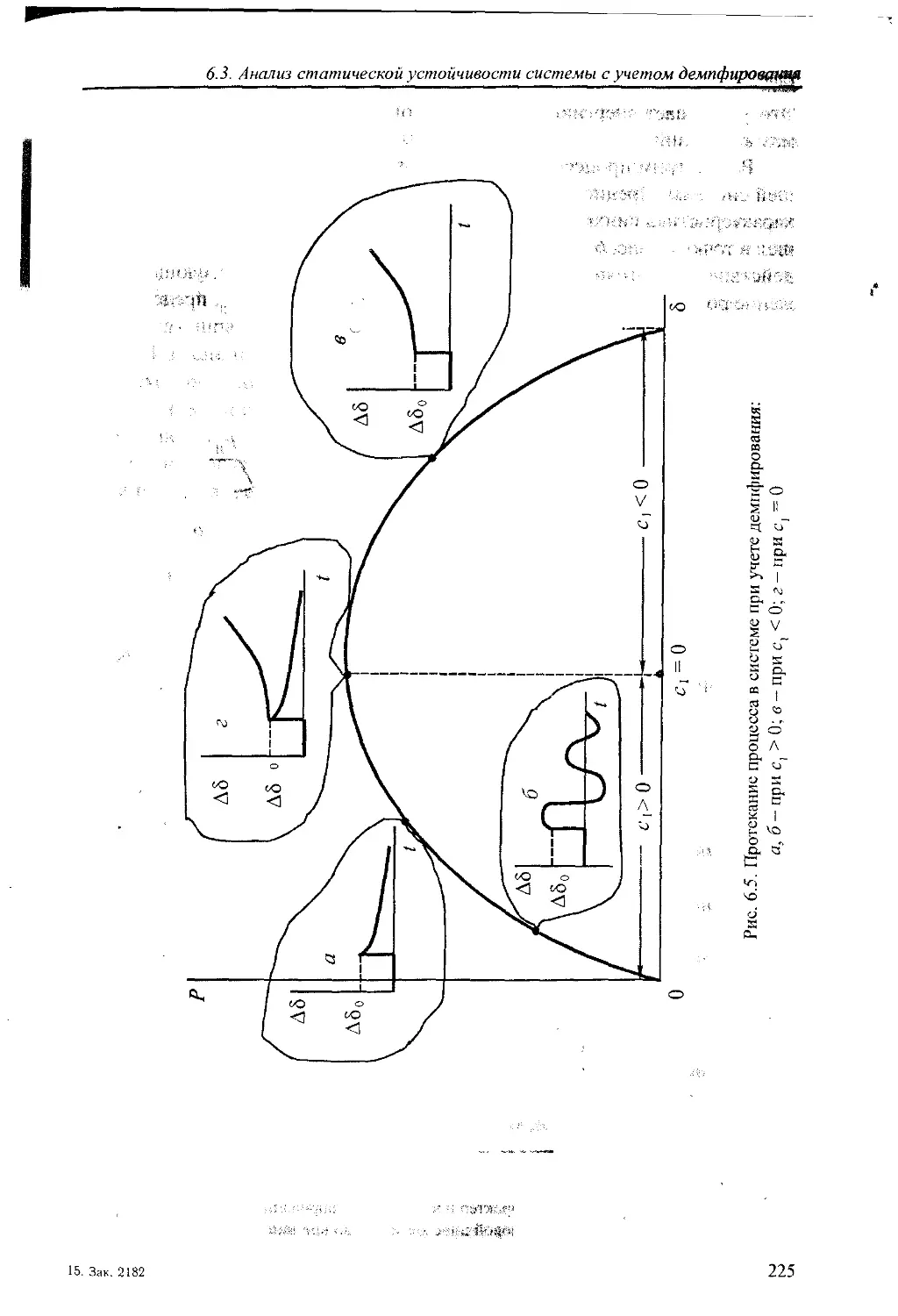
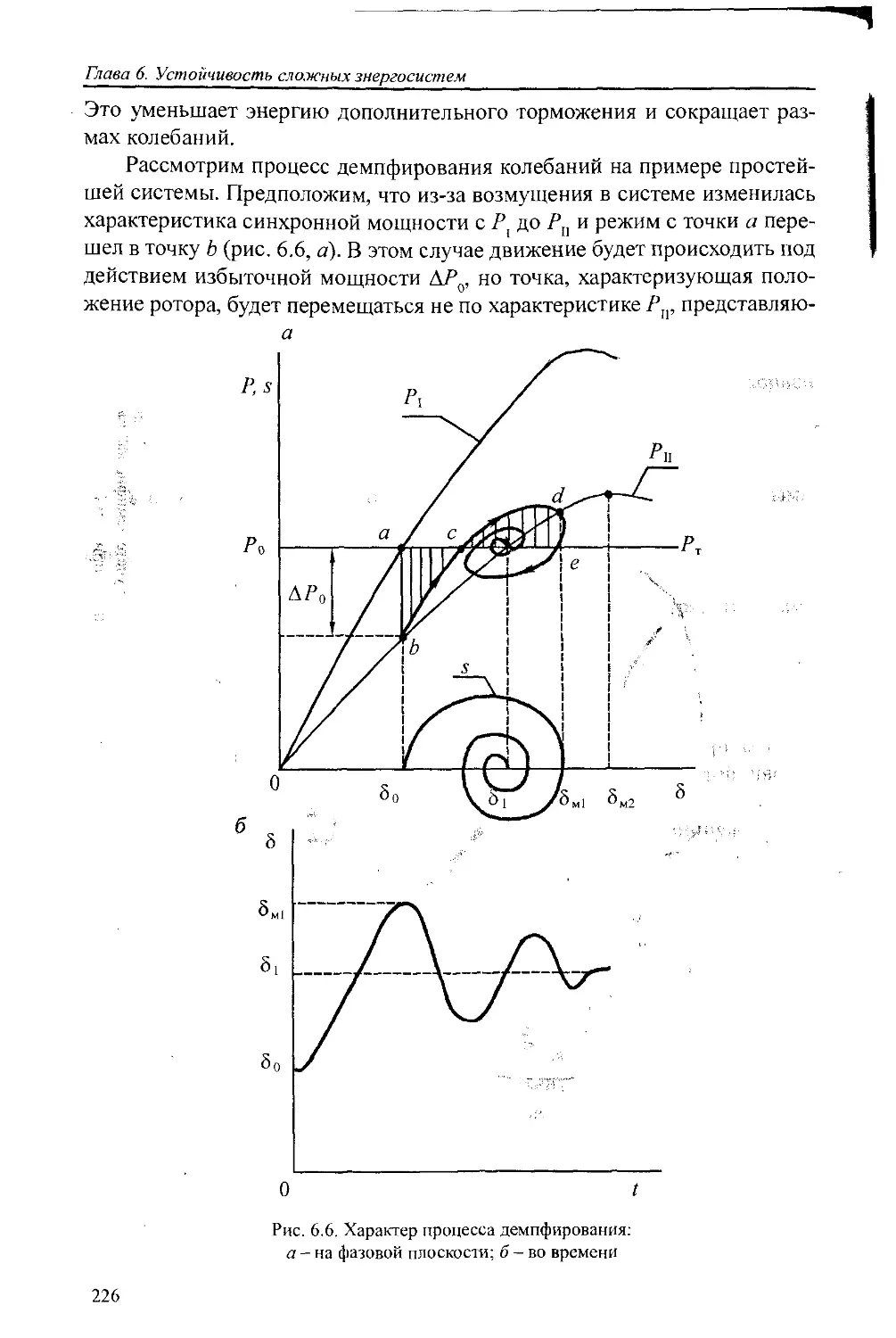
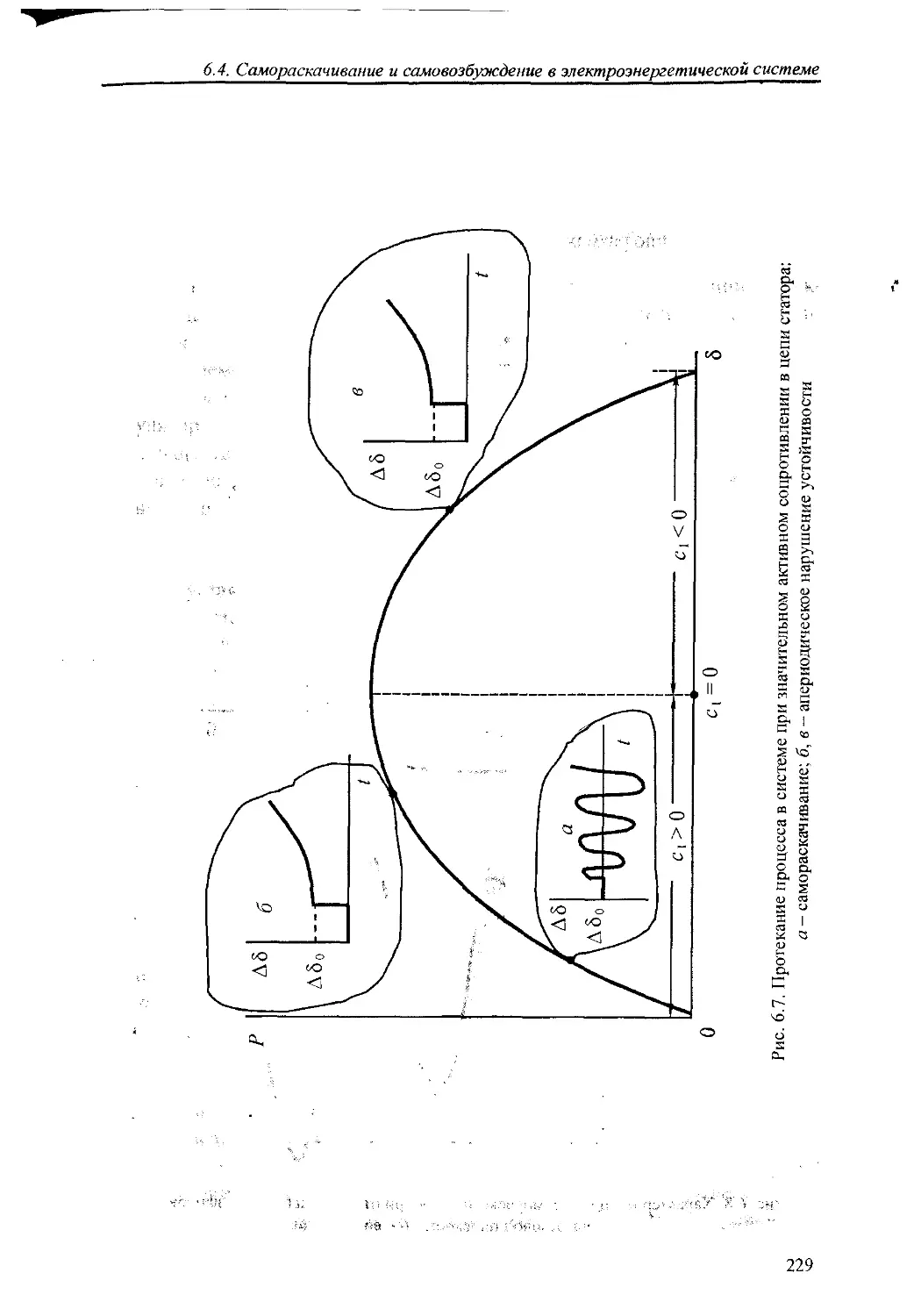
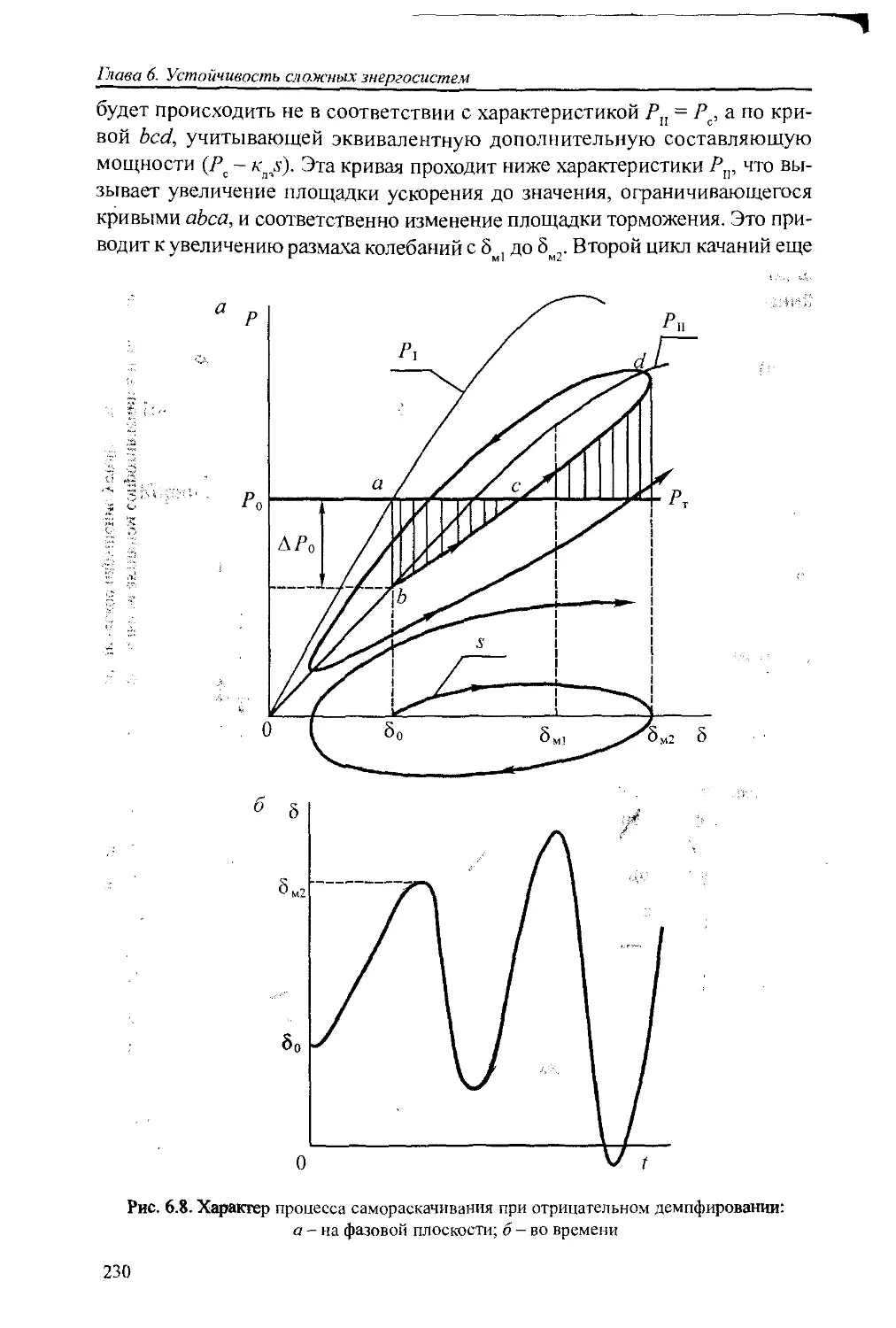
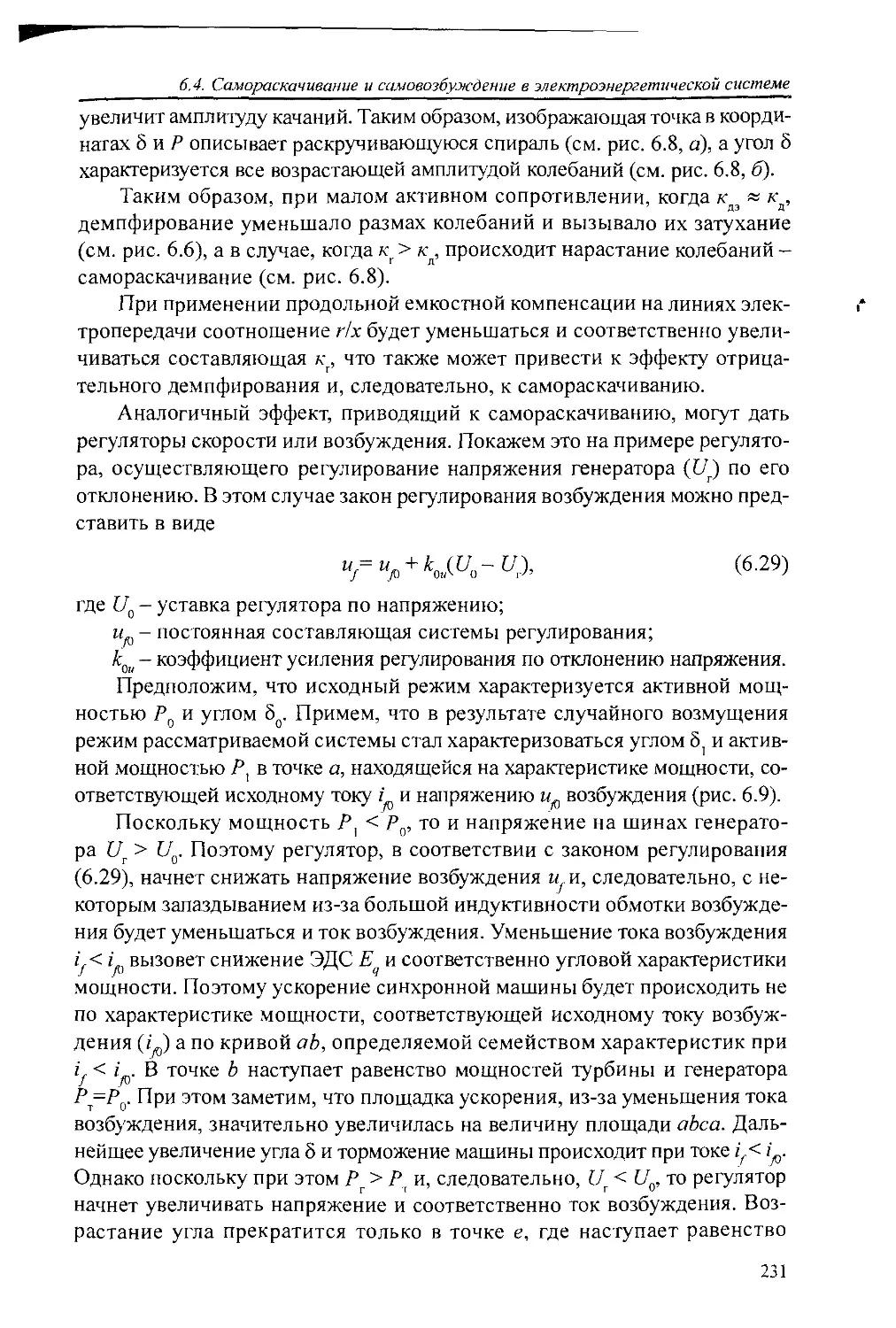
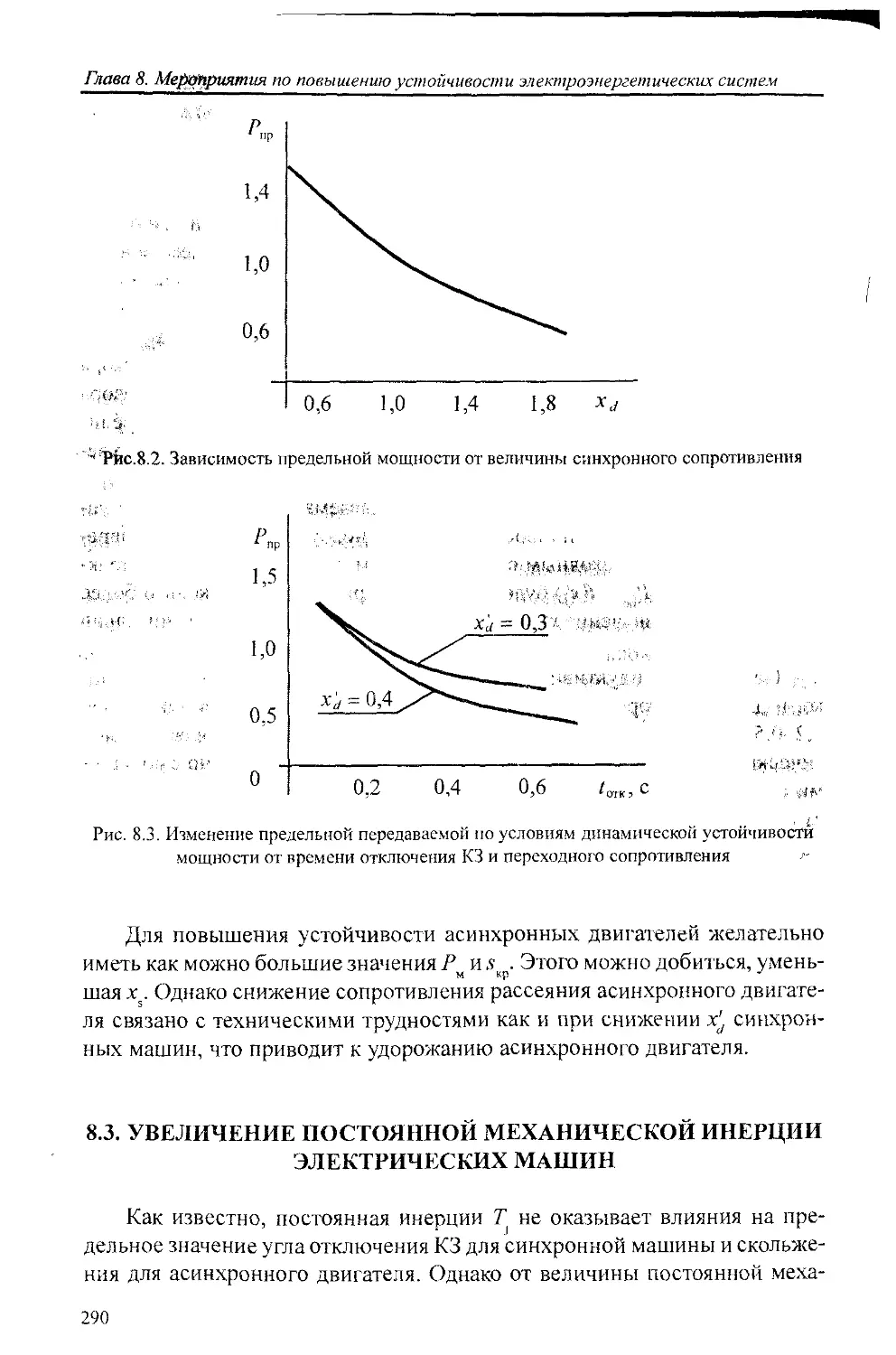
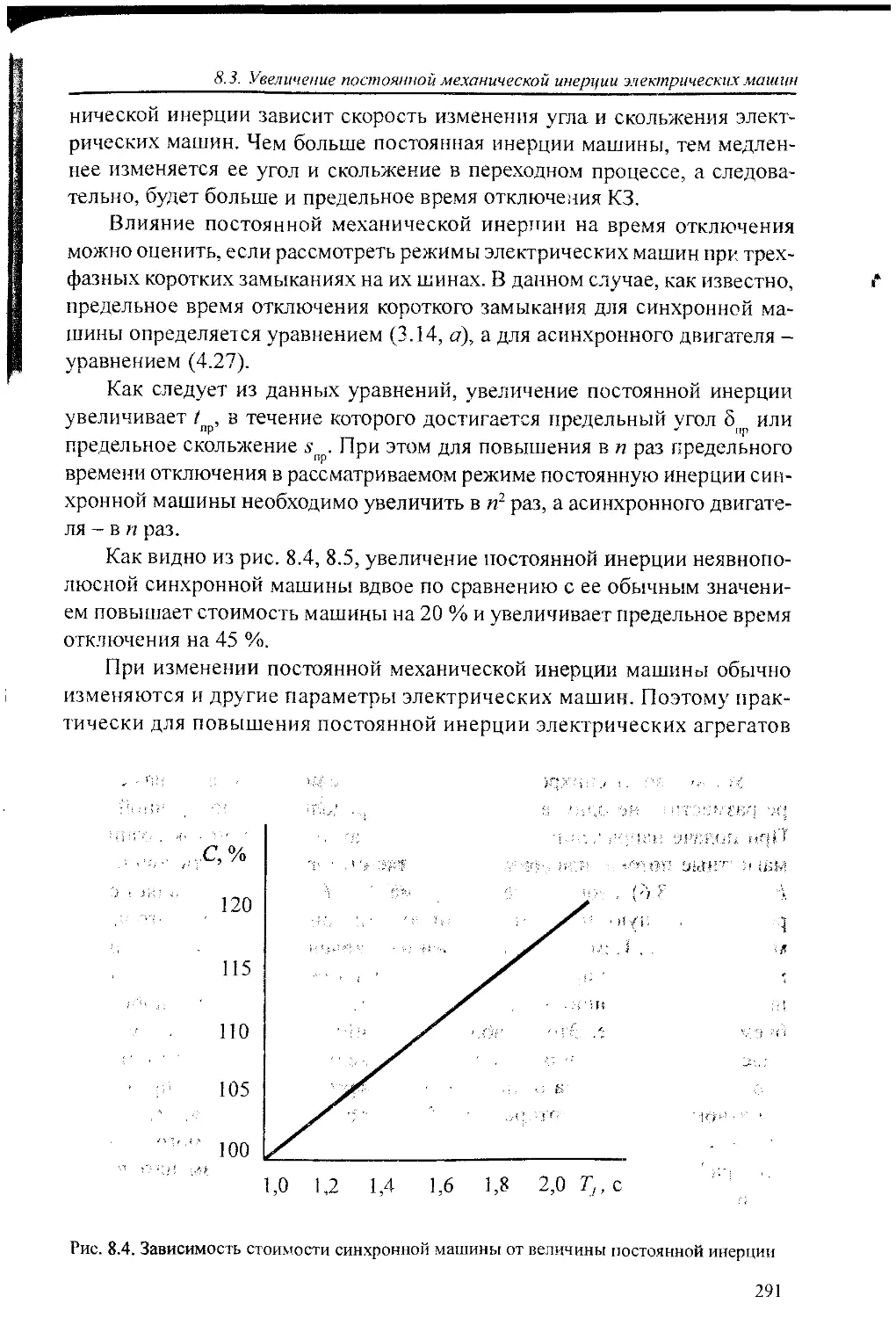
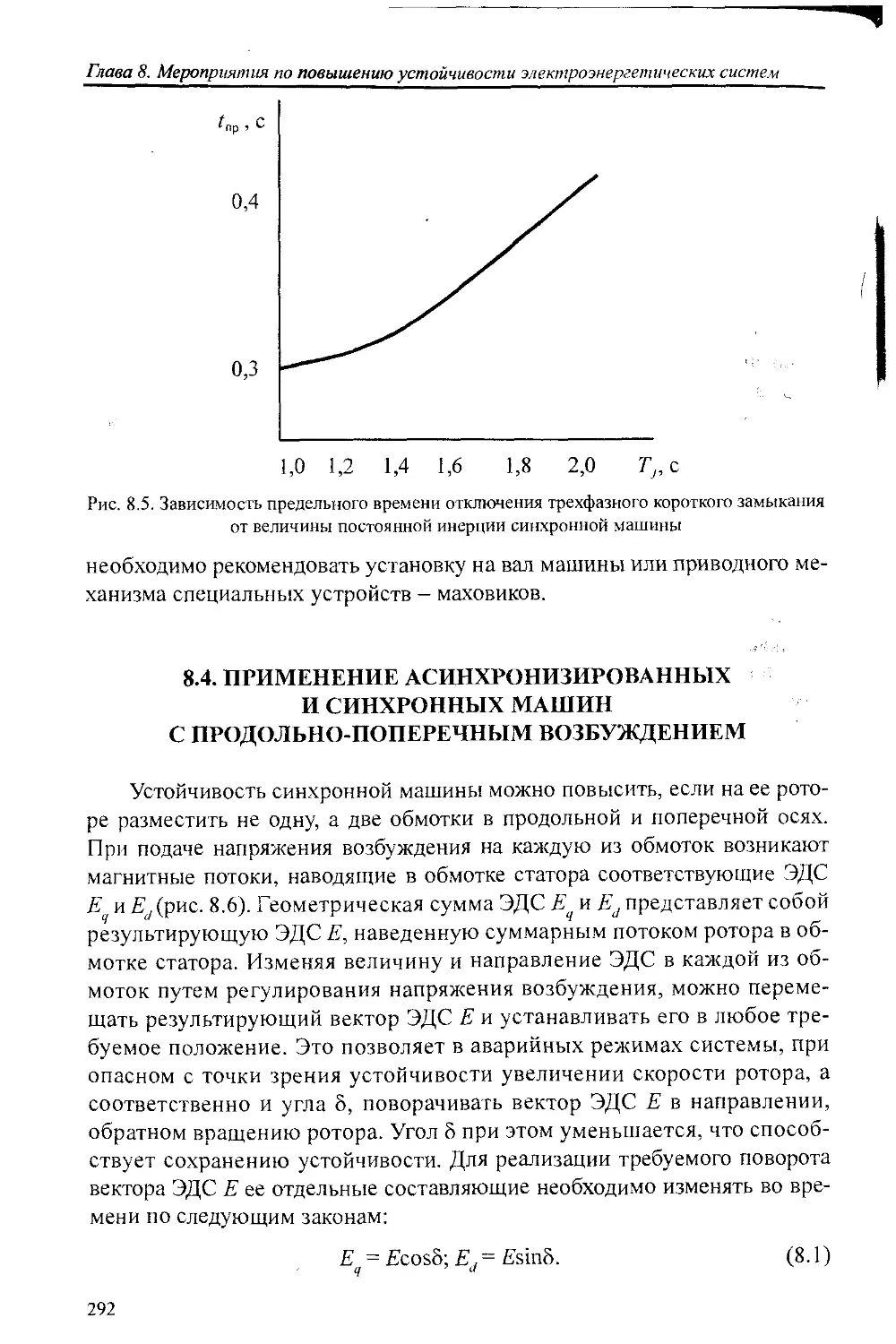
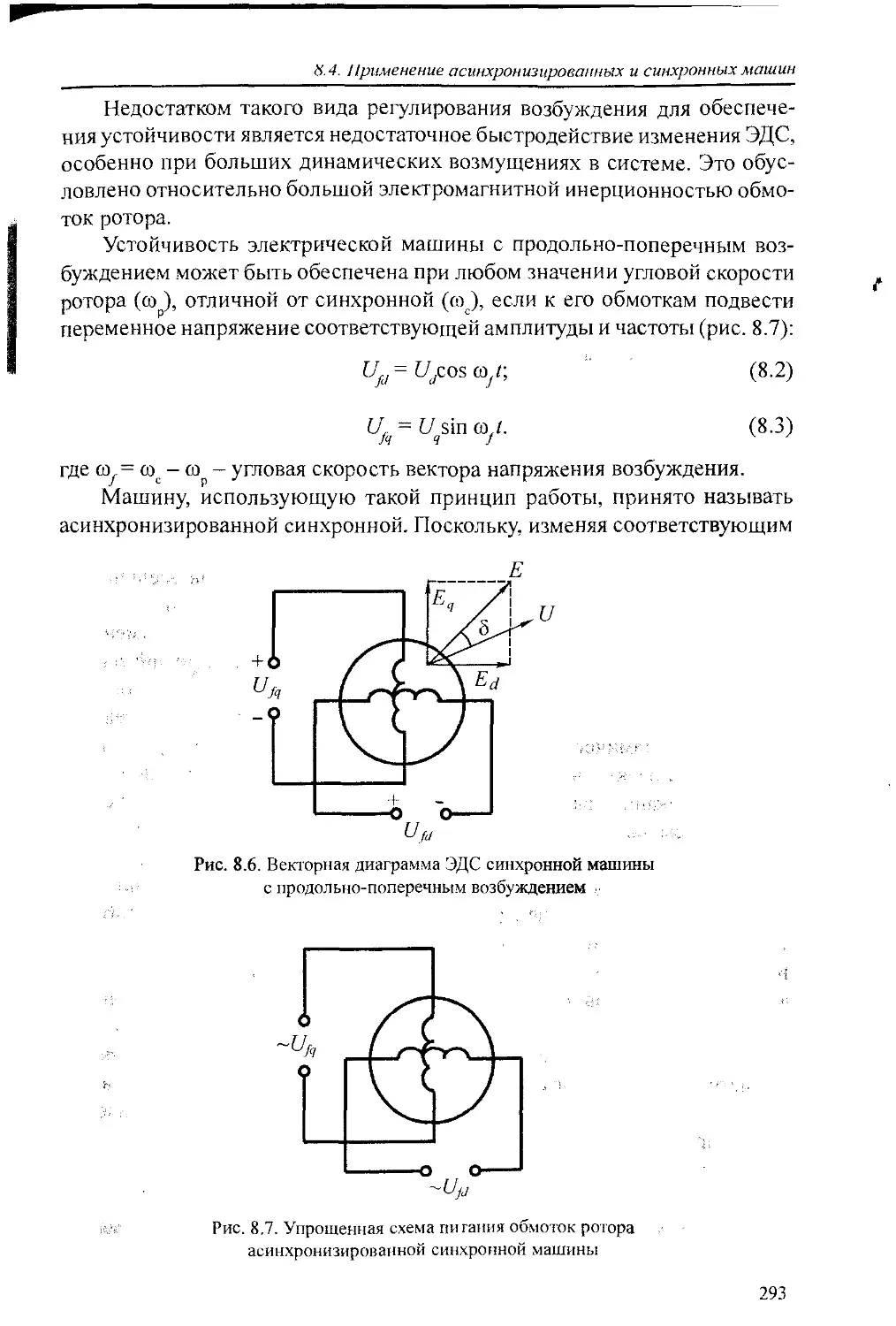
/




Автор: Калентионок Е.В.
Теги: электротехника электроэнергетика электроника энергетика
ISBN: 978-985-6591-47-4
Год: 2008




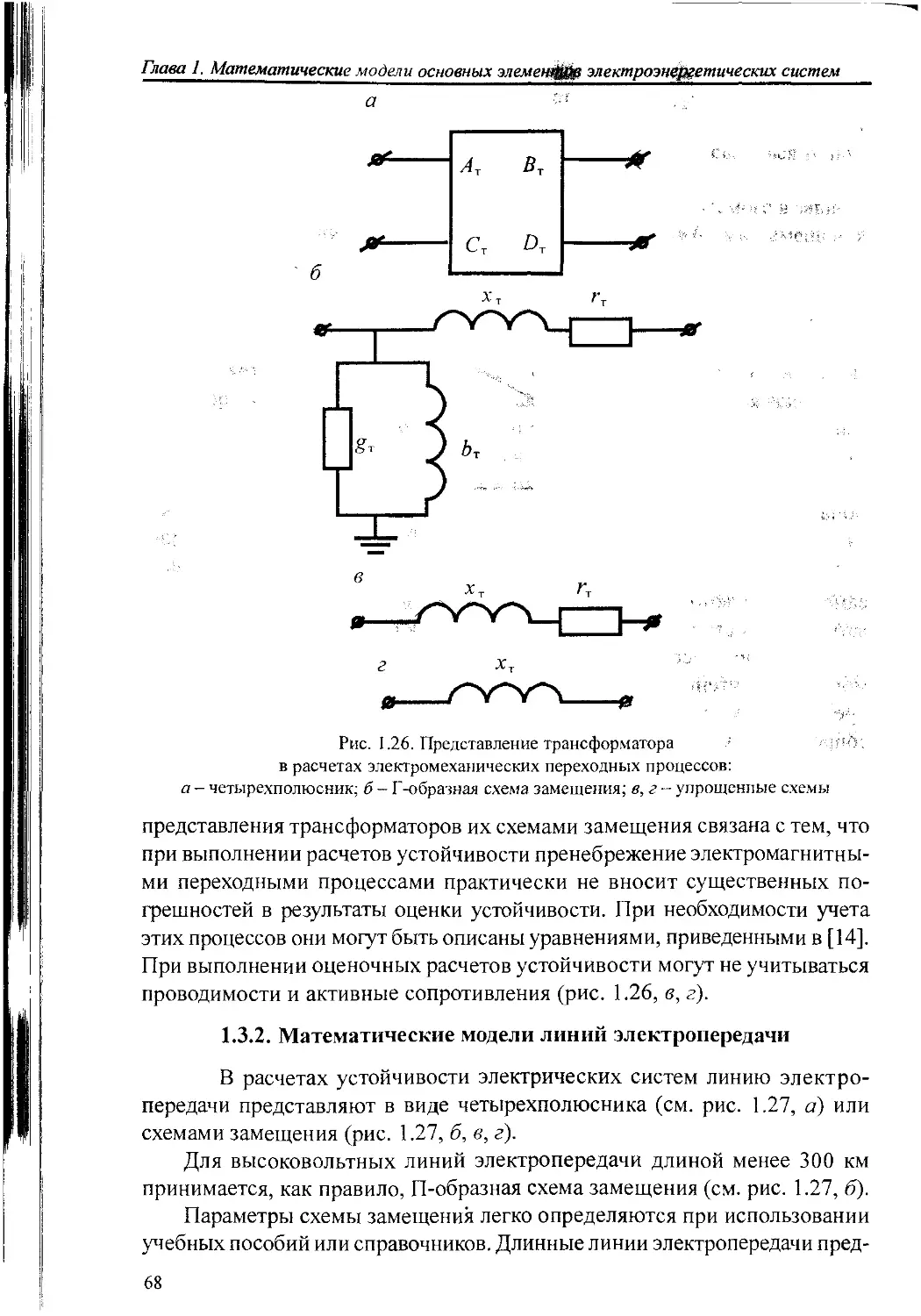
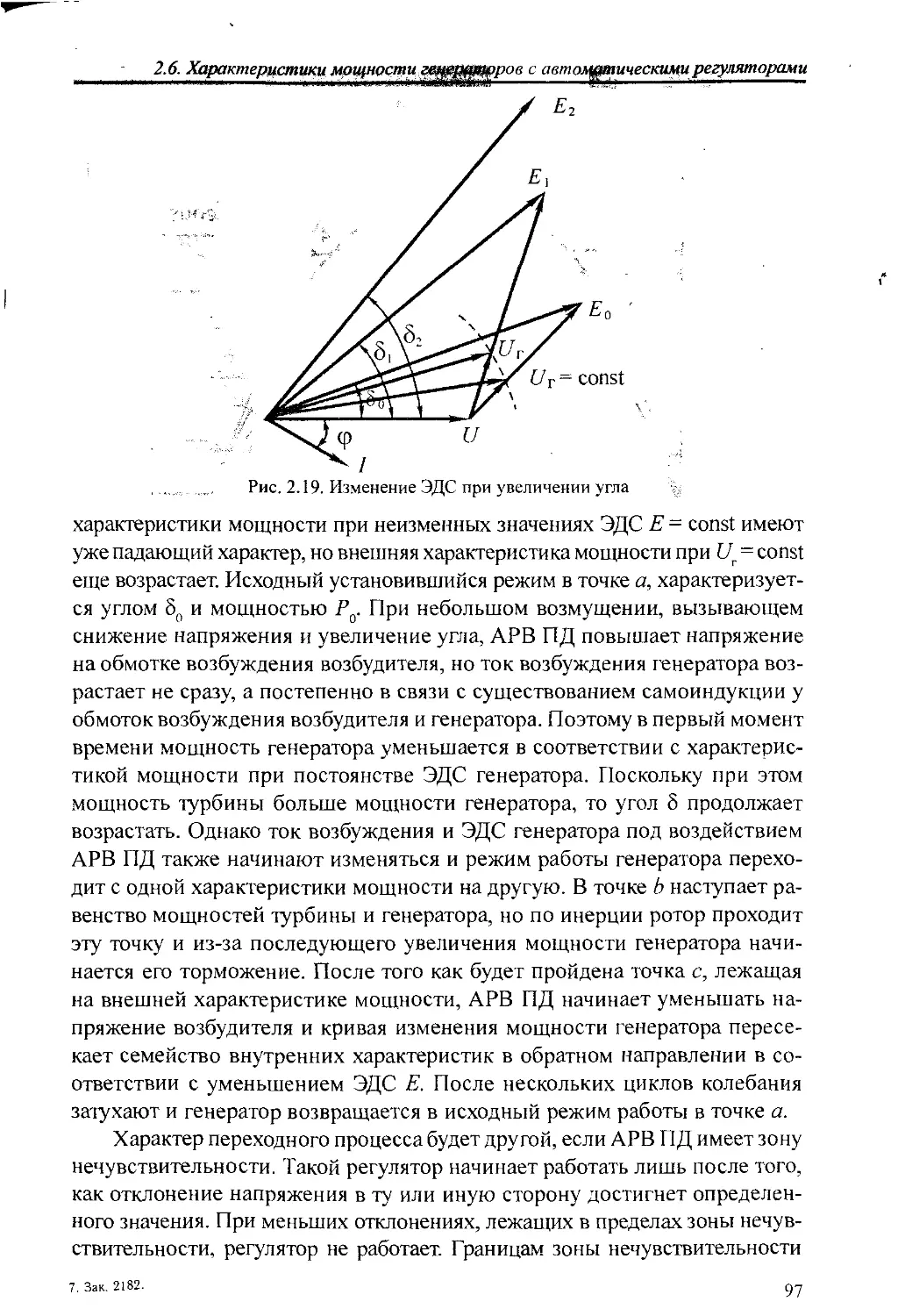
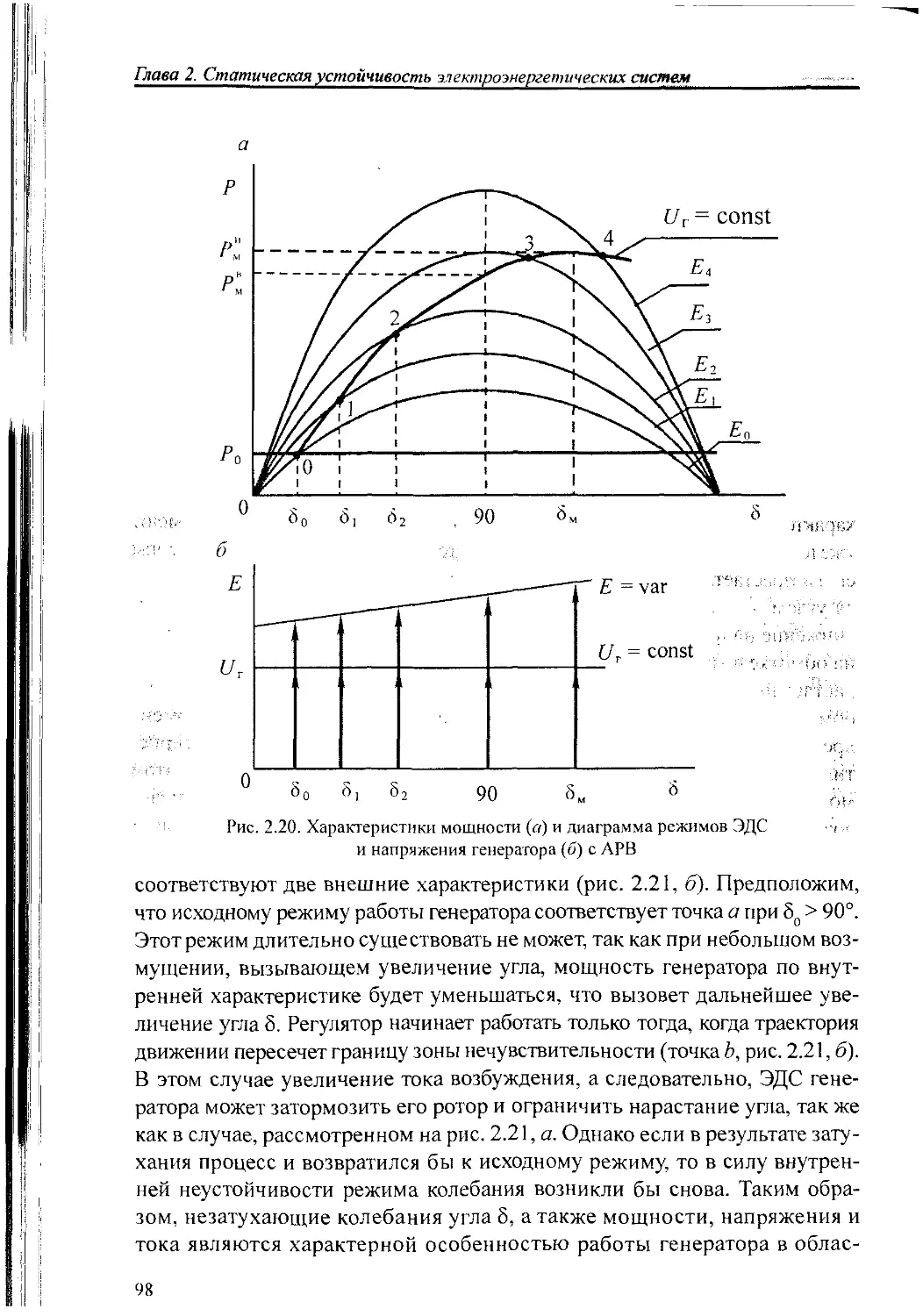
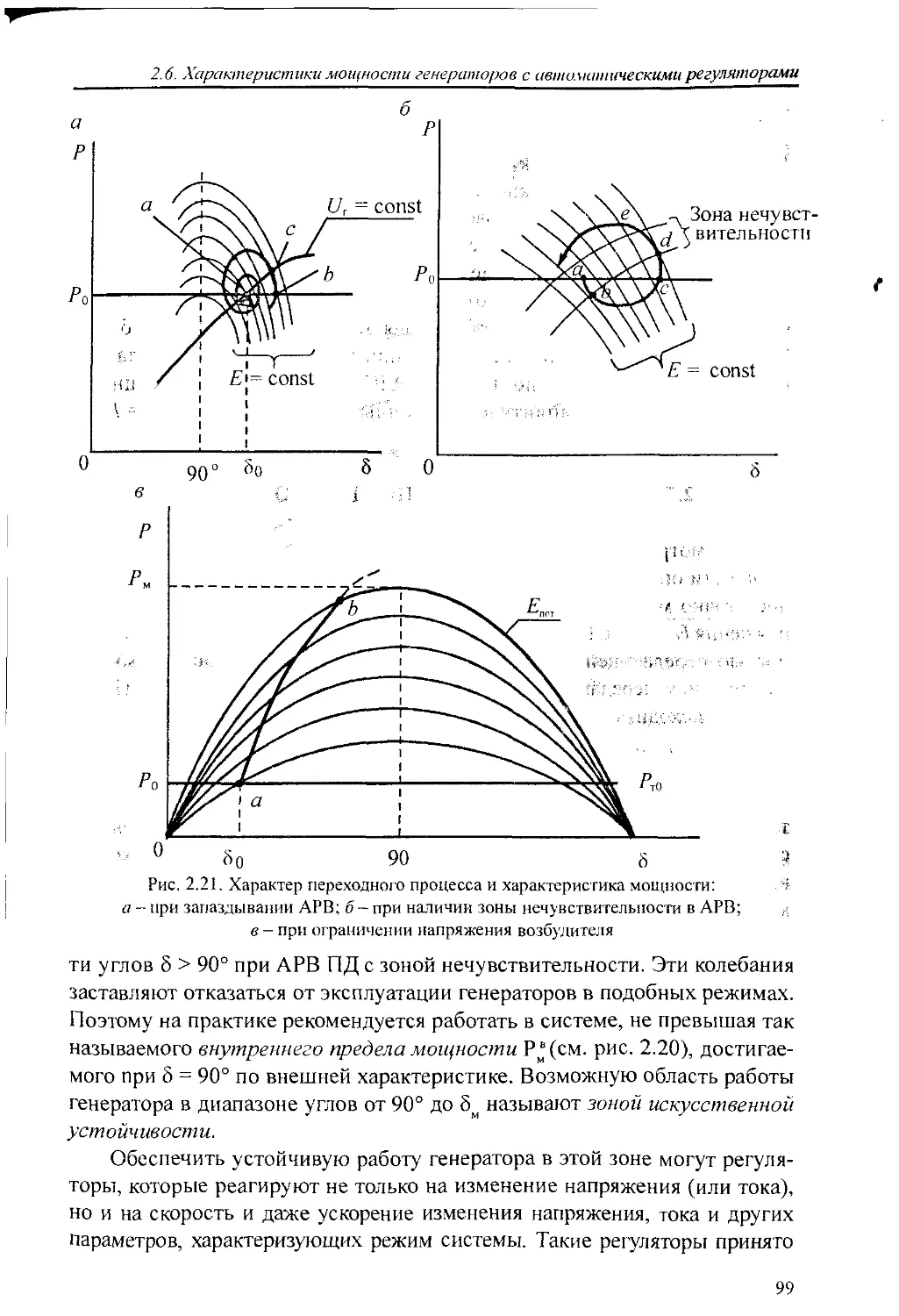
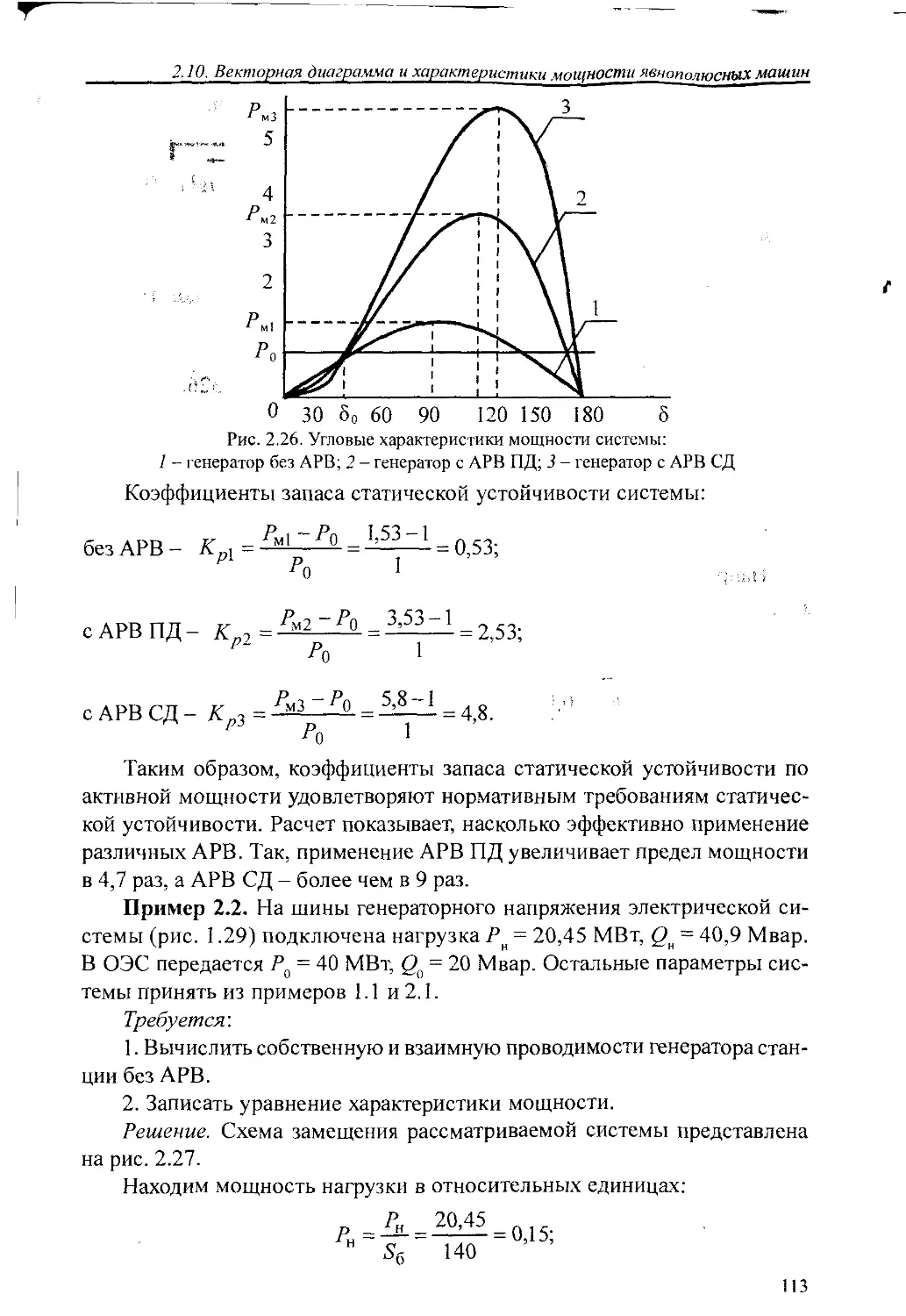
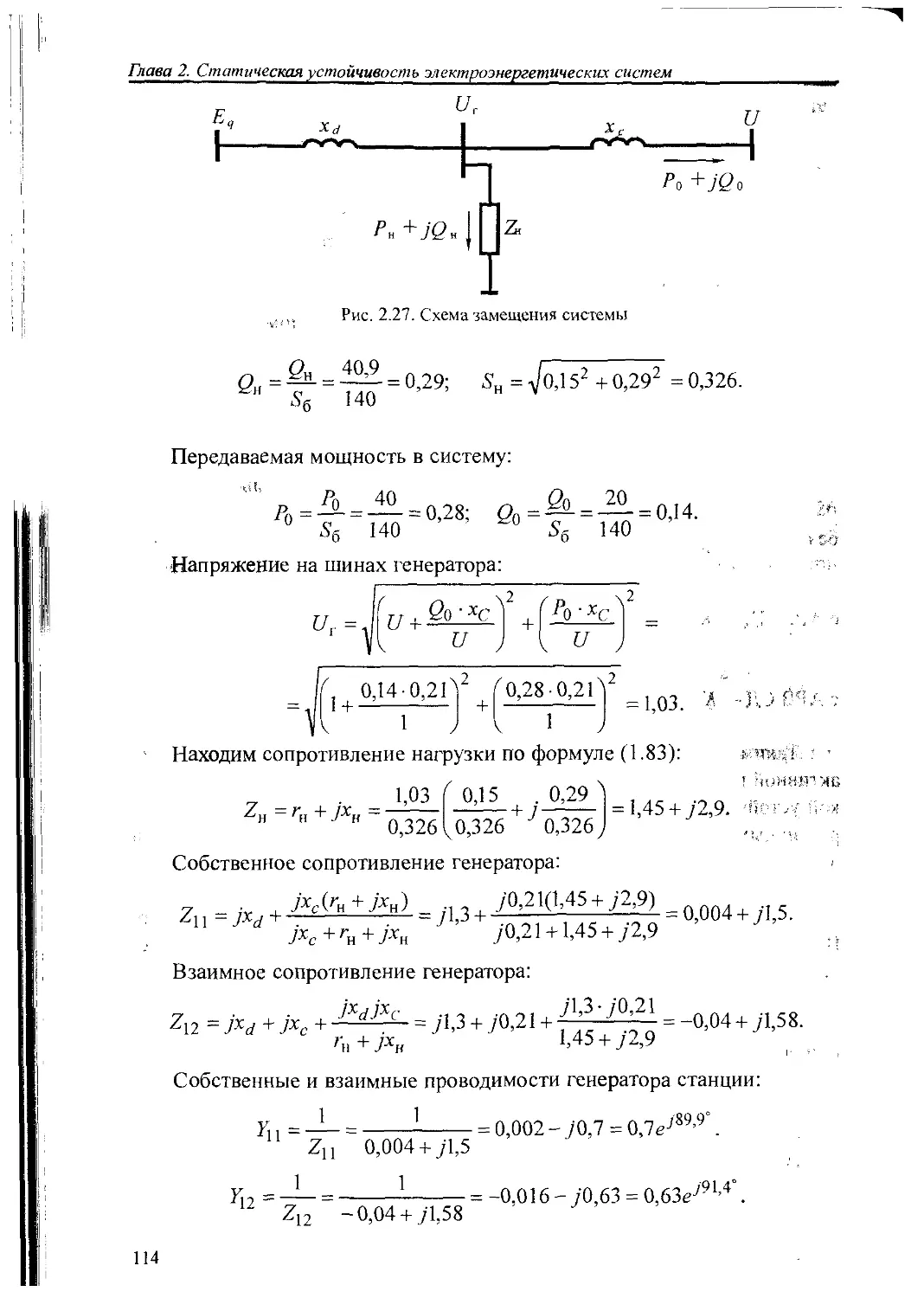
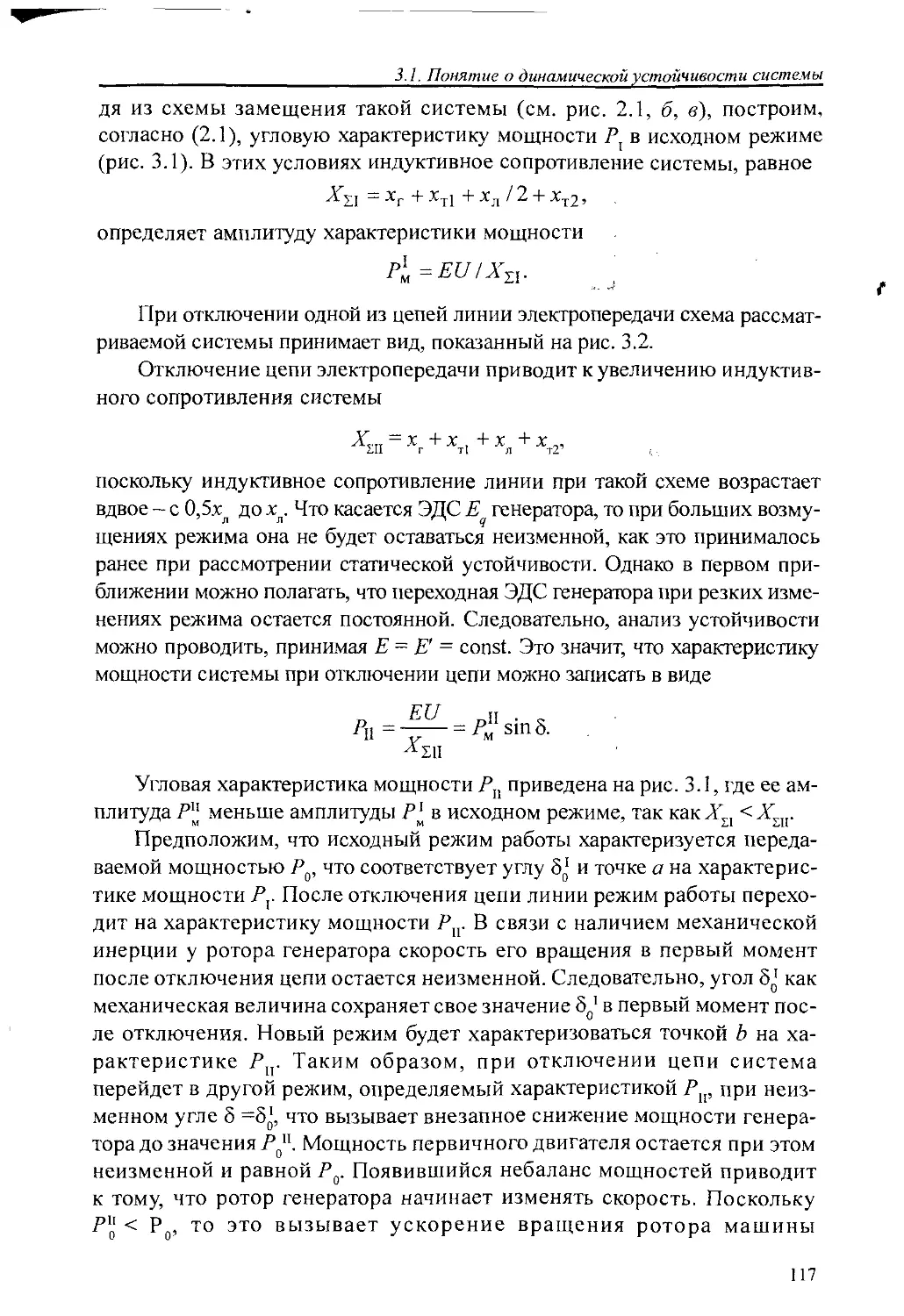
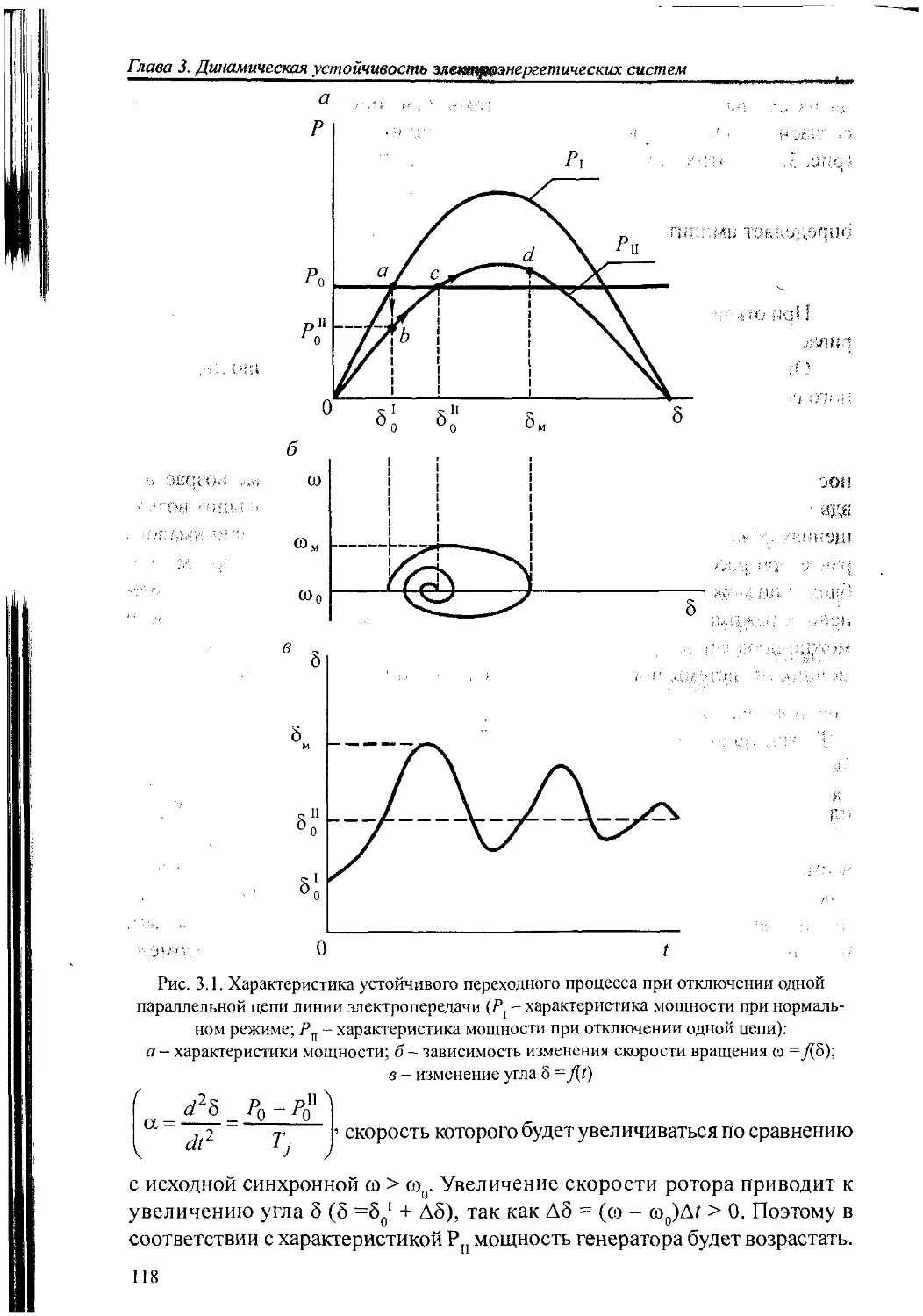
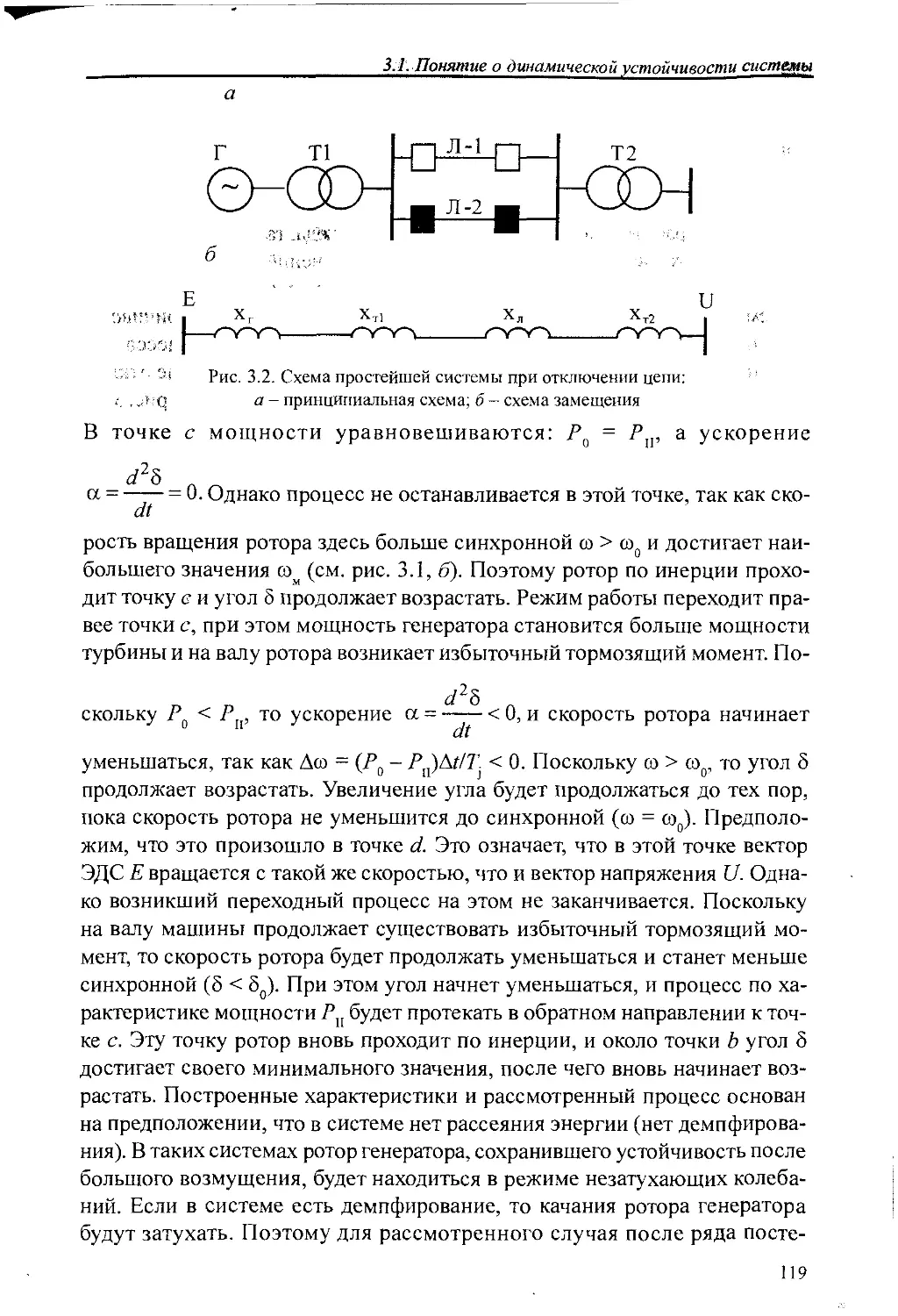
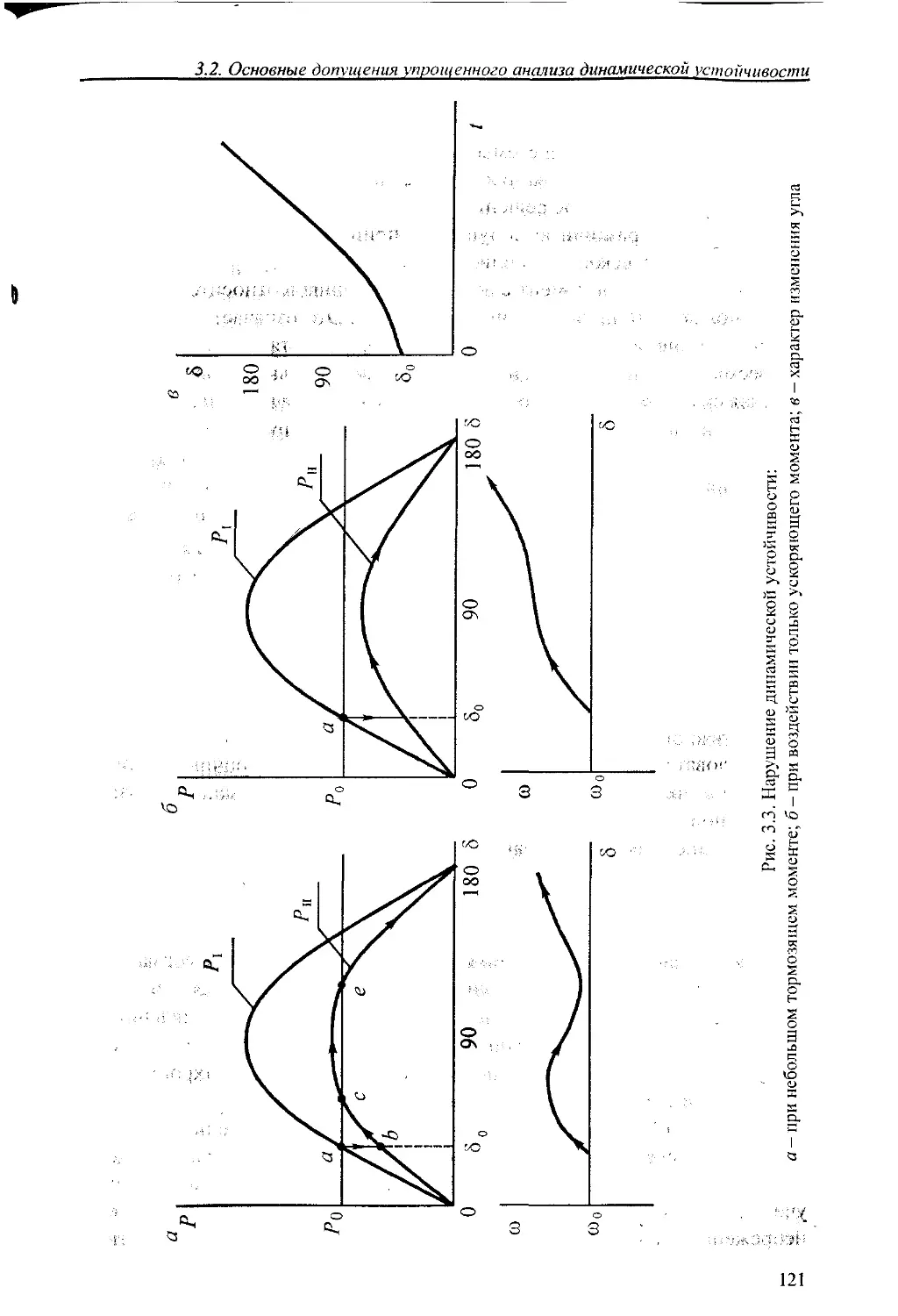
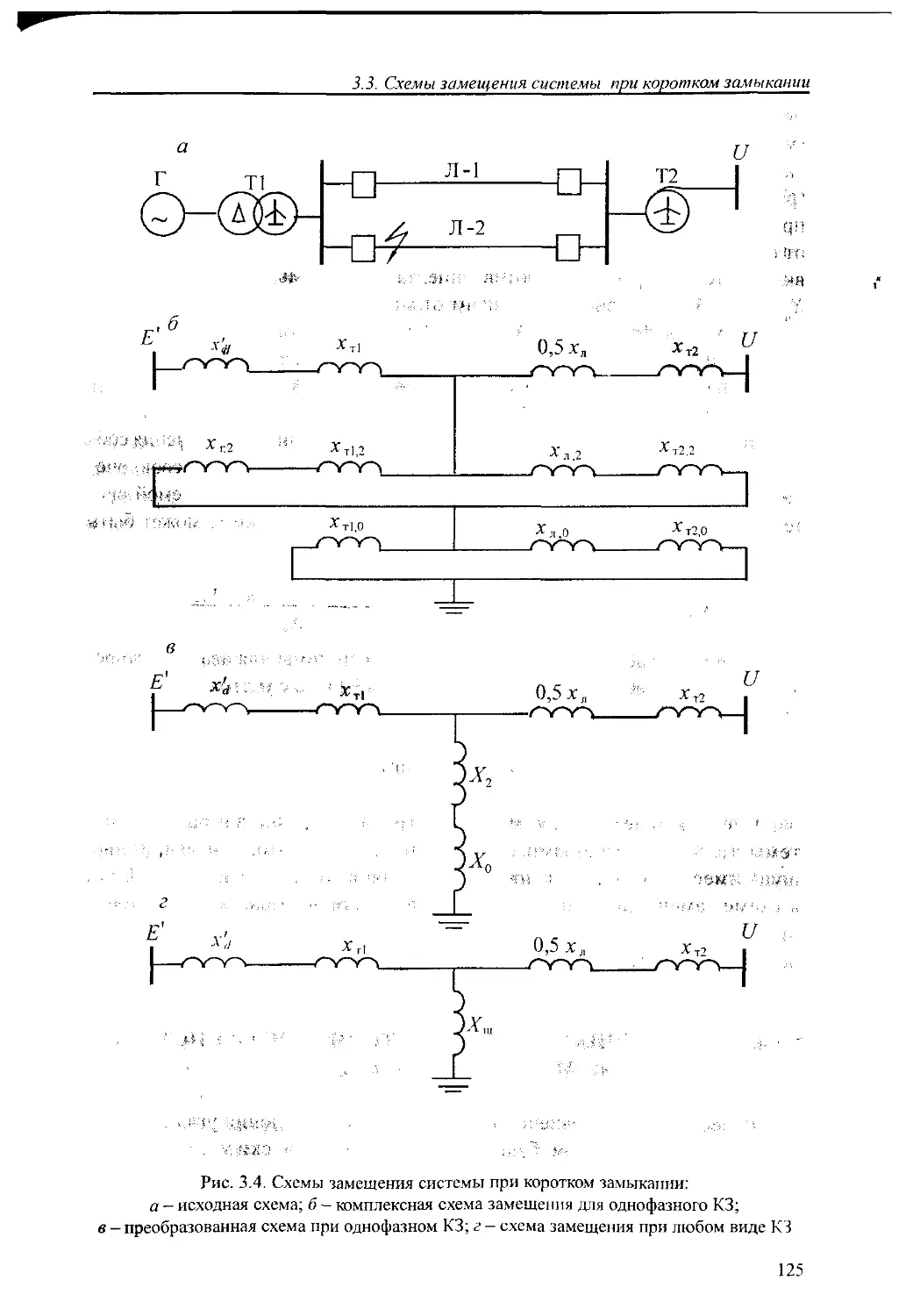
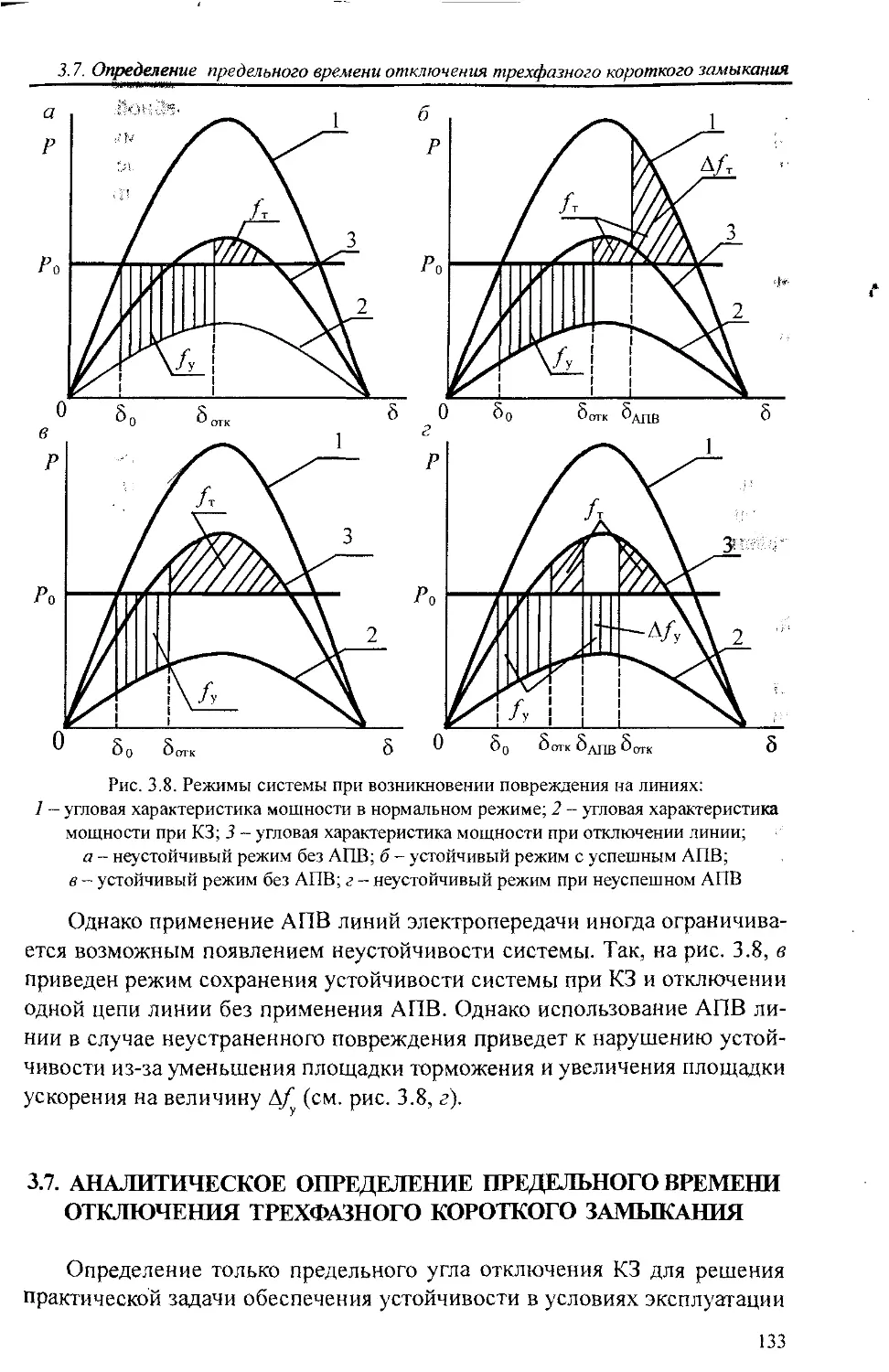
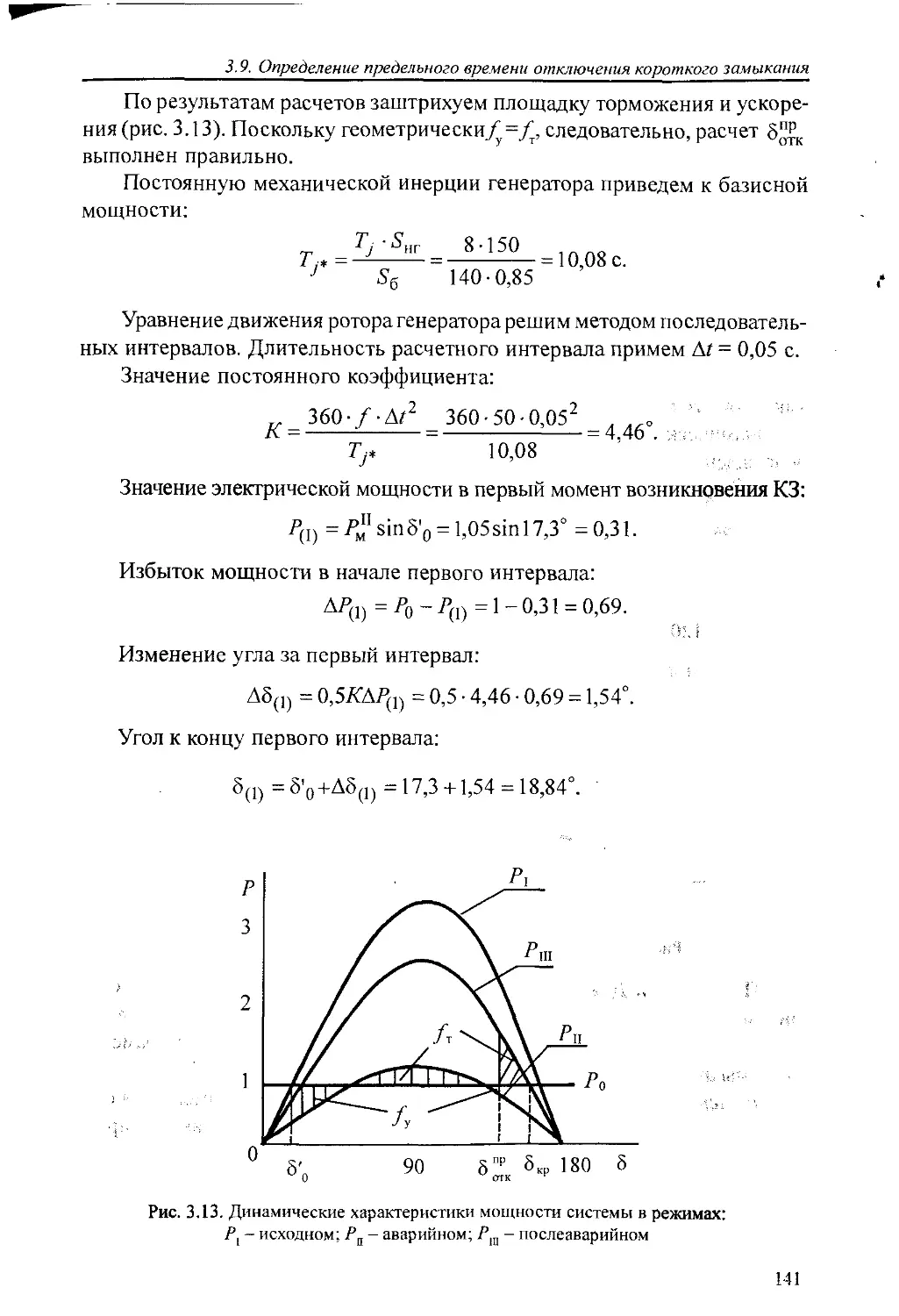
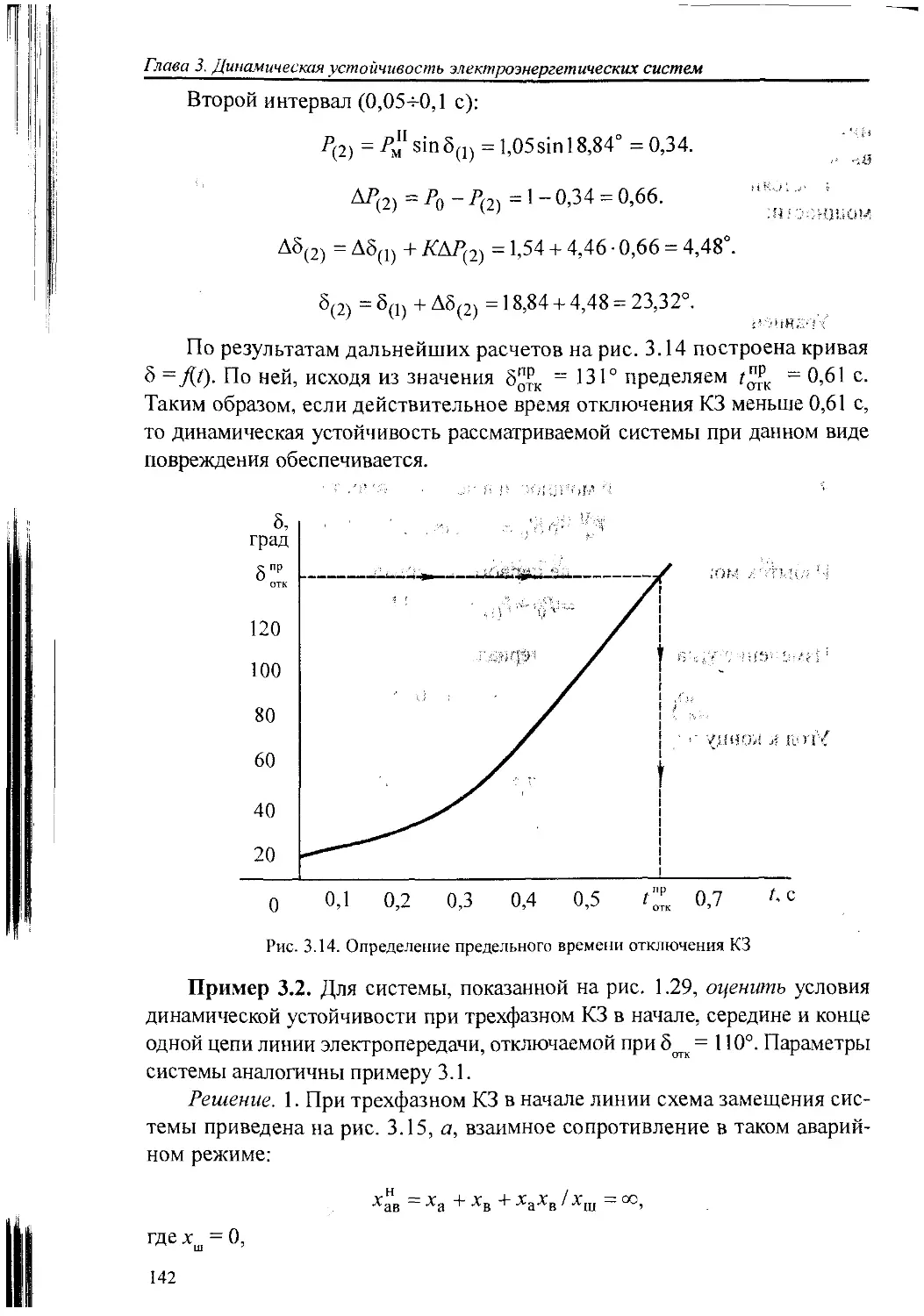
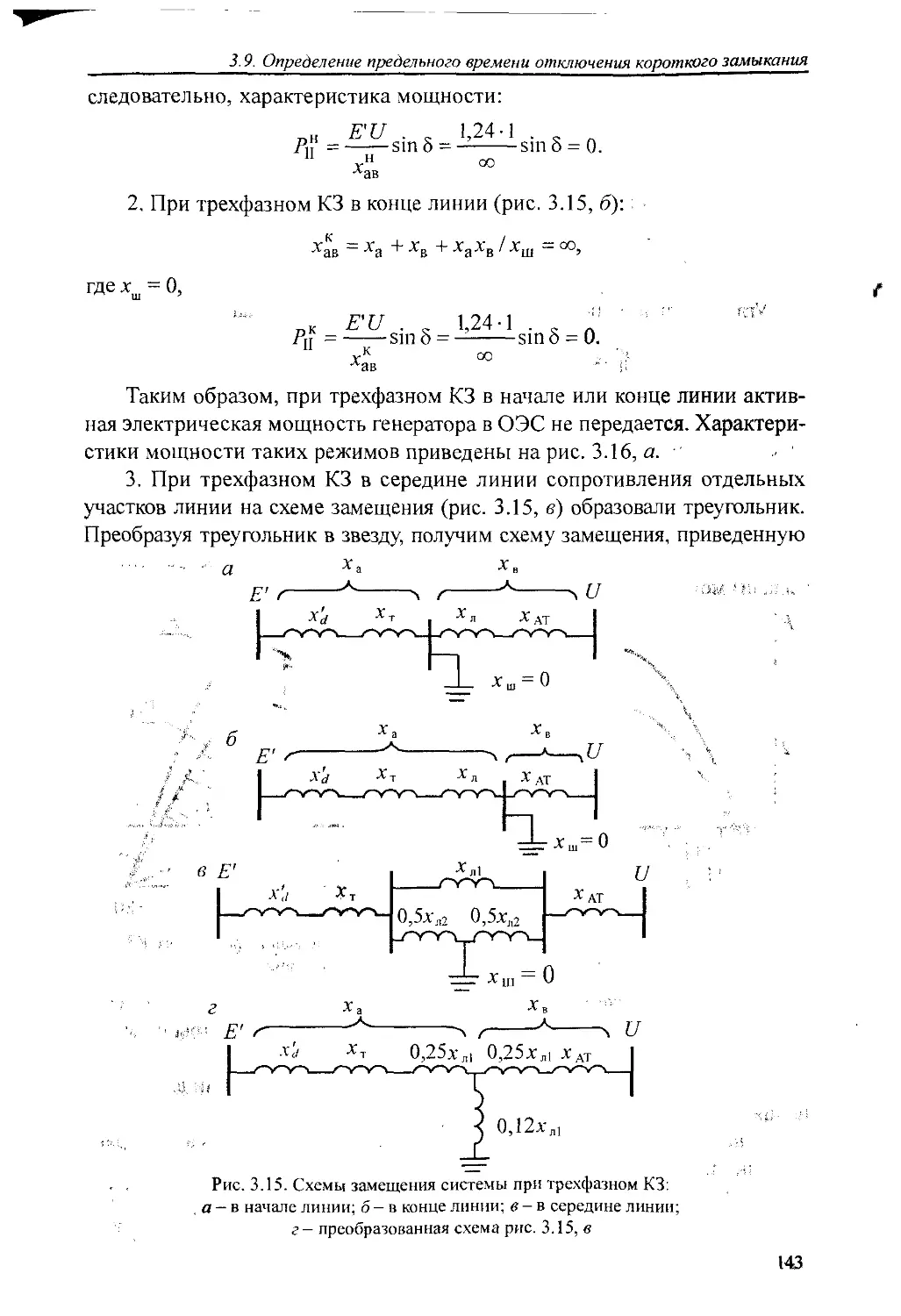
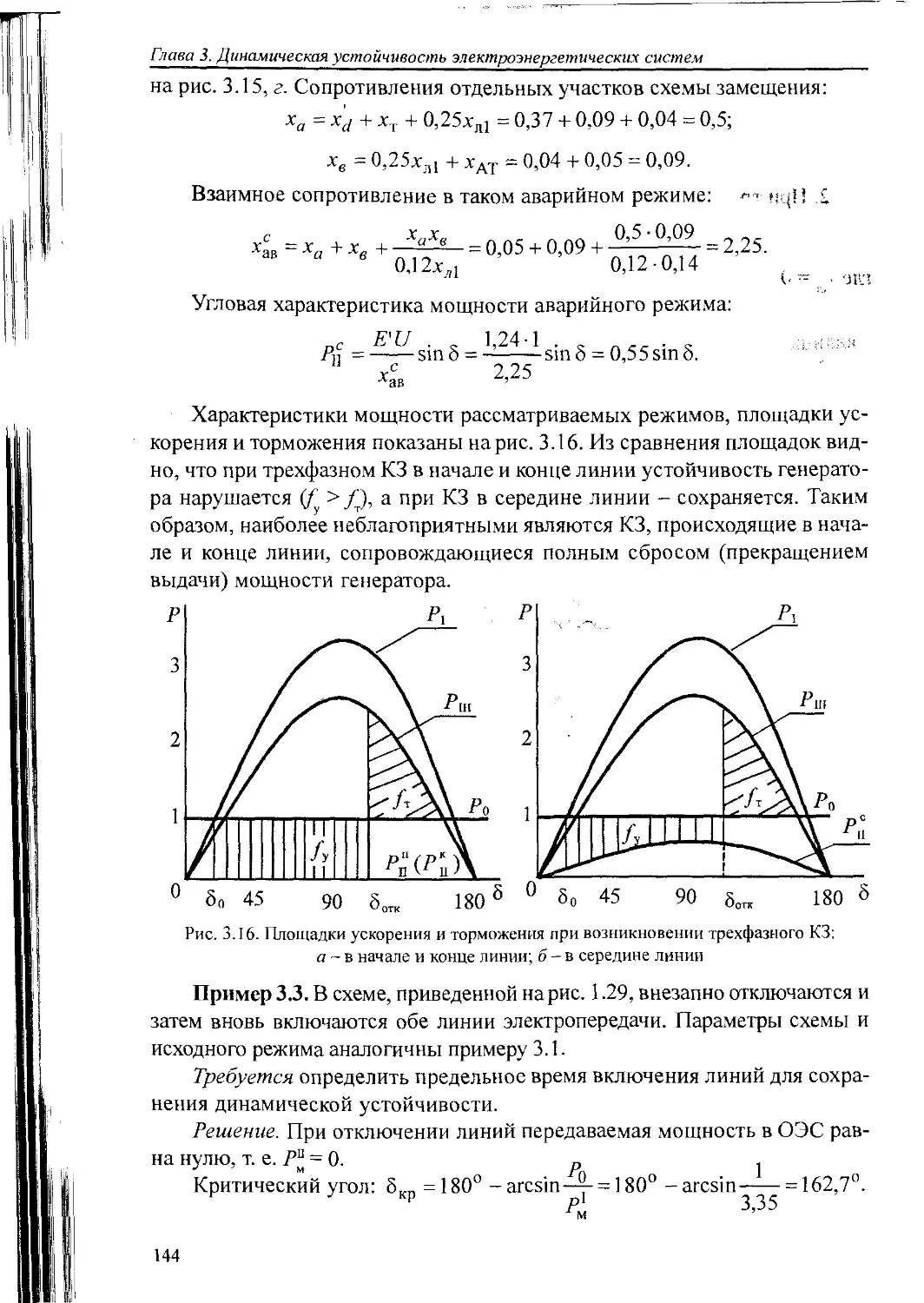
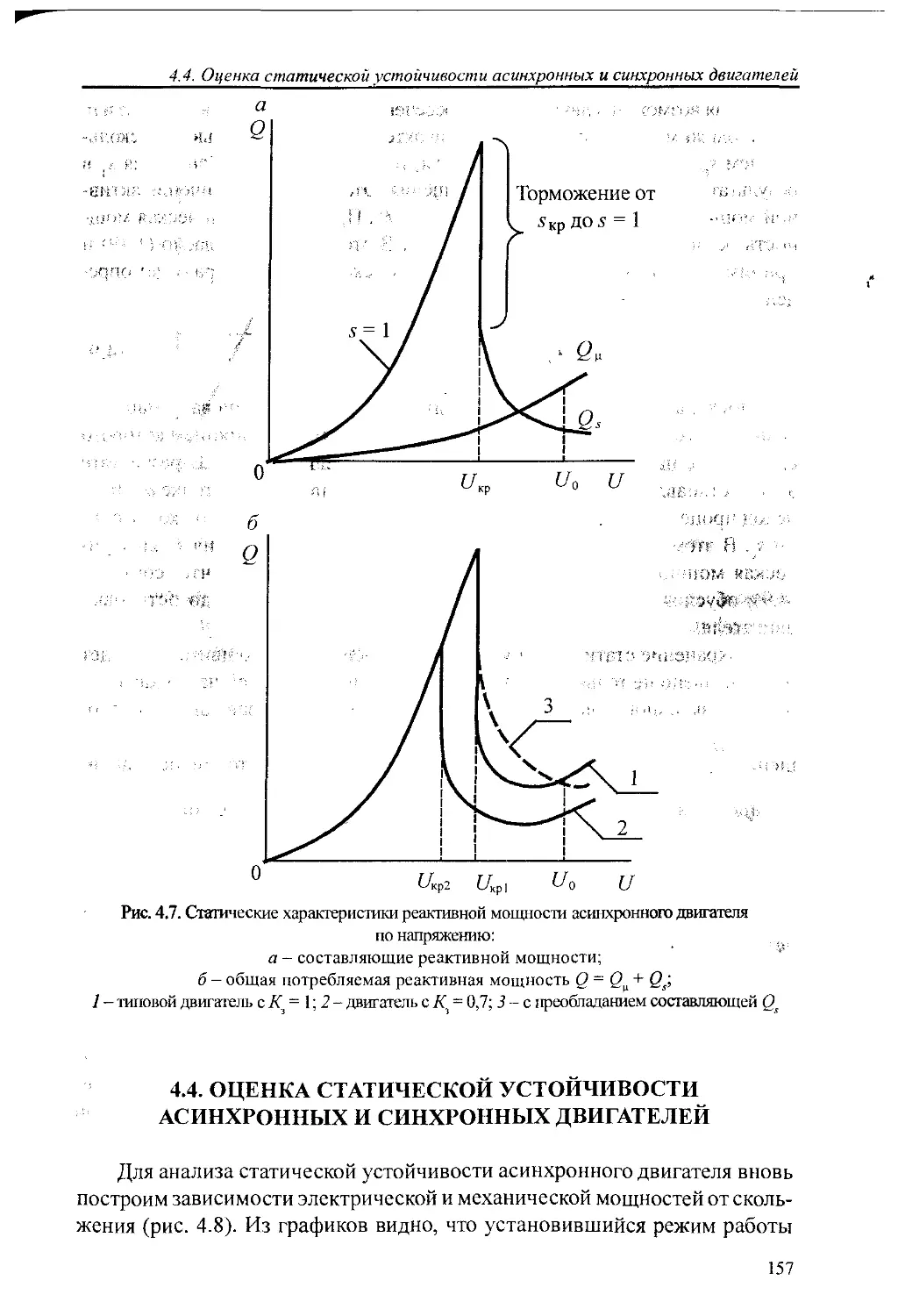
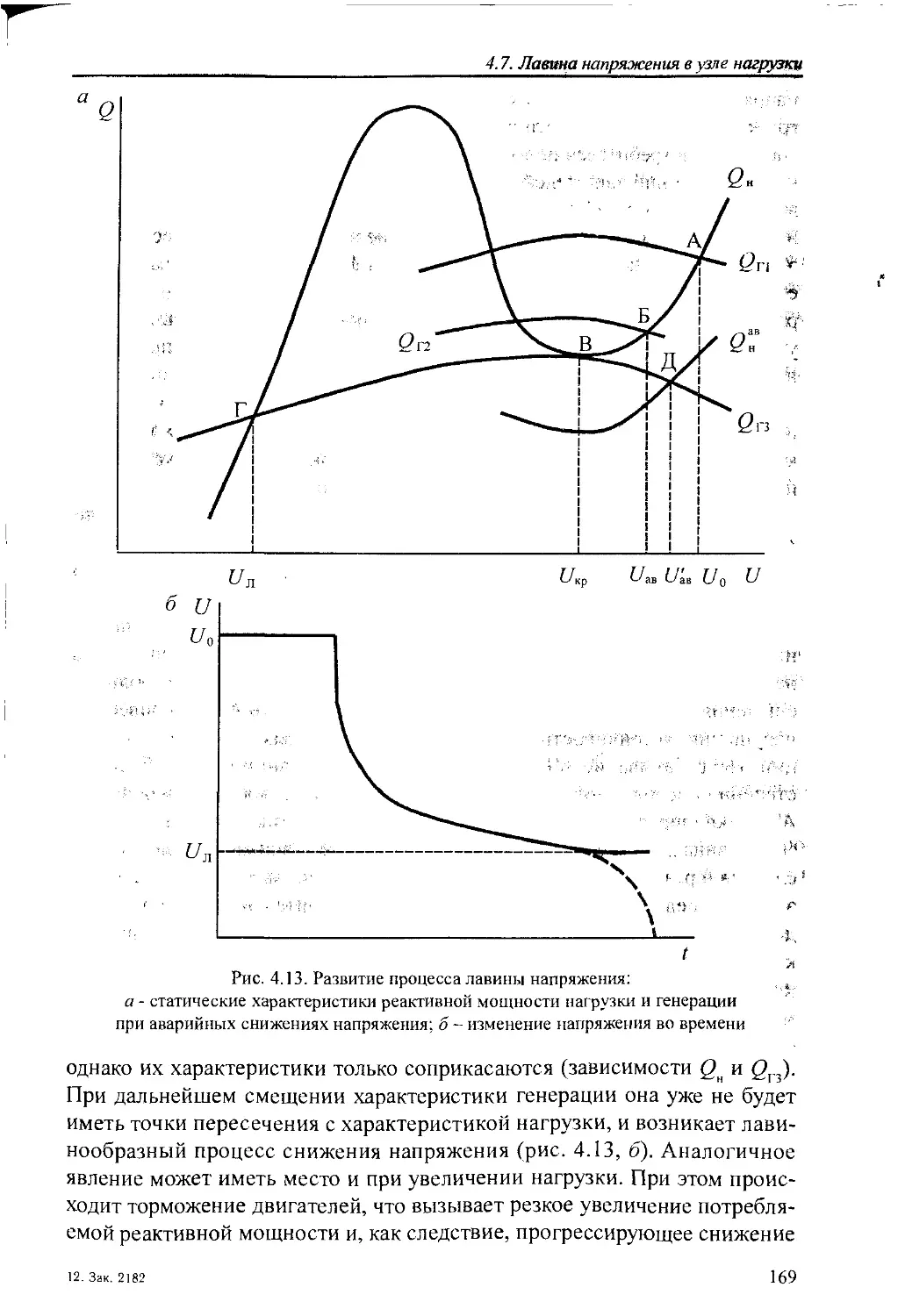
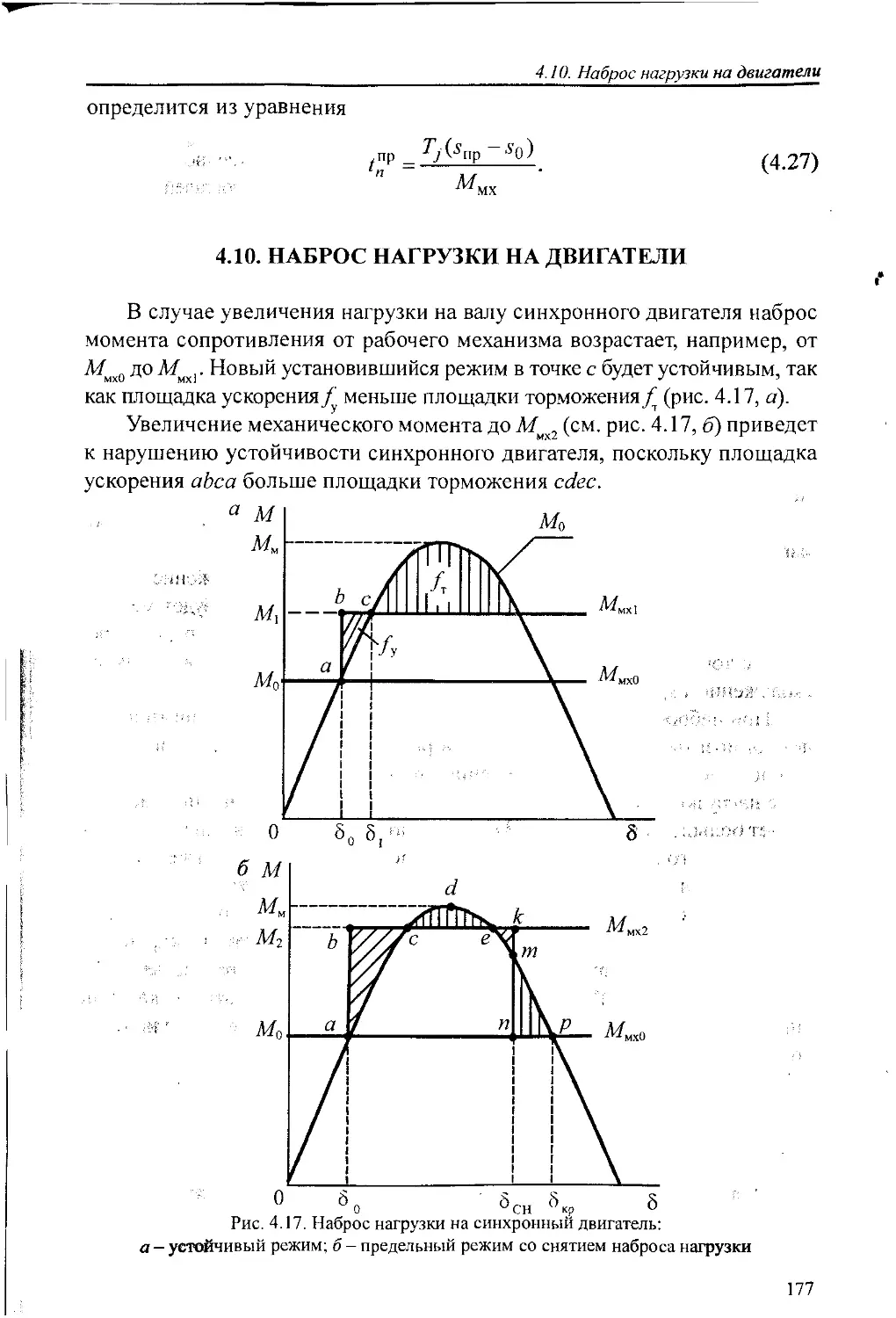
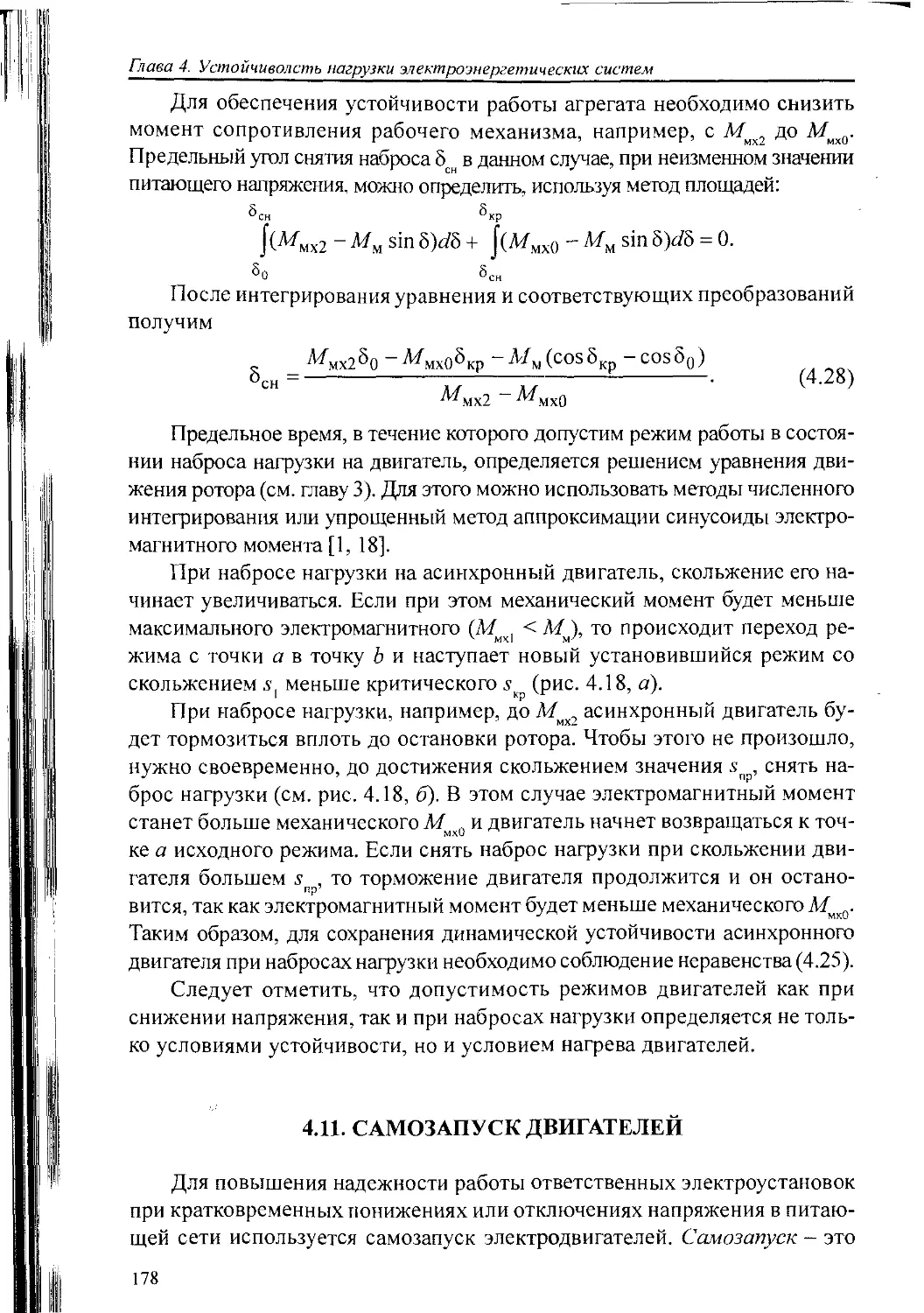
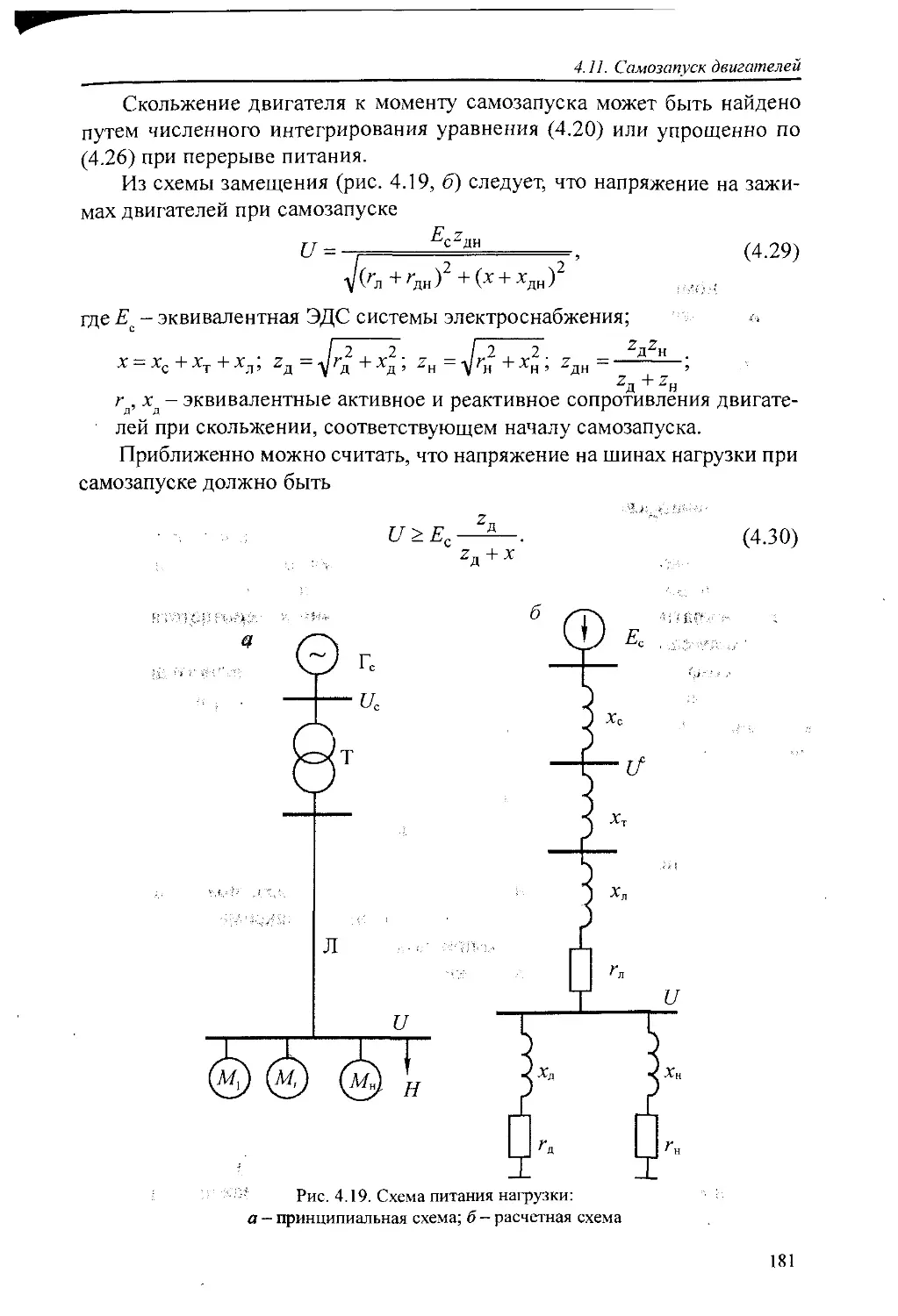
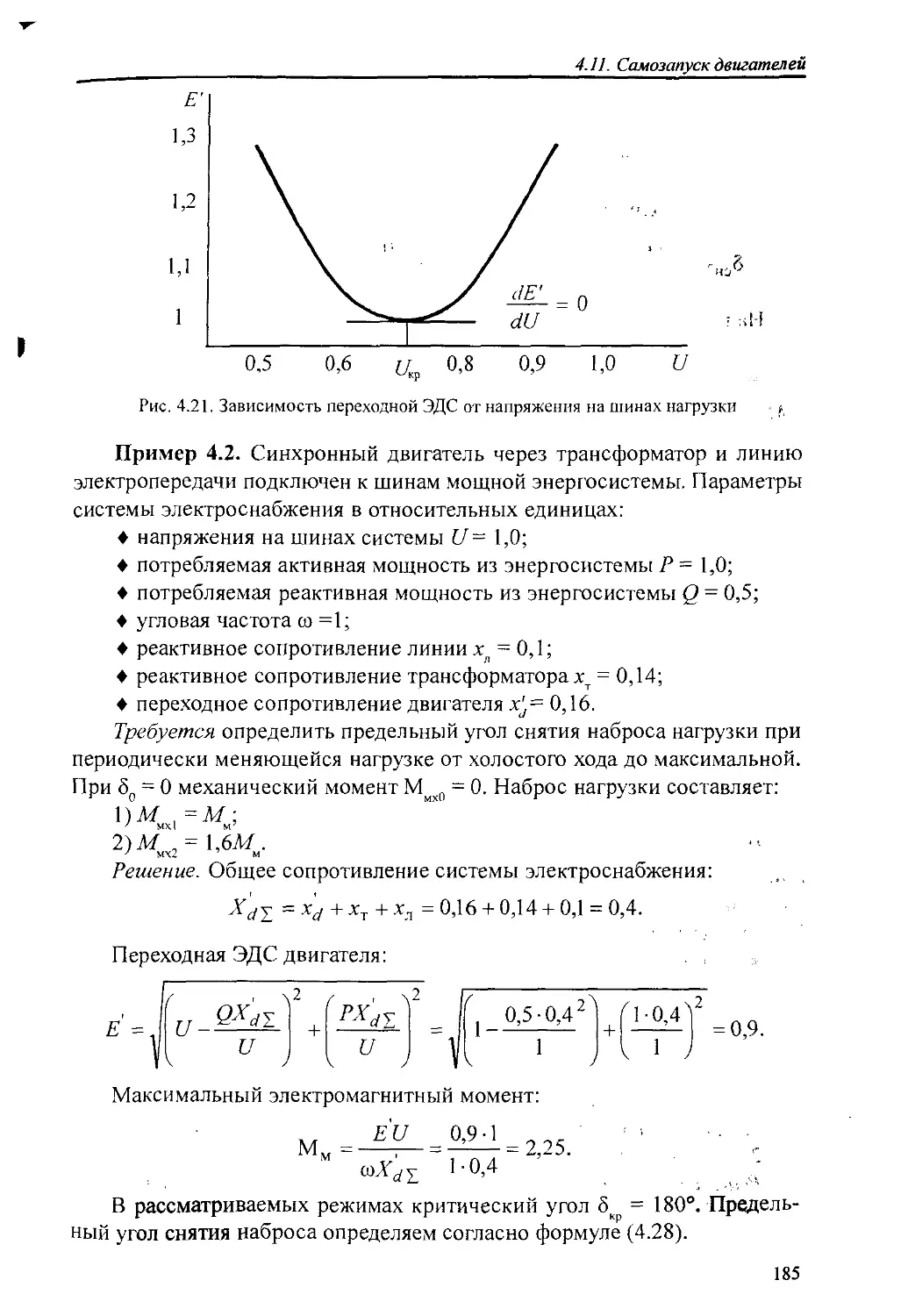
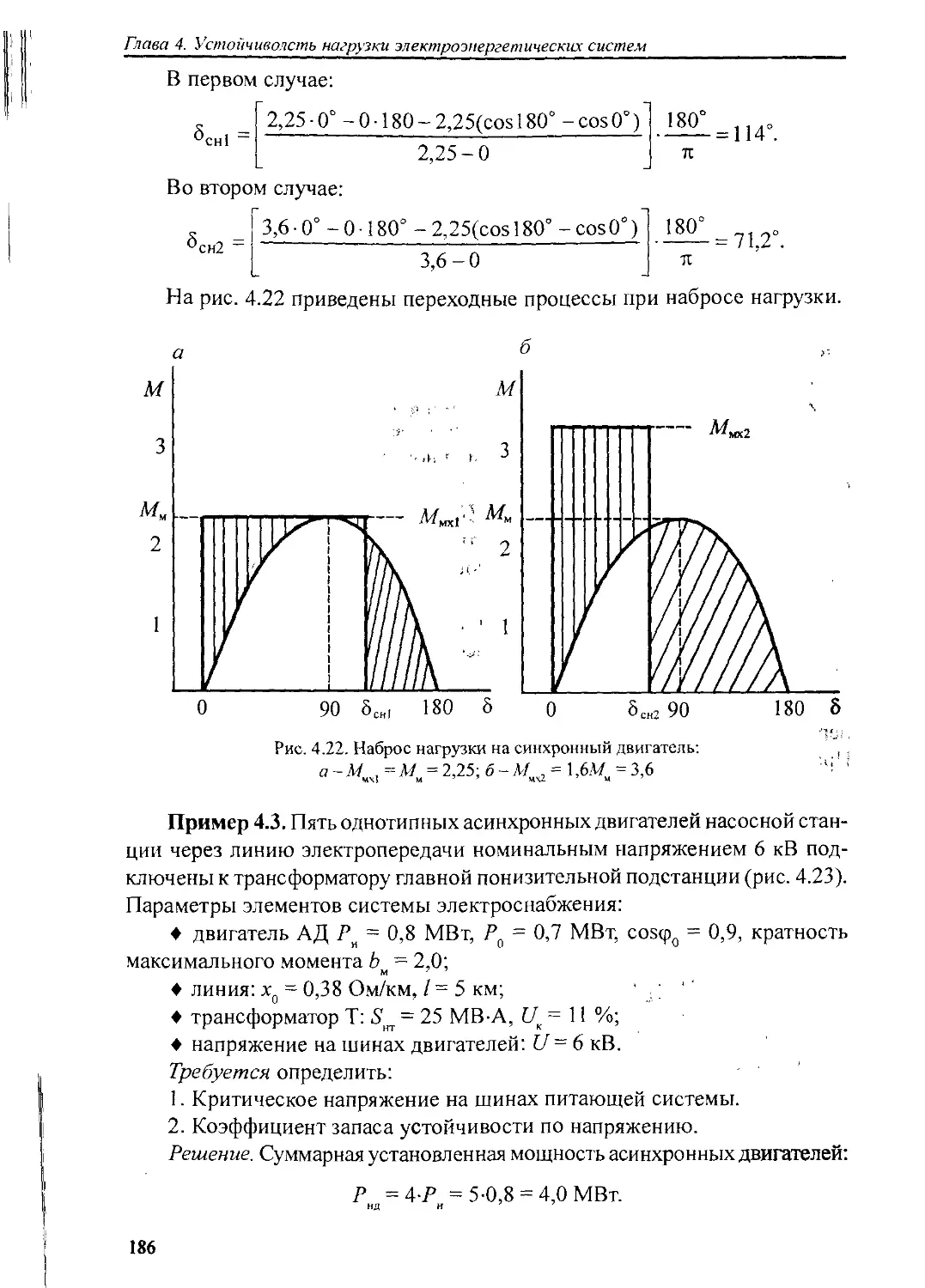
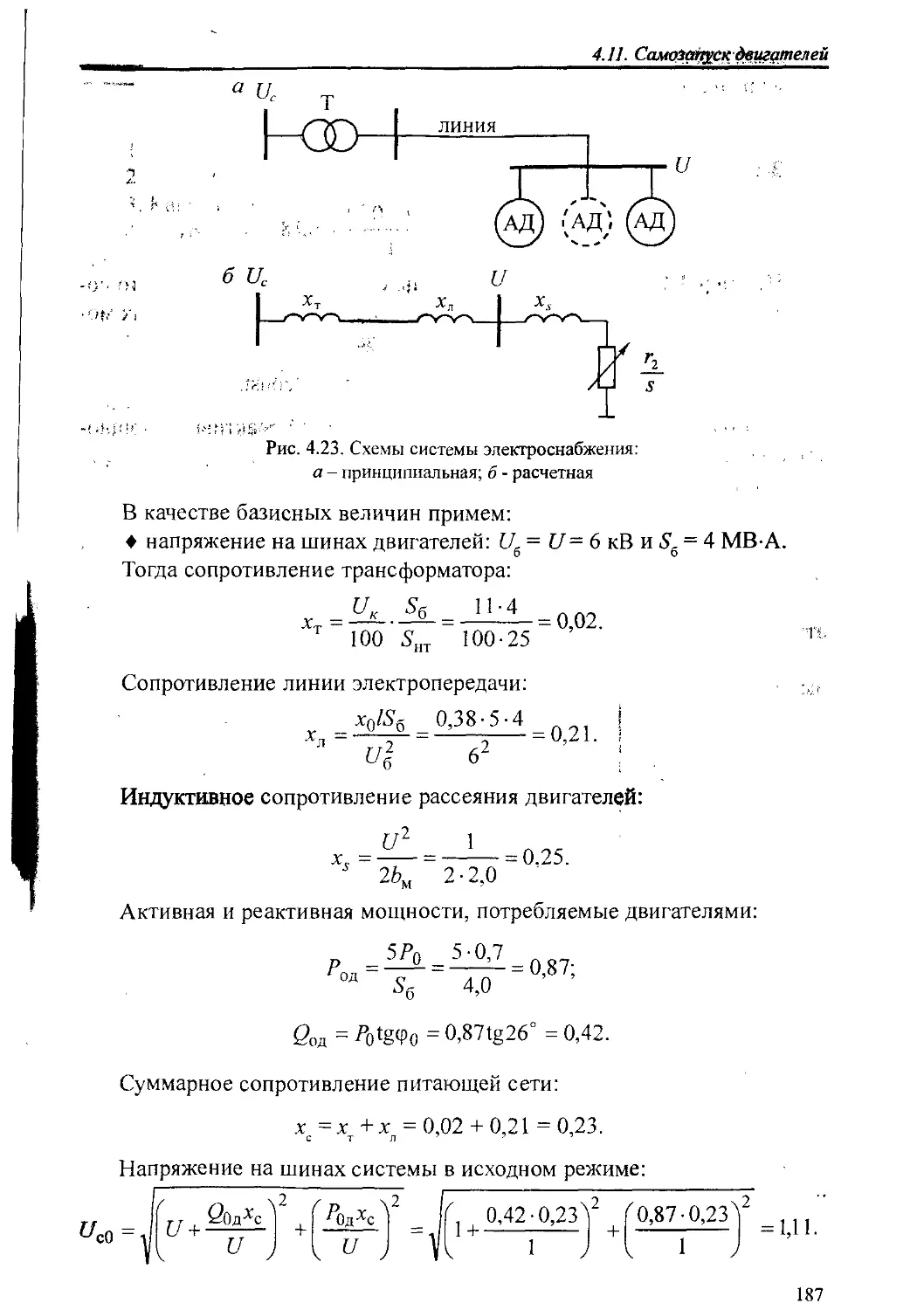
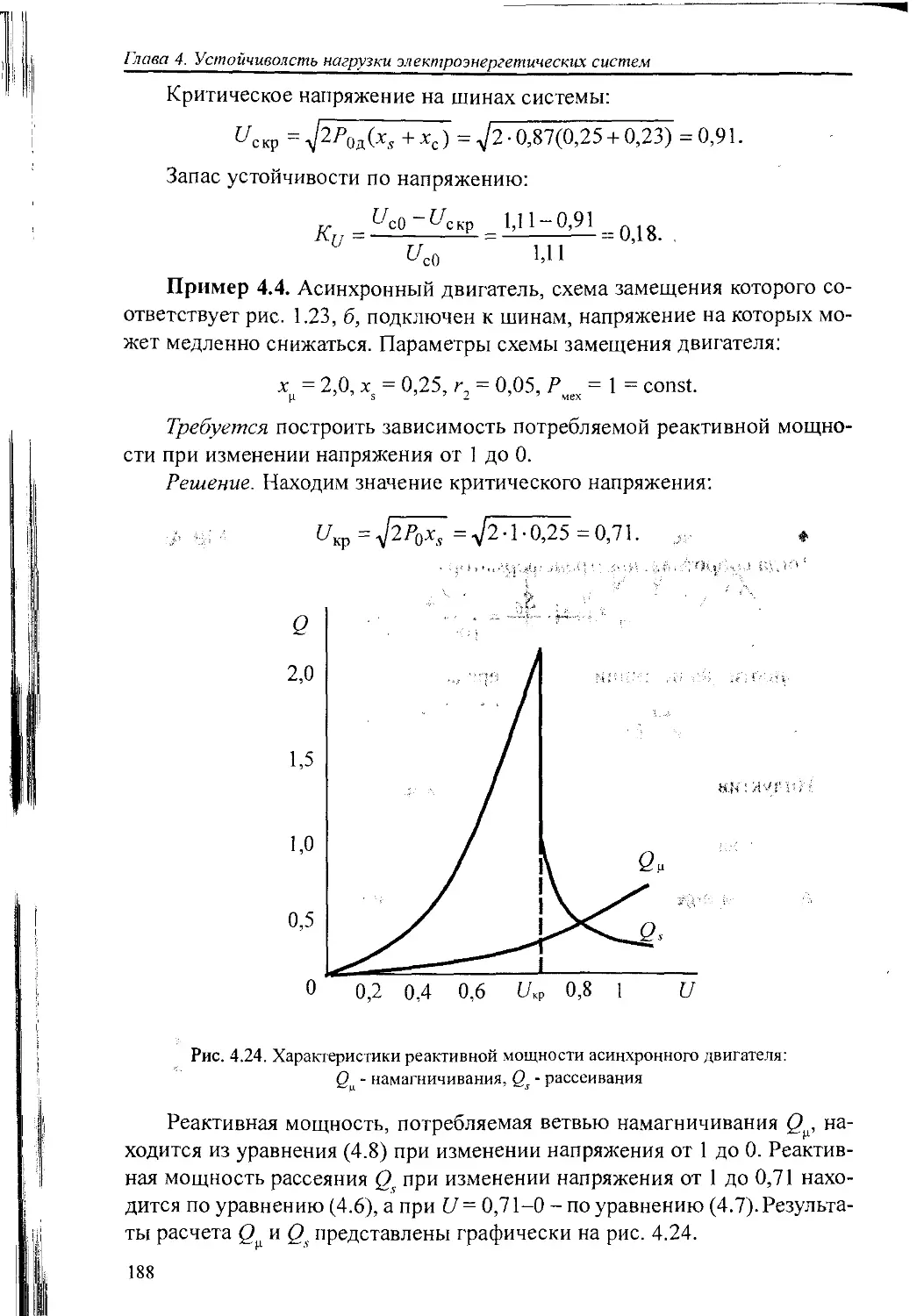
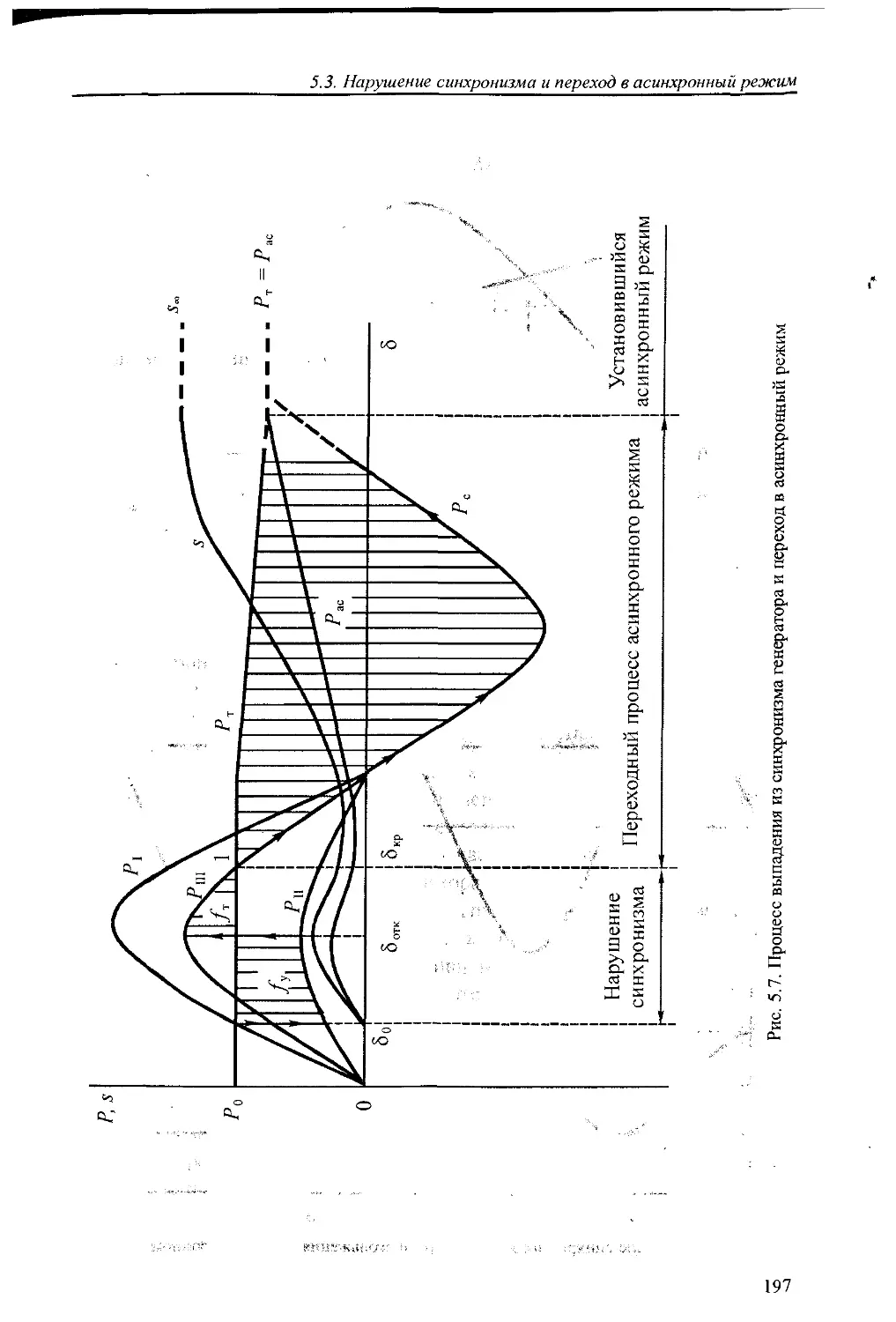
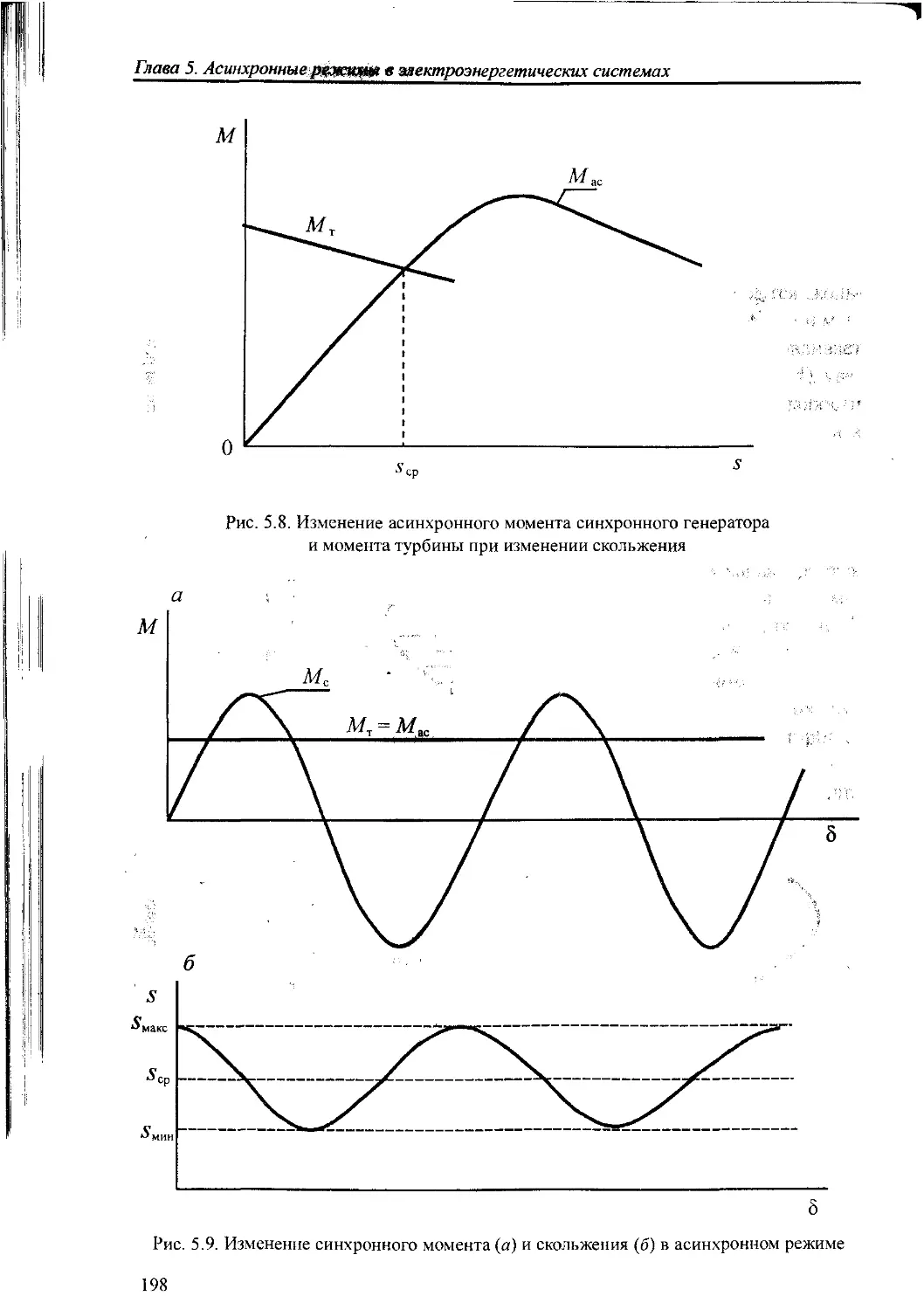
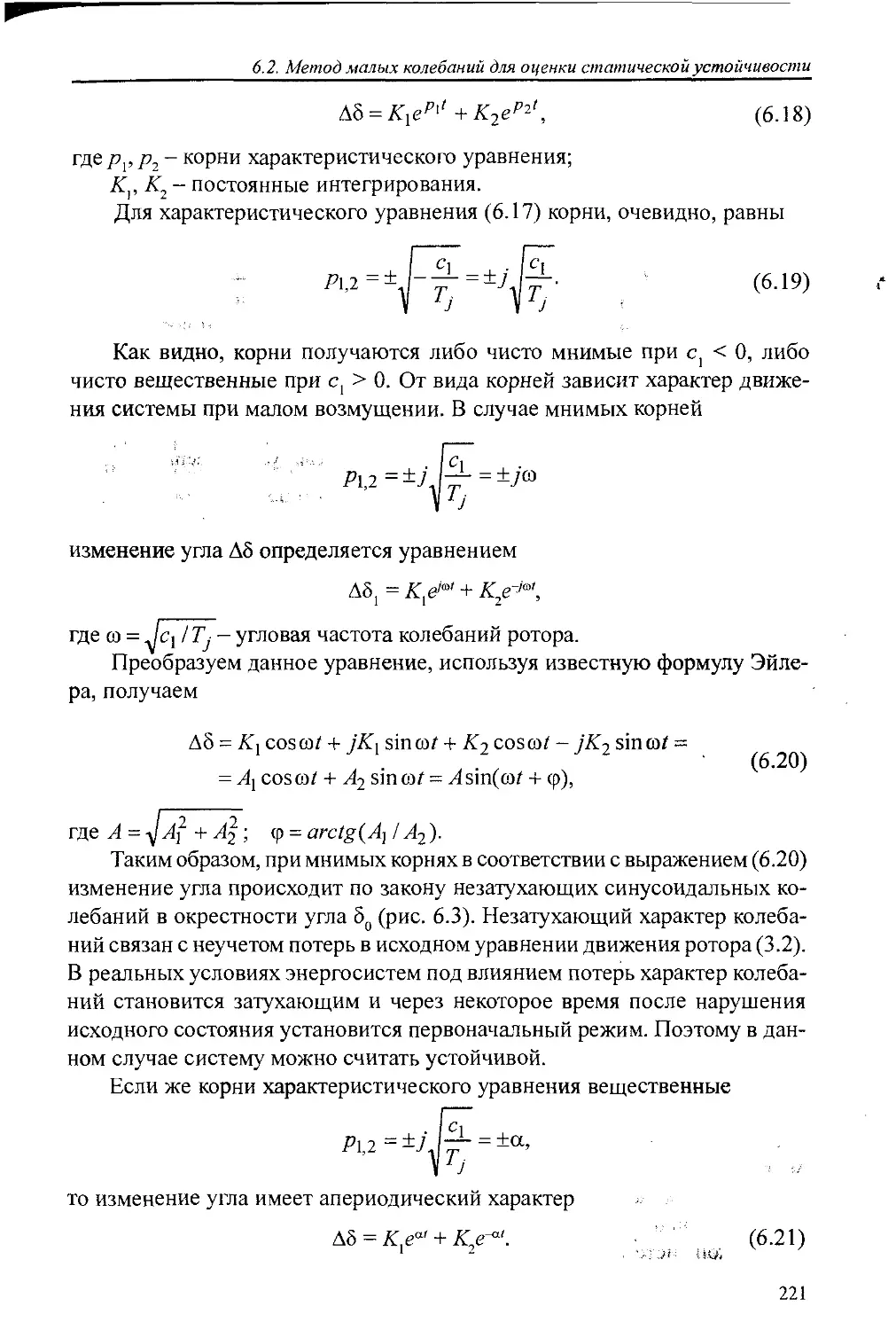
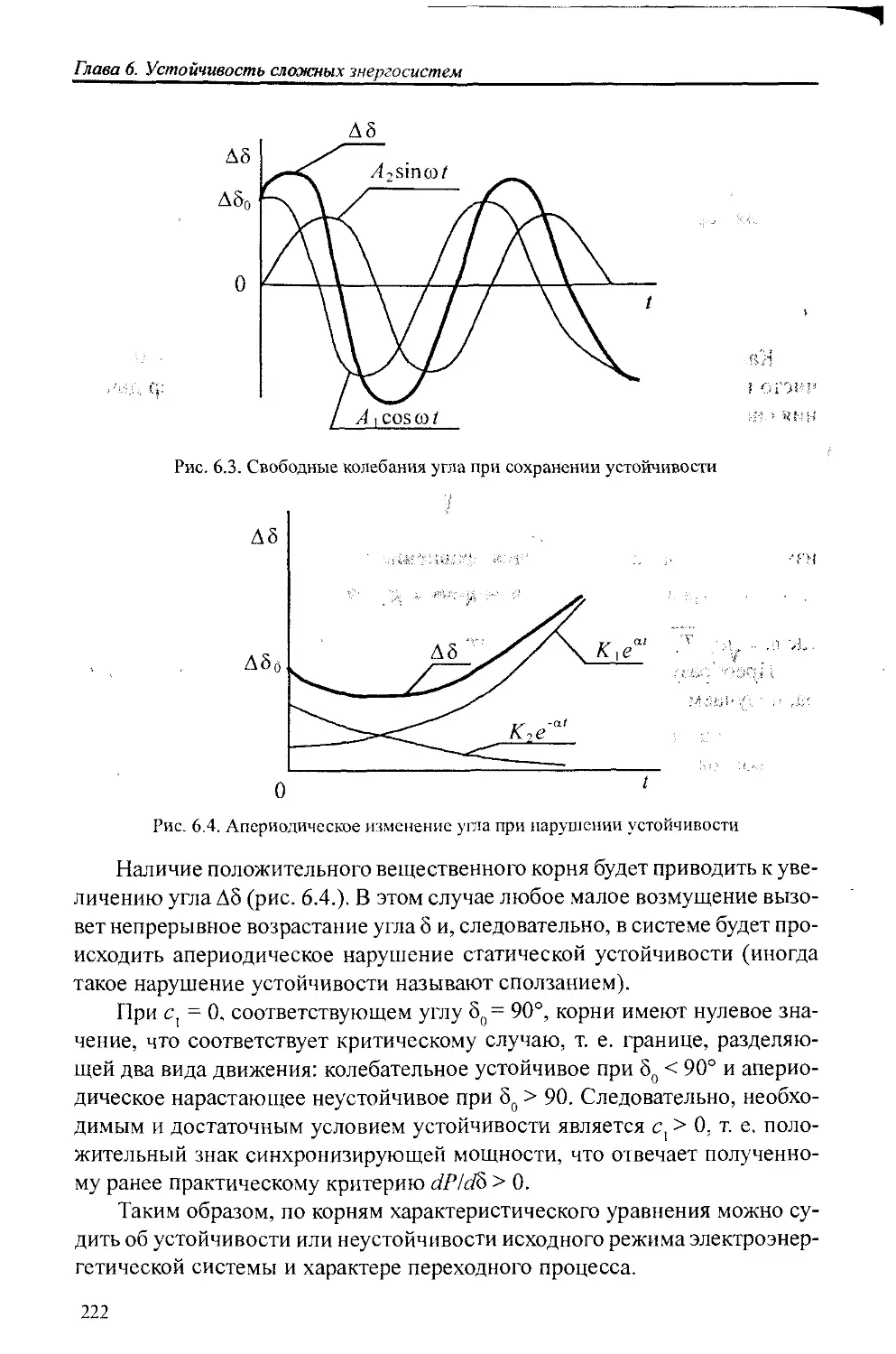
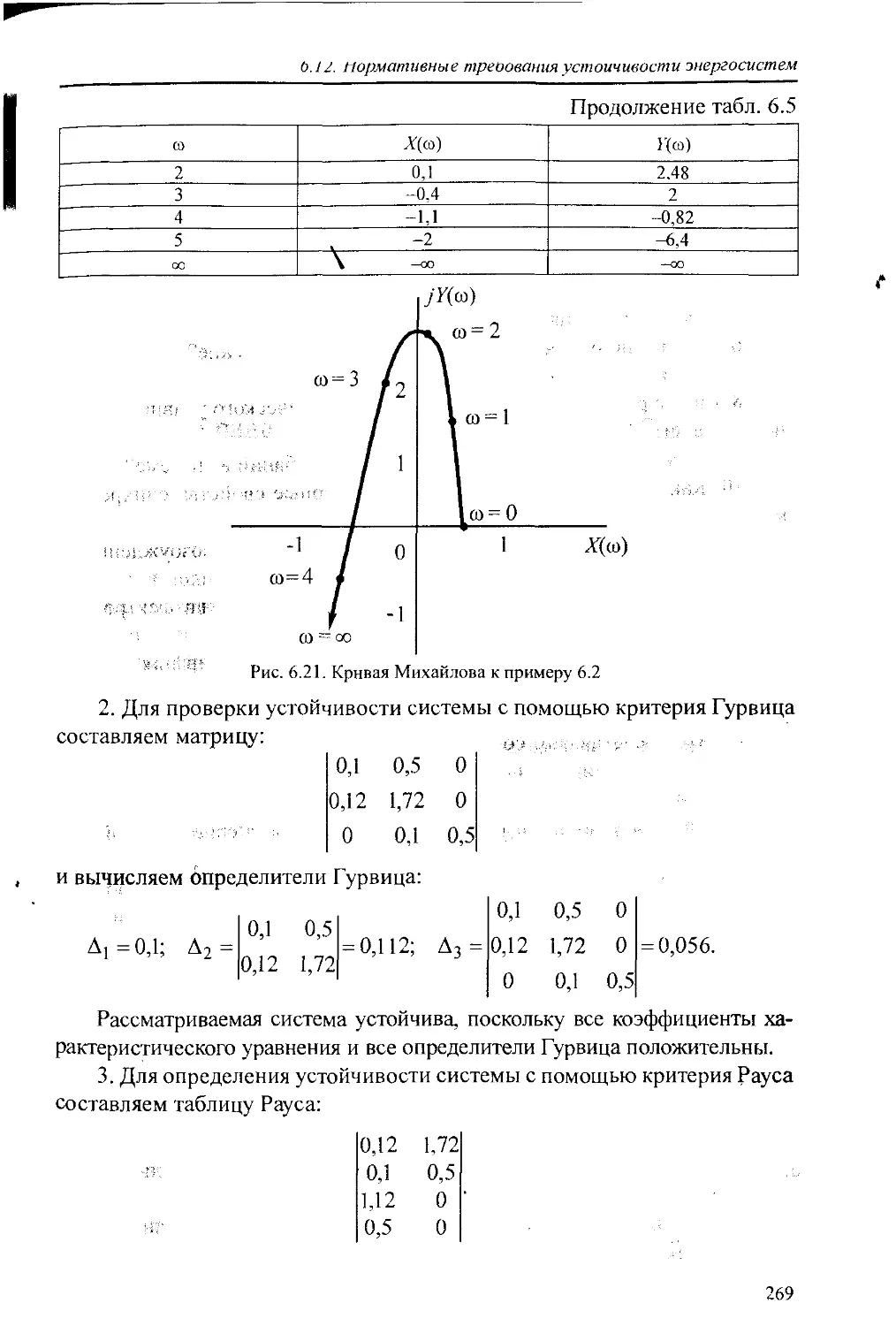
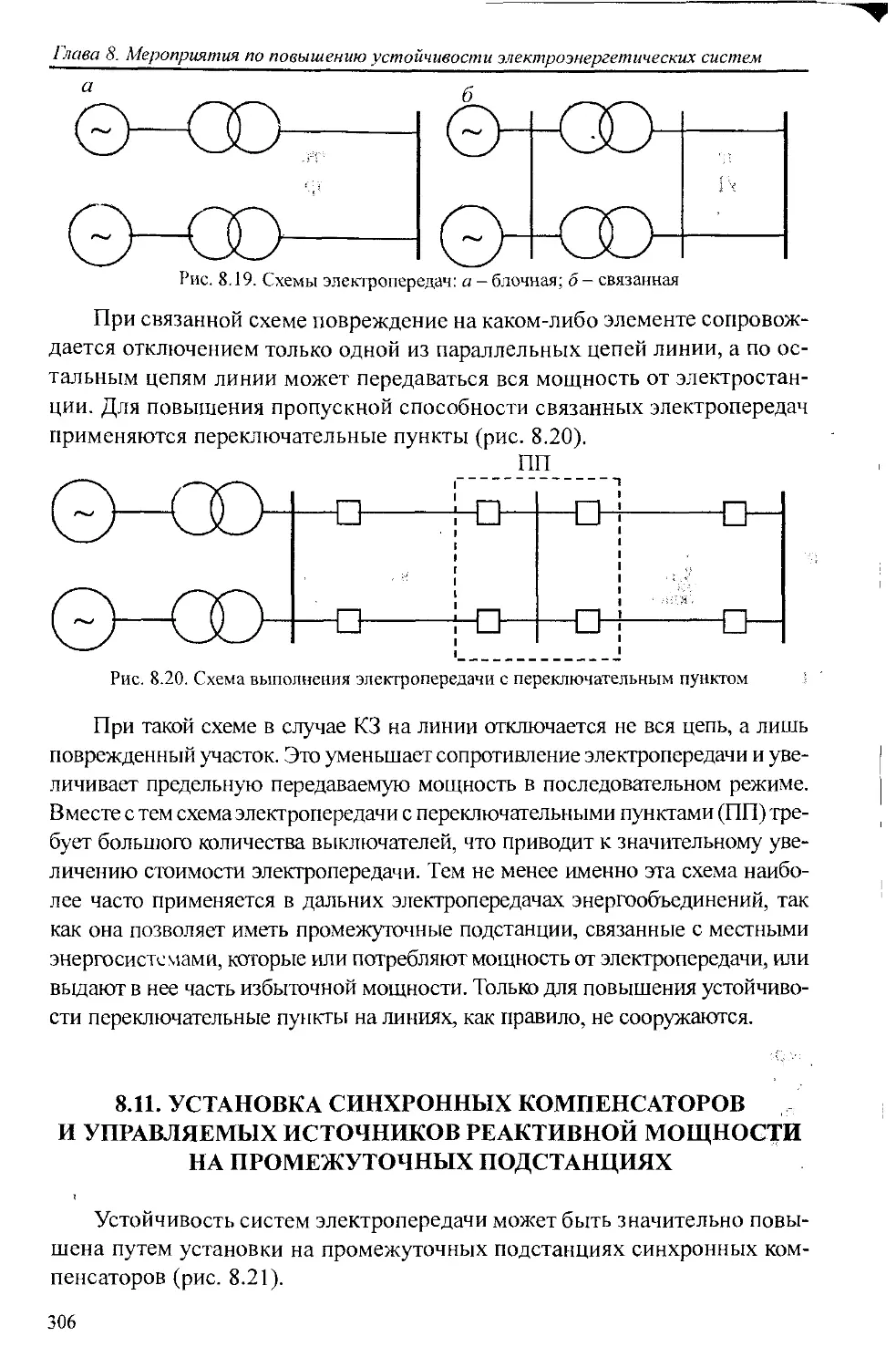
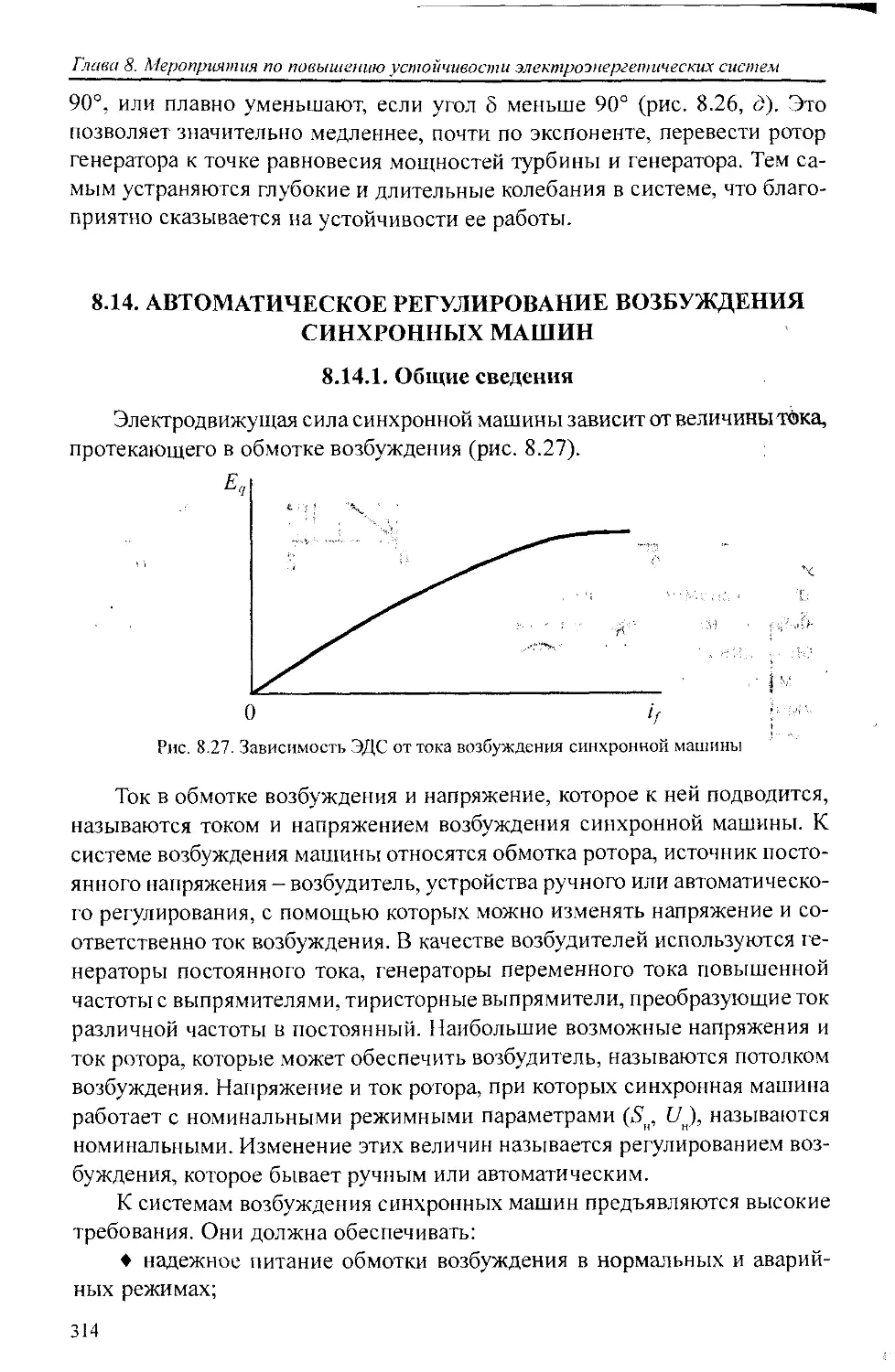
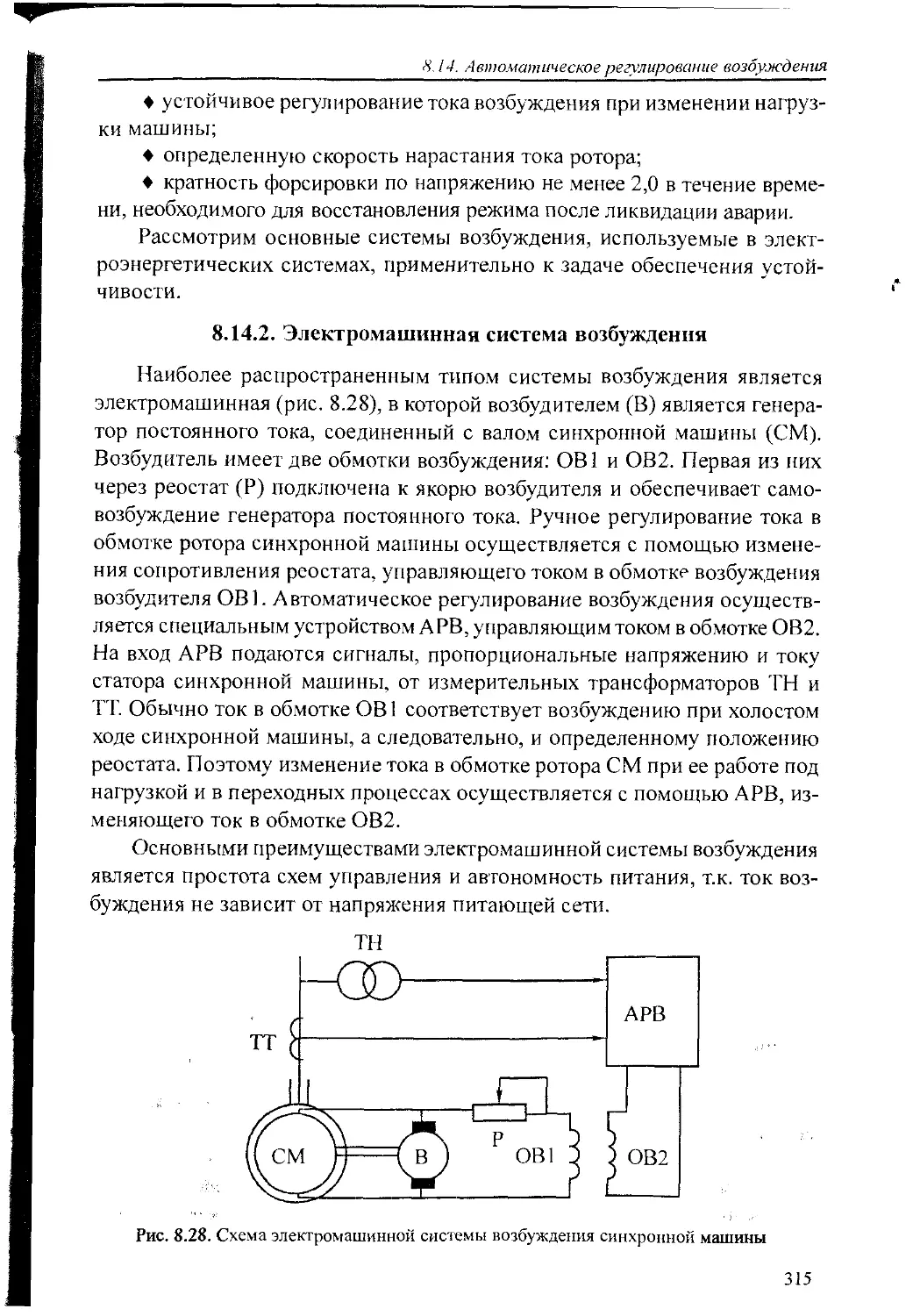
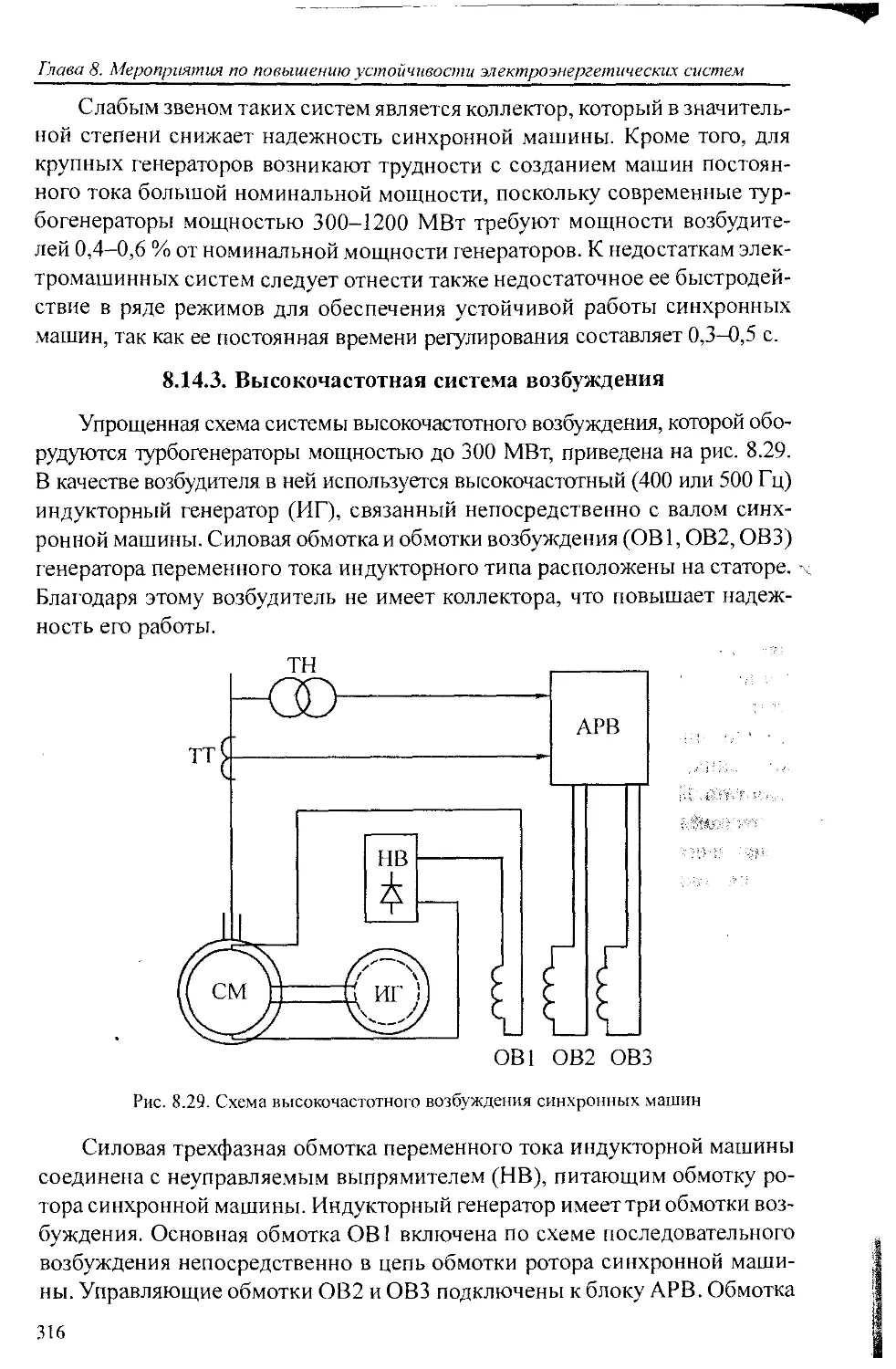
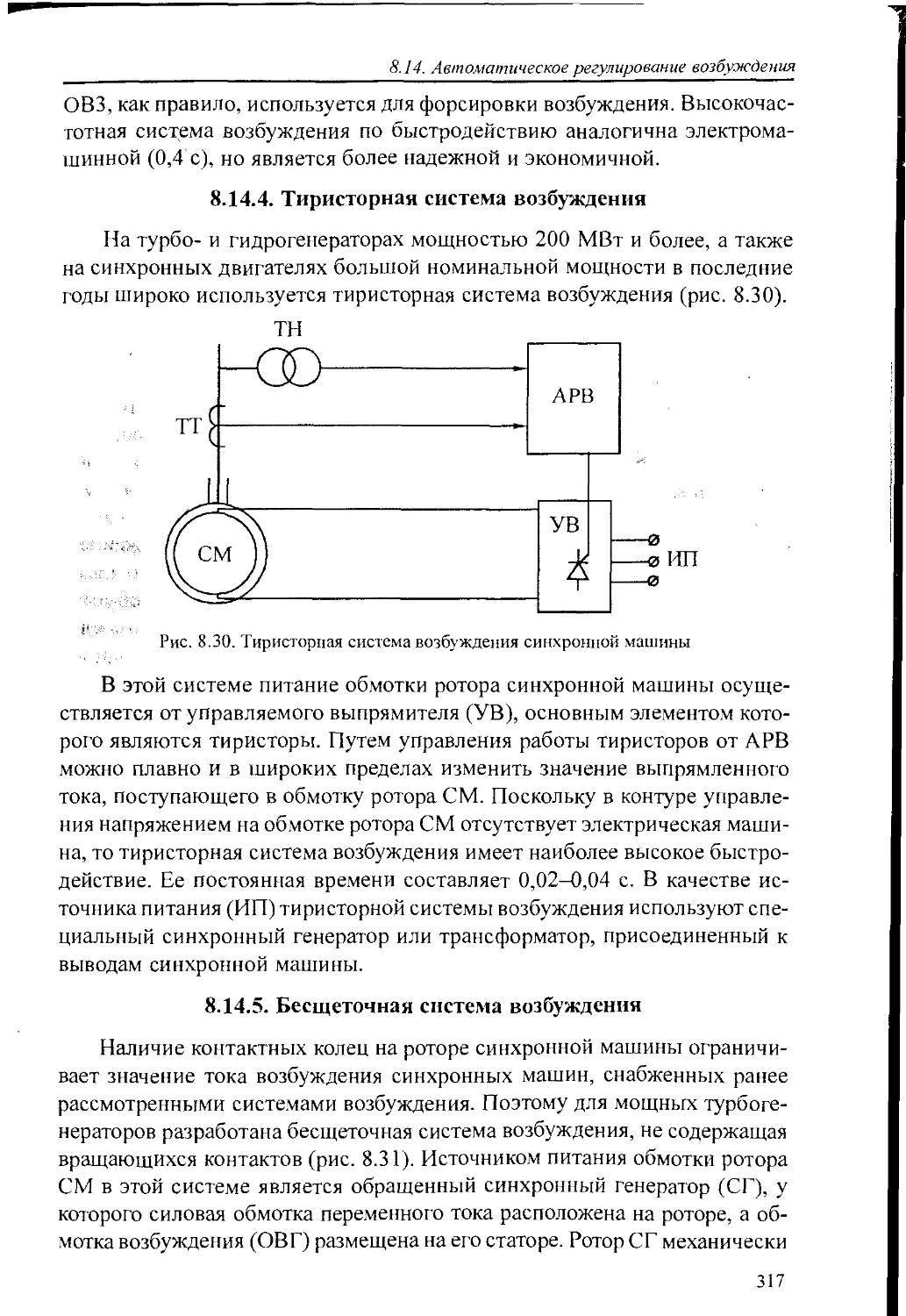
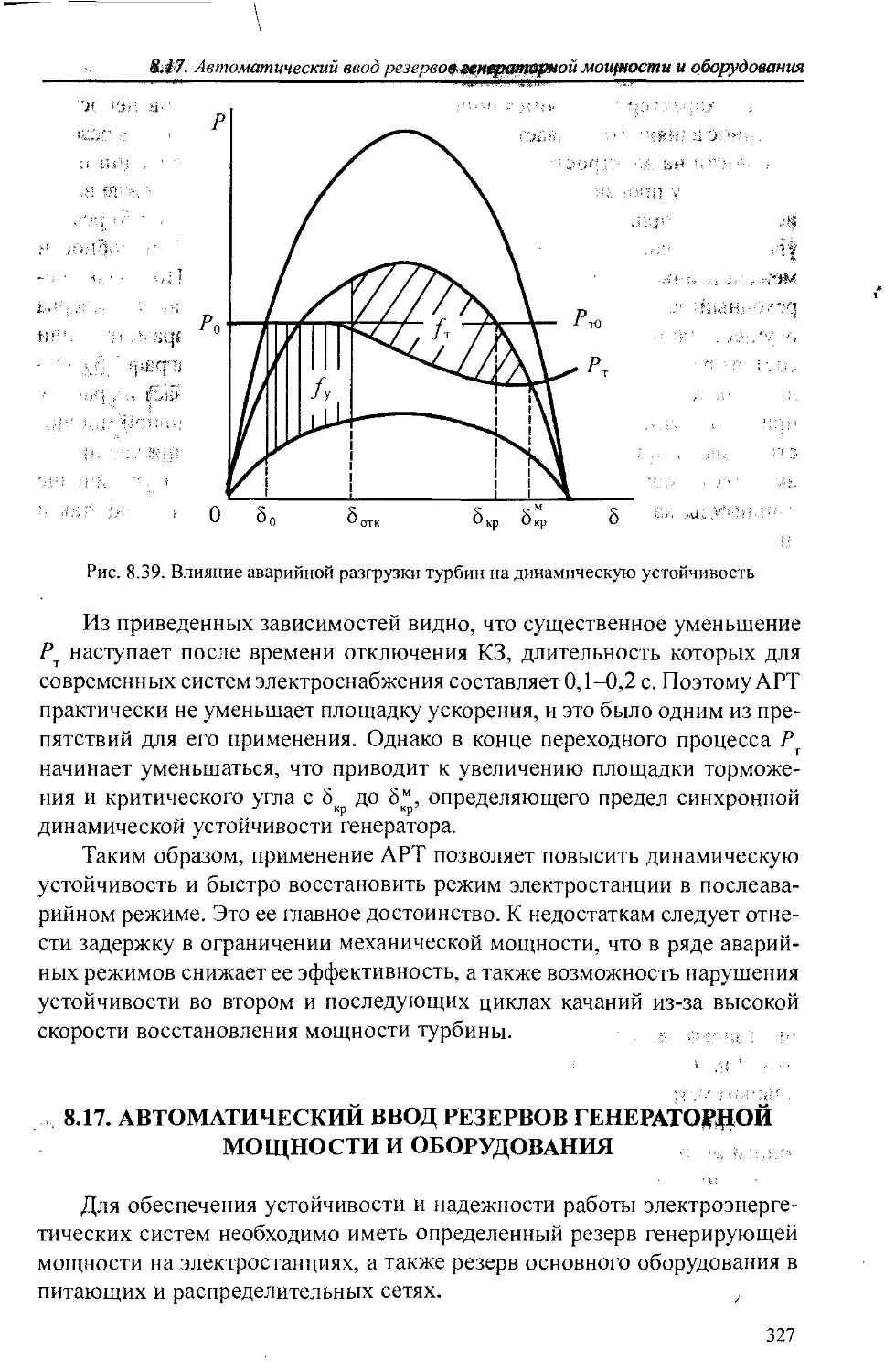
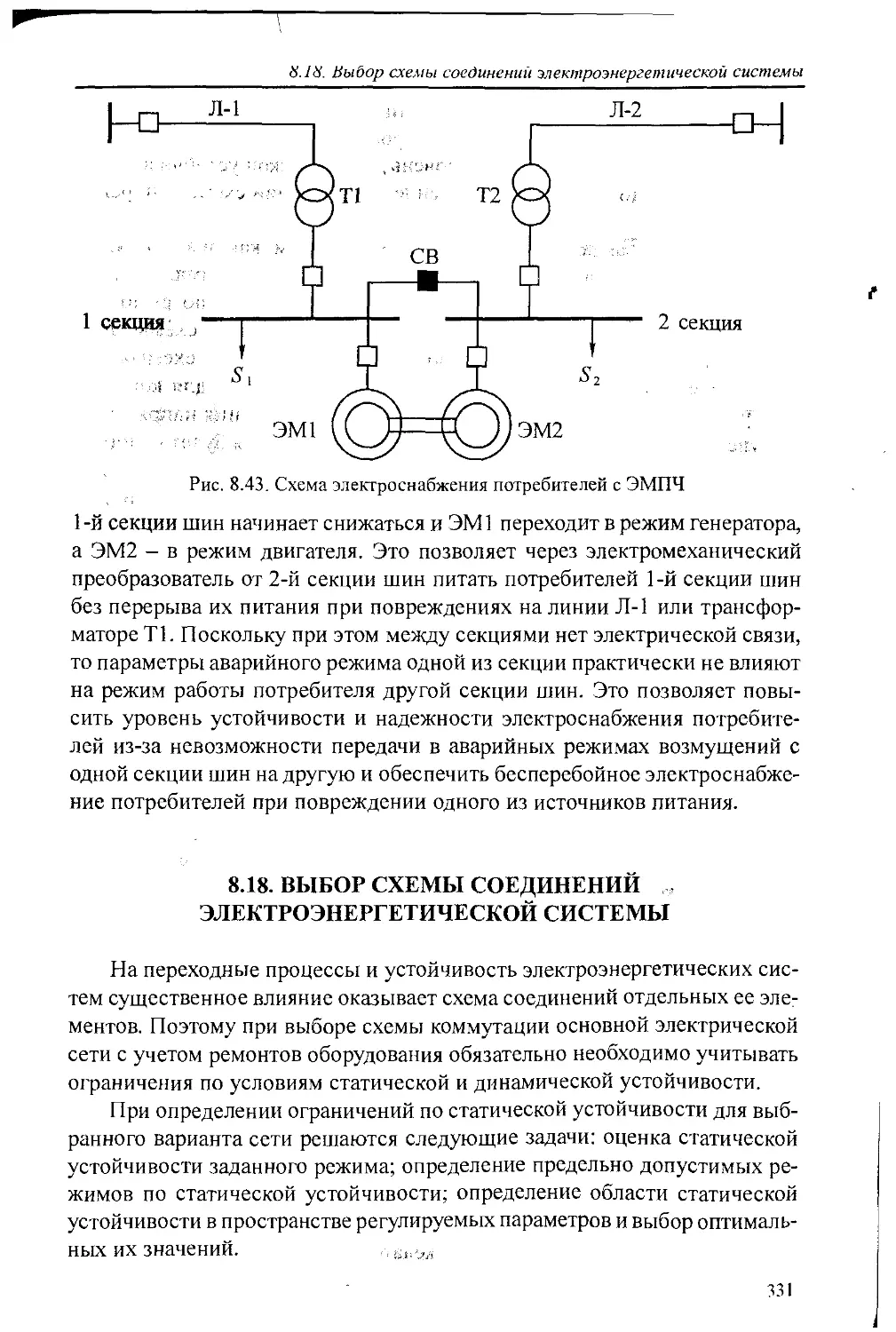
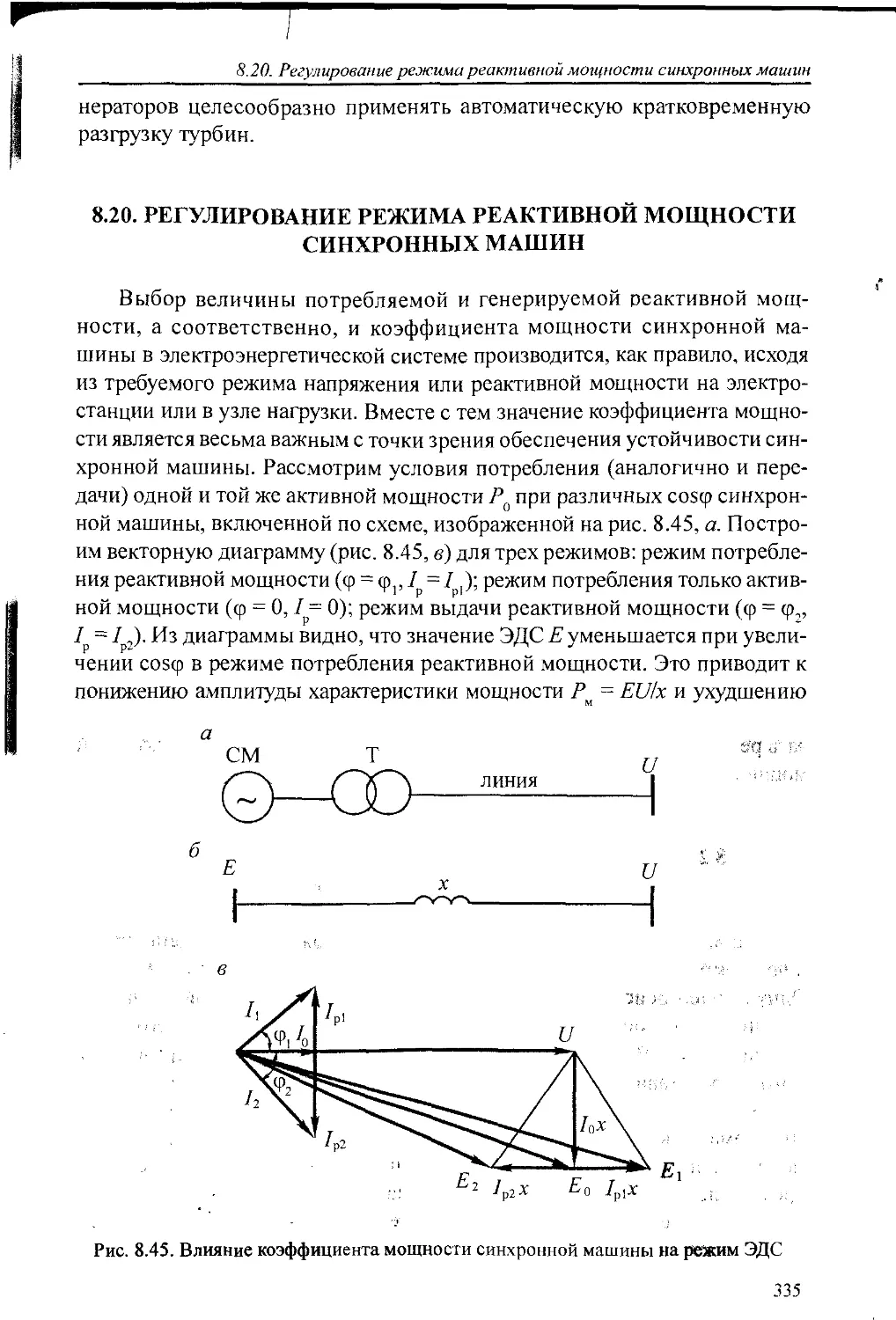
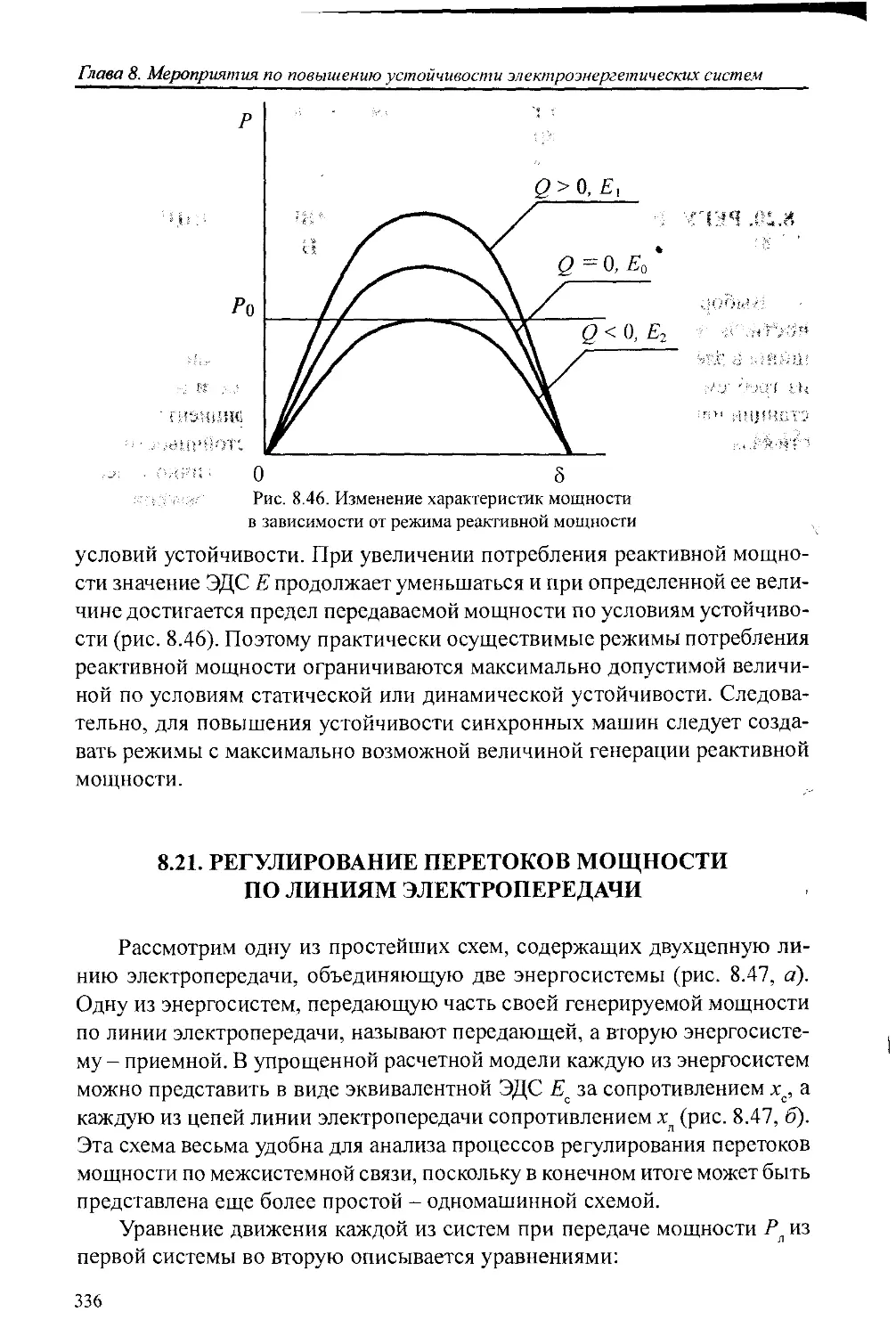
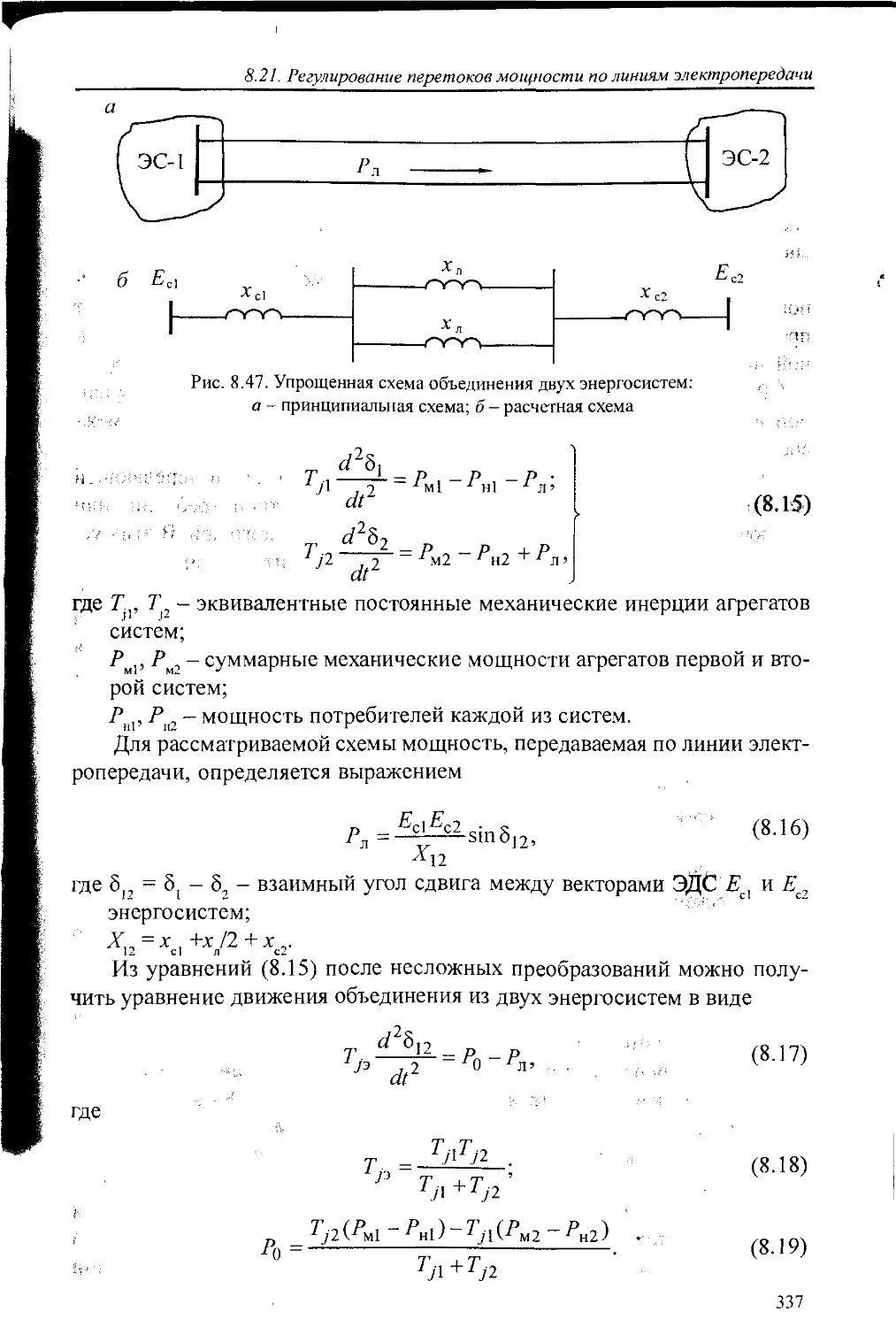
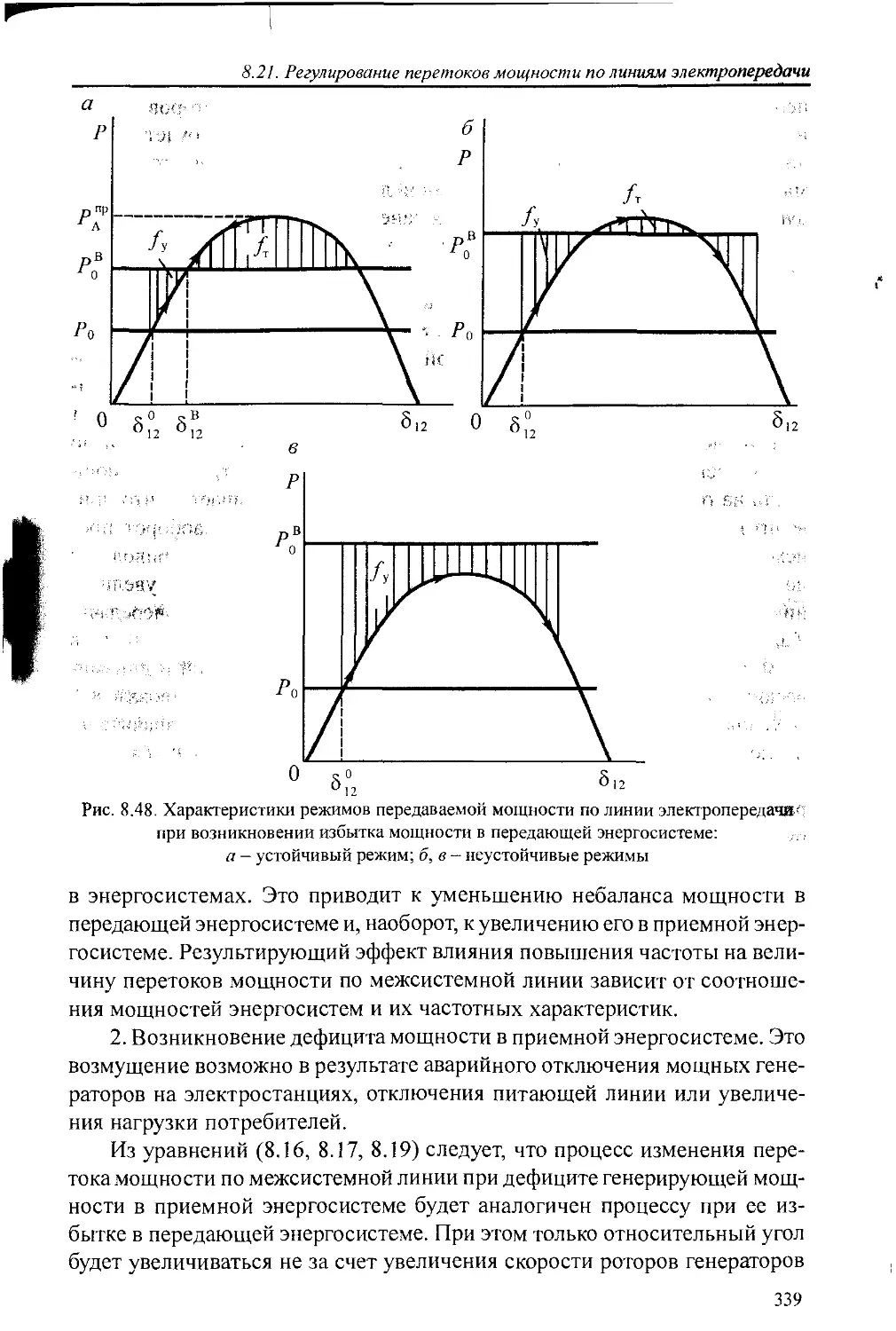
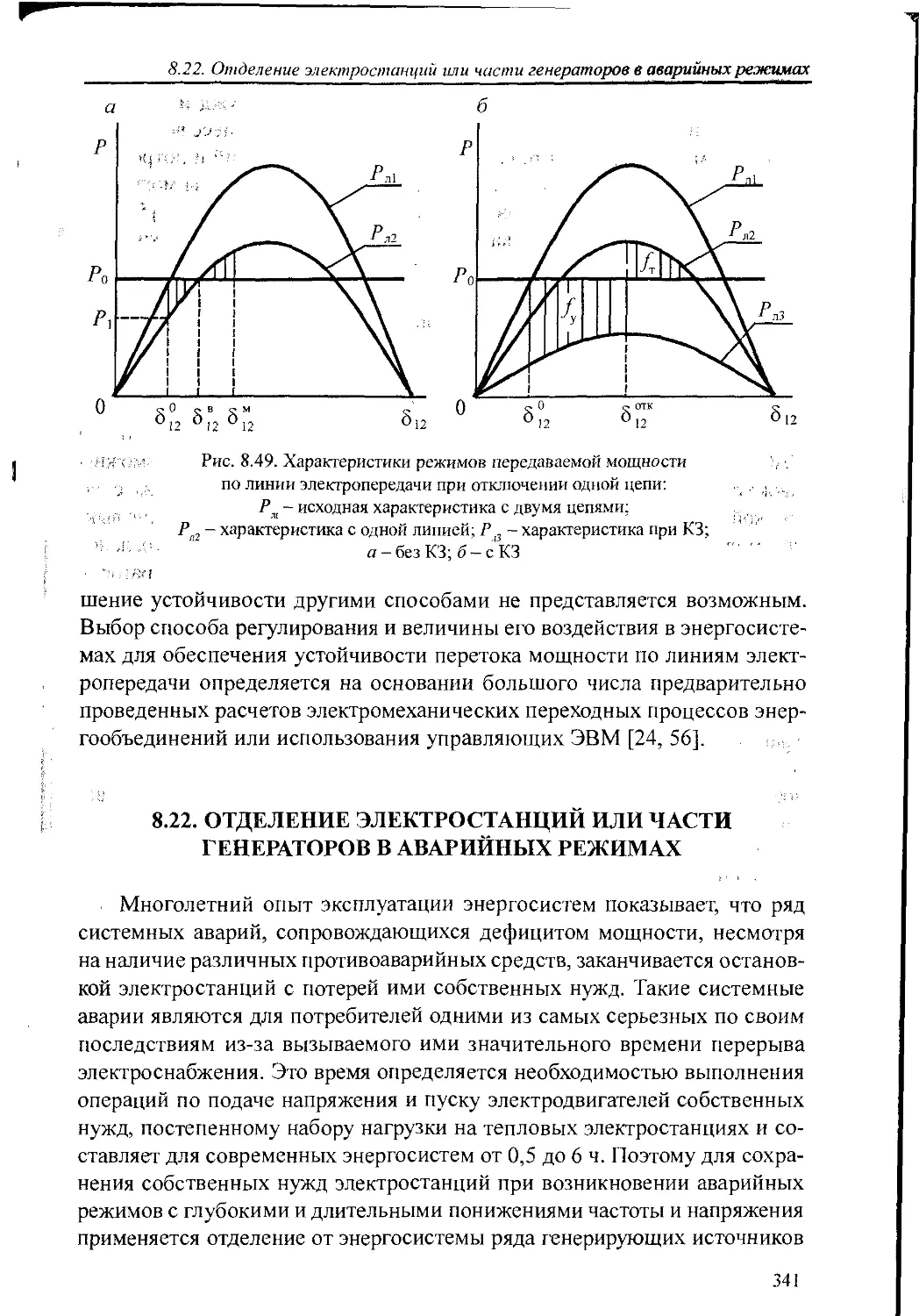
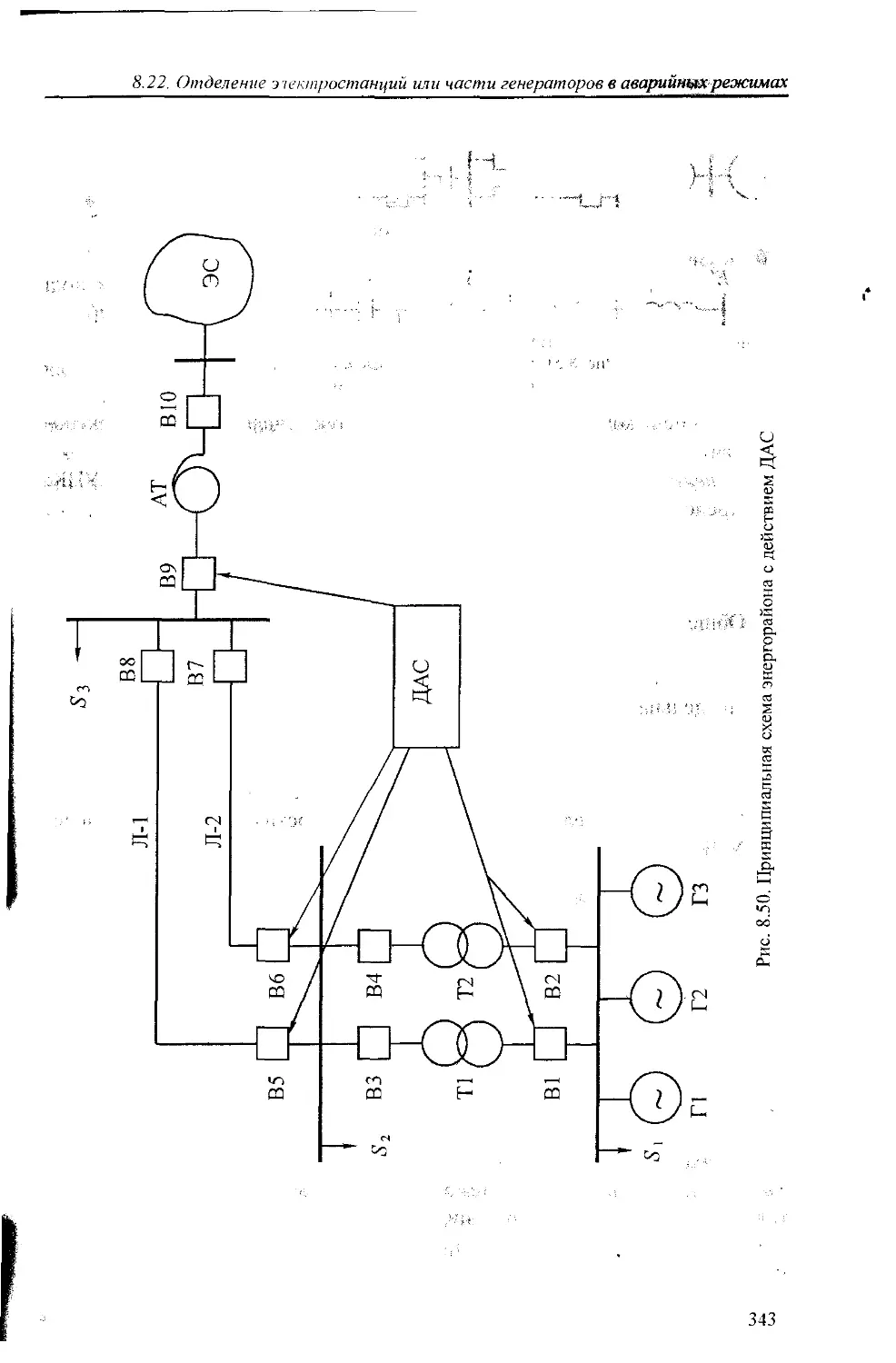
Текст
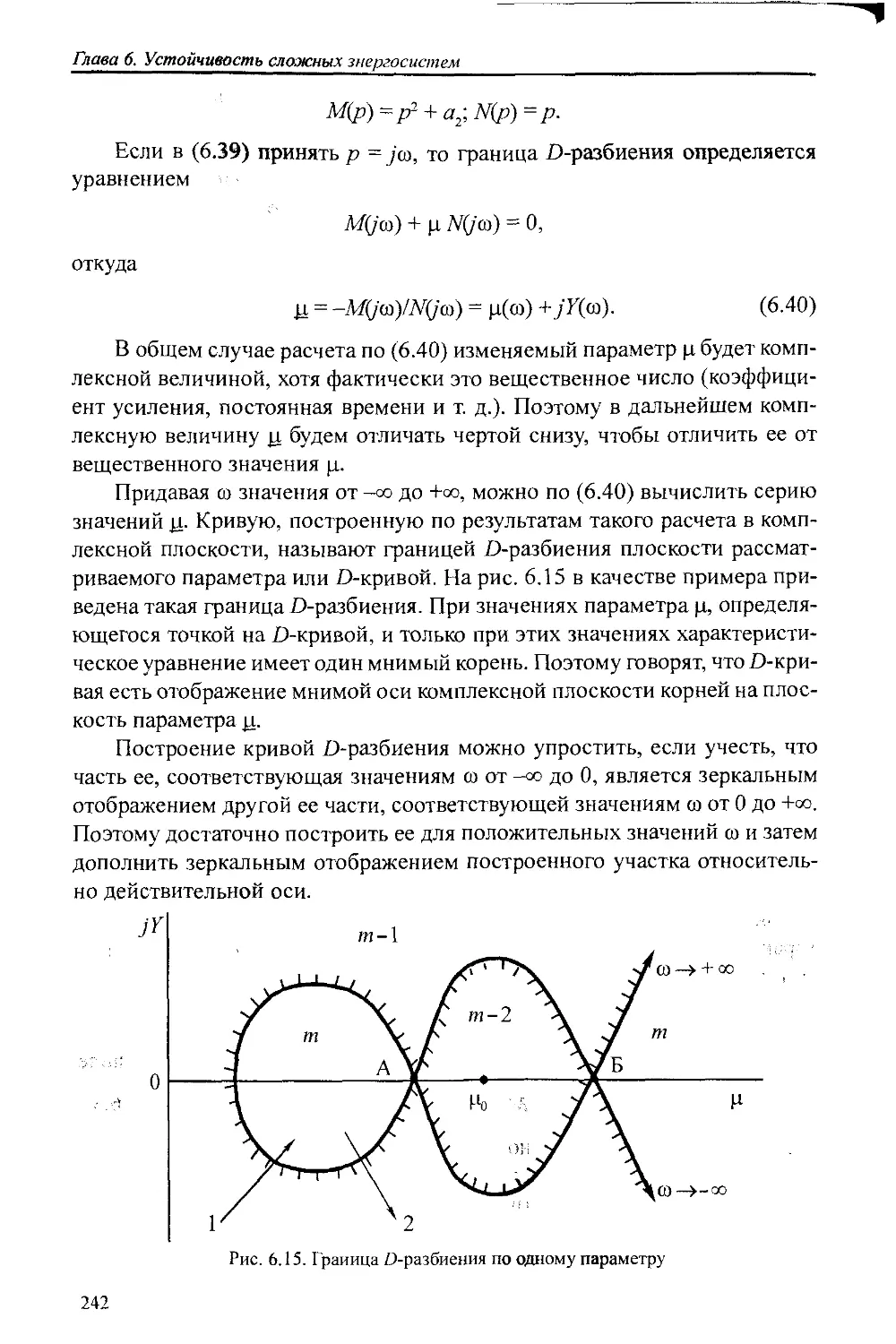
Е. В. Калентионок
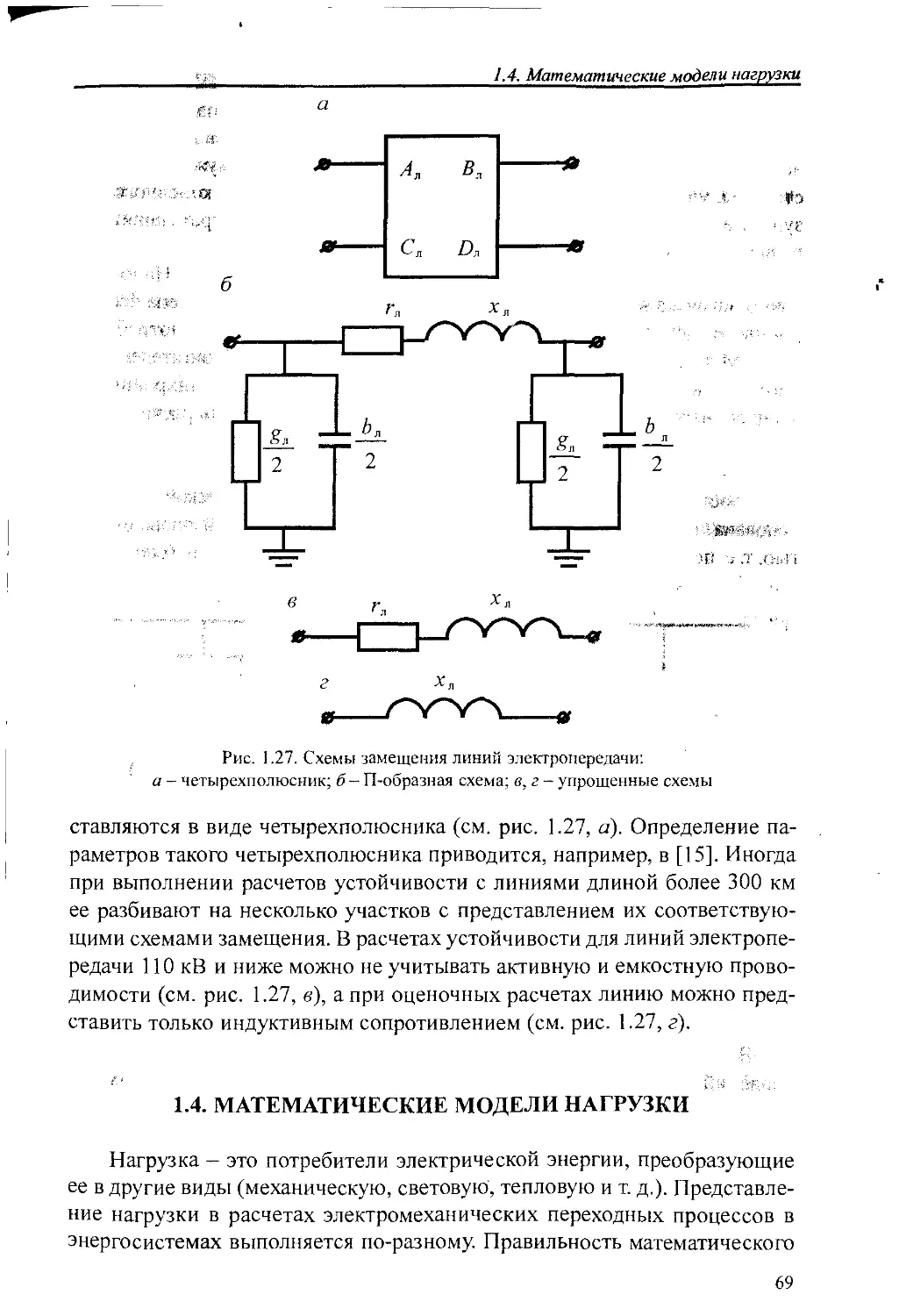
УСТОЙЧИВОСТЬ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ
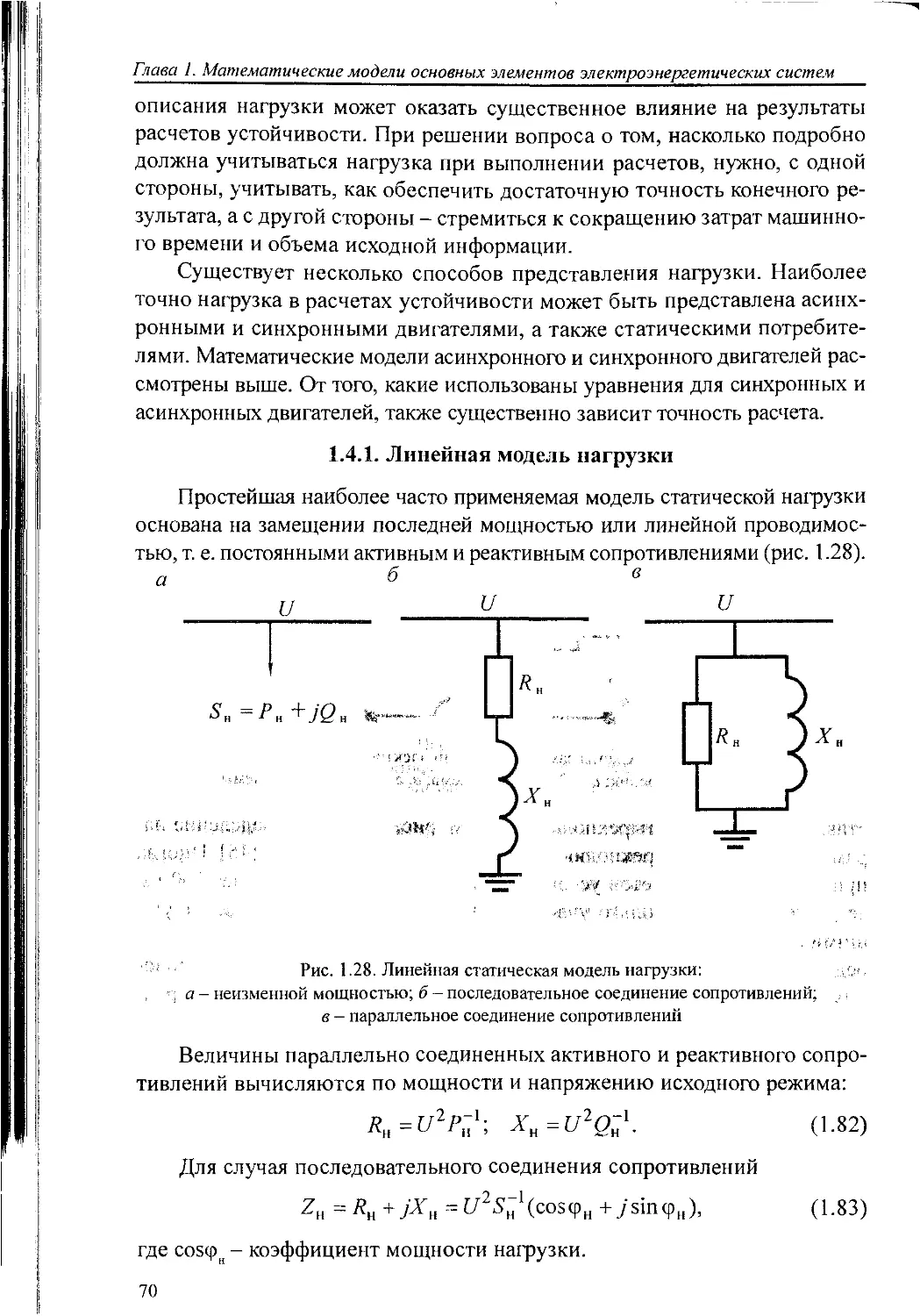
СИСТЕМ —
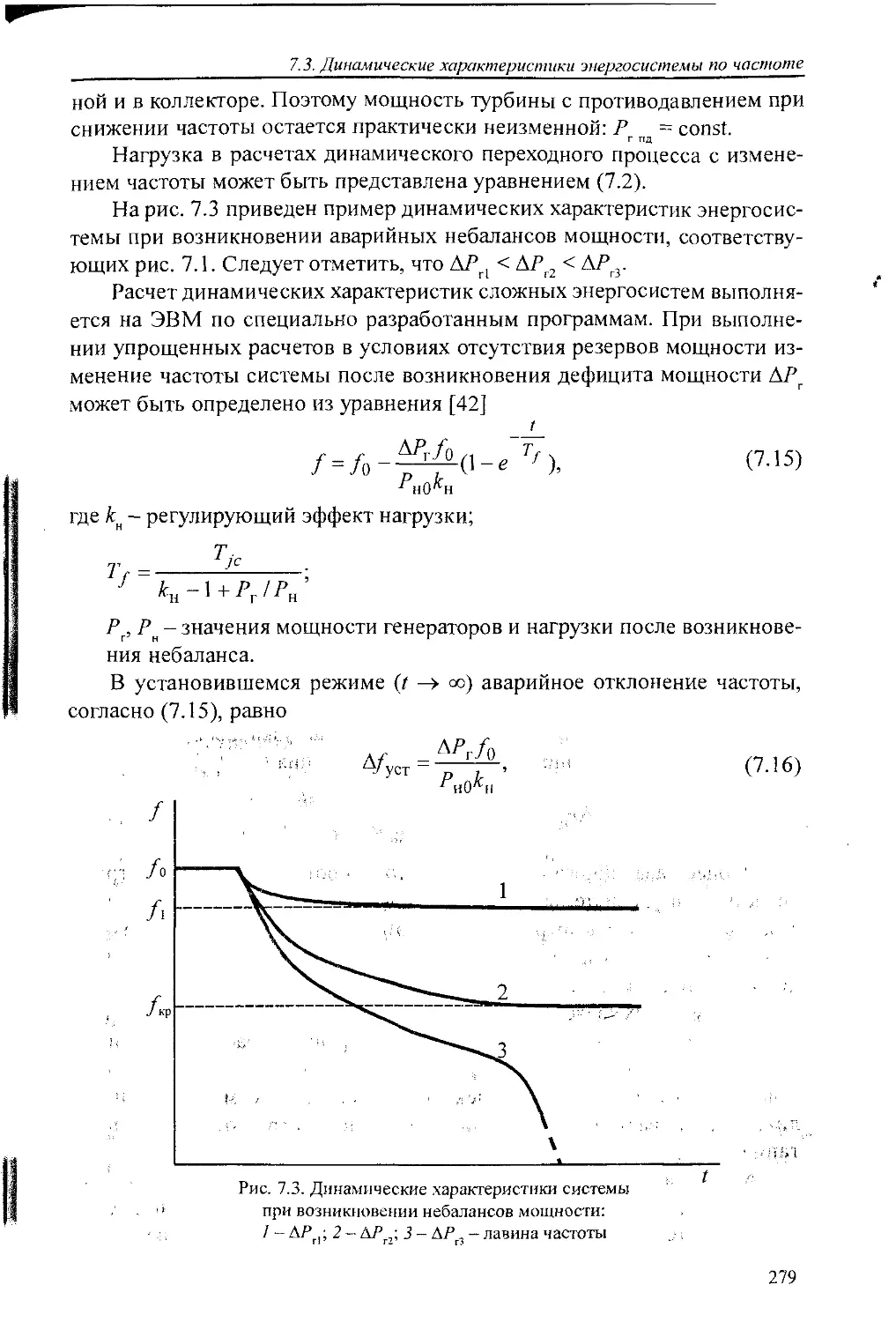
Е. В. Калентионок
УСТОЙЧИВОСТЬ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ
СИСТЕМ
Допущено Министерством образования Республики Беларусь
в качестве учебного пособия для студентов энергетических специальностей
учреждений, обеспечивающих получение высшего образования
Минск
«Техноперспектива»
2008
УДК 621.311.1 (075.8)
ББК 31.279-04я73
К 17
Рецензенты:
кафедра электроснабжения Гомельского технического универ-
ситета им. П. О. Сухого (зав. кафедрой - канд. техн, наук, доцент
А. В. Сычев)',
канд. техн, наук А. М. Короткевич (Республиканское унитарное
предприятие электроэнергетики «ОДУ»)
Калентионок, Е. В.
К 17 Устойчивость электроэнергетических систем : учебное пособие /
Е. В. Калентионок. - Минск : Техноперспектива, 2008. - 375 с.
ISBN 978-985-6591-47-4.
В учебном пособии рассматриваются основные вопросы теории и практических
методов выполнения расчетов устойчивости энергосистем и узлов нагрузки. Излага-
ются физические явления, обусловленные электромеханическими переходными про-
цессами. Описаны основные мероприятия по повышению устойчивости, дана их клас-
сификация. Рассмотрены дополнительные средства и устройства автоматики для по-
вышения устойчивости.
Предназначается для студентов энергетических специальностей, магистрантов и
аспирантов. Может быть использовано специалистами, занимающимися проектиро-
ванием и эксплуатацией электроэнергетических систем.
УДК 621.311.1 (075.8)
ББК 31.279-04я73
ISBN 978-985-6591-47-4
© Калентионок Е. В., 2008
© ЗАО «Техноперспектива». 2008
ПРЕДИСЛОВИЕ
Для надежного функционирования электроэнергетики необходимо
обеспечить устойчивость параллельной работы электростанций и энерго-
систем. Нарушение их устойчивости приводит к погашению большого
числа потребителей электроэнергии, повреждению оборудования и дру-
гим отрицательным последствиям. Поэтому расчеты и анализ режимов и
устойчивости работы энергосистемы являются неотъемлемой частью ра-
боты, выполняемой как при проектировании, так и в условиях эксплуата-
ции систем с целью обоснованного выбора структуры сети, определения
пропускной способности линий электропередачи, выбора параметров ре-
лейной защиты и автоматики.
Устойчивость электроэнергетических систем как одна из основных дис-
циплин при обучении инженера-энергетика опирается на общую теорию
устойчивости материальных систем, основные теоремы которой сформу-
лированы и доказаны выдающимся математиком А. М. Ляпуновым. Осно-
вы теории устойчивости электрических систем разработаны А. А. Вуль-
фом, С. А. Лебедевым, П. С. Ждановым, А. А. Горевым, В. А. Вениковым,
Ю. Е. Гуревичем, И. А. Груздевым, Р. Парком, Э. Кимбарком, Ч. Конкордия
и др. Ими же подготовлен и издан ряд монографий и учебников по вопро-
сам устойчивости электрических систем. В последние годы на территории
бывшего СССР наиболее широко при изучении курса устойчивости ис-
пользовались книги доктора технических наук, профессора В. А. Венико-
ва [1]. Однако следует признать, что они были и остаются довольно слож-
ными для первоначального изучения вопросов устойчивости. Поэтому
многие начинающие для постижения основ устойчивости обращались к
основным трудам доктора технических наук, профессора П. С. Жданова [2],
3
книга которого из-за малого тиража является для студентов практически
недоступной. Поэтому автор поставил своей целью кратко и доходчиво
изложить в данном пособии основные разделы курса устойчивости элект-
роэнергетических систем. При этом автор стремился изложить вопросы ус-
тойчивости так, чтобы студент в максимальной степени мог дать инженер-
ную оценку полученным результатам как при ручном счете, так и при расчете
с использованием специальных программ на ЭВМ.
При подготовке книги автор опирался на фундаментальные учебники
и монографии по устойчивости и переходным процессам в энергосисте-
мах, использовал свой многолетний опыт преподавания дисциплины «Ус-
тойчивость электроэнергетических систем» в Белорусском национальном
техническом университете, а также свои ранее опубликованные работы.
В основу изложения вопросов устойчивости положена методика, предло-
женная П. С. Ждановым и продолженная В. А. Вениковым.
Для лучшего усвоения теоретического материала в учебном пособии
приведены примеры решения практических задач.
Приведенный в книге список литературы, конечно, не претендует на
полноту. В него включены лишь источники, на которые в тексте сделаны
ссылки и которые могут помочь углубить знания по отдельным вопросам
данной дисциплины.
Материал данного пособия соответствует дисциплине «Устойчивость
электроэнергетических систем», а также частично дисциплинам «Переход-
ные процессы в электроэнергетических системах» и «Надежность и устой-
чивость систем электроснабжения».
Автор выражает глубокую благодарность коллективу кафедры электро-
снабжения Гомельского технического университета им. П. О. Сухого, доцен-
ту В. И. Токочакову, ведущему инженеру 1О. Д. Головачу, канд. техн, наук
А. М. Короткевичу за рецензирование рукописи, а также доценту Т. А. Ши-
манской, старшему преподавателю А. А. Волкову и моему учителю, веду-
щему научному сотруднику Ю. С. Бампи, взявших на себя большой труд
по редактированию рукописи. Сделанные ими замечания и предложения
были учтены в окончательной редакции пособия.
Автор весьма признателен сотрудникам кафедры «Электрические си-
стемы» Белорусского национального технического университета Е. А. За-
борской, Е. Л. Ковенской, О. Б. Киселевой, С. А. Кокшаровой, Г. Н. Ко-
роткому, вложившим большой и кропотливый труд в подготовку рукописи
к изданию.
Все замечания и пожелания по содержанию книги автор примет с бла-
годарностью и просит направлять их по адресу: 220013, г. Минск, пр. Не-
зависимости, 65, кори. 2, кафедра «Электрические системы».
ВВЕДЕНИЕ
В.1. Характеристика курса и его место в обучении
Для удовлетворения все возрастающей потребности в электроэнер-
гии и обеспечения надежного и экономичного электроснабжения по-
требителей создаются сложные энергосистемы. Развитие энергосистем
идет по пути создания крупных межгосударственных энергообъедине-
ний, охватывающих значительные территории, в состав которых вхо-
дит большое число электростанций, потребителей, внутрисистемных
и межсистемных связей. При проектировании и эксплуатации таких слож-
ных энергообъединений возникает ряд проблем, связанных с обеспечени-
ем их безопасности, надежного и устойчивого функционирования.
Устойчивость электроэнергетических систем как научная дисциплина
опирается на общую теорию устойчивости движения, которая изучает вли-
яние возмущающих факторов на движение любой материальной системы.
Под движением системы понимается изменение во времени любых ее па-
раметров: координат материальных точек, их скоростей и т. д. Для механи-
ческих систем - это движение в обычном, общепринятом смысле, для не-
механических систем - это изменение во времени соответствующих
физических параметров. В электроэнергетической системе такими
параметрами являются, например, мощности генераторов и нагрузок, час-
тота вращения и взаимные углы между осями роторов электрических ма-
шин, токи, напряжения. Движение любой материальной системы называют
устойчивым, если оно мало изменяется под действием возмущающих факто-
ров [3]. В противном случае движение неустойчиво.
Электроэнергетическим системам также присуща проблема обеспече-
ния устойчивости. Это связано с тем, что она постоянно испытывает
5
Введение
возмущающие факторы, связанные с изменением нагрузок, архитектуры
сети, повреждением оборудования, воздействием окружающей среды (ве-
тер, грозы, снег, гололед, землетрясения, тайфуны и т. д.) и ошибочными
действиями ремонтного и оперативного персонала. Нарушение устойчи-
вости приводит к большим изменениям и колебаниям режимных парамет-
ров, вызывающим повреждение оборудования электростанций и сетей, от-
ключение и погашение большого количества потребителей. Такие аварии со-
провождаются тяжелыми экономическими и социальными последствиями.
Поэтому расчет и анализ устойчивости энергосистем является неотъем-
лемой частью работы организаций, занимающихся их проектированием,
эксплуатацией и управлением. От достоверности оценки устойчивости во
многом зависит правильность принимаемых решений, обеспечивающих
надежность и экономичность функционирования энергосистем.
К специалистам, занимающимся исследованиями устойчивости и раз-
рабатывающим мероприятия по ее повышению, предъявляются требова-
ния высокой теоретической подготовки, понимания физической картины
тех процессов в энергосистеме, которые приводят к нарушениям устойчи-
вости или являются следствием этих нарушений, знания методов и про-
граммных средств расчета электромеханических переходных процессов.
Исходя из этого, в данном курсе студент должен научиться понимать
физику явлений, происходящих в электроэнергетических системах при
воздействии возмущающих факторов, применимость математической тео-
рии устойчивости к энергетике и иметь представление о допущениях, при-
нимаемых при практических расчетах устойчивости. Однако только пони-
мания будущему инженеру недостаточно, он должен знать терминологию
и основные математические выражения, методы расчета и критерии ус-
тойчивости, мероприятия по обеспечению и повышению устойчивости
электроэнергетических систем.
В ходе изучения данного курса студент должен получить практические
навыки расчета простейших электроэнергетических систем, применяя тради-
ционный ручной счет и специальные программные средства на ЭВМ. При этом
весьма важно научиться наглядно воспринимать характеристики переходного
