/






















































































































Текст
www.vokb-la.spb.ru - Самолёт своими руками?!
ДЛЯ ВУ31
FC.MJEzep
НКЛисейцев
О.ССамойлович
ОСНОВЫ
АВТОМАТИЗИРОВАННОГО
ПРОЕКТИРОВАНИЯ
САМОЛЕТОВ
•МДНИНОСТРСЕНкЕ
www.vokb-la.spb.ru - Самолёт своими руками?!
ДЛЯ ВУЗОВ
СМ. Егер
Н.К.Лисейцев
О.С.Са.мой.ювич
OCI ювы
АВТОМАТИЗМ РОВАННОГО
ПРОЕКТИРОВАНИЯ
САМОЛЕТОВ
Цопущеио Министерством высшего и среднего
спсцнаяьного о бразовани я С< С?
в качестве учебного пособия
для студентов авиационных
специальностей вузов
МОСКВА
МАШИНОСТРОН1И
1986
ения-
шрная
'да к
на с
Все
оцес-
ки и
ской
0ЮЙ,
ских
5юро
иро
ным
1М в
ев но
важ-
лчес-
так
иой-
пши
гной
Э>а
ого,
эпо-
хой
[ОЖ-
рек-
1ЙСЯ
об
2 3
3
ЬЬК 39.52
Е 28
УДК 629.7.01
Рсцснзсн гы:
кафедры автоматизированного проектирования и конструкции самоле-
тов Харьковского авиационного института и кафедра конструкции
и Проектирования летательных аппаратов Куйбышевского авиацион-
ного института.
Егер С.М. и др.
Е 28 Основы автоматизированного проектирования самолетов:
Учеб, пособие для сгудснтов авиационных специальностей
вузовУСЛ!. Егер, Н.К. Лисейцев, О.С. Самойлович. М.: Маши-
ноороенис, 1986.—232 с., ил.
В пер.: 80 к.
3606030000-122
Г 122-86
038 (01)-86
ЬЬК 39.52
6T5.I
© Издательство "Машиностроение
www.vokb-la.spb.ru - Самолёт своими руками?!
ПРЕДИСЛОВИИ
Вторая половина XX столетия характеризуется коренными изменения-
ми в сфере трудовой деятельное:и человека. Подобно тому ’’как первая
промышленная революция была связана с переходом от ручною труда к
механизированному, так и научно-техническая революция связана с
переходом к автоматизированному труду в производстве” [231. Все
более широкое внедрение автоматизированных производственных процес-
сов на базе электронно-вычислительных устройств микроэлектроники и
робототехники является важнейшим направлением научно-технической
революции.
Значительные резулыаты достигнуты и в решении такой сложной,
комплексной задачи, как автоматизация проектно-конструкторских
работ. В научно-исследовательских институтах и конструкторских бюро
.созданы, развиваются и все шире используются системы ароматизиро-
ванного проектирования (САПР). Их появление стало возможным
благодаря разработке теоретических основ проектирования, успехам в
области вычислительной математики, программирования и собственно
вычислительной техники.
Именно в САПР удастся наиболее полно реализовать следующие важ-
нейшие для проектирования возможности ЭВМ?
быстрое и эффективное выполнение большого числа математичес-
ких операций;
хранение и передачу большого объема информации;
визуализацию результатов проектирования (как окончательных, так
и промежуточных) с помошью средств машинной графики;
общение проектанта с ЭВМ в режиме лишил а, что обеспечивает свой-
ственную проектированию непрерывность творческого процесса.
В таких системах ЭВМ из великолепного среде та автоматизации
расчетов превращается в средство обьединсния для достижения единой
Цели усилий специалистов в различных областях проектирования. Эта
интеграция на основе общности методологического, информационного,
программною и технического обеспечения, на базе коллективного диало-
га пользователей с ЭВМ позволяет преодолевать барьер все более узкой
специализации инженеров, участвующих в разработке современных слож-
нейших сисчем, в том числе и авиашюпных.
В настоящее время еще рано подводить окончательные июги эффек-
тивности и результативное!и применения САПР. Однако имеющийся
опыт их использования в ряде отраслей техники позволяет судшь об
этом. По опубликованным данным применение САПР позволяет в 2-3
3
раза сократить время проектирования и доводки летательных аппаратов
(ЛА), в 3 5 раз — время пот отопки их производства. При этом затраты
на разработку сокращаются на 50—80 %. В автомобильной промышлен-
ности время на создание повой модели сокращается с 2—3 лет до 8—12
месяцев. При этом на 30 % снижается стоимость проектирования и под-
готовки производства, на 60 % уменьшается численность проскшров-
щиков.
Весьма эффективным оказалось применение С/ХПР в радиоэлектрон-
ной промышленности при проектировании электронных машин, интег-
ральных схем, многослойных плат.
О степени совершенствования технике-экономических показателей
некоторых технических объектов при их автоматизированном проекти-
ровании можно судить по следующим данным: благодаря САПР в судо-
строении удается уменьшить массу корпусных деталей на 5-25 %, п
авиационной промышленности повысить несущую способность силовых
элементов конструкции крыла самолета на 10—20 % (при неизменной их
массе), на 20—30 % увеличить грузоподъемность транспортного обору-
дования [4]
Следует подчеркнуть еще одно важное обстоятельство, касающееся
особенностей автоматизированного проектирования. Появление САПР
открывает качественно новые возможности в ряде отраслей техники.
Так, в микроэлектронике именно благодаря ав хсмати за ди и проекти-
рования стало возможным создание больших интегральных схем.
Таким образом, применение САПР обеспечивает повышение качества
проектируемых изделий, сокращение цикла проектирования, т.с. повыше-
ние производительности груда, являясь существенным фактором уско-
рения научно-технического npoi ресса.
Появление и все более широкое применение систем автоматизирован-
ного проектирования в практике проекгпо-консгрукторских организаций
ставит перед высшей школой задачу подготовки необходимых кадров.
Это вызвано тем, что применение САПР неизбежно влечет за собой изме-
нение технологии проектирования, характера деятельности инженера-
проектировщика. В этих условиях задачу подготовки специалистов необ-
ходимо решать исходя из новой роли человека (конструктора, проекти-
ровщика) в сфере производственной деятельности по созданию современ-
ных самолетов. САПР - человеко-машинная система, и эффективность ее
зависит не только от совершенства вычислительной техники и математи-
ческого обеспечения, но и не в меныпей степени от квалификации пользо-
вателей. Чем сложнее инструмент проектировщика, тем выше должна
быть его квалификация. САПР предъявляет новые, повышенные требо-
вания к качеству и содержанию подготовки инженеров-механиков по
самолетостроению, как в части овладения методами автоматизированною
проектирования, позволяющими корректно ставить, формально описы-
вать и решать проектно-конструкторские задачи, так и в части изучения
возможностей и особенностей рабсил современных технических среде in
проектирования и программного обеспечения.
В последние годы выньте несколько учебных пособий и монографий,
4
www.vokb-la.spb.ru - Самолёт своими руками?!
посвященных проблеме автоматизации проектирования [24, 26 и Др].
В них достаточно глубоко освещены основные вопросы, касающиеся раз-
личных аспектов этой проблемы Вместе с тем в указанных публикациях
практически нс отражены специфические проблемы, связанные с
автоматизацией проектирования самолетов. К тому же многие из них
написаны с позиции разработчика САПР. Авторы, не претендуя на всесто-
роннее освещение проблемы автоматизации проектирования ставили перед
собой задачу написать пособие для пользователей САПР самолетов.
Предисловие и гл. 8 написаны СМ Егером, гл. 1,2,3,4,5,9 и прило-
жение - U.K. Лиссйцевым, i л. 6 и 7 О.( Самойловичем.
Авторы выражают благодарность д-ру техн, наук В.А. Комарову,
канл- техн, наук В.В. Мальчевскому. В.М. Смирнову, А.А- Лаулю,
В-И. Богатову за помощь, оказанную ври подготовке рукописи книги,
а также д-ру техн, наук Л.М. Шкадову. академику Al I СССР 11.11. Моисееву,
чл.-кор. АП СССР ПС. Краснощекову и д-ру физ.-мат. паук В В Федоро-
ву, чья поддержка и содействие способствовали появлению этого пособия.
5
ГЛАВА 1. САПР - НОВАЯ ФОРМА
ОРГАНИЗАЦИИ ПРОЦЕССА ПРОЕКТИРОВАНИЯ
Lt. ПРЕДПОСЫЛКИ ПОЯВЛЕНИЯ САПР
Современный этап научно-технической революции характеризуется
рядом объективно существующих закономерностей, оказывающих замет-
ное влияние на темпы научно-технического прогресса. Эти закономерности,
по данным работы [I |, можно характеризовать следующими определен-
ными количественными показателями развития техники в ведущих
отраслях промышленности:
число различных классов технических систем удваивается в среднем
через каждые 10 лег;
сложность изделий по числу деталей и узлов возрастает в два раза
через 15 лет;
обьсм научном ехничсской информации, используемой в конструк-
торских разработках, удваивается за 8 лет.
Для авиационной техники эти закономерности проявляются в следую-
щем. Прежде всего необходимо отметить се постоянное усложнение.
Усложняются аэродипамическмя и конструктив но-силовая схемы самоле-
та, растет число и сложность агрегатов, узлов и деталей планера, а также
всех его систем. Как отмечается в работе I 19|, самолеты конца семидеся-
тых годов в 5-6 раз сложнее самолетов аналогичного назначения, пост-
роенных в пятидесятых годах. Следствием этого является увеличение
трудоемкости, стоимости и сроков разработки самолета. Так, за указан-
ный двадцатилетний период затраты человеческою труда, потребные на
разработку единицы массы конструкции, увеличились примерно вдвое,
а продолжительность разработки нового самолета возросла с 3 4 до 8—10
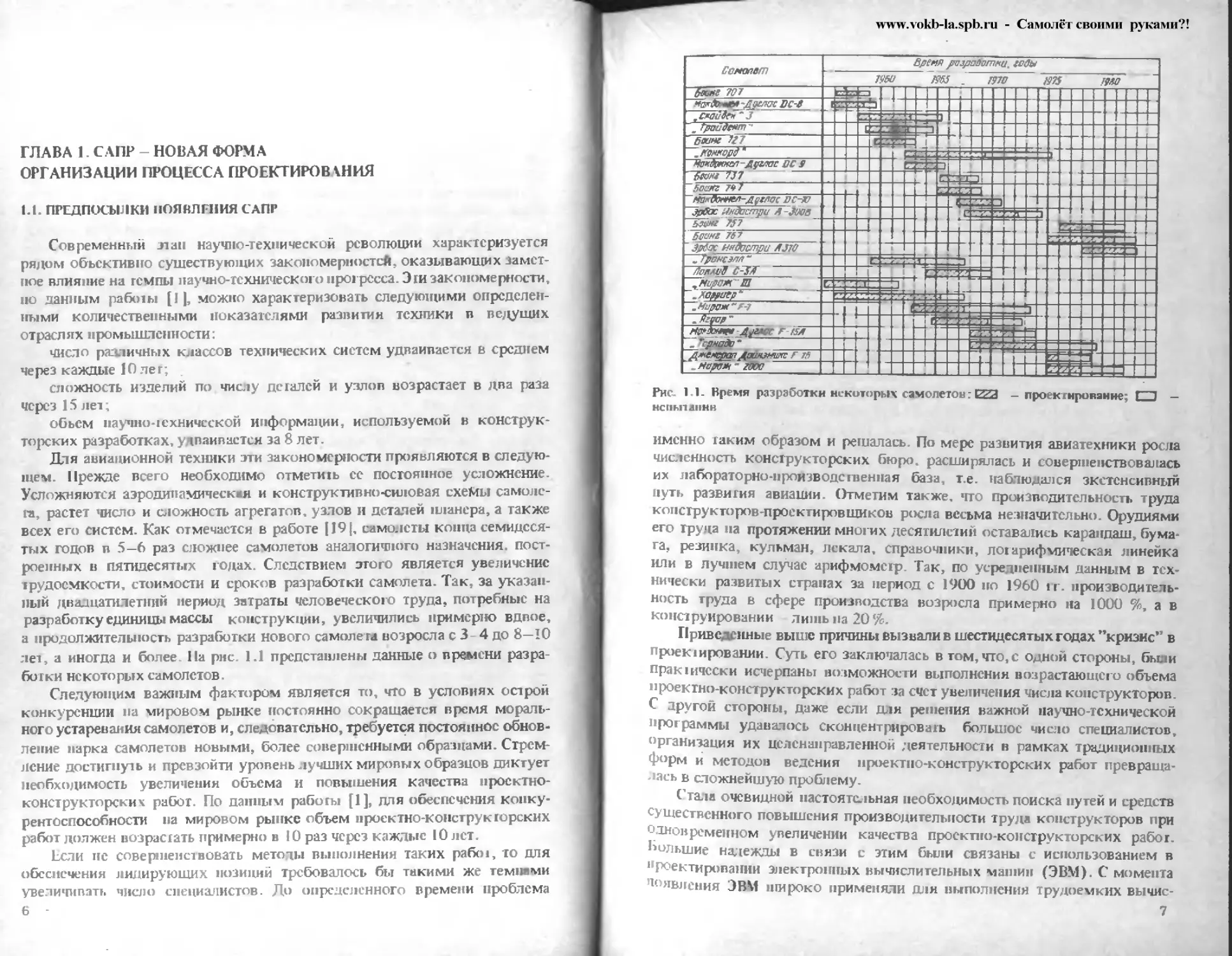
лет, а иногда и более На рис. 1.1 представлены данные о времени разра-
ботки некоторых самолетов.
Следующим важным фактором является то, что в условиях острой
конкуренции на мировом рынке постоянно сокращается время мораль-
ног устаревания самолетов и, следовательно, требуется постоянное обнов-
ление нарка самолетов новыми, более совершенными образцами. Стрем-
ление достигнуть и превзойти уровень лучших мировых образцов диктует
необходимость увеличения объема и повышения качества проектно-
конструкторских работ. По данным работы [1], для обеспечения конку-
рентоспособности на мировом рынке объем проектно-конструкторских
работ должен возрастать примерно в 10 раз через каждые 10 лет.
Если не совершенствовать метолы выполнения таких работ, то для
обеспечения лидирующих позиций требовалось бы такими же темпами
увеличивать число специалистов. До определенного времени проблема
6 -
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 1 1 - Время разработки некоторых самолетов: - проек гнронэнне; EL3 -
нсиьпаннв
именно таким образом и решалась. По мере развития авиатехники росла
численность конструкторских бюро, расширялась и совершенствовалась
их лабораторно-производствен на я база, т.е. наблюдался экстенсивный
путь развития авиации. Отметим также, что производительность труда
конструкторов-проектировщиков росла весьма незначительно. Орудиями
его груда па протяжении многих десятилетий оставались карандаш, бума-
га, резинка, кульман, лекала, справочники, логарифмическая линейка
или в лучшем случае арифмометр. Так, по усредненным данным в тех-
нически развитых странах за период с 1900 но i960 п*. производитель-
ность труда в сфере производства возросла примерно на 1000 %, а в
конструировании лишь на 20 %.
Приведенные выше причины вызвали в шестидесятых годах "кризис” в
проек1ировании. Суть его заключалась в том, что, с одной стороны, были
праквичсски исчерпаны возможности выполнения возрастающего объема
проектно-конструкторских работ за счет увеличения числа конструкторов.
С другой стороны, даже если для решения важной научно-технической
программы удавалось Сконцентрировав большое число специалистов,
организация их целенаправленной деятельности в рамках традиционных
>рм и методов ведения проектно-конструкторских работ превраща-
лась в сложнейшую проблему.
Стала очевидной настоятельная необходимость поиска путей и средств
существенного повышения производительности труда конструкторов при
°твои ременном увеличении качества проектно-конструкторских работ.
Ьольшие надежды в связи с этим были связаны с использованием в
“роектировании электронных вычислительных машин (ЭВМ). С момента
1< явления ЭВМ широко применяли для выполнения трудоемких вычис-
7
пений при анализе нанряже1пю-леформи|юванного сосюяния конструк-
ции» расчетах распределения давления на поверхности летательного аппа-
рата, решение траекторных и других задач, некоторые из которых без
применения ЭВМ не решали вовсе, либо решали весьма приближенно.
Эю был начальный этан использования ЭВМ, характеризующийся тем,
чю отдельные программы, моделирующие те или иные аспекты проекти-
рования самолета, нс были связаны друг с другом. К тому же большие
затраты времени на подготовку исходных данных, невозможность вмеши-
ваться в проводимые машиной расчеты, сложность обработки и анализа
полученной информации существенно снижали эффективность использо-
вания ЭВМ.
Хотя попытки внедрить ЭВМ в процесс проектирования относятся к
концу пятидесятых годов, первые практические результаты были полу-
чены лишь во второй половине шестидесятых. К этому времени появи-
лись ЭВМ, имеющие средства ввода и вывода графической информации,
а также развитые системы математического обеспечения. Они позволяли
осуществлять работу с машиной нс только в режиме пакетной обработки,
но и в режиме разделения времени. Это дало возможность использовать
ЭВМ в диалоговом режиме, что существенно повышало эффективность
процесса антоматизированного проектирования Уже при создании САПР
первого поколения ставилась задача объедини г ь в интегральную систему
все имеющиеся в распоряжении промышленности программы. В полной
мере эту задачу удалось решить лишь в семидесятых годах, когда поя-
вились б АПР второго поколения. Они располагали развитой системой
управляющих и вспомогательных программ, что существенно повышало
эффективность их использования.
Следует подчеркнуть, что первые САПР были ориентированы Лишь
на автоматизацию нредэекизного проектирования. Однако в дальнейшем
стало очевидным, что наиболее эффективна комплексная автоматизация
на всех этапах проектирования самолета. В этом направлении и осущест-
вляв гея развитие современных САПР.
t .2. ОПРЕДЕЛЕНИЕ И ЗАДАЧИ САПР
В соответствии с ГОСТ 23501.0 79 САПР представляет собой органи-
зационно-техническую систему, состоящую из комплекса средств автома-
тизации проектирования, взаимосвязанного с подразделениями проектной
организации , выполняющую автоматизированное проектирование. Ес
укрупненная структура представлена па рис. 1.2. Основу САПР составляет
комплекс средств автоматизации проектирования. Он включает в себя
средства технического, программного, информационного, методического
(включая средегна лингвистическою и математического обеспечения) и
организационного обеспечения. Функционирование системы осуществля-
ется в процессе взаимодействия комплекса с коллективом разрабо!чиков,
а также с коллективом обслуживающего персонала, обеспечивающим
работоспособность и развитие системы.
8
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 1.2. Укрупненная структура САПР
Наличие в САПР коллектива соответствующим образом организован-
ных людей» а также аппаратурно-npoi раммной части, отражающей органи-
зационные взаимосвязи коллектива проектировщиков, делает такую
систему проектирования организационно-технической. Из этого, в част-
ности, следует, что ( АПР конкретной проектной организации должна
строиться с учетом сложившейся структуры и традиций этой организации.
Основная функция САПР осуществление атоматизированного
проектирования на всех или отдельных стадиях проектирования объектов
и их составляющих частей на основе применения математических и других
моделей, автоматизированных проектных процедур и средств вычисли-
тельной техники.
Автоматизированным называется проектирование, при котором
отдельные преобразования описаний объекта и (или) алгоритмы его
функционирования а также представление описаний на различных язы-
ках осуществляются путем взаимодействия человека с ЭВМ*
САПР, в которых информационно и организационно объединены
все стадии разработки проекта от ввода первичного описания объекта до
выдачи проекта с необходимым комплектом документации, называются
интегрированными. Как правило, при создании таких САПР должна
предусматриваться возможность их взаимосвязи с другими автоматизи-
рованными системами, используемыми при создании новых образцов
техники. К таким системам относятся автоматизированные системы науч-
ных исследований (АС ПИ), автоматизированные системы управления
(АСУ), автоматизированные системы технологической подготовки произ-
водства (АСТПП) и др. Именно при таком комплексном подходе дости-
гается наибольший эффект от внедрения автоматизации.
Задачей САПР является максимально возможная автоматизация
значительной части процессов, реализующих проектирование сложных
технических объектов; не только вычислительных процессов, но и таких
как:
*ГОСТ 224R7-77. Проектирование автоматизированное. Термины и опреде-
ления.
9
накопление и обработка информации о проектируемом изделии и
его подсистемах;
разработка вариантов проектных решений;
отбор рациональных вариантов для дальнейшей прорабодки;
оформление решении и передача их на нижние уровни для дальнейшей
детализации и на верхние уровни для осуществления контроля и принятия
решений;
выпуск технической документации;
управление ходом процесса разработки проектируемого изделия.
Целью создания САПР является повышение качества и технико-
экономического уровня проектируемых объектов, повышение произ-
водительности труда проектировщиков, сокращение сроков, уменьшение
стоимости и трудоемкости проектирования.
Перспективы повышения качества разрабатываемых с помощью
С/М IP проектов основываются на:
совершенствовании методов проектирования, в частности использо-
вании методов многовариантною проектирования и оптимизации для
поиска рациональных вариантов и принятия решений;
повышении доли творческого труда проектировщиков путем осво-
бождения их от рутинных, не требующих высокой квалификации работ;
повышении качества проектной документации;
совершенствовании управления процессом разработки проектов.
Повышение производительности труда достигается путем:
значительного ускорения выполнения расчетных операций и операций
по обработке графической информации;
увеличения скорости передачи информации между подразделениями
проектной организации и сокращения сроков ее согласования;
ускорения процесса подготовки проектной документации;
частичной замены натурных экспериментов и макетирования модели-
рованием на аналого-цифровых вычислительных комплексах;
совершенствования организации труда специалистов, занятых рутин-
ной работой (вычисления, обработка текстовой и графической информа-
ции) , а также специалистов информационно-справочных служб;
уменьшения объема испытаний и доводки опытных образцов авиа-
ционной техники вследствие повышения качества проектирования и
уровня прогнозирования ожидаемых результатов проектирования.
При определении эффективности применения САПР следует, однако,
учитывать и неизбежные затраты на создание, эксплуатацию и развитие
САПР. Эти затраты особенно велики на начальных этапах внедрения
САПР. Однако их можно снизить, например, путем концентрации усилий
для создания типовой САПР отрасли и ее дальнейшего распространения на
всех ее предприятиях. Значительная экономия достигается благодаря
созданию централизованного обслуживания комплекса технических
средств, отраслевых и межотраслевых фондов алгоритмов и программ,
а в перспективе — отраслевого банка данных.
10
www.vokb-la.spb.ru - Самолёт своими руками?!
1 J. 1 РЕНОВАЦИЯ К САПР И ПРИНЦИПЫ F Е РАЗРАБОТКИ.
РОЛЬ ЧЕЛОВЕКА В САПР
Как уже Отмечалось, наиболее эффективны интегрированные С/ХПР.
Поэтому одно из важнейших требований, предъявляемых к вновь созда-
ваемой САПР, заключается в возможности ее использования на всех
стадиях разработки проекта, начиная с анализа ТЗ и разработки техни-
ческого предложения и кончая выпуском комплекса технической доку-
ментации, необходимой для изготовления самолета- Однако это весьма
сложная задача, решение которой требует больших затрат времени и
средств- Анализ иерархической структуры проектирующей системы
указывает на возможность разделения общей САПР самолетов на отдель-
ные подсистемы, соответствующие, например, этапам проектирования
самолета [19]. Такой подход позволяет существенно упростить проблему,
решая се поэтапно и получая положительный эффект уже при решении
частных задач автоматизированного проектирования.
По мере накопления опыта решения задач на отдельных этапах проек-
тирования, развития теоретических основ построения проектирующих
систем, совершенствования программного и аппаратурного оснащения
появляется возможность все ближе подходить к созданию интегрирован-
ных автоматизированных систем проектирования самолета.
Следует также подчеркнуть, что этот подход обеспечивает удовлет-
ворение одного из важных требований при внедрении САПР в практику,
сошасно которому такие системы на современном этапе не должны
противоречить организационной структуре конструкторского бюро. Это
позволит преодолеть известный психологический барьер на пути внед-
рения САПР.
Разрабатывая отдельные подсистемы, следует с самого начала обес-
печивать их аппаратурную, программную и информационную совмести-
мость для всех этапов проектирования. Очень важным требованием
является создание комфортных условий работы пользователя в системе.
Для этого работу человека с системой необходимо осуществлять в диало-
ювом режиме реального времени*. Язык общения с системой обязан быть
привычным для проектировщика. При этом должна быть обеспечена
возможность ввода, обработки и вывода графической информации,
являющейся наряду с числовой одной из основных для проектировщика.
В системе должна быть предусмотрена возможность обеспечения пользо-
вателей всей необходимой для проектирования информацией: справочной,
архивной, оперативной и тд.
Процесс проектирования является коллективным, поэтому
ел 1 ющим важным требованием, предъявляемым к С/ХПР, является
обеспечение возможности параллельного ведения нескольких проектных
^адач с автоматическим распределением ресурсов системы м ;жду зада-
* Режим реального времени характеризуется тем. что проектировках оператив-
но получает результаты решения, г_е. в ритме, обеспечивающем непрерывность
Процесса проектирования.
11
ниями, а также совместного решения одной задачи несколькими испол-
нителями
Кроме того, САПР должна обеспечивать возможность реализации
различных стратегий процесса проектирования и процедур принятия
решений с целью совершенствования процесса проецирования; высокую
надежность системы; возможность обучения пользователей в рамках
системы.
Сформулировуем основные принципы разработки САПР. Они отра-
жают основные идеи, реализуемые в системе, а также приближенно очер-
чивают круг ее функциональных возможностей. САПР — сложная система,
полому в основу се разработки положены принципы системного подхода.
Важнейшими из этих принципов являются следующие, принцип вклю-
чения^ принцип системного единства, принцип развития, принцип ком-
плексности, принцип совместимости, принцип информационною един-
ства и принцип стандартизации -
Принцип включения предусматривает возможность включения САПР
в более сложную систему — проектную организацию, которая и опреде-
ляет требования к ее созданию, функционированию и развитию.
Принцип системного единства заключается в том, что при создании,
функционировании и развитии САПР связи между входящими в нес под-
системами обеспечивают целостность системы.
Принцип развития состоит в том, что САПР разрабатывают с учетом
возможности ее постоянного развития путем расширения, совершенство-
вания и обновления компонентов САПР и связей между ними.
Принцип комплексности предполагает обеспечение согласования и
связности отдельных элементов и всего объекта в целом на всех стадиях
проектирования с помощью соответствующих компонентов САПР.
Принцип совместимости заключается в обеспечении совместного
функционирования всех подсистем САПР и сохранении открытой струк-
туры системы в цепом. Это достигается соответствующим согласованием
языков, символов, информационных и структурных связей между под-
системами и компонентами С.АПР
Принцип информационного единава состоит в том, что в подсистемах
и компонентах САПР необходимо использовать единую систему терми-
нов, символов, условных обозначений, проблемно-ориентированных
языков программировать и способов представления информации, уста-
новленных в отрасли соответствующими нормативными документами.
Принцип стандартизаии заключается в проведении унификации»
типизации и стандартизации подсистем и компонентов, инвариантных к
проектируемым объектам и отраслевой специфике, а также в установле-
нии правил с целью упорядочения деятельности в области создания и
развития САПР.
Весьма важным принципом разработки САПР является обеспечение се
эргатичности, т.е. возможности для человека-проектировщика играть
активную роль в системе: в режиме оперативного диалога изменять
входные данные и получаш ответы на интересующие его вопросы, прини-
мать решение по ходу выполнения задачи. CAI IP ло человеко-машинная
12
www.vokb-la.spb.ru - Самолёт своими руками?!
система, в которой рациональное сочетание возможностей каждого из
"партнеров" позволяет получить качественно новые результаты. Процесс
разработки проекта самолета — творческий акт и он никогда не может
быть до конца формализован. Поэтому естественно, что успех проекти-
рования в огромной степени зависит от таких интеллектуальных качеств
человека, как интуиция, изобретательность, исследовательские и позна-
вательные способности, умение принимать решения в неформальных
ситуациях. В САПР эти качества дополняются и усиливаются возмож-
ностями современных ЭВМ: большим объемом памяти, их способностью
быстро обрабатывать огромное количество цифровой и графической
информации, высокой точностью и надежностью работы.
Следует, однако, дифференцировать понятие пользователей САПР в
зависимости от характера их взаимодействия с системой Можно выде-
лить три уровня пользователей 126 J. К первому относятся те, кто стоял
у истоков создания конкретной САПР, формировал требования к ее
основным элементам, определял структуру и состав пакетов прикладных
программ. Ко второму уровню относятся пользователи, знания которых
позволяют модифицировать и расширять предметную область систем,
совершенствуя таким образом процесс проектирования, приспосабливая
его к решению новых проектных задач. К третьему относятся пользова-
тели, которые общаются с системой на специально ориентированном на
них языке взаимодействия. Их работа заключается в задании исходных
данных, постановке задач исследования, анализе результатов расчета и
принятии решений. На современном этапе внедрения САПР четкой границы
между пользователями указанных уровнен не существует
ГЛАВА 2 КОМПЛЕКС СРЕДСТВ
АВТОМАТИЗАЦИИ IIPOEKI ИРОВ АНИЯ
2.1. СРЕДСТВА ТЕХНИЧЕСКОГО ОБГСПЕЧЕНИЯ
Средства технического обеспечения САПР, образующие ее комплекс
технических средств (КТС), включают в себя набор аппаратных средств
вычислительной и организационной техтаки, предназначенных для ввода
информации в систему, се обработки, передачи и хранения, а также выво-
да во внешнюю среду. Кроме этого, в состав КТС входит вспомогательное
оборудование, предназначенное для обеспечения нормального функцио-
нирования комплекса (ремонтно-диагностическое оборудование, блоки
энерго пи гания, системы кондиционирования и г.д.).
КТС современных САПР создаются на базе ЭВМ единой серии —
ГС ЭВМ, а также СМ ЭВМ. Эти ЭВМ в основном отвечают требованиям,
предъявляемым к техническим средствам САПР. ЕС ЭВМ представляют
собой семейство моделей ЭВМ третьего поколения, которые обладают
конструктивной, программной и информационной совместимостью.
Их особенностью является универсальность, адаптируемость к примене-
нию. способность к наращиванию вычислительной мощности в большом
13
диапазоне. В состав системы входят семь моделей процессоров, отличаю-
щихся в основном быстродействием.
FC ЭВМ имеют единую струкчурную схему (рис. 2.1). Основными компонента-
ми ЭВМ являются процессор, внешняя н внутренняя (опсратишыя) память, устрой-
ства ввода - вывода информации и аппаратура связи и телекоммуникации (каналы
связи). Процессор (Пр) осуществляет выполнение арифметических и логических
операций, управляет последовательностью выполнения команд, организует обмен
информации с устройствами ввода - вывода и обращение к оперативной л-амяги.
Функции оперативной памяти выполняет оперативное запоминающее устройство
(ОЗУ), которое характеризуется высоким быстродействием, но сравнительно малой
емкостью. Внешние запоминающие устройства (ВЗУ) выполнены в виде накопителей
на магнитных лентах (НМЛ), магнитных дисках (НМД) и магнитных барабанах.
ВЗУ в отличие от ОЗУ обладают меньшим быстродействием, но значительно большей
емкостью.
Ввод и вывод информации в ЭВМ осуществляется с помощью специальных
устройств: алфавитно-цифровых печатающих устройств (АЦПУ), устройств ввода
вывода с перфолент (УВВ/Пл) и с перфокарт (УВВ/Пк). Эти устройстве имеете с
ВЗУ составляют группу внешних, или периферийных устройств, которые подклю-
чаются к процессору и оперативной памяти с помощыо устройств обмена, называе-
мых каналами. Различают два вида каналов - селекторный (СК) и мультиплекс-
ный (МК). Селекторный канал используют для связи с внешними устройствами»
работающими с относительно высокой скоростью передачи данных (например, маг-
нитные ленты или /щеки). Особенностью СК является То, что он работает в моно-
польном режиме. т.е. один канал может одновременно работать только с одним
ВЗУ. Мультиплексный канат осуществляет параллельный обмен данными с нес-
колькими устройствами ввода - вывода, работающими' с небольшой скоростью
передачи данных, например АЦПУ» УВВ/Пк, УВВ/Пл. Он состоит из большого числа
подканалов, каждый из которых обслуживает одно периферийное устройство.
МК может работать в монопольном режиме и в мулыинлерсном. В посиадшм случае
нее подканалы могут работать одновременно, при этом информация, поступающая
от отдельных устройств, уплотняется и в ОЗУ поступает не одновременно, а последо-
вательно. Мультиплексный канал обеспечивает работу со 176 внешними устройства-
ми при минимальном обьсме оперативной памяти в 65536 байт, поэтому в нем
может быть использовано групповое управление внешними устройствами
Важной особенностью ЕС ЭВМ является стандартизация связей внешних
устройств с процессором и оперэгивной памятью. Оборудование, обесточивающее
Рис. 2.1. Структурная схема ЕС ЭВМ
14
www.vokb-la.spb.ru - Самолёт своими руками?!
сопряжение каналов с устройствами управления ВЗУ (УУВЗУ) или с устройствами
ввода - вывода, в сочетания с системой унифицированных сигналов называют
интерфейсов. Налнвдс стандартного интерфейса позволяет легко подключать к
каналам различное по числу и номенклатуре периферийное оборудование р^ширяя
состав КТС Кроме оборудования, приведенного на рис. 2.1, в состав КТС обычно
входят: электрические пишущие машинки для связи оператором с ЭВМ; графопос-
троители планшетного и рулонною (барабанного) типов; алфавитно-цифровые
и графические дисплеи с дополнительным оборудованием чля ввода символьной
и графической информации (например клавиатуры, световые перья, ручки управ-
ления); устройства телеобработки данных, включая мультиплексоры (устройство,
осуществляющее управление внешними каналами ЭВМ и Их переключение), ком-
плекты аппаратуры передачи данных (модемы, осуществляющие модуляцию и
демодуляцию сигналов в аппаратуре передачи данных по каналам связи, устройства
защиты от ошибок, вызывные устройства), абонентские пульты. К КТС также
относятся устройства подготовки данных для различных машинных носителей
(перфокарт, перфолент, магнитных л сит) и их расшифровки.
Часть из названных средств входит в состав стандартного периферийного
оборудования ЕС ЭВМ. другую - разрабатывают специально для САПР К таким
средствам относятся ^афопостроители, дисплеи, устройства оптического считыва-
ния документов, устройства считывания |рафнческой информации (диджмтайзеры),
устройства ввода вывода речевой информации
ЕС ЭВМ позволяет на базе входящих в нее технических средств созда-
вать многопроцессорные и многомашинные вычислительные комплексы,
структура и состав средств которых определяется назначением и условиями
разработки САПР
Связь между отдельными процессорами может быть организована
на трех уровнях. Первый, самый низкий по быстродействию, уровень
предполагает использование общего устройства внешней памяти (напри-
мер, накопителей па магнитном диске). Второй уровень характеризуется
наличием непосредственной связи каналов разных ЭВМ. Он обеспечивает
более высокую скорость обмена информацией. И, наконец, третий уровень
реализует возможность работы нескольких процессоров на общем поле
оперативной памяти.
Помимо FC ЭВМ в САПР находит широкое применение система
мини-ЭВМ (СМ ЭВМ). Машины этой системы по ряду показателей нс
уступают средним ЭВМ единой серии.
Машины этой серии оснащены развитым программным обеспечением,
включающим операционную систему реального времени, дисковую
операционную систему, а также периферийным оборудованием, обеспе-
чивающим удобный ввод и вывод информации, в том числе символьной
и графической.
Рассмотрим режимы работы вычислительных систем. Различают два
основных режима работы, пакетный и диалоговый.
Пакетный режим характеризуется отсутствием непосредственной
связи пользователя с ЭВМ ЭВМ работает в автоматическом режиме по
заранее составленной программе. Технология решения задачи на Э1кМ
включает в себя операции перевода алгоритма решения задачи на язык,
понятный машине (разработка программы), кодирования программы на
перфокартах (перфолентах), ввод пакета (колоды) перфокарт в машину,
выполнение программы па ЭВМ, выдачу результатов па АЦПУ и их
15
анализ. При этом пользователь обычно выполняет только первую и
последнюю операции. Операторы вычислительного центра осуществляют
перфорирование, ввод колоды перфокарт или бобины перфоленты в
приемник устройств ввода и съем с АЦПУ' распечатки, на которой пред-
ставлены результаты решения задачи.
Режим пакетной обработки эффективен в тех случаях, когда в прог-
рамме заранее предусмотрены все возможные ситуации, которые могут
возникать при решении задачи, и полностью формализован выбор продол-
жения решения в точках ветвления алгоритма. Он 1акжс применяется при
решении громоздких задач, требующих большого времени счета. Режим
пакетной обработки пришел вместе с ЭВМ второго поколения на смену
режиму опсрагивного диалога, который был характерен при эксплуата-
ции ЭВМ первого поколения. В режиме оперативного диалога пользова-
тель мог прервать автоматическое выполнение программы, проанализи-
ровать ход решения задачи и с помощью команд, задаваемых с пулыа
управления ЭВМ, направить его по тому или иному пути. Удобный
с точки зрения единичного пользователя (правда, владеющего специаль-
ным языком общения с ЭВМ), этот режим крайне непроизводителен с
точки зрения использования ЭВМ, которая находится в распоряжешш
единственного пользователя, простаивая значительное время, необходи-
мое ему для обдумывания результатов.
Пакетный режим позволил существенно повысить производительность
ЭВМ. Это достигается благодаря юму, что ЭВМ в определенной последо-
вательности решает группу задач, сформированных в пакет. При этом ЭВМ
автоматически переходит к выполнению следующей программы, прек-
ращая обслуживание предыдущей в случае ее завершения либо появления
в ней каких-либо ошибок. Это создает значительные неудобства пользо-
вателю, который, получив программу обра1но, должен внести в нее
исправления и дождаться, когда сю программа снова будет включена в
пакет. Такая технология работы приводит к тому, что на решение сравни-
тельно простой задачи иногда требуется более суток.
Соединение преимуществ режима оперативного диалога (непосред-
ственная связь пользователя с ЭВМ) и режима пакетной обрабогки
(высокая производительность ЭВМ) стало возможным при реализации
многопрограммного режима работы вычислительной системы. При шком
режиме ресурсы вычислительной системы рационально распределены
между несколькими задачами и обеспечена более полная загрузка уст-
ройств системы (процессора, устройства ввода — вывода и тд.). Много-
программный режим работы (режим мультипрограммирования) с воз-
можностью прямого контакта пользователя с вычислительной машиной
получил название режима разделения времени. Если решение задачи
осуществляется в реальном масштабе времени, то режим называется
диалоговым (интерактивным). При режиме разделения времени пользо-
ватель получает возможность думать за пультом терминала, с помощью
которого он непосредственно изменяет массивы исходных данных и
управляет процессом решения задачи. Однако при таком режиме ЭВМ
практически не простаивает. Последовательно опрашивая юрминалы,
16
www.vokb-la.spb.ru - Самолёт своими руками?!
она выполняет поступающие запросы, а в случае их отсутствия решает
фоновую задачу, требующую больших затрат времени. Вследствие высо-
кого быстродействия ЭВМ у пользователей создается впечатление, что
машина обслуживает только сто. Важным преимуществом диалогового
режима является легкость внесения изменений в данные [261. В отличие
от пакетного режима, при котором структура входных данных жестко
фиксирована и ввод их осуществляется в строю определенной последо-
вательности, в диалоговом режиме операции ввода (добавление, исклю
чсние и корректировка данных) обладают гибкой командной структурой
и предусматриваю! изменение не только записи в целом, но и отдельных
ее элементов. Диалоговый режим имеет преимущества и при обработке
результатов вычислений, так как позволяет кон1ролировать вид и
объем выводимой информации, определять набор процедур проектирова-
ния на основании текущих результатов. Следует, однако, иметь в пилу,
что реализация режима разделения времени требует определенных затрат
вычислительных ресурсов ЭВМ (.машинного Времени, памяти)- Эти зат-
раты достигают 20 % 04 общих затрат [24].
Иногда, кроме двух названных основных режимов, используется
режим дистанционной пакетной обработки. В этом режиме дисплей
используется только для автономного ввода — вывода данных.
Структура и состав технических средств конкретной САПР зависят от
специфики организационной структуры предприятия, для которого она
создается, класса разрабатываемых объектов, а также имеющихся воз-
можностей. Общим для всех систем является то, что периферийные
устройства, включающие в себя устройства подготовки информации, ее
ввода и вывопа. а также хранения оперативной информации, образуют
терминальные пункты САПР, или терминалы*. Терминалы это все
устройства, с которыми работает пользователь САПР в процессе автома-
тизированною проектирования. Они могут располагаться на -значительном
расстоянии от вычислительного центра. В перспективе можно ожидать, что
средства общения с ЭВМ придут на рабочие места проектировщика. Дис-
танционный режим использования вычислительных машин и систем
обеспечивается с помощью специального оборудования через телефонные
и 1елеграфпые линии. -
На рис. 2.2. в качестве примера показана структура комплекса тех-
нических средств учебно-исследовательской (УИ) САПР МАИ и ее тер-
минала, рассчитанного на одновременное обучение одной академической
группы Студентов. В качестве базовой эта САПР использует ЭВМ ЕС-1045
с объемом оперативной памяти 1 Мбайт. Помимо ЭВМ, в состав КТС УИ
САПР входят дисплейная станция ЕС-7906 (ЕС-7920) с алфавитно-циф-
ровыми дисплеями (АЦП), графопостроитель ЕС-7054, а также устройства
подготовки, ввода и вывода информации. В терминале находятся дисп-
лей, графопостроитель, алфавитно-цифровое печатающее устройство,
устройство ввода с перфокарт, устройство вывода на перфоленту, нишу-
*<)i ливийского tcnniiiztl - конечный (пункт).
-53 2 17
ft П-Ю7
Рис. 2-2. Структура комплекса технических средств учебио-исследовагсиьскон
САПР МАИ
щая машинка, а также перфоратор. Графопостроители могут работать
как автономно, 1ак и непосредственно с ЭВМ.
Дистшсйная станция ЕС -7906 предназначена для ввода, вывода и
обработки (редактирования) алфавитно-цифровой информации при
работе с ЕС ЭВМ. В се состав входят: групповое устройство управления
(ГУУ) ЕС-7566, до 16 алфавитно-цифровых дисплеев ЕС-7066 и пишущая
машинка "Консул 260.Г’ (ЕС-7172).
Устройство управления ЕС-7566 предназначено ця одновременного
подключении к нему нескольких дисплеев, работающих в режиме ввода —
вывода алфавитно-цифровой информации с возможностью ее контроля,
редактирования и получения копии результатов счета.
Число одновременно подключаемых дисплеев определяет объем
информации, выводимо» на экран. Так, при подключении 4-х дисплеев
обеспечивается максимальный обьс.м информации - 960 знаков (12 строк
по 80 знаков в строке). При подключении 8 дисплеев 480 знаков
(J2 строк по 40 знаков или 6 строк по 80 знаков) При подключении
15 дисплеев — 240 знаков (6 строк по 40 знаков): 16 пультов но 240
знаков можно подключить при отсутствии пишущей машинки.
Расстояние, на которое можно удалять дисплеи от устройства
управления, также записи! от числа одновременно подключаемых
дисплеев. Так, одиночные дисплеи могул находиться на расстоянии до
600 м. При подключении к одному направлению (каналу связи) от 2 до
10 выносных нулыов максимальное удаление составляет не более 300 м.
К устройству можно подключить четыре отдельных канала связи-
Оно имеет два блока буферной памяти, предназначенных для хранения
информации выносных пультов (дисплеев) и пишущей машинки. Блоки
буферной памяти выносных пультов имеют емкость 4096 баш, блок
буферной памяти пишущей машинки — 1024 байт.
18
/ f f \
J V $ s
Рис 2.3. Клавиатура алфавитно-цифрового дисплея:
1 _ курсор влево до табулятора; 2 - пробел. 3 - Передвижение курсора влево;
4 сдвиг влево до конца строки; 5 сдвиг вправо до конца строки; 6 - передви-
жение курсора вниз; 7 - разметка экрана точками; 8 - передвижение курсора
вправо; 9 передвижение курсора в левый верхний угол; 10 - передвижение
, курсора вверх; 11 сдвиг вправо до конца экрана; 12 - сдвиг влево до конца
экрана 13 гашение экрана; 14 - переход на нпвую строку; 15 - символ начала
строки; 16 - курсор вправо до табулятора, ВВ - ввод; ВР переключение на
верхний регистр: HP - псрсключеннс ия нижний pci-истр; БЛК - лампочка блоки-
ровки экрана; ВСТ сброс блокировки; ИЧ - вывод информации с экрана ин
пишущую машинку; ТВ табуляция
Алфавитно-цифровые дисплеи (АЦЦ) ЕС-7066 предназначены для
отображения алфавитно-цифровой информации на экране электронно-
лучевой 1 рубки Д1я набора и редактирования ее с помощью клавиатуры.
АЦД состоит из двух основных частей: индикатора на электронно-лучевой
трубке и клавиатуры.
Размер рабочего поля экрана индикагора 280X160 мм, максималь-
ное число знаков, воспроизводимых на экране.960 (определяется числом
подключенных пультов), число с крик отображаемых на экране. 12 или 6,
число знаков в строке80 или 40.
На нередней панели индикатора находя 1ся тумблер "Сеть/Огкл?\
предназначенный для включения устройства, лампочка ’’Сеть" для ука-
зания наличия напряжении, лампочка "Авария" для указания неисправ-
ностей в сети питания, потенциометры "Яркость” и "Фокус". Клавиатура
выносного пульта предназначена Х1я организации обмена информацией
между пользователем и ЭВМ. Клавиатура (рис. 2.3) имеет набор функцио-
нальных клавиш. 22 из которых являются клавишами управления, а
^9 - клавишами набора текста Она снабжена двумя регистрами. С
помощью клавиатуры пользова1ель может набрать необходимую
информацию и ввести ее в память ЭВМ. Он также может корректировать
выведенную на экран информацию и отсылать ее либо на устройство
еча1и- либо снова в ЭВМ. Таким образом, обмен информацией между
ьзовагелем и ЭВМ осуществляется в режимах ввода, вывода и управ-
•ия Возможен также автонимный режим работы выносного пульта.
Для отображения графической информации (чертежей, схем, графи-
в в состав оборудования терминалов обязательно входят графопостро-
19
Рис- 2.4. Конструктивная схема 1рафа-
построитеая нмншстного типа:
I планшет; 2 траверса; J - гибкий
провод; 4 каретка
ители (чертежные автоматы). Гак, в
состав периферийного оборудования
ЕС ЭВМ входит электромеханичес-
кий графопостроитель планшетного
тина ЕС-7054. Конструктивная схема
его представлена на рис. 2 4
Бумага либо другой носитель чер-
тежа крепится на планшете I за счет
пониженного давления в пустотелой плите планшета, имеющей отверстие
в верхней части. Каретка 4 с пишущим устройством (как правило, три
пера — но числу возможных типов линий) в поперечном направлении
перемещается по траверсе 2, которая но направляющим, установленным
на передней и задней сторонах планшета. перемещается в продольном
направлении. Вместо шариковых или перьевых самописцев пишущее
устройство может иметь источник узкого луча света - для фотобумаги,
либо резец — для пластика. Управляют пером путем его опускания или
поднятия на несколько миллиметров над бумагой с помощью электро-
магнита. Управляющие электрические сигналы нош унаки к электромаг-
ниту из устройства управления графопостроителем через гибкий провод
3 и разьем на каретке. Перемещение пишущего устройства в продольном
и поперечном направлениях осуществляется с помощью электродвигате-
лей. управляемых электрическими импульсами. Эти импульсы, поступаю-
щие через устройство управления либо непосредственно от ЭВМ, либо с
перфоленты, представляют собой графическую информацию в закодиро-
ванном виде.
Кроме 1 рафопостронтслей планшетного типа, применяются графо-
построители рулонного типа. Достоинством всех электромеханических
графопостроителей являеген высокая точность и качество чертежей, а
также возможность получения чертежей довольно больших размеров.
Планшетные и рулонные графопос трои гели с большой шириной рулона
применяются при изюговлении конструкторских чертежей и сложных
схем. Рулонные графопостроители с шириной рулона 400 мм исполь-
зуются для вычерчивания различных графиков, диаграмм, траекто-
рий и т.д.
Недостатком графопостроителей такого типа является малая скорость
вычерчивания.
Оперативное взаимодействие проектировщика с машиной обеспе-
чивают графические дисплеи. € их помощью осуществляется формиро
ванис, отображение и редактирование графической, а также алфавшно-
цифровой нпформащ1И на экране электронно-лучевой трубки
Графические дисплеи являются основным элементом автоматизиро-
ванного рабочего места конструктора, которое будет рассмотрено ниже.
20
www.vokb-la.spb.ru - Самолёт своими руками?!
Среди прочих устройств терминального класса САПР, обеспечивающих работу
пользователя с ЭВМ как в пакетном, так и в диалоговом режиме, о[мстим следующие:
перфоратор предназначен для набивки перфокарт. С помощью устройства
ввода осуществляется ввод информации, закодированной на перфокартах в виде
пробивок, в ЭВМ Аналогичные операции осуществляет устройство ввода с перфо-
ленты;
устройство вывода на перфопенту служит для вывода информации, передавае-
мой из ЭВМ в виде электрических сигналов,па бумажную ленку н виде пробивок.
Информация на перфоленте можст быть использована для работы графопостроителя
или управления станков с ЧПУ;
АЦПУ предназначено дня преобразования выводимой из ЭВМ информации в
виде электрических сигналов в буквенную и цифровую. Пишущая машинка “ Кон-
сул 260-1” используется как печатающий механизм С ее помощью можно также
осуществлять связь оператора с процессором.
В проектно-конструкторекой деятельности» особенно при конструи-
ровании, значительная доля работы конструктора связана с преобразова-
нием графической информации, а нс с вычислениями т.е. преобразова-
нием числовой информации. Конструктор должен реализовать вариант
решения в виде чертежа» оформленного в полном сооквстствии с требо-
ваниями ЕСКД При этом конструктор выполняет графические операции
взаимного расположения деталей, вписывая их в ограниченные объемы,
соединения отдельных злсмснюв с помощью нормализованных и стан-
дартных деталей, указанных в каталогах и справочниках: составления
спецификаций и простановки размеров. К рабочим операциям конструк-
тора относятся построение различных сечений и видов, вычисление площа-
дей и объемов конструируемых деталей и тл-
Таким образом, графический язык и (рафическис процедуры, с одной
стороны, облегчают задачи конструирования, а с другой стороны, резуль-
таты конструирования (конструкторскую документацию) в настоящее
время чаще всего принято представлять в виде чертежей. С развитием
станков с числовым программным управлением роль чертежей, как
единственных носителей информации для изготовления изделий, будс!
постепенно уменьшаться, однако это отнюдь не означает, что в ближайшее
время чертеж утратит свое значение.
Если учесть исключительно высокую трудоемкость изготовления
конструкторской документации (около 60% рабочего времени конструк-
торов и технологов в машиностроении затрачивается на чертежной рафи-
чсские работы [3]), то станет очевидной актуальность проблемы автома
тизации этого процесса Автоматизация изготовления конструкторской
документации ipeGyei кодирования и декодирования графической инфор-
мации. Поскольку в ЭВМ информация имеет числовую форму, при вводе
в машину графическая информация должна кодироваться специальным
образом в виде дискретных цифровых сигналов, при выводе цифровая
информация преобразуется в [рафическую. Совокупность средств и прие-
мов кодирования и декодирования г ефической информации подучила
название машинной графики Применение манн иной рафики облегчает
в'ЗДвмоценствис человека с ЭВМ упрощает решение многих конструк
Арских задач, ускоряет и облегчает процесс изготовления конструк-
1 ° Рекой документа ции.
21
Основными устройствами машинной графики являются чертежные
автоматы, кодировщики графической информации и дисплеи.Они входят
в комплект серийно выпускаемых автономных диалоговых вытопи-
тельных подсистем, построенных на базе малых ЭВМ (например СМ4),
и предназначены для автоматизации проектирования в различных отрас-
лях промышленности. Так, в машинист роении используется комплекс
технических и программных средств АРМ-М (автоматизированное рабочее
место проектировщика в машиностроении), схема которого представлена
на рис. 2.2. Он может работать как автономно, так и совместно с ЭВМ
FT-1045.
В состав АРМ входят специфические устройства: графический дисплей и полу-
автомат кодирования графической информации.
Графический дисплей - -jro устройство преобразования графической информа-
ции ГУПГИ). Он состоит из вычислителя, устройства отображения, индикатора и
источника питания. Вычислитель предназначен для ввода информации с перфо лет ы,
с полуавтомата кодирования, выполнения арифметических и лопгюских операций,
вывода информации па перфоленту, на пишущую машинку. на графопостроитель if
па устройство отображения, а также для синхронизации работы дисплея в течение
вычислительного процесса.
Устройство отображения обеспечивает преобразование дискретной формы
представления информации в аналоговую. работу светового пера, генерацию симво-
лов по их коду и управление яркостью луча. Блок индикации служит идя отображе-
ния на экране адсктронно-лучсвой трубки графической и алфавитно-цифровой
информации в соотистстннн с законом изменения аналоговых сигналов, поступаю-
щих с устройства отображения.
Дисплей имеет разви гую систему приказов, позволяюn^yto:
вводить разлишгыс ллементы чертежа с указанием вида и типа линий;
идентифицировать элементы чертежа;
производить преобразование идентифицированных элементов чертежа сдвигом,
поворотом, изменением масштаба, симметрией, видом линии и т.д.
Для кодирования графической информации, представленной на бумаге, кальке,
и ввода ее в ЭВМ используется полуавтомат кодирования графической информации
(ПКГИ).
В состав ПКГИ входят: координагный планшет, пульт оператора, логический
блок, клавиатура символов.
Кодирование графической информации происходит в ПКГИ при обводе исход-
ного чертежа, установленного на планшете. Возможно кодирование текстовых
документов, над «иссй и г.п.
ПКГИ позволяет выполнять следующие операции :
кодировать графические элементы чертежа;
колировать произвольиыс кривые;
кодировать символы;
организован массивы да1шых;
ко/оронать чертежи с учетом перехода к другим координатам
2.2, HPOI PAMMIIOF ОБЕСПЕЧЕНИЕ
ЭВМ это программируемый автомат, возможности которого во
многом определяются программами, управляющими его работой. Прог-
раммное обеспечение (НО) современных САПР - это прежде всего ком-
плекс нршрамм. реализующих функционирование устройств ЭВМ на всех
режимах их работы. В настоящее время это наиболее дортмая часть вычис-
22
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 2.5. Структурная схема системного программного обеспечения
ЛИТСЛЫ1ЫХ машин. Причем наблюдается тенденция постоянного увеличе-
ния обьема и стоимости программного обеспечения при снижении объема
и стоимости технических средств. Программное обеспечение принято
делить на два больших класса: системное (базовое) и прикладное
(специализированное). В состав системного программного обеспечения
(СПО) входят программные средства, поставляемые вместе с ЭВМ и
являющиеся базовыми для всех категорий пользователей вычислительных
машин данной серии. Они предназначены для организации работы вычис-
лительного комплекса как универсальной системы обработки данных.
('ПО нс зависит от характера решаемых на машине задач. Оно однотипно
для ЭВМ одного семейства и имеет аналогичную структуру для машин
различных типов. Структурная схема ('ПО представлена на рис. 2.5 | J 51.
Ядром СПО современных вычислительных комплексов является операционная
система (ОС) ОС представляет собой совокупность программ и методов управления
ЭВМ и задачами пользователей. Появление операционных систем связано со стрем-
лением рационально использовать ресурсы ЭВМ, в основном процессорное время,
которое и определяет быстродействие ЭВМ. ОС координирует работу трехосновных
частей ЭВМ: процессора, состоящего из арифметического и управляющего устройств,
памяти и устройств ввода - вывода, обеспечивая их рациональную загрузку. Одной
из основных функций ОС является планирование работ по выполнению Программ
пользователя и реализация плана с учетом сложившейся ситуации. Кроме того, опера-
ционная система обеспечивает обмен н1и|юрмацнсй между ЭВМ и оператором а
также расширяет либо видоизменяет набор операций, выполняемых ЭВМ, используя
Д1Я этих целей специальную библиотеку подпрограмм. ОС обеспечивает работу ЭВМ
R казн энны х выШе режи мах: iгакетноЙ о бработки. мульти i«рограммном, раздел ения
времени, му. i ыи процессе рю м. Крепко рассмотрим основные блоки ОС. о мрел сплю-
щи с режим функционирования ЭВМ (см. рис 2.5).
Управляющая программа осу шести яст обработку карт задазшй или директив
пользователя, различных сигналов о прерываниях в рабогс периферийных устройств
ЭВМ, сообщений оператору о требуемых дня работы устройствах и носителях данных
4 1 .Д- Программа-планировщик определяет очередность выполнения заданий пользо-
вателя и вывода результатов счета задач, вводимых оператором. Она также У -
-'йст системными буферными ВЗУ при hbkoivichhii введенных заданий и выводе
Результатов счета ин печать, перфорацию, графопостроители и другие внешние
Устройств а. Программа-загрузчик включает в работу программы пользователя. Это
ОсУЩсствляется следующим образом. Загрузочные модули, которые формируются
с результате перевода программы полкюнагсия с языка программирования в
м^шинп1.[е команды, помещаются в указываемого управляющей программой ОС'
°гоасть памяти. Затем пропзнодитсн настройкз адресов машинных команд на
^чкрепюс место магнитного оперативного запоминающего уоройсгва (МОЗУ).
23
Редактор внешних сак Теи, который работает совмссшо с загрузчиком, объединяет
независимо транслированные программные блоки В единую рабочую программу.
После разрешения загрузочных модулей в МОЗУ, настрой км Ни месту их располо-
жения и уициоилсНня между ними связей управляющая программа ОС передает
управление программе пользователя, оставляй за собой лишь контрольные функции-
По мимо указанных блоков, в состав ОС Входят трансляторы с языков программиро-
вания различного уровня, а также библиотека стандартных программ. В совокуп-
ности они представляют гобой систему iсрограммировалия. обеспечивающую состав-
ление и отладку программ. Транслятор - это программа, которая переводит записи
программ с языка программирования (алгоритмического языка) на машинный
язык. В ОС ЕС ЭВМ имеются трансляторы с языков ФОРТРАН, ПЛ/1. АЛГОЛ-60,
КОБОЛ, Ассемблер 1 С и др. Следует отмешть, что в настоящее время в отечествен-
ной и зарубежной практике для САПР в качестве основного языка пршрамми роса-
Ния принят ФОРТРАП-1\.
Библио 1ска стандартных программ включает в себя оформленные но единым
для данной системы программирования правилам программы, реализующие наи-
более часто используемые типовые алгоритмы н численные методы решения
различных вычислительных задач (решение систем уравнений, интерполирова-
ние. вычисление определенных ишаралов и т.н.). В нас юн шее время имеется
большое число библиотек стандартных программ, рассчитанных на опреде-
ленный круг пользователей. Эта библиотеки хранятся во внешней памяти ЭВМ и
доступны всем пользователям системы программирования. Например, если у
пользователя возникла Необходимость решить систему линейных уравнений, то ему
Не Нужно разрабатывай, для этого программу, Достаточно определенной командой
вызвать из памяти ЭВМ стандартную программу, ввести свои исходные данные
(таблицу коэффициентов системы уравнений) И запустить программу. В состав
ОС входят также разнообразные аяужебяые программы-утилиты (по терминологии
О(? ЕС). Они позволяют осуществлять копирование носителей информации па маг-
нитной ленте или диске, расчищать каталоги и содержимое томов на ВЗУ: создавать,
корректировать и унифицировать наборы данных с различной структурной орваниза-
цней. С помощью утилит осуществляется генерация ОС на определенную конфигура-
цию вычислительных средств, з также некоторые другие операции.
В состав СПО входит также комплекс программ технического обслуживания,
предназначенный для контроля работы устройств вычислительной машины и выяв-
ления Неисправностей в ес блоках.
Описанное выше программное обеспечение явдясгсн базовым для
САПР. Оно осущсствдяе! функционирование системы и решение лишь
некоторых обгцеинженерных задач. Проект!ю-копструкторские задачи,
для решения которых и создается та или иная САПР, решаются с помощью
прикладного прО1раммного обеспечения (ППО). Это обеспечение пользо-
ватели либо создают сами, либо подучают по кооперации из других, род-
ственных организаций, ранее разработавших ie или иные прикладные
программы
Существует два способа организации прикладных программ: библио-
тека прикладных программ (ЫПГ) и пакет прикладных программ (ППП)
|28]. БПИ является механическим объединением программ по принципу
специализации (аэродинамика, маиса и кд.). Программы при этом, каки
книги в библиотеке, нс зависят друг от друга. Такой способ ор1анизации,1
удобный для ощелыюго пользователя, решающего гу или иную задачу,
нельзя при знать удачным с точки зрения системного подхода. Во-первых,
потому что всякая библиотека слишком избыточна и это педет к нерацио-
нальному использованию памят ЭВМ- Во-вторых, потому чю при такой ।
организации можно решагь задаем только строго оговоренного перечня
24
www.vokb-la.spb.ru - Самолёт своими руками?!
и всякая новая постановка задачи требует разработки новой программы.
При организации ППП используется модульный принцип програм-
мирования. В соответствии с этим принципом пакет должен состоять из
отдельных ненерсискающихся "кирпичиков” (модулей), из которых и
собираются прикладные программы.
Под модулем понимают упорядоченное множество операторов, имею-
щее уникальное имя и хранящееся как раздел библиотечного набора дан-
ных. Он оформляется в виде подпрограммы, например, типа SUBROUTINE
(ФОРТРАН-IV). Каждый модуль представляет собой подпрограмму, пред-
назначенную для реализации какой-либо одной функции прикладного
либо системного характера При этом включение модуля в рабочую
программу не требует каких-либо его изменений. По структуре програм-
мные модули могу г быть простыми или составными. Простой модуль
представляет собой одну подпрограмму, т.е. он не содержит операторов,
имеющих собственное имя. Составной модуль состоит из совокупности
вызывающей и вызываемых подпрограмм. Причем последние, как
правило, не предназначены для автономного использования Программные
модули оформляются на внешних носителях в виде библиотеки со своим
каталогом, содержащим паспорта по каждому модулю. Паспорт модуля
содержит его краткую характеристику, включающую: имя модуля, язык
программирования, список входных параметров, потребный для выпол-
нения модуля обьсм памяти, список обращений к другим модулям (для
составного модуля).
Основным достоинством модульного принципа организации пакетов
является экономия памяти ЭВМ, а также структурная и функциональная
гибкость подсистем САПЕ. Струк1урная гибкость означает, что возможно
расширение состава модулей, быстрая модификация или даже замена
отдельных модулей без изменения остальных модулей пакета. Функцио-
нальная 1ибкость это возможность как автономного использования
отдельных программных модулей, так и формирования из них различных
последовательностей, отвечающих требованиям конкретной задачи „
проектирования. Пример реализации модульной структуры пакета приве-
ден в гл. 5.
Однако для реализации отмеченных достоинств модульных пакетов
требуется разработка специальных управляющих программ. Эти прог-
раммы, получившие название мониторов, осуществляют процесс сборки
Прикладной программы из имеющихся в ППП модулей. Такие программы
расширяют возможности системного программного обеспечения ЭВМ,
являясь как бы надстройкой над ним. Рассмотрим два возможных типа
мониторов САПР Монитор первого типа — вызывающий — управляет
решением заранее оюворелного круга задач, встречающихся при проекти-
ровании. Пакеты программ (или отдельные модули), реализующие эти
Задачи с помощью собственных управляющих программ, образуют биб-
лиотеку. В распоряжении проектировщика имеется перечень этих прог-
рамм (’меню"). Если для решения поставленной задачи в библиотеке
^гсугствует необходимая программа, то ее следует создать и включить
й меню".
25
Рис. 2.6. Схема алгоритма работы вызы-
вающего монитора
Общение проектировщика с сис-
темой происходит в форме вопросов
и ответов. Имеющийся в системе
комплекс технических средств обес-
печивает возможность двусторонне-
го обмена информацией проектиров-
щика с системой при помощи алфа-
витно-цифровой информации и одно-
стороннего обмела (от системы к
проектировщику) при помощи гра-
фической информации. Реализация
диалогового режима позволяет опе-
ративно изменять входные данные
для сформированной вычислитель-
ной программы и варьировать ими.
Работа диалоговой системы на базе вызывающего монитора осуществ-
ляется в соответствии с алгоритмом, схема которого представлена на
рис. 2.6 [25}.
