/

































































































































































































































Текст
This book is in the
ADDISON-WESLEY SERIES IN MATHEMATICS
Lynn H. Loomis
Consulting Editor
TOPOLOGICAL
VECTOR SPACES
DISTRIBUTIONS
Volume I
JOHN HORVATH
University of Maryland
ADDISON-WESLEY PUBLISHING COMPANY
Reading, Massachusetts • Palo Alto • London • Don Mills, Ontario
Copyright © 1966, by Addison-Wesley Publishing Company.
All rights reserved.
This book, or parts thereof, may not be reproduced in any form
without written permission of the publisher.
Printed in the United States of America.
Published simultaneously in Canada.
Library of Congress Catalog Card Number 66-22574.
To
Jean Dieudonne,
Alexandre Grothendieck,
and
Laurent Schwartz
Preface
In spite of the several excellent books published recently, there still
seems to be room for an elementary introduction to topological vector
spaces and their most important application: the theory of distributions
of Laurent Schwartz.
The present text grew out of courses taught at the University of Mary-
land, the Universit£ de Nancy, and the Universidad de los Andes, Bogota.
I tried to make it reasonably self-contained by including in small print all
the necessary definitions and results from algebra and topology, giving
complete proofs for all results which are not immediate consequences of
the relevant definitions. This arrangement should enable the undergrad-
uate mathematics major to get into contact with functional analysis early,
and I hope to have served also the applied mathematician, the physicist,
and the engineer whose training does not usually include abstract algebra
and topology. A student who has had a course of advanced calculus and
a minimum of abstract algebra and topology (if only that of metric spaces)
should have no difficulties reading the book, though a few examples also
use the theory of analytic functions of one complex variable. I even hope
that the book might serve as an introduction to general topology and, by
exhibiting an important application of the theory, stimulate and motivate
its study. The reader who is already familiar with algebra and topology
should skip the small print, consulting it for the terminology with help of
the index, if necessary. In preference to other convergence theories I use
exclusively filters. Not only do I think that their theory is the most
beautiful, simple, and (because of the theorem of ultra-filters) powerful
(cf. the miraculous proof of Tihonov’s theorem), but the main object of
our study, namely the system of neighborhoods of the origin in a topologi-
cal vector space, is a filter. Of course a complete exposition of the theory
of filters is given in the text (Chapter 2, §§2 and 8). On the other hand, I
do not need or use the theory of uniform spaces.
The first chapter is of an introductory character. It deals with the theory
of Banach spaces and serves as a motivation and guide for the generaliza-
tions which are to follow in the next two chapters. With the exception of
vii
viii
PREFACE
a few properties of Hilbert spaces and some quantitative theorems in-
volving norms, the results of the first chapter are proved again in a more
general setting, and therefore the more advanced or impatient reader is
advised to start with Chapter 2. The treatment is not encyclopaedic, and
many important results, such as the Krein-Milman, Eberlein, Smulian
theorems, and Choquet’s beautiful theory of the integral representation
of points of a compact, convex set [5,108], are completely omitted. The in-
terested reader is referred in the first place to the superb monograph of
Kothe [52] for further study. I postponed some parts of the theory of
topological vector spaces to the place where they are first needed, to en-
sure a better motivation and livelier pace. Thus the theory of bilinear
maps is treated in Chapter 4, §7 in connection with the multiplication of
distributions.
The theory of distributions is presented, as originally by Schwartz, as a
theory of duality of topological vector spaces. Many so-called elementary
approaches to distributions have been devised in the past few years, but,
to quote Dieudonn6, “none offers, in my opinion, the flexibility and power
of the original description of Schwartz” [Amer, Math, Monthly, 71 (1964),
p. 241]. The treatment in Chapter 4 is again not exhaustive, and no serious
student can forgo to read Schwartz’s original masterwork [81, 82], where,
in the introduction, he will find an excellent account of the precursors and
origins of the theory. I also want to call the reader’s attention to the
monumental work in five volumes by I. M. Gelfand and his collaborators
on “generalized functions” (cf. Example 4.1.1), written in a leisurely and
informal style and containing an enormous wealth of material [30 through
34].
Chapter 4 contains only those results on measures and distributions
which do not use Lebesgue’s theory of integration. Volume II, which I
hope will appear some day, should start with an exposition of the theory
of integration and introduce some important Banach spaces of distribu-
tions: the Lp spaces discovered by Frederick Riesz in 1908. Following that,
a chapter on miscellaneous subjects is planned, such as convolutions and
Fourier transforms in Lp spaces, 3C* spaces, distributions defined by
analytic continuation (distributions of Marcel Riesz), Sobolev’s inequal-
ities, the Paley-Wiener theorem, Laplace transforms, Lions’ theorem of
supports, Schwartz’s kernel theorem, etc. Finally, a few selected applica-
tions to partial differential equations will be given. These chapters will
be very short, since the reader has the splendid monographs of Hormander
[46] and Treves [100] at his disposal.
Most exercises are simple verifications and serve the reader to check
whether he has understood the theory. Some are results which are too
simple to waste space for them in the text; these results are used freely
PREFACE ix
later on. The reader who wants more challenging exercises will find his
fill in the books by Bourbaki [9] and Grothendieck [43].
The three great mathematicians to whom this book is dedicated are
not only the authors of most of what is contained in it but also the persons
from whom I learned almost everything I know about the subject. It was
Schwartz who pointed out to me more than ten years ago the merits of
writing an introductory textbook, and both he and Dieudonn£ gave me
constant help and encouragement while I was writing this book. I want
to express my gratitude to Jacques Deny who first initiated me in 1947
into the theory of distributions. The book owes a lot to many other friends
and colleagues, in the first place to Robert Freeman, who read carefully
the first version of the first three chapters and the galleys of Chapter 4, to
my audiences in College Park, Nancy, and Bogota, to Mohamed Salah
Baouendi, John Brace, Akos Csdszdr, Arthur Du Ргё, H. G. Gamir, Pierre
Grisvard, Adam Kleppner, German Lemoine, Jacques-Louis Lions, Robert
Nielsen, Jean-Louis Ovaert, Mrs. Jacques Rebibo, Hugo Sim, Henri
Yerly, and others who pointed out errors, taught me proofs, made sugges-
tions, and encouraged me in every possible way. I want to thank Professor
Lynn H. Loomis for accepting this book in the prestigious series of which
he is the editor and the Addison-Wesley Publishing Co. for producing it
according to their usual high standards.
J. H.
College Park, Maryland
June 1966
Contents
Terminology and Notations
Chapter 1
Banach Spaces
1. The definition of Banach spaces................................... 5
2. Some notions from algebra and topology...........................17
3. Subspaces........................................................27
4. Linear maps......................................................35
5. Linear forms......................................................40
6. The Hahn-Banach theorem..........................................45
7. The dual space...................................................52
8. The Banach-Steinhaus theorem.....................................62
9. Banach’s homomorphism theorem and the closed-graph theorem . . 68
Chapter 2
Locally Convex Spaces
1. Some notions from topology.......................................71
2. Filters..........................................................75
3. Topological vector spaces........................................79
4. Locally convex spaces............................................84
5. Linear maps, subspaces, quotient spaces..........................97
6. Bounded sets, normability, metrizability........................108
7. Products and direct sums........................................117
8. Convergence of filters .........................................124
9. Completeness....................................................128
10. Finite-dimensional and locally compact spaces..................141
11. Initial topologies.............................................149
12. Final topologies...............................................157
xi
xii
CONTENTS
Chapter 3
Duality
1. The Hahn-Banach theorem...........................................176
2. Pairings.........................................................183
3. Polarity....................................................... 190
4. ©-topologies.................................................... 195
5. The Mackey topology..............................................203
6. Barrelled spaces.................................................211
7. Bornological spaces..............................................220
8. Reflexivity......................................................226
9. Montel spaces....................................................231
10. The Banach-Dieudonn£ theorem....................................243
11. Grothendieck’s completeness theorem.............................247
12. The transpose of a linear map...................................254
13. Duals of subspaces and quotient spaces..........................260
14. Duals of products and direct sums...............................266
15. Schwartz spaces.................................................271
16. Distinguished spaces............................................288
17. The homomorphism theorem and the closed-graph theorem . . . 294
Chapter 4
Distributions
1. The definition of distributions..................................313
2. Support..........................................................317
3. Derivation.......................................................323
4. Distributions of finite order....................................337
5. Integrable distributions.........................................344
6. Multiplication...................................................347
7. Bilinear maps....................................................355
8. Tensor product...................................................365
9. Convolution..................................................... 381
10. Regularization..................................................401
11. - Fourier transform.............................................408
Bibliography.....................................................427
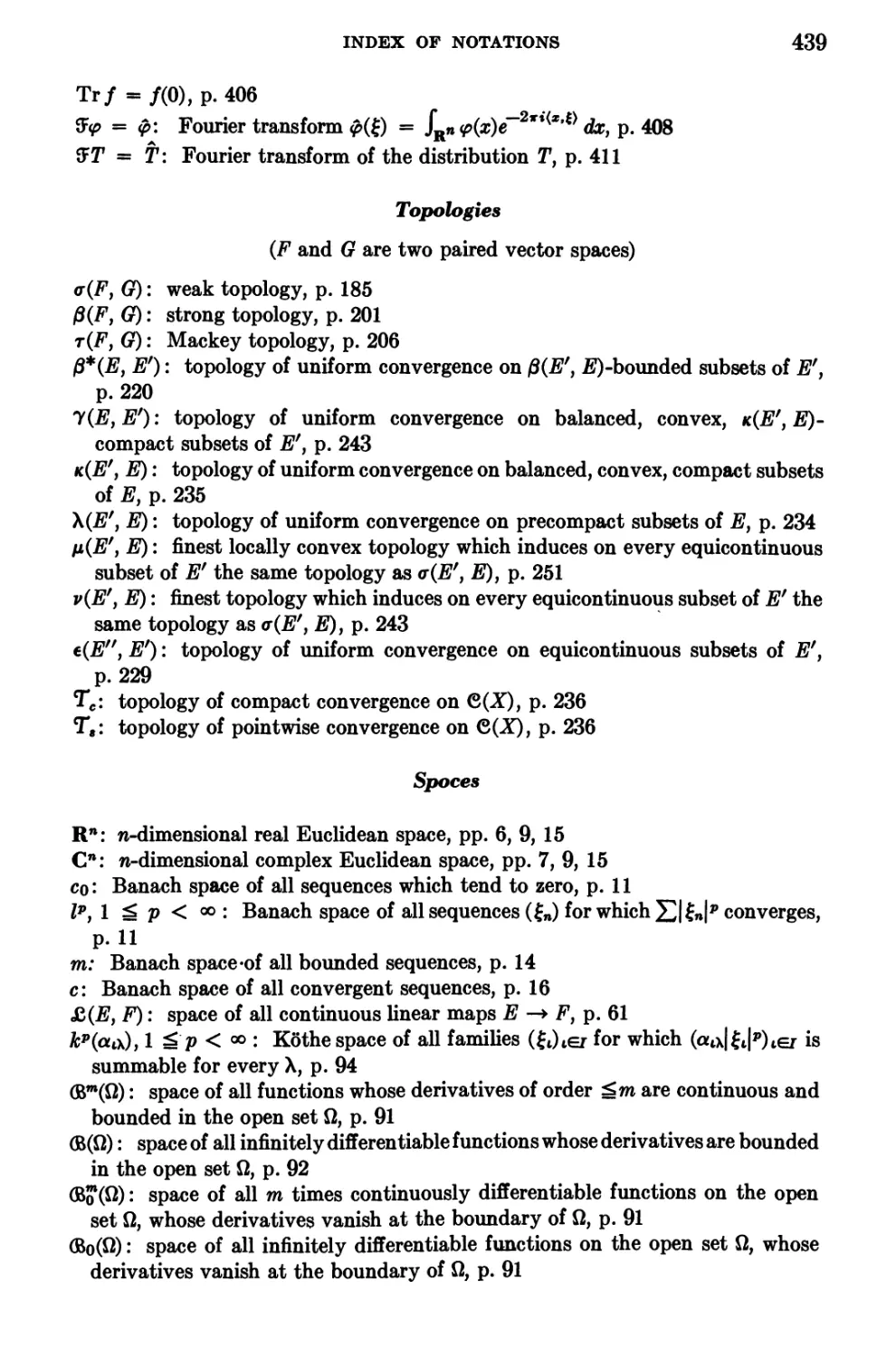
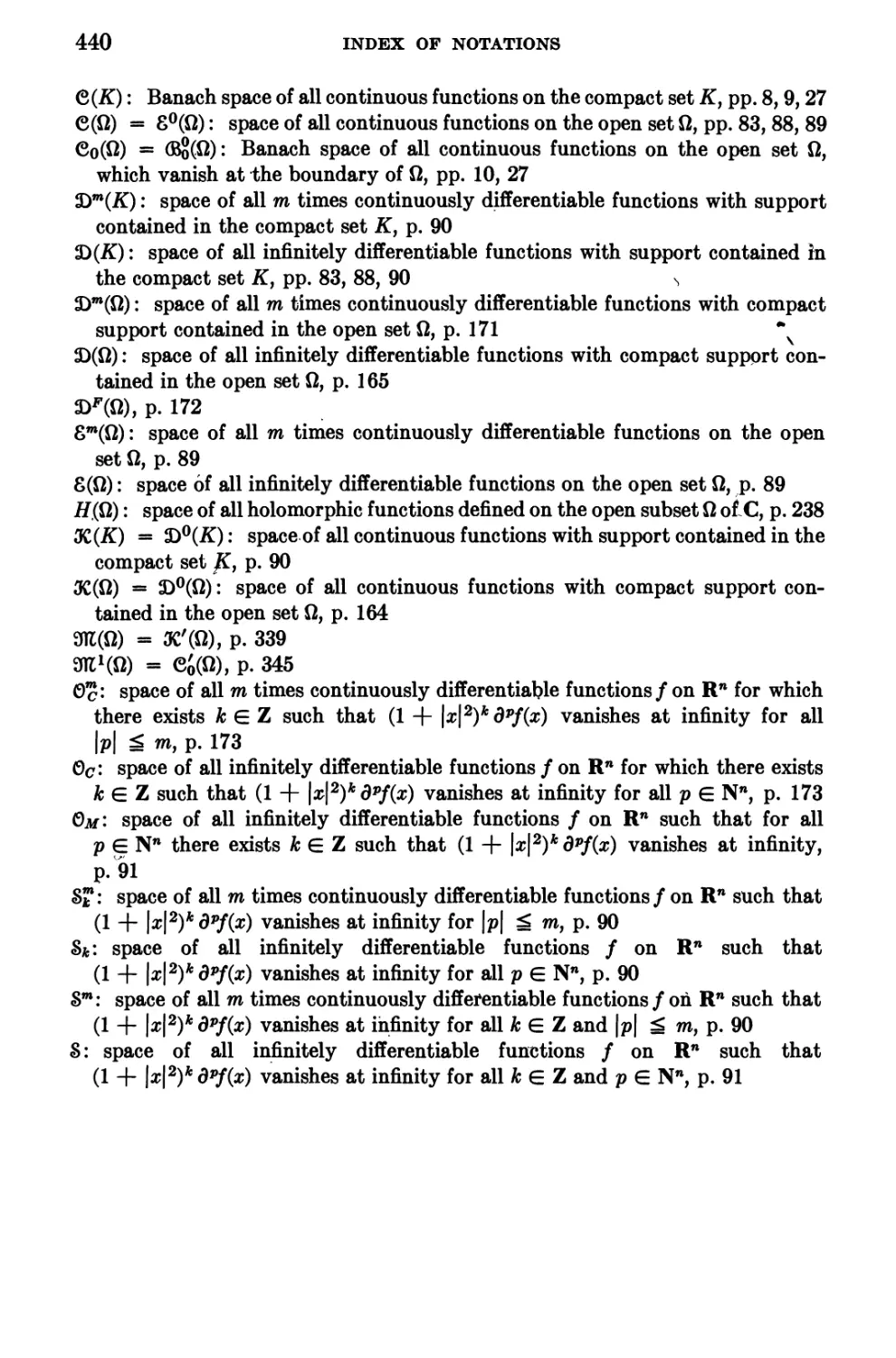
Index of notations...............................................437
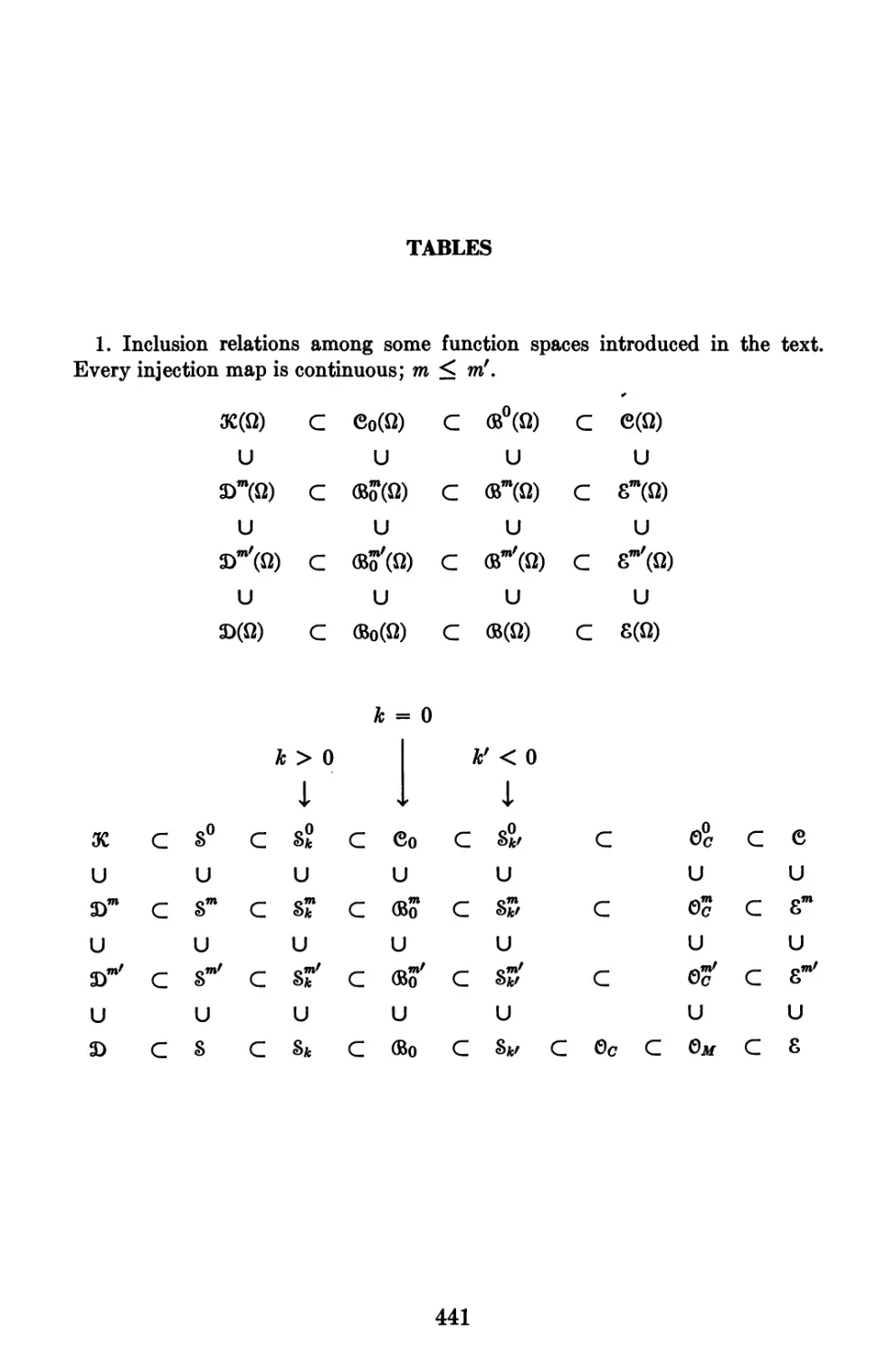
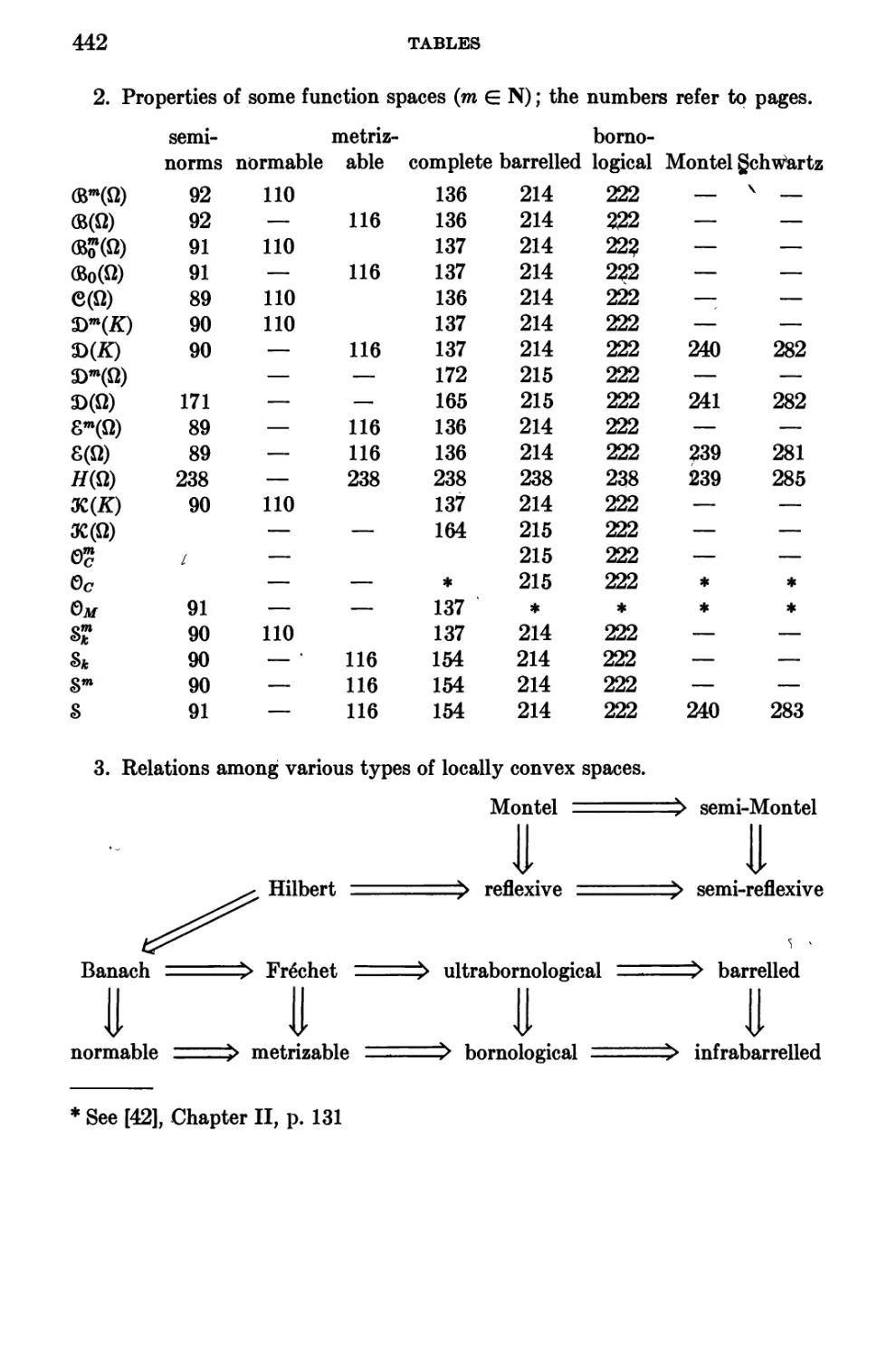
Tables.......................................................... 441
Index............................................................443
Terminology and Notations
The empty set is denoted by 0. The notation А С В means that A is a
subset of B, where the case A = В is not excluded. If A and В are both
subsets of the same set X, then A U В is their union, А П В their inter-
section, and CxA, or simply CA, the complement of A with respect to X,
i.e., the set of those points of X which are not in A. We shall often denote
a set by writing between { } first its generic element and then, separated
by J, the relations which define the set, e.g.,
A = {x | x e A}, CxA = {x | x e X, x g A}.
The cartesian product X X Y of two sets X and Y is the set of ordered
pairs (x, y) with x e X, у e Y. A map f:X —> Y from X into Y (or a
function defined on X with values in Y) is determined by a subset G = G(f)
of X X Y, called the graph of /, such that: (a) for every x e X there exists
у e Y such that (x, y) e G\ (b) if (x, y) e G and (x, yf) e G, then у = yf.
If (x, y) e G(f), we write у = f(x) от f: x »-> y. If А С X, then
7(A) = {f(x) lx e А} С К
In particular, f(X) = Im(/) is called the image of /. If В С У, then
Г\В)= {xlf(x)eB} CX.
If f(x) = f(x') implies x = x', we say that f is an injection or an injective
map. In particular, if A с B, then the map x x is injective; it is called
the canonical injection and denoted by A <-> B. If for every у e Y there
exists x e X such that f(x) = г/, i.e., if Im(/) = У, then we say that f is
a surjection or a surjective map or that f maps X onto Y. A map which is
both injective and surjective is said to be a bijection or a bijective map.
The diagonal A of the set X X X is formed by all the pairs (x, x). If
А с X X Y, then
A"1 = {{y, x) | (x, у) e A} C Y X X.
If A is the graph of the map /: X —> Y and A-1 is the graph of a map
(i.e., satisfies conditions (a) and (b) above), then we denote by/-1 the map
1
2
TERMINOLOGY AND NOTATIONS
from Y into X determined by and call it the map inverse to/. Clearly
/: X -+ Y has an inverse if and only if it is bijective.
If А С X X Y and В C Y X Z, then В о A is the subset of X X Z
formed by all the pairs (xf z) for which there exists у G Y such that
(x, y) G A and (yf z) G B. If A is the graph of a function / and В the
graph of a function g, then В <>A is the graph of the composite function g ° f.
An equivalence relation defined on a set X is determined by a subset R
of X X X such that: (a) A C Rf (b) 7?-1 = R, (c) R°R QR. If
(x, y) G 7?, we shall say that x is equivalent to у modulo R and write
x ~ y. The three conditions can be restated in the following form:
(a') for every x G X we have x ~ x (reflexivity); (b') if x ~ yf then у ~ x
(symmetry); (c') if x ~ у and у ~ z, then x ~ z (transitivity). An equiv-
alence relation R on X defines a partitioning of X into disjoint subsets
called equivalence classes (modulo R); two elements of X belong to the same
equivalence class if they are equivalent modulo R. The set X/R whose
elements are the equivalence classes modulo R is called the quotient set
of X modulo R. The map X X/R which associates with an element
of X its equivalence class (i.e., the equivalence class to which it belongs)
is called the canonical surjection.
An order on X is determined by a subset C of X X X such that:
(a) CoC C C, (b) С A С”1 = A. If (xf у) g C, we usually write x g у
or something similar. Then the two conditions can be restated in the
following form: (a') if x у and у z, then x z; (b') we have x у
and у x if and only if x = y. An order is total if for any pair z, у Qi
elements we have either x у or у x. An ordered set is directed (to
the right) if for any pair x, у of elements there exists an element z such that
x z and у z. Given a subset A of an ordered set X, we say that the
element x G X is the least upper bound (sup) of A if: (a) a g x for all
a G A; (3) if у G X is such that a у for all a G A, then x y. The
definition of the greatest lower bound (inf) of A is similar. An element x
of an ordered set is maximal if x у implies x = y. An ordered set is
inductive if every totally ordered subset has a least upper bound.
Zorn’s lemma: An inductive ordered set possesses at least one maximal
element.
We shall employ the following notations: N is the set of natural num-
bers, Z the set of integers, Q the set of rational numbers, R the set of real
numbers, and C the set of complex numbers. We shall use the same letters
if we consider any of these sets together with any of the structures (addi-
tive group, ring, field, order, metric space) defined on it. An asterisk, as
in N*, indicates that the set is to be considered without the element 0.
A real number x such that x 0 will be called positive, while a number
x > 0 will be called strictly positive. The symbols Z+, Q+, R+ will stand
TERMINOLOGY AND NOTATIONS 3
for the subsets formed by the positive elements of the respective sets. If
z = x + iy G C, we denote by z = x — iy its conjugate, by (Stez = x its
real part, and by $mz = у its imaginary part.
A surjection f: I —» A defines a family where /(t) = aL (t g Z,
at g A) and I is the index set. If Z is a subset of N, then (&n)nez is a
sequence. If (At)tez is a family of subsets of a given set, then UtGj At is
the union and Qigz At the intersection of the family. Given a set A, we
can always define a family whose elements are those of the set A with
the help of the identity map of A onto itself.
Definitions, propositions, theorems, examples, remarks, and exercises are
numbered within each section. Within the same section they will be re-
ferred to by their numbers (e.g., Definition 2); within the same chapter
by the section number and their numbers (e.g., Proposition 3.4); and in
another chapter by the chapter number, the section number, and their own
numbers (e.g., Theorem 2.12.2). The end of a proof is marked with the
symbol |. References to the bibliography are in brackets.
CHAPTER 1
Banach Spaces
§1. The definition of Banach spaces
In the whole book the letter К will always stand either for the field R
of real numbers or for the field C of complex numbers. The elements of К
are called scalars and will be denoted mostly by small Greek letters.
A structure of vector space on a set E is defined by two maps:
(1) a map (ж, у) x + у from EXE into E, called addition,
(2) a map (X, x) \x from К X E into E, called multiplication by a scalar.
These maps (or algebraic operations) must satisfy the following axioms:
(VS 1)я+г/ = г/4-я (commutativity).
(VS 2) (x + y) + z = x + (y + z) (associativity).
(VS 3) There exists an element 0 in E such that x + 0 = x for all x G E.
This element 0 is called the zero vector or the origin of E.
(VS 4) For every element x G E, there exists an element — x G E such that
x + (—x) = 0. The element — x is called the opposite of x.
(VS 5) \(x + y) = \x + \y.
(VS 6) (X + p)x = \x + px.
(VS 7) (ХД)х = Х(Дх).
(VS 8) 1 • x = x for all x G E.
If these axioms are satisfied, we say that E is a vector space (or linear space)
over the field K; the elements of a vector space are called vectors. The first four
axioms express the fact that E isz an abelian group under addition. Note that
the symbol 0 is used to denote both the zero scalar and the zero vector; this
ambiguity does not in general lead to any confusion. Axioms 5 and 6 express
the distributivity of multiplication by a scalar with respect to the two kinds of
addition. Axiom 7 expresses a kind of associativity.
A vector space over R will also be called a real vector space and a vector
space over C a complex vector space.
Here are some easy consequences of the above definitions.
(a) 0 • x = 0 for all x G E.
(Here on the left-hand side we have the scalar zero and on the right-hand side
the vector zero.)
5
6
BANACH SPACES
[1, SI]
Proof. We have x = 1 • x = (1 + 0) • x = 1 • ® + 0 • x = ® + 0 • x. Adding
—x to both sides and using (VS 2), we obtain 0 = 0 • x.
(b) X • 0 = 0 for all X G K.
Proof. We have X • 0 + X • 0 = X(0 + 0) = X • 0. Adding —(X • 0) to both
sides, we obtain X • 0 = 0. 4
(c) The vector 0 is unique.
Indeed, suppose we have two vectors 0 and O' such that x + 0 = x and
x + O' = x for all x. Then 0 = 0 + O' = O'.
(d) The opposite vector is unique. I
Indeed, if x + xr — 0 and x + x" = 0, then
xr = x1 + (x + x") = (x' + x) + x" = x".
(e) (—1) • x = — x for all x G E.
Indeed, x + (—1) • x = 1 • x + (—1) • x = [1 + (—1)] • x = 0 • x = 0 by
(a) and the assertion follows from (d).
(f) Given two vectors a and 6, there exists a unique vector x such that
a + x = b.
Proof, x = 6 + (—a) satisfies the equation and its uniqueness follows from
the fact that x must be the opposite of a + (—6).
The element a + (—6) is usually written as a — b and called the difference
of the vectors a and b.
Definition 1. Given a vector space E, a norm on E is a map x ||®||
from E into the set R+ of positive real numbers which satisfies the following
axioms:
(N 1) ||®|| = 0 if and only if x = 0.
(N 2) ||Xx|| = |X| • ||®|| for allX G К andxeE.
(N 3) ||x + j/ll ||®|| + ||y|| (the triangle inequality).
A vector space on which a norm is defined is called a normed vector space or
simply a normed space.
Example 1. The n-dimensional real Euclidean space Rn is the set of all
n-tuples x = (®i, . . . , xn) of real numbers, where addition and multipli-
cation by a scalar X G R are defined by
(®i, . . . , xn) + (з/i,. . . , yn) = (®i + i/i, . . . , xn + i/n),
X(®1, • • • , #n) = (X#l, • • • , X®n).
The zero vector is (0, . . . , 0). The eight axioms of a real vector space
can be easily verified. The norm on Rn will be denoted by |®( rather than
[1, §1] THE DEFINITION OF BANACH SPACES
7
||x||, and is defined by
The axioms (N 1) and (N 2) can be readily verified. To prove the triangle
inequality, let us first prove the Cauchy-Schwarz inequality:
n
Z xiDi
i=l
И • Ij/I-
(1)
The quadratic polynomial in X,
Z (Xi + \yi)2 = Xi + 2X E x®t + Z (2)
1=1 1=1 1=1 1=1
is positive for every real X. Now we know from elementary algebra that
if aX2 + ЬХ + c 0 for every real X, then necessarily b2 — 4ac 0.
Applying this to the polynomial (2), we obtain
which is just another form of (1).
We have, using the Cauchy-Schwarz inequality,
1^ + J/l2 = Z tXi + У^2 = Z Xi + 2 Z XW* + Z y2i
1=1 1=1 1=1 1=1
£ |x|2 + 2|x| • M + |j/|2 = (|x| + |j/|)2.
If we take the positive square roots on both sides, we have also verified
(N 3).
The norm |x| can be thought of as the length of the “line segment”
going from the origin 0 to the point x. The corresponding expression for
n = 2 and n = 3 is well known from analytic geometry. The triangle
inequality expresses the fact that the length of one side of a triangle is less
than or equal to the sum of the lengths of the other two sides. This ac-
counts for its name.
In a similar fashion the set Cn of all n-tuples z = (zi,.. . , zn) of com-
plex numbers is a complex normed vector space if we define
(n \l/2
Z w2) •
1=1 '
See Example 10.
8
BANACH SPACES
[1, §1]
Example 2. Let I = [a, b] be a finite closed interval of the real line
and let e(/) or eR(/) be the set of all continuous functions x •-* f(x\
defined on I and whose values are real numbers. The function f + g is
defined by x f(x) + g(x) and the function Xf (X G R) is defined by
x V(s). К can be immediately verified that with these operations
becomes a vector space over R, where the zero vector is the function
which is identically zero for every x G I. The norm of f G €(/) is defined
by
II/1| = max |/(x)|.
xElI
It is well known that this maximum exists (Weierstrass’ theorem [2],
Theorem 4-20, p. 73). The first two properties of a norm are quite ob-
viously satisfied.. To see the third one we observe that for any x G I we
have
l/(*) + (7(^)1 £ 1/^)1 + |р(Ж)| <: ll/ll + 11(711,
whence
II/ + pll 11/11 +Ы-
If we consider the set ec(/) of complex-valued functions, we obtain in
a similar way a normed vector space over C.
The norm of a vector space defines a metric in a natural way. Let us recall
that a metric on a set X is a map (x, у) 8(x, y) from XXX into the set R+
of positive real numbers which satisfies the following axioms:
(M 1) 8(x, y) = 0 if and only if x = y.
(М2) 8(x,y) = 5(2/,x).
(M 3) 8(x, y) 8(x, z) + 8(z, y) (the triangle inequality).
The value 8(x, y) is called the distance between the points x and y. A set X
on which a metric 5 is defined is called a metric space, and we say that X is
equipped with the metric 5.
If E is a normed vector space, we set 8(x, y) = ||s — y||. The three
axioms for a metric are verified :
(1) 8(x, y) = 0 <=> ||x — 2/|| = 0 <=> x — у = 0 <=> x = 2/, where we
use (N 1).
(2) у — x = (—l)(z — y) and thus by Axiom (N 2)
III/ - *11 = |-1| • II* - 2/11 = II* — 2/11,
i.e., S(y, x) = &(x, y).
(3) ||s — 2/11 = l|(* — 2) + (2 — 2/)|| ||ж — г|| + ||z — 3/11 by (N 3).
In the sequel we shall always consider a normed vector space as a metric
space equipped with the metric just defined.
[1, §1] THE DEFINITION OF BANACH SPACES 9
In a metric space X (and thus in a normed vector space) we have the usual
notions of topology: closed and open sets, neighborhoods, convergence, etc.
(see §2). Let us recall in particular that a sequence Crn)nGN of points of X is
said to converge to a point x, if for every e > 0 there exists an У = N(e) G N
such that 8 (x, xn) < e for every n > N. A sequence is said to be convergent
if it converges to some point.
Let (^n)nGN be a convergent sequence. Then it satisfies the following so-called
Cauchy condition: For every e > 0 there exists N = N(e) G N such that
8(xnj хт) < e for n > N and m > N. Indeed we have 8(xf xn) < e/2 for
n > N, 8(x, xm) < e/2 for m > N, and hence by the triangle inequality
8(xn, xm) 8(x, Xn) + 8(x, xm) < i € + I € = € for n, m > N.
Let us call a sequence which satisfies the Cauchy condition a Cauchy sequence.
We have just proved that every convergent sequence is a Cauchy sequence. If,
conversely, every Cauchy sequence is convergent, then X is said to be a complete
metric space. It is a basic property of the real line R (and also of the complex
plane C) that it is a complete metric space. The rational line Q is not a complete
metric space.
Definition 2. A normed vector space E is called a Banach space if it is
complete as a metric space.
Example 3. The space Rn is complete. Indeed, let
(x<m>) = .... ^(m)))
be a Cauchy sequence. It follows from the obvious inequality
(n \l/2
£ x2) = |x|
2=1 '
that for every i with 1 i n, the sequence of real numbers (x^) is
a Cauchy sequence. Thus^ by the completeness of R, there exist real
numbers x^ such that \xi — х(-п}\ < e/y/n for m > M(i,e). Setting
x = (яъ . . . , xn), we have
(n \ 1/2 / n 2\ 1/2
Zlxi-хП2) <(E^) =<
г=1 ' '2=1 '
for m > max^is* М(г, e); in other words, (x^) converges to x.
It can be shown in an entirely analogous fashion that Cn is a complex
Banach space.
Example 4. The space C(I) is a Banach space. Indeed, let (fn) be a
Cauchy sequence in Q(T). For every ж G Iwe have
|/n(*) = \\fn /m||-
10
BANACH SPACES
[1, 51]
Thus for every xeI the sequence of numbers (/n(z)) converges to some
number which we shall denote by f(x). The function /: x f(x) defined
on I is continuous, and (/n) converges to f in the space €(/). Indeed, for
every e > 0 there exists an integer M such that \\fn — fm\\ < e for
n, m > M, and thus |/n(x) — < € for every x G I and ft, m > M.
It follows that
|/(x) — yn(x)| e for every хеГ and n > M, (3)
i.e., the sequence (/n) of continuous functions converges uniformly to the
function f; hence f is continuous, i.e., / G 6(1). From (3) we have
II/ — fn\\ e forn > M, and the proof is complete.
For the convenience of the reader let us prove the theorem we have just used,
according to which the limit f of a uniformly convergent sequence (fn) of continuous
functions is itself continuous. Given e > 0 there exists an integer N such that
|/(x) -fn(x)\ < I
О
if n > N. Let n be a fixed index such that n > N. For every xo G I there
exists an a = a(#o, e) > 0 such that
|A(%) -/n(x)| < I
if |zo — z| < Thus
1/0*) -7(x)| |7(яо) -7n(xo)| + |А(яо) - А(я)| + |A(x) -7(x)|
. € . € € =
3.3.3 €
if |#o — x| < a, i.e., f is continuous at xo.
Let us also observe that a sequence (Jn) converges to J in the space Q(I)
if and only if it converges to f uniformly on I. Indeed, the relation
\\f ~ fn\\ < e is equivalent to “\f(x) — fn(x)| < € for every x G I.”
Example 5. Let e0(Rn) be the set of all continuous functions defined
on Rn and which "vanish at infinity.” By this last condition the follow-
ing is meant: for every f g e0(Rn) and every e > 0 there exists a
p = p(e, f) >0 such that |/(x) | < e if |x| > p. It is clear that e0(Rn)
is a vector space (real or complex according as we consider real- or complex-
valued functions), and if we define again ||/|| = maxxGRn|/(^)L then the
requirements of a norm are satisfied. The maximum exists again; indeed,
suppose that f(x) is not identically zero. Then for some x G Rn we have
|/(x)| = rj > 0. Now |/(x)| < ?j/2 for |x| > p. Thus
max \f(x)\ = max |/(x)|,
z£Rn |sc|^p
and the second maximum exists by Weierstrass’ theorem^
[1, §1] THE DEFINITION OF BANACH SPACES 11
Finally, e0(Rn) is complete. Indeed, it can be shown, exactly as in the
previous example, that a Cauchy sequence (/n) tends uniformly to a con-
tinuous function /. Thus we have only to prove that f g C0(Rn), i.e., that
/vanishes at infinity. Let e > 0. Then \f(x) — /n(x)| < e/2 for some n,
and |/n(z) | < e/2 for |x| > p. Thus \f(x) | < e for |x| > p.
Example 6. Denote by c0 the set of all infinite sequences x = (fn)nGN
which tend to zero. Let у = (?jn), and define
x 4“ у = (£n H- = (^£л)*
Then c0 is clearly a vector space (real or complex according as we consider
sequences of real or complex numbers). Define
||x|| = max |£„|.
nGN
Since (fn) tends to zero, this maximum is attained, and the properties of
the norm are trivially verified. We leave it as an exercise to prove that
co is complete.
Example 7. Let p be a real number, 1 p < oo. Let lp be the set
of all sequences x = (Uwgn of elements of К for which the infinite series
i i^i₽
n=0
converges. In contrast to the previous examples, it is not at all trivial
that lp is a vector space over K. We shall prove this and prove at the
same time that
COO \ 1/p
z knlp)
is a norm on lp (the first two axioms of a norm are obviously satisfied, so
that we must only prove the triangle inequality).
We start with the inequality between the weighted arithmetic and geometric
mean: Let a > 0, P > 0, and a + p = 1. Then for every и > 0, v > 0
we have
uav& au + Pv. (4)
To prove this, let us observe that the function ta is concave downward for
t > 0, since its second derivative a(a — 1)Z“~2 is negative because
0 < a < 1. It follows that the curve is below its tangent line at the
point t = 1, i.e.,
ta at +
Setting t = и/v and multiplying both sides by v, we obtain (4).
12
BANACH SPACES
И, §1]
Next we prove the Holder inequality. Let 1 < p < oo and 1/p + 1/q = 1.
Then we have
n / n \l/p / n \l/ff
E ы (E im₽) (E Hd9) > s (5)
t=l n=l ' M=1 '
where (fc) and (yi) are two arbitrary finite sequences of real or complex
numbers. The case p = q = Jlyields the Cauchy-Schwarz inequality
(since obviously Z|&w|). For the proof let us set
= e = l, 9 = 1.
SJ-ilbl” S-iM' ” ’
Then it follows from (4) that
E 7-------xM '?г1----7ТГ = E = E (««* +
£ (EIMWEInd9)1'9
= Ui + #E vi
= a + P = 1,
since Ew» = £>« = 1- Multiplying by (E IM’)1/P(E |nd9)1/e, we
obtain (5).
Finally we prove the Minkowski inequality,
(n \l/p / n \l/p / n \ 1/p
E (E im₽) + (E Hd”) • (6)
1=1 ' 'i=l ' '1=1 '
This is clear for p = 1. For 1 < p < oo we have
2 lb* + Vi\P = 2 + Vi\P 1 • |£i +
E ifc + ndp_1(iM + ind)-
Using the Holder inequality, we have
E + ’hl’-1 • kd (E и*- + nd(₽-1)9)1/9 • (E IM’)1/P
= (Е1ь + М’)1/9-(Е1М’)1,’>
since (p — l)q = p. Adding the similar estimate for E |&+ nd’-1 • lnd>
we obtain
E H.- + м₽ (E ifc + M’)1/9[(E im₽)1/₽ + (E hd’)1'”]-
Dividing both sides by (E |fc + nd’)1/9> we obtain (6).
[1, §1]
THE DEFINITION OF BANACH SPACES
13
Let us now return to the space lp. If (fc) G lp and (w) G lp, then it
follows from (6) that
(n \HP / 00 \l/p / » \1/P
£ if.- + <) ^(£т +(£н,г)
i=0 ' 4=0 ' 4=0 '
for any n G N, and thus
(00 \l/p / 00 \l/p / 00 \l/p
£ lb + ni\p) * (£ it,-r) + (£ н.г) • (7)
i=0 ' 4=0 ' 'i=0 '
Consequently, (fc + %•) G and the axioms of a vector space can now
be immediately verified. The inequality (7) is just the triangle inequality.
To conclude we prove that lp is complete. Let (x(w)) = ((&(w))) be a
Cauchy sequence in lp. Then for each i G N the numerical sequence
(f/w))mGN is a Cauchy sequence and therefore (&(w)) converges to some
number &. There exists a constant д > 0 such that
/ v \l/p
(£ if?’ - #T) iix(m> - x(n>n д
4=0 /
for all m,n,N G N. Letting n —> oo, it follows that
/V \l/p
(£ If,- - frr) M,
4=0 '
and hence by the Minkowski inequality
(N \1/P
£ |ftf) z Ill’ll + д
i=0 '
for all N G N; i.e., the sequence x = (&) belongs to lp. Furthermore, for
any € > 0 there exists n0 G N such that
(N \1/P
£ 1йл) - £?T) ll*(w) - *(n)ll < e
i=0 '
for m, n > n0 and for all N G N. Letting n —> oo, it follows that
(N \1/P
£ If,- - f?T) e
i=0 '
for/n > n0; and letting N —» oo, we see that ||x — x(w)|| < eform > n0.
Thus (x(w)) tends to x, and we have proved completely that lp is a Banach
space.
14
BANACH SPACES
[1, §U
Example 8. Our last example is the space m of all bounded sequences
x = (£n)« It is clear that if x = ($n) G m and у = (ijn) E then
x + у = ($n + Уп)
and
Xx = (X$n) G m.
The norm is now defined as
IM = sup |£„|,
nGN
since a maximum of the values |£n| does not necessarily exist. The first
two properties of a norm are again trivial to verify. To prove the third
one, let us observe that |$n + ^n| |$n| + Ы Ikll + \\y\\- Thus
||x + y\\ g ||x|| + ||i/||. The proof of the completeness of m is left to the
reader.
A very important class of Banach spaces is constituted by the Hilbert
spaces, to the definition of which we now turn.
Definition 3. A vector space E over К is called an inner product space
if there is defined a map (x, y) (x | y) from E X E into К which has the
following properties:
(SP 1) (x | x) 0 for every x G E.
(SP 2) (x | x) = 0 if and only if x = 0.
(SP 3) (x | y) = (y | x) for every x G E, у G E.
(SP 4) (Xx + py\z) = X(x | z} + p(y | z) for every X, д G K, x, y,
and z G E,
The value (x | y) is called the inner or scalar product of the vectors x and y.
Let us observe that in the case when К = R, Axiom (SP 3) simply
means that (x | y) = (y | x) for all x G E, у G E. It follows from (SP 3)
and (SP 4) that
(x | X?/ + pz) = X(x | y) + p(x I z)
for X, д G K, x, y, z G E, where of course the right-hand side is simply
X(x I У) + д(я I z) if К = R.
The scalar product defines a norm on E in a natural way. Indeed,
setting
1Ы1 = +V(x | x) (8)
we have ||a:|| e R+ by (SP 1) and ||a:|| = 0 if and only if x = 0 by (SP 2).
Furthermore, (Xx | Xx) = ХХ(ж | x) = fX|2(a? | x). Thus ||Xa;|| = |X| • ||ж||.
[1, §1]
THE DEFINITION OF BANACH SPACES
15
To prove the triangle inequality, let us first prove the inequality
[<ReO 12/)| ||x|| • ||y||. (9)
By (SP 1) the expression
(® + Xy | x + Xy) = (x | x) + X(x | y) + X(x | y) + |X|2(j/1 y)
is always positive, and in particular for real X the quadratic polynomial
in X with real coefficients,
(® I ®) + 2<Ste(x I y) • X + (у I y)X2,
is always positive. As in the proof of (1), we have
(<Re(a: | y))2 — (x | x) • (y | y) SO,
which is just another form of (9). We now have
II® + И2 = (® + У | X + y) = (x I x) + (x I y) + (y I x) + (y I y)
= M2 + 2(Re(® I у) + 1Ы12 S IMI2 + 2||x|| • IIj/II + 1MI2
= (INI + INI)2.
Taking the positive square roots on both sides, we obtain the triangle
inequality.
Definition 4. Let E be an inner product space and ||x|| the norm defined
by (8). If E is complete for this norm (i.e., E is a Banach space), then E
is said to be a Hilbert space.
Example 9. In the vector space Rn we define a scalar product by setting
(® I у) = L
t=l
Axioms (SP 1) through (SP 4) are trivial to check and the norm obtained
from the scalar product is the same as the norm introduced in Example 1.
Thus Rn is a real Hilbert space.
Example 10. In the vector space Cn we define the scalar product of
two vectors z = (z\,. . . ,zn) and w = (wj,. . ., wn) by
(z | w) = £ Zfa.
t=i
It is again trivial to verify that Axioms (SP 1) through (SP 4) hold, and
so Cn is an inner product space over C. But we can prove exactly as in
Example 3 that Cn is complete; hence Cn is a complex Hilbert space.
16 BANACH SPACES [1, §1]
Example 11. For two vectors x = (fc) and у = (in) of the space I2
we define the scalar product by
(x I У) = £ toi reap. (x I y) = £
1=0 1=0
according as we consider real or complex sequences. The right-hand side
series converge by virtue of inequality (5). The norms obtained from
these scalar products are the same as the norms defined in Example 7, and
thus I2 is a real or a complex Hilbert space.
Example 12. The set of all continuous functions on an interval
I = [a, b] with the inner product
(/|p) = Cf(x)g(x) dx
Ja
is an inner product space. We shall see later (Chapter 5) that it is not
complete.
We conclude this section with the proof of the general Cauchy-Schwarz
inequality:
Proposition 1. Let E be an inner product space. Then
I(*|3/)I =s IMI-M
for all x G E} у g E,
Proof, For a real E the statement is equivalent to inequality (9). Let
E be a complex inner product space. For x g E, у g E there exists an
e*e such that e'e(x | y) = (ei9x | y) 0. But then |(z 11/)| = ei9(x | y),
and by (9)
(e“x | y) = |(Re(^ | y)\ ||Л|| • \\y\\ = ||z|| • \\y\\. |
Exercises
1. Prove that the spaces co and m are complete.
2. Let c be the set of all sequences x = (fn) which converge to some finite
limit. Define on c a structure of Banach space.
3. Let I = [a, b] be a finite closed interval of the real line and let m be a
strictly positive integer. Let 6W(Z) be the set of all functions x i-> f(x) defined
on I which have continuous m-th derivatives. Prove that with the norm
ll/ll = max |/(x) | + max |/<m)(z) |
the set ew(Z) becomes a Banach space.
[1, §2]
SOME NOTIONS FROM ALGEBRA AND TOPOLOGY
17
§2. Some notions from algebra and topology
Let E be a vector space over a field K. A nonempty subset F of E is said to
be a linear subspace (or simply subspace) of E if the following two conditions are
satisfied:
(SS 1) If x G F and у E Ff then x + у G F.
(SS 2) If x G F and X G K, then Xx G F.
If these conditions are satisfied, then for x G F we have also —x = (—1) • x G F
and x + (—x) = 0 G F. The operations of addition and multiplication by a
scalar are defined on F, because F is a subset of Ef and by our conditions they
always yield elements of F; we say that the operations on E induce the operations
on F. It is trivial to check that under the induced operations F is a vector space
over K. There are two trivial subspaces of E (except when E = {0}): the space
E itself and the subspace {0}. All other subspaces are called proper.
A linear subspace of a normed space or of an inner product space is in a
natural way a normed space or an inner product space itself.
If (^t)ter is an arbitrary family of linear subspaces of E} then the intersection
П igz Fl is also a subspace of E. Given any set A of elements of Ef we can there-
fore speak of the smallest linear subspace containing A, i.e., the intersection of
all linear subspaces containing A. This smallest linear subspace F will be called
the linear subspace generated by A (or the linear hull of A), and A is a set of
generators of F. The subspace F is the set of all linear combinations of elements
of A, i.e., the set of all expressions Хьи + Х2Я2 + • • • + Xn^n, where X» G К
and Xi G A.
A family (xi)iei of elements of E is said to be algebraically free if a relation
Sier Хсхс = 0 can hold only if all Xt = 0. Equivalently, (zjier is algebraically
free if no xL belongs to the subspace generated by the xK with к # 1. A family
consisting of a single nonzero element is algebraically free, and if (zt) is an
algebraically free family, then Xi # xK for 1 И к. A subset L of E is said to be
algebraically free if the family defined by the identical bijection of L onto itself
is algebraically free. The elements of an algebraically free set are also said to
be linearly independent. A family (xl)lei which is not algebraically free is said
to be linearly dependent; this means that there exists a family (Xt)tGi of scalars,
a finite number of which are different from zero, such that X1G1 XlXi = 0.
An algebraically free family of generators of a subspace F is called an algebraic
basis (or Hamel basis) of F. It follows from Zorn’s lemma that every subspace F
has an algebraic basis? More precisely, given a set of generators $ of F and an
algebraically free subset L in F such that SjL, there exists an algebraic basis
В of F such that $ D В Э L. In particular, an algebraic basis of a subspace
F of E can always be completed to become an algebraic basis of E. An algebraic
basis is a maximal algebraically free subset and also a minimal set of generators.
A family Q/t)tGz of elements of F is an algebraic basis of F if and only if every
x G F has a unique representation of the form x = Xt2/t (where all except
a finite number of Xt are equal to zero).
18
BANACH SPACES
[1, §2]
If a vector space E has an algebraic basis with a finite number of elements,
then every other algebraic basis of E is finite and has the same number of ele-
ments. It is clearly enough to prove that if an algebraic basis В of E has n
elements, then any other algebraic basis C has at most n elements; this is a con-
sequence of the following lemma:
Let г/i,..., Уп+i be n + 1 elements of E which are all linear combinations of n
elements xi,. .. ,xn of E. Then the elements t/i,. .., t/n+i are linearly dependent.
The proof goes by induction. For n = 1 the lemma is true, since if y\ = Xx
and у2 = px, then pyi — \y2 = 0. Assume therefore that the lemma is true
for n — 1. We can write
n
Vi = (j = 1, • • •, И + 1)
1=1
and it is no restriction to suppose that Xn 0. The n elements
Уз = Уз ~^~У1 (j = 2,.. ., П + 1) (1)
An
are linear combinations of X2,. .., xn, and therefore by our induction hypothesis
we have a linear relation
n + l
X MH = °’
3=2
where not all pj are zero. From (1) we obtain the relation
V1 V1* n
L w ~ У1 = °’
~2 ~2 X11
which proves that the y3- (j = 1, 2,. .., n + 1) are linearly dependent. Q.E.D.
Coming back to our original statement, suppose that C has more than n ele-
ments. Then we can pick n+l elements from (7, and these n+l elements are
linear combinations of the n elements of B. Hence, by the lemma, the n+l
elements are linearly dependent, which contradicts the fact that C is an algebraic
basis.
If E has a finite algebraic basis, then the number n of elements in any algebraic
basis of E is called the algebraic dimension of E and denoted by dimK E or dim E.
If E does not have a finite algebraic basis, then we say that E is infinite-dimen-
sional. It can be proved that even in the infinite-dimensional case two algebraic
bases of E have the same cardinal ([7], §1, no. 12, Corollary 12 of Proposition 23
or [52], §7, 4.(2)).
Example 1. An algebraic basis of the vector space Rn is clearly given by
then elements Ci = (1, 0,..., 0), e2 = (0,1,..., 0),..., en = (0, 0,... ,1).
Thus the dimension of Rn over R is n, which justifies its name. The basis
is called the canonical basis of Rn.
Similarly, it can be seen that dimc Cn = n.
И, §2]
SOME NOTIONS FROM ALGEBRA AND TOPOLOGY
19
If E is a vector space x G E and A G E, then x + A is the set of all vectors
x + у with у G A and is called the translate of A by x. Similarly, if A G E,
В Q E, then A + В is the set of all vectors x + у with x G A, у G B, and
A — В is the set of all vectors x — у with x G A, у G B. Finally, if X G К
and A С E, then XA is the set of all vectors Xx with x G A.
Before we link the algebraic concepts just recalled with the norm on
the vector space, we must also recall some notions and results from the
topology of metric spaces. This will be an excellent occasion to review
some topological properties of the space Rn, with which the reader is
anyhow expected to be familiar.
Let X be a metric space with distance 3(z, y) defined on it (cf. §1). A subset
A of X is in a natural way a metric space under the metric induced by that of X.
Let a be a point of X and p a strictly positive real number. The set Bp(a) of
all points x G X such that 5 (a, x) p is called the closed ball with center a
and radius p. A set V С X is a neighborhood of a if it contains some closed ball
with center a. A sequence (zn)nGN of points of X converges to a if and only if
for every neighborhood V of a there exists an integer N such that xn G V for
every n > N.
Let A be a subset of X. A point x G X is said to adhere to A if every neigh-
borhood of x contains points of A. The point x adheres to A if and only if there
exists a sequence of points of A which converges to x. The set A of all points
adherent to A is called the adherence or closure of A. Clearly, АСА. If A = A,
then the set A is said to be closed. The intersection of any family of closed sets
is closed; the union of finite family of closed sets is closed.
If A and В are two subsets of X, we denote by 3(A, B) the greatest lower
bound of all numbers 5(z, у), where x varies in A, у varies in B, and we call it
the distance between the sets A and B. If A = {a} is reduced to one element,
we write 3(a, B) instead of 5({a},B). We have 3(z, A) = 0 if and only if
x G A.
The interior A of a subset A of X is the set of those points x G X which possess
a neighborhood contained in A. Clearly A C A. If A = A, then the set A
is said to be open. A is open if and only if its complementary CA is closed.
The union of any family of open sets is open; the intersection of a finite family
of open sets is open. The total space X and the empty set 0 are both open and
closed. For any set А G X the set A is closed and A is open. If А G X, В G X,
and А Э B, then A is dense in B. If A = X then A is everywhere dense.
Let X and У be two metric spaces with their respective metrics 5 and y. A
map f from X into Y is said to be continuous at the point a G X, if for every
neighborhood W of the point/(a) G У there exists a neighborhood V of a such
that f(x) G W for every x G V (i.e., /(У) G W). This is equivalent to the
following: to every e > 0, there exists a > 0 such that 5(a, x) < a implies
^(/(a), /(ж)) < e, and also to the following: for every sequence (zn) tending to a
the sequence (/(zn)) tends to /(a). A map f: X —> У is said to be continuous
if it is continuous at every point of X. The map f is continuous if and only if
for every closed (resp. open) set A in У the set J”1 (A) is closed (resp. open)
20
BANACH SPACES
[1, §2]
in X. More generally, let Xi (1 i n) be a finite family of metric spaces
and let / be a map of the cartesian product П”=1 into Y (i.e., a function
(xi,. .., хя) •—> /(xi,. . ., Xn) of n variables, where x» varies in Xi). The map
/ is said to be continuous at the point (ai,. . ., an) if for every neighborhood
W of the point /(ai,.. ., an) there exist neighborhoods Vi of the points
di (1 i n) such that /(xi,. . ., xn) G W for Xi G Vi (1 i n) (i.e.,
/0В-1 Ft) G TF). A continuous map from П”=1 А» into У is a map which is
continuous at every point of П”=1 А».
Two metric spaces X and Y are isometric if there exists a bijection /: X —> Y
(called isometry) such that ^(/(x), f(y)) = 6(x, y) for every x, у G X. Two
metric spaces X and Y are homeomorphic if there exists a bijection /: X —> Y
(called homeomorphism) which is continuous together with its inverse /-1.
Clearly, an isometry is a homeomorphism, but the converse is not necessarily
true. A homeomorphism transforms closed sets into closed sets and open sets
into open sets.
Let E be a normed vector space and a G E. The bijection x •—> x + a,
called translation by a, is an isometry of E onto itself, since
||® + a — (y + a)|| = ||x — j/||.
If Bp = Bp(0) then Bp(a) = Bp + a; i.e., the ball with center a and
radius p is obtained through translation by a from the ball with center 0
and radius p. If X is a nonzero scalar, the bijection x •—> Xx, called homothecy
by X, is a homeomorphism of E onto itself. Indeed,
||Xx — Ay|| = |X| • ||z — 2/|| < €
if ||x — у|| < e/|X|, and the inverse map, given by x •-* X-1x, is also
continuous.
Proposition 1. Let E be a normed vector space. Then the map
(x, у) x + у from E X E into E, the map (X, x) •-> Xx from К X E into
E, and the map x ||x|| from E into R+ are continuous. If E is an inner
product space, then the map (x, y) (x | y) from E X E into К is also
continuous.
Proof. We have ||a + b — (x + y)|| ||a — x|| + ||fe — y||. Thus
II® + b — (x + 2/)|| < €
if
II® — *11 < and llb — у\\ < H
Next we have the identity
$x — Xa = ($ — X)(x — «) + (£ — X)a + X(x — a);
[1, §2]
$>' SOME NOTIONS FROM ALGEBRA AND TOPOLOGY
21
hence ||£r — Xa|| < e, provided:
|$| < х/ё, ||x|| < х/ё if X = 0, a = 0,
ICl < min ’ II* ~ a|| < ^| if X = 0, a # 0,
lf-xl<^’ < min (-\/l ’ 2щ) if X И °’ a = 0’
le-x| <-(4’1н)’ I1<”“(лЛ-зщ)
if X # 0, a # 0.
The continuity of the norm follows from the inequality
1 llxll - IMI I ||x - 2/Ц. (2)
To prove this inequality let us observe that
IMI = II* — У + 2/11 II* - 2/11 + IMI,
i.e., ||x|| — Ц2/Ц ||x — 2/Ц- For reasons of symmetry we also have
II»II ~ 11*11 — II* ~ »ll- The last two inequalities imply (2).
Finally, the continuity of the scalar product follows from the identity
(* 12/) — (a I b) = (x — a \ у — Ъ) + (x — a \ Ъ) + (a \ у — b)
similarly as in the proof of the continuity of multiplication by a scalar. |
An open cover of a set A in a metric space X is a family (Bt)ter of open sets
such that AC (J ter Bt. If J С I and is a cover of A, we say that
is a subcover of (Bt)tei. A set А С X is compact if any of the following
equivalent conditions is satisfied:
(1) Every sequence (xn)neN of points of A has a subsequence which converges
to a point of A.
(2) Every open cover of A has a finite subcover (Heine-Borel-Lebesgue
theorem).
(3) If (Ft)ter is any family of closed sets such that Q ter is disjoint from A,
then there exists a finite subfamily of (Ft)tez whose intersection is already dis-
joint from A (Cantor’s theorem).
Let us make the important remark that these conditions are equivalent only
in metric spaces and not in general topological spaces (see Chapter 2, §10).
A compact set is always closed. If f is a continuous map of a metric space X
into a metric space Y and A is compact in X, then /(A) is compact in Y, A
set A is relatively compact if its closure is compact or, equivalently, if every
sequence of points of A has a subsequence which converges to a point of X (but
not necessarily of A).
In a metric space X a set A is bounded if it is contained in some ball Bp(a).
22
BANACH SPACES
[1, §2]
In a normed vector space a bounded set is always contained in a ball
Bff(0) == Ba with center at the origin. Indeed, if ||x — a|| p for every x in
A,then
IMI = Их - a + all g ||® - a|| + ||a|| g p + ||a||,
i.e., A is contained in the ball Ba with center 0 and radius a = p + ||a||.
A compact set is always bounded. It is a basic property of the spaces Rn
and Cn that in them the converse is also true:
Weier str ass-Bolzano theorem: A closed bounded subset of Rn or Cn is compact.
A bounded set of Rn or Cn is relatively compact.
This theorem is not true for infinite-dimensional Banach spaces; we shall
give an example below. In fact we shall see in Chapter 3, §9 that if in a
Banach space E every bounded set is relatively compact, then E is neces-
sarily finite dimensional.
Example 2. Consider in I2 (Example 1.7) the set U of all unit vectors
e0 = (1, 0, 0,. . .), ei = (0,1, 0,...),.. . . The set U is bounded, since
||en|| = 1 for all n G N. Since ||en — ew|| = y/2 > 1 for n # m, any
ball with radius < J contains at most one element of U. Therefore U is
also closed. But U is not compact, since the sets Vn = {x j ||s — en|| < 1}
form an open cover of U, and clearly no proper subfamily of (Fn) covers U.
A continuous function defined on a compact set is always bounded, and
attains its maximum and its minimum (Weierstrass’ theorem; we have used this
property in Examples 2 and 5 of §1).
We have already introduced in the previous section the concept of a complete
metric space. A compact metric space is always complete. A complete subset
of a metric space is always closed. If a metric space X is not complete, then we
can construct a complete metric space £, called the completion of X, such that
X is isometric with a subset Ao of £ and Ao is dense in %. Most often X will
be identified with Ao, and hence A is considered to be a subset of %. The con-
struction of £ generalizes the familiar construction of the set R of real numbers
from the set Q of rational numbers; we shall recall it briefly. Let S be the set
of all Cauchy sequences of A. In S we introduce an equivalence relation R:
two Cauchy sequences (xn) and (yn) are equivalent if the sequence (b(xn, уп))
tends to zero. It is trivial to check that R is indeed an equivalence relation.
£ is now the set of all equivalence classes of S modulo R (i.e., £ is the quotient
set S/R). Let us define a metric on £. If x and у are two elements of £, let
(xn) and (i/n) be elements of S representing these equivalence classes. Then we
set
5(Д у) = lim b(xn, yn).
П—><Х)
The following points are now easy to check: (1) the limit on the right-hand side
really exists, (2) it is independent of the choice of the representatives (xn) and
(yn) in the equivalence classes f and y, (3) <5(f, y) is a metric on %. Now let
[1, §2] SOME NOTIONS FROM ALGEBRA AND TOPOLOGY 23
x G X, let (xn) be the Cauchy sequence in which xn = x for every n G N, and
let x be the class of (xn) modulo R. The map x i—> x is clearly an isometry of X
onto a subset Xo of R- Let ж G let (zn) be a representative of x in S, and
let xn be the image in Xo of xn G X under the isometry just defined. Then
(xn) converges to x, since
xn) = lim 8(xm, xn).
m—>oo
This proves that Xo is dense in Finally, we have to prove that £ is com-
plete. Let (zn)nGN be a Cauchy sequence in %. For every n G N there exists
a yn G Xo such that d(xn, yn) < 2~n. Let yn be the image of yn G X. Then
(l/n) is a Cauchy sequence in X, since
Ут) = Ут) = S(j/n, %n) “1“ %m) “1“ b(xm, Ут)}
and thus (i/n) defines an element x G By what we have said above, (yn)
converges to x\ but then (zn) also converges to x.
Let X and Y be two metric spaces with their respective metrics 5 and rj. A
map f from X into Y is said to be uniformly continuous if to every € > 0 there
exists an a > 0 such that ??(/(z), f(y)) < e for any two points x, у G X satisfy-
ing 8(x, y) < a. We have a similar definition for a map from a product space
IL=i X» into Y. A uniformly continuous map is clearly continuous; the con-
verse is in general false. On a compact set, however, every continuous map is
uniformly continuous. If /: X —► У is uniformly continuous and (xn) is a
Cauchy sequence in X, then (/(xn)) is a Cauchy sequence in У.
Proposition 2. Let f be a map from a normed vector space E into a
normed vector space F. The map f is uniformly continuous if for every neigh-
borhood W of the origin in F there exists a neighborhood. V of the origin in E
such that x - y eV implies f(x) — f(y) G W for x, у G E.
Proof. Both conditions express the fact that to every e > 0 there exists
an a > 0 such that ||/(^) — f(y) || < € whenever ||s — y|| < a. |
Remark 1. Though we shall not need nor use the notion of uniform structure
in this book, it may be worth while to note for the interested reader that the
uniform structure deduced from the metric space structure of a normed vector
space coincides with the uniform structure deduced from the abelian group
structure. Proposition 2 is an immediate consequence of this rather obvious fact
(see also Chapter 2, §9).
Proposition 3. Let E be a normed vector space. The map (x,y) x + у
from E X E into E and the map x •—> ||z|| from E into R+ are uniformly con-
tinuous. For every X G К the map x •—> Xx from E into E is uniformly
continuousj and for any a G E the map % %a from К into E is uniformly
continuous. If E is an inner product space and a G Ef then the map
x ь-> (я | a) from E into К is uniformly continuous.
24
BANACH SPACES
[1, §2]
This follows immediately from the inequalities
||(a + b) — ty 4- j/)|| ||a - x|| + ||b — j/||,
I 11*11 - IMI I II* - 3/11,
l|X* - Xj/|| |X| • ||x - y||,
Ufa — 4all If — ’ll • H,
К* I a) - (У I a)| II* — 3/11 • ll«ll- I
Let X be a metric space, Y a complete metric space and A a subset of X.
Then to every uniformly continuous map / from A into Y there corresponds a
unique uniformly continuous map f from A into Y such that fix') = f(x) for
every x G A (i.e., such that the restriction of f to A coincides with /). Let us
recall the construction of f. Let x be a point which adheres to A but does not
belong to A, and let (xn) be a sequence of points of A which converges to x.
Then (xn) is a Cauchy sequence in X and, since f is uniformly continuous,
(Ж)) is a Cauchy sequence in Y which converges to some point у G Y because
Y is complete. Define у = f(x). It is easy to check that у is independent of
the particular choice of the sequence (xn) tending to x. For x G A, we_define,
of course, f(x) = f(x). Let us prove that f is uniformly continuous on A. Let
e > 0 be arbitrary and let a > 0 be such that 8(x,y) < 3a implies
f(yj) < */% for x, у G A. We claim that d(x, y) < a implies
ч(7(*)> 7(з/)) < « for x, у e J.
Indeed, let x, у G J be such that 5(x, y) < a. There exists a sequence (xn)
of points of A tending to x and a sequence (yn) of points of A tending to y.
It follows that there exists an m G N such that b{xn, xm) a/2 and
Styn,ym) a/2for» ^_m. Hence i?(/(xn), ftym)) < e/3,niftyn), ftym)) < «/3
for n m, and thus i?(/(x), ftym)) e/3, nifty), fty^)) g e/3. We also have
5(x, x„,) < a, 5(y, ?/m) < a, and thus
5(xm, 3/m) Stym, x) + 5(x, J/) + Sty, ym) < a + a + a = 3a,
which implies that ч(/Сг»>), ftym)) < «/3. Finally, we obtain
nifty), 7ty)) £ nifty), ftym)) + niftym), ftym)) + niftym), fty))
< 3 + 3 + 3 e‘
It is quite obvious that f is unique.
Of course, we have an entirely analogous theorem for a uniformly continuous
map from a subset of a product of metric spaces into a complete space.
If f is an isometry from A onto /(A), then f is an isometry from A onto /(A).
This shows that the completion of a metric space X is unique up to an
isometry.
[1, §2]
SOME NOTIONS FROM ALGEBRA AND TOPOLOGY
25
A subset A of a metric space X is said to be precompact (or totally bounded)
if its closure in Ё is compact. A is precompact if and only if for every e > 0
there exists a finite family ai, Л2,. .., an of elements of X such that given x G A
we can find an aj which verifies d(x, aj) < e. In other words, A is precompact
if and only if for every e > 0 it can be covered by a finite number of open balls
(see Exercise 2) Oe(ai),. .., 0e(an) wither adius e. Indeed, the balls 0e(a),
where a runs through A, cover the closure A of A in JXj and since A is compact,
it can be covered by a finite number of these balls, which cover A a fortiori.
To prove that the condition is also sufficient, it is enough to show that if it is
satisfied, then every sequence (zn) of elements of A has a subsequence which is
a Cauchy sequence. First, cover A by balls of radius 1. One of these balls
contains infinitely many terms of the sequence (zn); pick one of these terms
and call it хЯ1. Next, cover A by balls of radius J. The intersection of one of
these balls with the first ball contains infinitely many terms of (zn). Pick one
whose index is larger than ni and call it хЯ2. Continuing this way we obtain a
sequence (xnA.)jteN, where b(xnk, xni) l/2m-1 if k, I > m.
If X is complete, then of course precompact sets are the same as relatively
compact sets.
Definition 1. Two normed vector spaces E and F over the same field К
are isometrically isomorphic if there exists a bijection f: E —> F such that
f(x + y) = f(x) +f(y), f(Xx) = X/(z), and ||/(x)|| = ||x||
for all x, у G E, \ E K. Two inner product spaces E and F over the same
field К are isometrically isomorphic if there exists a bijection f.E—+F such
that
f(x + y) = f(x) +f(y), f(Xx) = Xf(x), and (/(x) | /(j/)) = (x | y)
for all x,y G E,\ G K.
Proposition 4. Let E be a normed vector space. Then there exists a
Banach space Ё such that E is isometrically isomorphic to a linear subspace
Eq of Ё and that Eq is dense in Ё. The space Ё is unique up to an isometric
isomorphism.
Let E be an inner product space. Thm there exists a Hilbert space Ё such
that E is isometrically isomorphic to a linear subspace Eq of Ё and that Eq
is dense in Ё. The space Ё is unique up to an isometric isomorphism.
Proof. Let Ё be the completion of the underlying metric space of E,
equipped with the metric 8, and let Eq be the dense subspace of Ё isometric
with E. The functions
(я, y) x + y, x •-> \x (X G K), x •-> ||z||
can be transported to Eq, and since they are uniformly continuous
(Proposition 3), they can be extended uniquely to Ё. Similarly, if E is an
26
BANACH SPACES
[1, §2]
inner product space, for each a G Eq the map x (x | d) is uniformly
continuous on Eq and can be extended uniquely to Ё, and then for each
b G Ё the map у >-> (b | y) is uniformly continuous on Eq and can be
extended uniquely to Ё. The maps so defined satisfy Axioms (VS 1)
through (VS 8), (N 2), (N 3) (resp. (SP 1), (SP 3), (SP 4)) trivially
because Eq is dense in Ё. Let us show this for instance for (VS 1). Let
x,y Then there exist two sequences (xn), (yn) in Eq which tend to x
and у respectively. By the continuity of addition (xn + yn) tends to
x + у and (yn + zn) tends to у + x. But xn + yn = yn + xn, and since
a sequence has at most one limit, x + у = у + x. We can see similarly
that the distance 8(x, y) already defined on Ё coincides with the value
||z — y\\ of the extended norm (cf. Exercise 3 below). This implies that
Axioms (N 1), resp. (SP 2), are also satisfied on Ё. |
Remark 2. Ё is called the completion of E. We usually identify E with
Eq and thus imbed E into Ё.
Exercises
1. Supply complete proofs of all the statements made without proof.
2. Prove that in a metric space X a closed ball is a closed set. The set 0p(d)
of all points x G X such that 6(a, x) < p is called the open ball with center a
and radius p. Prove that an open ball is an open set. Prove that V is a neighbor-
hood of a point a if and only if it contains some open ball with center a.
3. Prove that if X is a metric space, the mapping (x, y) i-> t>(x, y) from
EXE into R+ is uniformly continuous.
4. Prove that if A is a bounded subset of К and В a bounded subset of the
normed vector space E, then the map (X, x) »—> Xx from AX В into E is uni-
formly continuous. Similarly prove that if A and В are bounded subsets of the
inner product space E, then the map (x, y) (x | y) from AX В into К is
uniformly continuous.
5. (a) Prove that the identity
(x\y) =
holds for any real inner product space.
(b) Prove that the identity
<«is> - 4^
holds for any complex inner product space.
(c) Prove that if the underlying normed vector spaces of two inner product
spaces are isometrically isomorphic, then the inner product spaces are also iso-
metrically isomorphic.
[1, §3]
SUBSPACES
27
6. Let К be a compact subset of Rn and let be the set of all real- (or
complex-) valued continuous functions defined on K. Generalizing Examples 2
and 4 of §1, define a structure of Banach space on Q(K).
7. Let О be an open subset of Rn and let Go(fi) be the set of all real- (or complex-)
valued continuous functions defined on О which “vanish at the boundary of 0”
in the following sense: for every / G воф) and every e > 0 there exists a com-
pact subset К of 0 such that |/(a)| < e for x G О П ZK. Define a structure
of Banach space on Go(ft) (cf. Example 1.5).
§3. Subspaces
A closed subspace F of a normed space E is a linear subspace of the vector
space E which is a closed subset of the metric space E.
Proposition 1. The closure F of a linear subspace F of a normed
space E is a closed subspace of E.
Proof. We know that F is a closed set; we have to prove that F is a
subspace of E. Let x G F, у G F. Then there exist sequences (xn), (yn)
of points of F which tend to x and у respectively. Since F is a linear
subspace, xn + yn G F for every n G N, and by the continuity of addition
(Proposition 2.1) the sequence (xn + yn) tends to x + y. Thus x + у G F.
Similarly, (Xxn) tends to Xx for any X G K; i.e., Xx G F. |
The intersection of an arbitrary family of closed subspaces is a closed
subspace, since it is both a linear subspace and a closed set. Therefore,
given a set A of elements of E, we can speak of the smallest closed sub-
space containing A, i.e., the intersection of all the closed subspaces con-
taining A.
Definition 1. A set A is total in a closed subspace F of a normed space E
if F is the smallest closed subspace containing A. Then F is said to be the
closed subspace generated by A (or the closed linear hull of A).
The closed subspace generated by a set A is the closure F of the sub-
space M formed by all linear combinations of elements of A. Indeed, F is
a closed subspace (Proposition 1) containing A. Conversely, any closed
subspace containing A necessarily contains every linear combination of
elements of A as well as the limit of every sequence of such linear com-
binations.
Example 1. The set of the n unit vectors elf e2, . . . , en is total in Rn
(resp. in Cn).
Example 2. Let I be a finite closed interval of the real line. A well-
known theorem of Weierstrass asserts that every continuous function on I
can be approximated uniformly by polynomials; i.e., given a continuous
28
BANACH SPACES
[1, §3]
function f on I, for every e > 0 there exists a polynomial
P(x) = a0 + a±x + • • • + anxn
such that
\f(x) — Р(я)| < e for every x G /. (1)
Now this theorem can be restated in the following way: In the Banach
space e(/) the set (xn)nE^ is total. Indeed, (1) is equivalent to \\f — P\\ < e,
i.e., f is adherent to the space of linear combinations of the functions xn.
Later (Example 6.1) we shall prove Weierstrass’ theorem in this form.
Another approximation theorem of Weierstrass states that every con-
tinuous function f on the closed interval [0, 2т] such that /(0) =
can be approximated uniformly by trigonometric polynomials, i.e., expres-
sions of the form n
a0 + au cos kx + bk sin kx.
k=l
This can be expressed by saying that the sequence 1, cos x, sin x,...,
cos nx, sin nx,. . . is total in the closed subspace F of в([0, 2т]) formed by
the functions f which satisfy/(0) = /(2т).
Example 3. It can be shown that the set Crne”,aj,a)neN of functions is
total in ©o(R) if and only if a 1. More generally, let F be a strictly
positive, even function defined on R. Assume that
lim (xn/F(x)) = 0
X—>00
for all n G N and that logF(:r) is a convex function of log |s|. Then
it can be shown that the set (xn/F(x))n&9 is total in e0(R) if and only if
the integral J* x~2 log F(x) dx diverges [65]. Even more general results
have been obtained recently by Nachbin [69 through 73].
Definition 2. A family (x^^i of elements of a normed space is topo-
logically free if no xL belongs to the closed subspace generated by the xK with
к # I.
Clearly a topologically free family is also algebraically free, but the
converse is not necessarily true.
Example 4. We shall see later (Example 6.1) that the family (хп)пе^
is not topologically free in в([0, 1]), although it is algebraically free. We
shall also see (Example 6.2) that the sequence 1, cos x, sin x,..., cos nx,
sin nx,. . . is topologically free in в([0, 2т]).
The set of all topologically free families, when ordered by inclusion, is
not inductive and it is not true that every topologically free family is
contained in a maximal topologically free family (see Exercise 3(b)). We
[1, §3]
SUBSPACES
29
shall now see that for certain topologically free families in a Hilbert space
the situation is more favorable.
Definition 3. A set A in a vector space is convex if for x G A, у g A,
and 0 a Iwe have ax + (1 — a)y G A.
Example 5. A linear subspace of a vector space is clearly a convex set.
Example 6. A closed ball Bp(a) in a normed vector space is a convex
set. Indeed, x G Bp(a) and у G Bp(a) mean ||a — x|| p, ||a — y\\ g p;
hence setting /3 = 1 — a, we have
||a — ax — 0y\\ = ||a(a — x) + fi(a — y)|| a||a — x|| + 0||a — y||
ар + /Sp — p,
i.e., ax + (3y e Bp(a).
Proposition 2 (Parallelogram law). For any two vectors x, у in an inner
product space, we have the identity
Ik + J/ll2 + Ik - ?/||2 = 21И12 + 2|1j/||2.
Proof.
Ik + 3/112 + Ik — ?/ll2 = к + У I x + у) + (x — у I x — у)
= (x I X) + (x I y) + (y I x) + (y I y)
+ (x I x) — к I y) — (y I x) + (y I y)
= 2(x I x) + 2(y I y) = 2|kl|2 + 2|k||2. |
Proposition 3 (Lemma of F. Riesz). Let A be a closed convex set in a
Hilbert space. Then there exists a unique x G A such that ||x|| \\y\\ for
every ye A.
Proof. Let d = infyGA IMI- There exists a sequence of elements yn G A
such that ||ул|| —> d. By the parallelogram law (Proposition 2) we have
Уп Ут
2
2 -J -J
= nlknll2 + i||M2
4
Уп ~Ь Ут
2
(2)
Given e > 0, there exists N G N such that ||ул|| < d + € for n > N.
Furthermore, since A is convex, |(i/n + Ут) E A, and so || + Ут)\\ = d.
Thus it follows from (2) that
Уп Ъ -Ут 2ed + e2 for n,m> N,
i-e-> (Уп) is a Cauchy sequence. Since the Hilbert space is complete, (i/n)
converges to an element x which belongs to the closed set A. By the
continuity of the norm (Proposition 2.1) ||x|| = lim ||ул|| = d.
30
BANACH SPACES
[1, §3]
To prove the uniqueness of x let us suppose that we have two vectors
Xi x2 with ||afi|| = ЦхгН = d. Then
Xi + ^2
= |lW2 + ||Ы2 -
A A
Xi — X2
since ||«i — x2II > 0- But |(xi + x2) e A and the norm of every
element in A is d. |
Remark 1. It would be clearly sufficient to assume that A is a com-
plete convex subset in an inner product space.
Corollary. Let A be a closed convex set in a Hilbert space E and a a vector
in E. Then there exists a unique xeA such that ||x — a|| g \\y — a|| for
every у e A.
Proof. Let В = A — a be the set of all vectors у — a, where у runs
through A. The set В is obviously closed and convex; hence it has a
point xQ such that ||x0|| lll/oll for all Уо Setting x = xQ + a, we
have ||x — a|| \\y — a|| for all у e A. |
Definition 4. Two vectors x, у in an inner product space are orthogonal
if (s 13/) = 0. A vector x is orthogonal to a subset M. if (x\y) = Q for ail
у E M. Two subsets M and N are orthogonal if (x\y) =0 for every x E M
and у e N.
The only vector which is orthogonal to itself is 0 by Axiom (SP 2).
Proposition 4. Let F be a closed subspace of a Hilbert space E. Then
every vector x e E can be uniquely written in the form x = у + z, where
у eF and z is orthogonal to F.
Proof. Since F is a closed convex set, by the above corollary there
exists a vector у eF such that
||s — y\\ ||s — t>|| for all v eF.
(3)
Set z = x — y. We must show that z is orthogonal to F. Let w be an
arbitrary nonzero vector in F. Then for all X e К the vector v = у + Xw
belongs to F; hence by (3) we have ||^|| ||z — Xw||, i.e.,
0 —2(ReX(w I z) + |X|2||w||2 for all X e K.
This is possible only if (w | z) = 0. Otherwise, setting
X = (w I z)/||w||2
would give a contradiction.
To prove uniqueness, let us suppose that x = у + z = y' + z', where
у Е.Р)у’ e F,z and zf are orthogonal to F. Then z — z' is also orthogonal
[1, §3]
SUBSPACES
31
to F; and since z — z' = у' — у g F, we have z — z' = 0. Thus z = z'
and у = у’. |
Corollary. Let F be a closed subspace of a Hilbert space E. If F # E,
then there exists a nonzero vector in E which is orthogonal to F.
Definition 5. A family (a^^i °f elements of an inner product space E
is orthogonal if (ас | aK) = 0 for с # к. It is orthonormal if furthermore
||at|| = 1 for every l g I.
Proposition 5. An orthonormal family in an inner product space is
topologically free.
Proof. Let (Xk)k^i be any family of scalars of which only a finite number
are different from 0. Then
K=#4 ' K=£C K^l
= Wl2 + Z№- 1Ы12 i-i
K=£L
Proposition 6. Any orthonormal family in an inner product space is
included in a maximal orthonormal family.
Proof. Consider the set ® of all orthonormal families containing the
given orthonormal family. If we order ® by inclusion, then this set is
inductive. Indeed, let (Qa) be a totally ordered family in ® and let
О = Ua^a- Then every x G О belongs to some Oa; hence ||x|| = 1.
Furthermore, if x, у G 0, x # y, then x G Oa, у G 0$; and if for instance
Oa C Op, then x G Op; thus (x | y) = 0. Consequently О belongs to ®
and is the least upper bound of the family (Oa). The existence of a maximal
element in ® now follows from Zorn's lemma. |
Proposition 7. In a Hilbert space E a maximal orthonormal family is
total.
Proof. Let F be the closed subspace generated by the family. If F # E,
then by the corollary of * Proposition 4 there exists a vector у # 0 which
is orthogonal to F and in particular to every element of the family. Thus
enlarging the original family by у/\\y ||, we would still obtain an orthonormal
family, which contradicts the hypothesis of maximality. |
Remark 2.' A maximal orthonormal family in a Hilbert space is also
called an orthonormal basis. It should not be confused with the notion of
algebraic basis (§2). It can be shown that two orthogonal bases of a
Hilbert space have the same cardinal. This common cardinal is the Hilbert
dimension of the space and should not be confused with the algebraic
dimension (§2).
32
BANACH SPACES
[1, §3]
Definition 6. Let (a^^i be an orthonormal family in a Hilbert space E.
For x E E the numbers (x | aL) (t G 7) are called the Fourier coefficients of x
with respect to (at). The expression (x | aL)aL is called the Fourier
expansion of x.
Definition 7. A family (x^^i of elements in a normed vector space is
summable to an element x if for any € > 0 there exists a finite subset J of I
such that ||x — M < €/°r any finite subset H of I satisfying H D J,
In this case, we write x = xL.
Proposition 8. (a) A family (x^^i of elements in a Banach space is
summable if and only if for every € > 0 there exists a finite subset J of I
such that HSieh ^ill < efor any finite subset H of I, verifying H П J = 0.
(b) A family (a^ei of positive real numbers is summable if and only if
there exists a number 0 such that = P for all finite subsets H of I.
In this case, we have also &•
Proof, (a) If (zOigi is summable, then for e > 0 we have a finite
subset J of I such that
Ik — £ zdl < and Ik — £ odl <
II igj 'I II igjuh II
whenever H n J = 0. Thus ||£ighM < €-
Conversely, let the condition of the proposition be satisfied, and let
(€n)nGN be a sequence of positive numbers tending to zero. To every en
there corresponds a finite subset Jn of I such that ||^€ен M < €n if
H n Jn = 0, and we may suppose that Jn C Jn+i (n G N). Set
Уп = Then (i/n)nGN is a Cauchy sequence. Indeed,
Ут — Уп = £
iGJwnCJn
if m n, and thus \\ym — yn\\ < en for m n. Hence (i/n)nGN con-
verges to a vector x, and we have ||s — yn\\ en. If Я is a finite subset
of I such that Я D Jn, then
|k — M = Ik - Z M + II £ M <«» + «» = 2cn-
II i<=H II II iejn II IlieffnCJ. II
Thus (xL) is summable to x,
(b) Let X be the least upper bound of all expressions where Я
is any finite subset of I, For any € > 0 there exists a finite subset J of I
such that X — e < and thus, since the aL are positive,
X— €<£al^X
iGH
for all finite subsets Я of I containing J. Hence (at) is summable to X.
[1, §3]
SUBSPACES
33
If (aj is summable to a number X, then there exists a finite subset
J of I such that |X — aj < 1 for any finite subset H of I such
that H D J. It follows clearly that
E < i + x
16Я
for any finite subset H of I. |
Proposition 9 (Bessel’s inequality). Let (a^^i be an orthonormal family
in an inner product space E. Then for every x G E we have
El(®IOI2 Ы2.
ter
Proof. For any finite subset H of I we have
° = ||® - E (x l °‘)a‘||2
= (x — E (x I aja. I x — E (x I а.)аЛ
4 lEH iEH 7
= Ы2 — E (® I I я) — E (® I °i)2 + E (® I °i)2
lEH iEH lEH
= IHI2-El(x|at)|2.
lEH
The result now follows from Proposition 8(b). |
Corollary. In a Hilbert space E} for any x G E the family (fx | ajujie/
is summable.
Indeed, for any finite subset H of I we have
|| E i otx||2 = (E (® I o‘)°‘ i £ (® I a‘X) = E к® I a‘)i2-
11 lEH 11 lEff lEff 7 lEH
The corollary now follows by using Proposition 8(a). |
Proposition 10. Let (x^^i be a summable family in an inner product
space E, and let у G E. Then the family ((Xi | y))iei is summable and
(E ®»I у) = E (®‘ I y>-
ЧЕ1 7 iEI
Proof. Set x = Given € > 0, there exists a finite subset J
of I such that
h~fi4 <m
34
BANACH SPACES
[1, S3]
for every finite subset H of I verifying H D J. But then
|(ж I J/) — E (яч I У)| = |(я — E I j/)| Ik — E ®‘|| • ЬП < €
' i€H I I X lEH ' I И iG# II
whenever H contains J, |
Proposition 11. Let (ai)^i be an orthonormal family in a Hilbert
space E, The following conditions are equivalent:
(a) The family (a\^i is maximal.
(b) For every x E E we have x = (x |
(c) For every x G Ewe have ||z||2 = £tGZ |(z | at)|2 (Parse val’s relation).
Proof, (а) => (b). Let у = (x | at)at (this vector exists by the
corollary of Proposition 9). Using Proposition 10, we have (y | at) = (x | at)
for every t G I, i.e., x — у is orthogonal to every aL, Since (at)tGZ is
maximal, we have x = y,
(b) => (c). If x = Sigz (x | at)at, then by Proposition 10
и2 = (E i a‘)®‘ ix} = E к® I a‘)i2-
\GZ 7 iGZ
(с) => (a). If (cQigz is not maximal, then there exists апж # 0 which
is orthogonal to every aL (t G Г). But then ||z||2 Sigz |(я I ^i)|2, since
the last expression is 0. |
Exercises
1. Why is the subspace F of Example 2 closed in C([0, 2тг])?
2. Prove that the family (xw)hgn is algebraically free in C(Z) (cf. Example 4).
3. (a) Prove that the unit vectors en (see Example 2.2) form a maximal
orthonormal family in I2,
(b) Set
Oo = Co, ak = eo + I ek for к G N*.
к
Prove that for any n G N the family (a*)o^^n is topologically free, but the
family (a^jbGN is not topologically free.
4. A Banach space is said to be uniformly convex if for every e such that
0 < e < 2 there exists a 6 > 0 such that the relations ||z|| 1, ||i/|| 1,
h — 2/11 c imply
SI-».
2
(a) Show that a Hilbert space is uniformly convex. (Hint: Use the parallelo-
gram law.)
[1, §4]
LINEAR MAPS
35
(b) Show that Proposition 3 also holds in a uniformly convex Banach space.
(c) Show that if 2 p < oo and a, ft are any two complex numbers, then
\a + 0\p + \a - 0\p 2₽-1(|a|₽ + \0\p).
(d) Prove that for 2 p < oo the Banach space lp is uniformly convex.
Remark 3. It can be proved that lp is uniformly convex for 1 < p < oo
([52], §26, 7.(12)).
5. Let (3t)ier and G/JiGz be two summable families in a normed space.
(a) Show that at most countably many xL are different from zero.
(b) Show that the family (zt + y^iei is summable and that
X <*»+»») = Z *•+E vt-
lEI iEI lEI
(c) Show that for any X E К the family (X«t)ter is summable and that
x z = z \xt.
iez »er
6. Let (at)ter be a maximal orthonormal family in a Hilbert space E. Let
x and у be two elements of E, and l&h and their Fourier ex-
pansions. Show that
(x I у) = Z
ier
7. Let I be a set of indices. Let L2(I) be the set of all families (&)ter of
(real or complex) numbers such that the family (|$i|2)ter is summable. Show
that L2(I) is a Hilbert space, where the scalar product is given by
(($.) I (4.)) = Z fa-
lEI
Show that every Hilbert space is isometrically isomorphic with some space
L2(7). [It follows from Remark 2 that two spaces Ь2(Г) and L2(K) are iso-
metrically isomorphic if and only if I and К are equipotent.]
§4. Linear maps
Let E and F be two vector spaces over the same field of scalars K. We recall
that a map / from E into F is said to be linear if it satisfies the identity
/(Ха + дЬ) = Х/(а) + д/(Ь)
for all a,beE and X, д G K.
If /: E —► F is a linear map from a vector space E into a vector space F,
then the set of all those vectors x G E for which f(x) = 0 is a linear subspace
of E, called the kernel of f and denoted by /^(О) or Ker(/). The map f is
injective if and only if Ker(/) is reduced to 0.
36
BANACH SPACES
[1, §4]
If f is a continuous linear map from a normed space E into the normed
space F, then Ker(/) is a closed subspace of E, since it is the inverse image
of the closed subset {0} of F.
Proposition 1. If a linear map f from a normed vector space E into a
normed vector space F is continuous at the origin, then it is continuous every-
where and even uniformly continuous.
Proof. Clearly, f maps the origin of E into the origin of F. Let us
assume that for every € > 0 there exists an a > 0 such that ||x|| < a
implies ||/(s)|| < e. But then ||s — y\\ < a implies \\f(x) — f(y)|| =
IIЛ* — kill < «• I
Proposition 2. A linear map f from a normed space E into a normed
space F is continuous if and only if there exists a positive number M such
that ||/(s)|| g M||s|| for every x G E.
Proof. Suppose that such an M exists. Then for € > 0 we set a = e/M;
thus ||:r|| < a implies \\f(x) || < M • a = e. By Proposition 1 the map f
is then continuous. For the converse it will be instructive to give two
proofs, each using a different definition of continuity.
(1) If f is continuous, then there exists а У > 0 such that ||s|| У
implies ||/(s)|| 1. We can take M = 1/7, for if x G E, then
7s
and thus
= та ИЛ*) II
i.e, №11 (lA)||x||.
(2) Suppose that f is continuous, but that there exists no M satisfying
the condition of the theorem. Then for every n G N* there exists xn G E
such that ||/(sn)|| ^||^n||- Set yn = хп/п\]хпЦ. Then \\yn\\ = 1/nand
(yn) tends to zero, but ||/G/n)|| 1, i.e., (/G/n)) does not tend to zero,
which contradicts the continuity of f. |
Definition 1. A bijective continuous linear map f from a normed space E
onto a normed space F is an isomorphism if the inverse map f^1 is continuous.
An injective continuous linear map f from a normed space E into a normed
space F is a strict morphism (or topological homomorphism) if it is an
isomorphism from E onto f(E) = Im(/).
To make this definition meaningful, it should be observed that if f: E —> F is
a linear map from a vector space E into a vector space F, then f(E) = hn(/) is
a linear subspace of F. If, furthermore, f is bijective, then is a linear map
from F onto E.
[1, §4]
LINEAR MAPS
37
A continuous linear map/from a normed space E into a normed space F
is an injective strict morphism if and only if there exists a strictly positive
number m such that ||/(s)|| m||s|| for every x G E, Indeed, if this re-
lation is satisfied, then f(x) = 0 implies x = 0; i.e.,/is injective. Further-
more, if we denote by g the inverse of the bijection/: E —> f(E), then the
relation is equivalent to ||jr(y)|| = (l/m)||i/|| for every у i.e., to
the continuity of g (Proposition 2). In particular, a surjective linear map
f: E —> F is an isomorphism if and only if there exist two constants
0 < m M such that
mH g ||/(®)|| g M||a:||
for every x G E, If, furthermore, m = M = 1, then / is an isometric
isomorphism (Definition 2.1).
We want to extend the notion of strict morphism also to continuous linear
maps which are not injective, and for this we need the concept of the quotient
space of a normed space modulo a closed subspace. Let E be a vector space
over К and M a linear subspace of E. We say that two elements x, у G E are
congruent modulo M, and write x = у mod M, if x — у G M. By the definition
of a linear subspace, the congruence is an equivalence relation on E, We denote
by E/M the quotient set of E modulo the equivalence relation defined by M,
We can define a structure of vector space over К on E/M, by setting
f # = (s + y) • and H = (kr) *, where for instance x is a representative in
E of the equivalence class f G E/M and Х Е K. It is trivial to check that this
definition of the algebraic operations in E/M is independent of the choice of the
representatives x and y, and also that all axioms of a vector space are satisfied.
In particular, M is an equivalence class in itself and is the zero vector of E/M,
The quotient set E/M equipped with the vector space structure just defined is
the quotient vector space (or simply quotient space) of E modulo M.
Now let E be a normed vector space and M a closed subspace of E, We
define a norm on the quotient vector space E/M by setting
||i|| = inf hll, (1)
xEx
and call it the quotient norm. Let us prove that Axioms (N 1), (N 2),
(N 3) are satisfied. We first observe that every equivalence class x in E
is a set of the form x = x + M, where x is an arbitrary element of x,
and therefore i is a closed set in E, If now ||i|| = 0, then 0 adheres to x
in E and consequently belongs to it. Thus x = M or x = 0, where 0
denotes the zero vector of E/M, We also have
M = inf HXxrll = |X| inf ||®|| = |X| • ||*||.
Next let € > 0 and х, у G E/M, Then there exist x G x and у Ey such
38
BANACH SPACES
[1, §4]
that ||z|| ||x|| + e and ||j/|| ||0|| 4- e, and thus
II*+ 2/11 11*11 +112/11 1И1 + II0II + 2e;
and since e is arbitrary,
II* + 0|| = inf ||x + y|| ||f|| + ||0||.
Proposition 3. Let E be a Banach space and M a closed subspace of E.
Then the quotient vector space E/M equipped with the quotient norm (1) is
complete, i.e., a Banach space.
Proof. Let (fn)nGN be a Cauchy sequence in E/M. Then there exists
a subsequence (fnjfc) of (fn) such that ||fnjfc — fw|| < 2~k for m > n^, in
particular that ||fn*+i — #nj| < 2”k for every к g N, and we can find
elements xnk G injfc such that ||xnjfc+1 — sn*|| < 2”k. The sequence (xnk)
is a Cauchy sequence, for if I > k, then
ll^ni xnk II = ll^ni Xni—1 II + • • • + ll^nfc-j-l #nfc||
< 2-1+1 4- ... 4- 2~k < 2_fc+1.
Thus (xnk) converges to some element x of E, and if i is the class of x
modulo M, then the relation ||injfc — x|| ||xnjfc — x|| shows that (fnjfc)
converges to i in E/M. For every e > 0 there exists an iV G N such that
||fn — im|| = €/2 if n, m > N. Thus if we choose n > N and nk > N, we
have
II* - inll II* - м + ||*nfc - *n|| = e;
i.e., the sequence (fn) converges to i and the space E/M is complete. |
Let E be a vector space and M a linear subspace of E. The canonical surjection
<p of E onto E/M which associates with every element x G E its equivalence
class <p(x) = f modulo M is a linear map by the very definition of the algebraic
operations in E/M. If f is a linear map from E into another vector space F
such that f(x) = 0 for all x G M [i.e., such that Ker(/) D M], then we can
define a map f from E/M into F by setting 7(*) = f(x) for f g E/M, where
x g E is an element representing f. If у is another element representing f,
then x — у G M, f(x — y) =0, and f(x) = f(y), which proves that 7 is well-
defined. It is clear that J is linear and that the definition of J is equivalent to
the relation f = J ° <p. If we choose in particular M = Ker(/), then J is injective
and will be called the injection associated with f.
Now let E be a normed vector space and M a closed subspace of E.
The canonical surjection <p: E —> E/M is continuous, since by (1) we have
||#>(x) || ||x||. If f is a continuous linear map from E into another normed
space F such that f(x) = 0 for all x belonging to the closed subspace M
of E, then the map f: E/M —» F defined by f = 7° is also continuous.
Indeed, we have ||/(ж)|| д||я|| for some p 0 and all x G E (Proposi-
[1, §4] LINEAR MAPS 39
tion 2), and therefore ||7(i)|| д||я|| for all xet. Hence by (1) we
obtain ||7(4)|| д||4||, i G E/M, which proves the continuity of 7- In
particular, the injection f: ^/Ker(J) —> F associated with/is continuous.
Definition 2. A continuous linear map f from a normed space E into
a normed space F is a strict morphism (or topological homomorphism) if
the associated injection^: 2?/Ker(/) —* F is a strict morphism (Definition 1).
If E is a normed space and M a closed subspace of E, then the canonical
surjection <p: E —> E/M is a strict morphism since the injection associated
with <p is precisely the identical isomorphism of E/M onto itself. If V
is a neighborhood of 0 in E, then <p(V) is a neighborhood of 0 in E/M.
Indeed, there exists an € > 0 such that V contains all x which satisfy
||s|| < €. If 4 G E/M is such that ||4|| < e, then there exists an x G x
for which ||s|| < e, i.e., this x belongs to V and 4 = <p(x) E^(V). Conse-
quently <p(V) contains all 4 such that ||4|| < e; i.e., <p(V) is a neighborhood
of 0 in E/M. If A is an open set in E, then <p(A) is an open set in E/M.
Indeed, if 4 G <p(A), then there exists a point x G A such that 4 = <p(x).
Since A is open, there exists a neighborhood V of x satisfying V C A.
But then <p(V) is a neighborhood of 4 satisfying <p(V) c ^>(A); i.e., ^>(A)
is open.
Proposition 4. If f is a continuous linear map from a normed space E
into a normed space F, then the following conditions are equivalent:
(a) f is a strict morphism,
(b) f maps every neighborhood of 0 in E onto a neighborhood of 0 in f(E),
(c) f maps every open set of E onto an open set of f(E).
Proof. Let N be the kernel of f, <p the canonical surjection of E onto
E/N and 7- E/N —* F the injection associated with f. We have f = 7°<P-
Let g be the inverse map of the bijection 7- E/N —> f(E).
First assume that J is a strict morphism. If V is a neighborhood of 0
in E, then W = <p(V) is a neighborhood of 0 in E/N. Since g is continu-
ous, ^“"1(JF) = 7(JF) = is a neighborhood of 0 in f(E). Thus
(a) ==> (b). If A is an open set in E, then В = <p(A) is an open set in E/N,
and g~\B) = = f(A) is an open set in f(E). Thus (a) => (c).
Conversely, suppose that (b) is satisfied. Let IF be a neighborhood of 0
in E/N. Then V = <p-1(J7) is a neighborhood of 0 in E, and by (b)
f(V) = 7(Ю is a neighborhood of 0 in f(E). Thus g is continuous; i.e., f
is a strict morphism and (b) => (a). Similarly, let (c) be satisfied. If В
is an open set in E/N, then <p-1(B) = A is an open set in E, and by (c)
7(B) = f(A) is an open set in f(E). Thus g is continuous; i.e., (c) ==> (a). |
Remark 1. Proposition 4 shows why a strict morphism is sometimes
called a relatively open (continuous linear) map and an open map if it is
surjective.
40
BANACH SPACES
[1, §5]
Exercises
1. Supply complete proofs of all the algebraic statements made without proof.
2. Let co and I1 be the Banach spaces introduced in Examples 6 and 7 of §1.
Clearly I1 is a subset of co. Show that the canonical injection of I1 into co is a
continuous linear map but not a strict morphism.
3. Prove that if f is a linear map from a normed vector space E into a normed
vector space F, which maps every bounded set of E into a bounded set of F,
then there exists a positive number M such that ||/(z) || and in par-
ticular f is continuous. (Hint: Use a device similar to that employed in part (2)
of the proof of Proposition 2.)
4. Let E and F be two normed vector spaces over the same field K. Show
that the operations
(*, У) + (*i, 2/i) = (x + xify + yi), X(x, y) = (Xz, Xy),
where x, Xi EE, y, yiEF,\E K, define a structure of vector space on the
cartesian product E X F of the two spaces. Show that the map
is a norm on E X F. Show that if E and F are Banach spaces, then E X F is
a Banach space. Show that if E and F are Hilbert spaces, then the scalar product
corresponding to this norm defines a structure of Hilbert space on E X F.
Show, furthermore, that the projection (x, y) x from E X F onto E is
continuous.
5. Let (Ня)яем be a sequence of Hilbert spaces. Let H be the set of all
sequences (zn)nGN, where xn G Hn and 22n=o IWI2 < 00. Clearly, H is a
vector space in a natural way. Show that the scalar product
00
(x I y) = £ (x„ I y„)
n=0
defines a structure of Hilbert space on H.
§5. Linear forms
Let E be a vector space over the field K. A linear form (or linear functional)
on E is a map f from E into К which satisfies the identity
f(Xa + nb) = Xf(a) + yf(b)
for all a, b G E and X, д G K. We can consider К as a vector space over itself.
Indeed, the operations (x, у) x + у and (X, x) Xx are defined if x, у, X G К
and satisfy Axioms (VS 1) through (VS 8). Furthermore, К has dimension 1
over itself, since any nonzero element constitutes a basis. A linear form on E
is then a linear map from E into the vector space К and thus we can apply our
results concerning linear maps to obtain results on linear forms.
[1, §5]
LINEAR FORMS
41
Equipped with the absolute value as norm, the vector space К is a
Banach space over К; it is simply the Banach space R1 or C1 introduced
in Examples 1 and 3 of §1. Therefore, if we want to consider К as a
Banach space over itself, we shall denote it by Кx. It follows from
Proposition 4.2 that a linear form f on a normed space E is continuous if
and only if there exists a positive number M such that |/(z)| M||s|| for
every x G E,
A maximal proper linear subspace Я of a vector space E is called a hyperplane.
In other words, a linear subspace Я of Я is a hyperplane if Я -A E and if for
any linear subspace M of E such that Я С M С E we have either M = Я or
M = E.
A linear subspace Я of a vector space Я is a hyperplane if and only if the
quotient space E/H is one-dimensional. In fact, if Я is a hyperplane and а Й Я,
then the set {x | x = h + Xa, h G Я, X g K} is a linear subspace of E, con-
taining Я but different from it, and thus necessarily equal to E. Thus the image
a of a in E/H generates E/H] i.e., E/H is one-dimensional. Conversely, assume
that E/H is generated by the element a, and let a E E be a representative of a.
Then every element x E E can be written in the form x = h + Xa with h E Я
and X G K. If M is a linear subspace of E containing Я, then either а S M,
in which case M = Я, or a G M, in which case M = E. This proves that Я
is a hyperplane.
It follows from the previous discussion that if Я is a hyperplane in E, and a
a vector in E which does not belong to Я, then every x G E can be represented
in the form x = h + Xa, where h G Я and X G K. This representation is unique,
since if h + Xa = hf + X'a, then (X — X')a = hf — h G Я. Therefore,
X — X' = 0 and consequently X = X', h = h'.
If f is a not identically zero linear form on E, then Ker(/) is a hyperplane.
Indeed, f is clearly surjective, and therefore the associated injection
J: Я/Кег(/) —► К is a bijective linear map, i.e., an isomorphism of the two
vector spaces in the sense of algebra. Since К is one-dimensional, so is Я/Кег (/).
Conversely, if Я is a hyperplane, there exists a not identically zero linear
form / on Я such that Я = Ker(/); we say that Я has equation f(x) = 0. In
fact, let a be a fixed vector in Я not belonging to Я, and for x G Я let us write
x = h + Xa, where h G Я, X G K. Then we can define/ by f(x) = X.
Finally, let us observe that if / and g are two not identically zero linear forms
on Я such that f(x) = 0 and g(x) = 0 are the equations of the same hyper-
plane Я, then there exists a nonzero scalar a such that/ = a0;i.e.,/(z) = a-g(x)
for all x G Я. Indeed, if а Й Я, we can choose a = f(a)/g(a).
If/is a continuous linear form on a normed vector space Я, then Ker(/)
is a closed hyperplane. In fact, we have just seen that it is a hyperplane,
and we observed in the previous section that the kernel of a continuous
linear map is a closed subspace.
We define the norm ||/|| of a continuous linear form / as the greatest
lower bound of all numbers M for which the relation |/(x)| Af||z|| is
42
BANACH SPACES
[1, §5]
satisfied. In other words,
ll/ll = sup -T§r- = sup |/(x)|.
xEE |R| |M = 1
xE;E
The equality of the last two expressions follows immediately from the
fact that for any x G E the norm of z/||z|| is 1. We have, furthermore,
ll/ll = sup |/(ж)|, (1)
MSI
since
11/11= sup |/(x)| g sup |/(x)| = sup ||x||- /(-Af') sup |/(x)|.
и=1 ||X||£1 W|£1 xIRl/ |«|-1
x¥=0
Now let E be an inner product space and a a fixed vector in E. The
map/: x (x | a) from E into К is linear by Axiom (SP 4) and continuous,
since by Proposition 1.1 we have |(z | a)| ||a|| • ||s||. We also see that
ll/ll ||a||, but for x = a we get/(a) = ||a||2, and thus ||/|| = ||a||. For
a Hilbert space we shall now prove the converse of this result:
Proposition 1 (Fr£chet-Riesz). Let E be a Hilbert space and f a con-
tinuous linear form on E. Then there exists a unique vector a eE such that
f(x) = (x ( a) for all xeE.
Proof. If / is identically zero, we choose a = 0. If / is not identically
zero, then its kernel H is distinct from E, and by the corollary to Proposi-
sion 3.4 there exists a nonzero vector b G E which is orthogonal to H.
Set a = Ь/(Ь)/||Ь||2. Then
/(«) = w2 =
Since H is a hyperplane, every vector x e E can be written in the form
у + Xa, where у eH and X e K. Thus
/(®) = f(y + W = V(«) = X||a||2 = (*« I «) = (У + Xa | a) = (x | a).
The uniqueness of a is clear. |
Remark 1. We do not need to use explicitly the fact that Я is a hyper-
plane. Indeed, if z is a vector orthogonal to Я, then f(a)z — f(z)a belongs
to H and is also orthogonal to it; i.e., z = f(z)a/f(a). Using Proposition 3.4,
we get the decomposition x = у + Xa, where X = f(z)/f(d).
If E is a vector space over a field K, we say that a map / from E into К is a
semi-linear form if
/(Ха + дЬ) = Х/(а) + д/(Ь)
[1, §5]
LINEAR FORMS
43
for all a, b E E and X, д E K. This is, of course, a new concept only in the
case К = C; for К = R a semi-linear form is simply linear. Now let E
and F be two vector spaces over the same field K. A map (x, у) B(x, y)
from E X F into К is called a sesquilinear form if for every у E F the map
x ► B(x, y) is a linear form on E, and for every x E E the map у ► B(x, y)
is a semi-linear form on F. If, instead, у B(xt y) is a linear form, then we
say that (x, y) B(xt y) is a bilinear form. Of course, if К = R, then sesquilinear
and bilinear forms are the same.
Proposition 2. Lei E and F be two normed spaces over the same field.
A sesquilinear form В on E X F is continuous if and only if there exists a
positive number M such that |B(x, y)\ M||x|| • II?/II for every x E E, у E F.
Proof (cf. the proof of Proposition 2.1). Suppose that such an M > 0
exists. Let (a, b) be a point of E X F and € > 0. We have the identity
B(x, y) — B(a, b) = B(x — a, у — b) + B(x — a, 6) + B(a, у — b);
hence \B(x, y) — B(a, 6)| < e, provided
IH| < Ve/M, \\y\\ < Ve/M, if a = b = 0,
H <minGS’2вд)’ ll?z~b||<5& if a =
if a*°’b = 0’
II* - “II < тт (л/зМ ’ ЗЛГ||d||) ’ II2' ~ *11 < min ’ ЗЛГ]]a||) ’
if a 0, b 0.
Conversely, if В is continuous, then there exist a > 0, ft > 0 such that
IM a, ||y|| ft imply |B(x, y)\ 1. Then we can take M = 1/aft,
for if x E E, у E F, then
and thus
that is,
в(ы’ м)|~ immmi |b(x,2,)I - 1;
If E is an inner product space, then the scalar product is a continuous
sesquilinear form on E X E. More generally, if f is a continuous linear
44 BANACH SPACES [1, §5]
map from E into E satisfying ||/(x)|| Af||z|| for every x e E, then
(z, у) h-> (x | /(i/)) is a sesquilinear form on E X E satisfying
|(x|№))| m-IKIM.
For a Hilbert space E we shall now prove the converse of this statement
as an easy corollary to Proposition 1.
Proposition 3. Let E be a Hilbert space and В a continuous sesquilinear
form on E X E. Then there exists a continuous linear map f from E into E
such that B(x, y) = (x | /(?/)) for all x, у e E.
Proof. For a fixed у e E the map x »-> B(x, y) is a linear form on E.
Thus by Proposition 1 there exists a unique vector f(y) such that
B(x, y) = (x | /(?/)).
The map у i—> f (y) is clearly linear. Finally, we have
|B(x, y)| M||x|| •
or setting x = f(y) and using the identity just proved,
11Ж112 M\\f(y)\\ Из/ll,
i.e., 11/(2/)II Wil- I
Proposition 4 (Lax-Milgram). Let В be a continuous sesquilinear form on
a Hilbert space E. Suppose that there exists an m > 0 such that
|B(x, x)| m||x||2 for every x eE. Letf be a continuous linear form on E.
Then there exists a unique vector a e E such that f(x) = B(x, d) for all
x e E.
Proof. By Proposition 3 we have B(x, y) = (x | g(yf) for all x, у e E,
where g is a continuous linear map from E into E. Let us show that g
is an isomorphism. In the first place, g is an injective strict morphism,
since
m||x||2 |B(x, x)| = |(x | p(x))| ||x|| • ||p(x)||
implies
m|k|| ||p(x)||.
Next, g(E) is a closed subspace of E. Indeed, if the sequence yn = g(xn)
converges to у e E, then xn is a Cauchy sequence in E and therefore
converges to some element x e E. But then, by the continuity of g, the
sequence g(xn) converges to g(x), and we have у = g(x) G g(E). Now let
x be a vector orthogonal to g(E). Then in particular we have (x | g(xf) = 0;
hence J(x I д(хУ)\ m||x'|2 implies x = 0. Thus by the corollary to
Proposition 3.4 we have g(E) = E.
[1, §6]
THE HAHN-BANACH THEOREM
45
By Proposition 1 there exists b G E such that fix) — ix | b) for every
x G E. By what we have just proved, there exists a G E such that
b = g(a). But then f(x) = (x\b) = (x | g(a)) = B(x, a) for all x g E.
Finally, let B(x, a) = B(x, a') for all x G E. Then B(x, a — a') = 0
for all x, and in particular 0 = \B(a — a', a — a')| m\\a — a'||; i.e.,
a = a'. |
Exercises
1. Prove that a continuous linear form which is not identically zero is a sur-
jective strict morphism onto K1.
2. Prove that if f is a map from a real normed space E into R which satisfies
f(a + b) = f(a) + f(b) for every aeE, beE, and if f is bounded in some
neighborhood of the zero vector in F, then f is a continuous linear form on E.
3. Prove that a sesquilinear or a bilinear form В defined on the product
E X F of two normed spaces is continuous if it is continuous at the point (0, 0).
§6. The Hahn-Banach theorem
We now arrive at the first of the three main theorems of the theory of
normed vector spaces.
Theorem 1. Let E be a normed space and M a subspace of E. Let f be
a continuous linear form defined on M. Then there exists a continuous linear
form g on E which coincides withf on M and for which ||^|| = ||/||.
We first observe that we can suppose the subspace M to be closed.
Indeed, by Proposition 4.1 if f is continuous on M, then it is uniformly
continuous and thus can be extended to M (see §2), which according to
Proposition 3.1 is a closed subspace of E. We know that the extended
map f is continuous on M. Let us show that it is linear. Given x G M
and у G M for every e > 0, there exist x' g 21/, у' E M such that
\f(x) -/(«')I < «, \f(y) -Ж)| < €, \f(x + y) -f(x' + y')\ < e. Thus
\f(x) +f(y) — f^+y)]
= l7(z) + f(y) — f(x + y) — /O') - f(y') + f(x' + г/') I
|7O) — /О') I + \f(y) — f(y')\ + \f(x + y) — f(x' + /)| < 3e,
because f(x' + y') — fix') + f(y'). Since e was arbitrary, we have
fix + y) = fix) + №)• Similarly, if x G 21/, X G К and e > 0, there
exists x' G 21/ such that \f(x) — fix') | < e, and since Xx' tends to Xx as
x' tends to x, we can choose x' such that also |/(Xz) — f(Xx')\ €. Then
\f(Xx) — Xf(x)\ = \fiXx) — Xf(x) — fiXx') + Xf(x')\
l7(Xz) - f(fix')\ + |X| ♦ |7(x) - f(x')\ (1 + |X|)e
46 BANACH SPACES [1, §6]
Thus we have /(Xz) = X/(z). Finally, for any x G M and e > 0 there
exists an xr G M such that
|7(*)I < l/(^)l + e ll/ll • llx'H + e ||/|| • M + 2e;
thus ||7l| H/Ц. Since obviously ||/|| ||7ll, we have ||7ll = Ц/Ц.
Lemma 1. Let E be a normed vector space, z a nonzero element of E, and
L = {Xz | X G K} the linear subspace generated by z (the straight line through
the origin and z). Then L is a closed set.
Proof. If the point x adheres to L, there exists a sequence (Xnz) which
converges to x. From ||Xnz — Xwz|| = |Xn — Xw| • ||z|| it follows that (Xn)
is a Cauchy sequence. Since К is complete (Xn) converges to some X G K.
But then by Proposition 2.1 the sequence (Xnz) tends to Xz. Thus
x = Xz G L. |
Lemma 2. Let M be a closed subspace of the normed space E, and let z
be a vector in E which does not belong to M. Let N be the closed subspace of
E generated by M and by z (Definition 3.1). Then every element x G A7 can
be written in a unique way in the form x = у + Xz, where у G M, X G K.
Proof. The set P = {y + Xz | у G M, X G K} is clearly the smallest
linear subspace of E containing M and z. Thus to show that P = N,
we have only to show that P is closed. Let <p be the canonical surjection
from E onto E/M, and set z = <p(z). By Lemma 1 the straight line
L = {X5 | X G K} is a closed set in E/M, and therefore P = <p—1(L) is
closed in E. |
The next lemma is the heart of the proof of the Hahn-Banach theorem.
Lemma 3. Let E be a real normed space and M, z and N as in Lemma 2.
Let f be a continuous linear form on M. Then there exists a continuous linear
form g onN which coincides withf on M and for which ||</|| = ||/||.
Proof. For i/i, У2 e M we have
/(2/1) — /(2/2) = /(2/1 — y2) ll/ll • II1/1 — 1/2II
= ll/ll • 112/1 + z - (2/2 + z)||
ll/ll • II2/1 + *11 + ll/ll -b + sll;
hence
-ll/ll • 111/2 + *l| - /(2/2) ll/ll Н2/1 + *11 - /(2/1). (1)
Set
£ = sup (-11/11 Ц2/ + г|| - /(2/)),
yEM
2 = inf (ll/ll • ||j/ + z|| - /(2/)).
[1, §6] THE HAHN-BANACH THEOREM 47
It follows from (1) that f Й. Let д be any real number such that
£ д 2. We define
g(y + Xz) = f{y) + Хд;
g is obviously a linear form on AT. We have furthermore, if X > 0,
g(y + Xz) = f(y) + Хд = x{/(x—1y) + д}
j £ XW-’j) + S} |X| • ||/|| • Ilx-^ + z|| = ll/ll • II? + xz||,
I X{/(X—1y) + £ £ —IM • ll/ll • ||X-^ + z|| = -ll/ll • Из/ + Xz||,
and if X < 0,
g(y + xz) = /(у) + Хд = x{/(x—1y) + д}
j Х^Л) + 2} £ —IM • ll/ll • IIX-^ + z|| = -ll/ll • ||y + Xz||,
(+ 0 IM • ll/ll • llx-1!/ + z|| = ll/ll • Из/ + Xz||.
It follows from these inequalities that
147(2/ + Xz)| Ц/ll • ||y + Xz||,
which proves the continuity of g and the relation ||^|| ||/||. Since the
relation ||gr|| ||/|| is trivial, we have the asserted equality. |
We are now in the position to prove Theorem 1 for the case of real
scalars. Let be the set of all continuous linear forms h, defined on sub-
spaces N of E containing M, which coincide with f on M and are such
that Ц&Ц = ||/||. We order $ by setting h hr if the corresponding sub-
space N and AT' satisfy N cNf and if h' coincides with h on N. The set
is inductive. Indeed, let (ha) be a totally ordered family in and let Na
be the subspace on which ha is defined. Set N = |Ja Na. If x G N, then
x G Na for some a and we define h(x) = ha(x). Clearly, the definition of
h is independent of the choice of a; and h is linear, since if x G Na, У E Ng,
and for instance Na C Np, then
h(x) + h(y) = ha(x) + hp(y) = hp(x) + hp(y) = hp(x + y) = h(x + y).
Furthermore, h coincides with/on M and verifies ||Л|| = ||/||. Thus h is
the least upper bound of (Ла) in $.
Zorn’s lemma proves the existence of a maximal element g in %. The
subspace N on which g is defined is closed, since otherwise we could extend
g to "N by continuity. Furthermore, N = E, since otherwise we could, by
Lemma 3, extend g to a subspace which contains N properly, in contra-
diction to the maximality of g. Hence g has all the properties required in
Theorem 1.
Next we turn to the proof of Theorem 1 in the case of complex scalars.
In the first place, if E is a vector space over C, we can, by restricting
48
BANACH SPACES
[1, §6]
ourselves to real scalars only, consider the set E as a vector space Eq
over R. If E is a complex normed space, then Eq is a real normed space.
We say that Eq is the real normed space underlying the complex normed
space E. Similarly if M is a subspace of E, we can consider the set M as
a subspace Mq of Eq.
With the notations of Theorem 1, set /i(x) = (Re/(ж) and /2(^) —
4mf(x). We have/(;r) = Л(х) + #2(2), and clearly x j-> j\(x) is linear on
MQ; i.e.,
/i(Xx + py) = X/i(x) + pfAy)
for real X aud p. Since |/i(x)| g |/(x)| ||/|| • ||x||, we have ||/i|| ||/||,
and /i is a continuous linear form on Mq. We also have
f(ix) = + г/2(гх)
and
= if(x) = ifa(x) — f2 (x).
Comparing the last two identities, we obtain f2 (%) = —j\ (ix) and
/(x) = /i(x) — ifi(ix). (2)
By the part of Theorem 1 we have already proved, there exists an ex-
tension g! of/i to Eq which satisfies ||^i|| = ||/i||. Define
g№ = gi(x) — igifa)
for x G E. It follows from (2) that g coincides with / on M. Since g\ is
linear on Eq, it follows that g is real linear on E', and to prove that g is
complex linear we have only to show that g(ix) = ig(x). But, indeed,
f?(tx) = ^i(fx) - igi(-x) = i(gi(x) — ^i(ix)) = ig(x).
Finally, let x e E and suppose that g(x') = регв, where p is a positive
real number. Then
|fi<x)| = P = e~ieg(x) = g(e~iex) = gi(e~iex)
1Ы-1И1 = ll/ill • Ы ll/ll-IK
Consequently, ||^|| S ||/|| and since obviously ||^|| ||/||, we have
\\g\\ = ll/ll-1
Remark 1. Let E and F be two Banach spaces, M a closed subspace
of E and f a continuous linear map from M into F. For the problem
whether it is possible to extend f into a continuous linear map g\ E —> F,
see the recent report of Nachbin [68].
Let us prove a few immediate corollaries of the Hahn-Banach theorem.
[1, §6]
THE HAHN-BANACH THEOREM
49
Proposition 1. Let M be a closed subspace of the normed space E and
let z be a vector in E which does not belong to M. Then there exists a con-
tinuous linear form f defined on E such that f(z) = 1 and f(x) = 0 for
x G M.
Proof. We know from Lemma 2 that every element x of the closed
subspace N generated by M and z can be written uniquely in the form
x = у + \z, у G M, X G K. For x G N define f(x) = f(y + \z) = X.
Then clearly f is linear, f(z) = 1, and /(x) = 0 for x G M. If we set
a = inf ||z + i/||,
y^M
then a > 0 (since M is closed and z & M), and we have for X 0
a|X| |X| • ||X"1 у + z\\ = ||г/ + Xz|(,
i.e.,
1/(2/ + Xz)| t 1^ j_ хг||.
This shows that f is continuous on N. Extending f to E by Theorem 1,
we obtain the required continuous linear form. |
Proposition 2. A set G is total (Definition 3.1) in a normed space E if
and only if every continuous linear form f on E which satisfies f(x) = 0 for
all x G G is identically zero.
This is an immediate consequence of the following more general result.
Proposition 3. A set G is total (Definition 3.1) in a closed subspace M
of a normed space E if and only if every continuous linear form f on E which
satisfies f(x) = 0 for all x G G is zero for every element x of M.
Proof. Let us first prove the trivial part of the proposition, and let us
suppose that G is total in M. Let x G M, and let f be a continuous linear
form on E which vanishes on G. For every e > 0 there exists a linear
combination 22 with Xi G G such that ||x — 22 ХгХг-[[ < e. Then
1/0)1 = \f(z - E M.)l ll/ll • e,
and consequently f(x) = 0.
Conversely, suppose that G is not total in M. Then the closed subspace P
generated by G is different from M. Let г be a vector in M but not in P.
By Proposition 1 there exists a continuous linear form f on E such that
f(z) = 1 and f(x) = 0 for all x G P, and in particular for all x G G. |
Example 1. Anticipating the Riesz representation theorem which will
be proved in Chapter 5, and using a few results from function theory, we
prove here the Weierstrass approximation theorem (Example 3.2). Let
50
BANACH SPACES
[!', §6]
us observe first that it is sufficient to consider the case I = [0, 1]. Indeed,
the function x t-* t = (x — d)/(b — d) maps the interval a x g b
onto the interval 0 t 1. If f is a continuous function on a x b,
then g, defined by g(t) = f(a + (b — a)/), is a continuous function on
0 t 1. If the polynomial Q(t) satisfies \g(t) — Q(/)| < eonO g t 1,
then the polynomial
-«(F^)
satisfies \f(x) — P(x) | < € on a x b.
We shall now prove the more general result that if (Xn)n£N is a
strictly increasing sequence of positive numbers with Xo = 0 such that
12n=i 1/Xn = 00, then (zXn)nGN is total in C([0, 1]) (theorem of Muntz).
By Proposition 2 we have to show that if F is a continuous linear form on
€([0, 1]) such that F(zX") = 0 for n G N, then F is identically zero. Ac-
cording to Riesz’ representation theorem, there corresponds to F a function
of bounded variation д(я) on 0 x 1 such that
*V) = f1 f(x) dn(x)
Jo
for all f G e([0, 1]). The function
$(f) = j* d/j.(x) (3)
of the complex variable f = £ + irj is holomorphic for f > 0 and bounded
for f 0, since
|Ф(Г)| f1 Xi |</м(х)| fl |dM(x)|.