режима и давать инженерную оценку полученным результатам расчета.
Из-за ограниченного объема курса в нем по возможности дается про-
стейшее описание методов и подходов оценки устойчивости при измене-
нии состояния электроэнергетической системы. Однако эти знания явля-
ются фундаментом, который позволит в будущем освоить более сложные
методы анализа, применяемые в практике исследования, проектирования
и эксплуатации энергосистем.
Изучение устойчивости электроэнергетических систем базируется на
знаниях, полученных в предшествующих общенаучных дисциплинах -
математика, физика, механика, теоретические основы электротехники, а
6
В.2. Краткая история проблемы устойчивости электроэнергетических систем
также специальных - математические задачи энергетики, электромеханика,
электроэнергетические системы и электромагнитные переходные процессы.
Хорошее усвоение данной дисциплины является основой для ус-
пешного изучения специальных курсов - противоаварийная автомати-
ка в электроэнергетических системах, эксплуатация энергосистем, элек-
тропередачи и надежность электроэнергетических систем.
В.2. Краткая история возникновения и развития проблемы
устойчивости электроэнергетических систем
Проблемы устойчивости возникли впервые в механике при изучении
равновесных положений системы. По мере развития науки и техники в
середине XIX столетия появились задачи обеспечения устойчивости не
только равновесия, но и движения. Так, например, центробежные регуля-
торы, установленные на паровых машинах небольшой мощности, устой-
чиво сохраняли заданные обороты двигателя. С увеличением мощности
машин регуляторы, построенные по тем же схемам, не только не обеспе-
чивали надежного регулирования, но даже разгоняли двигатели, создавая
неустойчивый режим работы. Это непонятное для инженеров и техников
тех лет явление вызвало серьезный кризис в двигателестроении и потре-
бовало усилий ученых многих стран для решения возникшей проблемы.
На основе исследований было показано, что решение как этой задачи, так
и общее развитие теории регулирования требует установления и выполне-
ния критериев устойчивости движения.
В конце XIX века начался процесс исторического становления комп-
лексной энергетики. Появившиеся в эти годы электрические станции ста-
новятся фабриками нового товара - электроэнергии, который находит ши-
рокий спрос в быту и промышленности. На первых электростанциях вна-
чале все генераторы работали изолированно друг от друга, т. е. каждый
генератор питал через отдельную линию свою группу потребителей. Од-
нако необходимость отключения потребителей электроэнергии при ремонте
питающего их генератора, трудности с выделением потребителей на опре-
деленную линию привели к потребности объединения генераторов на па-
раллельную работу. Так возникла проблема обеспечения устойчивости па-
раллельной работы синхронных машин, первоначально связанная с нерав-
номерностью хода первичных двигателей, вращающих генераторы. Таким
образом, впервые стала рассматриваться устойчивость во взаимосвязи элек-
трической и механической части или в более широком смысле - электро-
механические переходные процессы.
На первом этапе изучения устойчивости были проведены исследова-
ния по анализу тех условий, при которых обеспечивается параллельная
работа двух и более машин, подключенных к общим шинам и совместно
питающих общую нагрузку. -..vi >*
7
Введение
Дальнейшее развитие энергетики вызвало потребность передавать элек-
троэнергию на значительные расстояния и объединять работу нескольких
электростанций на общую сеть. Необходимость передачи электроэнергии
на значительные по тем временам расстояния объяснялась высокой сто-
имостью земельных участков в городах (американские многоэтажные элек-
тростанции) и получением более дешевой электроэнергии от гидростан-
ций или электростанций на месте добычи топлива. Примерами могут слу-
жить: строительство в 1890 году центральной тепловой электростанции в
Денфорде, находящемся в 12 км от энергоснабжаемого района Лондонско-
го Сити; пуск в эксплуатацию в 1896 году первой районной электростан-
ции на Ниагарском водопаде для электроснабжения крупных заводов по
производству карборунда, алюминия и городов Буффало, Тонаванда и Лок-
порта; построенная в 1914 году самая крупная в мире Богородская элект-
ростанция на торфе, передающая по линии передачи протяженностью 70 км
электроэнергию в Москву. Необходимость объединения электростанций
была вызвана возможностью уменьшения необходимого резерва на каж-
дой станции в отдельности, ремонта оборудования станции без отключе-
ния основных потребителей, создания условий для выравнивания графика
нагрузки станций, более эффективного использования энергетических ре-
сурсов. Первое известное объединение двух электростанций трехфазного
тока было осуществлено в 1892 году в Швейцарии. Две небольшие элект-
ростанции, номинальной мощностью 120 и 360 кВА, были соединены
двухкилометровой линией 5 кВ и питали завод по линии передачи протя-
женностью 24 км при напряжении 13 кВ. В России первые объединения:
две Бакинские электростанции, питавшие общую кабельную сеть; Мос-
ковская система, включающая две электростанции - Московскую городс-
кую и районную Богородскую.
При передаче энергии на значительные расстояния и при объеди-
нении электростанций на первых порах величина нагрузки линий элек-
тропередачи ограничивалась нагревом проводов и потерей напряже-
ния. Однако затем на основе эксплуатационных наблюдений и теоре-
тических исследований было выявлено, что существует предельное
значение мощности, передаваемой по линии, прямо пропорциональ-
ное квадрату напряжения и обратно пропорциональное реактивному
сопротивлению рассматриваемой системы электропередачи. Если на-
грузка линии превзойдет это значение или напряжение на линии пони-
зится, то электростанции, работающие в таком предельном режиме,
выпадают из синхронизма. Это означает, что достигнут предел устой-
чивой работы энергосистемы. При нарушении устойчивости наблюда-
ются большие периодические изменения тока, напряжения, мощности
(так называемые «качания»), при которых длительная работа станций
п приемников энергии становится невозможной.
8
В.2. Краткая история проблемы устойчивости электроэнергетических систем
Нарушение устойчивости параллельной работы станций имеет ме-
сто и при мощности ниже предельной, если в системе произойдет резкое
изменение режима работы, например, короткое замыкание. Короткие за-
мыкания, даже быстро отключенные, могут явиться причиной нарушения
устойчивости.
Рост мощностей электростанций и дальности электропередач, укруп-
нение энергосистем привели к тому, что в начале XX столетия возникла
проблема обеспечения устойчивости параллельной работы генераторов
переменного тока, связанных электрической сетью значительной протя-
женности. Вначале наиболее серьезно встал вопрос об устойчивости па-
раллельной работы в США. Это связано с тем, что в США к этому времени
были созданы наиболее крупные энергосистемы, охватывающие большие
территории. Так, например, энергосистема 4 южных штатов США к 1914 году
уже объединяла электростанции суммарной мощностью 230 тыс. кВт и
простиралась с Востока на Запад на 1500 км.
Из-за неучета условий устойчивости при развитии энергосистем в
1920-х годах в США произошли первые массовые аварии электрических
систем с нарушением параллельной работы электростанций, которые при-
вели к весьма тяжелым последствиям. Поэтому американскими инженера-
ми в этот период были выполнены первые теоретические исследования и
практические расчеты по определению способности энергосистемы про-
должать свою работу после резких толчков и внезапных изменений режи-
мов и определению предельных режимов по нагрузке или напряжению,
при которых возникает нарушение устойчивости даже при небольших из-
менениях режима.
В начале первой пятилетки проблемы устойчивости возникли и перед со-
ветскими энергосистемами. После выполнения плана ГОЭЛРО в 1930-х годах
происходило объединение энергосистем Московской, Горьковской, Ива-
новской, Ярославской и других областей. Это позволило при значитель-
ных протяженностях систем в меридианном и широтном направлениях
получить более равномерный график нагрузки вследствие временных сме-
щений пиков нагрузки. Однако в период 1932-1934 годов в энергетичес-
ких системах СССР происходит ряд аварий из-за нарушений устойчивос-
ти. Поэтому над проблемой обеспечения устойчивости начинает работать
ряд научных организаций, и изучение ее выделяется в самостоятельную
область науки. Для работ, проведенных советскими учеными и инженера-
ми, характерно стремление не только найти решение узко практических
задач, но и установить широкое общетеоретическое обоснование приме-
няемых расчетных методов. Для этой цели используются классические
работы по теории устойчивости и теории регулирования. В этот период
было показано, что знание переходных процессов, возникающих при на-
рушении устойчивости, имеет большое значение для проектирования
2, Зак 2182
9
Введение
релейной защиты и автоматики энергосистем. Поэтому вопросам обеспе-
чения устойчивости начинает уделять большое внимание эксплуатацион-
ный персонал энергосистем, в высшей школе начинают читаться специ-
альные курсы по устойчивости.
Решающее значение для расширения знаний по вопросам устойчиво-
сти имела книга П. С. Жданова и С. А. Лебедева [4], изданная в 1934 году,
в которой впервые в мире с исчерпывающей полнотой охватывались все
вопросы устойчивости электрических систем. В ней был отражен опыт
зарубежных исследователей, подведены итоги отечественных работ по
вопросам устойчивости. Теоретические положения были увязаны с прак-
тическими расчетами.
Изучение электромеханических переходных процессов позволило в
1930-х годах предложить ряд мероприятий по повышению устойчивости
энергосистем Советского Союза. Именно в эти годы проводятся первые
эксперименты по автоматическому повторному включению (АПВ) линий
электропередачи после их отключения из-за перекрытия изоляции. При
кратковременном отключении электрическая дуга гаснет в 70-80 % всех
повреждений и не возникает вновь после обратного включения. Широко
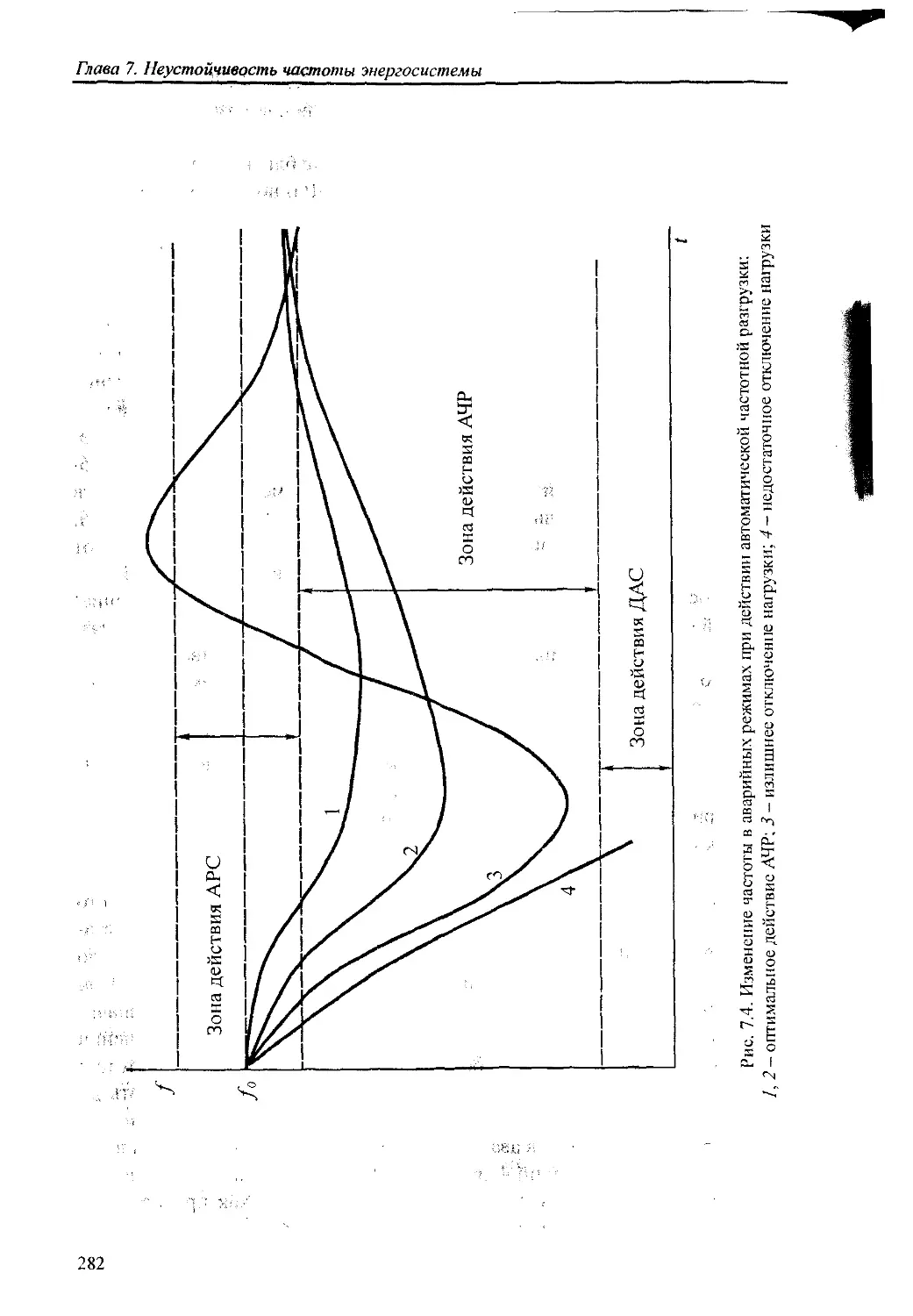
стала применяться автоматическая частотная разгрузка (АЧР) энергосис-
тем, т. е. автоматическое отключение части приемников энергии при от-
ключении источников питания или иных аварийных состояниях системы,
сопровождающихся снижением частоты. Наиболее существенно были улуч-
шены условия сохранения устойчивости энергосистем за счет использова-
ния автоматических регуляторов возбуждения (АРВ) синхронных машин.
Особенно велика роль разработанных и применяемых автоматичес-
ких устройств для повышения устойчивости во время Великой Отечествен-
ной войны, когда промышленность Советского Союза была перебазирова-
на в восточные районы страны, где энергосистемы работали со значитель-
ной перегрузкой. В этих тяжелых условиях внедрение АПВ, АЧР, АРВ и
самозапуска двигателей позволило обеспечить снижение системных аварий.
Так, например, много аварий было в Уральской энергосистеме. В 1943 году
там произошло 33 аварии с нарушением устойчивости. После внедрения
указанных мероприятий число аварий снизилось в 1944 году до двух, а в
1945 году уже не было ни одной такой аварии.
Перед белорусскими энергетиками проблема обеспечения устойчиво-
сти наиболее остро возникла после включения первой системообразую-
щей ВЛ-110 кВ Смолевичская ГРЭС - Орша. Тем самым на параллельную
работу были объединены два динамично развивающихся энергорайона:
Оршанский с Белорусской ГРЭС, Могилевской и Витебской ТЭЦ и Минс-
кий со Смолевичской ГРЭС и Минскими городскими электростанциями
(Минские ГЭС-1 и ГЭС-2). Поскольку в то время связь между генерирую-
щими источниками и узлами нагрузки осуществлялась по одиночным ли-
10
В. 2. Краткая история проблемы устойчивости электроэнергетических систем
ниям 110 кВ и их длина порой превышала сотню километров, а линии не
были защищены грозозащитными тросами, то аварии с нарушением ус-
тойчивости были довольно частым явлением. Для сохранения устой-
чивости в Белорусской энергосистеме стали широко использоваться