Блок 1 но заданию проекта ров шика вызывает из библиотеки системы требуе-
мую программу. Это осуществляемся следующим образом. В начале работы блока
на экране дисплея загорается надпись:
ЗАДАЙТГ ИМЯ ТРЕБУЕМОЙ ПРОГРАММЫ
В отвит на этот запрос пользователь с помощью клавиатуры дисплея набирает
и вводит имя программы. по которой будут проводиться вычисления. Пели прог-
раммы с заданным именем в библиотеке нет, то иа экране дисплея появляется сооб-
щение:
ПРОГРАММА <имя программы-- НЕДОСТУПНА
После этого пользователю представляется возможность повторить ввод. Гели
программа найдена в библиотеке, то происходи г переход и блок 2.
Блок 2 формирует исходные данные для вызванной программы. В начале
работы этого блока на экране дисплея появляется надпись:
ЗАДАЙТЕ ИСХОДНЫЕ ДАННЫЕ
<имя первой входной переменной >•-------------------
<имя второй входной переменной--------—-—--------——
<имя последней входной переменной>*-------—---------
В каждой строке после звездочки (•) пользователь набирает и вводит значения
входных переменных. Переход в следующий блок не произойдет до тех пор, пока
значения всех входных переменных нс будут заданы. В случае случайного или умыш-
ленного недо задания значений некоторых исходных перемегшых они запрашиваются
дополнительно.
Блок 3 передает вызванную программу с заданными входными переменными на
выполнение. Во время выполнения этой программы па экране дисплея высвечи-
вается сообщение:
26
www.vokb-la.spb.ru - Самолёт своими руками?!
ВЫПОЛНЯЕТСЯ ПРОГРАММА <имя программы>
Поете выполнения прсмраммы управление перелается блоку 4.
1 Блок 4 производит вывод результатов проведенных расчетов. При этом на экра-
не дисплея появляется сообщение:
<имя первой выходной псрсмс1ШоЙ> = <зиачение>
<имя второй выходной переменной> - <значенис>
<имя последней выход1ЮЙ исременной> - <значение>
После ознакомления с результатами вычислений в левом верхнем углу экрана
Л11Сился пользователь набирает и вводит звездочку (♦>- После этого происходит
переходе блок5.
Блок 5 является блоком управления и позволяет зддагь монитору следующие
действия. В начале работы этого блока на экране дисплея появляется сообщение»
содержащее перечень имеющихся возможностей:
ЗАДАЙТЕ ПОМ IP АЛЬТЕРНАТИВЫ:
I. продолжить работу с программой <имя программы>
2. ВЫБРАТЬ ИЗ БИБЛИО ГЕКИ ДРУГУЮ ПРОГРАММУ
з. закончить работу
0'шак0Ь01В1ПИсь с Предоставляемыми возможностями» пользователь н левом
верхнем у ту экрана дисплея набираег и вводит номер выбранного действия. При
лом, если он набирает цифру 1, то происходит переход в блок 6, при наборе цифры 2
происходит переход в блок 1. а при наборе цифры 3 в блок 7.
Блок 6 позволяет изменить Некоторые или все ранее заданные значения исход-
ных переменных. В начале его работы на экране дисплеи по является надпись:
ИЗМЕНИТЕ ЗНАЧЕНИЯ ВХОДНЫХ ПЕРЕМЕННЫХ
<имя первой входной переменной > - <ранее заданное значением
<имя второй входной переменной > - <рансс заданное зпачение>
Сим я последней входной переменной > <ранее заданное значсмие>
У переменных» значения которых требуется изменить, на месте ранее заданных
значений пользователь набирает и вводит новые значения. После выполнения этих
дейс1вий происходит переход в блок 3.
Блок 7 завершает работу; иа экране дисплея появляется сообщение:
КОНЕЦ РАБОТЫ
и мони гор Освобождает память ЭВМ.
Монитор второго 'Типа, называемый гибким, выполняет функции
аыоматического формирования из набора модулей требуемой вычисли-
тельной схемы и генерации ее управляющей программы. Использование
монитора второго типа избавляет пользователя от необходимости предва-
рительно разрабатывать управляющие программы для всех возможных
постановок задач, встречающихся при проектировании.
Схема алгоритма работы гибкого монитора приведена на рис. 2.7
1^1- В качестве исходной информации гибкий монитор использует зада-
ние проектировщика на формирование вычислительной процедуры» а
гакжс сведения об имеющихся в пакете прикладных программ модулях,
задании оговаривается перечень переменных, значения которых необ-
ходимо определить, а также перечень известных переменных моделей и их
качения. Кроме этого, в нем указывается, о1куда вводятся исходные
данные (дисплей, перфокарты и др.), в каком виде и на какие устройства
г]'еСуется вывести результаты расчеюв, а также точность, с которой
27
Рис. 2.7. Схема алгоритма работы гибкого моим гора
нужно провести расчеты. Сведения об имеющихся модулях хранятся в
каталоге паспортов.
На первом этапе работы формируется вы числительная схема решения
задачи При этом монитор определяет полноту исходной для решения
данной задачи информации и в случае необходимости запрашивает у
проектировщика недостающие данные.
На втором этапе монитор генерирует вычислительную процедуру»
реализующую построенную схему, и передаст управление ее выполнением
ЭВМ Это управление сводится к вызову и исполнению в определенной
последовательности программных модулей. После завершения вычисле-
ний и вывода требуемых результатов пользователь может либо закончить
работу, либо повторить расчеты при новых исходных данных. В рассмат-
риваемом мониторе предусмотрено четыре возможных режима вычис-
28
www.vokb-la.spb.ru - Самолёт своими руками?!
ений отличающиеся способом задания исходных данных и формой
подставления результатов расчета:
I) простой счет, при котором задаются имя и значение переменной,
сохраняемые при всех расчетах;
2) счет списком, в этом случае задаются имя переменной и ряд
(список) се значений, для которых и осуществляются расчеты при
постоянных значениях остальных переменных;
3) счет в цикле, когда задаются имя переменной, ее начальное зна-
чение, приращение и конечное значение или число шагов цикла; при этом
па каждом шаге все остальные переменные остаются неизменными;
4) построение i рафика, когда задаются имена переменных, являю*
щихся аргументом и функцией, начальное и конечное значение ар!умснта.
В последнем режиме на графопостроителе строится график зависи-
мости функции от аргумента при постоянных значениях остальных пере-
менных. Приращение аргумента выбирается автоматически. Если пере-
менная, являющаяся фукнцией, нс задана среди выходных переменных,
го она автоматически добавляется к ним монитором.
Работа с гибким и вызывающим мониторами осуществляется в режи-
ме диалога.
Возможны и другие варианты программных средств управления
пакетами прикладных программ.
Помимо названных средств в состав прикладного программного
обеспечения САПР входят программы (подсистемы) обеспечения диа-
логового взаимодействия проектировщика с ЭВМ, а также программы
управления базами данных.
Назначение диалоговых подсистем — обеспечение оперативного
обмена информацией между пользователем и системой. Общение человека
с ЭВМ осуществляется на определенном языке, который называется
входным. Программа должна расшифровать сообщение пользователя,
т.е. выявить содержащийся в нем смысл, и передать это сообщение паке-
там программ. Кроме того, она должна передать пользователю требова-
ния, исходящие от пакетов программ.
В зависимости от вида входного языка диалоювые подсистемы
можно разделить на три группы: подсистемы с директивным входным
языком подсистемы с входным языком тина алгоритмического и под-
системы с входным языком, близким к естественному |25]. Наиболее
просты диалоговые подсистемы первой группы. Их недостатком является
То, что сообщения, которыми обмениваются пользователь и система,
строго фиксированы. Это делает их неэффективными для реализации
сравнительно сложных диалогов, так как в этом случае пользователь
Должен запомнить и применять без ошибок большое количество директив.
Диалог можно построить от системы, т.е. организовать его таким
образом, что система вместе с вопросом предлагает пользователю воз-
можные варианты действий. В этом случае требования к специальной
подготовке пользователя существенно снижаются, поскольку диалог
ведется на естественном для данной области инженерном языке. Такой
иодход к организации диалога использован при создании описанных выше
29
Рис- 2.Я. Структура прикладного
программного обеспечения
мониторов. В них диалоговая под-
система является частью системы
управления пакетом программ.
В подсистемах второго типа
для обращений к системе исполь-
зуется язык, являющийся диало-
говым вариантом какого-либо
языка npoi раммирования. Это
обеспечивает большую свободу
действий пользователю, однако
ведет к некоторому усложнению
системы К тому же такой подход требует от пользователя специальной
подготовки в области программирования. Причем чем шире набор средств
и возможностей входного языка, тем выше требования, предъявляемые к
подготовке пользователя.
Диалоговые подсистемы, использующие в качестве входного либо
ееiсе 1 венный, либо близкий к нему язык, являются наиболее сложными.
Однако эта сложность окупается большими возможностями при форму-
лировке запросов к подсистеме. При этом не требуется специальной под-
готовки пользователя в области программирования, так как задача
формулируется на русском языке с привлечением общепринятой матема-
тической символики
Для формирования, ведения, хранения, поиска и выдачи информа-
ции служат программы управления базами данных. Среди этих программ
можно выделить программы ввода, контроля и формирования упорядо-
ченных массивов' данных (файлов) на внешних носителях, программы
корректировки файлов, поиска информации, обмена информацией между
подсистемами через внешние носители, а также программы сортировки
информации на внешних носителях по ключевым элементам данных.
Структура прикладного программного обеспечения САПР приведена
па рис. 2.8. Отметим, что программы управления библиотеками (паке-
тами) прикладных программ, программы диалогового взаимодействия
и программы управления базами данных в значительной мере не зависят
от объекта проектирования и типов решаемых задач, они расширяют
возможности базового программного обеспечения ЭВМ, образуя вместе
с ним общесистемное ядро программного обеспечения САПР
2.3. ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ
Проектирование можно определить как информационную подго-
говку изменения окружающего нас мира техники. Тогда одной из важ-
нейших функций проектирующей системы является поиск, накопление,
30
www.vokb-la.spb.ru - Самолёт своими руками?!
хранение и передача информации. В САПР эти функции выполняет
ф рмационное обеспечение (ИО). Информационное обеспечение эго
с вокушюсть всех необходимых для проектирования данных, опреде-
ленным образом организованных для удобного управления ими. Комло-
еитами ИО являются докумешы, содержащие описание стандартных
проектных процедур, типовых проектных решений, унифицированных и
стапдарп!ых элементов и комплектующих изделий, характеристики
материалов и другие справочные и нормативные данные, а. также файлы
й блоки данных на машинных носителях, обеспечивающие информацион-
ную базу САПР
Данные, содержащиеся и используемые в ИО САПР, подразделяются
па временные и постоянные. Временные данные хранятся в системе в
период ведения какой-либо работы и после ее окончания либо уничто-
жаются, либо переводятся в категорию постоянных. Постоянные данные
включают информацию, постоянно хранимую в САПР. В систему при се
генерации вводится ядро этих данных, дополняемое и модифицируемое
в процессе функционирования системы. В состав этих данных входят
архивные, справочные, системные и учебные данные.
Архивные данные это редко используемые массивы данных, содер-
жащие, например, тексты программ, входящих в программное обеспе-
чение ( ЛИР, на исходных языках, а также копии всех других данных,
имеющихся в системе. Справочные данные — это данные, необходимые
пользователю системы для работы (например, таблицы стандартов, норма-
лей, характеристик самолетов и их систем, таблицы формул). Системные
данные обеспечивают функционирование средств программного обес-
печения (например, каталоги, словари, указатели, таблицы). Учебные
данные необходимы для обучения пользователей системы и обслуживаю-
щего персонала приемам работы в САПР, а также для оперативного раз-
решения затруднений, возникающих у пользователей при работе с сис-
темой .
В принципе алгоритмические языки высокого уровня позволяют
организовать хранение информации на внешних носителях (магнитных
дисках, магнитных лентах) в виде наборов даш1ых. Управление данными и
организацию доступа к ним обеспечивают с помощью операционных
систем. При обращении к наборам данных пользователи в своих програм-
мах должны описывать характеристики этих наборов, а также созда-
вать процедуры обработки данных, позволяющие осуществлять их моди-
фикацию, дополнения и исключения. Такой подход к созданию информа-
ционных систем оказался неприемлемым для САПР, харакюризуюшихся
большим объемом информации и сложной структурой данных. По
современным представлениям наиболее перспективной формой органи-
зации информационного обеспечения САПР являются специализированные
автоматизированные банки данных (АБД). Их можно определить как
систему программных, языковых, технических и организационных
средств и самих хранимых данных, обеспечивающую целенаправленное
н Коллективное использование информации и также ее пополнение, хра-
Нс|<ие и защиту Of несанкционированного использования
31
Важнейшими достоинствами АБД являются: обеспечение легкого
доступа пользователей к данным, гибкость в обращении с данными бла-
годаря различным методам доступа, высокая производительное 1ь, прос-
тота внесения изменений и др. [12]. Эти преимущества достигаются в
основном благодаря тому, что в банках функции формирования, накоп-
ления и ведения информационной базы выделены в автономно выполняе-
мый процесс. Этот процесс с прикладными программами связан только
информационно.
Одной из главных проблем при создании АБД является разработка
баз данных и систем управления ими.
База данных это сформированный на внешних носителях в виде
файлов, лишенный избыточное 1и набор взаимосвязанных элементов
информации, который может использоваться в одной или нескольких
областях. База данных представляет собой информационную модель
объектов проектирования. Чем она полнее и достовернее, тем выше
качество проектирования.
Одним из основных свойств базы данных является логическая и
физическая независимость хранимых в них данных от программ поль-
зователя Для управления базами данных разрабатывается специальный
программный аппарат — система управления базами данных (СУБД).
СУБД выполняет функции нормирования и преобразования баз данных
н накопление в них информации, а также поиска информации по запросам
пользователей и выдачи ее в виде определенных документов. СУБД —
это важнейший элемент общесистемного программного обеспечения. Их
создание является после разработки операционных систем одним из
важнейших результатов в развитии программного обеспечения ЭВМ.
В настоящее время в нашей стране разработан ряд систем управления
базами данных,универсальных и специального назначения. Ведутся работы
но созданию специализированных банков для САПР
2.4. МЕТОДИЧЕСКОЕ И OPI АНИМАЦИОННОЕ ОБЕСПЕЧЕНИЕ
Методическое обеспечение САПР — это набор необходимых докумен-
тов, регламентирующих состав, правила отбора и эксплуатации средств
автоматизированного проектирования. Из состава методического обес-
печения можно выделить математическое и лингвистическое (языковое)
обеспечение. Математическое обеспечение включает в себя теорию, мето-
ды, математические модели и шпорит мы проектирования. При создании
математического обеспечении САПР необходимо ориентироваться на
использование «средовых достижений теории и методов проектирования,
эффективных моделей, адекватно описывающих те или иные стороны
поведения объекта проектирования и его элементов, применение методов
многовариантного проектирования и оптимизации на базе системною
подхода.
Лингвистическое обеспечение определяется набором языков, с
помощью которых проектировщик общается с системой. Создание САПР
32
www.vokb-la.spb.ru - Самолёт своими руками?!
потребовало разработки специальных проблемно-ориентированных язы-
ков удобных для различных категорий пользователей САПР, с учетом
основных операций и структур данных, характерных соответствую-
щих областей применения. Использование таких языков, правда, требует
разработки специальных трансляторов к ним.
Язык взаимодействия пользователя с ЭВМ в общем случае можно
представить совокупностью трех взаимосвязанных языков:
1) описания объекта проектирования (структуры и входных Данных);
2) управления вычислительным процессом, т. е описания требуемых
дня решения задачи действий ЭВМ;
3) сообщений САПЕ, информирующих пользователя о состоянии
данных и возможных режимах использования системы [251.
Организационное обеспечение САПР это совокупность нормативно-
технических материалов, необходимых для разработки, внедрения и
эксплуатации системы автоматизированною проектирования.
Основными материалами организационного обеспечения являются:
основания для проектирования;
основные положения по САПР,
комплекс методических положений по созданию и стыковке под-
систем САПР;
планы организационно-технических мероприятий, связанных с внед-
рением и эксплуатацией ( АИР;
комплекты документации по всем компонентам САПР;
комплект документации по эксплуатации САПР.
методические материалы, регламентирующие способы автоматизи-
рованного решения отдельных задач САПР;
методика расчета экономической эффективности от внедрения
САПР и др.
В разработке И эксплуатации САПР участвуют большие ipyiiiihi специалистов
разного профиля. Поэтому очень важно определить права, обязанности и функции
основных партнеров: проектировщика, оператора ЭВМ и внешних устройств, прог-
раммной, оператора банка данных и администратора САПР 1261- Всякая САПР
создается для решения прикладных задач, т.г. проектирования каких-либо объек-
тов и систем Поэтому естественно, что центральной фигурой САПР является проек-
тировщик. Он готовит «адание на проектирование, участвует в процессе счета, анали-
зирует полученные результаты, корректирует исходные д<чнные. Это требует от
проектировщика хорошего знания всех компонентов CAI 1Р. сс недостатков и перс-
пектив развития. Опыт создания САПР показам, что наибольших практических
результатов добились те организации, в которых во таве коллективов, занимаю-
щихся разработкой н эксплуатацией САПР, с самого начала стояли высококвалнфи-
нировазшыс проектировщики, обладающие к тому же необходимой эрудицией в
области вычислительной техники, программирования, системотехники.
Задача обслуживающего персонала ЭВМ и внешних устройств — обеспечение
работпоюсобноити и функционирования комплекса технических средств, а также
°Р|^иизацця вычислительного процесса.
Эксплуатация и развитие программного комплекса, обеспечение эффективного
>е-чуживанмя нн<]юрма11иоП1!ш запросов, оперативная корректировка использус-
ых данных, модификации организации банка данных и библиотек прикладных
Но ,'рамм и систсм управления ими - вот далеко ие полный перечень нсключнтель-
ьажпых функций системных и проблемных программистов.
ЛдминистРатоР САПР - лицо, осуществляющее общее руководство и оргаииэа-
11,10 Работ.
33
4S3 _ з
ГЛАВА 3 ОСНОВНЫЕ ПОЛОЖЕНИЯ
МЕТОДОЛОГИИ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВНИЯ
3.1. ЭТАПЫ И ПРОЦЕДУРЫ ПРОЕКТИРОВАНИЯ.
ВОЗМОЖНОСТИ ИХ АВТОМАТИЗАЦИИ
За сравнительно короткий исторический период, насчитывающий
немногим более 80 лет, самолет из экспериментального летательного
аппарата, демонстрировавшею перед изумленной публикой свои довольно
скромные по современному представлению возможное™, превратился в
надежный и незаменимый элемент многих отраслей народного хозяйства.
За этот период сменилось много поколений самолетов, неизмеримо вырос
их технико-экономический уровень. Этот уровень отражает не только
возросшие технические возможности, но и, в не мепыпей степени, бога-
тый опыт, накопленный в процессе создания самолетов. Однако, несмотря
на опыт, задача создания нового самолета не ст ала тривиальной, поскольку
для ее решения всегда требуется сделать шаг вперед за пределы прошлого
опыта. Необходимость в разработке нового ЛА возникает по двум причи^
нам. Во-первых, происходит постепенное моральное устаревание суще
ствуюших типов самолетов, а также появляются новые технические
возможности, реализация которых обещает повышение гсхнико-эконо
мических показателей самолета и транспортной системы в целом.
Во-вторых, народное хозяйство ставит перед авиацией задачи, решений
которых с помощью существующих типов ЛА невозможно или экономи-
чески нецелесообразно. Так, например, может оказаться, что существую-
щие типы самолетов не удовлетворяют новым требованиям по размерИ
перевозимых грузов либо по условиям базирования на нреднола! аемыя
взлетно-посадочных полосах и тд.
В обоих случаях ,ыя достижения цели требуется поиск новых путЛ
и возможностей.
Ключевым элементом процесса создания самолета является разработ]
ка его проекта — процесс проектирования. Спроектировать самолет 1
это значит разработать комплект технической документации, позволим
щий осуществить его постройку и эксплуатацию. Техническая докумсп
гация представляет собой знаковую модель самолета, представленную в
графическом, числовом либо ином виде. Но техническая документация -
эго лишь конечный результат сложного и длительного процесса челоД
ческой деятельности, направленного на разработку проекта ранее не су*
шествовавшего объекта, системы, процесса и т.д. Хотя эта цель ипогдз
может быть достигнута путем использования известных элементов либо
принципов, однако в любом случае требуется творческий поиск сочетания
этих элементов и процессов новым, оригинальным способом, который
бы приводил к достижению количественных или качественных резул*'
татов, оправдывающих затраты на разработку новых образцов icxiihkh
Таким образом, можно констатировать, что проектирование — творчес-
кий процесс. Понятно, что степень его авгомагизании во многом буЯЯ
определяться не столько возможностями вычислительной и др>г°*|
34
www.vokb-la.spb.ru - Самолёт своими руками?!
рис Э.Ь Схема алюритма процесса проектирования
сложного технического объекта
техники. сколько возможностью формали-
зации той или иной проектной задачи, т.е.
умением проектировщика дать достаточно
строгую постановку задачи проектирования
и завершенный алгоритм ее решения. В
связи с этим возникает вопрос: в какой
мере отдельные составляющие процесса
проектирования могут быть формализо-
ваны В настоящее время неизвестны алго-
ритмы прямого синтеза сложных техничес-
ких объектов. Их проектирование осущест-
вляется многократным повторением анали-
за различных вариантов проектных альтерна-
тив. Схема алгоритма процесса проектирова-
ния сложного технического объекта пред-
ставлена на рис. 3.1.
ьми Л
После определения цели проектирования проектировщик, опираясь
на свои 1ворческие способности, формирует основную идею, замысел
(концепцию) будущего объекта, намечая возможные варианты (альтер-
нативы) решения проектной задачи. Зачастую в основе этого процесса
лежит изобретательство, т.е. способность человека синтезировать новые,
полезные идеи и принципы для решения инженерных задач. Именно бла-
годаря изобретательству удается добиваться принципиально новых техни-
ческих решений, скачкообразно улучшающих характеристики проектируе-
мого объекта. Вместе с тем опыт авиастроения свидетельствует, что
только очень немногие проекты самолетов могу! быть признаны совер-
шенно новыми. При этом даже в них значительное число технических реше-
ний принимается на основе прошлого опыта. Иными словами прогресс
авиации осуществляется как на основе ее эволюционного развития, так и
на основе принципиально новых технических решений, используемых в
проектах новых самолетов. С целью уменьшения степени технического
риска от внедрения новых технических решений, получаемых в результате
иэобрста1ельской деятельности либо из научно-техническою задела,
каждое такое решение подвергается тщательной апробации на стендах,
макетах экспериментальных образцах и гл-
Следуюнп1й этап процесса проектирования инженерный анализ -
На ’Рамен на детализацию намеченных вариантов решения задачи (опре-
снис структуры и размерных параметров проектируемого объекта)
проверку его соответствия физическим законам и другим ограниче-
объе1* Вь11екающим из специфических требований к проектируемому
н Основе инженерного анализа лежит моделирование, т.е. исследова-
Ъое °бьекта проектирования с помощью модели, которая,отображая или
Роизледя объект исследования, способна дать необходимую инфор.ма-
35
цию о нем. При проектировании самолетов широко использую гея как
физические (материально реализованные), гак и математические (абст-
рактные) модели. Физическими моделями являются макет самолета,
его продувочные модели, различные стенды и тл. Физическое модели-
рование дает наиболее полное и достоверное представление об исследуе-
мых явлениях, однако оно зачастую связано со значительными затратами
времени -и материальных ресурсов. Тем не менее физическое модеяиЛ
вание является практически единственно возможным при исследовании
новых закономерностей либо непредсказуемых теоретически, либо
требующих экспериментальной проверки и подверждепия каких-то
гипотез. Понятно, что роль физического моделирования возрастает при
создании принципиально новых самолетов, основывающихся на новых
технических концепциях.
Математическое моделирование базируется на известных закономеп!
ностях прикладных авиационных наук, используемых при проектировав
нии и расчете самолста. Математическое моделирование, в свою очередь,
можно разделить па аналитическое и численное. Аналитическое модели-
рование позволяет провести исследования в наиболее общем виде и
получить результаты в наглядном, удобном для анализа виде. Ошжко
построение аналитических моделей часто связано с необходимостью
существенно упрощать рассматриваемое явление, что снижает достовер-
ность получаемых результатов. Примерами удачных аналитически!
моделей могут служить балочная модель крыла и др. Численное модели-
рование с помощью ЭВМ в настоящее время становится одним из основ-
ных методов исследования сложных объектов и процессов, обеспечи-
вая высокую точность и достоверность получаемых результатов. Так, на
основе конечноэлементных моделей разработаны высокоэффективны!
численные методы расчета аэродинамических характерно гик самолету
|5|, а также методы анализа напряженно-деформированного состояния
конструкции самолета и синтеза рациональных конструкгивно-сшювых
схем (см. гл. 9). Л
Информация. полученная в результате анализа, позволяет перейти к
третьему этапу процесса проектирования принятию решения. Эю весьма
ответственный этап, целью которого является выбор единственного среди
возможных варианта решения задачи. Такой выбор, как правило, носи!
компромиссный характер, поскольку каждому варианту присущи опреде-
ленные достоинства и недостатки. Иными словами, проектировщик
сталкивается с необходимостью поиска условного оптимума. Принятие
решения — это многошаговый процесс, в котором каждый последующий
шаг сужает область поиска, ограничивает как число альтернатив, так я
число факторов, которые следует при этом учитывать.
Краткий анализ процесса проектирования позволяет выявить возмоЖ
пости формализации отдельных составляющих этого процесса. В наимейч
шей степени поддается формализации первый этап проектирования I
генерация вариантов решения задачи. В настоящее время предприняла
ются попытки решить эту проблему с помощью специальных эвристичес
ких методов поиска рациональных технических решений [I]. Однак^
36
www.vokb-la.spb.ru - Самолёт своими руками?!
возможности применения таких методой при проектировании сложных
технических объектов весьма ограничены. Вместе с тем» если решение
базируется на известных элементах, принципах, то задача поиска рацио-
иаяьного сочетания этих элементов (комбинаторная задача) может быть
формализована. Так. с помощью матрицы признаков компоновочных
схем можно формализовать процесс генерации вариантов схем самолета»
чго позволяет автомашзиропать этот процесс и на этой основе значитель-
но увеличшь область поиска рационального варианта (см. гл. 7). Попол-
нение же матрицы признаков компоновочных схем благодаря принципи-
ально новым техническим решениям на бззе изобретательства - процесс
пока неформализусмый.
Соотношение математического и физического моделирования опреде-
ляет в значительной степени возможности формализации этапа анализа
При этом, когда разрабатывается принципиально новый самолет» базирую-
щийся на новых технических концепциях, роль и объем физического
моделирования возрастают, а следовательно, уменьшается возможность
формализации и, как следствие, автоматизации этого эк ana.
Формализация процесса принятия решения базируется на аппарате
развивающейся технической дисциплины "Теория принятия решении”,
в основе которой лежат методы математического программирования.
Так, например, если цель проектирования удается количественно выразить
через определенный показатель-критерий, являющийся функцией проект-
ных параметров, го задачу принятия решения о конкретных значениях
этих параметров можно свести к задаче отыскания такого сочетания
параметров, при котором критерий достигает экстремально го значения
Таким образом, в общем процессе проектирования имеется значи-
тельная доля проектных процедур, которые могут быть формализованы,
а. следовательно, процесс их выполнения — автоматизирован.
3.2. РАЗВИТИЕ МЕТОДОВ ПРОЕКТИРОВАНИЯ.
ОСОБЕННОСТИ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
Автоматизация проектирования самолетов стимулировала развитие
теоретических основ и совершенствование методологии проектирования,
«од которой понимается совокупность принципов и методов, а также
математический аппарат, с помощью которого решаются проектно-кон-
структорские задачи.
За период развития авиации претерпели существенное изменение и
нри11цицы и мстоды? и ма1ематический аппарат проектирования. Так, до
50-х годов целью проектирования было создание самолета» способ-
но легагь как можно выше и дальше, несги большую целевую нагрузку,
1ее маневренного и т.д. Однако уже в 60-х годах стало ясно, что в
Усл эвиях чрезвычайного удорожания авиационных систем принцип
Делай то, что позволяет современный научно-технический уровень”
что *СН ^Ь1ТЬ замснсн На принцип ’’делай го, что нужно сделать” или ”то»
и можно себе позволить”. Это существенно изменило цели и задачи
кгирования» а следовательно, и его критерии.
37
Методы проектирования прошли эколюциоппый путь развития от
метода “проб и ошибок” к статистическому методу и далее к аналити-
ческому методу. на базе которого стал возможен переход к методу опти-
мального проектирования [27].
Практическое применение метода оптимально! о проектирования
в самолетостроении началось с решения частных задач оптимизации
отдельных агрегатов самолета и участков траектории его полета. По мере
накопления опыта решения таких сравнительно простых задач стали пред,
приниматься попытки решения более сложных задач многопарамстричев
кой оптимизации. Однако при практической реализации таких задач
проектировщики сталкивались с чието вычислительными трудностями.
Применение же последовательной опгимизации по отдельным параметрам
не давало ощутимых результатов. Лишь с появлением ЭВМ и численных
методов оптимальное проектирование становится на реальную основу. К
этому же периоду относится развитие общей теории технических систем
(системотехники). Названные выше предпосылки, а также дальнейшее
развитие прикладных авиационных наук, успехи в области вычислитель-
ной математики, совершенствование ЭВМ создали условия для станов-
ления методологии и методов автоматизированного проектирования.
Включая в себя как составную часть метод оптимального проектирования,
метод автоматизированного проектирования отличается от широко рас-
пространенных процедур оптимизации отдельных устройств и харак-
теристик обьсктов применением обобщенных критериев оптимальности,
использованием математических моделей, описывающих существенные
черты системы в целом, математическим аппаратом оптимизации и широ-
ким применением ЭВМ.
Методология автоматизм рованного проектирования органически
соединяет достижения в развитии общей теории проектирования систем с
возможностями современных технических средств проектирования. В
основе этой мегодологии лежат принципы системного подхода, методы
математического моделирования проектно-конструкторских задач и
математический аппарат теории оптимизации сложных систем. Практи* I
ческая реализация ее возможна лишь в рамках САПР.
Системный подход предполагает изучение системы как единого
объекта, выполняющего определенные функции в конкретных условиях-
В то же время при системном подходе возможно расчленение сложных
систем и процессов иа составляющие их относительно самостоятельные
подсистемы (подпроцессы) с целью облегчения их изучения Каждая из
этих подсистем также может быть расчленена на подсистемы более
низкого порядка. Подсистемами самого низкого порядка являются эле-
менты, внутренняя структура которых не представляет, интереса ДЛЯ
решения задач определенного уровня, однако свойства которых влияют
на свойства других подсистем и свойства системы [26]. Так, например»
при проектировании самолета элементами являются крыло, оперение н
т.д. При проектировании крыла тки ми элементами являются элементы
силового продольного и поперечного набора.
В свете сказанного обоснованное расчленение (декомпозиция) V
38
www.vokb-la.spb.ru - Самолёт своими руками?!
Mlil на подсистемы, а процесса проектирования на подпроцессы (этапы) и
определение существенных структурно-функциональных связей — одна
3 главных задач методологии автоматизированного проектирования.
При выборе объекта системного исследования необходимо руководство-
ваться следующими положениями
объект должен обладать достаточной масигтабностью, чтобы резуль-
таты его исследования давали значительный эффект по сравнению с рас-
смотрением системы по частям;
объект должен допускать описание (хотя бы приближенное) его
структуры и функционирования математическими методами;
степень детализации исследуемого объекта должна соответствовать
вычислительным возможностям современных ЭВМ
Отметим как положительную тенденцию укрупнение объектов систем-
ного исследования при проектировании самолетов. Она основывается на
достижениях прикладных авиационных наук, все более глубоко рас-
крывающих многосторонние связи между параметрами и характеристи-
ками авиационных систем, а также па постоянном совершенствовании
вычислительных комплексов.
формирование облика самолета с учетом параметров системы управ-
ления является наглядным примером положительного эффекта от исполь-
зования этой тенденции.
Поскольку автоматизированное проектирования основано на эконо-
мико-математическом моделировании па ЭВМ, следующей важной задачей
методологии автоматизированного проектирования является разработка
приемлемых матемашческих моделей исследуемых систем и процессов.
Построить модель системы — это значит дать ее количественное описа-
ние с помощью системы урапнештй. связывающих параметры (аргументы)
и характеристики (функции) системы. При этом следует иметь в виду,
что в иерархических системах понятия ’’параметр” и ’’характеристика”
имеют относительный характер, поскольку параметры верхнего уровня
при переходе к низшему уровню превращаются в характеристики. Нап-
ример. такие параметры, как 1рузонодъемносгь самолета, дальность его
полета, определяемые при исследовании перспективной транспортной
системы, на этапе формирования облика самолета -элемента этой систе-
МЪ1 - превращаются в характеристики
Построение модели начинается с определения перечня параметров,
к^горые могут оказать заметное влияние па результаты моделирования.
Ри этом число параметров на каждом этапе проектирования должно
Тиким, чтобы набор их конкретных значений давал достаточную
Формацию для принятия необходимых па рассматриваемом уровне
Р^работки проекта решений.
Следующий этап построения модели — установление отношений
Я ме>кду параметрами, а также между параметрами и характерис-
вы ЭТом из всего многообразия таких отношений необходимо
иг 1ИТь наиболее существенные. Определение ’’существенности” зависит
Ъ1И ,1РЛсктиРопа,(ИЯ» ™1|а решаемой задачи, а также от опыта проек-
Шика и наличия априорных сведений о проектируемом объекте.
39
Если на рассматриваемом этапе некоторые параметры нс удается связан
отношениями с характеристиками и другими параметрами, их исключаиЛ
из формализованного описания модели, оставляя для рассмотрения на
последующих этапах. Имея модель, с определенной степенью досто-
верности отображающую реальный процесс или объект, можно приступа^
к решению проектной задачи С этой целью необходимо разработан
метод (алгоритм) решения, специфичный для каждой конкретной поста
новки задачи проектирования. При этом следует иметь в виду, что проек-
тирование всегда направлено на поиск нам вы годнейших (оптимальных)
параметров системы При проекшровании необходимо руководство,
ваться следующими основными положениями об оптимальности систем.
1. В общем случае система, состоящая из оптимальных элементов
(подсистем), не обязательно будет оптимальной. Опа должна оптимизи-
роваться в целом, как единый объект с заданным целевым назначением.
Это, однако, пе означает, что оптимизация по частям вообще нс имеет
смысла.
2. Система должна оптимизироваться по количественно определен-
ному и единственному критерию, отражающему в матема1ический
форме цель проектирования. Отсутетвис такого критерия свидетель-
ствует о недоопределенное ги задачи
3. Поскольку система, как правило, оптимизируется п условиях
количественно определенных ограничений на оптимизируемые параметры,
то ее оптимальность всегда относительна, условна.
Определение взаимосвязанною комплекса критериев, позволяющих
па каждом иерархическом уровне расчленения системы объективно
оценить результаты проектирования, находить для каждого элемента
подсистемы такие параметры, которые бы обеспечивали высокую эффек-
тивность системы в целом, является также важной задачей методологии
автомашзировашюго проектирования Выбранный критерий и его связи
с параметрами объекта являются составной частью модели.
Последующие этаны решения проектной задачи включают в себя раз
работку про1ра.ммы для ЭВМ, се отладку; проведение тестовых расчетов,
позволяющих проверить работоспособность программы; вы г олнение
программы; анализ результатов расчета и подготовку материалов ЛЯ*
принятия решения. |
Рассмотрим перечисленные выше задачи методологии автоматизиро-
ванного проектирования применительно к самолету.
3.3. ПРОБЛЕМЫ ДЕКОМПОЗИЦИИ CAMOJit ГЛ
И ПРОЦЕССА ЕГО ПРОЕКТИРОВАНИЯ
Самолет, как объект проектирования, представляет собой сложнЯ
техническую систему, обладающую развитой иерархической структуру
В соответствии с системным подходом при решении задач определен^ |
иерархического уровня нет необходимости строить всю иерар-
системы. Обычно бывает достаточно рассмотреть сисгемы и подсист^
40
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 3.2. Графическая модель иерархической структуры самолета (фрагмент)
на два порядка выше и ниже рассматриваемого. Тогда при иросктирова-
• нии самолета необходимо рассматривать более высокие иерархические
уровгш, например транспортрую систему и ее подсистему — авиационный
комплекс. В свою очередь, если рассматривать самолет как исходную
подсистему, то в нем можно выделить такие подсистемы, как планер, си-
ловая установка, снаряжение, оборудование и тл Каждая из этих подсис-
тем при проектировании также расчленяется на ряд подсистем, элементов,
агрегатов и узлов. Графически иерархическая структура самолета с указа-
нием возможных иерерхических уровней представлена на рис. 3.2 в виде
ориентированного графа.
Иерархические уровни связаны между собой двумя типами отноше-
ний. Первый тип характеризует структуру системы, упорядочивая состав
ес элементов, блоков, агрегатов и связь частей между собой. На графе
Ли опюшения представлены сплошными линиями.
Вместе с тем всякая структура создается для выполнения онределен-
Нь1х полезных функций. Так, например, определенная конструкция крыла
выполняет такие функции, как передача нагрузок, создание подъемной
^лы» размещение топлива и т.д. Таким образом, элементы подсистемы и
Се °гделы1ыс иерархические уровни связаны между собой функциональ-
41
ными отношениями. которые на рис. 3.2 изображены пунктирными линии,
ми. Каждому иерархическому уровню соответствует спой перечень зада,
решение которых необходимо для принятия соответствующих этой
уровню проектных решений. Так. на иерархических уровнях 1 и 2 необ.
ходимо Припять решения о необходимых типах и желательных техники*
экономических характеристиках самолетов рассматриваемой транспорт,
ной системы; числе (парке) каждого типа самолетов и их распределении
по авиалиниям; характеристиках аэродромов базирования и их оборудо-
вания, способах обслуживания самолетов и составе экипажей и т.д. Реше-
ние этих задач позноляе! ответить на важнейший вопрос; ’’что проскти-
ровать?*\ т.е. в каких условиях будет эксплуатироваться вновь созда-
ваемый самолет и какими технико-экономическими характеристиками
он должен обладать, чтобы его разработка оправдывала затрачиваемые на
это средства. Ответы на эти вопросы оформляют в виде документов,
называемых техническим заданием (ТЗ) на новые самолеты. Разработка
ТЗ завершает один из этапов процесса проектирования, который но
отношению к последующим является внешним.
На следующих трех уровнях определяют форму, размеры самолета,
структуру и состав основных его а!регатов и систем, удовлетворяющих
заданным требованиям. Эти задачи решают в конструкторском бюро и
оформляют в виде техютческого предложения и эскизного проекта.
Последующие иерархические уровни включают в себя проектно-
конструкторские задачи по разработке узлов и деталей всех ai регатов и
систем самолета. Результаты этой работы, соответствующей этапу рабо-
чего проектирования, оформляют в виде технической документации для
производства и эксплуатации самолета.
Решение перечисленных выше задач позволяет принимать проектные
решения, обеспечивая по мере перехода на более низкие иерархические
уровни все большую степень детализации проектирумого объекта. При
сравнении иерархических уровней и этапов проектирования видно, что
усложнение самолета как объекта проектирования еще до формирова-
ния концепций системного подхода привело к расчленению самолета на
определенные элементы, а процесса его проектирования — на отдельные
этапы.
Итак, важным с точки зрения формализации аспектом нроскгирова
ния самолета является его иерархическая структура и вытекающая из нее
многоэтапностъ проектирования.
3.4. ПРОБЛЕМЫ МОДЕЛИРОВАНИЯ.
ТИПЫ ПРОЕКТНЫХ МОДЕЛЕЙ
Понятие формализации проектирования -включает в себя описание
объекта и процесса его проектирования с помощью графического языка,
чисел, букв и других символов. Естественно, что каждому иерархичес-
кому уровню соответствуют своя степень детализации описания и свой
набор символов, знаков, с помощью которого осуществляется эго они*
42
www.vokb-la.spb.ru - Самолёт своими руками?!
Структуру самолета, его форму, размеры можно описать с
Ча,£ие‘ „ конечного числа таких символов, которые называются парамет-
поМ свойства же самолета (или любой его подсистемы) можно описать
^LnoM°inb,° ’ФУГОГО на^°Ра символов, называемого характеристиками.
К пактсристики являются функцией параметров, а в общем случае и дру-
* IX характеристик. Например, коэффициент лобового сопротивления
крыла является функцией его геометрических параметров, однако
д;1Я одни* и тех же параметров крыла он будет изменяться с ростом
такой характеристики самолета, как скорость полета. Мы уже отмечали,
что в иерархических системах понятия ’’параметр” и ’’характеристика”
относительны.
Расчленение системы на иерархические уровни облегчает решение
отдельной задачи, по в то же время требует учета всех существенных
связей между расчлененными уровнями. Эти связи делятся на прямые и
обратные. Рассмотрим характер связей для этапов разработки ТЗ, раз-
работки технического предложения и эскизного проекта (рис. 3.3)
Прямые связи (они обозначены сплошными линиями) являются выход-
ной информацией (результатом проектирования) для верхнего уровня
и входной информацией - для нижнего уровня. Обратные связи (пунк-
тирные линии) - наоборот. Для верхнего уровня прямые связи пред-
ставляют собой искомые переменные (оптимизируемые параметры), для
нижнего дисциплинирующие условия. Они являются основой для
формулирования критериев и ограничений при решении задачи данного
уровня. Так, прямые связи между уровнями разработки ТЗ и техничес-
кою предложения зто переменные, характеризующие потребные летпо-
тсхничсские и другие характеристики, регламентируемые ТЗ. Прямые
связи между уровнем разработки технического предложения и уровнем
разработки эскизного проекта отражают тс решения по проекту, которые
следует принять, прежде чем приступить к эскизному проекту'. Они вклю-
чают в себя числовое, графическое и словесное описание проекта, подт-
верждающее возможность или степень выполнения технического зада-
ния. Это описание, например для пассажирского
самолета, должно включать обший ввд самолета
в трех проекциях, компоновку пассажирской
кабины, размеры, площади и объемы багажно-
грузовых помещений; массовые и центровочные
х*ракзеристики, включая полную весовую свод-
ку самолета, диапазон эксплуатационных центро-
аэродинамические характеристики и харак-
теристики устойчивости и управляемости, резуль-
таты предварительных расчетов на прочность,
аэроуцруГОсть и акустическую выносливость;
летно-технические характеристики; общие
Пгхы* Пгямыс и обРа,|,ые связи между этапами
*МЪеК1ироьанИн (фрагмент)
43
сведения о конструкции, системах и игре! агах самолета, силовой ycrql
новкс и оборудовании самолета и др.
Обратные связи .'щя уровня разработки ТЗ отражают прогнозируем Л
технико-экономические характеристики перспективных самолетов, вырд,
жасмые через обобщенные показатели, например массу пустого снарЦ
женного самолета (весовое совершенство), полетное аэродинамическое
качество (аэродинамическое совершенство), удельный расход топлгща
(совершенство силовой установки). Для уровня разработки техничес-
кого предложения — аэродинамические характеристики различных схем
самолета, характеристики двигателей, оборудования и систем, физико-
механические свойства конструкционных материалов, полуфабри-
катов и др.
Поскольку проектирование, как правило, всдсвся сверху вниз, то
естественно, что информация, соответсзвующая обратным связям, hociI
прогнозный характер. Проектирование же на каждом уровне направлено
на подтверждение заявленных на более высоком уровне характеристик.
Прогнозный характер информации требует наличия итерационных
циклов между различными уровнями. Это определяет второй важный
с точки зрения формализации аспект процесса проектирования
итерационный характер. Такой характер проектирования сопряжен с
опасностью принятия не вполне обоснованных и даже ошибочных реше-
ний в случае шнорирования некоторых структурных или функциональ-
ных связей. Это шнорирование может быть следствием как субъектив-
ных причин, koi да, например, проектировщик считает данную связь
несущественной, так и объективных причин, связанных с невозмож-
ностью учета тех или иных факторов из-за отсутствия достоверной инфор-
мации на рассматриваемом этапе проектирования. Так, в процессе форми-
рования облика самолета на этапе разработки технических предложений
приходится принимать решения о форме, размерах и взаимном располо-
жении основных элементов планера самолета и его силовой установки
исходя из заданных летно-техничсских характеристик. Эти характерис-
тики являются функцией весовых характеристик, характеристик сило-
вой установки и аэродинамических характеристик, определяемых на
рассматриваемом лапе с довольно невысокой точностью. Например,
масса полезной нагрузки самолета определяется как разность взлетной
массы и массы пусгого снаряженного самолета. Вследствие тою, чтя
указанные массы определены с невысокой точностью, возникает опас-
ность серьезных просчетов в оценке возможностей проектируемого
Самолета. Эти просчеты обычно выясняются на этанах рабочего нроекти*
рования или даже испытаний, когда внесение изменений в проект сопря-
жено со значительными трудностями.
К чему могут привести такие ошибки, видно из следующих пр»1
меров (19]. Для сверхзвукового самолета с расчетной взлетной массой
272 т_при среднестатистическом значении оросительной массы конструк-
ции т к = 0,25 ее абсолютная величина составит 68 т. Возможная ошибка
в определении этой величины может достигать 30 %, т.е. приблизительно
20 т, что соответствует расчетному значению всей платной нагрузкИ-
44
www.vokb-la.spb.ru - Самолёт своими руками?!
3 4- 1'РЯФ|<КН расчетного и
физического июьпка thi н
^7/^Л/77
Даже если ошибка составит
всего 3 %, ‘по считается
вполне допустимым на началь-
ных этапах проектирования,
Т0 ЭТО означает уменьшение
pnaTHoff нагрузки на 10
Понятно, что такое уменыпе-
НИС приведет к существенно-
му ухудшению экономичес-
ких показателей самолета. Опыт разработки в США сверхзвукового
пассажирского самолета Боинг -2707 является убедительным подтверж-
дением приведенного выше примера.
Значительные ошибки могут быть допушепы при определении харак-
теристик силовой установки, даже при использовании готового двигателя,
□го объясняется тем, чго потери, обусловленные особенностями
конструкции воздухозаборников и сопл, а также отбором воздуха и
мощности от двигателей для нужд различных систем самолета, на рас-
сматриваемом этане обычно определяются весьма приближенно. А
поскольку летные характеристики в значительной степени являются
функциями разности тяги и лобового сопротивления, то становится
очевидной цепа ошибок в определении потребной (Рп) и располагаемой
(Рр) тя1 (рис. 3.4). Нс менее сложной является проблема достаточно
точного определения на ранних стадиях разработки проекта самолет его
аэродинамических характеристик. При этом цена ошибок здесь также
достаючно велика. Расчеты показываю!, что, например, для пассажир-
скою самолета с расчетной взлетной массой rnQ = 180 т ошибка в опреде-
лении cyinax всего на 10 г/ при сохранении платной на1 рузки и дальности
полета ведет к увеличению потребной длины взлетно-посадочной полосы
(ВПП) па 10 %. При сохранении же длины ВПП без изменений уменьша-
ется на 25 % дальность полета, что, разумеется, существенно изменяет
возможности самолета.
Субъективные причины ошибок можно исключить путем повышения
квалификации проектировщика. Устранению объективных причин спо-
собствуют следующие две тенденции, наметившиеся в настоящее время
в Разработке новых ЛА. Первая из них связана с расширением роли и
объема научно-исследовательских и экспериментальных исследований,
НапРавленных на создание научно-технического задела по перспективным
^правлениям авиастроения. Такой задел позволяет отработать и проверить
Г|>тем натурного и полунагурного моделирования новые технические
Чт^ПСиии' Щ^’шолатаемые к использованию на перспективных самолетах,
сУШесгвс11ио снижает риск из-за принятия необоснованных решений.
и ^|Г)рая, дополняющая первую, тенденция связана с появлением
П ИСПО11,званием ЭВМ, а гакже развитием численных мегодов анализа и
"ягия решений. Она направлена па применение в проектировании
45
численных моделей, адекватно отображающих исследуемые объекты ил^
процессы. К таким моделям, например» относятся конечноэлемскпД
модели, используемые при расчете аэродинамических характерисгД
самолета и анализе напряженно-деформированного состояния его кон.
струкции.
Итерационный характер проектирования ведет к увеличению сроков
разработки проекта и его стоимости. В этой связи сокращение и герани-
онных циклов является одной из задач методологии проектирования
В методоло! ии автоматизированного проектирования предусмотрен^
возможность решения этой задачи. Она заключается в использовании npj
проектировании самолетов более сложных математических моделей
отличающихся более высокой степенью адекватности. Можно предполо.
жить, что развитие методологии автоматизированного проектирования
приведет к изменению технологии разработки'проекта, в частности к
объединению некоторых этапов проектирования.
Усложнение моделей связано с увеличением затрат машинного
времени, однако оно не всегда приводит к повышению качества прини-
маемых проектных решений, т.е. дополнительные затраты на проект
ропапис нс окупаются качеством проектных разработок. Поэтому необ-
ходим разумный компромисс между точностью, временем и ст имость!
проведения расчета.
В соответствии с принципами системного подхода каждому этапу
проектирования свойственны свои модели, отличающиеся степенью дета-
лизации, т.е. числом учитываемых в модели факторов и связей между
ними. Иными словами, модели, используемые при проектировании само-
лета. иерархи41 гы. С другой стороны, нельзя говорить о некоторой универ-
сальной модели, пригодной для решения всех типов задач, связанных с
разработкой проекта самолета. На каждом иерархическом уровне модель
представляет собой набор субмоделей, отражающий те или иные стороны
структуры и функционирования самолета и его подсистем. Каждая суб-
модель представляет собой блок, включающий в себя группы связен
(уравнений), описывающих, например, геометрию самолета, его аэро-
динамические и весовые характеристики, стоимостные и эффект»-
костные показатели. Такой подход к построению модели имеет ряд преи-
муществ. В частности, появляется возможность разработки и совершен-
ствования субмодели специалистами, компетентными в определенной
области знаний. Достигается определенная гибкость при построении
расчетных моделей при различных постановках задач проектирования, э
также некоторые преимущества при программной реализации зтй1
моделей.
Состав и струк1ура субмоделей, используемых на различных эталя!
проектирования, различны. Так, например, на этанах впекшего проекти-
рования транспортного самолета исследуются экопомико-математичес-
кие модели воздушной транспортной системы. Они включают в себя
ряд субмоделей Одни из них это субмодели сущее шующе го и при,,|£|
зируемого 1 рузооборота. учитывающие распределение грузов по отладь
ным авиалиниям, номенклатуру грузов, сезонные изменения объсьв
46
www.vokb-la.spb.ru - Самолёт своими руками?!
ток и Другие факторы. Другие - это субмодели существующей
1,е гективной сети аэродромов которые учитывают технические
И Герметики аэродромов (число, размеры и параметры ВПП), воз-
43 Юности служб управления воздушным движением и ремонтно-экс-
^Уаташ1онной базы и т.д.
Самолет, как элемент транспортной системы, представлен своей
'бмоделью- Она отражает связи технико-экономических характеристик
сэмолета с его обобщенными параметрами» характеризующими уровень
технического совершенства самолета. Так. функционирование самолета
на авиалинии моделируется зависимостями величины коммерческой
нагрузки и рейсовой скорости от дальности полета. Экономические
ха герметики самолета моделируются зависимостью себестоимости
тонно-километра от дальности полета. Топливная эффективность —
расходом топлива па пассажиро-киломегр (тонно-километр) в зависи-
мости о г дальности.
Чтобы принять оговоренные выше решения но проекту на этапе
разработки технического предложения нужна модель самолета, отли-
чающаяся гораздо большей степенью детализации и полнотой учета
факторов. Ее основное назначение — получение падежной информации о
возможности реализации тех или иных проектно-конструкторских
решений для достижения поставленных целей проектирования, а также
оценка сравнительной эффективности этих решений. В основе модели
самолета лежат различные методы весового и аэродинамического рас-
чета, прочностных расчсюв и расчетов устойчивости и управляемости,
определения в ысотно-скоростных и дроссельных характеристик двига-
теля и др. Эти методы, отличающиеся для различных этанов разработки _
проекта, в соответствии с блочным принципом моделирования при раз-
работке модели объединяются в отдельные блоки. Они представляют
собой субмодели модели самолета. Опыт проектирования позволяс!
установить примерный состав модели самолета для ранних этапов раз-
работки проекта. Назовем основные субмодели. некоторые из них затем
более детально будут рассмотрены в последующих главах.
Одной из важнейших является геометрическая модель. Важность
се определяется и тем, что с ее помощью формируется зримый образ
проектируемого обьскта, и тем, что для самолета внешние формы и
размеры во многом определяют его летные свойства, и тем» что эта
модель является мостиком между проектом и его конкретной реали-
зацией. Эта модель описывает отношения между параметрами самолета и
^рактерисгиками его формы и размеров. С ее помощью определяют
Л Лы. площади, объемы, поперечные сечения самолета и его агрегатов,
но ,Ь1С JT°” м°неяи используют для весовых, аэродинамических и проч-
™Ь,Х г>асчств1 компоновки самолета, графического отображения
Ультатов проектирования, а также разработки гехноло! ичсской
^1Ки и иР<>грамм для станков с числовым программным управлением,
чьих СС°вая м°дель обеспечивает расчет массы самолета и ее составляю-
оп R Со°ГВетсгпии с весовой сводкой, степень детализации которой
ДСлястся этапом разрабожи проекта. В се основу положены связи
47
между геометрией самолета* действующими па него нагрузками, особеД
постами конструктивно-силовой схемы, величиной целевой naipyaxil,
составом и размещением оборудования и снаряжения* с одной стороны J
массой самолета и его составляющих, с друт ой.
Аэродинамическая модель служит для расчета аэродинамических
характеристик самолета в полетной и взлетно-посадочной конфигурациях
В основе’ ее - связи между параметрами формы и размеров самолета
а также режимом полета и характером действующих на самолет сил и
моментов (их величиной и законами изменения).
Модель силовой установки делает возможным расчет высотно-ско.
ростных и расходных характеристик двигателей. Она основана на связях
между' геометрическими и газодинамическими параметрами двигателей
разного типа и их тягой и расходим топлива на различных режимах
полета.
Весовая, аэродинамическая модели и модель силовой уставов»
обеспечивают расчет силовых факторов* действующих на самолет, Это
позволяет решать важные при проектировании самолета задачи по опре-
делению общих показателей маневренное! и самолета, траекторий полета,
взлетно-посадочных характеристик, а также характеристик его устой-
чивости и управляемости. Эти задачи решаются с помощью динамически й
модели. Она описывает сложный комплекс связей между названным]!
выше характеристиками и силовыми факторами.
При формировании облика самолета важную роль играет модель
компоновки и центровки^ обеспечивающая взаимную прострапстпеннчю
увязку основных компонентов самолета с учетом удовлетворения проти-
воречивых требований аэродинамики и прочности, устойчивости и уирав-
ляемосш, эксплуатационной и производственной технологичности и др-
Сислует отмстить, ’по задачи компоновки, особенно внутренней, пока
формализованы в малой степени и поэтому их решение требует акяв-
ного участия проектировщика.
Для оценки вариантов проектно-конструкторских решений приме-
няются различные показатели технико-экономического совершенству
Для их расчета используются эффектионостные модели. Они позволяют!
ч а дул и
Рис. Л-5. Структурная схема модели ’’самолет”
www.vokb-la.spb.ru - Самолёт своими руками?!
ть показатели эффективпости (весовой, топливной, зкономи-
РаСС . Самолста (или его отдельных подсистем) в зависимости от его
ческ™ таК экономические модели транспортного самолета отражают
[тяраме IР'-
11 г между [рзнспортнои производительностью самолета, определяе-
е,° техяическ01 ° совершенства, и затратами на проекти-
МР>\ние. изготовление и эксплуатацию самолета.
укрупненная структурная схема модели "самолет” представлена на
L5" Показанные на ней блоки — это описанные выше субмодели.
Каждый из блоков. в свою очередь, состоит из ряда расчетных моду-
лей Расчленение блока па модули определяется перечнем задач рас-
сматриваемого этапа. В зависимости от стадии разработки проекта и
в(па проектируемо го самолета состав и структура модели может
изменяться.
3.5. РАЗРАБОТКА А-И ОРИТМА РЕШЕНИЯ З АДАЧИ
Следующая стадия решения задачи — ее алгоритмизация — пред-
ставляет собой разложение вычислительного процесса на составные
части, определение последовательности их выполнения, составление
описания содержания каждой из выделенной частей в определенной форме
и проверку соответствия алгоритма BwGpaHHOMv методу. Назначение
алгоритмизации iочное и детальное описание процесса обработки исход-
ных данных для получения требуемого результата в соответствии с выб-
ранным методом решения задачи.
Многообразие Задач, способов их решении нс позволяют формализо-
вать процесс разработки алгоритмов. Однако по способу орканизации
управ тения порядком выполнения действий все алгоритмы можно раз-
делить на три группы: линейные, разветвляющиеся и циклические [30].
В линейных алгоритмах получение результата достигается путем однок-
ратного выполнения одной и той же последовательности дейывий при
любых значениях исходных данных. В разветвляющих я алгоритмах в
зависимости от значений исходных данных или промежуточных резуль-
татов предусма!ривас гея выбор одной из нескольких возможных пос-
ледовательное! ей действий (ветвей алгоритма). Такие алгоритмы в
отличие от линейных содержат но крайней мере по одному логическому
ч°ку. в циклических алгоритмах, наиболее сложных по структуре.
Результат получают путем многократного повторения некоторой после-
довательности действий. Различают циклические алгоритмы с заданным
юм пов горений и итерационные, в которых выход из цикла зависит
ВЫ11Олнения <)ПРсДеленн°го условия, связанного с проверкой значения
нно изменяющейся в цикле величины.
ним аИ^ОГ|ес Распространенной при решении задач общего проектирова-
само.чета является циклическая структура алгоритма.
Рис ?Щая схема алгоритма решения проектных задач представлена на
Терйгг 6 ГПе неК|ОР искомых параметров обозначен X. вектор харак-
а I ’ Ш - целевая функция. ¥0 — параметры начального
4$3 - и 49
Рис. 3.6. Общая схема алгоритма решения проектных задач
приближения. Изменяя входы в модель, проектировщик, который!
выполняет функции обратной связи в модели, добивается лучение
требуемых характеристик объекта проектирования. Если при этом допои-
нительно ставшем задача достижения экстремума целевой функции Л (JQ I
то решается оптимизационная задача. В рассма! риваемом случае опти-
мальный проект ищут путем перебора параметров но логике, oi ре л ел не-1
мой проектировщиком. В литературе методы решений проектных залам
по описанной схеме называются методами прямого перебора, сканиро-
вания, "слепого” поиска и т.д.
Другая схема реализации процесса, изображенного на рис. 3.6, харак-
теризуется включением в обратную связь модели специальной формали-
зованной стратегии управления, осуществляющей поиск ”т учшего’Й
проекта. Лтический процесс формирования последовательности улуч-
шаемых проектов осуществляется автоматически на основе информа-
ции о результатах предыдущих итерации. Это, однако, не означает, тго
проектировщик нс принимает участия в интерпретации результатов рас-
четов. Такой подход реализуется с помощью упорядоченных методов
поиска экстремума. Он положен н основу автоматизированного проекти-
рования.
Названные подходы к решению задач оптимального проектирования
имеют много общего Оба они имею! общую цель - поиск ’’лучшею*
проекта, оба используют интуицию проектировщика для выбора исх<Ш
кого варианта. В основе обоих подходов лежит итерационный продев
улучшения исходною варианта. Каждому из этих подходов присуще
определенные достоинства и недостатки. Так. методы прямого перебора
(параметрического анализа) обладают следующими достоинствами: в1
требуют предварительного задания целевой функции и ограниченна
чувствительность проекта к изменению переменных очевидна из резуль-
тагов анализа. К тому же, решая задачу, проектировщик все время на*0'
дится в центре событий, кошролирует вычислительный процесс Одна1?*
такой подход малоэффективен при исследовании многомерных областей
Вследствие естественных ограничений па число варьируемых параметра
неаддитивности параметров он не обеспечивает получение деиствитсдьН
оптимальных решений. Подход требует выбора хорошей номиналы®
точки (начального приближения проекчных параметров). 1
Достоинством упорядоченных методов оптимизации является то-
они потенциально более эффективны в отыскании оптимума, особе® I
50 ИН
www.vokb-la.spb.ru - Самолёт своими руками?!
тыиой размерности задачи. Они применимы для решения широкого
ЛРИ задач, включая такие, в которых человеческая интуиция недос-
К разработана. Более того, они минимизируют человеческие пре-
cTaJ . .нин- Основной недостаюк этих методов заключается в том. что
уют строг ого количественного определения области исследований
Эпзт процесс принижает роль опыта и интуиции проектировщика а также
часто связан с искажениями реальной проблсмы.
Следует подчеркнуть, что в основе обоих подходов лежит количест-
венная абстракция реальной действительности (математическая модель),
которая лишь приближенно отображает эту действительность. Это обсто-
ятельство требует зачастую корректировки модели в процессе проекти-
рования например, на основе физического моделирования. К тому' же
при втором подходе всегда есть опасность обыскать точку локального
оптимума, поэтому всегда требуется экспертиза оптимального решения
опытным специалистом-проектировщиком.
ГЛАВА 4 МЕТОДЫ ОПТИМИЗАЦИИ
ПРОЕКТНЫХ РЕШЕНИЙ
4.1. РОЛЬ оптимиз \ЦИИ В ТЕХНИЧЕСКОМ проектировании.
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ
*
Ошимизация - это процесс нахождения экстремума количественной
характеристики проектируемого объекта. Если эта харакгерис1ика выра-
жает полезное, желаемое свойство объекта, то ищется максимальное зна-
чение характеристики. В противном случае сс минимальное значение.
Термин "оптимум 'ввел в XVIII веке Г- Лейбниц, взяв за основу латин-
ское слово optimus, что означает '’наилучший". Изучением и количествен-
ным определением минимумов и максимумов функций (функциона-
лов) занимается специальный раздел магемашки — теория оптимиза-
ции, включающий в себя методы оптимизации различных классов функ-
ций.
Прежде чем перейти к обсуждению этих методов, рассмотрим их
Р°1ь в техническом проектировании. Когда мы говорим "оптимальное
проектное решение" или "оптимальный проект", мы понимаем под
11Им Такое решение или проект, которые являются наилучшими из раци-
оналЫ1ых допустимых решений или проектов Термин "допустимое
проектное решение" означает, что это решение удовлетворяет всем тре-
аниям, предъявляемым к нриекшрусмому объекту. Эти требования
зад^101 °^Ласгь воз*к>жпых решении, играя роль ограничений при решении
ч’ 3^ах°Жцение хотя бы одного допустимого решения является важ-
Ше [и^и 3аДачей проектирования. В общем случае число допустимых ре-
МОст ” °coficHII° если ограничения нс слишком жестки, может быть
ny^Ul.°1ШО б°ЛЬ1|!И^- В этом случае возникает проблема выбора наи-
сг° (оптимального) решения. Сделать это можно лишь при условии,
51
если допустимое проектное решение поддается количественной оценке
позволяющей осуществлять сравнение вариантов по показателям эффек’
тивностн или полезности.
РассмО1рим простейший пример, позволяющий получить наглядн^]
представление о проблеме опгимизагщи технического решения. Пред,
положим, что проектировщик стоит перец проблемой выбора параметров
крыла, максимизирующих аэродинамическое качество. Иными словами
ему необходимо найти максимум функции F (хь х2), где Л ] и х2
проектные переменные, например удлинение крыла и удельная нагрузи
па крыло, a F — аэродинамическое качество. Графическая интерпретация
этой задачи показана на рис. 4 1, где проектные переменные представлены
в нормализованном (безразмерном) виде. Очевидно, что максиму^
критерия достигается в точке А, являющейся вершиной холма, при
значениях параметров х1орх и *2ор1- Точка А соответствует строгому
математическому оптимуму. Однако результат может получиться иным,
если математический оптимум находится за пределами допустимой
области изменения проектных параметров, определяемой ограничениями
на величины этих параметров. Так, например, максимально допустимое
значение удлинения крыла может быть о«раничено условиями хранения
самолета в ограниченных помещениях, а удельной нагрузки на крыло -
скоростью захода на посадку. На рисунке ограничения показаны штрихов-
кой. При наличии ограни-
чений оптимальное значе-
ние критерия д< стигается
в точке Л*. в рассматривае-
мом примере лежащей на
границе допустимой об-
ласти. Точка Л' определяет
оптимальное техническое
решение, соответствую-
щее значениям парамет-
Р?Е *l'upl “ *1орГ Т°ЧКУ
А называют условным
оптимумом функции F-
Именно с отысканием
таких оптимумов чаше
всего приходится сталки-
ваться проектировщик)'-
Однако это нс единствен-!
ная сложность при реше-
нии практических заДач
оптимального проектнрО’
ванИя. Прежде всего
вая функция может иМегЬ
Рис. 4.1. Графическая инТС£
ирстэцмя поиска опти^5,льнО1
го решения
www.vokb-la.spb.ru - Самолёт своими руками?!
