличением высоты висения тяга винта во всех
случаях уменьшается.
На рис. 24 показаны кривые тяги, развиваемой винтами верто-
лета Ми-6 на трех режимах работы двигателей: взлетном, боевом
43
и номинальном в зависимости от высоты висения для винта с пря-
моугольными лопастями (сплошные кривые) и с трапециевидными
лопастями (пунктирные), полученные в результате летных испыта-
ний и приведенные к стандартным атмосферным условиям. Из
рисунка видно: чем больше режим работы двигателей, тем больше
Рис. 23. Зависимость макси-
мальной тяги несущего вин-
та вертолета Ми-6 от высо-
ты на режиме висения:
/ — без учета влияния земли;
2 — с учетом влияния земли; 3 —
взлетный режим; 4 — боевой ре-
тяга винта с лопастями трапециевидной и прямоугольной формы,
кроме того, чем меньше высота висения, тем больше тяга обоих
винтов за счет влияния эффекта воздушной подушки. Вне зоны
влияния воздушной подушки (//=40 jh) винт с прямоугольными
лопастями на висении на всех режимах работы двигателей разви-
вает большую тягу, чем винт с трапециевидными лопастями при тех
же условиях. Так, например, винт с прямоугольными лопастями
в плане па взлетном режиме работы двигателей развивает тягу
свыше 37000 кГ, на боевом — несколько меньше, 36000 кГ, а на но-
минальном около 34 000 кГ, а винт с трапециевидными лопастями
развивает на этой высоте тягу соответственно 36000, 34 500 и
32 000 кГ, т. с. в среднем на 1500 кГ меньше. В поступательном по-
лете эта разница еще больше. Объясняется это тем, что винт с пря-
44
моугольными лопастями имеет лучшие геометрические и аэродина-
мические характеристики.
По мере приближения к земле указанная разница начинает
уменьшаться за счет более резкого увеличения тяги винта с трапе-
циевидными лопастями по сравнению с ростом тяги винта с прямо-
угольными лопастями. И на высоте 12 м. от колес до земли, или
точнее, в диапазоне высот 10—15 м указанная разница отсутствует,
г. е. оба винта на этих высотах практически развивают одинаковую
тягу на данном режиме работы двигателей. На этой же высоте
на взлетном режиме оба винта развивают тягу по 40000 кГ, на
боевом—38 500 кГ и на номинальном — 36000 кГ. На еще
Меньшей высоте большую тягу развивает винт с трапециевид-
ными лопастями.
Так, на высоте 5 м винт с прямоугольными лопастями развивает
тягу соответственно указанным мощностям 43 000, 41000 и
38000 кГ, а винт с трапециевидными лопастями на 1700—2000 кГ
больше (см. рис. 24).
I Объясняется это тем, что у винта с прямоугольными лопастями
площадь «оголенного» центрального участка больше, чем у винта
с трапециевидными лопастями. По этой причине на высотах ниже
15 м винт с прямоугольными лопастями имеет худшие тяговые ха-
рактеристики по сравнению с винтом с трапециевидными ло-
пастями.
На высоте висения более 15 л и поступательном полете винт с
прямоугольными лопастями имеет лучшие тяговые характеристики
по сравнению с винтом с трапециевидными лопастями.
I Следовательно, при висении вблизи земли существенно увели-
чивается тяга несущего винта на всех режимах работы двигателей,
особенно у винта с трапециевидными лопастями. У этого винта
эффект воздушной подушки сказывается больше, так как цент-
ральная часть ометаемой поверхности больше заполнена лопастями
и поэтому под винтом создаются лучшие условия для поддержания
повышенного давления.
На рис. 25 дано изменение относительной тяги несущего
винта с трапециевидными лопастями в зависимости от относитель-
ной высоты висения —. Из графика видно, что влияние воздушной
I подушки начинает проявляться на относительной высоте 0,8, что
составляет 28 м от земли до колес шасси вертолета. По мере при-
ближения к земле эффект воздушной подушки возрастает и на от-
носительной высоте, например 0,15, относительная тяга составит
1,15, т. с. тяга вблизи земли на 15% больше тяги винта, развивае-
мой вне зоны влияния земли (свободной тяги Т»),
Летными испытаниями установлено, что изменение нормального
числа оборотов турбокомпрессора двигателя при эксплуатации в
пределах диапазона, установленного техническими условиями на
45
взлетном режиме (93—95%), приводит к значительному изменению
тяговых характеристик несущего винта. Например, уменьшение
числа оборотов турбокомпрессора на висении па 0,8% уменьшает
свободную тягу несущего винта на 1000 кГ.
Летные испытания показали, что установка резиновой защиты
на носках лопастей от образивного износа практически не изменяет
тяговые характеристики несущего винта, а значит, практически не
изменяет летно-технические харак-
теристики вертолета.
Влияние крыла на величину тя-
ги несущего винта на режиме висе-
ния. Как известно из аэродинамики
одновинтового вертолета, несущий
винт, находящийся вблизи фюзеля-
жа, создает меньшую силу тяги по
сравнению с таким же изолирован-
ным винтом за счет сопротивления
фюзеляжа от индуктивного потока,
направленного вниз. На величину
этого сопротивления и будет мень-
ше тяга, развиваемая винтом. У вер-
толета Ми-6, кроме фюзеляжа, в ин-
дуктивном потоке находится еще и
крыло, поэтому тяга винта будет
уменьшаться па большую величи-
ну. По экспериментам, проведенным
в ЦАГИ, система «несущий винт
Рис. 25. Характеристика несу-
щего винта вертолета Ми-6 на
режиме висения в зоне влияния
«воздушной подушки»
4-крыло» вертолетаМи-6 на висении
создает тягу на 2% меньше тяги изолированного винта. С увеличе-
нием скорости полета вредное влияние крыла на несущий винт
уменьшается, поэтому в поступательном полете оно практически не
учитывается.
§ 9. АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ФЮЗЕЛЯЖА
И КРЫЛА
Аэродинамические характеристики фюзеляжа
и килевой балки
На рис. 26 представлена зависимость коэффициента подъемной
силы фюзеляжа с„ф от угла атаки. Угол атаки фюзеляжа отсчиты-
вается от его продольной строительной оси. Как видно из графика,
при угле атаки, равном нулю, коэффициент подъемной силы также
равен нулю. Это говорит о том, что фюзеляж имеет аэродинами-
ческую симметрию, хотя геометрически он не симметричен. Тогда
при положительных углах атаки коэффициент подъемной силы, а
46
лначит, и подъемная сила будут положительными, при отрица-
тельных углах атаки — отрицательными. Подъемная сила фюзеля-
жа определяется по формуле
Которой видно, что выгодно совершать полет при углах атаки, близ-
ких к нулю, на которых сопротивление минимально. Для того чтобы
при крейсерских скоростях полета угол атаки фюзеляжа был бли-
зок к нулю, и предусмотрен угол заклинения вала несущего винта,
который у вертолета Ми-6 состав-
ляет 5°. Лобовое сопротивление
фюзеляжа определяется по фор-
муле
Концевая балка, состоящая из
килевой балки, фиксированного
руля и съемного обтекателя,
имеет общую площадь 9,4 м2.
Фиксированный руль имеет не-
симметричный профиль за счет
соответствующей формы его нер-
вюр. В результате этого в посту-
пательном полете руль создает
подъемную силу, направленную
в сторону тяги хвостового винта на режимах полета с работающими
двигателями — влево, тем самым разгружая рулевой винт. Такая
разгрузка рулевого винта особенно необходима на скоростях, близ-
ких к максимальным, так в этом случае возникает большой реак-
тивный момент несущего винта и требуется большая тяга рулевого
винта. На этих скоростях фиксированный руль наиболее эффек-
тивен.
47
На режиме авторотации фиксированный руль будет играть
отрицательную роль, так как его подъемная сила будет направлена
противоположно тяге рулевого винта, что потребует увеличения
отрицательного шага рулевого винта. Но такие полеты’ редки, по-
этому вышеизложенное обстоятельство не играет практического
значения.
Аэродинамические характеристики крыла
На рис. 28 представлена зависимость коэффициента подъемной
силы крыла от его углов атаки. Из графика видно, что при угле
Рис. 28. Зависимость коэффициента
подъемной силы крыла вертолета
Ми-6 от угла атаки
Рис. 29. Поляра крыла вертолета Ми-6
Рис. 30. Потребные и располагаемые
углы атаки крыла вертолета Ми-6 на
режимах полета с работающими дви-
гателями
48
атаки, равном нулю, величина
коэффициента подъемной силы
крайне незначительна . Это
указывает на то, что профиль
крыла симметричный. По кри-
вой также видно, что при кри-
тическом угле атаки, равном
20°. cumax составляет более
1,1-
На рис. 29 представлена по-
ляра крыла вертолета Ми-6.
Потребные углы атаки кры-
ла на любых режимах полета с
увеличением скорости и высо-
ты полета увеличиваются, так
как чем больше скорость и вы-
сота полета, тем более необхо-
димо разгружать несущий
винт путем увеличения подъем-
ной силы крыла (рис. 30).
Располагаемые (истинные) углы атаки крыла на режимах поле-
та с работающими двигателями от скорости и высоты полета изме-
няются следующим образом. При малых скоростях поступательного
полета углы атаки крыла небольшие, так как на крыло дей-
ствует большой индуктивный поток от несущего винта, который
скашивает вниз основной поток воздуха, подходящий к крылу. Так,
например, при скорости 120 км/ч угол атаки крыла составляет при-
мерно 8 . С увеличением скорости полета угол тангажа вертолета
уменьшается, что приводит к уменьшению угла атаки крыла, но
так как индуктивный поток от несущего винта уменьшается, то при
скорости до 200 км/ч угол атаки увеличивается до 13—14°. При
дальнейшем увеличении скорости полета угол атаки крыла умень-
шается вследствие уменьшения угла тангажа вертолета несмотря
на увеличение угла атаки от уменьшения индуктивного потока.
От изменения высоты полета угол атаки крыла на тех же скоростях
полета изменяется незначительно за
счет изменения индуктивного потока
от высоты полета. На скоростях’ поле-
та до 200 км/ч с увеличением высоты
угол атаки крыла уменьшается, так
как увеличивается индуктивный поток
от несущего винта. При скоростях бо-
бее 200 км/ч с увеличением высоты
угол атаки увеличивается.
На режиме авторотации (планиро-
вание) располагаемый (истинный)
угол атаки крыла в зависимости от
скорости полета изменяется следую-
щим образом (рис. 31). При малых
скоростях угол атаки большой, так как
большая вертикальная скорость снижения. С увеличением скорости
полета до экономической вертикальная скорость снижения умень-
шается до минимальной, поэтому угол атаки крыла также умень-
шается и становится минимальным.
При дальнейшем увеличении скорости угол атаки крыла снова
начинает увеличиваться за счет увеличения вертикальной скорости
снижения.
На изменение угла атаки крыла на режиме самовращения несу-
щего винта также влияет и изменение угла тангажа в зависимости
от скорости полета, поэтому минимальный угол атаки крыла будет
на скорости больше экономической.
Подъемная сила крыла. На режиме висения и на малых ско-
ростях полета крыло создает отрицательную подъемную силу
вследствие действия на него сверху индуктивного потока от несу-
щего винта. Так, на режиме висения подъемная сила составит 2%
от общего веса вертолета (тяги винта), т. е. около 800 кГ. С увели-
чением скорости поступательного полета угол атаки крыла будет
увеличиваться, и когда он станет при некоторой скорости равен
49
Рис. 31. Располагаемые уг-
лы атаки крыла на режиме
самовращения несущего
винта
нулю, подъемная сила его также будет равна нулю. При дальней-
шем увеличении скорости подъемная сила крыла будет положи-
тельной и при скорости 200 км/ч составит 14% от подъемной силы
несущего винта, при скорости 250 км/ч—19% и при скорости
300 км/ч — 25%- Таким образом, при больших скоростях полета
крыло создает большую подъемную силу, существенно разгружая
несущий винт.
Аэродинамические характеристики системы
«фюзеляж + крыло»
На рис. 32 представлена кривая, показывающая изменение ко-
эффициента подъемной силы системы «фюзеляж + крыло» сИф+к в
зависимости от ее угла атаки a$+li. Как видно из графика коэффи-
циент подъемной силы системы увеличивается до углов атаки фюзе-
зеляж + крыло» от углов атаки
фюзеляжа
ляжа 5°, затем уменьшается и, начиная с угла атаки 9°, опять уве-
личивается, и при 20° достигает такой же величины, как и у крыла
на том же угле атаки (см. рис. 28). Коэффициент подъемной силы
суф+к равен нулю лишь при отрицательном угле атаки фюзеляжа,
равном — 8°.
На рис. 33 представлена поляра системы «фюзеляж + крыло».
§ 10. ХАРАКТЕРИСТИКИ РУЛЕВОГО ВИНТА
Геометрические параметры рулевого винта АВ-63Б следующие:
диаметр 6,3 м, ширина лопасти 0,5 м на г=0,7, профиль лопасти
NACA-230, относительная толщина 0,096 на г = 0,9, коэффициент
заполнения винта 0,202. Вес одной лопасти 60 кГ, винта 570 кГ.
Кинематические характеристики рулевого винта такие же, как
и несущего. Лопасти имеют осевые шарниры, позволяющие изме-
нять общий шаг винта, и горизонтальные шарниры, за счет кото-
рых совершаются маховые движения относительно плоскости вра-
щения. От плоскости вращения лопасти могут отклоняться по гори-
зонтальному шарниру в обе стороны на 15°. Степень редукции
такова, что число оборотов рулевого винта уменьшено по сравне-
нию с числом оборотов свободной турбины в 12,24 раза. Число
оборотов рулевого винта при минимально допустимом числе оборо-
тов свободной турбины (7800) составит 7800: 12,24=637 в минуту,
при максимальном (8300) —678 в минуту и при максимально допу-
стимом кратковременно (9000)—735.
Рулевой винт, как и несущий, в поступательном полете за счет
маховых движений образует завал конуса и аэродинамической силы
винта, в результате чего возникают продольная и боковая силы.
: ГЛАВА III
ПОТРЕБНЫЕ И РАСПОЛАГАЕМЫЕ МОЩНОСТИ
ВЕРТОЛЕТА
§ 11. ПОТРЕБНАЯ МОЩНОСТЬ
Потребная мощность для полета вертолета Ми-6, как и для
любого вертолета, складывается из мощности индуктивной, про-
фильной и мощности чиижепия Кроме того, на режиме висения и
при малых скоростях полета потребуется дополнительная мощность
для создания дополнительной тяги винта из-за вредного влияния
крыла. Эта дополнительная мощность потребует большей величины
индуктивной и профильной мощности, так как для создания допол-
нительной тяги, уравновешивающей сопротивление крыла, потре-
буется большая индуктивная скорость, что приведет к росту индук-
тивного сопротивления лопастей. Кроме того, увеличивается и
профильное сопротивление вследствие увеличения общего несущего
винта или его числа оборотов.
Влияние сжимаемости воздуха. В поступательном полете, начи-
ная со средних скоростей полета, лопасти Ми-6 в азимуте 0—180°
имеют сверхкритические истинные скорости обтекания. Здесь про-
является сжимаемость воздуха, что приводит к появлению волно-
вого сопротивления, на преодоление которого требуется определен-
ная мощность, которую называют мощностью сжатия. Чем больше
скорость полета, тем больше волновое сопротивление, тем большая
мощность требуется для его преодоления. Следовательно, с увели-
чением скорости мощность сжатия увеличивается.
Чем больше высота полета, тем больше мощность сжатия, так
как сжимаемость воздуха увеличивается за счет уменьшения ско-
рости звука. В аэродинамическом расчете вертолета Ми-6 сжимае-
мость воздуха учитывается через увеличение коэффициента потреб-
ного крутящего момента
^кр = 'Мкр.б.сж + Д/Псж.
Изменение прироста коэффициента потребного крутящего момента
от скорости горизонтального полета и высоты показано на
рис. 34.
Следовательно, потребная мощность для поступательного полета
вертолета Ми-6 будет складываться из мощности индуктивной, про-
фильной, движения и мощности сжатия
^потр^^инд+^пр + ^лп * Л^сж.
52
Зависимость указанных мощностей от скорости горизонтального
пролета в общем виде показана на рис. 35. Как видно из рисунка
индуктивная мощность на висении максимальная, с увеличением
скорости она уменьшается, так
как большая масса воздуха про-
ходит через несущий винт за еди-
ницу времени. Профильная мощ-
ность на висении минимальная и
с ростом скорости увеличивается
за счет увеличения профильных
потерь. Мощность движения на
висении равна нулю, с ростом
скорости она увеличивается за
счет увеличения вредного сопро-
тивления. Мощность сжатия по-
является на средних скоростях
полета, при дальнейшем росте
скорости она увеличивается. Сум-'
марная потребная мощность для
Рис. 34. Изменение коэффициента по-
требного крутящего момента за счет
сжатия по скорости и высоте полета
горизонтального полета, как и
для любого вертолета, до скорости экономической уменьшается, при
скорости больше экономической — увеличивается.
Рис. 35. Изменение потребных мощностей для горизонтального полета вер-
толета Ми-6 в зависимости от скорости
Общий потребный крутящий момент для полета вертолета опре-
деляется по формуле
Л1К|;=т.,0,5р («Л)= Fm sR.
где Fom — площадь, ометаемая винтом;
/? — радиус винта.
53
Аналогично изменению потребной мощности от скорости гори-
зонтального полета изменяются и потребные установочные углы
лопастей (общий шаг винта): при изменении скорости от нуля до
экономической потребный общий шаг несущего винта уменьшается,
при дальнейшем росте скорости он увеличивается (рис. 36).
§ 12. РАСПОЛАГАЕМАЯ МОЩНОСТЬ
Характеристики двигателя Д-25В
Дроссельные характеристики представлены на рис. 37. По гори-
зонтальной оси отложены относительные числа: отношение числа
оборотов турбокомпрессора на данном режиме работы двигателя
в процентах. По вертикальным осям отложены относительные мош-
С„
ности , относительные удельные расходы топлива —-— и
процентах.
Как видно по кривым, при открытии дроссельного крана число
оборотов турбокомпрессора пшк, мощность двигателя N и темпера-
тура газа Т за турбиной увеличиваются, а удельный расход топли-
ва Се уменьшается. Увеличение эффективной мощности Ne по числу
оборотов объясняется одновременным увеличением расхода возду-
ха через двигатель и удельной эффективной мощности (с ростом
степени повышения давления воздуха лк). При этом удельный
эффективный расход топлива с ростом числа оборотов непрерывно
уменьшается за счет увеличения степени повышения давления и
температуры в двигателе.
Режимы работы двигателя Д-25В. В табл. 1 указаны режимы
работы двигателя Д-25В 2-й серии, начиная с № С3532013 в стан-
дартных атмосферных условиях у земли и на высоте 3000 м. Двига-
тели 2-й серии до № С3532013 имеют большее число оборотов тур-
бокомпрессора, а двигатели 1-й серии — меньшее.
Д-25В 2-й серии с № C35320I3 в условиях стандартной атмосферы
55
Продолжен
56
Рис. 37. Дроссельные характе-
ристики двигателя Д-25В:
N е— мощность: Т — температура
выхлопных газов за турбиной: Ск-
удельный расход топлива
«Нормальным» числом оборотов турбокомпрессора будет назы-
ваться такое число, которое дано для стандартных атмосферных
условий и с учетом закона регулирования.
«Замеренным» числом оборотов будем называть такое число, ко-
торое получено по показаниям приборов в данном полете при дан-
ной температуре и на данной высоте.
Двигатель Д-25В очень чувстви-
телен к изменению температуры ок-
ружающей среды и высоты полета,
так как эти изменения приводят к
изменению количества воздуха, про-
ходящего через двигатель и его
мощности. Для поддержания мощ-
ности в необходимых пределах тре-
буется изменять число оборотов
турбокомпрессора. Чем больше тем-
пература окружающей среды и вы-
сота полета, тем больше должно
быть число оборотов турбокомпрес-
сора.
Максимально допустимые «заме-
ренные» обороты турбокомпрессора
в зависимости от температуры ок-
ружающего воздуха и высоты поле-
та для двигателя 2-й серии с
№ С3532013 указаны в табл. 2.
Зависимость максимально допустимых чисел оборотов ротора компрессора
от температуры воздуха и высоты полета в процентах
Н, я ! 1 S i 8 8 2 + 8 + 1 X S
0 85,5 86,5 88,0 89,5 90,5 92,0 93,5 94,5 96,0 97,5
500 86,5 88,0 89,5 91,0 92,5 93,5 95,0 96,5 98,0 —
1000 88,0 89,5 90, о 92,0 93,5 95,0 96,0 97,5 98,5 —.
1500 89,0 90,5 92,0 93,5 95,0 96,0 97,5 98,5 — г—
2000 90,5 92,0 93,0 94,5 96.0 97,5 99,0 — *_ —
2500 91,5 93,0 94,5 96,0 97,5 99,0 —- — .— —
3000 92,5 94,0 95,5 96,5 97,0 98,5 99.5 — —. — -t—
3500 93,5 95,0 98,0 99,5 — — — —
4000 и более 91,5 96,0 97,5 99,5 - —
число оборотов турбокомпрессора в процен-
В табл. 2 указано
тах по ИТЭ-2.
57
Максимально допустимая температура газов за турбиной для
двигателей 2-й серии в зависимости от температуры окружающего
воздуха и числа «замеренных» оборотов турбокомпрессора дана в
табл. 3.
Таблица 3
Максимально допустимая температура газов за турбиной для двигателя
Д-25В 2-й серии
Число оборотов турбо- компрессора по ИТЭ-2, % Температура газов за тупбииой
50-5—21 -20+0 0+20 21+50
До 85 440 475 510 560
85-90 490 510 540 595
90-95 570 580 590 630
95-99 650 650 650 650
Температура выходящих газов измеряется приборами 2ТВГЗ-1,
установленными на приборных досках пилотов и бортмеханика.
Мощность двигателей Д-25В на взлетном режиме у земли со-
ставляет 5500x2=11000 л. с. на валу свободной турбины. Взлет-
ный режим двигателей применяется для взлета и посадки
вертолета, для выполнения вертикальных режимов поле-
та, особенно в сложных условиях набора высоты, а также при
полете на одном двигателе. На взлетном режиме работы двигате-
лей общий шаг несущего винта примерно 9° при полностью введен-
ном корректоре газа вправо, если вертолет пришвартован или
находится на режиме висения. Если вертолет движется с поступа-
тельной скоростью, то общий шаг несущего винта будет больше 9°,
так как за счет скорости несущий винт облегчается и для поддер-
жания нужного числа оборотов его затяжеляют ручкой общего
шага.
На боевом режиме работы двигателей мощность у земли состав-
ляет 5200X2 = 10400 л. с. Применяется боевой режим в тех же слу-
чаях, что и взлетный.
На номинальном режиме работы двигателей мощность на валу
свободной турбины у земли составляет 4700X2=9400 л. с. Номи-
нальный режим работы двигателей применяется в основном для
набора высоты.
На первом крейсерском режиме работы двигателей (0,85 номи-
нального) мощность на валу свободной турбины у земли 4000X2 =
= 8000 л. с. Применяется этот режим для набора высоты и горизон-
тального полета вертолета.
На втором крейсерском режиме (0,66 номинального), который
применяется в основном для горизонтального полета на крейсер-
ских скоростях, двигатели развивают мощность на валу свободной
58
турбины у земли в стандартных атмосферных условиях 3100X2 =
•=6200 л. с.
Перечисленные режимы работы двигателей могут быть получены
на земле с помощью ручки «шаг-газ» при правой коррекции: чем
больше шаг, тем выше режим работы двигателей. В поступатель-
ном полете указанные режимы работы двигателей устанавливаются
при соответствующем общем шаге и определенном положении кор-
ректора газа в зависимости от режима полета, скорости, полетного
веса вертолета, высоты полета и атмосферных условий.
Рис. 38. Высотные характеристики двигателя Д-25В:
а —изменение мощности и удельного расхода топлива по высоте полета; б —
изменение числа оборотов турбокомпрессора и температуры газов по высоте
полета; в — изменение мощности и удельного расхода топлива по высоте по-
лета в абсолютных числах:
I — взлетный режим; 2 — боевой; 3 — номинальный; 4 — 0,85 номинального; 5 — 0,66 но-
минального
Высотные характеристики двигателя Д-25В. Двигатель Д-25В
относится к высотным газотурбинным двигателям. На всех эксплу-
атационных режимах работы в условиях международной стандарт-
ной атмосферы мощность его до расчетной высоты (высоты огра-
ничения) или возрастает, или сохраняется неизменной по сравне-
нию с мощностью у земли, после достижения расчетной высоты —
уменьшается.
На рис. 38 представлены высотные характеристики двигателя
Д-25В в относительных координатах. За 100% приняты мощность,
удельный расход топлива, число оборотов турбокомпрессора и тем-
пература газов на номинальном режиме работы двигателя.
У любого газотурбинного двигателя мощность зависит от тем-
пературы и давления. При увеличении атмосферного давления
мощность увеличивается за счет увеличения расхода воздуха через
двигатель за единицу времени, при уменьшении давления — мощ-
ность уменьшается. При увеличении температуры воздуха мощность
59
двигателя уменьшается, так как уменьшается количество воздуха,
проходящего через двигатель за единицу времени.
С подъемом на высоту температура воздуха и его давление
уменьшаются. Уменьшение температуры приводит к увеличению
мощности, а уменьшение давления — к уменьшению. Степень воз-
действия давления воздуха на уменьшение мощности с подъемом на
высоту больше, чем влияние температуры на увеличение мощности,
поэтому с увеличением высоты мощность двигателя уменьшается.
Следовательно, газотурбинный двигатель является невысотным
двигателем.
Высотность двигателя Д-25В достигается тем, что температура
газов перед турбиной двигателя у земли снижается по сравнению
с максимально возможной температурой их по условию прочности
деталей двигателя. Мощность двигателя пропорциональна темпера-
туре газов перед турбиной: чем больше подается топлива в двига-
тель, тем выше температура газов после его сгорания, тем больше
скорость истечения газов и больше крутящий момент на свободной
турбине. Для того чтобы сохранить мощность до высоты ограниче-
ния, необходимо увеличивать температуру газов перед турбиной.
Повышение температуры газов и числа оборотов турбокомпрес-
сора до расчетной высоты происходит автоматически при помощи
программного устройства насоса-регулятора НР-23А. С увеличени-
ем высоты анероид высотно-скоростной корректировки расширяет-
ся и с помощью следящей системы и щентробежного датчика пере-
страивает регулятор оборотов на большие обороты компрессора за
счет увеличения подачи топлива в двигатель. Такое действие про-
граммного устройства рассчитано до высоты 3000 м в условиях
MCA. По достижении этой высоты подача топлива в двигатель
становится максимальной, температура газов перед турбиной и
число оборотов турбокомпрессора — максимально допустимыми по
условиям прочности вращающихся деталей двигателя па взлетном
режиме, мощность двигателя — максимальной (см. рис. 38).
При дальнейшем наборе высоты подача топлива уменьшается.
Температура газов перед турбиной уменьшается вследствие умень-
шения температуры наружного воздуха. Число оборотов турбо-
компрессора остается постоянным ввиду пропорционального
уменьшения крутящего момента от газов и потребного крутящего
момента за счет уменьшения плотности воздуха. Мощность двигате-
ля при этом уменьшается.
Как видно из рис. 38, мощность на взлетном режиме до расчет-
ной высоты 3000 м не остается строго постоянной: она вначале
увеличивается, а затем уменьшается, но на высоте 3000 м такая
же, как и у земли. На других режимах работы двигателей мощность
на высоте 3000 м больше, чем у земли.
Па заданном режиме работы двигателей (для Д-25В до
8800 об)мин) до начала автоматической работы поддерживается
постоянный расход топлива, а число оборотов компрессора при этом
будет изменяться в зависимости от давления и температуры возду-
60
ха: чем выше давление и меньше температура, тем меньше число
оборотов турбокомпрессора. При числе оборотов выше 8800 в мину-
Рис. 39. Изменение мощности и удельно-
го расхода топлива турбовинтового дви-
гателя в зависимости от скорости полета
ту происходит автоматическое их корректирование в зависимости
не только от давления, но и от температуры воздуха по программе,
обеспечивающей постоянство заданной мощности двигателя не
только до расчетной высоты в условиях MCA, по и в диапазоне тем-
ператур от —40° С до +40° С в данной атмосфере.
Данная автоматика топливной системы позволяет сохранять
заданную мощность двигателей почти для всех температур для
любого времени года, широ-
ты и применяемых высот, что
позволяет успешно эксплуа-
тировать вертолет.
Высотно-скоростные ха-
рактеристики. Рассмотрим
влияние скорости полета на
эффективную мощность тур-
бовинтового двигателя в об-
щем случае. При этом все
остальные факторы, влияю-
щие на мощность двигателя,
будем считать постоянными:
высоту полета, число оборо-
тов двигателя, атмосферные
условия. С увеличением ско-
рости полета мощность дви-
гателя будет увеличиваться
вследствие того, что расход
увеличиваются за счет действия скоростного напора набегающего
потока воздуха. При этом увеличение предварительного скорост-
ного сжатия вызывает повышение температуры воздуха, вследствие
чего степень сжатия компрессора уменьшается. Но так как комп-
рессор сжимает воздух, предварительно сжатый действием скорост-
ного напора, то общая степень сжатия возрастает. Поэтому увели-
воздуха и общая степень сжатия лк
чивается плотность, а значит и количество воздуха, проходящего
через двигатель, т. е. увеличивается мощность и уменьшается
удельный расход топлива (рис. 39). В полете меняются скорость и
высота, это в свою очередь приводит к изменению мощности двига-
телей от указанных факторов одновременно.
На рис. 40 представлены высотно-скоростные характеристики
двигателя Д-25В. Здесь мощности до расчетной высоты на всех
эксплуатационных режимах условно показаны прямыми линиями.
Сплошными линиями показано изменение мощности двигателей
по высоте на всех указанных режимах при висении (ц = 0),
пунктирными изменение мощности по высоте в поступательном
полете (р=0,22, V=180 км!ч}. По кривым видно, что прирост мощ-
ности за счет скоростного напора составляет около 200 л. с. и
остается почти постоянным на всех режимах работы двигателя и
61
высотах. Чем больше скорость полета, тем до большей высоты со-
храняется или даже увеличивается мощность, т. е. чем больше ско-
рость полета, тем больше расчетная высота двигателя. В данном
примере для ц = 0,22 она составляет 3500 м.
Рис. 40. Высотно-скорост-
ные характеристики дви-
гателя Д-25В:
1 — взлетный режим; 2 — бо-
евой режим; 3 — номиналь-
ный режим; 4 — 0,85 номи-
нального; 5 — 0.66 номнналь-
Потери мощности двигателей
и коэффициент использования мощности
Потери мощности. Потери эффективной мощности двигателей
вертолета Ми-6 состоят из потерь на всасывание, на трение, на
охлаждение, па приводы и рулевой винт.
Потери мощности двигателей на всасывание возникают за счет
определенной компоновки двигателей на фюзеляже и вследствие
сопротивления в тоннелях входа воздуха. Эти потери составляют
2,5% от эффективной мощности двигателей. Потери мощности на
трение в трансмиссии составляют 3% от эффективной мощности.
Потери на охлаждение, т. е. на вращение вентилятора для охлажде-
ния агрегатов двигательной установки — 1,15%, потери на приводы
вертолетных агрегатов— 0,8% от эффективной мощности двигате-
лей. От скорости полета все эти виды потерь не меняются.
Потери мощности двигателей на рулевой винт изменяются в
зависимости от скорости полета: на висении они составляют 9%
эффективной мощности, с ростом скорости уменьшаются и при
ц=0,3 (И=240 км/ч) составляют 3,5%, при дальнейшем росте
62
скорости полета они возрастают и при максимальной скорости
(300—320 кл/ч) составляют 5% (рис. 41). Уменьшение потерь мощ-
ности на рулевой винт с ростом скорости объясняется уменьшением
потребной мощности для полета вертолета, а также улучшением
4(7 80 120 ISO 200 2^0 280
Рис. 41. Потери мощности двигателей на рулевой
условий работы самого рулевого винта в косой обдувке до скорости
240 км/ч. Этим объясняется и то, что с увеличением скорости полета
для сохранения направления пути пилот должен отклонять вперед
левую педаль, уменьшая шаг рулевого винта.
При скорости более 240—250 км/ч для сохрапения направления
пути необходимо увеличивать шаг рулевого винта, перемещая пра-
вую педаль вперед *.
Рис. 42. Изменение коэффици-
ента использования мощности
вертолета Ми-6 по скорости
полета
Коэффициент использования мощности. Все вышеперечисленные
потери мощности двигателей учитываются с помощью коэффици-
ента использования мощности В, который показывает, какая часть
мощности двигателей передается на втулку несущего винта. Он
определяется отношением располагаемой мощности несущего вин-
та к эффективной мощности двигателей
Изменение коэффициента использования мощности в зависимо-
сти от скорости полета для вертолета Ми-6 показано на рис. 42.
Из рисунка видно, что на висении коэффициент равен 0,8355, с ро-
* Здесь указаны расчетные данные, летные данные будут приведены в гла-
ве IX,' «Балансировка;.
63
стом скорости он увеличивается за счет уменьшения потерь мощ-
ности на рулевой виит и при скорости 240 км/ч имеет наибольшую
величину — 0,89.
При дальнейшем увеличении скорости коэффициент уменьшает-
ся, так как увеличиваются потери мощности на рулевой винт.
Располагаемая мощность несущего винта
Располагаемой мощностью несущего винта называется часть
эффективной мощности двигателей, расходуемая на вращение не-
сущего виита. Эта мощность определяется как разность между эф-
фективной мощностью двигателей и потерями на всасывание, тре-
ние, охлаждение, приводы и вращение рулевого винта
Так как перечисленные потери от скорости не зависят, за ис-
ключением потерь на вращение рулевого винта, то характер изме-
нения располагаемой мощности по скорости полета аналогичен из-
менению коэффициента использования мощности.
Рис. 43. Изменение располагаемой мощности несущего винта по ско-
рости полета
На рис. 43 изменение располагаемой мощности несущего винта
для вертолета Ми-6 в общем виде будет выглядеть следующим об-
разом. Эффективная мощность двигателей с ростом скорости по-
лета увеличивается, так как увеличивается степень сжатия лк- По-
тери мощности двигателей на всасывание, трение, охлаждение и на
приводы от скорости полета не меняются, а потери на рулевой винт
64
уменьшаются до скорости 240 км/ч, а затем увеличиваются. Поэто-
му располагаемая мощность несущего винта с ростом скорости от
нуля до 240 км/ч будет увеличиваться как за счет увеличения ско-
рости, так и за счет уменьшения потерь на рулевой винт. При
дальнейшем росте скорости располагаемая мощность будет умень-
шаться, хотя эффективная мощность и продолжает увеличиваться,
но потери на рулевой винт будут больше, чем прирост мощности
вследствие увеличения скорости полета.
Реактивная тяга двигателей. У двигателя Д-25В давление вы-
ходящих газов превышает атмосферное. Поэтому выходящие газы
Рис. 44. Реактивная тяга двигателей
обладают энергией и создают реактивную силу, направленную в
сторону, противоположную выходящим газам. Выпускные трубы
расположены под углом 32° к продольной оси вертолета (рис. 44).
Реактивная сила выходящих газов TR раскладывается на состав-
ляющие Та и Тв. Составляющие Тв двух двигателей направлены под
углом 90° к продольной оси вертолета и уравновешиваются, а со-
ставляющие Та направлены по полету и дополняют горизонтальную
составляющую тяги несущего винта. Чем меньше угол между про-
дольной осью вертолета и осью выпускных труб, тем больше состав-
ляющие реактивной силы Та, тем больше прирост скорости полета.
По условиям компоновки двигателей сделать этот угол меньшим не
удается.
Величина реактивной тяги двигателей зависит от скорости по-
лета: чем больше скорость, тем больше реактивная сила.
Аэродинамическим расчетом принято учитывать реактивную
силу тяги двигателей через прирост располагаемой мощности не-
сущего винта, а прирост располагаемого крутящего момента через
его коэффициент—Тогда располагаемая мощность несуще-
го винта с учетом реактивной тяги двигателей в зависимости от
скорости полета вертолета будет изменяться, как показано на
рис. 45.
Прирост коэффициента крутящего момента вследствие реактив-
ной тяги двигателей определяется по формуле
^ucosx
=---£-----,
3—Япуновнч
65
где iXR — коэффициент тяги винта за счет реакции выходящих
газов;
X — угол между продольной осью вертолета и осью выпуск-
ной трубы двигателя;
Пдвиж — К. п. д. несущего винта, как движителя.
Рис. 45. Зависимость распола-
гаемой мощности несущего вин-
та вертолетами Ми-6 от ско-
рости1 полета в общем виде:
а —без учета реактивной тяги
двигателей; б — с учетом реак-
тивной тяги двигателей
Принимая т|дВ1,и( за постоянную величину, равную 0,9, а х=32°,
для вертолета Ми-6 формула прироста коэффициента крутящего
момента за счет реактивной тяги принимает вид
Лгс,р₽=0,9&,г|..
По этой формуле строится график зависимости прироста коэф-
фициента крутящего момента за счет реактивной тяги двигателей
H-4000 м,
H-3000 м.
Н-1000 м.
, —207 М/сек;
Я-6000 м.
Рис. 46. Изменение прироста
коэффициента крутящего
момента от реактивной тя-
ги двигателей в зависимости
от ц и высоты полета вер-
от характеристики режима ц и от высоты полета (рис. 46). По гра-
фику видно, что чем больше ц и высота полета, тем больше при-
рост коэффициента.
Общий же (суммарный) располагаемый коэффициент крутяще-
го момента mKlli будет складываться из коэффициента распола-
66
гаемого крутящего момента для вращения несущего винта и из
коэффициента крутящего момента за счет реактивной тяги двига-
телей
«кр, = '”кррасп-|- Д'Якр^.
§ 13. БАЛАНС МОЩНОСТЕЙ
На рис. 47 представлен баланс мощностей для вертолета Ми-6
в общем виде. Здесь показано, как изменяются мощности по ско-
рости полета при определенном заданном режиме работы двига-
0 40 во ’20 КО '60 200 МО 280 V. км/ч
Рис. 47. Баланс мощностей вертолета Ми-6 в общем виде
•гелей. По оси ординат отложена эффективная мощность двигате-
лей на определенном режиме их работы, например, на взлетном.
По оси абсцисс отложена истинная скорость полета вертолета.
С увеличением скорости полета эффективная мощность двигателей
растет за счет увеличения напора воздуха, поэтому эта мощность
изобразится прямой восходящей линией. Площадь трапеции а, б,
в, г условно принимается за эффективную мощность двигателей на
взлетном режиме. Эта мощность распределяется на всасывание,
вращение всей трансмиссии, вентилятора, приводов агрегатов,
рулевого и несущего винтов (располагаемая мощность несущего
винта). Сверху по оси ординат последовательно отложена мощ-
ность на всасывание, трение, охлаждение, приводы и рулевой
винт. Тогда располагаемая мощность несущего винта без учета ре-
активной тяги двигателей изобразится пунктирной линией. С уче-
том же реактивной тяги двигателей — сплошной линией. Как вид-
3* 67
но, располагаемая мощность несущего винта с ростом скорости
полета вначале увеличивается, а затем уменьшается.
На этом же графике изображены все потребные мощности для
горизонтального полета вертолета: индуктивная, профильная, дви-
жения и мощность сжатия. Сумма всех потребных мощностей
Рис. 48. Располагаемые и потребные коэффициенты крутя-
щего момента в зависимости от характеристики режима и
высоты полета на взлетном и номинальном режимах
должна укладываться на площади располагаемой мощности, что-
бы обеспечить горизонтальный полет во всем диапазоне скоростей.
Кроме того, желательно, чтобы имелись избытки мощности для
полетов на других режимах. Сумма всех потребных мощностей
с увеличением скорости до экономической (для вертолета Ми-6 —
140 км!ч) уменьшается. При дальнейшем росте скорости потребная
мощность растет. Избыток мощности, как видно по графику, бу-
дет максимальным на экономической скорости полета.
68
В аэродинамическом расчете вертолета Ми-6 располагаемые и
потребные мощности в зависимости от скорости полета на разных
нысотах представляются в виде изменения располагаемых и по-
требных крутящих моментов, выраженных через зависимость ко-
эффициентов этих моментов ш|(р от характеристики режима поле-
та ц и высоты (рис. 48). Здесь располагаемые коэффициенты кру-
тящих моментов даны для взлетного и поминального режимов.
Расчет этих коэффициентов до ц=0,25 велся без учета увеличения
этих коэффициентов за счет скорости полета, т. е. расчет велся
для режима висения (ц = 0). Начиная же от ц.=0,3 до 0,4, эти ко-
эффициенты представлены для определенной скорости полета вер-
толета, соответствующей ц=0,22; кривые, соответствующие зна-
чениям от ц = 0,25 до 0,3, соединены между собой пунктирными
линиями.
§ 14. УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ И ВИНТОМ
С ПОМОЩЬЮ СИСТЕМЫ «ШАГ-ГАЗ»
Существуют две системы поддержания постоянного числа обо-
ротов несущего винта вертолета: система «шаг-газ» и автоматиче-
ская. Для вертолета Ми-6 была избрана система «шаг-газ».
Принцип работы системы «шаг-газ» заключается в том, что
между автоматом перекоса, изменяющим шаг винта, и рычагами
топлива двигателей имеется механическая программная связь (си-
стема тяг и качалок), обеспечивающая при перемещении ручки
общего шага такое одновременно изменение шага винта и режима
работы двигателей, при котором число оборотов несущего винта
сохраняется постоянным (рис. 49). Но указанная механическая
связь позволяет сохранять постоянным число оборотов несущего
винта лишь при определенных температуре и давлении окружаю-
щей среды, полетном весе вертолета, режиме и высоте полета и
других факторах. При изменении указанных условий изменение по-
ложения ручки общего шага 1 приводит к изменению числа обо-
ротов несущего винта. В этом случае необходимо повернуть рукоят-
ку корректора газа 2, чтобы сохранить заданное число оборотов. От
коррекции подается сигнал b на изменение режима работы дви-
гателей, минуя механическую связь с винтом 3. При этом регу-
лятор числа оборотов турбокомпрессора 4 изменяет подачу топлива
по связи f в двигатели, и число оборотов несущего винта изме-
няется на нужную величину, т. е. пилот их удерживает постоянны-
ми — необходимыми для данного режима полета.