АПВ линий электропередачи с улавливанием синхронизма, однофазное и
быстродействующее АПВ. На Березовской ГРЭС использовался режим ре-
синхронизации для вхождения в синхронизм генераторов после наруше-
ния устойчивости.
Со всей остротой проблема обеспечения устойчивости встала после
начала строительства Лукомльской ГРЭС. Это связано с большой единич-
ной мощностью блоков, уменьшением постоянной механической инерции
и увеличением реактивных сопротивлений в связи с форсированным ис-
пользованием активных материалов по сравнению с агрегатами прежних
типов. Для обеспечения надежности работы была разработана и установ-
лена на Лукомльской ГРЭС специальная автоматика предотвращения на-
рушения устойчивости (АПНУ), действующая в аварийных режимах на
отключение части блочных агрегатов или на разгрузку турбин. Однако,
несмотря на принятые меры, предотвратить крупную системную аварию
не удалось. В 1979 году из-за аварийного отключения ряда линий электро-
передачи, несовершенства и отказа устройств противоаварийной автома-
тики были погашены крупные электростанции (Березовская ГРЭС, Минс-
кая ТЭЦ-3), а также потребители городов Минск, Брест, Гродно, Барано-
вичи, Молодечно, Лида.
Проблема обеспечения устойчивости касается не только энергосистем
в целом, но также отдельных промышленных и сельскохозяйственных
предприятий. Это, прежде всего, предприятия с непрерывным технологи-
ческим циклом (нефтехимическая промышленность, металлургия, транс-
порт нефти и газа и т. д.). Нарушение устойчивости работы двигателей
может вызвать прекращение выработки продукции, нарушение техноло-
гического процесса, брак продукции, выход из строя и сокращение срока
службы оборудования, простой обслуживающего персонала.
В современных условиях объединенных энергосистем проблема со-
хранения устойчивости становится еще более актуальной. Объясняется это,
прежде всего, все возрастающими катастрофическими последствиями си-
стемных аварий с нарушением устойчивости. Так на северо-востоке США
в результате аварии 1965 года были отключены потребители мощностью
20 000 МВт, а время восстановления электроснабжения составило 13 ч.
В результате аварии в США 2003 года общая потеря нагрузки состави-
ла 61 800 МВт, отключилась 21 электростанция, включая 10 атомных. Без
электроснабжения осталось 50 млн человек, проживающих на террито-
рии 24 тыс. км2. Массовыми отключениями электроэнергии были охвачены
крупнейшие города в северо-восточной части США (штаты Нью-Йорк,
Введение
Огайо, Мичиган, Пенсильвания, Коннектикут, Нью-Джерси) и Канады (То-
ронто, Оттава). Это привело к прекращению работы предприятий и уч-
реждений, городского транспорта, систем водоснабжения и канализации.
В крупных городах погас свет, остановились лифты, поезда метро, в об-
щем, замерло все, что питается электроэнергией. В результате такой ава-
рии страна была повергнута в состояние шока. Энергоснабжение Нью-
Йорка было восстановлено за 24 часа, а в течение лишь 44 часов было
подано энергопитание всем потребителям. Экономический ущерб от та-
кой аварии оценивается в несколько миллиардов долларов.
Таким образом, по мере развития энергосистем вопросам обеспече-
ния их устойчивой работы как при проектировании, так и при эксплуата-
ции необходимо уделять должное внимание. Недостаточные или недосто-
верные исследования устойчивости энергосистем, несовершенство средств
противоаварийного управления являются наиболее существенными при-
чинами появления крупных системных аварий.
В.З. Сущность проблемы устойчивости электроэнергетических систем
Современные электроэнергетические системы характеризуются прежде
всего тем, что все синхронные генераторы подключаются к общей элект-
рической сети, к которой также присоединяются синхронные и асинхрон-
ные двигатели. Таким образом, в рассматриваемой системе имеет место
неразрывность процесса производства, распределения и потребления элек-
трической энергии. Поэтому в электроэнергетических системах измене-
ние режима работы какого-то ее отдельного элемента (например, генера-
тора, двигателя, линии и т. д.) сказывается на режиме работы других эле-
ментов. Для устойчивости энергосистем весьма важным является режим
работы электрических машин.
Несмотря на существенные отличия в конструкции и системе питаю-
щих напряжений, все электрические машины объединяет одно общее —
они являются электромеханическими преобразователями. В двигателях
происходит преобразование электрической энергии в механическую, а в
генераторах механическая энергия преобразуется в электрическую. Поэтому
в каждой электрической машине имеет место взаимодействие электричес-
кой и механической мощностей и соответственно моментов.
Механический момент генератора определяется первичным двигате-
лем (турбиной) и зависит, прежде всего, от впуска энергоносителя. Меха-
нический момент двигателей определяется характеристиками и режимом
работы приводных механизмов (станков, насосов и т. д.).
Электромагнитный момент генератора или двигателя в общем случае
определяется взаимодействием трех статорных контуров, контура ротора
и ряда других контуров, таких, например, как демпферные обмотки. Зна-
чение электромагнитного момента зависит от характеристик самой маши-
12
В.З. Сущность проблемы устойчивости электроэнергетических систем
ны (ЭДС, потокосцепления, токов и т. д.), а также параметров электричес-
кой сети (напряжения, частоты, реактивного сопротивления и т. д.).
При исследовании движения электрических машин, работающих па-
раллельно в энергосистеме, необходимо учитывать все силы и моменты,
действующие в переходных режимах.
При поступательном движении движущая сила F всегда уравно-
вешивается силой сопротивления машины F и инерционной силой
du
dt
, возникающей при изменении скорости. Поэтому уравнение рав-
новесия сил в переходном режиме при поступательном движении за-
писывается так:
,,
гл - К =т —,
д с dt
где т — масса тела; и - скорость.
Аналогично уравнение равновесия моментов для вращательного дви-
жения электрической машины
.с/го
М„ -М- = J—
д с dt
где М - движущий или вращающий момент электрической машины;
Л/ - момент сопротивления машины;
J— момент инерции вращающихся частей электрической машины, при-
водного механизма или первичного двигателя;
го - угловая скорость вращения ротора.
Для генератора моментом сопротивления является электромагнитный
момент машины, для двигателя - механический момент приводного меха-
низма. Движущим или вращающим моментом для генератора является меха-
нический момент приводного двигателя (турбины), для двигателя - электро-
магнитный момент машины.
Из анализа уравнения движения ротора электрической машины видно:
1. При М = Л/, dtsddt = 0, в данном случае момент на валу машины
уравновешивается электромагнитным моментом и электрическая машина
работает в установившемся режиме с неизменной скоростью вращения
ротора го0. В таком режиме и отдельная машина, и электроэнергетическая
система в целом находятся в положении равновесия под влиянием как дви-
жущих сил, так и сил сопротивления.
2. При Л/ > Л/, dpydt > 0, имеет место ускорение ротора электричес-
кой машины.
3. При М < Л/, d<y>!dt < 0, имеет место торможение ротора электричес-
кой машины.
13
Введение
Таким образом, в двух последних случаях имеет место нарушение по-
ложения равновесия. В электроэнергетической системе это связано со мно-
жеством факторов: отключения или включения нагрузки, отключения ге-
нерирующих источников, изменения режима работы приводных механиз-
мов или первичных двигателей, изменения архитектуры сети и т. д. Если в
результате таких возмущений энергосистема через определенное время
приходит к положению равновесия, т. е. к установившемуся режиму с до-
пустимыми по условиям эксплуатации параметрами, то такая система ус-
тойчива. В противном случае система неустойчива.
Это простейшее, весьма нестрогое в математическом отношении оп-
ределение устойчивости. В дальнейшем, при более детальном анализе
устойчивости, будет дана более строгая формулировка этого понятия.
Следует отметить, что часто в технической литературе под устойчиво-
стью электроэнергетической системы понимают ее способность сохранять
параллельную работу и синхронизм синхронных генераторов. Такое опре-
деление является не совсем правильным и объясняется исторически тем,
что в начале изучения и исследования данной проблемы основным показа-
телем нарушения устойчивости системы был выход из синхронизма части
ее генераторов. И только позднее выявилось значение нагрузок в вопросах
устойчивости. Поэтому, изучая проблему устойчивости электроэнергети-
ческой системы, необходимо рассматривать всю систему как единое це-
лое, а не только синхронные машины или асинхронные двигатели. Однако
в частных случаях можно и нужно выполнять расчет и анализ устойчивос-
ти отдельных генераторов или двигателей.
Первичными причинами, вызывающими возникновение и развитие
аварийных ситуаций, сопровождающихся нарушением устойчивости, яв-
ляются следующие:
1. Отключение линий электропередачи из-за КЗ при грозе, дожде, силь-
ном ветре, пожаре, в результате наброса постороннего предмета, перекры-
тия изоляции на посторонний предмет, из-за обрыва провода (» 40 %).
2. Повреждения или отказ оборудования из-за разрушения опор, изо-
ляторов, обрыва гирлянд изоляторов, повреждения выключателей 17 %).
3. Отказ или неправильные действия релейной защиты и автоматики
(~ 14 %).
4. Отключение или снижение мощности блока, котла, собственных
нужд электростанций 9 %).
5. Отключение трансформаторов и автотрансформаторов (~ 8 %).
6. Превышение предела передаваемой мощности из-за нарастания на-
грузки 5 %).
7. Неправильные действия оперативного и ремонтного персонала энер-
госистем 4 %).
8. Потеря возбуждения генераторов (® 2 %).
14
В.4. Основные понятия и определения
9. Прочие причины (« 1 %).
Нарушение устойчивости возникает чаще всего в начальный момент
эксплуатации новых линий, электростанций и подстанций, когда не введе-
ны все запроектированные элементы системы, не полностью введена ав-
томатика, происходит освоение нового оборудования, недостаточно иссле-
дованы и изучены все возможные режимы работы. После стабилизации
схем и режимов, ввода в действие основных быстродействующих релей-
ных защит и противоаварийной автоматики количество нарушений устой-
чивости резко снижается. '"'‘i Г .’'.-Н
В.4. Основные понятия и определения
Под электроэнергетической (электрической) системой* понимают
электрическую часть энергосистемы и питающиеся от нее приемники элек-
трической энергии, объединенные общностью процесса производства, пе-
редачи, распределения и потребления электроэнергии.
Электроэнергетическая система состоит из элементов, которые мож-
но представить двумя группами:
♦ силовые элементы - вырабатывающие (например, генераторы, син-
хронные компенсаторы), преобразующие (трансформаторы, выпрямители),
передающие и распределяющие (кабельные и воздушные линии электро-
передачи) и потребляющие (двигатели, осветительные установки, печи)
электрическую энергию;
♦ элементы управления — регулирующие и изменяющие состоя-
ния системы (автоматические регуляторы, коммутационные аппара-
ты, реле и т. п.).
Состояние системы, характеризующееся совокупностью условий и
величин в какой-либо момент времени или на интервале времени, назы-
вается режимом системы. Режим характеризуется количественными
показателями, которые называются параметрами режима. К ним отно-
сятся значения мощности, напряжения, частоты, тока, ЭДС и т. д. Пара-
метры режима связаны между собой зависимостями, в которые входят
параметры системы.
Параметры системы - это показатели, количественно определяющи-
еся физическими свойствами элементов системы, схемой их соединения, а
также расчетными данными. К параметрам системы относятся сопротив-
ления и проводимости элементов, коэффициенты трансформации, посто-
янные времени и т. д.
В качестве примера приведем известные выражения: : - j ,
U2 Р2 + О2
Р = ~; AQ =--------~Х,
R и2 ......
* В дальнейшем для сокращения термин «электроэнергетическая» иногда опускается. , >
^Q =
15
Введение
где Р, и, Q, AQ - параметры режима;
R,X- параметры системы.