ко экстремальных значений. Это обстоятельство приводит к
ЯССК ти нахождения локального оптимума (точка В на рис. 4.1) вместо
^бального (точка Л) - Топография целевой функции часто характсри-
гГК целым рядом особенностей, затрудняющих нахождение экстрему-
\ к таким особенностям относятся "гребни”, ’’овраги”, седловые
ТОЧКИ И Т-Д-
Таким образом, можно констатировать,, что оптимизация проектных
. пений является важнейшим элементом процесса проектирования
gK печение этого элемент в процесс превращает его в оптимальное проек-
тирование. Как научная дисциплина оптимальное проектирование пред-
ставляет собой отрасль прикладной науки, занимающейся отысканием
оптимальных проектных решений. Оптимальное проектирование опи-
ется на различные методы теории оптимизации, связанные с анализом
мугвстсгвуюшего класса функции. Рассмотрим формальную постановку
задачи оптимального проектирования
4.2. ПОСТАНОВКА ЗАДАЧИ
ОПТИМАЛЬНОГО ПРОЕКТИРОВАНИЯ
При проектировании самолетов значительное число задач относится
к оптимизационному классу. При этом можно выделить два основных
их типа.
Первый тип представляет собой случаи, п которых цель процесса
оптимизации может быть выражена как функция F определенного числа
переменных (проектных параметров)
F=/(xr-)u=i> (4.1)
В этом случае Г называется целевой функцией, а ее аргументы —
параметрами или управлениями.
Можно предположить, что п параметров принадлежат «-мерному
евклидову пространству, в котором расстояние р между двумя точками
-fri, ... . хя) и X" - (.г".х**) определяется следующим уравнением:
Р « Г') = I S (д’ _ х’)2 ]’ '2 (4.2)
i = I
Переменные xf- могут быть интерпретированы как компоненты
лектора А в «-мерной поверхности управлевшя. В этом смысле вектор X
Ba^hlBai0T втором управления. С изменением вектора X меняется целе-
м"юФУ11К1ШЯ’ оСРазУя поверхность в (л + I)-мерном свклидиане, называе-
* Целевой поверхностью или поверхностью отклика.
Их . а иРактикс в большинстве случаев на отдельные параметры или (и)
комбинацию априори накладывается ряд Ограничений
^вий^343 Оптими:,а™и теперь может быть определена как выбор зна-
uUl ' V/ yifCTOM ограничений), минимизирующих (или максимизирую-
Вто ЯеПУЮ Фу||КЦИ10’
°бык| 1 °” ™п СЕязан с процессами, которые описываются системой
енных дифференциальных уравнений
53
- fi (Xj, 14.), j - 1, n. j- 1, r,
г *
(4J)
где л,- — так называемые переменные состояния или фазовые псрсменщ(1е.
iij переменные управления или параметры управления, влияющий на xj
процесса. 1
Цель оптимизации обычно выражается как требование найти измс*.
ние управления по времени t « (г), которое обеспечивает экстрему^
функционала, выражающего некоторую целевую функцию А, связанную
с переходом объекта от заданного начального фазового состояние
Л'г Go) =-vro к предписанному конечному фазовому состояниюf/j)l
~xi i
I
F~ J fo Ui, - .A’„;u...,Hr)df-OpT. (44|
Большинство задач оптимального проектирования самолета и его
частей относится к первому типу. Например, задачи минимизации взлет-
ной массы самолета или себестоимости тонно-километра полезной ны
рузки путем выбора оптимальных проекшровочных параметров w. X
е, т*. хи г.д. (см- гл. 5).
Примером задач второго тина является нахождение оптимальном
траектории (например, при взлете и посадке) самолета, обеспечивающем
минимальное время набора высоты (или снижения) или м нимальпый
расход топлива.
На практике па ранних этапах проектирования большинство задач
второго типа удастся свести к задачам первою типа, поэтому в дальней-
шем мы будем рассматривать в основном лишь их.
Для постановки оптимизационной задачи необходимо:
I) определить цель оптимизации (выбрать целевую функцию Л;
2) выбрать параметры, наиболее существенно влияющие на пелсву*
функцию (ху. i = 1, л);
3) выразить целевую функцию через параметры оптимизащш Ч
~= f (ху) в такой математической форме, которая, с одной стороны, итр-*
жала бы наиболее близко истинное влияние каждого параметра, а с ДрУг0Ь
обеспечивала бы наибольшую простоту предстоящего процесса оптнмЧ
зации; Ж
4) математически описать все ограничения па отдельные параметры*
(или) их комбинацию.
Такие ограничения могут быть выражены в вице равенств
= 7 = Lw-
либо в виде неравенств, когда указываю ich допустимые верхние и нм#11**
пределы изменения парэме!ра: г
xfu<xf- Схг-В,
Кроме этого, ограничения гина неравенств Moryi быть также нзложе,,ь1
комбинацию (функцию) параметров (л;-) Ж
c^i:k(Xj)<c^ к=Гр.
54
www.vokb-la.spb.ru - Самолёт своими руками?!
>4JlC leHTir'* вь,ше ограничения определяют допустимую область
проектных параметров Эта обмастъ в сокращенной записи
[ЗМСНеляется следующим образом
- !>} (4.8)
И
опредс
Адо п
Здесь ft (А') - ограничения.
Любой вектор А, принадлежащий допустимой области (X е Адоп),
'пеляег допустимый вариант проекта, а совокупность таких векторов
°fi азуст допустимую область изменения проектных параметров.
Предположим, что в допустимой области изменения проектных пара-
метров (области существования проекта) может существовать проект,
пэраме1ры которого определяют экстремум целевой функции Пред-
положим, что мы ищем минимум целевой функции. Тогда задача опти-
мальною проектирования формулируется следующим образом: найти
вектор проектных параметров X* - (.vlt л*2, ... , хя), соответствующий
минимуму величины критерия оптимальности при выполнении системы
неравенств (4.8)- Краткая запись этой задачи
min / (.¥):
А ^Адоп.
WС - Г'и J - (4 9)
Эта запись означает, что подмножество проектных параметров Л,1ОП
n-мерного евклидова пространства Еп состоит из всех тех векторов
А = (Л|, л-2, ... , лся). для которых выполняются заданные ограничения.
Запись в виде (4.9) соответствует наиболее сложной задаче нахождения
условного экстремума многопараметрической функции. Эта задача яв-
ляется типичной при оптимизации облика самолета и его конструктив-
но-силовой схемы.
Частным случаем указанной задают является задача нахождения
экстремума действительной функции п действительных переменных, не
содержащих ограничений, т.е. задачи вида
min Г (Л);
.¥<=/- (4.9')
Простейшей из задач оптимизации является задача отыскания экстремума
действительной функции действительной переменной в заданных грани-
ldx ее ИЗмснения, т.е. задача вица
min F (х);
(4.9")
~ заданные границы изменения переменной.
фун*. -^игимосги or постановки оптимизационной задачи, вида целевой
°Птими3 ' На11ИЧ11я и вида ограничений применяют ге или иные методы
53
43. МК1ОДЫ ОПТИМИ ЗАЦИИ
Методы оптимизации можно разделить па аналитические и числ hH1J
Аналитические методы, базирующиеся на классическом математичеси
анализе, включают в себя дифференциальное и вариационное исчисленВ
метод множителей Лагранжа. Применение этих методов накладывает 5
решаемую оптимизационную задачу существенное ограничение, к
заключается в том. что целевая функция (функционал) должна б£Я
выражена анали1ически, но крайней мере один раз дифференцируем
имс1ь конечное число разрывов. Для использования классических МС1-
доп определения экстремумов функций и функционалов - дц фференци
ального и вариационного исчислений — в общем случае обязательно тькЛ
отсутствие ограничений на искомые параметры. Метод множителей
Лагранжа применяется при ограничениях в виде равенств. Множите^
Лагранжа использую 1ся также при решении задач вариационного исчис-
ления и некоторых численных методах оптимизации.
В задачах классического аишш за нз безусловный экстрему м фун кции одной или
многих переменных необходимым условием оптимума является равенство kjjjo
градиента функции F (Х~)
за
VF(A'*)-(----
эх,
—)-0.
йхп
(4.1»
При ограничениях в виде равенств оптимальное решение А* будет и предел imu
соотношением
VMAT*. A*j = O. (4.П
где / (АГ) — F (А') + А1 £ (А) — функция Лагранжа, а Аг = (А,, .... А,,,) — векторне-
определенных множителей.
Достаточные условия ошимальностн связаны с понятием матрицы Гехх
(гессиана) Н, Представляющей собой матрицу вторых частных производных функ-
ции F (А) :
й2 А(.¥) . ----
П~1 -------1, м 1,и. (4-1. I
ах,- алу яЦ
Чтобы X* была точкой минимума, достаточно положителытой полуопрсделевн^И
(определенности) гессиана Н (X*). т.е. выполнения условия дХ7 // (А’*) ДАГ
любых А-¥ - 0. Понятие градиента и псесиана используется во многих ал1'Ори‘Г|'®|
поиска экстремума. Для многоэкстремалыюй функции F (А') все корни ураанеяня
(4.10) и 14.11) необходимо еще проверить на глобальный оптимум.
Методы дифференциального исчисления применяют при решеня*
задач частной оптимизации при исследовании сравнительно неслиЖ(«
моделей с одним-тремя переменными, границы допустимых знвчениу
которых не прохо (ят через экстремум целевой функции.
Если целевая функция представлена в виде функционалов. исиольЗ^И
методы вариационного исчисления. Эти методы находя г применение
решении задач опгимиза1щи параметров траектории полета и
изменения тяги двигателя по времени. В этом случае задача опти^<^^
параметров сводится к интегрированию системы дифферспии^^Т!
уравнений Эйлера. В качестве других примеров использования мет^Н
вариационного исчисления при решении оптимизационных задач Пр°^№1
ш
l.n.
www.vokb-la.spb.ru - Самолёт своими руками?!
самолетов назовем задачи об оптимальном законе изменения
p°paJD<fl толщины крыла по размаху и об оптимальной крутке
относи - поверхНОСТИ крыла сверхзвуковою самолета для получения
сРе1И алыюго аэродинамического качества. Попытки реннпь методами
максим НСЧИСЛения более сложные задачи оптимизации параметров
раРиЭ 3 наталкиваются на значительные трудности, связанные с
СЯМ ином громоздкой краевой задачи При достаточно большой размер-
ности вектора проектных параметров такие задачи становятся практи-
чески неразрешимыми
В целом изложенный выше математический аппарат теории оптимиза-
ции оказавший заметное влияние на развитие математики в XIX столетии,
пить в малой степени отвечал практическим нуждам проектировщиков.
Появление быстродействующих ЭВМ и связанное с этим развитие числен-
1ых методов оптимизации открыли новые возможности практической
реализации методов оптимального проектирования.
К этому периоду относится становление новой прикладной дисцип-
лины, получившей название ’’исследование операций”. Начальный этап ее
формирования связан с попытками использовать научные принципы раз-
работки боевых операций с учетом бережного расходования ограниченных
ресурсов в период второй мировой войны. В рамках этой дисциплины
постепенно были объединены ранее существующие и созданные вновь
методы оптимизации ’’операций”; под этим термином понимают любое
целенаправленное действие, способствующее рациональному выбору
способа действия, варианта плана, параметров конструкции, т.е. приня-
тию решений. Задачи принятия решений имеют мною общего для самых
разнообразных направлений человеческой деятельности. Эта общность и
послужила основой и стимулом шля развития исследования операций и
ее широкого применения в планировании, управлении и проектировании.
Совокупность численных методов оптимизации, разработанных в основ-
ном в рамках этой дисциплины, в конце 60-х годов позволила сформи-
ровать раздел прикладной математики, который получил название мате-
матическое npoi раммирование или теория оптимизации.
Первые, наиболее значительные, результаты использования матема-
тического программирования были достигнуты при решении задач линей-
ного программирования, т.е. задачи (4.9), в которой и целевая функция,
и ограничетшя являются линейными функциями параметров. К этому
классу удается свести большой круг практических задач, встречающихся
таких сферах человеческой деятельности, как организация и планиро-
ание производственной деятельности, распределение и использование
Различных ресурсов, транспорт и др
л*нь,м свойством задач линейного программирования является выпуклость
^>у^кции Допустимого множества. Функция F (А) выпукла на выпуклом
ечгпзе А, если ддЯ любых двух точек л Хн х "е X справедливо неравенство
***' Л(л"-х')| <F(x*)+ X)Ff№)-.F(x')|
а’’я0«Х<ч1. (4.13)
*ссхво д выпукло, если из условий х'гХих”₽Х следует
*’х'+ Мх',-х')ех, гж0<1< 1- (4 14)
57
Как известно, дин решения задачи, если она псвырождсна, при выполнении yCjI<J 1
(4 13), (4.14) достаточно примени гь необходимые условия оптимальности.
В настоящее время методы решения задач линейного программирую!
ния довольно хороню разработаны. В зависимости от круга решае.мчЛ
задач их можно разделить на общие и специальные. Среди общих методЗ
наибольшее распространение получил симплекс-метод и его разновидности
(34]. К ним же относится и модифицированный метод разрешаюцт!
множителей Л.В. Канторовича. К специальным методам принадлежу
метод линейных ветвлений, распределительный метод и др.
Особый класс задач математического программирования составляв
задачи, в которых переменные являются неделимыми па части величина,
ми, т.е. целыми числами. Такими переменными, например, могуг бД
число двигателей, число членов экипажа, число окон, число ги тросистем
число элементов продольного и поперечного набора крыла и тл- Такие
задачи получили название задач целочисленного (дискретного) програм!
мирования. В них область допустимых ре.пений, в которой необходимо
выбрать дискретные точки, является невыпуклой и несвязанной. Дщ
решения таких задач потребовалась разработка специальных методов,
среди которых наибольшую известность получили методы отсечения,
например^ метод Гомори, который основан на применении симплекс-
метода. С его помощью ищут оптимальное решение, нс учитывающее
целочисленности или дискретности переменных. Если полученное решение
нс отвечает требованиям целочисленности, то вводят добавочное ограни*
чение, которое отсекает часть области допустимых решений вместе с
полученным оптимальным решением, не содержащую ни одной цезо
численной точки. В суженной допустимой области симплскс-ме годом
снова ищут оптимальное решение. Когда такое решение будет отвечать
1ребованиям целочисленности, процесс вычисления заканчивается.
Назовем также разработанные в последнее время комбинаторные
методы решения задач целочисленного программирования. Среди них
наиболее известен метод ветвей и границ. Это метод является достаточно
общим. Он позволяет решать как линейные, так и нелинейные задачи
дискретного программирования, представляющие собой обобщение
целочисленных задач.
Для уяснения сущности метода рассмотрим следующую задачу общего вида:
Найти
min Г (х) при х е X, (4-15)
где X конечное множество
В основе метода ветвей и границ лежат разбиение по определенному правилу
множества X на подмножества X, (ветвление) так, чтобы X — U Xj, и опрсд
нижних оценок (границ) £ (X;) целевой функции F (АЭ из этих подмножеств®**
удовлетворяю щих условию $ (Хр < (-*) Для всех х <= X,-. Если при этом окаж^Ч
что для некоторого вектора Л* е Хр будут вы 1юл пяться условия / А* ~ '
G К (Х;) дня всех Л то в силу определения оценок X* - ошимальное решение задачи
(4.15) [20j.
Успешное применение методов линейного программирования дИ
решения оптимизационных задач в самых разнообразных обласгяХ% f
также их распространение на нелинейные задачи, допускающие приЧ
58 i
www.vokb-la.spb.ru - Самолёт своими руками?!
{min |„. nunF(xbx2»----
А J хп
шейную аппроксимацию, стимулировали работу специалистов в
деМУ10 |едоРания операций над проблемами, которые можно было
облаС™ еи1СНлю оптимизационных задач.
свести14 }^ноВе сформулированного им принципа оптимальности Р. Бел-
1 зработал досточно общий вычислительный метод решения задач
ЛМа3магического программирования, известный под названием дичамичес-
МаТС* программирования. Согласно принципу оптимальности принятие
когО 11О управлению сложной системой разбивают на ряд последова-
Ре яых шагов (этапов), на каждом из которых решают свою оптимиза-
ТеЛнную задачу. При этом задача минимизации функции многих пере-
^нных сводится к последовательному (поэтапному) решению задач
минимизации функции одной переменной согласно следующей схеме:
minFlxi.-Vj.-> хп)~ ™n {min |„. nun F(xt, х2.....*„)]}-
ЛД . Х3« - Хл
Динамическое программирование ориентировано прежде всего на
решение оптимизационных задач, связанных с исследованием систем,
характеристики которых зависят от времени (динамических систем). К
таким задачам относятся, например, задачи автоматического управления
летательным аппаратом, экономического планирования и др.
Работы Л.С. Понтрягина по дальнейшему развитию вариационного
исчисления привели к формулировке принципа максимума. Это позво-
лило поставить на строгую математическую основу теорию оптимального
управления и открыло широкие возможности ее практического приме-
нения. В частности, эго дало возможность решить ряд чрезвычайно
сложных проблем но созданию систем автоматического управления кос-
мическими neral ел ьными аппаратами. В зто же время был разработан ряд
ориентированных па использование ЭВМ алгоритмов поиска локальных
оптимумов многопараметрических функций ври наличии и отсутствии
ограничений па параметры. Однако в общем случае задачи (4.9), в кото-
рых и целевая функция, и ограничения представляют собой нелинейные
зависимости от X, называемые задачами нелинейного математического
программирования, не имеют единого алгоритма или класса алгоритмов
и* решения. Трудность решения таких задач объясняется тем. что при
Нелинейных ограничениях допустимая область изменения параметров
лаип может пе быть выпуклым множеством или даже состоять из ряда
несвязанных областей. Если для ныпуклой функции F (X) и выпуклого
Множества ХДО||, как мы уже отмечали, лока.1ьный минимум одновре-
менно является и глобальным, то для невыпуклой области ^доп даже при
мнуклой функции F (АТ) задача нелинейного программирования может
Эти*31*10” многозкстРемалЬ11°й’ 410 существенно усложняет ее решение,
j и Ряд Других причин приводят к тому, что большой класс встречаю-
НейноЯ ПРИ 1,Роек1ИРовании сложных технических объектов задач нели-
> программирования не имеет строгого решения
Нейв СМ Не МСнее ДДЯ Ряда практически интересных частных задач нели-
Мст Г 3 пР°граммирования разработаны весьма эффективные численные
1 решения. Так, если F (А) квадратичная функция, а ограничения
ютсн линейными функциями, то задача (4.9) называется задачей
59
квадратичного программирования. Для большинства таких задач разпаг
таны универсальные алгоритмы, обеспечивающие получение олтимаЗ
ного решения за конечное число шагов итерационного процесса. b
Разработана также методика оптимизации для задач нелинейной;
программирования, в которых целевая функция и ограничения являют^
полиномами относительно неотрицательных переменных хь х2. ... f х
положительными коэффициентами следующего вица: л с
к
Л'(АЭ- Г РДА),
г = 1
где Pi (I) = cfx*'« xfi* ... xfiin.
Ci > 0, Ху > О J = 1, п. а показатели степени atl. aj2.... ain - произволь-
ные вещественные числа.
Такие задачи, называемые задачами геометрического пре граммирШ
вания, часто встречаются в практике технического проектирования [10).
Прежде чем обсуждать методы решения задачи (4.9) общего вида,
рассмотрим методы решения частных задач вида (4.9'), т.е. задач безус-
ловной оптимизации.
Методы решения таких задач важны потому, что алгоритмы миними-
зации с ограничениями строятся на основе алгоритмов минимизации без
ограничений. Кроме этого, задачу оптимизации с ограничениями часто
решают путем преобразования ее в задачу оптимизации без ограничений.
Решение задачи (4.9*) в общем виде затруднено. Только в случае
выпуклости целевой функции можно найти оптимальное решение X*
выполнив необходимое условие оптимальности: равенство нулю гради-
ента функции, т.е. VF(A*) — 0. Однако в большинстве практических
задач выпуклость либо не имеет места, либо не поддается проверке. В
этом случае для решения задачи рекомендуется выбрать несколько на-
чальных точек поиска и затем взять наинизшую из всех конечных точек
Такая стратегия рекомендуется для любого алгоритма оптимизации с
Рис. 4.2. Схема алгорит-
ма поиска эксгрсмума
60
ограничениями и без них, когда условия, гаранти-
рующие минимум, либо не выполняются, либо
проверяются с трудом.
Рассмотрим численные методы решения зада-
чи (49), в основе которых лежат процедур*1
систематического получения последовательности
векторов, т.е. точек ЛГ°, X1,... , в Ь71 таких, что
F(JT°) >F(X1) > ... >F(A*)> - .
и оценки их эффективности при локадизаШЧ
точек минимума Такие методы получили наЯ
вание методов спуска. Схема алгоритма вычисли
ний при таких методах представлена на рис. 4.--
Решение задачи начинают с выбора нача-1ЬЯ°Ч
точки Xю При этом стремиться использоы»11
любую имеющуюся информацию о поведен Ч
www.vokb-la.spb.ru - Самолёт своими руками?!
f (У) с тем, чтобы выбрать как можно ближе к точке мини-
фУнКШ<роСле выбора начальной точки необходимо решить, в каком
МУ><3 (И располагать следующие точки и какой величины шаг должен
нэПраТделан в выбранном направлении.
бытъ1‘ , побом метоне спуска последовательность Хк подчиняется
При jiru
•слови»
Хк ♦ 1 --.¥а + tkdk,k = 0,1..
jK еСТ1> направление, a I? dk\\ величина шага.
ГЛе Если dk нормализовано II/ II - 1, то величина шага будет равна
|А1.
Механизм образования последовательности точек и его эффектив-
ность в локализации точки минимума в сильной степени зависит от вида
минимизируемой функции, а также от наших знаний или информации,
которая может быть использована для следующего прогноза точки
минимума. Изменяя процедуру выбора dk и можно варьировать
методы спуска
В зависимости от способа выбора направления очередного шага
методы спуска подразделяют на гри группы:
методы, использующие при выборе направления информацию только
о значениях функций; их называют методами нулевого порядка или
прямыми методами;
методы, использующие, кроме того, первые производные функций»
называют методами первого порядка;
мсгоды, которые требуют вычисления вюрых производных функций,
называю! методами второго порядка.
Выбор величины шага во многом определяет эффективность поиска
экстремума, в том числе потребное число шагов (итераций), от которого
зависят затраты машинного времени. Среди многих способов выбора шага
наиболее эффективны основанные на минимизации функции F (Д') в
выбранном направлении» г.е. решении задачи (4.9”) одпопараметрической
оптимизации.
1рафическая интерпретация прямых методов и методов, использую-
ншх значения производных, представлена па рис. 4.3. Видно, что они
отличаются выбором направления поиска.
первого порядка направление движения на каждом шаге совпадает с
^^грапиентом функции. В э/нх методах, называемых грасУиентными^точклХ^ + *
ь,оирается по отношению к X* в направлении - Л, т.е.
к градиент функции F (X) в произвольной точке Л*; t — некоторая
тельная скалярная величина, называемая шагом поиска.
причину можно обеспечить выполнение условия F (Хк + Ъ <
’«’исимости от способа выбора шага t существуют разновидности гради-
JHcrort Мст°Дов. среди которых наиболее известны метод градиентного спуска и
спуска.
На каж”0 М задают шаг достаточно малой величины и вычисляют i-радиент
Ма >м ш*гс (см. рис. 4.3, 6). Это может привести к чрезмерно большим затра-
Ынного времени. В методе наискорейшего спуска величину шага выбирают
61
Рис. 4.3. Графическая интерпретация двух методов поиска экорсмума:
д - прямые методы; б методы, использующие значения производных; “* приня-
тый шаг; - жхлединшшый шаг
Рис. 4.4. Поиск жырсмумэ методом наис-
корейшего спуска
Рис. 4.5. Градиентный поиск вдоль
’’оврага*'
шггимачьной путем решения задачи одномерной минимизации из условия
Л vF(A*O-minF(.** ( УГ(Л*)).
,>0 Д
В этом методе ие требуется вычисление i ради сига на каждом шаге- И***
направление выбирается лишь при условии, что при прежнем целевая функнИ*
шс не улучшается. Это может привести к вышрышу в числе машинных onep^lj
Храфичсская иллюс крайня метода представлена на рнс 4.4. К методам пер*1
порядка относится и ряд других методов, в частности весьма эффективный мИ*
сопряженных наир влений и его частный случай — метод сопряженных
При градиентных методах процесс поиска экстремума прекращается. ссл0 &
всех компонентов вектора 1 ради ента ?Г(А*) выполняются условия
е?ЧА*)
•-------। < ь, j = О ,
sxi
где б - наперед заданное число, характеризующее точность минимума. *
Существенным недостатком градиентных .методов является их слаба*
мисть в случае, если оптимум лежит в ’’овраге” или на длинном узком €
(рис. 4_5). В этом случае траектория градиентных методов характеризуемое
таточно медленным зигзагообразным движением вдоль дна‘оврага” или ТреснЯ
точке минимума.
62 ▲
www.vokb-la.spb.ru - Самолёт своими руками?!
vct ряд приемов, позволяющих избежать "овражных** эффектов,
(yiucv изменения масштабов независимых переменных, что изменяет
налример’ юйерхности отклика целевой функции (траектории линий равного
юпограф^ iHaK(J наиболее эффективным является переход к методам второго
уровня) 'cl<f>.[bKy вторые производные минимизируемой функции чувствительны
роряд*3- линий уровня. Эти методы являются обобщением метода Ньютона^
к крива * быть интерпретирован как метод последовательного поиска точек
когорт квадратичных аппроксимаций функции F (X) - Алгоритм метода Ньютона
имеет вИ-^ _
1 -ЛА 1Г‘ VFlA*),
// (> матрица Гессе целевой функции вычисленная в точке X*.
ГДе Яс 410 ecjui Функция F (X) строго квадратична, метод Ньютона дает решение
./и за один шаг. Однако и в общем случае нс квадратичной функции F (X) этот
ъ год потенциапыю более эффективен при отыскании минимума, чем i-радиснтныс
ил. поскольку квадратичная функция локально более точно аппроксимирует
Лункин io Л Х'к чем лилейная, лежащая в основе градиентных методов
Недостатки метода Ньютона связаны в основном с необходимостью вычислять
вторые производные и обращение матрицы Гессе. К тому же метод не обеспечивает
сходимости н случае, если целевая функция не является сильно выпуклой и началь-
ное приближение выбрано неудачно
В настоящее время разработан ряд методов, представляющих собой модифи-
кации метода Ньютона, которые лишены его недостатков. Так, для уменьшения
трудностей, связанных с вычислением вторых производных, в методе переменной
метрики (метод Флетчера - Пауэла) вычисление минимума нсдсгся по следующей
формуле:
ЛА + 1 - Хк - /Я-1 ) V h lXkl
При этом матрицу Гессе вычисляют по прнбпижезшой формуле без определения
вторых частных производных. Величина шага определяется одномерной минимиза-
цией целений функции на луче
// 1 ?Г|Л'А).
В м&ъве Нмптони - Рафсокд для обеспечения сходимости от начального приб-
лижения в алгоритм минимизации помимо определения направления поиска
вводится процедура выбора длины шага вдоль него.
X* + 1 --ГА - ik Н 1 «Д’*) Л F(,ГА).
Отметим, что методы переменной ыезрикм и сопряженных направлений -
наиболее мощные методы, разработанные за последнее десятилетие. Они обладают
хорошей сходимостью, поэтому являются предпочтительными при решении задач
«Цраметрической оптимизации.
ибщим для методов первого и второго порядка, как мы видели, является то,
вес они предусматривают поиск локальных минимумов ла последовательности
«вправлений (лучей). Этот поиск является состояний частью общей процедуры
!|их1изацим Поиск локального минимума целевой функции FfX) вдоль заданного
^нрадлецня представляет собой задачу однопарамсгричсской минимизации (4.9 'V
>шхРа”°ТЯПО достаточное число алгоригмов решения этой задачи- Назовем три из
часто употребляемые. Эго метод золотого сечения, меюд Фибоначчи и
!1ЗД У'е^ВЫс 1X1511 истода не требуют дычнеления производной функции. Их оспов-
Jtocnen1^ ~ >ГМсньшить количество вычислений функций и заключить минимум в
ьычи^0РаТе’,Ь31° Убывающие вложенные интервады Ц-, A?f|. С этой целью функцию
1^. ft?”!?1 в Щух внутренних точках /f- (левая) и (правая) текущего интервала
либо лКачсствс ,Ювог° меньшего интервала + !• + 1* бсрется либо [я,, Fjl,
ri ннте* метохха основаны на том, что оставшаяся внутренняя точка или
К t Г + JI используется наследующем шаге как одна из внутренних
!oni интервала, с которым мы поступает так же. как с |<тг hjj. Оба метода
63
применимы для оптимизации нимодальных (имеющих один экстремум) фу-^д
При л ом метод Фибоначчи при заданном допустимом количестве вычислений
ции обеспечивает максима, ыюс сокращение интервала. Однако метод зол
сечения реализуется несколько проще и поэтому, вообще юноря. прелпо(гги^| |В
Метод хорд основан пз нспольк вании дискретного варианта метода ЦиГ_1
для отыскания нуля производной F’U) функции /’(Х> в интервале |о
существует. Собственно мсго i Нью она состоит в линеаризации F'(.v) в окрееп2°Н
текущей точки в выборе нуля этой линеаризованной функции в качестве исТ*^1
точки следующий итерации.
Рассмсирим теперь прямые методы безусловной оптимизации
ряде случаев. имеющих практический интерес, эти методы оказьшЛВ
единственно возможными. Это относится к тем случаям, когда вычи^
нис градиентов н гессианов сложной функции численными методами
невозможно, либо может погребена!ь больше машинного времени,^
вьгЕИСление значений функций и необходимом для отыскания минимум
числе точек. Такая ситуация может иметь место, если нелепая функция
имеет разрывы непрерывности или задается не в явном виде, а системой
уравнений, относящихся к различным подсистемам некоторой системы
(например, при построении моделей сложных систем или процессов)
Методы нулевого порядка могут конкурировать с методами первого и
второю порядка в случае, когда целевая функция F (AQ обладает нес
колъкими локальными экстремумами.
Характерном особенностью прямых методов является их звристичес
кий характер, отсутствие строгого обоснования. Поэтому требуется
экспериментальная проверка сходимости и эффективности методе*
путем решения конкретных задач.
Наиболее известные методы этой группы: метод покоординатно*
спуска (метод Гаусса Зейпеля), метод конфигураций (метод Хука ।
Дживса), метод деформируемого многогранники (метод Нелдера и
Мида), метод Розенбрс ки, метод Пауэла.
Наиболее простым из лих ян пястей метод покоординатного спуска, синросп
которо го состоит в по следов ател ьпой м и ли м из аци и i юлсвой функции по от лсльЖ>
переменным. В общем случае метод не обеспечивает отыскания экстремума фУ1и°Ж
за один цикл. К тому же метод малоэффективен при минимизации "овраж|йГ1
функций Ьго применение целесообразно в комбинации с другими методами.
Метод конфигураций по своей сути является достаточно обидам мег' •
прямого поиска. Согласно лому методу для выбранной начальной точки A'0 VT *
изменения одной или нескольких значений компонент вектора ¥" обслсдЗ^Д
окрестность I см. рис 4.3. я). После нахождения приемлемой направления
ляют функцию при постепенно увеличивающемся шаге до тех пор, пока это
ляет определять точки X с меньшими значениями функции А (V) 1сли ь
направлении не удается найти точку с меньшими значениями функции размер
уменьшается. После нескольких последовательных сокращений размера иЗЮ?*»
принятой конфи iy рации (направления ) отказываются и предпринимают новое о
дование окрестности Таким образом, при этом методе делаются попытки
направление ‘опраха" целевой функции и восстанавливать направление №
вдоль него в тех случаях, когда вследствие искривления "оврага” стан«вЛ
ранее конфигурация теряется
Метод поэноляст учесть О1раничснин. накладываемые как на отдельные
Ныс, лак и на область поиска, например псрс1улярные границы и изолнр°р
запрещенные области. Недостатком метода конфыурзщии является то•,|Т0
может приостанавливаться вблизи локальной» минимума
64
www.vokb-la.spb.ru - Самолёт своими руками?!
формируемого многогранника является модификацией метода кон-
МеТОД ^С^сь функция к перемйШых Г LV> минимизируется с использованием
фнгУРэШ1 некоторого деформируемо io многогранника в Пространстве этих
я * 1 вс^ Бсршииа (точкаI в Я". в которой значение F |Л ) максимально,
перем нни* я ЧСрет "центр тяжести' оставшихся вершил. Улучшенные (более
проектир>4 ^„еНня целевой функции находятся последовательной заменой точки с
низкий ЭНЛМ значением F <Л'_> на почки с меньшим значением функции, пока не
Максим^,ьв формально алгоритм записывается следующим образом,
будет н аЯЛ сн м
] формирование в «-мерном пространстве многогранника:
.4 Л-0.1. ...
_ нерппч1я на^-ом Этапе поиска.
flie\ Определение среди вершин "паихудшей"a}j и ’ наилучшей" ьу:
f{a^) =- max (/«A J - . f + ] }
f (af' > - niin )- - -. f + । )J -
3. Определение "центра тяжести" всех вершин, исключая <?/,:
f 1 "+ 1 к к ~
где / коо р.л патно е направо cciDiе.
4 Отражение ’ паи худшей" вершины
К + 5 еп + 2 + ’4» < > - °Л>- “ О
5-Нас жжение: (
ecJiii/(4f+ Г
4”^ + 2+ + 3-fi«+ 2).7> 11
если7 (4?,| + 4) < t ш/’l. то -а* + 4.
в Противном случае v
6 Сжатие:
3) >/ для всех i / Л,
+ 5 2 1 1110Л* “ дп » л», б < ,5 < 1.
af^ =an+ 5*
Гели /to + </(д.) хотя бы ддя одного i * Л то верши 11а <Л заменяется
"а вершину fjJ+ 3. “
й-Редую^ия;
вдьое^ И iCfI + 3^ ’ то формирустом норый многогранник с умепыиснпымн
сторо]]дми и вершинами цк~ар+ 0J5 (х? - jq) и поиск повторяется.
г РЦТеРий окончания поиска
J I ft + 1 [
И (л/) - /(<4 + 2^2J е-
,1имаП1огп ПС ^ОЭсн®Р°ка> который также является модификацией метода иокоор-
Уз>сих ” сгтУска. для преодоления сложностей поиска минимума при наличии
<iCcft так R^ai П1 ИсПользуется процедура поворота opiviопальных координаты*
JKcTpeMv Cu ОД)1а иэ ,1ИХ совпадала с направлением ' оврага”. Траектория поиска
В По этпму методу по казана на рис. 4.6
аее с’,Ожп°м методе Пауэла поиск экстремума производится вдоль сопря-
НС оРТО|пнальиых направлений Также усовершенствована процедура
"опека, позволяющая отыскивать не локальный а глобальный оптимум-
453 - s 65
Г
ч+ I
Рис. 4.6. Траектория n0M(.J
экстремума по методу Рои«
Срока *н‘
Особую группу ере
прямых методов
методы случайного поцс^.
|29]. В лтих методах й
отличие от ранее рассмот-
ренных Детёрминировал.
ных методов выбор точек ь
области определения целе-
вой функции исуществла.
стоя случайным образом
Это обстоятельство позволяет строить эффективные алгоритмы поиска
глобального экстремума. Вероятность достижения успеха при исподьзсвд.
нии этих методов во многом зависит от априорного знания возможного
расположения оптимальных точек. Методы могут оказаться особенно
эффективными при решении задач оптимизации с дискретными перемен-
ными (т.е. задач целочисленного программирования), а также смешанных
задач с дискретными и непрерывными переменными Среди методов
случайного поиска наиболее известны поиск по случайным точкам и
поиск по случайным лучам.
Простейший эдгоригм случайного поиска заключается в следующем. В точке $
формируется случайное направление с помощью единичного случайного вскгора Я
равномерно рас предел сшюго по всем направлениям. Делается пробный шаг в этом
направлении ЛПр Рабочий шаг формируется из условий
[ /?раб • еспи Г * Лпр > < ^ (Y*), лЦ
йХ* - 1 ИИ
(^0 — в Про ги в ном случае-
В результате получаем новое приближение .¥* 4 * = лЛ ♦ Величина подби-
рается экспериментально. ЯЦ
Рассмотрим теперь способы решения задачи нелинейного программа-
рованич с ограничениями, т.е. задачи (4.9), представляющей наиболь-
ший интерес для проектировщика. Существует два различных подхода к
решению таких задач. Первый основан на непосредственном учете orpaW'
чсний при решении задачи. Такой подход лежи г в основе метода возМО*'
ных направлений (метод Зоитендейка), метода проективного градиснИ
мет )ов ппр ксимирующего лш ейн >го п юграммиров ния
Второй подход к решению задачи (4.9) основан на преобраэсв^д
задач с ограничениями к более простым задачам без ограничении- Эш4
цели можно достигнуть заменой переменных либо видоизменением н₽
вой функции с помощью некоторых функций ограничивающих УР3?
пений. Наибопсс распространенным является метод штрафных
основная идея которого заключается в сведении задачи на услов*^И
экстремум к последовательности задач безусловной оптимизации НУ
использования функций штрафов.
66
www.vokb-la.spb.ru - Самолёт своими руками?!
Опишем кратко сущность некоторых из названных выше методов
лвной оптимизации.
усл Ч|СТОд возможных направлений заключается в следующем. Целевую
ию минимизируют как функцию без ограничений до тех пор. пока
oi раничения. Затем находят направление поиска, позволяю-
НС -* уменьшить целевую функцию, не нарушая ограничений. Такое нанрав-
называется допустимым (возможным). Обозначим его 5*, тогда
яеН точка буле! определяться по соотношению А* * 1 = А* + М 5*
Точка А* 4 1. а следовательно, и направление 5* будут допустимыми,
если выполняется условие
Т_(Л2 L 5* < о.
эл
(4-16)
Решая задачу
niinVF‘(.V*).S* (4.17)
при условии (4.1о), определяют векюр допустимых направлений S*,
вдоль которого целевая функция имеет наибольшую скорость убывания
Величину шага // вдоль выбранною направления можно определить,
решая задачу однонарамечрической минимизации вида
Г(Л* * Л* S*) = minFCY* +
Я(АЛ ♦ Л5*)С0,Л >0.
Достоинством метода возможных направлений является его универ-
сальность, недостатками — невозможность учета ограничений в виде
ранено в. а также большой объем вычислений на каждой итерации.
Метод проективного градиента является модификацией .метода
возможных направлений. В отличие от последнего в нем при попадании
точки Л* в район ограничения допустимое направление поиска S* опреде-
ляется нс с помощью решения зада'ги (4 17), а проектированием анти-
градиента - v /' (А*) на много] ранник. являющийся линейной аппрокси-
мацией допустимого множества вблизи точки .¥*. Это позволяет учиты-
вать игра ниче ни я как в виде неравенств, так н равенств.
Сущность методов аппроксимирующего линейного программирова-
ния заключается в сведении задачи нелинейного програхтмирования к
Шачс линейною программирования путем замены нелинейной целевой
функции и функции ограничений последовательностью аппроксимирую-
иецХ ЛИНе|’НЫх функций. В одних алгоритмах эта цепь дооигается путем
их ЛЬ30Вщ,Ия линейной интерполяции нелинейных функций, в других —
Разложением в ряд Гейлора в окрестности точки X*
к методе штрафных функций задача условной оптимизации сводится
,1елсво^а],еНТНО” Залаче безусловной оптимизации путем преобразования
ФУИНии. Новая целевая функция /(АГ) образуется путем цобав-
НИЧ1Щ. К Цепеь°й функции /‘ (АЗ функции штрафа, составленной из огра-
тим -авд,иих Условий таким образом, чго приближение к границе допус-
г.е. ца об,асп< приводит к резкому увеличению новой целевой функции.
Лшение ограничений штрафуется ухудшением ?' (.V)
67
В зависимости от того, находится ли решение задачи па безусловиВ
экстремум внутри или вне исходной допустимой области, различают пЖ
типа алгоритмов решения задач методом штрафных функций - алгор^Я
внутренней штрафной функции и алгоритм внешней штрафной фунКшД
В первом случае поиск оптимума должен начинаться из допус^^Н
области и его траектория полностью будет лежать внутри этой облас3
Это достигается при образовании новой целевой функции. нанрц^Л
вида
(X) - F (X) + S 1 :Ri (X).
1-1
где > 0 - весовой коэффициент.
При приближении к границе допустимой области изнутри какой
либо из элементов вектора О1раничений стреми 1ся к нулю, а следова-
тельно, функция штрафа приближается к бесконечности. Недостатками
этого алгоритма являются необходимость выбора исходной точки внутри
области существонания, а также его неприменимость при ограничениях в
виде равенств.
Во втором случае поиск может начинаться из любой точки, в тем
числе находящейся вне допустимой области. При этом функция штраф!
выбирается таким образом, чтобы значения повой целевой функции в
допустимой области точно или приближенно равнялись значениям исход
ной целевой функции, а вне ее — существенно превосходили значения
/ (X). Возможный вид такой повой целевой функции
/ т
F (X)~F(X)+ Rk S М(Х).
i — 1
V
0. если/? (А'ХО
w 1, ес.1И£ (Л) > 0.
Величина штрафа зависит от выбора весового коэффициента Rf
чем он больше, гем ближе F(X) к Fr(X), тем точнее решение. Однако необ-
ходимо иметь в виду, что увеличение R^ ведет к росту роли ошибок
счета и. что самое важное, к усложнению поиска экстремума. Это связано
с тем, что введение штрафа ’’искривляеi” целевую функцию, образуя
двусторонний "овраг” при ограничениях в виде равенств и (односторонний
"утес” для ограничений в виде неравенств. Вследствие этого формули-
ровка ограничений в виде неравенств предпочтительна при решения
задачи методом штрафных функций.
В силу указанных причин рассмотренный метод обычно применяет®
для получения приближенных решений при небольших значениях весовые
коэффициентов Rk.
Рассмотренные выше методы оптимизации применяют при иссДСД0®^
нии детермированных (неслучайных) функций и процессов, одна^^
практике проектирования приходится решать оптимизационные
в которых необходимо учитывать случайные факторы- Такие
решают методами стохастического програм мироаания ОбыЧИЯ
решении подобных задач рассматривают математические ожидания в
68
www.vokb-la.spb.ru - Самолёт своими руками?!
свапя! стохастическую задачу к детерминированной. что не
чиН- г сТро(им. либо привлекаю! линейное upoiраммированис для
ЯЬЛЯе я егохагисческих задач. Эти методы применяются при анализе
pcujetn 0!П1СЬ1ВаЮ1дих конфликтные ситуации.
практике проектирования самолетов могут иметь место зд&чи
папин одновременно по нескольким показателям качества.
0,1 мер перед проектировщиком поставлена задача получить наилу ч-
К значения для нескольких характеристик самолета, например макси-
^^иоовать дальность полета, минимизировать потребную длину ВИН
взлетную массу самолета. Как правило, эти хзрактеристики,ныбираемые
И качсс/вс критериев, противоречивы и оптимизация по каждому из них
Боивела бы к разным значениям проектных параметров X В тех случаях,
келг нс удается найти обобщенный показатель качества, включающий в
себя указанные частные показатели, возникает задача многокритериаль-
ной (векторной) оптимизации. Для многокритериальной задачи в общем
случае решение не является оптимальным ни для одного из частных слу-
чаев. В то же время оно является компромиссным для векторного кри-
терия
F(JO- [А, (А), - , /,„ (А)|.
Такое решение называется областью компромиссов или областью реше-
нии, оптимальных но Hupei о |22|. Такая оптимальность означает, что
нельзя больше улучшить значение одного из частных критериев, не ухуд-
шая значение хотя бы одного из остальных. Для определения минимума
по Парето необходимо перейти от задачи векторной оптимизации к задаче
нелинейной оптимизации со специально сконструированной скалярной
целевой функцией, решив предварительно задачу свертывания вектор-
ного критерия оптимальности.
Способы свертывания векторного критерия оптимальности зависят
от информации о степени сравниваемое™ частных критериев оптималь-
ности [9|. Пример решения мноюкри термальной задачи оптимизации
приведен в гл. 6.
44‘ ЗАКЛЮЧИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
В заключение рассмотрим некоторые рекомендации по выбору и
Пых-ТИЧеСКС” реализации методов оптимизации при решении проект-
вставлена оптимизационная задача, перед инженером встает
ПорЯд*^а пыбора метода, по возможности однозначно определяющего
Некот К ОПеРаш,й’ приводящих к решению. Кратко описанные выше и
с*анп°РЬ1С другие численные методы оптимизации, оформленные в виде
®Ычи* НЬ,Х НР°ЦС/1УР и хранящиеся в библиотеке прикладных программ
центра современных проектно-конструкторских орга-
ЯЬ',ЯЮТся достоянием любого инженера. Ему необходимо среди
СЯ В ^и^иотеке методов выбрать наиболее приемлемый для
К°1,кретной задачи и затем состыковать программу с моделью.
69
Разумеется уже сама постановка задачи позволяет отбросить некотогИ
методы как неприемлемые. Как мы видим, методы решения разлмиМ
для задач со слабой нелинейностью и с малым числом переменными
задач с резко выраженной нелинейностью е малым и большим чигдД
переменных; задач с одним экстремумом и со многими локальный
экстремумами. Тем не менее выбор остается все же достаточке бодьц^
и,чтобы сю еде л ат ь,к инструктор должен обладать достаточной квалифД
кадием Он обязан хорошо понимать как физическую сущность само*
задачи, так и особенности алгоритма оптимизации. Концепция применен!
программ оптимизации ио принципу ’’черною ящика” может привести к
результатам решения,весьма далеким от оптимальных.
Опыт показывает, что не существует универсального метода, kotJL
рый можно успешно применять к широкому круту практических задН
оптимизации облика самолета и его конструктивно-силовой схемы. В
связи с этим при разработке оптимизационных программ проектирования
самолетов пошли но нуги применения в таких программах комбинации
различных методов, например несколько прямых методов и несколько
методов первого и второго порядка. Это позволяет дзя начальной и конеч-
ной фазы решения задачи использовать различные методы. В развитых
системах автоматизированного проектирования имеется ci е шальная
подсистема оптимизации, представляющая собой сложный рограммный
комплекс. Он включает в себя комбинацию различных методов поиска
экстремума, объединенных специальной управляющей программой,
осуществляющей переход к различным методам в зависимости от сове-
дения целевой функции на различных шагах итерации |8 J.
Такой комплекс призван обеспечить возможность эффективного
использования алгоритмов оптимизации, включенных в систему, путем
реализации процессов адаптации поиска, предусматривающих своевре-
менную смену алгоритмов при решении задачи. Он должен обеспечивав
рабогу как в автоматическом, так и в интерактивном режиме, позволяя
пользователю вносить оперативные изменения и в модель, и в исходвъв
данные, а также использовать различные эмпирические приемы, ускоряю-
щие сходимость Управляющий язык комплекса должен быть npocW'
позволяющим использовать мнемонику и смысловые конструкции <4*
формировании заданий и работе с системой пользователей, не владеЛШ
языками программирования. Возможная структура такого комптекй
представлена на рис 4.7.
Опыт применения пршрамм оптимизации показал, что их полкл
чение к модели параметрического анализа самолета не требует ее суте1
ственной доработки. Эти доработки связаны в основном с необху
мостью нормализовать варьируемые параметры, ограничения и й»
вую функцию Нормализация облегает проблему поиска экстрем, -
так как при выборе направления и величины шага необходимо оис
вагь расстояния. т.е. нужно вводить ту или иную норму в прострзн W
параметров. Эта операция требует, чтобы все параметры имели одну Ру
мерность или вообще были безразмерными. £
Кроме этого нормализация приводил к подобию различные
70
www.vokb-la.spb.ru - Самолёт своими рука
Рнс 4 7 Структура прчираммного комплекса оптимального проектирования
оптимизации, облегчает анализ резулыатов оптимизации, позволяя срав-
нивать OIHOCHтельный "вклад" в изменение критерия каждой переменной.
В нормализованном виде все переменные имеют порядок единицы.
Можно пре сложить следующий алгоритм нормализации .
1. Определить нормализованные переменные х}
V - Х-" — —
л,Д ' ц ' ' , ОСа. <1./-1,и.
1 - л,в - г*1 1
2. Определить нормализованные ограничения в виде равенств
у j (Х:1 Д — - I. / - i. m.
‘ ' — В
3. Определить нормализованные ограничения в виде неравенств
£* (л;) Л <л< > < 1 (или Е к > I для Q ), к = 1 ,р.
В этих соотношениях символ Л означает равенство по определению»
а индексы "в” и *’н” верхний и нижний пределы изменения параметров
соответственно.
ее Целевую функцию также можно нормализовать, используя для эгого
значение в начальной точке расчета, задаваемой вектором входных
Р метров Л_ иди, что эквивалентно, . Значение нормализованной
Цс^вой фу|(кц^ 6удет равно
п '^-F<W''W
ил,* нормализации требует от проектировщика хорошего понима-
Физической сути решаемой задачи, знания пределов изменения
л0 hJ1IL1X 1,еРеменных и порядка значений целевой функции. Обычно
Мо11РС1СТаВяяет С,|ОЖНОЙ проблемы для опытною проектировщика.
MaTetHa*H° угВсР>кДать, что при современных достижениях в области
'Некого программирования может бып. решена практически
71
любая задача оптимизации нелинейных систем с несколькими CO[h
переменных и ограничений. 1ем не менее существуют оппсчр^ц^И
ограничения на размерность решаемой задачи При этом более критит Ж
является число варьируемых переменных» а нс число ограничений цЯ
r том. чю с ростом размерности задачи не только усложняется проц J
анализа результатов се решения, ио, чю более важно, уменьшается степЯ
сходимости процесса оптимизации. Это является следствием ирод- 1
точности вычислительного процесса при оперировании со слоиоцЯ
нелинейными функциями. !Ь5Й
Необходимо также учитывать, что затраты машинного врс\ (
иными словами стоимость оптимизации, прямо пропорциональны
проектных переменных л. Но опубликованным даннымf при реш^Н
задач с числом проектных переменных от 5 до 20 необходимое для поиска
экстремума число пробных шшов (итераций), определяющее затраты
машинного времени, составляет примерно Юл + 30.
I ЛАВА 5. АВТОМ ХТИЗИРОВАННОЕ ФОРМИРОВАНИЕ
ОБЛИКА ПАССАЖИРСКОГО САМОЛЕТА
В качестве иллюстрации применения методов математического upoi
раммирования в проектировании рассмотрим задачу автоматизирован
мог о формирования облика пассажирского самолета на этапе разработки
технических предложений. Этот этап играет особую роль в общем процесс
проектирования самолета. Занимая промежуточное положение между
этанами разработки ТЗ и эскизного проектирования, он в значительной
мере определяет правильность выбора как целей проектирования, гзкв»
путей их достижения. Известно, что на этом этапе принимается бозее
70 % решений по проекту и от качества этих решений в шромной мере
зависит возможность последующей реализации проекта самолеи с ж не-
мыми характеристиками в заданные сроки при ограничениях на финан-
сирование программы создания новою самолета.
Применение математического моделирования в рамках САПР
вопиет существенно поднять уровень проектных исследований на этим
этапе и повысить гем самым качество принимаемых решений. Проекти-
ровщик получает возможность оценивать перс пек тин нос гь тех или иньЯД
проекциях концепций. Особо важное значение при этом имеет возмам’
ность осуществления многопарамедрической оптимизации. позводню1ЭД
отыскивать наилучшее сочетание проектных параметрон. При этомзаДЗ^
оптимизации проектных параметров самолета, как правило, У^аеГ(р
свести к одно критериальной, что существенно упрощает ее решение- J
качестве критериев обычно используются обобщенные показатели-.
теризующие технико-экономическое совершенство самолета- К 414
таких показателей относятся: взлетная масса самолета ffl0, прямы6
луатаиионные расходы (ПЭГ), себестоимость тонно-километра, нрив<^<
нал себестоимость, топливная эффектовность и некоторые другйСв ‘М
теряй "топливная эффективность’* в настоящее время является одни** Г
72
www.vokb-la.spb.ru - Самолёт своими руками?!
Выбор тою или иного показателя в качестве единственного
равней дСЛяется конкретной постановкой задачи.
кр|ПСриЯ ^ятее время достигнуты определенные успехи в автоматизации
звания на этапе разработки технических предложений Созданы
1»РоекТ^^сНируют ряд подсистем САПР, реализующих процесс разработки
и функ Основные черты и особенности автоматизированною форми-
эван P°L йпика самолета рассмотрим на примере учебно-исследователь-
S'SuPMAUdS].
1 ПОСТАНОВКА ЗАДАЧИ ПРОЕКТИРОВАНИЯ
CociHB И структура технического предложения определяют перечень
задач которые необходимо решать на этом этапе проектирования. Назо-
вем важнейшие из них.
I Предвари тельное формирование облика самолета, удовлетворяю-
щего ТЗ на проект, включающее в себя
определение основных проектных параметров;
компоновку и центровку в рамках выбранной схемы.
2. Оптимизация проектных параметров самолета по выбранному
критерию с учетом ограничений, налагаемых на проект уровнем требуе-
мых ТЗ лет по'Технических характеристик, Нормами летной годности
самолетов и другими директивными документами. Исследование окрест-
ностей он 1 и му ма (квазиоптимальных решений).
3. Исследование изменения технико-экономнческх характеристик
проецируемого самолета при применении технических решений на основе
современных достижений авиационной науки, в частости:
у сове рше пет во в а ний в области аэродинамики и двигателей самолетов;
прогресса в области авиационных материалов;
использования новых концепций схемного нроск1ирования и тл.
4. Проведение расчетов летно-технических и технико-экономических
характеристик самолета с выбранными параметрами-
Отмегим, что и терминах мстодоло1ии оптимального проектирования
|1еРвая задача представ;!яет собой задачу формирования допустимой
** астн существования проекта и нахождения в ней допустимого проекта,
описываемого параметрами начального приближения. Вторая задача —
г^венно задача оптимального проектирования. Третья задача - это
тс si, 3 ,|аРа-метРИЧСского анализа, направленная на исследование чувстви-
°сти проекта к изменению проектных альтернатив (вариантов схем-
Решений), проектных параметров и проектных ограничений.
раМ11 Точненные расчеты характеристик самолета с выбранными парамет-
С0]1СР5|«ание четвертой задачи, целью которой является докумен-
I Ие результатов проектирования.
Роцат7 °' Что тою чтобы проводить анализ, необходимо сформули-
Чия) ’ nP°eKT7iyro альтернативу (синтезировать гипотезу) Отбор (селек-
П0Ь^РенжГ??НЫХ 1ино1ез осуществляется на основе многократного
я анализа для различных вариантов проектных альтернатив.
73
Упорядоченный процесс поиска наилучшей п определенном с\ И
проекшой альтернативы осуществляется методами оптимизации. Kjle
Помимо перечисленных выше задач, которые можно отнести к КЛа
задач ’’проектирования от ТЗ”, в практике ОКЬ весьма часто встречаыЯ
задачи ’’проектирования от прототипа”. Эти задачи связаны с iipod
рованием различных вариантов модификаций самолета на Сазе им
щегося прототипа (базового самолета). В таких задачах в отличие^
предыдущих значительная часть схемных решений и параметров в п
цсссе проектирования остается неизменной (фиксированной)
Так» например, может возникнуть задача разработки модификации
самолета с новыми, более совершенными двигателями (мсныпий уд»Д
ный расход, большая статическая тяга, мсныиие размеры и т.д.)_ При
требуется определить минимально необходимую доработку прототипа
связанную с изменением массы составляющих, его перекомпоновкой а
также определить технико-экономические характеристики самолета
Могут также возникнуть задачи доработки проекта, связанные с
заменой материалов (например на композиционные) в некоторых агре-
гатах самолета; применением нового профиля и конфигурации крыла или
нового типа механизации на нем; применением системы активного
управления аэродинамическими силами для снижения ветровых и манев-
ренных нагрузок, снижения запасов устойчивости благодаря использо-
ванию автоматических систем управления; заменой оборудования и тл.
Отдельную группу задач составляют задачи разработки различных
модификаций самолета (семейства) для различных вариантов его при-
менения (различные варианты загрузки, различные дальности полета,
различные условия базирования) с максимальным использованием агре-
гатов, систем, отсеков прототипа (принцип модульности в проекти-
ровании).
Совершенно очевидно, что конкретные алгоритмы решения перечис-
ленных задач, даже в рамках одного класса, а тем более задач разных
классов, могут иметь существенное различие. Это различие объясняется
тем, что в каждой задаче существуют свои исходные данные, искомые
параметры, ограничения и критерии. Различны степень и источники инфор-
мационной обеспеченности задач. Однако, несмотря на разнообразие
алгоримтов. в них можно выделить систему инвариантов (модулей)-
которые будут использоваться для решения различных задач. Эти
дули должны составлять основу обобщенной модели самолета, обе(Я
чиваюшей под управлением мониторной системы реализацию ироизэв*
ных стратс!ий проектирования. Структурная схема модели представле-
на на рис. 3.5. В основе модели лежат различные методы весового, яэР°1
динамического, прочностного расчетов и расчетов устойчивости и улр2*
ляемости, силовой установки и эффективности самолета На рассмэтр^
ваемом этане проектирования информация о создаваемом само ете
основном ограничена знаниями его потребных характеристик» свсД^В
ями, почерпнутыми из прошлого опыта проектирования самолетов
логичного назначения, и некоторыми данными научных исследовании
новым техническим решениям Это предопределяет применение в мо
74
www.vokb-la.spb.ru - Самолёт своими руками?!
пических методов расчета самолета, базирующихся на упрощен-
„олуэм^
этических формулах и аппроксимациях, отражающих важней-
цЫх С метрические связи. В ряде случаев в эти формулы вводятся ПОП-
^С лзрз> коэффициенты, получаемые на основе обработки статистичес-
^^экспериментального материала.
потоков информации при формировании облика самолета
„оставлена на рис. 5.1.
п м обобщенную постановку задачи формирования облика само
* включающую первые три задачи из класса задач "проектирования от
тТ’ Она формулируется следующим образом Найти вектор параметров,
*3 \,геризгющих форму, структуру и размеры самолета, который бы
^овлетворял требованиям, предъявляемым к проектируемому самолету,
*v обеспечивал достижение минимума (максимума) целевой функции
° В такой постановке она представляет собой задачу нелинейного
математического npoi раммирования, т.е. задачу (4.9).
Раскроем содержание понятий "параметры” и "ограничения ' примени-
тельно к пассажирскому самолету.
Вектор искомых параметров X = (хь х2. ... . хп) представляет собой
набор независимых переменных, которые однозначно определяют все
остальные параметры и характеристики самолета, а также значение целе-
вой функции. Число параметров, с достаючной степенью подробности
характеризующих структуру, архитектуру и размеры самолета (его
облик), даже на этапе разработки технических предложений достаточно
велико. Облик прежде всего характеризуется схемными признаками.
Эти признаки определяют способ балансировки самолета (нормальная
схема, "утка”, "бесхвостка” или их комбинации), схему крыла (моно-
план, низкоплан ...), схему силовой установки (тип двигателей, воздухо-
заборников и их размещение на самолете) и тд. С хемные признаки дис-
кретны. При автоматизированном проектировании их можно закоди-
ровать определенными числами, выступающими в роли констант для
ОДюго варианта расчета. Основными схемными признаками являются*
I- игюнои ]
°3ду хозабо рнн ков);
СХРмо
схема расположения крыла (низкоплан, высокоплан, среднеплан);
схема механизации крыла (тип механизации по передней и задней кромкам,
«алчаде интерцепторов):
схема оперения (нормальное. Т-Образнос, крестообразное);
ситовой установки (тип и расположение двигателей на самолете, тин
н0С1|С*ема (схема уборки, число основных стоек, число колее на передней
он ной стойках, число термоэныч колес);
вправления самолетом (ручное, бустерное, элсктродистзнниошюе);
баков э6е5,н°сти конструкции (тип панелей, способ герметизации топливных
^Моп 5Гекеиь использования композиционных материалов в конструкции
ivraj
Хема фюзеляжа (узко-, широкофюзеляжный, число падуб).
харак Рамка* заданной схемы форма и размеры самолета и его частей
Htie следующими параметрами. Это прежде всего размер-
>Икс Растрыz площадь крыла S и стартовая 1яга двигателей Ро. В прак-
^№м‘У°СКТИРОВш1ИЯ иногда удобно пользоваться производными этих
Р°в- Удельной нагрузкой на крт»!ло р0 = m0 g/S и стартовой тяго-
75
76
www.vokb-la.spb.ru - Самолёт своими руками?!
юностью Го ~ ^о//7,о£- Здесь /п0 — проектное значение взлетной
Boopy^aMo;ieia. Эти и обобщенные параметры, характеризующие азро-
кое совершенство схемы самолета (су , сх К) и эффектив-
дДО _
его силовой установки (бу. лгт). однозначно определяют летные
^^теристики самолета. Названные аэродинамические и энергетические
Иг чры являются функциями геометрических параметров планера и
п3Р* ммческих параметров двигателя, а также параметров, характери-
гз3°’ х взаимное расположение агрегатов самолета. Основные из них
приведены ниже.
Параметр
Обозначение
ГЫошадь крыла. м1 -................... .... S
уДЛИНСМНС крыла.......................................ЛКр
Стреловидность крыла, i-рвдус......................... хКр
Относительная толщина крыла ........................... скр
Сужение крыла .............- - -......................»?Кр
JUoiiiailb горизонтального оперения (ГО) . м2 - - . . - - - - ^г.о
Удлинение ГО................. ........................\.о
Плишха вертикального оперении (ВО), м2 ......... .....5ВО
Удлинение ВО . -...................................- -
Удлинение фюзеляжа............. ... . . Лф
Диаметр фюзеляжа, м .......... ....................... /)ф
Плечо горизонтального и вертикального оперения, м . . / гсг /
Статическая гя1-а двигателей, даН .................... rj
Степень двух конту рности дни гатедей ................tn *
Степень сжатия компрессора................................
Степень сжатия вентилятора ........................... .
Температура газов перед турбиной, К -...........
Угол установки крыла, градус..............................
к
яв
Л
Геометрическая крутка крыла, градус.................... ^Кр
Относительная толщина ГО................................. сго
Сужение ГО................................................7?г о
Стреловидность ВО. градус..................
Относительная площадь вертикального оперения................о
Относительная площадь горизонтального оперения ...........Sr о
Относм гсл ьный раз v ах закрыл ков............./зак
Относнтепы1ыс координаты двигателей по размаху крыла
1Ьрьируя эти параметры, а также схемные решения, проектировщик
40сгигаст целей просктиронания. Разумеется, указанные параметры и
схемнЬ1с признаки не позволяют получить полное представление о проек-
те- Можно назвать целый ряд дополнительных параметров, от выбора
к°торых зависит совершенство самолета. Например, для крыла такими
раметрами являются параметры, характеризующие форму и размеры
лывов ц законповок крыла, законы деформации его срединной
“♦««..к,,,,,,.,
НоГ() Ве:|ьчение числа искомых параметров в процессе поиска оптималь-
BeCTll0GjlHKa самолета вследствие учета их взаимовлияния может при-
Ирине ^J,^4UJe,,lfK> характеристик проекта. Однако это связано с услож-
К 1 Вь1числительного алгоритма и трудностями его реализации на ЭВМ
Нцде ' Же в настоящее время мы не располагаем достаточно точными и
Ь1ми алгоритмами, описывающими все многообразие связей между
77
параметрами и характеристиками самолета, особенно па ранних этап-1
разработки. В этих условиях задачу приходится решать поэтапно
дня принятие решений по целому ряду параметров на более пОз 43
этапы разработки либо принимая их априори па основании npoi^B
опыта. По мере развития представлений о таких связях, а также с
шепствования ЭВМ м вычислительных методов анализа и олгимизаИ
многонараметрических моделей число искомых параметров nocr^Jr
увеличивается.
Рассмотрим теперь основные факторы, которые формируют o&fa
существования проекта, т.е. выступают в качестве ограничений нриВь.?
ре проектных параметров, либо однозначно их определяют. Прежде вс*»
это ограничения, диктуемые условиями физической реализуемости с^В
лета. Эти условия являются обязательными для любого самолета,
симо от его назначения. Связи между параметрами и характеристика^
самолета, определяемые условиями физической реализации, называв
уравнениями существования [27|.
Слсдующая группа ограничений вытекает из необходимости выиа>
пять при проектировании самолета ряд требований директивного харак-
тера, диктуемых, например. Нормами летной годности, Нормами проч-
мости и т.д. Они одинаковы ал я всех самолетов определенного назна-
чения. ж
И, наконец, заключительную группу ограничений, определяющих
выбор проектных параметров, формируют требования ТЗ к характерис-
тикам проектируемого самолета. специфичные для каждого самолета.
ТЗ регламентирует, например, массу коммерческой нагрузки для рас-
четных дальностей полета, диапазоны скоростей и высот полета, требова-
ния к аэродромам базирования и т.д. Эти ограничения целесообразно
задавать в виде неравенств. Ниже представлены важнейшие характерис-
тики самолета, задаваемые ТЗ.