Jo Jo
The condition F(«x») = 0 (n 1) then means that Ф(ХП) = 0 and it
follows from Carlson’s theorem ([6], Theorem 9.3.8, p. 156) that Ф = 0.
Now, the substitution x = transforms (3) into the Laplace-Stieltjes
transform
$(f) = f “ е-!/Г
Jo
and it follows from the uniqueness theorem ([103], Chapter II, Theorem 6.3,
p. 63 and Remark on p. 70) that д(е—v) is equivalent to a constant for
0 g у < oo; i.e., д is equivalent to a constant for 0 < x 1. But д
cannot have a jump at x = 0 either, since F(zx») = 0 also for n = 0;
i.e., /ойд(я) = 0. Hence д is equivalent to a constant and thus
F = 0. Q.E.D.
It follows from the result just proved that (xn) is not topologically free,
as asserted in Example 3.4. Indeed, if we omit one term of this sequence,
the remaining set is still total in C([0, 1]), and thus every element of the
[1, §6]
THE HAHN-BANACH THEOREM
51
sequence (xn) belongs to the closed subspace generated by the remaining
elements.
It can be proved that if 22n=i 1/Xn < <*> then (zXn)nGN is not total in
@([0, 1]) (Muntz) and that it is topologically free (Laurent Schwartz [80]).
Proposition 4. A family (aL)Lei of elements in a normed space E is
topologically free if and only if there exists a family (fL)iei of continuous
linear forms on E such thatfL(aL) = 1 andfi(aK) = 0 if ь # к.
Proof. If (ut)tG/ is topologically free, let ML be the closed subspace
generated by the aK with к # t. Then aL & MLJ and by Proposition 1
there exists a continuous linear form /t on E such that fL(aL) 1 and
/t(x) = 0 for x G ML, and in particular fi(aK) = 0 for к # i.
Conversely, if (at)ter is not topologically free, then there exists an ele-
ment aK which is contained in the closed subspace generated by the aL with
ь г* к. But then for every continuous linear form f such that J(ut) = 0
for ь # к, we also have f(aK) = 0 (cf. first half of the proof of Proposi-
tion 3). |
Example 2. Consider the continuous linear form
/•2т
f i-> Fn(f) = — / /(x) cos nx dx (n G N*)
7Г Jo
on C([0, 2tt]). A simple calculation shows that
Fn(cos nx) = 1, Fn(cos mx) = 0 if m # n, m G N,
Fn(sin mx) = 0 if m G N*.
Similarly, for the continuous linear form
/•2т
f *--> Gn(f) = — I f(x) sin nx dx (n G N*)
7Г Jo
we have
(?n(cos mx) = 0 if m G N,
(?n(sin nx) = 1, Gn(sin mx) = 0 if m # n, m G N*.
Finally, for
/•2т
= f(x)dx
we have
F0(l) = 1, F0(cos nx) = 0 if n 6 N*,
F0(sin nx) = 0 if n e N*.
52
BANACH SPACES
[1, §7]
It follows that the sequence 1, cos x, sin x, ... , cos nx, sin nx, ... is topo-
logically free in e([0, 2тг]), as asserted in Example 3.4.
Proposition 5 (F. Riesz). Let (zOigi be a family of elements in a normed
space E and let (cq)igi be a family of scalars. A necessary and sufficient
condition for the existence of a continuous linear form f on E which verifies
f(xf) = aL is the existence of a positive constant M such that
|E M ME Ml (4)
Lei I 'Lei И
for any family (Xt)tei of scalars, of which only a finite number of elements are
different from zero.
Proof. If such an f exists, then
|E M = IE Х‘Ж)| = |/(E XMI - III- X‘MI ’
Lei । Lei II \ei 7 । ILei H
and we can take M = Ц/Ц.
Conversely, define
f (E XM= E x‘a‘-
igz ' iei
If Siei KxL = 0, then it follows from condition (4) thatjf(Xiei Xtzt) = 0;
thus У is a well-defined, continuous linear form on the subspace generated
by the family (zt)tGi. The extension of f to E, which exists by virtue of
Theorem 1, satisfies the requirements of the proposition. |
Exercise
1. Show that for a Hilbert space Proposition 3 can be proved independently
of the Hahn-Banach theorem. (Hint: Use the corollary to Proposition 3.4.)
§7. The dual space
Let E be a normed vector space over a field K, and let E' be the set
of all continuous linear forms on E. We shall now define in a very natural
way a structure of Banach space over К on the set Er. If f and g are two
continuous linear forms on E, then f + g is defined by
(/ + 0)(z) = /G'r) + g(x) for all X G E.
It is quite clear that / + g is a linear form; its continuity follows from the
inequality
K/ + </)(*)! m + |p(x)| (ll/ll + b№||. (i)
[1, §7] THE DUAL SPACE 53
If X is a scalar, then X/ is defined by
(Х/)(я) = X • f(x) for all x e E.
It is again clear that X/ is a linear form; its continuity follows from
|(X/)(x)| |X| • Ц/ll • ||x||.
Axioms (VS 1) through (VS 8) are readily verified; in particular the zero
element of Ef is the map which to everyxeE assigns the zero of K. The
norm of a continuous linear form has already been defined in §5. It clearly
satisfies Axiom (N 1), and it follows from (1) that it also satisfies (N 3).
Axiom (N 2) is also verified since
Hxfii — sun IV(^)I _ s N * l!/(s)ll _ ixI su ll/(s)|| _ ix 1. и л||
IIX/H - sup -sup — |X| sup |W| - |X| 11Л1-
Finally, we prove the remarkable fact that the normed space E’ is com-
plete. Let (/n)n£N be a Cauchy sequence in Ef. Then for x e E we have
\fn(x) ~ fm(x)\ \\fn - fm\\ • |H| < €||X|| (2)
whenever n, m > V(e). This means that the sequence (/nW)neN of
scalars is convergent. Let us denote its limit by f(x). The map f: x f(x)
from E into К is linear, since
f(Xx + я/) = lim fn(Xx + я/) = X lim fn(x) + g lim fn(y)
П—НХ) П—юо П—НП
= W) + m/(?/)-
It follows from (2) that |/(x) — /m(x)| €||x|| if m > N. Thus
|/(x)| |/(x) ~/TO(s)| + |/m(x)| (e+WIM
i.e., / is continuous. Furthermore,
II/ - All = sup I/(X) if m > N,
which signifies that (/n) converges to f in the sense of the norm of E'.
We have thus completely proved that Ef is a Banach space. This space
is called the dual (conjugate or adjoint) space of E.
Example 1. Let lp (1 < p < oo) be the space introduced in Example
1.7, and let the conjugate exponent q be defined by
54
BANACH SPACES
[1, §7]
Every element f = (pn)neN of the space I9 defines a continuous linear
form f on lp according to the formula
f(x) = £ v’nfn, x = ($n) e lp.
n=0
Indeed, the right-hand side converges absolutely, since by Holder’s in-
equality we have
m / m \l/« / m \l/p
£ Wni (£ ыч (£ ii/imix||p>
n=0 '4n=0 ' 'n=0 '
where, of course, \\f\\q denotes the norm of f in lq and ||z||p the norm of x
in lp. It also follows that |/(z)| ||/||J|z||p, i.e., \\f\\ \\f\\q. We shall
prove that the map f >-*f is an isometric isomorphism of lq onto the dual
space (lPY of lp (F. Riesz). It is evident that this map is injective. Let
f be an element of (lpy. Denoting the n-th unit vector (i.e., the vector
with components £n = 1, = 0 if m ri) of lp by en, we define
<Pn = f(eny If x = (%n) is an element of lp such that fn = 0 for all n
larger than some integer m, then
7(x) = 7( £ bfin\ = £ w(en) = £
'n=0 ' n=0 n=0
Set <pn = ег’в»|^>„| and define ym = (птп)пек, where
_ le~ 1вп|<рп|4~ 1 if 0 n m,
Vmn ~ |0 if n > m.
Then we have
m / m
\f(ym)\ = £ Ы’ \\7\\ 1Ы1р = ll/ll • ( £ l^nl”'9-1’
n=0 'n=0
Using the fact that p(q — 1) = q and 1 — 1/p = l/qt we obtain
This proves that the sequence f = (<pn)nGN belongs to lq and that-
\\f]\q l'7il- If X = (fn) e lp, let xm = (£mn)nEN be defined by
t _ / if 0 n m,
imn ~ |0 if n > m.
For every e > 0 we have
[1, §7]
THE DUAL SPACE
55
if m > M. Furthermore,
m
f(Xm) ==
n=0
(3)
and
I/O) - 70m)| ll/ll • Ik - Xw||p € • \\f\\. (4)
By Holder’s inequality we have
S^n^n!
0 n=0 1
£ <Pnln ||/||e • Ila; -
(5)
It clows from (3), (4), and (5) that
oc
/0) 2^ «pnfn
n=0
= 2€-||/||,
: e..
00
/0) <Pn£n)
n=0
V/’hich concludes the proof.
By virtue of this result we usually identify the spaces (Zp)' and lq and
say that the dual of lp is lq.
Example 2. Consider now the space c0 defined in Example 1.6. If
/ = (^n) is an element of the space Z1, then the relation
00
/0) ~ Фп&п) X ~ (%n)
n=0
defines a continuous linear form f on c0, since evidently
E |<Pn^n| max|fn| • E Ы = 11/111 • ||x||.
n=0 n=0
It also follows that |’/|| ||/|| i - Let us prove that the map f f estab-
lishes an isometric isomorphism between Z1 and (c0)z. Let / be an element
of (cq)' and define, similarly as in the previous example, <pn = f(en), where
er. is the n-th unit vector of c0. If x = (fn) is such that = 0 for n > m,
:hen we again have
7(^) = £
n=0
c.-7i = ei6n\vn\ and define ym = (чтп)п<=к, where
Vmn —
I e
|0
if 0 n m,
if n > m.
56
BANACH SPACES
[1, §7]
Then we have
m
= E W ll/ll • Ibll = ll/ll-
n=0
It follows that / = (^>n) G Z1 and |]/|| i
||71|. If x = ($n) G c0, then we
define again xm = (£mn)nf=n by
^mn
Un
|0
if 0 n m,
if n > m.
For any € > 0 we have ||a; — zw|| = maxn>w |£n| < e for m > M, since
by the definition of c0 the sequence (£n)nGN tends to zero. Furthermore,
m
= ^n$n,
n=0
(6)
|,f(x) - J(xm)\ ЦУ11 • ||a; - xm\\ e • ||J||
and
^2 <Pn£n
n=0
m
^2 Vn&i
n=0
<Pn£n
max
n>m
Ы- E
n=m+l
Ы e-ll/ll! 6-ll/ll.
(7)
(8)
It follows from (6), (7), and (8) that
7(*) - E =S 2e- ll/ll,
?i=0 I
i.e.,
00
/(*) = E
n=0
which concludes the proof.
We usually identify the spaces (c0)' and I1.
Example 3. As our final example, let us find the dual of I1. If f = (<pn)
is an element of the space m (Example 1.8), then the formula
7^) = E ^n’ x = e 11 ’
n = 0
defines a continuous linear form f on I1, since
oo oo
E w»i sup w- e 1^1 = ll/ll»' Их,
n=0 n n=Q
[1, §7]
THE DUAL SPACE
57
where is the norm of f in m. It also follows that ||/|| ||/lk- The
map f <-♦ f is an isometric isomorphism of m onto (I1)'. Indeed, given an
J e (Z1)', we define, as in the previous two examples, <pn = /(<?«.) and
obtain
/(») = £
n=0
if = 0 for n > m. Set as before <pn = егвп\<рп\ and let ym = ^mn)nEN
be defined by
(е~г6п if n = m,
0 if n # m.
Then we have
|7(Ы = Ш ll/ll - 1Ы11 =
This implies that f = (<pn) e m and that ||/||«> ||/||. The proof that
for an arbitrary x = (£n) e Z1 we have
7(x) = E <Pn^n
n=0
is similar to that of the two previous examples and can be left to the
reader.
We usually identify the spaces (Z1)' and m.
Let E be a normed space and E' its dual space. With a very useful
change of notation we shall denote the elements of E' by primed letters
x', y', . . . and define the symbol (x, xf} by
(x, x') =
where the right-hand side is the value of the linear form x' at the point x.
The map (x, a/) i—> {x, x') is a bilinear form on E X E', called the
canonical bilinear form. Linearity in x follows from the fact that x' is a
linear form; linearity in x' follows from the definition of the operations in
E'. We have, by the definition of the norm in E',
|<x, x')| ||x|| • ||x'||,
which shows in particular that the canonical bilinear form is continuous.
Two other properties are the following:
(a) if for an x' e E' we have (x, x') = 0 for every x G E, then x' = 0;
(b) if for an x G E we have (x, xf) = 0 for every xf G Ef, then x = 0.
Property (a) is just the definition of the zero vector in E'; property (b),
however, lies much deeper and is an immediate consequence of Proposition
6.1 for M = {0}.
58
BANACH SPACES
[1, §7]
Definition 1. Two vectors x G E and xr G Er are said to be orthogonal
if (x, x') = 0. The vector xr G E' is said to be orthogonal to the set M С E
if x' is orthogonal to every x E M. The vector x G E is said to be orthogonal
to the set M' С E' if x is orthogonal to every x' G M'.
Given a set M С E, we denote by M1- the set of all vectors of Er which
are orthogonal to M. Given a set M' С E', we denote by M'-1- the set of
all vectors of E which are orthogonal to Mr.
With this terminology we can restate Proposition 6.3 in the following
form: A set G is total in a closed subspace M of a normed space E if and
only if every element xr G E' which is orthogonal to G is also orthogonal
to M.
Proposition 1. Let G be a subset of a normed space E. Then GL is a,
closed subspace of the dual space Er and GL1~ = (G1-)1- is the closed subspace
of E generated by G.
Proof. It is clear that G1- is a subspace of E'. Let x' adhere to G\
Then for every e > 0 there exists yr G GL such that ||x' — y'\\ < e. For
x G G we have
|<X, x')| = |<X, x'} — {x, y'}\ ||x|| • ||x' — y'\\ g |h|| • €,
i.e., (z, x') = 0, x' G G\ Thus G1- is closed.
A similar reasoning shows that G^ is a closed subspace of E. Clearly,
G С If x' is orthogonal to G, then xr G G3- and thus xr is orthogonal
to G±J-. By the new version of Proposition 6.3 this implies that G gen-
erates G±J-. |
Before stating the next result let us introduce a notation. If M and
N are two closed subspaces of a normed space E, then M V N will denote
the closed subspace of E generated by M и N. We recall that M + N
denotes the subspace of E formed by all vectors of the form у + z, where
у G M, z G N. It then follows from the remark made after Definition 3.1
that M V N = M + N.
Proposition 2. Let M and N be two closed subspaces of a normed space E.
Then
(M У N)1- = M1- n A-1.
Proof. Let x' G (M V A)-1-. Then in particular x' is orthogonal to M
and A; i.e., x' G M1- n A-1". Conversely, let x' G M1- n A-1". Then x' is
orthogonal to both M and A, i.e., to M и A. It follows from the trivial
half of Proposition 6.3 that xr is orthogonal to the subspace M V A gen-
erated by M U A; i.e., x' G (M V A)-1". |
[1, §7]
THE DUAL SPACE
59
Let E be a normed space. Every element x G E defines a linear form x
on the dual space E' according to the formula
x(x') = (x, xf) for all x' G Ef.
It follows from the inequality
!*(*')! = IfoOl И • Ill'll
that x is continuous and that ||x|| ||x||. Thus x i—> x is a continuous
linear map from E into the space E" = (E')f, called the bidual (or second
conjugate) of E. We have ||x|| = ||x||. Indeed, let the linear form yf be
given on the subspace {Xx} of E by y'(Xx) = X||x||. Clearly, ||/|| = 1,
and extending to E by the Hahn-Banach theorem (Theorem 6.1), we ob-
tain an element yf G Ef which verifies (x, y') = ||x|| and ||?/|| = 1. But
then
||x|| = sup
x’EE’
Ill'll
> {x, y')
= Ill'll
IM-
It follows that the map x i—> x establishes an isometric isomorphism of E
onto a subspace E of E" (we usually identify E with E). It may happen
that E # E". If E = jE", then we say that the normed space E is re-
flexive. Clearly, a reflexive normed space is complete, i.e., a Banach space.
Example 4. For 1 < p < oo the space lp is reflexive. Indeed, observe
that as p increases from 1 to oo, the conjugate exponent q decreases from
oo to 1, and therefore the roles of p and q are symmetric. Now, in Example 1
we have precisely proved that the map f i—> f from lq into (lp)' = (I9)"
is surjective.
Example 5. The space c0 is not reflexive. Indeed, we know from
Examples 2 and 3 that (c0)" = (I1)' = and the map x i—> x is here
clearly the canonical injection c0 m> which is not surjective.
Now let E be a Hilbert space. If to an element a G E we assign the
linear form fa defined by
/а(х) = (x I a), x e E,
then a i—> fa is a semi-linear map from E into E', since we have
(Va + = (x I Xa + gb).
If К = R, then, of course, the map a i-> fa is just linear. It follows from
the Frechet-Riesz theorem (Proposition 5.1) and the remarks preceding it
that а и-> fa maps E onto E' and conserves the norms, i.e., ||a|| = ||/a||.
60
BANACH SPACES
[1, §7]
We shall sometimes identify the spaces E and Er by this "isometric semi-
isomorphism. ” If we define (fa \ fb) = (& I then the Banach space E'
even becomes a Hilbert space.
It follows that every Hilbert space is reflexive. To show this, let us denote
by Ф the map a fa from E onto E' and by Ф the analogous map
b' ► fb' from E' onto E". We have by definition
(x, Ф(а)) = (x | a) for all x e E,
{xr, Фг(Ь')) = (xr | b') for all xr e Ef.
Let a e E. Then we have for any xf e E'\
a(xf) = (a, xf).
Now, xf = Ф(я) for some x e E, and hence
a(xf) = (а, Ф(х)) = (a | x)
= (ф(х) | Ф(а)) = (xf | Ф(а)) = {xf, ф(Ф(а)));
i.e., a = ф(Ф(а)). Thus the map a i—> a is surjective as the composite of
the two surjective maps Ф and Ф.
If E is a Hilbert space, M a closed subspace of E, and if we identify E
with E'j then will be the subspace of E consisting of all vectors z
which verify (y | z) = 0 for every у e M. We know (Proposition 1) that
M1- is a closed subspace of E; it is called the orthogonal complement of M.
We have clearly M n M1- = {0} and it follows from Proposition 3.4 that
M + = E.
Let us go back to a Banach space E. With the help of the dual space Er
we can define on E a topology, distinct from the one defined by the norm,
and which is called the weak topology. We can say roughly that a sequence
WnGN of elements in E tends weakly to zero in E if for every xf e E' the
sequence (fxn, xf}) of scalars tends to zero.
Example 6. The sequence (en) of unit vectors in I2 does not tend to
zero in I2 since ||en|| = 1 for every n. It tends, however, to zero weakly,
since if у = (rjn) is an element of Z2, then (en | y) = rjn and rjn tends to
zero because is convergent.
Sequences are, however, not adequate to describe the weak topology and
an exact definition must be given in terms of neighborhoods. Let a e E.
A neighborhood V of a in the weak topology is determined by a finite
sequence of elements of E'; V is the set of all those vectors
x e E which verify |((z — a), 1 for 1 i n. We shall prove
in the next chapter that the sets so defined satisfy the axioms of neighbor-
[1, §7]
THE DUAL SPACE
61
hoods and also that the two operations on E are continuous for the weak
topology.
The weak topology cannot be defined in terms of a norm (except in
trivial cases) and thus we have here the first example of a topological
vector space which is not a normed space. The next two chapters of this
book will be devoted to the theory of general topological vector
spaces.
The weak topology has many useful properties which the strong topology
does not have. Thus the closed unit ball of a Hilbert space (and more
generally of any reflexive space) is weakly compact, which we know
(Example 2.2) is not true for the topology defined by the norm.
Exercises
1. Complete the proof in Example 3.
2. Let E be a normed space and (Mt)tez a family of closed subspaces of E.
We denote by \Дег Ml the closed subspace of E generated by (Jeer ML. Prove
the relation x.
{У&МУ = QigzMA
3. Let E be a Hilbert space (which we identify with E'). Let M and N be
closed subspaces of E.
(a) Give a proof of М±л- = M independent of the Hahn-Banach theorem.
(Hint: Use the corollary to Proposition 3.4.)
(b) Prove that if the subspaces M and N are orthogonal (Definition 3.4), then
M + N is closed, i.e., M V N = M + N. (Hint: If x = у + z with у G M,
z G N, then н ||2 _ I. Ц2 I ii«ii2 \
Remark 1. If M and N are not orthogonal, then M + H is not necessarily
closed ([44], §15).
(c) Prove the relation (MnN)1 = M1- V Лт±. {Hint: Use Proposition 2
and (a).)
(d) Deduce M + M1- = E from (a), (b), and (c). (Hint: M + M1- = М±л-
+ M1- = V M1- = (M^-n M')1- = {О}-1- = E.)
4. Let £(E, F) be the set of all continuous linear maps from the normed
space E into the Banach space F. Defining the algebraic operations on £(E, F)
in a natural way and setting
!|/|| = sup ,
xE.E H^il
show that £(E, F) is a Banach space.
5. Prove that if the dual E' of a Banach space E is reflexive, then E itself
is reflexive. (Hint: First show that the image of E in E" under the map x ь-> %
is closed (cf. the proof of Proposition 5.4); then apply Proposition 6.1.)
62
BANACH SPACES
[1, §8]
§8. The Banach-Steinhaus theorem
The second fundamental result concerning normed spaces is the
following:
Theorem 1 (Banach-Steinhaus theorem or the principle of uniform
boundedness). Let (X)tGZ be a family of continuous linear forms defined on
a Banach space E. Suppose that for each x E E the family of scalars
(ис(хУ)С£1 is bounded. Then there exists a constant M > 0 such that
|ui(x)| M||x|| for all x E E and t G I.
In this theorem the completeness of E is essential and we shall first
present the general result from the theory of metric spaces on which the
proof is based.
We say that a subset A of a metric space is rare (or nowhere dense) if
the closure of A has a void interior, i.e., if A = 0.
Baire's Theorem. If X is a complete metric space and (Fn)n^N a se-
quence of closed rare subsets of X, then |JnGN En # E.
Proof. Write An = CFn for n G N. The set Aj is open and therefore
contains a closed ball BP1(xf) with p^ <1. The intersection A2 П BP1(xf)
is not empty because F2 is rare, and therefore there exists a closed ball
BP2(z2) with P2 < 2 such that BP2(z2) С A2 П BP1(xi). Continuing this
construction, we obtain a nested sequence
BP1(xj) D BP2(x2) D • • • D BPn(x„) D • • •
of closed balls such that BPn(xn) C An and pn < 1/n. Then (xn)nGN is a
Cauchy sequence, since for p, q n we have xp G BPn(xn), xq G BPn(xn)
and thus
•fyz) — $(%р> %n) ^n) = ^Pn < 2/?z
Since X is complete, the sequence (xn) converges to some point x G X.
Now x adheres to every ball BPn(xn), because xp g BPn(xn) for p n.
Thus x G BPn(xn) and a fortiori x G An for all n G N. Hence the point
x G X does not belong to any set Fn. |
Corollary. If the complete metric space X is the union of the sequence
(Fn)n^N of closed sets, then at least one set Fn contains some ball Bp(z).
Osgood's Theorem. Let (uc)L(=i be a family of continuous functions
defined on a complete metric space X. Suppose that for each x G E the family
{nfx')}LE.i of numbers is bounded. Then there exists a ball Bp(z) in X and
a constant M > 0 such that |ut(x)| M for all x G Bp(z) and i G I.
Proof. For i g I and n g N let Gin be the set of those points x g X
in which |ut(x)| n. Since uL is continuous, the set GLn is closed. The
[1, §8]
THE BANACH-STEINHAUS THEOREM
63
intersection Fn = Qtej GLn is also closed, and it consists of those points
x G X in which |ut(x)| n for every iG I. The hypothesis that
(ut(x))tGj is bounded at every point means that X = (JnGN Fn. By the
previous corollary there exists a ball Bp(z) which is contained in some
Fn, i.e., |ut(x)| n for all x E Bp(z) and i e I. |
Proof of Theorem 1. By Osgood’s theorem there exists a ball Bp(z) in E
and N > 0 such that |ut(x)| N for all x G Bp(z) and i G I. If x is
arbitrary in E, then we have
Й', + геВ'(г)
and therefore
for every l g I. It follows that
l“‘ (1HP)| = I“‘ (Й*’ + г~г)|
= lMt (Йp + 2)l+ ~2N
and
|ut(x)| Й ||x||
r
for every x G E and i G I. Taking M = 2N/p, we obtain the desired
conclusion. |
Remark 1. The method just used, based on Baire’s theorem, will serve
us in Chapter 3 to generalize the Banach-Steinhaus theorem. There is,
however, a different proof, using the method of the “gliding hump, ” which
is also of interest (see [52], §20, 11.(3), (b), p. 254 and [9], Chapter IV,
§5, Exercise 4(a)).
As a corollary of Theorem 1 we get:
Proposition 1. Let (Un)neN be a sequence of continuous linear forms on
a Banach space E. Suppose that for each x G E the sequence (un(x)) con-
verges to some value u(x). Then u: x » u(x) is a continuous linear form
on E.
Proof. The map и is a linear form since
u(x 4- y) = lim un(x + y) = lim un(x) + lim un(y) = u(x) + u(y)
n—>00 n—>00 П—>00
and
u(Xx) = lim un(Xx) = X lim un(x) = Xu(x).
64
BANACH SPACES
[1, §8]
For every x G E the sequence (un(x)) is bounded; hence by Theorem 1
there exists M > 0 such that |un(x)| M||z|| for all x G E and n G N.
But then |u(x)| M||x|| for all x G E; i,e,? и is continuous, |
In general, to ensure continuity of the limit of a sequence of continuous
functions, we need uniform convergence (cf. Example 1,4), Proposition 1
shows that in the case of linear functions on a Banach space, pointwise
convergence already implies the continuity of the limit function.
Example 1, As a striking application of the Banach-Steinhaus theorem,
we shall prove that there exist continuous functions whose Fourier series
diverges at one point.
Let us recall a few facts concerning Fourier series, A series of the form
oo
4- J} аь cos kx + bk sin kx (1)
is called a trigonometric series. If the series (1) is uniformly convergent,
then its sum f(x) is a continuous periodic function with period 2тг, In
this case if we multiply by cos lx or by sin lx. the resulting series will still
be uniformly convergent. Integrating termwise and using the ‘"ortho-
gonality formulas” (cf. Example 6,2)
r27r 7 , . f тг, к — I0,
/ cos kx cos lx dx = j ,
Jo l“, /с I,
f2ir ' i ' i j (тг, к = I # 0,
/ sm kx sm lx dx = j , 7
Jo к /,
/•2тг , г2тг
/ cos kx sm lx dx = 0, / dx = 2тг,
Jo Jo
we obtain the expressions
г27г
ak = - f(x) cos kx dx
7Г Jo
bk = -
ТГ
f(x) sin kx dx
(k G N),
(k G N*).
Now let f(x) be a continuous periodic function with period 2тг. Then
we can define the so-called Fourier coefficients of f(x) by the formulas (2),
and the series (1) formed with these coefficients is called the Fourier series
of /. The first question we ask is, of course, whether the Fourier series
of f converges. To answer this question we represent the partial sum
n
sn(x) = O'k cos kx + bk sin kx
k=i
in a closed form.
[1, §8]
THE BANACH-STEINHAUS THEOREM
65
To do this we start out with the geometric progression
V ike _ ei(n+1)e - 1.
ь л 6 eiff — 1
fc=0
It follows that
1 , V - е'(П+1)в - 1 1 = 2ei(n+l/2>e - e(1/2)ie - е~(1/2)гв
2+ — е*0—1 2 — 2(e(1/2)ie) — e—<i/2)*0)
_ ei(n+1/2)t> - cos jff >
2i sin ^9 ’
and taking the real parts,
1 । v zn sin-J-(2n + 1)0
2+Ecos^=
л=1
From this formula we obtain
sn(x) = 8„(ж; /)
1 Г2* n г Г2*
= ^— / /(<) dt + У — / /(7) (cos kt cos kx + sin kt sin kx) dt
2ТГ Jo 7Г Jo
r2ir / n \
= - I f(t) (x + У cos ~ x)]dt
* Jo V k=i /
/• 2 7r
_l +!)« -») dt.
2tt Jq sm — x)
Let E be the Banach space formed by the continuous periodic functions
with period 2тг, with the norm \\f\\ = supo^z^r |/(#)I* Of course E can
be identified with the closed subspace of e([0, 2тг]) formed by the functions
f which satisfy /(0) = /(2тг) (cf Example 3.2). The continuous linear
form
г2тг
л /Л. _ 1 / SHI ^2П +
f Sn(0,f) — C) I f(f) ' If dt
Ztt Jq sm
has the norm
/•2тг
«“" - гЦ I ±y-'|d‘“<3>
and the number ln (n e N) is called the n-th Lebesgue constant. Let us
prove (3). It is clear that if \f(x) | 1 for all x, then \un(f) | ln> There-
fore we have only to show that for any e > 0 there exists an f G E such
66
BANACH SPACES
[1, §8]
that ll/ll 1 and |un(/)| ln — e. The function sin |(2n + l)x is zero
at the points x = 21тг/(2п +1) (I G Z). Suppose that 6 < тг/(2п + 1)
and define the continuous function fa by
fi(x) = < sin J(2n + 1)2 .p 2Ztt . . . .2(1 + 1)tt _ sgn J;—- if o . , + 5 x g \ d, sin %t 2n + 1 2n + 1 linear if o . 1 x -—p-—h 5, 2n + 1 2n + 1
where sgn £ stands for $/|$|. Clearly, ||/5|| = 1. Furthermore, we have
|^n(/s)| = k
2n + l 1 r2ZTr/(2n + l)4-3
v A /
7_n 2?r J 2lirK2n + l)—8
sin |(2n + 1)£
sin %t
dt
2n + l
In - £ - (2n + 1) = ln - - (2n + l)(2n + 2),
z=o T
since
sin |(2n 4-1)2
sin %t
1 + 2 cos kt
k=l
2n + 1.
If now the sequence (sn(0; /))n6N converged for every f eE, then in
particular it would be bounded for every f eE. It would then follow
from the Banach-Steinhaus theorem that the sequence (Zn) is bounded.
Thus, to prove the existence of a continuous function whose Fourier series
diverges at the origin, it is sufficient to show that ln tends to +qo as
n —» oo. In the intervals
(4Z + 1)tt (4Z + 3)tt
4n + 2 = X = 4n + 2
we have
sin |(2n + l)x
£
and consequently
(4Z4-3)Tr/(4n4-2)
q J (4?4-1)тг/(4п4-2)
dt___
|sin
Furthermore, since sin for t > 0, we have
(4Z4-3)Tr/(4n+2)
y2
4ТГ J(4Z+l)7r/(4n+2) t
and the last sum tends to + oo as n —» oc.
[1, §8]
THE BANACH-STEINHAUS THEOREM
67
Remark 2. In Definition 3.6 we introduced the name Fourier coefficient
in a sense which appears to be completely different from the present one.
We shall see in Chapter 5 that the terminology is consistent.
Exercises
1. Let E be a Banach space, F a normed space, and let be a family
of continuous linear maps from E into F. Suppose that for each x E E the
family (izt(x))tGz is bounded in F. Show that there exists a constant M > 0
such that ||-ut(x) || 7l/||x|| for all x E E and c E I.
2. Show that Baire’s theorem does not hold in the space Q of rational
numbers.
3. Give an example of a sequence (un) of continuous functions defined on the
interval [0,1] such that the sequence (un(x)) is bounded for every x E [0, 1]
but maxo^x^i |глл(х)| is unbounded.
4. (a) Let (umn) im,n)eNXN be a double sequence of continuous linear forms
defined on a Banach space E. Suppose that for every m E N there exists an
element xm such that the sequence (umM)„en is unbounded. Prove that
there exists a common element x E E such that for every m E N the sequence
GuW)n£N is unbounded (principle of condensation of singularities).
(b) Prove that if A is any countable set in [0, 2тг], then there exists a continu-
ous function whose Fourier series diverges at every point of A.
5. Let (an)nGN be a sequence of numbers such that for every (£n) E co the
series 2n=o Mn converges. Prove that (an) E I1. (Hint: Use Example 7.2 and
Proposition 1.)
6. (a) Let E be a Banach space and (x, y) B(x, y) a bilinear form defined
on E X E. Suppose that for each x E E there exists g(x) > 0 such that
|R(x, y)| ju(x) ||?/|| for all у E E and that for all у E E there exists a v(y) > 0
such that |R(x, y)| p(?/)||x|| for all x E E. Show that there exists a constant
M > 0 such that |R(x, y)| g Jf||x|| • ||y|| for all x E E and у E E. (Hint:
Consider the linear forms x B(x, y) as varies in the unit ball {y j ||y|| 1}
of F.)
(b) Let (aij) (i,;)eNXN be an infinite square matrix such that for any two
elements x = (&) and у = (тц) of I2 the double sum
00 00
i—O j=0
converges. Show that there exists a constant M > 0 such that
i=Q j=Q
M\\x\\ Из/H
for all x, у E I2 (theorem of Hellinger-Toeplitz). (Hint: First prove with the
method of Exercise 5 that if (fr)iGN is a sequence of numbers such that for every
(&) E I2 the series 22Г=о converges, then (ft) G Z2.)
68
BANACH SPACES
[1, §9]
§9. Banach’s homomorphism theorem and
the closed-graph theorem
Let us start with a result from topology. Let X be a compact metric
space, Y an arbitrary metric space, and / a continuous bijection from X
onto Y. Then the inverse map is also continuous; i.e., f is a homeomor-
phism. Indeed, if A is a closed set in X, then it is compact; thus f(A)
is compact and hence also closed in Y.
We now prove a somewhat analogous result for linear maps of Banach
spaces.
Theorem 1. Let E and F be two Banach spaces and f a continuous bi-
jective linear map from E onto F. Then f is an isomorphism.
We shall need two lemmas.
Lemma 1. If the image f(Bx) of the unit ball BY of E is dense in some ball
Bp of F, then f(Bi) contains the interior B'p of B'p.
Proof. The set A = f(By) n B'p is dense in B'p. Indeed, let у e B'p and
e > 0. Take z e F such that ||z|| < p and \\y — z|| < There exists
x e BY such that ||/(x) — z|| min (Je, p — ||z||). But then
||y —/0)11 < € and 11/0)11 < P-
Let у e B'p. Take 0 < e < 1 and let yQ be the zero vector in F. We
shall define by induction a sequence (yn) of elements of F such that
Уп+1 — Уп& enA, ||з/„+1 — 3/11 < en+1p (n eN).
Suppose that the elements yt for 0 i n have already been selected
and satisfy the conditions indicated. The set yn + tnA is dense in the ball
Уп + tnBp — B'np(?/n),
and у e yn + tnB'p. Hence there exists an element yn+i ^Уп + enA such
that ||?/n+i — 3/|| < en+1p.
There exists a sequence (xn)nGN of elements of E such that x0 — 0,
/(zn+1) = Уп+\ — Уп and H^n+ill = cw. Since the series with positive
terms £n=o 6W is convergent, it follows from Proposition 3.8 that (xn) is
summable. Let x — £nGN xn. Then we have
ion Z lOnii Ьл =
n=0 n=0
and
f(x) = lim £ /0*) = lim Z 0* ~ ^*-1) = lim = У-
[1, §9]
banach’s homomorphism theorem
69
We thus have /(B1/(i_€)) D Bp; that is, f(By) D Bp{1_e) for every e > 0.
Hence/(Bi) contains the interior of Bp. |
Lemma 2. For every Bp QE the set f(Bp) is a neighborhood of 0 in F.
Proof. Since/is surjective, we have |Jngn/(^p) = F. By the corollary
to Baire’s theorem (§8) one of the closed sets f(nBp) contains some ball
and consequently f(Bp) contains some ball B'(t/0)« Clearly also
—В'^уо) cftBp). We show that f(Bp) contains the ball B', from which
the conclusion of the lemma follows. Let ||?/|| S a; then
У = %(Уо + У) + ~ 2/o),
and we have
2/o + У G B'a(yQ), у - yQ G - B'Q/0).
Since/(Bp) is clearly convex (Definition 3.3), it follows that у ^f(Bf). |
Proof of Theorem 1. If Bp is a ball in B, it follows from Lemma 2 that
f(Bp) is a neighborhood of 0 in F; i.e., f(Bp) is dense in some ball B' of F.
But then, by Lemma 1, the set f(Bp) contains the interior of B'; i.e., f(Bp)
is a neighborhood of 0 in F. Thus/-1 is continuous at the origin. The
theorem now follows from Proposition 4.1. |
Let us now deduce a few simple consequences of Theorem 1.
Proposition 1 (Banach’s homomorphism theorem or the open-mapping
theorem). Let E and F be two Banach spaces and f a continuous linear map
from E onto F. Thenf is a strict morphism (Definition 4.2).
Proof. Let N be the kernel of /. The associated injection / is a continuous
linear bijection from E/N onto F. Hence by Theorem 1 it is an
isomorphism. |
Proposition 2. Let E and F be two Banach spaces and f a continuous
linear map from E into F. Then f is a strict morphism if and only if f(E)
is closed in F.
Proof. If /(B) is closed in B, then it is a Banach space. Hence by
Proposition 1 the map/is a strict morphism of E onto/(B).
Conversely, if / is a strict morphism and N its kernel, then the associated
injection / is an isomorphism of E/N onto f(E). Since E/N is complete
(Proposition 4.3), so is/(B) and hence it is also closed in F. |
Observe that a particular case of the second (trivial) half of the proposi-
tion has already been used in the proof of Proposition 5.4.
Let X and Y be two metric spaces and / a map from X into Y. The
graph of / is the subset of the cartesian product X X Y formed by all
pairs of the form (x, f(x)). If / is continuous, then its graph G is a closed
set in X X Y. Indeed, let (x, y) G G. Then there exists a sequence (xn)
70
BANACH SPACES
[1, §9]
of elements of X such that limn_>00 xn = x and limn_>00 f(xn) = y. But
the continuity of f implies that limn_^00 f(xn) = f(x). Thus у = f(x) and
(z, у) = (x, f(xY) G G. We shall now see that for linear maps of Banach
spaces the converse is also true. }
Proposition 3 (Closed-graph theorem). Let E and F be two Banach
spaces and f a linear map from E into F. If the graph of f in E X F is
closed, then f is continuous.
Proof. The graph G of f is a closed subspace of the Banach space E X F
provided with the norm ||(x, y)\\ = (||x||2 + ||z/||2)1/2 (cf. Exercise 4.4).
Thus G is also a Banach space, and it follows from the inequality
||x|| ||(x, y) || that the projection (x, f(x)} x from G onto E is con-
tinuous. By Theorem 1 the map x i—► (x, f(x)) is then also continuous;
and since the projection (x, f(x)) f(x) is clearly continuous, it follows
that the composite map x i—► f(x) is continuous. |
Corollary. Let fbe a linear map from a Banach space E into a Banach
space F. If for every sequence (xn) of points in E which tends to zero and
for which f(xn) tends to a vector у we have у = 0, then f is continuous.
Proof. Let (x, z) adhere to the graph G of f in E X F. Then there exists
a sequence (xn) of points of E such that (xn) tends to x and f(xn) tends to z.
But then (xn — x) tends to 0 and f(xn — x) tends to z — f(x). By
hypothesis z = f(x); thus (x, z) G G and G is closed. Proposition 3 shows
that f is continuous. |
Exercises
1. Show that Lemmas 1 and 2 are true if f is a continuous linear map from E
onto F which is not necessarily injective. Then deduce Proposition 1 directly
from the lemmas.
2. Deduce Theorem 1 from the closed-graph theorem. (Hint: Observe that
the map (x, y) i—> (y, x) from E X F onto F X E establishes an isomorphism
between the graph of f and that of J-1.)
CHAPTER 2
Locally Convex Spaces
§1. Some notions from topology
A topology is defined on a set X by assigning to every point x G X a collection
93 (z) of subsets of X so that the following axioms are satisfied:
(NB 1) If W С X and W contains a set V G ®(s), then W G «(ж).
(NB 2) The intersection of a finite collection of sets in %S(x) belongs to 93 (z).
(NB 3) If V G ®(s), then x G V.
(NB 4) For every V G 93 (z) there exists W G 93 (z) such that for every
у G W we have V G 93(?/) -
A set X with a topology T defined on it is called a topological space and we
say that X is equipped with the topology T. The sets of 93 (z) are called neighbor-
hoods oi x.
If X is a metric space, then it is trivial to check that the neighborhoods of
the points x G X, as defined in §2 of Chapter 1, satisfy the axioms (NB 1)
through (NB 4). Thus every metric space is equipped in a natural way with a
topology.
Let X be a topological space and А С X. The interior A of A is the set of
all those points x for which there exists a neighborhood V G 93(z) such that
V C A. Clearly, АСА. If A = A, then the set A is open. The set X and
the empty subset of X are always open. Let © be the collection of all open sets
of X, then it is easy to verify that we have the following two properties:
(О 1) The union of any collection of sets in © belongs to ©.
(0 2) The intersection of a finite collection of sets in © belongs to ©.
Conversely, suppose that we have a set X and a collection © of subsets of X
which satisfies the conditions (0 1) and/0 2). Observe that X G © as the inter-
section of the empty collection of sets in © and that 0 G © as the union of the
empty collection of sets in ©. We say that a set V is a neighborhood of x G X
if there exists a set U G © such that V D U and x G U. The neighborhoods
defined in this fashion satisfy Axioms (NB 1) through (NB 4). Indeed, (NB 1)
and (NB 3) are obvious; (NB 2) follows from (0 2). As for (NB 4), we can
choose W = U. Furthermore, for the topology T defined by these neighbor-
hoods, © is exactly the collection of open sets. To show this, let us denote by ©'
the collection of all open sets for T. If A G ©', then for each x G A there exists
a set Ux G © such that x G Ux C A. Thus A = U^ex UX) and by (0 1) we
71
72
LOCALLY CONVEX SPACES
[2, §1]
have A G £). Conversely, if A G £), then for every x G A the set A itself is a
neighborhood of x contained in A; hence A G©'. We see therefore that a
topology can also be defined in terms of its open sets, and the system of Axioms
(0 1) and (O 2) is equivalent to (NB 1) through (NB 4). A set is open if and
only if it is the neighborhood of each of its points. We also define a neighborhood
of an arbitrary subset A of a topological space X as a set V which contains an
open set containing A, Thus a subset A of X is open if and only if it is a neigh-
borhood of itself.
If A is a subset of a topological space X, then a point x G X is said to adhere
to A if for any neighborhood V of x we have V Г1 A ft. The set A of all
points adherent to A is called the adherence or closure of A. Clearly, A C A.
If A = A, then A is closed, A set A is closed if and only if C A is open. The
intersection of any collection of closed sets is a closed set. The union of a finite
collection of closed sets is a closed set. If A is any subset of X, the set A is open
and the set A is closed. If А С X, В Q X, and A D B, then A is dense in B,
If A = X, then A is everywhere dense.
Let X and Y be two topological spaces. A bijection from X onto Y is called
a homeomorphism if it transforms the collection of all open sets of X into the
collection of all open sets of Y, Two topological spaces are homeomorphic if
there exists a homeomorphism between them.
Let X and Y be two topological spaces and let f be a map from X into Y,
We say that f is continuous at the point x G X if for every neighborhood W of
f(x) the set /-1(W) is a neighborhood of x. We say that / is continuous on X
(or simply continuous) if it is continuous at every point of X. For this the
following equivalent conditions are necessary and sufficient:
(a) For every open set A in У the set /-1 (A) is open in X,
(b) For every closed set A in У the set/-1 (A) is closed in X,
A bijection /: X —> У is a homeomorphism if and only if / and /-1 are both
continuous. If f:X —> У and g: Y —> Z are continuous maps, then gof is a
continuous map from X into Z, Similarly, if / is continuous at x G X and g is
continuous at/(ж), then </o/is continuous at x.
Let Ti and T2 be two topologies on the same set X and let ©» (i = 1, 2) be
the collection of all open sets for the topology Т». We say that Ti is finer (or
larger) than T2 and that T2 is coarser (or smaller) than Ti if ©1 D ©2. The
following conditions are necessary and sufficient for Ti to be finer than T2:
(a) For every x G X we have 251 (x) D 25г (я), where 25» (x) is the collection
of all neighborhoods of x for Т» (i = 1,2).
(b) The identical bijection x »—> x from Xi onto X2 is continuous, where Xi
denotes X equipped with the topology Т» (г = 1, 2).
Clearly, the relation “Ti finer than T2” is an order on the set of all topologies
on the set X, The finest topology on X (i.e., the largest element of the set of
all topologies) is the discrete topology for which every subset of X is open. The
coarsest topology on X (i.e., the smallest topology) is the one for which 0 and X
are the only open sets (chaotic or indiscrete topology).
[2, §1]
SOME NOTIONS FROM TOPOLOGY
73
Let be a nonempty family of topologies on a set X and denote by £)t
the collection of all open sets for the topology (t G /). There exists a topology
T on X which is the greatest lower bound of the topologies Tt, i.e., a topology T
which has the following two properties:
(a) T is coarser than any Tt (t G I).
(b) If T' is coarser than every Tt, then T' is coarser than T.
Indeed, the collection © of all open sets for T is simply given by £) = p| tez £\.
Similarly, there exists a topology T on X which is the least upper bound of
the topologies Tt, i.e., a topology T which has the following two properties:
(a) T is finer than any Tt (t G I). _ __
(b) If T' is finer than every Tt, then T' is finer than T.
Let Ф be the set of all topologies finer than any Tt (i G I). The set Ф is non-
empty since the discrete topology on X belongs to it. Then T is the greatest
lower bound of Ф. In other words, T is the smallest element of the set of all
topologies which are finer than all the Tt (iG /). Similarly, of course, the
greatest lower bound T of the topologies Tt (i G /) is the largest element of
the set of all topologies which are coarser than all the Tt (iG I).
Let ® be a collection of subsets of a set X. There exists a coarsest topology T
for which all the sets of ® are open, namely, the greatest lower bound of the
set Ф of all topologies for which the sets of ® are open. The set Ф is not empty,
since it contains the discrete topology. We say that ® is a subbasis (or a system
of generators) of T and that T is the topology generated by ®. Let be the
collection of all finite intersections of sets in ®, then the collection of all open
sets for the topology T is formed by all the unions of sets belonging to ®'.
In particular, if (Tt)tez is a nonempty family of topologies on a set X and
£)t is the collection of open sets for Tt, then is a subbasis of the least
upper bound of the topologies Tt.
If ® is a collection of subsets of a set X with the property that every open
set in the topology T generated by ® is the union of sets belonging to 33, then
we say that 33 is a basis for T. Thus if ® is a subbasis of the topology T, then
the collection ®' of all finite intersections of sets in ® is a basis of T.
Let X be a set, a family of topological spaces, and for each index
t G I let fL be a map from X into Yt. There exists a coarsest topology T on X
for which all the maps fL are continuous, also called the initial topology on X for
the family (Ji)iez. If denotes the collection of all open subsets of Ylf then
a subbasis of T is formed by all the sets/Г1 (A), where A G £)t, i G I. A map
g from a topological space Z into X is continuous for T if and only if Д о g is a
continuous map from Z into for every l G I.
There are two important examples for this method of defining a topology.
First let X be a topological space and A a subset of X. We call the induced
topology on A the coarsest topology on A for which the canonical injection
A c* X is continuous. A subset U C A is open for the induced topology if and
only if U = А П G, where G is an open subset of X. The topological space A
equipped with the induced topology is called a (topological) subspace of X.
74
LOCALLY CONVEX SPACES
[2, §1]
Next let Xi and X2 be two topological spaces and let тгг (г = 1, 2) denote the
projection of the cartesian product Xi X X2 onto the factor space Xi, i.e.,
7Ti((zi, £2)) = %i- The product topology on Xi X X2 is defined as the coarsest
topology for which the projections тгг (i = 1, 2) are continuous. A basis for the
product topology onXi X X2 is formed by all the sets
Ui X U2 = П ttT\u2),
where Ui (i = 1, 2) is an open set in Xi. Let f: (x, y) 1—> f(x, y) be a map from
Xi X X2 into a topological space Z. If у G X2, we define the partial map fy from
Xi into Z by setting fy(x) = f(x, y) for all x G Xi. If f is continuous, then fy
is also continuous.
Now let (Xt)tEr be a family of topological spaces, Y a set, and for each index
t G I let fc be a map from XL into Y. There exists a finest topology T on Y for
which all the maps fL are continuous; we also call this the final topology on Y
for the family (Д). A set U C Y is open for T if and only if /Г x(t/) is open in
Xt for every t G I. A map g from Y into a topological space Z is continuous for
T if and only if g°fc is a continuous map from XL into Z for every t G I.
An important example for this method of defining a topology is the quotient
topology, which we shall consider in §5.
A topological space X is said to be a Hausdorff space if for any two distinct
points x and у of X there exists a neighborhood V of x and a neighborhood W
of у such that V П W = 0. Any finite subset of a Hausdorff space is a closed
set. A subspace of a Hausdorff space is a Hausdorff space. A product space
Xi X X2 is a Hausdorff space if and only if each factor space Xi (i = 1, 2) is
a Hausdorff space.
Exercises
1. Supply complete proofs for all the statements made without proof in this
section.
2. Let x be a point of a topological space and V a neighborhood of x. Prove
that V is a neighborhood of x. (Hint: V contains the set W whose existence is
postulated in Axiom (NB 4).)
3. (a) Prove that a collection ® of subsets of a set X is a subbasis for the
topology T if and only if for every point x G X and every neighborhood V of x
there exists a finite collection of sets in ® whose intersection is contained in V
and contains x.
(b) State and prove a condition for a collection of subsets to be a basis of T.
4. Prove that a collection ® of subsets of X is a basis of the topology it gen-
erates if and only if for any two sets U and V in ® and any point x G U П V
there exists a set W G ® such that x G W C U П V.
5. (a) Let X be a set, Y a topological space equipped with the topology T,
and f a map from X into Y. The coarsest topology on X for which f is con-
tinuous is called the inverse image of T and denoted by /~1(<Г). Show that a
subset A of X is open (resp. closed) in X for/-1^) if and only if A = /~1(B),
[2, §2]
FILTERS
75
where В is an open (resp. closed) set in Y. Show that a subset V of X is a
neighborhood of the point x G X for/-1(T) if and only if V = /-1(HZ), where
W is a neighborhood of f(x) in Y. Finally, show that if X G Y and f is the
canonical injection X <—> F, then J-1 (T) is the induced topology on X.
(b) Let X be a set, (Ft)ier a family of topological spaces, and for each iEl
let fi be a map from X into YL. Call Tt the topology of YL. Show that the
coarsest topology on X for which all the maps fL are continuous is the least
upper bound of all the inverse-image topologies/Г1^) on X (tG Z).
§2. Filters
A collection 5 of subsets of a set X is called a filter on X if it satisfies
the following axioms:
(Fl) If А С X and A contains a set В E then A E
(F 2) The intersection of a finite collection of sets in 5 belongs to
(F 3) The empty subset of X does not belong to g.
It follows from the Axioms (F 2) and (F 3) that the intersection of a
finite collection of sets in a filter is never empty. Since the intersection of
an empty family of subsets of X is X itself, it follows from (F 2) that X
belongs to every filter.
Example 1. Let x be a point of a set X. The collection of all the sub-
sets of X containing x is a filter on X.
Example 2. Let X be a topological space and x G X. The collection
S5(.r) of all neighborhoods of x forms a filter on X according to Axioms
(NB 1) through (NB 3). Observe that Example 1 is a special case: the
filter considered there is the filter of all neighborhoods of x for the discrete
topology on X.
Example 3. Let A be a nonempty subset of a set X. The collection
of all the subsets of X containing A is a filter on X. Example 1 is of
course again a special case.
Example 4. Let X be a set having infinitely many elements. The col-
lection of all subsets of X whose complement is finite is a filter on X. In
particular, if X = N, we obtain in this manner a filter called the Frechet
filter.
If Sh and §2 are two filters on the same set X, we say that $i is finer
than ^2 (or that is coarser than §i) if Gi Э ^2-
The relation “gh is finer than §2” is an order on the set of all filters on X.
The filter which consists of the set X alone is clearly the “smallest *’ element
of the set of all filters. If X has two or more elements, then there is no
“largest” element in the set of all filters on X.
76
LOCALLY CONVEX SPACES
[2, §2]
Let be a nonempty family of filters on a set X. Then it can be
immediately verified that the set $ = Qigz is a filter on X which has
the following two properties:
(a) g is coarser than any (t G Z).
(b) If is a filter coarser than every (i G Z), then $ is finer than
In other words, the filter g is the greatest lower bound of the family
with respect to the order defined above on the set of all filters on X.
Again let be a family of filters on a set X. This family has a
least upper bound in the set of all filters on X if and only if there exists a
filter which is finer than every (t G Z). Indeed, if such a least upper
bound exists, it is finer than every (t E Z). Conversely, suppose that the
set Ф of filters finer than any (t e Z) is not empty. Then the greatest
lower bound g of Ф is the least upper bound of This filter g is
characterized by the following two properties:
(a) g is finer than any (t G Z).
(b) If is a filter finer than every (t G Z), then g is coarser than .
In particular, if is a totally ordered family of filters on X, then
Uisz is a filter, and clearly, the least upper bound of the family
Thus the set of all filters on a set X is inductive. A maximal element of
the set of all filters is called an ultrafilter. In other words, a filter U is an
ultrafilter if there exists no filter finer than U and distinct from U. It
follows from Zorn’s lemma that every filter is contained in an ultrafilter.
A filter g is an ultrafilter if and only if A и В e g implies that either
A or В Indeed, suppose that g is an ultrafilter, A g g, В & g,
and А и В e g. Let ® be the collection of subsets Z of X such that
A U Z G It is trivial to verify that ® is a filter finer than In par-
ticular 0g® follows from the hypothesis that A g But ® is distinct
from g since В e 0, В g g. This contradicts the hypothesis that $ is an
ultrafilter. Conversely, suppose that А и В e g implies either A e g
or В e g. Let ® be a filter finer than g and let Z g ®. Then CZ g ®
and thus CZ g Since X = Z U CZ e g, we must have Z e i.e.,
® I
Let ® be a collection of subsets of a set X and let ®' be the collection
of all finite intersections of sets in ®. A necessary and sufficient condition
for the existence of a filter g such that $ D ® is that none of the sets in
®' be empty. Indeed, if such a filter exists, then by Axiom (F 2) it must
contain ®', and thus by Axiom (F 3) the empty set cannot belong to ®'.
Conversely, suppose that no set of ®' is empty and let $ be the collection
of all subsets of X which contain a set belonging to ®'. It can be immedi-
ately verified that $ is a filter containing ®. Actually the filter g just
defined is clearly the coarsest filter containing ®. We say that ® is a
[2, §2]
FILTERS
77
subbasis (or a system of generators) of $ and that g is the filter generated
by
In particular, if is a family of filters, then gt is a subbasis
of the least upper bound g of the filters gt, provided tins least upper bound
exists. For g to exist it is necessary and sufficient that the intersection of
a finite number of sets selected from various filters gt be never empty.
Let ® be a collection of subsets of a set X and let g be the collection of
all subsets of X which contain a set of 58, Clearly, g is a filter if and only
if 58 satisfies the following two conditions:
(FB 1) The intersection of two sets of 58 contains a set of 58,
(FB 2) 58 is not empty and the empty subset of X does not belong to 58,
A collection 58 of subsets of X is called a filter basis if it satisfies Axioms
(FB 1) and (FB 2), We also say that 58 is a basis of the filter g it generates.
Two filter bases are said to be equivalent if they generate the same filter.
Let 58 and 58' be two filter bases generating the filters g and g' respectively.
Then g is finer than g' if and only if every set in 58' contains a set in 58,
In particular, 58 and 58' are equivalent if and only if every set in 58 contains
a set in 58' and every set in 58' contains a set in 58,
A subcollection 58 of sets belonging to a filter g is a basis of g if and only
if every set of g contains a set of 58. Indeed, if each set in g contains a
set in 58, then clearly 58 is a filter basis, and by Axiom (F 1), g is the col-
lection of all sets containing a set of 58, Conversely, if 58 is a basis of g,
then by definition every set in g must contain a set in 58,
Example 5, Let X be a directed set and for each x G X denote by S(x)
the set {y\y x}. The collection ® of all the sets S(x) is a filter basis
on X, Indeed, Axiom (FB 2) is evidently satisfied. Furthermore, if x
and у are elements of X, then there exists an element z G X such that
x z and у г, and thus S(x) A S(y) D $(z), The filter generated by
S is called the filter of sections of X. In particular, if X = N, the filter of
sections is the Frechet filter.
Let X be a topological space and x a point of X, A basis of the filter
58(x) of all neighborhoods of x is called a fundamental system of neighbor-
hoods of x, A collection © of neighborhoods of x is a fundamental system
of neighborhoods of x if and only if every neighborhood of x contains a
set W G ©,
The open neighborhoods of a point x in a topological space form a funda-
mental system of neighborhoods of x (sec Exercise 1,2), If X is a metric
space and x a point of X, the set of all closed balls Bp(x), where p runs
through the set of all strictly positive real numbers (or only through the
set of all numbers of the form 1/n, n G N*), forms a fundamental system
of neighborhoods of x (see p, 19).
78
LOCALLY CONVEX SPACES
[2, §2]
Let Xi and X2 be two topological spaces and Xi X X2 their product
equipped with the product topology. A fundamental system of neighbor-
hoods of a point (x1} x2) G Xi X X2 is given by all sets of the form
7i X V2, where Vi is a neighborhood of Xi in Xi (i = 1, 2). More gen-
erally, if (г = 1, 2) is a fundamental system of neighborhoods of the
point Xi in X^ then the sets TFi X Ж2, where Wi runs through @г-, form a
fundamental system of neighborhoods of (xb x2).
A topological space is said to be regular if it is a Hausdorff space and if
the closed neighborhoods of each of its points form a fundamental system
of neighborhoods of that point. In other words, a Hausdorff space is regular
if every neighborhood contains a closed neighborhood.
Let SB be a filter basis on a set X and let f be a mapping from X into a
set Y. We denote by/(SB) the collection of all sets /(A), where A G SB.
Then/(SB) is a filter basis on Y since /(A) A /(B) D /(A A B) and A # 0
implies/(A) # 0.
Let 5 be the filter on X generated by SB and @ the filter on Y generated
by /(S3). If ft is an ultrafilter, then so is ®. Indeed, let A и В G 0; we
have to show that either A g ® or В G ®. There exists С G SB such that
А и В D/(C), that is, /-1(А) U/~Х(В) Э/’ЧЖ)) D C. Thus
/-1(А) U/-1(B) G and since ft is an ultrafilter, either/-1(A) G ft or
/-1(B) G ft. Suppose, for instance, that/-1(A) G ft. Then
/-1(A) D D, В e SB,
and thus A D/(B), that is, A G ®. Q.E.D.
Now let SB be a filter basis on a set Y and let / be a mapping from a set X
into Y. We denote by /-1(SB) the collection of all sets /“\A), where
A G SB. Then/-1 (SB) is a filter basis on X if and only if /-1(A) # 0 for
every A G SB, i.e., if/(A) meets every A G SB, as can be seen from the rela-
tion /“\A А В) = /-1(A) A/”X(B). In particular, /-1(SB) is a filter
basis if / is a surjection.
If A is a set, A a nonempty subset of A, and ft a filter on A, we denote
by ftx the trace of ft on A, i.e., the collection of all sets A A B, where
В G ft. Then fta is a filter on A if and only if A A В # 0 for every
В G ft. Indeed, this last condition is necessary and sufficient for ftx to
satisfy Axiom (F 3). The other two axioms are always satisfied since
(f| Bi) n A = П (Bi П 4)
\=1 ' г = 1
and
В А А С С C A implies С = (В U C) A A.
If the condition is satisfied, we say that ftj. is the filter induced by ft on A.
[2, §3]
TOPOLOGICAL VECTOR SPACES
79
Similarly, if 53 is a filter basis on X, then the trace
53a = {А П В | В g 53}
of 53 on A is a filter basis on A if and only if A meets every В G 53. This
follows from our considerations above, since 53a = Z”1 (53), where / is the
canonical injection А °* X.
Exercises
1. Prove that a Hausdorff space X is regular if and only if given a point
x G X and a closed subset A of X such that x g A, there exist disjoint open
sets U and V such that x G U and A С V.
2. Let U be an ultrafilter on a set X and A a subset of X. Prove that the
trace of U on A is a filter on A if and only if A G U.
3. Let § be a filter on a set X and A a subset of X. There exists a filter
finer than § and containing A if and only if А П В И 0 for every В G S-
4. Show that if the map /: X —> Y is surjective and is a filter on X, then
/(§) is a filter on Y. (Hint: A map f:X —> Y is surjective if and only if
/(/-1(A)) = A for every А С Y.)
5. Let X and Y be two sets and / a map from X into Y.
(a) Prove that if 53 is a filter basis on X, then У1 (/(53)) is a filter basis on X
and that the filter generated by 53 is finer than the filter generated by /~т (/(53)).
(b) Prove that f~4/(53)) is equivalent to 53 for every filter basis 53 on X if
and only if / is injective.
§3. Topological vector spaces
Definition 1. A set E on which a structure of vector space over К and a
topology are defined is a topological vector space if
(TVS 1) the map (x, у) i—> x + у from E X E into E is continuous;
(TVS 2) the map (X, x) i—> Xx from К X E into E is continuous.
It is understood, of course, that in Axioms (TVS 1) and (TVS 2) we
consider the product topology on the product spaces. A vector space
structure and a topology on a set are said to be compatible if Axioms
(TVS 1) and (TVS 2) are satisfied.
Example 1. According to Proposition 1.2.1 a normed vector space,
equipped with the topology defined by its norm, is a topological vector
space.
It follows from (TVS 1) that for any a G E the translation by a (p. 20)
is a continuous map from E into E. Since the inverse of the bijection
x »—> x + a is the map x x — a, wre find that the translation by a is a
80
LOCALLY CONVEX SPACES
[2., §3]
homeomorphism of E onto itself. In particular, the neighborhoods of a
are the sets of the form V + a, where V is a neighborhood of 0. Thus we
know the topology of a topological vector space if we know the neighbor-
hood of 0. We shall now investigate the latter in greater detail.
In the first place, it follows from (TVS 1) that for any neighborhood V
of 0 there exists a neighborhood U of 0 such that (7 i- U G V.
Definition 2. A set A in a vector space E over К is absorbing (от radial
at 0) if for every хбЕ there exists an a > 0 such that x G A A for all X G K,
such that |X| a.
Since this means that X.r G A for all X such that iXj a~\ it follows
from (TVS 2) that every neighborhood of 0 in E is absorbing.
Definition 3. A set A in a vector space E over К is balanced (or circled)
if XA G A for every X G К such that [X| 1.
If A is balanced and for every x G E there exists а д G К such that
x G дА, then A is absorbing. Indeed, if |X| |m|, then |X-1m| = 1 and
thus x G pA = X(X—\u)A G XA.
The intersection of an arbitrary family of balanced sets is balanced.
Given an arbitrary set В in E, there exists a smallest balanced set A
containing B. This set A is called the balanced hull of В and is the inter-
section of all balanced sets containing B.
The union of an arbitrary family of balanced sets is balanced. There-
fore given any subset A of E, there exists a largest balanced set В contained
in A, namely, the union of all balanced sets contained in A. The set В
is called the balanced core of A. It is nonempty if and only if A contains
the origin.
A point x G E belongs to the balanced core В of A if and only if X.r G A
for all X G К such that |X| 1. Indeed, the set C(x) — {Xrr j |X| 1} is
clearly balanced; hence if C(x) G A, then C(x) G B, and in particular,
x G B. Conversely, if x G B, then Xx G В and a fortiori Xx G A for all
X G К with |X| 1.
It follows that if В # 0, then it is given by
в= П (D
IXI^l
since in this case “x G XA for every X G К with |X| 1” is equivalent to
“px G A for every p G К with |д| 1.”
Let E and F be two vector spaces over К and f:E F a linear map.
If A is a balanced set in B, then /(A) is a balanced set in F. If В is a
balanced set in F, then /-1(B) is a balanced set in E.
Let us now suppose that В is a topological vector space. For a # 0
the bijection x ax from В onto В is continuous by (TVS 2). Since its
[2, §3]
TOPOLOGICAL VECTOR SPACES
81
inverse is the bijection x i—> a~}x, it follows that x ax is a homeomor-
phism from E onto itself. Hence formula (1) shows that if A is closed,
then its balanced core is also closed.
In a topological vector space the balanced core of a neighborhood V
of 0 is a neighborhood of 0. Indeed, by (TVS 2) there exists an a > 0
and a neighborhood U of 0 such that |X| a and x G U imply Xx G V.
Since the map x ax is a homeomorphism of E onto itself, a U is a neigh-
borhood of 0. Furthermore, aU is contained in the balanced core of V.
For let ax G aU and |д| 1; then |да| g a and thus
p(ax) = (jj,a)x G V.
We have now proved the first part of the following:
Theorem 1. In a topological vector space E there exists a fundamental
system of neighborhoods of 0 such that:
(NS 1) Every V G 91 is absorbing.
(NS 2) Every V G 91 is balanced.
(NS 3) For every V G 9J there exists aU eft such that U + U G V.
Conversely, let E be a vector space over К and let Ж be a filter basis on E
which satisfies conditions (NS 1) through (NS 3). Then there exists a unique
topology on E for which E is a topological vector space and for which 9J is a
fundamental system of neighborhoods of 0.
Proof. Let us first observe that if there exists a topology on E for which
E is a topological vector space and 9? a fundamental system of neighbor-
hoods of 0, then in that topology a set IF is a neighborhood of a point
a g E if and only if W contains a set of the form V + a, where V G 91.
This proves that the topology, if it exists, must be unique. Let us now
prove that defining the neighborhoods in E in the way just indicated, we
obtain a structure of topological vector space on E.
Clearly, if WiDW and W D V + a, where V G 91, then D V + a;
that is, Axiom (NB 1) is satisfied. Next let Wi (1 i ri) be a finite
number of neighborhoods of a. Then each Wi contains a set Vi + a,
where Vi G 91. Since 9? is a filter basis, there exists a set V G 9J contained
ill П?=1 Vi. Then
ft W,• D V + a;
i=l
i.e., П?=1 is a neighborhood of a. This proves (NB 2). For every
V G 91 we have 0 G V since, by the definition of a filter basis, no V is
empty and if x G V, then by (NS 2) we have 0 • x G V. It follows that if
W D V + a, V G 9i, then a G W; i.e., (NB 3) is satisfied. Finally, let
82
LOCALLY CONVEX SPACES
[2, §3]
W D V + a, where V G 91. By (NS 3) there exists U E 9? such that
U + U С V. Then U + a is a neighborhood of a, and if b G U + a,
then U + bcU+U + aQV + acW; i.e., for every b G U + a the
set IT is a neighborhood of b. Thus we have also verified Axiom (NB 4).
Let a + b = c and IT be a neighborhood of c. Then W contains a set
V + c, where V E 9? and by (NS 3) there exists U E 9? such that
U + U С V. Then U + a is a neighborhood of a, U + b is a neighbor-
hood of 6, and we have
(U + a) + (U + b) С V + a + b = V + с C W;
i.e., Axiom (TVS 1) is satisfied.
Next let us prove that given V E 9? and X G K, there exists U E 9? such
that XU С V. In the first place, it follows from (NS 3) by mathematical
induction that given V E 91, for any n E N there exists [7 G 9? such that
2nU С V. Now let n be so large that |X| 2n. If U E 9? is such that
2nU С V, then by (NS 2) we have X2~nU C U, i.e. XU C 2nU С V.
Let a E E, X E K, and let IT be a neighborhood of Xa. There exists
V E 9? such that W D V + Xa and furthermore, applying (NS 3) twice,
one sees that there exists U E 9? such that U + U + U С V. Because
of (NS 1) there exists e > 0 such that h|. < e implies E U. By the
remark just proved, there exists T E 9? such that XT C U. Furthermore,
if H| 1 and x — a E U, then by (NS 2) we have ??(x — a) E U. Let
$ G 9? be such that $ С T A U. It follows from the identity
%x — Xa = (£ — X)a + X(x — a) J- (£ — X)(x — a)
that if |£ — X| min (1, e) and x E S + a, then
& - Xa E U + U + U С V,
i.e., £x G W. This proves (TVS 2). |
Proposition 1. Let E be a vector space over К and let ® be a collection
of absorbing, balanced subsets of E such that for every V E ® there exists
U G ® such that U + U CV. Then there exists a unique topology on E
for which E is a topological vector space and for which the finite intersections
of elements of ® form a fundamental system of neighborhoods of 0.
Proof. An absorbing set is nonempty; hence every V E ® contains 0
because it is balanced. Thus the finite intersections of elements of ® form
a filter basis 9? on E. It is completely clear that 9? satisfies the conditions
(NS 1) through (NS 3) of Theorem 1. |
Example 2. In a normed vector space the balls Bp = {x | l|x|| p}
form a filter basis satisfying conditions (NS 1) through (NS 3).
[2, §3]
TOPOLOGICAL VECTOR SPACES
83
Example 3. Let Q be an open subset of Rn and let 6(0) be the vector
space of all continuous functions f defined on 0. For every compact
subset К of 0 and strictly positive number e let Vк,e be the set of all
f G 6(0) such that |/(x)| e for x € K. Since the union of two compact
sets is compact, the sets V form a filter basis on 6(0) which clearly
satisfies conditions (NS 1) through (NS 3). Thus the VKti form a funda-
mental system of neighborhoods of 0 for a topology on 6(0) which is called
the topology of uniform convergence on compact sets.
Example 4. Let К be a compact subset of Rn. We denote by 3L>(K) the
vector space of all functions which are defined in some open set containing
K, which vanish outside К and whose partial derivatives of all orders
exist and are continuous. We can, of course, extend the definition of the
functions of £>(K) to the whole space Rn simply by assigning the value
zero to each point outside the original domain of definition and consider
the elements of £>(IC) as infinitely differentiable functions defined on Rn.
Let f be a continuous function defined in some open subset 0 of Rn.
The support (or carrier) of f is the closure of the set on which f is different
from zero; i.e., if A = {x\f(x) # 0}, then Supp/ = A. With this
terminology we can say that S>(K) is the vector space of all functions defined
on Rn whose partial derivatives of all orders exist and are continuous and
whose support is contained in К.
Before defining the topology of 2)(К), let us introduce some important
notations which will be of constant use in this book. We denote by Nn
the set of all n-tuples p = (pb ... , pn), where each pj G N. In other
words, an element of Nn is a vector whose components are natural numbers
and we shall also call such an element a multi-index. The order |p| of a
multi-index p = (pb . . . , pn) € Nn is defined by |p| = px + • • • + pn.
We shall use the abbreviated symbol dj for the symbol of derivation
d/dxj (j = 1, . . . , n), and for any p G Nn we set
dp = a?1... dPn =
дхГдХ22 * * * д*пП
where the order |p| of p is also the order of the derivation.
For any p G Nn and e > 0 let Vp^ be the set of all f G S>(K) such that
|dp/(a;)| = € for all x G K. Clearly, the sets satisfy conditions (NS 1)
through (NS 3) and thus by Proposition 1 their finite intersections form a
fundamental system of neighborhoods of 0 for a topology for which
is a topological vector space.
We shall see many more examples of topological vector spaces in the next
section; now we prove some additional results.
Proposition 2. A topological vector space is a Hausdorff space if for
every element a # 0 there exists a neighborhood V of 0 which does not contain a.
84
LOCALLY CONVEX SPACES
[2, §4]
Proof. It is .sufficient to prove that if a И 0, then there exists a neigh-
borhood U of 0 and a neighborhood IV of a such that U A IV # 0. Indeed,
if a # b, then a 6 # 0. Let U be a neighborhood of 0 and W a neigh-
borhood of a -- b such that (/ A W •- 0. Then IV 4 b is a neighborhood
of a, U !- b a neighborhood of 6, and (IF f Ь) А (Г L b) ~ 0,
Let a # 0 and let V be a neighborhood of 0 whic h does not contain a.
There' exists a balanced neighborhood U of ft such that (J + U С V.
Then U is a neighborhood of 0 and t7 t a is a neighborhood of a. Further-
more, U A (U + a) 0 since .r // a G (7, // g U would imply
a = - у g U + U С V. |
The spaces considered in Examples 2, 3» and 4 are ITausdorff spaces.
Proposition 3. In a topological vector space every neighborhood of 0
contains a closed neighborhood of 0.
Proof. Let Jr be a neighborhood of 0. 'There exists a balanced neighbor-
hood U of 0 such that U + U С V. Let us show t hat U С V. If x G U,
then (т ' Г) A U 0; i.e., there exists у e U such that x + у G C7.
But then
x G — у -t Г c I' t L К I
Corollary. If a topological vector space is a Ihiusdorff space, then it
is regular.
Exercises
1. Prove that if in a topological vector space E tin* sot ;0) is closed, then E
is a Hausdorff space (cf. Proposition 5.5).
2. Prove that the intersection of a finite collection oi .absorbing sets in a
vector space is absorbing.
3. (a) Prove that the balanced hull of a set В in a vet1 tor space is given by
UlMSi XB.
(b) Show that if for each t G I the set AL is the balanced hull of BL, then
UtGr A1 is the balanced hull of |J BL.
V Show by an example that if 0 Й 4, then Qixm XJ can be nonempty
(i.e., different from the balanced core of A).
5. Prove that the closure of a balanced set in a topological vector space is also
balanced. (Hint? See the proof of Proposition 4.3.)
§4. Locally convex spaces
We have already defined convex sets in a vector space E (Definition
1.3.3). We can say that a set A is convex if for a 0, /3 0, a + /3 = 1
we have a A + /ЗА C A. If A is a convex set in then A + a is convex
for every a g E and XA is convex for every X e a. Let E and F be two
[2, §4] LOCALLY CONVEX SPACES 85
vector spaces and f a linear map from E into F. If A is convex in E, then
f(A) is convex in F. If В is convex in F, then/-1(B) is convex in E.
The intersection of an arbitrary family of convex sets is a convex set.
Given an arbitrary set В in E, there exists a smallest convex set A con-
taining B, namely, the intersection of all convex sets containing B. This
set A is called the convex hull of В.
Proposition 1. Let A be a convex subset of a vector space, a
finite sequence of elements of A, and a sequence of scalars such that
Хг = 0 (1 i n) and S?=i Хг- = 1. Then the linear combination
22?= i Хгхг- belongs to A.
Proof. For n = 1 the proposition is trivial, and for n = 2 it is the defi-
nition of a convex set. Assume therefore that the proposition is true for
n — 1, and we may clearly suppose that Хг- > 0 for 1 i n. Set
“ = Г X» 3 = Xn, Mi = —
• , a
г=1
for 1 i n — 1. By the induction hypothesis we have
n—1
£ рцх, G A,
г=1
and therefore by the definition of a convex set
n /n—1 \
XiXi = a ( piXi \ + fixn G A. I
г=1 4=1 '
Proposition 2. Let (Ac)^j be a family of convex subsets of a vector space.
Then the convex hull of |Jte/ Ac is the set C of all linear combinations
22igj Xtxt, where xc G Ah Xt 0, 22ig/ Xt = 1, and, of course, only
finitely many Xt are different from zero.
Proof. By Proposition 1 the set C is contained in every convex set con-
taining the sets Ac. On the other hand, taking Xt = 1, we see that AL Q C
for every t G I.
Thus we have only to prove that C is convex. Let x = 22ig/ Xtxt and
у = 22ig/ MdA be two points of C, a > 0, 0 > 0, and a + 0 = 1. For
each t g I we set = aXc + Let J be the finite subset of I for which
Vi > 0. Then
e At for i e J
and
ax + fiy = e C
i<=J
since 2>t = a£Xt + /S^/Л =1-1
86
LOCALLY CONVEX SPACES
[2, §4]
Corollary. The convex hull of a set Aina vector space is the set of all linear
combinations ^iXi, where (xf) is a finite family of elements of A, Xi 0
and^fiXi = 1.
Indeed, each point of A is a convex set and A is their union.
It follows from §3, formula (1) that the balanced core of a convex set
is convex. A set A is balanced and convex (“absolutkoiivex” in [52]) if
and only if for all x, у G A and X, p G К such that |X| + |д| 1 we have
Xx + py G A. Indeed, if this condition is satisfied, we see that A is
balanced, choosing p = 0; and that A is convex, choosing X > 0, p > 0,
X + p = 1. Conversely, if A is both balanced and convex, we see that
Xx + py G A from the identity
Xx + цу = (IX| + ImI) [ |x| |m| x) + |x( |m( (ff
Proposition 3. In a topological vector space the closure of a convex set is
convex.
Proof. Let A be a convex set, x G A, у G A, a > 0, 0 > 0, a + 0 = 1.
Let IP be a neighborhood of ax -j- By. Since the map (u, v) au + (to
is continuous from E X E into E, there exists a neighborhood U of x and
a neighborhood Г of у such that aU + @V C W. Now, U A A # 0 and
V A A # 0. Let z e U A A, lc g V A A. Then az + fiw G W A A,
which proves that ax + By G A. |
Definition 1. A topological vector space is locally convex if each point
has a fundamental system of convex neighborhoods.
A locally convex topological vector space will be called simply a locally
convex space. We shah deal almost exclusively with locally convex spaces,
which are the only ones occurring in functional analysis. Clearly, a topo-
logical vector space is locally convex if 0 has a fundamental system of
convex neighborhoods. If ® is a system of subsets of a vector space E
which satisfies the conditions of Proposition 3.1, and furthermore, every
V G ® is convex, then the topology defined by ® on E is locally convex.
Example 1. The spaces considered in Examples 2, 3, and 4 of §3 are
locally convex. Indeed, we have seen in Example 1.3.6 that the balls Bp
are convex. Furthermore, it is easy to verify directly that the sets Vk,(
in е(Й) and the sets Vp,e in £>(K) are convex.
Example 2. To give an example of a not locally convex topological
vector space, let E be the vector space of all real-valued functions continu-
ous on the interval [0, 1]. For any pair e, 5 of numbers such that € > 0,
0 < 5 < 1, we denote by F€i5 the set of all f G E such that |/(/)| €
for all t not belonging to some open subset A = &[ of [0, 1]
[2, §4] LOCALLY CONVEX SPACES 87
such that XX i (Pi — 5 (the subset A depends on/). Let us recall
that every open subset of [0, 1] is the union of a countable family of disjoint
open intervals.
The sets Уе,а form a filter basis on E since У€',$' П У€",а" contains
V€j with e = min (e', e"), 5 = min (5', 5"). It is easy to check that the
V€j satisfy conditions (NS 1) and (NS 2) of Theorem 3.1. Furthermore,
(NS 3) is also satisfied since V€/2,8 + У€/2,а C Уе,а. Thus the sets У€,а
form a fundamental system of neighborhoods of 0 in E, and E becomes a
topological vector space.
To prove that E is not locally convex it is enough to show that if a set
U G E satisfies Уе,а D U D V^', then U cannot be convex. We may
suppose that 5 < |. Let Ц (1 i n) be n disjoint open intervals in
[0, 1] each of length 5' and such that the sum of their lengths exceeds 25.
Denote by Ji the interval of length 5'/2 lying in the middle of Ц and let
the function /< G E be equal to zero outside Ц and such that fi(t) > ne
in Ji. Then fi G V€'ts' C U for 1 i n, but
and thus X?=i (1/п)/г ё U (cf. Proposition 1).
Proposition 4. In a locally convex space the balanced, closed, convex
neighborhoods of 0 form a fundamental system of neighborhoods of 0.
Proof. Let W be a neighborhood of 0. Then W contains a closed neigh-
borhood У of 0 by Proposition 3.3. By hypothesis У contains a convex
neighborhood U of 0 and U С V. Finally, the balanced core of U is a
balanced, closed, convex neighborhood of 0 contained in W. |
Let us prove a result in the opposite direction.
Proposition 5. Let E be a vector space and let 53 be a filter basis on E
formed by absorbing, balanced, convex sets. Let 91 be the collection of all sets
ХУ, where X > 0 and V G 53. Then there exists a unique topology on E for
which E is a locally convex space and for which 91 is a fundamental system of
neighborhoods of 0.
Proof. Clearly, 9? is a filter basis on E which satisfies conditions (NS 1)
and (NS 2) of Theorem 3.1, and furthermore, every У G 91 is convex.
But 91 also satisfies condition (NS 3) since if У G 91, then J У G 91 and
iV + jV C V. |
Example 3. Let E be a vector space and 91 the collection of all absorb-
ing, balanced, convex sets. Clearly, 91 forms a filter basis; and if У G 91,
then ХУ G 91 for all X > 0. Thus 91 defines a topology on E called the
finest locally convex topology.
88
LOCALLY CONVEX SPACES
[2, §4]
Example 4. In the space 6(9) of Example 3.3 the sets V к = У кд
satisfy the conditions of Proposition 5. Since Vk,* = cVk, we see again
that the V к,t form a fundamental system of neighborhoods of 0 for a
locally convex topology on 6(9).
Proposition 6. Let E be a vector space and let ® be a collection of absorb-
ing , balanced, convex subsets of E. Let 9J be the collection of all finite intersec-
tions of sets of the form ХУ, zvhere X > 0 and V G ®. Then there exists a
unique topology on E for which E is a locally convex space and for which 9?
is a fundamental system of neighborhoods of 0.
Proof. We see, exactly as in the proof of Proposition 3.1, that 9t is a
filter basis on E. The elements of 9J are absorbing, balanced, convex sets
(see Exercise 3.2), and V G 91 implies ХУ G 9t for all X > 0. Thus the
statement follows from Proposition 5. |
Corollary. Let 53 be the collection of all finite intersections of elements of &
and let 9)? be the collection of all sets ХУ, where X > 0 and V G 53. Then 9)?
is a fundamental system of neighborhoods of 0, equivalent to 9J.
Proof. Clearly, 9)? C 91. Conversely, if X = mini^^n Хг-, then
Xi7i П Х2У2 П • • • П \nVn D X(7i П V2 П • • • П Vn)- I
Example 5. In the space £>(K) of Example 3.4 the sets Vp = VPtl are
absorbing, balanced, and convex. Since Vp>€ = eVp, we see again that the
finite intersections of the VPt€ form a fundamental system of neighbor-
hoods of 0 for a locally convex topology on 2D(K).
Definition 2. Given a vector space E, a semi-norm (pseudo-norm, pre-
norm) on E is a map q:x •—> q(x) from E into R+ which satisfies the following
axioms:
(SN 1) q(Xx) = |X|q(x) for all\ G К and x G E.
(SN 2) q(x + ?/) g q(x) + q(y).
It follows from (SN 1) that q(0) = 0. If, conversely, q(x) = 0 implies
x = 0, then q is a norm.
Let E be a vector space and q a semi-norm on E. The set
v = {x | q(x) 1}
is absorbing, balanced and convex. Indeed, if q(x) = a # 0, then
q{a~xx) = 1. Furthermore, q(Xx) q(x) for |X| 1. Finally, if q(x) 1,
q(y) = 1, and a 0, /3 0, a + /3 = 1, then
q(ax + 0y) aq(x) + /3q(y) g a + /3 = 1.
[2, §4]
LOCALLY CONVEX SPACES
89
Now let (qL)LEi be a family of semi-norms defined on E, and for each
t G I let Vc be the set of all x G E such that q^x) g 1. It follows from
Proposition 6 that the finite intersections of the sets eVt (e > 0) form a
fundamental system of neighborhoods of 0 for a locally convex topology
T on E. The set eVL = VL<e is formed by all x G E such that qL(x) e
and thus a fundamental system of neighborhoods of 0 for T is given by
the sets
Кц......i„, «!....e„ = & ! qck(^ Cfc for 1 g к n},
where , tn is a finite subset of I and > 0 (1 к n). By
virtue of the corollary of Proposition 6, an equivalent fundamental system
of neighborhoods of 0 for T is formed by the sets
.....e = {ж I qik(x) g e for 1 к £ n}. (1)
Example 6. On the space 0(9) of Example 3.3 we can define a family
of semi-norms in the following way. For every compact subset К of 9 let
<7x(/) = max |/(x)|.
xEK
The topology on 0(9) defined by these semi-norms is the same as the one
introduced before, since the set V к defined in Example 4 is given by
VK = {f\qK(.f) 1}.
Example 7. Let 9 be an open subset of Rn and m a positive integer. We
denote by 8?n(9) the vector space of all functions/defined in 9 and taking
their values in K, such that the partial derivatives dpf exist and are con-
tinuous for all p g Nn with |p| m. For each compact subset El of 9
and multi-index p G Nn with |p| m we define a semi-norm qxtP by
QK.ptf) = max (2)
xGK
The family (^xlP) of semi-norms defines a locally convex topology on
8W(9). Observe that for m = 0 this space is just 0(9) (Example 6).
Example 8. If 9 is again an open subset of Rn, we denote by 8(9) the
vector space of all functions defined in 9 which possess continuous partial
derivatives of all orders. We equip 8(9) with the locally convex topology
defined by the family (qKvP) of semi-norms, where qxiP is defined by (2),
К runs through the compact subsets of 9 and p through Nn.
We shall sometimes denote 8(9) also by 8°°(9). This will enable us to
speak of all the spaces 8W(9) and 8(9) at once by writing
8?r/(9), 0 m co.
90
LOCALLY CONVEX SPACES
[2, §4]
Example 9. Let К be a compact subset of Rn and m a positive integer.
We denote by T)m(K) the vector space of all functions f defined on Rn
whose partial derivatives dpf exist and are continuous for |p| gm and
whose support is contained in K. For each p e Nn such that |p| g m
we define the semi-norm qp by
qp(f) = max |dp/(®)l- (3)
xEK
Equipped with the family (qp)\p\^m of semi-norms, ^m{K) becomes a
locally convex space.
For m = 0 we shall also write JC(K) instead of S)°(2Q. Observe that the
topology of JC(K) is defined by the norm qG.
Example 10. In the space £>(K) of Example 3.4 the topology is defined
by the family of semi-norms (qp), where qp is defined by (3) for every
p e Nn. Indeed, the set Vp defined in Example 5 is given by
VP = {f\qPtO О-
Similarly as in Example 8, we shall sometimes denote 3)(X) by sy°(K).
Example 11. Let m be a positive integer and k an arbitrary integer.
Denote by S™ the vector space of all functions f defined on Rn whose
partial derivatives dpf exist and are continuous for |p| g m and which
satisfy the following condition: given p G Nn with |p| g m and € > 0,
there exists p > 0 (depending on f, p, and e) such that
|(1 + |x|2)*a,’/(a:)| g e for |x| > p.
For every p with |p| g m we define the semi-norm
Vk.ptf) = max |(1 + И2/dpf(x)\. (4)
xERn
Example 12. If k is a fixed integer, we denote by §>k (or by §£) the vector
space of all functions defined on Rn which possess continuous partial
derivatives of all orders and which satisfy the condition of the preceding
example for every p g Nn. On §>k we have the family (qk,p) of semi-norms,
where qk,p is defined by (4) and p varies in Nn.
Example 13. Given a fixed positive integer m, we denote by S>m the
vector space of all functions f defined on Rn whose partial derivatives dpf
exist and are continuous for |p| g m and which satisfy the following
condition: for any k G Z, p G Nn with |p| g m and € > 0, there exists
p > 0 such that
|(1 + H2)*dW)| S « if И > P-
[2, §4]
LOCALLY CONVEX SPACES
91
We say that/and its derivatives of order are rapidly decreasing. We
equip with the family of semi-norms (^,p) defined by (4), where к
runs through N and p through the multi-indices of order
Example 14. S (or S00) denotes the vector space of all functions defined
on Rn which possess continuous partial derivatives of all orders and which
are rapidly decreasing together with all their derivatives. We equip S
with the locally convex topology defined by the family (qk.p) of semi-
norms, where qk,p is defined by (4), к runs through N and p through Nn.
Example 15. Let Qm be the vector space of all functions / defined on
Rn which possess continuous partial derivatives of all orders and are such
that for every <p G S and p G Nn the function <p dpf is bounded on Rn.
We say that is the space of all infinitely differentiable functions which
are slowly increasing together with all their derivatives. For every G eS
and p G Nn we define the semi-norm q<ptP by
?p,p(/) = sup |^(x) dp/(x)|.
rGR71
Example 16. Let ft be an open subset of Rn and m a positive integer.
We denote by (Во/ft) the vector space of all functions / defined in ft whose
partial derivatives dpf exist and are continuous for (p( m and, further-
more, “vanish at the boundary of ft” in the following sense: for every
/ G (Bo1, p G Nn, with |p| m, and e > 0 there exists a compact subset
К of ft such that |dp/(x)| e if x G ft П CK. We define a locally con-
vex topology on (Bo1 (ft) with the help of the family of semi-norms (gp),
where qp is defined by
Qp(/) = max |Эр/(х)| (5)
for |p| m.
For m = 0 the space (Bo (ft) is simply the Banach space 60(ft) intro-
duced in Exercise 1.2.7. For ft = Rn the space (Bo/Rn) is the same as
So1, that is, S™ with к = 0 (Example 11).
Remark 1. One could also define the spaces S™(ft) [91].
Example 17. Again let ft be an open subset of Rn. We denote by (Bo (ft)
or by (Bo (ft) the space of all functions defined in ft which have continuous
partial derivatives of all orders and which, together with all their partial
derivatives, vanish at the boundary of ft. The topology of (B0(ft) is defined
by the family (qp) of semi-norms, where qp is defined by (5) and p varies
in Nn. For 0 = Rn we obtain the space So-
Example 18. If ft is an open subset of Rn and m a positive integer, we
denote by (Bm(ft) the vector space of all functions / defined in ft which
possess continuous and bounded partial derivatives of orders |p| m.
92
LOCALLY CONVEX SPACES
12, §4]
For each p e Nn we define the semi-norm qp by
= sup |д₽/(х)| (6)
а; (Ей
and equip ®W(Q) with the topology defined by the family (qp), where
|p| m.
Example 19. If 2 is an open subset of Rn, we denote by (B(0) or by
(B°°(0) the vector space of all functions defined in Q which possess continu-
ous and bounded derivatives of all orders. The topology of (B(0) is defined
by the family of all semi-norms qp defined by (6), where p e Nn.
The locally convex spaces which figure in Examples 6 through 19 play
an important role in the theory of distributions. If 2 = Rn, we shall
write 6, 8W, 8, (B™, (Bo, (Bw, (B respectively instead of C(Rn), 8w(Rn), etc.
Let us now turn to some examples of a different type.
Example 20. Let E be a normed space and E' its dual (Chapter 1, §7).
For every x' e E' we define the semi-norm qx on E by
<1Лх) = |<x, x')|.
The locally convex topology on E defined by the family (&')sO' of semi-
norms is the weak topology mentioned at the end of Chapter 1, §7.
Similarly, for every x e E we define the semi-norm qx> on E' by
Qx(x') = |<x, я/>|.
The locally convex topology on E' defined by the family (qx)XEE of semi-
norms is called the topology a(E', E) or the weak* topology (cf. Chap-
ter 3, §2).
Example 21. Let E be a Hilbert space and let £(E) = £(E, E) be the
set of all continuous linear maps of E into itself. Clearly, <£(#) is a vector
space (its elements are also called continuous endomorphisms of E or
bounded operators). On £(E) we can define several locally convex topol-
ogies [21].
(a) For A e £(E) let us define the norm of A by setting
a:=#o
It is easy to verify that ||A|| is a norm on £(£) and that £(E) is indeed a
Banach space (see Exercise 1.7.4). The topology defined by this norm is
called the normic (or uniform) topology on £(E).
[2, §4]
LOCALLY CONVEX SPACES
93
(b) For every x e E we define the semi-norm qx on £(2?) by
qx(A) = ||4x||.
The family (qx)xf=E of semi-norms defines a locally convex topology on
£(E), called the strong topology.
(c) For every x, у G E we define the semi-norm qXty on £(E) by
qx,v(A) = К4* I з/)1-
The family (qx,y\Xty)^EXE of semi-norms defines a locally convex topology,
the weak topology, on £(E).
(d) Let (^n)nGN be a sequence of elements of E such that
£ ll^nll2 < 00.
For A G £(E) we have
£ ikii2 mu2 £ ini2 < oo,
and thus we can define the semi-norm q(Xn) by
/ * \l/2
g<«„)(-4) = ( L ll^nll2) •
'n=0 '
The locally convex topology on £(E) defined by the family (q<Xn)) of semi-
norms on £(E) is called the ultra-strong (or strongest) topology on £(E).
(e) Finally, let (xn) and (yn) be two sequences of elements of E such that
£ ||xn||2 < 00,
n=0
£ 1Ш12 < oo-
For A G £(E) we have
£ (Axn I yn) £ ||4xn|| • 1Ы1 ||A|| £ ||x„|| • ||j/n||
n=0 n=0 n=0
and we can define the semi-norm q{Xn),{yn) by
oo
E (Axn I yn)
n=0
94
LOCALLY CONVEX SPACES
[2, §4]
The locally convex topology defined by the family (g(xn),o/n)) fbe so-called
ultra-weak topology on £(E).
Example 22. We finally define the spaces kp(aL\) introduced by Kothe,
which are useful in constructing various counterexamples in the theory of
locally convex spaces. Let (<nx)(t,X)G7XL be a double family of positive
numbers and let 1 p < x. We denote by kp(aL\) the set of all families
x = of real or complex numbers such that the family (atX| iJp)lei
is summable (Definition 1.3.7) for every X G L. The set kp(aL\) clearly
forms a vector space under the natural operations, and we obtain a family
(<Zx)xgl of semi-norms on kp{aL\) by setting for each X G L:
gA*) = (Z llp’ * = 6 kp(ao).
If I = N, L contains one element, and aL\ = 1 for every (t, X), then the
space is just lp (Example 1.1.7).
In the above examples we defined the locally convex topologies with the
help of semi-norms. We want to show now that every locally convex
topology can be defined with the help of a family of semi-norms. Let E
be a vector space and A a subset of E. The gauge (or Minkowski functional)
gA of A is a map x ^л(х) from E into the extended set R+ U {x} of
positive real numbers ([2], §3-9, p. 56) defined as follows:
Pa(x) = inf p if there exist p > 0 such that x G pA,
xEpA
P>0
gA(x) = +x if x & pA for all p > 0.
For X > 0 we have £a(Xx) = \7a(z) since the conditions x G pA. and
\x G XpA are equivalent. If A is absorbing, then gA is clearly finite. If
0 belongs to A, then gA(0) = 0.
If A is a convex set, then its gauge g — gA satisfies the inequality
q(x + У) g(x) + g(y). (7)
This is clear if g(x) or g(y) is + x. Next let us observe that if A is convex,
then XA + pA = (X + p) A for X > 0, p > 0. Indeed,
always holds and
(X + p)A C XA -|- pA
X
X + p
A +
__P_
X + p
A C A
is equivalent to the convexity of A. Thus let us suppose that g(^ ----- u
and g(y) = ?? are both finite. For any e > 0 there exist p and a '-u -n that
[2, §4]
LOCALLY CONVEX SPACES
95
£ p < £ + €, у ст < у + e, z G pA, у G (?A. But then
x + у g pA + (jA = (p + a)A,
i.e.,
g(x + y) £ + rj + 2e.
Since e is arbitrary, we have g(x + y) % + v-
If A is balanced, then its gauge g = дд satisfies the relation
g(\x) = |X|p(x)
for all X G K. Since we know this for X > 0, it is sufficient to prove it
for |X| = 1, but then it follows from the fact that for a balanced set A
the relations Xx G pA and x G pA are equivalent.
Summing up, we have obtained the following result:
Proposition 7. In a vector space E the gauge of an absorbing, balanced,
convex set is a semi-norm.
An absorbing, balanced, convex set A in a topological vector space is a
neighborhood of 0 if and only if its gauge g = дд is continuous. Let us
first suppose that A is a neighborhood of 0. From (7) we obtain the in-
equality \g(x) — g(y)\ g(x — y), and thus it is sufficient to prove that
g is continuous at 0. But for any € > 0 the relation x G eA implies
g(x) e and eA is a neighborhood of 0. Conversely, if g is continuous,
then {x | g(x) < 1} is an open set contained in A and containing 0.
Let У be a balanced, convex neighborhood of 0 in a topological vector
space and g = gv its gauge. Then the closure of V is the set
В = {x\g(x) g 1}.
Indeed, the continuity of g implies that В is closed. Since obviously
У G B, we have У G B. To prove that В G У, let g(x) 1 and let W
be a neighborhood of x. We have px G У for p < 1, and there exists
€ > 0 such that px G W for 1 — € < p < 1 + €. Hence px G У П W
for 1 — e < p < 1, which proves that x G У.
Now let E be a locally convex vector space. We know from Proposition 5
that the balanced, closed, convex neighborhoods of 0 form a fundamental
system of neighborhoods of 0. The gauge gv of each such neighborhood У
is a continuous semi-norm on E, and the locally convex topology defined
by the family (gv) of semi-norms is the same as the topology originally
given since У = {x | gv(x) 1}. Thus we have proved that a locally
convex topology can always be defined by a family of semi-norms, namely,
by the family of all semi-norms which are continuous for the given locally
convex topology.
96 LOCALLY CONVEX SPACES [2, §4]
Example 23. The locally convex topology defined by the family of all
semi-norms on a vector space is the finest locally convex topology intro-
duced in Example 3.
Let qi (1 г ri) be a finite family of semi-norms on a vector space E.
Then the function q = max qi defined by
q(x) = max qi(x)
1 i^n
is also a semi-norm on E, and we have
{x I q(x) e} = P) {x j qi(x) g e}
i=i (8)
= {x j qi(x) €, 1 i n}.
If, furthermore, E is a topological vector space and the qi (1 i ri)
are continuous, then q is also continuous. We say that a family (F of semi-
norms on a vector space is saturated if for any finite subfamily (qz) of
the semi-norm max qi also belongs to If (qJig/ is a saturated family
of semi-norms defining a locally convex topology T on E, then it follows
from (8) that a fundamental system of neighborhoods of 0 for T is given
by sets = {x j qL(x) e}. A locally convex topology can always be
defined by a saturated family of semi-norms, e.g., by the family of all
continuous semi-norms.
We say that two families of semi-norms on a vector space E are equivalent
if they define the same locally convex topology on E,
If (qJigi is a family of semi-norms which defines a locally convex
topology on a vector space E, then the family obtained by taking for
every finite subfamily qLk (1 к 5g ri) of (qL) the semi-norm
<1ч....cn= max <Lk
l^k^n
is an equivalent saturated family of semi-norms. Indeed, the neighborhood
Vtl....hlt€ defined in (1) is now the set {x j qL1 Cn(x) 5g e} by virtue of
(8) .
Proposition 8. Let the locally convex topology T on the vector space E be
defined by the family (qlLei of semi-norms. Then T is Hausdorff if and only
if for every x # 0 in E there exists an index leI such that qL(x) # 0.
Proof. If qL(x) = a > 0, then {x j qL(x) 5g a/2} is a neighborhood of 0
in E which does not contain x. Thus T is Hausdorff by Proposition 3.2.
Conversely, let T be Hausdorff and x # 0. Then again by Proposition 3.2
there exists a neighborhood FT of 0 which does not contain x. The neigh-
borhood W contains a set of the form {x j qLk(x) 5g e, 1 к 5g n}, and
thus qLJc(x) # 0 for some к (1 rg к ri). |
[2, §5]
LINEAR MAPS, SUBSPACES, QUOTIENT SPACES
97
Exercises
1. (a) Prove that if A is a balanced convex set in a vector space, then for
every finite family of elements of A and every family (Xt)i^t^n of
scalars such that 22?=i |X*| 1, we have 22?= i XtXi G A.
(b) Let (At)tGi be a family of balanced convex subsets of a vector space.
Prove that the balanced convex hull of U^z At (i.e., the smallest balanced
convex set containing At) is the set of all linear combinations 22iG/Xt.rt,
where xL G At, 22iez |Xt| 1, and Xt = 0 except for finitely many u
(c) Prove that the balanced convex hull of a subset A of a vector space is
the set of all linear combinations 22?= i X^-, where is a finite family
of elements of A, and (X?-.)i is a family of scalars such that 22?= i M = L
2. Let A be a convex subset of a vector space over R. Show that A contains
an absorbing, balanced, convex set if and only if for every straight line L going
through the origin the set А П L contains an Open segment containing the
Origin (i.e., for every z H 0 there exists a > 0 and /3 < 0 such that Xz G A
for /3 < X < a).
3. Prove that a convex set A is balanced if XA C A for all X G К such that
|X| = 1.
4. Prove that the finest locally convex topology defined in Example 3 is
Hausdorff. ‘Hint: Given an element а 0 of E, consider an algebraic basis
В •- (af. of л ,-ach that a G В and observe that the set {x J x = 22 |Xt| < 1}
is absorbing, balanced and convex.)
5. Let q be a semi-norm on a vector space. Show that q is the gauge of every
set A such that {x J q(x) < 1} C AC {z| q(x) 1/.
§5. Linear maps, subspaces, quotient spaces
Proposition 1. A linear map f from a topological vector space E into a
topological vector space F is continuous if it is continuous at the origin.
Proof. Let TP be a neighborhood of 0 in F, then there exists a neighbor-
hood V of 0 in E such that /(У) C W. But then /(a + У) G/(a) + W
for every a G E. |
Proposition 2. Let E be a locally convex space whose topology is defined
by a saturated family (Qi)ig/ of semi-norms and F a locally convex space
whose topology is defined by a family (г\)\еь of semi-norms. A linear map f
from E into F is continuous if and only if for every semi-norm r\ there exists
a semi-norm qL and a positive number M such that r\(j(x)) Mqfx) for all
xeE.
Proof. Suppose that for every r\ such an M > 0 and a qL can be found.
Let ТУ be a neighborhood of 0 in F. Then W contains a set of the form
{.r J r\k(x) €, 1 к n}.
98
LOCALLY CONVEX SPACES
[2, §5]
If now rxA(/(x)) then let
V = {x | qlJc(x) e/Mk, 1 к n}.
It follows that/(F) C W, and thus by Proposition 1 the map / is continuous.
Conversely, let / be continuous. Since (<?t) is saturated, for each X G L
there exists an index t G I and a T > 0 such that qc(x) T implies
rx (/(#)) 1. We then have rx(/(x)) (1/T)#t(x) for all x G E. Indeed,
if qL(x) = 0, then also rx (/(#)) = 0, since in this case q^x) = 0 for
every д > 0; that is, дгх(/(#)) = 1 for every д > 0. If, on the other
hand, qt(x) # 0, then
/ Ух \
* W = 7’
and thus
Ч^да)) = й5Гл(Л1))г1-1
In particular, a linear form / on E is continuous if and only if there
exists a semi-norm qL and a positive number M such that | f(x) | MqL(x)
for every x G E.
Let E and F be two locally convex vector spaces whose topologies arc
defined by the families of semi-norms (<Zt)tez and (rx)xez, respec tively
and / a linear map from E into F. It follows from the remarks maae ai.
the end of §4 and from Proposition 2 that / is continuous if and only if
for every X G L there exists a finite family (ц, . . ., tn) of elements of I
and a positive number M such that
’•xlftz)) M max qtk(x)
1
for all x G E.
Let E be a vector space and let T and T7 be two locally convex topologies
on E, where T is defined by the family (g€)€er of semi-norms and T' is
defined by the family (гх)хеь of semi-norms. Then T is finer than T' if
and only if for every r\ there exists a finite subfamily qCJc (1 к ri) of
(qc) and a number M 0 such that
rx(x) M max <zt,(rr)
for all x G E. Indeed, according to the previous remark, this condition
means that the identical bijection x x from E equipped with the topol-
ogy T onto E equipped with the topology T' is continuous. In particular,
T and T' coincide—i.e., (#t) and (rx) are equivalent—if and only if for
every X G L there exists a finite family (и, . . . , tn) of elements of I and
a positive number M such that
r\(x' g M max q^Cx)
[2, §5] LINEAR MAPS, SUBSPACES, QUOTIENT SPACES 99
for all x g E and for every tel there exists a finite family (Xb . . . , Xw)
of elements of L and a positive number N such that
Qt(^) N max r^k(x)
for all x G E.
Example 1. Let us introduce the following notations, which we shall
use frequently in the sequel: if x = (aq, . . . , xn) is a vector in Rn and
p = (pb . . ., Pn) a multi-index in Nn, then we set
zy.P _ zy.Plzy.P2 zyPn
.C — Jzj Uy 2 • • •
and p! = Р1!рг! • • • pn!. With these notations we can write the multi-
nomial theorem of elementary algebra in the convenient form
^ + x2 + ---+ xnr = 2] ^xp.
Ipl=m P'
We want to show that if к is positive, then on the spaces S™
(0 m oo) of Examples 4.11 and 4.12 the family of semi-norms qk,p
with |p| g m is equivalent to the family of semi-nonns
f max |Zdpf(x)\ (1)
x<=Rn
with r, p G Nn, |r| 2fc, and |p| g m. Indeed, by the multinomial
theorem, (1 + |x|2)fc is the linear combination of monomials
x2r = xl^xp • x2r”
with |r| k, and therefore for every p G Nn there exists M > 0 such that
Qk,p(f) = M max max dpf(x)\.
[r[^2kxERn
Conversely, |xr| (1 + |x|2)fc if |r| 2k; hence the semi-norm (1) is
not greater than qk,p(f)-
Example 2. On the spaces Sm (0 m go) of Examples 4.13 and 4.14
the family of semi-norms with к G N and |p| m is equivalent to
the family of semi-norms (^,p) with к G Z and |p| m. This follows
immediately from the inequality (1 + |x|2)fc 1 which holds for к 0.
Another equivalent family of semi-norms on §>m is given by (1), where
r, p G Nn and |p| m.
Example 3. Let m be a fixed positive integer or the symbol oo. We
clearly have §>m C S™ for any к G Z, and the injection Sw S™ is continu-
ous since the family of semi-norms which defines the topology of S™ is a
subfamily of the family of semi-norms which defines the topology of S™.
100
LOCALLY CONVEX SPACES
[2, §5]
Example 4. If к k', then S™ C 8$ and the map S™ 8$ is continuous,
as follows immediately from the inequality (1 + l^l2)*' (1 + И2)*-
Example 5. If 9 is an open subset of Rn and m a positive integer or oo,
then (Bw(9) С 8W(9) (cf. Examples 4.7, 4.8, 4.18, and 4.19). The map
(Bw(9) 8W(9) is continuous, since if К is a compact subset of 9 and
p G Nn, |p| m, we have
gx,p(/) = max |dp/O)| sup |d7(x)| = qp(f)
xEK xGQ
for every / g (B™(9).
Example 6. We can see similarly that the maps (В 0м 8 are con-
tinuous (Exercise 2).
Example 7. Let 9 be an open subset of Rn and m, m' two positive
integers such that m > mf. We clearly have
8(9) C 8W(9) C 8W'(9) C 6(9);
and the canonical injections are continuous since the family of semi-norms
tex.p) with |p| m' is a subfamily of the family of semi-norms (qk,p)
with |p| m.
We can see similarly that for 0 m' m cc the maps £>m(K)
8Г °* C', °* <(9) °* (Bo'(9), and (Bw(9) <=+
are continuous.
Definition 1. A bijective continuous linear map f from a topological
vector space E onto a topological vector space F is called an isomorphism if the
inverse map f~l is continuous (i.e., if / is a homeomorphism). An injective
continuous linear map f from a topological vector space E into a topological
vector space F is a strict morphism (or topological homomorphism) if it is
an isomorphism from E onto f(E) = Im (/).
Two topological vector spaces E and F are isomorphic if there exists an
isomorphism from E onto F. An isomorphism from E onto itself is called
an automorphism.
Before giving an example of an isomorphism between two spaces, we
want to prove the Leibniz formula of differential calculus in a convenient
form, in which we shall often use it in the sequel. First, let us introduce
the following vectorial notations in addition to those already introduced
in Example 1. If p G Nn and q G Nn, we write
p + q = (pi + qi,P2 + Q2, ,pn + qn);
and p q if pi qlt p2 q2, . . ., pn qn. If p q, we denote by
[2, §5] LINEAR MAPS, SUBSPACES, QUOTIENT SPACES 101
p — q the multi-index whose components are pi — qi (1 i n).
Furthermore, we set
(P\ = (Pv\ (P2\ . . . (Pn\ ,
\q) \qi) \q2/ \qn)
where C? J is the binomial coefficient t/ ^г'-— ; i.e., with p\ defined
\qi/ qiKPi — qi)'
as in Example 1, we have
(p\ =p1
\q/ qKp - qV-
if p q and =0 otherwise.
Proposition 3. If <p and ф are two functions defined in a neighborhood of
the point x G Rn and whose partial derivatives of orders |p| (p G Nn)
exist and are continuous in that neighborhood, then we have
apW) = 2 HaWV (2)
q = P
at x.
Proof. We use induction on the order |p| of p. For |p| = 0 the formula
(2) reduces to the identity <рф = <рф. Let us assume that (2) holds for all
p G Nn such that |p| = m, and let s = (sb . . . , sn) G Nn be a multi-
index of order |s| = m + 1. Since in particular |s| 1, one of the com-
ponents of s must be ^1, and without loss of generality we may assume
that 1. Letp G Nn be such that pj = $i — 1, py = Syfor2 j n.
Then |p| = mandds = d]dp. By the induction hypothesis and the formula
di(^) — di<p • ф 4 (p • д\ф
we have
d*W) = <h £ dq<p • dp~qt
q = P W'
= I 0 {^aVa^V t aV-^a^ V}
q^p
= £ W • M !(S1 П + 61
\Q2/ \?n/ I\Qi - 1/ \ 71 /)
= I Qa^ a’-V.l
q^s
Example 8. Let к be a fixed integer and m a positive integer or oo. We
want to show that the linear map / •--> (1 + |x|2)V is an isomorphism
from S™ onto (В™.
102
LOCALLY CONVEX SPACES
[2, §5]
Let us first prove the formula
a’(i + и2/ = E Утхг • (i + M2)*-1’1, (3)
Irl^lgl
where q G Nn and the Уг are constants which, of course, depend also on
к and q. Formula (3) clearly holds for \q\ = 0. Let us assume that it holds
for \q\ = m and let ds = d]dq. Then
as(i + H2)4= 2 дКт^-а + Н2)*-1’1)
IrI ^Igl
= E {W?"1*? • • • (1 + M2) + yrx\k - 131)2x0 (1 + |x|2)A-'ff|_1,
which is of the same form as (3) since |g| + 1 = |s| and
П - 1 + r2 + • • • + rn + 2 H, \r\ + 1 |s|.
If f G S™, set g = (1 + |^|2)V’ Using (2) and (3), we see that
tW) = E + м2Л*р_7(*)
<l=-p
(4)
which shows that g G (B™. Now from (4) follows the existence of an
M > 0 such that
max |dp#(a;)| M max max |(1 + |,t|2)*dQf(x)\;
xGRn q=P xGRn
hence the map f g from S™ into (Bo is continuous.
Clearly, the map f g = (1 + |^|2)V is injective. But it is also
surjective, and the inverse map g f = (1 4- |.r|2)”^ is continuous, as
one sees from the inequality
|(i + H2)4aW)| E (5)
q^p
where the /3PtQ are positive constants, = 1. For |p| = 0 formula (5)
is evident. Assume that it holds for any multi-index < p. From iden-
tity (4) we get
|(i + |x|2)fcaVO)l l*W + E “pvK1 + kl2)^-W)|,
q<p
aP,q 0, and by the induction hypothesis
1(1 + E 3p-,.r|aW)l-
r^p—q
[2, §5] LINEAR MAPS, SUBSPACES, QUOTIENT SPACES 103
Example 9. If 2 is an open subset of Rn and К a compact subset of 2,
then the map £>m(K) °* 8W(Q) is a strict morphism (0 m oo). In
the first place, it is continuous, since if L is an arbitrary compact subset
of 2, we have , „
max |dpy(x) | max |d
xGL xEK
for every f g S>m(K) and |p| m. But, conversely, if V is the neighbor-
hood of 0 in £>m(K) defined by the inequality
max |dpy(x)| €,
xEK
then its image in 8™(Q) is the intersection of S>m(K) with the neighborhood
of 0 in 8W(Q) defined by the same inequality.
Similarly, it can be seen that the map £>m(K) (B™(Q) is a strict
morphism.
Example 10. The map (Bo (0) (BW(Q) (0 m oo) is a strict
morphism since the semi-norms which define the topology of (Bo (0) are
the restrictions of the semi-norms which define the topology of (Bw(2).
Remark 1. We shall see in Chapter 4 that none of the inclusion maps
considered in Examples 3 through 7 is a strict morphism.
If M is a subspace of a topological vector space E, then the topology
induced on M by E clearly satisfies the axioms (TVS 1) and (TVS 2), and
thus M becomes a topological vector space in its own right. Unless other-
wise stated, we shall always consider on M the induced topology. If E is
locally convex, then M is locally convex. If the topology of E is defined
by a family (<fr)tez of semi-norms, then the topology of M is defined by
the restrictions of the qc to M.
Proposition 4. The closure M of a linear subspace M of a topological
vector space E is a closed subspace of E.
Proof. We know that M is a closed set; we have to prove that it is a
linear subspace. Let a G M, b G M, and let PF be a neighborhood of a + b.
Since the map (x, у) •—> x + у is continuous from E X E into E, there
exists a neighborhood U of a and a neighborhood V of b such that
U + V C W. But U П M # 0, V П M X 0; thus W П M # 0 and so
a + b G M. Similarly, it can be shown that if a G M and X G K, then
Xa G M. |
The definition of the closed subspace generated by a set G, of a total set
in a closed subspace (Definition 1.3.1), as well as Definition 1.3.2, can be
repeated word for word for any topological vector space.
Let E be a topological vector space and M a linear subspace of E. We
have already mentioned in §4 of Chapter 1 that the quotient set E/M
104
LOCALLY CONVEX SPACES
[2, §5]
carries a natural vector space structure. We want to prove now that the
quotient topology on E/M is compatible with the vector space structure,
and to do so we first recall the concept of quotient topology.
Let X be an arbitrary topological space, R an equivalence relation on X, and
let be the canonical surjection from X onto the quotient set X/R which assigns
to each element x G X its equivalence class <p(x) modulo R. The quotient topology
on X/R is defined as the finest topology for which <p is continuous. In other
words, a set A in X/R is open if and only if <p-1(A) is open in X.
Let / be a map from X/R into a topological space У, and define the map
f:X —» Y by f = fo<p. Then f is continuous if and only if f is continuous.
Indeed, since <p is continuous, we know that if f is continuous, then the com-
posite map / is also continuous. Conversely, assume that f is continuous and
let A be an open set in Y. Then the set/-1 (A) = (p~1(j~1(A)') is open in X,
and therefore, by the definition of the quotient topology, /-1 (A) is open in X/R;
i.e., / is continuous.
The map / is constant on every equivalence class modulo R. Conversely, if
we have a continuous map /: X Y which is constant on every equivalence
class modulo R, then there exists a unique continuous map f:X/R —> Y such
that / = f°<p-
Let us now consider a topological vector space E, a linear (not neces-
sarily closed) subspace M, and the quotient vector space E/M equipped
with the quotient topology. In this case the canonical surjection is not
only continuous but transforms open sets into open sets. Indeed, let A
be an open set in E; then <p-1(<p(A)) is clearly the set A + M. Now, the
set A + x is open for each x g M, and thus
A + M = U (A + x)
zEM
is open, which proves that ^?(A) is open in E/M. It follows that a set U
in E/M is a neighborhood of a point x = <p(x) if and only if <p-J(t7) is a
neighborhood of x in E. We can now prove that E/M is a topological
vector space, i.e., that it satisfies Axioms (TVS 1) and (TVS 2). Let U
be a neighborhood of the point x + у G E/M, and let x and у be two
points of E such that x = <p(x), у = <p(y). Then <p~ 1(U') is a neighborhood
of x + y, and there exist neighborhoods V and W of x and у such that
V + W C But then <p(V) and <p(W) are neighborhoods of x and
у such that <p(V) + <p(W) G U. Similarly, if x = <p(x) and U is a neigh-
borhood of Xx in E/M, then ^-1(С7) is a neighborhood of Xx in E and there
exists a neighborhood V of X in К and a neighborhood W of x in E such that
VW G ^-1((7). But then <p(W) is a neighborhood of x such that
V<p(W) G U.
In the sequel we shall usually consider the quotient vector space E/M
equipped with the quotient topology.
[2, §5] LINEAR MAPS, SUBSPACES, QUOTIENT SPACES 105
Proposition 5. The quotient space E/M of a topological vector space E
modulo a linear subspace M is a Hausdorff space if and only if M is a closed
subspace of E.
Proof. If E/M is a Hausdorff space, then in particular the set {0} is
closed in E/M. Since the canonical surjection <p is continuous, the set
M = <£>-1({6}) is closed in E.
Conversely, suppose that M is closed and let x be an element of E/M
different from 0. Then x = <p(x) for some x g M. Hence there exists a
neighborhood U of x such that U П M = 0. But then x — is a
neighborhood of 0 which does not contain x and thus E/M is a Hausdorff
space by Proposition 3.2. |
Applying Proposition 5 to the case M = {0}, we see that the topo-
logical vector space E is a Hausdorff space if (and only if) the set {0} is
closed (cf. Exercise 3.1).
If f is a continuous linear map from a topological vector space E into a
topological vector Hausdorff space F, then Ker(/) is a closed subspace
of E. In any topological vector space E the set {0} is a closed subspace
of E (Proposition 4). The quotient space E/{ty is called the Hausdorff
space associated with E.
Suppose now that E is a locally convex space, and let M be a subspace
of E. Then the quotient space E/M is also locally convex. Indeed, if U
is a neighborhood of the origin in E/M, then is a neighborhood of
the origin in E. By hypothesis <p-1(?7) contains a convex neighborhood
of the origin V С E and thus <p(7) is a convex neighborhood of the origin
in E/M contained in U.
Let q be a semi-norm on a vector space E. If M is a subspace of E, we
define the quotient semi-norm q on E/M by
q(i) = inf q(x);
xEi
q is a semi-norm on E/M. Indeed,
q(Xx) = inf q(Xx) = |X| inf q(x) = |X| • q(x).
xEi xGi
Next let e > 0 and x, у G E/M. Then there exist x G £ and у G у such
that
q(x) q(x) + e and q(y) q(y) + e, and thus
q(x + y) g q(x) + q(y) q(£) + q(y) + 2e.
Since e is arbitrary,
q($ + 5) = inf q(x + y) q(%) + q(ff).
106
LOCALLY CONVEX SPACES
12, §5]
If q is a semi-norm on E and U = {x j q(x) < e}, then clearly
<p(U) = {i\№) < e}.
From here it follows in particular that if q is continuous on the topological
vector space E, then q is continuous on the quotient space E/M.
Let (QiXgi be a saturated family of semi-norms defining a locally convex
topology on the vector space E. Then (qJigz is a family of semi-norms
defining the quotient topology on the space E/M. Indeed, the sets
= {x i qjx) < e}
form a fundamental system of neighborhoods of 0 in E, and thus the sets
<p(Uj) = {x | q^x) < e} form a fundamental system of neighborhoods of
6 in E/M.
Let f be a continuous linear map from a topological vector space E into
a topological vector space F, f: 2?/Ker(/) —> F the associated injection
(cf. Chapter 1, §4), and <p:E 2?/Ker(7) the canonical surjection. Since
f = f°<P, it follows from the remarks made above concerning the quotient
topology that the linear map f is continuous.
Definition 2. A continuous linear map f from a topological vector space E
into a topological vector space F is a strict morphism (or topological homo-
morphism) if the associated injection f: 2?/Ker(7) —> F is a strict morphism
(Definition 1).
In particular, the canonical surjection from a topological vector space
E onto a quotient space E/M is a strict morphism, since the associated
injection is the identity map of E/M onto itself.
Theorem 1. If f is a continuous linear map from a topological vector space
E into a topological vector space F, then the following conditions are equivalent:
(a) f is a strict morphism.
(b) f maps every neighborhood of 0 in E onto a neighborhood of 0 in f(E).
(c) f maps every open set of E onto an open set of f(E).
Proof. Let N be the kernel of /, <p the canonical surjection of E onto
E/N, and J:E/N F the injection associated with f. We have f = f°<p.
Denote by g the inverse of the bijection f: E/N —> f(E).
Assume that f is a strict morphism. If V is a neighborhood of 0 in E,
then <р(У) is a neighborhood of 0 in E/N\ and since g is continuous,
7(^(Ю) = ЛЮ is a neighborhood of 0 in f(E). Thus (a) => (b). Simi-
larly, if A is an open set in E, then <p(A) is an open set in E/N
and 7(^(4)) = /(Л) is an open set in f(E). Thus (a) => (c).
[2, §5] LINEAR MAPS, SUBSPACES, QUOTIENT SPACES 107
Conversely, suppose that (b) is satisfied. If W is a neighborhood of 0
in E/N, then <p-1(IF) is a neighborhood of 0 in £7; and thus
f(W) = Ktp-Xw))
is a neighborhood of 0 in f(E). Hence g is continuous; i.e., f is a strict
morphism and (b) => (a). Similarly, suppose that (c) is satisfied. If В
is an open set in E/N, then <p—1(B) is an open set in £/; and thus
Ж = /(^-’(B))
is an open set in f(E). It follows that g is continuous; i.e., (c) => (a). |
Proposition 6. Let E be a topological vector space over K. Assume that E
is a Hausdorff space and that its algebraic dimension is 1. If a is a fixed
nonzero element of E, then the map % %a is an isomorphism from the
Banach space K1 (cf. Chapter 1, §5) onto E.
Proof. Clearly, the map is bijective, linear, and continuous. Let us prove
that the inverse map is also continuous. Given e > 0, there exists a bal-
anced neighborhood U of 0 in E which does not contain ea, since E is
assumed to be Hausdorff. Then %a e U implies | f | < e, since otherwise
we would have lef”1! 1, and thus ea = e U. |
A hyperplane (cf. Chapter 1, §5) H in a topological vector space E is
either closed or everywhere dense. Indeed, by Proposition 4 the set H
is a closed subspace of E and thus, by the maximality of H, either H = H
orH = E.
Proposition 7. Let E be a topological vector space and H a hyperplane in
E with equation f(x) = 0. H is closed if and only if the linear form f is
continuous.
Proof. If f is continuous, then H = /-1({0}) is closed since {0} is
closed in K. Conversely, if H is closed, then E/H is a Hausdorff space
according to Proposition 5. Let <p be the canonical surjection of E onto
E/H. The injection/: E/H —* К associated with / is surjective (and thus
bijective) since/is not identically zero. Since E/H is one-dimensional, it
follows from Proposition 6 that / is an isomorphism and thus / = /°<? is
continuous. |
Exercises
1. Show that the following relations hold between the various topologies on
<£(£) introduced in Example 4.21:
normic ultra-strong ultra-weak
AY AY
strong weak
where means “is finer than.
108
LOCALLY CONVEX SPACES
[2, §6]
2. Prove that the maps (В Олг 8 are continuous (cf. Example 6).
3. Let U be an absorbing, balanced, convex set in a vector space E, and let
g be the gauge of U. If M is a subspace of E, show that the quotient semi-norm
g is the gauge of the image U of U in E/M. (Hint: Let g be the gauge of U,
x G U, and e > 0. Show that if g(x) = X, then g(x) X + 2e and if g(x) = X,
then g(x) < X + €.)
4. Let q be a semi-norm on the vector space E, M a subspace of E, and q
the quotient semi-norm on E/M. Show that q is a norm if and only if M is
closed in the topology defined by q and contains the set {x \ q(x) = 0}.
5. Show that Proposition 6 is false if we do not assume that J? is a Hausdorff
space. (Hint: The chaotic topology on a vector space E is compatible with the
vector space structure of E.)
6. Prove that every not identically zero continuous linear form on a topological
vector space J? is a surjective strict morphism from E onto K1. (Hint: Use
Propositions 5, 6, and 7.)
7. Prove that there exists no not identically zero continuous linear form on
the space E defined in Example 4.2. (Hint: If F is a continuous linear form on E,
there exists such that / G implies |F(J)| 1. If f is zero outside an
interval of length < 6 then X/ G 7е,з for all X G R, and thus F(f) = 0. Finally,
by using a “partition of unity” on [0, 1] show that for each f £ E there exist
fi G E (1 i ri) such that f = 2?=i A and that fi is zero outside an in-
terval of length < 6.)
§6. Bounded sets, normability, metrizability
Definition 1. Let E be a vector space over К and A, В two subsets of E.
We say that A absorbs В if there exists an a > 0 such that В с XA for all
X G К such that |X| a.
With this terminology we can say that A С E is absorbing (Defini-
tion 3.2) if it absorbs all finite subsets of E. If A is balanced, then it
absorbs В if there exists one p G К such that В C pA. Indeed, if this is
the case, then for |X| |д| we have |X“\u| 1 and thus
В С pA = \(\~xp)A c XA.
Definition 2. A set В in a topological vector space is bounded if it is
absorbed by every neighborhood of 0.
This definition, which clearly generalizes the notion of a bounded set
in a normed vector space, is due to Kolmogorov and von Neumann and
plays a fundamental role in the theory of locally convex spaces. A set is
of course bounded if it is absorbed by every neighborhood belonging to a
fundamental system of neighborhoods of 0. Bounded sets and neighbor-
hoods of 0 behave in a “contravariant” way. For instance, if E and F are
[2, §6]
BOUNDED SETS, NORMABILITY, METRIZABILITY
109
topological vector spaces and f a continuous linear map from E into F,
then the image by/of any bounded set of E is a bounded set in F. Indeed,
let A be a bounded set in E and W a neighborhood of 0 in F. Then /-1(I7)
is a neighborhood of 0 in E and thus absorbs A. It follows that W absorbs
f(A). In particular, the finer the topology on a vector space E, the fewer
the bounded sets. We shall see, however, that different topologies may
have the same bounded sets.
A set contained in a bounded set is clearly bounded itself. The union
of two bounded sets is a bounded set and hence, by induction, the union
of finitely many bounded sets is bounded. Indeed, let A and В be bounded
sets. For a balanced neighborhood У of 0 there exist a > 0, /3 > 0 such
that A C aV and В C 0V. Setting У = max (a, ft), we have А и В Q7V.
A set consisting of a single point is bounded (because any neighborhood
of 0 is absorbing), and therefore any finite set is bounded. It follows from
Proposition 3.3 that the closure of any bounded set is bounded.
A collection $ of bounded sets of E is called a fundamental system of
bounded sets if for every bounded set В of E there exists a set P G $ such
that В cP. In a locally convex space the balanced, closed, convex,
bounded sets form a fundamental system of bounded sets. To show this,
let В be a bounded set and let P be the intersection of all balanced, closed,
convex sets containing B. Then P is a balanced, closed, convex set con-
taining В (i.e., the balanced, closed, convex hull of B), and it is sufficient
to prove that P is bounded. But this is clear, since by Proposition 4.4
the balanced, closed, convex neighborhoods of 0 form a fundamental
system of neighborhoods of 0; and if V is such a neighborhood and В C XF,
then also P C XT.
Let В be a locally convex space whose topology is defined by the family
(qOigi of semi-norms. A set В С E is bounded if and only if every qL is
bounded on B.
Let E be a vector space and q a semi-norm on E. We know that q
defines a locally convex topology on E, and in this topology E has a funda-
mental system of bounded neighborhoods of 0 formed by the sets
v( = {x ! q(x) <=}.
Conversely, we have the following result:
Proposition 1. If E is a locally convex space in which there exists a
bounded neighborhood of 0, then the topology of E can be defined with the help
of a single semi-norm.
Proof. Let V be a bounded neighborhood of 0 in E. Then by Proposi-
tion 4.4 there exists a balanced, closed, convex neighborhood W of 0 con-
tained in V. Let q be the gauge of W. By Proposition 4.7 q is a semi-norm.
по
LOCALLY CONVEX SPACES
[2, §6]
The sets W€ = {x\ q(x) e} form a fundamental system of neighbor-
hoods of 0 in E. Indeed, if U is any neighborhood of 0 in E, then by the
boundedness of V there exists e > 0 such that eV C U; but then W€ C U. |
Let E be a topological vector space whose topology is defined by a single
semi-norm q. It follows from Proposition 4.8 that q is a norm if and only
if E is a Hausdorff space.
If the topology of E can be defined by the finite family of
semi-norms, then it can also be defined by the single semi-norm q defined,
for instance, by
q(x) = max qi(x)
1 = i = n
or by
?(z) = E 9i(^)
г=1
for x e E, since
n
qt(x) max qi(x) £ q^x) n max qi(x).
г=1 l=i=n
In this case the set {x j q(x) 1} is a bounded neighborhood of 0.
