/













































































































































































































































































Автор: Андреев В.С.
Теги: электротехника общая радиотехника электроника теория электрических цепей издательство радио и связь
Год: 1982




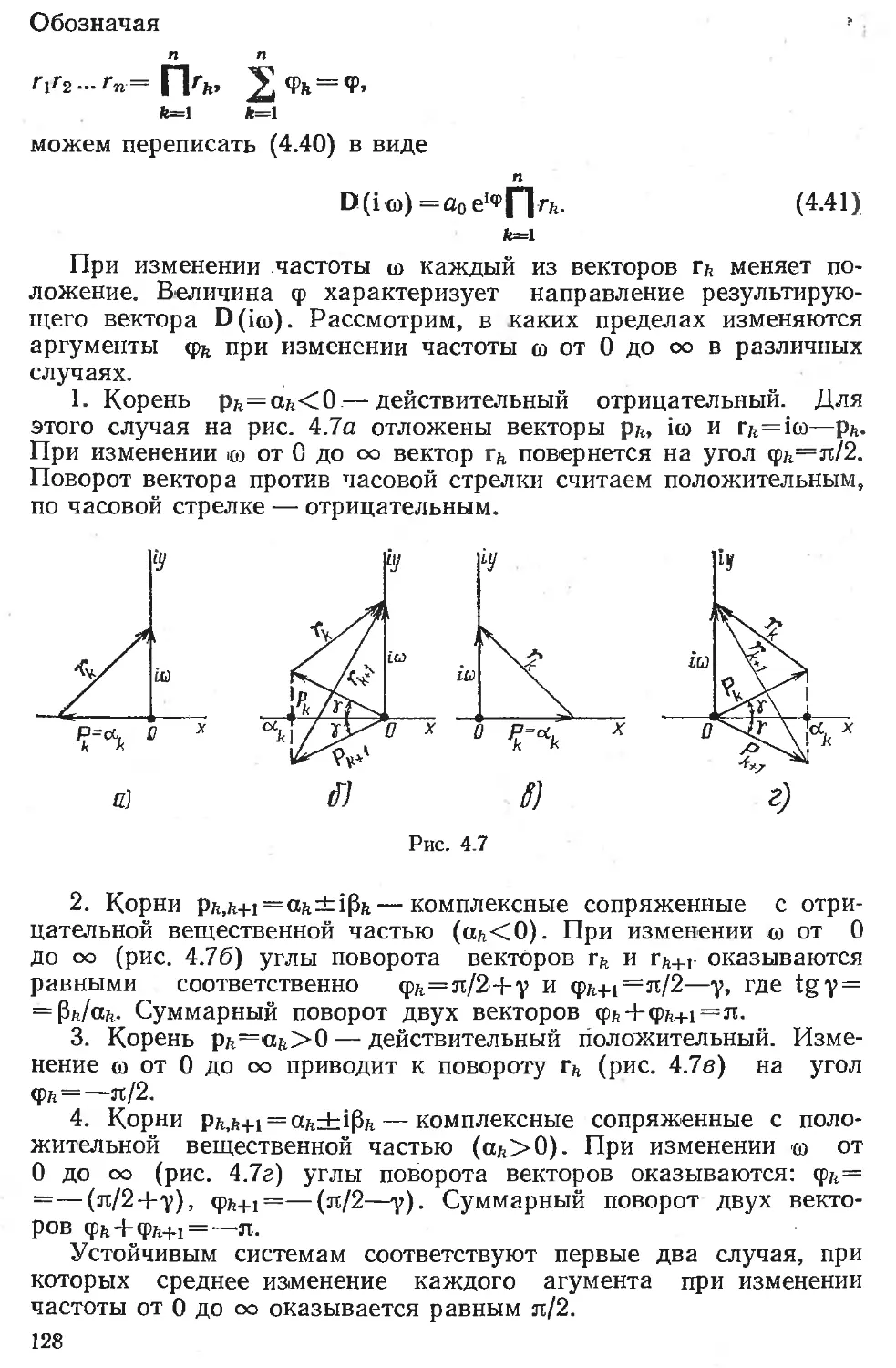
Текст
В.С. Андреев
ТЕОРИЯ
НЕЛИНЕЙНЫХ
ЭЛЕКТРИЧЕСКИХ
ЦЕПЕЙ
Допущено Министерством связи СССР
в качестве учебного пособия
для студентов электротехнических институтов связи
МОСКВА «РАДИО И СВЯЗЬ» 1982
ББК 32.841
А65
УДК 621.373
Андреев В. С.
А65 Теория нелинейных электрических цепей: Учебное
пособие для вузов. — М.: Радио и связь, 1982. —
280 с., ил.
В пер.: 85 к.
Рассматриваются физические процессы в нелинейных и параметрич
ских цепях, их общие особенности, основные математические метог
применяемые при расчете таких целей. Большое внимание уделено теот
автогенераторов, машинным методам анализа. нелинейных цепей, осоС
ностям и характеристикам функциональных преобразователей сигна
(модуляторов, детекторов, умножителей частоты, усилителей, устро
синхронизации и ФАПЧ и др.), передаваемых по системам связи, ха
теристикам этих сигналов.
Для студентов вузов связи, обучающихся по специальностям:
диосвязь и радиовещание», «Многоканальная электросвязь» и «Автом
ческая электросвязь».
2402020000—012 ББК 39
А—---------------- 128—82 «а
046(01)—82 6<I
РЕЦЕНЗЕНТЫ: Л. М. ФИНК, Г. С. РАММ. К- Н. ЩЕЛКУНОВ,
В. Ф. КУШ-НИР. Л. М. КОЛОМИЙЧУК
Редакция литературы по электросвязи
Вадим Сергеевич Андреев
Теория нелинейных электрических цепей
Ответственный редактор Ю. Л. Хотунцев
Редакторы В. К. Старикова, В. Н. Вяльцев
Художественный редактор Р. А. Клочков
Технический редактор Л. К. Грачева
Корректор О. И. Галанова
Сдано в набор 29.06.81 г. Поди, в печ. 4.11.81 г
Т-28629 Формат 60х90/и Бумага тнп. № 2 Гарнитура литературная Печать высока!
Усл. печ. л. 17,5 Усл. кр.-отт. 17,625 Уч.-изд. л. 18,39 Тираж 20 000 экз. Изд. № 178»
Зак. № 92 Цена 85 к.
Издательство «Радио и связь». 101000 Москва, Главпочтамт, а/я 693________,
Типография издательства «Радио и связь» Госкомиздатз СССР
101000 Москва, ул. Кирова, д. 40
© Издательство «Радио и связь», 198
ПРЕДИСЛОВИЕ
Учебное пособие написано в соответствии с программой курса
«Теория нелинейных электрических цепей» и с учетом опыта его
преподавания в Московском электротехническом институте связи.
Главное внимание в книге в соответствии с названием курса
уделено изучению особенностей нелинейных и (параметрических
цепей и наиболее распространенных теоретических методов, ис-
пользуемых при их анализе и расчетах. Эти методы применяются
для установления основных характеристик разнообразных нели-
тейных и (параметрических устройств, используемых в приемопе-
тедающих трактах аппаратуры связи и радиотехнических уст-
ройств для генерирования колебаний, усиления сигналов, преоб-
разования, умножения и деления частоты, модуляции, детектиро-
-.ания и т. и. Значительное внимание уделено методам анализа
автоколебательных устройств (в том числе неавтономных), вклю-
чая определение условий самовозбуждения, стационарных режи-
мов и их устойчивости, процессу установления колебаний.
По сравнению с первым изданием 1972 г. книга полностью
переработана. Введены новые главы: модулированные колебания
(гл. 1) и машинный анализ нелинейных цепей (гл. 7). (Рассматри-
ваются такие важные для современных систем связи вопросы, как
взаимодействие нескольких сигналов в нелинейных цепях, форми-
рование и детектирование двух- и однополосных сигналов без не-
сущей, затягивание частоты в многоконтурных генераторах, фазо-
вая автоподстройка частоты и др. Расширено изложение теории
устойчивости нелинейных цепей, синхронизации генераторов, диод-
ных умножителей частоты, в более общей форме рассматриваются
автогенераторы, в том числе на приборах с отрицательным сопро-
тивлением, и т. п.
Материал, посвященный машинному анализу нелинейных цепей
(гл. 7), впервые излагается в курсе ТНЭЦ. Его изучение предпо-
лагает знакомство студентов с курсом «Вычислительная техника
в инженерных и экономических расчетах». Этот раздел по просьбе
автора написан доцентом канд. техн, наук Й. X. Риэкиным.
При (подготовке данного издания были учтены рекомендации и
замечания, высказанные по первому изданию книги академиком
АН СССР Ю. Б. Кобзаревым, профессором В. В. Шахгильдяном,
доцентом Л. А. Чиненковым. Автор также признателен рецензен-
там профессору Л. М. Финку, 'профессору Г. С. Рамму, доценту
К. Н. Щелкунову, доценту В. Ф. Кушниру, доценту Л. М. Коло-
мийчуку, ответственному редактору профессору Ю. Л. Хотунцеву
за замечания и рекоменда1ции, 'которые способствовали устранению
ряда недостатков рукописи и введению в нее некоторых новых
вопросов.
Отзывы и рекомендации по книге следует направлять по адре-
су: 101000, Москва, Главпочтамт, а/я 693, издательство «Радио
и связь».
Автор
ВВЕДЕНИЕ
В.1. ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ СВЯЗИ И СИГНАЛАХ
Современные системы связи — это аппарат управления практи-
чески всеми отраслями народного хозяйства, мощное средство
научно-технического прогресса, это комплекс разнообразных си-
стем, с помощью которых население земного шара знакомится со
всеми происходящими событиями, средство приобщения к куль-
туре и знаниям многих миллионов людей. Невозможно предста-
вить нашу жизнь без телефона, телеграфа, телевидения, радиове-
щания, радиолокации, связи с судами и космическими корабля-
ми и т. д.
Задача систем связи состоит в передаче информации, т. е. све-
дений о каком-либо событии, явлении, объекте. 'Информация вво-
дится в систему связи в .виде сообщения большей частью неэлек-
трического характера: текста телеграммы в телеграфии, речи или
музыки в телефонии, неизменного или изменяющегося во времени
изображения в фототелеграфии и телевидении, данных датчиков
в телеметрии и т. п. Одна и та же информация может быть пере-
дана различными системами связи, причем в каждом случае она
вводится сообщениями разного характера. Следовательно, по су-
ществу, сообщение — это форма представления информации.
Совокупность технических средств, используемых для передачи
сообщений, образует систему связи. В последующем под система-
ми связи будем подразумевать системы электросвязи, передача
информации в которых производится с помощью электрических
сигналов. Ее общая схема приведена на рис. В.1.
Рис В.1
На входе системы связи (.в передатчике) передаваемое сообще-
ние преобразуется в электрический сигнал. Так, в телеграфии
буквы телеграммы преобразуются телеграфным аппаратом в соот-
ветствии с принятым кодом в определенные последовательности
электрических импульсов; в телефонии создаваемые речью звуко-
вые колебания с -помощью микрофона — в непрерывно изменяю-
щийся ток; в телевидении изображение с помощью специальной
передающей трубки—в 'последовательность импульсов тока, ам-
плитуды которых 'пропорциональны яркости элементарных участ-
ков изображения, и т. д. 'Получающиеся при этих преобразованиях,
сигналы называют первичными сигналами или видеосигналами.
Первичные сигналы характеризуются относительно медленным из-
менением во времени, вследствие чего их спектры содержат низ-
кие частоты. Одной из важнейших характеристик сигнала является^
ширина спектра, т. е. интервал частот, в пределах которого сосре-
доточены основные спектральные составляющие сигнала. Ширина;
спектра различных сигналов неодинакова. Так, речевой сигнал, пе-
редаваемый >по телефонным каналам, занимает спектр 300—
3000 Гц, музыкальный—спектр 20—16 000 Гц; телеграфный Обыч-
но'занимает спектр 0—200 Гц, а телевизионный-—50 Гц—6 МГщ
Первичные сигналы не могут (быть переданы на большие рас-
стояния по системам связи: в радиосвязи — главным образом;
вследствие быстрого .затухания низкочастотных колебаний в про-
цессе распространения, в проводной связи-—из-за заметного раз-
личия затухания в линии связи для разных частотных компонент-
сигнала, что приводит к его .искажениям, а также из-за невозмож-
ности одновременной передачи по одной линии (с последующим'
разделением в месте приема) нескольких сигналов с совпадающи-
ми спектрами (например, ряда телефонных сообщений).
В большинстве систем связи (за исключением телефонных и
телеграфных систем небольшой протяженности) для передачи сиг-
налов применяют вспомогательное высокочастотное 'Колебание, пе-
ренося на него информацию, содержащуюся в первичных сигна-
лах. В соответствии с его назначением это высокочастотное коле-
бание называют переносчиком или несущим колебанием. Приме-
нение переносчиков позволяет разнести спектральные компоненты^
относящиеся к каждому 'первичному сигналу, и на этой основе-
создать современные многоканальные системы связи, в которых
одновременно на одной несущей частоте удается передавать до
нескольких тысяч телефонных сообщений или нескольких телеви-
зионных. Для высококачественной передачи сигналов по линии
связи и через различные части передающего и приемного устройств;
необходимо выбирать частоту переносчика достаточно высокой:
в десятки—сотни раз большей ширины спектра передаваемого сум-
марного сигнала. В этих условиях для отделения полезного сиг-
нала от нежелательных и от помех различного рода используются
избирательные свойства колебательных контуров и фильтров.
Операция преобразования низкочастотного первичного сигнала
в высокочастотный с сохранением содержащейся в нем информа-
ции называется модуляциейона производится в передатчике. Как
1 Термин модуляция широко -используется в различных областях для обо-
значения колебания некоторой величины относительно среднего значения. В>
этом смысле говорят о модуляции ширины базы транзистора, скорости элект-
ронов и плотности тока в электронных СВЧ приборах, емкости варикапов 1Ь
т. п.
правило, (модуляция состоит в пропорциональном первичному сиг-
налу x(t) изменении одного из параметров переносчика
u = C70cos(fi)(/+<p0): (В.1)
амплитуды, частоты или фазы. Если под действием x(t) изменяет-
ся амплитуда, имеем амплитудную модуляцию (AM), если частота
или фаза, то соответственно частотную (ЧМ) или фазовую (ФМ)
модуляцию. Следовательно, .в модулированном колебании, пере-
даваемом по линии связи, информация содержится в изменении
-соответствующего параметра переносчика.
Линии связи могут быть проводными, кабельными, ’ волновод-
ными или представлять свободное пространство (при радиосвязи).
'На приемном конце системы связи 'Производится ряд операций над
сигналом, в том числе обратное преобразование высокочастотного
сигнала в (первичный сигнал, называемое детектированием, с по-
следующим формированием сообщения, передаваемого получа-
телю.
Сигналы связи — это некоторые изменяющиеся во времени фи-
зические величины (токи, напряжения). Сигналы подразделяют
на детерминированные и случайные. Детерминированными назы-
ваются сигналы, закон изменения которых заранее известен. Ма-
тематически они могут быть описаны известными функциями вре-
мени. Примерами таких сигналов являются гармоническое колеба-
ние (В.1) с известными параметрами Uo, шо и фо, периодическая
последовательность импульсов тока или напряжения, форма, ам-
плитуда, частота и время действия которых известны. Случайными
называются сигналы, значения которых (в любой момент времени
заранее предсказать невозможно. Только такие сигналы достав-
ляют получателю новые, ранее неизвестные сведения (информа-
цию) . Сигналы, передаваемые по системам связи, а также помехи
являются случайными. Для математического описания случайных
сигналов используются статистические характеристики. Реальные
сигналы связи, как правило, сочетают в себе свойства детермини-
рованных и случайных сигналов, поскольку некоторые параметры
сигнала бывают получателю известными, а другие — неизвестны-
ми. Например, в AM сигнале обычно бывает известной частота
высокочастотного переносчика, а информация содержится в не-
предсказуемом заранее законе изменения амплитуды. В некоторых
местах системы связи действуют детерминированные сигналы; на-
пример, гармонические колебания вида (В.1), создаваемые в гене-
раторе передатчика и гетеродине приемника (см. § В.З). В дан-
ном курсе будет изучаться воздействие детерминированных сиг-
налов на нелинейные и параметрические устройства, поскольку
для одних устройств (например, генераторов) это имеет важней-
шее значение, а для других—позволит .установить основные их
характеристики, знание которых необходимо для 'более глубокого
изучения в последующих курсах воздействия как детерминирован-
ных, так и случайных сигналов.
Сигналы можно 'классифицировать и >по другим признакам.,
подразделяя их, в частности, на аналоговые (непрерывные) и дис-
кретные. Аналоговые сигналы представляют собой непрерывно из-
меняющиеся функции времени, например ток в цепи 'микрофона,
протекающий во время речи. Дискретными являются телеграфные
сигналы, состоящие из чередующихся посылок фиксированного'
уровня, >а также сигналы, составленные из последовательности им-
пульсов, передаваемых через определенные интервалы времени..
В первом случае осуществляется дискретизация по уровню, по-
втором— по времени. Сигналы, дискретные и по времени и по
уровню, называют цифровыми.
При модуляции дискретным первичным сигналом высокочас-
тотного переносчика (В.1) изменение соответствующего параметра
последнего происходит скачкообразно. Такой процесс называют
дискретной модуляцией или манипуляцией. Следовательно, мани-
пуляция является частным случаем модуляции 'переносчика дис-
кретным первичным сигналом.
На рис. В.2 приведены примеры аналогового' (а) и дискретного'
(б) первичных сигналов н .соответствующих колебаний, получаю-
щихся при амплитудной модуляции (в) и манипуляции (г). Ам-
плитудно-модулированное .колебание (рис. В.2в) можно записать
как u(t) = [7(/)cos((Do^+q)o), где индексы у со и <р подчеркивают их
постоянство. Граничные линии U(t) и —U(t), в пределах которых
происходят изменения u(t), называются огибающими (на рис. В.2
они нанесены пунктиром).
В.2. КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ
Электрический сигнал
как в передающей, так и
в приемной частях систе-
мы связи (см. рис. В.1)
подвергается разнообраз-
ным преобразованиям. Ус-
тройство, выполняющее
определенное преобразо-
вание “сигнала (усиление,
модуляцию и т. п.), назы-
вается функциональным
узлом. Функциональные
узлы составляются из различных конструктивных элементов: элек-
тронных приборов, резисторов, катушек индуктивности, конденсато-
ров,, источников питания и др. В современной аппаратуре такими
конструктивными элементами, нередко являющимися готовыми
функциональными узлами, оказываются интегральные схемы и мо-
дули— сложные устройства, часто содержащие десятки и сотни
более простых элементов (транзисторов, резисторов, конденсаторов'
и др.), изготовленных в едином технологическом цикле1.
1 Современная технология изготовления интегральных схем, модулей и от-
дельных элементов изучается в курсе микроэлектроники.
Для анализа процессов в .различных функциональных узлах
реальные (физические) элементы заменяют некоторыми идеализи-
рованными моделями, процессы в которых .допускают точное ма-
тематическое описание. Так, конденсатор с потерями заменяют
цепью, состоящей из емкости и параллельно или последовательно
включенного сопротивления, транзистор — одной из эквивалентных
схем, ®ид, параметры и характеристики которой зависят от выбора
независимых переменных. В результате получается электрическая
•цепь, моделирующая процессы в реальном устройстве.
Различают пассивные и активные электрические цепи. Пассив-
ной называют цепь, которая не может отдавать в окружающую
•среду (в нагрузку) энергию, превышающую ту, которая поступает
на ее вход. Такие цепи состоят из пассивных элементов: резисто-
ров, конденсаторов, катушек индуктивностей, трансформаторов.
Активными называют цепи, которые наряду с пассивными элемен-
тами содержат и активные, т. е. источники энергии (генераторы
ЭДС и тока) или электронные приборы, способные осуществлять
усиление мощности сигнала (транзисторы, сеточные электронные
лампы, диоды с отрицательным сопротивлением). В эквивалент-
ных схемах этих приборов содержатся источники энергии частоты
сигнала (вспомним эквивалентные схемы транзисторов), а в прин-
ципиальных схемах — источники питания обычно постоянного то-
ка, за счет расхода энергии которых и происходит усиление. Сле-
довательно, цепь, осуществляющая усиление напряжения с по-
мощью повышающего трансформатора, является пассивной, по-
скольку увеличения мощности в ней произойти не' может.
Рис. В.З
Рис. В.4
Электрическая цепь, на входе которой действует известный
сигнал x(t), вызывающий появление отклика y(t) на выходе,
представлена на рис. В.З. В общем случае отклик y(t) можно
найти из решения дифференциального уравнения, описывающего
процессы в цепи
dn у
dtn
dn 'у
Л"-1
+
, dm х . , dm 1 х . ,
• • -+ь«х-
(В.2)
Это уравнение можно получить, например, если записать с по-
мощью законов Кирхгофа систему уравнений, связывающих токи
и напряжения в различных элементах системы, а затем исключить
see .переменные, кроме интересующей нас величины у. Коэффи-
циенты а, и bj для каждой схемы выражаются через параметры
се элементов (R, L, С и др.). В частных случаях (например, если
9
цепь содержит только резистивные элементы) уравнение (В.2)
оказывается алгебраическим.
Электрические цепи подразделяют на линейные, параметриче-
ские, нелинейные и нелинейно-параметрические. Условные обозна-
чения для элементов разных групп приведены в табл. В.1. Рас-
смотрим основные особенности электрических цепей каждого типа.
Т а бл ица В.1
Элементы Условные обозначения элементов
Линейнб/е Нелинейные Параметри- ческие Нелинейно- Параметри- те с ше. ...
Резисторы, сопротивления R Rib)
Ктнденсаторы, емкости 1 ^.Cfu} ^сС(Цр)
Ритусики., индуктивности Шг
Линейными (точнее, линейными с постоянными параметрами)
называются электрические цепи, описываемые линейными диффе-
ренциальными (или алгебраическими) уравнениями с постоянны-
ми коэффициентами at и b-j. Поскольку эти коэффициенты выра-
жаются через параметры элементов описываемой цепи, '.последняя
оказывается линейной в том случае, когда все ее элементы явля-
ются линейными постоянными, т. е. обладают параметрами, вели-
чины которых не зависят .ни от времени, ни от протекающих токов-
или приложенных напряжений. Особенности и 'методы анализа
линейных цепей изучаются в курсе ТЛЭЦ. Такими цепями явля-
ются одиночные и связанные колебательные контуры, электриче-
ские фильтры, длинные линии и т. д. Важнейшим свойством ли-
нейных цепей является применимость принципа суперпозиции..
Продемонстрируем его на примере цепи, описываемой линейным
алгебраическим уравнением
у—ах. (В.З)
Если на ее входе действует сигнал Xi или х2, то соответствую-
щие отклики yi=axi и у2=ах2. Если же на входе действует сум-
ма этих сигналов x=Xi-rX2, то на выходе будет у=а(Х1+х2) —•
=У1+У2- Таким образом, отклик линейной системы н а
действие суммы сигналов равен сумме откли-
ков на действие каждого .сигнала в отдельности.
В этом и состоит принцип суперпозиции *. На использовании этого
1 Отметим, что уравнение у—ax+b, где а и b — постоянные, также описы-
вает линейную цепь. Однако принцип суперпозиции выполняется для такой це-
пи только в том случае, если ее уравнение записывается аналогично (В.З); т. е..
без свободного члена Ь. Последнее достигается введением переменной и=х+
Р~Ь!а, что приводит к уравнению вида у=аи. Если положить в основу опреде-
ления линейной цепи справедливость принципа суперпозиции (без каких-либо»
дополнительных условий), можно сделать неверный вывод о том, что рассмат-
риваемая цепь ие является линейной.
10
свойства основаны известные методы исследования воздействия
(Сложного сигнала на линейные .цепи: спектральный, при котором
входной сигнал заменяется суммой синусоидальных компонент, на-
ходятся отклики на действие каждой компоненты, после чего все
отклики суммируются, и временной, при котором входной сигнал
представляется суммой скачков или импульсов, определяется от-
клик на действие каждой компоненты, а выходной сигнал полу-
чается .в виде суммы откликов в форме интеграла Дюамеля.
Рассмотрим вопрос о преобразовании спектров в линейных це-
пях по-прежнему на примере цепи, описываемой уравнением (В.З).
Если на входе x=xi + x2==^rcosa>i/+X2cose>zt, то 'в отклике
g/=aXiCOS (Oi/+aX2cos &zt окажутся те же частотные компоненты,
которые содержались в спектре входного сигнала.-В линейных
пенях с п о с т оя н ны м и п а р а м е т р а м и новые спект-
ральные составляющие не возникают, поскольку от-
клик на каждую спектральную составляющую входного сигнала
‘.представляет собой синусоидальное колебание той же частоты.
Параметрическими, или линейными с переменными параметра-
ми, называются электрические цепи, описываемые линейными диф-
ференциальными уравнениями с переменными коэффициентами,
т. е. уравнениями типа (В.2), в которых хотя бы один из коэффи-
циентов аг или bj зависит от времени. Такой случай имеет место,
если в цепи содержится хотя бы один параметрический элемент,
т. е. элемент, параметр которого зависит от времени. Примером
служит цепь рис. В.4, содержащая, например, угольный микрофон,
проводимость которого под действием звукового давления изме-
няется с низкой частотой Й по закону g(t) =go (1 +m cos S2/).
Если на входе цепи действует высокочастотное гармоническое
напряжение e=£ioos-cooA то ток в ней
i'=eg=Ego( 1 +tn cos QY)’cos Got (B.4)
окажется амплитудно-модулированны-м, так как Eg0 (1 +m cos Ш)
можно рассматривать как амплитуду колебания частоты соо, из-
меняющуюся с низкой частотой Q. Для определения спектра тока
«нужно представить выражение (В.4) в виде суммы синусоидаль-
ных колебаний
i=Eg0cos a0t+mEgo Cos 9-t cos aot=Eg0cos Got+
+ — Egocos((o0 + QK+ -^-Eg0cos(®o—&)t. (B.5)
T-ок i содержит три компоненты с частотами соо, -coo+Q и
<£Оо—£2, причем две последние во входных воздействиях не содер-
жатся. Это означает, что в параметрических цепях воз-
никают новые спектральные составляющие.
Если входной сигнал e=ei + C2, то отклик i= (ei + e2)g’=ii+is,
где ii=eig и 1г=е^— отклики на действие каждой компоненты
входного- сигнала. Таким образом, в параметрических це-
лях выполняется принцип суперпозиции. К числу
наиболее часто используемых параметрических устройств относят-
11
ся .преобразователи частоты и малошумящие (параметрические уси-
лители.
Нелинейными называются цепи, описываемые нелинейными
дифференциальными уравнениями, т. е. уравнениями вида (В.2),
•в которых хотя 'бы один из коэффициентов йг является 'функцией у
или ее производных либо один из коэффициентов Ь, — функцией х
или ее производных:
a.i=a.i(y, dy/dt, ...), bj=bj(x, dx/dt, ...). (B.6)
Уравнение электрической цепи оказывается нелинейным в том
случае, когда в схеме используются какие-либо нелинейные эле-
менты, т. е. элементы, параметры которых зависят от тока или
напряженияНелинейными элементами являются .все электрон-
ные и полупроводниковые приборы, катушки с сердечниками и т. п.
Одной из важнейших особенностей нелинейных цепей является
то, что в них принцип суперпозиции не выполняется,
в чем легко убедиться на примере простейшей нелинейной зави-
симости
у=ах2. (В.7)
Если на такой элемент действует сложный сигнал x=Xi+%2,
отклик
у=a (xi+х2)2 = ах2!+ах22+2axix2 (В .8)
отличается от суммы откликов на действие каждой составляющей
в отдельности (ax2i + ax22) наличием компоненты 2axix2, которая
появляется только в случае одновременного воздействия обеих
составляющих и зависит от характера каждой из них. В нелиней-
ных цепях обычно не удается без выполнения специальных расче-
тов предсказать результат воздействия суммы сигналов, если из-
вестны результаты воздействия каждой компоненты. Из сказан-
ного вытекает непригодность для анализа нелинейных цепей ме-
тодов интеграла Дюамеля и спектрального, широко используемых
в теории линейных цепей, .основанных на определении отклика на
действие сложного сигнала в виде суммы откликов на действие
его элементарных составляющих.
Рассмотрим на примере уравнения (В.7) вопрос о преобразо-
вании спектра в нелинейных цепях. Пусть х=Х1+х2=У1СОЗ ®0^+
+X2COSQ/. Тогда
i/=a(X1cos too/+X2 cos Ш)2=-^Х21'(1 -boos 2too^) +
-]——Х22 (1 -Feos 2QZ) Т- 0^1X2(009 ((00+Q) t T-cos (too—й) t].
1 В некоторых случаях цепь может быть линейной и при наличии в ией не-
линейных элементов: например, в двухтактных нелинейных цепях вследствие
взаимной компенсации нелинейностей (см. § 2.2).
12
На рис. В.5 построены спектры входного .и выходного сигна-
лов. Все спектральные компоненты выходного сигнала оказались
•новыми, не содержавшимися во входном сигнале. В этом прояви-
лось одно из важнейших свойств нелинейных цепей: в нелиней-
ных цепях возникают новые спектральные ком-
поненты.
В технике связи и радиотехнике для 'преобразований сигналов,
связанных с изменением их спектров, в большинстве случаев при-
меняют нелинейные цепи. При изучении нелинейных устройств ча-
сто приходится иметь дело с нелинейными дифференциальными
уравнениями. Примером является уравнение Ван-дер-Поля
^ + 2a(l-y^ + tfoy = 0,
. at2 dt
в котором коэффициент при dy/dt является функцией у.
К нелинейно-параметрическим
относятся цепи, описываемые нели-
нейными уравнениями с переменны-
ми коэффициентами. Такими явля-
ются уравнения вида (В.2), если не-
которые из коэффициентов и Ь,
зависят соответственно от у и х или
их производных и, кроме того, какие-
либо из коэффициентов аг и Ь, (мо-
жет быть, даже те же самые) зави-
сят от времени. Цепи являются не-
линейно-параметрическими, если в
них содержатся нелинейные и пара-
метрические элементы. Подобные
цепи встречаются в устройствах, предназначенных для осуществле-
ния частотной модуляции, в параметрических генераторах и пр. Их
особенности: а) неприменимость принципа суперпозиции и б) обо-
гащение спектра по сравнению со спектром входных сигналов.
О SI V
О S. 2SI U-il UB Ua-tSi 2b)B а
Рис. В.5
В.З. ФУНКЦИОНАЛЬНАЯ СХЕМА СИСТЕМЫ СВЯЗИ. ЗАДАЧА КУРСА
Рассмотрим на примере системы радиосвязи характер типовых
преобразований, которым подвергаются сигналы в системах связи.
На рис. В.6’приведена функциональная схема рассматриваемой
системы, выделены основные узлы и показан характер колебаний
в различных точках.
Основными узлами передающего устройства являются:
микрофон Микр, преобразующий звуковое давление p(t) (сооб- .
Щение) в первичный сигнал x(t); этот сигнал поступает затем на
усилитель низкой частоты УНЧ для увеличения мощности сигнала
перед подачей его на модулятор;
13
генератор несущей частоты Г (задающий генератор), выраба-
тывающий высокочастотное колебание частоты f0 переносчика оп-
ределенной амплитуды;
модулятор М, в котором производится модуляция переносчика
первичным сигналом x(t)\ на рис. В.6 рассматривается амплитуд-
ная модуляция;
Рис. В.6
усилитель высокой частоты УВЧ, увеличивающий мощность из-
лучаемых антенной колебаний до величины, обеспечивающей не-
обходимые дальность и качество связи.
Из этих узлов не могут быть линейными: задающий генератор
(в реальных линейных цепях, обладающих потерями, нельзя по-
лучить колебания постоянной амплитуды) и модулятор (в про-
цессе модуляции согласно. (В.5) создаются новые спектральные
компоненты). Усилители (УНЧ и УВЧ) могут быть линейными,
но, как показывают расчеты, их КПД существенно возрастает,
если они работают в нелинейных режимах.
Переходя к приведенной на рис. В.6 схеме наиболее распрост-
раненного приемного устройства супергетеродинного типа, от-
метим:
1) в большинстве случаев .полезные сигналы на входе прием-
ника оказываются весьма слабыми: мощности—порядка 10-10—
10~14 Вт, ЭДС — порядка 10“4—10-6 В. Для надежного же преоб-
разования принятых сигналов в .сообщение их мощности должны
быть порядка единиц ватт. Поэтому в приемнике должно произ-
водиться значительное усиление сигнала: порядка 1012 по мощно-
сти или 106 по напряжению;
2) на вход приемника поступают сигналы огромного числа
станций, работающих на различных частотах, причем зачастую си-
гнал нужной станции оказывается значительно слабее других
(мешающих) сигналов. Поэтому отдельные части (каскады) при-
емника должны обладать большой избирательностью, усиливая
14
сигналы нужных частот и ослабляя остальные; это достигается
применением колебательных контуров и фильтров.
Основными узлами приемника являются:
усилитель высокой частоты УВЧ, усиливающий слабые вход-
ные сигналы приемника. Ввиду того что в последующих каскадах
усиливаются и полезный сигнал, и шумы, важно, чтобы уровень
шумов, возникающих в УВЧ, !был возможно меньшим;
гетеродин Гi -— генератор синусоидальных колебаний частоты
fr. Частоту fr выбирают обычно больше несущей частоты сигна-
ла fo на величину fnp (промежуточная частота): fr=fo+fnp. В ве-
щательных приемниках fap=465 кГц;
преобразователь частоты ПЧ, в котором несущая частота при-
нимаемого AM сигнала заменяется более низкой промежуточной
частотой fnp—fr—fo с сохранением формы огибающей. Для приема
сигналов с различными несущими частотами fo одновременно с
перестройкой контура УВЧ изменяют частоту гетеродина fr (что
показано на рис. В.6 пунктирными линиями, соединяющими эти
два каскада) так, чтобы получающееся на выходе ПЧ AM коле-
бание всегда имело одну и ту же несущую частоту, равную fnp.
Замена различных несущих частот сигнала f0 более низкой и при-
том неизменной частотой позволяет осуществлять последующее
усиление сигнала на фиксированной частоте fnP усилителем про-
межуточной частоты УПЧ, частотные характеристики которого
можно сделать (близкими к идеальным (прямоугольным);
детектор Д, в котором модулированный сигнал преобразуется
в первичный;
усилитель низкой частоты УНЧ, необходимый для усиления
первичного сигнала после детектора;
выходное устройство Вых (громкоговоритель, кинескоп, букво-
печатающий аппарат и т. и.), преобразующее сигнал в сооб-
щение.
Все каскады приемного устройства, в которых возникают но-
вые частотные компоненты, не могут быть линейными. К их числу
относятся преобразователь частоты, детектор-, гетеродин. Если к
этому добавить, что во многих случаях КПД УНЧ может быть
увеличен при его работе в нелинейном режиме и что лучшие 'ма-
лошумящие УВЧ (молекулярные и параметрические) также не
являются линейными устройствами с постоянными параметрами,
то окажется, что большинство каскадов как передаюшего, так и
приемного устройств не могут быть линейными. В радиотехниче-
ской и связной аппаратуре используется и ряд других нелинейных
устройств: выпрямители (на входе — переменное напряжение, на
выходе— постоянное), умножители частоты (на входе —колеба-
ния частоты f, на выходе — nf, где п=2, 3, ...), делители частоты
(на входе — колебания частоты f, на выходе—f/n, где п=2, 3, ...).
Изучение общих особенностей нелинейных и параметрических
Цепей, основных математических методов их исследования и рас-
смотрение на этой основе принципов действия и .важнейших осо-
15
бенностей типовых устройств, осуществляющих (преобразование
сигналов в аппаратуре связи, составляет .цель и содержание курса
«Теория нелинейных электрических цепей». Он подготавливает
студентов к изучению таких базовых и специальных курсов, как
теория передачи сигналов, электронные приборы СВЧ и квантовые
приборы, многоканальная связь, радиоприемные и 'радиопередаю-
щие устройства и др., в которых более глубоко изучаются свой-
ства и характеристики разнообразных нелинейных и параметри-
ческих устройств, методы их расчета и проектирования, целесооб-
разные области применения.
Глава 1
Модулированные колебания
1.1. ОБЩИЕ СООТНОШЕНИЯ
Как отмечалось (выше, передача сигнала на большие расстоя-
ния производится высокочастотными модулированными колеба-
ниями. Частота ®0 переносчика (В.1) выбирается с учетом особен-
ностей распространения колебаний в линии связи, дальности связи
и многих других технических и экономических факторов. Но в лю-
бом случае частота ®0 значительно больше наивысшей частоты £2
первичного сигнала, осуществляющего модуляцию. В этих услови-
ях параметр модулированного колебания изменяется медленно по
сравнению со скоростью изменения несущего колебания', в одном
периоде модулирующего сигнала 7’=1//?=2л/£2 обычно укладыва-
ются сотни, тысячи и более периодов высокочастотного колебания;
поэтому за время нескольких периодов последнего 7'0= 1//0=2л/®0
происходит лишь незначительное изменение параметра переносчи-
ка. В общем случае модулированное колебание будет
u[jt} = U (£)cos[W+iA<p'('0 +'фо] =£7(/)cosi|?'(0» (1-1)
где »L7 (/) и ф(/) = ®о?-ЬАф (0+фо— изменяющиеся во времени
амплитуда к мгновенная (или полная) фаза сигнала. Если ампли-
туда U и фаза <р=|Д<р+<р0 постоянны, имеем смодулированное
колебание. Скорость изменения мгновенной фазы
<о(О = 5 (1-2)
at
называют мгновенной частотой колебания. Если закон изменения
мгновенной частоты ®(£) известен, мгновенная фаза колебаний
t
tp(/)=J со(t)dt+фо- (1-3)
о
t
Здесь ф0 — начальная фаза колебаний, a J®(/)dt — приращение
о
(набег) фазы за время t.
У немодулированного колебания мгновенная частота ®(/)=(Оо
постоянна, а мгновенная фаза ф(/) =(о0^+фо изменяется во време-
ни линейно.
Модуляция обычно заключается в пропорциональном первич-
ному сигналу x(t) изменении параметра переносчика. Тогда при
AM
ФМ
ЧМ
Д[7=ах(/),
A(p = ax(t),
Да=ах (/),
(1-4)
где а — коэффициенты пропорциональности. В § 1.3 будет показа-
но, что аналитические выражения ФМ и ЧМ колебаний имеют
одинаковый вид u(t) — L'0cos[®o^+A(p(^) +<ро], что позволяет в
обоих случаях говорить об угловой модуляции. Различие между
фазовой и частотной модуляцией состоит в различной зависимости
изменения фазы iA<p(/) от первичного сигнала x(i£).
1.2. АМПЛИТУДНО-МОДУЛИРОВАННЫЕ КОЛЕБАНИЯ
Амплитудная модуляция состоит в пропорциональном первич-
ному сигналу x(t) изменении амплитуды переносчика (В.1):
[7АМ=До+ал;(О. В результате получается AM колебание:
«ам=[По+«а;(О] lC,°s(®o^+tpo) =n0[l + -^-x(^]cos(®0f+<po)- (1-5)
В простейшем случае гармонического сигнала x(£) =Xcos Ш
амплитуда
£7ам= Uo+aX cos Ш. (1.6)
В результате имеем AM колебание:
«ам= (t/o+aXcos Q/)cos((do^+<Po)- (1.7)
18
На рис. 1.1 изображены графики колебаний и и аАМ. Оги-
бающая AM колебания соответствует выражению (1.6). Макси-
мальное отклонение амплитуды [7Ам от f{70 представляет амплиту-
ду огибающей Va \ согласно (1.6) •Ua — aX. Отношение амплитуды
огибающей к амплитуде несущего (немодулированного) колеба-
ния
m=Ua/U0 (1.8)
называется коэффициентом модуляции. Обычно т<1. Коэффици-
ент модуляции, выраженный в процентах, т. е. (т 100)%, назы-
вают глубиной модуляции. Коэффициент модуляции пропорциона-
лен амплитуде модулирующего сигнала.
Используя (1.8), выражение (1.7) записывают в виде
H=[7d(l + mcosQ/)cos((i)o^+!<Po). (1-9)
Для определения спектра AM колебания раскрое?»! скобки в
выражении (1.9):
и= UqCos (соо^+фо) Н—~ cos [ (<Do+£2) + tpo] 4~
+ Uo cos[ (соо—Q)/+<fo]- (1.10)
Согласно (1.10) AM колебание является суммой трех высоко-
частотных гармонических колебаний близких частот (поскольку
й<Ыо или А<С)о):
а) колебания несущей частоты fo с амплитудой tU0,
б) колебания верхней боковой частоты fo+F с амплитудой
£7В= ^-Ио,
в) колебания нижней боковой частоты f0—F с такой же ампли-
тудой UH= FL- и0.
Спектр AM колебания (1.10) приведен на рис. 1.2. Ширина
спектра равна удвоенной частоте модуляции: А/Ам=2А. Амплиту-
да несущего колебания при модуляции не изменяется; амплитуды
колебаний боковых частот (верхней и нижней) пропорциональны
глубине модуляции, т. е. амплитуде X модулирующего сигнала.
При щ= 1 амплитуды колебаний боковых частот достигают поло-
вины несущей (O,5t7o). При меньших значениях m амплитуды ко-
лебаний боковых частот меньше; при m=0 боковые частоты от-
сутствуют: в спектре остается только компонента несущей часто-
ты, что соответствует немодулированному колебанию.
Рассмотрим векторную диаграмму AM колебания. Колебание
(1.10) можно представить в виде суммы векторов Uo, UB и UH
(рис. 1.3а), вращающихся против часовой стрелки с различными
скоростями (®о, о>э+Н и соо—И). Наглядность векторной диаграм-
мы существенно повышается, если строить ее па плоскости, вра-
щающейся по часовой стрелке с угловой частотой ®0 (рис. 1.36).
В этом случае несущее колебание изображается неподвижным
вектором Uo, колебания (верхней и нижней частот — векторами UB
и UH, вращающимися в противоположных направлениях с угловой
, 19
скоростью Q и расположенными симметрично относительно векто-
ра Uo. Сумма трех векторов, изображающая AM колебание (век-
тор Uam), совпадает по направлению с вектором Uo; это означает,
что фаза AM колебания в любой момент времени совпадает с фа-
зой колебания несущей частоты. Мгновенное значение AM напря-
жения определяется проекцией вектора Uam на ось времени, вра-
щающуюся с частотой wo по часовой стрелке.
С течением времени векторы UB и UH, поворачиваясь навстречу
друг другу, занимают различные положения относительно вектора
Uo: когда они противоположны друг другу Uam—'Uq', когда на-
правлены против вектора Uo, амплитуда Й/Ам минимальна; когда
совпадают с направлением вектора tJ0, амплитуда С/Ам макси-
мальна.
Сходные результаты получаются при амплитудной модуляции
более сложным сигналом. Так, если первичный сигнал состоит из
суммы гармонических колебаний различных частот
х(0= j? Ай cos (1.1'1)
fc=l
амплитуда AM колебания
п
Uam — Ай cos ^й^,
й=1
и аналитическое выражение AM колебания имеет вид
п= До(1 + V mhcos QftOcos(®o^+T>o). (1-12)
Й=1
Величины Той = aXh/U0, называемые парциальными коэффици-
ентами модуляции, представляют собой коэффициенты модуляции
амплитуды соответствующими компонентами первичного сигнала.
Коэффициенты mh пропорциональны соответствующим амплиту-
дам Xk. Для определения спектра рассматриваемого колебания
перепишем (1.12) в виде
u=U0 cos ((Оо'^+фо) +^^~^o{cos[ (<Оо + Sift) t+фо] +
+ cos[(<o0—£2й)^+'<ро]}- (1-13)
На рис. 1.4a, б представлены соответственно спектры сигналов.
(1.11) и (1.12). Каждая компонента частоты первичного сиг-
нала x(t) создает две компоненты боковых частот (®0--)-Йй и «о—
—Qfi) с одинаковыми амплитудами, пропорциональными амплиту-
дам Ай спектра х(ф). Сумма всех верхних боковых частот подобна
спектру сигнала x(t), она образует верхнюю боковую полосу. Со-
вокупность нижних боковых частот, имеющая симметричный (ин-
версный) характер, образует нижнюю боковую полосу. Ширина
20
спектра AM колебания в общем случае вдвое больше наивысшей
модулирующей частоты
A/AM=2Fmax. (1.14)
Если по линии связи одновременно передается несколько AM
сигналов с различными несущими частотами, то для возможности
их разделения в приемном устройстве без создания взаимных по-
мех нужно, чтобы спектры сигналов не перекрывались, как пока-
зано на рис. 1.5, а приемник обладал достаточной избиратель-
ностью, характеризуемой зависимостью коэффициента усиления от
частоты (пунктирная линия). Для этого несущие частоты сигналов
должны отличаться друг от друга на величины, большие 2Fmax.
Приведенные соображения позволяют определить количество сиг-
налов п, которое может передаваться по линии связи в определен-
ном диапазоне частот Af с возможностью их разделения на при-
емном конце, как A//2Fmax. Так, если Fmax=5 кГц, то в диапа-
зоне частот от 1 до 2 МГц
= 106/104=100 сигналов.
Определим среднюю
мощность AM колебания
(1.9) за длительный интер-
вал времени. Поскольку это
колебание является суммой
трех гармонических компо-
нент, среднюю мощность,
выделяемую в сопротивле-
нии R, можно определить,
как сум'му средних мощностей, выделяемых каждой комшонентой.
Средняя мощность колебания несущей .частоты
P0=U\!2R. (1.15).
Средние мощности колебаний верхней и нижней боковых час-
тот
21!
'Средняя мощность AM колебания
Рср=Р0 + Рв + Рв=Р0( 1+^-) (1161
больше мощности Ро несущего колебания на величину — Ро-
Первичный сигнал x(t) характеризуется амплитудой X и часто-
той модуляции Й. В модулированном колебании информация о
первичном сигнале содержится в боковых частотах: в амплитудах
пропорциональных амплитуде X, и в расстоянии боковых
частот от несущей, равном й. Несущее колебание никакой инфор-
мации не содержит, и в процессе модуляции оно не меняется. По-
этому можно ограничиться передачей только боковых полос, что и
реализуется в системах связи на двух боковых полосах (ДБП) без
несущей. Больше того, поскольку каждая боковая полоса содер-
жит полную информацию о первичном сигнале, можно обойтись
передачей только одной боковой полосы (ОБП)1. Модуляция, в
результате которой получаются колебания одной боковой полосы,
называется однополосной (ОМ).
Очевидными достоинствами систем связи ДБП и ОБП являют-
ся возможности использования всей мощности передатчика на пе-
редачу только боковых полос (двух или одной) сигнала, что поз-
воляет повысить дальность и надежность связи. При однополосной
модуляции, кроме того, вдвое уменьшается ширина спектра моду-
лированного колебания, что позволяет соответственно увеличить
число сигналов, передаваемых по линии связи в заданной полосе
-частот. Особенности таких сигналов рассматриваются ib § 1.5.
1.3. КОЛЕБАНИЯ ПРИ УГЛОВОЙ МОДУЛЯЦИИ
Рассмотрим особенности обоих видов угловой модуляции: фа-
зовой и частотной.
Фазовая модуляция заключается в пропорциональном
первичному сигналу x(t) изменении фазы <р переносчика и=
—Uo cos (too/4-<p):
<jp=<jPo+a*(O, (1-17)
тде а — коэффициент пропорциональности. Амплитуда колебания
яри фазовой модуляции не изменяется, поэтому аналитическое вы-
ражение ФМ колебания согласно (1.1)
u=nocos[(O0f+<j>o+ax(O]- (1-18)
Если модуляция осуществляется гармоническим сигналом
-х(t)~X sin Ot, то мгновенная фаза
ф(0 = W+'Фо + аУ sin Qt. (1-19)
1 В системах связи используются также двухполосные и однополосные сиг-
налы, в которых несущая подавляется не полностью. В данной книге будут рас-
сматриваться колебания ДБП и ОБП с полностью подавленной несущей.
22
Первые два слагаемых (1.19) определяют фазу смодулиро-
ванного колебания, третье — изменение фазы колебания в резуль-
тате модуляции.
в
и©
периодическом с
на угол Д<р (/) =
“Я
Рис. 1.6
^и'‘
Фазомодулированное колебание наглядно характеризуется век-
торной диаграммой рис. 1.6, построенной, как и в случае AM, на
плоскости, вращающейся по часовой стрелке с угловой частотой
со©. Немодулированному колебанию соответствует неподвижный
вектор Uo. Фазовая модуляция заключается
частотой й повороте вектора U относительно
= aXsin£it. Крайние положения вектора U
обозначены U' и U". Максимальное откло-
нение фазы модулированного колебания от
фазы немодулированного колебания
М=Л<ртах=аХ (Ь.20)
называется индексом модуляции. Индекс
модуляции М пропорционален амплитуде X
модулирующего сигнала. Он в такой же
степени характеризует ФМ колебание, .как
коэффициент модуляции т — AM коле-
бание.
Используя (1.20), перепишем ФМ колебание (1.18) как
u=t70cos(coo^+iq)o+AlsinQO- (1-21)’
Согласно (1.2) мгновенная частота ФМ колебания
co = cl>o+M£2 cos Q.t. (1.22).
Таким образом, ФМ колебание в разные моменты времени име-
ет различные мгновенные частоты, отличающиеся от частоты не-
сущего колебания со© на величину Д<в=Л1Й cos Qt, что позволяет
рассматривать ФМ колебание как модулированное по частоте^
Наибольшее отклонение частоты оз от со© 'называется девиацией
частоты Асод. Согласно (1.22)
Асод=Л1й или &fp=MF. (1-23)
Частотная модуляция заключается в пропорциональном
первичному сигналу x(t) изменении мгновенной частоты перенос-
чика:
со = со©+ах(/), (1.24)
где а — коэффициент пропорциональности. Подставляя (1.24)
в (1-3), 'определим 'мгновенную фазу ЧМ колебания как
Ф (0 == W+фо+в j х (/) dt.
о
23»
Аналитическое выражение ЧМ колебания с учетом постоян-
ства амплитуды можно согласно (1.1) записать в виде1:
t
u=U0cos[o)0t+<p0 + a J x(t)dt], (1.25)
о
В простейшем случае модуляции гармоническим колебанием
x(t)=XcosQt мгновенная частота co=co0+AcoHcos Fit, где Дюд=
— аХ — девиация частоты, т. е. максимальное ее отклонение от не-
сущей частоты соо, вызванное модуляцией. Аналитическое выраже-
ние этого ЧМ колебания согласно (1.25)
tr=lt/o cos'[<oo/-}-(po-f- (A<Ofl/Q)sin £2/).
Слагаемое (Дсйд/П)зш Qt характеризует изменение фазы, полу-
чающееся при ЧМ. Это позволяет рассматривать ЧМ колебание,
как ФМ колебание с индексом модуляции
М=Айд/Й, (1.26)
я записать его аналогично (1.21):
w=L'o'COs((9o/,+q>o+Al sinfi/). (1.27)
Из сказанного следует, что ФМ и ЧМ колебания имеют много
общего. Так колебание вида (1.27) может быть результатом как
ФМ, так и ЧМ гармоническим первичным сигналом. Кроме того,
ФМ и ЧМ характеризуются одними и теми же параметрами (ин-
дексом модуляции М и девиацией частоты Л/д), связанными меж-
ду собой одинаковыми соотношениями: (1.23) и (1.26).
Наряду с отмеченным сходством частотной и фазовой модуля-
ции между ними имеется и существенное отличие, связанное с
различным характером зависимости величин М и Д/д от частоты F
первичного сигнала:
при ФМ индекс модуляции не зависит от частоты F, а девиа-
ция частоты согласно (1.23) пропорциональна F;
при ЧМ девиация частоты не зависит от частоты F, а индекс
модуляции согласно (1.26) обратно пропорционален F.
Различие между частотной и фазовой модуляцией особенно за-
метно, когда модуляция производится сложным сигналом, содер-
жащим большое число компонент с разными частотами. Для ил-
люстрации сказанного на рис. 1.76, в построены графики ЧМ и
ФМ колебаний, соответствующие сигналу x(t) треугольной фор-
мы (рис. 1.7а). При ЧМ увеличение x(t) сопровождается возрас-
танием со и наоборот. При ФМ Xq(t)=ax(t), a (d—Mo+adx/dt.
Поэтому на участках, где dx/dt>Q, мгновенная частота сй больше
1 Отметим, что нельзя записывать ЧМ колебание как и =1/cos (соН-фо) >
подразумевая здесь под а мгновенную частоту (1.24). Дело в том, что если
скорость изменения фазы (o=di|)/d/ в разные моменты времени неодинакова (а
это характерно для ЧМ), за равные интервалы времени dt приращения фазы
будут различными, что и приводит к выражению (1.3).
24
л
t I
Рис. 1.7
несущей на величину Aco=co—too=adxldt-, на участках с dxldt<^
частота ФМ колебания меньше <оо на величину Дсо. Таким обра-
зом, ФМ сигналом x(t) треугольной формы совпадает с ЧМ сиг-
налом x\(i) (рис. 1.7г) прямоугольной формы. И вообще любое
колебание с угловой модуля-
цией может быть получено как
р результате ФМ первичным
сигналом x(t), так и ЧМ пер-
вичным сигналом Xi (t) =dx!dt.
К сказанному следует доба-
вить, что частотная и фазовая •
модуляция различаются также
способами их осуществления,
рассматриваемыми в гл. 3.
Определим среднюю мощ-
ность ЧМ (ФМ) колебаний.
Так как обычно Й<Смо, можно
считать рассматриваемые ко-'
лебания в пределах периода
Т=^.п1а> гармоническими. Сред-
няя мощность такого колеба-
ния за период Т
•
R 2 R
а поэтому и за пери-
Р = —
1 СР у,
б
Такой же она будет и в другие периоды,
од низкой частоты. Следовательно, средняя мощность при ЧМ-и ФМ.
остается такой же, как и в отсутствие модуляции; происходит
лишь ее перераспределение7 между составляющими спектра.
1.4. СПЕКТРЫ КОЛЕБАНИЙ ПРИ УГЛОВОЙ МОДУЛЯЦИИ
Исходным для определения спектров колебаний при гармони-
ческой угловой модуляции является выражение (1.27). Примем-
для упрощения выражений <ро=О и перепишем (1.27) в виде
u=U0 cos (М sin Q0cos со0/— По sin (М sin Q/)isn a>ot. (1.28»
Выражение (1.28) представляет сумму двух квадратурных ко-
лебаний частоты юо, из которых каждое модулировано по ампли-
туде частотой О. Угловую модуляцию принято подразделять на
узкополосную (М<0,5 рад) и широкополосную (М> 0,5 рад). На-
ибольшее распространение в технике связи имеет широкополосная
ЧМ с М^>1. Начнем с определения спектра узкополосной угловой
модуляции. Полагая М<С1, имеем
sin(M sin й/) sin СУ, cos(M sin Q0 «1, (1.29)
а потому
и= Uo cos <оо/ + ~U0 cos (соо+й) t——- Uо cos (соо—Q) t. (1.30)-
2
25<
Таким образом, спектр узкополосных сигналов угловой моду-
ляции аналогичен спектру простейшего AM колебания, показанно-
му на рис. 1.2. Он содержит компоненты несущей частоты <оо и
двух боковых частот <оо-|-П и <оо—Н. Параметром, определяющим
амплитуды боковых частот, здесь является индекс модуляции М.
Ширина спектра узкополосной угловой модуляции такая же, как и
при AM: она paiBHa удвоенной частоте модуляции.
Несмотря на идентичность спектров, рассматриваемое колеба-
ние отличается от AM колебания, что является следствием раз-
личия в знаках (т. е. в сдвиге фаз на 180°) компонент нижней бо-
новой частоты в выражениях (1.3'0) и (1.10)1. Это означает воз-
можность преобразования AM колебания в узкополосное ФМ ко-
лебание поворотом фазы одной из боковых частот на 180°. Для
иллюстрации сказанного на рис. 1.8а построена векторная диа-
грамма AM колебания. Изменяя фазу нижней боковой частоты на
180°, получаем векторную диаграмму .рис. 1.86, на которой конец
вектора результирующего колебания L7Pe3 перемещается с низкой
частотой Q по горизонтальной линии, что соответствует изменению
фазы А<р(/). При этом несколько изменяется и амплитуда U. Од-
нако при Афтаж’С 1 изменение амплитуды пренебрежимо мало. Со-
гласно рис. 1.86 tg A<p=2(if7B/[7o)sin Q/=tgAl sin Qt. Заменяя при
малых М и Л<р тангенсы их аргументами, получаем изменение фа-
зы =М sin Qt, соответствующее ФМ колебанию.
При широкополосной угловой модуляции и выражения
’(1.29) и (1.30) несправедливы. Приходится спектр колебаний оп-
ределять непосредственно из (1.28). Выражения cos (М sin ПО и
sin (М sin Qt) являются периодическими функциями частоты П, а
потому они могут быть разложены в ряды Фурье. Первая из этих
функций является четной, вторая — нечетной. В теории бесселевых
1 Спектры колебаний содержат сведения только об амплитудах спектраль-
ных компонент, тогда как характер сигнала зависит и от фазовых соотношений
между ними. Следовательно, спектр колебания не определяет однозначно его
характер.
26
частоты До = По/о(Л1), которая обра-
функций [23] доказывается, что ряды Фурье для этих функций
имеют вид
cos(M sin QI) +2/2(Al)cos2Q/+2/4(Al)cos4Qt+...,) ,, o1.
1 (i.Olfri
sin (Al sinQO = 2/i(Al)sin fi^ + 2/s(Al)sin 3Qf+..., f
где Jn (M) — функция Бесселя первого рода n-го порядка от аргу-
мента М. На рис. 1.9 приведены графики функций Бесселя
Подставляя (1.31) в (1.28), получим
u= L'o[Zo(Al)'COS (Oo^+^i (Af)cos(<oo+fi)^—Л'(Л1) cos(co0—П)£+
+ J2 (М) cos (coo+2й) t+/г (М)'cos (<в0—2Й) t+
+ /3 (Al)cos (соо+Зй) t—J3 (Al) cos (coo—3Q)1 4-...]. (1.32)^
Таким образом, спектр ЧМ и ФМ колебаний, модулированных
гармоническим сигналом, оказывается дискретным, симметричным;
относительно ио и содержащим бесконечное число боковых частот
вида <во±пй с амплитудами
An = U0Jn(M). Для Л1=4 он
построен на рис. 1.10. Соот-
ношения между функциями
Бесселя различных поряд-
ков, а следовательно, и ме-
жду амплитудами различ-
ных боковых компонент оп-
ределяются индексом моду-
ляции Л4. При некоторых
значениях М отдельные ком-
поненты могут исчезнуть (ес-
ли 7п(Л1)=0). Это же отно-
сится к амплитуде несущей
щается в нуль при Л! = 2,4; 5,6 ...
Наличие бесконечно большого числа боковых компонент спект-
ра означает, что теоретически спектр ФМ и ЧМ колебания явля-
ется бесконечно широким. Однако функция Бесселя начи-
ная с некоторых п<Л1, быстро убывают с ростом п, что видно на
рис. 1.9 и 1.10. Это позволяет ограничить полезный (практиче-
ский) спектр таких сигналов определенным количеством боковых
частот. При ограничении спектра необходимо учитывать влияние
Двух противоречивых факторов: в более узкой полосе частот ос-
лабляется 'Влияние помех, но одновременно увеличиваются иска-
жения сигнала из-за отсутствия опускаемых составляющих. На
практике выбирают компромиссное решение.
Если ограничиться в спектре боковыми составляющими, ампли-
туды которых не превосходят q % от максимальной амплитуды
спектральной компоненты Umax (см. рис. 1.10), то для каждого Af
можно рассчитать соответствующую ширину спектра. Она окажет-
ся несколько большей, чем 2MF—2\fg. Из рис. 1.10 следует,
что при <7=20% для Л1=4 ширина спектра Д/чм,фм =2(Л1-|-3)Е=
= 2 (Д/д+ЗЕ). При больших индексах модуляции (порядка десят-
2Г
ков и сотен) практическая ширина спектра, подсчитанная подоб-
ным образом, близка к удвоенной девиации частоты
Д/чм.фм ^2Afa—2MF. (1.33)'
Заканчивая рассмотрение вопроса о ширине спектра сигналов
гармонической угловой модуляции, подчеркнем ее отличие от ин-
тервала частот 2Д/д, в пределах которого происходит изменение
мгновенной частоты сигнала:
1) теоретическая ширина спектра Af чм.фм = о°;
2) практическое ее значение при М<С 1 оказывается Д/чм.фм~
= 2F^>2AfR, а при М^>\ Д/чм.фм несколько превышает 2Д)д и
лишь приближенно считается равной ей (1.33).
Рассмотрим влияние параметров модулирующего сигнала
x(/)=Xcosfi/ на спектры ФМ и ЧМ колебаний, используя для
определения ширины спектра приближенное выражение (1.33).
При изменении амплитуды X модулирующего сигнала спектры
ФМ и ЧМ колебаний изменяются одинаково. При возрастании X
происходит пропорциональное увеличение индекса модуляции,
спектры расширяются за счет увеличения числа спектральных
компонент.
Изменение частоты F модулирующего колебания по-разному
влияет на изменение спектров ФМ и ЧМ колебаний. При ФМ из-
менение F не влияет на величину индекса модуляции, а следова-
тельно, и на число спектральных составляющих (рис. 1.11а, б)1,
о,4-
о, г -
0,4 -
0,2-
F=BKfU,
М=2
I I I ...
f
а)
ФМ
F=2kOU, Ь
М=2
। Ма^кГц
J.l L______д,
fo f
S1
M=8 \
г)
Рис. 1.11
При ЧМ с уменьшением F индекс модуляции увеличивается, что
приводит к увеличению числа спектральных компонент (рис.
1.11в, г). В итоге ширина спектра ЧМ колебания от частоты почти
не зависит, а при ФМ изменяется пропорционально F.
1 На рис. 1.11 амплитуды спектральных , компонент нормированы относи-
тельно амплитуды Uo.
28
Колебание, получающееся при угловой модуляции негармоническим сигналом
п
x(t) = XfeCosfifci, можно записать в виде разности двух AM колебаний:
fe=i
M=t7oCos[coo^4-Aq>(/)]=|I>,oCOsA<p(/) cos at—Ue sin A<p(/)sin coot (1-34)
Для определения спектра каждого из этих AM колебаний нужно знать
спектры их огибающих, т. е. cosA<p(£) и sinA<p(i). Спектры Д<р(£) при ФМ и
ЧМ содержат те же частотные составляющие, что и первичный сигнал x(t). По-
скольку cosA<p(£) и sinAq>(Z) являются нелинейными функциями аргумента
Дф(/), спектры этих функций будут заметно отличаться от спектра Aq>(i): они
будут содержать составляющие кратных и комбинационных частот, возникающих
при нелинейных преобразованиях (см. § 3.2). Соответственно эти компоненты
будут перенесены в спектры боковых частот обоих AM колебаний (1.34).
В технике связи широко используется фазовая манипуляция (ФМп) перенос-
чика с изменением фазы на 180°. Графики изменения фазы Дф(£) и ФМп на-
пряжения показаны соответственно на рис. 1.12а, б. Аналитическое выражение
последнего соответствует (1.34), т. е. сумме двух квадратурных колебаний час-
тоты соо; каждое из этих колебаний обладает амплитудной манипуляцией
(АМп).
4р(9
Рис. 1.12
Разложим огибающие этих колебаний в ряды Фурье.- Так как cos <рш=
= cos(—фт), cosДф(1) =const. Если фш=л/2, то созДф(1)=0, и первое из
АМп колебаний в (1.34) обращается в нуль. Огибающая второй компоненты
41/ 1
VB sin Дф(/) = —-sin A<p(sin — sin ЗШ+ ...),
л 3
нипуляции. Из (1.34) получаем для Дф=л/2
2
где £1=2л/Т— частота ма-
1
«(f) =——Z7ofcos(coo'+n)Z—cos (СОО—fl)frf-— cos(icoo+3Q)i—
л 3
—— cos(<Bo—Bfi) <4- ...].
О
Амплитудный спектр сигнала (1.35) построен на рис. 1.12в: он содержит
только боковые частоты вида fo±nF (с нечетными п).
. (1.35)
1.5. БИЕНИЯ- ДВУХПОЛОСНЫЕ И ОДНОПОЛОСНЫЕ
КОЛЕБАНИЯ БЕЗ НЕСУЩЕЙ
Биения. Они образуются в результате сложения двух гармони-
ческих колебаний близких частот. Рассмотрим сумму двух высоко-
частотных колебаний ui=.Ui coscoitf и «2= (4 cos сог^, частоты кото-
рых мало отличаются друг от друга:
<|)2-<01 = й, (1-3'6)
29
Предположим, что амплитуда 17i>172. На рис. 1.13а построена
векторная диаграмма суммарного колебания
U = U\ + U2 = 171 COS ©i't + U2 COS ©2I
(1.37)
на плоскости, вращающейся с частотой ©i по часовой стрелке. На-
пряжение щ изображается неподвижным вектором Ub напряже-
ние и.2 — вектором U2, равномерно вращающимся с частотой Q
Рис. 1.13
против часовой стрелки. Вектор, суммарного колебания U опреде-
ляется геометрической суммой векторов Ui и U2. Его конец опи-
сывает на плоскости окружность радиуса 172. Периодическое с час-
тотой Й изменение величины и фазы вектора U означает наличие
амплитудной и фазовой модуляции. Это. позволяет представить
суммарное колебание (1.37) как
a = 17cos(©!l+<p), (1.38)
где U=\U(t) и <р=<р(1) —соответственно амплитуда и фаза коле-
бания, периодически изменяющиеся с частотой Й, называемой час-
тотой биений.
Когда конец вектора U оказывается над дугой 1—Oi—2, про-
веденной радиусом it7i из точки О, амплитуда U>Ui- Поскольку
вектор U2 вращается на диаграмме с постоянной частотой й, вре-
мя, в течение которого 17>17ь больше, чем то, в течение которого
17<it7i. Поэтому огибающая 17(f) колебания (1.38), постро-
енная на рис. 1.136, несинусоидальна: продолжительность
положительных полуволн больше, чем отрицательных, на-
пряжение вблизи максимума изменяется медленнее, чем
вблизи минимума, среднее значение амплитуды колеба-
ний 17ср несколько больше, чем 17ь Для меньших амплитуд 17г
продолжительность положительного полупериода огибающей мень-
ше отличается от продолжительности отрицательного, и огибаю-
щая ближе по форме к синусоидальной.
Перепишем (1.37) с учетом (1.36):
и— (I7i4-t72 cos Ш) cos ©if—172 sin Q.t sin ©if.
30
Поскольку £2<C<oi, множители при cos со it и sincoif можно рас-
сматривать как медленно меняющиеся амплитуды этих компонент
и записать сумму колебаний в виде (1.38). В этом случае
£7cos <p= £7] +£72cos Й/, U sin <р= £72sin Qt. (1.39)
Амплитуда биений, определяемая из (1.39),
U=VU\ + U22+2UVU2 cos £72r+ U22V 1 + zncos Й£, (1.40)
где m = 2U1U2/(U21 + U22).
Для определения фазы ср делим выражения (1.39) друг на дру-
га:
tgcp = £72sin Q£/(£7i + £72cos Й0. (1-41)
Выражения (1.40) и (1.41) подтверждают, что биения пред-
ставляют собой колебание, одновременно модулированное по амп-
литуде и по фазе, и что огибающая биений несинусоидальна.
Рассмотрим два крайних случая: сильно отличающихся ампли-
туд £7] и U2 и одинаковых амплитуд U\=U2. Если, например,
£72<^|£7ь величина im^2£72/£7i<c 1, j/l-f-m cos й£~ 1 + (m/2)cos Й£,
<р~ (m/2)sin й£. Тогда £7~-£7] (1+ |^ cos й£). При малой глубине мо-
дуляции огибающая биений приблизительно синусоидальна, а ин-
декс модуляции 7И~от/2. При равенстве амплитуд £7, и U2 т=Л,
амплитуда биений из (1.40)
£7=2£71Cos-|-£, - (1-42)
и из (1.41) tgqi=tg~t- Принимая cp= t и, используя (1.36), '
находим мгновенную фазу колебаний
о)1£+ф=®1/+ = (1.43)
Подставляя (1.42) и (1.43) в (1.38), получаем выражение для
биений в виде AM колебания с несущей частотой, равной средней
частоте суммируемых колебаний:
w=2£7jcos — t cos^l-±^L (1.44)
1 2 2
Этому случаю соответствует штрихпунктирная окружность на
рис. 1.13а и огибающая биений на рис. 1.13в. Амплитуда биений
при т=1 изменяется от величины 2Ui — 2U2 до нуля; в моменты
достижения амплитудой нулевого значения знак cos—£ меняется
на противоположный, что означает скачкообразное изменение фа-
зы колебания на 180°.
1 Двухполосные (ДБП) и однополосные (ОБП) сигналы без не-
сущей. Целесообразность использования таких сигналов была обо-
снована в § 1.2. Исключая компоненты несущей частоты из выра-
31
жения (1.5) и принимая для упрощения <ро=О, получаем выраже-
ние, определяющее колебание ДБП
ыДБп = ах(^)со3 (1-45)
При модуляции гармоническим сигналом x(Z)=XcosQZ двух-
полосный сигнал (1.45) можно представить в виде суммы двух гар-
монических колебаний верхней м0+П и нижней со0—П боковых
частот с одинаковыми амплитудами t/B=it7H=aX72, образующих
биения с частотой 2Q; огибающая такого сигнала подобна приве-
денной на рис. 1.1 Зе. Однополосный сигнал в этих условиях пред-
ставляет гармоническое колебание частоты со0+П или <оо—И.
Таким образом, формы огибающйх сигналов AM, ДБП и ОБП не-
одинаковы.
Обратимся теперь к случаю модуляции несущего колебания
частоты со0 бигармоничесиим первичным сигналом
x(t) =XiCOS Q^+Xacos Й2/, (1-46)
полагая й] и й2<Ссоо- В этих условиях двухполосный сигнал
«дбп =«(Xicos Й^Д-ХгСоз й2^)соз также имеет характер бие-
ний, только с более сложной огибающей.
Воспользовавшись выражениями (1.38), (1.40) и (1.41), можно
первичный сигнал (1.46) записать в виде
х(/)=Х'(0созф(0, (1.47)
где
(1-48)
/7?!
Х(£) = V Х21+Х22|/ 1+Н11 cos(Q2—Qi)A <p(if) =Й1£+Дф(£),
2Х< Х2 л , Х2sin (Q„ — Р,) t
=----, Лф (t) = arctg —--------.
X\ + X\’ 6X1 + X2cos(Q2-Q1)Z.
Теперь двухполосный и однополосный (для верхней боковой
полосы) сигналы согласно (1.45) и (1.48) будут
г/дБП = аХ(/)соз ф(/)созощ/= ?7о'соз[соо^+ф(0] +
+ 770cos[(oo^—ф(/)],
(1-49)
«ОБП = ^осоз[соо^+ф(0]- (1.50)
В этих выражениях1 m(t) =аХ (1)/Uo. Хотя спектр однополос-
ного. колебания достаточно простой (для верхней боковой полосы
он отличается от спектра первичного сигнала сдвигом на постоян-
ную частоту (о0), само колебание оказывается сложным, обладаю-
щим амплитудно-угловой модуляцией. В общем случае у одно-
полосных сигналов изменяются во времени и
огибающая, и мгновенная фаза ф = (ОоН~ф(^), и
мгновенная частота ы—d^jdt.
1 Выражения (1.49) являются общими для колебаний ДБП и ОБП, по-
скольку и более сложные первичные сигналы (1.11) можно представить в виде
Ца рис. 1.14 показаны первич-
ный сигнал х(0> состоящий из
двух гармонических колебаний
xi(t) и хг(1) кратных частот F и
3F с одинаковыми амплитудами, и
соответствующие AM, ДБП, ОБП
колебания. При построении сигна-
ла ДБП принято во внимание, что
при изменении положительного
значения x(i) на отрицательное,
фаза высокочастотного заполнения
меняется иа 180°.
Спектр колебания одной (пусть
верхней) боковой полосы содержит
две равные компоненты частот:
Гоо+П и ыо+ЗП, т. е. не отличается
от спектра двухполосного сигнала
без несущей, получающегося при
модуляции колебания частоты
Ыо4-2й гармоническим сигналом
частоты й *. Поэтому колебание
ОБП представляет биения с часто-
той 2й и средней частотой wo+2Q.
Графики рис. 1.14 показывают су-
щественное различие огибающих
колебаний AM, ДБП, ОБП и,
в частности, отличие огибающей
колебания ОБП от первичного сиг-
нала x(t).
Рис. 1.14
1.6. КОЛЕБАНИЯ ПРИ ИМПУЛЬСНОЙ МОДУЛЯЦИИ
В ряде систем связи, телеметрии и других нередко использует-
ся многоступенчатая (двух- или трехступенчатая) модуляция.
На первом этапе (ступени) модуляции первичным сигналом
x(t) (рис. 1.15а) подвергается переносчик иного вида: периодиче-
ская последовательность прямоугольных импульсов Фи(0 (рис.
1.156). Этот переносчик характеризуется: амплитудой U, шириной
(длительностью) т, частотой следования F1/i=\ITK и временным
положением центров импульсов А)л=6),1+&7и> где Zo,i соответству-
ет середине первого импульса, а &=0; ±1, +2 ...
Различают четыре вида импульсной модуляции, заключающих-
ся в пропорциональном сигналу x(t) изменении одного из пара-
метров данного переносчика:
амплитудно-импульсную модуляцию (АИМ), при которой изме-
няется амплитуда: Д17~х(/);
1 Аналитическое доказательство этого базируется иа преобразовании вы-
ражения (Г.45): и дБп=яХ(cos Й/4-cos 3Q0cos <>W=2rzX cos Qt cos 2Qt cos <Oof=
=aXcosfi/cos(a>o+2Q)f4-fi^cosQZcos(a>o—2Я)/. Первое слагаемое соответству-
ет рассматриваемому колебанию ОБП.
2—92 ‘ . 33
широтно-импульсную модуляцию (ШИМ), при которой изме-
няется ширина импульса: Дт~х(/);
фазово-импульсную (ФИМ) или временную импульсную (ВИМ)
модуляцию, при которой изменяется время действия (фаза) им-
пульса: Д/~х(£);
Рис. 1.15
частотно-импульсную модуляцию (ЧИМ), заключающуюся в
изменении частоты следования импульсов:. |ДГи~х(£).
На рис. 1.15в—е представлены сигналы, получающиеся при раз-
личных видах импульсной модуляции, первичным сигналом х(/).
Эти модулированные видеоимпульсы обладают относительно широ-
ким спектром частот, начинающимся со сравнительно низкочастот-
34
ных компонент, что затрудняет их передачу по каналам связи. По-
этому осуществляется следующая (вторичная) модуляция гармо-
нического высокочастотного колебания частоты fo последователь-
ностью видеоимпульсов. Вторичная модуляция может быть амп-
литудной, частотной или фазовой. В результате получаются коле-
бания: АИМ—ЧМ, ШИМ—AM, ФИМ—AM и др. Они и передают-
ся по линиям связи. В результате АИМ—AM модуляции образуют-
ся высокочастотные радиоимпульсы, приведенные на рис. 1.16е.
Для определения спектра АИМ—AM колебания удобно не-
сколько иначе представить порядок его формирования: считать,
что сначала производится формирование радиоимпульсов u(t) в
результате умножения периодической последовательности прямо-
угольных импульсов Фи(^) на гармоническое колебание cos а
затем—модуляция амплитуды радиоимпульсов. На рис. 1.16а—в
изображены преобразуемые сигналы, а на рис. 1.16г—е — соответ-
ствующие им спектры. Раскладываем последовательность прямо-
угольных импульсов Фи (0 рис. 1.16а в ряд Фурье
t/nCQS(nQH^—фп)- (1-51J
п=0
На рис. 1.16г построен спектр Фи(0- Немодулированныё радиоим-
пульсы рис. 1.166 можно записать как
СО
а(£)=Фи(#)С08<В(/= £ Un COS(MM—фтО'СОБ (HOt. (1.52J
n=0
Их спектр содержит компоненту несущей частоты ©о с амплиту-
дой Uq и боковые частоты g>o±^Qh с амплитудами 0,5t7n. В ре-
зультате амплитудной модуляции этих радиоимпульсов сигналом
x(t) получаем
Цдим (О = [1+ах(0]Фи(0,созм0Л
2* . . 35
! Для' простейшего первичного сигнала x(/)=XcosQ£
оо
ИАИМ (0 "= (1 +/H COS Ш) 2 COS(nQ[r/—<Tn)COS СОоЛ (1.53)
п=0
где т=аХ. Напряжение (1.53) отличается от (1.52) дополнитель-
ной модуляцией каждой его компоненты частотой й, приводящей
к образованию около каждой компоненты спектра радиоимпульсов
(1.52) двух боковых частот, сдвинутых на ±й.
Обычно для импульсной модуляции используются импульсы
большой скважности (Ги/т2>1), а частота их следования превы-
шает наивысшую модулирующую частоту сигнала x(t). В этих ус-
ловиях ширина спектра Д<о модулированных и немодулированных
радиоимпульсов примерно одинакова (рис. 1.165 и е) и равна уд-
военной ширине спектра импульсного переносчика: Дсо=2ДЙ.
Расчет спектров сигналов, получающихся при других способах
^первичной и вторичной модуляции, заметно сложнее, чем для сиг-
налов ДИМ—ДМ, и рассматривается в специальной литературе.
Глава 2
Нелинейные элементы и их характеристики
2.1. НЕЛИНЕЙНЫЕ РЕЗИСТИВНЫЕ ЭЛЕМЕНТЫ
Нелинейными элементами, как уже указывалось, являются все
полупроводниковые и электронные приборы, работающие с доста-
точно большими входными сигналами. На низких частотах экви-
валентные схемы этих приборов можно представить в виде ре-
зистивных нелинейных элементов, особенности которых определя-
ются вольт-амперными характеристиками, т. е. зависимостями то-
ков от приложенных напряжений 1=Ф(ц). Мгновенное значение
тока, протекающего через резистивный элемент, определяется по
вольт-амперной характеристике напряжением в этот же момент
времени. Поэтому резистивные нелинейные элементы называют
также безынерционными нелинейными элементами.