Характеристика Обозначение
Число пассажиров, чел..................................Упас
Шаг кресел, мм ........... _ гКр
Максимальная коммерческая пшрузка, кг . ........... отк.н
Расчетная дальность полета, км . ................. . . - -
Максимальная дальнестыюлстэ, мм .... . . ^тач
Потребная посадочная дистанция при максимальной посадочной
массе, м ....... ...... . ... . L
Потребная juiHHa ВИП при максимальной взлетной массе н рас-
чстнь£хусловиях(Т’-30°С,р - 730 мм рт.ст.), м ^ВПН
Крейсерская скорость полета или км/ч . . - - ^ кр
Скорость захода на посадку с макс!<мальной посадочной массой,
км'ч................................................ . х з п
Чисто членов экипажа и бортпроводников» чел............ - лЭк
Ресурс до списания планера самолета, основных самолстых шре-
гэтов, элементов несъемного оборудования, ч (число посадок) Гр (V)
Срок службы, лет........................... ..........
Может выступать в качестве параметра.
78
www.vokb-la.spb.ru - Самолёт своими руками?!
Числовые значения, характеризующие схему самолета, а также вели-
чины С’° потрсоных характеристик являются исходными данными для
проектирования. Однако перечисленных данных обычно недостаточно
чтобы однозначно определить параметры самолета и рассчитать его теХ’
к0-экопомические характеристики. Некоторые дополнительные исходные
данные представлены ниже. VA'” ди“е
Дополни тельные исходные данные Обозначение
3 кспяуатаци он но -эко] юмически с данные
Цена топлива. руб./л......................................ст
Коэффициент зш-рузки . . .................................V?
] иловое время использования ч/год........................Тг
Срок амортизации,нет ....................................7*а
Оситочиая стоимость, %..................................^ост
Число самолетов в серии, шт..............................jVc
Отношение числа пассажиров в салопах 1-го класса к общему числу
пассажиров..................................-...........\ни/^пас
Прочие данные
Максимальный скоростной напор, да! 1а ....
Масса постоянного бортовою оборудования, ki
радиотехнического.........................
дилотажно-наннгационнопэ .........
контрол ыю-испытагслыюго ...........
Описитсньиая мощность ВСУ ................
tfmax
• - - "Jp.O
• • л,п.н
• • • тк.н
уВСУ/л'да
Решения о численных значениях приведены* данных должны быть
приняты к моменту начала проектирования.
К числу дополнительных исходных данных можно также отнести
характеристики двшателя (если самолет проектируется под готовый
двигатель) и некоторые другие.
5.2. ОПИСАНИЕ АЛГОРИТМА ФОРМИРОВАНИЯ
ОБ.1ИКЛ САМОЛЕТА
В САПР описанною выше задачу можно реализовать на основе алго-
ритма, схема которого представлена из рис. 5.2. Операции, выполняемые
проектировщиком, на схеме обозначены окружностью, а машинные
операции прямоуг ельником.
^ходными данными алгоритма являются прежде всего числовые
в^прШны, определяющие значения лсзно-технических характеристик
олета, диктуемые ТЗ на нроекг. Вторая группа входных данных фор-
РУстся из назначаемых проектировщиком схемных решений 11а основе
ИогсГ^3 тРебований к самодегу; опыта разработки самолетов аналогич-
iie - Па:1на^*-’ния1 изучения результатов научных исследований но псрс-
пр0ТИНн,’1М Управлениям авиастроения, личных г вормсских способностей
ЛетаКТиРощцик намечает ряд признаков, характеризующих схему само-
признаку в алгоритме соответствует определенное число —
4 Следовые значения входных данных выступают в качестве кон-
79
Рис. 5-2. Схема алгоритма формирования облика самолета
гтант модели для одного варианта расчета. Их ввод оеушсс1вляс1ся
пользователем с пульта алфавитно-цифрового дисплея.
На основе входных данных, а также информации, хранящейся в
>анке данных, вычисляют или задают:
параметры стандартной атмосферы па расчетных высотах полета в
□счетное число М полета; I
параметры аэродромов взлета и посадки (/-Впп* ггр’“И
избыточное давление в пассажирском салоне;
прогнозируемые значения аэродинамических характеристик самолета
Су , с. . 0, -Л»зл > ),
•^отр >з.п СК4У
коэффициенты, характеризующие изменение тяги шиг< д^енл»1*
ости и высоте, а также некоторые другие статистические к эфф^ L прн&
еобходимые для определения проектных параметров пачаль
ижения; а
начальные значения искомых параметров (5, Ро. К X, G г?.?3- ”
О
(5.1)
www.vokb-la.spb.ru - Самолёт своими руками?
е jcriiie основных параметров начинают с нахождения парамет-
«даяэь'й” пР°скта “ удельной нагрузки на крыло pQ и стартовой
р°в Л.-ценности самолета . Предусмотрена также возможность
^я^'проекгировшиком.
з*4 [ ’ се определяют составляющие уравнения баланса масс. Для этого
лс проводят расчеты, связанные с определением массы, геометри-
рна1*3^ параметров и рабочих характеристик силовой установки. Если
ст прэекзкр^ют ноя заданный двигатель, его характеристики могут
5аМ непосредственно введены пользователем. Затем последовательно
быТЪ яюТ массу топлива, массу крыла, оперения, фюзеляжа, шасси,
°г оуповаии«« снаряжения и управления, В алгори1ме предусмотрена
°озмож31ость задания пользователем массы готовых изделий, входящих
В комплектацию проектируемого самолета. Уравнение баланса масс
записывают в следующем виде:
__ №Гк-н
' (1 - tri
где /лк и - масса коммерческой нагрузки; — сумма относительных
масс конструкции, топлива, силовой установки, оборудования, снаряже-
ния, управления; — взлетная масса самолета: А — результат решения.
Уравнение (5.1) считается решенным, если/ - 1 ± 0,001. Решение его
осуществляется итерационным способом.
Полученное значение взлетной массы позволяет определить размеры
самолета и перейти к реализации итерационных циклов, связанных с
соблюдением условия равенства потребной и располагаемой тяги. Для
этою уточняют геометрические параметры самолета, соответствующие
определенному значению взлетной массы, расчетным значениям нагрузки
на крыло и стартовой тяговооруженности. Затем рассчитывают аэроди-
намические характеристики самолета. Эти расчеты позволяют при замене
статистических данных по аэродинамике на расчетные повторить циклы
расчетов но определению основных параме!ров самолета, начиная с опре-
деления удельной нагрузки на крыло. Число итераций зависит от того,
насколько правильно были выбраны аэродинамические характеристики
самолета на этапе формирования начальной информации. В рассматривае-
мом алгоритме условием выхода из итерации является удовлетворение
^равенству
—“---------tt' *£0,001,
'"о I
'«о, — значение взлетной массы самолета, определенное на /ом шаге
Игераиии.
^ледуюН1Ий цикл расчетов связан с коррекцией параметров самолета
из оспоштых требований компоновки и центровки Здесь решается.
4 Определения рационального взаимного расположения крыла.
ЦельюЯЖЗ’ о,1еРсния и шасси, а также размещения грузов в самолете. С
Ия ^пР°щеиия формализации процесса компоновки самолет расчленен
РЦ компоновочные группы: группу крыла, группу шасси и группу
(5.2)
фюзеляжа. Последняя принята в качестве базовой. Задача коми
сводится к определению местоположения начала координа! i омпоноводи
ных групп, предварительно сформированных в соответствии с дирск^
вами ио схеме самолета, относительно начала координат базовой 1рущГЬ1
Цель достшается путем решения системы уравнений компоновки, oipS
жэющих сле/^ующие условия н ограничения:
условие продольной статической устойчивости на крейсерском
режиме;
условие балансировки самолета на взлетно-посадочных режимах-
условие подъема переднего колеса шасси на скорости 0,95 V
при взлете; т?
условие неевзливания на хвост пустого снаряженною самолета при
стоянке на земле;
условие незздевания ВПП хвостовой частью фюзеляжа при трьтве
или посадке;
условие незздевания ВПП концом крыла при посадке с максимально
допустимым креном;
условие неопрокидывалия на крыло при рулежке по земле с задан-
ным радиусом разворота;
условие незздевания ВПП носом фюзеляжа при резком торможении;
условие незздевания ВПП гондолами двигателей (при их размещении
под крылом);
условие минимального разбе>а центровок в летном диапазоне;
конструктивные ограничения на базу и колею шасси.
Расчеты, связанные с определением характеристик устойчивости и
управляемости самолета^дают возможность осуществить коррекцию таких
конструктивных параметров самолета, как угол поперечного V крыла,
угол установки двигателей, угол установки стабилизатора, балансировоч-
ные углы отклонения поверхностей управления и тл. В случае необходй’
мости после этого уточняют аэродинамические и весовые характеристики
самолета и затем согласовывают его параметры
Для того чтобы убедиться, что фактические (расчетные) петно-тсхяи-
ческие характеристики самолета полностью удовлетворяют ТЗ на проект,
а его экономические показатели являются приемлемыми, необхачимо про-
вести поверочные расчеты по определению легно-тсхиичсских характерис-
тик самолета и его экономических данных по общепринятым методикам-
Оценивая результаты этих расчетов, проектант в случае необходимости
изменяет ’’входы*’, прежде всего связанные с задаваемыми проектными
альтернативами, добиваясь соответствия расчетных характеристик TP*"
буемым либо их корректировки по согласованию с заказчиком.
Смысл описанною выше алгоритма формирования облика самолет
сводится к определению допустимого варианта проекта самолета»
летворяюшего заданным требованиям и ограничениям при выбраИ^И
схеме самолета и заданном наборе независимых иарамегров, харэктерй
зуюших его планер и силовую установку. Конечная же цель нроекгиЯ
вания — нахождение оптимального по выбранному критерию пР°е* <
самолета. Эта цель доетжается подключением алгоритма оптими331
82 1
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 5.3. Сгруктурно-функциопальная схема программною комплекса формирова-
ния об тика самолета
реализующего специальную процедуру управления, которая позволяет
на основе оценки результатов расчетов итеративно изменять независи-
мые переменные, добиваясь достижения экстремума целевой функции.
Комбинация имеющихся в библиотеке численных методов оптими-
зации позволяет достаточно надежно отыскать глобальный экстремум
целевой функции для принятой номенклатуры варьируемых парамет-
ров.
Лля реализации описанного выше алгоритма формирования облика
самолета разработан программный комплекс, структурно-функциональ-
ная схема которого представлена на рис. 53. Помимо общесистемных
средств комплекс включает в себя управляющие программы режимов
работы и пакеты прикладных программ.
В соответствии с блочным принципом моделирования пакеты объеди-
нены в функциональные блоки, соответствующие структуре модели само-
лета см. рис. 3.5). Комплекс состоит из семи функциональных блоков,
представляющих собой набор модулей простой и сложной структуры,
Решающих отдельные задачи проектирования Модульный принцип нрог-
1МмиР°вания делает комплекс открытым для дальнейшего развития,
позволяет производить замену отдельных модулей, либо расширение их
0001 ава R зависимости от типа решаемой задачи и используемых методов
Расчета. Описание алгоритмов функциональных блоков учебно-исследо-
аге'1ьской (УИ) САПР МАИ приведено в приложении.
Моп Комплекс функционирует с помощью управляющих программ режи-
расчета. В соошетствии с перечнем задач рассматриваемого лапа
63
предусмотрено три режима работы комплекса: собственно режим
формирования облика, режим параметрического анализа и режим опти-
мизации.
Управляющие программы определяют последовательность обращений
к блокам или их модулям, обмен данными между ними, организуют
необходимые итерационные циклы в зависимости от режима работы
комплекса. Управляющая программа состоит из обращений к модулям
а также логических операторов. Обмен информацией между управляю-
щей программой и модулями осуществляется через формальные
параметры.
Программы написаны на алгоритмическом языке ФОРТРАН-IV для
операционной системы <Х' ЕС.
Пакеты прикладных программ и управляющие программы записаны
на магнитных дисках в библиотечный набор данных и вызываются оттуда
стандартными средствами языка управления заданиями ЕС ЭВМ
Для работы программного комплекса рассмотренной конфигурации
требуется около 150 К оперативной памяти. Время счета одного вариан-
та в режиме формирования облика нс превышает 1 мин.
5.3. ОПТИМИЗАЦИЯ ПАРАМЕТРОВ
БЛИЖНЕГО МА1 ИСТРЛЛЬНОГО ПАССАЖИК КОГО САМОЛЕТА
Рассмотрим пример использования описанного выше программного
комплекса для решения задачи оптимизации параметров ближнего
магистральною онмолега. В качестве формальной стратегии поиска паивы-
годнейшего сочетания параметров самолетов используется алгоритм
минимизации неновой функции Дживса и Хука (см. гл. 4). Для работы
комплекса в режиме оптимизации пользователь должен указать целевую
функцию (критерий), назначить оптимизируемые параметры, выбрать
базовую точку (задать начальные значения параметров), шаг изменения
параметров, а также верхние и нижние границы их изменения
Задача формулируется следующим образом. При заданных тактике*
технических требованиях и принятых схемных решениях по проекту
определить
оптимальное значение скорости крейсерского полета и соответствую-
щие ему параметры самолета: удельную нагрузку на крыло, его удли-
нение, стреловидность по 1/4 хорд, а также относительную толщину;
влияние стоимости топлива на величину оптимального значения
крейсерской скорости;
поведение оптимума по VKp при изменении дальности попета.
В качестве критерия оптимальности (целевой функции) приняты
приведенные затрата на тонно-километр, определяемые по формуле:
^пр + ДКЗ!1.ВЛ'
где а - себестоимость перевозок, кои/т-км; якап.вл — приведении*
капиталовложения, коп.;т-км-
84
www.vokb-la.spb.ru - Самолёт своими руками?!
К проектируемому самолету предъявляют следующие основные
урсбпвания:
коммерческая нагрузка 14,5 Т;
число пассажиров -120 чел.;
высота крейсерского полета 7800 м;
расчетная дальность полета 17 5 О км;
длина ВПП 2150 м.
В качестве исходной принята схема низкоплана с тремя турбореак-
тивными двухкошурными двигателями, два из которых размещены под
крылом., а один — на фюзеляже. Оперение Т-образное» шасси трехопор-
ное с передней стойкой, основные стойки на крыле, убираются в фюзе-
ляж- Крыло снабжено двухщелевыми закрылками и предкрылками.
Принято, что удельные параметры двигателей (лл* ср, удв) известны
и нс изменяются в процессе решения задачи.
Качественный анализ связей оптимизируемых параметров самолета
с целевой функцией указывает на наличие оптимума. Действительно,
увеличение VKp увеличивает часовую производительность самолета и,
следовательно, ведет к снижению себестоимости перевозок. Одпако
превышение скорости, соответствующей Мкр, связано с ростом массы
конструкции, увеличением потребной тя!и двигателей. Это ведет к росту
эксплуатационных расходов и повышению себестоимости перевозок. С
другой стороны, снижение скорости позволяет уменьшить стреловид-
ность крыла и увеличить его относительную толщину, что ведет к сниже-
нию массы конструкции или при фиксированной массе позволяет увели-
чить удлинение крыла. Последнее ведет к повышению аэродинамического
качества, а следовательно, к уменьшению потребной тяги двигателей и
уменьшению раехша топлива, т.е. снижению эксплуатационных расходов.
При изменении цены на топливо перераспределяется структура экс-
плуатационных расходов» а следовательно, оптимальное значение VKp
также изменит свою величину. Моделирование на ЭВМ с помощью раз-
работанного программного комплекса позволяет дать количественную
оценку OIмеченных выше факторов.
Задача решалась в следующей последовательности.
Первоначально был выбран диапазон изменения скорости крейсер-
ского полета. Из опыта и статистики было принято VKp = 620 . - 780 км/ч.
При выборе принимались во внимание дальность и рабочая высота полета
Однако при увеличении цены на топливо потребовалось изменить ниж-
нюю границу до V = 550 км/ч. На всем диапазоне в первом случае
было просчитано пять точек, соответствующих оптимальным значениям
Функции, во втором случае (при увеличении цены топлива) - семь.
Были приняты верхние и нижние границы значении четырех парамет-
ра оптимизации и их шаг.
Параметр Границы изменения Шаг
Ло.даПа......................... 390 ...490 50
л - ........... 6.5 ...9,5 1
X ................. 5...29 8
с................. 0» 11 ...0,15 0.02
85
9
9 Vi
Я
«?.? г Л г ЛК
г,~л л
5Л9
Л-
40. 8
-V
Г
М - -I—
W № КО 7X7
0
АЙ? ТОР 790 ifo**
”)
Рис. 5.4 Изменение целевой функции с и ее составляющих no VKp.
а при старой цене на топливо; п — при новой цене на топливо
Л ***._
®Л Л *,%
Я* 8
flV 660 ТОО 790
4 -
Рис. 5.5* Изменение варьируемых параметров при минимизации целевом функции.
а - при старой цене на топливо; б - при новой цене на топливо
Идя исследования влияния цены па гоплипо на оптимальные пар»
метры примем два значения цены, отличающиеся на 70 %, например,
40 руб. за тонну (рис- 5.4, д; 5.5, д) и 68 руб. за тонну (рис. 5-4, 5 5#)
Цена топлива 40 руб. за тонну'
Ркр км/ч . ... с11р’ КОП./т -км 620 11.5 660 11.21 1 700 0.85 740 11.34 780 11.84
*юрт ХорЬ ipwyc ropt • ’ pq, даПА 9,25 9,1 8 5 5 5 0.1175 0,115 0,11 . 390 390 390 Цена топлива 68 руб. за тонну 7,75 17 0.11 390 25 23 0.11 390
ГКр. км/ч. . . . 550 590 610 620 660 700 740 *. 15.4 И'-0* 8,25
СцП, коиД-км . . 15,7 14.9 14.62 14 44 14.6 14.7
4« 9-5 8,5 8,5 9 8,5 8,25
Хорь градус- - 0 0 5 1 1 1 *0,11 t,-‘1 440 49<? 1
Copt 0.1175 рл, днПа . . 86 0.115 440 0,11 * 0,11 420 390 0,11 400 0J1 400
www.vokb-la.spb.ru - Самолёт своими руками?!
5 6 Влияние дальности полета на
К.мальное значение VKp
Вида0» что в 1,еРвом случае
ситим^ьное значение скорости
составляет примерно 700 км/ч. а во
втором - 630 км/ч Этот результат
вполне согласуется с отметившейся
тенденцией некоторого снижения
крейсерской скорости в связи с
ростом цены на топливо.
На рис. 5.6 показано влияние
дальнее™ полета на оптимальное
(ио минимуму себестоимости перевозок) значение крейсерской скорости.
Расчеты проводились для случая цены на топливо 68 руб. за тонну.
Как следует из графиков, с увеличением дальности полета оптималь-
ное значение VKp pacici из-за опережающего роста рейсовой скорости.
Также видно, «по при выбранных значениях параметров полет на малые
дальности (7. “ 1000 км) экономически невыгоден, так как при этом
резко возрастает себестоимость перевозки. Проведенный анализ позво-
ляет сделать некоторые практические выводы, касающиеся проектиро-
вания ближних магис1ральных самолетов в условиях роста цен на
топливо.
. С ростом цен на топливо для рассматриваемых самолетов эконо-
мически выгодны скорости крейсерского полета порядка 660 км/ч.
2. Возвращение к прямому крылу или крылу малой стреловидности
для таких самолетов значительно повышает их топливную эффек1ивность.
3. Для заданных требований оптимальными по критерию д||р с учетом
Рис. 5.7. Общий вид оптимнэироваи-
ного самолета, вычерченный па i рзфо-
лостроителе
87
новых пен на топливо являются следующие величины параметров kd
Л = 8,8; " 420 даПА. у-0; с "0,1125.
4. Указанный рост цепы на топливо привел к росту Приведен»
затрат на тонно-километр приблизительно на 5 коп-/т-км. Х
5. Оптимизация параметров крыла (\ Xi/ь Го, с)
на
по
НО критерию
95 - Ю % |Ю
Опыту, стат„с.
йпр позволяет снизить себестоимость юнно-километра
сравнению с проектом, параметры которого выбраны
тике и инкуииии.
Способ выбора параметров спр- К°“7Г ' км
По статистике............ 11,86
Оптимальных но критерию дПр. . 10,85
Л«о, кт
48 300
46 840
Если же учитывать возможную неточность модели (ошибка по тес-
там достигала 5 %), io и в этом случае выигрыш по себестоимости сос-
тавляет более 5 %.
На рис. 5.7 представлен чертеж общего вида ближнего Maiистралъного
самолета, параметры которого оптимизированы с помощью описанной
подсистемы. Чертеж получен с помощью графопостроителя ЕС-7054.
Приведенный пример демонстрирует некоторые возможности авто-
матизированного формирования облика самолета и. в частости, роль
оптимизации при выборе проектных параметров самолета.
ГЛАВА 6 ОСОБЕННОСТИ МЕТОДОЛОГИИ
ПРОЕКТИРОВАНИЯ МНОГОЦЕЛЕВЫХ САМОЛЕТОВ
При разработке маневренных самолетов многоцелевого назначения
проблема выбора оптимальных параметров имеет ряд особенностей^ по
сравнению с выбором параметров пассажирского самолета. ТипИ’ПИЯ
ситуацией, с которой сталкивается конструктор при разработке такого
самолета, являсюя то, что требования к его эффективности зачастую
формулируются на словесном уровне. Это затрудняет задание и опреде-
ление единого критерия, вынуждая решать многокритериальную задачу
Рассмотрим возможный подход к решению такой задачи.
6.1 ПОСТАНОВКА ЗАДАЧИ ПРОЕКТИРОВАНИЯ
Предположим, что объект проектирования (ОП) с требуемой степейш
подробности описывается вектором X - (х1л д2. .. . лп) размерности я
причем известно, что X в Лдо1| С А'л. где Е* — конечномерное евкли№°
пространство размерности /?, X О11 — множество допустимых вариант^8
проекта.
Это означает, что задание конкретного значения вектора параметр08
X* Е Хдоп вполне определяет конструкцию ОП, т.е. можно создал» ОАИ
www.vokb-la.spb.ru - Самолёт своими руками?!
- ором конструктивных параметров (КП) АГ* Отметим, что вектор АГ
Р давать далеко не самое подробное описание 011 Выбор описания
* -rvefcH двумя требованиями. Во-первых, описание должно быть дос-
таточно подробным, чтобы задание X С АДо|1 не вызывало сомнении при
а1изадии ОП е параметрами Лг*. Во-вторых, описание должно быть
цостагочно обозримым для гою, чтобы можно было говорить об алго-
ритмизации процесса проектирования и автоматизации его с помощью
ЭВМ-
Таким образом, при выборе вектора КП объекта проектирования
необходимо, как и всегда в исследовании операций и теории принятия
решений, найти компромисс между стремлением к точности моделиро-
вания ОП и простотой его математической модели. Будем полагать, что
этот компромисс найден и основной задачей проектирования является
определение значений вектора КП №.
Предположим, что внешние условия, влияющие на функционирование
ОП, известны и фиксированы. Тогда критерий эффективности функцио-
нирования Oil является функцией Л (У) только конструктивных пара-
метров А' еХдоп.
Предположим, что глобальный критерий Л" (АГ) один и что его жела-
тельно максимизировать. Тогда задача проектирования состоит в нахож-
жении А'* е Arg max F(X), т.е. в решении задачи:
А е АГДО|1
найти
max FCX). (6.1)
Л еЛдоп *
Таким образом, сформулировав глобальный критерий F(AT) и описав
множество АГ, можно решить задачу оптимального проектирования (6.1),
эквивалентную задаче (4.9), с помощью известных метопов оптимизации
на ЭВМ. Однако при проектировании таких достаточно сложных техни-
ческих систем, как, например, многоцелевой самолет, ЭВМ и тому подоб-
ные, формальный подход к задаче (6.1) как к задаче математического
программирования не всегда приводит к успеху из-за значительной раз-
мерности п вектора КП АГ, сложности множества АГД п и болы.цого вре-
мени, необходимо! о для вычисления значений критерия Г (А).
Решение задачи (6.1) методом испытаний всех конкурирующих
вариантов компоновочных схем самолета на имитационных моделях
Функционирования может быть осуществлено в том случае, если число
1,регсндентов (конкурирующих вариантов самолета) на дальнейший отбор
На Имитационных моделях функционирования будет небольишм. При
этом желательно, чтобы среди претендентов с большой степенью досто-
Ьерносги находились бы эффективные (совершенные) варианты (или
Ьариант). Для достижения этого можно использовать следующий фор-
^^льный подход [17]. Эффективность проектируемого самолета можно
°иепивать по значениям некоторою набора технических характеристик —
ъКп!ых критериев эффективности (ЧКЭ), определяющих концепцию
^Монета.
Каждая такая характеристика представляет собой отдельно взятое
89
и определяемое тактическим назначением качество ЛА. а весь набор I
совокупность* качеств, необходимых самолету щя решения тактических
задач, возникающих при его применении (эксплуатации). Гармоническое 1
сочетание отдельных качеств будет соответствовать наибольшее
эффективности самолета. Если обозначить ЧКЭ самолета через
^(Х)-(И\ (X). Й'2 (X),..., Wn (X)), Я
где W (X) — вектор частых критериев оптимизации, то задаче (6J) |
можно сопоставить задачу нахождения
max F(X).
А е П (И7. Хдоп) W
где И (Й'? Хдоп) — множество эффективных вариантов из Хдоп но вектор-
ному критерию И7 (Х)? называемое также множеством Парето.
Прежде чем обсудить связь* задач (6.1) и (6.2), сформулируем сете
ствепные требования к частным критериям. При назначении частных!
критериев должны соблюдаться следующие правила: |
частные критерии имитируют ’’простейшие” формы функциониро-
вания самолета и являются функциями его конструктивных параметров I
(следовательно, легко вычислимы и не требуют больших затрат времени
и памяти ЭВМ);
все частные критерии должны быть такими, чтобы их увеличение 1
соответствовало повышению эффективности самолета.
Естественно предполагать, что размерность лектора ЧКЭ меньше
размерности вектора КП. Поэтому следует ожидать понижения сложности
задачи при поиске вариантов компоновочных схем, эффективных относи-Я
тельно выбранных ЧКЭ Другими словами, при использовании с очных
мето, to в множество 11 (И7 Хдо11) содержит гораздо меньшее число эле-
ментов, чем множество X, и задача (6,2) в отличие от задачи (6.1) может
быть решена за приемлемое время, если удалось найти множество
п ( Адоп)
Обоснуем метод решения задачи (6.1) путем декомпозиции ее к
задаче (6.2) и для этого сформулируем требования к ЧКЭ IV (X).
Введем на множестве конкурирующих вариантов Хдоп два отно-
шения предпочтения (бинарных отношений) Rj, и определяемых
критериями Г и W следующим образом:
X! RrX2 ~ Л(Х1)>А (Х2);
Л^Х2 -и;(х1)^в;(Х2),
И^ХО^ИЧХа)
для любых Хь Х2 ЕХДОП.
Это означает, что
ХЬХ2 € X п связаны отношением Rp тог.ка и только тогда. когЛ
F(Xf) > F (Х2), те. вариант X, лучше варианта Х2 по гл балыю^У«
критерию F (X);
Хь Х2 С Хдоп связаны отношением Rw тогда и только тогда, коГЙ,
90
www.vokb-la.spb.ru - Самолёт своими руками?!
НЗНТ не хужс ваРИаНТа ^2 «Ю
компонентам векторного кри-
В<;С И (-V) и лучше хотя бы по
ЧКЭ (Л)‘ <3амС1ИМ> чго
^ношение Rw ® литературе назы-
вают отношением Парето)
Определение 6.1. Ядром CR (X)
бинарного отношения R, заданного
на множестве ХдоП. адзыейктся
множество недоминируемых по
данному отношению элементов из
АдоП*
Очевидно, что для отношения
ядро Crf (^Лоп) совпадает с
к/ к,
Рис. 6.1. Отображение множества Парето
множеством Arg шах I (х), а для Rw ядро CR (Хдоп) П (И', Хдоп).
Сказанное можно проиллюстрировать графически. Пусть имеется
только два частных критерия IV (X) = (IV, (X); И2 (X)) и задано отоб-
ражение IV множества конкурирующих вариантов Хдоп в плоскости
И'г- Допустим, Ч1о образ И’ (X) имеет вид, изображенный на
рис. 6.1. Тогда в соответствии с определением образ W {CR^ (X)) есть
кривая BCD. Точка А не принадлежит множеству Парето, так как точка
В превосходит ее но значению IVь т.е. В доминирует над А.
Определение 6.2, Отношение Rp называется согласованным с отно-
шением Rw. если для любых Xt, Хг е Хдоп. таких чтоХ1 R^t Х2, следует
XxRpX2.
Смысл согласованности состоит в том, что если X, лучше Х2 по
векторному критерию IV (X), то он лучше и по Глобальному критерию
эффективности Г (Л).
Естественно, что требованию согласованности Rw с Rp можно удов-
летворить, лишь-специальным образом выбирая IV (х), т.с. настраивая
IV На 1 Систему критериев (IV, (X), — , И'я (X)), согласованную в
смысле определения 6.2, будем называть полной.
Необходимо отметить, что в некоторых случаях, используя физичес*
Кий смысл целевого функционала и инженерный опыт, удается обсс
лечить согласование частных критериев (X) с глобальным крите-
рием F (X).
Утверждение 1. Если Rp согласовано с то Ср? (^ДОп) ~
^доц) •
и 1 следУет» 410 ПРИ согласованности Rp с Rw задачи (6.1)
(6.2) имеют одно и то же решение, т.е.
niax F (X) = max / (X) (6.3)
Vt:xnon *-П (iv.Anofl)
мы определяли отношение Rp и Rw соответственно через
е СПовые критерии F (X) и И' (X). Однако все рассуждения остаются
силе и при произвольных бинарных отношениях, не связанных с
Нкретными числовыми критериями, а заданных, например, с помощью
91
экспертных процедур. При этом исходная задача формулируется к
задача отыскания ядра Сд (X). **
Решение задачи (6.2) может оказаться слишком сложным. есЯ
велика размерность п вектора КП X, сложна структура множества X J
вычисление значений ЧКЭ И' (X) связано со значительными затраТаЛ
машинного времени. Эти трудности можно преодолеть при трименС1й,
агрегирования.
Назовем вектор КП X* агрегированным, если выполняется условие
и'< - “4 «I . О;
(6.4)
Хд. СХдоп С , //д < «д. + ।:к — О,/л,
где к уровень иерархии решаемой задачи проектирования; fk - фун.
кдия агрегирования уровня к.
Это означает, что вектор Хк в принципе может быть выражен через
другие КП, соответствующие более детальному описанию системы. Пос-
кольку пк < Ид. + 1 > то вектор Хк даст более укрупненное представление
об ОП Функции агрегирования нс обязательно выражены аналитически.
Так бывает лишь в простейших случаях. Чаще всего функция arpeinpo-
вания — это алгоритм, реализованный в виде программы на ЭВМ.
Выбор числа т ступеней агрегирования определяется следующими
соображениями желательно, чтобы размерность вектора КП X* была
невелика, а критерии Нд. (X*) достаточно простыми, чтобы оказалось
возможным решение задачи нахождения множества П (И', Хдоп).
Агрегирование Хк = fk (Хк + может состоять просто в фиксации
значений некоторых координат вектора Хк + несущественных для
к-ro уровня. Существенность и несущественность КП непосредственно
связана с этапом проектирования, т.е. с уровнем иерархии решаемой
задачи в процессе проектирования
Если число ступеней агрегирования т интерпретировать как число
иерархических уровней проскхированип, то после выполнения всех этапе*
агрегирования задача (6.2) может быть представлена в виде: найти По “
= П (И'о, Х° оп) и все решения уравнения Хо -/0 (Xi) порождают^
множество /0!(П0), из которого можно выделить Щ = П
» Ute f о — функция, обратная /0 (X,)
Распро траняя этот метод на гижни^ уровни иерархии, полу1®04
рекуррентное уравнение пр цесса внутреюи пр ктир алия 116J
Щ + 1 = И оГ (П*); И* +1 );* = о,™ - i, :
решение к торою есть нахожд нис конечного множества П„г.
Геометрическая интерпретация функции ДГ’и уравнения (6.5) np«^c
нительно к задачам проектирования приведена на рис. 6.2.
Смысл уравнения (6_5) заключается в том, что на каждом уровк
решения задачи проектирования отыскиваются оптимальные (по
конструкции X* + 1 е Пд + j (И/. + удовлетворяющие трсо°
92
www.vokb-la.spb.ru - Самолёт своими руками?!
*0Z
fy-MWo)
х - £ .z.
/1..
n.
Л,
v
A J
4r<W£f3№ljfl W
^zz
~1А>пй&ям Xjj
/Z?=^U).wi)
Лгу
Xjz
ra**7
ij-j'i'A) &
*31 Л
'/'< =Лту,А?2.Лл?
£-77i№ /ЮН&ф&шЗ
* ?A-' ’J Г #А?Л5#Я¥Т**
^=4iA>
хж-зз&л&ьяоя Z^7
Zf7
пл
мг.чъ'?
4
nv "{fjUW]
JVj
пт
Рис. 6.2. Геометрическая интерпретация уравнен ня внутреннею проектирования
вациям к эффективноеги конструкций более высокого уровня X.. С
e/4<4.il„„).
Легко видеть, что на каждом шаге решения уравнения (6.5) происхо-
дит отсев вариантов, неперспективных для детализации на следующем
шаге. При удачном подборе критериев и функций агрегирования
*к задача (6.5) будет достаточно простой.
б 2- ОТЫСКАНИЕ МНОЖЕСТВА ЭФФЬКГИВНЫХ ВАРИАНТОВ ОП
РЕШЕНИЕ ЗАДАЧИ ПРОЕКТИРОВАНИЯ) г
С математической точки зрения нахождение множества П (И- %до|1)
с®одится к решению параметрического семейства так называемых лекси-
^графических задач оптимизации Задача упрощается, если отыскивать
^тожество Парето, а более широкое множество так называемых полу-
Эффективных вариантов самолета П° (И', ^доп ), отображение которого
Пл°с к ость И* есть кривая ABCDF т рис 6 1.
93
Если Яц/ согласовано с /\у., то на основании утверждения
(6.3) сводится к задаче:
найти
1 -*элача
max F(X)- max F (Jf).
л'схдоп %еп° (одоц) (б.()
При применении сеточных методов эта задача может быть irpeiicrJ
лена в виде:
найти
Шах F(X, X),
% е * тон
где F (X, X) - min X, Wt (Af) вспомогательный критерий» представляю-
ШИЙ собой свертку частных критериев (А") с весовыми коэффициент],
ми X,-
X = (Хь Х2,... , Хя)
л
(6Л)
Весовые коэффициенты X, при часшых критериях эффективности В'(У)
можно интерпретировать как коэффициенты важности соотвегствуюнщх
критериев чем больше величина некоторого Xf, тем важнее критерии
И'(X). Таким образом, каждый вектор X задаст определенные пропорции,
в которых должны сочетаться различные качества ОН, определяемые
ЧКЭ.
Для исключения неопределенное!и, возникающей при решении задащ<
(6.7), при Ху - 1 проводится монотонное преобразование критериев
ц/ u Иг ( УТ лЩ
W, (X) - 1 - — , где И'°- пшх И', (У) > 0.
W i ЛН
w- (X) и
В этом случае F (Л, X) - шах —---------- г X,- и задача отыскания
i
max F(X) сводится к решению семейства задач
W:9- U'(A')
шах---------' -
И',*
(6-9)
min
ЛеХДои
где 0 С
И7 И, (X)
“Г
< 1 при всех Л Лгдо1).
Определение П° (И', АСДОП) как множества неулучшас.мых по отн
шению К# точек означает, что нельзя добиться увеличения o’twoiw
частного критерия без одновременного уменьшения значений ДрУгй*
частных критериев. Аналогично, для X Е -¥Д(>|| невозможно одновремеН*
ное увеличение всех ЧКЭ Например, при некоторых \ - 1 реалЛ’^г>
максимальное значение соответствующего критерия:
max И; (А) И/у max (прямые А В и DE на рис. 6.1).
Л дол
94
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 6.3.1 сометрическая интерпретация решения семейства задач (6.9):
4 (X, --- X ----/4 (X, Л4):/у --F(X, = щах fJX, Л);------*-
/, А Л),----’ -/2fX X); - - Д/А'Х);---X-*--/4fXX)
Если назвать вариант ОП Xpi9 реализующий значение ^1так, рекордистом
И*7- И'- (У)
no t му частному критерию, то выражение -----—«оказывает, нас
W?
кодько вариант X хуже соответствующего рекордиста номера р/; причем
чем больше это выражение, тем больше отличается ОП X от ОП-рекор-
Xffi. В частности, в точках Хр}, Хр2, Хрз, Хрл, где max (X) -=
- h/.
А<;=*доп
реализуется предельно достижимое значение соответствующего
95
частного критерия. Геометрическая интерпретация решения емейсЛ
задач (6.9) представлена на рис. 6.3.
Вопросы численного отыскания .множества 11° (И; Л'Д(1П) являюгД
весьма сложными. Обычные градиентные методы поиска экстремуД
для решения семейства задач (6.6), как правило, непригодны, поскодьКу
мы имеем дело с многоэкстремальными и недифференцируемыми фущ!
днями. В практической работе обычно применяют сеточные методы реше-
ния семейства задач (6.9). Если сетка весовых коэффициентов состоит
из га узлов, где т — конечное число, го выход на множество Парето не
может бьиь гарантирован. Однако можно полагать, что при достаточно
большом ш множество решений задач (6.9) будет находится вблизи
множества Парето.
6 3. МОДЕЛЬ ОБЪЕКТА ПРОЕКТИРОВАНИЯ
Формализация процесса проектирования требует разработки опи-
сания ОП, которое должно осуществляться на языке, представляющем А
собой сочетание естественного языка, языка графики и чисел.
Таким образом, описание это знаковая модель проекта, в которой
информация об ОП последовательно возрастает в процессе проектирова-
ния Модель проекта в соответствии с традиционной схемой проекти|ю-
вания представляют в виде конечного набора объектов и заданных отно-
шений между ними.
Каждый объект соответствует отдельной части конструкции (агре-
iaia, системы, оборудования и т.д.) самолета, имеет определенное имя.
позволяющее идентифицировать его среди друт их объектов, перечень
свойств, содержащих всю информацию о данном объекте, необходимую
ня решения задач синтеза и анализа проекта Отношения служат для
формального предс шипения типов взаимодействия между объектами- I
Для наглядного описания иерархической структуры ОП обычно
используют ее графическую модель в форме древовидного ориентире-
илиного 1рафа, называемую иначе деревом конструкции, корневой вер*
нпной которого является Oil, вершинами первого уровня - крупные
н< (системы (блоки, модули), вершинами второго уровня — подсистемы
ио лес низкого ранга, выдел иные из предыду них, и т л.
Для задач проектирования наиболее пшичны отношения тина ’’вклю-
чает”, ’’принадлежит’ ’’зависит”. Например, если рассматривать самолет
как исходную систему, то в качестве подсистем первою уровня можно
рассматривать планер, силовую установку ценное оборудование, снаря-
жение и тл. В свою очередь, они будут рассматриваться разработчиками
каждой из перечисленных подсистем в качестве исходных самостоятельна
ных технических систем (объектов), состоящих из отдельных част€и:|
агрегаюв, узлов и других комплектующих элементов. Элементом назы-
вается первичный объект, не подлежащий при данном уровне рассмогре-
ния дальнейшему разбиению. Членение (декомпозиция) объектов Q
большим числом элементов на крупные подсистемы (блоки, .моДУЛ^Н
96
www.vokb-la.spb.ru - Самолёт своими руками?!
зрочяег упростить анализ отношений и уменьшить число принимаемых
^внимание связей, ограничившись наиболее существенными.
Такая модель, используемая на этапах синтеза и анализа проекта,
является очень удобной для построения банка данных. В этом смысле
дерево конструкции, в котором отражается только факт существования
0Тношений включения между именами вершин, а все данные, относящиеся
к этим вершинам, хранятся в банке данных, можно назвать инфраструк-
гурой над банком данных (например, компоновочная, весовая техноло-
плеская инфраструктура).
Любая частная задача проектирования связана с математической
моделью ОП. Это может быть самолет в целом на сличим разработки
технического предложения, какая-либо система, агрегат или деталь на
сгэ,щях эскизного и рабочего проектирования.
В любом случае под математической моделью ОП будем понимать
некоторое множество Адоп в пространстве КП X, которое может иметь
достаточно сложную иерархическую структуру, отражающую структуру
конструкции ОП.
Множество АцОП представляет собой множество реализуемых ОП
(инО!да его называют множеством допустимых конструкций) и опре-
деляйся множеством значений КП с наложенными на них связями и
ограничениями. Заметим, что ограничения имеют двоякий характер.
С одной стороны, это могут быть законы, обязательные для данного ОП
(физические законы функционирования; ограничения, сформулирован-
ные в ПТ заказчика), с другой, — ограничения, введетшые самим кон-
струкюром и.отражающие его представление об ОП (опыт предшествую-
щей практики конструирования).
Кроме собственно конструктивных параметров, 011 обычно обладает
некоторыми характеристиками, являющимися функциями КП. Поэтому
1цэи составлении описания модели ОП необходимо определить способы
вычисления этих характеристик.
Формально характеристики и КН ничем ле отличаются. Их часто
бывает трудно разделить и на пракхикс. Вводимые же функциональные
зависимости характеристик от КП можно без особых осложнений рас-
сматривать наряду с компоновочными связями
В соответствии с вышеизложенным магсматичсская модель ОН может
быть представлена в виде
Адоп (ЛГ-(хьх2....Рх (Y)), (6.10)
ГЦе е ^доп вектор конструктивных параметров ОП (некоторый
вариант допустимой конструкции ОП); xi — значения конструктивных
1 эраыетров ОП; X - множества значений соответствующих конструк-
тивных параметров; Р (X) — предикат, отражающий связи и ограниче-
НИя?наложенные нал-/
Множества могу г представлять собой множества целых или дей-
-льных чисел, множество певческих значений процесса проекти-
н ИЯ1 а могут быть и множествами, описывающими модели агрегатов,
Ко7оРЬ1Х состоит ОП.
453 _7
97
Таким образом, математическая модель ОП задает одновременно и
структуру ОП,и пространство КП^и связи между ними.
Рассмотрим упрощенное описание модели самолета:
САМОЛЕТ =- «/«о- А Ль - , агр. U агр. 2, агр. 3, агр. 4, ...
где конструктивные параметры /п|Ь л.р р, - масса, координаты lентра
масс, нагрузка на крыло, стартовая тяговооруженность, ... - принад.
нежат множеству действительных чисел, а агр. 1, aip. 2,агр. 3,агр. 4
агрегаты самолета:
агр. 1 - ПЛАНЕР, агр. 2 - СИЛОВАЯ УСТАНОВКА,
агр. 3 - ОБОРУДОВАНИЕ, агр. 4 - СНАРЯЖЕНИЕ.
В свою очередь, ПЛАНЕР — это модель конструкции планера, которая
может быть представлена как
ПЛАНЕР - (<агр. II, агр. 12, агр. 13. агр. 14, ... >),тдс агр Ц J
ФЮЗЕЛЯЖ, агр. 12 - КРЫЛО, агр. 13 - ОПЕРЕНИЕ, агр 14 - ШАССИ и
т.д. Аналогично можно описать другие агрегаты.
В дереве конструкций (рис. 6.4) терминальным вершинам (т.е. тем,
из которых ничего нс выходи!) будут соответствовать простейшие агре-
гированные КП, которые представляются целыми или действительными
числами (ш0. *т А Л)-
Модель компоновочной схемы ОП является исходной при разработке
любого нового ОП и основой для разработки компоновочных ограниче-
ний — алгоритмов синтеза компоновочной схемы нового 011, в качестве
которого будем рассматривать самолет.
Определение 6.3. Признаками компоновочной схемы самолета назы-
ваются параметры геометрической схемы самолета, совокупность
которых определяет особенности (конфигурацию) компоновочно и схемы
самолета. Конструктивные параметры - это параметры, coeoi упноаъ
которых определяет форму, размеры и массу конкретного амолета.
Введем обозначения
Пр — вектор компоновочных признаков самолета (формализованное
описание особенностей компоновочной схемы);
Хо множество вариантов допустимых конструкций самолета меюших
одинаковый набор компоновочных признаков.
При принятых обозначениях справедливо включение X С ¥0, гЖ
Хо - X (Пр). В этом смысле можно сказать, чго задание вектора Пр’
= (Прь Пр2, ... , Прл) определяет множество Аг0, представляющее собой
множество всех допустимых конструкций самолетов данной архитек-
туры, а задание вектора X - конкретную реализацию самолета.
Определение 6 4 Компоновочными ограничениями называется сис-
тема равенств и неравенств, связывающая конструктивные параметр** 1
координаты вектора X и описывающая компоновочную схему самолет
Компоновочные ограничения учитывают имеющий! я оньп сам0'
летостроения и практическую реализуемость того или иного к мпой0
вочного решения Они определяют “правила поведения” системы
рования облика самолета при синтезе компоновочной схемы.
Матрица признаков компоновочной схемы само лета является
мализованным описанием основных компоновочных решений, т-е-
ЭВ
j
www.vokb-la.spb.ru - Самолёт своими руками?!
стен основным справочным материалом при составлении описания ком-
поновочной схемы, в котором необходимо тщательно определить не
только то, чго можно делать, по еше более пцательно — то, чего нельзя
лететь.
Помимо этого матрица может служить основой дли построения прог-
раммы определения компоновочных схем самолетов-аналогов
Примерный состав матрицы для принятия решений при выборе ком-
ноновочной схемы самолета на словесном уровне приведен на рис 6,5,
r'ic в рамках выделены признаки, определяющие компоновочную схему
истребителя ВВС США 1-I5A
Примем, чю признаки компоновочных схем самолета ф рмиру
юТся но принципу “или-или”, в связи с чем установим что
запись (Пр-В = fo при Ир - 1;
11 при Ир ~ 2;
запись (2 - Пр) - J1 при Пр - 1;
10 при Пр = 2. Э9
7 z J * 1
! -* 4 1
ГГГ 7Г .-76Т J _ X -^- —i— • • •
-У?#7 fK/VffVW&MWW Л?£' .У< 7 "‘j^, i\, ^Tl
cs s-
&ию&пя gang кт? fan: Ttf? $№&&?*№
Яд&ыъхп- .^соше^пл ^Z<$AWZ7P+ • • •
От З&итаглелл JTPA<P_ r^4
fc/77 -г /T£/’.T.V/7.'Ar/.WZ/£' даса₽удгЛ'
ТГ uc OU^LU
0'7 f—
Сг*~3 • » 1 «»
1 _A_
V
Кзыл#:
^ETX^VXw «К Г ” ИАКГ^Ц7КЛЛ "7^’—rf№7 .7r”.r-^7fe
^тмп S ллоле _ A_
7$3U7tofh 77:77Ь Уле 37?7?ЛЧ/М?. .4,-УТ- f r-'-.'^/'v -Лй'^ТЛ^^Т'ЛХ j \"‘"7Tv j\'“1'
7?.-517Ж’'77Л‘^г • ••
^SOi&VUC ->& .7/ .- .-1.
— V
ЗертикилАлпе- o&epewe -
//„ / _ I <r vAt ча:?*
^r^.47 -;Z77_T_-r 77 - .75 U-g^y • • • • ••
¥&ЛЛ& Л рЛЛЧЕЩГ'/ил т.члей A Г lJ L a | | • • •
?.7J*f£Z%&f£/P 1 A. L^J • • •
fflptttf -
AfcJJJW TZCiXfawnS S№.40 J]f * W.7T.7- ttm&m • • •
&wmqewve 5 гл/ле *W • ••
Тип тележки e <hf\ • • •
Числе колес S /т7?/7сжке 1 Z 6
<?чил&ж.
Vtraw 7 2 3
Ризмрщ&ые O«7ey СкрЦ7Л9КЛе • ••
ТлпслЗ utfuJCUHOZO .'tf7?r,',j?pejtfOP X.?^7fS
Рис. 6-5. Примерный состав матрицы признаков компоновочных схем сзМОЛСи
100
www.vokb-la.spb.ru - Самолёт своими руками?!
рассмотрим пример формирования матрицы признаков комноно-
рочных схем: нормальная, "утка”, "бесхвостка”; для этого составим
гзблипу-
С учетом принятых обозначений балансировочная схема задается в
следующем виде:
схема "бссхвостка"» индекс 112: (ПБАЛ1-1);
нормальная схема, индекс 121: (2-ПБАЛ1) (2-ПБАЛ2);
схема’Утка”, индекс 122: (2-ПБЛЛ1) (ПБАЛ2-1).
Табл. 6.1 содержит 16 признаков вида ’’или—или", что позволяет
получигь число вариантов компоновочных схем, равное:
2*1 Ь + 2*12 I + 2‘Л г ~ 163 840.
Таблица 6-1. Признаки компоновочных схем
Описание признака Запись Индекс
признака признака
1. Балансировочная схема самолета ПБАЛ 1
1.1. Признак наличия ГО: ПБАЛ1 11
ГО имеется ПБАЛ 1-1 111
Г 0 отсутствует ПБАЛ1-2 112
1.2. Признак расположения ГО по оси ОХ: 11БАЛ2 12
позади крыла ПБАЛ2-1 121
впереди крыла ПБАЛ 2-2 122
2. Фюзеляж 2
2.1. Признак расположения воздухоза-
борников (B3) : ПФ 21
сбоку фюзеляжа ПФ-1 211
под фюзеляжем ПФ-2 212
2.2 Признак размещения двигателей: пл 22
в едином отсеке фюзеляжа (пакете) пл-1 221
в изолированных отсеках фюзеляжа (мото гондол ах) ПЛ-2 222
2-3. Признак схемы дошюЙ части фюзеляжа: ПС 23
сопла дни га юл ей разнесены ПС-1 231
сопла двигателей сомкнуты ПС-2 232
2-4. Признак размещения колеса
главной опоры самолета относи- тельно канала подвода воздуха
к двигателю (КПВД): IIIU 24
снизу сбоку КНВЛ ПШ-1 241
сверху сбоку КП ВЛ —Признак схемы фюзеляжа по ПШ-2 242
размещению целевой нш рузки (ЦП) : ПЦП 25
наружная подвеска ЦП ПЦН-1 251
э , г КонФ°РМная подвеска ЦН - Признак размещения экипажа 1НЦ1-2 252
ПЭК 26
тандем ПЭК-1 261
э РЯДОМ Признак размещения ГО: ПЭК-2 262
ПГО 27
Ча фюзеляже НГО-1 271
на шрегатах, примыкающих к Фюзеляжу (в нормальной схеме - ПГО-2 272
101
Описание признака
//р< движение Габ.Е л /
Запись Индекс
признака при шака
на балках. примыкающих к
хвостовой част фюзеляжа,
в схеме ’’утка” на боковых ВЗ)
2.8. Признак схемы ВЗ •
плоский ВЗ с горизонтальным
клином торможения
Плоский ВЗ с вертикальным
клином торможения
J. Крыло
3.1. Признак стреловидности передней
кромки крыла:
прямая сгрсловкдоюетъ
обратная стреловидность
3.2. Признак конфигурации передней
кромки крыла:
с наплывом
без наплыва
3.3 Признак расположения крыла
относительно строительной три-
эонталн фюзеляжа:
высокоплан
низкоплан
4. Вертикальное оперение
4.1. Признак числа килей
один
два
5. Двигательная установка
5 1. Признак типа двигателя
ДТРДФ
ГРДФ
5 .2. Число двигателей:
опии
два
б Основная опора самолета
6.1. Признак направления уборки.
вперед (против полета)
назад (по полету)
6.2. Признак числа колес:
одно
два
ПВЗ 28
ИВЗ-1 281
ПВЗ-2 282
ППК 31
ППК-1 311
ППК-2 312
ПП 32
ПН-1 321
ПП-2 322
ПКФ 33
ПКФ-1 331
ПКФ-2 332
4
ПВО 41
ПВО-1 411
ПВО-2 412
5
1ШУ 51
ПЛУ-1 511
ПДУ-2 512
ПДВ 52
ПДВ-1 521
ПДВ-2 522
6
ППУ 61
П11У-1 611
ПНУ-2 612
ПК 62
ПК-1 62!
ПК 2 622
Однако не вес компоновочные признаки являются совместимыми
В табл 6.1 несовместимыми признаками являются
112—271, 272: ’’Балансировочная схема ’’бссхвостка”
'ТО размещается на фюзеляже’’,
’ТО размещается па агрегатах, примыкающих к
фю.теляжу”
222 231,232, 521: ”Дви< атели в мотогондолах” —
’’Сопла двигателей разнесены”,
’’Сопла двигателей сомкнуты”, .
“Один двигатель”;
102
www.vokb-la.spb.ru - Самолёт своими руками?!
( //7 3 127 722
1 —
tii 1 212 .. 1 l_£ v ] m 211 212
izi j zzz l_£ □ 7Z7 ( * ) С Г"1)-
231 I 232 U 7 □ 232 |C*J7 >
Фюзеляж 241 | 242 I \W| zw 1 241 742 1
257 | 252 | /5/ | 252 ] 251 252
75' [ Ж | .УГ | 767 I 251 262
c -4^2 271 | f_ ^77 ) 272
78I Z8Z | ?ЛГ~| 282 281 282
377 712 Li r; □ J!2 311 312
321 322 321 I 31 XJ 321 322
JJ7 332 U □ 332 331 332
¥11 417 l_i 3 ‘Hl 472
J// 5.7 Ц □ 512 511 512
521 522 • 1 UL 1 ( 5Z: 1_522_
Шт 5’1 51? Ll tn 511 617
621 522 Q - О 527 621 622
F £5Л
Рис. 6 6. Матрица признаков компоновочных схем
аналогично 231, 232-222. 521; 521-222, 231,232.
211—271: "Боковые ВЗ” ТО разметается на фюзеляже (для
схемы ’’утка”);
212 272: '‘Подфюзеляжные ВЗ” — 'ТО размещается на боковых ВЗ
(для схемы ”уткв”Х
Учет несовместности признаков понижает число вариантов компо-
новочных схем до
2И2 + 2/Л +2/L - 12 288.
На рис. 6.6 приведена матрица признаков компоновочных схем само-
Лета’ построенная на основе табл 6.1. В овалах указаны несовместимые
“РИзнаки. Прямоугольниками выделены признаки, описывающие ком-
По,Ювочную схему самолета Б-15 А
В этом случае описание вектора Пр имеет вид
103
Hph и л - (121, 21 к 22k 231, 241, 25k 261, 272.281,311
33k 412, 511, 522, 611,621) z :
или r словесном виде
самолет нормальной схемы; фюзеляж с боковыми ВЗ; двигателе
размещены в фюзеляже; сопла двигателей разнесены; колесо главной
опоры самолета размещается снизу сбоку К11ВД: наружная подвссЯ
ЦН; экипаж размещен тандемом; ГО размещается на балках, примыкаю-
щих к хвостовой части фюзеляжа; ВЗ плоский с горизонтальным клином
торможения; крыяо прямой стреловидности без переднего наплы»
ВО двухкилсвое; два двигателя ДТРДФ; главная опора самолета убн'.
рается вперед (против полета) : колесо одно.
6.4. МГТОДОЛОГИЯ ПРИНЯТИЯ РКШЬНИЙ
Решения о выборе варианта компоновочных схем для последующей
разработки на практике оказывается весьма затруднительным. Это связа-
но с тем, что чисто ’’эффективных",компоновочных схем может быть
достаточно большим; при отсутствии ограничений на число узлов вариации
конструктивных параметров оно равно числу узлов сетки весовых коэф-
фициентов.
Если для дальнейшей разработки проекта принимается исходное
число ’’эффективных” компоновочных схем, то па последующих уровнях
проектирования происходит лавинообразное увеличение вариантов ком-
поновочных схем самолета, сохраняющих значения ЛТХ и агрегирован-
ных параметров 1-го уровня. Таким образом, возникает проблема отсева
вариантов компоновочных схем при переходе с одного уровня иерархии
на другой.
Наиболее приемлемыми и логичными методами сокращения вариан-
тов ’’эффективных” компоновочных схем самолета могут быть:
Декомпозиция чаоных критериев эффективности. На рис. 6-7 рас-
смотрен пример декомпозиции критерия ’’выживаемость”.
Замена частных критериев эффективности, которая является следст-
вием анализа градиентов ограничений. В районе существования maxF(-V)
эффективность решения меняется слабо В то же время градиенты огра-
ничений могут иметь существенное различие В этом случае целесообразна
произвести замену системы ЧКЭ, выбирая в качестве новых ЧКЭ огра-
ничения, имеющие наиболее сильное различие в значсииих 1радиентов.
Выделение концептуально ориентированного подмножества компо-
новочных схем самолета. В разд. 6.2 указывалось, что весовые коэффиш*'
енты при ЧКЭ интерпретируются как коэффициенты важностей соотвег-
ствующих критериев. Если перечень ЧКЭ предварительно определен и
указана область, которой принадлежат весовые коэффициенты соотее*!
ствующих критериев, то задача понижения размерности множества эффев
тивных компоновочных схем сущее тепло упрощается.
Допустим, что из моделей более высокого уровня этапа внеип^
проектирования получено следующее значение пространства конпейв
104
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 6.7. Декомпозиция частного критерия эффективности "‘выживаемость**
проектируемою АК (на примере двух частных критериев оптимизации):
X (IV,) =о,3 ... 0.4 и X (И'2) =*0,7 ...0,8. Тем самым из множества эффек-
гивных компоновочных схем исключаются подмножества, находящиеся
на кривых BKt и К2О (см. рис. 6.1), а искомое концептуальное под-
множество находится на кривой К, К2*
Совмссшый анализ эффективности и стоимости самолета (АК)
проводится, если сформирован однозначный вектор концепций самолета
и из моделей более высокого уровня известно минимально допустимое
значение уровня эффективности, например
F* <w, X) - v h'»max у.
где Hzfmax - максимальное значение /-го критерия, полученное лЛ
моделировании операций на этапе внешнего проектирования; IV?—
дельное для данного уровня развития техники значение /-го частного
критерия.
Тогда в качестве показателя эффективности конкурирующих вари-
антов компоновочных схем самолета выступает свертка вида
л
/'(У. X)- S
г - 1
х.
\пах
(6-11)
где И'г (А\) значение гго критерия в А’-ом варианте компоновочной схсмЬ1
самолета; И', Wmax " максимальное значение /-го критерия, реализован-
ное на этапе формирования облика самолета.
Масса самолета в данном случае исключается из списка частных кри-
терисв, поскольку при детерминированных /мц о и тц н (где гпц^ -
масса целевого оборудования; шц и - масса целевой нагрузки) она
является эквивалентом стоимости самолета.
На рис. 6.8 представлена графическая интерпретация этого совмест-
ного анализа при различных вариантах распределения весовых коэффи-
циентов и при значениях F* (IV. X) - 0,97 и С = 1,05, где С - отнеситель- 1
пая стоимость снаряженного самолета (за единицу принята стоимость
варианта самолета с минимальной взлетной массой)..
Если значение вектора концепций не было определено на этапе внеш-
него проектирования, относительная значимость частных критериев
устанавливается по результатам экспертизы, проводимой на основе графа
качеств. Если в результате экспертизы будет установлено, что относи-
да
ОМ
007
7П7Г'7---
да-
да
Л^л)-57ЛГ.
• г7
FA
FZ •
F7J
Ml
ioo io? юг ioj ж ия с
тельная значимость частных кри-
териев одинакова, то цслссооб- J
разно принимать к дальнейшей
разработке схемы самолета,
имеющие значения весовых
коэффициентов Хср - 1/л, или
схемы имеющие минимальное
значение w/0. Последнее решение
является для конструктора наи-
более оправданным и t гичным,
тем более, что оно является
количественно обоснованным.
Применение метода метрик.
Пусть множество П° (И. .¥дсП)
включает в себя два подмножест-
ва недоминируемых но совокуп-"
ности ЧКЭ самолетов П01 О1’*
*дон) И Н02 <’*' *Доп),
Рис. 6.8 Геометрическая ннтерпр**13’
цня анализа но критериям "стои-
мость эффективность"
Г
П
106
www.vokb-la.spb.ru - Самолёт своими руками?!
«личные концепции компоновочных схем. СЪклонением .множсст-
111,поГ' f множества II02 назовем величину
рз I1
о иг01 по2)“«>ах т',’> <7 (10’)),
и’^’еП** и<”«=по’
мс гонка, задающая степень ’’близости” вариантов самолета по
значениям их ЧКЭ.
Be и чина /? (II01, И ) дает точную верхнюю оценку расстояния
любон точки множества И01 до множества П° Заметим, что если
уТ г П02. то Л (П01, П02) “0. Эго означает, что яти любого самолета
lai конвенции найдется эквивалентный (с теми же значениями ЧКЭ)
самолет 2-й концепции Обобщай. можно считать самолет 2-й концепции
*’нс хуже’* самолета I-й концепции, если /? (П01, П02) < G где € - дос-
таточно малое положи 1сльнос число.
Эти рассуждения можно распространи ib на пространство ЧКЭ
проектируемого самолета. В этом случае условие "нс хуже" принимает
вид: Я (Й01 п И02 п Я) < с, где D заданная область пространства
ЧКЭ. соответствующая заведомо приемлемым самолетам Будем счи-
тать самолет 2-й концепции ’лучше” самолета J-и концепции,если выпол-
няю ня условия
R (П*1 гD: П02 ПО) <c:R (П02 ОДП01 А/)) <№,
где V — некоторое положительное число.
Отношение "лучше” можно ввести и другим образом. Например,
самолет 2-й концепции ’’лучше” самолета 1-й концепции, если
ЛЯ (П01 Г1/Л П02 Л/)) </? (В01 П/);П’’1 П0).
Предположим, чго в пространстве ЧКЭ заданы метрики вида
/ » иИ ’ К ь '
J, (М11. ь (1»______J )
' -' */.
11.» 1» 1 IV (2 1
d~ (101 \ h,<2 J - max ( —----— ),
i ie ki — нормирующий коэффициент, с помощью которого можно обра
эовывать различные варианты метрик, задающих соотношения "ценности”
единиц измерения ЧКЭ; Ап максимальное значение 7-го ЧКЭ (шах И,-):
*г2 разница между максимальным и минимальным значением /-го ЧКЭ
(»nax Hrf- rniii h’f)
Здесь для всех частных критериев И, предполагается:
й варианте Af- { равноценное 1ь диапазонов ( О; niax hy),
R варианте ki2 равноценность диапазонов (min hrf ;max hrf).
Задание области D пространства ЧКЭ означает выделение из мпо-
*ес)ва эффективных самолетов подмножества, у которого для каждо-
1 выполняется условие И,- (X) А и, х max (X). где А и.» коэф-
Фидиепг. показывающий допустимое отклонение значений ЧКЭ простран-
С1ь.: /) максимальных значений Иу
107
По результатам расчетов отклонений R (П° ’, П02) для каждо
сочетания вариантов метрик d и области D отбираются наиболее эффЯ
тивные самолеты, имеющие превосходство во всех комбинациях мет
допустимых областей пространства ЧКЭ. 11
ГЛАВА 7. ФОРМИРОВАНИЕ ОБЛИКА
МАНЕВРЕННОГО С АМОЛЕТА
7.1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
При разработке новых само ле пт иногда возникает ситуация, когда
требования внешнего проектирования не согласуются с возможностями
внутреннего проектирования. Выражается это в том, что они либо завыше-
ны и поэтому невыполнимы .либо занижены и не используют всех возмож-
ностей технологии. В связи с этим необходимо создать еще один этап
проектирования, который назовем этапом формирования облика (ФО)
самолета. На этом этапе требования внешнего проектирования должны
быть корректно согласованы с возможностями внутреннего. Это озна-
чает, что должна быть решена задача отбраковки заведомо плохих вари-
антов самолетов и образования множества допустимых вариантов, среди
которых надо найти варианты, обеспечивающие достижение целей, сфор-
мулированных на этапе внешнею проектирования в тактико-технических
требованиях (ТТТ). Поэтому на этане ФО необходимо использован
магематическис модели принятия решений, чтобы образовать поста!очно
узкое множество допустимых вариантов и нс потерять при этом эффек-
тивные варианты ОП.
Целью проектирования на этапе ФО является не просто определение
облика самолета, удовлетворяющего предъявленным требованиям, а -
оптимального обшка. Такой облик всегда является результатом ком-
промиссного решения частных задач проектирования.
Проектирование современных самолетов, как правило, является
концептуальным, г.е. направленным на достижение конкретной пели-
Это обстоятельство значительно повышает степень ответственности реше-
ний,принимаемых на начальной стадии разработки.
При разработке военных самолетов наиболее ответственные решения,
определяющие дальнейшую судьбу проекта (рис. 7.1), принимаются из
начальных этанах работ в условиях неполной информации не только в
отношении реализации ТЗ, но и в отношении обоснован пости самого ТЗ-
Так, по оценке корпорации ’Тэнд’^неопределенности ГТТ но системам
оружия обусловливают до 30 % перерасходов по сравнению с нерв®113'
чальными сметными оценками. Неопределенность на этапе внепПЮГЧ
проектирования боевых самолетов связана в основном с оценками
можностей действий вероятного противника. Неопределенность на этапе
внутреннего проектирования связана с миоюми фа кто ракш, к основный
из которых можно отнести:
108 i
7 1 Значимость решений. при-
^масммх из различных этапах соз
"зиия самолета
задержку в поступлении от
снежников достоверной информа-
даи о характеристиках основных
Систем самолета (например, дви-
гателя. целевого оборудования);
недостаточную изученность
некоторых физических закономер-
ностей. что наиболее сильно прояв-
ляется при принятии новых техни-
ческих решений (например, кры-
ло обратной стреловидности, кры-
ло с адаптивным профилем и тл.).