Режим энергосистемы может быть установившимся или переходным,
нормальным или аварийным. Причины, вызывающие изменение парамет-
ров режима, называются возмущающими воздействиями.
Различают следующие основные виды режимов электрических систем:
♦ нормальный установившийся режим, при котором обеспечивается
снабжение всех потребителей электроэнергией надлежащего качества, а
параметры режима могут приниматься неизменными;
♦ нормальный переходный режим, во время которого энергосистема
переходит от одного нормального рабочего состояния к другому;
♦ аварийный переходный режим обусловлен возникновением ава-
рийных ситуаций, при которых скорости изменения параметров на-
столько значительны, что они должны учитываться при эксплуатации
энергосистем;
♦ аварийный установившийся режим, при котором не обеспечивает-
ся снабжение электроэнергией всех потребителей или (и) параметры ре-
жима не находятся в установленных допустимых пределах. В таких режи-
мах требуется устранение аварийных условий;
♦ длительный переходный режим обусловлен возмущениями; при нем
вступает в действие автоматика турбин, котлов электростанций, противо-
аварийная автоматика энергосистем, предпринимаются меры диспет-
чером по предотвращению развития аварии;
♦ восстановительный режим, при котором обеспечивается возврат
системы к нормальному функционированию.
В инженерной практике, как правило, не рассматривается все много-
образие режимов, а только те из них, которые непосредственно относятся
к решаемой задаче. Так, например, в данном курсе практически не рас-
сматриваются восстановительные режимы, а основное внимание уделено
нормальным и аварийным переходным режимам.
При переходе от одного режима к другому изменяется не только элек-
тромагнитное состояние системы, но изменяются и механические харак-
теристики ее элементов (турбин, приводных механизмов). Это означает,
что переходный процесс характеризуется совокупностью электромагнит-
ных и механических изменений в системе, которые взаимно связаны и пред-
ставляют собой единое целое. Поэтому изучение устойчивости базируется
на рассмотрении электромеханических переходных процессов, происхо-
дящих в электроэнергетической системе.
Следует отметить, что строго неизменного режима в электроэнергети-
ческой системе не существует, поэтому установившимся режим можно
назвать только условно, так как в силу своих особенностей энергосистема
подвержена воздействию непрерывного потока возмущений. Они связа-
16
В. 4. Основные понятия и определения
ны, в первую очередь, со случайным изменением нагрузки и реакцией на
них регулирующих органов электростанций. Поэтому в реальной энерго-
системе всегда имеют место малые (слабые) возмущения, которые не долж-
ны вызывать нарушения устойчивости системы, т. е. не должны приводить к
прогрессирующему возрастающему изменению параметров ее исходного
режима. Электроэнергетическая система должна быть устойчива при малых
возмущениях. Применительно к малым возмущениям введено понятие ста-
тической устойчивости.
Статическая устойчивость — это способность электроэнергетичес-
кой системы самостоятельно восстанавливать исходный установившийся
режим после малых возмущений или режим, весьма близкий к исходному,
если возмущение не снято.
Исходя из определения статической устойчивости системы, можно
заключить, что существует такой режим, при котором очень малое увели-
чение нагрузки вызывает нарушение его устойчивости. Такой режим на-
зывают предельным, а нагрузки системы — максимальными или предель-
ными нагрузками по условиям статической устойчивости.
Ограничение нагрузок может быть вызвано и другими факторами, на-
пример уровнями напряжения в узлах, нагревом генераторов, трансфор-
маторов или линий электропередачи.
Пропускной способностью элемента электроэнергетической системы
называют наибольшую мощность, которую можно передать через этот эле-
мент с учетом всех ограничивающих факторов (устойчивости, нагрева,
напряжения в узлах и т. п.). Иногда пропускную способность определяют
только по одному фактору и говорят, например, о пропускной способнос-
ти по статической устойчивости.
Аварийные режимы в электроэнергетической системе возникают так-
же и при больших возмущениях, например, при КЗ на электрооборудова-
нии с последующим отключением линий, трансформаторов, генераторов.
При этом возникают значительные и резкие отклонения параметров режи-
ма от их исходного состояния. По отношению к большим возмущениям
введено понятие динамической устойчивости.
Динамическая устойчивость - это способность электроэнергетичес-
кой системы восстанавливать после большого возмущения исходное со-
стояние или практически близкое к нему.
Если после возмущения синхронная работа генераторов или двигате-
лей системы нарушается, а затем, по прошествию определенного, допус-
тимого по условиям эксплуатации времени восстанавливается, то такую
систему принято считать обладающей результирующей устойчивостью.
Следует отметить, что понятие «энергосистема устойчива» не опреде-
лено до тех пор, пока не установлены условия, при которых устойчивость
энергосистемы обеспечивается. К ним, прежде всего, относятся параметры
17
Введение
сети и исходного режима, а также вид и характер возмущения, возникаю-
щего в энергосистеме. Ведь практически всегда можно найти такие воз-
мущения (иногда очень тяжелые и крайне редкие), которые вызовут наруше-
ние устойчивости энергосистемы. Поэтому часто в термин «энергосистема
устойчива» вкладывают понятие «сохранение устойчивой работы генерато-
ров и двигателей при нормативных требованиях в части возмущений».
При исследовании устойчивости широко используются статические и
динамические характеристики элементов системы. Под статическими ха-
рактеристиками понимают аналитические или графические зависимости
параметров режима, определенные при медленных их изменениях, когда каж-
дый режим можно считать установившимся. Примером могут служить зави-
симости активной Р или реактивной Q мощности нагрузки от напряжения U
и частоты fi
P = F^U,f)-Q = F/U,f).
Динамические характеристики - это зависимости параметров режи-
ма системы, определенные при быстрых изменениях режима с учетом вре-
мени и скорости его изменения. Например,
гл ,Гг , dU ,rr r dU „ ‘
Р - ,...); Q = <p2(U, f ,t,-—~,. !»•.
dt at ......
Контрольные вопросы
1. Что студент должен знать и понимать по завершении изучения дан-
ной дисциплины?
2. Каковы основные этапы возникновения и решения проблемы ус-
тойчивости электроэнергетических систем?
3. Что следует из анализа уравнения движения ротора электрической
машины?
4. Какие основные причины вызывают нарушение устойчивости в элек-
троэнергетических системах?
5. Что такое электроэнергетическая система и из каких элементов
она состоит?
6. Каково различие между понятиями «параметры режима» и «пара-
метры системы»?
7. Какие виды режимов имеют место в электроэнергетических системах?
8. Что считается возмущением режима электроэнергетической системы?
9. Что такое «пропускная способность» элемента системы?
10. Что понимается под статической, динамической и результирую-
щей устойчивостью системы?
18
Глава 1. МАТЕМАТИЧЕСКИЕ МОДЕЛИ
ОСНОВНЫХ ЭЛЕМЕНТОВ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
Важное место в исследовании устойчивости занимает математичес-
кое моделирование, основу которого составляют математические модели
элементов электроэнергетической системы. Под математической моделью
обычно понимают совокупность уравнений и других математических со-
отношений, описывающих состояние или процессы в одном элементе или
группе элементов. Иногда вместо уравнений используются схемы замеще-
ния элементов в виде электрических цепей, но они всегда являются след-
ствием математической модели.
В современной практике исследования электроэнергетических систем нет
универсальных математических моделей элементов. Выбор определенного типа
моделей определяется, как правило, задачей исследователя. Так, например, при
выполнении точных расчетов устойчивости синхронная машина представляется
системой нелинейных дифференциальных уравнений, при выполнении ориен-
тировочных расчетов - индуктивным сопротивлением и соответствующей ЭДС.
1.1. МАТЕМАТИЧЕСКИЕ МОДЕЛИ И СХЕМЫ ЗАМЕЩЕНИЯ
СИНХРОННОЙ МАШИНЫ
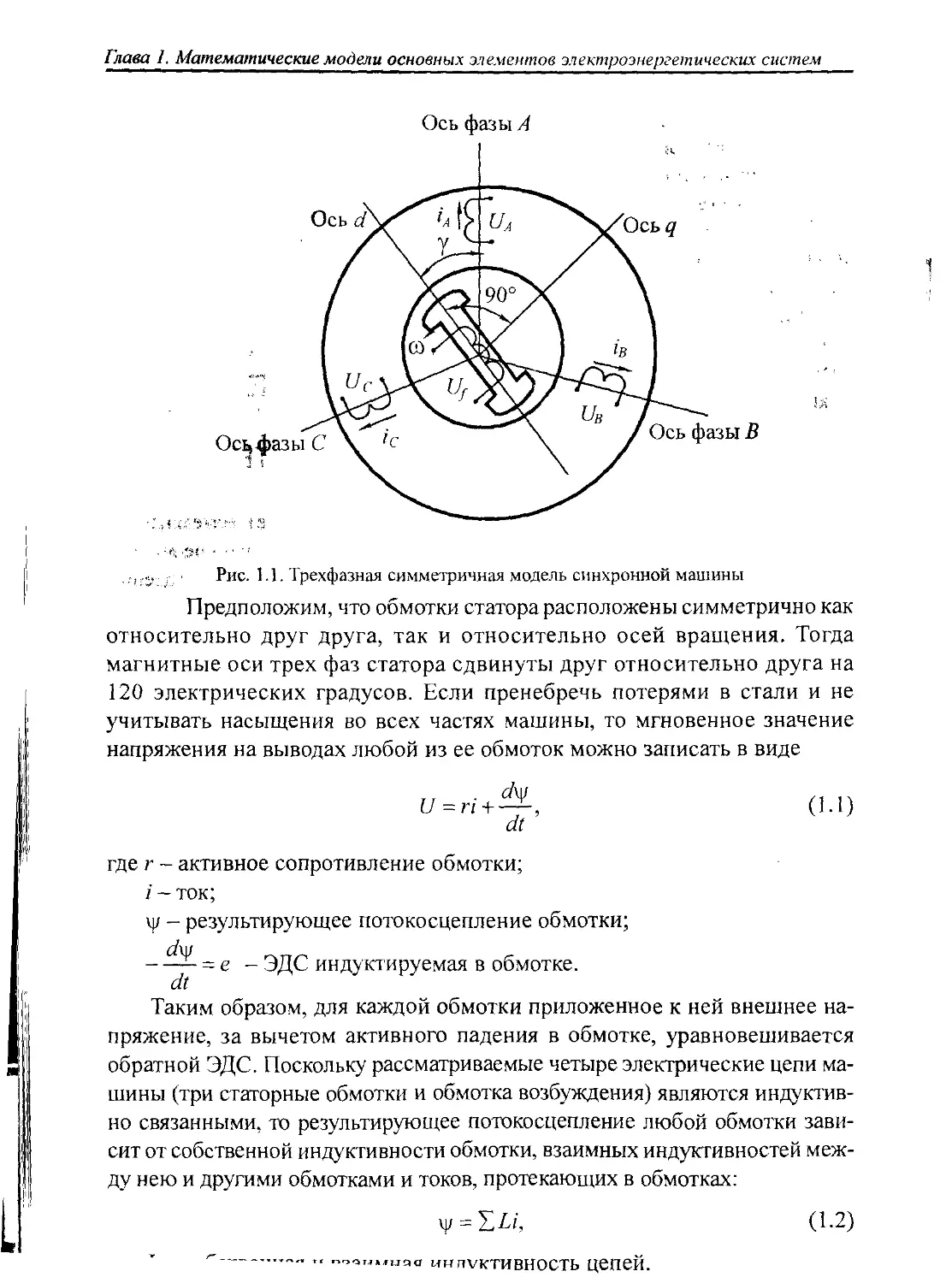
1.1.1. Трехфазная симметричная модель синхронной машины
Рассмотрим двухполюсную синхронную машину, состоящую из не-
подвижной части - статора, на которой расположены три фазные обмотки,
и вращающейся части - ротора, с расположенной на ней обмоткой возбуж-
дения (рис. 1.1). Ротор такой модели машины имеет две оси симметрии.
Ось, совпадающую с осью полюсов, принято называть продольной осью
ротора, а ось к ней перпендикулярную - поперечной его осью. Примем,
что продольная ось опережает по направлению вращения поперечную.
19
Глава 1. Математические модели основных элементов электроэнергетических систем
Предположим, что обмотки статора расположены симметрично как
относительно друг друга, так и относительно осей вращения. Тогда
магнитные оси трех фаз статора сдвинуты друг относительно друга на
120 электрических градусов. Если пренебречь потерями в стали и не
учитывать насыщения во всех частях машины, то мгновенное значение
напряжения на выводах любой из ее обмоток можно записать в виде
.. dy
U =ri +---,
dt
(М)
где г - активное сопротивление обмотки;
i - ток;
- результирующее потокосцепление обмотки;
- = е - ЭДС индуктируемая в обмотке.
dt
Таким образом, для каждой обмотки приложенное к ней внешнее на-
пряжение, за вычетом активного падения в обмотке, уравновешивается
обратной ЭДС. Поскольку рассматриваемые четыре электрические цепи ма-
шины (три статорные обмотки и обмотка возбуждения) являются индуктив-
но связанными, то результирующее потокосцепление любой обмотки зави-
сит от собственной индуктивности обмотки, взаимных индуктивностей меж-
ду нею и другими обмотками и токов, протекающих в обмотках:
V = И Li,
ии активность цепей.
(1-2)
1.1. Математические muu^.iu .. .-
Обозначим параметры машины, относящиеся к ее статорным обмот-
кам, индексами А, В и С, а к обмотке возбуждения - индексом f. Рассмот-
рим генераторный режим синхронной машины, когда токи статора имеют
направление от зажимов в сеть, а токи ротора, наоборот, имеют направление
из сети к зажимам. Тогда с учетом направления токов и на основании (1.1) и
(1.2) запишем уравнения для каждой из обмоток рассматриваемой синх-
ронной машины:
U А- Г1А '> пв at at г т dxVC . т т . Uс — Flf-1 , U f — Г fl f 4- , с с dt J J J dt (1.3)
V A = ^AA^A + + ^AC^C + LAfijA ".
Vb = LbaIa + ^BPdB + Дес'с + ^Bff 1 (1.4,0
Vc = ^СА*А + LCBlB + LC(dc + LCpf'’ (1.4, e)
= L/dA + LjdB + L/dc + (1.4, a)
где г - активное сопротивление каждой фазной обмотки статора;
г - активное сопротивление обмотки возбуждения;
LM, Lff-собственные индуктивности обмоток;
LM, ..., LCf- взаимные индуктивности соответствующих обмоток.
Полученные уравнения (1.3 и 1.4) показывают взаимосвязь между на-
пряжениями, токами, потокосцеплениями и позволяют полностью охарак-
теризовать переходный процесс в электрических цепях синхронной ма-
шины. Однако при исследовании электромагнитных и электромеханичес-
ких переходных процессов электрическую машину целесообразно рассмат-
ривать как электродинамическую систему, состоящую из электрических
цепей (обмоток) и вращающейся части (ротора). Необходимость такого
рассмотрения синхронной машины объясняется взаимным влиянием элек-
трических процессов и скорости движения ротора. Поэтому для описания
поведения синхронной машины в переходном процессе систему уравне-
ний (1.3-1.4) необходимо дополнить уравнением движения ротора
= ~ (1.5)
at
где Мм - момент механических сил, приложенный со стороны вала машины;
А/ - электромагнитный момент машины.
При работе машины генератором Мм является моментом первично-
го двигателя (турбины). При работе машины в режиме двигателя М„
21
Глава 1, Математические модели основных элементов электроэнергетических систем
представляет собой момент механической силы рабочего механизма, при-
водимого в движение двигателем. Момент М в генераторе является тор-
мозящим, в двигателе - движущим.
В установившемся режиме разность Мм - М равна нулю и изменение
скорости вращения ротора не происходит. Однако при возмущениях раз-
ность Ма -Мз = АЛ/не равна нулю, и ротор электрической машины ускоря-
ется или тормозится в зависимости от того, является ли небаланс момен-
тов АЛ/ положительным или отрицательным.
Индуктивности синхронной машины. Собственная индуктивность об-
мотки ротора L не зависит от положения ротора в пространстве, так как по
отношению к ней конфигурация магнитной системы остается неизменной
при любом положении ротора и поэтому она имеет постоянное значение.
Другие индуктивности, входящие в уравнения (1.4), изменяются во времени
при вращении ротора. Индуктивность зависит от положения ротора вслед-
ствие того, что магнитная проводимость зазора для полей, создаваемых тока-
ми обмоток, из-за явнополюсности ротора зависит от его положения. Поэто-
му для решения дифференциальных уравнений (1.3) необходимо знать зако-
ны изменения индуктивностей в зависимости от положения ротора.
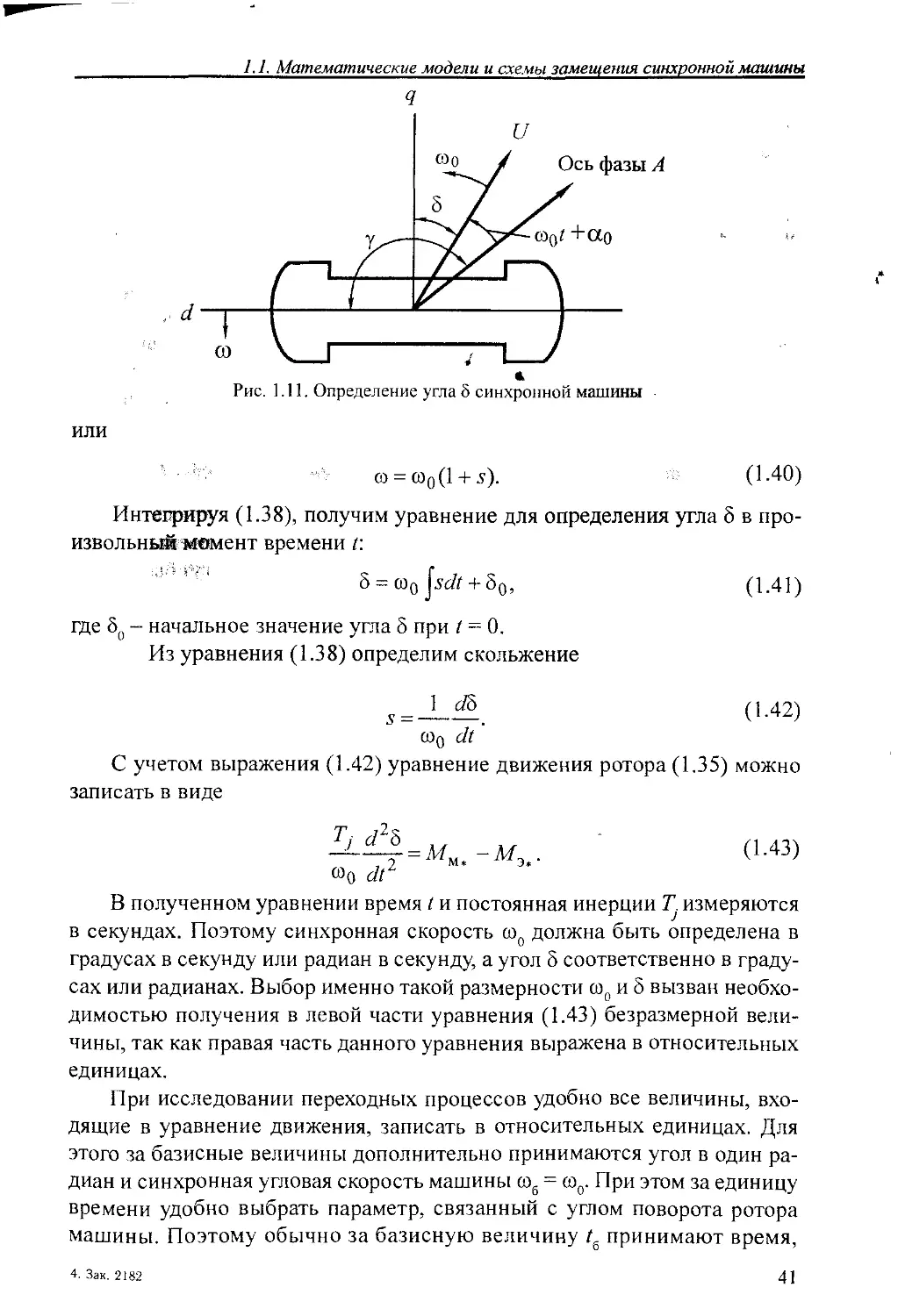
Условимся положение ротора в пространстве определять углом у, на ко-
торый продольная ось опережает при вращении магнитную ось фазы А стато-
ра (см. рис. 1.1). При вращении ротора за время dt угол у изменится на величи-
ну dy = a>dt. К произвольному времени t угол у определяется из выражения
t
у=|иЛ + у0, (1.6)
о
где у0 — начальное значение угла у при t = 0.
Если угловая частота вращения ротора ft) постоянна (со = со0), то угол у
изменяется во времени по закону
Y = a)or + Yo- (L7)
Поскольку ротор периодически занимает одно и то же положение в про-
странстве, то очевидно, что и зависимость индуктивностей от угла будет
периодической.
Собственная индуктивность фазной обмотки статора всегда положительна
и является периодической функцией утла между магнитной осью фазы и про-
дольной осью ротора d. Поскольку изменение магнитных потоков происходит
гармонически с периодом л, а не 2л, так как при повороте ротора на л повторяет-
ся цикл изменения магнитного сопротивления, то зависимость собственной ин-
дуктивности фазы статора от угла у может быть выражена уравнением
L =£ +/cos2y, (1.8)
где Lo - постоянная составляющая индуктивности;
22
_______________1.1. Математические модели и схемы замещения синхронной машины
Lm - амплитуда второй гармоники индуктивности;
х = А, В, С- наименование фаз;
ул - угол между осью d ротора и магнитной осью соответствующей
, фазы Л, В или С.
Очевидно, что если положение ротора в пространстве определяется
углом у, то угловое положение относительно осей фаз yv будет находиться
согласно рис. 1.1. Подставив данные значения углов в (1.8), получим выра-
жения собственных индуктивностей фазных обмоток статора:
^=£0 + kcos2Y;
^ = Z0 + Zcos(2y+120o); - (1.9)
Lcc = Lo + LMCos(2y - 120°).
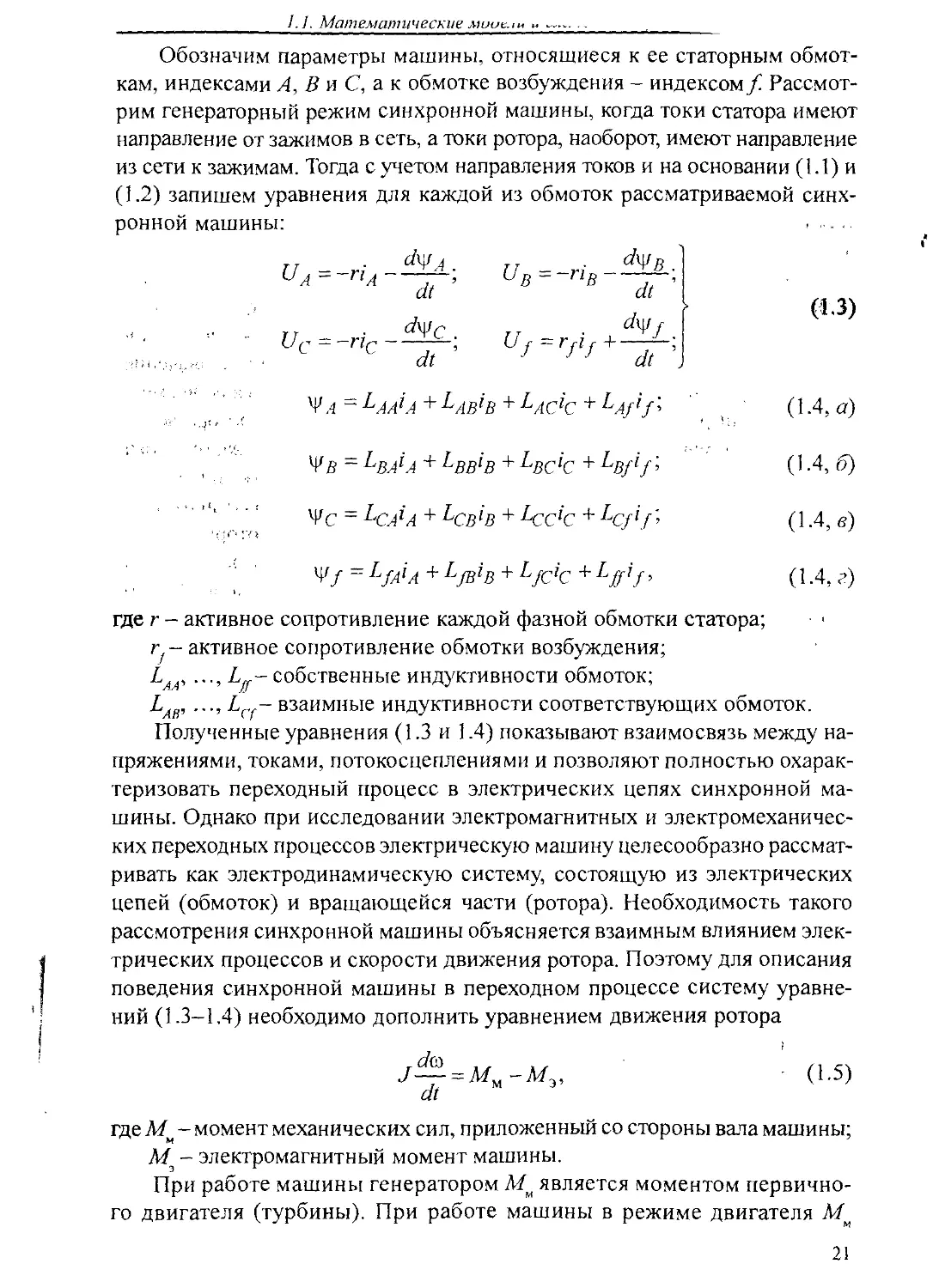
На рис. 1.2 в виде примера представлена зависимость индуктивности
фазной обмотки статора синхронной машины от углового положения ротора.
< Рис. 1.2. Зависимость собственной индуктивности фазы статора
от положения ротора синхронного двигателя мощностью 15 кВ-А,
Lli = (2,36 + 0,796cosy), мГн
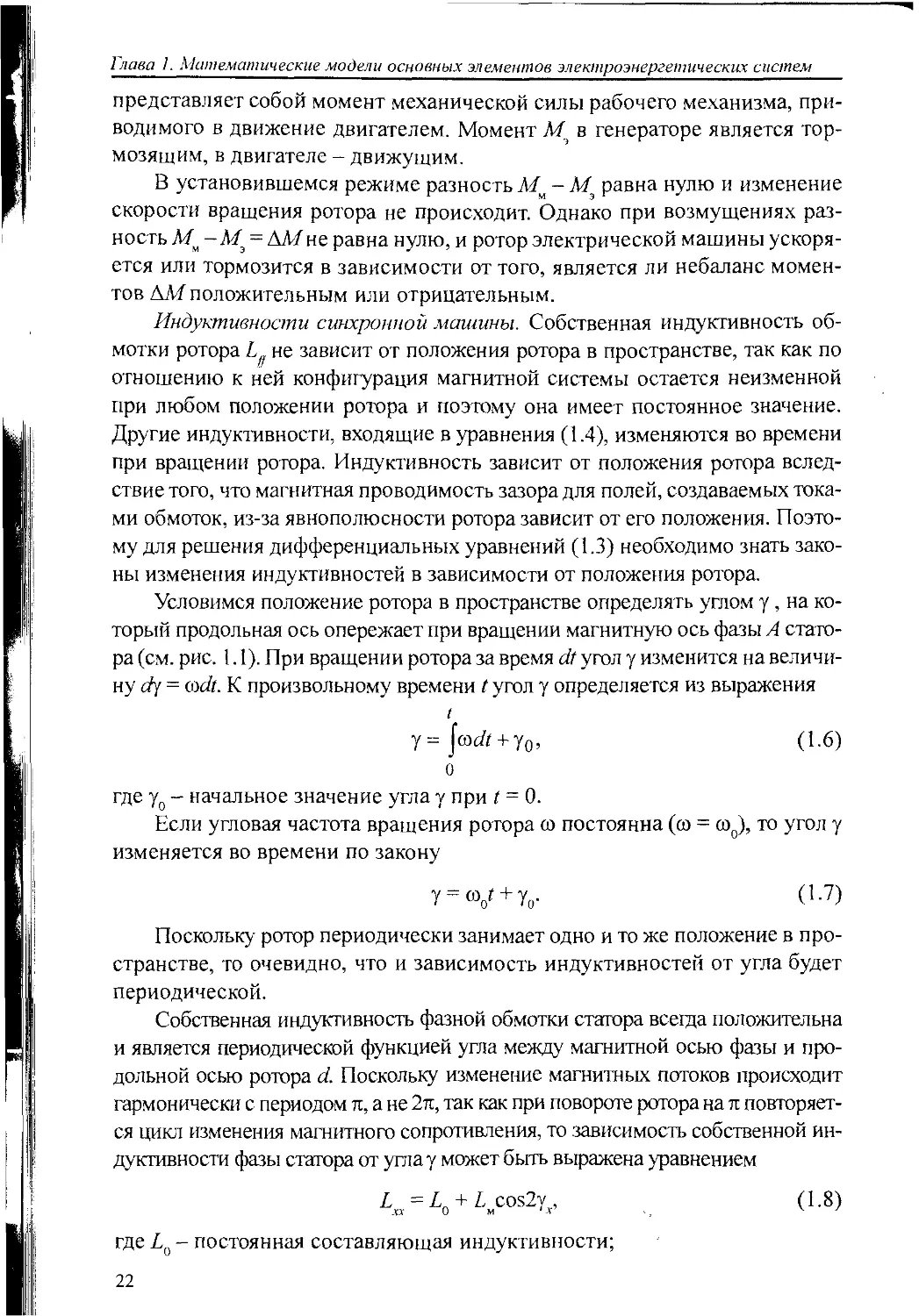
Взаимная индуктивность между двумя фазами статора зависит от угла
между осью d и линией, проведенной посредине между магнитными ося-
ми рассматриваемых фаз. Она всегда отрицательна, поскольку углы между
магнитными осями фазных обмоток больше 90°, и принимает наибольшие
и наименьшие значения при соответствующих углах у. Так, например,
по абсолютному значению максимальны при у = -30° или 150° и мини-
мальна при 60° или 240° (см. рис. 1.3).
Теоретически и экспериментально показано, что амплитуда изменения вза-
имной индуктивности фазных обмоток статора получается практически такой,
как амплитуда изменения индуктивности фазной обмотки, а аналитические за-
висимости записываются в виде
Т^ = Тл + £мсоз(2у- 120°);
Lac=Lb + ZMCOs(2y+ 120°); (1.10)
Т ‘ Lk = L в + kcos2T
где1£й - постоянная составляющая взаимной индуктивности.
23
Глава 1. Математические модели основных элементов электроэнергетических систем
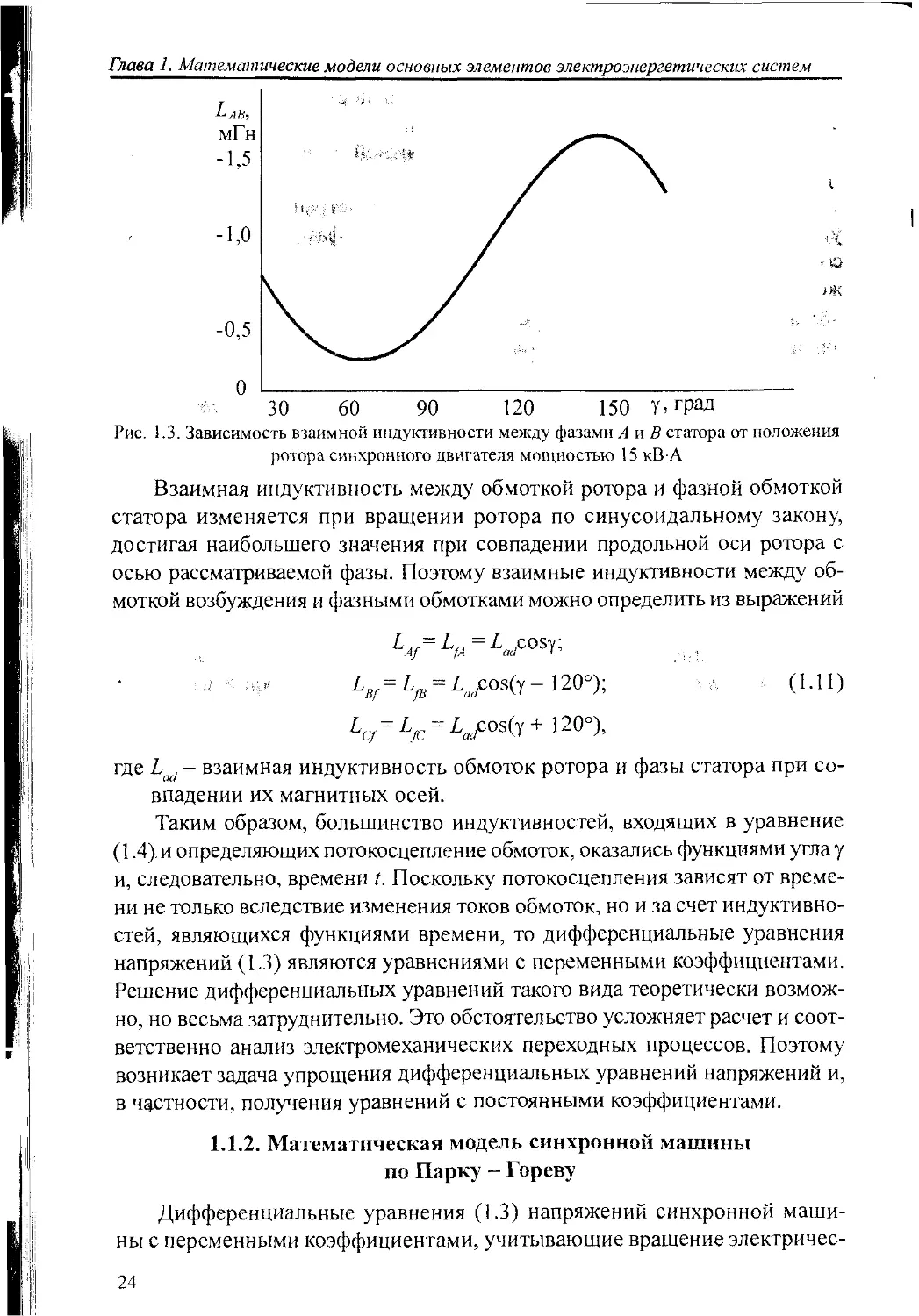
Рис. 1.3. Зависимость взаимной индуктивности между фазами А и В статора от положения
ротора синхронного двигателя мощностью 15 кВ А
Взаимная индуктивность между обмоткой ротора и фазной обмоткой
статора изменяется при вращении ротора по синусоидальному закону,
достигая наибольшего значения при совпадении продольной оси ротора с
осью рассматриваемой фазы. Поэтому взаимные индуктивности между об-
моткой возбуждения и фазными обмотками можно определить из выражений
, £^=£^ = £U(/cos(7-120°); у (1.11)
^ = ^ = ^os(y+120°),
где Lad - взаимная индуктивность обмоток ротора и фазы статора при со-
впадении их магнитных осей.
Таким образом, большинство индуктивностей, входящих в уравнение
(1,4).и определяющих потокосцепление обмоток, оказались функциями угла у
и, следовательно, времени t. Поскольку потокосцепления зависят от време-
ни не только вследствие изменения токов обмоток, но и за счет индуктивно-
стей, являющихся функциями времени, то дифференциальные уравнения
напряжений (1.3) являются уравнениями с переменными коэффициентами.
Решение дифференциальных уравнений такого вида теоретически возмож-
но, но весьма затруднительно. Это обстоятельство усложняет расчет и соот-
ветственно анализ электромеханических переходных процессов. Поэтому
возникает задача упрощения дифференциальных уравнений напряжений и,
в частности, получения уравнений с постоянными коэффициентами.
1.1.2. Математическая модель синхронной машины
по Парку - Гореву
Дифференциальные уравнения (1.3) напряжений синхронной маши-
ны с переменными коэффициентами, учитывающие вращение электричес-
24
1.1. Математические модели и схемы замещения синхронной машины
ких цепей ротора, могут быть преобразованы в уравнения с постоянными
коэффициентами, известные как уравнения Парка - Горева. На основе этих
уравнений могут быть разработаны математические модели синхронных
двигателей и генераторов.
Смысл выполняемых преобразований, называемых обычно в теории
переходных процессов преобразованиями Парка - Горева, состоит в том,
что при изучении электрических процессов в контурах фаз статора совер-
шается переход от неподвижной трехосной системы отсчета (А, В, С) к
вращающейся вместе с ротором декартовой системе (J, q). При этом пере-
менные в исходных уравнениях заменяются новыми переменными, линейно
связанными с исходными. Так, например, действительные токи ;д, ic
можно заменить новыми фиктивными токами , г и г0, представляющими
собой проекции обобщенного вектора тока на оси d и q и связанными с
исходными токами зависимостями:
2
id = —[iA cosy + iB cos(y -120°) + ic cos(y +120°)];
' 2
- iq =— [zxsiny + /Bsin(y-12O°) + ccsin(y + 12O0)]; >
r 3
го =~(/'л + г'в+z'c)-
(1-12)
Новые переменные iiP i и i0 принято называть продольным, попереч-
ным и нулевым током статора. Необходимо заметить, что для симметрич-
ных режимов, а при соединении трехфазных обмоток в звезду с изолиро-
ванной нейтралью и для несимметричных режимов i0 = 0. Однако если
значение нулевого тока статора и отличается от нуля, то он все равно не
оказывает влияния на движение ротора синхронной машины, так как он не
участвует в создании вращающего поля машины. Поэтому при исследова-
нии электромеханических переходных процессов обычно нулевую состав-
ляющую тока статора не рассматривают.
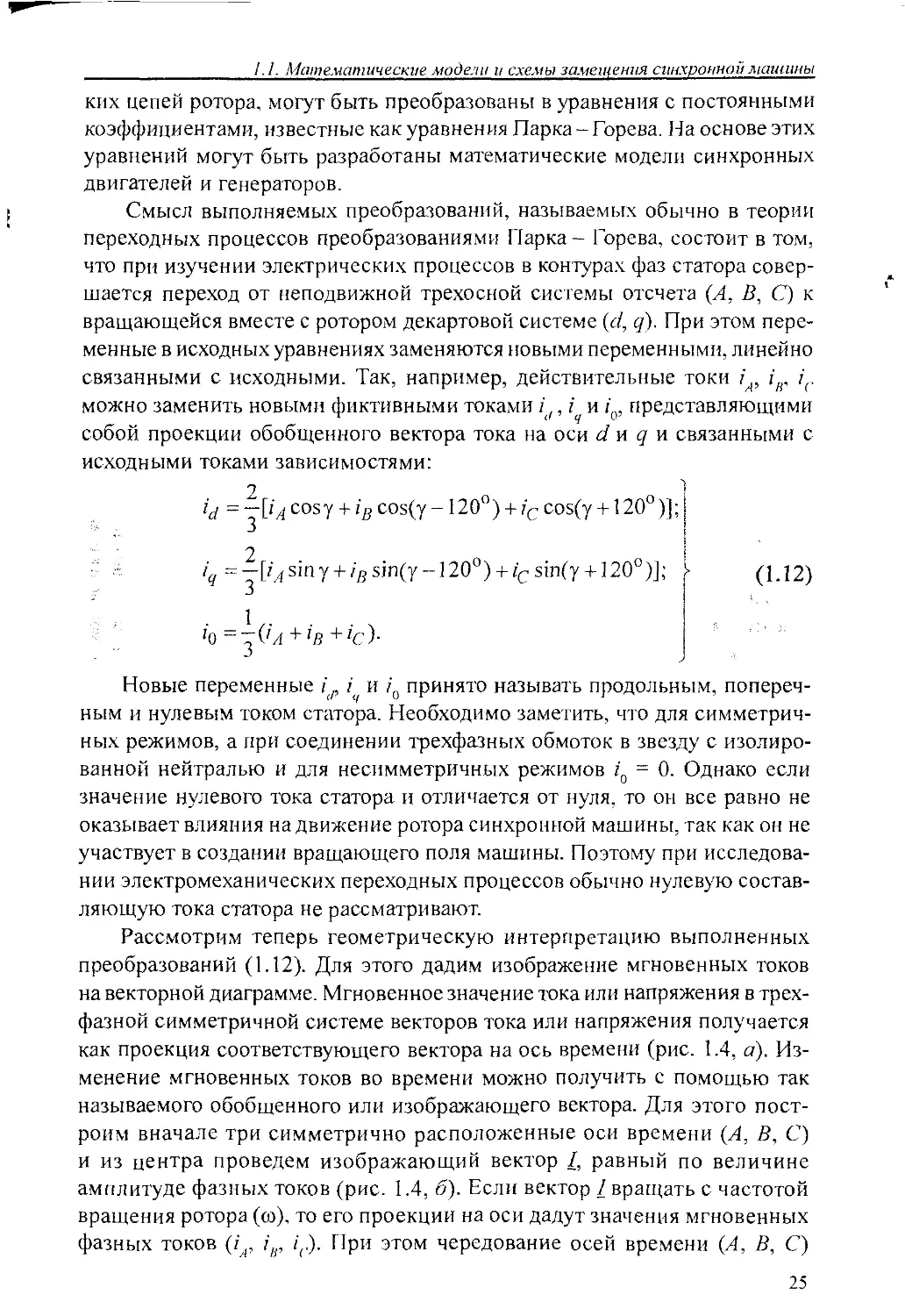
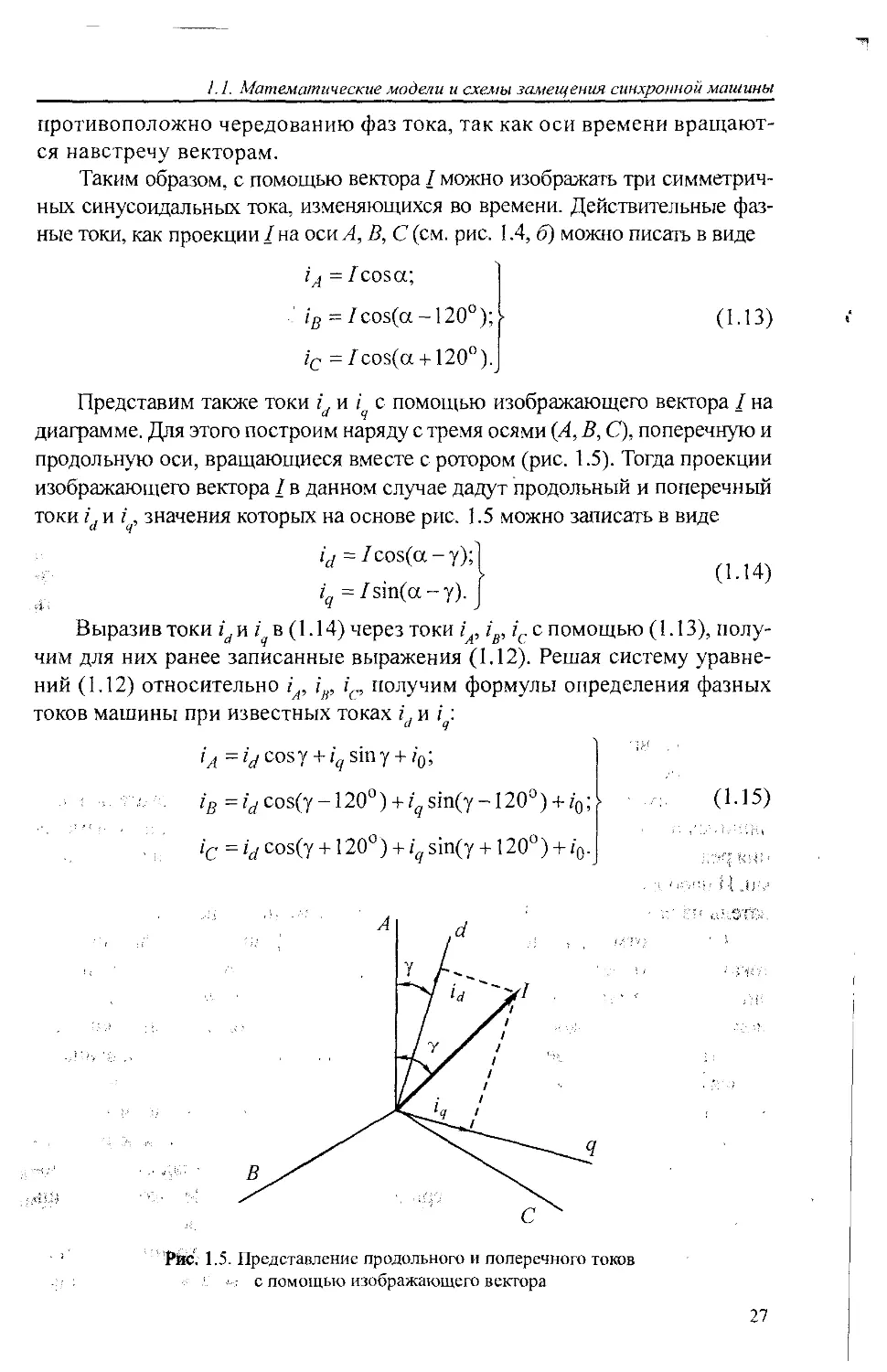
Рассмотрим теперь геометрическую интерпретацию выполненных
преобразований (1.12). Для этого дадим изображение мгновенных токов
на векторной диаграмме. Мгновенное значение тока или напряжения в трех-
фазной симметричной системе векторов тока или напряжения получается
как проекция соответствующего вектора на ось времени (рис. 1.4, а). Из-
менение мгновенных токов во времени можно получить с помощью так
называемого обобщенного или изображающего вектора. Для этого пост-
роим вначале три симметрично расположенные оси времени (А, В, С)
и из центра проведем изображающий вектор I, равный по величине
амплитуде фазных токов (рис. 1.4, б). Если вектор 7 вращать с частотой
вращения ротора (со), то его проекции на оси дадут значения мгновенных
фазных токов (iA, i№, i(\ При этом чередование осей времени (А, В, С)
25
Рис. !.4. Представление мгновенных фазных токов статора: 5 ~
с помощью векторов тока; б - с помощью изображающего вектора
1.1. Математические модели и схемы замещения синхронной машины
противоположно чередованию фаз тока, так как оси времени вращают-
ся навстречу векторам.
Таким образом, с помощью вектора I можно изображать три симметрич-
ных синусоидальных тока, изменяющихся во времени. Действительные фаз-
ные токи, как проекции I на оси А, В, С (см. рис. 1.4, б) можно писать в виде
iA = /cosa;
iB =/cos(a-120°); >
ic - /cos(a + 120°).
(1-13)
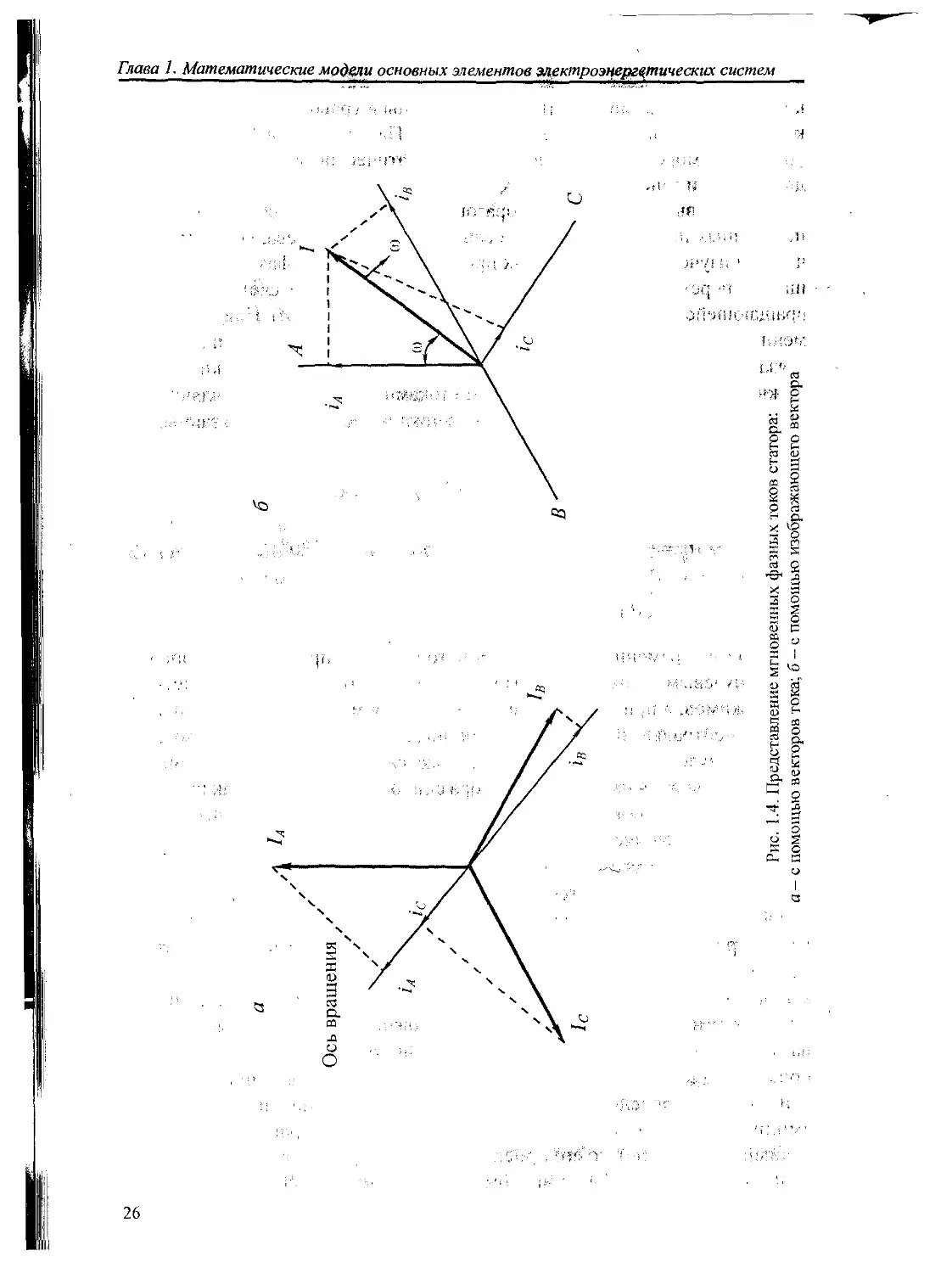
Представим также токи id и i с помощью изображающего вектора I на
диаграмме. Для этого построим наряду с тремя осями (А, В, С), поперечную и
продольную оси, вращающиеся вместе с ротором (рис. 1.5). Тогда проекции
изображающего вектора I в данном случае дадут продольный и поперечный
токи id и z, значения которых на основе рис. 1.5 можно записать в виде
id = 7cos(a - у);
. iq = Zsin(a - у).
Выразив токи idw в (1.14) через токи iA, ig, ic с помощью (1.13), полу-
чим для них ранее записанные выражения (1.12). Решая систему уравне-
ний (1.12) относительно i i, i получим формулы определения фазных
токов машины при известных токах id и i :
‘а = ^cosy + i9siny + /0;
' = z6/Cos(y-120°) + Z1?sin(y-120o) + Z0;
,.. ic — id cos(y +120 ) + ig sin(y +120 ) + Iq.
(1-14)
(1-15)
Рйс. 1.5. Представление продольного и поперечного токов
: с помощью изображающего вектора
27
Глава 1. Математические модели основных элементов электроэнергетических систем
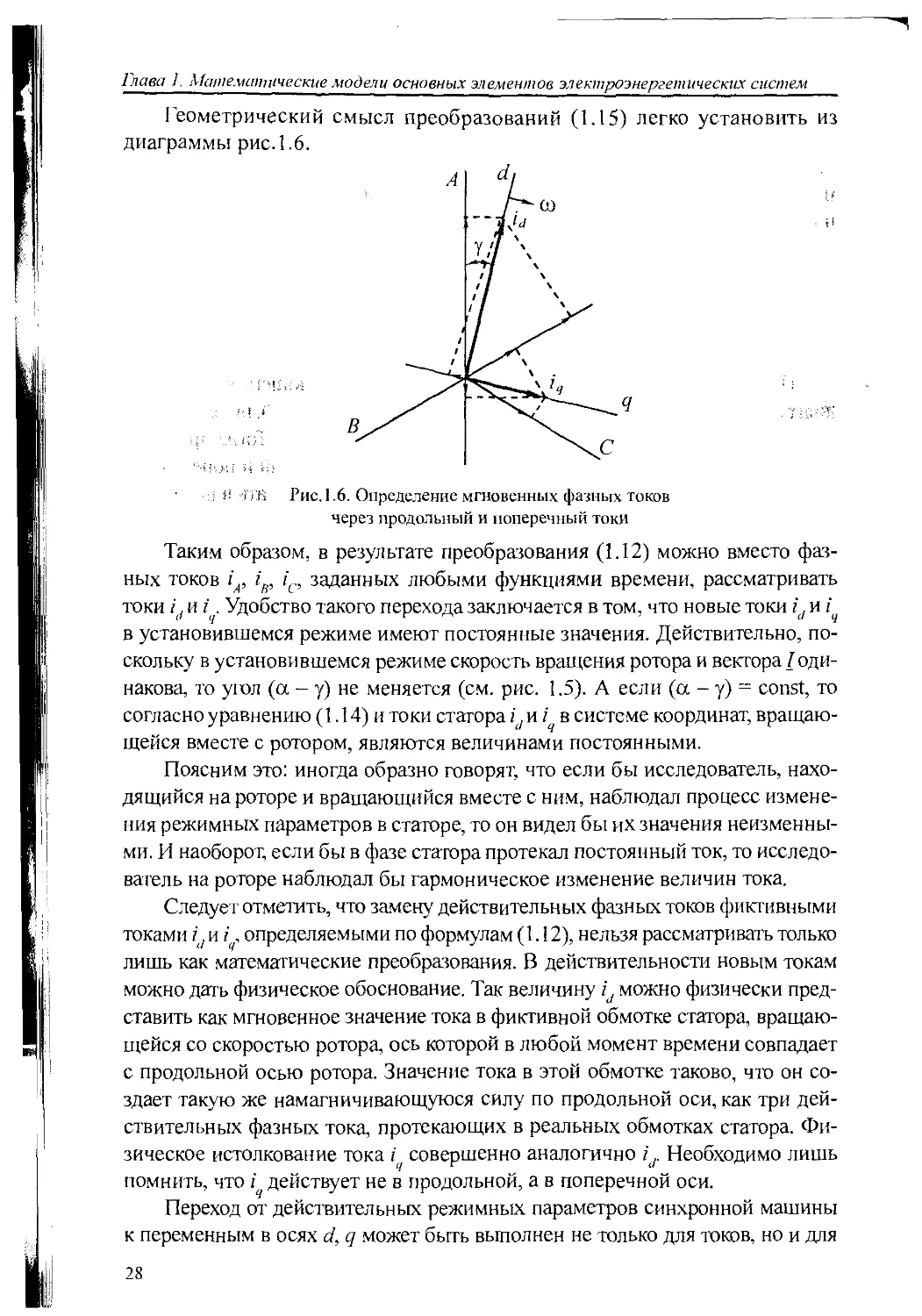
Геометрический смысл преобразований (1.15) легко установить из
диаграммы рис. 1.6.
ч и i)fi Рис. 1.6. Определение мгновенных фазных токов
через продольный и поперечный токи
Таким образом, в результате преобразования (1.12) можно вместо фаз-
ных токов iA, i ic, заданных любыми функциями времени, рассматривать
токи /, и г Удобство такого перехода заключается в том, что новые токи id и
в установившемся режиме имеют постоянные значения. Действительно, по-
скольку в установившемся режиме скорость вращения ротора и вектора I оди-
накова, то угол (а - у) не меняется (см. рис. 1.5). А если (а - у) = const, то
согласно уравнению (1.14) и токи статора id и i в системе координат, вращаю-
щейся вместе с ротором, являются величинами постоянными.
Поясним это: иногда образно говорят, что если бы исследователь, нахо-
дящийся на роторе и вращающийся вместе с ним, наблюдал процесс измене-
ния режимных параметров в статоре, то он видел бы их значения неизменны-
ми. И наоборот, если бы в фазе статора протекал постоянный ток, то исследо-
ватель на роторе наблюдал бы гармоническое изменение величин тока.
Следует отметить, что замену действительных фазных токов фиктивными
токами /; и /, определяемыми по формулам (1.12), нельзя рассматривать только
лишь как математические преобразования. В действительности новым токам
можно дать физическое обоснование. Так величину id можно физически пред-
ставить как мгновенное значение тока в фиктивной обмотке статора, вращаю-
щейся со скоростью ротора, ось которой в любой момент времени совпадает
с продольной осью ротора. Значение тока в этой обмотке таково, что он со-
здает такую же намагничивающуюся силу по продольной оси, как три дей-
ствительных фазных тока, протекающих в реальных обмотках статора. Фи-
зическое истолкование тока i совершенно аналогично id. Необходимо лишь
помнить, что i действует не в продольной, а в поперечной оси.
Переход от действительных режимных параметров синхронной машины
к переменным в осях d, q может быть выполнен не только для токов, но и для
28
1.1. Математические модели и схемы замещения синхронной машины
других величин. Замена, например, в (1.12) переменных; на к/или U дает соот-
ветствующие уравнения преобразования для потокосцеплений или напряже-
ний по осям dnq:
2
у б/ = у [у a cos У + V в cos(y _ 120°) + у с cos(Y +120°)];
2
У 7 = у[va sin У + W sin(Y ~120°) + ус sin(y +120°)].
2
Ud -—[U А cosy + UB cos(y -120°) + Uc cos(y +120°)];
2
Uq = —\UA sin у + UB sin(y -120°) + Uc sin(y +120°)].
(1-16)
(1-17)
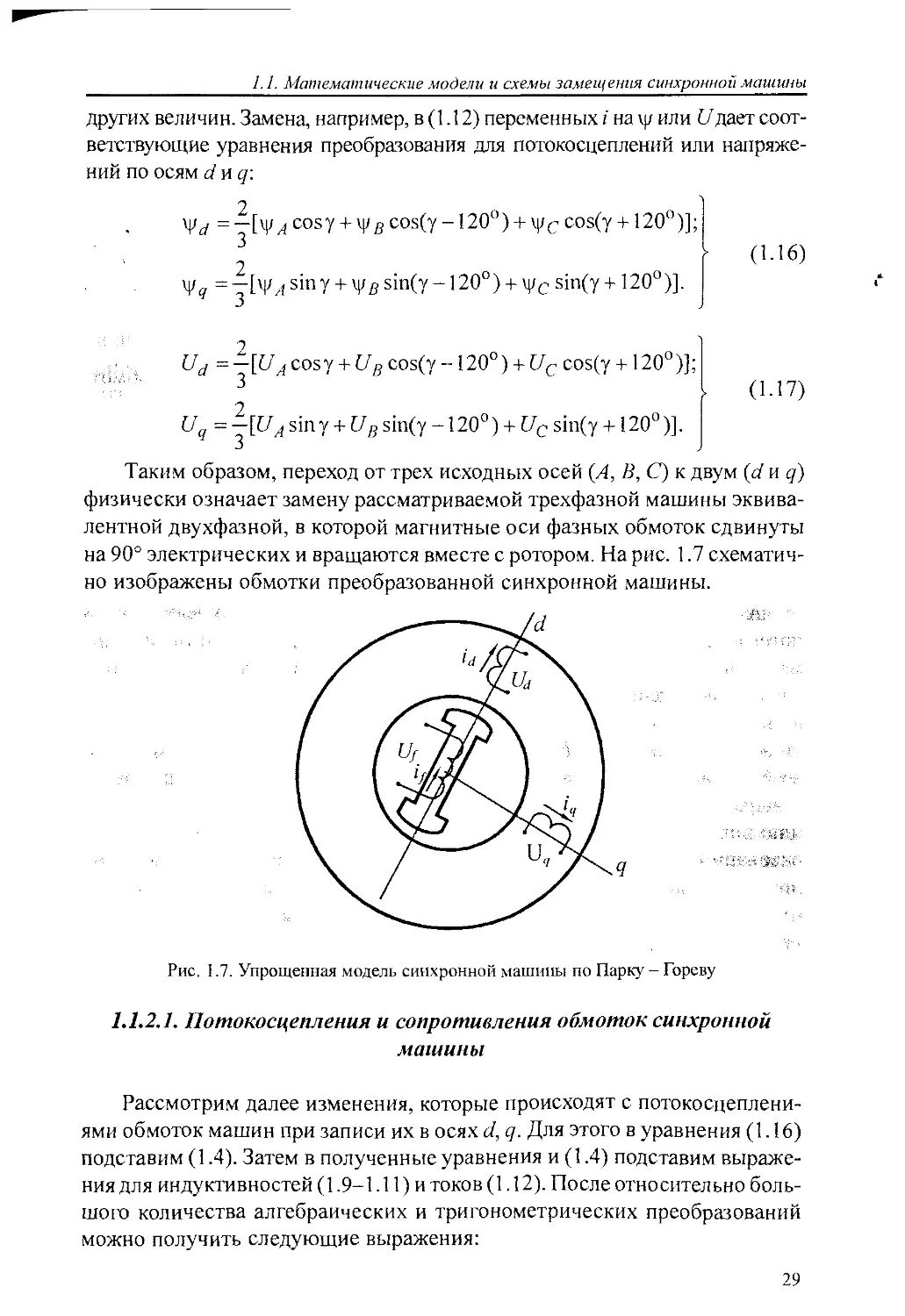
Таким образом, переход от трех исходных осей (А, В, С) к двум (d и <у)
физически означает замену рассматриваемой трехфазной машины эквива-
лентной двухфазной, в которой магнитные оси фазных обмоток сдвинуты
на 90° электрических и вращаются вместе с ротором. На рис. 1.7 схематич-
но изображены обмотки преобразованной синхронной машины.
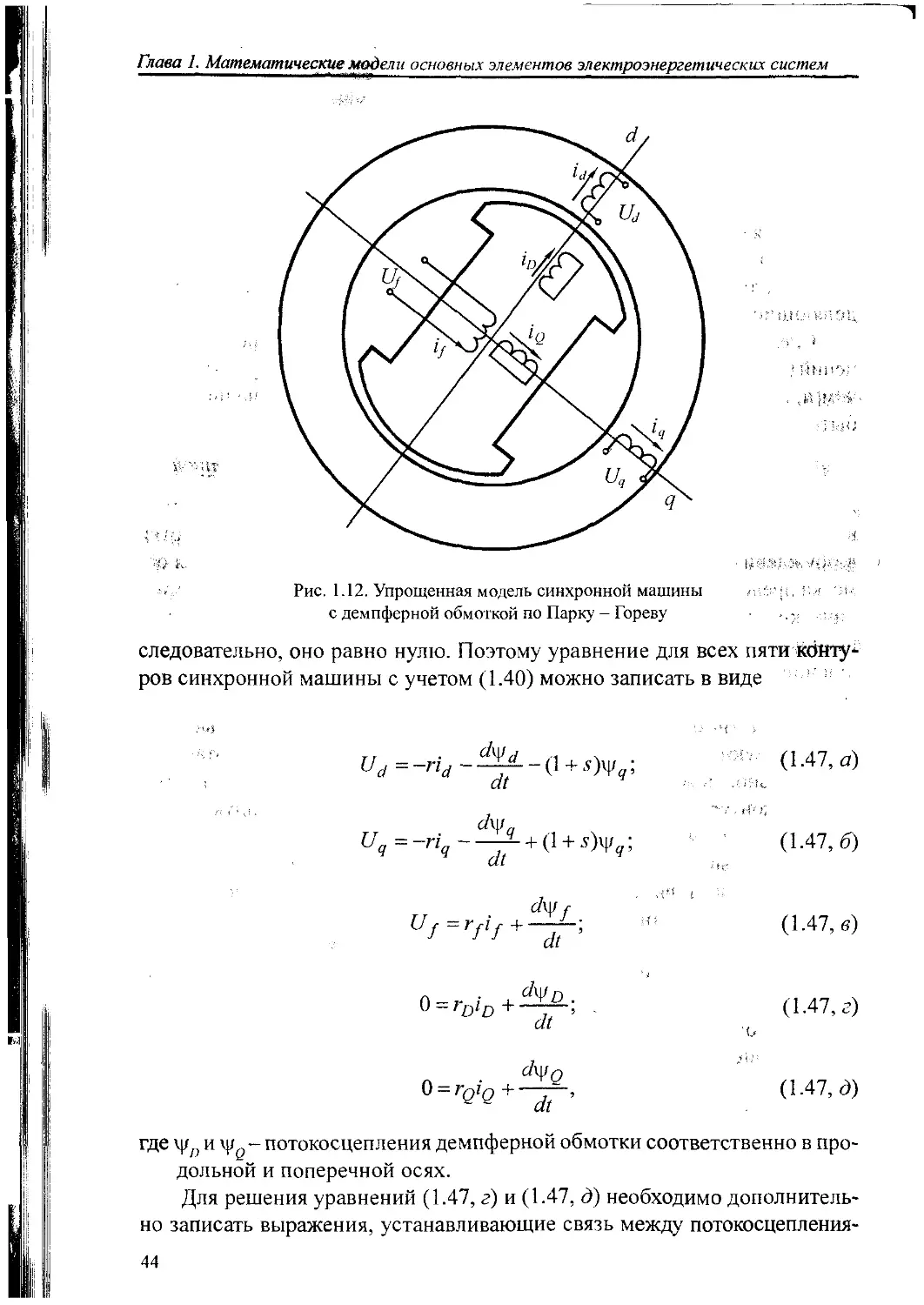
Рис. 1.7. Упрощенная модель синхронной машины по Парк}' - Гореву
LL2.1. Потокосцепления и сопротивления обмоток синхронной
машины
Рассмотрим далее изменения, которые происходят с потокосцеплени-
ями обмоток машин при записи их в осях d, q. Для этого в уравнения (1.16)
подставим (1.4). Затем в полученные уравнения и (1.4) подставим выраже-
ния для индуктивностей (1.9-1.11) и токов (1.12). После относительно боль-
шого количества алгебраических и тригонометрических преобразований
можно получить следующие выражения:
29
Глава I. Математические модели основных элементов электроэнергетических систем
Vd - Ld4 +Ladif>
7u *1 ?•> J
г
3 . 3 L ;-= V
V/ =уДмХ/ + £/*/>
з
где Ld = Lq + LB +—LM - синхронная продольная индуктивность
обмотки статора;
3
Lq = Lo + LB +—LM - синхронная поперечная индуктивность обмот-
ки статора;
Lj = Ljj - индуктивность обмотки возбуждения;
Lad - взаимная индуктивность обмоток статора и ротора в продольной оси.
Характерной особенностью полученных уравнений является отсут-
ствие индуктивностей, зависящих от углового положения ротора, т. е. угла у.
Поэтому при вычислении производных от потокосцепления по времени
операция дифференцирования будет относиться только к токам.
Анализ уравнений (1.18) показывает, что в полученных выражениях
потокосцеплений нарушено правило взаимности, согласно которому для
магнитносвязанных цепей взаимные индуктивности должны быть одина-
ковы. В выражении для потокосцепления продольного контура статора \ца
взаимная индуктивность, определяющая потокосцепление от тока обмот-
ки возбуждения, равна Lad, а в выражении для потокосцепления обмотки
возбуждения ^взаимная индуктивность оси равна 3/2 LaJ. Такое различие
в выражениях для индуктивностей, определяющих взаимную индук-
цию полей статора и ротора, объясняется характером принятых преоб-
разований вида (1.12) и (1.16). Более удобно записывать уравнения
потокосцеплений в форме, когда принцип взаимности полностью со-
ответствует в отношении индуктивностей магнитносвязанных цепей
ротора и статора. Исходные уравнения (1.19) преобразуются к указан-
ной форме, если вместо действительных токов ротора рассматривать
уменьшенные в 2/3 раза и вместо действительных индуктивностей це-
пей ротора - увеличенные в 3/2 раза. Поскольку уравнения синхрон-
ной машины обычно записываются в системе относительных единиц,
то необходимые преобразования могут быть сделаны одновременно с
введением новых параметров, а уравнения (1.18) представлены как
4!d* -Ld.’d. + Ladjf^
'i!q, ~ ^qjq, ’
V/. '-=Lad.'d.
(1-19)
30
1.1. Математические модели и схемы замещения синхронной машины
В полученных уравнениях для потокосцеплений и у (индекс
относительности величин в дальнейшем для простоты изложения бу-
дем опускать) содержатся названные нами поперечная L и продольная
Ld индуктивности обмотки статора, математически определяемые че-
рез коэффициенты собственных и взаимных индуктивностей фазных
обмоток машин, согласно выражениям (1.18). Однако индуктивности
Ld и L имеют простой физический смысл. Предположим, что к трех-
фазной сети с симметричными напряжениями подключена синхронная
машина с отключенной системой возбуждения (i = 0). Если ротор ма-
шины вращать с частотой, равной частоте магнитного поля, то ротор и
магнитное поле статора будут неподвижны относительно друг друга.
Допустим, что в таком синхронном режиме амплитуда магнитного поля
совпадает с продольной осью полюсов d. В этом случае будет отсут-
ствовать магнитное поле вдоль оси q, и следовательно, потокосцепле-
ние у = 0. Таким образом, в рассматриваемом режиме работы машины
потокосцепление с обмотками статора будет определяться только ве-
личиной \yd. Согласно (1.19), равенство \|/ = 0 может выполняться, толь-
ко если z = 0. Поэтому фазные токи статора в данных условиях явля-
ются только продольными. Следовательно, индуктивность Ld из первого
уравнения (1.19) при i = 0 определится так:
п • ;
Ld=~- (1.20)
’ Поскольку для рассматриваемого случая потокосцепление yd опреде-
ляется фазной обмоткой, а ток id равен амплитуде фазного тока, то их отно-
шение (1.20) есть индуктивность фазной обмотки. Однако физически Ld-
это не просто индуктивность какой-либо фазы, а эквивалентная индуктивность,
учитывающая взаимные индуктивности с другими фазами. Если Ld-величина
постоянная, то в нашем случае изменение во времени потокосцепления
совпадает по фазе с изменением во времени тока. Вследствие этого отно-
шение (1.20) потока к току получается величиной неизменной при враще-
нии ротора.
Таким образом, величина Ld с физической точки зрения представляет
индуктивность фазной обмотки статора при протекании по обмоткам ста-
тора симметричных синусоидальных токов прямой последовательности,
вращении ротора с синхронной частотой и ориентации поля токов статора
по продольной оси. Соответствующее сопротивление xd = mLd называется
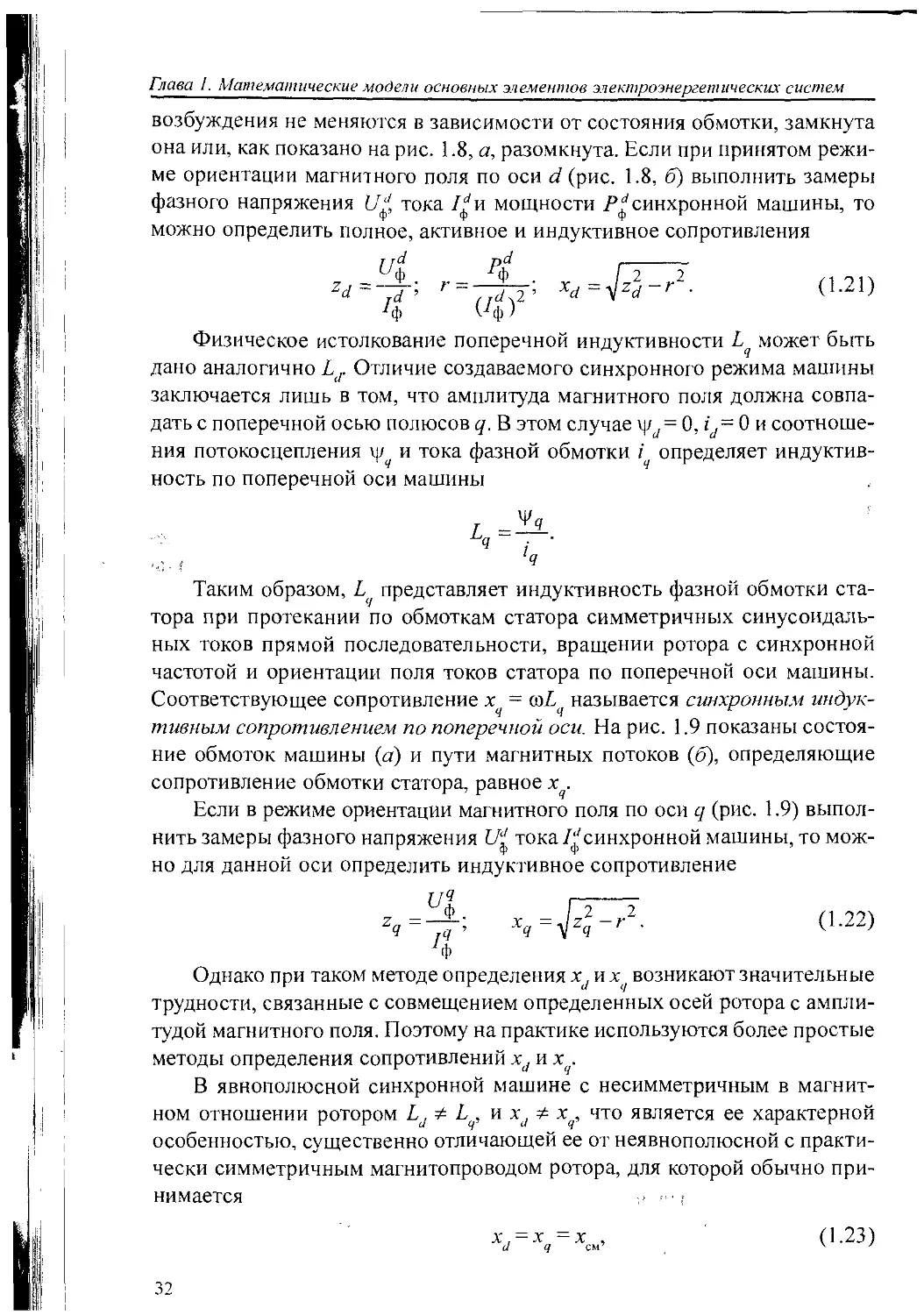
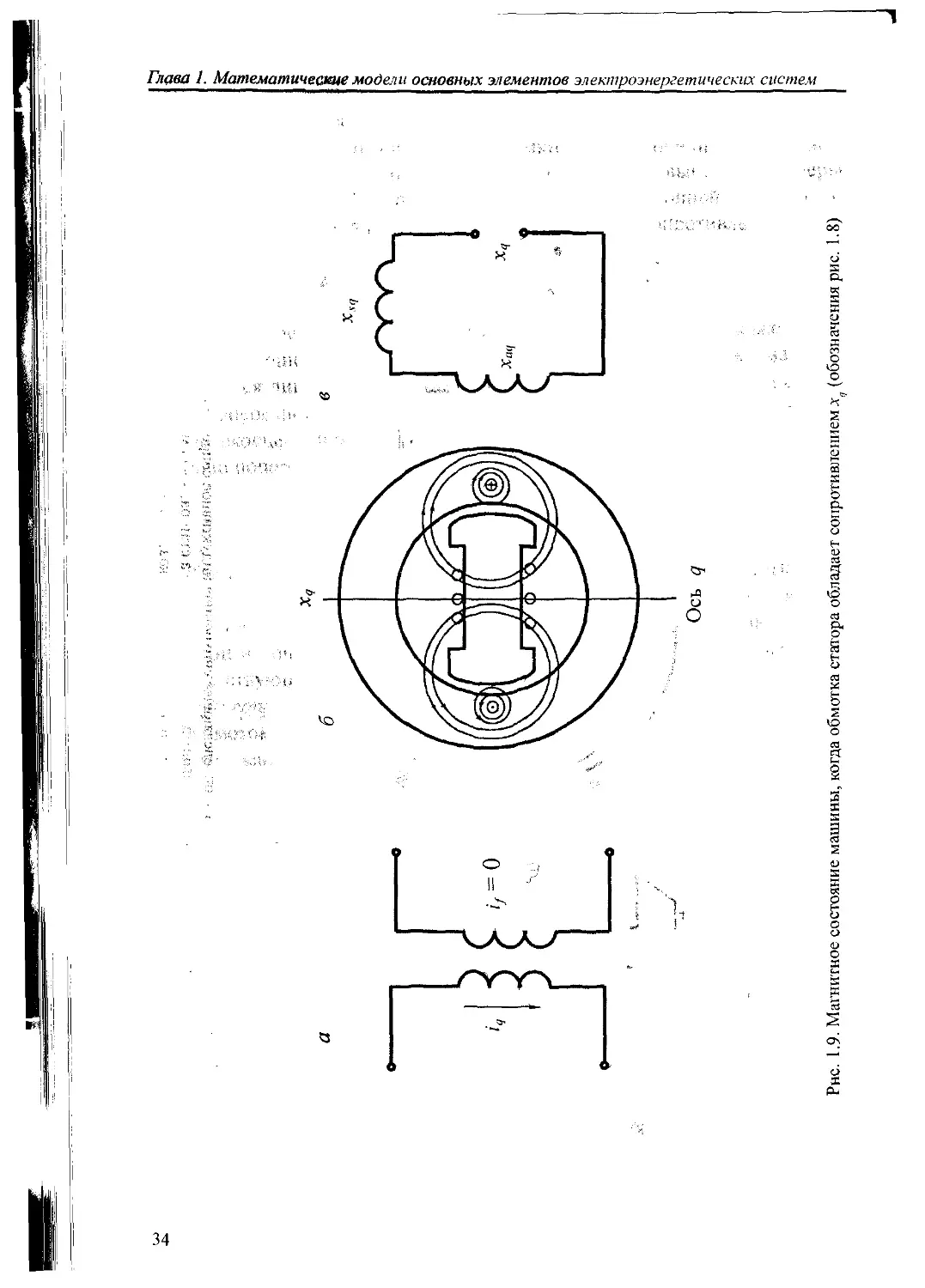
синхронным индуктивным сопротивлением по продольной оси. На рис. 1.8
показаны состояние обмоток машины (а) и условная картина магнитного
поля (6), соответствующая сопротивлению обмотки статора, равному xd.