Для изменения режима работы двигателей пилот при помощи
ручки общего шага / изменяет через программный механизм связи
3 одновременно шаг винта по связи а и мощность двигателей по
связи в. При этом вступает в работу автомат приемистости регу-
лятора (ограничитель нарастания давления топлива), тогда новая
порция топлива по связи g и далее по связи f подается в камеру
сгорания. При этом двигатели выходят на новый режим работы,
а располагаемая мощность и потребная для вращения винта урав-
69
новешиваются. Если число оборотов отклоняется от заданного, пи-
лот опять при помощи корректора газа восстанавливает их в нуж-
ных пределах.
На установившемся режиме работы двигателей число оборотов
турбокомпрессора поддерживается постоянным с помощью регу-
лятора обортов. Если число оборотов турбокомпрессора изме-
няется по каким-либо причинам, то подается сигнал е на изменение
Рис. 49. Схема системы <газ-шаг» для вертолета с газотурбинны-
ми двигателями:
/ - ручка <шаг-газ>; ’ — корректор режима работы турбокомпрессора; 3 —
механизм связи режима работы двигателей и винта; 4 — регулятор числа
подачи топлива и число оборотов опять будет постоянным. По
этому же сигналу ограничивается и максимальное число оборотов
турбокомпрессора.
По сигналам d и с в зависимости от температуры и давления
воздуха или высоты полета изменяется число оборотов турбоком-
прессора за счет изменения подачи топлива, т. е. сохраняется за-
данная мощность двигателей.
Система «шаг-газ» вертолета Ми-6 не имеет кулачкового меха-
низма, как у других вертолетов, что упрощает конструкцию и
уменьшает трепне в системе, она состоит из набора тяг и
качалок.
Но управление несущим винтом и двигателями с помощью си-
стемы «шаг-газ» довольно сложно. Часто возникают забросы оборо-
тов несущего винта выше или ниже допустимых. Пилоту приходится
действовать корректором газа почти на всех режимах поле-
та. Кроме того, на режимах снижения с работающими двигателя-
70
ми при выведенном корректоре и допустимом числе оборотов не-
сущего винта нельзя было добиться желаемой скорости верти-
кального снижения: она была ниже рекомендуемой; трудно было
производить посадку, особенно незагруженного вертолета. Поэто-
Характеристика системы «шаг-газ»
правая коррекция
коррекция
УПРТ-2,
Оборот»!
турбины
15—18
15—18
76—80
60—68-
24-28
24-28
97—100
84-86.5
85-86,5
фавая коррекция
число оборотов
78—82
84-87
84-87
показания
УПРТ-2,
град
60—68
84-92
97-100
доработкам.
му система «шаг-газ» подвергалась неоднократным
В результате проведенных доработок, после правильной регу-
Рис. 50. Характеристика системы «шаг-газ»:
а — трапециевидные лопасти; б — прямоугольные лопасти; А—диапазон об-
щего шага винта, соответствующий полному ходу корректора газа 101°:
/ — набор высоты на взлетном режиме; 2- набор высоты на номинальном режиме; 3 —
горизонтальный полет при л„.в —8700 об/мин; 4 — горизонтальный полет при ян.в =
7800 об/мин; 5 —снижение с работающими двигателями при Ру-4—5 м/сек; 6 — планиро-
вание на режиме самовращения несущего винта
лировки, которая делается после устранения несоконусности несу-
щего винта, характеристика системы «шаг-газ» должна быть сле-
дующей (см. табл. 4 и рис. 50).
При нижнем положении ручки общего шага общий шаг несу-
щего винта по указателю будет составлять 1°, и если корректор
газа переведен влево до отказа, то это соответствует среднему
71
положению корректора газа. Это достигается регулировкой таким
образом, что при шаге 1° и средней коррекции качалки на шпан-
гоуте № 1 поставлены на свои верхние упоры. Показания УПРТ-2
(указатель положения рычагов топлива) должны соответствовать
15—18° (точки а). Если при этом двигатели работают, то число
оборотов несущего винта (турбины винта) должно быть 34—40%.
Следовательно, точки а на графиках соответствуют режиму мало-
го газа двигателей.
Если теперь, не трогая ручку общего шага, перевести рукоятку
корректора газа до отказа вправо, то показания УПРТ-2 должны
соответствовать 32—36°, а число оборотов винта — 76—80%, если
винт с трапециевидными лопастями и соответственно 30— 36° и
78—82%, если винт с прямоугольными лопастями (точки б на
рис. 50).
При увеличении общего шага при правой коррекции показания
УПРТ-2 будут увеличиваться и также будет увеличиваться и число
оборотов несущего винта. И при шаге 5° показания УПРТ-2 долж-
ны соответствовать 60—68°, а число оборотов несущего винта с тра-
пециевидными лопастями 84—86,5% и 84—87% с прямоугольны-
ми (точки в). При дальнейшем увеличении общего шага показания
УПРТ-2 увеличиваются, а число оборотов несущего винта остает-
ся неизменным и при шаге 8° по УПРТ-2 должно быть 84—92°, а
число оборотов такое же, как и при шаге 5° (точки г). При шаге 9°
показания по УПРТ-2 будут составлять 97—100°, а число оборо-
тов несущего винта с лопастями трапециевидной формы 85—86,5%
и 83—86% для винта с прямоугольными лопастями в плане (точ-
ки д, взлетный режим).
Для получения указанных чисел оборотов несущего винта поль-
зуются изменением установочных углов лопастей при помощи из-
менения длины тяг управления лопастями. При этом длина всех
тяг изменяется на одну и ту же величину, чтобы не нарушалась
ранее отрегулированная соконусность несущего винта.
При дальнейшем увеличении общего шага несущего винта по-
казания УПРТ-2 уже не изменяются, так как рычаги НР-23А по-
дошли к упорам, при этом рукоятка корректора газа будет само-
стоятельно поворачиваться влево, так как качалки на шпангоуте
№ 1, начиная с общего шага 9°, уже стоят на нижних упорах. Верх-
нее положение ручки общего шага по указателю соответствует 13,5°
(точки е). При этом ручка общего шага переместилась от своего
крайнего нижнего положения на 46°. В точке е корректор газа
окажется отклоненным от крайнего правого положения влево на
некоторый угол (около 50°). Отклонение ручки общего шага от 9°
до 13,5° (от точки д до точки е) на вертикальных режимах полета,
при вертикальных взлетах и посадках дает так называемое «пере-
тяжеление несущего винта», но это необходимо для других режи-
мов полета: на больших высотах и скоростях, для посадки на ав-
торотации и для посадки на «большом шаге» в случае крайней не-
обходимости.
72
L Если при максимальном шаге несущего винта выводить коррек-
тор влево, то показания УПРТ-2 будут уменьшаться и при левой
коррекции составят около 58° (точки ж). При уменьшении общего
Шага с выведенным корректором показания УПРТ-2 будут умень-
| шаться и при шаге 8° они должны быть в пределах 24—28° (точ-
ка з); при достижении шага 5—6° (режим малого газа) —15—18°
I (точки и). При дальнейшем уменьшении общего шага рукоятка
корректора будет вводиться вправо самопроизвольно, так как
качалки на шпангоуте № 1 подошли к верхним упорам малого га-
за. При шаге 1° рукоятка корректора займет среднее положение
(точка а на рис. 50). Следовательно, при общем шаге несущего
винта 1° рукоятка корректора совершает не полный ход (101°), а
лишь половину — 50° (от точки а до точки б).
Е На рис. 50 на участке кривой с выведенной коррекцией (между
t точками е и и) число оборотов несущего винта не указано, так
V как такая регулировка системы «шаг-газ» ведется с неработающи-
ми двигателями («холодная характеристика»). Заштрихованные
I площади на рис. 50 указывают 'на допустимые показания по
УПРТ-2 при регулировке системы «шаг-газ».
Приведенная в табл. 4 характеристика системы «шаг-газ» вер-
толета Ми-6 снимается на пришвартованном вертолете. В случае
отсутствия швартовки рекомендуется проверить систему «шаг-газ»
на вертикальном взлете и висении с нормальным полетным весом.
Эта проверка, как и проверка при швартовке, проводится после
устранения иесоконусности несущего винта и проверки холодной
। .регулировки системы «шаг-газ», при этом показания УПРТ-2
должны соответствовать приведенным в табл. 4.
Методика такой проверки заключается в следующем. После
запуска и прогрева двигателей ручка «шаг-газ» находится в ниж-
f, ;нем положении (1° по УШВ), корректор газа переводится вправо
до упора, при этом число оборотов несущего винта должно быть
в пределах 76—80% (табл. 5).
Таблица 5
Характеристика системы «шаг-газ» (без швартовки на висении)
Шаг пн ука-
град
оборотов
турбиры
винта, %
Примечание
6—8
30'
76—80
83—87
3-5
не менее 6
Допускается заброс числа оборо-
тов до 90И в течение 1 мин, не
более
Взлетная мощность двигателя
Дальнейшая проверка ведется с правой коррекцией. Затем
плавно увеличивается общий шаг до 4°, при этом в диапазоне об-
73
щего шага 2—4° число оборотов несущего винта возрастает до мак-
симального (83—87%), кратковременно (до 1 мин) допускается
до 90%.
При дальнейшем увеличении общего шага вертолет отрывается
от земли и на высоте 3—5 м при шаге 6—8° число оборотов несу-
щего винта должно быть 82—85%. После этого необходимо пере-
вести двигатели на взлетный режим, увеличив общий шаг, при
этом высота висения должна быть не менее 6 м, а число оборотов
несущего винта 80—84%. В этом случае висение можно совершать
па высоте более 10 м.
Указанные данные системы «шаг-газ» приводятся для нормаль-
ного взлетного веса вертолета, ветра не более 3 м!сек и высоты не
более 500 м над уровнем моря.
По площади, описанной замкнутой кривой на рис. 50, можно
представить величину общего шага несущего винта и положение
рукоятки корректора газа для установления того или иного режи-
ма работы двигателей согласно табл. 1 и для совершения того или
иного режима полета вертолета во всем диапазоне скоростей и
высот.
Специальными летными испытаниями установлено, что набор
высоты с поступательной скоростью на взлетном режиме работы
двигателей осуществляется при полностью введенном корректоре
вправо и шаге больше 9° (зона 1, рис. 50, а). Набор высоты с по-
ступательной скоростью на номинальном режиме осуществляется
с меньшим, чем на взлетном режиме, шагом, по уже с несколько
выведенным из крайнего правого положения корректором (зона 2),
в горизонтальном полете общий шаг изменяется от 3 до 12° в за-
висимости от скорости полета и числа оборотов несущего винта.
При этом для увеличения числа оборотов корректор вводится
больше вправо (зоны 3, 4). Снижение с работающими двигателями
совершается при шаге от 3 до 8° при корректоре почти выведенном
(зона 5). Планирование с убранным газом совершается с малым
шагом (1—2°) при выведенном корректоре влево, т. е. когда дви-
гатели работают на режиме малого газа (зона 6).
Таким образом почти на всех режимах полета для установления
допустимого числа оборотов несущего винта пилоту приходится
управлять корректором газа, а это создает определенные трудно-
сти при пилотировании.
В дальнейшем усовершенствовании системы «шаг-газ» верто-
лета Ми-6 предусматривается установка агрегата для автоматиче-
ческого поддержания числа оборотов несущего винта на всех ре-
жимах полета и приспособления для предотвращения возможности
перетяжеления несущего винта. При этом пилот управляет только
шагом винта, а регулятор числа оборотов свободной турбины, из-
меняя соответствующим образом подачу топлива в камеру
сгорания, поддерживает заданное постоянное число оборотов не-
сущего винта. Регуляторы числа оборотов несущего винта могут
быть однорежимными, т. е. на всех режимах полета сохраняется
74
Постоянным число оборотов винта (например, у вертолетов Ми-2
Н Ми-8). Применяются также системы более совершенные, при ко-
торых число оборотов несущего винта может меняться по желанию
пилота путем соответствующей перестройки регулятора, например.
Нажатием на кнопку нужного числа оборотов для данного режима
Полета.
I Предусматриваемая в дальнейшем система автоматического
Поддержания числа оборотов несущего винта вертолета Ми-6 не
такая, как у вертолетов Ми-2 и Ми-8. Здесь управление топливным
краном осуществляется с помощью гидроэлектрического агрегата
(раздвижной тяги), который без вмешательства пилота будет от-
крывать топливный кран, получая сигналы от электронного вычис-
лителя, который в свою очередь получает сигналы от несущего
винта в зависимости от его числа оборотов. Но вместе с тем эта
Система позволяет менять число оборотов несущего винта по же-
ланию пилота в зависимости от режима полета, путем перестройки
указанной системы регулирования.*
Для предотвращения перетяжеления винта вводится дополни-
тельный фрикцион, который затяжеляет ход ручки общего шага.
Так, например, если усилие на ручку общего шага в диапазоне
углов от 1 до 9° составляет 0,5 кГ, то при шаге больше 9° эти уси-
лия составят уже 10 кГ. Возросшее усилие будет предупреждать
пилота о том, что двигатели работают на взлетном режиме и даль-
нейшее увеличение общего шага приведет к перетяжелению винта.
И если происходит режим полета, на котором перетяжеление вин-
та опасно, пилот его не допустит, а если перетяжеление необхо-
димо на некоторых элементах полета, пилот может его сделать, но
с большим усилием на рычаге общего шага.
— ГЛАВА IV
РУЛЕНИЕ, ВИСЕНИЕ И ВЕРТИКАЛЬНЫЕ РЕЖИМЫ ПОЛЕТА
§ 15. РУЛЕНИЕ
Общая характеристика
Руление на вертолете Ми-6 является основным видом передви-
жения на небольшие расстояния, особенно вблизи летательных ап-
паратов и других препятствий, так как при подлете от винта ис-
ходит мощный воздушный поток, поднимающий пыль (снег) и
приводящий иногда к повреждениям летательных аппаратов и со-
оружений. Но это не значит, что руление может применяться всег-
да, установлен ряд ограничений на руление. Вертолет Ми-6 под-
вержен «земному резонансу», кроме того, имеется опасность
опрокидывания при трехколесном шасси, высоко расположенном
центре тяжести и большой массе вертолета. Для устранения этих
явлений тяга несущего винта должна быть меньше веса вертолета.
Реактивный момент несущего винта на режиме руления урав-
новешивается путевым моментом рулевого винта и частично за
счет трения колес о землю.
Вертолет Ми-6 обладает хорошими рулежными свойствами,
имеет высокую маневренность и относительно легко управляем при
рулении, но есть и некоторые трудности, особенно при рулении
по скользкому грунту, когда при недостаточном трении колес и за
счет большой массы вертолет может получить боковое движение —
юз. При рулении по пыльным вертодромам или по свежевыпавше-
му снежному покрову поднявшиеся пыль или снег от струи несу-
щего винта, ухудшают видимость в большей степени, чем при ру-
лении на других вертолетах вследствие большого диаметра винта
и большой удельной нагрузки на отметаемую площадь.
Скорость на рулении выдерживается изменением наклона и ве-
личины силы тяги несущего винта при помощи ручек циклическо-
го и общего шага. Сохранение направления при рулении и разво-
роты осуществляются изменением величины тяги рулевого винта
при помощи педалей. Хорошей маневренности способствует нали-
чие самоориентирующейся передней стойки шасси. Для уменьше-
ния скорости и экстренных остановок используется тяга несущего
винта, а также тормоза основных колес.
Если невозможно производить руление по каким-либо причи-
нам, то разрешается выполнять подлет на малой высоте.
При рулении на вертолет действуют следующие силы и момен-
ты (рис. 51): сила тяги несущего винта Т, рулевого винта Гр.в, си-
ла сопротивления вертолета X, сила трения колес о землю FTP,
76
сила веса вертолета G, сила реакции земли fp_3, реактивные мо-
менты несущего винта Мр, рулевого винта МРрв и путевой момент
рулевого винта. Сила тяги несущего винта ручкой циклического
шага отклоняется вперед и вправо, поэтому она раскладывается
на три составляющие: Ту — вертикальная составляющая; Тх — го-
ризонтальная составляющая, направленная вперед, и Тг — гори-
зонтальная составляющая, направленная вправо. Сила тяги ру-
левого винта направлена влево.
Рис. 51. Схема сил, действующих на вертолет при рулении
Для равномерного и прямолинейного движения вертолета по
земле должно быть соблюдено следующее равенство сил и момен-
тов. Для равномерного движения необходимо, чтобы горизонталь-
ная составляющая тяги несущего винта была равна вредному со-
противлению вертолета и силе трения колес о землю
T,=X+F^.
Для предотвращения скольжения вертолета по земле (юз) и
боковых давлений на пневматики колес, а также тенденции к опро-
кидыванию необходимо, чтобы сила тяги рулевого винта была
уравновешена боковой составляющей тяги несущего винта, т. е.
TP.D=TZ. Для прямолинейного движения необходимо, чтобы реак-
тивный момент несущего винта был уравновешен путевым момен-
том рулевого винта
М[>нв=Л4урв = 7'р.вА’|1-
Кроме того, для создания устойчивого положения вертолета на
земле вертикальная составляющая тяги несущего винта должна
быть существенно меньше веса вертолета.
77
Особенности выполнения руления
Для начала руления при общем шаге 1° корректор газа повер-
нуть полностью вправо, выждать, пока число оборотов несущего
винта возрастет до 78—82% (для этого допускается незначитель-
ное увеличение общего шага до 2° не более). Рычаги раздельного
управления двигателями должны находиться в нейтральном поло-
жении — на защелках. По достижении указанного числа оборотов
продольный триммер поставить в нейтральное положение, а попе-
речный — на 0,5—1,5 деления вправо. Затем -ручка циклического
шага плавно отклоняется вперед, и вертолет страгивается с ме-
ста. Если при отклонении ручки вертолет не стронулся с места,
необходимо увеличить общий шаг, но не более чем до 2°, и когда
начнется движение вертолета, то общий шаг нужно уменьшить до
минимального значения.
Для страгивания вертолета с места, особенно с мягкого грунта
или с плохо укатанного снега, нецелесообразно отклонять ручку
циклического шага вперед до упора, так как увеличивается нагруз-
ка на переднее колесо и возрастает сила трения. Не рекомендуется
также увеличивать общий шаг более 2°, потому что растут тяга
и реактивный момент несущего винта и тяга рулевого винта, тре-
ние о землю уменьшается, и за счет возросшей тяги рулевого вин-
та вертолет начнет смещаться влево, что приводит к зарыванию
левого колеса в мягкий грунт или снег, может возникнуть большой
опрокидывающий момент. Для страгивания вертолета с места
не рекомендуется раскачивать вертолет при помощи педалей, это
может привести к поломке хвостовой балки и рулевого винта.
Скорость на рулении должна быть не более 20 км/ч. Изменять
ее нужно с помощью ручки циклического шага, а при неровном и
вязком грунте и с помощью ручки общего шага винта. Руление
производить с полной правой коррекцией, сохраняя число оборотов
винта в пределах 78—82%. При длительном рулении можно откло-
нить продольный триммер на 0,5—1 деление вперед.
Развороты на рулении выполняются плавным отклонением пе-
далей. Чем больше скорость, тем больше должен быть радиус раз-
ворота. Энергичные развороты с малыми радиусами недопустимы,
так как даже на обычном грунте вертолет начинает скользить за
счет большой центробежной силы, действующей в сторону, обрат-
ную развороту. Кроме того, юз возникает, как правило, и при
обычных разворотах, но при большой силе тяги, когда вертолет
находится во взвешенном состоянии, а также при прямолинейном
рулении но вязкому или скользкому грунту. При появлении юза
необходимо прекратить руление, для чего уменьшить мощность
двигателей до минимальной, подать педаль в сторону юза, до-
ждаться остановки вертолета и лишь потом начать руление или
разворот с меньшей скоростью.
При рулении с боковым ветром вертолет стремится развернуть-
ся носом против ветра, поэтому этот разворот нужно парировать
78
соответствующей педалью. Кроме того, конус вращения и тяга Ъйн-
та в этом случае заваливаются по ветру и возникает боковая Аи-
ла Тг, которая при ветре слева будет больше, а при ветре справа
меньше, чем это необходимо. Значит, ручку циклического шага
нужно отклонять в сторону, противоположную ветру.
При рулении по пыльному или песчаному вертодрому при
встречном ветре более 5 м/сек видимость хорошая, так как вся
пыль, поднятая несущим винтом на всех скоростях руления, остает-
ся позади. При встречном ветре менее 5 м/сек, в штиль или при
попутном ветре видимость значительно ухудшается. Поэтому не-
обходимо рулить с остановками через определенные интервалы
(20—25 м) или на повышенной скорости, чтобы пыльный вихрь
отставал от вертолета. Также рекомендуется рулить и по засне-
женному вертодрому.
Для остановки вертолета необходимо уменьшить мощность дви-
гателей до минимальной (общий шаг 1°. левая коррекция), плав-
но отклонить ручку циклического шага па себя и применить тор-
моза.
Ограничения при запуске двигателей и рулении
1. Запуск двигателей, раскрутка, остановка несущего винта и
руление допускаются при следующих скоростях ветра в зависимо-
сти от направления: при встречном — 25 м/сек, боковом —
15 м/сек, попутном— 12 м/сек.
2. При наличии бокового ветра в первую очередь запускается
двигатель с подветренной стороны, так как при этом улучшаются
условия запуска двигателя с наветренной стороны: уменьшается
нагрузка на двигатель вследствие вращения свободной турбины
от запущенного ранее двигателя.
3. При раздельном опробовании двигателей без швартовки вер-
толет должен иметь вес не менее 33 000 кГ (без загрузки при
полной заправке основных топливных баков), а при опробовании
двух двигателей одновременно — около 42 000 кГ.
4. Перед запуском двигателей продольный триммер устанавли-
вается на 1 —1,5 деления по указателю назад, а поперечный на
0,5—1 деления вправо. При таком положении триммеров автомат
перекоса занимает нейтральное положение, не происходит цикли-
ческого изменения шага, отсутствуют маховые движения лопастей,
предотвращаются удары лопастей об упоры горизонтальных шар-
ниров.
5. При рулении число оборотов несущего винта должно быть
в пределах 78—82%.
6. Скорость на рулении должна быть не более 20 км/ч, при ру-
лении по пыльному или песчаному вертодрому не более 30 км/ч,
а по заснеженному — не более 10 км/ч.
7. На заснеженных площадках разворачиваться на месте за-
прещается, так как это может привести к срыву покрышек колес
79
или к поломке стойки носового шасси. Запрещается рулить по
слишком вязкому, неровному грунту, по глубокому и рыхлому
снегу.
§ 16. ВИСЕНИЕ
Общая характеристика
Режим висения для вертолета Ми-6 является основным расчет-
ным режимом полета.
Висение применяется для проверки работы двигателей, транс-
миссии, управления, центровки, оно является составной частью
вертикального взлета и посадки как с грузом- внутри кабины, так
и на внешней подвеске.
На рис. 23, 24 и 25 приведены аэродинамические характери-
стики несущего винта вертолета Ми-6 на режиме висения. По
характеристикам видно, что несущий винт только в зоне влияния
воздушной лодушки развивает тягу, близкую к полетному весу
вертолета. На этом основании можно сделать вывод, что потолок
висения вертолета с нормальным и максимальным полетным весом
в условиях стандартной атмосферы над уровнем моря небольшой.
Так, например, при весе вертолета 42 Т максимальная высота
висения составляет 2 м, при весе 40 Т — 6 м, при весе 39 Т— 8 м
и при весе 38 Г—10 м. Поэтому при необходимости иметь боль-
шую высоту висения для выполнения различных работ нужно
уменьшать полетный вес или выжидать благоприятные атмосфер-
ные условия.
Рис. 52. Зависимость
потребной мощности
двигателей от веса и
высоты на висении
На рис. 52 показана необходимая мощность двигателей на ви-
сении по показаниям приборов УПРТ-2 в градусах и по ИТЭ-2
в процентах на различных высотах и при различных полетных ве-
сах. Эти показания получены в результате летных испытаний в ат-
80
мосферных условиях, близких к стандартным на уровне моря. Как
видно по кривым этого графика, чем больше полетный вес вертоле-
та и высота висения, тем большая требуется мощность двигателей.
Вертолет с полетным весом 42 т висит на высоте около 4 м на
взлетном режиме двигателей (УПРТ-2 — 97°, ИТЭ-2 — 94%). На
том же режиме работы двигателей с уменьшением веса высота
висения увеличивается.
Вертолет Ми-б, как и Ми-4, балансируется на режиме висения
с правым креном 2° при симметричном расположении грузов в ка-
бине по поперечной оси и с положительным углом тангажа в за-
висимости от центровки: при предельно передней центровке угол
тангажа 3,5°, при предельно задней—10°. Ввиду нелинейности
системы управления для удобства пилотирования на крейсерских
скоростях полета на режиме висения рычаги управления зани-
мают такое же положение, как и у вертолета Ми-4: ручка цикли-
ческого шага отклонена назад от нейтрального положения и впра-
ве, правая педаль отклонена вперед.
На висении по показаниям указателя продольного и попереч-
ного триммеров при снятом давлении с ручки управления можно
окончательно судить о центровке вертолета. Если продольный
триммер отклонен назад на 2,5 деления — центровка предельно пе-
редняя, но допустимая, больше 2,5 делений — центровка больше
предельно допустимой, если продольный триммер отклонен вперед
на 0,5 делений, то центровка предельно задняя, при большем от-
клонении триммера — центровка больше задней допустимой. При
отклонении триммера на 0,5—1 деление назад — центровка сред-
няя, при отклонении поперечного триммера вправо на 0,5—1,5 де-
ления поперечная центровка находится в пределах нормы.
На вертолете Ми-6 на режиме висения разрешается маневриро-
вание, но с определенными ограничениями для обеспечения безо-
пасности.
Схема сил и моментов, действующих на вертолет
На режиме висения на вертолет действуют следующие силы и
моменты (рис. 53): аэродинамическая сила несущего винта R,
тяга рулевого винта Тр.в, сопротивление фюзеляжа X за счет об-
дувки его индуктивным потоком, подъемные силы крыла и стабили-
затора за счет обдувки их индуктивным потоком несущего винта
Укр и Уст, вес вертолета G, реактивный момент несущего винта
Мр„„, путевой и реактивный моменты рулевого винта, продольный
и поперечный моменты втулки за счет разноса горизонтальных
шарниров AJ-bth
Аэродинамическая сила несущего винта и конус вращения от-
клонены вправо. Аэродинамическая сила раскладывается на тя-
гу Г и боковую силу Тг. Тяга рулевого винта направлена влево и
на плече до центра тяжести вертолета создает путевой момент,
направленный в сторону, противоположную действию реактивного
81
момента несущего винта. Сила сопротивления фюзеляжа X нап-
равлена вниз и составляет для одновинтового вертолета около
1,5% от полетного веса. Подъемная сила крыла па режиме висения
направлена вниз и составляет для вертолета Ми-6 около 2% ет по-
летного веса. Подъемная сила стабилизатора создает кабрирую-
Рис. 53. Схема сил и моментов, действующих на вертолет на висении и верти-
кальных режимах полета
щий момент, по величине она незначительна и в практике ею пре-
небрегают, хотя момент, создаваемый этой силой, учитывают.
Момент реактивный рулевого винта направлен в сторону, противо-
положную его вращению, и создаст кабрирующий момент. Про-
дольный момент втулки за счет разноса горизонтальных шарниров
вызывает кабрирование, так как чаще всего на режиме висения ко-
нус незначительно завален назад. Поперечный момент втулки за
счет разноса горизонтальных шарниров направлен вправо, в сто-
рону завала конуса вращения, создает правый крен.
Для балансировки вертолета на установившемся висении долж-
но быть соблюдено следующее соотношение между силами и мо-
ментами, действующими на вертолет. Тяга должна уравновешивать
82
составляющую веса Gy, сопротивление фюзеляжа и подъемную
силу крыла для сохранения постоянства высоты висения: Ту=
= Gy+X + Укр.
Тяга рулевого винта должна уравновешиваться боковой силой
Т и составляющей веса Gz :Tpu = t2 + G:. Для сохранения направ-
ления висения реактивный момент несущего винта и путевой мо-
мент боковой силы должны уравновешиваться путевым моментом
Хвостового винта МРн в4-Гг • а = Л4р.в=Тр.в/р.в. Сумма всех продоль-
ных моментов должна быть равна нулю для соблюдения продоль-
ного равновесия. Сумма всех поперечных моментов должна быть
равна нулю для соблюдения поперечного равновесия.
Особенности пилотирования и маневрирования на режиме
висения
Перед вертикальным отрывом устанавливается продольный
триммер на 0,5—1 деление назад, поперечный на 0,5—1,5 деления
вправо для предварительного снятия давления с ручки циклическо-
го шага, которое возникает на висении. Корректор газа вводится
полностью вправо и когда число оборотов несущего винта дости-
гнет 78—82% плавно поднимается ручка общего шага вверх для
отделения вертолета от земли и набора заданной высоты. Одно-
временно ручкой управления и педалями необходимо предотвра-
щать стремление вертолета к развороту, крену и перемещению.
Двигатель Д-25В обладает худшей приемистостью, чем поршневой,
поэтому темп движения ручки общего шага от нижнего положения
до момента отрыва вертолета от земли должен быть плавным
(в течение 5—7 сек), в противном случае может быть перетяжсле-
нне несущего винта, что приведет к уменьшению тяги и непроиз-
вольному снижению или приземлению после отрыва. При отрыве
и наборе высоты для висения число оборотов несущего винта рас-
тет, его необходимо удерживать при помощи корректора газа в
пределах 80—82%. Допускаются минимальные обороты 78%, мак-
симальные 87% и 90% кратковременно (в течение 1 мин). Для
вертолета Ми-6 как при взлете, вертикальном наборе высоты, ви-
сении, так и при вертикальной посадке для правильного определе-
ния пространственного положения рекомендуется направлять
взгляд на 15—20° влево от продольной оси вертолета и вперед от
носа на 25—35 м. Вертолет Ми-6, как и Ми-4, на висении удержи-
вается при помощи всех рычагов управления: по высоте — ручкой
общего шага, при этом число оборотов находится в пределах 80—
82%, по направлению— педалями, по месту висения — ручкой цик-
лического шага. Запаздывание при управлении всеми рычагами,
особенно ручкой циклического шага в продольном направлении,
вызывает существенные отклонения вертолета, поэтому движения
рычагами должны быть плавными и двойными.
Маневрирование вертолетом Ми-6 на режиме висения осуще-
ствляется, как и на вертолете Ми-4, по высоте, направлению и ме-
83
сту висеНия. Методика маневрирования и поведение вертолета та-
кие же, как и на вертолете Ми-4, лишь с другими летными ограни-
чениями.
Летные ограничения на режиме висения
и маневрировании
Ограничения по высоте висения. Висение допускается без вся-
ких ограничений на высоте до 10 м, с 10 до 250 м только в случаях
полета с грузами на внешней подвеске, при выполнении спасатель-
ных работ, экстренной медицинской помощи и при взлетах и по-
садках с вертодромов второго типа или площадок, им соответствую-
щих*. При отказе двигателей на высотах 10—250 м посадка
на режиме авторотации небезопасна. Но так как двигатели на-
дежные в работе, то работы на указанных высотах и при явной
необходимости производятся. На высотах более 250 м вертолет
должен иметь скорость по прибору не менее минимально допусти-
мой в горизонтальном полете на данной высоте, так как вертолет
не снабжен указателем малых скоростей, пилот может допустить
ошибку и вертолет получит малые воздушные скорости, при кото-
рых наблюдается повышенная вибрация — «трясучий режим».
Высота висения при вертикальном взлете и посадке с верто-
дромов первого типа** (в зоне влияния воздушной подушки)
2—3 м. Высота контрольного висения при вертикальном взлете с
вертодромов, расположенных на высоте до 500 м над уровнем моря
5 м, а с вертодромов, расположенных на высоте более 500 м, высота
контрольного висения определяется по специальной номограмме.
При взлете с вертодромов второго типа высота висения должна
быть не менее 10 м над препятствиями, при взлете и посадке с
грузами на внешней подвеске не менее 3 м от груза до земли.
Ограничения по скорости и высоте перемещений. Перемещения
в любую сторону можно производить со скоростью не более 15кл/ч.
Высота вертолета при перемещении над ровным местом должна
быть не менее 2—3 м, над препятствиями не ниже 10 м. Перемеще-
ния над самолетами и вертолетами запрещаются.
Ограничения по ветру. На вертолете Ми-6 висение, а также
взлеты, посадки и подлеты разрешаются против ветра до 25 м/сек,
при боковом до 10 м/сек, по ветру до 5 м/сек. Поэтому при ветре
до 5 м/сек разворачиваться на месте можно на 360°, при ветре от
5 до 10 м/сек — под углом не более 90° к направлению ветра, при
ветре более 10 м/сек производить развороты на месте запрещается,
висение можно выполнять только при встречном ветре. При ветре
более 25 м/сек запуск двигателей и полеты запрещаются. С груза-
* Ко второму типу относятся вертодромы, обеспечивающие взлет и посадку
вертолета по вертикали.
** К первому типу относятся вертодромы, обеспечивающие взлет и посадку
вертолета по-самолетному или с использованием влияния «воздушной подушки».
84
мн на внешней подвеске при полетном весе вертолета более 36 т
’ развороты на висении также запрещаются.
Ограничения по скорости вращения. Развороты на висении ре-
комендуется производить со скоростью не более 10° в секунду, т. е.
время одного разворота должно быть не менее 36 сек. При разво-
I ротах, а также и при любом другом виде полета не допускается
В резкое действие педалями, особенно при их перекладывании.
§ 17. ВЕРТИКАЛЬНЫЕ РЕЖИМЫ ПОЛЕТА
ВЕРТОЛЕТА
Общая характеристика
К вертикальным режимам полета относятся вертикальный на-
! бор высоты и вертикальное снижение с работающими двигателями.
। Вертикальные режимы полета, как и режим висения, не экономич-
ны и сложны по технике пилотирования. На этих режимах мал
| запас мощности и недостаточен запас управления, особенно нож -
I ного, недостаточна устойчивость вертолета. По этим причинам
I применение вертикальных режимов ограничено, их применяют, если
это оправдывается необходимостью.
Вертикальные режимы полета используются при вертикальных
I взлетах и посадках как с грузами внутри кабины, так и на внешней
| подвеске, при выполнении различных строительных, монтажных,
В спасательных и других работ.
На вертикальных режимах полета на вертолет действуют те же
I силы и моменты, что и на режиме висения (см. рис. 53). При наборе
высоты вертикальная составляющая тяги должна быть больше, чем
В на висении, так как увеличивается вредное сопротивление верто-
В лета и отрицательная подъемная сила крыла за счет движения
вертолета вверх. Боковая составляющая тяги несущего винта Т.
I также должна быть больше, чем на висении ввиду того, что пилоту
в приходится увеличивать тягу рулевого винта из-за роста реактив-
ного момента несущего винта, а для предотвращения боковых
перемещений необходимо, чтобы боковая сила была равна тяге
хвостового винта. При вертикальном снижении тяга несущего
винта должна быть меньше, чем на висении, так как сопротивление
фюзеляжа и подъемная сила крыла, хотя и будут направлены вниз,
Г как на висении, но они меньше по величине. Боковая сила и тяга
I рулевого винта также должны быть равны между собой при уста-
новившемся снижении, но они меньше, чем на висении.
При увеличении высоты потребная мощность для висения, а
г значит и для вертикального набора высоты увеличивается, а рас-
полагаемая мощность до расчетной высоты сохраняется неизмен-
ной, поэтому избыток мощности будет уменьшаться, что приведет
к уменьшению вертикальной скорости набора высоты. Высота, на
которой избыток мощности равен нулю, и будет потолком висения
вертолета. Как было установлено ранее, запас мощности у верто-
85
лета Ми-6 на висении мал, поэтому потолок висения у вертолета
с нормальным и максимальным весом отсутствует. Для висения
вертолета на большой высоте в зоне влияния «воздушной подуш-
ки» или вне ее необходимо уменьшить взлетный вес вертолета.
При вертикальном наборе высоты могут быть случаи перетяже-
ления винта, а при вертикальном снижении с большими скоростя-
ми несущий винт может войти в режим вихревого кольца.
Особенности выполнения вертикальных режимов
полета
Вертикальный набор высоты. Для перехода от режима висения
к вертикальному набору высоты необходимо ручку общего шага
плавно перевести вверх, для парирования возросшего реактивного
момента — координированно отклонять вперед правую педаль и
ручку вправо, число оборотов несущего винта как и на висении
поддерживать в пределах 80—82%. Характерной особенностью
этого режима является то, что при вертикальном наборе высоты
для удержания заданного числа оборотов необходимо действовать
не только ручкой общего шага, но и рукояткой корректора газа.
Вертикальная скорость набора высоты должна быть небольшой,
так как запас мощности и потолок висения малы, в противном слу-
чае вертолет может по инерции выйти на высоту выше потолка ви-
сения, а затем самопроизвольно снизиться.
Для прекращения набора высоты необходимо плавно умень-
шить общий шаг несущего винта и зависнуть на заданной высоте,
удерживая ее движением ручки общего шага.
Вертикальное снижение. Для перехода от режима висения
к режиму вертикальною снижения необходимо плавным отклоне-
нием ручки «шаг-газ» вниз уменьшить общий шаг винта, чтобы
вертикальная скорость снижения была не более 1—2 м/сек. При
этом координированным движением левой педали вперед (осла-
бить нажим на правую педаль) и ручки циклического шага влево
предотвратить разворот и перемещение вертолета вправо за счет
уменьшения реактивного момента несущего винта и тяги рулевого
винта.
Скорость снижения должна быть 1 — 2 но не более 3 м/сек. При
скорости более 3 л/cgx. несущий винт входит.в режим, вихревого
что особенно опасно на малых высотах, на которых затруд-
нен вывод вертолета из режима вихревого кольца. Если вертикаль-
ное снижение производится для посадки, то, начиная с высоты 5 м,
нужно начать уменьшение вертикальной скорости снижения дви-
жением ручки общего шага вверх с таким расчетом, чтобы перед
приземлением она была бы не более 0,1—0,2 м/сек. Если же сни-
жение ведется для зависания на заданной высоте, то движением
ручки общего шага вверх уменьшить вертикальную скорость сни-
жения до нуля на данной высоте.
86
При вертикальном снижении, как при наборе и висении, число
оборотов несущего винта необходимо удерживать в пределах
80-82%.
Летные ограничения на вертикальных
режимах полета
1. При вертикальном наборе высоты и снижении другие манев-
ры запрещены, кроме взлета с грузами на внешней подвеске,
поэтому ограничения для этих режимов будут лишь по высоте. Они
такие же, как и для висения: от земли до 10 м их можно совершать
без ограничений, на высотах от 10 до 250 м только в особых слу-
чаях, на высотах более 250 м эти режимы запрещаются по тем же
причинам, что и режим висения. Скорость при наборе высоты и
снижении на высотах более 250 м должна быть не менее мини-
мально допустимой для набора или снижения на данной высоте.
2. Вертикальный набор высоты и вертикальное снижение жела-
тельно производить при встречном ветре, но так как эти режимы
обычно применяются для взлета .и посадки, то нужно поставить
вертолет по курсу взлета или по месту стоянки на земле, тогда эти
режимы будут выполняться при боковом или попутном ветре (ско-
рость бокового ветра до 10, попутного до 5 м/сек).
3. Вертикальная скорость снижения должна быть не бодай,
3 м/сек. ~
=============== ГЛАВА V
ВЗЛЕТ И НАБОР ВЫСОТЫ С ПОСТУПАТЕЛЬНОЙ
СКОРОСТЬЮ
§ 18. ВЗЛЕТ
Общие сведения
На вертолете Ми-6 можно взлетать в зависимости от условий
по-самолетному и вертикально. Взлет по-самолетному является
для вертолета Ми-6 основным, так как для него требуется мень-
шая мощность. Вертолет может взлетать с большим полетным ве-
сом, что увеличивает весовую отдачу и коммерческую загрузку или
увеличивает дальность полета за счет увеличения количества топ-
лива. Все это улучшает экономическую эффективность и прибли-
жает вертолет в этом отношении к самолетам с укороченным раз-
бегом. Расчетами и летными испытаниями установлено, что при
взлете по-самолетному может быть увеличен полетный вес на 15%
по сравнению с максимальным, при котором он взлетает верти-
кально. При этом длина разбега составит не более 60—100 м. При
увеличении максимального веса на 15% по сравнению с нормаль-
ным необходимо на разбеге добиться отрыва основных колес и за-
канчивать разбег на переднем колесе, так как это уменьшает тре-
ние, а увеличивающаяся тяга несущего винта с ростом скорости
позволит поднять в воздух перегруженный вертолет*. Такая мето-
дика взлета для вертолетов пока еще не узаконена, так как она
требует увеличения прочности стойки переднего колеса. Но так
как стойка на такой взлет не рассчитана, то в настоящее время
максимальный вес вертолета больше нормального не на 15%. а на
меньшую величину. Для вертолета Ми-6 в гражданской авиации
нормальный взлетный вес установлен 40500 кГ, максимальный —
42 500 кГ. При взлете по-самолетному, при разгоне скорости при
разбеге у вертолета отсутствует повышенная вибрация («трясучий
режим»), наблюдаемая при разгоне скорости после зависания. При
взлете по-самолетному вертолет имеет достаточно большую длину
разбега и взлетную дистанцию, поэтому такие взлеты могут совер-
шаться лишь с постоянных или временных вертодромов первого
типа для тяжелых вертолетов.
Максимально допустимый взлетный вес для вертикального взле-
та определяется по номограммам. Номограмм для определения
длины разбега при взлете по-самолетному и взлетной дистанции
* М. Л. Миль и др. Вертолеты. Расчет и проектирование, Кн. I. Аэроди-
намика, гл. 1. «Машиностроение», 1966.
88
для обоих в-идов взлета не существует, так как вертолет Ми-6
аксплуатируется на вертодромах, для которых установлены опре-
деленные технические требования. Этими требованиями устанав-
ливаются определенные размеры летных полос, полос воздушных
подходов, плоскости ограничения препятствий, уклонов рабочей
площади для вертодромов первого и второго типа в зависимости
от превышения их над уровнем моря для различных типов верто-
летов: легких, средних и тяжелых (Ми-6). Указанные технические
требования разработаны на основании всесторонних летных испы-
таний всех вертолетов при различных атмосферных условиях,
меняющихся в среднем в течение года, а также от превышения
вертодрома над уровнем моря. Вертодромы первого типа для
данного типа вертолета (легкий, средний, тяжелый) имеют такие
размеры и уклоны полос подходов и ограничения препятствий для
данного превышения над уровнем моря, которые позволяют
взлетать и садиться любым способом в любое время года и суток.