На достаточно высоких частотах характеристики нелинейных
элементов оказываются зависящими от частоты. Эта зависимость
обусловлена:
наличием реактивностей (в большинстве случаев паразитных):
емкостей между электродами и их выводами, а также индуктив-
ностями последних. В эквивалентной схеме наличие реактивностей
обычно учитывают включением реактивных элементов;
соизмеримостью времени, затрачиваемого на движение носи-
телей через прибор и процессы рекомбинации, с периодом воздей-
ствующих ма него колебаний. Если длительность этих процессов
составляет заметную часть периода колебаний, выходной ток при-
бора отстает по фазе от входного сигнала, т. е. прибор становится
инерционным. Инерционность прибора нередко учитывают введе-
36
нием дополнительных частотно-зависимых реактивностей в экви-
валентную схему.
Статические характеристики электронного прибора (они сни-
маются на постоянном токе) достаточно полно характеризуют
прибор только в пределах тех частот, где его можно считать ре-
зистивным, т. е. безынерционным. На рис. 2.1 приведены вольт-ам-
перные характеристики типовых нелинейных резисторов и их ус-
ловные обозначения: полупроводникового (а) и туннельного (б)
диодов, биполярного (в, г) и полевого (д) транзисторов, динисто-
ра (е). Характеристики электронных ламп (диодов, триодов, тет-
родов, пентодов) сходны с приведенными на рис. 2.1г, д.
Характеристики бывают однозначные и многозначные. В одно-
значных каждому значению аргумента соответствует единственное
значение функции при заданных величинах параметров (рис. 2.1а,
в—д). У вторых некоторым значениям одной величины соответст-
вует несколько значений другой (рис. 2.16, е). Отметим, что гисте-
резисные характеристики являются многозначными.
37
Нелинейные элементы подразделяют на управляемые и неуп-
равляемые. К первым относятся многоэлектродные приборы, имею-
щие раздельные вход и выход (транзисторы, сеточные электрон-
ные или ионные приборы), поскольку в них можно управлять вы-
ходной характеристикой изменением входного воздействия. Неуп-
равляемыми являются двухэлектродные приборы (диоды).
Если известна некоторая (прямая) зависимость у=Ф(х), то
зависимость х=ф(у) называют обратной. Так, прямой характе-
ристике z/=sinx соответствует обратная x=arcsinz/1.
Приборы, имеющие падающие участки на вольт-амперных ха-
рактеристиках, где производные di/du<ZO или dufdKQ, называют
приборами с отрицательным сопротивлением. В зависимости от
того, какую букву напоминает форма характеристики прибора,
различают два типа отрицательных сопротивлений: сопротивления
A-типа, вид вольт-амперной характеристики которых сходен с при-
веденной на рис. 2.16; они же называются отрицательными сопро-
тивлениями, управляемыми напряжением, поскольку именно нап-
ряжение однозначно определяет режим их работы; сопротивления
S-типа, вольт-амперные характеристики которых соответствуют
рис. 2.1е; они же называются отрицательными сопротивлениями,
управляемыми током, так как их режим однозначно определяется
протекающим через прибор током. Если на рис. 2.1е поменять мес-
тами координатные оси, то характеристика этого прибора примет
А-образный вид. Дифференциальные сопротивления du/di элемен-
тов обоих типов являются отрицательными на участках PQ и по-
ложительными за их пределами. Приборами A-типа являются тун-
нельные диоды, диоды Ганна, лампы при наличии в них динатрон-
ного эффекта; приборами S-типа — некоторые ионные (газотроны,
неоновые лампы) и полупроводниковые (динистры, тиристоры, ла-
винно-пролетные диоды) приборы.
Для расчета схем с нелинейными элементами применяются
графические, аналитические и машинные методы. Достоинством
графических методов является возможность наглядного определе-
ния токов и напряжений в схеме при заданных ее параметрах. Од-
нако графическое решение не позволяет установить аналитические
зависимости между изменением параметров устройства и вели-
чинами его токов и напряжений, определить оптимальные
значения параметров и т. п. Аналитические методы обеспечивают
установление таких зависимостей, и в этом их главное достоинст-
во. При анализе сложных схем особенно с высокой точностью ана-
литические решения оказываются или очень громоздкими, или
практически невозможными. Тогда применяют машинные методы
исследования.
Определим графически (рис. 2.2) ток, протекающий через ре-
зистивный нелинейный элемент, под действием напряжения
u=UD+Ucos at. (2.1)
1 Пример перехода от обратной характеристики к прямой приведен в § 5.5.
38
Используемый для этого метод проекций состоит ib следующем:
на графике u(t) замечаем величины и в различные моменты I, за-
тем по вольт-амперной характеристике находим соответствующие
значения тока i и откладываем их на плоскости i, t. Огибающая
последних дает зависимость {(£). Построение удобно начинать с
Рнс. 2.2
определения тока в моменты, соответствующие максимальному,
минимальному и среднему значениям напряжения (£i = 0, t.2=TI4,
t?,= TI2, t4=3T/4, ts—T), и лишь затем находить промежуточные
значения тока. При воздействии гармонического сигнала (2.1)
ток оказывается периодической функцией той же частоты со, но
иной формы.
Постоянная составляющая напряжения Uo, называемая смеще-
нием, определяет положение рабочей точки А на характеристике
нелинейного элемента. Из рис. 2.2 следует:
1) если входное напряжение является четной функцией време-
ни, то ток через нелинейный резистивный элемент также является
четной функцией времени той же частоты и потому его разложе-
ние в ряд Фурье имеет вид
i(t) =1'о+Ц cos<b1+/2COs2®^+/3Cos Зсо£+...; (2.2)
2) Первая гармоника тока находится в фазе с приложенным
напряжением1’,
3) постоянная составляющая тока I'q зависит и от смещения
UQ и от амплитуды U входного напряжения. Б общем случае ток
I'o отличается от тока /о, соответствующего рабочей точке. Так,
Для рассматриваемой на рис. 2.2 вольт-амперной характеристики,
1 Это имеет место только при безгистерезисных характеристиках нелинейно-
го элемента. Прн наличии гистерезиса первая гармоника отклика сдвигается по
фазе относительно входного сигнала (2.1), как показано ниже при объяснении
рис. 2.15.
крутизна которой возрастает с увеличением напряжения и, посто-
янная составляющая тока /'о больше тока /о в рабочей точке, при-
чем при увеличении U Го возрастает. Величина Го соответствует
уровню, при котором заштрихованные на рис. 2.2 площади, распо-
ложенные выше и ниже этого уровня, оказываются равными. За-
висимость постоянной составляющей тока Го от амплитуды пере-
менного напряжения является важной особенностью нелинейных
элементов, на использовании которой основана работа выпрямите-
лей, детекторов, разнообразных измерительных приборов.
2.2. АППРОКСИМАЦИЯ ВОЛЬТ-АМПЕРНЫХ
ХАРАКТЕРИСТИК
Общие сведения. Математическое описание работы схемы начинается с со-
ставления уравнений, связывающих токи и напряжения в различных частях
схемы, в том числе и в нелинейных элементах. Для нелинейных элементов
обычно известна графическая зависимость тока от напряжения (из справочника
или эксперимента). Поэтому возникает задача аппроксимации, т. е. приближен-
ного аналитического представления нелинейной характеристики. Наиболее широ-
кое распространение имеют аппроксимации полиномиальная, кусочно-линейная,
а также с помощью некоторых трансцендентных функций (экспоненциальных,
тригонометрических и др.).
Обычно при выборе способа аппроксимации стремятся удовлетворить тре-
бованиям, являющимся в значительной степени противоречивыми:
возможности выявления свойств схемы, представляющих интерес в рассмат-
риваемом случае. Например, для объяснения различных особенностей работы
автогенератора требуется аппроксимировать характеристику нелинейного элемен-
та полиномами то первой, то третьей, а то и пятой степени;
простоты аппроксимирующей функции, допускающей последующую матема-
тическую обработку;
достаточной точности.
Необходимость определенной точности аппроксимации очевидна, ибо без
нее нельзя гарантировать достаточную точность расчетов всего устройства. Од-
нако увеличение точности аппроксимации достигается, как правило, ценой ус-
ложнения аппроксимации, что противоречит второму, а иногда и первому тре-
бованиям. Кроме того, характеристики и параметры реальных приборов (тран-
зисторов, ламп) обладают значительным разбросом и потому во многих слу-
чаях качественно правильная аппроксимация имеет большее значение, чем точ-
ность. В других случаях, например при расчетах на ЭВМ сложных устройств
микроэлектроники, содержащих сотни и тысячи элементов и не имеющих орга-
нов регулировки, вопрос о точности аппроксимации характеристик элементов
приобретает первостепенное значение. Величина допустимой неточности аппрок-
симации может оцениваться различными критериями приближения. Наибольшее
распространение имеют: I) среднеквадратическое приближение, при котором тре-
буют, чтобы среднее значение квадрата отклонения аппроксимирующей зависи-
мости £=Ф(и) от действительной /=Ф(ц) не превышало некоторой допустимой
величины б
(Ф(Ц)—Ф(и)]24/и^б
и1
в интервале ДУ=ц2—щ значений и, в пределах которого производится аппрок-
симация; 2) равномерное приближение, при котором требуют, чтобы при любом
значении и интервала ДУ величин^ отклонения Ф(ы) от Ф(ы) не превышала б,
т. е. |Ф(ы)— Ф(н) |<б.
40
Полиномиальная аппроксимация. Полиномиальная аппроксима-
ция заключается в представлении вольт-амперной характеристики
/=ф(и) полиномом n-й степени:
п
1= У GfeWfe=ao + (Ziw+o2w2+ ... апип. (2.3)
fe=0
Такой способ аппроксимации является наиболее удобным для
объяснения принципа действия многих нелинейных устройств (мо-
дуляторов, детекторов, генераторов и пр.), находящихся под воз-
действием одного или нескольких гармонических колебаний. Опре-
делим коэффициенты полинома (2.3) с помощью метода выбран-
ных точек. Метод состоит в определении коэффициентов аь из ус-
ловия равенства значений ординат аппроксимированной и дейст-
вительной характеристик в выбранных точках кривой. Для ап-
проксимации полиномом л-й степени в пределах интервала ап-
проксимации ДУ, задаваемого диапазоном изменения и, выбираем
zz-J-1 напряжения и—Uk (от щ до ип+\) и определяем соответст-
вующие токи i=ik (от ii до z’n+1). Простейший способ выбора зна-
чений Uk — деление интервала ДУ на п равных частей Л, как по-
казано на рис. 2.3. При п=4 Д= (и5—wJ/4.
Рис. 2.4
Для определения коэффициентов а& потреоуем, чтобы при на-
пряжениях u—Uk правые части полинома (2.3) давали i—ik-
i1 = a0+aIul+a2u2i + - +anunh j
i2=c0+o1iz2+a2u22 + - +anun2,
in+i = a0+aiUn+\ +a2u2n+i+ — + anunn+i-
В этих уравнениях значения ik и Uk известны. Решая систему
алгебраических уравнений (2.4), находим коэффициенты щ. Если
и—0 лежит внутри интервала аппроксимации ДУ, коэффициент
41
а0 определяется как ток при и=0. Очевидно, чем выше степень
полинома п, тем ближе точки, в которых аппроксимированная
характеристика совпадает с действительной, и тем точнее аппрок-
симация.
Для упрощения расчетов нередко характеристику аппроксими-
руют относительно рабочей точки А, вводя координаты y—i—is и
х—и—Uq. В этом случае в аппроксимирующем полиноме
у = Ф] (х) =bix+b2x2 + bsx3 + — (2.5}
отсутствует свободный член (&о='О), ибо у=0 при х=0. При этом
уменьшается число коэффициентов полинома n-й степени, подле-
жащих определению, и упрощаются последующие расчеты компо-
нент тока, поскольку при воздействии (2.1) в (2.5) нужно под-
ставлять только переменную составляющую воздействия: х~
= U cos mt.
За пределами использованного при аппроксимации интервала
ДУ аппроксимированная характеристика (пунктир на рис. 2.3) мо-
жет резко отклоняться от действительной (сплошной), и пользо-
ваться ею без специальной проверки не следует.
Определение п+1 коэффициентов аь сводится к наложению на
полином (2.3) п+1 граничных условий. В ряде случаев некоторые
из этих условий целесообразно заменить иными. Например, можно
потребовать, чтобы в определенных точках равными у аппрокси-
мированной и действительной характеристик были бы не только
ординаты, но и производные первого, а иногда и более высокого по-
рядка. Так, характеристику туннельного диода (рис. 2.4) нередко
аппроксимируют относительно середины падающего участка MN
неполным полиномом третьей степени у=п1х+озх3, определяя ко-
эффициенты П] и аз из условий совпадения в экстремальных точ-
ках М и N, где x=±AU/2 и y=+t\.II2\ а) ординат характеристик
и б) касательных к ним. Второе условие означает -^j = 0.
Из него
й1 = _Зй3(Д{7/2)2. 1
Из первого условия для точки N имеем
А/ А(7 , /А(7\3
-----— ai-----h ач (- ) .
2 1 2 \2 /
Совместное решение (2.6) и (2.7) дает
а1=— ЗД7/2Д67, а3=2Д7/(ДП)3.
Четные и нечетные части характеристик. Нелинейную вольт-амперную хат
рактеристику 1=Ф(и), аппроксимируемую полиномом (2.3), можно представить
в виде суммы четной и нечетной частей
1=Ф(Ы)=ФЧ(Ы)+ФНЧ(Ы), (2.8)
где
Фч(н) =ао+а2«2+а4«4+ .... Фнч(и) =ai«+aaW3+a;,H5+ ... (2.9)
Четная и нечетная части характеристики удовлетворяют соотношениям:
фч(—«)=Фч(ы), Фнч(—«)=—Фвч(и). (2.10)
42
(2.6)’
(2.7}
Заменяя в (2.8) и на —и и учитывая (2 10), получим
Ф(—и)=Фч(и)—Фвч(м). '(2.11)
Сложение и вычитание правых и левых частей (2.8) и (2.11) приводит к
следующим выражениям для определения четных и нечетных частей характерис-
тики:
Ф(и)+Ф(—и) Ф(и)— ф(—и)
ФД«) =---------------, фвч(н) = —— 2 ------.(2.12)
Четные и нечетные части характеристик строятся обычно относительно сме-
щений, соответствующих рабочим точкам. На рис. 2.5а, б показаны такие по-
строения для двух рабочих точек: А! и Д2. Для каждого случая по характе-
ристике £=Ф(и) построены: ф(—и) как зеркальное изображение ф(и) отно-
сительно оси ординат, проведенной через рабочую точку, —Ф(—и) как зер-
кальное изображение Ф(—и) относительно оси абсцисс, Фч(и) и Фвч(и) как
полусуммы характеристик, соответствующих выражениям (2.12).
Рис. 2.5
Целесообразность раздельного построения четной и нечетной частей харак-
теристик вызвана рядом причин. Во-первых, работа многих схем определяется
либо только четной (модуляция, детектирование), либо только нечетной (гене-
рирование колебаний при постоянном смещении) частью характеристики. Ап-
проксимация же отдельно четной и отдельно нечетной частей вольт-амперной
характеристики значительно проще аппроксимации полного полинома той же
степени. Во-вторых, наличие таких характеристик во многих случаях облегчает
понимание процессов в анализируемом устройстве.
По виду этих характеристик можно судить о минимальной степени полино-
ма, правильно отображающем их основные особенности. Так, если напряжение
и изменяется относительно рабочей точки на рис. 2.5а в пределах отмеченного
интервала AV', коэффициенты четной части характеристики должны иметь зна
чення: ао>0, равное току в точке А], а2<0, поскольку он определяет уменьше-
ние Ф,(«) при небольших напряжениях |uj, и а<>0 для ограничения уменьше-
ния Фч(и) при дальнейшем возрастании |а|. Нечетная часть характеристики
Должна выражаться полиномом третьей степени с ai>0 н аз<0; последнее—-для
43
ограничения возрастания Фч(ы) при увеличении |«|. Для рис. 2.56 четная часть
характеристики может аппроксимироваться по-прежнему полиномом четвертой
степени, но с коэффициентами ао>0, аг>0 и а4<0, а нечетная — полиномом
пятой степени с ai>0, п3>0 и с5<0.
Из выражений (2.10) следует практический способ создания устройств, ха-
рактеристики которых имеют вид либо четной, либо нечетной части характе-
ристики Ф(ы). Для этого нужно взять два идентичных нелинейных элемента
(НЭ1 и НЭг), работающих в одинаковых режимах; переменные напряжения на
их входы должны подаваться в противофазе, что, в большинстве случаев, дос-
тигается благодаря использованию входного трансформатора с выведенной сред-
ней точкой вторичной обмотки, как показано на рис. 2.5в и а. В обеих схемах
токи й=Ф(и), £2=Ф(—и). Для формирования четной части характеристики
требуется выходное напряжение снимать с того места схемы, где протекает сум-
ма токов ii+('г (рис. 2.5в), так как тогда выходное напряжение иВых=
=J?lO(u)+®(—ы)]=2/?Фч(и) пропорционально Фч(н). В схеме формирования
нечетной части характеристики нагрузка должна быть включена так, чтобы
выходное напряжение изменялось пропорционально разности токов й—is (рис.
2.5г). В этом случае ыВых=7?[Ф(«)— Ф(—«)] =27?Фнч(и) пропорционально
Фвч(и).
Аппроксимация трансцендентными функциями. В качестве ап-
проксимирующих трансцендентных функций применяются экспо-
ненты и суммы экспонент, гиперболические, тригонометрические,
обратные тригонометрические и другие функции.
Характеристику полупроводникового диода (рис. 2.6а) часто
аппроксимируют экспонентой
i=A(e»“—1) (2.13)
с постоянными А и а. Характеристика (2.13) проходит через нача-
ло координат, так как при и=0 ток i=0. При больших обратных
напряжениях, не достигающих напряжения пробоя, ток диода при-
близительно постоянен и равен току насыщения неосновных носи-
телей —70-'При и-э—оо из (2.13) имеем t = —А. Поэтому далее
считаем А—10 и записываем (2.13) как
i=Z0(e»“—1). (2.14)
Чтобы определить диапазон напряжений, в пределах которого,
характеристика рис. 2.6а близка к экспоненте, воспользуемся рас-
пространенным методом приведения нелинейной ха-
рактеристики к линейному виду, заключающемся в
таком изменении масштабов откладываемых по осям величин, при
котором аппроксимирующая зависимость становится линейной. Пре-
образуя (2.14) и логарифмируя, получаем In (г/7о+1) = ooz. Следо-
вательно, если по точкам характеристики рис. 2.6а построить за-
Рис. 2.6
Рис. 2.7
висимость ln(ii/70+l) от и (рис. 2.66), то в диапазоне напряжений
ДУ, где эта характеристика мало отличается от линейной, ее ап-
проксимация выражением (2.14) будет достаточно точной. Посто-
янная а определяется из рис. 2.66 как угловой коэффициент ка-
сательной: a=tgp. Нередко коэффициент а определяют иначе: из
условия совпадения в некоторой точке (щ, реальной и теоре-
тической (2.14) характеристик, т. е. из соотношения 70(e“Ui—1) =
=й.
Нелинейные зависимости более сложного характера иногда аппроксимируют
суммой трансцендентных функций. "Так, для характеристики туннельного диода
подходящим оказывается выражение вида
i=/ue-c“+£»(e₽“—1), (2.15)
в котором каждое слагаемое характеризует определенную компоненту тока:
первое — туннельный ток, второе — диффузионный. На рнс. 2.7 пунктирные ли-
нии изображают этн компоненты, а сплошная — суммарный ток. В, области на-
пряжений, близких к 6], влиянием второго слагаемого можно пренебречь, что
позволяет определять параметры А и а из условий:
наличия горизонтальной касательной при u=UIt т. е.
= Л (1—a6j)e-aI71 =0;
получения в точке М i=/i=4e“’6i.
Из этих выражений а=1/£Л, А=е/1/1Л.
Коэффициенты D и р второго слагаемого могут быть определены, например,
из условий i=i\ при м=6з и i=I2 прн u=Uz.
Кусочно-линейная аппроксимация. Кусочно-линейная аппрокси-
мация заключается в замене реальной плавно меняющейся зави-
симости /=Ф(и) приближенной, состоящей из отрезков прямых
линий, выбираемых большей частью касательными к реальной ха-
рактеристике в нескольких точках. На рис. 2.8а показана такая
аппроксимация, содержащая два линейных участка. Характеристи-
ка аппроксимируется выражениями
0 при u^U0, (2 16)
S(a—67О) при u^U0.
На рис. 2.86 по методу проекций построены импульсы тока, по-
лучающиеся при воздействии гармонического колебания достаточ-
но большой амплитуды на дан-
ный нелинейный элемент, описы-
ваемый действительной (пунктир
ные линии) и кусочно-линейной
(сплошные) характеристиками.
При больших амплитудах вход-
ных сигналов получающиеся в
этих двух случаях импульсы тока
мало отличаются друг от друга и
при разложении их в ряд Фурье
du
Рис. 2.8
45
постоянная составляющая и амплитуды нескольких первых гармо-
ник также близки друг к другу. Поэтому данная аппроксимация
широко используется при рассмотрении воздействия сигналов боль-
шой амплитуды. Если же амплитуда входного сигнала невелика,
наблюдается значительное различие в результатах расчета по дей-
ствительной и аппроксимированной характеристикам, т. е. такая
аппроксимация непригодна.
2.3. ПАРАМЕТРЫ НЕЛИНЕЙНЫХ РЕЗИСТИВНЫХ
ЭЛЕМЕНТОВ
Когда на нелинейный
Нелинейные двухполюсники (диоды) характеризуются сопро-
тивлениями и проводимостями, которые определяются различными
способами.
Статическое сопротивление или. сопротивление постоянному
току определяется, как и для линейного элемента, отношением- на-
пряжения к току: Ro—u/i. Если обозначить через а угол наклона
линии, соединяющей точку А характеристики (рис. 2.9) с началом
координат, то /?o~ctga. Величина, обратная Ro, называется ста-
тической проводимостью-. Go=iju.
Дифференциальное сопротивление R определяется как
R=duldi. (2.17)
Заменяя бесконечно малые приращения малыми конечными Ди
и’Дг, получим R~Au/Ai. Если угол наклона касательной к харак-
теристике в точке А обозначить р,
то 7?~ctgp. Для характеристики
Ё=Ф(и) производная di/du=<£>'(u)
й/?=1/Ф'(и).
Величина G= 1/R = dl!du назы-
вается дифференциальной прово-
димостью. Дифференциальные и
статические параметры нелиней-
ных элементов зависят от напря-
жения и. На практике преимуще-
ственно используются дифферен-
циальные параметры, они совпа-
цают с соответствующими мало-
сигнальными параметрами тран-
зисторов и электронных ламп.
нт действует напряжение (2.1) с
малой амплитудой U, небольшой участок'вольт-амперной характе-
ристики, в пределах которого происходит изменение напряжения,
можно заменить касательной. Тогда ток, протекающий через этот
элемент, i=70+^cos wf, причем
I=U/R = UG. (2.18)
Таким образом, дифференциальное сопротивле-
ние—это сопротивление нелинейного элемента
46
переменному току малой амп л’и т у д ы. Дифференци-
альное сопротивление приборов с ВАХ рис. 2.1 положительно во
всех режимах за исключением тех, которые соответствуют падаю-
\цим участкам (PQ на рис. 2.16, е), где оно отрицательно.
\ Для выяснения смысла отрицательного дифференциального со-
противления рассмотрим простейшую цепь переменного тока, со-
стоящую из .источника синусоидального напряжения иИСт= Д sin со/
и сопротивления нагрузки (рис. 2.10). Полагаем, что в ка-
кой-то момент времени полярность напряжений соответствует обо-
значенной на рисунке, ток i=I sin at течет в направлении, указан-
ном стрелкой. В сопротивлении 7?н ток и напряжение синфазны,
Рис. 2.11
что показано на графиках колебаний и векторной диаграмме рис.
2.11а. Отношение комплексных амплитуд [7//='C//Z=RH>0. Сред-
няя мощность в сопротивлении P=Re(y(7/) =yt//>0, что сви-
детельствует о потреблении энергии сопротивлением Рн. В источ-
нике энергии ток и напряжение противофазны (рис. 2.116). Поэто-
му его сопротивление Z1ICT= 17Ист/^=Рист 'И средняя мощность
1 1
Рист=Не(—17Ист/) =——UI отрицательны. Таким образом, поло-
жительное дифференциальное сопротивление яв-
ляется потребителем, а отрицательное — источ-
ником энергии переменного тока.
Если построить, например, для туннельного диода графики то-
ков, протекающих через прибор под действием малого гармониче-
ского напряжения при различных смещениях (рис. 2.12), окажет-
ся, что на участке R<0 (точка В) прибор является источником, а
на участках R>0 (точки Л и С) — потребителем энергии перемен-
ного тока1.
При воздействии на нелинейный резистивный элемент гармони-
ческого напряжения (2.1) большой амплитуды U ток (2.2) оказы-
вается негармоническим с амплитудой Ц первой гармоники. Сред-
1 Сопротивление постоянному току также может быть Положительным или
отрицательным. Так, аккумулятор имеет положительное сопротивление, когда он
заряжается,- и отрицательное, когда разряжается.
47
ней (по первой гармонике) проводимостью нелинейного элемента
называют отношение
Gcp=/i/t7. (2.19)
Величина Gcp зависит от амплитуды U, поскольку изменение по-
следней -вызывает непропорциональное изменение амплитуды /ь а
также от смещения Go.
Нелинейные многополюсные резистивные элементы (транзисто-
ры, сеточные электронные лампы и др.) чаще всего при анализе
цепей представляют в виде четырехполюсников, имеющих вход и
выход. В зависимости от того, какие токи и напряжения выбира-
ются в качестве независимых
переменных, получают различ-
ные системы характеристик,
малосигнальные параметры (z,
у или h) и эквивалентные схе-
мы прибора 1. Все малосигналь-
ные параметры являются диф-
ференциальными.
При воздействии гармониче-
ского напряжения пвх=
= GBX cos at на вход нелинейно-
го резистивного четырехполюс-
ника выходное напряжение,
входной и выходной токи оказываются периодическими функциями
той же частоты с амплитудами первых гармоник соответственно
G1 вых, Л ВХ и II вых- При анализе таких устройств (см. § 4.4, 4.8 и др.)
нередко используют средние (по первой гармонике) параметры:
крутизну 5Ср = Л вых/Gbx; (2.20)
коэффициент передачи напряжения КСр= Gj Вых/Пвх;
входные и выходные проводимости: GCp.Bx—Ii bx./Ubx, Сср.вых=
==11 Вых/G] ВЫХ-
Все эти величины зависят от выбора исходного рабочего режи-
ма работы прибора и амплитуды GBX. Особенно широко в теории
нелинейных цепей используется средняя крутизна SCP-
2.4. НЕЛИНЕЙНЫЕ ИНЕРЦИОННЫЕ ЭЛЕМЕНТЫ
До сих пор мы рассматривали безынерционные нелинейные
элементы. Когда на безынерционный нелинейный элемент пода-
ется напряжение определенной формы, ток оказывается искажен-
ным, причем величина искажений не зависит от частоты прило-
женного напряжения. Однако, как отмечалось в § 2.1, нелинейные
элементы могут быть и инерционными. Ими могут стать электрон-
ные лампы и транзисторы при работе на высоких частотах, когда
время прохождения носителей через прибор окажется сонзмери-
1 Эти вопросы рассматриваются в курсе электронных приборов.
48
\мьш с периодом действующих в схеме колебаний. Инерционность
шриборов, связанная с инерционностью носителей, проявляется в
возникновении запаздывания (сдвиге фаз) выходного тока относи-
тельно входного 'напряжения, изменении входного и выходного со-
противлений прибора и превращении их в комплексные и т. д. В
результате, как правило, уменьшаются коэффициенты усиления
усилителей, выходные мощности усилителей и генераторов и т. д.
Следует заметить, что инерционность прибора не всегда явля-
ется его недостатком. Существует ряд приборов, нормальная ра-
-бота которых возможна только при наличии достаточно большого
запаздывания. Это лампы бегущей волны, клистроны, лавинно-
пролетные диоды и другие приборы, используемые на СВЧ.
В радиотехнике, автоматике, измерительной технике применя-
ется и другая группа инерционных (точнее, теплоинерционных)
нелинейных сопротивлений, примером которых является обычная
.осветительная лампа. Если включить лампу в цепь постоянного то-
ка, то с увеличением тока (или напряжения) температура нити и
•ее сопротивление будут возрастать. Следовательно, лампа являет-
ся сопротивлением нелинейным.
, Теперь рассмотрим работу этого прибора на переменном токе.
При достаточно низкой частоте воздействующих колебаний темпе-
ратура нити следует за мгновенными значениями напряжения, что
проявится в мигании лампочки и искажениях протекающего тока.
При большей частоте колебаний, например 50 Гц, лампа останется
прибором нелинейным, поскольку при увеличении амплитуды на-
пряжения возрастают температура и сопротивление нити. Однако
ток теперь не будет искажаться, так как из-за большой тепловой
инерционности нити ее сопротивление в пределах периода колеба-
ний будет практически постоянным. В этом состоит важнейшая
особенность подобных приборов. Величина сопротивления такого
резистора зависит от его температуры или выделяемой в нем мощ-
ности или при заданной форме колебаний от амплитуды напря-
жения или тока.
Элементы, сопротивления которых определяются их температу-
рой, называются терморезисторами. Сопротивление металлическо-
го терморезистора (осветительной лампы) возрастает с уве-
Рйс. 2.13
личением амплитуд напряжения U или тока I, что показано на
рис. 2.13. Более широкое применение в технике имеют полупро-
водниковые терморезисторы, у которых с ростом U или I сопро-
тивление падает. Применение терморезисторов в генераторах
синусоидальных колебаний рассматривается в § 4.8.
2.5. НЕЛИНЕЙНЫЕ РЕАКТИВНЫЕ ЭЛЕМЕНТЫ
Нелинейными индуктивностями являются катушки
с ферромагнитными сердечниками. Их основные характеристи-
ки— кривые намагничивания (рис. 2.14а), представляющие зави-
симости индукции В от напряженности магнитного поля Н. При
различных величинах Нт получается семейство гистерезисных ха-
рактеристик, вложенных друг в друга. Пунктирная линия, прохо-
дящая через их вершины, называется основной кривой намагничи-
вания. Поскольку магнитный поток Ф пропорционален В, а напря-
женность магнитного поля Н пропорциональна току i, ампер-ве-
берная характеристика нелинейной индуктивности Ф(7) отличает-
ся от характеристики намагничивания только масштабами. Нели-
нейный индуктивный элемент характеризуют статической £о=ФЛ\
или дифференциальной Ь—дФ/сИ индуктивностью. Зависимости
этих величин от тока t, определенные по основной кривой ампер-
веберной характеристики рис. 2.14а, построены на рис. 2.146.
На рис. 2.15 методом проекций определен отклик нелинейного
элемента, обладающего гистерезисом, на воздействие синусоидаль-
ного сигнала (тока). Для большей наглядности использована ку-
сочно-линейная аппроксимация ампер-веберной характеристики.
Пунктирная линия на рис. 2.15 изображает первую гармонику Ф1
магнитного потока, которая оказывается сдвинутой на угол <pi
относительно входного сигнала. Таким образом, наличие гис-
терезиса приводит к появлению сдвига фаз
между воздействующим синусоидальным сигна-
лом и первой гармоникой отклика. Обычно измене-
ние амплитуды входного колебания вызывает непропорциональное
50
изменение размеров петли гистерезиса. В результате величина фа-
зового сдвига <pi оказывается зависящей от амплитуды воздейст-
вующего тока I.
Эквивалентную схему катушки индуктивности представляют в
виде последовательно включенных индуктивности L и сопротивле-
ния г. Последнее учитывает как активное сопротивление провода,
Рис. 2.15
так и многие другие факторы (потери на перемагничивание сер-
дечника, определяемые площадью петли гистерезиса, на вихревые
токи и т. п.). С ростом частоты потери и активное сопротивление
г увеличиваются, что влияет на добротность катушки QL=o>L/r;
обычно на некоторой частоте величина Q максимальна.
Различают две группы нелинейных емкостей: а) вари-
конды, нелинейность которых связана с зависимостью диэлектри-
ческой проницаемости е от напряженности Е электрического поля,
б) варикапы —- полупроводниковые диоды, нелинейная емкость ко-
торых определяется свойствами р-п-перехода.
Вариконды, в качестве диэлектрика которых чаще всего ис-
пользуется титанат бария, характеризуют зависимостями элект-
рической индукции D=zE от напряженности поля Е, по форме
сходными с характеристиками намагничивания рис. 2.14а. С рос-
том частоты добротность Q=l/a>Cr варикондов уменьшается. По-
этому они применяются преимущественно в низкочастотных схе-
мах.
Основной характеристикой варикапов является зависимость ем-
кости диода от приложенного напряжения (рис. 2.16):^при обрат-
ных напряжениях емкость диода определяется зарядной емкостью,
зависящей от толщины запирающего слоя, при прямом—> преиму-
щественно диффузионной емкостью, связанной с инфекцией носи-
телей.
51
Нелинейные емкости характеризуют статической С^—qlu или
дифференциальной
C — dqjdu (2.21)
емкостью. При заданном напряжении и выражения для протекаю-
щего через емкость тока ic=dq]dt зависят, от того, какая из ха-
рактеристик емкости [Со(«) или С(м)] известна. Если задана
С(и), то
С (и) — .
' 'di
dq d и
du dt
Рис. 2.16
Если же известна статическая емкость С0(и), то
• d (Со и) /р Сс \ Д к
'С= —------ь0+«— )— .
dt \ au J d i
Переходы р-п полупроводниковых диодов и транзисторов при-
нято характеризовать дифференциальными емкостями (2.21). За-
висимость зарядной емкости от напряжения описывается выраже-
нием
(2.22)
С с (С)
3 (1-«/фк)'-'п ’
где С(0) —дифференциальная емкость при и=0; <рк — контактная
разность потенциалов. Коэффициент п зависит от характера пере-
хода: резкому ' переходу соответствует п—2, плавному — п—3.
Для большинства встречающихся варикапов 2<п<3. В области
допустимых изменений обратного напряжения и<’д (от нуля до
напряжения пробоя) зарядная емкость изменяется обычно в 4—5
раз.
2.6. ИСПОЛЬЗОВАНИЕ НЕЛИНЕЙНЫХ ЭЛЕМЕНТОВ
В КАЧЕСТВЕ ПАРАМЕТРИЧЕСКИХ
Классифицируя в § В.2 электрические цепи, мы отмечали от-
дельно параметрические и нелинейные цепи, получаемые в ре-
зультате включения в схему соответственно параметрических и не-
52
линейных элементов. На практике в большинстве случаев в ка-
честве параметрических используются нелинейные элементы, ра-
ботающие в определенных условиях.
Предположим, что на нелинейный элемент одновременно воз-
действует несколько входных сигналов x(t): xi(t), x2(t),... ,xn(t).
В общем случае его отклик может быть представлен в виде нели-
нейной зависимости ytff — Yfx^f), x2{t),..., xn(Z)]. В некоторых
случаях отклик линейно зависит от одного из сигналов, например
х-Л(0:
y(t) =УО[Х1(0, ..., (/)] +2[Х1(П, Хп-1(0]*п(0,
где Уо и Z — некоторые нелинейные функции от всех х< (/), кроме
хп(/). В этих условиях нелинейная система по отношению к воз-
действию xn(t) оказывается линейной параметрической: линей-
ной— поскольку изменение y(t) пропорционально хп(1), парамет-
рической— поскольку ' параметр системы Z(t), определяющий
влияние xn(t) на у{1), зависит от времени t и не зависит от xn(t).
С подобным случаем мы встречаемся, в частности, когда на не-
линейный элемент (рис. 2.17) с характеристикой 1=Ф(и) дейст-
вует сумма гармонических колебаний
u=u\ + u2 = U\ cosfi>if+t72COs<j)2A (2.23)
причем амплитуда одного из них значительно меньше амплитуды
другого:
U2<^UX. (2.24)
Условие (2.24) позволяет рассматривать слабый сигнал и2 как
небольшое отклонение от сильного и\ и ограничиться в разложе-
нии правой части зависимости 1=Ф(«14-П2) в ряд Тейлора по сте-
пеням малого сигнала и2.
Т=Ф (и)) + и2Ф' (щ) + ...
двумя первыми слагаемыми. Здесь Ф'(п) —dildu-S(u) —крутиз-
на характеристики. Обозначая
Ф(щ)=11, u^S(ul)=i2, *(2.25)
получаем J = r'i-|-Z2-
Ток i оказывается равным сумме двух токов: тока й, протекаю-
щего через нелинейный элемент при воздействии только сильного
входного сигнала, и тока i2, зависящего от обоих сигналов. Величина по- следнего согласно (2.25) определяется как произве- дение меньшего из вход- ных сигналов на диффе- ренциальный параметр (крутизну) нелинейного элемента, управляемый сильным сигналом. Но 1 ГТ Рис. 2.17
53
сильный сигнал периодически меняется с частотой «щ, следователь-
но, крутизна также периодически изменяется с частотой ел,
что позволяет записать ее как S(e>iZ), а компоненту тока 1% как
i2=«2«S(coiO- (2.26)
Зависимость i2(u2) вида (2.26) свойственна линейным (i2 про-
порционально и2) параметрическим (параметр S является функ-
цией времени) цепям.
Таким образом, если на нелинейный элемент действуют одно-
временно слабый и сильный сигналы, то по отношению к
слабому сигналу нелинейный элементведет се-
бя как линейный параметрический, управляемый
сильным сигналом.
Сказанное относится не только к резистивным элементам, но и
к реактивным. Действительно, если для нелинейной емкости с
вольт-кулонной характеристикой д=*р(и), находящейся под воз-
действием напряжений (2.23), ограничиться при условии (2.24) в
разложении в ряд Тейлора по степеням и2 первыми двумя слагае-
мыми, получим
<7=<p (Wj + u2) +-u2<p,'(ui). (2.27)
Первая компонента заряда соответствует воздействию только
сильного сигнала щ. Отклик же нелинейной емкости на: действие
слабого напряжения и2 определяется как произведение этого на-
пряжения на дифференциальную емкость C(«i) =<p'(ui), периоди-
чески изменяющуюся под действием сильного сигнала. Таким об-
разом, по отношению к слабому сигналу нелинейная емкость ведет
себя как параметрическая, изменяющаяся с частотой
Глава 3
Преобразование сигналов и спектров
3.1. СОЕДИНЕНИЕ НЕЛИНЕЙНЫХ И ЛИНЕЙНЫХ
ЭЛЕМЕНТОВ. ОГРАНИЧЕНИЕ И СТАБИЛИЗАЦИЯ
Различные функциональные узлы (усилители, модуляторы, детекторы и др.)
приемных и передающих частей систем связи содержат комбинации линейных
и нелинейных элементов.
Рассмотрим определение тока -и напряжений в цепи рис. 3.1а, состоящей из
постедовательно включенного линейного резистора и нескольких нелинейных
Рис. 3.1
54
элементов НЭ1, НЭ2, НЭ3 с вольт амперными характеристиками (ВАХ) i=
=Ф1(и), £=Ф2(м), 1==Фз(и), приведенными иа рис. 3.2а. Заменяя нелинейные
элементы одним эквивалентным НЭ, приходим к схеме рис. 3.16. При любом
значении тока i общее напряжение на нелинейных элементах a=aI+u2+a3.
Суммируя на рис. 3.2а при различных i эти напряжения, получаем характе-
рно 3.2
ристику эквивалентного нелинейного элемента НЭ 1=Ф(а). Согласно второму
закону Кирхгофа в схеме рис. 3.16 E=u+iR. Решаем это уравнение относи-
тельно тока:
i= (Е—u)/R. (3.1J
Зависимость (31) i(u)—линейная. Она называется нагрузочной прямой
(или характеристикой), поскольку линейным резистором в данной цепи часто
является нагрузка Характеристика (3 1) пересекает ось абсцисс в точке i=0,
и—Е, ось ординат-—в точке и=0, i—E/R. Линия, проходящая через эти точ-
ки, является нагрузочной прямой. В цепи могут иметь место только такие ре-
жимы, при которых одновременно :=Ф(и) и выполняется уравнение (3.1).
Данному условию удовлетворяет точка А пересечения этих характеристик, ко-
торая определяет величины тока I, напряжения U на эквивалентном НЭ и
Ur—1R на резисторе. Зная ток I, находим напряжения Ut, U2, U3 на каждом
НЭ по их вольт-амперным характеристикам, как показано на рис. 3.2а.
Цепь, содержащую нелинейный элемент с ВАХ 1—Ф(и) и последовательно
включенный резистор R (рис. 3.16), можно рассматривать как нелинейный эле-
мент, с иной ВАХ i=V(E). Этот новый НЭ отличается от исходного тем, что
тот же ток i достигается при большем напряжении E=u+uR. Изменение ВАХ
нелинейного элемента путем включения резистора R иллюстрируется на рис.
3.26.
В схеме рис. 3.16 резистором R зачастую бывает нагрузка. В этом случае
изменение ВАХ следует расценивать как результат изменения напряжения на
НЭ при изменении тока, т. е. как следствие влияния (реакции) нагрузки на
процессы в цепи. Пренебрегать этим влиянием можно только тогда, когда
«л'Си, т. е. при достаточно малых сопротивлениях R.
На рис. 3.1 в показана цепь, в которой параллельно нелинейному элементу
НЭ1 с ВАХ й=Ф1(и) подключен линейный резистор R2. Для преобразования
этой схемы к схеме рис. 3.16 заменяем параллельную цепь эквивалентным не-
линейным элементом НЭ, учитывая, что ток i=ii+i2. Суммируя токи в ветвях
при различных напряжениях и (рис. 3.2в), получаем ВАХ эквивалентного НЭ.
1=ф(и). Различие ВАХ ФДа) и Ф(а) означает возможность изменения ВАХ
НЭ путем параллельного подключения линейного резистора. Проводим нагру-
зочную прямую i= (Е—u)/R и по ее пересечению с характеристикой эквивалент-
ного НЭ в точке А устанавливаем величины тока I и напряжения U. Токи в
ветвях 11 и /2 определяются напряжением U по характеристикам каждого из
параллельно включенных -элементов, как показано на рис. 3 2в. Расчет цепи,
55
в параллельной ветви которой содержится несколько нелинейных элементов,
проводится аналогично.
Под ограничением мгновенных значений (напряжения или тока) подразуме-
вается такая нелинейная операция, в результате которой не допускается выход
этих величин за пределы определенных значений (уровней). На практике ис-
пользуются три вида ограничения:
сверху, или по максимуму, при котором мгновенные значения выходного
сигнала не превосходят некоторого уровня;
снизу, или по минимуму, в результате которого мгновенные значения вы-
ходного сигнала не могут оказаться меньшими некоторого уровня;
двустороннее, при котором мгновенные значения выходного сигнала ограни-
чиваются некоторым определенным интервалом.
Основной характеристикой ограничителя напряжения является зависимость
его выходного напряжения и? от входного U\. Рисунок 3.3 иллюстрирует дейст-
вие всех трех типов ограничителей: по максимуму — а, по минимуму — б, дву-
стороннего — в.
Рпс. 3.3
Двусторонний ограничитель нередко используется для формирования тра-
пецеидальных импульсов из синусоидального колебания.' Чем больше амплитуда
входного гармонического сигнала, тем ближе форма получающихся импульсов
к прямоугольной.
На рис. 3.3г—е приведены схемы диодных ограничителей: по максимуму —
г, по минимуму — д и двустороннего — е. Уровни ограничения определяются
величинами и полярностью источников смещения (£] и £2). включенных в ветвь,
параллельную выходным зажимам. Поскольку иа вход ограничителей подают-
ся колебания значительной амплитуды, можно воспользоваться кусочно-линей-
ной аппроксимацией характеристики диода. Для прямых напряжений (н>0) со-
противление диода гпр невелико (десятки — сотни ом), для обратных .(и<0) со-
противление гОбр большое (сотни килоом). Сопротивления Л в схемах рис.
3.3г—е должны удовлетворять условиям
^^Гпр, (3.2)
Обратимся к схеме рис. 3.3г. Когда напряжение Ui>0 и притом «<>£{, ди-
од открыт, через него протекает прямой ток в направлении, указанном сплош-
56
ной стрелкой Поэтому, пренебрегая падением напряжения на диоде в силу пер-
вого условия (3.2), имеем a2=£i (горизонтальная линия на рис. 3.3а). При
ui<.Ei направление тока соответствует пунктирной линии, диод закрыт и в си-
лу второго условия (3.2) и^щ. На рис. 3.3а этому соответствует линия, про-
веденная под углом 45° для U\<Ei. Аналогичные рассуждения показывают, что
рис. 3.30 представляет схему ограничителя по минимуму с характеристикой,
приведенной на рис. 3.36. На рис. Э^.3е изображена схема двустороннего огра-
ничителя с уровнями ограничения £j и £2, характеристика которого соответст-
вует показанной на рис. З.Зв.
Схемы рис. 3.3г—е называются схемами ограничителей с параллельным (по
отношению к нагрузке) включением диодов. Если на этих рисунках поменять
местами диоды и резисторы, получим схемы ограничителей с последовательным
включением диодов.
На рис. 3.4с приведена схема двустороннего ограничителя на биполярном
транзисторе типа р-п р. Для его нормальной работы сопротивление Re, вклю-
ченное в цепь базы, должно во много раз превышать входное сопротивление
Рис. 3.4
Rr.x открытого транзистора, нагрузочная характеристика должна быть пологой,
для чего сопротивление нагрузки RB должно быть достаточно большим. Пред-
положим, что при е—0 ток в цепи базы равен i'6 (рис. 3.46). При
е<0 эмиттерный переход открывается сильнее, ток if, возрастает. На-
пряжение на коллекторе |£кэ|т,п, определяемое точкой А пересе-
чения выходных характеристик с нагрузочной для ie^i'e, будет оставаться не-
изменным, близким к нулю. Величина |(7K.0|min определяет первый уровень ог-
раничения. Запирая эмиттерный переход достаточно большой ЭДС е противо-
положного характера, получим второй уровень ограничений икэ=Ек.
Кроме рассматривавшихся до сих пор ограничителей мгновенных значений,
в радиотехнических устройствах применяют ограничители амплитуды, предназ-
наченные для значительного уменьшения амплитудной модуляции сигнала
е(/) = Е(Z)cos[<iW+<P(/)]• Для создания такого устройства следует в качестве
нагрузки транзистора (рис. 3.4а) использовать колебательный контур, настроен-
ный на частоту юо- При больших амплитудах Е вследствие двустороннего огра-
ничения ток 1К будет почти прямоугольным, а его первая гармоника и вызван-
ное ею падение напряжения на контуре будет иметь почти постоянную ам-
плитуду.
Задача стабилизации тока и напряжения питания электронных схем сводит-
ся к обеспечению постоянства этих величии при неизбежных иа практике коле-
баниях напряжения на выходе выпрямителя, нагрузки и т. п. Стабилизаторами
тока являются устройства, в которых относительное изменение тока в цепи Л///
значительно меньше относительного изменения напряжения питания ЕЕ/Е или
нагрузки ER/R, стабилизаторами напряжения — устройства, в которых относи-
тельное изменение напряжения на нагрузке Дц/ц значительно меньше .ЕЕ/Е и
ER/R.
Простейший стабилизатор тока представляет цепь (см. рис. 3.16), в кото-
рой последовательно с нагрузкой включен нелинейный элемент НЭ с «выпук-
лой» характеристикой <=Ф(а), показанной на рис. 3.5а. Там же проведены на-
грузочные прямые для двух значений сопротивления /?(/?2>J?i) и напряжений
Е и £|. Видно, что при малом сопротивлении R—Ri небольшое изменение на-
пряжения иа величину EE—Ei—Е вызывает относительно меньшее изменение
57
тока i, т. е. имеет место стабилизация тока (EIII-^EEIE). При больших R=Ri
эффект стабилизации отсутствует.
Стабилизация напряжения осуществляется НЭ с «вогнутой» характеристи-
кой (рис. 3.56), включенным по схеме рис. 3.1 в: параллельно нагрузке R2 и
последовательно с вспомогательным резистором Суммируя токи в парал-
лельных ветвях при фиксированных напряжениях и, получаем характеристики
эквивалентного нелинейного элемента: НЭ] для большого сопротивления на-
грузки iRz—R'z и НЭ2 для малого сопротивления R'^^-R'z- Затем проводим
нагрузочные прямые для сопротивления Ri и напряжений Е и Et=
=Е~ЕЛЕ. Из графика следует, что стабилизация напряжения
имеет место (Ди/и^ЛЕ/Е), только прн достаточно больших Е и R2 и неболь-
ших Rt.
Во многих случаях стабилизация, достигаемая в таких простых схемах, ока-
зывается недостаточной. Тогда применяют более сложные электронные стаби-
лизаторы тока или напряжения.
3.2. МЕТОДЫ СПЕКТРАЛЬНОГО АНАЛИЗА КОЛЕБАНИЙ
В НЕЛИНЕЙНЫХ ЦЕПЯХ
. ПОСТАНОВКА ЗАДАЧИ
Ниже, при рассмотрении различных функциональных преобра-
зований сигналов перед нами неоднократно будет возникать зада-
ча определения спектра колебаний на выходе нелинейной цепи.
Поэтому целесообразно прежде всего ознакомиться с общими ме-
тодами спектрального анализа.
Задача заключается в следующем: на вход безынерционной не-
линейной цепи, аппроксимируемой зависимостью
г=Ф(п), (3.3)
действует гармоническое
и—U cos(W+<p),
(3.4)
5b
или бигармоническое
I U=U\ C'OS((O1/ + <P1) + г72'СО5(с>2^+<Р2), (3-5)
или полигармоническое колебание
«= 2 Uh<cos((i)ht + ([>h). (3.6)
k=i
Требуется определить спектр отклика, т. е. спектр тока I. Клас-
сический метод решения этой задачи заключается ib подстановке
выражений (3.4) -— (3.6) в правую часть (3.3) с последующим оп-
ределением спектральных компонент путем использования аппара-
та рядов Фурье в случае гармонического воздействия (3.4) или
кратных рядов Фурье в случае бигармонического (3.5) и полигар-
монического (3.6) воздействий. Однако такой метод определения
спектра отклика оказывается весьма трудоемким. Поэтому на
практике получили распространение специальные методы спект-
рального анализа, каждый из которых связан, как правило, с оп-
ределенными способами аппроксимации нелинейной зависимости
(3.3) и характером воздействующего сигнала.
Задача любого метода спектрального анализа заключается в
таком преобразовании правой части (3.3), при котором отклик
(ток) представляется в виде суммы гармонических слагаемых:
амплитуды и частоты этих компонент определяют спектр отклика.
Наибольшее распространение имеют методы, основанные на ис-
пользовании: 1) тригонометрических формул кратного аргумента,
2) формул трех и пяти ординат, 3) функций Бесселя от мнимого
аргумента, а также 4) угла отсечки.
МЕТОД, ОСНОВАННЫЙ НА ИСПОЛЬЗОВАНИИ ТРИГОНОМЕТРИЧЕСКИХ
ФОРМУЛ КРАТНОГО АРГУМЕНТА
Этот метод является основным при использовании полиноми-
альной аппроксимации и особенно удобен для выявления принци-
па действия и основных особенностей таких устройств, как моду-
ляторы, детекторы, преобразователи частоты, делители частоты
и т. п.
Сначала рассмотрим воздействие на нелинейный резистивный
элемент, характеристика которого аппроксимирована полиномом
n-й степени
^ао + ащ + щд2-!- ... + апип (3.7)
гармонического колебания (3.4). Подставляя (3.4) 'в (3.7), полу-
чаем
i=a0+ai£7 соз(а>о^+ф) + a2I72 cos2 (а>о?+<р) + ... +anUn-cosn (<в0?+ф).
(3.8)
Для представления правой части (3.8) в виде суммы синусо-
идальных компонент воспользуемся известными тригонометриче-
59
сними формулами1, позволяющими заменить степени косинусов
(или синусов) через тригонометрические функции кратных аргу-
ментов (отсюда название метода)
cos2 ф = — + — соЗ^ф, cos4 ф = — + — cos 2 ф — cos 4 ф,
2 2 8 2 8
COS3 ф = -5- cos Ф + -i- cos 3 ф, COS5 ф = -5- COS Ф + COS Зф +
J I
+ — cos 5 ф, I
16 )
(3.9)
полагая
ф = ио^+<р. (3.10)
Осуществление такой подстановки и последующее суммирова-
ние коэффициентов при косинусах одинаковых аргументов позво-
ляет записать (3.8) как
i=/o+^i'COS (g>o^+<р) +/2 cos 2 (coq/+<р) +
+ /3'C0S 3(<Во^ + ф) + ... +1п COS п(®о^+'ф). (3.11)
где * \
13 11
4 = а0 + — a2U^+ -±-a4U*+ . . . ;/, = а21/2 + 4 а4(/*+...,;)
2 0 2 2;
/l==fllU+Afl3£/3 + -|-a6t/5+...;7s = -^a3t/3+i|-c6f/s+...
(3-12)
На рис. 3.6а построен спектр выходного сигнала (3.11) и от-
мечены амплитуды спектральных компонент.
о 2ив Зй)й пав и
а)
6
Рис. 3.6
1 В приложении 1 приведены для справки и другие тригонометрические
формулы, используемые при спектральном анализе.
60
Из сравнения выражений (3.11) и (3.12) с (3.4) следует:
1. Спектр отклика нелинейного элемента при воздействии на
него гармонического сигнала- оказывается линейчатым, содержа-
щим ряд составляющих с частотами, кратными частоте входного
сигнала. Наивысший номер составляющей спект-
ра равен степени используемого полинома. По-
этому, если для какого-то применения нелинейного элемента необ-
ходимо знать амплитуду пгй гармоники отклика, вольт-амперная
характеристика элемента должна быть аппроксимирована поли-
номом порядка'не ниже щ-го.’
2. Постоянная составляющая отклика и амп-
литуды четных гармоник определяются только
четны,ми степенями напряжения в полиноме (3.7),.
а нечетных гармоник — только нечетными1.
3. Текущая фаза ф& k-й гармоники отклика с частотой тоь—ka>a
в k раз больше значения текущей фазы (3.10) воздействующего
сигнала:
фгг = £Ой^ + фА = ^(а>о^ + ф). (3.13)
Начальные фазы связаны соотношением
фь = £ф. (3.14)
При воздействии бигармонического напряжения (3.5) на нели-
нейный элемент, аппроксимируемый полиномом (3.7),
И
Пй[(7!'С05(£01^ + ф1)+Т;2С05(£1)2^ + ф2)]1'- (3.15)
fc=0
Раскрываем скобки в правой части (3.15), используя в случае
высоких степеней k бином Ньютона, после чего с помощью три-
гонометрических формул представляем правую часть (3.15) в ви-
де суммы гармонических составляющих различных частот. Для
п=3
i = а0 + а± Uх cos (ы^ + U2 cos (to2f + q>2) + a2 U\ cos2 (co^ + фг) +
[0] [о,] [Oj] [0,2
+ a2 U\ cos2 (co21 + q>2) + 2 a2 U2 cos (®± t + q>±) cos (to21 + q>2) 4-
+ os U\ cos3 (®! t + + 3 a3 U\ U2 cos2 (®x t + qjJ cos (®21 + q>2) +
[e,, 3m,] [Wj. 2«, +Ы,]
+ 3 as U} U32 cos (©! t + cos2 (<a21 + q>2) + as U32 cos3 (ы21 + q>2).
[ш1,и>1±2<»£] [«j, Зю»]
(3.16)
Под каждым слагаемым записаны частоты, получающиеся при
замене степеней и произведений косинусов суммой гармонических
1 Это справедливо, когда воздействие (3.4) не содержит постоянной со-
ставляющей.
61
составляющих на основании соотношений (3.9) и известного три-
гонометрического выражения
cos a cos р=Ц-[соз(а+Р) +cos(a—₽)]. (3.17)
Из выражения (3.15) и частного случая (3.16) следует, что при
воздействии Ангармонического сигнала ток содержит три группы
гармонических составляющих:
гармоники с частотами £i®i и начальными фазами £1фь где
£1=1, 2,..., п\
гармоники с частотами £2102 и начальными фазами £гф2, - где
£2= 1, 2,..., л;
комбинационные составляющие с частотами £i<di±£2<02 и на-
чальными фазами £1<Р1±£гф2, где |£i| + |£г| —2, 3,..., a £i и £2—
отличные от нуля целые числа любого знака.
Комбинационные частоты возникают в нелинейных цепях толь-
ко в случае одновременного воздействия на них двух или боль-
шего числа гармонических колебаний. Комбинационные частоты
принято характеризовать их порядком £, определяемым суммой
коэффициентов: £=£i4-£2. Простейшими являются комбинацион-
ные частоты второго порядка (ы1±ь>2). В случае л=3 в отклике
содержатся комбинационные частоты второго и третьего поряд-
ков1.
На рис. 3.66 построен спектр отклика (3.16) на воздействие
бигармонического сигнала (3.5), причем -комбинационные частоты
выделены пунктирными линиями.
Если отношение частот Ы1/<г>2 не может быть представлено в
виде отношения небольших целых чисел (случай асинхронных
воздействий), то все гармоники и колебания комбинационных час-
тот образуют различные частотные компоненты. В частности, пер-
вая гармоника тока частоты он может быть записана как 1Ш1 =
=/iCos (££>1/+<р1), т. е. она совпадает по фазе с воздействующим
напряжением этой частоты.
Положение меняется, если отношение частот может быть выражено отноше-
нием небольшим целых чисел mln (случай синхронных воздействий)
4>il<ii2=mln, (3.18)
где т=1, 2, 3,...; п=1, 2, 3,...; m#=n. В этом случае ток может содержать
несколько компонент одной и той же частоты с различными фазами. В качестве
примера рассмотрим воздействие бигармонического колебания с m/n=l/2
u= Ui cos wi#4-i{72cos (i2<ai£+<p2) (3.19)
иа нелинейный элемент, описываемый полиномом второй степени
i=(3.20)
Подставляя (3.19) в (3.20), легко установить, что теперь первая гармоника
тока й£>1 частоты состоит из двух компонент:
iat=aiUi cos ©1f+aznft/2cos(wi?+<p2), (3.21 J
1 Порядок комбинационной частоты еще не определяет ее вида. Так, сле-
дующие шесть различных частот являются комбинационными четвертого поряд-
ка: <Oizb3<02, 2<О1±2(Ог, 3wizb<t>2-
62
из которых вторая является следствием возникновения комбинационной часто-
ты второго порядка. Если, например, <р2=—90°, выражение (3.21) можно запи-
сать ,
^“AcosCci)!?—4[)), (3.22)
где h — Ui^a2i~l-a22!U2z, tgty=a2iUz/ai. (3.23)
Из выражений (3.22) и (3.23) следует, что в рассматриваемом случае:
имеет место сдвиг фаз ip между первой гармоникой тока частоты и воз-
действующим напряжением той же частоты; это означает, что резистивный не-
линейный элемент (3.20) по отношению к воздействию частоты обладает
комплексной средней крутизной Scp = S'0P+i S"cp или
SCp=/i/t7i=Sop е' *s ; (3.24)
величина сдвига фаз ips и амплитуды Л, а значит, и величины активной и
реактивной компонент средней крутизны зависят от амплитуды и фазы второго
колебания (второй гармоники e>i).
Обогащение спектра отклика по сравнению со спектром воздействия проис-
ходит и в нелинейных реактивных цепях. Так, если на нелинейную дифферен-
циальную емкость, аппроксимируемую относительно рабочей точки полиномом
С=Со(1+а;п+а2ц2), действует бигармоническое напряжение (3.5), в спектре
тока
i=C — • =—Co{l’+ai'[t/i cos(wiZ+<pi) -f-itA соэ^г/Ч-фз)] cos(<j>iZ-f-<pi) 4-
dt
+t/2cos(W+<p2)]2} [wit/i sin(<iJi?+<pi)+<ii2£/2 sin(<02i'-|-<p2)] 1(3-25)
окажутся частоты, кратные Wi и w2, и комбинационные частоты до третьего
порядка включительно.
МЕТОД УГЛА ОТСЕЧКИ
Метод угла отсечки применяется при кусочно-линейной аппрок-
симации вольт-амперных характеристик. Он широко используется
при расчетах транзисторных и ламповых усилителей, генераторов,
умножителей частоты.
Рассмотрим воздействие напряжения
u=E+U cos at (3.26)
на нелинейный элемент, вольт-амперная характеристика которого
аппроксимирована двумя прямыми (рис. 3.7) или выражениями
(2.16). Применяя для построения тока i метод проекций, удобно
сначала (пунктирная линия) определить ток, который получился,
если бы характеристика прибора была линейной с крутизной S
при любых значениях и. Части полученной синусоиды, находящие-
ся над осью абсцисс (сплошные линии), определяют характер дей-
ствительных импульсов тока I. Нелинейный элемент работает с от-
сечкой, т. е. часть входного напряжения, не заштрихованная на
рис. 3.7, не участвует в создании тока. Получающиеся импульсы
тока синусоидальной формы характеризуются двумя величинами:
высотой 1-тах и шириной. Половина части периода, в течение кото-
рой протекает ток (или та часть периода, в течение которой ток
изменяется от максимального значения до нулевого), называется
углом отсечки. Угол отсечки обозначаем б.
S3
В интервале —ток i отличен от нуля и может быть
рассчитан как
j=/OV—MN = 1 cos at—I cos 0=/(cos£o£—-cos 0). *(3.27)
Поскольку I=SU,
i=SU (cos (at—cos 0). (3.28)
При co/=O, i—Imaxt а потому из (3.28)
Лпах = SH(1—COS 0). (3.29).
Рис. 3.7
Периодическая последовательность импульсов тока рис. 3.7 яв-
ляется четной функцией. Ее разложение в ряд Фурье имеет вид
i=IO+Ii cos (at+12 cos 2(at+/3 cos 3(at+...
Постоянная составляющая и амплитуды гармоник
. е
— JS£7(cos£o/—cos Q)dti>t=SUy0(8),
-е
в
1 6
1± = — С SU(cos(at—cos 0)cos (atd(at=SUyl (0),
л J
—e
1 S
In = — i SU(c<os(at—'cos Q) cos na)tdt = SUyn(B),
л J
-e
)
где
To (6) = (sin —6 cos 0), Yi (6) = (6—sin 6 cos 0),
Л n
2 sin n 6 cos 6 — n cos n 6 sin 6 o o . 1
Tn(e) =------------2, 3, 4...
(3.30)
(3.30)
(3.31)
(3.32)
(3.33)
n (ns— 1)
64
Каждая компонента тока (3.30) согласно (3.31), (3.32) про-
порциональна SU и зависит от угла отсечки 0. Коэффициенты у0.
Yi, у2,... называются соответственно коэффициентами постоянной
составляющей, первой, второй и прочих гармоник. Коэффициенты
гармоник являются нормированными относительно SU амплиту-
дами спектральных составляющих тока, определяющими влияние
угла отсечки на амплитуды компонент:
Yo(e)=-^.,V1(0) = ^??a(e)=^, • • • (3.34).
ос/ ос/ ос/
Зависимости этих коэффициентов от 0 построены на рис. 3.8.
Пунктирной линией нанесена зависимость отношения yi/yo—IJIo
от 0. При использовании этих графиков амплитуды компонент то-
ка определяются как
In=SUyn(e). (3.35)
Максимальные значения уп(0) Для достигаются при
0ОПТ= 180°/п.
Если нелинейный элемент используется в условиях, когда мак-
симальное значение тока Imax поддерживается постоянным при
изменении угла отсечки 0, что требует одновременного изменения
амплитуды U входного напряжения, более удобным при расчетах
оказывается использование коэффициентов гармоник, нормирован-
ных относительно Imax-
On -IniImax- (3.36)
Из (3.29) и (3.35)
ап = уи(0)/(1—cos0). (3.37)
Зависимости а„(0) для п=0, 1, 2, 3,... также часто приводят-
ся в литературе [1—3, 5]. Наибольшие значения ап достигаются
при 6'Опт=120°М-
3—92 65
Метод угла отсечки применим и для расчета воздействия бигармонических
колебаний. Пусть на нелинейную цепь с кусочно-линейной характеристикой дей-
ствует напряжение (рис. 3.9)
u(t) =E-{-Ul ©os ф—it/ncosmp, (3.38)
где ф=(о<. Получающаяся последовательность импульсов тока также является
четной функцией; ряд Фурье для нее имеет вид:
i=/o-p/i cos ф-р/2 cos 2ф-р/3 cos Зф-р... (3j39)
В соответствии с (2.16), (3.31) и (3.32) (для Л^1)
О
1 f S
/0 =----| S (и—I70) d ф= —
я,1 я
О
е е
(Е — Uo) J d ф + U± Jcos ф d ф —
о о
6 1
Усо5 п ф d ф ,
о
0
2 2S
1k = — IS (и—U6) coskфdф=-----
я ,) л
о
е
J'cos k ф d ф -р
о
е 0
+ Ui | cos ф cos k ф d ф — I/nycos п ф cos k ф d ф
о о
Здесь 0=wfi — угол -отсечки. Величина 6 определяется из условия u=U0 или с
учетом (3.38) -из уравнения
Е—it/o-p Ui cos 0—cos ri0=-O.
e
Обозначая Fmk(0) = J cos m ф cos йфйф, имеем
о
sin (m — k)Q sin (zn -p A) 0
2 (tn — k)
0 sin 2 m 6
2~+ 4m
Emft(0)=
6
Теперь можем записать
Iq = - [(E—'t/о) Fqq-EUiF io—it/ ne],
я
2 (m + k)
для m~/=k.
для т=А^0,
для tn=k = 0.
1
Ii ==-----[(E—t/ojToi'-pt/i-Fu—'t/n<Fni],
я
1ц, ~ ' [(£"—,t/o)P'onl-pt/lP'ln—'t/n-t’nn].
я
(3.40)
(3.41)
(3.42)
Если n=2 или 3 и Un^Ui из (3.40), получается единственное решение
для 0 в интервале 0<6<л, и последующий расчет по выражениям (3.42) по-
зволяет определить спектральные компоненты тока. При п^З и достаточно
больших t/n/t/i из решения (3.40) получается несколько значений О<0<л, и то-
гда выражения для /о и 1п оказываются отличными от (3.42).
66
МЕТОД, основанный на использовании формул
ТРЕХ И пяти ОРДИНАТ
Это приближенный графоаналитический метод гармонического
анализа колебаний, используемый в инженерной практике для
оценки нелинейных искажений в
усилителях, модуляторах и иных
устройствах. В отличие от других
методов спектрального анализа,
данный не требует предваритель-
ной аппроксимации характери-
стики нелинейного элемента.
Пусть на вход нелинейной це-
пи действует гармоническое на-
пряжение (3.26). Метод основан-
ный на использовании формул
пяти ординат, позволяет про-
сто и быстро определить среднее
значение тока и амплитуды его
первых четырех гармоник, т. е.
Рис. 3.10
получить ток в виде
i = /0 + /1 cos оД + Дсоз 2й)/ + 7з cos 3w/ + /4cos 4соЛ (3.43)
Для определения пяти постоянных 1о—h накладываем на вы-
ражение (3.43) пять условий, сводящихся к требованию, чтобы
при at, равных 0, л/3, л/2, 2л/3 и л1, значения тока, получающиеся
из (3.43), совпали бы с действительными величинами тока i, обо-
1 Для таких at расстояния между соседними точками ВАХ по осн напря-
жений оказываются одинаковыми.
3* 67
значенными на рис. 3.10: imaa;, ib i0, t2, imin- В соответствии с рис.
3.10 получаем следующую систему уравнений:
= l'max: = ^o + /l+^2+ ^з + ^4>
£i)Z = 3T/3, l'i —Д)+~Л. 2* 2~^4’
(£>t=nl'2., io=Io—А+Д;
® i = 2 л/3, i2 = Io 2^1 2~ ""I” 2~ ’
(i)t = n, 1щгп = 1о—Л+Д—Д + Д.
(3.44)
Решая эту систему уравнений относительно неизвестных 1о—Д,
получаем
A)= fr'maKН-^тгп Н-(iiH-ig)], Д — Umax
Д= ~Г~ Umax "Т imin 2 lg], /3 = —— Umax imin ^U1 ia)]*
4 о
Д j2 Umax + imin 4 (ii+iJ + Ol’oJ.
(3.45)
Для проверки правильности нахождения величин Io—h реко-
мендуется после их определения подсчитать сумму всех значений
Ik, которая в пределах точности расчетов должна совпасть с ве-
личиной imax согласно первому из уравнений (3.44).
Метод, основанный на использовании формул трех ор-
динат, основан на требовании совпадения рассчитанных ординат
тока с действительными в трех выбранных точках (imax, io, imin,
соответствующих £oi=0, л/2 и л) и потому позволяет определить
только первые три компоненты тока (3.43): постоянную состав-
ляющую и амплитуды двух первых гармоник. Расчетные формулы
имеют вид
Д Gmax “И imin “Н 2 Ig), Д Umax imin)’
i2 = Umax H- imin 2 ig)
(3.46)
Точность определения этих величин при использовании формул
трех ординат ниже, чем при использовании формул пяти ординат.
МЕТОД, ОСНОВАННЫЙ НА ИСПОЛЬЗОВАНИИ ФУНКЦИИ
БЕССЕЛЯ ОТ'МНИМОГО АРГУМЕНТА
Метод используется преимущественно для анализа работы де-
текторов и преобразователей частоты при аппроксимации вольт-
амперной характеристики экспонентой или суммой экспонент.
Рассмотрим воздействие ^гармонического колебания (3.26) на
полупроводниковый диод, характеристика которого (см. рис. 2.6а)
аппроксимирована экспонентой (2.13). Подставляя в (2.13) нап-
ряжение (3.26), получаем
i=A(eaEeaUcos<B1—1). 1(3.47)
Из (3.47) следует, что ток является четной периодической
функцией времени частоты ы, а потому может быть представлен
в виде ряда Фурье (3.30). Для определения коэффициентов раз-
ложения удобно воспользоваться следующими выражениями из
теории функций Бесселя [23]:
eacos<p=50(aj +$V £>fc(fl)icos k(p, (3.48)
easin<p=£0.(a) +2Z>i(a)sin<p+ 2£2(a)cos 2<p +
+ 2E3 (a) sin 3<p+2E4 (a) cos 4<p +... (3.49)
Формулы (3.48) и (3.49) представляют разложения в ряд
Фурье экспоненциальных функций eacos<p и easln<p. Коэффициенты
этих рядов определяются величинами Бп(а) —модифицированны-
ми функциями Бесселя, называемыми также функциями Бесселя
от мнимого аргумента, зависимости которых от х—а приведены
на рис. 3.111.
Отметим, что 5о(О) = 1, а Б1 (0) =Д2(0) = • - • =0. В нашем
случае a=aU, tp—at.
Используя выражение (3.48), можем переписать (3.47) в виде
i=A [eGEA0(a£/)—1] + 2А eaEEY(aUyCos at +.
+ 2A eaEE2(aU)cos 2at + 2A еаЕ5з(аС/)со5 3ы/ + ... (3.50)
Сравнение выражения (3.50) и (3.30) позволяет выписать ком-
поненты спектра тока:
Z0=A[e“E5tf(«C7) —1],
71 = 2Д eaE5i (at7),
' /2 = 2А еаЕБ2 (a(J),
Амплитуды гармоник тока оказываются пропорциональными
соответствующим функциям Бесселя от одного и того же аргумен-
та. Проведя на графике рис. 3.11 вертикальную линию для опре-
деленного значения x—a—aU, замечаем, что с увеличением
номера гармоники ее ’амплитуда уменьшается,
что вообще характерно для подавляющего большинства НЭ.
! В литературе функции Бесселя от мнимого аргумента обозначают
Поскольку у нас /„ используется для обозначения амплитуд гармоник тока,
приходится функции Бесселя обозначать Бп, как это сделано в [2].
69
При использовании данного метода часто приходится пользо-
ваться следующими соотношениями:
2 -—Бп(а) = Бп+х (а) + Бп-1 (о), — Бо(а) =Ei(a),
da da
2-^-Бп(а) = Бп^1 (а) — En+i (а), Бп (—а) = (—1)пБп (а).
Рис. 3.11
3.3. ВЫДЕЛЕНИЯ ПОЛЕЗНЫХ КОМПОНЕНТ СПЕКТРА.
НЕЛИНЕЙНЫЕ ИСКАЖЕНИЯ
В отклике нелинейной цепи на входные воздействия, как пра-
вило, существуют не только полезные частотные составляющие,
необходимые для данного преобразования сигнала, но и ряд дру-
гих, мешающих, вызывающих его искажения. В связи с этим воз-
никают задачи выделения полезных компонент спектра и оценки
искажений, возникающих ib различных устройствах.
Искажения, вызванные нелинейностью цепи, называются не-
линейными. Нелинейные искажения гармонического сигнала
оценивают коэффициентом нелинейных искажений (коэффициен-
том гармоник) кг. В усилителях первичного сигнала его определя-
ют как отношение корня квадратного из суммы квадратов ампли-
70
туд всех гармоник тока, кроме полезной, к амплитуде полезной
первой гармоники
К- Ул,+л,+ . . . . (351)
В ряде случаев (при усилении AM сигналов, модуляции, детек-
тировании и т. д.) качество работы устройства определяется со-
хранением формы огибающей. В этих условиях для оценки нели-
нейных искажений также можно воспользоваться коэффициентом
гармоник кг. При этом следует рассматривать модуляцию гармо-
ническим сигналом частоты Q и подразумевать в (3.51) под Л, /2,
7з,... амплитуды первой и высших гармоник огибающей выходно-
го сигнала.
Основной метод выделения полезных и подавления нежела-
тельных спектральных составляющих основан на применении
фильтров и поэтому называется методом фильтрации. В качестве
фильтров часто применяют простейшие: параллельный колеба-
тельный контур (рис. 3.12а), если требуется выделить какие-либо
высокочастотные составляющие; параллельную 7?С-цепочку (рис.
3.126), когда нужно выделить постоянную или низкочастотные со-
ставляющие. Выделение полезных составляющих с помощью
фильтров иллюстрирует рис. 3.12е.
Рис. 3.12
Модуль сопротивления параллельного контура, настроенного
на ’частоту (оо, определяется как
Z3=J?3/yi + Q2e2, (3.52)
где R —— О = — 1Z_А_,е = — — . На резонансной часто-
3 г С г г с <оо to
те сопротивление контура Z3~R3 наибольшее, с увеличением
расстройки Z9 уменьшается (характеристика А на рис. 3.12в). По-
этому, когда через контур протекают различные компоненты то-
ка, амплитуды которых одного порядка, значительное падение на-
пряжения на нем создают только те компоненты, частоты которых
близки к too- Компоненты тока с частотами, значительно отличаю-
щимися от ©о, заметного напряжения не создают, благодаря чему
в выходном напряжении они практически отсутствуют.
71
Сопротивление цепочки ВС (рис. 3.126) 2=#/^ 1+а>27?2С2
имеет максимальное значение Z=R при (0=0 и убывает с ростом
частоты со по тому же закону, что и Z3 параллельного контура
(3.52) с возрастанием расстройки А(о (характеристика В на рис.
3.12в). Когда все составляющие тока протекают по такой цепи,
заметное падение напряжения (выходное напряжение) создают
только постоянная составляющая и составляющие низких частот.
Скорость убывания Z с частотой определяется выбором постоян-
ной времени этой цепи, равной ВС.
Другим методом значительного ослабления нежелательных
компонент спектра является метод компенсации, заключающийся
в таком включении нелинейных элементов, при котором нежела-
тельные составляющие взаимно компенсируются. Этот метод реа-
лизуется в двухтактных схемах рис. 2.5в и г: так если входное на-
пряжение u—U cos &t, то в схеме рис. 2.5в происходит взаимная
компенсация нечетных гармоник, а в схеме рис. 2.5г — четных1.
3.4. УМНОЖЕНИЕ ЧАСТОТЫ
Умножение частоты заключается в получении на выходе уст-
ройства колебания, частота которого в целое число раз больше
частоты входного сигнала. На вход умножителя частоты обычно
подается синусоидальное напряжение u— U cos Qt, на выходе по-
лучают колебание с частотой соВых=лй. Поскольку в умножителе
частоты создается спектральная компонента, отсутствующая во
входном сигнале, в нем должны быть применены элементы, в ко-
торых возможно образование новых спектральных составляющих^
(нелинейные, параметрические); построить умножитель частоты на
основе линейных элементов 'невозможно. В настоящем параграфе
рассматриваются умножители частоты на управляемых нелиней-
ных элементах.
На рис. 3.13 изображена принципиальная схема транзисторно-
го умножителя частоты. При входном сигнале hbx=I/bxcos Qt про-
текающий в выходной цепи ток оказывается несинусоидальным,
1 Применение этого метода в балансных и кольцевых модуляторах показа-
но в § 3.7.
72
содержащим компоненту частоты Q и гармоники. Ставя в эту цепь
достаточно добротный контур,' настроенный на частоту n-й гармо-
ники, получим на нем почти синусоидальное напряжение частоты
п£2. Обычно на вход умножителя частоты подают колебания боль-
шой амплитуды, что позволяет использовать в расчетах кусочно-
линейную аппроксимацию и метод угла отсечки. Для получения
большей амплитуды выходного напряжения выбирают оптималь-
ный угол отсечки. С увеличением коэффициента умножения п ве-
личина «опт уменьшается, также уменьшаются наибольшие значе-
ния коэффициентов гармоник уп и амплитуды полезных гармоник
1п- По этой причине подобные умножители используются лишь
для умножения в 2—3 раза.
Для умножения частоты в большое число раз используется
иной подход: с помощью нелинейного устройства входной гармо-
нический сигнал периода 71=2л/Й преобразуется в последователь-
ность коротких видеоимпульсов прямоугольной формы длитель-
ностью х<^Т той же частоты й с последующим выделением п-й
гармоники с помощью фильтра. Спектры прямоугольных импуль-
сов для двух значений т/Т приведены на рис. 3.14. Чем меньше
т/Т, тем меньше амплитуды первых гармоник и тем медленнее
убывают их величины с ростом п. Используя импульсы с малыми
х/Т, удается осуществлять умножение частоты в десятки раз. На
рис. 3.15 приведена схема такого умножителя частоты, основан-
ного на использовании трансформатора с почти прямоугольной ха-
рактеристикой намагничивания сердечника (рис. 3.16а). Процесс
образования коротких импульсов ЭДС ez во вторичной обмотке
трансформатора, пропорциональных—dBfdt, в результате протека-
ния тока ii=I cos Qt через первичную обмотку поясняют рис.