В процессе ФО самолета (т.е.
выбора сю компоновочной схе-
мы) больше, чем где-либо требу-
ется интуиция и воображение. Это
www.vokb-la.spb.ru - Самолёт своими руками
особенно характерно для стадии появления первого ’’рисунка” самолета,
создаваемою на основе матрицы признаков компоновочных схем.
Изучение матрицы показывает, что число схем самолетов одинакового
тастичсског о назначения может быть очень большим. Например, на кон-
курсы ВВС США. проводившиеся в 70-х годах, фирмы но одним ТТТ
представили проекты самолетов различных схем (YF-15— четыре проекта,
АХ — два проекта, ACF — два проекта). Это различие в компоновочных
схемах является косвенным подтверждением того, что выбор схемы —
процесс неформализуемый и его нельзя поручить ЭВМ. Но с помощью
ЭВМ можно и нужно решить задачу ношотовки опорного варианта об-
щею вида самолета на основе имеющегося опыта и знаний.
Определение 7.1. Формирование облика самолета - это задача опреде-
ления значений его основных конструктивных параметров, обеспечиваю-
достижение поставленных целей. Под основными конструктивными
Урометрами понимают такой их минимальный перечень, который в
совокупности однозначно определяет форму, размеры и взлетную массу
самолета.
ФО самолета с учетом всех показателей (общею и частных критериев,
01раничсний) представляет собой очень сложную задачу и в ряде случаев
вообще невозможно. О трудности принятия решения на этапе ФО совре-
мснного истребителя можно судить пр тому, что,по данным фирмы Мак-
Н,1ел-Дуглас, полная матрица компоновочных решений содержит более
- млн вариантов.
Заказчик нового авиационного комплекса может заблаговременно
Нем математического моделирования более крупных операций на
Ие внешнего проектирования установить упорядоченную последователь-
109
ность значений частных критериев* характеризующих самолет только к ]
транспортное средство. При эюм желательно, чтобы уровни частей
критериев были бы про варьированы в некоторой области с гем, чтов
не упустить возможность получить значительный выигрыш при незнаш
тельном отклонении частных критериев от заранее установленного уровня"
При таких условиях-допущениях задачей ФО самолета является
генерирование множества конкурирующих вариантов, Удовлетворяющих
требованиям внешнего проектирования.
Основные КП самолета условно можно разделить на параметра
формы (балансировочная схема, конфигурация крыла, тип двигателя
и т.п.) и параметры размерности (площадь крыла, тяш двигателя, взлет-
ная масса и т.д.).
В реальном проектировании предварительно задают следующие пар*,
метры формы .
балансировочную схему самолета (нормальная, ’’утка”, ”бесхвостка”
и т.н.); ]
конфигурацию крыла (сгреловн дность, удлинение. сужение, форма и
толщина профиля и т.п.):
тин двигателя (форсажный, бесфорсажный. степень двухконтур,
ности, степень сжатия веншлятора и компрессора и т.н.), т.с. залают
безразмерный прототип самолета.
Предварительное задание параметров формы позволяет практически
однозначно и с приемлемой точностью определить аэродинамические
характеристики самолета. Кроме того, в предварительном задании пара-
метров формы находит отражение психологический момент: bccijui но
тгометрическому образу отыскивают массу и другие характеристики, а
не наоборот. Такой подход в САПР наиболее близок к традиционному и,
по-видимому, лучше всего учитывает человеческий фактор.
Если параметры формы заданы однозначно, т.е имеет место так
называемое проектирование от прототипа, то можно построить область
существования самолета в параметрах размерное!и. Как правило, рас-
сматривают несколько опорных вариантов конфигураций самолета и
двигателя, выступающих в качестве альтернативных.
При форхгировании области существования наиболее распространен-
ным является следующее трехмерное пространство параметров размер-
ности:
WlH--------• Ро “ —— » РО -----------
Л zn0
(7.1)
где ти — масса нагрузки; остальные обозначения общепринятые-
Сечения трехмерного пространства нлоскостяьщ, парахлсльиьИ
координатным плоскостям, имеют вполне определенный физически
смысл. Гак, описание границьцссчения обласш существования плоскости0
тпп - const дает зависимость (/’о)» которая характеризует скор<Я
ные и маневренные возможное!и самолета.
Па рис. 7.2 зависимость Pv J (Pg) соответствует максимально
можному значению Рц в данном сечении именно ык определяет»-
1(0
www.vokb-la.spb.ru - Самолёт своими руками?!
рис. 7-2-
проектз в
Область существования
координатах Г
AviiKiiHH р0. Граничные линии
L t з соответствую г ограни-
чениям. заданным в ТТТ на Л ГХ,
а И*! и И'2 - минимальным
„рисуемым значениям частных
критериев. _ _
Зависимость — / (мн) ПРИ
р0 - eonsi характеризует возмож-
ности самолета по дальности и
продолжительности полета. Зави-
симость жн ~ J (Ро ) при Ро =
- consi характеризует совершен-
ство конструкции планера,
силовой установки и общего оборудования самолета.
Однако параметры пространства (7.1), описывающие безразмерный
самолек. дают слишком грубое представление о нем. Возможности ЭВМ
позволяют оперировать с большим числом основных конструктивных
параметров, и это нужно учитывать при разработке СЛ11Р, отвечающих
современным требованиям.
Естественно, об оптимизации можно юворить только при рассмот-
рении конечного множества конкурирующих вариантов, т.е. в том случае,
когда основные конструктивные параметры опорных вариантов, высту-
пающих в качестве альтернатив, варьируются в определенных пределах.
7.2. МАТЕМЛТИЧК'КИЕ ОСНОВЫ ФОРМИРОВАНИЯ
ОКЯИКД САМОЛЕТА
Задача ФО самолета формулируется следующим образом: найти те
значения основных конструктивных параметров самолета, которые
обеспечивают достижение целей, поставленных в ТТТ. При такой поста-
новке задача нахождения эффективных вариантов самолета сводится к
задаче (6.3).
Обозначим через IV* значение 7-го частною критерия самолета-аналога.
Тогда задача ФО заключается в том, что необходимо создать самолет,
Ио крайней мере не уступающий самолету-аналогу, а решение следует
искать в области X Е -¥доп, в которой значение хотя бы одного И'- превос-
ходит соответствующий частный критерий самолета-аналога.
Здесь MOi yi встретиться следующие случаи:
1 Существует точка X С А'ДО|| такая, что И' (А) > Н'* для всех Ё
Искомые эффективные варианты являются решением семейства
Эадач (6.6) с ограничениями.
M*)>*V*f ~ 177г. (7.2)
Ill
Рис. 7.3. Отображение множества эффек-
тивных вариантов самолша при й'- с¥) >
> И*, i- ],«
Рис. 7.4. Отображение множеств
эффективных варианюв самолета при
min(H; (X) *) < о 1
Для кривой BCD (см. рис. 6-1) таковыми являются точки на кривой
МС\\ изображенные па рис. 7.3.
В случае coi ласованности и Кр можно без проверки на имитаци-
онных моделях функционирования утверждать, что самолеты-аналоги
(характеристики которых соответствуют заштрихованной области па
рис. 7.3) будут обладать меныдей, чем самолеты сгенерированного мно-
жества (соответствующего кривой ЛЮУ), эффективностью.
2. Существует точка X С АГ такая, что (АЗ > И'* хотя бы для
одного /, но inin (JVf (А) V* < О.
В этом случае, паретовские точки, претендующие на оптимальность,
являются решением семейства задач (6.6) с ограничением
тах(И;-( Y)-k’f)>0. (7.3)
Эти точки находятся на кривых ВМ и V£)5 изображенных на рис. 7.4.
3. Для всех точек А Е X1О п имеем И',- (а) < И'г*. i - 1, и. В данном
случае ограничения (7.2) и (7.3) несовместимы. Это означает, что при
X Е Адоп заведомо не существует варианта самолета, превосходящего
самолет-аналог.
Чрезвычайно важной задачей является разработка систем частных
критериев эффективности. Эти системы формируются, как правило, на
основании экспертиз, проводимых наиболее опытными специалистами
Иногда систему частных критериев удастся сформировать па основе
анализа имитации функционирования альтернативных вариантов буду-
щих самолетов. В том и другом случае выводы, служащие основой для
принятия последующих решений, неоднозначны.
Определение 7.2. Концепцией самолета называется набор (вектор)
частых критериев эффективности, определяемых его тактическим назна-
чением.
Определение 7.3. Перечень частных критериев эффективности и
пределы изменения значений весовых коэффициентов при них называются I
пространством концепций проектируемого самолета; если значения
совых коэффициентов при частных критериях определены однозначно,!
то - вектором концепций.
Определить одпозпапо вектор X на этапе ФО удастся далеко не всегда*
112
www.vokb-la.spb.ru - Самолёт своими руками?!
зависит прежде всего от неопределенностей, имеющихся па этапе
неги проектирования. В этом случае приходится прибегать к псфор-
в гы1Ым методам, связанным с применением экспертиз, в результате
рых могут быть получены несогласованные оценки весовых коэффи-
циентол
Поэтому разработка шрогих систем частных критериев эффектив-
ное < для самолетов различного назначения является весьма актуальной
задачей - формальный подход к этой проблеме позволяет устранить
споры и дслаег излишней экспертизу при разработке новых образцов
самолетов.
В качестве примера рассмотрим систему частных критериев эффек-
тивности, используемую при формировании облика маневренного само-
лета. В работе [7] доказано, что если рассматривать самолет как матери-
альную точку и использовать предельно широкое понятие маневренности
самолета как располагаемые (дот роту изменения скорости полета по
величине и направлению, то эффективность самолета в ближнем манев-
ренном воздушном бою (при условии равенства систем вооружения)
полностью определяется следующими ЧКЭ
характерисгикой разгона Вг\ -п™ах ;
характеристикой торможения IV2 = ««>»> ;
несущей способноеiwo'BVj — яга;
максимально допустимой перегрузкой IV - инн fay Wl, л J ).
где иг и пх перегрузки по осям OY и ОХ соответственно, —ограни-
чение на перегрузку по физиологическим возможностям летчика.
Отметим, что (X. М. 11). i = 1,4, т.е все ЧКЭ являются функ-
циями летною режима (нары Н. М) и вектора КН самолета X
В этом случае производить оценку синтезированной компоновочной
схемы А’на имитационных моделях функционирования нет нсобходи-
мос1и. Следует отметить, что использование дополнительной информации
общего характера о ведении воздушного боя (например, положений
энергетической концепции воздушною боя) позволяет с вер» уть частные
критерии h’j, .. . И'4 по летным режимам (пара //, М), т.с избавиться
от зависимости частных критериев от летных режимов.
73. СТРУКТУРА АВТОМАТИЗИРОВАННОЙ СИСТГМЫ
ФОРМИРОВАНИЯ ОБЛИКА САМОЛЕТА
На рис. 7.5 и 7.6 приведены схемы системы ФО самолета, где выде-
лены нсформализуемые позиции, т.с. позиции, в которых главную роль
играю г опыт и интуиция конструктора.
Задача системы ФО — предоставить в распоряжение конструктора
Лостзточлое количество данных, позволяющих ему всесторонне оценить
рсимущества каждого синтезированного варианта компоновочной схемы
леТа (при этом ЭВМ освобождает конструктора от процессов, свя-
,rbix с вычислениями, поиска и обработкой информации).
знача конструктора формирование и изменение входных данных,
453 113
управление процессом решения задачи, принятие решений в критических
точках и выбор варианта для рабочего проектировання.
Отметим, что решение, которое на этапе ФО самолета представляется
хорошим, может по мере детализации проекта оказаться недостаточно
эффективным Например, в процессе рабочего проектирования, произ-
водства и доводки самолета происходит почти неизбежное увеличение его
полетной массы, что ухудшает его основные ЛТХ
Все это конструктор обязан предвидеть уже на стадии ФО и принимать
решения, гарантирующие успех при реализации проекта. В связи с этим
114
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 7.6. Схема программы формирования облика самолета
Цепе эбразно формировать два множества эффективных компоновочных
ерем* сличающихся друг от друга значениями эмпиричеких коэффици-
°в, отражающих уровень конструирования и технологии изготовления
анера самолета, двигателя и оборудования.
н к эФфициенты первого множества должны отражать прогнозируемый
Сн Ри д разработки самолета уровень развития техники, а к эффици
erpv ВТоР°го множества - уровень, достигнутый в уже созданных кон-
дйух Ях самолетов Геометрическая интерпретация этих множеств для
Устных критериев оптимизации приведена на рис. 7.7.
115
Рис. 7-7. Отображения множеств эффектиъ-
ных вариантов самолета при различных
уровнях развития техники
Для полученных неулучшаемьи
вариантов компоновочных схем само-
лета вычисляют градиенты — значения
частных производных, оценивающие
влияние изменения основых конструк-
тивных параметров синтезированной
компоновочной схемы на значения
частных критериев оптимизации. Иначе — производится анализ чувстви-
тельности частных критериев к малому изменению конструктивных
параметров синтезированной компоновочной схемы.
Резюмируя, • Приведем примерную модель взаимодействия внеш-
него и внутреннего проектирования на этапе ФО самолета (рис. 7.8):
1. С этана внешнего проекшрования поступают:
вектор частных критериев эффективности Ил (X) = (И\ (X),..., (Д'))
и значения весовых коэффициентов при них;
набор альтернатив компонентов новою самолета (целевого обору-
дования (ПО), целевой нагрузки (ЦН) и т.н.), на основе которых фор-
мируется множество X реализуемых вариантов. (В качестве варьируемых
параметров альтернатив компонентов Ц() и ЦН рекомендуется принимать:
дальность обнаружения, углы обзора и другие параметры информа-
тивной системы ЦО, характеристики эффективности ЦО и ЦН,
показатели стоимости ЦО и ЦН;
массу и габаритные размеры ЦО и ЦН;
лобовое сонро1ивлсние ЦН.)
2. На этапе внутреннего проект ров алия по вектору ЧКЭ W (X)
формируется множество эффективных вариантов самолета X G Д'о (11РИ
эгом каждый вариант конкурирующей компоновочной схемы рассмат-
ривается с полным набором альтернатив компонентов самолета).
3. Если среди множества эффективных вариантов есть варианты,
приемлемые ятя руководителя проекта, го эти варианты поступают в
систему внешнего проектирования для последующего отборе на имита-
ционных моделях функционирования.
4. В системе внешнего проектирования по результатам имитация
функционирования с привлечением экспертиз и процедур принятия реше-
ния отбирается наиболее эффективный вариант самолета и разрабатываются
ТТТ к самолету (или ТЗ на разработку технического предложения) -
5. Если сделанный выбор не удовлетворяет руководителя (роекта.
то необходимо пересмотреть концепцию самолета и повторять процедуре
выбора до тех пор, пока среди эффективных вариантов не найдется приев
лемый для дальнейшего проектирования.
116
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 7.8. Модель взаимодействия систем внешнего и внутреннего проектирования
6. Если изменение концепции нс даст приемлемого варианта, то надо
либо снижать требования к качеству самолета, либо формировать другое
множество т.е. изобретать принципиально новые варианты конст-
рукций.
7-4- СИСТЕМА КОНСТРУКТИВНЫХ ПАРАМЕТРОВ.
ОБРАЗУЮЩАЯ ВЕКТОР КП МНОЖЕСТВА А'о
до ^Исло конструктивных параметров (размерность вектора X) в случае
лт°чно подробного описания компоновочной схемы самолет может
ап. нескольких сотен. При этом нс все они являются независимыми.
Усмотрим предпосылки к созданию системы этих параметров,
117
минимально необходимых для этапа формирования облика самолета
Для определения в полном объеме ЛТХ самолета должны быть Я
вестпы поляра, площадь крыла. полетная масса самолета и высотно-сКо_
ростныс харакюристики (ВСХ) двигателя.
В линейном диапазоне изменения yi ла атаки до режима А'тах поляру
с достаточной точностью можно представить в виде квадратичной зависи
мости Сх = Сх* (Ч.1Г) + сх (М) = СХ' (М,/7)+Л (М) Сгу.
В этой зависимости Сх и Сх являются функциями следующих КП
самолета:
(^п,К ^пр> С* Хп.К,Н*
“н* (S. Хп.к* Х« ^пр* с)гл>* Хп.к’
^пр> Г)в.О’ ^М' \)М.ф- \i.4’
^\В’ ^ф • ^фон) ?
Qr;- ~f fXn.ie ^пр' ^П’ Хпки' ~ц)
ВСХ двигателя зависят от т, <к н, як в» ц в? Я, М
Полетная масса самолета зависит от ЛТХ самолета, ВСХ двигателя и
следующих КП планера и двигателя:
wnon ~/($ ХП.К' С’ 2борт» 2п»
^н- Хп.к’
(‘V, Хпк* ^^В.О" мдв-
^Ц.О’ Тц.о» ™Ц.Н’Тц.Н’^Т’•
В приведенных соотношениях К‘пр —коэффициент формы профиля,
и — закон управления двигателем; индексы означают н — наплыв; п.к -
передняя кромка,ф— фюзеляж, фон — фонарь, вх — вход, ом — омыва-
емая. Остальные обозначения общепринятые
В приведенных выше функциональных зависимостях независимыми к
инвариантными по отношению к множеству КП являются:5,Хп к
X. ^2. С, ЛПр Хл.к.н» ~н* Хп.к* ^пр» Хп.к» ^пр’^* ^Х-О’
пдвв ^вх’^н.ч* ^хв» ^ц.о» ’Уц.о» ^цн» "Уцн
Остальные КП могут быть представлены в виле следующих функцио-
нальных зависимостей:
^ф2 ^'д)> |
.О “ ^ф2 ’ -О ’ ^Д» ^Н.Ч^ »
^ф* ^эап' ^ф.ш» ^ф.р»
^фг ^ф.плг ^т) ’
^ом.ф — f ^вх» ^*ф2- ^ф» 1ап» ^ф.ш
^ф.р* ^ф.с* ^ф.п.н1 ^Г' \i.'J »
118
www.vokb-la.spb.ru - Самолёт своими руками
н " ^фон>:
ХхН ~~ f ^в х* идв ’ д’ с )’
Хф“/ \в?^ф2- /гдв* ^ф^зап’ ^ф.ш1
А'11Г ^ф.с* Лф.п.нЛт)^
Шт -ftfpx-£ф2- С ^2. Кф- Лф.цр
A„r ^ф-Р' А Ф-С’ ^ ф-П.М- *Т) >
1Де c/рдс диаметр антенны РЛС обзорно-прицельной системы;
- относительная (в долях хорды крыла) координата передней стенки
кессона крыла; Ъ2 — относительная (в долях хорды крыла) координата
задней стенки кессона крыла; Аф2 — длина средней части фюзеляжа,
предназначенной для размещения основных стоек шасси и топлива;
д' ~ коэффициент полноты (формы) сечения фюзеляжа; Азап — коэф-
фипиет, отражающий объемную плотность компоновки оборудования;
коэффициент, учитывающий изменение размеров фюзеляжа при
коэффициент,
отражающий изменение длины основной сгонки шасси при уборке;
двигательных
коэффициент,
, - 2 и связан-
^Ф-Ш ‘ . г
размещении в фюзеляже основных стоек шасси, Аш
Кф р коэффициент, отражающий величину разнесения
отсеков (при Идв “ 2) в долях диаметра сопла; Лф с — ]
учитывающий компоновку донной части фюзеляжа при лдв
пое с этим изменение размеров поперечного сечения фюзеляжа; Аф п н —
коэффициент, учитывающий изменение размеров фюзеляжа при раз-
мещении под фюзеляжем (в фюзеляже) полезной нагрузки; Ат — коэф-
фициент заполнения топливного бака., учитывающей его конструкцию;
Ас коэффициент диаметра сопла двигателя; Ад - коэффициент длины
двигателя.
Удлинсние хвостовой части Ххв и коэффициенты Ас и Ад являются
функциями площади входа в двигатель и определяются его моделью,
Т-е. не являются независимыми.
Коэффициенты А‘зап, АфШ. Аф Р’ к Ф п 1Р Ат являются сложными
функциями и зависят от многих параметров Например, коэффициент
Зависит от кинематической схемы шасси, размера колес и типа их
навески, схемы уборки основной сгонки шасси, взлетной массы самолета,
типа и класса взлетно-посадочной полосы и тл.
Таким образом, система КП, образующая вектор Л0, имеет вид
Лп.к* г* ^пр1 Лп.к.и» •
^r.o’Xii .к.г.о* ^г.сг *г.о* р.г-0* ^в.о’
В .О’ ^П.К.В.О’ ^В-О’ О’ СВ.О* ^11 р.В.0’^.0'
Тц.О’ Тп.Н<^РЛС‘ \i.4‘ ^фон* ^ф2»
^Ф’ ^зап’ ^ф-ui’ ^ф.с’ ^ф.р* ^ф.п.Н’
'’пв ^Вх./П. як як r3,w),
Т ° независимых КП.
Исполь:ювать все эти параметры в качестве варьируемых при решении
119
оптимизационной задачи типа (6.3) при быстродействии совремсццьЯ
ЭВМ нереально. В связи с этим возникает необходимость декомпт^^Н
проектных задач уже на этапе формирования множества А'С1 т.е. nocip^j
ние иерархической системы КП и компоновочных ограничений.
Отмстим, что это вынужденная мера, связанная с oi раниченнымЯ
возможностями современных ЭВМ. При увеличении производи)ельноегц
ЭВМ ’шело варьируемых параметров будет увеличиваться.
7-5. ИЕРАРХИЯ ПРОЕКТНЫХ ЗАДАЧ
ЭТАП А ФОРМИРОВАНИЯ ОБЛИКА
Рассмотрим предпосылки ,1дя построения иерархической системы
КП этапа формирования облика самолета. При определении уровней
иерархии будем исходить из того, что оптимизационная задача должна
решаться на современных ЭВМ в кечение рабочею дня (ограничение для
осуществления диалога, конструктор — ЭВМ).
Для понижения размерности вектора X® сделаем следующие допу-
щения: ян
I. Целевое оборудование и целевая нагрузка являются заданными в
ТТГ величинами, т.е. заданы: тц о, 7Ц.ОЛЛЦ lt, 7U.H- ^РЛС*
2. Принята опорная конфигурация самолета. г-е. задана принадлеж-
ность вновь проектируемого самолета фиксированному множеству
^о/ (/ = L п — фиксированное значение).
3. Принимаются заданными п^у. К^.
4. Принимаются в качестве постоянных величин значения компоно-
вочных коэффициентов, отражающих состояние уровня техники Аф,
^зап* ^ф.ш1 ^ф.р> ^ф.с’ ^ф.п.П"
Значение этих коэффициентов определяют в основном на основании
обработки статистических данных по уже построенным самолетам идя
рассчитывают заранее, как например Аф ш и Хф Л1 н. Компоновочные
коэффициенты отражают уже достигнутый уровень в проектировании и
технологии самолетостроения и должны постоянно обновляться при
появ ении новых конструкторских и технических решений.
Век гор А0 с размерностью т° - 31 в этом случае имеет вид
~ С • ^Пр’^Ь ^2. ХпкП*2!!’
Хп-к.г.сн \-.о’ Ч'.О’ р.г.о?
*^н.о» Хп.к.в.о’ р.в.и»
^Н.Ч’ фз» ш* Х‘ > ^К_Н* ^К.в^ ^3«.М) •
Э1а размерность также не позволяет решить оптимизационную заЛМ
чу в рамках отведенного времени. Поясним это на примере. Если чаи
син1ез одного варианта компоновочной схемы самолета будет загрэчИ"
ваться г 4 с машинного времени ЭВМ (что само по себе явлй^1^
очень труднодостижимой задачей), то в течение рабочего дня можег бь^В
емнгазированно около 7000 конкурирующих вариантов ком
120 ЯН
(7-5)
www.vokb-la.spb.ru - Самолёт своими руками?!
Что означает, что среднее число узлов вариации вектора КП равно
/*х.еМ __ -
- т.е. организовать решение оптимизационной задачи сеточными
родами не представляется возможным.
М О решении задачи типа (6.3) с требуемой точностью можно говорить
лько при наличии в среднем 3 ... 5 узлов вариации по каждому КП В
Т ом случае число существенных варьируемых КП должно находиться в
Эоеделах м° - 5 ... 8. Это, по существу, и определяет число потребных
ровней иерархии проектных задач при формировании облика самолета.
** Рассмотрим вариант 5-уровневой оптимизации компоновочной схемы
самолета. Примем, что в качестве варьируемых КП рассматриваются наи-
более существенные для каждого уровня решения этой задачи параметры,
а остальные КП вектора Xе фиксируются (принимаются среднестатис-
тическими в соответствии с тактическим назначением самолета).
Уровень 7. Оптимизация геометрических параметров крыла и раз-
меров двигателя. Целью этого этана оптимизации является определение
весовых и геометрических характеристик самолета и двигателя (пос-
кольку £вх ~ ^вх*п Дальнейшем будем употреблять в качестве КП dBX).
В качестве вектора КП 1-го уровня примем
X*1 = (£ Хн.к- X. а С. Апр, dBX, Z^2). (7.6)
Размерность вектора Х°1 равная т°1 =8, не позволяет в определен-
ных случаях выявить наиболее эффективные по совокупности ЧКЭ
компоновочные схемы самолетов. Если число конкурирующих вариантов
находится, например, в пределах 7000, то число узлов вариации КП не
превышает 3-х (3s - 6561), что явно недостаточно. В связи с этим целе-
сообразно построить дополнительную иерархию по уровням диалога.
Допустим, что конструктор назначил пределы изменения стреловид-
ности крыла х„ к = 30 ... 50° с шагом Дхп к - 5° Допустим также, что в
результате решения оптимизационной задачи реализовались компоновоч-
ные схемы с Хп.к ~ 40 .. 45е В этом случае рекомендуется провести
второй (а при необходимости и последующие) цикл решения задачи на
более мелкой сетке узлов вариации, например, при Дхп.к ~ Этот
прием позволяет производить отбор, приводящий к целенаправленному
сокращению вариантов проекта подвергающихся дальнейшей детали-
зации.
Уровень 2. Оптимизация геометрических и конструктивных парамет-
ров фюзеляжа и крыла Целью этого этапа является оптимизация кон-
структивны/ параметров фюзеляжа и крыла из условий обеспечения
минимальной массы, а также геометрических параметров фюзеляжа и
кръЕ1а при размещении воздухозаборника под крылом.
Вектор конструктивных параметров:
“ ^Н.Ч’^ф2’Хп.К.Н’2н)- (?• )
Уровень 3. Оптимизация геометричес ких параметров горизонтального
^Р ия Цель этапа — определение геометрических параметров ГО иэ
ловил обеспечения потребных характеристик устойчивости и баланси-
р°Вки при минимальном лобовом сопротивлении
121
М-'Г.О* ЛП-К.Г.О’ 'Y.O’ 'fr.O' ''Г.О* f*n р.г,о^' (^8)
Уровень 4. Оптимизация геометрических параметров вертикальной
оперения. Цель - обеспечение потребных характеристик путевой устой
чивости при минимальном лобовом сопротивлении
“ (^.о- ^п.к.в.О’ ^в.о’ о» гв-о* ^пр.цр)/ (7.9)
Уровень 5. Оптимизация силовой установки (или согласование п д
нера с двигателем)
(га, wK>H, як,в- м). (7.10)
Этот этап оптимизации рекомендуется проводить только для эффек.
тивных вариантов самолетов принятых к дальнейшей разработке.
Общим для всех рассмотренных уровней иерархии проектных задач
является сохранение неизменными существенных конструктивных пара-
метров, полученных на предыдущих уровнях (этапах) оптимизации.
Схема иерархии проектных задач при формировании облика самолета
приведена па рис. 7.9.
122
www.vokb-la.spb.ru - Самолёт своими руками?!
Декомпозиция проектных задач, связанная с описанием самолета с
пй степенью агрегирования, предъявляет определенные требования
Р33 м цяемым алгоритмам и вычислительным методам. Так, для опре-
к ния положения фокуса самолета на нервом уровне может использо-
116 я статистическая информация по самолетам-аналогам и соотвст-
уЮшие приближенные формулы На втором уровне для обоснования
выбор3 параметров горизонтального оперения требуются более точные
вычислительные методы.
Длгоритмы первого уровня должны отличаться по быстродействию
от алгоритмов последующих уровней. Это объясняется тем, что на первом
уровне решения задачи синтеза компоновочной схемы требуется прово-
дить гораздо больший объем вьгшелений в ограниченное время, чем при
детализации одного или нескольких вариантов компоновки самолета.
Особенно сильно отличаются алгоритмы синтеза и анализа компоновоч-
ной схемы. Алгоритмы, используемые при синтезе, должны быть ’’быст-
рыми Требования к точности вычислений в системе синтеза могут
быть понижены, в то время как алгоритмы системы анализа должны
быть достаточно точными. Специфика синтеза делает весьма желательным
использование аналитических методов и аппроксимирукпцих зависимос-
тей; специфика анализа требует (в основном) применения численных
методов решения задачи
7.6. СИНТЕЗ КОМПОНОВОЧНОЙ СХЕМЫ САМОЛЕТА
Компоновочные ограничения (см. определение 6.4) представляют
собой алгоритмы блока компоновки, задачей которого является опреде-
ление основных геометрических параметров планера самолета и подготов-
ка необходимой, дополнительной к исходным данным, информации для
блоков расчета аэродинамических, балансировочных и весовых харак-
теристик. Основой для разработки компоновочных ограничении
являются модели агрегатов
Модель фюзеляжа
Для построения модели условно разобьем фюзеляж на четыре отсека:
головную часть Ф1 длиной Ьф,, шириной Вф t и высотой Нф 1;
среднюю часть Ф2 (£ф2. Яф2, //ф2 );
хвостовую часть ФЗ (Гфз. Вфз. Яфз);
воздухозаборник Ф4 (1ф4 Ьф4. Яф4)
В отсеках размещены:
1 - прицельно-обзорная система, экипаж, общее и целевое оборудова-
ние, передняя стойка шасси (для схемы с боковыми воздухозабор-
никами), навеска горизонтального оперения (для балансировочной
схемы ’’утка” с подфюзеляжными или подкрыльевыми воэдухоза-
ёрниками);
канал подвода воздуха к двигателям (КВПД), топливо, полезная
нагрузка, главные стойки шасси, коммуникации, навеска крыла
прямой стреловидности для всех балансиров очных схем, навеска
123
крыла обратной стреловидности в нормальной балапсировочнп^
схеме;
ФЛ — двигатели, навеска крыла обратной стреловидности для баланси
ровочной схемы ’’утка”, навеска вертикального оперения, иавсска
горизонтального оперения (для нормальной балансировочной схеьц^.
Ф4 - навеска горизонтального оперения (для балансировочной схем]
’’утка” с боковыми воздухозаборниками), передняя стойка шасси
для схемы с подфюзеляжными (подкрыльевыми) воздухозаборци.
ками.
Примем, что на границах отсеков выполняются условия:
для схемы с признаками ПФ-J, ПД 1 (рис. 7.10)
^ф1 “#ф4 —#ф2^ Т/ф2 “Нф3;
^ф1 + ^ф4 =^ф2^ ^ф2=^фэ^
для схемы с признаками ПФ-2; ПД-1
^ф1 + ^ф4^^2'^ф2^^фЗ»
^ф1 ^^ф4' #ф4 ~^ф2— -#фЗ>
для схемы с признаками ПФ-2; ПД-2 (рис- 7.11)
"ф1 ♦ "Ф4 ~ = "ф3;
Примем также, что 5фг- = Кф1- Яф/ «ф1-, где Кф, (i - 1,4) - коэффици-
ент полноты сечений z-ro агрегата: (эллипс) — ^^ф/- I (прямоугольник).
Рис. 7.10. Модель фюзеляжа с признаками ПФ-1 и ПД-1
124
www.vokb-la.spb.ru - Самолёт своими руками?!
На рис. 7Л2 приведена иерархическая структура построения попереч-
ного сечения фюзеляжа в соответствии с признаками, введенными в
табл_ 6.1. Уровни иерархии признаков приведены в порядке их значи-
мости при разработке компоновочной схемы фюзеляжа (в этой струк-
туре отражен имеющийся опыт разработки компоновочных схем фюзе-
ляжа: нс вес признаки являются совместимыми)
В лом случае с учетом ранее принятых обозначений функциональ-
ные зависимости для определения основных размеров фюзеляжа имеют
вин
I 1 % ^ф2’ ^каб.ст) ’
"^ф(ПД, ГПП,<7Вх.Лф ш);
Яфз-Нф(ПФ //ф2);
%="ф(ПФЛфг//ф2);
^Ф1 ^ф(ПЭК, Аэк. Вка() с1);
яфг Дф(НФ ИД, ПС ПП1, пин. пдв,
RX’ *ф.цг Р’ & ф П.н)’
Яфз Вф<77ф2. dBх );
*Ф«-Яф(ПФ. ПД.Лф2,^х);
' ф! " -£ф(^ф« Вф}, Нф1);
\12 -= 5ф (ПФ, пд, пс5 пш. ппн5 пдв,
ЬХ’ ^ф’ ^с> ^ф.щ» ^ф.р’ ^ф.п.н)»
^Дон 5ф (ПДВ. JBX, лс);
(7.П)
125
<
Рис. 7.12. Иерархическая структура признаков фюзеляжа
^ф1 = ^ф(ПФ, ИЭК>Лгэк,//ф2г //каб ст.
^ф1> ^зап» ^н.к1 ^н.ч* ^рлс)»
^ф2 " £ф(ПШ, ПДВ, £ф2» ^вх» ш)»
^'фз — ^ф(^вх» ^л)»
126
www.vokb-la.spb.ru - Самолёт своими руками?!
^оМ11оиовочные признаки выступают в качестве аргументов.
ГХ1е Нз рис- 7ЛЗ приведены в качестве примера схемы сечения отсека
п Люзеляжа, обладающие различными компоновочными признаками
координата — признак ПЭК - не влияет на основные размеры
;^ней части фюзеляжа и поэтому опущена).
Модель крыла.
В качестве модели рассматривается трапециевидное крыло с перед-
шии наплывом (признак ПН-1), общим случаем которого является кры-
50 изменяемой геометрии и без него (признак ПИ-2).
Аэро динамические характеристики рассчитывают для крыла без
ысмы 0ШГ7М сбегла ^2
па -i пд=1, лс=1. ла-i, ллн-1
ш
ПФ-1.ЛД-1. НС-1, nw-z. ллн-z
V 1 v Ц 31 м L—/
ф **22? na-i. пд-1. ic-z. лш-г, лпн-1 •U
фг??? • ЛФ-1. ДД-1, ПС-2, ППН-2
См
НФ-2. ЛД-1, ЛС-1, ПШ-1.ЛЛН-1 z*\
•fznzz ЛФ-г, ЯД-1, ПС-1, лш-г, ллн-г i— м г— м*
•fZZCZZ па-2, пд-г.лс-с лш-г, плн-! • ! Х/1
тризна1 ^хемь! сечений отсека Ф2 фюзеляжа с различными компоновочными
127
наплыва, так называемого базовою
трапеции.
крыла.
построенного на основцЛ
Положение замыкающей нервюры топливного бака базового крьД
определяется технологическим ^граничением па минимальную сгрои
тельную высоту топливного бака <?стр m in
. ™ = min --------_________
1 —1'2 ^борт с i
Модель оперения
(7-12)
Модель горизонтального оперения. Рассматривается схема цельно,
поверенного ГО трапециевидной формы. Площадь ГО определяют из
выражения
5,,„ - i b, S(1 + -!_) ( «Г г1 <£>
3 П + О ' ф / с “ Л г.сн
? - ИГО
+ (ПБАЛ2 - 1) 2 [--- ----------- +
Ат.сп Лн.ч ^каб
*— _ ПГ~1 ------------- ]); I
^Г.СН ^ф1 * *т.г.о
(7.13)
хт.го “2Нг.о сЧ>Хп.к.г.о г.сг
Модель вертикального оперения. Рассматривается ВО трапециевид-
ной формы двухлопжеронной схемы, в которой лонжерон расположен
на расстоянии 0,7 хорды Площадь ВО определяется из выражения
SB.o = »вх>5ф.бок(С -Л'в.о) *ЛВ.О GVB.O - 1)). (7.14)
h В -О
где 5ф.бок “ боковая проекция фюзеляжа; Лв о - статический момент
вертикального оперения.
7.7. СИСТЕМА КОМПОНОВОЧНЫХ ОГРАНИЧЕНИЙ
Допущения
1. Угол установки крыла относительно СГФ равен нулю: <А> ~
2. Расчетный полетный центр масс самолета совпадает с центром
масс снаряженного самолета в пределах установленного допуска Л*т
и лежит в плоскости СГФ
^Т.пол =ХГ.СП — А^Т’- Т.ПОЛ “-^Г.сн “б.
3. Центр масс снаряженного самолета совпадает с предельно задним я4*'
ложением масс: х т С11 = хт иред задп. I
4. Значение производной вычисляется но упрощенным завис
мостям:
(ПЬАЛ2- 1)еа = 0; (2 - ПБАЛ 2) .
128 х
www.vokb-la.spb.ru - Самолёт своими руками?!
П унимаются среднестатистические значения:
(ПБАЛ2- 1)Аг.о = 1; (2-ПБАЛ2)Лго^0>85.
условие неопрокидывания самолета на хвост при посадке и руле-
соответствует минимальному значению угла опрокидывания, рав-
ному посадочному углу атаки.
Система компоновочных ограничений 1-го уровня решения задачи
фО самолета
Условие обеспечения заданной меры устойчивости:
Я .
-Тп к пот + (* д — — ) etg Хц.к —
с Са
- xF бсэ г.о) bA-bA —(fl СО Лго 2 -
* са СУ
-ЛСО^го.
где Л (П) = (2 - ПБАЛ 1) (2 - ПБАЛ 2);
А (П) - (2 - ПБАЛ 1) (ПБАЛ 2-1);
(7.15)
(7 16)
Л ь к2 — ста!истические коэффициенты.
Условие обеспечения навески крыла па одном агрегате (удовлетво-
рение требований технологии (рис. 7 14)) :
£ф1<^<лф, (7.17)
^•ф! ~‘Xb2 ф2 + Сф2’
₽Ис. 7.14. Условие навески крыла на одном arpci arc
453 - 9
129
Условие размещения ГО позади крыла (нормальная балансировоч-
ная схема (рис. 7.15)):
*з.к </| (И) (£ф - Lc - ). (7 18)
где Lc — длина сопла двигателя.
Условие размещения ГО впереди крыла (балансировочная схема
’утка” (см. рис. 7.15):
*п.к >/2 (п) ((ПГО 1 - 1) (/.ф1 / ф4 +
+ *борт.г.о) + (2 - ПГО 1) (Z-н.ч +Ь каб ~
““ Лт.г.о +^борт.г.о))> I
хп;к.г.о 00 0-ф t — ^-ф д),
где £н ч длина носовой части фюзеляжа; £каб — длина кабины экипажа.
Система компоновочных ограничений
2-го уровня решения задачи ФО самолета
Ограничения, накладываемые к ohci рук тип но-си лов ой схемой
систему ’’крыло — фюзеляж", вытекают из принципа совмещения ДеИ'
ствия сил, согласно которому основные силовые элементы крыла
130
www.vokb-la.spb.ru - Самолёт своими руками?!
7.16. Условие совмещения основных силовых элементов крыла и фюзеляжа
Фюзеляжа должны воспринимать сосредоточенные нагрузки как в усло-
виях полета, так и в условиях взлета и посадки Как следует из рис. 7 16,
Ме|Цение ОС11ОВНых силовых элементов крыла и фюзеляжа требует
Ьл,олспия следующий условий:
Vk + бборт(П) Лф, + 1(2
- ПБдл 1) д (П) + (ПБАЛ I _ 1) (х с н
min
Jr 4 Г п‘эх'
П.к+fti А_ /т (г
)]; (7.20)
о
. сн . «. 0,05 -
131
- *'штах лш - ) +1 (2 - ПБАЛ 1) л (II) +
О
+ (ПЬ4Л1 - 1)|(/.ф1 + /.ф2); (7.2П
гп in J
* п.к *66pT>A (П) (лт сн + е + 0,1 -
I ж
- IT ) + I (2 - ПБАЛ 1) л> (II) + (ПБАЛ I I) ](Лф1 + Лф2);
m»n (7.22)
* п.к+*2 *>борт ^Ф1 +^фз +1 (2-ПБАЛ 1)Л(П) +
* (ПБАЛ 1 - 1) еф2. (7.23 )
Здесь Л (П) = (2 - ПБАЛ I) (2 - ПБАЛ 2) (2 - ППК):
/« (И) = 2 11БАЛ2 + 2ППК - ПБАЛ 2 ППК - 3; (7 U
где е — вынос центра масс относительно оси колеса основной стойки
шасси; DK - диаметр колеса основной стойки шасси; Лш — высота основ-
ной стойки шасси.
Условие нсонрокидывания самолета на хвост при рулении и посадке
(рис. 7.17):
е > (Л ш + //доН - ) tR ftnoc. (7.24)
Условие размещения потребного запаса топлива
Л°Л >Л°Л + __________йУт.ф 2 Петр__ (7-25)
Ф2 Ф1 ПДВ
“т - --4-^в’х-0.О
132
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 7.18. Условие совмещения наплыва крыла с в здухозаборннком
Условие совмещения передней кромки наплыва крыла с входными
кромками воздухозаборника (рис. 7 J8):
ЛН (*П.К.И “ ^ф! +^ф4 ) Хп.к.н + * (7-л.б)
Условие непересечения скачка уплотнения от передней кромки нап-
лыпа с входными кромками воздухозаборника, расположенного под
«авлывом (см. рис. 718):
з Чк - (ПВЗ - 1) //ф 4 tg д +
+ <-1. - -у^) (cigXn.K c«fiXn.K.n)- (7-2'
3^ еМа компоновочных ограничений
и 4‘го Уровней решения задачи ФО самолета
‘ieIU К ^1,о,,Опочными ограничениями этих уровней являются ограни-
-I? и 7.18 и условие обеспечения минимальных потерь эффектив-
Тяги сопла двигателя* 133
^ф^/i (П) (/-ф Ас 0,2 хт.г.о + ^борт?г.о)»
Лб°1’г< оз'
(7-28)
Система компоновочных ограничений
5-i о уровня решения задачи ФО самолета
Как следует из подразд. 7.4, этот уровень оптимизации является
заключительным па стадии ФО самолета.
Вариация КП двигателя т, тгк н, ттк в, Г3, и при JBX = const связана
как правило, только с малыми изменениями dM и L д, т.е. с малыми измени
киями размеров отсека ФЗ фюзеляжа. Поэтому компоновочными огра,
ничениями этою этапа являются ограничения: 7.18,7.22,7.25.
7.8. ПРИМЕРЫ ФОРМИРОВАНИЯ
ОБЛИКА МАНЕВРЕННОГО САМОЛЕТА
Формирование множества Хс. На рис. 7.19. а) и б) приведены варианты ком-
поновочных схем самолета, полученные на l-м уровне решении задачи формиро-
вания облика, имеющие одинаковые значения координат вектора конструктивных
параметров X01 = <66 ма; 30*; 3,7; 3,5; 0,05; 1,0; 1,0 м; 5,0 м) н различающиеся
только компоновочными признаками.
Формирование облика самолета, принадлежащего заданному множеству А’о
по перечню показателей — ограничений н частных критериев эффективности Б
качестве примера рассмотрим формирование облика самолета типа фронтового
истреби геля с основными данными, соответствующими истребителю ВВС США
Г-15 А
Входная информация. Описание вектора Пр имеет вид. приведенный в ка-
честве примера в табл. 6-2, т.е.
ПРЫ5 = (121, 211, 221, 231, 241,251, 261, 272» 281» 311» 32 2, 331,4 1 2.511.522,
611.621)»
Ограничения Л ГХ для расчетной массы т • максимальная скорость на высо-
те - 2650 км/ч; максимальная скорость у зсмЛн - 1450 км/ч; статический пото-
лок - 20 км.
Ограничения ЛТХ для взлетной массы те: дальность палета на крейсерской
скорости и высоте - 2300 км; дальность полета у земли на скорости 900 км/ч - 800
км; длина разбега па бетонированной ВПП — 350 м
Ограничения ЛТХ для посадочной массы ™Itoc скорость захода на посадку -
230 км/ч; длина пробега на ВПП - 760 м.
Частные критерии эффективности* максимальная угловая скорость разворота
на II = 0,2 км при тСр — Нс мсисс 23 град/с; максимальная скороподъемность на
Н - 0.2 км при . ис менее 310 м/с; время разгона от 600 км/ч до 1300 км/ч «
II - 0?2 км при т - не более 20 с; взлетная масса самолета - нс более 19 т.
Параметры целевого оборудования н полезной нагрузки масса целевого обо-
рудования «ц Q = 660 кг: диаметр РЛС - 0.915 м- масса груза целевого наз
чения (полезной нагрузки) ти н - 1250 кг/
Параметры двигателя, тип двигателя ЛТРДФ; степень двух конгу рности
гатсля m ~ 0,7; суммарная степень повышения давления в компрессоре я " |
максимальная температура газа перед турбиной Т, - 1672 К р
Параметры компоновочной схемы, компоновочные коэффициенты и к
ты удлинение фонаря АфоН = 5;
коэффициент статической устойчивости т
134
снис носовой части фюзеляжа Анл1
/ ~ -0»05; попетый диапазон центров01*
www.vokb-la.spb.ru - Самолёт своими руками?!
JrtjvTHiifi коардина/л бемлора КП K9f'
Ж’; 3.7; 3.5. 0.05; КО. КОм1; 5.0м)^
хрмлснсдачнои. схемы -
„«^“пШ7‘К поо-г.ив-z
П ' ' ЛГП-2
юз-1
ПН-2
Признаки квмпвкодоФЮй схемы:
- ПЬАЛ1'1,ЯМЖ 2JirO~2J13K-2.ntM=2№-Z
лез-г
ПМ’2
пн-i
(183-2
ппк t
ПН-2
ПГ0=1
МЗ-2
ПН = 1
annexe wj&wxa
МГ-ffi)
Jfrfert ^М9МН^а
Hprtttf]
Индекс цюхятка
| 9Ш11 |
Рис. 7.19. Варианты схем множества Ас
AXj - -0,05; коэффициент изменения длины основной стойки шасси при уборке
- 1,0; коэффициенты полноты сечения фюзеляжа Л(*)1 - 0,9; Кф2 - 0,98; коэфй'
4мцие объемной плотности компоновки оборудования АГза|| н ч - 230 кг/м3;
-ЙЧ*Ф = 150 коэффициент компоновки донной части фюзеляжа Яфс=
” °’* м коэффициент заполнения бака топливом К- = 0,91; плотность топлива -
800 кг/м’.
Вектор варьируемых конструктивных параметров, пределы нх изменения и
число узлов вариации:
Xе» 5 *п.к X с ^вх ^фи
min 52Д 40° 2Л 35 0,05 0.9 55
max 60,5 50° 40 35 0,06 0.94 6,0
лГ~" 5 5 4 1 2 5 6
ДаЮ!м °бразом, число синтезируемых компоновочных схем равно N -
1 Х'2 5'6 = 6000.
чНачсния управляемых параметров*
min max N
М........................ 0,2 2,5 24
Я . . . . . . 0 20 3
Ки<ия принята сетка весовых коэффициентов из 286 узлов с шагом нзмо
CCORux коэффициентов ЛХ/“ 0,1.
135
136
www.vokb-la.spb.ru - Самолёт своими руками?!
рис- 7.20. Сравнение КП
веяной схемы № 6 и
F45A
компоно-
самолета
Результаты расчета. Синтезирова-
но относительно мало эффективных
(оптимальных по Парето) вариантов
компоновочных схем самолета, при
теорически возможном А (Л\) = 286
голучеяо 1V (^эф) -13 (компоновоч-
ные схемы №1/4 6.8,9, 23. 34.144
191.203,213,233,278). Это является
следствием задания грубой сетки
узлов вариации КП.
Основные параметры синтези-
рованных компоновочных схем при-
ведены в табл. 7.1.
Значения ЧКЭ и основные КП
синтезированных комаюновочных
схем изменяются в относительно
малых пределах: Ф = 25,3 ... 26,7
град/с; Х> = 320.2 ... ззо,б м/с;
t - 17,0 ... 18,1 с; т, - 17691 ...
18780 кг; 5 = 543 ... 56,5 м’;
хп.к = 42Л - 47^°; л = 3,0 ... 3,5;
d»x = °>91 - °^4 м; р = 320
344даПа; Ро= 1.21 ... 1.25
Среди эффективных компоновочных схем отсутствуют схемы со значениями.
S-52.5; 58,5 н 60,5 ма;
Хц.к ~ 40 и 50°;
х- 2,5 н 4,0;
с = 6%;
^В X “ W м
Само.1етами-”рекордистами * являются: схема № 1 (по взлетной массе)» схема
№ 278 (но угловой скорости разворота), схема № 9 (по скороподъемности и вре-
мени разгона).
Наиболее близким аналогом самдлета F-15A является компоновочная схема
№6 (рис. 7.20).
Компоновочная схема № 6 является эффективной ио 12 сочетаниям весовых
^зффнштемтов при ЧКЭ Анализ вышеуказанных сочетаний позволяет сделать
выводл чтп самолет 1--15Д оптимизировал по совокупности ЧКЭ: угловая скорость
Разворота — взлетная масса.
137
ГЛАВА 8 АВТОМАТИЗАЦИЯ ПРОЦЕССА
КОМПОНОВКИ САМОЛЕТА
НА ЭТАПЕ ПРЕДВАРИТЕЛЬНОГО ПРОЕКТИРОВАНИЯ
8.1. ОБЩАЯ МЕТОДИКА
АВТОМАТИЗАЦИИ КОМПОНОВКИ САМОЛЕТА
Компоновка начинается после того, как выбрана схема самолета и
установлены основные размеры и характерные величины отдельных его-
частей. Однако процесс компоновки является и обратной связью, влияя на
весовые, аэродинамические и размерные характеристики самолета и его
отдельных час гей. Компоновка в значительной степени определяет такти-
ческие и эксплуатационные характеристики самолета в целом Все это
требует проведения глубокого анализа возможных вариантов кс мпонов-
ки, особенно на начальных этапах проектирования.
При отсутствии автоматизации процесс компоновки занимает дли-
тельное время, так как возможности конструктора одновременно увя-
зывать большое число часто противоречивых требований ограничены. К
тому же следует иметь в виду и известный субъективный подход ком-
поновщика, приверженность его к определенной компоновочной схеме,
в результате чего исследуются далеко не все возможные оптимальные
вари н Поэтому н х дим ра рабатывать методы к мпоновки |
самолетов с использованием ЭВМ Эта необходимость тем более настоя-
тельна, что без блоков автоматизированной компоновки система автома-
тизирование о проектирования юлучастся незамкнутой.
Существует несколько методик автоматизированной компоновки 1
сам лета. Рассмотрим в качестве примера одну из них [21 ].
На предварительной стадии автоматизированной компоновки (АК)
ее компоненты должны быть формализованы, т.е. представлены в виде,
удобном для обработки на ЭВМ.
Исследованиями психологов установлено, что непременными ком-
понентами решения любой задачи, к которым < полным нравом может
быть отнесена и задача АК, являются оперативные элементы статичес-
кая система и стратегия. В процессе решения задачи авт маги шрованнои
компоновки названные компоненты могут быть интерпретированы
следующим образом;
оперативные элементы функциональные элементы, входящие в ।
состав самолета и обеспечивающие выполнение им определенной за. чн
(целевая нагрузка, двигатели, несущие поверхности и тле);
- статическая система — особым образом описанное пространство,
позволяющее размешать и перемещать в нем функциональные элемент^ J
без больших затрат машинного времени и объема оперативной ламя*4
ЭВМ;
стратегия — система правил, позволяющая построив-из набор3
функциональных элементов работоспособный вариант комноновК1!
самолета и оптимизировать его по некоторому критерию.
138
www.vokb-la.spb.ru - Самолёт своими руками?!
В результате проведенного анализа было установлено, что перечне-
жл компоненты задачи АК наиболее целесообразно формализовать в
ленные
виде.
Информацию о функциональных элементах удобно вводить в ЭВМ в
массива эталонного набора элементов (ЭН) каждая строка кото-
о соо1ве!ствует данным конкретного элемента. Подобная форма
^пеяставления данных об элементе позволяет сформировать компоно-
воднЫй критерий - число» определяющее очередность и процедуру вве-
дения элемента в компоновку.
В качестве статической системы для размещения элементов по длине
фюзеляжа используется график площадей поперечных сечений внешней
конфигурации самолета, дополненный данными о площадях поперечных
сечений различных функциональных элементов (рис. 8Л). При этом
г афик площадей представлен в памяти ЭВМ в виде матрицы (компоно-
вочного ноля КП-J), у которой столбцы соответствуют отсекам фюзе-
ляжа. а в строках записываются данные, характеризующие площади
поперечных сечений отдельных элементов. Подобная форма представ
ления позволяет быстро находить свободные площади в каждом отсеке
Реальная
кснпоноб*а
Комп скобка. б
цилиндрических
координатах
График
площадей
с бещестбеннын
содержанием
компоновочное
пол?
(дес о бое поле (№))
Обрабатываются
б ЗВМ б биде мас-
са би б КП и 8П
Рис.
”Ь1Х
^•1. Переход от реальной компоновки самолета к графику площадей поперсч
^синй и компоновочному полю (матрице)
139
Рнс. 8.2. Полная статическая система
автоматизированной компоновки
КП-1 - массив размещения элемен-
тов по осн OX; Kil l7 - массив
увязки формы ЛА; КП-2 - массив
формирования сечений; ВП — массив
весовых н центровочных расчетов
Состояние Kfl-1 и КП-2
Рнс. 8-3. Этапы решения задачи автома-
тизированной компоновки
J. Формирование ^долдс их и
(размещение по Рх)
ь Минимизация размеров 7Ц
5 Формирование сеченииvcn?осей
(размещение по &уf Ре)
6. Сплайн - процедура „ ФОРМА
Z Р'ХмщмРхние речений, cwjrffcdrf
S Результат расчета
SO (путем вычитания из располагаемой площади сечения SP суммы пло-
щадей поперечных сечений уже размещенных элементов 50» а также
определять свободные объемы внутри фюзеляжа (путем суммирования
свободных объемов отсеков)
В дополнение к КП-1 для размещения элементов в поперечных се-
чениях фюзеляжа используется матрица (двухмерный массив) КП-2
И наконец., для обеспечения в процессе автоматизированной компоновки
весовых и центровочных расчетов введена матрица ВП, аналогичная по
структуре КП-1, но в соответствующих ячейках которой записывается не
площадь поперечного сечения элемента, а часть массы элемента» приходя-
щаяся на данный отсек. Описанная статическая система задачи АК изоб-
ражена на рис. 8.2.
Стратегия, или правила вывода, представлены в процессе автомати-
зированной компоновки в виде эвристик выработанных практике! прие-
мов решения подобно! о рода задач. Эвристики формализуются п програ**'
ме АК в виде многоуровневой системы логических онсрагоров либо в виде
процедур сканирующего поиска по мозаичным матрицам КП-1, КП-2 и ВП
Описанный способ формализации основных компонентов процесса
АК позволил разработать методику, предусматривающую следуют111
основные этапы синтеза компоновки самолета (рис. 8.3).
140
www.vokb-la.spb.ru - Самолёт своими
Рнс. 8.4 Последовательность заполнения компоновочного поля КН 1 при комппяов-
ке фюзеляжа
1 После выбора схемы самолета и определения в первом приближе-
нии его основных весовых характеристик и размерных параметров на
основании законов аэродинамики строят оптимальный график площадей
поперечных сечеиий самолета для наиболее типичного режима полета.
2. Из общей площади графика вычитают в намеченных но оси ОХ
координатах Г1Лощади несущих и стабилизирующих поверхностей (НСП)
и резервируют площади в поперечных сечениях под конструкцию планера
(фюзеляжа) и проводки на основании статистических данных по ранее
встроенным самолетам. ,
3. Размещают функциональные компоновочные элементы по длине
фюзе 1яжа (рис. 8 4) (этот этап можно рассматривать как отдельную
процедуру компоновки изолированного фюзеляжа).
Сначала размещают элементы с передними или задними открытыми
Нами* (большие антенны РЛС кабину экипажа, кормовые антенны)
т
Педнц ° такНс> Для нормального функционирования которых необходимы опреде-
Зо,|ы обзора вперед или назад.
141
Элементы поочередно вносят на компоновочное поле в зоне мияслсЛ
сечения, после чего начинают перемещать их к концам тела (псрсд11ех
или заднему — в зависимое! и о г типа элемента) до iex нор, пока ццо
щадь их поперечного сечения не сравняется с площадью, оставшейся и
сечении свободной (т.е. до тех пор, пока они не коснутся конструкций
планера), после чего их положение фиксируют.
Затем размешают элементы, связанные с положением центра
масс самолета (груза, шасси и т.н.). Элемент вносят на компоновочное
поле КП-1 в месте предпочтительного размещения. Специальной проце.
дурой проверяют, позволяют ли габаритные размеры элемента разместить
его в данном месте. Если да, то положение элемента фиксируется на KTI-j
если нет, то происходит поиск места в некоторой наперед заданной е-ок’
рсстности предпочтительного размещения Если и в этом случае элемент не
разместится, то будет дана команда на увеличение исходных размеров
ЛА и повторную компоновку.
Далее происходит размещение так называемых свободных элементов,
т.с. элементов, которые могут располагаться по длине самолета произ-
вольно (крупные блоки электро н радио оборудования ЭРО, вспомо-
гательная силовая установка — ВСУ, азрофотоаппаратура) В зависимости
от сложившейся центровки самолета, а центровка постоянно koi хрони-
руется с помощью массива весового поля специальной процедурой, эле-
мент пытаются разместить в задней или передней части фюзеляжа. Если
это нс удается, элемент постепенно перемещают к противоположному
концу фюзеляжа до тех пор, пока нс будет найдено место, на котором он
мог бы размесАиться.
Завершают компоновку фюзеляжа размещением заполняющих эле-
ментов (мелкого оборудования "россыпью” и топлива). Оборудование
как элемент, имеющий меньшую плотность, размещают от концов
фюзеляжа к его середине: ’’разбивают” на части и каждую часть разме-
щают таким образом, чтобы обьем шпации был заполнен полностью и
центровка пустого самолета была приведена к заданному значению.
Аналогично размещают топливо, но уже от центра к концам фюзеляжа.
Таким образом, в процессе компоновки осуществляют совмещение
центровок пустого самолета и самолета с топливом
4 После того, как все элементы размещены и выявлены объемы-
оставшиеся внутри фюзеляжа незаполненными, компоновку повторяют,
но уже в меньшем объеме (см. рис. 8.3). Процедура итерационного умень-
шения размеров построена таким образом, что изменение объема само-
лета идет со все уменьшающимся шагом. Габаритные размеры и массу
элементов, зависящих от размеров самолета (площадь крыла, масса
планера, масса и объем шасси и т.п;), корректируют при этом спениал^
ной процедурой "УВЯЗКА”. В итоге получают работоспособный ва|
компоновки фюзеляжа с максимально возможной плотностью запоя
нения.
5. Пекле минимизации размеров компоновки в форме i ро.межутЯ
пого тела, характеризующегося лишь площадями поперечных сеченя**
она перерабатывается в реальную форму тела, имеющего конкрс«,ы
142
www.vokb-la.spb.ru - Самолёт своими
Рис. 8.5. Результат работы блока "ФЮЗЕЛЯЖ”
размеры сечений. На этом этапе компоновки, нс требующем уже большой
вычислительной работы, последовательное размещение элементов в
поперечных сечениях самолета ведут па мозаичном поле КП-2.
6. Полученная форма фюзеляжа с учетом выбранной формы попереч-
ных сечений описывается с помощью сплайн-функций на этом заканчи-
вается компоновка фюзеляжа.
Результат работы блока ’’ФЮЗЕЛЯЖ” показан па рис. 8.5, на котором
видна достаточно высокая плотность заполнения внутреннего объема ЛА,
а также нестандартов взаимное размещение кабины и пиши передней
стойки шасси (наклонный пол), подсказанное машиной.
Программа ’’ФЮЗЕЛЯЖ” может быть преобразована в программу
САМОЛЕТ” путем введения в компоновку несущих и стабилизирую-
щих поверхностей (крыла I О, ВО), а также элементов силовой установ-
ки (воздухозаборника, канала и двигателя).
Данные о несущих и стабилизирующих поверхностях вводят в блок
в виде графиков площадей, предварительно полученных с помощью
автономной I рафоаналитической системы (рис. 8.6). При этом раздель-
<шпрокСиМИруЮТСя графики площадей поперечных сечений всей несу*
дСИ Поверхности, ее части, заполняемой топливом, а также центроплана,
проксимация проводится с помощью следующей формулы
5кр - (LKP - X)?,
где V
к я - площадь поперечного сечения крыла (стабилизирующей по-
tJXH°C™) ’ статистический коэффициент, зависящий от относительной
WliLl поверхности; £кр - 1абаритный размер крыла по оси OX: X —
143
Рнс. 8.6. Представление в программе АК несущих н стабилизирующих поверхностей
текущая координата по оси ОХ; аир- показатели степени значения
которых приведены в табл. 8.1.
С помощью этой формулы можно также аппроксимировать графики
площадей таких не вписывающихся в общее миделево сечение at регате»
ЛА, как подвесные баки, пилоны, специальные гондолы и т.п. Виды
получаемых зависимостей SKp = f (X) для различных значений а и )3 пред-
ставлены на рис 8.7.
Размещение крыла ведется на компоновочном попе КП-1 таким
образом, чтобы был обеспечен нормальный запас статической устой-
чивости ЛА
Значения коэффициентов а и Д
Вид апироксиьшрующей зависимости
Произведение линейных функций
Произведение ливейно-квадратичных функций
Произведение квадратичных функций
Произведение квадратично-кубичных функций
Таблица8-1
144
www.vokb-la.spb.ru - Самолёт своими
fi.7. Аппроксимации различных типов графиков
^лиадсй поперечных сечений несущих и стабилн*
Дующих поверхностей
Данные о габаритных размерах элементов
ендовой установки также вводят в блок ЛК в
вИде графика площадей, показанного на
рис. 8.8. Для достижения минимального
волнового сопротивления при обеспечении
работоспособности силовой установки часть
ее должна обязательно размещаться вне основ-
ной аэродинамической конфигурации (лло- •
щаш> се поперечного сечения линейно возраста-
ет от /?о заборника до Л'с сопла), а часть с
площадью поперечного сечения AF вн должна располагаться внутрй
основной конфигурации.
Размещение элементов силовой установки но оси ОХ начинается с
поиска положения двигателя как элемента силовой установки^ большей
степени влияющего на эффективность ЛА, чем заборник (рис. 8.9). Начи-
ная с конца фюзеляжа, рассматривают различные варианты положения
двигателя по направлению к носовой части Аналогично рассматривают
различные варианты размещения заборника, но в этом случае перебор
идет уже от начала фюзелижа до двигателя. Для каждого исследуемого
145
О 1,0 1,5 2,0 М
Рис. К9- Схема поиска наивьноднейшего положения двигателя и воздухозаборника
в программе АК; примеры экспериментальных зависимое! ей. непс эьлуемых в
программе
положения двигателя и воздухозаборника рассчитывают значение кри-
терия эффективности компоновки, отражающего влияние изменения
массы, аэродинамических характеристик, потерь полного напора потока
в каналах и т.п. (всего шести параметров) на величину дальности полета.
Как только компоновочный критерий будет равен максимальному зна-
чению или как юлько компот смый агрегат достигнет границы допус-
тимой зоны поиска, положение его фиксируется, а параметры /*заб ?цв*
Л7Чаб тдв вносят в соответствующие ячейки матриц КП-1 и ВП После
того как места размещения двигателя и заборника определены, меЖЭД
ними pacnonai ают воздушный канал. Данные о влиянии взаимного рас-
положения coicia и фюзеляжа на относительную дальность полета
вследствие потери эффективной тяги, а также данные об относительном
аэродинамическом сопротивлении клина слива воздузаборника
необходимые для поиска оптимального расположения элементов СЯ
приведены на рис. 8.9.
После того как все элементы разметены на компоновочном по
проводится, как уже отмечалось итерационное уменьшение размеров'*’* ’
Напомним, что при этом параметры элементов, зависящих от размер01!
146
www.vokb-la.spb.ru - Самолёт своими руками?!
Я 10. Построение контура
pone чИОГ ССЧ€НИЯ Фю:,сляжа
ЛА корректируются с по-
мощью специальной пропеду--
СЬ1 ’’УВЯЗКА”
В процедуре ’’ФОРМА’
оипезирустся (с использова-
нием некоторых положений
1еории кривых 2-ю порядка)
плавный аэродинамический
кошур РЯДУ сечений и
заданному графику плошадей.