If the topology of a topological vector space can be defined by a norm,
we say that it is normable. As we have seen, for a topology to be normable
it is necessary and sufficient that the space be locally convex and Haus-
dorff, and that it possess a bounded neighborhood of 0.
Example 1. If Q is an open subset of Rn, К a compact subset of Rn, m
a positive integer, and к an arbitrary integer, then the spaces $>W(X),
S™, (0), (Examples 9, 11, 16, and 18 of §4) are normable since
they are clearly all Hausdorff and defined by finite families of semi-norms.
We say that a topological space X is metrizable if there exists a metric
on X such that the topology defined by it coincides with the topology of
X. Clearly, a metrizable space is always Hausdorff, and each point pos-
sesses a countable fundamental system of neighborhoods (namely, the
balls Byn(x) with n 1). We shall now prove that in a topological
vector space the converse is also true (Theorem 1). The proof of Theo-
rem 1, patterned after the proof of a more general theorem from the theory
of uniform spaces ([8], Chapter IX, 2nd ed., §1, no. 4, Proposition 2), is
somewhat long and complicated. The reader who is primarily interested
in locally convex spaces can skip the proof of Theorem 1 at first reading,
since a little further on (Proposition 2) we shall give a simpler proof for
locally convex spaces.
A metric 6 on a vector space E is said to be translation-invariant if
b(x 4- a, у + a) = 6(.r, y) for every x, y, a G E. If 6 is a translation-
invariant metric, then the distance from the origin |я| = 6(x, 0) has the
[2, §6] BOUNDED SETS, NORMABILITY, METRIZABILITY 111
following properties:
(a) |я| = 0 if and only if x = 0,
(b) |x| = |-x|,
(c) |x + y\ g |x| 4- |j/|.
Conversely let x •-> |x| be a map from the vector space E into R+ having
properties (a), (b), and (c). Then 8(x, y) = \x — y\ defines a translation-
invariant metric on E. Clearly, if 6 is a translation-invariant metric on a
vector space E, then the neighborhoods of a point x e E are the sets
x + U, where U is a neighborhood of the origin.
Theorem 1. Suppose that the topological vector space E is Hausdorff and
that there exists a countable fundamental system of neighborhoods of 0 in E.
Then the topology of E can be defined by a translation-invariant metric 5 such
that the distance from the origin |z| = 8(x, 0) satisfies the conditions:
(d) |X| 1 implies |Xx| |z|,
(e) X ~> 0 implies |Xx| —> ft for every x G E.
Proof. Let (yn)n£N* be a fundamental system of neighborhoods of 0 in
E such that QnGN* Vn = {0}. Let us set Wf = Vi and define by induc-
tion a sequence (Wn)nGN* of balanced neighborhoods of 0 which satisfy
the relation
Wn+1 + Wn+1 + Wn+1 G Vn О Wn.
Clearly, the Wn also form a fundamental system of neighborhoods of 0
in E; in particular, QnGN* Wn = {0}, and furthermore, J7n+i C Wn.
Let us define the function 7 on E as follows:
7(0) = 0,
7(x) = x e Wk but x g Wk+i,
y(x) =1 if x Wi.
For x # 0 we have У(х) # 0, and for |X| = 1 we have У(Хх) = 7(x)
since the Wn are balanced. For the same reason |X| 1 implies
7(Xx) 7(x).
Define now
8(x, y) = inf £ y(ti — ti-i),
1=1
where the infimum is taken with respect to all finite sequences
such that to = x, tp = y. We have the inequalities
%7(y — x) d(x, y) У(у — x).
(1)
112
LOCALLY CONVEX SPACES
[2, §6]
The second inequality is obvious. To prove the first one, we will show by
induction on p that for every pair of points x, у and every finite sequence
such that = x, tp = у we have
p
%) = 2d t{—1)* (2y
2 = 1
The statement is trivial for p = 1, since then the only sequence (7>) is
-o — x. t] = y. Xow let p > 1 and set
p
a ~ 2d —
?'=1
11 a J, then (2) is true since ?(.r) 1 for all x G E. Suppose that
a < There exists an integer q such that 1 q p and
(7—1 <1
2j ^i—l) = L—1) >
i=--l 2 = 1
We then necessarily have
p
2d ^г—i) = %<*•
2=Q+1
Since q — 1 < p and p — q < p, we have by the hypothesis of induction
T(Zg_i — x) g a and Т(т/ — tq) a.
On the other hand, clearly
tq_ 1) Ci.
Let к be the smallest integer for which 1/21’ a. Then к 2 and
tq — 1 ~ X G tq — tq-\ G Wk) У — tq E: Wk
by the definition of T. But then
У ~ X = (y -- tq) + (tq ~ ^-/-1) + (tq_l — x) G Wк + И' к + Wк G И' к—1,
and thus
Т(г/ - x) 2a.
Next let us prove that 6 is a translation-invariant metric on E. It
follows from (1) that b(x, y) — 0 if and only if x = y. The property
5(x, y) — 5(y, x) follows from ?(—x) = y(x) and the definition of 5.
Let x, yy z G E and e > 0. There exists a sequence to = x,
[2, §6] BOUNDED SETS, NORMABILITY, METRIZABILITY 113
tp = z and a sequence = z, uq = у such that
p
IE — ti— 1) = 3(я, Z) + €,
г=1
9
£ — Uj-i) 8{z, y) + e.
j=i
Then we have
P 9
6(x, y) g £ y(ti — + £ y(uj — Uj-i) a(.r, z) + 8(z, y) + 2e,
г = 1 >=1
and since e is arbitrary, we obtain the triangle inequality
5(x; y) 8(x, z) + $(z, y).
The translation-invariance of 5 follows from the obvious fact that
У(у — X) = y(y + a — (x + a))
and from the definition of 6,
Denote by Ue the set of all x G E such that d(x, 0) = |x| e It
follows from the inequalities (1) that for each integer к 1 we have
{71/2*+! C Wk C Un2k\ Furthermore, it follows from the relation
d(x, d) = |x — a|
that {.t ! 8(x, a) e} = U€ + a. Thus the topology defined by 6 is the
same as the topology of E.
Finally, condition (d) follows from the definition of 6 and the analogous
property of V, and condition (e) follows from the fact that if X —* 0, then
Xx tends to 0 in E. |
A subspace of a metrizable topological vector space is clearly metrizable.
If E is a metrizable topological vector space and M is a closed subspace
of E, then the quotient space E/M is metrizable. Indeed, by Proposi-
tion 5.5 E/M is a Hausdorff space. Furthermore, if (7n)nGN is a funda-
mental system of neighborhoods of 0 in E and <p is the canonical surjection
from E onto E/M, then (<p(Vn))nGN is a fundamental system of neighbor-
hoods of 0 in E/M.
A locally convex space is metrizable if and only if it is Hausdorff and its
topology can be defined by a countable family of semi-norms. This follows
from Theorem 1 and also from Proposition 2 below. If the sequence
(<Zn)nGN defines the topology on the vector space E, then setting
rtl(x) = max qi(x)
0 = i^n
114
LOCALLY CONVEX SPACES
[2, §6]
we obtain an equivalent family (rn)n£N of semi-norms which satisfies the
condition rn(x) rn+i(x) for every x G E, and thus the sets
Vn ---- I Гп(я) = 1}
satisfy the condition Vn D Vn+i (n G N). We say that (rn) is an increasing
sequence of semi-norms.
Proposition 2. Let Ebe a locally convex Hausdorff space whose topology
T is defined by an increasing sequence (qn)neN of semi-norms. The map
x »-> |я| from E into R+, where
<3)
has the following properties:
(a) |x| = 0 if and only if x = 0,
(b) |x| = |-x|,
(c) \x + y\ |z| + |y|,
(d) |X| 1 implies |Xx| |x|,
(e) X —» 0 implies |Xx| —» 0 for every x G E.
Furthermore, the metric д(х, у) = \x — y\ defines the topology T and is
translation invariant.
Proof. The series with positive terms (3) converges since its n-th term
is ^2“n. If x = 0, then qn(x) = 0 for all n G N; hence |x| = 0. If
x # 0, then by Proposition 4.8 there exists an index n such that qn(x) # 0
and therefore |x| # 0. This proves (a). For each n we have qn(x) =
Цп(—х)} which proves (b).
Next we observe that the function £ *-* £/(l + £) is increasing for
£ # —1, as can be seen by taking its derivative. In other words, we have
Г+1 for -1 < e П- (4)
If |x| 1, then g„(Xx) = |X| • qn(x) qn(x), and by (4)
gn(Xr) qn(x)
1 + qn(Xx) = 1 + qn(x) ’
from which (d) follows. Since qn(x + y) qn(x) + <Zn(z), we have again
by (4)
qn{x + y)____ < qn(x) + ?n(y) < qn(x) . 9n(y) ,
1 + qn(x + y) ~ 1 + qn(x) + qn(y) = 1 + qn(x) 1 + qn(y) ’
and (c) follows.
[2, §6]
BOUNDED SETS, NORMABILITY, METRIZABILITY
115
From (a), (b), and (c) we see that 8(x, y) = |.r — y\ defines a transla-
tion-invariant metric. Let us prove that the topology T' deduced from it
coincides with T. Let U = {x | |z| l/2fc} be a neighborhood of 0 for
T'. We want to show that U contains the set
F j# j qjc+i(x) 2fc+2|’
which is a neighborhood of 0 for T. If x е У, then
QoO) 2i(z) QfcW Qfc+iW
1 .
2fc+2 ;
hence
J_ gn(-C) < 1 у 1 _ 1
„=о2п 1+ ?»(*) = 2*+2“o2n 2*+1
since
(5)
qn(x)
1 + qn(x)
qn(x).
On the other hand,
qn{x) < 1
1 + g»(z) ~
and therefore
у 1 ?»(*) < у i i
2» 1 + qn(x) = " „2» 2*+!
=k+2 1 7 n=k+2
From (5) and (6) we obtain |z| l/2fc, i.e., x e U.
Conversely, let us show that the neighborhood W = {x | qm(x) 1/2*}
of 0 for T contains Z = {x | |z| l/2m+fc+1}, which is a neighborhood of
0 for T'. If x G Z, then we have a fortiori
that is,
I ___Qw (^) ____i__
2m 1 + qm(x) = 2m+k+l "
< 1 .
1 + qm(z) = 2fc+1 '
hence
qm(x) (1 2M-1) — 2k+1
and therefore
qm(x) ^k+l _ 1 = 2k"
which means that x e W.
116
LOCALLY CONVEX SPACES
[2, §6]
Finally, (e) follows now from the fact that if X —> 0, then Xx —» 0
for T. |
Example 2. The spaces Sw, S, (Bo(^) and CB(Q) are metrizable
since they are clearly Hausdorff and their topology is defined by a count-
able family of semi-norms (see §4, Examples 10, 12, 13, 14, 17, and 19).
Example 3. The spaces e(fi), 8(Q), and 8™(Q) are metrizable (§4, Ex-
amples 6, 7, and 8). Indeed, let the sequence (Kk) of subsets of 9 be defined
as follows: Kq = 0, and for 7c 1 let К к be the set of all points x such
that the distance of x from Cq is not less than l/7c and the distance of x
from the origin is not greater than k. Clearly, each К к is compact and it
is easy to see that every compact subset of 9 is contained in some Kk.
It follows that the family of semi-norms (qxJ/cgn on e(Q) is equivalent
to the family of semi-norms (qx) and that the family of semi-norms
(QKktp)kEN,\p\^m on 8™(Q) (1 m oo) is equivalent to the family of
semi-norms (qx,p).
Proposition 3 (Mackey’s countability condition). Let E be a metrizable
locally convex space and (Bk)ken a sequence of bounded subsets of E. There
exists a bounded subset В of E and a sequence (Xk)ktN of positive numbers
such that В к C XkB for all к e N.
Proof. Let (gy)jGN be a sequence of semi-norms which defines the
topology of E. For each 7c e N there exists a sequence (pkftjeN of positive
numbers such that qj(x) pkj for x e. В к and j e N. Define the sequence
(m;)jgn by
My = max (/ziy, • • •)
We have Pkj му for j /с, and therefore for each 7c G N there exists
Xk > 0 such that pkj = XkPj for all j e N. The set
В = {x !q/x) pjJ e N}
is bounded. If x e Bk, then q/x) pkj XkPj for all j G N; that is,
x e XkB. Hence we also have Bk C XkB. |
Exercises
1. Let E be a vector space and x |x| a map from E into R+ having the
properties (a) through (e) above. Prove that the sets U = {x ! |x| e} (e > 0)
form a fundamental system of balanced neighborhoods of 0 for a metrizable
topology on E which is compatible with the vector space structure on E and for
which \x — y\ is an invariant metric. (Hint: Use Theorem 3.1.)
2. Let К be the interval [0, 1] in R. Prove that the space £>(K) is not norm-
able.
[2, §7]
PRODUCTS AND DIRECT SUMS
117
3. Prove that the spaces 8m(Q) (0 m oo) are not normable. (Hint: In
the case of 6(12), for instance, if Ki and K2 are two disjoint compact subsets
of 12, then, in the notations of Example 4.4, the neighborhood Vki does not
absorb the neighborhood Kk2-)
4. Prove that if A and В are two bounded sets in a topological vector space,
then the set A + В is bounded.
§ 7. Products and direct sums
Let (Xi)iei be a family of sets. We recall that the cartesian product
X = IJiGr XL of the sets XL consists of all families x = (xOigz, where xL G XL.
The element xL is called the t-th component (or coordinate) of x = (xL) and the
map 7Tt from X onto XL defined by я\(я) = Xi is called the t-th projection.
If all the sets XL are equal to the same set X, we write X1 for IJigz Given a
set У, there is a one-to-one correspondence between the maps f: У —> ILer XL
and the families of maps (/i)tez, where fL: Y —> XL. This correspondence is
defined by fL = irL°f and f(y) = (fi(y)). We shall often identify f with the
family (fc) and write / = (/t).
Given a family (Ei)Lei of vector spaces over the same field K, we can define
a vector space structure on E = ILer EL. Indeed, if x = (xt) G E,y = (yA G E,
we set x + у = (xL + 7/t); and if X G K, x = (zt) G E, we set Xx = (Xxt). It
is trivial to check that the operations so defined satisfy all eight axioms of a
vector space and that the projections 714 are linear maps from E onto EL. The
vector space E is called the cartesian product of the family (Ei)iei of vector
spaces. If fi'.F —> EL is a family of linear maps from a vector space F into
El (t G I), then the map
/= Et
tGZ
is linear.
Now let (Xi)iei be a family of topological spaces. The product topology on
the cartesian product X = IIigz XL is defined as the coarsest topology on X
for which all the projections irL (t G I) are continuous. We shall call the set X
equipped with the product topology the product space of the spaces XL and the
latter will be called the jactor spaces of X. Let be the system of all open sets
of XL] then the collection of all sets 7rt-1(A), where A G £)t, 1 G I, forms a
subbasis of the product topology T on X. A basis for T is given by all sets
ILer Ai, where each At is an open set in Xt and At = XL except for a finite
number of indices. A fundamental system of neighborhoods of a point
x = (xL) G X is given by all sets ILgi Ft, where each VL is a neighborhood of
Xi in Xt and VL = XL except for a finite number of indices. If /t: У —> At is
a family of maps from a topological space У into the XL (t G I), then the map
/ = (/J: У —> A is continuous at the point у G У if and only if the maps /t
are continuous at the point у G У.
If Fi is a nonempty subset of XL (t G I), then F = ILer FL is closed in X
if and only if each Fi is closed in At. In fact, let F be closed and consider a point
xK G F*. For each 1 к take a point xL G Fi and set x = (xt). Then x adheres
118
LOCALLY CONVEX SPACES
[2, §7]
to F and therefore belongs to F, which proves that xK G FK. Conversely, assume
that the sets Fc are closed, i.e., the sets Cxt FL = At are open. Now,
F = П Л = П TrrV);
iGZ iGZ
hence
A = CxF = U <’(A)-
iGZ
Thus A is open and therefore F is closed.
The product space X = JJigz Xc is a Hausdorff space if and Only if every
factor space (i G 1) isa Hausdorff space.
Now let be a family of topological vector spaces over the same
field K. The product topology on the cartesian product E = ILgz Ec is
compatible with the vector space structure of E. Indeed, let a = (ai) G E,
b = (6t) G E, and let W = ILgz be a neighborhood of a + b, where
Wc = E i if l does not belong to a finite subset H of I. For every leH
there exists a neighborhood Uc of ac and a neighborhood Vc of bc such that
UL + Vt C wc. For L £ H let us set U, = VL = Ec, Then U = ILgi
is a neighborhood of a, V = ILgz Vt is a neighborhood of b, and
U + V G W. This proves (TVS 1). Next let X G K, a = (at) G E, and
let W = ILgz IFt be a neighborhood of Xa, where WL = EL if c does not
belong to a finite subset H of I. For every l G H there exists a neigh-
borhood Uc of X in К and a neighborhood Vc of ac in Ec such that UcVc C Wc.
For i g Я we set Vc = Ec. Then U = Qte# Uc is a neighborhood of X
in К and V = ILgz Ft is a neighborhood of a in E such that UV C W,
This proves (TVS 2).
The product of a countable family of metrizable topological vector spaces is
metrizable. Indeed, let (ДХе/ be a family of metrizable topological vector
spaces, where the index set I is countable, and write E = ILgi Ec. Since
each Ec is a Hausdorff space, the same holds for E. Furthermore, let
(Vt,x)xGLt be a fundamental system of neighborhoods of 0 in Eh where
the index set Lc (i G I) is again countable. Then a fundamental system
of neighborhoods of 0 in E is given by all sets ILgz Wh where for t belong-
ing to a finite subset H of I the set TFt is equal to some V\,x, and TFt = Ec
for c & H. The assertion then follows from Theorem 6.1, if we observe
that the collection of all finite subsets of a countable set is itself countable.
Let E = TIleiEl be the product of a family (EJ&i of topological
vector spaces. A set В in E is bounded if and only if тг^В) is bounded in
Ec for every l G I. Indeed, suppose that every BL = тг^В) is bounded,
and let V = ILgz Vt be a neighborhood of 0 in E, where each Vt is a
balanced neighborhood of 0 in Ec and Vc = Ec except when t belongs to
a finite subset H of I. For every l g I there exists a Xt > 0 such that
Bc G XtVt. Set X = maxtefl- Xt. Then В G XV, i.e., В is bounded. Con-
[2, §7]
PRODUCTS AND DIRECT SUMS
119
versely, let В be bounded in E. Since 7rt is a continuous linear map from
E onto EL, the set 7rt(B) is bounded in EL.
As a corollary of the last result we find again (cf. Exercise 6.4) that if A
and В are bounded sets in a topological vector space, then the set A + В
is bounded. Indeed, A X В is then bounded in E X E and A + В is the
image of A X В under the continuous linear map (x, у) ь-> x + у from
E X E onto E.
Let CE\)igi be a family of vector spaces and for each t e I let AL be a
subset of EL. The set A = ILei Ac is convex in E = ILgi El if and only
if for every t e I the set AL is convex in Ec. This follows from the fact
that the projection 7rt from E onto El is a linear map and from the formula
A = Quei тг~1(А1').
If (^t)tGi is a family of locally convex spaces, then clearly their product
E is also locally convex. Furthermore, if (#t,x)xGLt is a family of semi-
norms defining the topology of El, then (qLt\ ° zrj (X e L, t 6 I) is a family
of semi-norms on E defining the product topology.
Let E be a vector space over K. If (AJiez is an arbitrary family of subsets
of F, then, generalizing our earlier notations, we shall denote by E^gz At the
set of all elements x = E, where xL e AL and xL = 0, except for finitely
many indices t.
Now let (Mt)tEz be a family of linear subspaces of E and assume that
Eigz Mc = E, i.e., that every xeE can be written in the form x = ^lei Zi
with Xl G Ml and xL = 0 except for finitely many t. We say that E is the
(algebraic, internal) direct sum of the family (AfJ, and we write E = ©iez Ml
if the representation of each element x e E in the form x = E^gz xl is unique.
The uniquely determined element xL E ML is called the component of x in ML.
If E = Eigz Ml, then the following conditions are equivalent:
(a) E = ©tEz Ml,
(b) Siez Xl = 0, Xl E Ml implies Xl = 0 for all L E I,
(c) Mt n E^i Mk = {0} for all I E I.
Proof, (a) => (b): Eigz 2Л = 6 with all yL = 0 is a representation of 0.
Therefore, if the representation of each element of E in the form Eigz xc, xl E Ml,
is unique, then Eigz xl = 0 implies xL = 0.
(b) => (c): Let x E ML A E*^i MK. Then x = xL = E«#t hence
Xl — У хк = 0.
From (b) it follows that xL = 0 and therefore x = 0.
(c) => (a): Let Ext = Ез/i- For all t E I we have
— yi = 2 — £ M„
i.e., хс = yL by hypothesis. |
120
LOCALLY CONVEX SPACES
[2, §7]
For example, if (et)tGi is an algebraic basis (Chapter 1, §2) of the vector space
E, then E is the direct sum of the one-dimensional subspaces {Xet j X E K}.
A linear map p from a vector space E into itself is called a projector if it satisfies
the relation pop = p. Let E be the algebraic direct sum of the family (J/i)igi
of linear subspaces. For each index t E I denote by pL the map which assigns
to each x = Sigi £t G E its component xL in ML. Clearly, pL is a well-defined
linear map from E onto ML. Furthermore, pL is a projector since
Pi (pc (2d = Pi(^i) = = Pc (£ •
If i к, then pLopK = 0 since
Pi (pk (£xA)) = PtU\) = 0.
Finally, wre have Pt = If, where denotes the identity map x >—> x of E
onto itself. Indeed,
2 Pl (2d = 2d X>-
lGi \e.i ' iG/
Conversely, let E be a vector space and assume that we have a family (pt)
of projectors such that pLopK = 0 if t # к and 22t pt = 1 Then E is the
algebraic direct sum of the subspaces Mc = Im(pt). Indeed,
x = IeM = 2d^t^)’
i
that is, E = ML. Next observe that the restriction of any projector p to
Im(p) is the identity map. Indeed, if x = p(?y) E Im(p), then
p(x) = p(p(?y)) = p(?/) = x.
From xL = 0 it follows therefore that pt(;rt) = 0 and thus for any index к
we have
0 = pK (2d P^X^ = pAPk(^k)) = pM = xK.
Hence by condition (b) above we see that E = ML.
Now let E be the algebraic direct sum of the finite family of sub-
spaces of E. Then the map > J2?=i х* clearly defines an isomorphism
of the product vector space H?=i Mi onto called the canonical (algebraic)
isomorphism.
We say that the linear subspace N of the vector space E is an algebraic supple-
ment of the linear subspace M if E is the direct sum of M and W, i.e., if
M + N = E and M A N = {0}. Every subspace of a vector space has an
algebraic supplement. If E = M © N and p is the corresponding projector
from E onto M, then 1# — p is the projector from E onto N, which shows that
N = Ker(p). Conversely, if p is any projector in E and M = Im(p), then
N = Ker(p) is an algebraic supplement of M and — p is the projector onto
.2, §7] PRODUCTS AND DIRECT SUMS 121
V corresponding to the decomposition E = M © N. This follows from the
above considerations in view of
(U — P)°(1e ~ p) = 1e ~ p, P°(1e ~ p) = (1e — p)°p = 0
and
Ker(p) = Im(l# — p).
We call p the projector onto M parallel to N.
Let E = M ® N, q:E —> N the corresponding projector, j:N E the
canonical injection, and <p:E E/M = j£/Ker(#) the canonical surjection.
The injection q associated with q is an algebraic isomorphism from E/M onto N,
and we have q = q°<p, q-1 = <p°j. In particular, two algebraic supplements
of a given subspace M are always isomorphic.
Definition 1. Let Ebe a topological vector space and a finite
family of subspaces of E such that E = ф?=1 Mi- We saV E
topological direct sum of the Mi if the canonical algebraic isomorphism
1 * 'X'i
i=l
is a homeomorphism from the product space JI?=i Mi ont° E (i.e., an iso-
morphism of the topological vector space structures in the sense of
Definition 5.1).
To make this definition meaningful, let us observe that the map
1 * Xi
i=l
from n?=i Mi onto E is always continuous by Axiom (TVS 1), but the
inverse map may fail to be continuous.
Proposition 1. Let E be a topological vector space and assume that E is
the algebraic direct sum of the finite family of subspaces. Then E
is the topological direct sum of the Mi if and only if the projectors pp. E Mi
are continuous.
Proof. The inverse of the bijection (.t\) >—» xi is given by the map
z (zh'(#)) which is continuous if and only if the pi are continuous. |
Definition 2. The linear subspace N of the topological vector space E is a
topological supplement of the linear subspace M if E is the topological direct
sum of M and N.
Let E be a topological vector space and assume that N is an algebraic
upplement of the linear subspace M. If p:E —> M is the projector cor-
’esponding to the decomposition E = M © 7V, then N is a topological
supplement of M if and only if p is continuous. This follows from Propo-
122
LOCALLY CONVEX SPACES
[2, §7]
sition 1 if we observe that 1^ — p is the projector onto N and that it is
continuous at the same time as p.
If p is a continuous projector from a topological vector space into
itself, then M = Im(p) has N = Ker(p) as its topological supplement.
Example 1. Let M be a closed subspace of a Hilbert space E. By Propo-
sition 1.3.4 every vector x G E can be written uniquely in the form
x = у + z with у e M, z E which shows that E = M © M±
(cf. Chapter 1, §7). We have ||z||2 = + ||z||2, and therefore the pro-
jector p:x*~+ у from E onto M satisfies ||p|| 1. In particular, p is
continuous and therefore M1 is a topological supplement of M.
Remark 1. In a topological vector space there can exist closed subspaces
which have no topological supplement (cf. Exercise 4). Clearly, c0 can be
considered as a closed subspace of m (Examples 6 and 8 of Chapter 1, §1).
It can be shown that c0 does not have a topological supplement in m
([52], §31,2.(5); [110]). It can also be shown that for p # 2 there exist
closed subspaces in lp (Example 1.1.7) which have no topological supple-
ments ([52], §31,3.(6)).
Let M and N be two algebraic supplements in the topological vector
space E, and q:E —> N the corresponding projector. Then M and N are
topological supplements if and only if the associated injection q\E/M N
is continuous. Indeed, with the above introduced maps j: N E and
<p:E —> E/M, we have q = q°cp and therefore q is continuous if and only
if q is. Let us observe that q is a bijective linear map and its inverse
?-1 = <p°f is always continuous; hence if q is continuous, it is an
isomorphism.
It follows that if M and N are two closed subspaces of a Banach space E
which are algebraic supplements of each other, then they are also topological
supplements. Indeed, q~x :N —> E/M is then a continuous bijective linear
map from the Banach space N onto the Banach space E/M, and therefore
by Theorem 1.9.1. its inverse q is continuous. In Chapter 3, §17 we shall
generalize Theorem 1.9.1 to a larger class of spaces (e.g., complete metriz-
able spaces) and accordingly we shall obtain a generalization of the last
result.
Remark 2. The last result does not hold for arbitrary topological vector
spaces. For instance, let M and N be the two closed subspaces of a Hilbert
space E mentioned in Remark 1.7.1 such that F = M + N is not closed.
One can see that F = M © N, but M and N are not topological supple-
ments, because then F would have to be complete (cf. §9), hence closed.
(See also [35].)
Proposition 2. Let E and F be two topological vector spaces and f a con-
tinuous linear map from E into F. There exists a continuous linear map g
[2, §7]
PRODUCTS AND DIRECT SUMS
123
from F into E such that f °g shall be the identity map 1 f from F onto itself
if and only if f is a surjective strict morphism (Definition 5.2) and Ker(/)
has a topological supplement in E.
Proof. Suppose that a map g with the indicated properties exists.
Then for у G F we have f(g(y)) = y; that is, f is a surjection. Let p be
the map g°f from E into E. Since 0°/)°0°/) = 0°(/°0)°/ = g°f,
the map p is a continuous projector and E is the topological direct sum
of p(E) and Ker(p). Now, Ker(p) = Ker(/) since f(x) = 0 implies
p(x) = g(f(x)) — 0 and P(x) — 0 implies
/(?(«)) = /(ff(/(x))) = f(x) = 0.
Thus Ker(/) has p(E) as a topological supplement. The injection
f:E/Ker(f) —> F associated with f can be decomposed into f = f°p,
where p is the canonical map from
jE/Ker(/) = £/Ker(p)
onto p(E) = g(F) and f is the restriction of f to g(F). Now p is an iso-
morphism by what we have seen above and f is an isomorphism, because
its inverse is g. Hence f is also an isomorphism and f is a strict morphism.
Conversely, suppose that f is a surjective strict morphism and that
Ker(/) has a topological supplement N in E. Let <p be the canonical sur-
jection from E onto jE/Ker(/) and let j be the canonical injection N E.
Then = <p°j is an isomorphism from N onto jE/Ker(/). Furthermore,
the injection/associated with/is an isomorphism from E’/Ker(/) onto F.
Thus \p~1°f~1 is an isomorphism from F onto N and g = is
a continuous linear map from F into E such that /о g = 1/?. I
Proposition 3. Let E and F be two topological vector spaces andf a continu-
ous linear map from E into F. There exists a continuous linear map g from
F into E such that g°f shall be the identity map 1# from E onto itself if and
only if f is an injective strict morphism and f(E) has a topological supple-
ment in F.
Proof. Suppose that a map g with the indicated properties exists. Then
f(x) = 0 implies g(f(x\) = x = 0 and thus / is injective. Furthermore,
the restriction of g to f(E) coincides with /-1 and thus / is a strict mor-
phism. Finally, p = f°g is a continuous projector from F onto f(E);
hence/(£) has a topological supplement in F.
Conversely, suppose that / is an injective strict morphism and that
f(E) has a topological supplement in F. Let p be the projector from F
onto/CE); then g = /-1 ° p is a continuous linear map from F into E such
that g°f = 1я. |
124
LOCALLY CONVEX SPACES
[2, §8]
Exercises
1. Show that every locally convex Hausdorff space is isomorphic to a subspace
of a product of Banach spaces. (Hint: If is a family of semi-norms which
defines the topology of the space E, let Fc be the quotient of E modulo the sub-
space {x } qc(x) — 0} equipped with the quotient norm qc. For each x G E let
xc be its canonical image in Then x (x^i^i is an injective strict morphism
from E into Пл£г A-)
2. Let E be a vector space and (pi)i^i^n a finite family of linear maps of E
into itself such that piQPk = 0 for i к and 52?= i Pi = Itf. Show that each
Pi is a projector.
3. Let E be a Hausdorff topological vector space which is the topological
direct sum of the finite family (Mih^i^n of subspaces. Prove that each subspace
Mi is closed.
4. Let E be the topological vector space considered in Example 4.2 and
Exercise 5.7. Show that a one-dimensional subspace of E has no topological
supplement. (Hint: Use Exercise 3 and Proposition 5.7.)
5. Let M be the closure of {0} in a topological vector space E. Show that E
induces on M the chaotic topology. Show that every algebraic supplement N
of M is a topological supplement and that E induces on N a Hausdorff topology.
§8. Convergence of filters
Definition 1. Let X be a topological space, x a point of X, and S3 (x) the
filter of all neighborhoods of x (Example 2.2). We say that the filter g on X
converges to x if % is finer than S3 (ж).
Example 1. Let (zn)neN be a sequence of elements of a set X. The filter
on X generated by the image of the Frechet filter (Example 2.4) under
the map n xn from N into X is called the elementary filter associated
with the sequence (zn)nGN. In other words, the elementary filter associated
with the sequence (zn)n£N has a basis formed by the sets
Sm = {xn \ n m},
where m runs through N.
Now let X be a topological space. Similarly as in a metric space
(Chapter 1, §2), we say that a sequence (xn)neN of points of X converges
to x if for every neighborhood V of x there exists an integer m = m(V)
such that xn G V for every n m. The sequence (zn)nGN converges to
the point x if and only if the elementary filter associated with (zn)nGN
converges to x. Indeed, both conditions mean that each neighborhood V
of x contains a set Sm.
If the filter converges to a point ж, we say that x is the limit of
A filter basis S3 is said to converge to x if the filter generated by S3 con-
verges to x. In this case we also say that x is the limit of S3.
[2, §8]
CONVERGENCE OF FILTERS
125
A topological space X is a Hausdorff space if and only if every filter
has at most one limit. If X is a Hausdorff space, then a filter which con-
verges to two distinct points x # у would have to contain two disjoint
neighborhoods of x and у respectively, but this contradicts Axioms (F 2)
and (F 3). Conversely, if X is not a Hausdorff space, then there exist two
distinct points x and у such that every neighborhood U of x intersects
every neighborhood V of y. In this case the sets U П V form a filter basis
which converges to both x and y.
A point x in a topological space X belongs to the adherence of a set A
if and only if there exists a filter basis on A which converges to x. Indeed,
if x G A, then the sets U П A, where U is a neighborhood of ж, form a
filter basis on A which converges to x. Conversely, if there exists a filter
basis on A which converges to x, then every neighborhood of x must meet
A. In general topological spaces this result takes the place of the propo-
sition concerning metric spaces according to which x G A if and only if
there exists a sequence (xn) with xn G A which converges to x. In fact,
this last proposition holds not only in a metric space but in any topological
space where each point has a countable fundamental system of neighbor-
hoods (cf. Exercise 1) and in particular in a metrizable topological vector
space.
Let X and Y be two topological spaces and f a map from X into Y.
The map f is continuous at the point x G X if and only if for every filter
basis SB which converges to x the filter basis /(SB) converges to f(x) G Y.
Suppose first that f is continuous at x and let SB be a filter basis which con-
verges to x. If W is a neighborhood of f(x), then/”1^) is a neighborhood
of x and contains therefore a set A g SB. Hence W contains/(A) and thus
/(SB) converges to/(z). Conversely, if for every filter basis SB which con-
verges to x the filter basis/(SB) converges to f(x), then in particular/(SB (#))
converges to f(x), where SB(x) is the filter of all neighborhoods of x. But
then each neighborhood W ot f(x) contains a set/(F), where У is a neigh-
borhood of x, i.e., / is continuous at x. Again this result is the substitute
for the proposition which holds if X is a metric space (or more generally
a topological space where each point has a countable fundamental system
of neighborhoods; cf. Exercise 1), and according to which / is continuous
at x if and only if for every sequence (xn) in X which converges to x,
the sequence (/(zn)) converges tof(x).
Let X be a set, Y a topological space, / a map from X into У, and ft a
filter on X. We say that the point у G Y is the limit of f with respect to
the filter ft if the filter basis /(ft) converges to y. If this is the case, we
write lim^g f(x) = y.
If X is also a topological space and we choose for ft the filter of neigh-
borhoods SB (a) of some point a belonging to X, then the fact that у is the
limit of / with respect to SB (a) will be expressed by saying that /(x) tends
126
LOCALLY CONVEX SPACES
[2, §8]
to у as x tends to a, and we write у = Yimx^af(x). Using this terminology,
we can say that f: X Y is continuous at the point a e X if and only if
f(x) tends to /(a) as x tends to a. Indeed, if f is continuous at a
and g = 53(a) is the filter of neighborhoods of a, then by our previous
result/(5) converges to f(a). Conversely, suppose that lim^a/Cr) = /(a)
and let 53 be a filter basis on X which converges to a. Then the filter
generated by 53 is finer than the filter of neighborhoods 53(a) of a and thus
/(53) is finer than/(53(a)). Since, by assumption, /(53(a)) converges to
/(a), a fortiori f(f&) converges to/(a) and therefore/ is continuous at a by
our previous result.
Example 2. If X is the set N, then the image of N in Y under a map
/: N —> У is a sequence WnGN of elements of У. The image of the Frechet
filter on N under / is the elementary filter associated with (xn), and there-
fore it is the same to say that the sequence (xn) converges to x or that the
limit of / with respect to the Frechet filter is x. If this is the case, we
write x = limn^oo xn and say that xn tends to x as n increases.
Example 3. Let a be a strictly positive number and I = {e ! 0 < € < a}
an interval on R. For each € e I let Se denote the set {y j 0 < у < e}.
Clearly, the sets S€ (e e I) form a filter basis 53 on Z. Now let / be a map
from I into a topological space Y and set x€ = /(e). If у is the limit of/
with respect to the filter generated by 53, then we write ij = lime^0
and say that xe tends to у as e tends to 0. This means that for every neigh-
borhood W of у there exists e (0 < e < a) such that хп e W for all у
such that 0 < у < e.
Let (Xi)tGi be a family of topological spaces, X = IIigz X, the product
space (§7), zrt: X XL the t-th projection and g a filter on X. Then g
converges to a point x = (xfY^i if and only if for each t e I the filter
basis 7rt(g) converges to xL. Since 7rt is continuous, it follows from a previ-
ous result that if converges to x, the filter basis 7rt(g) converges to xL.
Conversely, suppose that for each t e I the filter basis 7rt(g) converges
to xL. Let V = ILgz be a neighborhood of x, where VL is a neighbor-
hood of xL in X,, and VL = XL for all t which do not belong to a finite subset
H of Z. For each t e H let AL e $ be such that 7Tt(At) C Vc. Then
Ac is an element of g which is contained in V. Thus g converges
to x.
Let X be a topological space and 53 a filter basis on X. We say that a
point x e X adheres to 53 if it adheres to every set A e 53. Clearly, x
adheres to 53 if and only if every neighborhood V of x meets every set
A e 53. It follows that if x adheres to 53, then there exists a filter finer than
the filter g generated by 53 which converges to x. Indeed, the sets V A A
form then the basis of a filter which is finer than both § and the filter of
all neighborhoods of x.
[2, §8]
CONVERGENCE OF FILTERS
127
To conclude, we generalize to topological vector spaces the notion of
summable families we have defined for normed vector spaces (Defini-
tion 1.3.7).
Definition 2. Let (xL)Lei be a family of elements of a topological vector
space E. With each finite subset J of I we associate the element xj =
of E. The set Ф(/) of finite subsets of I is an ordered set with respect to in-
clusion and it is a directed set. Let ® be the filter of sections (Example 2.5) of
Ф(7). We say that (x^^i is summable to an element x of E if the filter generated
by the image of S under the map J «—> xj converges to x. If this is the case,
we say that x is the sum of (xL) and we write x = xL.
In other words, x = if for every neighborhood V of x there
exists a finite subset J of I such that xc G V for any finite subset H
of I such that H D J.
Exercises
1. Let A? be a topological space where each point has a countable fundamental
system of neighborhoods.
(a) Prove that the filter 58 (x) of neighborhoods of a point x G E is the inter-
section of the elementary filters associated with the sequences which converge
to x.
(b) Prove that a point x G X adheres to a set A if and only if there exists
a sequence (xn)n£N of elements of A which converges to x.
fi) Let f be a map from X into an arbitrary topological space Y. Prove that
f is continuous at a point x G X if and only if for every sequence (xn)neN in X
which converges to x the sequence (/(xn))nGN converges to/(x) in Y.
2. Give an example of a topological space X, a subset A of X, and a point
x G A such that there exists no sequence of elements of A which converges
to x. (Hint: Take for X the real line and for a fundamental system of neighbor-
hoods of a point x G X the intervals ]x — a, x + a[, a > 0, from which count-
ably many points ^x have been removed.)
3. Let X be a set, Y a topological space, f a map from X into Y and $ a
filter on X. We say that the point у G У is a value of adherence off with respect
to the filter % if у adheres to the filter basis/($•)•
(a) Prove that у is a value of adherence of f with respect to $ if and only if
there exists on X a filter ® finer than $ such that у is the limit of f with respect
to ®. (Hint: Consider on X the filter basis/-1 (58), where 58 is the filter of neigh-
borhoods of y.)
(b) Let X = N and f(ri) = xn. Prove that the following conditions are
equivalent :
(i) у G Y is a value of adherence of / with respect to the Frechet filter on N;
(ii) у G Y adheres to the elementary filter associated with the sequence
(*£n) wSN j
(iii) for every neighborhood IF of у and every m G N there exists n G N
such that n m and xn E W.
128
LOCALLY CONVEX SPACES
[2, §9]
If these conditions are satisfied, we say simply that у is a value of adherence
of the sequence (xn).
(c) Suppose that in У every point has a countable fundamental system of
neighborhoods. Prove that if у is a value of adherence of the sequence (xn),
then there exists a subsequence (xnk)kEN of (ял) which converges to y.
§9. Completeness
Definition 1. Let E be a topological vector space and A a subset of E.
A filter g on A is said to be a Cauchy filter if for every neighborhood V of 0
in E there exists a set X G § suc^ that X — X G V; that is, x — у G V
for all x, у G X.
Suppose that § is a filter on a subset A of a topological vector space E
and that fy converges to a point a G A. Let У be a neighborhood of 0 in
E and let U be a balanced neighborhood of 0 such that U + U С V.
There exists X G § such that X G U + a. Hence for x,y G X we have
x - у = (x - a) - (y - a) eU +U CV‘
i.e.. J is a Cauchy filter.
Proposition 1. If the point x adheres to the Cauchy filter § on a subset
of a topological vector space, then fj converges to x.
Proof. Let У be a neighborhood of 0 and let ГУ be a neighborhood of 0
such that ТУ + ТУ G У. There exists a set A G 3 such that A — A G W.
On the other hand, А A (x + W) 0. Let у be a point belonging to
A A (x + W). If z G A, then z — у E W and
z E y + W Cx + w + W Cx + V.
Thus A e x + У and § converges to x. |
Definition 2. A subset A of a topological vector space is complete if every
Cauchy filter on A converges to a point of A. A topological vector space is
quasi-complete if every bounded closed subset is complete.
Proposition 2. A complete subset A of a Hausdorff topological vector
space is closed.
Proof. Let x be adherent to A. The sets U A A, where U runs through
the neighborhoods of x, form a Cauchy filter § on A which converges to a
point of A. On the other hand, § has x as its only limit and thus x G A. |
Proposition 3. Let A be a complete subset of a topological vector space.
Then every closed subset of A is complete.
[2, §9]
COMPLETENESS
129
Proof. Let В be a closed subset of A and let 8 be a Cauchy filter on B.
Then 8 is the basis of a Cauchy filter on A and so converges to a point
x G A. But x is clearly adherent to B; hence x E В and thus the filter 8
converges on B. |
Definition 3. Let E and F be two topological vector spaces. A map/from,
a subset A of E into F is said to be uniformly continuous if for every neigh-
borhood W of 0 in F there exists a neighborhood V of 0 in E such
that x — у eV implies f(x) — f(y) E W.
If 8 is the basis of a Cauchy filter on A and f is uniformly continuous,
then /(8) is the basis of a Cauchy filter on F. If f is uniformly continuous
on A, then it is clearly continuous on A.
If a linear map f from E into F is continuous at the origin, then it is
uniformly continuous, as follows immediately from the relation
/(ж) - f(y) = J(x — y\
Similarly, if the semi-norm q defined on a topological vector space is
continuous at the origin, then it is uniformly continuous. This follows
from the inequality |#(z) — q(y) | q(x — y).
Proposition 4. Let E be a complete topological vector space, F a Hausdorff
topological vector space and f: E F an injective strict morphism (Defini-
tion 5.1). Then f(E) is a closed subspace of F.
Proof. Let g: f(E) E be the inverse of the isomorphism f:E f(E).
If 8 is a Cauchy filter on f(E), then #(8) is a Cauchy filter on E and con-
verges to some point x E E. Consequently, 8 = converges to
the point f(x) E f(E); hence f(E) is complete, and by Proposition 2, also
closed in F. |
Proposition 5. Let E be a topological vector space, A a subset of E and F
a complete Hausdorff topological vector space. Iff is a uniformly continuous
map from A into F, then there exists a unique uniformly continuous map f
from A into F such that f(x) = f(x) for all x E A.
Proof. Let x E A. The filter of neighborhoods of x induces a Cauchy
filter 8 on A and thus /(8) is the basis of a Cauchy filter on F. Since by
our assumptions F is complete and Hausdorff, /(8) converges to a well-
defined point у E F. We set у = f(x). If x E A, we clearly have
70) = f(x).
Let us prove that f is uniformly continuous on A. Let W be a closed
balanced neighborhood of 0 in F. There exists a neighborhood U of 0 in
E such that s E A, t e A, s — t E U imply /(s) — f(t) E W. Let V be
a balanced neighborhood of 0 in E such that V V + V C U. Let
x E А, у E A be such that x — у E V. There exist elements хг G A,
130
LOCALLY CONVEX SPACES
[2, §9]
?/i e A such that e x + У, yx Ey+V. Let us assume for a moment
that we have already proved that
f(x) e f(xj + W, f(y) e f(yi) + W. (1)
Then it follows from
— yi = Oi — x) + (x — у) + (у — yx) e V + V + V C U
that/(xx) — /(?/i) E W, and this combined with (1) yields
7(z) — f(y) = (fa) — fai)) + (/Oi) — Лз/i)) + (№i) - fa))
GW + W + W.
Now we prove the relations (1), and it is obviously sufficient to prove the
first one. Let X be a neighborhood of /(#). By the definition of / there
exists a neighborhood Y of x such that /(У A A) cX. The set
(x + V) A Y
is a neighborhood of x. Since x E A, there exists an element
и E (x + V) A Y A A.
But и E x + V implies и — xx = (и — x) + (x — xx) E V + V C U
and thus/(w) — f(Xi) E T7, i.e.,
f(u) e f(x.) + W.
On the other hand, и E Y A A implies f(u) E X. Hence
» G X П + Ж);
and since X was an arbitrary neighborhood of /(#), we have
/(*) G >1) + W = f(x.) + W.
But W is closed; thus f(x) E /(xx) + W.
Finally, the uniqueness of J follows from the fact that the set on which
two continuous maps into a Hausdorff space coincide is necessarily closed. |
Let E be a topological vector space, M a linear subspace of E, and / a
continuous linear map from M into a complete Hausdorff topological
vector space F. The uniformly continuous extension f of f to the closure
M of M, which exists and is unique by Proposition 5, is also a linear map.
Indeed, let У be a balanced neighborhood of 0 in F and let U be a balanced
neighborhood of 0 in E such that x, у E M and x — у e U + U imply
/(x) — /(?/) e V. Given x E M and у e M there exist х-^у^ e M such
[2, §9]
COMPLETENESS
131
that x — G C7, у — yi G C7, and thus
x + у - (xi + yi) G U + U.
Since J is linear on Л/, we have
7C*0 + f(y) — f(x + y)
= f(x) + ~f(y) - f(x + y) ~ /Oi) - /(2/1) + f(Xi + У1)
= — f(Xx) + f(y) — f(yx) — f(x + y) + f(Xx + У1)
G V + v + V.
Since V is an arbitrary balanced neighborhood of 0 and F is a Hausdorff
space, this implies that/W + 7(2/) = 7(# + У)- We can see similarly that
7(Xx) = X/(F) for all X G К and x G M.
Theorem 1. Let E be a Hausdorff topological vector space. Then there
exists a complete Hausdorff topological vector space Ё such that E is isomorphic
to a dense subspace Eq of Ё. The space Ё is unique up to an isomorphism.
Proof. Let aS be the set of all Cauchy filters on E. We introduce in aS
an equivalence relation R as follows: two Cauchy filters § and ® are equiva-
lent if for every neighborhood У of 0 in E there exist A G 5 and В G ®
such that x — у G V for all x G A, у G B. The relation R is reflexive by
the definition of a Cauchy filter. It is symmetric and transitive by proper-
ties (NS 2) and (NS 3) of Theorem 3.1 respectively.
Let Ё be the quotient set S/R. We now define a vector space structure
on E. Let F and G be two elements of Ё and let g and ® be two Cauchy
filters representing F and G respectively. The collection
{Л + В | A g g, В G ©}
is the basis of a Cauchy filter § on E, and the class of § modulo R will be
F + G by definition. Similarly, let X G K, F G Ё and g G F. Then the
collection {XA | A G is the basis of a Cauchy filter on E whose class
modulo R will be XF. It is easy to check that these definitions are inde-
pendent of the choice of representatives of F and G.
The axioms (VS 1), (VS 2), (VS 5) through (VS 8) of a vector space are
clearly satisfied. The zero vector 0 of 7? is formed by all filters tending to
0 in E, and thus (VS 3) is satisfied. Finally, (VS 4) is also true, since the
relation F — F = 0 means precisely that every § G F is a Cauchy filter.
Let У be a closed balanced neighborhood of 0 in E. The subset Uv of Ё
will be the collection of all elements F such that choosing an § in F, for
every neighborhood IF of 0 in E there exists A g 8 which satisfies
А с У + 1У. This definition is independent of the choice of 5 in F.
Indeed, let ® be equivalent to g modulo 7?, let IF be a neighborhood of 0
132
LOCALLY CONVEX SPACES
[2, §9]
in E and let W\ be another neighborhood of 0 such that W\ + Wi C W.
There exist A e 5 and В G ® such that А с V + W\ and В — A C
But then
BcWi + AcV + Wi + WiCV+W.
We can easily check that the following relations hold:
if V C W, then Cv C tJw, (2)
tJvnw С Су A Uw, (3)
XtJv = &xv, (4)
if W + W С V, then tJw + -(Jw C fry. (5)
Relation (3) shows that the sets tjy form a filter basis, (2) and (4) imply
that the tJy are balanced, and (5) that they satisfy condition (NS 3) of
Theorem 3.1. Each set tJy is absorbing. Indeed, let W be a balanced
neighborhood of 0 such that W + W С V and let F e Ё. Pick § e F.
Since g is a Cauchy filter, there exists A e 5 such that A — A c W.
Let x e A; then there exists X > 0 such that x e XI7, and we may suppose
that X 1. Then A C W + x C W + XJ7 С ХУ; i.e., F e \0y.
By virtue of Theorem 3.1, the sets tZy form a fundamental system of
neighborhoods of 0 for a topological vector space structure on Ё. The
topology on Ё is Hausdorff. For let F H 0 and choose 5 e F. Then g
does not tend to 0 in E; hence there exists a neighborhood У of 0 in В
such that A (£V for all A E ft. Take a closed balanced neighborhood W
of 0 in В such that W + W С V. Then F g 1JW and it follows from
Proposition 3.2 that Ё is Hausdorff.
For every x E E let x be the collection of all filters tending to x. Clearly,
x is exactly one equivalence class of S modulo Я, i.e., an element of Ё.
The map x »—> x from E into Ё is linear; it is also injective because В is a
Hausdorff space. Let Eq be the image of E under this injection. If for a
balanced closed neighborhood У of 0 in В we denote by Vo its image in
Eq under x *—> х^ then we have
У о = tJy A Eq. (6)
Indeed, if x E Vo, then x E Eq. Furthermore, x E V and if 5 E x, then
for every neighborhood W of 0 in E there exists A e ft such that
A C x + W;
but then А с V + W, i.e., x E tly. Conversely, let x E tJy A Eq. We
have to show that x E V. Suppose that x & V. Then, since V is closed,
there exists a neighborhood W of 0 in E such that
V A (x + W) = 0.
(7)
[2, §9]
COMPLETENESS
133
Let IFi be a balanced neighborhood of 0 in E such that Wf + W\ C W.
If now § G x, then there exists A G 5 such that A C z + I7i; and since
x G Ёу, there also exists В E g such that В C V + W\. But this is
impossible since
(x + Wr) П (V + WJ = 0.
Indeed, if x + = v + w[ (w1} G Wlf v G 7), then
v = x + G x + Wi + Wi C x + W,
which contradicts (7). Thus x must belong to V and (6) is proved. It
follows from (6) that x x is an isomorphism of E onto the subspace
Eq of Ё.
The subspace Eq is dense in Ё. Indeed, let F G Ё and let Ёу be a neigh-
borhood of 0 in Ё. If $ G F, there exists A G 8 such that A — A C 7.
Choose an element x E A; then we have a fortiori x — A EV. But the
set {x} belongs to the filter formed by all sets which contain x, and this
filter belongs to the class x G Eq. It follows that x — F G Ёу] that is,
x G F -|- Ёу.
To prove that Ё is complete we shall use the following
Lemma. Let Ebe a topological vector space and A a dense subset of E. If
every Cauchy filter on A converges to a point in Е, then E is complete.
Assuming the lemma for a moment, let g0 be a Cauchy filter on Eq.
Then g0 is the image of a Cauchy filter § on E under the isomorphism
x x. Let F G Ё be the class of § modulo R. We shall prove that g0
converges to F. Let 7 be a closed balanced neighborhood of 0 in Е] then
there exists A G g such that A — A C 7. Let Ao G So be the image
of A in Eq. We claim that Ao C F + Ёу, which will prove the assertion.
Let x be any element of Ao and x the corresponding element in A. We have
{x} — A C 7. Since {x} is an element of the filter formed by all subsets
of E containing x, the last relation implies x — F G Ёу. Since x is arbi-
trary in Ao, we have Ao C F + Ёу.
Finally, let Ё and F be two complete Hausdorff topological vector
spaces. Let Eq and Fq be dense subspaces of Ё and F, respectively, which
are both isomorphic to E and consequently to each other. The isomor-
phism f: Eq Fq can be extended by Proposition 5 into a continuous
linear map/from Ё into F. Similarly, the inverse isomorphism g:FQ Eq
can be extended into a continuous linear map from F into Ё. Now g °f
is the identity map of Eq onto itself and f° g is the identity map of Fq
onto itself. It follows that g °f is the identity map of Ё onto itself and that
fog is the identity map of F onto itself; hence f is an isomorphism of Ё
onto F. |
134
LOCALLY CONVEX SPACES
[2, §9]
Proof of the lemma. Let g be a Cauchy filter on E. The collection of all
sets X + V, where X G § and V is a balanced neighborhood of 0 in E,
is the basis of a filter ® on E since if X G Y G and У, W are balanced
neighborhoods of 0, then (X + У) n (Y + W) D (X А У) + (У A W).
Furthermore, ® is a Cauchy filter on E since for any balanced neighborhood
У of 0 there exists X G § such that X — X С V and thus
(X + У) - (X + У) С У + У + У.
The sets (X + У) A A are not empty since .4 is dense in E. Thus ®
induces a Cauchy filter on 4, and by hypothesis converges to a
point x G E. But then x adheres to ® and since @ is a Cauchy filter, by
Proposition 1 it converges to x. Consequently, which is finer than @,
also converges to x. |
The space Ё constructed in Theorem 1 is called the completion of E.
We usually identify E with the subspace Eq of Ё and thus imbed E into Ё.
With this identification we can say that the closures in Ё of the neighbor-
hoods belonging to a fundamental system 91 of neighborhoods of 0 in E
form a fundamental system of neighborhoods of 0 in Ё. To prove this let
us first observe that if A is an open subset of a topological space T and В
is any set in T, then
A n В С Тг\В. (8)
Indeed, if x G A A B, then for every neighborhood У of x, the set У A A
is also a neighborhood of x since A is open. Thus У А А А В # 0; i.e.,
x G A A B. Now let tf be a closed neighborhood of 0 in Ё and set
U = U A E. Then U is a neighborhood of 0 in E and there exists У G 91
such that У C U and consequently У C where У is the closure of У
in Ё. Let W be an open neighborhood of 0 in 3 such that W С У. There
exists an open neighborhood W of 0 in Ё sue о that W = W A E. But
then by (8), since E is dense in B, we have W := W A E G W С V; i.e.,
V is a neighborhood of 0 in Ё.
It follows from the last remark that the ' ompletion of a locally convex
space is locally convex since the closure of a convex set is convex (Proposi-
tion 4.3). Let (^t)tGi be a family of semi-norms defining a locally convex
topology on the vector space E. Since each qL is uniformly continuous in
E, it can be extended into a uniformly continuous function qL on Ё (Propo-
sition 5), and it is clear that qL is a semi-norm on Ё. The topology of Ё is
defined by the family (#t)tGz. To show this, let L\e be the open set
{x qc(x) < e}, ULt( its closure in Ё, and
yti€ = {z j x G B, qfx) < e}.
Then C Уие and thus L\i€ C Vti€. Conversely, it follows from the
[2, §9]
COMPLETENESS
135
definition of the extended function that every x G Ё with qL(x) < e
adheres to Uht, i.e., C ULt6 and thus also V\t€ C Uht. Hence
СЛ.е =
which proves our assertion.
The completion of a metrizable topological vector space is a complete
metrizable topological vector space. A sequence in a topological vector
space is called a Cauchy sequence if the associated elementary filter is a
Cauchy filter. In other words, (xn)nGN is a Cauchy sequence if for every
neighborhood V of 0 there exists an integer N = N(V) such that
xn — xm V for all n,m > N.
Let (xn)nGN be a sequence in a metrizable topological vector space E.
Then (xn) can be a Cauchy sequence with respect to the topological vector
space structure of E or with respect to one of the translation-invariant
metrics 6 (§6) which define the topology of E (cf. Chapter 1, §1). For-
tunately the two notions coincide. Indeed, the sets V€ = {x | 6(x, 0) < e}
form a fundamental system of neighborhoods of 0 in E and the condition
xn — xm G Ve is equivalent to 8(xn — xm, 0) = 6(xn, xm) < €.
A metrizable topological vector space E is complete if every Cauchy
sequence in E converges. Indeed, let x G Ё. Since E is dense in Ё and Ё
is metrizable, there exists a sequence (xn) of elements of E converging to x.
But (xn) is a Cauchy sequence on E; hence x G E.
In particular, if a metrizable topological vector space is quasi-complete,
then it is complete. This follows from the fact that a Cauchy sequence
(xn) in a topological vector space E is always contained in some bounded
closed set. Indeed, let V be a balanced neighborhood of 0 in E and let W
be a balanced neighborhood of 0 such that W + W С V. There exists
N G N such that xn — xm G W for N and in particular
xnExNiW for n N.
On the other hand, there exist Xy > 0 (0 j N) such that
Xj e XjJV (0 j A).
Let X = max (1, Xo, Xb . . . , Хдг). Then Xi е ХЖ + W С XV for all
i G N; i.e., the set of points Xi is bounded. Consequently the closure
of the set of points хг- (г e N) is a closed, bounded set.
Let us say that a filter g in a topological vector space is bounded if there
exists a bounded set A G We have just proved that the elementary filter
associated to a Cauchy sequence is bounded. In general a Cauchy filter
need not be bounded. Thus, for instance, the filter of all neighborhoods of
0 in a nonnormable Hausdorff locally convex space converges to 0 but is
not bounded (cf. Proposition 6.1).
136
LOCALLY CONVEX SPACES
[2, §9]
Definition 4. A complete, metrizable, locally convex space is called a
Frechet space.
Example 1. Every Banach space is a Frechet space.
Example 2. The space C(ft) of Examples 3.3 and 4.6 is a Frechet space.
We know from Example 6.3 that it is metrizable. Let (/jOjcgn be a Cauchy
sequence in C(ft). For every compact subset К of ft and every € > 0
there exists an integer N = N(K, e) such that \fk(x) — fi(x)\ < e for
zeK and k,l > N. In particular, for each x e ft we have a numerical
Cauchy sequence (/л(я))лел which converges to some number f(x). If
К is a compact neighborhood of x$ eft contained in ft, we have
I/O) — fk(x)\ e
for all x E К and к > N; i.e., fk converges uniformly to f on К. Thus f
is continuous at xQ (cf. Example 1.1.4); and since xQ was arbitrary in ft, we
have / e C(ft). Finally, it is clear that (fk) converges to f in 6 (ft).
Example 3. The spaces 8 (ft) and 8w(ft) of Examples 4.7 and 4.8 are
Frechet spaces. We know that they are metrizable (Example 6.3). Let
(A)/cgn be a Cauchy sequence in 8w(ft) (1 m сю). For every compact
subset К of ft, p = (pi, . . . , pn) e Nn, |p| m, and € > 0 there exists
an integer N = N(K, p, e) such that
|d%(*) - < e
for all x E К and k,l > N. It follows from the previous example that the
sequence (dpfk)k&t converges to a continuous function g{p) in ft, uniformly
on every compact subset of ft. We know from advanced calculus ([2],
Theorem 13-13, p. 402) that if a sequence (fk) tends uniformly to a func-
tion/ and the sequence of derivatives (djfk) tends uniformly to a function h,
then h = djf. Thus, setting f = ^(0), we have dpf = g(p) and (fk) con-
verges to f in 8™(ft).
Example 4. The spaces ®w(ft) (0 m oo) of Examples 4.18 and
4.19 are complete. The proof is even simpler than in the previous example,
since we deal here with uniform convergence on ft and not only on compact
subsets. In fact, let (fk)k<=n be a Cauchy sequence in ®w(ft); then for every
p G Nn with |p| m we have \dpfk(x) — dpfi(x)\ < e for all x E ft and
k,l > N(p, e). Thus for every p G Nn, |p| m, the sequence (dpfk)
converges uniformly on ft to a continuous function g{p\ Just as in the
previous example, we see that g{p} = dpf (f = (j(0)) and that (fk) con-
verges to/in CBw(ft).
It follows that (B(ft) is a Frechet space, since we know from Example 6.2
that it is metrizable. For finite m the situation is even better: the space
63w(ft) is banachizable. i.e., normable and complete.
[2, §9]
COMPLETENESS
137
Example 5. The spaces ЗС(К), 2)w(К) (1 m < oo) of Example 4.9 are
banachizable (cf. Example 6.1), the space £>(K) of Example 4.10 is a
Frechet space (cf. Example 6.2). Indeed, we know from Example 5.9 that
£>m(K) can be considered as a subspace of 8™(Q) for К С Й (0 m g oo);
and thus to prove that £>m(K) is complete, by Proposition 3 it is sufficient
to prove that it is closed. If a sequence (fk) of elements of £>m(K) con-
verges to f G 8™(Q) and x & K, then
|У(«) -AO)I = 1/0)1 < € for k > N(e);
that is, f(x) = 0. Hence Supp/ С К and f G S)m(K).
Example 6. The spaces (B™(Q) (0 m oo) of Example 4.16 are
banachizable (cf. Example 6.1), the space (В0(Й) of Example 4.17 is a
Fr6chet space (cf. Example 6.2). Indeed, we know from Example 5.10
that (B™(Q) is a subspace of (Rm(fi); hence, similarly as in the previous
example, it suffices to show that (Bo (0) is closed in (B™(Q) (0 m oo).
If (fk) is a sequence of elements of (B™(Q) which converges to an element
f G (B™(Q), then for every e > 0 and every p G Nn with |p| m there
exists an integer N > 0 such that |dp/(rr) — dpfk(x)\ < Je for x G Q and
k N. On the other hand, there exists a compact subset К of 0 such that
|dp/v(rr)| < for x G Q A CK. Hence
|d7(x)| < e for x G 2 A CK,
that is, f G (Bo (G).
It follows that the spaces 8™ (m G N, k G Z) of Example 4.11 are
Frechet spaces, since by Example 5.8 they are isomorphic to (Bo •
Example 7. The space 6м of Example 4.15 is complete. Let § be a
Cauchy filter on 6м- For every function G 8, p G Nrt. and e > 0
there exists a set A — A (<p, p, e) in $ such that
\<p(x){dpf(x) - dpg(x)}\ < e (9)
for all x G Rn and/,0 G A. Given any compact set К in Rn there exists
a G 8 such that <p(x) 1 for x G К and thus a В g % such that
IW) - < e
for x G К and f,g G B. It follows as in Example 3 that there exists a
function h defined on Rn which possesses continuous partial derivatives
of all orders and such that |dp7i(x) — dpf(x)| < e for all x G К and / G B.
Given x G Rn and v > 0 there exists g G A such that
\<p(x) {dph(x) — a^(x)}| < 4
138
LOCALLY CONVEX SPACES
[2, §9]
and hence by (9)
< e + n,
i.e.,
\<p(x){d*>h(x) - dPf(x)}\ €
for all x G Rn and f G A. Thus h belongs to Qm and g converges to h
in
Theorem 2. Let E be a complete, metrizable, topological vector space and
M a closed subspace of E. Then the quotient space E/M is complete.
Proof. We know (§6) that E/M is metrizable. Therefore it is enough
to prove that every Cauchy sequence is convergent. Let (7n)nGN be a
fundamental system of neighborhoods of 0 in E which satisfies
Vn+i + Vn+i c vn
for n G N. If we denote by Vn the canonical image of Vn in E/M, then
the Vn form a fundamental system of neighborhoods of 0 in E/M. Let
(^)fcGN be a Cauchy sequence in E/M. There exists a subsequence
(^z)zgn of (xk) such that xkl — Xkm G Vn for l,m n. If у and z are
elements of E such that у G Хкг and z G Xkm, then у — z G Vn + M. It
follows that for z G Xkm and l,m | n we have
Xkl c 0 + vn) # 0.
Indeed, let у E &кг, then у G z + Vn + M, i.e., у = z + v + u, where
v G Vn and и G M. Thus у — и = z + v belongs to z + Vn and also to
Хкг since у — и = у (mod M).
We now define inductively a sequence (xn)nGN in E. Take an arbitrary
xq in xq and suppose that we have already chosen the elements Xi
(1 i n) so that Xi G Xkv Xi G Xi—! + Ki—i. Then we pick
x„+i G xfcn+1 so that
%n+i П (%n Я- Vn) (2 xn Pn,
which is possible by what we have just seen. We have xn+p G xn+p_i +
Vn+p—i C xn_|_p_2 + Vn+P_2 + Vn+p—i C • • • C xn + Vn + Fn+i + • • • +
7n_|_p_i C xn + 7n-i for p > 0 and so (xn) is a Cauchy sequence. Since
E is complete, (xn) converges to some element x g E and therefore (xkn)
converges to the image x of x in E/M. Hence x adheres to the elementary
filter associated with the sequence (xk) and by Proposition 1 (xk) converges
tox. |
Corollary. Let f:E-+Fbea strict morphism (Definition 5.2) from a
metrizable and complete topological vector space E into a Hausdorff topological
vector space F. Then Im(J) is a closed subspace of F.
[2, §9]
COMPLETENESS
139
Proof. The quotient space EfKer(f) is complete by the theorem.
Hence, if f: B/Ker(/) —> F is the associated injection, Im(J) is a closed
subspace of F by Proposition 5. But Im(J) — Im(J). |
Remark 1. There exist complete topological vector spaces E which
contain a closed subspace M such that E/M is not complete ([52], §31,6;
[9], Chapter IV, §4, Exercise 10(b); [41], p. 92).
Let (Д)€е/ be a family of topological vector spaces, E = ILer their
product (§7) and tv^.E EL the t-th projection. A filter g on E is a
Cauchy filter if and only if тг/5) is a Cauchy filter for every le I. Indeed,
if g is a Cauchy filter, then it follows from the uniform continuity of 7Tt
that 7rt(g) is a Cauchy filter on EL. Conversely, suppose that each 7rt(g)
is a Cauchy filter. Let V = Псе/ Vi be a neighborhood of 0 in E, where
VL is a neighborhood of 0 in EL and = EL for all t which do not belong
to a finite subset H of I. For each t G H let e J be such that
tvt(At) — 7Tt(At) C VL. Then A = Л G g and A — А С V.
It follows that if for each leI the set AL is a complete subset of EL,
then the subset A — ILer A of E is complete. Indeed, if g is a Cauchy
filter on A, then ttAjs) is a Cauchy filter on At and therefore converges to
a point xL G Al. But then § converges to (x/). It is also true that if E is
complete, then the El are complete (see Exercise 5).
Proposition 6. Let (E/)^i be a family of topological vector spaces and
E = Псе/ El. If the EL are quasi-complete (Definition 2), then E is quasi-
complete.
Proof. Let В be a closed bounded set in E. For each t G I the set
Bc = irfB) is bounded; hence BL is a closed, bounded set and therefore
complete. But then В is a closed subset of the complete set ILer BL, and
thus by Proposition 3 it is complete. |
Exercises
1. Prove the theorem quoted in Example 3.
2. Prove Theorem 1 for a locally convex Hausdorff space E using Exercise 7.1.
3. (a) Let В be a Hausdorff topological vector space, Ё a completion of B,
and j the isomorphism of В onto the dense subspace Bo of B. Show that the
pair (J, Ё) has the following “universal property”:
(U) Given a continuous linear map f from В into a complete Hausdorff
topological vector space G, there exists a unique continuous linear map f:E^>G
such that f = f °j.
(b) Show that (U) characterizes the pair (j, Ё) up to an isomorphism in the
following sense: If (j, Ё) is a pair consisting of a complete Hausdorff topological
vector space Ё and of a continuous linear map j \Е^>Ё satisfying condition (U),
then j is an isomorphism onto a dense subspace of Ё. If, furthermore, (Ji, Bi)
140
LOCALLY CONVEX SPACES
[2, §9]
is another such pair, then there exists a unique isomorphism h:E —» Ei such
that h °j = ji.
4. Let E be a topological vector space. The set of all Cauchy filters on E
is ordered by inclusion. A minimal Cauchy filter on E is a minimal element in
the set of all Cauchy filters; i.e., is a minimal Cauchy filter if there exists no
Cauchy filter coarser than 5 and distinct from 5-
(a) Prove that given a Cauchy filter § on E there exists a unique minimal
Cauchy filter 5о coarser than 5- A basis of о is given by the sets A + V,
where A G § and V is a neighborhood of 0 in E. Prove that in particular for
every x G E the filter 53 (z) of all neighborhoods of я is a minimal Cauchy filter.
(b) Suppose that E is a Hausdorff space and denote by Ё the set of all minimal
Cauchy filters on E. Define on Ё a structure of complete Hausdorff topological
vector space such that E is isomorphic to a dense subspace Eq of Ё. {Hint:
Establish successively the following steps:
(i) Associating with x G E the filter 53(я) G Ё, we obtain a bijection from E
onto a subset of Eq of E.
(ii) Given fj, ® G Ё, define 5 + ® as the minimal Cauchy filter contained
in the Cauchy filter generated by the collection {A + В j A G BE®}. Simi-
larly, for X G K, 5 G Ё, define X5 as the minimal Cauchy filter contained
in the Cauchy filter generated by the collection {XA j A G 5)- Prove that these
operations satisfy Axioms (VS 1) through (VS 8) of Chapter 1, §1, where
53(0) is the zero vector.
(ii i) Given a balanced neighborhood V of 0 in E, let Vv be the collection of
those elements $ of Ё for which there exists an A G $ and a IPG53(0) such
that A + IP С V. Prove that the sets Vv form a filter basis on Ё which sat-
isfies conditions (NS 1) through (NS 3) of Theorem 3.1.
(iv) Prove that Ё is a Hausdorff space.
(v) Prove that the map E —* Eq is an isomorphism and that Eq is dense in Ё.
(vi) Prove that Ё is complete.)
5. (a) Let (Ei)iez be a family of sets and E = ILgi their cartesian prod-
uct. Suppose that on each set EL we are given a filter 5o and consider on E
the collection 53 of all sets of the form ILer At, where At G for all l and
At = EL for all l which do not belong to a finite subset H of I. Prove that 53
is a filter basis on E. The filter 5 generated by 53 is called the product Qi the
filters 5c and we write 5 = ILgz
(b) Let (Ei)iez be a family of topological vector spaces and E = Jlier El.
Let fjh be a filter on and 5 = ILgi Prove that is a Cauchy filter if
and only if each 5c is a Cauchy filter.
(c) Prove that if the topological vector space E = IltGr EL is complete, then
each El is complete. {Hint: Given a Cauchy filter 5c on Ec, take a Cauchy filter
on each EK with к # t and consider the product filter Дкег 5«-)
6. (a) Let E be a topological vector space and {xi)iei a summable family of
elements of E (Definition 8.2). Prove that the following condition is satisfied:
Cauchy's condition: For every neighborhood V of 0 in E there exists a
finite subset J Qi I such that 22 ig# x< G V for all finite subsets H of I which do
not meet J.
[2, §10]
FINITE-DIMENSIONAL AND LOCALLY COMPACT SPACES
141
(b) Let E be a complete topological vector space and (xt)tei a family of
elements of E. Prove that if (xt) satisfies Cauchy’s condition, then it is sum-
mable. (Hint: The image of the filter of sections under the map J h-> xj (see
Definition 8.2) is the basis of a Cauchy filter.)
§10. Finite-dimensional and locally compact spaces
Lemma 1. Let H be a closed hyperplane in a topological vector space E and
let D be a (one-dimensional) algebraic supplement of H. Then D is a topo-
logical supplement (Definition 7.2) of H.
Proof. Since H is closed, the one-dimensional vector space E/H is a
Hausdorff space (Proposition 5.5). Also D is a Hausdorff space since the
set {0} is closed in D as the intersection of D with the closed set H. If
f:D E/H is the canonical algebraic isomorphism f = where
j: D E is the canonical injection and <p:E E/H the canonical sur-
jection, then it follows from Proposition 5.6 that / is an isomorphism of the
topological vector spaces and thus D is a topological supplement of H. |
Theorem 1. Let E be a Hausdorff topological vector space which has finite
algebraic dimension n over the field K. Then E is isomorphic to the product
Kn of n spaces K1 (cf. Chapter 1, §5). More precisely, if (е/)х^^п is a basis
of E, then the map
n
(%i) 1 = i = n 1 >
i=l
is an isomorphism from Kn onto E.
Proof. We use induction on n and observe that for n = 1 the statement
is precisely Proposition 5.6. Suppose therefore that the theorem holds for
n — 1, and let H be the hyperplane of E spanned by the vectors
elf e2, . . . , en_p By the induction hypothesis the map
n — 1
г=1
is an isomorphism from Kn”J onto H. The space Kn”J is complete as the
product of the complete spaces K1. Thus H is complete, and since E is
Hausdorff, it follows from Proposition 9.2 that H is closed. By the lemma
E is the topological direct sum of H and the D = {Ken j X G K}; i.e., the
map
n
t=l
from К72-1 X K1 onto E is an isomorphism (Definition 7.1). |
Let us now draw some conclusions from the above theorem.
142
LOCALLY CONVEX SPACES
[2, §10]
Proposition 1. A finite-dimensional subspace F of a Hausdorff topolog-
ical vector space is closed.
Proof. Since F is a finite-dimensional Hausdorff topological vector space
over K, it is isomorphic to the complete space Kn for some n G N. Thus
F is complete and hence by Proposition 9.2 it is closed. |
Corollary. If E is a Hausdorff topological vector space, then every
algebraically free finite subset of E is topologically free (Definition 1.3.2).
Proposition 2. If E is a finite-dimensional Hausdorff topological vector
space and F an arbitrary topological vector space, then every linear map f from
E into F is continuous.
Proof. There exists an isomorphism <p from E onto some space Kn,
given by
1 ► (£i)l = i=n>
i=l
where is a basis of E. Let bi = f(ei); then the map
n
Ф* (ft) 1 > £ibi
i—1
from Kn into F is continuous by the definition of a topological vector
space. Hence / = is continuous. |
Proposition 3. Let E be a topological vector space, M a closed subspace
of E, and F a finite-dimensional linear subspace of E. Then the subspace
M -r F is closed.
Proof. We know that E/M is a Hausdorff space (Proposition 5.5). Let
<p-.E E/M be the canonical surjection. Then <p(F) is a finite-dimen-
sional subspace of E/M, and thus by Proposition 1 it is closed. Hence the
subspace M + F = ^“’(^(F)) of E is closed. |
Remark 1. If M and N are two closed subspaces of a topological vector
space, then M + N is not necessarily closed (cf. Remark 1.7.1).
Before we pass to the next proposition, let us recall that the (algebraic)
codimension of a subspace M of a vector space E is the dimension of the quotient
space E/M. It is also the dimension of any algebraic supplement of M.
Proposition 4. If E is a Hausdorff topological vector space and, M a closed
subspo.ee of E with finite codimension, then every algebraic supplement N of
M is a topological supplement (Definition 7.2) of M.
Proof. Let q:E N be the projector onto N and q:E/M —> N the
associated injection. By Proposition 2 the map q is continuous since E/M
[2, §10]
FINITE-DIMENSIONAL AND LOCALLY COMPACT SPACES
143
is a finite-dimensional Hausdorff space. This proves that M and N are
topological supplements (p. 122). |
Remark 2. We shall see (Proposition 3.1.3) that if E is a locally convex
Hausdorff space and M a finite-dimensional subspace of E, then there
exists a topological supplement of M.
In our next theorem we shall prove that a locally compact topological
vector space is necessarily finite-dimensional, which will be of fundamental
importance in the theory of compact linear maps. First, however, let us
recall the definition and basic properties of compact sets.
A topological space X is said to be compact if it is a Hausdorff space and if
the following equivalent conditions are satisfied:
(C 1) Every filter on X has at least one adherent point.
(C 2) Every ultrafilter on X converges.
(C 3) (Cantor property) Every family of closed sets in X whose intersection
is empty contains a finite subfamily whose intersection is empty.
(C 4) {Heine-Borel-Lebesgue property) Every open cover of X contains a
finite subcover.
The last condition means, of course, that given a family of open sets (C7t)tez
such that X = IJigz there exists a finite subset J oi I such that
x = Ute/ ut.
Let us prove the equivalence of conditions (C 1) through (C 4).
(C 1) => (C 2): Let U be an ultrafilter and x G X a point which adheres to U.
Then there exists a filter ®, finer than U, which converges to x (cf. §8). But
by the definition of an ultrafilter we have ® = U.
(C 2) => (C 1): Let 5 be a filter on X. There exists (cf. §2) an ultrafilter U
finer than 5- By condition (C 2) the ultrafilter U converges to a point x G X.
But then x adheres to
(C 1) => (C 3): Let S be a family of closed subsets of X whose intersection
is empty. Let S' be the collection of all finite intersections of sets in S. If
none of the sets in S' were empty, then S' would generate a filter 5- By (C 1)
the filter g would have an adherent point x which then would belong to all the
sets in S in contradiction to the hypothesis.
(C 3) => (Cl): We prove that the negation of (C 1) implies the negation of
(C 3). Let g be a filter with no adherent point. The collection of all sets A,
where A runs through g, has an empty intersection (since every point belonging
to the intersection would adhere to 5), but by the definition of a filter no finite
subcollection has an empty intersection.
Finally, the equivalence of (C 3) and (C 4) is clear by passing to the
complements.
A subset A of a topological space X is said to be compact if, equipped with
the topology induced by X, it is a compact space. In other words, A is compact
if the induced topology is Hausdorff and every family (CJigz of open sets in X
144
LOCALLY CONVEX SPACES
[2, §101
such that A C Ul contains a finite subfamily (L\)igj such that
AC U iGj Ui. Here are some easy properties of compact sets.
(a) A closed subset of a compact space is compact. This follows immediately
from Axiom (C 3) if we observe that if A is a closed subset of the topological
space X, then a closed subset of A is also closed in X.
(b) A compact subset of a Hausdorff space is closed. Indeed, let x adhere to
the compact subset A of the Hausdorff space X. Then every neighborhood of
x meets A, and therefore the filter 33 (x) of neighborhoods of x in X induces a
filter 33 a on A. By Axiom (Cl) there exists a point уE A which is adherent
to 33a and also to 33(x). But 33(x) converges to x; therefore, since X is a
Hausdorff space, we must have x = y, i.e., x E A.
(c) If f is a continuous map from a topological space X into a Hausdorff
space У, then the image/(A) of any compact subset A of X is a compact subset
of У. Proof. Let (UJiei be an open cover of /(A) in У. Then the sets
(/-1(L7t))iGz form an open cover of A in X, hence there exists a finite subfamily
which still covers A. But then (L7t)tGj covers A.
A subset A of a topological space X is said to be relatively compact in X if it
is contained in a compact subset of X.
(d) A subset A of a Hausdorff space X is relatively compact if and only if
A is compact. Since A C A, it follows from the definition that A is relatively
compact if A is compact. Conversely if A is contained in the compact set B,
then also A С B, since by (b) the set В is closed. But then by (a) the set A is
compact.
(e) If A is a relatively compact subset of the topological space X, then every
filter basis on A has at least one adherent point in X. Indeed, if A is contained
in the compact subset В of X, then every filter basis on A generates a filter on
B, which by Axiom (Cl) has at least one adherent point in B.
The following result is one of the most important theorems of analysis. Its
proof is very simple because we can use Axiom (C 2), i.e., the existence of
ultrafilters.
Tihonov’s theorem. If (Xt)tez is a family of compact spaces, then the product
space X = Плег XL is compact.
Proof. We know that A" is a Hausdorff space (§7). Let тг^.Х —> Xc be the
i-th projection and let U be an ultrafilter on X. Then ?rt(U) is an ultrafilter on
Xc (§2), hence converges to some point Xi by Axiom (C 2). Consequently,
U converges to x = (xt). |
A topological space X is said to be locally compact if it is a Hausdorff space
and every point x E X possesses a compact neighborhood.
A Hausdorff topological vector space is locally compact if 0 possesses a
compact neighborhood. It follows from Tihonov’s theorem that the
product of finitely many locally compact spaces is locally compact. Since
the space K1 is locally compact, it follows in particular that every finite-
dimensional Hausdorff space is locally compact (Theorem 1). We shall see
in a moment that the converse is also true. First let us, however, establish
some results concerning compact sets in topological vector spaces.
[2, §10]
FINITE-DIMENSIONAL AND LOCALLY COMPACT SPACES
145
Lemma 2. Let Ebe a Hausdorff topological vector space, A a compact subset
of E and В a closed subset of E. If А А В = 0, then there exists a neighbor-
hood V of 0 such that (A + F) A (B + 7) = 0.
Proof. Since В is closed, for each x G A there exists a neighborhood Wx
of 0 such that (x + Wx) n В = 0. For each x G A let Vx be a balanced
neighborhood of 0 such that Vx + Vx + Vx C Wx. Now the sets x + Vx
cover A; hence there exists a finite family (xi)x^i<n of points of A such
that the sets Xi + VXi cover A. The set V = VXi is a neighborhood
of 0. Furthermore, (A + 7) A (B + 7) = 0. Indeed, if a + v = b + v'
with a G A, b G B, v,v' G 7, then a G Xi + VXi for some index i. Hence
a + v —- v' G Xi + V Xi + VXi + V Xi C Xi + WXi.
But a A~ v — v' = b eB, which contradicts the choice of WXi. |
Proposition 5. Let Ebe a Hausdorff topological vector space, A a compact
subset of E and В a closed subset of E. Then the set A + В is closed.
Proof. Let x be a point of E not belonging to A + В. Then
(x — B) A A = 0,
and since x — В is closed, by Lemma 2 there exists a neighborhood 7 of
0 such that (x — В + 7) A A = 0. The set x + 7 is a neighborhood
of x and (x + 7) A (A + B) = 0. This shows that C(A + B) is open,
i.e., that A + В is closed. |
A compact subset A of a topological vector space is always complete.
Indeed, let $ be a Cauchy filter on A. Then by Axiom (C 1) there exists
a point x G A which adheres to But by Proposition 9.1 the filter $
converges to x.
Definition 1. A subset A of a Hausdorff topological vector space is said to
be precompact (or totally bounded) if every ultrafilter on A is a Cauchy filter.
Clearly every compact subset of a Hausdorff topological vector space is
precompact and every complete and precompact subset is compact.
Theorem 2. Let E be a Hausdorff topological vector space and A a subset
of E. The following conditions are equivalent:
(a) A is precompact.
(b) If Ё is a completion of E andj'.E —> Ё the isomorphism onto the dense
subspace Eq of Ё (cf. Theorem 9.1), then the closure of j(A) is a compact
subset of Ё.
(c) For every neighborhood V of 0 in E there exists a finite family
of points of A such that A C LK=i + F).
146
LOCALLY CONVEX SPACES
[2, §10]
Proof, (a) => (b): Suppose that В = j(A) is not compact in Ё and let
us prove that A is not precompact. There exists on В a filter g which has
no adherent point. The collection of all sets X + V, where X G 5 and V
is a balanced neighborhood of 0 in Д is the basis of a filter ® on Ё. Since
every set X + V meets A, the trace of ® on A is a filter on A. Let
U be an ultrafilter on A finer than If U were a Cauchy filter, it would
generate a Cauchy filter on В which would converge to some point x G B.
But then x would be clearly an adherent point of g, in contradiction to
our original assumption.
(b) => (c): Let 17 be a closed neighborhood of 0 in E such that W С V.
The closure W of j(W) in Ё is a neighborhood of 0 in Ё. Since j(A) is
compact in Ё, there exists a finite family (Zi)i^n of points of A such that
the sets j(xf) + W cover j(A). Since W П E = W С V, the sets x^ + V
cover A.
(c) => (a): Let U be an ultrafilter on A, U a neighborhood of 0 in E,
and V a balanced neighborhood of 0 in E such that V + V C U. Suppose
that A C Uti (xi + V). Then A = |J?=i (x{ + 7) n A G U; hence by
a characteristic property of ultrafilters (§2) there exists an index j
(1 j ri) such that the set X = (xj + 7) n A belongs to U. But
then X — X С V + V C U, which shows that U is a Cauchy filter. |
Proposition 6. Let E and F be two Hausdorff topological vector spaces and
f\E-^Fa uniformly continuous map (Definition 9.3). If A is a precompact
subset of E, then f (A) is a precompact subset of F.
Proof. Let 7 be a neighborhood of 0 in F and U a neighborhood of 0
in E such that x — у G U implies f(x) — f(y) g 7. There exists a finite
family (xih^i^n of points of A such that the sets Xi + U cover A, and
hence the sets/(xT-) + 7 cover/(A). |
Proposition 7. A precompact subset A of a Hausdorff topological vector
space E is bounded.
Proof. Let 7 be a balanced neighborhood of 0 in E. By Theorem 2
there exists a finite family (zOi^n of points of A such that
A C (J (Xi + 7).
г=1
On the other hand, there exists a number X 1 such that Xi G X7 for
1 = i = n. Thus
А С X7 + 7 C X(7 + 7). |
In particular, in a quasi-complete (Definition 9.2) Hausdorff topological
vector space every closed, precompact set is compact and every precompact
set is relatively compact (cf. Exercise 3(b)).
[2, §10] FINITE-DIMENSIONAL AND LOCALLY COMPACT SPACES 147
Theorem 3 (F. Riesz). Let E be a Hausdorff topological vector space in
which there exists a precompact neighborhood U of 0. Then E has finite
algebraic dimension (and is by Theorem 1 isomorphic to some Kn).
We first prove:
Lemma 3. Let Ebe a topological vector space, F a proper closed subspace of
E, U a bounded neighborhood of 0 in E, and V a balanced neighborhood of 0
in E such that V + V C U. Then U is not contained in F + V.
Proof. Assume that U C F + V. Then V fiV QU CF fiV and
a fortiori 2 V C F + V. We see by induction that 2nV C F + V for every
integer n 1. Indeed, this holds for n = 1; and if we assume it for n,
we have
2n+iy c 2ny + 2nV CF + V + F + V CF + V
since F + F = F.
Every integer m 1 verifies m 2W for some n. Therefore mV C F + F
for all m 1: i.e.,
F +
Now,
p = n
1
Fc П (F + -7
Indeed, the inclusion
1
is clear. On the other hand, let
and let IT be a balanced neighborhood of 0. Since V is bounded, there
exists an integer m 1 such that (\/m)V C W and therefore x e F -j- W.
Hence (x + W) П F # 0 and x e F. The assertion follows from the
hypothesis that F is closed.
Thus we have V C F and therefore F = E since V is absorbing. This,
however, contradicts the assumption that F is a proper subspace of E. |
Proof of Theorem 3. Let V be a balanced neighborhood of 0 such that
V + V C U. We assume that E is not finite-dimensional and construct
an infinite sequence (zn)neN of elements of U such that xn — xm g V for
n 7^ m. This, however, contradicts the assumption that U is precompact.
Indeed, if W is a balanced neighborhood of 0 such that W + W С V, let
148
LOCALLY CONVEX SPACES
[2, §10]
(yi) be a finite sequence of elements of U such that the sets yi + W cover
U. There must exist two distinct indices m and n such that xn and xm
are in the same set yi + W. But this implies xn — xm e W + W С V.
It remains for us to construct the sequence (xn). For x0 we choose any
nonzero element of E. Assume that we have already chosen x0, xlf . . . , xn
and denote by Fn the (necessarily closed) subspace of E generated by
these elements. By our hypothesis E Fn, and therefore by Lemma 3
there exists xn+1 E U such that xn+1 & Fn + V, and in particular
xn+i & Xj + V for 0 j n. This defines the sequence (xn) inductively. |
Exercises
1. Let X be a compact space.
(a) Prove that if § is a filter on X and A the set of points adherent to
then every neighborhood of A belongs to (Hint: Let V be a neighborhood
of A and assume that every set В E § meets CT. Consider the filter ® generated
by the sets В A CF. Then © has an adherent point x E X, x A, which also
adheres to §.)
(b) Prove that a filter on X converges if and only if it has a unique adherent
point.
(c) Let x be a point of X. Show that a filter basis S3 formed of closed neigh-
borhoods of x is a fundamental system of neighborhoods of x if and only if the
intersection of all the sets belonging to S3 is the point x.
(d) Prove that every compact space is regular (cf. §2).
(e) Show that if A and В are two closed subsets of X such that А П В = 0,
then there exist two open subsets U and V of X such that A C U, В С V, and
U П V = 0. (Hint: If every neighborhood U Qi A met every neighborhood V
of B, then the sets U П V would generate a filter Using (d), show that a
point adherent to § would belong to А П B.)
2. Let X be a regular topological space. Prove that if every filter on a subset
A of X has at least one adherent point in X, then A is relatively compact.
(Hint: Let § be a filter on A and © the filter basis on A formed by all open
sets which contain a set of Consider the trace of ©on A.)
3. Let E be a Hausdorff topological vector space.
(a) Prove that every relatively compact subset of E is precompact.
(b) Prove that if the subset A of E is precompact, then A is also precompact.
(c) Prove that every subset of a precompact set is also precompact.
(d) Prove that the union of two precompact subsets of E is precompact.
4. Let E be a Hausdorff topological vector space,
(a) Prove that the balanced hull of a compact subset A of E is compact.
(Hint: If В is the set of all X G К such that |X| 1, then the balanced hull of
A is the image of В X A under the map (X, x) i—> Xx.)
(b) Prove that the balanced hull of a precompact subset C of E is precompact.
(Hint: The closure of j(C) is compact in Ё, and by part (a) so is its balanced
hull.)
[2, §11]
INITIAL TOPOLOGIES
149
5. Prove that Lemma 2 and Proposition 5 hold if we only assume that the
set A is closed and precompact. (Hint: Use condition (b) of Theorem 2.)
6. Give a direct proof of the implication (a) => (c) in Theorem 2. (Hint: If
V is a neighborhood of 0 in E such that for no finite family (x^ Qi points of A
do the sets Xi + V cover A, then the traces on A Qi the sets С (x + F), where
x G A, generate a filter gon A. If U is an ultrafilter on A finer than g, then
for no В G U can we have В — В G F.)
7. (a) Let X be a locally compact topological space. Denote by X' the set
whose points are the points of X and one additional point, “the point at infinity, ”
denoted by co. Define on X' a topology as follows: the neighborhoods of a point
x G X in the original space X form a fundamental system of neighborhoods of x
in X', while a fundamental system of neighborhoods of co is given by the comple-
ments (with respect to X') Qi the compact subsets of X. Show that the neighbor-
hoods defined in this way satisfy axioms (NB 1) through (NB 4) of §1, that X'
induces on X its original topology and that X' is compact. (Xr is called the
Alexandrov or one-point compactification of X.)
(b) Let X be a locally compact space, X\ and X'z two compact spaces. Assume
that for i = 1,2 there exist maps/;: A X\ such that Cft(X) is a single point
and that/; is a homeomorphism of X onto/;(X). Show that there exists a unique
homeomorphism g:X'i —> X2 such that/2 = g°fi-
(c) We say that a numerical function <p defined on a locally compact space X
“vanishes at infinity” (or “vanishes at the boundary of X”) if for every e > 0
there exists a compact subset К of X such that |^(я)| € for x G CX (cf.
Examples 1.1.5, 4.16, and Exercise 1.2.7). Show that <p vanishes at infinity if
and only if, setting <p(co) = 0, the extended function is continuous on the
Alexandrov compactification X' of X.
§ 11. Initial topologies
Let E be a vector space and (F^^i a family of topological vector spaces,
all over the same field K, and for each index t G I let /t be a linear map
from E into F,,. Let T be the coarsest topology on E for which all the maps
/t are continuous (§1), i.e., the initial topology on E for the family (/t).
If is a fundamental system of neighborhoods of 0 in Ft, then a funda-
mental system of neighborhoods of 0 in E for T is given by all finite inter-
sections
C\--- C\frn\Un), Where Uk e Wlk (1 к n).
The topology T is compatible with the vector space structure on E. Indeed,
let a e E, beE and let ("K=i fik (JF&) be a neighborhood of 0, where
Wk is a neighborhood of 0 in Let — fik(a) and bk = fik(b)
(1 к ri). Then there exist neighborhoods Uk and Vk of 0 in FCk
(1 к ri), such that и E. ak + Uk and v G bk + Vk imply
и + v G ak + bk + Wk-
150
LOCALLY CONVEX SPACES
[2, §11]
Bur then in 4 the relations
G a - Q and у G b 4 Q f^1(Vk')
fc = l fc=l
; m ply
X 4- у G a + b + PI fp(Wk').
1
Next let X G K, a G E and let Q^=1 fi?(Wk) be a neighborhood of 0 in E,
where Wk is a neighborhood of 0 in FCk. For each к (1 g к ri) there
exists a neighborhood Uk of 0 in К and a neighborhood V к of 0 in FCk such
that £ G X + Uk and и G a>k + Vk imply %u G \ak + W^ But then the
relations
G X + P] Uk and x G a + Q fckl(Vk)
/.-=1 k=l
imply
G Xa ft
k=l.
Example :. Let F be a topological vector space, E a bnear subspace of
the vector space F and/: E F the canonical injection. Then the initial
topology on E for/is the topology induced on E by F (§5).
Example 2, Let (Ft)tez be a family of topological vector spaces and E
the product ILgz Л of the vector spaces Ft. For each t g I let ?rt be the
t-th projection from E onto Fc. Then the initial topology on E for the family
(ttJ is the product topology (§7),
Example 3, Let E be a vector space and (Tt)tez a family of topologies
on E compatible with the vector space structure on E. For each t let Fc be
the vector space E equipped with the topology Tt on it, and let /t be the
identical bijection from E onto Ft, Then the initial topology on E for the
family (/,) is clearly the least upper bound of the topologies Tt (§1), It is
compatible with the vector space structure of E.
Proposition 1, Let E be a vector space, (C?t) a family of topological vector
spaces, I = [JxglA a partitioning of the set I, and (F\)\el a family of
vector spaces. For each X G L let h\ be a linear map from E into F\ and for
each l g J\ let gc\ be a linear map from F\ into Gc. Setfc = gcx°h\. Equip
each F\ with the initial topology for the family Then on E the
initial topology for the family (h\)\eL coincides with the initial topology for
the family (/t)tGz,
Proof. If W — |Xi is a neighborhood of 0 in E for the second
topology, where U4. is a neighbornood of 0 in GCk, then V\k = gi~kxk(Uik)18
[2, §11]
INITIAL TOPOLOGIES
151
a neighborhood of 0 in F\k where Xk is such that e J\k. Since
frk4ulk) = = h^(y^,
it follows that
W = n KkXv^
k=l
is also a neighborhood of 0 for the first topology. Conversely, let
W = П
XEM
be a neighborhood of 0 in E for the first topology, where M is a finite subset
of L. Then each neighborhood of 0 in F\ (X e M) contains a set
where H\ is a finite subset of J\ and for each t e H\ the
set Uc is a neighborhood of 0 in GL. But then W contains the set
П ( A = П П
XEM \EffX 7 XfEM iEH\
i.e., W is a neighborhood of 0 for the second topology. |
Proposition 2. Let Ebe a vector space, and (Gx)m=l two families
of topological vector spaces. For each l EE I let fL be a linear map from E into
Fc and for each X G L let gx be a linear map from E into G\. Let T be the
initial topology on E for (/J and T' the initial topology on E for (gx). Suppose
that for each lE I there exists a continuous linear map uL\ from some Gx
into Fi so that fi = исх°дх- Then T' is finer than T.
If, furthermore, for every X e L there exists a continuous linear map vxl
from some Fc into Gx so that gx = vx^f^ then the topologies T and T' are
identical.
Proof. The second statement follows obviously from the first one.
To prove the first assertion, it is enough to observe that under the
hypotheses, the fi are continuous for the topology T' on E. |
Let E be a vector space, a family of topological vector spaces,
fi\ E —> Fi a linear map (t e I), and equip E with the initial topology for
the family (/J. If E is a Hausdorff space, then for each x # 0 in E there
exists an index t G I such that fc(x) # 0. Indeed, there exists a
neighborhood
V = n f~^ulk)
k=l
of 0 such that x & V; hence fik(x) Й Uik for some index к and a fortiori
flJr(x) 0. It follows that the linear map x (/t(x))tGz from E into
152
LOCALLY CONVEX SPACES
[2, §11]
IItG7 Ft is injective. It is even a strict morphism (Definition 5.1). In
fact, the image of the neighborhood Ha=i °f 0 in E is the trace
on the image of E of the neighborhood ILei СЛ of 0 in ILer Fl, where
UL = ULk for l = Lk and UL = FL for l # Lk (1 к ri). Thus if E
is a Hausdorff space, it can be considered as a subspace of the product
space ILgi Fl.
Conversely, assume that the Ft are Hausdorff spaces and that for each
x # 0 in E there exists an index i G / such that fL(x) 0. Then E is a
Hausdorff space. Indeed, if /t(x) # 0, then there exists a neighborhood U
of 0 in Ft such that/t(z) Й U. But then/Г1 (77) is a neighborhood of 0
in E and x g f?\U) (cf. Proposition 3.2).
If the are locally convex spaces, then E is a locally convex space since
if Uk (1 к ri) is a convex neighborhood of 0 in FLk, then П^Л^ТЛ)
is a convex neighborhood of 0 in E. If for each t g I the topology of Ft is
defined by the family (gt\)xeLt of semi-norms, then the topology of E is
clearly defined by the family of semi-norms (&х°Л) (X еД, iG I).
Example 4. For every positive integer m the space 8(2) defined in Ex-
ample 4.8 is a linear subspace of the space 8W(2) of Example 4.7. Let fm
be the canonical injection 8(2) 8W(2) and equip 8™(2) with the topology
defined in Example 4.7. It is clear that the initial topology on 8(2) for
(fm) coincides with the topology defined in Example 4.8.
The situation is entirely analogous for the canonical injections
S)(K) ^m(K), §>k §%, §> §>m, ®0(2) °* (2), and (B(2) &w(2)
of the spaces defined in Examples 9 through 14 and 16 through 19 of §4.
Example 5. If m is a fixed positive integer and к an arbitrary integer,
then the space §>m of Example 4.13 is a linear subspace of the space 8™
of Example 4.11. If we equip 8™ with the topology defined in Example
4.11, then the topology of Sw defined in Example 4.13 coincides with the
coarsest topology on §>m for which all the maps/fc : S>m 8™ are continuous,
where we may take either all к G Z or only 7c G N by virtue of Proposition 2
and Example 5.4 (cf. Example 5.2).
Example 6. For any к G Z and m G N the space 8 of Example 4.14 is a
linear subspace of the space 8™. The topology of 8 defined in Example 4.14
is identical with the initial topology for the family of maps
: 8 8™ (w EN, fc G Z or к G N).
By Proposition 1 the topology of 8 is also the initial topology for the
family of maps 8 Sk or the family of maps 8 °* Sw.
With the same notations as above, a sei В is bounded in E if and only if
fL(B) is bounded in FLfor each t G I. Indeed, suppose that each set — fL(B)
[2, §11]
INITIAL TOPOLOGIES
153
is bounded and let W = be a neighborhood of 0 in E,
where Uk is a balanced neighborhood of 0 in Fck (1 к ri). For each
к there exists X* > 0 such that BLk Q \kUk- Let X = maxi^^n X*. Then
В С ХЖ, i.e., В is bounded. Conversely, if В is bounded, then fc(B) is
bounded since fL is continuous (§6).
Let g be a filter on E. Then g is a Cauchy filter if and only if /t(g) is
the basis of a Cauchy filter on FL for every t e I. Indeed, if g is a Cauchy
filter, then it follows from the uniform continuity of /t that /t($) is the
basis of a Cauchy filter on Ft. Conversely, suppose that each /t(g) is the
basis of a Cauchy filter. Let W = be a neighborhood of
0 in E, where Uk is a neighborhood of 0 in FCk. For each к there exists
Aj e g such that ftk(Ak) — ftk(Ak) C Uk. Then A = ГК=1 Ak E. g
and A — A Q W.
These results are really trivial and their proofs are almost word for word
the same as in the case of product spaces. Let us now prove a slightly
deeper result.
Proposition 3. Let (FJcei be a family of Hausdorff topological vector
spaces, where the index set is ordered and we suppose that for t к we have
a continuous linear map fcK'.FK —> Ft. Let E be a vector space and for each
l e I let fc be a linear map from E into such that for t к we have
fc = fcK°fK- Assume, furthermore, that if (xfjc^i is a family of elements such
that e Fc and for each pair (t, к) with t к we have fcAx*) = xc, then
there exists an x e E such that xt = ffx,) for all t e I. If the spaces are
complete, then E equipped with the initial topology for the family (/t) is
complete.
Proof. Let $ be a Cauchy filter on E, then = /t(g) is the basis of a
Cauchy filter on for each t e I. By assumption converges to an
element xc of Ft. Let us prove that the family (xc)c<ei so obtained satisfies
the condition xc = fcK(xK) for t к. Since tends to xK, it follows from
the continuity of fLK that tends to On the other hand,
Лк(8«) = Лк(Л(Ю) = A(S) = Si which tends to xL. But in a Hausdorff
space a filter basis has at most one limit; hence xL = fcAx*).
Let x e E be an element such that fc(x) = xL. Let W = DLi A?
be a neighborhood of 0 in E, where Uk is a neighborhood of 0 in Fck. For
each k there exists Ak G S such that fck{Ak) C xCk + Uk- Then
A = Q Ak G g and A G x + W;
k=i
that is, $ converges to x. |
Remark 1. Let E = ILe/ Fc, for the fc choose the projections 7rt and
order I in such a manner that no two different elements of I are compa-
154
LOCALLY CONVEX SPACES
[2, §11]
rable. Then every family (xt)tej satisfies the condition of Proposition 3
and we have proved again that E is complete for the product topology if
the Fl are complete.
Corollary. Let (Ft)t£i be a family of Hausdorff topological vector spaces,
where the index set is ordered. Suppose that for l к the space FK is a linear
subspace of FL and the topology of FK is finer than the topology induced by FL
on FK. Let E = Qis/ Ft and equip E with the initial topology for the injec-
tions E °* Ft. If the FL are complete, then E is complete.
Example 7. If m,mf G N and m > m', then the map &m(Qi) 8W'(O)
is continuous (Example 5.7) and clearly 8(Q) = PI^sn Thus by
Example 4 and the corollary the completeness of the for finite m
implies the completeness of 8(Q). This is, however, of little interest to us,
since in Example 9.3 we have already established the completeness of
with equal ease for both finite and infinite m.
Exactly the same applies to the spaces (B™(Q), &m(Kf and <Bo*(Q) (cf.
Examples 4, 5, and 6 of §9).
Example 8. If k is a fixed integer, m,mf G N and m > m', then the map
8™ S™’ is continuous (Example 5.7) and 8^ = P|?nGN It follows
from Example 4 and the corollary to Proposition 3 that S& is complete
since the spaces 8™ are complete by Example 9.6.
Example 9. If mis a fixed positive integer, k, k' G Zand k > fc', then the
map ЗГ is continuous (Example 5.4) and we have §>m = Ppez S™.
It follows from Example 5 and the above corollary that is complete.
Example 10. If m,mf G N, k,k' G Z, m > mr and fc > fc', then the map
8™ S™' is continuous since it is composed of the maps 8™ S™' S™'
or ЗГ S™ c* 8™'. Furthermore, 8 = 8™; hence it follows from
Example 6 and the above corollary that the space 8 is complete.
Of course this follows also from the completeness of or §>k since
8 = S™ and 8 = П* Sfc (cf. Example 6).
Let E be a vector space, (Fn)nGN a sequence of metrizable topological
vector spaces, and for every n G N let fn be a linear map from E into Fn.
Then the initial topology on E for the sequence (/n) is metrizable. Indeed,
if (Fnm)mGN is a fundamental system of neighborhoods of 0 in Fn, then
the sets Z”1
(F П1?П1 ) n • • • Cifnp(Vnpmp) form a fundamental system of
neighborhoods of 0 in E. The assertion then follows from Theorem 6,1 if
we observe that the collection of all finite subsets of a countable set is itself
countable.
Example 11. The spaces Sjb, Sm, and 8 are metrizable, and hence are
Frechet spaces by virtue of Examples 8, 9, and 10.
[2, §11]
INITIAL TOPOLOGIES
155
Exercises
1. Let E be a vector space, (Ft)tGz a family of topological vector spaces and
for each index i G I let be a linear map from E into Ft. For each x G E
denote by <p(x) the point (./№)) ter of the product space Show that
the initial topology on E for the family (/t) is the coarsest topology on E for
which the map <p : E —> Hiez Fl is continuous if we equip Fl with the
product topology.
2. Let E be a vector space, (Ft)tez a family of Hausdorff topological vector
spaces, fa: E —> a linear map, and equip E with the initial topology for (/t).
Show that a set К is precompact (Definition 10.1) in E if and only if fa(K) is
precompact in for each i G I.
3. Let I be an ordered set and (Ft)tez a family of topological vector spaces.
Suppose that for every pair (i, к) of indices such that i к we have a con-
tinuous linear map fa^.F*. and that these maps satisfy the following two
conditions:
(i) fu is the identity map for each t G I,
(ii) Ax = /lk °/kx for i к X.
A topological vector space E is said to be an inverse (or projective) limit of the
inverse (or projective) system (Fl, if the following conditions are satisfied:
(iii) for every t G I there exists a continuous linear map /t: E Fl such that
/t = fLk ° f'к for I X,
(iv) given a topological vector space D and a family of continuous linear
maps gc. D —> Fl such that Ql = /u ° Qk for t к, there exists a unique contin-
uous linear map д'. D —> E such that gL = fa°g for all i G 1, i.e., such that the
diagram
/к ГIK
is commutative.
(a) Show that given an inverse system there always exists an inverse limit
which is unique up to an isomorphism. {Hint: Consider the subspace of liter Л
formed by those vectors (xifaei which satisfy/ute) — xL for t к.)
(b) Let E be an inverse limit of the inverse system (Ft, /u). Show that given
a family (xl)l& of elements such that xL G Fl and /u(£«) = for t к, there
exists a unique x G E such that /t(z) = xc for all t G I and show that this
property characterizes E up to an isomorphism. In particular, the map
x i—> (/tW) from E into liter Fl is injective, and if the Fl are complete
Hausdorff spaces, then E is complete.
4. Show that there exists a family (Ft)ter of complete, Hausdorff topological
vector spaces, a vector space E, and linear maps/и F —> Fl (t E I) such that
156
LOCALLY CONVEX SPACES
[2, §11]
E equipped with the initial topology for (/t) is not complete. (Hint: Take a
subspace of Ft which is not closed.)
5. Suppose that the hypotheses of Proposition 3 are satisfied. Show that if
the spaces Ft, are quasi-complete, then E is quasi-complete for the initial top-
ology for the family (/t).
6. Let E be a vector space over К and suppose that we have on E a sequence
of norms я > |M|p (p E N) which satisfy the condition
Mo IMli HI, •
for every x G E. If Ep is the space E equipped with the norm |Ы|Р, then for
p q the identical bijection Eq Ep is continuous.
We assume that the norms ||x||p are pairwise coordinated in the sense of Gelfand
and Shilov [31], i.e., that if p q and (xn) is a Cauchy sequence in Eq (hence
a fortiori in Ep) and (xn) converges to 0 in EP) then (xn) converges to 0 in Eq.
Denote by Ёр the completion of Ep (Proposition 1.2.4) and denote the norm of
Ёр also by ||x||p. Furthermore, let fpq be the continuous linear map from Eq
into Ёр which is the unique extension of the identical map Eq Ep (p q).
(a) Show that the map fpq: £q —> Ёр is injective.
(b) For each index p E N let fp be the canonical injection E Ёр. Show
that for p q we have/p = fpq°fq.
(c) Let T be the coarsest topology on E for which all the maps fp are con-
tinuous. Show that T is a locally convex metrizable topology defined by the
saturated family of norms x i—> ||x||p. (E is a countably normed space in the
terminology of Gelfand and Shilov.)
(d) Show that E is complete for T if and only if E = P|pgn Ёр. (Hint: To
show that the condition is necessary observe that E is always dense in
Прем Ёр.)
(e) Show that E equipped with T is the inverse limit of the inverse system
(EP1 fpq) (cf. Exercise 3).
(f) Let F be a second countably normed space defined with the help of the
norms
Mo Mi Mp
Show that a linear map f: F —> E is continuous if and only if for every norm
||x||p on E there exists a norm ||t/||J on F and a constant M > 0 such that
\\f(y)\\P M\\y\\'q for all у EF.
(Hint: Use (c) and Proposition 5.2.)
(g) Show that S)(K), equipped with its topology as defined in Example 4.10,
is a countably normed space defined with the help of the norms
\\f\\m = max max|dp/(x)|.
zEK
Show that the completion of S)(K) with respect to the norm \\f\\m is ^)m(K)
(cf. Chapter 4, §4).
[2, §12]
FINAL TOPOLOGIES
157
§12. Final topologies
Let F be a vector space and (E/f^i a family of topological vector spaces,
all over the same field K. For each index t e I let /t be a linear map from
EL into F. Let Ф be the set of all locally convex topologies on F for which
all the maps /t are continuous. The set Ф is not empty since the chaotic
topology on F belongs to it. Let T be the least upper bound of the set Ф
of topologies on F. We know from Example 11.3 that T is compatible
with the vector space structure on F.
Let У1 be the filter basis on F formed by all absorbing, balanced, convex
sets V such that for every index t e I the set/71(T) is a neighborhood of
0 in Ec. We shall prove that SR is a fundamental system of neighborhoods
of 0 in F for T. It will then follow from Proposition 4.5 that T is a locally
convex topology on F.
Indeed, again by Proposition 4.5, the filter basis SR is a fundamental
system of neighborhoods of 0 for some locally convex topology T' on F,
and clearly all the maps/t are continuous for T7. We prove that T' is finer
than T, from which T = T7 will follow by the definition of T as the least
upper bound of Ф. Let U be the neighborhood of 0 in F for T. There exist
a finite family of topologies belonging to Ф and for each к a
balanced, convex neighborhood Vk of 0 in F for 7/ such that U D ГК=1
Now
V = П Vk e SR
fc=i
since it is absorbing, balanced, convex and for each t e I the set
/г1 m = ПЛ"Ш
Ы
is a neighborhood of 0 in EL.
We have proved that T is the finest locally convex topology on F for which
all the maps fL are continuous. We shall also refer to T as the final locally
convex topology on F for the family (/t).
Let SRt be a fundamental system of neighborhoods of 0 in EL and assume
that the set |Jtez fi(E/) generates the vector space F. Then the balanced,
convex hulls U of the sets (Jtez fifU/), where e SRt, form a fundamental
system of neighborhoods of 0 in F for T. Indeed, U is balanced and convex,
ff\U) Э Uc and by our hypothesis U is absorbing. Thus U e SR. Con-
versely, if V G 92, then/t-1(F) contains some U\ e SRt. Thus/t(L\) С V,
hence (Jtez Л(^) С V; and since V is balanced and convex, the balanced,
convex hull of |Jigz/i(?A) is also contained in V.
Example 1. I ct E be a locally convex space and M a subspace of E.
Let/be the canonical surjection from E onto the quotient space F = E/M.
158
LOCALLY CONVEX SPACES
[2, §12]
Then the quotient topology on F (§5) is the finest locally convex topology
in F for which the map f is continuous.
Before giving our next example we need another definition from algebra. Let
(Ei) ter be a family of vector spaces over the same field K. The external direct
sum ILgz El of the vector spaces EL is the subspace of ILg/ El formed by all
those elements (xjcez for which xL = 0 except for finitely many indices t G I.
If the index set I is finite, the external direct sum and the product are the same.
For every t G / we have an injective linear map jL from EL into LLgz El, called
the t-th injection and defined as follows. Let у G Ft. Then x = ji(y) = (xi)iei
is given by xc = у and xK = 0 for к # t. Clearly, [Jieiji(Ei) generates
ILgz Ei. If all spaces Ec are equal to the same space E, we write E(T) for
LIiGZ El.
Example 2. Let (Ft)tez be a family of locally convex spaces. We shall
equip LLgz El with the finest locally convex topology for which all the
injections jL are continuous and refer to the locally convex space LLgz El
as the locally convex direct sum of the spaces Ec.
If the index set I is finite, then the product topology and the locally
convex direct sum topology coincide on ILgz El = LLgz El. We may
assume that 1 is the interval [1, n\ Qi N. If Ui (1 i n) is a balanced
convex neighborhood of 0 in Ei, then the balanced, convex hull of
и?=1Л*(^г) is contained in П?=1 Ui and contains (1/n) II?=i Ui.
Example 3. LetFbe a vector space and (Tt)tei a family of locally convex
topologies on F. For each t let Ec be the vector space F equipped with the
topology Tt and let be the identical bijection from Ft onto F. Then the
finest locally convex topology T on F for which the are continuous is
the greatest lower bound of the topologies Tt in the set of all locally convex
topologies on F. Indeed, T is coarser than any Tt. A balanced, convex
set V is a neighborhood of 0 for T if it is a neighborhood of 0 for all TL.
Thus if T' is a locally convex topology on F which is coarser than every
Ti and V is a balanced, convex neighborhood of 0 for T', then V is a neigh-
borhood of 0 for each Tt and consequently for T. It follows that T is finer
than T'.
Example 4. Let F be a vector space and let (Ej)i^i be the family of all
finite-dimensional subspaces of F. On each Ft we consider the unique
Hausdorff topology compatible with the vector space structure of EL
(Theorem 10.1). For each iGl let/t be the canonical injection from Ft
into F. Then the finest locally convex topology on F for which all the
are continuous coincides with the finest locally convex topology on F
(Examples 4.3 and 4.23). Indeed, if V is an absorbing, balanced, convex
set in F, then for each i G I the set V A Ft is absorbing, balanced, and con-
vex in Ft, hence a neighborhood of 0 in Ft.
[2, §12]
FINAL TOPOLOGIES
159
Proposition 1. Let F be a vector space, (ДХег a family of locally convex
spaces, and for each c g I let fL be a linear map from EL into F. Equip F
with the finest locally convex topology T for which all the mapsfL are continuous.
Let G be a locally convex space and g a linear map from F into G. Then g is
continuous for T if and only if all the maps g°fL are continuous.
Proof. If g is continuous, then by a general theorem from topology all
the maps are continuous. Suppose that all the maps are con-
tinuous and let ТУ be a balanced, convex neighborhood of 0 in G. Then
is a neighborhood of 0 in Ec, and thus the absorbing, bal-
anced, convex set is a neighborhood of 0 in F for T; i.e., g is
continuous. |
Proposition 2. Let G be a vector space, (ДХег a family of locally convex
spaces, I = (Jxgl J\ cl partitioning of the set I, and (Fx)xel cl family of
vector spaces. For each X E L let g\ be a linear map from F\ into G and for
each leJ\ let h\L be a linear map from EL into F\. Set fi = gx° h^. Equip
F\ with the finest locally convex topology for which all the maps h\L(i G Jx)
are continuous. Then on G the finest locally convex topology for which all the
gx are continuous coincides with the finest locally convex topology for which
all the fc are continuous.
Proof. Let V be an absorbing, balanced, convex set in G. Then
/ГЧЮ = is a neighborhood of 0 in E, if and only if ^(V)
is a neighborhood of 0 in Fx. |
Proposition 3. Let Gbe a vector space, (Efj^i and (Fx)xel two families
of locally convex spaces. For each c g I let fL be a linear map from EL into G
and for each X G L let gx be a linear map from F\ into G. Let T be the finest
locally convex topology on G for which the maps fc are continuous and T'
the finest locally convex topology on G for which all the maps gx are continuous.
Suppose that for every t G I there exists a continuous linear map u\L from
EL into some Fx so thatfc = 0xo^Xi- Then T' is coarser than T.
If, furthermore, for every X G L there exists a continuous linear map
Vcxfrom Fx into some Ec so that gx = fL°vLx, then the topologies T and T' are
identical.
Proof. The second statement follows obviously from the first one.
To prove the first assertion it is enough to observe that under the
hypotheses T' is a locally convex topology on G for which the maps /t are
continuous. |
Theorem 1 (Dieudonn6-Schwartz). LetF be a vector space andlet(En)n^
be a sequence of linear subspaces of F such that En cEn+i for all n eN and
F = |Jngn En. Suppose that each En is equipped with a locally convex
topology Tn and for each n the topology induced by Tn+i on En is Tn (i.e.,
160
LOCALLY CONVEX SPACES
[2, §12]
the map En En+i is a strict morphism). Let T be the finest locally convex
topology on F for which all the canonical injections fn :En F are continuous.
Then T induces on each En the topology Tn.
Remark 1. If the hypotheses of Theorem 1 are satisfied, then F is often
said to be the strict inductive limit of the sequence (En).
Proof. Let T' be the topology induced by T on En. Since fn is continu-
ous, T' is coarser than Tn. We have to prove that T' is finer than Tn.
Let Vn be a convex neighborhood of 0 in En for Tn. We shall construct a
sequence (Fn+p)peN, where Vn+p is a convex neighborhood of 0 in En+p
for Tn+p, Vn+p C and Vn+p П En = Vn for all p 1. Assuming
that such a sequence has been constructed, set
V = и vn+p.
pGN
Then V is a convex set in F such that for each к G N the set V П Ek is a
neighborhood of 0 in Ek for T&; that is, V is a neighborhood of 0 in F for T.
Since V П En = Vn, the set Vn is a neighborhood of 0 in En for T', and
thus T' is finer than Tn. The possibility of constructing the sequence
(Fn+p)pGN results by induction on p from part (i) of the following lemma. |
Lemma 1. Let F be a locally convex space, M a subspace of F and V a con-
vex neighborhood of 0 in M.
(i) There exists a convex neighborhood W of 0 in F such that W П M = V.
(ii) If M is closed, then for every Xq not belonging to M there exists a convex
neighborhood Wo of 0 in F such that Wq О M = V and xQ & Wq.
Proof, (i) By the definition of the induced topology there exists a convex
neighborhood U of 0 in F such that U П M C F. Let W be the convex
hull of U U F. Since W D U, the set W is a neighborhood of 0 in F. Also
W П M D V; hence we must prove that W П M c F. By Proposition 4.2
an element z G W can be written in the form z = ax + /Зу, where x G F,
У G U, 0 a 1, a + /3 = 1. Let us now assume that z also belongs
to M. If /3 # 0, then у = I3~} (z — ax) G M and thus у G U П M C F,
i.e., z G V. If /3 = 0, i.e., a — 1, then z = x G F.
(ii) If M is closed, then by Proposition 5.5 the quotient space F/M is a
Hausdorff space. Hence there exists a convex neighborhood Uq of 0 in F
such that Uq П M C F and Uq П (x0 + Mj = Let IFO be the convex
hull of Uq U F. Again Wo is a neighborhood of 0 in F for which
Wq П M = V. Suppose that Xq g Wq. Then Xq = ax + /Зу, where
x G F, у G Uq, O^a^l, afi-/3=l. Hence (3y -- xq — ax would
belong to Uq П (z0 + M) since /Зу — /Зу fi- a0 G Uq and Xq — ax G
Xq 4- M. But this is impossible. |
[2, §12]
FINAL TOPOLOGIES
161
Corollary 1. Under the conditions of Theorem 1, if each Tn is a
Hausdorff topology, then T is a Hausdorff topology.
Proof. Let x e F, x # 0. There exists an index n e N such that
x e En. Since the topology Tn is Hausdorff, there exists a neighborhood
Vn of 0 in En for Tn such that x g Vn. By Theorem 1 there exists a neigh-
borhood V of 0 in F for T such that V C\ En = Vn. Then x & V and it
follows from Proposition 3.2 that T is a Hausdorff topology. |
Corollary 2. Under the conditions of Theorem 1, if each subspace En is
closed in En+i for the topology Tn+1, then En is closed in F for T.
Proof. It is clear by mathematical induction that En is closed in each
En+p for Tn+p (p 1). Let x e F, x & En. There exists p e N such that
x e En+p. Since En is closed in En+p, there exists a neighborhood Vn+p
of 0 in En+p for Tn+j9 such that (x + Vn+p) П En = 0. By Theorem 1
there exists a neighborhood V of 0 in F for T such that V A En+p = Vn+p.
But then
(x + V) П En =
i.e., ZEn is open in F for T. |
Lemma 2. A set В in a topological vector space F is bounded (Definition 6.2)
if and only if for every sequence (xn)nGN of elements of В and every sequence
(Xn)nGN of positive scalars converging to zero the sequence (X A)nGN tends to
0 in F.
Proof. Suppose that В is bounded and let V be a balanced neighborhood
of 0 in F. There exists an a > 0 such that Xxn e V for |X| a and n e N.
By hypothesis there exists an n0 e N such that Xn a for n n0.
Hence Xnxn e V for n n0.
Suppose that В is not bounded. There exists a balanced neighborhood
U of 0 in F such that В £ nU for all n e N. Choose xn e В n C(nJ7) and
Xn = 1/n. Then
Xnxn — (1 /n)xn U
for all n 1 and (Xnxn) does not tend to 0 in F. |
Theorem 2 (Dieudonn6-Schwartz). Let F be a vector space and let (En)n^
be a sequence of linear subspaces of F such that En C En+i for all n e N
and F = (JnGN En. Suppose that each En is equipped with a locally convex
topologij Tn, that Tn+1 induces the topology Tn on En, and that En is closed
in En+i for Tn+1. Equip F with the finest locally convex topology T for
which all the canonical injections fn :En F are continuous. Then a set В
in F is bounded if and only if В is contained, in some En and is bounded there.
Proof. If В is a bounded set in En, then it- is also bounded in F since the
map fn: En F is continuous.
162
LOCALLY CONVEX SPACES
[2, §12]
Next suppose that В is not contained in any subspace En and choose a
sequence (xn) such that xn E В n ZEn. There exists a subsequence (yk)
of (xn) and a strictly increasing sequence (nk) of positive integers such that
for all к 1 we have у к Й ЕПк, ук G Enk+1. By part (ii) of Lemma 1 there
exists an increasing sequence (Vk) of convex sets such that Vk is a neigh-
borhood of 0 in Enk, П Enk = Vk and ук/k £ 7&+i. Then
V = |Ja;gn Vk is a neighborhood of 0 in F for T and у к/к g V for all
к 1; i.e., the sequence ук/k does not tend to 0 in F. It follows from
Lemma 2 that В cannot be bounded.
Thus if В is bounded in F, it must be contained in some En. Let us show
that it must be bounded there. If Vn is a balanced neighborhood of 0 in
En for Tn, then by Theorem 1 there exists a balanced neighborhood V of
0 in F for T such that V П En C Vn. We have В G XV for some X G K;
hence В G XVn. |
Remark 2. Douady [22] proved that Theorem 2 is false if the sequence
(En) is replaced by an uncountable family of subspaces.
Theorem 3 (Kothe). Let F be a vector space and let (En)n^ be a sequence
of linear subspaces of F such that En G En+1 for all n E N and
F = |JneN En. Suppose that each En is equipped with a locally convex
topology Tn and let T be the finest locally convex topology on F for which all
the canonical injections fn:En F are continuous.
Then F is complete with respect to the topology T if and only if for every
Cauchy filter % on En with respect to the topology induced by T on En there
exists an index p n such that § is convergent in Ep with respect to the
topology induced by T on Ep.
Proof. Suppose that F is complete with respect to T and let § be a
Cauchy filter on En with respect to the topology induced by T on En.
Then § is the basis of a Cauchy filter on F and so converges to some point
x g F. But x E Ep for some p n and g converges to x in Ep for the
topology induced by T on Ep.
Conversely, suppose that the condition is satisfied and let § be a Cauchy
filter on F. We shall use the following:
Lemma 3. Let ® be the Cauchy filter whose basis is formed by all the sets
M + V, where M runs through § and V through the filter of neighborhoods
of 0 in F. Then there exists an integer n such that ® induces a Cauchy filter
on En.
Let us assume the lemma for a moment and conclude the proof of the
theorem. Let ®n be the Cauchy filter induced by ® on En. Then ®n
converges in some Ep to a point x G Ep which therefore adheres to ®.
It follows from Proposition 9.1 that ® converges to x in F and a fortiori
which is finer than ®, converges to x. |
[2, §12]
FINAL TOPOLOGIES
163
Proof of Lemma 3. If there exists an index n G N such that the sets
(M + V) A En are all nonempty, then the lemma is proved. We assume
therefore that this is not the case and obtain a contradiction. Let (7n)nGN
be a decreasing sequence of balanced, convex neighborhoods of 0 in F and
let (Mn)nGN be a sequence of sets Mn G ft such that Mn — Mn C Vn and
(Mn + Vn) A En = 0 for n G N. If we denote by W the convex hull in
F of the set IJ^gn i(Vn A En), then W is a neighborhood of 0 in F. We
shall show that there exists no set Q G ft such that Q — Q C W. This,
however, will contradict the fact that ft is a Cauchy filter; it is the desired
contradiction.
Let Wn be the convex hull in F of the set
J(7i A Er) U |(72 A E2) U • • • U J(7n-i П £4-1) U iVn.
Then Wn is a neighborhood of 0 in F such that W C Wn. Let Pn G ft be
such that Pn — Pn C Wn. Then (Pn 4- Wn) A En = 0. Indeed, let
Xq g Pn П Mn G ft. By Proposition 4.2 the elements у G Pn have the
form
n
У = xo + Yi aiXi’
i=l
where x{ e n EJ for 1 jS i n — 1, xn e jVn, 04 0,
n
£ «г = 1,
г=1
and therefore the elements z G Pn + Wn have the form
n n
Z = Xq 4“ 01{Х{ -J-
г=1 г=1
where U G A Ef) for 1 i n — 1, tn G j7n, ft 0,
n
£ & = i.
i=l
Now
Oi-nXn firfri 2'7n “F 2 7n 7n.
Since Xq g Mn ano (Mn т 7n) r ?n = 0, the element Xq 4- anxn + Mn
is not in En. On he )ther hand,
Уj e^iXi 4- 3{ti G En_i c En\
i=l г=1
hence z does not belong- to En, i.e., :Pr/ 4- Wn) A En = 0.
164
LOCALLY CONVEX SPACES
[2, §12]
Suppose now that there exists a set Q G g such that Q — Q G W. Let
ijq G Q. Then there exists an index n G N such that yQ G En. We shall
prove that for this index n we have Q A Pn = 0, which contradicts the
fact that § is a filter. Let у G Pn. Then (y + Wn) A En = 0 and in
particular уъ & у + Wn-, i.e., y0 — у & Wn and a fortiori yQ — у & W.
But then у cannot belong to Q since Q — Q C W. |
Corollary. Let F be a vector space and let (En)n&t be a sequence of linear
subspaces of F such that En C En+i for all n G N and F = IJ^gn En.
Suppose that each En is equipped with a locally convex topology Tn such that
for each n the topology induced by Tn_|_i on En is Tn and En is closed in
En+i for Tn+i. Let T be the finest locally convex topology on F for which all
the canonical injections fn:En F are continuous. Then F is complete if
and only if all the En are complete.
Proof. By Theorem 1 the topology T induces Tn on En. If En is complete,
then every Cauchy filter on En (for T or for Tn) converges in En. Hence
by Theorem 3 the space F is complete. Conversely, it follows from Corol-
lary 2 of Theorem 1 that En is closed in F. Hence if F is complete, it follows
from Proposition 9.3 that En is complete. |
Example 5. Let fi be an open subset of Rn and let 3C(fi) be the vector
space of all continuous functions on fi whose support (cf. Example 3.4) is
contained in some compact subset of fi. The space 3C(fi) is the union of
the linear subspaces 3C(X) introduced in Example 4.9, where К runs
through the compact subsets of fi. We equip JC(fi) with the finest locally
convex topology T for which all the canonical injections 3C(2£) 3C(fi)
are continuous.
If К С K', then JC(ZC) G 3C(2C), and for f G JC(ZC) the norm of f in
3C(ZC) is the same as its norm in JCfK7)- Hence in particular JC(ZC') induces
on JC(ZC) its own topology; i.e., the injection JC(ZC) <=* 3C(2C) is a strict
morphism. Let (Kk)k&N be the sequence of compact subsets of fi con-
structed in Example 6.3 such that Kk C Kk+i for all к G N and every
compact subset of fi is contained in some Kk. Then 3C(AjO C 3C(^+i) for
all к G N and
3C(O) = U K(Kk).
kEN
It follows from Proposition 3 that the topology T on JC(fi) can also be
defined as the finest locally convex topology for which the canonical
injections fk: 3C(Kk) <-> 3C(fi) (fc G N) are continuous.