Вертодромы второго типа позволяют совершать взлеты и посадки
вертикальные вне зоны влияния воздушной подушки, также
в любое время года и суток. Поэтому взлетая с данного типа
вертодрома одним из способов и подобрав соответствующий
полетный вес, пилот уверен в безопасности взлета. Посадка с под-
бором площадки с воздуха для вертолета Ми-6 запрещена, кроме
вынужденных посадок.
Взлеты вертолета Ми-6 с пыльных, песчаных и заснеженных
вертодромов, как и руление на них, затруднены вследствие плохой
видимости.
Взлет по-самолетному
Взлет по-самолетному на вертолете Ми-6, как основной вид
взлета, совершается с аэродромов и вертодромов первого типа, с
искусственных и с естественных ВПП и только с грузом внутри
кабины. Взлет по-самолетному состоит из следующих этапов: раз-
бега, отрыва, дальнейшего разгона скорости до 90 км/ч с одновре-
менным набором высоты 25—30 м и с последующим увеличением
скорости до паивыгоднейшей— 140 км/ч (рис. 54).
Перед взлетом ручка общего шага устанавливается в нижнее
положение, рукоятка корректора газа поворачивается полностью
вправо и по достижении числа оборотов несущего винта 78—82%
ручка циклического шага отклоняется от себя с одновременным
увеличением общего шага, и начинается разбег. При разбеге ручка
циклического шага отклоняется от себя не на полный ход, а на
такую величину, чтобы не допустить отрыва основных колес, так
как вертолет может оказаться на переднем колесе. При разбеге на
вертолет действуют такие же силы, как и при рулении (см. рис. 51).
При скорости 50—60 км/ч вертолет отрывается от земли плав-
ным движением ручки общего шага несущего винта до получения
взлетного режима, одновременно ручка циклического шага откло-
89
няется на себя. При таком действии двумя ручками тяга несущего
винта увеличивается за счет увеличения шага винта мощности дви-
гателей и углов атаки несущего винта.
После отрыва необходимо продлить разгон скорости с одновре-
менным набором высоты, так как здесь воздушной подушки уже
нет, а вертолет должен находиться в известном безопасном «кори-
доре» на случай отказа двигателей. Кроме того, после отрыва вер-
толет с увеличением скорости стремится к увеличению угла тан-
гажа и к правому крену (за счет завала оси конуса вращения назад
и вправо), что необходимо парировать движением ручки цикли-
ческого шага от себя и влево.
Рис. 54. Профиль и элементы взлета вертолета Ми-6 по-самолетному
Длина разбега и взлетная дистанция зависят от полетного веса
вертолета, скорости отрыва, атмосферных условий и качества ВПП.
Неоднократными летными испытаниями вертолетов с разными
взлетными весами в различных атмосферных условиях на верто-
дромах с искусственным покрытием и разными высотами их над
уровнем моря длина разбега получена 180—370 м, а взлетная дис-
танция 580—860 л. На этом, основании и предусмотрена длина
полос вертодромов для тяжелых вертолетов (Ми-6) от 300 до 650 .и
в зависимости от высоты вертодрома над уровнем моря (чем боль-
ше высота, тем больше длина), качества покрытия ВПП и кругло-
суточной или только дневной эксплуатации полосы (для кругло-
суточной эксплуатации длина полосы больше). При взлете по-само-
летному возможно возникновение «земпого резонанса».
На вертолете Ми-6 взлет по-самолетному возможен при боко-
вом ветре до 10 и при попутном до 5 м/сек. При боковом ветре на
разбеге вертолет стремится развернуться носом против ветра,
поэтому этот разворот необходимо парировать соответствующей
педалью. Кроме того, при боковом ветре отрыв может происходить
с креном и последующим перемещением (сносом). Для предотвра-
щения этого явления необходимо парировать крен, отклонением
ручки управления в сторону, противоположную ветру. После от-
рыва от ВПП снос предупреждается креном в сторону, противопо-
ложную ветру, а намечающийся разворот в сторону против ветра
90
парируется движением педали по направлению ветра. На высоте
более 50 м снос устраняется подбором курса.
При эксплуатации Ми-6 на пыльных и заснеженных вертодро-
мах целесообразно взлеты производить по-самолетному и против
ветра. Если скорость ветра более 5 м/сек, то такой взлет не отли-
чается от обычного взлета, так как пыль или снег будут отставать
от вертолета. Если же скорость ветра менее 5 м/сек, то в зависи-
мости от размеров вертодрома отрыв необходимо производить на
разных скоростях: чем меньше длина полосы, тем меньше должна
быть скорость отрыва вертолета. Кроме того, во всех случаях в на-
чале разбега до появления видимости направление выдерживать
по компасу ГИК-1- При достижении скорости 30 км/ч появляется
Хорошая видимость, так как пыль или снежный вихрь отстают от
'вертолета.
Краткая методика выполнения взлета. После проверки показа-
ний приборов и получения разрешения на взлет установить кор-
ректор газа в крайнее правое положение и выждать до тех пор,
пока число оборотов не достигнет 72—82%, для этого можно уве-
личить общий шаг на 1,5—2°. Затем начать разбег, плавно отклоняя
ручку циклического шага от себя с одновременным движением
ручки общего шага на себя. На разбеге выдерживать направление
плавными движениями педалей. Отклонение ручки циклического
шага от себя должно быть умеренным, чтобы вертолет не оказался
на переднем колесе. По достижении скорости 50—60 км/ч даль-
нейшим движением ручки общего шага вверх до достижения взлет-
- него режима (до УПРТ-2 97—100°) и ручки циклического шага на
’ себя оторвать вертолет от земли. После отрыва продолжать разгон
скорости с постепенным удалением от земли с таким расчетом,
чтобы при достижении скорости 90—100 км/ч высота была
25—30 м. Далее довести скорость до 140 км/ч, установить номи-
I нальный режим работы двигателей (84—85° по УПРТ-2) и совер-
шать установившийся режим набора высоты, сохраняя числа обо-
ротов несущего винта 83%’± 1 % (для вертолета с трапециевидными
лопастями и 79% ±2% (для вертолета с прямоугольными лопа-
стями).
• При боковом ветре устранять разворот и крен на разбеге дви-
жения ручки управления против ветра и отклонением педали по
ветру. После отрыва снос устранять скольжением в сторону против
ветра, а по достижении высоты 50 м — подбором курса.
Вертикальный взлет
Этот вид взлета применяется в случаях, если невозможно совер-
шить взлет по-самолетному, при наличии соответствующего верто-
дрома или если взлет совершается с грузами на внешней подвеске
и в других случаях. В свою очередь вертикальный взлет можно
подразделить на два вида: взлет с использованием воздушной по-
душки и взлет вне зоны влияния воздушной подушки.
91
Вертикальный взлет с использованием воздушной подушки со-
вершается с постоянных или временных вертодромов первого типа,
размеры и полосы подхода которых позволяют совершать этот
взлет, а грунт или небольшие препятствия мешают совершать раз-
бег по земле.
В этом случае для выполнения взлета запас мощности двига-
телей должен быть таким, чтобы вертолет обязательно висел на
определенной высоте, а для этого необходимо загрузить вертолет
Рис. 55. Номограммы для определения полетного веса вертолета Ми-6 при взлете
и посадке с использованием воздушной подушки:
а — винт с прямоугольными лопастями; б—винт с трапециевидными лопастями
соответствующим образом. Максимально допустимый полетный вес
для возможности взлета определяется по номограммам с учетом
влияния воздушной подушки (рис. 55).
Номограммы построены отдельно для вертолетов с прямоуголь-
ными и трапециевидными лопастями. В верхней части номограмм
показана зависимость предельного веса вертолета на взлетном
режиме работы двигателей на высоте 5 м от барометрической вы-
соты и температуры окружающей среды; в нижней части номо-
грамм— зависимость от скорости встречного ветра. В верхней
части номограмм пунктирными линиями показано число оборотов
несущего винта, обеспечивающее запас хода правой педали 10 мм
на режиме висения на указанной высоте.
Перед взлетом делается контрольное висение, чтобы определить
правильность расчета взлетного веса и загрузки: если вертолет
набрал высоту 5—6 м и устойчиво висит на режиме работы дви
гателей до взлетного, то такой взлет возможен. Контрольное висе
ние необходимо еще и потому, что не у всех вертолетов тяга несу
92
Щего винта на взлетном режиме двигателей одинакова в резуль-
тате различной регулировки двигателей и несущей системы каж-
дого экземпляра вертолета. Затем необходимо снизиться на высо-
ту 2—3 м и произвести разгон скорости в зоне влияния воздушной
Подушки. При этом за счет уменьшения мощности на этой высоте
запас хода правой педали увеличивается до 20 мм. Если вертолет
висит на взлетном режиме на высоте менее 5—6 м. то взлет невоз-
можен. Необходимо уменьшить полет-
ный вес, а если его уменьшить нельзя
или нецелесообразно, взлетать по-са-
молетному, если позволяет вертодром.
Указанное требование необходимо
для того, чтобы при разгоне скорости
от висения с высоты 2—3 м был запас
мощности для предотвращения сниже-
ния вертолета и касания колесами
о землю. Если вертолет висит на взлет-
ном режиме на высоте более 5—6 м,
то при необходимости его можно до-
грузить.
Рис. 56. Номограмма для определения попра-
вок к предельному весу вертолета Ми-6 и высо-
ты контрольного висения для вертикального
взлета в зоне влияния воздушной подушки в
зависимости от барометрической высоты верто-
дрома
По номограммам определяется максимальная тяга на взлетном
режиме двигателей и максимально допустимый полетный вес вер-
толета на высоте 5—6 м, хотя висение перед разгоном скорости
выполняют на высоте 2—3 м. Такой запас высоты, а следовательно,
мощности необходим для предотвращения проседания вертолета в
момент разгона скорости. Указанные ограничения предусмотрены
для взлета с вертодромов, имеющих барометрическую высоту над
уровнем моря нс больше 500 м.
Если высота вертодрома больше 500 .и, то проседание вначале
разгона скорости увеличивается, поэтому необходимо высоту конт-
рольного висения увеличить, что делается за счет уменьшения по-
летного веса вертолета.
Поправку к полетному весу вертолета и высоту контрольного
висения определяют по специальной номограмме (рис. 56). Тогда
максимально допустимый взлетный вес определится как разность
между весом, полученным по номограмме (см. рис. 55), и поправ-
кой, полученной по номограмме (рис. 56).
Контрольное висение делается на высоте, определенной по
номограмме. Если вертолет устойчиво висит на этой высоте на
взлетном режиме работы двигателей, тогда расчет полетного веса
93
вертолета и его загрузка произведены правильно, взлет возможен.
Пример пользования номограммой.
Дано: барометрическая высота вертодрома взлета 900 температура возду-
ха + 10° С, скорость ветра 6 м/сек, винт с прямоугольными лопастями.
Решение: на вертикальной оси графика (см. рис. 55) находят высоту 900 .и
(точка /) и проводят горизонтальную прямую до пересечения с кривой темпера-
туры соответствующей 10° С (точка 2). Затем опускают перпендикуляр на гори-
зонтальную линию полетного веса (точка 3). Точка 3 соответствует взлетному
весу вертолета в штилевых условиях 41 300 кГ. Для определения максимально
допустимого взлетного веса при встречном ветре 6 м)сек, из точки 3 проводят
линию, эквидистантную кривым на нижней части графика, до пересечения с ли-
нией скорости ветра, соответствующей 6 м/сек (точка 4). Из точки 4 проводят
вертикальную линию до пересечения с горизонтальной линией взлетного веса
(точка 5). Читаем ответ: максимально допустимый взлетный вес 42 250 кГ. Точ-
ка 2 пересечения горизонтальной прямой с кривой температуры расположена меж-
ду кривыми числа оборотов несущего винта, соответствующими 81 и 82%. Следо-
вательно. минимально допустимое число оборотов несущего винта для получения
запаса управления правой педалью 10 мм составляет 81,5%.
Так как барометрическая высота вертодрома превышает 500 л, то находим
поправку к взлетному весу и высоту контрольного висения по другой номограмме
(рис. 56). Пример решения показан пунктирными прямыми со стрелками и нуме-
рацией точек. Ответ: высота контрольного висения около 6 м, поправка к взлетно-
му весу 500 кГ. Следовательно, максимально допустимый взлетный вес равен
42 250—500 = 41 700 кГ.
Вертикальный взлет в зоне влияния воздушной подушки состоит
из следующих этапов: вертикального отрыва на высоту контроль-
ного висения, контрольного висения на этой высоте, вертикального
V-по км/ч
Рис. 57. Профиль и элементы вертикального взлета с использованием
воздушной подушки
снижения до высоты 2—3 м, висения на этой высоте, разгона ско-
рости до 50—60 км/ч и перехода к набору высоты с дальнейшим
увеличением скорости (рис. 57).
После висения на высоте 2—3 м разгон скорости ведется на
той же высоте в зоне влияния воздушной подушки. По достижении
скорости 50—60 км/ч влияние воздушной подушки исчезает и мож-
но переходить к набору высоты, как и при взлете по-самолетному,
чтобы при достижении скорости 90—100 км/ч была высота 25—30 .и.
Затем продолжается разгон скорости до 140 км/ч, после чего уста-
навливается номинальный режим работы двигателей.
94
I Возможны случаи перетяжеления несущего винта как при
Ьертикальном наборе, так и при разгоне скорости после зависания,
когда для предотвращения снижения пилот увеличивает мощность
двигателей.
При разгоне скорости в диапазоне 20—60 км/ч наблюдается
Повышенная вибрация всего вертолета («трясучий режим»). Для
уменьшения вибраций необходимо разгон вести энергично, но так,
Чтобы вертолет не снизился за счет слишком большого отклонения
ручки циклического шага от себя.
При достижении скорости 60—70 км/ч вертолет заметно разба-
лансировывается, т. е. стремится увеличить угол тангажа, энергич-
но набирать высоту, крениться и разворачиваться вправо за счет
завала конуса вправо и роста тяги рулевого винта при косой
обдувке. Для выдерживания траектории необходимо координиро-
ванным движением всеми рычагами управления балансировать
вертолет в нужном положении.
В процессе разгона скорости вследствие облегчения винта число
‘ оборотов его растет и чтобы поддерживать обороты в нужных пре-
делах необходимо затежелять винт.
I При взлете с предельной задней центровкой запас продольного
управления «от себя» уменьшается, особенно на взлетном режиме,
^поэтому отклонять ручку циклического шага от себя необходимо
I плавно, чтобы она не достигала переднего упора. Если это случит-
ся, то нужно увеличить число оборотов несущего винта и умень-
шить скорость.
Ограничения по ветру установлены для вертикального взлета
такие же, как и для взлета по-самолетному. Необходимо учитывать,
что боковой ветер более опасен при вертикальном взлете в момент
отрыва вертолета от земли, чем при разгоне скорости. Поэтому,
I- если предстоит разгон скорости при боковом ветре около 10 м/сек,
то целесообразно поставить вертолет против ветра и так взлететь,
а на висении развернуться в нужном направлении.
Взлетная дистанция при вертикальном взлете в зоне влияния
воздушной подушки, полученная в одном из испытательных поле-
тов на аэродроме с превышением 500 м при полетном весе верто-
лета 40 Т, температуре воздуха 19е С и встречном ветре 2—3 м/сек,
составила 385 м. Длина горизонтального участка при разгоне на
воздушной подушке составляет около 120 м. Величина взлетной
дистанции при вертикальном взлете зависит от тех же факторов,
что и при взлете по-самолетному. Кроме того, величина взлетной
дистанции зависит от величины скорости набора высоты, установ-
ленной после разгона скорости на горизонтальном участке до
50—60 км/ч: чем больше скорость набора, тем больше длина взлет-
ной дистанции. Па рис. 58 показана эта зависимость, полученная
в результате летных испытаний. Данные не приведены к условиям
стандартной атмосферы. Испытания велись при температуре на-
ружного воздуха 22° С, Ph = 742 мм рт. ст., скорости встречного
нетра 2—3 м/сек. Мощность на горизонтальном участке увеличи-
95
валась до номинальной. Полетный вес вертолета 38,5 т. Как видно
из рисунка при скорости набора 90 и 100 км/ч на высоте 25 м взлет-
ные дистанции соответственно составляют 416 и 442 м. При эксплу-
атации вертолета Ми-6 рекомендуется достигать таких скоростей
на высоте 25 м. Если же разгон скорости производить менее энер-
гично и если на высоте 25 м скорость окажется менее чем
90—100 км/ч, то взлетная дистанция соответственно уменьшится.
Как видно, величины взлетной дистанции таковы, что вертикаль-
ный взлет с использованием воздушной подушки возможен лишь
с вертодромов первого типа.
Рис 58. Зависимость взлетной дистанции при вертикальном взлете
вертолета Ми-6 от скорости набора высоты 25 м:
Оср=38 500 кГ- по УПРТ —85°; nT.B83%; IF=2—3 м/сек (встречный); /-22° С;
Р^-742 мм РТ. ст.
Вертикальные взлеты с пыльных и песчаных вертодромов при
встречном ветре более 5 м/сек не представляют трудностей, так как
видимость обеспечивается. При ветре менее 5 м/сек для выполне-
ния вертикального взлета такие площадки должны поливаться
водой, в противном случае взлеты запрещены. Вертикальные взлеты
с вертодромов со свежевыпавшим или сыпучим снегом запрещают-
ся. Вертикальный взлет на воздушной подушке с заснеженных вер-
тодромов производить разрешается, но висение выполняется при
встречном ветре на высоте 5 м и на этой же высоте начинается
разгон скорости.
Краткая методика выполнения взлета. После получения разре-
шения на взлет перевести рукоятку корректора газа в крайнее
правое положение, выждать, пока число оборотов достигнет
78—82%, плавным движением ручки общего шага оторвать верто-
лет от земли, набрать высоту контрольного висения (определяется
по номограмме). Если вертолет на этой высоте висит устойчиво на
режиме работы двигателей до взлетного, то взлет возможен. Затем
снизиться на высоту 2—3 .и, число оборотов несущего винта под-
держивать в пределах 80—82%. Плавно отклоняя ручку цикличе-
ского шага, начать разгон скорости, одновременно увеличивая мощ-
ность двигателей до взлетной (97—100° по УПРТ-2, общий шаг 9°).
96
Разгон скорости до 50—60 км/ч вести без набора высоты или одно-
временно с набором, но в обоих случаях с таким расчетом, чтобы
При достижении скорости 90—100 км/ч высота была 25—30 м (как
И при взлете по-самолетному). После преодоления препятствий
довести скорость до 140 км/ч и установить номинальный режим
работы двигателей (84—85° по УПРТ-2), сохраняя число оборотов
Несущего винта 79±2% для винта с прямоугольными лопастями и
83± 1 % — с трапециевидными.
Рис. 59. Номограммы для определения предельного полетного веса вертолета
Ми-6 для взлета и посадки без использования влияния «воздушной подушки»:
а —для вертолета с прямоугольными лопастями; б — для вертолета с трапецие-
видными лопастями
Вертикальный взлет вне зоны влияния воздушной подушки при-
меняется при взлете с вертодромов второго типа для выполнения
спасательных, строительных, монтажных работ и при транспорти-
ровке грузов на внешней подвеске.
Для безопасности взлета высота висения должна быть на 10 м
выше препятствий, которые необходимо преодолеть при разгоне
скорости. Чтобы вертолет мог набрать такую высоту, необходимо
его соответственно загрузить. Максимально допустимый взлетный
вес в этом случае определяется по номограммам, не учитывающим
влияние воздушной подушки (рис. 59). Методика определения
максимально допустимого взлетного веса и числа оборотов несу-
щего винта для получения запаса управления правой педали 20 мм
такая же, как и по номограммам с учетом влияния воздушной по-
душки. Запас управления правой педали не меняется, так как
4--Яцунович 97
после контрольного висения при данном способе взлета высота
начала разгона скорости не уменьшается.
Чем больше высота вертодрома над уровнем моря и выше тем-
пература воздуха, тем больше должно быть число оборотов несу-
щего винта для сохранения постоянного запаса управления правой
педали 20 мм, По такому закону и построены кривые температур
и числа оборотов несущего винта на номограммах. Максимально
допустимое число оборотов несущего винта при вертикальном взле-
те составляет 86%. На тех высотах и при тех температурах, когда
число оборотов должно быть больше 86% для сохранения запаса
управления хода правой педали 20 мм, необходимо число оборотов
оставить прежним, а мощность для взлета необходимо уменьшать
за счет уменьшения взлетного веса вертолета. Эта закономерность
также отражена на номограммах. Сплошные кривые, показываю-
щие зависимость тяги винта от высоты при разных температурах
воздуха, имеют излом в точках пересечения с пунктирной линией,
соответствующей числу оборотов несущего винта 86%. На высо-
тах, больших чем высоты, соответствующие точкам излома, кривые
имеют больший наклон влево, т. е. в сторону уменьшения тяги
(взлетного веса). Следовательно, при меньшем весе требуются
меньшая тята и мощность, взлет выполняется на мощности ниже
взлетной и обеспечивает запас хода правой педали не менее 20мм.
Правильность расчета взлетного веса по номограммам и пра-
вильность загрузки определяются перед взлетом: если вертолет на
высоте 10 м над препятствиями устойчиво висит на взлетном
режиме двигателей, то взлетный вес подобран правильно. Верти-
кальный взлет вне зоны влияния воздушной подушки состоит из
следующих этапов: вертикального отрыва и набора высоты на 10 м
выше препятствий, кратковременного зависания на этой высоте,
разгона скорости до экономической (140 км/ч) и перехода в уста-
новившийся набор высоты на этой скорости (рис. 60).
Вертикальный набор высоты ведется осторожно с небольшой
скоростью до высоты 10 м над препятствиями. Слишком энергич-
ный набор высоты с большой скоростью может привести к тому,
что вертолет по инерции наберет высоту выше своего потолка
висения для данных условий, после чего он самопроизвольно начнет
снижаться. Кроме того, в этом случае возможно перетяжеление
несущего винта. Разгон скорости после зависания ведется осторож-
но; плавным отклонением ручки циклического шага от себя или го-
ризонтально или с небольшим набором высоты в зависимости от
запаса мощности. Если же запаса мощности нет, т. е. висение вы-
полняется на взлетном режиме работы двигателей, то разгоп ско-
рости будет происходить горизонтально. При подходе к препятст-
виям вертолет имеет поступательную скорость, появляется избыток
мощности, позволяющий совершать маневры. Столкновение с пре-
пятствиями исключается во всех случаях, если вертодром или
площадка, с которых осуществляется взлет, будут соответствовать
техническим требованиям для вертодромов второго типа.
98
При этом виде взлета вертикальный набор высоты и разгон
скорости ведутся в опасной зоне на случай отказа двигателей,
поэтому данный вид взлета применяется в случае необходимости,
а так как двигатели Д-25В надежны в работе, то такие взлеты при-
меняются широко.
При взлете с пыльных, песчаных или заснеженных вертодро-
мов необходимо руководствоваться теми же рекомендациями, что
и при вертикальном взлете с использованием воздушной подушки,
но здесь условия для такого взлета более благоприятны, так как,
набрав большую высоту, вертолет выходит из зоны пыльного
облака.
I Рис. 60. Профиль и элементы вертикального взлета вне зоны влияния
воздушной подушки
Взлеты с грузами на внешней подвеске более сложные по тех-
нике пилотирования и требуют большого запаса мощности, поэтому
такие взлеты разрешены с вертодромов, имеющих высоту над уров-
нем моря не более 500 м. Полетный вес вертолета должен быть не
более 38 т, а вес груза па подвеске не более 8 т. После подцепки
груза необходимо произвести контрольное висение (высота от гру-
за до земли должна быть 3 л), проверить центровку и запас мощ-
ности и лишь после этого начинать разгон скорости. Разгон реко-
мендуется производить, плавно отклоняя ручку циклического шага
от себя с постепенным набором высоты. По достижении скорости
100 км/ч по прибору необходимо перевести двигатели на номиналь-
ный режим работы, установить число оборотов несущего винта
83%, перевести вертолет в режим установившегося набора высоты.
Летные ограничения при взлете
1. Максимально допустимый взлетный вес вертолета Ми-6
42500 jc/', нормальный взлетный вес 40500 кГ, максимально допу-
стимый взлетный вес с грузами на внешней подвеске — 38 000 кГ.
4* • 99
2. Максимально допустимый вес перевозимого груза внутри
кабины 12 000 кГ, на внешней подвеске — 8 000 кГ (по условиям
прочности фюзеляжа в месте крепления подкосов гидрозамка).
3. Взлет допускается при встречном ветре до 25 м/сек, боко-
вом — до 10 м/сек и попутном —до 5 м/сек. Погодный минимум для
всех полетов днем: высота облачности не ниже 200 м, горизонталь-
ная видимость не менее 2000 м и скорость ветра не более 25 м/сек,
температура воздуха — от 40° до минус 50° С.
4. При встречном ветре менее 5 м/сек взлеты с пыльных и пес-
чаных вертодромов необходимо выполнять только по-самолетному
и со следующими скоростями отрыва: если длина площадки, при-
годной для разбега, больше 300 м, то отрыв производить при
скорости 50—60 км/ч, если длина площадки менее 300, но не менее
100 м с открытыми подходами, скорость отрыва — 30—35 км/ч.
5. Запрещаются вертикальные взлеты с вертодромов и площа-
док со свежевыпавшим и сыпучим снегом.
6. Взлеты возможны лишь с аэродромов, постоянных и времен-
ных вертодромов, а также с площадок, соответствующих техниче-
ским требованиям к вертодромам ГА.
§ 19. НАБОР ВЫСОТЫ С ПОСТУПАТЕЛЬНОЙ
СКОРОСТЬЮ
Общая характеристика
Набор высоты с поступательной скоростью для вертолета Ми-6
является основным видом набора высоты. Этот режим требует
Рис. 61. Изменение наи-
выгоднейшей скорости
набора в зависимости от
высоты полета:
1 — расчетная (истинная);
2 — по прибору
меньшей мощности по сравнению с верти-
кальным набором высот, т. е. он более
экономичен. Для него характерны боль-
шая скороподъемность, вследствие боль-
шого избытка мощности, лучшая устой-
чивость и управляемость, больший запас
управления, поэтому техника пилотиро-
вания облегчается. При наборе высоты
с поступательной скоростью можпо на-
брать большую высоту (потолок вертоле-
та), чем при вертикальном наборе (по-
толок висения), и эта разница в высотах
очень большая.
Наивыгоднейшей скоростью набора
высоты является экономическая скорость
горизонтального полета (140 км/ч по при-
бору), на этой скорости достигается мак-
симальный избыток мощности, а значит,
и максимальная скороподъемность. На-
ивыгоднейшая истинная скорость набора
высоты в зависимости от высоты полета.
100
Полученная расчетом, изменяется следующим образом (рис. 61, 1):
у земли она составляет 150 км/ч, с подъемом на высоту увеличи-
вается и на высоте 5 000 м составляет 162 км/ч.
к Наивыгоднейшая скорость набора высоты по прибору до высо-
ты 3000 м составляет 140 км/ч, при дальнейшем наборе высоты она
должна уменьшаться на 10 км/ч на каждые 1000 м высоты полета
рис. 61,2).
Теоретический потолок вертолета Ми-6 составляет 5 000 м, прак-
тический— 4500 м, что является максимально допустимой высотой
Полета для вертолета с нормальным полетным весом и для
Линта с трапециевидными и прямоугольными лопастями. При мак-
симальном весе 42 500 кГ максимальная высота полета 3000 м
(прямоугольные лопасти) и 1500 м (трапециевидные лопасти).
Для набора высоты с поступательной скоростью требуется боль-
шая мощность, чем для горизонтального полета, поэтому набор
возможен лишь при избытке мощности
7VHa6=M.n'+A^.
I Рекомендуемые и допустимые числа оборотов несущего винта
для набора высоты и для всех остальных режимов полета одинако-
вы и указаны в табл. 6.
Таблица 6
Допустимые и рекомендуемые числа оборотов несущего винта вертолета Ми-6
в режиме набора высоты
Допустимые числа оборотов. % Рекомендуемые числа оборотов, %
Высота полета, прямоугольная лопасть трапециевидная
лопасть лопасть
0 78—87 78-87 83 80
1000 78—87 78-87 83 80
2000 80-87 80—87 83 82
3000 82-87 82—87 83 83
4000 83—87 84-87 85 85
4500 84-87 85—87 86 86
По мере набора высоты при неизменном положении ручки об-
щего шага и корректора газа число оборотов несущего винта
увеличивается, так как заданная мощность сохраняется до высоты
3000 м (плотность воздуха уменьшается и винт облегчается).Одна
из задач пилота при наборе высоты — следить за числом оборотов
несущего винта и удерживать его в пределах рекомендуемого, а в
крайнем случае в пределах допустимого, затяжеляя несущий винт
<• помощью ручки общего шага и одновременно действуя рукояткой
корректора газа.
Г#1
Силы и моменты, действующие на вертолет при наборе
высоты с поступательной скоростью
При наборе высоты с поступательной скоростью на вертолет
действуют следующие силы и моменты (рис. 62): общая аэродина
мическая сила несущего винта R, сила общего аэродинамического
сопротивления крыла Rl!V, сила тяги рулевого винта, вредное сопро
Рис. 62. Схема сил и моментов, действующих на вертолет в режиме набора
высоты с поступательной скоростью (креи и скольжение не показаны)
тивление вертолета X, вес вертолета G, реактивный момент несу
щего винта А4Р, продольный, поперечный и путевой моменты руле
вого винта, продольный и поперечный моменты втулки нссущег
винта, продольные моменты аэродинамической силы несущего вик
та, крыла, стабилизатора и поперечный момент боковой силы S.
При наборе высоты с поступательной скоростью конус вращени
и аэродинамическая сила винта отклоняются в сторону полета при
помощи ручки циклического шага в продольном направлении. Аэр,
динамическая сила несущего винта раскладывается в связаны
системе координат на три составляющие: тягу Т, продольную си
Н и боковую силу S. Тяга направлена по осп вала, продолы,
102
сила—по плоскости вращения в сторону против полета, боковая
ЙнЛ8 направлена по плоскости вращения вправо.
t Тягу винта Т можно разложить в скоростной (поточной) систе-
ме координат по правилу параллелограмма на силу Тд, направлен-
in ю перпендикулярно траектории полета, и силу Тх — по направ-
лению полета. Сила Г|; является подъемной силой, а Тх — тянущей.
Продольная сила Н раскладывается на Нх, направленную по
Траектории полета, но в противоположную сторону, и на Ну,
Направленную в сторону действия Ти. Сила Нх является сопро-
тивлением несущего винта, а Ну дополнительной подъемной
ЕИЛОЙ.
L Аэродинамическая сила крыла раскладывается на подъемную
килу Г1ф и лобовое сопротивление Акр-
I, Тяга рулевого винта направлена влево. Вредное сопротивление
вертолета возникает за счет обдува фюзеляжа основным и индук-
тивным потоком и направлено в сторону, противоположную полету,
г Сила веса раскладывается на* Gx, направленную в сторону,
противоположную полету, и G„, направленную перпендикулярно
траектории полета вниз.
С В режиме установившегося набора высоты с поступательной
скоростью должны быть соблюдены следующие условия равнове-
сия сил. Для прямолинейного набора высоты с постоянным углом
Набора 0 и вертикальной скоростью необходимо, чтобы силы Tv,
Hv и У1ф уравновешивали составляющую веса G„
т,+//,+Г,р=0,.
। Для равномерного полета необходимо, чтобы тянущая сила Тх
уравновешивала составляющую продольной силы Нх, вредное
сопротивление вертолета X, сопротивление крыла Хир и составляю-
щую веса Gx
Тх = Нх + Х+Хкр ±GX.
Для соблюдения продольного равновесия сумма всех продольных
моментов должна быть равна нулю.
В боковом направлении вертолет в указанном режиме полета
может балансироваться либо с правым креном без скольжения,
Либо без крена, но с левым скольжением.
Тогда при полете с креном тяга хвостового винта уравновеши-
вается боковой силой S и составляющей веса Gr, а при полете с
левым скольжением -боковой силой S несущего винта и боковой
силой фюзеляжа Qz.
В полете пилот добивается установившегося набора высоты с
поступательной скоростью и балансировки вертолета, по показа-
ниям приборов и положением вертолета относительно естествен-
ного горизонта.
103
Летные характеристики вертолета в режиме
набора высоты с поступательной скоростью
Вертикальная скорость набора высоты определяется по следую-
щей формуле:
_ SN75
Согласно этой формуле максимальная вертикальная скорость
набора высоты должна быть на той скорости полета, при кото-
рой избыток мощности максимальный (для вертолета Ми-6
140—150 км/ч). Для горизонтального полета эта скорость является
экономической, а для набора высоты — наивыгоднейшей. При из-
менении скорости от наивыгоднейшей в сторону меньших скоростей
или больших избыток мощности и вертикальная скорость будут
меньше. Это теоретическое положение подтверждено и летными
испытаниями. На рис. 63 изображены кривые изменения вертикаль-
Рис. 63. Зависимость вертикальной ско-
рости набора высоты от скорости полета
и веса вертолетом Ми-6 па номинальном
режиме работы двигателей на высоте
500 м
/—G-35.6 Т. t-ZfC- г-0-38 Т, t-ltr-C;
3 - 0=38,4 Г; «-27 "С.
ной скорости набора высоты от скорости полета по траектории,
полученные при летных испытаниях для трех полетных весов и раз-
личных температурах наружного воздуха на номинальном режиме
работы двигателей на высоте 500 м. Как видно по кривым, чем
больше полетный вес, тем меньше вертикальная скорость набора
высоты, но во всех случаях она максимальная на скорости 140 км/ч.
Температура воздуха также влияет на величину вертикальной ско-
рости набора высоты, хотя номинальная мощность с подъемом на
высоту до 3000 м и не меняется, но потребная мощность для гори-
зонтального полета с увеличением температуры увеличивается, а
поэтому избыток мощности уменьшается, и, следовательно, будет
уменьшаться и вертикальная скорость набора высоты. Результаты
летных испытаний, показанные на рис. 63, получены для вертолета
с грузами внутри грузовой кабины.
На рис. 64 дана кривая изменения вертикальной скорости на-
бора высоты от скорости полета по траектории (высота 450 м, по-
летный вес 37 т, номинальный режим работы двигателей, вес груза
на внешней подвеске 8 г, температура воздуха —10°С). Как видно
из кривой, максимальная скорость набора высоты будет при ско-
104
рости по прибору 140—150 км/ч. Следовательно, наивыгоднейшая
скорость набора с грузами на внешней подвеске практически
остается такой же, как и с грузами внутри кабины. Также были
проведены летные испытания по определению наивыгоднейшей ско-
рости набора высоты с подвесными топливными баками. В резуль-
тате испытаний установлено, что наивыгоднейшая скорость набора
Высоты остается неизменной (140 км!ч). Но величины вертикаль-
ных скоростей набора высоты с грузами на внешней подвеске при
Рис. 64. Зависимость вертикальной
; Скорости набора высоты от скорости
Полета вертолета Ми-6 с грузами на
Внешней подвеске на номинальном
режиме работы двигателей:
В 0-37 Т. //=450 м. Р-760 мм рт. ст..
"н.в-83%
прочих равных условиях будут меньше, чем с грузами внутри ка-
бины за счет большего сопротивления, а следовательно, меньшего
избытка мощности.
Вертикальная скорость набора высоты существенно изменяется
от высоты полета, так как при этом изменяется избыток мощности.
’ На рис. 65 даны кривые изменения максимальной вертикальной
। скорости набора высоты для вертолета Ми-6, полученные при на-
Va, м/сек
Рис. 65. Максимальные вертикальные
скорости набора высоты вертолетом
Ми-6 с полетным весом 38 800 кГ на
номинальном режиме работы двига-
телей в условиях стандартной атмос-
феры:
1— расчетная; 2 — установленная летными
испытаниями вертолета с трапециевидными
лопастями; 3 — установленная летными ис-
пытаниями вертолета с прямоугольными
лопастями
боре высоты на номинальном режиме работы двигателей и на наи-
выгоднейшей скорости набора для полетного веса 38800 кГ в усло-
виях стандартной атмосферы. Кривая 1 показывает изменение мак-
симальной вертикальной скорости набора по высоте, полученное
при аэродинамическом расчете вертолета. Как видно по кривой,
максимальная вертикальная скорость набора у земли 6,5 .ч/сек,
с подъемом на высоту скорость плавно уменьшается, достигая ве-
личины 0,5м/секча высоте 4500м (практический потолок). Кривая 2
показывает изменение максимальной вертикальной скорости набо-
ра высоты при тех же условиях для винта с трапециевидными ло-
105
пастями. В этом случае вертикальная скорость набора высоты у
земли составляет 6 м!сек и сохраняется до высоты несколько боль-
ше 1500 м. Это объясняется ростом мощности двигателей до этой
высоты, поэтому хотя потребная мощность для полета растет, но
также растет и располагаемая мощность, избыток мощности не ме-
няется, а значит, и вертикальная скорость сохраняется. При даль-
нейшем наборе высоты вертикальная скорость уменьшается: до вы-
соты 3000 м избыток мощности уменьшается за счет увеличения
потребной мощности, а на высоте более 3000 м еще и за счет умень-
шенц^лэасполагаемой мощности. Кривая 3 показывает изменение
вертикальной скорости набора при тех же условиях, но для винта
с прямоугольными лопастями. Как видно по кривой, характер из-
менения скорости по высоте почти такой же, как и для винта с тра-
пециевидными лопастями, но по величине скорость больше, так как
аэродинамические и тяговые характеристики несущего винта с пря-
моугольными лопастями лучше.
На рис. 66 представлены кривые, показывающие время набора
высоты на наивыгоднейшем режиме набора на номинальном режи-
38 800 кГ, при стандартной атмосфере. Кривая 1 показывает время,
полученное аэродинамическим расчетом, кривая 2 время, полу-
ченное летными испытаниями вертолета с трапециевидными лопа-
стями. Как видно по кривым, расчетное и полученное время при
испытаниях почти совпадают. Кривая 3 показывает время набора
при тех же условиях испытаний, но для винта с прямоугольными
лопастями. Здесь время набора высоты меньше вследствие большей
скороподъемности.
Теоретический потолок вертолета Ми-6 составляет 5000 м, прак-
тический — 4500 м. По мере набора высоты вплоть до 3000 .и (по
стандартной атмосфере) при неизменном положении ручки общего
шага и рукоятки корректора газа число оборотов турбокомпрессо-
ра увеличивается, так как уменьшается плотность воздуха, что при-
водит к срабатыванию анероида высотно-скоростной корректировки
и перестройке регулятора НР-23А на большее число оборотов.
106
Мощность двигателей сохраняется заданная. При этом числе оборо-
гы несущего винта увеличиваются самостоятельно, что способству-
рт сохранению аэродинамических сил винта.
By ‘ На высоте более 3000 м число оборотов турбокомпрессора и
мощность двигателей уменьшаются при заданном положении ручки
«шаг-газ». Число оборотов несущего винта сохраняется или незна-
I :«рпельно изменяется в сторону увеличения или уменьшения в за-
писимости от условий. При наборе высоты пилот следит за числом
оборотов несущего винта и удерживает его в пределах рекомендуе-
мого или допустимого, действуя ручкой общего шага и коллекто-
ром газа (см. табл. 6).
Особенности набора высоты с поступательной скоростью
и методики его выполнения
В Положение рычагов управления в установившемся режиме на-
бора высоты по сравнению с их положением в горизонтальном
полете на той же скорости различное: вперед отклонена правая пе-
даль от положения, занимаемого ею в горизонтальном полете (уве-
личена тяга рулевого винта), ручка циклического шага отклонена
^вправо от того положения, занимаемого ею в горизонтальном поле-
те (увеличена боковая сила).
Г В установившемся наборе высоты без скольжения вертолет бу-
дет балансироваться с небольшим правым креном (при V= 140 км/ч
угол крена 1,5°), как и в горизонтальном полете за счет действия
I поперечного момента втулки или с левым скольжением (при V=
=140 км/ч угол скольжения р = 11°).
Угол тангажа при наборе высоты будет зависеть от скорости на-
бора высоты, центровки и режима работы двигателей: чем больше
I скорость по траектории, более передняя центровка и чем боль-
ше режим работы двигателей, тем меньше угол тангажа и наобо-
| рот. Набор высоты обычно совершается на номинальном режиме
работы двигателей при скорости 140 км/ч до высоты 3000 м. На-
брав заданную высоту, вертолет переводится в режим горизонталь-
1 ного полета, для чего, не меняя режим работы двигателей, ручкой
f управления установить нужную скорость горизонтального полета,
а затем подобрать для этой скорости режим работы двигателей
ручкой общего шага и рукояткой коррекции газа. При переводе
| вертолета из режима набора высоты в горизонтальный полет не-
f обходимо рычагами управления действовать плавно, чтобы не вы-
звать разбалансировки вертолета и выхода числа оборотов несу-
I щего винта за допустимое.
Набор высоты с грузами на внешней подвеске обычно совер-
шается на скорости 100 км/ч, особенно если грузы несимметричны
I и больших габаритов. Если же грузы симметричной формы и не-
9 больших габаритов, то вертолет устойчив на скорости набора 140—
150 км/ч. Скорость полета от 100 до 140—150 км/ч необходимо уве-
личивать при наборе высоты плавно. Увеличение скорости необхо-
107
димо прекратить, если трос будет подходить близко к ограничи-
тельному кольцу или если груз начнет раскачиваться. После набора
заданной высоты необходимо перевести вертолет в режим горизон
тального полета. Действия рычагами управления должны быть
очень плавными, чтобы нс вызвать разбалансировки вертолета и
раскачки груза.
Летные ограничения при наборе высоты
с поступательной скоростью
1. Потолок вертолета при нормальном полетном весе составля-
ет 4500 м, при максимальном весе вертолета с трапециевидными
лопастями — 1500 м, с прямоугольными — 3000 м.
2. Число оборотов несущего винта лучше поддерживать в пре-
делах допустимого и рекомендуемого (см. табл. 6). На высотах до
3000 м максимально допустимое число оборотов (87%) можно дер-
жать не более 5 мин, а на высотах более 3000 м — не более 60-имн.
3. На вертолетах с трапециевидными лопастями несущего вин-
та и автоматом перекоса, имеющем максимальное отклонение впе-
ред 6°30', при полной заправке топливом, с грузом, при центровке,
близкой к предельно задней, для обеспечения достаточного запаса
продольного управления скорость должна быть не более 140 км/ч
до выгорания 1000 кГ топлива из IV группы баков.