3.166—г. Ток 12 во вторичной обмотке трансформатора подобен
е2 (рис. 3.16а). Контур обеспечивает выделение нужной гармони-
ки. Для получения однополярных импульсов i2 достаточно допол-
нить внешнюю цепь диодом (пунктир на рис. 3.15). Недостатками
Данного способа умножения частоты являются, во-первых, малый
73
КПД вследствие рассредоточения энергии импульсов по большому
числу гармоник; во-вторых, возникновение паразитной AM выход-
ного сигнала, обычно более глубокой при больших п. Последнее
является следствием того, что соседние с полезной, в первую оче-
редь (п+1)-я и (п—1)-я, гармоники тока также создают на кон-
туре некоторые напряжения; в результате их сложения с основ-
ной компонентой образуется колебание, модулированное по ампли-
туде частотой Q входного сигнала. Во многих случаях это недо-
пустимо.
Более эффективными, но и более сложными умножителями
частоты большой кратности являются радиоимпульсные умножи-
Рис. 3.16
тели частоты, в которых полезная
гармоника выделяется фильтром
из последовательности радиоим-
пульсов, получающихся в резуль-
тате осуществления амплитудной
манипуляции (АМп) несущего
колебания частоты <в0 видеоим-
пульсами частоты Й входного
сигнала (рис. 3.17а). В общем слу-
чае, когда частота <в0 не кратна
частоте й, начальные фазы коле-
баний внутри каждого импульса
оказываются разными; поэтому
получающееся АМп колебание не
является периодическим. Однако,
если обеспечить постоянство на-
чальных фаз колебаний частоты юо внутри каждого импульса,
процесс окажется периодическим с частотой w0- В-таком режиме и
работают радиоимпульсные умножители частоты.
Спектр АМп колебания отличается от спектра огибающей
сдвигом последнего на частоту соо: на этой частоте огибающая
спектра прямоугольных радиоимпульсов максимальна (см. рис.
1.16а и д). При радиоимпульсном умножении частоты изменение
йо смещает огибающую спектра, но не влияет на частоты спект-
ральных компонентов, остающихся кратными частоте Й. Следова-
тельно, для того чтобы полезная п-я гармоника была наибольшей,
74
нужно выбирать (оо=пй. При данном способе умножения частоты
удается получать большие п, до 50—100.
Для ослабления соседних компонентов спектра (что необхо-
димо для уменьшения паразитной AM) огибающая спектра долж-
на достаточно быстро убывать при отклонении от частоты <в0
(рис. 3.176). Поэтому в таких устройствах целесообразно исполь-
зовать «широкие» радиоимпульсы с отношением т/7’=‘0,5ч-0,9.
Умножители частоты, на выходе которых при действии входного напряже-
ния и— U cos Sit возникает единственная составляющая полезной частоты nSl
i=InCOsnQt, (3.53)
считаются идеальными. В них не требуется применения фильтра на выходе, и вы-
ходное напряжение частоты п£1 свободно от паразитной AM. Переходя к нор-
мированным переменным
j/n=i//n=|cos ncoof и x=u/U=cos aot (3.54)
и обозначая с>о<=ф, можно характеристики уи=Ф(х) идеальных умножите-
лей записать в виде cos пф=Ф(собф).
Используя тригонометрические формулы (3.9), получаем уп(х) в виде по-
линомов Чебышева Тп(х):
У1 = Т1(х) =cos ф=х,
Уг=Т2(х) =!2 сое2 ф—1 =2х2—1,
уз=Т3 (х) —4 cos3 ф—В cos ф =4х3—Зх,
г/4=7\ (х) =8 cos4 ф—8 cos2 ф-Н1==8х4—8х2+1,
(3.55)
Характеристики идеальных умножите-
лей частоты (3.55) для п=2, 3 и 4 построе-
ны на рис. 3.18. Характеристики умножите-
лей в четное и нечетное число раз являются
соответственно четными и нечетными функ-
циями входного сигнала. Следует заметить,
что характеристики (3.55) соответствуют
идеальным умножителям частоты только в
случае отсутствия влияния выходного на-
пряжения на ток выходной цепи. Реальные
умножители лишь приближенно удовлетво-
ряют этому условию.
Рис. 3.18
3.5. НЕЛИНЕЙНОЕ
Усилители, т. е. устройства, увеличивающие мощность сигнала,
относятся к числу наиболее распространенных устройств техники
связи. Усилители сигналов малой амплитуды обычно бывают ли-
нейными. Усилители сигналов большой амплитуды также могут
быть линейными. Однако, как показано ниже, используя нелиней-
ные режимы, можно заметно улучшить их важнейшие характе-
ристики.
Рассмотрим этот вопрос на примере резонансного усилителя,
на вход которого подан гармонический сигнал uBx=^bxCOs <W-
Схема его отличается от схемы умножителя частоты (рис. 3.13)
75
только тем, что контур в выходной цепи настраивается на часто-
ту (оо входного сигнала. Вольт-амперную характеристику активно-
го элемента считаем кусочно-линейной (рис. 3.19) с крутизной на-
клонного участка S. Линейное усиление имеет место тогда, когда
входной сигнал авх не выходит за пределы линейного участка ха-
рактеристики 1к(нб.э), как показано на рис. 3.19а, в результате вы-
ходной ток tK(tf) изменяется по тому же закону, что и uBX(Z). Ток
в выходной цепи содержит постоянную составляющую /0 и пере-
менную частоты соо с амплитудой 1\.
Рис. 3.19
Пренебрегая влиянием выходного напряжения на ток iK, по-
лучаем напряжение на контуре uK=>UK cos где t7K=SiP3t7BX,
а |/?э — эквивалентное сопротивление контура. Выбирая 7?3^>1/S,
получим коэффициент усиления по напряжению K=UjJUBx=
=SRs^l.
Мощность, расходуемая источником энергии, РО=1ОЕК, а полез-
ная мощность переменного тока в нагрузке
Pi=0,571 t/к- !(3.56)'
Коэффициент полезного действия усилителя •ц = Р1/Р0 с учетом
(3.31) ,и (3.32)
т] = —= . (3.57)
2 Iq Ек 2 Ек
В линейном режиме Ii^Io (рис. 3.19а) и амплитуда напряже-
ния на контуре UK не может быть больше £к. Принимая Ц=1о и
UK=EK, получим в самом благоприятном случае т)=0,5.
В нелинейном режиме усиления (рис. 3.196), т. е. при работе
с углом отсечки 0<18О°, величина 7i//o='Vi/to>-1- Используя при-
веденную на рис. 3.8 зависимость yi/yo от 0, убеждаемся в том,
что при 10=60° у1/у0=1,8, и если UK=EK, КПД может быть уве-
личен до т]=0,8. Дальнейшее уменьшение 0 обычно не допускает-
ся, так как при этом значительно уменьшается уь а значит, и по-
лезная мощность Pi.
76
Часть мощности источника
Р = ^о-Л=(1-П)^о
не превращается в полезную колебательную мощность и бесполез-
но расходуется в приборе, вызывая его разогрев. Это обстоятель-
ство является одной из основных причин, ограничивающих воз-
можность увеличения выходных мощностей транзисторных
усилителей. В связи с этим поиски режимов рабо-
ты и схем, в которых могут быть получены большие значения
КПД, являются задачами весьма актуальными. Мощность Р мо-
жет быть определена как среднее значение мгновенной мощности,
выделяющейся в приборе:
1 т
Р = J u^dt, (3.58)'
о
где ык и iK — мгновенные значения напряжения на активном эле-
менте и выходного тока. Уменьшение этой мощности ведет к уве-
личению КПД.
В последнее время в мощных ламповых и особенно транзистор-
ных усилителях получают распространение нелинейные режимы,
называемые ключевыми. Они характеризуются тем, что ток через
нелинейный элемент протекает, когда нк~0; когда же нк=^0, ток
г’к~0. В результате в соответствии с (3.58) мощность Р~0, поэто-
му Pi~Ptj и Т]~ 1.
Таким образом, в нелинейных режимах усиления
удается получить значительно большее КПД,
чем в линейных.
3.6. ПРЕОБРАЗОВАНИЕ ЧАСТОТЫ
Под преобразованием частоты подразумевают перемещение
спектра сигнала по шкале частот без изменения характера сигна-
ла, т. е. соотношений между компонентами спектра. Для модули-
рованных колебаний это означает изменение (повышение или по-
нижение) несущей частоты с сохранением вида модуляции и зако-
на изменения модулируемого параметра.
Преобразование частоты осуществляется в нелинейных или па-
раметрических цепях. Рассмотрим преобразование частоты AM ко-
лебания
«i=I7i[l+/nx(0]cos (3.59)
с помощью вспомогательного синусоидального напряжения
«2 = {/2:COS 0)2^ (3.60)
в параметрической цепи, ток в которой определяется выражением
i=Au2Ui. (3.61)
Соотношению (3.61) соответствует схема рис. 3.20, содержащая
параметрический резистивный элемент, проводимость которого
g=Au2 (3.62)
изменяется пропорционально сигналу и2.
Подставляя (3.59) и (3.60) в (3.61), получаем ток
i = A Uх U2 [ 1-F тх (t) ]cos cos a2i< = — 4 Ux U2 [ 14-mx (t) ] X
Xcos(toi + (02)^+“ AUj^fl -\-tnx(t)]cos(coi—tt>z)7 (3.63)
в виде суммы двух AM колебаний, подобных входному сигналу
(3.59). На рис. 3.21а, б построены соответственно спектры вход-
ных напряжений и тока i. Для получения
------ — AM напряжения с несущей частотой ®пр=
= <01—<<В2 достаточно ток i пропустить через
\---------------------параллельный колебательный контур, на-
Иы -Au стРоенныа на эту частоту; его частотная ха-
1 -Ст 2 рактеристика сбответствует пунктирной ли-
* Т нии на рис. 3.216. Напряжение на таком
контуре будет модулированным по ампли-
—---------- туде по тому же закону, что и входной сиг-
Рис. 3.20 нал (3-59):
^ВЫХ = £/вых[ 1 + тх (t) ] cos (0щ/, (3.64)
т. е. преобразование частоты произойдет без искажений. Анало-
гично производился преобразование частоты ЧМ (ФМ) сигналов
(см. табл. 3.1).
U
/|И IK______
и£ а
ч)
ё)
Рис. 3.21
Преобразование с выделением частоты (0пр=<й1—а2 осуществ-
ляется в радиоприемных устройствах (см. рис. В.6) и во входных
частях ретрансляторов радиорелейных линий (РРЛ). В выходных
78
Таблица 3.1
Характер сигналу Входной сигнал Выходной сигнал
АМ £/ifH-nix(/)]cos <Dif бф:-|-/ПХ(0 ]COS (Опр/
ЧМ, ФМ U cos [wiA4-<p(f)J U COS[<Bnp#+<p(01
частях РРЛ производится восстановление входного сигнала Ui(i)
путем выделения суммарной частоты юпр+сог^соь
В практических схемах преобразователей частоты используют-
ся нелинейные элементы (полупроводниковые диоды, транзисторы,
лампы), работающие чаще всего в таких условиях (см. § 2.6), ког-
да они ведут себя как параметрические, управляемые сильным
сигналом. В качестве сильного сигнала используется вспомога-
тельное гармоническое колебание (3.60), получаемое от отдельно-
го генератора (гетеродина).
Когда напряжения (3.59) и (3.60) действуют на нелинейный
преобразователь частоты с квадратичной ВАХ, ток i=ac~hai («1+
+«2)+а2(ы21+2ы1И2+«22) имеет компоненту 2a2«i«2, подобную
(3.61). Поэтому в числе других в токе содержатся такие же со-
ставляющие с частотами (0i±fi)2, что и в (3.63), обеспечивающие
неискаженное преобразование частоты. В общем случае аппрокси-
мации ВАХ полиномом п-й степени компоненты частот он+сог по-
лучаются из членов ahUk с четными k, что приводит к искажениям
огибающей, если п^4. Так, из компоненты 4g4U3iu2, содержащей-
ся в аДго+иг)4, получаются составляющие частот coi±a>2 с оги-
бающей, пропорциональной не x(t), а [ 1 -\-ах ($) ]3.
3.7. МОДУЛЯЦИЯ
АМПЛИТУДНАЯ МОДУЛЯЦИЯ
Амплитудную модуляцию можно осуществлять в нелинейных и
параметрических цепях. Ниже рассматриваются нелинейные моду-
ляторы, имеющие более широкое распространение.
На рис. 3.22а изображена схема нелинейного амплитудного
модулятора, в котором в качестве нелинейного элемента применя-
Рис. 3.22
78
ется диод Д. На схему действуют два напряжения: высокочастот-
ное £7]Cos (оо/ и низкочастотное a2=//2cos й/. Вольт-амперную
характеристику диода 1—Ф(и) аппроксимируем полиномом второй
степени
i=a0+a1a+a2a2. (3.65)
Пренебрегая влиянием выходного напряжения на ток (что в
данной схеме можно сделать, если эквивалентное сопротивление
контура Дэ значительно меньше дифференциального сопротивле-
ния диода), имеем
u=u1 + u2=Ui cos (оо/+ U2cos Qt. (3.66)
Подставляем (3.66) в (3.65):
1 = 00 + 0! (I/i COS (0О/ + t/2cos Q/) +О2(П21 COS2 (Hot +
+ 2UiU2 cos й/cos<W+ t/22cos2 Ш).
Представляя это выражение в виде суммы гармонических коле-
баний различных частот, строим спектр тока. В соответствии с об-
щими правилами, сформулированными на с. 62, спектр тока
(рис. 3.226) содержит первые и вторые гармоники частот соо и й
и комбинационные частоты второго порядка (оо±й. Для получения
AM колебания нужно из всего спектра выделить компоненты с
частотами too, (Оо+Й и (оо—й, что достигается пропусканием тока
через колебательный контур, настроенный на частоту (оо. Состав-
ляющие тока с частотами, близкими к (оо, определяются как
iao =ciiUi cos ио/+2a2t/iU2cos Qtcos <£>ot.
Если характеристика Z3((o) контура такова, что для частот ио,
(Оо4~й и ©о—й Z3~iR3, а для остальных компонент тока Z3((o)~O,
то на контуре получаем AM напряжение
«Бых=1'а1<)/?э=(г1^э1/1(11+^?^ cos Q/)icos (оо/,
at
которое можно записать в виде
^ВЫХ = // вых (1 + т cos й/)юоз «0/,
где //вых==^1/?э1/1, т—2——U2.
at
Глубина модуляции т напряжения тем больше, чем сильнее
нелинейность характеристики, определяемая а2, и амплитуда мо-
дулирующего сигнала U2. Изменение огибающей AM колебания
пропорционально модулирующему сигналу и2, поэтому модуляция
оказывается неискаженной.
Если в той же схеме характеристику нелинейного элемента ап-
проксимировать полиномом третьей степени «=а0+с1«+(г2и2+сзи3,
то спектр тока при входном напряжении (3.66) будет содержать
уже по три гармоники частот (оо и й и комбинационные частоты
второго и третьего порядков ((Оо±й, (Оо±2й, 2(оо±й). Этот спектр
построен на рис. 3.23а. Для получения неискаженной модуляции
нужно, как и прежде, поставить фильтр (например, контур), вы-
80
деляющий из всего спектра тока только компоненты частот и0 и
<oo±Q- Однако, поскольку полоса пропускания фильтра должна
определяться наибольшей возможной частотой модуляции £1тах, а
в спектре модулирующего сигнала будут и частоты Q, значитель-
но меньшие £imax, для большинства частот Q фильтр не позволит
избавиться от составляющих <d0±2Q. Наличие же этих компонент
означает модуляцию высокочастотного колебания частотами 2Q,
т. е. искажение огибающей.
9
Рис. 3.23
На практике в качестве нелинейных элементов модуляторов
чаще используются не диоды, а транзисторы или лампы (триоды,
пентоды). Модулируемое высокочастотное напряжение подают во
входную цепь нелинейного элемен-
та. Модулирующий же сигнал -вво-
дят в цепи различных электродов:
в транзисторах — в цепь базы или
коллектора (соответственно базо-
вая млн коллекторная модуляция),
в .электронных лампах чаще всего
в цепь управляющей сетки (сеточ-
ная модуляция) или анода (анод-
ная модуляция). Рассмотрим схему
базовой модуляции на тран-
зисторе (рис. 3.24). Напряжение на
базе содержит, кроме смещения Ев, определяющего положение
рабочей точки, колебания низкой и высокой частот
Ug =Д1 + ^2 + ^б- (З.б?)
Здесь щ = U\ cos aot — высокочастотное напряжение; ы2=
=\U2 cos QZ -— модулирующее низкочастотное напряжение. На рис.
3.25а—в по характеристике прибора 1К=Ф (Дб) методом проекций по-
строена зависимость iK от времени. Коллекторный ток представля-
81
ет последовательность импульсов, отличающихся друг от друга
высотой 1-тах и углом отсечки 6. Если разложить каждый из этих
импульсов тока в ряд Фурье за период высокой частоты То=
= 2л/<йо, получим постоянную составляющую и гармоники высокой
Рис. 3.25
частоты. Напряжение на контуре, настроенном на частоту ®о, со-
здается только первой гармоникой iKi —/Ki cos aot:
Цвых = ,^к1^?э = Д1Дэ COS (0q/.
Изменение высоты и ширины импульсов тока во времени при-
водит к изменению амплитуды IKi с низкой частотой Q. Поэтому
выходное напряжение получается модулированным по амплитуде
(рис. 3.25г).
Режим работы модулятора, определяемый величинами Е^, U\
и >Uz, нельзя (выбирать таким, чтобы все мгновенные значения на-
ходились в пределах линейного участка характеристики транзис-
тора, так как в этом случае коллекторный ток будет иметь такую
же форму, что и «б, амплитуда высокочастотной составляющей то-,
ка iKi будет постоянной, а потому напряжение на выходе окажется
немодулированным.
При осуществлении модуляции могут возникать искажения оги-
бающей ДМ колебания. Оценка величины искажений и выбор ре-
жима работы, обеспечивающего их отсутствие, по характеристике
прямой передачи гк(пб) практически невозможны. Для решения этой
задачи целесообразен иной подход к рассмотрению работы моду-
лятора. Напряжение можно рассматривать как сумму высоко-
частотного колебания щ и напряжения смещения «б(/)=Дб+
+«2(0, медленно изменяющегося с низкой частотой, а модуляцию
82
как следствие изменения смещения, приводящего к изменению им-
пульсов тока и их первой гармоники. Так как амплитуда выходно-
го напряжения пропорциональна Дь для получения неис-
каженной модуляции требуется, чтобы ампли-
туда Л-i изменялась пропорционально измене-
нию напряжения смещения. Зависимость /К1 от Е$ при
постоянной амплитуде U\ называется статической модуляционной
характеристикой. Она может быть рассчитана по статической ха-
рактеристике прибора рис. 3.26о: при неизменной амплитуде Ui и
различных смещениях Ёб с помощью одного из методов спектраль-
ного анализа определяем амплитуды /К1 и строим зависимость
/к1(£б) (рис. 3.266), которая и является статической модуляцион-
ной характеристикой.
Рис. 3.26
Отметим некоторые ее особенности. При смещении, равном на-
пряжению запирания U'a, получаются импульсы тока 1К с углом
«тсечки 10=90°, а потому Iki=A=0. Амплитуда /К1 уменьшится до ну-
ля, когда смещение достигнет величины E'c—U'c—EJ\. Если при
изменении смещения колебание Wi не выходит за пределы линей-
ного участка статической характеристики транзистора, амплитуда
/К1 не меняется. Обычно в средней части статической модуляцион-
ной характеристики имеется линейный участок MN. Для получе-
ния неискаженной модуляции с наибольшей глубиной m нужно
выбирать рабочую точку А на середине этого участка (смещение
83
Ебо) и использовать низкочастотный модулирующий сигнал с та-
кой амплитудой U2, при которой работа происходит в пределах
участка MN. В этом случае изменение /К1 во времени (жирная ли-
ния на графике iKi (t)) не отличается от модулирующего сигнала,
т. е. имеет место неискаженная модуляция. Если взять большую
амплитуду U2, при которой в процессе работы будут использовать-
ся нелинейные участки модуляционной характеристики, огибаю-
щие /К1 и 17вых окажутся искаженными и притом тем сильнее, чем
больше U2.
Для построения зависимости и аналогичного графика
«вых (0 достаточно симметрично ниже оси абсцисс провести вто-
рую огибающую и промежуток между огибающими заполнить ко-
лебаниями частоты ®о (рис. 3.26е). Коэффициент модуляции в со-
ответствии с обозначениями рис. 3.26 может быть подсчитан по
статической модуляционной характеристике как m=A/Ki/Ati ср-
БАЛАНСНАЯ И ОДНОПОЛОСНАЯ МОДУЛЯЦИЯ
В § 1.2 было показано, что при передаче двухполосных ДБП и
однополосных ОБП сигналов без несущей достигается существен-
ный выигрыш в мощности, а во втором случае еще и в ширине
спектра передаваемого сигнала.
Для получения сигналов ДБП используются балансные моду-
ляторы (БМ), действие которых основано на компенсации напря-
жений несущей частоты при сложении двух AM колебаний на об-
щей нагрузке. Так, подав на входы двух одинаковых диодных
амплитудных модуляторов с ВАХ (3.65) напряжение частоты соо в
фазе, а модулирующее напряжение частоты Q в противофазе, полу-
чим на их выходах напряжения: щ = ПоЦ+ш cos Q/)cos ц2=
='(7о(1—mcosQ£)cos<D0Z. В случае встречного включения этих на-
пряжений на нагрузке получается двухполосный сигнал «дбп =
= «1—U2=2Uom cos Qt cos
A
Рис. 3.27
Схема диодного БМ приведена на рис. 3.27. Если считать оба
модулятора одинаковыми, аппроксимировать характеристики дио-
дов полиномами третьей степени и пренебречь падением напряже-
ния на резисторах Д (что допустимо для малых величин R), по-
84
лучим напряжения на диодах: и'д1=«1+«2, Нд2=Д1—«2. Токи в
цепях диодов
Й = ф (W1 4-U2) = Оо + щ (U1 + U2)i-b^2 (U1 + ^2) 2 + од('^1 + W2) 3, I
£2=Ф(«1—«2) =a0+a1(ti1—uz) +tz2(wi—u2)2+a3(ui—и2)3. J
(3.68)
Напряжение на выходе балансного модулятора
«вых=!/?(й—й) =2j^aiu2+2a2uiu2+a3u32+3a3u2iu2). (3.69)
Спектр выходного напряжения, определяемого (3.69), приведен
на рис. 3.236. Он содержит меньшее число составляющих, чем
спектр однотактного модулятора (см. рис. 3.23а). Отсутствуют, в
частности, компоненты несущей частоты и ее гармоники, состав-
ляющие частот <йо±2£2, вызывающие искажения. Ставя в качест-
ве нагрузки вместо резистора 7? колебательный контур, настроен-
ный на частоту ©о, получим двухполосное колебание без несущей.
Значительно лучшее подавление нежелательных составляющих
спектра достигается в кольцевом модуляторе (рис. 3.28а), отли-
чающемся от рассмотренного наличием еще двух диодов Дз и Д4.
Рис. 3.28
В этой схеме все четыре диода включены в кольцо в одном на-
правлении; отсюда название кольцевой модулятор или кольцевой
преобразователь. Для определения протекающих в схеме токов об-
ходим цепь каждого диода в направлении проводимости через
источники сигналов и сопротивление нагрузки. Обозначим через
in ток, протекающий через диод Дп (п=1, 2, 3, 4). Токи й и i2
по-прежнему определяются выражениями (3.68), а токи
Й=Ф(—«j—и2), Й=Ф(—щ + Дг)-
Направления токов й и i2 совпадают с показанными на рис.
3.27, а токов й и й даны пунктирными линиями на рис. 3.28а. Там
же показаны направления токов й—й в нагрузочных сопротивле-
ниях.
Выходное напряжение аВых='7?(й—й)4~7?(й—й)- Обозначим
^вых 1 ==7? (й—^2) и ^вых2—7? (й й) - Выражение для Пвых1 совпа-
дает с (3.69). Ток й отличается от й, а ток й от й знаками щ и
85
«2. Поэтому Ивых2 получим в результате изменения знаков щ и
«2 в (3.69) на противоположные:
«ВЫХ2=2^? (—tZi«2 + 2a2Ui«2—а3п32—За3«21«2) • (3.70)
Складывая (3.69) и (3.70), получаем
Пвых” 3/?tZ2^1H2- (3-71)
Таким образом, при идентичных диодах и небольших амплиту-
дах входных сигналов, позволяющих аппроксимировать характе-
ристики диодов полиномами третьей степени, кольцевой мо-
дулятор ведет себя как идеальный преобразо-
ватель-перемножитель двух входных сигналов.
Спектр его выходного напряжения содержит только боковые час-
тоты <йо+П и <в0—Q.
Кольцевой модулятор нередко используется в режиме, в котором
и притом амплитуда Ui столь велика, что можно считать характеристики дио-
дов кусочно-линейными, обладающими при прямом напряжении сопротивлением
Гпр~0, а прн обратном — сопротивлением ГоСр~°°- При этом диоды превра-
щаются в ключи: при указанной на рис. 3.28а полярности напряжения ui дио-
ды Д1 и Д2 открыты, т. е. представляют замкнутые ключи Ki и Кг, а диоды
Дз и Д4 представляют разомкнутые ключи Кз и К4, как показано на рис. 3.286;
в результате авых~2и2. При изменении полярности ui ключи Ki и Кг размы-
каются, а Кз и К4 замыкаются, а потому ыЕЫх~—2а2- В этом режиме кольце-
вой модулятор ведет себя по отношению к слабому сигналу а2 как параметри-
ческое устройство (ключ), управляемое сильным сигналом, что соответствует
результатам § 2.6.
Кольцевые преобразователи находят широкое применение в
многоканальных системах связи для целей модуляции, детектиро-
вания и преобразования частоты, а также в измерительных при-
борах.
Модуляция, в результате которой получается однополосный
сигнал без несущей, называется однополосной модуляцией (ОМ).
Основными методами однополосной модуляции являются: метод
фильтрации и метод фазирования. Формирование сигнала ОБП
первым методом в случае, когда модулирующее колебание состо-
ит из суммы гармонических компонентов, иллюстрирует рис. 3.29.
Рис. 3.29
Сигнал osn
Колебание несущей частоты и модулирующий сигнал подаются на
балансный или кольцевой модулятор, на выходе которого созда-
ется двухполосный сигнал без несущей. Далее ставится полосовой
86
фильтр, пропускающий на выход сигнал ОБП (верхней или ниж-
ней).
Идея метода фазирования такова. Пусть входные сигналы
U\ = U\ cos torf и u2=U2cos £it, и требуется получить на выходе,
например, только нижнюю боковую частоту нВЫх—^выхСО8(и0—
—Й)А Записав это выражение в виде иВЪ1Х= UBB!X cos £it cos <й0^+
+'^вых sin QZ sin соо^, замечаем, что оно может быть сформировано в
результате сложения колебаний, получающихся на выходе двух пе-
ремножителей колебаний (в качестве которых могут быть исполь-
зованы балансные или кольцевые модуляторы), как показано на
рис. 3.30. Подавая на вход первого перёмножителя сигналы щ и и2,
а на вход второго — те же’сигналы, предварительно повернутые по
Рис. 3.30
фазе на 90° с помощью фазовращателей, получим на выходе каж-
дого перемножителя (БМь БМ2) напряжения, пропорциональные
произведению двух входных сигналов нЕых1,2=пиЕХ1ЦВХ2. На выхо-
де сумматора будет иВых=wBbixi + uBblx2=aU1U2 cos (<в—Й)£. Для
формирования верхней боковой частоты нужно в схеме рис. 3.30
поставить вычитающее устройство вместо суммирующего.
ЧАСТОТНАЯ МОДУЛЯЦИЯ
Для получения частотной модуляции нужно, чтобы частота ко-
лебаний автогенератора изменялась под действием первичного
сигнала ио . На рис. 3.31 приведена схема автогенератора (обве-
дена пунктирной линией), вырабатывающего синусоидальное на-
Рис. 3.32
Рис. 3.31
87
пряжение и= U cos со/ с частотой и, приблизительно равной резо-
нансной частоте контура <о0. Следовательно, изменение частоты
генерируемых колебаний может быть достигнуто изменением ем-
кости или индуктивности контура. Для осуществления частотной
модуляции параллельно контуру генератора подключают пара-
метрический элемент — реактивное управляемое сопротивление
Xy(t), величина которого изменяется под воздействием модулиру-
ющего сигнала: Лу(7)=Ф(ца).
Рассмотрим случай, когда в качестве сопротивления Ху ис-
пользуется емкость C/==Ci+AC(/). Частота генерируемых коле-
баний определяется формулой
®=l/]/L(C+‘Ci+AQ'=WKl+AC/Co, (3.72)
где Со=С+Сь ио=1/1/ГLC0. Изменение общей емкости контура
на величину ДС вызывает изменение частоты на Д<о = <о—соо. Раз-
лагая правую часть (3.72) в ряд Тейлора и ограничиваясь для
ДС/С0<^_ 1 первыми двумя членами разложения, получаем
Д<й/(йо=—ДС/2С0. (3.73)
Если изменять индуктивность контура L=L0+&L(t) так, чтобы
AL/LO<C1, относительное изменение частоты будет
Дсо/(йо=—AL/2Lo- (3.74)
В рассмотренных случаях изменение частоты колебаний про-
исходит пропорционально изменениям \C(t) или &L(<t). Знак
«минус» в (3.73) и (3.74) является следствием того, что увеличе-
ние индуктивности или емкости контура ведет к уменьшению час-
тоты колебаний. Из выражений (3.73) и (3.74) следует, что если
AC(t) и k.L(ty изменяются пропорционально первич-
ному сигналу и притом в небольших пределах,
изменение частоты также пропорционально wa, т. е. частотная
модуляция будет неискаженной.
В качестве управляемого сопротивления в транзисторных ге-
нераторах обычно используют варикапы, подключаемые к генера-
тору, как показано на рис. 3.32. На варикап В подается смеще-
ние £см и модулирующее напряжение иа. Остальные элементы
на рис. 3.32 имеют вспомогательное значение: емкость Ср боль-
шей величины разделяют цепи питания генератора и варикапа по
постоянному току, позволяя в каждой из них установить нужные
напряжения; добавочное сопротивление 7?д величиной порядка со-
тен килоом включается для того, чтобы источник смещения и
вторичная обмотка трансформатора не шунтировали контур гене-
ратора.
Емкость варикапа с резким р-п-переходом определяется из
(2.22) для п=2. При постоянном напряжении на варикапе ы=£во,
Сво= — . Выражая в (2.22) С(0) через СВо и считая
V 1 ^во/фи
н=£во+Дц, получим
C=CBtf(l-^)-V2,
где £=Ди/(фк—Ев0). Относительное изменение емкости
С — св0 дс й
х =-----— = будет
Сво бво
х=(1^)~1/2-1 (3.75)
или после разложения в ряд Тейлора
<3-76*
Z о 1о
Примем в качестве отклонения g нормированное значение низ-
кочастотного модулирующего сигнала
£=на/(фк—Ево) = I4'cos Ш. (3.77)
Из (3.76)
J^=-ly2 + J_y cosQf + Ay2cos2£H+_
Св0 16 2 2 г16 2
Следовательно, емкость’ варикапа изменяется с частотой Q и
ее гармоник; кроме того, изменяется и ее среднее значение.
Если емкость контура состоит только из емкости варикапа
(Со=СвО), то согласно (3.72) относительное изменение частоты
колебаний
4^=(1+хг1/2-1«-4х+4ха-...
/о 2 8
Заменяя здесь х двумя первыми слагаемыми (3.76), получим
уравнение модуляционной характеристики автогенератора с вари-
капом
AL =-----В -В2—..., (3.78)
/о 4 32 7
т. е. зависимости отклонения частоты генератора от изменения
напряжения Ди на варикапе. Поскольку эта зависимость нелиней-
ная, ЧМ, возникающая при воздействии напряжения (3.77), долж-
на сопровождаться искажениями (изменением частоты генерации
с частотами 2Q, 3Q, ...) и сдвигом средней частоты. Подставляя
(3.77) в (3.78), получаем:
' =----- VI— — V, cos Q t--- Vl cos 2 Q t. (3.79)
fe 64 4 2 64 V 7
Из (3.79) получаем следующие выражения для девиации час-
тоты Д)д по первой гармонике, коэффициента нелинейных искаже-
ний по второй гармонике к%, определяемого отношением девиаций
по второй и первой гармоникам, и сдвига средней частоты Д)Ср
генератора:
АХ 1 TZ X 3 т; ЗД /д _
Д/д= — Е2/о; = ,
(3.80)
Д/ср __ 3 у2 _ з /Д/д \2
/о 64 2 4 \ /о / ’
89
Таким образом, увеличение девиации частоты сопровождается
увеличением искажений и сдвига средней частоты.
В качестве управляемого реактивного сопротивления исполь-
зуются также специальные транзисторные и ламповые схемы, на-
зываемые соответственно реактивными транзисторами или лампа-
ми. Рисунок 3.33 поясняет реализацию таких схем с помощью уп-
равляемого нелинейного элемента УНЭ (транзистора или лампы).
Первая гармоника тока входной цепи безынерционного УНЭ /К1
синфазна с входным гармоническим напряжение t7BX и может
быть определена как
7ki—Scp^Bx, (3.81)
где Scp — средняя крутизна УНЭ.
Для превращения УНЭ в реактивный элемент нужно при пе-
редаче напряжения й на вход УНЭ осуществить сдвиг фаз на 90°.
Это достигается введением параллельно УНЭ фазовращателя ФВ,
состоящего из элементов Zt и Z2, питаемого по высокой частоте
со входным напряжением О. Если пренебречь входным током
УНЭ, то ток в фазирующей цепи /2=^/(Zi+Z2), а высокочастот-
ное напряжение на входе УНЭ
t7BX=j7Z2/(Zj + Z2). (3.82)
Обычно выбирают величины Z\ и Z2 столь большими, чтобы
и притом Z!»Z2. Тогда эквивалентное (управляющее) со-
противление реактивного каскада Za~UlIK\ оказывается
Z3~Zj/Z2SCp. (3.83)
Теперь для получения реактивного сопротивления Z3=iXa до-
статочно выбрать одно из сопротивлений (Zt или Z2) активным,
другое — реактивным. Так, если Zi=l/icoC, a Z2=iR, то согласно
(3.83)
-7 1
Z3 = —1-------.
(a CHS ср
Рассматриваемая схема оказалась эквивалентной реактивному
сопротивлению с отрицательной мнимой частью, изменяющемуся
обратно пропорционально частоте. Подобными свойствами обла-
дает емкость
Z3= —. (3.85)
1 со Cq
Приравнивая правые части (3.84) и (3.85), получаем вели-
чину эквивалентной емкости Ca=GRScp. Если же выбрать Z]=/?,
Z2 = l/i(oC, УНЭ с фазовращателем эквивалентен индуктивности
Lg — RC/Scp.
Для осуществления ЧМ модулирующее напряжение uQ(t) мож-
но будет подать во входную цепь УНЭ (см. рис. 3.33). Ес-
ли УНЭ работает в нелинейном режиме, изменение смещения
приведет к изменению первой гармоники тока высокой частоты,
а значит, и средней крутизны Scp. Последнее приведет к измене-
90
нию во времени Са (или £э), а следовательно, и и, т. е. к ЧМ. Для
получения неискаженной ЧМ требуется, чтобы при малых измене-
ниях С или L ток изменялся пропорционально смещению ECM(t) =
=£cm+«q(O> т- е- в пределах линейного участка статической мо-
дуляционной характеристики прибора (см. рис. 3.266).
При использовании рассмотренных простейших фазовращате-
лей обычно выбирают Zi== (10-4-20)Z2; при этом сдвиг фаз между
/К1 и й составляет <р~(80—85°), эквивалентное сопротивление
схемы оказывается комплексным, а его изменение приводит не
только к полезной ЧМ, но и к нежелательной AM. Для ослабле-
ния этого эффекта можно, например, последовательно включить в
фазовращателе две идентичные цепочки Zi—Z2, как это показано
ниже на рис. 3.34, с тем, чтобы на нужных частотах общий сдвиг
фаз ф~90°.
Реактивные транзисторы получили широкое распространение в
микроэлектронике в качестве перестраиваемых емкостей и индук-
тивностей. В качестве примера на рис. 3.34 приведена схема коле-
бательного контура, образованного двумя реактивными транзис-
торами: левая часть схемы эквивалентна емкости Сэ, правая —
индуктивности £э. Изменение смещений во входных цепях транзи-
сторов приводит к изменениям Сэ, La и резонансной частоты кон-
тура.
ФАЗОВАЯ МОДУЛЯЦИЯ
Для осуществления фазовой модуляции (ФМ) нужно иметь
устройство, ца выходе которого фаза колебаний изменяется про-
порционально модулирующему сигналу. Для этого можно исполь-
зовать те же самые управляемые реактивные сопротивления Xy(t).
Однако подключать их нужно к контуру усилителя, а не генера-
тора, как это имело место в случае ЧМ. Такая схема показана на
рис. 3.35.
Будем считать, что напряжение на входе . усилителя пвх=
= t/BxCos Ю]/, и первая гармоника тока iKi синфазна с напряжением
ивх. Изменение резонансной частоты контура с помощью реактив-
ного управляемого сопротивления вызывает изменение ампли-
туды и фазы напряжения на контуре. Их величины при заданном
токе iK1 определяются по частотной и фазовой характеристикам
контура. Частота же колебаний в стационарном режиме при лю-
бой настройке контура равна частоте дц входного сигнала. На
рис. 3.36 построены частотные Z(w) и фазовые <р(ю) характерис-
тики контура для трех значений резонансной частоты cooi<g>i;
cdo2 = coi и юоз>&)1- На рис. 3.37 для этих же трех случаев построе-
ны векторные диаграммы. При любой настройке контура сдвиг
фаз напряжения на контуре й по отношению к току 1к1 определя-
ется ординатой фазовой характеристики на частоте а эквива-
лентное сопротивление — ординатой частотной характеристики на
Рис. 3.37
частоте дц. Если резонансная частота контура медленно изменя-
ется под действием управляющего сигнала от cdoi до (Ооз и обрат-
но, фаза выходного напряжения (напряжения на контуре) меня-
ется между ф7! и ф'3, т. е. имеет место ФМ напряжения на кон-
туре. Одновременно в результате изменения эквивалентного со-
противления контура для частоты coi возникает паразитная AM.
92
Уравнение фазовой характеристики контура с добротностью Q
для небольших расстроек Ди имеет вид
tg<p=- —Q, (3.86)
С»0
где Ди=И1—но-
Если Ди изменяется пропорционально модулирующему сигна-
лу иа , то неискаженная ФМ имеет место, когда изменение <р про-
порционально Ди, т. е. на линейном участке фазовой характери-
стики (3.86), где tg<p=<p. Это справедливо лишь для небольших
индексов модуляции, не превышающих 20—30°.
Другой способ осуществления ФМ основан на преобразовании
AM в ФМ колебание с помощью устройства, структурная схема ко-
торого приведена на рис. 3.38. На балансный модулятор БМ по-
даются: высокочастотное колебание щ частоты <во и модулирую-
щее напряжение ио (в дальнейшем полагаем иа ~Ua cos £lt).
В сумматоре осуществляется сложение напряжения, полученного
на выходе БМ, с напряжением несущей частоты, повернутым по
Рис. 3.38
фазе на 90° в фазовращателе ФВ. Если бы напряжение и'\ посту-
пало на сумматор без поворота фазы (<p = 0), то на выходе схемы
рис. 3.38 получилось бы AM колебание Ыдм, образование которо-
го поясняется векторной диаграммой рис. 3.39а. В схеме рис. 3.38
те же компоненты верхней и нижней боковых частот, существую-
щие на выходе БМ, складываются с вектором U'x (рис. 3.396),
/
Рис. 3.39
93
повернутым на 90° относительно Ui, в результате чего и получа-
ется ФМ колебание. Для получения неискаженной ФМ и умень-
шения паразитной AM, связанной с изменением амплитуды
и<ыл (t)> и в этой схеме индекс модуляции должен быть неболь-
шим.
В заключение укажем на способ получения ФМ с помощью
частотного модулятора. При осуществлении ФМ первичным сиг-
налом x(t) получается колебание
ыфм = ICOS [W+фо+ая (/) ],
где а — коэффициент пропорциональности, а при осуществлении
ЧМ сигналом y(t)
ичм=^с08[ю^+фо + «У y(t)dt].
Следовательно, если сначала продифференцировать сигнал
x(t), т. е. получить y(t)~dxldt, а затем осуществить частотную
модуляцию сигналом y(t), то получим ФМ колебание. При этом
возможно достижение ФМ с большими индексами М.
ИМПУЛЬСНАЯ МОДУЛЯЦИЯ
Обратимся к способам формирования ИМ колебаний (см. рис.
1.15). Первичная АИМ может осуществляться теми же методами,
что и AM. Так, можно использовать схему базовой модуляции
(см. рис. 3.24), вводя вместо
(напряжения Ил (последователь-
ность 'импульсов рис. 1.156 и
применяя в (качестве нагрузки
резистор вместо (контура.
(Простейший способ форми-
рования ШИМ и ФИМ, имею-
щих 'более широкое распрост-
ранение, поясняется графика-
ми рис. 3.40. Если сложить мо-
дулирующее напряжение (а)
с периодической последова-
тельностью . треугольных им-
пульсов (б) и их сумму (в)
.пропустить через двусторонний
ограничитель, на выходе по-
следнего получим трапецеи-
дальные импульсы ШИМ (а).
Крутизна фронтов импульсов
зависит от соотношения ам-
плитуды и ширины импульсов.
Если пропустить полученный
сигнал (а) через дифференци-
Рис. 3.40
94
рующее устройство (б), а затем через ограничитель по минимуму
с нулевым уровнем ограничения, получим сигнал ФИМ. (е), сдвиг
импульсов которого относительно центров треугольных импульсов
(б) окажется пропорциональным модулирующему сигналу. Им-
пульсные модуляторы выполняются на транзисторах и диодах.
3.8. ДЕТЕКТИРОВАНИЕ
ОБЩИЕ СВЕДЕНИЯ
Детектирование представляет собой процесс, обратный моду-
ляции. При модуляции один из параметров высокочастотного пе-
реносчика изменяется пропорционально первичному сигналу. Де-
тектирование заключается в восстановлении того первичного сиг-
нала, которым производилась модуляция. Детектирование счита-
ется неискаженным, если напряжение на выходе детектора повто-
ряет закон изменения параметра модулированного колебания (ам-
плитуды в случае AM, частоты в случае ЧМ, фазы в случае ФМ).
Поскольку в спектре модулированного колебания содержатся
только высокочастотные компоненты (несущая и боковые часто-
ты), а результатом детектирования является получение низкочас-
тотных колебаний, линейные цепи для детектирования непригод-
ны. В большинстве случаев детекторы являются устройствами<йе-
линейными, реже — параметрическими.
На рис. 3.41 приведена обобщенная схема детектора, состоя-
щая из двух элементов: а) нелинейного (НП) или параметричес-
кого (ПП) преобразователя, в выходном токе которого при воз-
Рис. 3.41
действии на вход гармонического напряжения uBX= t7cos..(o>/+(p)
появляется постоянная составляющая Го, б) фильтра нижних ча-
стот ФНЧ, предотвращающего прохождение на выход детектора
высокочастотных составляющих. Требование к преобразователям:
величина Го должна зависеть
в детекторе AM сигналов от U,
в детекторе ЧМ сигналов от со,
в детекторе ФМ сигналов от ср.
При подаче на вход модулированного колебания, один из па-
раметров которого меняется с низкой частотой, постоянная со-
ставляющая тока Го на выходе соответствующего детектора так-
же будет изменяться с низкой частотой, и это колебание после
ФНЧ выделится на выходе детектора. Для неискаженного детек-
тирования необходимо, чтобы компонента тока Го изменялась
пропорционально модулируемому параметру (U, со или ср). В свя-
95
зи с этим важнейшими характеристиками детекторов являются
характеристики детектирования, под которыми подразумеваются
зависимости /'о от U в амплитудных, от ю в частотных и от ф в
фазовых детекторах.
ДЕТЕКТИРОВАНИЕ AM КОЛЕБАНИИ В НЕЛИНЕЙНЫХ ЦЕПЯХ
На рис. 3.42а—в показано графическое определение тока, про-
текающего через диод при воздействии на не^о AM напряжения
«вх= J7(l + moos й/)соз и0А (3.87)
Поскольку диод обладает односторонней проводимостью, ток
i имеет характер импульсов длительностью в половину периода
частоты (в0, амплитуда которых изменяется при изменении огиба-
ющей входного напряжения. В получившейся последовательности
импульсов тока содержится уже и низкочастотная составляющая
частоты й. Действительно, импульсы тока i различаются глав-
ным образом амплитудой /. Зависимость i(t) можно рассматри-
вать как результат модуляции импульсов тока, записанных в ви-
де ряда Фурье 10+Ц cos aot+I2 cos 2ио7+ —, колебанием низкой
частоты й
t= (1+тсозй/) (7о+/rcos и07+/2 cos 2<оо/+...). (3.88)
Таким образом, ток i содержит постоянную составляющую и
компоненты высокой частоты ио и ее гармоник, каждая из кото-
рых модулирована низкочастотным сигналом.
На рис. 3.42в штрихпунктирная линия изображает зависи-
мость постоянной составляющей тока от времени определяе-
мой как среднее значение тока i за период высокой частоты соо:
1'0 = (1 + rn cos Й7) /0. (3.89)
96
/
Для выделения низкочастотного сигнала последовательно с
нелинейным элементом включают такую цепь RC (рис. 3.43),
чтобы
(3.90)
• Здесь емкость С выполняет роль ФНЧ: в силу (3.90) высо-
кочастотные компоненты тока напряжения на выходе почти не
создают. Для того чтобы низкочастотные компоненты тока созда-
вали большое выходное напряжение, сопротивление R должно
быть достаточно большим и притом с тем, чтобы для
низких частот сопротивление нагрузочной цепи ZH~R. Объеди-
няя эти неравенства, получаем условия, определяющие выбор ем-
кости С:
(3.9Ц
График «вых(0 рис. 3.42а показывает форму выходного напря-
жения.
На рис. 3.44а и б представлены спектры напряжения (3.87) и
тока (3.88). Пунктирная линия на рис. 3.446 изображает зависи-
мость ZH(co) при условии (3.91). /
Перемножая амплитуды спект-
ральных компонент на соответ-
ствующие величины ZH, получаем
спектр выходного напряжения
(рис. 3.44в).
Переходя к более подробно-
му рассмотрению процесса детек-
тирования, отметим, что сопро-
тивление нагрузки R обычно вы-
бирается настолько большим, что
учет его влияния на ток i оказы-
~U | |
а0-л О0 и0+Л
а)
Рис. 3.43
2(0п а
Б)
0 £ . ®
е)
Рис. 3.44
0
вается необходимым. Пусть на детектор в схеме рис. 3.43 дейст-
вует синусоидальное напряжение частоты юо==2л/7’о
^вх!= U COS (Hot.
(3.92)
Напряжение на диоде u=uBX + U0. Вследствие наличия цепоч-
ки RC, оно отличается от напряжения (3.92) на величину посто-
янного смещения —I'oR. На рис. 3.45 показано определение
4—92 97
тока с учетом влияния С70 для кусочно-линейной аппроксимации
характеристики диода. При больших 7? диод работает с неболь-
шими углами отсечки 0, т. е. ток через диод протекает только в
течение небольшой части периода, соответствующей заштрихован-
ной части входного сигнала. Так как сопротивление открытого ди-
ода мало, в это время происходит быстрый заряд конденсатора С,
сопровождающийся возрастанием напряжения ис на нем. Ког-
да ивх оказывается меньшим ис диод запирается, входное напря-
жение перестает влиять на процессы в 7?С-цепи, конденсатор С раз-
ряжается через большое сопротивление R. Согласно (3.90) постоян-
ная времени разряда Траз==^С^>То/2л или Траз^Ль Поэтому за
ту часть периода То, пока конденса-
тор разряжается, напряжение ис
уменьшается незначительно. Харак-
тер изменения по времени иВх,
«вых=«с и тока I, протекающего че-
рез диод, показан на рис. 3.46. Пре-
небрегая пульсацией напряжения
«вых, будем в дальнейшем считать
его при воздействии сигнала (3.92)
постоянным и равным Uo (штрих-
пунктирная на рис. 3.46) Ч Это по-
зволяет записать напряжение на диоде как u=U cos aot—I'oR.
Определим угол отсечки 0 как значение aot, при котором и=0:
cos0= (3.93)
Согласно (3.31) при кусочно-линейной характеристике диода
1 Схема простейшего (однополупериодного) выпрямителя не отличается от
приведенной на рис. 3.43. На вход выпрямителя действует напряжение (3.92)
постоянной амплитуды, и рис. 3.46 поясняет происходящие в ием процессы. В
AM детекторах при выбранном 7? наибольшее значение С ограничивается пра-
вой частью неравенства (3.91). Для выпрямителей такое ограничение отсутству-
ет, величина С может быть взята большей, в результате чего пульсация вы-
ходного напряжения уменьшится и
98
su
(рис. 3.45) /'o= — (sin 6—6 cos 0). Подставляя это выражение
л
в (3.93), получаем уравнение, определяющее 0:
tg 0—0=71/5./?. (3.94)
Амплитуда U в (3.94) не входит. Следовательно, угол отсечки
0 не зависит от амплитуды U входного сигнала, а определяется
исключительно параметрами схемы S и /?. Поэтому согласно
(3.93) I'a~U, данный детектор обладает линейной характеристи-
кой детектирования, и детектирование в нем происходит без иска-
жений.'Детектор с линейной характеристикой детектирования на-
зывается линейным детектором. Диодный детектор является ли-
нейным в случае достаточно больших амплитуд входного сигнала,
когда пригодна кусочно-линейная аппроксимация его характери-.
стики. При этом следует помнить, что линейный детектор
является устройством нелинейным, работающим с
отсечкой тока. /
Коэффициент передачи линейного диодного детектора, опреде-
ляемый как Кд=/7Вых/П, совпадает с правой частью (3.93). Сле-
довательно, Лд = СО8 0<1.
Для малых амплитуд входного сигнала характеристику диода
аппроксимируем полиномом второй степени
1=Ф(п) = а1и+а2и2. (3.95)
Полагаем J? малым. Тогда и~нвх и согласно (3.95) и (3.92)
i=ci\Ucos aoi+aUz cos2 ю0/. Зависимость постоянной составляю-
щей тока от амплитуды U'
U2 (3.96)
является характеристикой детектирования. Она имеет квадратич-
ный характер, и потому диодный детектор, колебаний малой ам-
плитуды называется квадратичным детектором.
Амплитудно-модулированное колебание (3.87) можно рассмат-
ривать как почти гармоническое u^=U(i) cos aot с медленно ме-
няющейся амплитудой
[/(/) = /7(l + mcosQf). (3.97)
Из-за’ нелинейности характеристики детектирования изменение
амплитуды входного сигнала вызывает непропорциональное из-
менение постоянной составляющей тока детектора, поэтому низ-
кочастотные колебания на выходе детектора искажаются по срав-
нению с огибающей AM колебания.' Подставляя (3.97) в (3.96),
получаем
l'0=^U2+a2mU2 cos Q./+-Jm2t/2(l-hcos2Qf).
В спектре тока, а значит, и выходного напряжения детектора
имеются две низкочастотные составляющие: частоты й передава-
емого сигнала с амплитудой Iq =,a2mU2 и ее второй гармоники с
4* ’ 99
амплитудой 12о U2. Искажения при квадратичном детек-
тировании можно характеризовать коэффициентом гармоник
Кг=/2я//а = т/4,
величина которого пропорциональна т. Наличие сильных искаже-
ний (при т=1ОО°/о кг=25%) является недостатком квадратичного
детектора. Однако в одном важном случае—квадратичного де-
тектирования радиоимпульсов с прямоугольной огибающей (см.
рис. В.2а) — искажения не возникают: ток Го также имеет прямо-
угольную форму, его величина определяется по (3.96).
Диодные детекторы обычно бывают квадратичными при ам-
плитудах входных сигналов [7^0,14-0,2 В и линейными при
[7> 0,54-1 В. Чтобы избежать искажений, следует принимаемый
AM сигнал усилить до детектора настолько, чтобы его амплиту-
да была достаточно большой.
СИНХРОННОЕ ДЕТЕКТИРОВАНИЕ AM КОЛЕБАНИИ
Синхронным детектором (СД) называют детектор, основанный
на использовании параметрического элемента, параметр которо-
го (проводимость, крутизна, коэффициент передачи и т. д.) изме-
няется с частотой, равной несущей частоте сигнала (синхронно с
сигналом). В качестве СД может быть использована цепь, состо-
ящая из идеального преобразователя частоты — перемножителя
двух входных сигналов щ и и2 и фильтра нижних частот ФНЧ.
Пусть напряжение на выходе преобразователя
u=/((t)u2, (3.98)
где K(t) =сщ (/) —коэффициент передачи (с — постоянная), а
uz{t) = U cosfAot — детектируемый сигнал. При Ui=Ui соз(юо[+ф),
обозначая c[7i=/C0, имеем
/<(/) =/СоСоз(юо7+|ф), (3.99)
и=Ucos ф + U cos (2гоо£+ф). (3.100)
Первая компонента в (3.100) является полезной. Выделяя ее с
помощью ФНЧ1, получим на выходе СД
«вых=-~-П1[7созф. (3.1.01)
Напряжение ивых пропорционально U, значит, характерис-
тика детектирования синхронного детектора
линейная. При медленном изменении амплитуды U(t) =
= [7(1+m cos Q[) в выходном напряжении будет низкочастотная
составляющая иВЫХ1 ='[7вых1 cos Qt. Ее амплитуда .
[7Вых1 = -^-/п[7|Созф (3.102)
1 При рассмотрении'СД считаем, что при прохождении полезных составляю-
•щих через ФНЧ никаких искажений не возникает.
100
зависит от фазы ф, что определяет важное свойство синхронного
детектора: его фазовую избирательность. При фОпт=0
достигается наибольшая амплитуда С7Выхь При ф=±л/2 'С/Вых1 = 0.
Самым выгодным режимом работы синхронного детектора явля-
ется такой, при котором коэффициент передачи K(t) меняется
синхронно и синфазно с несущим колебанием сигнала.
Покажем, что синхронный детектор обладает также частотной изби-
рательностью. Предположим, что на входе детектора действуют два ДМ
сигнала (полезный и мешающий):
ям= Uс (IH-wic cos £2o/)Cos ©of-pt/n(Г+^Дп cos £2n/)cos <оп<. (3.103)
Спектры этих сигналов показаны на рис. 3.47а. В нелинейных детекторах
AM колебании низкочастотные компоненты появляются в результате детектиро-
вания биений, возникающих между несущей и боковыми частотами входного
сигнала. Поэтому при детектировании напряжения (3.103) на выходе нелиней-
ного детектора будут получены напряжения с обеими частотами модуляции
и ЙТ1, причем их амплитуды не будут зависеть от значений частот <£>о и <оп.
В синхронном детекторе составляющие на выходе преобразователя полу-
чаются согласно (3.98) в результате перемножения компонент входных сигналов
на коэффициент K(t), меняющейся с несущей частотой <0о; низкочастотные ком-
поненты (рис. 3.476) имеют частоты, равные разности частот каждой компо-
ненты (3.103) и частоты <о0 изменения K(t). В этих условиях компонента часто-
ты ЙТ1 не создается.
Чем больше частоты спектральных компонент напряжения и отличаются от
<£>о, тем значительнее их ослабление в ФНЧ, частотная характеристика К(<о)
которого приведена на рис. 3.476 пунктирной линией. Поэтому чем больше
разность частот | <вп—шо|, тем меньшее напряжение компоненты помехи создают
на выходе СД (рис. 3.47в).
Частотная избирательность синхронного детектора способствует ослаблению
влияния помех на прием сигналов, а фазовая — делает возможным раздельный
прием двух AM сигналов с одинаковой несущей частотой u(f) = tA(Ocos«oH~
+<72(/)sin <в01, различающихся фазой несущей частоты. Действительно, если
K(t) изменяется пропорционально cos<B0t то согласно (3.98) на выходе СД вы-
деляется огибающая только первого сигнала если K(t) изменяется про-
порционально sinifOof, то выделяется U?(t).
В качестве синхронных детекторов часто используются кольцевые преобра-
зователи. Проведенное рассмотрение соответствует их работе в режиме малых
входных сигналов щ и и2, недостатком которого является значительное ослаб-
ление сигнала, вызванное тем, что До-С1. Эффективность СД возрастает, если
кольцевой преобразователь используется в ключевом режиме. Предполо-
жим, что на рис. 3.28 слабый входной сигнал 2u2=77(l-|-zncos£2f)coswo^, а
сильный, управляющий состоянием диодов, щ —<UiCos (<Oot-|-4j?). По отношению
к слабому сигналу преобразователь согласно объяснениям, приведенным при
рассмотрении схемы рис. 3.286, ведет себя как четырехполюсник с коэффициен-
том передачи K(t), равным К=1 при щ>0 и К=—1 при ai<0. Запишем л(г)
в виде ряда Фурье
K(t) = — [cos(<ooH-il5)— 4-cos 3(®o#-M1>)H-4-cos5(<ooH-i|>)— ...]. (3.104)
л 3 °
Напряжение на выходе преобразователя рис. 3.286 ,
«вых(0='2“2^(0- (3.105)
На рис. 3.48а приведен детектируемый AM сигнал u2(t), на рис. 3.486 и
в — зависимость K(t) и график выходного напряжения «вых(О. построенный
согласно (3.105) для наивыгоднейшего случая фонт—0. Среднее значение
«вых(П за период То=2л/<0о, обозначаемое Uo, изменяется пропорционально
огибающим напряжений «вых(0 и ад(0- Напряжение на выходе ФНЧ также
101
повторяет без искажений огибающую входного сигнала. Согласно (3.105) и
4
(3.104) амплитуда низкочастотного напряжения на выходе равна— U. .
Л
Для иллюстрации фазовой избирательности СД на рис. 3.48а и д построены
зависимости и Пвых(0 Для Ф==л/2 и того же входного сигнала (рис.
3.48а). В этом случае среднее значение напряжения на выходе преобразователя
Uо=О; таким же будет напряжение на выходе ФНЧ.
ДЕТЕКТИРОВАНИЕ ДВУХПОЛОСНЫХ И ОДНОПОЛОСНЫХ СИГНАЛОВ
Наиболее удобным детектором двухполосных сигналов без не-
сущей является синхронный детектор. Рассмотрим воздействие
сигнала ДБП u2=cx(i)cosaot (с — постоянная) на СД с коэф-
фициентом передачи (3.99). Согласно (3.98) напряжение на выхо-
де перемножителя
iz=—/<ox(0icos ф+ -^-Kox(t) соз(2о>о^+ф)
содержит колебание, пропорциональное первоначальному сигналу
x(t), которое и будет выделено ФНЧ на выходе СД. При откло-
нении фазы ф от оптимального значения фОпт = 0 детектирование
остается неискаженным, однако амплитуда выходного сигнала
уменьшится пропорционально соэф. Если считать допустимым
уменьшение амплитуды на 30%, величина ф не должна превы-
шать 45°.
102
Для детектирования сигналов ОБП также подходит синхронный детектор.
Предположим, на вход СД действует напряжение верхней боковой полосы, об-
разованное в результате однополосной модуляции колебания частоты ыв пер-
вичным сигналом (1.46):
U2 = b [Xi cos (<оо1-|-Й1) cos (<oo+S2z) fl, (3.106)
где b — постоянная. Используя (3.98), (3.99) и (3.106), получим на выходе
СД низкочастотный сигнал
b
иных = — Ка[Х1 COS(Ri<—ф)+Х2СО8(П2Р—ф)] =
Ь Г ( Ф \ / ib \1
= — Ко XiCosQj / — -4-)+%2cosfi2( t— , (3.107)
отличающийся от первичного (1.48) временными сдвигами спектральных компо-
нент: составляющая частота Й1 сдвинута на iA£i=ip/S21, составляющая частоты
S22—на AZ2=i|>/S22. При ПгтАЙ] AZ2=/=A^i> и потому суммарный сигнал «вых
отличается по форме от первичного, которым производилась модуляция. Таким
образом, если требуется точная передача формы первичного сигнала, отклоне-
нение фазы ф от фонт=О недопустимо во избежание возникновения искаже-
ний. Однако при передаче звуковых сигналов наличие фазового сдвига ф иска-
жений не вызывает, так как органы слуха реагируют только на амплитуды
спектральных компонент звука, оставаясь нечувствительными к фазовым соот-
ношениям.
Для синхронного детектирования сигналов ОБП, как правило,
применяются кольцевые преобразователи, работающие в рассмот-
ренном ранее (рис. 3.48) ключевом режиме. В этом случае при
том же входном сигнале (3.106) согласно (3.105) и (3.104) на
выходе СД имеем низкочастотный сигнал
2
Ивых=—b [Xi cos (£2]/—ф) +X2cos (£22/—ф) ]
Л
такого же характера, что и (3.107), но значительно большей амп-
литуды, поскольку в режиме перемножения сигналов, как уже от-
мечалось, /Со'С 1-
Однополосный сигнал можно детектировать и нелинейным детектором, если
к принимаемому сигналу ОБП, например, wi=(7icos(fi>o+fi)i, где £2— частота
первичного сигнала, добавить колебание несущей частоты u2= £72cos o>of, вос-
станавливаемое в приемнике. Их сумма образует биения. При линейном детек-
тировании искажения будут малыми только в том случае, если огибающая бие-
ний имеет почти синусоидальную форму; для этого нужно, чтобы Ui/Uz^X.
ДЕТЕКТИРОВАНИЕ ФМ КОЛЕБАНИИ
Напряжение на выходе фазового детектора должно воспроиз-
водить закон изменения фазы входного сигнала. Такое свойство
имеет диодный детектор (рис. 3.49а). Если на его вход одновре-
менно поданы детектируемое напряжение и2—t/2cos(£0of+tp) и
эталонное щ = Ui cos asot, от которого отсчитывается фаза прини-
маемого сигнала, входное напряжение детектора будет и=а] + ы2.
Из векторной диаграммы рис. 3.496 следует, что амплитуда
УU2i + и22+2UiU2cos<р. Напряжение на выходе линейного
103
детектора с коэффициентом передачи /Сд
uBbti=Яд£/=KKV U2i+ U*2+2UiU2 cos <p (3.108)
зависит от фазы <p. Зависимость авых(ф) имеет такой же харак-
тер, что и зависимость огибающей биений (1.40) от времени.
Рис. 3.49
При медленном изменении фазы <р напряжения и2 (ФМ коле-
бание) будет изменяться амплитуда U, а значит, и величина
«вых- Из-за нелинейности зави-
симости иВЫх((р) детектирова-
' ние в такой схеме сопровожда-
и1ых ется значительным искажени-
1 ем, что ограничивает ее приме-
нение.
Большее распространение
получила схема двухтактного
иВых (балансного) фазового детек-
тора (рис. 3.50), состоящего из
-----------------------------двух одинаковых однотактных.
Элементы нагрузок каждого
детектора JR'=R", С'=С" вы-
бирают в. соответствии с (3.91).
Обходя цепь каждого диода в направлении его проводимости, опре-
деляем комплексные амплитуды напряжений на первом (Uд1) и
втором (Одг) диодах:
иД1=и1+^-<
На рис. 3.51а построена векторная диаграмма, соответствую-
щая этим выражениям. Напряжения на выходе детекторов:
Ивых! — ^Д^Д1
= #д|/ US+Ui cos Ф.
^ВЫХ2 —KrU Д2
= /Сд1/Ul+(^-uS-U^ cos Ч>.
(3.109)
104
Общее выходное напряжение
Нвых=,Цвых1 Ивых2 = Ад ( £/д 1 2^ • (3.110)
Зависимости ивых1, —«выхг и UpbIX от <р построены на рис. 3.516.
Вблизи <р=90 и 270° характеристика детектирования пВЫх(ф)
близка к линейной в значительных пределах; при работе на этих
Рис. 3.51
участках достигается почти неискаженное детектирование. При
Ф=90 и 270° пвых1 = мвых2 и «бых=0. Поэтому, если эталонное ко-
лебание U\=U\ cos &ot, принимаемый ФМ сигнал должен быть
U sin +<р (/) ].
Для детектирования ФМ колебаний с небольшими индексами модуляции
пригодны устройства, осуществляющие перемножение входных сигналов. Так,
если cos<oof, «2=^2sin[<оо^+ф(0] и «вых=Аюцг, где А — коэффици-
А А
ент пропорциональности, то Ивш=~ £A^2Sin<p(0 + “ sin[2<o0 f+<p(/)],
низкочастотная компонента выходного напряжения пропорциональна <р(/) при
небольших индексах ФМ: М<20-?-30°, поскольку sin<р(£)«<р(>(). В качестве та-
кого устройства может быть использован кольцевой преобразователь.
ДЕТЕКТИРОВАНИЕ ЧМ КОЛЕБАНИЙ
На выходе детектора ЧМ колебаний должно получаться на-
пряжение, пропорциональное отклонение частоты колебаний от
среднего значения. Существуют две группы методов решения этой
задачи:
1) ЧМ сигнал преобразуется в AM или ФМ сигнал и затем
детектируется амплитудным или фазовым детектором;
2) ЧМ сигнал преобразуется в последовательность коротких
импульсов той же частоты, создающих постоянное напряжение,
пропорциональное числу импульсов в единицу времени.
Рассмотрим работу детектора, основанного на преобразова-
нии ЧМ в AM с помощью расстроенного колебательно-
го контура (рис. 3.52). Пусть через контур, настроенный на
105
частоту фр, протекает ЧМ ток i чм с постоянной амплитудой /
и меняющейся частотой со(/) =|£оо+Аф(/). На рис. 3.53 приведены
частотная характеристика контура Z3(co) и зависимость ф(£).
Если частота со(/) изменяется достаточно медленно, можно в лю-
бой момент определять амплитуду напряжения на контуре UR
как произведение амплитуды тока I на величину сопротивления
Z3(co) для данной мгновенной частоты
t/к (со) = /Z3(co).
Амплитуда UK будет изменяться приблизительно пропорциональ-
но Аф(0, если несколько расстроить контур относительно несу-
щей частоты сигнала соо, как показано на рис. 3.53. Определяем
С7к(0 на рис. 3.53 методом проек-
ций. Если нанести симметрично вто-
рую огибающую (пунктир) и высо-
кочастотное заполнение, получим
форму напряжения uK(t). Последнее
оказывается модулированным одно-
ременно и по амплитуде и по часто-
Рис. 3.52 /е> причем закон изменения UK(t)
примерно такой же, что и Асо(?).
Для получения низкочастотного сигнала аЕЫх достаточно uK(t) по-
дать на линейный амплитудный детектор, как показано на рис. 3.52.
Недостаток схемы заключается в появлении искажений вслед-
ствие нелинейности скатов частотной характеристики контура. На
практике для приближения зависимости щ.ых(Ам) к линейной
применяют балансную схему (рис. 3.54а), называемую дискри-
минатором с расстроенными контурами; резонансная частота од-
ного из контуров берется больше несущей частоты ®о сигнала на
'‘'о), второго — меньше на бсо. Напряжение на выходе дискрими-
106
натора равно разности выходных напряжений линейных ампли-
тудных детекторов = «вых1—«вых2- Напряжения на входах де-
текторов
£
L- —Т-
<оС
_L_ «Jlz
icoC ~ ip
где Ё— наводимая в контурах ЭДС; Z3=.R3/(l-bi Qv)—эквива-
лентные сопротивления контуров: р=1/ы0С~1/аС можно считать
постоянным при изменениях со в небольших пределах. При одина-
ковых Ё и р напряжение ивых пропорционально разности модулей
эквивалентных сопротивлений контуров:
£вЫХ/~ (Zg]-£32).
При некоторых бсо и добротностях контуров зависимости
(2Э1—Z32) и «вых от Асо имеют значительный почти линейный
участок (сплошная линия на рис. 3.546), который и используется
для детектирования ЧМ колебаний.
В рассмотренных схемах детекторов, как и детекторах, осно-
ванных на преобразовании ЧМ в ФМ, выходное напряжение за-
висит не только от величины отклонения частоты Лю, но также и
от амплитуды входного ЧМ сигнала. Последняя же может ме-
няться, например, из-за воздействия помех, что приводит к иска-
жениям ивых. Для предотвращения этого ЧМ сигнал перед час-
тотным детектором пропускают через ограничитель амплитуды.
Наличие индуктивностей в рассмотренных частотных детекто-
рах первой группы затрудняет их реализацию средствами микро-
электроники. Поэтому все большее распространение получают
методы детектирования второй группы. Процессы в них сходны с
показанными на рис. 3.40: ЧМ колебание подвергается двусторон-
нему ограничению, дифференцированию и ограничению по мини-
муму, в результате чего получается последовательность коротких
однополярных импульсов (рис. 3.42е) с частотой w(t), пропускае-
мых затем через интегрирующее устройство. Выходное напряже-
ние последнего пропорционально среднему значению этой после-
довательности за некоторый отрезок времени, т. е. w(t).
107
Частотные детекторы могут быть использованы для детекти-
рования широкополосных ФМ колебаний. Для этого выходное на-
пряжение детектора, пропорциональное A<o(Z) =dq{t)ldt, нужно
пропустить через интегрирующее устройство.
3.9. ВЗАИМОДЕЙСТВИЕ НЕСКОЛЬКИХ СИГНАЛОВ
В НЕЛИНЕЙНЫХ ЦЕПЯХ
ПОДАВЛЕНИЕ СЛАБОГО СИГНАЛА СИЛЬНЫМ
Во многих случаях на вход нелинейных цепей (модуляторов,
детекторов, усилителей и др.) одновременно воздействует несколь-
ко сигналов. Например, через различные части радиорелейных и
спутниковых систем связи одновременно могут передаваться ты-
сячи сообщений с одной или несколькими несущими частотами;
на вход приемного устройства наряду с полезным сигналом дей-
ствуют мешающие. В нелинейных цепях принцип суперпозиции
не выполняется, и при одновременном действии суммы сигналов
отклик такой цепи на каждый из них оказывается зависящим от
характера и интенсивности остальных сигналов. В результате воз-
можно возникновение искажений передаваемых сигналов. Эти ис-
кажения приходится изучать ради разработки методов их предот-
вращения или уменьшения до допустимого уровня. К числу та-
ких явлений относятся: подавление слабого сигнала сильным, пе-
рекрестные и интермодуляционные искажения, амплитудно-фазо-
вая конверсия.
Подавление слабого сигнала сильным в НЭ поясняет рис,
3.55. Пусть на вход избирательного (резонансного) усилителя с
ВАХ рис. 3.55а, настроенного на частоту о>1, действует входной
СИГНАЛ =«i = (7i coscoi^ небольшой амплитуды. Выходное на-
108
пряжение не отличается по форме от входного, а его амплитуда
определяется амплитудой первой гармоники тока
UsblX—Il (ы1)^э = <$ср/?э(Л> (3.111)
где Ra— эквивалентное сопротивление контура; SCP — средняя
крутизна (при малых амплитудах t7i она равна крутизне S ВАХ
в рабочей точке).
Пусть теперь «Bx=wi + w2, где и2— сигнал большой амплитуды
с частотой £о2> выходящей за пределы полосы усиливаемых частот.
Для наглядности примем его форму прямоугольной. На рис.
3.556 приведены графики uBX(t) для обоих рассмотренных слу-
чаев, а на рис. 3.55в соответствующие графики i(t). Если гар-
моники частоты а2 и комбинационные частоты &icoi±&2c>2 не по-
падают в полосу усиливаемых частот, напряжение (7ВЫх опреде-
ляется согласно (3.111) амплитудой компоненты /цИ1) , завися-
щей от крутизны ВАХ в точках, где u=±U2 При увеличении U2
амплитуды /1(<В1) и (7ВЫХ уменьшаются. Следовательно, увеличе-
ние амплитуды сильного сигнала приводит к уменьшению (по-
давлению) слабого на выходе усилителя, т. е. к уменьшению ко-
эффициента усиления K='UBblx/Ui.
Рассмотрим количественные соотношения для НЭ с ВАХ
1 — вх (щ>0, а3>0), когда
UB-X!=U1 + U2=U1 COS(i)it+U2COS ti)2t. 1(3.112)
В результате очевидных преобразований получим следующие
выражения для амплитуды 11(И1) частоты coj и .средней крутиз-
ны 5cpl=/l(<01) /t/ll
_ гт/ 3 г >2 3 т т2 \
h юп = “1—-u3Ui — —as и2),
4 , о о , (3.113)
SCP1=a1-^a3U21-^-asUl
4
Определив (7ВЫХ из (3.113) и (3.111) для Ui<^.U2
ПВых= ( —^-a3U22 yRsUt,
убеждаемся в том, что увеличение сильного входного сигнала вы-
зывает подавление слабого.
Рассмотрим особенности этого явления в детекторах AM колебаний. Если
на линейный детектор с характеристикой детектирования, изображенной толстой
линией (А) на рис. 3.56а, поочередно действуют сигналы Hi==t71cos<o1/ и Us=
= U2 cos i, отношение соответствующих постоянных составляющих токов бу-
дет /01//02= UJUn.
При одновременном воздействии этих напряжений в случае Ди=1]ш1—н2| С
^«>1 суммарный входной сигнал образует биения с частотой Ли, огибающая
которых состоит из среднего значения 17Ср и гармоник частоты Ди. Если Ди
выходит за пределы полосы пропускания фильтра детектора, выходное напря-
жение пВЫ1 создается только постоянной составляющей тока /0 и определяется
как
/0=S„UcP, (3.114)
109
где 5Д — крутизна характеристики детектирования. Из рис. 1.13 следует, что,
когда добавление «г к и, приводит к небольшому увеличению среднего
значения огибающей AUcp= Ucp—обязанному только отклонению фор-
мы огибающей биений от гармонической. Поэтому приращение тока ДЛ® под
действием напряжения а2 при наличии более сильного сигнала ui оказывается
меньшим тока /02, получающегося в отсутствие сигнала щ. Это означает умень-
шение полезного действия на детектор слабого сигнала, т. е. подавление слабо-
го сигнала сильным.
Рнс. 3.56
Для количественной оценки этого эффекта запишем амплитуду биений
(1.40) как
П=1ЛУ Н-е. (3.115)
где. е= (t72/tA)2+2(i72/t7i)cosДо/. Раскладывая правую часть (3.115) в ряд
Тейлора и ограничиваясь первыми тремя слагаемыми, имеем
/ е е2 \
и = их P + v + T - (3J16)
\ и /
Из (3.116) и (3.114) получим, пренебрегая (С/г/СЛ)4,
/о = зд[1 + -у0};)2]- <3-117)
Характеристика детектирования (3.117) /o(tA>) для слабого сигнала t/2 (при
t/i=const) также нанесена на рис. 3.56а (кривая Б). Таким образом, линей-
ный детектор по отношению к слабому сигналу оказывает-
ся квадратичным.
Если слабый сигнал модулирован t/2=t/2o(l+mcos &2f), то
^ВЫХ — «Д RU1
т? \1
-|- 2/n cos й2 t + ~cos 2 й2 t I I.
Амплитуда основной компоненты частоты й2 Н"Вьгх=5дД772ота(С4о/2СЛ) оказы-
вается меньше t//BHx=S„1Rl/20/n, получающейся при (Д=0, в lUilUm раз. Так,
при E7j = 5t/20 получаем ослабление в 10 раз.
На рис. 3.566 изображен AM сигнал u2(t), а на рис. 3.56в по характерис-
тикам детектирования построены графики «вых(0> подобные А— в отсут-
110
ствие сигнала Щ (детектор линейный), Б — при наличии ut с амплитудой 77i>>
3> U2 (детектор по отношению к и2 квадратичный). Во втором случае низкочас-
тотный выходной сигнал имеет значительно меньшую амплитуду (подавление
слабого сигнала) и появляются искажения, что свойственно всем квадратичным
детекторам. С этими особенностями приходится считаться, если на детектор кро-
ме полезного сигнала действует еще и помеха (например, сигнал какой-либо
иной радиостанции). При этом, если сигнал сильнее помехи, в детекторе подав-
ляется помеха, что способствует лучшему приему сигнала. Если же сильнее
помеха, подавляется сигнал, что затрудняет его прием. Во избежание этого в
приемных устройствах необходимо достаточно сильно ослаблять мешающие
сигналы до детектора.
перекрестные искажения
Перекрестные искажения возникают при прохождении не-
скольких модулированных колебаний с различными несущими
частотами через нелинейную цепь. Они состоят в переносе пере-
даваемого низкочастотного сигнала с одной несущей частоты на
другую. Для выяснения причин этого явления обратимся снова к
рис. 3.55, полагая, что по-прежнему Ui=Ux cos a>it и что прямо-
угольное напряжение и2 модулировано по амплитуде: U2(t) =
= П2о(1+m2 cosQ 20 При разных величинах U2 крутизна ВАХ,
соответствующая и==±и2, окажется различной, и потому будет
изменяться амплитуда /цш,) В результате /цо,) и ПВых ока-
жутся модулированными частотой й2, т. е. модуляция сигнала
U2{t), частота которого находится за пределами полосы усилива-
емых частот, будет перенесена на полезный сигнал частоты щр
Рассмотрим снова воздействие двух асинхронных напряжений (3.112) иа НЭ,
ВАХ которого аппроксимирована полиномом:
i=Oo+ci (ui-f-uzji-f-az (wii-p- н2) М-Сз (ui-f-uz) s+ ... (3.118)
Компоненты тока j получаются из слагаемых (3.118), содержащих щ в
нечетных степенях, и из Uimuh2 с нечетными т и четными k, которые также по-
лучаются из членов (ui-f-u2)m+h нечетных степеней. В общем случае амплиту-
да /1(ш ) и средняя крутизна SCpi при воздействии нескольких асинхронных ко-
лебаний определяется только нечетной частью ВАХ.
В случае AM входных сигналов, когда
771 =<771о(l-|-^ri cos Qi7), Uz=V2o(l'-l-m2 cos й27), (3.119)
величина SCpi согласно (3.113) и 77ВЫх окажутся зависящими от частоты й2.
Используя (3.119), (3.113) и (3.111), получим
«вых=С1^7/щ{1-|-Ш1 cos QiZ-p-y- — [|(14-Д11 cos Qi7)37/2io+
4 Oj
+3(1-|-и11 cos Й17) fl-pnzcos йгОЧТ^о]}»» a>it.