Полученные в результате
описать контуры поперечных
процедуры ’’ФОРМА” данные позволяют
сечений проектируемого ЛА используя
зависимость вида
Й |1Г + 2/ 1) (X А ) + If Jo~f ГГ77 Пх+Л’Р1)
—/1 (1 ~7Й
Здесь / - дискриминант кривой. Значения остальных входящих в уравне-
ние вс. ш чин приведены на.рис. 8.J0.
В качестве примера использования про|раммы АК на рис. 8.11 пока-
зан варианг компоновки самолета? полученный с ее помощью. В процессе
машинной компоновки оыли сня1ы ограничения, дейсгвовавшие при
проектировании первоначального варианта. В результате новый вариант
компоновки обладает меньшими габаритными размерами и массой по
сравнению с проклииом при сохранении основных летно-технических
характеристик.
Наиболее эффективным способом анализа ситуации на компоновоч-
ном поле, определения незаполненных объемов и размещения функцио-
нальных элемснюв внутри заданной конфигурации самолега является
сканирование по мозаичным матрицам статической сшлемы, контроли-
руемое с помощью обратной связи. Формально процесс сканирующего
поиска целесообразно оформлять либо в виде циклических процедур,
либо в виде итерационных процедур с меткой
В с мотренпый метод АК летательных аппаратов и разработанная на
е1° основе программа обеспечивают (в рамках заданной компоновочной
схемы):
К°мпонопку функциональных элементов как по длине Л Л (но оси
> так и в поперечных сечениях (по осям OY, 02;;
-риближенпый расчет взлетной массы ЛА в целом, а также расчет
с<ы и эпюр изгибающих моментов отдельных ai рсгатов;
ентровку ЛА в целом и размещение агрегатов с заданным поло-
1И м центра масс (груз.топливо.шасси и т.п.);
Зат *°Ра1,Ие пленной аэродинамической формы ЛА в соответствии с
а I им графиком площадей;
Мег М Ними:,а,ш>0 размеров ЛЛ с корректней и взаимной увязкой пара-
Функциональных элементов.
147
Рис. 8-11. Пример компоновки самолета, сформированной с помощью АК
8.2 АВТОМАТИЗАЦИЯ КОМПОНОВКИ
ПАССЛЖИК КОЙ КАБИНЫ САМОЛЕТА
Пассажирская кабина занимает наибольшую часть обьема пассажир-
ского самолета и во многом определяет его размеры и, следовательно,
аэродинамические, весовые и тсхнико-зкономичсские характеристики- I
При пре варите whom i pot ктировании к мпоновка пассажирской каби-
ны определяет основные размеры фюзеляжа (площадь милелева сечения
и длину). Необходимость оптимального сочетания (исходя из условии
комфорта пассажиров и удобства их обслуживания) размещения запан-
ного числа пассажиров с расположением служебно-бытовых помещении,
вестибюлей, аварийных выходов и входных дверей с учетом паивыгв
нейшего положения силовых элементов фюзеляжа делает задачу компа-
новки пассажирской кабины многовариантпой, а сам процесс этой ком-
поновки трудоемким.
Автоматизация компоновки пассажирской кабины позволяет зла
чительно облегчить и ускорить этот процесс. Разработано не коль*0
методик автоматизированной компоновки пассажирской кабины. Л
148
www.vokb-la.spb.ru - Самолёт своими руками?!
рнс 8-12. Группирование элементов компоновки
Рис. 8-13. Формализованное представление связей и ограничений при компоновке
кухни
примера приведем методику, позволяющую вести диалог ЭВМ — ком-
поновщик.
Построение математической модели компоновки пассажирской
кабины базируется на следующих допущениях:
а) элементы компоновки группируются компоновочными цепоч-
ками, т.е. последовательно (например, вдоль борта) без зазоров между
собой (рис. 8.12);
) элементы компоновки устанавливаются перпендикулярно либо к
продольной оси самолета, либо к борту пассажирской кабины.
На основе этих допущений в вычислительную npoi рамму да ЭВМ
В|*одит процедуры, которые рассчитывают основные размеры элементов
компоновки и определяют координаты их положения так, чтобы слу-
ио-бытовыс помещения в цепочке размещались плотно друг за другом
вписывались в объем пассажирской кабины, нс уменьшая необходимой
Рины продольных проходов в салоне. В качестве примера формали-
не анНых СВЯЗей, реализуемых в вычислительной программе на рис. 8 13
паеа3аНЬ1 связи и ограничения па положение кухни относительно борта
с^жирской кабины (ограничения и f-P) и зоны продольных прохо-
дов (tп
в ц s и а также по отношению к предшествующему элементу
1Очке (связи и $2 )-Кроме того, для кухни-буфета контролируется
149
обеспечение минимально допустимой высоты потолка в центре се
площадки (в точке С), а также обеспечение минимальных размеров тЛ
площадки для работы обслуживающею персонала. Чтобы копструктЛ
сформировать с помощью этой программы, например, компонопКу
показанную на рис. 8.12. ему достаточно указать положение начала ueJ
чек (параметры ан о. ах о? где / — номер цепочки, расположенД
вдоль борта кабины) и перечислить последовательность чередовании Л€
ментов компоновки в цепочке. Для расчета габаритных размеров i ухоць
и гардеробов надо указать площадь, занятую кухонным оборудование^
и емкость гардеробов. В зонах между цепочками вычислительная i ро/
рамма осуществляет установку блоков кресел с заданным шагом Коор.
дииаты их положения рассчитывают с учетом условий вписывания в
геометрию фюзеляжа, а также обеспечения необходимых расстояний д0
поперечных перегородок. Возможны различные варианты их усюиовки:
блоки кресел устанавливают перпендикулярно продольной оси самолета,
вдоль линии борта кабины, на прямолинейных направляющих.
Расчетные процедуры по формированию компоновочных юпочек
являются основным элементом диалоговой системы проектирования
компоновки пассажирской кабины.
Возможно решение двух задач компоновки: прямой и обркпюй.
Рассмотрим сначала прямую задачу компоновки салона в пассажирский
кабине заданных размеров разместить служебно-бытовые помещения и
аварийные выходы, обеспечив при этом высокую плотность компоновки
и удобство обслуживания пассажиром, а также необходимые условия
аварийною покидания. Эту задачу решают в процессе нескольких niepa-
ций. Номенклатуру служебно-бытовых помещений конструктор опреде-
ляет в соответствии с заданными условиями комфорта и рекомсндз1|иямв
"Норм летной юдности” .в зависимости от * предполагаемой пассажиро-
вместимости. Затем последовательно формируются центры обслуживания
в носовой и хвостовой частях салопа, в средней его части. При этом
конструктор вводит в расчетную программу в качестве исходных данных
координаты начала цепочек и списки шифров, которые обозначают наи-
менование элементов компоновки и последовательность их размещения
в цепочках. По этим данным ЭВМ рассчитывает координаты элементов и
все необходимые для компоновки параметры. На графопостроитель или
эк; *н дисплея выводится чертеж компоновки, а также данные о числе
размещенных пассажирских кресел и резервах площади пола кабины.
Конструктор анализирует полученный вариант и указывает новые зна-
чения координат начала цепочек или состав и последовательность череда
вания элементов компоновки в них. Он получает новый чертеж и инфор-
мацию для анализа. Итерации повторяются до получения приемлемой
для конструкюра и согласованного с другими специалистами решения-
Обратную задачу формирования геометрии фюзеляжа при зэцзпи°1
пассажировместимости решают по тому же принципу последовательны*
итераций. Форма фюзеляжа описывается с помощью кривых втсроЛ
порядка. В отличие от прямой задачи компоновки салона в этом сД)
необходимы дополни тельные итерации для вычисления параметр4
150
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 8 14 Примеры компоновок пассажирских салонов
151
определяющих размеры фюзеляжа, в котором размещается задЭНцД
число пассажиров. Вариации этих параметров (при выбранном пог^ЛН
ном сечении это параметры, связанные с длиной фюзеляжа) также
ствляст конструктор с последующей компоновкой салона по приведение/
выше схеме.
Практика использования диалогового метода показала его высокую
эффективность. При использовании ЭВМ производительность труда кО||
структора повысилась в 8 раз. На рис. 8.J4 показаны варианты компоц0
вок, полученные в результате ЛК в режиме диалога конструктор - э^М
ГЛАВА 9. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
КОНСТРУКТИВНО-СИЛОВОЙ СХЕМЫ САМОЛЕТ! А
9.1. ПОСТАНОВКА И ПУТИ РЕШЕНИЯ ЗАДАЧИ
ОПТИМАЛЬНОГО ПРОЕКТИРОВАНИЯ СИЛОВОЙ КОНСТРУКЦИИ
Определение области существования конструкции
Проектирование силовой конструкции весьма важный этан в общем
процессе создания самолета. В условиях широкого внедрения в проекти-
рование средств вычислительной техники, методов и методик, базирую-
щихся на использовании ЭВМ, стало доступным применение строгих
методов определения напряженно-деформированного состояния в эле-
ментах исследуемой конструкции, а 1акжс методов математического!
npoi раммировання при решении экстремальных задач. Это позволило в
процессе создания силовых конструкций самолетов проводить обшир-
ные исследования с применением математических моделей (|лавным
образом дискретною типа). Такой подход обеспечил повышение каче-
ства и достоверности исследований, что нашло свое отражение в пенре
рыв ном росте весового совершенства создаваемых конструкций само-
летов. Характер изменения относительной массы конструкции самолетов
за последние годы показан на рис. 9.1. Применение новых методов,
основанных на математическом моделировании, позволило получить
юхничсскис решения, которые были невозможны ранее. В частности,
применение сложных математических моделей дискретного гигм поз-
волило обеспечить высокое весовое совершенство самолетов с mhtci-
ра явной аэродинамической компоновкой.
Однако высокий уровень весового совершенства сам по себе euie |1С
определяет конечную эффективность самолета. Важно го, что эти резуль-
таты MOiyi быть достигнуты за сравни 1ельно короткое время. Иным»1
словами, процесс разрабожи высокоэффективной конструкции не при*
водит к чрезмерному увеличению цикла создания самолета и связанной
с этим опасности его моральною устаревания еше до запуска в серийно
производство. - 1
Специалисты по проектированию силовой конструкции саМапе1а
приступают к ее созданию, koi да в соответствии с выбранными критср ।
152 I
www.vokb-la.spb.ru - Самолёт своими руками?!
, Тенденция изменения отиоси-
ммты конструкции {6|
определен один из возможных
вариантов пространственного обли-
ка конструкции, для которого
известны:
параметры математическом модели каркаса внешней поверхности;
параметры математических моделей каркасов внутренних поверх-
ностей конструкции, предназначенных язя размещения двигателя,
топлива и т.д.,
формализованное отражение воздействия на объект внешней среды.
Параметры математических моделей поверхностей конструкции
самолета позволяют определить допустимое пространство существо-
вания агрегатов и элементов проектируемой конструктивной системы.
На рис. 9.2 показано пространство существования силовой конструкции
самолета в зоне хвостовой части фюзеляжа. Эта область исследований
может претерпевать значительные изменения.
формализованное отражение воздействия на объект внешней среды
предполагает знание непрерывных или дискретно заданных функциональ-
ных связей, определяющих законы изменения параметров окружающей
среды по всей зоне се взаимодействия с исследуемым объектом. Эго озна-
чает, чю существуют операторы дифференциального, алгебраического или
иного функционального типа, позволяющие в выбранном метрическом
пространстве для конкретных математических моделей каркаса поверх-
ности ставить в соответствие точке, определенной тремя координатами,
значение интересующего специалистов параметра, характеризуеющего воз-
действие окружающей среды. Например:
(9.1)
где х-{ j А к _ текущие координаты запрашиваемой точки;
— О11ерзторы преобразования для аэродинамической, газодинами-
Tj, — коэффициенты давления,
Тошнее
ческой и инерционных моделей; Г,,
температуры и инерционные силы,
соответствующие текущим коорди-
натам.
Обычно А и Г операторы алгеб-
Раического типа. При запросе гшра-
2 Огр4ННчсния* сужающие область
сзмолег°Ва,1И>1 снлов(>й конструкции
^РУкъи Ч1,РгШ<-’ИНЫС ДЛИ СИЛОВОЙ KO1I-
bf пространственной
1Ю°ки самолета
Отсел о&оруШания
153
метров математической модели поверхности каркаса роль CTicpaTcM
выполняет совокупность кусочно-определенных функций изменения г3
метрических обводов, в общем случае нелинейного типа: °'
где // — оператор, отражающий аппроксимацию геометрических обно Юв
с помощью сплайн-функций, коник и т.д.; D запрашиваемое зпачсЛ
третьей координаты по /-й точке.
Параметры математических моделей каркасов наружной и вщ i рении*
поверхностей, формализованное описание воздействия окружающей
среды, определеннее для конкретного положения исследуемого объекту
предельные возможности конструкционных материалов, эксплуатацион-
ные и иные требования образуют совокупность функциональных ог^.
ничений, формирующих допустимую область существования силовой
конструкции самолета. В случае линеаризации функционального представ-
ления всех компонентов шраничений они образуют в совокупности й
конечномерном пространстве гиперплоскость, определяющую iрапшщ
возможного исполнения силовой конструкции. Нс всегда все компо-
ненты отмеченных ограничений используются для формирования области
существования силовой конструкции самолета конкретного назначения.
ТЗ определяет требуемый качественный и количественный состав ограни-
чений, используемых в процессе проектирования. Например, нс для всех
самолетов необходим учет газодинамического воздействии. В то же время
иные требования, определяющие специфические особенности проектируе-
мой конструкции, могут дополнительно сузить отмеченную область.
Для решения задачи проектирования силовой конструкции самолета
помимо определенной области существования необходимо имсть форма-
лизованное представление объекта исследований, методический ангара
формирова. ия альтернатип исполнения конструкции и процесса поведе-
ния поисковых исследований. Рассмотрим кратко структуру и функции
основных компонентов процесса проектирования
Выбор объекта исследований
для процесса проектирования
Основная цель проектирования заключается в создании конструК|Л
минимальной массы, не разрушающейся под воздействием внешних сЛ
поэтому одной из основных задач проектировочного процесса слеДУ6^
считать задачу определения предельной несущей способное!и
конструкции.
Важнейшей характеристикой несущей способности конструкция
являются действующие в ес элементах напряжения Знание их значении я
сравнение с допускаемыми позволяет оценить поведение констрУьЦ>1Я
в области действия растягивающих усилий и сделать прогноз огиосШОИ
154
www.vokb-la.spb.ru - Самолёт своими руками?!
рй способности в случае возникновения нелинейных форм де-
‘'“Дранного состояния.
ф°Р г причин при проектировании силовых конструкции основ-
И к м исследований служит тот, который нозволясг проводить
нЫ-м компонентов напряженно-деформированного состояния (НДС)
^элементах силовой конструкции. В качестве такого объекта могут
быть использованы:
сама физическая систем»;
физическая модель проектируемой или модифицируемой системы;
математическая модель проектируемой системы.
Использование самой .физической системы для целей проектирования
наиболее целесообразно лишь при ограниченных модификациях уже
^шествующей силовой конструкции. В процессе эксплуатации самоле-
тов возникают объективные причины проведения таких модификаций.
Для пассажирских самолетов 1акими причинами могут быть:
оснащение самолета более экономичной и совершенной аппара-
турой
появление новых технических средств повышения аэродинамичес-
кого качества летательных аппаратов;
постановка на самолет более мощных и экономически более выгод-
ных двигателей и т.д.
Доработка элементов силовой конструкции при подобных модифика-
циях носит локальный характер и принятие решений о внедрении соответ-
сгвуюшей модификации конструкции самолета может быть осуществлено
на основании испытаний в лаборатории или после проведения исследова-
ний в воздухе. В ряде случаев для этих целей более целесообразно исполь-
зовать физические модели, которые дост. точно строго могут отображать
свойства исследуемой системы. Среди таких моделей можно отметить
аэродинамически, конструктивно, упруго-, , динамически подобные и
другие модели. Использование этих моделей зачастую позволяет значи
тельно сократить материальные затраты на исследования и исключить
риск неизбежно присутствующий при работах на натурных конструкци-
ях. При проектировании новых самолетов использование физических
моделей нерационально по нескольким причинам.
Достаточно дликельный срок изготовления физическ. х моделей;
большие сложности в реализации отдельных алгоритмов проектиро-
вочного процесса, например процедур поиска экстремума целевых
функций;
унимодальное|ь функциональной направленности исследований.
По этим причинам для процесса проектирования силовой конструк-
ции самолета, и прежде всего на ранних ляпах — технических предгто-
^НИи и эскизного проекта, широко применяются математические моде-
Различной структуры. С помощью математических моделей через
^воку1ГН(>сть а6страк1ных
параметров и понятий удается достаточно
Civ Г° Отсбражать свойства иссдедуемой физической системы. В нашем
такой системой является силовая консгрукция самолета.
Реди различных математических моделей, используемых в процессе
155
проектирования силовой конструкции самолета, центральное
занимает модель, отображающая упругое взаимодействие отдельнл
агрегатов и элементов конструкции. Основой формирования такой Мо 1
ли служат законы механики твердого деформируемого тела, являкплл д|
предметом изучения математической и прикладной теории упруГо<Ж
Знание этих законов и способов решения задач механики позволя I
оценить уровень деформаций и напряжений в любой области исслелур^Д
конструкции.
Знание компонентов НДС дает возможность проектировщику оцре
делить тип материала для изготовления элементов конструкции и прис
тупить к процессу проектирования отдельных ее деталей, т.е. начать
конструирование.
К простейшим математическим моделям, позволяющим проводить
оценку НДС в элементах авиационных конструкций, относится модель
балочного типа. Использование такой модели целесообразно при исследо-
вании агрегатов большого удлинения, для которых практически по всей
области справедливы следующие допущения.
сечения конструкции до и после возникновения деформаций остаются
плоскими;
контур сечений до и после деформации остается неизменным.
При таких допущениях нормальные напряжения в сечениях ai регатсв
могут быть определены но формуле
(9.3)
где yt расстояние исследуемой точки до нейтральной оси сечения;
J — момент инерции сечения; М изгибающий момент, действующий в
данном сечении .
Распределенные касательные силы в сечении, возникающие вследствие
действия перерезывающих сил и крутящего момента, могут быть опреде-
лены соответственно по следующим формулам
j ’ ‘Кр
(9-4)
где Qy — усилие, действующее в рассматриваемом сечении; S текут#
значение статического момента; М — крутящий момент; F — площадь
ограниченная контуром поперечного сечения.
При проектировании дозвуковых самолетов балочная модель Д°с
таточно широко использовалась в совокупности с методами расчета
плоских статически неопределимых рам. Однако погрешности в о«рс**
пении компонентов НДС при использовании этой модели достаточно вели*
ки, и их величина тем существеннее, чем большая нерегулярность наблч|
дается в строении конструкции самолета. Эти нерегулярности являются
следствием наличия эксплуатационных разъемов ниш шасси и ер**0*
кабины, сложных переходов в каналах воздухозаборников и тд. В
зультатс появления погрешностей в определении компонентов НДС
практике возникает необходимость ’’доводить” конструкцию до заДЯ|
156
www.vokb-la.spb.ru - Самолёт своими руками?!
вня напряженного состояния, используя результаты статических
ною УР% е созданных конструкций» а также результаты вибро- и
^^исследований. ’'Доводка" прочности конструкции всегда увели-
летНЬ1Х мЗССу проектируемого самолета, материальные затраты и продол-
4103 ность цикла создания. Однако для дозвуковых ЛА, главным
юм транспортного назначения, балочные модели применяют и в
°°^юяшее время, поскольку основные агрегаты таких самолетов обычно
11ЭС'Пзют большим удлинением и их деформации подчиняются балочным
'ономерпостям. В то же время использование моделей балочного типа
дежелателыю ДО|Я самолетов, имеющих крылья малого удлинения,напри-
мер трапециевидные и треугольные в плане. Малая строительная высота
подобных крыльев, значительные размеры в плане приводят к появлению
иэгибных деформаций в двух плоскостях. Наиболее ярко это явление
проявляется в эоне заделки крыла на фюзеляже. В итоге практически
любое сечение крыла не только поворачивается от воздействия общего
из1иба, как балка, но и деформируется в своей плоскости. Для таких
крыльев принятые допущения неспреведдины, так как приводят к слиш-
ком большим погрешностям.
Для описания свойств таких конструкций необходимо использовать
более строгие математические модели. Небольшие но сравнению с раз-
мером в плане шроигельные высоты крыльев малого удлинения позво-
лили использовать аналогию их структуры с анизо> ровными в общем
случае пластинами, в исследовании которых к тому времени был накоп-
лен определенный опыт.
№ строительной механики известно, что дифференциальное уравнение
упругой поверхности пластины может быть записано следующим образом:
E/i3
1777
д * и’ 3 * и1
-------+-----
э3ха2у ау4
(9.5)
)=/<ху).
V2 J ЙЛ ^
~~ искомая Функция прогибов срединной поверхности пластины;
— - цилиндрическая жесткость пластины; f (х у) известная
Функция распределения внешней нагрузки.
При известных краевых условиях в резулыагс интегрирования этого
Уравнения получают функцию напряженного состояния всей конструкции.
Использование метода пластинной аналогии существенно повышает
киль°СТЬ пР°ектиР°вания таких агрегатов, как крыло, стабилизатор,
в ' ь и Т-Д- Однако вблизи заделок таких агрегатов на смежных агрегатах,
частности крыла на фюзеляже, строгость оценки НДС с помощью меюда
астинной аналогии недостаточна'.
вне Uie” ЧСРТОЙ изложенных методов анализа НДС следует считать
Ний СНИе Д°статочно жесткого условия о структуре объекта исследова-
bshho J1° ли^° Салка, либо пластина. Конечное число форм цсформиро-
кРасвГ° Состояния> отсутствие корректности в формировании реальных
Ь,х Условий при решении частных задач анализа НДС — все зги
157
факторы на определенном этапе развития авиационной техники Пересу^
уцовлепюрт ।ь потребности специалистов. ,и
Современная методология проектирования сложных авиациоцп
конструкций базируется на использовании для анализа НДС матемЯ
чсских моделей дискретного тина, сознаваемых на базе метода конечм
элементов (МКЭ). Основное достоинство моделей такого типа jaia| *
чгется в возможности адекватного отображения свойств исслелурд
конструктивных систем с крайне нерегулярными структурами. В настой
шее время дискретные математические модели, и математическая моц^
МКЭ в частности, занимают центральное место в традиционном, а так^с
частично или полностью автоматизированных процессах проектирования
конструкций самолетов. Поэтому необходимо более детально с стано-
виться на их особенностях и методологии формирования.
МКЭ получил свое развитие с появлением проблемы анализа НДС
тонкостенных авиационных конструкций нерегулярных структур.
Методическая реализация МКЭ протекала по двум направлениям -
создания мете да сил и метода перемещений. В силу ряда причин (раз.
витис МКЭ для анализа явлений потери устойчивости, динамической
реакции упругих систем и т.д.) к настоящему времени наибольшее раз-
витие получил метод перемещений.
Основы МКЭ достаточно полно изложены в ряде работ 16. 11. 321. Краше
остановимся на основных особенностях МКЭ. приняв за основу метод перемещений.
Для метода перемещений искомой функцией является функция перемешатий
и, зависящая от текущих значений координат х. у. г в выбранной, обычно фостран-
ствевной. ортогональной системе координат заданно го метрического пространствз.-
1.C-W-/ (X. у. 7).
Закон изменения функции Р должен удовлетворять дифференциальному урав-
нению в частных производных:
(9.61
а дР э &р й f эр л л
— (*хх — ) + — (Avr — ) + - -—) + С 0-
ЙХ дх йу - - 3 f dz -- а*
Использование вариационного подхода позволяет перейти оз интегрирования )Гав>
иения (9.6) к задаче м..Нимиэации функционала х:
I ЭГ , йР , ЭР , Л
к-; . )•
V
(9.«1
- + /<уг PdS,
S
где JlXJC k7Z - некоторые физические параметры, определяющие и itchch’
ность изменения исследуемой функщти по осям CZA. OY\ 07 соответственно: I
некоторая интегральная функция, определяющая красные условия; (J' коЮр-
распределсипая функция, характеризующая вьлкжкенн граничных условий на
печной области исследуемой поверхиссти.
Если ввести обозначение
и
^хх
О
(D| =
к
О
^zz
(9 ”
158
www.vokb-la.spb.ru - Самолёт своими руками?!
. в целях упрО1дч1мя посчитать, чю функция на поверхности не определена,
а ТЗК*С (9.7> МОЖНО записать ел еду ющим образом:
го
I
2 PQ JrfV + / <7Г PdS.
S
1у1СИ1а<й этан в преобразованиях является основным и определяющим
С -тъМкЭ. Делзегся допущение относительно того, чти в пределах конечной
cylj£HOL J1CCJ1 (.дуемого npoci ранетка поведение функции Р удовлетворяет выбран-
оСЛ а рн ри закону: линейному, квадратическому, кубическому и тл.
|ЮМ‘-|акой конечной областью ним иначе конечным цементом принято считать
д,(я одномерных областей отрезок, соединяющий две точки, которые принято
1вэть узлами (существует общепринятое обозначение этих узлов 1 и J);
1133 для двумерных областей - треугольник (или четырехуюльник) с обозначением
узлов / Z А /-
для трехмерных областей трехгранник, лараллепипсд с узлами /, J, л. L.
у X G, (? (-' учетом введенных с ^значений узлов для конечных элементов пред-
ставим изменение исследуемой функции на элементе Л = мс
{«}f 1-4. •-V/. I- (9.10)
где { J с обобщенный вектор перемещений, определяющий поведение функции
и па элементе: .V,-. . Vj функции формы» определяющие закои изменения ком-
понентов исследуемой функции на элементе.
I спи гхчя исследуемого пространства ввести т элементов, то искомая функция
можст быть представлена в виде функционала
U -Jiu\ . с?.. .м^>.
(9.9)
(9.11)
< учетом этого функционал х мож т быть представлен н виде
Х= Х1 + Хт + Ъ ’ •-+ \п = - xf-T-«
I ~ I
х J- - Vе 1 |/> I <7С <Л -
' 1 X'- '
- f н< (?е + f ,<с ЧГ< (9-12)
5е
Общая мини ми 13ЦИЯ функционала (9.121 осуществляется относительно ухтовых
значений исслсдуемий.фун’'!1ии м. представленных в виде вектора:
И = м (9 ,3)
Выражение дхс/й { /} применительно к хчемситоэй оСлаити примет вид
Н (9Л4)
И’ I" f I/r'j'1
{»']- I CIM’PJV (9t5)
Окончательно мы приходим к ратрешаыщсР системе линейных алгебраических
Ячииедий (СЛАУ) в виде
IAlp]-{pj (916)
Г 1« А I Д | № (/•] - {/», />2. . рV)
_ < Р^ием матрищют уравнения (9.16) на всей области
'М МКЭ мо1ут быть опр^елвы как компоненты функционала перемещений
159
относительно узлон типологическою пространства, так и компоненты деф^^ЛИ
на каждом из элементов согласно (9.8), а слсдонательво* и компоненты
женпого состояния. Кроме того, согласно уравнению (9-12) величина хс
быть о ।ipcj icri cita гл еду юны м в ыраже! 1ием:
хс' (<А‘} Т {'fj '-1Х,
Vе
которое с учетом (9-10) может быть пределанлени в виде
Xе- J ' {пЛ {«(]} г|ЛеИ/Н{^}^-.
Окончательно згтхэ выражение будет иметь вид
Xе-4 {“tJZ {"«]
(9-Г|
W.18)
(9 I9j
Слсдичатепьно. после получения решении СЛАУ пользователи имеют возмож-
ность догюлнитс-тыю проводить оценку затрат потенциальной Л1ср1ии - еформации
как на каждом из элементом модели, так и интегральную оценку затрат этой энергии
Кроме того, знание компонентов мшрмцы (£^’| позволяет пользователям провести
оценку за грат силовой массы те на отдельном элементе, а в конечном счете черс
гн МН
выражение ~ znf -И интегральные затраты силовой массы на всю конструкцию.
i = 1
г ’од силовой массой понимают массу силовой конструкции -
Таким образом, решение задачи анализа НДС в элементах силовой конструкции
позволяет специалистам формировать стратегию проектирования, ирсдусмнтрина»
1дую целенаправленное изменение компонентов проектируемой конструктивм
системы с использованием различных критериев оптимальности весового, люрге-
гического или равнопрочно|хэ для опенки достигнутых результатов.
Практическая реализация процесса проектирования с использование^
в качестве объектов исследований моделей МКЭ прецусмлривает. с
одной стороны, применение существующих или создание новых шпорит*
мов и программ ыя решения задачи анализа НДС с помощью МКЭ. а с
другой, разработку специальных методов и методик для организации
собственно процесса проектирования силовой конструкции самане ia-
Особенности процесса формирования моделей МКЭ
Точность отображения свойств физической системы — конструкции -
п модели МКЭ зависит от следующих факторов:
выбранного качсовенного типа элемента для каждой области модели-
руемой системы;
числа степеней свободы в каждом из умов топологического У*®’
вого пространства;
степени детальною представления в модели отдельных ибтасК*
конструкции:
способа о1ражсния воздействия внешней среды па конс<рУК1в
самолета. и|
При проведении моделирования сложных конструкций отмеченн
факторы вызывают необходимость использования в моделях МКЭ
таючно большого числа элементов различной структуры. При эго41 гj
мерность tn 1спьных моделей достигает 10 ... 20 1ыс. элементов и Лс
160
www.vokb-la.spb.ru - Самолёт своими
еделяет размерность СЛАУ по общему числу неизвестных. В связи
что °||р^йстОЯТельсгвом возникает ряд проблем как при формировании
С Устной модели МКЭ. так и при проведении анализа НДС.
рзлних этапах внедрения моделей и методов МКЭ в практику рас-
тдя анализа НДС авиационных конструкций формирование модели
^КЭ занимало пт 60 до 80% всего времени исследований. При этом весь
л исследований для модели с 500 ... J000 неизвестными с использо-
ечни м ЭВМ второго поколения занимал 2 4 месяца.
Вне трение в практику расчетов более мощных ЭВМ третьего поко-
ления хотя и значительно ускорило процесс решения СЛАУ» но сущест-
венного сокращения общего цикла исследований при этом достигнуто
не было. Время создания моделей МКЭ по-прежнему определяло продол-
жительность цикла исследований. В настоящее время ла проблема ре-
шается комплексно, с учетом имеющихся возможностей повышения про-
изводительности 1руда с помощью автоматизации процесса моделирова-
ния. Основу такой автоматизации составляет использование существую-
щих технических средств для реализации функций кодирования, хра-
нения. контроля и визуального отображения всей совокупности информа-
ции по создаваемой модели МКЭ.
После создания объекта исследований, в частности модели МКЭ,
перед специалистами открываются возможности проведения комплекс-
ных исследований, связанных с проектированием силовых конструкций.
Эффективность таких исследований определяется совершенством методи-
ческого аппарата, используемого при проектировании силовых конструк-
ций самолетов.
9.2. МЕТОДИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
ПРОЦЕССА ПРОЕКТИРОВАНИЯ СИЛОВЫХ КОНСТРУКЦИЙ
Создание силовой конструкции любой технической системы (и авиа-
ционной в частности) предполагает проведение работ по двум направ-
лениям:
формирование силовой схемы конструкции;
получение количественных соотношений но затратам материала
11 рамках выбранной силовой схемы или получение распределения мате-
риала для проецируемой конструкции.
Д° недавнего времени формализация процесса выбора вариантов
исполнения силовой конструкции носила субъективный характер,
ффекгивность принятого решения во многом определялась квалифи-
* Wci1 специалиста, проводящего исследования. По мере развития
^^ационпой 1ехники. роста требований, предъявляемых к ней, и созда-
мощных вычислительных средств появилась необходимость в раз-
IIn Ike методов с более высоким уровнем формализации проектировоч-
10 Процесса
err lntlT|ie методов в области схемного проектирования осуществля-
я в двух направлениях.
- u
161
1 Использование методов математического программирс^ ?ДиД
2 . Разработка машинных алгоритмов, использующих ’’искусственИ
интеллект”.
В обшем процессе проектирования силовых схем важное место сдЛ
дится выбору критерия оценки перспективности предлагаемых ^арцЛ
тов исполнения.
Критерии оценки перспективности
вариантов силовой конструкции
Наиболее объективным критерием оценки перспективности того «ли
иного варианта конструкции является критерий минимума массы кон-
струкции. Его использование позволяет однозначно выделить из множт.
ства вариантов наилучший, которому соответствует конструкция, имею-
щая после своего изготовления наименьшую массу На этапе технических
предложений, когда происходит фс рмированис силовой схемы конструк-
ции прогноз окончательной массы конструкции по каждому из коих-
ретных вариантов можно получить лишь на основе статистических дан-
ных. Эти данные должны отражать уровень действующих внутренних
сил, существующий на конкретном предприятии уровень технологии
изготовления элементов и агрегатов конструкции, уровень эксплуатации
онной эффективности конструкции и гл.
При отсутствии детальной статистической модели в качестве крите-
рия оценки перспективности может выступать критерий минимума массы
силовой конструкции. Под силовой массой понимается сумма силовых
масс, определенных на всей обласш конечноэлементной модели, сое-
п
тояшей из л элементов, т.е. М = Z mi9 где ~ р J /(6. F)dV Поскочь-
I - 1 v
ку в последнем выражении б и F - текущие физические параметры эле-
ментов, зависящие, в свою очередь, от величины действующих сил, тл!
5 = J\ ( j ) и / '-/> ( {pJ ), то выражение для вычисления затрат сило-
вой массы на элемент получит следующий вид:
т,=р f Ф( {?} )<Л (9-20>
V
Анализ этого выражения показывает, что решающее влияние на
величину потребной силовой массы оказывает значимость компонент®
внутренних сил и протяженность их действия. Поэтому в качестве эквй
валентного критерия для оценки перспективности силовой конструкпд
может выступать функция ’’силовой вес”, впервые введенная в практик!
проектирования А.А. Комаровым |13|. Эту функцию обозначают 1
(7 и для вычисления ее применительно к стержневым системам
быть использовано следующее выражение
т
I -= 1
(9.21)
где 7, - длина 7-го стержня; Р, — усилие в данном стержне.
162
о ч Схема стыка крыла и фю-
Гнс- * ’
зеляжа
Использование этой функ-
в проектировочных расчетах
взывается более целесообраз-
ном так как она в отличие от
Аловой массы не^^твдет
влияние
удельная
ми -
ных
www.vokb-la.spb.ru - Самолёт своими руками?!
Передний лвхгеррн
Средний ррннеран
Задний лрюкерон
таких факторов, как
плотность материалов, облачающих приблизительно одинаковы-
значениями упругих постоянных (например, для стали и композицион-
материалов); использование раз.жчных конструкционных материа-
лов в отдельных областях конструкции по технологическим, эксплуата-
ционным или иным соображениям
Функция ’’силовой вес” позволяет создавать совершенные силовые
конструкции с позиций наиболее рационального распределения в ее эле-
ментах внутренних усилий, возникающих от внешнего возпсйствиии.
В качестве криюрия при оценке вариантов силовых конструкций исполь-
зуется критерий минимума силового веса.
Одним из основных преимуществ использования функции ’’силовой
вес” является то, чю абсолютная величина этого критерия зависит в
большей степени от пространственной конфигурации силовой конструк-
ции и в меньшей степени — от геометрических параметров элементов,
ее составляющих. Например, на рис. 9.3 представлена схема центрально-
ю отсека планера. Отсек включает в себи центральную часть фюзеляжа
и консоль крыла. В процессе разработки силовой схемы этого отсека
большое внимание было уделено поиску наиболее эффективного с пози-
ции весовых за। pai стыка этих двух агрегатов самолета. В частности,
исследовался вопрос о числе и местоположении моментных узлов стыка
крыла с центропланом. Большие строительные высоты консоли крыла
в зоне переднего и среднего лонжеронов определили начальное решение —
организацию двух моментных узлов в этой области конструкции При
таком варианте изгибающие моменты распределяются между передним
и средним лонжеронами в соотношении 28 и 72 соответственно. Однако
весовое совершенство всего отсека планера при таком стыке оказалось
невысоким. Были проведены попытки изменить отмеченное процентное
«^отношение в распределении изгибающих моментов однако даже до-
Bceft,llTe},I HOe упсличе,,ие массы* материала в облаши Л на 20 ... 30 % от
ние Нача;1ЬН°й массы консоли позволяло осуществить i lepepacii редел е-
еду» .Момент0и л,ишь в пределах 3 ... 5 %. Функция "силовой вес” в этом
тРегь ~ МС1,ялась лишь в диапазоне 5 ... 7 %. И только при введении
си и_ м°мснтной точки по заднему лонжерону. т.е. при изменении
Функ стРУктуры» удалось существенно уменьшить величину этой
Нии Н’ слсаовательнсэ более чем на 20 % массу силовой конструк-
альн^1^411н?с поведение функции "силовой вес” играет принципи-
г - роль на начальных зтапах проектирования Появляется возмож-
163
ность использовал. критерий ми!гимума силового веса при «предел J
переспективного варианта без нахождения распределения матег®
силовой конструкции. Обычно в этом случае целесообразно исг Ль
вать постоянство толщин, площадей и других размеров но всей облЗ
конструкции. Если учесть, что определение раскроя материала с ист1*
зованием ЭВМ требует 3 5 итераций, го становится понятным преиму
ство криюрия минимума силового веса. При практическом ИсполъЯ
вании этого критерия иногда в качестве начального распределения мзТе
риала используют квазиоптимальный раскрой, т.е. раскрой, полученЛI
после первого шага работы процедуры оптимизации. Однако не искл2
чается возможность назначения компонентов квазиоптимального рл
кроя на базе использования эвристических приемов и правил, иапримег
проводя начальный анализ НДС конструкции с применением балоед^
схемы. #
Использование критерия минимума силового веса наиболее эффс*.
тивпо при работе со стержневыми моделями В случае проведения
дования на континуальных моделях, сформированных из таких элемц.
тов, как мембрана, пластина и г.д., поиск величины функции ’’силовой
вес” на каждом элементе требует применения процедур численного интсг
рирования дли определения количественных параметров в ответствии
с выражением
G = J oJV,
v
где (х._к z)
(9.221
Это требует хранения большого объема информации и дополнись
ных временных затрат, что несколько усложняет процесс исследования.
В подходе, нрешюжешюм В.М. Смирновым, в качестве критерия
при проектировании силовых консфукцдй используется критерий мини-
мума потенциальной энергии деформации, который позволяет избежать
сложностей, связанных с применением критерия минимума силовая
веса [31].
Однако в этом случае возникает необходимость применять ДИС'
кретпые модели специальной структуры — потенциальные модели, имею*
щие некоторые особенности. Как отмечалось ранее, для метода переме-
щений в МКЭ разрешающим уравнением является матричное уравнение
1*1 {(,'] = {р}, (9-2Я
в котором получение компонентов матрицы [К] осуществляется в со01
ветствии с уравнением (9.15) Перепишем это выражение
[A,]=J (5]т [2>] HJV. (9 241
\ ]
На величину компонентов внутренних сил в конструкции в больГШ
степени влияют компоновочные характеристики элементов и 31 РеГ J
конструкции, чем их физические и геометрические параметры.
ству речь идет о "сильных” и "слабых” факторах, определяющих
чения функционала внутренних сил в конструктивной системе при
164
www.vokb-la.spb.ru - Самолёт своими руками?!
внешнем на нее воздействии. На этапе выбора силовых схем
деленном цСЛЖио быть отдано ‘’сильным” переменным, определяю-
компоновки исследуемого варианта силовой схемы.
щИм ° 1араметрам относятся строительные высоты агрегатов, их удли-
К такИ1^цис вырезов, запрещенных для организации конструкции
нения и т д Чтобы в исследованиях на дискретных моделях МКЭ
пр^Р я^ие только "сильных” переменных, обратимся к выражениям
и ф 24). Спектр внутренних сил в частности зависит от компо-
& ~ в матриц |А| и |А,|. В выражении (9.24) матрица [Я| отображает
НС1,Т°ие геометрических размеров элемента на компоненты [A'J; матрица
в содержит только компоненты упругих постоянных материала зле-
та Fenn при формировании модели к ней. к ее структуре предъявить
М Сования постоянства: типа конечного элемента для всей модели,
n vthx констант для всех элементов модели, г.е_ |/У ] - const, и физи-
ческих параметров для всех элементов, т.с. 6 или F = const, то в этом
случае распределение внутренних сил в модели будет определяться толь-
ко ес пространственной конфигурацией. Именно такие модели названы
потенциальными. так как они предназначены для определения перспек-
тивной силовой структуры конструкций из конечной совокупности
потенциально возможных. В качестве интегральной количественной
оценки значимости конкретного варианта силовой схемы конструкции
может быть использована величина потенциальной энергии деформации,
вычисленная для всей модели согласно следующему выражению.
п
и~ Ъ и,.
i — 1
где»-! {«,} 1 {«J т [А,] {М<.} -
(9.25)
Возможность сторого определить величину энергии деформации
при применении потенциальных моделей позволяет ввести в практику
проектирования силовых схем критерий минимума энергии деформации.
Шиболес тривиальное его использование возможно при проведении
повариантпых исследований.
При исследованиях на потенциальных моделях можно непосред-
ственно прогнозировать за!раты и самих силовых масс, поскольку
из теории упругости известно, что величина энергии деформации может
быть определена из соотношения
f efidV,
V
(9.26)
что для определения распределения
Матсриаг ТРии,Пъ во внимание, г--
B»UeiivIa ПО ЭЛемеНта-м силовой конструкции специалисты используют
Нос — °ПЛ1МИЗации? которые приводят обычно к равнопрочной
' 0Шюв близкой к ней конструкции, то становится понятной
вредно-1* Ccyi,1CclRhTb оценку предполагаемых затрат массы.
11Шх мег Жеииыс критерии перспективности лежат в основе существую-
ческих разработок в области проекги|х>вания силовых схем.
165
Формализация процесса поиска перспективных силовых схем в ha
тсс время базируется прежде всего на все возрастающих возможно
вычислительной техники и происходит по двум основным На равде1!
разработки соответствующего методическою обеспечения:
формализованные методы исследования;
формально-эвристические методы в проектировании.
Первая группа методов базируется на частичной или полной
зации процесса достижения конечного результата. При осуществлен
процесса формализации в области проектирования специалисты
щаются к методам математического программирования.
Формально-эвристические мето ты в проектировании и, в част oCft
при выборе силовых схем также базируются на использовании срецч1'
вычислительной техники, однако решающее значение при таких метод
для конкретизации процесса исследовании имеет опыт и интуищ^
человека. •
Формализованные методы
Для формализованной методологии исследований характерно стр;,
гое выделение области существования исследуемой целевой функив
Возможности пространственной компоновки силовой схемы ограныщ-
пы внешними и внутренними обводами конструкции, заданными лиф
кусочными аналитическими функциями, либо дискретным множеству
узлов, положение каждот о из которых определено в пространстве тремя
координатами (х. г. г). Требования не разрушаемости к< нструкшв.
возможности изготовления ее в реальных условиях с учетом существе-
щей технологии, а также иные требования образуют совокупность
нительных ограничений. Например, требование неразрушасмосги с?*-
золит к ограничениям по предельным допускаемым напряжениям i
конструкции, причем это могут быть не обязательно допускаемые нал, •
жепия выбранного материала. Требования технологии находят свое огр
жение в предельно допускаемых толщинах материала обшивок и юю-
дей для стрингеров, поясов лонжеронов и нервюр ит.д. В совокугпюсГиЖ
ограничения в случае линеаризации задающих их функций позвозяя
сформировать с помощью гиперплоскостей пространство, в преЖ®
которого должен быть осуществлен поиск нужного решения. Такой по*
обычно связан с решением за щчи на экстремум. Существует ряд I
ходов к решению такой задачи Один из них предполагает решение
с помощью метода линейного программирования В качестве кр?-т*^
оптимальности конструкции используется минимум ситовой -
Допустимое множество конструкций задается конечным число**
связанных стержней (элементов), которые располагают на всей ,
существования. В качестве целевой функции выступает шнейныи <га
ционал с начальной силовой массой А
Л/- (
1 - *
166
www.vokb-la.spb.ru - Самолёт своими руками?!
(9.28)
,рМ уравнения равновесия
jaunu*eM
число стержней; косинусы углов между стержнями; т
гле 1 ,равнений (2к плоская задача, ЗА' - пространственная); к —
Ч,<С. , узлов топологического пространства; -S) - усилие в стержне; /у
пт с1ержня. Условия прочности имеют виц
дДОШа U* с г
(Опои!"
(9.29)
Т<к как л > т.е. число базисных переменных меньше их общего
числа то в результате работы алгорн гма па базе симплекс-метода" ряд
стержней из начальною их числЪ исключается, чго приводит к последо-
вательному сужению области существования конструкции, i.c. выявля-
ется н-1и синтезируется облик будующей силовой конструкции. В итоге
после окончания процедуры линейного программирования специалист,
гюводяший исследования, получает возможность определить направление
основных силовых потоков, количественные показатели которых поз-
воляю! решить вопрос о выборе типа силовых структур.
Отметим некоторые недостатки, присущие данному подходу. С
увеличением размерности уравнений равновесия методу линейного upoi -
раммировапия свойственно значительное увеличение времени поиска
решения. Это делает проблематичным проведение исследований на моде-
лях большой размерности. Необходимо также отмстить имеющийся раз-
рыв между моделью синтеза и моделями МКЭ. что увеличивает Трудо-
затраты проектировщиков при создании расчетных моделей.
Интересный формализованный метод проектирования силовых кон-
струкций, базирующийся па использовании критерия минимума ’’силово-
го веса” разработан под руководством Комарова В.А. [14]. В основе
метода лежит следующий план отыскания рациональной силовой схемы.
1. В ограниченные внешние размеры проектируемой конструкции
вписывается непрерывная упругая среда, называемая континуальной
моделью, которая включает в себя все возможные силовые схемы.
2. Решается задача об оптимальном распределении материала в исход-
нон кошицуальпой модели и находится таким образом теоретически
°”тимальная конструкция.
3. Анализируются основные пути передав! сил в полученной оптималь-
ном конструкции и с учетом конструктивных и технолотческих требовл-
разрабагываются вариан 1ы силовых схем.
Через ’’силовой вес” оценивается относительная эффективность
<чтЛ*Иан,,,>1х силопь1Х схем и близость их к идеалу шоретически
^альной конструкции.
сил Т КЯК’ напРимер. решается возникающая при проектировании
Шей ЫХ 11,113,11 °УТОВ задача выбора силовой схемы конструкции, передаю-
пНа и 1и^аюп1Ий момент внутри области CDD'. Момент приложен в
Двух парсил в заданных yxiax /1. //и А'В' (рис. 9.4 д).
167
Рис. 9.4. Графическое изображение потоков главных усилий
В соответствии с вышеизложенным планом вначале выбирают кон-
тинуальную модель. Для плоских конструкций это изотропная (шас-
тан ка переменной толщины. Затем с помощью итерационного алгоритма
ищут оптимальный закон изменения толщины пластинки. На рис. 9.4, б
показаны линии равною уровня толщин ОД; 02; 0,3- Так как пластина
симметрична, то рассматривалась ее четвертая часть. Напряжения вычис-
лялись по МКЭ в перемещениях с использованием конечпо-элсмснпшй
модели первого уровня (КЭМ-1).
( иловой вес теоретически оптимальной конструкции на 26 9? меньше
силового неся соответствующей идеальной двутавровой балки с парвя
дельными поясами Границы зон вырожденных элементов I. II, III к»
рис. 9.4 б показаны пунктирными линиями
Для анализа основных путей передачи сил в теоретически опгилйЯ*
ных конструкциях используется следующий прием. В каждом элемеи*
определяют главные напряжения Умножив их на пэлщины элемент*
получают потоки главных усилий (ПГУ). П1 У изображают па чертеж*
с помощью линий, направление к >юрых соответствует направлен*0*
главных напряжений, а длина пропорциональна величинам потоков
усилий. Картина ПГУ в рассматриваемой конструкции показана на
рис 9.4, в. Это дает наглядное представление о работе кс<нструкш*
способе передачи усилий в пси Видно, что в зоне б< лыних толщин
тинки около внешней границы с вырожденными элементами мзтерв
пластинки находится в одноосном напряженном состоянии. В зоне ок«^
узлов приложения сосредоточенных сил отчетливо видна работа матер**
ла пластинки па сдви!. Проведенный анализ позволяет приступить
разработке рациональных вариантов силовых схем. Внешняя грз11
вырожденных элементов в рассматриваемом примере получилась вес
16Я
www.vokb-la.spb.ru - Самолёт своими руками?!
Он днозначно определяет внешнюю форму конструкции.
чстКс11 лишенных толщин пластинки, в которых материал работает
”\ $rld напряженном состоянии, могут трактоваться как стерж-
в одно меНТЫ (на рис 9.4, г они изображены линиями л). Более слож-
невые Задача выбора внутреннего контура. Как следует из рис.
н°й н /три оптимизируемой конструкции должен быть вырез, но
9-4’ а ею нечеткая, так как он образуется очень плавным уменьшением
Г 1 н к центру. Принято два возможных варианта границ, представлен-
тоЛ1 в виде стержневых элементов и показанных на рис. 9.4, г сплошной
/^н nyn^W1*0” ЛИНИ,1МИ Между наружным и внутренним контуром
1 теоретически оптимальной конструкции материал работает в сушест-
Pei1(l0 двухосном напряженном состоянии. Это определяет целесообраз-
ность постановки между наружными и внутренними стержневыми эле-
ментами (линии п и 0 пластинки в качестве основного силовою эле-
мента Таким образом, для передаю! изгибающего момента получена
конструкция рамного тина. В реальных конструкциях стенки приходи 1ся
подкреплять стойкими. Их направление необходимо выбирать в соответ-
ствии с ориентацией ПГУ. Сравнение двух вариантов конструкции, пред-
ставленных на рис 9 4 гэ показало, что силовой вес первого варианта на
21 %, а второго - на 14 % меньше, чем у идеальной двутавровой балки.
Видно, что положение внутреннего пояса существенно влияет на величи-
ну силового веси. При эн м первый вариан! достаточно близок к тео-
ретически оптимальной конструкции.
Oiмечено, что многократное выполнение расчетов конструкции по
МКЭ и анализ работы агрегатов иля изделия в целом способе! вуют повы-
шению инженерной квалификации проектантов и приводит к появлению
нового типа конструкторского мышления, основывающегося на исполь-
зовании для синтеза конструкций хорошо изученных типов конечных
элементов вместо конкретных стрингеров, лонжеронов, шпангоутов и
т п. Это приводит к появлению новой технологии проектирования кон-
струкции планера, суть которой состоит в следующем-
1. Па ранних стадиях проектирования после аэродинамической и
°иьсмно-весовсй компоновки изделия с помощью достаточно простых
миделей (КЭМ-i) отыскиваются теорсчически оптимальные конструкции
и анализируются основные пути передачи в них сил.
2 До начала рабочего проектирования планера разрабатывается
^тат°чно подробная конеч1ю-элемситная модель второго уровня
1КЭМ-1 ) будущей конструкции или нисколько ее вариантов. Подроб-
0СТь ЭМ-П должна быть такой, какая требуется для поверочных рас-
т°п. КЭМ-П представляет собой математическое описание будущей
кинелрукцни Так, участки лонжеронов и нервюр описываются балоч-
-га элементами, участки подкрепленной обшивки — анизотропными
Ег аНН1>1МИ хпсментами с указанием принятой ориентации стрингеров,
У 1ки т°нкостснной конструкции, где предполагается попустить потерю
живости - с щиговыми элементами и т.д.
Ме КЭМ-И ищется рациональное распределение материала но эле-
и сравниваются различные варианты силовых схем по их весовой
169
эффективности и возможности реализации с г>чки зрении тсхнол 1
4 Лучшая конечно-элементная модель с указанием распредет^И
в ней мате риала и усилий передастся конструкторам ця
чертежей.
Результагы тщательной проработки будущей конструкции на мдт
тичсской модели дают хорошую основу для выпуска качественных в
чих чертежей. Конструкторы получают полное представление о раба»
агрегатов и изделия в целом, рекомендации но рациональному pacnpJH
нию материала, значения усилий в элементах конструкции и стыках тЯ
детального проектирования.
Для рабочего проектирования в зонах с локальной концентрации
напряжений (типа окантовок малых вырезов) строя гея к нечно-элем^ц
ные модели еще более высокого уровня КЭМ-Ш. На этом этапе оптим>
зэция распределения материала- должна вестись по возможности с
более полным учетом всех действующих ограничений.
Использование КЭМ II и КЭМ-Ш не ограничивается конструирован^
и поверочными расчетами. Модели необходимы в течение всего сро^
производства и эксплуатации сложных ответственных изделий для p*.;.
смотрения производственных отклонении, модификаций и ремонтов.
Для реализации описанной выше человеко-машинной технологии яроектирсед.
ния силовых конструкций в Куй бы । невском авиационном институте разработ^
САПР РИПАК (Расчет и Проектирование Аннационных Конструкций) |2]. Систэд
Написана на языке PLj\ и содержит примерно 50 тысяч операторов. Открытий
ее обеспечивается блочной структурой, организацией обменов данными мсэд
блоками через ннешшою память. наличием служебного архива данных, динамичен
кой зирузкой программ Система допускает включение практически любых коник
типов конечных элементен с произвольными узловыми .элементами
Система РИПАК состоит из ряда подсистем процессоров, решающих одну ?п
подзадач: ВВОД ввод исходных данных' СТАТИКА - определение НДС в линей-
ной статической постановке; ДИНАМИКА - определение частот и форм собсп^Ь
нык колебаний; ПРОЕКТИРОВАНИЕ оптимизации распределения материалу
ЧЕН ЕЖ - «рафическос изображение исходных данных, реэулматов расчета н з
Некоторые программные блоки в модули многократно используются в prw
ных процессах, а каждый процессор предусматривает стандартную послсдовэгфг
цость их выполнения, которая может изменяться только допустимым обрз^
путем ввода дополнительной информации на языке управления заданием- • J
В методе, предложенном ВМ Смирновым |31], проведение схемны'
исследований базируется на процессе итерационного анализа потенциал
ных моделей. Критерий оценки перспективного варианта — минимум
потенциальной энергии деформации.
Основу итерационного процесса составляет алгоритм процедД*
целочисленного, npoi рзммирования, предусматривающий носледопэтеЛ
ное сужение области существования силовой структурьнупутем иэь»™
части элементов модели из ее сое шва перед последующей терапией Г*
возможное^ изъятия какою-либо элемента из системы решают**
нис оказывают следующие факторы:
уровень удельных эпсрюгических 3aipar, приходящихся на элем*
после очередного шага процесса; J|
производная удельных энергетических затрат и ее знак. он^|П^Ю
170 Ц
www.vokb-la.spb.ru - Самолёт своими
о
О JU Л
Y А А
а/о
О О Л A A z о
О С jQ [JA Д А
О О A A A A J_
О Д Л Д А А А/о
о
о
о
о
о
А
О
о
о
ОН
о 4ч
О
А Л
А А А А/О
А А Л 6 О
О
О Л А А А |О О орд А|С
о Гл л а }о о о к a A1LJ
о
о
о
о
_О_ Q
а)
6)
перспективной организации силовой
9 5 Итерационный процесс определения
рис\ укцин для двух вариантов кинематических условий на границе (я и б) :
иоистру . ад 1 i-й шаг: Л - 3-й шаг;— - границы перспективной области
мая из каждом из элементов модели дня всех пинов итерационного
процесса, начиная со второго;
тенденция поведения удельных энергетических затрат на элементах
системы в продолжении итерационного процесса.
Практическая реализация такой методологии исследований связана
с необходимостью сохранять постоянным объем силовой массы материа-
ла на каждом шаге итерационного процесса. Процесс завершается тогда,
когда энергетические затраты на конечный набор элементов потенциаль-
ной модели постигают экстремума с заданной степенью точности, т.с.
если / — текущий шаг процесса, то & U - L'j — Ц* _ ; и выполняется усло-
вие ДС’ < const. Кроме того, процесс может быть завершен, если АС’ из-
менила свой знак, т.е. оптимум целевой функции пройден.
При программной реализации алгоритма целочисленного програм-
мирования после каждого шага процесса можно изменить геометрию
модели, прогнозируя весовые затраты на каждый из элементов дискрет-
ной модели. Для этой цели используется либо статистическая модель, либо
набор аналитических функций. На рис 9.5 приведен пример поиска сило-
вых структур с помощью процедуры целочисленного программирования
при действии только сосредоточенной силы в плоскости.
Применение изложенного подхода позволяет в случае отсутствия
ограничений на предельные геометрические размеры элементов выбирать
п Качесгве исходной iy конфигурацию, которая получена после процедуры
исключения Конкретные же геометрические параметры для элементов
Конструкции получают после проведения процедуры оптимизации.
Ьсли же существуют ограничения па предельные размеры элементов
консхрукгивной системы, т.е. область не может быть сужена из-за, нал-
рямер? техноло! ическмх и эксплуатационных ограничений, то процедура
^вычисленного программирования может быть эффективна при выяв-
ления наиболее перспективной области соединения двух или более агре-
°н между собой. Пример такого использования показан па рис. 9.6.
jvj0 аибодес существенные результаты использования потенциальных
елеи Д;,я схемных исследований можно ожидать в случае применения
171
Рис, 9.6. Выбор иерспекгипи
ои^стеи конструкции
при проектировании *-о ₽Mjl
с фюзеляжем
моделей с Hepapxlf4CCK<J
структурой. При лом пОяв
ляегся возможность бол
детально проводить мощ£
рование отдельных облаете#
будущей конструкции и
соответственно, получав
более корректный резудьГаг
В частности, появляется воз-
можность выявления ситмк
вых структур элементу
типа силового пояса лоюи^
рона, пояса нервюры, бимся
и тд. Для этих целей не.*.
сообразно использовать потенциальные модели континуального типа.тл
модели, состоящие из элементов пространственного типа.
Формально-эврис! ические методы
В настоящее время для решения слабострукгуризованных зад»
разработаны специальные методы, известные как эвристические или
методы искусственно! о интеллекта, Слабоструктуризованными заш*
чами принято считав задачи исследования сложных систем, связи меж
ду элементами которых слабо формализованы и носят в основном лишь
качественный характер. Отличительная особенность таких методов зак>
лючается в рациональном сочетании творческой деятельности человеке
носящей эвристический характер, с формализованными процедурами
анализа в процессе поиска нужного решения.
Под эвристикой, эвристическим правилом обычно подразумевая®
закономерность, познанную на опыте, аратегию, ловкий прием или
иное средство, существенно облегчающее поиск нужного решения ия
сложных задач. История развития авиационной техники показывает чга
именно опыт и интуиция специалистов, основанные на глубоком понимз-
пии процессов взаимодействия агрегатов и элементов конструкции к*
монета, позволяли осуществлять прогресс в авиастроении. В ю
время та же история свидетельствует и о многочисленных пеудачжХ
проектировании силовых конструкций, практически всегда лриволяши
к неудаче проекта в целом. Основная причина таких неудач обычно зак*
л мчалась в неверной интерпретации отдельными специалистами пр0;
цессов силового взаимодействия между элементами и агрегатами коН<
струкиии.
Успехи в моделировании сложных физических систем с помои^10
172
www.vokb-la.spb.ru - Самолёт своими руками?!
математических миделей большой размерности позволяют
дцскрс ” более полно использовать свои творческие возможности,
сг<ци< Ирокий машинный эксперимент, затраты на который вполне
пров< ДJ повышением качества проекта. В то же время отсутствие
окурен
ленного эксперимента может привести к неэффективному
неясна * е даже использование сложных моделей может дать реше-
5г текое от оптимальною. Это объясняется рядом причин, из кото-
’"’хследуе-* огмепггь следующие:
^^бояыиая размерность модели, приводящая к тому, что часто, исследо-
атель основное внимание сосредотачивает на частных элементах взаимо-
действия, упуская главные;
некорректное проведение моделирования отдельных областей;
в состав просматриваемых вариантов нс включен наиболее перепек-
тивный.
Возникаст необходимость в организации определенной стратегии
поиска наиболее перспективной силовой струкгуры самолета. Стратегия
должна базироваться на тнорческих способностях человека и заклю-
чаться в целенаправленном выполнении рекуррентных шагов итерацион-
ного процесса для достижения поставленной цели. В качестве целевой
функции для формально-эвристических концепций проектирования наи-
более целесообразно использовать массу силовой конструкции, как
наиболее естественную и доступную для восприятия. Соответственно
выбирается и критерий оценки перспективности минимум силовой
массы. Роль эвристических концепций проецирования при формирова-
нии обшей стратегии исследований заключается в поиске на каждом
этапе процесса наиболее эффективного продолжения проектировочного
процесса в соответствии с определенной логикой эвристических алго-
ритмов.
В настоящее время используется несколько направлений в построе-
нии эвристических алгоритмов: лабиринтные методы, концептуальное
моделирование, эволюционное моделирование, ситуационное управ-
ление и др.
Продемонстрируем формально-эвристические концепции проекти-
рования на примере метода ситуационного управления. Центральное
место в данном методе отводится процессу формирования и последую-
щему исследованию структуризованной модели физической системы,
экие модели отражают основные функциональные связи между отдель-
1МИ элементами и группами элементов системы в виде совокупности
ктурных компонентов, находящихся в формализованных или фор-
Ь|,° эвристических отношениях. Для формирования структуризован-
ctbv М0Дели «восходим формализованный язык, содержащий соответ-
’ им ЬШС., стРУктУРпЬ1е элементы: имена, понятия, отношения. Под
опрей ЗМИ 1,онимают слова или синтагмы (группы слов), передающие
или cu IIHyi° мыс«ль. "Понятия" в ситуационном управлении — это слова
НТагмы’ обозначающие однородные объекты. ’’Отношения” - это
^йстпИЛЧ СИптагмы, с помощью которых описываются связи и взаимо-
Ие между нонятия%ш и именами.
173
При формировании структуризованных моделей конструк
силовой схемы (КСС) самолетов в качестве ’’понятий” следует J
зоватъ традиционные термины, принятые в авиастроении:
кессон (замкнутый несущий корпус);
балка (сдвиговая стенка, окаймленная поясами);
стенка (элемент мембранного типа, работающий тачько на слв
пояс балки (стержень постоянного или переменною сечения, нац j
ленный вдоль оси, характеризующей наибольшую протяженность) и
Аналогично под ’’отношениями” можно понимать следующие ви **
взаимодействия:
непрерывная связь ’’понятий’ : лонжерон - панель сдвиговая;
дискретная связь между ’ понятиями” лонжерон — узел креплений!
шпангоут и тл.
Создание структуризованных моделей может осуществляться *
базе исследования физических систем или их математических модели
В последнем случае ЭВМ выступает в роли экспериментальной усганом!
для оценки качественных закономерностей в работе исследуемой
темы. J
Применительно к процессу проектирования силовых конструвИ
самолета для выявления компонентов сгруктуризовашюй модели слсММ
нс просто исследовать модель под воздействием спектра внешних во
ствий, а проводить се тестирование, прилагая совокупность единичны
нагрузок в различных областях модели. Такими единичными натру лачв
moi ут быть:
конечные усилия в зоне стыка крыла с фюзеляжем;
конечное усилие в зоне стыка стабилизатора и фюзеляжа;
конечное усилие в точках подвески агрегатов шасси и т.д.
Проводя с помощью ЭВМ подобное исследование на полноразмерь
или агрегатной моделях МКЭ, можно в конечном итоге оформи
структуризованную модель, которую можно будет использовать в
нейшем для:
исследования ее структурных компонентов с целью улучшения
ранной целевой функции;
прогнозирования се структурных компонентов и связей между ннма <
целью определения наиболее нерспективн и лиловой конструкции.
Реализация первого направления может быть осуществлена с №»
шью методов математического программирования. Поскольку структ]
зованная модель даст возможность оцепить взаимодействие элемсШ
конструкции, специалист, проводящий исследования, может
ряд вариантов организации силового взаимодсйсгния, коюрые '
соображениям эврисшчсскою характера могут привести к успеху. * j
Пусть имеется некоторая целевая функция: () ~ Ф (Х|. Хг. — ’
где аргументы Х2, - Х5 - некоторые обобщенные векюр^’
жаюшие различные варианты силовой структуры конструкции. )Т
намечают после анализа взаимодействия элементов структурировав!
модели. Этому этапу исследований обычно предшествует этан tcciHPW
ния модели МКЭ для выявления закономерностей в распределении
174
www.vokb-la.spb.ru - Самолёт своими руками
напряжений и деформаций, возникающих в ее элементах
ренНйХ сИ Тестмрования единичными нагрузками.