:ГЛАВА VI
ГОРИЗОНТАЛЬНЫЙ ПОЛЕТ
§ 20. ОБЩАЯ ХАРАКТЕРИСТИКА
Схема сил и моментов, действующих
на вертолет
В горизонтальном полете на вертолет действуют следующие си-
лы и моменты (рис. 67): аэродинамическая сила несущего винта R,
аэродинамическая сила крыла 7?Кр. тяга рулевого винта Тр.в, вред-
ное сопротивление вертолета X, вес вертолета G, реактивный мо-
мент несущего винта AJpn.n, путеврй момент рулевого винта Л4р.в,
продольный момент аэродинамической силы винта (пикирующий),
Рис. 67. Схема сил и моментов, действующих на вертолет в горизонтальном
полете
109
продольные моменты крыла и стабилизатора, продольный реактив-
ный момент рулевого винта, продольный момент втулки Л4.вт, попе-
речный момент втулки Л4ХВТ, поперечный момент рулевого винта и
поперечный момент боковой силы S.
В связанной системе координат аэродинамическая сила несуще-
го винта раскладывается на три составляющие: тягу винта Т, про-
дольную силу Н и боковую силу S. В свою очередь тягу винта Т
в скоростной (поточной) системе координат можно раскладывать
на Tv — вертикальную составляющую и Тх — горизонтальную со-
ставляющую. Сила Ти является подъемной силой, а Тх — тянущей.
Сила /?Кр раскладывается на подъемную силу крыла У)ф и лобовое
сопротивление Хкр, продольная сила Н— на Нин Нх. Тяга рулево-
го винта в горизонтальном полете всегда направлена влево.
В установившемся горизонтальном полете на определенной ско-
рости должны соблюдаться следующие условия равновесия сил.
Для прямолинейного и горизонтального полета необходимо, что-
бы сила Ту, Укр и Ну уравновешивали вес вертолета G:
Ту + Улр+Ну= G.
Для равномерного полета необходимо, чтобы сила Тх уравнове-
шивала силы Нх, К и ХК1>:
Тх = Ях+Х + Хкр.
В горизонтальном полете, как и при наборе высоты, вертолет
балансируется либо с правым креном либо с левым скольжением.
При этом углы крена или скольжения будут меньше, чем при на-
боре высоты ввиду меньшей потребной мощности. Тяга рулевого
винта уравновешивается теми же силами, что и при наборе высоты.
В полете пилот добивается установившегося горизонтального
полета и его балансировки, а значит, соблюдения указанных урав-
нений действием всеми рычагами управления, руководствуясь по-
казаниями приборов и положением вертолета относительно естест-
венного горизонта.
Потребные мощности
для горизонтального полета
Потребная мощность для горизонтального полета в зависимости
от скорости полета изменяется следующим образом: на экономиче-
ской скорости она минимальная, на скорости меньше или больше
экономической мощность больше, так как несущий винт на этих
скоростях работает в худших условиях, а для поддержания необ-
ходимой тяги для данного горизонтального полета требуется боль-
шая мощность. С подъемом на высоту потребная мощность на всех
скоростях по прибору увеличивается.
Рассмотрим потребные мощности для горизонтального полета
вертолета Ми-6 в зависимости от положения рычага подачи топли-
ва двигателя (УПРТ) и от величины общего шага несущего винта.
Такие характеристики более целесообразны с точки зрения практики
НО
Полета. На рис. 68 представлены кривые для вертолета Ми-6
с прямоугольными лопастями при разных числах оборотов несу-
щего винта с полетным весом 40 Т на высоту 1000 м в условиях
Стандартной атмосферы. Система «шаг-газ» позволяет выполнять
Полеты при различных числах оборотов несущего винта в пределах,
допустимых для данного режима полета. Из рис. 68 видно, что ми-
нимальный шаг и минимальное значение УПРТ будут при истин-
ной скорости около 170 км!ч, что соответствует скорости по прибо-
ру 140—150 км!ч. При других скоростях полета потребные значе-
ния общего шага и показаний УПРТ будут больше. Из рисунка также
видно, что чем меньше число оборотов несущего винта, тем
меньше будет мощность по показаниям УПРТ при одной и той же
скорости, т. е. при меньших числах оборотов требуется меньшая
мощность, так как уменьшаются профильные потери несущего
винта. Но для поддержания необходимой тяги при меньших числах
оборотов потребуется больший общий шаг несущего винта, что в
свою очередь приведет к увеличению потребной мощности вслед-
ствие увеличения индуктивных потерь несущего винта. Но увеличе-
ние индуктивной мощности при большем шаге меньше, чем ее
уменьшение за счет профильной мощности на меньших числах обо-
ротов, и, следовательно, в этом случае потребуется меньшая общая
мощность для горизонтального полета. Но совершать полеты при
малых числах оборотов ниже допустимых запрещается, так как это
приводит к уменьшению скорости по срыву потока, повышенной
вибрации, уменьшению запаса управления. Кроме того, недоста-
точны запас числа оборотов и время для перехода на режим само-
вращения на случай отказа двигателей.
Чем больше число оборотов несущего винта, тем требуется боль-
шая мощность, поэтому выполнять полеты при повышенных числах
оборотов также нецелесообразно. Кроме того, при больших числах
оборотов уменьшается запас их по флаттеру, а также явно растет
потребная мощность за счет увеличения волнового сопротивления.
Поэтому в режиме горизонтального полета для вертолета Ми-6
установлен строго определенный диапазон допустимых чисел обо-
ротов несущего винта по высотам (см. табл. 6). Рекомендуемые же
числа для вертолета Ми-6 независимо от веса приводятся в табл. 7.
Таблица 7
Рекомендуемые числа оборотов несущего винта вертолета Ми-6
в горизонтальном полете по высотам
Высота, м Число оборотов несущего Высота, м Число оборотов несущего винта, %
трагецне- прямоугольные тра есве- ло ас.ти
лопасти лопасти
50 83±1 79+2 3000 83±1 83+2
500 83±1 79+2 4000 84 1 84+2
1000 83 ±1 79+2 4500 85 ±1 85+2
2000 83±1 81+2
§ 21. ХАРАКТЕРНЫЕ СКОРОСТИ ГОРИЗОНТАЛЬНОГО
ПОЛЕТА
На вертолете Ми-6 можно совершать горизонтальный полет во
всем диапазоне скоростей. Но существуют характерные скорости,
применяемые в зависимости от условий полета, а также ограничи-
вающие скорости. Вертолет Ми-6 имеет четыре характерные скоро-
сти: минимальную, экономическую, наивыгоднейшую (крейсер-
скую) и максимальную.
Минимальная скорость
Минимальной скоростью горизонтального полета вертолета на-
зывается скорость, на которой вертолет может удерживаться в го-
ризонтальном полете на данной высоте на взлетном или номиналь-
ном режиме работы двигателей. Минимальная скорость горизон-
тального полета для любого вертолета на высотах от нуля до
потолка висения равна нулю, выше потолка висения она постепенно
увеличивается до экономической скорости на потолке полета вер-
толета. Такое изменение минимальной скорости по высоте объяс-
няется изменением потребной и располагаемой мощностей для го-
ризонтального полета в зависимости от высоты и скорости. Потреб-
ная мощность для висения и горизонтального полета с подъемом на
высоту увеличивается, а с увеличением скорости от нуля до эко-
номической— уменьшается. Располагаемая же мощность с подъ-
емом до расчетной высоты сохраняется неизменной, а выше расчет-
ной— уменьшается. Поэтому выше потолка висения с увеличением
высоты должна увеличиваться минимальная скорость горизонталь-
ного полета. На потолке вертолета минимальная скорость будет
равна экономической, так как на этой скорости требуется мини-
иг
мильная мощность. Такое изменение минимальной скорости по вы-
соте называют изменением ее по мощности двигателей.
Минимальные скорости горизонтального полета могут быть по-
лучены аэродинамическим расчетом и могут быть определены по
результатам летных испытаний.
Минимальные скорости (истинные) горизонтального полета на
взлетном режиме работы двигателей для вертолета Ми-6 с нор-
мальным полетным весом с трапециевидными лопастями, получен-
ные в результате аэродинамического расчета, представлены кри-
80 120 160 200 240 2B0V.KH/4
Рис. 69. Изменение характерных скоростей горизонтального полета в зави-
симости от высоты для вертолета Ми-6 с трапециевидными лопастями в
условиях стандартной атмосферы:
вой 1 на рис. 69. Как видно по теоретической кривой, вертолет
Ми-6 на взлетном режиме двигателей не имеет потолка висения
или он крайне мал. С увеличением высоты минимальная скорость
растет, и на высоте 5000 м она равна 140 км)ч. Изменение мини-
мальной скорости по высоте на номинальном режиме работы дви-
гателей представлено кривой 3. Как видно по кривой, у земли ми-
нимальяая скорость составляет 30 км/ч. с подъемом на высоту она
увеличивается (120 км/ч на высоте 4000 м).
Но в практике полета минимальные скорости ограничиваются
В результате летных испытаний вертолета Ми-6 с трапециевидны мп
лопастями и весом не более нормального установлены следующие
минимально допустимые скорости горизонтального полета по при-
бору (кривая 2):
Высота, м Скорость,
км/ч
. . 80
2000—3000 .................................. 80—90
3000—4500 .................................... 90
Если полетный вес вертолета больше нормального или макси-
мально допустимый (42,5 Т), то минимальная скорость по прибору
установлена 100 км/ч на высотах от нуля до 1500 м, кривая 4.
Для вертолета Ми-6 с прямоугольными лопастями и нормаль-
ным полетным весом минимально допустимые скорости по пркбо-
Рис. 70. Изменение характерной скорости горизонтального
полета вертолетами Ми-6 с прямоугольными лопастями.
- минимальная скорость по прибору, установленная в эксплуата-
ции вертолетами Ми-6 с нормальным полетным весом; 1 - мнни-
мальпая скорость по прибору для вертолета с максимальным
полетным несом; 3 минимальная истинная скорость, установлсн-
Мпксимальио допустимая скорость по прибору дли вертолета с
максимальным весом; 7 - крейсерская скорость по прибору для
П1мая скорость по прибору для вертеле га с нормальным полетным
весом: 9 — максимально допустимая истинная скорость для верто-
лета с нормальным полетным весом
114
ji) ограничены по высотам до следующих пределов (кривая 1,
Кс. 70):
R Вчсота, м Скорость,
км/ч
0—2000 .................................... 80
kl 2000-3000 ....................................... 80 -110
|| 3000-4500....................................... 110
Истинная минимальная скорость для этого же вертолета пред-
оставлена кривой 3, рис. 70.
|i Для вертолета с прямоугольными лопастями и максимальным
Весом минимальная скорость по прибору установлена ПО км/ч на
всех допустимых высотах до 3000 м.
Г Как видно из приведенных данных, минимальные скорости по
прибору, установленные в эксплуатации для вертолета Ми-6 с пря-
I моугольными лопастями, несколько больше, чем скорости вертолета
с трапециевидными лопастями. Так, если у вертолета Ми-6 с тра-
Пециевидными лопастями с нормальным полетным весом на высо-
тах более 3000 м минимально допустимая скорость по прибору
00 км/ч, то у вертолета с прямоугольными лопастями — 110 км/ч.
, У вертолета с максимальным весом и трапециевидными лопастями
Скорость на всех высотах установлена 100 км/ч, с прямоугольными
1 Лопастями — 110 км/ч. Объясняется это тем, что у вертолета с пря-
моугольными лопастями вибрации на малых скоростях наблюдают-
В ся в большем диапазоне скоростей, чем у вертолета с трапецие-
видными лопастями.
Экономическая скорость
L Экономической скоростью горизонтального полета называется
скорость, при которой требуется минимальная мощность, поэтому
на этой скорости минимальный часовой расход топлива. На эконо-
мической скорости полета с данным запасом топлива достигается
наибольшая продолжительность полета, а для полета на заданное
время расходуется минимальное количество топлива. В результате
расчета и летных испытаний минимальный часовой расход топлива
для вертолета Ми-6 получается на скорости по прибору ЦО—
150/^и/ч. На рис. 71 представлены кривые, показывающие часовой
расход топлива в зависимости от скорости полета, полученные в
результате летных испытаний. Кривая 1 показывает зависимость
часового расхода топлива от скорости полета вертолета Ми-6 с тра-
пециевидными лопастями при полетном весе 39,7 Т на высоте 500 .и
при температуре воздуха 17° С. Кривая 2 показывает аналогичную
зависимость для вертолета весом 40 т с прямоугольными лопастя-
ми на высоте 500 м. Как видно по кривым, для вертолета Ми-6
с трапециевидными лопастями минимальный часовой расход со-
ставляет 2200 кГ при скорости по прибору 140—150 км/ч, для вер-
толета с прямоугольными лопастями — около 2000 кГ/ч и при боль-
шей скорости — 150—160 км/ч.
При увеличении веса вертолета и высоты полета часовой расход
топлива увеличивается, так как при этом растет потребная мощность
для полета. Поэтому наибольшую продолжительность полета мож-
но получить на малых высотах. Часовой расход топлива и продол-
жительность полета также зависят от температуры и давления воз-
духа: чем выше температура и ниже атмосферное давление, тем
больше часовой расход топлива, а меньше продолжительность по-
лета.
Рис. 71. Зависимость часового расхода топлива от ско-
рости полета
Экономическая скорость по прибору не зависит от высоты по-
лета; для вертолета Ми-6 как с трапециевидными, так и с прямо-
угольными лопастями принята равной 140 км/ч (см. рис. 69, 70).
При полной заправке топливом основных, подвесных и допол-
нительных баков (13 295 кГ) наибольшая продолжительность
полета будет на экономической скорости 140 км/ч и составит на
высоте 500 м в условиях стандартной атмосферы около 6 ч.
Экономическая„скорость применяется для полетов, не связан-
ных ~с необходимостью преодолевать большие расстояния, а для
пребывания в воздухе с различными целями. Экономическая ско-
рость горизонтального полёта "является наийыгоднейшей скоростью
набора высоты, так как на этой скорости максимальный избыток
мощности, а следовательно, максимальная вертикальная скорость.
Наивыгоднейшая и крейсерская скорости
Наивыгоднейшей скоростью горизонтального полета называется
скорость, при которой достигается минимальный километровый
расход топлива. На этой скорости с данным запасом топлива даль-
116
ность полета наибольшая, а при прохождении заданного расстоя-
ния расходуется минимальное количество топлива.
Зависимость километрового расхода топлива от скорости поле-
та по прибору для вертолета Ми-6 с трапециевидными и прямо-
угольными лопастями на высоте 500 м показана на рис. 72. Как
видно по кривым, минимальный километровый расход топлива для
вертолета с трапециевидными лопастями будет при скорости по
прибору несколько больше, чем 200 км/ч, а с прямоугольными ло-
пастями при скорости около 250 км/ч. По кривым также видно,
Рис. 72. Зависимость километ-
рового расхода топлива от ско-
рости полета:
1 — для вертолета с трапециевидны-
ми лопастями с полетным весом
2 — для вертолета с прямоугольны-
ми лопастями с полетным весом
40 Г на высоте 300 м в условиях
стандартной атмосферы
что километровый расход топлива меньше у вертолета с прямо-
угольными лопастями — 9 кГ/км вместо 11,5 кГ/км у вертолета
с трапециевидными лопастями, несмотря на то, что при данных
испытаниях вес этого вертолета был несколько больше.
Для вертолета с трапециевидными лопастями и с нормальным
полетным весом у земли для продолжительных полетов принята
скорость 200 км/ч по прибору, а у вертолета с прямоугольными ло-
пастями при тех же условиях — 250 км/ч по прибору (крейсерские).
Наивыгоднейшая истинная скорость (скорость, при которой до-
стигается наибольшая дальность полета) с подъемом на высоту
увеличивается, скорость же по прибору остается неизменной. Но
так как наивыгоднейшая скорость вертолета Ми-6 незначительно
меньше максимально допустимой, которая с подъемом на высоту
уменьшается, поэтому уменьшается и крейсерская скорость.
Для вертолета Ми-6 с трапециевидными лопастями с нормаль-
ным полетным весом (40,5 Т) и меньше крейсерская скорость по
прибору установлена в следующих пределах (кривая 8, см. рис. 69):
Высота, м
0-2000 ......................................
2000-3000 ......................................
3000—4000 ......................................
4000-4500 ......................................
Скорость,
км/ч
200
200-190
190—140
140-120
Как видно по кривой 8, рис. 69, начиная с высоты 2000 м, крей-
серская скорость уменьшается, так как уменьшается скорость мак-
симально допустимая, а с высоты 3000 ле она равна максимально
допустимой скорости горизонтального полета. Для вертолета с
полетным весом до 42,5 Т крейсерская скорость по прибору установ-
лена независимо от высоты — 160 е> она равна максималь-
н^ГдопуСТййби скорости по прибору на высотах до 1500 м (см. кри-
вую 6, рис. 69).
Для вертолета Ми-6 с прямоугольными лопастями и нормаль-
ным весом и менее крейсерская скорость по прибору в зависимости
от высоты полета изменяется в следующих пределах (кривая 7,
рис. 70):
Высота, м
Скорость,
км/ч
0-1000.......................................
1000-1500 ......................................
1500-2000 ......................................
2000-2500 ......................................
2500—3000 ......................................
3000-4000 ......................................
4000-4500 ......................................
250
250-240
240—230
230—225
225—220
220—190
190—165
Как видно из рис. 70 (кривые 7 и 8) крейсерская скорость по
прибору с подъемом на высоту уменьшается, так как уменьшается
максимально допустимая скорость по прибору.
Для вертолета Ми-6 с весом более нормального и до макси-
мального крейсерские скорости по прибору установлены в следую-
щих пределах (кривая 5, рис. 70):
Высота, м
Скорость,
0—1000 ......................................
1000-1500 .....................................
230
1500-2000 .......................................
230—225
2000-2500 ......................................
2500-3000 ......................................
225- 220
220-200
200—190
Эта скорость также уменьшается с подъемом на высоту ввиду
уменьшения максимально допустимой скорости для этого полет-
ного веса на высотах до 3000 м (кривые 5 и 6 рис. 70).
Наивыгоднейшая скорость используется для обычных рейсовых
полетов как на наибольшую дальность, так и на заданное рассто-
яние.
Километровый расход топлива и дальность полета на крейсер-
ских скоростях будут зависеть от веса вертолета, высоты полета,
скорости и направления ветра. Чем больше вес вертолета, тем
больше километровый расход топлива вследствие увеличения по-
требной мощности, тем меньше дальность полета. До высоты 3000 м
километровый расход топлива уменьшается, а дальность увеличи-
вается, на высотах более 3000 м километровый расход топлива
увеличивается, а дальность соответственно уменьшается, поэтому
полеты выгодно выполнять на границе высотности двигателя —
118
3(Ю0 м. На рис. 73 представлены кривые изменения километрового
расхода топлива для вертолета Ми-6 с трапециевидными лопастями
на крейсерских скоростях в зависимости от веса вертолета и высо-
ты полета. Как видно по кривым, минимальные километровые рас-
ходы топлива будут на высоте 3000 м, на больших или меньших вы-
сотах они увеличиваются. Этим графиком экипаж и пользуется
для определения количества топлива, для данного полета, прини-
мая за взлетный вес, указанный на графике, средний вес вертолета
Рис. 73. Зависимость ки-
лометрового расхода топ-
лива для вертолета с
Трапециевидными лопа-
стями в условиях стан-
дартной атмосферы на
Крейсерских режимах го-
।рпзоитальиого полета в
'зависимости от высоты
'полета и веса вертолета:
/ - Н—500 м, Ипр -200 км/ч;
2 — Я-1000 м. Рпр -200 км/ч:
3 — Н—2000 м. Рпр -200 КМ/Ч:
1 - Н-3000 м. l'np -1Й0К.Ч/Ч;
6 - Н-4000 м. V пр -140 км/ч;
6-Н-Хтм. Vn|1 -160 км,ч;
7 —Н-1000 м, Vnp-l60 км/ч
на участке предстоящего горизонтального полета. Так как верто-
лет Ми-6 имеет сравнительно небольшие скорости полета, то на
дальность полета существенное влияние оказывает скорость и на-
правление ветра.
Кроме того, на дальность полета будут влиять такие факторы,
как число оборотов несущего винта и место размещения грузов.
Чем больше число оборотов несущего винта, тем больше километ-
ровый расход топлива, тем меньше дальность. Поэтому необходи-
мо всегда сохранять число оборотов в пределах рекомендуемого
для данной высоты как для вертолета с трапециевидными лопастя-
ми, так и с прямоугольными (см. табл. 7), Размещение грузов на
внешней подвеске увеличивает километровый расход и уменьшает
дальность полета. А если учесть, что с грузами на внешней подве-
ске не всегда возможно держать максимально допустимую скорость
полета (200 км/ч), то в этом случае явно увеличивается километ-
ровый расход топлива и уменьшается дальность полета. Установка
подвесных баков практически не влияет на километровый расход
и дальность полета, поэтому все расчеты для вертолета с подвес-
ными баками делаются по тем же данным, что и для вертолета
без них.
На рис. 74 даны графики зависимости дальности полета верто-
лета Ми-6 с трапециевидными лопастями на наивыгоднейших ре-
жимах полета для нормального и максимального взлетного веса
в зависимости от высоты полета и количества заправляемого топ-
лива. На рис. 74, а указанная зависимость дается для вертолета
Ми-6 с нормальным полетным весом на наивыгоднейших режимах
полета (Vnp—200 км/ч, Пц,в=83%). Как видно по кривым, чем
больше запас топлива, тем больше дальность полета, и при заправ-
ке 12 000 кг топлива при полете па высоте 500 м максимальная
дальность составит 1050 км. на высоте 1000 м — 1075 км, а на вы-
соте 2000 м—1175 км. При полете на высоте 3000 м дальность
будет около 1 200 км, а на высоте 4000 м 1100 км (рис. 74, б). На
рис. 74, в дана зависимость дальности полета от количества за-
правленного топлива всех баков (13295 кГ) для максимального
веса вертолета 42,5 Т. В этом случае при полете на высоте 500 м
максимальная дальность — 1125 км, а на высоте 1000 м— 1175 км.
При максимально допустимом взлетном весе вертолета с тра-
пециевидными лопастями наивыгоднейшая скорость полета
160 км!ч по прибору удерживается в первой части пути. По мере
выгорания топлива вес вертолета уменьшается, поэтому во второй
части пути, когда вес будет равен 40,5 Т и меньше, скорость долж-
на быть 200 км]ч. Такая смена режима полета установлена и для
вертолета Ми-6 с прямоугольными лопастями, только скорость
соответственно будет больше: 230 и 250 км)ч.
Графики рис. 74 построены по результатам летных испытаний.
По ним экипаж определяет количество необходимого топлива в за-
висимости от намеченной дальности полета. В них учтены количе-
ство топлива для работы двигателей на земле в течение 5 мин
120
I (120 кГ), расход топлива на набор данной высоты и снижение, не-
вырабатываемый остаток топлива 50 кГ в основных баках и по
20 кГ в подвесных и дополнительных баках, навигационный запас
на 0,5 ч полета — 1200 кГ. Расход топлива на набор высоты и сни-
| жен не определяется по отдельному графику и таблице, которые
приведены в руководстве по летной эксплуатации вертолета Ми-6.
Дальность полета вертолета Ми-6 с прямоугольными лопастя-
ми больше, чем дальность полета вертолета с трапециевидными ло-
I пастями вследствие меньшего километрового расхода и больших
I допустимых скоростей полета как для нормального взлетного веса,
Г так и для максимально допустимого на всех высотах, что позволя-
I ет применять наивыгоднейшую (крейсерскую) скорость в большем
В диапазоне, чем у вертолета с трапециевидными лопастями (см
рис. 69 и 70).
Максимальная скорость
У вертолета Ми-6 имеются три максимальные скорости: по мощ-
I ности двигателей, по срыву потока и максимальная скорость, огра-
I ниченная Главным конструктором и принятая для эксплуатации
В вертолета.
Максимальная скорость по мощности двигателей. Максималь-
ная скорость горизонтального полета вертолета определяется по
следующей формуле:
где ——энерговооруженность вертолета:
Су
—----аэродинамическое качество вертолета;
•%—относительный к. п. д. несущего винта;
;—коэффициент использования мощности двигателей.
Как видно из формулы, максимальная скорость горизонтально-
I го полета прямо пропорциональна энерговооруженности, аэроди-
намическому качеству, относительному коэффициенту полезного
I действия несущего винта и коэффициенту использования мощности.
L В зависимости от высоты полета, при прочих равных условиях, эта
I скорость изменяется пропорционально изменению мощности дви-
гателей на номинальном режиме их работы (см. рис. 38). Макси-
малЬные скорости горизонтального полета по мощности в зависи-
I мости от высоты могут быть получены аэродинамическим расчетом
(см. рис. 48). Максимальные скорости для вертолета Ми-6 с тра-
I пециевидными лопастями, полученные в результате аэродинамиче-
ского расчета, на номинальном режиме работы двигателей от
высоты полета изменяются следующим образом (см. кривую 12,
рис. 69):
12!
Высота, м
Скорость,.
км'ч
294
295
О .
1000
3000
4000
На указанных скоростях эксплуатировать вертолет не разре-
шается по условиям прочности несущего винта и по срыву потока
с концов лопастей.
Максимальная скорость по срыву потока. Эта скорость в гори-
зонтальном полете аэродинамическим расчетом определялась для
двух случаев: в азимуте 270° при максимальном угле атаки лопа-
стей (12°), соответствующем критическому углу атаки элемента
лопасти, и при угле больше критического—15°. Критические ско-
рости по срыву потока, соответствующие максимальному углу ата-
ки, равному критическому, названы максимально допустимыми
скоростями. По высотам для вертолета Ми-6 с трапециевидными
лопастями они изменяются следующим образом (см. кривую 10,
рис. 69):
Высота, м
252
Скорость,
252
217
194
156
125,6
1000
3000
4000
5000
Максимально возможные скорости по срыву потока по величи-
не больше, чем максимально допустимые и по высоте полета бу-
дут изменяться следующим образом (см. кривую II, рис. 69).
Скорость,
Высота, м
1000
<3000
4000
5000
272,6
268
242
223
Максимальные скорости, принятые для эксплуатации вертоле-
тами Ми-6. Для вертолета с нормальным полетным весом с трапе-
циевидными лопастями максимальные скорости по прибору, уста-
новленные для эксплуатации, изменяются по высотам в следующих
пределах (см. кривую 9, рис. 69):
Высота, м
Скорость.
КМ ,4
Г00....................................................
1000 ..................................................
2000
.3000 ...................................................
4000 .... ...............................................
4500 ....................................................
265
260
250
235
190
140
120
122
г Для вертолета с трапециевидными лопастями с максимальным
Взлётным весом (42,5 Т) максимально допустимая скорость по
прибору на всех разрешенных высотах составляет 160 км/ч (см.
Кривую 7, рис. 69).
Для вертолета Ми-6 с прямоугольными лопастями и нормаль-
ным полетным весом максимально допустимые скорости по прибо-
ру в горизонтальном полете в зависимости от высоты установлены
следующие (см. кривые 8 и .9, рис. 70):
Высота, м
500
1000
2000
3000
4000
4500
Скорость,
км/ч
300
300
300
270
240
190
165
и полетным
71 Для вертолета Ми-6 с прямоугольными лопастями
весом от нормального до максимального установлены следующие
максимально допустимые скорости по прибору (см. кривую, 6,
рис. 70):
Высота, м
Скорость,
500
1000
1500
2000
3000
250
230
ISO
§ 22. ОСОБЕННОСТИ ГОРИЗОНТАЛЬНОГО ПОЛЕТА
И МЕТОДИКИ ЕГО ВЫПОЛНЕНИЯ
Для горизонтального полета скорость выбирается, исходя из
условий и целей полета: полет с минимальным часовым или с ми-
нимальным километровым расходом топлива, по расписанию с ми-
нимальной затратой времени, грузы размещены внутри кабины или
на внешней подвеске. Необходимая заданная скорость поддержи-
вается с помощью ручки циклического шага, я необходимая мощ-
'Йбсть для ДанАби скорости— с подошью ручки «шаг-газ». Число
Оборотов несущего винта Должно соответствовать рекомендуемому
или допустимому для дайиой скбрЬёти и пысо'тй (см. табл. 6 и 7), а
для сохранения заданной скорости и высоты потребуется опреде-
ленный режим работы двигателей,’который пилот и установит руч-
кой общего шага, контролируя его по показаниям УПРТ и ИТЭ-2.
При этом нужно помнить, что при опускании ручки общего шага
число оборотов несущего винта растет, а при поднятии -- умень-
шается, и чтобы сохранить число оборотов в пределах допустимого,
необходимо действовать корректором газа.
123
В полете по положению указателя продольного триммера при
снятом давлении с ручки циклического шага в продольном направ-
лении необходимо следить за величиной центровки вертолета, так
как она может нарушаться вследствие отказа автоматического уп-
равления последовательностью выработки топлива. Если стрелка
указателя триммера отклоняется более чем на 1,5—2 деления от
нейтрального положения, то необходимо проверить исправность
работы автоматики, и, если последняя неисправна, то бортмеханик
должен перейти на ручное управление последовательностью расхо-
да топлива.
Положение рычагов управления во всем диапазоне скоростей
горизонтального полета такое же, как и у вертолета Ми-4: с уве-
личением скорости полета ручка циклического шага должна пере-
мещаться вперед и влево, левая педаль — до определенной скоро-
сти; при дальнейшем разгоне скорости необходимо перемещать
вперед правую педаль, так как условия работы рулевого винта на
больших скоростях ухудшаются и следует увеличивать его общий
шаг с помощью ручки «шаг-газ»; во всем диапазоне скоростей
поддерживается необходимая мощность (см. рис. 68).
Виражи и развороты на вертолете Ми-6 совершаются так же,
как и на вертолете Ми-4. Если полетный вес вертолета нормаль-
ный, то угол крена на виражах и разворотах не превышает 30°, а
при максимальном весе — 15°. Максимальный крен ограничен пе-
регрузкой, а значит, запасом прочности лопастей несущего винта.
Вертолет вводится в вираж или разворот координированным дви-
жением ручки циклического шага и педали в сторону нужного раз-
ворота или виража с одновременным увеличением мощности. Так
как для выполнения левого виража или разворота требуется мень-
шая мощность, чем для правого, то при крене до 15° на левом вира-
же и развороте не требуется увеличивать мощность. Виражи и раз-
вороты можно совершать в диапазоне всех допустимых скоростей
полета. В учебном полете виражи и развороты совершаются на
скорости 160 км)ч.
В результате действия тяги рулевого винта и гиромоментов
обоих винтов на правом вираже для вертолета Ми-6 требуется
большая мощность, и имеется тенденция к уменьшению скорости и
крена, что необходимо парировать соответствующим движением
ручки циклического шага и общим шагом. По тем же причинам
для выполнения левого виража требуется меньшая мощность, чем
для правого, и у вертолета появляется тенденция к росту скорости
и крена, что также необходимо парировать соответствующим об-
разом ручками управления.
Вывод вертолета из виража или разворота необходимо начи-
нать за 10—15° до намеченного ориентира или заданного направ-
ления по гироиндукционному компасу. Вывод выполняется коор-
динированным движением рычагов управления. При вводе в вираж,
его выполнении и при выводе вертолета из виража необходимо дей-
ствовать всеми рычагами управления плавно и координированно,
124
ин да вертолет не так подвергается разбалансировке и облегчает-
I'll техника пилотирования.
Радиус и время одного круга виража определяются по тем же
формулам, что и для самолета (табл. 8).
Таблица 8
Радиус и время одного круга виража в зависимости от скорости и угла крена
Креи, Радиус, .« Время, град' Радиус, м
10 1140 160 10 1450 180
160 15 750 105 180 15 950 120
30 350 50 30 440 55
Полеты на малой высоте выполняются при невозможности про-
изводить руление (по состоянию грунта), при проведении специ-
лльных работ, а также в учебных целях.
Обычно полеты на малой высоте при ровном рельефе местности
рекомендуется выполнять на высоте до 10 м при скорости не более
10 км/ч с использованием воздушной подушки. Если полет по не-
гбходимости выполняется на высотах от 10 до 50 м, то скорость
Можно увеличить до 30 км/ч. Полеты над пересеченной местностью
Необходимо производить на высоте не менее 50 м и при скорости не
менее 80 км/ч для того, чтобы полет происходил вне зоны влияния
воздушной подушки. При малых скоростях полета вертолет Ми-6
имеет повышенную вибрацию, поэтому длительные полеты не реко-
мендуются.
Г Полеты на малой высоте и перемещения желательно выполнять
против ветра, при необходимости можно их производить при встреч-
но-боковом и боковом ветре, если его скорость не более 10 м/сек,
п также при попутном — не более 5 м/сек.
Горизонтальный полет с грузами на внешней подвеске. В таком
полете вертолет имеет большее вредное сопротивление, что приво-
дит к необходимости увеличивать мощность для полета, при этом
километровый расход топлива увеличивается, дальность полета и
грузоподъемность уменьшаются. Так, для вертолета Ми-6 установ-
лен максимальный вес с грузом на внешней подвеске 38 Т, макси-
мальный вес груза 8 Т. Скорость полета также ограничена, она не
должна превышать 200 км/ч. Кроме того, величина скорости уста-
навливается в зависимости от веса груза, его габаритов и поведе-
ния в полете. Скорость подбирается такой, чтобы трос не подходил
до ограничительного кольца на 100 мм, и груз не раскачивался.
По технике пилотирования полеты с грузами на внешней подве-
ске сложнее и имеют ряд особенностей. Раскачивание груза на
подвеске приводит к раскачиванию вертолета, особенно в продоль-
ном направлении, поэтому удерживать заданную скорость труднее.
Для предотвращения раскачки грузов необходимо подобрать соот-
ветствующую скорость, балансировать вертолет необходимо более
125
внимательно и с большей тщательностью, движения рычагами уп-
равления должны быть плавными и соразмерными. Необходимость
такой техники пилотирования объясняется не только поведением
груза, ио и изменением эффективности управления вертолетом з::
счет смещения центра тяжести всего вертолета вниз. Известие,
что чем ниже центр тяжести вертолета от втулки несущего винта,
к которой приложена аэродинамическая сила, тем больше эффек-
тивность управления. Поэтому потребные отклонения автомата пе-
рекоса и ручки циклического шага как в продольном, так и в по-
перечном направлениях будут меньше. При излишних отклонениях
могут создаваться такие углы тангажа и крена, что вывод из них
будет затруднен или даже невозможен.
Выполнение разворотов с грузами на внешней подвеске также
затруднено, поэтому ввод в разворот выполняется очень плавно,
координированно с креном не более 10°.
Горизонтальный полет с одним работающим двигателем. Такой
полет может совершаться с учебной целью или при отказе одного
из двигателей. Горизонтальный полет возможен с одним работаю-
щим двигателем на взлетном режиме лишь при нормальном полет-
ном весе вертолета. Но такой полет с учебной целью может длить-
ся не более 6 мин. Скорость при этом должна быть 130—150 км/ч.
Число оборотов несущего винта 80—82%. При максимальном по-
летном весе горизонтальный полет невозможен, так как происходит
снижение вертолета с вертикальной скоростью 1—2 м!сек. Поэто-
му горизонтальный полет с одним работающим двигателем с учеб-
ной целью выполняют на незагруженном вертолете на номиналь-
ном режиме работы двигателя при скорости 130—150 км/ч на вы-
соте 1000—1500 л.
Двигатель выключается краном останова. Имитировать отказ
двигателя, переводя его на режим малого газа, не рекомендуется
из-за возникающих повышенных вибраций в трансмиссии двига-
теля.
Продолжительность такого полета с учебными целями не бо-
лее 90 мин.
Выключение двигателя производится на высоте 1000—1500 м
при числе оборотов не ниже 83%. Двигатель выключает бортме-
ханик.
После выключения • двигателя вертолет стремится к правому
развороту за счет уменьшения реактивного момента несущего вин-
та, опуская нос, и число оборотов несущего винта уменьшается на
5% за 6—7 сек. После выключения двигателя пилот должен быст-
ро уменьшить общий шаг винта на 4—6° и одновременно повернуть
рукоятку корректора газа вправо, переместить вперед левую пе-
даль, ручку циклического шага отклонить на себя, затем оба рыча-
га раздельного управления перевести в крайнее верхнее положение,
увеличить общий шаг, установить скорость 130 -150 км/ч. число
оборотов несущего випта 80—83%, а рычаг раздельного управле-
ния выключенного двигателя поставить на защелку.
126
1| Развороты с одним работающим двигателем необходимо выпол-
нять с углом крена не более 15°, В полете можно запускать выклю-
ченный двигатель. Обычно остановку двигателя приурочивают
№ посадке вертолета с одним работающим двигателем.
§ 23. ЛЕТНЫЕ ОГРАНИЧЕНИЯ В РЕЖИМЕ ГОРИЗОНТАЛЬНОГО
ПОЛЕТА
L 1. Максимальные и минимальные скорости установлены в за-
висимости от типа лопастей несущего винта, полетного веса верто-
лета, высоты полета и способа размещения грузов. На высоте ни-
же 50 м скорость должна быть не более 30 км/ч.
F 2. Число оборотов несущего винта установлено в зависимости
от типа лопастей несущего винта и высоты полета (см. табл. 6 и 71.
Г 3. Максимальная высота горизонтального полета для вертоле-
та с нормальным полетным весом (40,5 т) составляет 4500 .и,
С максимальным (42,5 т) и трапециевидными лопастями— 1500 м,
С максимальным весом и прямоугольными лопастями — 3000 м.
4. Минимальная допустимая высота горизонтального полета
над пересеченной местностью — 50 м, с грузом на внешней подве-
ске — 200 м.
г 5. Виражи и развороты в горизонтальном полете можно совер-
шать на всем диапазоне допустимых скоростей с креном до 30° для
Вертолета с нормальным полетным весом, до 15° —с максимальным
Ш до 10° при полете с грузами на внешней подвеске. Развороты при
полете с одним работающим двигателем делать с креном не бо-
лее 15°.
6. На вертолетах с трапециевидными лопастями и автоматом
перекоса, имеющим предельное отклонение вперед 6°30' при пол-
ной заправке топливом, с грузом и при центровке, близкой к пре-
дельно задней, для обеспечения достаточного запаса продольного
управления скорость необходимо выдерживать не более 200 км/ч
до окончания выработки 1000 кГ топлива из IV группы баков.
:ГЛАВА VII
СНИЖЕНИЕ С ПОСТУПАТЕЛЬНОЙ СКОРОСТЬЮ И ПОСАДКА
ПРИ РАБОТАЮЩИХ ДВИГАТЕЛЯХ
§ 24. СНИЖЕНИЕ С ПОСТУПАТЕЛЬНОЙ СКОРОСТЬЮ
ПРИ РАБОТАЮЩИХ ДВИГАТЕЛЯХ
Общая характеристика режима
Снижение с поступательной скоростью при работающих двига-
телях вертолета Ми-6 является основным видом снижения.
При снижении с поступательной скоростью на вертолет дейст-
вуют следующие силы: аэродинамическая сила несущего винта /?.
Рис. 75. Схема сил и моментов,
действующих на вертолет Ми-6
на режиме снижения с поступа-
тельной скоростью (крен и
скольжение не показаны)
аэродинамическая сила крыла /?кр, тяга рулевого винта Трл, сила
вредного сопротивления вертолета X, сила веса G (рис. 75). Аэро-
динамическая сила винта действует перпендикулярно основанию
128
ДОнуса вращения. Конус вращения и сила /? отклоняются в сторо-
•0 Полета при помощи ручки циклического шага. За счет маховых
Кижений в поступательном полете они отклоняются от плоскости
Бцщения назад и вправо. В связанной системе координат можно
рп »ложить силу R на тягу винта Т, продольную силу Н и боко-
вую S,
В поточной системе координат тяга винта Т и продольная сила Н
Кдскладываются на составляющие: Ту и Тх и Ну и Нх. В этой же
Системе координат сила /?1!Р раскладывается на УКр и Хк-р, сила ве-
ли — на Gv и Gx.
Ь При снижении с поступательной скоростью на вертолет действу-
ют следующие моменты: продольные — момент аэродинамической
силы винта, крыла, стабилизатора, вредного сопротивления фюзе-
ляжа, реактивный момент рулевого винта и момент втулки за счет
; разноса горизонтальных шарниров; путевые — реактивный момент
Несущего винта и момент рулевого винта; поперечные — моменты
рулевого винта, боковой силы и втулки за счет разноса горизон-
тальных шарниров.
Для соблюдения прямолинейного*полета, постоянства угла сни-
жения и вертикальной скорости снижения необходимо, чтобы си-
лы Ту и Укр уравновешивали составляющую веса Gy и составляю-
щую продольной силы Ну
К Для равномерного полета необходимо, чтобы сумма составляю-
щих тяги Тх, сопротивления крыла Х|1р, составляющей продольной
силы Нх и вредного сопротивления X уравновешивала составляю-
щую веса Gx
Tx+XK-p + Hx+X = Gx.
I При снижении с поступательной скоростью как и при других
режимах полета вертолет балансируется либо с правым креном,
либо с левым скольжением. При этом углы крена или скольжения
будут меньше, чем при горизонтальном полете ввиду меньшем по-
требной мощности. Тяга рулевого винта уравновешивается теми же
, силами, что и при наборе высоты или при горизонтальном полете.
I Указанная на рис. 75 схема сил и моментов будет справедлива
для всех случаев снижения с работающими двигателями при посту-
пательной скорости, в других случаях различаться будут только
углы снижения.
Снижение с поступательной скоростью — это такой режим по-
I лета, при котором располагаемая мощность несущего винта мень-
I ше потребной мощности для горизонтального полета вертолета, по-
катому и совершается снижение с работающими двигателями с оп-
1ределенной вертикальной скоростью. Величина вертикальной
скорости снижения зависит от величины заданной мощности двига-
телям, поступательной скорости, полетного веса вертолета, атмос-
ферных условий и высоты.
К—Яиунович 129
При любой заданной мощности двигателей при снижении ми
нимальная вертикальная скорость будет при экономической посту
нательной скорости (140 км/ч). На всех других скоростях полети
вертикальная скорость снижения будет больше, так как винт ш.
других скоростях работает в худших условиях и развивает меньшую
тягу, а для ее сохранения необходима большая вертикальная ско-
рость. При любой поступательной скорости величину вертикальной
скорости можно увеличивать или уменьшать, меняя величину мощ-
ности двигателей.
При снижении с работающими двигателями при поступатель-
ной скорости для вертолета Ми-6 с нормальным полетным весом
в зависимости от типа лопастей и высоты полета устанавливается
следующий диапазон допустимых скоростей по прибору по траек-
тории снижения (табл. 9).
Для вертолета Ми-6 с полетным весом больше нормального
в зависимости от типа лопастей и высоты полета допускается сле-
дующий диапазон скоростей (табл. 10).