Огибающая нВых(0 оказалась искаженной по сравнению с огибающей
(3.119) усиливаемого сигнала появились гармоники частоты Qi н состав-
ляющие с частотами й2, 2Й2, Й1±Й2, Й1±2Й2. При выключении модуляции уси-
ливаемого сигнала (д1]=0) напряжение нВЫх оказывается промо дулиров энным
частотами й2 и 2Й2.
ИНТЕРМОДУЛЯЦИЯ
Интермодуляция заключается в образовании в спектре вы-
ходного сигнала НЭ составляющих комбинационных частот
f==kifi + k2fz+ ... +knfn, где ki, k2, ... kn — положительные или от-
111
рицательные целые числа, a fi, f2, fn — частоты входных сиг-
налов. Интермодуляционные искажения возникают в том случае,
если какие-нибудь из комбинационных частот сигналов, выходя-
щих за пределы полосы усиливаемых частот, попадают в полосу
частот одного из сигналов и тем самым искажают и затрудняют
его прием.
Рассмотрим одновременное воздействие трех ФМ колебаний
одинаковой амплитуды
и=U\ + u2+'U3= U sinfcojoZ +<pi (/) ] + U sin[©2oZ+<p2(Z) ] +
+ £7sin[co30f+<p3(f)], (3.120)
где <pi(/) =AfisinQitf; <р2(/) =Af2sinП2/; <рз(0=.Л4з5тй3/, на НЭ с
ВАХ i=a1u + as,uz. Разнос несущих частот сигналов считаем оди-
наковым: ю20—1<01о==<х>зо—<й2о=Д (рис. 3.57). В составе тока будут
гармоники и комбинационные составляющие до третьего порядка
включительно. Нетрудно установить, что комбинационные часто-
ты третьего порядка
2&>2о-©30 =©10, <010-- ©20+ ©30 =©20, 2©20---©10 = Изо.
Поэтому вызванное ФМ (или ЧМ) изменение частот и2 и ©з
относительно ©ю, ю20 и ©зо будет переноситься на другие частоты.
Подставляя (3.120) в полином, аппроксимирующий ВАХ, получим после
тригонометрических преобразований следующие выражения компонент токов с
частотами, близкими к несущим:
— agU2 ) U sin ((01о#+ф1)|+
3
-I-— a3U3 sin(coio$+'2qp2—фз),
4
/ 3 \
Чм») = (+ ~4~ a®^2 IU sin (G»2oH-q>2)4-
3
a3U3 sin(<o2oH-q>i—фг+фз),
/ 3 \ .
— ( ai o3it/2 IU sin (ызо^+фз)+
3
+ — a3U3 sin («зоН-йфг—Ф1).
(3.121)
После разделения фильтрами этих сигналов на передаваемый по каждому
каналу «свой» ФМ (ЧМ) сигнал, характеризующийся первыми слагаемыми
(3.121), наложится второй, модулированный сообщениями, передаваемыми по
другим каналам. Результирующий сигнал первого канала можно записать как
Ч®,)—А зЩ((О1о^-|-ф1Н-||31), где 7i=<ziL/"V^l-|-62‘-|-26 соз(2фг—Ф1—фз),
b ='(3аз/14а1) U2, tg Pi=b sin (Йфг—ф1—фз)/ [ l'+6 cos (2фг—ф1—фз) ].
Следовательно, ток оказывается промоделированным по амплитуде и по
фазе сигналами других каналов.
112
В случае малых индексов модуляции (ЛЬ, М2, М3<С1) и сла-
бой нелинейности (Ь<С1) Р1~6(2ф2—<pi—фз) и
sinfcoiof+ф14-1&(2ф2—Ф1—фз)]- (3.122)
Сигнал частоты ми будет промодулирован по фазе (частоте) низ-
кочастотными колебаниями, передаваемыми на других несущих
частотах, т. е. будет иметь место перекрестная фазовая модуля-
ция. Подобным же образом можно рассмотреть возникновение
перекрестной модуляции в случае
крестные искажения являются
следствием наличия (нелинейно-
'сти и особенно опасны для систе-
мы многоканальной связи. Поэто-
му одновременное усиление мно-
гих сигналов следует осущест-
влять в устройствах с малой 'Не-
линейностью.
ДМ входных сигналов. Пере-
AZT
Рис. 3.57
АМПЛИТУДНО-ФАЗОВАЯ КОНВЕРСИЯ
Амплитудно-фазовая конверсия (АФК) — преобразование ам-
плитудной модуляции в фазовую. Она возникает при прохожде-
нии AM сигнала через устройство (усилитель, преобразователь,
умножитель частоты), сдвиг фаз в котором зависит от амплитуды
входного сигнала. Амплитудно-фазовая конверсия особенно ха-
рактерна для устройств, работающих в диапазоне СВЧ, исполь-
зующих лампы бегущей волны, клистроны, лавинно-пролетные ди-
оды, диоды Ганна и другие приборы. В одних случаях она явля-
ется следствием зависимости фазовой скорости волны от ампли-
туды сигнала, в других — зависимости от амплитуды сигнала
главным образом реактивной проводимости прибора, влияющей
на резонансную частоту колебательной системы.
Рассмотрим возникновение АФК в транзисторном усилителе
(см. рис. 3.35), в котором в качестве Ху используется варикап.
В линейном режиме работы усилителя при входном напряжении
Нвх=Д/вх51п<а1/ переменный ток в выходной цепи iK=SKt7BXsincoi(,
где SK— крутизна транзистора. Выходное напряжение
^вых==*5к^вх^э sin (С0]( +ф) , (3.123)
где ф — сдвиг фаз в контуре. При изменении амплитуды (7ВХ (AM
входного сигнала) изменяются: UBKX=SUBTZ3, средняя емкость
варикапа (она зависит от (7Вых), резонансная частота контура fo,
его расстройка относительно частоты fi входного сигнала, фаза ф
выходного напряжения. В результате напряжение пВых оказыва-
ется модулированным и по фазе.
Если в отсутствие иВх(О контур был настроен варикапом (с резким р-п-пе-
реходом) на частоту со,, то при воздействии входного сигнала его резонансная
частота уменьшится в соответствии с первым слагаемым (3.79):
= (3104)
' к 64
113
где VBbix=KVBx. В этих выражениях K=SKZ3(«i)—коэффициент усиления уси-
лителя, УВых= ПВых/ (фк—Вво), Удх=-L7BK/ (фк—£во) — нормированные амплитуды
напряжения, a Z3=J?3
Подставляя (3.124) в последнее
выражение, обозначения 5к7?э=Крез, и используя (3.123) Za получаем уравнение
для определения УВыХ:
Г вых
л/’+Й^^^^резУвх-
У ' /
(3.1'25)
Для небольших амплитуд Увых и расстроек Af/fi можно считать Z3(<Bi)==
. 3
=ДЭ и — СУ2Вых«С1. Тогда из (3.125) получим: Увых = КрезУВх.
В случае AM входного сигнала t/BX(() = t/o(l-|-mcosn/) изменение резо-
3
нансной частоты оказывается AJ7fi =——-У2ВЫх(1'+т cos Q/)2. Соответственно из-
64
меняется и сдвиг фаз на частоте Ц:
12 Д £ 3 _ 9 I т2 т2
Ф (t)~Q —:—= QVebIX 14- —+ 2mcosQ/ + ——COS2QZ
/1 \ Z ^4
Следовательно, AM входного сигнала с глубиной т приводит к возникновению
3
ФМ выходного сигнала с индексом модуляции М= — QV2BBixWi-
16
Если через подобный усилитель проходит ФМ (ЧМ) сигнал
или сумма таких сигналов, обладающих паразитной AM с часто-
той Q, то в результате амплитудно-фазовой конверсии эта AM
переносится на изменение фазы выходных ФМ (ЧМ) сигналов,
искажая их. Для ослабления АФК необходимо при усилении ФМ
(ЧМ) сигналов использовать режим работы устройства, характе-
ризующиеся слабой зависимостью сдвига фаз от амплитуды ко-
лебаний, и принимать меры к уменьшению паразитной AM.
Глава 4
Автоколебательные системы
4.1. АВТОКОЛЕБАНИЯ. ОБЩИЕ СВЕДЕНИЯ
Колебания на выходе различных рассмотренных выше уст-
ройств (усилителей, умножителей и преобразователей частоты,
детекторов и модуляторов) имеют место только в .том случае, ког-
да на их входы подаются определенные сигналы. Колебания, вы-
зываемые внешними воздействиями, называются вынужденными.
Форма вынужденных колебаний и такие их основные параметры,
как амплитуда и частота колебаний, зависят от вида и парамет-
ров входных сигналов.
В отличие от вынужденных колебаний, колебания, самостоя-
тельно возникающие в отсутствие внешних воздействий, назы-
ваются автоколебаниями, а устройства и системы, в которых они
возникают — автоколебательными. Такими устройствами, широко
используемыми в современной технике, являются разнообразные
источники или генераторы колебаний (электрических, механиче-
114
ских, звуковых, световых), называемые часто автогенераторами.
Автоколебания обладают следующими основными особеннос-
тями:
возникают один не за счет воздействия внешнего сигнала, а
благодаря наличию некоторых особых свойств системы;
форма возникающих колебаний, их амплитуда и частота также
определяются свойствами самой системы;
возникающие автоколебания, например напряжение на конту-
ре генератора, обладают определенной энергией.
Последнее означает, что в состав автоколебательной системы
должен входить источник энергии, за счет расхода которой под-
держиваются колебания. В большинстве случаев в автогенерато-
рах используются источники энергии постоянного напряжения
или тока. Такие автогенераторы являются преобразователями
энергии постоянного напряжения или тока в энергию колебаний.
Автоколебания и соответствующие устройства делят на авто-
номные и неавтономные. Автономными называют автоколебания,
происходящие в отсутствие внешних воздействий. Такие автоколе-
бания изучаются в данной главе. Неавтономными называют ко-
лебания в автоколебательных системах, подверженных каким-
либо воздействиям; они изучаются в гл. 5.
Автоколебательные системы встречаются во многих областях техники и в
природе. 1\ нх числу относятся часовые механизмы, смычковые и духовые музы-
кальные инструменты, паровая машина, разнообразные механические вибраторы
и т. п. Многие биологические (например, работа сердца и легких) и астрономи-
ческие (движение планет) явления представляют собой автоколебания.
Нередко автоколебания оказываются нежелательными, и условия их воз-
никновения изучаются для того, чтобы предотвратить нх появление. К числу
таких явлений относятся: автоколебания усилителей, систем автоматического ре-
гулирования, мостов, крыльев самолета (флаттер), колес автомашин и самоле-
тов (шимми), резцов токарных станков и пр.
Следует отметить, что основные свойства разнообразных по физике явлений
автоколебаний, уравнения, которыми описываются эти процессы, и методы их
решения являются сходными. Поэтому изучение автоколебательных явлений и
методов их исследования позволяет решать многие задачи не только в области
радиотехники и связи, но и в других областях науки и техники.
На рис. 4.1. приведены принципиальные схемы автогенерато-
ров на биполярном (а) и полевом (б) транзисторах с колебатель-
ным контуром в выходной цепи. Аналогичный вид имеет схема
Рнс. 4.1
115
лампового генератора. Каждая схема состоит из двух частей:
1) избирательного усилителя, содержащего активный
нелинейный элемент (лампу, транзистор), входом которого яв-
ляется промежуток между точками 1—1, и колебательную систе-
му (колебательный контур), 2) цепи обратной связи (тран-
сформатора), по которой колебание с выхода усилителя подает-
ся обратно на его вход. Генераторы, содержащие избирательный
усилитель и внешнюю цепь обратной связи, называются автоге-
нераторами с внешней обратной связью. Общая структурная схе-
ма автогенератора с внешней обратной связью, содержащая упо-
мянутые выше части, приведена на рис. 4.21. Особенности и струк-
тура генераторов другого типа, с внутренней обратной связью,
будут рассмотрены в § 4.7.
Рис. 4.2
Обратимся к качественному объяснению процессов, происходя-
щих в генераторах. В большинстве случаев причиной возникно-
вения автоколебаний в генераторах являются флуктуации,
всегда имеющие место в элементах реальной схемы. Ток, проте-
кающий через активный элемент (транзистор, лампу), всегда
флуктуирует из-за наличия дробового эффекта. Другими источ-
никами подобных обычно весьма слабых колебаний являются
тепловое движение электронов в приборе и резисторах, флуктуа-
ции токораспределения в приборах и т. д. Благодаря этим явле-
ниям токи и напряжения во всех элементах схемы даже при по-
стоянстве питающих напряжений быстро изменяются случайным
образом. Спектр этих колебаний близок по характеру к белому
шуму, т. е. содержит компоненты практически любых частот.
Предположим, что такие флуктуации появились в напряжении
I «в на входе активного элемента АЭ. Они вызовут колебания тока
iK в выходной цепи АЭ. На выходе колебательной системы (кон-
туре) появится напряжение ик, причем, поскольку контур имеет
максимальное эквивалентное сопротивление 2Э=^Э на резонанс-
ной частоте <й0, наибольшее напряжение на нем создадут компо-
ненты с частотами, близкими к со0. Напряжение ик через цепь
обратной связи передается на вход АЭ, создавая напряжение
1 Здесь и далее используем следующие обозначения токов и напряжений не-
зависимо от типа применяемого активного элемента (АЭ): ив — напряжение на
входе АЭ, иа —- напряжение на выходе АЭ, ик — напряжение на контуре, iE —
входной ток АЭ, iH — ток в выходной цепи АЭ.
116
и'в. Если какая-то компонента м'в окажется в фазе с первоначаль-
ной компонентой мв той же частоты и притом будет иметь боль-
шую амплитуду, она вызовет большее изменение тока iK, что
приведет к дальнейшему возрастанию напряжения ик и, как след-
ствие, еще большему ив. Таков механизм самовозбуждения коле-
баний частоты ©г. близкой к юо, в процессе которого амплитуды
.колебаний ив, iK и ик возрастают. Этот процесс имеет место, если
на частоте i<ar коэффициент передачи напряжения по замкнутой
цепи генератора больше единицы: /С>1. Представляя последний
в виде произведения коэффициента усиления усилителя Ку=
=|{7к/?7в и коэффициента обратной связи Ао.с = Йо.с/Пк, получим
условие, необходимое для нарастания колебаний1:
К=КуЯо.с>'1. (4.1)
На рис. 4.3 приведена эквивалентная схема генератора для
переменного тока. В общем случае в элементах этой схемы име-
ют место зависящие от частоты сдвиги фаз. Поэтому напряжения
на рис. 4.3 характеризуют комплексными амплитудами, а сами
элементы — комплексными коэффициентами передачи.
На рассмотренном начальном
этапе самовозбуждения ампли-
туды колебаний малы. АЭ и уси-
литель ведут себя как линейные.
С энергетической точки зре-
ния нарастание колебаний проис-
ходит из-за того, что АЭ отдает
за период колебаний энергию
большую, чем расходуемая за
это время в пассивных элементах
схемы и в нагрузке. В результа-
те к началу каждого следующего
периода энергия, а значит, и ам- Рнс. 4.3
плитуда колебаний возрастают.
С увеличением амплитуды колебаний все сильнее сказывается
нелинейность АЭ: при достаточно больших амплитудах происхо-
дит уменьшение коэффициента усиления усилителя /Су. При неко-
торой амплитуде U*B KyUB уменьшается до значения, при кото-
ром полный коэффициент передачи напряжения (по замкнутой
цепи генератора) К становится равным единице:
А=Ау(П*в)Ао.с = 1.
(4.2)
В системе устанавливается стационарный динамический ре-
жим с постоянной амплитудой колебаний U*B и частотой юг,
обычно близкой к резонансной частоте колебательной системы.
При этом энергия, расходуемая в пассивных элементах схемы и
1 1 Для нарастания колебаний необходимо также, чтобы при каждом обхо-
де схемы получалось бы колебание приблизительно в одной и той же фазе
(условие баланса фаз). Подробнее условия самовозбуждения рассматриваются
в § 4.2.
117
нагрузке, оказывается равной отдаваемой активным элементом
на частоте иг. Из сказанного следует, что любой автогене-
ратор должен содержать нелинейный элемент,
ибо стационарные колебания устанавливаются только благодаря
нелинейности. В линейной системе получить стацио-
нарные автоколебания с постоянной амплиту-
дой невозможно. Чаще всего нелинейным элементом в авто-
генераторе является АЭ, хотя иногда нелинейность находится в
колебательной системе или цепи обратной связи, а АЭ работает
с небольшими амплитудами колебаний, при которых он ведет
себя как линейный.
В исследовании любых автоколебательных систем, в том числе
автогенераторов, можно выделить три основные задачи: 1) ана-
лиз условий самовозбуждения; 2) определение стационарных ре-
жимов (формы, амплитуды и частоты генерируемых колебаний)
и анализ их устойчивости; 3) исследование переходных процессов
установления колебаний. Для определения важнейших свойств и
характеристик, автогенераторов разработано большое количество
различных методов. Основная задача данной главы состоит в
рассмотрении наиболее распространенных методов исследования
автогенераторов и установлении на этой основе ряда общих осо-
бенностей и характеристик таких устройств.
4.2. ТЕОРИЯ УСТОЙЧИВОСТИ
ПОСТАНОВКА ВОПРОСА
В технике связи, радиотехнических устройствах, системах ав-
томатического регулирования широко используются устройства с
обратной связью, структурная схема которых соответствует рис.
4.3. К числу таких устройств, помимо генераторов, относятся раз-
нообразные усилители, модуляторы, системы автоматической ре-
гулировки амплитуды, частоты и т. п.
От усилителей и систем автоматического регулирования обыч-
но требуется, чтобы в отсутствие входного сигнала колебаний в
них не было, т. е. параметры этих устройств должны быть таки-
ми, чтобы их состояние равновесия (состояние покоя) было ус-
тойчивым.
В противоположность этому для того, чтобы автогенераторы
выполняли свои функции, состояние равновесия в них должно
быть неустойчивым и притом таким, чтобы нарушение устойчи-
вости заключалось в возникновении колебаний и росте их ампли-
туды, т. е. в самовозбуждении. Таким образом, устойчивость со-
стояния равновесия в одних случаях приходится изучать ради ее
' выполнения, в других— ради ее нарушения.
В теории устойчивости анализируются условия, при которых
слабое отклонение или колебание, вызванное действием началь-
ного возмущения (флуктуации), затухает. В силу малости амплиту-
ды при действии этого колебания на нелинейный элемент последний
118
заменяют линейным с характеристикой, совпадающей с каса-
тельной к вольт-амперной характеристике нелинейного элемента. То
же самое делают и при исследовании условий самовозбуждения.
Поэтому теория устойчивости и теория самовозбу-
ждения в большинстве случаев являются ли-
нейными теориями даже тогда, когда в состав исследуемо-
го устройства входят нелинейные элементы. Однако такой подход
возможен не всегда, о чем сказано на с. 140.
ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ГЕНЕРАТОРА. УСЛОВИЯ
САМОВОЗБУЖДЕНИЯ
Составим дифференциальное уравнение генератора (см. рис.
4.16), учитывающее только переменные составляющие токов и
напряжений. Согласно первому закону Кирхгофа ток в выходной
цепи
i’k—ir+'ic+iK- (4-3)
С целью упрощения расчетов используем два допущения:
а) входной ток активного элемента считаем отсутствующим
(tB=0), что достигается в генераторах на лампах и полевых тран-
зисторах подачей надлежащего смещения во входную цепь, тогда
ик=L = Тр’с dt=iR Ra’ (4-4)
’ (4.5*)
и б) пренебрегаем влиянием выходного напряжения усилителя
на ток iK, считая его зависящим только от входного напряжения
1к=ф(ив), (4.6)
что в большинстве случаев лишь несколько снижает точность
расчетов, не влияя на характер получающихся зависимостей.
Выражение (4.6) можно рассматривать как аппроксимацию
характеристики прямой передачи активного элемента относитель-
но рабочей точки. Производную тока iK по времени запишем как
= = (4.7)
dt duB dt dt
где S(uB)— Ф'(ив)— крутизна характеристики (4.6). Заменяем
токи в (4.3) согласно (4.6) и (4.4):
1[Ивй+С^ + ^-=Ф(«8).
L J at
Дифференцируя это уравнение по времени, используя (4.7)
и (4.5) и обозначая <о%=1ДС, получаем дифференциальное .
уравнение генератора
^ + Г_1________MS (Цв)-1 ^5- + со? пв = 0. (4.8)
dt2 L RaC LC J dt u
119
Это уравнение является нелинейным, поскольку коэффициент
при durjdt зависит от искомой переменной ив. Нелинейность урав-
нения является следствием наличия в схеме нелинейного элемен-
та. Уравнение определяет все свойства рассматриваемого гене-
ратора, и его решение позволяет установить и условия самовоз-
буждения, и особенности стационарных колебаний, и характер
переходных процессов.
При определении условий самовозбуждения колебаний нели-
нейное уравнение генератора (4.8), как уже отмечалось, может
быть заменено линейным. Действительно, в этом случае нас ин-
тересует выяснение только вопроса, что будет с небольшим откло-
нением от состояния равновесия: станет оно затухать или нара-
стать. Так как нелинейная функция S(uB), представляющая кру-
тизну характеристики прямой передачи, не имеет разрыва, для
малых величин ив она может быть заменена значением этой
функции при мв=0, т. е. крутизной S(0)=S в рабочей точке. В
результате нелинейное уравнение (4.8) превращается в линей-
ное:
d2u
dt2
MS \ du
LC / dt
-f-cooiz == 0.
(4.9)
Здесь напряжение и записано без индекса, поскольку уравнение
справедливо и для ик, в чем легко убедиться, используя (4.5).
Уравнение (4.9) можно записать как уравнение контура
—+ 2аэ—+<о2ц = О (4.10)
di2 э dt 0 v ’
1/1 MS\
с эквивалентным коэффициентом затухания аэ =—I----------I.
2 ( /?8С LC /
Его решение имеет вид
и=А е~ав%т(ыЛ- <р),
где А и ф — амплитуда и фаза, зависящие от начальных условий;
V ю2о—а2э — частота свободных колебаний. Если записать
Rs^L/Cr, где г — сумма сопротивлений потерь, включенных по-
следовательно в ветвях контура, то
____zns \ _ MiS
2 \ L ILC /~а 2LC ’
(4.П)
где a = r/2L = 1/2ДэС— коэффициент затухания контура.
Уравнение (4.10) показывает, что генератор эквивалентен ко-
лебательному контуру, коэффициент затухания которого умень-
шен на величину MSI2LC, зависящую от взаимоиндукции М, т. е.
от обратной связи. Полученный результат означает, что перемен-
ное напряжение на входе активного элемента, обязанное наличию
обратной связи, создает ток iK, доставляющий в колебательную
систему энергию, компенсирующую потери в ней. Необходимая
же энергия переменного тока iK получается благодаря тому, что
переменное напряжение «в управляет расходом энергии источни-
120
ja постоянного тока, имеющимся в
выходной цепи, т. е. благодаря пре-
бразованию энергии постоянного
j'OKa в энергию переменного тока.
Если обратная связь невелика
(аэ>0 или MS/C<2r), вносимая
энергия лишь частично компенси-
рует расходуемую в колебательной
системе, поэтому возникшее колеба-
ние затухает, хотя и медленнее чем
в отсутствие обратной связи. При до-
статочно сильной обратной связи
коэффициент а3 оказывается отри-
цательным (вносимая энергия боль-
ше расходуемой) и колебания нара-
стают. Зависимость характера ко-
лебаний от аэ показана на
рис. 4.4.
Условия самовозбуждения гене-
ратора можно записать как
Рис. 4.4
(4.12)
аэ<0
или
M>MKp=L/S.R3=rC/S. (4.13)
В рамках допущений, принятых при выводе уравнения генера-
тора, коэффициент обратной связи Ko.c=MfL, а коэффициент уси-
ления усилителя Ky=SR3. Поэтому условие самовозбуждения (4.13)
идентично условию (4.1).
Можно дать и иное объяснение действию обратной связи. Для
этого перепишем уравнение (4.9) в виде
^+^(Сэ + Свн)^ + ^ = 0, (4.14)
где G8=l/J?8, Gbh=—MS/L. Уравнению (4.14) соответствует экви-
валентная схема рис. 4.5а. Действие обратной связи оказывается
эквивалентным включению параллельно контуру проводимости
GBH или сопротивления 7?bh=1/Gbh- Теперь условия самовозбуж-
дения генератора можно записать как
G3 + GBH<0. (4.15)
121
Для выполнения этого условия вносимая проводимость долж-
на быть отрицательной (GBB<0), а ее величина | GBH| >G0; при
этом общая активная проводимость эквивалентной схемы
рис. 4.5а
Собщ— G3+GBH<0. (4-16)
Общее активное сопротивление
/?общ=^?вн7?э /(7?вн+^э)=-|7?вн|7?э/(^э-|^вн|) (4.171
отрицательно, если при 7?вн<0 знаменатель выражения (4.17)
положителен, т. е. |7?вн|<^э, что эквивалентно условию (4.16).
Отрицательное активное сопротивление,, как показано в § 2.3,
является источником энергии переменного тока. Поэтому отри-
цательное общее активное сопротивление (или проводимость)
схемы указывает на то, что поступающая в нее энергия перемен-
ного тока превосходит расходуемую, за счет чего происходит уве-
личение амплитуды и энергии колебаний. Таким образом, объяс-
нения самовозбуждения как следствия внесения энергии, компен-
сирующей затухание контура, или введения отрицательного со-
противления — совершенно идентичны.
Обратная связь, способствующая самовозбуждению колеба-
ний, называется положительной. В рассмотренном случае она
соответствует Л4>0. Если знак М изменить на обратный, для чего
достаточно поменять местами точки подключения одной из об-
моток трансформатора, 7?вн и GBH станут положительными; зату-
хание контура возрастет, и самовозбуждение станет невозмож-
цым. Обратная связь, затрудняющая самовозбуждение, т. е. уве-
личивающая устойчивость состояния равновесия, называется отри-
цательной. Следовательно, для создания автогенераторов необхо-
димо использование положительной обратной связи.
Применение положительной обратной связи, меньшей крити-
ческой (Л1<Л1Кр), приводит к увеличению общего эквивалентно-
го сопротивления /?Общ и добротности QMtB контура в соответствии
с выражениями
/?общ=^э К1 —гА-\ £экв=Яобщ/р = <Э К1—-^
/ \ | АвН I / / к °ВН
Это используется для увеличения усиления и избирательности
усилителей.
Эквивалентная схема генератора, определяющая условия самовозбуждения,
нередко представляется в виде последовательного контура рис. 4.56, в кото-
ром действие обратной связи характеризуется вносимым сопротивлением гвн.
Такая схема соответствует (4.10), переписанному в соответствии с (4.11) в виде
d2 и 1 du
+Y (r-l-гвн)— +с^н = 0, (4.18)
где ГвН=—MS/С. Условия самовозбуждения для схемы рис. 4.56
г+гВн<|0 (4.19)
или Гвн<0 и [Гви1>г. ’(4.20)
122
Из анализа эквивалентных схем рис. 4.5 следует, что для са-
мовозбуждения колебаний достаточно вклю-
чить в контур такое отрицательное сопротивле-
ние, при котором общее активное сопротивление
контура окажется отрицательным.
Одной из особенностей биполярных транзисторов является наличие во вход-
ной цепи активного элемента АЭ тока iB=/=0. Учет входных токов АЭ усложня-
ет анализ работы автогенератора, приводит к повышению порядка дифференци-
ального уравнения, описывающего процессы в схеме1.
В некоторых схемах учет влияния iB не повышает порядка дифференциаль-
ного уравнения. Это, в частности, имеет место для схемы рис. 4.6а с контуром
во входной цепи. Для рис. 4.6а
„ d ив , „ , d i .,diK
С ~7Г + i + iB = 0» L T7 + 44— + ri ~ u*-
di dt dt
Заменяя для малых амплитуд колебаний характеристики транзистора (вход-
ную и прямой передачи) касательными в рабочих точках, как показано на
рис. 4.66, имеем 1в=ив1гвх, iK=Sus, причем S=tgPi, rBX=ctgP2. Теперь диф-
ференциальное уравнение приобретает вид
d UB 2
л/ 1 °
d2 ив . 1 F г 1 MS\
dt2 . L * г (-* LC /
ав — 0,
ГвХ J
Следовательно, рассматриваемый генератор эквивалентен колебательному .
контуру с коэффициентом затухания
1 / г . 1 MS \ 1 Г 1
аэ =
гвх С LC / 2 |_ L \ г вх / AC J
При наличии входного тока iB коэффициент затухания колебательной систе-
мы возрастает по сравнению со случаем iB = 0 из-за добавления потерь во вход-
ном сопротивлении. Поэтому для их компенсации требуется более сильная по-
ложительнйя обратная связь. Соответственно условие самовозбуждения можно
записать как
C
м>мкр = -£
причем А4'кр>Л1Нр, определяемого (4.13).
1 Сказанное здесь характерно и для ламповых генераторов при наличии се-
точных токов.
123
КРИТЕРИИ УСТОЙЧИВОСТИ
Для определения устойчивости состояния равновесия необхо-
димо выяснить, как ведет себя система при малых отклонениях
от него. Выше было показано, что эта задача обычно является
линейной, поскольку при ее решении нелинейные зависимости за-
меняются линейными. Обозначим через у малое отклонение ка-
кой-либо величины (тока, напряжения, заряда...) от значения,
имеющего место в состоянии равновесия. Будем считать, что по-
ведение системы при малых значениях у описывается линейным
дифференциальным уравнением n-го порядка
а0^- + а1^г + ...+an-r^- + any = G. (4.21)
dtn df-1 dt
Решение линейного уравнения можно искать в виде суммы
слагаемых вида
у=А еР*. (4.22)
Подставляя (4.22) в (4.21), получаем характеристическое
уравнение
D'(p)=aopn+aipn~1+ - +an-ip+an=0, (4.23)
имеющее п корней. Решение (4.23) можно записать как сумму
слагаемых (4.22):
у = 4 ер*' + Л2 ер*' + ... + Ап (4.24)
где постоянные Ai—Ап определяются из начальных условий, а
Pi—рп являются корнями характеристического уравнения (4.23).
В общем случае характеристическое уравнение обладает действи-
тельными корнями Pt=a.i и парами комплексно-сопряженных кор-
ней Pj=ctj±i pj. Если среди общего числа п корней действительны-
ми окажутся т, то общее решение (4.24) можно представить в
виде суммы т экспоненциальных и s=(n—m)/2 осциллирующих
членов
ТП S 4
у = У А е“г + У Bj еа> cos (₽31 + <р3-), (4.25)
jtoc» лиг
i=l /=1
где B3-e“>f cos(₽3/+<p3) представляет собой сумму двух слагае-
мых (4.24) с комплексно-сопряженными корнями.
Характер процессов, соответствующих (4.25), может оказать-
ся весьма сложным. В общем случае изменение у происходит по
апериодическому закону, на который накладываются процессы
колебательного характера с нарастающими, затухающими или
неизменными амплитудами различных частот. Отклонение, выз-
ванное апериодическим слагаемым с аг->0, монотонно возраста-
ет, а с а3<0 — монотонно уменьшается. Аналогично амплитуда
В3е“^ каждого колебательного процесса с течением времени не-
ограниченно возрастает, если а3>0, и затухает, если а3<0.
124
Следовательно, если все корни характеристичес-
кого уравнения имеют отрицательную вещест-
венную часть, отклонение у от состояния равно-
весия стечением времени затухает, благодаря
чему состояние равновесия является устойчи-
вым. Если хотя бы один из корней (например, ph) имеет положи-
тельную вещественную часть, а остальные отрицательную, то
(п—1) слагаемых в (4.24) с течением времени приближаются к
< нулю, тогда как k-e слагаемое yh=Ah^Pkt неограниченно возрас-
тает, уводя систему в целом все дальше от состояния равновесия.
При некоторых комбинациях коэффициентов а0 — ап все кор-
ни характеристического уравнения (4.23) имеют отрицательные
вещественные части. Весьма заманчиво установить соотношения,
при которых это имеет место, ибо тогда можно будет судить об
устойчивости состояния равновесия, не решая соответствующих
дифференциальных уравнений. По существу, все критерии устой-
чивости представляют собой выраженные в той или иной форме
условия, при которых все корни характеристического уравнения
имеют отрицательные вещественные части. Наиболее широкое ра-
спространение получили критерии Рауса — Гурвица, Найквиста и
Михайлова, к изучению которых мы переходим.
КРИТЕРИИ РАУСА—ГУРВИЦА
Критерий Рауса—Гурвица является аналитическим критери-
ем, непосредственно устанавливающим условия, при которых ве-
щественные части всех корней характеристического уравнения
оказываются отрицательными. Для этого нужно написать глав-
ный определитель, пользуясь следующими правилами: первый
столбец содержит коэффициенты уравнения (4.23) с нечетными
индексами в порядке возрастания, а в каждом ряду вправо рас-
полагаются коэффициенты в порядке убывания их индексов
:а0 0 :0 0 ...
Gg Gg i' ar > G'O 6 ...
iZg G4 G3 ; Gg Gj . . .
П? Uq a4 a.,..,
Далее из главного определителя нужно выписать п определи-
телей (здесь п — степень характеристического уравнения) соглас-
но пунктирным линиям в (4.26):
первый определитель D\ включает один столбец и одну
строку
£»i=|ai|=ab (4.27)
второй определитель содержит два столбца и две строки
#3 ^2
(4-28)
125
третий — три столбца и три строки
а0 О
iZ3 iZg
ае iZ3
И T. Д.
(4.29)
Критерий Рауса — Гурвица устанавливает, что все корни
характеристического уравнения (4.23) при Оо>0
имеют отрицательные вещественные части, если
все п определителей £)д (где А= 1, 2, ..., п) положи-
тельны. При составлении определителей следует считать ко-
эффициенты «1=0, если индекс 1>п, т. е. если такие коэффициен-
ты в (4.23) отсутствуют. Поскольку главная диагональ определи-
теля (4.26) содержит коэффициенты аь а2, ..., ап, в нижней стро-
ке последнего определителя Dn слева от ап оказываются коэффи-
циенты с индексами i~>n, потому они должны быть заменены ну-
лями. Рассмотрим примеры.
1. Характеристическое уравнение второй степени
aopz-j-aip-l-a2=0. (4.30)
Полагая а0>0, получаем два условия устойчивости по критерию Рауса — Гур-
вица:
£)1=ai>0.
а1
о а2
= О1О2> 0.
(4-31)
(4-32)
Если выполняется (4.31), то для выполнения (4.32) требуется, чтобы а2>0.
Таким образом, из критерия Рауса — Гурвица следует, что корни уравне-
ния (4.30) имеют отрицательные вещественные части, если все коэффициенты
уравнения положительные.
Справедливость этого вывода можно проверить непосредственно из реше-
ния квадратного уравнения (4.30) pi,z=(—ai±"|/fl2i—4аоа2)/2ао. Если все ко-
эффициенты уравнения положительны, то возможны два варианта: а) когда
a2i>4a0a2, и тогда оба корня действительные и отрицательные; б) когда a2i<
<4а0а2, и тогда корни комплексные сопряженные с отрицательной вещественной
частью.
2. Характеристическое уравнение третьей степени
a0ps‘+aip2-}-azp-j-a3<=iO. (4.33)
Условия устойчивости при ао>0 записываются как £>i=ai>0,
= =0^0^ — о3 a3 0, (4.34)
I ^3 ^2
«1 «0 0
о3 = аз 02 = а3 fo а2 — а0 а3) > 0. (4.35)
0 0 с3
В случае выполнения (4.34) из (4.35) следует а3>0. Если же учесть, что
Яойз>О и fli>0, то для выполнения условия (4.34) необходимо, чтобы а2>0.
Таким образом, для обеспечения устойчивости требуется, чтобы все коэффициен-
ты характеристического уравнения были бы положительными и, кроме того, вы-
полнялось условие (4.34).
3. Характеристическое уравнение четвертой степени
яор‘4-Я1ра4-Я2Р2'4-азр+в4=О.
126
Условия устойчивости при й0>0 оказываются
£)1 = а1>0, ' D^aiaz—ааа3>0, ]
D3=asD2—a2ia4>0, Р4=С14Йз>0. J
Легко показать, что если эти условия выполняются, то а4>0, аз>0 и as>0.
В общем случае для обеспечения устойчивости необходимо
(хотя для п>2 недостаточно), чтобы все коэффициенты харак-
теристического уравнения были положительными
а{>0, i=0, 1, 2, п. (4.37)
Если все коэффициенты сц положительны, то не все условия
£)ь>0 оказываются независимыми: из положительности определи-
телей Dh четного порядка следует положительность определите-
лей нечетного порядка и наоборот. С учетом этого Льенар и
Шиппар сформулировали критерий: все корни характери-
стического уравнения (4.23) имеют отрицатель-
ны е в е щ еств ен н ы е части, если: а) все коэффици-
енты щ уравнения (4. 23) положительные и б) вы-
полняются условия £>2>0, Z?4>0, ... или £>з>0, £>б>0 ...
Читателю рекомендуем самостоятельно проверить, что при вы-
полнении (4.37) корни характеристического уравнения третьей
степени будут иметь отрицательные вещественные части, если
£>2>0, четвертой степени, если £>з>0, пятой степени, если jD2>0
и Д4>0.
Критерии Рауса — Гурвица и Льенара — Шиппара широко ис-
пользуются при теоретических исследованиях различных уст-
ройств с обратной связью.
КРИТЕРИИ МИХАЙЛОВА
Графоаналитический критерий Михайлова предназначен для
исследования устойчивости замкнутой системы по ее характери-
стическому уравнению (4.23). В случае сложных систем, описы-
ваемых дифференциальными уравнениями высокого порядка, ис-
пользуемые по критерию Рауса — Гурвица выражения становятся
громоздкими и ненаглядными, и в этцх условиях преимущества
критерия Михайлова оказываются особенно ощутимыми.
Для вывода критерия Михайлова перепишем левую часть ха-
рактеристического уравнения (4.23) в виде
D<(p) =a0(p—pi) (Р—Р2)-(Р—Рп), (4.38)
где pi, р2, ..., рп — корни характеристического уравнения D(p)=O.
Подставляя в правую часть (4.38) p==iico, получим
D (i ср) =а0 (i о—/л) (i а—/л) - (i ®—рп) (4.39)
Каждый из сомножителей выражения (4.39) можно предста-
вить на комплексной плоскости вектором г&=по—e14>ft , а
весь характеристический многочлен — вектором
D (i со) =«о е 9к гхг2... гп. (4.40)'
127
Обозначая
п п
r}r2...rn = Пг/Р 2% = <Р>
fe=l *=1
можем переписать (4.40) в виде
D(i®) =аое1ч,Пп. (4.41)
fe=i
При изменении частоты ш каждый из векторов г?1 меняет по-
ложение. Величина <р характеризует направление результирую-
щего вектора D(i®). Рассмотрим, в каких пределах изменяются
аргументы <ph при изменении частоты to от 0 до со в различных
случаях.
1. Корень рь=а&<0.— действительный отрицательный. Для
этого случая на рис. 4.7а отложены векторы р&, ito и г&=1со—ph.
При изменении ко от 0 до со вектор rh повернется на угол (p/t=n/2.
Поворот вектора против часовой стрелки считаем положительным,
по часовой стрелке — отрицательным.
Рис. 4.7
2. Корни pb,fc+i = ah±iPh — комплексные сопряженные с отри-
цательной вещественной частью (аь<0). При изменении to от 0
до оо (рис. 4.76) углы поворота векторов rfe и rft+J оказываются
равными соответственно (рь=л/2+у и <р^+1=л/2—у, где tgy =
= Pfe/afc. Суммарный поворот двух векторов <p/i+<p/1+i=Jt.
3. Корень pfc==ia^>0 — действительный положительный. Изме-
нение to от 0 до со приводит к повороту rh (рис. 4.7в) на угол
— —л/2.
4. Корни pb,ft+i = afc±i₽b — комплексные сопряженные с поло-
жительной вещественной частью (а&>0). При изменении ® от
0 до со (рис. 4.7г) углы поворота векторов оказываются:
— — (л/2+у), <рй+1=—(л/2—у). Суммарный поворот двух векто-
ров tpfe4-(pft+i = —л.
Устойчивым системам соответствуют первые два случая, при
которых среднее изменение каждого агумента при изменении
частоты от 0 до оо оказывается равным л/2.
128
Состояние равновесия системы, описываемой
линейным дифференциальным уравнением и-го
порядка, является устойчивым, если при изме-
нении частоты со от 0 до со вектор D(ico) повернется
н а
угол ф = п— против часовой стрелки.
Если угол
л
поворота ср отличается от п —
состояние равновесия неустойчивое.
В этом и состоит критерий Михайлова.
Траектории конца вектора D(ico), т. е. годографы вектора
D(ico) называются кривыми Михайлова. На рис. 4.8а показан ха-
рактер кривых Михайлова для устойчивых состояний равновесия
в системах различного порядка. Точка, соответствующая <о = 0
для устойчивой системы, всегда лежит на оси абсцисс справа от
начала координат, так как при p=ico=O из (4.23) Z>(0)=an, а
согласно критерию Рауса — Гурвица в такой системе все коэф-
фициенты характеристического уравнения должны быть положи-
тельными. В устойчивой системе вектор D(ico) с ростом частоты
поворачивается против часовой стрелки вокруг начала коорди-
нат.
В качестве примера рассмотрим характеристическое уравнение (4.33)
О(р) =a0p3-|-01p2_|_02p_|_a3==o с корнями pi, р2, рз- Считаем все коэффициенты
уравнения (a0, Яс, я2, я3) положительными, что, как отмечалось при изучении
критерия Рауса — Гурвица, является условием необходимым, по недостаточным,
для устойчивости состояния равновесия. Заменяя в характеристическом урав-
нении р на но, получаем
D(i со) =Da(co)-}-i ОДсо), (4.42)
где £>х(со)=а3—Я1<о?, Dy(со) =со(я2—яосо2).
При со=О £>х(0)=а3, £>„(0)=0. Поэтому со=О соответствует точка А на
оси абсцисс (рис. 4.86), где х=а3. При увеличении частоты от 0 до оо благо-
даря положительности всех коэффициентов a, Dx уменьшается, стремясь к —оо;
Dy сначала возрастает (достигая максимума при со= 1/а2/Зя0), а затем также
уменьшается, стремить к —оо. Значит, при со—>-оо вектор D(ico) попадает в тре-
тий квадрант. При этом могут получиться кривые Михайлова двух типов: охва-
тывающие (кривая /) и не охватывающие (кривая //) начало координат.
5—92 429
Кривая I соответствует тому случаю, когда с увеличением со вектор D(ico)
сначала совпадает с осью у, что имеет место иа частоте ®i, на которой
£*^(coi)=O или co2i=a3/ai, (4.43)
и лишь потом на более высокой частоте
<02>С01 (4.44)
совпадает с осью х, что имеет место, когда1
Csfco2)=O или a>z2=a2/a0. (4.45)
Кривая I характеризуется условием (4.44) Возводя обе части неравенства
(4.44) в квадрат и используя (4.43) и (4.45), приходим к выражению a2<zi—
СоОз>0, совпадающему с условием устойчивости (4.34) по критерию Рауса —
Гурвица.
Кривая II характеризуется тем, что при увеличении а> вектор D(fco) сначала
на частоте <о2 совпадет с осью абсцисс [£>,, (w2) = 0], а затем на более высо-
кой частоте сщ совпадает с осью ординат [2Эх(<01) =0]. Следовательно, для кри-
вой II или a2ai—а0Аз<0, что означает нарушение одного из условий ус-
тойчивости Рауса — Гурвица. Итак, кривая I соответствует устойчивому состоя-
нию равновесия, кривая II — неустойчивому. Для любой из этих характеристик
при <ш->оо обозначенный на рис. 4.86 угол ф=(зт/2, что следует из выражения
... .. Du (®) со (а3 — а(. со2)
limtgij) = lim -Ц-4 = iim ------—--------- = оо
СО-►со (0~*сю (со) (О —* оо (а3 — ® )
Проследив теперь непосредственно по графикам рис. 4.86 за поворотом век-
тора D(ico) при изменении со от 0 до оо, легко убедиться в том, что общий угол
поворота вектора D(ico) оказывается для кривой I срг=Зл/2, что соответствует
устойчивому состоянию равновесия по критерию Михайлова; для кривой II угол
фп=—л/2, что означает неустойчивость состояния равновесия.
Таким образом, как и следовало ожидать, оба метода оценки устойчивости
(по критерию Рауса — Гурвица и Михайлова) дают одинаковые результаты.
КРИТЕРИЙ НАЙКВИСТА
Критерий Найквиста решает вопрос об устойчивости состоя-
ния равновесия замкнутой цепи с обратной связью по свойствам
разомкнутой цепи: по ее амплитудно-фазовой характеристике
(АФХ).
Представим цепь с внешней обратной связью (см. рис. 4.2 или
4.3) в виде четырехполюсника рис. 4.9а; его входное сопротивле-
ние считаем ZBX. Разомкнем цепь
обратной связи, позаботившись
о том, чтобы режим работы четы-
рехполюсника остался прежним;
для этого подключим на его выхо-
Рис 4д де сопротивление нагрузки, рав-
ное ZBX, как показано на рис. 4.96.
Свойства разомкнутого четырехполюсника в последующем бу-
дем характеризовать его комплексным коэффициентом передачи
K(i со) =Ле1<₽=с72/^1, (4.46)
определяемым отношением комплексных амплитуд выходного U-2
и входного Ui напряжений. Траектория конца вектора K(ico) на
1 Уравнение Dy(<£>)=0 имеет еще одно решение ®=0, что соответствует
начальной точке кривой Михайлова: х—аз-
130
комплексной плоскости, получающаяся при изменении частоты
со от 0 до оо, т. е. годограф вектора K(ico) называется аплитудно-
фазовой характеристикой четырехполюсника.
Схема рис. 4.9а при малых амплитудах колебаний описывается линейным
дифференциальным уравнением п-ro порядка
dn uz , ы2 , rflz2
ao-^+a1-^=I-+...+an_1'^- + an«2 = O, (4.47)
Подстановка в (4.47) a2=C,2epi приводит к характеристическому уравнению
(4.23) £>(р)=0. Уравнение (4.47) можно записать как
DtfaeP'-O. (4.48)
Разомкнутая система рис. 4.96 описывается дифференциальным уравнением
dm и2
m +
di
dm 1 а2
dfi-l + • ’ • + bm-i +
Ьщ ^2 —
d и± duA
= co-dt^+---+ck-i^r + ck^’
(4.49)
которое в случае комплексного ZBX может иметь порядок более высокий, чем
уравнение (4.47). Пусть щ—Сре?1 и а2=172е^'. Обозначая £)0(р) =6оР™+
+b1pm-1+ - +bm-iP+bm и Dt{p) =copk+clph-'+ ... Ч-сл-^+сл, запишем
(4.49) в виде
DoC72eP‘=Dit7ieP‘. (4.50)
Уравнение Do=0 является характеристическим уравнением разомкнутого че-
тырехполюсника, определяющим его поведение при гч = 0. В дальнейшем счита-
ем разомкнутый четырехполюсник устойчивым, что имеет место, если все его
корни характеристического уравнения имеют отрицательные вещественные части.
Если замкнуть цепь обратной связи, то «1=1/2, Oi = Oz, и (4.50) сведется к
(£>о—£>1)172еР' = 0, из сопоставления которого с (4.48) следует, что
£>=£>о—Di (4.51)
при любых р.
Если на входе разомкнутого четырехполюсника действует гармоническое на-
пряжение £Ле1ю', то p=ico, и из (4.50) можно определить комплексный коэф-
фициент передачи (4.46) как
K(ico) = Di/D0. (4.52)
С учетом (4.51)
K(ico)='l—F(ico), (4.53)
где F(i со) =D(i co)/£>o(i <»)- (4.54)
Здесь согласно (4.39) D(i<o) =fld(i<o—pi) (ico—р2) • • (i<o—рп). При выводе кри-
терия Михайлова было показано, что каждый из векторов гй = 1со—рь, в котором
Рй величина действительная отрицательная, при изменении частоты со от 0 до
<» поворачивается в положительном направлении (против часовой стрелки) на
угол п/2, а векторы Гй, у которых pft комплексные сопряженные с отрицатель-
ными вещественными частями, в среднем поворачиваются на тот же угол. Если
>1чс Рк имеют положительные вещественные части, то поворот векторов Гй=1со—
Рй происходит на такие же величины, но в противоположном (отрицатель-
ном) направлении. Поэтому, если из общего числа п корней уравнения £>(р) =
~ 0 п.\ корней имеют отрицательные вещественные части, а /г2 — положительные
(И1+п2=/г), то при изменении со от 0 до °° вектор D(ico) поворачивается на
угол (/г,—/22)51/2.
Так как все корни вектора Do имеют отрицательные вещественные части
(условие устойчивости разомкнутой цепи), то общий угол поворота вектора
5* L3E
F(ico) <pF=(/i,—n2—т)л/2. Критерий Найквиста доказывается для случая одина-
ковых степеней полиномов D и До, что соответствует омическому сопротивлению
Zbx- При этом т=п и
<pF = («1—пг—п) я/2 (4,55)
Система устойчива в замкнутом состоянии, если все п корней характерис-
тического уравнения имеют отрицательные вещественные части. При этом пх —
=п, п2=0 и <рг = 0. Следовательно, состояние равновесия замкнутой системы
является устойчивым, если при изменении а от 0 до оо угол поворота вектора
F (i<o) равен нулю <pF=0. На рис. 4.10 сплошные линии представляют ампли-
тудно-фазовые характеристики (АФХ) комплексной функции F(i<o). Согласно
сформулированному здесь критерию рис. 4.10а соответствует неустойчивому со-
стоянию равновесия, поскольку при обходе АФХ угол <рг=2л; рис. 4.106 и в
соответствуют устойчивым состояниям равновесия, ибо для них <рг=О.
Переход от АФХ функции F(ico) к АФХ функции K(ico) осуществляем со-
гласно (4.53): сначала на рис. 4.10 наносим пунктирными линиями АФХ функ-
ции —F(ico), а затем сдвигаем их вправо на 1, что приводит соответственно к
рис. 4.11а—в. Точка (0, 0) плоскости F переходит в точку (1, 0) плоскости К.
Поэтому величина <pF на плоскости К равна полному углу поворота <pv радиу-
са-вектора у, проведенного из точки (1, 0) в точку (А, <р) при изменении со от
0 до оо.
Рис. 4.10
Рис. 4.11
Годографы вектора K(ico), построенные на рис. 4.11, являют-
ся АФХ разомкнутого четырехполюсника рис. 4.96.
Теперь сформулируем критерий Найквиста: состояние
равновесия замкнутой системы является устой-
чивым, если амплитудно-фазовая характеристи-
ка разомкнутой системы не охватывает точку с
координатами (1,0). Следовательно, рис. 4.11а соответствует
неустойчивому состоянию равновесия, а рис. 4.116 и в устой-
чивым.
В большинстве случаев АФХ коэффициента передачи K(ico)
представляет замкнутую кривую, проходящую через начало ко-
ординат из-за того, что при <о = 0 и а = оо К=0. При со=О это
имеет место, например, если одни части схемы отделены от дру-
гих разделительными конденсаторами; при и=оо это является
следствием наличия у любого прибора выходной емкости, вклю-
ченной параллельно нагрузке.
Строго говоря, рассмотренный метод пригоден лишь для ана-
лиза устойчивости линейных цепей. В [22] показано, что данный
метод можно применять и для приближенного определения ста-
ционарных режимов автоколебаний и их устойчивости в автоко-
лебательных системах, характеризующихся медленным ( малым за
период колебаний) изменением амплитуды. Для этого нужно
снять и построить семейство АФХ при различных амплитудах 67,
входного сигнала, определяя Ку как средний по первой гармонике
коэффициент передачи усилителя (см. § 2.3). В большинстве случа-
ев величина Ку уменьшается с ростом амплитуды 67ь Поэтому АФХ,
снятые при разных LA (U'\ < < U"'t), оказываются вложенны-
ми друг в друга, как показано на рис. 4.12.
Поскольку автоколебания начинаются с малых амплитуд
(Ur=U'i), состояние равновесия такой системы является неустой-
чивым, колебания в ней должны нарастать и притом на частоте
«т>о, на которой фаза коэффициента передачи K(i©) <р = 0. Когда
амплитуда достигнет 67I = 67"i, в схеме установятся стационарные
автоколебания, соответствующие точке А (1, 0). Если АФХ сни-
мать при большой амплитуде 67i = 67"'i, то может быть сделан
неправильный вывод о том, что состояние равновесия является
устойчивым. Поэтому для оценки устойчивости состояния равнове-
сия нелинейной цепи АФХ следует снимать при малой амплитуде
входного сигнала.
В усилителях и автогенераторах годографы K(i<o) обычно име-
ют характер кривых, приведенных на рис. 4.11а, б и 4.12: они
•оказываются замкнутыми и притом такими, что если годограф
пересекает ось абсцисс в точке (К>1, <р=0), то <pv#=0 и состоя-
ние равновесия оказывается неустойчивым. В таких условиях
возможен более простой аналитический подход к оценке устой-
чивости состояния равновесия.
133
На рис. 4.13 приведена схема усилителя с обратной связью, в
ней t72= [[7i + Ko.c(iM)tf2]Ky(iM), а поэтому комплексный коэффи-
циент передачи схемы с обратной связью
К (i со) = . (4.56)
1 4-Koc(i<o)^ (i<D)
При «1 = 0 (короткое замыкание на входе) схема рис. 4.13 сво-
дится к схеме рис. 4.3 и произведение /С0.с(1к>) Ку(1к>) равно коэф-
фициенту передачи напряжения по замкнутой цепи генератора
рис. 4.3 или 4.9а. Обозначим Ky(ico) =Лу(со)е 1<₽y(t0) , К0.с(ко) =
=Ло.с(|со)е 1<₽о-с(и) . Тогда условие пересечения годографом оси
абсцисс при К<1 можно записать в виде двух условий:
условия баланса фаз
фу(со) +ф0.с(со) = 2лл, где «=0, 1, 2, (4.57)
определяющего частоту ©о, на которой коэффициент передачи
K(ico) становится действительным, и
амплитудного условия
Ку(й0)Ко.с(со0)=К(®0)<1. (4.58)
Самовозбуждение колебаний в усилителе происходит, если при
соблюдении условия баланса фаз (4.57) знак неравенства в (4.58)
меняется на обратный.
Для иллюстрации критерия Найквиста рассмотрим определение условий са-
мовозбуждения генератора рис. 4.16. Размыкая схему в точках, обозначенных
крестиками, и принимая ZBx = °o, получим эквивалентную схему рис. 4.14а. Счи-
таем схему для малых амплитуд напряжения us линейной с крутизной S в ра-
бочей точке и пренебрегаем влиянием напряжения на контуре на ток iH; тогда
комплексная амплитуда его первой гармоники iKi=SOB.
Рис. 4.14
O/xq
(1 + ig)
Напряжение на контуре на любой частоте 17к
где Ш Q-------обобщенная расстройка контура. Выходное напряжение
<о0
ily.MIL. Комплексный коэффициент передачи схемы рис. 4.14а равен
K(ico) =
б'вых
Дв
MSRa
(4.59)
£(1 + И) ’
134
Из (4.59) получаем выражения фазовой и частотной характеристик:
<р=— arctgl (4.60)
MSRa
=K°C0S4’- <4j61)
Здесь Ko=(M/£)Sfl8 —коэффициент передачи при <р=0, т. е. на частоте, рав-
ной резонансной частоте контура <о0-
Построение амплитудно-фазовой характеристики разомкнутой цепи иллюст-
рирует рис. 4.146. Задаваясь различными значениями частоты <о, из .(4.60) полу-
чаем <р, а затем согласно (4.61) определяем К как проекцию вектора Ко на
линию, идущую под углом <р к оси абсцисс. Линия, прочерчиваемая концом
вектора К (!<»)> при изменении ю от 0 до оо и будет АФХ. В рассматриваемом
случае она проходит через вершины прямоугольных треугольников, а потому
оказывается окружностью диаметра Ко- По критерию Найквиста условие само-
возбуждения генератора будет Ко>® или с учетом (4.61) M>iL/SRa, что совпа-
дает с условием самовозбуждения (4.13), полученным из решения дифференци-
ального уравнения генератора. Частоту <о возникающих колебаний определим,
приравнивая нулю (4.60): со=.<ад= 1/VLC.
Критерий Найквиста широко используется при Оценке устой-
чивости усилителей и других устройств. Достоинством его явля-
ется то, что он не требует составления подчас весьма сложных
дифференциальных уравнений исследуемых устройств, а опериру-
ет с частотными и фазовыми характеристиками отдельных звень-
ев системы, почти всегда определяемыми расчетным или экспе-
риментальным путем при проектировании каждого устройства.
В то же время он является менее общим, чем критерий Михайлова,
так как оказывается непригодным в случае неустойчивой разомк-
нутой цепи, а также тогда, когда порядок дифференциального
уравнения разомкнутой цепи выше, чем замкнутой.
УСТОЙЧИВОСТЬ СОСТОЯНИИ РАВНОВЕСИЯ ПО ЛЯПУНОВУ
Классический метод определения устойчивости был разрабо-
тан в конце XIX в. выдающимся русским математиком М. А. Ля-
пуновым и с тех пор носит его имя. Определение устойчивости по
Ляпунову состоит в следующем: состояние равновесия является
устойчивым, если при любой заданной области е допустимых от-
клонений от состояния равновесия (например, область е вокруг
точки равновесия 0 на рис. 4.15) можно указать область 6(e),
окружающую состояние равновесия и обладающую тем свойст-
вом, что ни одно движение, начинающееся внутри 6(e), никогда
не достигнет границ области е. Иными словами, устойчивое со-
стояние равновесия характеризуется тем, что отклонение от этого
состояния не превысит сколь угодно малой величины, если на-
чальное возмущение достаточно мало. Если же возникающее
малое отклонение с течением времени затухает, то такое состоя-
ние равновесия называется асимптотически устойчивым. Следо-
вательно, если малые начальные отклонения приводят к возник-
новению достаточно малых периодических колебаний в системе,
состояние равновесия считается устойчивым, но не асимптоти-
чески.
135
М. А. Ляпунов обосновал метод аналитического исследования
устойчивости состояния равновесия нелинейных цепей, заключа-
ющийся в замене характеристики нелинейного элемента каса-
тельной к ней, взятой вблизи исследуемого состояния. Рассмот-
рим метод Ляпунова для систем, описываемых нелинейными диф-
ференциальными уравнениями первого и второго порядка. Пусть
некоторая система описывается нелинейным дифференциальным
уравнением первого порядка
dxjdt=f(x), (4.62)
где х может быть током, напряжением, зарядом. Состояниям рав-
новесия системы соответствуют значения х—х0, для 'которых.
dx/dt=Q), или
!f(xo)=O. (4.63)
Для исследования устойчивости этих состояний будем считать
х—х0+Дх, (4.64)
где Ах — малое отклонение от состояния равновесия. Подставляя
(4.64) в (4.62), получаем
dAx/ii/=/(x0+Ax), (4.65)
поскольку х0— величина постоянная. Правую часть (4.65) рас-
кладываем в ряд Тейлора
|)(х0+Дх) Н(хо) +Дх Л(xq) + (хд) +... (4.66)
Согласно Ляпунову ввиду малости Дх ограничиваемся в выра-
жении (4.66) первыми двумя слагаемыми. Подставляя их в (4.65),
получаем с учетом (4.63) линейное уравнение первого приближе-
ния — уравнение вариаций:
dkxldt=f' (х0)Дх. (4.67)
Обозначив )'(х0)=а, получим решение этого уравнения:
Дх=С еа*. (4.68)
где С — постоянная интегрирования.
Если а>0, т. е. производная dfldx при х=х0. положительна,
Дх будет нарастать, т. е. состояние равновесия окажется неустой-
136
чивым. Если же а<0, то состояние равновесия при х—х0 будет
устойчивым. На рис. 4.16 построен трафик функции f(x), для ко-
торой равновесие имеет место в точках хОь х02, Хоз- Остальные
значения х изменяются во времени согласно (4.62): возрастают,
если f(x)>0, и уменьшаются, если §(х)<0. Направления измене-
ния-координаты х отмечены стрелками. Из рис. 4.16 и выражения
(4.68) следует, что состояния равновесия: х02— устойчивое, х01 и
х03 — неустойчивые.
Переходим к рассмотрению системы, описываемой нелинейны-
ми дифференциальными уравнениями второго порядка или дву-
мя уравнениями первого:
~ = Р(^ У) и -^=<3(х, у). (4.69)
dt dt
Состояния равновесия системы определяются координатами
точек х0, уо, в которых производные dxldt=Q и dy]dt = Q или
Р(х0, уо)=О и Q(x0, уо)=О. (4.70)
Дадим х и у небольшие начальные отклонения от х0 и у0'.
х=х0+Дх и у=Уо+ку- '(4.71)
Подставляем (4.71) в (4.69) и раскладываем правые части
в ряд Тейлора
= Р(х0+Дх, у0+Ду) = Р(х0,у0) +ЛхР'х(х0, у0) +
at
-рЛуР'у(х0, уо) +... >(4 72)
—— Q (хо + Дх, уо + Ду) = Q (Хо, Уо) + AjcQ'x(Xo, уо) +
dt
+ &yQ'y(x0, Уо) + —
Здесь Р'х (х0, уо) = (дР/дх)Хо, Ул; Р'у (х0, у0) = (dPfdy)х„, Уо ;
0\ (Хо, уг) = (dQ/dx) Х(1, Ув; Q'y (х0, у0) = (dQ/dy) х„, Ув.
Пренебрегая в (4.72) слагаемыми, имеющими множители
Ах и Ду в степенях выше первой (т. е. нелинейными членами), и
принимая во внимание (4.70), получаем два линейных уравнения
вариаций:
—- = Р'м(х0, уо) ^х+Р'у (х0, уо)Лу, 1
dt I (4.73)
= Q\-(x0, yo)&x+Q'y(xo, уо)&У, I
dt '
которые после несложных преобразований сводятся к одному ли-
нейному уравнению второго порядка относительно Дх
АА1 _(P'x+Q'y)*±L + (P'xQ'y-P'yQ'x)bx=0 (4.74)
dP ’ dt
или такого же относительно Ду.
137
Переписав это уравнение в виде
(Р&.Х , dEx , А л
а0--------ha,---------ра2Дх = 0.
dt2 1 dt
(4-75)
где а0=1, ai=—(P'x+Q'y), a2 = P/xQ'v—P'yQ'x, мы можем для
оценки устойчивости состояния равновесия использовать критерий
Рауса — Гурвица.
Для иллюстрации метода Ляпунова рассмотрим вопрос об устойчивости со-
стояний равновесия генератора на туннельном диоде. Принципиаль-
ная схема такого генератора для достаточно высоких частот (рис. 4.17a) состо-
ит из туннельного диода ТД, индуктивности £н, используемой для настройки
Рис. 4.17
генератора, сопротивления нагрузки гн и источника питания Е. Переходя к рас-
чету генератора, учтем, что источник питания Е обладает некоторым внутрен-
ним сопротивлением Ri, а туннельный диод заменим эквивалентной схемой
(рис. 4.176), содержащей RK —нелинейное сопротивление р-/г-перехода (его
вольт-амперная характеристика £=Ф(а) приведена на рис. 4.18a), С —емкость
р-/г-перехода1, £д — индуктивность выводов, rs — сопротивление объема полу-
проводника, примыкающего с обеих сторон к р-га-пе реходу.
Приняв r=7?i+rs+rH и £=£д+£н, получаем эквивалентную схему генера-
тора на ТД (рис. 4.186). С учетом обозначений рис. 4.186 составим уравнения:
ir+L(di/dty+u=E, i=iR+ic, ) (4 76)
£д=Ф(а), ic = C(du[dt), J
откуда
C(du/dt)=i—Ф(а), L(di/df)=E—u—ir. ’(4-77), (4.78)
1 Величина емкости ТД также несколько зависит от напряжения. В после-
дующем для упрощения анализа считаем С постоянной.
138
Исключая из (4.77) и (4.78) одну переменную, получим нелинейное уравнение
генератора на ТД
в котором Ф'(и) =d<b(u)ldu. В состоянии равновесия du/dt=Q и di/dt-G, а
потому согласно (4.77) и (4.78)
г=Ф(ы), i=(E—и)/г. (4.80)
Токи io и напряжения и0, соответствующие возможным состояниям равнове-
сия системы, должны удовлетворять обоим соотношениям, поэтому они могут
быть определены, как показано на рис. 4.18а, по точкам пересечения характе-
ристик (4.80). В общем случае получаем три состояния равновесия: в двух '(точ-
ках В и С) нелинейный элемент обладает положительным дифференциальным
сопротивлением, в одном (точка Л) — отрицательным. Для оценки устойчивости
этих состояний подставляем ы=«о+Д« и i=io+Ai в (4.77) и (4.78), считая,
что ио и io удовлетворяют (4.80). Ограничиваясь в разложении Ф(ио+Ли) для
AuCuo первыми двумя слагаемыми Ф(ыо-|-Аы) =Ф(ао)-|-ДиФ'(ыо), получим
d А и
М = С--------+ Д и Ф' (и0), (4.81)
dt
L d Д t u_|_r д 1=0. (4.82)
dt
Коэффициент Ф'(ыо) = 1/Дд является величиной, обратной дифференциально-
му сопротивлению нелинейного элемента в рабочей точке. Из (4.81) и (4.82)
получаем уравнение вариаций
А а / г 1 \dku 1
dt* + \ L + CRr ) dt + LC
(4,83)
Уравнение (4.83) аналогично (4.75), причем
«0 = 1, = Ca = L7F(1 + ^)- (4Ж)
Согласно критерию Рауса-—Гурвица состояние равновесия при ао>0 яв-
ляется устойчивым, если
ai>0 и аг>0. (4.85)
Состояния равновесия, соответствующие точкам В и С, являются устойчи-
выми, так как в них Ед>0 и условия (4.85) выполняются. Для определения ус-
тойчивости состояния равновесия в точке А, где Ед<0, удобно обозначить
ЯД=-|ЯД| (4.86)
и переписать условия (4.85) в виде
rC/L— 1/|Ед|>0, 1— г/|Ед|>0. (4.8'7), (4,88)
Условие (4.88) означает
г<|Ел|- (4.89)
Соотношение (4.89) называют условием устойчивости по постоянному току,
так как его выполнение гарантирует сохранение рабочей точки на падающем
участке, а нарушение приводит к переходу к другому состоянию равновесия.
Таким образом, для того чтобы рабочая точка находилась на падающем участ-
ке ГД, питание схемы необходимо осуществлять от источника напряжения, об-
ладающего малым внутренним сопротивлением Ri.
Для переменного тока схема рис. 4.186 представляет параллельный колеба-
тельный контур с эквивалентным сопротивлением R3—L/Cr, подключенный к не-
линейному сопротивлению Ед. Перепишем (4.83) в виде
г— V = o. (4.90.)
dt* С \ Ro \Rr\ J dt LC \ I Ед I 7
13&
Условие устойчивости (4.87) можно записать как
Яэ<|«д|. (4.91)
Из уравнения (4.90) следует, что при выполнении условия устойчивости
(4.89) колебания в генераторе затухают, если коэффициент при dAu/dt положи-
тельный, и нарастают, если отрицательный. Неравенство (4.91) является услови-
ем предотвращения нарастания колебаний в точке А, поэтому его называют
условием устойчивости по переменному току. “
В усилителях на ТД требуется обеспечить устойчивость состояния равнове-
сия на падающем участке, т. е. выполнить условия устойчивости и по постоян-
ному и по переменному токам. В генераторах нужно выполнить условие устой-
чивости по постоянному току (для того, чтобы рабочая точка находилась на па-
дающем участке) и нарушить условие устойчивости по переменному току, тогда
возникающее из-за действия флуктуаций колебание небольшой амплитуды будет
нарастать.
Рассматривавшиеся до сих пор методы анализа и критерии
устойчивости нелинейных устройств основываются на использо-
вании укороченных линейных уравнений первого приближения
[смотрите например, переход от уравнения (4.66) к (4.67)]. Воз-
никает естественный вопрос, в каких случаях результат исследо-
вания устойчивости с помощью линеаризованных уравнений вари-
аций совпадает с результатами такого же исследования исходной
нелинейной системы. М. А. Ляпуновым было доказано, что это
имеет место в случаях, когда решение линеаризованных уравне-
ний возмущения асимптотически устойчиво или неустойчиво. Если
же решение линеаризованных уравнений приводит к устойчивос-
ти неасимптотической (например, к малым незатухающим коле-
баниям около состояния равновесия), для нелинейной системы
такое решение может оказаться неверным, поскольку отбрасыва-
емые при линеаризации выражений (4.66), (4.72) и других нели-
нейные члены высшего порядка малости приобретают теперь ре-
шающее значение.
Подтвердим сказанное примером. Пусть уравнения вариаций системы второ-
го порядка имеют вид
—- = — а у ах")/-*2 + У2 > ~ « х -|- а у ~\/х2 + J/®, (4.92), (4.93)
/
где а=const. Будем рассматривать движение на плоскости х, у. Обозначим
г= "\/ х2+у2— расстояние до начала координат. Умножая (4.92) на х, а (4.93)
на у и складывая их почленно, получим уравнение drldt=ar2. Разделяя пере-
менные и интегрируя от to до t, полагая, что при этом расстояние изменяется
от Го до г, получим
г=гв/[\—ar0(t—10)]. (4.94)
При а<0 и t->oo г-»-0, что соответствует асимптотической устойчивости;
при а>0 и /->to+l/aro г->-оо, что означает неустойчивость состояния равнове-
сия.
Если же линеаризовать правые части уравнений (4.92) и (4.93), получим
dx dy d2x
~=—ay, —=ах или---------- +а2х=0. Корни соответствующего характеристиче-
dt dt di
ского уравнения будут мнимыми (как для колебательного контура без по-
терь), что означает существование колебаний с постоянной амплитудой г=
=const, т. е. неасимптотическую устойчивость состояния равновесия. Как ви-
дим, в данном случае анализ устойчивости состояния равновесия нелинейной
системы по линейным уравнениям первого приближения приводит к неверным
результатам.
ПРЯМОЙ МЕТОД ЛЯПУНОВА
М. А. Ляпуновым был предложен и другой метод анализа
устойчивости состояния равновесия нелинейных систем, называ-
емый прямым или вторым методом Ляпунова. Этот метод осно-
ван на формировании и рассмотрении специальных функций
У(х, у), где х и у—-небольшие отклонения (вариации) перемен-
ных от состояния равновесия1, соответствующего х=0 и у=0.
Требования к функции V(x, у):
в некоторой области, окружающей начало координат, V(x, у)
непрерывна вместе со всеми частными производными первого по-
рядка;
в начале координат V(0,0) =0;
во всех остальных точках этой области V(x, у) отличается от
нуля и принимает значения одного знака.
Функция V (х, у), обладающая такими свойствами, называется
знакоопределенной: определенно-положительной или определенно-
отрицательной. Функцию называют знакопостоянной (положитель-
ной или отрицательной), если она также сохраняет в области по-
стоянство знака, однако нулевые значения имеет не только в на-
чале координат. Эти функции называют функциями Ляпунова.
Рассмотрим некоторые функции V(x, у). Функция
(4.95)
построенная на рис. 4.19а, является знакоопределенной (опреде-
ленно-положительной): в точке равновесия Й(0, 0)=0, а в лю-
бых других точках Е>0. Функция V=x2—2ху+у2=(х—у)2, по-
строенная на рис. 4.196, .знакопостоянна (положительна), но не
знакоопределенна, так как
Р=0 не только в начале
координат, но и в точках,
где х=у; при иных значе-
ниях хну У>0.
Обращаясь к знакооп-
ределенным функциям,
например к (4.95), можно
заметить, что кривые
V (х, у) = С, где С — фик-
сированный параметр, яв-
ляются замкнутыми кри-
выми, охватывающими на-
чало координат, причем
кривые с меньшими С располагаются ближе к началу координат.
Используя эту особенность V-функций, М. А. Ляпунов доказал тео-
ремы [8]..
Теорема 1. Если дифференциальные уравнения возмущенного
движения таковы, что можно найти знакоопределенную функцию
1 Здесь изложение ведется для системы второго порядка, характеризующей-
ся двумя независимыми переменными х и у, хотя метод применим для систем
любого порядка.
141
V(x, у), производная которой d-V/dx была бы знакопостоянной
функцией противоположного с V знака или тождественно равна
нулю-, то равновесие системы в начале координат устойчиво.
Теорема 2. Если же производная dV/dx Является знакоопреде-
ленной функцией противоположного с V знака, то равновесие си-
стемы в начале координат асимптотически устойчиво.
Для иллюстрации этих теорем на рис. 4.20 построено нес-
колько замкнутых кривых определенно-положительной функции
V(x, у)=С для значений CiC
<С2<С3. Аргументами функ-
ции V (х, у) являются откло-
нения х и у от состояния рав-
новесия, которые изменяются
во времени в соответствии с
характером возмущенного дви-
жения. Поэтому и значения
функций V[x(Z), y(t)] и ее про-
изводной dV/dt также изменя-
ются во времени.
Пусть производная dV/dt знакоопределенна и имеет противо-
положный с V знак, для рис. 4.20 она определенно-отрицательна
(dV/dt<0). Если в начальный момент to Ё-функция имела значе-
ние Ео=Сз, то за время t—to она изменится на величину
t
V~ Vo= f — dt<0. . ’(4-96)
J dt
t 0
Очевидно, У<У0 = С3. В рассматриваемых условиях с течением
времени функция V последовательно проходит через значения
Со, С2, С} и вместе со своими компонентами х и у приближается
к началу координат (линия 1 на рис. 4.20), что означает асимпто-
тическую устойчивость состояния равновесия.
Если же функция dV/dt в рассматриваемом случае знакопо-
стоянна (отрицательна), то в процессе уменьшения V, происхо-
дящем согласно (4.96), она может достичь значения V=Vlt при
котором dV/dt=It при %i#=0. Тогда дальнейшее уменьшение V
функции, т. е. приближение к состоянию равновесия приостано-
вится. Этому соответствует неасимптотическая устойчивость со-
стояния равновесия и линия II на рис. 4.20.
Прямой метод Ляпунова является исключительно эффектив-
ным методом исследования устойчивости состояния равновесия
нелинейных систем. Основной трудностью на пути его использова-
ния является отсутствие общего метода построения функций Ля-
пунова, хотя существует ряд приемов, пригодных для уравнений
вариаций определенного типа.
Пример. Пусть возмущенное движение описывается уравнениями
dx/dt=y~(2xs, dy/dt=—х~5ух (4.97)
142
с состоянием равновесия х=у—0. Линеаризация уравнений (dxjdt=y и
„ сРх
dy/dt——х) приводит к общему уравнению возмущенного движения----------f-x=O
с мнимыми корнями характеристического уравнения, что означает неасимптоти-
ческую устойчивость состояния равновесия линеаризованной системы и, как
следствие, необходимость анализа устойчивости нелинеаризованиой системы.
Выберем знакопеременную (определенно-положительную) функцию Ляпуно-
ва вида
V(x, у) =х%+у2. (4.98)
Производную по времени функции Ляпунова вычисляем как производную
сложной функции
д v g у dv dy
dt дх dt "f" ду dt '
Используем (4.98) и (4.97)
dV
= 2х (у—2x:i) —,2у (х'+15у3) =—2 (Ъх^+ЪуЬ).
dt
Производная dV'Idt оказалась знакоопределенной функцией противоположно-
го с V знака — определенно-отрицательной. Следовательно, в силу упомянутой
выше второй теоремы Ляпунова состояние равновесия нелинейной системы
асимптотически устойчивое.
4.3. КРАТКАЯ ХАРАКТЕРИСТИКА МЕТОДОВ АНАЛИЗА
НЕЛИНЕЙНЫХ АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМ
Как было показано выше, процессы, происходящие в автоко-
лебательных системах, описываются нелинейными дифференци-
альными уравнениями. Точных аналитических методов решения
нелинейных дифференциальных уравнений (за редким исключе-
нием) не существует. В связи с этим было разработано большое
количество разнообразных методов приближенного анализа не-
линейных цепей. Каждый метод обладает определенными пре-
имуществами при решении некоторых задач, уступая другим в
иных случаях. Даже при исследовании одной и той же схемы ав-
тогенератора в зависимости от режима его работы, интересую-
щих нас вопросов, от требуемой точности и наглядности решения
приходится применять различные методы.
Наиболее распространенными методами являются: метод ли-
неаризации; квазилинейный метод (метод гармонической линеари-
зации); метод медленно меняющихся амплитуд; метод фазовой
плоскости; метод малого параметра; метод математического
моделирования. Каждый из этих методов обладает рядом разно-
видностей.
Метод линеаризации заключается в замене нелинейных зависимостей линей-
ными, что возможно только для малых возмущений (отклонений). Применяется
в основном при исследовании условий устойчивости и условий самовозбужде-
ния. Для исследования поведения системы при больших амплитудах (стацио-
нарные автоколебания, переходные процессы) не пригоден- Этот метод исполь-
зовался в § 4.2.
Квазилинейный метод, получивший наибольшее распространение для инже-
нерных расчетов стационарных режимов автогенераторов (пригоден и для изу-
чения переходных процессов), основан на исследовании соотношений между
143
первыми гармониками токов и напряжений и замене нелинейного элемента эк-
вивалентным линейным, характеризуемым средним по первой гармонике пара-
метром. После такой замены нелинейная цепь описывается линейными уравне-
ниями и может исследоваться методами линейной теории (например, методом
комплексных амплитуд). Нелинейность схемы проявляется в зависимости средне-
го параметра от амплитуды. Квазилинейный метод применим для систем, коле-
бания в которых близки к гармоническим.
Квазилинейный метод разработан Ю. Б. Кобзаревым, другой его вариант —
С. И. Евтяновым; в последнее десятилетие благодаря работам Е. П. Попова,
Л. С. Гольдфарба н других получил широкое развитие в теории автоматическо-
го регулирования под названием метода гармонической линеаризации.
Метод медленно меняющихся амплитуд, так же как и квазилинейный, при-
годен для исследования колебаний, близких по форме к синусоидальным. Такие
колебания в большинстве случаев являются следствием использования высоко-
добротных контуров. Для последних характерно сравнительно медленное изме-
нение во времени амплитуды и фазы колебаний (малое относительное изменение
этих параметров за период колебаний). Использование этой особенности позво-
ляет упростить и понизить порядок нелинейного дифференциального уравнения,
описывающего работу схемы.