By Example 9.5 the space JC(-Kjb) is complete, hence it is a closed subspace
of 3C(2^fc+i)- It follows therefore from all the above results that 3C(fi) is a
complete Hausdorff space which induces on each 3C(2£) its own topology.
[2, §12]
FINAL TOPOLOGIES
165
Each subspace 3C(7Q is closed in 3C(fi), and a set В is bounded in 3C(fi) if
and only if there exists a compact subset К of fi and a number /z > 0
such that all f G В have their support in К and | f(x) | д for all x G fi
and f e B.
The topology T on 3C(fi) is strictly finer than the topology Tw of uniform
convergence on fi; i.e., the injection 3C(fi) e0(fi) (cf. Example 4.16 or
Exercise 1.2.7) is continuous but not a strict morphism. Indeed, let A be a
continuous, strictly positive function on fi and denote by Vh the set
of all f g 3C(fi) such that | f(x)\ h(x) for all x. The set Vh is ab-
sorbing, balanced, and convex. Furthermore, if дх > 0 is the minimum
of h on the compact subset К of fi, then Vh A 3C(7Q contains the ball
{f] maxsGtf |/(x)| g рк} in 3C(7Q; hence Vh is a neighborhood of 0 in JC(fi)
for T. However, if h is not bounded away from zero in fi, then Vh is not a
neighborhood of 0 for Tu.
We find that T is a fortiori finer than the topology of uniform conver-
gence on compact subsets of fi (Examples 3.3 and 4.6). Finally, let us recall
that not only T but also Tu induces on each 3C(7£) its own Banach space
topology (cf. Example 5.9).
The space 3C(fi) will have an important role in measure theory: we shall
define a measure on fi as a continuous linear form on 3C(fi).
Example 6. Let fi be an open subset of Rn and let 3J(fi) be the vector
space of all functions defined on fi whose partial derivatives of all orders
exist and are continuous and whose support is contained in some compact
subset of fi. For each compact subset К of fi let £)(7Q be the linear subspace
of 3J(fi) formed by those functions whose support is contained in K. Then
the space 3J(fi) is the union of all the subspaces £)(7Q; it plays a funda-
mental role in the theory of distributions.
We have equipped each space £)(7Q with a locally convex topology
(Examples 3.4 and 4.10) for which it is a Fr6chet space (Example 9.5).
We equip 3J(fi) with the finest locally convex topology T for which all the
canonical injections £)(7£) 3J(fi) are continuous.
If К C K', then £>(K) С 3X7C) and it follows immediately from the
definition of the topologies of these two spaces that £)(/<') induces on
£)(7Q its own topology. Let (Kk)kf=w be an increasing sequence of compact
subsets of fi such that Kk C Kk+i and every compact subset of fi is con-
tained in some Kk (cf. Example 6.3). Then £)(Л^) C 3J(^+i) for all
к G N and 3J(fi) = IJ^gn £>(Kk). It follows from Proposition 3 that T
is also the finest locally convex topology on 3J(fi) for which the canonical
injections £>(Kk) £)(fi) (k G N) are continuous.
The subspace £)(Л^) is complete and thus closed in 3J(^+i)- Hence,
by the above results, 3J(fi) is a complete Hausdorff space which induces
on each its own topology. Each subspace £)(7Q is closed in 3J(fi),
166
LOCALLY CONVEX SPACES
[2, §12]
and a set В С &(Q) is bounded if and only if there exists a compact subset
К of Q and positive numbers pp, where p = (pi, • • •, Pn) £ Nn, such that
all f E В have their supports contained in К and for any p E Nn we have
IdVCOl = Mp for all я G £2, / G B.
Before proving other properties of the spaces 2)(0) we have to consider
in detail the behavior of infinitely differentiable functions with compact
support. It is not at all trivial that such functions exist. To construct an
example, one observes with Cauchy that the function defined on R whose
value for £ > 0 is e~1/f2 and which vanishes for £ ^ 0 is infinitely differ-
entiable ([2], Exercise 13-30, p. 427). Similarly, the function <p defined by
<p(x) = exp x _X |x|2^ if bl < 1,
v(x) = 0 if |x| 1 (1)
is infinitely differentiable on Rn and its support is the unit ball
Bl = {x ! |x| 1}
of Rn. In particular, the function
has the ball В€(я0) — {x ! |z — ^ol = f°r its support, which shows
that if Q # 0, then 3D(Q) contains nonzero elements. If we divide <p by
the positive constant fRn <р(я) dx, we obtain a function p which has the
following properties:
(i) p is infinitely differentiable in Rn,
(ii) Supp p = Bb
(iii) р(я) > 0 for |z| < 1,
(iv) p(x) 0 for all x E Rn,
(v) Jr«pO) dx = 1.
For e > 0 the function p€ defined by
= (2)
has properties (i), (iv), (v) and furthermore,
(ii') Supp pe = B€,
(iii') Pe(x) > 0 for |z| < e.
Let X be a topological space and (AJlgz a family of subsets of X. We say
that (At) is locally finite if every point x E X has a neighborhood V such that
V Q Al = 0 except for finitely many indices t E I.
[2, §12]
FINAL TOPOLOGIES
167
Lemma 4. Let ft be an open subset of Rn and (Uk)k^N cl countable locally
finite open cover of ft. There exists an open cover (Vk)k<=N of ft such that
Vk C Ukfor each к G N.
Remark 3. A topological space X is said to be normal if it is a Hausdorff
space and if the following axiom is satisfied:
(N) Given a closed subset A of X and anopen set Vcontaining A, there exists
an open set W containing A such that W С V.
An open subset of Rn, and more generally, any metric space is normal. In-
deed, for every x G A let B(x) be a ball with center x, radius a(x) contained
in V. If C(x) is the open ball with center x and radius |a(x), we can take
W = C(x). By Exercise 10.1(e) any compact space is normal. We
shall prove Lemma 4 under the sole assumption that ft is a normal space.
Proof. We shall define by induction a sequence (Vk) of open sets
such that
(a) Vk C Uk for every к G N.
(b) For every m G N the sets Vk with к m and the sets Uk with
к > m cover ft.
This will prove the lemma since each x G ft is contained only in finitely
many sets Uk, say Uk„ • • • , Ukv Taking m > ki (1 i Z), it follows
from (b) that (Vk) is a covering of ft.
Suppose that we have defined the sets Vk with к < p such that (a) is
satisfied for к < p and (b) for m < p (with an obvious interpretation we
may also suppose p = 0 to start the induction). Write
w = (и n) U (U Uk\ •
' ^k>p
The set W is open and taking m = p — 1, it follows from (b) that
Cf/p C W. Since ft is a normal space, there exists an open subset Z of ft
such that C Up C Z C Z C W. If we set Vp = CZ, we have Vp C CZ C Up,
and since CZ is closed, also Vp C Up. Furthermore, Vp U W = ft; i.e.,
(b) is satisfied for m = p. |
Proposition 4. Let ft be an open subset of Rn and (Uk)ken cl countable
locally finite open cover of ft by relatively compact sets. Then there exists a
family (fik)ke^ of functions belonging to ©(ft) such that
(a) &k(x) = 0 for all x G ft,
(b) Supp pk C Ukfor each к G N,
(c) EfcGN ftt(z) = 1 for all X G ft.
Proof. By Lemma 4 there exists an open covering (Vk) of ft such that
Vk C Uk for all к G N.
168
LOCALLY CONVEX SPACES
[2, §12]
Consider a fixed index к G N and for each x G. Vk let B(x) be a ball with
center x contained in Uk- Since V к is compact, it can be covered by the in-
teriors of a finite number of these balls, say . , Bi, Let Xi be the
center and the radius of Bi (1 i I) and define the function pi by
x ь-> pe.(x — х^, where p€ is the function introduced in Eq. (2). Then
Pi(x) > 0 in Bi, Supp pi = Bi and pi G £>(£2). Consequently, if we set
i
7 k = Pi)
i=l
then > 0 for x G Vk, Supp 7k C Uk and 7k E £>(£2).
The sum 7 = SfceN 7k is well-defined since the cover (Uk) is locally
finite, and 7 is infinitely differentiable for the same reason. Furthermore,
7(x) > 0 for all x G £2. Setting 0k = 7k/7, we obtain the required
functions. |
Lemma 5. Let £2 be an open subset of Rn and (£2t)ter an open cover of £2.
There exists a countable locally finite open cover (Uk)ken of £2 by relatively
compact sets Uk, which is a refinement of (£2t); i.e,, for each к G N there exists
an l E I such that UkCtk-
Proof, Let (Ki)iEN be the sequence of compact subsets of £2 constructed
in Example 6.3 such that Ki C 2h+i, = UkeN Ki, and set Ki = 0 for
i 0. The set Li = Ki n СЛ'г-х is compact and Vi = Ki+i П CKt-__2
is an open neighborhood of Li, For each point x G Li there exists an open
neighborhood W(x) contained in Vi and in some set £2t. Since Li is com-
pact, it is covered by a finite number of these sets W(x), say
Wi,!,,,,^,^,
The family of all sets Wa (1 j l(i), i G N) form a countable open
cover of £2 by relatively compact sets, which is a refinement of (£2t). Let us
show that it is locally finite. Let z G £2 and let i be the smallest integer for
which z G Ki, Then z & Ki-\ and there exists a neighborhood T of z
such that T C Ki and T n Ki-2 = 0- Consequently, T meets at most
those sets Wmj for which i — 2 m i + 1, which are finite in
number. |
Theorem 4. Let £2 be an open subset of Rn and (^Ic)lei an open cover of £2.
There exists a family (a^Ei of functions possessing continuous partial
derivatives of all orders and having the folloicing properties:
(a) at(x) 0 for all xe^l,
(b) AL = Supp aL C £2t for each l g I,
(c) the family (A^ei is locally finite,
(d) Sigi oic(x) = 1 for all x G £2.
[2, §12]
FINAL TOPOLOGIES
169
Proof. By Lemma 5 there exists a countable locally finite open refine-
ment (CZfc)fcGN of (ftt) composed of relatively compact sets Uk. Consider
a sequence (0 k) of functions belonging to 3D (ft) and having the properties
(a) through (c) of Proposition 4.
There exists a map к: N —» I such that Uk C SlK(k) for each k G N. Let
us set
(Xi = 2] 0k
K(k) — L
for t g I. This sum is well-defined since the family (Supp 0k)k&i is locally
finite, and the functions have continuous partial derivatives of all orders
for the same reason. Clearly afx) 0 for all x G ft.
Next let Ci be the union of all the sets Supp 0k with к(к) = t. Clearly
Ci C fti. On the other hand, let x G AL. Then every neighborhood of x
meets some set Supp 0k with k(/c) = t, and there exists a neighborhood
of x which meets only finitely many sets Uk and a fortiori only finitely
many sets Supp 0k. Therefore there must exist an index fc0 with K(kQ) = c
such that x G Supp 0ko. Hence x G Ct, that is, AL C CL and we have
proved that AL Q ftt.
The family (Ct)tez is locally finite. Indeed, for each x G ft there exists
a neighborhood V of x and a finite subset H of N such that V n Uk = 0
for fc g H. But then V П CL = 0 for all t which do not belong to the finite
set k(H).
The family is a fortiori locally finite. Finally, for every x G ft
we have
i = 2u л(х) = 2d (£ - 2u «л*)-1
fcGN iEI \(k)=c ' i<=I
Remark 4. The family (at) constructed in Theorem 4 is called a locally
finite, infinitely differentiable partition of unity subordinated to the cover
(ftt). In Theorem 4 the sum in (d) is well defined because of condition (c).
It also follows from condition (c) that each compact subset of ft meets only
finitely many sets At. Finally, if the sets ftt are relatively compact, then
(b) implies that G 3D(ft) for all t G I.
Proposition 5. Let ft be an open subset of Rn, A a closed subset of ft, and
V an open subset of ft containing A. There exists an infinitely differentiable
function <p such that 0 <p(x) g 1 for x G ft, <p(x) = 1 for x G A, and
<p(x) = 0 for x G CP.
Proof. Apply Theorem 1 to the cover of ft formed by the two sets fti = V
and ft2 = CA. If («i, a2) is the partition of unity subordinated to (ftb ft2),
then we can choose since сц + «2 = 1 and Supp a2 G CA
imply that ai(x) = 1 for x G A. |
We can now return to the study of the spaces 3D (ft).
170
LOCALLY CONVEX SPACES
[2, §12]
Example 7. It is useful to indicate explicitly a fundamental system of
neighborhoods of 0 in D(O). Let m = be an increasing sequence
of positive integers and e = (tk)k^i a decreasing sequence of strictly posi-
tive numbers. Denote by Vmti the set of all functions / e which for
every к 1 satisfy \dpf(x)| tk if |p| = mk and x e Q Cl C^_i, where
(Kk)k<=N is the sequence of compact subsets of 2 considered e.g. in Ex-
ample 6. The set Vm<t is balanced and convex and for each к 1 the
intersection Vm^ Cl contains a neighborhood of 0 in ©(КД to wit,
the set of those functions /е©(К&) which satisfy |dp/00| = ek for
|p| тпк and x e 0. Thus is a neighborhood of 0 in ©(0). Con-
versely, let V be a balanced, convex neighborhood of 0 in ©(0). Then for
each к e N the set V П ©(K^+i) is a neighborhood of 0 in Х>(2Гл_|_1);
hence there exists an integer Ik and a number i)k > 0 such that
V A ©(К&+1) contains the set of those functions / e ©(K^+i) which
satisfy \dpf(x)| т]к for x e Kk+i and |p| Ik. Choose an infinitely
differentiable partition of unity (ak)k^i subordinated to the cover
of Q. For f e ©(0) we can write
f= z А (24/),
k^l
where the sum is actually finite since the support of / is contained in some
Kk. If all the functions 2kakf belong to F, then / belongs to V since it is
balanced and convex.
By virtue of the Leibniz formula (Proposition 5.3), dp(otkf) is a finite
linear combination of products of the form dqak • drf, where |g| |p| and
|r| |p|. Since the sequence (ak) has been fixed once and for all and since
only the values taken by/in CKk—i A Kk+i intervene, it follows that there
exists a constant Xk such that
law I ъ
for |p| mk and x e Q A CK^-i imply
|ap(24/)|
for |p| mk and x e 0. Suppose now that mi and ег- have already been
chosen for 0 i к — 1 and determine mk and tk so that mk mk—i,
mk Ik, ^k tk-i, ХкЪс Vk- Let Vm>t be the neighborhood of 0 defined
by the sequences m = (mk) and e = (€&) just constructed. If / e
then for every к 1 the function 2kakf, whose support is contained in
CKfc-1 П Kk+i C Kk+i, belongs to V A ©(K^+i) С V. Hence / e V;
i.e., V contains Vm>€.
[2, §12] FINAL TOPOLOGIES 171
We can also indicate a family of semi-norms which determines the
topology of £)(Q). We consider families 0 = (0p)P(=Nn of continuous func-
tions 0P defined in 9 and such that the family of sets (Supp 0р)рв^п is locally
finite. For each 0 and / 6 S)(Q)
qe(f) = max max \0p(x) dpf(x)\, (3)
where the expression on the right-hand side exists since Supp/ meets
Supp 0p only for finitely many multi-indices p. Let us show that the family
of semi-norms (qe), where 0 runs through all possible families, has the
required property.
Conserving our earlier notations, let Vm^ be a neighborhood of 0 in
30(0), where we may obviously assume that the sequence m = is
strictly increasing. If p G Nn, < |p| mk) we define
l^k-1
(with a0(x) = 0). Suppose that qe(f) 1 and consider a point
x G CK]c—i П Kk.
Then for |p| mk we have
{еГ1ак-1(х) + tk+iWc(x)} Ю>)1 1
and a fortiori |dp/(#)| = Q since ек e^+i and ак-\(х) + ak(x) = 1.
Hence / G Vm^
Conversely, let 0 = (0p) be the family which defines qe of (3). Deter-
mine mk inductively so that mk W-i and Kk П Supp 0p = 0 for
|p| > mk. Set
Pk = max max |0p(z)|
Ipl ^mjc x^Kjc
and determine ek > 0 inductively so that ek tk-i and ekpk 1. If
|dp/CO| 6fcfor |p| and я G CiCfc-i П Kk (k 1), then^(/) 1.
Obviously instead of (3) we can consider the semi-norms defined by
£ max |0p(x) dpf(x)\.
pen71
Example 8. For a fixed positive integer m denote by 3DW(£2) the vector
space of all functions / defined in the open subset Q of Rn, whose partial
derivatives dpf exist and are continuous for |p| m and whose support
is contained in some compact subset of Q. For m = 0 we obtain the space
3C(0) of Example 5.
172
LOCALLY CONVEX SPACES
[2, §12]
Analogously as in Examples 5 and 6, the space £)W(Q) is the union of all
spaces S>m(K) of Example 4.9, where К is a compact subset of 2. We
equip £)W(Q) with the finest locally convex topology for which the maps
S)m(K) £)m(Q), or equivalently the maps £>m(Kk) £)W(Q), are con-
tinuous, where (K^) is the often-mentioned sequence of compact subsets
of 2.
Again £)m(Q) is a complete Hausdorff space which induces on each
its own topology. Each subspace is closed in £)m(Q). A set
В C S)W(Q) is bounded if and only if there exists a compact set К С ft
and for each p G Nn with |p| ma number pp > 0 such that Supp f С К
and |Эр/(х)| pp for all/ G B, x G 2, and |p| m.
As before, we shall also write ЗУ0 (ft) for ©(ft). Instead of ©m(Rn) we
write ©m (0 m oo).
Let us prove that for each m (0 m oo) the injection ©m Sm
(cf. Examples 4.13 and 4.14) is continuous. By virtue of Proposition 1 we
have to prove that for every compact set К C Rn the map £>m(IC) Sm
is continuous. Let fc G N and denote by M the maximum of (1 + M2)*
on K. Then for/ G S>m(K) and |p| m we have
max |(1 + |z|2)*dp/(s)| = M max |dp/(x)|,
xERn xEK
from which the conclusion follows (Proposition 5.2).
For any open set ft C Rn and 0 m oo the map ©m(ft) (BoXft)
is continuous. This follows from Proposition 1 and from the fact that for
every compact set К С ft the map ^m(K) (Bo*(ft) is continuous
(Example 5.9).
Let m > m', then the maps
©(ft) ©m(ft) ©m'(ft) jc(ft)
are continuous. Indeed, for every compact set К С ft the map
is continuous by Example 5.7 and ^m\K) ©w'(ft) by definition. Hence
by Proposition 1 ©m(ft) ©m\ft) is also continuous, where we may take
m = oo and mf = 0.
The vector space ©(ft) is clearly the intersection of all the spaces ©m(ft)
with m G N. For reasons which will appear in Chapter 4, §4, we denote
by S)F(ft) the vector space 5) (2) equipped with the coarsest topology for
which all the maps 2) (2) ©m(ft) are continuous. ©F(ft) is a locally
convex Hausdorff space and by the corollary to Proposition 11.3 it is com-
[2, §12]
FINAL TOPOLOGIES
173
plete. The topology of £)y(Q) is coarser than the topology of $)(Q) defined
in Example 6, i.e., the identity map $)(Q) £)y(Q) is continuous. Indeed,
we have the diagram:
/ (7
£>(K) ЗХФ °* £>F(ty
г fi к
S>m(K) £W(Q).
We know from Example 5.7 that h is continuous. Since I is continuous by
definition, we see that l°h is continuous. But k°g°f = l°h\ hence g°f
is continuous by a property of the initial topology recalled in §1. Hence g
is continuous by Proposition 1. We shall see in Chapter 4, §4 that the
topology of £)y(Q) is strictly coarser than the topology of $)(Q).
Example 9. Let m be a positive integer or the symbol oo. We denote by
Q™ the union of the spaces S™ (Examples 4.11 and 4.12) as к varies in Z.
Instead of we also write Oc-
A function f belongs to 0™ if and only if it is of the form f = Pg, where
P is a polynomial and g G (B™. Indeed, if f G Q™, then f belongs to some
S™; and since S™ G S™ for к fc', we may suppose that к = — I < 0.
But by Example 5.8 the function g = (1 + |я|2)”У belongs to (B™; hence
f = (1 + H2)lg. Conversely, if f = Pg, where g G (B™ and P is a poly-
nomial of degree I, then clearly / G S™ for к = — I.
We equip 0™ with the finest locally convex topology for which all the
maps S™ are continuous. The map &c 8™ is continuous. By
virtue of Proposition 1 we have to prove that for each к G Z the map
S™ E>m is continuous. Let If be a compact subset of Rn. Then we have
max |dp/(^)| = max (1 + |x|2)-Amax |(1 + |x|2)A dpf(x)\,
xEK xEK xERn
from which the conclusion follows by Proposition 5.2.
In particular, 0™ is a Hausdorff space since it has a topology finer than
a Hausdorff topology. Observe that we cannot apply the corollary of
Theorem 1. In fact, as we shall see in Chapter 4, §11, the linear subspace
2) is dense in S™ and a fortiori is dense in S™. Now since is com-
plete (Examples 9.6 and 11.8), if S™ were a strict morphism, we
would have = S™, which is obviously not the case.
If 0 mf < m oo, then the map Q™ $ is continuous. Again
by Proposition 1 we have to show that for every к G Z the map S™ tic
is continuous. Now this map is composed of the maps S™ and
S™' of which the first is continuous by Example 5.7 and the second
by the definition of the topology of tie'.
174
LOCALLY CONVEX SPACES
[2, §12]
Exercises
1. (a) Let be a family of locally convex spaces. On Uter EL define
the topology T*, for which a fundamental system of neighborhoods of a point
(xi) is given by the setsHiez VL, where for each t G 1 the set VL is a neighborhood
of xL. Show that T* induces on ILez EL a locally convex topology To which is
coarser than the locally convex direct sum topology T on Ibei EL.
(b) Show that if the index set I is countable, then the topologies To and T
coincide on LLei EL. (Hint: Assuming that 1 = N*, the balanced, convex hull
of jn(Vn) contains Пп^1 (l/2n) Vn and is contained inJIn^i Fn.)
2. Let F be a vector space and let (Д)^ег be a family of linear subspaces of F.
Suppose that each EL is equipped with a locally convex topology Tt and let T
be the finest locally convex topology on F for which the canonical injections
fL: EL F are continuous. Show that T is defined by those semi-norms on F
whose restrictions to each EL are continuous for Tt.
3. Let F be a vector space, (Ei)Lei a family of locally convex spaces, and for
each index t G 1 let fi be a linear map from EL into F. Define a linear map
from the locally convex direct sum ILei EL into F by
(S Xt) = £ Afo)-
\ei ' iei
Show that the finest locally convex topology on F for which the maps ft are
continuous coincides with the finest locally convex topology on F for which the
map <p: liter EL -+ F is continuous.
4. Let 1 be a directed set and (£\) ter a family of locally convex spaces. Sup-
pose that for every pair (t, к) of indices such that t к we have a continuous
linear map fKL: EL —> EK and that these maps satisfy the following two condi-
tions :
(i) fu is the identity map for each t G I,
(ii) fu = for l к X.
A locally convex space F is said to be a direct (or inductive) limit of the direct
(or inductive) system (EL, fKL) if the following conditions are satisfied:
(iii) For every l G I there exists a continuous linear map fi:EL -+ F such
that/i = fK°fKi for t к.
(iv) Given a locally convex space G and a family of continuous linear maps
gdEi —> G such that gL = gK°fKi for l к, there exists a unique continuous
linear map g:F Gs uch that gL = g° fL for all l G I, i.e., such that the diagram
is commutative.
[2, §12]
FINAL TOPOLOGIES
175
(a) Show that given a direct system there always exists a direct limit which
is unique up to an isomorphism. (Hint: Consider the quotient space of Uigi El
modulo the subspace generated by the vectors xL — where xL G EL and
t к.)
(b) Let F be the direct limit of the direct system (Ec, fKL). Show that if
fc(xL) = 0 for some xL G Eh then there exists some к t such that f,a(xi) = 0.
5. Let I be a directed set, F a vector space, and (E^^i a family of subspaces
of F such that EL C EK for i к and F = IJiez El. Suppose that each EL is
equipped with a locally convex topology Tt and for t к the topology TK
induces Tt on EL. Let T be the finest locally convex topology on F for which
all the canonical injections fL:EL F are continuous. Suppose that there
exists on F a locally convex topology T' which induces on each Et the topology
Tt. Show that T induces on each EL the topology Tt. Apply this result to the
space 3C((2), taking for T' the topology (cf. Example 5).
6. Let F be a vector space and let (#ft)nGN be a sequence of subspaces of F
such that En C En+i, En # En+\ f°r all n G N and F = IJnGN En. Suppose
that each En is equipped with a locally convex Hausdorff topology Tn such
that for each n the topology induced by Tn+i on En is Tn and the linear sub-
space En is closed in En+i for Tn+i. Equip F with the finest locally convex
topology T for which all the canonical injections fn'En F are continuous.
(a) Show that if each En is complete for Tn, then F is not metrizable. (Hint:
Use Baire’s theorem, Chapter 1, §8.)
(b) Show that there exists a sequence of bounded sets (Bk)kEN in F such that
for no choice of the sequence (XjcHgn of strictly positive numbers is the set
bounded (cf. Proposition 6.3).
7. Prove that the function (p defined by formula (1) has all the properties
claimed in the text.
8. (a) Prove that the union of a locally finite collection of closed subsets of
a topological space is closed.
(b) Show that the sets CL which figure in the proof of Theorem 4 are closed,
and using this, give a shorter proof of the inclusion AL C Cc.
9. (a) Show that the sets Vh introduced in Example 5 form a fundamental
system of neighborhoods of 0 in 3C((2).
(b) Again let h be a continuous, strictly positive function defined on the
open set (2 C Rn. Let m G N and denote by Vh the set of all functions
f G 3DW(£2) such that |дрУ(я)| h(x) for |p| m and x G £2. Show that the
sets Vh form a fundamental system of neighborhoods of 0 in 32)w((2).
10. Let (EL)Lei be a family of locally convex Hausdorff spaces and let E be
their locally convex direct sum (Example 2). Show that a subset В of E is
bounded in E if and only if there exists a finite subset H of I such that В is
contained in the subspace F = П^я Ei and В is bounded in F. (Hint: To show
that the condition is necessary, use an argument similar to the one used in the
proof of Theorem 2.)
CHAPTER 3
Duality
§7. The Hahn-Banach theorem
Theorem 1.6.1 can be generalized in the following way.
Theorem 1. Let E be a vector space over K, q a semi-norm on E, and M
a linear subspace of E. Let f be a linear form defined on M which satisfies
| f(x)\ q(x) for all x G M. Then there exists a linear form g on E such
that g(x) = f(x) for all x G M and |^(x)| q(x) for all x G E.
The theorem quoted above follows from this result taking
<z(*) = ll/ll • IK
It is possible to give a proof of Theorem 1 following the lines of the proof
given in Chapter 1, §6. We shall leave this, however, as an exercise to the
reader. Instead we shall give a different, more geometric proof.
A subset C of a vector space E is called a cone with vertex at Xq if for
every x G C the half-line {x0 + X(x — x0) ! X > 0} belongs to C. If
x0 g C, the cone is said to be pointed; if xQ g C, the cone is blunt (epointe
in French). In what follows we shall mainly consider cones with vertex
at 0. Any cone can be obtained from a cone with vertex at 0 by translation.
A subset C of E is a convex cone with vertex at 0 if and only if XC С C
for X > 0 and С + С С C. Indeed, the first condition means that C is a
cone with vertex at 0. If C is convex, then for x, у G C we have
X + у = 2(%x + %y) G C,
i.e., С + С С C. Conversely, if С + С С C, then for a + /3 = 1, a > 0,
/3 > 0 and x, у G C we have ax G C, fty G C, and ax + fry G C.
If C is a convex pointed cone with vertex at 0 in a real vector space E,
then M = С A (—C) is the greatest linear subspace contained in C.
Indeed, if x, у g M, then x + у G M, since clearly — C is also a convex
cone with vertex at 0. Furthermore, if x G Af, then 0 • x = 0 G M since C
is pointed and \x G M for X 0; thus M is a subspace of E. Finally, it
is clear that any subspace contained in C must be contained in M.
176
[3, §1]
THE HAHN-BANACH THEOREM
177
The translate of a linear subspace of a vector space E is called a linear
manifold (or affine subspace). In other words, the subset M of E is a linear
manifold if there exists a linear subspace Mq of E and a vector x0 G E
such that M = Mq + x0. Clearly, xQ G M and for every y$ G M we have
M = Mq + г/o- We also say that M is the linear manifold through x0,
parallel to Mq.
If Hq is a hyperplane of E, the linear manifold H = Hq + xQ is said
to be an affine hyperplane. Hf(x) = 0 is the equation of Hq and /(x0) = a,
then clearly H = {x \f(x) = a}. We say that H has equation/(x) = a.
Let E be a vector space over the field R and let H be an affine hyperplane
with equation f(x) = a. The sets defined by f(x) a and f(x) a
are called the two algebraically closed half-spaces determined by H. The
sets defined by f(x) > a and f(x) < a are called the two algebraically
open half-spaces determined by H. Each of these four sets is convex.
If E is a real topological vector space and H a closed affine hyperplane
with equation/(x) = a, then/is continuous (Proposition 2.5.7), and thus
the two algebraically closed (open) half-spaces determined by H are closed
(open) sets in E.
If H is an affine hyperplane in a real vector space E and A a nonempty
convex set in E such that A n H = 0, then A is contained in one of the
two algebraically open half-spaces determined by H. Indeed, let/(x) = a
be the equation of H. The set /(A) is convex in R and a £ /(A). Thus
/(A) can contain either only numbers < a or only numbers > a.
We can now prove the following theorem due to Mazur, which is also
referred to as the geometric form of the Hahn-Banach theorem:
Theorem 2. Let E be a topological vector space, A an open convex non-
empty set in E, and M a linear manifold in E which does not meet A. There
exists a closed affine hyperplane H which contains M and does not meet A.
Proof. Performing, if necessary, a translation, we may suppose that
0 G M, i.e., that M is a linear subspace.
We shall consider first the case of real scalars. We can assume that
M = {0}. Indeed, if <p is the canonical surjection of E onto the quotient
space E/M, then <p(A) is a convex open nonempty set in E/M which does
not contain 0. If Hi is a closed hyperplane in E/M such that
Hx П <p(A) = 0,
then ^“^Hi) is a closed hyperplane in E which contains M and does not
meet A.
Let a be an interior point of A; then -a g A since otherwise 0 would
belong to A. Let S be the collection of all convex pointed cones with vertex
at 0 which contain A but not —a. The set В = (Jx^0 belongs to S
178
DUALITY
[3, §1]
and in particular G is not empty. Indeed, В + В С В follows from the
relation XA + /jl A = (X + /jl) A for X О, м = 0, equivalent to the
convexity of A, and the other properties are evident.
If ordered by inclusion, G is inductive. In fact, let (Ct)tG/ be a totally
ordered family in G and let C = |J Cl. We have С + С С C since if
x eC, у eC, then x e CL, у eCk; and if for instance CL C CK, then
x E CK and x + у E Ск С C. It is clear now that C belongs to G and is
the least upper bound of the family (Ct).
Let C be a maximal element of G. We shall prove that H = С A (— C)
is a closed hyperplane which does not meet A.
Let us first prove that C U (—С) = E. Suppose that C U (—С) E.
Then there exists a vector x such that Xx g C for X # 0. The set
Ci = {Xx + у ! X 0, у E C} is clearly an element of G and C G Ci,
but C # Ci since x e Ci.
We say that x e C is an internal point of C if for every straight line
z(r) = x + ту through x there exists r0 > 0 such that z(t) E C for
|r| r0. If x E C is not an internal point of C, then x E H, i.e., x E —C.
Indeed, since C is convex, there exists у E E such that x + ту g C for
т > 0. Suppose that x g —C, then the set Ci = {w — Xx j w e С, X 0}
is a convex pointed cone with vertex at 0 and C G Ci, but C # Ci since
—x E Ci. We have у g Ci, i.e., Ci # E. In the first place, у g C since
у E C would imply x + ту E C for all т 0. Next у E C\ would mean
у = w — Xx, where necessarily X > 0. But then it would follow that
। 1 1
X + -y = - w eC,
A A
which again contradicts the choice of y. Now we can prove that —a g Cj.
Let b E E. Then since a is an interior point of A, we have
a -|- X(b — a) E A G Ci for |X| Xq.
If —a belonged to Ci, then it would follow that X(b — a) E Ci, i.e., that
b E Ci, but this contradicts the relation Ci E. Thus Ci E G, which is
a contradiction of the fact that C is a maximal element of G. Hence we
necessarily have x e —C.
If у E C and z E —C, then on the segment x(r) = (1 — т)у + tz
(0 т 1) there exists a point x(cr) E H. To show this let <r be the least
upper bound of all values т for which х(т) E C. Since C is convex, we have
х(т) e C for т < a and х(т) S C for т > a. If х(<г) E C, then x(<r) is not
an internal point of C and thus x(cr) E H. If x(cr) e —C, then either there
exist points х(т) E —C with т < a, and then for these values of т we have
х(т) e H, or x(r) g —C for т < a, in which case x(a) is not an internal
point of —C, that is, —x(<r) is not an internal point of C, and thus x(a) E H.
[3, §1]
THE HAHN-BANACH THEOREM
179
We are now in the position to prove that Я is a hyperplane. In the first
place, H # E since —a & H. Let x e C. Then the segment
х(т) = тх — (1 — r)a
contains a point у = х(сг) е Я, and <т # 0 since —a g C. Thus
1 I 1 — 14
x = - у H----------a = w + Xa,
(T (T
w e H, x o.
Similarly it can be shown that if x e — C, then x = w + Xa with w e H,
X 0.
Next we prove that А П Я = 0. Every point of A is an interior point
of C and thus evidently an internal point of C; hence it is sufficient to prove
that H contains no internal points of C. Let x E H; then x — Xa £ C for
X > 0 since x — Xa = у E C would imply
—a = | (—x + y) G C.
A
Finally, H is closed. Indeed, it cannot be dense since СЯ contains the
open set A.
We still have to consider the case of complex scalars. Let Eo be the real
vector space underlying the complex vector space E. Clearly, Eq is a real
topological vector space and M is also a linear subspace of Eq. Next let
Hq be a closed hyperplane in the real space Eq which contains M and does
not meet A. Then Я = Hq А (гЯ0) is a closed hyperplane in the complex
space E (cf. Exercise 5) which contains M = M A (iM) and a fortiori does
not meet A. |
Proof of Theorem 1. If f(x) = 0 for every x E M, then g = 0 gives the
required extension. Thus we may suppose that f is not identically zero
on M.
We first consider the case К = R. Let us equip Я with the locally convex
topology defined by the semi-norm q. Then the set A = {x\ q(x) < 1}
is convex, nonempty, and open in E. Let N be the affine hyperplane of
M defined by /(x) = 1. Then Я is a linear manifold in E and does not
meet A since on A we have |/(x)| q(x) < 1. By Theorem 2 there exists
a closed affine hyperplane Я which contains N and does not meet A.
Let the equation of Я be g(x) = 1, where g is a linear form on E. For
у E N we have g(y) = f(y) = 1. Also f(z) = 0 implies g(z) = 0 since
{x\x E M, f(x) = 0} = N — Xq Q H — Xq
= {x\x E E, g(x) = 0},
where Xq e N С H. Every x E M can be written in the form x = £y + z,
180
DUALITY
[3, §1]
where у G N and f(z) = 0. It follows that g(x) = f(x) for all x G M.
Finally, since 0 G A and H does not meet A, we have g(x) < 1 for all
x G A, i.e., for q(x) <1. In other words, g(x) = 1 implies q(x) 1.
Let x be an arbitrary element of E. If g(x) = 0, then clearly |^(x)| q(x).
If g(x) = p 0, then x = py with g(y) = 1 and thus
fif(x) = pg(y) |p[g(z/) = q(x).
Since also — g(x) = g(—x) q(—x) = qfx) we have |<7(z)| q(x) for
every x g E.
Let us now pass to the complex case. Let Eq be the real vector space
underlying the complex vector space E and let Mq be the set M considered
as subspace of Eq. If we set /i(z) = (Re/(x) for each x g M, then /i(z)
is a real linear form on Mq, and by Eq. (2) of Chapter 1, §6 we have
f(x) = fit?) - ifi(ix).
Furthermore, we obviously have |/i(x)| g q(x) for x e Mq. By the first
part of the proof there exists a real linear form gq on Eq such that
<7i(z) = /1(2) on Mq and |<7i(z)| q(x) for x G Eq. Set
= 010) — *01(^0
for x G E. Clearly, g(x) = f(x) on M and g is a linear form on E since
g(ix) = gi(ix) — igi(—x) = ig(x). Finally, for x G E set g(x) = регв,
where p 0. Then
|p(z)| = p = e~ieg(x) = д(е~*вх) = g1(e~i6x')-^ q(e~iex) = q(x). |
We now draw some conclusions from the above theorems.
Proposition 1. Let Ebe a locally convex space, M a linear subspace of E,
and f a continuous linear form defined on M. Then there exists a continuous
linear form g defined on E such that g(x) = f(x) for all x G M.
Proof. There exists a continuous semi-norm q on E such that
|/O)| 0O) for all x g M (cf. Proposition 2.5.2). By Theorem 1 there
exists a linear form g on E such that g(x) = /О) for x G M and
|0O)I = 00) f°r all x £ E. But then g is continuous on E. |
Proposition 2. Let Ebe a locally convex space, M a closed subspace of E,
and z E E a vector which does not belong to M. Then there exists a continuous
linear form f on E such thatf(z) = 1 andf(x) = 0 for x G M.
Proof. Let <p be the canonical surjection of E onto the quotient space
E/M and set z = <p(z). Since z & M, we have z # 0; and since E/M is a
Hausdorff space (Proposition 2.5.5), there exists a continuous semi-norm
q on E/M such that q(z) # 0 (Proposition 2.4.8). Define the linear form
[3, §1] THE HAHN-BANACH THEOREM 181
g on the line {Xz } X e K} by setting g(Xz) = X. We have
1^)1 = |X| =
Q\z)
By Theorem 1 there exists a linear form h defined on E/M which satisfies
for all x e E/M and for which h(z) = 1. The linear form/ = h° defined
on E satisfies all the requirements. |
From this proposition, which is a straightforward generalization of
Proposition 1.6.1, we can deduce conclusions generalizing Propositions 2, 3,
and 4 of Chapter 1, §6. This will be left as an exercise.
Proposition 3. Let Ebe a locally convex Hausdorff space and M a finite-
dimensional linear subspace of E, Then there exists a closed subspace N of E
which is a topological supplement (Definition 2.7.2) of M,
Proof, We know that M has a topological supplement if there exists a
continuous projector p from E onto M. Since M is a Hausdorff space, it
is isomorphic to Kn (Theorem 2.10.1). Let (e;)i^n be a basis of M and
consider the continuous linear form/; (1 i g n) defined on M by
/ n \
ft ( %k&k J =
4=i '
By Proposition 1 there exists a continuous linear form gi (1 i n)
defined on E which coincides with /; on M, Then p can be defined by
p(z) = £ Qi(x)ei
i=i
for x E E, Clearly, p is a continuous projector from E onto M and
N = Т&ет(р) is a closed topological supplement of M. |
Proposition 4. In a locally convex space every closed linear manifold M
is the intersection of the closed affine hyperplanes which contain it.
Proof, If x g M there exists a convex open neighborhood V of x which
does not meet M. Hence by Theorem 2 there exists a closed hyperplane
H containing M which does not meet V, A fortiori H does not contain x, |
Let E be a real topological vector space, H a closed affine hyperplane
with equation f(x) = a in E, and V an open set contained in the closed
half-space/(x) a. Then V is contained in the open half-space/(x) < a.
Indeed, suppose that V A H 0. Then a Ef(V), On the other hand,
/ is a surjective strict morphism of E onto R1 (Exercise 2.5.6). Hence
182
DUALITY
[3, §1]
/(У) is an open set in R (Theorem 2.5.1). Thus V contains points with
f(x) > a, which is a contradiction.
Proposition 5. Let Ebe a locally convex space over R, A a closed convex
nonempty set in E, and a a point which does not belong to A. Then there exists
a continuous linear form f defined on E and a real number a such thatf(x) > a
for all x G A and f(a) < a.
Proof. There exists an open convex neighborhood V of a which does not
meet A. The set A — V = (z — V) is open, convex, nonempty
and does not contain the origin. By Theorem 2 there exists a closed hyper-
plane H which does not meet A — У, and we can find an equation/(z) =0
of Я such that f(z) 0 for all z G A — У, i.e., f(x) f(v) for x G A,
v G V. Set /3 = infXG^ /(z); then by the preceding remark V is contained
in the open half-space f(v) < and in particular f(a) < /3. The number
a = %(f(a) + /?) will satisfy the required conditions. |
Corollary. In a real locally convex space every closed convex set A is the
intersection of the closed half-spaces which contain it.
Proof. If x & A, there exists a closed affine hyperplane H such that x
and A belong to different open half-spaces determined by H. |
Exercises
1. Prove Theorem 1 by the method of Chapter 1, §6. (Hint: Prove successively
the following statements:
(a) Consider on E the locally convex topology defined by q. Prove that M
can be supposed to be closed, since otherwise f can be extended to M by con-
tinuity (Proposition 2.9.5).
(b) If E is a topological vector space, M a closed subspace of E, and a & M,
then every x of the closed subspace generated by M and a can be written uniquely
in the form x = у + Xa, у G M, X G К.
(с) If Е is a real vector space, q a semi-norm, M a closed subspace (for the
topology defined by q), f a linear form defined on M which satisfies
|/(x)| q{x)
for every x G M, and a & M, then there exists a linear form g defined on the
closed subspace N generated by M and a such that g(x) = f(x) for all x G M
and |£(z)| q(x) for all x G N. Show that
k = sup (-g(j/+ a) < S = inf G(?/+ a) — /(?/)).
yE.M y£M
Then choose д such that £ д E and prove that the linear form g defined
by g(y + Xa) = f(y) + Xfj, (y G M, X G R) satisfies the requirements.
(d) Prove Theorem 1 for the case of real scalars using Zorn’s lemma.
(e) Extend to the case of complex scalars.)
[3, §2]
PAIRINGS
183
2. A function q: E —> R defined on a vector space E is said to be positively
homogeneous if q(\x) = \q(x) for all X 0, x G E. It is said to be subadditive
if q{x + y) q{x) + q{y) for all x,yEE.
(a) Prove the following generalization of Theorem 1: Let £ be a vector space
over R; let q be a positively homogeneous, subadditive function on E. Let f be
a linear form defined on a subspace M of E which satisfies f{x) q{x) for all
x G M. Then there exists a linear form g on E such that g{x) = f{x) for all
x G M and g(x) q{x) for all x G E. {Hint: Use the method of Exercise 1.)
(b) Deduce Theorem 2 from (a). {Hint: Suppose that 0 G A and let q be the
gauge of A. Set M = xq + F, where F is a linear subspace of E. Then
q{xQ + y) = 1 for у G F. Define /(Хяо + у) = X, X G R, у G F and prove
that J(Xzo + y) q{\xQ + y). By (a) there exists g such that g{x) = f{x) for
x G M and g{x) q{x). Then A C {x\ g{x) < 1} and
MCH = {x\g{x) = 1}.)
3. Deduce Proposition 1 directly from Theorem 2. {Hint: Suppose that M is
closed and J # 0. Then N = {x | f{x) = 1} is a closed linear manifold in E
and OS N. If Я is a closed affine hyperplane of E such that N G H, OS H
(cf. Proposition 4), and H has equation g{x) = 1, then g is the required linear
form (cf. the proof of Theorem 1).)
4. Using Proposition 2, generalize Propositions 2, 3, and 4 of Chapter 1, §6
to locally convex spaces.
5. Let E be a complex vector space and Eq the underlying real vector space.
(a) Let Я be a hyperplane of E with equation f{x) = 0 and let Ji {x) = (Re f{x).
Prove that Ji(x) = 0 defines a hyperplane Hq of Eq and that H = Hq ГУ Mq.
(b) Prove that if Я is an affine hyperplane of E with equation f{x) = a + i/3
{a, ft G R), then Ji(x) = a and fi{ix) = —/3 define two affine hyperplanes Hi
and H2 of Eq such that Я = Hi А Я2.
(c) Let Hq be a hyperplane of Eq with equation fi{x) = 0. Prove that
Я = Hq А г’Яо is a hyperplane of E with equation fix') = fi{x) — ifi{ix) = 0.
(d) Prove that a linear subspace M of Eq is also a linear subspace of E if
and only if M = iM.
§2. Pairings
Definition 1. Let F and G be two vector spaces over the same field K. If
a bilinear form (x, y) B{x, y) is given on F X (?, then we say that the spaces
F and G are paired or form a pairing with respect to the bilinear form B.
The pairing or the bilinear form separates points of F if for x G F, x # 0,
there exists у G G such that B{x, y) # 0. Similarly, the pairing or the
bilinear form separates points of G if for у G G, у # 0, there exists x E F
such that B{x, y) # 0. If the pairing separates points of both F and G, then
we say that it is separated or that {F, G) is a dual system with respect to the
bilinear form B.
184
DUALITY
[3, §2]
If F and G form a dual system with respect to the bilinear form
(Xj y) h-> B(x, y)j then the underlying real vector spaces Fo and GQ form
a dual system with respect to the bilinear form (x, y) Bi(x, y), where
Bi(x, y) = <Re(B(x, 7/)). We see exactly as in the proof of formula (2)
of Chapter 1, §6 that B(x, y) = B\(x,y) — iB\(ix, y).
Example 1. Let E be a vector space and let E* be the set of all linear
forms on E. We shall denote by the letters x, y, . . . the elements of E and
by the primed letters x', yr, . . . the elements of E*. If we define addition
and multiplication by a scalar on E* by the formulas
(x' + y')(x) = x'(x) + y'(x), (Xx')(x) = x'(Xx), (1)
then it is trivial to verify that Axioms (VS 1) through (VS 8) of a vector
space are satisfied and in particular the zero vector of E* is the map which
assigns 0 to each vector x e E. The vector space E* will be referred to as
the algebraic dual of E. If we set (x, x'} — {x'j x) = x'(x) for x e. Ej
x' eE*, then for each xr e E* the map x h-> (x, x'} is linear since xr is a
linear form on E and for eachxeE the map xr h-> (x, x'} is linear by the
definitions (1) of the operations on E*. The map (x, xr) (x, x'} is called
the canonical bilinear form. It follows from the definition of the zero
vector in E* that the canonical bilinear form separates points of E*.
But it also separates points of E. Indeed, let x be a nonzero element of E
and let (et)iGz be an algebraic basis of E. Then
x = £ ftet,
where £« # 0 for some index к. Let x' e E* be the linear form on E which
associates with each vector у — твс its к-th coordinate Then
(x, xf} = # 0.
Example 2. Our second example will be of fundamental importance
in the remainder of this book and is in fact one of the most important
notions of mathematics.
Let E be a topological vector space and denote by Er the set of all
continuous linear forms on E. Then Er is a linear subspace of the algebraic
dual E*. Indeed, let x', yr e Er. Given e > 0, there exist neighborhoods
U and V of 0 in E such that |(x, x')| < for x e U and |(x, y')\ < Je
for x e V. But then |(x, x' + y')\ < e for x e U П F, and thus by Propo-
sition 2.5.1 we have x' + у' e E'. Similarly, let X G К, X # 0, and
x' e E'. Given e > 0, there exists a neighborhood U of 0 in E such that
| (x, x')| < e/|X| for x e U. But then
|(x, Xx')| = |(Xx, x')| < €
for x e U] i.e., \xr e E'. The vector space Er will be called the dual
[3, §2]
PAIRINGS
185
(adjoint, conjugate, or topological dual) space of E. In the particular
case when E is a normed space we have introduced the dual space Ef in
Chapter 1, §7.
We also denote by (z, x') (x, xf) the restriction to E X Ef of the
canonical bilinear form defined on E X E * in Example 1. It clearly sep-
arates points of Ef. If E is locally convex and Hausdorff, then it also
separates points of E by virtue of Proposition 1.2 applied to the subspace
M = {0}, which is closed because E is a Hausdorff space.
In the sequel the dual systems (E, E*) and (E, E') will always be
considered with respect to the canonical bilinear form.
Let F and G form a pairing with respect to the bilinear form
(x, y) B(x, y).
For every у G G the map x B(x, y) is a linear form on F, i.e., an element
y* of the algebraic dual F* of F, and the map Ф: у >—► у* from G into F*
is clearly linear. If В separates points of G, then this map is injective;
hence in this case we can consider G as the linear subspace 1т(Ф) of F*,
and if we do so we shall say that we identify G canonically with a linear
subspace of F*. If this identification is made, then the bilinear form
(x, у) B(x, y) is the restriction to F X G of the canonical bilinear form
(x, у) (x, y) on F X F*, and therefore in such a situation we shall
usually write (x, y) instead of B(x, y). Similarly, if the pairing separates
points of F, then the map Ф: x >—► x* from F into G* is injective and F
can be identified canonically with the linear subspace 1т(Ф) of the alge-
braic dual (?* of G.
Given a pairing of F and G with respect to the bilinear form
(z, у) B(x, y), we can define a locally convex topology <r(F, G) on F
and a locally convex topology (r(G, F) on G. These are called the weak
topologies defined by the pairing of F and G, In the special case when F
is a normed space F, and G its dual F', the weak topologies were already
introduced in Example 2.4.20. Since the definitions of the two topologies
are perfectly symmetric, we shall consider only a(F, G).
Let у G G, then the map x |F(z, t/)| is clearly a semi-norm on F.
We denote this semi-norm by qy, and <r(F, G) will be the topology on F
defined by the family of all semi-norms qy as у runs through G. A funda-
mental system of neighborhoods of 0 in F for the topology <r(F, G) is given
by the sets
V1, • •• = I Ук)\ = 0?
where e > 0 and (yk)iis a finite family of elements of G.
Proposition 1. Let F and G be two vector spaces paired with respect to
the bilinear form (x, у) B(x, y). The pairing separates points of F if and
only if <r(F, G) is a Hausdorff topology on F.
186
DUALITY
[3, §2]
Proof. Assume that the pairing separates points of F and let x G F,
x # 0. There exists у G G such that qy(x) = \B(x, y)\ H 0; hence by
Proposition 2.4.8 the topology a(F, G) is Hausdorff.
Conversely, if <r(F, G) is a Hausdorff topology and x e. F, x H 0, then
again by Proposition 2.4.8 there exists a semi-norm qy such that qy(x) H 0,
i.e., B(x, y) # 0. |
Let us observe that if В separates points of F and we identify F canoni-
cally with a linear subspace of (?*, then G) induces on F the topology
<r(F, (?).
We know that each element у G G defines a linear form у* = ^(t/) g F*
on F according to the formula y*(x) = B(x, y). Furthermore, each such
7/* is continuous for the topology a(F, G) by virtue of the relation
|j/*(x)| = |B(x, 3/)| = qy(x)
and Proposition 2.5.2. It is, however, also true that conversely every
linear form on F which is continuous for <r(F, G) is of the form x h-► B(x, y)
for some у G G. To prove this, we shall need the following result from
algebra.
Lemma. Let E be a vector space and ui, . . . ,un a finite family of linear
forms on E. If и is a linear form on E such that
Ker(u) D P| Ker(ujt),
jt=i
then there exists a family of scalars (fikh^k^n such that
n
и = XfcUfc.
fc=l
Proof. We may obviously assume that none of the forms иг is zero. Then
each Ker(ud is a hyperplane Hi. For n = 1 the lemma follows from the con-
siderations of Chapter 1, §5. Indeed, if и = 0, then и = 0 • ui; and if и H 0,
then necessarily Ker(u) = Ker(ui); i.e., и = Хщ.
Assume that the lemma holds for n — 1. The kernel of the restriction of и
to Hn contains the intersection of the kernels of the restrictions of the щ to Hn.
Hence there exist scalars Xi,..., Xn_i such that
n — 1
u(x) — У XfcUfc(x) = 0
A=1
for all x G Hn. But then, by the result used already at the beginning of the proof,
there exists a scalar Xn such that
n-1
U 'hkUk = |
fc=l
[3, §2]
PAIRINGS
187
Now let f be a linear form on F which is continuous for the topology
(t(F, G). By Proposition 2.5.2 there exists a finite family (yk)i^k^n of
elements of G such that
|/(a?)| max \B(x, j/t)|
1 ^k^n
for all x g F. In particular,/^) = 0 for all x G F such that B(x, yk) = 0,
1 к n. It follows from the lemma that
f = E
&=1
for some family (Xkh^k^n of scalars, where у* = ^(Ук)- If we set
у = E
k=l
then f(x) = B(x, y) for all x G F. We have thus proved the following
result:
Proposition 2. Let the vector spaces F and G form a pairing with respect
to the bilinear form (x, у) h-> B(x, y) and equip F with the topology a(F, G).
For every у G G the map x В (x, y) is a continuous linear form on F, and
conversely j iff is a continuous linear form on F, then there exists у G G such
thatf(x) = B(x, y) for every x G F.
In other words, the dual of F equipped with the topology <r(F, G) can
be identified with (7/Кег(Ф). If В separates points of G, then Ф is injective
and the dual of F can be identified with G.
Let us observe that a(F, G) is the coarsest topology on F for which all
the maps x h-> B(x, y) are continuous as у runs through G. Indeed, if for
some topology T all the maps x h-> B(x, y) are continuous, then given
Xq g F, e > 0, and a finite family (y^i^k^n of elements of G, there exists
a neighborhood V of xQ for T such that x G V implies \B(x — xQ, yk)\ < e
for 1 к n. In other words, V C x0 + Uyit,,,tVn,€ and thus T is finer
than <r(F, G). In particular, if В separates points of G, then <r(F, G) is
the coarsest locally convex topology on F for which G is the dual of F.
We shall determine in §5 all the locally convex topologies on F for which
G is the dual of F (cf. Definition 4.1, Example 4.2, and Proposition 5.4).
Proposition 3. Let F and G be two vector spaces which form a pairing
separating points of F. Identify F canonically with a linear subspace of G*
and equip G* with the topology cr(G*, G). The pairing separates points of G
if and only if F is dense in G*.
Proof. Assume that the pairing separates points of G. Let / be a con-
tinuous linear form on G* such that f(x) = 0 for all x G F, and thus
188
DUALITY
[3, §2]
also f(x) = 0 for all x belonging to the closure F of F. By Proposition 2
there exists у G G such that/(x) = (x, y) for all x G G*, and in particular
(x, у) = 0 for all x G F. By hypothesis we have у = 0, that is, f = 0,
and it follows from Proposition 1.2 that F = G*.
Conversely, assume that F = G*. Let у G G be such that (x, y) = 0
for all x G F. Since x h-> (x, y) is a continuous linear form on G*, we also
have (x, y} = 0 for all x G G*. It follows from Example 1 that у = 0;
i.e., the pairing separates points of G. |
Proposition 4. Let F and G be two vector spaces paired with respect to
the bilinear form В which separates points of G and let N be a subspace of G,
distinct from G. Then the topology (?(F, G) on F is strictly finer than the
topology cr(F, N).
Proof. If у G G but yiN, then the linear form x B(x, y) on F is
continuous for a(F, G). On the other hand, it is not continuous for a(F, N)
since otherwise by Proposition 2 there would exist an element z G У such
that F(x, y) = B(x, z), i.e., B(x, у — z) = 0 for all x G F, which by
hypothesis would imply у = z G N. |
Example 3. Let E be a vector space over the field К and let (et)tez be
an algebraic basis of E. The map
iGZ
is clearly an isomorphism from E onto the external direct sum K(Z). The
algebraic dual F* of E is then isomorphic to the product Kz. Indeed, the
map which assigns to the linear map
E ~ E w
iGZ iGZ
is clearly an injective linear map from К 7 into F*. Furthermore, it is also
surjective since if x' G F*, then we set £ = (et, x') and obtain
2 2 ^(x', et) = 2 М'й
iGZ cGZ
that is, x' is the image of under the above map.
Let us identify F with K(/) and F* with Kz. The topology <r(F, F*) on
F is coarser than the locally convex direct sum topology T on F = K(/)
(Example 2.12.2). It is enough to show that each set
UX',e = {x j |<x, x')| < e}
contains a neighborhood of 0 for T. Let x' = then the set
V = lx | x = £ 2 IM 1, IUJI < 4
' iGZ cGZ '
[3, §2]
PAIRINGS
189
forms a neighborhood of 0 for T in E since for each i G I the set
{dl«;i < e}
is a neighborhood of 0 in K. Clearly V C If I is infinite, then it
can be shown that a(E, E*) is strictly coarser than T (cf. Exercise 1).
On the other hand, the topology a(B*, E) coincides with the product
topology T* on E* = Kz. Indeed, for every x e E the linear map
x' h-> (x, x') is continuous on E* for T*. For, let x = and
ft = 0 for all l which do not belong to the finite subset H of I having n
elements. Given e > 0, the set
v= [oedlsll < iGtf)
is a neighborhood of 0 in E* for T* and xr е V implies
|<Ж, xz>| g 1^1 < €-
tG7
Thus a(B*, E) is coarser than T*. Conversely, if
V = {(ffhe/lirj < l^k^n}
is a neighborhood of 0 in E* for T*, then
...eifc’c
where e = mini^^n e^. Hence a(B*, E) is also finer than T*.
It follows that a set in E* is relatively compact for the topology a(E*, E)
if and only if it is bounded, i.e., the analogue of the Bolzano-Weierstrass
theorem holds. By Proposition 2.10.7 any relatively compact set is
bounded. Conversely, let В be a bounded set in E* = Kz. Then the
projections Bi = 7rt(B) are bounded in K, hence relatively compact by
the Bolzano-Weierstrass theorem. Thus В is contained in ILer Ви which
is compact by Tihonov’s theorem; i.e., В is relatively compact.
Finally, is complete for the topology a(B*, E) as the product of
complete spaces. We have the even stronger result:
Proposition 5. Let F and G be two vector spaces which form a pairing
separating points of F. Identify F canonically with a linear subspace of (?*,
equip (7* with the topology ofG*, G) and F with the induced topology ofF, G).
(a) The completion of F is its closure in (7*.
(b) If the pairing also separates points of (7, then (7* is the completion of F.
Proof, (a) We have just seen that (7* is complete. Hence the closure of
F in (7* is also complete (Proposition 2.9.3).
(b) follows from (a) and Proposition 3. |
190
DUALITY
[3, §3]
Exercises
1. Let £ be a vector space with algebraic basis (ejiei over the field К and let
£* be the algebraic dual of E. As in Example 3, identify E with K(Z).
(a) Show that the locally convex direct sum topology T on E is the finest
locally convex topology on E. (Hint: See Example 2.12.4.)
(b) Show that if I is infinite, then the topology <т(Е, E*) is strictly coarser
than T. (Hint: The T-neighborhood
V = {x | x = 2 |f,| 1, i G 1}
cGZ
of 0 contains no subspace of E, but every <r(E, E*)-neighborhood of 0 contains
a subspace of finite codimension.)
2. Let (F, G) be a dual system. Show that every subset of F which is bounded
for the topology a(F, G) is precompact (Definition 2.10.1) for this topology.
(Hint: Use Proposition 3 and Example 3.)
3. Let £ be a locally convex Hausdorff space and Ё its completion. Show
that the dual of E can be identified with the dual of Ё. (Hint: Use Proposi-
tion 2.9.5.)
4. Show that if E is a topological vector space and the pairing (E, Ef) separates
points of E, then £ is a Hausdorff space.
§3. Polarity
Definition 1. Let F and G be two vector spaces over the same field K,
paired with respect to the bilinear form (x, у) B(x, y). If A is a subset
of F, then the polar of A is the subset A° of G, formed by those elements yEG
which satisfy |B(x, y)\ 1 for all x G A.
We define in a similar way the polar of a subset of G.
Remark 1. In the literature ([9], Chapter IV, §1, no. 3, Definition 2-3;
[52], §20, 8) A° is often called the absolute polar of A, while the term polar
is used for the set of those у G G which satisfy (Re B(x, y) 1 for all
x G A. If A is balanced, the two coincide (see Exercise 2).
We shall list the trivial properties of the polar in the following:
Proposition 1. Suppose that the vector spaces F and G are paired with
respect to the bilinear form (x, y) >—> B(x, y).
(a) If Ai G A2 C F, then A? D A?.
(b) If A G F and D is the balanced hull of A, then A° = L>°.
(с) A c A°° = (A°)°.
(d) A° = Aoo°.
(e) If A Q F, then A ° is a balanced, convex set in G closed for cr(G, F).
[3, §3]
POLARITY
191
(f) (XA)° = (1/X) A ° for X gK, X/0. In particular, A° is absorbing
if and only if A is bounded for a(F, G).
(g) If (Л) ig/ is a family of subsets of F, then
(UA)°= П A?.
\GZ 7 iGZ
Proof, (a) If у G A2j then |B(x, y)\ 1 for all x G A2 and a fortiori
for all x g Ax; hence у G A?.
(b) Since A CD, we have A ° D by (a). Conversely, let у G A°.
Then |B(Xx, y)\ 1 for all x G A and |X| 1. Since
D = {Xx j x g A, |X| g 1}
(Exercise 2.3.3(a)), we have у G D°, that is, A ° C D°.
(c) If x G A, then \B(x, y)\ 1 for all у G A°, that is, x G A°°.
(d) From (c) we obtain A C A°°; hence by (a) A ° D Aoo°. On the
other hand, from (c) we get A ° C (A°)°° = Aoo°.
(e) Let у G A°, z G A°, X and д two scalars such that |X| + |д| 1.
Then for any x G A we have
|B(x, Xy + »z)\ |X| • |B(x, y)\ + |m| • |B(x, z)|
|x| + |m| 1;
that is, Xy + /AZ G A ° and thus A ° is balanced and convex.
For each x G F the map у н-> B(x, у) is continuous on G for <t((?, F)
(Proposition 2.2). Hence the set Ax = {y j |B(x, y)\ 1} is closed in G
as the inverse image of the closed set {$ j | £[ 1} in K. Thus
A° = П Ax
xGA
is closed for (t(G,F).
(f) у G (XA)° is equivalent to \B(Xx,y)\ = \B(x, Xy)\ 1 for all
x G A, i.e., to Xy G A°.
Suppose that A ° is absorbing and let у G G, There exists д > 0 such
that цу g A °, that is, у G (дА)°. Thus
?y(.r) = |B(x, у) I g
for all x g A; i.e., A is <r(F, (?)-bounded. Conversely, if A is <r(F, G)-
bounded, then for every у g G there exists а у > 0 such that
|B(z, y)l
192
DUALITY
[3, §3]
for all x G A. Hence yy G A°, and so A ° is absorbing.
(g) У G (LUi A)° l5(*> У)\ !, for a11 * G LLer At
<=> \B(x, y)\ g 1 for all x e At and t e I
G flier A?. I
Our next result on polars is much deeper since it uses the Hahn-Banach
theorem.
Theorem 1 (Theorem of the bipolars). Suppose that the vector spaces
F and G form a pairing. If A is a nonempty subset of F, then A°° is the
balanced, convex, a(F, G)-closed hull of A, i.e., the smallest balanced, convex
set containing A which is closed for the topology a(F, G).
Proof. By Proposition 1(e) the set A°° is balanced, convex, <r(F, G)-
closed, and by Proposition 1(c) it contains A. Thus we have only to show
that if D is a balanced, convex, cr(F, (?)-closed set containing A, then
A°° C D. Let a & D. By Proposition 1.5 there exists a continuous linear
form/ on the real vector space Fo underlying F (taking, of course, Fq = F
if F is real) an da real number a such that/(x) < a for x G D and f(a) > a.
Since 0 G D, we can choose a = 1. In the case when F is a complex vector
space then, as we saw in the proof of Theorem 1.1 (cf. Chapter 1, §6, (2)),
the map x i—► f(x) — if(ix) is a linear form on F, continuous for a(F, G).
By Proposition 2.2 there exists у G G such that f(x) = (Re B(x, y) for
all x G F. Since D is balanced, we have \B(x, y)\ 1 for all x G D;
i.e., у G D° and therefore by Proposition 1(b) у e A°. On the other hand,
\B(a, y)\ f(a) > 1, i.e., a g A°°. |
Proposition 2. Let (A^ei be a family of balanced, convex, nonempty
subsets of F which are closed for the topology a(F, G). Then the polar of
Q At is the balanced, convex, <r(F, G)-closed hull of the union of the sets A ?.
Proof. By Theorem 1 we have At = A?° and therefore by Proposi-
tion 1(g)
Пл = n^° = (U<;
hence
(n^)o = (u^o)°°-
Again by Theorem 1 the right-hand side is the balanced, convex, a(G, F)-
closed hull of (JA?. I
If M is a linear subspace of F, then \B(x, y)\ 1 for all x G M is
possible only if B(x, у) = 0 for all x G M. Thus in this case M° is the
linear subspace M1- of G, orthogonal to M, which we considered briefly
earlier in a special case (Chapter 1, §7). In general we state:
[3, §3]
POLARITY
193
Definition 2. Let F and G be two vector spaces over the same field K,
paired with respect to the bilinear form (x, у) h-> B(x, y). If M is a subset
of F, the elements у G G which are orthogonal to M, i.e., which satisfy
B(x, У) — 0 for x M, form a linear subspace of G, called the subspace
orthogonal to M and denoted by ML.
We define in a similar way the linear subspace W1 of F when N is a
subset of G. If is a family of subsets of F, let us denote by
Vie/ Mi the <r(F, ^-closed subspace generated by i.e., the
smallest linear subspace of F which contains all the sets ML and which
is closed for the topology <r(F, G) (cf. Exercise 1.7.2). Clearly, \/Lei ML
is the <r(F, (7)-closure of the linear subspace of F formed by all the sums
Sigi Xtxt, where Xt G K, xL g Ml, and Xt = 0 except for finitely many
indices t (Proposition 2.5.4).
Proposition 3. Let F and G be two vector spaces paired with respect to
the bilinear form (x, y) i-> B(x, y).
(a) If Mr CM2C F, then Mi D M2.
(b) M C
(c) = M^.
(d) Мг is closed for the topology <r(G, F).
(e) is the cr(F, G)-closed subspace of F generated by M.
(f) Let (Mi)L(=i be a family of subsets of F. Then
(U мУ = (V = П Mi.
\gz ' ' IGI
(g) Let (Mt)tGi be a family of <r(F, G)-closed subspaces of F. Then
= V Mi.
\GZ ' L&I
Proof, (a) If у G M2, then B(x, у) = 0 for all x G M2 and a fortiori
for all x G Mr; hence у G Mf.
(b) If x G M, then B(x, у) = 0 for all у G M1-; i.e., x G M±±.
(c) From (b) we obtain M C M±A-; hence by (a) M1- D M1-1-1-. On the
other hand, from (b) we get M1- C (M±)±± = M±±±.
(d) For each x G F the map у н-> B(x, у) is continuous on G for <r(G, F);
hence the set Mx = {y j B(x, y) = 0} is closed as the inverse image of the
closed set {0} in K. Thus = ("%ем Mx is also closed for (j(G, F).
(e) By (d) M±± is a <r(F, Q-closed subspace of F and by (b) M C
Let L be the <r(F, (7)-closed subspace of F generated by M and assume that
L # M^. Then by Propositions 1.2 and 2.2 there exists an element
у G G such that B(x, y) = 0 for all x G L, and in particular for all x G M,
194 DUALITY [3, §4]
but В (а, у) = 1 for some a G М±л\ Thus we would have у G M1- but
у g M-1-1-1 in contradiction to (c).
(f) Clearly
(U мУ = n Mi.
\GZ 7 iGZ
On the other hand,
( и мУ = (u мА111
\gz ' \GZ '
by (c) and
(и m\ll = \/m.
\gz ' cei
by (e).
(g) By (e) we have ML = Mi1 and therefore by (f)
n Mt = p| мУ = (\J MiV.
i(=i iei \gz '
Using (e) again, we obtain
(п му- = V Mi-
\GZ ' cEI
Parts (d), (e), and (f) of Proposition 3 show a striking similarity to
Propositions 1.7.1, 1.7.2, and Exercise 1.7.2. Actually these earlier results
are special cases of the proposition just proved, since it will soon turn out
that in a normed space E the linear subspaces which are closed for the topol-
ogy defined by the norm are exactly those which are closed for &(E, Ef)
(Proposition 4.3), and that in Ef every subspace which is closed for a(£", E)
is also closed for the topology defined by the norm (Example 4.5). How-
ever, in Chapter 1 we were unable to prove the analogue of part (g) of
Proposition 3 (cf. Exercise 1.7.3(c)). This is due to the fact that if E is a
nonreflexive normed space, then there exist in Er subspaces which are
closed for the norm topology but not fora(£", E). We shall return to these
questions in greater detail in §8.
Exercises
1. Why do we have to assume in Theorem 1 that A is not empty?
2. Let F and G be two vector spaces over the same field K, paired with respect
to the bilinear form (x, y) i—> B(x, y). If A is a subset of F, we denote by Ap
the subset of G formed by those elements у which satisfy (Re B(x, y) 1 (or
simply B(x, y) 1 if К = R) for all x G A (cf. Remark 1). We define similarly
Ap for a set A G G.
(a) If A is a subset of F, show that A ° C Ap and that A ° = Ap if A is
balanced. More generally, if D is the balanced hull of A, show that A ° = Dp.
Give an example in which Ap is not balanced and in particular A ° # Ap.
[3, §3]
©-TOPOLOGIES
195
(b) Prove the following properties of Ap\
(i) If Ai С A2 C F, then A? D Av2.
(ii) A С App = (A*)*.
(iii) Ap = Appp.
(iv) If A C F, then Ap is a convex, a(G, F)-closed subset of G.
(v) (XA)* = (1/X) A* for X G К, X 0.
(vi) A* is absorbing if and only if A is bounded for a(F, G).
(vii) If (Ai)tGi is a family of subsets of F, then
At
(c) Show that App is the convex, a(F, G)-closed hull of A U {0}.
(d) Show that if A is a cone with vertex at 0 (§1), then A* consists of those
у G G for which (Re В(x, y) 0 for all x G A and that A* is a cone (the dual
cone).
3. Let F and G be two paired vector spaces, A a subset of F, and M the linear
subspace of F generated by A. Show that A± = M-L.
4. (a) Prove that the convex hull of the balanced hull of a set A is the bal-
anced, convex hull of A. (Hint: Using the expression for the convex hull C of a
set A given in the corollary to Proposition 2.4.2, show that C is balanced if A is.)
(b) Show that the balanced hull of the convex hull of a set is not necessarily
convex. (Hint: Consider the points (0, 0), (0, 1) and (1, 0) in R2.)
§4. ^-topologies
Let F and G be two vector spaces which form a pairing with respect to
the bilinear form (x, y) >—> B(x, y). The concept of polarity allows us to
define all kinds of important locally convex topologies on F and G.
Let © be a collection of <j(F, (?)-bounded subsets of F. Then by Proposi-
tion 3.1 the pohrs A ° of the sets A G ® form a collection of absorbing,
balanced, convex sets in G and thus define a locally convex topology on
G according to Proposition 2.4.6 or its corollary. We shall call it the
^-topology от the topology of uniform convergence on sets belonging to S.
As we know, the finite intersections of the sets XA°, where X > 0 and
A G ®, form a fundamental system of neighborhoods of 0 for the ®-
topology.
The S-topology on G is defined by the family of semi-norms дл, where
A G ®, which are given by
<1A (y) = sup |B(x, y) I,
xG.A
since дл(у) e is equivalent to у G eA°.
196
DUALITY
[3, §4]
Proposition 1. Let F and G be paired and S a collection of a(F, (?)-
bounded sets in F. The ^-topology on G is Hausdorff if and only if |J ле® A
is total in F for a(F, (?) and the pairing separates points of G.
Proof. By Proposition 2.4.8 the S-topology is Hausdorff if and only if
дл(у) = 0 for all A G S implies у = 0. But дл(у) = 0 for all A g S is
equivalent to
n (V
AG® XAE® 7
(Proposition 3.3(f)). If |Jag® A is total in F, i.e., if \/ag® A = F, then
Ца(у) = 0 for all A g S implies B(x, у) = 0 for all x G F, which in turn
implies у = 0 if the pairing separates points of G. Conversely, if
\/ag® A F or if В does not separate points of (?, then there exists
у G G,y 7* 0, such that у G A1- for all A g S, i.e., such that дл(у) = 0
for all A G S. |
Proposition 2. Let F and G be paired and S a collection of a(JF, (?)-
bounded sets in F. The ^-topology on G will not be changed if we replace S
by one of the following collections of subsets of F:
(a) all the subsets of the sets in ®;
(b) the finite unions of the sets in ® ;
(c) the sets XA, where X G К and A G S;
(d) the balanced hulls of the sets in S;
(e) the cr(F, G)-closures of the sets in S;
(f) the balanced, convex, cr(F, G)-closed hulls of the sets in S.
Proof, (a) if AT C A and A G S, then A ° Q Ap and so A f is a neigh-
borhood of 0 for the S-topology.
(b) The sets
(n \ О n
U aA = П A?,
2 = 1 ' 2=1
where A, 6 @ (1 i ri), are neighborhoods of 0 for the S-topology.
(c) If X # 0, then the set (XA)° = (1/X) A ° is a neighborhood of 0
for the S-topology. If X = 0, then (XA)° = G.
(d) If D is the balanced hull of A, we have D° = A °.
(e) We have A G A C A°°, hence A ° D A ° D Aoo°. But A ° = Aoo°;
thus A ° = A°.
(f) We have A ° = Aoo°, where A°° is the balanced, convex, a(F, (?)-
closed hull of A (Theorem 3.1). |
We may thus always assume that ® is a collection of balanced, a(F, (?)-
bounded (or even of balanced, convex, a(F, (?)-closed and<r(F, (?)-bounded)
sets. We shall need in §5 the fact that we may even suppose that S is a
[3, §4]
(S-TOPOLOGIES
197
collection of balanced, convex, <t(F, (?)-closed, <t(F, (?)-bounded subsets of
F which has the following two stability properties:
(i) Given a finite family (Ai)\<.i<n of sets in S, the balanced, convex,
<t(F, (7)-closed hull (U?=i A)°° of the union of the Ai belongs to S.
(ii) If A G ®, then XA G ® for X # 0.
Indeed, if S is au arbitrary collection of a(F, (?)-bounded subsets of F, let
be the collection of all the sets XA, where X # 0, A g ®, let be
the collection of the finite unions of the sets in ©i, and finally, let S3 be
the collection of the balanced, convex, <t(F, (7)-closed hulls of the sets in
@2- It follows from Proposition 2(c), (b), and (f) that the ©-topology
coincides with the S3-topology. It is also clear that the sets in S3 are
balanced, convex, a(F, (?)-closed and a(F, G)-bounded. Thus we have
only to show that S3 has the stability properties (i) and (ii). Now every
set in S3 is of the form (U\A)°°> with Sj G S. Hence (i) follows from
(Uc?0)00 = (исг)°° (i)
Indeed, if Ai = ((J j ^ц8ц)о° E @3, then setting Ci = |J; KjSij we have
(U = (U = (U ^)°° = (U xt-A>)°° 6 ®3.
z z z * 3
Formula (1) itself is a consequence of
(U^)° = IT? = T?°° = (Uc°°)°
Property (ii) follows from
X (UM/)00 = (UXXA)°°,
which is an immediate consequence of Proposition 3.1(f).
Example 1. The weak topo’ogy a((?, F) is the ©г-topology (1 S i 5)
for each of the following collections of subsets of F:
©i = all subsets of F consisting of a single point.
@2 — all subsets of F of the form {Xx | |X| 1}, where x is an arbitrary
element of F. These sets are the balanced, convex, <t(F, (?)-closed hulls of
the sets in ©p
©3 = all subsets of F of the form {22?=i X^-1 £|Xi| = X}, where
is an arbitrary finite family of elements of F. This collection ©3
has properties (i) and (ii).
@4 = all balanced, convex, <t(F, (?)-closed, <t(F, (?)-bounded, finite-
dimensional subsets of F.
= all <t(F, (?)-bounded, finite-dimensional subsets of F. (This col-
lection is saturated; cf. Exercise 2.)
198
DUALITY
[3, §4]
We know that if F and G form a pairing which separates points of G,
then G can be considered canonically as a subspace of F*. Thus we can
pose the following:
Definition 1. Suppose that the vector spaces F and G form a pairing
which separates points of G. We say that a locally convex topology T on F is
compatible with the pairing of F and Gif G is the dual of F for the topology T.
In other words, T is compatible with the pairing of F and G if the
continuous linear forms on F are precisely those defined by elements of G,
i.e., are of the form x n-> (x, y) for some у G G.
s°
Example 2. We have shown that if the pairing of F and G separates
points of G, then the topology a(F, G) on F is compatible with the pairing
of F and G (Proposition 2.2). We have even shown that a(F, G) is the
coarsest such topology on F.
Example 3. Let E be a topological vector space with topology T and
let E' be its dual (Example 2.2). Then T is compatible with the pairing of
E and Ef by the very definition of E'.
Example 4. Let E be a Banach space and Ef its dual. If E is not
reflexive then the topology defined by the norm on Ef is not compatible
with the pairing of Ef and E since the dual of Ef is strictly larger than E.
The topology <r(Ef, E) is of course compatible with the pairing of E' and E.
&
Proposition 3. Let the vector spaces F and G form a pairing which
separates points of G. The closed convex sets of F are the same for all locally
convex topologies on F which are compatible with the pairing of F and G.
Proof. We may suppose that F and G are real vector spaces since a set
is closed and convex in F if and only if it is closed and convex in the under-
lying real vector space FQ. By the corollary to Proposition 1.5 a closed
convex set is the intersection of the closed half-spaces which contain it.
Now a closed half-space is defined by an equation f(x) g a, where f is a
continuous linear form on F. But the continuous linear forms on F are
the same for all topologies compatible with the pairing of F and G. |
Our next goal is to show that every locally convex topology can be
obtained as an S-topology for an appropriate collection S. Let E be a
topological space, F a topological vector space, and 5C a set of maps from
E into F. We say that JC is equicontinuous at the point a G E if for every
neighborhood W of 0 in F there exists a neighborhood V of a in E such
that J(x) — f(a) G W for all x G V and / G 5C. If 3C is equicontinuous at
a, then in particular every function f G 5C is continuous at a. We say
that JC is equicontinuous on E if it is equicontinuous at every point of E.
[3, §4]
©-TOPOLOGIES
199
Suppose now that E is also a topological vector space. We say that 3C
is uniformly equicontinuous if for every neighborhood W of 0 in F there
exists a neighborhood V of 0 in E such that x — у e V implies
/(*) - f(v) e W
for all f G JC. If JC is uniformly equicontinuous, then it is equicontinuous
and each f G JC is uniformly continuous.
Proposition 4. A set JC of linear maps from a topological vector space E
into a topological vector space F is uniformly equicontinuous if it is equi-
continuous at the origin.
Proof. Let Ж be a neighborhood of 0 in F. There exists a neighborhood
V of 0 in E such that f(x) g W for all x G V and f G JC. But then
x — у E V implies that f(x) — f(y) = f(x — у) E W for all / G JC. |
In particular, a set JC of linear maps from a topological vector space E
into a topological vector space F is equicontinuous if for each neighborhood
Ж of 0 in F, the set р|лезе A-1(TF) is a neighborhood of 0 in E.
Proposition 5. Let F be a vector space and (EJ^i a family of locally
convex spaces. For each l E I let fL be a linear map from EL into F and
assume that IJiez Л(Д) generates F. Equip F with the finest locally convex
topology T for which all the maps /t are continuous. Let G be a locally convex
space and JC a set of linear maps from F into G. Then JC is equicontinuous if
and only if for each l E I the set JC °/t = {h °fL | h E JC} of maps from EL
into G is equicontinuous.
Proof. Assume that JC is equicontinuous and let Ж be a neighborhood
of 0 in G. Then
v = n
лезе
is a neighborhood of 0 in F and
Л-1(Р) = n Л_1(Л_1(Ю)
лезе
is a neighborhood of 0 in Еи which proves that 3C°/t is equicontinuous.
Conversely, suppose that all the sets JC °/t are equicontinuous, and let W
be a balanced, convex neighborhood of 0 in G. Then for each t G I the set
ut =
лезе
is a neighborhood of 0 in Ec. The subset V = Плезе А”1(Ю of F is
clearly balanced and convex. Since it contains Uigz/i(?A), we conclude
from an observation made in Chapter 2, §12 that У is a neighborhood of 0
in F. |
200
DUALITY
[3, §4]
Let E and F be two locally convex vector spaces whose topologies are
defined by the families of semi-norms (Qi)igj and (гх)хеь respectively. A
set 3C of linear maps from E into F is equicontinuous if and only if for every
X G L there exists a finite family (ц, . .., in) of elements of I and a
positive number д such that
гх(Л(х)) g м max q^{x)
1
for all x G E and h g 3C. The proof is similar to that of Proposition 2.5.2.
Continuous linear forms oh the topological vector space E are continuous
linear maps from E into the topological vector space K1 and therefore we
can speak about equicontinuous subsets of the dual E'. If the space E
is locally convex, then A С E' is equicontinuous if and only if there exists
a continuous semi-norm q on E such that |u(x)| q(x) for all x g E and
и G A.
Let E be a locally convex space, M a linear subspace of E and
an equicontinuous family of linear forms defined on M. One sees, exactly
as in the proof of Proposition 1.1, that there exists an equicontinuous
family of linear forms defined on E such that g^x) = /t(z) for all
x g M and t G I.
Proposition 6. A subset M of the dual Ef ofyi topological vector space
E is equicontinuous if and only if it is contained in the polar V° of a neigh-
borhood V of 0 in E.
Proof, Suppose that M is equicontinuous. Then there exists a neigh-
borhood V of 0 in E such that |(x, u)| 1 for all x g V and и G M.
Thus M C V°. Conversely, let M C V°, where V is a neighborhood of 0
in E. Then |(x, u)| € for x g eV and и g M; hence M is equicontinuous
at 0 and therefore equicontinuous by Proposition 4. |
It follows from this proposition that every equicontinuous subset M of
E' is bounded for a{E', E), We do not state it as a formal proposition,
since we shall soon have a better result (Proposition 6.1). The proof is
easy. We have M C V°, where V is some neighborhood of 0 in E. On
the other hand, a fundamental system of neighborhoods of 0 in E' for
<r(E', E) is formed by the polars A ° of finite subsets A of E, Now A is
bounded; hence A Q\V for some X > 0. But then M c V° C XA°; i.e.,
M is bounded for (r(E'> E),
Proposition 7. Let E be a locally convex space with topology T. Then T
coincides with the ^-topology, where S is the collection of all equicontinuous
subsets of E',
Proof. By Proposition 2.4.4 the balanced, closed, convex neighborhoods
V of 0 form a fundamental system of neighborhoods of 0 for T. By Proposi-
[3, §4]
©-TOPOLOGIES
201
tion 3 each of these sets V is also closed for the topology ofE, E'). Hence
by the theorem of bipolars (Theorem 3.1) we have V = 7°°. But by
Proposition 6 the set F° is equicontinuous in E' ; hence V is a neighborhood
of 0 for the ©-topology. Thus the ©-topology is finer than the topology
T. Conversely, let M be an equicontinuous set in E'. Then M C F°,
where V is a balanced, convex, a(E, E')-closed neighborhood of 0 for T
in E. It follows that M° Э 7°° = 7; i.e., M° is a neighborhood of 0 for
the topology T. Thus T is finer than the ©-topology. |
Theorem 1 (Alaoglu-Bourbaki). Let E be a topological vector space.
Then any equicontinuous subset of E' is relatively compact for the topology
(r(E'> E).
Proof. By Proposition 6 it is sufficient to prove that if V is a neighbor-
hood of the origin in E, then V° is compact for (r(E'> E). Now E' is a sub-
space of the algebraic dual E* of E and the topology a(E*, E) induces
(r(E'> E) on E'. Denote by V9 the polar of V in E*. Since V9 is a bounded,
closed set for afE*, E), it is compact in E* (Example 2.3). But if и G 7е,
then |u(x)| e for x G eV; i.e., и is a continuous linear form on E and
therefore и G У °. Thus V9 = V° С E' and V° is a compact subset
of E'. |
Corollary. Let E be a normed vector space and E' its dual. The closed
unit ball B{ = {x' | ||a/|| g 1} of E' is compact for the topology a(Er, E).
Proof. By formula (1) of Chapter 1, §5 the norm in E' is defined by
Ill'll = sup |<x, o/>|.
wsi
In other words, the closed unit ball B{ of E' is the polar of the closed unit
ball Bi in E. The conclusion then follows from Theorem 1. |
If E is a reflexive Banach space (in particular, if it is a Hilbert space),
then E = E” and therefore its closed unit ball is compact for the topology
(r(E, E'), as we already mentioned in Chapter 1, §7. We shall see in §8
that this necessary condition is also sufficient for the reflexivity of E.
Since a collection © of subsets on F which defines the ©-topology on G
must consist of a(F, G)-bounded sets, a special interest is attached to the
topology defined by all bounded sets of F. Accordingly, we introduce the
following:
Definition 2. Let F and G be two vector spaces which form a pairing.
If © is the collection of all (r(F, G)-bounded sets in F, then the corresponding
^-topology on G will be called the strong topology and denoted by fi(G, F).
We also refer to /3(G, F) as the topology of the uniform convergence on
bounded subsets of F.
202
DUALITY
[3, §4]
Example 5. Let E be a normed vector space and E' its dual. A set
A С E is <r(E, E')-bounded if for each x' e Ef there exists a scalar
X = x(x') > 0
such that | (x, x')| X for all x G A. Therefore if A is bounded in the sense
of the norm, then it is bounded for <r(E, E') since ||z|| M implies
|(z, z')| M ♦ |!a;'||. Conversely, we can consider a set A G E as a collec-
tion of linear forms on the Banach space E' defined by x' h-> (x, xr). All
these linear forms are continuous for the norm topology on E' since
|(x, z')| ||z|| ♦ ||л;'||. Suppose that A is bounded for <r(E, E'), i.e., that
for each x’ G E' the set {|(x, x')| J x G A} is bounded. Then we can apply
the Banach-Steinhaus theorem (Theorem 1.8.1) to the Banach space E'
to find that |(x, z')| ^11^'11 for all x G A; i.e.,
INI = supz-^g^- M
x ^E ||«Г II
for all x G A, which means that A is bounded in the sense of the norm on
E. Therefore in E the sets bounded for а(Е, Ef) are exactly the sets
bounded for the norm (cf. Theorem 5.3).
Now in E a set is bounded in the sense of the norm if and only if it is
contained in some set where X > 0 and Bx is the closed unit ball in E.
Therefore the topology 0(E', E) is also the S-topology, where ® consists
of the unique element Bx. But the polar of B\ is the unit ball B{ of Ef.
Hence we have proved that 0(E', E) is the topology defined by the norm
on E'.
In particular, the topology /3((?, E) is not necessarily compatible with
the pairing of the spaces F and G (see Example 4).
Exercises
1. Suppose that the vector spaces F and G form a pairing and let S be a
collection of balanced, convex, a(F, (r)-closed, a(F, G)-bounded subsets of F,
Suppose furthermore that given a finite family of sets in S, the balanced, convex,
<r(E, G)-closed hull of their union belongs to <S. Prove that the family of semi-
norms (<?л)ле(£ is saturated (cf. Chapter 2, §4). (Hint: If (U?=i A;)00, then
£a(z/) = maxi^n qA.(y) for every у G G.)
2. Let F and G be paired and <S a collection of cr(F, G)-bounded subsets of F,
We say that © is saturated if the following conditions are satisfied:
(i) Every subset of a set A G @ belongs to S.
(ii) The union of a finite number of sets in belongs to
(iii) If A G S. then XA G ® for all X 0.
Civ) The balanced, convex, a(F. G)-closed hull of ел ery set in S belongs to
(a) Show that given a collection 'S of cr(F. G^bciw.ded subsets of E, there
exists a smallest saturated collection ® of a(F. G} ??<unued subsets containing
[3, §5] THE MACKEY TOPOLOGY 203
©. The collection © is called the saturated hull of ©. Show that the ©-topology
on G coincides with the ©-topology.
(b) Let ©i be a saturated collection of a(F, G) -bounded subsets of F and let
©2 be a collection of cr(F, G) -bounded subsets of F containing ©i but distinct
from ©i. Show that the ©2-topology is strictly finer than the ©i-topology.
(c) Deduce from (b) that if ©i and ©2 are two collections of a(F, G)-bounded
subsetsjjf F, then the ©1-topology coincides with the ©2-topology on G if and
only if ©1 = ©2.
3. Let F and G form a pairing which separates points of G and let M be a
subspace of F. Show that M = M±A- if and only if M is closed with respect to
some topology on F, compatible with the duality between F and G.
4. Give an example of a family of continuous real-valued functions defined
on a closed interval of the real line which is not equicontinuous.
5. Show by an example that Proposition 5 does not necessarily hold if the
fi(EL) do not generate the space F. (Hint: Let I consist of one element and take
E = R, F = R2, G = R2, /: я 1—> (z, 0), hn(x, y) = nyJ)
6. Show that if E is a Banach space and E' its dual, then the topology fi(E, E')
coincides with the original normed topology of E. (Hint: Use the Banach-
Steinhaus theorem similarly as in Example 5.)
7. Let E be the subspace of I2 formed by those elements x = (£n)nGN such
that = 0 for large n.
(a) Show that E is dense in I2 and that the dual Er of E can be identified with
I2 (cf. Example 1.7.1).
(b) Show that a subset A С E' is bounded for <r(E', E) if and only if there
exists a sequence (wn)neN of positive numbers such that |^| mn for n G N
ana x' = (^n) G A.
(c) Show that a subset A С E' is bounded for ft(E', E) if and only if there
exists a positive number M such that ||a/|| M for all xr G A.
8. Let E be a locally convex Hausdorff space and Л its completion. Show that
the equicontinuous subsets of Er are the same whether we consider E' as the
dual of E or as the dual of Ё (cf. Exercise 2.3).
§5. The Mackey topology
Let F and G be two vector spaces forming a pairing which separates
points of F (Definition 2.1). We know that F can be considered as a linear
subspece of the algebraic dual G* of G. Let © be a collection of <r(F, G)-
bounded subsets of F and equip G with the ©-topology T. We want to
find conditions which will ensure that the continuous linear forms on G
for T be precisely the elements of F, i.e., that F be the dual Gr of G. In
the terminology of Definition 4.1 we want to find the ©-topoiogios on G
which are compatible with the pairing of G and F. More generally, we
shall determi no the dual of G for any ©-topology. We start with a spe.na:
case when © possesses the stability conditions mentioned in §4.
204
DUALITY
[3, §5]
Proposition 1. Let F and G be two vector spaces which form a pairing
separating points of F. Let © be a collection of balanced, convex, <r(F, G)-
closed, <r(F, G)-boundcd subsets of F which has the following two properties:
(i) Given a finite family of sets in <&, the balanced, convex, <r(F, G)-closed
hull of their union belongs to ©.
(ii) If A G ©, then XA G © for X # 0.
The dual of the space G equipved with the ^-topology is the linear subspace
of G* formed by the G)-closures of the sets A G ©.
Proof. Let и be an ©-continuous linear form on G. By conditions (i)
and (ii) there exists A G © such that |?z(z)| 1 for x G A°; hence
и G A°°. But A°° is the cr(G*, (?)-closure of A in (?* (Theorem 3.1).
Conversely, let и G (?* belong to some set A°°, where A g ©. Then
|?z(z)| € for x G eA° = [(l/e)A]° and thus и is continuous for the
©-topology. I
In order to pass to arbitrary collections of <r(F, ^-bounded sets we shall
need the following result, which is also of independent interest:
Proposition 2. Let E be a locally convex Hausdorff space and (Ai)i^i^n
a finite family of convex, compact subsets of E. Then the convex hull and the
balanced convex hull of the union of the sets Ai are both compact.
Proof. Let L be the compact subset of Kn formed by all points
X — (Xi, . . . , Xn) G Kn such that X< 0 (1 i ri) and 22?=i hi ~
By Tihonov’s theorem (Chapter 2, §10) the set К = L X A! X • • • X An
is a compact subset of Kn X En. Define the continuous map f from К
into E by
n
У(Х1, . . . , Xn, X\, . . . , xn) \jXi.
г=1
By Proposition 2.4.2 the image f(K) of К is the convex hull of U?=i -4 л
Since К is compact and f continuous, f(K) is also compact.
If we define L as the compact subset of Kn formed by all points
X = (Xb . . . , Xn) G Kn such that 22-=1 |X?| 1, then by Exercise 2.4.1(b)
the set f(K) will be the balanced convex hull of U?=i By the seme
reasoning as above, we see that f(K) is compact. |
Proposition 3. Suppose that the vector spaces F and G form a pairing
which separates points of F, and let ©0 be a collection of a(F\ G\-bounded
subsets of F. Equip G with the ^-topology. Then the dual of G is "te linear
subspace of G* generated by the balanced, convex, ofG*, G)-closed cults of the
sets E G
P^oof. ^et © be the collection of all the balanced, convex, at(?)-closed
hul’s in F of the sets U?=i KBi, where Bi G ©o (1 i 5 We have
[3, §5]
THE MACKEY TOPOLOGY
205
seen in §4 that © has the properties (i) and (ii) stated in Proposition 1
and that the ©0-topology on G coincides with the ©-topology. Thus by
Proposition 1 the dual G' of G Is the union of the a(G*, (?)-closures of the
sets in ©. In particular, the balanced, convex, a(G*, (?)-closed hulls in
G* of the sets belonging to ©0 ai’c contained in Gr and therefore the sub-
space H of G* generated by these hulls is also contained in G'.
Thus we have only to show that conversely Gf is contained in 7,he sub-
space H of G*. Lei (BA^.-s^ be a finite family of elements of ©c. and
(X/) j a finite family of nonzero scalars. Lei A« be the balanced, convex.
<r(G*. (?)-closed hull in (7* of Bi (1 г n). Since Ai is the polar in
(?* of the ©о-neighborhood B® of 0 in G. it is cr(G*, G)-compaet (Theo-
rem 4.1). Thus by Proposition 2 the balanced convex hull A of the vuior
of the sets Х<Аг- is <t(G*? G)-compact and hence a(G*, (?)-closed in G*.
But XiBi C A for 1 i n\ hence the <t(G*, G)-closure of (U^^t)°°
is also a subset of A. Since A is a subset of H, we have proved that the
<r(G*, (?)-closure of every set in © is a subset of H, hence that G' С H. |
Corollary. Suppose that the vector spaces F and G form a pairing which
separates points of F, and let © be c collection of <r(F, G)-bounded subsets
of F. Equip G with the ^-topology and let Gf be the dual of G for that topology.
Then:
(a) G' will be contained in F if and only if the balanced, convex, a(F, G)-
closed hulls in F of the sets В e © are <r(F, G)-compact.
(b) G' will contain F if and only if the subspace of F generated by the
balanced, convex, <r(F. G)-closed hulls of the sets В £ is equal to F.
Proof, (a) If the balanced, convex, <r(F, (?)-closed hulls of the sets
Be© are <r(F, G)-compact, then they are also cr(G*, (?)-closed. Thus by
Proposition 3 the dual G' of G is contained in F.
Conversely, if G' C F, then the balanced, convex, a(F, (?)-closed Hulls
of the sets Be© are also a(G*, G)-closed< hence of the form Вэо. Since
B° is a neighborhood of 0 in G for- the ©-topology, B°°is <r(G*, G)-compact.
(b) If the subspace of F generated by the balanced, convex, cr(F, G)-
closed hulls of the sets В e © is equal to F, then the subspace of G*
generated by the balanced, convex, a(G*, G)-closed hulls of the sets
Be©, i.e., the space G', must contain F.
Conversely the subspace N of F generated by the balanced, convex,
a(F, G)-closed hulls of the sets В e © is the intersection of G' with F.
Thus if G' D F, then N = F. |
Theorem 1 (Mackey-Arens). Suppose that the vector spaces F and G
form a pairing which separates points of G. A locally convex topology T on
F is compatible with the pairing of F and G (Definition 4.1) if and only if
T is an ^-topology, where © is some collection of balanced, convex, <r(G, E)~
compact subsets of G which cover G.
206
DUALITY
[3, §5]
Proof. Let T be compatible with the pairing of F and G and let 9i be
the collection of all balanced, convex, T-closed, and thus <r(F, (?)-closed
(Proposition 4.3) T-neighborhoods of 0 in F. Let us denote by © the col-
lection of the polars V° of the sets V G 91. Then T is the ©-topology since
V = V°° for each V G 9L By part (a) of the preceding corollary (with
the roles of F and G interchanged) it follows that the sets V° are <r((?, F)-
compact. One could prove from part (b) of the corollary that the sets
V° cover G (cf. Exercise 2), but a direct proof is simpler. Thus let у G G.
Then the linear form x i-► (ж, у} is continuous on F for the topology T,
hence there exists a neighborhood V G 9i such that |(z, y)\ 1 for x g V,
that is, у G У °.
Conversely, if T is an ©-topology, where is a collection of balanced,
convex, <r((?, F)-compact subsets of G which cover G, then by the preceding
corollary (again interchanging the roles of F and (?) the dual of F is (?;
i.e., T is compatible with the pairing of F and G. |
The theorem just proved shows that a special interest is attached to the
©-topology on F defined by the collection of all balanced, convex, <r((?, F)-
compact subsets of G. Thus we are led to the following:
Definition 1. Let F and G be two vector spaces which form a pairing
which separates points of G. If © is the collection of all balanced, convex,
a(G, F)-compact subsets of G, then the corresponding ^-topology on F will
be called the Mackey topology and will be denoted by r(F, G).
With this definition we can restate Theorem 1 as follows.
Proposition 4. Suppose that the vector spaces F and G form a pairing
which separates points of G. A locally convex topology T on F is compatible
with the pairing of F and G if and only if T is finer than <r(F, G) and coarser
than r(F, (?).
Proof. If T is compatible with the duality between F and G, then by
Theorem 1 it is an ©-topology, where © is some collection of balanced,
convex, <r((?, F)-compact subsets of G. Thus T is coarser than the topology
of the uniform convergence on all balanced, convex, <r((?, F)-compact
subsets of G, i.e., coarser than t(F, (?). On the other hand, we know
(Example 4.2) that <r(F, (?) is coarser than any topology compatible with
the duality between F and (?.
Conversely, if T is finer than <r(F, (?), then all elements of G define
linear forms on F which are continuous for T (Proposition 2.2) and thus
the dual of F for the topology T contains (?. If, on the other hand, T is
coarser than t(F, (?), then the dual of F for the topology T is contained in
the dual of F for the topology t(F, (?), i.e., in (?. |
Our next goal is to prove that the bounded subsets of a locally convex
Hausdorff space E are the same for all locally convex topologies which are
[3, §5]
THE MACKEY TOPOLOGY
207
compatible with the duality between E and Ef. To do this we must first
prove a chain of propositions which will also be useful in other connections.
In the proof of Theorem 2 we shall use the Banach-Steinhaus theorem
(Theorem 1.8.1). For the benefit of the reader who has skipped Chapter 1
we note that the Banach-Steinhaus theorem will be proved again in the
next section (Corollary to Proposition 6.3) and that the proof does not use
the last two theorems of this section. Therefore, if the reader wishes, he
may just read Definition 2, Proposition 7, Definition 3, and Proposition 8
below and then go on to §6, returning to the present section after the corol-
lary to Proposition 6.3.
Proposition 5. Let E be a vector space and let T and T' be two Hausdorff
topologies on E compatible with the vector space structure of E. Suppose that
T is finer than T' and that for T there exists a fundamental system of neigh-
borhoods 53 of 0 which are complete for T'. Then E is complete for T.
Proof. We first prove that each V G 53 is complete for T. Let g be a
Cauchy filter on V for T. A fortiori g is a Cauchy filter for T', and thus
by our assumption $ converges in the topology T' to some point Xq g V.
Let W be a balanced neighborhood of 0 for the topology T, which is com-
plete and thus by Proposition 2.9.2 also closed for T'. By definition g
contains a set A such that A — A GW. Let xT be a point of A, then
A G Xi + W. But xT + W is closed for T' and xQ belongs to the T'-
closure of A; hence xQ G xt + W and A G xQ + W + W. Thus g con-
verges to х0 for the topology T, and V is T-complete.
Now let 5 be a Cauchy filter on E for the topology T. Let V G 53 and
A g 5 such that A — A G V. Let Xi be a point of A. Then we have
A G Xi + V. But the set Xt + V is complete for the topology T by the
first part of the proof, and the filter induced on + V by g is a Cauchy
filter on Xi + V, which is therefore convergent. Thus g is also convergent,
and E is complete for T. |
Let us now introduce a very useful notation due to Grothendieck. Let
E be a locally convex space and A a nonempty, balanced, convex subset
of E. We know that the linear subspace of E generated by A is simply
Un=i and that on this subspace the gauge дд of A is a semi-norm
(Proposition 2.4.7). We denote by Ед the linear subspace of E generated
by A and equipped with the semi-norm дд. If A is absorbing (in particu-
lar, if A is a neighborhood of 0 in E), then the subspace generated by A
is the whole of E.
Proposition 6. Let E be a locally convex space and A a nonempty bal-
anced, convex, bounded subset of E.
(a) If E is a Hausdorff space, then so is Ед; i.e., Ед is a normed space.
(b) If furthermore A is a complete subset of E, then Ед is complete, i.e., a
Banach space.
208
DUALITY
[3, §5]
Proof, (a) Let x be a nonzero vectoring- There exists a neighborhood
U of 0 in E such that x б U. Since A is bounded, there exists X > 0
such that XA C U. Then ж g XA, that is, <7а(я) = X. Thus qA is a norm
on Ea-
(b) The sets XA with X > 0 form a fundamental system of neighbor-
hoods of 0 in the normed space Ea- Since A is bounded in E, every neigh-
borhood of 0 in E contains a set XA, X > 0; i^., the normed topology T
on Ea is finer than the topology T' induced by E on Ea- Furthermore,
each set XA is complete for the topology T*f Hence Proposition 5 shows
that the space Ea is complete for the topology T. |
If now V is an absorbing, balanced, convex subset of £7, then the gauge
qv of 7 is a semi-norm on E (Proposition 2A.7). If N is the linear subspace
of E formed by the vectors x eE such that qv(x) = 0, then x — у G N
implies qv(x) = <lv(y)- Thus we can define a norm on the quotient space
E/N by setting ||i|| у = Qv(%)> where x is any representative of the equiva-
lence class x. We denote by Ey the normed space obtained this way.
The similarity of the two notations Ea and Ey does not in general lead
to any confusion, since if E is a locally convex Hausdorff space and A = V
is an absorbing, balanced, convex, bounded subset bf E, then Ea and Ey
coincide.
Definition 2. Let E be a locally convex space. An absorbing, balanced,
convex, and closed subset of E is said to be a barrel (keg; tonneau in French).
Proposition 7. Let E be a locally convex space and E' its dual. A subset
M of E' is bounded for the topology <r(E', E) if and only if it is contained in
the polar T° of a barrel T in E.
Proof. If the set M is (r(Ef, £7)-bounded, then by Proposition 3.1 its
polar T = M° is balanced, convex, tr(E, Ef)-closed, and absorbing. By
Proposition 4.3 the set T is also closed for the original topology of E.
Thus T is a barrel in E and T° = Moo D M. Conversely, if T is a barrel
in E, then T = T°° by Theorem 3.1, and by Proposition 3.1(f) its polar
T° is (r(E', £7)-bounded. Therefore if M C T°, then M is also a(Ef, E)-
bounded. |
Theorem 2 (Banach-Mackey). Let E be a locally convex Hausdorff
space and T a barrel in E. Then T absorbs (Definition 2.6.1) every balanced,
convex, bounded and complete subset A of E.
Proof. By Proposition 6 the space Ea is a Banach space; the set
aS = T A Ea is a barrel in Ea since it is obviously absorbing, balanced,
convex, and the topology of Ea is finer than the topology induced by the
original topology of E. By Proposition 7 the set aS° is bounded for the
topology а((1?л)', Ea) in the dual space (Ea)' of Ea- In other words, for
every x G Ea there exists X = X(x) > 0 such that |(я, я')| < X for all
[3, §5]
THE MACKEY TOPOLOGY
209
xf G S°. But then by the Banach-Steinhaus theorem (Theorem 1.8.1)
there exists д > 0 such that |(я, я')| < рУа(х) for all x G Ед and xf G 8°,
where дд is the norm in Ед, Consequently the ball {x j дд(х) l/д} is
contained in 8° ° = 8. By the definition of the gauge of A we thus have
(l/д) A G 8 CT; i.e., T absorbs A, |
Now we are in the position to prove the result announced earlier.
Theorem 3 (Mackey). Suppose that the vector spaces F and G form a
dual system. The bounded subsets of F are the same for all locally convex
topologies compatible with the pairing of F and G,
Proof, If a subset of F is bounded for some topology on F, then it is
bounded for every coarser topology. Thus by Proposition 4 it is enough
to prove that if a set is bounded for the topology a (F, G), then it is bounded
for the topology r(F, G),
Let M be a subset of F which is bounded for the topology <r(F, G).
Since the pairing of F and G separates points of F, we can apply Proposi-
tion 7 to the case when E = G,Er = F, and the topology on G is <r(G, F)
and see that M G T°, where T is a barrel in G for the topology <r(G, F),
Since the pairing also separates points of G, by Proposition 2.1 the topology
<r(G, F) is Hausdorff and we can consider the collection © of all balanced,
convex, <r(G, F)-compact subsets of G. Since each such set is <r(G, F)-
complete, by Theorem 2 for every A G S there exists X > 0 such that
A G XT. It follows that M G T° G XA°. Since the sets A°, where
A g S, form a fundamental system of neighborhoods of 0 for the topology
t(F, G), the set M is bounded for r(F, G), |
In particular, if E is a locally convex Hausdorff space with topology T,
and E' its dual, then the subsets of E which are bounded for T are exactly
those which are bounded for a(E, Ef), Furthermore, the topology P(Ef, E)
on E' is the topology of the uniform convergence on subsets of E which
are bounded in the sense of the topology T. For the case of a normed vector
space E we proved this result in Example 4.5. Observe that in both the
general and the particular cases the proof depended essentially on the
Banach-Steinhaus theorem for Banach spaces.
By virtue of the last theorem we sometimes speak of the bounded sets
of a locally convex Hausdorff space without specifying for which topology
they are bounded.
To conclude this section we want to use the techniques just introduced
to show that if E is a quasi-complete (Definition 2.9.2) locally convex
Hausdorff space, then every subset of its dual E' which is bounded for
<r(E', E) is also bounded for fi(E', E), This does not follow from Theorem 3,
since, as we have observed above (Example 4.5), 0(E', E) is not necessarily
compatible with the duality between E' and E, Also if E is not quasi-
complete, the assertion is not necessarily true (Exercise 4.7).
210
DUALITY
[3, §5]
Definition 3. A set S in a topological vector space E is said to be bor-
nivorous if it absorbs every bounded subset of E.
By the definition of bounded sets (Definition 2.6.2) every neighborhood
of 0 in E is bornivorous.
Proposition 8. Let E be a locally convex space and Er its dual. A subset
M of E' is bounded for the topology &(Er, E) if and only if it is contained in
the polar T° of a bornivorous barrel T of E.
Proof. Let M be a 0(E', #)-bounded subset of Er. By Proposition 3.1(e)
its polar T = M° is balanced, convex, a(E, £")-closed, and by Proposi-
tion 4.3 also closed for the original topology of E. Furthermore, T is
bornivorous since given a bounded set A in E, there exists X = X(A) > 0
such that M G XA° and therefore A G A°° G XMQ = XT. Thus T is a
bornivorous barrel in E and T° = M°° D M. Conversely, if T is a
bornivorous barrel and A a bounded set in E, then there exists X > 0
such that A G XT and thus T° G XA°; that is, T° is /?(#', j&)-bounded.
Therefore if M G T°, then M is also 0(Ef, #)-bounded. |
Theorem 4. Let E be a quasi-complete (Definition 2.9.2), locally convex
Hausdorff space and E' its dual. Then every subset of E' which is bounded
for the topology a(E\ E) is also bounded for the topology 0(Ef, E).
Proof. Let M be a subset of E' which is bounded for the topology
<т(Е", E). By Proposition 7 there exists a barrel T in E such that M G T°.
Every bounded set in E is contained in a balanced, convex, closed bounded
set A (p. 109) and by our assumption such a set is complete. Hence T is
bornivorous by Theorem 2 and thus M is bounded for 0(E', E) by
Proposition 8. |
Exercises
1. Let F and G be two vector spaces which form a pairing separating points
of F. Let © be a collection of balanced, convex, <r(F, G)-closed, and a(F} G)-
bounded subsets of F which satisfies the stability properties (i) and (ii) of Propo-
sition 1. Equip G with the ©-topology. Show that a subset of G* is an
equicontinuous set of linear forms on G if and only if it is contained in the
<r(G*, G)-closure A of some set AG©.
2. In the first part of the proof of Theorem 1 show that the sets in © cover G
using the corollary to Proposition 3. (Hint: If x E V° and у E HzO, then
x + yE2(VQ Ж)°.)
3. Let E be a vector space and let Ti and T2 be two Hausdorff topologies on
E compatible with the vector space structure of E. Denote by Ek the space E
equipped with the topology Ta- (k = 1, 2). Suppose that Ti is finer than To.
ne., that the identity map i: Ej E? is continuous. By Proposition 2.9.5 there
[3, §6]
BARRELLED SPACES
211
exists a continuous extension г of i which maps the completion E\ of E\ into the
completion Ё2 of Suppose that for Ti there exists a fundamental system
of neighborhoods of 0 w’hich are closed for Show that the map г is injective.
(Hint: If z G E\ such that l(z) = 0 and is a Cauchy filter on E\ which
converges to 2, construct a Cauchy filter §2 on E2 which converges to 0 and is
coarser than §1. Then show by an argument similar to the one used in the proof
of Proposition 5 that $2 converges to 0 in the topology Ti.)
4. Show that if A is a bounded, balanced, convex subset of the locally convex
Hausdorff space E, then A is the closed unit ball of the normed space Ед.
5. Let F and G be two vector spaces which form a pairing and let S be a
collection of <r(F, G)-bounded subsets of F. A set 5 in F is said to be S-bornivor-
ous if it absorbs every set A G
(a) Show that a set M C 64s bounded for the S-topology in G if and only if
it is contained in the polar of an S-bornivorous subset of F. (Hint: See the proofs
of Propositions 7 and 8.)
(b) Suppose that the pairing of F and G separates points of F and that S is
formed by balanced, convex, <r(F, 6?)-bounded, and <r(F, 69-complete subsets of
F. Show that every subset of G which is bounded for the topology a(G, F) is
also bounded for the S-topology. (Hint: Apply Theorem 2.)
§ 6. Barrelled spaces
Proposition 1. Let E be a locally convex space and Ef its dual.
(a) Every equicontinuous subset of E' is bounded for the topology &(Er, E).
(b) Every subset of E' which is bounded for the topology 0(E', E) is also
bounded for the topology <r(Ef, E).
Proof, (a) Let M be an equicontinuous subset of E'. By Proposition
2.4.4 and Proposition 4.6 we have M C V°, where V is a balanced, convex,
closed neighborhood of 0 in E. Since V is also bornivorous, it is a borniv-
orous barrel. Hence by Proposition 5.8 the set M is bounded for 0(E', Ef
(b) Let M be а Р(Е^ i/)-bounded subset of Ef. Then by Proposition 5.8
we have M C 7°, where T is a bornivorous barrel in E. It follows from
Proposition 5.7 that M is bounded for cr(E', E). |
Remark 1. Proposition 1(b) also follows from the fact diat the topology
0(E', E) is finer than cr(E', E).
Example 1. Let £ be a normed vector space and E' its dual. The
balls Bp = pBY = {x 5 p} in E constitute at the same time a
fundamental system of neighborhoods of 0 and a fundamental system of
bounded sets.
A subset M G E' is equicontinuous if and only if it is contained in the
polar p-^BY — (pRi)c of a ball in E, i.e., if and only if it is bounded in
the sense of the norm in E‘.
212 DUALITY [3. §6]
A subset M С E' is bounded for $(£". E) if and only if the numbers
' vf\ — supjixij^i |w(x)| are bounded for и e M (Example 4.5), i.e., if and
only if M is bounded in the sense of the norm in E'.
Thus in the dual of a normed vector space the equicontinuous sets are
-:xacJy the strongly bounded sets.
Ex-cvtPLE 2. Let E be a Banach spare and E" its dual. A subset M E'
.s bounded for cruF', E} if :o. each ~ e E there exists > 0 such that
u'd); лж for ail и E M. By the Banach-Steinhaus theorem (Theorem
1.8.1; there exists then a /z > 0 such that |u(x)| f°r 'u £ M
and thus
.iu I = sup -Чг^п /z for all и e M.
x=#=0 I ^|l
Thus M is bounded in the sense of the norm of £", and consequently in the
dual of a Banach space equicontinuous, /?(£", E)-bounded and <т(£", E)-
bounded subsets coincide.
We shall now characterize those locally convex spaces in whose dual
every weakly bounded subset, resp. every strongly bounded subset, is
-rouicontinuous.
Definition 1. A locally convex space E is said to be barrelled (kegly;
onnele in French) if every barrel (Definition 5.2) in E is a neighbor hood of 0.
Let us observe that by Proposition 2.4.4 there exists in a locally convex
space a fundamental system of neighborhoods of 0 formed by barrels.
Proposition 2. A locally convex space E is barrelled if and only if every
cvbset of its dual E' which, is bounded for the topology a(E', E) is also
equicontinuous.
Eroof. Suppose that E is barrelled. Let M be a <r(£", £b-bounded subset
of E'. By Proposition 5.7 there exists a barrel T in E such that M Q Tc.
But T is a neighborhood of 0, hence M is equicontinuous by Proposition 4.6.
Conversely, suppose that every a(E'. F)-bounded subset of E' is equi-
continuous and let T be a barrel in E. Then by Proposition 5.7 the set
T° is <r(£", E'j-bounded in E' and consequently equicontinuous. But then
by Proposition 4.7 the set T - TZQ is a neighborhood of 0 in E. |
Corollary. Let E be a barrelled locally convex space. Then the following
collections of subsets of its dual E' are identical:
(a) the equicontinuous sets.
(b) the relatively a(E', E)-compact sets,
tc) the /3(E;, E)-bounded sets,
(d) the a(E', E)-bounded sets.
[3, §6]
BARRELLED SPACES
213
Proof. We have (a) => (c) => (d) by Proposition 1, (d) => (a) by
Proposition 2, (a) (b) by Theorem 4.1, and (b) => (d) by Proposition
2.10.7. |
In spite of its trivial appearance, Proposition 2 will enable us to find
large classes of spaces in whose duals every weakly bounded subset is
equicontinuous. First, let us reformulate Baire’s theorem (Chapter 1, §8)
in tne context of topological spaces.
A subset A of a topological space X is rare (or nowhere dense) if the
closure of A has a void interior, i.e., if A = 0. Clearly A is rare in X if
and only if CA is everywhere dense in X. We say that the subset A of X
is meager (of first category) if there exists a sequence (An)nGN of rare
subsets of X such that A = UnGN An. Finally, we say that a topological
space X is a Baire space if no nonempty open subset of X is meager. If X
is a Baire space, then X itself is not the union of countably many rare
subsets; and in particular, if X is the union of a sequence (Fn)nGN of closed
sets, then at least one set Fn has an interior point.
The topological space X is a Baire space if and only if the intersection
of an arbitrary countable family (О-л/П^ of everywhere dense open sub-
sets of X is everywhere dense. Indeed, suppose that this condition is
satisfied and let A = UnGN An, whc”e the An are rare subsets of X.
Then each CAn is an everywhere dense _>pen subset of X and thus
П CAn = C J An
nGN nGN
is everywhere dense. Hence A cannot be a nonempty open set. Conversely,
let X be a Baire space and let (<?п)яея be a sequence of everywhere dense
open subsets of E. Then each An = C(?n is a closed rare subset of X,
and therefore A = UnGN An has no interior points (since if A contained
the open neighborhood V of one of its points, then V would be the union
cf the rare sets V n An). Thus
CA - C U An = П CAn = П G.
nGN nGN nGN
is everywhere dense.
Baire’s Theorem. A complete metrizable topological space is a Baire
space.
Proof. Let X be a complete metrizable space and let 5 be a metric on
E which defines the topology of X. Let (6rn)neN be a sequence of every-
where dense open subsets of A and let H be an arbitrary nonempty open
subset of E. We have go show that H П (Q^gn Gn) is nonempty.
We shah determine inductively a sequence (Bp (aw))weN of balls
BpJ^) = I ^n) = Pni
214
DUALITY
[3, §6]
such that Вро(во) С H and
C -Bpnl(an_i) П Gn—i, Pn = ~ (1)
for n 1. Suppose that we have already defined the balls В p.(ai) with
the required properties for 0 i n — 1. The set BPni(an_i) П Gn~i
is open and nonempty. Hence there exists a ball Bp (an) satisfying con-
ditions (1). I
The sequence (an)n£N is a Cauchy sequence since/for n, m к we have
an, am G BPk(ak) and thus 8(an, am) 2/k. By hypothesis (an) converges
to a point a which belongs to each closed ball BPn(an). Hence
a G П BpnM С H П ( П • I
n£N \i£N '
Proposition 3. A locally convex space E which is a Baire space is
barrelled.
Proof. Let T be a barrel in E. Since T is absorbing, we have
U nT = E.
1
By the definition of a Baire space, one of the closed sets nT has an interior
point. Since x i—> nx is a homeomorphism, the set T itself has an interior
point Xq. Let У be a balanced neighborhood of 0 in E such that x0 + V С T.
Since T is balanced, we have — x0 + V С T. But then V С T since if
x G V, then
я = ifco + x) + |(—x0 + x) G T,
because T is convex. Hence T is a neighborhood of 0. |
From this proposition and Baire’s theorem we obtain the following:
Corollary. Every Fr6chet space (Definition 2.9.4) is barrelled.
This corollary, combined with Proposition 2, contains the Banach-
Steinhaus theorem (Theorem 1.8.1) as a particular case, which has thus
been proved anew.
Example 3. The spaces 8w(fi), DW(K), ®o(^), ®w(fi), S™,
(0 m oo) are barrelled since they are Fr£chet spaces (Examples
2.9.2 through 2.9.6 and 2.11.8 through 2.11.10).
Proposition 4. Let F be a vector space, (El)lei a family of barrelled
locally convex spaces, and for each c G I letfL be a linear map from EL into F.
Then the space F equipped with the finest locally convex topology for which
all the maps fL are continuous (Chapter 2, §12) is barrelled.
[3, §6] BARRELLED SPACES 215
Proof. Let T be a barrel in F. For each index t the set f\\T) is a barrel
in EL. Indeed, fT\T) is balanced and convex since is linear, and fT\T)
is closed since is continuous. Furthermore, fT\T) is absorbing since
given x G Ei, there exists X > 0 such that X/t(x) G T, that is, Xx G/T^T).
Since Ei is barrelled, fT4T) is a neighborhood of 0 in EL. Thus T is a
neighborhood of 0 in F. |
From Examples 1 and 2 of Chapter 2, §12 we obtain the following:
Corollary, (a) Let Ebe a barrelled locally convex space and M a subspace
of E. Then the quotient space E/M is barrelled.
(b) Let (Ei)iei be a family of barrelled locally convex spaces. Then the
locally convex direct sum LLgi El is barrelled.
It can be shown that the product of barrelled spaces is barrelled (see
Exercise 14.2). On the other hand, a closed subspace of a barrelled space
is not necessarily barrelled ([52], §31, 5, p. 437 and §27, 2, p. 373).
Example 4. The spaces 3)™(12) and 0™ (0 m g oo) (Examples 2.12.5
through 2.12.9) are barrelled.
As an application of Proposition 2, we want to generalize Proposition
1.8.1 to barrelled spaces. We first prove two lemmas which will also be
useful later.
Lemma 1. Let E be a locally convex space over the field К and E' its dual.
Let 5 be a filter basis on E'. For a fixed x G E and A g 8 denote by A(x)
the subset of К formed by all elements xf(x), where x' runs through A. Then
the collection %$(x) of all sets A(x), A g 5, is a filter basis on K. Suppose
furthermore that for each x the filter basis %(х) converges to some number
u(x). Then the map u:x^ u(x) is a linear form on E.
Proof. The collection %(x) is indeed a filter basis since if А, В, C G 5
and A G В A C, then A(x) G B(x) A C(x).
Given x, у G E and e > 0, there exist sets А, В, C G 5 such that
|w(x) — x'(x)| < for all x' G A,
о
|м(у) — for all x' e В
and
|w(x + y) — x'(x + j/)| <5 for all x' .e C.
О
Choosing xf G А П В A C, we have therefore
|«(z + y) — u(x) — u(?/)|
= |«(x + y) — u(x) — u(y) — {x'(x + y) — x'(x) — x'(y)} |
|w(x + y) — x'(x + j/)| + \u(x) — ж'(я;)| + |u(?/) — x'(j/)| < e.
216
DUALITY
[3, §6]
Since € is arbitrary, we obtain u(x + y) = u(x) + u(y). We can prove
in an entirely analogous fashion that u(Xx) = Xu(x) for X G К and x G E. |
Lemma 2. Let E be a locally convex space and E' its dual. . Let M be an
equicontinuous subset of E'f and let § be a filter basis on M. Suppose that for
each x G E the filter basis §(#) (cf. Lemma 1) converges to some number
u(x). Then the map u:x u(x) is a continuous linear form on E.
Proof. It follows from Lemma 1 that и is a linear form on E. Given
€ > 0, there exists a neighborhood V of 0 in E such that |x'(x)| for
all x G V and x' G M. For each x G V there exists xf G M such that
\u(x) — x'OOl = 2€- Thus
|u(x)| |u(x) — x'(x)| + k'(z)| = € for x G V.
Hence и is continuous by Proposition 2.5.1. |
Now we are ready to prove the announced result, which is also often
called the Banach-Steinhaus theorem.
Proposition 5. Let E be a barrelled locally convex space and E' its dual.
Let § be a filter basis on E' which contains a (r(Ef, E)-bounded set [i.e., §
generates a filter which is bounded for the topology a(J?', E) (see Chap-
ter 2, §9)]. Suppose that for every x G E the filter basis %(x) (cf. Lemma 1)
converges to some number f(x). Then f:x f(x) is a continuous linear
form on E.
Proof. Let A be a afE', J?)-bounded set belonging to Then A is
equicontinuous by Proposition 2. The filter basis = M П В | В G §}
induced by § on A is such that for every x G E the filter basis 5a(x)
converges to f(x). Hence the conclusion follows from Lemma 2. |
Corollary. Let Ebe a barrelled space and suppose that one of the following
conditions is satisfied:
(a) (/n)nGN is a sequence of continuous linear forms on E such that for
every x G E the sequence (Jn&Y) converges to some number f(x).
(b) (Л)о<е<а is a family of continuous linear forms on E such that fe(x)
converges to some number f(x) as € —> 0 for every x G E.
Then f:x f(x) is a continuous linear form on E.
Proof. (1) The elementary filter associated with the sequence (/n) is
bounded for a{E\ E). Hence the conclusion holds under condition (a).
(2) Let § be the filter basis formed by the sets {/e | € ^}, where
0 < q < a. The fact that/e(x) converges to/(x) as c —> 0 means precisely
that g(x) converges to f(x). Now if we set €n = 1/n for n 1, then the
sequence fen(x) converges to/(x) as n -+ oo. Thus by part (1) the conclu-
sion also holds under condition (b). |
[3, §6] BARRELLED SPACES 217
Definition 2. A locally convex space E is said to be infrabarrelled
(quasi-barrelled, evaluable) if every bornivorous (Definition 5.3) barrel in
E is a neighborhood of 0.
Clearly, every barrelled space is infrabarrelled. Conversely, there exist
infrabarrelled spaces which are not barrelled (see Exercise 7.1).
Proposition 6. A locally convex space E is infrabarrelled if and only if
every subset of its dual Ef which is bounded for the topology 0(E', E) is
equicontinuous.
Proof. Suppose that E is infrabarrelled and let M be a 0(E', 2?)-bounded
subset of E'. By Proposition 5.8 there exists a bornivorous barrel T in E
such that M Q T°. But Г is a neighborhood of 0; hence M is equicontinu-
ous by Proposition 4.6.
Conversely, suppose that every 0(E', 2?)-bounded subset of E' is equi-
continuous and let Г be a bornivorous barrel in E. Then by Proposition 5.8
the set T° is 0(E', 2?)-bounded in E' and consequently equicontinuous.
But then by Proposition 4.7 the set T = T°° is a neighborhood of 0 in E. |
It follows from this proposition and from Theorem 5.4 that if a quasi-
complete locally convex Hausdorff space is infrabarrelled, then it is bar-
relled. The following diagram helps to remember some of the relations
proved in this and the previous section:
A balanced, convex, closed
A С E A°CE'
neighborhood of 0 <=> equicontinuous
4 j) if E infrabarrelled
if E barrelled \\ bornivorous barrel <=> 0(E', E)-bounded^
# j] if E quasi-complete
^^zzbarrel <=> <r(E', ^)-boundedv
Proposition 7. Let Ebe a locally convex Hausdorff space and Ef its dual.
Every convex subset of E' which is relatively compact for the topology a(Ef, E)
is bounded for the topology fi(Ef, E).
Proof. Let M be a convex, relatively (?(E', I?)-compact subset of E'.
By Proposition 5.2 the balanced convex hull N of the closure of M is a
balanced, convex, cr(E', ^-compact subset of E'. Its polar № is a neigh-
borhood of 0 in E for the Mackey topology t(E, Ef). Let В be an arbitrary
bounded subset of E. Then В is also bounded for the Mackey topology
(Theorem 5.3) and thus there exists X > 0 such that В C X2V°. But
then M c N = №° C XB°. Hence by the definition of the topology
0(E', E) the set M is 0(E', ^-bounded. |
Remark 1. If we do not assume that M is convex, then the conclusion
is not necessarily true (see Exercise 7).
218
DUALITY
[3, §6]
Proposition 8. Let E be an infrabarrelled locally convex Hausdorff space
with topology T. Then the topology T coincides with the Mackey topology
t(E,E').
Proof. By Proposition 4.7 and the definition of т(Е, E') we have to show
that the collection of balanced, convex, a(Ef, B)-closed, equicontinuous
subsets of Ef is identical with the collection of all balanced, convex a(Ef, E)-
compact subsets of E'.
By Theorem 4.1 а a(Ef, B)-closed, equicontinuous subset of E' is
a(JEf, B)-compact. Conversely, a convex, a(Ef, ^-compact subset of Ef
is (r(Ef, B)-closed. It is also $(Ef, B)-bounded by Proposition 7. Hence
it is equicontinuous by Proposition 6 and the assumption that E is infra-
barrelled. |
We shall see in the next section that every metrizabfe locally convex
space is infrabarrelled.
Proposition 9. Let F be a vector space, (E/)^i a family of infrabarrelled
locally convex spaces, and for each lEl let fL be a linear map from EL into F.
Then the space F equipped with the finest locally convex topology for which
all the maps ft, are continuous (Chapter 2, §12) is infrabarrelled.
Proof. Let T be a bornivorous barrel in F. For each index t the set
/Г1(Т) is a bornivorous barrel in Ec. Indeed, /Г1(Г) is balanced and
convex since ft, is linear, and/r1(T) is closed since Д is continuous. Further-
more, /Г1(Т) is bornivorous since if В is a bounded set in Ec, then ftfB)
is a bounded set in F. Hence there exists X > 0 such that /t(B) C XT,
that is, В С Х/Г1(Т).
Since Ec is infrabarrelled, /ГХ(Т) is a neighborhood of 0 in Ec. Thus T
is a neighborhood of 0 in F. |
From Examples 1 and 2 of Chapter 2, §12 we obtain the following:
Corollary, (a) Let E be an infrabarrelled locally convex space and M a
subspace of E. Then the quotient space E/M is infrabarrelled.
(b) Let (Et,)t,<=i be a family of infrabarrelled locally convex spaces. Then
the locally convex direct sum ILez Д is infrabarrelled.
It can be shown that the product of infrabarrelled spaces is infrabarrelled
(see Exercise 14.2). On the other hand, a closed subspace of a barrelled
space is not even necessarily infrabarrelled ([52], §27, 1, pp. 371-372 and
§31, 5, p. 437).
If В is a barrelled space, then its dual E' is quasi-complete for the
topology a(Ef, E) since a bounded, closed subset of Ef is compact by the
Corollary of Proposition 2 and thus complete. A much stronger result is:
Theorem 1. Let E be a barrelled locally convex space and Ef its dual.
Let <&bea collection of bounded subsets of E which cover E. Then Ef is quasi-
complete for the ^-topology.