Bnp°ucC аргументы Xt. Х2.....Xs определены, то для оценки перепек*
’ ЕслИ тО1р и 1И иного направления необходимо проводить исследую-
т’я^1С,С1^сК аналогичный методу возможных направлений в нелинейном
Л даровании, в окрестности функции (?тек. те. определить:
ПЕ£Т эсуэъ. - • ^йх5. при использовании численных методов
дв -тически оценивается величина ЭО/ЭХ, Если принять A¥j ~&Х2 — =
пР^ то для решения задачи о выборе перспективного направления
- ния к оптимальному значению целевой функции необходимо
сети соответствующее количество расчетов на модели МКЭ. В ре-
ПР°ьтаГе определяют наиболее перспективное направление движения к
\ тремуму целевой функции и двигаются в этом направлении до того
мента, пока не возникнет необходимоегь проводить новый исследую-
поиск. Главным достоинством структуризованной модели в таком
процессе является возможность сужения области варьируемых парамет-
ров по отношению к исходной области модели МКЭ в процессе принятия
решений.
В отличие о г первою второе направление связано с решением проб-
лемы изменения области су шествовали я силовой структуры конструк-
ции. В этом случае решают задачу, как с помощью введения дополнитель-
ных силовых компонентов в систем} увеличить или уменьши 1ь величину
выбранной целевой функции. Поскольку в настоящее время нс суще-
ствует формализованной идеологии решения подобной задачи, го исполь-
зование формально-эвристических концепций в проек1ировапии является
определяющим фактором успешного проектирования силовых схем.
Изложенные методы и алгоритмы проектирования силовых схем
Дают возможное 1ь специалистам определить в основном качественные
компоненгы силовой конструкции, характеризующие взаимодействие
между ее элементами. Для завершения процесса формирования силовой
структуры необходимо определить соотношения затра! материала между
отдельными элементами конструкции. Для этой цели необходимо вос-
иользоваться соответствующими алгоритмами и программами оптими-
зации распределения материала силовой конструкции.
Определение распределения (раскроя) материала
В Рентах конструкции
ДопусЬШ1С _ваРЬиРУемыми параметрами в основном являлись элементы
410 им МОИ °^ласти существования оиловой конструкции. Отмечалось,
J™ аРгУМСнты определяют в наибольшей степени изменение
^елесооб°И Целево” Функции. Поэтому па этапе схемных исследований
^азНо Отказагься от варьирования количественными характерис-
тик 0ГеомстРИческнх параметров для элементов дискретной модели
^РУКциц1 аК° пос?1е свершения процесса выбора силовой схемы кон-
г,сРед проектировщиками встает проблема определения в каж-
области количественных параметров ее элементов, пос-
кильку избыток материала приводит в конечном итоге к перетяге
конструкции Необходимым же считается обьем и соответственной
материала, который обеспечивает прежде всего неразрушаемость а
струкнии при воздействии на нее внешних сил. Конструкция
отдельный элемент может разрушиться по следующим причинам: И
1. В какой-то локальной облаои конструкции действующие J J
жения оДсйств превосходят допускаемые (идоп), в качестве кото^
выбирают предельные паспортные характеристики материала, олрсд2^
ные для одноосного нанряженн го состояния
2. Совокупность внутренних сил, действующих в течение консчЯ
промежутка времени, приводит к разрушению элемента или всей к.
струкции из-за усталости материала.
3. Возникли нелинейные формы деформаций и прежде всего явлепщ
потери устойчив сти в элементах конструкции.
4. При нагреве конструкции и постоянном воздействии иных еилоььц
факторов развились явления ползучести.
Если материал, из которого изготавливается силовая копсгрувд|
определен то та или иная причина разрушения конструкции определяете
величиной действующих напряжений в ее элементах. Напряжения,
которых возникает разрушение моментов или всей конструкции, высч
пают в роли ограничений, т.е. определяют уровень предельно допуск*
мых в конструктивной системе. Ряд этих ограничений носит постоянна
характер, например ограничения |пдоп| материала, а часть из них, iw <
ример ограничения по устойчивости, зависит oi таких факторов, къ
жесткость системы относительные i сометрические размеры покат»
области ^действ и тя- адсйств зависит, в свою очередь, от соотногоежк*
жесткостей отдельных элементов конструкции. Соотношение жеспах
гей элементов конструкции, которое позволяет удовлетворить кс*
наложенным на нее ограничениям, а также условиям технолшии
товления и эксплуатации, определяет экстремальное значение выбрш
ной целевой функции и называется оптимальным. Из-за того, что о**
между ^действ’ распределением си ювого материала и внутренИТ7
силами, возникающими в конструкции, носит нелинейный хара**-
задачу поиска экстремума целевой функции принято решать поэт»*’
или но итерациям, пользуясь линеаризацией отмеченных связей 1’
каждом шаге итерационного процесса.
В качестве критериев, определяющих наилучшии вариант сил<>'1
конструкции принято использовав
минимум силовой массы на создание конструкции
критерий равнопрочное™ в элементах конструкции,
минимум потенциальной энергии деформации;
минимум функции силовой вес
Наиболее доступна организация процесса поиска рационального Р3
деления силового материала с минимальными затратами его масс^^И
использовании критерия равнопрочности- Большое число исслеД
посвящено проблеме проектирования равнопрочных конструкци
прежде всего ферменных Дзя ферменных конструкций на очер
176
www.vokb-la.spb.ru - Самолёт своими руками?!
F апнойного процесса / потребная площадь дня гго элемента
щзге **гС * оПреде7ена согласно следующему выражению:
может быть
’ ’/кдопЬ (930)
I . _ 1 _ действующее усилие в стержне; [одоп] допускаемое напря-
ги з условия сохранения несущей способности
же,П1Г -рукния считается равнопрочной и близкой к оптимальной по
ie затрат силовой массы, когда после очередного шага итерацион-
но про’есса 715111 все” СОВОКУ,,НОС1И элементов выполняется условие:
Н0Гр/ГП^Оп]=1+е> (9J,>
пе наперед заданное число.
К Для ускорения сходимости процесса в выражение (9.30) вводят
либо коррекТИРУ,ощий коэффициент обычно скаляр, либо используют
степенное рекуррентное выражение тина
F/+ 1 (° действ у>
1 1 [°доп]
(932)
где ct — коэффициент, подобранный эмпирическим путем.
В случае использования в моделях МКЭ элементов мембранного
типа hj и пластин, идя которых характерно многоосное напряженное
состояние, вместо [оДО|| | используют со эквивалентную величину оэкв,
определенную согласно выражению, отражающему наступление предель-
ною состояния материала но одной из гипотез прочности. В частности
согласно гипотезе Бельтрами эквивалентное напряжение может быть
определено по следующей формуле:
1°доп1>1'тэкв1> " °У^2 * (<> “
Г(о2 - 0х) 2 + 6 (?ху + + тг2, ). (933)
При использовании критерия минимума потенциальной энергии
итерационный процесс строится таким образом, что на каждом шаге
изменяемые геометрические параметры определяются согласно выраже-
нию;
- —
г — I
(934)
о - постоянный в процессе процедуры обьсм силового материала;
I ~ сила, действующая в элементе: — линейный размер элемента
(стсржня).
ныэД’07 пг>о,1еСс приводит также к отысканию конструкции с минималь-
и коН си,1ОВЫм весом”. Процедуры отыскания равнопрочной конструкции
UU1 С ми,,|<мальн°и потенциальной энергией обладают высокой
сгеце LTl Ю Сх°ДИ.мости> практически нс зависящей от числа элементов и
iene . С1атической неопределенности конструкции Для инженерных
ВТ °°ь,чио достаючно 5 6 итераций
- 12
177
Значительное число работ в области оптимизации распределен I
риала для силовых конструкций самолетов связано с непосрсдсг
поиском конструкций минимальною объема или минимальной
При решении этой задачи применяются либо численные процедур МаСчь
с использованием различных рекуррентных соотношений, nf
алгоритмы методов математического программирования, Hani
методы случайного поиска. рим
Опыт использования алгоритмов случайного поиска показал, цЛ
отдельных конструкций сходимость к оптимуму с заданной точноД
достигалась достаточно быстро. Однако алгоритмы случайного ц^З
требуют предвариюльной настройки, адаптации, что создает опрсдСЛе.ж|
трудности при их практической реализации. *с
Значительное число алгоритмов поиска оптимального распре
деиия .массы силовой конструкции базируете г ia использовании варц^
ционного подхода к решению зтоГт проблемы. В этом случае обычно
качестве исследуемого функционала выступает масса силовой m
струкции
т
м~.^ Pi Fili- (9
где pf — плотность материала; площадь сечения элемента; - раздир
элемента ю третьей координате.
Требуется найги функцию f (/7), дающую минимум функшимвду
(9 35) при наличии р связей изопараметрическог типа
fj (I- ) - Cj (Fj) - Cj (Fj) для / - I .p. (9 36f
где с — действующее значение исследуемой функции; су цределнк
допустимое значение этой функции.
Как известно, изонараметричсская задача может быть сведена В
обычной с помощью неопределенных множителей. В эюм случае 3dii4i
сводится к исследованию функционала Лагража
ф= s рд /, + £
f - I / - 1
Продифференцирован эту функцию по варьируемым параметрам, к-Х
структивным переменным, мы получим условия оптимальности решения
р’ + ? Х/ F7T fi (/ ')" “ 1"" <9'Ш
В качестве функций fj обьппю выступают либо функции неремепиИ'
либо - напряжений.
Алгоритмы оптимизации конструкции с помощью критерия
мума силовой массы работают усюйчиво,процесс сходится за
раций В большинстве случаев результаты совпадаюi с резуль^а,Г
оптимизационных процедур на базе других критериев. |ft
Применение в качестве критерия минимума ногенниалыюй тпем
деформации обусловлено рядом преимуществ:
178
www.vokb-la.spb.ru - Самолёт своими
л-> оптимизация распрсаеле-
Рис- «териааз десятистержневой
«*” М? использованием различные
рМы С
^ритмов
минимизации массы
4 использования рекуррент-
•м Отношения: И ~ мегол
иоГ° г'лей Лагранже; С - ми1Ш-
MH0*’‘r‘J* гюГг>|циХИЛОЙ зИерГИИ
Minaisi» р модифицировал-
преемственность критерия
с целевой функцией па этапе
синтеза силовых схем;
возможность строгой ска-
лярной оценки значений кри-
терия для каждого элемента
системы;
квадратичная зависимость
критерия от j. гйствующих внутренних сил, что обсспе’швает повышенную
скорость сходимости к оптимуму целевой функции.
В качестве алгоритма оптимизации целесообразно использовать
метод пзискорейшего спуска.
Расою 1 ренине кри герии out имитации позволяют специалистам
разрабатывать эффективные алгоритм поиска оптимальных конст-
рукций. Траектория движения к оптимуму во многом определяется
как выбором критерия, гак и конкретной реализацией алгоритмов опти-
мизации. Тестовые расчеты по оптимизации распределения силового
магериала дссятистсржпевой фермы с помощью различных алгоритмов
(рис. .7) подтерждают эго. Видно, чю применение критерия минимума
потенциальной энергии деформации в сочетании с алгоритмом метода
пзискорейшего спуска обеспечиваем высокую скорость сходимости. Так
Как исследование моделей с высоким порядком разрешающей СЛАУ
требует значительных затрат времени, это преимущество может оказаться
решающим.
^ АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПРОЕКТИРОВАНИЯ
,0вЫХ КОНСТРУКЦИЙ С АМОЛЕТОВ
Нь Использование метода и моделей МКЭ для исследований рациональ-
чецияК°,,СТру|<ци“ "РИ сущсствовшем технологическом процессе полу-
м я КО,1С,ГНЬ1Х результатов нс могло решить проблему еркрашения вре
,х затрат. Главными препятствиями на пути се решения были:
^ТНо^И1ельно большие временные затраты на этапе формирования
битной структуры модели МКЭ
179
2. Отсутствие формализованных средств преобразования инйн
от внешних систем для модели МКЭ.
3. Длительность цикла обработки полученных резулыатов.
Стало ясно, что решить проблему существенного сокращения в , j
можно только на основе системного подхода в рамках систем авт \ Ме,1и
рованного проектирования. В САПР задача проектирования В
конструкции самолета решается в подсистеме более низкого УЕХ^В
Остановимся на отдельных аспектах проблемы сокращения Вос
на процесс проектирования Поскольку затраты времени на чисто щЗ
лемпые исследования, проводимые на больших ЭВМ с использопаюЯ
уже подготовленной модели МКЭ, зависят только от мощностей выI
лнтельных машин, т.е. носят объективный характер, то имеются лищь I
возможных пути их уменьшения: автоматизация задания и обработку
информации для моделей МКЭ и увеличение числа специалистов,
вующих в подготовке и обработке информации.
Рассмотрим каждый из названных путей.
Автоматизированная система подготовки
и обрабенки информации
Всякое повышение производительности труда при формировании
моделей МКЭ и при обработке информации для таких моделей может
быть достигнуто благодаря:
использованию технических средств для получения модельной
информации;
автоматизации процесса выборки уже готовых компонентов ин-
формации;
реализации технических возможностей контроля информации;
антоматизадии процесса корректировки и модификации информации*
использованию достаточно ’’быстрых” и высококачественных носи-
телей цтя готовых компонентов информации и тл.
Понятно, что реализация как можно большего числа oiмеченных
факторов способствует достижению наилучших резулыатов. Если пре**44
формализации завершен и разработано соо1ветстпуюшее программ^
обеспечение, оформленное в виде процедур для каждого фупкционЗИ
него направления, то набор таких процедур в совокупности сс ср?ДсТва’
ми технического обеспечения представляет собой уже систему подток®
ки и обработки информации (СПИОИ). Системная и структурная oprw
зация таких систем, возможности их практического использов^ *
налагают определенный отпечаток на весь tcxhojioi ический цикл реп|С Т
проблемных задач проектирования
Рассмотрим вопросы практической реализации основных к<
тов таких систем.
Технические средства, используемые для ускорения процесса «Ч
говки и обработки информации, включают в себя вычислительные М
ны. алфавитно-цифровые и графические дисплеи, графопостр01^
180 j
www.vokb-la.spb.ru - Самолёт своими руками?!
I даки М1ПУ и накопители информации на магнитных лентах и
-иге*3* «. требует создания специальных программных средств для
СП>> огдеиы1ых функциональных возможностей системы. Прог-
рсаяи ^|Чцо пишутся на языках программирования высокого уровня:
раммь pi tj КОБОЛ или сверхвысокого уровня APL или NOMAD.
совокупность программ объединяют в систему открытого типа,
pL'°omyio се непрерывную модификацию и развитие. Поскольку
программ може! достигать нескольких сотен, необходима
ж^и,ееш1ачьнзя организация в виде процедур, каждая из которых объеди-
ЙХ ^обычно многоуровневую программную структуру для конкретного
^кдаонэльною направления.
™ Позьзовэтсзь выбирает конкретную процедуру определенной функ-
наяъпой направленности с помощью монитора, который не только
^беспечиваех целенаправленную загрузку требуемых программных единиц
в оперативную память, но и позволяет быстро использовать иные ресурсы
вычислительной системы (оперативную и внешнюю намять, информаци-
онные системы и та.). Особо следует остановиться на системных сред-
ствах обмения с пользователем. Одной из обязательных функций сущест-
вующих или создаваемых систем подготовки и обработки информации
для дискретных моделей большой размерности является упрощение про-
цесса общения специалистов (конструкторов, прочнистов, технологов
и тд.) с вычислительной системой Как отмечалось ранее, существует
два основных направления реализации такой функции: создание специа-
лизированного языка и разработка диалоговых систем с сервисными
возможностями типа “меню”.
Создание специального языка перспективно для систем, где iребустся
известная гибкость при выборе конкретного направления продолжения
исслепова] ий па каждом шаге процесса проектирования. Роль логического
annapaia человека .здесь является определяющей, например, использова-
ние такого языка имсс! смысл при проведении исследований собственно
процесса проектирования.
Для таких же систем, как система подготовки информации, вся
послсдоватс.зыюсп. выполнения отдельных операций по каждому функ-
Шюпальиому направлению обычно определена В этом случае общение
пользователя с ЭВМ может быть обеспечено путем организации много-
₽ов’*ев°н системы - "предложение - запрос ответ" в режиме "меню”,
гюп к1сп°ЛьК)пан,1е режима "меню” может зна’штельно облегчить процесс
• Учении нужного ответа. Например:
СОойщепие: В базе данных имеется информация об изделиях:
Изд. 001 Изд. 002 .... Изд. 003
выбрано
с’Оо0щепис: Для изделие Изд. 001 есть информация об arpciwrax:
Al per. 01 Лгрег. 02 - - Агрег. 03
СП()б11 выбран
с,,ис: ^обходима ли информация об агрегате? Да!
сине Ддн какого агрегата необходима информация?
, »т.д.
4S3- 13
181
Ри . 9.8. Структура графа информационной 1
А - локальная область графа
Предложенная структура ’’меню” дает возможность выборки инфор-
мации по одному функциональному направлению Подобный запрос
может быть ор!анизован но каждому функциональному нанрэвленИЮ-
Иначе говоря, многоуровневая структура ’’меню” позволяет обеспечить
организацию чрезвычайно большого числа нроСЬемно-ориеИГИртваНЯЫ*
запросов
Для обеспечения высокой скорости доступа к информации, работа
пей многих пользователей на уровне шкального исследования к
нентов информации, объединения различных компонентов ипф°Я
в разделы треб 'тся многоуровневая структура информации-
Наилучшим образом отмеченные 1ребования выполняются в
хранения компонентов информации иерархической структуры
данных. Работа с такими базами возможна при наличии сисниализмр^
ных средств доступа к информации без которых эффективность рЧ
систем резко снижается
182
Пь,й заключается
с,РУКции I-
11ЧИО, ’«W-ILH 11ОДК
teCKO*; J*0'*’1* o,-',,(,Bb,u je
«3CHv?U,Ioe ,,pc,i
«£XT:-ni™
HvBo Mw cr •
r ' www.vokb-la.spb.ru - Самолёт своими руками?
в кучность созданной промежуточной и результатной информа-
Р#1 'я наиболее доступной при использовании специальных
mill СГ * представления структуры информации логического типа.
М1Пе ,е Троадоя таких моделей составляют обычно древовидные или
рсНОР4 . . Привязка к вершинам таких графов кортежей информа-
ce№b J >ь1е в общем случае также имеют иерархическую структуру»
доц. >п0ГС получи ib информационную модель для СПИОИ. Фраг*
п°ЗВ°ЛГзК(ш модели отражены на рис. 9.8.
ме,п1’1 рмапионную модель и специальные средства доступа к
I через згу модель, пользователи получают возможность оператив-
*1HI* '|е1Ц.|П> и выбирать требуемую информацию, что резко увеличивает
1,0 1 во-цпсльность груда на лапе создания модели МКЭ и особенно на
Хиеобрабмки результатов.
Реализация СПИОИ осуществляется на базе автоматизированных
Gwnix мест, техническое оснащение коюрых позволяет достичь целей,
которые преследуются при создании таких систем.
Расширение фронта работ
при проведении моделирования и исследований
Создание СПИОИ представляет собой необходимое, но не единствен-
ное средство сокращения временных затрат на этанах подготовки и обра-
емчкн информации. Другое направление сокращения таких затрат связано
с возможностью привлечения к процессу моделирования и последующего
исследования госта точного числа специалистов, обычно имеющих поагрс-
гатную специализацию. В этом случае исследуемая область конструкции
подвергается разбиению на отдельные под конструкции или агрегаты,
которые, в свою очередь могул бьиь представлены сшс более мелкими
конструктивными образованиями - отсеками, лонжеронами. кессонами
и «Л- Создание исходной информации и се обработка с использованием
СПИОИ осуществляется для различных агрегатов параллельно специалис-
тами узкою профиля. Это. cctccibchho. приводит к сокращению времеп-
иых затра! па исследование всей конструкции. Однако при такой органи-
**|ади процесса возникают определенные трудности в получении кор-
ректною конечного результата, поскольку для зiого необходимо учиты-
ь реально сущесшующис в конструкции внутренние связи. Эту цель
жио досипнуть лишь при объединении отельных aiperaroB в единую
пнй^)^1°Леяь- Существует два подхода к решению этой проблемы. Пер-
— в формировании макромолели .ня обьсдинсиой кон-
и из моделей подкопе тру кций па уровне объединения исходных
_______________________егся на использовании специального математи-
зпнарата, позволяющего учитывать влияние друг на друга огдель
-лструкций на уровне абс! рак гной модели.
нрсня1ствие в реализации первого подхода заключается в
. । создании моделей огдельных агрегатов специалисты
своим узловым юнологическим прострапством, Tje. они
• свою нумерацию узлов этого пространства. Элемента» юпо-
183
логическая информация также отражает локальную агрегатную п JL
цию. Поэтому прямой путь объединения моделей в макромодсЛьЭ**М
пнем отдельных колод или массивов в единую колоду или массив *
можсп Устранить это препятствие можно путем заранее определи
нумерации (выделения /доаназона) для каждого агрегата rpynnoft1^!
циалистов. руководящей всем процессом исследований; испояъзо а
программной процедуры, позволяющей изменять нумерацию в
ном из рассматриваемых агрегатов с помощью последователыюгИ
наращивания- Недостатком такого подхода является го, что пги
ленгы матрицы жесткости (МЖ) в матричном уравнении равновесия*
макромодели обычно чрезвычайно велика, из-за чего процолжителым^*
решения этой задачи па большой ЭВМ и затраты внешней памяти
быть весьма значительны. Время решения СЛАУ может быть при иже- *
оценено по эмпирической формуле
Т-апВ2 -3 , (9 ч
те а — скалярный коэффициент; п — порядок СЛАУ; В — подуши;*^
ленты МЖ
Анализ этой формулы показывает, что даже сокращение шидец
ленты в два раза приводит к сокращению временных затрат не меч*
чем в четыре раза. Поэтому проблема снижения ширины ленты МЖ яы»
ется постоянно актуальной, требующей разработки формализовала^
методов ее решения.
Один из таких методов, предложенный В.М Смирновым, бэзируг •
на преобразовании топологической структуры модели через отобрзжед*
существующих связей между узлами на плоском графе. Конечная пг?
преобразований сводится к ностроешгю древовидного графа, имскшег
максимальное число уровней. Такой структуре графа соответствуем
минимальной ширины Автоматизация процесса перенумерации узлов
топологического пространства с реализацией процедуры уменжиЛВ
ширины ленты МЖ даст возможность собирать макромодели из лкйж
числа моделей агрегатов в короткие сроки, что позволяет специалиста
активно проводить проектировочный процесс, шюясдователыю мо”И^
цируя и совершенствуя проблемные модели МКЭ
Если разделить всю совокупность тополо1ичсских узлов модели |
внутренние г и граничные Ь, то после соответствующей псрекомпонпв
матрица |К'|в выражении (9-23) примет вид клеточной
Тогда матричное уравнение равновесия для метода перемещении
иметь вид
Л
...... ч
Использование инвариантных преобразований для уравнения
позволяет осуществить переход к уравнению следующего вида:
184
(О л
www.vokb-la.spb.ru - Самолёт своими руками
М - w . ,94?)
. .К»,-«».«*/»; (9.43)
I т обныс преобразования дают следующие перспективы совсршсн-
1 ,<i проектировочною процесса в условиях использования больше-
сТВОВЗНИЯ up- -Г М1Го.
"мерных монелей М КЭ
Р3 Розможность осуществлять строгий анализ НДС отдельных ai ре-
конструкции благодаря отображению жссткостных параметров
Кпошснных элементов и агрегатов через интегральные жесткости и
ОТгловые параметры согласно выражениям (9.43) и (9 44).
Сокращение временных затрат па решение СЛАУ высоких поряд-
ков путем введения рационального, в общем случае многоуровневого,
членения топологической структуры узлового пространства на внутренние
и граничные узлы.
Необходимо отметить, что использование процесса последователь-
ного сокращения размерности модели па абстрактном уровне, т.с. про-
цесса редуцирования МЖ и вектора сил R, требует хорошего уровня
информационного обеспсче1шя. поскольку получение результатов для
отдельных агрегатов требует сохранности ма1риц Kib и вектора
в выражении (9.41) для получения компонентов вектора перемеще-
ний Uj
{Ц j1 - [A'iч Г' [I’i - Kib UhI . (9.45)
В случае MHOi оу ров нсвой структуры модели МКЭ функции хранения
матриц и векторов для отдельных нодконечрукций или агрегатов наряду
с выполнением существующих требований по оперативной выборке
отмеченных или иных компонентов информации могут быть обеспе-
чены только в условиях функционирования универсальных или специ-
альных баз данных, имеющих соответствующие СУБД (системы управ-
ления базами данных). Это означает, что ускорение процесса исследований
при использовании изложенного метода подкопструкпий практически
возможно лишь в условиях функционирования на ЭВМ базовых средств
Уступа к информации.
нТИе С^ЛУ большого порядка
° Работка полученных результатов
кзл°жснии процедур ускорения подготовки информации для
мсцСЛеИ МЬ| Уже частично коснулись проблемы уменьшения вре-
* Затрат и ресурсов оперативной и внешней памяти при проведении
Мецн^1,1Ь,х исследований на большой ЭВМ. Хотя относительные ире-
прн Затрзты для полною процесса исследований на моделях МКЭ
°значз ХОЖде11ИИ пР°блемиых задач на больших ЭВМ невелики, это нс
^ctjx)1’ 4141 ПРИ отсУтствии определенных системных разработок можно
8,1,1 лют Пол^Чить результат. На вероятность достижения результата
такие факторы, как надежность процессора, надежность работы
185
каналов, постукивая емкость внешних устройств и надежность сре 1Ст
общения с ними и тл. Практика показывает, что вероятность бессбойно ’
прохождения задач с СЛАУ размерности свыше пяти тысяч за один прОхЗ
чрезвычайно мала. Необходимо организовать нозганное решение с с<И*
пнем контрольных точек. Наиболее доступными средствами создай 1
контрольных точек являются средства, предоставляемые широком!
пользователю операционными системами современных ЭВМ. Эти орский
позволяют при решении задачи на ЭВМ через заданный Временно» интеп
вал создавать DAMP - евгимок всего состояния оперативных устройств
вычислительной системы. Такие точки создаются через заказные квзнты
времени, и естественно, что сокращение интервалов между ними приводит
к Значительным затратам внешней памяти и машинного времени. КроМе
того, при использовании таким образом созданных контрольных точек
возобновление прерванного счета возможно лишь с того состояния ЭВМ
которое зафиксировано последней контрольной точкой. В этом случае
специалисты лишены возможности белое гибко проводить вычислс1шя
базирующиеся на понимании проблемных аспектов исследовательскою
процесса и существующих возможностей ЭВМ.
Такая гибкость общения с ЭВМ доспи аегея введением в вычисли-
велывый процесс специализированных баз данных, в которых хранятся
компоненты информации в соответствии с введенными пользователями
информационными моделями логической структуры. Использование в
вычислительном процессе таких баз данных позволяет не только продол
жить решение задачи в случае сбоя вычислительной системы с того мо-
мента. когда этот сбой произошел, но и с более ранних этапов процесса
исходя из анализа специалистами промежуточных результатов исследо-
ваний.
Результатная информация в ходе прохождения задачи на больших
ЭВМ обычно также размещается в специализированной безе данных,
откуда она может выбираться либо для размещения в общесистемной
базе, либо для сброса через формализованные процедуры на такие ноей
тели информации, как магнитные ленты, диски листинги и графики
После прохождения очередного шага итерационною процесса п роек ти-
ров ания силовой структуры пользователям становятся доступным*1
следующие компоненты результатной информации:
перемещения для всего узлового топологического нрос1рапства.
напряженное состояние в элементах конструкции для всех расчетный
случаев;
ориентация площадок главных напряжений;
уровень знсрютических ззтрз! в каждом элементе системы;
распределенные весовые параметры но каждому элементу мо.
ли и । .д.
Характерной обшей чертой отмеченных компонентов результат о
инфо|>мации снсдует считать сс объем, например в состав моче-Л* .
входит более 10 тыс. элементов. Трудности усугублялися тем. 1по отд^^
ныс виды информации имеют mhoiокомпонентпую шруктуру- ОМИ
тировавься в ваком большом объеме информации чрешычзйно ел
186
ипн. vokb-la.spb.ru - Самолёт своими руками
Рис. 9.9. Пример машинною представлении результатов расчета
Необходимо использовать специальные средства поиска требуемой
информации и отображения ее в доступном для широкого пользователя
виде.
Таким системным средством поиска требуемых данных является
информационная система, основы построения которой мы рассмотрели
выше. В качестве технических средин при обработке данных исполь-
зуются мини-ЭВМ и их периферийные средства. Обработка результатной
информации с использованием алфавитно-цифровых и графических
Дисплеев с целью выборки наиболее информативной области данных с
последующим копированием их на твердых носителях информации суще-
ственно повышает производительность труда. Ряд специальных процедур
Л-»я целенаправленной выборки результатов ио определенной совокуп-
ности элементов позволяют Нс только избавить специалистов от рутин-
ного труда, но и довески информацию до пользователей в новом, бо-
Лее эффективном качестве. Пример выдачи интегрированной резуль-
татной информации на бумажных носителях после просмотра ее на экра-
нах алфавитно-цифрового и графическою дисплеев предскавлен на
lexHojioi-ия автоматизированного проектирования
силовой конструкции самолета
Ниц аложсниь1С в предыдущих разделах основные концепции организа-
Т|1»"Р°5КГ11Р°|юнното процесса определили возможность создания прак-
Koii^Koh технологии автоматизированного проектирования силовых
РУХций самолетов Остановимся на основных ее особенностях.
187
Как отмечалось, центральное место отводится вопросу создаЯ
объекта исследований В рассматриваемой технологии это модель Mir?
Выбор модели, ее структурное членение и размерность неотделимы I
анализа целевого назначения летательного аппарата и условий его °Т
плуатации. В соответствии с изложенным в предыдущих разделах под^о
дом модель МКЭ целесообразно представлять в виде исрархическ ‘
структуры. Грехуровневос представление структуры объекта иссл^^З
ний наиболее целесообразно в условиях существования традиционно^
разделения функциональных направлений исследований для отдельны
подразделении ОКБ. Проведение исследований на таком многоуровневом
объекте должно поддерживаться соответствующей иерархией испол-
нителей.
После проведения этапа структуризации объекта становится возмож-
ным разделение всего фронта исследований между специалиста ми и
проведение следующего этапа проектирования — создание моделей МКЭ
с использованием АРМов и соответствующего программного обеспечения
Проведение проблемных исследований на соогветств}ющем этапе
имеет типовую организацию, одинаково приемлемую на каждом уровне
исполнения (рис. 9.J0), суть которого заключается в осуществлении
следующей последовательности рабок
1. Определение наиболее перспективной области для организации
силовой структуры самолета на базе исследований поюнциальиых мо-
делей;
2. Введение в выбранную перспективную область конечных элементов
новых качественных типов (стержней, банок, пластин и г.д );
3. Проведение процедуры оптимизации с целью получения распреде-
ления материала;
Рис. 9 10. Структурная схема процесса проектирования силовой конструкции са
монета
188
www.vokb-la.spb.ru - Самолёт своими
Рис» 9,11 Схема алгоритма технолслического процесса проектировании
ендовой конструкции самолета
189
силЬв^
4 Осуществление прогноза реальной массы силовой и всей кон|г
ции в целом на основе иерархической структуры статистических ci
ний ио затратам дополнительных масс на реализацию фрагментов
структур агрегатов и элементов конструкции
Предложенная последовательность работ, как отмечалось пьщ^
может быть проведена на каждом уровне, однако при этом на кзжгЗ
последующем уровне иерархии в качестве ограничений выступают локдЭ
ныс значения исследуемых параметров, полученные на моделях богж,
высокого уровня.
Анализ сходимости процесса завершает технологический цикл проекЛ
рования. На этом этапе оценивается степень достижения глобального и
локального экстремумов целевой функции, сравнение альтернативных
вариантов исполнения конструкции самолета и принимается решение l
прекращении или продолжении процесса проектирования. Схема алгоритм
ма технолотческого процесса проектирования в соответствии с общем
структурой организации процесса представлена на рис. 9.11.
Изложенные концепции проектирования силовых структур хараю
теризуюг основную тенденцию в практической реализации соврсмсчшь^
процессов исследования сложных конструктивных систем в авиастроении.
Суть 31 ой тенденции заключается во все более интенсивном использовании
средств вычислительной техники, более глубоком уровне формализации
проблемных исследований. Практически проявление згой тенденции
находит снос отражение в непрерывном развитии систем автоматизиро-
ванного проектирования, автоматизированных систем конструирования
(АСК) и дополнении их друг другом.
ПРИЛОЖЕНИЕ. ОПИСАНИЕ АЛГОРИТМОВ
ФУНКЦИОНАЛЬНЫХ БЛОКОВ УИ САПР
В основе алгоритмов функциональных блоков нежат зависимости,
отражающие взаимосвязь параметров и характсрисшк самолета, в ф°Р*
мс систем алгебраических и дефференшшльных уравнений. Они базиру-
ются на известных методиках, используемых па ранних этанах проекти-
рования и описанных в соответствующей литературе.
При разработке алгоритмов особое внимание обращалось на л®3
фактора: одноуровневоеп» и модульность. Под одноуровнеп остью
маюг согласование алгоритмов по точностям и информационной обес-
печенности. В УИ САПР принята двухуровневая структура алгоритмов-
Алгоритмы первого уровня используют при формировании начпльпи
облики самолета, а алгоритмы вюрого уровня для ею уточнения
Детализации Были приняты следующие допущения о предельных отК-В
пениях получаемых результатов: к,
погрешность расчетов по алгоритмам первого уровня должна быть
более 10 ... 15 %;
190
rwww.vokb-la.spb.ru - Самолёт своими руками
orpeiuHucTb расчетов по алюритмам второго уровня - нс более
* -поритмах используют исходные данные, известные или oiipe/ic-
li 4 на рассматриваемом этане проектирования. Применение модуль-
”’eM,s,0MnmnM дало возможность в рамках определенного уровня изме-
’’О1 ° от тельные расчетные алгоритмы в зависимости от особенностей
Актируемого самолета.
! ь (ОК ГЕОМЕТРИИ
Ъ.юк геометрии предназначен или расчета геометрических параметров
самолета и его агрегатов: крыла, фюзеляжа, оперения* Он состоит из
стедуюших модулей.
Модуль GLO 12 служит для вычисления основных чеомстрических
параметров крыла трапециевидной формы в плане, имеющего передние
и задние наплывы. Аналотичиые вычисления размеров горизонтального
оперения осуществляются в модуле GFO 14 Алгоритмы этих модулей
основаны на известных формулах расчета пзрзме1ров несущих поверх
постен.
В модуле СЕО 17 вычисляют основные размеры управляющих поверх-
ностей лерппа. руля высоты или направления, а также закрылков.
Корневую хорду поверхности определяют следующим образом:
(II. I)
где b (jh) - хорда в корневом сечении управляющей поверхности; bff
относительная хорда управляющей поверхности.
Концевую хорду определяю! по сошношению
Ь1р-Ь(гк)Ьр.' (11.2)
1 де Ь (ск) хорда в концевом сечении управляющей поверхности.
Размах руля (крыла ГО, ВО) вычисляют по формуле
/Р = 2 ^к--~„), (Т1.3)
,де гк> 7н относительные координаты но размаху корневого и кон-
Невого сечений.
Площадь управляющей поверхности определяется как
lr- (П.4)
модуле GEO 18 вычисляют хорды в сечении, имеющем к<юрдинэту
По Размаху г:
^<->-/>0(1 2!—1 Г)
п
Дс - корневая хорда; т/ — сужение.
(П-5)
191
В модуле GFO 19 рассчитывают координаты по осибЛ¥ произвол J
хорды, имеющей безразмерную координату по размаху 2 °*
(11.6)
где / — размах; Хо стреловидность по передней кромке.
В модуле GEO 20 рассчитывают длину закрылков в зависимости
числа и расположения двигателей на крыле. В программе учитывает01
также схема уборки шасси. Сч
В модуле GEO 21 производится пересчет углов стреловидности llD
МЫХ, проходящих ПО разным ПОСТОЯННЫМ ДОЛЯМ и п2 хорд*
. . 4 Ч 1 4 л _ 1
^ = arctg(tg%Jl + n|-x — г-п2- — f), (ПЛ)
где X — удлинение; — известная стреловидность но линии и, хорд-
Х^, — стреловидное 1ь, определяемая по линии н2 хорд.
Модули GEO 30. GEO 31 и GEO 32 предназначены для определения
основных геометрических параметров фюзеляжей дозвуковых пассажир-
ских самолетов, имеющих одну палубу.
В модуле GEO 30 производится расчет диаметра фюзеляжа в соответ-
ствии с размерами кресел и проходов
d кэб и •
где — коэффициент диаметра, Вкаб — ширина кабины; - расстоя-
ние от СГФ до пола.
Ширину кабины определяют по формуле
-^кзб “Лкр ^кр + ЙПОДЛ ^Подл * нпрох ^нрох* (П-9)
где лкр. «ПОЛИ. wnPox число кресел, подлокотников и проходов соответ-
встствснно; &кр, &Ппдл. 61|рох — ширина кресел, подлокотников и прохо-
дов соответственно.
В модуле GEO 31 рассчитывают длину и прощали пассажирских и
вспомогательных помещений при заданном числе пассажиров и заданном
классе пассажирских салонов.
Длину пассажирских салопов определяют следующим образом:
^'и_с “ (А^пер + ^задн ) ис + “ 1) ^кр»
где Д/иср, Д/зздн — расстояние соответственно ог первого и заднего рядов
кресел до перегородок; ис — число салонов; лр число рядов кресел;
Акр - шаг кресел.
Длину веномо! ательных помещений рассчитывают по формуле
/ — к4- г4 S * ^в + $бп (П.П)
Х НСП. ПОМ р „ h > v
°каб ”прох ‘ прох
где 5’к — площадь кухни; Sr — площадь туалетов; — площадь гзрДе*
робов; — площадь вестибюлей; SG11 — площадь, отводимая под мео*3
бортпроводников. Суммарная длина всех помещений фюзеляжа oiipc’ICr
ляется по формуле
192
wnv.vokb-Ia.spb.ru - Самолёт своими
~ ^пх 4 ^'всп.пом + ^'баг * (jar > (П.12)
- длина помещений» отводимых под багажники, располагаемые
гЛСпа^убе салона; - длина дополнительных помещений, отводимых
1Г*а багажники
П В модуле GLO 32 определяют длину фюзеляжа
/,ф“ Лрад * ^каб.эк + ^пом +^ф\о* (ПЛЗ)
у - длина носика фюзеляжа (до кабины экипажа); /каб.эк —
гД\ *р кабины экипажа; Xvo - удлинение хвостовой негерметичной
дгЛН» । 14 хн
части фюзеляжа.
В модуле GEO 33 рассчитывают удлинение хвостовой нсгермстичной
части фюзеляжа и длину pajajm, при этом используют данные статистики с
четом расположения двигателей в хвостовой части фюзеляжа.
' Модуль GEO 34 предназначен для определения ширины и высоты
входных дверей, которые определяются исходя из ширины салона.
В модуле GFO 50 вычисляют длину носовой части фюзеляжа. В
модуле используется зависимость:
/*ч - /?Ф\Ч (п-,4)
где /,„ч - джина носовой части фюзеляжа; Хн ч - удлинение носовой
части фюзеляжа.
Модуль GLO 51 служит для определения удлинений фюзеляжа и
цилиндрической части фюзеляжа. В модуле используются следующие
зависимости-
\г^фЯф; (П-15)
\шл ~ \j) ^Н.ч ~ ^ХВ’ (П-16)
inc Хф удлинение фюзеляжа; - удлинение цилиндрической части
фюзеляжа.
Модуль GEOSAL предназначен для определения геометрических пара-
метров пассажирского салона: шага и ширины кресел, числа проходов,
числа туалетов и их нлошади, площади кухни и гардеробов, погребного
объема багажных отделений. Все эти параметры зависят от времени поле-
та, числа пассажиров, величины коммерческой нагрузки, класса пасса-
жирских салонов и заданного числа кресел в ряду.
Модуль KRILO служи! для определения геометрических параметров
крыла на уровне формирования предварительной информации. В модуле
используются следующие зависимости:
1 5кр Хкр- (’кони ! (]
(H.J7)
Лл-0.666Ькор1,
где s р к₽
‘ кр - плошадь крыла; Хкр удлинение крыла; пкр - сужение
193
крыла; I - размах крыла; Лконц - концевая хорда; ^кор„ _ к JW
хорда; средняя аэродинамическая хорда е ••
Модуль YKPCCF предназначен для определения координаты Д 1
корневой хорды крыла относительно счроитсльнон горизонтали
ляжа:
-1крФ_± + ^корн П^кр 4 ^ф’
где i/?Kp угол установки крыла; A/sJt коэффициент превышения k|)tB
над или под фюзеляжем 1 •
Знак соответствует схеме низкоплана, знак ”+” - схеме высок
плана. *
Модуль ZDW I служи! для определения относительных кэдрд^Н
двигателей. Зависимости получены на основании обработки отечественна*
и зарубежной статистики. Координаты зависят от числа двигателем, их
расположения и размеров самолета.
В модуле NAPL определяют стреловидности крыла и наплывы на Нсм
в зависимости от стреловидности крыла по передней кромке и но ] 4
хорд.
Модуль DGODVVO предназначен для определения шамстра фюзетяжа
В местах крепления горизонтального и вер шкального оперения.
Модуль DDONT рассчитывает диаметры дойных срезов фюзеляж
и мотогондол
^дов-0>89Р/ш (Рф), (П.19)
где Лдв диаметр двш ателя.
При отсутствии среднего двигателя на фюзеляже диаметр донною
среза принимают равным нулю.
Модуль XNMD предназначен для нахождения предельно переднем
координаты начала силовой установки при установке .гвигзге гей па
фюзеляже Эта координата определяется из условия расположения
СУ за герметичной часшго фюзеляжа
v -г +z 4 / 4 Аьсп.иом. ill W
Анмг ''рад+ *'каб.эк 4 'mi.с + 7 ~ н ~ '
Модуль ZPB предназначен дзя расчета относительной координаты р)
высоты вдоль размаха ГО. Отпосиюльныс координаты начала и KoHlj
руля высоты определяются в зависи.мсюти от схемы оперения, размаха 10,
тиаметра фюзеляжа в месте крепления ГО и корневой хорды ГО.
Модуль ZPH I определяет относительные координаты начала и кон11
руля направления. Относительная координата начала руля направления
-0?58/Ъ/Л (П-Ц
* р.п *,ф/"нлГ
гдсЛв о высока вертикального оперения
При нормальной схеме расположения горизонтального оперения
относительную координату коми руля направления вычис-чяют но Ф°И
муле
7Р‘И _ 0.98 - 0,9 •“ °//'и д>-
194
(П.23)
rwww.vokb-la.spb.ru - Самолёт своими руками?
- 0 _ относительная толщина ВО; Л?— корневая хорда ВО
р-образном оперении относительная координата конца руля
оаГлепия принимается равной 0.97 Лвя.
11ЭП Модуль BDKKR 1 предназначен для определения координат начала и
|цз размаха элерона» закрылка, бака, относительной хорды начала бака
К°основании статистических данных.
,м В модуле ГСО 1 вычисляют плечо горизонтального оперения в зави-
-ти от статического момеша ГО, площадей крыла и оперения. Мо-
ib используется для начального определения Lr о. В дальнейшем эту
Дичину уточняют по результатам работы блока компоновки Расчетная
форм? та имеет ,1ИД
4КГ-
Здесь Lv о ’1Печс ГО; 0 - статический момент ГО.
Модуль MARU 1 предназначен для определения расстояния от центра
масс до мотогонлолы
Гдв.ХН -^-гонд’ (И -4)
|Дс ^юич длина мотогондолы; Аф статистический коэффициент.
Модуль MIDI вычисляет площадь мидслева фюзеляжа, площадь
милелева сечения могогондолы, площадь подфюзеляжной части, длину
шшиидри’теской части и .чрутие параметры, необходимые для расчета
зэрешнзмичеики х хдрак герметик.
Модуль 11KR вредна вкачен для определения угла установки крыла
по ызтистическим формулам в зависимости от скорости полета.
Т.п
2. БЛОК ВЕСОВЫХ РАСЧЕТОВ
Блок предназначен ,ьля весовою проектирования дозвукового пас»
сажирекого самолета при автоматизированном формировании облика
самолета и определении его потно-технических и экономических ха рак-
терис гик.
В основе алгоритмов первого уровня лежат пол у эмпирические фор-
мулы. построенные па основе статистических данных, ^основе алгоритмов
Щорого уровня — теоретические соотношения,скорректированные змгги-
Ричсскими коэффициентами. Блок имеет модульную структуру- Основ-
ными модулями являются: "Масса планера \ Масса снаряжения и обо-
рудования". "Масса силовой установки”, ’’Масса гоплива”.
В основе модуля "Масса планера” первою уровня лежат алгоритмы
расчета относи тельных масс атрегатов самолета: крыла, фютеляжа, опе-
РСния и шасси.
Сложный модуль расчета массы крыла состоит из грех основных
WtSZAK, WLSPRD WKR и трех всномогагсльпых модулей, АВ1, WCI,
Bl
Модуль HLSZAK пре.чназиачен для определения ошосителыюй массы
1экрылков самолета но формуле Торснбика
195
шэакр ^закр
fC / P V3/16 Y
закр 'мзаКр ззкр'
X Г( D-Э )2 &*П &Эакр CQs ^закр i3/< ?
1 гзакр j
где А'закр коэффициент, зависящий от конфигурации *акрыдКо
5закГ л£кр - "лошадь и расчетный размах закрылков: Vr з _ Ско *
выпуска закрылков; Л.1акр " Угоя отклонения закрылков; с а
относительная толщина закрылков в убранном положении; уЭЭКр
угол стреловидности закрылков.
Модуль VSLSPRD служит для определения массы предкрылков. \|асо
предкрылков определяю! в зависимости от площади предкрылков Л
и массы одного кнэцратного метра поверхности предкрылка г/Пр 1
wnP ^пр^нр- |
Величина зависит от тина предкрылков
Модуль VVKR определяет величину относительной массы крыла
“ - ( 4 * кр * 1 Пкр * 4 +
Кр 10’ Pc, С*?7’ cos^Xj/* Чкр * 1
+ 3,96*’-^- +0,015) +»7закр+/нпр.
о
(П.261
где — величина расчетной перегрузки; — коэффициент раирузки
крыла; а — коэффициент, зависящий от удлинения крыла; коэф-
фициент, зависящий ог типа панелировэния крыла; к2 — коэффициент
механизации крыла; к3 коэффициент, зависящий от вида герметизации
крыла; т0 взлетная масса самолета: — удельная нагрузка на кры ю;
со — относительная толщина профиля крыла; xt 4 — стреловидность кры
ла по 1/4 хорды: соответственно относительная масса зак-
рылков и предкрылков.
Массу крыла на втором уровне рассчтывяют по алгоритму, р основе
которого лежит поэлементный расчет.
Масса крыла без учета механизации тК$ складывается из масс полок
лонжеронов «1П П, стенок лонжеронов шсл, поясов нервюр тп н стенок
нервюр тсЛ1, обшивки носовой и хвостовой частей крыла /мос и х1еР°
нов тэ:
"гкр г'"11.л + тс.п + /Нп.н + W,C.H + "’об + /мэ
Массу полок лонжеронов определяют в модуле WGPL
шп.л
1 2 000 о Гcos2 х i
(Л.?*)
> ^и.л-
где <?и л эмпирический коэффициент; р плотность материала; J °’’
ношение среднего напряжения в полке к максимальному в гом же се-
чении; - отношение плеча пары сил, действующих по верхней и нижией
полкам (панелям) к толщине профиля крыла: о - напряжение в целом
месте полки в момент разрушения, т.с. без учета концентрации папряж®
196
www.vokb-la.spb.ru - Самолёт своими
оспаб.тсшюм сечении; с — относительная толщина среднего профиля
нИя д, _ коэффициент, учитывающий уменьшение массы полок
крь[ 3’ грансниевидпою крыла благодаря разгрузке но сравнению
лон*с полок лонжеронов прямоугольного крыла с постоянным по
с ^3Xv толщиной и распределенной нагрузкой.
Р33 Масса стенок лонжеронов определяется в модуле WGCTL по формуле
= к (П.29)
,мсЛ 4000 Т cos Х1 С 1
д. _ коэффициент, учитывающий уменьшение массы стенок лонже-
|Диов трапециевидного крыла, вызываемое разгрузкой, по сравнению с
Р ссой стенок лонжеронов прямоугольного крыла с постоянными по раз-
маху тонтиной и распрсделнной нагрузкой; т — допустимые касательные
наиряжения-
Модуль V\GPN определяет массу полок нервюр
wo Р 1
Wn-H ” н 1000 V с А.’’
14 Р
Модуль VVGCTN определяет массу стенок нервюр
лдр /я 0 /> /
W,C.H ~ Q.1I П)00гЛкп '
14 р
(ПЗО)
(П31)
Модуль WGOB определяет массу обшивки носовой и хвостовой
частей крыла
т =с . S (П.32)
/7‘о6 *об ^кр
Модуль WGEM определяет массу элеронов
гмэ - сэ 5Э • (1133)
Здесь ес л» сп н, сс |Г соС. сэ эмпирические коэффициенты; 5Э - относи-
тельная площадь элеронов.
В модуле WGKR осуществляется суммирование масс отдельных зле-
менгов крыла и перевод их в относительные величины.
Лля определения относительной массы фюзеляжа на первом уровне
используются два модуля WC1 и WESFM. Модуль WC1 осуществляет
определение значений коэффициентов, необходимых для работы модуля
WSFM. Модуль WESFM предназначен для расчета величины относитель-
ной массы фюзеляжа дозвукового пассажирского или транспортного
самолета. Величина относитеэьной массы фюзеляжа определяется по
бедующей формуле:
a;wc)x
90126131+ (ДфЛ.а i (1 + 13^4'L)
_ __________________________\/ WlQ
\ fmo cos X, ;4
x (» *0.2
_£;w_
XB
197
+ —р3ф + ЗХ ю-л (А'з +1.7),
01.34)
где £ Ад. А'2, A3 - коэффициенты, зависящие от схемы расположения
гателей и главных опор шасси самолета: /Я — избыточное эксплузуаЛ^Н
нос давление в I срмокабине самолета; 7ДВ — удельная масса двигаю- *
Ро - стартовая тяговооруженность самолета; число двигэтсг ?
расположенных на крыле и фюзеляже самолета соответственно- £
£хн — соо1ветствешю расстояние но оси Ох от центра масс самои^
до центра масс шигателей и до конца фюзеляжа.
Масса фюзеляжа па втором уровне рассчитывается па основе теорети
ческой формулы с использованием эмпирических коэффициентов почу.
ченныхв результате обработки статистических данных.
Масса фюзеляжа складывается из масс стрин! еров, обшивки.шпангоу-
тов, пола» фонаря» окон и стекол, дверей с окантовками» узлов сочленения
За расчетный принимается случай Л или Е в зависимости от того, какая
из расчетных перегрузок лд или лЕ будет больше. Фюзеляж рассматрива-
ют как балку, лежащую на двух опорах: переднем и заднем лонжеронах
крыла. Воздушными силами и силами инерции, обусловленными угло-
вым ускорением, пренебрегают. Фюзеляж заменяю! цилиндром с постоян-
ной но контуру сечения толщиной 6 стенки и радиусом К.
Масса стрингеров и присоединенной обшивки, т.с. продольного набора
определяется в модуле WGPRN по следующей формуле:
"'пр.н“ /Ф ЛМх. (П.35)
1 пкр гф О
Здесь с11р н поправочный множитель, учитывающий огличце теорети-
ческой массы продольного набора от действительного; J Udx — ic» иизш»
О
эпюры изгибающих моментов по длине фюзеляжа.
Модуль WCS11P определяет массу шпангоутов При выводе расчетной
формулы предполагалось, что рядовые шпангоуты предназначены идя
сохранения формы сечения фюзеляжа при его изгибе и кручении. Если к
шпангоуту не приложена дополнительно сосредоточенная сила, расчетным
случаем для него является изгиб фюзеляжа
wuin
"А.Е ^кр О *4/?)
1 О’ /Г ошп Л Ьф
1 ф
J’ Mdx.
0
(П-ЗЫ
где сшп — статистический коэффициент; L — модуль упругости*- dKp ’
критическое напряжение в продольном наборе* ошп напряжения
продольном наборе и шпангоутах; (1 +4/?) - множитель, учи ты вэю11™
что к напряжению от момента Л1Пак “
fl'max Djj> в сечении шианго>га
16
добавляется напряжение от сжимающей силы /’ - Лф- е
Модуль WEDG определяет массу обшивки юрметичной части Ф Ч
ляжа как массу стенки цилиндрического сосуда с избыточным давне!
р3 внутри
198
www.vokb-la.spb.ru - Самолёт своими руками?!
(П.37)
(11.38)
И
_08
2 ир
р - диаметр герметичной части фюзеляжа; Lr — длина герметичной
Г1\и^ю5е;,яжа' аР ~ максимальное напряжение в обшивке.
ЧЗС1К тффиниент 0.8 учитывает, что часть массы обшивки вошла в массу
дольною набора (присоединенная обшивка).
ПР°\|ОДучь WEDN определяет массу герметического днища Если днище
_ форму шарового сегмента, то ею стенка иод действием избыточного
^вдения работает из растяжение, а стягиваемый днищем шпангоут испы-
тывает сжатие равномерной нагрузкой, направленной к его центру. Массу
этих твух ’ккдей днища можно вычислить по формуле
10.33 рэр л D-
Юдн-н!»1 “‘«н-шн Гб~~ °'
Здесь сдн It - эмпирический коэффициен г; а ~
гте/ - относительная глубина днища: /Э диаметр днища.
Модуль ULSON рассчитывает массу обшивки иегерметичной части
фюзеляжа. Эта обшивка, за исключением той ее части, которая уже учтена
в продольном наборе, работает на сдвиг от нс ре разрываю! них сил и кру-
чения фюзеляжа.
формула дня определения массы негерметичной доти обшивки
фюзеляжа имеет следующий вид:
w/oG.hi “ сиб.нг- Ря ^Лгр ^нг 1 (П.39)
где н,. эмпирический коэффициент; /)ср средний диаметр нсгер-
мешческой части фюзеляжа; Л11Г - длина негерметичной части фюзеляжа;
6 юлщина обшивки.
Ятя расчета масс фонаря, окон, стекол, дверей и узлов сочленений
используют эмпирические формулы.
Модуль WESFON определяет массу фонаря
»«фоН - 53 Аф (1+ . (П.40)
где Аф- 1 для фонаря нилита; Аф" 1»5 - для фонаря пилота и штур-
вала. v
Модуль VVLSOK определяем массу окон и сюкол пассажирской каби-
!|Ы- Эта масса пропорциональна длине Z.OK участка фюзеляжа, занятого
окнами, и зависит от моментов, изгибающих хвостовую часть фюзеляжа,
а также от и сбыточного давления в кабине:
в %к-0.59АокЛхв (1+риА),
l7te ^‘хн длина хвостовой части фюзеляжа.
Масса дверей и окантовки определяется в модуле V\LSOD
'"д.а -14.9 А?ф (1+Ризб). . (П-42)
^ Модуль WESPL определяет массу пола пассажирской кабины. Эта
“I’oiiopiiMonajibHa длине /.г герметичной части фюзеляжа и его
(П.41)
199
?лпол “ L Г- (и43}
Модуль WESS рассчитывает массу узлов сочленения фюзеляжа '
крылом, оперением, шасси и двигателями, а также массу vchjicII
соответствующих элементов каркаса фюзеляжа:
'"сочл = |0’2 № тгР.ф + ф f %п +
+ Л"3Г у + A«' т0 + A"). (ПЛ4)
Здесь А" - 4 — для низкоплана и Aj - 7 - для высокоплана; /я . +
масса грузов в фюзеляже и самого фюзеляжа; шоП масса otiqiet^.
А'2 ^5; А'з ~ 7, если двигатели на фюзеляже; А’з - 0. если Двигатели «а
крыле; тс у - масса силовой установки; Ад коэффициент, учитываю.
<пий способ крепления переднего колеса; А$ коэффициент, учишваю-
ший способ крепления основных стоек шасси к фюзеляжу.
Суммирование отдельных составляющих массы фюзеляжа и перевод
их в безразмерные величины осуществляется в модуле WESKON.
Определение массы оперения на первом уровне осуществляют в
модуле WESCO. Расчетная формула имеет вид
l(JjO 3 *сх ^н.м^Р^ои8 *г.о «о S96
тг.о - 1СУ II---------------------------J .
c^socas 0,0585 uin х?
^р.в.н t ’
здесь Ac^'°- коэффициент, учитывающий влияние схемы ГО Ап м
коэффициент, учитывающий применение новых материалов; И1 -
расчетная воздушная нагрузка на оперение; \>п площадь оперения;
\ (> - удлинение 10; сг о — относительная толщина ГО;Х5°- стреловид-
ность но передней кромке ГО; н и - масса одного квадратного метра
рулей высоты и направления; D н — площадь рулей высоты и направ-
ления.
Показатель степени ' ~ 0,0197 — 0,00116 Sr о.
Для определения массы оперения на втором уровне используют
соотношение
%n=7Wno+WB.o+wo6’
где о, шв о — масса горизонтально! о и вертикального оперения соот-
ветственно; тоб масса обтекателя.
Значения входящих в формулу величин определяют по слсдую1П>,м
формулам:
тг.о = 1,! 5 [0.11Я к‘♦ c.row х« °'лв
+ 0,32 .л» i в р Р i о 1_ го fr.n р + 1 37 *г.о ‘г.р Р '•«. г-о cos xl ° "в ” cos X» ° "в
+ 2,25 fr.o % г.о со< xur < Р I + 10"3« Л' • 10>л’о 1 lu VhVo- (11.46)
200
www.vokb-la.spb.ru - Самолёт своими руками?
0.15 fg.o*B.oP____+к % о ? +
4АсТ в.о CO!i х“ ° "в °6,Ц ° °"
<• 2.25 А1|ер о^оО J + 10- <(р а 5р(П 47)
,Нсб -53V\.oMr7v (,L48>
це коэффициенты 1.15 и 1,2 учитывают увеличение массы, обусловленное
Особенностями конструкции, технологии,стыками и другими причинами;
- высота вертикального оперения: Л'р н. Л’р в — площади рулей
направления и высоты; г = аср/ин; оср - среднее напряжение в верхней и
нижней панелях оперения, иср ^^раст °сж^(^расг + ^сж)’ ~
расчетные воздушные нагрузки на 1 О и ВО; коэффициенты в формулах
11.46 и 11-47 имеют следующие значения:
Схема оперения ^сх ^п.н ст ^общ ^нер
Ни экорасположеннос
ГО... . . .......... 1,0 1.037 1.0
Г-обрззпая схема ... 1.11 1.15 23
1,0 1,0 1.0
2.5 1,2 135
Массу шасси на первом уровне определяют но формуле
-Ш=АПАС ^4, (П.49)
где Ан — коэффициент, отражающий влияние на массу числа основных
стоек. Ас - коэффициент, отражающий тип силовой установки и диаметр
фюзеляжа.
Вычисления по этой формуле осуществляется в модуле WESSH
Расчеты массы шасси по формулам второго уровня осуществляется
в двух модулях WESNA и WESSH 3.
Модуль сложной структуры WESHA служит для определения массы
основных опор, как суммы масс стоек шасси, створок и колес
Ш1л.ш ~/ик.гя.1н +w,ctb +лт,гл.коп- (11.50)
Масса основных стоек шасси определяется по формуле
^К.Г.Ч.Ш — С мК,ИСТ.кр + WTCJl.Kp) rtCT.Kp +
+ (отст.ф+'«теЛ-ф>«ст.ф1. <П-5,)
гле ф статистический коэффициент; см коэффициенг, учитывающий
1ел,*51ую прочность применяемых материалов; «СТЛ|Р ,нСт.ф- ,пгсл.ф ~
ГИс 10 и масса нодфюжеляжных стоек и тележек: псТ кр /нтел.кр
lHl 1 и масса подкрыльсвых стоек и тележек.
^kicc\ подкрыльевых и подфюзеляжных стоек шст и тележек *нгсл
453_ 14 201
определяют по одним и 1ем же формулам, но с подстановкой
сгвующих значений размеров, нагрузок и коэффициентов:
"ст 5,09 X К X А'сх Ар с Ар н IIOC (1 ) А£т; (П.5Э)
"тел “4,4 X 10 Ар н п?р IIOC (1 — С|) ^кол> (П.53)
где /г?р ,1ОС - расчетная масса самолета при посадке; Асх, Ав с - козфд
циенты, учитывающие схему основных стоек и весовое совершенство
шасси; Ар н - коэффициент распределения нагрузки между основными
стоиками шасси; Ci — относительный вынос основной стойки- //
— 1 ст I
высота стоики; диаметр колеса.
Масса передней опоры определяется в модуле V\ESSH 3. Полная
масса передней опоры шп ш, как и основной, равна сумме ее составляю-
щих’ конструкции створок тств и колес 'нкоя:
"lI.lU "к.П.11! + "сТВ +"кОЯ'
<П.54)
Масса конструкции переднего колеса определяется по формуле:
"к.н.ш “ 0,645 + 2,7 Асх //ст) X
X {1,85 + 2 X 10-3 жр пос |ё2 + 2^у.м (1 ё7) } (11.55)
где i — статистический коэффициент: е2 — относительный вынос перед-
него колеса; я — коэффициент сцепления с грунтом; Лц м - расстояние
от ЦМ самолета до земли; /? - баэа шасси.
Масса колес основной и передней опоры определяется из банка дан-
ных по величине стояночной нагрузки.
Масса створок определяется в модуле WESSTW
" в — АСТВ ("к.ГЛ.Ш + "к.Н.Ш ) + ~ "кОЛ* I
где Аств — статистический коэффициент.
Массу оборудования и снаряжения в первом приближении рассчиты-
вают в модуле WESOB 1 ио формуле
"об.сн “"сам .об+ "п.об
где "сам.о б *1 Ю "ком при *иком < 50 т; (П.57)
"сам об =0,052 - 0,96 X IO'4 ЮкОЧ
при "1ком > 50 т; /»ком - масса коммерческой нагрузки
Относительную массу пассажирского оборудования и снаряжения
определяют по формуле
"П.об^2[1+ОЛ8(А11С-1))Х I
X (0,0325 - 0,4 х 10'5 Л'пас), (П-58)
где Лгпас — число пассажиров, Апс — статистический коэффициент.
На втором уровне масса оборудования и снаряжения уточняется в
соответствии со с унификацией оборудования.
Определение массы топлива в нервом приближении осуществляется
в модуле WESTO Относительную массу топлива Тпт рассчитывают к|
202
(П-60)
(1162)
Г
гае Ср^-и
нии: Рсн
www.vokb-la.spb.ru - Самолёт своими руками?!
относительных масс топлива, необходимого на набор высоты,
; ^йсерский полег, снижение и аэронавигационного запаса топлива
wt -7>?т й + 4-^АНЗ (П 59)
Относительную массу топлива, потребного на набор высоты вычис-
ляют по следующей формуле:
_ _ ср.н.в ^н.вЛ//ЭНЛ1-Н
' VH.B <2их е,)
где ('ж “ средний относительный удельный расход топлива при наборе
высотьн в - средняя тяговооруженносгьпри наборе высоты; Д//эн -
изменение энергетической высоты при наборе высоты; в — скорость
набора высоты; 0[ — угол наклона траектории при взлете; пх — перег-
рузка по оси ОХ.
Относительная масса топлива, расходуемого на крейсерском режиме,
определяется но формуле гр.кр
,йкр =(| /п»-в)(]-е AKPVxp ), (П.61)
где Акр, гр.кр* ^ кр- VkP “ дальность, удельный расход топлива аэроди-
намическое качество и скорость полета на крейсерском режиме соответ-
ственно.
Относительная масса топлива, необходимого при снижении, опреде-
ляется по формуле:
zy.uii_ Ср-сн ^сн ^эн.сн
сн ^пх
— средний относительный удельный расход топлива при сниже-
— средняя тяговооруженность при снижении ЛЯЭИвСМ — изме-
нение энергетической высоты при снижении; VC1I скорость снижения
О2 угол наклона траектории снижения.
Относительная масса навигационного запаса топлива определяется
по формуле
л7АПЗ = 64 гр кр Л°кр
кр кр
Составляющие массы самолета вычисляют по следующим формулам,
а] масса планера
'"пл -'ъР+'^+'^п + '”ш;
б) масса пустого снаряженного самолета
™п.с» "'«пл +'«обсн+'«сУ;
в) масса полезной нагрузки
г) взлетная масса
«20 " П,п.СН + ?«п.н-
(II 63)
203
3. БЛОК РАСЧЕТА
АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
Этот блок предназначен для расчета аэродинамических харакТерИ
тик дозвукового пассажирского самолета на этапе предварительной
проектирования во взлетной, крейсерской и посадочной конфигурации
В нем предусмотрено два уровня определения указанных характеристик
Для расчетов первого уровня предназначены три модули: AFR jq
AER3MnMRR2.