Метод широко используется при исследованиях разнообразных нелинейных
систем, в том числе при анализе стационарных и переходных процессов в авто-
генераторах.
Метод медленно меняющихся амплитуд впервые был предложен и приме-
нен для исследования автогенераторов голландским физиком Ван дер-Полем. В
последующем трудами советских ученых (Л. И. Мандельштама и Н. Д. Папа-
лекси, А. А. Андронова, Н. М. Крылова и Н. Н. Боголюбова, К- Ф. Теодорчнка
и др.) был создан ряд разновидностей этого метода.
Метод фазовой плоскости является графическим методом, используемым
для анализа стационарных и переходных процессов по интегральным кривым
нелинейного дифференциального уравнения второго порядка. Метод является
более общим, чем упомянутые выше, пригоден для исследования как синусо-
идальных, так и несииусоидальных (релаксационных) колебаний Недостатки
метода состоят в необходимости выполнения трудоемких построений и отсутст-
вии аналитических решений.
Метод фазовой плоскости был разработан для решения задач небесной ме-
ханики выдающимся французским математиком А. Пуанкаре н развит примени-
тельно к задачам радиотехники А. А. Андроновым и другими.
Метод малого параметра основан на отыскании решения нелинейного диф-
ференциального уравнения в виде ряда по степеням малого параметра. Метод
пригоден для определения параметров стационарных колебаний. Используется
при теоретических исследованиях автоколебаний.
Метод первоначально также был разработан для изучения движения планет
(А. Пуанкаре и другие). Дальнейшее его развитие связано с работами А. А. Анд-
ронова, Л. И. Мандельштама, Н. М. Крылова, Н. Н. Боголюбова, Ю. А. Митро-
польского н других советских ученых.
Математическое моделирование основано на формировании уравнений, опи-
сывающих процессы в нелинейных цепях, в виде, удобном для решения иа вы-
числительной машине, и выполнении исследований с ее помощью. Преимущества
этих методов возрастают по мере повышения порядка нелинейных дифферен-
циальных уравнений, описывающих поведение системы. Нередко они являются
единственно возможными.
В следующих параграфах рассматриваются основные черты
наиболее распространенных методов (квазилинейного, медленно
меняющихся амплитуд, фазовой плоскости), а также вытекающие
из их применения общие особенности автогенераторов. Вопросы
машинного анализа нелинейных цепей вынесены в гл. 7.
144
4.4. КВАЗИЛИНЕЙНЫЙ МЕТОД
стационарный режим автогенератора
Квазилинейный метод, как уже упоминалось, является основ-
ным инженерным методом анализа автогенераторов синусоидаль-
ных (точнее, почти синусоидальных) колебаний. На рис. 4.21 при-
ведена обобщенная схема генератора с контуром в выходной це-
пи усилителя, активным элементом (АЭ) которого могут быть
электронная лампа (триод, те-
трод, пентод), биполярный или
полевой транзистор. Благо-
даря значительной добротно-
сти (обычно порядка 50—200)
колебательные контуры генера-
торов обладают большой изби-
рательностью. Поэтому даже
тогда, когда выходной ток уси-
лителя сильно отличается от
синусоидального из-за нели- рис. 4.21
нейности АЭ, напряжения на
контуре ик и на входе АЭ иъ оказываются почти синусоидальными,
лишь незначительно отличающимися от их первых гармоник
WkI И 1/вЬ
Квазилинейный метод применяется для исследования автогене-
раторов и других устройств, в которых напряжения (или токи)
мало отличаются от гармонических. Он состоит в замене соотно-
шений между токами и напряжениями в схеме соотношениями
между их первыми гармониками. Поскольку эти величины явля-
ются гармоническими одной частоты, их можно характеризовать
комплексными амплитудами, связанными между собой комплекс-
ными уравнениями. Решая последние, можно определить ампли-
туды и частоты стационарных колебаний, условия самовозбуж-
дения, исследовать переходные процессы и т. п.
Анализируемый генератор состоит из двух частей: нелинейной
(АЭ) и линейной (контура и катушки связи). Запишем соотноше-
ния между комплексными амплитудами первых гармоник токов
и напряжений. Нелинейный элемент будем характеризовать сред-
ней крутизной, определяемой отношением комплексных амплитуд
тока /К1 в выходной цепи АЭ к амплитуде напряжения возбуж-
дения ЦЕ1 на входе АЭ:
Sep—/к1/Рвь (4.99)
Вследствие нелинейности АЭ Scp зависит от амплитуды С7В1.
Пренебрегая влиянием напряжения t7Ki на ток /кь получим из
(4.99)
Лк! — ScptAn.
(4.100)
М5
Если первая гармоника тока iM совпадает по фазе с первой
гармоникой напряжения возбуждения ив1, средняя крутизна ока-
зывается действительной
Scp^Scp. (4.101/)
Однако на практике выражение (4.101) может и не иметь
места, например, при работе на достаточно высоких частотах, на
которых в результате конечного времени прохождения носителей
через прибор ток iK1 отстает по фазе от mb1!. Поэтому в общем
случае среднюю крутизну (4.99) следует считать комплексной.
Для линейной части схемы рис. 4.21 при iBl = 0 имеем I7Ki =
IVbi = Ko.c^ki = Ко.с2э/кь (4.102)
причем комплексный коэффициент обратной связи К0.с = Ов1 Оы =
=M]L=K0C оказывается действительным. Произведение Ko.cZ3,
характеризующее линейную часть схемы, называют управляющим
сопротивлением
Zy = Ko.cZ3. (4.103)
Заметим, что напряжение иа1 на выходных зажимах активного
элемента иа1=Ек—им, поэтому переменные составляющие напря-
жений иа1 и цК1 находятся в противофазе:
Оа1 = ~ йк1. (4.104)
В стационарном режиме должны одновременно удовлетво-
ряться оба уравнения (4.100) и (4.102). Подставляя (4.100) в
(4.102), получим комплексное уравнение генератора:
ScpK0.cZ3=l. (4.105)
Оно имеет очевидный физический смысл: в стационарном
режиме комплексный коэффициент передачи
по замкнутому контуру генератора равен еди-
нице. Если воспользоваться (4.103), придем к иной форме ком-
плексного уравнения генератора:
ScpZy=l. (4.106)
Представляя каждую из комплексных величин в показательной
форме
е ___с 1 4*8
эср—оСре ,
Ко.с=/<о.с е’Фк, Z3=Z3 е', (4.107)
можем записать уравнение (4.105) в виде
ScpKo.cZ. е1(4)5 + Фк + Фг * = 1. (4.108)
1 Другим фактором, вызывающим появление сдвига фаз между iKi и «вь
как будет показано ниже, является несинусоидальность колебаний.
146
Уравнение (4.108) имеет место, если одновременно выполня-
ются два условия:
<jPs+<pK+<Pz=O, 2л,(4.109)
5срЛо.С'£э= 1. (4.110)
Соотношения (4.109), (4.110) являются важнейшими в теории
автогенераторов, определяющими параметры стационарного ре-
жима. Выражение . (4.109), называемое условием баланса фаз, оз-
начает, что в стационарном режиме сумма всех фазовых сдвигов
по замкнутому контуру генератора равна нулю или целому числу
2л. Поскольку каждый из сдвигов фаз, входящих в выражение
(4.109), зависит от частоты по-разному, в большинстве генерато-
ров существует лишь одна частота со, на которой выполняется ус-
ловие баланса фаз, т. е. на которой возможно генери-
рование колебаний. Таким образом, из условия баланса
фаз определяется частота генерируемых колебаний. В схеме рис.
4.21 <рк=0, а потому, если <ps = 0, т. е. сдвига фаз в АЭ не проис-
ходит, то и <pz = 0. При этом частота генерируемых колебаний со
равна резонансной частоте контура соо- Если же имеется неболь-
шой сдвиг фаз <ps#=0, то частота генерируемых колебаний долж-
на настолько отличаться от соо, чтобы возникающий в кон-
туре сдвиг фаз <pz полностью компенсировал <ps: <pz =
——arc tg Q (2А'<в/|£оо) = —<ps.
Выражение (4.110), называемое условием баланса амплитуд,
говорит о том, что в стационарном режиме коэффициент переда-
чи по замкнутому контуру генератора равен единице. В этом
условии две величины (А0.с и Z3) от амплитуды .колебаний не за-
висят, а одна (Sep) зависит от 17Е1. Следовательно, условие ба-
ланса амплитуд выполняется лишь при определенной амплиту-
де UB1. Для определения амплитуды стационарных колебаний
удобно (4.110) переписать в виде
•^ср (ИВ1) = 1/Ао.сД. (4.111)
На рис. 4.22 построены зависимость 5Ср(ДВ1), называемая
характеристикой средней крутизны, и прямая обратной связи,
проведенная на уровне l/A0.cZ3. Точка пересечения этих зависи-
мостей определяет стационарную амплитуду колебаний U'Bi, для
которой выполняется условие баланса амплитуд. Если частота
генерируемых колебаний равна резонансной частоте контура, то
Z3=J^S и условие баланса амплитуд
Sc^HbJ^I/Ao.c-Rs. (4.1'1 Г)
В случаях, когда часть сдвигов фаз (в 4.109) оказывается за-
висящей не только от частоты, но и от амплитуды колебания,
определение амплитуды и частоты стационарных колебаний тре-
бует совместного решения (4.109) и (4.110).
Использованное выше уравнение (4.100) не учитывает влияния выходного
напряжения усилителя на ток 1К1. Более точные результаты получаются, если
147
считать, что ток iK является функцией управляющего напряжения иу=цв4-
+Dua, где П-Cl, и заменить (4.100) на
/К1=8сР((7в1Ч-С(7а1). (4.112)
Подстановка (4.112) и (4.104) в (4.102) приводит к комплексному уравне-
нию генератора
ScpZa(Ko.c—D)=‘l (4.113)
или Ko.c=C+l/ScpZ0, известному как условие Баркгаузена стационарного ре-
жима автогенератора. Учет влияния напряжения мк1, как следует из сопостав-
ления (4.105) и (4.113), сводится к некоторому изменению величины коэффи-
циента обратной связи до К'о.с=Ко.с—D, что не меняет характера основных
зависимостей, а лишь несколько влияет на количественные соотношения.
Рис. 4.22
Рис. 4.23
При выводе (4.105) считалось, что входной ток АЭ iB=0 Если (в=/=0 (что
характерно для биполярных транзисторов и электронных ламп, работающих с
сеточными токами), целесообразно активный элемент считать идеальным с
iB=0, а его входное сопротивление Zsx = Osl/Isl рассматривать как нагрузку,
включенную на выходе линейной части схемы. В таких случаях может оказаться
более удобным комплексное уравнение генератора в виде (4.106). Если средняя
крутизна АЭ — величина действительная, a Zy —iR7+jXy—комплексная, урав-
нение (4.106) разбивается на два действительных
ScpJ?y=l, Ху=0, (4.1.14), (4.115)
обеспечивающих определение обоих параметров стационарных колебаний. При
этом нелинейность входной характеристики АЭ можно характеризовать сред-
ним по первой гармонике входным сопротивлением ZBi.cf(Hbi) = I7bi//bi.
Соотношения, свойственные квазилинейному методу, могут
быть получены и из нелинейного дифференциального уравнения
генератора. Так, заменяя в (4.8) для схемы рис. 4.16 напряжение
ив и ток iK их первыми гармониками и полагая, что первая гармо-
ника тока может быть определена как iKi=Scp(UBl)uBl, получим
уравнение
’----™ ScP <Ub± 1 + Ю2 и = о (4.116)
Л2 [/?ЭС LC .1 dt 1 0 B1 v
являющееся линейным для постоянной амплитуды напряжения
С7В1. Если в составе генератора имеется колебательный контур с
большой добротностью, быстрые изменения амплитуды UKi на-
пряжения на нем (а следовательно, и t/Ei) оказываются невоз-
можными. Поэтому даже во время переходных процессов установ-
ления колебаний можно рассматривать Scp(UBi) как величину
постоянную в течение периода колебаний и медленно (мало) из-
меняющуюся от одного периода к другому. В стационарном ре-
148
жиме генератор эквивалентен контуру с коэффициентом затуха-
ния -
1/1 М Scp \
сс = — I-----— р ).
2 \ RSC LC J
Колебания будут незатухающими, если аэ=0 или
Scp=L/M7?3.
(4-117>
'(4.118)
В этом случае эквивалентный контур не имеет потерь, часто-
та колебаний в нем согласно (4.116) равна резонансной частоте
иоо; выражение (4.118) совпадаете (4.11Г)-
Уравнение (4.116) позволяет получить и новые результаты:
исследовать устойчивость стационарного режима и вывести урав-
нение, пригодное для расчета переходных процессов .в генерато-
ре. Предположим, по какой-то причине амплитуда колебаний t7Br
оказалась большей, чем t/'Bi, на величину At7B1: HBi = U'rA +At7Bi.
При этом коэффициент затухания контура аэ окажется отличным от
нуля п амплитуда колебаний начнет изменяться пропорционально'
е-“эг . Стационарный режим будет устойчивым, если большая
амплитуда UB1 станет затухать, т. е. если при UBi>U'Bi величина.
Оз окажется положительной. Для этого согласно (4.117) требу-
ется, чтобы
ScP(t7,Bi+At7Bi)«Scp(C7/B1)+AHBi^^<5cp(t/'B1) (4.119)
d с/В1
ИЛИ'
dSCp/d t7Bi «).
(4.120)
Стационарный режим автоколебаний являет-
ся устойчивым, если производная средней кру-
тизны по амплитуде напряжения отрицательна.
Таким образом, стационарный режим с амплитудой U'B1 (на рис.
4.22) является устойчивым.
В колебательном контуре, описываемом уравнением
4-2а (-wnw = 0>
dt*------dt °
амплитуда колебаний изменяется по закону U=I70 е at, а потому
dU
dt
= -aU.
(4.121)
Подставляя в (4.121) аэ вместо а, получаем
=___1_/5сРЯэЛ4_ (4.122)
dt_ ШэСХ L )
Умножая обе части равенства (4.122) на 2/соо и принимая во1
внимание, что L/.RSM определяет среднюю крутизну в стационар-
ном режиме, которую обозначим здесь SCp<> . получим уравнение
переходного процесса генератора для произвольной зависимости
----lit/, .(4.123)
®о dt \ScPo I
решение которого позволяет определить изменение амплитуды
U(t) в процессе установления колебаний.
СВЯЗЬ УСЛОВИИ БАЛАНСА АМПЛИТУД И БАЛАНСА МОЩНОСТЕЙ
В автогенераторах (см. рис. 4.21), когда частота колебаний
со совпадает с резонансной частотой контура, напряжение I7Ki
находится в фазе, a Uai=—Uki в противофазе с /кь Последнее
означает, что АЭ обладает отрицательным сопротивлением, т. е.
-является источником энергии переменного тока частоты со. Соот-
ветствующая эквивалентная схема генератора для переменного
тока, в которой АЭ заменен источником энергии, приведена на
рис. 4.23.
Мощность, потребляемая на любой частоте со сопротивлени-
ем Рэ,
P-=U2K1/2R3. (4.124)
Ток /К1 с учетом условия баланса фаз (4.109)
Ап= СццКо-с^ср е ( к = C'kiAo.c'Scp е 2. (4.125)
Для параллельного контура tg<pz=—Q(2Aco/coo) =—Qe, поэтому
cos <pz= 1 + tg2 <pz= Г/К 14-iQ2e2.
Мощность, отдаваемая на частоте со нелинейным
элементом, Р+=—/KrHai cos ср, где ср = п—<pz— сдвиг
Ду 7ki и Оа1. Поскольку 'Ual=UKi,
Р+ =----COS <pz
(4.126)
активным
фаз меж-
•или с учетом (4.125) и (4.126)
P+=-Ko.cSCpH2Ki/2K 1 + W- (4.127)
В стационарном режиме должно выполняться условие балан-
са мощностей:
Р++Р_=0. (4.128)
Подстановка (4.124) и (4.127) в (4.128) приводит к условию
баланса амплитуд (4.110). Следовательно, условие баланса
мощностей (4.128) определяет тот же самый ста-
ционарный режим, что и условие баланса ам-
плитуд. Расчет стационарных режимов генераторов, работаю-
щих на частотах, не превышающих сотен мегагерц, когда в гене-
раторах применяются элементы с сосредоточенными параметрами,
•обычно основывается на использовании условия баланса ампли-
150
туд. При расчетах генераторов сверхвысоких частот, использую-
щих элементы с распределенными постоянными, где колебания
обычно характеризуют не амплитудой, а мощностью, определение
стационарных режимов опирается на условие баланса мощностей.
При этом следует помнить и о наличии второго обязательного ус-
ловия стационарного режима: условия баланса фаз.
как показано на рис.
Рис. 4.24
МЯГКИЙ И ЖЕСТКИЙ РЕЖИМЫ САМОВОЗБУЖДЕНИЯ КОЛЕБАНИЙ
В квазилинейном методе для определения амплитуды стацио-
нарных колебаний применяется один из двух равноценных подхо-
дов. Первый из них, базирующийся на характеристиках средней
крутизны, пояснен на рис. 4.22. Второй, основанный на использо-
вании колебательных характеристик, излагается ниже.
Колебательной характеристикой называется зависимость ам-
плитуды /К1 первой гармоники выходного тока нелинейного эле-
мента от амплитуды 77в входного гармонического напряжения.
/К1=Ф1(1/в). (4.129)
Колебательная характеристика определяется по динамической:
вольт-амперной характеристике прибора,
4.24: при выбранном смещении £в
для различных амплитуд входно-
го напряжения (t////B>C7"B>t//B)
строим графики тока iK и рассчи-
тываем амплитуды их первых
гармоник 7кь Для смещения £'в,
соответствующего участку с пос-
тоянной крутизной S, при неболь-
ших амплитудах UB IKi=SUB.
По мере увеличения UB напряже-
ние все больше заходит на уча-
стки меньшей крутизны, в резуль-
тате чего рост амплитуды 7Ki за-
медляется. Соответствующая ко-
лебательная характеристика I
приведена на рис. 4.25а.
Если смещение Е"в соответст-
вует нижнему загибу характери-
стики iK(uB), то с увеличением UB сначала IKi растет быстрее
UB, а затем приблизительно пропорционально UB, что приводит
к колебательной характеристике II. При больших амплитудах
UB амплитуды 7Ki всегда уменьшаются из-за влияния напряже-
ния на нагрузке.
При любой амплитуде UB средняя крутизна
5cp=tga, (4.130)
где a — угол наклона линии, соединяющей точку колебательной
характеристики с началом координат. На рис. 4.256 построены
характеристики средней крутизны Sep (££>), соответствующие ко-
лебательным (7 и II). При малых 77в Scp определяется крутизной
•S в рабочей точке
Scp(0)=S. .(4.131)
Режим работы генератора с характеристиками I называется
мягким, а с характеристиками II — жестким. Отметим, что при
характеристике II наибольшее значение Scp соответствует точке
Л на рис. 4.25а, в которой касательная к колебательной характе-
ристике проходит через начало координат.
Для аналитического определения колебательной характеристики (4.129) до-
статочно в выражение 1к=Ф(ив) характеристики прибора, аппроксимированной
относительно рабочей точки, подставить
un=UB cos at (4.132)
и определить 7К| по формуле ряда Фурье
л
/К1= '— cos <af)cos co/dcof. (4.133)
—л
Поделив 7ki на UB, получаем аналитическое выражение характеристики
средней крутизны.
Если вольт-амперная характеристика аппроксимирована относительно ра-
бочей точки полиномом
fK = fl<r+fllHB+fl2HaB+fl3HSe+fl4W4B+fl5U5B+ .... (4.134)
то для определения /К1 достаточно подставить (4.132) в (4.134) и использовать
•формулы (3.9) кратных аргументов. В итоге получим
3 5
7кг = бв + fl3 t/2— Со 7/5 + . . . > (4.135)
4 о
3 5
Scp = fli + — a3U2B + — а5и*в+... (4.136)
4 о
Согласно (4.131) at=S. Члены полинома (4.134) с четными степенями wB
не создают компонент IKi. Поэтому определение колебательной характеристики
можно производить по нечетной части вольт-амперной характеристики (4.134)
/к.нч—ЯШв~|-Сзи3в-|-Я5Лэв-|- ..., (4.137)
^построение которой описано в § 2.2.
Выясним, какова должна быть наименьшая степень аппроксимирующего
аюлинома (4.134) нли (4.137) с тем, чтобы он качественно правильно переда-
152
вал важнейшие особенности характеристик мягкого и жесткого режимов. Длю
того чтобы ордината /К1 колебательной характеристики мягкого режима при;
малых амплитудах входного сигнала росла пропорционально UB, коэффициент,
с, должен быть положительным. Для последующего замедления роста IKi не-
обходимо а3<0. Для жесткого режима знаки коэффициентов полинома долж-
ны быть <21>0 (для начального возрастающего участка), а3>0 (для последую-
ющего более быстрого возрастания ZKi) и Cs<0 (для ограничения амплитуды;
/К1).
Таким образом, при анализе работы генератора в
мягком режиме вольт-амперная характеристи-
ка его нелинейного элемента должна быть ап-
проксимирована полиномом не ниже третьей сте-
пени, а в жестком не ниже пятой степени. Пере-
ходим к изучению особенностей каждого режима.
Мягкий режим. На рис. 4.26а, помимо колебательной характе-
ристики /к1=Ф(^в1), построено семейство характеристик обрат-
ной связи, определяющих зависимость Ust от /К1 через линейные-
элементы генератора. Эти характеристики соответствуют выра-
жению (4.102), если в последнем перейти от комплексных ампли-
туд к модулям: t/B1=/C0.cZaZK1. Решая это уравнение относитель-
но /К1 и учитывая, что /С0.с=7И/£, получаем уравнение характери-
стик обратной связи
IKi<—(L/MZ3) UBi. (4.138)
На рис. 4.26а характеристики обратной связи приведены для
различных значений М: М1<М2<М3<Л/14. Стационарным режи-
мам соответствуют точки пересечения колебательной характери-
стики и характеристики обратной связи. При Af=Af3 точек пере-
сечения окажется две: точка О, соответствующая состоянию рав-
новесия :(7В1 = 0, и точка Лз, соответствующая динамическому ре-
жиму с амплитудой U'm. В каждой из них выполняется условие
баланса амплитуд. Однако это еще не означает, что любой из
этих режимов может быть получен. В реальных схемах может
быть получен только устойчивый режим.
Для проверки устойчивости состояния равновесия (точки О)
предположим, что за счет какого-т*о возмущения возникло коле-
бание напряжения с небольшой амплитудой &UBi. Это вызовет
15S
(4.139)
’появление тока с амплитудой Д7кь определяемой по колеба-
тельной характеристике. В свою очередь этот ток создает на-
пряжение на входе АЭ с амплитудой Д77в2, определяемой по ха-
рактеристике обратной связи, причем At7B2>Af7Bi, что вызовет
дальнейшее увеличение тока и т. д. В итоге амплитуда случайно
возникшего колебания возрастает, т. е. состояние равновесия
оказывается неустойчивым. Аналогично производится проверка
устойчивости токи Аз путем введения предположения о случай-
ном отклонении амплитуды UBi от U'Bi в сторону больших и мень-
ших значений. Легко убедиться при этом, что динамический ре-
жим, соответствующий точке Аз, является устойчивым, так как
небольшие отклонения затухают.
Приведенные рассуждения об устойчивости стационарного ре-
жима можно заменить аналитическим критерием устойчивости.
Запишем колебательную характеристику IBi=Scp(;UBi)UB и про-
дифференцируем это выражение по UBi:
JJ^ = u dS^_ s
dUB1 dUB1 cp
Устойчивым режимам соответствует (4.120). При этом
d Ля Ли
dUB1 UB1
Стационарный режим является устойчивым,
если в точке пересечения характеристик кру-
тизна колебательной характеристики меньше
крутизны характеристики обратной связи, и не-
устойчивым в противоположном случае. Применение этого крите-
рия к точкам О и Аз подтверждает сделанный ранее вывод о не-
устойчивости состояния равновесия и устойчивости динамического
режима.
Графики рис. 4.26а позволяют установить зависимость ампли-
туды колебаний, например /К1 от изменения М, определяющей ве-
личину обратной связи. При увеличении М от нуля до Af2=AfKp
единственным стационарным и притом устойчивым режимом яв-
ляется состояние равновесия. При Af>Af2 появляются два стацио-
нарных режима, причем устойчивым оказывается динамический
режим (точки Аз и А4). Поэтому при М>М2 с ростом М ампли-
туда 7ki плавно изменяется, как показано на рис. 4.266. При
уменьшении М амплитуда IKi изменяется в соответствии с той же
характеристикой и при М2=Мкр колебания исчезают.
Режим генератора, в котором амплитуда коле-
баний плавно меняется с изменением обратной
связи, называется мягким режимом самовозбу-
ждения колебаний.
Жесткий режим. Колебательная характеристика и семейство
характеристик обратной связи для различных значений
Л4 (Л11<Л12<Л1з<Л14) приведены на рис. 4.27а. При Л4=Л1з ха-
рактеристики пересекаются в трех точках, соответствующих трем
154
стационарным режимам: О — состоянию равновесия, Вз и Аз—-
динамическим режимам с амплитудами t7"Bi и U'Bi. Рассматри-
вая качественно процесс изменения /к1 и UBi при небольших на-
чальных отклонениях ДС7В1 от значений UBi, соответствующих
точкам О, Вз и Аз, или применяя критерий (4.139), убеждаемся в
том, что точки О и Лз соответствуют устойчивым, а точка Вз —
неустойчивому режимам.
Рис. 4.27
Определим зависимость амплитуды 7Ki от величины обратной
связи. При увеличении М от нуля до значения М~М4, при кото-
ром характеристики оказываются касательными в начале коорди-
нат, режим, соответствующий точке О, является устойчивым и
малые флуктуации нарастания колебаний не вызывают. При
М=М4 режим, соответствующий точке О, становится неустойчи-
вым и малые колебания сразу нарастают до больших ампли-
туд, соответствующих точке Л4. При дальнейшем увеличении М
изменение амплитуд происходит по колебательной характеристи-
ке. Если теперь уменьшать М до A4=Af2, то при М=М4, так же
Как и при М=Мз, срыва колебаний не произойдет, так как дина-
мические режимы, определяемые точками Л4 и Аз, являются ус-
тойчивыми. Колебания сорвутся, когда М уменьшится до Af=Af2,.
так как соответствующая ему точка Л2 неустойчива: небольшое
уменьшение амплитуды UB\ вызовет ее дальнейшее уменьшение
до нуля. Зависимость /К1 от М для жесткого режима построена,
на рис. 4.276: сплошным линиям соответствуют устойчивые режи-
мы, пунктирной — неустойчивые.
Жесткий режим самовозбуждения колебаний
характеризуется скачкообразным возникнове-
нием колебаний большой амплитуды при плав-
ном увеличении обратной связи и скачкообраз-
ным срывом колебаний при уменьшении обрат-
ной связи. Между этими значениями обратной связи сущест-
вует область затягивания (заштрихована на рис. 4.276) в преде-
лах М2<М<М4.
155
Если возбудить .колебания в генераторе при A4^Af4, а затем
уменьшать Af до значений, соответствующих этой области (напри-
мер, Af=Af3), колебания в генераторе сохранятся. Если же увели-
чивать М до Af3 от значений, меньших М2, колебания в схеме не
возникнут. В этом последнем случае колебания можно возбудить,
•если за счет какого-либо внешнего воздействия создать на корот-
кое время колебания с амплитудой UBl>.U"Br. дальше она сама
увеличится до U'Bi. Этого иногда можно добиться за счет пере-
ходных процессов, возникающих при включении напряжения пи-
тания.
Выведенные выше соотношения позволяют получить и аналитическую за-
висимость стационарной амплитуды колебаний от параметров генератора. В
мягком режиме колебательная характеристика может быть записана
3
ZKi=SC/Bi—— fl3t/sB1, (4.140)
где S=fli—крутизна характеристики активного элемента в рабочей точке, а
.сз>0. Характеристика обратной связи (4.138) для схемы рис. 4.21 при
/Ki=(£/M7?3)t/B1.
Подставляя /К1 в (4.140) для стационарного режима с UBi = U'Bi, получаем
, 2 Л L-
UB, = —— 1 / S — —— . (4.141)
Y За3 г А1/?э
Выражение (4.141) справедливо при 5^£/ЛИ?э или 7И^ЛГкр.
Автосмещение. В автогенераторах широко применяется авто-
матическое смещение, действие которого проиллюстрируем на
примере схемы рис. 4.28. Выберем исходное смещение на базе
транзистора соответствующим участку характеристики гк(Пб) с
большой крутизной S = — , на котором происходит мягкое само-
dug
возбуждение колебаний при небольшой взаимоиндукции М. В про-
цессе нарастания амплитуды колебаний в цепи базы происходит
детектирование колебаний, возрастает постоянная составляющая
тока базы До, происходит смещение рабочей точки транзистора,
определяемой выражением Е'б=-Еб—ДоДб, влево (рис. 4.29).
Уменьшение смещения на базе транзистора вызывает уменьшение
средней крутизны коллекторного тока. При правильно выбранной
величине i/Д переходный процесс в генераторе заканчивается
установлением стационарного режима с отсечкой тока со свойст-
венным ему более высоким КПД.
Таким образом, применение автосмещения позволяет совме-
стить режим мягкого самовозбуждения колебаний с достиже-
нием более высоких КПД в жестком режиме.
ВЛИЯНИЕ ВЫСШИХ ГАРМОНИК
В квазилинейном методе при определении первой гармоники
тока напряжение на входе активного элемента предполагается
синусоидальным. При этом на не слишком высоких частотах при-
бор считается безынерционным, в котором первая гармоника то-
ка д'к1 совпадает по фазе с напряжением ивЬ т. е. Scp считается ве-
личиной действительной. Между тем установление стационарных
колебаний в генераторах всегда вызывается уменьшением коэффи-
циента передачи нелинейного элемента при больших амплитудах
из-за его нелинейности, в результате чего ток iK оказывается ис-
каженным по сравнению с напряжением (4.132):
iK=Д0+Д1 cos <bZ+7K2COS 2<j)/+7K3COs 3<в/+...
Если генерация происходит на частоте, равной резонансной ча-
стоте контура, первая гармоника напряжения на нем будет в фа-
зе с первой гармоникой тока iKi. Для всех высших гармоник со-
противление контура имеет емкостной характер. Поэтому в схеме
рис. 4.21 напряжение цв можно приближенно представить как
wB= f7Bj cos -|- t7B2cos (2(o t-—- \ cos( 3<b t — .., (4.142)
причем при достаточной избирательности контура t7Bi^>t7B2,
^§>Е7вз. ...
Если аппроксимировать характеристику нелинейного элемен-
та полиномом (к=До+«1«в+«2П2в и ограничиться для упрощения
расчетов первыми двумя компонентами (4.142), первая гармони-
ка тока окажется равной1
1лк1=7к1 cos со/+(z2t7Bit7B2 cos^co t-(4.143)
где /k1 = Gi17bi. Выражение (4.143) можно записать в виде
i'Ki = I'kI -cos (со/+<р«),
где
1'к1=1к1У1 + (а2/а1)2и2в , igqs = —a2UB2!ax. (4.144)
; 1 В этом разделе величины /К1 и Sep соответствуют uB = UBi cos со/, а
7'к] и S'cp — полигармоническому напряжению ив (4.142).
157
На рис. 4.30 построена векторная диаграмма для рассматривае-
мого случая. Вторая компонента в (4.143), появившаяся из-за на-
личия высших гармоник в напряжении ив, приводит, во-первых, к
некоторому изменению амплитуды (Z'ki^/ki) и средней крутизны
•j,cp=/,Ki/<VBi==5Cp]/l+ (a2/ai)2U2B2, во-вторых, к возникновению
сдвига фаз между первыми гармониками тока и напряжения,
т. е. к появлению отличной от нуля фазы средней крутизны q)s<0,
определяемой из (4.144).
Особенно важным является последнее обстоятельство, озна-
чающее, что при наличии высших гармоник в напряжении на вхо-
де нелинейного элемента его средняя крутизна становится комп-
лексной, а аргумент оказывается зависящим от уровня высших
гармонических. Полагая <pK=0, перепишем условие баланса фаз
(4.109) для схемы рис. 4.21 как
<Pz=— <ps. (4.145)
Для небольших расстроек
ф2=—Q2A<b/o)o, (4.146)
Подставляя (4.146) в (4.145), получаем '
(4.147)
Из графического определения Д&> на рис. 4.31а, выполненного
в соответствии с (4.145), следует, что частота «о генерируемых ко-
лебаний меньше резонансной. Увеличение интенсивности
гармоник вызывает понижение частоты генери-
руемых колебаний.
Из установленной здесь зависимости величины и фазы средней
крутизны от амплитуд гармоник следует, что пренебрежение ими
в квазилинейном методе приводит к неточному определению как
амплитуды, так и частоты стационарных колебаний. Чем выше из-
бирательность используемых в генераторах колебательных конту-
ров, тем слабее высшие гармоники и тем более точным оказыва-
ется квазилинейный метод.
СТАБИЛЬНОСТЬ ЧАСТОТЫ АВТОГЕНЕРАТОРА
Стабильность частоты автогенератора является одной из важ-
нейших его характеристик, которая в значительной степени опре-
деляет надежность и бесперебойность работы систем связи, точ-
ность работы радиолокационных станций и т. п. Нестабильность
частоты определяется возможным относительным изменением ча-
стоты б=Д///о> где f0 — установленная частота генератора, Af —-
ее возможное изменение. В различных случаях требования к ста-
бильности частоты оказываются существенно разными. Так, если
в связных радиостанциях допустимой нередко считается неста-
бильность частоты порядка 10-4, то при приеме слабых сигналов
с далеких космических кораблей она не должна быть большей
10-ю— ю-n.
Частота колебаний автогенераторов определяется из условия
баланса фаз. Поэтому изменение любого из сдвигов фаз, входя-
щих в выражение (4.109), должно приводить к осуществлению ба-
ланса фаз на другой частоте, т. е. к изменению частоты. При
4fK=0 изменение частоты генерируемых колебаний определяется
(4.147), оно может произойти в результате изменения <ps, Q или
<ь0- Рассмотрим эти факторы.
Изменение <ps является следствием изменения содержания (ин-
тенсивности) гармоник в напряжении, действующем на входе не-
линейного элемента. Поскольку интенсивность гармоник зависит
от формы импульсов тока 1К, определяемой режимом работы авто-
генератора, всякое изменение последнего (например, за счет ре-
гулировки питающих напряжений) приводит к изменению часто-
ты. Так, если в контуре с добротностью Q=100 <ps изменится на
Iе, относительное изменение частоты согласно (4.147) будет б =
= 1/57,3-2-100^ 10—1. Уменьшения ухода частоты, вызванного
этим обстоятельством, можно добиться, повышая добротность ко-
лебательной системы. На рис. 4.316 показано, что одно и то же
изменение Дфз==ф//В—q/s вызывает меньшее изменение частоты
Д<»2<Д(01 при использовании контура с добротностью Q2>'Qi-
В контуре с большей добротностью вследствие
большей крутизны его фазовой характеристики
изменение частоты оказывается меньшим. Такой
контур обладает большей фиксирующей способностью.
Изменение резонансной частоты контура <в0 может произойти
из-за изменения величин С или iL контура вследствие изменения
температуры, влажности, давления, изменения емкости коллектор-
ного перехода данного транзистора, входной емкости следующего
каскада и т. п.
Способность контура поддерживать постоянной резонансную
частоту при изменении внешних условий называют эталонностью
колебательного контура. Поскольку генераторам приходится ра-
ботать в условиях изменяющихся температур, одним из важней-
ших показателей эталонности контура является его температур-
ный коэффициент частоты ТКЧ, определяемый относительным из-
159
менением частоты при изменении окружающей температуры па
1°С. Для уменьшения ТКЧ в качестве элементов контура исполь-
зуют конденсаторы и катушки, величины С и L которых мало за-
висят от температуры, применяют специальные методы термо-
компенсации. Когда этого недостаточно, автогенератор или его
колебательную систему помещают в термостат, обеспечивающий
поддержание постоянной температуры элементов при изменения
температуры окружающей среды.
Более высокая стабильность частоты (10~6—10-8 вместо КУ4)
генераторов в диапазоне частот от единиц килогерц до 100 МГц
достигается при использовании в качестве колебательной системы
кварцевых резонаторов. Последние представляют собой плоские
пластины, вырезанные из кристаллов кварца, на противополож-
ные поверхности которых наносятся металлические контакты.
Кварц обладает прямым и обратным пьезоэлектрическим эффек-
тами-. прямой пьезоэлектрический эффект состоит в возникновении
электрических зарядов на противоположных поверхностях в ре-
зультате механического сжатия или растяжения кристалла, обрат-
ный — в изменении размеров кристалла при изменении приложен-
ного к нему напряжения. Пластина кварца представляет собой
электромеханический резонатор, резонансная частота которого об-
ратно пропорциональна его толщине. Основное достоинство квар-
цевого резонатора — высокая добротность: до 105—106. Темпера-
турный коэффициент частоты кварцевого резонатора зависит от
ориентации вырезаемой пластины относительно кристаллографи-
ческих осей: при некоторых ориентациях он уменьшается до 10~8.
На рис. 4.32а приведена эквивалентная электрическая схема
кварца, а на рис. 4.326 частотные характеристики активной и
реактивной компонент сопротивления Z3((i)]i=iR3((o) +iAg((o). На
рис. 4.32а Lq, Cq, rq — параметры кварца, Со — емкость между
контактами кварца. Частота параллельного резонанса ио=
= ]/ (Cg+C0)/LQCQC0. Обычно Св/Со~ 10~2-е-10-3. Поэтому часто-
тэ <»1 последовательного резонанса «! = 1/LqCq=
='(l)o/J/^ 1 + Сц/Со^ (1)0 (1-Cq/ICs).
В кварцевых генераторах обычно возбуждаются колебания иа
частотах, немного мень-
ших (Оо, где Х3 кварца
имеет индуктивный ха-
рактер и где | dX^da |, а
значит, и крутизна фазо-
вой характеристики кон-
тура велики, что способ-
ен ствует повышению ста-
бильности частоты.
На СВЧ в качестве ста-
билизирующих контуров
а) ф) используют полые резона-
торы с добротностью
Рис. 4.32 Ю4___105
160
П 4.5. МЕТОД МЕДЛЕННО МЕНЯЮЩИХСЯ АМПЛИТУД
УКОРОЧЕННЫЕ УРАВНЕНИЯ
Данный метод, так же как и квазилинейный, применим в тех
случаях, когда возникающее колебание близко по форме к гармо-
ническому, что обычно имеет место при использовании в автогене-
раторе контура с достаточно высокой избирательностью. Уравне-
ние, описывающее процессы в таких схемах, может быть записано
в виде
(4.М8).
Подобными являются встречавшиеся ранее уравнения генератора
с внешней обратной связью (4.8) и генератора на туннельном дио-
де (4.79). Если перенести в правую часть уравнения (4.148) ю20и
и добавить в обе части ©2iz (где со — частота генерируемых коле-
баний, которая может отличаться от соо), получим
= (4.149)
dt2 \ dt /
где f (и, = + а>о)и.
\ dt J \ dt j
Как известно, чисто гармонические колебания вида и—
=Acos(ojZ—<р) являются решением уравнения контура без потерь
^--}-(o2t/ = 0, (4.150)
которое получается из (4.149) при f(u, du/dt)=O. В генераторах
f(u, du/dt)y=0, а потому решение (4.149), строго говоря, не может
быть гармоническим.
Однако, когда f(u, du]dt) близка к нулю, т. е. уравнение
(4.149) мало отличается от (4.150), следует ожидать, что и реше-
ние этих уравнений различаются мало. Поэтому прежде чем при-
менять метод медленно меняющихся амплитуд к исследованию
уравнения вида (4.149), следует убедиться в малости f(u, du/dt)
по сравнению с другими слагаемыми. Рассмотрим в качестве при-
мера уравнение генератора (4.8), заменяя ив на и. Полагаем,
что генератор работает в мягком режиме, и аппроксимируем его
вольт-амперную характеристику в рабочей точке выражением
Ф(«)=51/—а3п3. Подставляя крутизну Ф'(«)=5—За3и2 в (4.8),
получаем
^-+(2аэ + у«2)Г-^+<о2« = 0, (4.151)
гДе аэ определяется из (4.11), а
y=3a3M/LC. (4.152)'
Непосредственно по (4.151) установить, при каких условиях
среднее слагаемое значительно меньше каждого из двух других,
6-92 161
затруднительно, так как коэффициенты при переменной и ее про-
изводных не допускают сравнения вследствие их различной раз-
мерности. Замена переменной t на безразмерную переменную
T==at, имеющую смысл фазы колебаний, существенно облегчает
рассмотрение вопроса. Подставляя
du du dt du d? и » dz и
—— = —— — - co----- и — = or-----
dt dt dt dt dt2 dt2
в (4.151) и обозначая й=-^- и й= , получим с учетом (4.
уравнение генератора в виде
— ----1—и2)и-1-еи. (4.153)
Здесь d=r[®L — затухание контура, Л1кр=гС/5 — величина
взаимоиндуктивности, при которой происходит самовозбуждение
колебаний; е=1—ш2о/о)2 — относительная расстройка. Теперь все
переменные (и, й и й) имеют одинаковую размерность, и в случае
возникновения почти гармонических колебаний, близких к
u=Ac>os(t—ср), (4.154)
все они имеют приблизительно одну и ту же амплитуду. Поэтому
степень влияния каждого слагаемого уравнения (4.153) на харак-
тер получающегося решения определяется величинами соответст-
вующих коэффициентов. Так, если обратная связь не очень велика
(М/Мкр^.2—3) и нелинейность сказывается не очень сильно (т. е.
величина За^Ми21гС — порядка единицы), то коэффициент при й
имеет порядок величины затухания контура d (обычно del).
Расстройка в генераторах в большинстве случаев очень мала
(е<С1), поскольку ш близка к ш0- Таким образом, обычно уравне-
ние генератора (4.153) мало отличается от уравнения контура без
потерь, что позволяет искать его приближенное решение в виде
(4.154).
Если в (4.149) перейти к «безразмерному времени» т, то1
ii+u=F(и, и). (4.155)
Для уравнения (4.151)
F(u, й)~------(2аэ+уи2) +еы.
со
(4.156)
При F(u, й)=0 решение (4.155) является гармоническим ко-
лебанием вида (4.154) с периодом колебания 2л. При этом
й=—Дз1п(т—<р). (4.157).
Если F(u, й)=^0, но принимает достаточно малые значения,
можно решение (4.155) или и и й искать в виде (4.154) и (4.157),
считая Д=Д(т) и <р—<р(т) медленно меняющимися функциями
времени. Предположение о медленности изменения амплитуды и
1 Для того чтобы подчеркнуть малость функции F(u, й), уравнение (4.155)
часто записывают в виде й), считая здесь р<^1, а Гци,
«) —одного порядка сын й. Для (4.153) можно принять p=d.
фазы колебания основывается на том, что в колебательных конту-
рах относительное изменение этих величин за период колебаний
оказывается порядка n/Q, а поэтому при больших добротностях
Q эти изменения действительно небольшие.
Поскольку из (4.154) производная
й=—A sin1 (т—<р) + A cos (т—ф) +Лф sin (т—ф), (4.158)'
определение й согласно (4.157) означает наложение дополнитель-
ного условия
Acos(t—ф) +Дф sin(r—ф) =0. (4.159)
Определяя теперь й из (4.157) и подставляя полученное выра-
жение, а также (4.154) и (4.157) в (4.155), имеем
—A sin(т—ф) +Лф cos(т—ф) =F[A cos (т—ф), —A sin (т—ф)].
Решаем совместно два последних уравнения,
т—ф=ф:
dA
— ——sin ib F (Л cos ib, —Л sin ib),
dt ‘ '
= — cos ib F(4 cos ib, —Л sin ib).
dt A ’ v j
(4.160)
обозначая
(4-161)
До сих пор никаких ограничений на зависимости Л(т) и ф(т)
не накладывалось, поэтому (4.161) являются столь же точными,
как и (4.155). Теперь наложим на эту систему ограничение: заме-
ним скорости изменения А и ф в пределах периода колебаний
средними скоростями их изменения, т. е. примем
-у- = ^-И(2л)-Л(0)], А1_-Ич>(2л)-ф(0)],
ат 2л ах 2л
что допустимо в случае медленности изменения этих величин, т. е.
использования колебательных систем достаточно высокой доброт-
ности. Заменяя правые части (4.161) их средними значениями за
период 2л, получаем
—-=Фо(Л),
ат
-T^W),
аТ
(4-162)
где
2л
о
cos ib, —A sin ib) sin ф dty.
2л
V0M) = —— C PMcosib, —A sinф)cosфйф.
2лА J
0 J
(4.163)
6*
163
Уравнения (4.162) называются укороченными, или уравнения-
ми медленно меняющихся амплитуд и фаз, поскольку они спра-
ведливы в тех случаях, когда А и <р медленно (мало) меняются
за период колебаний. Из выражения (4.162) следует, что в общем
случае в процессе установления колебаний, т. е. при изменении
амплитуды А, происходит изменение и величины dy/dx. Следова-
тельно, во время этого процесса мгновенная частота колебаний
ь/, определяемая как
= ^-=«>[l-Vo(A)],
также меняется.
Величины —2Фо(А) и 2Чро(А) являются коэффициентами при
simp и cosip разложения функции F(Acosip, —.Asinip) в ряд
Фурье. Это означает, что для получения укороченных уравнений
нужно в правую часть нелинейного дифференциального уравнения
(4.155) подставить и=А cosip и й = —Л simp, разложить полученное
выражение в ряд Фурье и приравнять величину —2dAldx коэффи-
циенту ряда при simp и 2Adq>ldx коэффициенту ряда при cosip.
Достаточно часто амплитуды первых гармоник функции
F(Acosip, —Asin ip) можно получить с помощью элементарных
тригонометрических преобразований. Так, в случае уравнения
(4.151) из (4.156) имеем
F.(u, й) =—(2a3+vA2cos2ip)A sin ip + еА cos ip =
co
= (2a3 +—vA2) — sin ip + еА cos ip-1—~ A3 sin 3ip.
4 co 4o)
Используя коэффициенты при simp и cosip, получаем укорочен-
ные уравнения
2 — = — (2 a 2-^-=е
dx \ ’ 4 /со dx
или, возвращаясь к времени /=т/ш,
2 —= —(2 а3 А- аЛа,}
dt V 4 /
9 d ф а>2 —(0%
dt со
Переходим к исследованию укороченных уравнений.
СТАЦИОНАРНЫЙ режим
В стационарном режиме амплитуда А и фаза ср постоянны. По-
ложив в (4.164) dAfdt=Q и dqldt=Q, получим уравнения стацио-
нарного режима:
(2аэ+—А2)А=0, со2—ю2о=О. (4.165), (4.166)
4
164
Из (4.165) получаем два значения амплитуды:
Л 1 = 0, Д2=/ —8аэ/т- (4.167)
Из них первое соответствует отсутствию колебаний, а второе с
учетом (4,152) — амплитуде
Аг = L- У S—г С/М , (4.168)
v 3 а3
полученной выше (4.141). Амплитуда Л2У=0, если
M>MKp = rC/S, (4.169)
что определяет условие самовозбуждения автогенератора. Зависи-
мость стационарной амплитуды А от величины М, получающаяся
из (4.168), соответствует рис. 4.266. При единственным
решением является Ai=0, при Af>A4Ep получаем два значения:
A1==0 и Д2У=0. При А=А2 согласно (4.166) частота и=а>о-
Используя укороченные уравнения, можно проверить устойчивость стацио-
нарных режимов. Для этого предположим, что амплитуда А отклонилась на
небольшую величину ДЛ от стационарного значения Ло (им может быть
или Аг):
Л=Л0-ЬДА. (4.170)
Подставляем (4.170) в первое из уравнений (4.164). Учитывая, что
dAo/dt=O, и пренебрегая из-за малости ДЛ. слагаемыми с ДЛ в степени выше
первой, получим
2 + 2аэЛ° + 2“э ДЛ + Т V Ло + 4“ V Д А = °’
Исключая подчеркнутые слагаемые, удовлетворяющие уравнению (4.165),
получим:
-^4г|+а‘дл=°- (4л71)
dt
где
ai=a3'+(3/8)yA2i>. (4.172)
Согласно критерию Рауса—Гурвица величина ДЛ, получаемая из решения
(4.171), будет с течением времени затухать, т. е. колебание с амплитудой Лэ
окажется устойчивым, если
ai>0. (4.173)
Подставляя Л^О в (4.172), убеждаемся, что состояние равновесия является
устойчивым, если аэ>0 или Л4<Л4Кр, и неустойчивым, если аэ<0, т. е. выпол-
няется условие самовозбуждения (4.169). Для Ло=Л2 из (4.172) и (4.167) at=
=2аэ, стационарный динамический режим согласно (4.173) является устойчи-
вым, если аэ<0 или Л4>Л4кр.
УСТАНОВЛЕНИЕ КОЛЕБАНИЙ В ГЕНЕРАТОРЕ
Для нахождения закона установления амплитуды колебаний
А (0, воспользуемся первым укороченным уравнением (4.164),
умножив все его слагаемые на А:
— и—2аэС Ц--^-Аг)Д2.
di 3\ 8аэ /
165
деля правую и левую части на квадрат амплитуды А\ ста-
ционарных колебаний, используя (4.167) и обозначая
К=(Д/Л2)2, (4.174)
приходим к уравнению dK!dt=—2аэ(1—К)К. Разделяем перемен-
ные:
dK
(У—К) К
= 2 аэ dt.
Интегрируя, получаем — Ci е 8 . где Сх — постоянная
интегрирования. Находя К., подставляя его в (4.174) и принимая
во внимание, что в автогенераторе 2аэ<0, получаем
_ ______^2_______.
К1 + Сое-'^'
Здесь C0=l/Ci. Обозначим через /1(0) амплитуду А
Из (4.175)
(4.175)
при £=0.
с0= (Л22м2(0))-1.
Теперь закон изменения амплитуды записывается как
Л=Л«/ У 1+(Д-1)е’|2°‘'‘ • <41т6’
При заданной величине 2аэ
характер изменения амплитуды
во времения определяется со-
отношением стационарной и на-
чальной амплитуд. Во всех
случаях при t-^-oo А-+А2. Если
А (0) <ZA2, то амплитуда А моно-
тонно возрастает, приближаясь
к А2, как показано на рис. 4.33,
Когда амплитуда колебания на-
растает, начиная с очень малой
величины Д(0), обязанной на-
личию флуктуаций, т. е. когда
Д2/Д(0)>1,
Со~А22/А2(О).
(4.177)
Пренебрегая для начального этапа нарастания амплитуды еди-
ницей в знаменателе выражения (4.175), получаем
Л = Д(0)е|а»|г (4.178)
— экспоненциальный закон нарастания амплитуды. Причина это-
го состоит в том, что при малых амплитудах генератор ведет себя
как линейный колебательный контур с отрицательным затуха-
нием, а в последнем нарастание амплитуды колебаний происходит
но экспоненте. При больших амплитудах сказывается нелиней-
166
ность генератора, в результате чего происходит постепенное при-
ближение к амплитуде
Теоретически время установления колебаний ty, как следует из
(4.176), бесконечно большое, если /1(0) отличается от А2. Обра-
тимся к вычислению времени установления /у для случая
определив (у как время, в течение которого амплиту-
да А нарастает до 0,9Д2. Используя (4.176), запишем (4.175) как
0,8 Г 1 + е-2 1%l tyl ж 1 или 2 = е’“э1 *у . (4.179)
L Л2 (0) J л (0) z
Отсюда время установления колебаний
fy= —ln2^- = -^-lg2 А- . (4.180)
у |аэ| Л (0) |2аэ| * А (0) V L
Отношение Д2/Д(0) обычно бывает порядка 103 * s *—107. Поэтому
даже тогда, когда регулировка параметров схемы в широких пре-
вызывает изменение амплитуды А2 в 2—3 раза, величина
изменяется незначительно. Рассмотрим зависимость /у
от | <Хэ |, представив последний как
делах
1g 2^-
Ы = 4 rf0(MS-rC)=^<J0S (М-----------1— 1 ) .
2 2 \ (0q <SQ / 2 Q \ у
(4.181)
Полагая, что при регулировке параметров схемы частота ш0
остается неизменной, убеждаемся в том, что увеличение М или
5 приводит к уменьшению (у; уменьшение добротности контура Q
(за счет увеличения г или С) вызывает увеличение ty, если же
при этом изменять М так, чтобы ЛГ/ЛГкр=const, время установле-
ния /у уменьшится.
Время установления колебаний ty при неизменных | Оэ| и А2 за-
висит от начальной амплитуды /1(0), определяемой флуктуацион-
ными процессами: при меньших /1(0) ty возрастает. Как правило,
при каждом включении генератора /1(0) оказывается разной, а
потому различными оказываются и ty.
Покажем теперь, что общее уравнение переходного процесса (4.123), полу-
ченное квазилинейным методом, приводит в рассмотренном случае мягкого ре-
жима самовозбуждения к тому же закону (4.176) изменения амплитуды А
во времени. Для этого достаточно показать, что (4.123) сводится при кубиче-
ской аппроксимации вольт-амперной характеристики нелинейного элемента к
первому из укороченных уравнений (4.164). Используя принятое здесь обозна-
чение (17=Л), перепишем (4.123) в виде
— = d ( Scp~Sc?A ) А. (4.182)
<оо dt \ "Sep д /
3
Для мягкого режима SCP=S— азА2. В стационарном режиме с ам-
плитудой Аг средняя крутизна
3
Scpo=S—— а3А2а. (4.183)
(4.184)
Подставляя 5ср и SCPo в (4.182), получаем
„ dA 3 9 4 — Л2
2 = — г Юр С-----------А.
4 Scp 0
Преобразуя правую часть (4.184) с использованием соотношений (4.118),
(4.167) и (4.152), получаем первое из укороченных уравнений (4.164).
Как уже отмечалось, метод медленно меняющихся амплитуд,
как и квазилинейный метод, применим для рассмотрения автоко-
лебательных систем, колебания в которых близки к гармониче-
ским. Оба метода в конкретной схеме позволяют получить одни и
те же результаты (в отношении условий самовозбуждения, стацио-
нарных режимов и их устойчивости, переходных процессов). Со-
поставляя эти методы, отметим, что квазилинейный метод требует
лучшего понимания происходящих в схеме процессов как при со-
ставлении, так и при анализе уравнений стационарных и переход-
ных режимов. В нем широко используются характеристики, рас-
пространенные в инженерной практике (колебательные, средней
крутизны, средней проводимости и др.), а получающиеся решения
имеют более общий характер: они не связаны с конкретным ви-
дом характеристики нелинейного элемента, поскольку не требует-
ся предварительная аппроксимация последней.
4.6. МЕТОД фазовой плоскости
ФАЗОВАЯ ПЛОСКОСТЬ, ФАЗОВЫЕ ТРАЕКТОРИИ
Метод фазовой плоскости является качественным методом ин-
тегрирования дифференциальных уравнений второго порядка, по-
лучившим широкое применение в радиотехнике и теории автомати-
ческого регулирования. При решении дифференциальных уравне-
ний второго порядка появляются две постоянные интегрирования,
для определения которых требуется задание двух независимых
начальных условий. В качестве последних чаще всего использу-
ются значения функции и ее производной в некоторый момент t0.
Эти начальные условия могут быть заданы в виде координат пло-
скости состояний системы, характеризуемых величинами х, у.
Плоскость х, у называется фазовой плоскостью. Последующее из-
менение координат плоскости происходит однозначно в соответст-
вии с решением дифференциального уравнения, т. е. по определен-
ной траектории на плоскости. Каждая точка этой траектории пол-
ностью определяет состояние системы в некоторый момент време-
ни t. Уравнения рассмотренных выше автогенераторов, содержа-
щих контур LC, могут быть записаны в виде двух дифференциаль-
ных уравнений первого порядка:
Если исходное уравнение
—+Ф(х) — + <в20х —О,
Л2 к ' d t °
(4.186)
то его рядка: также можно записать в виде двух уравнений первого по- d х — = У1 2 (4л,87) = — Ф(х)1/— a t
Уравнения (4.187) являются частным случаем уравнений
(4.185), когда
Р (х, у) = у, Q (х, у) = —со2ох—Ф (х) у. (4.188)
выражается через скорости из-
Откладывая по координатным осям (рис 4.34) переменные х
и у, получаем фазовую плоскость, точки которой определяют со-
стояние системы. Начальным значениям х|г0=х0 и y\t0~yo на
плоскости соответствует точка Мо, называемая изображающей
точкой, которая характеризует состояние системы в момент to. Так
как х и у изменяются во време-
ни согласно (4.185), к моменту
t\>to изображающая точка пе-
реместится в Mi (с координата-
ми Xi и yi). Траектория переме-
щения изображающей точки по
фазовой плоскости называется
фазовой траекторией.
Скорость перемещения изо-
бражающей точки по фазовой
траектории называют фазовой
скоростью. В любой точке фазо-
вой плоскости эта скорость Оф
направлена по касательной к фа-
зовой траектории, а величина ее
менения координат (4.185)
vx=dxldt=P(x, у),
vv=dy!dt=Q(x, у)
(4.189)
как
= (4.190)
На рис. 4.34 в точке Л1] построен вектор фазовой скорости ¥$
и его компоненты Vx и Vy. Направление перемещения изображаю-
щей точки, указываемое стрелкой, определяется знаками их и vy.
Фазовая плоскость, заполненная фазовыми траекториями, опреде-
ляющими поведение системы при любых начальных условиях, на-
зывается фазовым портретом.
169
Для построения фазовых траекторий, т. е. зависимости i/(x),
нужно из уравнений (4.185) исключить время. Деля одно из этих
уравнений на другое, получаем уравнение фазовых траекторий в
дифференциальной форме:
dyjdx=Q(x, у)/Р(х, у). (4.191)
Уравнение фазовой траектории у(х) может быть получено в
результате интегрирования (4.191). Аналитически это удается сде-
лать лишь в простейших случаях (см. ниже пример LC-контура
без потерь). В большинстве случаев переменные в (4.191) не раз-
деляются и расчет фазовых траекторий следует осуществлять чис-
ленными методами на ЭВМ. Известны и графические методы рас-
чета и построения фазовых траекторий: метод изоклин, дельта-
метод, метод Льенара и др. [24, 2].
При построении фазовых траекторий нередко используются изоклины — ли-
нии, во всех точках которых угол наклона а касательной к фазовой траекто-
рии одинаков. Уравнение изоклины
dy Q(x, у)
--' = ------ = к,
dx Р(х, у)
(4.192)
где A=tg а. Уравнение изоклины вертикальных касательных получается из
(4.192) при й=оо;
Р(х, у)=0. (4.193)
Уравнение изоклины горизонтальных касательных получается из (4.192)
при А=0:
Q(x, у)=0. (4.194)
Если исходными уравнениями считаются (4.187) или (4.186), то согласно
(4.188) и (4.193) касательные к фазовым траекториям будут вертикальными
иа оси абсцисс (i/=0), горизонтальными на линии г/=—<о20х/Ф(х). Записав
первое из уравнений (4.187) в виде dx=ydt, убеждаемся в том, что в этом
случае в верхней полуплоскости (ji>0) изображающая точка движется в на-
правлении увеличения координаты х, поскольку при dt>Q получаем dx>0, в
нижней полуплоскости (у<0) — в направлении уменьшения х, так как при
dt>Q dx<0.
Среди многочисленных фазовых траекторий особое значение
имеют те, которые определяют возможные состояния равновесия
и режимы периодических колебаний. Уравнение (4.191) однознач-
но определяет касательную к фазовой траектории во всех.. точках,
кроме тех, в которых одновременно
Р(*о, Уо)=О и Q(x0, уо)=0. (4.195)
Точки (хо, уо), в которых выполняются условия (4.195), назы-
ваются особыми точками. Фазовая скорость в особых точках рав-
на нулю, поскольку производные dxfdt—Q и dyldt=Q, и поэтому
координаты изображающей точки во времени не меняются: х=
=Xo=const и i/=«/o=const. Следовательно, особые точки
фазовой плоскости соответствуют состояниям
равновесия системы.
Рассмотрим ряд примеров.
170
Пример 1. Свободные колебания в АС-контуре без потерь описываются
уравнением
d2 х 2
— +<о§х = О.
Решение этого уравнения х=А sin (со0А+<р) соответствует гармоническому
колебанию, амплитуда А и фаза кр которого определяются начальными усло-
виями. Покажем, что метод фазовой плоскости приводит к тому же результа-
ту. Согласно (4.187) записываем исходное уравнение второго порядка в виде
двух уравнений первого порядка:
dx dy 9
~7Г=У' 1Г=-^Х- (4Л96)
Поделив почленно второе из этих уравнений на первое, получаем диффе-
ренциальное уравнение фазовых траекторий
ЁУ_ _ „2 2L
dx ° у
Разделяя переменные и интегрируя, получаем уравнение фазовых траек-
торий
х2 _ у2 л
= 14.ЮТ1
где С — постоянная интегрирования, опреде-
ляемая начальными условиями. Фазовые
траектории, соответствующие различным зна-
чениям С, имеют характер вложенных друг в
друга эллипсов (рис. 4.35п). _________
Фазовая скорость Пф= Vy^+iuAoX2, под-
считанная согласно (4.190) и (4.196), ни в
одной точке эллиптических траекторий не
обращается в нуль. Поэтому последние соот-
ветствуют периодическим колебаниям.
Единственной особой точкой (г>ф=О) яв-
ляется начало координат (х0—0, г/о=О). Осо-
бая точка, охваченная фазовыми траектория-
ми, имеющими характер вложенных друг в
друга замкнутых кривых (эллипсов, окруж-
ностей и пр.), называется особой точкой типа
центра. Такая особая точка характеризуется
тем, что в случае возникновения небольшого
отклонения от состояния равновесия в системе
возникают небольшие ненарастающие колеба-
ния около этого состояния. Изменением мас-
штаба по одной из осей можно превратить
фазовые траектории в круговые. Для этого
достаточно заменить х иа jKi=<OoX. Подставляя
х=Х]/соо в (4.197), убеждаемся в том, что
*2i+f/2=2<o20C.
При замене х на Xi фазовые траектории
Для различных С превращаются в концентри-
ческие окружности (рис. 4.356) радиуса р=
2ico2oC. При движении по такой траекто-
рии фазовая скорость
иф= V (dxi/d/)2+(dy/d02= Кo?o//z+ffl2oX2i=iOJop
оказывается постоянной во всех точках, а угловая скорость перемещения изо-
сражающей точки по любой фазовой траектории со=соо одна и та же. Это
означает, что при любых отклонениях от состояния равновесия в системе воз-
никают гармонические колебания Xi(t), определяемые проекцией изображаю-
щей точки на ось абсцисс, амплитуда и фаза которых определяются началь-
ными условиями (рис. 4.35в).
Пример 2. Колебания в колебательном контуре с потерями описываются
уравнением
d2 х dx
' -4- а< -4- Со х — 0,
J/2 1 1 Л * 2 ’
(4.198)
где c1=2a=r/L, С2=к>2о=1ДС. Переходные процессы в таком контуре имеют
колебательный характер, если корни характеристического уравнения
("Г") ~а‘‘
(4.199)
комплексные, т. е. сг> (ai/2)2. В последующем для упрощения выкладок счи-
таем
a2<Sco2o. (4.200)
Решение (4.198) при условии (4.200) имеет вид
х=А е~а* зт(Ф1£+ф), (4.201)
где А и ф определяются начальными условиями, а частота свободных колеба-
ний с£>1 = Д/со2о—а2.
Для определения характера фазовых траекторий воспользуемся решением
(4.201). Дифференцируя его, получаем
У = ~ = Лсо1е“а/ соз^^ + ф)-------------— sin^Z-f- ф)|.
at coj J
На основании (4.200) пренебрегаем вторым слагаемым в квадратных скоб-
ках, принимая
у =До>1 е~а( соз(<о^+ф). (4,20’2)
Заменяя х на х^сорс, имеем
Х1=ДсО1 е-o'81п(со1<+ф). (4.203)
Для построения фазовых траекторий на плоскости Х\,у обозначим
со1^+ф=ф, С01Д e~af=p (4.204)
и перепишем (4.203) и (4.202) в полярных координатах: Xi=psini[>t
у=р cos ф.
Исключая из (4.204) время t, получаем уравнение фазовой траектории
а ,,
_ (ф_ф)
р = ©j А е , (4.205)
соответствующее свертывающейся логарифмической спирали (рис. 4.36a). При
иных начальных условиях получим другие спирали, сходящиеся к началу ко-
ординат. Каждая спираль соответствует затухающему колебанию, построенно-
му на рис. 4.36a. Начало координат соответствует устойчивой особой точке,
ибо всякое отклонение от нее с течением времени затухает. Особая точка, охва-
ченная фазовыми траекториями вида вложенных друг в друга закручивающих-
ся спиралей, называется особой точкой типа устойчивого фокуса.
Если в (4.198) ai=2a<l0 (отрицательное затухание может быть следстви-
ем использования положительной обратной связи или введения отрицатель-
ного сопротивления), величина р в (4.205) с течением времени будет возрас-
тать, а потому фазовые траектории будут иметь характер раскручивающихся
спиралей (рис. 4.366). Амплитуда таких колебаний будет нарастать по эк-
споненциальному закону, состояние равновесия окажется неустойчивым. Осо-
бые точки, охваченные фазовыми траекториями, имеющими характер вложен-
иых друг в друга раскручивающихся спиралей, называются особыми точками
типа неустойчивого фокуса.
Пример 3. Процессы в контуре, описываемые (4.198), имеют апериоди-
ческий характер. Кории характеристического уравнения (4.199) в этих усло-
виях должны быть вещественными. Здесь возможны три случая:
I) Ог<0, ai—любое; корни pi и р?— действительные разных знаков:
х = е₽*' + А2
dx 4 ,
У = ~7Т = A Pi ePl + 4 Р2 •
di
(4.206)
Если Л =5^0 и Л2=/=0, то с увеличением t одна компонента выражений
(4.206) стремится к нулю, вторая — к бесконечности. Следовательно, с тече-
нием времени система удаляется от состояния равновесия; последнее оказы-
вается неустойчивым. Характер получающихся фазовых траекторий вблизи
особой точки хо=0, z/o=O показаны на рис. 4.37п. Такая особая точка называ-
ется седлом.
2) Oi>0, 0<О2<(О1/2)I) 2; корни pi и Рг— действительные отрицательные.
Величины каждого слагаемого в выражениях (4.206) стремятся к нулю. Лю-
Рис. 4.37
173
Рис. 4.38
бая изображающая точка с тече-
нием времени приближается к
особой точке по апериодическому
закону, как показано на рис.
4.376, особая точка устойчива.
Такая точка называется устойчи-
вым узлом\
3) ai<0, 0<«2<(ai/2)2; кор-
ни Pi и рг — действительные по-
ложительные. Оба слагаемых в
выражениях (4.206) нарастают,
в результате чего изображающая
точка удаляется от состояния
равновесия по апериодическому
закону, как показано на рис.
4.37в. Особая точка неустойчива
и называется неустойчивым уз-
лом.
Зависимость характера осо-
бых точек от коэффициентов ли-
нейного уравнения (4.198) пока-
зана иа рис. 4.38.
Рассмотренные примеры показывают, что вид фазовых траекто-
рий вблизи особой точки полностью определяет ее устойчивость.
В частности, если изображающая точка с течением времени удаля-
ется от состояния равновесия, последнее является неустойчивым,
если приближается к нему, то асимптотически устойчивым.
В случае нелинейных систем исследование характера фазовых
траекторий вблизи особых точек совпадает с исследованием устой-
чивости состояний равновесия по Ляпунову (см. § 4.2), при кото-
ром нелинейная система второго порядка (4.69) для малых откло-
нений заменяется линейной (4.74). Поскольку (4.74) не отличает-
ся от рассмотренного здесь уравнения (4.198), особые точки для
нелинейных цепей второго порядка могут быть только тех же ше-
сти видов: центр, устойчивый и неустойчивый фокус, устойчивый
и неустойчивый узел и седло.
Фазовые траектории бывают разомкнутые и замкнутые. Пос-
ледние заслуживают особого внимания. Если изображающая точ-
ка движется по замкнутой фазовой траектории и притом такой,
что ни в одной ее точке Цф не обращается в нуль, т. е. она не про-
ходит через особую точку, то по прошествии некоторого определен-
ного времени Т процесс (изменение х и у во времени) будет повто-
ряться. Следовательно, такая фазовая траектория характеризует
периодическое колебание с периодом Т.
Замкнутые фазовые траектории, соответствующие возможным
периодическим колебаниям, называются предельными циклами.
Если соседние фазовые траектории с течением времени приближа-
ются к предельному циклу, как показано ниже на рис. 4.39а, та-
кой предельный цикл называется устойчивым-, он соответствует
устойчивому периодическому колебанию. Предельный цикл, от ко-
торого соседние фазовые траектории с течением времени удаляют-
ся, называется неустойчивым предельным циклом; он соответству-
ет неустойчивому периодическому режиму. В реальных системах
могут существовать периодические колебания, соответствующие
только устойчивым предельным циклам.
ФАЗОВЫЕ ПОРТРЕТЫ КОЛЕБАНИЙ ГЕНЕРАТОРОВ
Фазовыми портретами колебаний исследуемых систем называ-
ют совокупность большого числа фазовых траекторий, определяю-
щих характер процессов в системе при любых начальных усло-
виях. Построим такие портреты для генераторов, работающих в
различных режимах.
На рис. 4.39й изображен фазовый портрет колебаний генерато-
ра в мягком режиме, соответствующем взаимоиндукции М—М3
на рис. 4.26, при которой в генераторе возможны два стационар-
ных состояния: равновесия (точка 0) и периодических колебаний
(точка Л3). Уравнение генератора (4.151) для этого режима (ссэ<;
<0, у>0) запишем как
du)dt=y, dy/dt= — [(2аэ+уц2) у+со2о«] •
Фазовая скорость
Оф = У у7 + [ (2аэ+т«2) у-Ь<в20«]2. (4.207)'
Координаты «о, г/0 особых точек (состояний равновесия) опре-
деляем из условия Оф=0. В правой части (4.207) оба подкоренных
слагаемых положительны, поэтому Wq=0 и уо=О, единственная
особая точка соответствует началу координат. При малых и
(4.151) не отличается от (4.198), а поскольку аэ<0, особая точка
имеет характер неустойчивого фокуса, т. е. фазовые траектории
около нее соответствуют рис. 4.366.
Устойчивые периодические колебания с амплитудой U' харак-
теризуются устойчивым предельным циклом, который при надле-
жащем выборе масштабов близок по форме к окружности. Учиты-
175
вая, что колебания с очень большой амплитудой являются зату-
хающими, поскольку реальный источник питания не может отда-
вать энергию, необходимую для поддержания таких колебаний, н
что все переходные процессы носят колебательный характер, по-
лучаем фазовый портрет, приведенный на рис. 4.39а.
Генератор в жестком режиме при M=MS на рис. 4.27а обла-
дает тремя стационарными режимами, и его фазовый портрет
(рис. 4.396) характеризуется следующими особенностями: а) со-
стояние равновесия, соответствующее началу координат, является
устойчивым; б) стационарные колебания с меньшей амплитудой
U" — неустойчивые, с большей U' — устойчивые.
Из приведенных на рис. 4.39 фазовых портретов вытекает важ-
ная особенность предельных циклов: они разделяют области с раз-
личным характером фазовых траекторий, соответствующих нара-
стающим и затухающим колебаниям. По семейству фазовых тра-
екторий можно наглядно определить: возможные состояния равно-
весия и их устойчивость, возможные периодические режимы (амп-
литуду, частоту и форму колебаний) и их устойчивость, а также
характер переходных процессов при любых начальных условиях.
Таким образом этот метод позволяет выявить все те характе-
ристики интересующего нас устройства, которые могут быть по-
лучены из решения дифференциального уравнения. При этом ме-
тод фазовой плоскости пригоден для рассмотрения систем, колеба-
ния в которых могут иметь любой характер: гармонический или
релаксационный. В этом отношении он является более общим, чем
квазилинейный метод или метод медленно меняющихся амплитуд,
пригодные для анализа только таких систем, колебания в которых
мало отличаются от синусоидальных.
4.7. ГЕНЕРАТОРЫ НА ДВУХПОЛЮСНИКАХ
С ОТРИЦАТЕЛЬНЫМ СОПРОТИВЛЕНИЕМ
ПРИМЕНЕНИЕ КВАЗИЛИНЕЙНОГО МЕТОДА
Автогенераторы на двухполюсниках с отрицательным сопротив-
лением (ОС) являются основными в диапазоне сверхвысоких ча-
стот. К их числу относятся генераторы на полупроводниковых и
электровакуумных приборах: диодах Ганна, туннельных и лавин-
но-пролетных диодах, отражательных клистронах, лампах обрат-
ной волны, магнетронах. В большинстве случаев эти генераторы
являются генераторами почти гармонических колебаний, и основ-
ным методом анализа их работы,
" как и генераторов с внешней обрат-
ной связью, является квазилиней-
. ный.
Схема генератора на двухполюс-
нике с ОС приведена на рис. 4.40.
Она отличается от схемы рис. 4.21
Рис. 4.40 отсутствием цепи внешней обратной
176
связи — обловного канала воздействия колебательной системы
на активный элемент (АЭ). В генераторах на приборах с ОС об-
ратная связь, т. е. воздействие колебательной системы на АЭ, осу-
ществляется по той же цепи, что и прямая*. Подобные устройства
называют также генераторами с внутренней обратной связью.
Если параллельный колебательный контур обладает достаточ-
но высокой избирательностью, напряжение на нем и на нелиней-
ном АЭ в режиме автоколебаний оказывается почти гармониче-
ским.
Перепишем комплексное уравнение генератора с внешней об-
ратной связью (4.105), заменив Scp и К0.с отношением соответст-
вующих комплексных амплитуд:
/к1_^ш_2э=1. (4.208)
t/B1 UKi
Исключая GB1 из (4.208), обозначая /К1=Л и вводя в рассмот-
рение среднюю проводимость нелинейного АЭ по первой гармо-
нике
Ycp=/i/l7ol, (4.209)
где Uai=—СК1, получаем комплексное уравнение генератора на
двухполюснике с ОС в виде
YcpZ3=—1. (4.210)
Из этого уравнения следует, что если нелинейный элемент яв-
ляется резистивным (Ycp=Gcp), то в стационарном режиме Z3
также должно быть резистивным (Z3=R3), чтобы'
Gcp7?3=—1; (4.211)
генерация возможна лишь на резонансной частоте контура и толь-
ко, если проводимость нелинейного элемента отрицательна (Gcp<
<0). То же условие стационарного автоколебательного режима
получается и из рассмотрения энергетических соотношений для
рис. 4.40, если при Ycp—Gcp подставить в условие баланса мощ-
ностей
Р++Р_=0
потребляемую нагрузкой мощность Р-—----------* и отдаваемую от-
2 Rg
рицательным сопротивлением на основной частоте
G21GCp(G1)<0. (4.212)
Записывая Уср=УСреЧ/, Z3=Z3el’’z и — 1 = е-*<2п+*)1Т, где
п—Q, ±1; ±2, ..., получаем из (4.210) комплексное уравнение
i [<P„+q>z+(2n+I)nJ_ ,
Уср^-э е 1 >
1 Такой канал обратной связи имеется и в генераторах с внешней обрат-
ной связью. Однако там он является второстепенным и нежелательным —
уменьшающим усиление усилителя и тем самым затрудняющим самовозбуж-
дение генератора.
177
которое имеет место только в случае одновременного выполнения
двух условий:
баланса фаз1
4>у+(рг=—(2п+1)л (4.213)
и баланса амплитуд
|Ycp|Z3=l. (4.214)
Эти выражения аналогичны (4.109) и (4.110). В простейших
случаях, когда фз, не зависит от амплитуды колебаний Ut = Uai =
= UKu из условия баланса фаз определяется частота to стацио-
нарных колебаний, а- из условия баланса амплитуд их амплитуда
Uio.
Вернемся к случаю, когда <ру=±л или Ycp=Gcp<:0, и пере-
пишем условие баланса амплитуд (4.211) как
|Gcp(Gt)|=G3. (4.215)
Характеристику средней проводимости |Gcp(Gi)| обычно рас-
считывают по колебательной характеристике Л=Ф([Л), как
Gcp=O(Gi)/Gi. Определение колебательных характеристик, а
также требуемых в ряде случаев зависимостей постоянной состав-
ляющей /о и амплитуд гармоник (Л, 12, Ц, —) от Ux существенно
облегчается, как отмечалось в § 2.2, в случае предварительного
построения семейства четных и нечетных частей вольт-амперных
характеристик.
На рис. 4.41 приведены семейства а) нечетных iBn(u) и б) четных iB(u}
частей вольт-амперной характеристики туннельного диода ТД из арсенида гал-
ЛИЯ С ТОКОМ 1max — 20 мА, рассчитанные согласно (2.12) для разных смещений
Ua. Эти графики позволяют определить степени полиномов, которыми следует
Рис. 4.41
1 Условие (4.123) можно записать и как <р8+<рг= (2д+1)л. Форма записи
(4.213) для приборов СВЧ оказывается более удобной, так как во многих слу-
чаях (отражательный клистрон, ЛПД и др.) ф8<0, а <рг близко к 0.
178
аппроксимировать характеристики iB4(u) и iB(u) при различных величинах
Ue и l/ь Так, если смещение t/o=O,24-0,3 В, нечетную часть характеристики
можно аппроксимировать нечетным полиномом третьей степени 1нч=О|И+озИ3
с коэффициентами щ<0, о3>0, а для смещений С'о=0,44-0,6 В ее придется ап-
проксимировать нечетным полиномом пятой степени 1’ич=ащ+ази3+а5и5, в ко-
тором о3<0, д5>0, а коэффициент О[<0 для Uo=0,44-0,5 В и Oj>0 для
114=0,554-0,6 В. Подставляя в эти полиномы iz=£/|COs со/, нетрудно рассчитать
зависимости /1(14), а затем и |Gcp(f/i)|. Последние приведены иа рис. 4.42.
Амплитуды стационарных колебаний определяются точками
пересечения горизонтальной линии, проведенной на уровне Ga, с
соответствующей характеристикой |Gcp(Gi) |. Так, для Uo=
=0,4 В при G3=0,02 См получаются два стационарных режима
(точки А и В). Ниже показано, что стационарный режим является
устойчивым, если
dIGepimcO, (4.216)
и неустойчивым в случае неравенства противоположного знака.
Следовательно, точке А соответствует устойчивый динамический
режим, точке В — неустойчивый.