Рекомендуемые скорости при снижении в зависимости от типа
лопастей и высоты полета установлены следующие (табл. 11).
Если скорость должна быть меньше минимально допустимой,
например, при заходе на посадку на вертодром с высокими препят-
ствиями, когда требуется более крутое снижение, то в этом случае
скорость выдерживается не менее минимально допустимой для го-
ризонтального полета.
Вертикальная скорость снижения на высотах от 4500 до 3000
не должна быть более 4 м/сек, а на высотах ниже 3000 м — более
7 м/сек. Вертикальная же скорость снижения для вертолета Ми-б
с полетным весом более нормального на всех допустимых высотах
и скоростях полета должна быть не более 7 м/сек.
При скорости меньше минимально допустимой в горизонталь-
ном полете вертикальная скорость снижения должна быть не бо-
лее 3 м/сек, так как возможен переход на режим вихревого кольца.
Числа оборотов несущего винта при снижении с поступательной
скоростью и работающими двигателями такие же, как и для дру-
гих режимов полета в зависимости от высоты и типа лопастей.
При установившемся снижении с поступательной скоростью и
неизменном положении ручки общего шага и корректора газа чис-
ло оборотов турбокомпрессора будет уменьшаться, а мощность
двигателей оставаться неизменной. Число оборотов несущего вин-
та будет уменьшаться вследствие увеличения плоскости воздуха. По
мере приближения к земле пилот должен уменьшать общий шаг
несущего винта, сохраняя заданную скорость вертикального сни-
жения, с помощью корректора газа поддерживать рекомендуемое
пли допустимое число оборотов несущего винта в зависимости от
высоты и типа лопастей (см. табл. 6 и 7).
Снижение с поступательной скоростью при работающих двига-
телях можно совершать по нисходящей спирали, при этом скорость
должна быть в пределах, указанных в табл. 9, вертикальная око-
130
кость не более 3 м/сек и крен — не более 15°. Снижение с посту-
мтельной скоростью с грузами на внешней подвеске требует от
Йцлота особого внимания. Переход с горизонтального полета на
снижение вызывает разбалансировку и раскачку груза. За счет от-
ставания груза на вертолет действует пикирующий момент, который
необходимо уменьшать отклонением ручки циклического шага на
себя. Такое снижение необходимо выполнять при скорости НО—
1*0 км/ч (в зависимости от поведения груза) и вертикальной ско-
ростью не более 2—3 м/сек.
Таблица 9
Диапазон допустимой скорости по
Прибору при снижении с работаю-
щими двигателями для вертолета
Мн-6 с нормальным полетным весом
Скорость полота по прибору, КМ1ч
llucoia, м ляг ециевиж- угольные
4500-4000 90-110 110-140
4000—3000 90-130 110-160
3000- 2000 90—190 110—190
aooo-iooo 90—200 100—230
1000-0 90-200 100-250
Таблица 10
Допустимые скорости по прибору по
траектории при снижении с работаю-
щими двигателями для вертолета
Ми-6 с полетным весом больше
нормального
Тра ецие- угольные
3000—1500 1500— 0 120—160 110-231 110—230
Рекомендуемые скорости снижения
для вертолета Ми-6 в зависимости
от типа лопастей и высоты полета
Высота, м Трапепие- у?Й“ные
4500—4000 4000-3000 ниже 3000 90- 110 100—130 120-140 110-130 НО- 140 120-160
Снижение можно также совершать с одним выключенным дви-
гателем в учебных целях или при отказе одного двигателя, скорость
рекомендуется выдерживать 130—140 км/ч, вертикальную скорость
снижения — не более 4 м/сек.
Особенности выполнения режима снижения с поступательной
скоростью при работающих двигателях
Для перехода из режима горизонтального полета на режим сни-
жения при поступательной скорости необходимо установить нуж-
ную скорость снижения, с помощью ручки общего шага установить
h* 131
необходимую вертикальную скорость снижения, следя за тем, чтобы
число оборотов несущего винта находилось в рекомендуемых пре
делах. Система «шаг-газ» вертолета Ми-6 такова, что при опуска
нии ручки общего шага вниз число оборотов несущего винта
увеличивается за счет его облегчения, поэтому необходимо
выводить корректор газа, чтобы выдерживать ранее заданное чис-
ло оборотов.
При уменьшении общего шага несущего винта вертолет стре
мится к кабрированию, так как стабилизатор устанавливается на
отрицательный установочный угол, следовательно, для предотвра
щения кабрирования необходимо движением ручки циклического
шага от себя удержать вертолет на заданном режиме полета. Од-
новременно с уменьшением общего шага уменьшается реактивный
момент несущего винта, поэтому нужно уменьшить тягу рулевого
винта движением вперед левой педали. Но чтобы не было скольже-
ния, так как боковая сила осталась прежней, следует одновремен-
но отклонить ручку циклического шага влево для уменьшения бо-
ковой силы.
Если снижение выполняется для захода на посадку, то скорость
должна быть 150 км/ч, вертикальная скорость снижения 2—3 м!сек.
При этом значение общего шага будет зависеть от веса вертолета:
чем больше вес, тем больше общий шаг для сохранения той же вер-
тикальной скорости снижения. Для нормального полетного веса при
снижении с высоты менее 500 м значение общего шага составит
примерно 3°, показания УПРТ — 35—40°.
Если необходимо перевести вертолет из режима снижения с по-
ступательной скоростью на режим горизонтального полета, то в
первую очередь увеличивают общий шаг винта до нужного преде-
ла, при этом одновременно движением правой педали удерживают
вертолет от левого разворота за счет роста реактивного момента;
движением ручки управления вправо предотвращают левое сколь-
жение. При движении ручки общего шага вверх число оборотов
несущего винта уменьшается в результате его затяжеления, поэто-
му необходимо рукоятку корректора газа повернуть вправо для
сохранения необходимого числа оборотов.
Летные ограничения в режиме снижения
с поступательной скоростью
1. Поступательная скорость должна быть в зависимости от ти-
па лопастей, полетного веса и высоты полета в пределах, указанных
в табл. 9 и 10. При необходимости допускаются минимальные ско-
рости, ниже указанных в таблицах, но они должны быть не ниже
минимально допустимых для горизонтального полета на данной
высоте.
2. Рекомендуемые скорости снижения в зависимости от типа
лопастей и высоты полета должны быть в пределах, указанных
132
п табл. 11. При снижении с одним работающим двигателем реко-
^КйНдуемая скорость 130—140 км/ч.
I 3. Вертикальная скорость снижения для вертолета с нормаль-
ным полетным весом на высотах от 4500 до 3000 м должна быть
lie больше 4 м/сек, на высотах ниже 3000 м — не больше 7 м/сек.
При скорости меньше минимально допустимой (заход на посадку)
^Вертикальная скорость должна быть не более 2—3 м/сек. Для вер-
толета с полетным весом более нормального вертикальная скорость
I ни всех высотах должна быть не более 7 м/сек. При снижении с од-
ним работающим двигателем вертикальная скорость снижения
должна быть не более 4 м/сек.
4. Число оборотов несущего винта должно быть в пределах до-
пустимого в зависимости от типа лопастей и высоты полета, ука-
панных в табл. 7.
§ 25. ПОСАДКА
Общие сведения
Посадка для вертолета является завершающим этапом полета
II является наиболее сложным его элементом. На вертолете Ми-6
1 Применяются следующие виды посадки: с работающими двигателя-
ми с поступательной скоростью (по-самолетному), вертикальная
с работающими двигателями (по-вертолетиому), с одним работаю-
щим двигателем с поступательной скоростью (по-самолетному) и
пл режиме самовращения несущего винта с неработающими двига-
, В Телями. В этой главе рассматриваются посадки по-самолетному и
1 Вертикальная с работающими двигателями. Посадка с одним рабо-
I 1 тиюшим двигателем рассматривается в гл. X, посадка на режиме
II Самовращения несущего винта с учебной целью — в гл. VIII.
! Для вертолета Ми-6 посадка по-самолетному является основ-
ным видом посадки, так как для нее требуется меньшая мощность
и она возможна на вертолете как с нормальным, так и с максималь-
ным полетным весом. Кроме перечисленных преимуществ, у верто-
f лета отсутствуют повышенные вибрации («трясучий режим»), на-
блюдаемые при скорости полета менее 60 км/ч. При посадке по-са-
молетному вертолет имеет большую длину пробега и посадочной
I дистанции, поэтому посадка возможна лишь на постоянные или
Временные вертодромы первого типа для тяжелых вертолетов.
Вертикальная посадка (по-вертолетному) применяется, если
Нельзя совершить посадку по-самолетному (при посадке на верто-
дромы второго типа, величина и подходы к которым не позволяют
совершить посадку по-самолетному или, если поверхность верто-
дрома, не позволяет произвести пробег вертолета). Предельный
• посадочный вес при вертикальных посадках определяется по тем
же номограммам, по которым определяется взлетный вес. так как
условия посадки по мощности остаются такими же, как и условия
взлета, учитывается также необходимость возможного ухода на
133
второй круг. Если высота вертодрома более 500 м над уровнем мо-
ря, то для посадки с использованием воздушной подушки опреде-
ляется поправка к весу по той же номограмме, что и для взлета,
при этом высота контрольного зависания не учитывается, так как
опа при посадке не нужна.
Длина пробега и посадочная дистанция при посадке по-само-
летному, а также посадочная дистанция при вертикальной посадке,
как установлено летными испытаниями, меньше, чем длина разбега
и взлетная дистанция при взлете по-самолетному и взлетная ди-
станция при вертикальном взлете. Как уже было сказано выше,
номограмм для определения взлетно-посадочных характеристик
для вертолета Ми-6 нет. Все вертодромы для тяжелых вертолетов
построены из расчета не посадочных, а взлетных характеристик
вертолета Ми-6, поэтому размеры и подходы к вертодромам для
тяжелых вертолетов, соответствующие техническим требованиям,
позволяют производить посадку в любое время года и при любых
атмосферных условиях. Посадка с подбором площадки с воздуха
на пыльные, песчаные и заснеженные вертодромы для вертолета
Ми-6 запрещается.
Посадка по-самолетному
Посадка по-самолетному на вертолете Ми-6 производится толь-
ко на вертодром первого типа с искусственным и естественным
покрытием ВПП. Посадке предшествует расчетное снижение.
Посадка по-самолетному состоит из следующих этапов: умень-
шения скорости с высоты 100—80 м с последующим увеличением
мощности для сохранения и уменьшения вертикальной скорости
снижения, приземления и пробега (рис. 76).
Рис. 76. Профиль и элементы посадки по-самолетному вертолета Ми-6
После выхода на посадочную прямую необходимо установить
такой угол снижения, чтобы намеченное место приземления проек-
тировалось на среднюю часть бокового стекла (с электрообогре-
вом), подобрать такое значение общего шага и показаний УПРТ,
при которых обеспечивалась бы скорость 150 км/ч и вертикальная
134
! BfcupocTb снижения 2—3 м[сек. При этом общий шаг и число оборо-
,<>п несущего винта установить такими, чтобы в процессе дальней-
шего снижения и уточнения расчета движение ручки общего шага
| *низ или вверх не приводило бы к большому изменению числа
Оборотов и выходу его за допустимое (т. е. внимание пилота не
молжно отвлекаться для наблюдения за числом оборотов и нх
Поддержанием в процессе посадки).
L Посадка начинается с высоты 100—80 м, с этой высоты необ-
f Кадимо начать уменьшение скорости отклонением ручки цикличе-
ского шага на себя. Темп отклонения ручки должен быть таким,
чтобы на высоте 40—30 м скорость составляла 70—80 км/ч. При
руменьшении скорости вертикальная скорость не меняется, а остает-
ся в пределах 2—3 м[сек, хотя потребная мощность на меньшей
Скорости и увеличивается, но за счет увеличения угла атаки несу-
щего винта тяга винта увеличивается. При достижении скорости
7(|—80 кл/ч начинает увеличиваться вертикальная скорость сниже-
ния. Для ее сохранения необходимо плавно выбирать ручку общего
шага вверх для увеличения мощности. Темп и величина выбора
I ручки «шаг-газ» должны быть такими, чтобы соответствующим
f Изменением вертикальной скорости снижения добиваться уточнения
Почета на посадку. С высоты 25—20 м следует увеличить общий
Шаг для уменьшения вертикальной скорости до 1—2 м]сек. При
Гаком расчете на посадку вертолет должен снижаться в намечен-
ную точку и подойти к ней на высоте 5—6 м при скорости 60—
70 км/м и вертикальной скорости 0,5 м!сек. Ручка циклического
шага при этом отклоняется от себя для уменьшения угла тангажа
и придания вертолету посадочного положения (на основные
Колеса), одновременно поднимается незначительно ручка общего
шага для дальнейшего уменьшения вертикальной скорости сниже-
ния. Если не отклонять ручку циклического шага от себя или
отклонять ее недостаточно, то’вертолет может удариться о землю
Хвостовой опорой. Если же на указанной высоте 5—6 м ручка
циклического шага будет отклонена от себя излишне, то возможно
Приземление на три колеса, что недопустимо.
При правильных действиях пилота приземление вертолета
должно произойти на основные колеса при скорости 50—60 км/ч
и с вертикальной скорости 0,1—0.2 м!сек.
Посадочная скорость может быть больше указанной в резуль-
тате более позднего начала уменьшения скорости (ниже 100—80 м)
Или в результате подтягивания на малой высоте для исправления
расчета. В этом случае будет больше длина пробега. Если места
для пробега недостаточно и если такая ошибка замечена, то с вы-
соты 5—6 м необходимо уйти на второй круг.
После приземления на основные колеса необходимо задержать
ручку циклического шага неподвижно, вертолет сам опустится на
переднее колесо. Затем общий шаг уменьшить до минимального, а
корректор газа повернуть полностью влево. Сбрасывание ручки
общего шага до отказа и поворот рукоятки корректора влево до
135
отказа обязательны, так как в противном случае может возникнуть
земной резонанс.
В первой половине пробега торможение осуществляется ручкой
циклического шага, во второй половине — тормозами. Направление
выдерживается плавным отклонением педалей.
Длина пробега зависит от посадочного веса вертолета, посадоч-
ной скорости и атмосферных условий, а также и от качества ВПП.
В результате летных испытаний установлено, что в зависимости от
указанных условий длина пробега вертолета Ми-6 составляет
150—250 м, а посадочная дистанция—450—600 м. На вертолете
Ми-6 посадка по-самолетному возможна при боковом ветре до
10 м/сек и при попутном до 5 м/сек.
На песчаные и пыльные вертодромы и площадки, им соответ-
ствующие, посадку при возможности необходимо производить по-
самолетному. Но такая посадка имеет особенности в зависимости
от направления и силы ветра, а также от размеров вертодрома.
Посадка в этом случае производится только против ветра, чтобы
обеспечить хорошую видимость. Если встречный ветер более
5 м/сек, то такая посадка происходит обычно. Видимость обеспечи-
вается на всем протяжении посадки. При встречном ветре менее
5 м/сек в зависимости от размера площадки посадку необходимо
производить при разных посадочных скоростях. Если площадка,
пригодная для пробега длиной более 300 тогда посадочная
скорость обычная (50—60 км/ч, не меньше). Если же длина пло-
щадки от 300 до 100 м, то посадочная скорость должна быть умень-
шена, но не менее 30—35 км/ч. Если при такой посадке при умень-
шении скорости ухудшится горизонтальная видимость из-за пыли,
поднятой воздушным потоком, то необходимо уйти на второй круг
и при повторной посадке приземление производить на повышенной
скорости.
Посадка по-самолетному на заснеженный вертодром или пло-
щадку должна производиться только при плотно укатанном снеге,
при свежевыпавшем снеге следует руководствоваться теми же
рекомендациями, что и при посадке на песчаные и пыльные верто-
дромы.
Краткая методика выполнения посадки по-самолетному. После
четвертого разворота устанавливается скорость 150 км/ч, верти-
кальная скорость 2—3 м/сек. На высоте 100—80 м уменьшается
скорость отклонением ручки циклического шага на себя с таким
расчетом, чтобы на высоте 40—30 м она была 70—80 км/ч. Про-
должая уменьшать скорость, необходимо одновременно увеличи-
вать мощность движением ручки общего шага вверх с таким рас-
четом, чтобы на высоте 25—20 м вертикальная скорость была
1—2 м/сек, на высоте 5—6 м— 0,5 м/сек, а к моменту приземления
посадочная скорость —50—60 км/ч, а вертикальная скорость
0,1—0,2 м/сек. Для приземления вертолета на основные колеса не-
обходимо с высоты 5—6 м ручкой циклического шага тщательно
добиваться посадочного положения. После приземления ручка об-
136
Iliero шага опускается вниз до отказа, рукоятка корректора газа
поворачивается влево, вертолет опускается на переднее колесо. Для
уменьшения пробега используются тормоза.
При заходе на посадку при боковом ветре борьбу со сносом ДО'
ПРС вести изменением курса, а начиная с высоты 50—60 м— кре-
ном в сторону против ветра, парируя стремление к развороту от-
клонением педали в сторону, противоположную крену. Перед при-
землением необходимо убрать крен и отклонить педаль в сторону
сноса для предотвращения бокового удара колесами о землю. На
пробеге направление выдерживается отклонением педалей в сторо-
ну, противоположную развороту.
Вертикальная посадка
Вертикальная посадка применяется, если невозможно произ-
вести посадку по-самолетному и также при посадке с грузом на
внешней подвеске. Аналогично вертикальному взлету вертикальная
посадка производится с использованием воздушной подушки и вне
зоны влияния воздушной подушки*.
Вертикальная посадка с зависанием в зоне влияния воздушной
подушки совершается на постоянные или временные вертодромы
первого типа (как и посадка по-самолетному), размеры и подходы
которых позволяют произвести этот вид посадки, но состояние
Грунта или небольшие препятствия не позволяют совершить про-
бег по земле.
Предельный посадочный вес вертолета для такой посадки опре-
деляется по тем же номограммам, что и для взлета (см. рис. 55).
Если же барометрическая высота вертодрома более 500 м, то опре-
деляется поправка к полетному весу по номограмме рис. 56.
Посадке предшествует расчетное снижение. Высота выхода из
четвертого разворота должна быть не менее 150 м. Принцип рас-
чета на посадку после выхода на посадочный курс остается такой
же, как и при посадке по-самолетному. Предпосадочная скорость
снижения должна составлять 120—140 км/ч при вертикальной
скорости снижения 2—3 м/сек.
Вертикальная посадка состоит из следующих этапов: уменьше-
ния скорости с высоты 100—80 м до зависания с одновременным
увеличением мощности, начиная со скорости 80—70 км/ч, кратко-
временного висения на высоте 2—3 м и вертикального приземления
со скоростью 0,1—0,2 м/сек (рис. 77).
Посадка начинается на последней прямой с высоты 100—80 м,
на этой высоте начинается уменьшение скорости выбором ручки
циклического шага йа себя, как и при посадке по самолетному.
Отклонение ручки циклического шага на себя должно быть
таким, чтобы на высоте 40—50 м скорость была 80—70 км/ч.
С этого момента необходимо увеличивать общий шаг, в противном
случае вертикальная скорость будет расти несмотря на увеличение
угла атаки несущего винта при отклонении ручки циклического'
шага на себя. Поэтому при достижении скорости 80—70 км/ч не-
137
обходимо поднять ручку общего шага вверх и начать уменьшение
вертикальной скорости снижения, одновременно продолжая умень-
шать поступательную скорость. При этом следить, чтобы число
оборотов несущего винта не выходило за пределы допустимого:
оно должно быть таким же, как в горизонтальном полете в зависи-
мости от типа лопастей и высоты полета. Если же число оборотов
уменьшается при движении ручки общего шага вверх, то его надо
поддерживать поворотом рукоятки корректора газа вправо.
Рис. 77. Профиль и элементы вертикальной посадки с зависанием в зоне
влияния воздушной подушки вертолета Ми-6
По достижении скорости 60 км/ч, что должно быть на высоте
25—30 м, у вертолета Ми-6 наблюдается повышенная вибрация
(«трясучий режим»), но более ярко выраженная, чем у вертолета
Ми-4, и более сильная, чем при разгоне скорости на вертолете Ми-6
после зависания. Объясняется это тем, что вертолет Ми-6 имеет
больший полетный вес, следовательно, большую индуктивную ско-
рость, поэтому вихревая система в поступательном полете труднее
перестраивается в вихревую систему на режиме висения. При умень-
шении скорости вибрация больше, чем при разгоне, потому что
разгон можно вести в быстром темпе, а при уменьшении скорости
это не удается, так как из-за большой массы вертолета угол тан-
гажа может стать более допустимого, в результате чего пилот не
справится с посадкой. Для уменьшения вибраций по величине и
продолжительности следует уменьшать скорость, начиная с 60 км/ч
не только с помощью ручки циклического шага, но и ручки общего
шага, так как тяга винта отклонена назад и при увеличении общего
шага несущего винта интенсивно уменьшается скорость. Кроме
того, если имеется запас мощности, то выбор ручки общего шага,
начиная со скорости 30—20 км/ч, должен быть таким, чтобы ско-
рость до зависания уменьшалась с небольшим набором высоты.
При таком действии ручкой общего шага пилот создает большую
(38
индуктивную скорость, и вихревая система поступательного полета
быстрее перестраивается в вихревую систему режима висения.
Темп движения ручки общего шага должен быть таким, чтобы за-
висание произошло на высоте 2—3 м. При такой методике посадки
время пребывания вертолета на «трясучем режиме» будет мини-
мальным и составит 10—15 сек.
В процессе уменьшения скорости, как и при ее разгоне на взле-
[те. вертолет разбалансировывастся вследствие уменьшения скоро-
сти, увеличения мощности двигателей и реактивного момента несу-
щего винта. Вертолет необходимо балансировать перемещением
вперед правой педали и одновременным движением ручки цикли-
ческого шага на себя и вправо. Кроме того, необходимо иметь в
виду еще и такое обстоятельство: если уменьшение скорости про-
исходило плавно, начиная с высоты 100—80 м, а вертикальная ско-
рость уменьшалась постепенно со скорости 70—80 км/ч, то к мо-
менту зависания угол тангажа будет нормальным, если же тормо-
жение происходило энергично, то к моменту зависания угол
тангажа будет большим, поэтому* необходимо отклонением ручки
циклического шага от себя создать нормальный угол тангажа, а
ручкой общего шага предотвращать снижение за счет наклона тяги
назад и уменьшения ее вертикальной составляющей.
Перед зависанием и в момент зависания не допускать перетяже-
ления несущего винта и уменьшения числа оборотов ниже допу-
стимого.
Необходимо зафиксировать установившееся висение, лишь после
этого начать снижение, не допуская смещений вертолета. Вер-
тикальная скорость к моменту приземления должна быть
0,1—0,2 м/сек. Вертолет Ми-6, как и Ми-4, вначале опускается на
правое колесо, так как он висит с правым креном, затем на левое и
после этого на носовое колесо. Общий шаг можно уменьшать только
при полной уверенности, что вертолет устойчиво стоит на грунте
всеми колесами шасси.
Вертикальная посадка в зоне влияния воздушной подушки, как
н посадка по-самолетному, должна выполняться против ветра.
В случае же необходимости допускается посадка при боковом ветре
до 10 м/сек и при попутном до 5 м/сек. Посадка при боковом ветре
слева более благоприятна, чем при ветре справа, так как при ветре
слева больше запас управления ручкой циклического шага в боко-
вом направлении. После зависания необходимо развернуть вертолет
против ветра и совершать приземление. Посадочная дистанция при
вертикальной посадке составляет 230—300 м.
При вертикальной посадке можно уходить на второй круг с
любой высоты, даже после зависания. Для ухода на второй круг
следует увеличить мощность при помощи ручки общего шага и
удерживать число оборотов в пределах допустимого (78—83%), со-
общить вертолету скорость движением ручки, циклического шага и
перевести его в набор высоты. Дистанция набора высоты 25 м при
уходе на второй круг зависит от полетного веса вертолета, величи-
139
ны заданной мощности и скорости, с которой начат набор высоты.
Чем больше вес и больше скорость набора высоты, тем больше
дистанция набора высоты. Так, например, при одном из испыта-
тельных полетов получены следующие данные: при весе вертолета
38 т с использованием взлетной мощности при скорости набора
высоты 60 км/ч, дистанция получена 270 м, а при скорости набора
80 км/ч — 370 м.
Вертикальную посадку на песчаные и пыльные вертодромы
необходимо производить против ветра, и если встречный ветер бо-
лее 5 м/сек, то посадка особенностей не имеет,, так как видимость
будет нормальной. Если же ветер менее 5 м/сек, то вертикальная
посадка разрешается только на площадки, обильно политые водой.
Вертикальная посадка па заснеженный вертодром возможна,
но в этом случае уменьшение скорости ведется в таком темпе (по-
ниженном), чтобы снежный вихрь отставал от вертолета и «нак-
рывал» его только к моменту зависания у ориентира «привязки».
В это время видимость может ухудшиться на 1—2 сек, поэтому не-
обходимо удерживать вертолет по приборам в нормальном поло-
жении, вертикальное снижение и приземление производить только
при появлении видимости ориентира «привязки» и земли.
Вертикальная посадка на вертодром или площадку со свеже-
выпавшим или сыпучим снегом запрещается, так как в этом случае
сильно ухудшается видимость и затрудняется техника пилотиро-
вания.
Краткая методика выполнения вертикальной посадки в зоне
влияния воздушной подушки. Снижение перед посадкой произво-
дится на скорости 120—140 км/ч при вертикальной скорости сни-
жения 2—3 м/сек. С высоты 100—80 м начинается уменьшение
скорости ручкой циклического шага таким темпом, чтобы на высоте
40—50 м скорость была 70—80 км/ч. С этого момента следует одно-
временно увеличивать общий шаг винта движением ручки общего
шага вверх, удерживая с помощью корректора газа число оборотов
в пределах допустимого в зависимости от типа лопастей. По дости-
жении скорости 60 км/ч на высоте 25—30 м темп движения ручки
общего шага необходимо увеличить так, чтобы вертолет завис на
высоте 2—3 м. В процессе уменьшения скорости и увеличения мощ-
ности балансировать вертолет по направлению, крену и высоте
всеми рычагами управления, снимая давление с них триммерами.
После зависания произвести вертикальное приземление при верти-
кальной скорости 0,1—0,2 м/сек. Перед приземлением не допускать
боковых перемещений. При полной уверенности в том, что вертолет
устойчиво стоит на грунте, уменьшить величину общего шага винта
до минимальной.
Вертикальная посадка с зависанием вне зоны влияния воздуш-
ной подушки применяется на вертодромы второго типа, которые не
позволяют использовать эффект воздушной подушки, а также при
транспортировке грузов на внешней подвеске.
Этот вид посадки состоит из тех же этапов, что и посадка с за-
140
писанием в зоне влияния воздушной подушки, только зависание
выполняется на высоте 10—15 м над препятствиями, т. с. вне зоны
влияния воздушной подушки. Такая посадка возможна при наличии
Мощности, позволяющей делать зависание на соответствующей вы-
соте вне зоны влияния воздушной подушки. Предельный полетный
вес для такой посадки определяется по номограммам (см. рис. 59).
Профиль и элементы вертикальной посадки с зависанием вне
зоны влияния воздушной подушки показаны на рис. 78. При этом
виде посадки уменьшение скорости, зависание и вертикальное сни-
жение ведутся в опасной зоне в случае отказа двигателей, поэтому
Рис. 78. Профиль и элементы вертикальной посадки с зависанием вне зоны
влияния воздушной подушки
такая посадка применяется лишь в исключительных случаях (с гру-
зами на внешней подвеске, на вертодромы второго типа, при ава-
рийно-спасательных работах и оказании экстренной медицинской
помощи). Ограничения по ветру для такой посадки предусмотрены
такие же, как и при посадке в зоне влияния воздушной подушки.
Методика выполнения этой посадки вплоть до момента зависа-
ния нс отличается от методики вертикальной посадки с зависанием
в зоне влияния воздушной подушки. Вертикальное снижение после
зависания необходимо вести при вертикальной скорости не более
1—2 м!сек, превышение этой скорости (особенно более 2—3 м!сек)
может привести к режиму вихревого кольца. К моменту приземле-
ния вертикальная скорость должна быть 0,1—0,2 mJ сек. Указанная
посадка на пыльные, песчаные и заснеженные вертодромы произ-
водится также и с такими же ограничениями, как и посадка с зави-
санием в зоне влияния воздушной подушки.
Вертикальная посадка с грузами на внешней подвеске имеет
ряд особенностей. Вследствие отставания груза от вертолета на
него действует пикирующий момент, поэтому для удержания задан-
ной скорости ручка циклического шага должна быть отклонена на
себя в большей степени, по сравнению с ее положением при нали-
141
чип грузов внутри кабины. Снижение перед началом торможения
необходимо производить с поступательной скоростью в зависимости
от поведения груза и с вертикальной скоростью 2—3 м/сек. Послед-
ний разворот для захода на посадочную прямую необходимо выпол-
нять несколько дальше, чем в обычном полете для того, чтобы
можно было более плавно уменьшать скорость, что предотвращает
раскачивание груза и облегчает технику пилотирования. Резкое
уменьшение скорости приводит к «забеганию» груза вперед, в ре-
зультате чего возникает большой кабрирующий момент и недопу-
стимый угол тангажа. Скорости уменьшать необходимо постепенно,
плавно увеличивая мощность. Обычный же темп уменьшения ско-
рости приводит к раскачке груза в продольном направлении.
Уменьшение скорости даже обычным темпом приводит к некоторому
«забеганию» груза вперед, а горизонтальная составляющая тяги,
несущего винта наклонена назад, в результате чего создается зна-
чительный кабрирующий момент, вынуждающий пилота удержи-
вать ручку циклического шага в переднем положении.
При торможении вертолета на снижении число оборотов несу-
щего винта может увеличиваться, поэтому для сохранения его не-
обходимо увеличивать общий шаг, удерживая рукоятку корректора
газа в среднем положении. Увеличение общего шага в конце тор-
можения может привести к падению числа оборотов ниже допусти-
мого и к увеличению вертикальной скорости снижения. Чтобы не
допустить такого явления, необходимо плавно поворачивать ру-
коятку корректора газа с таким расчетом, чтобы к моменту зави-
сания она была полностью повернута вправо. Снижение и тормо-
жение необходимо вести с таким расчетом, чтобы вертолет завис
над местом укладки груза, а груз находился бы на высоте 3—5 м
от земли. Если уменьшение скорости было произведено рано, то
необходимо зависнуть, не долетев до места укладки груза на высо-
те не менее 3 м от груза до земли, а затем выполнить подлет к ме-
сту укладки груза со скоростью 5—10 км/ч. Если же уменьшение
скорости началось поздно и она не уменьшилась до нуля над ме-
стом укладки груза, в этом случае необходимо, не уменьшая мощ-
ности, перейти к увеличению скорости, произвести набор высоты и
повторить заход на площадку для укладки груза.
При скорости менее 60 км/ч, как и при обычной вертикальной
посадке, у вертолета возникает повышенная вибрация («трясучий
режим»), для уменьшения которой пилот должен применить ту же
методику, что и при вертикальной посадке с грузами внутри кабины.
После устойчивого зависания необходимо плавным движением
ручки «шаг-газ» опустить груз со скоростью не более 0,2—0,3 м/сек.
После приземления груза необходимо произвести дальнейшее сни-
жение вертолета для того, чтобы отцепить груз.
Зависание вертолета с грузами на внешней подвеске и верти-
кальное снижение необходимо производить обязательно строго про-
тив ветра для обеспечения безопасности насадки и облегчения тех-
ники пилотирования.
142
Летные ограничения при посадке
' 1. Посадка допустима при встречном ветре до 25 м!сек, боко-
вом — до 10 м[сек. и попутном — до 5 м!сек.
I 2. Вертикальная посадка запрещена на пыльные и песчаные
Вертодромы при встречном ветре менее 5 м!сек, а также при боко-
вом н попутном ветре.
F 3. Вертикальная посадка запрещена на вертодромы со свеже-
выпавшим и сыпучим снегом.
f 4. Посадка возможна лишь на аэродромы и вертодромы как
временные, так и постоянные, а также на площадки, заранее подо-
бранные и соответствующие техническим требованиям к вертодро-
мам гражданской авиации.
Особенности вертикальных взлетов и посадок
на высокогорных вертодромах
Особенность системы <шаг-газ» вертолета Ми-6 состоит в том,
что с увеличением высоты вертодрома над уровнем моря или повы-
шением температуры воздуха, или понижением атмосферного дав-
Рис. 79. Характер использованпя коррекции газа на вертолромах разной вы-
соты над уровнем моря:
а — вертикальные режимы полета; б— режим торможения перед посадкой;
( — высокогорный вертодром; 2 — вертодром, расположенный на высоте, близкой к
ню моря
ления несущий винт при любом шаге и при полностью введенном
корректоре газа вправо облегчается, т. е. число оборотов его уве-
личивается и может выйти за максимально допустимое. Поэтому на
Вертодромах с большим превышением вертикальный взлет, висение,
вертикальные режимы полета и вертикальная посадка должны со-
вершаться с использованием корректора газа, т. е. его следует
держать не в крайнем правом положении, а в промежуточном по-
ложении. На вертодромах, расположенных на высотах, близких к
уровню моря, на вертикальных режимах полета корректор газа
обычно используется в небольшом диапазоне общего шага (2—5°),
143--
а с увеличением превышения вертодрома — в большем диапазоне
шага, и чем больше высота вертодрома, тем шире этот диапазон
(рис. 79,а).
Как известно из практики пилотирования при предпосадочном
торможении к зависанию на невысокогорные вертодромы для удер-
жания допустимых оборотов приходится пользоваться корректором
газа. При таком же торможении при посадке на высокогорные вер-
тодромы пользоваться корректором приходится еще чаще
(рис. 79,б).
Также известно, что при повороте рукоятки корректора газа
число оборотов сначала изменяется медленно, а затем быстрее. Это
особенно заметно с увеличением высоты вертодрома над уровнем
моря. Чтобы сохранить число оборотов в допустимых пределах, не-
обходимо управлять двигателями плавными, небольшими, неодно-
кратными, упреждающими поворотами рукоятки корректора газа.
Чтобы получить наибольшую высоту висения или возможность
взлетать с большим полетным весом, двигатели должны работать
на взлетном режиме, а число оборотов несущего винта должно быть
наивыгоднейшим (78—80%) . Если число оборотов винта будет
больше или меньше указанного при той же мощности двигателей,
тяга несущего винта будет меньше. С увеличением высоты верто-
дрома над уровнем моря наивыгоднейшее число оборотов увеличи-
вается и приближается к верхнему пределу — 86%. Это обязывает
пилота при пилотировании на высокогорных вертодромах с боль-
шей точностью пользоваться корректором газа, так как диапазон
числа оборотов между максимально допустимым и наивыгодней-
шим уменьшается.
Для улучшения тяговых характеристик несущего винта имеет
также большое значение регулировка величины общего шага. Регу-
лировкой общего шага можно получить при той же мощности дви-
гателей разное число оборотов несущего винта, например, на висе-
нии: большое число оборотов «легкий» винт или малое число оборо-
тов — «тяжелый» винт. Если винт будет «тяжелым», значит он не
разовьет наивыгоднейшего числа оборотов, при котором тяга будет
максимальной, и нельзя будет получить наибольшую высоту висе-
ния или взлететь с большим весом. Даже при наличии запаса мощ-
ности двигателей при попытке увеличить тягу отклонением ручки
«шаг-газ» вверх число оборотов уменьшается и доходит до своего
нижнего допустимого предела. Если же винт будет «легким», то
получить наивыгоднейшее число оборотов можно путем затяжеле-
ния винта ручкой общего шага больше нормы.
«Тяжелый» винт не только ухудшает тяговые характеристики,
то и уменьшает запас хода правой педали при вертикальных взле-
тах, посадках и на висении. Известно, что чем меньше число оборо-
тов несущего винта при той же мощности, тем больше реактивный
момент несущего винта.
Следовательно, для уравновешивания возросшего реактивного
момента потребуется больший ход вперед правой педали. Вместе с
144
Впм при неизменных числах оборотов и мощности с подъемом на
К Высоту потребный ход правой педали увеличивается, запас управ-
Лепия уменьшается за счет снижения тяги рулевого винта вслед-
ствие уменьшения плотности воздуха.
I На высокогорных вертодромах при висении на взлетном режиме
1 двигателей и числе оборотов несущего винта в пределах 79—80%
Практически запаса хода правой педали уже нет. Следовательно,
Довершать висение, взлеты, посадки и маневры на висении опасно,
Особенно вблизи препятствий и в неспокойной атмосфере. Чтобы
обеспечить нужный запас хода правой педали, следует увеличивать
Число оборотов несущего винта, если же оно дошло до верхнего
Предела, тогда нужно уменьшить мощность, т. е. полетный вес вер-
В Толета, что и предусматривается номограммами для расчета пре-
Дсльного полетного веса вертолета для взлета и посадки. Если же
Пилот не уверен в достаточном запасе хода правой педали, то для
обеспечения безопасной посадки необходимо заходить на зависание
и таком месте, чтобы можно было уйти на второй круг, израсходо-
нить часть топлива, а затем произвести посадку. Если запас топ-
J лива мал, необходимо произвести посадку на вертодром с меньшей
Высотой над уровнем моря.
При взлете с высокогорного вертодрома запас хода правой
Педали может легко определяться путем выхода на высоту конт-
» рольного зависания (запас должен составлять не менее 10 мм).
I Боковой ветер при вертикальных взлетах, посадках и на верти-
кальных режимах полета уменьшает запас хода правой педали, так
как рулевой винт при разворотах против ветра получает не косую
В Обдувку, а прямую, которая уменьшает тягу рулевого винта, следо-
нательно, для ее удержания в нужных пределах требуется больший
шаг рулевого винта, больший ход правой педали. Запас управления
особенно будет уменьшаться при правом развороте, и чем больше
В скорость бокового ветра (слева), тем меньше запас хода правой
педали. Кроме того, труднее прекратить левый разворот, так как
при развороте на угол более 60—70° вертолет стремится к увеличе-
нию скорости вращения вследствие ухудшения работы рулевого
В пинта при ветре справа.
в— Япунович
ГЛАВА VIII
ПЛАНИРОВАНИЕ И ПОСАДКА НА РЕЖИМЕ
САМОВРАЩЕНИЯ НЕСУЩЕГО ВИНТА
§ 26. ПЛАНИРОВАНИЕ
Общая характеристика режима планирования и схема
сил, действующих на вертолет
На вертолете Ми-6 можно производить планирование на режиме
самовращения несущего винта с двигателями, работающими на ре-
жиме малого газа (с учебной целью), и с неработающими двига-
телями (при их отказе), а также при остановленных двигателях
в случае посадки на режиме самовращения.
Ранее на вертолетах Ми-6 было предусмотрено крыло управляе-
мое, т. е. его установочный угол мог изменяться по желанию пило-
та: для полетов с работающими двигателями крыло устанавлива-
лось на большие установочные углы — 15°, на режиме самовраще-
ния несущего винта — на малые — 5° для предотвращения срыва
потока и улучшения характеристик режима планирования. Но прак-
тика полетов и летные испытания показали, что при установочном
угле крыла 15° поведение вертолета на режиме самовращения не-
сущего винта мало отличается от его поведения при планировании
при установочном угле крыла 5° (при этом характеристики плани-
рования ухудшаются незначительно). Поэтому на вновь выпускае-
мые вертолеты устанавливается фиксированное крыло, а вертоле-
ты, имеющие управляемое крыло, подвергались доработке, с целью
фиксирования крыла. Кроме того, в этом случае упрощается кон-
струкция и уменьшается число отказов систем.
При планировании на режиме самовращения несущего винта на
вертолет Ми-6 действуют следующие силы и моменты (рис. 80).
Несущим винтом создается общая аэродинамическая сила R. ко-
торая ручкой циклического шага отклоняется вперед от вертикали
на соответствующий угол. За счет маховых движений она вместе
с конусом вращения заваливается назад и вправо. Но пилот для
нужной балансировки вертолета при планировании отклоняет ее
ручкой циклического шага влево на необходимый угол. Сила R в
связанной системе координат раскладывается на тягу Т, продоль-
ную силу Н и боковую силу S, направленную влево по плоскости
вращения несущего винта. В поточной же системе координат сила
тяги и продольная сила раскладываются каждая на две составля
ющие: Тх и Ту, Нх н Ну. Сила тяги рулевого винта направлена впра
во за счет перевода шага рулевого винта на отрицательные углы
движением левой педали вперед.
146
На крыло действует общее аэродинамическое сопротивление
RKi>, которое может быть разложено в поточной системе координат
На подъемную силу Укр и лобовое сопротивление Хнр. На вертолет
Гакже действуют силы вредного сопротивления вертолета X и se-
ta G. Вес в свою очередь раскладывается на две составляющие;
Gu и Gx. На рис. 80 крен и скольжение не показаны.
Рис. 80. Схема сил и моментов,
действующих на вертолет Ми-6
при планировании на режиме
самовращения несущего винта
При планировании па вертолет действуют следующие моменты:
продольный момент аэродинамической силы R винта, продольный
момент крыла, разворачивающий момент несущего винта, направ-
ленный вправо, путевой момент рулевого винта, продольный и по-
перечный моменты втулки за счет разноса горизонтальных шарни-
ров, поперечный и продольный моменты рулевого винта, попереч-
ный момент боковой силы и продольный момент стабилизатора.
Для соблюдения прямолинейности полета и постоянства угла
планирования необходимо, чтобы сумма сил Ту и Укр уравновеши-
пнли составляющую веса Gy и составляющую продольной силы Ну
г,+и„=с,- н„.
Для равномерного полета необходимо, чтобы сумма сил, состав-
ляющих тяги Тх, продольной силы //*-, сопротивления вертолета X
fi* 147
и сопротивления крыла Хнр, уравновешивалась составляющей веса
Gx
Г,+Н,+Х+Х„-6„
В отличие от снижения с работающими двигателями на режиме
планирования сумма всех аэродинамических сил, действующих на
несущий винт и вертолет, направлена вертикально вверх и равна
весу вертолета.
Для соблюдения продольного равновесия необходимо, чтобы
сумма всех продольных моментов была равна нулю: 2Мирод=0.
В боковом направлении вертолет на указанном режиме полета,
в отличие от режимов полета с работающими двигателями, балан
снруется либо с левым креном, либо с правым скольжением. При
этом углы крена или скольжения крайне малы. При полете с левым
креном тяга рулевого винта уравновешивается боковой силой S
несущего винта и составляющей веса G2, а при полете с правым
скольжением — боковой силой S несущего винта и боковой силой
фюзеляжа Q,.