Следует отметить, что при принятых условиях магнитный поток относи-
тельно ротора неподвижен, и поэтому он и потокосцепление обмотки
31
Глава I. Математические модели основных элементов электроэнергетических систем
возбуждения не меняются в зависимости от состояния обмотки, замкнута
она или, как показано на рис. 1.8, а, разомкнута. Если при принятом режи-
ме ориентации магнитного поля по оси d (рис. 1.8, б) выполнить замеры
фазного напряжения тока и мощности Р.'синхронной машины, то
можно определить полное, активное и индуктивное сопротивления
г rd pd ------
. гф . /22 /1 о 1 \
Zd~ J ’ r~ rrd.2’ xd~yzd r (1-21)
•'Ф (A[J
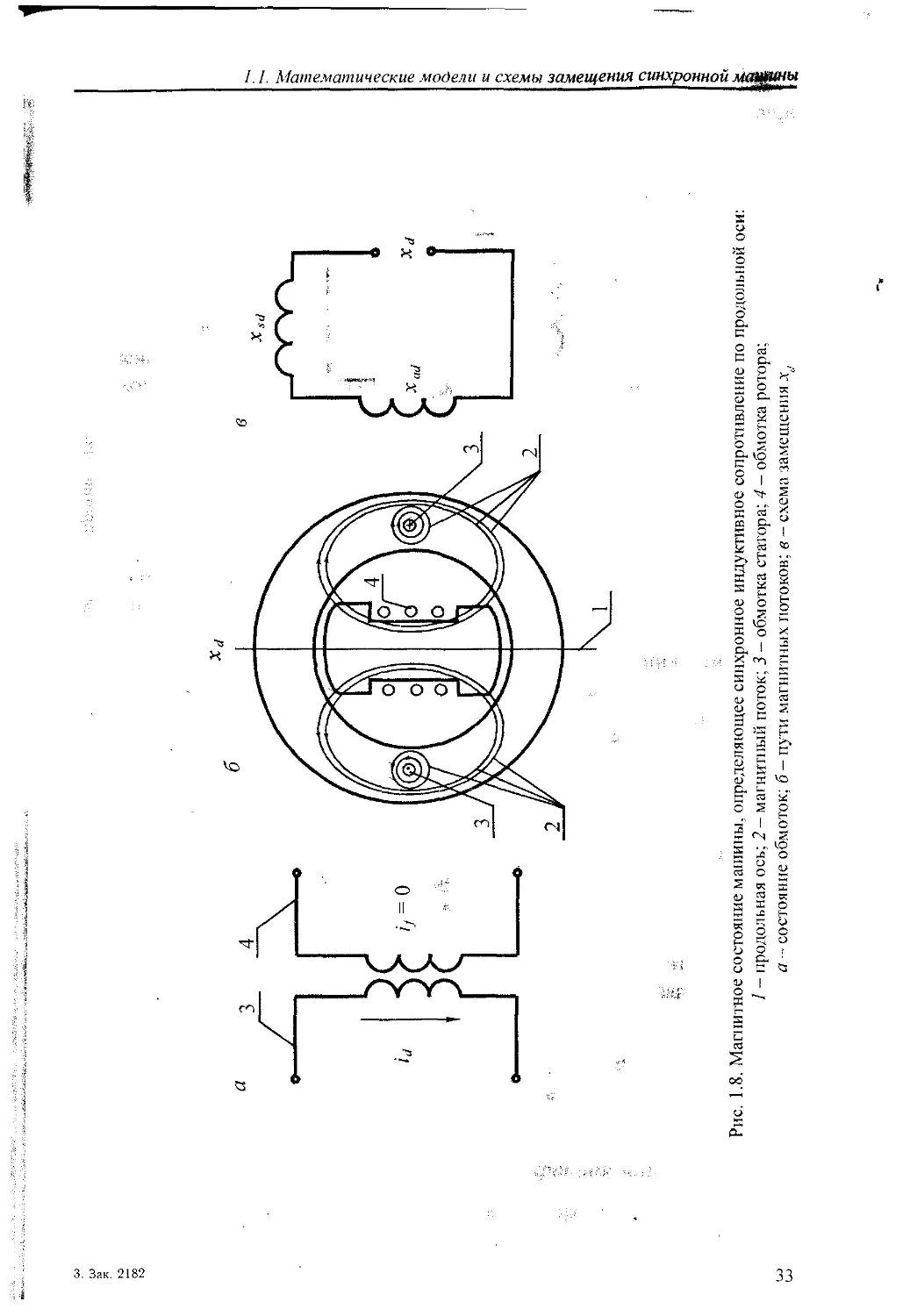
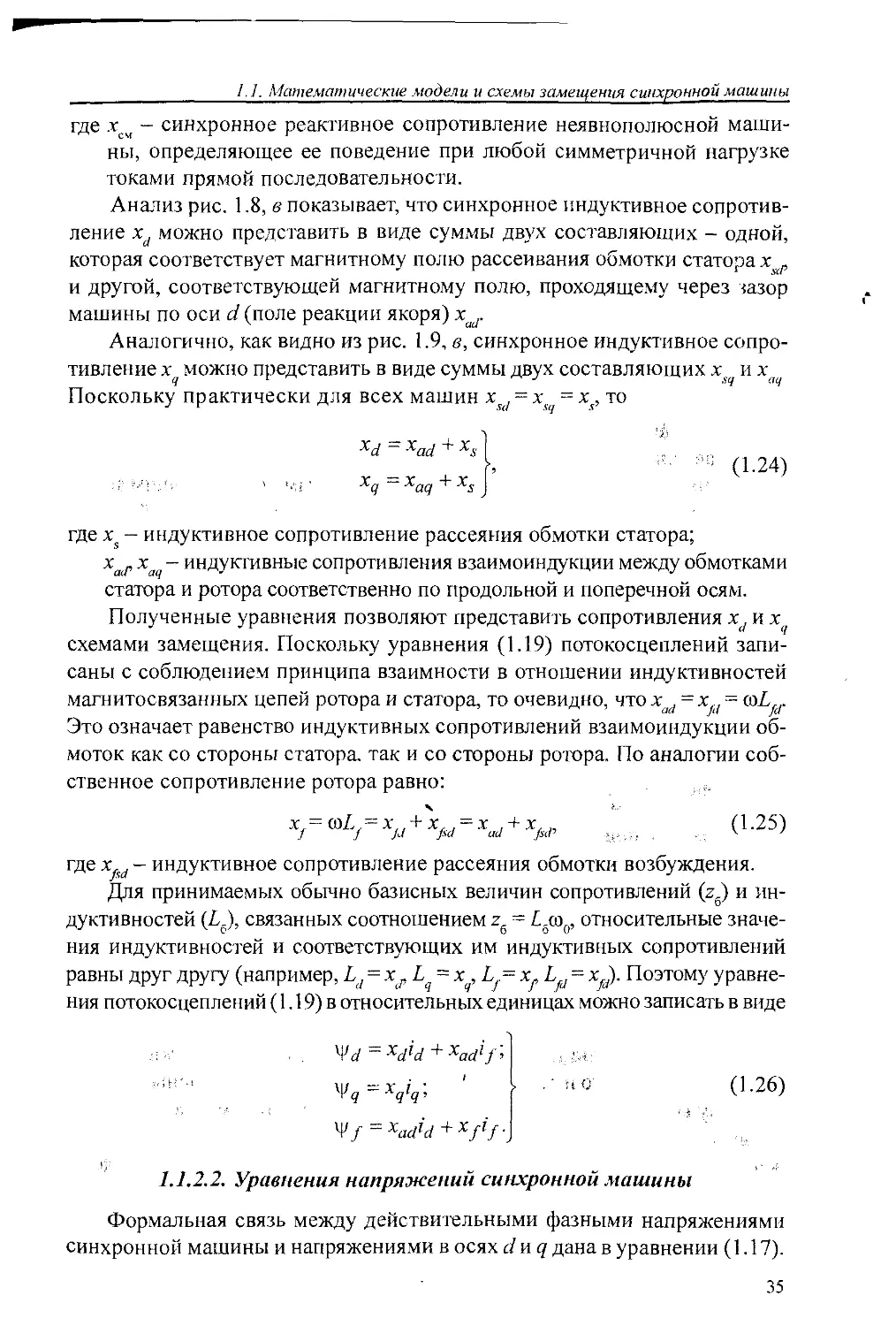
Физическое истолкование поперечной индуктивности L может быть
дано аналогично Ld. Отличие создаваемого синхронного режима машины
заключается лишь в том, что амплитуда магнитного поля должна совпа-
дать с поперечной осью полюсов q. В этом случае \|/^ = О, id= 0 и соотноше-
ния потокосцепления и тока фазной обмотки i определяет индуктив-
ность по поперечной оси машины
Таким образом, L представляет индуктивность фазной обмотки ста-
тора при протекании по обмоткам статора симметричных синусоидаль-
ных токов прямой последовательности, вращении ротора с синхронной
частотой и ориентации поля токов статора по поперечной оси машины.
Соответствующее сопротивление называется синхронным индук-
тивным сопротивлением по поперечной оси. На рис. 1.9 показаны состоя-
ние обмоток машины (а) и пути магнитных потоков (б), определяющие
сопротивление обмотки статора, равное х
Если в режиме ориентации магнитного поля по оси q (рис. 1.9) выпол-
нить замеры фазного напряжения тока синхронной машины, то мож-
но для данной оси определить индуктивное сопротивление
U4 I----
^=-|; ^=^2-Л <к22)
Однако при таком методе определения xd и х возникают значительные
трудности, связанные с совмещением определенных осей ротора с ампли-
тудой магнитного поля. Поэтому на практике используются более простые
методы определения сопротивлений xd и х .
В явнополюсной синхронной машине с несимметричным в магнит-
ном отношении ротором Ld Ф L , и xd Ф х^, что является ее характерной
особенностью, существенно отличающей ее от неявнополюсной с практи-
чески симметричным магнитопроводом ротора, для которой обычно при-
нимается ?
32
Зак. 2182
Xd
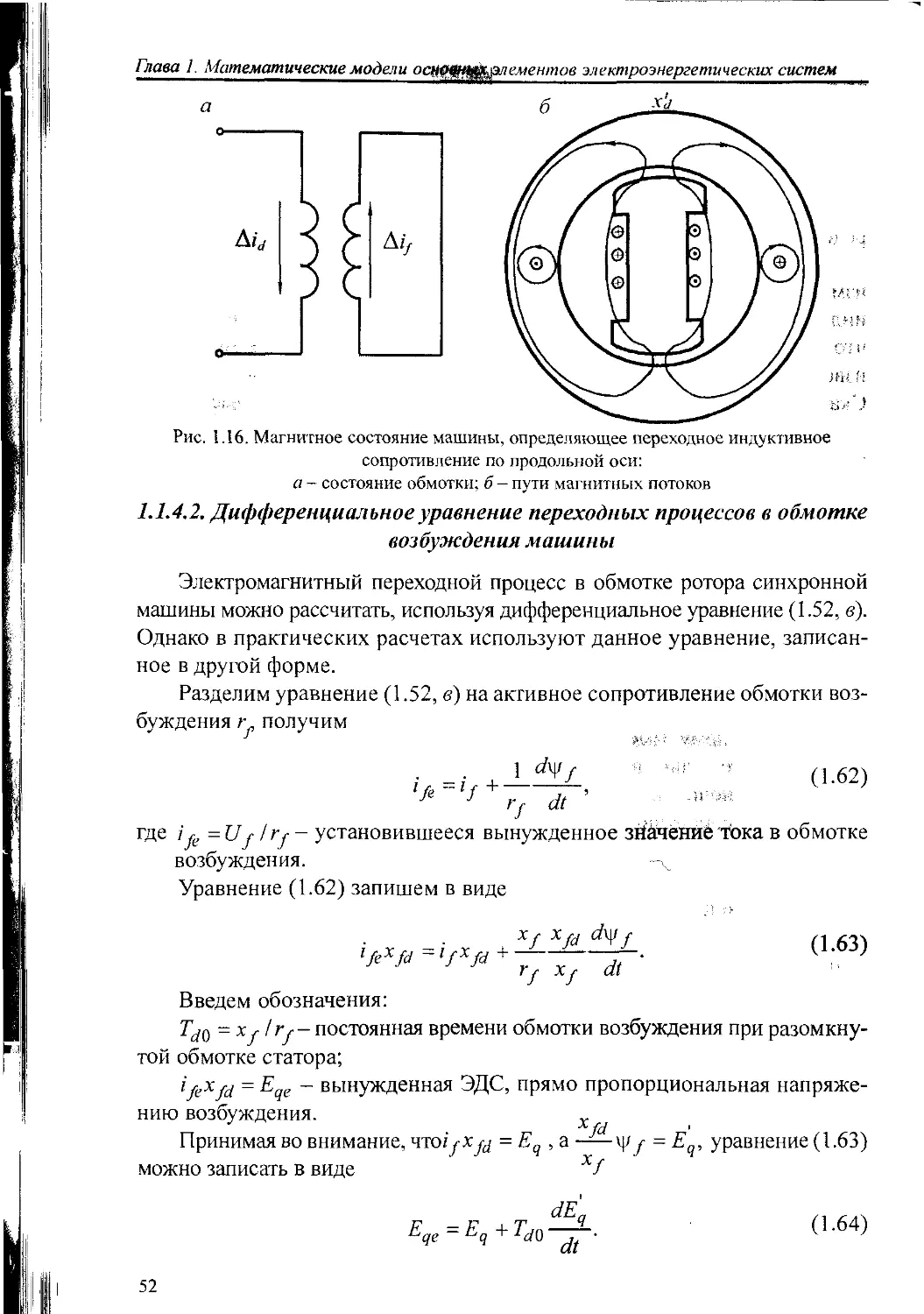
Рис. 1.8. Магнитное состояние машины, определяющее синхронное индуктивное сопротивление по продольной оси:
1 - продольная ось; 2 - магнитный поток; 3 - обмотка статора; 4 - обмотка ротора;
а - состояние обмоток; б - пути магнитных потоков; в - схема замещения х^
!. I. Математические модели и схемы замещения синхронной машины
Рнс. 1.9. Магнитное состояние машины, когда обмотка статора обладает сопротивлением (обозначения рис. 1.8)
1.1. Математические модели и схемы замещения синхронной машины
где хч - синхронное реактивное сопротивление неявнополюсной маши-
ны, определяющее ее поведение при любой симметричной нагрузке
токами прямой последовательности.
Анализ рис. 1.8, в показывает, что синхронное индуктивное сопротив-
ление xd можно представить в виде суммы двух составляющих - одной,
которая соответствует магнитному полю рассеивания обмотки статорах^,
и другой, соответствующей магнитному полю, проходящему через зазор
машины по оси d (поле реакции якоря) xjd.
Аналогично, как видно из рис. 1.9, в, синхронное индуктивное сопро-
тивление xq можно представить в виде суммы двух составляющих ху? и х
Поскольку практически для всех машин xsd = х = xs, то
xd=xad + xS
xq ^xaq+xs '
' (1.24)
где xs — индуктивное сопротивление рассеяния обмотки статора;
хжГ xaq - индуктивные сопротивления взаимоиндукции между обмотками
статора и ротора соответственно по продольной и поперечной осям.
Полученные уравнения позволяют представить сопротивления xd и х
схемами замещения. Поскольку уравнения (1.19) потокосцеплений запи-
саны с соблюдением принципа взаимности в отношении индуктивностей
магнитосвязанных цепей ротора и статора, то очевидно, что xad = xd = G)Lfd.
Это означает равенство индуктивных сопротивлений взаимоиндукции об-
моток как со стороны статора, так и со стороны ротора. По аналогии соб-
ственное сопротивление ротора равно:
x=(oL=x..+x=x , + х... (1-25)
f J J-I fid ad JscP 7
где xfid - индуктивное сопротивление рассеяния обмотки возбуждения.
Для принимаемых обычно базисных величин сопротивлений (z ) и ин-
дуктивностей (£.), связанных соотношением zg = £6соо, относительные значе-
ния индуктивностей и соответствующих им индуктивных сопротивлений
равны друг другу (например, Ld = xJ,Lcj = х, Lf= xf Lfd = x/rf). Поэтому уравне-
ния потокосцеплений (1.19) в относительных единицах можно записать в виде
^d=xdid+xadif’
4q=xqiq',
Ч*/ “ хtid'd + Xf'f \
(1.26)
1.1.2.2. Уравнения напряжений синхронной машины
Формальная связь между действительными фазными напряжениями
синхронной машины и напряжениями в осях d и q дана в уравнении (1.17).
35
Глава !. Математические модели основных элел/ен/иов электроэнергетических систем
Необходимо получить выражения продольной Ud и поперечной U составля-
ющих напряжений через параметры машины в рассматриваемых осях d, q.
Для этого подставим в уравнение (1.17) выражения (1.3) для фазных на-
пряжений и после преобразований с учетом (1.12) и (1.16) получим
т, dVd
Ud=~rld-----
„ : T: (L27)
Uq=-nq------TL + ^d- '
Ч ' I Q,[ J -
Данные уравнения напряжений синхронной машины в осях d и q были
получены независимо друг от друга американским инженером Р. Парком и
советским ученым А. А. Горевым, поэтому в литературе они обычно называ-
ются уравнениями Парка - Горева.
Дадим физическую интерпретацию отдельным составляющим полу-
ченных уравнений. Произведение активного сопротивления фазной обмот-
ки на токи (г?Д и (п ) являются омическими падениями напряжения в про-
дольной и поперечной обмотке статора. Две другие составляющие в урав-
нениях являются функциями потокосцеплений. В переходном процессе
потокосцепления и \{/ изменяются по абсолютной величине (пульсиру-
ют). Изменения потокосцеплений приводят к появлению в обмотке по оси d
dyd dy
ЭДС ed - —, а в обмотке по оси q ЭДС eq = ——. В литературе часто
dyd d\^
составляющие —-— и —— называет трансформаторными ЭДС. Это свя-
Clt
зано с тем, что при схематичном изображении обмоток по осям, синхронная
машина, например, по оси d, представляет собой двухобмоточный трансфор-
матор, так как имеет два электромагнитосвязанных контура (см. рис. 1.7).
Чтобы понять смысл третьей составляющей в уравнениях (1.27), не-
обходимо по-иному схематично представить синхронную машину.
До сих пор мы представляли, что id, i и Uj, Uq-токи и напряжения
в фиктивных вращающихся обмотках статора (рис. 1.7). Однако не обяза-
тельно предполагать, что фиктивные обмотки по осям d и q вращаются.
Аналогичный результат можно получить, полагая, что обмотки статора
неподвижны (как это и есть в действительности) и присоединены к непод-
вижному коллектору с контактными кольцами, по которому скользят щет-
ки, вращающиеся вместе с ротором. При этом щетки коллектора располо-
жены в продольной и поперечной осях. В таком случае Ud можно предста-
вить как напряжение на паре щеток, а величину id- как ток статора, проте-
кающий через эту же пару щеток, ось которой все время совпадает с про-
дольной осью ротора (рис. 1.10). Аналогичным образом U можно пред-
36
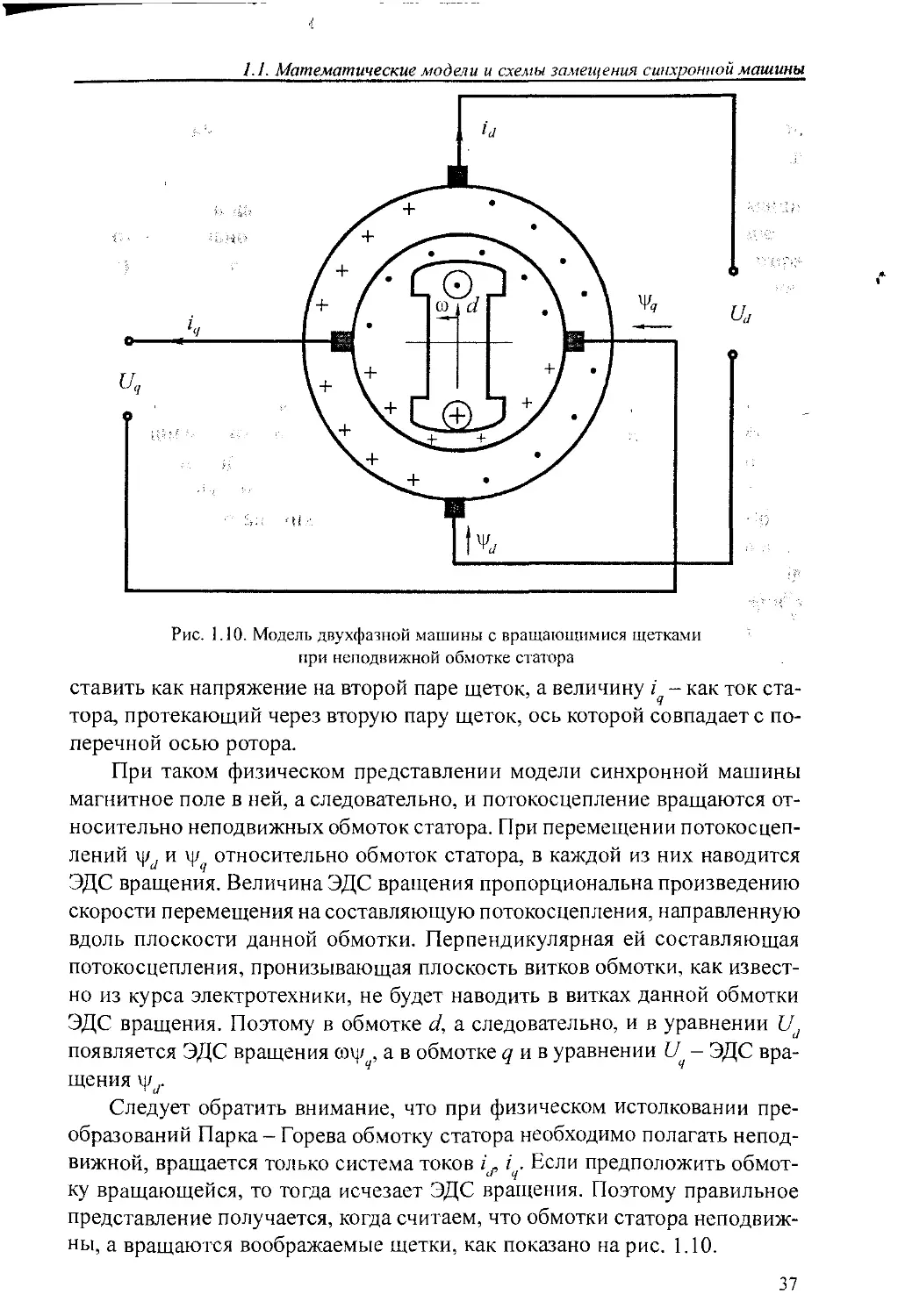
1.1. Математические модели и схемы замещения синхронной машины
Рис. 1.10. Модель двухфазной машины с вращающимися щетками
при неподвижной обмотке статора
ставить как напряжение на второй паре щеток, а величину i - как ток ста-
тора, протекающий через вторую пару щеток, ось которой совпадает с по-
перечной осью ротора.
При таком физическом представлении модели синхронной машины
магнитное поле в ней, а следовательно, и потокосцепление вращаются от-
носительно неподвижных обмоток статора. При перемещении потокосцеп-
лений и \{/ относительно обмоток статора, в каждой из них наводится
ЭДС вращения. Величина ЭДС вращения пропорциональна произведению
скорости перемещения на составляющую потокосцепления, направленную
вдоль плоскости данной обмотки. Перпендикулярная ей составляющая
потокосцепления, пронизывающая плоскость витков обмотки, как извест-
но из курса электротехники, не будет наводить в витках данной обмотки
ЭДС вращения. Поэтому в обмотке d, а следовательно, и в уравнении Ud
появляется ЭДС вращения со\|/, а в обмотке q и в уравнении £7 - ЭДС вра-
щения
Следует обратить внимание, что при физическом истолковании пре-
образований Парка - Горева обмотку статора необходимо полагать непод-
вижной, вращается только система токов ij, i. Если предположить обмот-
ку вращающейся, то тогда исчезает ЭДС вращения. Поэтому правильное
представление получается, когда считаем, что обмотки статора неподвиж-
ны, а вращаются воображаемые щетки, как показано на рис. 1.10.
37
Глава 1. Математические модели основных элементов электроэнергетических систем
Для анализа переходного процесса синхронной машины систему урав-
нений напряжений статора (1.27) необходимо дополнить уравнением (1.3)
для обмотки возбуждения. Тогда полная система уравнений
ТТ dVd
^d = ~rld—т,—
at 4
т. . d't'q
^q=~riq----T~ + &Vd'’
4 at
dy f
U / = г fi / н-.
J J J dt
(1.28)
На модели синхронной машины (рис. 1.10) наглядно можно получить
выражение для электромагнитного момента. Известно, что в машинах пе-
ременного тока электромагнитный момент равен произведению тока в об-
мотке статора, потокосцепления и синуса угла между ними. Исходя из дан-
ного положения и известного «правила левой руки», на рис. 1.10 можно
установить, что действующие на ротор электромагнитные силы от взаимо-
действия одноименных токов и потокосцеплений обмотки статора (id и vj/^,
iq и \|/р равны нулю, т. е. id\\td = 0 и ixp = 0.
Электромагнитный момент возникает от взаимодействия разноимен-
ных токов и потокосцеплений. При этом момент, обусловленный i и \yd
действует на ротор в направлении его вращения. Поскольку направление
момента совпадает с направлением вращения ротора, то знак момента не-
обходимо принять положительным, т. е. +i^d- Электромагнитный момент
определяемый id и \|/, направлен против вращения ротора. Поэтому с
учетом направления действия двух составляющих электромагнитного мо-
мента будем иметь .-Щ,.;.'
Ml^qVd-W'q- ’ О'29)
1.1.2.3. Уравнение движения ротора
Угловое положение ротора в пространстве было нами принято опреде-
лять углом у поворота оси d относительно неподвижной фазы А. Однако обыч-
но рассматривают не абсолютное движение ротора в пространстве, характе-
ризуемое углом у и скоростью его вращения со, а относительное движение по
отношению к некой оси, чаще всего вращающейся с постоянной синхронной
скоростью соо. Преимущества такого измерения углового положения ротора
объясняются тем, что электрические машины в энергосистемах работают в
сети, мощность которой значительно превосходит номинальную мощность
машины. Если мощность такой сети в несколько раз больше мощности ма-
шины (обычно > 10), то сеть идеализируют и принимают ее бесконечно мощ-
ной. Напряжение и частота сети бесконечной мощности остаются неизмен-
38
1.1. Математические модели и схемы замещения синхронной машины
ными, какие бы процессы ни происходили в исследуемой машине. Поэтому
на диаграммах вектор напряжения сети бесконечной мощности можно изоб-
разить неизменным по амплитуде и вращающимся с постоянной синхронной
скоростью.
Поэтому в дальнейшем будем рассматривать движение ротора маши-
ны относительно вектора напряжения сети U. По существу, это вращение
ротора относительно результирующего магнитного поля обмотки статора.
В соответствии со сказанным угловую скорость вращения ротора и можно
рассматривать как сумму синхронной скорости соо и скорости перемеще-
ния ротора относительно синхронно вращающейся оси Асо:
со = соо + Аю. (1-30)
Поскольку соо = const, то уравнение движения ротора (1.5) может быть
записано в виде
Т dA®
= ,, (1.31)
; 'i dt
Для перехода к относительным единицам, разделим все члены урав-
нения (1.31) дополнительно на номинальный момент синхронной машины
М = —
®0
а левую часть уравнения (1.31) дополнительно умножим на отношение
«о
со0 ’
В результате получим
2
s„ dt “
где S' - номинальная мощность электрической машины;
MMt, M3t - моменты в относительных единицах.
В полученном уравнении величина (Асо/соо) характеризует относитель-
ное движение ротора и обычно называется скольжением:
(132)
<1>0 0>0
Соотношение Jojn2/.S'H этого уравнения является механической постоянной
инерцией, имеющей размерность времени; обозначим ее
Т,^. ! (1.33)
Г-
С учетом (1.32) й (1.33) уравнение движения ротора примет вид
' = 0-34)
39
Глава I. Математические модели основных элементов электроэнергетических систем
Полученная в результате формальных преобразований Г имеет физи-
ческий смысл. Действительно, из уравнения (1.34) можно получить
Пусть требуется найти время, в течение которого ротор машины раз-
ворачивается от состояния покоя (со = 0) до синхронной скорости (to = ш0)
при М, = 0 и неизменном вращающемся моменте, равном номинальному
(4=1).
Для невращающегося ротора в соответствии с (1.32) скольжение .v —1,
„ - юо-юо _ о п
для ротора, вращающегося с синхронной скоростью, ' ~ ю ~ . 110-
этому искомое время разворота может быть найдено из (1.35) путем его
интегрирования:
т Q
= (1-36)
Отсюда следует, что величина механической постоянной инерции Т
численно равна промежутку времени, необходимому для изменения ско-
рости машины от нуля до синхронной при постоянном вращающемся мо-
менте, равном номинальному.
Для характеристики относительного движения ротора введем допол-
нительно угол 5 между поперечной осью машины q и вектором напряже-
ния сети U (рис. 1.11).
Если вектор U вращается с постоянной синхронной скоростью со0, а
ротор - со скоростью со, то, как следует из рис. 1.11,
5 = у-(со0/ + а0)-у, ' (1.37)
где а0 - начальное (при t = 0) значение угла между вектором U и осью фазы Л.
Продифференцировав это уравнение, получим
<75 dy
— = — -®о-
dt dt и
>. dy
Поскольку — = ® и с учетом (1.32), полученное уравнение запишем в виде
— = со - соо = Асо = со0^. (1.38)
dt
Из (1.38) определим параметры абсолютного движения ротора:
db
со = со0+—, (].39)
40
1.1. Математические модели и схемы замещения синхронной машины
Рис. 1.11. Определение угла 3 синхронной машины
ИЛИ
<> <»()(Н .v). (1 -40)
Интегрируя (1.38), получим уравнение для определения угла 5 в про-
извольныйдйвмент времени г.
З = соор<* + 5О, (1.41)
где 50 - начальное значение угла 5 при t = 0.
Из уравнения (1.38) определим скольжение
5=_1_Д (1.42)
(о0 dt
С учетом выражения (1.42) уравнение движения ротора (1.35) можно
записать в виде
= (1.43)
tt>0 dr
В полученном уравнении время t и постоянная инерции Т измеряются
в секундах. Поэтому синхронная скорость со должна быть определена в
градусах в секунду или радиан в секунду, а угол 5 соответственно в граду-
сах или радианах. Выбор именно такой размерности соо и 5 вызван необхо-
димостью получения в левой части уравнения (1.43) безразмерной вели-
чины, так как правая часть данного уравнения выражена в относительных
единицах.
При исследовании переходных процессов удобно все величины, вхо-
дящие в уравнение движения, записать в относительных единицах. Для
этого за базисные величины дополнительно принимаются угол в один ра-
диан и синхронная угловая скорость машины со6 = со0. При этом за единицу
времени удобно выбрать параметр, связанный с углом поворота ротора
машины. Поэтому обычно за базисную величину t6 принимают время,
4. Зак. 2182
41
Глава 1. Математические модели основных элементов электроэнергетических систем
в течение которого ротор, вращающийся с синхронной скоростью а>0, про-
вернется на угол, равный одному радиану, т. е. / = 1/©0. Это время измеря-
ется в радианах.
Таким образом, при записи всех величин в относительных единицах
уравнение движения ротора принимает вид (индексы относительности
опускаем)
J2S
Т}~Т = Мы~Мэ- - (1-44)
' clt
или с учетом (1.29) \ ‘ -
12 о
Tj~-T=MM-iqWd+id4’q- (1’45)
аГ
1.1.2.4. Сводка уравнений синхронной машины по Парку - Гореву
Система уравнений синхронной машины в осях dv\ q включает в себя
уравнения (1.26), (1.28) и (1.45). При всех величинах в относительных еди-
ницах уравнения Парка- Горева для синхронной машины могут быть пред-
ставлены в виде
тт • dty d Ud = rid “ ; П : dt - (1.46, a)
dtyQ Uq =~riq + dt , (1.46,6)
7 7 f dt (1.46, в)
Vd ~xd'd + Tid'f'-- (1.46, г)
'c -w (1.46, 6)
V/ = xad'd + xf'f'- (1.46, e)
d2b Tj ~ ~ 'qtyd + 'dtyq- dt . (1.46, ж)
Из рис. 1.11 можно получить уравнения для составляющих напряжения:
Uj = t/sin8; (1.46, з)
U = C/cosS. ’ " (1.46, w)
ч ....
42
1.!. Математические модели и схемы замещения синхронной манаты
Записанная система уравнений (1.46) дает связь между напряже-
ниями, токами, потокосцеплениями, скоростью вращения ротора и па-
раметрами рассматриваемой машины. Если напряжение U на выводах
машины и напряжение приложенное к обмотке возбуждения не за-
висят от режима рассматриваемой электроэнергетической системы, то
уравнения (1.46) полностью характеризуют переходный процесс. Если,
например, напряжение возбуждения зависит от режимных параметров
машины, то необходимо составить дополнительные уравнения, опре-
деляющие эту зависимость.
Следует отметить, что знаки отдельных составляющих в системе урав-
нений (1.46) могут измениться, если направление токов, осей принять иное,
чем принято нами в пособии. Поэтому и формы записи уравнений могут
быть различными.
1.1.2.5. Уравнения синхронной машины с демпферной обмоткой
До сих пор мы рассматривали синхронную машину с одной обмоткой
возбуждения на роторе. В общем случае ротор машины, кроме обмотки
возбуждения, имеет еще и демпферную обмотку. Обычно демпферная об-
мотка представляет собой короткозамкнутую клетку, состоящую из метал-
лических стержней, уложенных в специальные пазы в полюсных нако-
нечниках и соединенных между собой по торцам полюсов. В неявнопо-
люсной машине с массивным ротором специальной демпферной обмотки
может и не быть. Роль такой обмотки выполняет тогда массив ротора.
В магнитном поле по продольной оси машины короткозамкнутые стер-
жни образуют несколько контуров с токами. Эти контуры, работающие
параллельно, можно заменить одним эквивалентным продольным демп-
ферным контуром с током iD и параметрами: активным /у и индуктивным
xD сопротивлениями демпферной обмотки по продольной оси.
Магнитный поток в поперечной оси машины, проходя в пространстве
между полюсами, вызывает в короткозамкнутых стержнях появление то-
ков. Здесь аналогичным образом можно представить эквивалентный
демпферный контур (обмотку) с током i и параметрами: активным rQ
и индуктивным сопротивлениями демпферной обмотки по попереч-
ной оси. На рис. 1.12 схематично изображена синхронная машина с демп-
ферными обмотками.
Наличие демпферной обмотки усложняет анализ переходных процес-
сов в синхронной машине, поскольку систему дифференциальных уравне-
ний машины (1.28) необходимо дополнить уравнениями для демпферных
контуров по продольной и поперечной осям. Дифференциальные уравне-
ния для демпферных контуров могут быть записаны аналогично контуру
возбуждения в соответствии с выражением (1.1). При этом необходимо учи-
тывать, что напряжение к демпферной обмотке специально не подводится,
43
Глава 1. Математические модели основных элементов электроэнергетических систем
Рис. 1.12. Упрощенная модель синхронной машины
с демпферной обмоткой по Парку - Гореву
следовательно, оно равно нулю. Поэтому уравнение для всех пяти конту-
ров синхронной машины с учетом (1.40) можно записать в виде ’
Ud=-rid~^-~(y + s')\\j , (ДАТ, а)
at
Uq=-riq~-^- + (\ + S)yq, ' (1.47,6)
c7='z'7+^ ' <1.47,«)
0 = 'Ь<о+~й; (1.47,г)
а/ Чя
° = ^г2+-?-’ (1-47,6)
4-4— Z7/
где \\in и - потокосцепления демпферной обмотки соответственно в про-
дольной и поперечной осях.
Для решения уравнений (1.47, г) и (1.47, д') необходимо дополнитель-
но записать выражения, устанавливающие связь между потокосцепления-
44
/. 1. Математические модели и схемы замещения синхронной машины
ми \\>D и демпферной обмотки и токами во всех магнитносвязанных конту-
рах. Полученные ранее уравнения потокосцеплений (1.26) также видоизме-
нятся, так как по оси d синхронная машина с демпферной обмоткой имеет не
два, а три электромагнитно-связанных контура, а по оси q магнитное поле
создается двумя обмотками (см. рис. 1.12). Следуя ранее изложенному спосо-
бу получения уравнений (1.26), выражения для потокосцеплений всех обмо-
ток синхронной машины можно записать в виде
vf'd ~xd‘d ^xadlf +xDd‘D’ , • (1.47, e)
Vf-xad4 + xfif +xDfiD’ ' (1.47, ж)
, D ~ xDd4 + xDf‘f + XD‘D’ (1-47,3)
Wq^qiq+XQqiQ’ T (1-47, U)
^Q=xQqiq+xQiQ^ (1-47, к)
где xnP xQij - сопротивления взаимоиндукции демпферной обмотки и об-
моток статора по поперечной и продольной осям;
xDf- сопротивление взаимоиндукции демпферной обмотки и обмотки
возбуждения в продольной оси.
Эти уравнения следует дополнить уравнением движения ротора (1.45).
Записанные уравнения Парка- Горева (1.47) и (1.45) называют иногда «пол-
ными», так как они учитывают все основные составляющие электромаг-
нитного и электромеханического переходных процессов. Данная система
алгебраических и дифференциальных уравнений может быть названа мо-
делью первого класса точности.
Решение полных уравнений Парка - Горева позволяет определить наи-
более точно изменение токов, момента и скорости вращения ротора при
расчетах динамической устойчивости, асинхронного хода, автоматическо-
го ввода резерва, повторного включения элементов системы и т. д.
1.1.3. Упрощенные уравнения Парка - Горева
Анализ переходных электромеханических процессов по полным
уравнениям Парка - Горева является довольно сложным и требует про-
ведения большого количества расчетов. Это вызвано, во-первых, зави-
симостью токов (z,, z ) от изменений скорости ротора. Во-вторых, появ-
лению в переходных процессах апериодической составляющей в фаз-
ных токах машины. Так, например, при коммутациях в электроэнергети-
ческой системе в фазных токах статора машины возникают апериоди-
ческие составляющие, которые образуют магнитный поток, почти не-
подвижный относительно статора и затухающий со своей постоянной
45
Глава 1. Математические модели основных элементов электроэнергетических систем
времени (рис. 1.13, а). Поскольку ротор вместе с осями d, q вращается
относительно апериодической составляющей магнитного потока, то в
токах (ij, i), определяемых во вращающейся вместе с ротором системе
координат d, q появляются знакопеременные составляющие, соответству-
ющие апериодическим составляющим в фазных токах статора (рис. 1.13, б).
а
Рис. 1. 13. Токи статора синхронной машины при трехфазном КЗ:.
а - в неподвижной системе координат;
б - в осях <7. q, вращающихся вместе с ротором;
1 - полный ток; 2 - периодическая составляющая тока;
3 - апериодическая составляющая тока
46
1.1. Математические модели и схемы замещения синхронной машины
Таким образом, токи статора id и z в общем случае содержат состав-
ляющие, изменяющиеся с периодом \!fs = 0,02 с. Поэтому для правиль-
ного расчета тока при численном интегрировании полных уравнений
Парка - Горева приходится применять очень малый шаг интегрирова-
ния. В то же время апериодическая составляющая тока, как и составля-
ющая, зависящая от скольжения ротора, не играют решающей роли при
оценке устойчивости многомашинных систем. Дело в том, что длитель-
ность протекания апериодических токов существенно меньше длитель-
ности переходных электромеханических процессов, по характеру кото-
рых судят об устойчивости систем. Если отказаться от учета зависимос-
ти тока от скольжения и его апериодической составляющей, то это обычно
не оказывает заметного влияния на оценку устойчивости, но значитель-
но упрощает ее анализ.
Периодические составляющие токов id и z, имеющие частоту враще-
ния ротора, появляются при решении системы полных уравнений Парка-
d\\:q
Горева из-за наличия трансформаторных ЭДС, —-— и —-— в выражениях
at at
(1.47, а, б). Чтобы исключить из решения составляющие с частотой со, необ-
d4d dUq n п
ходимо в данных уравнениях принять —— = —— = и. В этом случае урав-
dt at
нения (1.47, а, б) принимают вид
. . ud =~rid -(! + ? Жд
' 7Г > (1.48)
Uq =-Г1 +(\ + s)^d.
Если не учитывать составляющие токов, зависящие от скольжения, то
в уравнениях (1.47, а, 6) нужно принять syd = sy - 0. Такие условия позво-
ляют записать уравнения (1.48) в виде
Ud=-rid -уд
Uq =-riq +Vd-<
(1.49)
Поскольку в расчеты устойчивости обычно не вносит значительных
погрешностей отказ от учета потерь активной мощности в статоре маши-
ны, то можно принять следующее допущение: г = 0. Таким образом, урав-
нения (1.49) принимают вид
Ud=~4q’
Uq = Vrf-
(1.50)
47
Глава 1. Математические модели основных элементов электроэнергетических систем
Система выражений (1.48), или (1.49), или (1.50), а также (1.47, в -
1.47, л) и (1.45) называются упрощенными уравнениями Парка - Горева
или моделью машины второго класса точности.
Отказ от учета отдельных составляющих в уравнениях (1.47, а, 6) приводит
к ряду погрешностей. Однако в большинстве практических случаев по-
грешности упрощенных уравнений Парка - Горева невелики, а расчеты
переходных процессов значительно упрощаются. Например, используя одну
из упрощенных форм уравнений Парка- Горева (1.50), а также формулу (1.29),
можно получить более простое выражение для определения вращающего-
ся момента в симметричном режиме
(1.51)
1.1.4. Уравнения Лебедева - Жданова
Дальнейшим упрощением расчетов переходных процессов является
исключение из рассмотрения уравнений демпферных контуров. Получаю-
щуюся при этом систему выражений в литературе обычно принято назы-
вать уравнениями Лебедева-Жданова или моделью машины третьего клас-
са точности. На основе выражений (1.50) и (1.46, в, г, д, е) уравнения Лебе-
дева - Жданова могут быть записаны в виде
L/rf = -v?; ' ’ (1-52, а)
Uq = yd; (1-52,5)
= (1-52, в)
\ (1.52, г)
; (1.52,0)
. (1.52, е)
Полученная математическая модель позволяет использовать для рас-
четов переходных процессов представление электрической машины с помо-
щью схемы замещения и векторной диаграммы.
Отказ от учета демпферной обмотки приводит к значительному иска-
жению характеристик электромагнитного момента машины в переходных
процессах. Чтобы несколько снизить эту погрешность, в уравнение дви-
жения ротора синхронной машины (1.44) вводят составляющую момента,
пропорциональную скольжению
(1.53)
dr at
где к - демпферный коэффициент.
48
______________1.1. Математические модели и схемы замещения синхронной машины
Располагая данными расчетов, выполненных по уравнениям Парка -
Горева, демпферный коэффициент кл можно подобрать так, чтобы с доста-
точной точностью рассчитать переходный процесс качаний ротора. Одна-
ко заранее задать правильное значение коэффициента кл весьма сложно,
поскольку он зависит не только от параметров рассматриваемой системы
(сопротивлений элементов, коэффициентов загрузки и др.), но и от пара-
метров режима (колебания угла 5 и др.).
1.1.4.1. Векторная диаграмма синхронной машины
Рассматривая совместно уравнения (1.52, а) и (1.52, д), можно записать
U=-xi. (1.54)
а q q х 7
Подставив (1.52, г) в (1.52, б) с учетом знаков токов, получим:
................ Э иГ xJr-x^ .. (i-55)
или
4 = (1-56)
где Ец = xaJf- синхронная ЭДС, прямо пропорциональная току возбужде-
ния.
Для построения диаграммы воспользуемся комплексной плоскостью.
Совместим оси q, d соответственно с осями +1, +j комплексной плоскости.
Обозначим i = Z; id = ld. Умножив (1.54) на j и сложив с (1.56), получим
уравнение
U= и +jU =Е -xl,+jx I. (1.57)
qJaqaaJqq v 7
По этому уравнению на рис. 1.14, а построена векторная диаграмма
на комплексной плоскости для генератора.
Полученными уравнениями (1.54)-(1.57) и векторной диаграммой, изоб-
раженной на рис. 1.14, а, удобно пользоваться для анализа медленно изменя-
ющихся установившихся режимов синхронных машин. В переходном режи-
ме при быстром изменении режимных параметров (например, при КЗ имеет
место резкое изменение тока статора) ЭДС Е и ток также изменяются. По-
этому возникает необходимость поиска таких величин, которые в начале или
на всем протяжении переходного процесса остаются практически постоян-
ными. Для этого из уравнения (1.52, е) найдем ток возбуждения
; _ Vf Xad ;
If --------Id’
xf xf
подставив в (1.55), получим
Uq=^f^--(xd-^)id, •
xf xf
49
Глава I. Математические модели основных элементов электроэнергетических систем
Рис. 1.14. Векторная диаграмма синхронной машины:
а - для установившегося режима работы; б - для переходного режима
.1,.:.. ‘.Ж':
или
Uq = Eq-xdid, (158)
где£(/ = \|/f(xad /ху)- составляющая переходной ЭДС, пропорциональная
результирующему потокосцеплению обмотки возбуждения;
xd ~ (xd ~ xad / xf)- продольное переходное реактивное сопротивление.
Поскольку потокосцепление обмотки возбуждения в первый момент
нарушения режима работы синхронной машины остается неизменной, то
неизменной будет и ЭДС £7. Это позволяет связать режим машины, пред-
шествующий его нарушению, с новым режимом, наступающим после воз-
мущения. На рис. 1.14, б показана векторная диаграмма для переходного
режима неявнополюсной синхронной машины.
Электродвижущую силу Е', приведенную на диаграмме, принято на-
зывать переходной ЭДС за переходным индуктивным сопротивлением. Ее
составляющими по продольной и поперечной осям являются соответствен-
но E'd иЕ'. Из совместного рассмотрения уравнений (1.56) и (1.58) следует
уравнение для синхронной ЭДС
Eq =Eq +{xd -xd)id. (1.59)
Полученное в результате математических преобразований переходное
сопротивление xj можно представить схемой замещения и дать ей физи-
ческое истолкование. Для этого в выражение для переходного сопротивле-
ния подставим уравнение (1.24) для х, и (1.25) для х? получим
50
1.1. Математические модели и схемы замещения синхронной машины
(1.60)
1 xadx fsd
xd = -----
xad xfsd
По этому уравнению на рис. 1.15 построена схема замещения для оп-
ределения продольного переходного индуктивного сопротивления.
Переходное индуктивное сопротивление по продольной оси можно
измерить в режимах машины, аналогичных для определения синхронного
индуктивного сопротивления по этой же оси. Отличие состоит лишь в том,
что токи в обмотку статора подаются мгновенно, и в этот же момент про-
изводится измерение величины напряжения на выводах статора машины.
Скачкообразное изменение тока в обмотке статора обусловливает мгно-
венное возникновение магнитного поля, стремящегося создать поток че-
рез полюса машины. Такой поток был бы сцеплен с обмоткой возбужде-
ния. Но, согласно теореме о постоянстве потокосцепления, в момент пода-
чи тока в статор потокосцепление обмотки возбуждения должно остаться
равным нулю. Поэтому в начальный момент может возникнуть только по-
ток рассеяния, не сцепленный с обмоткой возбуждения, а проходящий че-
рез обладающие большим магнитным сопротивлением пути рассеяния, пре-
имущественно в воздухе, как показано на рис. 1.16. Возникновению пото-
ка через полюса противодействует возникающий в обмотке возбуждения
ток (Az), стремящийся поддержать потокосцепление обмотки неизменным,
т. е. равным нулю. В этих условиях даже значительное изменение тока (Azrf)
приводит к малому изменению потокосцепления (Av^) по продольной оси,
определяемого только величиной изменения тока в статоре. Поэтому оче-
видно, что отношение Ац^ и Az^ в рассматриваемых условиях определяет
индуктивное сопротивление, называемое переходным:
' --
xd . .
Azrf
Обычно переходное индуктивное сопротивление по продольной оси
меньше синхронного: x'd< xd.
(1-61)
Рис. 1.15. Схема замещения для определения продольного переходного
' индуктивного сопротивления
51
Рис. 1.16. Магнитное состояние машины, определяющее переходное индуктивное
сопротивление по продольной оси:
а - состояние обмотки; б - пути магнитных потоков
1.1.4.2. Дифференциальное уравнение переходных процессов в обмотке
возбуждения машины
Электромагнитный переходной процесс в обмотке ротора синхронной
машины можно рассчитать, используя дифференциальное уравнение (1.52, в).
Однако в практических расчетах используют данное уравнение, записан-
ное в другой форме.
Разделим уравнение (1.52, в) на активное сопротивление обмотки воз-
буждения г получим
(1.62)
1 dyf
Де ~lf +----
rf dt
где ij-e = JJf Irj- установившееся вынужденное значение тока в обмотке
возбуждения.
Уравнение (1.62) запишем в виде
ХуХу/й^у
1 fexfd - 1 fxfd +---3~-
г j- Xf dt
Введем обозначения:
(1-63)
7^0 = Xf / zy- постоянная времени обмотки возбуждения при разомкну-
той обмотке статора;
zfexfd = Eqe - вынужденная ЭДС, прямо пропорциональная напряже-
нию возбуждения. х
Принимая во внимание, что/уХу/ = Eq , а у - Eq, уравнение (1.63)
можно записать в виде xf
dEa
Eqe=Eq+TM—3~.
4 dt
(1-64)
52
_______________1.1. Математические модели и схемы замещения синхронной машины
Полученное уравнение является основным дифференциальным урав-
нением, характеризующим режим обмотки возбуждения в любой момент
времени.
Постоянной времени ТЛ можно дать наглядное пояснение. Если в ре-
жиме холостого хода машины мгновенно изменить напряжение на обмот-
ке возбуждения, то напряжение на зажимах машины будет изменяться по
экспоненциальному закону (рис. 1.17). Постоянная времени, соответствую-
щая этой экспоненте, и определяет величину Тм.
На основании полученных выражений (1.53), (1.54), (1.56), (1.59) и
(1.64) уравнения Лебедева - Жданова можно записать в так называемой
«форме ЭДС», наиболее часто используемой в расчетах:
Ea-U„
Л id=^---------q~- - v (1.65, а)
’ (1-65,6)
’ X
Я
,, ... (1.65, в)
• . dt Тм
, Eq - Eq + (xd -xd)id; (1.65,г)
625 1 dd
— = — (Мм-Мэ-кД—)-, (1.65, d)
at lj dt
М3=ич‘ч+иЛг (1.65, e)
Рис. 1.17. Процесс изменения напряжения на зажимах статора при резком изменении
напряжения возбуждения в режиме холостого хода машины
53
Глава 1. Математические модели основных элементов электроэнергетических систем
1.1.5. Анализ переходных процессов в машинах
с демпферными обмотками к
Расчет электромеханических переходных процессов в синхронных
машинах с демпферными обмотками может быть выполнен с использова-
нием уравнений (1.46, ж) и (1.47). Однако в промышленных программах
на ЭВМ наиболее часто используется другая форма уравнений, в которой
необходимые исходные параметры совпадают с теми, которые приведены
в справочниках и каталогах.
Подставим значения потокосцеплений из уравнений (1.47, е, ж) в уравне-
ния (1.50) и, решив их относительно токов статора, получим
Ч ~---txfdlf + xDd ~ Uq\,
xd
г9 =—(xQg'Q +идУ
xq
(1.66)
Из уравнений (1.47, ж, з, л) выразим токи в обмотках ротора через пото-
косцепления и токи статора и, подставляя эти выражения в уравнения (1.66),
после преобразований получаем
id=±(Eq~Uqy, (1-67, а)
xd
iq--^(Ud~Ed\ (1.67,6)
где
" xOd •
(1.68, а)
ХО
£ f^XDXfd ~xDfxDd^ + 4lp(xfxDd ~xDfxfd\ (1 68
ХуХр-Хру J
Xq=Xq--^-; % (1.68, в)
2 2 о f
xfxDd +xDxfd ~2xJDxDdxDf
xd — xd 2 • - 1 1 ! 1
XyXp - Xpy
Введенные в рассмотрение новые ЭДС называются сверхпереход-
ными по поперечной (£") и продольной (£") оси. Поскольку потокос-
цепления обмоток ротора у , \у!У первый момент нарушения режи-
ма остаются неизменными, то неизменными будут и сверхпереходные
54
______________1.1. Математические модели и схемы замегиения синхронной машины
ЭДС. Это позволяет, например, в новом режиме, наступившем после
возмущения, определить токи статора, зная значение сверхпереходных
ЭДС в исходном режиме и закон изменении напряжения на выводах
синхронной машины.
Параметры х" и х” представляют собой сверхпереходные индуктивные
сопротивления машины, определяющие ток статора в момент нарушения
режима работы синхронной машины. Полученные в результате математи-
ческих преобразований сверхпереходные сопротивления х" и х’, можно
представить схемами замещения, дать им физическое истолкование
и измерить.
Вначале примем допущение о равенстве взаимных сопротивлений
между обмотками статора, демпферной и возбуждения, т. е. хЛ, = х = xI)d =
= xaJ. Это позволяет выражение (1.68, г) для сверхпереходного сопротив-
ления по продольной оси значительно упростить:
| _ xlicl(xf +XD ~2xad)
' 1 xd ~ xd
(1-69)
2
xfxD~xad
Величины х1Г х() по аналогии с х, и х можно представить как сумму
индуктивных сопротивлений взаимоиндукции между обмотками (xoJ) и
рассеяния демпферной обмотки по осям
x =x ,+ x„; x, = x + x„; (1-70)
1) ail .d)‘ Q aq sQ7 4 7
где xifl, xsQ - индуктивные сопротивления рассеяния демпферной обмотки
соответственно по продольной и поперечной осям.
Подставляя эти выражения, а также (1.24) и (1.25) в (1.68, в) и (1.69),
получаем
; '7'^’ . ' \ . .V,. 1 ; ‘ : (1.71,а)
-Y ---1----5 „
xaq xsQ
7 xd=xs+—-----------------j-----—• (1.71.6)
.,, e -----1-------1---
% ad -^Jsd -^sD
Эти формулы позволяют построить для сверхпереходных индуктив-
ных сопротивлений схемы замещения, показанные на рис. 1.18.
Сверхпереходное индуктивное сопротивление по продольной оси мож-
но измерить в режимах машины аналогичных для определения переходного
сопротивления по этой же оси. Отличие состоит в том, что при определе-
нии x’dротор машины имеет только обмотку возбуждения, при определе-
нии х" машина имеет обмотку ротора и демпферную обмотку в обеих
осях. Сверхпереходное индуктивное сопротивление всегда меньше
55
Глава J. Математические модели основных элементов электроэнергетических систем
Рис. 1.18. Упрощенные схемы замещения для определения
сверхпереходных индуктивных сопротивлений синхронной машины: 1
а - по поперечной оси; б - по продольной оси
переходного значения сопротивления. Это объясняется тем, что создавае-
мый токами статора поток проходит по путям рассеяния, имеющим боль-
шее магнитное сопротивление, чем в случае, когда на роторе была только
обмотка возбуждения (см. рис. 1.19).
Сверхпереходное индуктивное сопротивление по поперечной оси оп-
ределяется аналогичным образом как x"d, только ток в статоре подается в
момент времени, когда амплитуда магнитного поля совпадает с попе-
речной, а не продольной осью ротора (см. рис. 1.19, б).
Следует заметить, что затухание токов в демпферных обмотка всегда
происходит значительно быстрее, чем в обмотке возбуждения, поэтому ин-
дуктивное сопротивление машины практически за несколько периодов тока
увеличивается от сверхпереходного до переходного значения. Термин сверх-
переходный и обозначает, что такой режим и величины, его определяющие
(£”, E"d, Xj х£), существуют очень короткий промежуток времени.
Выполняя преобразования в уравнениях для всех обмоток ротора
(1.64, в - д), аналогичные как в разделе 1.1.4.2 для обмотки возбуждения, а
также заменяя в уравнении движения (1.46, ж) потокосцепление на ЭДС с
учетом (1.47, е-л), получаем следующие уравнения:
dE j
-(*</ -*Л1; (1-72,«)
at Тм
56
1.1. Математические модели и схемы замещения синхронной машины
Рис. 1.19. Пути магнитных потоков, определяющие сверхпереходные индуктивные ’’
сопротивления синхронной машины:
_ а - по продольной оси; б - по поперечной оси
’ ' ' dE 1 ..............
' -^ = -^lEq-Eq-(xd-xM; (1.72,6)
dt TdQ ..
= (1.72,в)
dt Тм
• ' <1.72.0
" xD~xad^f ХО
где TdQ=----------То= — - постоянные времени. ;ш*
Гй 4 rQ
Система четырех дифференциальных уравнений (1.72) и двух алгеб-
раических уравнений (1.66) позволяет выполнить расчет переходных элек-
тромеханических процессов в синхронных машинах с демпферными об-
мотками. Данная система уравнений содержит девять неизвестных i Е^
Е, E'j, 5, Uq и Е . Составляющие напряжения на обмотках статора опре-
деляются из условий работы машины в электроэнергетической системе, а ве-
личина Е определяется системой возбуждения и АРВ генератора.
1.1.6. Упрощенная модель синхронной машины
При выполнении качественного анализа и простейших расчетов ус-
тойчивости синхронная машина может быть представлена схемой заме-
щения (рис. 1.20).
57
Глава 1. Математические модели основных элементов электроэнергетических систем
V
Рис. 1.20. Упрощенная схема замещения синхронной машины
Поясним более подробно, почему именно эти, а не другие параметры
приняты при представлении синхронной машины при больших возмуще-
ниях в электрических системах. Для этого рассмотрим магнитные потоки
в синхронной машине при установившемся режиме и в момент внезапно-
го его изменения.
При отсутствии демпферной обмотки на роторе магнитные потоки в
поперечной оси машины связаны только с обмоткой статора и зависят только
от поперечной составляющей тока статора.
Если не учитывать магнитные потоки рассеяния, то в продольной оси
нагруженной машины существуют два магнитных потока, пронизываю-
щих обмотку статора и ротора: полезный поток Фг создаваемый током
возбуждения, величина которого пропорциональна ЭДС Е синхронной ма-
шины; продольный магнитный поток реакции статора Ф|Г вызываемый про-
дольной составляющей тока статора 7. Как известно, кроме магнитных пото-
ков Фа и Ф существуют еще магнитные потоки рассеяния статора и ротора,
сцепленные только со своими обмотками. Поскольку они не оказывают влия-
ния на качественный анализ процессов в синхронной машине, то в дальней-
шем мы их рассматривать не будем. Таким образом, результирующий маг-
нитный поток Ф сцепленный с обмоткой возбуждения, равен
Ф = Ф _ Ф I !
Jd d ad
Его величина, как известно, пропорциональна продольной состав-
ляющей переходной ЭДС Е1 . На рис. 1.21 показана векторная диаграм-
ма магнитных потоков и соответствующих им ЭДС.
При возникновении большого возмущения в системе, например, ко-
роткого замыкания, магнитные потоки синхронной машины изменяются.
При этом в первый момент КЗ их изменение соответствует определенной
закономерности, вытекающей из известного принципа постоянства пото-
косцеплений, утверждавшего, что результирующий магнитный поток, про-
низывающий любую замкнутую обмотку, не может изменяться скачкооб-
разно, так как в противном случае в обмотке наводилась бы бесконечно
большая ЭДС. Поэтому суммарный магнитный поток, пронизывающий
обмотку, в начале любого нарушения работы цепи остается неизменным и
лишь затем начинает плавно изменяться. Данный принцип постоянства
потокосцеплений должен в равной мере относиться как к обмотке возбуж-
дения, так и к обмотке статора, что позволяет получить полную картину
изменения тока возбуждения и тока статора машины в момент короткого
замыкания. Применительно к обмотке статора машины мы должны тем
58
!. I. Математические модели и схемы замещения синхронной машины
самым рассматривать две составляющие тока, возникающие при КЗ: апе-
риодическую составляющую и весьма медленно затухающую периодичес-
кую составляющую. Неучет апериодической составляющей тока КЗ в рас-
четах динамической устойчивости допускает возможность скачкообразного
изменения тока, а следовательно, и соответствующего ему магнитного по-
тока. Однако это допущение является вполне оправданным с точки зрения
оценки динамической устойчивости, хотя не позволяет должным образом
сформулированный принцип применить к обмотке статора. Вместе с тем
принцип постоянства потокосцепления со всей строгостью должен быть
применен к обмотке возбуждения.
Рассмотрим приложение этого принципа к режиму при возникнове-
нии КЗ на выводах синхронной машины. Если пренебречь апериодичес-
кой составляющей тока статора, то в первый момент нарушения режима
величина тока мгновенно увеличивается и, следовательно, возрастает на
соответствующую величину и поток реакции статора Фи<7(0) • В силу прин-
ципа постоянства потокосцепления результирующий поток обмотки воз-
буждения Ф в первый момент КЗ должен остаться неизменным, при увели-
чении потока Фо7,0| одновременно возрастает и поток Ф на величину ЛФ;
(рис. 2.4). Увеличение основного потока до Фад обусловлено появлением
свободного тока в обмотке возбуждения, наводимого в момент КЗ. Это
приводит к скачкообразному изменению тока в роторе и соответствующе-
му изменению ЭДС Е так как Е = К
Таким образом, в первый момент нарушения режима почти все ре-
жимные параметры претерпевают измене'ния, остается неизменным лишь
результирующий магнитный лоток Ф/г/. Следовательно, неизменной в этот
момент будет и соответствующая ему ЭДС Е' (см. рис. 1.21).
Постоянство ЭДС Е является чрезвычайно важным свойством синх-
ронной машины, так как, исходя из него, можно определить другие пара-
метры режима после возмущения, например ток, мощность и т. д.
Итак, при нарушении режима ток возбуждения мгновенно увеличива-
ется и его значение не соответствует напряжению возбудителя, приложен-
ного к обмотке возбуждения синхронной машины. Поскольку его величи-
на не поддерживается напряжением возбудителя, в дальнейшем он начнет
затухать и при отсутствии АРВ будет стремиться к своему первоначально-
му значению i с постоянной времени ГЛ = 5-10 с (см. рис. 1.21). В связи с
затуханием тока возбуждения начнут уменьшаться пропорциональные ему
основной магнитный поток и ЭДС Е. Вместе с уменьшением /убудет умень-
шаться также и результирующий магнитный поток Ф/7, так как магнитный
поток реакции статора Фа/ хотя и уменьшается, но не так значительно, как Ф;.
Уменьшение Ф^ в течение КЗ объясняется затуханием тока статора. В свя-
зи с уменьшением Ф уменьшается и пропорциональная ему ЭДС Е'
(см. рис. 1.21, 1.22).
59
Рис. 1.21. Векторная диаграмма магнитных потоков и соответствующих нм ЭДС синхронной машины
Глава 1. Математические модели основных элементов электроэнергетических систем
1.1. Математические модели и схемы замещения синхронной машины
‘ Рис. 1.22. Характерное изменение токов и ЭДС синхронной машины
при коротком замыкании:
1 - огибающая тока статора; 2 - ток возбуждения; 3,4, 5 - ЭДС Е',
Анализ приведенных векторных диаграмм и зависимостей, в том чис-
ле и Е' показывает, что представление синхронной машины в виде
постоянной ЭДС Е' за переходным индуктивным сопротивлением в тече-
ние длительного переходного процесса, вообще говоря, было бы непра-
вильным. Однако учитывая, что современные средства зашиты и выклю-
чатели позволяют достаточно быстро (0,1-0,2 с) отключить короткое за-
мыкание, такое замещение синхронной машины можно считать допусти-
мым. Это связано с тем, что за такое короткое время свободные токи в
обмотке ротора не успевают уменьшиться на значительную величину, а
следовательно, ЭДС Е' практически останется неизменной.
Такое упрощенное представление синхронной машины в расчетах
динамической устойчивости тем более правомерно при оснащении син-
хронных машин автоматическими регуляторами возбуждения, которые
в переходных режимах увеличивают напряжение возбуждения. Тем
самым предотвращается снижение тока в обмотке ротора, что способ-
ствует стабилизации Е' на более длительном интервале времени. Не-
которые типы современных регуляторов могут даже обеспечить увели-
чение £'. Поскольку в настоящее время все генераторы энергосистем и
значительная часть синхронных двигателей имеют автоматические ре-
гуляторы возбуждения, то приближенно можно полагать Т7 = const.
Таким образом, с некоторыми допущениями синхронная машина в пере-
ходном режиме может быть заменена постоянной ЭДС
61
Глава 1. Математические модели основных элементов электроэнергетических систем
Преимуществом такой упрощенной модели синхронной машины яв-
ляется большая легкость при выполнении расчетов и хорошая наглядность
при инженерной оценке происходящего переходного процесса. Однако при
этом необходимо иметь в виду, что как физика переходного процесса, так и
его количественная оценка будут иметь определенные искажения, связан-
ные с упрощением модели синхронной машины.
I
1.2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ АСИНХРОННОГО |
ДВИГАТЕЛЯ j
I
1.2.1. Математическая модель асинхронного двигателя
по Парку - Гореву
Наиболее точным математическим описанием асинхронного двигате-
ля являются уравнения Парка - Горева, записанные аналогично синхрон-
ной машине с учетом следующих отличий: отсутствие обмотки возбужде-
ния, магнитной и электрической симметрии ротора. Это позволяет несколь-
ко упростить уравнения и выбрать наиболее удобную систему координат.
Поскольку ротор и статор асинхронного двигателя симметричны, то его
дифференциальные уравнения переходных процессов, записанные в сис-
теме координат как жестко связанных с ротором, так и вращающихся с
постоянной скоростью, не будут содержать переменных коэффициен-
тов. Поэтому уравнения для исследования переходных процессов асин-
хронного двигателя, записанные в осях d, q, жестко связанных с рото-
ром, не имеют особых преимуществ по сравнению с уравнениями, запи-
санными в других системах координат, как это было для явнополюсной
синхронной машины. Поскольку уравнения переходных процессов в
элементах сети сложной электроэнергетической системы обычно за-
писывают в системе координат, вращающейся с постоянной скоростью
со соответствующей частоте установившегося режима, то и уравне-
ния для асинхронного двигателя целесообразно записать в такой же
системе координат. Это позволяет без дополнительных уравнений пре-
образования координат объединить уравнения сети и асинхронного
двигателя в общую систему для исследования переходных процессов.
Таким образом, система уравнений Парка - Горева (1.34) и (1.47) при-
менительно к асинхронному двигателю может быть записана в виде
. . . (1.73,«)
dt
d^a
Uq=~r\lq----Т~ + . (1-73,6)
• 4 4 dt
62
1.2. Математические модели асинхронного двигателя
. d\[l pd , х °-r2zprf+ +(®0 pq' (1.73, в)
wqsn Лл/ dy nq ^-r2'pq + , +(®0 ^Wpd’ Lil г (1.73, г)
ЦЛЛ j . : ds
Щ'-Щ ! • = M U~M3, VP. . J dt (1.73, d)
где у у - потокосцепление обмоток по осям d и q статора и
ротора соответственно;
0 0 ipd, i - токи в обмотках статора и ротора;
гх, г2 - активные сопротивления статора и ротора. ' -
Появление в уравнениях цепей ротора (1.73, в, г) составляющих ЭДС
вращения (а>0 - <0)14/ и (<о0 - со)^ обусловлено разностью скоростей враще-
ния ротора со и магнитного поля статора соо.
Потокосцепления обмоток синхронного двигателя на основе (1.47, е - л)
выражается следующим образом:
w =x i , + x i Trf cd ц pdy (1.74, a)
w = x i + x i ; (1-74,0
w = x i , + x i ' pd p pd [id7 (1.74, в)
w = x i + x /, p pq ц q (1.74, г)
где хс = xd - х^ - индуктивное сопротивление обмоток статора;
х = хш = ~ индуктивное сопротивление обмоток ротора;
- сопротивление взаимоиндукции (намагничивания) между
обмотками статора и ротора.
1.2.2. Упрощенные уравнения асинхронного двигателя
При расчетах электромеханических переходных процессов в асинхрон-
ных двигателях часто пренебрегают электромагнитными переходными про-
цессами в его обмотках, т. е. полагают в уравнениях производными, равными
с/
нулю (~ - 0 ). В этом случае уравнения (1.73, а - г) принимают вид
- -t\id -co0\|/9; (1.75, 0
= -rxiq +a>0\|/rf; (1.75, 0
— ^2^pd "* (®0 ~®)4Zpq> (1.75,0
63
Глава 1. Математические модели основных элементов электроэнергетических систем
°-r2?w+(юо _{0)Ч/pd- (1.75, г)
. По аналогии с уравнениями для синхронной машины (см. разделы 1.1.2
и 1.1.5) запишем полученные уравнения в более удобной форме, переходя
от потокосцеплений к ЭДС. Для этого введем обозначения:
х}= хс~х - индуктивное сопротивление рассеяния обмотки статора;
х2 = хр - х - индуктивное сопротивление рассеяния обмотки ротора;
Ed = + x*q~ ЭДС по оси d;
I1 Eq = (ВоЧЛ/ “х-ЭДС по оси q, '• у j
х2х -
гдех=х!+------.
х2 +хц
। Используя выражения для потокосцеплений (1.74), уравнения для це-
пей ротора можно выразить через потокосцепления и токи ротора. Затем,
। заменяя в полученных уравнениях, как в уравнениях для статора, потокос-
цепления на ЭДС, после выполнения алгебраических преобразований по-
лучаем систему уравнений, описывающих переходные и установившиеся
режимы асинхронного двигателя:
. Ed-xiq-Vd (1.76,а)
Eq+xid~rliq=Uq- ’ (1.76,6)
(оэ0 - (o)TEd - Eq + xid = О’, 0-76’«)
(а>0 - (E)TEq +Ed+ xiq - 0; (1-76, г)
Tj^Mw-Uqiq-Udid, (1.76,6)
I *2 + Ali г2
। Полученные уравнения можно преобразовать в уравнения электри-
ческой цепи. Для этого уравнения (1.76, а) умножаем наj, просуммируем
с (1.76, 6), получим
Uq + jud -{Eq+ jE'd~)-(iq+ jid)(i\+ jx),
' j или
Ц.^Е jx}, O-77)
где
I U = Uq+jUd; E=Eq + jEd; L = iq+jid.
64
____________________________1.2. Математические модели асинхронного двигателя
Выполняя аналогичные преобразования уравнений (1.76, в) и (1.76, г),
находим
О = Е [1 + 7(го0 ~ “УП + Jlx-
(1-78)
Из полученного уравнения находим Е', подставляем его в (1.77),
получаем .<•, ..-.ч
U = -I
Jxp(~ + Jx2)
(И + jxx) + --s--------
~ + j\x2 +хц)
S
(1-79)
Из полученного уравнения следует, что в переходных и установив-
шихся режимах асинхронный двигатель может быть представлен схе-
мой замещения, показанной на рис. 1.23, а. Это известная и широко
используемая в расчетах Т-образная схема замещения. При выполне-
нии приближенных расчетов сопротивление х которое много больше
+ Jx}, выносят на зажимы обмотки статора. Активным сопротивлени-
ем гх в расчетах устойчивости обычно пренебрегают, сопротивления
рассеяния объединяют в сопротивление xs = х + х2. Таким образом по-
лучаем Г-образную схему замещения, приведенную на рис. 1.23, б.
а
Рис. 1.23. Схемы замещения асинхронного двигателя:
а - полная Т-образная; б - упрощенная Г-образная
5. Зак. 2182
65
Глава 1. Математические модели основных элементов электроэнергетических систем
При исследовании устойчивости двигателей, как правило, не требует-
ся находить изменение его токов и ЭДС в переходном режиме, поэтому
переходные процессы в асинхронном двигателе могут описываться только
дифференциальным уравнением движения ротора (1.34).
Выражение для электромагнитного момента, определяемого в зависи-
мости от напряжения и скольжения, легко получить из схемы замещения
(см. рис. 1.23, б)
=-----u\s ....._ (1.80)
®0 “о 5 юо(г2\+xss )
Следует отметить, что полученные выше уравнения определяют пара-
метры при условии, что активные и реактивные сопротивления асинхрон-
ного двигателя не зависят от скольжения. Однако известно, что сопротив-
ления роторах, и г, существенно зависят от режима работы двигателя. Так,
при увеличении скольжения, а следовательно, и частоты тока в роторе, уси-
ливается эффект вытеснения тока в обмотках ротора. Поэтому активное
сопротивление ротора при увеличении скольжения s возрастает. Индук-
тивное сопротивление ротора х„ наоборот, уменьшается, так как магнит-
ный поток рассеяния ротора вытесняется в воздушный зазор двигателя,
где магнитное сопротивление выше, чем у металлических проводников.
На рис. 1.24 приведен пример зависимостей г2 и xs Поэтому допуще-
ние о постоянстве сопротивлений х = const и г, = const применимо только
при исследовании переходных процессов с небольшими отклонениями
скольжения от рабочего значения. При расчете режимов, таких, как пуск,
Рис. 1.24. Зависимости сопротивлений двигателя:
1 -x=J[s);2-r2=J(s)
66
1.3. Математические модели и схемы замещения электрической сети
Рис. 1.25. Простейшая аппроксимация зависимостей сопротивлений
асинхронного двигателя от скольжения
самозапуск, в которых скольжение изменяется значительно, следует учиты-
вать зависимость активного и реактивного сопротивления от скольжения.
Зависимости сопротивлений асинхронного двигателя от скольжения
могут быть учтены кусочно-линейными аппроксимациями (рис. 1.25) или
представлены аналитическими зависимостями, например, для активного
сопротивления в виде t
r2 = r20 + (r21 -r2o)V^, (1.81)
где г,0, г — сопротивления обмотки ротора соответственно в синхрон-
ном (5 = 0) и начальном пусковом (s=l) режимах.
‘1
1.3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ И СХЕМЫ ЗАМЕЩЕНИЯ г
ЭЛЕКТРИЧЕСКОЙ СЕТИ 1
1.3.1. Математические модели трансформаторов
При выполнении расчетов устойчивости электроэнергетических систем
силовые трансформаторы могут быть описаны уравнениями четырехполюс-
ника (рис. 1.26, а), узловыми уравнениями электрической цепи или уравне-
ниями напряжений его обмоток.
Наиболее часто при оценке устойчивости трансформаторы представ-
ляются Г-образными схемами замещения (рис. 1.26, б), где ветвь намагни-
чивания относится к стороне высокого напряжения. Расчет их параметров
выполняется на основе известных зависимостей [12, 13]. Возможность
67
Глава 1. Математические модели основных элементе электроэнергетических систем
Рис. 1.26. Представление трансформатора
в расчетах электромеханических переходных процессов:
а - четырехполюсник; б - Г-образная схема замещения; в, г- упрощенные схемы
представления трансформаторов их схемами замещения связана с тем, что
при выполнении расчетов устойчивости пренебрежение электромагнитны-
ми переходными процессами практически не вносит существенных по-
грешностей в результаты оценки устойчивости. При необходимости учета
этих процессов они могут быть описаны уравнениями, приведенными в [14].
При выполнении оценочных расчетов устойчивости могут не учитываться
проводимости и активные сопротивления (рис. 1.26, в, г).
1.3.2. Математические модели линий электропередачи
В расчетах устойчивости электрических систем линию электро-
передачи представляют в виде четырехполюсника (см. рис. 1.27, а) или
схемами замещения (рис. 1.27, б, в, г).
Для высоковольтных линий электропередачи длиной менее 300 км
принимается, как правило, П-образная схема замещения (см. рис. 1.27, б).
Параметры схемы замещения легко определяются при использовании
учебных пособий или справочников. Длинные линии электропередачи пред-
68
1.4. Математические модели нагрузки
Рис. 1.27. Схемы замещения линий электропередачи:
а - четырехполюсник; б- П-образная схема; в, г - упрощенные схемы
ставляются в виде четырехполюсника (см. рис. 1.27, а). Определение па-
раметров такого четырехполюсника приводится, например, в [15]. Иногда
при выполнении расчетов устойчивости с линиями длиной более 300 км
ее разбивают на несколько участков с представлением их соответствую-
щими схемами замещения. В расчетах устойчивости для линий электропе-
редачи 110 кВ и ниже можно не учитывать активную и емкостную прово-
димости (см. рис. 1.27, в), а при оценочных расчетах линию можно пред-
ставить только индуктивным сопротивлением (см. рис. 1.27, г).
1.4. МАТЕМАТИЧЕСКИЕ МОДЕЛИ НАГРУЗКИ
Нагрузка - это потребители электрической энергии, преобразующие
ее в другие виды (механическую, световую, тепловую и т. д.). Представле-
ние нагрузки в расчетах электромеханических переходных процессов в
энергосистемах выполняется по-разному. Правильность математического
69
Глава 1. Математические модели основных элементов электроэнергетических систем
описания нагрузки может оказать существенное влияние на результаты
расчетов устойчивости. При решении вопроса о том, насколько подробно
должна учитываться нагрузка при выполнении расчетов, нужно, с одной
стороны, учитывать, как обеспечить достаточную точность конечного ре-
зультата, а с другой стороны - стремиться к сокращению затрат машинно-
го времени и объема исходной информации.
Существует несколько способов представления нагрузки. Наиболее
точно нагрузка в расчетах устойчивости может быть представлена асинх-
ронными и синхронными двигателями, а также статическими потребите-
лями. Математические модели асинхронного и синхронного двигателей рас-
смотрены выше. От того, какие использованы уравнения для синхронных и
асинхронных двигателей, также существенно зависит точность расчета.
1.4.1. Линейная модель нагрузки
Простейшая наиболее часто применяемая модель статической нагрузки
основана на замещении последней мощностью или линейной проводимос-
тью, т. е. постоянными активным и реактивным сопротивлениями (рис. 1.28).
Рис. 1.28. Линейная статическая модель нагрузки:
, а- неизменной мощностью; б - последовательное соединение сопротивлений;
в - параллельное соединение сопротивлений
Величины параллельно соединенных активного и реактивного сопро-
тивлений вычисляются по мощности и напряжению исходного режима:
RH=U2P„-, X"=U2Q-\ (1.82)
Для случая последовательного соединения сопротивлений
9 —1
ZH = Ян+уХн = 1/ (coscpH +jsin<pH), (1.83)
где coscpH - коэффициент мощности нагрузки.
70
1.4. Математические модели нагрузки
Если напряжение в исходном режиме неизвестно, то в выражениях
(1.82), (1.83) подставляется номинальное или среднее напряжение.
Замена нагрузок постоянными сопротивлениями Rt и Хн позволяет
существенно упростить расчеты, но связана с наибольшими погреш-
ностями.
1.4.2. Статические характеристики нагрузки
Мощность статической нагрузки в общем случае зависит от напряже-
ния Uи частоты f в электроэнергетической системе. Поэтому нагрузка может
быть представлена статическими характеристиками нагрузки Р = ф((/,/) и
е„=Ф(^д
Часто, однако, применяются характеристики Р = <p(t7) и Qn~ (p(t7)
при f= const, Рн = ф(/) и 0н= <р(/) при U= const - это так называемые стати-
ческие характеристики нагрузки по напряжению и по частоте. В промыш-
ленных программах расчета на ЭВМ электромеханических переходных про-
цессов для описания статических потребителей используются характерис-
тики вида
2
“ Рс-у н jjy* + ^2^* + ^з/* )’
0c-i = 0С1Н (b0+b\U* + b2U* + b2f*),
(1-84)
где а0, ау ау ау by b2, bf,b0- коэффициенты статических характеристик по
- активной и реактивной мощности;
Р тн, 2С, „ — активная и реактивная мощность статических электроуста-
? новок в исходном установившемся режиме;
ь U» = UHJн, f* = f / fn - значения напряжения и частоты на шинах по-
требителей, отнесенные к их номинальным параметрам.
Статические характеристики нагрузки могут быть получены путем:
♦ выполнения экспериментальных исследований с изменением напря-
жения, частоты;
♦ расчета с детальным учетом состава нагрузки;
♦ использования статистических данных.
Статические характеристики нагрузки приведены в работах [16, 17].
Следует отметить, что при расчетах устойчивости иногда и вся нагрузка
может быть представлена статической нагрузкой. Это возможно при усло-
вии сохранения устойчивости самой нагрузки и при относительно неболь-
ших изменениях на ее шинах напряжения и частоты.
Важным показателем нагрузки для работы энергетической системы явля-
ется так называемый регулирующий эффект. Под регулирующим эффектом
нагрузки понимают явления, заключающиеся в изменении активной и реактив-
ной мощностей нагрузки при изменении напряжения или частоты на ее шинах.
Численно регулирующий эффект определяют как изменения активной или
71
1лава 1. Математические модели основных элементов электроэнергетических систем
реактивной мощности нагрузки на единицу изменения напряжения или
частоты:
где Кр1], К - регулирующий эффект активной мощности нагрузки по на-
пряжению и частоте, соответственно;
KQU, К ~ регулирующий эффект реактивной мощности нагрузки по
напряжению и частоте, соответственно;
Д{7, А/- небольшие изменения напряжения и частоты;
ДР, AQ - изменения активной и реактивной мощности, вызванные A U
или А/
Регулирующие эффекты нагрузки достаточно правильно характеризу-
ют изменения нагрузки при малых отклонениях напряжения и частоты.
При больших изменениях U и /из-за нелинейности статических характе-
ристик регулирующие эффекты нельзя использовать для оценки измене-
ния мощностей нагрузки.
Регулирующий эффект комплексной нагрузки при изменении напря-
жения вблизи нормальных значений, выраженный в относительных еди-
ницах, обычно составляет 1,5^4 для реактивной мощности и 0,3-1 для ак-
тивной мощности.
Регулирующий эффект комплексной нагрузки при изменении частоты
в области нормальных значений составляет 1-3 для активной мощности
и 1-6 для реактивной мощности.
Более точным является учет нагрузки с помощью динамических
характеристик нагрузки по напряжению и частоте [1, 17]. Например,
Рн = <p,(t4 dU/dty, QH = <p2(t/, dU/dt).
Пример 1.1. Для электрической системы (рис. 1.29, а) требуется най-
ти параметры схемы замещения (рис. 1.29, б).
Параметры элементов системы:
Генератор Г: Pw = 150 МВт, cos<pHr = 0,85, Um — 18,0 кВ, х(/ = 148,7 %,
х'а = 18,0 %, х, = 1 4-"5 %.
Трансформатор Т: Sm = 200 MB-А, Um = 242 кВ, = 242/18, Uy = 11 %.
Линии Л1, Л2: Z = 120 км, х0 = 0,43 Ом/км.
Автотрансформатор АТ: 5нДТ = 240 МВ-А, С/нДТ = 347 кВ, =
= 347/242, Uy в с = 7,6 %.
Нагрузка: Рк = 140 МВт, QH - 70 Мвар.
Решение: Расчет параметров элементов системы выполним в относи-
тельных единицах, используя точное приведение. Примем в качестве
72
1.4. Математические модели нагрузки
Рис. 1.29. Схема электрической системы:
а - принципиальная; б - расчетная
базисных величин номинальное напряжение ОЭС U& = 330 кВ и актив-
ную номинальную мощность нагрузки Sg = 140 МВ-А.
С учетом действительных коэффициентов трансформации получа-
ем следующие значения реактивных сопротивлений генератора:
_ [72нг 2 2 _
"’ioo-s,,-^2 т АТ’
148,7-182-0,85-140 р42^ Г347^2_ 1?
100-150-3302 I 18 J <242j
, _ xd'Uw'$6 ,2 ,2 _ ......
Л М АТ ‘ ' 1 • " ' -4’
' : |8182'0,85'140 ('242? !4";
=------------—------- ------ =0,16; . .
100-150-3302 <18 J <242>
Х2 -и НГ s6 2 ,2 _ ’
' 2Г“ 100-Slfr-C7? Т АТ’ J
_ 14,9-182 -0,85-140 <242V <347^ ..ч s.
100-150-3302 I 18 J l242j
Индуктивные сопротивления трансформатора и автотрансформатора:
= 2 = 11'2422-;40 .Г347у 0>09;
100-SIIT-(/62 100-200-3302 1242J
UKB_C-U2^-S6 7,6-3472-140 nn.
хЛТ =----------5— =---------------- = 0,0э.
100-SHAT -Щ 100-240-3302
6. Зак. 2182
73
Глава 1, Математические модели основных элементов электроэнергетических систем
Индуктивное сопротивления одной линии:
/ \2
хЛ1=хЛ2=х0-/-^ЧА2т =0,43-120-^-- '=(0,14, О
t/б 33 О2 <242) г . у
двух линий:
хл = хл1 /2 = 0,07.
Сопротивление передающей сети системы в нормальном режиме:
хс - хт + хл + хАТ = 0,09 + 0,07 + 0,05 = 0,21.
Мощность нагрузки: , . >
Рн = PH/S6 =140/140 = 1;2Н =QH/S6 =70/140 = 0,5.
гл Контрольные вопросы
1. В каком виде можно записать мгновенное значение напряжения на
выводах обмоток трехфазной синхронной машины?