Из рис. 4.42 следует, что в рассматриваемых генераторах воз-
можно существование как мягкого, так и жесткого режимов са-
мовозбуждения. Так, при По=0,4 В при уменьшении 6Э самовоз-
буждение колебаний наступает при Ga—G'a, когда суммарная ак-
тивная проводимость схемы рис. 4.40 при малой амплитуде Ui «0
уменьшается до нуля:
Gcp(0) + 6'э=0, (4.21-7)
где Gcp(0) равно дифференциальной проводимости G ТД в рабо-
чей точке. При этом амплитуда Ui нарастает до стационарного
значения, соответствующего точке Ль При последующем увеличе-
нии Gs амплитуда Ui постепенно уменьшается, пока при G"3=
= I GCp(Hi) |ma;ic не произойдет скачкообразного срыва колебаний.
Получающаяся зависимость Ui(Rs) (сплошная линия на рис.
4.43a), характеризуется наличием области затягивания (заштри-
хована) и скачкообразным возбуждением и срывом колебаний,
что характерно для жесткого режима самовозбуждения. Согласно
рис. 4.42 такой режим имеет место при С7о>О,3 В. При 0,15
L7O'^'O,3 В возбуждение и прекращение колебаний происходит
без скачков, при одном и том же G3; с уменьшением G3 амплиту-
да L7] плавно возрастает (пунктирная линия на рис. 4.43a), т. е.
режим самовозбуждения оказывается мягким.
На рис. 4.436 показаны зависимости мощности Pi= |Р+| пер-
вой гармоники, отдаваемой отрицательным сопротивлением в на-
грузку Ga от величины последней, рассчитанные для различных
Uo по рис. 4.42 согласно (4.212); пунктирная линия представляет
огибающую этих зависимостей. При каждом смещении Uo мощ-
ность Pi достигает наибольшего значения, когда амплитуда U\
или нагрузка G3 достигает оптимальных значений (П10Пт и 63.опт)-
Используя (4.215) и (4.212), получаем из условия dPi/dUi = 0
2 °э 0Г|т - =_д'Gcp I
Pi опт d U1
или, обозначая G3.OnT/GionT=tg а и — d| Gcp\/dUi — tg p,
2tga=tgp. (4.218)
Смысл соотношения (4.218) поясняется графиком, построен-
ным в правом верхнем углу рис. 4.42. Условие (4.218) означает,
180
что бэ.опт определяется точкой D характеристики |GCp(Gi)|, в ко-
торой 0К—2КМ, где КМ является проекцией отрезка DM каса-
тельной на ось абсцисс.
Для доказательства условия устойчивости (4.216) составим дифференци-
альное уравнение для схемы рис. 4.40
duK 'ик 1 С
c~7f + -r, + -r\u*dt = i’
dt /?э] L J
где ик и 1=Ф(и) —напряжение и ток в нелинейном элементе. Заменяя для ге-
нератора почти гармонического напряжения и и I их первыми гармониками
«1 и ii и считая й = ОСр(1Л)и1, получим
dwj 1 Г 1 1 If
,, + + GCp (Uj) wj 4- ——-1 dt = 0. (4.219)
Полагая GCp(tA) =const в пределах одного или нескольких периодов коле-
баний, продифференцируем (4.219)
d2 Ui 1 Г 1 d ш . Их
Анализируемый генератор эквивалентен контуру с коэффициентом затуха-
ния аэ= — — +Gcp(Hi) , в котором стационарный режим колебаний
|_ Аэ J
может иметь место только при аэ=0, т. е. с амплитудой UID, определяемой из
условия —Gcp(Uio) = 1/|^э аналогичного (4.215).
Для оценки устойчивости стационарного режима предположим, что по ка-
кой-то причине амплитуда Ui увеличилась относительно Uw иа небольшую
величину ДПр Теперь коэффициент затухания контура аэ окажется отличным
ст нуля, и амплитуда колебаний станет изменяться пропорционально е~.
Стационарный режим будет устойчивым, если большая амплитуда станет за-
тухать, что имеет место, когда
d Gcn
Gcp (Glo 4~ Л Gi) Л; GCp (Gio) + A Gj > GCp (G10) или d GCp/5 0.
L/j
Это условие совпадает с (4.216), поскольку Gcp<0.
Во многих случаях, особенно на СВЧ, УСр(£Л, со) и q>y(Ui, со),
и тогда определение амплитуды и частоты стационарных колеба-
ний требует совместного решения (4.213) и (4.214). В этих усло-
виях удобно заменить в (4.210) Z3 на Y3=G3 + i.B3=l/Z3, что при-
водит к другой форме записи комплексного уравнения генератора
Y(L7b ю) =YCp(t/b со) + Y3(co) =0 (4.221)
или двум действительным условиям баланса активных и реактив-,
ных проводимостей:
G = GCp(Gb со) + G3(co) =0, jB = jBcp(Gi, со) +-Вэ(со) =0,
(4.222), (4.223)
эквивалентных условиям
баланса амплитуд и фаз. В
(4.222) — (4.223) принято v
Ycp=Gcp-|-iBcp. Уравнениям иа
(4.223) или (4.222) соответ-
ствует эквивалентная схема
генератора рис. 4.44.
Стационарные режимы колебаний, удовлетворяющие (4.221), удобно опре-
делять графически на плоскости комплексного переменного (или на круговой
диаграмме), строя семейство годографов прибора —Ycp(f) | ьг Для различных
-амплитуд 17]=const (параметр кривой) с нанесенными линиями постоянных
частот и годограф нагрузки Ya(f) также с отмеченными значениями частот.
Точки годографов, в которых — Ycp=Ya, на одинаковых частотах определяют
•частоты и амплитуды возможных режимов стационарных колебаний. На рис.
•4.45 построены упомянутые годографы. Стационарный режим определяется точ-
жой А, которой соответствуют амплитуда U'"t и частота f'" колебаний.
Рис. 4.45
Рис. 4.46
АНАЛИЗ УСТОЙЧИВОСТИ
Комплексное уравнение генератора рис. 4.44, состоящего из нелинейной и
линейной частей, характеризуемых соответственно зависимостями Ycp(tA, со) и
Ya (со), можно записать в виде
Y(IA, to) = G(t/1, <o)+i B(Ult co)=O, (4.224)
где G(if7], <o) = Gcp(t7], co)-f-Ga(co), B(t/], co) =Bcp('t7i, co)-pBa(co).
Полагая решение (4.224) в виде Hi =lt/io cos W или 17ю=1Ла/?ее1Ио< < оп"
ределяем из
Y(t7io, соо)=О (4.225)
амплитуду UK и частоту со0 стационарного колебания. Для анализа устойчиво-
сти стационарного режима предположим, что произошло небольшое отклонение
от него, в результате чего амплитуда и частота колебаний оказались
’1/1={71о+Д171, co=iMo+Aco, причем ДсоСсОо- При малых отклонениях
режима нелинейной системы от стационарного она ведет себя как линейная,
изменение амплитуды происходит по экспоненциальному закону, что позволяет
’представить ожидаемое решение в виде
Hi= (Gitf+At/tJe-Acic cos (сооЧ-Асо) /
-или
Oi= (Uio+iMJiyRe еИйо+Дй-ы ДаН. (4.226)
Стационарный режим автогенератора устойчив, если отклонение амплитуды
.At7i с течением времени затухает, для чего AUi и Да должны быть одного
знака. Выражение (4.226) также является решением (4.224), которое можно
записать как
0([/1о+Д£Д, соо+Дсо+i Да)-}-1 B(f7io+A'[/t, <oo-|-A<Oj-|~i Да) =0.
Раскладывая каждое слагаемое левой части этого уравнения в ряд Тейло-
ра по степеням малых параметров AUi, Дсо и Да, ограничиваясь малыми вели-
чинами первого порядка и переходя от комплексного уравнения к двум дейст-
вительным, получаем с учетом (4.225)
dG dG dG
—- Д + —— Д to -4- —— Д а = О,
дЩ да 'да
дБ дБ дБ
— Д[/х+—Дсо + —Да = О.
dUi да да
(4.227)
Как известно, производная функций комплексного переменного G+i В—
=Ф(Д«+1Да) существует только в случае, если она удовлетворяет условиям
Коши — Римана:
dG/da^dB/da и dG/da=—дВ/да.
(4.228)
Исключая из (4.227) Дсо и используя (4.228), приходим к выражению
Act da Г dG дБ dG дВ ~| /Г/ dG у / б В \81
&Ui dUi ~ [ dUt да ~ да дЩ ] / |_\ да) ]’
Сформулированное выше условие устойчивости (одинаковые знаки Д{Д и
Да) стационарного режима сводится к неравенству
dG дБ dG дБ
dUi да да дС\>
(,4.229)
Это условие может быть использовано для анализа устойчивости стацио-
нарных режимов, определяемых по годографам прибора и нагрузки (см. рис.
4.45). В частном случае резистивного нелинейного элемента,
когда В от амплитуды С\ не зависит, условие устойчивости оказывается
(dGcpIdUi) (дВ/да) >Ю. (4.230)
В автогенераторах - на резистивных НЭ TV-типа в стационарном режиме
BGCp/5Gi>0, а потому условие (4.230) сводится к
дБ
д а
(4.231)
Условие устойчивости (4.231) широко используется при анализе генерато-
ров СВЧ. При определении устойчивости согласно критериям (4.229)—(4.231)
все частные производные должны быть определены в исследуемых стационар-
ных режимах.
В одноконтурном генераторе на резистивном двухполюснике с ОС ЛТ-типа
в стационарном режиме В=0, поэтому генерация возможна только на резо-
нансной частоте соо. Однако, поскольку на частоте <в0 в параллельном конту-
дВ дБ
Ре -— >0, а в последовательном -— <0, генерация возможна лишь в nep-
fl ш да
вом случае. Аналогичный анализ генераторов почти синусоидального
v___ _____________ ____ _д , . тока
•1=71 cos at, основанный на дуальной эквивалентной схеме рис. 4.46, линейная
часть которой характеризуется комплексным сопротивлением Z3(to) =/?э(ш)+
+1Уэ(ш), а нелинейная — средним по первой гармонике сопротивлением
2ср(Л, to)=J?cp(/i, to) +i Уср(Л, со), приводит к условиям устойчивости, отли-
чающимся от (4.229)—(4.231) заменой G и В соответственно на J? и X. Для
частного случая генератора на резистивном нелинейном эле-
менте S-типа в устойчивом стационарном режиме б/?ср(Л)/<Э/1>0, по-
д X
этому условие устойчивости оказывается >0, что означает необходимость
использования в одноконтурном генераторе синусоидального тока последова-
тельного контура.
183'
4.8. ОСОБЕННОСТИ ГЕНЕРАТОРОВ СИНУСОИДАЛЬНЫХ
КОЛЕБАНИИ РАЗЛИЧНОГО ТИПА
ТРЕХТОЧЕЧНЫЕ СХЕМЫ ГЕНЕРАТОРОВ
На рис. 4.47а показана обобщенная трехточечная схема генера-
тора, в которой в качестве элементов контура Zj, Z2 и Z3 обычно
используются емкости и индуктивности с малыми потерями, что
позволяет при дальнейшем рассмотрении считать Z1=iA'i, Z2=
==iX2, Z3=iXg.
Рис. 4.47
В генераторе должны одновременно выполняться условия ба-
ланса амплитуд и фаз. Выполнение первого из этих условий обес-
печивается надлежащим выбором 7СУ и Кос, при котором КуКОс^
>1.
Поскольку напряжение Uai на выходе АЭ повернуто относи-
тельно СВ1 на '180°, для выполнения условия баланса фаз требует-
ся в делителе напряжения, состоящем из Xi и Х2, также осущест-
вить поворот фазы на 180°, для чего нужно, чтобы
X2/(Xi+X2)<0. (4.232)
Для выполнения (4.232) X, и Х2 должны быть реактивностями
разного характера и притом |Х1|>-|Х2|.
Частота со генерируемых колебаний будет близка к резонанс-
ной частоте контура, если
2Х1(ш)=Х1+Х2+Х3«0. (4.233)
Так как | Xi | > | Х21, равенство (4.233) может иметь место толь-
ко, если реактивное сопротивление Х3 того же характера, что и
Х2. На рис. 4.47а однотипные по характеру реактивные сопротив-
ления заштрихованы.
Существует два типа трехточечных схем: а) индуктивная трех-
точка, в которой Х2 и Х3 — индуктивности, Xi — емкость; б) ем-
костная трехточка, в которой Х2 и Х3 — емкости, Xi — индуктив-
ность. На рис. 4.476 приведена схема индуктивной трехточки. Эле-
менты Ci, L2 и L3 образуют колебательный контур; резистор Re
является элементом цепи автосмещения, через который протекает
постоянная составляющая тока базы, конденсатор Cq предотвра-
184
щает попадание напряжения Ек на базу и влияет на постоянную
времени пепи автосмещения.
Кварцевые генераторы, обладающие как отмечалось в § 4.4,
повышенной стабильностью частоты, собираются в основном по
трехточечной схеме и работают на частотах, где реактивное со-
противление кварцевого резонатора имеет индуктивный характер.
Б емкостной трехточке кварцевый резонатор включают в качестве
элемента Zb в индуктивной — преимущественно в качестве Z2.
/?С-ГЕНЕРАТОРЫ
Рассмотренные выше схемы LC-генераторов оказываются ма-
лопригодными для генерирования низкочастотных колебаний, по-
скольку для настройки контура на такие частоты приходится при-
менять катушки и конденсаторы с большими L и С, обладающие
значительными габаритами и весами; собранные на них контуры
оказываются низкодобротными и практически не перестраиваемы-
ми по диапазону. Эти обстоятельства и послужили причиной раз-
работки ./?С-генераторов синусоидальных колебаний, содержащих
только резисторы Д и емкости С. Индуктивности, а значит, и коле-
бательные контуры в /?С-генераторах отсутствуют.
Структурная схема /?С-генератора соответствует рис. 4.3; она
содержит усилитель и цепь положительной обратной связи, причем
параметры схемы подбираются такими, чтобы необходимые для
генерирования колебаний условия баланса амплитуд и фаз выпол-
нялись на одной частоте. Усилители во всех случаях 'резистивные.
Генератор с мостом Вина — наиболее распространенный тип
^С-генератора. Основу его составляет последовательно параллель-
ная /?С-цепочка, включенная в цепь обратной связи усилителя*
(рис. 4.48а). Сопротивления последовательной и параллельной
1 Назначение резисторов Ri и /?з, отмеченных пунктиром, рассматривается'
ниже.
185-г
частей цепочки соответственно Z1=i/?+ 1/icoC и Z2—/?/(l + ki>/?C),
Поэтому комплексный коэффициент обратной связи
К°'с Zj. + Z2 3 + i(toCtf-l/«>Ctf) <4-234)-
Величина Ко.с достигает наибольшего значения тахЛо.с= 1/3,
когда мнимая часть знаменателя обращается в нуль, т. е. на ча-
стоте
оо= 1/RC.
(4.235).
Выражение (4.234) можно записать как
JZ ____ v- ’Ч’о.с
^О.с--- ^о.сс
1
3(l + i<2e) '
(4.236)’
где Q = l/3, е= (со/соо) — (соо/со)-
Зависимость (4.236) сходна с зависимостью Z3(co) параллель-
ного колебательного контура с добротностью, равной 1/3. На
рис. 4.486 построены частотная Ло.с(со) и фазовая <р0.с(со) харак-
теристики, соответствующие (4.236).
Схема рис. 4.48g будет автогенератором в случае выполнения
условий баланса амплитуд фаз. Для выполнения первого условия
коэффициент усиления усилителя должен быть
/<v>-----р— = 3. (4.237)
у тах7<о.с
Для выполнения второго условия на частоте <оо сдвиг фаз в
усилителе должен быть <рк=0,2л,... Поскольку в резистивном уси-
лителе сдвиг фаз в одном каскаде составляет 180°, необходимость
выполнения этого условия заставляет применять двухкаскадный
усилитель. Получение Ку^Кукр—3 в таком усилителе затрудне-
ний не вызывает.
Рассмотренный генератор имеет очень низкую стабильность частоты, так
как при эквивалентной добротности цепи <2 = 1/3 ее фазовая характеристика
оказывается очень пологой. На практике для увеличения стабильности частоты
цепь обратной связи усложняют, добавляя к последовательно-параллельной
RC-цепи положительной обратной связи цепь Rt—Rs отрицательной обратной
связи, показанную пунктиром на рис. 4.48а. Совместно эти цепи образуют мост
Вина. Выходное напряжение усилителя 0% подается на одну диагональ моста АО,
напряжение с другой диагонали БД подается на вход усилителя (6Вх). На
частоте напряжения Oi и Os=OzRsl(Ri+Rs) находятся в фазе с 02. Так как
Os во входной цепи усилителя включено навстречу Ot, напряжение OB2=Oi—Os,
и коэффициент обратной связи
6вх _ Ui-U3 _ 1
°’с 1/2 Й2 3 +
(4.238).
при добавлении цепи iRi—R3 уменьшается, что означает необходимость соот-
ветствующего увеличения коэффициента усиления усилителя Ку.
На рис. 4.49а построены, начиная с Oit векторные диаграммы последова-
тельно-параллельной 7?С-цепочки и моста Вина для частоты шо. Покажем, что
мост Вина позволяет существенно увеличить стабильность частоты генера-
тора. Предположим, что по какой-то причине в усилителе поивился небольшой
сдвиг фаз Дфу. Это приведет к изменению частоты со=щ>о+Дсо, при котором"
Дф0.с(<о) +Дфу=0. Приблизительно Дф0.с =
характеристики фо.с(<о)- Поэтому
До,
5(Ро с
где • — крутизна
дфр.с
да>
Д <о = —Д фу
(4.239}
Чем больше крутизна фазовой характеристики фо.с(<в), тем выше фикси-
рующая способность рассматриваемой системы, т. е. тем меньше изменение
Рис. 4.49
частоты До. На рис. 4.496 для частоты о, немного большей <в0, построена век-
торная диаграмма /?С-цепи, а на рис. 4.49в приведена векторная диаграмма
моста Вина. Здесь Дфо.с — сдвиг фаз в /?С-цепочке, а Дф'о.с—в схеме моста.
Очевидно, sin Дф'о.с = Hi sin Дфо.с. При небольших Дф0.с=—Дфу> а значит,
в До
А Фо.с Ut
& Фо.с ^вх
G>,
®0
U1
б'вХ
® о
_ Ку.
з '
Принимая Дфо.с/Дш~йфо.с/6<0, Лф'о.с/Дм^дф'о.сАЭш, получаем
6ф'в.е/6®= (Лу/3) (дфо.с/Лв). (4.240)
Следовательно, введение цепи отрицательной обратной связи позволяет
увеличить стабильность частоты генератора в Лу/3 раз. Так, при переходе от
Ку=3 к Ку=400 стабильность частоты увеличивается более чем в 100 раз.
Остановимся на вопросе получения синусоидальных колебаний
в генераторе с мостом Вина. Для возбуждения колебаний в ис-
ходном состоянии генератора нужно выбрать Ку^Ку.кр=3 (с уче-
том действия цепи отрицательной обратной связи). Когда ампли-
туда (71 нарастающих колебаний превысит Z7i* (рис. 4.50а), нач-
нет сказываться нелинейность усилителя, в результате чего ег©
выходной ток и напряжение искажаются, становясь негармониче-
скими, средний по первой гармонике коэффициент передачи уси-
лителя Ху в большинстве случаев уменьшается (рис. 4.506). При
187
некоторой амплитуде U\ величина Ку уменьшается до Kv.vp, в
схеме установятся стационарные колебания с определенными ис-
кажениями.
_Для получения в iRC-генераторах почти гармонических колеба-
ний используются нелинейные инерционные сопротивления (тер-
морезисторы), рассмотренные в § 2.4. В схеме генератора рис.
4.48п полупроводниковый терморезистор включают вместо Ri или
металлический — вместо R3. В первом случае по мере возрастания
амплитуды U2 увеличивается амплитуда переменного тока, проте-
кающего через цепь R\—R3. При этом сопротивление полупровод-
никового терморезистора (J?"T на рис. 2.13) уменьшается и все
большая часть напряжения С/2 падает на R3. В итоге отрицатель-
ная обратная связь увеличивается, снижая коэффициент усиления
усилителя (пунктирная линия на рис. 4.506). При соответствую-
щем подборе элементов схемы величина Ку уменьшается до Ку.кР
при амплитуде £Л"<СЛ*. В результате устанавливаются стацио-
нарные колебания амплитуды U\", при которой искажения отсут-
ствуют: нелинейность активного элемента еще не сказывается, а
инерционный элемент искажений не создает.
Такой же эффект достигается при включении металлического
терморезистора (с характеристикой R't на рис. 2.13) вместо R3.
/?С-генератор с мостом Вина является основным элементом мно-
гочисленных лабораторных генераторов, работающих в диапазоне
частот от 20 Гц до 200 кГц. Во избежание снижения стабильности
частоты |/?С-генераторов в них следует применять активные эле-
менты с большими входными сопротивлениями.
МНОГОКОНТУРНЫЕ ГЕНЕРАТОРЫ. ЗАТЯГИВАНИЕ ЧАСТОТЫ
Колебательные системы автогенераторов могут быть многокон-
турными как из-за введения дополнительных колебательных кон-
туров (например, для повышения стабильности частоты или увели-
18S
чения мощности и КПД), так и из-за влияния других цепей (в
том числе паразитных). Хотя общие положения теории автогене-
раторов (условия самовозбуждения, условия баланса амплитуд и
фаз, режимы стационарных колебаний и др.) справедливы и для
многоконтурных автогенераторов, в последних имеют место неко-
торые своеобразные явления. Рассмотрим их на примере двухкон-
турного автогенератора на резистивном приборе с отрицательным
сопротивлением (рис. 4.51а). Для определения проводимости ли-
Й ......... $
Рис. 4.51
(ЙО!--
(4.242)
(4.243)
нейной цепи, включенной между точками 1—Г, заменим эту цепь
эквивалентной (рис. 4.516). Общая проводимость нагрузки между
точками 1—Г
Yh=Y1 + YcY2/(Yc + Y2). (4.241)
Обозначим через Yi=Y1+Yc и Yn=Y24-Yc проводимости соот-
ветственно первого и второго контуров, параллельно которым под-
соединена емкость Сс; их резонансные частоты:
= 1/1/Li(Ci + Cc), й>02= 1/(С2 + Сс). Тогда из (4.241)
Y,„Y,+T^"T<V-b
1 Y„ Yn
Проводимости Yj и Yu представим в виде
Yi= (1 +1 Yn = (1 + i ^2)
где обобщенные расстройки и |2 связаны с добротностями Qi и
Q2 и расстройками контуров как
= 2Qi ((О—(Bol)Mob ^2 = 2Q2 (<й—Ы02) Мо2-
Обозначая Yc=iBc> получаем из (4.242) и (4.243)
Y,_Y',+ Y".-Tiib_+_^.. (4.244)
На рис. 4.52 приведено графическое построение амплитудно-
фазовой характеристики (АФХ) линейной части рассматриваемо-
го генератора. АФХ первого слагаемого Y'B=Yi выражения
(4.244) представляет вертикальную линию (рис. 4.52а). Проводи-
мость Y"H=B2C#32(1—i£2)/('l+ё2г) можно записать как Y"H=
= У"не,ф, где tg<p=~h. H/H=52c/?82//l+tg2<p=B2c^32COS<p. Эти
выражения подобны (4.60), (4.61) для схемы рис, 4,14а, АФХ ко-
189
торой представляет собой окружность (см. рис. 4.146). Точно так
же и в рассматриваемом случае: при изменении со конец вектора
Y"H перемещается по окружности радиуса 0,5В2с/?э2 с центром в
точке (0,5В2с</?э2» 0), являющейся АФХ проводимости Y"H. Стрел-
кой на графиках указано направление увеличения частоты со.
Рис. 4.52
Складывая на каждой частоте векторы Y'H и Y"H, получаем YH,
как показано на рис. 4.52в. На рис. 4.52—4.54 частоте coi соответ-
ствует точка 1, частоте сог — точка 2 и т. д. На рис. 4.52 принято
0)01 = С04, С002 — 0)5-
При достаточно сильной связи АФХ оказывается петлеобраз-
ной, при слабой — петля отсутствует. Расчеты показывают, что
петлеобразная АФХ имеет место, если коэффициент связи между
контурами превышает затухание с?2= 1/<2г второго контура; в пос-
ледующем рассматриваем только такой случай.
При изменении резонансной частоты первого контура изменя-
ется положение точек Y'a на рис. 4.52g: если, например, частота
cool становится равной cos или со6, то все пронумерованные на этом
рисунке точки опускаются: опускается и годограф YH, как показа-
но на рис. 4.53а и б.
Рис. 4.53
190
При небольшой расстройке cooi относительно ыо2 реактивная
проводимость Вн=0 на трех частотах: Если АЭ ге-
нератора резистивный, т. е. <ру=0, на этих трех частотах выполня-
ется условие баланса фаз. Однако устойчивыми согласно условию
(4.231)1 * * * являются режимы колебаний только с крайними частота-
ми со7 и со", называемыми частотами связи. Нижняя частота связи
то' всегда меньше наименьшей из резонансных частот контуров,
верхняя частота связи а" — больше наибольшей. Области не-
устойчивых решений, где дВ/ды<^0, на рис. 4.52 и 4.53 заштрихо-
ваны.
На рис. 4.54а на основе рис. 4.52 и 4.53 построена зависимость
активной проводимости GH на частотах связи (<о', ы" и с/") от
изменения частоты wOi настройки первого контура. Если в генера-
торе используется резистивный АЭ с характеристикой средней про-
водимости, соответствующей рис. 4.546, то возможно возбуждение
колебаний на любой из частот связи.
Предположим, мы увеличиваем частоту настройки cooi первого
контура, начиная от значений cooiCco'ot (рис. 4.54а). Вплоть до
частоты й"о1 частота генерируемых колебаний ю совпадает с ниж-
ней частотой связи ы' (линия MiNi). При aoi=(i)"oi (точка
происходит скачкообразное изменение режима по линии N\N2: ча-
стота генерируемых колебаний резко увеличивается до соответст-
вующего значения частоты а", одновременно изменяется и ампли-
туда колебаний от U'x до U"i (см. рис. 4.546). Если теперь умень-
шать частоту сооь частота колебаний <в=о// уменьшается по ли-
нии N2M2, пока в точке М2 не произойдет скачкообразное ее умень-
1 Устойчивость режимов, в которых дВ/до>0, можно пояснить следующи-
ми соображениями. Предположим, что по какой-то причине частота колебаний
возросла. В случае дВ/ды>0 это вызовет увеличение В, что ведет к уменьше-
нию частоты, т. е. ее возвращение к стационарному значению.
Рис. 4.55
шение по линии Af2-A4i с одновременным увеличением амплиту-
ды Ui от U'i до U"i.
На рис. 4.54е построен соответствующий график зависимости
частоты и от сооь Он характеризуется наличием области частот
a'oi—ы"оь в пределах которой возможны два устойчивых стацио-
нарных режима с различными частотами и амплитудами колеба-
ний. В таком генераторе устанавлива-
ются одночастотные колебания, часто-
та которых зависит от того, как до-
стигалась данная настройка: путем
увеличения или уменьшения частоты
cool (аналогично для частоты соог).
Данное явление, свойственное много-
контурным генераторам, называется
затягиванием, частоты, а интервал
co'oi—<о"о2 — областью затягивания.
На рис. 4.55 по данным рис. 4.53а
построена зависимость Вн(со) (об-
ласть неустойчивых решений заштри-
хована); там же пунктирной линией 1
зависимость для случая отсутствия второго
дБ.
нанесена
контура,
системы
чем для
значительно более высокая стабильность частоты генератора. Спо-
соб увеличения стабильности частоты за счет подсоединения к ос-
новному контуру второго (высокодобротного) широко распростра-
нен.
аналогичная
Поскольку крутизна —двухконтурной колебательной
да>
на рабочих частотах (со' или со") значительно больше,
одноконтурной, в первом случае может быть достигнута
ОСОБЕННОСТИ ТРАНЗИСТОРНЫХ АВТОГЕНЕРАТОРОВ
Биполярный транзистор как активный элемент АЭ схемы гене-
ратора обладает следующими основными особенностями:
меньшими, чем у полевых транзисторов и ламп, величинами
входного и выходного сопротивлений АЭ, зависимостью этих вели-
чин от режима работы и частоты;
инерционностью протекающих в транзисторе процессов, свя-
занных с процессами накопления зарядов и конечным временем
пролета неосновных носителей через базу.
Первая из этих особенностей приводит к уменьшению избира-
тельности и фиксирующей способности контура, затрудняет усло-
вия самовозбуждения. Во избежание существенного уменьшения
стабильности частоты и с целью оптимизации режима в таких ге-
нераторах используется обычно частичное подключение контура к
выходу АЭ.
Вторая особенность имеет большее принципиальное значение,
поскольку в транзисторах диапазон частот (низких), в пределах
которого можно пользоваться в расчетах статическими характери-
192
стиками, составляет лишь несколько процентов от рабочего диа-
пазона частот транзистора; на более высоких частотах инерцион-
ность прибора существенно влияет на все характеристики генера-
тора, нередко заставляя видоизменять используемые принципиаль-
ные схемы.
На рис. 4.56 приведена эквивалентная схема транзистора —
схема Джаколетто [15]. Здесь г6— объемное сопротивление базы,
Рис. 4.56
г — сопротивление, учитывающее рекомбинацию неосновных но-
сителей в базе, Сд — диффузионная емкость, учитывающая накоп-
ление неосновных носителей в базе, Sn= 4^ — крутизна
коллекторного тока по напряжению на эмиттерном переходе,
Ск.а и Ск.п — компоненты емкости коллекторного перехода. Ча-
стотная характеристика крутизны Sn такая же, как и у коэффи-
циента передачи а:
(l + if//e) ’ (4 245>
где S°n — значение Sn на низких частотах, — граничная часто-
та усиления по току в схеме ОБ. Коэффициент передачи входной
цепи К=17п/С/б.э на низких частотах К°=/С°=1/(l+irg/r). В об-
щем случае согласно рис. 4.56 К=1/(1-НГб/г + щ>СдГб)- Обозначая
г 1 (гб —I— г) v
через ts~-----~ граничную частоту, на которой модуль ко-
йя re гСд
эффициента передачи уменьшается до К=К°/]/2, получаем
K=K°/(l+if/fs). (4.246)
Коэффициент передачи можно записать также в виде К=Ке’ф«.
Следовательно, из-за шунтирующего действия Сд с ростом часто-
ты уменьшаются коэффициент передачи входной цепи и напряже-
ние (7П, возрастает сдвиг фаз <рк-
Крутизна транзистора может быть определена как
8 = -^— = -^------rL- = KSn. (4.247)
17б.э ^б.э йп
Записывая S=Sei,Ps и Sn=Snei4,sn , получаем
5 = № 5°/ / [ 1 + 2] [ 1 + (Ш2] > Ч>8 = Фк + Фвп> (4.248), (4.249)
7—92 193
где tg <рк=—f/fs, tg<psn=— f/fa Расчеты показывают, что
«0,054-0,1.
С увеличением частоты уменьшается крутизна транзистора S
и возрастает сдвиг фаз (запаздывание /к относительно 1?б.э), при-
чем на более низких частотах преимущественное влияние оказы-
вает шунтирующее действие Сд во входной цепи. При f=fs кру-
тизна транзистора 5~«S°n/l^2 и сдвиг фаз <р8~<Рк=—45°. В таких
условиях нельзя вести расчет генератора по статическим характе-
ристикам прибора, это возможно только при (0,34-0,5) fs~
= (0,0154-0,05)fа- Транзистор же работает достаточно эффек-
тивно, примерно до f=f а .
На рис. 4.57а приведены зависимости <рк, <p6n и tps от частоты f,
а на рис. 4.576 показана (заштрихована) та часть рабочих частот,
Рис. 4.57
в которой инерционными свой-
ствами транзистора можно пре-
небречь. Как видим, в большей
части диапазона рабочих частот
транзистора при анализе гене-
ратора необходимо учитывать
инерционные свойства при-
бора.
В автогенераторах стремят-
ся иметь частоту генерируемых
колебаний со близкой к резо-
нансной частоте контура юо,
ибо при этом достигается наи-
большая стабильность частоты.
При .(рк='фв=0 из (4.109) полу-
чаем <pz=0 и ы = юо- Если же величина <р« значительна, то при <рк = 0
в стационарном режиме <pz=—<ps, т. е. <о=э^='соо-
Для предотвращения этого в транзисторных автогенераторах
используют схемы с фазовой компенсацией, в которых в цепь об-
ратной связи вводят такие элементы, чтобы в стационарном режи-
ме <pK+q)s=O, а потому и tpz=O. Схема генератора такого типа
показана на рис. 4.58а. При введении фазирующей емкости Сф в
потенциометре, состоящем из Сф и входного сопротивления тран-
зистора ZE2, происходит поворот фазы на величину (рк, равную
Рис. 4.58
194
q)K==arctg(l/a>C$7?Bx)> если ZBX==J?BI. На рис. 4.586 построена
векторная диаграмма такого автогенератора для оптимального
случая полной компенсации фазовых сдвигов, когда <рк=—<ps-
4.9. ГЕНЕРИРОВАНИЕ НЕСИНУСОИДАЛЬНЫХ КОЛЕБАНИИ
ОБЩИЕ СВЕДЕНИЯ
В радиолокационных устройствах, многоканальных системах
связи, вычислительных, измерительных и других устройствах и
приборах широко используются генераторы, вырабатывающие не-
синусоидальные колебания. В каждом конкретном случае требу-
ются колебания определенной формы. Так, в осциллографах и те-
левизорах для осуществления развертки необходимо иметь гене-
ратор пилообразного напряжения или тока, в разнообразных им-
пульсных устройствах ।— генераторы, вырабатывающие импульсы
прямоугольной, треугольной или какой-либо иной формы.
Резко несинусоидальные колебания, характеризующиеся раз-
рывом функции или ее производной, называются релаксационны-
ми, а создающие их устройства — генераторами релаксационных,
колебаний. Релаксационные колебания могут быть получены как
в схемах, аналогичных используемым для генерирования почти
гармонических колебаний (при определенном выборе параметров
последних), так и в многочисленных специальных схемах релак-
сационных генераторов. Последние создаются преимущественно
на полупроводниковых приборах.
Определим условия получения релаксационных колебаний в
генераторе рис. 4.16. Преобразуем (4.153), обозначив
2аэ = — 12<хэ ] и ------1) :
й + и,( ——и2—1^й+п = 0. (4.250)’
\ I 2аэ| /
Заменяя в (4.250) переменную и на у/|2аэ|, получим
уравнение Ван-дер-Поля
, х+ц(х2—1)х+х=0. (4.251)
При ц=0 (4.251) описывает колебание в контуре без потерь
л+х=0, имеющее, как известно, гармонический характер. Чем
больше параметр ц, тем сильнее колебание, определяемое (4.251),
должно отличаться от гармонического. Плавным увеличением ц
можно осуществить переход от синусоидальных колебаний к резко
несинусоидальным. На фазовой плоскости последним соответст-
вуют предельные циклы, форма которых резко отличается от ок-
ружностей или эллипсов.
МУЛЬТИВИБРАТОРЫ
Мультивибраторами называются релаксационные генераторы,
состоящие из двухкаскадных резистивных усилителей, выход кото-
рых соединен со входом. В результате образуется замкнутая цепь
с положительной обратной связью. На рис. 4.59 приведена схема
мультивибратора, состоящая из двух однотипных транзисторных
усилителей с общим эмиттером.
Рис. 4.59
Мультивибратор называется симметричным, если транзисторы
Т, и Т2 и сходные элементы схемы каждого усилителя одинако-
вые, т. е.
Rk\=Rk2~Rk, -Рб! —R62 = R6, С\ = С2 = С,
и несимметричным, если какое-либо из этих условий не выполня-
ется. Можно ожидать, что рассматриваемый далее симметричный
мультивибратор будет находиться в таком состоянии равновесия,
при котором напряжения и токи в соответствующих элементах
каждого усилителя окажутся одинаковыми:
Ч-к 1,2= Ек + Гк 1,2-Рк 1,2, U6\,2 — Еб + 1б1,2 -Рб 1,2, j 252)’
Uki,2 — 2,1 + 2,1 • I
Полярность напряжений ис соответствует указанной на рис.
4.59. Однако такое состояние равновесия является неустойчивым.
Действительно, если ток iK1 транзистора Т\ несколько увеличится
(например, из-за действия флуктуации), возрастет падение на-
пряжения на J?ki, что вызовет повышение потенциала коллектора
(точка Л’1); потенциалы эмиттеров транзисторов считаем нулевы-
ми. Конденсатор С2 начнет разряжаться по цепи: Rq2, источник
Еб, транзистор Т,. Разрядный ток ipa32 протекает во внешней цепи
конденсатора С2 в указанном на рисунке направлении.
Напряжение на конденсаторе С2 мгновенно измениться не мо-
жет, поэтому возрастание потенциала точки Л’1 вызовет такое же
увеличение потенциала и&2 на базе транзистора Т2. Последнее при-
ведет к уменьшению токов i^2 и iK2, а также к понижению потен-
циала Uk2-
Напряжение ик2 окажется большим суммы Uci + ^ei, в резуль-
тате чего начнется заряд конденсатора С\ током i3api, протекаю-
щим от +ЕК через промежуток эмиттер—база открытого транзи-
стора Ti, конденсатор Ct и резистор /?н2 к —Ек. В результате по-
нижается потенциал и^, что способствует увеличению iK1.
Если коэффициент усиления схемы
Л'=Л1Л'2>1, (4.253)
где Л1 и Кг — коэффициенты усиления каскадов, произойдет даль-
нейшее увеличение тока tKi, повышение потенциала икЬ а значит,
и базы «62. еще большее уменьшение тока iK2, понижение потен-
циалов «кг и Пб1 и т. п. В результате лавинообразного, почти мгно-
венного (поскольку обычно Л1К2}>1) развития этого процесса
о
о
Vx
о max
о
Рис. 4.60
о
Л
"я,
схема переходит в состояние, в котором: а) транзистор Т] открыт
и насыщен, в результате чего нК] близко к нулю, б) транзистор Т2
заперт положительным напряжением на его базе, в) конденсатор
С2 разряжается, а С\ за-
ряжается.
На рис. 4.60 приведе-
ны осциллограммы напря-
жений в мультивибраторе.
Рассмотренное лавинооб-
разное открывание одного
транзистора и запирание
другого соответствует мо-
менту ti. Постоянные вре-
мени заряда Тзар и разря-
да Траз существенно раз-
личаются: Тзар«С’|7?к, если
пренебречь небольшим со-
противлением база—эмит-
тер открытого транзисто-
ра, Траз^СРб в пренебре-
жении сопротивлением
коллектор — эмиттер от-
крытого транзистора.
Обычно Тзар<С
огц.
Страз, и заряд конденса-
тора происходит значительно быстрее разряда. Напряжение Wei по
окончании заряда конденсатора С\ несколько уменьшается по абсо-
лютной величине, но сохраняется отрицательным, благодаря чему
транзистор Т< остается открытым.
Процесс разряда конденсатора С2, имеющий экспоненциальный
характер, сопровождается уменьшением разрядного тока tP2 и по-
ложительного потенциала нб2= (гр2 +1'62)^62—Ебл+Р2#б2—Еб- Ког-
да «бг в момент /2 достигает определенного для данного типа
транзистора (приблизительно нулевого) уровня, транзистор Т2
открывается; появляется ток 1'кг, увеличивается потенциал пк2, а
значит, и и61, несколько уменьшается ток iKi. Это приводит к
уменьшению потенциала икь а значит, и ивг- Когда транзистор Т2
откроется настолько, что окажется Л’1К2>1, произойдет дальней-
шее лавинообразное развитие этого процесса, в результате чего
197
состояние схемы скачкообразно изменится: транзистор Т2 окажет-
ся открытым, Т] — закрытым, конденсатор С2 станет заряжаться,
Ci — разряжаться. Схема будет оставаться в таком состоянии до
тех пор, пока в результате разряда конденсатора С] не произой-
дет очередное переключение, и т. д.
Потенциал коллектора закрытого транзистора равен —Ек.
В результате отпирания транзистора последний скачком перехо-
дит в режим насыщения, когда ик«0. Скачкообразное повышение
потенциала коллектора на величину АикшЕк в первый момент
полностью передается на базу другого транзистора, увеличивая
ее напряжение от небольшого отрицательного до максимального
положительного.
В момент скачкообразного запирания транзистора параллель-
но ему оказывается подключенным разряженный к этому времени
конденсатор С; восстановление большого коллекторного напря-
жения происходит постепенно, путем заряда конденсатора током
«зар, в результате чего напряжение ик несколько отличается от
прямоугольного.
Период колебаний мультивибратора опреде-
ляется продолжительностью процессов разряда
конденсаторов С\ и С2: 7’=Д^+Д/2, где Д/i— время запер-
того состояния транзистора Т>, At2 — то же для транзистора Т2.
Для определения величин Д^ и Д/2 на рис. 4.61а и б приведены
Рис. 4.61
эквивалентная схема разряда конденсатора С2 и временная диа-
грамма изменения и§2. Момент /=0 на последней соответствует
началу разряда, когда и^2=Ек. Изменение и^2 происходит по за-
кону
«62= (Ек+Еб)ег1'ъ—Еб,
где т2=С2/?б2 — постоянная времени разряда конденсатора С2-
В момент |/=Д/2 Ыб2=0 и транзистор Т2 отпирается:
Д/2=т21п[ (Ек+Еб)/Еб].
Аналогично продолжительность запертого состояния транзи-
стора Ti определяется выражением
Д#1=Т11п[(Ек+Дб)/Дб],
где Т1 = С1Дб1.
Таким образом, период колебаний
Т=(т1 + т2)1п -£к + £б. (4.254),
Во многих случаях нижние точки резисторов и Т?б2 под-
ключают непосредственно к клемме —Ек. Тогда Ев~Ек и
T=0,7(ti+t2). (4.255)
Полученные выражения позволяют определить величины п и
т2, необходимые для достижения определенного периода Т колеба-
ний мультивибратора и каждой его части (ДД и Д/2). Например,
для того чтобы в симметричном мультивибраторе при Е^ = ЕК по-
лучить колебания с заданным периодом Т, постоянные времени
должны быть Т1=т2=т=771,4. Если при том же Т требуется,
чтобы Д/1 = ЗД/2, постоянные времени придется выбрать: т2=т/2,
Т1=Зт/2.
ТРИГГЕРЫ
Триггером называют устройство, которое может находиться в
одном из двух устойчивых состояний равновесия и переходить из
одного в другое под воздействием внешнего напряжения. В боль-
шинстве случаев триггеры строятся
на основе двухкаскадных нелиней-
ных усилителей постоянного тока с
положительной обратной связью
(рис. 4.62).
Рис. 4.62
Предположим, характеристика усилителя
«2=Ф(и1) ’(4.256)
соответствует построенной на рис. 4.63а. Там же приведены ха-
рактеристики цепи внешней обратной связи
Ut=E+и2 (4.257)
Рис. 4.63
199
для различных значений Е(Е2>Е1>0>Ез>Е4). Общие точки
характеристик (4.256) и (4.257) определяют возможные состояния
равновесия.
Если коэффициент усиления при Ui=0
> 1, (4.258)
du± |U1=o
а в дальнейшем рассматривается только такой случай, то в от-
сутствие внешнего воздействия (Е=0) имеем три состояния рав-
новесия (точки До, 0 и Во), из которых устойчивые только крайние
(До и Во)- В этом легко убедиться, предположив, что произошло
небольшое отклонение щ от значения, соответствующего состоя-
нию равновесия, и определив отклонение и?, по характеристике
(4.256), затем новое значение и\ по характеристике (4.257) и т. д.
Устойчивые состояния равновесия на рис. 4.63а для различных
Еп обозначены точками Ап и Вп. По этим точкам на рис. 4.636
строим зависимость и2(Е). Переключение системы из одного устой-
чивого состояния в другое (точки Ао и Во) можно осуществить,
подавая на вход импульсы чередующейся полярности с амплиту-
дой Е^>ЛЕтгП1 где AEmin—Е2— | Е$ |.
На рис. 4.64 приведена простейшая схема симметричного
триггера на биполярных транзисторах. Параметры схемы выбира-
ются такими, что в среднем (из трех возможных) состоянии рав-
новесия оба транзистора открыты, токи iKi и iK2 равны и все на-
пряжения постоянны. Такое состояние равновесия при условии
Рис. 4.64
(4.258) неустойчиво: при случайном увеличении, например, тока
i'ki произойдет последовательно: увеличение потенциалов uKi и
иб2, уменьшение тока iK2, потенциалов wK2 и z/gi, что вызовет даль-
нейшее увеличение iK1 и т. д. Процесс лавинообразного изменения
состояний транзисторов происходит скачкообразно, как в мульти-
вибраторе. В результате один транзистор (в рассмотренном слу-
чае Т2) окажется закрытым, второй (Ti) открытым. Для переклю-
чения триггера в другое устойчивое состояние нужно коротким
импульсом или открыть закрытый транзистор (Т2) или закрыть
открытый (Ti). Для ускорения процесса переключения обычно па-
раллельно резисторам ставятся емкости С «204-50 пФ. Путем
небольшого усложнения можно добиться переключения триггера
однополярными импульсами.
Триггеры могут создаваться на базе различных устройств с
двумя устойчивыми состояниями равновесия: различных транзи-
сторных и ламповых схем, катушек с сердечниками, туннельных
диодов и др. Триггеры относятся к числу наиболее распространен-
ных устройств, используемых для счета, запоминания и формиро-
вания импульсов.
Глава 5
Нелинейные избирательные системы
под внешним воздействием
5.1. ОСОБЕННОСТИ НЕАВТОНОМНЫХ НЕЛИНЕЙНЫХ
; СИСТЕМ
В предыдущей главе рассматривались разнообразные автоном-
ные автоколебательные системы, т. е. системы, не подверженные
внешним воздействиям. Происходящие в них процессы описыва-
ются однородными нелинейными дифференциальными уравне-
ниями.
В данной главе изучаются неавтономные (преимущественно
автоколебательные) нелинейные системы, т. е. находящиеся под
некоторым внешним воздействием Ф(/). Процессы в них описы-
ваются неоднородными уравнениями, куда в явном виде входит
функция времени. Чаще всего ею оказывается Ф (/) или ее произ-
водная ф'^). Основное внимание будет уделено рассмотрению не-
линейных цепей, содержащих высокодобротный колебательный
контур, интенсивные колебания в котором могут иметь место
только на частоте, близкой к резонансной.
Вынужденные колебания в нелинейных цепях во многих слу-
чаях существенно отличаются от аналогичных колебаний в линей-
ных цепях. Так, частотные характеристики контура, содержащего
нелинейную емкость или индуктивность, отличаются от характери-
стик линейного контура заметной асимметрией, зависимостью ре-
зонансной частоты от амплитуды колебаний, возможностью скач-
кообразных изменений амплитуды при плавном изменении часто-
ты. При внешнем воздействии на автоколебательные системы воз-
можны такие явления, как
синхронизация колебаний внешним воздействием частоты ю,
при которой частота генератора изменяется, становясь равной ча-
стоте воздействия;
деление и умножение частоты воздействия со в целое число
и раз, в результате чего частоты колебаний автогенераторов изме-
няются, становясь равными соответственно а/п или со/г;
201
асинхронное возбуждение и гашение колебаний, при которых
воздействием колебания произвольной (некратной) частоты воз-
буждаются колебания в цепи, где в отсутствие воздействия коле-
бания невозможны, или гасятся автоколебания, имеющие место в
отсутствие воздействия.
В нелинейных устройствах частота вынужденных колебаний в
общем случае может существенно отличаться от частоты воздей-
ствия как в целое, так и в произвольное число раз, причем неред-
ко незначительное изменение режима работы нелинейного устрой-
ства или воздействующего сигнала (его амплитуды или частоты)
резко изменяет характер вынужденных колебаний.
Для исследования работы нелинейных неавтономных систем
преимущественно используется квазилинейный метод или метод
медленно меняющихся амплитуд. Если на систему, содержащую
контур с большой добротностью, действует периодическое колеба-
ние Ф(/) = В cos at, то напряжение на контуре чаще всего отыски-
вают, предполагая, что оно является гармоническим:
д
U=U COS (ait+ц>). (5.1)
При этом на основании физических сображений задаются ча-
стотой ©I. Например, при изучении явления синхронизации пола-
гают coi=ico, а при делении частоты в п раз coi = (o/n и т. д. Но
действительное напряжение на контуре в стационарном режиме
может быть и иным, так что наши предположения относительно
ожидаемого вида колебаний (5.1) и частоты «ц могут оказаться
верными лишь в ограниченной области значений параметров, а
иногда и вовсе неверными. Поэтому после определения параметров
(17 и ф) стационарного колебания (5.1) нужно проверять устойчи-
вость полученного решения. Стационарные колебания могут соот-
ветствовать (5.1) только в том случае, если полученное решение
устойчиво.
Таким образом, применение квазилинейного мето-
да или метода медленно меняющихся амплитуд
к исследованию неавтономной системы позво-
ляет определить амплитуду и фазу (а не частоту)
колебаний. Ниже это будет показано на конкретных приме-
рах. Для анализа рассматриваемых схем будут использованы: в
§ 5.2 и 5.6 — квазилинейный метод, в § 5.4 — метод медленно ме-
няющихся амплитуд.
5.2. РЕЗОНАНС В НЕЛИНЕЙНОМ КОНТУРЕ
Нелинейным контуром называют колебательный контур, у ко-
торого хотя бы один из реактивных параметров является нелиней-
ным. Рассмотрим параллельный контур рис. 5.1, содержащий не-
линейную емкость р-п-перехода. С такими контурами приходится
встречаться в параметрических усилителях и умножителях часто-
ты, в транзисторных усилителях, генераторах и пр.
Полагая добротность контура достаточно большой, можно ожи-
дать, что при протекании через контур тока с частотой а напря-
жение на контуре будет синусоидальным той же частоты
и= U sin tut (5.2)'
даже, если ток i содержит еще и гармоники частоты со. Согласно
§ 2.5 ток в емкостной ветви определяется выражением
ic=dqldt=C(u\duldt, (5.3)
где С (и) =dq/du — дифференциальная емкость р-п-перехода. Под-
становка (5.2) в (5.3) дает
ic= С (u\aUcos at. (5.4)
Рис. 5.1 Рис. 5-.2
Аппроксимируя относительно смещения в рабочей точке зави-
симость С (и), показанную на рис. 2.16, полиномом второй сте-
пени
С(и) =Co+aiU+a2u2 (5.5)
с положительными коэффициентами Со, Щ и а2 и подставляя (5.5)
и (5.2) в (5.4), получаем
ic — (с0+-^~U2+а,Usin at--172cos2coZ ^aU cosat.
\ 2 2 /
Первая гармоника этого тока ici = (Со-|-- U2)aUcosat.
4
Тот же ток ict может быть получен, если вместо нелинейной
емкости включить эквивалентную (или среднюю по первой гармо-
нике) емкость
Ccp = Co+-JC2. (5.6)
Средняя емкость р-п-перехода оказывается тем большей, чем
больше амплитуда колебаний. Связано это с тем, что для рас-
сматриваемой характеристики С (и) увеличение емкости в поло-
жительный полупериод напряжения и оказывается большим ее
203
уменьшения в отрицательный полупериод, что и приводит к увели-
чению ССр. При больших амплитудах U этот эффект проявляется
сильнее. Возрастание Сср должно приводить к уменьшению резо-
нансной частоты контура. Ее величина с учетом (5.6) определяет-
ся как
Мр=1/ГЩГ=Мо/|/1+-^, (5.7)
где g>o='1/J/LC; p=G2/C0.
Полагая (JC2/4<g;l, разлагаем (5.7) в ряд Тейлора, ограничи-
ваясь первыми двумя слагаемыми
copi=co0 (1-— Uz\ (5.8)
Таким образом, увеличение амплитуды U вызывает уменьше-
ние резонансной частоты по параболическому закону. На рис. 5.2
штрихпунктирной линией нанесена зависимость сор(Й). Если кон-
тур был бы линейным с емкостью Со, то частотные характеристи-
ки соответствовали бы изображенным пунктирными линиями.
Для определения характеристик нелинейного контура рис. 5.1
используем квазилинейный метод: нелинейную емкость заменим
ее средним по первой гармонике значением (5.6). Очевидно,
i = 0[4- + 7-V + i «Сер ( U)
L /?э I о ь
откуда
U=IJR3/(1 + 1Qeu). (5.9)
Полагая добротность Q=J?:)/o>L постоянной и определяя рас-
стройку относительно частоты <ор(С7) как
е = и2 । = [о — юР (t/)] [о + top (£/)] ~ 2ha(U)
<»р (I/) «)р (I/) ~ “о ’
где Лсо(С)=со—(Ор(Д), получаем из (5.9) уравнения частотной и
фазовой характеристик нелинейного контура:
С=/Дэ/К1 + (22е2и, tg<p = — Qeu. (5.1Ю), (5.11)
При со=сор(С), е«=0, а потому <р=0 и Umax=I^R3.
Уравнения (5.10) и (5.11) отличаются от таких же для линей-
ного контура только тем, что расстройка Лео (С) отсчитывается от
(Ор(С), а не от фиксированной частоты соО- Поэтому абсциссы ча-
стотных характеристик £7(со) нелинейного контура (сплошные ли-
нии) получаются путем сдвига абсцисс характеристик линейного
контура на величину изменения резонансной частоты Дсор(£7) =
=<0p(J7)—coo Для каждого значения U. В результате частотные
характеристики оказываются несимметричными (симметричными
относительно зависимости сор(С7)), наклоненными влево тем силь-
нее, чем больше амплитуда тока I. При достаточно больших амп-
литудах I в некоторой области частот амплитуда U оказывается
204
неоднозначной, что приводит к возникновению скачков амплитуды
при плавном изменении частоты. Так, если снимать частотную ха-
рактеристику рассматриваемого контура при 1—12 путем увели-
чения частоты от со=сод, то сначала напряжение U изменяется в
соответствии с кривой AGB. При частоте со=<ов амплитуда U
скачком возрастает на величину ВС, при дальнейшем увеличении
<о она плавно уменьшается по кривой CD. Если теперь уменьшать
частоту, то U будет меняться по ветви DCEF-, при co=cof ампли-
туда U скачком уменьшается на величину FG, после чего она из-
меняется по ветви GA. Следовательно, на частотной характеристи-
ке нелинейного контура, снятой при достаточно большой ампли-
туде тока I, встречаются участки скачкообразного изменения амп-
литуды; они ограничивают гистерезисную область, амплитуда ко-
лебания внутри которой зависит от способа установления частоты:
путем увеличения или уменьшения со. Участок ветви FB экспери-
ментально не может быть получен, так как соответствующие ему
режимы неустойчивы.
Остановимся на некоторых соотношениях. Границы области неустойчивости
определяются частотами сов и аг, в которых касательные к характеристике
б'(и) вертикальны: dU!da=oo. Подставляя (5.7) в (5.10), получаем из этого
условия ординаты граничных точек
— е± -i-Ve2 —3d2 У (5.12)
где е= (<о2/<о2о)—1==2Л<в/<оо, d=lfQ.
Гистерезисная область появляется, если амплитуда При /=Лр два
решения (5.12) сливаются в одно, что имеет место при e2rp=3d2, еГр=—]F3d*
и £/Гр=&//’р/Зр. Подставляя эти значения в (5.10), получаем
Следовательно, 7гр уменьшается при увеличении добротности контура и
увеличении нелинейности. Исследование фазовых характеристик может опирать-
ся иа (5.11) или уравнение
U=iRaI cos<p, (5.14)
получающееся при подстановке (5.11) в (5.10). Продифференцировав обе час-
ти (5.14) по частоте
dU
da
„ . d<P
— 7?э I sin ср ——
da
убеждаемся в том, что фазовая характеристика имеет вертикальные касатель-
ные (tftp/dra=oo) на тех же частотах, что и частотная. Следовательно, скачки
амплитуды сопровождаются скачками фазы.
На рис. 5.3 построены семейства нормированных частотных и фазовых ха-
рактеристик нелинейного контура, рассчитанных по приведенным выше фор-
мулам. По осям ординат отложены y=UIRsIv$ и ф, а по оси абсцисс обобщен-
ная расстройка x=Qe. Области неустойчивых режимов заштрихованы. Зависи-
мость xv(y) соответствует зависимости oipft/) на рис. 5.2. Параметром харак-
теристик является величина а=111г-р-
* Решение erp=‘l/5d опускаем, так как оно не дает действительного зна-
чения (7Гр.
205
Ь.З. РЕГЕНЕРАЦИЯ
Ранее было показано, что генераторы с внешней обратной
связью (см. рис. 4.4) эквивалентны контуру с включенным в него
отрицательным сопротивлением 'Гвн<0 (см. рис. 4.56). Когда по-
ложительная обратная связь превышает некоторую критическую,
Рис. 5.3
общее активное сопротивление контура оказывается отрицатель-
ным r+irBH<0, система — автоколебательной, и в ней нарастают
колебания, источником энергии которых является отрицательное
сопротивление. Если величина отрицательного сопротивления
|гвн|<Л вносимая в контур энергия недостаточна для возникно-
вения автоколебаний, вследствие чего такие системы называют
потенциально-автоколебательными.
Подобные системы могут быть использованы в качестве уси-
лителей (рис. 5.4). Действительно, за счет источника входного
сигнала евх в контуре в отсутствие гвн возникают колебания, обла-
дающие определенной энергией. При введении irBH<0 энергия ко-
лебаний в контуре возрастает, что можно объяснить отдачей до-
полнительной энергии отрицательным сопротивлением или умень-
шением общего активного сопротивления контура. Явление частич-
ной компенсации потерь в колебательной системе за счет положи-
206
тельной обратной связи или внесения отрицательного сопротивле-
ния называется регенерацией, а схемы, в которых оно имеет ме-
сто, называются регенеративными. Все регенеративные схемы
склонны к самовозбуждению, возникающему при некотором уве-
личении обратной связи или величины отрицательного сопротив-
ления.
Рис. 5.4
На рис. 5.5 приведена схема регенеративного усилителя, отли-
чающаяся от схемы генератора рис. 4.6п прежде всего тем, что
здесь Л1<7Икр. Входным сигналом будем считать ЭДС е—
—Ecosat, выходным — напряжение на емкости С. Воспользуемся
квазилинейным методом, и запишем уравнения, связывающие
комплексные амплитуды первых гармоник токов и напряжений.
Комплексная амплитуда тока в контуре
/=(£+Г70.с) ----(5.15)’
где U0,c—iaMIK — напряжение, вводимое в контур через цепь об-
ратной связи. Активный элемент характеризуем средней крутиз-
ной Scp=/K/[7B, пренебрегая реакцией выходной цепи. Тогда
U0.c = iaMScvUB= 7. (5.16)
С/
Подставляем (5.16) в (5.15) и решаем последнее относитель-
но 1:
<517>
Действие положительной обратной связи в схеме рис. 5.5 ска-
залось только на изменении общего активного сопротивления
контура:
.гобщ=г- =г+гвн, (5.18)
С/
Т. е. схема рис. 5.5 эквивалентна рис. 5.4. Если в отсутствие реге-
нерации (гвн=0) добротность контура Q=p/-r, то при регенера-
ции
Qp = __P__= Q (5.19),
207
может быть увеличена во много раз путем приближения |гвн| к г.
Одновременно возрастает коэффициент усиления на резонансной
частоте
Крез = ив\(£>о) /Е= Qp= Qp,
где р=1/(1— ) — коэффициент регенерации, показываю-
г
щий, во сколько раз увеличивается добротность контура при ре-
генерации. Регенерация нередко используется для увеличения
усиления и избирательности усилителей.
Обратимся к случаю аппроксимации нелинейной характеристи-
ки АЭ полиномом iK=«SwB—asu3B, и будем характеризовать контур
эквивалентным затуханием dg—r06wJp = 1/Qp- В нашем случае
Scp=S------n3Z72B. Поэтому согласно (5.18)
d3 = d0+ (т/4©о) U\. (5.20)
Здесь d0=d—TVfSoio, d=<rlp, y=3asMa>2o. С учетом (5.17) и введен-
ных обозначений частотная характеристика коэффициента переда-
чи контура K—UBjE
K=l/Vd23+&. (5.21)
При малых амплитудах колебаний (у/4соо) U2B<^d0 и регенера-
тор можно считать линейным с dg=do', его частотная характери-
стика не отличается от аналогичной для контура с затуханием
d0, а коэффициент передачи на резонансной частоте (е=0) равен
добротности Qp=l/d0 регенерированного контура.
На рис. 5.6 приведены характеристики К/Крез=Ф(Аи) для не-
регенерированного контура с затуханием d и регенерированных с
различными эквивалентными затуханиями (do'"<Zdp"<Zd'о) - В не-
линейном режиме, т. е. при больших амплитудах Е величина
(у/4ыо)^72в в (5.20) оказывается соизмеримой с do и ею пренебре-
гать нельзя. Коэффициент усиления регенератора на резонансной
частоте описывается выражением
Арез=-^- = l/(d0+^-U2B).
d3 4соо
Он оказывается большим для меньших UB, т. е. для входных
сигналов с меньшей амплитудой Е. Следовательно, регенера-
тор. обладает лучшими чувствительностью и из-
бирательностью для более слабых сигналов, что
является его достоинством.
Зависимость da от U2B влияет и иа форму частотной характеристики. Пред-
положим, что при Дш=0, когда амплитуда UB наибольшая, da=d'g, а при
l/B=0 da<.d"'o (см. рис. 5.6). С увеличением расстройки |Дсо| сначала изме-
нение UB происходит в соответствии с частотной характеристикой для da=do-
При некоторой расстройке уменьшается UB и его значение будет определяться
по характеристике для da—d"a; при еще больших расстройках по характерис-
тике для da=d"'o и т. д. В результате получается частотная характеристика
7((Ди) для da(UB), в большей степени приближающаяся к идеальной — прямо-
угольной, чем характеристика нерегенерированного контура.
208
Основным недостатком регенерации является уменьшение устойчивости ра-
боты усилителя. Так, если при Q=100 использовать |rBE| =MS/C=0,99г, то
коэффициент усиления Креа возрастает от 100 до 10 000. Однако теперь при
уменьшении крутизны S (например, из-за изменения напряжения питания)
всего на 1% |гВЕ|= 0,98г и /(реа уменьшится до 5000, т. е. вдвое;
таком же увеличении X |гВЕ|=г, /(реа=оэ, т. е. усилитель превратится в
генератор. С целью предотвращения такой неустойчивости используемые зна-
чения коэффициента регенерации обычно не превышают р=5ч-10.
^/^рез
Рис. 5.6
Рис. 5.7
5.4. ПРИМЕНЕНИЕ МЕТОДА МЕДЛЕННО МЕНЯЮЩИХСЯ
АМПЛИТУД К АНАЛИЗУ НЕАВТОНОМНЫХ СИСТЕМ
Будем рассматривать этот метод на примере схемы рис. 5.7,
находящейся под воздействием тока iB=7BcoscoZ. Схема представля-
ет автогенератор, если НЭ при малых амплитудах колебаний обла-
дает отрицательной проводимостью G такой величины, что G +
-pGgCO, регенератор, если при G<0 G + Ga>0, нелинейный кон-
тур, если используется реактивный НЭ. Согласно первому закону
Кирхгофа
C-^-4-G,w + — [udt + i = iB.
dt L j
Производя дифференцирование и деля все слагаемые на С, имеем
dt* С dt LC С dt С
Переходя к безразмерной переменной т=<о/, как это сделано
в § 4.5, обозначая со2о=1/АС и е=1—со2о/со2, получаем из (5.22)
Уравнение
H + u=F(u, й, т), (5.23)
в котором
F(u, й, т) =--+ ------------------^-sinx. (5.24)
, \ / иС юс dr иС
Уравнение (5.23) неавтономной системы отличается от (4.155)
автономной системы тем, что его правая часть является явной
Функцией времени, характеризующей внешнее воздействие. Как и
в случае автономного генератора ищем решение уравнения (5.23}
в виде
и=Лсов(т—ф)=Лсовяр, й=-—A sin (т—ф) =—Л sin яр, (5.25)
считая Д=Л(т) и <р=<р(т) — медленно меняющимися функция-
ми времени. Далее, как и в § 4.5, рассчитываем й(т), подставляем
и, й и й в (5.23) и, решая это уравнение совместно с (4.159), при-
ходим к двум уравнениям, аналогичным (4.161)
dA
----- —F[A cos (т—ф), —A sin (т—<р), т] sin (т—<р),
А = F[Я cos (т—яр), -—A sin (т—<р), t]cos (т—<р).
dx
Предположение о медленном изменении А (т) и <р (т) позволяет
заменить скорости изменения А и ф в пределах периода колебаний
их средними значениями, что приводит к укороченным уравнениям
(5.26)
ф), f)’
ат dx
в которых
2л
—-—cos яр, —Я sin яр, яр+ф] sin ярйяр,
о
2л
[Л cos яр, -—Я sin яр, яр+ф] cos ярйяр.
о
При использовании в схеме рис. 5.7 резистивного НЭ
вольной вольт-амперной характеристикой ток, протекающий через
НЭ под действием напряжения (5.25), можно записать как
1==/о+/1С05яр+72со52яр+7зс053яр-1-..., а его производную как
dijdx— di[dty= — (Ц sin яр + 2Д sin 2яр+ЗД sin Зяр +...). (5.28)u
Учитывая (5.28), получаем из (5.23) — (5.27) укороченные урав-
нения синхронизированного генератора:
2л
1
2л _
о
Ф(Я, ф)"
Т(Л, <р)
dA
dr
J sin яр-ЬеД cos яр-
(5.27)
с произ-
5Ш(яр + ф) I sin ярйяр—
га С J
dtp
dx
2л
—-—- J (Zi sin яр+2Д sin 2яр +...) sin ярйяр =
о
Gg Я 4~ li . Г /в бэ -4- GqT) - Л . I-a
——4---------— cos ф = —- cp A 4—— cos ф,
2raC 2raC 2raC 2oC
2л
] p г Q J
= -—-1 I—— A sin яр4-еЛ cos яр-— з!п(яр4-ф) 4-
2л A J [и С о С
о
(5.29)
+ sin ip + —— sin 2ф + ...1 cos4>dip = —-sin<p, (5.29')
coC oC j 2 2co CA
где Gcp=Ii/A — средняя проводимость НЭ пто первой гармонике.
В стационарном режиме dA)dr=Q и dq>jdi;=Q и из уравнений
(5.29) получаем
(бэ+бср)Л=/Bcos g>, е<вСЛ = /в sin ф. (5.30)
Деля все слагаемые этих уравнений на G8=l/E8 и обозначая
Eb—IbRs, d0—l/aCRB, имеем
(1 + ССр/'Оэ)Л=£'всозф, -7-Л=Ев sin ф. (5.31)
Исключая из (5.31) поочередно ф и А, получаем уравнения
амплитудно- и фазо-частотных характеристик
Ла Грэ + Gcp \2+/_e_Yl = £2 ,(5.32)
L\ G8 / \ dB j J
tg<P- *r°Tc'- <5-33>
1 ОСр/оэ
Рассмотрим подробнее синхронизацию генератора (рис. 5.7) на
резистивном НЭ с вольт-амперной характеристикой
i==—aiii+a3u3 * (cii>0, аз>0), (5.34)
для которого GCp(A) —Ц/А — — —а^А2. Заметим, что в отсут-
4
ствие внешнего воздействия (7в=0) амплитуда стационарных ко-
лебаний Ло определяется согласно первому уравнению (5.30) из
з
условия G8+GcpG4o)=O или —GB——di + ^-dsA20. Поэтому урав-
нение (5.32) можно записать как
з
или, обозначив q=GB/~^a3A2o=GB/(di GB) = l/(diRB 1), в виде
(5.35)
Вводя в (5.35) в качестве переменных, характеризующих рас-
стройку, амплитуду колебаний и амплитуду внешнего воздействия
соответственно
x=qs/d0, у—(А/А0)2 и F=q2E2B/A20, (5.36)
получаем уравнение АЧХ синхронизированного генератора
у[(у—1)2+*2] =Л (5.37)
а из (5.33) — уравнение ФЧХ генератора
tg<₽ = —~7- (5.38)
У — 1
э 211
Под АЧХ синхронизированного генератора обычно понимают
зависимость квадрата относительной амплитуды колебЯ1™ у от
величины х, пропорциональной расстройке Асо; а под 1 за"
висимость ф(х). Уравнение (5.37) является кубический относи-
тельно у и квадратным относительно х. Поэтому удобк0 сначала
рассчитать х(у), преобразовав (5.37) к виду
х2= -j- -(I-!/)2,
а затем построить обратную характеристику у(х), поме^ЯБ' Места-
ми оси координат. На рис. 5.8а построены зависимостидля
двух значений F (большого Fx и малого F2) и (1—y)2j у-ЗЯчках
М, Ni, N2 и N3 пересечения характеристик х=0. На рис- п0"
строены зависимости х2(у) для обоих значений F с у^етом того,
что х2>0. Извлекая квадратный корень из ординат эт^ зависи-
мостей и меняя местами координатные оси, получаем частотные
характеристики рис. 5.9.
Рис. 5.8 Рис. 5.9
Частотные характеристики генератора при сильный внешних
сигналах сходны с частотными характеристиками ОД1^ОЧНОГО K0J
лебательного контура. При малых значениях F они #меют ином
вид и оказываются неоднозначными: одному значений х соответ-
ствуют три значения у. Амплитуда А и фаза ср стацио11аРных к0'
лебаний синхронизированного генератора определяют1'51 в °ошел
случае из уравнений Ф(А, ср) =0 и ЧТ(А, ср) =0.
Для исследования устойчивости стационарных режимов нужно
предположить, что произошли небольшие отклонения амплитуды
и фазы колебаний от стационарных значений Л и <р, подставить
А+ДА и ф+Дф в (5.29), разложить их правые части по степеням
ДА и Дф и ограничиться величинами первого порядка малости
аналогично тому, как это было сделано при выводе (4.74). В ре-
зультате получим уравнение вариаций, применяя к которому кри-
терий Рауса—Гурвица приходим к условиям устойчивости
-[Ф'аИ, ф)+Чг'ч,(А, ф)]>0,)
Фл(А ф) Фф(А, ф)
Тл(А, ф) Т;.(А, ф)
>0.
(5.39)
Здесь Ф'а, Ф'ф и Т'ф — частные производные функций
Ф(А, ф) и Д’(А, ф) соответственно по А и ф при стационарных
значениях А и ф. Для рассматриваемого конкретного случая
(5.34) условия устойчивости (5.39) оказываются х>0,5 п х2+
+ (у—1) (Зу—1)>0. На рис. 5.9 области неустойчивых, т. е. не-
реализуемых, решений заштрихованы. Их границами являются го-
ризонтальная линия, проведенная на уровне х=0,5, и эллипс х2 +
+ (у—1) (Зу—1)=0 с центром в точке х=0, у=^13 и вертикаль-
ной полуосью, равной 1/3. Можно показать, что в точках этого
эллипса касательные к частотным характеристикам у(х) верти-
кальны.
5.5. СИНХРОНИЗАЦИЯ КОЛЕБАНИИ ГЕНЕРАТОРА
Синхронизация (на основной частоте) или захватывание ча-
стоты имеет место тогда, когда на автогенератор, работающий на
частоте соо, воздействует внешний сигнал с частотой со, близкой к
соо- Синхронизация заключается в изменении частоты колебаний
генератора, в результате которого она становится равной частоте
внешнего воздействия. Синхронизация колебаний широко исполь-
зуется в разнообразных радиотехнических, связных и измеритель-
ных устройствах: для стабилизации частоты автогенераторов, уси-
ления ЧМ колебаний и т. п. Без синхронизации невозможна рабо-
та осциллографов.
Синхронизация свойственна всем автогенераторам и имеет ме-
сто в некоторой полосе частот (2Дсо)с, называемой полосой син-
хронизации, или полосой захватывания. За пределами полосы
синхронизации в генераторе одновременно существуют автоколе-
бания частоты генератора сог и вынужденные колебания частоты
со; в результате образуются биения с частотой
£2 = | со—(Ог |. (5.40)
На рис. 5.10 показана зависимость частоты колебаний генера-
тора, от частоты воздействующего сигнала: внутри полосы синхро-
низации сог=со и £2 = 0.
213
На рис. 5.9 были приведены амплитудно-частотные характери-
стики синхронизированного генератора на приборе с отрицатель-
ным сопротивлением. Характеристики транзисторных и ламповых
синхронизированных генераторов в основном аналогичны.
Рис. 5.11
Важнейшей характеристикой синхронизированного генератора
является полоса синхронизации. При малых F можно считать, что
частотные характеристики пересекаются с эллипсом неустойчиво-
сти при у—\ (см. рис. 5.9). Подставляя это значение в (5.37), по-
лучаем (,xi)2max=F. Отсюда с учетом (5.36) относительная полоса
синхронизации П= (2Ай)с/®о==£вМо-
При больших F на границах полосы синхронизации г/=0,5 и
из (5.37) (х21)т(гя;=2Л—0,25. Поэтому при 2F3>0,25 Пта У~2Еа/А0.
Следовательно, полоса синхронизации возрастает с увеличе-
нием амплитуды синхронизирующего сигнала и с уменьшением ам-
плитуды Ао собственных колебаний автогенератора. Величиной же
До можно управлять изменением обратной связи и режима работы
генератора: чем меньше обратная связь превосходит необходимую
для самовозбуждения, тем больше полоса синхронизации.
В синхронизированном генераторе устанавливается определен-
ный сдвиг фаз ф между синхронизирующим сигналом и напряже-
нием на контуре автогенератора, определяемый выражением (5.38)
и зависящий от расстройки Ao=fi)—о>0- При малых F на границах
полосы синхронизации у та I иср» ±90°.
При анализе синхронизированных генераторов СВЧ диапазона
важное значение имеют частотные характеристики мощности
(ЧХМ) первой гармоники |P1(x)j, отдаваемой НЭ. На рис. 5.11
построены колебательная характеристика —Л (А) и зависимость
—Pi (А)1, рассчитанные для НЭ (5.34) по выражениям
1 При амплитудах Л<ЛГр=1/4«1/За3 мощность Р1=0,5/]Л<0; это означа-
ет, что НЭ отдает эту мощность.
214
—Л(Л)=Й1Л—|-М3, (5.41)
-Рх (А) = --L I, (Д) А = ± ( О1-А а3 А2) А*. (5.42)
Приравнивая нулю производную (5.41) по А, устанавливаем,
что при Ат= — у aja3 достигается наибольшая амплитуда тока
О
2 я
hmax— ~aiAm', для реализации такого режима необходимо, чтобы
/?э=Ат/Л удовлетворяло соотношению ац/?э=1,5. Аналогично из
(5.42) устанавливаем, что при Аопт= У 2а\13аг достигается наи-
большая мощность |F1|max=---------- , и это имеет место при опти-
6
мальной нагрузке, определяемой соотношением а1/?э.опт=2. Вели-
чина |Р1|та» — это наибольшая мощность, которую может отда-
вать НЭ при гармоническом напряжении как в автономном, так и
неавтономном режиме. На рис. 5.11 приведены и характеристики
обратной связи (А/Ра) для aiPB, равного 1,5 и 2.
Предположим, частота воздействия (о=соо и <р=0. Тогда амп-
литуда стационарных колебаний определяется согласно первому
уравнению (5.30) из условия — GCp(A)A=— /в, т. е. точкой
пересечения колебательной характеристики и характеристики об-
ратной связи, опущенной на величину /в (пунктирная прямая).
Из рис. 5.11 следует, что увеличение амплитуды /в всегда вызы-
вает увеличение амплитуды А. Характер же изменения мощности
| Pi (А) | зависит от нагрузки: если а^э^а^э.опт, то с увеличением
/в мощность |Pi| уменьшается; если а^эСа^э.опт, то сначала
возрастает, а после достижения |Pi\max — уменьшается.
Зависимость (5.42) с учетом (5.36) можно записать
1 { 3 \
—Pi (А) =—^— I а± — ~^~asAzoy j Azoy=—Gcp(y)PBPioy,
3
где Р1о=А2о/27?э — мощность автономного генератора, GCp(y)=—(щ— — а3А2ву).
Поэтому мощность НЭ, нормированная относительно Рю,
—pi=—Р1!Рю=—GBp(y)\RBy. (5.43)
Поскольку Gc р (Ao) = — аг+ (3/4) а3А3о=—11Рэ,
—pi(.y)—altRBy—(aiRB—l)yz
При любом apRa имеет квадратичный характер. Величина (—pi)max—aiRza/4X
X(aiiRB— 1) достигается при yOni=anRB/2(aiRB— 1). Значение «/опт соответствует
Аопт (см. рис. 5.11). Переход от АЧХ к ЧХМ сводится к замене у на —pi (у)
при тех же расстройках х.
На рис. 5.12 приведена ЧХМ — pi(x) для F=0,5, полученная в результате
такого расчета для когда —pi (у) =2у—уг. Зависимость у(х) сов-
падает с нормированной частотной характеристикой мощности в нагрузке при
'i«=const, так как у=А2/А20=Рв/Рю=рв; она также построена на рис. 5.12.
В стационарном режиме
S р—рн+Pi+Pc =0,
где Рс = Рс/Рю — нормированная мощность, отдаваемая синхронизирующим сиг-
налом. Поэтому
с (Ч =—Pi (х)—’Ри (%). (5.44)
Из зависимости —Pi(x), построенной на рис.
5.12 согласно (5.44), видно, что по мере увели-
чения расстройки величина мощности РЕ*=—Рс,
поступающей в генератор от источника синхрони-
зирующего сигнала, уменьшается, что является
следствием ее зависимости от амплитуды А н
сдвига фаз <р: PMC=0,5/BAcos <р. При некоторых
расстройках у=1 <р=±90°, согласно (5.38) и
Рих=0, а при еще больших расстройках мощ-
ность Рс изменяет знак и источник синхронизи-
рующего сигнала становится потребителем энер-
гии.
В генераторах СВЧ, подключаемых к источ-
нику синхронизирующею сигнала и нагрузке
через циркулятор, мощность рс(х) в полосе син-
хронизации приблизительно постоянна. В таких
условиях согласно (5.44) ЧХМ ря(х)=— Pi(x)—
—Рс подобны зависимостям —pi(x).
[зация может осуществляться колебаниями частот
(m/n)ico или со » (п/т) соо,
где тип — небольшие целые числа.
Механизм синхронизации при n#=m можно пояснить следующим образом:
п
при подаче синхронизирующего сигнала с частотой со= — (соо+Дсо), для кото-
рой ДшСсоо, в напряжении и появляется комбинационная частота
со'=тсо—>(п—4)соо=соо+п|Дсо,
близкая к со0. Начинается процесс синхронизации, сопровождающийся прибли-
жением частоты сог к со'. Этот процесс прекратится при таком значении сог,
при котором комбинационная частота со'=сог или ты—(п—1)сог=сог, т. е.