Обороты несущего винта и скорости снижения
Обороты несущего винта. На вертолете Ми-6 на режиме само-
вращения числа оборотов несущего винта поддерживаются при
помощи ручки общего шага: для увеличения числа оборотов общий
шаг уменьшается, для уменьшения—общий шаг винта увеличи-
вается. Числа оборотов несущего винта на режиме самовращения
рекомендуется держать в диапазоне допустимых и рекомендуемых
для горизонтального полета в зависимости от высоты и типа лопа-
стей (см. табл. 6 и 7). Для поддержания чисел оборотов в указан-
ном диапазоне общий шаг несущего винта должен быть на высоте
3000 м — 5°, 2000 м — 4°, 1000 м и ниже—1°. Кроме того, число
оборотов несущего винта при заданном шаге будет еще зависеть
от полетного веса вертолета: чем меньше вес, тем меньше число
оборотов несущего винта. При планировании на незагруженном
вертолете, даже при минимальном общем шаге (1°), число оборо-
тов может выйти за предел минимально допустимого (см. табл. 6)
В этом случае допускаются минимальные обороты до 76—78%.
Следовательно, регулировка общего шага несущего винта должна
быть такой, чтобы в этом случае число оборотов было не ниже
76—78%.
Число оборотов несущего винта также существенно изменяется
от скорости планирования по траектории: чем больше скорость пла-
нирования, тем меньше число оборотов, так как ухудшаются усло-
вия авторотации винта на больших скоростях полета. Изменение
скорости на 100 км/ч ведет к изменению числа оборотов несущего
винта примерно на 5%. По так как на режиме самовращения диа
пазон рекомендуемых скоростей небольшой, то изменение числа
оборотов от скорости полета мало заметно, что практического зна-
чения не имеет.
148
| Поступательная скорость. Для вертолета Ми-6 поступательная
Корость на режиме авторотации в принципе может быть в диапа-
Ulle допустимых скоростей горизонтального полета. Но в целях
упрощения техники пилотирования и полной безопасности полета
остановлен следующий допустимый диапазон скоростей по прибору
•Лри наличии винта с трапециевидными лопастями:
Скорость,
3000 ....
2000 ....
1000 и ниже
130-160
120—180
120—200
Для вертолета с прямоугольными лопастями несущего винта
щпазон допустимых скоростей 120—250 км/ч. При скоростях
|иьше и больше рекомендуемых наблюдается повышенная вибра-
1Я вертолета.
нормальным
। н устано-
, 81. Вертикальная
кость снижения и уг-
планпрования на ре-
«е самовращения не-
сущего винта:
b»|>ro.ier с нормальным по-
»»|Ным весом и установоч-
ным углом крыла 15°
[ Рекомендуемый диапазон скоростей необходим при маневриро-
пинни для изменения дальности планирования (вынужденная по-
рядка на режиме авторотации несущего винта). Рекомендуемой
Поступательной скоростью, при которой будет минимальная верти-
I-ильная скорость снижения, является экономическая скорость го-
пнзонтального полета, которая и для планирования составляет
I 10 км/ч по прибору независимо от высоты полета.
Вертикальная скорость снижения. В аэродинамическом расчете
in ртолета Ми-6 вертикальная скорость определяется по следующей
формуле:
V,=V„sln«.
Изменение вертикальных скоростей снижения в зависимости от
поступательной скорости на режиме авторотации в условиях стан-
1лртной атмосферы на высоте 1000 м для вертолета Ми-6 показано
ни рис. 81. Кривая 2 показывает изменение вертикальной скорости
। ннжения в зависимости от скорости по траектории для вертолета
149
с нормальным полетным весом при допустимых числах оборот,
несущего винта. Как видно по кривой, минимальная вертикальная
скорость снижения будет на экономической скорости и составш
11 м/сек.
Кривая 1 показывает изменение вертикальной скорости сниж,
ния для незагруженного вертолета. Как видно по кривой, мини
мальная вертикальная скорость будет при поступательной скорости
120 км/ч по прибору и составит 10 м/сек. Следовательно, скорост i
120 км/ч является экономической скоростью для пустого вертолета,
что не противоречит общим законам аэродинамики: чем меньше веч
самолета (вертолета), тем меньше экономическая скорость. Кри
вая 3 показывает изменение вертикальной скорости снижения при
установочном угле крыла 15°. Как видно из рисунка, вертикальная
скорость увеличивается по сравнению с ее величиной при устано
вочном угле 5° незначительно: так, при скорости 140 км/ч она боль
ше лишь на 0,5 м/сек. Следовательно, для получения наименьшей
вертикальной скорости снижения при планировании, а значит, и
максимальной продолжительности планирования с данной высоты
необходимо держать поступательную скорость 140 кл/ч. При этом
число оборотов несущего винта не должно выходить за пределы
допустимого в зависимости от высоты и типа лопастей (см. табл. 6)
Угол планирования и дальность планирования
Угол планирования вертолета определяется по следующей фор-
муле:
9=57,3-^-.
Большой интерес представляет минимальный угол планирова
ния, который дает представление о планерных свойствах вертолета
Согласно законам аэродинамики минимальный угол планирования,
а значит, и максимальная дальность планирования должны быт:
при наивыгоднейшей скорости горизонтального полета (планиро
вания). Летными испытаниями установлено, что минимальный угол
планирования у вертолета Ми-6 прп нормальном полетном весе
будет при скорости 180 км/ч по прибору и составит 13°. При умень
шении или увеличении скорости в обоих случаях угол планирования
будет увеличиваться. Так. например, при скорости 140 км/ч он ра
вен 15°, а при скорости 100 км/ч — 26° (см. рис. 81).
При скорости 180 км/ч достигается максимальная дальноеп
планирования
Д»ах= ^Ctg ®mim
где Н — высота полета.
Подставляя в формулу значение минимального угла планиро
вания, получим максимальную дальность планирования в штил:
£m„=/7ctgl33 =4,331//.
150
с. максимальная дальность планирования больше высоты в
,3 раза. По этим данным можно приближенно судить об аэроднна-
Ическом качестве вертолета. Как видно из приведенного примера,
вксимальное качество у вертолета Ми-6 будет несколько больше 4.
е. планерные свойства вертолета невысокие. Если же учесть, что
|1ыло не переводится на малый установочный угол, то аэродина-
Ическое качество вертолета еще ниже.
I Дальность планирования с учетом ветра определяется по сле-
ующей формуле:
Z. = //ctgO ± Ut,
|е (У —скорость ветра;
t—время планирования.
, Для быстрого определения дальности планирования вертолета
н-6 в зависимости от высоты, скорости планирования (угла пла-
Йрования), величины и
вправления ветра по за-
1>ну вышеприведенной
ормулы в результате
иных испытаний постро-
ка номограмма, которая
Взволяет определить
Ельность планирования,
Избегая расчета по фор-
муле (рис. 82). Определе-
ние дальности по номо-
граммам не представляет
рудности, если руковод-
Гвоваться указанным
/ночом.
В практике полетов,
бепбенпо при отказе дви-
hi гелей, пилот не успева-
|₽т воспользоваться не
только формулой, но и
Томограммой, поэтому
ion должен знать на па-
мять основные величины
Рнс. 82. Номограмма для определения
дальности планирования вертолета Ми-6
на режиме самовращения несущего
Дальности на применяемых скоростях в зависимости от высоты.
Направления и силы ветра. Для этого необходимо решить по номо-
грамме несколько задач для основных случаев возможного шланн-
брания и запомнить соответствующие величины дальности.
Особенности режима планирования и методики
его выполнения
При переводе вертолета с режима полета с работающими дви-
i елями на режим планирования необходимо установить скорость
151
в пределах допустимой на данной высоте (наилучшей скорости••
по прибору независимо от высоты является скорость 140 км/ч*
уменьшить общий шаг до минимального значения (Г по ука
телю) независимо от высоты и поворотом рукоятки корректора га ы
влево перевести двигатели на режим малого газа (15—18° и
УПРТ). Если число оборотов начнет возрастать до величины бо.т< -
допустимой на данной высоте (см. табл. G), то необходимо затя
желить несущий винт
Планирование с задросселированными двигателями ничем ю
отличается от планирования с выключенными или отказавшими
двигателями. Разница будет лишь в том, что на высотах более
1500 м вертикальная скорость несколько уменьшится, так как для
удержания нужного числа оборотов необходим больший шаг нес\
щего винта, а при увеличении общего шага будут увеличиваться
показания по УПРТ (они будут больше 15—18°),т. е. на винт буде>
передаваться некоторая мощность через свободную турбину.
По мере приближения к земле число оборотов несущего вины
будет уменьшаться, для удержания его в нужном пределе общин
шаг несущего винта необходимо уменьшать. Примерное значение
общего шага было указано ранее, но необходимо руководствовать
ся показаниями счетчика оборотов несущего винта. Если числи
оборотов мало, необходимо уменьшить общий шаг. если велико-
увеличить общий шаг. На высотах менее 1000 м при незагружен
ном вертолете и при минимальном шаге (1°) число оборотов можп
выйти за пределы минимально допустимого. В этом случае увели
чивать общий шаг не рекомендуется, так как число оборотов можем
значительно уменьшиться.
При переводе вертолета на режим самовращения несущег
винта нарушается его балансировка; он разворачивается вправ.
вследствие отсутствия реактивного момента несущего винта, оп\
екает нос и кренится вправо. Для нужной балансировки вертолет.,
необходимо отклонить левую педаль вперед, чтобы изменить на
правление тяги рулевого винта, ручку управления переместит:
влево для уравновешивания тяги рулевого винта. Одновременно
ручку управления необходимо отклонить на себя для предотвраще
ния пикирующего момента, который появляется у всех вертолетов
при уменьшении мощности несущего винта.
При планировании можно совершать развороты в любую сто
pony с углом крена до 15°. Эффективность управления при разве
ротах на авторотации ниже, чем при разворотах в полете с рабо
тающими двигателями. Правый разворот выполняется с необычным
для пилота положением рычагов управления, так как левая педал,
остается отклоненной вперед. При вводе в разворот число обороте,',
несущего винта при том же шаге увеличивается, так как вертикаль
ная скорость снижения увеличивается, условия авторотации улуч
шаются, винт развивает большее число оборотов и большую
тягу. Уменьшать число оборотов затяжелением винта не пеко
мепдуется.
152
При выводе из разворота число оборотов несущего винта само-
рятельно восстанавливается до прежней величины.
Если крыло неуправляемое (т. е. на малый установочный угол
П|1г не переведено), то у вертолета будет несколько повышена вер-
тикальная скорость снижения. Кроме того, при скоростях более
Ш><) к.и/ч появляются незначительные вибрации в зоне крыла, вер-
ОЛет стремится к пикированию, поэтому необходимо движением
кучки управления на себя удерживать его в нужном положении.
Г Для перевода вертолета с режима планирования на полет с
Ийббтающими двигателями необходимо плавным движением ручки
Общего шага вверх увеличить режим работы двигателей до необ-
Одимой величины и с помощью рукоятки корректора газа уста-
щишть число оборотов несущего винта, необходимое для этого
;Полета на данной высоте. При этом вертолет разбалансируется.
[Действуя всеми рычагами управления (в обратном порядке по
равнению с действием при переводе вертолета на режим самовра-
щения несущего винта), необходимо сбалансировать вертолет.
Имитировать отказ двигателя переводом рукоятки раздельного
вправления вниз нельзя, так как для опускания ручки общего шага
Потребуются очень большие усилия, что практически выполнить
'Йсвозможно, а если и удается, то рычаг раздельного управления
•лмостоятельно поднимается.
§ 27. ПОСАДКА НА РЕЖИМЕ САМОВРАЩЕНИЯ
НЕСУЩЕГО ВИНТА
J Посадка на режиме самовращения несущего винта применяется
При отказе двигателей, поломке рулевого винта или его трансмис-
сии, главного вала, а также пожара в двигательных отсеках или
Ни вертолете и с учебной целью.
Г Для вертолета Ми-6 пока разработан один способ посадки на
режиме самовращения несущего винта — с применением общего
шага, при этом получается обязательно пробег по земле. Здесь
рпссматривастся посадка с выключенными двигателями, рекомен-
дуемая для тренировки летного состава. Посадка на режиме само-
вращения несущего винта выполняется без штурмана.
Для выполнения посадки необходимо на высоте 600 м устано-
вить режим горизонтального полета со скоростью 130—140 км/ч.
Произвести расчет на посадку. После команды «Приготовиться к
Посадке с двумя выключенными двигателями» командир экипажа
Переводит вертолет на режим самовращения несущего винта, пово-
рачивая рукоятку корректора газа влево и уменьшая общий шаг
пинта до минимального значения (1°). При этом число оборотов
Несущего винта должно быть максимальным, но нс более 87%- На
планировании необходимо выдерживать скорость 130—140 км/ч с
нормальным полетным весом и 120 км/ч - при пустом вертолете.
При экономической скорости на планировании достигается мннн-
мильная вертикальная скорость снижения и при этом угол плани-
153
рования составляет 15—18°. В этом случае посадка проста по тех
пике пилотирования. Скорость на планировании более экономим*
скоп усложняет технику пилотирования, увеличивает посадочнх и
скорость, посадочную дистанцию и длину пробега, снижает безо
пасность посадки. Скорость предпосадочного планирования меньш*
экономической дает большой угол планирования, что усложняв!
технику пилотирования и не обеспечивает безопасности посадки
Заход на посадку необходимо производить против ветра и при
боковом ветре до 5 м/сек.
Рис. 83. Профиль и элементы посадки вертолета Ми-6 на режиме самовраще-
ния несущего винта при скорости предпосадочного планирования 130—140 км/ч
На высоте 400 м по команде командира экипажа бортмеханик
выключает одновременно оба двигателя переводом рукояток меха
ническрго крана в положение «Останов».
Посадка начинается с высоты 100—120 м. На этой высоте руч-
кой циклического шага нужно уменьшить скорость предпосадочного
планирования до 110—120 км/ч (рис. 83). При этом увеличивается
число оборотов несущего винта на 1—2% и угол тангажа вертолета
На высоте 45—55 м плавным движением ручки общего
шага следует начать увеличение общего шага несущего винта с
таким расчетом, чтобы к моменту приземления общий шаг был
максимальным. При этом уменьшается вертикальная скорость сни-
жения и выравнивается траектория полета вертолета. Время дви-
жения рычага общего шага от начала действия им до приземления
составляет 10—11 сек.
Перед приземлением необходимо создать посадочное положена
вертолету на основные колеса отклонением ручки циклического
шага от себя. При посадке с предельно задней центровкой, посколь-
ку угол тангажа будет больше, перед приземлением приходится
ручку циклического шага отклонять от себя несколько больше, чем
при нормальной центровке. Приземление происходит на основные
колеса с последующим опусканием вертолета на переднее колесо
154
:адочная скорость составляет 80—100 км/ч. После приземления
бходнмо быстро уменьшить общий шаг до минимального значе-
I за 1,5—2 сек. чтобы не допустить резкого уменьшения числа
|ротов винта. Тормозами необходимо пользоваться во второй
ти пробега при скорости ниже 50 км/ч. Время снижения с высо-
25 м до момента приземления составляет 10—11 сек.
Посадка на режиме самовращения несущего винта на незагру-
1ном вертолете мало чем отличается от посадки на вертолете с
1ным полетным весом. Разница будет лишь в том, что необходн-
84. Профиль и элементы посадки вертолета Ми-6 на режиме самовраще-
я несущего винта при скорости предпосадочного планирования 100 км/ч
выдерживать скорость предпосадочного планирования 120 км/ч,
еред приземлением ручку циклического шага отклонять от себя
большее расстояние, чем при посадке с нормальным полетным
эм, т. е. так же, как в случае предельно задней центровки вер-
Для получения меньшей длины пробега и посадочной дистанции
1учае вынужденной посадки на ограниченную по размерам пло-
1ку или с высокими препятствиями на ее границе методика по-
ки несколько отличается от изложенной выше. Скорость пред-
— посадочного планирования должна быть 100 км/ч. В этом случае
траектория планирования будет круче (26—27°), а вертикальная
К скорость снижения 14 м/сек. В остальном действия пилота должны
I быть такими же. как при посадке на обычный вертодром, но посад-
41 Mi должна выполняться более внимательно ввиду сложности тех-
ники тщлотирования. Посадочная скорость должна быть 60—
70 км/ч, длина посадочной дистанции 435 м, длина пробега 300 м.
Профиль и элементы такой посадки показаны на рис. 84.
— - - =ГЛАВА I -
БАЛАНСИРОВКА, УПРАВЛЯЕМОСТЬ И УСТОЙЧИВОСТЬ
ВЕРТОЛЕТА
§ 28. БАЛАНСИРОВКА
Продольная балансировка
Для выяснения условий продольной балансировки рассмотрим
продольные моменты, действующие на вертолет Ми-6 (рис. 85). На
вертолет в любом режиме полета действуют следующие продоль
ные моменты, поворачивающие его вокруг поперечной оси: момент
Рис. 85. Силы и моменты, действующие на вертолет Ми-Ъ в про-
дольной плоскости в поступательном полете (продольная балан-
сировка)
несущего винта, состоящий из момента тяги, момента продольной
силы и момента втулки за счет разноса горизонтальных шарниров;
продольный момент рулевого винта, состоящий из реактивного
момента и моментов продольной и боковой сил рулевого винта;
моменты фюзеляжа за счет обдувки встречным потоком и потоком
от несущего винта, крыла, стабилизатора и момент реактивной
силы двигателей. Суммарный момент рулевого винта и момент
реактивной силы двигателей по величине малы и направлены в
противоположные стороны, поэтому их практически не учитывают.
156
Момент тяги несущего винта является пикирующим при перед-
ней центровке и кабрирующим при задней центровке, моменты про-
дольной силы и втулки за счет разноса горизонтальных шарни-
ров — кабрирующими, суммарный их момент — момент несущего
винта всегда на всех режимах полета — пикирующим. Момент
стабилизатора — кабрирующим, крыла — пикирующим.
) Продольный момент фюзеляжа вследствие обдувки несущим
пиитом на режиме висения будет большой, на других режимах он
мал и в расчет не принимается, на всех режимах он будет кабриру-
ющим; за счет встречного потока продольный момент фюзеляжа
будет кабрирующим только на режиме самовращения и пикирую-
щим на всех остальных режимах полета. Суммарный момент фю-
зеляжа будет кабрирующим на режиме самовращения несущего
винта, на висении и на малых скоростях полета с работающими
двигателями и пикирующим на всех остальных режимах полета.
Момент крыла на висении вследствие обдувки несущим винтом
будет кабрирующим, на всех остальных режимах полета пики-
рующим. •
’ ’ Условием продольной балансировки вертолета является равен-
ство пикирующих и кабрирующих моментов, сумма всех продоль-
ных моментов вокруг поперечной оси должна быть равна нулю
ЪМ.=Мг -4-Л4г =0.
г н.в ф кР ' ст
Для соблюдения продольной балансировки также необходимо,
чтобы сумма сил, действующих по продольной оси вертолета, была
равна нулю. Условия равенства сил рассматривались при изучении
режимов полета, здесь будет рассматриваться лишь равенство мо-
ментов.
В полете на всех режимах добиваются продольной балансиров-
ки вертолета соответствующим отклонением тарелки автомата
перекоса при помощи ручки циклического шага в продольном на-
правлении. Предельное отклонение тарелки автомата перекоса
вперед для вертолетов с автоматами перекоса до № ГВ312001—
6°42', для вертолетов с автоматами перекоса с № ГВ312001 -7°18',
назад соответственно 4° и 5°36'.
Каждой скорости полета соответствует строго определенное от-
клонение тарелки автомата перекоса в продольном направлении,
оно также зависит от режимов полета вертолета, от величины
центровки, угла установки стабилизатора, числа оборотов несущего
пиита и полетного веса.
На рис. 86 даны балансировочные кривые потребного отклоне-
ния тарелки автомата перекоса в продольном направлении в зави-
симости от скорости полета при двух крайних центровках: передней
V, =360 мм и задней — Хт=—200—220 мм для режимов набора вы-
соты на номинальном режиме двигателей, горизонтального полета
и самовращения несущего винта и для двух чисел оборотов сво-
бодной турбины: 7800 и 8300 в минуту (78 и 83%). Указанные ба-
157
лансировочные кривые построены по результатам летных испыта-
ний вертолета Ми-6 с нормальным полетным весом на высоте
300 - 800 м.
Как видно по кривой, для горизонтального полета при скорости
по прибору НО—160 км/ч кривые не имеют наклона, т. с. на этих
скоростях требуется одно и то же положение автомата перекоса и
Пределонае отклонение кольиа вЛюмат перекоса назад5"ЗЬ'
Рис. 86. Изменение потребных углов отклонения тарелки ав-
томата перекоса в продольном направлении для вертолета
Ми-6 в зависимости от скорости и режима полета, числа
оборотов несущего винта и центровки вертолета. Сплошная
линия — пт=8300 об/мин. пунктирная — лт=7800 об/мин:
I — максимальное отклонение при отрыве; 2 - при отрыве; 3 — ви-
сение; « — висение, Хг-350 мм. ветер встречный; 5— висение, от
рыв. посадка прн ветре различного направления. А'т=—220 мм: 6 —
Хт =360 мм (ветер попутный); 7 — самовращение: 8 — Хг =360 мм:
8 — горизонтальный полет; /0 — набор высоты: // — самовращение;
//—горизонтальный полет; 13— лт --200—220 мм; /« — набор
ручки циклического шага. Для перехода на большие скорости не-
обходимо отклонять автомат перекоса и ручку циклического шага
вперед. По кривым также видно, что для перехода в набор высоты
из горизонтального полета требуется отклонение автомата пере-
коса и ручки циклического шага вперед, так как на большом режи-
ме работы двигателей стабилизатор обдувается больше потоком от
винта и создается больший кабрирующий момент, который надо
компенсировать движением ручки управления от себя. Для пере-
хода из горизонтального полета на режим самовращения, наоборот
автомат перекоса и ручку управления необходимо отклонять на
себя, так как при уменьшении мощности двигателей преобладают
158
пикирующие моменты, а для их уравновешивания требуется движе-
ние ручки на себя.
По кривым также видно, что при более передней центровке не-
обходимо автомат перекоса и ручку управления отклонять назад,
при более задней центровке — вперед.
Это объясняется тем, что при смещении центра тяжести верто-
лета назад начинают преобладать кабрирующие моменты, а при
Смещении его вперед--пикирующие.
fc С увеличением числа оборотов несущего винта завал конуса
(«ращения назад уменьшается из-за уменьшения маховых движений
лопастей, появляются пикирующие моменты, которые необходимо
уравновесить отклонением тарелки автомата перекоса и ручки
циклического шага на себя.
От величины установочного угла стабилизатора потребное от-
клонение тарелки автомата перекоса зависит следующим образом.
В полете с работающими двигателями чем больше установочный
угол стабилизатора, тем меньшим должно быть отклонение тарелки
вперед, и наоборот. Это объясняется тем, что при больших углах
установки стабилизатора возникает меньший кабрирующий мо-
мент и, следовательно, меньше должен быть ход кольца автомата
перекоса вперед для разгона скорости. На режиме авторотации
наблюдается явление, обратное полету с работающими двигателя-
ми. На рисунке кривые даны с учетом действия стабилизатора,
управление которого сблокировано с управлением общим шагом
несущего винта по такому принципу: общий шаг несущего винта
увеличивается, увеличивается и установочный угол стабилизато-
ра— «носик стабилизатора ходит за ручкой общего шага». При
максимальном шаге (13,5°) установочный угол стабилизатора ра-
нен 5° (относительно строительной горизонтали вертолета), при
минимальном шаге установочный угол стабилизатора — 13°.
Управляемый стабилизатор, таким образом, уменьшает потреб-
ное отклонение кольца автомата перекоса в продольном направле-
нии как в полетах с работающими двигателями, так и на режиме
авторотации, и тем самым увеличивает запас управления. Управ-
ляемый стабилизатор расширяет диапазон допустимых центровок,
играет роль аэродинамического триммера, позволяя балансировать
вертолет в большом диапазоне углов тангажа, потребного отклоне-
ния кольца автомата перекоса и хода ручки циклического шага.
Влияние полетного веса на потребное отклонение тарелки ав-
томата перекоса и ручки циклического шага в продольном направ-
лении на рисунке не показано, но летными испытаниями установ-
лено следующее: чем больше вес вертолета, тем больше нужно
отклонять тарелку и ручку от себя. Так, увеличение веса на 6—7 т
приводит к изменению положения кольца автомата перекоса на
0,5—1° в зависимости от скорости полета: чем больше скорость
полета, тем большим будет отклонение от себя.
Наименьший запас управления «от себя» будет на максималь-
ных скоростях горизонтального полета при предельно задней цент-
159
ровке вертолета при А’т=—200—220 мм и минимально допустим"'
числе оборотов (7800 в Минуту), а также при наборе высоты на
скорости около 200 км!ч. Запас продольного управления на этих
режимах составляет для горизонтального полета 13,4% от полови
ны полного диапазона хода ручки и 17,2% -для набора высоты
На вертикальной оси графика нанесены точки потребного откло
нения кольца автомата перекоса на режиме висения при различной
ориентировке вертолета относительно ветра 5—8 м!сек, а также
при маневрах в этих условиях. Минимальный запас управления
Каждому положению кольца автомата перекоса соответствует
определенное положение ручки циклического шага; чем больше
отклонение кольца вперед, тем больше должна быть отклонена и
ручка (рис. 87). Как видно по рисунку, при нейтральном положе-
нии ручки в продольном направлении кольцо автомата перекоса
имеет наклон вперед 2°18'. Такая нелинейность в продольном
управлении достигается при регулировке продольного управления и
служит для того, чтобы при средних скоростях (крейсерских) по-
лета и средних центровках ручка циклического шага в продольном
направлении занимала положение, близкое к нейтральному, наи-
более удобное для пилота. При скоростях меньше крейсерской руч-
ка будет отклонена на себя и запас ее хода будет достаточен даже
для висения при попутном ветре и при предельно передней цент-
ровке. При скорости больше средней ручка должна быть отклонена
от нейтрального положения в направлении от себя.
При каждой скорости полета вертолет балансируется с опреде-
ленным углом тангажа: чем больше скорость, тем меньше угол
тангажа, и наоборот. На рис. 88 даны балансировочные кривые
углов тангажа вертолета Ми-6 в режиме горизонтального полета,
160
При наборе высоты и на авторотации для двух центровок лт=350 мм
н Хт = —220 мм. По кривым видно: чем более задняя центровка, тем
йольше угол тангажа, и наоборот.
I, Вертолет Ми-6 отличается от вертолета Ми-4 тем, что у него
’больший диапазон углов тангажа вследствие большего диапазона
Эксплуатационных центровок. Так, например, на режиме висения
три задней центровке Хт=200 мм угол тангажа достигает 8°, а на
вИйении при попутном
ветре —9°. При полете на
максимальной скорости
250 км/ч при предельно
передней центровке угол
тангажа будет отрица-
тельный и составит око-
ло 6°.
Продольная центровка
Вертолета существенно
влияет на продольную
балансировку и управля-
емость, изменяя в боль-
ших пределах потребное
^отклонение кольца авто-
мата перекоса и ручки
циклического шага в про-
дольном направлении.
Эти отклонения стано-
Рис. 88. Изменение углов тангажа вертолета
Мп-6 в зависимости от скорости и режима по-
лета, продольной центровки:
I — набор высоты:
вятся большими особенно на висении и при больших скоростях по-
лета, может возникнуть недостаток запаса управления для желае-
мого режима полета, особенно при нарушении пределов допусти-
мых центровок. Продольная центровка вертолета имеет большое
практическое значение, так как ее величина изменяется от загруз-
ки вертолета.
Загрузка и центровка вертолета
Центровка вертолета определяется положением его центра тя-
жести в связанной системе координат. Для вертолета Ми-6 за
начало координат принята точка пересечения оси вала несущего
пинта с плоскостью вращения. Схема координатных осей для отсче-
та центровки вертолета Ми-6 дана на рис. 89.
При всех возможных вариантах загрузки вертолета центр
тяжести его может перемещаться в больших пределах по продоль-
ной оси х, что существенно влияет на управляемость и баланси-
ровку вертолета. По вертикальной оси у возможность перемещения
центра тяжести незначительна и почти не влияет на управляемость
и балансировку7, поэтому в практике ее не учитывают. О поперечной
Центровке вертолета будет сказано ниже.
Диапазон допустимых эксплуатационных продольных центровок
обусловливается величиной отклонения кольца автомата перекоса
в продольном направлении и поэтому является строго определен
ным для каждого вертолета. Исходя из условий компоновки, раз-
мещения оборудования и всех вариантов загрузки для вертолета
Ми-6 определена предельно передняя центровка Хт=0,36 м, пре
дельно задняя Хт=—0,2 м для загруженного вертолета всех вари
антов и для незагруженного, но с полной заправкой топлива
Хт = — 0,22 м
При эксплуатации вертолета необходимо строго соблюдать
пределы допустимых эксплуатационных продольных центровок:
если при загрузке вертолета центровка выйдет за пределы допу
стимой. то запас управления окажется недостаточным. Особенна
Рис. 89. Схема осей координат для отсчета центровки вертоле-
та Ми-6
отрицательно сказывается нарушение центровки на вертикальных
режимах полета и при больших скоростях полета (см. рис. 86).
Величина допустимых эксплуатационных центровок вертолета
Ми-6 выбрана так, что запас управления достаточен для выполне
ния всех режимов полета, в том числе и висения при попутном
ветре. Достаточный запас управления гарантирует возможность
безопасного пилотирования вертолета на всех режимах полета, в
том числе и в условиях болтанки, что уже неоднократно проверено
летными испытаниями и многолетней практикой полетов на верто-
летах Ми-6.
Для соблюдения допустимых эксплуатационных центровок топ-
ливные емкости размещены на вертолете определенным образом,
заправка их и порядок расхода топлива во время полета установ-
лены в определенной последовательности. Топливо на вертолете
Ми-6 размещается в 11 резиновых мягких баках, расположенных в
фюзеляже. Баки /—8 расположены под полом грузовой кабины,
баки 9—10 и 11— за главным редуктором над грузовой кабиной.
Баки топливной системы разделены на пять групп, каждая группа
имеет одну заливную горловину. Кроме того, на вертолет устанав-
ливаются несбрасываемые подвесные баки, выработка топлива из
которых идет через III группу. Для увеличения дальности полета
внутри грузовой кабины могут устанавливаться дополнительно еще
два топливных бака по емкости и конструкции аналогичные под-
весным.
162
Распределение баков по группам, емкость п вес топлива в труп-
ах показаны в табл. 12.
Таблица 12
Распределение топливных баков по группам, емкость и вес топлива
в группах баков
Номер группы баков Номер бака в группе Емкость группы баков при заправке ло горловины, Л Вес топливо в группе баков, кГ
1 2,3 940 725
II 4, 5. 6 1410 1100
III 7,8 870 675
IV 9.10 2700 2090
V Н , 1760 1365
Сзервный бак Отвесные баки(левый и пра- вый) 470 4500 360 3490
ополнигельпые баки (левый и правый - * 4500 3490
Общая емкость топливных без подвесных и дополнительных ба-
ков составляет 8150 л, с подвесными— 12 650 л. с подвесными и до-
полнительными— 17 150 л, вес соответственно 6315, 9805, 13295 кГ.
I Схема размещения топливных баков на вертолете Ми-6
Показана на рис. 90.
Рис. 90. Схема размещения топливных баков на вертолете Ми-6
Для соблюдения диапазона допустимых эксплуатационных цен-
тровок заправку топливных баков необходимо производить в по-
рядке, обратном выработке топлива при работе автоматики. Воз-
можные варианты заправки топливом вертолета Ми-6 показаны
в табл. 13.
При необходимости можно заправить любое, отличное от ука-
панного, количество топлива в каждом варианте, но тогда необхо-
димо следующую по порядку заправки группу баков заправлять не
163
Варианты заправки топливом вертолета Ми-6
Таблица 13
Подвес-
ные баки
(3490 кГ) (2090 к Г)
Подвес-
ные баки
(675 л-Г)
(1100 кГ)
(725 кГ)
(360
кГ)
ный
бак
13295
9803
6315
4225
3550
2450
1725
полностью. Например, при необходимости заправить всего 4000 кГ
топлива заправка производится так: 3550 кГ заправляют в V груп-
пу, резервный бак в I и II группы, а остальные 450 кГ в III группу.
Рис. 91. График для определения мак-
симального веса коммерческой нагруз-
ки в зависимости от запаса топлива и
взлетного веса вертолета:
I — взлетный вес 40 500 кГ; 2 — взлетный
вес «500 кГ
Вес коммерческой нагрузки зависит от количества топлива на
вертолете и его взлетного веса (рис. 91). График построен для
пустого вертолета весом 27 200 кГ. Если же вес данного вертолета
больше или меньше 27 200 кГ, что записано в формуляре, то необ-
ходимо вносить соответствующую поправку в величину коммерче-
ской нагрузки, полученной по графику. График построен без учета
164
веса дополнительных и подвесных баков, поэтому при их установке
на вертолетах вес коммерческой нагрузки нужно уменьшать на
227 кГ. а при установке дополнительных баков внутри кабины - на
378 кГ. На вертолете Ми-6 вес экипажа (5 человек) составляет
400 кГ. вес масла — 280 кГ, вес спирта противообледенительной си-
стемы рулевого винта — 25 кГ.
к Для получения допустимых эксплуатационных центровок на
всем протяжении полета необходимо грузы в кабине размещать,
пользуясь разметкой на правом борту грузовой кабины. Допускает-
ся размещать грузы в кабине так, чтобы их общий центр тяжести
находился между синей стрелкой, которая соответствует данному
грузу и находится впереди, и желтой обшей стрелкой для всех гру-
юв, находящейся ближе к хвостовой части фюзеляжа. Рекомен-
дуется размещать грузы так, чтобы их общий центр тяжести нахо-
дился между синей и красной стрелками, соответствующими данно-
му грузу.
Для минимального изменения центровки при выгорании топлива
во время полета и для того, чтобы центровка не выходила за пре-
делы допустимой установлена следующая автоматическая после-
довательность расходования топлива из групп баков (табл. 14).
Таблица 14
Последовательность расходования топлива из групп баков вертолета Ми-6
Очередность ыработки Номер группы Включены Примечание
I IV IV
2 V V Вырабатывается 150—200 кГ до от- крытия поплавкового клапана
3 Подвесные баки V, III —
4 III V, П1 —
Л И V, I! —
6 I V, 1 ——
V V, До за i о рання лампочки .осталось 800 кГ’
8 Резервный бак V, резерв- ного бака —
9 V V —
В табл. 14 показана последовательность расхода топлива из
групп баков без заправки дополнительных баков, устанавливаемых
внутри грузовой кабины вертолета. Если же будут заправлены и до-
полнительные баки, тогда выработка топлива ведется следующим
образом. Переключается управление выработкой топлива на руч-
ное. Включается насос IV группы и вырабатывается из нее 200 кГ
топлива. Затем включаются насосы IV и V групп, бортового топли-
возаправщика и вырабатывается топливо из дополнительных ба-
ков. После выработки топлива из этих баков насос бортзаправщика
выключается. Переключатель управления выработкой топлива ста-
165
8ится в положение «автомат», дальнейшая выработка происходи!
в последовательности, указанной в табл. 14.
Если автоматическое управление расходом топлива отказало, то
бортмеханик переводит управление на ручное и ведет его в той же
последовательности, пользуясь специальной таблицей, установлен
ной в кабине. В случае неполной заправки топливной системы по-
следовательность выработки топлива сохраняется.
Если последовательность расхода топлива будет соблюдена, как
показано в табл. 14, а грузы будут размещены согласно разметкам
Рис. 92. График изменения центровки вертолета Ми-6 в полете в
зависимости от выработки топлива:
I, 2. 3 — вертолет с грузом; 4. 5, 6 — вертолет без груз»
в грузовой кабине, то центровка вертолета на всех этапах полета
не выйдет за пределы допустимой и будет изменяться по мере выго-
рания топлива, как показано на рис. 92. Здесь дано шесть вариан-
тов загрузки и заправки топливом. Кривые 1, 2, 3 показывают
изменение центровки в полете за счет выгорания топлива прн за-
правке лишь основных 11 топливных баков (6315 кГ), но при раз-
ном размещении центра тяжести груза: 1 —груз размещен у синей
стрелки. 2 — у красной и 3 — у желтой стрелки на правом борту
грузовой кабины. Как видно по кривой /, у вертолета центровка бу-
дет близко к предельно передней — 360 мм после выгорания топли-
ва из III группы баков. В этом варианте загрузки и заправки при
взлете центровка будет 100 мм, а при посадке около 200 мм—впере-
ди вала несущего винта. Если груз разместить у красной стрелки
(кривая 2), то характер изменения центровки от выгорания топли-
ва будет такой же, как и в предыдущем случае, только центровка
будет более задней; при взлете она будет равна нулю, а при по-
166
Садке около 100 мм впереди вала винта. При размещении центра
Гнжести грузов у желтой стрелки центровка будет еще более зад-
ней: при взлете — около 160 мм, при посадке — около 130 мм (кри-
ная 3).
| На графике также даны кривые изменения центровки в зависи-
мости от выгорания топлива для вертолета без груза, ио при трех
различных вариантах заправки: 4— заправлены только основные
баки (6315 кГ); 5 — заправлены основные баки и подвесные
(9805 кГ); 6—полностью заправлены основные, подвесные и до-
полнительные баки (13295 кГ). Как видно по кривой 4, у вертолета
без груза и заправленных основных топливных баках центровка
в полете меняется так же, как и при наличии груза, центр тяжести
[Которого размещен у желтой стрелки. При заправке основных и
подвесных баков (кривая 5) при взлете на незагруженном вертоле-
те центровка будет близка к предельно допустимой задней, затем
она будет увеличиваться, при выгорании топлива из подвесных ба-
ков центровка уменьшается незначительно, так как центр тяжести
этих баков расположен близко к центру тяжести пустого вертолета.
Затем после выгорания топлива "йз подвесных баков центровка
будет изменяться, как в случае кривой 4.
При полной заправке основных, подвесных и дополнительных
баков у незагруженного вертолета (кривая 6) при взлете центров-
ка будет около +200 мм, затем при выгорании топлива из дополни-
тельных баков она будет уменьшаться, т. е. приближаться к задней,
так как центр тяжести дополнительных баков расположен впе-
реди центра тяжести вертолета. После выгорания топлива из до-
полнительных баков центровка будет изменяться как и в случае
кривой 5. Здесь кривая 6 не совпадает с кривой 5 потому, что перед
началом выработки топлива из дополнительных баков было израс-
ходовано из IV группы баков 200 кГ топлива.
Таким образом, при правильном размещении грузов по меткам
внутри кабины и автоматической последовательности расхода топ-
лива пилот может знать центровку при взлете, в полете и при по-
садке. Если по каким-либо причинам (габариты грузов) невозмож-
но разместить грузы по меткам, их ориентируют относительно
первого шпангоута и определяют центровку при взлете, предельно-
переднюю и предельно заднюю при полете за счет выгорания топ-
лива по специальному центровочному графику и если полученные
центровки не выходят за пределы допустимых, значит загрузка
вертолета произведена правильно и вылет возможен.
Во время полета предельно передняя центровка может быть
лишь после выработки топлива из III группы баков и переключения
на II группу (см. рис. 92). При этом должны быть полностью за-
правлены I, II, V группы и бак № 1, что составит 3550 кГ топлива
при удельном весе 0,775 кГ/л. Предельно задняя центровка при не
полностью заправленных основных баках будет в момент оконча-
ния выработки топлива из 1 бака и переключения на выработку
остатка топлива 820 кГ имеющегося в V группе.
167
По центровочному графику перед вылетом определяют взлетную
центровку, зная взлетный вес, загрузку и заправку при взлете,
предельно переднюю во время полета, зная остаток топлива к этому
времени и полетный вес, и предельно заднюю, зная остаток топлива
и полетный вес к этому моменту. Если из трех полученных центро-
вок какая-либо выйдет за пределы допустимых, тогда необходимо
переложить грузы в другое место и пересчитать центровку и делать
это до тех пор, пока все три указанные центровки нс будут выхо-
дить за пределы допустимых.
Рис. 93. График допустимых и эксплуатационных центровок
вертолета Мн-6 в зависимости от веса груза на внешней
подвеске
Центровочный график для вертолета Ми-6 аналогичен центро-
вочным графикам для других вертолетов, поэтому он здесь не при-
водится.
При транспортировке грузов только на внешней подвеске поря-
док расходования топлива остается такой же, как и при перевозке
грузов внутри кабины, центровка не будет выходить за пределы
допустимых, так как подвесная система находится близко к центру
тяжести вертолета. При этом максимальный взлетный вес верто
лета должен быть не более 38 Т, максимальный вес груза на под-
веске нс более 8 т. Чем больше вес груза на внешней подвеске, тем
меньше диапазон допустимых центровок. Так, если при перевозке
грузов внутри кабины предельно передняя центровка+ 360 мм, пре-
дельно задняя —220 мм, то с увеличением груза на внешней
подвеске этот диапазон уменьшается и при весе груза 8 Т предельно
передняя центровка должна быть+100 мм, предельно задняя —
НО мм. Изменение допустимых центровок в зависимости от вели-
чины груза на внешней подвеске показано на рис. 93 (кривые 1, 4).
На этом же рисунке указаны эксплуатационные центровки в зави-
симости от величины груза на подвеске (кривые 2, 3).
168
Разрешается одновременная транспортировка грузов на внеш-
ней подвеске и внутри грузовой кабины, при этом взлетный вес не
должен превышать 38 Т, как и при транспортировке грузов только
на внешней подвеске. Порядок расхода топлива остается таким же,
как и при транспортировке грузов внутри кабины. Для обеспечения
центровок в пределах допустимых необходимо грузы внутри каби-
ны размещать так, чтобы центр тяжести их не выходил за пределы
координат, указанных в табл. 15.
Таблица 15
Координаты центра тяжести грузов внутри кабины при смешанной
транспортировке
Вес груза п грузовой
кабины, м
Вес груза па внешней подвеске. кГ
0—2000 2001—4000 4001—6000 6001—8000
0—2000 3,140 1,889 0,509 0,1
2001—4000 1,715 1,057 0.334 —
4001—6000 1,240 0,780 —
6001—8000 1,003 — — —
0-8000 —0,190 —0,160 —0,130 —0,110
Примечание. Цифры со знаком плюс означают допустимое расположе-
ние ц, т. груза внутри кабипы впереди вала несущего винта, со знаком минус —
сзади оси вала несущего винта.
Пользоваться этой таблицей необходимо следующим образом.