[3, §6]
BARRELLED SPACES
219
Proof. Let M be a bounded, closed subset of E' for the ©-topology
and let 5 be a Cauchy filter on M. Then M is bounded for the topology
<r(B', E) since given x G E, there exists В e ® such that x G В and
sup I<2/, x')| < oo
2/GB
for all x' G M. Thus M is equicontinuous by Proposition 2.
For each x G E the collection %(x) (cf. Lemma 1) is the basis of a Cauchy
filter on K. Indeed, given € > 0 and x G В g ©, there exists A g 5 such
that A — A C eB° and in particular |x'(^) — 3/'(#)| = € for x'f y' G A.
Since К is complete, converges to an element u(x) G К and by
Lemma 2 the map и: x i-> u(x) is a continuous linear form on E.
Let us prove that 5 converges to и for the ©-topology. Since 5 is a
Cauchy filter, for every В g © and € > 0 there exists A G 5 such that
|я'(я) ~ y'(x)I < for all я G В and x', yf G A. On the other hand, for
every x G В there exists x' g A such that \u(x) — x'(x)| < Je. Hence
\u(x) — y'(x) I \u(x) — x'(x)| + |x'(x) — y'(x)\ < €
for every x g В and y' G A, that is, А С и + бВ°. If now Bi g © for
1 i n, and € > 0, then there exists A g 5 such that
А С и -f- € P| B^,
г=1
which proves our assertion. |
Exercises
1. Let В be a topological space. A function/: E —> R is said to be lower semi-
continuous at the point a G E if for every e > 0 there exists a neighborhood V
of a such that f(x) > f(a) — e for every x G V. We say that / is lower semi-
continuous on В if it is lower semi-continuous at every point on B.
(a) Prove that / is lower semi-continuous on В if and only if for every X G R
the set {x \f(x) X} is closed in B.
(b) Let q be a semi-norm on a locally convex space. Prove that the set
{z j q(x) 1} is a barrel if and only if q is lower semi-continuous.
(c) Prove that a locally convex space В is barrelled if and only if every lower
semi-continuous semi-norm on В is continuous.
2. Prove that the completion of an infrabarrelled locally convex Hausdorff
space is barrelled. (Hint: Use Exercise 4.8.)
3. (a) Prove that if a filter $ has a countable basis, then it is the intersection
of all the elementary filters finer than (Hint: If (An)neN is a basis of set
Bn = f)p=o Ap. Then (Bn)nGN is a basis of 5 and B„+i C B„. If an G B„,
then 5 is coarser than the elementary filter associated with (an). The intersection
of the elementary filters finer than 5 is a filter 3 finer than 5- If 3 were strictly
finer than 5, there would exist M g 3 such that Bn П CM $ for all n G N.
220 DUALITY [3, §7]
Picking bn E. Bn П CM, the elementary filter associated with (bn) would be
finer than but M would not belong to it.)
(b) Let E be a barrelled Hausdorff space, E' its dual, and § a filter on E'
which has a countable basis. Suppose that for every x E E the filter basis %(x)
(cf. Lemma 1) converges to some number f(x). Prove that f: x ь-» f(x) is a con-
tinuous linear form on E. (Hint: Use (a) and the corollary to Proposition 5.)
4. Give an example of a locally convex Hausdorff space which is quasi-complete
but not complete. (Hint: Consider the space I1 with the topology a(P, co)
(cf. Example 1.7.2). Use Theorem 1 and Proposition 2.5.)
5. Let E be a locally convex Hausdorff space with topology T and let E' be
its dual. Denote by fl(E, Ef) the topology of the uniform convergence on a(Z?', E)-
bounded subsets of E' on E and by fi*(E, E') the topology of the uniform con-
vergence on ft(E', ^-bounded subsets of E' on E.
(a) Prove that
P(E, E') > $*(E, E') > т(Е, E') > T,
where > means "is finer than.”
(b) Prove that E is barrelled if and only if /3(Е, E') = T.
(c) Prove that E is infrabarrelled if and only if @*(E, Ef) = T.
6. Show that if in a Fr£chet space E there exists a countable fundamental
system of bounded sets (cf. Chapter 2, §6), then E is normable. (Hint: Use
Baire’s theorem and Proposition 2.6.1.)
7. Give an example of a <r(E', ^-compact set which is not fi(E', ^-bounded.
(Hint: Let E be the subspace of I2 considered in Exercise 4.7 and consider in E'
the sequence nun, where the linear form un is given by (fc) fc.)
§ 7. Bornological spaces
We pointed out in Exercise 1.4.3 that if f is a linear map from a normed
vector space E into a normed vector space F which maps bounded sets
into bounded sets, then f is continuous. We shall now characterize those
locally convex spaces E which possess this property.
Definition 1. A locally convex space E is said to be bornological if every
balanced, convex, bornivorous (Definition 5.3) subset of E is a neighborhood
ofO.
Since a bornivorous barrel is in particular a balanced, convex, borniv-
orous set, it follows that every bornological space is infrabarrelled.
Proposition 1. (a) Let E be a bornological locally convex space and F
an arbitrary locally convex space. If f is a linear map from E into F which
maps bounded sets into bounded sets, then f is continuous.
(b) If E is a locally convex space such that, given a normed space F and a
linear map f from E into F which maps bounded sets into bounded sets, f is
necessarily continuous, then E is bornological.
[3, §7]
BORNOLOGICAL SPACES
221
Proof, (a) Suppose that E is bornological and let /: E —* F be a linear
map into the locally convex space F yrhich maps bounded sets into bounded
sets. Let V be a balanced, convex'neighborhood of 0 in F and let A be a
bounded set in E. Then /(A) is a bounded set in F; hence there exists
X > 0 such that /(A) С XF, that is, A C X/-1(F). Thus/-1(F) is bal-
anced, convex, and bornivorous and therefore a neighborhood of 0 in E.
Hence f is continuous.
(b) Suppose that E has the property indicated in part (b) of the proposi-
tion, and let V be a ba&nced, convex, bornivorous subset of E. Let Ey
be the normed space introduced in §5 (following Proposition 5.6) and f the
canonical surjection from E onto Ey. If A is a bounded set in E, then
there exists X > 0 such that A С XF, that is, qy(x) X for all x G A.
Hence /(A) is bounded in Ey and thus by our assumption f is continuous.
But if Bp is the ball with center 0 and radius p in Ey, then F D /-1(-Вр)
for p < 1 and thus F is a neighborhood of 0 in E. |
We shall now give a characterization of bornological spaces in terms of
linear forms instead of linear maps.
Proposition 2. A locally convex Hausdorff space E is bornological if
and only if the following two conditions are satisfied:
(i) The topology T of E coincides with the Mackey topology t(E, E') on E.
(ii) If a linear form f transforms bounded sets of E into bounded sets of K,
then f is continuous.
Proof, (a) Suppose that E is bornological. Then E is infrabarrelled and
'(i) follows from Proposition 6.8. Setting F = К in Proposition 1(a) we
obtain (ii).
(b) Suppose that conditions (i) and (ii) are satisfied.. By Proposition
2.4.5 the collection 9? of all balanced, convex, bornivorous subsets form a
fundamental system of neighborhoods of 0 for a locally convex topology
T' on E. The topology T' is finer than T since every balanced, convex
neighborhood of 0 is in particular bornivorous.
On the other hand, T' is coarser than т(Е, E'). Indeed, let f be a Tz-
continuous linear form on E. There exists F G 9? such that |/(x)| g 1
for x G F. If A is a T-bounded subset of E, then there exists X > 0 such
that A C XF. Hence | f(x) | X for x G A. Thus/maps bounded subsets
of E into bounded subsets of К and is therefore T-continuous by condition
(ii). Since conversely every T-continuous linear form on E is T'-continu-
ous, the dual space of E for the topology T' is the same as for the topology
T. Hence by Proposition 5.4 the topology T' is indeed coarser than
т(Е, E').
But then by condition (i) the topology T' must coincide with both T
and t(E, Ef) and in particular every balanced, convex, T-bornivorous set
in E is a neighborhood of 0 for T; i.e., E is bornological. |
222
DUALITY
[3, §7]
Proposition 3. Every locally convex space in which the origin has a
countable fundamental system of neighborhoods is bornological. In particular,
every metrizable locally convex space is bornological^
Proof. Let (K)n^i be a countable, decreasing (i.e., Vn D Fn+i) funda-
mental system of balanced neighborhoods of 0 in E, and let U be a bal-
anced, convex, bornivorous subset of E. Suppose that U contains no set
of the form (l/n)Fn. For each n 1 let xn be a point of (l/n)Fn which
does not belong to U. The sequence (nxn)n^i converges to 0, and thus the
set A = {nxn | n 1} is bounded. However, U does not absorb A since
if nxn G XU, X > 0, for all n 1, then xn G (X/n)C7 C U for n X,
contradicting the choice of xn. But this is impossible, since U is bornivorous
and so we have proved that U contains a set (l/n)Fn and is therefore itself
a neighborhood of 0. |
More particularly, a metrizable locally convex space is always infra-
barrelled, as we already mentioned in the previous section.
Example 1. The spaces 8W(Q), (Bo (0), S™, Sm, where
0 m oo, are bornological and infrabarrelled since they are metriz-
able (Examples 2.6.1 through 2.6.3).
Proposition 4. Let F be a vector space, (E/)lei a family of bornological
locally convex spaces, and for each l g I let ft. be a linear map from Ec into F.
Then the space F equipped with the finest locally convex topology for which all
the maps fL are continuous (Chapter 2, §12) is bornological.
Proof. Let U be a balanced, convex, bornivorous set in F. For each
index ь the set f^tU) is balanced and convex in EL since fL is linear.
Furthermore, if В is a bounded set in then fL(B) is bounded in F since
fL is continuous. Hence there exists X > 0 such that/t(B) C XU, that is,
В С Х/Г1(С/). Thus we have proved that f7‘1(U) is a balanced, convex,
bornivorous set in E.
Since each Ec is bornological, each set jT\U) is a neighborhood of 0.
Hence U is a neighborhood of 0 in F. |
From Examples 2.12.1 and 2 we obtain the following:
Corollary, (a) Let E be a bornological locally convex space and M a
subspace of E. Then the quotient space E/M is bornological.
(b) Let (E/)iei be a family of bornological locally convex spaces. Then the
locally convex direct sum LLez Et is bornological.
Example 2. The spaces ЗУ”(9) and 0™ (0 m g oo) (Examples 2.12.5
through 2.12.9) are bornological and infrabarrelled.
It can be shown that the product of a countable family of bornological
spaces is bornological ([52], §28,4. (4), p. 387). The problem, whether the
product of an arbitrary family of bornological spaces is bornological, seems
to be unsolved and is closely related to some problems posed by Ulam
[3, §7]
BORNOLOGICAL SPACES
223
and Mackey in the theory of infinite cardinals and in measure theory.
(For an account and references, see [52], §28,8, pp. 393-395 and [43],
pp. 279-281.) A closed subspace of a bornological space is not necessarily
bornological ([52], §28,4, p. 387).
Propositions 3 and 4 have a kind of converse. Let E be a bornological
locally convex space and let A be a bounded, balanced, closed, convex
subset of E. As in §5 (cf. Proposition 5.6), we denote by Ea the subspace
of E generated by A and equipped with the semi-norm ца = the gauge
of A. Denote by /a the canonical injection Ea E. Let T be the original
topology of E and let T' be the finest locally convex topology on E for
which all the maps Ja are continuous. We want to show that the topologies
T and T' are identical. Let V be a balanced, convex neighborhood of 0
in E for T. Then XA С V for some X > 0; that is, XA C/a^F). Hence
for every A the set /^(F) is a neighborhood of 0 in Ea, and thus V is a
neighborhood of 0 in E for T'. Conversely, let V be a balanced, convex
neighborhood of 0 in E for T'. Then for each A there exists X > 0 such
that XA C/Z^F) and a fortiori XA C F. Thus F is a bornivorous set
and therefore a neighborhood of 0 for the bornological topology T. We
have therefore proved the first part of the following result:
Proposition 5. Let F be a bornological locally convex space with topology
T. Then there exists a family of locally convex vector spaces, whose
topology can be defined with the help of a single semi-norm, and a family
(fi)iEi of linear maps fL:EL —> F, so that T is the finest locally convex topol-
ogy for which the maps fL are continuous and furthermore F = LU/AW.
If F is a Hausdorff space, then the EL can be taken to be normed spaces.
If furthermore F is quasi-complete, then the EL can be taken to be Banach
spaces.
The last two statements follow from Proposition 5.6.
In Chapter 1, §7 we showed that the dual of a normed space is always
complete for the normed topology. We shall now generalize this fact.
Proposition 6. Let E be a bornological space and Ef its dual. Then Ef
equipped with the topology &(Ef, E) is complete.
Proof. Let 5 be a Cauchy filter on Ef. For eachxeE the filter basis
g(x) introduced in Lemma 6.1 is the basis of a Cauchy filter on К since
given € > 0 and a bounded set В in E containing x, there exists A e §
such that A — A c eB°, and in particular |x'(x) — 2/'(rr)| € for
< y' G A.
Since К is complete, f?(x) converges to an element u(x) E K, and by
Lemma 6.1 the map u: x u(x) is a linear form on E. Let us show that
и is continuous. Let В be a bounded subset of E. There exists A e 5
such that A — A C B°; i.e., |x'(x) — г/'(гг) | = 1 for x E В and x', yf E A.
In particular, there exists a > 0 such that |x'(x)| a for x E B, xf E A.
224
DUALITY
[3, §7]
On the other hand, given x G B, there exists x' G A such that
|u(x) — x'(x)|
Hence
|u(x)| |u(x) — x'(x)| + |z'(z)| 2a
for all x G B; that is, и maps В into a bounded subset of K. Since E is
bornological, it follows from Proposition 1 that и is continuous.
Finally, converges to и for the topology 0(E',E). Indeed, since
is a Cauchy filter, for every bounded subset В of E and e > 0 there
exists A g such that |x'(x) — i/'(x)| < Je for all x G В and я/, yf g A.
On the other hand, for every x G В there exists x' G A such that
|u(x) — я/(я)| <
Hence
\u(x) — y'(x)\ \u(x) — z'(z)| + |z'(z) — y'(x)\ < €
for every x G В and yf g A; that is, А С и + eB°. If now (Bi)i^^n
is a finite family of bounded subsets of E and e > 0, then there exists
A g g such that
А С и + e П В?,
1=1
which proves our assertion. |
Exercises
1. Give an example of a locally convex space which is bornological, and thus
also infrabarrelled, but which is not barrelled. (Hint: Use Exercise 4.7, Proposi-
tion 3, and the corollary to Proposition 6.2.)
Remark 1. There exist barrelled spaces which are not bornological [67, 95].
2. Prove that a locally convex space E is bornological if and only if every
semi-norm on E which is bounded on every bounded subset of E is continuous.
3. Let E be a locally convex space. Prove that the following conditions are
equivalent:
(i) E is bornological.
(ii) If M is a set of linear maps from E into a locally convex space F such that
for every bounded set A С E the set M(A) = IJuEm u(x) is bounded in
F, then M is equicontinuous.
(Hint: Prove (i) => (ii) as in Proposition 1(a). Then prove (ii) => (b) of
Proposition 1.)
4. Let E be a locally convex Hausdorff space. Prove that the following condi-
tions are equivalent:
(a) E is bornological.
(fi) If J/ is a set of linear forms on E which is uniformly bounded on every
bounded subset of E, then M is equicontinuous.
[3, §7] BORNOLOGICAL SPACES 225
{Hint: (a) => (ii) of Exercise 3 => (/?). To prove (fi) => (a), use Proposition 2.
To show that (fi) => (i) of Proposition 2, observe that every balanced, convex,
<r(E', E)-compact set in E' is equicontinuous.)
5. (a) Let E be a locally convex space and suppose that given a normed space
F and a linear map/: E F which maps sequences converging to 0 into bounded
sequences, f is necessarily continuous. Prove that E is bornological. (Hint:
Use Proposition 1(b).)
(b) Let E be a metrizable locally convex space. Prove that every balanced
subset of E which absorbs all sequences converging to 0 is a neighborhood of 0.
(Hint: Use an argument similar to that employed in the proof of Proposition 3.)
(c) Using (a) and (b), prove that a metrizable locally convex space is
bornological.
6. (a) Let E and F be two topological vector spaces and let f: E —> F be a
linear map which transforms sequences converging to 0 into bounded sequences.
Prove that / transforms bounded sets into bounded sets. (Hint: Use an argument
similar to that employed in the proof of Proposition 3.)
(b) Let E be a bornological space, F a locally convex space, and f :E F
a linear map which transforms sequences converging to 0 into bounded sequences.
Prove that/is continuous. (Hint: Use (a) and Proposition 1(a).)
7. Let E be a locally convex Hausdorff space. A sequence (xn) of elements
of E is said to converge to xo E E in the Mackey sense (or locally) if there exists
a bounded, balanced, convex subset A of E so that (xn) converges to «о in the
normed space Ea (cf. Proposition 5.6).
(a) Prove that (xn) converges to xq in the Mackey sense if and only if (xn — xo)
converges to 0 in the Mackey sense.
(b) Prove that (xn) converges to 0 in the Mackey sense if and only if there
exists a sequence (Xn) of strictly positive numbers tending to +00 such that
(Xnsn) converges to 0 in the ordinary sense.
(c) Prove that if a sequence converges to 0 in the Mackey sense, then it con-
verges to 0 in the ordinary sense.
(d) Prove that if E is metrizable, then every sequence which converges to 0
in the ordinary sense also converges to 0 in the Mackey sense.
(e) Prove that E is bornological if and only if every balanced, convex set
which absorbs all sequences which converge to zero in the Mackey sense is a
neighborhood of 0. (Hint: If M does not absorb the bounded set B, pick xn E В
such that xn/n3 Й M and consider the sequence xn/n2.)
(f) Let E and F be two locally convex Hausdorff spaces and u:E —> F a
linear map. Prove that the following conditions are equivalent:
(i) и transforms bounded sets into bounded sets.
(ii) и transforms sequences which converge to 0 in the Mackey sense into
sequences which converge to 0 in the Mackey sense.
(iii) и transforms sequences which converge to 0 in the Mackey sense into
sequences which converge to 0 in the ordinary sense.
(iv) и transforms sequences which converge to 0 in the Mackey sense into
bounded sequences.
226
DUALITY
[3, §8]
(Hint: To prove (iv) => (i), suppose that В is bounded in E, but that there
exists a neighborhood V of 0 in F such that u(B) (/ n3V for all n 1. Pick
xn G В such that u(x^/n3 £ V. Then xn/n2 tends to 0 in the Mackey sense,
but u(zn/n2) is not bounded.)
(g) Using (d) and (f), prove that a metrizable locally convex space is borno-
logical. (Hint: If u:E —> F satisfies (i) of (f), then it satisfies (iii) of (f). If E
is metrizable, then by (d) the map и transforms sequences tending to 0 into
sequences tending to 0; that is, и is continuous. Apply Proposition 1(b).)
(h) Let E be a bornological Hausdorff space, F a locally convex Hausdorff
space, and и: E -* F a linear map. Prove that (i) through (iv) of (f) are equiva-
lent to the following conditions:
(v) и transforms sequences which converge to 0 in" the ordinary sense into
sequences which converge to 0 in the ordinary sense.,
(vi) и is continuous.
8. Let E be a locally convex space with topology 7*.
(a) Prove that among all the locally convex topologies on E for which the
bounded sets are the same as for T there exists a finest one T', which is the only
one among these topologies for which E is bornological. The vector space E
equipped with the topology T' is called the bornological space associated with E.
(Hint: The collection 91 of all balanced, convey, bornivorous subsets of E forms a
fundamental system of neighborhoods of 0 for the topology 7*'.)
(b) Let F be a locally convex space. Prove that a linear map u:E —* F
transforms every T-bounded set of E into a bounded set of F if and only if it is
continuous for the topology 7*'.
(c) For every bounded, balanced, closed, convex subset A of E let Ea be the
space introduced in §5 and let /л be the canonical injection Ea E. Prove
that 7*' is the finest locally convex topology on E for which the maps /л are
continuous.
§в. Reflexivity
Definition 1. Let E be a locally convex Hausdorff space and Ef its dual.
The dual E" of E' equipped with the strong topology (l(Ef, E) is called the
bidudl (second conjugate, second adjoint) of E.
If E is a normed space, this definition coincides with the one given in
Chapter 1, §7. Let x be an element of E and define the linear form x on
Ef by writing
x(xf) = (x, x') for all xf G Ef.
We know from Proposition 2.2 that x is continuous on E' for the topology
<r(Ef, E), and thus x is also continuous on E' for the finer topology
0(E'f E); that is, x is an element of the bidual E”. The map x i—> x from
E into E" is clearly linear. Since we suppose that E is a locally convex
Hausdorff space, the pairing of E and E' separates points of E (Example
2.2), and therefore x = 0 implies x = 0; i.e., the map x i-> x is also
[3, §8]
REFLEXIVITY
227
injective. We shall call this map x x the canonical imbedding of the
(algebraic) vector space E into the (algebraic) vector space E". It is
possible to consider E as a linear subspace of E". If we do so, we say
that E is identified canonically with a subspace of E”. We will then have
the nested sequence of spaces EСЕ" C (!?')* (of- §2). Our goal is to
investigate under what conditions this canonical imbedding is surjective
or is an isomorphism for the topology P(E''> E’) on E”.
Definition 2. A locally convex Hausdorff space E is said to be semi-
reflexive if the canonical imbedding from E into its bidual E" is surjective.
The fact that E is semi-reflexive is clearly equivalent to any one of the
following statements:
(a) Every linear form on E’ which is continuous for the topology
0(E', E) is of the form x' »-► (x, x') for some x E E.
(b) Every linear form on Ef which is continuous for the topology
0(E', E) is also continuous for a(E', E).
(c) The topology 0(E'> E) on E' is compatible with the duality between
E and E'.
In general, the strong topology 0(E', E) on the dual E' of a locally
convex Hausdorff space E is finer than the Mackey topology т(Е\ E)
(Definition 5.1) since every (r(E, E')-compact set is bounded (Proposition
2.10.7). Therefore it follows from the characterization (c) above and from
Proposition 5.4 that E is semi-reflexive if and only if the topologies 0(E', E)
and т(Е\ E) are identical. This can be expressed also in several other
forms.
Proposition 1. Let E be a locally convex Hausdorff space and E' its
dual. The space E is semi-reflexive if and only if every bounded, <r(E, En-
closed subset of E is compact for the topology a(E, E,y).
Proof. If E is semi-reflexive, then in particular the bidual E" of E is
contained in E. Hence it follows from the corollary to Proposition 5.3,
applied to F = E, G = E', and S = the collection of (r(E, Unbounded
subsets of E, that the balanced, convex, (r(E> E')-(dosed hull of every
(г(Е, Unbounded set is a(E, ЕП-cornpact. Therefore every bounded,
(t(E> £") "dosed set is also (r(E, 1?')-сотРас^.
Conversely, suppose that every bounded, (r(E, ЕП-closed subset of E
is (r(E, ЕП-compact. By Proposition 4.2, we can consider the strong
topology 0(E', E) as the topology of the uniform convergence on all
balanced, convex, a(E, E')~dosed, and a(E, Unbounded subsets of E.
But these sets are then precisely the balanced, convex, a(E, 1?')-сотРас^
subsets of E; that is, 0(E', E) coincides with the Mackey topology
r(E',E).l
228
DUALITY
[3, §8]
Proposition 2. Let E be a locally convex Hausdorff space and E' its dual.
The space E is semi-reflexive if and only if it is quasi-complete for the
topology a(E, E').
Proof. Suppose that E is semi-reflexive and let A be a bounded, closed
subset of E with respect to the topology a(E, E'). By Proposition 1 the
set A is compact and hence also complete.
Conversely, suppose that E is quasi-complete for a(E, E') and let A
be a bounded, (r(E, 7?z)-closed subset of E. Since E С E'* and <r(E'*, E)
induces on E the topology (r(E, Ef), the set A is bounded in E'* for
a(E'*,E'). It follows from Example 2.3 that A is relatively compact
in E'* for a(E'*, E). On the other hand, by virtue of Proposition 2.5,
the space E'* equipped with the topology a(E'*, E') is the completion of
E equipped with the topology a(E, Ef), and therefore A is a precompact
subset of E (Theorem 2.10.2). By our hypothesis A is complete; hence
it is compact for a (E, E'). It follows from Proposition 1 that E is semi-
reflexive. |
Proposition 3. Let E be a locally convex Hausdorff space and E' its
dual. Then E is semi-reflexive if and only if every convex subset of E' which
is closed for the topology fi(E', E) is also closed for the topology <r(E', E).
Proof. If E is semi-reflexive, then fi(E', E) is compatible with the
duality between E and E', and thus by Proposition 4.3 every $(Ef, E)-
closed convex set is also <r(E', I?)-closed.
Conversely, if every 0(7?', I?)-closed convex set is also (r(E', I?)-closed,
then in particular every 0(E', £7)-closed hyperplane in E' is also (r(E', E)-
closed, which, by Proposition 2.5.7, means that every 0(E'j ^-continuous
linear form on E' is also (r(E', ^-continuous. |
We shall see in §§14 and 15 that a closed subspace of a semi-reflexive
space is semi-reflexive (Proposition 15.2), and that the product (Proposi-
tion 14.4) and the locally convex direct sum of a family of semi-reflexive
spaces are semi-reflexive (Exercise 14.4). On the other hand, the quotient
space of a semi-reflexive space modulo a closed subspace is not necessarily
semi-reflexive ([52], §23,5, p. 307).
Proposition 4. The dual E' of a semi-reflexive locally convex Hausdorff
space E equipped with the topology P(E', E) is barrelled.
Proof. Let T be a barrel in E'. Then its polar T° is a bounded set for
the topology (r(E, E') = <г(Е", E') on E = E". Thus T°° = T is a
neighborhood of 0 in E' for the topology 0(E', E). |
Remark 1. The converse of Proposition 3 is false. Indeed, the dual of
a nonreflexive Banach space (see Example 1.7.4) is a Banach space and
in particular a barrelled space (cf. Proposition 16.1).
[3, §8]
REFLEXIVITY
229
Let E be a locally convex Hausdorff space, E' its dual and E" its bidual.
By the definition of E" and by Example 2.2 the two spaces E' and E"
form a dual system. An equicontinuous subset of E' is bounded for the
topology P(E', E) (Proposition 6.1) and therefore also for the topology
<r(E't E") (Theorem 5.3). Let us denote by e(E", E') the topology of the
uniform convergence on all equicontinuous subsets of E'. By Proposition
4.7 the topology e(E", E') induces on E its original topology.
The topology fi(E”, E') on E" is finer than e(E”, E'), and therefore
the canonical imbedding E —> E" is not necessarily continuous if we
equip E” with the topology fi(E”, Ef). We have the following result:
Proposition 5. Let E be a locally convex Hausdorff space, E' its dual,
and E" its bidual. The topologies 0(E", Ef) and e(E", Ef) on E" coincide
if and only if E is infrabarrelled. If this condition is satisfied, then the
canonical imbedding E —* E" is an injective strict morphism if we equip
E" with the topology 0(E”, E').
Proof. The equality of the topologies &(E", E') and e(E", E') means
that every ft(E', ^-bounded subset of E' is equicontinuous. By Proposi-
tion 6.6 this is the case if and only if E is infrabarrelled. The last state-
ment follows from the considerations preceding the proposition. |
Definition 3. A locally convex Hausdorff space E is said to be reflexive
if the canonical imbedding from E into its bidual E" is an isomorphism
when we equip E" with the topology £(E”, E').
Proposition 6. A locally convex.Hausdorff space is reflexive if and only
if it is semi-reflexive and infrabarrelled.
Proof. If E is reflexive, then the canonical imbedding E —* E" is sur-
jective; i.e., E is semi-reflexive. Furthermore, ft(E", E') induces on E
its original topology, i.e., coincides with t(E", Ef). Thus E is infrabarrelled
by Proposition 5.
Conversely, if E is semi-reflexive, then E —» E" is surjective, and if
furthermore E is infrabarrelled, then E —> E" is an isomorphism by
Proposition 5. |
Corollary. A reflexive space is always barrelled.
Proof. Let M be a <f(Er, ^-bounded subset of E'. If E is semi-reflexive,
then the topology P(Ef, E) is compatible with the duality between E and
E'. Hence M is also bounded for 0(E', E) (Theorem 5.3). But E is infra-
barrelled. Hence M is equicontinuous by Proposition 6.6. Consequently,
E is barrelled by Proposition 6.2. |
Proposition 7. The dual E' of a reflexive space E equipped with the
strong topology 0(E', E) is reflexive.
230
DUALITY
[3, §8]
Proof. In the first place, E' is barrelled by virtue of Proposition 4.
Next, let M be a subset of E' which is bounded and closed for the topology
E"). Since E is reflexive, M is also bounded and closed for E).
Since E is barrelled by virtue of the preceding corollary, it follows from
the corollary to Proposition 6.2 that M is compact for E). Thus E' is
also semi-reflexive. |
Since a normed space E is in particular infrabarrelled, the canonical
imbedding E —> E" is always an injective strict morphism. Actually we
have proved much more in Chapter 1, §7; namely, that the canonical
imbedding is an isometric isomorphism from E onto a subspace of E".
Thus if E is a semi-reflexive normed space, then it is reflexive and the iso-
morphism E —> E" is an isometry. In particular, E is then a Banach
space. The following theorem tells us when this is the case.
Proposition 8 (Banach-Bourbaki). A normed vector space E is reflexive
if and only if its closed unit ball {x | ||x|| 1} is compact for the topology
(r(E, E').
Proof. If E is reflexive, then in particular it is semi-reflexive, and there-
fore by Proposition 1 every bounded, <r(E, E')-closed subset of E is com-
pact for the topology a(E,E'). Now, the closed unit ball is bounded;
and since it is convex, it is I?')-closed by Proposition 4.3.
Conversely, if the closed unit ball is А’Э-сотрас!, then every ball
BP = {x | ||x|| p} is (r(E, I?')-compact. A bounded, a(E, Enclosed
subset of E is contained in some ball Bp and is therefore (r(E, E')-compa,ct.
Thus E is semi-reflexive by Proposition 1 and hence reflexive by the above
discussion. |
Remark 2. The first half of the proposition also follows from the corol-
lary to Theorem 4.1. Indeed, if E is reflexive, then it is the dual of E'.
Exercises
1. Show that a normed space E is reflexive if and only if its closed unit ball
is complete for the topology <r(E, E'). (Hint: Use Proposition 2.)
2. Show that a reflexive space is always quasi-complete. (Hint: Use Proposi-
tion 7, the corollary to Proposition 6, and Theorem 6.1.)
3. Let E be a locally convex space, E' its dual equipped with the topology
0(E', E), and E" the dual of E'. For each x G E define Ж G E" by
%(x') = (x3 x')
for all x' G E'. Show that the kernel N of the linear map x X from E into
E" is the adherence of {0}. Show that E' can be identified canonically with
(E/N)' and that ft(E', E) = @(E', E/N). Finally, show that the map x^x
is surjective if and only if E/N is semi-reflexive.
[3, §9]
MONTEL SPACES
231
§ 9. Montel spaces
Let E be a locally convex Hausdorff space with topology T. In the
preceding section we examined those spaces in which every bounded set
is relatively compact for the topology <r(I?, E'). This leads us to inquire
about the spaces in which every bounded set is relatively compact for the
topology T. If E is a normed space, then this property implies that E is
finite-dimensional. Indeed, in this case the balls Bp are compact; and
since they form a fundamental system of neighborhoods of 0, the space
E is locally compact, and hence finite-dimensional by Theorem 2.10.3.
On the other hand, in a nonnormable space a bounded set is never a
neighborhood of 0 (Proposition 2.6.1); in fact, some of the most important
spaces have the property just described. It is convenient to introduce the
following definitions:
Definition 1. A locally convex Hausdorff space E is said to be a semi-
Montel (perfect) space if every bounded subset of E is relatively compact.
An infrabarrelled semi-Montel space is said to be a Montel space.
Clearly every semi-Montel space is quasi-complete.
Proposition 1. Every semi-Montel space is semi-reflexive.
Proof. Every bounded subset of a semi-Montel space E is relatively
compact, hence a fortiori relatively compact for the coarser topology
a(Ey E'). Thus by Proposition 8.1 the space E is semi-reflexive. |
Corollary. Every Montel space is reflexive.
In particular, every Montel space is barrelled (Corollary to Proposi-
tion 8.6).
For our next proposition we need a property of compact sets. Let X be a com-
pact space and Y a Hausdorff space. Then every continuous bijection/: X w у
is necessarily a homeomorphism (in the case of metric spaces, we already observed
this in Chapter 1, §9). Indeed, let A be a closed subset of X, Then A is compact
in X; hence/(A) is compact in Y, Thus/-1 is continuous.
In particular, let X be a compact space with topology Ti. Then any Hausdorff
topology T2 on X which is coarser than Ti is necessarily identical with T2.
Indeed, let Xi be the set X equipped with the topology Тг (i = 1,2). Then the
identical bijection Xi —» X2 is continuous and therefore a homeomorphism.
Proposition 2. Let E be a semi-Montel space with topology T. If В
is a bounded subset of E, then the topology induced on В by T is the same as
the topology induced by a(E, E').
Proof, We can suppose that В is closed for the topology T since if T
and a(Ef E') induce the same topology on the T-closure В of B, then they
also induce the same topology on B,
232
DUALITY
[3, §9]
If В is a bounded, T-closed subset of E, then it is compact for the
topology induced by T. The topology induced by <r(B, E') on В is Haus-
dorff and coarser than the topology induced by T, with which it must
therefore coincide by what we have said above. |
Corollary. Let E be a semi-Montel space with topology T.
(a) Let (xn)nGN be a sequence of elements of E which converges to a point
x G E for the topology a(E,E'). Then (xn) converges to x also for the
topology T.
(b) Let (xe)o<e<a be a family of elements of E which converges to a point
x G E for the topology <r(E, Er) as e —> 0. Then (x€) converges to x also for
the topology T.
Proof, (a) The subset of E formed by the points xn (n G N) and x is
bounded for the topology a(E, E’) and therefore also for the topology T
(Theorem 5.3). Thus the topologies induced by T and by <r(B, Er) on this
set coincide.
(b) If (xe) does not converge to x for the topology T, then there exists
a sequence (en) of positive numbers tending to zero such that the sequence
(x€n) does not tend to x. But according to our hypothesis the sequence
(x€n) tends to x for the topology <r(B, Er) and therefore by part (a) also
for the topology T. |
Proposition 3. A closed subspace M of a semi-Montel space E is a semi-
Montel space.
Proof. Let A be a bounded subset of M. Then A is a bounded subset
of E and therefore relatively compact by hypothesis. Since M is closed,
A is also relatively compact in M. Hence M is a semi-Montel space. |
Proposition 4. Let (E^^i be a family of locally convex Hausdorff
spaces. If each EL is a semi-Montel space, then the product E = liter EL is
a semi-Montel space. <
Proof. Let A be a bounded subset of E. If irL denotes the projection
E —> El, then ?rt(A) is a bounded subset of EL. Hence if EL is a semi-
Montel space, then ?rt(A) is relatively compact. But in this case the
product set В = liter TTt(A) is relatively compact by Tihonov’s theorem.
Hence the set A, which is contained in B, is also relatively compact. |
Remark 1. Since the product of infrabarrelled spaces is infrabarrelled
(Exercise 14.2), the product of Montel spaces is a Montel space.
For our next result we shall need the following slight variant of Propo-
sition 2.11.3:
Proposition 5. Let be a family of Hausdorff topological vector
spaces where the index set is ordered, and we suppose that for t к we have a
[3, §9]
MONTEL SPACES
233
continuous linear map fLK: FK —> FL. Let E be a vector space and for each
l G I let fL be a linear map from E into FL such that for l i к we
have fL = fLK°fK. Assume that if is an element of ILei Pi such that
for l Kwe have fLK(xK) = xL, then there exists an element x G E such that
= fi(x)- If the linear map E ILei Pi is defined by <p(x) = (jL(x))iei
(cf. Exercise 2.11.1), then Im(^) is closed.
Proof. Let (xL) G <p(E). Consider two indices t and к such that t к
and let U be a balanced neighborhood of 0 in FL. There exist a balanced
neighborhood V of 0 in FK such that /tK(F) С and an element
e <p(E) such that yL G U + xL and yK G V + xK. Let у G E be
such that (yL) = <p(y). Then
У К = f'(y) and ?/t = fL(y) = /«(A(3/)) = /«G/k).
Hence
= fu(yK) e /«(F + хк) С и + У«(я!к)
and
%i — fM G U + U.
Since U is arbitrary and FL is a Hausdorff space, we have xL = fLK(xf).
Thus there exists x G E such that (xL) = <p(x), that is, (xL) G <p(E). |
Proposition 6. Let I be an ordered set and for each l g I let FL be a
semi-Montel space. Suppose that for l Kwe have a continuous linear map
fLK: FK —> Fl. Let E be a vector space and for each l g I let fL be a linear
map from E into FL such that for l к we have fL = fLK °fK. Assume that
the following condition is satisfied:
(P) If is an element of ILei Pi such that for i к we have
&к(хк) = Xi, then there exists a unique element x G E such that xL = fL(x)
for all l G I.
Then E, equipped with the coarsest topology for which the fL are continuous,
is a semi-Montel space.
Proof. The uniqueness requirement in condition (P) implies in particular
that if x G E and x # 0, then there exists an index i G I such that
fi(x) # 0; i.e, the linear map <p\: E —> ILei Fl defined by <p(x) = (/t(rc))tez
is injective and that E is a Hausdorff space. By the preceding proposition,
<p is an isomorphism of E onto a closed subspace of ILei FL (cf. Exercise
2.11.1), and by Proposition 4, this product is a semi-Montel space. Hence
E is a semi-Montel space by Proposition 3. |
Corollary. Let (Fl)lei be a family of locally convex Hausdorff spaces,
where the index set is ordered. Suppose that for l к the space FK is a
linear subspace of FL and the topology of FK is finer than the topology induced
234
DUALITY
[3, §9]
by Fi on FK. Let E = Q Ft and equip E with the coarsest topology for
which the injections E Fc are continuous. If the Fi are semi-Montel
spaces, then E is a semi-Montel space.
Our next aim is to prove that the strong dual of a Montel space is a
Montel space. In order to do this we have to introduce a definition which
is also of independent interest.
Definition 2. Let E be a locally convex Hausdorff space and let S be
the collection of all precompact (Definition 2.10.1) subsets of E. The cor-
responding ^-topology on the dual E' of E will be denoted by \(E'> E), and
is called the topology of the uniform convergence on precompact subsets of E.
The reason why one considers precompact sets rather than compact
ones lies in the following stability theorem:
Proposition 7. In a locally convex Hausdorff space E, the balanced
convex hull of a precompact set is precompact.
Proof. Let A be a precompact subset of E. The balanced convex hull
В of A consists of all points x = S?=i hPi, where n G N*, £?=i |Xt-| = 1,
and Xi G A (1 i n) (Exercise 2.4.1(c)). Let V be a balanced, convex
neighborhood of 0 in E. We have to show that there exist finitely many
points aj G В (1 j p) such that В C UT=i (аУ + (Theorem
2.10.2).
Since A is precompact, there exists a finite family of points bk G A
(1 к q) such that A C U*=i (&* + JV). Let A be the subset of
K5 formed by those points X = (Xb . . ., Xg) for which |Х*| = 1.
Since A is compact, for every 5 > 0 there exist finitely many points
= (//Д . . ., (1 j p) such that for every X G A we can
find а д(у) which satisfies < A Let us choose 5 > 0
so small that &A C %V. Since V is balanced and convex, we also have
6B C jV.
We will show that » / « \
В c U ( £ 4% + f) (1)
y=i 4=1 '
Indeed, if x = KXi G B, then for each Xi choose bki so that
Xi = bki + yi with yi G iV (1 i n). Hence
X = £ XiXi == \ibk. + £ Х{Уг = £ vkbk + у
г=1 г=1 г=1 &=1
with Хк=1 Ы 1 and у е %V.
For an appropriate we have
Q Q 9
x = £ Pk'bk + £ (yk — Рк^Ьк + у = £ 4% + z + з/,
k=\ k=\ k=\
[3, §9] MONTEL SPACES 235
where z G 8B c JF. Consequently,
X 6 i /4% + V;
Jb=l
and since x was arbitrary in B, we have proved relation (1). |
The balanced convex hull of a compact set is not necessarily compact
(see Exercise 5). If, however, the space E is quasi-complete, then every
precompact set is relatively compact since it is bounded (Proposition
2.10.7). Hence in a quasi-complete, locally convex Hausdorff space the
balanced, convex, closed hull of a compact set is compact; and by Propo-
sition 4.2(f) the topology X(i?', E) coincides with the topology к(Е', E) of
the uniform convergence on balanced, convex, compact sets. In general,
k(E',E) is coarser than h(E', E). Since each compact subset of E is
a fortiori a (E, _E")-C°mpact, we see that к(Е', E) is coarser than the Mackey
topology r(Ef, E). Also к(Е', E) is clearly finer than (r(Ef, E). Hence the
dual of E' equipped with the topology к(Е', E) is the space E (Propo-
sition 5.4).
If E is a semi-Montel space, then к(Е', E) and P(E', E) coincide on E',
and we have, of course, k(E',E) = X(E',E) = r(E',E) = 0(E',E).
Conversely, if E is a quasi-complete, locally convex Hausdorff space and
к(Е', E) = \(Ef, E) = 0(E', E), then E is a semi-Montel space.
Proposition 8. Let Ebe a locally convex Hausdorff space and E' its dual.
On every equicontinuous subset M of Er the topology induced by X(£", E)
coincides with the topology induced by <r(E', E).
Proof. The topology induced by X(£", E) on M is clearly finer than the
topology induced by <r(E',E). Thus to prove that the two topologies
coincide, it is sufficient to show that given x'o G M and a precompact
subset A of E, there exists a finite family (xi)i^i^n of points of E such that
SUPig^n |(x' — Xq, Жг)| J implies SUPxGA |(x' — Xq, z)| 1 for x'
belonging to M, i.e., such that (xq + |F°) A M C (xq + A °) A M,
where F is the finite set {xi 11 i g n}.
Since M, and therefore M — xq, is equicontinuous, there exists a neigh-
borhood V of 0 in E such that supX'gm,*gv I (я' — Ясь я)| J- On the
other hand, A is precompact. Hence there exist a finite number of points
(1 i n) such that A C IJti (xt + V); i.e., every x G A has the
form x = Xi + у, 1 i n, у G V. Suppose now that xf G M is such
that supi^ign |(x' — xq, яг-)| |. Then
sup |(x' — Xq, z)| sup |(x' — Xq, Жг’)| + SUp |(x' — Xq, y)\ 1. I
xEA l^i^n yEV
We shall return to the topology h(Ef, E) in the next section, where
we shall prove that if E is metrizable, then X(£", E) is the finest topology
which induces on equicontinuous subsets the same topology as a(Ef, E).
236
DUALITY
[3, §9]
Now we are in the position to prove the result announced earlier.
Proposition 9. If E Montel space, then its dual Ef equipped with
the topology &(E', E) is also a Montel space.
Proof. E is reflexive by the corollary to Proposition 1; hence Ef is
barrelled by Proposition 8.4.
Let M be a subset of Ef which is bounded for the topology $(E', E).
The set M is contained in a balanced, convex, &(Ef, l?)-closed, &(Ef, E)-
bounded set 2V. Since E is infrabarrelled, it follows from Proposition 6.6
that У is equicontinuous. Now, fl(Ef, E) is compatible with the duality
between E and Eft, hence A is also a(Ef, l?)-closed by Proposition 4.3,
and thus A is compact for the topology v(Ef, E) by the Bourbaki-Alaoglu
theorem (Theorem 4.1). By Proposition 8 the topologies induced by
<r(E', E) and X(E', E) on N coincide. Hence N is compact for the topology
X(E', E). Finally, since E is a Montel space, the topologies \(Ef, E) and
0(E', E) on E' are identical. Therefore N is compact for the topology
&(Ef, E), and M is relatively compact for that topology. |
Example 1. Every finite-dimensional Hausdorff topological vector
space is a Montel space by the Bolzano-Weierstrass theorem since every
such space is isomorphic to some space Kn (Theorem 2.10.1).
Before we give further examples, we must recall a classical theorem of
analysis. Let X be a locally compact space and denote by Q(X) the vector
space of all numerical functions defined and continuous on X. For each
compact subset К of X define the semi-norm q& by
?*(/) = max |/(x)|.
xEK
It follows from Proposition 2.4.8 that, equipped with the family (qk) of
semi-norms, the space e(X) becomes a locally convex Hausdorff space,
and we refer to the topology Tc defined by these semi-norms as the
topology of compact convergence. If X is a compact space, then the
family (&к)к of semi-norms on e(X) is equivalent to the unique norm qx,
and e(X) is a normed space. We have already met these spaces in the
particular cases where X is an open subset 0 of Rn (Examples 2.3.3 and
2.4.6) and where X is a compact subset К of Rn (Exercise 1.2.6). The
present generalization enables us to deal with these two particular cases
simultaneously. Since every point of X possesses a compact neighborhood,
we can prove similarly as in the special case mentioned above (Example
2.9.2) that e(X) is complete.
On e(X) we can define the topology of pointwise convergence T8 by the
semi-norms qx = |/(«)|, where x G X. Clearly, Te is coarser than Tc.
Consider the family of spaces (Kx)xGx, where each Kx is equal to K,
[3, §9]
MONTEL SPACES
237
and let Kx = Кж be their product. The space C(X) can be con-
sidered as a subset of Kx if we associate with every f G e(X) the family
(/(^))®ex. The product topology on Kx induces on C(X) the topology
T8. We have the following result which is closely related to Proposition 8:
Lemma 1. On every equicontinuous subset 5C of C(X) the topology induced
by Tc coincides with the topology induced by T8.
Proof. Clearly, the topology induced by Tc on JC is finer than the
topology induced by T8. Thus to prove that the two topologies coincide,
we have to show that given fQ G JC, € > 0, and a compact subset К of X,
there exists a finite family of points of X such that
max \f(xi) — fQ(xi) |
l^i^n
implies
max |/(x) — /oWI = e
x£K
for all f G JC.
Since JC is equicontinuous, each point x G X has a neighborhood Vx
such that у G Vx implies \f(y) — /(x)| for f G JC. The compact
set К can be covered by finitely many such neighborhoods Vx, say
T\,. . ., Vxn- Assume now that f G JC and | f(xi) — fo(xi) | for
1 i n. Let x be an arbitrary point in K. There exists an index i
(1 i n) such that x G Vx,. Hence we have
I/O — /oO)| I/O — + |/(xt) — /оО»)| + l/oO) — /оО)| Ol
The next result is a variant of Lemma 6.2.
Lemma 2. The closure in Kx of an equicontinuous subset 5C of C(X) is
itself an equicontinuous subset of C(X).
Proof. Let x G X and € > 0. There exists a neighborhood V of x such
that у G V implies |/(t/) — f(x)| < for all f G JC. Now let g G JC.
Given the points x, у G X, there exists f G 5C such that |/(x) — ^(x)| <
and \f(y) — g(y)\ < Thus if у G V, we have
\g(y) — <zOI \g(y) -f(y)\ + I/O — f(x)\ -4-1/0) — g(x)\ < «. ।
Ascoli’s theorem. A subset JC of C(X) is relatively compact for the
topology of compact convergence if and only if it is equicontinuous and for
each x G X the set JC(x) = {f(x) \f G 5C} is bounded in K.
Proof. Assume first that the two conditions of the theorem are satisfied.
By Lemma 2 the T8-closure JC of JC is also an equicontinuous subset of
C(X), and clearly JC(x) is bounded in К for each x G X. By the Bolzano-
238
DUALITY
[3, §9]
Weierstrass theorem each set 5C(x) is relatively compact in K, and thus by
Tihonov’s theorem the set 5C is compact in e(X) for T8. But by Lemma 1
the topologies Tc and T8 coincide on 5C. Hence 5C is also compact for Tc.
Thus 5C is indeed relatively compact.
Conversely, assume that 5C is a relatively compact subset of C(X) for
the topology Tc. A fortiori 5C is relatively compact in e(X) for the topology
Te induced by Kx. For each x G X the projection тгх: f f(x) from Kx
onto the factor Kx is continuous, and therefore the set тгх(5С) = 5C(x) is
relatively compact in K.
On the other hand, let x be a point of X, К a compact neighborhood of
Xy and € > 0. Since 5C is relatively compact, there exists a finite family
(A')i£t£n of elements of 5C such that for each / G 5C there exists an index
i (1 i n) such that \f(x) — fi(x)\ for all x G K. Furthermore,
for each i there exists a neighborhood Ui of x such that
|A(*) - fi(y)\
for all у e Ui. Hence for f e 5C and у G. К C\ Ui (У • • Q Un\ve have
l№) - №)| g |/(x) - Л(х)| + |Д(я) - Ш\ + \Ш - f(y)\
= =
i.e., 5C is equicontinuous. |
Now we are ready to give further examples of Montel spaces.
Example 2. Let us explain where the name "Montel space” comes
from. In its classical form, Montel’s theorem from complex function
theory ([1], Chapter IV, Section 4.1, Theorem 9, p. 171) can be stated as
follows. Let Я be a domain in С, 5C a collection of holomorphic functions
defined on Й, and suppose that for every compact subset К of Й there exists
а рк > 0 such that |/(z)| дк for all f G 5C and z G K. Then, given
a sequence (/n) of elements of 5C, there exists a subsequence (fnk) of (/n)
which converges to a holomorphic function g, uniformly on every compact
subset of Й.
We shall translate this statement into the language of topological
vector spaces. Let fl be a domain of C, and let Я(й) be the vector space
of all holomorphic functions defined in Й. Since Й can also be considered
as a domain in R2, the space H(ti) is a subspace of в(й). If we consider the
topology of compact convergence on в(й), then Я(й) is a closed subspace
of в(й) since, by a theorem of Weierstrass ([1], Chapter IV, Section 1.4,
Theorem 1, p. 138), if a sequence of holomorphic functions converges in
Я to some function g, uniformly on every compact subset of Й, then g is a
holomorphic function7 in Й. Thus Я(й), being the closed subspace of a
Fr£chet space, is itself a Fr£chet space and is, in particular, barrelled.
[3, §9]
MONTEL SPACES
239
Montel’s theorem is now clearly equivalent to the assertion that every
bounded subset of Я((2) is relatively compact. It then follows that Я((2)
is a Montel space. In complex function theory a relatively compact subset
of Я((2) is usually called a "normal family.”
To prove Montel’s theorem it is sufficient by Ascoli’s theorem to show
that every bounded subset 3C of Я((2) is equicontinuous. Suppose that 3C
is a bounded subset of Я((2), i.e., that for each compact subset К of S2
there exists дх > 0 such that |/(z)| рк for f e 3C and z E K. Let К
be a compact subset of S2. There exists a 3 > 0 such that the compact
set L = {f} |f — z\ 3 for some z e K} is contained in S2. If z E К
and У is the circle with center z and radius 3, then we have by Cauchy’s
formula
!/'(*)! =
1 f ЛГ)
2тгг J у (f — z)8
< J_ [ l/(f)l
= 2тг J у 82
|df| = vk.
Thus |/(zi) — /(z2)| |/'(z)| • |zi — z2| pk|si — z2| if f e 3C, zlf
z2 G K, |zi — z2| < 3, and in particular 3C is equicontinuous.
The modern proof of Riemann’s mapping theorem ([1], Chapter V,
Section 4.2, Theorem 10, p. 172) is based on the fact that Я((2) is a Montel
space.
Example 3. Let S2 be an open subset of Rn. The space 8(0) (Example
2.4.8) is a Montel space. Indeed, it is a Fr6chet space (Example 2.9.3)
and thus in particular it is barrelled.
For each p e Nn let ep(S2) be a space equal to <B(S2). If we associate
with each f E 8(0) the family (dpf)PENn, we obtain an imbedding of 8(0)
into the product space IZpen” ep(S2), and clearly the topology induced
by this product space on 8(0) is its own topology. Furthermore, 8(0) is
a closed subspace of Пр вр(0) since it is complete. Now let 3C be a bounded
subset of 8(0). This means that for every compact subset К of S2 and for
every p e Nn there exists рк,Р > 0 such that |д/У(ж)| рк,Р for all
f E 3C and x E K. The projection dp3C = {dpf\f E 3C} of 3C in ep(S2)
is equicontinuous. Indeed, given a compact subset К of S2 there exists
3 > 0 such that the compact set L = {x } |z — y\ 3 for some у E K}
is contained in S2. If x and у are two points of К such that |s — y\ < 3,
then the line segment joining them lies in L, and we have
1*700 “ *7(2/)! =
/•v
i=i Jx
n • |z — y\ • max pl,t ,
r
where r = (rlf . . . ,Гп) ENn runs through the multi-indices such that
H = П + • • • + rn = (p| + 1.
By Ascoli’s theorem each dp3C is relatively compact in 6(0), and thus by
Tihonov’s theorem 3C is relatively compact in 8(0).
240
DUALITY
[3, |9]
Example 4. Let К be a compact subset of Rn. The space D(K)
(Examples 2.3.4 and 2.4.10) is a Montel space. Indeed, it is barrelled
(Example 6.3) and it is a semi-Montel space since by Example 2.9.5 it
is a closed subspace of 8 (Proposition 3).
Example 5. The space S (Example 2.4.14) is a Montel space. We
know from Example 6.3 that it is barrelled.
Let 3C be a bounded subset of S. For every fc g N and p G Nn there
exists jLtjfe.p > 0 such that |(1 + |x|2)* dpf(x)\ pk,P for all f G 3C and
x G Rn. We have a fortiori |dp/(x)| = Pk,p for all J g 3C and x g Rn.
Since S C 8, the set 3C is bounded in 8, and by Example 3 it is relatively
compact in 8. To show that 3C is relatively compact in S it is clearly enough
to show that if (/y) is a sequence of elements of 3C which converges in 8
to some function g G 8, then g G S and (/y) converges to g in S. We have
|(i + b|2)*+1d7b)l M+i,p
for all f g 3C and x g Rn, and given e > 0, we have
|(1 + b|2)*d7(a;)| £ Д*+1,р(1 + И2)"1 £ jc
for |x| > p. Since (dpff) converges to dpg pointwise, we have
|(1 + b|2)fc^(x)| £ ie
for |x| > p and in particular g belongs to S. On the compact set |x| p
the sequence (dpfj) converges uniformly to dpg. Hence we have
|d7b) - g e(l + р2Гк
for J J and a fortiori (1 + |x|2)*|dp/y(x) — dp^(x)| e for |x| p and
j J. Collecting these inequalities, we obtain
Qk.ptfj — g) = max (1 + b|2)*|d7,(«) — dW)| e
for J J.
Proposition 10. Let F be a vector space and let (Еп)пен be a sequence
of linear subspaces of F such that En C En+1 for all n G N and
F= [J En.
n£N
Suppose that each En is equipped with a locally convex Hausdorff topology
Tn, that Tn+i induces the topology Tn on En, and that En is closed in En+i
for Tn+i. We equip F with the finest locally convex topology for which all
the injections En^ F are continuous.
If the En are semi-Montel spaces, then F is a semi-Montel space. If the
En are Montel spaces, then F is a Montel space.
[3, §9]
MONTEL SPACES
241
Proof. F is a Hausdorff space by Corollary 1 of Theorem 2.12.1. Assume
that the En are semi-Montel spaces and let В be a bounded, closed subset
of F. By Theorem 2.12.2 the set В is a bounded, closed subset of one of
the subspaces En, and therefore В is compact in En. Consequently, В is
also compact in F. This proves that F is a semi-Montel space. On the
other hand, if the spaces En are infrabarrelled, then it follows from Proposi-
tion 6.9 that F is infrabarrelled. |
Example 6. Let 12 be an open subset of Rn. The space 2D(12) of Example
2.12.6 is a Montel space by virtue of Example 4 and Proposition 10.
We conclude this section with conditions for compactness in the spaces
8m(12) (Example 2.4.7) and 2Dm(12) (Example 2.12.8) for finite m.
Proposition 11. Let 12 be an open subset of Rn and m a positive integer.
A subset 5C of 8m(12) is relatively compact if and only if it satisfies the following
two conditions:
(1) For every p eNn such that |p| m the set {dpf\f G 5C} is equi-
continuous.
(2) For every ж G 12 and every p e Nn such that |p| m the set
Ш \f G 5C}
is bounded in K.
Proof. For m = 0 this is precisely Ascoli’s theorem. In the general
case, for each p G Nn such that |p| m denote by Cp(12) a space identical
with C(12). The map f ь-> (dpf)\p\^m is an injective strict morphism from
8m(12) into CP(12) and the image of 8m(12) is closed in the product
space since 8m(12) is complete. By Tihonov’s theorem 5C is a relatively
compact subset of 8m(12) if and only if for each p the set
dp5C = {dpf\f G 5C}
is relatively compact in Cp(12). Thus the proposition follows immediately
from the special case m = 0. |
Proposition 12. Let 12 be an open subset of Rn and m a positive integer.
A subset 5C of 2Dm(12) is relatively compact if and only if it satisfies the follow-
ing three conditions:
(1) There exists a compact subset К of 12 such that Supp f G К for all
feK.
(2) For every p G Nn such that |p| m the set {dpf | f G 5C} is equi-
continuous.
(3) For every я G 12 and every p G Nn such that |p| m the set
{dpf(x) | / G 5C} is bounded in K.
242
DUALITY
[3, §9]
Proof. In the first place, if 3C is relatively compact in ©w(ft), then it
is bounded there, and thus by Theorem 2.12.2 there exists a compact
subset if of ft such that 3C is contained in £)т(К); i.e., condition (1) is
satisfied. Furthermore, by Theorem 2.12.1 the set 3C is relatively compact
in £>m(K). Conversely, if 5C is a relatively compact subset of ЗУ%К),
then it is also a relatively compact subset of Dw(ft).
For each p such that |p| m let 3ZP(K) be a space equal to 3Z(K)
(Example 2.12.5). The map/ >-► (dpf)\p\^m from £)m(K) into П|р1 KP(K)
is an injective strict morphism, and the image of £)m(K) is closed in the
product space, since ^m(K) is complete. By Tihonov’s theorem a set 3C
is relatively compact in £)m(K) if and only if for each p such that |p| m
the set dp3C = {dpf\f G 3C} is relatively compact in X(K). Now 3Z(K)
is a closed subspace of e(/f), and therefore by Ascoli’s theorem the sets
dp3C are relatively compact in 3Z(K) if and only if conditions (2) and (3)
are satisfied. |
Exercises
1. Let E be a semi-Montel space with topology T, and let g be a filter with
countable basis on E which converges to an element x G E for the topology
a(F, Ef). Prove that 3 converges to x for the topology T. (Hint: Use Exercise
6.3(a) and Corollary (a) to Proposition 2.)
2. Prove that the locally convex direct sum (Example 2.12.2) of a family of
semi-Montel spaces is a semi-Montel space. (Hint: Use Exercise 2.12.10 and an
argument similar to that employed in the proof of Proposition 4.)
3. Prove that the inverse limit (Exercise 2.11.3) of an inverse system of semi-
Montel spaces is a semi-Montel space.
4. Show that Proposition 2.11.3 follows from Proposition 5 and from the fact
that a product of complete spaces is complete.
5. Show by an example that the balanced convex hull of a compact set in a
topological vector space is not necessarily compact. (Hint: Let E be the subspace
of I2 considered in Exercise 4.7. Consider in E the subset A formed by 0 and by
the vectors (l/n)en, where en (n 1) is the n-th unit vector of I2. Let \n > 0,
22*^1 = 1. The vectors
(m \—1 m >
2 ) J} — en
n = l / n=1 n
form a Cauchy sequence in the balanced convex hull of A which converges to
no point of E.)
6. Let E be a locally convex Hausdorff space. Prove that the collection of
precompact subsets of E is saturated in the sense of Exercise 4.2.
7. Let E be a locally convex Hausdorff space and E' its dual.
(a) Show that every equicontinuous subset of E' is relatively compact for the
topology X(F', E). (Hint: Use Proposition 8 and Theorem 4.1.)
[3, §10] THE BANACH-DIEUDONNE THEOREM 243
(b) Show that if E is bornological, then E' equipped with the topology h(E', E)
is complete. (Hint: Using Exercise 7.7(f), prove first that if the restriction of a
linear form и to every compact subset of E is continuous, then и is continuous.)
(c) Deduce Proposition 7.6 from (b). (Hint: Use Proposition 5.5.)
8. Let E be a locally convex Hausdorff space, E' its dual, equip E' with the
topology k(E', E), and identify E with the dual of E', Denote by 7(E, E') the
topology of uniform convergence on balanced, convex, compact subsets of E',
(a) Show that 7(E, Ef) is finer than the original topology T of E and coarser
than t(E} Er), (Hint: Use Proposition 4.7.)
(b) Show that E has the topology 7(E, E') if and only if E is isomorphic to
the dual F' of a locally convex Hausdorff space F, equipped with k(F',F).
(Hint: F = E',)
§10. The Banach-Dieudonne theorem
Let E be a locally convex Hausdorff space and Ef its dual. Denote by
v(E'} E) the finest topology on Ef which induces on every equicontinuous
subset of E' the same topology as (r(Ef, E). We know from Proposition 9.8
that v(E', E) is finer than \(Ef, E) and we want to show that if E is
metrizable, then v(E', E) = h(E', E),
It was recently proved by Y. Komura [51] that the topology v(E', E)
is not necessarily compatible with the vector space structure of E' since
there can exist a neighborhood V of 0 such that for no neighborhood U
of 0 does U + U С V hold. We shall show, however, that it exists, that
it is translation-invariant and that the origin possesses a fundamental
system of absorbing, balanced neighborhoods. This follows from :
Proposition 1. Let U be the collection of all subsets A of Ef such that for
every equicontinuous subset M of Ef the intersection A(}M is open for the
topology induced on M by (r(Ef, E), Then U is the collection of all open sets
for the topology v(Er, E).
Proof, Let us first show that U satisfies Axioms (01) and (0 2) of
open sets.
(0 1) Let (AJiei be a family of sets of U and let M be an equicontin-
uous subset of E'. Then each set AL A M is open in M for <r(Ef, E) and
thus
( U A\ A M = IJ (ЛА M)
is open in M, Consequently,
U e u.
iGZ
244
DUALITY
[3, §Ю]
(О 2) Let (Ai)isi$n be a finite family of sets of 11 and let M be an
equicontinuous subset of E'. Then each set 4,- n M is open in M for
a(E', E), and thus
Q 4,) П M = П (4f П M)
1=1 ' 1=1
is open in M. Therefore Qi=i A e U.
Clearly, the topology for which the sets belonging to U are the open
sets has the property that on every equicontinuous subset of Er it induces
the same topology as (r(Ef, E). Conversely, if a topology is such that on
every equicontinuous subset of E' it induces the same topology as <т(Е', E),
then its open sets belong to the collection U. I
Corollary. v(Er, E) is a translation-invariant Hausdorff topology, and
the origin possesses a fundamental system of neighborhoods consisting of
absorbing, balanced sets.
Proof. A neighborhood of a point a e E' for v(E', E) is a set U such
that for every equicontinuous subset M of E' such that a e M the set
U П M is a neighborhood of a for the topology iiiduced on M by afE', E).
It follows that the neighborhoods of a point a e E' for v(E', E) are the
sets U + a, where U is a neighborhood of 0, since M is an equicontinuous
subset of Ef containing 0 if and only if M + a is an equicontinuous subset
of E' containing a and (U + а) П (M + a) = (L7 П M) + aisaa(£", E)-
neighborhood of a in M + a if and only if U C\M is a a(Ef, ^-neighborhood
of 0 in M. Thus v(E', E) is translation-invariant.
Since the topology v(E', E) is finer than the Hausdorff topology afE', E),
it is also a Hausdorff topology.
The balanced core У of a v(E', E)-neighborhood U of 0 is a v{Ef, E)-
neighborhood of 0. Indeed, if M is a balanced, equicontinuous subset of
Ef containing 0, then there exists a balanced a{Er, ^-neighborhood Wm
of 0 such that Wm П M Q U П M Q U. Since Wm П M is balanced,
we have Wm C\ M eV and thus WM П M С V П M. If A is an arbi-
trary equicontinuous subset of Ef, then its balanced hull M is equicontinu-
ous (cf. Proposition 4.6) and Wm П N С У П N. Hence V is indeed a
v(E', ^-neighborhood of 0.
Finally, let У be a balanced v(E', ^-neighborhood of 0 and x' e E'.
There exist a balanced equicontinuous subset M of Ef containing x' and
a a(Er, E) -neighborhood Ж of 0 such that W П M c V П M. There
exists a > 0 such that Xxf e W for |X| a and
Хх'еЖпМсУпМсУ
for |X| min (a, 1). Thus У is absorbing. |
[3, §10]
THE BANACH-DIEUDONNE THEOREM
245
Theorem 1 (Banach-Dieudonn£). Let E be a metrizable locally convex
space and E' its dual. The finest topology on E', which induces on every
equicontinuous subset of E' the same topology as a{Ef, E), is the topology
Х(Е', E) of the uniform convergence on precompact subsets of E.
Proof. Since v(E', E) is finer than \{Ef, E) and since v(E', E) is transla-
tion invariant, it is sufficient to show that given an open v(E', ^-neigh-
borhood U of 0, there exists a precompact subset A of E such that A° C U.
Let (Fn)nGN be a countable fundamental system of balanced, convex,
closed neighborhoods of 0 in E such that Vo = E and Vn D 7n+i (n e N).
The theorem is then a consequence of the following
Lemma. For every n e N there exists a finite subset Fn of Vn so that
if we set An = U fc=o Fk> then the set V® A A® is contained in U.
Let us assume for a moment that we have proved the lemma. Let
A = UfcGN^fc. The set A is precompact in E since every sequence of
elements of A has a subsequence which is either stationary or converges
to 0. On the other hand, AQ c A® and therefore AQ n CU for every
n G N. Now, QnGN Vn = {0}. Hence UnGN V® = E', and therefore
AQ C U. |
Proof of the lemma. We use mathematical induction. Suppose that for
n 0 we have constructed the sets F^ (0 к n — 1) with the re-
quired properties (i.e., for n = 0 we suppose nothing). We have to show
that there exists a finite subset Fn of Vn so that У°+1 П (An и Fn)° C U.
Let us assume that no such set Fn exists and write Bn = Fn+i А C17.
Then for every finite subset F of Vn the set (An и F)° meets Bn; i.e.,
An A F° n Bn # 0. The collection of all sets A® A F° n Bni where F
runs through the finite subsets of Vn, form a filter basis on Bn. Now, the
set is compact for the topology <r(E', E) by Theorem 4.1 and there-
fore also for the topology v(Ef, E), which by hypothesis coincides with
<r(E', E) on 7п+ь Since U is open for v(E', E), Ct7 is closed and Bn is
compact. The sets A° A F° A Bn are closed for <г(Е', E) and v(E', E),
and therefore there exists a point x' which is contained in all of them.
Now Vn is the union of all its finite subsets F. Hence V® is the intersection
of all the sets F°, and thus x' G A® A V% A Bn. But this contradicts
the fact that A® A CU, and the contradiction proves the lemma. |
Corollary. Let E be a metrizable locally convex space and Ef its dual.
A subset A of E' is closed for the topology X(E', E) if and only if for every
balanced, convex, a(Ef, Enclosed, equicontinuous subset M of Ef the set
A A M is closed for a{Ef, E).
Proof. If A is closed for X(E', E), then its intersection with M is closed
for the topology induced on M by X(E', E). Now Х(Е', E) and <r(E', E)
246
DUALITY
[3, §10]
induce the same topology on M. Hence, A n M is closed for the topology
induced on M by a(Ef, E). Since M is (r(Ef, 2?)-closed, A n M is (r(Ef, E)-
closed in E'.
Conversely, assume that A n M is (r(Ef, 2?)-closed for every balanced,
convex, (r(Ef, 2?)-closed, equicontinuous subset M of Er. Let N be an
arbitrary equicontinuous subset. The balanced, convex, <r(Er, ^-closed
hull AT00 = M of N is equicontinuous (Proposition 4.6), and it follows
from the relation A n N = (A n M) n N that A n N is closed in N
for the topology induced on N by (r(Ef, E). By Proposition 1 the set A
is closed for v(E', E). But by Theorem 1 we have v(E', E) = X(E', E). |
Theorem 2 (Krein-Smulian). Let E be a Frechet space and E' its dual.
A convex subset A of E' is closed for the topology a(JEr, E) if and only if for
every balanced, convex, <r(Er, Enclosed, equicontinuous subset M of E' the
set А П M is closed for (r(Ef, E).
Proof. If A is closed for a(JEr, E), then A n M is closed for a(JEf, E).
Conversely, if the condition is satisfied, then A is closed for the topology
X(E', E) by the previous corollary. On the other hand, E is complete.
Hence X(E', E) = к(Е', E) is compatible with the duality between E
and E’ by the observation made following Proposition 9.7. Thus A is
closed for <r(E’, E) by Proposition 4.3. |
Corollary (Banach). Let E be a Banach space and E' its dual. A linear
subspace F of E' is closed for the topology a(Er, E) if and only if its intersection
with the closed unit ball B{ = {x' | ||x'|| g 1} is closed for a(E', E).
Proof. Any equicontinuous subset of Ef is contained in a closed ball
B'p = {x' | ||ж'|| p}. Thus if F n B{ is a(JEr, I?)-closed, then F n M
is (r(Ef, I?)-closed for any a(JEr, I?)-closed equicontinuous subset M of Ef.
The corollary now follows from Theorem 2. |
We shall encounter in the remainder of this chapter several situations
which are similar to the one in Theorem 2. For the orientation of the
reader we shall present here a short list of these situations. Let E be a
locally convex Hausdorff space and denote by Er its dual. Consider the
following collections of subsets of E'\
C = all convex subsets of Er,
A = all balanced, convex subsets of Ef,
S = all linear subspaces of Ef,
H = all hyperplanes of E’,
D = all linear subspaces of Er which are dense in Ef for the topology
a(Ef, E).
Clearly, H C S С А С C and D C S. Let X be any of the collections
just introduced and denote by (X) the following statement.
[3, §11] grothendieck’s completeness theorem 247
"If A e X and for every balanced, convex, <r(Ef, 2?)-closed, equicon-
tinuous subset M of Ef the set Л П M is <rC&', 2?)-closed, then A is closed
foraCE', E).”
Clearly, (C) => (A) => (S) => (H) and (S) => (D). Now the following
can be said about these statements:
(1) We just saw that if E is metrizable and complete, then (C) holds.
(2) (H) holds if and only if E is complete, as we shall see in the follow-
ing section (Corollary 5 to Theorem 11.1 and Exercise 11.5).
(3) If (S) holds, we shall say that E is a Ptdk space (Definition 17.2).
We owe to Ptdk the deep and beautiful result that every continuous,
"almost open” (Definition 17.1) linear map from E into any locally convex
Hausdorff space is a strict morphism if and only if (S) holds for E (Theo-
rem 17.2). This enables us to generalize the Banach homomorphism
theorem (Theorem 1.9.1) and the closed-graph theorem (Proposition 1.9.3),
as we shall see in §17.
(4) If (D) holds, we say that E is an infra-Ptdk space (cf. Exercise 17.5).
(5) (A) means that E is a hypercomplete space in the sense of Kelley
([49], 13F, p. 116 and 18G, p. 177).
We shall see that (D) => (H) (Exercise 17.6). It seems to be an open
problem whether there are spaces which satisfy (D) but not (S). On the
negative side, we have the following results: (H) (S) (Exercise 17.4),
(H) ¥» (D) ([75], pp. 72-73), and (A) =A (C) ([49], 18H, p. 178).
Exercises
1. Let E be a metrizable locally convex space and E' its dual.
(a) Prove that every precompact subset of E lies in the balanced, closed,
convex hull of a sequence of points of E converging to 0. (Hint: Examine the
proof of Theorem 1.)
(b) Let © be the collection of subsets of E consisting of points of a sequence
which converges to 0. Prove that the ©-topology on E' coincides with X(E', E)
and with v(E', E).
§11. Grothendieck’s completeness theorem
In this section we shall characterize the completion of the dual of a
locally convex Hausdorff space equipped with an ©-topology as a space
of linear forms. Among the numerous consequences of this characteriza-
tion will figure one of the results announced at the end of the preceding
section.
248
DUALITY
[3, §11]
We begin with the following approximation lemma:
Proposition 1. Let F be a locally convex Hausdorff space, F' its dual,
and A a balanced, closed, convex subset of F. Let и be a linear form on F
whose restriction to A is continuous on A. For every € > 0 there exists a
linear form xf G F' such that |u(x) — (xf, x)| efor all x G A.
Proof. We consider F' as a linear subspace of the algebraic dual F* of
F. The topology <r(F*, F) induces on Ff the topology a(F', F).
Since the restriction of и to A is continuous at 0, there exists a balanced,
closed, convex neighborhood U of 0 in F such that x G U A A implies
|u(x)| €. The polar U° of U in F* is formed by all the linear forms v
on F such that |г>(я)| 1 for all x G U. Thus UQ is a <r(F', F)-closed,
equicontinuous subset of F', and therefore by Theorem 4.1 it is compact
in F' and also in F*. On the other hand, A ° is a balanced, <r(F*, F)-closed,
convex subset of F*, and by Proposition 2.10.5 the set C7° + A ° is
<r(F*, F)-closed in F*. By the theorem of bipolars (Theorem 3.1) we have
U = U°°, A = A°°; and since UQ + A ° is balanced and convex, we
also have U° + A ° = (U° + A°)°°. Since 0 G U° and 0 G A°, we
have U° U A ° C U° + A ° and (Proposition 3.2)
(U A A)° = (U° U A°)°° c (U° + A°)°° = U° + A°.
Now (l/e)u G (U A A)°, and therefore there exist v G UQ and w g A °
such that и = ev + ew; i.e., |u(x) — ev(x)| = |ew(x)| e for all x G A.
Setting ev = xf G F', we obtain the required linear form. |
We shall also need the following
Lemma 1. Let F be a locally convex space, A a balanced, convex subset
of F, and и a linear map from F into a locally convex space G. Then the
restriction of и to A is uniformly continuous on A if it is continuous at 0.
Proof. Suppose that the restriction of и to A is continuous at 0. Let V
be a balanced, convex neighborhood of 0 in G. There exists a balanced,
convex neighborhood U of 0 in F such that u(U A A) c tV. Let x and у
be two elements of A such that x — у G U. Then x — у G 2A since
A is balanced and convex. It follows that x — у e. U f]2A = 2(%U A A).
Hence i(x — y) G A A C U A A. Therefore u(|(x — y)) G iV;
that is, u(x — y) G V. Thus x — у G U implies u(x) — u(y) G V,
which means that the restriction of и to A is uniformly continuous. |
Now we are ready to state the main result of this section.
Theorem 1 (Grothendieck). Let F be a locally convex Hausdorff space
with topology T, and F' its dual. Let ® be a covering of F by bal-
anced, bounded, closed, convex sets. Consider F' equipped with the ^-topology.
Furthermore, let R be the vector space formed by all linear forms on F whose
[3, §11]
grothendieck’s completeness theorem
249
restrictions to all sets A G © are continuous for the topology induced by T
and equip R with the ^-topology. Then R is the completion of F'.
Proof. Observe first that F' C R C F* and therefore the spaces F and
R form a dual system. Next we observe that the sets A G © are <r(F, Я)-
bounded. Indeed, let A G © and и G R. There exists a T-neighborhood
U of 0 such that x G A n U implies |u(x)| 1. Since A is bounded, there
exists 0 < X < 1 such that X A C U. But then x G A implies Xx G A A U,
and thus |u(s)| 1/X, which shows that A is <r(F, Z?)-bounded. Thus
the ©-topology is a locally convex Hausdorff topology on R (Proposition
4.1). It follows from Proposition 1 that F' is dense in R for the ©-topology.
Thus we have only to prove that R is complete. Let be a Cauchy
filter on R for the ©-topology. The topology <r(F*, F) induces on R the
topology <г(Я, F), and a(R, F) is coarser than the ©-topology on R since
the sets A G © cover F. Consequently, is the basis of a Cauchy filter
on F* for the topology a (F*, F). But F* is complete for o'(F*, F) (Example
2.3). Thus 5 converges to an element uQ g F*; i.e., given xi,. . ., xn in
F and € > 0, there exists X G such that | (u — Uq, яг)| < e for all
и G X and 1 g i g n.
5 converges to u0 in the ©-topology on F*. Indeed, let A G © and
€ > 0. Since 5 is the basis of a Cauchy filter, there exists X G such
that |(u — v, s)| < for all u, v G X and x G A. Now for each x G A
there exists Yx G such that |(u0 — u, z)| < for all и G Yx. For
a given v G X and x G A we pick и in X A Yx and obtain
|(u0 — v, z)| g |(u0 — u, z)| + |(u — v, z)| < e;
i.e., |(^o ~ z)| < € for all v G X and x G A.
The linear form uo belongs to R. Indeed, let A G © and € > 0. There
exists X G such that |(u0 — u, z)| < Je for all и G X and x G A. On
the other hand, for each и G R there exists a neighborhood U of 0 in F
so that |(u, #)| < for all x G U A A. Picking и in X, we have therefore
|<u0,s>| |<uo - u,s)| + |(u, s>| < €
for all x G U A A; i.e., the restriction of u0 to A is continuous at 0. But
then this restriction is continuous everywhere on A by Lemma 1; i.e.,
u0 G R. This concludes the proof of the fact that R is complete. |
Remark 1. The fact that R is complete follows also from a theorem in general
topology. Let X be a topological space, © a collection of subsets of X, and Y
a complete uniform space. Then the space of all maps from X into Y whose
restrictions to the sets of © are continuous, equipped with the topology of
uniform convergence on the sets of ©, is complete ([8], Chapter X, 2nd ed., §1,
no. 6, Corollary 2 to Theorem 2; [49], 8.11, p. 73).
250
DUALITY
[3, 511]
Corollary 1. Let F and G be two vector spaces which form a dual system
(Definition 2.1). Let © be a covering of F by balanced, convex, a(F, G)-
closed and a(F, G)-bounded sets. Equip G with the ^-topology. Then the
completion of G can be identified with the vector space of all linear forms on
F whose restrictions to the sets A G © are continuous for the topology induced
by a(F, G).
Proof. For the topology T in Theorem 1 take a(F, G). Then F' = G
(Proposition 2.2). |
Corollary 2. Let E be a locally convex Hausdorff space and E' its dual.
Then the completion Ё of E can be identified with the vector space of all linear
forms on E' whose restrictions to the equicontinuous subsets of E' are continu-
ous for a(Ef, E).
Proof. We take E' equipped with the topology a(Ef, E) for the space F
of Theorem 1 and denote by © the collection of all balanced, closed, convex,
equicontinuous subsets of E'. Then the dual of E' is the space E, and by
Proposition 4.7 the ©-topology on E coincides with its original topology.
Thus by Theorem 1 the completion of E is the vector space formed by all
linear forms on E' whose restrictions to the sets A G © are a(Ef, E)-
continuous. |
Of course the topology of Ё is the ©-topology, where © has the same
meaning as in the preceding proof.
Corollary 3. Let E be a locally convex Hausdorff space and E' its dual.
Then E is complete if and only if every linear form on E', whose restrictions
to the equicontinuous subsets of E' are continuous for a(Ef, E), is continuous
for a(E', E), i.e., is an element of E.
Let us note the special case of a Banach space.
Corollary 4 (Banach). Let E be a Banach space and E' its dual. A
linear form и on E' is continuous for a(E', E) if and only if its restriction to
the closed unit ball = {xf | ||x'|| 1} is continuous for a(Ef, E).
Proof. This is an immediate consequence of Corollary 3, considering
that every equicontinuous subset of E' is contained in some ball
B'p = {x' 11И1 p}. I
Corollary 5. Let E be a locally convex Hausdorff space and Ef its dual.
Then E is complete if the following condition is satisfied:
(H) Let H be a hyperplane in E' and suppose that for any balanced,
convex, a(Ef, Enclosed, equicontinuous subset M of E' the intersection
H n M is <r(Ef, Enclosed. Then H is a(E', Enclosed.
[3, §11]
grothendieck’s completeness theorem
251
Proof. Assume that condition (H) is satisfied and let и be a linear form
on Ef whose restriction to any equicontinuous subset of Er is continuous
for the topology induced by E). Let H be the hyperplane in Ef
defined by the equation u(x') = 0. For every balanced, convex, <r(2?z, E)-
closed, equicontinuous subset M of E the set H n M is the inverse image
of 0 by the restriction of и to M. Hence H n M is (r(Er, 2?)-closed, and
therefore by condition (H) the hyperplane H is <r(2?', ^-closed. It follows
from Proposition 2.5.7 that и is a(E", ^-continuous, and thus by Corol-
lary 3 the space E is complete. |
In order to give another useful formulation of Corollary 2 to Theorem 1,
we introduce still another topology on the dual of a locally convex space.
Let E be a locally convex Hausdorff space and Ef its dual. We denote by
p(E', E) the finest locally convex topology on Er which induces on every
equicontinuous subset of Er the same topology as <r(2?z, E). Since it is
not obvious that the least upper bound of all locally convex topologies
on Er, which induce on equicontinuous subsets the same topology as
<r(l£', E), is itself a locally convex topology, we have to prove that p(Ef, E)
exists.
Proposition 2. Denote by U the collection of all absorbing, balanced,
convex subsets of Ef whose intersection with any equicontinuous set M con-
taining 0 is a neighborhood of 0 in M for the topology induced by <r(E', E).
Then U is a fundamental system of neighborhoods of 0 for p(E', E).
Proof. If U and V belong to U, then U П V also belongs to U, and for
every X > 0 the set XU belongs to U. Thus by Proposition 2.4.5 U is a
fundamental system of neighborhoods of 0 for a locally convex topology
T on E'. The topology T is finer than (j(Er, E), hence induces on every
equicontinuous subset of Ef a finer topology than does <r(Ef, E). Con-
versely, let M be an equicontinuous subset of Ef, a G M, and U G U.
Then 0 G M — a. Hence there exists a v(Ef, ^-neighborhood IF of 0
such that U П (M — а) Э W П (M — a), i.e., that
(a + U) П M D (a + W) П M.
This proves that T induces on M a coarser topology than a(Ef, E). Finally,
if U is a balanced, convex neighborhood of 0 for any locally convex topology
on Ef which induces on every equicontinuous subset the same topology
as <r(E', E), then U G U. I
Clearly,
<r(E', E) С к(Е', E) С X(E', E) С p(E', E) < v(E', E),
where means "coarser than.” We know that if E is metrizable, then
X(E', E) = v(E',E) (Theorem 10.1), and that к(Е',Е) = X(E', E) if E
252
DUALITY
[3, 511]
is quasi-complete. If E is complete, then
E) — X(E', E) = p(E') E)
(cf. Exercise 4). On the other hand, examples can be given where
X(E',E) # p(E',E) and p(E',E) # v(E',E) ([52], §21,8.(2)). We can
now give the following formulation of Corollary 2 to Theorem 1.»
Proposition 3. Let E be a locally convex Hausdorff space and E' its
dual. Equip E' with the topology p(E', E). Then the dual of E' is the com-
pletion Ё of E.
Proof. By Corollary 2 of Theorem 1, if и G Ё, then given € > 0, for
every balanced, convex, equicontinuous subset M of E' there exists a
balanced, convex a(Ef, ^-neighborhood Um of 0 so that x G Um П M
implies |^(^)| €. The balanced convex hull U of |Jm (Um П M) is a
neighborhood of 0 in E' for the topology p(E', E). Every x e 17 is of the
form Sm Xm^m with хм E Um П M and Sat |Xm| = 1 (Exercise
2.4.1(b)). Hence x G U implies |w(z)| S|Xm| • |м(ям)| €. Thus и
belongs to the dual of E'. Conversely, let и be a continuous linear form
on E'. Then the restriction of и to any equicontinuous subset of E' is
continuous for p(E', E) and thus also for ofE', E). Again by Corollary 2
to Theorem 1 we have и G Ё. |
Corollary 3 to Theorem 1 has an interesting application to the spaces
in which there exists a countable everywhere dense subset. Let us first
prove a property of the dual of such a space.
Let E be a locally convex Hausdorff space and E' its dual. Let A be a
subset of E which is total for the topology a(E', E') and denote by Тл
the S-topology on E', where ® is the collection of all sets {x} with x g A.
We refer to Тл as the topology of pointwise convergence on A. By Propo-
sition 4.1 the topology Ta is Hausdorff and it is clearly coarser than
ofE', E).
Lemma 2. On every equicontinuous subset M of E' the topology induced
by Ta coincides with the topology induced by (г(Е', E).
Proof. The c(E', EJ-closure of M is equicontinuous (cf. Lemmas 6.2
and 9.2) and thusa(E", E)-compact by Theorem 4.1. Hence the conclusion
follows from the remarks preceding Proposition 9.2. |
Proposition 4. Let E be a locally convex Hausdorff space and E' its
dual. Suppose that there exists in E a countable total subset A. Then every
equicontinuous subset M of E' is metrizable for the topology induced on it
by a(E', E).
Proof. The set A is a fortiori total in E for <r(E, E'), and thus Ta is a
Hausdorff topology. On the other hand, since A is countable, there exists
[3, §11]
grothendieck’s completeness theorem
253
a countable fundamental system of neighborhoods of 0 for the topology
Ta- By Theorem 2.6.1 the topology Ta is metrizable. But by Lemma 2
the topologies Ta and а(Е', E) induce the same topology on M. |
Now we come to the announced application of Corollary 3 of Theorem 1.
Proposition 5. Let E be a locally convex, complete Hausdorff space
and E' its dual. Suppose furthermore that there exists in E a countable total
subset. Then a linear form и on E' is continuous for the topology a(Ef, E)
if and only if for every sequence (x'n)new in E' which converges for a(E', E)
to a point xf eEwe have lim^oo u(x„) = u(x').
Proof. The condition is clearly necessary. Conversely if the condition
is satisfied, then the restriction of и to every equicontinuous subset of E'
is continuous for (r(E', E), since by Proposition 3 every such set is metriz-
able. It follows from Corollary 3 to Theorem 1 that и is continuous on Ef
for (t(E', E). I
Exercises
1. Deduce Proposition 7.6 from Theorem 1. (Hint: Let ©be the collection of all
balanced, bounded, convex, closed subsets of the bornological Hausdorff space E
and let и be a linear form on E whose restrictions to every A G S are continuous.
Show that и is bounded on every A G S.)
2. Deduce Proposition 2.5(b) from Theorem 1.
3. Let F and G be two vector spaces which form a dual system. Let ®f be a
collection of balanced, convex, <r(F, ^-bounded subsets of F which covers F,
and So be a collection of balanced, convex, a(G, F)-bounded subsets of G which
covers G.
(a) Show that the following statements are equivalent:
(a) Every set A G is precompact for the ©^-topology on F.
(/?) Every set В G is precompact for the ©^-topology on G.
(V) On every subset A G the topology induced by the ©^-topology
coincides with the topology induced by <r(F, G).
(ti) On every subset В G the topology induced by the ©^-topology
coincides with the topology induced by <r(G, F).
(Hint: It is sufficient to prove that (a) => (5) and (3) => (fi) since then by
symmetry (fi) => (У) and (У) => (a) will follow. To prove (a) => (5), observe
that the sets B°, where В G Sg, form a fundamental system of neighborhoods
of 0 for the ®g-topology; hence the sets B°° and thus also the sets В are equi-
continuous in G for the ©G-topology on F. By Proposition 9.8 the topology
induced on В by <r(G, F) coincides with the topology induced by the topology
of uniform convergence on precompact subsets of F for the ©G-topology. If
(a) holds, each A G ®f is precompact for the ©G-topology. Hence the ®f-
topology on G is coarser than the topology of uniform convergence on precompact
subsets of F for the ©G-topology. Since F = Uae<©f the ©F-topology is
finer than <r(G, F). Hence (3) follows.
254
DUALITY
[3, §12]
To prove (5) =Ф (j3), observe that every В G ©g is equicontinuous for the
©G-topology on F, hence relatively compact for <r(G, F) and precompact for the
topology induced by <r(G, F). Therefore if (5) holds, В is precompact for the
topology induced by the ©^-topology.)
(b) Denote by Tp the ©^-topology on F and by Tp the topology of uniform
convergence on Tf-precompact subsets of F on G. Show that Tp is the finest
locally convex topology on G which induces on every TF-equicontinuous subset
of G the same topology as <r(G, F). (Hint: By Proposition 9.8 Tp induces the
same topology as a(G, F) on every TV-equicontinuous subset of G. If T is some
locally convex topology on G which induces on every TF-equicontinuous subset
of G the same topology as <r((7, F), then T is an ©-topology, where © is the col-
lection of T-equicontinuous subsets of F; and by (a) of part (a) each set M G ©
is precompact for Tp. Thus T is coarser than Tp.)
4. Show that if the locally convex Hausdorff space E is complete, then the
topology p(E'f E) coincides with the topology \(E'f E). (Hint: By Proposition 3
the space E is the dual of E' equipped with the topology p(E', E), and p(E', E)
is the ©-topology for some collection © of balanced, convex, a(E, E')-bounded
subsets of E. By Exercise 3(a) each set A G © is precompact for the topology
of E. Thus p(E', E) is coarser than \(E', E).)
5. Show that if the locally convex Hausdorff space E is complete, then condi-
tion (H) of Corollary 5 to Theorem 1 is satisfied.
§12. The transpose of a linear map
Let us begin by recalling from algebra the definition of the transpose of a linear
map. Let E and F be two vector spaces over the same field К and let E* and F*
be their respective algebraic duals. If и is a linear map from E into F, then there
exists a unique linear map *u from F* into E* which satisfies
y') = (x,
for every x G E and yf G F*. Indeed, for every yf G F* the map x i—> {u(x), yr)
is clearly a linear form xr G F*; we set *u(yf) = xf. The map *u is linear since
for y', z' G F* and X G К we have
(ж, ‘u(?/ + г')) = (w(x), 2/' + г') = (w(x), ?/') + (м(х), «')
= fc, W')} + (ж, 'u(z')) = (х, + ‘и(г')>
and
{х, (и(Ху')} = (и(х),Ху') = {Хи(х),у'} = {и(Хх),у'} = (Хх, = {х, Х*и(у')).
We call *и the transpose of и.
Next, let us consider the transpose of a weakly continuous linear map.
Proposition 1. Let (Fi, (?i) and (F2f G2) be two pairs of vector spaces
forming dual systems. We consider Gi imbedded canonically into F* (i =1,2).
Let и be a linear map from F\ into F2. Then the restriction of *u to G2 maps
G2 into G\ if and only if и is continuous for the topologies a(Fi, (ri) and
^(^2)
[3, §12] THS TRANSPOSE OF A LINEAR MAP 255
Proof, (a) Suppose that ‘u(G2) C Gi and let Ж be a <t(F2, ^-neigh-
borhood of 0 in F2 defined by |(y, e, where у e F2, y'i G G2
(1 i n). Set x'f = 1и(у'{) e Gi for 1 i n and let V be the
<r(Fi, (ri)-neighborhood of 0 in Fi defined by |(я?, х{)\ g e for 1 i n.
If x e V, then
lfaO), «Л>| = 10, ‘«(^)>| = 10^)1 = e (1 = i = n);
i.e., u(x) e W. Thus и is continuous.
(b) Suppose that и is continuous for the weak topologies. Then for
each y' e G2 the linear form x (u(x), y') is continuous on Fi for
^(^ь Gi). By Proposition 2.2 there exists x' e (?i such that
(u(x), y') = (x, x')
for all x G Fi. This shows that tu(yr) = x', i.e., that lu maps G2 into Gi. |
If the conditions of Proposition 1 are satisfied, we call the restriction
of *u to G2 the transpose of и and go on denoting it by *u.
Corollary. If и is a linear map from Fi into F2, continuous for the
topologies a(Fll G±) anda(F2, G2), then the map *u: G2 —> Gx is continuous
for the topologies a(G2, F2) and a(Glt Fj). We have furthermore i(fu) = u.
Proof. It follows from the identity (u(x), у'} = (я, *и(у')), x e
yr e G2 that *(*и) = и. Now и maps Fx into F2; hence by Proposition 1
the map *u is weakly continuous. |
Proposition 2. Let (Fi, (?i) and (F2, G2) be two pairs of vector spaces
forming dual systems and let u: —» F2 be a linear map which is continuous
for the topologies <r(Flf Gi) and a(F2, G2). Let A be a subset of Fi and В a
subset of F2. Then:
(a) (u(A))° = ‘и-ЧЛ0).
(b) u(A) С В implies ьи(В°) C A°.
(c) If A and В are nonempty, balanced, convex and closed for the topol-
ogies a(Fi, (7i) and <r(F2, G2) respectively, then the relations u(A) С В and
*и(В°) C A° are equivalent.
Proof, (a) The relation yr e (u(A))° means that
\(u(x), i/'>| = |(x, *и(у'))\ 1
for all x e A, which is equivalent to *и(уг) e AQ, i.e., to yf G *и~ 1(A°).
(b) If u(A) С B, then by Proposition 3.1(a) we have
B° C (u(A))° = ^“ЧЛ0).
256
DUALITY
[3, §12]
(c) Since (?2 —> (?i is continuous for o’(<?2, F2) and Fi)
(Corollary to Proposition 1), by part (b) the relation *u(B°) C A° implies
that *(*u)(A°°) C B°°. But *(*u) = и by the preceding corollary, and
A°° = A, B°° = В by Theorem 3.1. |
Corollary 1. Let u: F^ F2 be a linear map which is continuous
for a(Fi, Gi) and <r(F2, G2). Then the kernel of *u is the subspace ufFi)1-
of G2, i.e., Ker(*u) = (Imw)1.
Proof. If A = Flf then A° = {0}, and V1^0) is the kernel of *u.
Now, by part (a) of Proposition 2 V”1^0) = (u(A))° = (и^))3-. |
Corollary 2. Let u: F\ —> F2 be a linear map which is continuous for
a(Fi, (?i) and a(F2, G2). Then u(F\) is everywhere dense in F2 for the
topology <r(F2, G2) if and only if the map *u is infective.
Proof. This is a consequence of the preceding corollary since u(Fi) = F2
means that u(Fi)± = {0} and 4i is injective if and only if its kernel is {0}. |
Proposition 3. Let E and F be two locally convex Hausdorff spaces with
topologies Te and Tf, and let Er and Fr be their duals.
(a) If the linear map и: E —> F is continuous for the topologies Те and
Tf, then it is continuous for the topologies a(E, Ef) and a(F, F').
(b) If the linear map u' : Fr —> Ef is continuous for the topologies a(Fr, F)
and <r(E', E), then it is continuous for the topologies &(F', F) and P(E', E).
Proof, (a) Let и: E —> F be continuous for the topologies Те and Tp.
Then for each y' G Ff the linear form x i-> (u(x), y') is continuous on E
for Те; hence it is also continuous for a(E, E') (Example 4.3). By the
definition of the topology <r(F, F') this means that и is continuous for the
topologies <т(Е, E') and a(F, F').
(b) Let uf\Ff-^E' be continuous for the topologies a(Ff, F) and
a(Ef,E). Then by the corollary to Proposition 1 we can set uf = *u,
where и: E —> F is a linear map, continuous for a(E, E') and a(F, F').
Let A be a a(E, 2?')-bounded subset of E. Then В = u(A) is a a(F, F')-
bounded subset of F, and by Proposition 2(b) we have u'(BQ) C A°,
which proves that uf is continuous for the topologies &(F', F) and 0(E', E). |
Corollary. Let E and F be two locally convex Hausdorff spaces with
topologies Te and Tf> and let E' and Ff be their duals. If the linear map
и: E —> F is continuous for Те and TF) then it is continuous for a(E, Ef)
and <r(F, F'), and its transpose *и: Ff —> E' is continuous for a(Ff, F) and
(t(E', E) and also for 0(F', F) and 0(E', E).
Proof. By Proposition 3(a) the map и is continuous for <r(E, E') and
a(F, F'). By the corollary to Proposition 1 the map *u is continuous for
(r(F', F) and а(Е', E). Finally, by Proposition 3(b) the map *u is con-
tinuous for 0(F', F) and P(E', E). |
[3, §12] THE TRANSPOSE OF A LINEAR MAP 257
For normed spaces we have the more precise result:
Proposition 4. Let E and F be two normed spaces and и: E —> F a
continuous linear map. Then
IIM = ||M||.
Proof. By the definition of the norm of a continuous linear map
(Exercise 1.7.4) we have
IIM = sup ||M?/')II, (1)
Ilz/'11^ 1
where y' varies in F'. By the definition of the norm in E' (cf. formula (1)
of Chapter 1, §5) we have
sup IIMs/')II = sup sup |(x, Ms/'))l, (2)
llz/'ll^i Hz/'11^1 llzll^i
where x varies in E. By the definition of the transpose we have
sup sup |<x, Ms/'))l = sup sup |(w(x), г/')|. (3)
Hz/'H=1 llzll^l llzll^l Ilz/'11^1
Since the canonical imbedding of F into its bidual is an isometry, we have
sup sup |<w(x), 7/'>| = sup ||u(x)||. (4)
llzll 1 Hz/' II = 1 llzll 1
Finally, again using the definition of the norm of a linear map, we have
sup ||«(a:)|| = ||u||. (5)
llzll^l
The assertion of the proposition follows by combining the equalities (1)
through (5). |
If a map и: E —> F is continuous for the topologies a(E, E') and<r(F, F'),
then it is not necessarily continuous for the topologies TE and Tf- For
instance, let G and H be two vector spaces which form a dual system and
suppose that <r(G, H) # r(G, H). Take for E the space G equipped with
the topology TE = H), for F the space G equipped with the topology
Tp = r(G, H), and for и the identical map G —* G. Then и is continuous
for <r(B, B') = <r(G, H) and <r(F, F') = <r(G, H) but not for TE and Tp.
We have, however, the following result:
Proposition 5. Let E and F be two locally convex Hausdorff spaces and
let Ef and F' be their duals. Every linear map и: E —> F which is continuous
for the topologies a(E, E') and cr(F, F') is also continuous for the Mackey
topologies т(Е, E') and r(F, F').
Proof. Let W = B° be a neighborhood of 0 in F for the topology
r(F, F'), where В is a balanced, convex, <r(F', F)-compact subset of F'.
Since *u: F' —> E' is continuous for the topologies <r(F', F) and <r(B', E)
258
DUALITY
(3, §12]
(Corollary to Proposition 1), the set A = *u(B) is a balanced, convex,
<r(E'f F)-compact subset of E', and thus V = A ° is a neighborhood of 0
in E for the topology т(Е, E'). By Proposition 2(b) we have 1(1и)(А°) C B°,
that is, u(V) C W, which proves that и is continuous for t(E, Ef) and
r(F, F'). I
Corollary. If the topology Те of E coincides with the Mackey topology
т(Е, E'), then every linear map и: E —> F which is continuous for the topol-
ogies a(E, E') and a(F, F') is also continuous for the topologies Te and Tf.
Proof. By the assumption and by Proposition 5 the map и is continuous
for the topologies TE = r(F, E') and r(F, F'). But r(F, F') is finer than
Tf (Proposition 5.4). |
Let us recall that the hypothesis of this corollary is satisfied if E is an
infrabarrelled space (Proposition 6.8).
Returning to Proposition 3, if uf:Ff —> E' is continuous for the strong
topologies 0(F', F) and fi(E'f E), then it is not necessarily continuous for
the topologies a(F', F) and a(F', E). For instance, let F be a non semi-
reflexive space and E = E' = K1. Then there exist linear forms on F'
which are continuous for 0(F', F) (i.e., belong to F") but are not con-
tinuous for a(F', F) (i.e., do not belong to F). Here we have the following
result:
Proposition 6. Let E and F be two locally convex Hausdorff spaces and
let E' and F' be their duals. Suppose that F is semi-reflexive. If the linear
map u': Fr —> E' is continuous for the topologies &(F'f F) and &(E'f E),
then it is also continuous for the topologies <r(Ff, F) and <r(E't E).
Proof. It follows from Proposition 3(a) that u' is continuous for the
topologies a(F', F") and a(F', E"). By our hypothesis
a(F',F") = a(F',F);
on the other hand, (г(Е'} E") is finer than a(F', E). |
Proposition 7. Let E and F be two locally convex Hausderff spaces
and и: E —> F a continuous linear map. If we equip the duals E' and F'
with the topologies к(Е', E) and k(F', F) or with the topologies X(F', E) and
\(Fr, F)f then the map *u: F' —> E' is continuous.
Proof. Let К be a balanced, convex, compact subset of E. Then
L = u(K) is a balanced, convex, compact subset of F. If x e К and
yf G L°, then
IW),^)I= Kz/X*))l 1;
i.e., *и(у') C K°. Thus ‘u is continuous for the topologies k(F', F) and
к(Е', E).
[3, §12]
THE TRANSPOSE OF A LINEAR MAP
259
To prove the statement concerning the topologies X one considers,
similarly as above, a precompact subset К of E and uses Proposi-
tion 2.10.6. |
We conclude this section with the description of a situation which we
shall encounter frequently in Chapter 4 (cf. Definition 4.2.3). Let D be
a reflexive locally convex Hausdorff space and D' its dual equipped with
the topology 0(D', D). Let E be another locally convex Hausdorff space
and assume that we have two continuous injective linear maps i: D —» E
and j-.E—* D'. Let us also assume that j(i(D)) is dense in D'. If i(D)
is dense in E, we say that (D, i, E, j, D') is a normal system. It will be
often convenient to identify D with a linear subspace of E with the help
of the injection i and to identify E with a linear subspace of D' with the
help of the injection j. Then we can say that D' induces on E a topology
coarser than its own and E induces on D a topology coarser than its own.
Scholium 1. Let (D, i, E, j, D') be a normal system. The restriction of
an element xf eE' to D is a continuous linear form on D, i.e., an element
yf G Df. We have у' = Ч(х'); and if we equip E' with the topology 0(E', E),
then the map 4: E' —» D' is continuous and injective. Similarly, the restric-
tion of an element и G D = D" to E is a continuous linear form on E, i.e.,
an element vf G Ef. We have vf = *Ци), and the map lj: D —» Ef is con-
tinuous and injective.
If D is a Montel space, then the same results hold if we equip E' with the
topology к(Е’, E). Furthermore, (D, lj, E', 4, D') is then a normal system.
Proof. For у G D we have {y, y') = (i(y), x'} = {у, hence
yf = 4(x'). Similarly, for v G E we have {v, v') = (j(v), u) = {v, ^(u)),
hence v' = *j(u). By the corollary to Proposition 3 the maps 4 and 7
are continuous. Since i(D) is dense in E, it is a fortiori dense for the coarser
topology <r(E, E'), and therefore by Corollary 2 of Proposition 2 the map
4 is injective (this is of course also directly obvious). Now, j(i(D)} and
a fortiori j(E) are dense in D'; hence, just like before, 7 is injective.
Next Joi is injective. Hence ^(Joi)(D) = ^*(7(D)) is dense in Df for
any topology compatible with the duality between D and D' by Corollary 2
to Proposition 2 and Proposition 4.3. For the same reason, ^(D) is dense
in E' equipped with the topology к(Е', E). Finally, if D is a Montel space,
the injections 7 and 4 are continuous for the topologies
0(D', D) = K(Df, D)
and к(Е', E) by Proposition 7. |
Observe that if E' is equipped with 0(E', E), then ^(D) is not necessarily
dense in E' (take D = 3J, E = (Bq and E’ = (B; cf. Chapter 4, §5).
260
DUALITY
[3, §13]
Exercises
1. Let E be a finite-dimensional vector space with basis and let
be the basis of the dual space E* defined by
(ei) ei) — |q
if i = У,
if i 5^ j.
Let и: E —* E be a linear map whose matrix (ац) is defined by
n
w(e.) = X “»e*-
k=i
Show that if the matrix (fin) of *и: E* —* E* is defined by lu(ej) = 2fe=i Pikt'k,
then fin = an for 1 i, j’ n; i.e., (fin) is the "transpose” of (ац).
2. If E and F are two vector spaces, M a set of linear maps и: E —* F, A a
subset of E) and В a subset of F, we write
M(A) = (J u(A) and M~l(B) = f| u~l(B).
uEM uEM
Let (Fi, (ri) and (F2, G2) be two pairs of vector spaces which form dual
systems and let M be a collection of linear maps u: Fi —* F2 which are continuous
for the topologies a(Fi, <n) and <r(F2, бгг). Denote by the set of all transpose
maps ‘u: G2 —* G\, where и runs through M. Let A be a subset of Fi and В a
subset of G2.
(a) Prove that (M(A))° = and M~l(B°) = (‘M(B))°.
(b) Prove that the balanced, convex,
CM-1^0))0.
3. Let E and F be two normed vector
B: (x, y)»-» B(x, y) be a bilinear form on
of В by
<t(F2, (?2)-closed hull of M(A) is
spaces over the same field and let
E X F. We define the norm ||B||
|B(x)2/)|.
||B|| = sup
11*11 IM
Let и: E —* F be a continuous linear map. Prove that the norm of the bilinear
form (x, y')*—► {u(x),y') = (x, *и(у')) on E X F' is ||u||. (Hint: Proof of
Proposition 4.)
§13. Duals of subspaces and quotient spaces
Let F and G be two vector spaces which form a dual system, M a linear
subspace of F, and j: M F the canonical injection. Let us consider
the transpose of j as a map from G into tlie algebraic dual M * of M
defined by
{x, %)'}) = y')
for x ЕМ,у' E G. Let us prove that
(a) xf G If* belongs to lj{G) if and only if x' is continuous for the
topology induced by <r(F, G) on M,
(b) the kernel of 7 is If1.
[3, §13]
DUALS OF SUBSPACES AND QUOTIENT SPACES
261
Indeed, if x' is continuous on M for the topology induced by a(F, G) on
M, then by Proposition 1.1 there exists y' G G such that
OM yf> = *').
Hence xf — i.e., x' G ^(G). Conversely, observe that 7(2/') — yf 0 j
is the restriction of yf to M, Thus is continuous on M since yf is
continuous on F for a(F, G). Finally, (b) follows from Corollary 1 to
Proposition 12.2, but it is also directly clear that the restriction of y' G G
to M is zero if and only if y' G Mx.
Let us denote by N the subspace of M * formed by all linear forms on
M which are continuous for the topology induced by a(F, G). Then the
map 7 can be factored into the maps
G -> G/M\ a: G/Mr -> N, i: N
where ф is the canonical surjection, a is a bijective linear map, and t is
the canonical injection.
Proposition 1. The vector spaces M and N form a dual system, and the
topology cr(M, N) coincides with the topology induced on M by a(F, G),
Proof, If xf G N is such that (x, x') = 0 for all x G M, then xf = 7(2/')
for some yf G G and (x, lj(y')) = (j(x), у'} — 0 for all x G M, i.e., yf G Mr,
Thus xf = 0 by (b) above.
If x G M is such that (x, x') = 0 for all x' G N, then
<j&), y') = fc, 7(2/')) = 0
for all ?/' G G. Thus j(x) — 0 and also x = 0, since j is injective. This
proves that M and N form a dual system.
Let V be the neighborhood of 0 in F defined by the inequalities
I <2/, 2/01 €,
where у G F and yk G G for 1 к n. Set xk = Ч(ук) G N, Then the
trace of V on M is the set W defined by the inequalities |fc, £0| e
(1 к n) since (x, xk) = {j(x), yk) for all x G M. Conversely, if
W = {x | |fc, £0| e, 1 к n}
is a neighborhood of 0 in M for <r(M, N), then choose yk G G such that
7(2/0 — xk for 1 к n. Clearly, W is the trace on M of the neighbor-
hood V of 0 in F defined by the inequalities |fc, ?/0| = e (1 к n). |
Since we now know that the vector spaces M and N form a dual system,
it is legitimate to consider 7 as a linear map from G onto N, Then
262
DUALITY
[3, §13]
a: G/M1- —> N is the injection associated with 7, and therefore it is con-
tinuous if we equip G/M1- with the quotient topology of <r((?, F) modulo
the subspace M± and N with the topology <r(N, M). We shall sometimes
identify the spaces G/M1- and N with the help of the bijection a.
Corollary. Let E be a locally convex Hausdorff space, M a subspace
of E, and E' the dual of E. Then there exists a canonical bijective linear map
from E'/М1- onto the dual M' of M, and the topology a(M, M') coincides
with the topology induced by <r(E, E') on M.
Proof. This follows from the previous considerations if we take into
account that a linear form и on M is continuous for the topology TM
induced by the original topology Те of E if and only if it is continuous
for the topology (?m induced by <r(E, E'). Indeed, if и is continuous for
Ям, it is a fortiori continuous for TM. Conversely, if и is continuous for
Tm, then by Proposition 1.1 it is the restriction to M of a linear form v
on E, continuous for Te- But v is continuous for <r(E, E'); hence и is con-
tinuous for (Гм-1
Proposition 2. Let us equip G/M1- with the quotient topology of a(G, F)
modulo the subspace M1- and N with the topology a(N, M). The continuous
bijective linear map a: G/M1- —> 2V is an isomorphism if and only if M is
closed in F for a(F, G).
Proof, (a) Suppose that M is closed for a(F, G). Let
V = {y' | |<г/ь 2/z>| e, 1 к n}
be a neighborhood of 0 in G for a(G, F). Let L be the subspace of F gen-
erated by M and the vectors у к (1 к n). There exists in L a supple-
ment P of M having finite dimension m. Let (^)i^i^m be a basis of P.
The restrictions to M± of the linear forms y' •-» (zi, y') are linearly inde-
pendent, since otherwise there would exist z = where not all
pi are zero, such that (z, у'} = 0 for all yr G Mr. This would mean that
z G M±J-, i.e., z G M since M is closed (Proposition 3.3(e)) in contradiction
to the definition of P. '
Each уъ (1 к n) can be written uniquely in the form
m
Ук = + X
1=1
where Xk G M. By the linear independence of the linear forms
у' fa, У')
on M1, for every y' G G there exists s' G M± such that (zi, y') = (zi, s')
[3, §13]
DUALS OF SUBSPACES AND QUOTIENT SPACES
263
for! I m. Hence
{Ук, У' — s') = {j(xk), y' — s') = {j&k), У')
for 1 g fc n.
Now let U be the neighborhood of 0 in N for the topology <r(A, M)
defined by the inequalities |(x^, x')| g e, 1 fc n. We have *j(7) D U.
Indeed, let x' = *j(y') G U. For some s' G Mx we have
У' - S')| = |(/to), 2/')| = |to, W))l = Ito, *')l e
for 1 fc n, whence y' — s' G V. But lj(y' — s') = *j(y') = x'
since s' belongs to the kernel Mx of lj.
It follows now from Theorem 2.5.1 that the surjective map *j is a strict
morphism; hence a is indeed an isomorphism.
(b) Suppose that M is not closed for <r(F, G) and let M be its closure.
Then N is also the space of all continuous linear forms on M (Proposition
2.9.5), and furthermore = (M±±)± = M-1- by Proposition 3.3. Thus
by part (a) the canonical bijection a: G/M± —> N is an isomorphism for
the topology <r(N, M) on N. Since M # M, it follows from Proposition 2.4
that the topology <r(N, M) is strictly finer than <r(N, M), and thus a
cannot be an isomorphism for (r(N, M). |
Corollary. Let Ebe a locally convex Hausdorff space, L a closed subspace
of E, and E' the dual of E. Then there exists a canonical bijective linear map
from (E/L)' onto L\ and the topology a (E/L, (E/L)') coincides with the
quotient of the topology <r(E, E') modulo L.
Proof. Let <p: E E/L be the canonical surjection. Its transpose
(E/L)' —► E' associates with every continuous linear form y' on E/L
the linear form l<p(y') = y'°<p on E. Clearly, is injective. Applying
Corollary 1 of Proposition 12.2 to и = and = <p, we see that
4(W) = zA
The assertion concerning the topologies follows from Proposition 2,
taking F = E', G = E, M = L±, and for j the injection L± c* E'. We
have Mx = L^ = L because L is assumed to be closed and thus also
closed for a(E, E'). Thus if we identify (E/L)' with L\ then we have
indeed N = E/L and a(N, M) = <r(E/L, (E/L)'). |
Let us now give some applications of the results proved so far in this
section.
Proposition 3. Let (Flf (?i) and (F2, G2) be two pairs of vector spaces
forming dual systems, and let и: F\ F2bea linear map which is continuous
for the topologies a(F\, G\) and a(F2, G2). Then и is a strict morphism
(Definition 2.5.2) if and only if lu(G2) is closed in G\ for a(G\, F\).
264
DUALITY
[3, §13]
Proof. Set N = eu((72) C (?i. Then Vх = ^(O) by Corollary 1 of
Proposition 12.2 applied to *u. Let <p:Fx —> Fi/N1- be the canonical
surjection and set и = u°(p, where u: F-JN1- —> F2 is the injection
associated with u. The spaces Fi/N^ and N form a dual system. Let
x G Fi/N^, y' G G2} and choose x G Fi so that <p(x) = x. Then we have
<w(f), у') = {и(х), у') = (x, *и(у')) = {x, lu(y'))
if we consider *u as a map from G2 onto N. This relation shows that u is
an injective strict morphism of F^N1- equipped with the topology
0’(F1/N±, N) into F2 equipped with the topology <r(F2, (?2). By Propo-
sition 2 the topology 0’(F1/N±, N) coincides with the quotient topology
of <r(Fi, (?i) modulo Vх if and only if N is closed in (?i for <r((?i, Fx). |
Corollary. Let u: Fr —> F2 be a linear map which is continuous for the
topologies <r(Fx, (7X) and g(F2, G2). Then и is surjective if and only if *u is
an injective strict morphism for the topologies a(G2i F2) and <r((7x, Fi).
Proof. u(Fi) = F2 if and only if u(Fi) is both closed and everywhere
dense in F2. Hence the corollary follows from Proposition 3 (applied to *u)
and from Corollary 2 of Proposition 12.2. |
Proposition 4. Let E and F be two locally convex Hausdorff spaces with
topologies Те and Tf, and let E' and Ff be their duals. If и: E —> F is a
strict morphism for the topologies Te and Tf, then и is also a strict morphism
for the topologies <r(E, E') and a(F, F').
Proof. Let N be the kernel of и, H the quotient space E/N equipped
with the quotient topology Th of Те modulo N, <p: E —> H the canonical
surjection, and u:H —> F the injection associated with u. If Hf is the
dual of H, then by the Corollary of Proposition 2 the map <p is a surjective
strict morphism for the topologies a{Et Ef) and <r(H, Hf). On the other
hand, u is an injective strict morphism for the topologies <r(H, H') and
(r(F, F') by the corollary of Proposition 1, since by assumption it is an
injective strict morphism for the topologies TH and Tp. Thus и = и о <p
is a strict morphism for the topologies a(E, E') and <r(F, F'). |
Conversely, it is not necessarily true that if и: E —> F is a strict mor-
phism for the topologies <r(E, E') and a(F, F')} then it is also a strict mor-
phism for the topologies TE and Tf (see Exercise 2 and [9], Chapter IV,
§4, Exercises 3 and 4). We have, however, the following result;
Proposition 5. Let E be a locally convex Hausdorff space with topology
Те, F a metrizable locally convex space with topology Tf, and let Ef and Ff
be their duals. Let и: E —> F be a linear map which is continuous for the
topologies Те and Tf and which is a strict morphism for the topologies
a{E, Ef) and a(F, F'). Then и is a strict morphism for Te and Tp.
[3, §13] DUALS OF SUBSPACES AND QUOTIENT SPACES 265
Proof, (a) First let us assume that и is injective. Let v: u(E) —> E be
the inverse map of и: E —> u(E). Since u(E) is metrizable, it follows
from the corollary of Proposition 12.5 that v is continuous for the topology
induced by TF on u(E) and for TE; i.e., и is a strict morphism for the
topologies Te and TF.
(b) In the general case, let N be the kernel of и, H the quotient space
E/N\ Th the quotient of TE modulo N, <p: E —> H the canonical surjec-
tion, and и: H —> F the injection associated with u. The map и is con-
tinuous for TH and TF> and it is a strict morphism for а(Я, Я') and
a(F, F') since a(Hf H') is the quotient of a(E} Ef) modulo N (Corollary of
Proposition 2). It follows from part (a) of the proof that и is a strict
morphism for Th and TF. Thus и = u°<p is a strict morphism for TE
and TF. |
Corollary. Let E be a locally convex Hausdorff space whose topology
TE coincides with the Mackey topology r(E, E')y and let F be a metrizable
locally convex space with topology TF. If the linear map и: E —> F is a
strict morphism for the topologies a(E, Er) and a(F\ F')y then it is a strict
morphism for the topologies Te and TF.
Proof. By the corollary of Proposition 12.5 the map и is continuous for
the topologies TE and TF> and thus by the preceding proposition и is a
strict morphism for Te and TF. |
Exercises
1. Let (Fi, Gi) and (F2, G2) be two pairs of vector spaces forming dual
systems, and let u: F\ —> F2 be a strict morphism for the topologies <r(Fi, G4)
and <t(F2, £2). Show that the dual of u(Fi) equipped with the topology induced
by <t(F2, G2) is isomorphic to the subspace N = ^(£2) of G\ and the topology
a(N, u(Fi)) coincides with the topology induced by <r(Cri, Fi) on N. (Hint:
By Proposition 3 the subspace N is closed in G\ for <r(Cri, Fi). Therefore, by
Proposition 2 the dual of N is Fi/ATX. But since и is a strict morphism, u(Fi)
is isomorphic to Fi/N^. Finally, the two topologies on N coincide by
Proposition 1.)
2. Let E and F be two locally convex Hausdorff spaces with topologies TE
and TF and let E' and F' be their duals. Show that a continuous linear map
и: E —> F is a strict morphism for the topologies TE and TF if and only if the
following two conditions are satisfied:
(a) и is a strict morphism for the topologies <r(F, F') and <r(F, F').
(fi) Every equicontinuous subset of E' contained in fu(F') is the image by
*u of some equicontinuous subset of F'.
(Hint: (a) is necessary by Proposition 5. To prove sufficiency, consider first the
case where и is injective.)
266
DUALITY
[3, §14]
3. Let E be a locally convex Hausdorff space. For each closed subspace F
of finite codimension we equip E/F with the unique Hausdorff topology com-
patible with its vector space structure (Theorem 2.10.1). For F D G we have
a natural map Jfg- E/G —> E/F, Show that the spaces E/F and the maps fpG
form an inverse system (Exercise 2.11.3) whose inverse limit L is canonically
isomorphic to the space E'* (cf. Proposition 2.5) equipped with the topology
cr(E'*, E'). (Hint: For x G L define x G E'* by setting (z, y') = {хр, y'} if
/ G F1 С E’, and xp is the image of x in E/F,)
§14. Duals of products and direct sums
Let (EL)Lei be a family of locally convex Hausdorff spaces, for each
index t G I let E{ be the dual of Ec and let E = ILei Ес be the product
of the spaces EL equipped with the product topology. Let us define a
canonical map X from the external direct sum ILez X of the spaces E{
onto the dual E' of E as follows. Let x' = (x{) G ILei E{, then x(a/) is
the linear form on E defined by
(x(x), x) = Xi)j
lei
where x = (x/) G E, The sum has a meaning since хс = 0 except for
finitely many indices t. The linear form x(a/) is continuous. Indeed, let
H be the finite subset of I such that # 0 for t G H, Let € > 0 and
suppose that H has n elements. For each t G H let Uc be a neighborhood
of 0 such that xc G Uc implies | {xCi xt)| < e/n. Set Uc = Ec for i$H.
Then x G ILei Uc implies |(x(a/), z)| < €.
It is clear that X is linear and injective. Let us show that it is also sur-
jective. Let yf be a continuous linear form on E, There exists a neighbor-
hood V = ILei Vi °f 0 in E, where У€ = EL except for those indices t
which belong to a finite subset H of Z, such that x G V implies |(/, x)| 1.
Define the element x{ G E{ by (x'CJ xc) = (y', x), where xc is an arbitrary
element in Ec and x = (xK) G E is such that xK = xL for к = t and xK = 0
for к # t. We have x'L = 0 for all t which are not in H, Indeed, if t g H,
then Xxt)| = |(г/', Xx)| 1 for all xc #0 inEL and X G K; hence
x{ = 0. It follows that the element x' = (x{) lies in ILei E'if and clearly
we have y' = X(x').
We can summarize our result as follows:
Proposition 1. Let (EJ&i be a family of locally convex Hausdorff spaces.
Then the external direct sum II ig/ E'l of the dual spaces E{ can be identified
canonically with the dual of the product space ILei Ес. The canonical
bilinear form is given by «
\Xj X / = Va, ^c)
lGI
for x = (x/)^i G ILei Ec and x' = (x{)iei £ ILei E{.
[3, §14] DUALS OF PRODUCTS AND DIRECT SUMS 267
Now let F = ILgi Ec be the external direct sum of the spaces EL
equipped with the locally convex direct sum topology (Example 2.12.2).
We define a canonical map 0 from the product ILei E'l of the dual spaces
X onto the dual F' of F as follows. Let xf = g ILgi E{. Then
0(x') is the linear form on F defined by
(0(# ), x) = (#J, x^))
where x = (xi) G F. Again this sum has a meaning, since xL = 0 except
for finitely many indices l The linear form 0(x') is continuous. Indeed,
let € > 0 and for each t g I let UL be a neighborhood of 0 in Ec such that
xc g Uc implies |(z£, zt)| < e. Denote by the t-th injection and let U
be the balanced, convex hull of |Jji(Ui). Then U is a neighborhood
of 0 in F. Furthermore, if x = £\gi e U, xL G UL, £\gi |Xt| 1,
then
|(0(O, x)| £ |Xt| • |<acj, xt)| < e.
lGI
It is clear that the map 6 is linear and injective. It is also surjective,
since if y' G F', define x{ e E{ by (x{,xi) = (y'ljifxi)} for xL g El.
Setting x' = (xi) we have 0(x') = y'. We can again summarize our
results.
Proposition 2. Let (Ei)^! be a family of locally convex Hausdorff spaces.
The product ILei E{ of the dual spaces E{ can be identified canonically with
the dual of the locally convex direct sum LLgi Ec. The canonical bilinear
form is given by
{x, x') — E fai, x{}
1<=I
for x = (xt) e ILer E„ x' = (x'J e JLei M-
Consider next a family (Fo G^<=i of pairs of vector spaces which form
dual systems. Set F = liter Ft, G = ILer Gu and define a bilinear
form on F X G by
у) = E
for x = (xi) G F and у = (yi) G G. The spaces F and G form a dual
system, since if for instance я # 0, then there exists an index i G I such
that Xi 0. Choose yv such that (xCi yi) 0 and yK = 0 for к # i.
Then (x, y) = (xc, yL) 7^ 0. It follows from the preceding two proposi-
tions that G can be considered as the dual of F equipped with the product
of the topologies a(Ft, 6?t), and F can be considered as the dual of G
equipped with the locally convex direct sum of the topologies (r(GL, FL).
268 DUALITY [3, §141
Proposition 3. The topology a(F, G) on F = ILgz Fi coincides with the
product of the topologies (r(F^ GJ.
Proof (cf. Example 2.3). Let us denote by T the product of the topologies
<r(Ft, Gf). As we have just mentioned, each element of G defines a linear
form on F which is continuous for T. It follows that T is finer than <r(F, G).
Conversely, let V = ILgz Vt be a neighborhood of 0 in F for T, where
Vi = Fi for those indices c which do not belong to a finite subset H of I
and let
Vt = {яч | xt e Л, |<xt, < e, к = 1,. .., mJ
for i G Я. Then
U = {x | x G F, \{x}ji(yitk))\ < t,k = 1,,.. ,mlfi E B}
is a neighborhood of 0 for <r(F, G) and UcV. Thus <r(F, G) is finer
than T. |
Remark 1. In general, if I is infinite, the topology ofG, F) on G is
strictly coarser than the locally convex direct sum of the topologies<r(Gfl, FJ
(see Exercise 2.1(b)).
Proposition 4. Let (J^Xer be a family of locally convex Hausdorff
spaces. If each Ei is semi-reflexive (Definition 8.2), then the product
E = ILez Ei is semi-reflexive.
Proof. Let A be a bounded, <r(B, B')-closed subset of E. If 7Ft denotes
the projection E —* Bt, then by Proposition 3 the set Trt(A) is <г(Во E'i)-
bounded in Д. If Ei is a semi-reflexive space, then by Proposition 8.1
the set iTi(A) is relatively compact for the topology <r(Bo Ei). It follows
from Proposition 3 and from Tihonov’s theorem that the set
В = П '
iGl
is relatively compact in E for the topology <r(B, E'). Thus the set A,
which is contained in B, is compact for <r(B, Ef) and therefore by Proposi-
tion 8.1 the space E is semi-reflexive. |
Remark 2. It follows from Proposition 4 and Exercise 2 that the
product of reflexive (Definition 8.3) spaces is reflexive (cf. Proposition 8.6).
Proposition 5. Let (Ff)i^i be a family of locally convex Hausdorff spaces,
E a vector space, and for each i G I let fa E —* Ft be a linear map. Assume
that for each x E E, x 7^ 0, there exists an index c G I such that /t(x) 0.
(a) If we equip E with the coarsest topology for which all the maps fi are
continuous, then for every continuous linear form xf on E there exists a finite
[3, §14] DUALS OF PRODUCTS AND DIRECT SUMS 269
family where y[k E.F[k(\ fc n), such that
X' = it ‘fvM = E 14 %•
fc=l fc=l
(b) If we equip each space Ft with the topology F{), then <r(E, Er)
is the coarsest topology on E for which the maps fL are continuous.
Proof, (a) We know (Exercise 2.11.1) that the linear map
П Ft,
iGJ
defined by <p(x) = (/t(x))tej, is an injective strict morphism. Define the
linear map ф: ILgj F{ —> E' by
= E 1ш).
lEI
If we identify the dual of ILgj Fl with LLe/ F{ according to Proposi-
tion 1, then ф = V since for x G E and (y{) G ILgj F{ we have
(2/0) = £ {ft(x), y{)
lEI
= E (x>
Now it follows from the Corollary of Proposition 13.3 and Proposition 13.4
(or from Proposition 1.1) that the map is surjective. Hence for x' G Ef
there exists (y{) such that x' = ф((у{)) = 22igj *Л(?/Х with y{ = 0
except for finitely many indices l
(b) The maps/t are continuous for the topologies a(E, E’) anda(Ft, Fj).
Indeed, let Vt be the neighborhood of 0 in FL defined by the inequalities
«2/, 2/fc)| = €, where y'k G F't (1 к ri), and set xk = %(ук). Then
U = {x I |(ж, X0| g €, 1 g к g n}
is а a(F, F')-neighborhood of 0 in E, and for x G U we have
|<Л(*),Ю1 = |(x, yt(z/O)| = |<ж,4>| e;
i.e.,/t(C0 C Vt.
Conversely, let U = {x | |(a:, e, 1 к g n] be a ff(E, E')-
neighborhood of 0 in E. By part (a) there exists for each x'k a family
(l/i.jiersuch that x'k = Sier ‘ЛСуО), Укл 6 F{, and yk,t = 0 except for
finitely many indices c. For each fc (1 g fc n) let p(fc) be the number
of y'k,i which are different from zero, and define the a(Ft, F't)-neighborhood
Vt of 0 in Ft by the inequalities |{у, г/£л)| e/p(fc), (1 fc n), where,
270 DUALITY [3, §14]
of course, Vt = Ftj except for finitely many indices t. If ж g П^т/Г1^),
then
Ito 4)1 = l/x, £ = Z 1<Л(4,4Л e;
I \ lEI • \ lEI
hence x G U, i.e., П^/УГЧЮ C 17.1
Corollary. Let I be a directed set and for each l g I let Ft be a locally
convex space. Assume that for c к the space FK is a linear subspace of FL
and that the map flK: FK Ft is continuous. Equip E = P|tGiFt with
the coarsest topology for which all the injections fc:E Fc are continuous.
Then every linear form on E is the restriction to E of a continuous linear
form on some FK.
Proof. Let n
*' = Z e E'.
k=l
s'
There exists к G I such that к for 1 k n. We have x' = %(у'),
where
y' = Z e F'. |
Л=1
If fAE) is dense in each Ft, then the maps
e/t: F't — E' and */«: Ff F'K
are injective. Identifying each y' e Fi with its restrictions to the spaces
FK C Ft and E C Ft (i.e., identifying F't with ‘/«(Fi) and with ‘/t(Fi)), we
can then say that E' = |Jte/ Fj.
Exercises
1. Let (Ft, (rt)tGz be a family of vector spaces which form dual systems, and
set F s= IIigi Et, G = Uigz G(,. Then the pair F, G forms a dual system with
respect to the bilinear form on F X G defined by
{x, у) = Z
for x = (xi) G F, у = (yi) G G.
(a) Show that fi(F, G) is the product of the topologies 0(Ft, Gi) and that
fi(G, F) is the locally convex direct sum of the topologies P(G^ Fi). (Hint: Use
Exercise 2.12Д0.)