2. Чем вызван переход от трехфазной модели синхронной машины к
двухфазной?
3. Какой физический смысл имеет величина механической постоян-
ной инерции?
4. Из каких уравнений состоит математическая модель синхронной
машины по Парку - Гореву?
5. Что понимается под синхронным сопротивлением по продольной
оси синхронной машины?
6. В каком виде можно записать уравнение движения ротора?
7. Что представляет собой модель синхронной машины первого клас-
са точности?
8. Какие допущения приняты в упрощенных уравнениях Парка -
Горева?
9. Какие уравнения принято называть уравнениями Лебедева - Жданова?
10. Как выполняется анализ переходных процессов в машинах с демп-
ферными обмотками?
11. Зачем вводят в рассмотрение фиктивную ЭДС?
12. Какой схемой замещения можно представить переходное индук-
тивное сопротивление синхронной машины?
13. В какой форме записывается уравнение переходных процессов в
обмотке возбуждения синхронной машины?
14. Какими схемами замещения можно представить синхронное и
сверхпереходное индуктивные сопротивления синхронной машины?
15. Почему синхронная машина в переходном режиме может быть пред-
ставлена одной из составляющих переходной ЭДС?
74
Контрольные вопросы
16. Из каких уравнений состоит математическая модель асинхронной
машины?
17. Какая схема замещения асинхронного двигателя широко использу-
ется в расчетах устойчивости?
18. Зависят ли сопротивления асинхронного двигателя от скольжения?
19. Как в расчетах устойчивости представляются элементы электри-
ческой сети?
20. Как моделируется нагрузка при выполнении расчетов устойчивости?
‘"ях-а
кг if
jfri я iff Я ,PJ
' i !Т:й Й0>1
< •< - и. , ! Л
Глава 2. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
2.1. ХАРАКТЕРИСТИКА МОЩНОСТИ ПРОСТЕЙШЕЙ
ЭЛЕКТРИЧЕСКОЙ СИСТЕМЫ г
Рассмотрим одну из типовых схем (рис. 2.1, а), в которой синхронная
машина, работающая в режиме генератора или двигателя, через трансфор-
маторы и линию электропередачи подключена к шинам мощной энергоси-
стемы. Будем предполагать, что мощность работающих генераторов элек-
тростанций энергосистемы намного, в 8-10 раз больше, чем мощность рас-
сматриваемой синхронной машины. Исходя из этого можно считать, что
напряжение на шинах и частота в системе являются величинами постоянны-
ми и не зависящими от режима работы синхронной машины и оборудования
электропередачи. Такие шины мощных энергосистем обычно называют ши-
нами бесконечной мощности. Если синхронную машину представить реактан-
сом хг и ЭДС Е, а трансформатор и линии - только их индуктивными сопро-
тивлениями, то схема замещения системы будет иметь вид, показанный на рис. 2.1,5.
Сумма индуктивных сопротивлений синхронной машины, трансформато-
ров и линий дает результирующее индуктивное сопротивление системы
Х=х + х , + 0,5х + х ..
L г т] ’ л т2
Исходя из известных величин напряжения J7, тока [ и сопротивления
Хъ, может быть построена векторная диаграмма для нормального устано-
вившегося режима работы системы, представленная на рис. 2.2. Из вектор-
ной диаграммы вытекает соотношение
/X. = EsinS,
где / - активная составляющая тока;
5 - угол сдвига вектора ЭДС Е относительно вектора напряжения сис-
темы U.
76
2.1. Характеристика мощности простейшей электрической системы
U = const
Рис. 2.1. Схема простейшей электрической системы:
а - принципиальная схема; б - схема замещения; в - упрощенная схема замещения
После умножения обеих частей уравнения на U/Х получаем
IaU = — sing, ' ‘
то есть
..... Р =—Sing. (2.1)
Полученная формула справедлива и для трехфазной сети, если в нее
подставить линейные значения напряжения и ЭДС.
Поскольку принято постоянство напряжения U на шинах системы, а
при отсутствии АРВ синхронной машины Е также будет постоянной вели-
чиной, то при таких условиях изменение активной мощности Р обусловлено
изменением только величины угла g.
Поэтому формулу (2.1) принято называть угловой характеристикой
мощности. Если g = 0, то sing = 0 и мощность Р равна нулю. Таким обра-
зом, обязательным условием передачи активной мощности через реактив-
ное сопротивление системы является наличие сдвига фаз между ЭДС син-
хронной машины и напряжением на шинах системы.
Представим уравнение (2.1) в виде
P = PMsing, ’ (2.2)
77
Глава 2. Статическая устойчивостыЛиктроЗПе1>^1»^ес>аа сис^ёй:
где
' I Р ~ EU/X (2.3)
' М Е \ V
и построим эту зависимость на графике (рис. 2.3) в диапазоне изменения
угла 5 = (-180°...+180°).
Как видно из рис. 2.3, зависимость активной мощности от угла имеет
синусоидальный характер, при этом, если угол 5 = (0-180°), то синхронная
машина работает в режиме генератора, а при угле 5 = - (0-180°) - в режи-
ме двигателя.
Рассмотрим установившийся режим работы генератора, когда скорость
вращения его ротора со является величиной постоянной. Такой режим бу-
дет возможен, когда вращающий момент Мт со стороны первичного дви-
Рис. 2.2. Векторная диаграмма нормального установившегося режима
простейшей электрической системы ,
Рис. 2.3. Зависимость активной мощности от угла 8
78
2.1. Характеристика мощности простейшей электрической системы
гателя (тепловой или гидравлической зурбины) уравновешивается элект-
ромагнитным моментом М, создаваемым генератором при выдаче мощно-
сти Р в сеть, т. е. при . ;:,р. .г:--
М=Мт. (2.4)
Умножая обе части равенства на го, подучаем условие существования
установившегося режима генератора , .
Р = ^т, " ' " „ (2.5)
где Р = Ма - мощность, развиваемая первичным двигателем;
Р = Л/со - активная мощность генератора. <
Мощность первичного двигателя Рт определяется величиной впуска энер-
гоносителя (пара, топлива) в единицу времени. Если предположить, что пер-
вичный двигатель не имеет регулирующих органов турбины, то впуск энер-
гоносителя будет постоянный и независимый от режима работы генератора
и, следовательно, его мощность не зависит от угла 5, т. е. Р = const.
Наличие соответствующих регуляторов, например на турбине, позво-
ляет автоматически изменять ее мощность с изменением режима работы
генератора. Однако необходимо учитывать, что здесь рассматриваются ре-
жимы, когда скорость вращения ротора генератора со равна синхронной
или незначительно отличается от нее. В таких случаях, учитывая инерци-
онность регулятора и регулирующих клапанов турбины и относительно
небольшое время переходного процесса, можно считать, что мощность тур-
бины не зависит от угла 5, т. е. Рт = const. Поэтому на рис. 2.3 изобразим
зависимость мощности Рт от угла 5 прямой линией.
В нормальном режиме мощность турбины и мощность генератора урав-
новешивают друг друга, т. е. Р_Л = РЮ = Ро, и установившийся режим харак-
теризуется углом 50 (см. рис. 2.3).
Если возникает необходимость в увеличении мощности, выдаваемой
в сеть, то увеличивают впуск пара в турбину, тем самым увеличивают мощ-
ность, например, с Р^ до Р Поскольку в таком случае Рт1 > РЛ, то на валу
ротора генератора возникает избыточный вращающий момент и ротор на-
чинает вращаться быстрее, следовательно, увеличивается скорость враще-
ния вектора ЭДС генератора Е. При этом вектор напряжения U вращается
с постоянной скоростью, определяемой частотой мощной системы. Поэтому
вектор ЭДС Е будет перемещаться относительно вектора U. Связанное с
этим увеличение угла 5 и вызывает, согласно (2.1), соответствующее уве-
личение мощности генератора. Эта мощность будет расти до тех пор, пока
она не уравновесит увеличенную мощность турбины, и новый установив-
шийся режим наступит при угле 5Г Следовательно, при увеличении мощ-
ности турбины угол 5 сдвига фаз между векторами напряжения и ЭДС так-
же увеличивается.
79
Глава 2. Статическая устойчивость электроэнергетических систем__
Предположим, что мощность турбины увеличилась до величины Рт2
(см. рис. 2.3). При этом не найдется такого значения активной мощности
генератора, при котором выполнялось бы равенство Р = Рт2. Следователь-
но, генератор не сможет создать момента Л/, = Л/2, уравновешивающего
момент первичного двигателя, ротор генератора будет ускоряться под дей-
ствием избыточного вращающего момента и генератор выйдет из синхро-
низма. Таким образом, при постоянных значениях ЭДС Е генератора и на-
пряжения шин системы Uсуществует предельная величина мощности (Рм),
которую можно передать по данной электропередаче без нарушения син-
хронизма генератора с системой. Эта величина определяется по урав-
нению (2.3) и в литературе носит название «идеальный предел мощно-
сти». Установившийся режим работы системы возможен лишь при зна-
чениях мощности, меньших Р .
f 2.2. ФИЗИЧЕСКИЙ СМЫСЛ УГЛА 5
С электрической точки зрения угол 5, как было установлено в преды-
дущем подразделе, - это угловой сдвиг во времени синусоид напряжения
на шинах бесконечной мощности и ЭДС генератора. Эта же величина име-
ет вполне определенный механический смысл, что позволяет связать в еди-
ных уравнениях как электрические, так и механические величины, харак-
теризующие электромеханические переходные процессы. Известно, что ток
возбуждения генератора создает магнитный поток, основная часть кото-
рого пронизывает воздушный зазор, пересекает обмотку статора ма-
шины и при вращении ротора наводит в ней ЭДС £ , (рис. 2.4). Векто-
ры Ф, и Е можно считать жестко связанными с ротором и вращающимися
со скоростью со. При этом вектор £ отстает от Ф, на 90°. На угол 5 вектор
Е опережает вектор напряжения шин системы U.
Проведем в роторе условную пространственную ось, параллельную
вектору U, и будем считать, что она вращается с постоянной синхронной
скоростью соо, так же как и вектор U. Угол, который составляет эта ось с
поперечной осью полюсов ротора или вектора Е в пространстве, равен
углу 5. Предположим, что генератор снижает свою активную мощность до
нуля (Р = 0, / = 0). В таком режиме вектор ЭДС Е будет совпадать по фазе
с вектором U на шинах системы (рис. 2.5).
Поскольку ось полюсов вращается с такой же скоростью, как и вектор
ЭДС, то при повороте вектора Е на некоторый угол она повернется на
такой же угол. Таким образом, при работе генератора на холостом ходу
поперечная ось полюсов совпадет с проведенной нами выше синхронно
вращающейся осью. Следовательно, с механической точки зрения угол 5
представляет собой угол в пространстве между поперечной осью полюсов
80
Рис. 2.4. Схема взаимного расположения векторов напряжения,
и ЭДС в простейшей системе Z
ротора при данной активной мощности и синхронно вращающейся в про-
странстве осью, с которой поперечная ось полюсов совпадала при нулевой
активной мощности генератора. Поскольку синхронно вращающаяся в
пространстве ось совпадает с вектором U, то с механической точки зрения
угол 5 характеризует положение ротора относительно оси, совпадающей с
вектором U системы и вращающейся в пространстве со скоростью <в0.
С математической точки зрения угол 5 в произвольный момент Т
т
8 = 80+'• -м • (2.6)
о . ’ ’ • '
где 80 - начальное значение угла.
Рассмотренные выше положения позволяют утверждать, что угол 8
отражает связь между механическим состоянием агрегата, состоящего из
первичного двигателя и генератора (его вращающим моментом, скорос-
тью вращения, положением ротора в пространстве), и его электрическим
состоянием (генерируемой мощностью и т. п.). Следовательно, угол 5 мо-
жет рассматриваться как один из наиболее важных и информативных
параметров режима системы.
... Еч
и ==с
- 7 = /Р 1
Рис. 2.5. Векторная диаграммарёжима системы прй Л^‘0 генератора
81
Глава 2. Статическая устойчивость электроэнергетических систем
2.3. ПОНЯТИЕ О СТАТИЧЕСКОЙ
УСТОЙЧИВОСТИ СИСТЕМЫ
Для осуществления установившегося режима в электрической систе-
ме необходимо соблюдение баланса мощностей. Например, для нормальной
работы генератора необходимо, чтобы было равновесие его электрической
Р и механической Рт мощностей, то есть выполнялось равенство (2.5).
Однако принципиальная возможность существования режима еще не оз-
начает, что этот режим сможет длительно существовать. В системах лю-
бой природы различают два типа равновесия:
Рис. 2.6. Простейшие случаи устойчивого (а)
и неустойчивого (б) состояний равновесия
Дадим начальное приращение координате х, равное Ах, т. е. от-
клоним шарик от исходного состояния. В одном случае (рис. 2.6, а)
после нескольких затухающих колебаний шарик придет в положение рав-
новесия, т. е. рассматриваемая система стремится восстановить исходный
или близкий к нему режим. Такое состояние оценивается как устойчивое.
В другом случае (рис. 2.6, 5) небольшое отклонение уводит шарик от ис-
ходного состояния. Такое состояние системы оценивается как неустойчи-
вое. Природа неустойчивости присуща, как отмечалось выше, и электро-
энергетическим системам. Дело в том, что даже в нормальных режимах
эксплуатации энергосистем имеются некоторые малые возмущающие воз-
действия, например изменения нагрузки, отклоняющие систему и в том
числе работающие в ней генераторы от положения равновесия. Однако
такие малые возмущения не должны вызывать нарушения устойчивости
системы, т. е. не должны приводить к прогрессивно возрастающему изме-
нению параметров ее исходного состояния. Для обеспечения надежного
энергоснабжения потребителей система должна быть устойчивой при
этих малых возмущениях. Величина этих возмущений не играет роли.
Предполагается, что малое возмущение сколько угодно мало.
82
2.3. Понятие о статической устойчивости системы
Способность системы самостоятельно восстанавливать исходный ус-
тановившийся режим при малых возмущениях или режим весьма близкий
к исходному, если возмущение не снято, принято называть статической
устойчивостью или устойчивостью «в малом».
Рассмотрим статическую устойчивость простейшей электрической
системы. Для этого вернемся снова к угловой характеристике мощности
(рис. 2.7), из которой видно, что равновесие мощностей машины, а следо-
вательно, и ее установившийся режим возможны в двух точках а и Ь. Пред-
положим, что нормальный режим системы характеризуется точкой а, следо-
вательно, углом 5а.
Далее допустим, что в результате какого-либо возмущения угол 5 уве-
личился на величину Д5 и составляет определенный угол 8'. Как видно из
характеристики мощности, это вызовет увеличение активной мощности
генератора с Ро до значения Р', определяемого углом 8’ и точкой а'. При
этом мощность турбины останется постоянной и равной Ро, так как при
принятых нами допущениях она не зависит от угла 8. В результате равно-
весие мощностей генератора и турбины оказывается нарушенным. В этом
случае скорость вращения ротора <в можно определить из уравнения
J^ = P0-P' (2.7)
at
Поскольку Р' > Р то на валу машины возникает тормозящий момент
и, согласно (2.7), ротор начинает тормозиться, а его скорость будет умень-
шаться, так как da>/dt < 0. Это обусловливает уменьшение угла 8, так как
его изменение определяется уравнением
83
Глава 2. Статическая устойчивость электроэнергетических систем
или в конечных приращениях Д5 = Дсо Дл В результате уменьшения угла
режим работы из точки d возвращается к точке а. Если угол 8а уменьшает-
ся на величину Д8, то это вызовет уменьшение мощности генератора до
значения Р". Поскольку/"' <Р то на валу генератора образуется избыточ-
ный ускоряющий момент и скорость ротора увеличивается, так как doldt > 0.
В результате будет также увеличиваться угол 8, который снова получит
свое исходное значение. Таким образом, при отклонении параметров сис-
темы от нормальных условий она снова вернулась в исходное состояние. Сле-
довательно, режим работы системы в точке а является устойчивым.
Совершенно'иное поведение системы мы наблюдаем, если генераторы
системы работают с углом 8Ь, которому соответствует точка b на характерис-
тике мощности. Увеличение угла 8А на величину А8 сопровождается не уве-
личением, а уменьшением мощности генератора до значения Р", при этом
Р" < Р. Это вызывает появление на валу ротора генератора избыточного момен-
та ускоряющего характера, что приводит к увеличению скорости (d(x>/dt> 0) и
соответственно угла 8 (d<Mt > 0). С ростом угла мощность генератора про-
должает уменьшаться, что обусловливает дальнейшее увеличение угла 8,
т. е. режим системы перемещается в противоположную сторону от точки Ь.
Таким образом, при даже небольших отклонениях режима от точки b возвра-
та в исходное положение равновесия не будет. Следовательно, такой режим
работы статически неустойчив и практически не осуществим.
Очевидно, что все сказанное выше относительно точки а относится ко
всем точкам установившегося режима на восходящей части характеристи-
ки мощности, а положение с точкой b относится ко всем точкам нисходя-
щей части характеристики мощности. Поэтому устойчивым режимам со-
ответствует восходящая ветвь угловой характеристики, где производная
активной мощности по углу положительная: dPido > 0. Следовательно, ма-
тематическое условие устойчивости простейшей электрической систе-
мы может быть записано в виде
^>0.
db
(2-9)
Величина dP/do называется синхронизирующей мощностью. Следо-
вательно, можно сказать, что критерием статической устойчивости яв-
ляется положительный знак синхронизирующей мощности. С учетом (2.9)
значение синхронизирующей мощности Р. определяется из выражения
dP E„U
^синхр = — V“cos5 = cos 8.
do лу
(2.Ю)
Синхронизирующая мощность положительна при 5 < 90° (рис. 2.8).
В этой области и возможны устойчивые установившиеся режимы работы
системы. Критическим, с точки зрения устойчивости рассматриваемой си-
84
2.3. Понятие о статической устойчивости системы
Рис. 2.8. Зависимость синхронизирующей мощности от угла 5 *’‘
стемы, является значение угла 5 = 90°, когда синхронизирующая мощность
Рсинхр = 0. За этой точкой начинается зона неустойчивости, так как Рс < 0.
Следует иметь в виду, что записанный критерий статической устойчи-
вости справедлив лишь для простейших случаев. На устойчивость элект-
рической системы влияет ряд других факторов, например параметры регу-
ляторов. Однако часто их влияние не особенно значительно, поэтому в
большинстве практических случаев пользуются критерием синхронизиру-
ющей мощности.
Статическая устойчивость является необходимым условием физичес-
кой реализуемости установившегося режима. Поэтому при планировании
режимов обязательной является оценка статической устойчивости такого
режима. Для надежного существования режима он должен иметь опреде-
ленный запас статической устойчивости. Теоретически запас статической
устойчивости можно характеризовать величиной синхронизирующей мощ-
ности. Практически он определяется путем расчета так называемого коэф-
фициента запаса статической устойчивости
К = . Р°-, (2.11)
р р v '
;о
где Рпр - предельная передаваемая мощность в системе по условию статичес-
кой устойчивости; в рассматриваемом случае такой величиной является
идеальный предел мощности Рпр = Рм;
Ро - действительная передаваемая мощность в систему.
Коэффициент запаса статической устойчивости по активной мощности
в нормальных режимах должен быть больше нормативно минимального, зна-
чение которого составляет величину 0,2 [43].
85
Глава 2. Статическая устойчивость электроэнергетических систем_
2.4. ХАРАКТЕРИСТИКА МОЩНОСТИ ПРИ СЛОЖНОЙ СВЯЗИ
СИНХРОННОЙ МАШИНЫ С ЭНЕРГОСИСТЕМОЙ
Полученная ранее синусоидальная зависимость активной мощности
от угла (2.1) справедлива при представлении элементов в виде чисто ин-
дуктивных сопротивлений (хг, хт, xj. При этом не учитывались активные
сопротивления трансформаторов, линий, синхронных машин, зарядные
мощности (емкостные проводимости) цепей линий, а также нагрузка по-
требителей. Теперь получим зависимости активной и реактивной мощно-
сти от угла, не накладывая ограничений на схему и параметры связи синх-
ронной машины с шинами мощной энергосистемы.
Рассмотрим электрическую систему, состоящую из синхронной ма-
шины, связанной через трансформаторы и две линии электропередачи с
шинами неизменного напряжения энергосистемы (рис. 2.9, а). Схема за-
мещения такой системы представлена на рис 2.9, б.
а
Рис. 2.9. Схема электрической системы:
а - принципиальная схема; б - схема замещения
Выполним упрощение схемы рис. 2.9. Для этого сложим последова-
тельно соединенные сопротивления zcm + zt] = za и параллельно соединен-
ные сопротивления - •<
2лНл2 , . zh(“/xc)_
“/>» - ~*d
2л1+2л2--------------zh 7хс
и, обозначив zt2 = zt и -jx = z получим схему замещения, приведенную на
рис. 2.10, а, в начале которой приложена ЭДС синхронной машины Е и в
конце напряжение шин бесконечной мощности U энергосистемы.
- 2.4 IfapewnepucmuKa мощностири сложной связи синхронной машины с системой
, а
Рис. 2.10. Упрощенные схемы замещения системы
В схеме (рис. 2.10, а) заменим треугольник сопротивления zA, z^ z на
эквивалентные сопротивления звезды. Произведя дальше сложение пос-
ледовательно соединенных сопротивлений, придем к схеме, представлен-
ной на рис. 2.10, б. Для данной схемы получим характеристики мощности
в зависимости от угла и параметров системы.
Рассчитаем режим рассматриваемой системы, используя принцип на-
ложения. Такой способ расчета режимов применим, только если активные
и реактивные сопротивления элементов схемы замещения не зависят от
режимных параметров, т. е. являются постоянными. Используя данный
принцип, режим работы системы можно получить как результат наложе-
ния друг на друга независимых режимов, получаемых путем последова-
тельного приложения к схеме ЭДС источника при закорачивании всех ос-
тальных источников. При этом режимов должно быть столько, сколько в схе-
ме имеется ветвей, содержащих ЭДС. Для данной схемы замещения (рис. 2.10)
необходимо рассмотреть два режима. Первый из них создается приложением
ЭДС Е при напряжении энергосистемы U, равном нулю (рис. 2.11, а). Второй
режим (рис. 2.11,5) создается напряжением U энергосистемы при ЭДС Е = 0.
В соответствии с принципом наложения токи в ветвях действитель-
ной схемы замещения (рис. 2.10) можно выразить через токи в двух режи-
мах (рис. 2.11). При этом ток синхронной машины
Z,=Zn-4’ (2-12)
ток в энергосистему
V' -4=4-4 ? (2.13)
87
Глава 2. С татическая устойчивость электроэнергетических систем
Рис. 2.11. Схемы замещения и режимы, создаваемые отдельными источниками:
a-U=0;6-E = 0
и ток в эквивалентной цепи нагрузки
4 41 + -32
(2-14)
Таким образом, нахождение действительных токов сводится к опре-
делению их отдельных составляющих, которые пропорциональны соответ-
ствующим ЭДС Е и напряжению U. Так, например, для режима (рис. 2.11, а)
/ и /21 имеют следующие значения:
(2-15)
Z11
где ' ...
/21=/11^~ ---------=---------Z-3— = -^- = EY1}, (2.16)
z2+z3 Z] +(z2z3/(z2 +z3)) z2 +Z3 Z21
где
7 - 1 -L 4. Z2Z3 z2 + z3 _ _ zlz2
Zo 1 —--— Zi +------1-----------Z\ + Zy -----.
^21 \ z2 + z3 J z3 z3
Аналогичным образом для второго режима (рис. 2.11,5) получим
^22 (2.17)
z22
где
Z12 = /22 ----------=-----------— = = Е*12> (2-18)
Z1+Z3 z2+(z1z3/(z1+z3)) Z]+Z2 Z12
88
2.4. Характеристика мощнрвти при сложной связи синхронной машины с системой
где . >
' 7 - 1 -С + Z'Z3 V1+Z3-7+7 , zlz2
Z12“~---z2 + “ Z1 + z2 +-•
Ы2 < zl+z3 7 z3 z3
Параметры ZH, Z22 и KH, К,, принято называть собственными сопро-
тивлениями и проводимостями ветвей синхронной машины и энергосис-
темы, a Z , Z 2 и У2|, К12 - соответственно взаимными сопротивлениями и
проводимостями ветвей. Собственные сопротивления и проводимости
определяют амплитуду и фазу тока в ветви данного источника при отсут-
ствии ЭДС в других ветвях схемы. Взаимные сопротивления и проводимо-
сти определяют амплитуду и фазу тока какой-либо ветви схемы, обуслов-
ленного приложением ЭДС или напряжения в другой ветви при отсутствии
ЭДС во всех остальных ветвях.
Собственные и взаимные сопротивления и проводимости ветвей оп-
ределяются исключительно конфигурацией схемы и значением сопротив-
лений отдельных ее ветвей. Они могут быть вычислены методом единич-
ных токов или методом преобразования схемы замещения [1].
Согласно соотношениям (2.12), (2.13) и выражениям (2.15-2.18), токи
в рассматриваемой схеме замещения:
L}-EYn-UYn, ’ ,7’
12 = -uy22 + ey2}.
Зная токи, можно легко найти мощности в начале 5) и конце электро-
передачи S,: ,/
* * * * * * * * *
£1 =Pi+jQx = ЕЦ =E(EY]i-UYi2') = EEYu-EUYn;
f \ ~ • -I )
* * * * * * * * * vz
S2 = Р2 + jQ2 =UI_2 =U(-UY22 + EY2i') = -UUY22+UEY21,
где * означает комплексное сопряжение.
В дальнейшем будем выполнять преобразования над которая наи-
более часто используется в практических расчетах и представляет собой
внутреннюю мощность генератора в точке приложения ЭДС Е за его со-
противлением схемы замещения.
Собственные и взаимные сопротивления и проводимости можно пред-
ставить в виде
Z = r + jx = ze±J\ (2.20)
l’’ Y = g + jb = ye±J'v, (2.21)
где <|/ = arctg (x/r) = arctg (big). ...
89
Глава 2. Статическая устойчивость электроэнергетических систем
В выражении (2.20) верхний знак означает индуктивный характер со-
противления, а нижний - емкостный. Для проводимостей знаки обратны
сопротивлениям.
Принимая направление Uза ось отсчета углов, т. е. U= U, следовательно,
Е = £е/5, Y, =уе~^ и, учитывая, что фазные углы сопряженных векторов дол-
жны быть взяты с обратным знаком, получаем
й = E^Ee~^yx^ ~ Ee^Uynej^- =
= E1y]]eJ'i'li ~EUy]2e,{b+v-,l2).
Переходя от показательной к тригонометрической форме записи ком-
плексных чисел А = ает = a(coscp + jsincp), преобразуем уравнение (2.22):
> лу:, 2
Si=Pi+jQi=E Hi(cosv|/n +jsinvn)- (2 23)
’ 1 - Wi2[cos(S + \|>i2) + jsin(S + vi2)]-
- ah Откуда можно записать:
! i 7 1
РХ=Е ^iCOSVll-W12COS(0 + V12);
2 Г : (2.24)
лллдл Q =Е Рцзтуц-£Ly12sm(S + \|/12).
В расчетах более удобно использовать вместо углов гр дополняющие
их до 90° углы о. = 90 — тогда получим
Рх = £2yn sin Иц + EUyx2 sin(S - а12);
2 f (2-25)
й = Е Гц cosa,,-£C/r12cos(c>-a12)J
В общем случае при наличии п источников генерации в схеме уравне-
ния (2.25) запишутся в виде
п
Pi = ЕЪи sin aii + Е EtEj>P sin(^/y - ay);
У=1
У*'
п
Q, = ЕЪч cosa(.( - ^Е,Е,уу cos(S,y - a,y).
’ ’ ’ Z=1
•cjwy . /.} • - -пи
(2.26)
ВЛИЯНИЕ ПАРАМЕТРОВ СХЕМЫ НА ХАРАКТЕРИСТИКИ
МОЩНОСТИ
Полученные выражения (2.25) и (2.26), с учетом разнообразия структу-
ры схемы и наличия в ней активных сопротивлений, вполне пригодны и для
рассмотренных ранее простых схем (рис. 2.1). Если активные сопротивле-
ния в схеме отсутствуют, то вещественные составляющие собственных и
оо
2.5. Влияние параметров схемы на характеристики мощности
взаимных сопротивлений и проводимостей ветвей равны нулю, угол ту = 90°,
а а - 90° — \|/ = 0°. При этому12 = \!XV, а мощность генератора
FU
P = EUyi2sin5 =----sing.
Х12
Характеристика мощности имеет тот же вид, что и при схеме замеще-
ния электропередачи с последовательным соединением реактивных сопро-
тивлений, отличие состоит лишь в том, что вместо суммарного сопротив-
ления X,. в знаменателе используется взаимное сопротивление^,. Вместе
с тем это дает возможность исследовать характеристики более сложных
схем, например, при включении шунтирующего реактора (хр) на шинах элек-
тростанции (рис. 2.12). В этом случае взаимное сопротивление
(хг + хт|)(хт7 + х„)
X[2 = х, + хт1 + хл + хт2 + —------- —------—,
Хр
в амплитуда характеристики мощности равна
t. -sin)
„ EU
Р , -----
M1 ур
Л 12
(2.27)
При отсутствии шунтирующего сопротивления, взаимное сопротив-
ление Х)2 = хг + хт) + хл + хт„ а величина амплитуды характеристики мощно-
сти находится из выражения
EU
/>м2=~' ' ' <2-28>
Л12
Поскольку знаменатель в уравнении (2.28) меньше, чем в (2.27), то
амплитуда характеристики мощности в первом случае больше (кривая 1,
рис. 2.13), чем во втором (кривая 2, рис. 2.13). Следовательно, включение
шунтирующего реактора снижает амплитуду характеристики мощности, и
это снижение тем больше, чем меньше х
Уменьшение амплитуды мощности возможно, только если ЭДС гене-
ратора Е остается неизменной как при наличии шунтирующего реакто-
ра, так и без него. Однако включение шунтирующего реактора приводит
Рис. 2.12. Схема замещения системы электропередачи
с шунтирующим реактором на шинах станции
91
Глава 2. Статическая устойчивость электроэнергетических систем
к снижению напряжения, например, на шинах станции из-за увеличения
реактивного тока. Для поддержания напряжения на должном уровне при-
ходится увеличивать ЭДС генератора Е. Это увеличение приводит к повы-
шению характеристики мощности (кривая 3, рис. 2.13).
Рис. 2.13. Влияние шунтирующего реактора на характеристики мощности:
I - при отсутствии шунтирующего реактора; 2 - при включении шунтирующего реактора
и неизменной ЭДС; 3 - при включении шунтирующего реактора и увеличении ЭДС
При учете в схеме электропередачи активного сопротивления (рис. 2.14, а)
мощность генератора, согласно (2.25), содержит две составляющие:
Ри = E^sina , называемую собственной мощностью, и
Рп = E(7y12sin(5 - а12), называемую взаимной мощностью.
Для рассматриваемой схемы (рис. 2.14, а) все собственные и взаим-
ные проводимости и их углы одинаковы:
^11 ~ ^12 — ^22’ ап — а|2~ а22 ~ а’ - ..
Рис. 2.14. Схема замещения (а) и характеристики мощности (6)
при учете активного сопротивления
92
2.5. Влияние параметров схемы на характеристики мощности
Характеристики мощности генератора Рг для этого случая, согласно
(2.25), имеют вид, представленный на рис 2.14, б причем
Рг = E2yl ^incc,, + E17y12sin(8 - а)2) = Рп + Р|2,
где Рц = E2y11sina)1; Pl2 = EVy12sin(8 - а,2).
Как видим, характеристика мощности генератора Рг смещена вверх на
величину />[| и вправо на угол ар. Максимум этой характеристики равен
/’„ = £2J?I1sinai1 +ЕиУп
при угле 8м = 90° + а12, несколько большем 90°.
Если активное сопротивление в схеме электропередачи включено не
последовательно, а параллельно, например в виде промежуточной нагруз-
ки (рис. 2.15, а), то взаимное сопротивление
u = j*\ + 7*2 + 7*17*2 = -^- + j(*i + x2). ‘ (2.29)
’П7- ". r r
' i ’-s X 1
Вещественная составляющая (2.29) отрицательна r12 = —а спеД°"
г
вательно, отрицателен и угол а Поэтому характеристика мощности ге-
нератора сдвинута вверх на величину/^ = Zy^sina и влево на угол а)2
(см. рис. 2.15, б).
Максимум характеристики мощности генератора
/’M = £2y1Isina.1+W12 t......... 1 л
достигается при угле 8 = 90° - a < 90°.
Рис. 2.15. Схема замещения (а) и характеристики мощности (о)
при наличии шунтирующего активного сопротивления
93
Глава 2. Статическая устойчивость электроэнергетических систем_
Как видно из (2.29), при определении взаимного сопротивления, а сле-
довательно, и взаимной проводимости можно получить отрицательные
значения их вещественных составляющих, что вызывает вполне понятное
недоумение. Однако это объясняется тем, что взаимное сопротивление не
является, по существу, реально существующим сопротивлением, а пред-
ставляет собой лишь некоторый комплексный коэффициент пропорцио-
нальности между током в одной ветви схемы и ЭДС в другой ветви. У соб-
ственных проводимостей, определяемых как отношение тока к напряже-
нию в данной точке схемы, активные составляющие не могут быть отри-
цательными. Таким образом, углы аи, а22... а.. собственных проводимос-
тей и их вещественные составляющие всегда положительны; углы а12, а21
... сс могут быть как положительными, так и отрицательными.
! Z5
2.6. ХАРАКТЕРИСТИКИ МОЩНОСТИ ГЕНЕРАТОРОВ
С АВТОМАТИЧЕСКИМИ РЕГУЛЯТОРАМИ ВОЗБУЖДЕНИЯ
Рассмотренные ранее характеристики мощности построены при неиз-
менности ЭДС генераторов. Если электрическая система работает с по-
стоянной величиной ЭДС генераторов, то рост передаваемой мощности вы-
зывает увеличение угла 8, снижение напряжения на шинах генератора и в
любой другой точке системы. Рассмотрим систему электропередачи (рис. 2.16).
На^р^жение на шинах генератора
/ / ' U =E-\U,
; Г
где AJ7- Zxr; 1= S/E,
тогда ....—-
94
_______2.6. Характеристики мощности генераторов с автоматическими регуляторами
Следовательно, при увеличении передаваемой мощностной неизменно-
сти ЭДС Е напряжение на шинах генератора снижается.
Изменение режима напряжения Ur при увеличении передаваемой мощ-
ности нетрудно получить, используя векторную диаграмму (рис. 2.17).
Рис. 2.17. Изменение напряжения на шинах генератора
при увеличении передаваемой мощности
При увеличении угла 8 на величину АЗ вектор ЭДС генератора Е зай-
мет новое положение по углу З^ Место расположения вектора напряжения
U в новом режиме находится путем деления вектора полного падения на-
пряжения на части, пропорциональные индуктивным сопротивлениям хс и
х. (см. рис. 2.17).
Из векторной диаграммы видно, что вектор напряжения генератора при
увеличении угла 8 уменьшается и поворачивается. Это справедливо и для
других режимов увеличения передаваемой мощности рассматриваемой сис-
темы. Характеристика мощности при отсутствии регулирования возбужде-
ния (Е = const) и соответствующая ей диаграмма режимов ЭДС и напряжений
представлена на рис. 2.18. Таким образом, при отсутствии регулирования воз-
буждения и увеличения передаваемой мощности, ЭДС остается неизменной,
угол 8 увеличивается, а напряжение на шинах генератора уменьшается.
Если генератор оснащен АРВ, стремящимся поддержать неизменным,
независимым от режима S напряжение на шинах генератора, то при сни-
жении напряжения вследствие возрастания мощности и угла регулятор
будет увеличивать ток возбуждения до тех пор, пока напряжение U. не ста-
нет равно исходному. Значение ЭДС генератора в таком режиме будет из-
меняться, возрастая с увеличением угла (рис. 2.19).
Если ЭДС генератора неизменна, то характеристика мощности систе-
мы электропередачи в зависимости от угла 8, в соответствии с (2.1), пред-
ставляет собой синусоиду (см. рис. 2.18, а).
При наличии АРВ эта характеристика будет иметь более сложный ха-
рактер, отражая непрерывное изменение ЭДС Е генератора в зависимости
95
Глава 2. Статическая устойчивость электроэнергетических систем
Рис. 2.18. Характеристики мощности (а) и диаграмма режимов ЭДС
и напряжения генератора (б) при отсутствии АРВ
от угла 8. Такую характеристику можно построить, используя данные
векторной диаграммы рис. 2.19 при изменении ЭДС. Для этого при раз-
личных значениях ЭДС Ео, Е, ... строят синусоидальные статические
характеристики (рис. 2.20), откладывают по оси 8 значений углов, вытека-
ющие из векторной диаграммы (8,8t, 82, ...), и находят точки так назы-
ваемой внешней характеристики (0, 1,2,...), отвечающие условию посто-
янства напряжения. Всю внешнюю характеристику можно построить пу-
тем постепенного перехода с одной синусоиды на другую. Внешняя характе-
ристика может иметь возрастающий характер даже в области углов 8 > 90°.
Это объясняется преобладанием роста ЭДС над уменьшением sinS в выра-
жении мощности (2.1) при 8 > 90°. Предел мощности электропередачи, так
называемый идеальный предел PJJ, в соответствии с внешней характерис-
тикой также может быть достигнут при углах 8м > 90°.
Внешняя характеристика мощности построена в предположении точ-
ного следования ЭДС Е за изменением режима работы генератора, что воз-
можно при идеальном регулировании. В этом случае устойчивая работа
генератора обеспечивается на всей возрастающей части внешней характе-
ристики, в том числе при углах 8, значительно больших 90°. Однако в дей-
ствительности АРВ генераторов могут иметь запаздывания и нечувстви-
тельность.
Рассмотрим процесс регулирования возбуждения, осуществляемый
регулятором, изменяющим ток возбуждения в зависимости от изменения
напряжения, т. е. регулятором пропорционального действия (АРВ ПД). На
рис. 2.21, а показаны условия работы генератора с АРВ ПД при 8 > 90°, где
96
2.6. Характеристики »ц>щностиг«^р(^ррров с автолдрпическими регуляторами
Рис. 2.19. Изменение ЭДС при увеличении угла
характеристики мощности при неизменных значениях ЭДС Е = const имеют
уже падающий характер, но внешняя характеристика мощности при Ur = const
еще возрастает. Исходный установившийся режим в точке а, характеризует-
ся углом 80 и мощностью Ра. При небольшом возмущении, вызывающем
снижение напряжения и увеличение угла, АРВ ПД повышает напряжение
на обмотке возбуждения возбудителя, но ток возбуждения генератора воз-
растает не сразу, а постепенно в связи с существованием самоиндукции у
обмоток возбуждения возбудителя и генератора. Поэтому в первый момент
времени мощность генератора уменьшается в соответствии с характерис-
тикой мощности при постоянстве ЭДС генератора. Поскольку при этом
мощность турбины больше мощности генератора, то угол 8 продолжает
возрастать. Однако ток возбуждения и ЭДС генератора под воздействием
АРВ ПД также начинают изменяться и режим работы генератора перехо-
дит с одной характеристики мощности на другую. В точке Ь наступает ра-
венство мощностей турбины и генератора, но по инерции ротор проходит
эту точку и из-за последующего увеличения мощности генератора начи-
нается его торможение. После того как будет пройдена точка с, лежащая
на внешней характеристике мощности, АРВ ПД начинает уменьшать на-
пряжение возбудителя и кривая изменения мощности генератора пересе-
кает семейство внутренних характеристик в обратном направлении в со-
ответствии с уменьшением ЭДС Е. После нескольких циклов колебания
затухают и генератор возвращается в исходный режим работы в точке а.
Характер переходного процесса будет другой, если АРВ ПД имеет зону
нечувствительности. Такой регулятор начинает работать лишь после того,
как отклонение напряжения в ту или иную сторону достигнет определен-
ного значения. При меньших отклонениях, лежащих в пределах зоны нечув-
ствительности, регулятор не работает. Границам зоны нечувствительности
7. Зак. 2182.
97
Глава 2. Статическая устойчивость электроэнергетических систем
0 б0 <51 б2 , 90 8М 8
Рис. 2.20. Характеристики мощности (а) и диаграмма режимов ЭДС ч
и напряжения генератора (б) с АРВ
соответствуют две внешние характеристики (рис. 2.21, б). Предположим,
что исходному режиму работы генератора соответствует точка а при 80 > 90°.
Этот режим длительно существовать не может, так как при небольшом воз-
мущении, вызывающем увеличение угла, мощность генератора по внут-
ренней характеристике будет уменьшаться, что вызовет дальнейшее уве-
личение угла 8. Регулятор начинает работать только тогда, когда траектория
движении пересечет границу зоны нечувствительности (точка Ь, рис. 2.21, б).
В этом случае увеличение тока возбуждения, а следовательно, ЭДС гене-
ратора может затормозить его ротор и ограничить нарастание угла, так же
как в случае, рассмотренном на рис. 2.21, а. Однако если в результате зату-
хания процесс и возвратился бы к исходному режиму, то в силу внутрен-
ней неустойчивости режима колебания возникли бы снова. Таким обра-
зом, незатухающие колебания угла 8, а также мощности, напряжения и
тока являются характерной особенностью работы генератора в облас-
98
2.6. Характеристики мощности генераторов с автоматическими регуляторами
Рис. 2.21, Характер переходного процесса и характеристика мощности: 1
а - при запаздывании АРВ; б - при наличии зоны нечувствительности в АРВ;
в - при ограничении напряжения возбудителя
ти углов 8 > 90° при АРВ ПД с зоной нечувствительности. Эти колебания
заставляют отказаться от эксплуатации генераторов в подобных режимах.
Поэтому на практике рекомендуется работать в системе, не превышая так
называемого внутреннего предела мощности Р^(см. рис. 2.20), достигае-
мого при 8 = 90° по внешней характеристике. Возможную область работы
генератора в диапазоне углов от 90° до 8м называют зоной искусственной
устойчивости.
Обеспечить устойчивую работу генератора в этой зоне могут регуля-
торы, которые реагируют не только на изменение напряжения (или тока),
но и на скорость и даже ускорение изменения напряжения, тока и других
параметров, характеризующих режим системы. Такие регуляторы принято
99
Глава 2. С татическая устойчивость электроэнергетических систем
называть автоматическими регуляторами возбуждения сильного действия
(АРВ СД). Более подробно о типах АРВ изложено в параграфе 8.14.
При построении характеристик мощности генератора с АРВ необ-
ходимо учитывать возможности систем возбуждения. При значитель-
ных изменениях режима и срабатывания АРВ напряжение возбудите-
лей не может увеличиваться беспредельно. Оно ограничивается неко-
торым максимальным значением, так называемым потолком возбужде-
ния. Потолку возбуждения соответствует и некоторое предельное зна-
чение ЭДС Епот. Если потолок возбуждения будет достигнут при угле 5 < 90°
(например, в точке Ь, рис. 2.21, в), то при дальнейшем росте угла про-
цесс протекает уже при постоянной ЭДС Е = Елот и предел мощности
получается равным амплитуде синусоиды, построенной при Е = Епот.
2.7. ДЕЙСТВИТЕЛЬНЫЙ ПРЕДЕЛ МОЩНОСТИ
Рассмотренные выше характеристики и соответствующие им пределы
мощности определены в предположении, что приемная система является
достаточно мощной и поэтому представляется шинами неизменного на-
пряжения U~ const. Если мощность приемной системы соизмерима с мощ-
ностью передающей системы, то напряжение не будет постоянным, а с
увеличением передаваемой по линии мощности будет снижаться. Поэто-
му, если исходить из известной нам зависимости
n EU . г
Р =----sin о,
то напряжение на шинах приемной системы в данном уравнении следует
считать переменным (U= var). Построим семейство синусоид для различ-
ных значений напряжения U приемной системы, которая представлена не-
которой нагрузкой и электростанцией (рис. 2.22, а). Действительную ха-
рактеристику мощности, учитывающую снижение напряжения, можно
получить, переходя при увеличении угла 5 с одной синусоиды на другую в
соответствии с уменьшением напряжения. Максимум этой характеристи-
ки, так называемый действительный предел мощности Р*, достигается
при угле 5 меньше 90°. Значение действительного предела мощности мень-
ше идеального предела Р^ < Р'\
Таким образом, снижение напряжения на шинах приемной системы
ухудшает условия статической устойчивости системы электропередачи.
Величина снижения напряжения зависит от свойств нагрузки, и в первую
очередь от ее регулирующего эффекта. Влияние регулирующего эффекта
нагрузки на уровень снижения напряжения и величину действительного
предела мощности иногда довольно значительно, поэтому его необходимо
100
2.2. Действительный предел мощности
Рис. 2.22. Влияние снижения напряжения приемной системы характеристики мощности:
а - схема системы; б - характеристики мощности
учитывать в практических расчетах устойчивости. Действительно, увели-
чение передаваемой мощности в приемную систему приводит к сниже-
нию напряжения U на нагрузке. Однако уменьшение напряжения сопро-
вождается уменьшением и мощности, потребляемой нагрузкой. Это в свою
очередь вызывает уменьшение потоков мощности в сети, питающей на-
грузку, что уменьшает падение напряжения в ее элементах и тем самым в
некоторой степени поддерживает напряжение нагрузки. При этом значи-
тельно большее влияние оказывает степень изменения реактивной мощ-
ности нагрузки, а не активной, поскольку величина падения напряжения в
сети определяется прежде всего этой составляющей мощности. Вторым
фактором, заметно влияющим на величину снижения напряжения, явля-
ются характеристики и мощность генераторов приемной системы. Так,
уменьшение индуктивных сопротивлений и увеличение мощности гене-
раторов способствует стабилизации напряжения на шинах приемной сис-
темы. Снижение напряжения заметно сказывается на пределе мощности,
когда мощность приемной системы менее чем в три раза превышает мощ-
ность рассматриваемой электропередачи. При большей разности это явле-
ние малозаметно, а при мощности приемной системы, в пять раз большей
мощности системы электропередачи, действительный предел мощности
практически совпадает с идеальным.
101
Глава 2. Статическая устойчивость электроэнергетических систем_
2.8. ВЕКТОРНАЯ ДИАГРАММА И ОСНОВНЫЕ УРАВНЕНИЯ
ПРОСТЕЙШЕЙ СИСТЕМЫ
Построение векторной диаграммы начнем с отложения осей q и d, при
этом приняв ось q за действительную, а ось d- за мнимую (рис. 2.23, а).
Тогда, исходя из известного вектора напряжения приемной системы U и
угла 5, ЭДС и напряжение генератора находим согласно уравнениям •
Pq -U+LXdY - (Uq + + PQ-^Vq ~ Pd^
E'=U + IXd£ = (Uq + JUP+ P'dP!q ~Р<1У’
Pr=u + LXc=(Uq+Jup + jxc(iq-jid),
где XdY =xd+xc-, xdl =xd+ xc.
Векторную диаграмму простейшей системы можно построить, исходя
из известною напряжения Uи тока I, разложенного на активную / и реактив-
ную Z составляющие (рис. 2.23, б). Тогда, приняв направление вектора U за
действительную ось, значения ЭДС и напряжения генератора найдем в соот-
ветствии с уравнениями
Ex=U + jXd^Iz-jIpP
n. X=U + jXd^Ia-jIp)- >
U^U + jXc^-jl^.
(2.30)
(2.31)
На построенных диаграммах выделены характерные ЭДС Еч, Е', Е' и
напряжение Ur генератора. Электродвижущая сила £ пропорциональна ве-
личине тока ротора, а поэтому в машине с нерегулируемым возбуждением
она остается постоянной при любых медленных изменениях режима. При
резких изменениях режима ЭДС Е также резко изменяется, повторяя из-
менения тока ротора.
Переходная ЭДС Е', непосредственно не имеющая физического смыс-
ла и являющаяся расчетной величиной, весьма широко применяется при
анализе устойчивости. Поперечная составляющая этой ЭДС F, обуслов-
ленная результирующим полным потокосцеплением обмотки возбуж-
дения, остается неизменной в первый момент при любом резком из-
менении режима работы синхронной машины. Это позволяет связать
режим системы до его нарушения с новым режимом, наступившим
после возмущения.
На основе диаграмм рис. 2.23 установим некоторые характерные со-
отношения между параметрами системы.
Отдаваемую генератором активную мощность Р можно выразить че-
рез различные ЭДС и напряжения. На основании векторной диаграммы
(рис. 2.23, б) можно записать:
102
2.8. Векторная диаграмма и основные уравнения простейшей системы
Eqsin5 = IaXd^
Е sin5 = IaXd^_',
Ur sin 5 = IaXc.
(2.32)
Определяя отсюда Za и подставляя его в выражение для активной мощ-
ности, получим
EqU
л ‘ РЕ sin 5; (2.33)
... / - 4
/'
/ ' FTI
/ ' PF- т—sin5; (2.34)
г*/- у
У i V Ри = ^—sindt. . . (2.35)
г хс
Индекс при выражении мощности указывает, через какую ЭДС или
напряжение она выражена.
Угол 5, как отмечалось выше, является определенной пространствен-
ной и механической координатой ротора. Угол 5 не может меняться скач-
кообразно, поэтому выражение мощности, содержащее его, является наи-
более удобным при исследовании устойчивости.
Углы 5' и 5с отражают главным образом электромагнитный переходный
процесс синхронной машины, их изменение не связано с пространственным
положением ротора. В отличие от угла 5, они могут меняться скачкообразно
при изменении режима. Поэтому выражения мощности (2.34) и (2.35) счита-
ют несколько искусственными. Получим аналогичные выражения, содержа-
щие угол 5. Согласно векторной диаграмме рис. 2.23, б, можем записать:
Р =///cos<p = L7cos(v - 5) = L7(cos\i-cos5 + sinxp-sinS). С учетом соотношений для токов и напряжений (2-36)
Zcosvpr = /; (2-37)
/si п'|/ = Ij, (2.38)
Z/cos5 = U; ч (2.39)
C/sinS = Ud :!.= уравнение (2.36) запишется в компактном виде: (2.40)
Р = UI + U1' q q а а (2.41)
103
Глава 2. Статическая устойчивость электроэнергетических систем
2.8. Векторная диаграмма и основные уравнения простейшей системы
На основе векторной диаграммы рис. 2.23, б имеем соотношения :
IqXdy =c/sin5;
IdXd-£ = Eq-U cos&,
IdX=Ura-Ucos5;
IdXcTL =Eq-Ucos5.
Откуда легко получить: у b.-j ПК*
_ I7sin5 <’ • 1 q - , Ad'L (2.42)
Ea-U cos5 T , ч a Obi ; (2.43)
x " Ki ' I. *•
Uva - U cos 5 - j, vq чгй.лй^2.44)
*- 7 “ > u Y ,.**^'•‘•‘1. -Cl Q
Ea-U cos 5 I г 4 (2.45)
ld r xdY
После подстановки (2.39), (2.40) и (2.42) - (2.44) в (2.41) и несложных
преобразований получим соответствующие мощности:
E’u и2 х., - х\
Р • = ~~—sin 5--------г—sin 25; (2 46)
' Е“ xdY 2
- : чРу =—^-sin5- —------—sin25. < (2.47)
• г? Хс 2 Х^-Хс
Если проделать аналогичные выкладки, то можно получить выраже-
ние мощности через ЭДС Е', напряжение Ur и угол 5:
Ре =-^sin5- — Xd Xd sin25—^-sin5[l-cos(5-5')]; (2.48)
£ Л/Е 2 xdY'xdY xdl
n UrU . * UzXd . „ UrU . ...
PUr =-^-sin5c-——sin25—sin 5(1-cos 5r). (2.49)
AC 1AdY.AC Ac
Данные выражения отличаются качественно от (2.46) и (2.47) третьим
членом. Влияние его невелико, особенно при малых значениях 5. Поэтому
8. Зак. 2182.
105
Глава 2. Статическая устойчивость электроэнергетических систем___________
часто, особенно в практике инженерных расчетов, используют выражения
без учета третьей составляющей:
р. , 4^sin5_£L Е х^ 2 Xd X<-sin 25; X<TL (2.50)
р иги . _ и2 Рг/ = —1—sin 5 г хс 2 — sin 25. Х^-Хс (2.51)
Внутреннюю реактивную мощность генератора можно найти соглас-
но выражению
QE4=EqId- (2.52)
После подстановки (2.45) в (2.52) получим
Е2 EgU
Qe, = -3—^-coS&. (2.53)
Xdz xdY
! Реактивная мощность, выдаваемая генератором, равна
(2-54)
Т Ur - U cos 5
где 7 = —!----------реактивная составляющая тока генератора.
Хс
После подстановки 7 г в (2.54) получим : •
772 и U " '
^_tMicos5 (2.55)
V V с
5 ' -ZX £ -ZX £
2.9. УПРОЩЕННОЕ ПРЕДСТАВЛЕНИЕ ГЕНЕРАТОРОВ
В РАСЧЕТАХ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ
При выполнении упрощенных расчетов статической устойчивости
синхронный генератор в схемах замещения представляется по-разному, в
зависимости от типа регулятора возбуждения. Общий подход к представ-
лению генератора может быть сформулирован следующим образом: какие
ЭДС или напряжение в исследуемой системе способен регулятор возбуж-
дения генератора поддерживать неизменными при изменении режима -
этими неизменными параметрами режима и представляется генератор в
расчетах статической устойчивости.
На рис. 2.24 приведены три угловые характеристики мощности элект-
ростанции, работающей на шины неизменного напряжения. Первая из них,
в соответствии с (2.33), построена при постоянной ЭДС Е, вторая, в соответ-
ствии с (2.50), при постоянстве переходной ЭДС Е', а третья, по (2.51), - при
106
2.9. Упрощенное представление генераторов в расчетах статической устойчивости
постоянстве напряжения Ur на шинах генератора. Неизменность ЭДС Е
при изменении угла 5 имеет место при отсутствии у генераторов АРВ.
Постоянство ЭДС Е’ обеспечивает АРВ ПД, изменяющее ток возбуждения
в зависимости от отклонения каких-либо параметров режима.
Постоянство напряжения Ur способно обеспечить АРВ СД, регулиру-
ющее возбуждение синхронных машин не только по отклонению парамет-
ров режима, но также по скорости и ускорению их изменения.
Для рассмотренных трех случаев на рис. 2.24 показаны схемы заме-
щения. При отсутствии АРВ генератор представлен синхронным индук-
тивным сопротивлением xd и неизменной ЭДС Е, включенной за этим со-
противлением (см. рис. 2.24, 6).
Рис. 2.24. Угловые характеристики мощности и схемы замещения простейшей системы
при различных типах АРВ генератора:
а - угловые характеристики мощности; б- схема системы без АРВ;
в - схема системы с АРВ ПД; г - схема системы при АРВ СД
При АРВ ПД генератор введен в схему замещения переходным индук-
тивным сопротивлением xj и переходной ЭДС Е' (см. рис. 2.24, в). При
наличии АРВ СД в схеме замещения сопротивление генератора отсутству-
ет (см. рис. 2.24, г), поскольку при поддержании неизменным напряжения
на шинах генератора в учете этого сопротивления нет необходимости. Это
связано с тем, что изменение падения напряжения в сопротивлении гене-
ратора не оказывает влияния на напряжение L/, которое является незави-
симым от параметров режима.
Такое упрощенное представление генератора дает возможность дос-
таточно просто отражать влияние АРВ при составлении расчетных схем
электрических систем, в том числе схем, предназначенных для построе-
ния угловых характеристик и определения пределов мощности.
107
Глава 2. Статическая устойчивость электроэнергетических систем
2.10. ВЕКТОРНАЯ ДИАГРАММА И ХАРАКТЕРИСТИКИ
МОЩНОСТИ ЯВНОПОЛЮСНЫХ МАШИН
В предыдущих выкладках синхронные генераторы представлялись од-
ним синхронным индуктивным сопротивлением, через которое протекает
полный ток генератора. Это возможно только для неявнополюсных генерато-
ров, у которых синхронные индуктивные сопротивления в продольной и по-
перечной осях ротора машины практически одинаковы: х. = xd « х . У явно-
полюсных машин (гидрогенераторов, синхронных компенсаторов, синх-
ронных двигателей) сопротивления xd* х . Неравенство сопротивлений не
позволяет составить схему замещения для полного тока, и можно лишь
говорить о различных схемах замещения с сопротивлениями xd и х для
продольной и поперечной составляющих тока явнополюсной синхронной
машины. Исходя из этого, на рис. 2.25, б и построена векторная диаграм-
ма, где Х& = xd + хс; X = х? + хс.
Из векторной диаграммы вытекают соотношения ,
U = tTcosS; U = t/sinS; ч !
_/7sin8 Eq-Ucosb
/<7”—; у
Aqx Ad-L
Подставляя их в (2.41), получаем выражение для активной мощности
явнополюсной машины
ЕЧи - s U1 Xd~Xq •
—-— sin 5 +-----—sm 25.
2 X^-X^
(2.56)
Характеристика мощности гидрогенератора (см. рис. 2.25, в) имеет как
основную синусоидальную составляющую Е Usinb/X^ так и вторую состав-
ляющую в виде синусоиды двойной частоты. Эта вторая гармоника несколь-
ко смещает максимум характеристики мощности явнополюсной машины, и
критический угол 5м, при котором достигается максимум мощности, получа-
ется меньше 90°. Однако это обстоятельство нельзя рассматривать как ухуд-
шение устойчивости, так как одновременно уменьшается и угол 50 при задан-
ном значении передаваемой мощности Ро. Предел передаваемой мощнос-
ти Рм, наоборот, возрастает в сравнении с характеристикой неявнополюсной
машины при тех же значениях Е и xrf.
Учет влияния явнополюсности, то есть различия индуктивных сопро-
тивлений в продольной и поперечной осях при расчете сложных электри-
ческих систем представляет значительные трудности. Поэтому при прове-
дении практических расчетов часто пренебрегают второй составляющей
мощности в уравнении (2.56). Это можно сделать потому, что в обычных
условиях, когда ЭДС Е достаточно высока, величина ее незначительна
108
a
Рис. 2.25. Векторная диаграмма и характеристика мощности гидрогенератора, работающего в простейшей системе:
а - схема подключения; б - векторная диаграмма; в - характеристика мощности
2.10. Векторная диаграмма и характеристики мощности явнополюсных машин
Глава 2. Статическая устойчивость электроэнергетических систем________
(меньше 10-15 % от основной составляющей) и ее можно не учитывать.
Это означает, что в расчетах статической устойчивости явнополюсные ма-
шины замещают неявнополюсными с сопротивлением, равным синхрон-
ному индуктивному сопротивлению явнополюсной машины Так что
мощность явнополюсной машины в этом случае можно представить
следующим образом:
В тех случаях, когда желательно учесть эффект явнополюсности, например,
при малых значениях ЭДС Е, у эквивалентной неявнополюсной машины вводит-
ся фиктивная ЭДС EQ, приложенная за сопротивлением х. При этом, согласно
векторной диаграмме (рис. 2.25, б),
Е=Е — 7.(х, — х). (2.57)
Q q сА a q-' v '
В этом случае электрическая мощность явнополюсной машины мо-
жет быть представлена в виде
7’ = —^—sin 5. (2.58)
X. п
Таким образом, использование фиктивной расчетной ЭДС Е позволя-
ет искусственно ввести в схему замещения системы явнополюсную маши-
ну, что весьма удобно для выполнения расчетов режимов. Величина EQ
представляет собой лишь часть ЭДС возбуждения Е, при этом изменяется
при изменении режима работы машины. На практике используется более
удобная, чем (2.57), зависимость EQ. Ее можно получить, используя соот-
ношения, вытекающие из векторной диаграммы (см. рис. 2.25, б):
= E -CcosS.
Решая данную систему уравнений относительно EQ, получим
EQ = Eq^X + u у —cos 5- (2.59)
При желании убедиться, что представление машины ЭДС Е за сопро-
тивлением хч позволяет учесть ее явнополюсность, следует выражение (2.59)
подставить в (2.58). При этом получим исходное выражение активной мощ-
ности явнополюсного генератора (2.56).
В заключение следует отметить, что представление явнополюсной ма-
шины в виде ЭДС EQ, приложенной за сопротивлением х, а не х^, преследует
цель получить правильное значение угла 5 (см. рис. 2.25, б).
НО
________- /0- Векторная диаграмма и характеристики мощности явнополюсных машин
Пример 2.1. Для электрической системы (см. рис. 1.29) с генерато-
ром без автоматического регулятора возбуждения, с АРВ ПД и АРВ СД
требуется'.
1. Построить угловые характеристики мощности.
2. Определить пределы передаваемой мощности.
3. Рассчитать коэффициенты запаса статической устойчивости.
Передаваемую мощность в ОЭС принять равной мощности нагрузки,
т. е. Ро = Рн, Qo = Qk, а напряжение на шинах приемной системы U= 330 кВ.
Остальные параметры системы взять с примера I. I.
Решение. Общее индуктивное сопротивление системы:
~xd +хс= + 0,21 = 1,51.
Напряжение на шинах приемной системы в относительных единицах:
и= и/и= 330/330 = 1,0.
Электродвижущая сила: а <.И1
Г/ \ 2 / х ? (Г ~Э х э
е-ЛцРРхР\ , + + ITS! = 231.
VI U ) \ U ) \\ 1 ) ( 1 )
Угол сдвига вектора ЭДС относительно вектора напряжения систе-
мы в установившемся режиме:
5 0 = arctg—--------= arctg— 1 1,5 ---= 40,6°.
U + Qoxd^ 12 +0,5-1,51 .
Угловая характеристика мощности без АРВ:
Е U 2 31-1
РЕа = —----sin 5 = —----sin 5 = 1,53 sin 5. u.
' Xdt L51
По данному выражению, изменяя угол 5 от 0 до 180°, на рис. 2.26 постро-
ена угловая характеристика мощности системы с генератором без АРВ (зави-
симость 1). Предел мощности достигается при угле 5 = 90° и равен Р = 1,53.
Общее индуктивное переходное сопротивление системы:
= xd + хс = 0,16 + 0,21 = 0,37.
Переходная ЭДС:
ill
Глава 2. Статическая устойчивость электроэнергетических систем
Угол сдвига вектора ЭДС Е' относительно вектора напряжения систе-
мы в установившемся режиме:
я- э р>р'сС , 1-0,37 __.о
J72 + e0^ l2+ 0,5-0,37
Поперечная составляющая переходной ЭДС:
E'q = E'-cos(50 -б'о ) = l,24cos(40,6° -17,3°) = 1,14. f
Активная мощность генератора с АРВ ПД: •млчн-т.г+д
р . = -^-£sinS- —• Xd~x'd sin25 =
XdY 2 X^-XdY
" 1,14-1 . s 1 1,3-0,16 . _ _ne . s 1Л. . os
=-------sin о------------sin 25 = 3,08 sin 5 - l,02sin 25.
0,37 2 1,51-0,37
По данному выражению, изменяя угол 5 от 0 до 180°, на рис. 2.26
построена угловая характеристика мощности системы с генератором, ос-
нащенным АРВ ПД (зависимость 2). Предел мощности достигается при
угле 5м,= 117° и равен Рм2 = 3,53.
Напряжение на шинах генератора:
ГТ hr 0o‘V? r^o-*cf L 0,5-0,21? fl-0,21? 7И.’-
Ur=J \U+——M + —— = J 1 + —---------- +--------- = 1,13.
К U 2 I U J Vv 1 ) I 1 J
Угол сдвига вектора напряжения генератора относительно вектера на-
пряжения системы в установившемся режиме:
я + Рохс + 1-0,21 0
5Г0 = arctg—Х-2-+— - arctg-7----------= 10,7 .
^+0о*с I2+0,5-0,21
Поперечная составляющая напряжения генератора:
Ulq = Ur cos(50 - 5с0) = 1,13cos(40,6° -10,7°) = 0,98.
Активная мощность генератора с АРВ СД:
Urq-U и Xd
р, = —2-----sin 5-------------sin 25 =
Uni v о г „.
О’98'1 - я 1 U • ОЯ Л А-7 • Я О АС • ОЯ
=-------sin 5-------------sin 25 = 4,67 sin 5 - 2,05 sin 25.
0,21 2 1,51-0,21
По данному выражению, изменяя угол 5 от 0 до 180°, на рис. 2.26
построена угловая характеристика мощности системы с генератором,
оснащенным АРВ СД (зависимость 3). Предел мощности достигается
при угле 5м3= 122° и равен /С, = 5,8.
112
2.10. Векторная диаграмма и характеристики мощности явнополюсных машин
Рис. 2.26. Угловые характеристики мощности системы:
1 - генератор без АРВ; 2 - генератор с АРВ ПД; 3 - генератор с АРВ СД
Коэффициенты запаса статической устойчивости системы:
безАРВ- Kpl = -7”1 ~= -5-—1 = 0,53;
ро 1 ,
р _ р — 1
сАРВПД- К„2 = ~^2 -° = -- = 2,53;
Р Л) 1
с АРВ СД - Кр3 = -° = = 4,8. / ’
Ро 1
Таким образом, коэффициенты запаса статической устойчивости по
активной мощности удовлетворяют нормативным требованиям статичес-
кой устойчивости. Расчет показывает, насколько эффективно применение
различных АРВ. Так, применение АРВ ПД увеличивает предел мощности
в 4,7 раз, а АРВ СД - более чем в 9 раз.
Пример 2.2. На шины генераторного напряжения электрической си-
стемы (рис. 1.29) подключена нагрузка Р* = 20,45 МВт, Qk = 40,9 Мвар.
В ОЭС передается Ро = 40 МВт, Qo = 20 Мвар. Остальные параметры сис-
темы принять из примеров 1.1 и 2.1.
Требуется'.
1. Вычислить собственную и взаимную проводимости генератора стан-
ции без АРВ.
2. Записать уравнение характеристики мощности.
Решение. Схема замещения рассматриваемой системы представлена
на рис. 2.27.
Находим мощность нагрузки в относительных единицах:
113
Глава 2. Статическая устойчивость электроэнергетических систем
q = 2^9 = 0 Jo,152 +0,292 = 0,3 26.
н 5б 140 V
Передаваемая мощность в систему:
7’о=А = _12_=:О,28; 20=^ = —= 0,14.
0 5б 140 ° 5б 140
Напряжение на шинах генератора:
ТТ _ Lr , Qo‘xC^\ , -ХС
0,14-0,21Y /0,28-0,21f 3
К i ) I 1
Находим сопротивление нагрузки по формуле (1.83): : нм. J
. 1,03 ( 0,15 . 0,29 'l ... . ’ ..
Z„ + /х„ -------- -------+ .7----- = 1,45 + j2,9. us <. :, •>!
н н н 0,326^0,326 0,326 )
Собственное сопротивление генератора:
Zn=jxd+JXc^ + jX-^^j\,3+ А21(У5 +А.9) =0)004 + Д5,
Лс+гн+7хн >0,21 + 1,45 + 72,9
Взаимное сопротивление генератора:
^12 = jxd + jxc + -®- = 7'1,3 + 7'0,21 + = -0,04 + 7'1,58.
'н+7*н 1,45 + 72,9
Собственные и взаимные проводимости генератора станции:
К, = — =--------2----= 0,002 - 70,7 = 0,7е789’9°.
Zn 0,004 + 7'1,5
У,? = — =-------------= -0,016- /0,63 = 0,63е-/'91’4”.
Z12 -0,04 + 71,58
114
Контрольные вопросы
Значения углов сопротивлений:
ац = 90°-89,9° = О,Г; а!2 = 90°-91,4° =-1,4°.
Потери реактивной мощности в сети:
Находим ЭДС генератора станции:
ц , (&+Q0+&Q)-xd}2 ((Р0+Рн)-хЛ
Г иг ) [ иг )
1 03 + (0’29 + °’* 1 2 3 4 5 6 7 8 9 10 11 12 13 14 + °’02)' t’3? ((0,28+ 0,15)-1,3^
’ 1,03 J Д 1,03 J
Уравнение характеристики мощности:
Д = Л1 Sin а!! + EqUyn sin(512 - сс12) =
= 1,б92 -0,7-sin0,1° +1,69-1-0,63-sin(512 +1,4°) = 0,05 + l,06sin(5J2 +1,4°).
Контрольные вопросы '
1. Что такое «шины бесконечной мощности»?
2. Что принято называть угловой характеристикой мощности?
3. Что понимается под «идеальным пределом мощности»?
4. Каков физический смысл угла 5?
5. В чем состоит основное условие устойчивости простейшей элект-
рической системы?
6. Какова суть использования понятия «синхронизирующая мощность»
для оценки статической устойчивости режима?
7. Какие параметры принято называть собственными и взаимными
сопротивлениями?
8. Как влияют параметры схемы на характеристики мощности? е
9. Как строится внешняя характеристика мощности?
10. Что понимается под «внутренним пределом мощности»?
11. Каков характер работы генераторов в зоне искусственной ус-
тойчивости?
12. Что понимается под «действительным пределом мощности»?
13. Как представляются генераторы в упрощенных расчетах статичес-
кой устойчивости?
14. Чем отличается характеристика мощности явнополюсной машины
от характеристики неявнополюсной? ,
115
шанТэи/т :ю— >П
Глава 3. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
3.1. ПОНЯТИЕ О ДИНАМИЧЕСКОЙ
УСТОЙЧИВОСТИ СИСТЕМЫ
Способность системы сохранять статическую устойчивость в уста-
новившемся режиме работы отнюдь не означает, что она будет продол-
жать устойчиво работать и при больших возмущениях режима. Появле-
ние больших возмущений в электроэнергетических системах чаще всего
вызвано короткими замыканиями, отключением или включением мощных
нагрузок, генераторов, трансформаторов или линий электропередач. Для
больших возмущений характерно резкое нарушение режима, приводя-
щее к значительным отклонениям его параметров от исходного состоя-
ния. Поэтому для оценки поведения системы при резких изменениях ре-
жима введено понятие динамической устойчивости. Существует несколь-
ко определений динамической устойчивости, приведем только три из них.
Динамическая устойчивость — это способность системы приходить
после большого возмущения к такому установившемуся режиму работы,
при котором значения параметров режима являются допустимыми по ус-
ловиям эксплуатации системы и электроснабжения потребителей.
Динамическая устойчивость — это способность системы восстанавливать
после большого возмущения исходное состояние или практически близкое к нему.
Динамическая устойчивость - это способность системы сохранять
синхронную работу после большого возмущения.
Последнее определение весьма упрощенное и применимо только к
оценке устойчивости отдельных генераторов и синхронных двигателей.
Рассмотрим основные положения динамической устойчивости на
примере простейшей системы (см. рис. 2.1) при внезапном отключе-
нии одной из двух параллельных цепей линии электропередачи. Исхо-
116
3.1. Понятие о динамической устойчивости системы
дя из схемы замещения такой системы (см. рис. 2.1, б, в), построим,
согласно (2.1), угловую характеристику мощности Р в исходном режиме
(рис. 3.1). В этих условиях индуктивное сопротивление системы, равное
Уу[ = хг 4- 4- /2 4- Хт2,
определяет амплитуду характеристики мощности
P’=W/A^.
При отключении одной из цепей линии электропередачи схема рассмат-
риваемой системы принимает вид, показанный на рис. 3.2.
Отключение цепи электропередачи приводит к увеличению индуктив-
ного сопротивления системы
X... + X , + X + X
2.II г т! л т2’
поскольку индуктивное сопротивление линии при такой схеме возрастает
вдвое - с 0,5хл до хл. Что касается ЭДС генератора, то при больших возму-
щениях режима она не будет оставаться неизменной, как это принималось
ранее при рассмотрении статической устойчивости. Однако в первом при-
ближении можно полагать, что переходная ЭДС генератора при резких изме-
нениях режима остается постоянной. Следовательно, анализ устойчивости
можно проводить, принимая Е = Е' = const. Это значит, что характеристику
мощности системы при отключении цепи можно записать в виде
Угловая характеристика мощности Рй приведена на рис. 3.1, где ее ам-
плитуда Р” меньше амплитуды в исходном режиме, так как Ха < X .
Предположим, что исходный режим работы характеризуется переда-
ваемой мощностью Ро, что соответствует углу 3J и точке а на характерис-
тике мощности Р. После отключения цепи линии режим работы перехо-
дит на характеристику мощности Рп. В связи с наличием механической
инерции у ротора генератора скорость его вращения в первый момент
после отключения цепи остается неизменной. Следовательно, угол З1 как
механическая величина сохраняет свое значение 30* в первый момент пос-
ле отключения. Новый режим будет характеризоваться точкой b на ха-
рактеристике Р . Таким образом, при отключении цепи система
перейдет в другой режим, определяемый характеристикой Рп, при неиз-
менном угле 3 =3', что вызывает внезапное снижение мощности генера-
тора до значения Рп. Мощность первичного двигателя остается при этом
неизменной и равной Ро. Появившийся небаланс мощностей приводит
к тому, что ротор генератора начинает изменять скорость. Поскольку
Р” < Р , то это вызывает ускорение вращения ротора машины
117
Глава 3. Динамическая устойчивость электроэнергетических систем
Рис. 3.1. Характеристика устойчивого переходного процесса при отключении одной
параллельной цепи линии электропередачи - характеристика мощности при нормаль-
ном режиме; Рв - характеристика мощности при отключении одной цепи):
а - характеристики мощности; б - зависимость изменения скорости вращения <а =Д8);
в - изменение угла 8
d2d
а = ~Т
dt2
Pq-Pq
г,
скорость которого будет увеличиваться по сравнению
с исходной синхронной со > со . Увеличение скорости ротора приводит к
увеличению угла 5 (5 =8 1 + Л8), так как Л8 = (со - ю0)Л? > 0. Поэтому в
соответствии с характеристикой Р мощность генератора будет возрастать.
118
3.1. Понятие о динамической устойчивости системы
a
Л-1
Т2
Л-2
Рис. 3.2. Схема простейшей системы при отключении цепи:
с . >> (’ а - принципиальная схема; б ~~ схема замещения
В точке с мощности уравновешиваются: Ро = Р , а ускорение
сс =---= 0. Однако процесс не останавливается в этой точке, так как ско-
dt
рость вращения ротора здесь больше синхронной ю > ю0 и достигает наи-
большего значения со (см. рис. 3.1, б). Поэтому ротор по инерции прохо-
дит точку в и угол 5 продолжает возрастать. Режим работы переходит пра-
вее точки с, при этом мощность генератора становится больше мощности
турбины и на валу ротора возникает избыточный тормозящий момент. По-
П п ^23 А
скольку Рд < Ри, то ускорение сс = —< 0, и скорость ротора начинает
уменьшаться, так как Дю = (Ро - 2’п)Дс/Г < 0. Поскольку со > со0, то угол 5
продолжает возрастать. Увеличение угла будет продолжаться до тех пор,
пока скорость ротора не уменьшится до синхронной (ю = со0). Предполо-
жим, что это произошло в точке d. Это означает, что в этой точке вектор
ЭДС Е вращается с такой же скоростью, что и вектор напряжения U. Одна-
ко возникший переходный процесс на этом не заканчивается. Поскольку
на валу машины продолжает существовать избыточный тормозящий мо-
мент, то скорость ротора будет продолжать уменьшаться и станет меньше
синхронной (5 < 50). При этом угол начнет уменьшаться, и процесс по ха-
рактеристике мощности Рп будет протекать в обратном направлении к точ-
ке с. Эту точку ротор вновь проходит по инерции, и около точки b угол 5
достигает своего минимального значения, после чего вновь начинает воз-
растать. Построенные характеристики и рассмотренный процесс основан
на предположении, что в системе нет рассеяния энергии (нет демпфирова-
ния). В таких системах ротор генератора, сохранившего устойчивость после
большого возмущения, будет находиться в режиме незатухающих колеба-
ний. Если в системе есть демпфирование, то качания ротора генератора
будут затухать. Поэтому для рассмотренного случая после ряда посте-
119
Глава 3. Динамическая устойчивость электроэнергетических систем
пенно затухающих колебаний (рис 3.1, в) в точке с устанавливается новый
стационарный режим с прежним значением передаваемой мощности Ро и
новым значением угла 5 ".
Рассмотрение характера данного переходного процесса показывает, что
при отключении линии (т. е. при большом возмущении) генератор сохранил
синхронную работу. Параметры как во время перехода, так и в новом устано-
вившемся режиме не вызывают серьезных осложнений при эксплуатации
системы и электроснабжении потребителей. Следовательно, рассмотренную
систему при данном возмущении можно считать динамически устойчивой.
Однако может иметь место и другой исход переходного процесса.
Предположим, что амплитуда характеристики мощности после отклю-
чения цепи меньше, чем в рассмотренном выше случае (например, рис. 3.3).
На рис. 3.3, а ротор генератора из-за небольшого тормозящего момента не
успевает до точки е уменьшить скорость до синхронной и по инерции про-
ходит ее. При этом на валу машины после точки е вновь появляется уско-
ряющий вращающий момент, под влиянием которого угол 5 начнет быстро
возрастать и генераторы выйдут из синхронизма. В другом случае (рис. 3.3,
б) после отключения цепи на ротор генератора действует постоянно толь-
ко избыточный ускоряющий момент, что также приводит к увеличению
угла более 180°. Это означает, что генератор не сохранил синхронную ра-
боту и рассматриваемую систему при данном возмущении можно считать
динамически неустойчивой.
3.2. ОСНОВНЫЕ ДОПУЩЕНИЯ УПРОЩЕННОГО АНАЛИЗА
ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ
Для того чтобы выполнить оценку динамической устойчивости систе-
мы, прежде всего необходимо уметь рассчитать изменения ее параметров
в переходном электромеханическом процессе при большом возмущении.
Если стремиться к наиболее точному решению такой задачи, то необходи-
мо каждый из элементов системы описать наиболее полной математичес-
кой моделью, например, с учетом электромагнитных переходных процес-
сов в электрических машинах и переходных процессов в системах возбуж-
дения, в первичных двигателях и регуляторах, в узлах нагрузки. Однако с
точки зрения практических расчетов устойчивости далеко не всегда стрем-
ление к полному математическому описанию и учету наибольшего коли-
чества элементов системы является оправданным, так как это приводит к
весьма сложной модели системы, требующей значительных затрат инже-
нерного труда и разрешимой, как правило, только с помощью современ-
ных программ на ЭВМ. Кроме того, при таких полных моделях весьма
затруднено наглядное понимание происходящих явлений в энергосистемах.
120
3.2. Основные допущения упрощенного анализа динамической устойчивости
' Рис. 3.3. Нарушение динамической устойчивости:
а - при небольшом тормозящем моменте; 6 - при воздействии только ускоряющего момента; в - характер изменения угла
Iлава 3. Динамическая устойчивость электроэнергетических систем
Поэтому часто для оценки поведения системы при больших возмущениях
применяют определенные упрощения, эквивалентируют или не учитыва-
ют отдельные элементы системы. При этом электромагнитный переход-
ный процесс также описывается упрощенно, однако это позволяет полу-
чить быстрое и наглядное решение.
Рассмотрим различные допущения, принимаемые при упрощенных
расчетах динамической устойчивости.
1. Вращающийся момент синхронной машины в относительных еди-
ницах может быть принят равным мощности. Это означает предположе-
ние, что изменение скорости вращения ротора на протяжении всего време-
ни рассматриваемого переходного процесса значительно меньше, чем син-
хронная скорость, но она в то же время настолько значительна, что маши-
на может выпасть из синхронизма. Покажем это на простейшем примере.
Максимально возможное изменение угла, при котором синхронная маши-
на еще может сохранить устойчивость, составляет А5 = 180 эл. град. При-
чем этой величины угол достигает за время, не превышающее А/ < 1 с.
Таким образом, скорость ротора синхронной машины до нарушения ус-
тойчивости может максимально измениться на
Асо = А5/А/= 180/1 = 180 эл. гр./с,
или, по отношению к синхронной:
Асо _ А® _ 180 _ q q ।
<в0 2л/с 360-50
Следовательно, при исследовании динамической устойчивости систе-
мы можно полагать, что скорость роторов синхронных машин близка к
синхронной: со «<в0 = 1.
В связи с этим будет справедливо и соотношение г! •
со* + А<в* 1 + 0,01
2. Изменения сопротивлений синхронных машин и трансформаторов,
обусловленные насыщением стали, в расчетах не учитываются или учиты-
ваются приближенно путем уменьшения замещаемого сопротивления.
3. В расчетах динамической устойчивости допускается неучет апери-
одического тока статора и периодического тока ротора синхронных ма-
шин. Это связано с тем, что они довольно быстро затухают с постоянной
времени 0,1-0,15 с. В действительности эти составляющие полных токов
создают пульсирующий электромагнитный момент на валу машины, кото-
рый при ускорении ротора несколько задерживает его. Таким образом, с
учетом этого момента, угол ротора менялся бы медленнее. Поэтому пре-
небрежение апериодической составляющей тока статора и, соответствен-
122
__________3.2. Основные допущения упрощенного анализа динамической устойчивости
но, периодической составляющей тока ротора можно отнести в опреде-
ленный запас надежности расчетов динамической устойчивости системы,
выполненных при данном допущении.
Однако отказ от учета апериодической составляющей тока статора и пери-
одической составляющей тока ротора означает, что в момент возмущения их
значения не будут равны предшествующему доаварийному значению, а изме-
нятся мгновенно. В соответствии с этим и другие электромагнитные парамет-
ры режима в момент КЗ также изменяются мгновенно, например, напряжение
на шинах и активная мощность синхронной машины резко уменьшаются.