Например, на внешней подвеске транспортируется груз 5000 кГ, а
внутри кабины- 3000 кГ. В месте пересечения вертикальной графы
4001—6000" с горизонтальной графой 2001—4000" читаем число
0,334 м — это и будет допустимое положение центра тяжести грузов
внутри кабины впереди вала несущего винта. На нижней строчке
читаем: —0,130 м, — это и будет допустимое положение центра тя-
жести грузов внутри кабины назад от оси вала несущего винта.
Центровка вертолета Ми-6 в поперечном направлении, как пра-
вило, не рассчитывается. Но груз в вертолете по поперечной оси
надо располагать симметрично. Если габариты груза не позволяют
разместить его симметрично, то по условиям достаточности запаса
поперечного управления поперечный момент от несимметрично
расположенного груза не должен превышать 4000 кГ. Плечо мо-
мента — от оси симметрии до центра тяжести груза.
На режиме висения при снятом давлении с ручки циклического
шага пилот может судить о средней центровке по показаниям ука-
зателя продольного и поперечного триммеров: продольный трим-
мер— 0,5—1 деления назад, а поперечный—0,5—1,5 деления
вправо.
169
Поперечная балансировка
Для выяснения условий поперечной балансировки рассмотрим
поперечные моменты, действующие на вертолет Ми-6 вокруг про-
дольной оси X и силы по поперечной оси.
В поперечном направлении вертолет может балансироваться без
скольжения^ но обязательно с правым креном (рис. 94, а) или без
крена, но с левым скольжением (рис. 94, б).
Рис. 94. Поперечная балансировка вертолета Ми-6
На вертолет Ми-6 действуют следующие поперечные моменты:
момент рулевого винта (Tf.nh2), момент фюзеляжа и крыла 6г
встречного воздушного потока (МХф+кр ), момент крыла от об-
дувки его несущим винтом (Л!Хкр ), момент несущего винта, состоя-
щий из момента боковой силы и момента втулки за счет разноса
горизонтальных шарниров (МХКР(НВ)) и поперечный момент от киля
за счет влияния на него рулевого винта,
Для полета без скольжения необходимо, чтобы боковые силы
были уравновешены, т. е. чтобы
S-LAZK -hZ$ кр=Тр..,
но для создания боковой силы S необходимо аэродинамическую
силу винта вместе с конусом вращения отклонять вправо, тогда
появится инерционный момент втулки за счет разноса горизон-
тальных шарниров (МХит ). Но для поперечной балансировки не-
обходимо и равенство моментов: Л4Х|)В +Мхф+кр +АЛ1Х1(р(11П)—
= МХнв +Л1Хк . Такое условие Выполняется только при правом
крене, так как плечи боковых сил h\ и h2 почти равны, а вправо дей-
ствует инерционный момент втулки за счет разноса горизонтальных
шарниров (Mr,,,. ), который вызывает правый крен. Крен вызовет
170
составляющую веса G%, равную Gsiny. Лишь теперь будет соблю-
дена равенство боковых сил по поперечной оси
rp., = S-[.AZ,+G,+Z,+„.
Для вертолета Ми-6 на режиме висения правый крен составляет
больше 2°. С увеличением скорости горизонтального полета до эко-
номической крен уменьшается ввиду уменьшения момента втулки
Л'1двт , так как потребная мощность уменьшается, уменьшается при
чтом и реактивный момент несущего винта, а поэтому уменьшается
потребная тяга рулевого винта и завал конуса вправо должен быть
уменьшен (рис. 95, кривая 2). На экономической скорости крен
составляет 0°45'. При дальнейшем увеличении скорости крен снова
чиваются реактивный момент несущего винта и потребная тяга
рулевого винта, а для ее уравновешивания требуется больший завал
конуса вправо, что и приводит к увеличению крена вправо. На
рис. 95 даны также кривые изменения угла крена в зависимости
от скорости в режиме горизонтального полета, при наборе высоты
и на режиме авторотации. В режиме набора высоты правый крен
больше, чем в горизонтальном полете на всех скоростях, так как
больше мощность несущего винта, больше его реактивный момент,
поэтому требуется большая тяга рулевого винта и большая боко-
вая сила. Для этого потребуется больший завал конуса вправо, что
увеличит момент втулки за счет разноса горизонтальных шарниров.
На режиме авторотации вертолет имеет уже небольшой левый
крен, так как конус завален влево и момент втулки направлен вле-
во (см. рис. 80).
Для поперечной балансировки вертолета без крена поперечные
моменты вокруг продольной оси должны быть уравновешены при
отсутствии крена (см. рис. 94,6). Чтобы не было крена, надо умень-
шить боковую силу S. отклоняя конус и силу R винта при помощи
ручки циклического шага влево. Теперь боковые силы будут не-
уравновешены, т. е. Тр.в больше суммы сил:
5 4- AZK-г^ф+кр>
171
поэтому появится левое скольжение, вертолет будет обтекаться по-
током воздуха спереди и слева под углом скольжения р. В устано-
вившемся полете должно быть равенство моментов вокруг продоль-
ной оси X и равенство сил по поперечной оси Z. Боковая обдувка
вертолета слева вызывает боковую силу на фюзеляже Q2, которая
и уравновешивает неуравновешенные силы. Теперь сумма всех сил
по оси Z будет равна нулю. При этом боковая сила Qz приложена
почти в центре тяжести и дополнительного момента не создает.
С увеличением скорости полета боковая сила Q? будет увеличивать-
ся, и для соблюдения поперечной балансировки угол скольжения
должен уменьшаться, что приводит к уменьшению боковой силы
Q:, т. е. она будет в этих случаях сохраняться неизменной.
Рассматривая поперечную балансировку, необходимо выяснить
природу появления поперечной силы на киле за счет влияния на
него рулевого винта AZK и поперечного момента крыла вследствие
обдува его несущим винтом.
Так как рулевой винт относительно килевой балки установлен
справа, а воздушный поток через винт проходит слева направо, то
подходящий к килю поток за счет скорости полета скашивается
индуктивным потоком рулевого винта слева направо. В результате
этого образуется угол атаки и возникает дополнительная аэродина-
мическая сила на киле AZK за счет действия на него рулевого винта.
Она направлена слева направо, приложена к центру давления киля
и создает поперечный момент ДЛ4Хк, направленный вправо, а также
путевой момент, значительный по величине и действующий в сто-
рону реактивного момента несущего винта.
При продувке в аэродинамической трубе модели вертолета Ми-6
с крылом и работающим винтом было установлено, что несущий
винт обдувает крыло своим индуктивным потоком неравномерно по
размаху крыла. В поступательном полете левая консоль обтекается
более интенсивно, чем правая, возникает левый кренящий момент
крыла ДМ, кр<нт. Для уменьшения действия этого момента была
предусмотрена деградация установочных углов левой и правой
консоли 1,5°. В дальнейшем в результате летных испытаний был
установлен явный недостаток запаса поперечного управления при
больших скоростях полета влево. Чтобы увеличить этот запас, кон-
структору пришлось убрать деградацию установочных углов левой
и правой консоли и установить ее обратную, т. е. правая консоль
имеет в настоящее время установочные углы на 1,5° больше
левой,
Для обеспечения поперечной балансировки вертолета на всех
режимах полета как без скольжения, так и со скольжением преду-
сматривается определенное отклонение кольца автомата перекоса
в поперечном направлении и ручки циклического шага. У вертоле-
тов Ми-6 независимо от номеров автоматов перекоса предельное
поперечное отклонение установлено вправо на 3°54'±12' влево на
5°24'±\2'.
172
Предельное отклонение кольца автомата перекоса влево состав-
пот 5°24', вправо — 3°54,±12'.
На рис. 96 даны балансировочные кривые потребного отклоне-
ния кольца
Правлении.
автомата перекоса вертолета Ми-6 в поперечном на-
Балансировочные углы отклонения кольца автомата
орекоса в зависимости от скорости полета на всем диапазоне
Продольных центровок и для всех режимов полета при симметрич-
Рис. 96. Потребные отклонения тарелки автомата перекоса в
поперечном направлении в зависимости от скорости полета,
центровок и режимов полета:
10Й поперечной загрузке вертолета расположены в заштрихованной
юне графика, ограниченной двумя прямыми. Кроме того, показаны
две пунктирные линии, характеризующие потребное отклонение
кольца автомата перекоса в поперечном направлении только с пра-
вым
или только с
одвесными
баками.
левым
кольца автомата
Как-
перекоса
полностью заправленными топливными
видно, разница в потребном отклонении
центровках составляет около 2°.
при предельно
правой и предельно
левой
По кривым видно, что при увеличении скорости полета необхо-
димо отклонять кольцо автомата перекоса, а значит, и ручку цик-
лического шага справа налево. Наибольшее отклонение кольца
плево — 3° получено при скорости 260 км/ч при полете с правым
заправленным подвесным баком. При этой скорости получен мини-
мальный запас поперечного управления, но и то он составляет
50.8% от половины полного поперечного хода кольца автомата
перекоса.
На графике нанесены точки, показывающие отклонение кольца
вправо и влево при скольжениях и предельно боковых центровках,
которые не превышают влево 4, вправо Г.
173
На оси ординат белыми кружками обозначены значения откло
нения кольца автомата перекоса для вертикального взлета, посад
КИ и висения, а также маневрирования на висении при предельно
передней центровке и ветре до 5 м/сек различного направления
Черными кружками показано значение поперечного отклонении
кольца автомата перекоса при крайних поперечных центровках, т. е
при заправленном только правом подвесном баке или только ле
отклонения тарелки автома-
та перекоса вертолета Ми-6
и ручки циклического шага
в поперечном направлении
вом. Как видно, и па этих режимах за
пас поперечного управления у вертоле-
та Ми-6 вполне достаточен.
На рис. 97 показана взаимосвяз!
отклонения кольца автомата перекоса
и хода ручки циклического шага в по-
перечном направлении. Как видно по
рисунку, при нейтральном положении
ручки циклического шага в попереч
ном направлении кольцо автомата пе-
рекоса отклоняется влево на 1,5°. Та-
кая нелинейность в поперечном управ-
лении достигается при регулировке и
нужна для того, чтобы при крейсер-
ских скоростях ручка циклического
шага в поперечном направлении зани-
мала положение, близкое к нейтраль-
ному.
Тогда при скоростях, меньше крей-
серских, она будет занимать положе-
ние вправо от нейтрального, а на ско-
ростях больше крейсерских — влево.
Путевая балансировка
Для анализа путевой балансировки рассмотрим путевые момен-
ты, действующие на него. Как было установлено ранее, боковая
балансировка может осуществляться с правым креном, но без
скольжения или без крена, но обязательно с левым скольжением.
Условия поперечной балансировки в этих двух случаях разобраны
ранее, теперь рассматриваются условия путевой балансировки при
полете с креном и при полете со скольжением.
На рис. 98, а показаны силы и путевые моменты, действующие
па вертолет при полете без скольжения, а на рис. 98,6 — с левым
скольжением. На вертолет Ми-6 при полете без скольжения дей-
ствуют следующие путевые моменты: момент рулевого винта —
МИрв , путевой момент несущего винта МРив , путевой момент
фюзеляжа с крылом за счет встречного воздушного потока , к
и путевой момент киля за счет влияния на него рулевого винта
\МУк (рис. 98,я).
174
При полете с левым скольжением будет еще действовать и путе-
юй момент за счет боковой обдувки фюзеляжа, разворачивающий
»ертолет влево (рис. 98, б).
В путевой момент фюзеляжа с крылом от встречного воздуш-
юго потока МИф+к входит также и путевой момент, создаваемый
ia счет профилированного фиксированного руля концевой балки,
(ак известно, фиксированный руль концевой балки профилирован
Рис. 98. Путевые моменты, действующие на вертолет Ми-6:
а — полет без скольжения; б — полет с левым скольжением
так, что в поступательном полете он создает подъемную силу, на-
правленную влево, в сторону действия тяги рулевого винта в поле-
тах с работающими двигателями, тем самым существенно разгру-
жая работу рулевого винта, особенно при больших скоростях.
Путевая балансировка вертолета при полете без скольжения
обеспечивается равенством моментов, действующих вокруг верти-
кальной оси
Так как на разных режимах полета и при разных скоростях
требуются различные мощность для полета и реактивный момент
несущего винта, то при постоянном плече тяги рулевого винта для
путевой балансировки потребуется различная тяга рулевого винта,
которую можно менять изменением установочных углов лопастей
рулевого винта — его шага.
175
Путевая балансировка вертолета Ми-6 с левым скольжением
обеспечивается равенством моментов (рис. 98,6).
+ДЛ1У — М.
"Р.н.н -*к -'р.в -ф КР
угла скольжения в
зависимости от
скорости при поле-
те без крена на
высоте 1000 м:
Как видно, при полете с левым скольжением момент рулевого вин
та дополнительно должен уравновешивать еще и путевой момент м
счет боковой силы Q-, поэтому тяга рулевого винта при полете со
скольжением должна быть больше, чем при
полете без скольжения. Для увеличения тяги
необходимо увеличить шаг рулевого винта
движением правой педали вперед (особенно
при малых скоростях, на которых скольжение
больше). Левое скольжение увеличит завал
конуса вращения вправо. Для получения лево-
го скольжения и уменьшения завала конуса
вправо следует увеличить завал кольца авто
мата перекоса и ручки циклического шага вле
во. Для уравновешивания дополнительного
бокового сопротивления Qz и создания боль-
шей тяги рулевого винта потребуется большая
мощность, что приведет к увеличению расхода
топлива.
Полет без правого крена со скольжением
сносит вертолет влево на величину угла сколь-
жения, который называется аэродинамическим
углом сноса — УСаэр- С увеличением скорости
полета угол снова уменьшается, так как уве-
личивается боковая сила Q2 (см. рис. 98, б), а
это требует большего отклонения конуса вра-
щения вправо ручкой циклического шага; при
этом боковая сила S растет при отсутствии
крена и скольжение влево уменьшается.
Изменение угла скольжения (аэродинами-
ческого угла сноса) в зависимости скорости
полета при наборе высоты, в горизонтальном
полете и на режиме авторотации для вертолс-
рис. 99, кривые получены в результате аэроди-
намического расчета. Как видно по кривой 2 при скорости (100 км/ч
в режиме горизонтального полета угол сноса несколько больше 12°.
с увеличением скорости он уменьшается и при скорости 200 км/ч
составляет 4°. В результате летных испытаний углы сноса получены
меньше расчетных. При наборе высоты углы скольжения больше,
так как при наборе высоты без скольжения угол правого крена
больше, чем в горизонтальном полете. Для того чтобы угол крена
уменьшить до нуля потребуется большее левое скольжение, чем
в горизонтальном полете (см. рис. 95). На режиме авторотации для
полета без крена необходимо правое скольжение, так как крен на
176
2 — горизонтальный
лолет; 3 — авторота-
та Ми-6 показано на
ингоротации левый. Чтобы устранить его, необходимо создавать
правое скольжение. С ростом скорости полета угол скольжения
уменьшается по тем же причинам, что и на режимах полета с ра-
йотающими двигателями.
[ Практически выполнять полет точно без крена с такими малыми
углами скольжения невозможно, как и невозможно выполнять по-
лет без скольжения с малыми углами крена вправо. Полет обычно
Максимальный
уд-----1—:---и----- £—_1:-----1—----, —— _
При переднем положении правой педали Гре -23*3-30
При крайнем положении левой педали Тай‘-9°*зо
Рис. 100. Изменение потребного шага рулевого винта для путевой
балансировки в зависимости от скорости и режимов полета:
/ — набор высоты; 2 — горизонтальный полет; 3 — самовращение несущего
вннта; 4 — висения н маневры на висении при ветре различного направ-
в выполняется или без крена, или с.правым креном без скольжения,
Й и иногда и с правым креном больше указанного, дающим правое
". скольжение или с левым креном, дающим угол сноса больше, чем
при полете без крена. Все это приводит, естественно, к дополни-
тельным ошибкам в курсе следования, который получается и по
К другим причинам. Учитывать аэродинамический угол сноса при
V выполнении навигационных расчетов нецелесообразно как для
визуальных, так и для полетов по приборам.
Для обеспечения путевой балансировки вертолета Ми-6 на всех
режимах полета и скоростях установлен диапазон изменения шага
рулевого винта. У рулевого винта типа АВ-63-Х6 при полном откло-
нении правой педали вперед шаг будет максимальным — 23°±30',.
при отклонении левой педали до упора — 9°±30'.
На рис. 100 даны балансировочные кривые зависимости потреб-
ного шага рулевого винта от скорости полета для всех режимов.
Потребный шаг рулевого винта на данном режиме полета может
быть различным в зависимости от величины скольжения, угла крепа
И заданной мощности двгателей. Полученные при летных испыта-
?—Яцунович
177
ниях балансировочные кривые для данного режима полета (гори-
зонтальный— сплошные линии, набор высоты — пунктирные линии,
авторотация штрихпунктирные линии) на рисунке ограничены за-
штрихованными зонами.
Как видно из графика, для выполнения всех режимов полетов
с работающими двигателями требуется положительный шаг руле-
вого винта, а на режиме авторотации — отрицательный для направ-
ления тяги его вправо. На всех режимах горизонтального полета
при увеличении скорости требуется меньший шаг рулевого винта.
Уменьшение потребного шага до экономической скорости полета
объясняется тем, что уменьшается потребная мощность несущего
винта, а значит, и реактивный момент его, поэтому требуется мень-
ший путевой момент рулевого винта. При скорости от 140 и до
175 км/ч мощность несущего винта увеличивается, реактивный
момент его растет, но рулевой винт за счет косой обдувки продол-
жает увеличивать тягу и она оказывается больше потребной. По-
этому необходимо уменьшать шаг движением левой педали вперед.
И лишь при скорости больше 170 км/ч вследствие увеличения мощ-
ности несущего винта и ухудшения условий работы рулевого винта,
шаг необходимо увеличивать движением правой педали вперед.
Для набора высоты требуется больший шаг рулевого винта, чем
в горизонтальном полете, так как потребная мощность увеличи-
вается. На режиме авторотации потребный шаг рулевого винта не
меняется в зависимости от скорости полета.
Наибольшее положительное значение общего шага рулевого
винта должно быть на режиме висения и при маневрах (особенно
при ветре) и может доходить до 17°, наибольшее, так называемое
«пиковое» значение,— до 20°. Минимальное значение шага бывает
на режиме авторотации— до —6°.
Потребный шаг рулевого винта в полетах с работающими дви-
гателями в зависимости от числа оборотов несущего винта меняется
следующим образом: чем меньше число оборотов, тем больше по-
требный шаг, так как реактивный момент несущего винта обратно
пропорционален числу оборотов
Мр =716,2-^2-.
“•в ла.„
Кроме того, уменьшение числа оборотов несущего винта приво-
дит к уменьшению числа оборотов рулевого винта и его тяги. Осо
бенно это проявляется на режиме висения, когда несущий винт
имеет большой реактивный момент, педаль отклонена вперед на
большую величину. Если допустить на этом режиме малое число
оборотов при той же мощности, момент увеличится настолько, что
полного хода правой педали вперед будет недостаточно для удер-
жаний вертолета от стремления к левому развороту, что в нрак
тике полетов и бывает особенно на вертодромах, расположенных
на больших высотах относительно уровня моря.
178
На рис. 101 показана взаимосвязь изменения шага рулевого
винта и хода педалей ножного управления. Здесь, как и в системе
продольного и поперечного управления, введена нелинейность пере-
дачи, при положении педалей близко к нейтральному шаг рулевого
винта составит около 4°, что соответствует потребному шагу для
горизонтального полета при крейсерской скорости около 200 км/ч
по прибору. Этим обеспечивается удобство при пилотировании вер-
толета.
§ 29. УПРАВЛЯЕМОСТЬ И УСТОЙЧИВОСТЬ
ВЕРТОЛЕТА
Управляемость
Отличительной особенностью управления вертолета Ми-6 яв-
ляется то, что для выполнения любого режима полета необходимо
действие всеми рычагами управления, так как при отклонении
одного рычага вертолет стремится разбалансироваться и вращает-
ся при этом вокруг трех осей. Для перехода к вертикальному на-
бору высоты от режима висения необходимо ручку «шаг-газ» под-
нять вверх. Вертолет начнет набирать высоту с одновременным
левым разворотом за счет возросшего реактивного момента. Чтобы
предотвратить разворот необходимо отклонить вперед правую
педаль. Увеличенная тяга рулевого винта создаст больший момент,
и вертолет сохранит направление, но начнет перемещаться влево.
Рис. 101. Взаимосвязь
шага винта и хода педа-
лей управления
Чтобы предотвратить это перемещение, необходимо отклонить руч-
ку управления вправо. Такая же зависимость одного вида управ-
ления от другого наблюдается и в горизонтальном полете, напрн-
1* 119
мер, при переходе на большую скорость. В этом случае приходится
отклонять ручку циклического шага вперед и влево, изменять мощ-
ность при помощи ручки «шаг-газ» и изменять положение пе-
далей.
При отклонении педалей одновременно с изменением путевого
момента рулевого винта дополнительно возникают моменты крена
и тангажа. Момент крена появляется в результате того, что точка
приложения силы тяги рулевого винта выше центра тяжести верто-
лета, а момент тангажа — в результате изменения реактивного
момента рулевого винта. При отклонении правой педали вперед
реактивный момент рулевого винта растет, вертолет стремится к
кабрированию, при отклонении левой педали вперед —к пикирова-
нию. Следовательно, в управлении вертолетом Ми-6 существует
полная зависимость одного вида управления от другого, что яв-
ляется недостатком этого вертолета. Включение автопилота на
установившихся режимах полета существенно сглаживает указан-
ные недостатки управления.
У вертолета Ми-6 ручка «шаг-газ» и ручка циклического шага
соединены с автоматом перекоса, а педали соединены с рулевым
винтом системой управления шагом его. Ручка «шаг-газ» соедине-
на с ползуном и воспринимает усилия от лопастей несущего винта,
стремящихся поднять ползун автомата перекоса. В системе управ-
ления общим шагом поставлен гидроусилитель БУ-32А, исполни-
тельный шток которого и воспринимает усилие от ползуна автомата
перекоса. Эти усилия с ростом скорости увеличиваются и дости-
гают на максимальной скорости 2000 кГ. Максимальное же рабо-
чее усилие, создаваемое гидроусилителем БУ-32А, составляет
±12 000 кГ.
Ручка циклического шага соединена с внешним кольцом
автомата перекоса через систему продольного и поперечного
управления. В продольном направлении кольцо автомата перекоса
стремится отклониться назад, что приводит к кабрированию
В цепи продольного управления ставится гидроусилитель БУ-ЗЗА.
шток которого и воспринимает это усилие от автомата перекоса.
Величина этих усилий на малых скоростях составляет 1800 кГ, с
ростом скорости они уменьшаются. Максимальное же усилие, со-
здаваемое гидросистемой на исполнительный шток гидроусилителя
продольного управления, составляет ±6000 кГ.
В поперечном направлении от лопастей работающего несущего
винта автомат перекоса получает постоянное усилие, стремящееся
накренить его вправо. С ростом скорости это усилие увеличивается
по абсолютной величине и достигает максимального значения
3500—3600 кГ при максимальной скорости полета. В системе попе
речного управления устанавливается гидроусилитель БУ-ЗЗА, ис
полнительный шток которого и воспринимает это усилие. Гидроси-
стема создает максимальное усилие в этом гидроусилителе величи-
ной ±6000 кГ. Величины и характер изменения указанных усилий
на штоке гидроусилителей управления общим шагом несущего
1в0
нта, продольного и поперечного управления по скорости горизон-
льного полета показаны на рис. 102.
В цепи управления шагом рулевого винта устанавливается
ндроусилитель БУ-32А, максимальное рабочее усилие, создаваемое
дросистемой на его шток составляет ±6000 кГ.
Как известно, при помощи гидроусилителей снимаются усилия
ыностью со всех рычагов управления, поэтому эта система управ-
сния несущим и рулевым винтом называется необратимой.
При отказе гидросистемы управление вертолетом осуществлять
Невозможно.
ic. 103. Изменение усилий иа
чке циклического шага в го-
ризонтальном полете в продоль-
ном направлении (Рх), попе-
речном направлении (Рг) и на
далях ножного управления
и) п зависимости от скоро-
ll полета при нейтральном
положении триммеров
Чтобы пилот ощущал полет вертолета по усилиям на рычагах
управления, т. е. чтобы имел возможность судить о необходимом
направлении действия рычагами управления, в системы продоль-
ного, поперечного и путевого управления включаются пружинные
загрузочные механизмы. Для снятия же усилий с рычагов управ-
ления от указанных загрузочных механизмов в любом уста-
новившемся режиме полета предусмотрены электромеханизмы
МП-100 м — триммеры.
При нейтральном положении триммеров по их указателям на
разных скоростях и режимах полета на ручке управления в про-
дольном и поперечном направлении и на педалях будут созда-
ваться определенные усилия, дающие возможность на основных
режимах полета осуществлять управление с определенной нагруз-
кой на правую руку и ноги пилота. На рис. 103 показаны величины
и характер изменения усилий по скорости полета в трех системах
управления при нейтральном положении триммеров в режиме
горизонтального полета при средней продольной центровке верто-
лета, равной Хт=0, и при использовании отклонений автомата
перекоса в поперечном направлении, как показано на заштрихован-
ной области рис. 96, также при использовании шага рулевого винта
и пределах, показанных на заштрихованной области рис. 100. Как
видно по рисунку, на ручке управления в продольном направлении
181
при скорости 100 км/ч создается положительное усилие Рх, равн
- кГ, с увеличением скорости до 250 км/ч оно увеличивается i
4 кГ. Значит, кривая Рх имеет такой же характер изменения, ка
балансировочная кривая продольного отклонения кольца автомат,
перекоса по скорости полета, т. е. чем больше скорость, тем больше
нужно отклонять кольцо автомата перекоса вперед (см. рис. 86).
На рис. 103 по вертикально)!
оси откладывается усилие на
ручке в продольном направление
на режиме висения при нейтраль
ном положении продольное
триммера. Это усилие отрица
тельное, т. е. направлено от пило
та (тянущее усилие) и равн
—6 кГ, следовательно, усилие на
ручке в продольном направлении
от режима висения до поступа
тельного полета при скорости
250 км/ч изменяется в пределах
10 кГ.
В поперечном направлен:)!
кривая усилий pt также повтори
ет балансировочную кривую п<
Рис. 104. Зависимость усилия Рх из руч
ке управления циклическим шагом в пре
дольном направлении от угла отклонение
тарелки автомата перекоса к положения
триммера:
I — крайнее положение триммера «в» себя»
2 — нейтральное положение триммера; 3 -
крайнее положение триммера сот себя»
автомата перекоса (см. рис. 96).
Здесь при скорости 100—250 км/ч будет отрицательное усилие р:
(0—6 кГ), т. е. давящее усилие ручки вправо. При изменении ско-
рости от 100 км/ч и до 0. давящее усилие на ручке направлено вле-
во от нейтрального положения. На всем диапазоне скоростей от 0
до 250 км/ч усилие на ручку в поперечном направлении будет ме-
няться в пределах 0—11 кГ.
Кривая усилий на педалях также повторяет балансировочные
кривые потребного шага рулевого винта в зависимости от скорости
горизонтального полета (см. рис. 100). При скорости 100 км/ч уси-
лий на педалях не будет, с увеличением скорости полета до 200к.и/ч
появляется отрицательное усилие, т. е. давящее на левую педаль
(левая педаль идет вперед). При дальнейшем увеличении скорости
это усилие уменьшается по абсолютной величине, т. е. начинается
подача правой педали вперед. При скорости менее 100 км/ч усилие
Р,, положительное, т. е. будет давящее усилие ноги на правую
педаль и на висении оно составит 16 кГ. Во всем диапазоне скоро-
182
стей от 0 до 250 кл/ч усилие на педалях меняется и может доходить
Цр17кГ.
Г Если же применять триммеры, то можно снять усилия от загру-
зочных механизмов со всех рычагов управления на всех режимах
Полета. На рис. 104 показана зависимость усилий на ручке цикли-
ческого шага в продольном направлении от угла отклонения кольца
автомата перекоса, а значит и хода ручки при нейтральном поло-
жении триммера и при крайних по
Рис. 105. Характеристики загрузочных механизмов вертоле-
та Ми-6:
а — зависимость усилив Рг на ручке управления цикличе-
ским шагом в поперечном направлении от угла отклонения
кольца автомата перекоса и положения триммера; б — за-
висимость усилий Р в на педалях в зависимости от величи-
ны шага рулевого винта и положения триммера:
I — крайнее положение триммера влево; 2 — нейтральное положение
триммера; 3 — крайнее положение триммера вправо; 4 — крайнее
положение триммера влево; 5 — нейтральное положение триммера;
6 — крайнее положение триммера вправо
себя». Как видно из рисунка, можно снять усилие с ручки цикли-
ческого шага до нуля в продольном направлении в большом диа-
пазоне отклонения кольца автомата перекоса от 3°30' (назад), до
—6°30' (вперед), т. е. почти на всем диапазоне отклонения кольца
автомата перекоса, и этого будет достаточно для снятия усилий на
всем диапазоне скоростей, всех режимов полета с допустимыми
предельными центровками вертолета. При нейтральном положении
триммера, в крайних положениях кольца автомата перекоса, за-
грузочные пружины создают усилия больше, чем это показано во
всем диапазоне скоростей от 0 до 250 км/ч (см. рис. 103). Это объ-
ясняется тем, что на рисунке усилия показаны лишь при отклонении
кольца автомата перекоса и ручки циклического шага в горизон-
тальном полете в диапазоне всех скоростей, при центровке Хт = 0 и
эти отклонения будут не предельными, как это показано на
183
рис. 104. На рис. 105, а показаны такие же характеристики мехами <
ма загрузки в цепи поперечного управления и на рис. 105,6 в цепи
ножного управления.
Ручка «шаг-газ» не имеет подобного приспособления для за-
грузки, для нее предусмотрено стопорение в любом заданном поло-
жении при помощи гидросистемы. Корректор газа имеет дисковый
фрикцион, степень затяжки которого регулируется муфтой.
Для вертолета Ми-6 характерно запаздывание в управлении
несущим винтом, чего не наблюдается в управлении рулевым вин-
том. Объясняется это различной величиной винтов, а от этого
зависит время изменения моментов при управлении винтами.
Устойчивость
Вертолет Ми-6, как и вертолет Ми-4, обладает статической
устойчивостью.
Динамика поведения вертолета в полете будет характеризовать-
ся следующим. После прекращения возмущений в продольном на-
правлении отклонение от исходного положения вертолета замед-
ляется, по мере изменения скорости появляется крен и скольжение
Если вертолет получил боковое возмущение, то возникают ко-
лебания особенно в путевом направлении. Вследствие бокового
возмущения вертолет плавно переходит в спираль, при этом коле-
бания имеют затухающий характер как в поперечном, так и в пу -
тевом направлении (по углам крена и рысканию).
Необходимо отметить, что всякое возмущенное движение верто
лета Ми-6 развивается медленно, благодаря большим размерам
вертолета и большим моментам инерции, поэтому пилот успеваем
заметить эти отклонения, вмешаться в управление и своевременно
принять меры для прекращения дальнейшего развития возмущен-
ного движения. Поэтому пилотирование вертолетом не вызывает
больших затруднений. При полете в условиях спокойной атмос-
феры или даже средней турбулентности после тщательной балан-
сировки вертолета Ми-6 в установившемся режиме оп способен
некоторое время совершать полет с брошенными рычагами управ-
ления. При средних скоростях горизонтального полета после осво-
бождения управления вертолет сам изменяет угол тангажа на 10е
и угол крена на 5° в течение 10—15 сек.
Вертолет Ми-6 в общем имеет удовлетворительные характери-
стики устойчивости, а применение автопилота на установившихся
режимах поступательного полета еще больше улучшает их и пило-
тирование вертолета значительно облегчается.
:ГЛАВА X
ОСОБЫЕ СЛУЧАИ В ПОЛЕТЕ
§ 30. ЗЕМНОЙ РЕЗОНАНС
1 Явление земного резонанса возникает при взаимодействии двух
колеблющихся систем несущей (лопастей относительно вертикаль-
ных шарниров) и вертолета. Все вертолеты, имеющие вертикаль-
ны шарниры без демпферов, обязательно подвержены земному ре-
зонансу. Демпферы вертикальных шарниров в основном и служат
для устранения земного резонанса. Конструктор всегда стремится
уменьшить демпфирующий момент вертикальных шарниров до
нуля. У вертолетов с колесным шасси целесообразно сделать так,
Чтобы частота собственных колебаний вертолета была бы ниже
частоты колебаний несущей системы, тогда при нарастании коле-
баний двух этих систем они будут проходить с меньшей интенсив-
ностью и потребуется меньшее демпфирование. Низкая частота
собственных колебаний вертолета достигается смягчением аморти-
зации шасси, увеличением частоты колебаний несущей системы —
увеличением демпфирующих моментов вертикальных шарниров.
В поступательном полете, а особенно при движении вертолета
по земле, лопасти совершают колебания вокруг вертикальных шар-
ниров. т. е. углы между лопастями неодинаковые. Общий центр
тяжести лопастей (винта) смещается от оси вращения винта, на
втулке появляется неуравновешенная центробежная сила, которая
раскачивает несущую систему с определенной частотой. Когда
вертолет находится на земле или перемещается по ней, то колеба-
ния несущей системы растут, а сам вертолет находится во взвешен-
ном состоянии, и частота его собственных колебаний увеличивается,
в этом случае частоты колебаний двух систем могут совпасть
(резонанс). Это приведет к опасной раскачке вертолета, неурав-
новешенная центробежная сила увеличится, в результате колеба-
ния всего вертолета быстро нарастают.
1 Источником энергии для поперечных колебаний вертолета явля-
ются работающие двигатели. При определенном небольшом режиме
работы двигателей и малых числах оборотов несущего винта
колебания несущей системы демпфируются амортизаторами шасси,
пневматиками колес и демпферами вертикальных шарниров. При
большем режиме работы двигателей и числе оборотов несущего
винта работа сил, вызывающих колебания, растет, а работа демп-
фирующих сил уменьшается вследствие роста тяги винта и умень-
шения обжатия амортизаторов шасси и пневматиков колес. Начи-
ная с некоторого режима приток энергии от двигателей, раскачи-
вающий несущую систему, будет больше энергии рассеивания во
185
всех амортизаторах и демпферах, поэтому колебания будут воз
растать и -если не принять срочных мер, возможно разрушение от-
дельных частей вертолета. Эти колебания будут развиваться и
основном в поперечной плоскости, так как поперечный момен ।
инерции вертолета Ми-6 намного меньше продольного момента
На вертолете Ми-6 явление земного резонанса явно выражен--
и может возникать в большом диапазоне чисел оборотов несущего
винта. Вертолет Ми-6 подвержен колебаниям по так называемым
первому и второму тону.
Рнс. 106. Колебания вертолета Ми-6 при земном резонансе:
а — по первому тону колебаний; б — по второму тону колебаний;
I — неуравновешенная центробежная сила; 2 — плоскости симметрии неподвижного
вертолета; 3 — положение плоскости симметрии при колебаниях; 4 — центры колеба-
При колебаниях по первому тону вертолет раскачивается в по-
перечной плоскости вокруг оси, проходящей ниже грунта
(рис. 106,а). Как видно по рисунку, при таком характере колеба-
ний неуравновешенная центробежная сила не только накреняет ось
симметрии вертолета, но и одновременно сдвигает вертолет и его
центр тяжести в сторону действия силы.
Колебания вертолета по первому тону колебаний возникают
при запуске и опробовании двигателей и трансмиссии на земле в
диапазоне чисел оборотов несущего винта 40—65% и при рулении,
когда тяга несущего винта сравнительно небольшая. При такого
рода колебаниях пневматики не отрывается от земли.
Для поперечных колебаний вертолета по второму тону характер-
но то, что эти колебания происходят вокруг оси, проходящей выше
центра тяжести вертолета (рис. 106,6). В этом случае при действии
неуравновешенной центробежной силы в ту же сторону, что и при
колебаниях по первому тону, вертолет накреняется в сторону дей
ствия силы, но центр тяжести вертолета и вся масса его сдвигаются
в сторону, противоположную действию силы на втулке винта.
186
L Колебания вертолета по второму тону появляются при большой
тнге несущего винта, близкой к весу вертолета, когда амортизаторы
, рисжаты (энергия колебаний не рассеивается). Такие колебания
[.Могут возникнуть после приземления при посадке по-самолетному и
и других случаях нахождения вертолета на земле при большой
• тяге несущего винта.
К. Здесь раскачка заключается в том, что происходит поперемен-
ный отрыв колес от земли.
В Для предотвращения колебаний вертолета по первому тону
I Предусмотрен пружинный демпфер, соединенный с камерами высо-
кого давления амортизационных стоек главного шасси (рис. 107).
Пружинный демпфер устроен так, что он не меняет характеристик
шасси при одинаковых усилиях на оба колеса, например, если про-
исходит посадка на оба колеса без крена, но значительно снижает
жесткость шасси при неодинаковых нагрузках на колеса, что может
быть при поперечных колебаниях типа земной резонанс по первому
Iтону колебаний и при посадке на одно колесо. При стоянке верто-
лета или при его движении по земле, когда оба колеса имеют оди-
наковую нагрузку, поршень демпфера находится в среднем поло-
жении. При посадке на одно колесо или при поперечных колебаниях
вертолета по первому тону гидросмесь из амортизатора высокого
давления, находящегося со стороны колеса, получившего большее
давление, перетекает по трубопроводу через перекрывной кран в
демпфер и отжимает его поршень в противоположную сторону до
упора в торец обоймы на максимальную величину, равную 175 мм.
Из другой полости демпфера гидросмесь вытесняется и перетекает
через перекрывной кран по трубопроводу в противоположный амор-
тизатор. Тем самым смягчаются попеременно удары колес о землю
за счет расширения объема полости, занятой гидросмесью.
Для предотвращения земного резонанса по второму тону коле-
баний предусмотрены на основных амортстойках шасси дополни-
тельные камеры с малым давлепием, которые вступают в работу
сразу же после касания колес земли или перед отрывом от земли,
когда тяга несущего винта еще большая и камеры с высоким дав-
лением не срабатывают. Тогда начавшиеся колебания вертолета
будут демпфироваться в камерах низкого давления, что и предот-
вращает развитие земного резонанса. Кроме того, мощным сред-
ством для предотвращения земного резонанса являются гидравли-
ческие демпферы вертикальных шарниров лопастей несущего вин-
та. Преимущество гидравлических демпферов перед фрикционными
заключается в том, что у них момент трения растет с ростом
амплитуды колебаний.
Поперечные колебания зависят от полетного веса вертолета,
характеристик амортизатора шасси, шин колес и гидравлических
демпферов вертикальных шарниров. Для вертолета Ми-6 конструк-
тор подобрал такой объем гидросмеси и начальное давление тех-
нического азота в амортизаторах, начальное давление воздуха в
пневматиках колес и моменты гидравлических демпферов верти-
187
кальных шарниров, что частота колебаний несущей системы н<
совпадает с частотой колебаний (она выше) вертолета, находяще
гося на земле и поэтому при правильной технической и летной
эксплуатациях вертолета земной резонансна вертолете Ми-6 исклю
чен. Но это не значит, что он не возникает. Наоборот, если не под-
держивать необходимый уровень гидросмеси и давления азота в
амортизаторах шасси, давления воздуха в пневматиках колес,
допускать ошибки при запуске и опробовании двигателей и транс
Рис. 107, Схема двухкамерного амортизатора шасси:
а—амортизатор низкого давлении; б—амортизатор высокого дав-
ления; в — гибкий шланг; г — пружинный демпфер
миссии, не выполнять установленные ограничения при рулении,
взлете и посадке по-самолетному, то земной резонанс на вертолете
Ми-6 возможен.
Первопричиной земного резонанса может послужить какой-либо
несущественней фактор: случайная неровность поверхности земли,
резкие порывы ветра, резкое или большое отклонение ручки управ-
ления от положения, при котором установочные углы лопастей не
меняются, большая скорость движения по земле, низкая темпера
тура окружающего воздуха и др. Сочетание перечисленных факто-
ров с неисправностью системы демпфирования пли нарушение ее
характеристик при техническом обслуживании может создать бла-
гоприятные условия для развития земного резонанса. В практике
эксплуатации вертолета Ми-6 наблюдались случаи возникнове-
ния резонанса при запуске двигателей и раскрутке несущего винта
после запуска первого двигателя и чаще при минимальном запасе
топлива и при ветре справа. Эти же причины способствуют резонан-
су при выключении двигателей через минуту после перевода их на
режим малого газа.
188
Для предотвращения возможности возникновения земного резо-
нанса на вертолете Ми-6 необходимо выполнять следующие прави-
ла технической и летной эксплуатации.
1. Точно соблюдать и правильно выполнять все регламентные
работы по обслуживанию гидродемпферов втулки несущего винта.
2. Зарядка амортизаторов шасси гидросмесью и техническим
азотом по объему и давлению должна быть в пределах установлен-
ной нормы: смеси в двух амортизаторах высокого давления, пру-
жинном демпфере и трубопроводах—46 л, в двух амортизаторах
низкого давления — 9,6 л, в амортизаторе передней ноги шасси —
6 л *, начальное давление технического азота в амортизаторах вы-
сокого давления главных ног шасси — 48 кГ/см2, в амортизаторах
низкого давления главных ног шасси—14 кГ/см2, в амортизаторе
передней ноги шасси — 27 кГ/слг2.
3. Зарядка пневматиков колес воздухом должна быть в преде-
лах нормы: начальное давление в пневматиках главных колес —
7 кГ/см2, передней ноги — 6 кГ/см2.
4. При возможности — избегать запуска двигателей и раскрутки
винта при боковом ветре, особенно справа, и ни в коем случае не
допускать запуска двигателей при боковом ветре более 15 м/сек.
5. При рулении соблюдать следующие ограничения. Скорость
руления не должна превышать 20 км/ч. Руление совершать только
при ветре не более 25 м/сек, сбоку — 15 м/сек, сзади — 12 м/сек. Не
рулить по неровному, мягкому грунту, по глубокому и рыхлому
снегу. Число оборотов несущего винта держать в пределах
78—82%.
6. При взлете по-самолетному добиваться минимальной длины и
времени разбега, не допуская скорости отрыва больше 50—60 км/ч.
7. При посадке по-самолетному не допускать посадочную ско-
рость более 50—60 км/ч. После приземления обязательно и как
можно скорее и до отказа опускать ручку общего шага вниз, пере-
водить рукоятку корректора газа влево. Использовать тормоза ко-
лес для уменьшения длины и времени пробега.
8. При вертикальном взлете не удерживать вертолет долго во
взвешенном состоянии до отрыва колес от земли и вблизи земли
после отрыва.