когда
(5.45)
Когда п—1, частота со приблизительно в т раз меньше частоты соо, в ре-
жиме синхронизации частота генерируемых колебаний cor=mco. Такой режим на-
зывается синхронизацией на гармонике и используется для умножения частоты.
Когда т=1, частота со примерно в п раз больше частоты соо, частота синхро-
низированных колебаний ат=а>1п. Такой режим называется синхронизацией на
субгармонике и используется для деления частоты. Отметим, что во всех упо-
мянутых случаях частота сог генерируемых колебаний близка к соо. Полосы
синхронизаций обычно заметно уменьшаются с ростом тип.
В общем случае
со, для которых
СОо
m
сог = — со.
п
5.6. ДЕЛЕНИЕ ЧАСТОТЫ
ДЕЛЕНИЕ ЧАСТОТЫ ПУТЕМ СИНХРОНИЗАЦИИ НА СУБГАРМОНИКЕ
В конце § 5.5 отмечалось, что деление частоты можно осущест-
вить в неавтономном генераторе частоты со0, если частота воздей-
ствующего колебания приблизительно в п раз больше частоты сось
216
(o=fi(fi)o+iAfi)), где Дй)<Ссоо. На практике для этого чаще всего ис-
пользуют транзисторные автогенераторы, вводя синхронизирую-
щий сигнал во входную цепь транзистора, например, как показано
на рис. 5.5. Напряжение на входе НЭ в этом случае можно пред-
ставить в виде
Пв — U\-{-U2—U \ 'COS Йо/ + U2 COS (£>t.
При полиномиальной аппроксимации характеристики НЭ
t(MB) = 2a*UB основную роль в делении частоты в п раз имеет
k
слагаемое апипв—ап(и1 + и2)п, содержащее составляющую
nanizin_1n2, одна из компонент которой пропорциональна
папи^п~1и2со&(п>—1)(Hotcosxat. Разностная частота
а'=а—\(п—1)й)о='®о+«А® (5.46)
близка к ©о- При достаточной амплитуде колебание частоты а'
осуществляет синхронизацию генератора: его частота йо начинает
приближаться к со', одновременно изменяется и со' согласно (5.46).
При любой частоте сог имеем
со'—й—(п—1)сог- (5.47)'
Переходный процесс заканчивается установлением режима, в
котором обе близкие частоты становятся одинаковыми (со'=сог).
Согласно (5.47) это имеет место при сог=со/п. Генератор окажет-
ся работающим на субгармонике входного сигнала. Подобные схе-
мы используются для деления частоты в 2—3 раза.
Как и при синхронизации на основной частоте, синхронизация
на субгармонике имеет место в некоторой полосе частот, завися-
щей от амплитуды синхронизирующего сигнала. Обычно с ростом
п коэффициент nanUin~1U2, определяющий амплитуду синхронизи-
рующей компоненты со' при неизменных Ui и С72, уменьшается, что
приводит к сужению полосы синхронизации. Для достижения
больших полос синхронизации нужно применять нелинейные эле-
менты с большими коэффициентами ап и увеличивать амплитуду
U2 синхронизирующего сигнала.
РЕГЕНЕРАТИВНОЕ ДЕЛЕНИЕ ЧАСТОТЫ
В делителях частоты типа синхронизированных генераторов де-
ление частоты является следствием возникновения компоненты
(5.47), образование которой можно рассматривать как результат
последовательного выполнения двух операций: а) умножения ча-
стоты в п— 1 раз: ®2== («—1)^; б) преобразования частоты с вы-
делением составляющей со=со—со2. Кроме того, с помощью актив-
ного элемента осуществляется усиление колебаний.
Регенеративные делители частоты можно рассматривать как
усовершенствованные делители частоты типа синхронизированных
автогенераторов, в которых каждая (или некоторые) из упомяну-
тых операций выполняется отдельными каскадами, что позволяет
независимо подобрать желаемые характеристики каждого. В ре-
217
зультате удается создать делитель частоты с лучшими характери-
стиками.
На рис. 5.13а приведена структурная схема регенеративного
делителя частоты, состоящая из замкнутых в кольцо: избиратель-
ного усилителя Ус с фильтром Фь умножителя частоты Умн.Ч в
4)
Рис. 5.13
п—1 раз с фильтром Ф2 и преобразователя частоты ПЧ. Входной
сигнал e=Eco&at поступает на вход преобразователя частоты.
Полагаем, что здесь используется идеальный преобразователь ча-
стоты, выходное напряжение us которого пропорционально произ-
ведению двух сигналов: входного е и и2, поступающего с выхода
умножителя частоты. Поэтому если
а2=С72'СО8(с1)2^+'ф2), (5.48)
то напряжение а3 на выходе преобразователя окажется
щ=уеи2= ~-EU2 {cos [ (со +'со2) t+<р2] + cos [ (со—со2) t—ф2]}, (5.49)
где у — коэффициент пропорциональности.
Механизм возникновения колебаний в схеме такой же, как в
автогенераторах. За счет действия флуктуаций в схеме возникают
небольшие колебания разных частот. При выполнении некоторых
условий (об этом — ниже) в схеме происходит увеличение ампли-
туды колебаний определенной частоты до некоторого стационар-
ного значения, определяемого имеющимися в схеме нелинейностя-
ми. Для выяснения возможных значений частот колебаний пред-
положим, что на выходе усилителя возникло синусоидальное ко-
лебание какой-то частоты coi
U\= U\ cosfcoff+'ф1). (5.50)
В этом случае на выходе умножителя получится напряжение
(5.48) с частотой со2= («—1)соь На выходе преобразователя часто-
ты согласно (5.49) получается напряжение с частотами <в± (п—l)coi.
Для последующего возрастания первоначально возникшего ко-
лебания (5.50) частоты нужно, чтобы одна из компонент на-
пряжения на выходе преобразователя обладала той же частотой
218
и резонансный усилитель осуществлял ее усиление. Поскольку ча-
стота о)] должна быть меньше со, такой частотой может быть толь-
ко разностная частота. Приравнивая ее частоте coi, получаем ус-
ловие баланса частот
со—(п—l)coi = coi, (5.51)
откуда определяем ту единственную частоту, которую могут иметь
колебания на выходе регенеративного делителя частоты:
со! = со/м. (5.52)
Она оказывается точно в п раз меньше частоты входного сиг-
нала. Одновременно на выходе умножителя частоты существуют
колебания частоты со2.
Для определения амплитуды и фазы стационарных колебаний,
воспользуемся квазилинейным методом. В качестве фильтров Ф1
и Ф2 обычно используются колебательные контуры, настраивае-
мые на частоты вц и о)2о, близкие соответственно к и/n и
(п—1)со//г.
Напряжение на выходе умножителя частоты при воздействии
на его вход напряжения (5.50) может быть записано в виде
(5.48), где ф2= (п—1)ф1 + ф2- Амплитуда U2 может быть найдена
по амплитудной характеристике умножителя
t/2 = F2(H1),
а сдвиг фаз ф2 определяется расстройкой 2Асо2/со2о и добротностью
Q2 контура умножителя: ф2 =—arc tg 2Q2Aco2/ti)2O. Компонента u'a
разностной частоты на выходе преобразователя согласно (5.49) и
(5.51) имеет вид
U'S =-^-EF2 (U\) COS [to11— (tl— 1) ф!—ф2].
На выходе линейного усилителя с коэффициентом усиления /Су
и сдвигом фаз ф1=—arc tg2QiAcoi/coio> где 2Acoi/coio и Qi — рас-
стройка и добротность контура, получаем напряжение
и'\ = KyEF2(Ui) cos [coi f—i(n—1) фг—ф2+tyi ] • (5.53)
В стационарном режиме u\=U\. Приравнивая (5.53) и (5.50),.
получаем:
условие баланса амплитуд
^KyEF2{U^Ux, (5.54)
из которого может быть определена амплитуда стационарных
колебаний;
условие баланса фаз
—(п—1)ф1—ф2+ф1=ф1, (5.55)
определяющее фазу выходного колебания1
_________ Ф1= (ф1—фг)/«-
1 Более общей формой условия баланса фаз является — (n—l)<₽i—ф2+Ф1 =
*=<Р1+2лА (где А=0, 1, 2, ...), откуда <р,= (Ф1~Фа +2nfe)/n.
219>
Поделив обе части равенства (5.54) на С7Ь запишем условие
баланса амплитуд в виде
КумКпр/<у=1, (5.56)
где коэффициенты передачи напряжения умножителя и преобра-
зователя определяются как
Кутл~ Fi(Ux)!Ux, /Спр=0,5уЕ. (5.57)
Таким образом, условие баланса амплитуд означает равенство
единице коэффициента передачи по замкнутому контуру регенера-
тивного делителя частоты. Из рассмотрения (5.56) и (5.57) выте-
кают следующие особенности рассматриваемой схемы:
при отсутствии входного сигнала (Е=0)/Спр=0 и условие
(5.56) выполнить невозможно. Следовательно, в отсутствие
входного сигнала стационарные колебания в
схеме существовать не могут;
поскольку Ку и /Сум ограничены, стационарные колебания в ре-
генеративном делителе частоты могут существовать, если ампли-
туда Е входного сигнала превосходит некоторое пороговое значе-
ние Епор, которое может быть определено из (5.56);
если аппроксимировать характеристику нелинейного элемента
умножителя частоты полиномом, то при малых амплитудах U\
амплитуда (м—1)-й гармоники тока, а значит, и амплитуда L72
пропорциональны а коэффициент передачи умножителя ча-
стоты /СуМ пропорционален 1Кп~2. Поэтому если (в случае
п=2 умножитель частоты не нужен, ибо коэффициент умножения
п—1 = 1), то при малых Ui /Сум~0 и мягкое самовозбуждение ко-
лебаний оказывается невозможным.
На рис. 5.136 приведена структурная схема регенеративного
делителя частоты в 2 раза, отличающаяся от схемы рис. 5.13а от-
сутствием умножителя частоты. Считая по-прежнему, что преобра-
зователь осуществляет перемножение входных напряжений, полу-
чаем условие баланса частот со—<01=соь из которого следует, что
частота выходного колебания coi=co/2. Возбуждение колебаний в
схеме возможно, если общий коэффициент передачи по замкнутой
цепи ЕПр/(у>1. С учетом (5.57) условие самовозбуждения делите-
ля можно записать, как Е>ЕПор=2/у/Су.
В регенеративных делителях частоты в 2 раза в качестве пре-
образователя частоты большей частью применяют кольцевой мо-
дулятор, поскольку в отсутствие входного сигнала (е=0) у него
/Спр=О и самовозбуждение схемы оказывается невозможным.
В современной аппаратуре во многих случаях деление частоты
осуществляется с помощью цепочки триггеров, образующих реги-
стры сдвига или пересчетные цепочки с обратными связями. Эти
устройства изучаются в курсе импульсной техники.
МНОГОЗНАЧНОСТЬ ФАЗЫ ВЫХОДНОГО КОЛЕБАНИЯ
Деление частоты заключается в создании выходного колебания с
<йвых в целое число раз (и=2, 3, 4, ...) меньшей частоты со входного
СОвых =со/л.
Всем способам деления частоты свойственна
значность фазы выходного
частотой
сигнала:
много-
колебания. Поясним это на приме-
ре. Пусть в какой-то схеме произошло деление частоты входного напряжения
со
е=£ cos (£>t в 3 раза так, что Ывых1='1Аых cos( — f+q>i) и моменты
О
е=Е и «вш, =|Двых1 совпали. При этом <pi=0, как показано на
случае п=3 существует еще два других колебания «вых
щиеся от «вых, значением начальных фаз
растеризующиеся тем, что «вых=Двых в те
включении ЭДС е на вход делителя часто-
ты выходное напряжение может
ствовать любому из этих решений.
Итак, для п=3, существует
можных стационарных
достижения
рис. 5.14. В
______________г И «ВЫХ3 . отличаю-
(ф2=2л/3 и фз=4п/3) и также ха-
моменты времени, года е—Е. При
соответ-
три воз-
значения фазы <р
выходного колебания, различающихся на
Дф=2л/3. В общем случае деления в п раз
существует п возможных стационарных
значений фазы <р, различающихся на ве-
личину Д<р=2л/п. Такой вывод соответст-
вует выражению для <pi в сноске на с. 219.
В ряде случаев небезразлично, какое
из этих напряжений имеет место. Напри-
мер, если «вых используется в последую-
щем для создания импульсов в моменты
перехода цБИХ через нулевой уровень, мо-
менты появления импульсов при различных
значениях ср окажутся различными. Поэто-
му нередко задача получения иии с опре-
деленной фазой и предотвращения пере-
хода фазы к другому ее значению стано-
вится весьма важной.
Рнс. 5.14
^Вых
bit
"ait
иВьа
5.7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ
Система фазовой автоподстройки частоты ФАПЧ является сис-
темой автоматического регулирования, с помощью которой частота
генератора может быть установлена равной эталонной частоте соэ
вспомогательного источника колебаний. В отличие от систем синх-
ронизации, основанных на непосредственном воздействии синхро-
низирующего сигнала на автогенератор, рассмотренных в преды-
дущем параграфе, система ФАПЧ, структурная схема которой при-
ведена на рис. 5.15, содержит устройство (дискриминатор), вы-
рабатывающее сигнал ошибки; этот сигнал воздействует на уп-
равляющий элемент (управитель частоты УЧ), корректирующий
частоту подстраиваемого генератора <во. В качестве дискримина-
тора используется фазовый детектор ФД, напряжение «ф на вы-
ходе которого зависит от разности фаз эталонного ЭГ и подстраи-
ваемого ПГ генераторов. Управителем частоты служит варикап
или управляемый реактивный НЭ.
В исходном состоянии частота ПГ <оо выбирается близкой к соэ-
Напряжение Ыф создает на выходе фильтра нижних частот ФНЧ,
вводимого в схему для подавления нежелательных составляющих,
управляющее напряжение ну, под действием которого управитель
частоты вносит в контур ПГ корректирующую расстройку. При до-
статочной величине ну происходит полная компенсация первона-
чальной расстройки генераторов и устанавливается стационарный
режим, при котором частота ПГ оказывается равной частоте соэ-
Рис. 5.15
Рис. 5.16
Система ФАПЧ может использоваться для стабилизации час-
тоты ПГ от высокостабильного ЭГ, в качестве узкополосного сле-
дящего усилителя ЧМ и ФМ колебаний, для деления и умножения
частоты (если частоты соо и <оо различаются приблизительно в це-
лое число раз) и т. п.
Обратимся к более подробному рассмотрению системы ФАПЧ.
Будем считать, что в качестве дискриминатора используется ба-
лансный ФД (рис. 3.50) с характеристикой, приведенной на рис.
3.516. Характеристику (3.110) такого ФД можно записать
Цф = итГ(<р), (5.58)
где Um — наибольшее значение выходного напряжения ФД, а мак-
симальное значение F(<p) = l. Если одно из напряжений много
меньше другого (например, Uz^Ui), то из (3.109)
ывыХ1 Яд Ui (1 "ТТГ" cos <р , ЫВых£ ~Ад 1 —у- cos ,
и согласно (3.110) и (5.58) можем записать Um=K.KU2 и
f(q)) =cos <р. (5.59)
В качестве ФНЧ применяют 7?С-фильтры. В теории ФАПЧ в
качестве характеристики фильтра используют операторный коэф-
фициент передачи А(р), получающийся заменой ico на р= — в
dt
выражении для комплексного коэффициента передачи A(i<o) =
— Оу/Оф. Для широко используемого в системах ФАПЧ интегри-
рующего фильтра (рис. 5.16) 17у = Оф/(1+i aCR), а потому
А(р) = 1/(1+рТ). (5-60)
где T—RC—постоянная времени фильтра.
Управитель частоты характеризуется модуляционной характе-
ристикой, т. е. зависимостью создаваемой им корректирующей
расстройки от напряжения иу на его входе. Для линейной моду-
ляционной характеристики с крутизной Sy,
(О (0(J-Sy^Wy, (5.61)
где и — текущая частота подстраиваемого генератора.
Общее дифференциальное уравнение системы ФАПЧ запишем
в операторной форме для текущей разности фаз <р колебаний ПГ
и ЭГ
p<p=d(pldt=aa—ы.
Преобразуя это выражение р<р=соэ—соо—(<о—соо) и используя
соотношения uy=K(p)u$=UmK(p)F((f) и (5.61), получаем диф-
ференциальное уравнение ФАПЧ в операторной форме
pty+QK(p)F =соэ—<оо, (5.62)
в котором Q=Syq£/TO обозначает максимальную расстройку ПГ,
которую могут осуществить ФД и УЧ.
Уравнение (5.62) означает, что текущая разность частот гене-
раторов ((оэ—со) отличается от начальной их расстройки (<оэ—®о)
на величину расстройки QK(p)F(q)), вносимой в подстраиваемый
генератор системой ФАПЧ.
Деля все слагаемые (5.62) на Й и обозначая относительную на-
чальную расстройку генераторов через у= (соэ—<оо)/П, получаем
дифференциальное уравнение системы ФАПЧ в безразмерной фор-
ме
p<p/Q + A(p)F(<p) =у. (5.63)
Синхронным режимом системы ФАПЧ называется такой, при
котором частота ПГ а=соэ, р—0 и <p=<p°=const. В этом режиме
на выходе ФД устанавливается постоянное напряжение U$, в
ФНЧ 7((0) = 1, а потому уравнение (5.63) примет вид
F(<p°)=v. (5.64)
На рис. 5.17а построена левая [соответствует (5.59)] и правая
(линия на уровне у) части уравнения (5.64) и графически опре-
делены стационарные значения ф°. На интервале —по-
лучаем два решения: <p°i, где производная Fz((po)>0, и ф°2, где
F'(<pO) <0.
Исследование устойчивости этих решений можно вести анали-
тически, составив уравнение вариаций для нелинейного уравнения
(5.63). Обратимся к простейшему случаю отсутствия ФНЧ, когда
А(р) = 1 и система согласно (5.63) описывается уравнением пер-
вого порядка
( ^•'Я^Д-^=у-Г(ф). (5.65)
Рассмотрим процесс на фазовой плоскости (рис. 5.176), при-
нимая в качестве переменных <р и Направление перемеще-
223
ния изображающих точек по фазовой траектории согласно (5.65)
таково: при F(<p)<jy dcp/dtZ>0, т. е. с увеличением времени фаз <р
возрастает; при F(q)>y dqldt<Z® и фаза ф уменьшается. Направ-
ления изменения ф(0 обозначены стрелками. В результате уста-
навливаем, что фаза ф°1 определяет устойчивый стационарный ре-
жим, а ф°2 соответствует неустойчивому режиму.
Стационарный синхронный режим системы (с фазой ф°1) воз-
можен только при или 1соэ—cool^H. Поэтому величину Q на-
зывают полосой синхронизма ФАПЧ. За ее пределами наступает
режим биений, при котором напряжения и$ и ну изменяются с
частотой, равной разности частот ЭГ и ПГ, с такой же частотой
изменяется корректирующая расстройка ПГ, а значит, и его час-
тота. На рис. 5.18 показана зависимость стационарной разности
частот со—соэ от изменения начальной расстройки. Пунктирная ли-
ния соответствует размыканию системы ФАПЧ, сплошные — ее на-
личию. В пределах полосы синхронизма —Й^соо—соэ^Й частота
ПГ со==<Оэ- График рис. 5.18 аналогичен рис. 5.10.
При наличии ФНЧ повышается порядок дифференциального
уравнения. В случае интегрирующего фильтра (рис. 5.16) из
(5.63) и (5.60) имеем
'О+рГ) + F(<p)=pTy+y.
Подставляя p=dfdt, вводя безразмерные переменные т=
= £}/т и 1/]/ Й7’=2Л и учитывая, что рТу=0, приходим к не-
линейному дифференциальному уравнению второго порядка
ф+2Лф+Г(ф) =?. (5.66)'
В стационарном режиме (5.66) снова сводится к (5.64), что
приводит к прежним стационарным решениям: устойчивому ф°1 и
224
^устойчивому <р°2. Исследование (5.66) показывает существование
«стерезисных областей на границах полосы синхронизма: уста-
овление синхронного режима происходит при |у3| <1, т. е. полоса
гхвата оказывается меньшей (и зависящей от инерционности
НЧ) полосы синхронизма (полосы удержания) у=1.
Глава 6
Параметрическое возбуждение и усиление
колебаний
6.1. ОСОБЕННОСТИ ПАРАМЕТРИЧЕСКИХ ЯВЛЕНИЙ
J Прежде всего остановимся на специфике вопросов, изучаемых
данной главе. Здесь следует отметить два момента.
Во-первых, параметрическое возбуждение и усиление колеба-
г 1Й происходят в результате периодического изменения энергоем-
tx параметров колебательной системы, определяющих ее часто-
: в колебательном контуре — путем периодического изменения
адуктивности L или емкости С контура. Основное внимание в по-
ф.цующем будет уделено более распростра-
шному случаю изменения емкости (рис. 6.1).
В рассматривавшихся до сих пор автоге-
фаторах и усилителях возбуждение и уси-
.,’ние колебаний осуществлялись за счет энер-
ш источника постоянного напряжения, обя-
ательно присутствовавшего в составе соот- Рис. 6.1
йетствующего устройства. С энергетической
то'дки зрения рассмотренные усилители и генераторы являются
треобразователями энергии постоянного напряжения (тока) в
>нергию переменного напряжения (тока).
В параметрических генераторах и усилителях механизм пере-
дачи энергии (или, как его называют, накачки) оказывается
Иым: энергия вводится в систему путем изменения с некоторой
(астотой реактивного параметра, на что какой-то источник затра-
гивает энергию. Поскольку параметр меняется с одной частотой,
возбуждаемые или усиливаемые колебания в большинстве слу-
/в имеют другую частоту, параметрические устройства оказы-
ваются преобразователями энергии переменного тока одной часто-
ты в энергию колебаний другой частоты.
Во-вторых, процессы в параметрических устройствах описыва-
ются параметрическими уравнениями. Для исследования этих
уравнений наряду с ранее рассмотренными методами анализа ли-
нейных и нелинейных цепей (комплексных амплитуд, квазилиней-
ного, медленно меняющихся амплитуд, фазовой плоскости и др.)
применяются и некоторые новые. К их числу прежде всего отно-
сятся методы решения дифференциальных уравнений Матье и
Хилла и метод, основанный на использовании уравнений Мэнли м
Я-92
225
Роу, рассматриваемые ниже. Характеристики генераторов и усили-
телей обладают заметным своеобразием. Применяемые в совре-
менных параметрических генераторах, усилителях и некоторых
других устройствах нелинейные реактивные элементы работают
как параметрические только при малых амплитудах колебаний. В
общем же случае работу таких схем приходится анализировать с
учетом их нелинейности, т. е. рассматривать их как нелинейно-па-
раметрические или нелинейные.
Параметрические явления- в технике известны давно. Еще в прошлом веке
их изучением занимались Мельде и Рэлей. Крупный шаг в развитии теории
этих явлений был сделан в СССР в 30-х гг. академиками Л. И. Мандельшта-
мом -и Н. Д. Папалекси и их учениками, исследовавшими явления параметриче-
ского резонанса и параметрического возбуждения колебаний в электрических
цепях. С 1954 г. параметрические генераторы стали использоваться в вычис-
лительных машинах. Спустя несколько лет началось бурное развитие парамет-
рических усилителей, их применение позволило во много раз увеличить чувст
вительность радиоприемных устройств. В настоящее время параметрические
усилители являются одним из важных типов малошумящих входных устройств
приемников, применяемых в радиолокации, радиоастрономии, космической ра-
диосвязи и т. ш Важное место в современной технике занимают и умножители
частоты, использующие нелинейные емкости p-zi-переходов.
6.2. ЭНЕРГЕТИЧЕСКИЕ СООТНОШЕНИЯ
В ПАРАМЕТРИЧЕСКОМ КОНТУРЕ. УСЛОВИЯ i
САМОВОЗБУЖДЕНИЯ
Параметрическое возбуждение (нарастание) колебаний, вы-
званное периодическим изменением 1индуктив1ности или емкости
контура, может иметь место только в том случае, если изменение
L или С приводит к увеличению энергии колебаний, существую-
щих в контуре. Предположим, что вследствие флуктуаций в кон-
туре возникли слабые колебания, в результате которых напряже-
ние и на емкости меняется приблизительно по синусоидальному
закону и= U sin art, как показано на рис. 6.2о. Аналогично изменя-
ется и заряд q на пластинах: ^=Qisin«Z. Возникает вопрос: в ка-
кие моменты и в каком направлении следует изменять емкость С
для того, чтобы энергия в контуре возрастала? Допустим, что- в
качестве емкости используется плоский конденсатор, в котором
можно менять расстояние между пластинами. Когда на пластинаД
конденсатора имеются заряды1 А
q=Cu, (6. <
они притягиваются друг к другу. Если теперь раздвинуть пласти-|
ны,..то на преодоление сил притяжения будет затрачена энергия,
которая преобразуется в единственно возможную иную форму —
энергию электрического поля конденсатора. Для введения таким
способом наибольшей энергии в контур нужно, во-первых, раздви-
гать пластины, т. е. уменьшать емкость, в моменты наибольшего
1 Для рассматриваемых здесь колебаний малой амплитуды U емкость С
имеет смысл дифференциальной емкости.
напряжения на пластинах, и во-вторых, делать это дважды за пе-
риод колебаний Т, как показано на рис. 6.26 (моменты Л и /3). В
момент скачкообразного уменьшения С заряд q сохранится неиз-
менным (он не может меняться мгновенно, так как иначе i=
=dqldt=oo), а потому возрастет и. Энергия электрического поля
№=?2/2С. (6.2)
Ее производная dW]dC=—q^lQ.C1 с,учетом (6.2),будет
dWldC=^ W/C. (6.3)
Переписав (6.3) в виде
dW/W=—dC/C, (6.4)
замечаем, что уменьшение емкости (с?С<0) ведет к увеличению
энергии электрического поля (dWz>0).
Рис. 6.2
Выше предполагалось, что уменьшение емкости связано с из-
менением расстояния между пластинами. Выражения (6.-3) и (6.4)
означают, что для увеличения энергии поля можно уменьшить ем-
кость любым способом. На практике для осуществления парамет-
рического изменения емкости в контур вводят варикап и управ-
ляют величиной его емкости с помощью переменного напряжения.
Напряжение и частоту этого воздействия называют соответствен-
но напряжением и частотой накачки.
227
Для осуществления периодического изменения емкости требу-
ется после каждого уменьшения восстанавливать ее исходное зна-
чение. Делать это лучше всего в те моменты tz и fa, когда напря-
жение «=0, ибо в противном случае уменьшение расстояния меж-
ду пластинами или вообще увеличение С согласно выражению
(6.4) сопровождается уменьшением энергии электрического поля.
На рис. 6.26 сплошная линия соответствует самому выгодному за-
кону изменения емкости, при котором в случае небольшого изме-
нения емкости ,ДС в контур дважды за период вносятся макси-
мальные порции энергии, а восстановление исходного значения С
расходом энергии не сопровождается.
Проведенное рассмотрение позволяет отметить следующие су-
щественные особенности параметрического возбуждения колеба-
ний в контуре:
самым выгодным режимом параметрического возбуждения яв-
ляется такой, при котором изменение параметра происходит с час-
тотой накачки <он, вдвое большей частоты возбуждаемых колеба-
ний;
важное значение имеют фазовые соотношения между изменени-
ем емкости (накачкой) и напряжением на ней. Действительно, ес-
ли сдвинуть моменты изменения емкости С на Л/ по времени или
на 2соЛ/ по фазе (пунктирная линия на рис. 6.26), то уменьшение
С будет происходить тогда, когда | и | < U, что приведет к умень-
шению вносимой в контур энергии; увеличение С будет совершать-
ся при «#=0, а потому будет сопровождаться расходом энергии
контура. В целом энергия, вносимая в контур за период колеба-
ний, уменьшится, и восстановление ее прежнего значения потребу-
ет увеличения глубины модуляции параметра. Если же сдвинуть
моменты изменений С относительно наивыгоднейших на At—Tf4,
то емкость будет уменьшаться, когда п=0, и увеличиваться, ког-
да |п| —\U, т. е. энергия в контур вообще поступать не будет, а ее
расход при увеличении емкости С окажется наибольшим. Такое
изменение С приведет к увеличению затухания контура.
Для определения условий параметрического возбуждения ко-
лебаний нужно сопоставить энергию, вводимую в контур за счет
изменения параметра, с расходуемой.на его активном сопротив-
лении. Проведем эти расчеты для наивыгоднейшего случая изме-
нения C(t). Заменяя в (6.4) dC и dW на небольшие конечные ве-
личины ДС и AW и обозначая согласно рис. 6.26 глубину модуля-
ции параметра m=iAC/2C, подсчитаем величину энергии AW, вно-
симой в контур в результате уменьшения емкости в момент fa:
AW=W\ACIC=mQ?JC.
Энергия ДИ7Т, вводимая в контур за период Т:
AWT = 2AW=2mQfa/C. (6.5)
За это время в активном сопротивлении г контура расходуется
энергия
Wr^-^-PrT. (6.6)
228
Ток в контуре i=dqldt=<aQ\ coscot
Подставляя в (6.6) Z=<oQi и Т=2ях/<о, получим
№г=ш-сй(Э21. .(6.7)
Колебания в контуре будут возрастать, если что со-
гласно (6.5) и (6.7) имеет место, когда глубина модуляции пара-
метра превысит некоторое критическое значение
m >/пкр, (6.8)
равное
mKp=~-d^ 1,57с?. (6.9)
Здесь d—r&C— затухание контура.
Если условие параметрического возбуждения (6.8) выполняет-
ся, каждое уменьшение С вызывает в соответствии с (6.1) увели-
чите напряжения и на величину Аы=ы(АС/С) =2ти, в результа-
те чего амплитуда напряжения возрастет по экспоненциальному
закону, как показано на рис. 6.2о пунктирной линией. В практиче-
ских схемах изменение емкости производится не скачкообразно, а
примерно по синусоидальному закону:
C=Co[l + msin(2co^+ip)]. (6.10)
Наивыгоднейшим является случай, показанный на рис. 6.2в,
когда наиболее быстрое уменьшение емкости происходит при и—
= ±U, а наиболее быстрое возрастание — при «=0. Этому соот-
ветствует ip=0. Очевидно, при той же глубине модуляции пара-
метра т при синусоидальном законе его изменения в контур'вно-
сится меньшая энергия, чем при скачкообразном, вследствие того,
что уменьшение емкости начинается и заканчивается при |и\ <ZU,
а увеличение начинается и заканчивается при ы=#0. Поэтому кри-
тическая глубина модуляции параметра mVp, необходимая для
возбуждения параметрических колебаний в случае синусоидально-
гр изменения параметра, должна быть большей.
Для ее определения предположим, что в контуре рис. 6.1 про-
текает гармонический ток
i=7coscoZ, (6.П)
и подсчитаем мощность, расходуемую в правой части контура
рис. 6.1, состоящей из г и C(t). Заряд на емкости равен-
9 (i) = Ji di = -£-sin со t (6.12);
f. Напряжение на ней согласно (6.10) и (6.12) определим как
________----------- (6.13)
1 ' с (0 со Ce 1 4- т sin (2 со t -j- ip)
О°__no
229
Обозначим l/fi>Co=p и преобразуем (6.13)’, полагая, что
u(t) ^/ipsin coZ[ 1—msiru(2(o/+'4>)] =7psin<o/+
+-^- Zpoos (Зсо^+ф)——Ip cos((o/+i|)). (6.14)
2 2
Средняя мощность, расходуемая в цепи за период Т=<2я1(й
или за любой достаточно длительный интервал времени,
т
P^^-Pr+^^uidt. (6.15)
о
Р=—/2г+^
2 Т
Подставляя (6.14) и (6.11) в (6.15), получим
гТ т
J sin ad cos (Mt+ —Joos (Зсо^+'фУсоз addt—
-о о
Г 1
—^-Joos(aZ+,4)):cos addt I.
о J
Первые два интеграла обращаются в нули, поэтому
P = -^-Ja^r—рсозф).
Полученный результат означает, что мощность, выделяемая
током I в рассматриваемой цепи, отличается от расходуемой в со-
противлении г и в зависимости от знака cosip, т. е. от величины
ф, может оказаться или меньшей или большей, чем 0,5/2г. А это
может иметь место, когда изменение емкости сопровождается со-
ответственно внесением энергии в рассматриваемую цепь или от-
бором энергии из нее. Сказанное эквивалентно введению в цедь
сопротивления
/•Вн=—'0,5mpcos$. (6.16)
Выражение, определяющее гвн, встречается и в ином виде. Так,
если вместо (6.12) и (6.10) принять q= — cos (<в/-|-<р) и С—
==Co/(l+m cos 2(of), то, проведя прежние расчеты, получим
гвн=—0,5/npsin2<p. (6.17)
Эквивалентная схема контура с периодически изменяющейся
С или ,L может быть представлена в виде контура с постоянными
величинами С и L и активными элементами г и Гвн, как показано
на рис. 6.3. Вносимое сопротивление (6.16) является отрицатель-
ным, если cosip>iO; его величина возрастает с увеличением tn.
Наибольшее значение отрицательного сопротивления
|ГВН=—0,5тр (6.18)
достигается, когда cosip=l или ф=0, что соответствует осцилло-
граммам и и С, построенным на рис. 6.2а и в. Когда юоэфСО, гви
положительно.
230
Для возбуждения колебаний в контуре нужно, чтобы выпол-
нялось условие
/Ч-Ген<0. (6.19)
Для этого вносимое сопротивление должно быть отрицатель-
ным и достаточно большим. Подставляя (6.16) в (6.19), получаем
условие самовозбуждения в виде (6.8), где
/иКр=2d/cos ф. (6-20),
В самом благоприятном случае, когда соэ-ф=1,
ткр=2d. (6.21))
Сравнивая (6.21) с (6.9), убеждаемся в том, что замена скач-
кообразного изменения С на гармоническое приводит к увеличе-
нию 7Икр.
Рие. 6.4
Если гВн<0, но /п</Пкр, в контур вносится энергия, недоста-
точная для возбуждения колебаний. Такой режим используется в
одноконтурном параметрическом усилителе, эквивалентная схема
которого приведена па рис. 6.4. Если входной сигнал нвх=
=iHBX cos со/, величины L и С постоянны и контур настроен на
частоту со, в нем можно осуществить усиление по напряжению, ес-
ли снимать выходное напряжение с одного из реактивных элемен-
тов. Получающийся при этом коэффициент усиления
K=t7BbIX/t7BX=Q. (6.22)
( При этом, однако, увеличения мощности сигнала не происхо-
дит, ибо, кроме источника wBX, св схеме нет никаких других источ-
ников энергии. Между тем под параметрическими и другими уси-
лителями слабых сигналов обычно подразумевают усилители мощ-
ности этих сигналов. В схеме рис. 6.4 усиление мощности достига-
ется периодическим изменением С или L, сопровождающимся вне-
сением в контур энергии, за счет которой увеличивается энергия
имеющихся в контуре колебаний. Очевидно, чем ближе —гвн к гг
при условии, что |гвн|<Л тем больше вносимая в контур мощ-
ность и тем большим окажется усиление мощности сигнала. Бо-
лее обстоятельное рассмотрение работы параметрических усилите-
лей приводится в § 6.5—6.6.
,9е* 231
6.3. ПАРАМЕТРИЧЕСКОЕ ВОЗБУЖДЕНИЕ КОЛЕБАНИИ.
УРАВНЕНИЕ МАТЬЕ
Предположим, что в колебательном контуре емкость плоского
конденсатора C-eS/I с площадью пластин S меняется из-за из-
менения расстояния между пластинами I с частотой сон=2<в по за-
кону
/=/0(1 +т cos 2с»/), (6.23)
в результате чего
C=C0/(l + mcos2(of), (6.24)
где C0=eS/L0. Выражение (6.24) пригодно и для рассмотрения
контура, емкость которого изменяется с помощью варикапа, по-
скольку изменение ширины запорного слоя в последнем в резуль-
тате действия накачки эквивалентно изменению расстояния между
пластинами.
Дифференциальное уравнение для тока в контуре рис. 6.1 име-
ет вид
+ ri+ -i-Ji dt = 0. (6.25)
Введем в качестве переменной заряд q= §idt. Определив ток
как
i—dqjdt, (6.26)
подставляем (6.26) и (6.24) в (6.25). Получаем линейное диффе-
ренциальное уравнение с периодически изменяющимся коэффици-
ентом
^4 + +<020 (j +m cos 2(О0 q = о, (6.27)
dt3 L dt
где co2o=l/LC’0. В радиотехнике нередко встречается уравнение
Матье
4-(ц 4-26 cos 2т) х=0, (6.28)
dr2
в котором а и 6 — некоторые постоянные, также являющееся ли-
нейным дифференциальным уравнением второго порядка с перио-
дическим коэффициентом, ибо при изменении т на величину л,
2л,... величина коэффициента при втором слагаемом принимает
прежнее значение. Поскольку решения уравнения Матье известны,
целесообразно преобразовать (6.27) в (6.28), чтобы воспользовать-
ся для установления свойств рассматриваемой параметрической
системы известными сведениями из теории уравнения Матье. Для
этого вводим в (6.27) безразмерную переменную
т=ш/. (6.291
Очевидно
d? _ dq rdt dg = = (630)
Kdt dt dt (dt‘ dt3 dt \ dt J dt3' ' z
232
Обозначаем далее q=y, dyldx=y, d2y]dx2=y и подставляем
(6.30) и (6.29) в (6.27):
УЛ~У + <^ (l+m.cos2r)f/=0. (6.31)
co £ со2
Введем обозначения: затухание контура d=r/aL=2di,
<& = <о2о/со2, 26 = m<o2o/o2. (6.32)
Величина b характеризует отношение частот, а 26 при задан-
ном, b—глубину модуляции параметра. Теперь (6.31) приобрета-
ет вид
z/+2z/]t/+(6+26cos2t)z/=0. (6.33)
Уравнение (6.33) отличается от (6.28) наличием слагаемого
2diy и совпадает с ним для контура без потерь (d=2d] = 0). Под-
становка
y — e~d^x (6.34)
позволяет исключить это слагаемое. Действительно, находя у=
—e-d<xx—d\&d,xx, y=e~ditx—2die~d>xx+d2ie~d'xx и вводя эти выра
жения в (6.33), получаем уравнение Матье (6.28), в котором
a=^—d21=O)2o/(d2_j2b (635)
Из теории уравнения Матье известно, что его решение может
быть представлено суммой двух линейно независимых решений
х=А е^Ф (т) + В е-^Ф (—т), • (6.36)
где А и В — произвольные постоянные, которые могут быть най-
дены из начальных условий; Ф (т) и Ф (—т) — периодические
функции с периодом л или 2л или соответственно с частотами
ын )или юн/2=о1; ц— коэффициент, зависящий от величин а и 6,
который может быть мнимым или действительным
Если р — действительная величина любого знака, амплитуда
одного из слагаемых (Ле-и1; или Ве~^х) неограниченно возрастает.
Следовательно, условие самовозбуждения параметрического кон-
тура без потерь можно записать как
Rep¥=0. (6.37)
<На рис. 6.5 на плоскости а, 6 построены области неустойчиво-
сти, внутри которых коэффициент р имеет действительные значе-
ния, причем с удалением от границ внутрь области величина Re р
возрастает. Границам областей соответствует р=0. Области неус-
тойчивости стягиваются к точкам оси абсцисс, в которых а—п2,
где п=1, 2, 3,... По величине п принято нумеровать области не-
устойчивости. Если параметры а и 6 уравнения (6.28) соответст-
вуют какой-либо из областей неустойчивости, имеет место само-
> * Если ш7’=л (где Т — период колебаний), то 7—л/а>=2л/сон, и частота
2л
колебаний равна <вн. Если «7=2 л, то Т=—— и частота колебании равна
й=йа/2.
233
возбуждение колебаний. В точках, расположенных вне этих облас-
тей, коэффициент у, оказывается мнимым, при этом колебания не
нарастают. Характер областей одинаков при б>0 и б<0; поэто-
му области неустойчивости в нижней полуплоскости опущены.
Параметрическое возбуждение в контуре без потерь (с?1 = 0)
возможно при сколь угодно малых значениях б (а значит, и т) на
частотах, на которых a—ri2. Поскольку coH=2w, согласно (6.35)
это имеет место при
(dH = 2(d0/rt. (6.38)
Следовательно, согласно рис. 6.5 параметрическое возбужде-
ние можно осуществлять, изменяя параметр с частотой (дн=2соо,
соо, 2йо/3, ... Для контура с потерями согласно (6.34) и (6.36)
у=А е'и-лотф (т) + в е-<м+а|)яр (—т) (6.39)
и один из показателей экспоненты будет положительным только
в том случае, если у — величина действительная и притом такая,
что
Рис. 6.6
|у|>^1. ;(6.40)
Области 'неустойчивости для (6.33) ограничиваются пороговы-
ми кривыми |у| =di. Эти кривые нахо-
дятся внутри областей у=0, причем в
областях, соответствующих большим
значениям п, их низшие точки соответст-
вуют большим б, которые будем обозна-
чать далее бп. Сказанное иллюстрирует-
ся пунктирными линиями рис. 6.5, огра-
ничивающими области возбуждения для
|у|—О, 1, и рис. 6.6, на котором приве-
дены границы областей возбуждения
первой зоны для нескольких значений
у. Координаты нижних точек, вычислен-
ные для нескольких областей неустойчи-
зости в предположении небольших |у|,
приведены в табл. 6.1. При оценке условий самовозбуждения по-
лагаем |i=rfi= =rf/2.
Таблица 6.1
V п 1 2 3 4
ап 1—Ц2 3 4 + Vi о 9+(.6ц)2/’ 16+4г(ад1/а О
бп 2|х 4|Х*/2 4(6ц)>/» 4(72р)*/4
Для обычно применяемых контуров с затуханием ^<<1 можно
приближенно считать
а г«со2о/<£>2«/г2, (6.41)
а йеличины 6П согласно (6.32)
6П *=а0,5т/г2. (6.42)
Теперь условие параметрического возбуждения в низших точках
областей неустойчивости оказывается
0,5mn2^6n (6.43)
или
m>mKp=26n/n2. ' (6.44)
В этих выражениях 6П подсчитываются по формулам табл. 6.1,
полагая р=^/2. Например, для первой зоны (п=1)
г. ткр=2с1. (6.45)
Ранее эта формула была получена из энергетических расчетов.
Характеристики 6(a) рис. 6.6 называются пороговыми, поскольку
они определяют зависимость ткр от расстройки.
В табл. 6.2 указаны: частоты накачки сон, соответствующие
низшим точкам областей неустойчивости, выражения для т^, по-
лученные из (6.44), и результаты расчета по ним величины
< Та б л и ц а 6.2
п 1 2 3 4
i юн 2соо (Оо £ сч | W 1 уюо
/ГСкр i 2d 1,4/d 1,28^ d 1,22 fyd
% (d=0,01) 14 28 39
235
для контура с затуханием d=0,01. Из формул и расчетов следует,
что возбуждение колебаний в высших зонах тре-
бует существенного увеличения глубины моду-
ляции параметра. Зависимость т^, от затухания пропорцио-
п /
нальна V d. По этой причине на практике используется возбуж-
дение в первой зоне. В последующем рассматривается только этот
случай.
Из рис. 6.6 видно, что осуществление параметрического воз-
буждения при отклонениях частоты накачки а>н от оптимального
значения, близкого к 2и0, требует увеличения глубины модуляции
параметра. Причина этого, как показывают расчеты, состоит в
том, что только при (дн~2(до фаза <р параметрически возбуждае-
мых колебаний {см. выражение (6.17)] оказывается оптимальной
sin2<pOnT=l, (6.46)
благодаря чему вносимое в контур отрицательное сопротивление
максимально (6.18). При отклонении щн от 2ю0 фазовые соотноше-
ния изменяются, sin2<p уменьшается и для достижения прежнего
значения |гВн| требуется увеличивать глубину модуляции пара-
метра.
Параметрический генератор, в котором возникают колебания с
частотой о=Ин/2, является делителем частоты в 2 раза. В соот-
ветствии с общим правилом, сформулированным в § 5.6, ему свой-
ственна двузначность фазы возникающих колебаний. При йн~2щ»0
согласно (6.46) <р,опт=45°, ф"опт=225°.
6.4. СТАЦИОНАРНЫЙ РЕЖИМ ПАРАМЕТРИЧЕСКОГО
ГЕНЕРАТОРА
При рассмотрении в предыдущих параграфах условий параметрического
возбуждения колебаний предполагалось, что в схеме возникли колебания не-
большой амплитуды. Поэтому схема считалась линейной параметрической. Если
условия параметрического возбуждения выполнены, амплитуда колебаний рас-
тет до тех пор, пока из-за имеющихся в схеме нелинейностей дальнейшее воз-
растание амплитуды станет невозможным. Таким образом, во всех авто-
генераторах (и нелинейных, и параметрических) причиной уста-
новления стационарного режима автоколебаний яв-
ляется наличие нелинейности. Характер нелинейности влияет на
вид зависимостей амплитуд стационарных колебаний генератора от различных
факторов.
На рис. 6.7 представлены: а) принципиальная схема однотактного парамет-
рического генератора на варикапе (для упрощения анализа пепи накачки и сме-
Рис. 6.7
тения опущены) и б) его эквивалентная схема, в которой варикап изобража-
ется параллельно включенными дифференциальными емкостью С (и) и сопро-
тивлением <R(u). На рис. 6.8 показаны зависимости С(и), i(u) и R(u) варика-
па. Последняя определяется по вольтамперной характеристике 1(и) диода сог-
ласно (2.17). Следовательно, в схеме рис.
6.7 имеются две нелинейности: реактивная
С (и) и активная R(u).
Рис. 6.8
Для последующего анализа удобно параллельную эквивалентную схему
варикапа заменить последовательной. Проводимость диода при малых ампли-
тудах колебаний
Y=l/7?+i<oC. (6.47)
Сопротивление Z=rc+iXc определяется из (6.47) как
1 R . юСД2
г~ Y = 1+(юС7?)а 1+(соСД)я ’ (6j48}
Полагая для напряжений ц<0 |/?^>1/<оС, получаем выражения
Хс=—1/шС, гС;=Х2с/Р, (6.49), (6.501
из которых следует, что в рассматриваемых условиях варикап может быть
представлен последовательно соединенными емкостью С (и) прежней величины
и сопротивлением гс(и), обратно пропорциональным /?(«):
г с (и) ~И/Д(«). (6.51)
Действие накачки сводится к небольшому (при небольшой величине
тНр) изменению емкости, в результате которого в контур вносится мощность
или сопротивление гвн<0, определяемое выражением (6.16). В результате экви-
валентная схема параметрического генератора содержит положительное ri=r+
+гс (к) и отрицательное гвн активные сопротивления.
В последовательном колебательном контуре при возбуждении колебаний с
частотой ш=1шн/2, близкой к резонансной <оо, ток оказывается почти гармони-
ческим
i=/cos<o/. (6.52)
Для рассмотрения процессов в контуре с высокой добротностью можно вос-
пользоваться методом гармонической линеаризации и опираться на эквивалент-
ную схему рис. 6.9, на которой rc(u) м С(и) заменены сначала иа гc(i) я C(i)
237
благодаря однозначной зависимости между и и i, а затем их эквивалентными
значениями гс(1) и Са(1) по первой гармонике, зависящими от амплитуды /.
В § 5.2 произведен расчет Ca(U) для синусоидального напряжения; объяснено
увеличение Са с ростом амплитуды U. В рассматриваемом случае увеличение Z
вызовет увеличение U, а значит, и Са.
С увеличением U (см. рис. 6.8) или / уменьшение R в положительный
яолупериод все значительнее превосходит его увеличение в отрицательный. По-
этому с ростом I эквивалентное по первой гармонике сопротивление Р(1) умень-
шается, а г с (/) возрастает.
На рис. 6.10а показаны зависимости Са и rt от I для малых смещений Е
на варикапе, когда наиболее резко сказывается изменение ri(/), а на рис. 6.106
для больших Е, когда даже при значительных амплитудах напряжения
ri^r и мало зависит от амплитуды колебаний, поэтому преобладает
влияние Са(1).
Различают несколько механизмов ограничения амплитуды параметрических
колебаний: диссипативный 1, расстроенный и др. Диссипативный механизм состо-
ит в ограничении амплитуды из-за увеличения сопротивления потерь в контуре,
в результате чего с ростом амплитуды колебаний мощность Р-, расходуемая
в контуре, возрастает быстрее, чем мощность Р+, вводимая в него путем изме-
нения параметра (накачки). Стационарному режиму соответствует
Р-=Р+. (6,53)
Согласно (6.16) мощность
1 1/71
Р+ = —/2|гВн| = -у/2 у pcos ij) (6,54)
растет пропорционально квадрату амплитуды возбужденных в контуре коле-
баний (cos тр, m и р считаем постоянными). Величина
Р-=у/ф+М/)] (6.55)
растет быстрее из-за возрастания гс(1). Поэтому если при малых амплитудах
I Р+>Р_ и амплитуда колебаний I начинает увеличиваться, то при некоторм
значении /сг наступает стационарный режим, определяемый равенством (6.53),
как это показано на рис. 6.11а.
Диссипативный механизм ограничения амплитуды обычно имеет место при
малых смещениях Е, когда уже при небольших амплитудах I заметно возрас-
тание гс(1), а зависимость Ca(I) еще не имеет существенного значения и мож-
но считать СВ(1)~СО (см. рис. 6.10а). Затухание контура
d=ri/tf>L=[r+rc(I}]l<i>L (6J56)
1 В теории нелинейных колебаний диссипативными называют колебатель-
ные системы, в которых происходит рассеяние (диссипация) энергии.
.238
оказывается большим для больших I. На рис. 6.12а построено семейство зави-
симостей ткр от частоты накачки <он для различных величин d (или /), полу-
чающихся переходом от одной пороговой характеристики к другой на рис. 6.6.
Наименьшее затухание de соответствует 7=0, наибольшее ds— наибольшей ампли-
туде 1з'. /ч>/2>/1>0.
Предположим, что шн=2<йо. а амплитуда накачки такова, что глубина мо-
дуляции m=mi. Для частоты д>=а>н/2 /ni>,mKp=2d0, а поэтому колебания
будут нарастать. Когда их амплитуда достигнет величины 12, затухание конту-
ра станет равным d2 (точка Д), глубина модуляции mi окажется равной кри-
тической для амплитуды /2 и в контуре установятся колебания с этой ампли-
тудой. Если о)н= io'и или ш"н, тКр при 1=0 окажется большей, чем в предыду-
щем случае, из-за того, что при возникновении колебаний фазовью соотноше-
ния в схеме, как было показано в
§ 6.2, окажутся менее благоприят-
ными. Однако и здесь (при
1=0), и потому колебания начнут
нарастать. Стационарный режим, со-
ответствующий mj=ткр, наступит
при амплитуде /t (затухание di),
меньшей /2 (точки и Д2). Для
частот <вн=сон"' и o>HIV при 7=0
1И1 = тКр, а потому воврастания ко-
лебаний не будет.
На рис. 6.126 по точкам, полу-
ченным на рис. 6.12а, построена за-
висимость амплитуды колебаний па-
оаметрического генератора от часто-
ты накачки при постоянной ее амп-
литуде (при т=т^. Большей амп-
литуде накачки (т=т2) соответст-
вует другая частотная характеристи-
ка генератора. При диссипативном
механизме ограничения амплитуды
частотная характеристика генерато-
ра оказывается симметричной, изме-
нение частоты <он вызывает плавное
(мягкое) увеличение или уменьше
ние амплитуды колебаний.
При расстроечном механизме с
ростом амплитуды изменяется сред
нее (за период колебаний) значение
нелинейной реактивности, а значит,
и резонансная частота контура, что
приводит к ухудшению условий пе
редачи энергии от источника накач-
ки и в конечном итоге к прекраще-
нию роста амплитуды колебаний.
Рис. 6.12
239
Расстроенному механизму ограничения амплитуды соответствуют характеристи-
ки рис. 6.106.
Установление стационарных колебаний при расстроенном механизме при
юн=2а>о поясняет рис. 6.116. Мощность Р-, потребляемую в контуре, принимая
в (6.55) rc'(/) =const, можно считать пропорциональной /2. При нарастании
амплитуды I среднее по 1-й гармонике значение емкости варикапа увеличивается,
резонансная частота уменьшается, возрастает сдвиг фаз ф, а потому Р+ со-
гласно (6.54) изменяется не пропорционально I2, а медленнее. Поэтому если
при малых амплитудах Р+>Р-, то при некотором значении /ст наступает ста-
ционарный режим, определяемый равенством (6.53).
При расстроенном механизме увеличение 1 приводит к смещению порого-
вых характеристик влево из-за уменьшения резонансной частоты контура, что
показано на рис. 6.13а. На рисунке принято Ii>h>h>Ii>Q-
Рис. 6.13
Предположим, что за счет накачки обеспечивается модуляция емкости с
глубиной m=mi. Если частота накачки <oH=2ci)o> то т>ткр и колебания в
контуре начнут нарастать. Когда амплитуда тока достигнет величины 12 (точ-
ка Д), вызванный расстройкой контура фазовый сдвиг ф окажется таким, что
наступит равенство mKJ>=mi. Следовательно, дальнейший рост амплитуды пре-
кратится, установятся колебания с амплитудой 12. Для частоты ю)=а>/н стаци-
онарная амплитуда колебаний окажется меньшей (/i), для — большей
(/з). Частотная характеристика генератора /(сон) окажется несимметричной
(рис. 6.136). Так как нарастание колебаний начинается с 1~0, при т=т\ са-
мовозбуждение колебаний имеет место, если coIVH<o)H<a)"H.
При o)h<ci)ivh (например, при covH) ткр>тх и возбуждение колебаний в
результате воздействия флуктуаций малой амплитуды окажется невозможным.
Однако если мы сумеем при <он=шуя увеличить т до величины т^, при кото-
рой колебания возникают, то в случае последующего уменьшения т до /П1
они сохранятся. Колебания при <oH=a>vH можно получить и таким способом:
осуществить возбуждение при <oH=o)IVH, а затем уменьшить частоту а>я до же-
лаемого значения. Такие явления свойственны жесткому режиму самовозбуж-
дения колебаний и наличию затягивания.
240
6.5. ОДНОКОНТУРНЫЙ ПАРАМЕТРИЧЕСКИЙ УСИЛИТЕЛЬ
Ранее было отмечено, что в одноконтурном параметрическом
усилителе (рис. 6.4) усиление сигнала происходит за счет мощно-
сти, передаваемой в контур путем изменения его реактивного па-
раметра. Различают два режима работы такого усилителя: син-
хронный и асинхронный (или бигармонический). Синхронным на-
зывается режим, при котором частота накачки вдвое больше час-
тоты усиливаемого сигнала: <ан=2<а. Асинхронным называется ре-
жим, при котором синхронизм между колебаниями накачки и сиг-
нала нарушается, т. е. когда <ону=2й>.
Рассмотрим основные характеристики синхронного режима. Ес-
ли входное напряжение усилителя меняется по закону
Двх = Свх 'COS О)/, (6.57)
то при изменении емкости по закону
C’=Co[l+msin((oH/+ip)], (6.58)
где для синхронного режима <ан=2ш, в контур вносится отрица-
тельное сопротивление, определяемое выражением (6.16). Если час-
тота со совпадает с резонансной частотой контура ш0= 1/ У LC,
коэффициент усиления по напряжению К=£/Вых/^вх равен экви-
валентной добротности контура Q3:
K=.Q3=p/(r+rBH) =Q/(1—у- Qicos-ф). (6.59)
С учетом (6.20)
К =--------. (6.60)
1 ——
ткр »
Наибольший коэффициент усиления, получающийся при ф=0, ра-
вен
Kmax=Q/(l—^Q)- (6.61)
На рис. 6.14 изображена принципиальная схема одноконтурно-
го параметрического усилителя на варикапе. Собственно парамет-
рическим усилителем является контур, состоящий из индуктив-
ности L и варикапа C(t), на вход которого поступает сигнал нвх.
Накачка осуществляется от источника ев частоты <ан через дрос-
сель iLw большой индуктивности. Смещение Е подается от специ-
ального (обычно регулируемого) источника постоянного напря-
жения через резистор R%, обладающий столь большим сопротивле-
нием, чтобы цепь питания заметно не ухудшала добротность кон-
тура. Разделительные конденсаторы Ci и Сг большой емкости не-
обходимы для предотвращения замыкания варикапа по постоян-
ному току через источники сигнала и накачки: в случае их отсут-
ствия постоянное напряжение на варикапе будет равно нулю.
241
Напряжение на варикапе создается обоими воздействующими
на схему напряжениями: сигналом и накачкой. Как отмечалось в
§ 6.1, параметрические усилители используются, главным обра-
зом, для усиления слабых сигналов, поступающих на вход прием-
ника. Напряжение же накачки должно быть таким, чтобы т. было
близким к ткр. Поэтому в обычных режимах усиления напряже-
ние на варикапе от накачки значительно больше напряжения, соз-
даваемого на нем сигналом, что позволяет рассматривать варикап
как емкость, периодически изменяющуюся с частотой сон, и поль-
зоваться при анализе усилителя его упрощенной схемой (рис. 6.4),
опуская цепи накачки и смещения как вспомогательные.
Рис. 6.14
Коэффициент усиления К зависит от т, а потому и от смеще-
ния Е и амплитуды накачки 1/н. На рис. 6.15а для случая ф~0
показан характер зависимости К от амплитуды LZH при £=const:
при (7н=0, т=0 и K=Q; с увеличением (7В возрастает т, следо-
вательно, растет и К. При некоторой амплитуде t7H=iL7HKp т=
—Шкр и общее активное сопротивление на рис. 6.4 станет равным
нулю, К-ъ-со и в схеме возникает самовозбуждение (область гене-
рации заштрихована).
Характер зависимостей К от Е при (7Н= const и показан
на рис. 6.156. При больших смещениях емкость С мало зависит
от и, т мало, а потому K~Q. С уменьшением Е величины т и К
возрастают и, если амплитуда iC7H достаточно велика (U'n), при
некотором Ейр tn достигает величины т^р и происходит самовоз-
буждение. Если же i£7H не столь велика (С7"н<17/н), то самовоз-
буждение может не произойти, а при малых Е рост К может даже
замедлиться из-за снижения добротности варикапа.
При приеме слабых сигналов частоты со в приемнике удается
получить колебание с частотой накачки сон лишь приближенно
равной частоте 2со. При этом реализуется асинхронный режим ра-
боты с (0и=^=2ш. Пусть
coH=2co+Q,
причем П<Ссо. При воздействии напряжения (6.57) частоты со на
вход усилителя, емкость контура которого согласно (6.58) меняет-
ся с частотой сон, в спектре тока, помимо составляющей частоты
со, появятся по меньшей мере еще две компоненты с комбинаци-
242
онными частотами <а-—о)Е—<а и <а+=<ан+<о. В рассматриваемом
режиме эти частоты будут ь>-=<а+й и co+=3<a+Q. Спектр тока
для этого случая изображен на рис. 6.16.
При П<С<а частоты а и а- оказываются близкими. Поэтому
при попытке выделить полезную компоненту частоты ш с помощью
фильтра (или контура), частотная характеристика которого нане-
сена на рис. 6.16 пунктирной линией, мы неизбежно выделим и
компоненту частоты <а~. Сумма же двух близких частот образует
биения, амплитуда и фаза которых изменяется с частотой ш—•
•—ю=П. Следовательно, усиление сигнала в асинхронном режиме
работы одноконтурного параметрического усилителя сопровожда-
ется возникновением паразитной модуляции.
Когда на вход такого усилителя действует AM или ЧМ сигнал,
модуляция, возникающая в усилителе, накладывается на полезную
и искажает передаваемый сигнал. Это обстоятельство препятст-
вует применению одноконтурных параметрических усилителей в
аппаратуре связи.
Рис. о.16 Рис. 6.17
6.6. ЧАСТОТНО-ЭНЕРГЕТИЧЕСКИЕ УРАВНЕНИЯ
МЭНЛИ И РОУ
Вывод уравнений. В аппаратуре, работающей преимуществен»
но на сверхвысоких частотах, широкое распространение получили
устройства, в которых на нелинейный реактивный элемент одно-
временно воздействует несколько колебаний различных частот.
К числу таких устройств относятся многоконтурные параметри-
ческие усилители, преобразователи и умножители частоты. Общей
особенностью этих устройств является наличие нескольких конту-
ров, настроенных на разные частоты и подсоединенных к нелиней-
ному реактивному элементу. Колебания в контурах происходят
на разных частотах и обладают различными мощностями. Частот-
но-энергетические соотношения Мэнли й Роу устанавливают связь
между частотами колебаний в схеме и величинами мощностей, от-
даваемых в нелинейную реактивность или получаемых от нее.
При некоторых упрощающих предположениях соотношения между
мощностями зависят только от отношения частот и не зависят от
таких факторов, как уровни сигналов, вид нелинейной характе-
ристики и т. п.
Уравнения Мэнли и Роу представляют мощный инструмент для
выяснения принципа действия, основных особенностей и соотноше-
ний, характерных для упомянутых выше устройств. В частности,
243
sth соотношения показывают, на каких частотах (возможно усиле-
ние сигнала и какова предельная величина усиления, позволяют
определить коэффициент полезного действия при преобразовании
частоты, выявить, какие из схем могут быть неустойчивыми.
На рис. 6.17 приведена структурная схема параметрического
преобразователя. Она содержит несколько колебательных конту-
ров, настраиваемых совместно с емкостью С (и) на различные час-
тоты. В двух из них, настроенных на частоты юч и юг, существуют
колебания, вызванные наличием внешних источников таких же
частот. В результате одновременного воздействия этих колебаний
на нелинейную емкость (аналогичные результаты получаются для
нелинейной индуктивности) напряжение на ней (а значит, и ток,
и заряд) содержит гармоники и комбинационные частоты вида
о>т,п=imfi)i+n<a2, где т. и п — любые целые числа. Остальные кон-
туры настраиваются совместно с емкостью С (и) на комбинацион-
ные частоты 'О)т,п. Эти контуры не содержат источников сигнала,
поэтому колебания в них могут возникнуть только в результате
преобразования энергии колебаний одних частот в энергию коле-
баний других частот в нелинейном элементе. Заметим, что в ли-
нейных элементах такое преобразование невозможно.
Избирательность контуров учитывается включением в схеме
рис. 6.17 идеальных полосовых фильтров Ф/£, имеющих нулевое
сопротивление для частоты настройки контура ft и бесконечно
большое для всех других частот. В результате заметную мощность
на нагрузках rt контуров могут выделять колебания только той
частоты, на которую настроен контур. В последующем будем счи-
тать мощность, поступающую в нелинейную емкость от источни-
ков колебаний, положительной, мощность, отбираемую от нели-
нейной емкости, — отрицательной. Очевидно, мощности на комби-
национных частотах могут быть только отрицательными.
Считаем, что нелинейная емкость не имеет потерь, ее вольт-ку-
лонная характеристика q=F (и) является однозначной. Напряже-
ние u(t) на емкости запишем в виде двойного ряда Фурье
оо со
u(t) = £ £ Um, п е1 .
т=—со П~—ОС
(6.62)
Заряд и протекающий через емкость ток также содержат со-
ставляющие комбинационных частот <ат>71. Поэтому можно запи-
сать:
(6/63)
ОО ОО
i(0 = £ £ im.n е‘ (т .
т=—со П——-оо
(6.64)
В (6.62) — (6.64) йт,п, Qm.ni im.n — комплексные коэффициен-
ты. Колебание каждой частоты в (6.62) .(6.64) складывается из
двух компонент. Например, компонента напряжения частоты
имеет вид
«(та1+пЮ2) (О = Vm.n е* + t/_m, _п е~! (««>.+"<»*),
причем колебания этой частоты являются действительными функ-
циями времени только, если
5? * . *
п = U—-т, —п, Qm, тг = <2-тп, — п, Im, тг'= I—m, —п- (6.65)
Так как i=dqldt, то
/то, п —i(m®i + «<a2)<3m,n- (6.66)
Напомним некоторые соотношения из курса ТЛЭЦ. Комплексные ампли-
туды напряжения и тока можно записать как 0=1) е'^и а сопря-
* —jjp * —i<p-
женные с ними как U=Ue. utI=Ie г , Обозначив (ри~-фг=ф, получим
у 6/ = -|'6/ei«’ = P+iQ, у Ш=у и1е~'1* = Р- IQ,
где Р — активная, a Q—реактивная мощности. Активная мощность может быть
рассчитана по одному из следующих выражений:
р = у (W + ui) = у Re и I = у Re UI. (6.67)
Мощность, поступающую в нелинейную емкость на частоте
com.n, будем согласно (6.67) рассчитывать как
1 . * 1 *
Pm, п “ Не Uyn, п^т, п ИЛИ Рта, n=—^“Не Um,nimtn‘
(6.68)
В установившемся режиме в реактивном элементе энергия не
ос оо
накапливается и не рассеивается. Поэтому S £ Рт,п = 0- УМНО-
tn— 00 п—ро
жая и деля Рт1П на m<oi+fico2> запишем
Ы1 V у ,.тР^ .+ у у (Lpm,n =0 (669)
И т со, п со, " т со, 4- п со,
т=— ос п=— ос х т=— ос п=—оо х 1
Из (6.66) и второго выражения (6.68) следует что
1 . *
Рта, п/ (/Ш01 4“ ИС02) Не i Um, nQm, п*
Если на емкости С существует напряжение u{t) с определен
ними значениями Pm,n, то по характеристике q=F(u) однозначно
определяется зависимость q(t) и ее комплексные амплитуды
Следовательно, правая, а значит, и левая части последнего выра-
жения не зависят от выбора частот <oi и cog, поэтому двойные сум-
Мы в (6.69) также не зависят от величин сщ и сог. В таких усло-
245
виях равенство
если каждая из
(6.69) ДЛЯ произвольных е>1 И (1)2 возможно ТОЛЬКО,
этих сумм равна нулю:
т Рт>п
т СД + п (02
7П=—оо п=—СО
По существу это и есть
записываются в виде
п Рт’п = 0. (6.70)
т их + п со2
уравнения Мэнли и Роу. Обычно они
Ш Ртт
т сог + п ы2
Ё У пРт’п =0. 1(6-71)
т=о п=-=о m=-co„^ ^«1 + ПС02
Рассмотрим преобразование первого уравнения (6.70), для чего суммиро-
вание в нем по т проведем в два этапа (на первом — от 0 до оо, иа вто-
ром— от 0 до —оо), используя (6.68):
IS S
rnRet/mnZmn
' т од + п со2
1
= TRe
= 0.
т ^т.п ^т.п
Л Ct>£ fl С02
оо
т=О п~—оо
т ^т,п 1т,п
тв>1 + ПС02
Во втором слагаемом п можно поменять на —п, так как суммирование ве-
дется по всем положительным и отрицательным значениям п. Заменим также
суммирование по отрицательным значениям т суммированием по положитель-
ным т и используем (6.65):
( т) —п 1—т, —п yi У т Uт.п ^т,п
Ы — Ий, — п (02 т (О* 4- П ОД
т=0 п=—оо 1 2 т=0 п=—со * 1
Теперь с учетом (6.67) можем записать
т \PtA,n ^т.п ~Ь Um,n ^т,п
т (Ох + п со2
т (Ох + п со2
Производя очевидное сокращение, приходим к первому уравнению (6.71).
Аналогично получается и второе уравнение (6.71).
Применим уравнения Мэнли и Роу к анализу наиболее распро-
страненных двухконтурных параметрических усилителей, принци-
пиальная схема которых приведена на рис. 6.18. Схема содержит
три колебательных контура, настраиваемых вместе с емкостью
С (и): входной контур — на частоту fi входного сигнала, контур
накачки — на частоту fH накачки, вспомогательный (или холостой)
контур — на комбинационную частоту равную обыч-
но fn+fi или fH—fi. Для этого случая в уравнениях (6.71) отлич-
ные от нуля мощности будут на частотах (мощность Рю^
246
(6.72)
=Ps), foi=ifi (мощность Poi=Pi) И fm,n (мощность Pm,n) • С уче-
том этих обозначений уравнения (6.71) сводятся к следующим:
7*н I tn Рт<п _ Q Pj | tl Рт,п _____ Q
/н т/н+n/i ’ ft mfn+nft
Различают два основных типа двухконтурных параметрических
усилителей: а) усилители нерегенеративного типа, в которых
fm,n=fs-\-fi, т. е. m=n=l; б) усилители регенеративного типа, в
которых —fl, Т. е. Ш=1, П= — 1.
Двухконтурный параметрический усилитель нерегенеративного
типа. Для данного случая уравнения (6.72) превращаются в
7н j 74- - о 5 I 7’+
/н /н + /1 fl /н + /1
(6.73)
где через Р+ обозначена мощность на частоте /н+fi- Из этих урав-
нений следует:
1. Так как источник сигнала комбинационной частоты в схеме
отсутствует, Р+<0. При этом из (6.73) получаем Рн>0 и Pi>0.
Следовательно, и источник накачки, и источник сигнала отдают в
емкость энергию, за счет которой возникают колебания суммарной
частоты.
2. Уравнения (6.73) можно записать как
lf±l = 5±A. 51= А
Pt ft ’Pi fi '
(6-74)
Таким образом, отношение мощностей на разных частотах рав-
но отношению частот: большим частотам соответствуют большие
мощности. Сказанное иллюстрирует рис. 6.19а.
3. Накачка не увеличивает мощность на частоте fi. Колебание
с мощностью, большей мощности входного сигнала Pi, можно по-
лучить только на частоте /н+fb т. е. при преобразовании частоты
вверх. Коэффициент усиле-
ния по мощности, определя-
емый отношением величин
мощностей выходного и вход-
ного сигналов Кр — | Р+1 /Pi,
оказывается согласно (6.74)
тем большим, чем больше
отношение выходной часто-
.ты ко входной.
В рассмотренном усили-
теле отсутствует регенера-
ция, т. е. компенсация по-
Рис. 6.18
терь в контуре за счет энер-
гии колебаний, передаваемой из другой цепи. Отсюда его назва-
ние— усилитель нерегенеративного типа. Такой усилитель устой-
чиво работает при любой мощности накачки.
Двухконтурный параметрический усилитель регенеративного
типа. Рассмотрим случай, когда вспомогательный контур настроен
на частоту fH—ft. Подставляя в (6.72) т=\ и п=—1, получаем
(6.75)
—— = о, ----—— = 0,
fll fli-fl fl fit— fl
где P_ обозначает мощность на частоте /н—А-
Эти уравнения отличаются от (6.73) усилителя нерегенератив-
ного типа прежде всего наличием знака «минус» перед вторым
слагаемым второго уравнения (6.75), что приводит к существен-
ным особенностям такого усилителя:
1. Отсутствие источника сигнала частоты /н—fi означает, что
А_<?0. Из (6.75) следует: Рн>0, Pi<0. Следовательно, источник
накачки отдает энергию, которая тратится как на создание коле-
баний комбинационной частоты, так и на увеличение энергии ко-
лебаний входной частоты.
2. Из (6.75) имеем
If- Л
Рс /н 17*11 fi
Отношение мощностей оказывается равным отношению частор.
График мощностей построен на рис. 6.196.
3. Введение энергии во входной контур на частоте А (за счёт
накачки) приводит к увеличению мощности колебаний на частоте
fi. Это увеличение энергии можно трактовать и как внесение во
входной контур отрицательного сопротивления, в связи с чем этот
тип усилителя называется регенеративным: чем больше мощность
накачки, тем больше вносимое отрицательное сопротивление, ком-
пенсирующее потери в контуре, тем больше увеличивается мощ-
ность колебаний по сравнению с мощностью входного сигнала.
Следовательно, в данном усилителе возможно усиление сигнала на
входной частоте. Усиленный сигнал частоты fi должен сниматься
с клемм Bbixi (рис. 6.18) *. Однако часть, а при большая
часть, мощности накачки превращается в мощность колебаний
1 Входной сигнал подается на вход 1—1' усилителя, а усиленный снима-
ется с ВыХ1 через специальное направляющее устройство — циркулятор.
Р- комбинационной частоты. Следовательно, усиленный выходной
сигнал можно получить и на комбинационной частоте (с Вых2),
т. е. данный тип параметрического усилителя может работать и
как преобразователь, повышающий частоту. При во вто-
ром случае мощность на выходе значительно больше, так как
Р-/Р1=(Ы^)-1. (6.76)
I 4. Увеличение мощности накачки приводит к возрастанию от-
рицательного сопротивления, вносимого в первый контур. При
превышении некоторой критической мощности (амплитуды) на-
качки суммарное активное сопротивление во входном контуре ста-
новится отрицательным и тогда в контуре возникают автоколеба-
ния на частоте, близкой к его резонансной, т. е. fi. Таким образом,
данный тип параметрического усилителя склонен к самовозбуж-
дению; увеличение усиления (увеличение накачки) сопровождает-
ся уменьшением полосы пропускания и снижением устойчивости
работы.
Параметрические усилители применяются главным образом при
приеме слабых сигналов на сверхвысоких частотах, где повыше-
ние частоты обычно затрудняет последующую обработку сигнала.
Поэтому наибольшее распространение получили регенеративные
усилители без преобразования частоты. Однако возможность до-
стижения большей выходной мощности сигнала и устойчивости ра-
боты (в случае нерегенеративного усиления) заставляет нередко
использовать и усилители с преобразованием частоты вверх.
6.7. НЕКОТОРЫЕ СООТНОШЕНИЯ
ДЛЯ ДВУХКОНТУРНОГО ПАРАМЕТРИЧЕСКОГО
УСИЛИТЕЛЯ РЕГЕНЕРАТИВНОГО ТИПА
Исследование двухконтурных параметрических усилителей с
помощью уравнения Мэнли и Роу позволило выяснить принципи-
альные особенности этих устройств. Более детальное изучение
влияния параметров реальной схемы на ее характеристики требу-
ет проведения анализа схемы методами теории цепей. Рассмотрим
двухконтурный регенеративный параметрический усилитель (рис..
6.20й) в предположении настройки контуров: входного — на часто-
ту сщ входного сигнала, вспомогательного-г на частоту Ю2=<аа—»
Ю—92
Рис. 6.20
24©
—®i, где шн — частота изменения емкости (накачки) C(t). Пола-
гаем, что в силу достаточно высокой избирательности контуров
напряжение щ на первом контуре получается только от компонен-
ты частоты со 1, на втором «2 — только от компоненты частоты <о2!.
а емкость C(t) изменяется по закону
с (/) =.С0—Д С cos W. (6.77)
Напряжение на первом контуре
Hi^Z/iCos^coiZ+cp^. (6.78)
Считаем, что на частоте ди эквивалентное сопротивление вто-
рого контура Z2<g>i) <C1/c£»iCo благодаря его сильной расстройке,
•а потому к емкости C(t) приложено все напряжение щ. Ввиду
того, что и напряжение и\, и емкость С зависят от времени, ток
через емкость
i (^^^ = + — . (6.79)
м' dt dt dt 1 dt v ’
Подставляем (6.77) и (6.78) в (6.79) и производим очевидные
нреобразования:
г'1(0 = — (Со—ДСсоэ сонО Скщ sin(<ai£+q)i)'+CiCos(coi£+q)i) X
X ДС(он sin сон^=—Сjсо 1 Со sin (,coi,Zl4-kpi) +'ACcoi Ui cos coh^X
Xsin(<oi/+<pi) +ACcohCi sin coH^cos(coi'/+q)i).
Используя обычные тригонометрические формулы, получим
f
i\ (i) =—UicojCo sin (coi£+<Pi) +-^-ДС(о2Сi sin (<Л2^—Ф1) +
+ 01 (<aH+&>i), (6.80)
где Oi(<aH+<ai) представляет остаточные члены с частотой о)Е+дн.
Первое 'слагаемое в (6.80) определяет ток через среднюю ем-
кость Со, получающийся в случае ее подсоединения параллельно
зажимам 1—1'. Считаем, что эта компонента тока напряжения на
втором контуре не создает. Вторая компонента тока ii имеет час-
тоту <а2, а потому она создает на втором контуре напряжение
«2= —ACci)2Ci7?32sin(<a2/—фг), которое можно записать как
uz= C2sin(d)2^—ф1), (6.81)
где
Uz~ kCfdzU 1Т?э2-
<6.82)
В свою очередь сопротивление сильно расстроенного первого
контура на частоте <а2 можно считать Zi«o2) dZc^C’o- Следова-
тельно, напряжение 112 оказывается полностью приложенным к ем-
кости C(t), поэтому оно создает ток 1’2, направленный в сторону,
противоположную току h. Величина i2 определяется аналогично
(6.79) как
i2 = C^ + «2^. (6.83)
dt dt
250
Поскольку C(t) является линейным параметрическим элемен-
том, протекающие через эту емкость токи, создаваемые напряже-
ниями «1 и и2, можно определять по отдельности, а затем резуль-
таты суммировать. Подставляем (6.77) и (6.81) в (6.83):
iz (0 = (Со—AC cos сонО С2&>2'cos (с£>2^—Ф1) + Пг sin (юг/—<pi) X
ХЛСТйг sin сон^= С’оПгсог'СОБ (сог^—<pi) Ч—cos (со11 + <рi) +
+ Oi (сон+'СОг) • (6.84)
Здесь Оч — остаточные компоненты с частотой сон+со2. Нерва®
компонента (6.84) представляет ток частоты со2, протекающий че-
рез емкость Со, подключенную параллельно второму контуру. Вто-
рая компонента создает падение напряжения .на первом контуре-
Так как направления токов п и г2 противоположны, полный ток
частоты coi можно записать как разность двух компонент токов
частоты coi, взятых из (6.80) и (6.84):
ii(<Bi) =—ChbiCo sin (coi/+<pi)-^-ACfi)it72cos(fi)if+<pi).„
(6.851
Ток (6.85) частоты сщ, протекающий между клеммами 1—Iе
[через С(£)] и второй контур, состоит из двух компонент: емкост-
ной и активной. Поэтому эквивалентная схема первого контура
(рис. 6.206) учитывающая влияние на него емкости С(/) и вто-
рого контура, помимо элементов самого контура, содержит еще
две ветви: реактивную с емкостью Со и активную с сопротивлени-
ем 7?вн=—2171/ДС(В1>572. Последнее оказывается отрицательным,
поскольку активная компонента тока (6.85) находится в противо<-
фазе с напряжением щ. С учетом (6.82)
4/ (А С) 2<В1(О2^Э2- (6.86)
Из эквивалентной схемы следует, что резонансная частота пер-
вого контура со1о= 1/ XCi (Сю+С0). Аналогично резонансная час?»