4. Предполагается, что на ротор синхронной машины действует электро-
магнитный момент, обусловленный только токами прямой последовательно-
сти, протекающими по статору машины. Это связано с тем, что токи нулевой
последовательности, например, через генератор вообще не протекают, так
как при обычном соединении обмоток трансформаторов по схеме «треуголь-
ник - звезда» они замыкаются на землю через заземленную нейтраль транс-
форматора. Но даже если бы токи нулевой последовательности и протекали
через синхронную машину, то они все равно не создали бы вращающегося
электромагнитного момента, так как они не образуют вращающегося элект-
ромагнитного поля. Токи обратной последовательности создают вращающе-
еся поле, направленное навстречу вращающемуся полю ротора. Возникаю-
щий при этом электромагнитный момент изменяется с частотой, в два раза
большей нормальной частоты системы. Среднее значение этого момента близ-
ко к нулю. Поэтому можно пренебречь влиянием момента, обусловленного
токами обратной последовательности, и считать, что они не оказывают за-
метного влияния на изменение движения ротора.
5. В сложных системах предварительно упрощают конфигурацию сети
и уменьшают число машин (путем замены нескольких генераторов и элек-
тростанций одной эквивалентной, объединения или переноса нагрузок).
6. Простейшие расчеты устойчивости могут быть выполнены, исходя из
постоянства ЭДС Е' Это позволяет синхронную машину представить схемой
замещения в виде переходного реактивного сопротивления х' и ЭДС Е'.
В этом случае мощность синхронной машины при расчетах динамичес-
кой устойчивости может быть определена по известному уже выражению
Р=—у—sin 5- —-----——sin 25.
г Xd\ 2 Xd\Xd\
Это так называемая «динамическая характеристика мощности системы».
Вычисление величины А'встречает определенные сложности, поэтому в прак-
тических расчетах полагают Е'® Е', кроме того, отбрасывают член с
sin25. При этом получают уравнение
P = (EU/X'd )sin5. “н' (3.1)
123
Глава 3. Динамическая устойчивость электроэнергетических систем
В данном выражении угол 5 фактически является углом 5'.
7. Все изменения режима системы отражаются в изменении ее схемы,
в которой вводятся новые значения сопротивлений, ЭДС синхронных ма-
шин и их механических мощностей.
3.3. СХЕМЫ ЗАМЕЩЕНИЯ СИСТЕМЫ
ПРИ КОРОТКОМ ЗАМЫКАНИИ
Исследование динамической устойчивости при возникновении КЗ, как
указывалось ранее, можно проводить без учета моментов, связанных с то-
ками обратной и нулевой последовательности. Это весьма важное положе-
ние позволяет от несимметричного режима работы системы перейти к сим-
метричному и тем самым значительно упростить анализ динамической ус-
тойчивости. Однако такое допущение не означает, что параметры схем
обратной и нулевой последовательности вообще не влияют на устойчи-
вость систем при КЗ. Это влияние связано с тем, что токи и напряжения
прямой последовательности зависят от сопротивлений и конфигурации схем
не только прямой, но также обратной и нулевой последовательностей. По-
этому при исследовании переходных процессов схемы прямой, обратной
и нулевой последовательностей связываются между собой и образуют ком-
плексные схемы замещения.
На рис. 3.4 приведен пример составления комплексной схемы заме-
щения простейшей системы при однофазном КЗ. Схема прямой после-
довательности является обычной схемой, которая составляется для рас-
чета любого симметричного режима или процесса, где синхронные ма-
шины представлены соответствующими реактивностями и ЭДС. Схема
обратной последовательности по структуре аналогична схеме прямой
последовательности, так как пути протекания токов обратной последо-
вательности те же, что и токов прямой последовательности. Различие
между ними состоит в том, что в схеме обратной последовательности
ЭДС всех генерирующих источников условно принимаются равными
нулю, а реактивности обратной последовательности, например, синхрон-
ных машин несколько отличаются от соответствующих значений пря-
мой последовательности. При составлении схемы нулевой последова-
тельности необходимо учитывать только те элементы схемы, по кото-
рым могут протекать токи нулевой последовательности. Поэтому схема
замещения нулевой последовательности в значительной мере определя-
ется соединением обмоток трансформаторов, определяющих пути цир-
куляции токов нулевой последовательности. Поскольку значения токов,
протекающих в отдельных элементах схем обратной и нулевой после-
довательности, при решении задачи динамической устойчивости
124
3.3. Схемы замещения системы при коротком замыкании
- . V.fiX3 ’ ' : ।
Рис. 3.4. Схемы замещения системы при коротком замыкании:
а - исходная схема; б - комплексная схема замещения для однофазного КЗ;
в - преобразованная схема при однофазном КЗ; г - схема замещения при любом виде КЗ
125
| | Глава 3. Динамическая устойчивость электроэнергетических систем
| I несущественны, то схемы обратной и нулевой последовательностей мо-
| гут быть преобразованы в виде эквивалентных сопротивлений схем об-
I । ' ратной и нулевой последовательностей X, и XQ относительно места КЗ
| i ; (рис. 3.4, в). Таким образом, в общем случае схема замещения системы
1 । I; при любом виде КЗ при расчете динамической устойчивости отличается
от схемы нормального режима работы системы лишь тем, что в месте КЗ
включается поперечное сопротивление, так называемый аварийный шунт
Хш (рис. 3.4, г). Его значение зависит от вида КЗ:
! ♦ при однофазных КЗ - Хш = X, + Хо;
♦ при двухфазных КЗ-Хш =Ху, <
! ♦ при двухфазных КЗ на землю-А'ш = Х2Х0/(Х,+Х0); '
I ' I ♦ при трехфазных КЗ - Хш = 0.
Величина и место включения аварийного шунта влияет назначения соб-
ственных и взаимных сопротивлений системы, определяющих в свою оче-
редь характеристику электрической мощности. Для рассматриваемой сис-
темы (рис. 3.4) взаимное сопротивление в аварийном режиме может быть
о ,| определено по следующему выражению:
fal = fa + *т,) + (0.5X, ♦ ***’ *1Д >. '
ш
В этом случае характеристика мощности системы для аварийного ре-
жима рассчитывается по известной формуле (3.1), но с учетом изменивше-
гося сопротивления
FIJ
Ра=-------sin5. (3.1, а)
ав fain v 7
Следует отметить, что мы рассматривали пример замещения сис-
темы только реактивными сопротивлениями. Поэтому и аварийный
|шунт имеет только индуктивную составляющую сопротивления. Если
в схеме замещения учитывать и активные сопротивления, то аварий-
ный шунт представляет собой сопротивление Zu, имеющее активную и
1 реактивную составляющие.
3.4. ОЦЕНКА ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ СИСТЕМЫ
МЕТОДОМ ПЛОЩАДЕЙ
(Ранее было установлено, что по характеру изменения угла 5 во вре-
мени можно судить о том, будет ли система динамически устойчива пос-
ле большого возмущения и последующего перехода от одного режима к
другому (рис. 3.1, 3.3). Для такой оценки динамической устойчивости
j необходимо иметь зависимость 5 = /(?) во время переходного процесса,
126
3.4. Оценка динамической устойчивости системы методом площадей
которую можно получить путем решения дифференциального уравне-
ния движения ротора:
^ — = />0-7;, sin 5. (3.2)
dt
Однако даже в простейшем случае данное уравнение из-за нелиней-
ной зависимости активной мощности генератора от величины 5 представ-
ляет значительные трудности и в общем случае не может быть решено. Но
иногда динамическую устойчивость системы можно проверить без реше-
ния дифференциальных уравнений, рассматривая энергетические соотно-
шения, возникающие в переходном процессе, и применяя так называемый
метод площадей. Сущность данного метода состоит в анализе совершае-
мой телом работы при его движении под действием силы, например/7. Тогда,
как известно из механики, работу, совершаемую при движении тела от точки
(> до ( с начальной скоростью, равной нулю, можно определить из урав-
нения 'СЩ М:
- • '• ' A- ^FdL > (3.3)
С
Рассмотрим основные положения метода площадей на примере про-
стейшей системы (см. рис. 2.1).
При отключении одной из цепей линии электропередачи происходит из-
менение характеристик электрической мощности с Р на 7^ (см. рис. 3.1, а),
что приводит к появлению небаланса мощности:
АР = РО-РМП sin 5.
Под действием этого небаланса (силы) происходит ускорение ротора
турбогенератора, и его перемещение характеризуется изменением угла 5 с
50 до некоторого 5, (рис. 3.5). При этом работу, совершаемую ротором, по
аналогии с (3.3) можно записать: ; г
б,
л Ау= \bPdb = fahca, • (3.4)
; i >: б0 • к-
гдеу^6от представляет собой заштрихованную на рис. 3.5 площадку abca, соот-
ветствующую графическому изображению выполненной работы Лу.
Вся эта работа Лу пошла на изменение кинетической энергии ротора.
Поэтому величина площади^ отражает приращение кинетической энер-
гии ротора генератора при его ускорении и перемещении от угла 50 до угла 5,.
Площадку fabca принято называть площадкой ускорения f (рис. 3.5).
При угле 5 = 5, электрическая и механическая мощности генератора
оказываются равными. Однако наличие кинетической энергии Лу, запасен-
ной ротором в процессе его ускорения, приводит к тому, что ротор движется
127
Глава 3. Динамическая устойчивость электроэнергетических систем
Рис. 3.5. Анализ устойчивости методом площадей
далее, проходя точку с и увеличивая угол 5. Однако под действием элект-
рической мощности, которая стала больше механической, ротор заторма-
живается. При этом кинетическая энергия, полученная при ускорении, рас-
ходуется, т. е. переходит в потенциальную. При угле 5м вся кинетическая
энергия, запасенная при ускорении, израсходуется. Работа, выполненная
ротором в период торможения, может быть записана в виде
А = J(P“ Sin5-PQ)d5 = fcdec. -о ч (3.5)
5,
Площадка/^может быть названа площадкой торможения Посколь-
ку при торможении израсходована вся энергия ускорения, то Av или
/у=4 (з.б)
Следовательно, для сохранения устойчивости необходимо, чтобы при
максимальном угле отклонения 5м площадка торможения была равна пло-
щадке ускорения. Очевидно, что это правило может быть выполнено при
5м < 5 т. е. при угле, где везде есть избыточный тормозящий момент. При
5 > 5кр, электрическая мощность генератора меньше механической и ротор
не будет тормозиться, а получит ускорение. Величина угла 5кр может быть
определена из равенства
5Кр=л-й1; P = P"sin51=P0,
откуда
5 = л - arcsin-^-. * ' (3.7)
г дЦ
ГМ
Таким образом, площадку можно рассматривать как максимально
возможную^803. Если эта площадка будет меньше, чем площадка ускорения,
128
_______________3.5. Определение предельного угла отключения короткого замыкания
то ротор не сумеет затормозиться, его скорость будет увеличиваться, угол 5
будет неограниченно нарастать. Это приведет к выпадению генератора из
синхронизма и нарушению динамической устойчивости. Поэтому условие со-
хранения динамической устойчивости может быть сформулировано в виде
/у</тВО3- (3-8)
Следовательно, для сохранения динамической устойчивости необхо-
димо, чтобы возможная площадка торможения была больше или хотя бы
равна площадке ускорения. Поэтому запас динамической устойчивости в
простейшей системе удобно характеризовать отношением
fB03 _ f
клу =h...f (3-9)
Л
Метод площадей является частным случаем энергетического подхода
к оценке динамической устойчивости [1].
3.5. ОПРЕДЕЛЕНИЕ ПРЕДЕЛЬНОГО УГЛА ОТКЛЮЧЕНИЯ
КОРОТКОГО ЗАМЫКАНИЯ
Рассмотрим переходный процесс в простейшей системе (см. рис. 2.1),
возникающий при КЗ на одной из цепей линии электропередачи с после-
дующим ее отключением релейной защитой. На рис. 3.6 представлены три
угловые характеристики мощности режимов: Р - нормального; Р — ава-
рийного (КЗ на одной цепи линии); Рш - послеаварийного, то есть режима
с отключенной одной цепью линии. Эти характеристики можно рассчи-
тать по выражениям (3.1), (3.1, а).
В нормальном режиме генератор работает с 50 в точке а. В момент КЗ
сопротивление системы меняется и режим скачкообразно переходит на
характеристику мощности Р Под воздействием избыточной механичес-
кой мощности ротор генератора начинает ускоряться и соответственно уве-
личивать свой угол 5. Предположим далее, что в момент достижения рото-
ром положения 5^к сработала релейная защита и отключила поврежден-
ную цепь линии (см. рис. 3.6, а). Наступил послеаварийный режим, в кото-
ром мощность генератора резко изменилась от точки с до точки d . Под
воздействием полученного ускорения угол 5 будет продолжать увеличи-
ваться. Поскольку при этом площадка торможения/^ слишком мала, то ге-
нератор не сумеет сохранить устойчивую работу. Если отключить КЗ при
угле, например, 5^ (см. рис. 3.6, б), то в этом случае площадка торможения
больше площадки ускорения и динамическая устойчивость системы обес-
печивается. Однако для того, чтобы уменьшить угол отключения 5отк, в реаль-
ной системе требуются более быстродействующие высоковольтные выклю-
9. Зак. 2182
129
Глава 3 Динамическая устойчивость электроэнергетических систем
чатели. Поэтому для практики эксплуатации систем представляет интерес
определение наибольшего угла отключения КЗ, при котором динамичес-
кая устойчивость будет сохраняться. Такой угол называют предель-
ным углом отключения КЗ. Пользуясь правилом площадей, угол мож-
но найти графически (см. рис. 3.6, в). Значение определяется равенством
площадок ускорения и торможения. Предельный угол отключения может быть
найден и аналитически из условия
г ~ /-воз
У у ~ Jt
Подставляя в равенство выражение интегралов с соответствующими
мощностями, получим
Ск 5*Р
J(P0-?’1 sinо)сй- f(p'I! sinS-P^db, (3.10)
6o
где P“, P1”- амплитуды характеристик мощности при КЗ и отключении цепи.
Дпияние угла отключения КЗ на устойчивость:
Проинтегрируем полученное выражение
- So) + ^m(c°sSotk - cos50) =
= -P'n(cos8Kp -cos8"P()-Po(Skp -Sqtk)-
После решения данного уравнения найдем
епв тг/180 • Р0(8кр - 80) - Р» cos80 + Р“= cos8Kp
cos8OTPK =----------------—. (3.11)
*м * м
При трехфазном КЗ на шинах генератора или полном разрыве (отклю-
чении) линии в формуле (3.11) следует принять Р'м'= 0.
3.6. ОЦЕНКА ЭФФЕКТИВНОСТИ АПВ ЛИНИЙ
ЭЛЕКТРОПЕРЕДАЧИ МЕТОДОМ ПЛОЩАДЕЙ
Значительная часть аварийных отключений воздушных линий элект-
ропередачи является следствием неустойчивых повреждений. Неустойчи-
выми называют такие повреждения, которые самоустраняются при отклю-
чении линии от источника напряжения. Обычно такие нарушения возни-
кают при перекрытиях изоляции из-за атмосферных перенапряжений, при
«набросах» на провода, схлестывании фаз и по другим причинам. В этом
случае при отключении линии и самоустранении аварии линия может быть
снова включена в нормальную работу. Такое включение называется по-
вторным включением, а специальные автоматические устройства, выпол-
няющие данную операцию - устройствами АПВ.
АПВ может быть трехфазным (ТАПВ), если при повреждении на ли-
нии отключаются и вновь включаются три фазы линии, или однофазным
(ОАПВ), если отключается и затем включается одна поврежденная фаза.
АПВ, после которого восстанавливается нормальный режим работы ли-
нии, называется успешным. АПВ считается неуспешным, если повторное
включение производится на сохранившееся КЗ и линия вновь отключает-
ся. Это происходит при устойчивых повреждениях, которые не устраня-
ются после отключения линии электропередачи. На рис. 3.7 приведены
схемы простейшей системы с двухцепной линией электропередачи в нор-
мальном режиме и при КЗ с успешным и неуспешным АПВ. Примерные
характеристики мощности в таких режимах представлены на рис. 3.8.
Как видно из приведенных зависимостей на рис. 3.8, а, режим КЗ и
последующее отключение поврежденной линии приводит к нарушению
устойчивости рассматриваемой системы, так как^ > fy. Использование АПВ
(успешного) приводит к увеличению площадки торможения на величину
(см. рис. 3.8, б) и сохранению устойчивости.
131
Рис. 3.7. Схемы системы в нормальных и аварийных режимах и при АПВ:
а - исходная нормальная схема; б - схема при КЗ на линии; в — схема при первичном отключении линии; г - схема при успешном АПВ;
d - схема при неуспешном АПВ; е - схема после неуспешного АПВ
Глава 3. Динамическая устойчивость электроэнергетических систем
3.7. Определение предельного времени отключения трехфазного короткого замыкания
Рис. 3.8. Режимы системы при возникновении повреждения на линиях:
1 — угловая характеристика мощности в нормальном режиме; 2 - угловая характеристика
мощности при КЗ; 3 - угловая характеристика мощности при отключении линии;
а - неустойчивый режим без АПВ; б - устойчивый режим с успешным АПВ;
в - устойчивый режим без АПВ; г - неустойчивый режим при неуспешном АПВ
Однако применение АПВ линий электропередачи иногда ограничива-
ется возможным появлением неустойчивости системы. Так, на рис. 3.8, в
приведен режим сохранения устойчивости системы при КЗ и отключении
одной цепи линии без применения АПВ. Однако использование АПВ ли-
нии в случае неустраненного повреждения приведет к нарушению устой-
чивости из-за уменьшения площадки торможения и увеличения площадки
ускорения на величину (см. рис. 3.8, г).
3.7. АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ ПРЕДЕЛЬНОГО ВРЕМЕНИ
ОТКЛЮЧЕНИЯ ТРЕХФАЗНОГО КОРОТКОГО ЗАМЫКАНИЯ
Определение только предельного угла отключения КЗ для решения
практической задачи обеспечения устойчивости в условиях эксплуатации
133
Глава 3 Динамическая устойчивость электроэнергетических систем_________
является недостаточным. Для выбора выключателей и релейной защиты
при проектировании электрической сети необходимо знать время, в тече-
ние которого ротор успевает достигнуть 8^к , то есть так называемое пре-
дельно допустимое время отключения КЗ. С помощью метода площадей
определить время отключения КЗ невозможно. Это можно сделать только
путем решения уравнения движения ротора генератора, учитывающего его
механические свойства.
Уравнение движения ротора генератора (3.2) представляет собой обык-
новенное нелинейное дифференциальное уравнение второго порядка, так
как содержит нелинейную и разрывную функцию Р = 7*15(/)]. Уравнение
этого класса не решается в общем виде, то есть нельзя получить аналити-
ческое выражение для искомой функции угла во времени 5 = /7). Однако
для некоторых частных случаев это возможно, например, при трехфазном
КЗ или перерыве питания (отключении линии электропередачи). В таких
аварийных режимах электрическая мощность генератора Р = PMsin5 = 0 и
уравнение движения принимает вид
Т,~ = Р0. ГР ‘-4^ (3.12)
1 dt2 '= —
Это уже линейное дифференциальное уравнение второго порядка, опи-
сывающее равномерно-ускоренное движение. Для интегрирования урав-
нения (3.12) запишем его в виде
где А® = d&dt - изменение скорости вращения ротора;
aQ = PJT - ускорение ротора.
Интеграл этого уравнения ‘ '
шла; • ‘
Л® = aQr + Cf if..
При t = 0 относительная скорость ротора Aft) = 0, следовательно, С\ =0
и А® - at.
Таким образом, имеем ‘z
— = <хп/ или с/5 = аог • dt. ’
dt 0
Интегрируя последнее уравнение, получим
5= = а0Г2/2 + С2.
При t - 0 угол 5 = 50, следовательно, С, = 50. Поэтому
5-50 = а//2 = (Р0/7;)Т/2.
3.8. Численное решение уравнения движения ротора
Отсюда легко найти время t, соответствующее какому-либо значению
угла 5:
pr7(8-8Q)
Рд
(3.14)
Если предварительно определить предельный угол отключения КЗ
5"РК , например, по выражению (3.11), подставить его значение 8 = 5JJP в
уравнение (3.14), то получим предельное время отключения трехфазного
КЗ на шинах синхронной машины:
™ _ 27}(5^-80)
‘отк 1 D
V 'О
(3.14, а)
3.8. ЧИСЛЕННОЕ РЕШЕНИЕ УРАВНЕНИЯ ДВИЖЕНИЯ РОТОРА
МЕТОДОМ ПОСЛЕДОВАТЕЛЬНЫХ ИНТЕРВАЛОВ
Общим способом решения нелинейных дифференциальных уравнений
являются хорошо разработанные в математике методы численного интегри-
рования (Эйлера, Рунге-Кутта, Адамса и др.). Одним из них является метод
последовательных интервалов, часто используемый в практике инженер-
ных расчетов. Идея метода заключается в следующем: время рассматрива-
емого переходного процесса разбивается на малые интервалы времени А/,
для каждого из них последовательно определяется приращение угла АЗ.
При этом интервал времени выбирается настолько малым, что на его про-
тяжении можно считать постоянным избыточный момент АР, действую-
щий на ротор машины. В этом случае, исходя из уравнения движения (3.2),
d28 ДР
и ускорение а = —— = — тоже можно считать постоянным. Следовательно,
dt2 Т
j
при принятых допущениях изменение угла будет происходить по закону
равномерно-ускоренного движения и к концу первого интервала составит
А3(1) = Дсо())Д1 + 0,5а(1)Дг2, (3-1 $)
где Д®(1), а - относительная скорость и ускорение ротора в начале перво-
го интервала.
Рассмотрим переходный процесс в простейшей системе (см. рис. 2.1)
при возникновении КЗ. Характеристики мощностей системы в исходном и
аварийном режиме показаны на рис. 3.9. В момент КЗ относительная ско-
рость машины равна нулю, поэтому для первого интервала Д® = 0. Уско-
рение а( может быть вычислено по формуле
135
Глава 3. Динамическая устойчивость электроэнергетических систем
а
а(1)“ Т. ’
А5(1) =0,5а(-])Д/2 =0,5
л/2 =о,5ллр(1),
(3-16)
где ДР - избыточная мощность на валу машины на первом интервале.
Величина ДР(]) может быть определена графически (рис. 3.9, а) или рас-
считана согласно уравнению
^(l) - - Pj1 sin50.
Таким образом, приращение угла ДЗ к концу первого интервала составит
^(1)
Tj
где К = £ДЧТ - постоянный коэффициент.
При расчете изменения угла Д5 по формуле (3.16) угол и время выра-
жены в радианах. В практических расчетах удобнее пользоваться значени-
ями угла в градусах, а времени в секундах. В таких случаях величина К
определяется следующим образом: К= З&ЗрмЧТ.
Значение угла 5 к концу первого интервала будет
51=8о + Д5(]).
Рассчитаем теперь изменение угла на втором интервале
Д5(2) = До)(-2)Д^ "Ь 0,5(Х(2)Д? •
Ускорение на данном интервале будет равно
^(2)
а(2)=—,
(3.17)
гдеДР(2) = Р0- P“sin8,.
Величину относительной скорости Да>(2, которую получил ротор к нача-
лу второго интервала, можно определить из выражения
Д®(2) = 0,5(а(1) + а(2) )Д?, (3-18)
где 0,5(а(1) + а(2)) - среднее арифметическое ускорение за первый интервал.
Подставим (3.18) в (3.17) и получим
Д8(2) = 0,5((Х(|) +а.(2))Дг -ь 0,5<х^2уА^ =0,5сс^рДг -нсс^^Д^ ~
Г др
= Д5(1) + ..(2) Л?2 = Д8(1) +Л?ДР(2).
Таким образом, приращение угла во втором интервале составит
ДЗ^) = Д8([) +ЛЛР(2).
136
Рис. 3.9. Изменение параметров режима простейшей системы
при расчете методом последовательных интервалов:
а - характеристики мощности; б - зависимость угла от времени
Аналогичным образом можно рассчитать изменение угла в третьем и
на любом последующем интервале:
^п)=^п-1)+КЛР^, (3.19)
где ДР - небаланс мощности на валу машины в начале и-го интервала.
Если в начале некоторого m-го интервала происходит резкое измене-
ние режима системы, вызванное, например, отключением поврежденной
линии, то небаланс мощности, составляющий ДР^, внезапно изменяет-
ся до величины ДР(^) (рис. 3.10). В этом случае изменение угла на пг-м
интервале определится следующим образом:
ДЗ^^ДЗ^+О^ДР^+ДР^). '. (3.20)
0 80 5 о 50 5 (т1) 5
Рис. 3.10. Примеры резкого изменения режима системы
Ю. Зак. 2182
137
Глава 3. Динамическая устойчивость электроэнергетических систем
В дальнейших расчетах можно снова использовать выражение (3.19). Та-
ким образом, решая на каждом интервале уравнение движения ротора, мы по-
лучаем требуемую зависимость 5 =у(/) (рис. 3.9, б). Расчет ведется до тех пор,
пока угол 5 не начнет уменьшаться или пока не станет ясным, что угол 5 бес-
предельно возрастает, а следовательно, происходит нарушение устойчивости.
Следует отметить, что при расчетах переходных электромеханических
процессов в электрических системах выбирается интервал А/1 = 0,01-0,05 с.
При этом величина интервала зависит от скорости протекания переходно-
го процесса во времени, определяемого постоянной времени. Наиболее
точные результаты получаются при меньшем интервале, так как погреш-
ность расчета угла будет меньше. Однако при уменьшении интервала их
необходимое число для решения задачи возрастает, следовательно, увели-
чиваются и длительность расчета, и погрешность округления. Эти обстоя-
тельства необходимо учитывать при выборе интервала расчета.
3.9. ОПРЕДЕЛЕНИЕ ПРЕДЕЛЬНОГО ВРЕМЕНИ ш
ОТКЛЮЧЕНИЯ КОРОТКОГО ЗАМЫКАНИЯ
Используя метод последовательных интервалов или другие методы
численного интегрирования дифференциальных уравнений, можно рассчи-
тать изменение угла 5 во времени (рис. 3.11). Для простых схем с помо-
щью метода площадей нетрудно определить предельный угол отключения
короткого замыкания 5£Р . В этом случае по зависимости 6 =Л0 и значе-
нию 8”^ находится предельное время отключения КЗ (см. рис. 3.11, а).
Для сложных систем угол 8','^ заранее, до расчета переходного процес-
са, определить, как правило, не удается, так как метод площадей и получен-
ное на его основе выражение (3.11) здесь не применимы. В этом случае вна-
чале задаются каким-то одним временем отключения КЗ tи для его дли-
тельности рассчитывается зависимость 8(1) Следующим шагом расчета
является выбор другого времени отключения КЗ - Если на основе преды-
дущего расчета переходного режима установлено, что устойчивость сохраня-
ется, то время t^K берется больше . Если же расчет показал, что устойчи-
вость при не сохраняется (см. рис. 3.11, б), то принимается £) < t$K .
Далее опять рассчитывается зависимость 8(2) =Д/) для принятого t^K Расче-
ты переходных процессов выполняются до тех пор, пока не удается найти с
достаточной точностью два близких значения времени отключения КЗ и
, для которых устойчивость сохраняется и нарушается. На основании этих
расчетов с определенной достоверностью можно принять, что = t$K .
Пример 3.1. В электрической системе (см. рис. 1.29) на линии Л1 вбли-
зи электростанции возникает двухфазное КЗ на землю. Релейной защитой
данная линия отключается.
138
3.9. Определение предельного времени отключения короткого замыкания
Рис. 3.11. К определению предельного времени отключения короткого замыкания:
а - для простых систем; б — для сложных систем
Требуется:
1. Определить параметры схемы системы в аварийном и послеаварий-
ном режимах.
2. Построить динамические характеристики мощности системы.
3. Рассчитать максимально допустимые угол и время отключения КЗ.
Параметры элементов системы:
♦ постоянная механической инерции турбогенератора Т = 8,0 с;
♦ сопротивление нулевой последовательности линий электропередачи
х° = 4хл .
+ схема соединений обмоток: Т - А/Т' , АТ -
Остальные недостающие параметры взять из примеров 1.1 и 2.1.
Решение. Схемы замещения для токов системы обратной и нулевой после-
довательности относительно точки КЗ приведены на рис. 3.12.
а
Д. Рис. 3.12. Схемы замещения системы:
а-обратной последовательности; б~ нулевой последовательности
139
Глава 3. Динамическая устойчивость электроэнергетических систем
Эквивалентные сопротивления схем обратной последовательности:
х __ О2г + *т )(*л + *ат ) (ОД 3 + 0,09)(0,07 + 0,05)
%2г + ^ат 0,13 + 0,09 + 0,07 + 0,05
нулевой последовательности:
х _ хт(40) + хАТ) _ 0,09(4 • 0,07 + 0,05) _ ?
° хт+4°1+хАТ 0,09 + 0,28 + 0,05 ’ ’ 4
Значение сопротивления аварийного шунта:
= 1,18.
_ х2х0 _ 0,08-0,07 _
х.п —------—-----------— 0,03 /.
х2 + х0 0,08 + 0,07
Сопротивление системы в аварийном режиме:
y Y' Л</+*т)(Хл+хАт) nV7 (0,16 +0,09)(0,07 +0,05)
а d хш 0,037
Сопротивление системы при отключении одной линии:
— x'd + х,12 + Хд-р = 0,16 + 0,09 + 0,14 + 0,05 = 0,44.
Угловая характеристика мощности в исходном режиме:
E'U . 1,24-1 . . _ [ __
Р] =-----sin5 =-----sin5 = 3,35sino, Рм =3,35.
x'dt 0,37
Угловая характеристика мощности в аварийном режиме:
R = —sin5 = -^3-sin5 = l,05sin5, Р*1 =1,05.
А'ав М8
Угловая характеристика мощности в послеаварийном режиме:
Р1П =—sin 5 = ^3-sin 5 = 2,82 sin 5, р'п =2,82.
Лта 0,44
По данным выражениям, изменяя угол 5 от 0 до 180°, на рис. 3.13 построе-
ны динамические характеристики мощности системы для трех рассматри-
ваемых режимов. р
Критический угол 5кр = 180° - arcsin—= 180° - arcsin---= 159,2°.
Предельный угол отключения КЗ:
епо (7г/18О)Ро(5кр -5'о)-р“ cos5'0+p“’ cos5
5ОТРК =arccos------------------^ЙГ—^i------------------------
*М
(3,14/180)-1-(159,2° -17,3°)-1,05cos 17,3° + 2,82cosl60°
arc cos
140
3.9. Определение предельного времени отключения короткого замыкания
По результатам расчетов заштрихуем площадку торможения и ускоре-
ния (рис. 3.13). Поскольку геометрически/.',=/', следовательно, расчет
выполнен правильно.
Постоянную механической инерции генератора приведем к базисной
мощности:
Уравнение движения ротора генератора решим методом последователь-
ных интервалов. Длительность расчетного интервала примем А? = 0,05 с.
Значение постоянного коэффициента:
360-/-А? 360-50-0,052
Тр " 10,08
Значение электрической мощности в первый момент возникновения КЗ:
P(I) =/>“ sin 5'0 = 1,05 sin 17,3° =0,31.
Избыток мощности в начале первого интервала:
АР(1) = - Р(\у = 1 - 0,31 = 0,69.
Изменение угла за первый интервал:
А5(1) = 0,5КАР(1) = 0,5 • 4,46 0,69 = 1,54°.
Угол к концу первого интервала:
5(1) = 5'0 + А5(1) = 17,3 + 1,54 = 18,84°.
90 5"р §кР 180 5
Рис. 3.13. Динамические характеристики мощности системы в режимах:
Р - исходном; Рв - аварийном; Рт - послеаварийном
Глаеа 3. Динамическая устойчивость электроэнергетических систем
Второй интервал (0,05+0,1 с):
^(2) sin5(1) =l,05sin 18,84° =0,34.
ДР(2) = ро - Р(2) =1 - 0,34 = 0,66.
Д5(2) = Д5(1) + KNPm = 1,54 + 4,46 0,66 = 4,48°
5(2) =5(1)+Д5(2) =18,84 + 4,48 = 23,32°.
По результатам дальнейших расчетов на рис. 3.14 построена кривая
5 =./(0- По ней, исходя из значения 6^ =131° пределяем = 0,61 с.
Таким образом, если действительное время отключения КЗ меньше 0,61 с,
то динамическая устойчивость рассматриваемой системы при данном виде
повреждения обеспечивается.
> -iS
Рис. 3.14. Определение предельного времени отключения КЗ
Пример 3.2. Для системы, показанной на рис. 1.29, оценить условия
динамической устойчивости при трехфазном КЗ в начале, середине и конце
одной цепи линии электропередачи, отключаемой при 5отк = 110°. Параметры
системы аналогичны примеру 3.1.
Решение. 1. При трехфазном КЗ в начале линии схема замещения сис-
темы приведена на рис. 3.15, а, взаимное сопротивление в таком аварий-
ном режиме:
-^ав ~ -^а + Хв + ХаХв / Л'ш — со,
где хш = 0,
142
3.9. Определение предельного времени отключения короткого замыкания
следовательно, характеристика мощности:
_н E'U . . 1,24-1 . „ п
Д, =-----sin 5 =------sm 5 = 0.
гн °°
Лав
2. При трехфазном КЗ в конце линии (рис. 3.15, б):
Хя„ = Хя + Х„ + ХяХп/х„. = 00,
do а о а В ш ’
где х = О,
пт ’
f
' .. E'U . . 1,24-1 . . .
Tlf =----sin 5 =-------sin 5 = 0.
rK °О
Аав *
Таким образом, при трехфазном КЗ в начале или конце линии актив-
ная электрическая мощность генератора в ОЭС не передается. Характери-
стики мощности таких режимов приведены на рис. 3.16, а.
3. При трехфазном КЗ в середине линии сопротивления отдельных
участков линии на схеме замещения (рис. 3.15, в) образовали треугольник.
Преобразуя треугольник в звезду, получим схему замещения, приведенную
....... • • а
Е' г
хш = О
X и
Рис. 3.15. Схемы замещения системы при трехфазном КЗ:
а — в начале линии; б - в конце линии; в-в середине линии;
г - преобразованная схема рис. 3.15, в
143
Глава 3. Динамическая устойчивость электроэнергетических систем
на рис. 3.15, г. Сопротивления отдельных участков схемы замещения:
ха = xd + хт + 0,25хл1 — 0,37 + 0,09 + 0,04 ~ 0,5;
хв = 0,25хл1 + хАТ = 0,04 + 0,05 = 0,09.
Взаимное сопротивление в таком аварийном режиме: нцВ <
= ха + хв + ~аХ-в = 0,05 + 0,09 + °’5'-?- = 2,25.
6 0,12хл1 0,12-0,14 .
Угловая характеристика мощности аварийного режима:
X = ——— sin 5 = - — sin 5 = 0,5 5 sin 5.
2’25
'Ж*
Характеристики мощности рассматриваемых режимов, площадки ус-
корения и торможения показаны на рис. 3.16. Из сравнения площадок вид-
но, что при трехфазном КЗ в начале и конце линии устойчивость генерато-
ра нарушается > f), а при КЗ в середине линии - сохраняется. Таким
образом, наиболее неблагоприятными являются КЗ, происходящие в нача-
ле и конце линии, сопровождающиеся полным сбросом (прекращением
выдачи) мощности генератора.
Рис. 3.16. Площадки ускорения и торможения при возникновении трехфазного КЗ:
а - в начале и конце линии; б - в середине линии
Пример 3.3. В схеме, приведенной на рис. 1.29, внезапно отключаются и
затем вновь включаются обе линии электропередачи. Параметры схемы и
исходного режима аналогичны примеру 3.1.
Требуется определить предельное время включения линий для сохра-
нения динамической устойчивости.
Решение. При отключении линий передаваемая мощность в ОЭС рав-
на нулю, т. е. = 0. р j
Критический угол: 8кр =180° -arcsin—у = 180° -arcsin----= 162,7°.
Л. 3,35
144
_______________________________________________Контрольные вопросы
Предельный угол включения линий электропередачи:
RGHS. §пр _ агссоз(П/180Ж5кр ^м C0S5° +PmCOs5kP
иВКЛ “* VVUS . .. —
р - р
1 м 1 м
(3,14 /180°) 1 (162,7° -17,3°) - о • cos 17,3° + 3,35 cos 162,7°
= arccos -----------------------------------------------— = 102.
3,35-0
Определим предельное время включения линий:
С = ^27/5^60)/(W) =
= д/2 • 10,08(102° -17,3°)/(1 -180° -50) = 0,53 с.
Характер процесса при отключении и включении линий показан на рис. 3.17.
Рис. 3.17. Характеристики мощности и площадки торможения и ускорения
в режиме отключения и предельно допустимого включения линий
Контрольные вопросы
1. Что понимается под динамической устойчивостью системы?
2. Какие основные допущения положены в основу упрощенного ана-
лиза динамической устойчивости?
3. Что представляет собой схема замещения системы при КЗ?
4. Какова сущность метода площадей?
5. Как оценивается динамическая устойчивость системы?
6. Как определяются предельный угол и предельное время отключе-
ния КЗ?
7. Как определить запас динамической устойчивости?
8. При каких условиях можно аналитически определить предельное
время отключения КЗ?
145
Глава 3. Динамическая устойчивость электроэнергетических систем
9. Как проверить динамическую устойчивость системы при использо-
вании АПВ линии?
10. Как проводится численное интегрирование уравнения движения
ротора синхронной машины?
11. Как оценивается динамическая устойчивость по изменению угла 5
во времени? -__-
ММ ЕЙ' Ж;!
Глава 4. УСТОЙЧИВОСТЬ НАГРУЗКИ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
; 4.1. ОБЩАЯ ХАРАКТЕРИСТИКА УЗЛОВ НАГРУЗКИ
Часть электроэнергетической системы, осуществляющая снабжение элек-
трической энергией потребителей, называется системой электроснабжения.
Она содержит питающие и распределительные линии электропередачи, транс-
форматоры, компенсирующие устройства и непосредственно электроуста-
новки потребителей электроэнергии. При анализе устойчивости можно
исследовать поведение как отдельных электроприемников, так и узлов
нагрузки, под которыми понимают группы потребителей, присоединен-
ных к шинам подстанции, линии электропередачи и т. д.
В состав узлов нагрузки, кроме асинхронных и синхронных двига-
телей, статической нагрузки могут входить синхронные компенсаторы и
даже небольшие электростанции. Под статической нагрузкой обычно
понимают электроприемники, в которых отсутствует вращающееся маг-
нитное поле: электрическое освещение, выпрямители, электропечи, по-
тери в электрической сети, коммунально-бытовые приборы и другие элек-
тротехнологические установки. Состав потребителей в узле нагрузки
может меняться в широких пределах и в основном зависит от района
электроснабжения.
В табл. 4.1 приведен наиболее типовой состав городской нагрузки.
Таблица 4.1
Средний состав городской нагрузки
Потребитель Доля потребления, %
Асинхронные двигатели 48
Освещение 25
Печи и нагревательные установки, выпрямители 10
Синхронные двигатели 10
Потери в сетях 7
147
Глава 4. Устойчиволсть нагрузки электроэнергетических систем________
Исследование устойчивости и переходных процессов в узлах нагруз-
ки весьма важно с двух позиций:
1. Обеспечение бесперебойной работы предприятий при кратковре-
менных нарушениях в системах электроснабжения. Так, например, КЗ в
питающих или распределительных сетях могут вызвать нарушение устой-
чивой работы двигательной нагрузки, что приводит к нарушению техно-
логических процессов, браку продукции и т. д.
2. Влияние переходных процессов в нагрузке на режимы энергосисте-
мы и устойчивость генераторов. Это связано с тем, что сами переходные
процессы в нагрузке могут быть опасными для нормального функциони-
рования энергосистемы. Можно отметить три наиболее характерных воз-
действия на энергосистему:
♦ внезапные большие набросы или сбросы нагрузки. Последние, как
правило, вызваны отключением крупных потребителей. Большие набросы
связаны с включением мощных потребителей, например, дугоплавильных
электропечей. Если такие отключения происходят в избыточных энерго-
районах, а включения - в дефицитных, то это приводит к набросу мощнос-
ти на внешние связи. При неблагоприятных обстоятельствах такие воздей-
ствия могут вызвать нарушение устойчивости электроэнергетической сис-
темы и привести к тяжелой системной аварии. Аналогичное воздействие
на энергосистему могут иметь КЗ во внутренних сетях предприятий, вызы-
вающих большие и резкие изменения потребляемой мощности;
♦ значительное увеличение реактивной мощности после нарушения
устойчивости двигателей. Особенно большой наброс реактивной нагруз-
ки имеет место при нарушении синхронной работы двигателей. Это может
вызвать настолько глубокие снижения напряжения, что возникает лавино-
образный процесс нарушения устойчивости двигателей. Поэтому в энер-
госистемах с большой долей синхронной нагрузки - это один из основных
факторов, приводящих к аварийным ситуациям;
♦ самозапуск группы мощных асинхронных двигателей.
В зависимости от особенностей решаемой задачи, нагрузки при иссле-
довании устойчивости могут представляться различными расчетными моде-
лями. В частности, двигательную нагрузку предлагается представить в зави-
симости от числа электродвигателей, входящих в состав узла нагрузки [17]:
1. Небольшие группы двигателей. Каждый двигатель вводится в рас-
чет непосредственно своим уравнением и параметрами.
2. Группы из десятков и сотен двигателей, относящихся к одному произ-
водству. Такие группы заменяются небольшим числом эквивалентных двигате-
лей, параметры которых рассчитываются по определенным правилам на осно-
вании данных о реальных двигателях.
3. Крупные узлы нагрузки. Их описание для расчета устойчивости со-
ставляется на основании конкретных данных о составе нагрузки и пара-
148
4.2. Характеристики синхронных двигателей
метрах распределительной сети, а также исходной информации, получен-
ной в результате статистического анализа.
Разнотипность синхронных двигателей в узлах нагрузки небольшая,
что позволяет учитывать их по фактическим параметрам и параметрам
нормального режима. При исследовании мощных двигателей, как синх-
ронных, так и асинхронных, весьма важно учитывать взаимное влияние
электродвигателей, так как это оказывает существенное воздействие на
поведение двигателей в переходном процессе.
Для повышения точности расчетов за счет более детального учета ос-
новных особенностей потребителей и распределительной сети могут
применяться многоэлементные комплексные модели. В зависимости от
поставленной задачи и структуры нагрузки расчетная схема может со-
держать различное число узлов, электродвигателей и других потребите-
лей. Чем меньше протяженность распределительной сети и чем больше
однородность нагрузки, тем проще ее расчетная модель.
4.2. ХАРАКТЕРИСТИКИ СИНХРОННЫХ ДВИГАТЕЛЕЙ
Амплитуда угловой характеристики мощности синхронного двигате-
ля, согласно (2.33) и (2.56), зависит от величины подведенного к нему на-
пряжения. На рис. 4.1 приведены зависимости Р =/(5) при уменьшении на-
пряжения, при этом Uo> U, > U2> U . Из графиков видно, что при уменьше-
нии напряжения увеличивается угол 6, но потребляемая активная мощность
не меняется (рис. 4.2). Это связано с тем, что скорость вращения ротора не
изменяется и приводной механизм не ощущает каких-либо изменений
в работе двигателя. Это продолжается до снижения напряжения до крити-
ческой величины (U ). При дальнейшем снижении напряжения механи-
ческая мощность становится больше электрической и устойчивая синхрон-
ная работа двигателя нарушается. Под критическим напряжением понима-
ется предельное наименьшее напряжение в узле электроэнергетической
системы по условиям статической устойчивости.
При снижении частоты статические характеристики синхронных
двигателей определяются в основном механической характеристикой
приводного механизма в зависимости от скорости вращения ротора (н).
В рассматриваемом случае п прямо пропорционально зависит от час-
тоты f подведенного к двигателю напряжения. У приводных механиз-
мов двигателей можно выделить три основных типа механических ха-
рактеристик, т. е. зависимостей механического момента от скорости
вращения (рис. 4.3).
1. Постоянный или мало зависящий от скорости механический мо-
мент характерен для подъемных и транспортных механизмов, прокатных
149
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
г I ?ИС. ;4.1,' Угловые характеристики мощности синхронного двигателя
Р№
Р-------------------л-------------!---
: . Рис. 4.2. Статическая характеристика активной мощности синхронного двигателя ;
по напряжению ..
станов, поршневых компрессоров: , ,
М = const; Р = со. •
мех ’ мех
2. Механический момент - примерно пропорциональный скорости,
характерен для основных рабочих машин двигателей:
М = со; Р = со2,
мех ’ мех
3. Вентиляторный момент - примерно пропорциональный квадрату
скорости:
М
мех
= со2;Р = со3.
’ мех
150
4.2. Характеристики синхронных двигателей
Рис. 4.3. Механические характеристики приводных механизмов:
1 - М = const; 2-М =(»; 3 - М = со2
,мс\ ’ мех ’ мех
В соответствии с этими характеристиками на рис. 4.4 показан диапа-
зон изменения активной мощности синхронных двигателей при измене-
нии частоты в питающей сети.
Следует отметить, что вид статических характеристик активной мощнос-
ти практически не зависит от типа двигателей. Статические характеристики
реактивной мощности синхронных двигателей, наоборот, определяются их
параметрами. Наиболее точно реактивная мощность синхронного двигателя
описывается уравнением [17]:
Рис. 4.4. Статические характеристики активной мощности синхронных двигателей
по частоте:
1 -Р = s>-,2-Р = <Х
(4-1)
151
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
Однако устойчивость режима синхронных двигателей можно анализи-
ровать без учета изменения его насыщения, а также без учета разницы в прояв-
лениях реакции статора по продольной и поперечной осям [18], т. е. при
хи = хч- С учетом последнего допущения уравнение (4.1) запишется в виде:
EJJ и2
2СД=—cos5---------. (4-2)
xd xd
Выразив угол 6 из уравнения (2.33) и подставив его в (4.2) получим:
2сд =
Ч Xd
>2
сд
и2
xd ’
(4.3)
где Рса - активная мощность синхронного двигателя.
На рис. 4.5, а показан вид и диапазон изменения реактивной мощности
синхронных двигателей при изменении напряжения. Исходный режим ха-
рактеризуется генерацией реактивной мощности Qo и при снижении напря-
жения ее величина может как уменьшаться, так и увеличиваться в зависимо-
сти от значений Xj, текущей активной мощности Р и параметров системы
возбуждения Е. При снижении напряжения до уставок срабатывания уст-
ройств форсировки возбуждения (С/ ), выдача реактивной мощности резко и
значительно возрастает. Это связано с увеличением тока возбуждения и, со-
ответственно, ЭДС Ец синхронного двигателя. Приведенные характеристики
справедливы до достижения синхронным двигателем критического напря-
жения. При снижении напряжения ниже критической величины происходит
выпадание двигателя из синхронизма. В таком режиме работы синхронный
двигатель приобретает дополнительные свойства асинхронного двигателя со
значительным потреблением реактивной мощности. В данном случае харак-
теристики синхронного двигателя могут быть весьма разнообразны в зависи-
мости от характера переходного процесса.
Статические характеристики реактивной мощности синхронного
двигателя по частоте не имеют определенной закономерности и зависят
как от параметров х^, Рся, так и от используемой системы и регулятора воз-
буждения (рис. 4.5, б).
4.3. ХАРАКТЕРИСТИКИ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Для установления основных характеристик асинхронных
двигателей воспользуемся упрощенной Г-образной схемой замещения
(рис. 1.23, б). Тогда активная мощность, потребляемая двигателем, может
быть определена из выражения
Г = = (4.4)
s xs + (r2 / S) (xss) + г2
152
' 4.3. Характеристики асинхронных двигателей
Рис. 4.5. Статические характеристики реактивной мощности синхронного двигателя:
а - по напряжению; б - по частоте
Эта зависимость дает известную характеристику мощности или вра-
щающего момента двигателя, показанную на рис. 4.6, а. Предположим,
что механическая мощность Р не зависит от скольжения. В этом случае
ее характеристика будет параллельна оси абсцисс (прямая 1, рис. 4.6, а).
Установившийся режим работы двигателя наступает при пересечении ха-
рактеристик электрической и механической мощностей. Например, при
подведенном напряжении Uo к двигателю установившийся режим харак-
теризуется исходной мощностью Ро и скольжением .v0 в точке а.
Следует обратить особое внимание на то обстоятельство, что значе-
ние активной мощности асинхронного двигателя, согласно (4.4), зави-
сит от квадрата напряжения на его выводах. Поэтому при уменьшении
напряжения на зажимах двигателя его скольжение будет увеличиваться для
153
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
уравновешивания тормозного и вращающего моментов. Так, например, при
уменьшении напряжения, подводимого к двигателю, с UQ до £7 двигатель
переходит в режим, характеризуемый точкой б с увеличением скольжения с .v(J
до£г При этом активная мощность, потребляемая двигателем, практичес-
ки не меняется в соответствии с рассматриваемой механической характе-
ристикой Рмех = const. Такой процесс изменения режимов будет продолжать-
ся до [7 (прямые а - в на рис. 4.6). При дальнейшем снижении напряжения
электрическая мощность становится меньше механической и ротор асинх-
ронного двигателя будет тормозиться вплоть до его останова. Линии в - г на
рис. 4.6 соответствуют режиму торможения двигателя. При снижении напря-
жения у остановленного двигателя потребляемая им активная мощность на-
ходится из уравнения
Данное выражение следует из (4.4) при s = 1. На рис. 4.6, б изображена
кривая г - 0, соответствующая режиму снижения напряжения при затор-
моженном двигателе. Однако такой вид статической характеристики асин-
хронного двигателя справедлив только для принятой механической мощ-
ности Рмех = const. В других случаях изменение активной мощности, по-
требляемой двигателем в условиях изменения напряжения на его выводах,
будет определяться механическими характеристиками, приведенными на
рис. 4.3. В качестве примера на рис. 4.6, б приведена зависимость 2, соот-
ветствующая примерно линейной зависимости механической мощности
от скольжения. При этом предельный режим по устойчивости наступает в
точке д при критическом напряжении U .
Статическая характеристика активной мощности асинхронного дви-
гателя по частоте мало чем отличается от соответствующей характеристи-
ки для синхронного двигателя, приведенной на рис. 4.4. Это связано с тем,
что как в первом, так и во втором случае характеристики двигателей опре-
деляются характеристиками приводимых рабочих машин.
Реактивная мощность асинхронного двигателя состоит из мощности
рассеяния Q_ и мощности намагничивания Q . Первая составляющая мо-
жет быть определена в соответствии с выражением
(4-5)
или, находя величину rj s из выражения (4.4) и подставляя ее в (4.5), полу-
чаем уравнение реактивной мощности рассеяния в виде
2Р\
U2 +у]и4 ~(2Pxs)2
(4-6)
154
4.3. Характеристики асинхронных двигателей
Hsivqa ?.i, к?
".тэоншга,-
> гя отС
НТ ,
№№'
Рис. 4.6. Статические характеристики активной мощности асинхронного двигателя:
а - по скольжению; б - по напряжению;
1 - Р = const; 2 - Р =s
мех ? мех
Последнее уравнение более удобно для анализа Q при изменении на-
пряжения. При остановленном двигателе, когда 5 = 1, величина Qs в соот-
ветствии с (4.5) находится из уравнения
ил и, учитывая, что г,« х, ;
- х. J72 ,{П1; . -
- Qs=-~- - (4-7)
Л5
155
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
На рис. 4.7, а построена зависимость Q во всем диапазоне изменения
напряжения. Как видно из приведенной кривой и уравнения (4.6), при сни-
жении напряжения значение Qs возрастает, а при достижении U наблюда-
ется ее резкое увеличение. При дальнейшем снижении напряжения на за-
торможенном двигателе Q уменьшается в соответствии с уравнением (4.7).
Реактивная мощность, потребляемая ветвью намагничивания, соглас-
но рис. 1.23, б, находится из уравнения
2ц = И2/хц. ' (4.8)
На рис. 4.7, а построена зависимость Q от напряжения. Следует отме-
тить, что с учетом насыщения при снижении напряжения уменьшается,
поэтому реальная зависимость от напряжения заметно отклоняется от
квадратичной параболы. На рис. 4.7, б приведена общая зависимость по-
требляемой реактивной мощности асинхронного двигателя от напряжения
как при работе, так и при его останове. Для большинства двигателей харак-
терным является начальное снижение потребляемой реактивной мощности
при уменьшении напряжения (зависимость 1, рис. 4.7, б). Однако в некото-
рых крупных асинхронных двигателях наблюдается увеличение реактивной
мощности при начальном снижении напряжения (зависимость 3, рис. 4.7, 6).
Это вызвано преобладанием составляющей Qs над (7 в общей реактивной
мощности двигателя.
Значение критического напряжения, при котором происходит наруше-
ние устойчивости двигателя, зависит от его типа и коэффициента загрузки
К (зависимости 1 и 2, рис. 4.7, б).
Потребляемая реактивная мощность асинхронного двигателя зави-
сит также от изменения частоты. Для установления характера этого
изменения запишем выражения для определения Qs и в виде
Qs=l\ = I2Ls2nf-
где L, и - индуктивности ветвей рассеяния и намагничивания.
Таким образом, составляющая Q уменьшается при снижении частоты
и возрастает с ее увеличением. Составляющая Q напротив, увеличивает-
ся при уменьшении частоты. Соотношение между этими составляющими
в обычных асинхронных двигателях таково, что полная реактивная мощ-
ность при небольших отклонениях частоты от номинального значения сни-
жается, а при значительном росте частоты - увеличивается. Такой рост
потребления реактивной мощности при больших снижениях частоты мо-
жет приводить к уменьшению напряжения в питающей сети и, следова-
тельно, к ухудшению условий работы нагрузки.
156
4.4. Оценка статической устойчивости асинхронных и синхронных двигателей
Рис. 4.7. Статические характеристики реактивной мощности асинхронного двигателя
по напряжению:
а - составляющие реактивной мощности;
б - общая потребляемая реактивная мощность Q = + Q-,
1 - типовой двигатель с К = I; 2 - двигатель с А‘ = 0.7; J -- с преобладанием составляющей О.
4.4. ОЦЕНКА СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ
АСИНХРОННЫХ И СИНХРОННЫХ ДВИГАТЕЛЕЙ
Для анализа статической устойчивости асинхронного двигателя вновь
построим зависимости электрической и механической мощностей от сколь-
жения (рис. 4.8). Из графиков видно, что установившийся режим работы
157
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
двигателя возможен в двух точках пересечения характеристик: в точках а и Ь.
Предположим, что исходный режим характеризуется мощностью Ро и сколь-
жением 50. Далее допустим, что скольжение увеличилось до значения s, в
результате какого-либо малого возмущения. Это вызовет увеличение актив-
ной мощности двигателя с Р(. до значения Р. При этом механическая мощ-
ность останется постоянной и равной Р В этом случае, согласно (1.49) и
принимая в относительных единицах Р = М, скольжение ротора будет опре-
деляться уравнением
ds
т — = р -р =р -р.
} dt мех э 0
(4.9)
Поскольку в рассматриваемом случае Р = Р,> Р то на валу машины
возникает ускоряющий электромагнитный момент, под влиянием которого
скольжение начнет уменьшаться, а скорость увеличиваться. В результате
этого устанавливается исходный режим работы двигателя в точке а. Иной
исход процесса имеет место при работе двигателя в точке b со скольжени-
ем s . В этом случае при увеличении скольжения до значения s2 электри-
ческая мощность Р2 становится меньше механической Ро, что, согласно
(4.9), обусловливает дальнейший рост скольжения вплоть до остановки
двигателя.
Сохранение статической устойчивости асинхронного двигателя будет
осуществлено не только в точке а, но и на всей восходящей части характе-
ристики активной мощности двигателя, для которой справедливо соотно-
си л
шение — > 0- Следовательно, критерием статической устойчивости асин-
хронного двигателя является положительный знак производной
— >0. (4.10)
ds
Следует отметить, что в общем случае, т. е. когда Р^ ф const, критерий
устойчивости асинхронного двигателя имеет вид
dp dP
^__££ме^>0 (4.10, а)
ds ds
Однако в большинстве практических случаев определение реальных
механических характеристик (см. рис. 4.3) затруднено, поэтому принима-
ют Рмех = Ро = const, следовательно, dP^Jds = 0 и критерий устойчивости
записывается в виде неравенства (4.10).
При этом предельный режим сохранения устойчивости имеет место
dP п
при — = 0
ds
(рис. 4.8) и характеризуется максимальной мощностью Рм
158
4.4. Оценка статической устойчпвЖЩ^^асиихронных и синхронных двигателей
Рис. 4.8. К анализу статической устойчивости асинхронного двигателя
и критическим скольжением 5кр. Математически эти параметры режима
можно определить, воспользовавшись выражением (4.4). Продифферен-
цировав и приравняв производную к нулю: *
dP и\(г2 -x2s2)
.4 ds , (r^+xjs1)2 , ’ 4
найдем
АЛ 7 A’J-J Д. а 4'- 7'- ' А/
; « Л<р=— (4.11)
А
Подставив 5кр в уравнение (4.4), получим значение максимальной элек-
тромагнитной мощности, развиваемой двигателем:
ц1
Рм=^~- (4-12)
2хЛ.
Таким образом, у асинхронного двигателя имеется только одна область
устойчивой работы - область, лежащая между синхронной скоростью и кри-
тическим скольжением. Область между критическим скольжением и скольже-
нием, равным единице, оказывается неустойчивой. В нормальных условиях
двигатель работает на устойчивой части своей характеристики при скольже-
нии меньше критического и потребляемой мощности меньше Р*. Нарушение
устойчивой работы может быть вызвано увеличением механической мощнос-
ти или снижением напряжения. Напряжение, при котором электромагнитная
мощность, развиваемая двигателем, становится равной механической мощности
159
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
(Рк = Р,), называют критическим (см. рис. 4.6), а его значение, согласно (4.12),
определяется выражением
(4.13)
Значения критического напряжения, критического скольжения и мак-
симальной мощности характеризуют предельное состояние режима по ус-
тойчивости асинхронной нагрузки. Зная эти предельные параметры и па-
раметры в исходном режиме, можно оценить запас статической устойчи-
вости. Однако наблюдение за текущей величиной, например, скольжения
не представляется возможным. Поэтому уровень статической устойчивос-
ти как асинхронного двигателя, так и узлов нагрузки оценивают путем рас-
чета коэффициента запаса по напряжению:
К=F°_Z.^P. (4.14)
Uo
Для обеспечения устойчивости нагрузки коэффициент запаса по на-
пряжению должен быть не менее 0,15 в нормальных и 0,1 в аварийных
режимах электроэнергетических систем [43].
Изменение частоты в системе оказывает влияние на условия устойчи-
вой работы асинхронных двигателей. Для качественной ее оценки запи-
шем реактивное сопротивление рассеяния двигателя в виде х5 = 2tt/Ls и,
подставляя его в (4.11), (4.12) и (4.13), получим
.. Г/2 —
.v =——; Рм=——; = лДЛ)^/-
кр 2nLsf м 4тг.Л5/ кр V 0 sj
Таким образом, из полученных формул видно, что критическое сколь-
жение, максимальная мощность у двигателя, работающего при понижен-
ной частоте, увеличиваются, а критическое напряжение уменьшается.
Снижение частоты, таким образом, положительно влияет на условия рабо-
ты двигателя. Поэтому в режимах со снижением частоты можно, не опаса-
ясь нарушения устойчивости, допускать более глубокие снижения напря-
жения, чем при нормальной частоте, так как критическое напряжение при
понижении частоты становится меньше. Однако полученные выводы спра-
ведливы для режимов, имеющих запасы по реактивной мощности. В усло-
виях дефицита реактивной мощности рост потребления реактивной мощ-
ности асинхронных двигателей при снижении частоты может вызвать на-
столько глубокое снижение напряжения, что приведет к нарушению ус-
тойчивости значительной части потребителей. Поэтому положительное
влияние снижения частоты на устойчивость двигательной нагрузки может
смениться весьма отрицательным из-за роста потребления реактивной
мощности двигателями. В каждом конкретном случае необходима провер-
ка и оценка режимов при снижениях как частоты, так и напряжения.
160
4.5. Вторичные критерии устойчивости нагрузки
Статическая устойчивость синхронного двигателя оценивается так же,
как и синхронного генератора, критерием dP/db > 0. При отсутствии АРВ
максимальная мощность и критическое напряжение определяются вы-
ражениями . ,, ц
_ EqU _ Poxd '
’ Ли > ^кр г-. • ’ (4.15)
х<* Ея ,t.
4.5. ВТОРИЧНЫЕ КРИТЕРИИ УСТОЙЧИВОСТИ НАГРУЗКИ
Нагрузка электроэнергетических систем состоит из различного рода по-
требителей, и двигатели составляют в ней значительную долю (см. табл. 4.1).
Для оценки устойчивости асинхронных двигателей в комплексном узле
нагрузки можно использовать критерий (4.10). Однако применение данно-
го критерия возможно лишь при условии представления множества двига-
телей нагрузки одним эквивалентным. Определение параметров такого
эквивалентного двигателя весьма сложно, а часто и проблематично. Это
заставило искать другие критерии, позволяющие оценить устойчивость
нагрузки, используя ее статические характеристики по напряжению.
Одним из таких критериев является знак производной ЭДС генерато-
ров электростанции либо эквивалентной ЭДС системы, питающей нагруз-
ку, по напряжению
dE
<416’
Данный критерий впервые был предложен проф. П. С. Ждановым,
поэтому его называют критерием устойчивости Жданова. Для проверки
устойчивости комплексной нагрузки по критерию (4.16) систему элект-
роснабжения необходимо представить схемой замещения, показанной
на рис. 4.9, а. При этом генераторы без АРВ замещаются ЭДС Е, а генера-
торы с АРВ - в зависимости от типа регулятора (см. параграф 2.9). Для
данной схемы эквивалентная ЭДС определяется из уравнения
: Е = /| Е/ I + | । । бн-^э j (4 17)
э К у j V и ) ’
где 7?э, X - эквивалентные сопротивления питающей сети и генераторов.
Для оценки устойчивости нагрузки по критерию (4.16) необходимо по-
строить зависимость Ез =fiU). Пусть исходный режим рассматриваемой сис-
темы электроснабжения характеризуется эквивалентной ЭДС Ео, напряжени-
ем на нагрузке Uo и значениями мощностей Ро и Qo. Задаваясь новым, мень-
шим значением напряжений Ц на шинах нагрузки, можно по статическим
II. Зак. 2182
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
характеристикам определить Р и Q}, соответствующие этому напряжению.
Далее, выполнив расчет режима системы, или по формуле (4.17) находят
новое значение ЭДС Ех. Проведя ряд таких расчетов для нескольких значе-
ний напряжения, можно построить кривую зависимости расчетных значе-
ний ЭДС Ез от напряжения U, приведенную на рис. 4.9, б. При £ = Ео устано-
вившиеся режимы возможны в точках а и Ъ. В точке а производная dE/dU> О,
следовательно, режим устойчив, в точке b - dE/dU < 0 - режим неустойчив.
Предельный режим определяется критическими значениями ЭДС £кр и на-
пряжения U в точке с, где dE/dU = 0.
Режим при dE/dU< 0 устойчивым быть не может по условиям его фи-
зической нереализуемости. Действительно, любое случайное снижение
напряжения левее точки с будет требовать увеличения ЭДС для наступле-
ния установившегося режима, что является неосуществимым в рассмат-
риваемых системах электроснабжения. Следует отметить, что рассмот-
ренные точки а и b (рис. 4.9, б) аналогичны точкам установившегося ре-
жима на характеристиках мощности асинхронного двигателя (см. рис. 4.8).
Использование критерия Жданова является достаточно простым и удоб-
ным способом оценки запаса статической устойчивости комплексной нагруз-
ки. При наличии нескольких узлов нагрузки в системе электроснабжения необ-
ходимо построить зависимости Е для каждого из них. Расчеты удобно
вести, задаваясь значением напряжения на наиболее удаленной из нагрузок.
При расчетах устойчивости нагрузки, получающей питание от несколь-
ких электростанций, удобно пользоваться практическим критерием
^<0, (4.18)
Л/
где EQ = (9,т - Q,, - небаланс мощностей; »
2гХ - суммарная генерируемая в узел реактивная мощность.
Для оценки устойчивости по данному критерию необходимо постро-
ить зависимости реактивной мощности генерации Qrl и нагрузки (?, от
напряжения U на нагрузке. Зависимость реактивной мощности нагрузки
представляет собой обычную статическую характеристику Q* при-
веденную на рис. 4.10, в. Характеристика реактивной мощности генера-
ции может быть построена с использованием серии расчетов режимов рас-
сматриваемой системы или по уравнению
2гУ =
(4.19)
где £ - эквивалентная ЭДС генерирующих источников.
Здесь уравнение генерируемой реактивной мощности получено пре-
образованием уравнения (4.3). Следует отметить, что - это не реактивная
162
4.5. Вторичные критерии устойчивости нагрузки
мощность самих генераторов и поэтому она не может быть вычислена по
уравнениям (2.26), (2.53) или (2.55). Эта мощность поступает со стороны
генерирующих источников к нагрузке, что и показано на рис. 4.10, б. При
расчете по формуле (4.19) необходимо учитывать, что значение Рн за-
висит от изменения напряжения.
На рис. 4.10, в приведена графическая зависимость Q,(t соответ-
ствующая эквивалентной ЭДС Ео в исходном режиме. Построенные графики
и Qh имеют две точки пересечения, характеризующие возможные режи-
мы работы при данной ЭДС Ео (точки а и Ь на рис. 4.10, в). В этих точках
балансируются как реактивные, так и активные мощности генерации и на-
грузки. Точки а и Ь, очевидно, совпадают с одноименными точками на характери-
стике мощности двигателя (см. рис. 4.8). Точка а, соответствующая большему
напряжению (а следовательно, меньшему скольжению), где dEQ/dU < 0, является
точкой устойчивой работы, а точка Ъ - неустойчивой.
Для определения критических параметров в узле нагрузки, например
С7кр, необходимо выполнить постепенное и пошаговое утяжеление режима
по различным параметрам, например увеличение мощности нагрузки,
уменьшение ЭДС генерирующих источников или увеличение реактивного
сопротивления питающей сети. На рис. 4.10, в приведена зависимость Q ,
соответствующая меньшей ЭДС 2?. Предельный режим определяется кри-
т т 3EQ
тическим напряжением с/р в точке с, где = 0.
Использование критерия (4.18) и построение характеристик реактив-
ных мощностей генерации и нагрузки позволяет наиболее просто и на-
глядно выявить факторы, благоприятно или отрицательно влияющие на
устойчивость, например, разнотипной нагрузки [17, 19].
Кроме рассмотренных критериев устойчивости нагрузки можно ис-
пользовать и другие, например,
dQ dP n
= -да,-> 0,
dE di
приведенные в [1, 20].
163
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
а - принципиальная схема электроснабжения; б - эквивалентная схема замещения;
; в - характеристики реактивной мощности в узле нагрузке , . ,г
4;6. ВЛИЯНИЕ КОНДЕНСАТОРНЫХ БАТАРЕЙ *
НА УСТОЙЧИВОСТЬ НАГРУЗКИ ж
В узел нагрузки реактивная энергия поступает из электроэнергетичес-
кой системы, но может генерироваться и местными источниками, напри-
мер конденсаторными батареями (рис. 4.11, а). Установка шунтовых кон-
денсаторных батарей (КБ) в узлах нагрузки может преследовать две цели:
повышение уровней напряжения и снижение потерь мощности в сетях.
Однако включение конденсаторов в состав нагрузки может привести к
ухудшению устойчивости двигателей. Это связано с тем, что реактивная
мощность конденсаторной батареи существенно зависит от напряжения в
узле (кривая 2КБ, рис. 4.11, б):
где СКЕ - результирующая емкость батареи.
В этом случае суммарная кривая QH - QKB оказывается более пологой и
значение критического напряжения увеличивается с У до С7 2. В резуль-
тате запас устойчивости при включении конденсаторов уменьшается от
164
Рис. 4.11. Оценка влияния конденсаторных батарей на устойчивость нагрузки:
2н -характеристика нагрузки без КБ; - 2КЕ - характеристика нагрузки с КБ; Ок,: - характеристика КБ;
~ г, - QM, Qrl, Qr2, - характеристики генерации , '
4.6. Влияние конденсаторных батарей на устойщцость нагрузки
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
„ ^0 — ^кр! Uq —
значения ---------------до К!;2 ------—, что отрицательно сказы-
ио Uo
вается на устойчивости нагрузки.
Следует иметь в виду, что условия устойчивости нагрузки при вклю-
чении конденсаторов ухудшаются всегда, только если снижается возбуж-
дение генераторов электростанций для поддержания неизменным напря-
жения на шинах потребителей. В тех случаях, когда напряжение в узле
нагрузки регулируется путем изменения коэффициента трансформации
понижающих трансформаторов, влияние конденсаторов на устойчивость
двигателей может быть различным. Это зависит от соотношения реактив-
ных сопротивлений сети и конденсаторных батарей [17, 18]. В случае ког-
да после подключения КБ напряжение на шинах нагрузки будет выше ис-
ходного, то запас устойчивости может не изменяться. В каждом случае
необходимо проводить отдельный и детальный анализ. Если одновремен-
но с установкой КБ в составе нагрузки увеличить количество синхронных
двигателей с регулированием возбуждения, то характеристики нагрузки
становятся более благоприятными в отношении устойчивости.
4.7. ЛАВИНА НАПРЯЖЕНИЯ В УЗЛЕ НАГРУЗКИ
В нормальных режимах работы асинхронных двигателей их рабочее
скольжение значительно меньше критического, а максимальная мощность
в (1,5-2,2) раза больше потребляемой. Исходя из этих параметров, боль-
шинство энергетиков предприятий обычно считают, что асинхронные дви-
гатели работают с большим запасом устойчивости. Поэтому колебания
напряжения не являются опасными с точки зрения устойчивой работы
двигателей, и только весьма значительные снижения напряжения мо-
гут приводить к останову или, как иногда говорят, к опрокидыванию
двигателей. Однако это справедливо только в том случае, если питание
двигателей осуществляется от шин, напряжение на которых не зависит
от режима их работы.
В большинстве случаев напряжение на шинах двигателя зависит от
режима двигателя (характерным примеров является режим пуска двига-
теля, когда отклонение напряжения на его шинах может быть весьма зна-
чительным). Условия нарушения устойчивости двигателя в этом случае
получаются существенно иными. Для оценки изменений условий ус-
тойчивости рассмотрим систему электроснабжения, приведенную на
рис. 4.12, а, где нагрузка представлена эквивалентным асинхронным дви-
гателем. Для данной системы очевидно, что изменение нагрузки двигателя
приведет к изменению напряжения на его шинах. В этих условиях характе-
ристику мощности удобнее вычислять и строить не по изменяющемуся
166
4.7. Лавина напряжения в узле нагрузки
напряжению U= <р(л), а по неизменному значению ЭДС Е. Максимальная
мощность в этом случае будет
, „ ' " "
ME «, , •
2(хг + хс + xs)
Данное выражение получено как приближенное, исходя из весьма уп-
рощенной схемы замещения при вынесении ветви намагничивания на шины
ЭДС (см. рис. 4.12, б). Однако это обстоятельство не меняет общих каче-
ственных закономерностей.
Величина определенная при Е = const [или, что одно и то же при
U — <p(.v)[, будет значительно меньше Р определенной при U = const по
формуле (4.12). Критическое скольжение, определяемое из выражения
Рис. 4.12. Схема и характеристики системы электроснабжения:
а - принципиальная схема системы; б - упрощенная схема замещения;
- . * в- характеристики мощности
167
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
также оказывается много меньше значения, определяемого по формуле
(4.11). Из этого следует (см. рис. 4.12, в), что опрокидывание двигателей,
получающих питание от системы соизмеримой мощности, может произойти
при сравнительно небольших изменениях скольжения и небольших сниже-
ниях ЭДС в системе и тем более при небольших изменениях напряжения.
Поэтому в общих случаях определение критических параметров следует
проводить, исходя не из напряжения на зажимах двигателей, которое не являет-
ся независимой переменной, а исходя из ЭДС генератора, которую можно счи-
тать не зависящей от изменений режима. Эта ЭДС в зависимости от способа
регулирования возбуждения генератора будет различной (см. параграф 2.9).
Рассмотрим процесс нарушения устойчивости комплексного узла на-
грузки, основываясь на статических характеристиках нагрузки, генерации
и критерия (4.18).
Известно, что в состав комплексного узла нагрузки кроме асинхрон-
ных двигателей входят также синхронные двигатели и статические потре-
бители (освещение, печи, выпрямители и т. д.). Однако именно асинхрон-
ные двигатели в большинстве случаев определяют качественный характер
статической характеристики реактивной мощности узлов нагрузки по на-
пряжению (зависимость Q рис. 4.13, а). При уменьшении напряжения
потребляемая реактивная мощность нагрузки снижается. Однако при боль-
ших снижениях напряжения, в зоне критических значений, реактивная
мощность увеличивается из-за останова не отключившихся от сети асинх-
ронных двигателей. Практически это увеличение ограничивается отклю-
чением части потребителей из-за самопроизвольного «отпадания» магнит-
ных пускателей при низких напряжениях. Это снижает нагрузку и, соот-
ветственно, характеристику реактивной мощности.
На рис. 4.13, а представлены наиболее типичные характеристики Qr ге-
нерируемой реактивной мощности. Вначале, при снижении напряжения, ха-
рактеристика мощности возрастает. Это обусловлено уменьшением второй
составляющей мощности в выражении (4.19) и увеличением первой из-за
возрастания ЭДС Е, обусловленной действием АРВ. При дальнейшем сниже-
нии напряжения ток возбуждения генерирующих источников достигает по-
толочных значений, и в дальнейшем их реактивная мощность уменьшается.
В нормальных режимах баланс реактивных мощностей характеризу-
ется точкой А пересечения характеристик нагрузки и генерации в области
допустимых значений напряжения (зависимости Q и 2гр рис. 4.13, а).
В аварийных режимах характеристика генерации, как правило, резко сме-
щается из-за отключения части питающих линий электропередачи или ге-
нерирующих источников. В этом случае характеристики нагрузки и генера-
ции пересекаются в точке Б (зависимости Qn и (9Г,) с аварийным уровнем
напряжения Um. Критический режим по напряжению £7 наступает в точ-
ке В, где реактивные мощности генерации и нагрузки еще балансируются,
168
4.7. Лавина напряжения в узле нагрузки
Рис. 4.13. Развитие процесса лавины напряжения:
а - статические характеристики реактивной мощности нагрузки и генерации
при аварийных снижениях напряжения; о - изменение напряжения во времени
однако их характеристики только соприкасаются (зависимости Qh и 2гз)-
При дальнейшем смещении характеристики генерации она уже не будет
иметь точки пересечения с характеристикой нагрузки, и возникает лави-
нообразный процесс снижения напряжения (рис. 4.13, б). Аналогичное
явление может иметь место и при увеличении нагрузки. При этом проис-
ходит торможение двигателей, что вызывает резкое увеличение потребля-
емой реактивной мощности и, как следствие, прогрессирующее снижение
12. Зак. 2182
169
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
напряжения из-за нарушения баланса мощностей (реактивная мощность на-
грузки Qk больше мощности генерации Qr). Оперативный персонал энерго-
системы и потребителей не имеет непосредственно информации о росте то-
ков и скольжений двигателей, входящих в состав комплексной нагрузки, в то
время, когда они приближаются или происходит режим опрокидывания, но
наблюдают резкое лавинообразное снижение напряжения. Процесс этот по-
этому и получил название лавины напряжения. Лавина напряжения заканчива-
ется полным обесточиванием всего энергоузла ((? = О, U= 0) из-за нарушения
работы собственных нужд электростанций или установлением весьма низких
уровней напряжения [/ (точка Г, рис. 4.13), когда у потребителей произошло
нарушение устойчивости двигателей и самоотключение части нагрузки.
Основными причинами аварийного снижения напряжения, вызываю-
щего лавину напряжения, являются отключения генерирующих источни-
ков (генераторов, синхронных компенсаторов, конденсаторных установок)
или основных питающих линий электропередачи.
Лавина напряжения может возникать как при номинальной частоте,
так и при ее аварийном снижении. Так, сопутствующая лавина напряже-
ния возникает одновременно с лавиной частоты вследствие разделения
энергосистемы на несинхронно работающие части и потери при этом час-
ти генерирующей реактивной мощности и зарядной мощности отключен-
ных линий электропередачи. Главная опасность сопутствующей лавины
напряжения со стороны энергосистемы заключается в том, что большие
снижения напряжения могут вызвать отказы устройств АЧР и привести к
нарушению устойчивости потребителей собственных нужд электростан-
ций. Несрабатывание АЧР и погашение электростанций в еще большей
степени способствуют развитию аварии. В то же время успешная работа
АЧР ликвидирует дефициты как активной, так и реактивной мощности [42].
Лавина напряжения при нормальной частоте возникает в большинстве
случаев в результате аварийного отключения основных питающих линий
электропередачи. При этом напряжение у потребителей может снизиться
до значений, вызывающих нарушение устойчивости двигательной нагруз-
ки и соответственно развитие лавины напряжения. Фактором, способству-
ющим развитию лавины напряжения в узле нагрузки, является несораз-
мерно большая мощность конденсаторных батарей, которые, в большин-
стве случаев, увеличивают критические напряжения. В таких условиях
бывает достаточно относительно небольшого аварийного снижения напря-
жения для развития лавины напряжения.
Важную роль по предотвращению лавины напряжения выполняет фор-
сировка возбуждения синхронных машин. Резкое увеличение напряжения
возбуждения приводит к росту ЭДС и напряжения на выводах генератора
и в питающей сети. Если действие форсировки не приводит к повышению
напряжения до допустимого уровня (а это, как правило, происходит в уда-
170
4.8. Влияние больших возмущений на режим работы нагрузки
ленных от источников питания точках сети), то необходимо отключить часть
потребителей для обеспечения аварийного баланса реактивных мощнос-
тей. Характеристики нагрузки генерации Qrj (рис. 4.13, а) в этом слу-
чае пересекаются в точке Д и возникает аварийный режим с допустимым в
этой ситуации уровнем напряжения [Г. Поскольку процесс лавины напря-
жения происходит довольно быстро (несколько секунд) и диспетчер энер-
госистемы практически не успевает предотвратить нарушение устойчиво-
сти нагрузки, то функция по предотвращению глубокого снижения напря-
жения в аварийных режимах возлагается на автоматику разгрузки по напря-
жению. В белорусской энергосистеме решение такой задачи возлагается
на специальную автоматику отключения нагрузки (САОН). Используется
также дополнительная аварийная разгрузка по напряжению (ДАРН), кото-
рая при снижении напряжения ниже заданного уровня с выдержкой вре-
мени производит отключение потребителей очередями до восстановления
его на допустимом аварийном уровне. Для уменьшения объемов аварий-
ной разгрузки, повышения ее селективности и быстродействия можно ис-
пользовать подходы и принципы, изложенные в [27-29].
Лавины напряжения довольно часто происходили в период становле-
ния энергосистем бывшего СССР, в том числе и белорусской энергосисте-
мы. По мере развития энергосистем, строительства новых электростанций
и линий электропередачи вероятность лавинных процессов уменьшилась,
однако возникновение их не исключено. Анализ последних аварий с лави-
нами напряжения показывает, что они происходят как в бурно развиваю-
щихся энергосистемах (Китай, Индия), так и в мощных энергосистемах
(Япония, Россия, США). Следует отметить, что глубокие аварийные сни-
жения напряжения часто приводят лишь к частичной лавине напряжения
[19], когда происходит нарушение устойчивости не всех потребителей, а
лишь части двигателей, или к саморазгрузке потребителей из-за самопро-
извольного их отключения вследствие отпадания магнитных пускателей и
действия защит минимального напряжения [30].
4.8. ВЛИЯНИЕ БОЛЬШИХ ВОЗМУЩЕНИЙ НА РЕЖИМ РАБОТЫ
НАГРУЗКИ
Большие возмущения в системе электроснабжения вызывают суще-
ственные и резкие изменения режима работы потребителей. К основным
причинам, значительно влияющим на устойчивость двигательной нагруз-
ки, следует отнести:
1. Отключение отдельных элементов в распределительных и питаю-
щих электрических сетях, когда напряжение резко уменьшается со значе-
ния Uo до U} (рис. 4.14, а).
171
Глава 4. Устойчиволсть нагрузки электроэнергетических систем_______
2. Возникновение короткого замыкания в системе электроснабжения,
когда напряжение резко уменьшается с U до U2, а затем восстанавливает-
ся при его отключении (см. рис. 4.14, а).
3. Отключение питания узла нагрузки с последующим его включени-
ем, когда в течение времени от t0 до Г наступает перерыв в электроснабже-
нии потребителей ([/= 0).
4. Изменение механического момента на валу двигателя при увеличе-
нии нагрузки на приводном механизме с М до М} или с Мо до Мг с после-
дующим восстановлением прежнего момента при t = (см. рис. 4.14, б).
Значительные изменения параметров режима могут быть вызваны пус-
ком крупных двигателей, резкими изменениями нагрузки при работе дуго-
вых плавильных печей, прокатных и трубосварочных станов, мощных подъем-
ных кранов, которые приводят к отклонениям и колебаниям напряжения.
Исследование переходных процессов в системе электроснабжения,
содержащей двигательную нагрузку, в общем случае сводится к решению
системы нелинейных дифференциальных уравнений. Методика оценки
динамической устойчивости генераторов, изложенная в главе 3, в полной мере
справедлива для синхронных двигателей. Для оценки устойчивости асинх-
ронного двигателя при больших возмущениях необходимо решить уравне-
ние движения его ротора, которое, согласно (1.34), можно записать в виде
/7 с
. Tj — = Mmx-M. (4.20)
Запись правой части уравнения в моментах связана с возможным
большим диапазоном изменения скорости ротора. Данное уравнение не-
линейно, его решение может быть получено с помощью любого из мето-
дов численного интегрирования (например, метода Рунге-Кутта). Наи-
более просто это решение получается при использовании метода после-
довательных интервалов, когда изменение скольжения на каждом ин-
тервале времени определяется по формуле
(4.21)
1 j
где Af Л/. - значения механического и электромагнитного Моментов в
начале z-ro интервала;
А/ — величина z-ro интервала времени;
z — номер расчетного интервала.