9. При вертикальной посадке не удерживать вертолет долго
вблизи земли и во взвешенном состоянии после касания колесами
земли.
При появлении земного резонанса при запуске двигателей необ-
ходимо прекратить запуск. При возникновении земного резонанса
при опробовании двигателей на земле необходимо немедленно от-
клонить ручку общего шага вниз и выключить двигатели, периоди-
чески притормаживая несущий винт до полного прекращения
* При зарядке и дозарядке а.ммортизационных стоек количество заправляе-
мой гидросмеси АМГ-10 определяется по уровню ее до отверстий зарядных кла-
панов при определенном обжатии стоек.
189
колебаний вертолета плавным кратковременным включением тор-
моза. По мере уменьшения числа оборотов несущего винта колеба-
ния вертолета будут постепенно уменьшаться.
При появлении земного резонанса во всех других случаях и на
всех стадиях его развития необходимо погасить источник энергии
этих колебаний — работающие двигатели, обжать амортизаторы и
пневматики колес, прекратить маховое движение лопастей вокруг
горизонтальных шарниров и колебаний их вокруг вертикальных
шарниров. Для этого необходимо уменьшить быстро общий шаг до
отказа с одновременным поворотом корректора газа влево. Ручку
циклического шага поставить в нейтральное положение и, если это
был разбег при взлете по-самолетному, пробег при посадке по-са-
молетному или руление, то применить тормоза шасси для быстрого
погашения скорости. Если колебания не прекращаются, то необ-
ходимо выключить двигатели. Если же и после этого колебания не
прекращаются, то необходимо затормозить несущий винт.
§ 31. ВОЗМОЖНОСТЬ ОПРОКИДЫВАНИЯ
ВЕРТОЛЕТА НА ЗЕМЛЕ
При страгивании с места, разгоне, рулении вертолета по земле,
а также при вертикальном взлете и посадке в случае неправильных
Рис. 108. Схема сил и моментов, действующих на вертолет Ми-6 на земле:
а — крен влево; б — вид сверху
действий пилота могут создаться условия, при которых возможно
опрокидывание вертолета Ми-6 на бок относительно оси, проходя-
щей через переднее колесо и одно из основных колес (рис. 108,6).
Опрокидыванию способствуют система вертолета с трехколесным
шасси, высокое расположение центра тяжести и большая масса
вертолета.
190
Накренить вертолет стремятся следующие силы: сила тяги ру-
левого винта, боковая сила тяги несущего винта Тг, продольная
сила тяги несущего винта Тх. Все эти силы действуют на плече, рав-
ном расстоянию от точки их приложения до оси 00 или 0,0,, и
создают соответствующие моменты. Если вертолет накренился, то
дополнительно в сторону крена будет действовать и сила тяги не-
сущего винта на плече I (рис. 108,а). И чем больше сила тяги,тем
больше будет момент, увеличивающий крен, тем менее устойчив
вертолет на земле. Силой, удерживающей вертолет в состоянии
равновесия, будет вес вертолета.
Чтобы не было скольжения вертолета по грунту (юза), необ-
ходимо, чтобы боковая сила Т. была направлена вправо и уравно-
вешивала тягу рулевого винта. При нахождении вертолета на земле
пилоту нечем руководствоваться в определении равенства этих двух
сил, поэтому легко может быть допущена ошибка. Если боковая
сила станет больше тяги рулевого винта, тогда появится правый
юз, если она меньше тяги рулевого винта, отсутствует или дейст-
вует в сторону тяги рулевого винта — левый юз. Если грунт неров-
ный или мягкий и при юзе на внешней стороне колес образуется
валик, препятствующий боковому перемещению вертолета, то со-
здадутся явные условия для опрокидывания вертолета вправо или
влево.
Предположим, что боковая сила Тг отсутствует или она сущест-
венно меньше тяги рулевого винта. Относительно точек опоры
левого и переднего колес на вертолет будут действовать следующие
моменты: момент тяги несущего винта Те, направленный влево, в
ту же сторону будет направлен и момент тяги рулевого винта
Тр.пй. Момент силы веса Ga будет направлен в противоположную
сторону. Если тяга несущего винта меньше веса вертолета, то мо-
мент силы веса будет больше суммы моментов тяги несущего и
рулевого винтов: Ga>Tl+Tv.Bh и чем больше это неравенство, тем
более устойчив вертолет на земле.
Если по каким-либо причинам вертолет накренится влево отно-
сительно оси 00 (см. рис. 108,6), например, силой удара правого
колеса при рулении по неровному грунту, тогда сила тяги несущего
и рулевого винтов и сила удара создадут моменты, увеличивающие
крен, а сила веса — уменьшающая крен. Появившийся креп изме-
няет соотношение этих моментов так, что с увеличением крена
момент силы веса будет уменьшаться за счет уменьшения плеча /,
так как центр тяжести будет приближаться к линии 00, вокруг
которой начал вращаться вертолет. Поэтому устойчивость вертоле-
та будет уменьшаться. При достижении какого-то критического
угла крена кренящие моменты тяг винтов будут равны моменту,
восстанавливающему равновесие от веса вертолета.
G a=Tl+TP.,h
и вертолет получит безразличное равновесие на точках опор лево-
го и переднего колес и при небольшом превышении кренящих мо-
191
ментов над моментом силы веса (Оа<Т1+Трл/1), вертолет будет
продолжать крениться, и если не принять срочных мер, он опро-
кинется.
Такая же опасность опрокидывания -в правую сторону возни-
кает, если появится крен в эту сторону при наличии боковой силы,
и особенно, если она будет больше тяги рулевого винта. Но опас-
ность опрокидывания вправо менее вероятна вследствие постоянна
действующей силы тяги рулевого винта.
Кроме того, способствовать опрокидыванию вертолета будут
следующие причины: смещение центра тяжести вертолета вперед
(более передняя центровка), что влечет за собой уменьшение
восстанавливающего момента от силы веса; боковой ветер; излиш-
нее отклонение ручки циклического шага вперед, что вызывает
наклон силы тяги и увеличение опрокидывающих моментов.
Для того чтобы не допустить опрокидывания вертолета, необ-
ходимо строго выполнять все ограничения при движениях по земле.
Если же наметилось опрокидывание вертолета по каким-либо при-
чинам, необходимо энергично сбросить ручку общего шага вниз до
отказа.
При этом тяги обоих винтов уменьшатся, и вертолет восстано-
вит нарушенное равновесие. Необходимо твердо помнить, что
движение педали ноги в сторону, противоположную крену или юзу,
не способствует выходу из крена или прекращению юза, а лишь
усугубляет их.
Если пилот хочет использовать педали при появлении крена, то
необходимо отклонять педаль в сторону крена.
В некоторых случаях при полной уверенности пилот может
избежать опрокидывания, оторвав вертолет от земли.
§ 32. ПЕРЕТЯЖЕЛЕНИЕ НЕСУЩЕГО
ВИНТА
Могут быть три случая перетяжеления несущего випта:
ручка «шаг-газ» при правом положении корректора газа очень
энергично и быстро отклоняется вверх; ручка «шаг-газ» на верти-
кальных режимах полета, хотя и нормальным темпом и при пол-
ностью отклоненном корректоре газа вправо отклоняется вверх
более чем на 9°; ручка «шаг-газ» отклоняется на себя при невведен-
ном корректоре газа.
Разберем более подробно каждый случай отдельно.
1. Этот случай перетяжеления винта характерен для вертикаль-
ного взлета, вертикального набора высоты и маневров на режиме
висения. Величина общего шага несущего винта и положение руко-
ятки корректора газа могут быть нормальными, но пилот для уве-
личения мощности двигателей и тяги несущего винта отклоняет
ручку общего шага слишком энергично. Ввиду определенной прие-
мистости двигателей их мощность не успевает нарастать соответ-
192
внно увеличенному шагу несущего винта, в результате винт
яжеляется. Здесь возможен и такой случай: при увеличении
Него шага винта за счет инерции вращения тяга его может
1тковременно увеличиться и вертолет может оторваться, если
□Изводился взлет, или набирать высоту, если производился вер-
бальный набор высоты с режима висения, но затем число оборо-
и его и тяга резко уменьшатся и вертолет будет самопроизвольно
ижаться. Еще большей ошибкой будет, если при таком снижении
Вилот попытается его предотвратить увеличением общего шага, это
может кончиться поломкой вертолета.
I При перетяжеления винта необходимо уменьшить общий шаг,
сохраняя горизонтальное положение вертолета ручкой цикличе-
ского шага, вертолет будет снижаться, число оборотов будет уве-
личиваться и снижение может прекратиться самостоятельно. Или
же оно прекратится вследствие возникновения воздушной подуш-
ки, вертолет зависнет на воздушной подушке или произведет плав-
ное касание земли. В случае же, если вертолет будет стремиться
к земле с большой скоростью, необходимо смягчить удар о землю
энергичным затяжелением винта, произвести так называемую по-
гадку «на большом шаге». Описанный случай перетяжеления винта
Может также вызвать помпаж двигателей.
Такой случай перетяжеления несущего винта может быть не
только на взлете и вертикальных режимах полета, но и на любом
режиме полета с поступательной скоростью, только последствия
такого перетяжеления будут менее опасны. Уменьшение числа обо-
ротов вызовет уменьшение тяги несущего винта, вертолет будет
снижаться, а если была большая скорость полета, то может возник-
нуть срыв потока.
2. Случай перетяжеления винта характерен также для верти-
кального взлета и вертикальных режимов полета при большом
ролетном весе вертолета, взлетном режиме работы двигателей
।или близкого к нему. Здесь при полностью отклоненном корректоре
। иза вправо общий шаг несущего винта составляет 9°. Если при
«том увеличить общий шаг, то винт будет затяжеляться, а мощ-
ность двигателей будет оставаться неизменной, так как топливные
краны уже полностью открыты, показания УПРТ-2 максимальные
(см. рис, 50, точки д). При этом число оборотов винта будет резко
уменьшаться, а следовательно, и тяга винта, и вертолет начнут
снижаться. По схеме работы системы «шаг-газ», изображенной на
рис. 50, движение будет происходить от точки д к точке е.
При таком перетяжеленни винта действия пилота должны быть
такими же, как и в первом случае.
3. Такой случай перетяжеления несущего винта тоже характе-
рен и для вертикальных режимов полета, но более опасен. Он мо-
жет быть допущен на любом режиме, если пилот действует лишь
ручкой «шаг-газ», не обращая внимания на число оборотов несу-
щего винта и не поддерживая их с помощью корректора газа в
пределах допустимого на данном режиме полета. При взлете и на
193
вертикальных режимах без предварительного введения корректора
газа действия лишь ручкой общего шага могут привести не только
к перетяжелению винта, но и к помпажу двигателей.
§ 33. ВИХРЕВОЕ КОЛЬЦО
Режим вихревого кольца при вертикальном снижении для вер-
толета Ми-6 имеет такие же характеристики и закономерности, как
и для любого одновинтового вертолета. Чтобы не допустить режи-
ма вихревого кольца, вертикальное снижение на вертолете Ми-6
ведется со скоростью 1—2 м/сек. При этом необходимо строго сле-
дить, чтобы скорость даже кратковременно не превышала 2—3 м.
При скорости снижения до 2 м/сек вихревое кольцо образуется
под винтом и опасности не представляет, при достижении же ско-
рости 2 м/сек и более появляются повышенные вибрации вертоле-
та, ухудшается управляемость, тяга винта самопроизвольно умень-
шается, резко увеличивается вертикальная скорость снижения.
Увеличение мощности двигателей не всегда приводит к желатель-
ным результатам. Поэтому рекомендуется при скорости снижения
2 м/сек увеличить режим работы двигателей и прекратить дальней-
ший рост вертикальной скорости снижения.
На режиме вихревого кольца, т. е. при скорости более 2—3 м/сек,
необходимо увеличить общий шаг несущего винта. Если это не даст
положительных результатов, одновременно с увеличением общего
шага перевести вертолет в режим поступательного полета отклоне-
нием ручки циклического шага вперед.
§ 34. ВИБРАЦИЯ ЛОПАСТЕЙ ТИПА
ФЛАТТЕР
Вибрации лопастей несущего винта типа флаттер также харак-
терны для вертолета, как и для крыла самолета. Как известно из
теории флаттера начало его характеризуется критической скоро-
стью обтекания крыла или лопасти несущего винта. Так как ло-
пасть обтекается за счет движения по окружности — окружной ско-
рости и за счет полета — поступательной скорости, то вертолет
оценивается по флаттеру критическими оборотами несущего винта
и критической скоростью полета вертолета. Задача конструктора
добиться таких критических чисел оборотов несущего винта и кри-
тической скорости по флаттеру, чтобы они были больше максималь-
но допустимых при эксплуатации. Для вертолета Ми-6 эта задача
успешно решена. Основным фактором, влияющим на критическое
число оборотов и скорость полета по флаттеру, является попереч-
ная центровка лопастей несущего винта: чем более передняя цен-
тровка, тем больше критическое число оборотов и критическая ско-
рость по флаттеру, и наоборот.
Кроме того, на критическое число оборотов и скорость по флат-
теру влияют и другие факторы, как постоянные (жесткость кон-
194
струкции, величина характеристики регулятора взмаха), так и пе-
ременные (величина трения в осевых шарнирах, место положения
центра давления по хорде лопасти и др.). Так как переменные фак-
торы могут меняться при эксплуатации по разным причинам, то
вертолет должен обязательно иметь запас числа оборотов и скоро-
сти по флаттеру. Запасом числа оборотов по флаттеру является
разность между числом оборотов, при которых появляется флаттер,
и числом оборотов, максимально допустимым в эксплуатации. За-
пасом скорости по флаттеру будет являться разность между ско-
ростью, при которой появляется флаттер, и максимально допусти-
мой скоростью в эксплуатации.
Добиваются определенных запасов чисел оборотов и скорости
по флаттеру при помощи изменения поперечной центровки лопа-
стей. Поэтому запасы числа оборотов и скорости по флаттеру за-
меняют эквивалентным запасом поперечной центровки по флатте-
ру, который изменяется и контролируется при изготовлении лопа-
стей и при их ремонте путем постановки противофлаттерных гру-
зов. У лопастей вертолета Ми-6 установлены следующие запасы
центровки по флаттеру: для трапециевидных лопастей — 2,25%,
для прямоугольных лопастей — 1,7%.
Запасом центровки по флаттеру является разность между цент-
ровкой, при которой появляется флаттер, и фактической центровкой
лопасти. Указанные запасы центровки по флаттеру лопастей верто-
лета Ми-6 гарантируют отсутствие появления флаттера на всех ре-
жимах полета, при этом число оборотов несущего винта должно
быть не более максимально допустимого (87%) и скорость полета
для вертолета с трапециевидными лопастями винта не более
265 км]ч, с прямоугольными лопастями — не более 300 км!ч по
прибору.
Были проведены соответствующие испытания на флаттер как
на земле, так и в полете. У трапециевидных и прямоугольных ло-
пастей смещали центровку на 1,6% путем постановки дополнитель-
ного груза на триммерных пластинках. У этих лопастей при про-
верке на земле флаттер не проявился при числе оборотов несущего
винта 90%. В полете флаттер не проявился у вертолета с трапе-
циевидными лопастями при числе оборотов несущего винта 87% и
при скорости 320 км!ч, у вертолета с прямоугольными лопастями
винта при числе оборотов несущего винта 78% и при скорости
350 км]ч по прибору. Следовательно, критическое число оборотов и
критическая скорость по флаттеру для вертолета Ми-6 еще не уста-
новлены, но они больше указанных выше.
При эксплуатации запас центровки лопастей по флаттеру мо-
жет меняться в результате ремонта лопастей или попадания влаги
внутрь лопасти. Критическое число оборотов и критическая ско-
рость по флаттеру также могут меняться изменением трения в под-
шипниках шарниров, смещением центров давлений на лопастях,
поэтому в полете как исключение может появиться флаттер лопа-
стей. Пилот должен знать признаки флаттера и способы прекраще-
195
ния этого вида вибраций, а также четко помнить все ограничения,
связанные с флаттером.
Для вертолета Ми-6 признаками флаттера является: размыв
тюльпана лопастей (выпадание лопасти из общего конуса), из-
менение характера вибрации всего вертолета и рычагов управления
(«вздрагивание» вертолета, «рывки» на рычагах управления).
При появлении первых признаков флаттера необходимо умень-
шить число оборотов несущего винта до минимально допустимого
и скорость полета. После прекращения вибрации продолжать по-
лет не рекомендуется: необходимо подыскать подходящую площад-
ку и произвести вынужденную посадку.
§ 35. ПРЕВЫШЕНИЕ МАКСИМАЛЬНО ДОПУСТИМОЙ
СКОРОСТИ ПОЛЕТА
Срыв потока с концов лопастей может наступить при превыше-
нии максимально допустимой скорости полета, а также при умень-
шении числа оборотов ниже допустимого или увеличении общего
шага выше допустимого при больших скоростях полета, при полете
в болтанку, при перегрузках и др. Но более частая ошибка в пило-
тировании вертолетами Ми-6 — это превышение максимально допу-
стимой скорости полета для вертолета с данным типом лопастей
несущего винта и на данной высоте полета, которая сопровождает-
ся следующими признаками.
1. Возникают повышенные вибрации вертолета, увеличивающие-
ся с ростом скорости полета.
2. Ухудшается управляемость (вертолет хуже реагирует на дей-
ствие любым рычагом управления).
3. Вертолет кабрирует и кренится вправо, раскачивается в про-
дольном и особенно в поперечном направлении.
Для предотвращения этих явлений необходимо: плавно умень-
шить общий шаг винта; установить рекомендуемое число оборотов
для данной высоты в зависимости от типа лопастей несущего вин-
та; уменьшить скорость до необходимой. Затем установить необхо-
димый режим работы двигателей и продолжать полет.
§ 36. ОТКАЗ В ПОЛЕТЕ ОДНОГО ДВИГАТЕЛЯ
Отказ двигателя пилот определяет как по разбалансировке вер-
толета, так и по приборам. Вертолет разворачивается вправо за
счет уменьшения реактивного момента несущего винта, одновремен-
но кренится вправо за счет уменьшения тяги рулевого винта; опу-
скает нос. По указателю числа оборотов видно уменьшение числа
оборотов турбокомпрессора и несущего випта, уменьшение или
увеличение температуры газов за турбиной у отказавшего двигате-
ля, уменьшение давления масла на входе в двигатель или турбину
винта. При уменьшении давления топлива загорается сигнальная
лампочка на пульте бортмеханика.
196
Отказ двигателя может быть полным и внезапным, а также
частичным.
При внезапном и полном отказе двигателя необходимо энергич-
но и без задержки уменьшить общий шаг несущего винта на 4 —
6° и одновременно повернуть рукоятку корректора газа вправо.
Это необходимо для того, чтобы не допустить сильного уменьшения
числа оборотов несущего винта. При правильном действии пилота
число оборотов несущего винта уменьшается на 5%. Для парирова-
ния разворота и крена вправо, опускания носа следует отклонить
ручку циклического шага влево и на себя и левую педаль вперед.
После этого плавно, но энергично перевести одновременно оба ры-
чага раздельного управления двигателя в крайнее верхнее положе-
ние. Так как при внезапном отказе не удается быстро определить,
какой двигатель отказал, поэтому переводятся на максимальный
режим работы оба двигателя с помощью рычагов раздельного уп-
равления. Затем необходимо увеличить общий шаг. не допуская
увеличения числа оборотов несущего винта выше максимально до-
пустимого.
Установить скорость 130—150 кЛ/ч, определить, какой двигатель
отказал, и после этого рычаг раздельного управления отказавшего
двигателя поставить на защелку.
При частичном отказе двигателя действия пилота остаются та-
кими же, как и при внезапном отказе, но на взлетный режим пере-
водится только работающий двигатель.
Во избежание пожара отказавшего двигателя прекратить в него
доступ топлива, закрыть механический кран останова. Бортмеханик
закрывает пожарный кран отказавшего двигателя.
Так как при переводе рычага раздельного управления пол-
ностью вверх рукоятка корректора газа самостоятельно поворачи-
вается влево и ход ее становится недостаточным для удержания
нужного числа оборотов, необходимо рычаг раздельного управле-
ния несколько опустить до появления большего хода рукоятки кор-
ректора газа. При этом проверить, чтобы при полностью поверну-
той вправо рукоятки корректора газа двигатель работал на взлет-
ном режиме. Поворот рукоятки корректора газа влево при верхнем
положении рычага раздельного управления обусловлен кинемати-
кой управления системой «шаг-газ» и раздельным управлением
двигателями. Установить режим горизонтального полета со ско-
ростью 130—'150 км!ч.
Характеристика горизонтального полета вертолета Ми-6 и сни-
жения с одним работающим двигателем была дана ранее. Необхо-
димо лишь дополнить, что, в случае снижения вертолета при работе
двигателя на номинальном режиме при полете над горной мест-
ностью или водным пространством, можно установить любой повы-
шенный режим работы двигателя, не считаясь с ограничениями по
времени. Если невозможен полет до ближайшего вертодрома, не-
обходимо выбрать подходящую площадку и произвести вынужден-
ную посадку с одним работающим двигателем.
197
Посадка на вертолете Ми-6 с одним работающим двигателем.
Методика выполнения посадки с одним выключенным двигателем
с учебной целью и при отказе одного двигателя остается неизмен-
ной, но в обоих случаях опа производится только по-самолетному
вследствие недостатка мощности одного двигателя для вертикаль-
ной посадки. Снижение на выбранную площадку производить со
скоростью 130—140 км/ч и вертикальной скоростью 2—3 м/сек (но
не более 4 М/сек). Уточнение расчета на посадку и выдерживание
числа оборотов выполняются движением ручки «шаг-газ» и рукоят-
ки корректора газа. Но при работе одного двигателя эти движения
Рис. 109. Профиль и элементы посадки вертолета Ми-6 с одним работа-
ющим двигателем
должны быть более плавными и координированными, так как при
движении ручки «шаг-газ» вверх число оборотов уменьшается ин-
тенсивнее, чем при работе двух двигателей. Предпосадочное сни-
жение рекомендуется совершать при скорости 130—140 км/ч и вер-
тикальной скорости 1,5—2 м/сек (рис. 109). Уменьшение поступа-
тельной и вертикальной скоростей надо начинать с высоты 25—
30 м незначительным движением ручки циклического шага на себя
и плавным движением ручки общего шага, рукояткой корректора,
удерживая обороты в рабочем диапазоне. С высоты 5—6 м придать
вертолету посадочное положение движением ручки циклического
шага от себя и продолжать уменьшать вертикальную скорость вы-
бором ручки общего шага вверх с таким расчетом, чтобы к моменту
приземления она была не более 0.5 м/сек. При таком действии ры-
чагами управления вертолет должен приземлиться на основные
колеса при посадочной скорости 60—70 км/ч. После приземления
необходимо ручку «шаг-газ» опустить вниз до отказа, повернуть
рукоятку' корректора газа влево, а рычаг раздельного управления
работающего двигателя перевести на защелку. Во второй части про-
бега на скорости не более 50 км/ч применить тормоза для умень-
шения длины пробега. При нормальном полетном весе вертолета
в стандартной атмосфере над уровнем моря длина посадочной дис-
танции составит 800 .и, а длина пробега 240 м.
198
В случае необходимости посадки на ограниченную площадку ме-
тодика выполнения посадки с одним работающим двигателем
остается такой же, с той лишь разницей, что для уменьшения дли-
ны пробега необходимо посадочную скорость сделать менее 60—
70 км/ч, более энергичным движением ручки циклического шага на
себя. При такой посадке возможна поломка вертолета.
Посадку с одним работающим двигателем желательно произво-
дить против ветра, но допускаются ограничения по силе ветра и его
направлению такие же, как и для посадки по-самолетному с двумя
работающими двигателями.
§ 37. ОТКАЗ В ПОЛЕТЕ ДВУХ ДВИГАТЕЛЕЙ
Отказ двух двигателей определяется по резкой разбалансиров-
ке вертолета: он разворачивается и кренится влево, опускает нос,
снижается, а по приборам наблюдается резкое уменьшение числа
оборотов несущего винта и турбокомпрессоров обоих двигателей,
уменьшение температуры газов за турбинами. Переходной режим
от момента отказа двигателей до* установившегося планирования
продолжается 12—17 сек, за это время вертолет теряет высоту
150—200 м. Чтобы исключить большое уменьшение числа оборотов
несущего винта и уменьшить величину снижения, необходимо при
отказе двух двигателей немедленно опустить ручку общего шага
вниз до отказа независимо от высоты и полетного веса вертолета,
а затем установить допустимое число оборотов в зависимости от
высоты и типа винта па вертолете (см. табл. 6 и 7). На высотах до
1000 м величина общего шага должна быть 1° (ручка «шаг-газ»
внизу), 2000 л —около 4°, 3000 м— 5°. Чтобы не допустить разба-
лансировки вертолета, необходимо одновременно с уменьшением
общего шага винта парировать правый разворот движением левой
педали, правый крен — движением ручки влево и стремление к пи-
кированию— движением ручки управления на себя.
Появившиеся нагрузки на ручке управления и педалях снимать
с помощью тримммеров.
Во избежание пожара прекратить доступ топлива в двигатели:
закрыть краны останова и пожарные краны. Если имеется управ-
ляемое крыло, то второму пилоту перевести его на малый устано-
вочный угол.
Установить скорость 130—140 км/ч, при которой будет мини-
мальная вертикальная скорость снижения. С высоты 120—100 м
следует начать уменьшение скорости, т. е. с этой высоты фактиче-
ски начинается посадка. Посадка вертолета Ми-6 с двумя
отказавшими двигателями ничем не отличается от посадки
с учебной целью с двумя выключенными двигателями, описанной
в VIII главе.
В случае отсутствия площадки, соответствующей требованиям
вертодромов для тяжелых вертолетов, предпосадочную скорость
можно устанавливать менее 130—140 км/ч, а также и менее
100 км/ч, но в этом случае возможна поломка вертолета.
199
§ 38. ПОМПАЖ ДВИГАТЕЛЕЙ
Явление помпажа характерно для компрессоров газотурбинных
двигателей. Компрессор рассчитывается на сжатие и подачу опре-
деленного расчетного количества воздуха в секунду, при этом коэф-
фициент полезного действия компрессора должен быть наибольшим.
При работе каждой ступени осевого компрессора на расчетном
режиме направление результирующей скорости W входящего пото-
ка воздуха (рис. ПО, а) совпадает с направлением входных кромок
рабочих лопаток, угол атаки потока на лопатки-равен нулю. Поток
Рис. НО. Обтекание рабочих лопаток ступени осевого компрессора:
а — расчетный режим; б — помпажный режим
плавно обтекает лопатки, и они создают минимальное лобовое со-
противление. При таком режиме потери энергии на вихреобразова-
ние будут минимальными.
Если через компрессор протекает меньшее или большее коли-
чество воздуха по сравнению с расчетным, то такие режимы назы-
ваются нерасчетными. Если через компрессор протекает количество
воздуха меньше расчетного, то осевая скорость движения воздуха
Уос уменьшается, и при той же скорости вращения компрессора
угол атаки а увеличивается (рис. 110,6). В этом случае на спинке
лопатки поток воздуха срывается и создается вихревая зона —
срыв потока. Вихревая зона нарушает плавное течение воздуха
между лопатками. Но основной поток на короткое время сдувает
вихревую зону, потом она возникает снова. Такое чередование
вихревых зон за лопатками вызывает пульсации давления и скоро-
сти воздушного потока. Работа данной ступени компрессора ста-
новится неустойчивой, такое явление и называется помпажом.
Пульсирующий поток воздуха поступает из первых ступеней в
последующие и вызывает в них также неустойчивую, неравномер-
ную работу, и наступает помпаж всего компрессора. Работа ком-
прессора на таком режиме совершенно недопустима, так как умень-
шается к. п. д. компрессора, повышаются вибрации лопаток, что
может привести к их разрушению.
Компрессор конструируется так, чтобы в пределах эксплуатаци-
онных режимов помпаж не возникал. Это достигается соответству-
ющим подбором профилей и углов установки лопаток.
200
Для устранения помпажа у двигателя Д-25В предусмотрен пе-
репуск воздуха после III и IV ступеней компрессора. Это осущест-
вляется автоматически через отверстия, перекрываемые лентами
перепуска. Двигатель работает с открытыми лентами в диапазоне
чисел оборотов компрессора 78± 1 %—82,5± 1 % (наиболее неус-
тойчивая, неравномерная работа первых ступеней компрессора).
При этом увеличивается расход воздуха через первые ступени ком-
прессора, увеличивается осевая скорость воздуха УОс, треугольник
скоростей на входе в компрессор приближается к расчетному, об-
текание лопаток происходит без срыва потока, без образования
вихрей, помпаж предотвращается.
Несмотря на наличие лент перепуска, у двигателей первой се-
рии и до № С3342001 второй серии появлялся помпаж и большие
вибрационные напряжения на лопатках первой ступени в диапазо-
не чисел оборотов компрессора 6000—7500 в минуту. Это не позво-
ляло дросселировать двигатели для перевода несущего винта на
режим авторотации, также требовало осторожного пилотирования
на других режимах полета и поэтому было установлено много раз-
личных летных ограничений. Для устранения перечисленных недо-
статков двигатели второй серии, начиная с № С3342001, выпускают-
ся с перфорацией * корпуса над первой ступенью ротора компрес-
сора.
При наличии двигателей с перфорацией корпуса над первой сту-
пенью ротора компрессора помпаж может наступить лишь при от-
казе системы управления лентами перепуска или при резком уве-
личении режима работы двигателя при закрытых лентах перепуска
воздуха. На этом основании у вертолета Ми-6 снято много различ-
ных ограничений по помпажу.
Как на земле, так и в полете появление помпажа сопровождает-
ся следующими признаками: резкое повышение температуры газов
за турбиной, характерные хлопки двигателей, уменьшение числа
оборотов компрессора.
Для предупреждения появления помпажа на земле необходимо
сначала переводить рукоятку корректора плавно вправо за время
не менее 2—3 сек. и после достижения числа оборотов несущего
винта нс менее 78% перемещать ручку «шаг-газ» вверх. При воз-
никновении помпажа на земле необходимо выключить двигатель.
Для предупреждения помпажа в полете при увеличении мощ-
ности необходимо следить за числами оборотов несущего винта,
которые должны увеличиваться постепенно, выполнять все летные
ограничения на режимах полета по помпажу. При появлении пом-
пажа в полете необходимо выключить двигатель, у которого воз-
ник помпаж, и ручку раздельного управления работающего двига-
теля установить в верхнее положение и в дальнейшем действовать
так. как и при отказе одного двигателя.
* В переводе г ли ГННСКОГО — пробуравливать. Пробнвяние спеннлльными мн
шинами (перф«|н||ирлМН) отверстий п определенном порядке
Если в полете возникла неисправность в системе управления
лентами перепуска, полет можно продолжать, только число оборо-
тов компрессора не должно быть ниже 83% для двигателей первой
серии и ниже 78% для двигателей второй серии. Ручку «шаг-газ»
и рукоятку корректора отклонять плавно. После -захода на посад-
ку необходимо выключить двигатель, у которого неисправна систе-
ма управления лентами перепуска.
§ 39. ОТКАЗЫ В ПОЛЕТЕ В СИСТЕМАХ УПРАВЛЕНИЯ
ВЕРТОЛЕТОМ
Отказ путевого управления
Отказ путевого управления возможен в двух случаях: при отка-
зе системы изменения шага рулевого винта и поломке рулевого
винта или его трансмиссии.
В случае отказа системы изменения шага рулевого винта руле-
вой винт будет создавать некоторую тягу и вертолет будет стре-
миться к развороту', который не представляется возможным испра-
вить с помощью педалей. В этом случае необходимо сбалансиро-
вать вертолет с соответствующим скольжением, продолжить полет
до ближайшего вертодрома и произвести посадку по-самолетному.
В случае поломки рулевого винта или трансмиссии тяга его бу-
дет отсутствовать, вертолет получит левый разворот за счет реак-
тивного момента несущего винта и крен вправо за счет неуравнове-
шенной боковой силы. Кроме того, вертолет будет опускать нос,
так как отсутствует реактивный момент рулевого винта. Вертолет
также может получить и тенденцию к набору высоты за счет осво-
бодившейся мощности рулевого винта.
Если отказ рулевого винта произойдет на малых высотах при
выполнении вертикальных режимов полета, необходимо, удержи-
вая вертолет от набора высоты, правого крена и опускания носа,
произвести приземление, плавно уменьшая общий шаг несущего
винта. В момент приземления следует немедленно уменьшить об-
щий шаг несущего винта до минимального, повернуть рукоятку
корректора газа влево. Тем самым устранить реактивный момент
несущего винта, который разворачивает вертолет на земле влево,
в результате чего создается момент, стремящийся опрокинуть вер-
толет вправо.
Если отказ рулевого винта произошел в поступательном полете
на высоте до 500 м, то нужно перевести вертолет на режим само-
вращения несущего винта, опустив ручку общего шага вниз до от-
каза, а рукоятку корректора газа повернуть влево. Вертолет будет
разворачиваться вправо с меньшей угловой скоростью. Этот разво-
рот необходимо устранить левым скольжением. Установить
скорость планирования 140 км/ч. Выключить краны останова и за-
крыть пожарные краны обоих двигателей. Посадку производить на
режиме самовращения несущего винта. Особенность такой посадки
202
будет заключаться в том, что подход к земле происходит с левым
креном для предотвращения правого разворота. По мере приближе-
ния к земле крен надо убирать с таким расчетом, чтобдо приземле-
ние произошло без крена. На пробеге вертолет будет стремиться
к развороту вправо за счет вращения несущего винта в эту сторо-
ну. Этот разворот пилот предотвратить не может, он будет «зату-
хать» при уменьшении числа оборотов винта и трения колес
о землю.
Если полный отказ рулевого винта произошел на высоте более
500 м, то направление полета после перевода несущего винта на
режим самовращения можно удерживать не только скольжением,
но и изменением мощности. При приближении к земле действия пи-
лота должны быть такими же, как и при отказе рулевого винта на
высоте менее 500 м.
Отказ в системе управления триммерами
В случае замыкания кнопки управления триммерами на ручке
управления левого пилота триммеры займут одно из крайних поло-
жений. и на ручке циклического шага появятся значительные уси-
лия (см. рис. 104 и 105). Необходимо переключить управление
триммерами на правого пилота, передать ему управление
вертолетом и продолжать полет. Если же произошло замыкание
кнопок управления на обоих ручках управления и усилия велики,
необходимо подобрать площадку и совершить вынужденную по-
садку.
Триммеры не работают вследствие отказа механизмов МП-100
или обрыва и замыкания проводки. В этом случае необходимо вы-
ключить АЗС триммеров. Если усилия на ручках управления боль-
шие, необходимо выбрать площадку и произвести вынужденную
посадку, если небольшие — произвести посадку на ближайший
аэродром или вертодром.
ОГЛАВЛЕНИЕ
Введение .......................................................
Глава 1. Общая характеристика вертолета Ми-6
§ 1. Краткие сведения о вертолете................................
§ 2. Планер вертолета............................................
Фюзеляж .........................................................
Крыло ...........................................................
Стабилизатор ....................................................
§ 3. Несущий винт, силовая установка, трансмиссия и управление вер-
толетом ..................................................................................................................
Несущий винт ........................................................................................................
Силовая установка................................................................................................
Трансмиссия и вентиляторная установка ...........................
Рулевой винт..........................................................................................................
Управление вертолетом............................................
§ 4. Посадочные устройства, системы вертолета и устройство для под-
вески грузов ....................................................
Посадочные устройства ...........................................
Гидравлическая система...........................................
Воздушная система.................................................
Противообледенительная система ...................................
Устройство для внешней подвески грузов............................
§ 5. Электро-, радио-, приборное и специальное оборудование......
Электрооборудование .............................................
Радиооборудование ...............................................
Приборное оборудование ..........................................
Отопление и вентиляция ..........................................
12
13
13
13
13
13
14
18
19
19
21
21
22
23
23
23
24
24
25
Глава II. Особенности аэродинамики несущей системы и фюзеляжа вер-
толета .......................................................... 26
§ 6. Геометрические характеристики несущей системы................. 26
Геометрические характеристики несущего’ винта...................... 26
Геометрические характеристики крыла................................ 30
§ 7. Кинематические характеристики несущего винта................. 31
Обороты несущего винта и окружные скорости конца лопасти.......... 31
Характеристика режима полета....................................... 32
Шарниры лопастей .................................................. 33
Устранение несоконусности несущего винта........................... 36
§ 8. Аэродинамические характеристики несущего винта............... 41
Аэродинамические характеристики профилей лопасти................... 41
Поляра несущего винта на режиме висения............................ 4!
Тяга несущего винта на режиме висения.............................. 43
§ 9. Аэродинамические характеристики фюзеляжа и крыла ............ 46
Аэродинамические характеристики фюзеляжа и килевой балки.......... 46
Аэродинамические характеристики крыла.............................. 48
Аэродинамические характеристики системы «фюзеляж+крыло» .... 50
§ 10. Характеристики рулевого винта . ............................ 50
204
Глава III. Потребные и располагаемые мощности вертолета............ 52
§ 11. Потребная мощность....................... .................. 52
§ 12. Располагаемая мощность .................................... 54
Характеристики двигателя Д-25В..................................... 54
Потери мощности двигателей и коэффициент использования мощности 62
Располагаемая мощность несущего винта.............................. 64
§ 13. Баланс мощностей . ......................................... 67
§ 14. Управление двигателями и винтом с помощью системы «шаг-газ» 69
Глава IV. Руление, висение и вертикальные режимы полета............ 76
§ 15. Руление.................................................... 76
Общая характеристика ............................................. 76
Особенности выполнения руления . ................................. 78
Ограничения при запуске двигателей и рулении....................... 79
§ 16. Висение .................................................... 80
Общая характеристика............................................ 80
Схема сил и моментов, действующих на вертолет...................... 81
Особенности пилотирования и маневрирования на режиме висения ... 83
Летные ограничения на режиме висения и маневрировании.............. 84
§ 17. Вертикальные режимы полета вертолета........................ 85
Общая характеристика............................................... 85
Особенности выполнения вертикальных режимов полета................. 86
Летные ограничения на вертикальных режимах полета.................. 87
Глава V. Взлет и набор высоты с поступательной скоростью.............. 88
§ 18. Взлет ............................... ..
Общие сведения ................................................................................................................................................................................................................
Взлет по-самолетному................................................ .
Вертикальный взлет . ............................................................................................
Летные ограничения при взлете......................................
§ 19. Набор высоты с поступательной скоростью......................
Общая характеристика ...............................................
Силы и моменты, действующие на вертолет при наборе высоты с посту-
пательной скоростью...................................................
.Четные характеристики вертолета в режиме набора высоты с поступа-
тельной скоростью ..................................................
Особенности набора высоты с поступательной скоростью и методики его
выполнения ........................................................
Летные ограничения при наборе высоты с поступательной скоростью . .
Глава VI. Горизонтальный полет.................................... 109
§ 20. Общая характеристика......................................
Схема сил и моментов, действующих на вертолет ...................
Потребные мощности для горизонтального полета....................
§ 21. Характерные скорости горизонтального полета...............
Минимальная скорость ............................................
Экономическая скорость ...................................
Наивыгоднейшая и крейсерская скорости............................
Максимальная скорость . . . , ...................................
§ 22. Особенности горизонтального полета и методики его выполнения
§ 23. Летные ограничения в режиме горизонтального полета.........
109
109
ПО
112
Л2
115
116
121
123
127
205
Глава VII. Снижение с поступательной скоростью и посадка при рабо-
тающих двигателях ................................................. 128
§ 24. Снижение с поступательной скоростью при работающих двигате-
лях ................................................................ 128
Общая характеристика режима........................ . .............. 128
Особенности выполнения режима снижения с поступательной скоростью
при работающих двигателях......................................... 131
Летные ограничения в режиме снижения с поступательной скоростью 132
§ 25. Посадка ................................................... 133
Общие сведения.................................................. . 133
Посадка по-самолетному . ... . ... . . ...... ... . . . . . . . 134
Вертикальная посадка ............................................... 137
Летные ограничения при посадке..................................... 143
Особенности вертикальных взлетов и посадок на высокогорных верто-
дромах ........................................................... 143
Глава VIII. Планирование и посадка на режиме самовращения несуще-
го винта ......................................................... 146
§ 26. Планирование ............................................... 146
Общая характеристика режима планирования и схема сил. действующих
на вертолет....................................................... 146
Обороты несущего винта и скорости снижения........................ 148
Угол планирования и дальность планирования ........................ 150
Особенности режима планирования и методики его выполнения .... 151
§ 27. Посадка на режиме самовращения несущего винта............... 153
Г лава IX. Балансировка, управляемость и устойчивость вертолета . . . 156
§28. Балансировка ........................................... 156
Продольная балансировка............................................ 156
Загрузка и центровка вертолета .................................... 161
Поперечная балансировка .......................................... 170
Путевая балансировка .............................................. 174
§ 29. Управляемость и устойчивость вертолета...................... 179
Управляемость ................................................. 179
Устойчивость ...................................................... 184
Глава X. Особые случаи в полете................................ 185
§ 30. Земной резонанс.............................................
§ 31. Возможность опрокидывания вертолета на земле.............
§ 32. Перетяжеление несущего винта................................
§ 33. Вихревое кольцо.............................................
§ 34. Вибрация лопастей типа флаттер..............................
§ 35. Превышение максимально допустимой скорости полета .....
§ 36. Отказ в полете одного двигателя.............................
§ 37. Отказ в полете двух двигателей .............................
§ 38. Помпаж двигателей................. .........................
§ 39. Отказы в полете в системах управления вертолетом............
Отказ путевого управления ...........................................
Отказ в системе управления триммерами..............................
185
190
192
194
194
196
196
199
200
202
Михаил Степанович Яцуиович
ПРАКТИЧЕСКАЯ АЭРОДИНАМИКА ВЕРТОЛЕТА Ми-6
Отв. редактор Г. Д. Стоянов
Редактор изд-ва И. В. Маркин
Технический редактор Р. А. Иванова
Корректор В. Я- Кннареевская
Сдано в набор 2/XII 1968 г. Подписано в печать 28/V 1969 г.
Бумага 60х90’/и Псч. л. 13 Уч.-изд. л 13,52
Т-06293 Тираж 5000 экз. Цена 60 коп. Заказ 2916.
Изд. № 3-1—2/17 № ЗОН
Издательство «Транспорт» — Москва, Басманный туп., 6а.
Московская типография № 8 Главполиграфпрома
Комитете по печати при Совете Министров СССР,
Хохловский пер,, 7.