(b) Show that 0*(F, G) (Exercise 6.5) is the product of the topologies fi*(FL, Gi)
and that (3*(G, F) is the locally convex direct sum of the topologies /3*(GL, Fi).
2. (a) Let (Ei)tei be a family of barrelled Hausdorff spaces. Prove that
ILgi Ec is barrelled. (Hint: Use Exercise 1(a) and Exercise 6.5(b).)
[3, §15]
SCHWARTZ SPACES
271
(b) Let be a family of infrabarrelled Hausdorff spaces. Prove that
ILgi Ei is infrabarrelled. (Hint: Use Exercise 1(b) and Exercise 6.5(c).)
3. Let F and G be two vector spaces forming a dual system and suppose that
F equipped with the topology a(F, G) is the topological direct sum (Defini-
tion 2.7.1) of the two subspaces M and N, Show that G equipped with the
topology <r(G)F) is the topological direct sum of the subspaces M1- and У1-.
(Hint: F can be identified with M X N, where, by Proposition 13.1, the space M
is equipped with a(Jf, G/M1-) and N with а(У, G/N1-). Hence by Proposition 3
the space G can be identified with G/M1- X G/N1-, and finally G/M1- = N1-,
G/N1- = M1-.)
4. Prove that the locally convex direct sum (Example 2.12.2) of a family of
semi-reflexive spaces is semi-reflexive. (Hint: Use Exercise 2.12.10 and an argu-
ment similar to that employed in the proof of Proposition 4.)
5. Assume that the hypotheses of Proposition 5 are satisfied and that E is
equipped with the coarsest topology for which the fL are continuous. Prove that
every equicontinuous subset of E' is contained in the a(F', F)-closure of a set
of the form
Z ‘/лад
fc=l
where MLk is an equicontinuous subset of F[k (1 к n).
§15. Schwartz spaces
Let E be a locally convex Hausdorff space and E' its dual. Let M be
a closed subspace of E and <p: E —> E/M the canonical surjection. Then
it follows from Proposition 13.1 that (E/M)' —> E' is an injective
linear map with image Mx and furthermore is a strict morphism if we
equip (E/M)' with the topology a((E/M)', E/M} and E' with a(E', E)
(see Exercise 1). In general, it is not true that is a strict morphism for
the topologies fi{(E/M)', E/M} and 0(E', E).
Similarly, if j: M E is the canonical injection, then it follows from
Proposition 13.2 that E' —> M' is a surjective linear map with kernel
Mx, and furthermore *j is a strict morphism if we equip E' with the topol-
ogy а(Е', E) and M' with (r(M', M) (see Exercise 1). In general, ij will
not be a strict morphism for the topologies 0(E', E) and P(M', M).
For normed spaces, however, the situation is more favorable since we
have the following result:
Proposition 1. Let E be a normed space. Then:
(a) The map is an isometry from (E/M)' onto the subspace M1- of E'.
(b) The injection a: E'/М1- —* M' associated with *j is an isometry (and
a bijection, of course).
272
DUALITY
[3, §15]
Proof, (a) For y' e (E/M)' we have
ll/ll = sup I<y,/>|= sun \(<p(x), 2/z>|.
II2/11 <1 ll^(x)ll<l
y&E/M xEE
If IIj/U < 1, then by the definition of the quotient norm there exists
x G E such that <p(x) = у and ||s|| < 1. Thus
ll/ll = sup \{<p(x), /)| = sup |(x, *<p(y'))\ = ||4/)ll-
llsllci llsllci
xEE xEE
(b) We have to prove that for every у' G M' we have
ll/ll = . inf ||/||.
5(x')=2/'
x’GE’
Now 7(^9 is the restriction of x' to M. Hence if 7(s') = У'-> we have
ll/ll = 117(^)11 = sup |(x, x')| g sup |(x, ж')| = |И|.
Ilzllgl WI Si
xEM x(EE
Thus
ll/ll t mf Ml-
1Ях')=2/'
x'EE'
On the other hand, by the Hahn-Banach theorem (Theorem 1.6.1) there
exists z' G E' such that ||z'|| = ||y'|| and such that the restriction of z'
to M is 1/', i.e., *J(z') = y'. This proves the assertion. |
In what follows we shall identify the space (E/M)' with M1- and the
space M' with E'/Jf1. We shall also denote the canonical surjection
7: E' —> E'/M1- = M' by Then we can say that in the case of the dual
E' of a normed space E the strong topology E/M) on M1 coincides
with the topology induced by $(E', E) on Af-^and that the strong topology
$(E'/M\ M) on E'/M1- coincides with the quotient of the topology
P(E', E) modulo Mx. We shall now see some other classes of spaces where
the same is true.
Proposition 2 (Dieudonn6-Schwartz). Let E be a semi-reflexive (Defi-
nition 8.2)^ locally convex Hausdorff space, M a closed subspace of E, and E'
the dual of E. Then:
(a) The strong topology ^(E'/M1-, M) on E'/M1- coincides with the quo-
tient of the topology 0(E', E) modulo M1-.
(b) M is semi-reflexive.
Proof, (a) By the corollary of Proposition 12.3 the map ф: E' —> M' is
continuous for the topologies 0(E', E) and $(M', M). Hence $(M', M) is
coarser than the quotient topology (2 of P(E', E) modulo M1-.
[3, §15]
SCHWARTZ SPACES
273
Conversely, let U be a balanced, closed, convex neighborhood of 0 in
E'/M1- for the topology Q. Then is a neighborhood of 0 in E' for
the topology 0(E', E); i.e., there exists a balanced, bounded, closed,
convex subset В of E such that BQ и М± C Since is
balanced, P(E', £/)-closed and convex, it also contains the balanced,
fi(E', £7)-closed, convex hull H of BQ и MNow, E is semi-reflexive,
hence by Proposition 8.3 the set H is also the balanced, (r(Ef, £/)-closed,
convex hull of B° и M2-; i.e., H = (В n M)° (Proposition 3.2). But
В n M is a bounded, balanced, closed, convex set in M, and U contains
the polar of В n M with respect to the duality between M and M'. Thus
&(М', M) is finer than Q.
(b) The topology (г(М, M') is the topology induced by a(E, E') on M
(Corollary of Proposition 13.1). A bounded subset В of M is also a bounded
subset of E and thus relatively compact for the topology <r(E, E') by
Proposition 8.1. But then В is also relatively compact for the topology
(r(M, Mf), and therefore, again by Proposition 8.1, the space M is semi-
reflexive. |
Corollary. Let I be an ordered set and for each l E I let FLbe a semi-
reflexive space. Suppose that for t g к we have a continuous linear map
flK: Fk —> Fc. Let E be a vector space, and for each t G I let fl be a linear
map from E into such that for t к we have fl = flK ° fl. Assume that
the following condition is satisfied:
(P) If (Xi)i^i is an element of ILez Ft such that for t к we have
fu(xK) = there exists a unique element xeE such that xt = fl(x) for
all ieI.
Then E, equipped with the coarsest topology for which the fl are continuous,
is a semi-reflexive space.
Proof (cf. Proposition 9.6). The uniqueness requirement in condition
(P) implies in particular that if x E E and x # 0, then there exists an
index t G I such that fl(x) 0; i.e., the linear map <p: E —> ILgz Fl
defined by <p(x) = (/t(z))tGz is injective and that E is a Hausdorff space.
By Proposition 9.5 and Exercise 2.11.1 the map <p is an isomorphism of
E onto a closed subspace of ILgz Fk. By Proposition 14.4 this product
space is semi-reflexive; hence by part (b) of the preceding proposition
so is E. |
Consider now the topology E/M) and the topology $ induced
by P(E', E) on M±. It follows from the corollary of Proposition 12.3 that
V-* M-1- —> E' is continuous for the topologies (ЦМ^, E/M) and 0(E', E);
i.e., ^(М-1-, E/M) is finer than $. Conversely, let U be a neighborhood of
0 in M± for the topology f^M2-, E/M). Then U contains a set of the form
274 DUALITY [3, §15]
B°, where В is a bounded subset of E/M. Suppose now that there exists a
bounded subset C of E such that В C <p(C). In that case, В С <p(C + M)
and U D BQ D (^(C + M))° = ^(С° П M1) = C° П M\ Since C°
is a neighborhood of 0 in E' for 0(E', E), it follows that <0 is finer than
E/M).
In general, we do not know whether every bounded set in E/M is con-
tained in the canonical image of a bounded subset of E. The following
lemma belonging to general topology will help us to single out a class of
spaces in which this is the case.
Before we can state our lemma we need a definition. Let X be a topological
space, R an equivalence relation on X, X/R the quotient space equipped with
the quotient topology, and <p: X —> X/R the canonical surjection. We say that
the equivalence relation R is open if the image <p(A) of any open subset A of X
is open in the quotient space X/R. An excellent example of an open equivalence
relation is given by the congruence modulo a subspace M of a topological vector
space E.
Lemma. Lei X be a complete metric space and R an open equivalence relation
on X such that the quotient space X/R is Hausdorff. Let (p:X X/R be the
canonical surjection. Then for every compact subset К of X/R there exists a compact
subset L of X such that <p(L) = K.
Proof. Let 53i be the collection of all open balls with radius | in X. Since
R is open, the sets where В runs through ®i, form an open covering of K.
Hence there exists a finite set Hi = {xi,..., xm} of points of X such that if
Bi(l i m) is the open ball in X with radius J and center at Xi (1 i m),
then the sets <p(Bi) (1 i m) cover K.
Suppose now that for all indices i with 1 i n we have constructed a
finite subset Hi of X with the following properties:
(a) and each point of Hl+i is at a distance ^l/2i from Hi
(1 i n — 1).
(0) If В runs through the open balls in X with radius 1/2* and center at a
point in Hi, then the sets <p(B) cover К (1 i n).
Let 53n+i be the collection of all open balls with radius l/2n+1 and whose
center x satisfies 8(x, Hn) < l/2n, where 5 denotes the distance in X. By the
properties of Hn, the sets <p(B), where В runs through 53n+i, form an open
covering of K. Since К is compact, there exists a finite set <7n+i С X such that
if В runs through the open balls in X with radius l/2n+1 and center at a point
of Сгп+ь then the sets <p(B) cover K. If we take Hn+i = Hn U Gn+i, we see
that we can define inductively an infinite sequence (Hn)nGN of finite subsets of
X which has the properties (a) and (fi).
Set H = IJnGN Hn and let us prove that H is precompact. For every p > 0
and every point yn+P G Hn+P there exists a sequence of points yn+i G Ня+г
(0 i p — 1) such that
5(2/п+г, 2/n+i+i) < 2^+1
[3, §15] SCHWARTZ SPACES 275
for 0 г p — 1. Thus
^(Уп, Уп^р) < 2n+i “ 2n-1 ,
and therefore for any у E H and any n 1 we have 8(y, Hn) 1/2*-1, which
proves that H is precompact.
Since by assumption X is complete, the set H is compact and hence <p(H) also.
Let us show that К C <p(H). If z G K, then by the definition of Hn we have
^^(z), Hn) l/2n for every n; hence H) = 0. Since (p-^z) is
closed and H compact, this implies that H A ^>“1(z) 5^ 0 (see Exercise 4) and
therefore z G <p(H).
If we set L = ЯП <p-1(K), then L is compact as a closed subset of the com-
pact set H, and we have <p(L) = K. |
In order to apply this lemma we introduce the following:
Definition 1 (Grothendieck). A locally convex Hausdorff space E is said
to be a Schwartz space if for every balanced, closed, convex neighborhood U
of 0 in E there exists a neighborhood V of 0 such that for every a > 0 the set
V can be covered by finitely many translates of aU.
Let us recall a notation introduced in §5. If U is a balanced, convex
neighborhood of 0 in a locally convex space E, and qu the gauge of U,
then we denote by Eu the quotient space of E modulo the subspace
Я = {x | qu(x) = 0}, equipped with the quotient norm of qu- Using
this notation, we can reformulate the above definition.
Proposition 3. A locally convex Hausdorff space E is a Schwartz space
if and only if for every balanced, closed, convex neighborhood U of 0 in E
there exists a neighborhood V of 0 in E whose canonical image in the space
Eu is precompact.
Proof, (a) Suppose that Я is a Schwartz space and let U be a balanced,
closed, convex neighborhood of 0 in E. Let V be a neighborhood of 0 in Я
with the property stated in Definition 1. If <p: E —> Eu is the canonical
surjection, set U = <p(U) and V = <p(V}. For every a > 0 the set V
can be covered by finitely many translates of a U. Since the sets a U (a > 0)
form a fundamental system of neighborhoods of 0 in Eu, it follows that V
is precompact in Eu-
(b) Suppose that the condition of the proposition is satisfied, i.e., that,
with the notations introduced previously, we have
V G (j (x< +
i=i
where is a finite family of points in Eu = E/N. If <р(х/) = x^,
276
DUALITY
[3, §15]
then we have
V C U + N-
i=\
Now N с W for every X > 0, and since U is convex, we have
^aU + N C jaU + iaU C aU;
hence
v С U + “CO-
i=l
Thus E is a Schwartz space. |
Here is another useful characterization of Schwartz spaces.
Proposition 4. A locally convex Hausdorff space E is a Schwartz space
if and only if the following two conditions are satisfied:
(i) Every bounded subset of E is precompact.
(ii) For every balanced, closed, convex neighborhood U of 0 there exists a
neighborhood V of 0 such that for every a > 0 we can find a bounded subset
A of E which satisfies the relation
V CaU + A.
Proof, (a) Suppose that E is a Schwartz space. Let В be a bounded
subset of E and U a balanced, closed, convex neighborhood of 0 in E. Let
V be the neighborhood of 0 associated with U in Definition 1. We have
В С XV for some X > 0. On the other hand,
V C U + I u\
2=1 ' ' o
for some finite family (^)i^2^n of points of E. Hence
в C U + U),
2=1
and thus В is precompact (Theorem 2.10.2).
Let U be a balanced, closed, convex neighborhood of 0. If
v c U & + «U>,
2=1
set A = {xi 11 g г g n}. Then A is bounded, and V C aU + A.
(b) Suppose that conditions (i) and (ii) are satisfied. Let U be a bal-
anced, closed, convex neighborhood of 0 in E and let V be the neighbor-
hood of 0 whose existence is postulated in (ii). For a given a > 0 deter-
mine a bounded subset A of E such that V C %aU + A. By (i) the set
A is precompact; hence there exists a finite family CrOigign of elements
[3, §15]
SCHWARTZ SPACES
277
of E such that A C U?=i (x< + iaU). Hence V C U?=i (x* + since
U is convex. This proves that E is a Schwartz space. |
For obvious reasons, we shall call a locally convex Hausdorff space a
Frechet-Schwartz space if it is a Fr6chet space (Definition 2.9.4) and a
Schwartz space.
Corollary. Every quasi-complete Schwartz space is a semi-Montel space
(Definition 9.1). In particular, every Frochet-Schwartz space is a Montel
space.
Finally, we want to characterize Schwartz spaces by a property of their
duals, but before doing so we have to prove a result which will be of great
importance later.
Theorem 1 (Schauder). Let E and F be two normed spaces and и: E —> F
a linear map which maps the unit ball of E into a precompact subset of F.
Then the transpose *u: F' —> E' maps the unit ball of F' onto a compact
subset of E' (equipped with the topology defined by the norm).
Proof. Let К be the image in F of the unit ball В of E. Then
*и(К°) C B°, which proves that *u is continuous if we equip Ff with the
topology X(F', F) (Definition 9.2) and Ef with the topology /3(Е', E). But
by virtue of Proposition 9.8 and the corollary of Theorem 4.1 the unit
ball of Ff is compact for the topology X(F', F); hence its image under the
map *u is compact in E' for 0(F', E). |
Let us observe that if E is a locally convex space and U a balanced
convex neighborhood of 0 in E, then the dual of the normed space Eu is
the normed space (E')u°- Indeed, a linear form on E will define a continu-
ous linear form on Eu if and only if it is bounded on U, i.e., belongs to the
subspace of E' generated by U°. Furthermore, it is clear that U° is the
polar of the unit ball of Eu in the duality between Eu and (E')u°-
Proposition 5. Let Ebe a locally convex Hausdorff space and E' its dual.
Then E is a Schwartz space if and only if for every equicontinuous subset В
of E' there exists a neighborhood V of 0 in E such that В is relatively compact
in the normed space (E')v<>.
Proof, (a) Assume that E is a Schwartz space; let В be an equicontinu-
ous subset of E' and U = B°. By Proposition 3 there exists a neighbor-
hood V of 0 in E whose image in Eu is precompact. We may assume that
V is balanced, convex and contained in U. In this case the kernel of the
canonical surjection E —> Ey is contained in the kernel of the canonical
surjection E —> Eu, and therefore we have a continuous linear map
u: Ev —> Eu which maps the unit ball of Fy into a precompact subset
of Eu- Now 7° э U°, and *u is clearly the canonical injection
(E')u° °*
278 DUALITY [3, §15]
By Theorem 1 the map *u maps U° onto a compact subset of (E')v° and
В onto a relatively compact subset, since В C B°° = U°.
(b) Conversely, assume that the condition of the proposition is satisfied
and let U be a balanced, closed, convex neighborhood of 0 in E. Then
В = U° is an equicontinuous subset of E', and therefore there exists a
neighborhood V of 0 in E such that В is relatively compact in (£/') i.e.,
for given a > 0 there exists a finite subset C of (Er) v° such that
В C C + iaV°.
On the other hand, the canonical image of V in Ev°° is precompact for
the topology <r (Ev°°, (E')v°), andC° contains the kernel of the canonical
surjection E Ev°°. Hence there exists a finite family of
points of V such that V C U?=i (Xi + W?0)- If s G У and y’ G £7°,
there exists an index i (1 £ i £ n) such that x — Xi G and ele-
ments z' G C and w' G |аУ° such that yf = / + w'. Thus
«X — Xi, 2/'>| |(X — Xi, z')\ + |<X, W')| + |(яг-, W')|
+ ja = a;
i.e., x — Xi; G a£7°° = aU, and therefore V is covered by finitely many
translates of aU. Thus E is a Schwartz space (Definition 1). |
Schwartz spaces have remarkable stability properties which we list in
the following three propositions.
Proposition 6. (a) A subspace M of a Schwartz space E is a Schwartz
space.
(b) Let (Ei)lei be a family of Schwartz spaces. Then the product ILez Ec
is a Schwartz space. c
(c) Let E be a vector space, (Ft)tei u family of Schwartz spaces and for
each index t G I let fL: E —> FLbe a linear map. Equip E with the coarsest
topology T for which all the maps fc: E FL are continuous, and suppose
that E is a Hausdorff space. Then E is a Schwartz space.
Proof, (a) Let £7 be a balanced, convex, closed neighborhood of 0 in
M. There exists a balanced, convex, closed neighborhood Ui of 0 in E
such that U D Ui П M. Let У i be a neighborhood of 0 in E such that
for every a > 0 the set V i can be covered by finitely many translates of
alh. Set V = Pi П M.
Given a > 0, there exists a finite family of elements of E
such that Vi C Ur=i i). Let H be the set of those indices
i (1 г n) for which (xi + %aU\) П M ty, and for each i G H
select a point yi G (xi + |a£7i) n M. Then we have V С Цкея (У* + <*U),
and therefore M is a Schwartz space.
[3, §15]
SCHWARTZ SPACES
279
(b) Let U be a balanced, convex, closed neighborhood of 0 in
E = J] Д.
iGZ
There exist a finite subset H of I and for each t G I a balanced, convex,
closed neighborhood UL of 0 in EL such that UL = EL for t й H and
U D ITigz UL. For each t G H choose a neighborhood V\ of 0 in EL ac-
cording to Definition 1, for each t G CH set VL = Ec and define
V = П V-
lEI
Given a > 0, for every t G H there exists a finite family
of points in El such that V\ C (zi,k + &UL). Denote by (yi)i^i^n
the finite family of points yi = (yitl) of E, where for t G H the component
yiti equals some (1 к n(t)) and yi,L = 0 for t g CH. Then we
have F C |J?=i (yi + aU), and thus E is a Schwartz space.
(c) Since T is a Hausdorff topology, the map x (/i(x))tGz from E
into ILgz Fi is injective; and if we identify E with its image, then T is
the topology induced on E by the product topology on ILez FL. Thus
the conclusion follows from parts (a) and (b) of the proposition. |
Proposition 7. Let E be a Schwartz space and M a closed subspace of E.
Then the quotient space E/M is a Schwartz space.
Proof. First of all, E/M is a Hausdorff space since M is closed
(Proposition 2.5.5).
Let U be a balanced, convex, closed neighborhood of 0 in E/M. If
<p'. E —> E/M is the canonical surjection, then U = <p~\U) is a balanced,
convex, closed neighborhood of 0 in E. Choose a neighborhood У of 0 in
E which satisfies the requirements of Definition 1 and set V = <p(V).
Then У is a neighborhood of 0 in E/M. If a > 0 and У C |j£=i (Xi + aU),
where is a finite family of elements of E, then setting yi =
for 1 i g n we have У C U?=i (У* + I
Corollary. Let E be a Frechet-Schwartz space and M a closed subspace
of E. Then the quotient E/M is a Frechet-Schwartz space.
Remark 1. In particular, E/M is a Montel space. This is of interest
because the quotient space of a Fr6chet-Montel space modulo a closed
subspace need not be a Montel space or even a reflexive space ([52], §27,2,
p. 373, §31,5, p. 437; [9], Chapter IV, §5, Exercise 21).
Proof. We have just seen that E/M is a Schwartz space. It is also
metrizable and complete (Theorem 2.9.2). |
280
DUALITY
[3, §15]
Proposition 8. Let F be a vector space and let (Еп)пеи be a sequence of
linear subspaces of F such that En C En+\ for alln e N and F = IJnGN En.
Suppose that each En is equipped with a locally convex topology Tn for which
En is a Schwartz space. Suppose furthermore that Tn+i induces on En the
topology Tn and that En is closed in En+i for Tn+i.
Let T be the finest locally convex topology on F for which the canonical
injections fn: En^> F are continuous. Then F equipped with the topology T
is a Schwartz space.
Proof. F is a Hausdorff space by Corollary 1 of Theorem 2.12.1. We
shall show that the two conditions of Proposition 4 are satisfied.
(i) Let В be a bounded subset of F. By Theorem 2.12.2 the set В is
contained in some subspace En and is bounded there. Since En is a
Schwartz space, В is precompact in En. Hence by Proposition 2.10.6 the
set В is precompact in F.
(ii) Let U be a balanced, convex, closed neighborhood of 0 in F. Then
Un = fn = U n En is a balanced, convex, closed neighborhood of 0
in En) and therefore there exists a neighborhood Vn of 0 in En such that
Vn C Un and that Vn satisfies condition (ii) of Proposition 4 with respect
to Un. Let V be the balanced convex hull of IJnGN [l/(n + l)]Vn- Then
V is a neighborhood of 0 in F. Let us show that it satisfies condition (ii)
of Proposition 4 with respect to U.
Let a > 0. Then
-4-Г Vn C aUn c aU for n + 1 •
n + 1 a
For each n such that 0 n 1/a let Л n be a bounded set in En such that
। 1 Vn C An + otUn
n + 1
and let A be the balanced convex hull of the union of the sets
An (0 g n g 1/a) in F. The set A is bounded and we have
-4-7 Vn C A + aU for n 6 N.
n + 1
Finally, since A + aU is balanced and convex, we have V C A + aU,
which proves our assertion. |
Example 1. Let F and G be two vector spaces which form a dual
system. Then F equipped with the topology <r(F, G) is a Schwartz space.
Indeed, every bounded subset of F is relatively compact in G* for <r((?*, G)
and thus precompact in F by Proposition 2.5(b). Hence condition (i) of
Proposition 4 is satisfied.
[3, §15]
SCHWARTZ SPACES
281
To prove that condition (ii) is also satisfied, let
и = {x I |(x, yk)\ €, 1 к n}
be a neighborhood of 0, where we may suppose that the vectors yk are
linearly independent. Let M be the subspace of G generated by the
У к (1 к n), let N be an algebraic supplement of M and let be
a basis of N. We choose V = U and
A = {x \ |(я, г/л>| S €, 1 к g n; |(x, st)| €, c G 1}
for the set A which figures in condition (ii), independently of a. In the
first place, A is bounded since if
У = 2 VkVk + £
л=1 iei
then
K*,0I e(X + E
4=i iei '
Next we see from an elementary algebraic consideration (cf. Exercise 10)
or from Proposition 1.2 that there exists a basis {х^^к^п in AT1 for which
(ял, yi) = 0 if к # Z,
(pkt Ук) = 1*
For each x G U set и = 22л=1 {я, Ук)%к- Then и G A since
|(ы, Ул>| = e and (u, st) = 0.
Finally, x — и G aU since {x — u, yk) = (x, yk) — {x, yk) = 0. Thus
U C aU + A, and therefore condition (ii) is satisfied.
Example 2. Let Й be an open subset of Rn. The space E = 8(й)
(Example 2.4.8) is a Schwartz space. To prove this, consider the
neighborhood
u= {/I l*7(*)l e, |p| £m,x(=K}
of 0 in E, where m G N and AC is a compact subset of Й. The space Eu
consists of all equivalence classes, where two functions are equivalent if
their partial derivatives up to order m coincide on the compact set K.
On Eu the topology is defined by the norm
q(f) = max |d7(x)|,
282
DUALITY
[3, §15]
where f actually stands for the equivalence class it represents. Choose
3 > 0 so that the compact set
L = {x | |x — y\ 3 for some у G K}
is contained in 0. Set
v= {f\ |d7(*)l 1, |p| m + 1, X e L}.
We shall show that the canonical image of V in Eu is precompact.
Indeed, for each p G Nn with |p| m let QP(K) be a space isomorphic
to the Banach space e(7Q. The map f (dpf)\P\^m is an injection from
Eu into Hipiand Eu can be identified with a subspace of the
Banach space &P(K). The projection dpV = {dpf\f G of
in <2P(K) is equicontinuous since if x and у are two points of К such
that — y\ 3, then the line segment joining them lies in L and we have
m) - ш
n гУ
X / dpf(z) dZi
г=1 J x
g n- |x — y\.
By Ascoli’s theorem each set dpV is relatively compact in QP(K). Hence
by Tihonov’s theorem V is relatively compact in вр(-К) and there-
fore precompact in Eq.
Since 8(й) is a Fr£chet space (Example 2.9.3), we obtain from the
corollary of Proposition 4 that 8(Q) is a Montel space. We have seen this
already in Example 9.3 with a proof very similar to the present one.
Example 3. If К denotes a compact subset of Rn, then the space
S>(K) introduced in Examples 2.3.4 and 2.4.10 is a Schwartz space. This
follows from Proposition 6(a), since by Example 2.5.9 if 0 is an open subset
of Rn containing K, then S)(K) is a subspace of 8(й). <
Since is a Fr£chet space (Example 2.9.5), it follows from the
corollary of Proposition 4 that it is a Montel space, as we already know
from Example 9.4.
Applying Proposition 8 to the space D(Q) of Example 2.12.6, we see
that it is a Schwartz space. Since it is barrelled (Example 6.4) and complete
(Example 2.12.6), it is a Montel space (cf. Example 9.6), but it is not a
Fr£chet space (cf. Exercise 2.12.6).
In the next example we shall use the following result:
Proposition 9 (Sebastian e Silva). Let I be an ordered set and for each
index t G I let Ft be a normed space. Suppose that for к l we have a con-
tinuous linear map fLK: F* F^ and assume furthermore that for each index
l G I there exists an index к l such that fLK maps the unit ball BK of FK
onto a precompact subset of FL.
[3, §15] SCHWARTZ SPACES 283
Let E be a vector space and for each к G I let fK: E -+ FK be a linear map
such that fi = fiK °fKfor l к. Equip E with the coarsest topology for which
the fi are continuous and assume that E is a Hausdorff space. Then E is a
Schwartz space.
Remark 1. The proof is similar to that of Proposition 6. It is possible
to give a statement which generalizes simultaneously Propositions 6 and 9
(see Exercise 11(b)).
Proof. Let U be a balanced, closed, convex neighborhood of 0 in E.
There exists a finite subfamily (tj) i g ig r of I and for each ц a neighborhood
Uit Qi 0 in Fit such that U D П1-1Л?1(^ч)- For each ц (1 I r)
let Ki G I be such that fil4(fiK^ is precompact in F4. The set
V = a neighborhood of 0 in E. Let us prove that it
satisfies the condition of Definition 1.
Given a > 0, for each I (1 I g r) there exists a finite family
(яуг))1^^п(1) of points of F4 such that
n(l)
c U + iat74).
3=1
Let P be the finite set of multi-indices p = (pi, . . . , pT) such that
1 = Pi = n(Z) and the set
= n + 4«^ч)
Z=1
is not empty. For each p eP choose a point zp G Wp. If z G V, then for
every I (1 I r) there exists an index qi (1 qi n(Z)) such that
/ч(я) f*i) xqi 4~ iaUit.
Choosing p G P such that pi = qi, we have f4(z — zp) G aU4 for each Z,
i.e.,
2 e Zp + а П C Zp + aU.
Z=1
Thus V C U₽ep (Zp + aU). |
Example 4. The space S introduced in Example 2.4.14 is a Schwartz
space. As we observed in Example 2.6.1, for k G N and m G N the topology
of the space S™ (Example 2.4.11) is defined with the help of the norm
ll/ll* = max max |(1 + |z|2)*dpf(x)\.
®GRn
In view of Proposition 9 and Example 2.11.6 it is sufficient to prove that
the unit ball BJE+i1 of SjJ+i1 is precompact in S™. We shall prove that it
is relatively compact, using a method similar to that of Example 9.5.
284
DUALITY
[3, §15]
In the first place, B™±/ is compact in since it satisfies the conditions
of Proposition 9.11. Indeed, for |p| m + 1 and f G B™+/ we have
|dp/(rr)| = 1 f°r all x and the inequality
m - dpw>\ =
П ГУ
X / di ^7(z) dz
4=1 Jx
n-\x — y\
proves that for |p| m the set {dpf\f G Is equicontinuous
It is now clearly enough to prove that if a sequence (fj) of elements of
converges in &m to some function g, then g G S™ and (/y) converges
to g in S™. We have
max |(1 + MV+1 dpf(x)\ 1
|p|
for all f 6 Bfc+i1, % 6 Rn. Hence given e > 0, there exists p > 0, such that
max |(1 + |x|2)*d7(x)| g (1 + |x|2)-1 S ie (1)
|p|
for |z| > p. Since in particular (dpfj) converges to (dpg) pointwise, we have
max |(1 + |аг|2)*!да’^(я:)| |e (2)
Ipl
for |z| > p, which proves already that g G S*. For |p| m each sequence
(dpfj) converges uniformly to dpg on the compact set |z| p. We have
therefore
max |d7y(z) — дР0(я)| S «(1 + P2)-*
and a fortiori
max |(1 + MWW ~ Wl e (3)
for |z| p and j J. Collecting the inequalities (1), (2) and (3), we
obtain
max max |(1 + |я|2)А{др/у(я) — dpg(x)}| e
IpISm xGRn
for j J, which proves our assertion.
Since S is a Fr6chet space by Example 2.11.11, it is a Montel space, as
we already know.
Proposition 10. Let E be a Frechet-Schwartz space and M a closed sub-
space of E. Then every bounded subset of the quotient space E/M is contained
in the image of some compact subset of E.
Proof. Since E/M is a Schwartz space (Proposition 7), its bounded
subsets are precompact (Proposition 4). But E/M is also a Fr6chet space
(Theorem 2.9.2), and therefore its bounded subsets are relatively compact.
Hence the statement follows from the lemma proved above. |
[3, §15] SCHWARTZ SPACES 285
From the discussion preceding the lemma we obtain:
Corollary. Let E be a Frechet-Schwartz space, E' its dual, and M a
closed subspace of E. Then the strong topology E/M) on M^ coincides
with the topology induced by P(E', E) on M^.
Exercises
1. Prove the statements made at the beginning of this section. (Hint: To
prove that (E/M)f —> Ef is an injective strict morphism for the topologies
<r(fE/M)f, E/M) and <r(Ef, E), replace F by E', G by E,M by M1- ~ (E/M)f,
N by E/M, and j by in Proposition 13.1. To prove that Ef —» Mf is a
surjective strict morphism for the topologies a(Ef, E) and <r(Mf, M), replace
F by E, G by E', M by M, and N by M' in Proposition 13.2.)
2. Let E be a reflexive Banach space and M a closed subspace of E. Prove
that E/M is a reflexive Banach space. (Hint: Ef is reflexive and by Proposi-
tion 2(b) M^ is also reflexive. Furthermore, (E/М)” ~ (M1)' ~ E/M by
Proposition 1.)
3. Let X be a set, R an equivalence relation on X, and A a subset of X. We
say that A is saturated for 7? if xE A and x = у mod R imply у G A. If A is
saturated, then it is the union of equivalence classes modulo R.
(a) Prove that, given any subset В of X, there exists a smallest saturated
subset A of X containing B. We call A the saturate of B.
(b) Suppose that X is a topological space. Prove that R is open if and only
if for every open set В in X the saturate of В is open.
(c) Still suppose that X is a topological space and let <p'. X —> X/R be the
canonical surjection. Prove that R is open if and only if for every point x G X
the filter of neighborhoods of <p(x) in X/R coincides with the image under <p
of the filter of neighborhoods of x in X,
4. (a) Let X be a metric space with metric 5, A a closed subset of X, and В
a compact subset of X, Show that if 5(4, B) = 0, then А П В ft. (Hint:
The function x i—> 5(4, x) attains its minimum on B.)
(b) Show by an example in R2 that if 4 and В are two closed sets, the condi-
tion 5(4, B) = 0 does not imply 4 П В 0.
5. Let 0 be a domain in C. Show that the space H(O) introduced in Example
9.2 is a Schwartz space. (Hint: Using Cauchy's formula for /(p)(z), show that
the injection H(O) 8(0) is a strict morphism.)
6. Let E be a locally convex Hausdorff space. We say that E satisfies the
Mackey convergence condition if every sequence which converges to 0 also con-
verges to 0 in the Mackey sense (Exercise 7.7). Thus every metrizable locally
convex space satisfies the Mackey convergence condition (Exercise 7.7(d)).
We say that E satisfies the strict Mackey convergence condition if for every
bounded subset 4 of E there exists a bounded, balanced, closed, convex subset
В Э A such that the topology induced by E on 4 coincides with the topology
induced on 4 by the normed space EB-
286
DUALITY
[3, §15]
(a) Prove that if E satisfies the strict Mackey convergence condition, then it
also satisfies the Mackey convergence condition.
(b) Let E be an infrabarrelled locally convex Hausdorff space and E' its dual
equipped with the strong topology 0(E'f E). Prove that E' satisfies the Mackey
convergence condition if and only if every sequence in E' which converges to 0
for 0(E', E), converges to 0 uniformly on some neighborhood V of 0 in E. Prove
that Ef satisfies the strict Mackey convergence condition if and only if for every
equicontinuous subset A of Ef there exists a neighborhood V of 0 in E such that
on A the topology induced by 0(E', E) coincides with the topology bf uniform
convergence on V.
(c) Following Grothendieck ([41], p. 106), we say that a locally convex
Hausdorff space E is quasi-normable if for every equicontinuous subset A of Ef
there exists a neighborhood V of 0 in E such that on A the topology induced
by 0(Ef, E) coincides with the topology of uniform convergence on V. Prove
that if E is an infrabarrelled quasi-normable space, then its dual E' equipped
with the strong topology 0(Ef, E) satisfies the strict Mackey convergence
condition.
(d) Prove that a locally convex Hausdorff space E is quasi-normable if and
only if for every balanced, closed, convex neighborhood U of 0 there exists a
neighborhood V of 0 such that for every a > 0 we can find a bounded subset
M of E which satisfies the relation V QaU M. In particular, every Schwartz
space is quasi-normable by Proposition 4. More precisely, a locally convex
Hausdorff space is a Schwartz space if and only if it is quasi-normable and its
bounded subsets are precompact. (Hint: If A ° = U, then XF C U + M is
equivalent to д7° D A Cl M°, where M° is a neighborhood of 0 for 0(F', E).)
7. Prove the following converse of Theorem 1. Let E and F be two normed
spaces and и: E F a continuous linear map. If Ff —> Ef maps the unit
ball of Ff onto a compact subset of Er equipped with the topology 0(E', E),
then и maps the unit ball of E onto a precompact subset of F. (Hint: Consider
the map “u, or use an argument similar to part (b) of the proof of Proposition 5.)
8. (a) Let E be a locally convex Hausdorff space, M a subspace of E and
(xfn) an equicontinuous sequence of linear forms on M which converges to 0 for
the topology 0(M', M). Prove that if M is quasi-normable, then every xfn has
an extension xfn to E such that the sequence (хя) of linear forms is equicontinuous
on E and converges to 0 for the topology P(E'f E). (Hint: There exists a balanced,
closed, convex neighborhood V of 0 in E such that supxEvn.w |(я, яя)1 = Хя —► 0.
By the Hahn-Banach theorem there exist x'n G E' such that |(я, хя)| = Xn for
XE V.)
(b) Let E be a vector space, (Ft)tei a family of locally convex Hausdorff
spaces, and for each t G I let fL: E —> FL be a linear map. Equip E with the
coarsest topology for which all the maps /<, are continuous. Suppose that E is
quasi-normable and let (x'n) be an equicontinuous sequence of linear forms on E
which converges to 0 for the topology 0(E', E). Prove that there exist a finite
subset H of I and for each t G H an equicontinuous sequence (z[,n)neN of linear
forms on Fc which converges to 0 for Ft) such that xfn =
for every n. (Hint: Consider E as a subset of liter then apply Proposition
14.1 and part (a).)
[3, §15]
SCHWARTZ SPACES
287
9. A locally convex Hausdorff space F is said to be ultrabornological if there
exist a family (E^^i of Banach spaces and for each t в I a linear шарД: EC—^F
such that the topology of F is the finest locally convex topology on F for which
all the maps Д are continuous.
(a) Prove that an ultrabornological space is barrelled and bornological.
(Hint: Use Propositions 6.4 and 7.4.)
(b) Prove that a quasi-complete bornological Hausdorff space is ultraborno-
logical. (Hint: Proposition 7.5.)
(c) Prove that the dual Er of a complete Schwartz space E equipped with the
topology P(Ef, E) is ultrabornological. (Hint: Every balanced, convex, о(Е', E)-
closed, equicontinuous subset В of E' is (r(E'> F7)-compact, hence <r(E', E)-
complete, and so (E') в is a Banach space by Proposition 5.6. Let T be the finest
locally convex topology on E' for which the injections /д: (Е')в —* E' are
continuous. T is finer than X(E', E) since the /в are continuous if we equip Er
with \(E') E). To prove that T = \(Er, E) we have to show by Exercise 11.4
that the two topologies induce the same topology on every balanced, convex,
<r(Er, F7)-closed, equicontinuous subset A of E'. Let В be a balanced, convex,
<r(E') B7)-closed, equicontinuous subset of E' such that A is compact in (E') в
(Proposition 5). Then on (E')b and a fortiori on A the topologies T and X(Ef, E)
are coarser than the Banach space topology of (E')b- But A is compact. Hence
both these topologies coincide on A. Finally, 0(E', E) = \(E', E) since E is a
complete Schwartz space.)
10. Let E be a vector space, E* its algebraic dual and (xk) i g fcg n a finite family
of linearly independent elements of E. Prove that there exists a family (x^) i^k^n
of elements of E* such that (xk, x'k) = 1 for 1 к n and (x^ x'i} = 0 for
к I, 1 Л, I n. (Hint: Use induction. If the elements x[ for 1 i к — 1
have been constructed, then we can write every xr G E in the form
fc—i
x' = J} {xi, x') x'i + y',
4=1
where (xi, y'} = 0 for 1 i к — 1. We cannot have (x^ y') = 0 for every
xr since this would imply Xk — (xk, xi)xi. There exists zb G E* such that
(xi, z'k) = 0 for 1 i к — 1 and (x^ zrk) = 1. Write 4 = x'i — (хк, х[}хк
for 1 i к — 1. The family (zt')i^«^fc satisfies the conditions (xi, z'i) = 1
for 1 i к and (x^ z'f) = 0 for i И j, 1 £ i, j k.)
11. (a) Prove the following converse of Proposition 9. Let E be a Schwartz
space. Then there exists a family (Ft)tez of normed spaces, where I is an ordered
set, such that:
(i) for к t there exists a continuous linear map fu: FK —* Ft,
(ii) for each к G I there exists a linear map fK: E —* FK such that = /u%
for к t,
(iii) for each t G I there exists а к t such that maps the unit ball BK
of FK onto a precompact subset of Ft,
(iv) the topology of E is the coarsest topology for which the fK are continuous.
(Hint: Consider the spaces Eu.)
288
DUALITY
[3, §16]
(b) Let (Fi)igz be a family of locally convex Hausdorff spaces, where I is an
ordered set. Suppose that for к t we have a continuous linear map
fu 'FK-^FL and assume furthermore that given an index i G I and a balanced,
closed, convex neighborhood U of 0 in FL, there exists an index к i and a neigh-
borhood V of 0 in FK such that the canonical image of /U(V) in (Fi)u is precom-
pact. Let E be a vector space and for each к G I let : E —» FK be a linear map
such that ft, = fn ofttfi^* к. Equip E with the coarsest topology for which
all the maps fK are continuous, and assume that this topology is Hausdorff.
Prove that E is a Schwartz space. Show that both Propositions 6 and 9 are
special cases of this result. Finally, verify that in Example 2 we made implicit
use of this result.
§16. Distinguished spaces
In subsequent chapters the strong duals of the spaces 8(0), 8 and 30(0)
will play an essential role, and it will be useful to know that these duals
are bornological. In this section we shall prove some results from which
the desired conclusion will follow (see also Exercise 15.9(c)).
Let E be a locally convex Hausdorff space, E' its dual, and E" its bidual
(Definition 8.1). In this section we shall use the symbol ° for polarity
in the duality between the spaces E and E' and the symbol e for polarity in
the duality between the spaces E' and E”. If A is a bounded set in E, then
A° is a neighborhood of 0 in E' for the topology /?(-&', E) and Aoe is an
equicontinuous, balanced, convex, (т(Е", EQ-closed, and in particular
cr(E", £/)-bounded subset of E". If we consider E canonically imbedded
into E", then it follows from the theorem of bipolars (Theorem 3.1) that
Aoe is the O’CEJ", Enclosure of A. Conversely, it is not always true that
every bounded subset of E" is contained in the (r(E", ^-closure of a
bounded subset of E ([52], §31,7, p. 438; [41], p. 88). Thus we are led to
Definition 1. A locally convex Hausdorff space E is said to be dis-
tinguished if every <г(Е", E')-bounded subset of its bidual E” is contained in
the сг(Е", E')-closure of some bounded subset of E.
In other words, E is distinguished if for every O’(E"/, #')-bounded subset
В of E" there exists a bounded subset A of E such that В C Aoe. Clearly,
a semi-reflexive space is always distinguished. Therefore the following
result generalizes Proposition 8.4.
Proposition 1. A locally convex Hausdorff space E is distinguished if
and only if Ef, equipped with the topology 0(E\ E), is barrelled.
Proof, (a) Suppose that E is distinguished and let В be a O’(BJ,/, E')-
bounded subset of E". Then there exists a bounded subset A of E such
that В C Aoe. Since A° is a neighborhood of 0 in Ef for 0(E', E), it
[3, §16]
DISTINGUISHED SPACES
289
follows from Proposition 4.6 that A* °, and hence also B, is equicontinuous
in E". Consequently (Proposition 6.2), E' is barrelled for the topology
P(E', B).
(b) Suppose now that E' is barrelled. Let В be a <r(B", B')-bounded
subset of B". Then В is equicontinuous. Hence there exists a neighbor-
hood У of 0 in Ef such that В G Vе (Proposition 4.6). On the other hand,
by the definition of the topology 0(E', E) there exists a bounded set A
in В such that A° G V. Thus В G V* G A°•; hence В is distinguished. |
In particular, every normed space В is distinguished since B' equipped
with 0(B', B) is a Banach space and therefore barrelled. A Fr£chet space
is not, however, necessarily distinguished (loc. cit. before Definition 1).
Theorem 1 (Grothendieck). Let E be a metrizable locally convex space.
Then E is distinguished if and only if Ef, equipped with the topology &(E', E),
is bornological.
The proof will be preceded by two lemmas.
Lemma 1. Let E be a metrizable locally convex space and suppose that its
dual E' equipped with the strong topology 0(E', E) is infrabarrelled. Let
(An)nGN be a countable fundamental system of bounded, balanced, a(Ef, E)-
closed, convex subsets of E'. Let (Xn)nGN be an arbitrary sequence of strictly
positive numbers and let A be the balanced convex hull of IJ^gn XnAn. Then
the ft(E', Enclosure A of A coincides with its “algebraic closure” 3 defined by
3 = {y | у G B', Xy G A for 0 < X < 1}.
Proof. It is clear that 3 G 3 since Xy converges to у as X —> 1.
To establish the inclusion 3 G 3 we shall prove C3 G CA, and we do
this by showing that for each x G C3 there exists xf G A* G B" such
that |(x, x')| > 1, since in this case x g Aee = A, i.e., x G CA.
If x G C3, then there exists some X with 0 < X < 1 such that Xx G C A;
i.e., there exists p > 1 such that x g СдА. We shall find x' G A* such
that (x, x’} = p.
Let Bn be the balanced convex hull of U?=o ХгАг-. Then Bn G Bn+1
for every n G N and A = U пеиВп. The sets An are equicontinuous,
hence <r(B', B)-compact (Theorem 4.1), and it follows from Proposition 5.2
that Bn isa(B', B)-compact, hence <r(B', B)-closed, and a fortiori a (Er, En-
closed. We have x G CpBn = СдВ®е, and therefore there exists x'n G B®
such that {x, x'n) = p.
The sequence (x4)neN is bounded for the topology 0(E", Ef). Indeed,
the sets XnB* form a fundamental system of neighborhoods of 0 for
0(E",E'). Since B* D B*+i for n g N, given an index n G N, we have
x'k G B* for к n, and the finite set {x'k | 0 к < n} is certainly
bounded.
290
DUALITY
[3, §16]
Since Ef is infrabarrelled, the set {xfn | n G N} is equicontinuous, hence
relatively a(E", 2?')-compact by Theorem 4.1. It follows that the sequence
(#') has a value of adherence x' G E" for the topology g(E", E') (Exercise
2.8.3(a)). Since the linear form y' i—► (x, y'} is continuous on E" for
a(E", E')j we have (ж, x') = д. Furthermore,
X' e П B* = ( U Bn\* = A*. |
nGN Sign '
Lemma 2. Let E be a metrizable locally convex space and suppose that its
dual E', equipped with the strong topology 0(E', E), is infrabarrelled. Then
every balanced, convex, bornivorous subset of E' contains a balanced, convex,
bornivorous, closed subset of E'.
Proof. Let T be a balanced, convex, bornivorous subset of E'. Then
JT has the same properties. Let (An)neN be a countable fundamental
system of bounded, balanced, convex, closed subsets of E'. For each
n G N there exists Xn > 0 such that XnAn C Hence contains the
union IJnGN XnAn and also its balanced convex hull A. Now the "algebraic
closure” of A is clearly contained in T, and therefore by the previous lemma
we have A С T. But A is a balanced, convex, bornivorous, closed set. |
Proof of Theorem 1. (a) Suppose that E is distinguished. Then by
Proposition 1 the space E' is barrelled. Let T be a balanced, convex,
bornivorous set in E'. By Lemma 2 the set T contains a bornivorous
barrel S. Since Ef is barrelled, S, and a fortiori T, is a neighborhood of 0;
i.e., E' is bornological.
(b) Suppose that Ef is bornological. Then Ef is infrabarrelled. But E is
bornological (Proposition 7.3), therefore E' is complete (Proposition 7.6)
and thus also barrelled. Hence E is distinguished by Proposition 1. |
Example 1. We know (Examples 3, 4, and 5 of §9) that 8(2), S)(K)
and S are Montel spaces. Hence they are reflexive and more particularly
distinguished. On the other hand, they are Fr£chet spaces (Examples
2.9.3, 2.9.5, and 2.11.11); hence their duals equipped with the strong
topology are bornological and barrelled.
Theorem 2 (Grothendieck). Let F be a vector space and let (En)new
be a sequence of subspaces of F such that En C En+i for all n G N and
F = UnGN^n- Suppose that each En is equipped with a locally convex
topology Tn and that Tn+1 induces Tn on En. '
Assume that each space En is metrizable and distinguished. Equip F with
the finest locally convex topology T for which all the injections En^ F are
continuous.
Then F is distinguished and its dual F' equipped with the strong topology
0(F', F) i* barrelled and bornological.
[3, §16]
DISTINGUISHED SPACES
291
Proof. Suppose that we know already that F' is bornological. Then
it is infrabarrelled. On the other hand, the spaces En are bornological
since they are metrizable (Proposition 7.3), and therefore F is bornological
(Proposition 7.4). Hence F' is complete for /3(F', F) (Proposition 7.6),
and consequently it is barrelled. But then by Proposition 1 the space F
is distinguished. Thus it suffices to show that F' is bornological.
We shall need the following lemma.
Lemma 3. Let F be a vector space and let (En)n&9 be a sequence of sub-
spaces of F such that En C En+1 for alln G N and F = (JneN En. Suppose
that each En is equipped with a locally convex topology Tn and that Tn+i
induces Tn on En.
Equip F with the finest locally convex topology T for which all the injections
fn - En^ F are continuous.
(a) If S is a balanced, convex subset of Ff which absorbs every equicon-
tinuous subset of F', then there exists an index m G N such that S contains
the subspace E± of F' orthogonal to Em [or, more precisely, to fm(Emj].
(b) If, furthermore, *fm: Ff —> E'm is the transpose of fm, then
sm= {x'\x'eE^f~\{x'})cS}
is a balanced, convex subset of E'm which absorbs every equicontinuous subset
of E'm.
Let us assume the lemma for a moment and conclude the proof of the
theorem. Let S be a balanced, convex, bornivorous subset of F'. Since
every equicontinuous subset of F' is bounded for the topology /3(F', F)
(Proposition 6.1), it follows that $ absorbs every equicontinuous subset
of F'. Hence the set Sm of Lemma 3 is balanced, convex and absorbs
every equicontinuous subset of E'm. But Em is infrabarrelled (Proposi-
tion 7.3), hence every /3(2?^, £'w)-bounded subset of E'm is equicontinuous.
Thus Sm is a balanced, convex, bornivorous set in E'm. By Theorem 1
the space E'm is bornological, and therefore Sm is a neighborhood of 0 in
E'm. By the corollary of Proposition 12.3 the map *fm is continuous, and
therefore is a neighborhood of 0 in F'. But S D lfm 1(Sm) and
therefore $ is also a neighborhood of 0 in F', which proves that F' is
bornological. |
Proof of Lemma 3. (a) Suppose that for no n G N is the subspace En
contained in S, and choose Xn G E„ П CS for each n. Since E* D -®n+i
for all n G N, we have^4 G E^ for n k, i.e., Xn°fk = 0 for n fc.
In particular, for each к G N the sequence (nXn°fk)nGN is equicontinuous
on Ek. It follows, similarly as in the proof of Proposition 2.12.1, that the
sequence (nxn) is an equicontinuous subset of F'.
On the other hand, S does not absorb the sequence (nx^) since nx„ G XS
would imply x^ G $ for n X, which is impossible by the choice of x„.
292 DUALITY [3, §16]
Since 8 is assumed to absorb all equicontinuous subsets of F', we have
arrived at a contradiction.
(b) Let T be the subset of 8 formed by those elements y' for which
y' + G By part (a) we have 0 G T. The set T is balanced and con-
vex. Indeed, let y' G T, z' G Г, a, 0 G К, 0 a 1, and a + /3 = 1.
We have y' + u' G 8 and z' + v' G 8 for every u', v' G E±. But then
ay' + 0г' + w' = a(y' + w') + 0(г' + w') G S
for every w' G E±. Hence ay' + fiz' G T. Also, if X G К, 0 < |X| 1,
then
Xy' + w' = X(y' + X~1w') G
for every w' G E±; hence Xy' G T.
The set T absorbs every equicontinuous subset В of F'. Indeed, we
have В C XS for some X > 0. Since E± G XSf we have В + E± G 2X8,
i.e., В G 2XT.
Next we prove that Sm = 7я»(Г) and in particular Sm is a balanced,
convex subset of E'm. Let us first recall that 7m is the canonical surjection
from F' onto F'/E± = E'm (§13). Observe also that by the definition of
Sm we have x' G Sm if and only if every y' G F' for which *}т(у') — x'
belongs to 8. Consider now x' G Sm and let y' be such that = s'.
Then for every u' G E± we have
Чт(у' + и') = 7m (Ю + Ут(и') = x' + 0 = x',
hence y' + u' G 8 and y' G T. Thus Sm G 7m(T). Conversely, let
x' = 7m (г') for some z' G T and let y' G F' be such that */т(у') = x'.
Then tfmly' — z') = 0; i.e., y' = z' + u' for some u' G E±. But
z' + u' G 8 by hypothesis, i.e., y' G 8 and thus x' G 8m. Consequently,
we also have 7m(T) G 8W.
Finally, we show that Sm absorbs every equicontinuous subset of E'm.
Let A be an equicontinuous subset of E'm. By Theorem 2.12.1 the topology
induced on Em by T is precisely Tm. Thus by Proposition 4.6 there exists
a balanced, closed, convex neighborhood V of 0 in F such that
A G (У П Em)Q. Let q be the gauge of V. If x' G A, then |(x', x)| q(x)
for every x G Em) and by the Hahn-Banach theorem (Theorem 1.1) there
exists an element y' G F' such that |(y'f x)| q(x) for all x G F, i.e.,
y' e 7°, and = {x', x) for all x e Em, i.e., x' = {/т(.у'). The
set В = V° is equicontinuous in F' and A C ‘fmtB) by what we have just
shown. There exists X > 0 such that В G XT; hence
A C %(B) C %,(XT) = \Sm. |
Example 2. The dual of the space SD(fi) (Example 2.12.6) equipped
with the strong topology is barrelled and bornological since the £>(K) are
[3, §16] DISTINGUISHED SPACES 293
distinguished Fr£chet spaces by Example 1. Similarly, for finite m E N
the duals of the spaces Dw(0) (Example 2.12.8) equipped with the strong
topology are barrelled and bornological since the spaces £>m(K) are norm-
able (Example 2.6.1).
Exercises
1. (a) Let E be a metrizable locally convex space and E' its dual equipped
with the strong topology 0(E', E). Let (Mn)n^ i be a sequence of equicontinuous
subsets of the bidual F". Show that if M = (J i Mn is bounded for the
topology a(F", Ef), then it is equicontinuous.
Remark 1. The conclusion would be immediate if we knew that E' is infra-
barrelled. However, if Ef were infrabarrelled, then it would be barrelled since
it is complete (Proposition 7.6), and thus E would be distinguished by Proposi-
tion 1. But as we mentioned earlier, there even exist Fr£chet spaces which are
not distinguished. The property expressed above serves as a substitute for the
infrabarrelledness of E' and has been used by Grothendieck to define his (DSF)
spaces ([41], p. 63; [52], §29,3, p. 399).
(Hint: (a) Observe that a fundamental system of neighborhoods of 0 for
0(E', E) in E' is given by all absorbing, balanced, convex, a(F', F)-closed sets
since these are the polars of the bounded subsets of E (Proposition 3.1).
(fi) Set Un = Mn and U = Un = (IJn^i^n)*- Each ITnisabal-
anced, convex, f}(E', F)-closed neighborhood of 0 in E' (Proposition 4.6), and U
is an absorbing, balanced, convex, &(E', ^>closed subset of E' (Proposition 5.7).
Show that it suffices to find an absorbing, balanced, convex, a(E', F)-closed set
vc u.
(7) Let (An)n^i be a countable fundamental system of 0(E', F)-bounded sets
in E' obtained by taking the polars of a fundamental system of neighborhoods
of 0 in E. The sets An are balanced, convex, and a(F', F)-compact (Theorem 4.1).
Suppose that a sequence (Xn) of positive numbers and a sequence (7n) of bal-
anced, convex, a(F', F)-closed /3(E', ^-neighborhoods of 0 in F' has been
constructed such that
(i) XiAi C (l/2i+1) U for all i,
(ii) Х»А» C Vj for all i and j,
(iii) Vi C Ui for all г.
Show that the balanced, convex, е(Е', F)-closed set V = Vi is absorbing
and V C U.
(8) Construct the sequences (X») and (Vi) by induction. Suppose that Xt
and Vi satisfy (i) through (iii) for 1 g г g n. By Theorem 5.2 there exists
Xn+i > 0 such that
Xn+i-An+i C 2^2 t7n(n У<)’ (1)
since A„+i is 0(E', E)-complete (Proposition 7.6) and the set on the right-hand
side is a fi(E', E)-barrel. Bn+i = X1A1 +--------1- Xn+iA„+i is a balanced,
294
DUALITY
[3, §17]
convex <г(Я', ^-compact set (see the proof of Proposition 5.2) and
Bn+i C + • • • + (1/2-+2) U C %U C jtfn+i.
If is a balanced, convex, ^-closed 0(E', ^-neighborhood of 0 con-
tained in iUn+i, then the balanced, convex set Pn+i = Bn+i + Wn+i is a
0(E', ^-neighborhood of 0 since 7n+i D Wn+i, and it is <r(^', #)-closed by
Proposition 2.10.5. Finally, Xn+M»+i С V, for 1 j’ £ n by Xl) and
XiAt C Bn+i C Fn+i for 1 i n + 1.)
(b) Prove that Lemmas 1 and 2 hold without the assumption that E' is infra-
barrelled for the topology 0(E'f E).
2. Let E be a metrizable locally convex space, E' its dual, and E" its bidual.
Prove that 0(E', E") is the bornological topology T' associated with 0(E'f E)
(see Exercise 7.8(a)). (Hint: A fundamental system ® of neighborhoods of 0 for
0(Е', E") is given by all absorbing, balanced, convex, /3(E', #)-closed sets, i.e.,
0(E', ^-barrels. A fundamental system SB of neighborhoods of 0 for T' is given
by all P(E'f ^)-bornivorous, balanced, convex sets. By Lemma 2 and Exercise
1(b) each T E SB contains an <8 G i.e., 0(E', E") is finer than T'. On the
other hand, Ef is complete for /3(Е', E). Thus every barrel is bornivorous (Theo-
rem 5.2); hence ® C SB, i.e., T' is finer than fi(E'f E").)
§17. The homomorphism theorem and
the closed-graph theorem
The three main results of the first chapter were the Hahn-Banach
theorem, the Banach-Steinhaus theorem and Banach’s homomorphism
theorem (or the related closed-graph theorem). In the preceding sections
we extended the validity of the first two of these theorems. We saw that
the Hahn-Banach theorem holds for all locally convex spaces (Theorem 1.1
and Proposition 1.1) and that the Banach-Steinhaus theorem holds if
and only if the space is barrelled (Example 6.2, Definition 6.1, and Proposi-
tion 6.2). No such simple characterization of the spaces for which the
Banach homomorphism theorem holds can be expected, and we shall try
to find some large classes of spaces for which it does hold.
To begin with, let us show that the proof of Theorem 1.9.1 carries over
to metrizable complete spaces which are not even necessarily locally convex.
Theorem 1 (Banach’s homomorphism theorem or the open-mapping
theorem). Let E and F be two metrizable complete topological vector spaces
and f a continuous surjective linear map from E onto F. Then f is a strict
morphism (Definition 2.5.2).
We shall need two lemmas.
Lemma 1. Let E and F be two topological vector spaces and let f be a con-
tinuous linear map from E onto F. If F is a Baire space, then for every neigh-
borhood U of 0 in E the setf(U) is a neighborhood ofO in F.
[3, §17] HOMOMORPHISM THEOREM AND CLOSED-GRAPH THEOREM 295
Proof. Let У be a balanced neighborhood of 0 in E such that V + V C U
(Theorem 2.3.1). Since V is absorbing, we have E = and
therefore F = |Jn^ i п/(У) since f is surjective. Now F is a Baire space;
hence one of the sets nf(V) = nf(V) has an interior point. It follows that
f(V) also has an interior point x.
Since V is balanced, so is f(V) and also f(V). Thus —f(V) = f(V),
and therefore 0 = x + (—x) is an interior point of f(V) + f(V). Now
the map (y> z) у + z from F X F into F is continuous, and therefore
ЛЮ + 7ПЭ с /(7) +ЛУ). But /(V) + f(V) =f(V+V)C f(U), and
therefore f(V) + f(V) C f(U). Thus 0 is an interior point of f(U); i.e.,
f(U) is a neighborhood of 0. |
Remark 1. The proof just given is strikingly similar to the proof of
the fact that a locally convex Baire space is barrelled (Proposition 6.3).
The reason for this similarity should become clear soon (Proposition 1).
Lemma 2. Let E and F be two metric spaces and assume that E is complete.
Denote the metric on either space by 6. Suppose that f is a continuous map
from E into F which has the following property: for every r > 0 there exists
p > 0 such that for every x G E the image f(Br(x)} of the ball
Br(x) = {zjz G E, 8(x, z) g r}
is dense in the ball
ВАШ = {y\yeF, Ау,Ш £ p}.
Then for every a > r the setf(Ba(x)) contains Bp(f(x)).
Proof. Let (rn)n^i be a sequence of strictly positive numbers such that
ri = r and a = rn- For every index n there exists a strictly positive
number pn (with px = p) such that f(Brn(x)) is dense in BPn(/(x)), and
we may suppose that lim^» pn = 0.
Let xQ be a point of E and let у be a point of Bp(/(x0)). We want to
show that у = f(x) for some x G Ва(х0), and we shall obtain x as the limit
of a sequence (xn)n^ whose first term is xQ.
We construct inductively the sequence (xn)n^ so that
xn G ВГп(яя_1) and f(xn) G BPn+1(y). (1)
For n = 0 the first condition is vacuous, and the second is satisfied since
У(ж0) G Bp(y) is equivalent to у G Bp(/(x0)). Suppose that we have
already constructed the points Xi with 0 i n — 1 which satisfy these
conditions. Then we have 1/G ВРп(У(хя_1)). Since the image of ВГп(хп-\)
is dense in 5Pn(/(xn_i)), there exists a point xn G ВГп(хп-л) such
that f(xn) G BPn+1(y). This proves the existence of a sequence (zn)nGN
satisfying (1).
296
DUALITY
[3, §17]
The sequence (zn) is a Cauchy sequence since
^(#n, ^n-j-p) = Лг+l "F * ‘ * "F Гп+р>
and this sum is arbitrarily small for large n. Since E is complete, (xn)
converges to some point x, and d(x, x0) E*=i rn = a; i.e., x G Ba(x0).
Also f is continuous; hence f(xn) converges to f(x). Now f(xn) G BPn+1(y)
for all n; thus/(z) = y. |
Proof of Theorem 1. Let us equip each of the two metrizable spaces E
and F with a translation-invariant metric compatible with their topologies
(Theorem 2.6.1). Since F is a Baire space, it follows from Lemma 1 that
for every r > 0 the set f(Br(O)) is a neighborhood of 0 in F. Hence there
exists p > 0 such that/(Br(0)) is dense in Bp(0) C F. By translation we
see that for every x eE the set/(Br(x)) is dense in Bp(f(x)). Since E is
complete, it follows from Lemma 2 that for a > r the set /(Ba(0)) is a
neighborhood of 0 in F. Since r > 0 is arbitrary, Theorem 2.5.1 implies
that f is a strict morphism. |
We shall now generalize Theorem 1, at least for the case where E and F
are locally convex. Lemma 1 motivates the following:
Definition 1 (Ptdk). Let E and F be two topological vector spaces and
f a linear map from E into F. We say that f is almost (nearly) open if for
every neighborhood U of 0 in E the closure f(JJ) of f(U) is a neighborhood of
0 in the subspace f(E) of F.
The following result generalizes Lemma 1 for the case where the spaces
involved are locally convex.
Proposition 1. Let E be a locally convex space and F a barrelled space.
Then every surjective linear map f: E —> F is almost open.
Proof. Let U be a balanced, closed, convex neighborhood of 0 in E.
Then/(17) is a barrel in F. Indeed, f(U) is balanced and convex; hence so
is f(U) (Exercise 2.3.5 and Proposition 2.4.3). Clearly, f(U) is closed.
Finally, f(U) is absorbing since/is surjective and U is absorbing.
It follows from the definition of a barrelled space (Definition 6.1) that
f(U) is a neighborhood of 0 in F. |
Lemma 2 will be replaced by the following result.
Theorem 2 (Ptdk). Let E be a locally convex Hausdorff space and E' its
dual. The following two conditions are equivalent:
(a) Let F be an arbitrary locally convex Hausdorff space. Every continu-
ous, almost open linear map f: E —> F is a strict morphism.
(b) If L is a linear subspace of Er such that for every balanced, convex,
(r(E', Enclosed, equicontinuous subset M of E' the intersection L n M is
a(E', Enclosed, then L is <r(E', Enclosed.
[3, §17] HOMOMORPHISM THEOREM AND CLOSED-GRAPH THEOREM 297
Proof, (a) => (b): Suppose that condition (a) is satisfied and let L be a
subspace of E' such that for every balanced, convex, <r(F', F)-closed,
equicontinuous subset M of E' the intersection L n M is a(F', Enclosed.
By Proposition 4.6 for each such set M there exists a balanced, closed,
convex neighborhood U of 0 in E such that M = UQ,
Set F = E/Ll, The canonical surjection f:E-+F is the transpose of
the injection j: L E', and the spaces F and L form a dual system
(Proposition 13.1). Let us denote by the symbol ° the polarity for the dual
pair (E, E') and by * the polarity for the pair (F, L), We equip F with
the locally convex Hausdorff topology Ti which has as a fundamental
system of neighborhoods of 0 the sets
(U° П L)e = f((U° П L)°),
where U runs through the balanced, closed, convex neighborhoods of 0 in E,
The dual of F is then L, Indeed, let x' be ar linear form on F which is
continuous for Tx. Then there exists a balanced, closed, convex neighbor-
hood U of 0 in E such that x G (L n U°)° implies |(x, x')| 1, i.e.,
x' G (L n U°)oo. By our assumption concerning L, the set L n UQ is
<r(F', F)-closed, i.e., (L n UQ) ° ° = L n U°, and therefore
x' G L П UQ G L,
Conversely, if x' G L, then x' G L n UQ for some U, But then
x G (L П (€L7)°)°
implies |(x, x')| e; hence x' is a continuous linear form on F,
The map f: E —> F is continuous since
/-1(/((С7° n L)°)) D (C7° П L)° D u.
Furthermore, f is almost open since
/([/)• = U° П L and f(U) = f(U)** = (U° П L)e
for each balanced, closed, convex neighborhood U of 0 in E,
By condition (a) the map f is a strict morphism; i.e., Ti coincides with
the quotient topology T of E modulo L\ Now, the dual of F for the topol-
ogy T is the subspace lA1- of E' by the corollary of Proposition 13.2.
Thus L = L^, and therefore L is a(F', F)-closed.
(b) => (a): We first prove
Lemma 3. Let E and F be two locally convex Hausdorff spaces and E' and
F' their duals. Let f:E-+Fbea surjective, continuous, almost open linear
map and set L = tf(Ff), Then for every balanced, closed, convex neighbor-
hood U of 0 in E the set L n U° is (r(E', Enclosed,
298
DUALITY
[3, §17]
Proof of Lemma 3. For any balanced, closed, convex neighborhood U
of 0 in E we have
L П U° = У(ЯС7)°). (1)
Indeed, if x' e L П U°, then x' — */(у') for some y' e F' and
|<*',*>| g 1
for all x G U. It follows that
= Кзл/оо» i (2)
for all x G /7, i.e., y' G f(U)°9 and therefore x' G У(/(С/)°). Conversely,
if x' G У(/(?7)0), then clearly x' G L, and setting x' = 7Q/') with
y' G/(C7)°, we obtain from (2) that x' G U°.
Since f(U)° = and/(/7) is by assumption a neighborhood of
0 in F, it follows from Theorem 4.1 that f(U)° is a(F', F)-compact. By
the corollary of Proposition 12.3 the map У is continuous for the topologies
a(F', F) and a(F', F), and therefore */(/(17) °) is a(F', F)-compact and
hence also (r(E', F)-closed in Fr. The conclusion now follows from (1). |
Let us now suppose that condition (b) is satisfied, let F be a vector
space equipped with a locally convex Hausdorff topology Tj and let
f: E F be a continuous, almost open linear map. We may assume
that f is surjective. It follows then from Lemma 3 and condition (b) that
L = tflF') is a a(F', F)-closed subspace of Ef.
Denote by T2 the locally convex Hausdorff topology on F for which a
fundamental system of neighborhoods of 0 is given by the sets /(/7),
where U is a balanced, closed, convex neighborhood of 0 in E. Since f is
continuous, T2 is finer than Tp
Let us denote by (F2)' the dual of the vector space F equipped with T2.
Clearly Fr G (F2)', and we shall show that Fr = (F2)'. Let и G (F2)'.
There exists a balanced, closed, convex neighborhood U of 0 such that
|u(i/)| 1 for all у ef(U); i.e., |u(/(#))| 1 for all x G U. Thus the
map x >-► u(f(x)} is continuous on F, and therefore there exists x' G E'
such that
(x, xr) = u(f(x)) for all z G E. (3)
If x’ G L, then we have и(/(#)) = (x, *f(y')) = (/(#), y') for some yr G Fr
and all x G E; i.e., и = у' G Fr. Thus to prove our assertion we must
show that xr G L. Suppose that xr S L. Since L is a a(F', F)-closed
subspace of E', by Proposition 1.2 there exists xq g E such that (x^ z'} = 0
for all zf G L and (z0, xf) = 1. It follows that
<*o, Ж» = </(*o), У'} = 0
for all y' G Fr so that f(xQ) = 0. On the other hand, by (3) we have
w(/(x0)) = (xo, x') = 1.
[3, §17] HOMOMORPHISM THEOREM AND CLOSED-GRAPH THEOREM 299
Take now a balanced, convex, T2-closed T2-neighborhood V of 0 in F.
Then V contains a set/((7), where U is a balanced, closed, convex neigh-
borhood of 0 in E. But V is also Ti-closed since F' = (F2)', and therefore
V also contains the Ti-clesure /((7) of /((7). By our assumption /((7) is a
Ti-neighborhood of 0 in F and therefore = T2. Thus for every bal-
anced, closed, convex neighborhood U of 0 in E the set f(U) is a neighbor-
hood of 0 in F for Ti, which by Theorem 2.5.1 implies that f is a strict
morphism. |
Definition 2. A locally convex Hausdorff space which satisfies the two
equivalent conditions of Theorem 2 is called a Ptdk space (fully complete,
B-complete).
Combining the last two results, we obtain:
Proposition 2. Let E be a Ptdk space, F a barrelled Hausdorff space,
and f a continuous surjective linear map from E onto F. Then f is a strict
morphism.
Proof. By Proposition 1 the map f is almost open, and so by Theorem 2
it is a strict morphism. |
Part (a) of the following result shows that Proposition 2 indeed general-
izes Theorem 1, at least for locally convex spaces.
Proposition 3. (a) Every Frechet space is a Ptdk space.
(b) Every Ptdk space is complete.
Proof, (a) This follows immediately from Theorem 10.2 since a linear
subspace of E' is in particular a convex set.
(b) This follows immediately from Corollary 5 of Theorem 11.1. |
Proposition 4 (Collins). A closed linear subspace of a Ptdk space is a
Ptdk space.
Proof. Let E be a Ptdk space, M a closed subspace of E, and j: M E
the canonical injection. By the corollary of Proposition 13.1 the dual M'
of M can be identified with the quotient space E’/M1 and
= 7: E' -> E'/M1-
is the canonical surjection.
Let L be a linear subspace of E'/M1- such that for every balanced, closed,
convex neighborhood U of 0 in M the set U° A L is <r(M', Af)-closed
in E'/M1-. If V is a balanced, closed, convex neighborhood of 0 in E,
then J”1 (V) = V C\ M = (7 is a balanced, closed, convex neighborhood
of 0 in M, and therefore UQ П L is <r(M', M)-closed. Now,
П L) = П
300
DUALITY
[3, §17]
and by Proposition 12.2(a) we have ф 1(U°) = j(U)°. Hence
j(U)° П *-4L)
isa(2?', 2?)-closed in Ef. But j(U) С V; hence j(U)° D F°, and therefore
V° П ф~ЧЬ) = V° П j(U)° П ^(L), which shows that V° П ^(L)
is <r(E', 2?)-closed. Since E is a Pt&k space, it follows that 1Д-1(£) is a
<r(2?', 2?)-closed subspace of Ef. The topology <r(M', M) coincides with
the quotient of the topology (r(E't E) modulo Mх (Exercise 15.1), and so
L is a <r(M', M)-closed subspace of M'. Thus M is a PUk space. |
Proposition 5. Let E be a Ptdk space and M a closed subspace of E.
Then the quotient space E/M is a Ptdk space.
Proof. Let F be a locally convex Hausdorff space and /: E/M —> F
a continuous, almost open linear map. Let <p: E —* E/M be the canonical
surjection and set g = f°<f>. Then g: E —> F is a continuous linear map.
It is also almost open since if U is a neighborhood of 0 in Et then <p(U) is
a neighborhood of 0 in E/M, and therefore g(U) = /(<p(C7)) is a neigh-
borhood of 0 in g(E). Since E is a Ptdk space, g is a strict morphism.
Let V be a neighborhood of 0 in E/M. Then U = <p-1(V) is a neigh-
borhood of 0 in Et and thus f(V) = g(U) is a neighborhood of 0 in
f(E/M) = g(E). This means (Theorem 2.5.1) that/is a strict morphism
and proves that E/M is a Pt&k space. |
Proposition 6. Let E be a reflexive Frechet space. Then its dual E'
equipped with the strong topology 0(E'f E) is a Ptdk space.
Proof. The polars of the balanced, convex, closed 0(E'f ^-neighborhoods
of 0 in E' are the balanced, convex, closed, bounded subsets В of E. Let
L be a subspace of E and suppose that for every such set В the intersec-
tion В П L is closed. If x adheres to L, then there exists a sequence (xn)
of elements of L which converges to x. But (xn) is contained in a balanced,
convex, closed, bounded set, and thus x G L; i.e., L is closed and hence
also <r(Ef 2?')“closed (Proposition 4.3). |
In Chapter 1 we deduced the closed-graph theorem (Proposition 1.9.3)
for Banach spaces from the homomorphism theorem. Let us do the same
now in the more general context of Theorem 1. First, let us point out,
however, that the graph of any continuous map is closed.
Let X be a topological space, Y a Hausdorff space, and/: X —> Y a continuous
map. Then the graph G = G(f) = {(z, f(x)) | x G X} is a closed subset of
the product space X X Y. Indeed, suppose that the point (x, y) G X X Y
adheres to G but у f(x). There exists a neighborhood V of у and a neighbor-
hood W of f(x) such that VOW = 0. Since / is continuous, there exists a
neighborhood U of x such that z G U implies/(г) G W. But then the neighbor-
hood U X V of (X) y) does not meet G, in contradiction to (x, y) G G.
[3, §17] HOMOMORPHISM THEOREM AND CLOSED-GRAPH THEOREM 301
Theorem 3 (Closed-graph theorem). Let E and F be two metrizable,
complete topological vector spaces, f:E —> F a linear map, and let us assume
that the graph Goff is closed in the product space E X F. Then f is continuous.
Proof. By our assumption G is a closed linear subspace of E X F, and
therefore it is both metrizable and complete (Proposition 2.9.3). The
projection 7Fi: (x, y) i-> x is a continuous, bijective linear map from G
onto E, and therefore by Theorem 1 it is an isomorphism. If тг2: (x, y) w у
is the projection from G into F, then/ = 7f2 ° Trf1, whence / is continuous. |
Similarly as in §9 of Chapter 1, the theorem can be rephrased in the
following way:
Corollary. Let E and F be two metrizable, complete topological vector
spaces and f: E —> F a linear map. Suppose that for every sequence (xn)
of points of E which tends to 0 and for which (f(xn)) tends to some vector у G F,
we have necessarily у = 0. Then f is continuous.
Proof. Suppose that the point (x, z) adheres to the graph G of /. Then
there exists a sequence (xn) of points of E such that xn tends to x and
f(xn) tends to z. But then xn — x tends to 0, and/(zn — x) = f(xn) — f(x)
tends to z — /(z). By our assumption z = f(x), and thus (x, z) G G.
This means that G is closed, and thus by Theorem 3 the map / is
continuous. |
We now generalize the closed-graph theorem, at least for locally convex
spaces, in the same spirit as we have done for the homomorphism theorem.
Theorem 4 (Robertson-Robertson). Let E be a barrelled Hausdorff
space, F a Ptdk space, f\E-+Fa linear map, and suppose that the graph
G of f is closed in the product space E X F. Then f is continuous.
The proof of this theorem will follow after some preparation.
Definition 3 (Ptdk). Let E and F be two topological vector spaces and
f a linear map from E into F. We say that f is almost (nearly) continuous
if for every neighborhood V of 0 in F the closure/“1(F) of /-1(F) is a neigh-
borhood of 0 in E.
Proposition 7. Let E be a barrelled space and F a locally convex space.
Then every linear map f\E—>Fis almost continuous.
Proof. Let F be a balanced, convex neighborhood of 0 in F. Then
/-1(F) is a balanced, convex set, and /^(F) a balanced, convex, closed
set in E (Exercise 2.3.5 and Proposition 2.4.3). But/^^F) is also absorb-
ing since F is.
Thus /""1(F) is a barrel in E, and therefore by the definition of a bar-
relled space (Definition 6.1) it is a neighborhood of 0. |
302
DUALITY
[3, §17]
Lemma 4. Let E and F be two locally convex Hausdorff spaces and
f:E—*Fa linear map. The graph G of f is closed in E X F if and only if
the subspace Q of Ff, consisting of those yf G F' for which, the map
x •-> (f{x), y')
is continuous on E, is dense in F' for <r{F', F).
Proof. Let zq G F be such that {zq, yf) = 0 for all y' G Q. We show
that (0, Zq) G G. Indeed, if (0, zQ) £ G, then by Proposition 1.2 there
exists a point {x', z') eE' X Ff (cf. Proposition 14.1) such that
<(x,/(x)), {xr, z')) = (x, x') + г!} = 0 (4)
for all x G E and
«0, Zq), {x', z')) = {Zq, Z') = 1. (5)
By (4) the map x »-> (f{x), z') is continuous; i.e., z' G Q. But then
(z0, z') = 0 in contradiction to (5).
Suppose now that G = G. Then (0, zq) g (?; i.e., zq = /(0) = 0.
Thus Q± = {0}, and therefore (Proposition 3.3(e)) Q is dense in F' for
<r(F', F).
Conversely, suppose that Q is dense in Ff for <r{Ff, F). Let (x0, yo) be a
point of E X F which does not belong to G. We want to show that
(z0, Уо) does not belong to G either. We have yQ — /(x0) H 0. There
exists yf eQ such that (yQ — f{xQ), yf) # 0, and by the definition of Q
there exists x' G E' such that (x, x') + (f(x), y') = 0 for all x eE. We
have thus ((x,/(x)), (xf, y')) = 0 for all x G E and also
((s, У)> <?', y')) = 0
for all (x, y) G G, but
«so, yo), (s', y')) = (xQj x') + (yQ, y')
= (so, s') + (/(x0), y') + (1/0 - /(so), y')
= (yo — /(so), y') * o,
which proves that (x0, Уо) £ G. |
Proposition 8 (Ptdk). Let E be a locally convex Hausdorff space, F a
Ptdk space, and f:E—*Fan almost continuous linear map. Suppose that
the graph G of f is closed in E X F. Then f is continuous.
Proof. It is sufficient to show that f is continuous for the topology
a{F, F') on F. Indeed, suppose this has been proved already, and let V
be a balanced, convex, closed neighborhood of 0 in F. Then V is <r{F, F')-
closed (Proposition 4.3), and so f^(V) is closed in E; i.e.,
[3, §17] HOMOMORPHISM THEOREM AND CLOSED-GRAPH THEOREM 3Q3
By our assumption /"“X(F) is a neighborhood of 0 in E; hence f is
continuous.
Let Q be the subspace of F' consisting of those y' G F' for which the
map x i-> (f(x), y') is continuous on E. We have to show that for every
balanced, closed, convex neighborhood V of 0 in F the set Q A V° is
<r(Ff, F)-closed in F'. It will then follow that Q is <r(F', F)-closed in F',
since F is a Ptdk space, and therefore that Q = F' since, by Lemma 4
and by the hypothesis that G is closed, Q is dense in F'. But then
x i-> (/(x), y') is continuous for every у' eF'; i.e., f is continuous for
<r(F, F').
Let us observe that if U is a balanced neighborhood of 0 in E, then
f(U)° CQ. Indeed, if y' ef(U)°, then |</(x), />| 1 for all x G U;
i.e., \(f(x), i/')| e for x E eU.
Now let V be a balanced, convex, closed neighborhood of 0 in F. Then
U = /““X(F) is, by assumption, a balanced, convex neighborhood of 0 in
E. By the remark just made we have f(U)° C Q- On the other hand,
Q A F° C f(U)°. Indeed, if y' G Q A F°, then the function
z •-> (№0, y')
is continuous on Ej and |{y, i/')| 1 for all у E F. Hence if ж G /^(F),
we have |(/(x), i/')| 1, and therefore by continuity we also have
\{f(z),y')\ 1
for x E U. Therefore y' G f(U)Q.
Thus we have the inclusions Q A F° C f(U)° GQ, whence
Q A F° = f(U)° A F°,
and this last set is <r(F', F)-closed. |
Proof of Theorem 4. By Proposition 7 the map f is almost continuous
and so by Proposition 8 it is continuous. |
Before we state other variants of Theorem 4, let us show that in a
certain sense it is the best possible.
Proposition 9 (Mahowald). Let E be a locally convex Hausdorff space.
Suppose that for every Banach space F every linear map f: E —> F whose
graph is closed is necessarily continuous. Then E is barrelled.
We shall need a lemma, but first let us recall a notation introduced in
§5. Let E be a locally convex Hausdorff space and T a barrel in E. If
дт is the gauge of T, then we denote by Et the quotient space of E modulo
the subspace N = {x j qr(z) = 0} equipped with the quotient norm of
qr- The completion Ёт of Et is then a Banach space. With these notations
we can state the following lemma.
304
DUALITY
[3, §17]
Lemma 5. Let E be a locally convex Hausdorff space, T a barrel in E, and
<p: E —» Et the canonical surjection. Then the graph of the linear map
<p: E —» Ёт is closed.
Proof. The subspace N = {x | qr(x) = 0} is also given by
N = p| XT
x>o
and is therefore closed in E. Let us denote by M the quotient space E/N
equipped with the quotient of the topology of E modulo N. The dual
of M can be identified with the subspace ЛГХ of E' (Corollary of Propo-
sition 13.2).
By Lemma 4 we have to prove that the subspace Q of (ЁтУ consisting
of those yf G (ЁтУ for which the map x {<p(x), y') is continuous on E,
is dense in (ЁтУ for the topology <г(($т)', Ёт}. By the definition of the
quotient topology, yf G (ЁтУ belongs to Q if and only if it is continuous
on M.
We show that |Jx>o ХГ° C Q. In the first place, |Jx>o XT° С IVх,
and therefore each x' G Ux>oXT° is a continuous linear form on M;
and we need only show that x' G (ЁтУ, i.e., that x' g (Et)' since
(ЁтУ = (ЕтУ (Exercise 2.3). If x' G XT°, then |(z, z')| € for all
x G (€/X)T; i.e., \{<p(x), я')| € for all <p(x) G (б/Х)^(Т), and the set
(e/X)<p(T) is a neighborhood of 0 in Et.
Thus it is enough to prove that Ux>0XT° is dense in (ЕтУ for
<г{(ЕтУ, Ёт). Let us denote by the symbol • the polarity for the pair of
spaces Ёт and (ЕтУ which form a dual system. The closure of <p(T) in
Ёт is the set Toe, and the sets ХТОФ (X > 0) form a fundamental system
of neighborhoods of 0 in Ёт. Hence the sets ХТОФФ (X > 0) form a
fundamental system of equicontinuous subsets of (ЕтУ, and so
U ХТОФФ = (ЕтУ.
X>0
But ТОФФ is the а {(ЕтУ, Ёт)^оехие of T°, and therefore the
а{(ЕтУ, $r)-closure of (Jx>o XT° contains |Jx>o ХТОФФ. |
Proof of Proposition 9. Let T be a barrel in E. Using the notations of
Lemma 5, it follows from our assumption that the map <p\ E —» Ёт is
continuous. Since <p(T) is a neighborhood of 0 in Ёт and T э (<p(T)),
it follows that T is a neighborhood of 0 in E. |
Proposition 10 (Robertson-Robertson). LetE be a vector space, (EL)Lei
a family of locally convex Baire spaces, and for each c g I let ut be a linear
map from EL into E. Equip E with the finest locally convex topology for
which all the maps ut are continuous.
[3, §17] HOMOMORPHISM THEOREM AND CLOSED-GRAPH THEOREM 305
Let F be a vector space, {F^)n^ a sequence of Ptdk spaces, and for each
n £ N let vnbe a linear map from Fn into F. Suppose that F = vn(Fn).
Equip F with the finest locally convex topology for which all the maps vn are
continuous, and suppose that F is a Hausdorff space for this topology.
Then every linear map f: E —► F, whose graph G is closed in the product
space E X F, is continuous.
Remark 2. The conditions on E are certainly fulfilled if E is a quasi-
complete, bornological Hausdorff space (Proposition 7.5) or more generally
an ultrabomological space (Exercise 15.9).
We first prove
Lemma 6. Let E be a locally convex space and L a поп-meager subspace
of E. Then L is barrelled.
Proof (cf. proof of Proposition 6.3). Let T be a barrel in L and T the
closure of T in E. Since T is absorbing in L, we have L C UL^i n^-
Since L is not meager, one of the closed sets nT has an interior point, and
therefore T has an interior point xQ. Let V be a balanced neighborhood
of 0 in E such that xQ + V С T. Since T is balanced (Exercise 2.3.5),
we have — xQ + V С T. But then V С T, since if x G 7, then
J(^o + x) + i(~xo + %) G T,
because T is convex (Proposition 2.4.3). Hence T is a neighborhood of 0
in E. Now T = T A L since T is closed in L, and therefore T is a neigh-
borhood of 0 in L for the topology induced on L by E. |
Proof of Proposition 10. (a) Let us first assume that E itself is a locally
convex Baire space. Then
E = = Г1 ( U = U /-1(»n(F)).
\i€N ' nGN
Hence there must exist an index m such that L = г'Ып) is not
meager in E since otherwise E itself would be meager. In particular, L is
not rare and so L contains an interior point x0. Since L is a subspace of
E (Proposition 2.5.4), it is in particular a balanced, convex subset in E,
and therefore we see by repeating the argument used in the proof of
Lemma 6 that L is a neighborhood of 0 in E. In particular, L is absorbing,
and therefore L = E.
Since F is a Hausdorff space, N = ^(O) is a closed subspace of Fm,
and so by Proposition 5 the quotient space M = Fm/N is a Ptdk space.
Denote by w: M —> F the injection associated with vm.
If fb is the restriction of f to L, then the graph of the map
g = w lofb- L M
306
DUALITY
[3, §17]
is closed in L X M since it is the inverse image of G G E X F by the
continuous map (z, y) i-> (x, w(y)). By Lemma 6 the space L is barrelled,
and so by Theorem 4 the map g is continuous.
By Proposition 3(b) the space M is complete. On the other hand, L is
dense in E. Hence by Proposition 2.9.5 the map g has a unique continuous
extension g: E —> M. For each x E L we have w(g(x)) = f(x). Let us
prove that the same holds for all x E E.
Suppose that the relation does not hold, i.e., that there exists xi G E
such that (xj, w(g(x1))) & G. Since G is assumed to be closed, there
exists a neighborhood U of 0 in E and a neighborhood V of 0 in F such that
{(*i + U) X (wQfa)) + У)} П G = 0.
Since g is continuous, there exists a neighborhood Ui of 0 in E such that
Ui C U and w(^(t7i)) с F. But L is dense in E. Hence there exists a
point X2 E L П (#1 + t7i). We have
(x2,f(x2)'} = (x2, w(V(x2))) e (*! + Ui) X + 7),
and this last set does not meet G. We have arrived at a contradiction.
Thus we have f = w°g, and since g and w are both continuous, we see
that f is continuous.
(b) Consider now the general case where E is equipped with the final
locally convex topology for the maps For each i G I let be the
graph of the map/t = f ° u^: E^ —> F. Then is a closed subset of Et X F
since it is the inverse image of G under the continuous map
(x, y) i-» (ut(x), y).
It follows from part (a) of the proof that each /t is continuous. Hence by
Proposition 2.12.1 the map/is continuous. |
The preceding result can be used to prove a variant of the homomor-
phism theorem.
Proposition 11. Let E be a vector space, (En)n^ a sequence of Ptdk
spaces, and for each n 6 N let un be a linear map from En into E. Suppose
that E = |JnGN un(En), and equip E with the finest locally convex topology
for which all the maps un are continuous.
Let F be a vector space, (F^^i a, family of locally convex Baire spaces,
and for each l G I let Vi be a linear map from into F. Equip F with the
finest locally convex topology for which all the maps vL are continuous, and
suppose that F is a Hausdorff space.
Every continuous surjective linear map from E onto F is a strict morphism.
Proof. Let f: E —> F be a continuous surjective linear map. Since F
is a Hausdorff space, the subspace N = /“*(0) is closed in E, and the sub-
[3, §17] HOMOMORPHISM THEOREM AND CLOSED-GRAPH THEOREM 307
space Nn = ^“^/“^O)) is closed in En. SetL = E/N and Ln = En/Nn.
Since un(Nn) C N, the map un defines a linear map wn: Ln —> L, and it
is easy to check that the quotient topology on L is the finest locally convex
topology for which all the maps wn are continuous. L is a Hausdorff
space, and the Ln are Ptdk spaces by Proposition 5. Furthermore,
L = U ^n(bn).
nEN
Let J: L —> F be the injection associated with /. The bijective map J
is continuous; hence its graph G is closed in L X F. The graph J-1 is
the image of G in F X L under the homeomorphism (x, y) i-> (y, x), and
therefore it is also closed. It follows from Proposition 10 that J-1 is con-
tinuous, i.e., that J is an isomorphism. But this means precisely that f is
a strict morphism (Definition 2.5.2). |
To conclude, we shall draw some consequences of the results proved so
far in this section.
Proposition 12. Let E and F be two metrizable and complete topological
vector spaces and f: E —> F a continuous linear map. Then f is a strict
morphism if and only if f(E) is closed in F.
Proof. If f(E) is closed in F, then it is metrizable and complete (Propo-
sition 2.9.3). Hence by Theorem 1 the map f is a strict morphism from E
onto f(E). The converse follows from the corollary of Theorem 2.9.2. |
The condition of the proposition is satisfied in particular if f(E) has
finite codimension, since then it has a topological supplement (Proposi-
tion 2.10.4) and is therefore closed (Exercise 2.7.3). More specifically:
Proposition 13. Let E and F be two metrizable and complete topological
vector spaces. Then every continuous bijective linear map from E onto F is
an isomorphism.
Similarly, if E is a Ptdk space and F a barrelled Hausdorff space, then
every continuous bijective linear map from E onto F is an isomorphism
(Proposition 2). As a consequence, we have the following result:
Proposition 14. Let Ebe a vector space and Ti and T2 two locally convex
topologies on E such that E is a Ptdk space for Ti and barrelled for T2. If
Ti is finer than T2, then Ti = T2.
Proof. Let Ei be the space E equipped with the topology Ti (г = 1, 2)
and f: Ei —> E2 the identity map. Then f is a bijective, continuous,
linear map and therefore an isomorphism. |
By virtue of Proposition 13 the same conclusion holds if Ti and T2
are complete metrizable topologies compatible with the vector space
structure of E.
308
DUALITY
[3, §17]
Proposition 15. Let E be a metrizable and complete topological vector
space. If M and N are two closed subspaces of E which are algebraic sup-
plements of each other, then they are also topological supplements (Defi-
nition 2.7.2).
Proof, The product space M X N is metrizable and complete, and the
map (x, у) ь-> x + у is continuous, bijective and linear from M X N onto
E, hence an isomorphism by Proposition 13. |
Proposition 16. Let E be a barrelled Hausdorff space, F a Ptdk space,
and denote by To the topology of F, Let T be a Hausdorff topology on F
which is coarser than To, If a linear map f: E —> F is continuous for the
topology T on F, then it is also continuous for the topology TQ on F,
Proof, The graph of f is closed in E X F if F is equipped with the
topology T, and therefore a fortiori if F is equipped with To. The conclu-
sion follows from Theorem 4. |
Proposition 17 (Dieudonn£-Schwartz). Let E and F be two Frechet
spaces with topologies TE and Tp respectively, E' and Fr their duals, and let
и: E —* F be a linear map. Then the following five conditions are equivalent:
(a) и is a strict morphism for Te and Tp;
(0) и is a strict morphism for <г(Е, E') and a(F, F');
(T) u(E) is closed in F;
(5) lu is a strict morphism for <r(F', F) and a(Ef, E);
(e) *u(F') is closed in E' for a(E', E),
Proof, We shall prove the proposition according to the following logical
scheme:
(5) 4=> (?) 4=> (a) 4=> (fi) 4=> (e).
(ft) 4=> (e) by Propositions 12.1 and 13.3.
(?) 4=> (6) by Propositions 12.1 and 13.3.
(a) => (0) by Proposition 13.4.
(0) =» (a) by the corollary of Proposition 13.5.
(a) => (?) by Proposition 12.
(?) =» (a) since by Proposition 12.1 the map *u is continuous for
<r(F', F) and <r(E', E), by its corollary и is continuous for <r(E, Er) and
a(F, F'), by the corollary of Proposition 12.5 the map и is continuous
for TE and Tp, and so (a) is true by Proposition 12. |
Corollary. Let E and F be two Frechet spaces, E' and Ff their duals,
and и: E —* F a continuous linear map,
(i) и is an injective strict morphism if and only if htfF') = Er,
(ii) и is a surjective strict morphism if and only if 1и(Рг) is closed in E'
for a(Ef, E) and fu is injective.
[3, §17] HOMOMORPHISM THEOREM AND CLOSED-GRAPH THEOREM 309
(iii) и is an isomorphism if and only if is an issmorphism for the
topologies <r(F', F) and <r(E', E).
Proof (i) If и is an injective strict morphism, then *u(F') is closed in
E' for <г(Е', E) by Proposition 17, and *u(F') is dense in E' for a(Ef, E)
by Corollary 2 of Proposition 12.2. Hence lu(Ff) = E'.
Conversely, if *и(Р') = Ef, then *u(F') is both closed and dense in Ef
for <г(Е', E). Hence by the results just quoted, и is an injective strict
morphism.
(ii) If и is a surjective strict morphism, then lu(Ff) is closed in E' for
a(Ef, E) by Proposition 17, and *u is injective by Corollary 2 of Propo-
sition 12.2.
Conversely, if lu(F') is closed in E' for <r(Ef, E), then и is a strict mor-
phism, and in particular u(E) is closed in F. If, furthermore, *u is injective,
then by Corollary 2 of Proposition 12.2 the set u(E) is dense in F; hence
u(E) = F..
(ii i) If и is an isomorphism, then *u is a strict morphism for the topol-
ogies <r(F', F) and a(Ef, E) by Proposition 17; it is surjective by (i) and
injective by (ii).
Conversely, if *u is an isomorphism for the topologies a(F', F) and
a(Ef, E), then и is a strict morphism by Proposition 17; it is injective
by (i) and surjective by (ii). |
In general, the conditions (a) through (e) of Proposition 17 do not imply
that *u is a strict morphism for 0(F', F) and P(E', E) ([9], Chapter IV,
§4, Exercise 5(b)). We have, however, the following result (see also
Exercises 8 and 11):
Proposition 18. Let E be a Frtehet-Schwartz space, F a reflexive Frechet
space, E' and F' their duals, and U.E-+F a strict morphism. Then
*u : F' —> Ef is a strict morphism for the topologies P(F', F) and 0(E', E).
Proof. By Proposition 17 the subspace M = *u(F') is closed in E' for
(j(Er, E) and a fortiori for 0(E', E). By the corollary of Proposition 15.10
the topology induced on M by 0(E', E) coincides with the topology
$(M, E/M1-) since M = M-1-1. But E/M1- is a Frdchet-Schwartz space
(Corollary of Proposition 15.7), and therefore by Proposition 16.1 the
space M equipped with the topology $(M, E/M1-) is a barrelled Hausdorff
space. On the other hand, F' equipped with 0(F', F) is a Ptdk space by
Proposition 6. Finally, *u is continuous for the topologies /3(F', F) and
P(E', E) by the corollary of Proposition 12.3. It follows from Proposition 2
that *u: F' -+ M is a surjective strict morphism, i.e., that F' —► E' is
a strict morphism. |
In the opposite direction we have the following result (see also
Exercise 9).
310
DUALITY
[3, §17]
Proposition 19 (Dieudonn£-Schwartz). Let E and F be two Fr&chet
spaces, E' and F' their duals, and и: E —» F a continuous linear map. If
*u: F' —> E' is an injective strict morphism for the topologies 0(F', F) and
/3(E', E), then и is a surjective strict morphism.
Proof. By part (ii) of the corollary of Proposition 17 we have to show
that A — *и(Р') is closed in E' for (r(E', E), and we shall do this with the
help of Theorem 10.2.
Let M be a balanced, convex, a(Ef, ^-closed, equicontinuous subset
of E’. Since *u is an injective strict morphism for the topologies P(F', F)
and 0(E', E), the set is bounded in F'. On the other hand, *u
is continuous for the topologies a(Ff, F) and <т(Е', E) by the corollary of
Proposition 12.3, and therefore tu~‘1(M) is closed for a(Ff, F). It follows
(Corollary of Proposition 6.2) that ^^(M) is compact in F' for <r(F', F).
Again by the continuity of *u, the set = A A M is compact
and in particular closed for a(E', E). Hence A is closed for a(E', E) by
Theorem 10.2. |
Exercises
1. Deduce Theorem 1 from Theorem 3. (Hint: Assume that f:E —> F is
bijective and prove that the graph of J-1: F -» E is closed.)
2. Let E be a Frdchet space and E' its dual. Prove that E' equipped with a
topology finer than the topology \(E', E) of uniform convergence on compact
sets but coarser than the Mackey topology т(Е', E) is a Ptdk space. (Hint:
See the proof of Proposition 6.)
3. Let E be a vector space and E* its algebraic dual. Prove that E* equipped
with the topology <r(E*, E) is a Ptdk space. (Hint: Every linear subspace of E
is <r(E, ^-closed.)
4. Give an example of a complete locally convex Hausdorff space which is
not a Ptdk space. (Hint: Consider an infinite-dimensional Banach space E
equipped with the finest locally convex topology. One can also use Proposi-
tion 3(b), Proposition 5 and Remark 2.9.1.)
5. (a) Let E be a locally convex Hausdorff space with topology T and let E'
be its dual. Show that the following three conditions are equivalent:
(i) Let F be an arbitrary locally convex Hausdorff space. Every injective,
continuous, almost open linear map f:E -» F is a strict morphism.
(ii) If Ti is a locally convex Hausdorff topology on E, coarser than T, such
that the Ti-closure of any T-neighborhood of 0 is a Ti-neighborhood of 0, then
T = Ti.
(iii) If L is a dense subspace of E' for the topology o(E', E) such that for every
balanced, convex, <r(E', ^-closed, equicontinuous subset M of E' the intersection
L A M is <r(E', 2?)-closed, then L = E’.
A space E which satisfies conditions (i), (ii), and (iii) is called an infra-Ptdk
(or Br-complete) space. (Hint: To prove (ii) => (iii), let L be as in (iii). The
[3, §17] HOMOMORPHISM THEOREM AND CLOSED-GRAPH THEOREM 311
sets (L A 17°) °, where U runs through the T-neighborhoods of 0, form a funda-
mental system of neighborhoods of 0 for a locally convex topology Ti on E.
The topology Ti is Hausdorff since if x G (L A U°)° for all U, then |(z, a/)| 1
for all x1 G L A U° and all U, i.e., {x, x') = 0 for all xf G L. Since L is dense
in E', we have x = 0. Also, Ti is coarser than T since U G (L A U°)°. If Ei
is E equipped with the topology Ti, then (Ei)' = L. Clearly, L G (#1)'. If
y' G (Ei)', there exists U such that |(z, y')| 1 for x G (L A 17°) °, i.e.,
y’ G (L A U°)oo. But by the assumption in (iii) we have (L A U°) ° ° = L A U°
and thus y' G L. For every U the Ti-closure of U is (L7° A L)°, i.e., a Ti-
neighborhood of 0. It follows from (ii) that T = Ti, and therefore E' = L.
To prove (iii) => (ii), let L be the dual of E equipped with Ti. Then L G E'f
and L is dense in E' for <r(^', E) by Proposition 2.3. If U is a balanced, convex,
T-closed T-neighborhood of 0, then the Ti-closure U of U is a Ti-neighborhood
of 0, so that U and U have the same polar LA U° in L. But L A U° is a(L, E)-
compact, hence a(^', ^)-closed. By (iii) this implies that L is <r(E'f ^)-closed,
and since L is dense, we have L = E'. Therefore the balanced, convex set U
has the same closure for T and Ti; i.e., U = U, which proves that T = Tp)
(b) Prove that every Ptdk space is an infra-Pt&k space.
(c) Prove that Proposition 8 and Theorem 4 hold if we only suppose that F
is an infra-Pt&k space.
6. Prove that every infra-Pt&k space E is complete. (Hint: A hyperplane H
in Ef, such that for every balanced, closed, convex, equicontinuous subset M of
Ef the set H A M is <r(Ef, ^)-closed, cannot be dense in E’. Apply Corollary 5
of Theorem 11.1.)
7. (a) Let E be an infra-Pt&k space and F a locally convex Hausdorff space.
Let f be an injective linear map from a subspace Eq of E into F. Prove that if
the graph of f is closed in E X F and f is almost open, then f maps open sets of
Eq onto open sets of /(Eq). (Hint: Let g:f(Eo) —> Eq be the inverse of the map
f:Eo —> f(Eo). Then g is almost continuous and the graph of g is closed in
f(Eo) X E. Hence by Proposition 8 and Exercise 5(c) the map g is continuous.)
(b) Let E and F be two locally convex Hausdorff spaces and f a linear map
from a subspace Eq of E into F. Suppose that the graph of f is closed in E X F.
Show that the kernel N = {x | x G Eq, f(x) = 0} is a closed subset of E.
(Hint: If xq G N, then (xq, 0) belongs to the closure of the graph of /.)
(c) Let E be a Ptdk space and F a locally convex Hausdorff space. Let f be
a linear map from a subspace Eq of E into F whose graph is closed in E X F.
Prove that if /is almost open, then it maps open sets of Eq onto open sets of f(Eo).
(Hint: By part (b) and Proposition 5 the quotient E/N is a Ptdk space. The
injection /: Eq/N —> F associated with / is almost open and its graph is closed
in E/N X F. Apply part (a). For another proof see [75], pp. 57-58.)
(d) Let E be a Pt4k space and F a barrelled Hausdorff space. Let / be a sur-
jective linear map from a subspace Eq of E onto F, and suppose that the graph
of / is closed in E X F. Prove that / maps open sets of Eq onto open sets of F.
8. Let E and F be two normed vector spaces, E’ and Ff their duals equipped
with the normed topologies 0(E', E) and fi(Ff, F). Show that if и: E —> F is a
strict morphism, then lu\ F' —> E' is a strict morphism.
312
DUALITY
[3, §17]
9. Let E and F be two Banach spaces, E' and F' their duals equipped with
the normed topologies 0(E', E) and ft(F', F), and и: E —* F a continuous linear
map. Show that if *и:Рг —* Ef is a strict morphism, then и: E —* F is a strict
morphism. (Hint: Use Proposition 13.3 and the corollary of Theorem 10.2.)
10. Let E be a locally convex Hausdorff space. Show that E is infrabarrelled
if and only if for every Banach space F every linear map f: E —* F such that
(i) f takes bounded sets into bounded sets,
(ii) the graph of f is closed,
is necessarily continuous. (Hint: If E is infrabarrelled, then (i) implies that f is
almost continuous. Apply Proposition 8. Conversely, assume that the condition
holds. If T is a bornivorous barrel in E, then by Lemma 5 the map <p has a closed
graph in E X Ёт, and <p sends bounded sets into bounded sets since T is borniv-
orous. Hence <p is continuous; i.e., T is a neighborhood of 0 in E.)
11. Let E and F be two Fr£chet spaces, E' and F' their duals equipped with
the topologies к(Е', E) and k(F', F). Show that if и: E -* F is a strict morphism,
then *u: Ff -* E' is a strict morphism. (Hint: Let U = C°, where C is a compact
subset of F. By Proposition 17 and the lemma in §15 there exists a compact
subset A of E such that u(A) = С Г) Im (и). Show that *u(U) = A ° and apply
Theorem 2.5.1.)
CHAPTER 4
Distributions
§1. The definition of distributions
Definition 1 (Laurent Schwartz). Let 0 be an open subset of Rw and
3D(0) the space of infinitely differentiable functions with compact support
defined in 0, equipped with the topology introduced in Example 2.12.6. A
continuous linear form on 3D(0) is called a distribution defined in 0.
The dual E' = 3D'(0) of E = 3D(0) is thus the space of all distributions
defined in 0. Usually we consider Ef equipped with the strong topology
0(E', E) (Definition 3.4.2) which coincides with the topologies к(Ег, E)
and \(Ef, E) (Definition 3.9.2) since 3D(0) is a Montel space. If 0 = Rw,
we shall write simply 3D' instead of 3D'(RW).
Let К be a compact subset of 0 and iic 3D(0) the canonical
injection. By Proposition 2.12.1 a linear form T on 3D(0) is continuous
if and only if T<>iK is continuous on 3D (IQ for every K. Using Proposi-
tion 2.5.2 and the definition of the semi-norms on 3D(Z£) (Example 2.4.10),
we obtain:
Proposition 1. A linear form T on 3D(0) is a distribution if and only
if for every compact subset К of 0 there exists a positive number M and a
positive integer m such that for all <p e 3D(Z£)
|<T, p)| = M max max |dp^(z)|. (1)
Ipl^m x
Clearly, condition (1) can be replaced by
|(7»| M £ тах|дЭД1-
Ipl^m x
Example 1. Let 0 be an open subset of Rw and let f be an element of
the space C(Q) of continuous functions defined on 0 (Example 2.3.3). For
each <p e 3D(0), the function fc is continuous and vanishes outside the
support of <p. If we define fc to be equal to zero outside 0, the extended
function is continuous in Rw and has compact support. It follows that
the integral $Rnf(xfc(x) dx exists. The map T/t <p fR« f(xfc(x) dx is a
313
314
DISTRIBUTIONS
[4, §1]
linear form on and it is also continuous since if <p e 30(2^), where К
is contained in the cube {x | |o:t | %a, 1 i’ n}, and
b = max |/(ж)|,
xEK
then
\{T/> ¥>)l = Ln 1/0)^001 dx anb- max |<p(x)|.
JR x
The map f *-> Tf from 6(0) into 3D'(fi) is clearly linear. We want to
show that it is also injective. Let f # 0. There exists a point x0 G fi such
that f(xo) # 0. We can write / = /i + г/г, where fi and f2 are real-
valued continuous functions. There exists a > 0 and a ball Br(x0) such
that one of the inequalities fi(x) > a and fi(x) < — a holds for x G Br(xQ)
at least for one of the indices г = 1,2. Letx G 2)(fi) be such that X(x) 0,
X(x) = 1 for x G B(1/2)r(xo), and X(x) = 0 for x G CBr(x0) (Proposition
2.12.5). Then
(Tf, X) = f fi(x)x(x) dx + if /2(я)х(я) dx 0
since if, for instance, f\(x) > a in Br(x0), then
f fi(x)x(x) dx f fi(x) dx a|B(1/2)r(xo)|,
JBr(XQ) •'В(1/2)г(жо)
where |B| is the volume of the set B. Thus Tf # 0.
We shall often idehtify the function f with the distribution Tf and
write (/, for (Т/, Thus the notion of distribution generalizes that of
continuous function. More generally, we shall see in the next chapter
that distributions generalize equivalence classes of locally integrable func-
tions. For this reason some authors call distributions “generalized
functions. ”
Example 2. Let 0 again be an open subset of Rw and a a point of 0.
The linear form <p i-> <p(a) is continuous on 30 (fi) since if it is a compact
subset of fi we have |<p(a) | maxx |<p(x)| for all <p G 30 (K). Thus we
obtain a distribution 8a such that (5O, <p) = <p(a). This distribution belongs
to a class of distributions called measures (Definition 4.1); if a = 0, we
call 5 = 50 the Dirac measure. By physical analogy we also say that
8a is “the unit mass (or charge) placed at the point a, ”
As we know, 30 (fi) is complete (Example 2.12.6), barrelled (Example
3.6.4), bornological (Example 3.7.2), a Montel space (Example 3.9.6),
and a Schwartz space (Example 3.15.3). T^e space 3O'(fi) is complete
(Proposition 3.7.6), barrelled (Proposition 3.8.4), bornological (Theorem
3.16.2), and a Montel space (Proposition 3.9.9). We can apply the results
obtained in Chapter 3, for instance to obtain Proposition 2.
[4, §1]
THE DEFINITION OF DISTRIBUTIONS
315
Proposition 2. Let (Т^)пе^ be a sequence of distributions [resp. let
(77c)o<€<a be a family of distributions] and suppose that for every tp e 3)(O)
the limit T(<p) = limn_^ao Tn(<p) [resp, T(tp) = lim^o exists. Then
T: tp ь-» T(<p) is a distribution and (Tn) [resp. (Te)] converges to T strongly
in ©'(0).
Proof, T is a distribution by the corollary of Proposition 3.6.5. Since
3/(0) is a Montel space, (Tn) [resp. (T€)] converges strongly to T by the
corollary of Proposition 3.9.2. |
Example 3. For each e 3>(R) the limit
lim ( dx
€—>0 x
(2)
exists. Indeed, let <p(x) = <p(0) + хф(х), where ф is a continuous function
for which ^(0) = </(0). Suppose that tp(x) = 0 for |x| a. Then
[ ^-dx = v(0)[ — + ( *(x) dx
J la?l>€ x J€<\x\<a x Jt<lxl<a
= ¥>(0) [log 7 — log + / /(x) dx
1 c Je<\x\<a
= / ф(х) dx,
J €<\x\<a
and this last expression tends to ф(х) dx as e —> 0.
On the other hand, for each e > 0 the linear map
' ^dx
lxl>€ x
is a distribution defined on R. In fact, if e 3>CK) and К is contained in
the interval —a x a, then
I ^dx
|a?l>€ x
2 log - • max \<p(x)|.
e x
It follows from Proposition 2 that the limit (2) defines a distribution on R.
Since in classical analysis the limit (2) is called the “Cauchy principal
value” of the integral we denote this distribution by
v.p. 1/x, i.e.,
/ 1 \ Г f VW Л
\ v.p. - j Ф/ = Inn / dx,
\ X / €—♦0«'lxl>€ x
We shall sometimes omit the letters v.p. and simply write x-1 or 1/x
for v.p. 1/x.
316
DISTRIBUTIONS
[4, §1]
Example 4. Let p be a continuous function defined on Rn which has
the following properties:
(a) Supp p C Bb
(b) p(x) 0 for all x e R",
(c) Jr" p(x) dx = 1,
where Bj = {x | |x| 1} is the unit ball of Rn. We saw in Chapter 2,
§12 that such functions exist even in SD. For every e > 0 define the func-
tion pt by
₽.(’) = S'©'
As we observed in Chapter 2, §12, the function pe satisfies the conditions
(a') Supp C B€ = {a; | |x| g e},
(bz) Pe(x) 0 for all x e R”,
(c') Jr“P«(z) dx = 1.
We want to prove that p€ converges in ЗУ to the Dirac measure <5 as б —> 0.
For <p g 3) we have by (c')
Pe(x)?(x) dx — <p(0) = lRnp((x){v(x) — <p(0)} dx,
and using (a'), (b'), (c'), we obtain
I L.Pe(x)<p(x) dx — <f>(0) I g max |^>(a:) — ^>(0)|.
I l®l^€
Since the right-hand side can be made arbitrarily small by taking e suffi-
ciently small, we have
lim (np€(x)<p(x)dx = <p(0);
€—>0
i.e., p€ converges to 5 weakly and thus by Proposition 2 also strongly.
We conclude this section with two results whose importance will appear
in §2. Let us recall that in Example 1 we defined an injection <p Tv
from D(O) into £>'(0).
Proposition 3. The image M of D(O) in is everywhere dense.
Proof. Assume that M # 3/(0). By Proposition 3.1.2 there exists a
continuous linear form и on 3/(0) such that (u, Tv} = 0 for all G D(O)
but u # 0. By the corollary of Proposition 3.9.1 the space D(O) is reflexive.
Hence there exists ф G D(f2) such that (и, T) = {T, ф) for every T G 5/(0),
and in particular
I dx = 0
[4, §2] support 317
for all <p G 3J(0). In other words, we have (7^, (p) = 0 for all G 3J(0);
i.e., = 0. Since the map ф i-> T$ is injective, we have ф = 0, i.e.,
и = 0, and this contradiction proves that M = ЗУ(£2). I
Proposition 4. The injection f ► Tffrom 6(0) into ЗУ(О) is continuous.
Proof. Since 6(0) is metrizable, it is sufficient to prove that if (/n) is a
sequence which tends to 0 in 6(0), then the corresponding sequence
(7/n) tends to 0 in ЗУ(О). Let (p g 3J(0) and К = Supp (p. Then
max|/n(rr)| e for n N(e),
x£K
and
\( dr I ef |<p(z)| dx;
IJQ I JQ
i.e., Tfn tends to 0 weakly in £)'(0). But by Proposition 2 the sequence
(7/n) also tends strongly to 0. |
Exercises
1. Let T be a linear form on the space 3J(0). Prove that T is continuous
(i.e., a distribution) if and only if the following condition is satisfied:
Suppose that (^*)*gn is a sequence of elements of 3J(0) such that
(1) the sets Supp (pk are contained in a fixed compact subset К of 0,
(2) for each p G Nn the sequence (dp(pk) *gn tends uniformly to zero as & —> «>.
Then (T, (pk) tends to zero as & —> «>.
(Hint: That the condition is necessary follows from Proposition 1. Conversely,
if the condition of Proposition 1 is not verified, then there exists a compact
subset К of 0 and a sequence ((pk) of elements of ^(K) such that
max|dW*)l
for |p| к but <T, (pk) = 1.)
§2. Support
Let 0 be an open subset of Rn and U an open subset of 0. Every func-
tion belonging to 3J(t7) can be considered as a function belonging to 3J(0).
If T G ЗУ(О), then its restriction to 3J(t7) is the distribution Tu G ЗУ(С7)
defined by {Tu, (p) = {T, (p) for every G 3J(t7). In other words, the
map T i-> Tu is the transpose of the injection 2D(t7) 3J(0). We shall
call Tu the restriction of T to U, or the distribution induced on U by T.
If Tu = 0, we shall say that T is zero in U. Similarly, if 0i and 02 are
two open subsets of Rn, U an open subset of £2i П S E 5У(01), and
T g ЗУ(О2), we shall say that S and T are equal in U if Su = Tu-
318
DISTRIBUTIONS
[4, §2]
Proposition 1. Let ft be an open subset of Rn, T G SD'(ft), and U an
open subset of ft. If for every x E U there exists an open neighborhood Vx
such that T is zero in Vx, then T is zero in U.
Proof. Let (ax) be a locally finite infinitely differentiable partition of
unity subordinated to the cover (Px) of U (Remark 2.12.4). If <p G SD(C7),
then <p = ^ax(p, and the sum has only finitely many non-zero terms since
Supp ax П Supp <p = 0 except for finitely many x. Also Supp ax<p G Vx,
and therefore we have
(T, <?} = {T, c^p) = 0;
i.e., T = 0. |
It follows in particular from Proposition 1 that if (L^)igz is a family
of open subsets of ft and T = 0 in each then T = 0 in |J tGi
Therefore the following definition is meaningful.
Definition 1. Let ft be an open subset of Rn and T G ЗУ (ft). If U is
the largest open subset of ft in which T is zero, then the set CnJ7 is called the
support of T and denoted by Supp T.
The set Supp T is closed in ft by definition. A point x G ft belongs to
Supp T if and only if for every neighborhood V of x there exists <p G 3D(ft)
with Supp (p G V and such that {T, <p) # 0.
Example 1. If f g e(ft) and Tf is the corresponding distribution
(Example 1.1), then Supp Tf = Supp/.
Example 2. Supp 6a = {a}.
Proposition 2. If S and T belong to ЗУ (ft), then
Supp(8 + T) G Supp /8 U Supp T,
and Supp(XT) = Supp T for X # 0, X G K.
Proof. If <p G 3)(ft) is such that
Supp <p G C (Supp /8 U Supp T) = (C Supp S) П (C Supp T),
then (S + T, <p) = (8, <p) + (T, <p) = 0, and therefore
C (Supp 8 U Supp T) G C Supp(8 + T).
The second assertion follows immediately from the relations
Supp(Xtf>) = Supp <p (X # 0, X G K)
and
(XT, „) = (T, x^>. I
[4, §2]
SUPPORT
319
It follows from Proposition 2 that the distributions belonging to 3/(0)
whose support is contained in a fixed subset of 0 form a vector space.
Similarly, all distributions with compact support form a vector space.
In Proposition 3 we shall characterize this vector space, but first we must
introduce a few notions which will play an important role in the sequel.
Definition 2. Let 0 be an open subset of Rn. A pair (E, j), consisting
of a locally convex Hausdorff space E and a continuous injective linear map
j: E —> 3/(0), wU be called an injective pair. The image j(E) will be called
a space of distributions on 0.
We shall most often identify E with its image j(E) and say simply that
E is a space of distributions. It is to be emphasized, however, that even
after this identification, E keeps its own topology, which by assumption
is finer than the one induced by 3/(0).
Definition 3. Let 0 be an open subset of Rn. A triple (i, E, j), consist-
ing of a locally convex Hausdorff space E, a continuous injective linear map
i: 3>(0) —> E, and a continuous injective linear map j: E —» 3/(0), will be
called a normal triple if the following conditions are satisfied:
(a) Im (г) is everywhere dense,
(b) j о i is the map <p i-> T^ of Example 1.1.
The image j(E) will then be called a normal space of distributions.
By Proposition 1.3 the image of 3)(0) in 3/(0) is everywhere dense.
Therefore if (г, E, j) is a normal triple, we are precisely in the situation
described in Scholium 3.12.1, and in particular (E', fi) is then an injective
pair provided that we equip E' with either the topology /3(E', E) or the
topology к(Е', E). If we identify 3>(0) with Im (г), we can say that a
distribution T G 3/(0) belongs to the space of distributions *ЦЕ') if and
only if it is continuous on 3>(0) for the (coarser) topology induced on it
by E.
Example 3. Take for i the identity map 1©(0): 3)(0) —> 3)(0) and for
j: 3)(0) —> 3/(0) the map <p i—► T* of Example 1.1. Then (г, 3)(0), j) is a
normal triple. Indeed, the only point to establish is the continuity of j.
But j is composed of the injections 3>(0) <B0(O) <B(0) 8(0) 6(0)
and of the map f Tj from 6(0) into 3/(0), which are continuous by
Examples 2.12.8, 2.5.10, 2.5.5, 2.5.7, and Proposition 1.4 respectively.
Example 4. This time let i: 3>(0) —» 3/(0) be the map <p T* and
j = 1©'(0)« Then (г, 3/(0), j) is a normal triple. Indeed, we saw in the
previous example that i is continuous, and we know from Proposition 1.3
that Im (г) is everywhere dense.
320
DISTRIBUTIONS
[4, §2]
Example 5. If г: 30(0) 8(0) and J: 8(0) —* 30'(0) is the map / ь-> Т/,
then (г, 8(0),/) is a normal triple. In fact, it follows from Example 3
that both i and / are continuous. Thus it remains for us to prove that
Im(z) is dense in 8(0). Let <p$ G 8(0) and let V be a neighborhood of 0
in 8(0) which we may assume to consist of all functions 6 8(0) which
satisfy |dp<p(z) | g e for all |p| m and x G K, where m G N and К is a
compact subset of 0. By Proposition 2.12.5 there exists X G 30(0) such
that x(x) = 1 for all x belonging to a neighborhood of K. Then
x<pq g 30(0) and x<p$ g <pq + Vf
which proves our assertion.
It follows that the dual 8'(0) of 8(0) is a space of distributions. We
shall now characterize the distributions belonging to 8'(0).
Proposition 3. Let 0 be an open subset of Rn. A distribution T g 30'(0)
belongs to 8'(0) if and only if Supp T is a compact subset of 0.
Proof, (a) Suppose that К = Supp T is a compact subset of 0. Let
X G 30(0) be such that x(x) = 1 for all x belonging to a neighborhood of
K. For <p G 8(0) we have X<p G 30(0), and we define
<5, <p) = {Tf X(p),
Clearly, 5 is a linear form on 8(0). Also, $ coincides with T on 30(0).
Indeed, if <p G 30(0), then <p = X<p + (1 — x)<pt and since
Supp(l — X)<p П К = 0,
we have (T, = {Tf x<p} = (S, <p).
Thus we have only to prove that 5 is continuous on 8(0). Let (^) be a
sequence of elements of 8(0) which tends to zero in 8(0). Then
Supp(Xwb) C Supp X
for every k, and the sequence (x<pk) tends to zero in 30(0) since by the
Leibniz formula (Proposition 2.5.3) dp(x<pk) is a linear combination of
terms d9X • dr(pk with q p, r g p. Since T is continuous on 30(0), the
expression (S, <pk} — {Tf X(pk) tends to zero as fc —> oo.
(b) Let T g 8'(0) and assume that Supp T is not compact. Let (AjQ^gn
be a sequence of compact subsets of 0 such that Kk C Aj^+i and that
every compact subset of 0 is contained in some Kk (Example 2.6.3). Then
Supp T meets every set Cfi Kki and thus for every fc g N there exists
<Pk G 30(0) such that (T, <pk) = 1 and Supp <pk С Сй Kk. But the sequence
(<Pk) converges to zero in 8(0) since given any compact subset К of 0, we
have <pk(x) = 0 for x G Kt provided fc is such that К C Kk. This con-
tradicts the assumption that T is a continuous linear form on 8(0). |
[4, §2]
SUPPORT
321
We know (Example 2.5.9) that the space 8(0) induces on each space
3)(2C) its own topology (К C 0). Furthermore, the topology of 3>(0),
which we have introduced in Example 2.12.6 as the finest locally convex
topology for which the injections £>(K) 3D(0) are continuous, coincides
with the topology ^(©(0), 3/(0)) since 3>(0) is barrelled (Exercise 3.6.5(b)).
The situation is analogous for distributions:
Theorem 1. Let 0 be an open subset of Rn, and for each compact subset К
of 0 denote by &'(K) the vector space of all distributions on 0 whose support
is contained in K. Equip &'(K) with the topology induced by 3/(0). Then
the strong topology 0(8'(O), 8(0)) on &'(&) is the finest locally convex topology
T for which the injections &'(K) 8'(0) are continuous. Furthermore,
3/(0) and 8'(0) induce on &'(K) the same topology.
Proof. Denote by 83 the space 8'(0) equipped with the strong topology
and by 87 the space 8'(0) equipped with the topology T. Let us prove first
that 83 induces on 8'(K) the same topology as 3/(0). Since the injection
3)(0) 8(0) is continuous, its transpose 83 —> 3/(0) is also continuous,
and 83 induces on 8'(K) a finer topology than 3/(0). Conversely, let
X E 3)(0) be such that x(x) = 1 in a neighborhood of K. If В is a bounded
subset of 8(0), then xB is a bounded subset of 3)(0). Indeed, for all E В
we have Supp(x^>) c Supp X, and it follows from the Leibniz formula
(Proposition 2.5.3) that for every p E Nn the expressions тахж |dp(x^)(rc)|
are bounded as <p varies in B. We have
(XB)° П 8'(2C) С B° П 8'(K)
since if T E (xB)° A and <p E B, then
|<T,^| = |<T,x^| 1.
Now, an arbitrary neighborhood of 0 in 83 contains a set of the form B°,
and (xB)° is a neighborhood of 0 in 3/(0), which proves that the topology
induced by 83 on 8'(2C) is also coarser than the one induced by 3/(0).
It follows that the injections 8'(/C) 83 are continuous; hence by
Proposition 2.12.1 the bijection 8'T —* 83 is continuous. Since the space
83 is bornological (Example 3.16.1), in order to show that the bijection
83 —> 87 is also continuous, it is enough to show that every bounded
subset of 83 is also a bounded subset of 8^- (Proposition 3.7.1(a)). Let A
be a bounded subset of 83. Since 8(0) is barrelled, the set A is equicontinu-
ous; i.e., there exists e > 0, m E N and a compact subset К of 0 such that
|d*V(:r)I e for |p| g m and x E К (1)
implies |(T, <p)| 1 for all T e A. Consequently, Supp T Q К for all
T e A, since if Supp C CK, then Xy satisfies conditions (1) for every
322
DISTRIBUTIONS
[4, §2]
X G К, and therefore (T, = 0. Thus A C &'(K) and A is bounded in
&'(K) since &'(K) 8$ is a strict morphism. It follows from the trivial
half of Theorem 2.12.2 that A is bounded in 8^. |
We conclude this section with the following result which permits us to
"piece together” distributions.
Proposition 4. Let 12 be an open subset of Rn and (Slt)iei an open cover
of 12. Suppose that for each index l G I we are given a distribution
G 3Y(12t) and that if 12t П 12K # 0, then is equal to TK in 12t П 12K.
Then there exists a unique distribution T G ЗУ (12) such that T is equal to
in 12t for each t G Z.
Remark 1. In terms of the theory of sheaves, the proposition expresses the
fact that the presheaf 3 of germs of distributions on 12 is a sheaf. Furthermore
we have
Я*(Р, ff) = 0
for p 1 and any paracompact differentiable manifold V. This follows from
the fact that ff is a fine sheaf, which in turn is a consequence (just like Proposi-
tion 4) of the existence of partitions of unity subordinated to a given open cover
[87, 45, 36].
Proof. The uniqueness of T follows from Proposition 1. To prove its
existence, let (at)tGz be a locally finite infinitely differentiable partition of
unity subordinated to the cover (12t) (Remark 2.12.4). For <p G 30(12)
define
(T, <p> = E {Tt, alV).
lEI
The sum on the right-hand side has only finitely many non-zero terms
since the compact set Supp <p meets only finitely many of the sets Supp at.
Clearly, T is a linear form on D(12). To prove that T is continuous on
30(12), it is sufficient to prove that for each compact subset К of 12 the map
<p ь-> {Tj is continuous on D(Zl) (Proposition 2.12.1). Let H be the
finite subset of I consisting of those indices t for which Supp meets K.
It follows from the Leibniz formula (Proposition 2.5.3), similarly as in
part (a) of the proof of Proposition 3, that for each t G I the map <p ь-> at<p
from into 3)(12t) is continuous. Let h be the number of elements in
H and € > 0 arbitrary. Since is continuous on D(12t), for each t G H
there exists a neighborhood Vt of 0 in £>(K) such that |(TO at^)| < ehT1
for <p G Vt. Thus <p G ГЬея Vt implies
KT7, F>l g Z КЛ, atF>l < e,
which proves the continuity of T.
[4, §3] DERIVATION 323
Finally, let <p be an element of D(51) which has its support in Qt. Then
Supp(a,<p) C Oi П Q<, and thus by hypothesis (TK, aK<p) = (To aK<p). Con-
sequently, we have
{T, = E <Л, <м>> = E <Л, = (4 E W> = <p>;
kEI k^I ' k^I '
i.e., T is equal to 7\ in 0t. |
Exercises
1. Let 0 be an open subset of Rn, U an open subset of 0, T G 3/(0) and Tu
the restriction of T to U. Prove that Supp Tu = U A Supp T.
2. Show that if 0 is an open subset of Rn and U an open subset of 0, then the
map T*-> Tu from 3/(0) into 3/(17) is not necessarily surjective. (Hint: Con-
sider 0 = R, U = ]0, oo [ and Tf E 3/(17), where f(x) = e1/a? for x > 0.)
3. Let 8 be a filter on 3/(0) and assume that for every compact subset К
there exists A G fj such that Supp T П К = 0 for all T E A. Prove that fj
converges to zero.