тота второго контура <й2о=1/1/ЛС2(С2о-|-С).
Наличие 7?вн<0 обеспечивает возможность усиления колебаний
на входной частоте. Отметим важную особенность: усилитель-
ные свойства двухконтурных параметрических
усилителей в отличие от одноконтурных, не за-
висят от сдвигов фаз м е ж ду с и г н а л о м и накач-
кой. Это следует из независимости /?Еп от фазовых соотношении
между сигналом и накачкой.
Как и в других типах усилителей, где усиление связано с вве-
дением отрицательного сопротивления, увеличение усиления в рас-
сматриваемом параметрическом усилителе сопровождается умень-
шением полосы пропускания. В итоге произведение коэффициента
усиления по напряжению на полосу пропускания остается величи-
ной постоянной, характерной для данного усилителя.
10* 253
Если | 7?вн| или
<й1АС^э1<й2ДС^э2^4, (6.87)
в усилителе возникают автоколебания.
Вводя в (6.87) величины: т=АС!Съ — глубину модуляции па-
раметра, у1 = С1о/Со и у2==С,2о/С’о — коэффициенты, определяющие
степень влияния варикапа на настройку контуров, определяем зна-
чение
игкр—4(у1 + 1|)(У2’+ О/СгСг, (6.88)
при превышении которого возникают автоколебания.
Коэффициент усиления К напряжения на настроенном первом
контуре равен добротности изображенного на рис. 6.206 кон-
тура:
— I ^вн I Rai 1 q J । Rai \
Rai — I Rbh Ip \ I 7?bh I J
(6.89)
Для достижения большего усиления в регенеративных пара-
метрических усилителях нужно работать в режимах, приближаю-
щихся к критическому. Величины Дэ] и Q, обычно большими сде-
лать не удается, так как к ним подсоединяется нагрузка. Поэтому
получение большого усиления требует использования вспомога-
тельного контура с большими Дэ2 и Q2.
6.8. ПАРАМЕТРИЧЕСКОЕ УМНОЖЕНИЕ И ДЕЛЕНИЕ
ЧАСТОТЫ
ПАРАМЕТРИЧЕСКОЕ УМНОЖЕНИЕ ЧАСТОТЫ
На частотах от килогерц до десятков мегагерц умножение час-
тоты чаще всего осуществляется устройствами на транзисторах
или лампах (см. § 3.4). На СВЧ наиболее распространенными яв-
ляются умножители на полупроводниковых диодах. Последние
могут быть использованы для умножения частоты или как нели-
нейные резисторы (диодные умножители), характеризуемые вольт-
амперной характеристикой i(u) или сопротивлением R(u), или как
нелинейные реактивные сопротивления (варакторные1 умножите-
ли), характеризуемые вольт-кулонной характеристикой q(u) или
-емкостью С (и).
На рис. 6.21 приведены две основные схемы таких умножите-
лей:. параллельная — а и последовательная — б, названия опре-
деляются способом включения диода. Принцип действия этих схем
таков: при воздействии входного гармонического сигнала часто-
ты ю1 напряжение на диоде и протекающий через него ток оказы-
ваются искаженными, содержащими гармоники частоты (щ; вы-
1 Другое название варакторных умножителей («параметрические») менее
.удачно, ибо обычно входное и выходное напряжения таких устройств имеют со-
измеримые амплитуды, а потому рассматривать нелинейные зависимости С (и)
и Р(и) как параметрические невозможно.
ходной контур, (настроенный на п-ю гармонику частоты служит
для ее выделения. Поскольку оба контура подключены к нелиней-
ному элементу одинаково, при анализе схемы рис. 6.216 необходи-
мо учитывать зависимость протекающего через диод тока от вход-
ного и выходного напряжений, а на рис. 6.21а — зависимость на-
пряжения на диоде от входного и выходного токов. Исходное сме-
щение Е в параллельной схеме подается на диод через дроссель
Ьдр большой индуктивности, предотвращающий протекание пере-
менного тока через цепь питания. В последовательной схеме про-
текание высокочастотных токов через источник питания предот-
вращается блокировочным конденсатором СбЛ большой емкости.
Важнейшими параметрами рассматриваемых умножителей яв-
ляются коэффициент преобразования
Кр=|Рп/Р1| (6.90)
и КПД
Т]=|Лг|/Л). (6.91
В (6.91) Ро— мощность, расходуемая источником смещения.
Когда Ро=0, величина Кр приобретает смысл КПД.
Варакторный умножитель частоты при работе в
области обратных напряжений на диоде является устройством
пассивным: единственным источником энергии выходных колеба-
ний является источник входного сигнала. Поэтому мощность п-й
гармоники Рп в выходном контуре не может быть больше мощно-
сти Рх источника входного сигнала.
Для определения Кр воспользуемся уравнениями Мэнли и Роу.
Полагая >т=0, получаем из второго уравнения (6.71)
7^ = (Ро, 1 + Ро, 2+Ро, з+•••) = 0.
И и
Здесь РО1=Р1 — мощность первой гармоники; Ро,п—Рп — мощ-
ность п-й гармоники. Следовательно,
Pi=-^Pn- (6-92)
л=2
253
Все мощности гармоник отрицательные, так как отбираются от
нелинейной емкости; мощность Р\ — положительна^. При наличии
в умножителе рис. 6.21 двух высокоизбирательных контуров, на-
строенных на частоты и nfi, отличными от нуля, можно считать
только Pi и Рп. Тогда Рп=—Р\ и коэффициент преобразования
Кр— 1. Те о р етич е с к и й коэффициент преобразова-
ния варакторного умножителя частоты равен
100%:
Кр=1, (6.93)
т. е. вся мощность колебаний входной частоты превращается в
мощность нужной гармоники. В действительности из-за наличия
потерь в варакторах, неидеальной избирательности контуров и
других факторов Кр варакторных умножителей оказывается
несколько меньшим, достигая величин 70—90% для п—2 и 60—
80% Для п=3.
Для достижения столь высоких Кр применяют ряд мер, к чис-
лу которых относится применение вспомогательных контуров, на-
строенных на промежуточные гармоники (номера которых меньше
п). Например, при умножении в 3 раза в схеме рис. 6.21а парал-
лельно диоду подключается индуктивность Ls (пунктир на рисун-
ке), которая вместе с диодом образует колебательный контур, на-
строенный на частоту 2coi, обеспечивающий возникновение в нем
интенсивных колебаний этой частоты. В результате последующего
совместного действия колебаний частот си и 2coi мощность вы-
ходных колебаний частоты Зси возрастает. Вспомогательный кон-
тур должен обладать малыми потерями. В противном случае мощ-
ность Р2, отбираемая от варикапа на второй гармонике, может
оказаться соизмеримой с Рз, и поскольку А =—(Р2+Рз), величи-
на Кр= | Р3/Р1'| уменьшится.
При диодном умножении входного гар ионического
сигнала частоты си напряжение и ток в нелинейном элементе мо-
гут быть записаны
ОО СО
Ы=П0+ У ПгСО5(Г(В1/ + «г), х = /о+ У Is COS(S(£>it+ ps).
r=l S=1
(6.94)
Заменяем для сокращения записи <di£=t. Среднюю мощность,
поступающую в нелинейный элемент на всех гармониках, опреде-
ляем как
2л со
h° = 2я f r' (т) w (т) d т = 2 Pk’ С6-95)
Л О k=0
где
P(j=I0U0, Pfe=-i-7feI7fecos(afe—рл) для k^l (6.96)
являются средними мощностями соответствующих компонент.
254
Дифференцируем (6.94) по т:
= - V rUT sin (гт+ат), (6.97)
ат
г=1
j^-= — У s/ssin(sr+ps) (6.98)
ат
s=l
и вычисляем среднее значение интеграла от произведения (6.97)
на (6.98) за период
. 2Л . со
(6-99)
2 п J ат ат
о k=l
где Pk определяются из (6.96). Величину Л2 можно определить и
иначе:
Если нелинейное активное сопротивление положительно
(di/duZ>0 и du/diZ>0), то /г2>0, как интеграл (6.100) от положи-
тельной функции. Полагая, что отличными от нуля мощностями
обладают только те гармоники, на которые настроены входной
(<В1) и выходной (пол) контуры, получим из (6.99)
. Pi—n2\Pn\=h2. (6.101)
В этом выражении учтено, что первая гармоника отдает в не-
линейный элемент мощность Pi>>0, а п-я потребляет. Из (6.101)
|Р„| = (Л-й2)/п2. (6.Ю2)
Так как /i2>0,
\Pn\<PJtP И Кр<1/гЛ (6.103), (6.104)
При Л2~0 в выражениях (6.103) и (6.104) знак неравенства
должен быть заменен на знак равенства.
Поскольку в мощность Рп превращается лишь небольшая часть
мощности Р\, поступающей в нелинейный элемент диодного ум-
ножителя, а на других частотах колебания с заметной мощностью
возникнуть не могут, остальная часть мощности Р\ превращается
в мощность постоянной составляющей Р^. Так как сумма мощно-
стей, поступающих в нелинейный элемент и расходуемых в нем,
должна быть равна нулю, можно (6.95) записать в виде йо=
=-|Л)|+А- |РЛ| =0
или Р1= |Рп| + |Ро|. (6.105)
Таким образом, при диодном умножении в мощ-
ность и-й гармоники превращается не более
1/«2-й части мощности Pi входного колебания, а
остальная ее часть, не меньшая (1—l/n2)Pi, превращается в мощ-
ность постоянной составляющей.
255
Сравнение варакторных и диодных умножителей по коэффици-
ентам преобразования, определяемым из (6.93) и (6.104), позво-
ляет отметить преимущества, первых, возрастающих с увеличени-
ем кратности умножения. Так, при умножении в 2 раза макси-
мальные величины Кр оказываются соответственно 100 и 25%,
при умножении в 4 раза— 100 и 6,25%.
Если применить в умножителе диод с отрицательным со-
противлением (du/di<zO или di/du<0), то согласно (6.100)
можно получить /i2<0 и Kp>i/n2. Какова наибольшая величина
Кр-тах в этом случае? Обратимся к схеме рис. 6.216 умножителя
частоты в п раз, считая, что контуры точно настроены на частоты
<х>1 и ncoi, а в качестве нелинейного элемента используется тун-
нельный диод ТД при смещении, соответствующем падающему
участку характеристики. Напряжение на ТД и протекающий через
ТД ток будут
U= Uo + lll+un= L'o + t/l'COST+t/nCOSnT,
i’=/o+/rcosT+72!Cos 2т+73 cos Зт
где т=Ю1Л Примем сначала /?э„=0 и '17п=0. На рис. 6.22а приве-
дена нечетная часть вольт-амперной характеристики ТД гнч=
= Ф(Аа) для t7o=O,3 В, перенесенная с рис. 4.41а; на рис. 6.22б
Рис. 6.22
построены графики г нч (т) для приведенных на рис. 6.226 напряже-
ний При малой амплитуде U'i 1-я гармоника тока Гнч(т)
оказывается в противофазе с напряжением щ. С увеличением Ui
амплитуда 1-й гармоники тока Ц сначала растет, затем уменыпа-
256
ется до нуля при некоторой амплитуде U"i=U*i (на рис. 6.22в),
этому соответствует ток ч"т, в котором 71 = 0, и, в основном, содер-
жится 3-я гармоника 73 cos Зт. При еще большей амплитуде напря-
жения Ui = Ui'" 1-я гармоника тока оказывается синфазной с на-
пряжением И].
При С71=,С7а;1 величина R(Uo, -U*i, Un=0)—0, потребляемая
нелинейным элементом мощность входного сигнала hU*i =
=0, тогда как амплитуда 1п гармоники тока (например, V3 на
рис. 6.22) — значительна. Если теперь ввести в цепь контур с не-
большим Rsn, настроенный на п-ю гармонику, то в силу непрерыв-
ной зависимости амплитуд токов 71 и 1п и от U\ и Un также мож-
но будет найти •[]**, несколько отличное от U\, при котором сно-
ва 7i (Uo, U**i, Un—InRan)=0 и Pi=0, однако при этом на на-
грузке Ran выделится напряжение п-й гармоники с амплитудой
Vп=InRsn, т. е. будет иметь место умножение частоты с коэффи-
циентом преобразования
Кртах=\Рп1РА=<*>. (6.106)
Практически достижимые коэффициенты преобразования по ряду
причин будут меньшими, порядка 3—5 для н=2.
В режиме максимального коэффициента преобразования энер-
гия и-й гармоники получается за счет преобразования энергии по-
стоянного тока, причем входной сигнал, управляя этим преобразо-
ванием, энергию не расходует, поскольку ток 71=^0. Очевидно, та-
кой режим невозможен в отсутствие смещения (при 77о=О), так
как тогда и мощность постоянного тока Ро=0. Таким образом, в
диодных умножителях частоты с отрицательными сопротивления-
ми возможно умножение частоты с усилением.
ПАРАМЕТРИЧЕСКОЕ ДЕЛЕНИЕ ЧАСТОТЫ
Простейшим параметрическим делителем частоты является одноконтурный
параметрический генератор. Так как в нем возбуждаются колебания с часто-
той, вдвое меньшей частоты воздействия (накачки), он является делителем
частоты в 2 раза (п=2). Делитель частоты с большим коэффициентом деления
может быть построен по схеме двухконтурного регенеративного параметричес-
кого усилителя (см. рис. 6.21).
Если увеличить мощность накачки Рн частоты <он до значения, при кото-
ром активное сопротивление во входном контуре, настроенном на частоту <ою,
станет отрицательным, в этом контуре возникнут колебания с частотой <oi,
близкой к кою, а во вспомогательном контуре, настроенном на о2о=<он—сою, воз-
никнут колебания частоты со2=<йн—дц. В этих условиях параметрический уси-
литель, превращается в двухчастотный параметрический генератор, генерирую-
щий частоты .<В1 и со2. В общем случае частоты сон, <0i и со2 являются некрат-
ными. Когда амплитуды возникаюших колебаний частот оц и <о2 достаточно
велики, напряжение на нелинейном элементе содержит большое число гармоник
и комбинационных частот вида
fecoa'ifticoi, (6.107)
причем те из них, частоты которых близки к резонансным частотам контуров,
создадут в последних значительные токи. Если частоты
О1=|(Вн/Д, <02=|(Он—<01= (Л—'1)(0в/л (6.108)
(рис. 6.23), генератор окажется параметрическим делителем частоты в п раз,
. 257
причем колебания поделенной частоты возникнут в контуре, настроенном на
частоту <£ц; в другом контуре получим со2=(п—
На первый взгляд вероятность возникновения колебаний с частотами, точ-
но соответствующими условиями (6.108), представляется ничтожной. На са-
мом деле это не так, если учесть явление захватывания частоты, возникающее
в схеме вследствие взаимодействия ком-
бинационных частот вида (6.107) на не-
линейном элементе. При этом основную
роль играют комбинационные частоты
наименьшего порядка, образующие ча-
, ,_________। ।_____ д стоты, близкие к он и io>2.
U't Ц" nda Uz Ыц U Поясним физику процесса. Пусть
п н для осуществления деления частоты в п
Рис 6 23 Раз 'КОНТУРЫ настраиваются на ча-
стоты:
а>1о««>н/п, е>2о~ (п—1)|<вн/п- (6.109)
При достаточной мощности иакачки в схеме возникнут колебания с часто-
тами co'i и ю/2, близкими к определяемым (6.108) и показанными пунктирными
линиями на рис. 6.23:
0/1=1(01—Лео, со'2=о>н—о/1=<о2-|-Лсо. (6.110)
Простейшими комбинационными частотами (6.107), близкими к co'i и ш'2,
оказываются частоты (п—1)-го порядка:
а>"1=1со'г—:(п—J2)fi>'i=o>ii4-(n—|1)Дсо, ы"2= (п—l)co'i=<O2—(п—1)Дсо. (6.111)
Обе эти компоненты изображены на рис. 6.23. Если Лео невелико, то кон-
тур, настроенный на еою, выделяет компоненты eo'i и .eo"i, а настроенный на
со2о — соответственно <о'2 и ®"2. Разности | eo"i—leo'i | и |ео"2—ео'2| равны
«Дсо. Если «Лео невелико, колебания комбинационных частот eo"i и «"г осуще-
ствляют синхронизацию. В результате частота <0'1 начнет возрастать, подтяги-
ваясь к ео"] а со'2 — уменьшаться. Одновременно во встречных направлениях
согласно (6.111) будут изменяться синхронизирующие частоты. Этот процесс
закончится установлением колебаний таких частот, при которых каждая пара
близких компонент превратится в одну: когда (п—l)coi = co2. Это соответству-
ет выполнению условий (6.108) деления частоты. Следовательно, при настрой-
ке контуров согласно (6.109), параметрическое деление частоты имеет месте-
в определенном диапазоне расстроек Дсо.
С ростом п амплитуды синхронизирующих сигналов при прочих равных ус-
ловиях уменьшаются. Поэтому и расстройки Дсо, в пределах которых произво-
дится деление частоты, также должны уменьшаться.
Глава 7
Машинный анализ нелинейных цепей
7.1. ОБЩИЕ СВЕДЕНИЯ
Рассматривавшиеся до сих пор преимущественно аналитиче-
ские методы исследования нелинейных и параметрических цепей
эффективны, если цепь достаточно проста, а нелинейные зависимо-
сти аппроксимируются относительно несложными выражениями.
Инженеру нередко приходится иметь дело с весьма сложными
нелинейными цепями, например нелинейными интегральными це-
пями, содержащими многие десятки и сотни транзисторов, дио-
дов и конденсаторов. Кроме того, при упрощении аппроксимации
характеристик нелинейных элементов, хотя и правильно качествен-
но описываются явления в нелинейной цепи, но теряется возмож-
ность получения точных количественных соотношений. Пока цепь
простая, это не очень существенно, так как неточно спроектиро-
ванное устройство можно «довести» в процессе эксперименталь-
ной отладки. Но если цепь сложная, то такая «доводка», напри-
мер в случае нелинейных интегральных цепей, оказывается техни-
чески невозможной. В связи с этим наряду с аналитическими и
графическими все более широкое распространение получают ма-
шинные методы исследования цепей, базирующиеся на использо-
вании современных ЭВМ. Эти методы обеспечивают столь высо-
кую точность, что делают излишней или редкой эксперименталь-
ную отладку рассчитанной цепи.
Машинные методы анализа нелинейных цепей позволяют рас-
считывать:
матрицы, числа, функции, входящие в некоторую форму урав-
нений, принятую за стандартную, т. е. автоматически формировать
уравнения нелинейной цени;
статический режим, т. е. токи и напряжения элементов цепи
в отсутствие переменных напряжений на входе;
стационарные динамические (колебательные) режимы в цепях
автоколебательного и неавтоколебательного типа (автогенерато-
рах, умножителях частоты, нелинейных усилителях и т. д.);
переходные процессы в тех же цепях (например, процесс ус-
тановления синхронного режима в синхронизируемом автогенера-
торе) .
Содержание данной главы предполагает знакомство читателей
с основами машинных методов анализа цепей по курсу «Вычисли-
тельная техника в инженерных и экономических расчетах», где
изучается решение двух первых задач. Поэтому рассмотрение этих
вопросов здесь опущено.
7.2. УРАВНЕНИЯ НЕЛИНЕЙНЫХ ЦЕПЕЙ, ИСПОЛЬЗУЕМЫХ
В МАШИННОМ АНАЛИЗЕ
Формы уравнений, базирующиеся на уравнениях состояния *. Вводится век-
тор независимых переменных состояния, т. е. токов через индуктивности и^ на-
пряжений на конденсаторах или соответственно потоков и зарядов нелинейной
щели:
,=/й (“ (71)
Внешние воздействия характеризуются вектором хВОзд(А), определяемым
подвекгорами источников токов I и напряжений Е:
Хвозд (О = [ р
L*-' v/J
Предполагается, что отклики цепи снимаются с tn выходов (например, у
четырехполюсника выход один, и т=1). Вводится вектор y(t), представляю-
щий собой совокупность функций времени, описывающих отклики цепи.
1 Метод анализа, опирающийся на использование этих уравнений, назы-
вается методом переменных состояния. т
259
Тогда для большого числа цепей их уравнения сводятся к двум векторным
соотношениям:
dxfdt—f[x(£), хБОад(0> У(0—g[x(Q, хвоад(0, (Т-3); (7.4)
причем время t входит явно в функции f и g только в параметрических цепях.
Если переменных состояния п, то (7.3) распадается на п одномерных дифферен-
циальных уравнений первого порядка; одномерных компонент уравнения (7.4)
столько, сколько откликов цепи. Функции f и g предполагаются однозначными.
Во многих случаях (7.3) принимает вид
dx/df =Ax+F(x)'+®(0, (7.5)
где А — матрица, составленная из постоянных величин; вектор-функция F(x)
характеризует нелинейные свойства цепи; Ф(/) описывает внешнее воздействие.
Иногда оперируют с более общим уравнением
dx/d/=AF(x)+0>(/). (7.6)
Из приведенных уравнений видно, что отыскание откликов цепи на воздействие
ХвоздСО распадается на два этапа: 1) интегрирование (7.3) с целью расчета
х(7); 2) вычисление по найденному х и известному хВозд вектора откликов
y(t). В случае параметрического воздействия следует учитывать зависимость
правых частей (7.3) и (7.4) от явного времени t.
Например, генератору на ТД (см. рис. 4.17) отвечает следующая система
уравнений:
“ Е и г
— — — — — i I
d Г i "I L L L j
,, I I = I» ивых = гн i'
dt L и J 1 1 I
— — Ф (“) + — i J
Первые два уравнения, вытекающие из одного векторного уравнения, сов-
падают с (4.78) и (4.77); в третьем принято, что отклик цепи есть напряжение
на нагрузке. В данном примере вектор состояния х= [„] , вектор воздействия
ХвоЗД = Е,
Е и г
— — — — — I
L L L
Формы уравнении, не разрешенные относительно производных первого по-
рядка. Уравнение (7.3) характерно тем, что слева входит производная пер-
вого порядка вектора состояния, которая явно вычисляется' по функции f.
Формирование уравнений состояния требует специальных операций на ЭВМ.
Рис. 7.1
Однако требование записи урав-
нений в форме (7.3)—(7.4) не явля-
ется обязательным; существуют ма-
шинные методы, обеспечивающие ин-
тегрирование уравнений, не разре-
шенных относительно производных.
Подобные уравнения получаются, на-
пример, при анализе того же генера-
тора -на ТД (см. рис. 4.17) методом
узловых потенциалов. Выбирая в ка-
честве базисного «заземленного» узла
схемы нижний зажим источника Е и
объединяя последовательно включенные индуктивности и сопротивления, получим
схему рис. 7.1, на которой узлы пронумерованы. Уравнения составляют для узлов
схемы, не связанных непосредственно с источником Е, т. е. для узлов 2 и 3: /а=
—ic = 0, ДТ д Чic—г'ь=0.
\ Подставляя сюда связи между токами и напряжениями на индуктивности
и емкости и учитывая (4.76), получаем систему двух нелинейных интегродиф-
ференциальных уравнений генератора: ,
\ Е—и* s d(rz2 —«з)
\ Ф (w2 Из) С j. —
1 г at
1 d (и2 — ц») 1 f
ф («2 -«з) + С —32 - — «3 dt = 0.
I dt L J
рта система непосредственно интегрируется на ЭВМ и ее решения опреде-
ляют потенциалы узлов 2 и 3, т. е. функции и2(0 и и3(Д Выходное напряже-
ние 1гц после этого может быть также рассчитано.
7.3. РАЗЛИЧИЯ В МАШИННОМ ИССЛЕДОВАНИИ
ОТДЕЛЬНЫХ КЛАССОВ НЕЛИНЕЙНЫХ ЦЕПЕЙ.
АПРИОРНАЯ ИНФОРМАЦИЯ
Характер и сложность машинного исследования и расчета не-
линейной цепи определяются не только тем, что мы хотим рассчи-
тать (например, переходный или стационарный режим), но и осо-
бенностями самой цепи. Оказывается, что с этой точки зрения
можно выделить некоторые важные классы нелинейных устройств.
Кратко рассмотрим их и укажем особенности их машинного иссле-
дования. i
Конвергентные и неконвергентные цепи. Важнейший способ ма-
шинного расчета нелинейной цепи основывается на интегрирова-
нии дифференциальных уравнений, например, вида (7.3) одним из
численных методов. В зависимости от начальных условий в нели-
нейной цепи могут возникать различные стационарные режимы.
Поэтому при различных параметрах процесса интегрирования на
ЭВМ1 и при введении в ЭВМ различных начальных значений он
может «привести» к различным стационарным режимам, возмож-
ным в исследуемой цепи.
Цепи называются конвергентными, если с течением времени
все траектории на фазовой плоскости,. отображающие переходные
режимы в цепи, стремятся слиться в одну. В противном случае
они считаются неконвер^ентными. Математическое определение
конвергентной цепи таково. Рассмотрим две векторные функции
времени хД() и х2((), являющиеся двумя решениями уравнений
цепи при разных начальных условиях хДО) и х2(0). Определим
норму разности этих решений (см. приложение 2) ||xi(()—х2(() 11-
Цепь является конвергентной (по Л. В. Данилову), если
lim ||Х1(Ц—х2(ОН = 0, (7.7)
00
какова бы ни была пара векторов начальных условий и какое бы
воздействие не было приложено.
1 Под параметрами процесса интегрирования понимаются постоянные, от
которых зависит данный алгоритм интегрирования; типичным таким парамет-
ром является шаг интегрирования. т
261
Таким образом, если исследуемая цепь является конвергенту
ной, то при любых параметрах процесса интегрирования рано или
поздно установится интересующий нас режим2. /
Диссипативные и недиссипативные цепи. Если решения диффе-
ренциальных уравнений, описывающие колебательный режим 1 в
нелинейной цепи, оказываются в некотором смысле ограниченны-
ми, то это сильно упрощает машинный расчет. Сведения об этЬм
желательно получить до того, как задача «поставлена» на маши-
ну. Цепь называют диссипативной, если может быть выбрано та-
кое число N, не зависящее от начальных условий, что предел!, к
которому при /->оо стремится норма решения уравнения (7.3), бу-
дет меньше Л': lim||x(Z) ||-< Л'. При этом внешние воздействия
t—ОО
должны быть ограниченными.
Оказывается, что если к диссипативной цепи приложено перио-
дическое воздействие, то в ней возможно установление хотя бы
•одного (а может быть, и более чем одного) периодического режи-
ма. Значит, зная заранее, что цепь диссипативна, мы можем уве-
ренно рассчитывать на ЭВМ периодическое решение.
Цепи, обладающие одновременно свойством конвергентности
и диссипативности, обладают важной особенностью: если к ним
приложено периодическое воздействие частоты fo, то обязательно
устанавливается единственный периодический режим частоты .fo,
устойчивый при любых начальных условиях. Поэтому предвари-
тельное (перед началом работы на ЭВМ) установление диссипа-
тивности и конвергентности цепи сильно упрощает ее машинный
расчет.
Установлено, например, что любая нелинейная цепь, диссипа-
тивна и конвергентна, если 1) она содержит линейные резисторы,
конденсаторы, катушки индуктивности и элементы взаимоиндук-
ции; 2) в цепи включены источники напряжения и тока произ-
вольной формы, но ограниченные по величине; 3) в качестве нели-
нейных элементов используются нелинейные резисторы с моно-
тонными ВАХ Ф(х) (производная Ф'(х) имеет неизменный знак).
Автономные и неавтономные цепи. Согласно определению
гл. 4 автономные цепи характерны тем, что к ним не приложено
внешнее воздействие; остальные цепи — неавтономные. При рас-
чете неавтономной цепи, когда к ней приложено периодическое
воздействие известного периода, и к тому же заранее известно,
что цепь диссипативна и конвергентна, частота единственного пе-
риодического режима цепи точно определена: она равна частоте
воздействия. Поэтому машинный расчет периодических режимов
неавтономных цепей при прочих равных условиях проще, чем ав-
тономных.
Нелинейные цепи с малым и большим разбросом постоянных
времени. Пусть нелинейная цепь описывается уравнениями (7.5)
и (7.4) и нелинейность невелика. Тогда многие особенности ее
2 Разумеется, некоторые условия на процесс интегрирования все же на-
кладываются, например, он должен быть устойчивым.
машинного расчета связаны с тем, близки ли друг к другу собст-
венные числа (см. приложение 2) матрицы А или же они образу-
ют две группы «малых» и «больших» собственных чисел. В не-
линейных радиотехнических цепях, в частности, содержащих уз-
кополосные контуры и фильтры, часто встречается последний слу-
чаи; в таких цепях отношение модулей некоторых собственных чи-
селсоставляет 107 и более.
Вместо разброса собственных чисел МА) часто говорят о раз-
бросе постоянных времени Тг(А). Последние определяются в соот-
ветствии с одним из соотношений:
J т<(Ау=1/|МА)|, тг(А) = l/|ReXf(A) |. (7.8J
Степень разброса постоянных времени исследуемой цепи долж-
на бриь хотя бы ориентировочно оценена до обращения к ЭВМ,
так к'ак она определяет выбор параметров процесса интегрирова-
ния уравнений системы.
Информация, касающаяся упомянутых выше особенностей це-
пи, составляет часть так называемой априорной информации о це-
пи, которая должна быть собрана до начала собственно машинно-
го расчета.
7.4. РАСЧЕТ ДИНАМИЧЕСКИХ РЕЖИМОВ
ИНТЕГРИРОВАНИЕМ ДИФФЕРЕНЦИАЛЬНЫХ
УРАВНЕНИИ ЦЕПИ
Широкий круг вопросов, относящихся к расчету нелинейной
цепи, связан с изучением динамики цепи, т. е. изменением во вре-
мени токов, зарядов, напряжений и т. п. Для установления этих
вопросов приходится интегрировать нелинейные дифференциаль-
ные уравнения цепи, рассмотренные в § 7.2. Ознакомимся с не-
которыми формами и характеристиками методов интегрирования,
связанными с особенностями цепей. Поскольку априорная инфор-
мация о свойствах исследуемой цепи играет важную роль как
при выборе метода интегрирования, так и его параметров, этот
выбор должен производиться инженером, решающим задачу рас-
чета цепи.
Методы интегрирования дифференциальных уравнений можно-
разбить на явные и неявные. Явные характерны тем, что значение
решения на некотором шаге итеративного процесса явно выража-
ется через значения решения на предыдущем шаге (или шагах) в
форме некоторого разностного соотношения. Неявные же методы
требуют для расчета «нового» значения интеграла (т. е. интеграла
на «новом» шаге) решения некоторой системы недифференци-
альных уравнений. Происходит это потому, что соответствующее
разностное соотношение неявно определяет искомую величину.
Поясним это на примере одного из самых простых методов ин-
тегрирования — метода Эйлера (только этим методом мы и огра-
263
ничимся в дальнейшем). Пусть интегрируется уравнение состоя-
ния (7.3), которое запишем теперь /
dx]dt=t(x, t). (7/9)
Поскольку внешнее воздействие хВОЗд(0 известным образом зави-
сит от времени t, то эта зависимость может быть учтена в функ-
ции, стоящей в правой части дифференциального уравнения, и /ар-
гумент хВОзд(0 можно явно не указывать. Новая функция в пра-
вой части для простоты обозначена в (7.9) так же, как и в (7.3),
т. е. через f. I
Из курса вычислительной математики известно, что решение
векторного уравнения (7.9) задается как последовательность век-
торов х(0), х(Д£), х(2Д£), —, x(nAt), ..., где М —шаг интегрирова-
ния. Сокращенно эта последовательность может быть обозначена
как х[0], х[1],..., х[и],..., где прямые скобки указывают на ди-
скретный характер переменной п.
В явном методе Эйлера значение решения на (п+1)-м шаге
явно выражается через решение на предыдущем шаге:
x[n+li] =x[n]+iArt[x[w], п]. (7.10)
В простейшей форме неявного метода Эйлера имеем
х[п+1]=х[п]+ЛЯ[х[п+1], п+1]. (7.11)
Здесь определяемый вектор х[п-|-1] входит в уравнение не только
слева, как в (7.10), но и под знаком функции f. Если эта функция
нелинейна, то (7.11) есть нелинейное алгебраическое или транс-
цендентное уравнение относительно х[п+1] и решать его прихо-
дится на каждом шаге интегрирования.
Казалось бы, последнее обстоятельство указывает на нецелесо-
образность применения неявного метода Эйлера (как и других
неявных методов) при расчете нелинейных цепей из-за роста вы-
числительных затрат. Однако во многих задачах радиоэлектро-
ники оказывается, что именно неявные методы интегрирования
•обеспечивают сокращение затрат на вычисления.
Чтобы уяснить это, вспомним, что подразумевается под устой-
чивостью вычислительного процесса — в нашем случае под устой-
чивостью процесса интегрирования. Известно, что всякий процесс
'вычислений подвержен действию своеобразных «помех» — оши-
бок, вызванных разными причинами. Для нас важнейшими из
этих причин являются две: округление чисел в ЭВМ и то обстоя-
тельство, что формулы интегрирования являются приближенны-
ми, причем точность приближения зависит от шага At. Чем мень-
ше шаг At, тем при прочих равных условиях меньше ошибка, на-
зываемая ошибкой усечения. Наоборот, ошибка, вызванная ок-
руглением, падает с ростом шага At. Качественно зависимость
ошибок округления (/) и усечения (2) и суммарной ошибки (3)
от шага изображены на рис. 7.2.
Как известно, при некоторых условиях действие ошибок, со-
провождающих вычисления на каждом шаге, накапливается; в
264
таких случаях говорят, что вычислительный процесс «теряет ус-
тойчивость». При этом обычно оказывается, что приближенное ре-
шение дифференциального уравнения даже качественно не отвеча-
ет точному решению (пример см. на рис. 7.3, где цифрами 1 и 2
обозначено соответственно точное и приближенное — при потере
устойчивости — решения x(t) некоторого дифференциального урав-
нения).
Рис. 7.2 Рис. 7.3
Попытаемся выяснить [19] -условия устойчивости процесса ин-
тегрирования и их связь с параметрами цепи. Ограничимся для
простоты случаем линейной цепи, однако и он весьма поучителен.
Кроме того, допустим, что цепь — автономная, т. е. внешние воз-
действия к ней не приложены; поэтому правая часть (7.9) не за-
висит от t. Данное ограничение не является существенным, так
как во многих случаях условия устойчивости можно определить
по автономной модели [19].''
Поскольку цепь принята линейной с постоянными во времени
параметрами, то в (7.9)
dx/d£=f (х) =Ах, (7.12)
где А — квадратная матрица, составленная из констант; она пол-
ностью характеризует линейную цепь. Иными словами, (7.9) со-
ответствует системе линейных дифференциальных уравнений:
dxddt—czj+ ...
(7-13)
dXsldt=asXxx-[- ... + assxs
Критерий устойчивости явного метода Эйлера. Рассмотрим
сначала устойчивость явного метода Эйлера. Подставив (7.12) в
основной явный алгоритм (7.10), получим
х[и+1] =х[и] + AfAx[n}= (1+Д*А)х[п], (7.14)
где 1 — единичная матрица. Далее обозначим
F=1+A£A. (7.15)
Эта матрица, как видно из (7.14), полностью определяет алгоритм
интегрирования; он зависит от шага М и свойств цепи, отобра-
265
жаемых матрицей А. Итак, следующее значение вектора решения
Х[п+1] получается из предыдущего Х[п] таким образом:
х[и+1] =Fx[n], (7.16)
Напомним (см. § 7.3), что i-e собственное число некоторой матри-
цы V обозначается X,(V). Как доказывается в теории матриц,
Xj(F) выражается через Х;(А) так:
MF) = 1+AMA). (7.17)
Теперь нам понадобятся два факта из общей теории устойчи-
вости. Первый относится к устойчивости цепей и, по существу,
уже известен нам из § 4.2, но будет приведен здесь в иной форме.
Критерий устойчивости линейной цепи, характеризуемой матри-
цей А, таков: действительные части в сехс о бствен -
ных чисел матрицы А д о л жны б ыть отр и ц а т е л ь -
н ы. Иными словами, если
(A) ='Oi + i 0)i, (7.18)
то для всех i должно быть
ог<0. (7.19)
Второй факт относится не к исследуемой цепи, а к алгоритму
(7.16). Чтобы процесс интегрирования по (7.16) был устойчивым,
т. е. чтобы не было неограниченного накопления действия ошибок,
должно выполняться условие: модули всех собственных чисел мат-
рицы F (не А!) должны быть менее единицы.
Подставив (7.18) в (7.17), получим собственное число и его
модуль
М F) = ( 1 + Д^Ог) + i I Кг ( F) | = У' ( 1 + Afoi) 2 + (ДО 2(B2i.
(7.20), (7.21)
Условие устойчивости интегрирования будет
(1+Л/щ)2+(.Д02ю2г<1- (7-22)
Для устойчивой цепи (когда все Ог<0) получаем из (7.22)
Д£<2| Oi|/(o2i + <B2i) для всех i. (7 23)
Итак, интегрирование будет устойчивым, если шаг интегриро-
вания не превосходит некоторого критического шага (ДОкр- Ве-
личина (ДОкр. очевидно, равна наименьшей из всех правых частей
(7.23). Критический шаг определяется тем собственным числом
матрицы А, которое приводит к наименьшему выражению |<т<|/
(<т2г+<о2;). Чтобы сделать более ясным физический характер этого
результата и вытекающие из него следствия, предположим, что
все собственные числа А чисто вещественны: Кг=Ог для всех i.
Обозначим наибольшее |Ог| через отах, а наименьшее — через
а-тгп- Введем теперь постоянные времени цепи с помощью выра-
жений (7.8)
Ti(A) = l/|oi|.
(7.24)
Минимальному по абсолютной величине собственному числу
отвечает максимальная постоянная времени и наоборот.
Возвращаясь к основному соотношению (7.23) при <щ=0, по-
лучаем Д^<21'Oi I /о2;=2/1 О; | ДЛЯ ВС6Х I ИЛИ
^t^^/'O-max', (ДО кр = 2/Omax= 2Тпггп, (7.25)
вде
Т^тгп ~ i/omax. (7.26)
Итак, при явном методе Эйлера критический шаг, который
нельзя превосходить из-за необходимости обеспечения устойчиво-
сти процесса интегрирования, равен удвоенной минимальной по-
стоянной времени.
Расчет нелинейной цепи устойчивым явным методом Эйлера.
Пусть сначала рассматривается переходный режим нелинейной це-
пи. Если все собственные числа вещественны, то длительность пере-
ходного процесса 7ПСр определяется максимальной постоянной вре-
мени Гтах=1/о-min*. МОЖНО СЧИТЭТЬ, ЧТО ТПер ПО ПОрЯДКу равна Не-
сколышм tmax, например 7пер=Зттеах. Найдем число шагов интегри-
рования, необходимое для окончания расчета переходного процесса:
•МПер=7'пер/Л^; минимальное число шагов Afnepmin, отвечающее на-
ибольшему шагу, т. е. (Д/)кр, будет
•Миертгп= Tnep/(Д^) max = 7Пер/(ДОкр = ЗТтах/2,Чт{п = -max . (J7.27)
Ттах
Величина Tmax/Tmin обычно называется разбросом постоянных
времени. Поэтому мы можем сказать, что число шагов при расчете
переходного режима по порядку равно разбросу постоянных вре-
мени. \
Соотношение (7.27) определяет число шагов из соображений,
связанных с устойчивостью процесса интегрирования, когда шаг
не может превышать (Д^)кр=2ттг?г. Но шаг определяется еще и
ошибками интегрирования. Возвращаясь к рис. 7.2, замечаем, что
для уменьшения ошибки интегрирования целесообразно выбирать
шаг (ДО опт. обращающий суммарную ошибку в минимум. При
этом число шагов МПер обычно получается большим из-за малости
шага. С другой стороны, вводимые в ЭВМ. данные сами имеют по-
грешность, как правило, большую, чем та, которой отвечает шаг
(ДО опт- Эти и некоторые другие соображения позволяют задать
уровень ошибки 4 (см. рис. 7.2) большим минимального. Это отве-
чает двум шагам: (Д01 и (Д02>(Д0)- 'Целесообразно выбрать
конечно, шаг (ДО2 как больший. Таким образом, требования, свя-
занные с допустимой ошибкой, приводят к шагу (ДО2, а сообра-
жения устойчивости — к шагу (А/)Кр- Во многих случаях, особенно
относящихся к высокочастотным радиоэлектронным цепям:
* Допускается нестрогость, так как понятие постоянной времени строго оп-
ределено лишь для линейной цепи. В первом приближении для цепей со сла-
бой нелинейностью можно считать, что рассматриваются постоянные времени
линеаризованной части нелинейной цепи.
267.
(ДОцрС (ДО2- '(7.28)
Поэтому не погрешность расчета, а устойчивость процесса ин-
тегрирования определяет величину шага, и число шагов состав-
ляет Л1пер по (7.27).
При большом разбросе постоянных времени число шагов и ма-
шинное время, необходимое для расчета переходного процесса на
ЭВМ, могут стать недопустимо большими даже при высокопро-
изводительных современных ЭВМ. В высокочастотных устройст-
вах, содержащих одновременно узкополосные фильтры и контуры
и сравнительно широкополосные тракты (например, разделитель-
ные iRC-цепочки), нередко получаются %maxlxmin~ 106-4-108. Явные
методы интегрирования (не только метод Эйлера) оказываются
при этом неприменимыми.
До сих пор рассматривался расчет переходного режима. Пусть
теперь к «нелинейной цепи приложено периодическое воздействие
периода То и требуется определить стационарный периодический
режим цепи. По соображениям достаточной точности интегрирова-
ния можно выбрать (Д^)2=аТо; коэффициент а, как показывает
опыт расчетов, часто лежит в диапазоне 0,005—0,05. Минимальная
же постоянная времени цепи Vmin, определяющая критический
шаг, в высокочастотных цепях нередко оказывается ттгп= (10-6-?-
-z-Iq-sjt'o. в результате снова приходим к неравенству (7.28); не-
обходимое число шагов интегрирования за период То оказывается
Мстач= (ДО ЕР = T0/2xmin=Т0/2 • 10-6 То= 0,5 • 106. Обычно прихо-
дится рассчитывать многие периоды решения, т. е. расчет ведется
на интервале порядка многих То (см. ниже § 7.5), поэтому в ста-
ционарном случае явные методы часто непригодны.
Затруднения, возникающие при применении явных методов,
когда разброс постоянных времени велик, объединяют термином
«проблема постоянных времени».
Устойчивость неявного метода Эйлера. Обратимся к алгоритму
неявного метода Эйлера (7.11) и опять ограничимся случаем ли-
нейной цепи (7.12), (7.13). Подставив (7.12) в (7.11), получим
х[н+1] =х[н] Н-Д/Ах[и+1], (7.29)
т. е. уравнение относительно х[н-}-1]. Рассматриваемая цепь ли-
нейна, поэтому решается оно без труда:
(1—Д^А)х[и+1] =х[и]. (7.30)
Умножая обе части (7.30) слева на матрицу, обратную 1—Д£А,
получим выражение для решения на «новом» шаге через решение
на предыдущем:
х[и+1]= (1—Д/А)-1х[п]. (7.31)
Введя обозначение
Ф=(1—Д^А)-1, (7.32)
представим (7.31) в форме, аналогичной соотношению (7.16):
х[п+1] =Фх[п]. ’(7.33)
268
Таким образом, матрица Ф полностью определяет алгоритм ин-
тегрирования уравнения нелинейной цепи неявным методом Эйле-
ра; заметим, что теперь, чтобы найти Ф, требуется обратить неко-
торую матрицу на ЭВМ.. Как показано в теории матриц, собствен-
ное число для Ф находится в силу соотношения (7.32) по формуле
Хг-(Ф) = 1/(1—Д/ХЦА)) [сравните с (7.17)!]
Полагая, как и ранее в (7.18), собственное число матрицы в
общем случае комплексным, найдем Хг(Ф) = 1/[(1—Д^оО—i Ato,];
модуль этого числа |Л,г(Ф) = 1/ ТК(1—Atoi)2+(AZ)2<o2i.
Если сама исследуемая цепь устойчива, т. е. все о4-<0, то все-
| МФ) | = 1 //(1+АПОг |)2+ (Д02С02г< 1.
Отсюда следует, что условие устойчивости процесса интегрирова-
ния линейных уравнений неявным методом Эйлера выполняется
всегда, т. е. при любом (!) шаге ДА
Следовательно, при выборе шага можно руководствоваться
только соображениями, связанными с погрешностью интегрирова-
ния (см. рис. 7.2). Как мы видели выше, это означает, что шаг
А/ может быть выбран гораздо большим, чем тот, который обус-
ловливался требованиями устойчивости и который характерен для
явных методов.
О выборе метода интегрирования (резюме). При выборе мето-
да интегрирования нелинейной цепи необходимо прежде всего оце-
нить порядок разброса постоянных времени хотя бы в грубом ли-
нейном приближении. Если этот разброс велик (>106), безуслов-
но должны применяться неявные методы. В сложных или сильно
нелинейных цепях оценка постоянных времени затруднена; в этом
случае целесообразно из осторожности также использовать неяв-
ные методы.
Неявные методы позволяют работать со сравнительно больши-
ми шагами интегрирования А/, и это часто компенсирует необходи-
мость разрешения уравнений типа (7.11) относительно х[и+1].
Отметим, что при использовании неявных методов нет необхо-
димости формировать уравнения нелинейной цепи в форме (7.3) —
(7.4), а можно использовать непосредственно «неявные» уравне-
ния , рассмотренные в § 7.2.
7.5. РАСЧЕТ НА ЭВМ СТАЦИОНАРНЫХ РЕЖИМОВ
В НЕАВТОКОЛЕБАТЕЛЬНЫХ И АВТОКОЛЕБАТЕЛЬНЫХ?
НЕЛИНЕЙНЫХ ЦЕПЯХ
Роль априорной информации. Рассмотрим теперь некоторые*
особенности машинного расчета стационарных режимов в нелиней-
ных цепях. Следующие обстоятельства осложняют расчет таких
режимов: 1) возможное отсутствие стационарного режима (в част-
26S'i
ности, периодического) при принятой идеализации цепи, например
при выбранной аппроксимации нелинейных элементов; в этом слу-
чае машинный счет может продолжаться сколь угодно долго без
^положительного результата; 2) сосуществование нескольких ста-
ционарных режимов; при этом расчет на ЭВМ может привести к
любому из них, если не принять специальные меры; 3) отсутствие
-сведений о частоте колебаний, если система автоколебательная.
Чаще всего машинный расчет стационарного режима произво-
дят «через переходный»; задают некоторые начальные условия и
интегрируют дифференциальные уравнения цепи, получая решение
.для нарастающих значений времени t. При небольших t это ре-
шение отображает переходный процесс приближения к стационар-
..ному (если последний существует), и лишь начиная с некоторого
момента процесс можно считать стационарным.
Если априорная информация о цепи содержит сведения о том,
что цепь конвергентна, то при любых воздействиях начальных ус-
ловий машинный расчет всегда приведет нас к одному и тому же
решению. «Неудачный» выбор начальных условий может лишь
увеличить необходимое для расчетов машинное (время. Когда мы
знаем, что цепь диссипативна, то при любом (конечно, устойчи-
вом) процессе машинного счета исключено появление неограни-
ченно больших значений в массивах чисел, образующих решение,
т. е. исключен останов из-за переполнения разрядной сетки ЭВМ.
В случае периодического воздействия на цепь информация о
.дисоипативности означает, что в конце счета будет достигнут дей-
ствительно установившийся режим, так как хотя бы один такой
периодический режим обязательно устанавливается в цепи. Когда
же априорная информация о цепи, находящейся под периодиче-
ским воздействием, содержит указание одновременно и о конвер-
гентности, и о диссипативности цепи, т. е. возможности реализа-
ции единственного устойчивого периодического режима, то можно
быть уверенным, что, начав с любых начальных условий, мы при-
дем при устойчивых вычислениях к одному и тому же искомому ре-
'шению. В случаях, когда периодических или иных стационарных
решений несколько, и расчет вновь идет через переходный про-
цесс, чрезвычайно важно знать, при каких начальных условиях
устанавливается тот или иной периодический режим. Например,
если требуется рассчитать выходные колебания <в делителе часто-
ты, отличающиеся начальными фазами (см. § 5.6), то в ЭВМ же-
лательно вводить именно те начальные условия, которые приво-
дят к колебанию с данной фазой. Поэтому на стадии задания ап-
риорной информации нужно хотя бы приближенно разбить мно-
жество начальных условий на области, обеспечивающие наступле-
ние того или иного периодического режима.
В заключение коснемся априорной оценки частоты автоколеба-
ний в автономных системах. Точное значение этой частоты может
быть получено лишь в результате самого машинного исследова-
ния (в частности, с учетом поправок за счет высших гармоник —
см. § 4.4). Приближенная же величина может быть подсчитана
570
заранее по Собственным частотам контуров автогенератора. При-
расчете стационарных режимов также важна априорная оценка
разброса постоянных времени, определяющая выбор метода интег-
рирования, о чем было сказано выше.
Два подхода к машинному расчету стационарных режимов.
Один подход нам уже известен — это расчет через переходный
процесс. Возможен и другой принцип расчета процессов в нели-
нейной цепи. Рассмотрим, например, расчет параметров автоколе-
баний в соответствии с методом медленно меняющихся амплитуд.
Согласно (4.162) стационарный режим определяется решением-
уравнений:
Фо=О, Чго='О. (7.34}
Их можно решить на ЭВМ и найти параметры автоколебаний
принципиально для сколь угодно сложных форм нелинейных ха-
рактеристик, а не только для простых аппроксимаций.
Сопоставим эти два подхода. При расчете через переходный
режим основным вычислительным процессом является интегриро-
вание, продолжающееся до окончания переходного режима. Если
стационарный режим устанавливается в исследуемой цепи мед-
ленно, что характерно для цепей с высокодобротными контурами,
то даже при не очень малых шагах интегрирования машинный
расчет займет много времени. С другой стороны, такой подход не
требует никаких предположений о характере цепи; в частности,
его можно использовать в случае сильно нелинейных цепей. Если
же говорить о втором способе, то здесь основная задача вычисле-
ния состоит в решении системы нелинейных алгебраических или-
трансцендентных уравнений. Длительного процесса интегрирова-
ния можно избежать. Заранее трудно сказать, какой из двух под-
ходов приведет к меньшим вычислительным затратам; выбор дол-
жен делаться применительно к конкретной задаче. В последующей
части этого параграфа будем иметь в виду только расчет через-
переходный процесс.
Критерии стационарности (правила останова интегрирования;.
В ЭВМ должно быть введено правило, в соответствии с которым-
машина должна принять решение об окончании переходного ре-
жима и (наступлении стационарного. Таких правил известно не-
сколько, но все они основываются на сопоставлении векторов ре-
шений х(/) на следующих друг за другом отрезках оси времени:
[О, 7], [7, 27],..., [пТ, (п-Н)7],... Здесь 7 — период искомого-
стационарного периодического решения уравнений (7.3). Напом-
ним, что в неавтономных цепях 7 может быть равно периоду воз-
действия То', быть кратным или субкратным То (при анализе де-
лителя или умножителя частоты); определяться свойствами самой
цепи, если она автоколебательная. В последнем случае на первых
стадиях проверки стационарности используется приближенная ап-
риорная оценка периода автоколебаний.
После того как действуя в соответствии с введенным прави-
лом, ЭВМ приняла решение о том, что стационарное решение име-
27Н
'ет место, интегрирование дифференциальных уравнений прекраща-
ется. Далее имеются две возможности: 1) прекратить вычисления
и вывести на печать массивы чисел, отвечающие некоторым или
всем компонентам вектора решения дифференциальных уравнений
и вектора отклика y(t) на одном периоде Т; 2) некоторым пред-
писанным заранее образом обработать эти массивы, например
найти амплитуды и фазы гармоник решения в разложении Фурье,
мощности различных составляющих, средние крутизны и т. п.
Правило, в соответствии с которым прекращается интегрирова-
ние, может быть названо также критерием стационарности. Чаще
-всего используются следующие критерии стационарности для х(/):
||х((п+1)Т)-х(;пТ)||<б1, (7.35)
пТ
max J —Xi(t + T))2dt<&2, (7.36)
* (n-l)T
’числа и б2 должны быть назначены заранее.
В первом случае вычисления строятся так. На отрезке времен-
ной оси, равном периоду Т, в двух крайних точках вычисляются
.значения компонент вектора х(^). Иначе говоря вычисляются
-Xi(nT’), х2(пТ), ..., Xh(nT) и Х1((п+1)Т), ..., xft((«+l)T) при п=
= 0, 1, 2,..., k. Для каждого п (т. е. на каждом периоде) вычис-
ляется норма вектора, равного разности х((«+1)7’) и х(пТ’). Да-
лее эта норма сравнивается с заданным порогом Если она
меньше порога, интегрирование прекращается, если больше или
равна ему, то интегрирование продолжается на следующем
ютрезке длины Т, т. е. п увеличивается на 'единицу, и т. д.
При использовании критерия (7.36) решение о стационарности
выносится на основании анализа значений х(£) не в двух точках,
.разделенных интервалом длины Т, а при сопоставлении двух мас-
сивов чисел, отвечающих решению на отрезке [(«—1)7, «Г] и
\пТ, («4-1)7]. Это сопоставление связано с вычислением среднего
квадрата разности между двумя частями решения для каждого I,
т. е. для каждого компонента вектора x(t). Затем выбирается наи-
больший из интегралов (среди всех значений i), и он сравнива-
ется с порогом б2-
Вычисления, связанные с критерием (7.35), конечно, проще, но
имеют тот недостаток, что сильнее подвержены влиянию сбоев
в ЭВМ: сбой в расчете всего лишь одного значения какой-либо
компоненты вектора х(/) может привести к грубой ошибке в оцен-
ке стационарности. Выбор чисел 61 и 62 связан с требованиями к
точности вычислений и допустимому машинному времени, так как
чем меньше 61 и 62, тем дольше будет идти счет. Кроме того, при
выборе порогов следует учитывать точность исходных данных це-
пи, вводимых в ЭВМ: если эта точность невелика, нет смысла де-
лать и 62 очень малыми.
Некоторые способы сокращения машинного времени при расче-
те неавтономных цепей. Как уже было отмечено, в радиоэлектрон-
ных нелинейных цепях расчет стационарного режима через пере-
.272
ходный может быть связан с очень большими затратами машин-
ного времени. Поэтому полезно хотя бы коротко рассмотреть неко-
торые способы сокращения этих затрат.
Один из самых простых способов состоит во введении пере-
менного шага интегрирования. Точнее говоря, переходный процесс
(информация о котором, как мы предполагаем, не представляет
интереса) считается со сравнительно большим шагом, т. е. невы-
сокой точностью (что и обеспечивает экономию времени), а ста-
ционарный отрезок решения — с малым *. Малость шага интегриро-
вания при расчете стационарного режима должна гарантировать,
требуемую точность. Однако для того чтобы этот прием не при-
вел бы к грубым ошибкам, необходимо выполнить некоторые ус-
ловия. В частности, следует обеспечить устойчивость процесса ин-
тегрирования при больших шагах. Нужно позаботиться и о том,,
чтобы большая ошибка при расчете переходного процесса не при-
вела бы к отличному от искомого стационарному режиму. Послед-
нее проще всего обеспечивается в случае конвергентности и дисси-
пативности рассчитываемой цепи.
Второй распространенный способ сокращения машинного вре-
мени основан на рассмотрении условия периодичности искомого-
решения
х(0)=х(Т) (7.37)
как некоторого операторного уравнения относительно вектора на-
чальных условий х(0). Из (7.9) следует, что вектор решения в
точке t=T, т. е. х(7), будет
т
х(Т) = Jf(x, r)dr+x(0), (7.38>
о
причем х(0 есть решение дифференциального уравнения (7.9).
Следовательно, на правую часть (7.38) можно смотреть как на не-
который оператор, ставящий в соответствие каждому начальному
значению х(0) некоторое значение х(7). Попытаемся найти такое
х(0), что указанный оператор будет переводить его снова в х(0);
если теперь рассчитать решение х(-() на участке [О, 7], исходя из
данного х(0), мы можем немедленно получить стационарное пе-
риодическое решение.
Для решения (7.37) относительно х(0) можно воспользовать-
ся, например, методом Ньютона. Оказывается, что ньютоновские-
итерации часто приводят к цели быстрее, чем обычное интегриро-
вание через переходный процесс.
Третий способ по своей идее близок к только что рассмотрен-
ному. Заметим сначала, что выражение в левых частях критери-
ев стационарности (7.35) и (7.36) для периодического режима
обращаются в нуль. Рассмотрим их соответственно при д=0 №
п=1 и учтем, что эти выражения являются функциями от началь-
1 Чтобы отличать отрезки решения друг от друга, можно, например, вычи-
слять левые части критериев стационарности (7.35) или (7.36).
273-
ного значения х(0). Зададимся х(0) и будем вычислять x(f)
только на интервале [О, 2Т] каким-либо методом интегрирования,
а затем рассчитаем, например, левую часть (7.36). Если неравен-
ство (7.36) не выполнено, выберем новое х(0) и снова рассчитаем
х(0 при te[0, 2Т], после чего вновь проверим (7.36), и т. д. Пе-
риодическое решение считается найденным, когда (7.36) удовлет-
ворено. Для выбора последующих векторов х(0) может быть ис-
пользован какой-либо метод минимизации функции многих пере-
менных, известный из курса вычислительной математики (ясно,
что чем меньше левая чДсть (7.36), тем лучше).
Заметим в заключение, что в двух последних методах расчета
стационарного режима фактически обходятся без интегрирования
на участке переходного режима.
7.6. ПРИМЕР МАШИННОГО ИССЛЕДОВАНИЯ
НЕЛИНЕЙНОЙ ЦЕПИ
Проиллюстрируем сказанное выше на примере машинного исследования
нелинейной цепи — транзисторного умножителя частоты1 (рис. 7.4а). Считаем
контур в цепи коллектора настроенным на гармонику частоты входного сигна-
ла e(t). Элементы Ев, Ro, Ек задают режим транзистора по постоянному току:
источник и резистор Ro — в цепи базы, источник Ек— в цепи коллектора.
Рис. 7.4
Индуктивность £бл предотвращает протекание токов высокой частоты в цепи
базового смещения, Сел предотвращает протекание постоянного тока через
источник сигнала евх.
Перед тем как записать уравнения состояния транзисторного умножителя,
транзистор заменяют его моделью (эквивалентной схемой). Опуская цепи
питания, т. е. считая режим работы транзистора по постоянному току задан-
ным, получаем схему рис. 7.46, в которой принята ключевая модель транзис-
тора (обведена пунктиром): замыкание ключа соответствует открыванию
эмиттерного перехода, размыкание — его закрыванию. Остальные параметры
-схемы характеризуют: Са — емкость перехода эмиттер — база, цепь £РСД — про-
цесс рекомбинации в базе, iK — генератор выходного тока, зависящий от вход-
ного воздействия, Е' — уровень, при котором переключается ключ К (при пре-
вышении Е' транзистор открывается). Влиянием выходного напряжения на
ток iK пренебрегаем. Это позволяет исключить контур LC из соотношений, опи-
сывающих процессы в схеме (уравнений состояния) и считать, что он лишь
обеспечивает выделение на выходе схемы нужной гармоники.
Переходя к составлению уравнений состояния, заметим, что в любой мо-
мент в схеме фигурирует лишь один реактивный элемент: при разомкнутом
1 Исследование проведено автором этой главы совместно с М. И. Аболиц
и Е. П. Мальцевой по модели и уравнениям цепи В. Г. Лаврушенкова и
И. А. Попова.
274
ключе — конденсатор Св, при замкнутом — комбинация конденсаторов Сэ и Сд„.
Поэтому вектор состояния содержит лишь один элемент, дифференциальное'*
уравнение состояния при любом положении ключа оказывается первого поряд-
ка и его формирование нетрудно осуществить вручную (без помощи ЭВМ).
Выберем в качестве переменной вектора состояния заряд
х = (£'), (7^9>
где ?2;='<7сд+? Сэ—сумма зарядов соответствующих конденсаторов.
Используя эту переменную, уравнение состояния умножителя, как оказы-
вается, можно записать так:
dxldt—цц (х)Ц-Дх sin(£е—Е')/Лт при xrjs'O ]
dx/dt=tp2(xy+Isxsm&t-\-i(E6—E')/RT 'при х<0, j
где <pi (х) и фг(х) —некоторые функции переменной состояния, определяемые*
свойствами транзистора. Два последних слагаемых в уравнениях (7.40) можно
трактовать как токи воздействия, т. е. компоненту хВОзд(7) в (7.2). Тогда функ-
ция f в (7.3) приобретает форму
.. ... ... / <pi(x)+/BXsin<B^+(£6—£')/Дг при х>0,
Хвозд , ( ф2(х)+Лж sin<oft-p(£6—E')IRt при х<0.
Теперь обратимся к (7.4). Ток iK приблизительно пропорционален q с , что»,
д
позволяет записать
»к = ?сд/Тт=х/тт (х^гО; при х^О x=qCjJf (7.42):
где тт — некоторый параметр транзистора. Рассматривая в качестве выходной!
величины y=iK, Запишем
' г/(О=£[х(О]=-------х(7), х(/)^Ю. (7.43)
Итак, (7.41) и (7.43) представляют уравнения (7.3) и (7.4) для рассматрива-
емой задачи. Поскольку нас интересует не y(t), а только одна ее гармоника^,
нужно к операции определения добавить спектральный анализ последней1.
Обратимся теперь к априорной информации о цепи. Будем считать, что вы-
данной неавтономной цепи устанавливается единственный периодический ре-
жим с известным периодом 2л/со.
В данном ключевой схеме в любом положении ключа имеется один реак-
тивный элемент, определяющий постоянную времени, которая может быть
найдена по функциям <pi(x) и ф2(х). Последние могут быть представлены как
<Р1(х)=х/те (х), <р2(х)=х/тэ(х), " (7,44>
где Тр и тэ — некоторые «постоянные» времени, зависящие от координаты х.
Если удается предвидеть область возможных изменений х, то, зная параметры
конкретного транзистора, можно выбрать некоторые «средние» в области из-
менения х значения т р и тв и принять их за постоянные времени цепи для
х^О и х<0. Так, для транзистора КТ-912 можно принять Тр=тэ=4-10~вс
(при определенном выборе i/?r).
Переходим к определению динамического режима умножителя и его харак-
теристик. Задача сводится к расчету зависимостей i'k(7) и последующему на-
хождению амплитуды и фазы определенной составляющей тока iK. Чтобы най-
ти iR(t), необходимо проинтегрировать на ЭВМ уравнения (7.40) и затем вос-
пользоваться (7.42). Поскольку проблема постоянных времени в данной зада-
че не возникает, можно избрать явный метод интегрирования, например явный
метод Эйлера, при достаточно малом шаге. Для оценки момента наступления-
стационарного режима изберем критерий (7.36) при 62= 0,0001. Обращаться к
1 Это связано с тем, что в уравнениях состояния не учтен контур LC ум-
ножителя. Достигаемое при этом упрощение уравнений столь существенно, что*
оправдывает необходимость усложнения процесса обработки y(t) при вычис-
лениях на ЭВМ.
и т.
сив
специальным методам ускорения расчета стационарного режима нет необходи-
мости, так как этот режим достигается всего через несколько интервалов, рав-
ных периоду 2л/ш. Для подсчета коэффициентов Фурье функции iK(i) при малых
номерах гармоник можно использовать общие методы вычисления интегралов,
известные из курса вычислительной математики.
Итак, умножитель рассчитывается на ЭВМ в следующем порядке: 1) вво-
дим в ЭВМ уравнения (7.40) и константу из (7.42); задаем номер интересую-
щей гармоники; 2) вводим начальное условие х», например х(0) =—0,1; 3) поль-
зуясь алгоритмом явного метода Эйлера, интегрируем второе уравнение (7.40),
проверяя на каждом шаге условие х<0; 4) как только стало х^О, переходим
к первому уравнению (7.40); продолжаем интегрирование, пока не стало х<0,
и т. д. 5) подобный расчет продолжается в течение двух интервалов оси t,
каждый длиной 2л/<в; по окончании расчета на интервале t от 0 до 4л/<о
производится проверка условия (7.36), причем интеграл в левой части нера-
венства вычисляется по одной из формул численного интегрирования (напри-
мер, методом прямоугольников); если неравенство не выполнено, продолжаем
расчет далее на интервале от 4л/со до 6л/со и вновь проверяем условие (7.36)
д. Как только условие стационарности будет выполнено, запоминаем мас-
неотрицательных значений х(1), отвечающих последнему рассчитанному
«периоду» х(/); 6) рассчитываем
iK(t) по (7.42) для последнего перио-
да и запоминаем массив 7) рас-
считываем амплитуду и фазу нужной
гармоники.
Соответствующие расчеты обычно'
повторяются для ряда значений вход-
ного воздействия tBX и частоты со, раз-
личных и разных параметров тран-
зисторов и кратностей умножения. На
рис. 7.5 представлены рассчитанные
на ЭВМ «Наири-2» зависимости ам-
плитуды Аз (сплошные линии) и фа-
зы <рз (пунктир) третьей гармоники
тока (к(0 для ряда значений т—
= /вх/1вхтах И ВХОДНЫХ ЧЭСТОТ
(/вхтох — максимальная амплитуда,
принятая в расчетах), отвечающих
низкочастотным (coi), высокочастот-
ным (соз) и среднечастотным (соа) умножителям (соз>®2>«1). Видно, что с уве-
личением частоты эффективность процесса умножения на данном транзисторе па-
дает; фаза выходного колебания зависит от частоты и амплитуды Ах. Заметим,
что получить эти результаты без применения ЭВМ было бы невозможно.
ПРИЛОЖЕНИЕ 1
1.
3.
5.
ТРИГОНОМЕТРИЧЕСКИЕ ФОРМУЛЫ, ИСПОЛЬЗУЕМЫЕ
ПРИ ГАРМОНИЧЕСКОМ АНАЛИЗЕ КОЛЕБАНИИ
1
cos2 а= —
1
cos4
1
cos6 а=—
32
2. cos3 а=—- (3 cos a+cos За)
4
(3+4 cos 2a+cos 4a) 4. cos5 a = -7 (10 cos a+'5 cos За+cos 5a)
16
(1 +cos 2а)
(10+15 ©os 2а+6 cos 4a+cos 6а)
6. cos7 а=— (05 cos а+21 cos За+7 cos ба+cos 7а) 7. sin2 а— (1—cos 2а)
64 2
8. sin3 а= —— (3 sin а—sin За) 9. sin4a= —- (3—4cos2a+cos4a)
4 8
276
JO. sin5 a=—— (10 sin a—6 sin3a-(-sin 5a)
16
11. cos a sin a=— sin 2a
2
12.
sin a sin₽=—[cos(a—₽)—cos(a+P)]
13. sin a oos ₽= —[ sin(a+(3)+sin(a—iP)]
14. oos a cos ₽=-y [cos (a—£) 4-cos (a+P) ]
ПРИЛОЖЕНИЕ 2
НЕКОТОРЫЕ МАТРИЧНО-ВЕКТОРНЫЕ СООТНОШЕНИЯ
Матрицей типа т\п называется таблица, составленная из вещественных
или комплексных констант, функций времени и т. д., записываемая как
A = [ayl,
где первый индекс указывает на номер строки, второй — столбца.
Матрица типа тХ1 называется вектором-столбцом, а типа 1Хп—векто-
ром-строкой. Соответственно имеем
Производная и интеграл от х(/) по времени определяются так:
d х
dt
’ dx±
dt
dxm
dt
t. e. они образованы производными и интегралами от компонент вектора.
Норма вектора [|х|| может определяться по-разному, в частности, как:
][х|| =max (|xi |, ..., |хт|) или как ||х[| = 1/ |Х1|Ч- — +1х™|2. причем в первом
случае имеется в виду наибольший из всех модулей компонентов х.
С помощью матриц и векторов удобно и компактно записываются алгеб-
раические и дифференциальные уравнения и различные соотношения, харак-
теризующие нелинейные цепи. Например, зависимость /-го тока от совокупнос-
ти напряжений щ, ип, записываемая в традиционной форме как
..., ип) может- быть сокращенно переписана в виде i3=i3(u), и совокуп-
ность всех токов i=i(u).
Система алгебраических или трансцендентных уравнений вида
/1(И1, .... Мп)=0,
fn(Ui, Un)=f>.
в матрично-векторной форме выглядит таким образом: f(u)—0,
где f — вектор-столбец, составленный из компонент-функций f, ..., fn-
Система дифференциальных уравнений в нормальной форме Коши
277
dxt
j, •••>
at
—-=fn(xt, ..., xn, t),
at
учитывая приведенное выше правило дифференцирования вектора, может быть
представлена так: dx/d/=f(x, /).
Рассмотрим далее уравнение Ах=Лх,
где X — скаляр. Смысл его состоит в том, что вектор, получаемый от умноже-
ния матрицы А типа тХт на вектор х, совпадает с вектором, который полу-
чится, если некоторый скаляр X умножить на тот же вектор х. Оказываетаз
[26], что нетривиальное решение этого уравнения относительно компонент век-
тора х возможно только при тех значениях X, которые являются корнями не-
которого алгебраического уравнения степени п: +on-iXn-1+ ... +ао=О. Коэф-
фициенты этого уравнения полностью определяются матрицей А, а корни его
называются собственными числами матрицы А.
СПИСОК ЛИТЕРАТУРЫ
1. Харкевич А. А. Основы радиотехники. М.: Связьиздат, 1962.
2. Кушнир Б. Ф., Ферсман Б. А. Теория нелинейных электрических цепей. М.:
Связь, 1974.
3. Гоноровский И. С. Радиотехнические цепи и сигналы. М.: Сов. радио, 1977.
4. Капчинский И. М. Методы теории колебаний в радиотехнике. М: Госэнер-
гоиздат, 1954.
5. Зернов Н. В., Карпов В. Г. Теория радиотехнических пепей. М.: Энергия,
1965.
6. Кобзарев Ю. Б. О квазилинейном методе трактовки явлений в генераторе
почти синусоидальных колебаний. — ЖТФ 1935, т. V, вып. 2, с. 216—249.
7. Котельников В. А., Николаев А. М. Основы радиотехники. Ч. II. М.:
Связьиздат, 1954.
8. Кальницкий Л. А., Добротин Д. А., Жевержеев В. Ф. Специальный курс
высшей математики для ВТУЗ. М.: Высшая школа, 1976.
9. Благовещенский М. В., Кулешов В. Н., Кунина С. Л. Радиопередающие ус-
тройства: Конспект лекций. Ч. II. М.: МЭИ, 1977.
10. Евтянов С. И. Ламповые генераторы. М.: Связь, 1967.
11. Каплаи А. Е., Кравцов Ю. А., Рылов В. А. Параметрические генераторы и
делители частоты. М.: Сов. радио, 1966.
12. Андронов А. А., Витт А. А., Хайкин С. Э. Теория колебаний. М: Физматгиз,
1959.
13. Палшков В. В. Радиоприемные устройства. М.: Связь, 1965.
14. Чистяков Н. И., Сидоров В. М. Радиоприемные устройства. М.: Связь,
1974.
15. Челноков О. А. Транзисторные генераторы синусоидальных колебаний. М.:
Сов. радио, 1975. ,
16. Коиторович М. И. Нелинейные колебания в радиотехнике. М.: Сов. радио,
1973.
17. Калабеков Б. А. Применение ЭВМ в инженерых расчетах в технике связи.
М.: Радио и связь, 1981.
18. Бондаренко В. М. Вопросы анализа нелинейных цепей. Киев: Наукова дум-
ка, 1967.
19. Синицкий Л. А. Элементы качественной теории нелинейных электрических
цепей. Львов: Вища школа, 1975.
20. Финк Л. М. Сигналы, помехи, ошибки... М.: Связь, 1978.
21. Верзунов М. В. Однополосная модуляция в радиосвязи М.: Воениздат, 1972.
22. Теодорчик К. Ф. Автоколебательные системы. М.: ТТЛ, 1952.
23. Грей Э., Мэттьюз Г. Б. Функции Бесселя и их приложение к физике и ме-
ханике! М.: ИЛ, 1953.
24. Филиппов Е. Нелинейная электротехника. М.: Энергия, 1963.
.25. Основы теории колебаний. Под ред. В. В. Мигулина. М.: Наука, 1978.
26. Курош А. Г. Курс высшей алгебры. М.: Наука, 1968.
ОГЛАВЛЕНИЕ
Стр.
Предисловие.............................................................. 3
Введение................................................................. 5
В.1. Общие сведения о системах связи и сигналах.......................... 5
В.2. Классификация электрических цепей................................... 8
В.З. Функциональная схема системы связи. Задача курса....................13
Глава 1. Модулированные колебания......................................17
1.1. Общие соотношения...................................................17
1.2. Амплитудно-модулированные колебания.................................18
1.3. Колебания при угловой модуляции...................................22
1.4. Спектры колебаний при угловой модуляции...........................25
1.5. Биения. Двухполосные и однополосные колебания без несущей . . 29
1.6. Колебания при импульсной модуляции................................33
Глава 2. Нелинейные элементы и их характеристики.........................36
2.1. Нелинейные резистивные элементы...............................36
^2.2. Аппроксимация вольт-амперных характеристик...................40
2.3. Параметры нелинейных резистивных элементов..................46
2.4. Нелинейные инерционные элементы...............................48
2.5. Нелинейные реактивные элементы............................... . 50
2.6. Использование нелинейных элементов в качестве параметрических . 52
Глава 3. Преобразование сигналов и спектров..............................54
3.1. Соединение нелинейных и линейных элементов. Ограничение и стаби-
лизация ...........................•...................................54
3.2. Методы спектрального анализа колебаний в нелинейных цепях . . 58
Постановка задачи...................................................58
Метод, основанный на использовании тригонометрических формул
кратного аргумента................................. . . . . 59
Метод угла отсечки............................................63
Метод, основанный на использовании формул трех и пяти ординат 67
Метод, основанный на использовании функций Бесселя от мнимого
аргумента.....................................................68
3.3. Выделения полезных компонент спектра. Нелинейные искажения . . 70
3.4. Умножение частоты.............................................72
3.5. Нелинейное усиление............................................... 75
3.6. Преобразование частоты........................................77
3.7. Модуляция.....................................................79
Амплитудная модуляция.........................................79
Балансная и однополосная модуляция .84
Частотная модуляция............................................... 87
. Фазовая модуляция 91
Импульсная модуляция 94
3.8. Детектирование................................................95
Общие сведения.................................................. 95
Детектирование AM колебаний в нелинейных цепях................96
Синхронное детектирование AM колебаний.......................100
Детектирование двухполосных и однополосных сигналов . . . 102
Детектирование ФМ колебаний.................................... 103
Детектирование ЧМ колебаний . 105
3.9. Взаимодействие нескольких сигналов в нелинейных цепях ... 108
Подавление слабого сигнала сильным...........................108
Перекрестные искажения . . ....................' 111
Интермодуляция...........................................I- • Ш
Амплитудно-фазовая конверсия...................................... ИЗ
Г л а в а 4. Автоколебательные системы-.................................114
4.1. Автоколебания. Общие сведения......................................114
4.2. Теория устойчивости................................................118
279
Постановка вопроса ............................................
Дифференциальное уравнение генератора. Условия самовозбуждения
Критерии устойчивости...........................................
Критерий Рауса—Гурвица..........................................
Критерий Михайлова..............................................
Критерий Найквиста...........................................
Устойчивость состояний равновесия по Ляпунову
Прямой метод Ляпунова...........................................
4.3. Краткая характеристика методов анализа нелинейных автоколебатель-
ных систем .........................................................
4.4. Квазилинейный метод...........................................
Стационарный режим автогенератора...............................
Связь условий баланса амплитуд и баланса мощностей
Мягкий и жесткий режимы самовозбуждения колебаний ....
Влияние высших гармоник.........................................
Стабильность частоты автогенератора ............................
4.5. Метод медленно меняющихся амплитуд . ................
Укороченные уравнения ..........................................
Стационарный режим..............................................
Установление колебаний в генераторе ...................
4.6. Метод фазовой плоскости.......................................
Фазовая плоскость, фазовые траектории...........................
Фазовые портреты колебаний генераторов .........................
4.7. Генераторы на двухполюсниках с отрицательным сопротивлением .
Применение квазилинейного метода....................................
Анализ устойчивости.............................................
4.8. Особенности генераторов синусоидальных колебаний различного типа
Трехточечные схемы генераторов ... ....................
ДС-генераторы...................................................
Многоконтурные генераторы. Затягивание частоты..................
Особенности транзисторных автогенераторов ...................
4.9. Генерирование несинусоидальных колебаний......................
Общие сведения..................................................
Мультивибраторы.................................................
Триггеры .' ....................................................
Глава 5. Нелинейные избирательные системы под внешним воздействием
5.1. Особенности неавтономных нелинейных систем....................
5.2. Резонанс в нелинейном контуре.................................
5.3. Регенерация..................................................* •
5.4. Применение метода медленно меняющихся амплитуд к анализу неавто-
номных систем ......................................................
5.5. Синхронизация колебаний генератора............................
5.6. Деление частоты...............................................
Деление частоты путем синхронизации на субгармонике ....
Регенеративное деление частоты ..............................
5.7. Фазовая автоподстройка частоты................................
Глава 6. Параметрическое возбуждение и усиление колебаний .
6.1. Особенности параметрических явлений........................
6.2. Энергетические соотношения в параметрическом контуре. Условия са-
мовозбуждения .....................................................
6.3. Параметрическое возбуждение колебаний. Уравнение Матье .
6.4. Стационарный режим параметрического генератора ...
6.5. Одноконтурный параметрический усилитель.......................
6.6. Частотно-энергетические уравнения Мэнли и Роу.................
6.7. Некоторые соотношения для двухконтурного параметрического усили-
теля регенеративного типа...........................................
6.8. Параметрическое умножение и деление частоты...................
Параметрическое умножение частоты...............................
Параметрическое деление частоты.................................
Глава 7. Машинный анализ нелинейных цепей ....... 258
7.1. Общие сведения................................................. 258
7.2. Уравнения нелинейных цепей, используемых в машинном диализе . . 259
7.3. Различия в машинном исследовании отдельных классов нелинейных
цепей. Априорная информация......................................... 261
7.4. Расчет динамических режимов интегрированием дифференциальных
уравнений цепи..................................................... 263
7.5. Расчет на ЭВМ стационарных режимов в неавтоколебател£Ных и авто-
колебательных нелинейных цепях...................................... 269
7.6. Пример машинного исследования нелинейной цепи 274
Приложение 1. Тригонометрические формулы, используемые ПРИ гармони-
ческом анализе колебаний ...................................... .... 276
Приложение 2. Некоторые матрично-векторные соотношения ... 277
Список литературы................................................... 278