Модуль AFR 10 служит дня определения коэффициента волнового
сопротивления при нулевой подъемной силе
ехс = 1 ’°5 (£х кр + ' Хф + схг) + 0.001, (П.64)
где схкр* схоп, сХф’ коэффициенты сопротивления крыла, оперения,
фюзеляжа гон юл (двигателей, шасси) соответственно
Коэффициент сх находят по формуле
КР- л
~dcxf (П.65)
tkp J эн
где d — коэффициент пропорциональности; г* - коэффициент трения
пластины (по Шлихтингу); = 1 + 3 - коэффициент, учитывающий
влияние на сх относительной толщины крыла; П м x/cos. \ + 0,087IX
КР I
коэффициент, учитывающий влияние сжимаемости поз-
0.36
(Го cos х)‘
-W
Х
"кр
духа; м -
Коэффициент сопротив тения оперения гх находится аналогично:
%1. (It Rcon)’ » (l + 3 ‘’ои) ‘'оп’
(11.66)
где соп наибольшая относительная толщина оперения; Reon — среднее
число Рейнольдса оперения
Коэффициент т/м оперения, учитывающий влияние сжимаемости
воздуха, принимают равным \/cos где — наименьший у горизон-
тального или вертикального оперения угол стреловидности по линии
четверти хорд.
Коэффициент сопротивления фюзеляжа при ЭД1-4 = 2,5 .. 3,0 вычис-
ляют по формуле
е - 0,008 Аф (1+ -12-) |1 + 0.65 М‘ ( ,- 1) 5ф). (П-6?)
1 Аф 4 ф
Аналогично рассчитывается коэффициент сопрот ивлепия гоп доя
(двигателей, шасси и т.п.):
сх = f),009 (1 + ^7 ) 11 + 0.65 М6 - 1) 5Г| ,
Г А ’ ' V X.»
Г 1
204
www.vokb-la.spb.ru - Самолёт своими руками?!
ГЯР
встственно
соответственно удлинение фюзеляжа и гондол; 5ф. 5Г — соот-
относительные площади миделевых сечений фюзеляжа и
1ОНД°-П- .
Сопротивление интерференции учитывается с помощью поправочных
коэффициентов.
В модуле AER 3 VI рассчитывают коэффициенты индукшвиого и
олнового сопротивления, коэффициент полного сопротивления па крей-
” иском режиме» а также на режимах взлета и посадки, коэффициенты
подъемно» силы, аэродинамическое качество а также углы» на которых
эю качество реализуется ,
--1 —с?
где у . - эффективное удлинение крыла; А — 0,00666 т/моП
+ 0.025): 17моп =Vcosxfl/57.3,
..2
где - коэффициент, учитывающий величину М.
Модуль MKR 2 служит для определения значения Мкр
' ^КрО S’|| v^o-
со>(хД/573) ° + 1’28а°*666) - 1’79fl°?33;
LUS lXn.K/57»3) ’
(11.69)
+ (0,002 Хкр +
(П.70)
(П.71)
С = 2 <m0 - "Ц/2)
H PH *^кр V3
В отличие от модулей первого уровня, базирующихся в основном на
эмпирических формулах, алгоритм расчета аэродинамических характе-
ристик второго уровня базируется на результатах:
теории тираничного слоя (для расчетов коэффициентов сопротив-
ления трения);
линейной теории (для расчета коэффициентов подъемной силы);
теории тонкого тела (для расчетов коэффициентов интерференции).
Для расчета коэффициентов сопротивления давления при неизвест-
ных подъемной силе, индуктивном сопротивлении» производных коэффи-
^ептах подъемной силы по углу атаки и некоторых других коэффициен-
гах используют эмпирические и полуэмпирическис формулы.
Ладим краткую характеристику алгоритмов основных модулей
бд°ка аэродинамики второю уровня.
Сложный модуль AER 10 Q служит для определения коэффициентов
ПоДъемной силы и сопротивления самолета, коэффициентов индуктивного
Согфотивления крыла. ГО, фюзеляжа и всего самолета, а также его аэро-
омического качества.
205
Коэффициент подъемной
в общем случае вычисляют по
силы самолета в крейсерской к
формуле
онфигура]
$> =с“ <* - а0),
где =с“ (I + )2 5 +
из.кп КР
г кр
+% * 'Л . о • 7^ >’ * » 1... V.;
v 4Г-О
- угол нулевой подъемной силы самолета
«о" 4- Iе? о+1 у х
с“ >иэ.кр ZKp
- ,ф -
Х Vp (1+ -f^)? *г.п Пг-о Vo («Ог-о + СоЛ;
г.о
аокр> аог.о “ угол нулевой подъемной силы крыла и горизонтального
оперения, dj*, d^o — доли размаха крыла и ГО, занимаемые фюзеляжем;
ао кр - “ ОЛср "" из.кр)
X + *кч>
+
кр'
а0Г.О 0г¥.О °из.г.о
fr^p + д£
*«+**
г.о*
) (
tfKp, i£rх — утлы установки крыла и ГО, задается пользователем; с^3.г.o'-
коэффициент торможения потока в области ГО; т?г о = 1 — с0 — коэффи-
циент эффективности ГО, учитывающий скос потока за крылом: -
производная скоса потока за крылом; Со — угол скоса потока за крылом
при Оф = 0; и со рассчитывают в модуле EPS.
Коэффициенты интерференции к^, ка, Дка и а0 рассчитывают в
модуле ALFOS.
Для расчета крыла и Су горизонтального оперения в модуле
СУАК исиол ьзуют^хТрмул v Джонса0
л = 2 яХ /П73)
У Ч-т?сж*2’ 1
эта формула применима для расчетов Су стреловидных крыльев при
0<МСМкр.
Удлинение крыла (10) и относительного нолупериметра крыла
(ГО) с учетом сжимаемости при заданном числе М вычисляют по фор'
мулам
\ж _W1 -М!, <п-
Vx = | <уА ~ И2 + <8 Хо + хА -М2 +tgx, )+ -^-7 • <П'7>1
206
www.vokb-la.spb.ru - Самолёт своими руками
F Xi - утлы стреловидности крыла (ГО) по передник! кромкам.
fJlC Ятя расчета с" фюзеляжа в модуле CYAFZI используется формула
<ф--<ос 0}3(l-VSM), (П-76)
, 5 - площадь миделевого сечения фюзеляжа.
г 11 д^я расчета производной С>”нос носовой части фюзеляжа используется
юоксимируюшая формула по параметрам подобия Хц/Хд, V1 — М^/Хн,
пк Хц “ удлинение цилиндрической и носовой частей фюзеляжа соот-
ветственно.
Коэффициент лобового сопротивления определяют следующим
образом:
г, -<г„ - (П-77)
г1е г _ коэффициент сопротивления самолета при су = О; сх — коэф-
фициент индуктивного сопротивления.
Значение вычисляют в модуле AER 2 по формуле
б. _ 1,075 (сА. +
хс __ окр
\н.О в о Го ф
где 5МГ - относительная
число мото гондол.
Коэффициенты сопротивления отдельных частей самолета при нуле-
вой подъемной силе вычисляют как сумму коэффициентов сопротивле-
ния давления и сопротивления трения. Коэффициент сопротивления
трения определяются в модуле CXERF для крыла, ГС) и ВО
гХтр = 0.925 к i cf т?с, (П.79)
тс коэффициент, учитывающий величину омываемой поверхности
элемента; т?с — коэффициент, учитывающий толщину элемента: < —
коэффициент сопротивления грсния эквивалентной плоской пластины
cl = cf\ (1-хт); (П.80)
кр Ttx,r.o г о
+ЛЧмг 5мг). (П-78)
площадь миделевого сечения мотогондол .V —
Q - -г—,-—---------— при Re < 0,5 X I06;
'a. Vr?(1 + 0,1 М* )°-,2S
0,455 -
cf = - —----------------г—--------- при Re > 10 ;
_ .^0.175^ (>£ пк;0-Т7ОТ)-
*1 _ координата точки перехода ламинарного пограничного слоя в турбу-
Пситный, определяемая ио отношению RcKp/Re.
Коэффициент сопротивления трения для фюзеляжа и мотошндолы
ОпРеДепяют в модуле CXFRF
Ч₽ " cf (П.81)
Гдс ~ коэффициент, учитывающий переход от плоской пластины к
207
пространственному элементу = 1 + с“° X удлинение фЮЗе 1
мотогондолы; Яом/$м отношение площади омываемой новсрхно<Я1
площади мидслевого сечения. ^Гч *•“
Коэффициент сопротивления давления фюзеляжа и мотогои
принимают равным нулю. 0;,ь
Коэффициент сопротивления давления крыла. ГО и ВО при М
(волнового) определяется в модуле СХВК по формуле
где коэффициент волнового сопротивления крыла ромбовидного
профилй Мкр критическое число М.
Коэффициент индуктивного сопротивления вычисляют по формуле-
*4 =ЧК_Р *кр 1 Чф 5ф *
* Чг.о ^г.°- (П.83)
гдесх. , сх сх — коэффициенты индуктивного 'опротивления
крыла. 'фюзеляжа и соответственно. |
Для определения сх. использую! формулу:
лнз.кр
- !ГГ) Чзкр (IL84)
л Л И is р
где оист — истинный угол атаки крыла; | — коэффициент реализации
подсасывающей силы.
Величину определяют в модуле АКС1:
где £* =
-0,03 М/Мкр + 0,93 при М < Мкр
| (0,9 - Г) М + Г Мкр - 0,91 (Мкр - 1) при М > Мкр1
0,9 1)
ros х0
1 ’
СОЧ Хо МкР
Расчет коэффициента индуктивного сопротивления ГО аналогичен
расчету коэффициента индуктивного сопротивления крыла.
Коэффициент индуктивного сопротивления фюзеляжа рассчиты-
вают в модуле CXIFZ 1
Чф - %
где £ф — коэффициент подсасывающей силы на носовой части фюзе.чяяЧ
или моюгопдолы.
В модуле AER 20 рассчитывают следующие величины
(11-85)
208
www.vokb-la.spb.ru - Самолёт своими
кОэффицис1п отвала поляры
.4 -- (П-86)
Ч-
максимальное значение аэро,1инамического качества Amd4;
допустимое по сваливанию на критических углах атаки значение коэф-
^нтз подъемной силы сЪо11 =<>дсп (М)
с.. ~ сг (°доп_ Go)’ (П.87)
3:10,1
Принято» ’по адсп на 2 меньше угла, соответствующею в
области линейного изменения зависимости^ =f(d).
Критический угол атаки самолета определяют из соотношения
*кр - -2°- (11.88)
--ИЗ-Кр
В модуле AER 4 М рассчитывают коэффициенты подъемной силы и
сопротивления самолета во взлетно-посадочной конфигурации
' мех
сх
Амех
J'6-мех
+ fry
мех
-сг + cY + ;
•*< Лмех
-Ac* Jkp— к кь\
-1мсх J сеч v
?ссч
П х
Л' - v и с 6 S
-гсеч /=~1 /мех >мех мех
(11.89)
Суммирование производится но секциям механизации (закрылков)
Максимальное число секций в закрылках п - 3
= ----- ---*-----------, (П.90)
< 2 + 7»+ 5/5,1—-—)»
wi cos х© s
где S и 5, — соответственно площади крыла в плане с убранной и выпу-
щенной механизацией (закрылками)» Xors — стреловидность крыла по
0,5 хорд, 5мех - угол отклонения механизации.
Коэффициенты 7сс и кв учитывают геометрические параметры меха-
низации (расположение закрылков но размаху и 'влияние удлинения
крыла на несущие свойства закрылков).
Для расчета коэффициента максимальной подъемной силы самолега
На режиме взлета и посадки использую! зависимости*
1 max вал C-Vinax ^€-vmax ^закР‘
(^г )закр • <П9,>
них JdKP -закр -гпахзакр
1де — коэффициент максимальной подъемной силы самолета без
Вьпц1цеййой механизации; Zk приращение коэффициента
> закр
209
(П.92)
самолета
(П.93)
подъемной силы самолета при выпуске механизации; Ас
уменьшение коэффициента максимальной подъемной силы ’щжв?®*’
закрылков ™
с«
J'max эакр ^^гпэх^сеч сcos Xos-
Joeq
Коэффициент, учитывающий приращение сопротивления
при выпуске закрылков, определяют следующим образом:
л
^закр = j Ji %акЛ - О *Х’
где кх = (-0.45 if1 + 1.45) /закр; ____
Влияние экранного эффекта поверхности земли на аэродинамические
характеристики убывают в модуле GROUND, если относительная высота
г А
полета самолета над поверхностью земли h = — <2 ,
Суз =СУ мех +ЛЧ; 0,94>
С„ - + -Ез.; (П 95)
хо Лзакр лХ*
где Лс = -0,1563 xh + 0,25;
Х* = Х(1- ^(X2,23-^ +2),
or?
X* — эффективное удлинение крыла у поверхности земли.
После расчета поляр во взлетной и посадочной конфигурациях опре-
• деляют данные, необходимые для работы блока летпо-техничсских харак-
теристик:
cxQ вэл = ГХС -j4cyc’
^тах %п1ах - 2 J
су = = 6° су& = <р 30/я;
(П.96)
^ф-О Ло = 0
Результатом работы блока аэродинамики является получение:
массивов значений коэффициентов подъемной силы и сопротивле-
ния на взлете, посадке и в крейсерском полете;
массивов значений аэродинамического качества при взлете, посадке11
крейсерском полете;
массивов коэффициенгов профильного, волнового, индуктивного
сопротивления самолета в целом, а также отдельных его агрегатов;
массивов коэффициентов сопротивления при нулевой подъемной
силе;
массивов коэффициентов интерференции.
210
www.vokb-la.spb.ru - Самолёт своими
(П.97)
(П.100)
(П-101)
- 0,1 б£’5 V?i Sp3 £4;
ПОК ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК
силовой УСТАНОВКИ
^док силовой установки предназначен для расчета ее массовых,
еТрнческих. высотно-скоростных и дроссельных характеристик
^заданным параметрам двигателя: тяге Ро; степени двухконтурности
110 степени сжатия вентилятора яв; степени сжатия компрессора
^мперзПТ^ газа пеРец турбиной Т3 и некоторым другим параметрам
бактеризующим особенности конструкции и размещения двигателей на
сам^т|еге‘ Бяок имеет двухуровневую структуру.
L Для расчетов на первом уровне используют ряд простых модулей»
предназначенных для определения отдельных характеристик двигателей и
силовой установки в целом. Рассмотрим основные из них-
Модуяь STL НМ предназначен для определения относительной массы
силовой установки
mcV=*i (1+0,11) +
дв
где «дв - общее число установленных двигателей; мдв р — число ревер-
сируемых двигателей: bi статистические коэффициенты.
В свою очередь, величина удв определяется как
7дв " т дв Лм ’ (П.98)
где 7*в коэффициент, учитывающий степень двухконтурности двига-
теля коэффициент, учитывающий степень сжатия компрессора;
кг — коэффициент, учитывающий величину Г3; км — коэффициент,
учитывающий перспективные материалы.
Величину у *в рассчитывают по формуле
7*лв - 0,215—0,0275 т + 0.00823 т1’5. (П.99)
Модули SIL 12 М и SIL 13 М предназначены для определения диа-
метра и длины двигателя
^дв
~ 0.072 *<7В D.
В j
1716 ’А’. <«?з. ^4 и к статистические коэффициоггы, зависящие от
п* и Г3: — секундный расход воздуха.
Модуль SIL 14 М служит для определения относительной массы
силовой установки самолета в целом, включая вспомогательную СУ,
если она имеется, и топливную систему
m*y =wcy +л?7всУ +^тс, (П.102)
гДе wBcy _ относительная масса вспомогательной СУ; тет с — относитель-
Нал м«юса топливной системы;
"Ьсу = 0,5 X 10-3РО1дв л»™ + JOO)/rzz0> (П.ЮЗ)
о 1 дв ~ тяга одного дви! ателя ВСУ; ~ количество двигателей
ILR’
211
^Т.с l^*- ^ксс ^Н.Т ’ l wo
где wT — масса располагаемого топлива на
топлива; А'кес, А'м б. Ан т — коэффициенты,
топливных баков,
^кес “wt»*(Pt ^pacu)> ^м.б “
— 1 + (^т.кб
самолете; рт - нлотиость
отражающие влияние типа
где Vpacn общий объем топливных баков;
мягких баках.
Блок силовой установки при расчетах ж ___
в себя ряд модулей простой и сложной структуры. Модуль GAMMa
назначен для определения удельной массы СУ и массы сухого двигателя
Тдв = АРо1П + fo ' +В. (П.105)
VT.M.6 - объем топлива в
второго уровня включает
V'TMA МПЛИШ /*»»«»•-
где А
_ 0.000169 » 0,00014 Ц* - 3)
(П.106)
В
- (1+0,013 лсх ,и2) + +0.0842J X
В
X
(I —
0.0686
(11.107)
Асх - коэффициент, учитывающий схему двигателя
Масса ТРДД представляю! в виде суммы масс первого и второго
контуров
,ИДВ ~т1 + П12-
Массу газогенераторам?! определяют как
пц - (600 + 50 (п* 3)1 £>? + 343 D2, + 60. (П Ю8)
Массу второго контура представляют в виде суммы
т2 = твен + ттур + "кор + '"до б’ 09
где /явен, /nTvp — соответственно масса вентилятора и дополнительных
ступеней турбины; ткор. 'Лцоб - масса обечайки (корпуса) второго
контура, добавочных узлов и агрегатов.
Массу вентилятора определяют в зависимости от тиаметра Рз и
степени повышения давления в вентиляторе пв
(П.1Ю)
"'вен = >00 ± п?.
15 ________________________________________________
Дополнительную массу турбины, необходимую для вращения венти
лятора, рассчитывают но формуле:
'Чур ”0,013Асх /н ?/,чен I
Массу корпуса второю контура определяют следующим образом:
D3 (П.П'2)
"'кор J + т
212
www.vokb-la.spb.ru - Самолёт своими рук
I Массу добавочных узлов и агрегатов второй ступени вычисляют
.441^. (П.113)
”дГ>О
yoaynb^WSP определяет массу вспомогательных агрегатов СУ
масса гондол симметрично расположенных двигателей
//V с-а ~ к сх i И-?р 1\сл Русл ( уел +
+ 0.25 \Л уел ”дв) + 235 йу-сл — 8 X уСЛ —
_ цз + £сч, Ли дв х ю хуся ДуСЛ]; (11.114)
масса реверсов и глушителей симметрично расположенных двига-
г^лей
fn - 0.75 (8.5 X 1(Г 3 Ро I + 039 X103 /^в +
+ 21т + 53) и дв р + 0,0477 тдв п яв; (П И 5)
мзсса гондолы килевого двигателя
/и, к — АСХ] [ Ху ед £)уСЛ (5 ХуСЛ + 0.25 >/ХуСЛ н£да) +
+ 235 /\.сл — 1 ХуСЛ — 113 + A'CXj /’о 1 дв
X НТ2 \сл %l; (11.116)
масса реверса и глушителя килевого двигателя
"|.г.к - 0,75 (8,5 X IO"3 PQt дв + 39 X Ю’3 тдв +
+ 21 w+ 53) + 0,0447 hjb; (11.117)
масса установки килевого двигателя
«уст.к.дв = °’3 "W (П ,18)
масса самолетных arpci атов
тс а - [ 0,017 '2-0,071 ]1 '2 X 10*; (П.119)
масса Ю1ЫИВНОЙ системы
wT.c - (0,0127 — 0,017 X 10-6 1.14Й,. тах гл0 ) X
X (0.68+0,27 к сх< ) 1.14m, m0 ; (П.120)
масса прочих arpci атов силовой установки
= А сх, (10 Ч'1 - 160). (П.121)
В приведенных формулах ХуСЛ и Лу.с11 - условные удлинение и диа-
Мс+Р гондолы, Лсх . Асч . icx . А'сх . кс’ статистические коэффициент
™- Учитывающие особенности СУ; »дв.р*- число реверсируемых двига-
тИей. ' 1
Выссню-скоростные характеристики ТРДД определяются в модуле
X- Дт я определения стартового удельного расхода ср используют
Формулу:
( _ 0-68 (П.122)
И 0.5 25 \fn? '
213
Для расчета относительной тяги и о i но стельного расход
зависимости от высоты и скорости полета используют эмпиОПЗ|1!и* ь
зависимости- Предусмотрена также возможность задания пыспМЧСС1С1*
ростных характеристик двигателей-прототипов с помощью массив1^^Н
5. БЛОК КОМПОНОВКИ И ЦЕНТРОВКИ
В блоке компоновки определяют взаимное положение крыла А
ляжа, горизонтального и вертикального оперения, стоек шасси ть
лей из условия обеспечения необходимых летных и эксплуатацио/3^
характеристик самолета. Эта задача сводится к решению системы
нений, в результате чего определяют следующие координаты: цент *
масс группы шасси, центра масс самолета, центра масс пустого само дта
фокуса самолета, расположения главной стойки шасси, расположения
носка крыла относительно носка фюзеляжа, а также высоту шасси Б
состоит из 1рунпы .модулей. В модуле FOKUSF рассшпывают координаты
фокуса фюзеляжа в системе координат фюзеляжа. Принято, что фокус
фюзеляжа расположен на расстоянии, равном 2/3 длины носовой части
фюзеляжа
хл.ф = 0,667 . (П.123)
В модуле FOKUSK определяют положение фокуса крыла в система
координат крыла по следующей формуле:
х> - xF +0,033 (X tgXi/4 +
кр проф !
+ 2—1) 5—LL, (П.124)
П + 1 г?
1 дехг — фокус профиля со средней толщиной крыла.
Приф
Фокус профиля определяют по формуле
- _ I 0.5 (с„ Г, V
--------I----------
' Про Ф 4
где <?0 — относительная толщина крыла и корне; Cj огносительная тол-
щина крыла на конце.
Координату фокуса крыла относительно носка базового крыла нах
дя1 следующим образом:
^к _ 2±L+ 2) lg xg + 7- h
^к b (ч + 1) ^кр А
В модуле FOKUSG определяют координаты фокуса ГО в
координат фюзеляжа по формулам, аналогичным (П.124) и (. '
Координату фокуса ГО в системе координат фюзеляжаАлг о
следующим образом:
для нормальной схемы
(П-125)
(П 126)
214
www.vokb-la.spb.ru - Самолёт своими
рука
и?
1т. д п + 2)
6 (ПГ.О+ 1)
+V °*.г°;
цдя 1 -образного оперения
+ Ар°о Ч Ховс + б'0°Кг.о +
(П 127)
(И. 128)
0.5 I- ф.
масс ГО и ВО приняты лежащими на 0,5 САХ ГО и ВО соот-
Цснтр масс крыла и топлива с топливной системой находится
Г fcrA° + /f r0 ° 4 2) tg XpI °
' ^r.o A 6 (nf o + 1)
где ^зВл° ~ относительная хорда заднего лонжерона ВО; ifjji ~~ относи-
тепьная хорда по заднему лонжерону ГО; /г о - размах ГО; -
СЧХГО.
В модуле КОМ 101 рассчитывают координаты центров масс фюзеля-
жа, крыла. ГО. ВО. передней стойки шасси и СУ.
Для центра масс фюзеляжа и фюзеляжных грузов приближенно
принято
Л lF М “
Центры
встствснно.
на 0,5 САХ крыла. Принимают, что ЦМ каждой мотогондолы с двига-
нием расположен на 0.6 ее длины. При расположении двигателей на кры-
ле координаты их центра масс рассчитывают по следующей формуле
хи?мс.уч
-£м°г + 0,6 Лм Г. _ _ (П.129)
где п^Р- число двигателей па крыле; -з - относительные коор-
динаты крыльевых двигателей; Z,FM г вынос носка мотогондолы; /мГ-
Жйина мотогондолы.
Координаты центра масс СУ в случае ее расположения на фюзеляже
определяют по следующим соотношениям
ф ~ ^*м.г +0’6 L м г. если п j£B — -
^ф у м.г + / м<г/6,ссли <- 3
i ф- '-м.г + 0,6 £мГ, если Н&-4
/ ф -0,6 /-м.г.,если ид| -1,
где _ число двигателей на фюзеляже.
Координаты центра масс крыла в системе координаг крыла определя-
101 по формуле
лцКм = 0’5 А + АЛ ’
r;ic л д _ координата САХ крыла.
л-Ф
Ц.Мс.у
(ПЛ 30)
м.г
(П 131)
215
www.vokb-la.spb.ru - Самолёт своими
Координаты центра масс 10 я системе координат фюзеляжа находя,
по следующим формулам.
t _ м-о + tV + 0.5 Ьгд° - для нормальной схемы
Ф ГО.
7ф_/,ов-п {1 7»;p+ftB,oigX3B.f
+ Х-Г.о +05 Ь\° - для Т-образного оперения.
4 (П.132)
стреловидность ио линии зад-
ф
цмг.о
Положение центра масс крыльевой группы находятся по формуле
- ("гкр * /лт> х ц.м * отс.у АЦ &с.у
К* ’
ц.м
Здесь л \*° - координата С АХ ГО;
него лонжерона ВО.
Координата центра масс передней опоры определяется так:
\tnoc “^и.ф- (П.133)
Координата ЦМ ВО в системе координат фюзеляжа вычисляю! по фор.
муле И
^н.о" ' Ф - ° + Л*А° + °’5 *ВА° (П-134)
В модуле КОМ 102 рассчитывают массы и координаты ЦМ компоно-
вочных групп фюзеляжа и крыла в соотетствии с резудыатами, получен-
ными в модуле КОМ 101 ятя двух вариантов загрузки:
при полной взлетной массе;
В модуле КОМ 103 решают собственно задачи компоновки и центров-
ан самолета. В начале решается система линейных уравнений, позволяю-
щая определигь семь основных компоновочных параметров самолета.
Идя этого используется стандартная подпрограмма решения линейных
у-рэвттений типа Лх - В. Ниже приводятся основные уравнения компонов-
ан сзмолсза
»1,J1 I-Ф 4 »1НОС 1-Ф
Ф - 111 -*!П.ГЛ Ш А1И.НОС ГП 143)
/«Г£ + \ )
где Лм in ~ цен,Р масс гРУппы шасси в системе координат фюзеляжа;
^^гл’ хш нос “ Центры масс соответственно основных и носовых стоек
шасси в системе фюзеляжа; лт™, - массы основных и передних
няя пустого снаряженного самолета. ; 1
Определяют j
собственную массу фюзеляжной труппы
- ™ф + «'ком + "'сам.об + "Loci <11.135)
полную массу пустой фюзеляжной группы, включая массу силовой
установки па фюзеляже и массу оперения
/нФ - т$ +/ис$ (11.136)
собственную массу пустой фюзеляжной группы
?мф_нуст “ #/,ф + /нсам.об + wn.o6* (П-1-^Д
стоек шасси;
X Ф + W "* +• ' [НОС 1 д- Ф
_ fn * Й-М^ *Л Ll-M 1 Ш III J мл» (11.1 -4 d)
м с г? Ф + тк » + w”}50
где tM с центр масс самолета относительно носка фюзеляжа; хк -
координата группы крыла относительно носка фюзеляжа;
v _ ”/?уит у4.фдуст * гппус। * *м.пусР + ** w 111е) xjj.uj
MCnycr ^ст + <уст + + WHOC
(П. 145)
м с — центр масс пустого самолета относительно носка фюзеляжа;
л * = 2.Ф &м-Ф ‘>г-о ° - сЯ) 5г о х^г.о + с"к%
г>ф5м.ф + егг о <! - «•’'» sr.o + c rK-S i<V
(11.146)
полную массу пустой фюзеляжной группы, включая установки и оперения. массу силопий
mnU - "Ф*пуст + "t-y + П1гФо + "'ВФО- (11 138)
Затем рассчитывают массу крыяьевой группы
'"К=ткр + '«сКу * "'т (И. 139)
и массу крыльевой группы без топлива
wnycT='«Kp+'«cK? (П.140)
г тс .гг - фокус самолета; с? . с" - производные коэффиниен-
ТОП подъемной силы по углу атаки для крыла, фюзеляжа, I О соответ-
ственно; к З1. тФ — фокусы фюзеляжа и 1 О в системе фюзеляжа;
1 ф 1 г.о
фокус крыла в системе крыла; Л’м.ф — площадь миделсвого сече-
Нин фюзеляжа; 5К 5ГО - площади крыла и ГО; е° — производная угла
скоса потока за крылом но углу атаки.
Условие продольной статической устойчивости на основном режиме
полета позволяет записать следующее уравнение:
(11.147)
Координату центра масс фюзеляжной группы определяют но формуле
Л-Фм -22^ Л Ц М * А1имГлд + "?нФо xn%iB.Q__HT 141)
гнФ
216
Л>с -лм.с
1 де tn у запас продольной устойчивости..
Условие неопрокидывания на хвост на режимах вхлета и посадки:
’ ^-Cnvc, Лш ^«пос- (”..14К)
Дс ''иос - посадочный угол атаки самолета; Лш высота шасси.
<53
15
217
Следующие уравнения позволяют определить высоту шасси Л
грех условий: 113
а) из условия незадевания ВПП хвостом фюзеляжа при вздето
посадке: и
ш ** Ф + 0 ф — хк — гл) tg о|10С (ВЗд);
(П 149)
б) из условия незадевания ВПП консолью крыла при посадке с мак
симально допустимым креном
Лш > —-коп- |tgyJlon- IR V]- ftK°n tg7noll +
£ л
+ (*к + ^!) °пос +^доп» (П.149)
в) из условия незадевания ВПП мотогондолой двигателя при посадке
с максимально допустимым креном
аш > “м *- <~ *«°я 11₽ Тцоп tRv]+л„ип + ;
< Ч,.г + «доп + I -Ц ' + ЛМ1. - /.м““г ] X ]
Х tg (а>ак« + «пос) -7 tg V. (П 149")
Здесь Лкоя — колея шасси; тдоП ~ допустимый угол крена при посадке;
V — угол поперечного V крыла; хк — координата концевой хорды крыла;
Z>! — корневая хорда крыла; 6ДОП - допустимый зазор на посадке и
взлете; ~м г — максимальная относительная координата мотогондолы;
Лпи I — высота пилона СУ; /9М г - диаметр мотогондолы; - вынос
мотогондолы относительно передней кромки крыла; ^эакя — угол уста-
новки крыла.
Система приведенных уравнений решается трижды, для случая
а),б),в).
Далее рассчитывают относительную координату фокуса самолета
р , К А
*А
(П 150)
Определяю! центровку пустого самолета
- мпуст ~ Лк ~ ЛЛ
мгуст ЛА
(П-151)
Проверяют условие обеспечения допустимой предельно задней центров*^
х„ >~F (П.132)
мП.з ‘ с * min
При этом величина минимального запаса продольной с этической устой-
чивости . задается пользователем.
гпнп
В модуле также определяется плечо горизонтальною оперения Лг.о-
218
www.vokb-Ia.spb.ru - Самолёт своими руками?!
6 БЛОК ДИНАМИКИ ПОЛЕТА
Блок динамики полета включает в себя два подблока, в которых
рассчитываются взлетно-посадочные и летно-тсхническис характеристики
самолета. Рассмотрим краткую характеристику названных подбло-
ков [331.
Блок расчета взлетно-посадочных характеристик
Блок предназначен для расчет параметров траекторий взлета, набора
высоты 400 м и посадки. Блок состоит из модулей расчет взлетной и
посадочной дистанций, скорости отрыва, посадочной скороеш. дистан-
ции разбега и пробега, сбалансированной длины ВПП и концевой полосы
безопасности, а также некоторых других параметров
Модуль SLV 01 предназначен для определения скорости срыва
Vc_ - 3,6 У . (11.153)
^max
Моду ль SLV 02 определяет скорость отрыва
Уотр - (П.154)
где VR скорость подъема, передней стойки шасси.
В соответствии с 1ЫГС скорость \7^ должна бьиь не меньше гой, при
которой в случае отказа двигателя обеспечивается балансировка само-
лета только аэродинамическими рулями Поэтому’ она определяется из
условия:
V/г = max { 1,05 Vcp; 1,05 Vrain эв ; 1,05 Vrain ,р) » (П.155)
где vmin эв’ vniin эр минимальные эволюшвпые скорости в воздухе
и на земле соответственно.
Безопасную скорость набора высоты рассчитывают в модуле SLV 03
Принимают, что эта величина па 20 % превышает скорость срыва для
взлетной конфигурации самолета
V.w - 1.2Vcp. (П.156)
Модуль SLP 01 рассчитывает скорость захода на посадку. В соответ-
ствии с ПЛГС скорость захода на посадку V3 п должна быть нс менее
13 Vcp и не менее минимальной зволютивной скорости на посадке
V3.11 — max Vcp ;V|I)in .JKJ . (П-157)
Модуль SLV 04 определяет дистанцию разбега. Рассматривают движе-
те самолета в вертикальной плоскости без учета вращения его вокруг
ЦМ. Используют скоростную chcicmv координат. Уравнения движения
самолета по земле записываются в виде:
(Fcos(a + ^дв) V-Л/);
219
=. у Y_ c pV* 5 - У - c S •
dt ' л cx 2 лкрг Ч- 2 >>кр.
-V-m.? /’sin (a+ У.
Здесь ft - угол атаки; ^дв угол установки двигателей:
циен1 трения.
f - коэффи-
Уравнение интегрирую! методом Рунге — Кутта* При этом принимают
что a-a€T до V < \-^ и a~ct при V >
Расчет дистанции набора высоты осуществляется в модуле SLV 0$
При наборе движение описывается системой дифференциальных уравне-
ний
dV
d7
do
dr
= (Р cos (о + ^дв) -A- nig sin 0);
- 1 (Р sin (g + ^on) f Y - mg cos 0);
m \
(П.159)
- = Vsin0. —“ = VcosO, 0-a+0=const.
dr dr
Постоянную величину угла тангажа 0 выбирают так, чтобы на высоте
Н- 10,7 м скорость полета равнялась безопасной скорости полета V2.
Выбор необходимого угла б осуществляется путем перебора с опре-
деленным шагом значений от Я = %Гр до значения, соответствующего
скорости в конце траектории < V2 .
Коэффициент сЛ определяют но формуле
сх =сх (Л/0 (ПЛ60)
Здесь (г. Н) — приращение коэффицента сопротивления самолета
при полностью выпушенном шасси.
Модуль SLV 06 рассчитывает характеристики набора высоты с
уборкой шасси. Движение самолета описывается систетой (П.159). Пред-
пола1ают, что на этом этане полета угол тангажа <9 постоянен и равен
углу тангажа ни высоте 10.7 м, с которой этот этан начинаемся. В резуль-
тат решения системы уравнений (П.159) получают зависимости V (Z)
Характеристики набора высо1ы с момента начала уборки механиза-
ции (120 м) рассчитывают в модуле SLV 07. До высоты начала уборки
механизации крыла полет обычно происходит с постоянной скоростью,
поэтому' угол атаки а определяют из условия dV'dt - 0. Полученное
уравнение
Р cos (G + ^дв ) + mg sjn 0 - 0
решается методом деления отрезка пополам Верхний предел интегрирО"
в а ни я второго, третьего и четвертого уравнений системы (П 159) опре-
деляется условием дос жжения высоты,равной 120 м.
В модуле SLV 08 осуществляется расчет набора безопасной высоты
400 м. Этот этап взлета начинается с высоты 120 м, на которой выполня-
220
www.vokb-la.spb.ru - Самолёт своими
ется уборка механизации крыла и осуществляется разгон самолета до
скорости V4 . равной или большей 1,3 V . Величину V подсчитывают
для полетной конфигурации самолета. Обычно V4 - скорость набора
высоты но маршруту. Предполагается, что этот этап набора происходит
при постоянном угле тангажа При решении системы (П.159) коэффи-
циент сх опредеделястся по формуле
с -сх (a) +At\
А мех
Модуль SLP 02 рассчитывает траекторию планирования, выравнива-
ния и посадочной скорости. Предполагают, что снижение по глиссаде
происходит с постоянной скоростью V3 п. Дистанцию планирования
вычисляют по формуле:
LJV(l = (15- Н}ЦоО,.„. (11.161)
Дистанция планирования с высоты 15 м до высоты начала выравни-
вания //выр равна:
''ПЛ - (^выР-15)»80гл^пл-°гл- 01-162)
Предполагают, что на этапе выравнивания полет выполняется с пос-
тоянным коэффициентом - 0,765 гутах -
Высоту начала выравнивания и дистанцию выравнивания определяют
в результате решения системы уравнений
</V 1 if, V Л. X/ - Л
— - — (Р-Х W7£sm0); — = Vsm0:
dt т ' 0 7 dt
— - —L (Y mgcosOY — = Vcos0. (П.163)
dt mY ' dt 4
Интегрирование проводят %при начальных условиях Vo = V3 п; 0 =
= 0ГЛ ; HQ = 0: - 0 до момента /к. когда скорость V = Vsin 6 будет
равна 1,5 м/с. Высота начала выравнивания //выр -Н (/к) - Яст. посадоч-
ная скорость VIIOC = V (гк ). Здесь ZZCT — высота ЦМ самолета над землей
на стоянке; Р — тяга малого газа.
Модуль SLP 053 рассчитывает дистанцию пробега. Движение самолета
но ВПП описывается системой дифференциальных уравнений
JV _ 1
dt ш
(Р- X - А/);
— - V: N = mg- У,
dt
(И 164)
где аэродинамические силы X и У рассчитывают при аст. Верхний предел
интегрирования определяется условием полной остановки самолета.
Модуль используется при расчете длины послепосадочного пробега и
пробега при прерванном вхзетс.
Модуль SLV 09 определяет дистанцию прерванного взлета как сумму
Дистанций разбега до скорости отказа двигателя / разб дистанции
Разбега до скорости принятия решения (разбега с одним отказавшим
221
дви!а1слем) /-„азб „ ; и дистанции пробега до полной остановки <«.„
лета /-ПрО(>
^пр.взл “ разб. п + ^'разб-м - 1 + ^'нроб' (П 165)
Предполагаю!, то время, необходимое на обнаружение отказа дди
гателя, перевод двигателей на режим малого газа (время реакции пилога)
составляет 3 с.
Модуль SLV 10 рассчитывает дистанцию продолженного взлета как
сумму дистанции разбега до скорости отказа двигателей /раэб
дистанции разбега с одним отказавшим двигателем до скорости отрыва
Аразб п 1 и дистанции набора высоты 10,7 м /Ч1аб
L взл.пр “ раэб.л + ^разб.л - 1 + 7 наб- (П 166)
В модуле SLV 11 определяю! полную взлетную дистанцию как сумму
взлетной дистанции ^В2Л, дистанции набора высоты с уборкой шасси
^уб.ш' Дистанции набора высоты 120 м£|2о и дистанции набора высоты
400 м Z/4оо
ВЗЛ.П — 7" нзл +^*уб-Ш 120’*' 7 400- (П 167)
Модуль SLP 04 рассчитывает посадочную дистанцию. Она представляет
собой сумму дистанции послепосадочного пробега £п дистанции
выравнивания /.выр и дистанции планирования с высоты 15 м до высоты
начала выравнивания Л]И
пос “ 7- проб + выр + 7/пл- П.168)
В этом же модуле рассчи!ывают полную в зле i ну ю дистанцию.
Расчет сбалансированной длины разбега и сбалансированной тины
ВПП осуществляется в модуле SLV 13
^раэб (VOTK) -L
up с рн взл (V0TK), (П-169)
где VCTK — скорость движения самолета по ВПП в момент отказа двша-
теля: (vOtk) — дистанция разбега до скорости отрыва при отказе
двигателя.
Моду ib SLV 14 определяет необходимую длину ВПП и необходимую
суммарную длину ВПП + КПБ
Z ВИП = тах {^разб. сб + ^ВУв); 1 67 z-nocj > (П-170)
Z ВИП + КПБ = |Пах { ^нэл.сб» 2^bnoeJ , (П-171)
где ^разб.сб ~ сбалансированная длина разбега; /^ув — длина воздуш-
ного участка взлетной дистанции; £пос - посадочнаядистанция; / вэл.сб “
сбалансированная длина взлетной дистанции.
Блок расчета летно-технических характеристик
Блок предназначен для расчета профиля полета и основных лстно-
технических характеристик самолета, а также потребного для полета на
заданную дальность запаса топлива.
222
www.vokb-la.spb.ru - Самолёт своими
В расчетных алгоритмах приняты следующие допущения:
самолет является материальной точкой;
земля - плоская, гравитационное поле земли постоянно;
движение воздушных масс относительно земли нс учитывается;
полет происходит по пологим траекториям, угол наклона траектории на отдель-
ных участках изменяется незначительно;
утлы агаки из рассматриваемых режимах полета малы и можно принять
р cos о *= Р:' Р sin л * 0;
при расчетах ЛТХ на участках разгона и набора высоты изменением массы
самолета пренебрегаем - 0,98 ;
при переходе с одного участка траектории не другой считают, что угол наклона
траектории меняется мгновенно.
Профиль полета самолета формируется из следуютдех участков:
1) разгон па высоте Н - 0 от безопасной скорости взлега V, до наивыгпдиейшей
скорости набора высоты \ н н;
2) пеустзновившийся набор высоты до крейсерской высоты полета по опти-
мальной программе Н (V), реализующей траекторию минимального расхода топ-
лива;
3) разгон на высоте крейсерского полета Z/Kp от скорости набора до крей-
серской скорости;
4) установившийся крейсерский полет со скоростью VKp на высоте Якр до
израсходования располагаемого запаса топлива;
5) снижение и высоты крейсерского полета до // = 400 м.
П блоке рассчи 1ывают следующие петно-тсхническис характеристики:
на 1-м и 3-м участках: время полета гразг (V), дальность начета 1~ра31. (V).
расход топлива т r г (V);
на 2-м участке: нремя полита гна6 (ZZ), дальность полета / 11аб ОТ, расход
топлива "'тнаб ’ ,|аивыгп*,,сйшая скорое ib набора VI( в (Я);
на 4-м участке: дальность полета А кр (шт). время полета / кр;
па S-м участке: дальность попела (Я).
Кроме того, рассчитываются /акне интегральные характеристики про^жля
полета как суммарное время полега и суммарная дальность полета.
JJX на участках разгона и набора высоты рассчитывают методом энергетичес-
ких высот с использованием упрошенного метода тяг Жуковского.
Гасчсгныс соотношения, используемые в модулях, имеют вид
3600 V*
^эк
Г
^30
*у
х
* пх
Р (V. //) Y
рп?
(ILI72)
_ ^эк 1
Hyo Vr
х Х Хс ’г.п Г.п qS
Интегрирование выражений д/Щ времени, расхода топлива и дальности полета
производится модифицированным методом Эйлера. Пределы интегрирования рас-
считывают по сле;1уюшим соотношениям
I- участок
№ =. У’ г/1 Л VHB 9 0 2^ "эк (Н=0) 2? (11.173)
2-Й участок
Л! ~ ^ЭК’ ~^кр * v?i.b ^кр* . 2к (11.174)
223
Э-й участок
•111 = //И - //«И - //
ЭО "эк • "эк " кр
(П.175)
2g '
Определим наивыгоднейшую скорость набора высоты
PlV.//)c (¥.Я)|
v. u (H — агЕ min — -------t---- I
IlB * 3600 V* (V. Н > IП - const (ПЛ 7б>
Выражение (П.176) определяет программу набора высоты, близкую к опти-
мальной, дли рассматриваемого класса самолетов.
При расчете иаивыгодиейшей скорости по выражению (П.176) шаг по энерге-
тической высоте (при интегрировании на 2-м участке) нс является независимым и
вычисляется следующим образом. Дчя текущей высоты (шаг но высоте задастся)
определяют нам выгоднейшую скорость ио выражению (11176), затем вычисляют
текущую энергетическую высоту1
"э, - lfi * -2я~ (П177)
и шаг по энергетической высоте
^'з~H3j - ИЭ; _ у (П.178)
Дальние гь и продолжительность крейсерского полета определяют но следующим
соотношениям
L -36V "> — — I -'“Р -
КР ’ КР''^Рк Хр КР VkP ’ Я
*кР ; С,.кр « - JS. : И
fPKp ^кр’ укр>лкр); якр- р1<Р ; ^Kp^jr ~ ’ (11-179)
к гтах Лкр
Чф. -«о - '%в; '«крк -"'кр0 - '%асч- Ч
Уравнение для дальности полета интегрируют модифицированным методом
Эйлера.
Дальность снижения рассчитывают но выражениям
I сн ^шах ( эо ^Э1<? ’
V2 V2
Язо“Якп + ; Нэк =0>4+ ?—
КР 2^ JK 2#
(11 ISO)
Характеристики установившегося пори зонталыю г о полета находят по следую-
щим соотношениям:
min ” ,,|аА { 4 min, fc3’KOII’v * * * *min2 •
''max ' тп*п {Ушах* (Акр) vniax. ^Р' •
Snin, V -
- ДОН
vmin, = <v- "> - x <a- v •«1= o}l
a > a jr
/0 P~ • ",ач
Чпэь - •• (H.18D
max, > p{/l ; S
viiia4, - ai-: {(Pp(V.W) Л («.
a “Ат»х
224
"'," ™и-1» Ч>Ь.,1. - Самое,с„им11
V* - так {v \ро I V. ну- X (а. V, H)U .
> max t J
Кроме теоретического потолка ЯсТ определяют практический потолок
//мп -- (vp (/,) ' 5 м/с}- (П 182)
ПР < Лтах »
7, БЛОК ЭКОНОМИКИ
Блок предназначен для расчета экономической эффективности раз-
рабагываемых проектов самолетов.
Входными параметрами блока являются:
основные летно-технические и взлетно-посадочные характеристики
анализируемых самолетов;
основные технико-экономические характеристики эксплуатации
(сроки амортизации планера и двигателя, число ремонтов и т.н.);
основные характеристики 1ранспортно1ю процесса, подлежащего
выполнению данным самолетом или их совокупностью;
объективные условия эксплуатации (существующие цены на топливо,
объем и условия перевозок и т.д.).
Основными выхо;щыми параметрами являются:
величина приведенной себестоимости ;
величины составляющих себестоимости летного часа.
Блок реализован в виде сложного модуля BCF 1 , в отдельных под-
прей раммах которого вычисляются прямые и косвенные эксплуатацион-
ные расходы, а также затраты на один летный час.
В основу ал i о ритмов положена методика экономической оценки гражданских
самолетов.
Основная расчетная формула для определения приведенной себестоимости
тонно-километра имеет вид
° нрив ~~с *скап. в* * (П.183)
где а собственно себестоимость т км; якал н приведенные капизальныс вложе-
ния.
В свою очередь, величину а рассчитывают по формуле
с =-----— • (П.184)
тком ' рейс *3
где .4 - прямые расходы на одни летный час; Л косвенные расходы на один летный
час; тмм масса коммерческой нагрузки, к3 - коэффициент загрузки; -
рейсовая скорость полета.
Прямые эксплуатационные расходы включают в себя
* ^а.д + ^т.о.п 4 ^тл».д +
+ ^гс.м + ^з.э + '^хб114’/*проч’ (П 185)
тле 1а1р Дад расходы на амортизацию планера с оборудованием и двигателей;
/Jr.o.ib z1ro д ~ Р^ходы на техническое обслуживание н текункй ремонт планера н
Двигателей; 1гс м расходы на топливо и смазочные материалы; Дэ э, ^з.бп ‘
расходы на заработную плату экипажа и бортпроводников; >4ЛрОЧ - прочие прямые
расходы.
225
л
Аморпгзационпыс отчисления на самолет включает в себя отчисления на пена
шло и капитальный ремонт планера с оборудованием
ей" + <р ™р -
где ejf1» гниокр’ ^о1 _ э31Ра1ь1 на разработку н изготовление танера с оборуао.
валием н его ликвидационная стоимость соответственно: tfJJJ - амортнзационИЕ1й
срок службы; 5 - программа выпуска; средняя стоимость одного капи-
тального ремоша.
Аналогично вычисляют амортизационные огчисления но двигателю:
иам "ам мр J
где Д-р число двигателей, а их межремонтный срок службы.
Грсднесовокупную величину затрат на планер с бортовым оборудованием без
учета затрат на двигатели о предел я ил- следующим образом;
с™-79 ХЮ’2 ST’-24 (П.18Й)
Затразы на разработку планера дозвукового пассажирского самолета рассчи-
тывают по следующей эмтрической зависимости;
^а.д ”ядв
(П.187)
(П.189)
гю?окп “ 5 ’
ШТ J 1Чр
где к — коэффициент перевода размерностей; Ан коэффициент новизны конструк-
ции.
Среднесовокупную величину затрат па изготовление двигателя определяют по
соотношению
‘п” -^р^сер^И3400 «Wl Ш190)
где - взлетная тяга одного двигателя; - коэффициент, отражающий серий-
ность двигателей; - коэффициент, отражающий число кагытальдых ремонтов.
Затраты на разработку двигателя рассчитывают по эмпирической зависимости
251+*®}
гниокр Ю > (11.191)
где Af - коэффициент перевода размерностей;^® _ коэффициент новизны двига-
теля. 11
Остаточную стоимость планера и двигателя принимают равной 5 % от их перво-
начальной стоимости.
Затраты на техническое обслуживание планера с оборудованием;
^т.о.п *удОХ39 — 1,21 X 1 ^нуст) мпуст
(11.192)
(П.193)
Затраты на техническое обслуживание двигателей;
. _ *5 0 ^о'?
т.о.д ] + 7^x0,7X10^ '
Здесь Аэо, Ауд. Аав, кВ9 - статистические коэффициенты; - обдцй ресурс
двигателя
Зарплата экипажа'
з.эк = гл п.с х ”л п.с + гбп х ябп« (И-1
где с.чп.С’ сб.н коэффициенты, учитывающие тарифную ставку членов экипажа и
бортпроводников соответств енно.
Затраты на топливо:
_ ст Аа о тт ^рсйс
лт “ Г
(П.195)
226
www.vokb-la.spb.ru - Самолёт своими руками?!
где - стоимость топлива; £в0 - коэффициент, учитываютадй разницу в цене
соплива в различных районах эксплуатации
Величину косвенных расходов укруниспж) определяют по формуле:
Д--Л,о (0,45 - 0.7 х 10“’ хгт^)тл.
Прин еденные капитальные вложе1д<я определяют но формуле
_^hjo.k (Ь05 Сцц + 1 >( 3 до Лдв Лрцд)
47 калл -г--------------v ---------—-----•
л ком ко м рейс год
где/Гц.о.к нормативный отраслевой коэффициент самоокупаемости; ^Kov -
коэффициент, учитывающий размеры самолета;/?1ХЗД - коэффициент. учитываю шй
годовой налет.
(11.196)
(П 197)
СПИСОК ЛИТЕРАТУРЫ
1. Автоматизация поискового конструирования. /Под. ред. А.И. Половинкина.
М : Радио и свяэь. 1981. 344 с.
2. Автоматизация проектирования авиационных конструкций на базе МКЭ
САПР РИПАК /В.А. Комаров, В.П. Псресыпкин, Г..А. Иванова и др. Деп. в ВИНИТИ
23 мая 1984. У 3709 84
3. Автоматизация просктно-конструкторских работ и Технологической под-
готовки производства в машиностроении. /Под ред. О.И. Ссменкона. Минск.: Выо
шейшая школа, 1976, 1. 1. 351 с.
4. AjEtopMTMM оптимизации проектных решений. /Под. ред. А.И- Половинкина.
М- Энергия, 1976. 264 с.
5. Белоцерковский СМ., Скрипач Б.К. Аэродинамические производные лета-
тельного аппарата и крыла при дозвуковых скоростях. М Наука, 1975. 424 с.
6. Бирюк В.И., Липин Е-К-, Фролов КМ. Методы проектирования конструк-
ций. М • .Машинострос1В«е, 1977. 324 с.
7. Визгни В.А- Q синтезе критериев качества для задачи отммиэашш парамет-
ров самолета. - В кн. Методы ныбора рациональных проектно-конструкторских
решений в процессе создания самолетов, М.: Изд. МАИ. 1983, с. 10 18.
8. Гсмиитерн В.И.. Каган Б.М. Методы оптимальною проектирования. М.: Энер-
гия. 1980. 160 с.
9. Гермейер Ю-Б. Введение в теорию исследования операций. М,: Наука* 1971.
384 с.
10. Даффни Р„ Питерсон к.. Зенекср К. Геометрическое программирование
М. Мир, 1972 375 с.
II. Зенкевич О. Метод конечных элементов в технике. М.: Мнр. 1975. 395 с.
12. Информационное обеспечение подсистем САПР ЛЛ./Под ред. ОЛ. Смирнова.
М_: Изд. МАИ, 1983- 82 с.
13 Комаров А.А. Основы проектирования силовых конструкций Куйбышев.
Книжное издательство, 1965- 87 с.
14. Комаров В.А. Проектирование силовых схем авиационных кометрукдиЙ-
Н кп.: Актуальные проблемы авиационной науки и техники М.: Машиностроение.
1984, с. 114 129.
15- Королев П.Н. Структура ЭНМ и их математическое обеспечение. М.. Наука,
1978. 352 с-
16 Краснощеков П.С. Математические модели в исслсцованми операций.
Сер. "Математика, кибернетика", N* 7. М-: Знание, 1984. 64 с.
227
17. Краснощеков II.C-. Петров А.Л. Принципы построения моделей М • И-
МГУ, 1983. 264 с. Ц
18. Лнсснцев И.К. Подсистема автоматизированного формирования облика
дозвукового транспортного самолета. М.: Изд. МАИ 1980.52 с.
19. Лисенцев Н.К.. Самойлович ОС Вопросы машинною проектирования
и конструирования. М.: Изд. МЛИ. 1977 84 с.
20. Малышев В.В. Методы ошимизацни сложных систем. М.. Изд. МАИ. 1981
76 с.
21. Мальчевский В.В. Формализация основных компонентов процесса автомати-
зированной компоновки летательного аппарата. - В кп.: Вопросы проектирования
самолетов. М.: Изд. .МАИ. 1977. - Вын. 394» с. 11 16
22. Моисеев Н.Н. Математические задачи системного анализа. М.: Наука 198
488 с.
23. Научно-техническая революция и ее социальные аспекты- - Коммунист
1982. № 12, с. 15.
24. Норснков I1.II. Введение в автоматизированное проектирование техничж-
кмх устройств и систем. М.: Высшая школа, 1980. 311 с.
25 Пада ^ко С.Н.. Смирнов О.Я.. Тюменцев Ю.П. Программное и информаци-
онное обеспечение автоматизированного нросктивалия. М-: Изд. МАИ. 1979. 88 с.
26. Петренко А.И- Основы автоматизированного проектирования. Киев,. Тех-
ника. 1982. 295 с.
27. Проектирование самолетов ./С.М- Егер. В Ф- Мишин, Н.К. Лисейцсв и др.
М . Машиностроение, 1983. 616 с.
28. ГастриЕин Л.Л. Вычислительные машины, системы, сети... М : Паука.
1982. 224 с.
29 Растрюин Л.Л- Статистические методы Поиска. М.: Наука, 1975. 356 с.
30- Сергеев Н.П.. Домнин Л.11. Алюригмизация и программирование М.:
Радио и связь. 1982. 230 с.
31. Смирнов В.М. О Некоторых возможностях применения нелинейного прог-
раммирования к решению задач оптимизации конструктинно-силовой схемы само-
лета. В кн Вопросы проектирования летательных аппаратов. Казань: Изд. КАИ,
1980, с. 43 53.
32. Стрен! Г.» Фикс Дж. Теория метода конечных элементов. М.: Мир, 1977.
420 с.
33. Сурин В. II. Система расчетов по динамике полета в автомапииронаипом
проектировании самолета. М.: Изд. МАИ, 1979. 57 с.
34. Юдин Д.Б„ Гольштейн Г.Г. Линейное про|раммирование. Мд Наука,
1969- 352 с.
22«
www.vokb-la.spb.ru - Самолёт своими руками?!
ЦРЫМЕТНЫП УКАЗАТЕЛЬ
анионный комплекс 41,42
Автоматизированная компоновка 138,
’139
двтомзтзирснззшая система подготов-
ка и обработки информации 180
Автоматизированное проектирование 9
Алгоритмизация 49
Аналитические методы оптимизации 56
\РМ (автоматизированное рабочее
место) 22,97
АСК (автоматизированная система кои
струированнд) 190
АИД (алфавитно-цифровой дисплей) 19
АЦПУ (алфавито-цифровое печатающее
уелройство) 53.59
Аэродинамическая модель 48
Баэл данных 45.148, 186
Библиотека стандартных программ 24
Блочный принцип моделирования 47
БИ 11 (библиотека прикладных прог-
рамм) 24
Вариационное исчисление 56
Векторная оптимизация 69
Весовая модель 47
ПЗУ внешнее запоминаю шее устрой-
ство 14
Вызывающий монитор 25
Геометрическая модель 47
Геометрическое программирование 60
Гибкий монитор 27
Градиентные методы 61
Градиент функции 56
Графический дисплей 20
Декомпозиция системы 38, 39
Диалоговый режим 16
Динамическая модель 48
Динамическое программировать 59
Допустимое проектное решение 51
ЕС ЭВМ 13» 15
Задача оптимального проектирования 55
Иерархическая структура самолета 41
Интегрированные САПР 9
Информационная система 187
Информ анионное обеспечение САПР 8
Исследование операций 57
Итерационный характер проектирования
44.46
Квадратичное программирование 60
Комплекс средств автоматизации проек-
тирования 8
Компоновочное поле 139
Компоновочные цепочки 150
Конструктивно-силовая схема 174
Континуальная модель 167
Кортеж информации 183
"Кризис” в проектировании 7
Критерии оценки 72,162
Линейный алгоритм 49
Линейное программирование 57.166
Математическая модель 39
Математическое программирование 5 7
Матрица жесткости 184
- Гессе 56
Метод ветвей и границ58
Метод Гомори 58
Методическое обеспечении САПР 8. 32
Методы оптимизации 51.56
проектирования 38
Метод конечных элементов 158
- множителей Лагранжа 56
М сто до л оси я звтом атиэи ров анлого
проектирования 46
МК (мультиплексный капал) 14
Модель компоновки и центровки 48
силовой установки 48
Модель 4
Монитор 27. 181
Напряженно-деформационное состояние
155,158
Нелинейное программирование 59
НМД (накопитель на магнитных дис-
ках) 14
НМЛ (накопитель на магнитных лен-
iax) 14
Облает существования проекта 55
Ограничения 75. 78
ОЗУ (оперативное запоминающее уст-
ройство) 14
Оптимальный проск! 51
Оптимизация 51
Организационное обеспечение САПР
8.32
Пакетный режим 15
Параметр 39.43, 75
Парею 69,91
Положения об оптимальности систем 40
Постановка оптимизационной задачи 54
ППП (пакет прикладных программ) 24
Принцип максимума Понтрсгина 59
Про1рамма-ппанировщик 23
11рограмма-загрузчм к 2 3
Программное обеспечение САПР 8.22
Простой модуль 25
Процессор 14
Прямые методы оптимизации 64
Разветвляющейся алгоритм 49
229
Редактор внешних связей 24
Режим мультипрограммирования 16
- разделения времени 16
САПР (система автоматизированного
проектирования) 3.6,8
Себестоимость перевозок 84
Симплекс-метод 58
Системный подход 38
СИЛУ (система линейных алгебраичес-
ких уравнений) 159,161,185
СК (селекторный канал) 14
Составной модуль 25
Стохастическое программирование 68
Структурные связи 41
СУБД (система управления базой дан-
ных) 185
Субмодели 46,47
Схемные признаки 75
Техническое обеспечение CAI 1Р 8 13
Техническое предложение 41,72
Технология проектирования конструк-
ции 169.187
Топливная эффективность 47. 72
Требования ТЗ 78
УВВ (устройства ввода - вывода) 14
Унимодальная функция 64
Управляющая программа23,83.84
Уравнение баланса .масс 81
Уравнения компоновки 82
- существования 78
Формализация нроекщрования 42
Формализованные методы 166
^рм;шы1о-эвристическис методы
Формирования облика самолета 7Э 1ПЯ
ФОРТРАН IV 84
Функции штрафа 67
Функциональные связи 41
Функция Jlai ранжа 56, 178
Характеристика 39,43
Целевая функция 53
Целочисленное про1раммированис 58
170
Циклический алгоритм 49
Численные мето,1Ы оптимизации 57
Численное моделирование 36
ЭВМ (электронные вычислительные ма-
шины) 7
'Эвристика 172
Экономическая модель 49
Эскизный проект 41
Эффективное иные модели 7
230
www.vokb-la.spb.ru - Самолёт своими руками?!
ОГ Л АВ ЛЕН НЕ
Предисловие..................................... ........... 3
Глзбз 1 САПР - новая форма организации Процесса проектирования . . 6
1.1. Предпосылки появления САПР ... .................6
1.2. Определение и задачи САПР .....................8
1.3. Требования к САПР и принципы сс разработки. Роль человека в
САПР ........................................................... 11
Глава 2. Комплекс средств автоматизации проектирования.......... ... 13
2-1. Средств а технического обеспечения..................... . . . 13
2.2. Программное обеспечение................................... 22
2.3. Информационное обеспечение....................... .... 30
2-4. Методическое и организационное обеспечение ......... . . 32
Глава 3. Основные положения методологии автоматизированного проекти-
рования ....................................................... , . . 34
3.1. Этапы и проце>1уры просктрования. Возможности их автоматизации . 34
3.2. Развитие методов проектирования. Особенности автоматизированно-
го проектировании . _ .......................37
3.3. Проблемы декомпозиции самолета и процесса иго проектирования . 40
3 4. Проблемы моделирования 1 и нм проектных моделей ........ .42
3.5- Разработка алгоритма решения задачи....................... 49
Глава 4 Методы оптимизации проектных решений................... .51
4.1. Роль оптимизации в техническом проектировании Основные опреде-
ления ........................................................- 51
4.2. Постановка задачи оптимального проектирования..............53
4.3. Методы оптимизации .............- .................. 56
4 4. Заключительные замечания.................. . ... . 69
Глава 5- Автоматзированнос формирование облика пассажирского самолета . 72
5.1. Постановка задачи проектирования.......................... 73
5.2. Описание алгоритма формирования облика самолета............79
5.3. Опгимизация параметров ближнего магистрального пассажирского
самолета .............................-................... - 84
I лава 6. Особенности методологии проектирования многоцелевых самолетов . 88
6.1. Постановка задачи просктрования............................88
6.2- Отыскание множеств. эффекгивных вариантов ОП (решение задачи
просктрования)................................................. . , 93
6.3. Модель объекта проектроваиия . . . . .................... .96
6 4. Методология принятия решений 104
Глава 7. Формирование облика маневренного самолета................ 108
7.1. Предварительные замечания........ ....... - - 108
7-2. Мэтемзгичсские основы формирования облика самолета , .....111
7.3. Структура автоматизированной системы формирования облика
самолета................................ . . .113
7 4. Система конструктивных параметров, образующая век<цр КП мно-
жества ...................................................... * 117
7.5. Иерархия проектных задач этапа формирования облика........120
7.6. Синтез компоновочной схемы ежмолетз .... .................123
7.7. Система компоновочных ограничении . ......- . ..... 128
7.8. Примеры формирования облика маневренного самолета.........134
Глава 8. Автоматизация процесса компоновки самолета па этане предвари-
тельного просктрования.......................... . .........138
8.1. Общая методика автомитизлшш компоновки самолета...........138
8.2. Автоматизация КОМ1ЮНОВКИ пассажирской кабины самолета .148
Глава 9. Ароматизация проектирования конструктивно-силовой схемы
самолета......................................................... 152
9.1. Постановка и пути решения задачи оптимального просктрования
силовой конструкции ........................-...................152
231
9.2. Мсто.шческое обеспечение пропесса Проектирования силовых кон-
струкций .......................................................161
9-3. Автоматизированная система проектирования силовых конструкций
самолетов............................................. ........ 179
Приложение. Описание алгоритмов функциональных блоков У И САПР . . . . 190
1. Блок Геометрии . ..................... . .........191
2. Блок весовых расчетов................. . . . . . 195
3. Блок расчета аэродинамических характеристик..................204
4. Блок определения характеристик силовой установки .... .211
5. Блок компоновки и центровки . . . .......................... 214
6. Блок динамики полета .................................... . . 219
7. Блок экономики .... .......................225
Список литературы..............................................
Предметный указатель . .................................
22R
229
Учебное пособие
Сергей Михайлович Ьгср, Николай Константинович Лнссяцсв.
Олег Сергеевич Самойлович
ОСНОВЫ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
САМОЛЕТОВ
Редакюр В. И Черных
Художественный редактор В.В. Лебедев
Технический редактор if.fi. Павлова
Корректор Т.В Багдасарян
ИБ NM016
Сдано в набор 1R.10.85- Подписано в печать 23.06.86- 1-14166. Формах 60x90 1 /16.
Бумага отфетпая V’ 2 - Гарнитура Пресс Роман Печать офсетная . Усллечл. 14.5 •
Усл -кр. отт. 14.5 Уч--изд.я. 15.10. 1йраж 6380 экз. Заказ 453 Цена 80 к«
Ордена Трудового Красного Знамени издательство Машиностроение,
107076. Москва, Б-76. Стромынский пер.. 4.
Отпечатано в Московской типографик № 8 СоюзНолиррафнрома
при Государственном комитете СССР по делам издательств, полшрафии
и книжной торговли 101898, Москва. Хохловский пер.. 7. с оригинал-максга.
изготовленного в издательстве "Машиностроение" на наборно-пишущих машинах
www.vokb-la.spb.ru - Самолёт своими руками?!