§3. Derivation
Perhaps the most important property of distributions is that for each
index J (1 j Ц n) one can define a linear map 3/ —> 3/ which generalizes
the usual partial derivation dy. We shall denote this map by the same
symbol dj, since this abuse does not in general lead to confusion. To see
how this map should be defined, let f be a once continuously differentiable
function and let T = Tf be the distribution we associated with it in
Example 1.1. Then it is reasonable to require that the distribution djTf
be associated with the function d;/. If <p E 3J, then, integrating by parts
with respect to Xj and taking into account that <p vanishes outside a com-
pact set, we have
• «>(«) dx-
If the above requirement is satisfied, we can rewrite this equation as
(dj-T, (p) = — (T, dj<p),
which we shall adopt as the general definition of djT. In other words,
the map d/ 3/ —> 3/ will be the opposite of the transpose of the map
dji 3J —> 3J. Before giving a formal definition, however, we must ascertain
that the last map is continuous.
Proposition 1. Let 0 be an open subset of Rw. For each index j
(1 j n) the linear map <p i—> from 3J(0) into itself is continuous.
324
DISTRIBUTIONS
[4, 53]
Proof. It is sufficient to prove that for any compact subset К of 0 the
map (p dj<p from £>(K) into 3)(S2) is continuous (Proposition 2.12.1).
Let V be a neighborhood of 0 in D(0). There exist € > 0 and к G N
such that V П £>(K) contains the set
I | €, |P| k}.
The set
u = {H |dM*)l €, |p| gfc + 1}
is a neighborhood of 0 in £>(K) and <p G U implies dj<p G V. |
Corollary. For every multi-index p G Nn the map tp dp<p is continuous
from D(O) into itself.
Definition 1. Let 0 be an open subset of Rn and p G Nn. We denote
by dp the linear map from D'(0) into D'(0) defined by
{дрТ, <p) = (-1)Ы(Т, др<р)
for T e D'(Q), <p G 3>(Q). The image dpT = T<p) of T is called the partial
derivative of index p of T.
It follows from the corollary of Proposition 1 and the corollary of
Proposition 3.12.3 that the map dp: D'(0) —* D'(0) is continuous. With
the present definition every distribution has partial derivatives of all
orders; this is one reason why distributions are useful. If f G 8(lpl)(0)
and g = dpf, then we see by integrating by parts |p| times that дрТ/ = Tg.
Now, 8(,pl)(0) is dense in D'(0) by Proposition 1.3; hence dp is the unique
continuous map from 3/(0) into itself which coincides with the usual partial
derivation operator dp on 8(,pl)(0) (Proposition 2.9.5). We shall have a
similar situation repeatedly: all operations introduced in this chapter
can be defined either by transposition or by continuous extension. Let us
also observe that didjT = dfliT for T g 3)'(0), 1 г, j n since the
analogous formula is valid for functions belonging to 3)(0). Clearly,
Supp(<FT) c Supp T for any p G Nn.
Example 1. Let Y be the Heaviside function on R defined by
Y(x) = I1 lf X - °’
(О if x < 0.
The map
/00 rOO
Y(x)<p(x) dx = / <p(x) dx
-oo Jq
from 3) into К is continuous since
I [ <p(x) dx\ a • max |^(x)|
Mo I x
[4, §31
DERIVATION
325
if the support of <p is contained in the interval [—a, a]. Thus Y defines а
distribution which we shall also denote by Y, i.e.,
{Y, <P) = f <p(z) dx
jq
for <p G S). Observe that the definition of the distribution Y is not covered
by Example 1.1 since the function Y is not continuous.
Now, for all <p G S) we have by Definition 1
<dF, = — {Y,$<p} = - Г <p'(x) dx
Jq
= — <p(z)|S = <p(0) = (5, <p}\
i.e., Yf = dY = 3. Note that the derivative of the function Y in the usual
sense is the function whose value is 0 for x # 0 and is not defined at the
origin.
Example 2. If p G Nn, then the derivative dp8 = 8(p) of the Dirac
measure 3 (Example 1.2) is defined by
v) = (-i)'W,
where <p G £) and <p(p) = dp<p.
Example 3. More generally than in Example 1, let f be a function
which is defined and continuous on R except for finitely many points
ai < a2 < • • • < a8. We also assume that at each point a* (1 к s)
the one-sided limits
f(ak + 0) = lim/(ajb + e)
do
and
/(«* — 0) = lim/Cat — e)
«Io
exist and are finite. Then f defines a distribution Tf if for <p g S) we set
Z00 e /-ajfe+l
f(x)<p(x) dx = £ I f(x)<p(x) dx
"°0 Jfe=o •/a*
(a0 = —oo, as_|_i = oo), since
I [ №)<p(x) dx\ max |#>(x)| • ( \f(x)\ dx
if Supp <p is contained in the interval [—a, a].
Let us now suppose that in each open interval ]aki a*+i[ (0 к s)
the function f has a continuous first derivative ff and at each point ak
(1 к s) also the one-sided limits/'(«л + 0) and/'(ajb — 0) exist and
are finite. Then the distribution Tf is well defined and, denoting the jump
326
DISTRIBUTIONS
[4, §3]
f(ak + 0) — f(ak — 0) of / at ak (1 g к g s) by jk, we have
3 f°t+l
{dTf, <p) = —{Tf,d<p} = — X / f(x)<p'(x) dx
k=Q Ja^
s ajfe+i-0 s Г ak+l
= — X + Z I f'(x)<f>(x) dx
fc=0 a*+° k=Q Jak
Zoo
f'(x)<p(x) dx,
®=i -°0
and therefore
dTf = Tf + £ jk6ak.
t=i
In particular, if /is continuous, we have dTf = Tp.
We shall now study in detail the maps dy: 5У —> 2У, and for this we need
to look more closely also at the maps df. 2D —> 3D. We start with the case
n = 1.
The continuous linear map d: £>(R) —* SD(R) is injective since d<p = 0
implies that is a constant, but Supp <p is compact, and therefore <p = 0.
A function X G £>(R) belongs to H = Im(d) if and only if it satisfies
the relation
Г X(x) dx = 0. (1)
J —00
Indeed, if X = дф for some ф G £>(R), then
( x(x) dx = f ф'(х) dx = ^(x)|“a) = 0.
Conversely, if x satisfies (1), then the function ф defined by
ф(х) = [ x(f) dt
belongs to SD(R) since ф is a constant for large values of x, but because of
(1) this constant must be zero. Clearly, X = d$.
By Example 1.1, the linear form X ь-> J2°oo x(x) dx is continuous on £>(R);
therefore Я is a closed hyperplane (Proposition 2.5.7) whose equation
is (1).
Let cpq be a fixed element of £>(R) such that /2°» <Po(x) dx = 1. Every
element <p G £)(R) has a unique decomposition <p = X<p0 + where
X G К and X g H. Indeed, if we set X = J2°oo <p(x) dx, then <p — X<p0
belongs to H, and if Xi<p0 + *i = X2<p0 + *2, then (Xi — X2)<po =
x2 — Xi g Hhence Xi = X2 and = x2.
\№)\
| x(t) dt
a
and
| = |d’-1X(a:)|
Collecting our results, we obtain
€
[4, §3] DERIVATION 327
Finally, the map X = d\p ф from H onto 3)(R) is continuous; i.e.,
d is a strict morphism. By Proposition 2.12.1 we have to prove that for
any compact subset К of R the map X ф from H n £>(K) into 3)(R)
is continuous. Let 7 be a neighborhood of 0 in 3)(R) and let L = [a, b]
be a compact interval containing K. Then V A 3)(L) contains a set of
the form | | g e,p g m}, e > 0, m G N. Let U be the neigh-
borhood of 0 in H n defined by
X | |x(z)| |d₽x(a;)| e, 0 p £ m - 1
(if m = 0, the second condition should be omitted). Then X G U implies
ф G V since
—L- (b - a) = e
u a
for 1 p m.
Proposition 2. The map d: 3)(R) —> 3)(R) is an injective strict mor-
phism whose image H is a closed hyperplane. Given an element <pQ G D(R)
such that J^qo <pq(x) dx = 1, each element <p G 3>(R) has a unique
decomposition
<P = Xtf>o + (2)
where X = <p(x) dx and X eH.
Now we are able to prove the following result:
Proposition 3. The linear map d: 3/(R) —> 3/(R) is a surjective strict
morphism whose kernel is the one-dimensional subspace of D'(R) consisting
of all distributions Tf associated with constant functions f.
Proof, (a) Let T G 3/(R) and dT = S. Using the decomposition (2),
we have
{T, <p) = x<r, <p0) + (T,X> = X(T, ^o) - (3)
where x = дф. In particular, if aS = 0, we have
(T, sp) = h{T, <po) = (T, / sp(#) dx‘f
i.e., T = Tf, where f(x) = (T, <pQ).
(b) Let us prove that d is surjective. Given aS g 3/(R), choose an arbi-
trary constant 7 G К and define T by
(T, <p) = 7X - (aS, *),
where <p is arbitrary in 3>(R) and X, ф have the same meaning as before.
328
DISTRIBUTIONS
[4, §3]
Since the representation (2) is unique, T is a well-defined linear form on
D(R). Next, T is continuous since the maps «-> X, X >—► ?X, i—► x =
<p — X^o, and / (S, /) are known to be so and X >-> ф is continuous
by Proposition 2. Finally,
<дТ,*) = ~{т,дф}= (8,ф)
for every ф G D(R), i.e., dT = aS. Observe that by (3) the distribution
T is completely determined by the value У = {T, ^0).
(c) With every aS G S)'(R) we associate that distribution T G SD'(R)
for which dT = aS and {T, <p0) = 0, and we set T = I(S), The map
I : 3Y(R) —> D'(R) is clearly linear. By definition it satisfies
dI(S) = aS for all aS G SD'(R) (4)
and by (3) it satisfies
(/(aS), = -(aS,^) for all aSgSD'(R) and G SD(R). (5)
Relation (5) means that —/is the transpose of the continuous linear
map <p >—► Hence by the corollary of Proposition 3.12.3 the map / is
continuous. It follows from (4) therefore that d is a strict morphism
(Proposition 2.7.2). |
Remark 1. S)'(R) = N ® L, where N consists of the constants and L
of those distributions T for which (T, <p0) = 0- If = X^o + X G 3D(R),
T = У + U, U G L, then
(T,^) = TX+ {U,x)
(cf. Proposition 3.14.1).
Remark 2. The preceding results hold if we replace R by a connected
open subset of R, i.e., by an open interval. They do not hold if the open
set is not connected. Thus dY = 0 in C{0}, but Y is not a constant there.
Remark 3. In Volume 2 we shall establish similar results for elliptic
differential operators on Rn. For n = 1 the operator d is elliptic.
Corollary, (a) For every distribution S G SD'(R) and every p G N there
exists a distribution T G SD'(R) such that dpT = &
(b) If T G SD'(R) is such that dpT = 0, then T = Т/, where f is a poly-
nomial of degree p — 1.
Proof, (a) By Proposition 3 the assertion is true for p = 1. Assume
that it is true for p — 1 (p > 1). Then there exists U G SD'(R) such
that dp~1U = aS. By Proposition 3 there exists T g SD'(^) suc^ that
dT = U. But then dpT = dp-TU = aS.
[4, §3]
DERIVATION
329
(b) By Proposition 3 the assertion is true for p = 1. Assume that it
is true for p — 1 (p > 1) and let T G 3)'(R) be such that dpT = 0.
Set 5 = dT. Thendp-1>S = 0; hence by the induction hypothesis 5 = Tg,
where g is a polynomial of degree g p — 2. Let f be a polynomial of
degree p — 1 such that df = g. Then d(T — Tf) = S — Tg = 0;
hence by Proposition 3 the distribution T — Tf is associated with a
constant. |
Before we pass to the case n > 1, we must introduce the translation
of distributions. If f is a function defined on Rw and h G Rw, then we
define the function Thf by (тл/)(я) = f(x — h) for all x G Rw. Let f G C
and g = Thf- Then we have for the associated distributions the relations
= J*nf(x — h)<p(x) dx
= fRM<P<x + h)dx = {Tf, T_h<p}.
This motivates
Definition 2. Let T G ЗУ. The translate of T by the vector h G Rw is
the distribution ThT defined by
<rhT, <p) = {T, T_h<p)
for all <p G 31
The map тл: 3} —> 3} is an isomorphism since
max |d*V(x)| = max |др(тл^)(я)|
X X
for all p G Nw. It follows that the map t&: 3)' 3)', which is the transpose
of the map r~h'- 3) —> 3), is an isomorphism from 3)' onto itself. Clearly,
= т_л. Hence t^: ЗУ ЗУ is the transpose of the inverse (or equiva-
lently the inverse of the transpose) of t&: 3) —> 3); i.e., we have
{ThT, rh(f>} = {T, <p)
for all T G 3)' and G 3). In general, if E and F are two vector spaces
and u \\E F an isomorphism, then the isomorphism
u = (fu)-1 = -►
which satisfies
<u(x'), u(x)) = {xf, x)
for all xf G Er and x g E, is said to be contragredient to u.
Example 4. If 5 is the Dirac measure and a G Rw, then та5 = 8a
(Example 1.2).
330
DISTRIBUTIONS
[4, §3]
The operation of translation plays a role in the classical definition of
the derivative of a function. In fact, the partial derivative dj<p at the
point x is defined by
lim <P& + fe) — <p(x) _ (T h<p)(x) — <p(x) ,
<->o t <->o t
where h = (h19 . . ., hn) G Rn is given by hj = t and hk = 0 for к # j.
We want to show that the situation is analogous if instead of pointwise
convergence we consider convergence in the sense of our topologies in 3D
and 3D'.
Proposition 4. Let h = (h19 . . ., hn) e R” be a vector parallel to the
Xj-axis (i.e., hk = 0 for к j) and write hj = t. For each G 3D the
function — <p) converges to dj<p in Stash —> 0, and for each Г G 3D'
the distribution — T) converges to d,T in 3D' ash —> 0.
Proof, (a) Let us set /t — — <p)f К = Supp <p> and let L
be a compact neighborhood of K. For sufficiently small values of |£| the
support of xl/t is contained in L.
For each p G Nn the function dp<p is uniformly continuous on Rn.
Therefore given € > 0, we obtain by using the mean-value theorem
mt)(x) - (d4v)W| = |(d#W + eh) - (djdp<p)(x)\ e
(0 g S 1), provided that |£| is sufficiently small.
Let V be a neighborhood of 0 in 3D. Then V A 3D(L) contains a set of
the form {x | \dpx(x) | g e, |p| m}. Thus we see that — dj<p G V
for sufficiently small |$|.
(b) For each <p E 3D we have
{t-4r_hT - T), <p) = Г\т^Т, <?) - t~\T, <?)
= t~\T, rh<p) - ГЧТ, <p) = (T, t-\rh<p - «,)).
Since Г is a continuous linear form on 3D, by part (a) the last expression
tends to
(Г, —dj<p) = (djT, (p)
as t —> 0. The conclusion follows from Proposition 1.2. |
We shall also need the following result:
Proposition 5. Let T g 3D'. The map h i-> тдГ from Rn into 3D' is con-
tinuous and differentiable; i.e., the limits
^ThT) = Um 4-1(та+дл!Г — ткТ)
[4, §3]
DERIVATION
331
exist and are continuous, where Ah denotes a vector parallel to the Xj-axis
with component (Ah)j = t (1 j n). Furthermore, we have
(rhT) = -д}(ткТ) = -t^T).
Proof, Let A be a bounded set in SD. For a fixed h G Rn there exists a
bounded set Bh in SD and € > 0 such that ip G A, к G Rn and |fc| < €
imply
7_/>_fc<p — T-h<P G |&|Вл-
We have therefore
Ктл+fcT — ThT, <p)| = |(T, T-h-k<P — T-h<fi)l 1,
i.e., Th+кТ — ThT G A° for |fc| < € provided that € is sufficiently small.
This proves the continuity of the map h ь-> тлТ.
The existence of the partial derivatives and the relation
A(riT) _ -a,.(Ti7.)
follow from Proposition 4 applied to ThT. For p G SD we have
<д,(тлТ), <p) - — {T, T_h(dj<p)}
= —{T, dj(r-h<p)) = (Th(djT), <p),
and therefore dj(rhT) = ThfdjT). The continuity of the map h ь-> тл(дуТ)
follows from the first part of the proof. |
Clearly, a function f is independent of the variable Xj if and only if
тл/ = f for every vector h parallel to the zy-axis. Therefore it is reasonable
to state
Definition 3. The distribution T е ЗУ is independent of the variable
Xj if ThT = T for all vectors h G Rn parallel to the Xj-axis.
Proposition 6. A distribution T е ЗУ is independent of the variable
Xj if and only if djT = 0.
Proof, If ThT — T = 0 for all h parallel to the zy-axis, then djT = 0
by Proposition 4. Conversely, if djT = 0, then by Proposition 5 we have
4- (rhT) = -TddjT) = 0,
v/l»y
and therefore the map t »-> ThT, where h = (hi,. . ., hn), hj = t,hh = 0
for к # j, is constant. It follows that тлТ = т0Т = T for all such h. |
332
DISTRIBUTIONS
[4, §3]
Now that we are in possession of the necessary notations and terminol-
ogy, we can pass to the study of the map If x = (xi, . .., xn) is a
vector in Rn, we shall also write x' or t for X} and x" for the vector
(x2, . . ., xn) of Rn-1. Thus x = (xi, x") = (x'f x") = (/, z"), and if /is
a function defined on Rn, we shall write/(s', x") or f(t, x") for f(x).
A function X G 3) = D(Rn) belongs to M — Im(di) if and only if it
satisfies the relations
Г х(/, x") dt = Q (6)
J—X
for all x" G Rn-1. Indeed, if X = dtf for some G 5), then
У” x(t, x") dt= I" d^t, x") dt = = o.
Conversely, if the relations (6) are satisfied, then the function ф defined by
^(zi, x") = [ 1 x(/, x") dt
belongs to 3) since if x vanishes outside a cube of Rn, then ф also vanishes
outside that cube. Clearly, dtf = x.
For each x" G R71”1 the linear form X »-> x(/, x”) dt is continuous
on 3), and therefore M is the intersection of closed hyperplanes, i.e., a
closed subspace of 3).
If d}(p = 0, then <p is a constant on every straight line parallel to the
zi-axis. But since <p has compact support, this constant is necessarily
zero, i.e., <p = 0. Thus the map di: 3) —* 3) is injective.
Let be a fixed element of 3J(R) such that ^o(0 dt = 1. Every
element p G 3) has a unique decomposition <p = X^o + where X G 3)(Rn-1)
and x G M. Indeed, if we set
X(rr") = y“ 4>(t, x") dt,
then X G D(Rn-1) and clearly <p — X^o E M. Furthermore, if
+ xi = X2^o + X2,
then (Xi — X2)^o == x2 — Xi G Mt hence Xi = X2 and Xi = X2.
Finally, the map x = dtf »-> ф from M onto 3) is continuous; i.e., dj
is a strict morphism. By Proposition 2.12.1 we must prove that for any
compact subset К of Rn the map X i-> ф from M n £>(K) into 3) is continu-
ous. Let V be a neighborhood of 0 in D and let
L = {x j |xy| a, 1 j n}
be a cube containing K. Then V A D(L) contains a set of the form
{Ф I |dp^(x)| g e, |p| m}t e > 0, m G N.
[4, §3]
DERIVATION
333
Let U be the neighborhood of 0 in M П D(K) composed of all functions X
which satisfy the inequalities
|dpx(z)| Д if |p| m and Pi = 0
AO
and the inequalities
|dpX(x)| e if |p| m — 1.
Then X e U implies ф e V. Indeed, if pi = 0, we have
|ap^(x)| =
dpx(t, x") dt
£ ^-2a = e
2a
since X e M implies that
У* dpX(t, x”) dt = 0
for all x" e Rn—1 and all p e Nn with pi = 0. On the other hand, if
Pi > 0, we can write dp = dqd^ with q e Nn, |g| = |p| — 1, and there-
fore we have |др^(я)| = |d9X(z)( e.
Collecting our results, we obtain
Proposition 7. The map d^: 3) —► 3) is an injective strict morphism
whose image M is a closed subspace of 3). Given an element <p0 e 3)(R) such
that dt = 1, each element <p e 3) has a unique decomposition
<P = X^o + X, (7)
where X e 3)(Rn—*) is defined by X(z") = s") dt and xeM.
In particular, X E M if and only if X(t, x") dt = 0 for all x" e R*-1.
Now we are able to prove the following result:
Proposition 8. The linear map ЗУ —» ЗУ is a surjective strict mor-
phism whose kernel consists of all distributions which are independent of the
variable Xi.
Proof, (a) We know from Proposition 6 that Ker(di) consists of all
distributions independent of Zj.
(b) If T e ЗУ and diT = 8, then using the decomposition (7), we have
<?» = (Т,Х^о)+<Г,х)= <T, X^o> — (8)
where X = dtf. If diT = 0, we can define a distribution G e 3)'(Rn—J)
by setting
(G, X) = (T, X^o) (9)
for X e 3)(Rn-1), and the map T G is clearly an isomorphism from
Ker(di) onto 3y(Rn-1).
334
DISTRIBUTIONS
[4, §3]
(c) Let us prove that di is surjective. Given /8 G ЗУ, choose an arbitrary
distribution G G D'(Rn-1) and define T by
<T,<p) = {G,\}-
where <p is arbitrary in D and X and 1Д have the same meaning as before.
Because of the uniqueness of the decomposition (7), the linear form T
is well-defined on D. It is also continuous since the maps <p X,
X i-> (G, X), <p »-> X = (p — X^o, and »-> (S, are clearly continuous,
and X ь-> ф is continuous by Proposition 7. Finally,
= (8,*)
for every ф G D; i.e., d^T = 8. Observe that by (8) and (9) the distribu-
tion T is completely determined by the distribution G.
(d) With every S G ЗУ we associate that distribution T G ЗУ for which
д±Т = /8 and G = 0 and set T = Ц(8). The map Ц: ЗУ —* ЗУ is clearly
linear. We have by definition
= S for all S G ЗУ (10)
and by (8) and (9)
(1^8), <p) = — (8, f) for all S G 3)' and <p E 30. (11)
Relation (11) shows that —Ц is the transpose of the continuous linear
map (p »—> ф. Hence by the corollary of Proposition 3.12.3 the map Ц is
continuous. It follows therefore from (10) that dx is a strict morphism
(Proposition 2.7.2). |
Remark 4. The last two propositions show that 3)(RW) is the direct
sum of two closed subspaces M = Im(di) and P ~ D(Rn-1) and that
3)'(Rn) is the direct sum of two closed subspaces N = Ker(di) and
Q, where = N and P1- = Q.
Remark 5. If n > 1, then the image of the map <9X: ЗЭ —> ЗЭ is not a
hyperplane (and has, in fact, infinite codimension), the kernel of the map
di: ЗУ —* ЗУ is not finite dimensional, and the operator di is not elliptic.
Proposition 9. Let к be an integer, 1 к n, and Si, S2, .. ., Sfc
distributions on Rw. There exists a distribution T G 3)' for which
djT = Sj (1 g j g k) (12)
if and only if the distributions Sj satisfy the k(k — l)/2 relations
= djSi (1 i,j ^k,i # j). (13)
[4, §3]
DERIVATION
335
Proof, (a) If a distribution T satisfying the relations (12) exists, then
we have
diSj = didjT = djdiT = djSi
for 1 i, j k.
(b) Next we show that if 8 E ЗУ is independent of the variables
xm, . • • j xn (1 m n), then there exists T E 3)' which is independent
of the variables xm, . . . ,xn such that d^T = 8. We know from the proof
of Proposition 8 that if <p = X^o + where X = д1ф, is the decomposi-
tion (7) of <p E 3), then the distribution T defined by (Г, <p) = — (8, ф)
satisfies the relations diT = 8. Now djX = and
djV = djX • <pQ + djX (1 < j n)
is the decomposition (7) of djp. We have therefore (Г, dj?) = —(8, д3ф);
and if djS = 0 for m j n, then
(dyT, <p) = — (Г, dj<p) = (8, д3ф) = — (d3S, ф) = 0,
i.e., djT = 0 for m j n.
(c) Now we prove by induction on к that the conditions (13) are also
sufficient. For к = 1 this follows from Proposition 8. Assujne-4hat4he
assertion holds for к — 1 and let 8j,.. ., 8* be distributions satisfying
(13). Then there exists a distribution T\ such that d3Ti = 8y for
1 j <£ к — 1. The distribution dkTi — Sk is independent of the vari-
ables xi, . . ., since
— Sk) = dkdjTi — d3Sk = dkSj — djSk = 0
by (13). It follows from part (b) that there exists a distribution T2,
independent of the variables xi,. .., Xk—i, such that длГ2 = dk^i — Sk-
Setting T = Ti — T2, we have d3T = d3Ti = 8; for 1 j к — 1
and дкТ = dkT\ — дкТъ = Sk-1
Remark 6. For к = n Proposition 9 can be stated more beautifully in terms
of currents, i.e., differential forms with distribution coefficients: if
8 = 8i dxi -|- 82 dxz 4" • • • 4" 8» dxn
is a current of degree 1, then there exists a distribution (= current of degree 0)
T such that
5 = dT = diT-dxi + d2T- dx2 4------------h dnT-dxn
if and only if
/ dS = £ (diSj - djSt) dxi A dXj = 0.
i<i
More generally, let V be a differentiable manifold. Let be the vector space
336
DISTRIBUTIONS
[4, §3]
over К of all currents a of degree p on V such that da = 0, and let Bp be the
subspace of Zp formed by those currents a for which there exists a current ft
of degree p — 1 such that a = dfl. Then the quotient space Zp/Bp is isomorphic
to the p-th cohomology vector space HP(7;K) of V. This is one form of
de Rham’s theorem [87, 45, 36,17].
We conclude this section with a very simple regularity theorem (cf.
Exercise 10.8). We shall establish later much stronger results in this
direction.
Proposition 10 (du Bois Reymond’s lemma). Let f and g be two
continuous functions on Rn and Т/ and Tg the corresponding distributions.
If djTf = Tgt then the partial derivative djf exists and djf = g.
Proof. For simplicity of notations take j = 1 and let us define the
function h by
A(x) = ( 1 g(t, x") dt,
Jo
where x" = (x2, . . . ,xn) as above. The function h is continuous, dih
exists and d\h = g. Clearly, = Tg, and therefore di(Tf — T^) = 0.
The function и = f — h is continuous as the difference of two continuous
functions. Since dxTu = 0, by Proposition 6 we have ThTu = 0 and hence
also ThU = 0 for all vectors h parallel to the xx-axis; i.e., the function и
is independent of Thus dif = d^h = g. |
Exercises
1. (a) Prove that TGS)' satisfies the relations djT = 0 for 1 j к
(к ri) if and only if тлТ = 0 for all vectors h = (hi,..., An) E Rn such that
Лан-i = • • • = hn = 0; i.e., T is independent of the variables xi,... ,xk.
(b) For any vector x = (zi,..., xn) E Rn write
xf = (zi,..., xk) G R*, x" = (zjfe+i,. . ., xn) E Rn“*,
and
x = (xf, x").
Prove that the map di ... dk: £> —> 3) is injective and
к
X e M = Im(di... дк) = П Im(d,)
7=1
if and only if
k X(t, x") dt = 0
for all x” G Rn“*. Let <pq G 3>(R*) be such that fR*^o(0 dt = 1. Show that
every <p G 3) has a unique decomposition given by <p(x) = Х^'Э^оС^) + X.(x),
where X G 3)(Rn-fc) and X G M. Prove that di ... d*: 3) —* 3) is a strict
morphism.
[4, §4] DISTRIBUTIONS OF FINITE ORDER 337
(c) Show that the linear map di . . . d*: ЗУ —» ЗУ is a surjective strict mor-
phism whose kernel consists of all distributions which are independent of the
variables xi,. .., Xk.
(d) Show that if djT = 0 for 1 j n, then T = Tf, where/is a constant.
(e) Show that if дрТ = 0 for all p such that |p| m, then T = Tf, where
/ is a polynomial of degree m — 1. }
2. Prove that Propositions 4 and 5 hold if the spaces 3) and 3)' are replaced
by the spaces 8 and 8'.
§4. Distributions of finite order
In this section we shall consider distributions which are continuous
linear forms On the spaces 3>w(0) introduced in Example 2.12.8. To estab-
lish that these are normal spaces of distributions we must consider the
operation of convolution in a simple special case. We shall study convolu-
tions more generally in §9.
Let / be a continuous function and g a continuous function with compact
support, both defined on Rn. For each vector x G Rn the function
У f(x — y)g(y) is continuous on Rn, and its support is contained in
that of g. Therefore the integral
л(х) = /R„/(x — y)s(y) dy
exists and defines the convolution h = / ♦ g of the two functions / and g:
By a change of variables we see that h is also given by
Л(г) = fRnf(y)g(x - y) dy.
We have
Supp h C Supp / + Supp g. (1)
Indeed, by Proposition 2.10.5 the set A = Supp / + Supp g is closed. If
x Й A, then x = x — у + У, where either x — у Й Supp/or у Й Supp g,
for all у G Rn. It follows that h(x) = 0, i.e., x & Supp h.
Let us now assume that / also has compact support. Then it follows
from (1) that Supp h is compact. Furthermore, / is then uniformly continu-
ous on Rn, and it follows from
IM^i) — Л(а?2)| = {/(«i ~ y) ~ f(x2 — y)}g(y) dy\
g sup I/O! — y) — f(x2 — y)| • f. |{/(2/)| dy
у
that h is continuous On Rn. We see in a similar fashion that if / G ЗУ*
(0 m oo), then h G 3)w and dph = dpf ♦ g for |p| m.
338
DISTRIBUTIONS
[4, §4]
Now we can prove
Proposition 1. Let £2 be an open subset of Rn and m G N. Then ЗУ”(£2)
is a normal space of distributions (Definition 2.3).
Proof. The map 3D(£2) °* ЗУ”(£2) is continuous by Example 2.12.8. The
map <p Tv from ЗУ”(£2) into ЗУ (£2) is composed of the maps
3DW(£2) <B^(£2) dT(£2) 8W(£2) 6(0),
which are continuous by Examples 2.12.8, 2.5.10, 2.5.5, 2.5.7, and of the
map f Tf from 6(£2) into ЗУ(£2), which is continuous by Proposition 1.4.
It remains for us to prove that the image of 3D(£2) is everywhere dense
in ЗУ” (£2). Let p G 3D be a function having properties (a), (b), and (c)
listed in Example 1.4, and let p€ be the function defined there. Given
<p g 3DW(£2), let К be a compact neighborhood of Supp <p contained in £2
and let rj > 0. Then p€ * <p G 3D(/Q for sufficiently small € > 0, and for
|p| m we have
dp(pt*<p)(x) — (dp<p)(x) = jpe(.y){(dp<p)(x — y) — (dp<p)(x)} dy;
hence
\dp(pt * <p)(x) — (dp<p)(x)\ max |(ap<p)(x — y) — (dp<p)(x}\ g y,
12/1
for x G К and sufficiently small €. This means that p€ * <p converges to <p
in 3DW(/C). Since 3DW(/Q 3DW(£2) is continuous, pe * <p tends to <p also in
3DW(£2). |
Let us observe for later use (Lemma 8.1) that the last conclusion of the
proof also holds for m = oo.
It follows from Proposition 1 that the dual space 3Dm(£2) of 3DW(£2) is a
space of distributions. We have the sequence
3D(£2) ay*+i(£2) jc(q)
of continuous maps (Example 2.12.8) and the image of each space in the
next one is everywhere dense. By transposition we obtain the sequence
3C'(£2) 3D'W(£2) -> 3Dm+1(£2) ->•••-> ЗУ(£2),
where each map is injective (Corollary 2 of Proposition 3.12.2). Hence
we can and we shall consider each of these spaces as a linear subspace of the
spaces following it. This gives a meaning to
Definition 41. A distribution defined in the open subset £2 of Rn is said
to be of order m if it belongs to but not to 3Dm—\£2). A distribution of
order 0 is also called a (Radon) measure on £2.
[4, §4] DISTRIBUTIONS OF FINITE ORDER 339
Thus ЗУШ(О) is the space of all distributions of order ^m. A distribu-
tion which belongs to some space ЗУ W(Q) is said to be of finite order. There
exist distributions which are not of finite order (Exercise 1). The space
JC'(Q) = ЗУ°(О) of all measures will sometimes be denoted by 9TC(Q). If
<p G JC(fi) and ju G 911(0), then the value (д, <p) Qi the canonical bilinear
form at (д, is traditionally denoted by
[ dju(x) (2)
JQ
and called the integral Qi the function <p with respect to the measure д.
A distribution T G ЗУ(О) is of order ^m if it is continuous on 3J(Q)
for the (coarser) topology induced on it by 3JW(Q). By Proposition 2.5.2
and the definition of the semi-norms on 3JW(X) (Example 2.4.9) this is so if
and only if for every compact subset К of 0 there exists a positive number
M such that
\{T, ^>)| M max max |dp^(x)|
Ipl^m x
for all tp G 3J(X). The same inequality holds then for all <p G 3JW(X).
Example 1. If f G 6(0), then the corresponding distribution Tf
(Example 1.1) is a measure, and therefore we shall denote it also by д/ or
dp,f. If 0 = Rn and f(x) = 1, then the corresponding measure will be
called the Lebesgue measure, which is sometimes denoted by dx in harmony
with the notation (2).
Example 2. The distribution <5a, introduced in Example 1.2, is a
measure as we have already pointed out. If |p| = m, then dpda = 8^
(Example 3.2) is a distribution of order m.
Example 3. The distribution v.p. 1/x (Example 1.3) is of order 1.
The space 3Jw(0) is complete (Example 2.12.8), barrelled (Example
3.6.4), and bornological (Example 3.7.2), but for finite m it is not reflexive.
The space ЗУт(О) equipped with the topology /3(зУш(О), 3Jw(0)) is com-
plete (Proposition 3.7.6), barrelled, and bornological (Example 3.16.2).
Proposition 2. If 0 is an open subset of Rn, then 3JF(0) (Example
2.12.8) is a normal space of distributions. Its dual 3J'F(0) consists of all
distributions of finite order.
Proof, (a) We know (Example 2.12.8) that the identity map
3J(0) 3JF(0)
is continuous. On the other hand, the map <p »-> from 3JF(0) into
ЗУ(О) factors into the maps 3JF(0) 3Jw(0) (m G N) and 3Jw(0) —► ЗУ(О),
of which the first is continuous by definition and the second by
Proposition 1.
340 DISTRIBUTIONS [4, §4]
(b) The second assertion is an immediate consequence of the corollary
of Proposition 3.14.5. |
Proposition 3. If 0 is an open subset vfXLn and m G N, then 8w(0) is a
normal space of distributions, and its dual 8m(b) is the space of all distribu-
tions of order m with compact support; i.e., 8m(O) = 8'(O) A X>m(O).
Proof, (a) The maps
©(0) 8(0) 8w(0) and 8w(0) <=4 6(0) -> ©'(0)
are continuous (Examples 2.5, 2.5.7, and Proposition 1.4). We see word
for word as in Example 2.5 that 1>W(O) is dense in 8w(0). Since D(0) is
dense in 1>W(O), it is a fortiori dense in 8w(0).
(b) If T G 8m(0), then the restrictions of T to 8(0) and 1>W(O) are
both continuous; i.e., T G 8'(0) A X>m(0). Conversely, let T be a distri-
bution of order m and with compact support K. Let X G X>(0) be such
that X(x) = 1 for all x in a neighborhood of K. For <p G 8w(0) we have
X<p G 1>W(O) and we define
(aS, = (T, X<p).
We see exactly as in part (a) of the proof of Proposition 2.3 that aS is a
continuous linear form on 8w(0) and coincides with T on 1>W(O). Thus
T can be considered as a distribution belonging to 8m(£2). |
Corollary. Every distribution with compact support is of finite order.
Proof. It follows from Example 2.11.4 and the corollary of Proposition
3.14.5 that if T G 8'(0), then there exists a positive integer m such that
T G 8m(0). But then T G X>m(0) by the proposition. |
The study of the derivation of distributions of finite order is based on
Proposition 4. Let 0 be an open subset of Rn and m a positive integer.
For each index j (1 j ri) the linear map <p i-> дцр from Dw+1(0) into
S)m(Qi) and from 8w+1(0) into 8w(0) is continuous.
Proof, (a) (cf. Proposition 3.1) Let К be a compact subset of 0 and
V a neighborhood of 0 in 1>W(O). There exists e > 0 such that V A £>m(K)
contains the set
fol |dfo(a:)| IpI m}.
The set
и = fo | |afo(x)| «, |p| g m + 1}
is a neighborhood of 0 in Ют+1(Х) and <p e U implies dj<p e V. Thus the
map <p •-» dj<p is continuous from 3>т+1(К) into ©’”(0), and thus by
Proposition 2.12.1 also from Dm+1(Q) into
[4, §4] DISTRIBUTIONS OF FINITE ORDER 341
(b) Let V be a neighborhood of 0 in 8m(0) which we may assume to
be of the form {<p | |dp^(x)| €, |p| g m, x G K}> where € > 0 and К is
a compact subset of Q. Then
U = {* | I e, |p| m + 1, x e K}
is a neighborhood of 0 in 8m+1(0), and <ptU implies dj<p G U. |
Observe that part (b) also proves that the map <p dj<p is continuous
from 8(0) into 8(0).
Corollary. For every multi-index p e Nw the map i—► dp<p is continuous
from Dm+,p,(0) into Dm(0), from 8m+,p,(0) into 8m(0), and from 8(0) into
8(0).
It follows from this corollary that the map T dpT (Definition 3.1)
is continuous from D,m(0) into D,m+lpl(0), from 8m(0) into 8m+,pl(0),
and from 8'(0) into 8'(0) for either the topologies P(E', E) (corollary of
Proposition 3.12.3) or for the topologies к(Е', E) (Proposition 3.12.7). In
particular, if p is a measure on Q, then dpp is a distribution of order at most
|p|. Conversely, we have the following result:
Theorem 1. If T G S/m(0), then there exists a finite family (pp) of
measures (p G Nw, |p| m) such that T = dppp.
Proof. For each multi-index p G Nn such that |p| m let JCP(O) be a
space identical with JC(Q). The map u: <p (dp<p)\p\£m from S)m(Q) into
the product space 3CP(0) is clearly linear and injective. It is con-
tinuous by the preceding corollary. Finally one sees that it is a strict
morphism by observing that a fundamental system of neighborhoods of 0
in S)m(0) is given by the sets Vh of functions <p satisfying |dp^(x)| g h(x)
for x G 0 and |p| m, where A is a continuous, strictly positive function
on 0 (Exercise 2.12.9).
Setting (L,(<)^)>=
we define a continuous linear from L on Im(u). By the Hahn-Banach
theorem (Proposition 3.1.1) there exists a continuous extension Z of L
onto the whole space 3CP(0). By Proposition 3.14.1, for each p
there exists a measure (—l),p,/xp such that
(£,(?,)> = £ (—1)IpI(Mp>
Ipl^m
for all (<f>p) e IllplSm 5Cp(0). In particular, for <р e Х»т(П) we have
(?»=(Ш)) = Z (-i)lpWM = £
lpl£m Ipl^m
i.e., T = дррр* I
342
DISTRIBUTIONS
[4, §4]
If a function vanishes in a neighborhood of the support of the distri-
bution T, then (T, <p) = 0. We can improve this result considerably
(see also Proposition 7.7 and Exercise 9.4(c)).
Theorem 2. Let 0 be an open subset of Rn and m E N. If T E 8m($2)
and <p G 8™(Q) is such that dptp(x) = 0 for all x G Supp T and |p| m,
then {T, <p) = 0.
Proof, (a) Set К = Supp T and denote by Ke the set of all those points
of Rn whose distance from К is g e. For sufficiently small e > 0 the set
Ke is a compact neighborhood of К contained in 0.
With the notations introduced in Chapter 2, §5 we can write Taylor’s
formula in the form
pO) = £ (x — У>Р + R™(x'> y).
For every compact subset L of 0 and every ij > 0 there exists 0 > 0
such that
I Rmfa) 2/) I <
|x _ y\m 17
whenever x, у g L and \x — ?/( < 0. Considering that dp(p{y) = 0 for
у G К and |p I g m, we can choose € > 0 so small that
k(#)( = for all x G K4e.
We can apply the same reasoning to the function dptp for a fixed index
|p( m. Observing that dq dp<p(y) = 0 for у e. К and (g( m — (p|,
and that only a finite number of choices have to be made, we can affirm
the existence of a number e > 0 such that
|d^(x)| (3)
for x G K4e and (p( m.
(b) By Proposition 2.12.5 there exists a function X€ G D(0) such that
x€(x) = 1 for x G K2€, x€(z) = 0 for x G C/£3€, and 0 x€(z) 1 for
all x. Let pe be the function employed in the proof of Proposition 1 and
consider the convolution ae = X€ * p€. We have a€ G 3)(0), Supp a€ C K4e
by formula (1), and
a€(x) = f Xe(x — y)pe(y) dy
= /лпРе(У) = 1
[4, §4]
DISTRIBUTIONS OF FINITE ORDER
343
for x 6 K€, since x e Kt and |y| iS e imply x — у G K2f. We have
furthermore
|d₽a€(aOI = Ln Xe(x ~ dy
J
= Д|э₽ре(г/)|^=
= « ы Ln I^PWI dx.
J **
Thus there exists a constant c > 0 such that
|Эра€(х)| ce-1”' (4)
for all x G 0 and |p| m.
(c) We have (ae<p)(x) = <p(x) for x G Ke and (а€<р)(я) = 0 for x E CK4€.
By the Leibniz formula (Proposition 2.5.3) dp(a€^>) is a linear combination
of expressions of the form d9ae • dr<p, where q + r = p. It follows there-
fore from (3) and (4) that there exists a constant c' > 0 such that
|d’W(x)| s c'em~lply £ c'y (5)
for all x e Й and |p| m if € is sufficiently small.
(d) Since T e Dm(Q), there exists a constant M > 0 such that
|CM)| M max max |dp^(a:)| (6)
Ipl^m t
for all e а>’п(К4е). Now Supp(l — ««)<? С CK, hence
(T> <p) = (T> <W>-
Since Supp(ae^>) C Kie, it follows from (5) and (6) that
|(T, „>| £ Mc'y.
Since ч > 0 is arbitrary, we have (T, <p) = 0. |
We know that Supp dpS = {0} for all p e N". Conversely, we can
deduce from the previous theorem the following important result.
Proposition 5. Every distribution whose support is {0} is a finite linear
combination of the Dirac measure and its derivatives.
Proof. Let Supp T = {0}. By the corollary to Proposition 3 we have
T e for some m e N. For every <p e Taylor’s formula gives us the
expression
Ipl
344 distributions [4, §5]
where cp = др<р(О)/р!, /Е6, and дрф(О) = 0 for |p| m. It follows
from Theorem 2 that (T, = 0 and therefore
<T, = z Д <T, xp> dMO) = £ (T, v).
Ipl |pI P’
Writing Ур = (—l)1^?7, xp)/p\, we have T = Ур dp8. |
Exercises
1. Show that the linear form T = dn6n, which for every <p G 3)(R) is
given by
= £ Л),
nGN
is a distribution on R but does not have finite order.
2. Show that if in Proposition 2.4 the distributions TL are of order then
T is of order ^m.
3. As in Proposition 3.4, let h = (&i,..., hn) G Rn be a vector parallel to
the xy-axis and hj = t.
(a) Show that if <p G XT, m 1, then 1~х(т^ур — <?) converges to dj<p in
XT-1 as h -» 0.
(b) Show that if T G X)'m, m G N, then t^ir-nT — T) converges to d,T in
3/m+i as Д —» 0.
4. Show that if Supp T = {0}, then the representation of T in the form
T = (Proposition 5) is unique. (Hint: Consider (T, xp}.)
5. Show that if T G X)'m(ft), <p G XT(ft) and Supp T A Supp tp = 0, then
<7» = 0.
§5. Integrable distributions
Denote by 1 the function which assumes the value 1 in every point
of the open set ft. In this section we shall consider distributions T for
which the expression {T, 1) is defined. This expression will also be de-
noted by fQ T and called the integral of T, which explains the title of the
section. To motivate the terminology, let us observe that if T = Tf,
then (T7, 1) = $ъ}(х) dx (cf. Remark 1).
Proposition 1. Let ft be an open subset of Rn. The Banach space
C0(O) = ®o(ft) (Example 2.4.16 and Exercise 1.2.7) is a normal space of
distributions (Definition 2.3).
Proof. The map X)(ft) C0(ft) is composed of the maps
x»(ft) <=^ ®0(G) e0(ft),
which are continuous by Examples 2.12.8 and 2.5.7. The map <p T*
[4, §5] INTEGRABLE DISTRIBUTIONS 345
from e0(O) into 5/(0) is composed of the maps e0(O) ®°(0) 6(0),
which are continuous by Examples 2.5.10, 2.5.5, and of the map f Tf
from 6(0) into 5/(0), which is continuous by Proposition 1.4.
Let <p G 60(O). Given € > 0, there exists a compact subset К of 0
such that |<p(x)| g eforxGfln CK. Letx 6 5>(O) be such that X(x) = 1
for x G К and 0 x(x) g 1 for all x G 0. Then X<p G X(0) and
]<p(x) — X(x)<p(x)\ = |{1 — X(x)}<p(x)\ €
for all x G 0. This proves that the image of X(0) is dense in 60(O). Since
the image of SD(O) is dense in X(0) (Proposition 4.1), and the map
jc(o) e0(o)
is continuous (Example 2.12.5), SD(O) is also dense in 60(O). |
It follows from Proposition 1 that the dual of e0(O) is a space of distri-
butions. We shall denote this dual by 6o(0) or by ®o°(0) or, for reasons
which should be clear in a moment, also by 5Ex(0). Since the map
jc(o) e0(o)
is continuous, and the image of JC(O) is dense in 60(O), the map
зе*(о) -> 5E(0)
(Definition 4.1) obtained by transposition is injective (Corollary 2 of
Proposition 3.12.2); i.e., every distribution belonging to 5E*(0) can be
considered as a measure. More precisely, a measure д belongs to 5E*(0)
if and only if there exists a number M 0 such that
l<M, <p)I M max |<p(x)| (1)
X
for all-in SD(O) or in JC(O). If this is the case, then (1) holds for
all <p G 60(O) and the smallest value of M for which (1) holds is the norm
||д|| of д in the Banach space 5Ex(0).
Example 1. The norm of the measure da is 1.
Remark 1. We shall see in Chapter 5 that the measures д G ЗЕ1®
are precisely those for which (д, 1) = cfyx(z) is defined and finite ([10],
Chapter IV, §4, No. 7, Proposition 12). Therefore the measures in 3Ex(0)
are said to be integrable or of finite total mass (Bourbaki uses the unfor-
tunate term “bounded”).
Proposition 2. Let 0 be an open subset of Rn, m G N, and j an integer
such that 1 j n. The linear map <p i-> dj<p is continuous from (R™+1(0)
into ®oP) and from into (B0(O) (Example 2.4.17).
346
DISTRIBUTIONS
[4, 55]
Proof. Let 7 be a neighborhood of 0 in (B™ (ft) which we may assume
to be of the form
€, xGft, |p| h},
where h G N and h = m if m is finite. Then
U = {<p | |dp^(x)| €, x G ft, |p| h + 1}
is a neighborhood of 0 in (Bo +1(ft), and <p G U~ implies dj<p G V. |
Corollary. For every multi-index p G Nn the map <p dp<p is continuous
from (Bo+Ipl(ft) into (Bq (ft) and from (B0(ft) into (B0(ft).
Proposition 3. Let ft be an open subset of Rn and m G N. If (p^)\p\^m
is a family of measures belonging to SHl^ft), then
<P^ Z (2)
Ipl
is a continuous linear form on (Bo (ft), and conversely every continuous linear
form on (Bo (ft) is of the form (2), where the pp belong to SHl^ft).
Proof, (a) Let e > 0 be a preassigned number, N the number of multi-
indices p G Nn such that |p| m, and M = rnax|P|^m ||др||. The set
7 = P | |dp^(x)| > x G ft, |p|
is a neighborhood of 0 in (B™ (ft), and <p G V implies that
|Z (-1)'%р,аМ £ |<мРЛ>1 Z
(b) Let L be a continuous linear form on (Bo (ft). For each multi-index
p such that fol m, let 6^(ft) be a copy of the space e0(ft). The map
u: <p i—> (dp^)|P|gm from (Bo (ft) into Co₽)(ft) is clearly linear and
injective. It is continuous by the preceding corollary, and considering the
definition of the neighborhoods, it becomes obvious that it is a strict mor-
phism. Setting
<F, (dM> = (Д <?),
we define a continuous linear form F on Im(u). By the Hahn-Banach
theorem (Proposition 3.1.1) there exists a continuous extension F of F
onto the whole space Ilipi^m e^p)(ft). By Proposition 3.14.1 for each p
there exists a measure (—l)lplgp G SOl^ft) such that
= Z (-l)lpl<MP,Vp)
Ipl
[4, §6] MULTIPLICATION 347
for all (<(>p) e Ilipism 6ор)(Л). In particular, for <p e (ВЦО) we have
<L, v) = (F, (a^)) = £ (-i)1’1^ I
Ipl
Corollary. The continuous linear forms on <Bo(O) are the maps of the
form
<p~ I
Ipl
where m is some positive integer and (p>p)\p\^m is a family of measures be-
longing to ЗТС^О).
This follows from Example 2.11.4, the corollary of Proposition 3.14.5,
and Proposition 3 (cf. the corollary of Proposition 4.3).
The distributions of the form where the pp belong to
ЗТС^О) and m G N, will be called integrable. By the preceding corollary,
to every continuous linear form on (Bo(O) there corresponds an integrable
distribution, and every integrable distribution defines a continuous linear
form on (Bo(O).
The image of the map 6o(O) °* 6(0) is everywhere dense since by
Proposition 4.3 already D(0) is dense in 6(0). It follows that the map
6'(0) ЗТС^О)
is injective; i.e., every measure with compact support is integrable.
Exercises
1. Show that if T G 8'w(0), then there exist measures цр (|p| m) whose sup-
port is contained in an arbitrary neighborhood of Supp T and such that
т = £ a%,-
I pl
(Hint: Consider an open neighborhood w of Supp T and apply the method of
die proof of Theorem 4.1 and Proposition 3 to 8'w(w).)
§6. Multiplication
Let f G 6(0) and a G 8(0). Then the function af belongs to 6(0), and
we have (cf. Example 1.1)
(Taf, <p) = ( a(x)f(x)<p(x) dx = (Tf, a<p).
Jo
We want to define the product aT of a function a G 8(0) and a distribu-
tion T G ЗУ(О) in such a way that for T = Tf we have aTf = Taf, and
348
DISTRIBUTIONS
[4, §6]
thus we are led to the following
Definition 1. Let 0 be an open subset of Rn and m either a positive
integer or the symbol oo. If a G 8m(O) and T G Dm(O), then aT is defined
by the relation
(aT, <p) = (T, a<p)
for all <p G Dm(O).
Since cup G Dm(O), it is clear that aT is a well-defined linear form on
Dm(O). That it is continuous, i.e., that aT G D'm(O), follows from
Proposition 1. Let О be an open subset of Rn, 0 g m g oo and
a G 8m(O). The linear map <p »-> oup from into Dm(O) is continuous.
Proof. Let V be a neighborhood of 0 in Dm(O) and К a compact subset
of 0. There exists e > 0 and an integer к 0, where к = m if m is finite,
such that V П ^m(K) contains the set {(p | |dp^(x)| g e, |p| g k}. By
the Leibniz formula (Proposition 2.5.3) each dp(a<p) is a linear combina-
tion of expressions of the form dqa • dr<p, where q + r = p. Since the
functions dqa (|g| g k) are bounded on K, there exists у > 0 such that if
<p belongs to the neighborhood {<p | |др^(я)| |p| k} of 0 in £>m(K),
then a<p G V. By Proposition 2.12.1 this proves the continuity of the
map (p »—> a<p. |
The map <p »-> (T, cup} is now indeed continuous since it is composed
of the maps <p »-> cup and ф »-> (T, $}.
By Definition 1 the map T »-> aT from D'm(0) into Dm(0) is the trans-
pose of the map (p »-> cup from Dm(0) into Dm(0), and therefore by the
corollary of Proposition 3.12.3 it is continuous. If we imbed 6(0) into
5/(0) with the help of the injection / »-> Tf, then the restriction of the map
T i-> aT to 6(0) is the usual multiplication / »-> of. Since 6(0) is dense
in 5/(0) (Proposition 1.3), the map T i-> aT is the unique continuous
extension of the map /»->«/ (Proposition 2.9.5).
Example 1. x8 = 0 since (x8, <p) = (6, x<p} = (z<p)(0) = 0.
Example 2. If д is a measure on 0 and a a continuous function on 0,
then the measure v = ap, defined by
[ <p(x) dv(x) = I <p(x)a(x) dp(x)
Jq Jq
for all <p G JC(O), is also called the measure with density a with respect to p.
Proposition 2. Let 0 be an open subset of Rn and 0 g m 'g oo. If
a G 8m(0) and T G 5)'m(0), then
Supp (a T) C Supp а П Supp T.
[4, §6]
MULTIPLICATION
349
In particular, if either a or T has compact support, then aT has compact
support.
Proof. We shall prove the equivalent relation
(C Supp a) U (C Supp T) С C Supp(aT).
If x e C Supp a, then there exists a neighborhood V of x such that a(y) = 0
for all у e V. If <p e 3J(0) is such that Supp <p С V, then a<p is identically
0, hence (aT, <p) = {T, cup) = 0. Thus
x e C Supp(aT)-
If x e C Supp T, then there exists a neighborhood V of x such that
Supp <p С V implies (T, <p) = 0. But Supp cup C Supp <p-, hence Supp <p с V
implies {aT, <p) = (T, cup) = 0 (Exercise 4.5), i.e., x e C Supp(aT). |
Proposition 3. Let 0 be an open subset of Rn and m a positive integer.
Ifa& 8(Q) and T e ЗУ (12) or if a e 8m+1(9) and T e 3>/m(Q), then
dj(aT) = djd-T + a- d3T
for 1 j n.
Proof. For <p e 3>(O) we have
<d/(aT), <p) = — {aT, d3<p)
= — {T, a • d3<p) = — (T, dj(cup) — <p d3a)
= °“p) + • T, v)
= (a • djT + d3a T, <p). |
Exactly as in the proof of Proposition 2.5.3 we obtain the analogue of
the Leibniz formula:
Corollary. If p e Nn, a e S(Q) and T e ЗУ (9) or a e gm+|p| (q) and
T e ЗУто(а), then
dp(aT) = £ (P\d9adp~qT.
q^p
Next we prove the associativity and distributivity of the multiplication
of distributions.
Proposition 4. Let 0 be an open subset of Rn and 0 m oo. If
a G гш(О), /3 e 8Ш(О), S G and T G then
(a + P)T = aT + 0T, a(S + T) = aS + aT,
(afi)T = a(£T).
350
DISTRIBUTIONS
[4, §6]
Proof. If <p G 3D(O), then
<(a + fi)T, = (T, (a + M
= (T, a<p + = (T, a<p) + (T, ffy}
= («Л = № + PT, <д
<a(S + T), = (S + T, a<p)
= (S, a<p) + (T, a<p) = (aS, <p) + (aT, <p)
= (aS + aT, <p),
{(a^T, <p) = (T, (a@)<p) = (T, @(a<p)) = (fiT, a<p)
= (a(?T), «,). |
Remark 1. Let I? be a ring with unit element 1 and M an additively written
abelian group. We say that M is an R-module if there is given a map (a, T) ь-> aT
from R X M into M such that (a + ff)T = aT + 0T, a(S + T) = aS + aT,
a(J3T) = (afi)T, and 1 • T = T for a, ft G R and 8, T G M. Thus SYW(J2) is
an 8™(Q)-module.
For a G 8m(Q), T G 3Dm(Q) we define Ta = aT. If Tlf T2,...,Tk
are к distributions of order such that at least fc — 1 of them belong
to 8™(Q), then we can define inductively their product by
TiT2 -Tk = T,(T2 • • • Tk).
This product is independent of the order of the factors, and we have for
it the general rule of associativity
(i \ / к \ к
П T,) ( П ’> ) = П r,
y=l / \=Z+1 7 j=l /
for any 1 g Z < fc. It is to be emphasized, however, that if Tlf T2) and
T3 are distributions of order but Tt and T3 do not belong to 8W(Q),
then (TiT2)T3 and T!(T2T3) can be defined without being equal. For
instance,
(8x) v.p. - = 0 • v.p. - = 0
x x
by Example 1, but
3 ( x • v.p. - ) = 31 = 3
\ x)
since by Example 1.3 we have
Cx • v.p. - j = lim [ _ f ^x _ (j,
\ X / e—>0 J lx|>€ X J —°0
[4, §6]
MULTIPLICATION
351
We shall now study in detail the maps T XjT from ЗУ into ЗУ, and
for this we need to look more closely also at the maps <p Xj<p from 3)
into 3). We start with the case n = 1.
The continuous linear map u: <p x<p from 5J(R) into 3>(R) is injective
since if x<p(x) = 0 for all x G R, then necessarily <p(x) = 0 for all x g R.
A function X g 3>(R) belongs to H = Im(u) if and only if x(0) = 0.
Indeed, if x = хф for some ф G 3>(R), then clearly x(0) = 0. Conversely,
if x(0) = 0, then the function 1Д, defined by
t(x) = ^.= ~ *<0) if x 0,
X X
*(0) = x'(0),
belongs to 3)(R) and x = хф.
By Example 1.2 the linear form X x(0) is continuous on 3)(R). Hence
H is a closed hyperplane (Proposition 2.5.7) whose equation is x(0) = 0.
Let (pQ be a fixed element of 3>(R) such that <£>o(O) = 1. Every element
<p G 3>(R) has a unique decomposition <p = X^o + X, where X G К and
X g H. Indeed, if we set X = <p(0), then <p — X^o belongs to H, and if
Хцро = Хг^Ро X2, then (Xi — Хг)^о = ^2 — Xi g hence
Xi = X2 and Xj = x%.
Finally, the map X = хф ф from H onto 3>(R) is continuous; i.e.,
и is a strict morphism. By Proposition 2.12.1 we have to prove that for
any compact subset К of R the map X »—► 1Д from H n into 3)(R) is
continuous. Let V be a neighborhood of 0 in 3>(R). Then V П
contains a set of the form {ф | \дрф(х) | i €, |p| g m}, € > 0, m G N.
Let U be the neighborhood of 0 in H n S>(K) defined by
{*! РЭД1 e,|p| m + 1}.
Then x e U implies ф e V. Indeed, the formula
x(x) — x(0) = f x'(u) du = ( xx'(tx) dt
Jo Jo
yields for x(0) = 0 and x = хф the expression
t(x) = f1 x'(tx) dt.
Jo
Hence |d,V(a:)| maxi^isisi |dp+1x(tt)| eforp g m.
We collect our results:
Proposition 5. The map <p x<p from 3)(R) into S)(R) is an injective
strict morphism whose image H is a closed hyperplane. Given an element
352
DISTRIBUTIONS
[4, §6]
<pQ g 30(B) such that <po(0) = 1, eacft element <p G 20(B) has a unique
decomposition
<P = X<po + X, (1)
where X == <p(0) and XeH.
Now we are able to prove the following result:
Proposition 6. The linear map v: T i—> xT is a surjective strict mor-
phism from 30'(R) onto 30'(R) whose kernel is the one-dimensional subspace
of 30'(R) consisting of all constant multiples of the Dirac measure.
Proof, (a) Let T G 3O'(R) and xT = S. Using the decomposition (1),
we have
<T, tp} = X(T, ^o> + (Г, X) = X(T, ^o> + <Sf *), (2)
where X = хф. In particular, if S = 0, we have
<T, <p} = X(T, <p0) = <T, ^o)^(O);
i.e., T = (T, <pQ)8.
(b) Let us prove that v is surjective. Given S G 3O'(R), choose an arbi-
trary constant 7 g К and define T by
(Г, = +
where <p is arbitrary in 30(B) and X, ф have the same meaning as before. Since
the representation (1) is unique, T is a well-defined linear form on 30(B).
Next T is continuous since the maps •-> X, X ► TX, i—► X = — X<p0,
and ф ► (S, ф) are known to be so, and X is continuous by Proposi-
tion 5. Finally,
{xT,*)= <T,x*) = {S,*)
for every ф G 30(B); i.e., xT = S. Observe that by (2) the) distribution T
is completely determined by the value T = {T, <?o)-
(c) With every S G 3O'(B) we associate that distribution T G 3O'(B)
for which xT = 8 and (T, <p0) = 0, and we set T = w(S). The map
w: £)'(R) —> 30'(B) is clearly linear. By definition it satisfies
v(w(S)) = 8 for all S G 3O'(B), (3)
and by (2) it satisfies
{w(S),<p) = (8, /) for all S G 3O'(B) and <p G 30(B). (4)
Relation (4) means that w is the transpose of the continuous linear map
i—► Hence by the corollary of Proposition 3.12.3 the map w is con-
tinuous. It follows therefore from (3) that v is a strict morphism (Prop-
osition 2.7.2). |
[4, §6]
MULTIPLICATION
353
Let us now pass to the study of the maps : <p and vx: T T
on Rw. As in §2, if x = (x19 . .. , xn) is a vector in Rw, we shall write x"
for the vector (x2,..., xn) of Rw-1. Thus x = (x^ x"), and if f is a func-
tion defined on Rw, we write f(x) = f(x1} x").
A function X e 3) = 2D(RW) belongs to M = Im(ui) if and only if
x(0, x") = 0 (5)
for all x" G Rn-1. Indeed, if X(xlf x") = xrftxi, x") for some ф G 2D,
then x(0, x") = 0. Conversely, if the relations (5) are satisfied, then the
function defined by
r") = if H 0,
= diX(0,x")
belongs to 2D and xrf = X.
For each x" G Rw-1 the linear form X ь—> x(0, x") is continuous on 2D,
and therefore M is the intersection of closed hyperplanes, i.e., a closed
subspace of 2D.
If = 0, then <р(х1} x") = 0 for xt # 0, and since <p is continuous,
<p = 0. Thus the map 2D —» 2D is injective.
Let <pq be a fixed element of 2D(R) such that ^>0(0) = 1. Every element
<p G 2D has a unique decomposition <p = X<p0 + X, where X G 2D(RW-1) and
X G M. Indeed, if we set \(x") = ^>(0, x"), then X G 2D(RW-1), and clearly
£ M. Furthermore, if Xi^>0 + *i = X2^>0 + *2, then
(Xi — X2)^po = ^2 — Xi G
hence Xi = X2 and Xx = x2.
Finally, the map X = xtf 1—► ф from M onto 2D is continuous; i.e., U\ is
a strict morphism. By Proposition 2.12.1 we have to prove that for any
compact subset К of Rw the map X i-> ф from M n 2D(7C) into 2D is con-
tinuous. Let V be a neighborhood of 0 in 2D. Then V П 2D(2C) contains a
set of the form
{ф I |др^(я)| €, |p| = m}> € > 0, m G N.
Let U be the neighborhood of 0 in M П 2D(X) defined by
{x j \дрх(х) I €, |p| m + 1}.
Then X G U implies ф G V. Indeed, the formula
X(a?i, x") — X(0, xff) = xff) du = [ x^d^tx^ x”) dt
354
DISTRIBUTIONS
[4, §6]
yields for x(0, x") = 0 and X = xtf the expression
Ф(Х1, x") = [ diX(txif x") dt.
Jq
Hence |др^(я)| maxi^i |dpdxx(tax, x") | ^ € for |p| m.
Collecting our results, we obtain
Proposition 7. The map <p хцр is an injective strict morphism from
3) into 3) whose image M is a closed subspace of 3). Given an element
(po G 3D(R) such that ^>o(0) = 1 > each element has a unique decomposition
Ф = X<Po + (6)
where X G 3)(Rn“x) is defined by X(x") = <p(0, x") and X G M. In par-
ticular, X G M if and only if x(0, я") = 0 for all x" G Rn“x.
Now we are able to prove the following result:
Proposition 8. The linear map v^: T x^T is a surjective strict mor-
phism from 3)' onto 3)'.
Proof, (a) If T g 3)' and x±T = 8, then using the decomposition (6)
we have
(T, <p) = (T, X^o) + <T, X) = (T, X^o) + <S, /), (7)
where X = xtf. If x\T = 0, we can define a distribution G G 3/(Rn x)
by setting
{G, X) = (T, X^o)
(8)
for X G 3)(Rn x), and the map T G is clearly a bijection from Ker(vx)
onto 3)'(Rn“x).
(b) Let us prove that yx is surjective. Given 8 G 3)', choose an arbitrary
distribution G G 3)'(Rn“x) and define T by
{T,<p}= +
where <p is arbitrary in 3) and X and ф have the same meaning as before.
Because of the uniqueness of the decomposition (6), the linear form T is
well-defined on 3). It is also continuous since the maps <p >—> X, X h-> {G, X),
у h-> x = <p — X^>o and ф h-> (8, ф) are clearly so and X н-> 1Д is continuous
by Proposition 7. Finally,
(х1Т,ф)= {T,xtf) = (8,i0
for every G S); i.e., x±T = 8. Observe that by (7) and (8) the distribu-
tion T is completely determined by the distribution G.
(c) With every 8 G ЗУ we associate that distribution T g 3)' for which
X\T = 8 and G = 0 and set T = wx(8). The map wx: 3)' —* 3)' is clearly
[4, §7]
BILINEAR MAPS
355
linear. We have by definition
Pi(wiG$)) = /8 for all 8 e ЗУ
(9)
and by (7) and (8)
(wi(S), <p) = (8, ф) for all S e3)' and £3). (10)
Relation (10) shows that wx is the transpose of the continuous linear map
<p ф. Hence by the corollary of Proposition 3.12.3 the map wx is con-
tinuous. It follows therefore from (9) that г>х is a strict morphism (Prop-
osition 2.7.2). |
Remark 2. We shall determine later (Exercise 8.4) the kernel of the
map T >—> x^T. The reader has no doubt observed the strong analogy
between Propositions 2, 3, 7, 8 of §3 and Propositions 5, 6, 7, 8 of the
present section. This analogy will be partly explained by the Fourier
transformation in §11. In Chapter 7 we shall study the map <p ь-> P(x)<p,
where P is an arbitrary polynomial.
Exercises
1. Show that
where p £ Nn.
2. (a) Let I be a positive integer. Show that T i-> xlT is a surjective strict
morphism from ЗУ (R) onto 3>'(R) whose kernel consists of all distributions of
the form 22?^ i-i 7P dp8.
(b) Let P(x) be a polynomial in one variable x. Show that T ь-> P(x)T is a
surjective strict morphism from ЗУ (R) onto ЗУ(R) and determine its kernel.
§7. Bilinear maps
It follows from Proposition 6.4 that the map (a, T) ь-> aT from
8m(0) X ЗУт(О) into ЗУт(О) is bilinear. In this section we want to examine
the continuity properties of this map, but first we must discuss some
general notions concerning bilinear maps.
Let us first recall the definition of a bilinear map. Let E, F, and G be three
vector spaces over the same field K. A map (ж, у) ь-> b(x, y) from E X F into G
is said to be bilinear if it satisfies the relations
b(axi + @x2, y) = ab(xi, y) + 0b(x2, y),
Ь(х, ayi + @y2) = ab(x, yi) + @b(x, y2)
356
DISTRIBUTIONS
[4, §7]
for all a, P G K, x, xi, X2 G E, and y, yi, уъ G F. In other words, the map b
is bilinear if for every у GF the map &(•, y): x b(x, y) from E into G is linear
and for every x G E the map b(x, •): у b(x, y) from F into G is linear. Observe
that in particular b(x, 0) = 6(0, y) = 0 for all x G E, у G F. In the case
G = K1 (Chapter 1, §5, p. 41) a bilinear map is simply a bilinear form (Chap-
ter 1, §5, p. 43).
In analogy to Proposition 2.5.1 we have:
Proposition 1. Let E, F, and G be three topological vector spaces. A
bilinear map (x, y) b(x, y) from E X F into G is continuous on the
product space E X F if it is continuous at the point (0, 0).
Proof, Assume that b is continuous at (0, 0). Let (xq, y0) be a point
of E X F and W a neighborhood of 0 in G. We have to prove that there
exists a neighborhood U of 0 in E and a neighborhood V of 0 in F such that
x G U and у G V imply b(x0 + x,y0 + y) — b(x0, y0) G W.
Let Wi be a neighborhood of 0 in G such that Wi + Wi + Wi C W.
There exists a balanced neighborhood Ui of 0 in E and a balanced neigh-
borhood Vi of 0 in F such that x G U\ and у G Vi imply b(x, y) G W\.
Since Ui is absorbing, there exists X > 1 such that xQ G XCTj. Similarly,
there exists д > 1 such that y0 G pVSet U = (l/p)Ui and
V = (1/X)Pi. Then U G U± and V G V±. Furthermore, if у G V, then
b(x0, y) = b[-x0,
g Wi.
Similarly, if x G U, then
b(x, y0) = b (цх ± y0
\ •
G Wl
It follows from the identity
b(*o + x, yo + y) — b(x0, yo) = b(x0, y) + b(x, y0) + b(x, y)
that U and V satisfy our requirements. |
Many of the bilinear maps we shall encounter are not continuous. We
must therefore consider some weaker forms of continuity.
Definition 1. Let E, F, and G be three topological vector spaces. A
bilinear map (x, y) b(x, y) from E X F into G is said to be separately
continuous if for every у G F the linear map b(*> у): z >-> b(x, y) from E into
G is continuous and for every x G E the linear map b(x, •): у b(x, y) from
F into G is continuous.
Every continuous bilinear map is separately continuous. Indeed, given
a neighborhood IF of 0 in G, there exists a neighborhood U of 0 in E and
a neighborhood V of у in F such that x G U and z G V implies b(x, z) G W
and in particular x G U implies b(x, y) G W. By Proposition 2.5.1 this
[4, §7]
BILINEAR MAPS
357
shows that 6(«, y) is continuous. We see in the same way that b(x, •) is
continuous.
We shall see that conversely not every separately continuous bilinear
map is continuous. We have, however, the following result:
Theorem 1. Let E be a metrizable and barrelled locally convex space, F
a metrizable topological vector space, and G a locally convex space. Every
separately continuous bilinear map from E X F into G is continuous.
Proof, Let Ь: E X F -> (? be a separately continuous bilinear map.
Since E X F is metrizable, by Proposition 1 it is sufficient to show that if
(xn, Уп) is a sequence of points in E X F which converges to (0, 0), then
b(xn, yn) converges to 0 in G,
Let TF be a balanced, closed, convex neighborhood of 0 in G and let T
be the set of all those points x G E for which b(x, yn) G W for every index
n. We show that T is a barrel.
(a) T is absorbing. Indeed, let a g E, Since the linear map b(a, •) is
continuous, we have b(a, yn) G W for n N, The set of points b(a, yn)
with n < N is finite, hence bounded in G, and therefore there exists X > 1
such that b(a, yn) g XTF for n < N, Thus
i.e., a G XT.
(b) T is balanced. Indeed, let a G T and |a| 1. Then
b(aa, yn) = ab(a, yn) G aW C W
for all n; i.e., aa g T.
(с) T is convex. Indeed, let alf a2 G T, a 0, fi 0, a + ff = 1.
Then
b(aax + fia2, yn) = otb(alf yn) + fib(a2, yn) QaW + fiW CW
for all n; i.e., aa^ + fia2 G T.
(d) T is closed. Indeed, let a g T. There exists a sequence (am) of
points of T which converges to a (Exercise 2.8.1(b)). Since &(•, yn) is
continuous for every n, the sequence b(am, yn) tends to b(a, yn) as m —> oo.
Now b(am, yn) G W, and since W is closed, we have b(a, yn) G W for every
n; i.e., a G T,
Since E is barrelled, T is a neighborhood of 0. Consequently, there exists
NT g Nsuchthatxn G Tforn Nlt Henceb(xn, yn) G TFforn N\, |
Remark 1. It is essential to suppose that E is metrizable ([9], Chapter
III, §4, Exercise 5). If, however, we suppose that E is not only barrelled
but a Baire space, then it is not necessary to assume that it is metrizable
(loc, dt,, Exercise 1).
358
DISTRIBUTIONS
[4, §7]
We shall now introduce a kind of continuity which is intermediate
between continuity proper and separate continuity.
Definition 2. Let E, F, and G be three topological vector spaces and S
a collection of bounded subsets of E. We say that a bilinear map
b:ExF-+G
is hypocontinuous with respect to S (or ©-hypocontinuous) if it is separately
continuous and satisfies the following condition:
(HC) For every neighborhood W of 0 in G and every set A G S there
exists a neighborhood V of 0 in F such that x G A and yEV imply
b(x, y) G W.
Clearly, if G is locally convex, then an ©-hypocontinuous bilinear map
is also hypocontinuous with respect to any collection (a) through (f) of
subsets of F obtained from © in Proposition 3.4.2.
If J is a collection of bounded subsets of F, we define in an analogous
way the bilinear maps which are hypocontinuous with respect to J (or
I-hy pocontinuous). If b is hypocontinuous with respect to both © and J,
then we also say that b is (©, J)-hypocontinuous. If © is the collection
of all bounded subsets of E and J is the collection of all bounded sets in
F, then the (©, I)-hypocontinuous maps will simply be called hypo-
continuous.
If the sets belonging to © cover E and the sets belonging to J cover F,
then every bilinear map b which satisfies condition (HC) and the analogous
condition for J is automatically separately continuous. Indeed, if for
instance у eF and у G В G ST, then there exists for every neighborhood
IF of 0 in ff a neighborhood U of 0 in E such that x G U implies
6(x, y) G W; i.e., &(•, y) is continuous.
On the other hand, every continuous bilinear map (x, y) »-► b(x, y) is
(©, S) -hypocontinuous with respect to any pair (©, J) of collections of
bounded sets. Indeed, for every neighborhood W of 0 in G there exists
a neighborhood U of 0 in E and a neighborhood V of 0 in F such that
x G U and у G V imply b(x, y) G W. If A G ©, there exists X > 0 such
that XA C U. Therefore x G A and у G XF imply
Since XF is a neighborhood of 0 in F, this proves that b is ©-hypocontinuous
and we can see in a similar fashion that it is also J-hypocontinuous.
Example 1. Let E be an infrabarrelled locally convex Hausdorff space
and Ef its dual equipped with the topology fi(E', E). The canonical
bilinear form (x, xf) (ж, xf} is then hypocontinuous on E X E'. Indeed,
[4, §7]
BILINEAR MAPS
359
let € > 0 and let A be a bounded subset of E. The polar A° of A is a
neighborhood of 0 in E' for 0(E', E), and x G A, x' g eA° imply
€.
If В is a fi(E', B)-bounded subset of E', then it is equicontinuous (Propo-
sition 3.6.6), and B° is a neighborhood of 0 in E, If x G eB° and x' g B,
we have |(x, x')| €.
If В is a normed space, then we know that the canonical bilinear form
is continuous on E X E' (Chapter 1, §7, p. 57). Conversely, if the canonical
bilinear form is continuous, then E is normable. Indeed, if this is the case,
then there exists a neighborhood U of 0 in E and a bounded subset A of
E such that x G U and x' g A° imply |(x, x')| 1. Thus U C A°°,
and since A°° is the balanced, convex, <r(E, B')-closed hull of A (Theo-
rem 3.3.1), it is also bounded. Therefore U is bounded, and it follows
from Proposition 2.6.1 that E is normable.
Remark 2. It can be shown that not every separately continuous
bilinear map is hypocontinuous ([9], Chapter III, §4, Exercise 4).
Let us prove some simple properties of hypocontinuous linear maps.
Proposition 2. Let E, F and G be three topological spaces, ® a collection
of bounded subsets of E and b: E X F —> G an ^-hypocontinuous bilinear
map. Let A G S and В be a bounded subset of F. Then:
(a) The image of A X В under the map b is bounded in G.
(b) The map b is continuous on A X F.
Proof. Let W be an arbitrary neighborhood of 0 in G and determine the
neighborhood V of 0 in F so that x G А, у G V imply b(x, y) G W.
(a) There exists X > 0 such that XB с V. If x G A and у G B, then
Xb(x, y) = b(x, Xy) g W.
(b) Let (x0, Уо) G A X F. For every point (x, y) G E X F we have
b(z, y) — b(x0, уо) = b(x — xQ, yQ) + b(x, у — yQ).
Now у — Уо eV implies b(x, у — yQ) G W for every x G A. On the
other hand, the linear map b(-, y0): E G is continuous. Hence there
exists a neighborhood U of 0 in E such that x — x0 G U implies
b(x — Xq, yQ) G W.
Therefore (x, y) G A X F, x G xQ + U, у G у о + V imply
b(x, y) — b(xQ, y0) G W + W. |
360
DISTRIBUTIONS
[4, §7]
Proposition 3. Let E, F and G be three topological vector spaces, S a
collection of bounded subsets of E, Z a collection of bounded subsets of F, and
b: E X F —> G an (S, Z)-hypocontinuous bilinear map. If A E® and
В g Z, then b is uniformly continuous on A X В.
Proof. Let W be an arbitrary neighborhood of 0 in G. Determine the
neighborhood U of 0 in E such that x G U, у G В imply b(x, y) G W and
the neighborhood V of 0 in F such that x G A and у G V imply
b(x, y) G W. If (xlt г/i), (x2, У2) E A X B, then x± — x2 G U and
У1 — У2 G V imply
b(xlf 2/1) — b(x2, y2) = b(xb yt — y2) + bfa — x2, y2) G W + W. |
Theorem 2. Let Ebe a topological vector space, F a barrelled locally convex
space, G a locally convex space and S any collection of bounded subsets of E.
Every separately continuous bilinear map b:ExF —> G is<S-hypocontinuous.
Proof. Let W be a balanced, closed, convex neighborhood of 0 in G and
A G S. Denote by T the set of all points у G F for which b(x, y) g W
for all x G A. Let us show that T is a barrel.
(a) T is absorbing. Indeed, let у G F. The linear map fe(*, y) is con-
tinuous. Hence there exists a neighborhood U of 0 in E such that x G U
implies b(x, y) G W. There exists X > 0 such that XA C U. If x G A,
then we have b(x, \y) = b(\x, y) G W; i.e., \y G T.
(b) T is balanced. Indeed, let у G T and |a| g 1. Then
b(x, ay) = ab(x, y) G aW C W
for all x G A; i.e., ay G T.
(с) T is convex. Indeed, let 2/1, У2 G T, a 0, 0 0, a + fi = 1.
Then b(x, ayx + fry2) = ab(x, 2/1) + fib(x, y2) G aW + /3W C W for all
x G A; i.e., «2/1 + №2 &T. _
(d) T is closed. Indeed, let у g T. Let x be an arbitrary element of A
and Z an arbitrary neighborhood of 0 in G. Since the linear map b (x, •)
is continuous, there exists a neighborhood V of 0 in F such that 2/1 G у + V
implies b(x, 2/1) G b(x, y) + Z. By hypothesis (2/ + F) П T 5^ 0, and
therefore (fe(x, y) + Z) n W 0. Since Z was arbitrary, this means that
У) G W = W. Since x was arbitrary in A, we have у G T.
Since F is barrelled, T is a neighborhood of 0 in F; i.e., condition (HC)
of Definition 2 is satisfied. |
Now we return to the multiplication of distributions. First we must
prove the following result:
Proposition 4. Let 0 be an open subset of Rn and 0 m g 00. The
bilinear map (a, tp) ь-> a<p from 8W(O) X DW(S2) into is hypo-
continuous.
[4, 57]
BILINEAR MAPS
361
Proof. Since the spaces 8W(S2) and DW(S2) are barrelled, by Theorem 2 it
suffices to show that the map (a, ip) ap is separately continuous. We
know from Proposition 6.1 that for every a G 8W(S2) the map ip ap is
continuous.
Let E DW(S2) and К = Supp p. Clearly, Supp ap С К for every
a g 8W(S2). Let У be a neighborhood of 0 in DW(S2). There exist an € > 0
and an integer к 0, where к = m if m is finite, such that V n DW(K)
contains the set ty | |др^(я)| €, |p| fc}. By the Leibniz formula
(Proposition 2.5.3) dp(ap) is a linear combination of expressions of the
form dqa • drp, where q + r = p. Since each drp is bounded, there exists
an 7) > 0 such that if a belongs to the neighborhood
{« I | Ц, X G K, |p| fc}
of 0 in 8W(S2), then ap G V. Thus the map a ap is continuous. |
Proposition 5. Let О be an open subset of Rn and 0 m oo. Denote
by the space Dm(Q) equipped with the topology DW(S2)) of
uniform convergence on compact subsets of DW(S2), and by the space
£>'m(Q) equipped with the strong topology 0(©m(Q), DW(S2)).
(a) The bilinear map (a, T) ь* aT from 8W(S2) X into &кт($£) is
hypocontinuous with respect to the compact subsets of 8W(O).
(b) The bilinear map (a, T) ь* aT from 8W(O) X into &pm(ti) is
hypocontinuous with respect to the equicontinuous subsets of Sfm(ti).
Proof, (a) Let W be a neighborhood of 0 in Dkw(Q) and A a compact
subset of 8W(S2). We can assume that W = C°, where C is a compact
subset of 5)™ (Q). It follows from Propositions 3 and 4 that the set M = AC
is compact in DW(S2). Thus V = M° is a neighborhood of 0 in tfKm(ti).
Furthermore, a G A, T g V, and ip G C imply
|<«T, o>| = |<T, ^>| 1;
i.e., aT G C° = W.
(b) This time let W = D° be a neighborhood of 0 in D^W(S2), where D
is a bounded subset of DW(S2), and let В be an equicontinuous subset of
Dm(Q). Then N = B° is a neighborhood of 0 in DW(S2). It follows from
Proposition 4 that there exists a neighborhood U of 0 in 8W(S2) such that
a G U and ip G D imply ap G N. Hence if a G U, T G B, and ip G D,
then
|(«7»| = |<T,^)| 1;
i.e., aT G D° = W. |
Since the map is continuous, it follows from part (b)
that a fortiori the bilinear map (a, T) »-» aT from 8W(S2) X into
Dkw(S2) is hypocontinuous with respect to the equicontinuous subsets of
©m(S2).
362
DISTRIBUTIONS
[4, §7]
For m = oo the spaces 8(9) and 30(9) are Montel spaces, and the
topology of uniform convergence on compact sets of 30(9) coincides with
the strong topology of 30'(9). Hence the bilinear map (a, T) aT from
8(9) X 30'(9) into 30'(9) is hypocontinuous. For finite m we can prove a
stronger result concerning the strong topology:
Proposition 6. If m G N, then the bilinear map (a, T) aT from
8™(9) X 30£w(9) into 30^(9) is continuous.
Proof. Let ¥ be a neighborhood of 0 in 30£w(9) which we may assume
to be of the form W = B°, where В is a bounded subset of 30w(9). There
exists a compact subset К of 9 and numbers > 0 for |p| g m such that
Supp <p с К and |dp<p(x)| g for <p G B, x G 9, and |p| g m.
Let U be the neighborhood {a | \dpa(x) | 1, x G K, |p| g m} of 0 in
8™(9). The set A = UB is bounded in 30™(9) since for a G U, G В we
have Supp(a<p) G Supp <p G К and
|dp(a<p)(x)| g 1^а(ж)1 ’ = vp
q^p
for |p| m, where we have set
vv ~ £ (g) Яр-«-
Thus V = A ° is a neighborhood of 0 in ©^(O), and furthermore a e U,
T eV, <p e В imply
|(aT, <p>| = |<T, a<p)| 1;
i.e., aT e B° = W. |
Remark 3. The hypocontinuity of the map
(a, T) •—* aT
from 8(9) X 30'(9) into 30'(9) can be seen very easily as follows. Since
8(9) and 30'(9) are barrelled, by Theorem 2 it is sufficient to prove that the
map is separately continuous. We know from Proposition 6.1 that the map
T i—> aT is continuous. To prove that a aT is also continuous, it suf-
fices—since 8(9) is metrizable—to prove that if (an) is a sequence in 8(9)
which converges to 0, then anT converges to 0 in 3D'(9). If <p G 30(9), then
(an<p) converges to 0 in 30(9); hence {anT, у) = (T, an<p) converges to 0
in K. It follows from Proposition 1.2 that (anT) converges to 0 in 30'(9).
It follows from Proposition 6.2 that the bilinear map (a, T) aT maps
both 8™(9) X 8,m(9) and 30w(9) X 30m(9) into 8m(9). We leave it as an
[4, §7] BILINEAR MAPS 363
exercise for the reader to establish continuity properties similar to the
above ones for these maps (Exercises 6, 7, 8).
We conclude this section with some consequences of Theorem 4.2.
Proposition 7. Let^lbe an open subset of ^Ln andm eN. If T еЗУш($2),
and <p G 3Jm(S2) is such that др<р(х) = 0 for all x G Supp T and |p| m,
then (T, <p) = 0.
Proof. Let a G 3J(S2) be such that a(x) = 1 for all x G Supp <p. Then
aT g 8,W(O) and (aT, <p) = (T, a<p) = (T, Since Supp(aT) C Supp T,
we have dp<p{x) = 0 for all x G Supp(aT) and |p| m. The conclusion
follows from Theorem 4.2. |
Proposition 8. Let 0 be an open subset of Rn and 0 m oo. If
a G 8m(S2), T G 3/m(O), and dpa(x) = 0 for x G Supp T and |p| m,
then aT = 0.
Proof. Let (S2y) be a sequence of relatively compact open subsets cover-
ing 0 and let (0y) be a locally finite infinitely differentiable partition of
unity subordinated to (S2y). The support of fyT is contained in that of
(Proposition 6.2) and is in particular compact. It follows from the corollary
of Proposition 4.3 that there exists an mj G N such that fijT G ЗУт>($2)
(we choose m, = m if m is finite). For an arbitrary <p G 3)^(0) we have
dp(a<p)(x) = 0 for all x G SupplyT) and |p| m,, and therefore by
Proposition 7 (or Theorem 4.2) we have (0y(aT), = (0yT, a<p) = 0, i.e.,
MaT) = 0.
Now Pj converges to 1 in 8m(S2) as fc —> oo and therefore
Sy=i PjtaT) converges to aT in 3/m(O) by Proposition 5(b). Hence
aT = 0. |
Exercises
1. Let Et F and G be three locally convex vector spaces, (qJigz a saturated
family of semi-norms defining the topology of E, {г\)\еь a saturated family of
semi-norms defining the topology of F, and (sm)mgm a family of semi-norms
defining the topology of G. Show that a bilinear map (x, у) b(x, y) from
E X F into G is continuous if and only if for every semi-norm there exist a
semi-norm qh a semi-norm rx, and a number M > 0 such that
8д(6(х, у)) MqL{x)rx{y)
for all x G E, у G F. {Hint: See the proof of Proposition 2.5.2.)
2. Let FJ F, G be three topological vector spaces and ® a set of bilinear
maps from E X F into G. Show that ® is equicontinuous if it is equicontinuous
at the point (0,0).
364
DISTRIBUTIONS
[4, §7]
3. Show that the map (a, <p)cup from 6(0) X JC(O) into JC(O) is not
continuous.
4. Denote by 2HiK(0) the space of all measures on 0 equipped with the topology
k(9TC(0), JC(O)). Show that the map (а, д) ь-» ад from 6(0) X 2HiK(0) into 2HiK(0)
is not continuous.
5. Show that the map (а, T) i-» aT from 8(0) X 5/(0) into 5/(0) is not
continuous.
6. Show that for 0 m oo the map (a, /3) » a/3 from 8Ш(О) X 8m(0)
into 8W(O) is continuous.
7. Similarly as in Proposition 5, denote by 8iw(0) the space 8'w(0) equipped
with the topology x(8'w(0), 8w(0)) of uniform convergence on compact subsets
of 8W(O), and by 8^(0) the same space equipped with the strong topology
0(8'™(О), 8™(0)).
(a) Show that the bilinear map (а, T) i-> aT from 8m(0) X 8im(0) into
8im(0) is hypocontinuous with respect to the compact subsets of 8m(0).
(b) Show that the bilinear map (а, T) i-» aT from 8m(0) X 8im(0) into
8^(0) is hypocontinuous with respect to the equicontinuous subsets of 8'w(0).
(Hint: Use Exercise 6 and the proof of Proposition 5.)
8. (a) Show that the bilinear map (а, T) i-> aT from 5)m(0) X 5/m(0) into
8iw(0) is hypocontinuous with respect to the compact subsets of 5)m(0).
(b) Show that the bilinear map (а, T) i-» aT from 5)m(0) X 5/m(0) into
&pm(Q) is hypocontinuous with respect to the equicontinuous subsets of 5/w(0).
9. Show that if T E 5/(0), and <p E D(0) is such that др<р(х) = 0 for
x E Supp T and all p E Nn, then {T, tp) = 0.
10. Let E and F be two distinguished Fr6chet spaces and G a locally convex
Hausdorff space. Equip their duals E', Ff, and G' with the strong topologies
0(E', E), &(Ff, F), and 0(Cr', G). Prove that every separately continuous bilinear
map Ь: E' X Ff -♦ Gf is continuous.
(Hint: By Proposition 3.16.1 and Theorem 2 the map b is hypocontinuous
with respect to the bounded subsets of FfS Let C be a bounded subset of G. For
each x' E E' and z E C the map y'{z, b(x', y')) is a continuous linear form
on F'. Hence there exists vz(x ) E F" such that (z, b(xf, у')) = (уг(х'), у') for
all у' E F'.
Next show that the set of linear maps vz: E' —> F" is equicontinuous if z E C
and F" is equipped with e(F", F'). For this show that if У is a neighborhood of
0 in F, then there exists a bounded subset A of E such that xr E A° and у' E У °
imply b(x'j у') E C°, and thus z E C and x' E A° imply vz(x') E У°°.
Finally, if (UJnGN is a fundamental sequence of balanced, closed, convex
neighborhoods of 0 in F", for each n E N choose a bounded set An С E such
that x' E Aj? implies vz(x') E Vn for z E C. By Proposition 2.6.3 there exists
a bounded set A С E and a sequence Xn > 0 such that An C ХЯЛ for all n E N.
Show that xf E AQ implies vz(xf) E ХЯУЯ for all z E C and n E N, i.e., that
D = U«ec,^(^°) is bounded in F". There exists a bounded set В in F such
that B°° D £>. If а/ E AQ and / E B°, then b(x', у') E C°).
[4, §8]
TENSOR PRODUCT
365
§#. Tensor product
We begin with the purely algebraic definition of the tensor product of two
vector spaces E and F over the same field K. We show that there exist a vector
space P over К and a bilinear map fi: E X F —* P having the following
“universal property”: for any vector space G over К and any bilinear map
b: E X F G there exists a unique linear map и: P —* G such that
u(/3(z, ?/)) = b(x,y)
for every x G E and у G F, We prove furthermore that two such spaces P are
isomorphic.
For each pair (x, у) E E X F let K(®>lz) denote a copy of К considered as a
one-dimensional vector space over itself. The vectors of the external direct
sum (cf. Chapter 2, §12)
KlBXF) = U K,..„
(®,10eEXF
are the families (X(®,IZ))(®,IZ)G^xp> where \X,V) G К and X(®flZ) = 0 except for
finitely many indices (ж, у). We will find it convenient to denote also by (s, у)
the element (€(e,0) of K(^XF) given by €(Ж,У) = 1 and €(e,0 = 0 if (s, t) (xf y).
The elements (ж, у) then form a basis of K(J*XF), and (X(®(1Z)) can be written as a
“formal linear combination” ^Х(®,ю(ж, 3/)-
Let I be the subspace of K(^XF) generated by all elements of the form
(si + ж2, y) — (si, y) — (ж2,3/), (аж, у) — у), (1)
(ж, г/i + У2) — (ж, г/i) — (ж, г/2), (ж, аг/) — а(ж, г/), (2)
where si, ж2, ж G Е, г/i, г/2, у Е F and а Е К. We set Р = K(J*XF)/Z, and
(Их, у) will be the image in P of the element (x, у) E under the canonical
surjection. Now suppose that we have a vector space G and a bilinear map
b: E X F —* G. We define a map v: K(SXF) —* G as follows:
v ^^X(®fIZ)(a;, г/)) = ^X(®>IZ)6(a;, y).
It is immediately verified that v is a linear map and that it vanishes on
all elements of the form (1) and (2). Hence v vanishes on I and defines a linear
map и: P —* G for which
w ^^X(®fIZ)$(a;, г/)^ = ^X(4pflz)6(a;, г/),
and in particular u(p(x, г/)) = b(x, y) for every x E E> у E F. Also и is com-
pletely determined by this last condition since the elements 0(ж, у) generate P.
Suppose that we have a second space Q and a bilinear map 7: E X F —* Q
with the same property. Then there exists a linear map f:P—*Q such that
f(fi(x> г/)) = 7(X) y) for every x E E, у E F and a linear map g: Q —* P such
that g(7(x, г/)) = /3(х, у) for every x E E> у E F. We have
g(j@(x, ?/)))= P(x,y) and f(g(4(x, у))) = У(х,у)
366
DISTRIBUTIONS
[4, §8]
for all x G E, yEF. Now the condition that for every bilinear map
b: E X F —> G there exists a unique linear map u: Q —> G such that
w(?(x, y)) = b(x, y)
for all x G E, у G F implies in particular that the elements У (x, y) generate Q.
Since the elements /3(x, y) generate P, we have g of = Ip, fo g = 1q, and f is
an isomorphism.
The vector space P constructed in the preceding proof is called the tensor
product of the vector spaces E and F and will be denoted by E ® &F or simply
E ® F if there is no doubt about the field K. The bilinear map
3: E X F -> E ® F
is called the canonical map, and the image fi(x, у) of an element (x, y) G E X F
will be denoted by x ® y. Every element of E ® F is a finite linear combination
of elements of the form x ® y, and we have
' (Si + X2) ® у = Xl ® у + X2 ® y, (ax) ® у = a(x ® y),
x ® (yi + 2/2) = X ® 2/1 + X ® 2/2, X ® (ay) = a(x ® y)
for all Xi, X2, x G E, yi, у2, у G F, a G K. In particular, the representation of
an element of E ® F as the linear combination of elements of the form x ® у
is not unique.
Let K1 be the field К considered as a one-dimensional vector space over
itself. The bilinear map (a, x) ax from К1 X E into E defines a linear
map и: К1 ® E —> E which for elements of the form a ® x is given by
u(a ® x) = ax.
Let us show that и is an isomorphism. In the first place, и is surjective since
given x G E, we have u(l ® x) = x. On the other hand, и is injective. Indeed,
let z G К1 ® E be such that u(z) = 0. We can write z in the form
n d
2 = £ak ® xk,
where the xk are linearly independent. Then u(z) = akxk = 0 implies
ak — 0 for 1 к n; i.e., 2 = 0.
Next let (/д)дем be an algebraic basis of the vector space F. We want to
prove that every element of E ® F can be written uniquely in the form
SmEm Хц ® fn, where Хц G E and x^, = 0 except for finitely many indices д.
To show that every element of E ® F admits such a representation, it is sufficient
to consider elements of the form x ® y. If у = ^ЕлдЛ, then x ® у = Х’УдЯ ® /д,
where r^x G E. To prove uniqueness, consider the bilinear map b: E X F —> E{M}
defined as follows: for any element (x, y) G E X F write у = Х’Уд./м and set
b(x, у) = (г}пХ)цем- The map b is well-defined because (fn) is an algebraic basis
of F. Let и: E ® F -> E(M) be the linear map associated with b, i.e., such that
[4, §8] TENSOR PRODUCT 367
u(x ®y) = b(x, y) for all x G E, у G F. If z = £дем яд ® /д, we have
u(z) = (яд)дем. It is sufficient to verify this for a single term x ® and for
such a term we have u(x ® Д) = b(x,f,) = (яд)дем, where xv = x and яд = 0
if д 5^ p. Now, to prove the uniqueness in question, let z = ^x^ ® /д = 0.
Then u(z) = (яд) = 0, i.e., яд = 0 for every д G M.
Let (cx)xgl be an algebraic basis of E and an algebraic basis of F.
We prove that (ex ® A)(x,M)glxm is an algebraic basis of E ® F. In the first
place, every element of E ® F is a linear combination of the ex ® /д since if
% = Sxgl £\e\ and у = £дем ??д/д, then
x® у = 2^ ёхЧд(вх ® л).
(х,д>егхм
То prove linear independence, let
X «хд(ех ® A) = X (X <Wx) ® A = 0.
(x.M)GLxxf дем Чеь '
Then by the preceding result we have
X = 0
XGL
for each д G M; and since (ex) is free, it follows that «хд = 0 for all X G L and
M G M.
In particular, if E and F are finite-dimensional we have
dim E ® F = dim E • dim F.
Now let E, F, G, H be four vector spaces and u-.E-^G, v: F —> H two
linear maps. The map (ж, у) »—> u(x) ® v(y) from E X F into G ® H is clearly
bilinear. There exists therefore a unique linear map w. E ® F G® H
which satisfies w(x ® y) = u(x) ® v(y) for x € E,y € F. We call w the tensor
product of the linear maps и and v and denote it by и ® v. Thus
(u ® v)(x ® y) = u(x) ® v(y) for all x G E, у G F.
If и and v are linear forms, then и ® v is a linear map E ® F —> К ® K.
But we know that a ® 0 a0 is an isomorphism from К ® К onto К and there-
fore we shall regard и ® v as the linear form on E ® F given by
(u ® v)(x ® y) = u(x)v(y) for x G E, у G F.
Let us now introduce the notations we shall use in most of the remainder
of this section. We shall consider a euclidean space Rfc of dimension к
and a euclidean space R* of dimension I. The vectors of the first space
will be denoted by x and those of the second by у (with eventual subscripts
or primes). E will denote an open subset of Rfc and H an open subset of
Rz, and we will consider S X H as an open subset of Rn (n = k + l).
368 DISTRIBUTIONS [4, §8]
If p and q are multi-indices, p = (pif. . ., p*?) G N* q = (gi, . . ., qi) G Nz,
then dp, dj will denote the derivations
alpl alql
dx*1 • • • dxkk dyl1 • • • dy?1
respectively. Finally s and t will denote either positive integers or the
symbol oo. If s or t or both = oo, then s + t = oo.
We define a bilinear map from the space ©(E) X ©(H) into ©(S X H)
by associating with every pair (<p, xp) of functions the function
(ж, у) ь-> <p(x)$(y).
To this bilinear map there corresponds a unique linear map
j: ©(E) ® ©(H) -> ©(S X H)
which associates with each element
® V'm (<Px E ©(E), V'm G ©(H))
the function
(*, y)
The map J is injective. Indeed, let f G ©(E) ® ©(H) be such that J(f) = 0.
We can write f in the form f = ^«Хд^х ® where the family (^>x)xgl
is free in ©(E) and the family (^м)мем is free in ©(H). Now j(f) = 0
means that
£аХд<Рх(я)^д(з/) = 0
for all x G S and у G H. Hence we have 22«хд^х(я) = 0 for all д G M
and x G S, and therefore = 0 for all X G L, p G M; i.e., f = 0.
We shall call j the canonical injection, and we shall usually identify
©(E) ® ©(H) with its image in ©(S X H). Our next aim is to show that
©(E) ® ©(H) is dense in ©W(S X H) for 0 g m g oo. This will be
accomplished with the help of
Lemma 1 (Henri Cartan). Let ti be an open subset ofRnandO oo.
Let p be a function in © having properties (a), (6), (c) listed in Example 1.4
and let pe be the function defined there. Denote by $(0) the set of all functions
ThPe (cf. Definition 3.2), where h G Rn and € > 0 vary so that
Supp(rhpe) C ti.
Then $(ti) is total in ©w(0).
[4, §8]
TENSOR PRODUCT
369
Proof. In the proof of Proposition 4.1 we saw that the convolutions
p€ ♦ where <p G 3JW((2) and e > 0 is small, are dense in 3JW((2). Hence
it is sufficient to prove that every such convolution can be approximated
in 3Jw(0) by finite linear combinations of the functions тдр6. We may
clearly assume that <p is not identically 0.
Let К be a compact neighborhood of Supp <p contained in 0 and let
e > 0 be so small that any ball with radius 6 that meets Supp <p is contained
in K. Then p€ * <p G 3J(ZC). Let V be a neighborhood of 0 in 3Jw(0). The
intersection V П 3JW(ZC) contains a set of the form
{a | |dpa(x)| r>, |p| h},
where у > 0, h G N, and h = m if m is finite. We can cover Rn by cubes,
no two of which have an interior point in common and such that
|dpPe (x — y') — dppt (x — y")l < • If |^(a:)| dxi-1
for x G Rn and |p | h if yf and y" belong to the same cube. Only a finite
number of these cubes, say Ci, C2, . . ., Cz, meet Supp <p. In each set
Ci П Supp <p pick a point yi and define the function X G S)(K) by
1 f
X(x) = У pe(x — yi) / <p(y) dy.
"1 Jc<
Then
\дрХ(х) - др(р6 * <p)(x)] =
X f {dppe(x — yt) — dppt(x — y)}<p(y) dy\
i=l JCi 1
= f 1 / м л E L Ш1Й = V
fa M®)! dx »=i JCi
for x G Rn and |p| h; i.e., X G pe * <p + V. |
Now we can prove
Proposition 1. For 0 m oo the space 35(2) ® 35(H) is dense in
35m(2 X H).
Proof. We know that there exist functions p G 35(Rfc) and <r G 35(Rl)
such that p satisfies conditions (a), (b), (c) of Example 1.4 on R* and <r sat-
isfies these conditions on R!. The function (x, y) \/2np(\/2 x)<r(\/2 y)
satisfies conditions (a), (b), (c) of Example 1.4 on Rn = R* X Rz. Hence
by Lemma 1 the finite linear combinations of the functions
(x, y) p(y/2 (x — x0))a(\/2 (y — y0))
are dense in 35m(g X H). |
370
DISTRIBUTIONS
[4, §8]
Let >S G ЗУ3 (2) and T G ЗУ*(Н). We have identified S ® T with the
linear form on ЗУ (2) ® ЗУ(Н), which for <p G ЗУ (2) and ф G ЗУ(Н) is
given by
{S®T,<p®*) = (S> ?)(T> /).
We want to show that aS ® T is a continuous linear form on 3)(2) ® 3)(H)
for the topology induced by ЗУ+*(2 X H). First, however, let us introduce
some more notations which will be very useful in the sequel. If
X G ЗУ*(2 X H),
then for each у G H we denote by X(«, y) the function x X(x, y) defined
for x G 2 (or x G R*), and similarly X(x, •) denotes the function
у x(x, y).
Let К be a compact subset of 2 and L a compact subset of H. If
Supp X С К X L,
then Supp X(-, у) С К for all y, and in particular X(-, y) G 3l)w(2). Simi-
larly, Supp X(x, •) C L for all x and X(x, •) G ЗУ^Н).
If aS G ЗУ3(2) and <p G ЗУ(Н), we shall also write fg S(x)<p(x) dx instead
of (aS, <p). This notation, used by Schwartz ([88], I, p. 71), has the advan-
tage of showing the variable x. Of course, one has to bear in mind that aS
is not a function and in particular that the symbol S(x) has no meaning.
If now X G 3l)w(2 X H), then the function
у i-> (aS, X(«, y)) = [ S(x)X(x, y) dx (3)
JS
will naturally be denoted by fg S(x)x(x, •) dx.
Lemma 2. Ifxe £>s+t(K X L) and S G ЗУ3(2), then (3) belongs to &(Ь).
Proof. If у & L, then X(x, y) = 0 for every x, and therefore
[ S(x)x(x> y) dx = 0.
Js
Thus the support of (3) is contained in L.
Next the function (3) is continuous. Indeed, the map у X(«, y) from
H into ^S(K) is continuous since this means that the functions
у d%X(x, y),
where p G N* |p| h, x G 2, h 0 is an integer, h = s if s is finite,
are uniformly equicontinuous; this is a consequence of the uniform con-
tinuity of the functions (x, y) d%X(x, y). It follows that the map
[4, §8]
TENSOR PRODUCT
371
у i—► x(*, y) from H into 3De(E) is continuous, and since S is continuous on
3/(2), we obtain the continuity of (3).
To show that (3) has continuous partial derivatives of orders it is
enough to show that for |q| we have
дуу S(x)X(x, •) dx = у S(x) • dyX(x, •) dx, (4)
for if so, then by what we have just seen the function
у dy^ S(x)x(x, y) dx
will be continuous.
To prove (4) we can restrict ourselves by recursion to a derivation dj of
order 1 with respect to one variable i/y. Let h be a vector in IV parallel to
the i/y-axis and yQ e H. The function
ж i-> hy^Xtx, y0 + h) — X(x, yQ)}
tends to the function
x i-> (dyX) (x, yQ)
in 3/(2) as |Л| —> 0 because the expressions
Ay 1 {da?X(x, i/o + A) d%X(x, l/о)} &x Уо)
= df djX(x, yQ 4“ 0A) dx djX(x, 2/o)
(0 < 0 < 1) can be made arbitrarily small, uniformly in x, by taking
|A| sufficiently small, since the function (x, y) i-> d% djX(x, y) is uniformly
continuous. We have therefore
dj / S(x)x(x, уо) dx
= lim 1 / S(x)x(x, уо + h) dx — I S(x)x(x, yQ) dxj
hj Us Js )
= lim [ S(x) X(x> y° + hl~ X(x> dx
J S
= / S(x) lim -J- {X(x, y0 + h) — X(x, y0)} dx
J s n>j
= / S(x) djX(x, уо) dx. |
Js
Lemma 3. If S e 5У’(2) and T e D'Z(H), then the linear form
X*"* fn (/s S^X^x> dx) dy
is continuous on x H).
372 DISTRIBUTIONS [4, §8]
Proof. For each compact subset К of % there exists a constant Mr > 0
and an integer a s such that
I (aS, ^>)| Mk max max |др^>(я)|
Ipl^a x
for all <p G 30s (S). Similarly, for each compact subset L of H there exists
a constant Nl > 0 and an integer b t such that
|(T, ^)| Nl max max |dV(2/)l
У
for all ф e ЗУ(Н). If X e £>,+t(K X L), then we have
I ( S(x) dyX(x, y) del Mk max max |d*dyX(x, j/)|
I Ipl^a x
c
for every у G H, and |q| t, q G Nz. Hence by (4)
I ( Ш ( [ S(x)x(x, y) dx\ dy\ Nl max max bj f S(x)x(x, y) dx\
MH \J2 / I iQl^b у I JS, I
= Nl max max / S(x) dyX(x, y) dx\
у 17g I
MrNl max max max |d£ d%x(x, t/)|
|p| |q| x,y
MrNl max max |d£ дуХ(х, y)|. I
lp+ffl^a+Ь x,y
If X is of the form X(x, у) = <p(&№(y) with <p G D(S) and G 3D(H), i.e.,
X = then
/H (Jv S^x(-X’ y) dy = <s> <№>
and it follows from Lemma 3 that S ® T is continuous on 30(E) ® 30(H)
for the topology induced by 3De+*(S X H). By Propositions 1 and 2.9.5
the linear form S ® T has a unique continuous extension to 30s+*(S X H).
Thus the following definition becomes meaningful.
Definition 1. Given two distributions S G 30'8(S) and T G 30'* (H), the
unique distribution
R G 3D'e+‘(S X H)
which satisfies
(Л, <p ® = <>S, ^>(T, ф)
for all <p G 30s (S) and ф G 30* (H) will be called the tensor product of the dis-
tributions S and T and denoted by 8 ® T.
Our discussions leading to Definition 1 prove the following result.
[4, §8]
TENSOR PRODUCT
373
Proposition 2. If 8 e ©'*(2) and T G ©"(H), then for every X G
©,+‘(2 x H) we have
(8 ®T,X) = fs 8{x) (J T{y)x(x, y) dy) dx
= T(y) (J* S(x)x(x, y) dx) dy.
Example 1. Let/ e 6(2), g G 6(H) and let Tf, Tg be the corresponding
distributions (Example 1.1). Then
{Tf® Tg,?®*) = {Tf, <p){Tg,*)
= f f{x)<p{x) dxIg(y)*(y) dy
= f f(x)g{y)?(x)*{y) dx dy.
If, in accordance with the identification made before Lemma 1, we denote
by f ® g the function (x, y) f(x)g{y) defined on 2 X H, then we have
Tf ® Tg = Tf ® g.
Example 2. Let Sx be the Dirac measure (Example 1.2) on R* and Sv
the Dirac measure on Rl. Then
{Sx ® 6v,<p®*) = {8X, ?){6y, *) = ^(0)^(0);
i.e., Sx ® Sv is the Dirac measure 5 on Rn = Rfc X R1.
Let us prove a few simple properties of the tensor product of distributions.
Proposition 3. If 8 e ©'*(2) and T G ©"(H), then
Supp 8 ® T = Supp <S X Supp T.
Proof. If {x, y) G Supp 5 x Supp T, then for every neighborhood U
of x there exists a function ? G ©(2) with support contained in U such that
(8, ?) 0, and for every neighborhood V of у there exists a function
* G ©(H) with support contained in V such that (T, *) 0. But then
<p ® * has its support contained in the arbitrarily small neighborhood
U X V of (x, y), and (S ® T, ? ® *) = (8, ?){T, *) 0. Thus
{x, y) G Supp 8 ® T.
Conversely, suppose that (x, y) S Supp <S X Supp T. Then either
x & Supp <S or у & Supp T. To fix our ideas, let us assume that the first
one is the case. There exists an open neighborhood U of x which does not
meet Supp <S. If X g ©(2 X H) has its support contained in U X H,
374 DISTRIBUTIONS [4, §8]
then for each у G H the function %(•, y) has its support contained in U,
and therefore by Proposition 2 we have
(S ®T,x} = f T(y) (J S(x)x(x, y) dx} dy = 0.
Since 17 X H is a neighborhood of (x, y), we have (x, y) & Supp 8 ® T. |
Proposition 4. If S G ©'"(S), T g ©"(H), p G N* and q G N‘, then
d{p'q)(S ® T) = dpS ® dqT,
where
д1р+«1
^(P.9) _ ________°______________ ,
dx^1- -dx^dyl1- • dyqi
Proof. For <p G 3>(E) and ф G S>(H) we have
{dlp'q)(S ®T),<p®V) = (-l)l₽+9l(8 ® T,d{p’q\<p ® ^))
= (—l)l₽+9l(8 ® T,dp<p ® d’^)
= (-i)lpl<8,a^>-(-i)l9l(T,a^>
= &S, <p)(dqT, *) = {dpS ® dqT, v ® *).
The assertion follows from Proposition 1.1
Example 3. With the notations of Example 2 and Proposition 4 we
have
d(P,9)5 = dPSx & d9&y
Observe that <%SX is of order |p|, dq6v of order |g|, and d<₽,?)3 of order
IpI + lei-
Proposition 5. If a G Ss+‘(S), ff G 8s+‘(H), 8 G 3>'’(S), and T g
©"(H), then
(a ® ff)(S ® T) = (aS) ® (ffT). (5)
Proof. Clearly, a ® ff g 8e+<(3 X H). For <p g ©’(2) and G ©‘(H)
we have
{(a ® ff)(S ® T), <p ® ф) = (8 ® T, (a ® ff)(V ® ф))
= {S ® T, (atp) ® W)) = (S, a<p)(T, 0Ф)
= (aS, ф) = ((aS) 0 (0T)f <p 0 ф).
The assertion follows again from Proposition 1.1
Remark 1. If only a g 88(E) and /3 G 8^(11), then formula (5) defines
(a 0 ff)(S 0 T) as a distribution belonging to ЗУ*+<(2 X H).
[4, §8]
TENSOR PRODUCT
375
Let Ei,..., Eh be h vector spaces over the same field K. Similarly as in the
case of two factors, we can define the tensor product
h
Ei®---®Eh = 0Ej
y=i
of the spaces E, (1 j Л). For this we recall that a map v: Hy=i Ej —> G
into some vector space G over К is said to be Л-linear if for each j and any choice
of the vectors xi,..., x,—i, x,-+i,..., Xh, the map x, w- v(xi,..., Xjf..., Xh)
is linear. Then
h
0Ei
У=1
is defined as the vector space (unique up to an isomorphism) which has the
following “universal property”: there exists an Л-linear map
h h
y=i y=i
such that given a vector space G over К and an Л-linear map v: Пу=1 G,
there exists a unique linear map
h
u-.^Ei-^G
y=l
which satisfies the relation v = адод. The elements of (^);=i E, are linear com-
binations of the elements
h
- Xl® • • • ® Xh = n(xi,.. .,Xh)
y=l
(xj G Ejj 1 j‘ Л), and и is defined by
u(xi ® ® xh) - v(xi,..Xh).
For any integer r such that 1 g r < h, the space
is canonically isomorphic to
h
®E,
y=l
(“associativity” of the tensor product). If all E, are finite dimensional, then
h h
dim0Ej = J]
У=1 y=l
376 DISTRIBUTIONS [4, §8]
Finally, if Ej and Fj are vector spaces and Ujt Ej —> Fj linear maps (1 j A),
then the linear map
h h h
<g)Uj = Ui ® • • • ® UK-. -> ® Fy
/=1 /=1 7=1
is defined by
Consider now h euclidean spaces Rny (1 J A), and in each space
an open set 9y. If <pj G D($2y), then the function
(xi, . . . , xh) • • • <ph(xh)
(xj G %, 1 S j = h) belonging to D(II;=i ty) will be identified with the
element
h
(g) ® • • • ® tph
7=1
of(^)y=i 3)(9y). With this identification
л
®з>(«/)
7=1
becomes a dense subspace of Dm(IIy=i ty) for 0 m oo (cf. Proposi-
tion 1). If for each index j (1 £ j £ h) we are given a distribution
Sj G a>'w>(Oy), then there exists a unique distribution
h
08, ^8!® 0 8k
7=1
belonging to S)'Zm7(IJy=1 Йу) which satisfies the condition
/ h h \ h
\®5*®«V“ П <^>
for all <pj e ©’”>(0,), 1 j Л. In particular, we have
/ r \ / к \ к
\®sA ® ( ® s,) « ® ss
\=1 ' \=r+i ' 7=1
for any integer r such that 1 r < h. The simple verification of these
facts is left to the reader who should also state and prove the analogues
of Propositions 2 through 5 for more than two factors.
Example 4. Denote by Yj the Heaviside function (Example 3.1) with
respect to the variable Xj. Then У! ® • • • ® Yn is the function on Rn
[4, §8] TENSOR PRODUCT 377
which takes the value 1 if Xj 0 for all j (1 j> S ft) and the value 0
otherwise. We have
di • • • Wi ® • • • ® Yn) = (diFi) ® • • • ® (dnYn) = 5.
To conclude this section we shall investigate the continuity of the map
(8, T) 8 ® T, which is obviously bilinear and which by Propositions 3
and 4.3 maps 8'S(E) X 8'*(H) into 8's+<(E X H). We can see similarly
as in Lemma 2 that if 8 G 8'S(E) and X G 8s+<(E X H), then the function
у Jg S(x)x(xt y) dx belongs to 8*(H) and formula (4) holds for |q| t
If furthermore T G 8'*(H), then the analogue of Proposition 2 holds.
Proposition 6. The bilinear map (8, T) 8 ® T from 8'S(E) X 8'*(H)
into 8,8+t(Z X H) is continuous if we equip 8'9(Z), 8'*(H), and 8's+<(S X H)
with their strong topologies.
Proof. Let C be a bounded subset of 8s+<(E X H). We have to find a
bounded subset A of 8s (E) such that the set В of all functions
У [ S(x)x(x, y) dx,
J'S.
where 8 varies in A ° and X in C, is bounded in 8*(H). Then 8 G A ° and
T G B° will imply 8 ® T G C°.
If К is an arbitrary compact subset of E, L a compact subset of H,
and |p + q| s + t, then there exists v(p, q, K, L) >0 such that
ld%d%x(x, y)l p(p, q, K, L) for X g C, x G К and у G L.
Let (Lf) be an increasing sequence of compact subsets of H whose union
is H (cf. Example 2.6.3). For each j g N denote by A; the set of all func-
tions x dyX(x, y), where X G С, у Lj and |q| min(Z, j). The set
Aj is bounded in 8S(E) since if К is a compact subset of S and |p| s,
then
|d? dyX(x, y) | max v(p, q, K, Lf)
I el
for all x G K. By Proposition 2.6.3 there exists a bounded subset A of
8S(E) and a sequence (Xf) of positive numbers such that Ay C XyA for all
jeN.
Now let 8 G A° and X G C. For q g N?, |q| t, and у G L3 we have
Idj/* S(x)x(x, y) dx\ = If S(x) dyX(x, y) dx\ Xy,
I Jz I Ms I
provided that j > |g|. Thus В is indeed bounded in 8*(Н). |
Proposition 7. Thebilinear map (8, T) 8 ® T from ЗУ8 (Ё) X ЗУ*(Н)
into $ys+t(S X H) is continuous if we equip S/S(E), ЗУ*(Н), and
ЗУ8+'(£ X H)
with their strong topologies.
378 DISTRIBUTION^ [4, §8]
Proof. Let C be a bounded set in ЗУ+*(Е X H). For each q g N1,
|q| t the functions
y): x •-> dqyx(x, y),
where X varies in C and у in H, form a bounded set A q in ЗУ (2). Indeed,
there exists a compact subset К of 2 and a compact subset L of H such
that Supp X С К X L, and in particular Supp x(«, y) G К for all X g C.
Furthermore, for each p G N* |p| g s the expression |d?d®x(z, ?/)| is
bounded as (x, y) varies in 2 X H.
We also see that Aq c ЗУ (IQ. Hence by Proposition 2.6.3 there exist a
bounded subset A Qi £>S(K) and a family (Xg) of positive numbers such
that Aq C \qA for q g N*, |g| g t. The set A is also bounded in ЗУ (2),
and U = 4° is a neighborhood of 0 in ЗУ® (2). If 8 G U, then
I [ S(x) d£x(x, y) dx\ g Xg (6)
for all x g C.
By Lemma 2 for every SeU and X g C the function Jg S(x)x(x, •) dx
belongs to ЗУ(Н) and has its support contained in L; and by (4) and (6)
we have
max |d^ S(x)x(x, y) dx\ g Xg
for |g| g t. In other words, the set
В = I f S(x)x(xf -)dx\S G J7, x g cl
Us J
is bounded in ЗУ(Н). Thus V = B° is a neighborhood of 0 in ЗУ*(Н), and
8 G С, T g V imply |<8 ® T, x>[ g 1 for all X g C; i.e., 8 ® T G C°. |
Next we investigate the continuity of (8, T) *-> S ® T for the topology
of uniform convergence on compact sets (cf. also Exercise 8).
Proposition 8 (Dieudonn£). The bilinear map (8, T) *-> 8 ® T from
ЗУ®(2) X ЗУ*(Н) into ЗУ*+*(2 X H) is continuous if we equip these spaces
with the topologies к(зУ8(Ё), ЗУ(2)), х(зУ*(Н), ЗУ(Н)), and
k^'s+\S X H), ЗУ+‘(2 X Н)).
Proof. We may assume that both s and t are finite. Let C be a relatively
compact subset of ЗУ+*(2 X H). We must find a relatively compact
subset A Qi ЗУ(2) and a relatively compact subset В Qi ЗУ(Н) such that
8 G 4° and T G B° imply 8 ® T G C°. By Proposition 2 this amounts
to finding В such that as X varies in C and T in B° the set of functions
Jh T(?/)x(-, y) dy is a relatively compact subset 4 of ЗУ (2).
By Proposition 3.9.12 the functions X g C have their supports contained
in a set of the form К X L, where К is a compact subset of 2 and L a
[4, §8]
TENSOR PRODUCT
379
compact subset of H. Furthermore, for every p G N* and q g Nz such
that |p + g| s + t the set of functions d£djx, where x varies in C, is
uniformly equicontinuous and uniformly bounded. For every integer
h > 0 there exists therefore e(h) > 0 such that
№W,y) -dpd9x(x",y)\ £ ±
if |x' - x"| £ e(h).
Let В be the subset of ЗУ(Н) consisting of all functions
У d%x(x, y),
where x g C, |p| s, x G S, and of all functions
^htp,ж*,®*** У *"“► h{dxX(xf, y) d£x(x"f y)},
where x G C, h > 0, |p| s, x', x" g S, |x' — x"\ е(Л). By Proposi-
tion 3.9.12 the set В is relatively compact:
(1) The support of every function belonging to В is contained in L.
(2) Let |g| t. The set of all functions is clearly equicontinuous.
On the other hand,
J (7)
for every <ph,p,x',x" and у G H. Given an integer r > 0 we have
1 — 7’
п T
provided that h 2r. There exists у = 77 (r) such that
№d'x(x,y') -d?d’x(x,^)| ±
for all x e B, provided fy' — y"\ y. It follows that
\^у'Рк,р,х',х"(.УГ) дрФЬ.р.х' ,х"(у,Г)\
= h\dpd9x(x', у') - дрд9х(х", у’) - дрд9х(х', у") + дрд9х(х", у") I
h\dpd9x(x', у1) - dpd9x(x', y") 1 + h\dpd9x(x", y>) - dUW, у")|
< Jl л 1L 1 z 1
= n ^4r2 "I- 4r2J 2r2 r ’
provided that h < 2r and ly' — y"l y.
(3) It follows from (7) and the hypotheses on C that В is bounded.
380 distributions [4, §8]
Finally, again using Proposition 3.9.12, we prove that the set A is rela-
tively compact:
fl) The support of every function belonging to A is contained in K.
(2) Let |p | s. Then we have
дх I T(y)x(x', y) dy — dx I T(y)x(x", y) dy
= f T(y) • d%{X(x', y) - X(x”, y)} dy £ |
Jh л
for T e B° and x e C, provided that \x' — x"\ e(h).
(3) If |p | s, then
p?/н T(y)X(x, y) dy\ = |/h T(p) d*X(x, y) dy\ £ 1
if T g B°, x e C, and x g 2. |
Exercises
1. Show that if the linear maps и: E -* G and v: F -* H are injective, then
the map и ® v: E ® F G ® H is injective.
2. Prove the existence and uniqueness of the tensor product
h
®Ъ
J=1
and verify the assertions made about it in the text.
3. Prove that the image of ©'*(2) X ЗУ*(Н) under the map (8, T) i-> 8 ® T
is total in ЗУв+г(2 X H).
4. (a) Using the notations of Proposition 6.8, show that x\T — 0 if and only
if T = 8X1 ® G, where G G ЗУ(НЛ-1).
(b) Show that the kernel of the map T i-> x\T from 3/(Rn) into 3Y(Rn) is
the set of distributions of the form
( £ ® g,
where G G ©'(R”"1).
5. Show that the distribution T G ЗУ is independent of the variables xi,..., xk
(Exercise 3.1(a)) if and only if it is of the form T = lx' ® Gx»», where x’ =
(si,..., «к) G R*, xn = (жл_|_1,..., zn), 1X' is the function which takes the con-
stant value 1 on R*, and G G ЗУ(КЛ-А).
6. Show that the bilinear map (^,^)i->^®^ from 8(2) X 8(H) into
8(2 X H) is continuous.
7. Show that the bilinear map (^>, ^) •-> ® from 3J(2) X 3J(H) into
D(2 X H) is hypocontinuous.
[4, §9]
CONVOLUTION
381
8. Prove that the bihnear map (8, T) i-> £ ® T from 8'e(2) X 8'*(H) into
8,e+*(2 X H) is continuous if we equip these spaces with the topology of uniform
convergence on compact sets.
§9. Convolution
At the beginning of §4 we introduced the convolution h = f ♦ g of two
functions /ее and g G JC with the help of the formula
л(я) = lKnf(.x — У)9(.У) dy, x e Rn.
We have seen that if both f and g have compact support, then h is con-
tinuous and also has compact support. In particular, h defines a distribu-
tion Th which for <p G 2) is given by
<Th, <p) = «’(*)/,../(я - y)9(y) dy dx.
If we change variables in the iterated integral and consider that the
function (x, y) i-> f(x)g(y) has compact support in R2n, then we obtain
<rA, <p) = j*n ^J(x)g{y)<p{x 4- y) dx dy. (1)
Since the function (x, y) *-> f(x)g(y) was identified with the tensor product
f ® g (Example 8.1), we are led to
Definition 1. Let 8 G 8'(Rn) and T g 8'(Rn) be two distributions with
compact support on Rn. For <p G 2}(Rn) denote by <pA the function belonging
to 8(R2n) defined by (x, y) *-> <p(x + y). The convolution 8 ♦ T of the
distributions S and T is defined by
(S *T,v)= <8 ® T,
The fact that £ ♦ T is a distribution will follow from
Proposition 1. The linear map <p *-> <pA from 3}(Rn) into 8(R2n) is
continuous.
Proof. By Proposition 2.12.1 we must prove that for every compact
subset К of Rn the map <p »-> <pA from 2D(A) into 8(R2n) is continuous.
Let У be a neighborhood of 6 in 8(R2n). Then V contains a set of the form
{/ I |dV(*)| e, r G N2n, |r| g m, z G M},
where m G N and M is a compact subset of R2n. The set
U = {H e, |p| 2m}
382
DISTRIBUTIONS
[4, §9]
is a neighborhood of 0 in £>(#), and <p E U implies G V since
д^Л(х, у) = (дрЧЛ>)(я + у),
where, similarly as in the preceding section,
nlpl *Jgl
=--------------, a’ =------------------,
dx?1 • • • dx%n dyl1 • • • dyln
p, q G Nn. |
Since S ® T E &'(R2n) the map (8 ® T, is a continuous
linear form on 3)(Rn); i.e., 8 ♦ T is a distribution on Rn. With the nota-
tions introduced in §8 we can write
<«8 * T, v) = S(x) (JrB T(y)v(x + y) dy) dx
(2)
= r(y) (Д» S(x)<p(x + y) dx) dy.
We shall see in Proposition 2 that Supp 8 ♦ T c Supp 8 + Supp T; hence
8 ♦ T has compact support.
The difficulty in defining the convolution for two arbitrary distributions
resides in the fact that for 9? G 3D the function has compact support
only if <p is identically zero. Indeed, Supp is the union of the affine
hyperplanes of R2n whose equations are x + у = £, where £ varies in
Supp In §6 we defined the product of two distributions, but the less
regular one factor became, the more regular we had to assume the other
factor. In particular, if one factor was a completely arbitrary distribution,
then we had to assume that the other factor was an infinitely differentiable
function. In the present situation two distributions whose convolution
we want to define cannot both "grow arbitrarily fast at infinity.” Thus
if one of them is completely arbitrary, we must assume that the other
has compact support. We shall now define the convolution 8 ♦ T of two
distributions 8 and T such that for every у e 3D(RW) the support of
8 ® T intersects Supp in a compact set. Observe that if 8 = f and
T = g belong to e(Rn) and this condition is satisfied, then the integration
in (1) is extended over a compact subset of Rn X Rn, and therefore
h = /♦ g is well-defined. In §11 and §2 of Chapter 6 we shall see some
other cases in which the convolution of two distributions is defined.
The basis of our definition is the important remark that we can give a
meaning to the scalar product (T, <p) even if T E 3/(Rn) and E 8(Rn),
provided that the set C = Supp T П Supp у is compact. Let X E 3D(Rn) be
such that x(x) = 1 for all x belonging to a neighborhood of C. We define
(T, (?)
The expression on the right-hand side has a meaning since x<p e 3D(Rn).
[4, §9]
CONVOLUTION
383
Next let us show that this definition of (T, <p} is independent of the choice
of X. Indeed, let ф G S)(Rn) be another function which is equal to 1 on a
neighborhood of C. Then
Supp(x Supp(x — ф) n Supp <p С CC П Supp <p с C Supp T,
and therefore (T, (x — \p)<p) = 0; i.e., (T, x<p) = (T, ф<р}.
If either T or <p has compact support, then (T, has the same meaning
as before, since in this case we can choose X to be equal to 1 on a neighbor-
hood of Supp T (cf. the proof of Proposition 2.3) or of Supp <p.
If C = Supp T A Supp <p is compact, then the formula
(<9yT, <p) = — (T, dj(p)
is still valid. Indeed, let X G £)(Rn) be equal to 1 in an open set U contain-
ing C. Since Supp djT c Supp T and Supp dj<p G Supp <p, we have
<p) = (djT, Xcp) = —{T, dj(X<p))
= —(T, djX - <p) — (T,X- dj(p)
= —(T> * ’ = — (T, djcp)
because djX vanishes in U. We can prove similarly that
(aT, <p) = (T, a<p)
for every a G 8(Rn).
Now we can return to the definition of the convolution of two distribu-
tions. Let A and В be two closed subsets of Rn and for any compact sub-
set К of Rn denote by KA the subset of Rn X Rn formed by all points
(x, y) such that x + у G K. The following two conditions are equivalent:
(£) For every compact subset К of Rn
the set (A X B) A KA is compact in
Rn x Rn.
(£') For every compact subset К of Rn
the set А А (К — B) is compact in Rn.
Indeed, if (A X A KA is compact,
then it is contained in some set M X Nf
where M and N are compact subsets of
Rn. If x G А А (К — B), then there
exists some у G В such that x + у G К;
i.e., (z, y) G K\ Since also (rr, у) G
A X B, we have (x, y) G M X N
and in particular x G M. Hence
384 DISTRIBUTIONS [4, §9]
А л (К — В) С М. Conversely, assume that
M = А Л (К - В)
is compact. If (x, у) e (A X В) Л K&, then x e A and x + у e K.
Hence x e M and у & K — x Q К — M.. Now N = К — M is com-
pact, and (A X В) Л С M X N, which proves that (22') implies (22).
We also see from the proof that А Л (К — B) is the first projection and
В Л (К — A) the second projection of (A x В) Л Кл.
Definition 2. Let S and T be two distributions on R" such that
A = Supp <S and В = Supp T
satisfy condition (22). The convolution S* T is defined by
(S * T, ф) = (8 ® T, (4)
for every G D(Rn).
We must prove again that 8 * T is indeed a distribution, i.e., a continu-
ous linear form on D(Rn). If К is a compact subset of Rn, by condition
(22) the set KQ = (A X В) A KA is compact in R2n. Let a G 3J(R2n) be
such that a(x, y) = 1 on a neighborhood of Kq. By virtue of Proposition
2.12.1 and the definition (3) of the right-hand side of (4) it is sufficient
to prove that (8 ® T, a<pA) is a continuous linear form on D(K).
The map / from D(K) into 8(R2n) is continuous by Proposition 1,
and the map <pA a<pA from 8(R2n) into 3J(R2n) by Proposition 7.4.
Since 8 ® T G 3/(R2n), the assertion follows.
Remark 1. Let 8 and T be two distributions whose supports A and В
satisfy conditions (£) and (S'). Let G D(Rn) have support К and
choose X G D(Rn) such that x(x) = 1 on a neighborhood of the compact
set А А (К — B). Denote by X* the function (x, y) x(x) belonging to
8(R2n). We then have
(S*T,?)=(S®T,x*A (5)
Indeed, as we observed earlier, А л (К — В) is the first projection of
(A x В) Л and therefore x*(x, y) = 1 on a neighborhood of
(A X В) Л K\
The function x*<p& has compact support since
(x, y) e Supp(x*VA) C Supp x* Л
implies x e Supp x and у G К — Supp x. Thus the right-hand side of
(5) has a meaning without using definition (3), in spite of the fact that
[4, §9]
CONVOLUTION
385
the support of x* is not compact. By Proposition 8.2 we have the relations
(8 S(x)x(x) T(y)<p(x + y) dy) dx
= г(у) (^„ S(x)x(x)<p(x + у) dx) dy.
Remark 2. It is clear that if A = Supp S is compact, then A and
В = Supp T satisfy condition (27) for any distribution T. In this case
we can choose X G 2D(Rn) independently of <p such that X(x) = 1 on a
neighborhood of A. Furthermore, relation (2) holds in this case for every
<p G 2D(Rn): the function x i-» $T(y)<p(x + y) dy does not necessarily have
a compact support, but this is compensated by the fact that S does.
Similarly, the fact that T does not have a compact support is compensated
by the fact that the function у w + у) dx has the compact
support Supp <p — A (cf. Exercise 1).
Remark 3. Another important case where the supports of S and T
manifestly satisfy condition (22) is when both are contained in a translate
of the "positive cone” of Rn, i.e., in a set defined by inequalities of the form
zi «i,. . ., «П-
Remark 4. According to the definition given in (3), the scalar product
(8 * T, tp) has a meaning whenever Supp <pA meets Supp S X Supp T in
a compact set.
Let us now prove some properties of convolutions.
Proposition 2. Let 8 and T be two distributions such that A = Supp S
and В = Supp T satisfy condition (22). Then Supp S * T С A + B.
Lemma 1. If A and В are two closed subsets of Rn which satisfy condition
(22), then A + В is closed.
Proof. Let z G A + B. There exists a sequence of points
Уп) E A X В
such that xn + yn tends to z. The set К whose points are xn + yn (n g N)
and z is compact, and therefore by our hypothesis the set
L = A П (К - B)
is compact. Since xn G L, there exists a subsequence (xnk) which con-
verges to some point x0 g A. Consequently,
Упк = Xnjk Упк Xnjc
converges to some point y0 G В and z = x0 + yQ g A + B. |
386
DISTRIBUTIONS
[4, §9]
Proof of Proposition 2. Let z £ A + B. By Lemma 1 there exists a
neighborhood V of z which does not meet A + B. Let <p G D(Rn) have
its support contained in V. Then Supp does not meet
A X В = Supp 8 ® T
(Proposition 8.3). Hence {8 *T,<p) = (8 ® T, <f£) = 0; i.e., z does not
belong to Supp S * T. |
Corollary. If both 8 and T have compact support, then 8 * T has compact
support.
Proposition 3. Let 8 G 5)' and A = Supp /8. Suppose that the support
of G X) is contained in the open subset О of Rn. If and T2 aretwo
distributions which are equal in £1 — A, then (8 * 7\, = (8 * T2,
provided that these scalar products have a meaning.
Remark 5. The set О — A is open as the union of the open sets О — a,
a G A.
Remark 6. The proposition can be stated in the following form: the
value of 8 * T in О depends only on the value of T in О — A. In particu-
lar, if A is contained in a "small” neighborhood of 0, then the value of
8 * T in 0 depends only on the value of T in a "small” neighborhood of 0.
Proof of Proposition 3. Set К = Supp <p. Clearly, all we have to prove
is that (A X Supp(Ti — T2)) П K& = 0. Now (x, y) G K& implies
x + У G К G 0. On the other hand, у G Supp(Ti — T2) implies
у e C(« - A),
and therefore x + у £ 0 for all x G A. |
Proposition 4. Let s and t denote positive integers or the symbol oo.
If 8 G X)'5, T G and the sets A = Supp 8, В = Supp T satisfy condi-
tion (22), then 8 * T belongs to £>fs+t.
Proof. We must prove that for each compact subset К of Rn the map
<p (8 * T7, is a continuous linear form on By assumption
the set KQ = (A X B) n K& is compact in R2n. If a G X)(R2n) is such
that а (ж, y) = 1 on a neighborhood of KQ, then by definition
(8 *T,<p) = (8 ® T, a^).
Now we see exactly as in the proof of Proposition 1 that is a
continuous linear map from ЗУ+^Х) into 8e-H(R2n). By Proposition 7.4
the map <рл from 8e-H(R2n) into ЗУ+*(В2п) is continuous. Finally,
8 ® T is a continuous linear form on De+e(R2n) (Definition 8.1). |
[4, §9] convolution 387
Proposition 5. The bilinear map (8, T) 8 * T from &'8 X 8'* into
&'a+t is continuous if we equip &'8, and &'a+t with their strong
topologies.
Proof. It is clear that the map is bilinear, and it follows from Proposi-
tion 4.3, the corollary of Proposition 2, and Proposition 4 that it maps
8'® X 8" into &'8+t.
Next let us prove that the map from 8®+*(Rn) into 8®+*(R2n)
is continuous. Indeed, let V be a neighborhood of 0 in 8®+*(R2n). There
exists a compact subset M of R2n, an e > 0, and an integer h (h = s + t
if s + t is finite) such that V contains the set
| |dV(*)| e, r G N2n, |r| Л, z e M}.
Let К be the image of M in Rn under the continuous map (ж, у) >—► x + у.
Then К is compact, U = {<p | |dp<p(x)| €, |p| Л, x G K} is a neigh-
borhood of 0 in 8®+*(Rn), and G U implies G V.
Now let C be a bounded subset of 8®+\Rn). The image of C under
the continuous map is a bounded subset of 8®+<(R2n). By Propo-
sition 8.6 there exists a neighborhood U of 0 in 8'® and a neighborhood V
of 0 in 8'* such that 8 G U and T G V imply 8 0 T G ((A)°. Since
(8 * T, <p) = (8 0 T, by Definition 1, 8 G U and T G V imply
8 * T G C°. |
Proposition 6. Let К be a compact subset of Rn and let &'8(K) be the
subspace of &'8 formed by the distributions whose support is contained in K,
equipped with the topology induced by the strong topology of &'8. The bilinear
map (8, 71) ь->8* T from S'8(K) X into £>'8+t is continuous.
Proof. It follows from Remark 2 that 8 * T is well-defined and from
Propositions 4.3 and 4 that 8 * T G D'®+e.
Choose X G D so that X(x) = 1 on a neighborhood of K. According to
Remark 2 the distribution 8 * T is defined by
(S ♦ T, <p) = (8 ® T, х*фд),
where ф 6 £>’+‘. Let C be a bounded subset of Ds+t. The image C*i under
the continuous map <p х*<р^ is a bounded subset of 8’+<(R2n). By
Proposition 8.7 there exists a neighborhood U of 0 in ЗУ’ and a neighbor-
hood V of 0 in ЗУ‘ such that 8 G U and T G V imply <8 ® T g C°. Now
the injection 3)* <=+ 8* is continuous (Examples 2.12.8, 2.5.3, 2.5.10, and
2.5.5), and thus the transpose 8'* -* ЗУ’ is also continuous, and in par-
ticular U П 8'’(K) is a neighborhood of 0 for the topology induced by
Since 8 G U П and T G V imply 5 ♦ T G C°, the conclusion
follows. |
388
DISTRIBUTIONS
[4, §9]
Proposition 7. The bilinear map (8, T) S ♦ T from 8'8 X 33'* into
<£),8+t is hypocontinuous if we equip 8'8, 3)'*, and ^,8+t with their strong
topologies.
Proof. Again by Remark 2 the distribution /8 * T is well-defined; by
Propositions 4.3 and 4 it belongs to ЗУ8+*.
(a) Let A be a bounded subset of 8'8 and W a neighborhood of 0 in
ЗУ8+*. Since 88 is barrelled, the set A is equicontinuous; i.e., there exists
a neighborhood У of 0 in 88 such that <p E Y and 8 E A imply
l<S, ?)l 1.
We may assume that Y is of the form | |др<р(я)| €, x E K, |^| h},
where К is a compact subset of Rn. It follows that A C &'8(K) since if
<p E &8 is such that Supp <p П К = 0, then X<p E Y for all X £ K; hence
for any /8 E A we have |(/S, X«p)| 1 for all X E K, i.e., {8, <p) = 0.
Clearly, A is bounded in 8'8(K). According to Proposition 6 there exists
a neighborhood U of 0 in &'8(K) and a neighborhood Pi of 0 in ЗУ* such
that 8 E U and T e Vi imply 8* T eW. On the other hand, there
exists X > 0 such that A С XJ7. If we set V = (l/X)Pi, then /8 E A
and T eV imply (1/Х)д8 E U and XT eV i; hence
(b) Let В be a bounded subset of ЗУ* and C a bounded subset of ЗУ+*.
If If is a compact subset of Rn, then for each p E Nn with |p| s the set
Cp of all functions
•): у »-> (др<р)(х + у),
where <р varies in C and x in K, is bounded in 33*. It follows that for each
p E Nn with |p| s the set of functions
X •-> dxjT(y)<p(x + y) dy
is bounded as x varies in К, T in B, and <p in C. This means that the set
A of functions
x »-> IT(y)<p(x + y) dy
is bounded in 88 as T varies in В and <p in C. USE AQ and T e B, we
have
1(5 * T, ?)| = | f S(x) (JT(y)<p(x + у) dy) 1
for all e C; i.e., 5 ♦ T e C°. |
[4, §9]
CONVOLUTION
389
Consider h distributions Tj on Rn, and set Aj = Supp Tj (1 j Л).
For a compact subset К of Rn denote now by K& the subset of RnA formed
by all points (xl} such that Xj G Rn and xT + • • • + xh g K.
Suppose that the Aj satisfy the following generalization of condition (22) •
(22л) F°r every compact subset К of Rn the set (Пу=1 Aj) П K& is com-
pact in RnA.
Then we define the convolution
л
☆ Tj = Ti * • • • * Tj
>=1
of the distributions Tj by
for all <p G S)(Rn), where <рл G 3J(RnA) is defined by
<A*b . • • , SA) = <p(S! 4-----h xh).
Condition (22л) is clearly satisfied if all the sets Aj, except possibly one,
are compact. More generally:
Lemma 2. (a) If the sets Аъ ..., Аъ, satisfy condition (22л) and the sets
Вif. . ., Bjc are compact, then the sets Ai, . Aa, , Bk satisfy con-
dition (£h+k)-
(b) If the sets Аъ ..., Aa satisfy condition (22л), then any subfamily
having I elements (2 I h) satisfies condition (22 г)-
Proof, (a) If (xlt ..., ylf..., yk) belongs to the subset
К л \. / к
п x (п в>)n
of RnA X RnA, then Xi + • • • + x^ G К — Bx — • • • — Bk. Hence by
hypothesis the first projection of C is a compact subset of RnA. But the
second projection of C is also compact since it is contained in IIy=i Bj.
(b) For the simplicity of notation let Ai,..., Ai (I < h) be the sub-
family in question. Let К be a compact subset of Rn, pick a point aj in
each of the sets Aj with I < j h, and set L = К + + • • • + aA.
Then L is compact and by hypothesis D = (П>=1 ^y) П LA is compact
in RnA = RnZ X Rn(A-Z). Now it can be seen, similarly as in the proof of
the equivalence of the conditions (22) and (22'), that the projection of D
onto the first factor RnZ is the set
(п Л,) Л (L - AJ+1----------------Ал)д.
\=1 '
390
DISTRIBUTIONS
[4, §9]
Hence this set is compact; on the other hand, it contains the set
П Ay) П KA |
j=l '
Proposition 8. (a) Let S and T be two distributions on Rn such that
A = Supp 8 and В = Supp T satisfy condition (£). Then S ♦ T = T ♦ 8.
(b) Let R, S, and T be three distributions on Rn whose supports satisfy
condition (22з)« Then
(R*S)*T = R* (8 *T) = R*S*T.
Proof, (a) If <p G 33 and К = Supp <p, choose a G 33(R2w) such that
а(я, У) = 1 on a neighborhood of (A X В) n K\ Then we have by
Definition 2 and Proposition 8.2
{S*T,v) = (8®T,a^)
= jS(x) (J T(y)a(x, y)<p(x + У) dy) dx
= IТ(у) (УS(x)a(x, y)<p(x + y) dx) dy
= (T®8, = {T*S, <p).
(b) If A = Supp R, В = Supp 8, C = Supp T, then for any compact
set К C Rn the first projection
M = А П (К - В - С) C Rn
and the second projection
N = В n (К - A - С) C Rn
of the set D = (A X В X С) П CRn X Rn X Rn are compact.
Let <p G 33 with К = Supp <p and choose the functions X G 33 and
Ф G 33 so that X(x) = 1 on a neighborhood of M and = 1 on a neigh-
borhood of N. Denote by 7* the function defined on R3n by
(я, у, z) X(x№(y).
The following properties can be verified immediately:
(i) 7*(я, у, z) = 1 on a neighborhood of D.
(ii) 7*<рл has compact support in R3w.
(iii) For each x G A we have ф(у) = 1 on a neighborhood of
В n (Supp(r_x<p) — C).
(iv) X(x) = 1 on a neighborhood of A n (K — Supp 8 ♦ T).
[4, §9]
CONVOLUTION
391
It follows from Remark 1 and the analogous fact concerning three factors
that
(Я ♦ 8 ♦ T, <p) = (R ® 8 ® T,
= jf R(x)x(x) (JS(y№(y) (y T(z)<p(x + y + z)dz} dy} dx
= У R(x)x(x) (J(8 * T)(y)<p(x + y) dy} dx
= M*1V);
i.e., R*S*T = R*(S*T).
To prove that R* 8 ♦ T — (R* 8) * T we choose ij, 9 6 © so that
y(y) = 1 on a neighborhood of В П (К — A — C) and 0(z) = 1 on a
neighborhood of С П (К — A — B) and use the relation
{R * 8 * T, <p) = у R(x) (yS(y)i](y) (yT(z)9(z)<p(x + у + z) dz} dy} dx
= у(Я * S)(x) (jT(z)9(z)<p(x + z) dz} dx
= <(й * 8) * T, <p). I
In view of Lemma 2(b) we obtain by induction from Proposition 8(b)
the general associativity rule
i \ / h \ h
тД ♦ ( ТД= Tj
y—i ' \=z+i '
for any I such that 1 I < h, provided that the Tj are distributions whose
supports satisfy condition (22 л)-
Remark 7. If R, 8 and T are three distributions whose supports do
not satisfy condition (22 з), then (R * 8) * T and R ♦ (8 * T) can both be
defined without being equal. Thus in the case n = 1 we have
(1 * di) * Y = 0 * Y = 0
since 1 ♦ 96 = dl = 0 (cf. Proposition 10), but
1 ♦ (98 * Y) = 1 ♦ S = I
(cf. Propositions 9 and 10).
Proposition 9. For any distribution T 6 we have S* T = T * i = T.
Proof. For <p G © we have
(T ♦ S, <p) = уT(x) (y6(y)<f>(x + y) dy} dx
= у ТЩх) dx = (T, <p). |
392
DISTRIBUTIONS
[4, §9]
It follows from Proposition 8 that 8' is a commutative ring if convolution
is taken for multiplication, and by Proposition 9 the Dirac measure 5 is
the unit element of 8'. It also follows from Proposition 8 that ЗУ is an
8'-module (Remark 6.1) if the multiplication between elements of 8' and
3)' is again the convolution.
Proposition 10. Let S and T be two distributions such that A = Supp S
and В = Supp T satisfy condition Q2). Then for every partial derivation
dj (1 j n) we have
dj(S * T) = djS * T = S * djT.
Proof. Since Supp(dyS) c A, the last two terms are well-defined. For
<p G 3) let X G 3) be such that X(x) = 1 on a neighborhood of
A n (Supp <p — B).
We have
(dy(S*T),^)= -<>S*T,d^)
= - fS(x)x(x) (J T(y)(dj<p)(x + y) dy) dx
= f S(x)X(x) (JШМх + y) Sy) dx
= {S*djT,<p};
i.e., dj(S * T) = S ♦ djT. The other relation follows now from Propo-
sition 8(a). |
With the notations introduced in Chapter 2, §5, a polynomial of
degree in the indeterminates fa,..., is an expression of the form
p(0 = Z
p 1
where p varies in Nn, ap G K, ap = 0 for (p| > m, and £ = (fi,. . ., £n).
It is exactly of degree m if there exists at least one p with |p| = m such
that ap 0. We shall usually identify the polynomial P(f) with the poly-
nomial function £ »—► P(£) defined on Kn. For any q = (gb. . ., qn) G Nn
we denote by the derivative
л1в1
a# • • • a^-
Let us introduce the notation
D._ J_
3 2m dXj 2m 3
for j = 1, ..., n, the significance of which will only appear in §11. If
[4, §9] CONVOLUTION 393
p G N”, then Dp will obviously stand for
= 1________alyl
(2ih)w . dxpn ’
If P($) is a polynomial of degree m and we replace each fy by Dj, then
we obtain the partial differential operator P(D) with constant coefficients
and of order m. If for x e Rn and $ G Rn we write
(я, £) = “b Xnknt
then we have
P^e2”'^’0 = P(£) • е2т<<а'>{>. (6)
By virtue of Propositions 9 and 10 we have
P(D)T = P(D)a*T.
We shall often identify the differential operator P(D) with the distribution
P(D) 5, whereby differentiation becomes a convolution. The relation be-
tween the function $ h-> P($) and the distribution P(D)d will be made
more explicit in §11. The support of P(Z>)5 is the origin, and we know
from Proposition 4.5 that every distribution whose support is the origin
is of the form P(D) 5. Let us observe that if the distributions P(D) 5 and
Q(D)8 are identified with the differential operators P(D) and Q(D), then
the convolution P(D) 5 ♦ Q(L>) 5 is identified with the composed operator
P(D) °Q(D) which corresponds to the product P(f)Q($) of the polynomials
P(£) and Q(fy. Thus the commutative ring of all distributions of the form
P(D) 5, with the convolution as multiplication, is isomorphic to the ring
of all polynomials P(£) with the ordinary product as multiplication
(cf. Theorem 11.3).
A distribution E such that
P(D)E = 5
is called a fundamental (or elementary) solution of the partial differential
operator P(D). If we know E, we can solve the partial differential equation
P(D)S = T, where S is an unknown distribution and T a given distribu-
tion with compact support. Indeed, S = E*T will be a solution since
by Propositions 9 and 10 we have
P(D)(E * T) = (P(D)E) *T= 8*T=T.
Every other solution is of the form 3 + Я, where H is an arbitrary solution
of the homogeneous equation P(D)H = 0.
394
DISTRIBUTIONS
[4, §9]
Example 1. Consider the Laplace operator
д = 4+...+4
dxi dx2
If n 3 a fundamental solution of Д is given by the function;
Г[(п-2)/2] 1
rn—2
where r = (я? + • • • + я2)1/2 Observe that this function is not con-
tinuous at the origin, but by Proposition 1.2 it nevertheless defines a dis-
tribution since it is improperly integrable.
For <p G 33 we have
v) = {E, Д„) = - Г[(те4тл/^)/2] lim
dx.
We apply Green’s identity
/ (u Av — v Au) dx = / ( и — v dw,
Jq J3q \ дп dn/
where d/dn indicates derivation in the direction of the outward normal of
the boundary dO of 0. For 0 we take the domain between the spheres
r = € and т = R, where R is so large that Supp <p is contained in the ball
r < R. We obtain
-2dx =
€n-*d<r
_ / 1
Jr=€ rn-2 dr
where da denotes the surface element on the unit sphere Sn_i. The first
integral on the right-hand side is zero since l/rn-2 is harmonic, i.e.,
Д(1/гп”2) = 0, outside the origin. Since
v- = -(n - 2)e1_n
dr rn~2 4 7
on r = €, the second integral equals
I <p(t<x) dff,
r=€
—(n — 2) / <p(x) da = — (n — 2)|Sn_i| • .g1
Jr=€ Pn-l|
where |Sn-i| = 2тгп12/Г(п/2) is the surface area of Sn-i. As e —♦ 0 this
expression tends to
4wn/2
-(» - 2>IS—I' <’«’> = - r[(n - 2)/2] <S’ ’>•
[4, §9]
CONVOLUTION
395
Finally, the third integral is dominated in absolute value by an expression
of the form const • efdtr, hence tends to zero as € —► 0. It follows that
(ДЯ, = (5, <p);
i.e., AZ? = 5, as asserted.
If T is a distribution with compact support, then a solution jS of the
Poisson equation AS = T is given by the Newtonian potential
S = UT = E * T
of T. If T is a sufficiently regular function /, then its Newtonian potential
Uf is given by
, _ _ Г|(п - 2)/2] [ Цу)_____________
W - 4Г-» Jr- |. - y|B“2
We shall return to these questions in Chapter 6.
It is one of the great triumphs of the theory of distributions that every
partial differential operator with constant coefficients possesses a funda-
mental solution. We shall prove in Chapter 7 this result obtained in 1953
independently by Ehrenpreis and Malgrange ([46], Section 3.1).
Let us prove the following useful generalization of Leibniz’s formula
(Corollary of Proposition 6.3):
Proposition 11. Let P(D) be a partial differential operator with constant
coefficients of order m. For a G 8(0) and T g ЗУ(О) or for a G 8fc+w(Q) and
T g ЗУ*(О) we have
P(D) (aT) = E n pWWT- (7)
Remark 8. If P(D) = Dp, i.e., P(f) = then
i.e.,
P<4)(D) = . p! D’-’
’ (p - ?)!
and since
_____£1____= M,
«!(p-«)l W
we obtain the formula of the corollary of Proposition 6.3 [multiplied by
the constant (27гг)_|,>|]. Let us also observe that since P(,)(D) = 0 for
|g| > m, the sum on the right-hand side of (7) is finite.
396
DISTRIBUTIONS
[4, §9]
Proof of Proposition 11. It follows from Proposition 6.3 that
P(D)(aT) = X (Z>’«)(Qg(D)T), (8)
where the Qg(Z>) are differential operators independent of a and T. To
determine these operators Qg(D) we choose £, rj G Rn, a(x) = e2Ti{x^,
and T = Tf, where f(x) = e2*i{x,4\ Substituting in (8), using (6), and
dividing both sides by е2тг^х' е+ч>, we obtain
P(f + n) = £ (9)
q
On the other hand, we have by Taylor’s formula
P(f + ч) = (10)
q
Comparing (9) and (10), we see that
Q,(„) = ^P(%).1
Proposition 12. Let S and T be two distributions whose supports satisfy
condition (£) and let h be a vector of Rn. Then we have (cf. Definition 3.2)
rh(S * T) = ThS * T = 8 * rhT.
Proof (a) Let us first assume that 8 has compact support. For <p e D
we have then
(rA(S*T),^)=
= fs(x) (JT(y)<p(x + у + h) dy) dx
'= IS(x) (У(ткТ)(,у)<р(х + у) dy) dx
=
i.e., Th(S * T) = S * r^T. We see similarly that Th(S *T) = ThS ♦ T.
(b) In the general case, since the support of 5 is compact, we have by
Proposition 9 and part (a) of the proof
rh(S * T) = rh(8 * (8 * T)) = rh8 * (8 * T).
But by Lemma 2 and Proposition 8(b) we further have
rh8 *(8*T) = (rh8 *8)*T= rh(8 * 8) * T = rhS * T.
The other relation follows from Proposition 8(a). |
[4, §9] convolution 397
Let S G S)z be a fixed distribution. By virtue of Proposition 7 the linear
map и : T S * T from 8' into 3)' is continuous. Furthermore, by Propo-
sition 10 it commutes with partial derivations; i.e.,
д;и(Т) = u(djT)
for 1 g j' n. We want to prove the converse result:
Theorem 1. Let и be a continuous linear map from & into <D' which
commutes with partial derivations. There exists a distribution S £5)' such
that u(T) = S* T for every T e 8'.
The proof proper of this theorem will be preceded by two auxiliary
results, the first of which is interesting in itself.
Proposition 13. The translates тьд = Зд of the Dirac measure 8 form a
total subset of 2)' and of 8'.
Proof. Since 3)' is reflexive, every continuous linear form on 3)' is given
by Г (Г, for some <p e 3). If {8hj <p) = <p(h) = 0 for every h e Rn,
then <p = 0, which proves that the set {Зд | h e Rn} is total in 3)' (Propo-
sition 1.6.2 and Exercise 3.1.4). For 8' the proof is similar. |
Lemma 3. Let и be a continuous linear map from into 3)'. Then
и commutes with partial derivations if and only if it commutes with
translations.
Proof, (a) If и commutes with translations, i.e.,
rhu(T) = u{rhT) (11)
for all h e Rn and T e 8', then for any vector h parallel to the xy-axis
we have
гЧт^Т) - u(T)) = u^^hT - Г}),
where t = hj. Since и is continuous, we have by Proposition 3.4 and
Exercise 3.2
dyu(T) = u(djT).
(b) Suppose that и commutes with partial derivations, let T e 8',
<p e 3), and define
g(h) = (u(rAT), Th<p),
where h varies in Rn. We have
i = (i u(ThT)>+(u(ThT)> •
398
DISTRIBUTIONS
[4, §9]
Since и is continuous, we have
^-u(rhT) = и(±Тлт)- (12)
Ullj \Urlj J
It follows from Proposition 3.5 and Exercise 3.2 that
“(/*/<)(13)
and since и commutes with partial derivations, we have
= <14>
From (12), (13), and (14) we obtain
= (s; + T‘”) =0
since obviously
( д . d \ _
It follows that g is a constant; i.e.,
(u(rAT), rh<p) = (u(T), <p)
for every h G R*. For ф g D set <p = т_л^, i.e., ф = тл^>. Then
(u(rAT), iA) = (w(T), t_mA) = (rAu(T), iA),
which proves that (11) is satisfied for every h G Rn. I
Proof of Theorem 1. For a fixed distribution T G 8' the map
R u(R *T) — Я ♦ u(T)
is continuous from 8' into ЗУ and therefore its kernel N is closed. On the
other hand, it follows from the hypothesis and from Lemma 3 that
u(8h ♦ Г) = u(rhT) = rhu(T) = 8h ♦ u(T);
i.e., all distributions 5л belong to N. By Proposition 13 we have N = 8',
i.e., u(R * T) = R* u(T) for all Й G 8' and T G 8'. Set S = u(5). Then
u(T) = u(5 ♦ T) = u(S) ♦ T = S ♦ T for every T G 8'. |
[4, §9]
CONVOLUTION
399
Corollary. Let и be a continuous linear map from 3D' into 3D' which
commutes with partial derivations. There exists a distribution with compact
support 8 E 8' such that u(T) = 8 * T for every T e 3D'.
Proof. Since 8 is a normal space of distributions (Example 2.5) the
map S' 3D' is continuous, and therefore by Theorem 1 there exists
В e 3D' such that u(T) = 8 * T for every T E S'.
Suppose that Supp В is not compact. Then there exists a sequence of
points xn E Supp В such that |xn| —> oo as n —> oo. The sequence of dis-
tributions cnd-Xnf where the cn are constants, tends to 0 in 3D', since if
В is a bounded subset of 3D, then there exists a compact subset К of Rw
such that Supp <p С К for <p E В (Example 2.12.6), and therefore
(cn5_xn) <P) = cn^( #n) = 0
for all E В if n is sufficiently large. On the other hand, the sequence
u(cn8__xn) = В * Cnd—xn = CnT—xnS
does not tend to zero if we choose the constants cn suitably. Indeed, for
every n there exists a function E 3D having its support in the ball
Bi(xn) = {x | — xnl 1} and such that (8, /n) = 1. We can write
фп = СпТХп<Рп) where <pn E 3D; the support of <pn is contained in the ball
Bi = {x | |x| g 1}, and cn is chosen so that |др^л(я)| 1 for |p| < n.
Then the set {<pn | n E N} is bounded in 3D but
(cnT_xnS, <Pn) = (В, CnTxn<Pn) = (В, ^n) = 1
for all n. We have therefore arrived at a contradiction with the continuity
of u, and so Supp В must be compact.
Finally, we have u(T) = В * T for every T e 3D' since the map
T u(T) — S*T
from 3D' into 3D' is continuous (Proposition 7), and its kernel contains 8'
which is dense in 3D'. |
We conclude this section with a relation between tensor product and
convolution.
Proposition 14. Let Q and R be two distributions belonging to SD'(R*)
whose supports satisfy condition (22). Similarly, let S and T be two
distributions belonging to 3D'(RZ) whose supports satisfy condition (22).
Then the supports of the distributions Q ® В and R ® T belonging to 3D'(Rfc-H)
satisfy condition (22), and we have
(Q* R) ® (В * T) = (Q ® В) * (Я ® T). (15)
400
DISTRIBUTIONS
[4, §9]
Proof, (a) Write A = Supp Q ® <S and В = Supp R ® T. Let К be
a compact subset of R*+z = R* x Rz. Its two projections Kj C R* and
j&2 C Rz are compact, and К С K\ X K2. The isomorphism
(®i, 2/i; «2,2/2) (®i, x2; у 1, у2)
from (R* X Rz) X (R* X Rz) onto (R* X R*) X (R* X Rz) maps the
subset (A X В) n K& of R*+l x R*+z into the set
{(SuppQ X Supp R) П X {(Supp <S X Supp T) П K2}. (16)
Indeed,
(xi, 2/1) G A = Supp Q X Supp 8, (x2, y2) eB = Supp R X Supp T,
(xi + x2, y! + 2/2) g К
imply
(xi, x2) e Supp Q X Supp R, xi + x2 e Ki,
(2/1, У2) G Supp <S X Supp T, 2/1 + У 2 G K2.
Since by assumption the two factors in (16) are compact, the sets A and В
satisfy condition (22).
(b) Consider now <p e 30(R4) and ф e D(Rl). Let X e 30(R4) be such
that x(x) = 1 on a neighborhood U of Supp Q Г) (Supp <p — Supp R) and
f e £>(RZ) such that f(j/) = 1 on a neighborhood V of
Supp Г) (Supp ф — Supp T).
Then
x ® f e 3>(R*+Z) and X(x)f(y) = 1
on the neighborhood U X V of the set
{Supp Q П (Supp <p — Supp й)} X {Supp *S Л (Supp ф — Supp T)},
which contains A n (Supp >p ® — B) as can be checked immediately.
We therefore have
((Q*f?)® (S*T),¥’®*)
= (Q*ft,^)(S*T,^)
= (/<2(x)x(x) (/B(f)^(x + f) df) dx) (JS(y)rty) (JТМф(у + ч) dn) dy)
= f(Q 8 S)(x, У)*(х)£(у) (J(R ® T)(f, ч)(р ® 4>)(x + f, у + ч) di dj) dx dy
= ((Q®S)*(R8T),<P®/),
from where relation (15) follows. |
[4, §10]
REGULARIZATION
401
Exercises
1. Let 8 G ЗУ' and tp G 3D. Show that the support of the function
У*S(x)<p(x + y) dx
is the set Supp 5 — Supp <p.
2. Let X and Y be two locally compact spaces. A continuous map f: X —> Y
is said to be proper if for every compact subset К of Y the subset /-1(K) is
compact in X,
(a) Let X' = X U {an} and Y' = Y U {а>г} be the Alexandrov compacti-
fications (Exercise 2.10.7) of the spaces X and Y. Given a map /: X —> У, let
X' —> Y' be defined by f'(x) = f(x) for x G X and /(an) = a>2. Show that
the continuous map f: X —> Y is proper if and only if the map /': Xf —> Y' is
continuous.
(b) Let A and В be two closed subsets of Rn. Show that A and В satisfy
condition (52) if and only if the (x, y) i—> x + у from A X В into Rn is proper.
3. Prove that the bilinear map (8, T) i—> 5 * T from 8'e X 8'* into &'a+t is
continuous if we equip 8'e, 8'f, and &'a+t with the topology of uniform conver-
gence on compact sets. (Hint: See Exercise 8.8 and the proof of Proposition 5.)
4. Let T G SD'(Rn) and <p G 8(Rn) be such that Supp T A Supp <p is compact.
(a) Show that {T, <p) = {(pT, 1) could have served as the definition of (T, <p).
(b) Show that if Supp T A Supp <p = 0, then {T, <p) = 0.
(c) Show that if dp<p(x) = 0 for all x G Supp T and p G Nn, then {T, <p) = 0.
5. Let X be the function x i—> aixi + • • • + anxn and e the function x i—> еХ(ж).
Prove the formulas
e(8*T) =
and
X(8*T) = (X8)*T+8*(XT).
§10. Regularization
One of the main applications of convolution is the regularization of a
distribution T, i.e., the approximation of T by expressions of the form
p€ * T, where p€ G SD is the function we have considered several times
(Example 1.4, Proposition 4.1). Since p€ tends to 5 as € —> 0 (Example
1.4), by Propositions 9.7 and 9.9 the distribution p€ * T tends to T, Now
it will turn out that p€ * T is (a distribution identified with) an infinitely
differentiable function. Hence if we let € run through the values 1/k
(k 1), we will have an effective method to approximate a distribution
by a sequence of infinitely differentiable functions. We know of course
that any distribution is the limit of a filter of infinitely differentiable func-
tions (Proposition 1.3).
Let us introduce a notation which will be useful in the sequel. If f is a
function defined on Rw, we denote by/the function x i—> /(—x). Clearly
402
DISTRIBUTIONS
[4, §Ю]
/ = f and the map <p £ is an automorphism of any space ©”* or 8”*
(0 m oo). Also
= (— l)lpl dp<p, rh<p = (j-hfpY-
If / is continuous, we have for any <p e ©
<Z <p) = ^я/(—x)<p(x) dx
= fR„ f(x)<p(—x) dx = (f, <f>).
This leads us to define for T G 3>'(Rn) the distribution T by
(Г, <p) = (T, £),
where <p G 3>(Rn). Clearly, T = T and the map T t is an automor-
phism of any space or 8'w (0 m oo); in fact, T T is the
transpose of the map <p J. We have
(dp7T = (—l)lpl dpT, rhT = (т_лТ)\
One verifies immediately that for a G 8W and T G ЗУ w we have
(а?У = йт
and that if S and T are two distributions whose supports satisfy condition
(D, then (S* Tf = S*f.
As in §8, the letters s and t will denote either a positive integer or the
symbol oo. If s = oo, then s — t will be equal to oo for any t.
Proposition 1. Let a G 8е, T G ЗУ*, where s t, and suppose that the
supports of a and T satisfy condition of §9. Then a * T is a function
belonging to 8e“* which for any x G Rn is given by
(<**T)(x) = {Т,тха). (1)
Proof. The expression (T, rxa) is well-defined by formula (3) of §9.
Indeed, if we write A = Supp a and В = Supp T, then
Supp(rxa) = x — A,
and condition (£) implies that В n (x — A) is compact.
Next let us prove that the map x »-> from Rn into 8s is continuous.
Let V be a neighborhood of 0 in 8s which we may assume to be of the form
V = |d^(x)| g e, |p| h,xeK},
[4, §10]
REGULARIZATION
403
where h is a positive integer, h = s if s is finite, and К is a compact subset
of Rn. Let U be a compact neighborhood of the point a e Rn. For any
x g Rn we have
ЯМ») - raa(y)} = (—1)|р|{(Эра)(а; - у) - (dpa)(a - y)}.
If x varies in U and у in K, then x — у varies in the compact set U — K.
Now dpa is uniformly continuous on U — K. Hence if we choose \x — a|
sufficiently small, we will have
|(apa)(x — y) — (dpa)(a — p)| e
for all у G К and |p| h; i.e., тха G raa + V.
Let C be a compact subset of Rn and X G 30 such that x(x) = 1 on a
neighborhood of the compact set В л (C — A). For x G C we have
Supp(rxa) c C — A and therefore
(T, тх«) = (T, X • rxa). (2)
From Proposition 7.4 and what we have just seen it follows that the map
x •-> X • rxa from C into 3D* is continuous. But T G 30'' C 30"; thus the
function x •-* (T, x • rxa) is continuous on C, and hence the function
x и-» (T, тха) is continuous on Rn.
Keeping the same notations, let us prove relation (1). If G 30(C),
then by Remark 9.1 we have
(a * T, <p) = (a 0 T, Х*<рЛ)
= УT(y)X(y) (Ja(x)<p(x + у) dx) dy
— У”т(у)х(у) (У<p(x)a(x — y) dx) dy
— f <p(x) (J T(y)x(y)a(x — y) dy) dx
= у (T, rxa)<p(x) dx,
which proves (1).
Finally, we prove that x ь-> (T, rxa) is s — t times continuously differ-
entiable. It is sufficient to prove that the relation
др(Т, тха) = (—1)|P|(T, rx(dpa)v) (3)
holds for |p| s — t since dpa G 8*_|p|, T G 30"“|p|, and therefore the
function x »-► (T, rx(dpa)v> is continuous as we know already. By recur-
sion it is sufficient to prove (3) for |p| = 1. If j is an index such that
1 j n, denote by h = (hlf... ,hn) a vector such that hj = t,
404
DISTRIBUTIONS
[4, §10]
hk = 0 for к j} and take t so small that x — h G C. Then we have
dj{Tj Txa} = lim t~l{{T, X • тж_ла) — (T, X • тха)}
<->o
= (T, X • lim 1~1{тх_Ка — rxoi}}.
<->o
Now тж_ла = т_л(тжа). On the other hand, it can be seen as in the proof
of Proposition 3.4 (cf. also Exercise 3.2) that for <p g 8m the function
~ <P) converges to dj<p in 8W-1. Thus we obtain
dj{TjTxa) = {Tj dj(rxa)).
Since dj(rxa) = Tx(dja) — —Tx(dja)"j we have proved formula (3) for
IpI = 1.1
Remark 1. Proposition 1 can be used to give a definition of convolu-
tion which does not use the tensor product ([46], Definitions 1.6.1
and 1.6.2). First, one defines T * a for a g 3) and T G ЗУ by formula (1).
Next one proves that if u: 3) —► 8 is a continuous linear map which com-
mutes with translations, then there exists a unique distribution R g ЗУ
such that u(<p) s= R * <p for every g 3) (Exercise 2). Finally, if S G ЗУ
and T g 8', then <p S * (T * <p) is a continuous linear map from 3) into
8 which commutes with translations. Hence there exists a unique R G ЗУ
such that S * (T * = R * for all <f>j and one sets R = S * T.
Proposition 2. Let p be a continuous function defined on Rn which has
the following properties
(a) Supp p C Bi,
(b) p(x) 0 for all x e Rn,
(c) Jr" p(x) dx = 1,
where Bi = {x | |x| 1} is the unit ball of Rn. For e > 0 define the
function Peby
PeW = ^P
Then pe converges to the Dirac measure 8 in the space &'m (0 m oo)
equipped with the topology к(8'т, 8m) of uniform convergence on compact
subsets of 8mj as e 0.
Proof. Denote by M the subset of 8'm formed by the pe with 0 < e 1
and the Dirac measure 5. For any e 1 and <p G 8W we have
l<Pe, *>)| =
<p(x) dx
jp(x)<p(ex) dx
max |^(x)|:
Ixl^l
[4, §10] REGULARIZATION 405
hence M is weakly bounded. Since 8W is barrelled (Example 3.6.3), the
set M is equicontinuous (Proposition 3.6.2). It follows from Proposition
3.9.8 that in order to establish the proposition we have to prove that for
any <p g we have
lim уpe(x)<p(x) dx = ^>(0).
This can be seen exactly as in Example 1.4. |
Remark 2. Unless m = oo the functions p€ do not tend to 5 in 8'™ for
the strong topology 0(8'™, 8W) (cf. Exercise 3).
Proposition 3. For every T g ЗУ* the map 8 >—> 8 * T from &'8 into
£>'8+t is continuous if we equip the spaces &'8 and £>'8+t with the topologies
к(&'8> 8е) and K(£>'a+t, De+*) of uniform convergence on compact sets.
Proof. We may assume that s is finite, since otherwise the proposition
follows from Proposition 9.7. Let W be a neighborhood of 0 in ЗУв+*,
which we may assume to be of the form W = C°, where C is a compact
subset of ЗУ+*. Denote by A the set of all functions
x <-> fT(y)<p(x + y)dy = {T, т-гф),
where <p varies in C. It follows from Proposition 1 that A G 8е.
Let us prove that A is a compact subset of 8е. In the first place, for
every x G Rn and |p| s the set т_хдрС is compact in ЗУ+*“|р|. Since
T is continuous on ЗУн“|р|, the set Т(т_хдрС) is compact in K; i.e.,
dp{T> r_x<p) is bounded as <p varies in C.
Next, for every e > 0 there exists a neighborhood V of 0 in ЗУ such that
1(7, ^)| e for ф G V. We may assume that V is defined by a set of
inequalities
|dV(z)l = ek for |я| к — 1 and |g| m*,
where e* €fc+i and mk t (к 1). Let p G Nn be such that
|p| g s and let x be a point of Rn. Since for |p + g| g s + t the set
{dp+q<p | <p G C} is equicontinuous and the supports of the <p G C are
contained in a compact subset of Rn (Proposition 3.9.12), there exists
Tj > 0 such that
ffi+W + У) - + y)| < ek
provided that <p e С, |y| к — 1, |з| mk, and \x' — x| g ij (k 1).
In other words, the functions
у i-> dp<p(x' + y) — dp<p(x + y)
406
DISTRIBUTIONS
[4, §Ю]
belong to V as <p varies in C and |x' — x| ij. Hence
|<Э₽IT(y)<p(x' + y) dy — dp jT(y)<p(x + y) dy\ e
provided that \x' — x| ij and <p e C. It follows now from Proposition
3.9.11 that A is indeed compact.
If S e A°, then
|(5 ♦ T, <p)| = \fs(x) (JT(y)<p(x + y) dy) <fo| £ 1
for all <p e C; i.e., S * T e C° = W. |
It follows from Proposition 1 that if p e 3), then for any T e ЗУ the
convolution Pe*T is an infinitely differentiable function which will be
called a regularization of T. If T e ЗУ*, then by Propositions 2 and 3 the
regularizations converge to T in <£),t as 6 —> 0. For r= oo this was pointed
out at the beginning of this section.
We want to develop an analogous procedure for the approximation by
infinitely differentiable functions of distributions defined in an open subset
of Rn. First, however, we must introduce one more notation. If f is a
function defined on Rn, in particular if f e 6, we set
Tr/= /(0).
If a e 8W and T e ЗУ™ are such that Supp a and Supp T satisfy condition
(22), then it follows from Proposition 1 that
(T, a) = Tr(a * T).
Observe that the left-hand side in this formula is well defined since condi-
tion (22) implies in particular that Supp T n Supp a is compact. If
S e ЗУ8 and T e £>ft are such that their supports satisfy condition (22),
then for any <p e ЗУ+< we have
(S*T,„)= (M*„). (4)
Indeed, Supp T and Supp(<§ ♦ #>)" = Supp 5 — Supp <p clearly satisfy
condition (22) and ♦ <p e S( by Proposition 1. Furthermore,
(5 ♦ T, v) = Tr(5 ♦ T * lp) = Tr(T * (£*«<) = <T, $ ♦ <P>.
Now we are in the position to prove
Proposition 4. Let О be an open subset of Rn and T e ЗУ™(0). There
exists a sequence of functions belonging to 8(0) which converges to T in the
space equipped with the topology к(зУ™(0), l>m(O)).
[4, §10] REGULARIZATION 407
Proof. Let (Kk)k*i be a sequence of compact subsets of Й such that
Kk C Kk+i and that every compact subset of Й is contained in some Kk
(cf. Example 2.6.3). For each к 1 let ak be a function belonging to
3>(S2) such that ak{x) = 1 in a neighborhood of Kk. The distribution akT
has its support contained in a compact subset of Й and can therefore be
considered as a distribution defined on Rn. If the function p which figures
in Proposition 2 belongs to SO, then by Proposition 1 the functions
Pi Ik * (afcT) (5)
(fc 1) are in 8.
For <p G 3)W(S2) we have by (4)
{рцк * (afcT), <p) = (T, otk(pnk * ?))• (6)
Now pi/* * <p converges to <p in 3)W(S2) as fc —> oo (cf. the proof of Proposi-
tion 4.1), and ak converges to 1 in 8W(S2) as fc —> oo. It follows from
Proposition 7.4 that ak{pi/k * <p) tends to <p in 3)W(S2) as fc —> oo. Hence
(6) converges to (T, <p) as к —> oo; i.e., the sequence (5) converges to T
weakly in ЗУ™ (9). It follows from Proposition 3.9.8 that (5) converges to
T also in the topology of uniform convergence on compact sets. |
Exercises
1. (a) Show that if a G SO* and T G 8'*, where s t, then a * T G ЗУ-*.
(b) Let T G 8'. Show that <p T * <p is a continuous map from SO into SO
whose transpose is the map 8»—► T* 8. Apply this result to the particular cases
T = Th8 (cf. Definition 3.2) and T = P(D)5, where P(D) is a partial differ-
ential operator with constant coefficients (§9).
2. Show that if и: SO —> 8 is a continuous linear map such that = и(тл<р)
for every h G Rn and tp G SO, then there exists a unique distribution R G ЗУ such
that u{<p) = R*<p for every G 3). {Hint: The map £»—► Tr u(^>) is a
distribution.)
3. Show that the functions of Proposition 2 do not tend to 8 in & for the
strong topology 0{&, 6). {Hint: In в there exists a fundamental system of
bounded sets В such that each В contains a function <p with fpe{x)<p{x) dx 0
for all € > 0 but £>(0) = —1.)
4. Show that the bilinear map (a, T) a * T from SO* X 8'* into ЗУ-*
(cf. Exercise 1(a)) is hypocontinuous if we equip 8'* with the topology 0(8'*, 8*).
5. Show that the bilinear map (a, T) a * T from SO* X ЗУ* into 8е-* is
hypocontinuous if we equip 3)'* with the topology 0(ЗУ*, 3)*).
6. Show that the bilinear map (a, T) *—► a * T from 8е X 8'* into 8е-* is
hypocontinuous if we equip 8'* with the topology /3(8'*, 8*).
7. Show that the bilinear map {8, T) 8 * T from 8,в X 3)'* into ЗУв+* is
hypocontinuous with respect to the equicontinuous subsets of 8'e and the com-
408
DISTRIBUTIONS
[4, §11]
pact subsets of S)'* if these spaces are equipped with the topologies к(8'*, 8е),
к(ЗУе, ЗУ), and к(3>'*+<, S)e+<)« Apply Proposition 8.8 and use the proof
of Proposition 3.)
8. Show that if f and g belong to 6(0) and djTf = Tg for some j (1 j n),
then djf exists and is equal to g. (Hint: First reduce to the case when/has com-
pact support. Then
= dj(pe* Tf) = pt* Tg = pt* g.
Finally, pt* f tends to / and pt * g to g uniformly as e —> 0.)
§77. Fourier transform
We conclude this chapter with a concept which is of basic importance
in the applications of distributions to the theory of partial differential
equations, in the theory of probability and many other branches of analysis.
For our purposes it will be useful to introduce two copies of the n-dimen-
sional Euclidean space Rn and to denote them by X and 2. Vectors of X
will be denoted by italic letters x = (xi, . . ., xn) ,y,..., vectors of 2 by
Greek ones f = (f i, . . ., fn), rj, . . . The spaces X and 2 will be con-
sidered as forming a dual system with respect to the bilinear form
(X, f) {x, = Xih H-------f- x„(„.
Definition 1. The Fourier transform ff^> or ф of a function G S(X) is
the function defined by
= ( <p(x)e~2^ dx.
Jx
We shall prove that ф exists, that it belongs to S(2), and that the map
ff: i—► ф is an isomorphism from S(X) onto S(2) whose inverse ff: ф
is given by
₽(x) = f ф^е2”^ dl-.
In the first place, repeated derivation under the integral sign yields for
any p G Nn the relation
Dp<p(£) = (-l)'pl[ xpv(x)e~2ri<^ dx. (1)
Jx
Since for |zj| 1 we have
|xP<p(x)| =
(1 |a;|2)iPi+n d + |a:|2)l₽l+Va:)
(2)
[4, §11]
FOURIER TRANSFORM
409
the integrand in (1) is absolutely integrable, and therefore ф exists and is
infinitely differentiable ([2], Theorem 14-24, p. 443). On the other hand,
<p and all its derivatives tend to zero as |x| —> oo, and therefore repeated
integration by parts yields for any q G Nn the relation
^(0 = [ Dev(x)e~2"™ dx. (3)
Combining (1) and (3), we have
^0^(0 = (-l)l₽l^_ Dq(xp4>(x))e-2ri{x'i} dx (4)
for every p and q in Nn. Since by the Leibniz formula Dq(xp<p) is a linear
combination of terms xr • D8<pj it follows from (2), (4), and Proposition
2.5.2 that ф G S(2) and that the map <p ф from S(X) into S(2) is con-
tinuous (cf. Example 2.5.2).
Proposition 1. For m G N and к G Z the space S™ (Example 2.4.11)
is a normal space of distributions (Definition 2.3).
Proof. The injection 3) S™ is clearly continuous (cf. Example 2.12.8).
On the other hand, the injection S™ 8m is continuous since if К is a
compact subset of Rn and p G Nn, |p| m, then for every <p G S* we have
max |dp^(x)| max (1 + |x|2)“* • max (1 + |x|2)*|dp^(x)|.
xEK xEK zERn
Since the injection 8m ay is also continuous (Proposition 4.3), we see
that S™ ЗУ is continuous.
Let f G 3) be such that f(x) = 1 for |x| 1, f(x) = 0 for |x| 2,
and 0 f(z) 1 for all x G Rn. Denote by fy the function x
and furthermore write
C = max max |dpf(x) | + 1.
x
If tp G S*, then $j<p G 3)w and
max (1 + |a:|2)i|ap{?>(a:) — fj(x)ip(x)} |
= max (1 + |x|2)* |£ Q ^-’(1 - №/») • ^<p{x) |
- X F} max "I"
“ \9/ Ixisy
By the definition of the space S* this last expression is arbitrarily small if
we choose j sufficiently large, and thus S)m is dense in S”. Since S) is dense
in 2Dm (Proposition 4.1) and the map S* is clearly continuous, D is
also dense in S™. |
410 DISTRIBUTIONS [4, §11]
Proposition 2. Let m g N and к e Z. The dual of S* can be identi-
fied with the space of all distributions of the form
т = (I + |x|2)‘ £
Ipl
where each pp is a measure which belongs to 9E1 (§5).
Proof. If L is a continuous linear form on S*, then its restriction T to D
is a distribution since D S* is continuous. Furthermore, the map
L i-> T is injective since 3) is dense in S*.
Denote by и the isomorphism tp i-> (1 + |x|2)*V from S* onto (Bq
(Example 2.5.8), and by й: S*w —> ©ow the contragredient isomorphism.
For any tp G S* we have
= m, = <«(L), (i + mW.
By Proposition 5.3 there exists a family (jiP)iP\^m of measures belonging
to 9T11 such that u(L) = SiPiSm дрцр. For <p G D we have
{L, <p) = /(1 + |z|2)‘ £ ;
i.e.,
T = (I + |x|2)‘ £ <>%,.
Ipl
Conversely, if (др) iP|g m is a family of measures belonging to 9TC1, then
<p •“* ( X (i + М2)%Л
is a continuous linear form on S* whose restriction to 3) is the distribution
(i + ।
Proposition 3. The space S is a normal space of distributions whose dual
S' can be identified with the space of all distributions of the form
(i + |x|2)‘£
where fc G N and (pp) is a finite family of measures belonging to 9E1.
Proof If we take into account Example 2.11.6, then the continuity of
the maps 3) S ЗУ follows from the continuity of the maps
D d'
for all m G N and fc G Z. Let tp G S and V a neighborhood of 0 in S. We
may assume that V is the inverse image of a neighborhood U of 0 in some
space S?. By Proposition 1 there exists G 3) such that ф G <p + U, and
therefore Ф G <p + F; i.e., 3) is dense in S.
[4, §11]
FOURIER TRANSFORM
411
The assertion concerning S' follows from Example 2.11.6, the Corollary
of Proposition 3.14.5, and Proposition 2. |
The elements of S' are called temperate (or slowly increasing) distribu-
tions. If J is an absolutely integrable continuous function on Rn, then
Tf G 9TC1 since
l<2WI = \ff(x)v(x) dx| max |^(я)|у\f(x)\ dx.
By Proposition 3 the measure Tf belongs to S', and in particular i—► T*
is a map from S into S'. We can prove exactly as in Example 1.1 that this
map is injective, and therefore we shall usually consider S as a subspace
of S'. Since the space S is reflexive (Example 3.9.5 or 3.15.4), the proof of
Proposition 1.3 shows that S is dense in S'.
We want to define the Fourier transform as a map from S'(X) into
S'(2). To motivate our definition, consider a function f belonging to S(X)
and a function <p belonging to S(2). Then we have
<&,*) = (f,3<p) (5)
since both sides are equal to
f f f(x)*(x)e-2vi{x'*}dxd};.
JX J a
This leads us to
Definition 2. The Fourier transform 3T or T of a distribution T G S'(X)
is the image of T under the transpose of the map CF: S(2) —> S(X); i.e.,
<*?» = (г,м
for all <p G S(2).
It is of course an abuse of notation to denote the transpose of 3 by
the same letter CF. It is, however, analogous to the abuse committed with
the symbol dp, and it is very convenient, since by (5) the operation
defined on S'(X) coincides with CF on S(X). It follows from the continuity
of £F: S(2) —* S(X) and the corollary of Proposition 3.12.3 that the
map £F: S'(X) —* S'(2) is continuous. Since S is dense in S', the map
fF: S'(X) —* S'(2) is the unique continuous extension of £F: S(X) —> S(2).
Example 1. 3(8) = 1 since for <p G S(2) we have
(3(8), <p) = (3, 3<p) = £>(0) = f <p(£) d% = (1, <p).
J'S,
Example 2. It follows from the identity
max \xrDq(Dp<p)(x)\ = max \xrDp+q<p(x)\
zERn ®GRn
412
DISTRIBUTIONS
[4, §И]
that the linear map <p Dp<p is continuous from S into S, and therefore
the map T DPT is continuous from S' into S'. It follows similarly from
Leibniz’s formula that <p xp<p is a continuous map from S into S and that
T xpT is a continuous map from S' into S'.
For T e S'(X) and p e Nn we have
$(DPT) = (6)
Indeed, for <p e S(2) we have
{$(PPT), = {DPT, M = (-1)’P'(T, Dp<5<p).
Now (1) can be rewritten as
DPS<p = (-l)IPIfr(^);
WPT), <p) = (T, St?*)) = <^(T), <p),
from which the desired conclusion follows.
If T = P(D)b = is a partial differential operator with con-
stant coefficients (§9), then by (6) we have ff(T)({) = = P(£)-
This is the relation between the operator P(D) and the polynomial function
f i-> P(f) alluded to in §9 after formula (6).
Example 3. For T e S'(X) and p e Nn we have
ff((—x)pT) =
Indeed, for <p e S(2) we have
<$F((-x)*T), v) = <T, (-х)Ъ<р).
Now (3) can be rewritten as
(-x)pS<f> =
Ф((-хУ>Т), v) = (-l)i’i(T, $F(^)) = (IFS(T), <f>).
Example 4. For T e S'(X) and h e R” we have
?(тлТ) = e-2r,<A>f>ff(T)
and
<F(e2"<A’*>T) = rAS(T).
For <p e S(S) we have
?(r^)(x) = - h)e-2^di
= f ^(0e-2"<x’{+A>d? = е-2ж<(х’А>(М(а:)
[4, §11] FOURIER TRANSFORM 413
and {t_*$F(v)}(x) = f
Js
Hence
(J(nT), <p) = (T, T^(<p))
= (T, ff(e-2T,<A1{M) = (e-2T*<M>S(T), <P),
which proves the first formula, and
(ff(e2”<A-’>T), <p) = (T,
= (T, = (r*S(T), <P),
which proves the second formula.
In the next proposition we shall consider h Euclidean spaces Rn;
(1 j Д), and of each Rny we shall consider two copies Xj and Sy which
will form a dual system as indicated at the beginning of this section. Then
Пу=1 Xj and П^1 Sy are both isomorphic to Rn (n = ni + • • • + пл),
and they form a dual system with respect to the bilinear form
л
(x, (x, 0 = E
i=i
(xj 6 Xj, fy 6 Sj).
Proposition 4. If Tj G S'(X>) for 1 s. j h, then
л \
n^)
3 = 1 7
and
/ h \ h
\y=l / y=l
Proof. Consider a family (^y)i^ygA of functions such that <py G S(Xy).
If Xj denotes a variable vector in Xj and dp> a partial derivation with respect
to the components of zy, then we have
л /
0 Tj & S' (
-• 1 \
dp(^>i ® • ® <Ph) = dP1<Pi ® • • • ® dPh<Ph
and
(1 + MV dp0<Pi(x)
3=1
П (1 + №)V ^)|.
3=1
Hence
h / h '
0 <P3f 6 S ( П Xi
3 = 1 \ = 1 4
i.e.,
h / h >
0s(X/)cs(n xi
y=l \'=1 '
414
DISTRIBUTIONS
[4, §11]
Also (^) S(Xj) is dense in 8(Пу=1 Xj) since (^ $>(Xj) is dense in
3)(Пу=1 Xj) (Proposition 8.1), and ©(П>=1 Xj) is dense in §(Пу=1 Xj)
(Proposition 3).
For <pj G S(Xj) we have
ff (0 *>/) (?) = fnx (0 Vi) (х)е-2гг<х’е dx '
= П / <р^)е-2^х^ dxi = ((g) ^)(0-
j=l JXi \=1 '
The identity
✓ h h \ h
Tj, (££)<Pi) = II {Tj, <f>j)
\=i y=i f j=l
shows that
0 Ti G S' (n Xi) •
Finally, we have
(ff (0 > 0 = (0 Ti, 5 (0 .-₽>))
= (0 Ti, ® ff(^)) = П <t>> *(*>>)>
\=1 3=1 f 3=1
= ft WTb, <Pi) = (0 JF(T?), 0 ,
j=l \=1 3 = 1 z
from which (7) follows. |
Example 5. We have
(8)
i.e., the function x e”T,x12 is its own Fourier transform (cf. Exercise 2).
Since for x = (xj, .. ., xn) G X = Rn we have
e-ir,x|2 = П
>=1
by virtue of Proposition 4 it is sufficient to prove (8) in the case n = 1.
Writing <p(x) = e”T|x12, we have
0(0 = Г e-xx2-2^dx = e~*2 Г e-^)2dx,
J —00 J—00
[4, §11]
FOURIER TRANSFORM
415
and it is sufficient to show that the last integral is equal to 1. For £ = 0
this integral is the so-called Gauss integral, and the following calculation
shows that its value is indeed 1 :
where we have set r2 = x2 + y2.
Now z i-> e~*z2 is an entire function of the complex variable z = x + iy,
and therefore its integral around the rectangle with vertices —a, a, a + i£,
—a + zf is zero (a > 0). Now the integrals on the two vertical sides tend
to zero as a —> oo since for instance
We have therefore
f e T(x+ti)2 dx = lim fa+^ e r‘2 dz
J—ж a—>oo J— a+it
г a 2 r°° 2
= lim / e“IZ dz = [ e~n dx = 1.
a—*ao J—a J —oo
Example 6. For h G Rn we have
= ThS = 6л
In the first place, by virtue of Example 4 it is sufficient to consider h = 0,
i.e., to prove
$F(1) = «.
Next 1 = 1», ® • • • ® lXn and 3 = SX1 ® • • • ® SXn (cf. Example 8.2),
and therefore by Proposition 4 it is sufficient to consider n = 1.
416
DISTRIBUTIONS
[4, §11]
Set 5(1) = T. By Example 2 we have = 5(D1) = 0, and therefore
by Proposition 6.6 the distribution T is a constant multiple of the Dirac
measure; i.e., T = X J. To determine the factor X observe that we have
<f>} — x(a, = (i, 5#>)
for every <p e S(R). Choosing <p = е~**2 we obtain by Example 5
/•00 2
X = / e~rX dx = 1.
Together with the Fourier transform SF we also must consider the con-
jugate Fourier transform SF, which for <p G S(X) is defined by
(S<p)(O = fx <p(z)e2ri^ dx. (9)
It is perfectly clear that SF is also a continuous linear map from S(X) into
S(2). We define, with a similar abuse of notation as in Definition 2, the
continuous linear map SF: &'(X) —> S'(2) by
(ST, <p) = (Г, M
for all T G S'(^) and у G S(2). This map SF coincides on S(X) with the
map defined by (9) and is its unique continuous extension to S'(X). The
formulas
S(a) = i, ff(i) = a,
S(DPT) = (-£)Р£(Т), $(xpT) = DP$(T),
S(rhT) = е2т*<м>5(Т), 5(е-2т‘<л’х>Т) = ta5(T),
5(e-2"<ft^>) = Sh
can be established exactly like the corresponding formulas for the
transform SF.
We now arrive at one of the main results of the theory.
Theorem 1. The Fourier transform SF is an isomorphism from 8(X) onto
S(2) whose inverse is given by SF. Similarly, SF is an isomorphism from S'(X)
onto S'(2) whose inverse is given by SF.
Proof. We know that SF: S(X) —> S(2) is a continuous linear map. If
<p G S(X), then for any h G X we have by Example 6
<p(h) = («л, <P> = (?(e2"<M>), V)
= {e2M\ ftp)
or, changing notations,
= f ^)e2ri(x’(>d^;
[4, §11]
FOURIER TRANSFORM
417
i.e., 33<p = <p. We see exactly in the same way that for every ф e S(E)
we have = ф. It follows that % is injective (since = 0 implies
<p = $$<p_= 0), surjective (since given ф E S(2), we have ff(ff^) = ^),
and that ff is the inverse of 3. Since ff: S(E) —> S(X) is a continuous linear
map, 3 is an isomorphism.
For T e S'(X) and 8 E S'(2) we have 33T = T and 338 = 8 since
(ffffT, <p) = (3T, 3<p) = (T, ffff^) = (T, <p)
and
(338, f) = (8, 33/) = (8, /)
for any <p E S(X) and / E S(2). It follows, similarly as above, that the
continuous linear map 3: S'(X) —> S'(2) is bijective, its inverse is the
continuous linear map 3: S'(2) —> S'(X), and ff is an isomorphism. |
Next let us investigate the multiplication of a temperate distribution
by an infinitely differentiable function. We first prove
Proposition 5. If a e Ом (Example 2.4.15) and <p e S, then a<p E S.
Conversely, if a E E> is such that a<p E 8 for all <p E S, then a E Ом- We have
Ом = DmGNOc (Example 2.12.9). Finally, for each a e Ом the map
<p »-> a<p from S into S is continuous.
Proof, (a) If <p e S, then (1 + |z|2)* dp<p E S for every к e N and
p E Nn. Now (1 + |x|2)*+1 dp(a<p) is a linear combination of functions
of the form (1 + |x|2)*+1 d9<p • dra. If a E Om> then by the definition of
Ом each such function is bounded. Thus
(1 + |x|2)V(««’)(*)l ’
which shows that a<p E S.
(b) If cup E S for every tp E S, then it follows from the formula
dja • <p = dj(a<p) — a - dj<p
that dja • <p e S for every e S. We see by induction that dpa • <p e S for
every tp e S and in particular a E 0 м-
(c) A function a belongs to QmGN Oc if and only if it is infinitely differ-
entiable, and for every m E N there exists an integer k(m) such that for
|p | m the function
x » (1 + |я|2)л(т)|дЗД|
tends to zero as |x( —> oo. We may obviously assume that
0 k(m) k(m + 1) —> — oo.
418
DISTRIBUTIONS
[4, §11]
Suppose that a e HmSN ©c and let <p e S, |p| = m. Then
<p(x) dva(x) = (1 + \x\2)~kbn\p(x) • (1 + |x|2)fc(m) dpa(x),
which shows that a 6 Qm-
(d) Consider a function a e 0 м and suppose that it does not belong to
ClmEN ©с- Then for some p e N" there exists a sequence of points x, e R”
with |x,| + 2 |x>+i | such that
|(1 + |х,|2)->д’а(х,)| £ 1
for every j e N. Let p 6 S have the properties (i) through (iv) listed in
Chapter 2, §12 and consider the function <p defined by
/ >. _ у P(x - Xj)
~ ,?Nd +W
Since the supports of the terms are disjoint, the function is infinitely differ-
entiable. Furthermore, if к E N and p E Nn, then for
|Xy| 1 |x| |#y| + 1
we have
л _i_ ы2)* dp(p(x) — dPp^x ~ Xj^~ •
(1 + |X| ) d V{X) - (1 + |a,.|2)fc (1 + |x.|2)i-fc
Since
? -L 1^'12 — ® and max = max |dPP(z)b
1 “Г |^il
we see by taking j > к sufficiently large that <p g S. On the other hand,
^\dpa(x3}| = p(0) • (1 + P(O) > 0
for all j G N, which contradicts the assumption a G 6м-
(e) Let У be a neighborhood of 0 in S which we may assume to be defined
by the inequalities
(1 + |я|2)*|др^(я)| € for |p| g m,
where fc, m G N and € > 0. If a G 6м, then by the Leibniz formula we
can determine rj > 0 so that, with the notation of part (c), the inequalities
(1 + |x|2)t-fc(m)|a’¥>(x)| s u
for |p| m imply a<p G V. |
[4, §11]
FOURIER TRANSFORM
419
Theorem 2. If a G 6 m, then aT G S' for every T G S', and conversely
if a e 8 is such that aT G S' for every T G S', then a G 6м- Рог each
a e 6м the map T i-> aT from S' into S' is continuous.
Proof. If a G 6м and T G S', then by Definition 6.1 we have
(aT, (p) = {T, oup} (10)
for every <p G £>. By Proposition 5 the map <p i-> cup from S into S is con-
tinuous, and since T G S', the map <p i-> (T, cup} is also continuous; i.e.,
aT is a continuous linear form on £) for the topology induced by S. Thus
aT can be extended by continuity to all of S, and the linear form so extended
belongs to S'. Relation (10) then holds for all <p G S; i.e., the map T i-> aT
is the transpose of the map <p i-> cup. It follows from the corollary of
Proposition 3.12.3 that T i-> aT is continuous.
Let a G 8 be such that aT G S' for every T G S'. Then for any <p G S
the map T i-> (aT, <p} is a continuous linear form on S'; i.e., there exists
ф G S such that (aT, <p) = (T, ф) for all T G S' and in particular for all
T G £>. Hence cup = ф G S, and thus a G 6м by Proposition 5. |
To conclude this section and also this chapter, we consider the convolu-
tion S * T of a distribution S and of a temperate distribution T. If S G 8',
then S * T is of course well-defined, and it is easy to see that S * T G S'.
We shall see, however, that S * T is meaningful and belongs to S' even if
jS belongs to the larger space 6 c, which we must investigate first.
One proves exactly like Proposition 3 the following result:
Proposition 6. For any к G Z the space S* (Example 2.4.12) is a normal
space of distributions whose dual S* can be identified with the space of all
distributions of the form (1 + |x|2)*12 where (др) is a finite family of
measures belonging to ЭТ11.
In particular, So = ®0 is a normal space of distributions. Its dual ®o
(denoted by X»!1 in [82]) consists of all integrable distributions (§5).
Corollary. The space 6c (Example 2.12.9) is a normal space of distribu-
tions whose dual 6 c can be identified with the space of all distributions T such
that for every к G Z the distribution (1 + |x|2)*T is integrable.
Proof. The continuity of £) <=+ 6c follows from the continuity of £> <=+ S*
(Proposition 6) and S* <=+ 6c- The continuity of 6c °* SO' follows from
the continuity of S* °* ЗУ (Proposition 6) and Proposition 2.12.1.
Let <p G 6c and V a neighborhood of 0 in 6c- Then <p G S* for some к
and V П Sjfe is a neighborhood of 0 in S*. By Proposition 6 there exists
G 3) such that ф G <p + V П S* and a fortiori ф e <p+ V. Thus 3) is
dense in 6c-
420
DISTRIBUTIONS
[4, §11]
Finally, a linear form on Oc is continuous if and only if its restriction to
each is continuous (Proposition 2.12.1), i.e., if T = (1 + |я|2)*7\ with
Tk G ®o-1
The elements of Oc are called rapidly decreasing distributions.
Remark 1. A function a belongs to Oc if and only if it is infinitely
differentiable and there exists an integer к such that for every p G Nn the
function c
x » (1 + |x|2)*|dpa(x)|
tends to zero as |x| —> oo. Thus Ос С Ом (cf. Proposition 5), and it is
easy to see that Ос И Ом (Exercise 6). The map Ос °* Ом is continuous.
Indeed, by Proposition 2.12.1 we must prove that for each к G Z .the map
Sfc °* Ом is continuous. If G S, then there exists д > 0 such that
(1 + |z|2)”*|^Cr)| д; hence
max |^(x) дра(х)\ д • max |(1 + |х|2)лдра(х)|
X X
for p G Nn and a G Sfc.
Since by Example 2.5.6 the map 0м 8 is continuous, it follows that
Oc °* 8 is continuous. On the other hand, the image of Oc is dense in 8
since already the image of 3) is dense in 8 (Example 2.5). Hence by Corol-
lary 2 of Proposition 3.12.2 the map 8' —> Oc is injective; i.e., every dis-
tribution with compact support is rapidly decreasing.
Proposition 7. If we define the convolution T * of T g S' and g S by
(T * <p)(x) = (T,r^),
then the function T * <p belongs to Oc- Furthermore, for each T G S' the map
<p i—► T * <p from S into Oc is continuous.
Remark 2. It follows from Proposition 10.1 that if Supp T and Supp
satisfy condition (£) of §9, then T * coincides with the convolution in
the sense of Definition 9.2.
Lemma 1. For every x G Rn and у G Rn we have
1 + h/l2 2(1 + |x|2)(l + |x + y|2).
Proof. For every real a and ft we have (a + 0)2 2a2 + 2/32 since
2a2 + 2/32 — (a + 0)2 = a2 + 02 — 2ap = (a — /3)2 0. Hence
|y|2 = |x + у — x|2 g 2|x + y|2 + 2|a:|2
and
1 + Ы2 1 + 2|x|2 + 2|x + y|2
2(1 + |x|2)(l + |x + y|2). |
[4, §11]
FOURIER TRANSFORM
421
Lemma 2 (cf. Proposition 3.4). Let h = (&i,..., hn) g R” be such that
hj = t and hk = 0 for к j. If <p G 8, then ft = t^^T-hV — <p) con-
verges to dj<p in 8 as t —> 0.
Proof. Let V be the neighborhood of 0 in S defined by the inequalities
(1 + |o;|2)fc|dpx(a:)| g e for |p| m, where к G Z, € > 0, and m G N.
There exists p > 0 such that (1 + |a:|2)*|dp^(a:)| |e for |x| > p and
|p| m + 1. Since дрф((х) = (djdp<p)(x + Oh) with 0 £ 0 £ 1, if we
take |Л| 1, we will have
(1 + И2)*|<э^(г)| £ (11)
and in particular
(l + M2)V^(x)| ie (12)
for |x| > p + 1 and |p| m. On the other hand, we have
(1 + |x|2)fc|d₽{^(x) - (<^)(x)}|
= (1 + M2)*|dy dpv(x + eh) - д^<р{х)\ £ e ( }
for all |x| p + 1, provided that |Л| is sufficiently small. It follows from
(11), (12), and (13) that
(1 + - д^(х)}\ < €
for x G Rn and |p| m, i.e., that g + V for sufficiently small |Z|. |
Proof of Proposition 7. (a) By Lemma 1 we have
(1 + |t/|2)k|ap(r^)(?/)| £ 2*(1 + |x|2)*(l + |x - у\2)к\др<р(х - у)|
for у G Rn, к g Z, p G Nn. Hence for every x G Rn the function тх<р
belongs to 8, and thus (T, rx<p) is well-defined.
Let us prove that the map x •-> rx<p from Rn into 8 is continuous. Let
V = | (1 + |«/I2)W«/)I у e R”, |p| £ rn}
be a neighborhood of 0 in S, where к g Z, € > 0, and m G N. Let a be a
point of Rn and let us consider points x g Rn such that |x — a| g 1.
If we choose p > 0 so large that
(1 + |t/|2)V^)| + |a|2)-*«
for |г/| > p and |p| m, then we have by Lemma 1
(I + M2) W* - »)l 2*(1 + M2)*(1 + к - J/I2) w* - y)l z14.
£ 8*(1 + |a|2)fc(l + I® - J/|2)*|3M* - j/)( 1 J
422
DISTRIBUTIONS
[4, §11]
provided |y| > p + |a| + 1 and |p| m. In the compact set 1
M P + 2|a| + 2 P
the function dp<p is uniformly continuous. Hence there exist 0 < 3 < 1
such that
(1 + - y) - (15)
for |г/[ p + |a| + 1, |p| m, provided that — a| 3. It follows
from (14) and (15) that
1(1 + \у\2)кдр{тхЦу) - та^у)}\
= Id + MWM(* - У) - (дМ(« - У)} I е
for у G Rn, |p| m, and |z — a| 3; i.e.,
тхф G та<р + V
for |x — a| g 3.
Since T is a continuous linear form on S, we see that
T * <p: x »-> (T, тх<р)
is continuous on Rn.
Next we shall prove the formula
dp{Tf rx^ = (-l)i₽i(T, rx(dMV) (16)
for p G Nn. Since dp<p G S for all p G Nn, it will then follow by what we
have just proved that T * <p has continuous partial derivatives of all
orders. By recursion it is sufficient to prove (16) for |p| = 1. Let
h = (Ai, ..., hn) G Rn
be such that hj = t and A* = 0 for к # j. Then
dj{T, rx?) = lim (-'{{T, rx_w) — (T, тхр)}
<—>0
= {T, lim /-1{т_л(тх^) — Tx<p}).
i—>0
Now by Lemma 2 the function t"1 {т^т^р) — rx<p} converges to
d;(rx£>) = rx{dj^) = — Txidjtpy
in S as t —» 0. Thus we obtain
dy(^, тх<р) = (T, Tx(dj<p) ),
which is (16) when |p| = 1.
[4, §11]
FOURIER TRANSFORM
423
Finally, we must show that T * <p 6 6c- By Proposition 3 we have
T = (1 + |?/|2)fc2To for some к e Z and To e ®o, and
(1 + ]х]2Гкдр{Т,т^)
= f T0(y)(l + |x|2)-‘(l + |z/|2) W(x - y) dy. (17)
By Lemma 1 we have
max (1 + |х|2)-\1 + |y|2)A|3pv>(o; - z/)|
2k max (1 + |x - г/|2)‘|Э^(х - p)| (18)
= 2fcmax(l + |y|2/|dWI-
У
It follows from this estimate and Leibniz's formula that for each p G Nn
the set of functions
У >-> (1 + И2Г*(1 + Ы2)* д*<р(х - у) (19)
is bounded in (Bo as x varies in Rn. Thus by (17) for every p G Nn the
function
x (1 + |x|2)-* dp{T, rx?)
is bounded on Rn; i.e., T ♦ <p e C ©c-
(b) If IF is a neighborhood of 0 in 6c, then W П contains a set
of the form
{X | (1 + |x|2)-fc-1|dpx(a:)| £ ъ |p| I}.
On the other hand, there exists a neighborhood U of 0 in ®o such that
ф e U implies |<To, ^)| i). It follows from (18) and Leibniz’s formula
that there exists a neighborhood Y of 0 in S, such that if <p e Y, then for
|p| I and x e Rn the functions (19) belong to U. But then
(1 + |x|2)-fc-1|dp(T * v)(x)|
* (1 + И2)"1 j/Го(?/)(1 + №)-*(l + l3/|2)W(x - y) dp| £ „
for |p| I; i.e., <p G Y implies T ♦ <p G W. |
Definition 3. The convolution S* T of a distribution 8 E 6c and a
distribution T G S' is given by
(8 *r,f)= <8, t1 *
for all <p G S.
Since by Proposition 7 the convolution t ♦ tp belongs to 6& the right-
hand side of the preceding formula is well-defined. Furthermore, since
§—> ♦ tp
424 DISTRIBUTIONS [4, §11]
is continuous by Proposition 7 and 8 is a continuous linear form on Oc,
the map <p (8, t ♦ <p) is continuous on S; i.e., S * T e S'. It follows
from formula (4) of §10 that if Supp 8 and Supp T satisfy condition (£),
then the new and the old definitions of 8 ♦ T coincide.
Finally, we state the following fundamental result, whose proof is post-
poned to Volume 2 (Chapter 6, §1). c
Theorem 3. The Fourier transform maps the space Oc(X) isomor-
phically onto the space 0 м (2). Furthermore, for 8 G Oc(X) and T G S'(X)
we have
$(8 ♦ T) = s(8) • S(T).
The inverse of the isomorphism 5: ©c(U ®m(S) is, of course, the
isomorphism 5: ®m(S) —» ©c(U- Also 5 establishes an isomorphism
between ©л/(Х) and ©c(E). If a e ©лг(Х) and T e S'(-X'), then
5(aT) = 5(a) * 5(T).
Exercises
1. Prove that the Fourier transform of the function x e_*|x|2 defined on X
is the function
defined on 2. Letting &—><», deduce another proof of the formula £F(1) = 6.
2. For every к G N define the Hermite function 3C* on R by
(—1)441 тг*/25С*(я) = .
axK
Show that ^(ЗС*) = (-i)*3C*.
3. Prove that the topology of 0м is the coarsest topology for which the
maps 0м Oc (mE N) are continuous.
4. Prove that for every G S the map а ь-> fromOM into S is continuous.
5. Prove that the bilinear map (a, 0)^ a0 from Ом X Ом into Ом is
continuous.
6. Show that the function x e'™2 defined on R belongs to 0м but not to ©c-
7. Assuming Theorem 3, prove the following assertions:
(a) For every Sg 6c the linear map T *—> 8 ♦ Tfrom S' into S' is continuous.
(b) If R G Oc and S G Oc, then R ♦ 8 G O'c.
(c) If R G Oc, *8 G Oc, and T G S', then (R ♦ 8) ♦ T = R* (8 * T).
(d) If 8 G Oc and T G S', then for every j (1 j ri) we have
dy(8*T) = djS*T = 8* djT
[4, §11] FOURIER TRANSFORM 425
and for every h G Rn we have
тн(8 * T) = тл8 * T = S * ThT.
(e) If Q G 0c(R*), R G S'(R*), 5 G 0£<RZ), and T G S'(RZ), then
Q ® 8 G 0£?(R*+Z)
and
(Q * R) ® (8 * T) = (Q ® 8) * (Я ® T).
8. Show that the strong topology on O'c is the coarsest topology for which
the maps (1 + |«|2)*Tfrom O'c into (Bo are continuous, where (Bo is equipped
with its strong topology and к G Z.
9. Show that for every <p G S the map T T * <p from S' into 0C is
continuous.
10. Show that (T, <p) T * <p is a separately continuous linear map from
0c X S into S and from &c X 0c into 0c.
427
Bibliography
This short bibliography contains, besides the works quoted in the text, mainly
references which might be useful to the reader for further study. Additional
bibliography can be found in [15,19, 52, 63]. A few papers of great historical
interest and some recent publications (with the reference to their review in
Mathematical Reviews) are also included.
1. Ahlfors, Lars V., Complex Analysis. An Introduction to the Theory of
Analytic Functions of One Complex Variable. McGraw-Hill, New York-
Toronto-London, 1953.
2. Apostol, Tom M., Mathematical Analysis. A Modern Approach to Advanced
Calculus. Addison-Wesley, Reading, Mass., 1957.
3. Arsove, M. G.; Edwards, R. E., “Generalized bases in topological linear
spaces.” Studia Math., 19 (1960), 95-113. MR 22#5871.
4. Baouendi, Mohamed Salah, “Division des distributions dans Ом ” C. R.
Acad. Sci., Paris, 258 (1964), 1978-1980. MR 28 #4351.
5. Bauer, Heinz, Konvexitat in topologischen Vektorrdumen, insbesondere:
Integraldarstellung in konvexen, kompakten Mengen, Vorlesung im Winter-
semester 1963/64 an der Universitat Hamburg, ausgearbeitet von Ulrich
Krause.
6. Boas, Ralph P., Jr., Entire functions. Academic Press, New York, 1954.
7. Bourbaki, N., Elements de maihematiques. Livre II. Algbbre, chapitre 2,
Algbbre lineaire. 3rd ed. Actualit£s Scientifiques et Industrielles 1236;
Hermann, Paris, 1962.
8. Bourbaki, N., Elements de maihematiques. Livre III. Topologic generate.
Actualit£s Scientifiques et Industrielles 1142, 1143, 1235, 1045, 1084, 1196;
Hermann, Paris, 1953-1961.
9. Bourbaki, N., Elements de maihematiques. Livre V. Espaces vectoriels
topologiques. Actualit£s Scientifiques et Industrielles 1189, 1229, 1230;
Hermann, Paris, 1953, 1955.
10. Bourbaki, N., Elements de maihematiques. Livre VI. Integration. Actualit£s
Scientifiques et Industrielles 1175, 1244, 1281, 1306; Hermann, Paris, 1952,
1956, 1959, 1963.
11. Bourbaki, N., “Sur certains espaces vectoriels topologiques.” Ann. Inst.
Fourier (Grenoble), 2 (1950), 5-16.
12. Brace, John W., “Compactness in the weak topology.” Math. Mag., 28
(1955), 125-134.
428
BIBLIOGRAPHY
13. Campos Ferreira, Jaime, "Les espaces de Schwartz et les espaces d’appli-
cations lin£aires continues.” Portugal. Math., 18 (1959), 1-32. MR 22
#2874.
14. Collins, Heron S., "Completeness, full completeness and к spaces.” Proc.
Amer. Math. Soc., 6 (1955), 832-835.
15. Day, Marlon M., Normed Linear Spaces. Ergebnisse der Mathematik und
ihrer Grenzgebiete, Neue Folge, Heft 21. Springer-Verlag, Berlin-GOttingen-
Heidelberg, 1958.
16. Day, Marlon M., “On the basis problem in normed spaces.” Proc. Amer.
Math. Soc. 13 (1962), 655-658. MR 25 #1435.
17. De Rham, Georges, Varies diff&rentiables. Formes, courants, formes
harmoniques. Actualit6s Scientifiques et Industrielles 1222; Hermann,
Paris, 1955.
18. Dieudonn^, Jean, "La dualit£ dans les espaces vectoriels topologiques.”
Ann. Sci. Ecole Norm. Sup., 59 (1942), 107-139.
19. Dieudonn^, Jean, "Recent developments in the theory of locally convex
vector spaces.” Bull. Amer. Math. Soc., 59 (1953), 495-512.
20. Dieudonn^, Jean; Schwartz, Laurent, "La dualit£ dans les espaces ((F)
et (JB^).” Ann. Inst. Fourier (Grenoble), 1 (1949), 61-101.
21. Dixmier, Jacques, Les algbbres d’operateurs dans Vespace hilbertien (algbbres
de von Neumann). Cahiers Scientifiques, fasc. 25, Gauthier-Villars, Paris,
1957.
22. Douady, Adrien, "Parties compactes d’un espace de fonctions continues &
support compact.” C. R. Acad. Sci. Paris, 257 (1963), 2788-2791. MR 27
#6121.
23. Edmunds, D. E., "22-symmetric locally convex spaces.” Proc. Amer. Math.
Soc., 14 (1963), 697-700. MR 27 #4055.
24. Edwards, R. E., "Integral bases in inductive limit spaces.” Pacific J. Math.,
10 (1960), 797-812. MR 22 #5868.
25. Edwards, R. E., Functional Analysis: Theory and Applications. Holt,
Rinehart and Winston, New York, 1965.
26. Fan, Ky, "On the Krein-Milman theorem.” Proc. Sympos. Pure Math.,
Vol. VII, pp. 211-219. Amer. Math. Soc., Providence, R. I., 1963. MR 27
#4056.
27. Friedman, Avner, Generalized Functions and Partial Differential Equations.
Prentice-Hall, Englewood Cliffs, N. J., 1963. MR 29 #2672.
28. Fullerton, Robert E., "Geometrical characterizations of certain function
spaces.” Proc. Internal. Sympos. Linear Spaces (Jerusalem, 1960),pp. 227-236.
Jerusalem Academic Press, Jerusalem; Pergamon, Oxford; 1961.
29. Gal, I. S., "On sequences of operations in complete vector spaces.” Amer.
Math. Monthly, 60(1953), 527-538.
30. Gel’fand, I. M.; Silov, G. E., Obobstennye funkcii [Generalized functions].
I. Obobstennye funkcii i deisstvija nod nimi [Generalized functions and
operations on them]. Gosudarstvennoe izdatel’stvo fiziko-matematiCeskoi
literatury, Moscow, 1958. MR 20 #4182.
English translation: Gel’fand, I. M.; Shilov, G. E., Generalized functions.
Vol. I: Properties and operations. Academic Press, New York-London, 1964.
MR 29 #3869.
BIBLIOGRAPHY
429
German translation: Gelfand, I. M.; Schilow, G. E., VerdUgemdnerte
Funktionen (Distributionen). I. VerdUgemeinerte Funktionen und das Rechnen
mit ihnen. VEB Deutscher Verlag der Wissenschaften, Berlin, 1960.
French translation: Guelfand, I. M.; Chilov, G. E., Les distributions.
Collection Universitaire de Math£matiques, 8. Dunod, Paris, 1962. MR 24
#A2235.
31. Gel’fand, I. M.; Silov, G. E., Obobstennye funkdi [Generalized functions].
II. Prostranstva osnovnyh i obobs&ennyih funkdi [Spaces of fundamental and
generalized functions]. Gosudarstvennoe izdatel’stvo fiziko-matematideskoi
literatury, Moscow, 1958. MR 21 #5142 a.
German translation: Gelfand, I. M.; Schilow, G. E., VerdUgemeinerte
Funktionen (Distributionen). II. Lineare topologische Rdume, Rdume von
Grundfunktionen und verallgemeinerten Funktionen. VEB Deutscher Verlag
der Wissenschaften, Berlin, 1962. MR 26 #6765.
French translation: Guelfand, I. M.; Chilov, G. E., Les distributions.
Tome 2, Espaces fondamentaux. Collection Universitaire de Math£matiques,
15. Dunod, Paris, 1964. MR 28 #4354.
32. Gel’fand, I. M.; Silov, G. E., Obobsdennye funkdi [Generalized functions].
III. Nekotorye voprosy teorii differendalnyh uravnenii [Some questions in the
theory of differential equations]. Gosudarstvennoe izdatel’stvo fiziko-
matematideskoi literatury, Moscow, 1958. MR 21 #5142 b.
German translation: Gelfand, I. M.; Schilow, G. E., VerdUgemeinerte
Funktionen (Distributionen). III. Einige Fragen zur Theorie der Differential-
gleichungen. VEB Deutscher Verlag der Wissenschaften, Berlin, 1964.
33. Gel’fand, I. M.; Vilenkin, N. Ja., Obobsdennye funkdi [Generalized func-
tions]. IV. Nekotorye primenenija garmoniteskogo analiza, osndstennye
giVbertovy prostranstva [Some applications to harmonic analysis, equipped
Hilbert spaces]. Gosudarstvennoe izdatel’stvo fiziko-matematideskoi liter-
atury, Moscow, 1961. MR 26 #4173.
English translation: Gel’fand, I. M.Vilenkin, N. Ya., Applications to
Harmonic Analysis. Academic Press, New York-London, 1964.
German translation: Gelfand, I. M.; Wilenkin, N. J., VerdUgemeinerte
Funktionen (Distributionen). IV. Einige Anwendungen der harmenischen
Analyse, Gdfandsche Raumtripd. VEB Deutscher Verlag der Wissen-
schaften, Berlin, 1964.
34. Gel’fand, I. M.; Graev, M. I.; Vilenkin, N. Ja., Obobsdennye funkdi
[Generalized functions]. V. Integral'naja geometrija i svjazannye s nd voprosy
teorii predstavlenii [Integral geometry and related questions in the theory
of representations]. Gosudarstvennoe izdatel’stvo fiziko-matematideskol
literatury, Moscow, 1962. MR 28 #3324.
35. Gil de Lamadrid, JesXjs, "Complementation of manifolds in topological
vector spaces.” Arch. Math., 14 (1963), 59-61. MR 28 #3306.
36. Godement, Roger, Topologic algtibrique et th&orie des faisceaux. Actualit£s
Scientifiques et Industrielles 1252; Hermann, Paris, 1958.
37. Goffmann, Casper; Pedrick, George, A First Course in Functional
Analysis. Prentice-Hall, Englewood Cliffs, N. J., 1965.
38. Goldberg, Seymour, "On Dixmier’s theorem concerning conjugate spaces.”
Math. Ann., 147 (1962), 244-247.
430
BIBLIOGRAPHY
39. Gould, G. G., "Locally unbounded topological fields and box topologies of
products of vector spaces.” J. London Math. Soc., 36 (1961), 273-281.
MR24#A413.
40. Grothendieck, Alexandre, "Critfcres de compacite dans les espaces fonc-
tionnels generaux.” Amer. J. Math., 74 (1952), 168-186.
41. Grothendieck, Alexandre, ”Sur les espaces (JF) et (SDJF).” Summa Brasil.
Math., 3 (1954), 57-123.
42. Grothendieck, Alexandre, “Produits tensoriels topologiques et espaces
nucleaires.” Mem. Amer. Math. Soc., 16 (1955).
43. Grothendieck, Alexandre, Espaces vectoriels topologiques, 2nd ed. Soci-
edade de Matemdtica de Sao Paulo, Sao Paulo, 1958.
44. Halmos, Paul R., Introduction to Hilbert Space and the Theory of Spectral
Multiplicity. Chelsea, New York, 1951.
45. Hirzebruch, F., Topological Methods in Algebraic Geometry. Die Grundlehren
der Mathematischen Wissenschaften, Bd. 131. Springer-Verlag, New York,
1966.
46. Hormander, Lars, Linear Partial Differential Operators. Die Grundlehren
der mathematischen Wissenschaften, Bd. 116. Springer-Verlag, Berlin-
Gottingen-Heidelberg, 1963.
47. Husain, Taqdir, The Open-mapping and Closed-graph Theorems in Topo-
logical Vector Spaces. Clarendon Press, Oxford, 1965. MR 31 #2589.
48. Kantorovic, L. V.; Akilov, G. P., Funkcional’nyi analiz v normirovannyh
prostransvah [Functional analysis in normed spaces]. Gosudarstvennoe
izdatel’stvo fiziko-matematiSeskoi literatury, Moscow, 1959. MR 22 #9837.
English translation: Kantorovich, L. V.; Akhilov, G. P., Functional
Analysis in Normed Spaces. Pergamon, Oxford, 1964.
49. Kelley, John L.; Namioka, Isaac, Linear Topological Spaces. With
the collaboration of W. F. Donoghue, Jr., Kenneth R. Lucas, B. J. Pettis,
Ebbe Thue Poulsen, G. Bailey Price, Wendy Robertson, W. R. Scott,
Kennan T. Smith. D. van Nostrand, New York-London-Toronto, 1963.
MR 29 #3851.
50. Komura, Yukio, “On linear topological spaces.” Kumamoto J. Sci., Ser. A,
5, 148-157 (1962). MR 27 #1800.
51. Komura, Yukio, “Some examples on linear topological spaces.” Math.
Ann., 153 (1964), 150-162.
52. Kothe, Gottfried, Topologische lineare Rdume. I. Die Grundlehren der
mathematischen Wissenschaften, Bd. 107. Springer-Verlag, Berlin-Gottin-
gen-Heidelberg, 1960. MR24#A411.
53. Levin, V. L., “Non-degenerate spectra of locally convex spaces.” Dokl.
Akad. Nauk SSSR, 135 (1960), 12-15 (Russian); translated as Soviet Math.
Dokl. 1, 1227-1230. MR 22 #4932.
54. Levin, V. L., “On a theorem of A. I. Plessner.” Uspehi Mat. Nauk, 16 (1961),
no. 5 (101), 177-179 (Russian). MR24#A2820.
55. Levin, V. L., “В-completeness conditions for ultrabarrelled and barrelled
spaces.” Dokl. Akad. Nauk SSSR, 145 (1962), 273-275 (Russian). MR 25
#3347.
56. Levin, V. L., “On a class of Ideally convex spaces.” Dokl. Akad. Nauk
SSSR, 145 (1962), 35-37 (Russian). MR 25 #5375.
BIBLIOGRAPHY
431
57. Lindenstrauss, Joram, "On a problem of Nachbin concerning extension of
operators.” Israel J. Math., 1 (1963), 75-84. MR 28 #478.
58. Lions, J. L., Equations differentielles optrationnelles et probtemes aux limites.
Die Grundlehren der mathematischen Wissenschaften, Bd. 111. Springer-
Verlag, Berlin-Gottingen-Heidelberg, 1961.
59. Luxemburg, W. A. J., "On closed linear subspaces and dense linear sub-
spaces of locally convex topological linear spaces.” Proc. Internal. Sympos.
Linear Spaces (Jerusalem, 1960), pp. 307-318. Jerusalem Academic Press,
Jerusalem; Pergamon, Oxford; 1961. MR 25 #2404.
60. Mahowald, Mark; Gould, Gerald, "Quasi-barrelled locally convex
spaces.” Proc. Amor. Math. Soc., 11 (1960), 811-816. MR 23 #A499.
61. Mahowald, M., "Barrelled spaces and the closed graph theorem.” J. Lon-
don Math. Soc., 36 (1961), 108-110. MR23#A2728.
62. Makarov, В. M., "Some pathological properties of inductive limits of
В-spaces.” Uspehi Mai. Nauk, 18 (1963), no. 3 (111), 171-178 (Russian).
MR 27 #2839.
63. Marinescu, G., Espaces vectoriels pseudotopologiques et theorie des distribu-
tions. Hochschulbilcher ftir Mathematik, Bd. 59. VEB Deutscher Verlag
der Wissenschaften, Berlin, 1963. MR 29 #3878.
64. Martineau, Andr6, "Sur une propri£t£ caract£ristique d’un produit de
droites.” Arch. Math., 11 (1960), 423-426. MR23#A3981.
65. Mergelyan, S. N., "Weighted approximation by polynomials.” Amer.
Math. Soc. Transl., (2), 10 (1958), 59-106.
66. Mochizuki, Nozomu, "On fully complete spaces.” Tohoku Math. J., (2),
13 (1961), 485-490. MR 26 #5397.
67. Nachbin, Leopoldo, "Topological vector spaces of continuous functions.”
Proc. Nat. Acad. Sci. U.S.A., 40 (1954), 471-474.
68. Nachbin, Leopoldo, "Some problems in extending and lifting continuous
linear transformations.” Proc. Internal. Sympos. Linear Spaces (Jerusalem,
1960), pp. 340-350. Jerusalem Academic Press, Jerusalem; Pergamon,
Oxford; 1961. MR 24 #2826.
69. Nachbin, Leopoldo, "Sur Papproximation polynomiale ponder£e des fonc-
tions r£elles continues.” Atti della 2a riunione del Groupement de Mathema-
tidens d’expression latine (Firenze, 26-30 settembre 1961 - Bologna, 1-3
ottobre 1961), pp. 42-58. Cremonese, Roma, 1963.
70. Nachbin, Leopoldo, "R£sultats r£cents et problfcmes de nature alg£brique
en th£orie de Papproximation.” Proceedings of the International Congress of
Mathematicians, pp. 379-384, Stockholm, 1962.
71. Nachbin, Leopoldo, "Weighted approximation over topological spaces and
the Bernstein problem over finite dimensional vector spaces.” Topology, 3
(1964), suppl. 1, 125-130. MR 28 #4286.
72. Nachbin, Leopoldo, "Weighted approximation for algebras and modules
of continuous functions: Real and self-adjoint complex cases.” Ann. of
Math., (2) 81 (1965), 289-302. MR 31 #628.
73. Nachbin, Leopoldo, Elements of Approximation Theory. Department of
Mathematics, University of Rochester, Rochester, N. Y., 1964. Notas de
Matemdtica no. 33, Institute de Matemdtica Рига e Aplicada, Rio de
Janeiro, 1965.
432
BIBLIOGRAPHY
74. Peetre, Jaak, Elliptic Partial Differential Equations of Higher Order. The
Institute for Fluid Dynamics and Applied Mathematics, Lecture series,
no. 40, University of Maryland, College Park, Md., 1962.
75. Ptak, Vlastimil, "Completeness and the open mapping theorem.” Hull.
Soc. Math. France, 86 (1958), 41-74.
76. Ptak, Vlastimil, "On the closed graph theorem.” Czechoslovak Math. J.,
9 (84) (1959), 523-527. MR 22 #5864.
77. Robertson, Alex. P.; Robertson, Wendy, "On the closed graph theorem.”
Proc. Glasgow Math. Assoc., 3 (1956), 9-12.
78. Robertson, A. P.; Robertson, W. J., Topological Vector Spaces. Cambridge
Tracts in Mathematics and Mathematical Physics, no. 53. Cambridge
University Press, Cambridge-New York, 1964. MR 28 #5318.
79. Schaefer, Helmut, "Zur komplexen Erweiterung linearer Raume.” Arch.
Math., 10 (1959), 363-365. MR 22 #171.
80. Schwartz, Laurent, Etude des sommes d’exponentielles rtelles et imaginaires.
Actualit6s Scientifiques et Industrielles 959; Hermann, Paris, 1959.
81. Schwartz, Laurent, Theorie des distributions. I. 2nd ed. Actualit6s Scien-
tifiques et Industrielles 1091; Hermann, Paris, 1957.
82. Schwartz, Laurent, Thtorie des distributions. II. Actualit£s Scientifiques
et Industrielles 1122; Hermann, Paris, 1951.
83. Schwartz, Laurent, Produits tensoriels topologiques et espaces nucUaires.
S6minaire, Institut Henri Ротсагё, Paris, 1953-54.
84. Schwartz, Laurent, "Espaces de fonctions difffrentiables & valeurs vectori-
elles.” J. Analyse Math., 4 (1954/55), 88-148.
85. Schwartz, Laurent, Lectures on Complex Analytic Manifolds. Tata Insti-
tute of Fundamental Research, Bombay, 1955.
86. Schwartz, Laurent, Ecuaciones diferenciales parciales elipticas. Univer-
sidad Nacional de Colombia, Departamento de Matemdticas у Estadfstica,
Bogota, 1956.
87. Schwartz, Laurent, Variedades analiticas complejas. Universidad Nacional
de Colombia, Departamento de Matemdticas у Estadfstica, Bogota, 1956.
88. Schwartz, Laurent, "ТЬёопе des distributions & valeurs vectorielles. I.-II.”
Ann. Inst. Fourier (Grenoble), 7 (1957), 1-141; 8 (1959), 1-209. MR 21
#6534; 22 #8322.
89. Schwartz, Laurent, Mtthodes maih^maiiques pour les sciences physiques.
Avec le concours de Denise Huet. Hermann, Paris, 1961.
90. Schwartz, Laurent, Convergence de distributions dont les derMes convergent.
Studies in mathematical analysis and related topics, pp. 364-372. Stanford
University Press, Stanford, Calif., 1962. MR 28 #4355.
91. Schwartz, Laurent, Some Applications of the Theory of Distributions.
Lectures on Modern Mathematics. I., pp. 23-58. John Wiley & Sons, New
York, 1963. MR 31 #2611.
92. Schwartz, Laurent, "Sous-espaces hilbertiens d’espaces vectoriels topo-
logiques et noyaux аззошёз. (Noyaux reproduisants).” J. Analyse Math.,
13 (1964), 115-256. MR 31 #3835.
93. Schwartz, Laurent, Functional Analysis. New York University, Courant
Institute of Mathematical Sciences. New York, 1964.
BIBLIOGRAPHY
433
94. Shibata, Toshio, "Adjoint space and dual space.” Proc. Japan Acad., 36
(1960), 261-266. MR 22 #9835.
95. Shirota, Taira, ”On locally convex vector spaces of continuous functions.”
Proc. Japan Acad., 30 (1954), 292-298.
96. Simons, S., ”The bornological space associated with Rz.” J. London Math.
Soc., 36 (1961), 461-473. MR 24#A2822.
97. SjJowikowski, W., ”On continuity of inverse operators.” Bull. Amer.
Math. Soc., 67 (1961), 467-470. MR24#A1590.
98. SjJowikowski, W., "Quotient spaces and the open map theorem.” Bull.
Amer. Math. Soc., 67 (1961), 498-500. MR 24#A1591.
99. Stampacchia, Guido, "Formes bilin6aires coercitives sur les ensembles
convexes.” C. R. Acad. Sci. Paris, 258 (1964), 4413-4416. MR 29 #3864.
100. Treves, J. F., Lectures on Linear Partial Differential Equations with Con-
stant Coefficients. Notas de Matemdtica no. 27, Institute de Matemdtica
Рига e Aplicada, Rio de Janeiro, 1961. MR 27 #5020.
101. Waelbroeck, Lucien, "Le compl6t6 et le dual d’un espace localement
convexe.” Bull. Soc. Math. Belg., 16 (1964), 393-406. MR 31 #3842.
102. Welland, R. R., "Metrizable K6the spaces.” Proc. Amer. Math. Soc., 11
(1960), 580-587. MR 22 #12369.
103. Widder, David Vernon, The Laplace Transform. Princeton Mathematical
Series, vol. 6, Princeton University Press, Princeton, N. J., 1941.
104. Wilansky, Albert, Functional Analysis. Blaisdell, New York, 1964.
105. Yosida, Kosaku, Functional Analysis. Die Grundlehren der mathema-
tischen Wissenschaften, Bd. 123. Springer-Verlag, Berlin-Gottingen-
Heidelberg, 1965.
106. Zaanen, A. C., "Banach function spaces.” Proc. Internal. Sympos. Linear
Spaces (Jerusalem, 1960), pp. 448-452. Jerusalem Academic Press, Jeru-
salem; Pergamon, Oxford; 1961. MR 25 #426.
107. Goldberg, Seymour, Unbounded Linear Operators. Theory and Applica-
tions. McGraw-Hill, New York, 1966.
108. Phelps, Robert R., Lectures on Choquet's Theorem. Van Nostrand Mathe-
matical Studies #7; D. van Nostrand, Princeton, 1966.
109. Schaefer, Helmut H., Topological Vector Spaces. Macmillan, New York,
1966.
110. Whitley, Robert, "Projecting m onto co.” Amer. Malh. Monthly, 73
(1966), 285-286.
INDEX OF NOTATIONS
TABLES
INDEX
INDEX OF NOTATIONS
The notations introduced on pages 1 through 3 are not listed.
K: the field of scalars, always either R or C, p. 5
0: the zero vector or origin; also the number zero, p. 5
||z||: norm of the vector x, p. 6
dimK E: the algebraic dimension of the vector space E over K, p. 18
x -j- A = {x + у \y G A}; A subset of a vector space, p. 19
A + В = {ж + у | x G А, у E. B}\ At В subsects of a vector space, p. 19
A — В = {x - у \ x E A,y e В}; A, В subsets of a vector space, p. 19
XA = {Xs | x G A}; X G K, A subset of a vector space, p. 19
Bp(a) = {x | 8(x, a) p} : closed ball with center a and radius p, p. 19
A: adherence (closure) of the set A, pp. 19, 72
5(A, B): distance between the sets A and В in a metric space, p. 19
5 (a, B): distance of the point a from the set B, p. 19
A: interior of the set A, pp. 19, 71
Bp: closed ball with center at the origin and radius p in a normed vector space,
p. 20
Ё: completion of the Hausdorff topological vector space Ef pp. 26, 134
E/M: quotient space of the vector space E modulo the subspace M, p. 37
K1: the one-dimensional Banach space over K, p. 41
B': dual of the locally convex Hausdorff space B, pp. 53, 184
(z, y}: the canonical bilinear form, pp. 57, 184
the subspace formed by all vectors orthogonal to the set M, pp. 58, 193
M V N: the closed subspace generated by the subspaces M and N, p. 58
\/ML: the closed subspace generated by the family of subspaces
pp. 61, 193
B": bidual of the locally convex Hausdorff space B, pp. 59, 226
Supp f: support of the continuous function /, p. 83
dy = ^>p.83
uXj
|p| = • • • -{- pn: order of the multi-index p G Nn, p. 83
Alpl
dp = = -------------,p. 83
dxl'---dxpn*
xp = zi1^2 • • • Xnn, x = (xi,..., Xn) G Rn, p = (pi,..., Pn) G Nn, p. 99
p! = Р1!рг! • • • pn!, p G Nn, p. 99
P + q = (Pi + <h,..., Pn + Qn), P, q G Nn, p. 100
p q: pj q, for 1 j n where p, q G Nn, p. 100
437
438
INDEX OF NOTATIONS
(p) = , (P'\... (M, p> q G N» p. 10i
W «HP — 9)! \9i/ \9n/
П cartesian product of the family (Xt)ter, p. 117
tez
X1 = fj Xu where Xt = X for alb G I, p. 117
tei
Я Ac = | TI Xt, I Xt, G A J ; (Athei family of subsets of a vector space, p. 119
ф Me, direct sum of the subspaces Mh p. 119
tei
lx: the identity map x »-> x from X onto itself, p. 120
M ® N: direct sum of the subspaces M and N, p. 120
II Et,: external direct sum of the vector spaces Eh p. 158
ter
E(T) = Ц Ei, where Д = E for all i G Z, p. 158
ter
E*t algebraic dual of the vector space E, p. 184
A°: (absolute) polar of the set A, p. 190
Ap: polar of the set A, p. 194
Ea: normed space associated with the balanced, convex set A 0, p. 207
Ey: normed space associated with the absorbing, balanced, convex set V, p. 208
transpose of the linear map u, p. 254
T/: distribution associated with the function/, p. 313
3: Dirac measure, p. 314
v.p. Cauchy principal value, p. 315
x
Supp T: support of the distribution T, p. 318
тд: translation by the vector h G Rn, p. 329
E ® F: tensor product of the vector spaces E and Ft p. 366
x ® y, x G E) у G F: p. 366
X(*, y): x X(x, y), p. 370
f S(x)<p(x) dx = <8, <p), p. 370
S ® T-. tensor product of the distributions 3 and T, p. 372
<рл: (s, У) •“* <p(x + У), where <p G £>(Rn), p. 381
S * T: convolution of the distributions 3 and T, pp. 381, 384
= {(xfy) \x + ye K},p. 383
X*: fa y) X(x)) where X G £>(Rn), p. 384
= Л A = A- &i> p-392
2тгг дх; 2тгг
Dp = D?4>52 • • • -----J—
(2л)1’1
f:x >-^f(—x), p. 401
T-. p. 402
Э1’1
dxPl • • •
> p. 393
INDEX OF NOTATIONS
439
Try = /(0), p. 406
&P = Ф'. Fourier transform £(f) = JRn p(x)e”2irt<x’{> dx, p. 408
= T: Fourier transform of the distribution T, p. 411
Topologies
(F and G are two paired vector spaces)
<r(F, G): weak topology, p. 185
3(F, G): strong topology, p. 201
r(F, G): Mackey topology, p. 206
3*(^, E'): topology of uniform convergence on 0(E', ^-bounded subsets of E',
p. 220
У(Е, E'): topology of uniform convergence on balanced, convex, k(E',E)-
compact subsets of E', p. 243
к(Е', E): topology of uniform convergence on balanced, convex, compact subsets
of E, p. 235
X(E', E): topology of uniform convergence on precompact subsets of E, p. 234
p(E', E): finest locally convex topology which induces on every equicontinuous
subset of E' the same topology as <г(Е', E), p. 251
v(E', E): finest topology which induces on every equicontinuous subset of E' the
same topology as <r(E', E), p. 243
t(E", E'): topology of uniform convergence on equicontinuous subsets of E',
p. 229
Tc: topology of compact convergence on 6(X), p. 236
Te: topology of pointwise convergence on 6(X), p. 236
Spoces
Rn: n-dimensional real Euclidean space, pp. 6, 9, 15
Cn: n-dimensional complex Euclidean space, pp. 7, 9, 15
co • Banach space of all sequences which tend to zero, p. 11
lp, 1 p < 00 : Banach space of all sequences (fn) for which 22Ifn(p converges,
p. 11
m: Banach space-of all bounded sequences, p. 14
c: Banach space of all convergent sequences, p. 16
£(E, F): space of all continuous linear maps E —> F, p. 61
kp(at\), 1 p < oo : Kothe space of all families (ft)iGi for which (atx|ft|p)tez is
summable for every X, p. 94
(Bw(0): space of all functions whose derivatives of order are continuous and
bounded in the open set 0, p. 91
(B(0): space of all infinitely differentiable functions whose derivatives are bounded
in the open set 0, p. 92
(Bq (0): space of all m times continuously differentiable functions on the open
set 0, whose derivatives vanish at the boundary of 0, p. 91
(Bo(O): space of all infinitely differentiable functions on the open set 0, whose
derivatives vanish at the boundary of 0, p. 91
440
INDEX OF NOTATIONS
Q(K): Banach space of all continuous functions on the compact set K, pp. 8,9,27
6(0) = 8°(f2): space of all continuous functions on the open set 0, pp. 83, 88, 89
6o(0) = ®o(^): Banach space of all continuous functions on the open set 0,
which vanish at the boundary of 0, pp. 10, 27
S)m(K): space of all m times continuously differentiable functions with support
contained in the compact set K, p. 90
: space of all infinitely differentiable functions with support contained In
the compact set K, pp. 83, 88, 90
Dw(f2): space of all m times continuously differentiable functions with compact
support contained in the open set 0, p. 171
D(O): space of all infinitely differentiable functions with compact support con-
tained in the open set О, p. 165
SDF((2), p. 172
8W(Q): space of all m times continuously differentiable functions on the open
set 0, p. 89
8(0): space of all infinitely differentiable functions on the open set 0, p. 89
H(Q): space of all holomorphic functions defined on the open subset 0 of C, p. 238
3C(K) = S)°(K): space of all continuous functions with support contained in the
compact set K, p. 90
3C((2) = D°(O): space of all continuous functions with compact support con-
tained in the open set 0, p. 164
9П(Й) = 3C'(S2), p. 339
Ж1®) = ej(«), p. 345
©c- space of all m times continuously differentiable functions/on Rn for which
there exists к G Z such that (1 + |x|2)* dpf(x) vanishes at infinity for all
|p| m, p. 173
Oc- space of all infinitely differentiable functions / on Rn for which there exists
к G Z such that (1 + |x|2)* dpf(x) vanishes at infinity for all p G Nn, p. 173
0м- space of all infinitely differentiable functions / on Rn such that for all
p G Nn there exists к G Z such that (1 + |x|2)* dpf(x) vanishes at infinity,
p. 91
8™: space of all m times continuously differentiable functions / on Rn such that
(1 4- |x|2)* dpf(x) vanishes at infinity for |p| m, p. 90
8*: space of all infinitely differentiable functions / on Rn such that
(1 + |x|2)* dpf(x) vanishes at infinity for all p G Nn, p. 90
Sw: space of all m times continuously differentiable functions/on Rn such that
(1 + |z|2)* dpf(x) vanishes at infinity for all к G Z and |p| m, p. 90
8: space of all infinitely differentiable functions / on Rn such that
(1 4- |x|2)* dpf(x) vanishes at infinity for all к G Z and p G Nn, p. 91
TABLES
1. Inclusion relations among some function spaces introduced in the text.
Every injection map is continuous; m < m!.
ЗС(Й) c e0(Q) с ®°(Й) с е(й)
и и и и
аУ"(Й) c ®о(Й) с ®”*(й) с 8т(Й)
U и и и
©"'(Й) c «о'(Й) с ®”*'(й) с е^й)
U и и и
©(Й) c (Во (£2) с ®(Й) с 8(Й)
к = 0
ЗС С S0 с к > 0 s° с ф во к' < 0 1
С Sv С Ос С е
и и и и и и и
с sm с с (Во С &к' с Ос с 8Ш
и и и и и и и
с sm' с с (Во' с стп' с б?' с 8Ш'
и и и и и и и
© с S с S*; с (Во с Sv С Ос С Ом с 8
441
442
TABLES
2. Properties of some function spaces (m G N); the numbers refer to pages.
semi- norms normable metriz- able borno- complete barrelled logical Montel gchwartz
®m(Q) 92 110 136 214 222 — \
®(Q) 92 — 116 136 214 222 — —
®?(Й) 91 110 137 214 22? — —
®o(O) 91 — 116 137 214 222 — —
e(Q) 89 110 136 214 222 — —
©m(K) 90 110 137 214 222 — —
©(K) 90 — 116 137 214 222 240 282
©m(Q) — — 172 215 222 — —
©(0) 171 — — 165 215 222 241 282
8m(0) 89 — 116 136 214 222 — —
8(Q) 89 — 116 136 214 222 239 281
Я(Й) 238 — 238 238 238 238 239 285
K(K) 90 110 137 214 222 — —
3C(Sl) — — 164 215 222 — —
0? / — 215 222 — —
6c — — ♦ 215 222 ♦ ♦
©л/ 91 — — 137 * * ♦ ♦
90 110 137 214 222 — —
St 90 — ‘ 116 154 214 222 — —
s™ 90 — 116 154 214 222 — —
s 91 — 116 154 214 222 240 283
3. Relations among various types of locally convex spaces.
Montel
semi-Montel
Banach
Hilbert
> Fr£chet
reflexive
> ultrabornological
normable
> metrizable
> bornological
> semi-reflexive
> barrelled
infrabarrelled
* See [42], Chapter II, p. 131
Index
The terms introduced on pages 1 through 3 are not listed.
abelian group, 5
absolute polar, 190
absolutkonvex, 86
absorb, 108
absorbing, 80
addition, 5
adherence, 19, 72
adhere to a filter basis, 126
adhere to a set, 19, 72
adjoint, 53, 185
affine hyperplane, 177
affine subspace, 177
Alaoglu-Bourbaki theorem, 201
Alexandrov compactification, 149
algebraically closed, 177
algebraically free, 17
algebraically open, 177
algebraic basis, 17
algebraic closure, 280
algebraic codimension, 142
algebraic dimension, 18
algebraic dual, 184
algebraic supplement, 120
almost continuous, 301
almost open, 296
Arens, R. F., 205
Ascoli’s theorem, 237
associativity, 5
automorphism, 100
Baire space, 213
Baire’s theorem, 62, 213
balanced, 80
balanced convex hull, 97
balanced core, 80
balanced hull, 80
Banach, S., 45, 62, 69, 246, 250
Banach-Bourbaki theorem, 230
Banach-Dieudonnd theorem, 245
banachizable, 136
Banach-Mackey theorem, 208
Banach’s homomorphism theorem, 69,
294
Banach space, 9
Banach-Steinhaus theorem, 62, 214,
216
barrel, 208
barrelled, 212
basis for a topology, 73
basis of a filter, 77
basis of a vector space, 17
B-complete, 299
Bessel’s inequality, 33
bidual, 59, 226
bilinear form, 43
bilinear map, 355
bipolars, 192
blunt, 176
Bolzano-Weierstrass theorem, 22
Borel-Lebesgue property, 21, 143
bornivorous, 210
bornological, 220
bornological space associated with a
locally convex space, 226
bounded filter, 135
bounded measure, 345
bounded operator, 92
bounded set in a metric space, 22
bounded set in a topological vector
space, 108
Bourbaki, N., 201, 230
Br-complete, 310
canonical basis, 18
canonical bilinear form, 57, 184
canonical imbedding, 227
443
444
INDEX
canonical isomorphism, 120
Cantor property, 21, 143
Carlson, F., 50
carrier, 83
Cartan, H., 368
cartesian product, 117
Cauchy, A. L., 166, 315
Cauchy condition, 9, 140
Cauchy filter, 128
Cauchy-Schwarz inequality, 7, 16
Cauchy sequence, 9, 135
chaotic, 72
circled, 80
closed ball, 19
closed-graph theorem, 70, 301
closed linear hull, 27
closed set, 19, 72
closed subspace, 27
closure, 19, 72
coarser filter, 75
coarser topology, 72
codimension, 142
Collins, H. S., 299
commutativity, 5
compact, 21, 143
compactification, 149
compatible topology, with pairing, 198
with vector space structure, 79
complete metric space, 9
complete subset of a topological
vector space, 128
completion, of a Hausdorff topological
vector space, 134
of a metric space, 22
of an inner product space, 26
of a normed vector space, 26
complex Euclidean space, 7
complex vector space, 5
component, 117, 119
cone, 176
conjugate, 53, 185
continuous, 19, 72
contragredient isomorphism, 329
converge, filter, 124
sequence, 9, 19
converge locally, 225
converge in the Mackey sense, 225
convergent sequence, 9, 19
convex, 29
convex hull, 85
convolution, 337, 381, 384, 423
coordinate, 117
countably normed space, 156
cover, 21
covering, 21
dense, 19, 72
density, 348 (
derivative of a distribution, 324
(2)ff)-space, 293
DieudonnS, J., 159, 161, 245, 272,
308, 310, 378
difference, 6
Dirac measure, 314
direct limit, 174
direct sum, 119
direct system, 174
discrete, 72
distance, 8
between two sets, 19
distinguished, 288
distribution, 313
distributivity, 5
divergent Fourier series, 64
dual, of a locally convex Hausdorff
space, 184
of a normed space, 53
dual cone, 195
dual system, 183
du Bois Reymond’s lemma, 336
Ehrenpreis, L., 395
elementary filter, 124
elementary solution, 393
endomorphism, 92
6point£, 176
equation, of a hyperplane, 41
of an affine hyperplane, 177
equicontinuous, 198
equivalent families of semi-norms, 96
equivalent filter bases, 77
Euclidean space, 6, 7, 15
evaluable, 217
INDEX
445
everywhere dense, 19, 72
external direct sum, 158
factor space, 117
filter, 75
generated by a collection of sets, 77
of sections, 77
filter basis, 77
final locally convex topology, 157
final topology, 74
finer filter, 75
finer topology, 72
finest locally convex topology, 87
for which a family of linear maps
is continuous, 157
finite total mass, 345
first category, 213
Fourier coefficients, 32, 64
Fourier expansion, 32
Fourier series, 64
Fourier transform, 408, 411
Fr£chet, M., 42, 75, 136
Fr£chet filter, 75
Fr£chet-Riesz theorem, 42
Fr£chet-Schwartz space, 277
Fr£chet space, 136
free, 17, 28
fully complete, 299
functional, 40
fundamental solution, 392
fundamental system, of bounded
sets, 109
of neighborhoods, 77
gauge, 94
Gauss integral, 415
Gelfand, I. M., 156
generalized function, 314
generate (a closed subspace), 27
(a filter), 77
(a subspace), 17
generator, 17
of a filter, 77
greatest lower bound, of a family
of filters, 76
of topologies, 73
Grothendieck, A., 207, 248, 275,
286., 289, 290, 293
Hahn-Banach theorem, 45, 176,177
half-space, 177
Hamel basis, 17
Hausdorff space, 17
associated with a topological vector
space, 105
Heaviside function, 324
Heine-Borel-Lebesgue property, 21,
143
Hellinger-Toeplitz theorem, 67
Hilbert dimension, 31
Hilbert space, 15
Holder inequality, 12
homeomorphic, 20, 72
homeomorphism, 20, 72
homomorphism, 36, 39, 100, 106
homomorphism theorem, 69, 294
homothecy, 20
hypercomplete, 247
hyperplane, 41
hypocontinuous, 358
increasing sequence of semi-norms, 114
independent of a variable, 331
indiscrete, 72
induced distribution, 317
induced filter, 78
induced metric, 19
induced operation, 17
induced topology, 73
inductive limit, 174
inductive system, 174
inequality, Bessel, 33
between the weighted arithmetic
and geometric mean, 11
Cauchy-Schwarz, 7, 16
Holder, 12
Minkowski, 12
triangle, 6, 8
infrabarrelled, 217
infra-Pt£k space, 247, 310
initial topology, 73
injection, 158
associated with a linear map, 38
446
INDEX
injective pair, 319
inner product, 14
inner product space, 14
integrable distribution, 347
integrable measure, 345
integral, 339
of a distribution, 344
interior, 19, 71
internal, 178
inverse limit, 155
inverse system, 155
isometric, 20
isometrically isomorphic, 25
isometry, 20
isomorphic, 100
isomorphism, 36, 100
keg, 208
kegly, 212
Kelley, J. L., 247
kernel, 35
Kolmogorov, A. N., 108
Komura, Y., 243
Kothe, G. M., 94, 162
Krein-Smulian theorem, 246
Laplace operator, 394
larger topology, 72
Lax-Milgram theorem, 44
least upper bound, of a family of
filters, 76
of topologies, 73
Lebesgue constant, 65
Lebesgue measure, 339
Leibniz formula, 101, 349, 395
lemma of F. Riesz, 29
limit, 124
of a map with respect to a filter,
125
linear combination, 17
linear form, 40
linear functional, 40
linear hull, 17
linearly dependent, 17
linearly independent, 17
linear manifold, 177
linear map, 35
linear space, 5
linear subspace, 17
local convergence, 225
locally compact, 144
locally convex, 86
locally convex direct sum, 158
locally finite, 166
lower semi-continuous, 219
Mackey, G. W., 208, 209, 223, 225,
285
Mackey-Arens theorem, 205
Mackey convergence condition, 285
Mackey’s countability condition, 116
Mackey topology, 206
Mahowald, M., 303
Malgrange, B., 395
Mazur, S., 177
meager, 213
measure, 338
metric, 8
metric space, 8
metrizable, 110
Milgram, A. N., 44
minimal Cauchy filter, 140
Minkowski functional, 94
Minkowski inequality, 12
module, 350
Montel space, 231
Montel’s theorem, 238
multi-index, 83
multiplication, by a scalar, 5
of distributions, 348
Muntz, Ch., 50, 51
nearly continuous, 301
nearly open, 296
neighborhood, 19, 71
of a set, 72
Newtonian potential, 395
norm, 6
of a bilinear form, 260
of a linear form, 41
of a linear map, 61
of a vector, 6
normable, 110
INDEX
447
normal family, 239
normal space of distributions, 319
normal system, 259
normal topological space, 167
normal triple, 319
normed space, 6
normed vector space, 6
normic, 92
nowhere dense, 62, 213
one-point compactification, 149
open ball, 26
open cover, 21
open equivalence relation, 274
open map, 39
open-mapping theorem, 69, 294
open set, 19, 71
opposite, 5
order, of a distribution, 338
of a multi-index, 83
origin, 5
orthogonal complement, 60
orthogonal family, 31
orthogonal subsets, 30
orthogonal vectors, 30, 58, 193
orthonormal basis, 31
orthonormal family, 31
Osgood’s theorem, 62
paired spaces, 183
pairing, 183
pairwise coordinated norms, 156
parallel, 121
parallelogram law, 29
Parseval’s relation, 34
partial derivative of a distribution, 324
partial differential operator, 393
partial map, 74
partition of unity, 169
perfect, 231
pointed, 176
Poisson equation, 395
polar, 190
positively homogeneous, 183
precompact, 25, 145
pre-norm, 88
principal value, 315
principle, of condensation of
singularities, 67
of uniform boundedness, 62
product filter, 140
product of distributions, 348
product space, 117
product topology, 74, 117
projection, 117
projective limit, 155
projective system, 155
projector, 120
proper map, 401
proper subspace, 17
pseudo-norm, 88
Ptdk, V., 247, 296, 301, 302
Pt4k space, 247, 299
quasi-barrelled, 217
quasi-complete, 128
quasi-normable, 286
quotient norm, 37
quotient semi-norm, 105
quotient space, 37
quotient topology, 104
quotient vector space, 37
radial at 0, 80
Radon measure, 338
rapidly decreasing, 91, 420
rare, 62, 213
real Euclidean space, 6
real vector space, 5
reflexive Banach space, 59
reflexive locally convex Hausdorff
space, 229
regular, 78
regularization, 406
relatively compact, 21, 144
relatively open map, 39
restriction, of a distribution, 317
of a map, 24
Riemann’s mapping theorem, 239
Riesz, F., 29, 42, 49, 52, 54, 147
Robertson, A. P., 301, 304
Robertson, W., 301, 304
448
INDEX
saturate, 285
saturated collection of bounded sets,
202
saturated family of semi-norms, 96
saturated hull, 203
saturated set for an equivalence
relation, 285
S-bornivorous, 211
scalar, 5
scalar product, 14
Schauder, J., 277
Schwartz, L., 51, 159, 161, 272, 308,
310, 313, 370
Schwartz space, 275
Schwarz, H. A., 7, 16
Sebastiao e Silva, J., 282
second adjoint, 226
second conjugate, 59, 226
semi-continuous, 219
semi-linear form, 42
semi-Montel,- 231
semi-norm, 88
semi-reflexive, 227
separate points, 183
separated pairing, 183
separately continuous, 356
sesquilinear form, 43
(5), 383
Silov, G. E., 156
slowly increasing, 91, 411
smaller topology, 72
Smulian, V. L., 246
space of distributions, 319
Steinhaus, H., 62, 214, 216
S-topology, 195
strict inductive limit, 160
strict Mackey convergence condition,
285
strict morphism, 36, 39, 100, 106
strongest, 93
strong topology, 93, 201
subadditive, 183
subbasis, of a filter, 77
of a topology, 73
subcover, 21
subordinated, 169
subspace, linear, 12
(topological), 73
sum, 127
summable, 32, 127
supplement, 120, 121
support, of a distribution, 318
of a function, 83
system of generators, 73, 77
temperate, 411
tensor product, of distributions, 372
of vector spaces, 366
theorem of bipolars, 192
Tihonov’s theorem, 144
Toeplitz, O., 67
tonneau, 208
tonnel£, 212
topological direct sum, 121
topological dual, 185
topological homomorphism, 36, 39,
100, 106
topologically free, 28
topological space, 71
topological subspace, 73
topological supplement, 121
topological vector space, 79
topology, 71
generated by a collection of sets, 73
of compact convergence, 236
of pointwise convergence, 236
of uniform convergence on compact
sets, 83, 236
of uniform convergence on sets
belonging to S, 195
total, 27
totally bounded, 25, 145
trace of a filter on a subset, 78
translate, 19
of a distribution, 329
translation, 20
translation-invariant metric, 110
transpose, 254
of a matrix, 260
triangle inequality, 6, 8
trigonometric series, 64
INDEX
449
Ulam, S., 222
ultrabomological, 287
ultrafilter, 76
ultra-strong topology, 93
ultra-weak topology, 94
underlying real space, 48
uniform boundedness principle, 62
uniformly continuous, 23, 129
uniformly convergent sequence of
continuous functions, 10
uniformly convex, 34
uniformly equicontinuous, 199
uniform topology, 92
value of adherence, 127
vanish at infinity, 10
vector, 5
vector space, 5
vertex, 176
von Neumann, J., 108
weak topology, 60, 92, 103, 185
weak* topology, 92
Weierstrass, K., 8, 22, 238
Weierstrass approximation theorems,
27, 28, 49
Weierstrass-Bolzano theorem, 22, 236
zero vector, 5
ABCDE69876