При этом Af может определяться выражением, соответствующим уп-
рощенной схеме замещения двигателя:
М,=-----........2 , (4.22)
<B[z-22 +(х^,.) 2]
где s. - скольжение в начале z'-ro интервала.
172
4.9. Динамическая устойчивость двигателей при изменении напряжения
Рис. 4.14. Изменение напряжения (о) на зажимах и механического момента (б)
на валу двигателя
Механический момент приводного механизма Л/мм в большинстве слу-
чаев можно определить из уравнения
2
МЫ1!1=К, т,.., +- т,..')
МХ/ 3 С 1 V с г /
1-^н
coscpH,
(4-23)
где Кз - коэффициент загрузки двигателя в исходном установившемся ре-
жиме;
?ист - составляющая механического момента, не зависящая от скольже-
ния;
sn, coscpH - номинальные скольжения и коэффициент мощности двигателя.
Скольжение ротора асинхронного двигателя к концу н-го интервала
определяется как
sn =^о+ЕЛ5г
/=1
Точность решения возрастает с уменьшением величины As и, соответ-
ственно, с увеличением количества интервалов.
4.9. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ ДВИГАТЕЛЕЙ ПРИ
ИЗМЕНЕНИИ НАПРЯЖЕНИЯ
В нормальном установившемся режиме при напряжении UQ асинхрон-
ный двигатель работает со скольжением s0, а синхронный двигатель с уг-
лом 50 (точка а на рис. 4.15).
Предположим, что произошло резкое снижение напряжения с Uo до J7
(см. рис. 4.14, а). Возникающий при этом переходный процесс будет опре-
деляться характеристиками Мх и Л/мх, приведенными на рис. 4.15. При
снижении напряжения вращающий момент двигателей резко уменьшится
173
Рис. 4.15. Изменение режима работы двигателей при снижении напряжения с Ц, до Ц:
а - асинхронный двигатель; б- синхронный двигатель
(точка с на характеристиках М}, рис. 4.15) и они начинают тормозиться,
скольжение 5 асинхронного двигателя и угол 5 синхронного двигателя воз-
растают. Если при этом максимальный электромагнитный момент окажет-
ся больше механического (Л/ > Л/мх), то в точке b возникает новый устано-
вившийся режим асинхронного двигателя со скольжением меньше кри-
тического (см. рис. 4.15, а).
Новый установившийся режим (точка Ь) синхронного двигателя на-
ступает после цикла качаний с углом 5Г поскольку/^ <fy. Таким образом,
при снижении напряжения до U двигатели сохранили устойчивую работу,
ГЫ1 плпго ни продолжалось это снижение.
_____________4.9. Динамическая устойчивость двигателей при изменении напряжение
При снижении напряжения до U2 (см. рис. 4.14, а) картина пере-
ходного процесса будет совершенно иная, поскольку она определяется
характеристиками ЛД и Л/ приведенными на рис. 4.16.
В этом случае ЛД, < Л?мх и асинхронный двигатель переходит в ре-
жим постоянного торможения, скольжение двигателя возрастает вплоть
до значения s = 1, когда ротор его останавливается (см. рис. 4.16, а). Син-
хронный двигатель в таком режиме выходит из синхронизма, так как пло-
щадка ускорения abca больше площадки торможение cdec (см. рис. 4.16, б).
Чтобы сохранить устойчивость двигателей, необходимо своевременно вос-
становить напряжение, например, до исходного значения Uo (см. рис. 4.14, а). Для
обеспечения устойчивой работы синхронного двигателя это должно произойти
до угла 5 , определяемого равенством площадок ускорения (abca + екое)
и торможения (cdec + отпо). В общем случае предельный угол 8Д, при
f
Рис. 4.16. Переходные процессы при больших изменениях напряжения: >
а - асинхронный двигатель; б- синхронный двигатель , ;
175
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
котором нужно восстановить напряжение, определяется из уравнения
&ВС 'Ч-Р
J(A/Mx-WM2sm5)+ J(MMX-A/M0sin5) = 0. .
После интегрирования данного уравнения получим '
s ^mx(5kp-5o) + ^mOcos8kP-A/m2cos50 .
о =arccos---------J----------------------------• (4.24)
вс Мм0-Мм2
Предельное время (t ), в течение которого необходимо восстановить
напряжение, определяется решением уравнения движения ротора синхрон-
ного двигателя.
Для сохранения устойчивости асинхронного двигателя восстановле-
ние напряжения должно произойти до достижения скольжением значе-
ния s (см. рис. 4.16, а). В этом случае при переходе с характеристики ЛД
на характеристику Мо электромагнитный момент становится больше ме-
ханического, и двигатель под его воздействием возвращается к исходно-
му режиму в точку а. При увеличении скольжения, например, до s, > snp
двигатель переходит на неустойчивую часть характеристики, и восста-
новление питающего напряжения уже не может прекратить его торможе-
ние и останов.
Таким образом, критерий динамической устойчивости асинхронного
двигателя можно записать в виде неравенства
5 <s , (4.25)
в пр’ 4 7
где ss - скольжение выбега ротора к моменту восстановления напряжения.
В общем случае значение скольжения ротора во время выбега (тормо-
жения) может быть определено путем решения уравнения (4.18) числен-
ными методами. Аналитическое решение данного уравнения можно полу-
чить в случае перерыва питания ([/= 0) и если принятьМю = const в тече-
ние всего переходного процесса. В этом случае уравнение (4.20) имеет вид
Г. — = М
J dt мх’
и после интегрирования
получаем \
= ''0 + (4ТМХ / Tj )tп, (4.26)
где tn — длительность перерыва питания.
Если известна величина snp, то предельное время перерыва (?лпр) по ус-
ловию сохранения устойчивости асинхронного двигателя, согласно (4.26),
176
4.10. Наброс нагрузки на двигатели
определится из уравнения
/ПР _
‘п
Тj О'пр ^0 )
(4.27)
4.10. НАБРОС НАГРУЗКИ НА ДВИГАТЕЛИ
В случае увеличения нагрузки на валу синхронного двигателя наброс
момента сопротивления от рабочего механизма возрастает, например, от
Л/мх0 до Л/мх|. Новый установившийся режим в точке с будет устойчивым, так
как площадка ускорения/у меньше площадки торможения/^ (рис. 4.17, а).
Увеличение механического момента до М 2 (см. рис. 4.17, б) приведет
к нарушению устойчивости синхронного двигателя, поскольку площадка
ускорения abca больше площадки торможения cdec.
а — устойчивый режим; б - предельный режим со снятием наброса нагрузки
177
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
Для обеспечения устойчивости работы агрегата необходимо снизить
момент сопротивления рабочего механизма, например, с Ммх, до Л/мх0.
Предельный угол снятия наброса 5сн в данном случае, при неизменном значении
питающего напряжения, можно определить, используя метод площадей:
Сн ^кр
- Л4 sin 8)J8 + J(Mmx0 - Мм sin 8)J8 = 0.
So 8СН
После интегрирования уравнения и соответствующих преобразований
получим
j. _ -^мх2^0 — ^мхО^кр “ (cos 8Кр — cos50)
Оси -------------—------~----------------• (4-28)
Ммх2 ^мхО
Предельное время, в течение которого допустим режим работы в состоя-
нии наброса нагрузки на двигатель, определяется решением уравнения дви-
жения ротора (см. главу 3). Для этого можно использовать методы численного
интегрирования или упрощенный метод аппроксимации синусоиды электро-
магнитного момента [1, 18].
При набросе нагрузки на асинхронный двигатель, скольжение его на-
чинает увеличиваться. Если при этом механический момент будет меньше
максимального электромагнитного (Ммх| < Л/м), то происходит переход ре-
жима с точки а в точку b и наступает новый установившийся режим со
скольжением меньше критического s (рис. 4.18, а).
При набросе нагрузки, например, до Л/мх2 асинхронный двигатель бу-
дет тормозиться вплоть до остановки ротора. Чтобы этого не произошло,
нужно своевременно, до достижения скольжением значения snp, снять на-
брос нагрузки (см. рис. 4.18, 6). В этом случае электромагнитный момент
станет больше механического Л/мх0 и двигатель начнет возвращаться к точ-
ке а исходного режима. Если снять наброс нагрузки при скольжении дви-
гателя большем s то торможение двигателя продолжится и он остано-
вится, так как электромагнитный момент будет меньше механического
Таким образом, для сохранения динамической устойчивости асинхронного
двигателя при набросах нагрузки необходимо соблюдение неравенства (4.25).
Следует отметить, что допустимость режимов двигателей как при
снижении напряжения, так и при набросах нагрузки определяется не толь-
ко условиями устойчивости, но и условием нагрева двигателей.
4.11. САМОЗАПУСК ДВИГАТЕЛЕЙ
Для повышения надежности работы ответственных электроустановок
при кратковременных понижениях или отключениях напряжения в питаю-
щей сети используется самозапуск электродвигателей. Самозапуск - это
178
4.11. Самозапуск двигателей
Рис. 4.18. Наброс нагрузки на асинхронный двигатель:
а - устойчивый режим; б - снятие наброса нагрузки
процесс восстановления нормального режима работы двигателей после
кратковременного отключения источника питания или снижения напряже-
ния. Основная задача самозапуска заключается в том, чтобы не допустить
останова ответственных рабочих механизмов и тем самым предотвратить
нарушение технологического процесса.
Переходный электромеханический процесс при кратковременных на-
рушениях электроснабжения потребителей с учетом самозапуска может
быть условно представлен тремя периодами:
I - групповой выбег, характеризующийся затормаживанием двигате-
лей, увеличением их скольжения. При этом между двигателями, подклю-
ченными к общим шинам, происходит переток мощностей за счет запа-
сенной кинетической и электромагнитной энергии;
179
Глава 4. Устойчиволсть нагрузки электроэнергетических систем_____
II - индивидуальный выбег, наступающий после того, как напряжение
на общих шинах снизится ниже 50 % от номинального или станет равным
нулю. Двигатели при этом продолжают затормаживаться в основном в со-
ответствии с индивидуальными механическими характеристиками;
III - самозапуск, наступающий после восстановления напряжения на
питающих шинах.
По условиям самозапуска приводные механизмы двигателей делятся
на две группы:
1. Механизмы, имеющие постоянный момент сопротивления, которые
при кратковременном нарушении электроснабжения быстро теряют ско-
рость, а при восстановлении напряжения медленно разгоняются (шаровые
мельницы, конвейеры, прокатные станы и т. п.).
2. Механизмы, имеющие вентиляторные характеристики момента (вен-
тиляторы, центрифуги, дымососы и др.). Самозапуск этой группы проис-
ходит легче, чем для механизмов первой группы, так как их моменты со-
противления значительно снижаются при уменьшении скорости.
Самозапуск можно считать обеспеченным, если при пониженном на-
пряжении избыточный электромагнитный момент двигателей достаточен
для доведения их до номинальной скорости и если за это время нагрев
обмоток не превысит максимально допустимой величины.
Самозапуск иногда бывает трудно осуществим. Это связано с тем, что
самозапуск большой группы двигателей вызывает такое глубокое сниже-
ние напряжения на их шинах, что вращающий момент становится меньше
момента сопротивления приводного механизма. Поэтому для облегчения
режима самозапуска оставляются включенными только электродвигатели
наиболее ответственных рабочих механизмов. Электродвигатели с меха-
низмами, внезапная остановка которых не вызывает повреждения обору-
дования и не связана со значительной недовыработкой и браком продук-
ции, отключаются. Также обязательно отключаются электродвигатели агре-
гатов, самозапуск которых недопустим по условиям техники безопасности.
Расчет самозапуска асинхронных двигателей заключается в проверке
условий возможности самозапуска. Для этого необходимо определить:
1) выбег (увеличение скольжения) за время нарушения электро-
снабжения;
2) величину напряжения и избыточного момента электродвигателей;
3) время самозапуска;
4) температуру нагрева за время разгона агрегата двигатель - рабочий
механизм;
5) влияние самозапуска на режим работы энергосистемы и других по-
требителей, находящихся в электрической близости.
Наиболее характерная схема питания нагрузки, при которой осуще-
ствляется самозапуск, показана на рис. 4.19.
180
4.11. Самозапуск двигателей
Скольжение двигателя к моменту самозапуска может быть найдено
путем численного интегрирования уравнения (4.20) или упрощенно по
(4.26) при перерыве питания.
Из схемы замещения (рис. 4.19, б) следует, что напряжение на зажи-
мах двигателей при самозапуске
Erzni,
и =....— с дн (4.29)
у (Гп Гдн) + (-^ + -\цн) ’ *
где Ес - эквивалентная ЭДС системы электроснабжения;
/ 2 2~ / 2 2*
Т = Хс + Хт + Хл, Сд — + Хд , сн — д/f,, + хн , 2дН — ,
2д +ZH
г хд - эквивалентные активное и реактивное сопротивления двигате-
лей при скольжении, соответствующем началу самозапуска.
Приближенно можно считать, что напряжение на шинах нагрузки при
самозапуске должно быть
U>EZ^-. (4.30)
2Д+Х .;
' Рис. 4.19. Схема питания нагрузки:
а - принципиальная схема; б - расчетная схема
181
Глава 4. Устойчиволсть нагрузки электроэнергетических систем________
Зная минимально допустимое значение напряжения для обеспечения
самозапуска (£7 = Цпт), можно определить допустимую величину неотклю-
чаемой мощности двигателей. Сопротивление двигателя в момент самоза-
пуска определяется выражением
U2
za=^, (4-31)
“-’сз
где Uu - номинальное питающее напряжение электродвигателя;
Sc3 - расчетная мощность двигателя при номинальном напряжении и
скольжении в момент самозапуска.
Приняв в (4.30) знак равенства и подставив в него (4.31), найдем вели-
чину мощности
II'2 Е
\з=^-(у7^-1)- (4.32)
'* XI- '
л min
Величина связана с номинальной мощностью двигателя Р соотношением
SC3=—(4.33)
TIhCOSCPh
где К) - кратность тока двигателя при скольжении 5сз, соответствующем
началу самозапуска;
Г]н, cos<pH - номинальные значения коэффициентов полезного действия
и мощности двигателя.
Значение К определяют из уравнения [1]:
К.,=/.пТ££_, (4.34)
•у 1 + (^Кр/^сз)
где /,п - кратность пускового тока.
Приравняв правые части уравнений (4.32) и (4.33), можно получить
выражения для мощности, которую можно назвать максимально допусти-
мой неотключаемой мощностью при самозапуске:
♦ только двигательной нагрузки
= цн coscpj^ (4 35)
НСОТКЛ [Г \ ТТ ’ 47
y^min J
♦ двигательной и статической нагрузки (см. рис. 4.19, б)
и2(
н
Е 'I U2 •
^С _ ] _ vmin
и . \ Z
min J
Минимально допустимое значение напряжения на зажимах двигате-
лей находят, исходя из условия возможности осуществления самозапуска:
> = tihcos<Ph
неоткл ту.
1х ~
(4-36)
182
4.11. Самозапуск двигателей
♦ для механизмов с постоянным моментом сопротивления
(4.37)
V " .iB.min
♦ для механизмов с характеристиками вентиляторного типа
‘Г „ /1,1-тИмх а
<_ ^min - J д , ’ (4-38)
У -^дв.тах
где Мдв т п - минимальный момент вращения двигателя, который часто при-
нимают равным пусковому; .<
А/втах - максимальный момент вращения двигателя.
Самозапуск синхронных двигателей обладает рядом особенностей по
сравнению с асинхронными. По характеру протекания переходных про-
цессов самозапуски синхронных двигателей могут быть двух видов:
♦ при сохранении динамической устойчивости двигателей;
♦ при нарушении устойчивости, т. е. выпадении синхронного двига-
теля из синхронизма.
В первом случае самозапуск синхронного двигателя может быть обес-
печен, если за время нарушения нормального электроснабжения значение
угла 5, характеризующего положение ротора, не превысит критического
значения 5кр«140 - 160°. Для сохранения динамической устойчивости син-
хронного двигателя необходимо, чтобы время t . и угол 6ЙС при восста-
новлении нормального электроснабжения не превышали предельных зна-
чений (см. параграф 4.9). Следует отметить, что на предельные значения
tBC и 5 значительно влияют состояние и воздействия системы возбужде-
ния двигателя, а также уровень напряжения как во время аварий, так и при
восстановлении электроснабжения.
Допустимое снижение напряжения на шинах нагрузки во время само-
запуска приближенно определяется следующими требованиями.
1. При совместном питании двигателей и освещения:
♦ при частых и длительных самозапусках U > 0,9 Пн;
♦ при редких и крагковременных самозапусках U> (0,8-0,85) £7.
2. При раздельном питании двигателей и освещения U> (0,75-0,80)£7.
3. При люминесцентном освещении U > ®,9Uh.
4. При питании двигателей через блок-трансформаторы напряжение
ограничивается минимальной величиной электромагнитного момента.
Если двигатель выпадает из синхронизма и к моменту восстанов-
ления напряжения работает как асинхронный с определенным сколь-
жением, то начальный этап его самозапуска можно рассматривать как
для асинхронного двигателя. Дальнейший этап успешного вхождения
в синхронизм зависит от многих факторов, которые будут рассмотре-
ны в следующей главе.
183
Глава 4. Устойчиволстъ нагрузки электроэнергетических систем
Пример 4.1. При отключении выключателя В в электрической систе-
ме (рис. 1.29) с генераторами, оснащенными АРВ ПД, требуется опреде-
лить критическое напряжение на шинах нагрузки и коэффициент запаса
устойчивости по напряжению. Статические характеристики нагрузки по
напряжению имеют вид
Р = Рн (0,83 - 0,3(7* + 0,47(7*);
g = gH(4,9-l 0,1(7*+6,2(7*2).
Параметры системы взять из примера 1.1.
Решение. Для определения критического напряжения узла нагрузки
используем практический критерий устойчивости (4.16). Схемы замеще-
ния системы электроснабжения потребителей в рассматриваемом режиме
показаны на рис. 4.20.
а б
Рис. 4.20. Схемы замещения системы электроснабжения:
а - полная; б - эквивалентная
При напряжении Uo = 1,0:
♦ активная мощность нагрузки До = 1(0,83-0,3-1 +0,47-12)= 1;
♦ реактивная мощность нагрузки Qo = 0,5(4,9 - 10,1 -1 + 6,2-12) = 0,5;
элс f hy
ЭДС Eo - Uo +—------------ + -
К Uo J c/0 J
. I+2+«2 +l+£ =1,24...
Ill i ) I i J
При снижении напряжения U} = 0,9:
Pt = 1 -(0,83 - 0,3-0,9 + 0,47-0,92) = 0,94;
2, = 0,5-(4,9 - 10,1-0,9 + 6,2-0,92) = 0,42;
Далее на основе расчетов ЭДС Е' при U = 0,8-0,5 построена кривая
Е = flU), приведенная на рис. 4.21. Критическому значению напряжения
соответствует точка перегиба кривой, где U = 0,69.
Запас устойчивости нагрузки по напряжению:
К -
“ и0
1 - 0,69
1
= 0,31.
184
4.11. Самозапуск двигателей
I
Рис. 4.21. Зависимость переходной ЭДС от напряжения на шинах нагрузки
Пример 4.2. Синхронный двигатель через трансформатор и линию
электропередачи подключен к шинам мощной энергосистемы. Параметры
системы электроснабжения в относительных единицах:
♦ напряжения на шинах системы (7= 1,0;
♦ потребляемая активная мощность из энергосистемы Р - 1,0;
♦ потребляемая реактивная мощность из энергосистемы Q = 0,5;
♦ угловая частота св =1;
♦ реактивное сопротивление линии х = 0,1;
♦ реактивное сопротивление трансформатора хт = 0,14;
♦ переходное сопротивление двигателя xj — 0,16.
Требуется определить предельный угол снятия наброса нагрузки при
периодически меняющейся нагрузке от холостого хода до максимальной.
При 50 = 0 механический момент Ммх0 = 0. Наброс нагрузки составляет:
1)М , = Л7;
2)Л/х2 = 1,6Л/.
Решение. Общее сопротивление системы электроснабжения:
- xd + хт + хл = 0,16 + 0,14 + 0,1 = 0,4.
Переходная ЭДС двигателя:
0,5-0,4 2
Максимальный электромагнитный момент:
’-°’4 . .;Л!;
В рассматриваемых режимах критический угол 5кр = 180°. Предель-
ный угол снятия наброса определяем согласно формуле (4.28).
185
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
В первом случае:
2,25 0° - 0 180 - 2,25(cos 180° - cos 0°) 180°
Во втором случае:
3,6 • 0° - 0 180° - 2,25(cos 180° - cosO°)
180
= 71,2°.
На рис. 4.22 приведены переходные процессы при набросе нагрузки.
Рис. 4.22. Наброс нагрузки на синхронный двигатель:
а-М =М = 2,25; б-Л/ =1,6Л/ =3,6
мх| м ’ ’ мх2 ’ м ’
Пример 4.3. Пять однотипных асинхронных двигателей насосной стан-
ции через линию электропередачи номинальным напряжением 6 кВ под-
ключены к трансформатору главной понизительной подстанции (рис. 4.23).
Параметры элементов системы электроснабжения:
♦ двигатель АД Рг = 0,8 МВт, Ро = 0,7 МВт, cos<p0 = 0,9, кратность
максимального момента Ьи = 2,0;
♦ линия: х0 = 0,38 Ом/км, 1=5 км; т ‘'
♦ трансформатор Т: 8нт = 25 МВ-А, (7 = 11%;
♦ напряжение на шинах двигателей: (7=6 кВ.
Требуется определить:
1. Критическое напряжение на шинах питающей системы.
2. Коэффициент запаса устойчивости по напряжению.
Решение. Суммарная установленная мощность асинхронных двигателей:
Р = 4-Р =5-0,8 = 4,0 МВт.
нд н
186
4.11. Самозатуск двигателей
Рис. 4.23. Схемы системы электроснабжения:
а - принципиальная; б - расчетная
В качестве базисных величин примем:
♦ напряжение на шинах двигателей: U5 = U= 6 кВ и Sg = 4 МВ-А.
Тогда сопротивление трансформатора:
х Л. = Л'4_ = о 02.
т 100 .S'HT 100-25
Сопротивление линии электропередачи:
x„=^=^LLA = 0.21. I
ц>2 «’ ;
Индуктивное сопротивление рассеяния двигателей:
xs = — = —!—= 0.25.
5 2ЬМ 2-2,0 '
Активная и реактивная мощности, потребляемые двигателями:
Р0Д= — = -^^ = 0,87;
д $б 4,0
бод =^otg<Po=0,87tg260 = 0,42.
Суммарное сопротивление питающей сети:
X =х +х =0,02 + 0,21 = 0,23.
С Т Л " ’ ’
Напряжение на шинах системы в исходном режиме:
Lr , Soa*cf , { ЛЛ2 FT. 0,42-0,23Y . (0,87 -0,23
R и J V и ) 1J11.
187
Глава 4. Устойчиволсть нагрузки электроэнергетических систем
Критическое напряжение на шинах системы:
ис кр = 42P^xs+xc) = 72-0,87(0,25 + 0,23) =0,91.
Запас устойчивости по напряжению:
гу. ^с0~^скр 1,11-0,91
1X.JT — *------- = --------- = U,1 О. .
[/с0 Ml
Пример 4.4. Асинхронный двигатель, схема замещения которого со-
ответствует рис. 1.23, б, подключен к шинам, напряжение на которых мо-
жет медленно снижаться. Параметры схемы замещения двигателя:
х = 2,0, х = 0,25, г. = 0,05, Р = 1 = const.
р. 7 7 s ’ 7 2 7 5 мех
Требуется построить зависимость потребляемой реактивной мощно-
сти при изменении напряжения от 1 до 0.
Решение. Находим значение критического напряжения:
Рис. 4.24. Характеристики реактивной мощности асинхронного двигателя:
<2ц - намагничивания, Q. - рассеивания
Реактивная мощность, потребляемая ветвью намагничивания Q , на-
ходится из уравнения (4.8) при изменении напряжения от 1 до 0. Реактив-
ная мощность рассеяния Q при изменении напряжения от 1 до 0,71 нахо-
дится по уравнению (4.6), а при U= 0,71-0 - по уравнению (4.7). Результа-
ты расчета Q и (7 представлены графически на рис. 4.24.
188
Контрольные вопросы
Контрольные вопросы
1. Что понимают под узлом нагрузки?
2. С каких позиций рассматривается устойчивость узлов нагрузки?
3. Какими расчетными моделями представляется узел нагрузки?
4. Каковы основные типы механических характеристик приводных
механизмов электродвигателей?
5. Как зависит величина активной и реактивной мощности синхрон-
ного двигателя от частоты и напряжения?
6. Что понимается под критическим напряжением?
7. Что представляют собой статические характеристики асинхронного
двигателя?
8. По каким критериям оценивается статическая устойчивость асинх-
ронного двигателя?
9. Как определяется коэффициент запаса по напряжению?
10. Какое влияние оказывает изменение частоты на условия устойчи-
вой работы асинхронных двигателей?
11. По каким критериям оценивается статическая устойчивость комп-
лексного узла нагрузки?
12. Какое влияние оказывают конденсаторные батареи на устойчивость
нагрузки?
13. Что такое лавина напряжения и каковы наиболее существенные
причины ее возникновения?
14. Чем заканчивается лавина напряжения?
15. Как предотвратить лавину напряжения?
16. Каковы основные причины возникновения больших возмущений в
узлах нагрузки?
17. Как оценивается динамическая устойчивость двигателей при из-
менении напряжения?
18. Как определить предельное время перерыва питания по условию
сохранения устойчивости двигателей?
19. Как рассчитать устойчивость двигателей при набросах нагрузки?
20. Что такое самозапуск двигателей?
21. На какие периоды может быть разделен переходный процесс при
кратковременных нарушениях электроснабжения потребителей с учетом
самозапуска?
22. В чем заключается расчет самозапуска двигателей?
23. Каковы особенности самозапуска синхронных двигателей?
И • дг < ЕЛ
Т Й^Н
' '’Д'
зтеипил.
Глава 5. АСИНХРОННЫЕ РЕЖИМЫ
/ В ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМАХ
п ‘ $.1. ВОЗНИКНОВЕНИЕ И ОБЩАЯ ХАРАКТЕРИСТИКА
АСИНХРОННЫХ РЕЖИМОВ ’
В нормальном установившемся режиме синхронные машины, включен-
ные на параллельную работу, работают синхронно. Синхронный режим ха-
рактеризуется тем, что ЭДС всех электрических машин имеют одинаковую
частоту и, следовательно, их векторы вращаются с одинаковой угловой ско-
ростью (рис. 5.1, а). Однако нарушение статической (рис. 5.2, а) или дина-
мической (рис. 5.2, б) устойчивости, потеря (исчезновение) возбуждения
(рис. 5.2, в) приводит к тому, что машины перестают работать синхронно.
В результате возникает асинхронный ход или асинхронный режим, который
характеризуется несинхронным вращением части синхронных машин, будь-
те генераторы или двигатели. При этом вектор ЭДС синхронной машины,
выпавшей из синхронизма, вращается относительно векторов ЭДС машин,
работающих синхронно (рис. 5.1, б). Разность угловых скоростей вращения
или электрических частот называется скольжением:
... (5.1)
(5-2)
где соо, (Oj - угловые скорости вращения ЭДС электрических машин;
fQ,f\ ~ частоты в различных частях энергосистемы.
Обычно скольжение выражается в процентах от номинальной частоты
л%=41оо%=2/- (5-з)
7н
где/н - номинальная частота, равная 50 Гц.
190
5.1. Возникновение и общая характеристика асинхронных режимов
• Рис. 5.1. Векторная диаграмма системы:
а -вокальный установившийся режим; б - асинхронный режим
Рис. 5.2. Переход на асинхронный режим:
а - нарушения статической устойчивости; б - нарушения динамической устойчивости;
в — потеря возбуждения и уменьшения при этом тока возбуждения (г)
191
Глава 5. Асинхронные режимы в электроэнергетических системах
Для асинхронных режимов характерно периодическое изменение угла
между ЭДС от 0 до 360°, изменения (качания) напряжения, тока, активной
и реактивной мощности. Поскольку такие изменения параметров могут
быть весьма значительные, то асинхронный ход для энергосистемы не яв-
ляется нормальным режимом и длительно недопустим. К асинхронным
режимам также относятся:
♦ самозапуск двигателей;
♦ самосинхронизация генераторов;
♦ асинхронный пуск двигателей или синхронных компенсаторов;
♦ несинхронное включение линий электропередачи.
5.2. ПАРАМЕТРЫ ОСНОВНЫХ ЭЛЕМЕНТОВ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ *
ПРИ АСИНХРОННЫХ РЕЖИМАХ | 1
Синхронные машины. При возникновении асинхронного режима элек-
тромагнитный вращающий момент и мощность, отдаваемая синхронными
машинами в генераторном режиме и соответственно получаемая в двига-
тельном режиме будет зависеть не только от угла 5, но и от скорости его
изменения. Синхронная машина в таких режимах приобретает дополни-
тельные свойства асинхронной, поскольку в роторе появляются токи, обус-
ловленные наличием скольжения. Поэтому упрощенно электромагнитный
момент М синхронной машины можно представить двумя составляющи-
ми: синхронной Л/ и асинхронной М , т. е. М= Мс + Мж. Соответственно и
активная мощность синхронной машины Р = Г, + Рх. При приближенном
анализе асинхронного режима можно считать, что наличие возбуждения
не оказывает влияния на асинхронную составляющую Рас. Это позволяет
выполнять отдельно расчет Рс и Р , а затем провести наложение синхрон-
ных и асинхронных мощностей и соответственно моментов.
В несинхронном режиме работы строгое аналитическое выражение
синхронной составляющей мощности машины весьма сложно получить.
Это связано прежде всего с тем, что в машине протекает ток, имеющий
составляющие двух частот: постоянную со0 и изменяющуюся Кро-
ме того, в таком режиме изменяются реактивное сопротивление машины и
ЭДС Е, зависящая от скольжения и параметров регулятора возбуждения.
Поэтому в первом приближении, преимущественно для качественного ана-
лиза, можно использовать известные выражения активной мощности ма-
шины, работающей в синхронном режиме.
Поскольку на роторе синхронной машины имеется, как правило, одна
и равномерно распределенная обмотка возбуждении, то асинхронная со-
ставляющая активной мощности по аналогии с асинхронной машиной
192
5.2. Параметры основных элементов электроэнергетических систем
может быть определена по выражению
U2r2.s
Ас = .2 / э, (5-4)
(r2l) + (х.й>'’')
где г,Е = г, + гвн; xsE = xs + хвн - параметры схемы замещения асинхронной
машины с учетом внешнего сопротивления системы.
Данные параметры могут быть определены с использованием ката-
ложных данных синхронной машины, например
CXd~Xd)
Асинхронная составляющая реактивной мощности упрощенно может
быть найдена из уравнения
бас ~ Ас • (5.6)
5кр
Если бы синхронная машина была идеально симметрична, то асинх-
ронная мощность при установившемся значении скольжения имела бы
постоянную величину. Наличие несимметрии приводит к тому, что асинх-
ронная мощность изменяется около некоторого среднего значения (рис. 5.3).
Величина средней асинхронной мощности или момента зависит от типа и
конструкции синхронной машины и от величины скольжения. Типовые
графические зависимости средней асинхронной мощности генераторов
приведены на рис. 5.4.
Изложенный способ получения характеристик мощности синхронной
машины в асинхронном режиме основан на предположении о возможнос-
ти применения принципа суперпозиции при разделении рассматриваемой
Рис. 5.3. Изменение активной (а) и реактивной (б)
асинхронной мощности синхронной машины
13. Зак. 2182
193
Глава 5. Асинхронные режимы «^электроэнергетических системах
1 - турбогенератор; 2 - гидрогенератор без успокоительной обмотки;
, 3 - гидрогенератор с успокоительными обмотками
машины на две механически связанные - синхронную и асинхронную
(рис. 5.5, б). Более строго данная задача может быть решена с использова-
нием уравнений Парка - Горева.
Первичные двигатели и приводные механизмы. Характеристики и
параметры первичного двигателя или приводного механизма синхронной
машины оказывают существенное значение на режим асинхронного хода.
Наибольшее влияние оказывает зависимость механической мощности (или
момента) от скорости вращения агрегатов (рис. 5.6).
Механическая мощность турбины при увеличении скорости под дей-
ствием автоматических регуляторов скорости уменьшается. Изменение
частоты вращения, соответствующее изменению мощности агрегата от нуля
до номинальной характеризует среднюю крутизну статической характери-
стики и, будучи отнесенной к номинальной частоте вращения нн(сон), но-
сит название коэффициента неравномерности или статизма
Q = ]QQ о/о_ (5,7)
«н
Механический момент приводных механизмов при уменьшении час-
тоты вращения остается постоянным (зависимость 1) или уменьшается (за-
висимость 2, рис. 5.6).
Электрическая сеть. Схемы замещения линий электропередачи,
трансформаторов, реакторов и конденсаторных батарей не изменяются. При
значительных отклонениях частоты в различных частях энергосисте-
мы необходимо лишь уточнить значения индуктивных и емкостных со-
противлений.
Нагрузка. При асинхронном режиме в составе напряжения, подведен-
ного к нагрузке, будет несколько (в лучшем случае две) различных частот
194
5.3. Нарушение синхронизма и переход в асинхронный режим
а
а - исходная схема; б - разделение машины на две - синхронную 1 и асинхронную 2
а - турбоагрегата; б - приводных механизмов синхронных машин
с тяжелыми (!) и легкими (2) условиями пуска
переменного тока. Однако расчеты в первом приближении можно прово-
дить без учета появления нескольких частот в мгновенных значениях на-
пряжения, а исходя только из понижения напряжения и изменения его оги-
бающих с частотой асинхронных колебаний.
5.3. НАРУШЕНИЕ СИНХРОНИЗМА И ПЕРЕХОД
В АСИНХРОННЫЙ РЕЖИМ г
Рассмотрим процесс перехода генератора в асинхронный режим работы
из-за нарушения динамической устойчивости применительно к простейшей
195
Глава 5. Асинхронные режимы в электроэнергетических системах
системе. Предположим, что в этой системе из-за КЗ отключилась одна из
линий электропередачи. При этом площадка ускорения^ превосходит пло-
щадку торможенияПоэтому генератор проходит критическое значение
<\р, после которого на ротор начинает действовать все увеличивающийся
избыточный момент, обусловленный разностью мощности турбины Рт и
электрической мощностью генератора Р (рис. 5.7), что приводит к даль-
нейшему увеличению угла 5.
При увеличении скорости ротора больше синхронной появляется сколь-
жение s, растущее с увеличением разности угловых скоростей ротора и маг-
нитного поля статора генератора. Возникновение скольжения обусловливает
появление асинхронной мощности Р определяемой выражением (5.4), уве-
личивающейся с ростом скольжения (см. рис. 5.4). С увеличением скорости
(скольжения) ротора вступает в действие регулятор скорости турбины и в
соответствии со своей характеристикой (см. рис. 5.6, а) начинает уменьшать
мощность турбины Рг. При некотором скольжении ,sy мощность турбины урав-
новешивается средней асинхронной мощностью генератора и наступает ус-
тановившийся асинхронный ход, где выполняется условие Ру = Рх. Среднее
значение скольжения ,р) определяется точкой пересечения характеристик
момента турбины Л/ и асинхронного момента М (рис. 5.8). Следует отме-
тить, что из-за относительно небольшого изменения скорости в асинхронном
режиме в относительных единицах можно принять Рх = М и Р = Мг
Если к обмотке ротора синхронной машины в асинхронном режиме по-
дается напряжение возбуждения, то, кроме взаимно уравновешивающих друг
друга асинхронного момента и момента турбины, на вал генератор - турбина
будет действовать также синхронный вращающий момент Мс (рис. 5.9, а).
Этот знакопеременный момент, среднее значение которого равно нулю,
вызывает периодическое изменение скорости вращения ротора в асинх-
ронном режиме, а следовательно, и пульсации скольжения, изменяющего-
ся от 5макс до .умин около своего среднего значения (рис. 5.9, б). При этом
чем больше амплитуда синхронного момента, тем больше разница между
максимальным и минимальным значениями пульсирующего скольжения.
Скольжение в любой момент времени можно определить, решив урав-
нение относительного движения ротора генератора в асинхронном режи-
ме, которое может быть записано в следующем виде:
,2е
T-^- = Mr-Mc-Mac=XM. (5-8)
dr
Преобразуем это уравнение, введя в его левую часть скольжение. Для
этого ускорение ротора представим так:
- <я'2^ _ds _ds d§ _ ds (59)
. - . dt2 dt dt dd d8
196
Рис. 5.7. Процесс выпадения из синхронизма генератора и переход в асинхронный режим
5.3. Нарушение синхронизма и переход в асинхронный режим
Глава 5. Асинхронные режимм в электроэнергетических системах
Рис. 5.8. Изменение асинхронного момента синхронного генератора
и момента турбины при изменении скольжения
а
Рис. 5.9. Изменение синхронного момента (а) и скольжения (б) в асинхронном режиме
198
5.4. Изменение режимных параметров энергосистемы при асинхронном ходе
Следовательно, уравнение (5.8) запишется в виде
cis
TjS—^M. (5.10)
J do
Тогда, проинтегрировав (5.10) в пределах изменения скольжения
[х, ,умаи;] и угла [8, 8 ], получим
(s2
° макс
.Т“' j\ 2
2 бмакс
— = |ЕЛ/о'8, '
2 ) 5
откуда находим значение скольжения в любой момент времени:
= 2 -А
5 -I Рмакс
V 1 ,
бмакс
Jews,
s
(5.11)
где 8макс - угол, при котором достигается максимальное скольжение j .
)
5.4. ИЗМЕНЕНИЕ РЕЖИМНЫХ ПАРАМЕТРОВ
1 ЭНЕРГОСИСТЕМЫ ПРИ АСИНХРОННОМ ХОДЕ
Асинхронный режим сопровождается характерными для него явлени-
ями и признаками:
1. Периодическое изменение угла между несинхронными ЭДС от нуля
до 360° с частотой скольжения (рис. 5.10, б). При этом частота скольжения
во время асинхронного хода не остается постоянной, а изменяется. Это
связано с тем, что в избыточной части энергосистемы частота под воздей-
ствием автоматических регуляторов скорости вращения турбин электро-
станций уменьшается. В дефицитной части системы частота, наоборот,
увеличивается под действием регулятора скорости за счет мобилизации
резервов мощности электростанций и ограничения электропотребления.
2. Периодическое изменение (качания) активной мощности. На рис. 5.10, а
приведена диаграмма изменения активной мощности в асинхронном ре-
жиме применительно к примеру, рассмотренному в параграфе 5.3. Из этой
диаграммы видно, что за один цикл (период) установившегося асинхрон-
ного хода знак активной мощности изменяется дважды. Физически это
означает, что генератор как синхронная машина в течение первого полупе-
риода работает в генераторном режиме, а в течение второго полупериода -
в двигательном. Средняя активная мощность, выдаваемая генератором,
равна асинхронной составляющей активной мощности. Характер измене-
ния активной мощности Р определяется соотношением Рс и Р При соот-
ветствующих условиях возможна работа генератора только в пульсирую-
щем режиме генерации.
199
Рис. 5.10. Изменение активной мощности (а) и угла (б) в асинхронном режиме
t
_______5.4. Изменение режимных параметров энергосистемы при асинхронном ходе
3. Периодическое изменение (качания) напряжения. Рассмотрим про-
цесс изменения напряжения в некоторых характерных точках простейшей
системы при работе генератора в асинхронном режиме (рис. 5.11, а). Исхо-
дя из этого, можно считать, что вектор мощной приемной системы Д являет-
ся неподвижным, а вектор ЭДС генератора Е вращается относительно Д с
частотой вращения Д. Примем, что ЭДС численно равны, т. е. Ег = Д.
С учетом принятых исходных условий и параметров на рис. 5.11, б
построена диаграмма изменения напряжения в различных точках при асин-
хронном ходе.
Эта диаграмма строится следующим образом. По горизонтали откла-
дывается отрезок ОС, равный в масштабе сопротивлению системы элект-
ропередачи между ЭДС Ег и Ес, и из точек О и С откладываются вертикаль-
но векторы этих ЭДС. Проводится линия из концов вектора Д и Д. Далее
вертикально откладываются векторы напряжения (7 и (Д на расстояниях
пропорционально их сопротивлениям от векторов Е и Д соответственно.
Таким образом получаем режим 1 системы, соответствующий углу 5 = 0.
Далее проворачиваем ЭДС Д от 0 до 360° и получаем характерные режи-
мы: 2 — соответствующий углу 5 = 90°; 3 — 180°; 4 - 270° - и соединяем
концы векторов окружностями.
Из диаграммы (см. рис. 5.11,6) видно, что векторы напряжения (Д и U*
изменяются по величине и занимают новое фазовое расположение. При
этом имеется их существенная зависимость от угла 5. На рис. 5.12 приве-
дены графики изменения напряжения за один период асинхронного хода.
На рассматриваемой системе электропередачи имеется характерная
точка, напряжение в которой при угле 5 = 180° снижается до нуля. Эта
точка называется электрическим центром качаний (ЭЦК). Характер изме-
нения напряжения в ЭЦК показан на рис. 5.12.
Напряжение в ЭЦК при равных ЭДС для любого угла можно опреде-
лить на основании векторной диаграммы (рис. 5.13). При Д = Д = Е ЭЦК
расположен в середине вектора Д - Д. Поэтому вектор напряжения Дэцк
делит угол 5 пополам, и. следовательно, можно записать:
5 "
t/3yK=£cos-. Ц (5.12)
При изменении значений Д и Д место расположения ЭЦК меняется.
В зависимости от соотношения величины ЭДС и сопротивления парамет-
ров системы ЭЦК может располагаться в любой точке линии, в трансфор-
маторе или даже в самом генераторе.
Следует отметить, что вектор напряжения в точке А, находящейся за
ЭЦК от вектора Д, последовательно занимает те же положения, что и век-
тор Д (см. рис. 5.11). Следовательно, вектор напряжения (Д вращается
относительно вектора Д с той же частотой, что и вектор Д, т. е. с частотой
14. Зак. 2182
201
Рис. 5.11. Схема системы (а) и диаграмма изменения напряжений в различных точках системы (б) в процессе асинхронного режима при Er = I'.,
5. Асинхронные режимы в электроэнергетических системах
5.4. Изменение режимных параметров энергосистемы при асинхронном ходе
Рис. 5.12. Изменение режимных параметров системы при асинхронном ходе
скольжения. Аналогично изменяются векторы напряжения во всех точках
электропередачи, находящихся за ЭЦК от вектора Е..
Иначе изменяется напряжение в точках электропередачи, находящих-
ся до ЭЦК от вектора Ес. Как видно из той же диаграммы, вектор напряже-
ния в точке Б не совершает оборота на 360°, а лишь колеблется по величи-
не и по углу.
Из рассмотренного следует, что при асинхронном режиме вращаются
относительно друг друга не только векторы ЭДС, но и все векторы напря-
жений, находящиеся по разные стороны от ЭЦК.
4. Периодическое изменение тока. Известно, что ток, проходящий по
электропередаче при асинхронном режиме, равен
Ee~Ev
", (5.13)
где - суммарное реактивное сопротивление между векторами Ес и Ег.
Из векторной диаграммы рис. 5.13 следует:
203
Глава 5. Асинхронные режимы в электроэнергетических системах
Рис. 5.13. Векторная диаграмма для определений напряжения в ЭЦК
' i , 4
откуда
Ec-E=2Esm~. (5.14)
-с -г 2
Подставляя это выражение в формулу (5.13), получим:
<• 2Е . 3
/ар-—Sin—. (5.15)
2
Диаграмма, показывающая изменение тока / за один цикл асинхрон-
ного хода, показана на рис. 5.12. Как видно из (5.15) и приведенной диаг-
раммы, ток асинхронного режима зависит от угла 3 и равен нулю при 3 = 0°
и достигает максимального значения при 3 = 180°. ц
5.5. ПОСЛЕДСТВИЯ АСИНХРОННЫХ РЕЖИМОВ
Как следует из рассмотрения режимных параметров энергосистемы
при асинхронном ходе, данный режим сопровождается глубокими пони-
жениями напряжения, особенно вблизи ЭЦК, протеканием больших то-
ков, которые могут превышать токи КЗ, и колебаниями активной и реак-
тивной мощности. Поэтому асинхронный режим представляет в общем
случае серьезную опасность для энергосистемы в плане возможного по-
вреждения оборудования, развития аварии и нарушения электроснабже-
ния большого числа потребителей. В практике эксплуатации энергосистем
204
5.5. Последствия асинхронных режимов
имело место большое число аварий, причиной которых являлся непрекраща-
ющийся или неликвидированный достаточно быстро асинхронный режим.
Опасными последствиями асинхронного режима для энергосистемы
являются:
1. Глубокие снижения напряжения в электрической сети могут приво-
дить к нарушению устойчивости двигателей, массовому отключению по-
требителей, нарушению технологических процессов и браку продукции
на производстве, нарушению устойчивой работы собственных нужд элек-
тростанций. На рис. 5.14 показаны характерные процессы поведения асин-
хронных двигателей в асинхронном режиме. Так, при небольших отклоне-
ниях напряжения до Ц (рис. 5.14, а) устойчивая работа двигателей сохра-
няется. При более глубоких снижениях напряжения до (рис. 5.14, 6)
двигатель теряет устойчивость. Эти процессы характерны только для од-
ного периода асинхронного хода. При продолжении асинхронного хода,
когда устойчивость двигателей в первом цикле сохранилась, в последую-
щих циклах она может нарушаться (см. рис. 2.14, в).
2. Повреждения элементов сети из-за больших токов перегрузки, ко-
торые в асинхронном режиме могут превосходить исходный или номиналь-
ный в несколько раз (см. рис. 5.12).
3. Повреждения генераторов из-за возникающих больших электроди-
намических и механических усилий, перегрева обмоток статора и ротора.
Появление значительных электродинамических и механических усилий
обусловлено пульсирующим и превосходящим номинальное значение мо-
мента на валу турбины и в обмотках статора. Увеличение нагрева ротора
связано с появлением скольжения и дополнительно циркулирующих в нем
вихревых токов.
4. Глубокие снижения напряжения при двухчастотном асинхронном
режиме могут привести к его развитию в трехчастотный и многочастот-
ный асинхронный ход. Это особенно вероятно в тех случаях, когда ЭЦК
находится вблизи электростанций. Рассмотрим такой процесс на простей-
шем примере (рис. 5.15). Предположим, что между электростанцией Ст1 и
остальной частью энергосистемы возник асинхронный режим. При этом
ЭЦК может быть расположен вблизи узла 2. В результате глубокого сниже-
ния напряжения уменьшается предел передаваемой мощности от электро-
станции Ст2, вследствие чего она выходит из синхронизма. При этом воз-
никает вторичный асинхронный режим Ст2 относительно остальной час-
ти системы с двумя дополнительными ЭЦК, один из которых может быть
расположен вблизи узла 3. Однако к этому узлу присоединена электропе-
редача, соединяющая электростанцию СтЗ с энергосистемой. Значитель-
ные снижения напряжения в узле 3 могут привести к нарушению устойчи-
вости СтЗ и возникновению новых ЭЦК, возможно, в зоне узла 4 и т. д.
Следовательно, глубокие снижения напряжения в асинхронных режимах
205
Глава 5. Асинхронные режимы в электроэнергетических системах
Рис. 5.14. Переходные процессы в асинхронном двигателе при асинхронном ходе:
а - устойчивый переход; б, в - неустойчивый переход
206
5.5. Последствия асинхронных режимов
могут вызывать каскадное нарушение устойчивости других электростан-
ций и приводить к развитию аварии.
5. Возникновение дефицита активной мощности, так как в асинхрон-
ном режиме предельная нагрузка, которую может выдать турбогенератор,
ограничивается 40-60 % от номинальной мощности, для гидрогенера-
тора - 30-50 %.
6. Глубокие колебания параметров электрического режима могут при-
водить к ложной работе устройств релейной защиты и противоаварий-
ной автоматики.
Таким образом, принимая во внимание возможные последствия для
энергосистемы, можно заключить, что асинхронный режим, даже кратков-
ременный, не является допустимым, когда:
♦ имеют место значительные снижения напряжения в узлах энергоси-
стемы, от которых питаются крупные и ответственные потребители или с
ними связаны мощные тепловые и атомные электростанции;
♦ при возникновении асинхронного хода между двумя частями энер-
госистемы следует нарушение устойчивости других электростанций;
♦ происходит повреждение оборудования в электрической сети, на
электростанциях;
♦ изменение режимных параметров приводит к неселективному сра-
батыванию устройств РЗ и ПА, а загрубление их уставок является недопу-
стимым.
В тех случаях, когда приведенные выше условия не являются опреде-
ляющими, кратковременный асинхронный режим может быть допущен.
При этом предельная длительность асинхронного режима составляет 30 с.
Турбогенератору при потере возбуждения разрешается работать в асинх-
ронном режиме до 15-30 мин. Активная нагрузка при этом должна быть
снижена до 40-60 % от номинальной.
207
Глава 5. Асинхронные режимы в электроэнергетических системах
5.6. РЕСИНХРОНИЗАЦИЯ
И РЕЗУЛЬТИРУЮЩАЯ УСТОЙЧИВОСТЬ
Длительная работа электрических машин в асинхронном режиме яв-
ляется недопустимой. Поэтому возникший асинхронный ход синхронных
машин должен быть прекращен. Ликвидация асинхронного режима воз-
можна следующими способами:
1. Отключением синхронной машины от электрической сети с последу-
ющим синхронным включением. Способ весьма простой, но редко использу-
емый. Это связано с тем, что отключение синхронного двигателя, как прави-
ло, приводит к нарушению технологии производства, а отключение генерато-
ра или электростанций - к возникновению дефицита мощности. Кроме того,
последующее включение генератора в сеть является довольно длительной и
сложной технологической операцией. Поэтому данный способ применим, в
основном, для отдельных генераторов при потере ими возбуждения.
2. Делением энергосистемы на части. Способ, который широко исполь-
зуется в энергосистемах. Операция разделения, как правило, осуществляется
автоматикой ликвидации асинхронного режима (АЛАР) или автоматикой пре-
кращения асинхронного хода (АПАХ), путем отключения, например, вык-
лючателя ВЗ (см. рис. 5.15). Если по какой-либо причине автоматика отказа-
ла, то прекращения асинхронного хода выполняет оперативный персонал энер-
госистемы, как правило, также путем деления энергосистемы на несинх-
ронно работающие части. Недостатком такого способа ликвидации асинх-
ронного режима является возникновение небаланса генерирующих мощнос-
тей и нагрузок в разделившихся частях энергосистемы: в одной части генери-
рующая мощность окажется выше мощности нагрузки и частота повысится,
в другой, наоборот, генерирующей мощности будет недостаточно и частота
может снизиться даже до уровня срабатывания устройств АЧР.
3. Ресинхронизацией генераторов, двигателей или частей энергосисте-
мы, вышедших из синхронизма.
Опыт эксплуатации показывает, что нередко синхронные машины, пере-
шедшие в асинхронный режим, можно синхронизировать, не отключая их от
сети. Процесс восстановления синхронизма машин в процессе асинхронно-
го режима называется ресинхронизацией. Одним из условий успешной ре-
синхронизации является прохождение скольжения через нуль, т. е. 5 = 0. Это
означает, что генератор или двигатель кратковременно вошел в синхронизм,
дополнительная кинетическая энергия стала равна нулю, а асинхронная со-
ставляющая мощности исчезла. Это условие, 5 = 0, соответствующее возмож-
ному процессу ресинхронизации, выполняется, согласно (5.11) при
- 8 max
4ах=— (5.16)
7 J 8
208
5.6. Ресинхронизация и результирующая устойчивость
Рассмотрим предельный случай выполнения условия 5 = 0: при 5mm = 0
среднее допустимое скольжение, при котором возможно наступление ре-
синхронизации, определяется как 5ср дап = smJ2 или с учетом (5.16) имеем
I 1 8 max
scp.доп ~ JE-МЖ- (5.17)
V ./ 8 1
Таким образом, если исходить из среднего установившегося значения
скольжения (5ср уст), ресинхронизация возможна при выполнении условия
5 <5 (5.18)
Данное условие, при котором возможен переход скольжения через ну-
левое значение, является необходимым, но недостаточным для ресинхро-
низации. Действительно, при 5 = 0 генератор кратковременно вошел в син-
хронизм. Однако останется ли он далее в режиме синхронной работы за-
висит от соотношений между моментами генератора и турбины, а также от
угла 5, при котором скольжение прошло через нуль. Избыточный момент,
определяющий движение генератора в асинхронном режиме, согласно (5.8),
состоит из трех составляющих:
ТМ=М-М-М. (5.19)
т с ас v '
Поскольку при 5 = 0 скорость вращения ротора генератора стала синх-
ронной, то асинхронный момент равен нулю. Следовательно, условием
втягивания генератора в синхронизм будет
М > М. (5.20)
При таком соотношении моментов и 5 = 0 на вал генератора действует
тормозной избыточный момент, который, согласно (5.8), вызывает умень-
шение угла 5. Если условие (5.20) не выполняется, то ресинхронизация
будет неуспешной, угол 5 продолжит возрастать, а генератор останется в
асинхронном режиме.
Успешная ресинхронизация может быть обеспечена путем уменьше-
ния мощности турбины (рис. 5.16, а) или увеличением синхронного мо-
мента путем регулирования его возбуждения (рис. 5.16, б).
Ресинхронизация синхронных двигателей имеет свои особенности и
ее процесс можно разделить условно на два этапа:
1. Разгон ротора двигателя до подсинхронной частоты вращения при
выполнении условия
М >М , (5.21)
где Л/мех - механический'ИШОРприводного механизма.
209
Глава 5. Асинхронные режимы в электроэнергетических системах
Рис. 5.16. Ресинхронизация синхронного генератора:
а - уменьшение мощности турбины; б ~ увеличение синхронного момента
210
Контрольные вопросы
2. Вхождение в синхронизм. Если процесс подтягивания скорости до
синхронной происходит под воздействием асинхронного момента, то втя-
гивание в синхронизм, как и генератора, осуществляется под воздействи-
ем синхронного момента, обусловленного в первую очередь током возбуж-
дения двигателя. Наиболее технологически простым способом является
ресинхронизация без воздействия на ток возбуждения. Однако если ре-
синхронизация без управления возбуждением двигателя не осуществима,
то на этапе разгона двигателя поле возбуждения гасится, а при достиже-
нии подсинхронной скорости производится подача и форсировка возбуж-
дения. В большинстве случаев за счет подобного управления возбуждени-
ем удается обеспечить успешную ресинхронизацию синхронных двигате-
лей. Это вполне возможно при выполнении условия i
,v <s , (5.22)
ср уст ср. кр 4 '
где 5ср - критическое скольжение, при котором возможно втягивание дви-
гателя в синхронизм.
Для обеспечения ресинхронизации может быть осуществлена разгрузка
рабочего механизма, если это допустимо по условиям технологического
процесса или предусмотрены другие меры, облегчающие вхождение в син-
хронизм.
Если выпавший из синхронизма генератор не отключается от сети, то
и работая в асинхронном режиме, он выдает в сеть некоторую мощность, а
входя в синхронизм путем ресинхронизации, он быстро увеличивает эту
мощность. Скорость вращения синхронного двигателя в асинхронном ре-
жиме несколько уменьшается, но при успешной ресинхронизации его ре-
жим работы быстро восстанавливается, что может не сказаться существенно
на приводном механизме и связанном с ним технологическом процессе.
Если генератор, двигатель или часть системы вышли из синхронизма и
некоторое время проработали в асинхронном режиме, а затем восстанови-
ли свою синхронную работу, близкую к параметрам исходного режима, то
такую энергосистему нельзя в полном смысле считать неустойчивой, ее
следует рассматривать как систему, обладающую результирующей устой-
чивостью, поскольку нарушения электроснабжения потребителей не про-
исходит. Следовательно, способность системы восстанавливать синхрон-
ную работу после возникновения асинхронного режима называется резуль-
тирующей устойчивостью энергосистемы.
Контрольные вопросы
1. Чем характеризуется синхронный режим системы?
2. Каковы причины возникновения асинхронного режима синхрон-
ных машин?
> 3. Какие режимы системы относятся к асинхронным?
I
1
Глава 5. Асинхронные режимы в электроэнергетических системах
4. Какие дополнительные свойства синхронная машина приобретает в
асинхронном режиме?
5. Как может быть определена асинхронная составляющая мощности
синхронной машины в асинхронном режиме?
6. Какой показатель характеризует крутизну статической характерис-
тики турбоагрегата?
7. Как происходит процесс выпадения генератора из синхронизма и
переход его в асинхронный режим?
8. Как изменяются активная мощность, ток и напряжение на шинах
асинхронно работающего генератора?
9. В чем опасность асинхронного режима для асинхронно работаю-
щих генераторов и для системы?
10. Какой процесс называется ресинхронизацией?
11. Каковы условия осуществления успешной ресинхронизации?
12. Что понимается под результирующей устойчивостью? >
13. Какими способами возможна ликвидация асинхронного режима?
"• 14. Какова предельная длительность асинхронного режима?
15. В каких случаях асинхронный режим является недопустимым?
Глав* 6. УСТОЙЧИВОСТЬ СЛОЖНЫ^
ЭНЕРГОСИСТЕМ
6.1. ОБЩИЙ ПОДХОД К АНАЛИЗУ УСТОЙЧИВОСТИ
На электроэнергетическую систему всегда действуют различные воз-
мущения, которые могут нарушить ее устойчивую работу. Поэтому в об-
щем случае рассматривая нелинейные системы, к каким относятся и энер-
госистемы, вводят понятие устойчивости «в малом», «в большом» и «в
целом». Система устойчива «в малом», если констатируют лишь факт на-
личия области устойчивости, но не определяют каким-либо образом ее
границы. Систему называют устойчивой «в большом», когда определены
границы области устойчивости, т. е. определены границы области началь-
ных отклонений, при которых система возвращается в исходное состоя-
ние, и выяснено, что реальные начальные отклонения принадлежат этой
области. В том случае, когда система возвращается в исходное состояние
при любых начальных отклонениях, систему называют устойчивой «в це-
лом». Устойчивость «в целом» для определенного класса нелинейных сис-
тем называют «абсолютной» устойчивостью.
Рассмотрим, прежде всего, устойчивость «в малом», которому отвеча-
ет понятие «статической устойчивости электроэнергетических систем».
Пусть движение рассматриваемой системы описывается дифференциаль-
ными уравнениями, которые могут быть приведены к виду
^7 = Yl{yxy2,...,yn,t), (6.1)
at
где у. - совокупность параметров системы, которые являются функциями
времени (ток, напряжение, мощность и т. д.);
z = 1, 2,..., п.
213
Глава 6. Устойчивость сложных знергосистем
Некоторое вполне определенное движение системы, подлежащее ис-
следованию на устойчивость, называют невозмущенным движением. При
этом выбор невозмущенного движения является произвольным. Это мо-
жет быть любое возможное движение системы, как установившееся, так и
неустановившееся. Невозмущенному движению системы отвечает опре-
деленное частное решение
У,=№ (6-2)
дифференциальных уравнений (6.1), удовлетворяющее начальным значе-
ниям параметров при t = ?0:
(6.3)
Изменим условия (6.3), дав начальным значениям переменныхур...,ул
достаточно малые приращения Др..., А а именно: пусть теперь при t = tQ\
у, =/Д0) +А, ,...,уп =fn(t0) + Ап (6.4)
Движение системы, отвечающее измененным начальным условиям (6.4),
называют возмущенным движением, а величины Ар..., Ап - возмущения-
ми. Другими словами, возмущенным движением системы называют вся-
кое иное движение системы, отличное от невозмущенного. Обозначим зна-
чения переменных в возмущенном движении через y[f) и приведем следу-
ющее определение устойчивости по Ляпунову.
Невозмущенное движение будет устойчивым по отношению к вели-
чинам у, если для всякого положительного числа е, как бы мало оно ни
было, найдется такое другое положительное число г](е), что для всех воз-
мущенных движений у = у (t), для которых в начальный момент t = t вы-
полняется неравенство «о>?«
будет при всех t > t выполняться неравенство ’ ;
\y,(t) -f,(t)\<£. rj. .
в противном случае движение неустойчиво.
Определение устойчивости, данное А. М. Ляпуновым в 1892 году, ока-
залось настолько удачным и наилучшим образом удовлетворяющим мно-
гим техническим задачам, что оно в настоящее время принято как основ-
ное. Графически это определение означает следующее: движение устой-
чиво, если достаточно близкое к нему в любой начальный момент tQ возму-
щенное движениеyff) целиком погружается в сколь угодно узкую е - труб-
ку, построенную вокруг движения /Д) (рис. 6.1, а). Если же возмущенное
движение пересечет е - трубку изнутри наружу, то исследуемое невозму-
щенное движение неустойчиво (см. рис. 6.1, б).
214
6.1. Общий подход к анализу устойчивости
Рис. 6.1. Движение по Ляпунову:
а - устойчивое; б - неустойчивое
Если невозмущенное движение не только устойчиво, но и любое воз-
мущенное движение при t -> со стремится к невозмущенному движению,
то его называют асимптотически устойчивым.
Таким образом, если известно общее решение дифференциальных
уравнений движения (6.1), то можно непосредственно определить значе-
ния переменных f^t) иу;(Т), составить вариации (г/О -/(?)] и, исследуя их,
решить вопрос об устойчивости невозмущенного движения. Однако, в по-
давляющем большинстве случаев общее решение уравнений (6.1) неизве-
стно. Поэтому, как правило, исследования устойчивости движения прово-
дятся не путем анализа общего решения, а с помощью методов, основан-
ных на качественном анализе уравнений возмущенного движения. Если
уравнение (6.1) преобразовать к новым переменным w
х, -ftf),
то они примут ВИД 1
z/r.
i!; —— = Fj(xl,x2,...,xn,t) (6.5)
at
и будут характеризовать изменение приращений переменных системы. Урав-
нения (6.5) называют дифференциальными уравнениями возмущенного дви-
жения. Разложив правые части этих уравнений в ряд Тейлора, получаем
= af!xt + ai2x2 +... + ainx„ + X *, (6.6)
at
где a = dFlldxi - коэффициент;
X* - совокупность членов, зависящих от х и разлагающихся в ряды по
степеням выше первой. .. ,
215
Глава 6. Устойчивость сложных энергосистем
Если в уравнениях (6.6) отбросить члены X*, то полученную при этом
систему линейных дифференциальных уравнений
~ = aiXx{ + ai2x2 +... + Я,-пх„ (6.7)
at
называют уравнениями первого приближения или линеаризованными урав-
нениями.
Характеристический определитель такой системы уравнений можно
записать следующим образом:
ад= «и -р «21 «12 «22 ~ Р а1н а2п = 0. (6.8)
«Ы г ап2 ат~Р
Раскрывая этот определитель, можно получить характеристическое
уравнение
aQpn + а\рп] +... + an=Q, (6-9)
где а0, а} ... а„- постоянные коэффициенты;
р - дифференциальный оператор, р = dldt.
Все коэффициенты а0, а, ... ап характеристического уравнения опре-
деляются параметрами и режимом исследуемой энергосистемы и являют-
ся действительными числами.
Решение характеристического уравнения степени п содержит п кор-
ней, которые могут быть вещественными, комплексными, мнимыми или
нулевыми. В общем случае корни характеристического уравнения
p^+a.i+j&i, (6.10)
а решение уравнения (6.9) имеет вид :
xy(/) = X!;ePiZ + K2iep-‘ +... + Кл1ер"‘, (6.11)
где КК2. ... Кп. - постоянные интегрирования.
При использовании линеаризации всегда возникали сомнения в досто-
верности суждения об устойчивости нелинейной системы по корням линей-
ных (линеаризованных) уравнений движения системы. Для обоснования пра-
вомерности исследования устойчивости систем по их линеаризованным урав-
нениям А. М. Ляпуновым сформулированы и доказаны две теоремы.
Теорема 1. Если все корни характеристического уравнения первого
приближения имеют отрицательные вещественные части, то невозмущен-
ное движение устойчиво и притом асимптотически, каковы бы ни были
нелинейные функции в правой части исходного уравнения.
216
____________________________________6.1. Общий подход к анализу устойчивости
Теорема 2. Если среди корней характеристического уравнения найдет-
ся хотя бы один с положительной вещественной частью, то невозмущен-
ное движение неустойчиво, каковы бы ни были нелинейные функции в
правой части исходного уравнения.
Если вещественные части некоторых корней характеристического урав-
нения равны нулю, а вещественные части остальных корней отрицатель-
ны, то невозмущенное движение устойчиво, но не асимптотически.
Случай, когда характеристическое уравнение не имеет корней с поло-
жительной вещественной частью, но имеет хотя бы один корень с нулевой
вещественной частью, является критическим. Как показал Ляпунов, в кри-
тических случаях по корням характеристического уравнения линеаризо-
ванной системы нельзя сделать заключение об устойчивости или неустой-
чивости реальной системы, а требуется рассмотрение дифференциальных
уравнений возмущенного движения (6.6) в их исходном виде.
Таким образом, необходимым и достаточным условием устойчивости
проверяемого режима системы, в том числе и электроэнергетической, яв-
ляется требование отрицательности вещественной части всех корней ха-
рактеристического уравнения.
Метод оценки устойчивости «в малом» на основе приведенных выше
теорем называется методом первого приближения или первым методом Ля-
пунова. В электроэнергетике и вообще в технических системах первый ме-
тод Ляпунова принято называть методом малых колебаний (отклонений). В
табл. 6.1 в качестве примера показан вид переходного процесса при различ-
ных значениях корней характеристического уравнения. Таким образом, пос-
ле того как найдены корни характеристического уравнения и определены их
знаки, задача проверки статической устойчивости оказывается решенной.
При использовании практических критериев устойчивости (например,
dP/db > 0) для исследования устойчивости системы ответ получается толь-
ко в форме «да» - «нет»; «уйдет» - «не уйдет» из исходного состояния при
рассматриваемом возмущении. При анализе устойчивости, основанном на
исследовании уравнений движения, физическая картина происходящих
явлений устанавливается более полно, так как выясняется не только факт,
устойчива или неустойчива система, но и каков характер движения: пери-
одическое или колебательное - затухающее или нарастающее.
Следует отметить, что вычисление корней весьма просто для характе-
ристического уравнения первой и второй степени. Существуют общие вы-
ражения для корней уравнений третьей и четвертой степени, но эти выра-
жения громоздки и мало пригодны. Что же касается уравнений более вы-
соких порядков, то для них вообще невозможно написать общие выраже-
ния для корней через коэффициенты характеристического уравнения.
Поэтому непосредственное решение характеристического уравнения не на-
шло до настоящего времени широкого применения в расчетах устойчивости.
217
Глава 6. Устойчивость сложных энергосистем
Таблица 6.1
Оценка устойчивости системы
по корням характеристического уравнения
Вид переходного процесса
х = fit)
Корни
/со
Слу-
чай
Расположение кор-
ней
./<»
0 * а
/ш
/<>
0 (I
описание
Возрастаю-
щая экспо-
нента - сис-
тема неус-
тойчива______
Экспоненци-
ально нарас-
тающее гар-
моническое
колебание -
система не-
устойчива
Затухающая
экспонента -
система
асимптоти-
чески устой-
чива_______
Затухающие
гармониче-
ские колеба-
ния - систе-
ма асимпто-
тически ус-
тойчива_____
Сохранение
постоянного
отклонения -
критический
случай______
Гармониче-
ские колеба-
ния с посто-
янной ам-
плитудой —
система ус-
тойчива
Решение задачи обычно выполняется с помощью правил, которые позво-
ляют определять устойчивость системы без вычисления корней. Эти пра-
вила обычно называют критериями устойчивости.
С помощью критериев устойчивости можно не только установить, ус-
тойчива система или нет, но и выяснить, как влияют на устойчивость те
или иные параметры и структурные изменения в системе.
218
6.2. Метод малых колебаний для оценки статической устойчивости
Критерии устойчивости могу быть разделены на алгебраические (Рауса, Гур-
вица, Льенара - Шипара) и частотные (Л-разбиения, Михайлова, Найквиста).
С математической точки зрения все критерии устойчивости эквива-
лентны, однако целесообразный выбор того или иного критерия устойчи-
вости при решении конкретной задачи позволяет провести исследование
устойчивости наиболее рационально.
Алгебраические критерии устойчивости позволяют судить об устой-
чивости системы по коэффициентам характеристического уравнения (6.9).
Частотные критерии позволяют оценивать устойчивость систем по
виду их частотных характеристик. Эти критерии являются графоаналити-
ческими и получили широкое распространение, так как позволяют срав-
нительно легко исследовать устойчивость систем высокого порядка, а так-
же имеют простую геометрическую интерпретацию и наглядность.
6.2. МЕТОД МАЛЫХ КОЛЕБАНИЙ ДЛЯ ОЦЕНКИ
СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ ,i i
Выполним исследование статической устойчивости электроэнергети-
ческой системы, приведенной на рис. 2.1. Предположим, что установив-
шийся режим характеризуется углом 50 и электрической мощностью Р
(рис. 6.2). В общем случае, при изменении параметров режима, переход-
ный процесс в рассматриваемой системе описывается нелинейным
дифференциальным уравнением (3.2). Для оценки статической устойчи-
вости систем методом малых колебаний необходимо выполнить лине-
аризацию данного уравнения. Для этого разложим нелинейную функ-
цию ДР = Ро - PMsin5 в ряд Тейлора в области около угла 50:
др = р -р sin5 = P0 -P..sin5f) Д5Д52 +..., (6.12)
65 2 652
где Д5 = 5 - 50 - малое отклонение угла от его исходного значения.
При небольших отклонениях Д5 его степенями выше первой можно
пренебречь, так как их значения весьма малы. Такое упрощение равносильно
спрямлению характеристики мощности в области угла 50 (см. рис. 6.2), т. е. кри-
вая заменяется касательной к ней. При рассмотрении генератора без АРВ
(Р = Ei/0 = const) частная производная совпадает с полной из-за дифферен-
цирования только по одной переменной 6/765 = dP/db. Учитывая также,
что Ро = PMsin50, уравнение (6.12) можно записать в виде q ч-
\P c\A (6 13)
где q = dP/db - значение синхронизирующей мощности при угле 50.
219
Глава 6. Устойчивость сложных энергосистем
* < 4 Рис. 6.2. Спрямление характеристики мощности
при оценке устойчивости методом малых колебаний
Поскольку 8 = 80 + Д8 и 80 - постоянная величина, то, дифференцируя,
получаем
d4 <?(80+Д8) <72Д8 ’ '
—5-=- %-----= —у-. ’ ’ (6.14)
di dt1 di
Подставив (6.13) и (6.14) в уравнение (3.2), получим линеаризованное
дифференциальное уравнение движения ротора при малых колебаниях
относительно исходного режима:
2
Г..^-^ + С1Д8 = 0. (6.15)
dr
d _
Для упрощения записи введем обозначение Р, тогда уравнение
(6.15) примет вид
Т/гЛ8 + 0^8 = 0 (6.16)
или, поскольку «/?» является алгебраическим множителем,
(Т^+с^ Д8 = 0.
Так как необходимо изучение движения, когда Д8 0, то
T/?2 + C1 = 0. (6.17)
Данное уравнение называется характеристическим. Оно не зависит от
того, какая из переменных величин использовалась при его получении.
Решением уравнения (6.17), в соответствии с (6.11), является изменение
угла Д8 во времени при малом возмущении исходного режима:
220
6.2. Метод малых колебаний для оценки статической устойчивости
\Ъ = Кхер'’ +Кгер^,
(6.18)
где р{, р._ - корни характеристического уравнения;
К},К2- постоянные интегрирования.
Для характеристического уравнения (6.17) корни, очевидно, равны
Р\,1 =
(6.19)
Как видно, корни получаются либо чисто мнимые при с, < 0, либо
чисто вещественные при р > 0. От вида корней зависит характер движе-
ния системы при малом возмущении. В случае мнимых корней
й’2
= ±усо
изменение угла Л8 определяется уравнением
+ К2е1а1,
где со = / Tj - угловая частота колебаний ротора.
Преобразуем данное уравнение, используя известную формулу Эйле-
ра, получаем
Д8 = Кх cosco/ + jKx sin со/ + К2 cosco/ - jK2 sin со/ =
= Д cosco/ + А2 sin со/ = Asin(co/ + ср),
(6.20)
где А = -^Aj + А%; <р = arctg(A} / Д2 ).
Таким образом, при мнимых корнях в соответствии с выражением (6.20)
изменение угла происходит по закону незатухающих синусоидальных ко-
лебаний в окрестности угла 80 (рис. 6.3). Незатухающий характер колеба-
ний связан с неучетом потерь в исходном уравнении движения ротора (3.2).
В реальных условиях энергосистем под влиянием потерь характер колеба-
ний становится затухающим и через некоторое время после нарушения
исходного состояния установится первоначальный режим. Поэтому в дан-
ном случае систему можно считать устойчивой.
Если же корни характеристического уравнения вещественные
то изменение угла имеет апериодический характер
Д8 = К,еа1 + К^‘. (6.21)
1 2 . но;
221
Глава 6. Устойчивость сложных энергосистем
Рис. 6.4. Апериодическое изменение угла при нарушении устойчивости
Наличие положительного вещественного корня будет приводить к уве-
личению угла Д8 (рис. 6.4.). В этом случае любое малое возмущение вызо-
вет непрерывное возрастание угла 8 и, следовательно, в системе будет про-
исходить апериодическое нарушение статической устойчивости (иногда
такое нарушение устойчивости называют сползанием).
При с - 0, соответствующем углу 80 = 90°, корни имеют нулевое зна-
чение, что соответствует критическому случаю, т. е. границе, разделяю-
щей два вида движения: колебательное устойчивое при 80 < 90° и аперио-
дическое нарастающее неустойчивое при 80 > 90. Следовательно, необхо-
димым и достаточным условием устойчивости является cf > 0, т. е. поло-
жительный знак синхронизирующей мощности, что отвечает полученно-
му ранее практическому критерию dPIdb > 0.
Таким образом, по корням характеристического уравнения можно су-
дить об устойчивости или неустойчивости исходного режима электроэнер-
гетической системы и характере переходного процесса.
222
6.3. Анализ статической устойчивости системы с учетом демпфирования
6.3. АНАЛИЗ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ СИСТЕМЫ
С УЧЕТОМ ДЕМПФИРОВАНИЯ
Под демпфированием понимают процесс подавления электромехани-
ческих колебаний в системе, либо уменьшение их амплитуды до допусти-
мых пределов с помощью устройств или приспособления, поглощающих
энергию колебаний - демпферов. Демпфирование может быть обусловле-
но как естественными факторами - потерями на трение, так и действием
регуляторов и появлением дополнительного асинхронного момента и со-
ответственно мощности из-за протекания токов в демпферной обмотке и
демпферных контурах, вызванных скольжением ротора синхронной ма-
шины относительно поля статора.
Демпфирование, проявляющееся во время относительного движения
ротора синхронной машины, может существенно изменить характер пере-
ходного процесса и соответственно оценку статической устойчивости рас-
сматриваемой системы.
Упрощенно демпфирование синхронной машины учитывается, как
отмечалось в параграфе 1.1.4, введением составляющей момента или мощ-
ности, пропорциональной скорости изменения угла 8. Таким образом, диф-
ференциальное уравнение движения ротора (1.53) в мощностях может быть
записано в виде
Tj — ^Po-^sinS-^—. (6.22)
at at
Следует отметить, что в данном случае можно считать, что демпфер-
ный коэффициент - это фактически производная активной асинхронной
мощности синхронной машины по скольжению, т. е. •,
k„ - dP,.,. I ds.
Д dL
При малых скольжениях иногда пренебрегают составляющей (х vs) в
формуле (5.4), и тогда весьма упрощенно демпферный коэффициент опре-
деляется в виде
кД =U2/г2у.
Выполнив линеаризацию уравнения (6.22) по аналогии с (3.2), полу-
чим уравнение малых колебаний с учетом демпферной мощности
tZ2A8 ДА8 та
Т,---г- + £„---+ с,А8 = 0. (6.23)
7 dt2 dt
Тогда характеристическое уравнение малых колебаний примет вид
Tj р2 + кдр + с1 = 0. (6.24)
223
Глава 6. Устойчивость сложных энергосистем
Его два корня имеют значения
~ ад -
(6.25)
где ад —£/2 Г - декремент затухания;
\2 ' .
- частота колебаний с учетом демпферной обмотки.
2Т,-
ci
V j
Рассмотрим влияние синхронизирующей мощности с} на вид корней
и характер процесса в системе при малых отклонениях режима:
I. с, > 0 - система будет всегда устойчива, поскольку:
с,
при^Е<
кл '
2
- оба корня будут действительными отрицательными
и процесс будет иметь характер, изображенный на рис. 6.5, щ
♦ при
Т:
2Ti
J /
2 !МГ^
- оба корня будут комплексными с отрицательными
вещественными частями, и характер процесса будет иметь вид затухаю-
щих колебаний, как показано на рис. 6.5, б.
II. с < 0 - система неустойчива, так как оба корня действительные,
причем один корень всегда будет положителен, а другой - отрицателен.
Протекание процесса в виде апериодического нарушения устойчивости
приведено на рис. 6.5, в.
III. с = 0 - критический случай, так как появляется один нулевой ко-
рень /?, = 0, а второй-р2 = -kjTy В этом случае можно грубо считать, что
это граница устойчивости, когда при малом возмущении возможно как
нарушение устойчивости, так и ее сохранение (см. рис. 6.5, г). Для выясне-
ния действительного поведения системы необходимо проведение допол-
нительных исследований с учетом уточняющих факторов или отказа от
линеаризации исходных уравнений.
Физически положительное воздействие демпфирования, приводящее
к затуханию возникших колебаний, объясняется двумя факторами:
1) при скорости выше синхронной и положительном скольжении 5 дем-
пферная составляющая мощности (Рас) выдается в сеть и добавляется к
синхронной Р (Р = Рс + Р ). Тем самым уменьшается площадка ускорения
и увеличивается площадка торможения;
2) при скорости ротора ниже синхронной и отрицательном скольже-
нии (-$) демпферная составляющая мощности потребляется из сети, тем
самым уменьшая общую мощность синхронной машины (Р = I\ - Рт).
224
15. Зак. 2182
6.3. Анализ статической устойчивости системы с учетом демпфирована^
Глава 6. Устойчивость сложных знергосистем
Это уменьшает энергию дополнительного торможения и сокращает раз-
мах колебаний.
Рассмотрим процесс демпфирования колебаний на примере простей-
шей системы. Предположим, что из-за возмущения в системе изменилась
характеристика синхронной мощности с Р до Рц и режим с точки а пере-
шел в точку Ь (рис. 6.6, а). В этом случае движение будет происходить под
действием избыточной мощности АР но точка, характеризующая поло-
Рис. 6.6. Характер процесса демпфирования:
а - на фазовой плоскости; б - во времени
226
0.4. Самораскачивание и самовозоужОение в электроэнергетической системе
щей значение синхронной мощности Рс = (£T7/J0sin8, а по кривой bed, учи-
тывающей демпферную составляющую мощности (Рс + k^s). Эта кривая
будет проходить выше характеристики Рп при скорости больше синхрон-
ной (+х), т. е. при росте угла 8, и ниже - при уменьшении угла (-5). Такое
изменение движения под действием дополнительной мощности приводит
к тому, что площадки ускорения уменьшаются до значения/^ = abca, а тор-
можения - до/^ = cdec. Это вызывает уменьшение первоначального разма-
ха колебаний от 8м2 до 8 . Изображение движения на фазовой плоскости
имеет вид спирали, скручивающейся к точке установившегося режима при
8] и Ро. Изменение угла 8 во времени имеет вид затухающих колебаний
с переходом к новому установившемуся режиму, характеризуемому
углом 8j (см. рис. 6.6, б). Таким образом, демпфирование превращает
незатухающие колебания в затухающие. Однако не всегда процесс дем-
пфирования оказывает положительное влияние на характер колебаний,
что и будет далее показано.
6.4. САМОРАСКАЧИВАНИЕ И САМОВОЗБУЖДЕНИЕ £
В ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЕ
Исследование устойчивости электроэнергетической системы будет
неполным, если не рассматривать особые виды нарушения устойчивости:
самораскачивание и самовозбуждение.
Под самораскачиванием понимают вид электромеханической перио-
дической неустойчивости энергосистемы, при которой ротор синхронной
машины совершает колебания, заканчивающиеся либо выпадением маши-
ны из синхронизма, либо установлением какого-то предельного цикла ка-
чаний, препятствующих нормальной работе энергосистемы. Самораска-
чивание может появиться при:
♦ работе синхронных машин в сети со значительным активным со-
противлением;
♦ применении продольной емкостной компенсации на линиях элект-
ропередачи;
♦ неправильной настройке автоматических регуляторов возбуждения
или скорости.
Упрощенно момент, действующий на ротор синхронной машины, обус-
ловленный потерями мощности в активном сопротивлении ее контура,
может быть оценен через коэффициент kr, определенный выражением
- т—J _ Еч -r(.r2-xdX^ ..... (6.26)
где г, г - активное и полное сопротивление синхронией машины и сети.
227
Глава 6. Устойчивость сложных энергосистем
В этом случае эквивалентный демпферный коэффициент к будет оп-
ределяться двумя составляющими
При значительном активном сопротивлении, когда к > к , коэффици-
ент кю и соответствующий ему эквивалентный демпферный момент может
изменить знак и стать моментом, не тормозящим ротор при качаниях, а,
наоборот, ускоряющим его. В этом случае уравнение малых колебаний
примет вид
- клэрА8 + с.ЛЗ = 0. (6-27)
Тогда характеристическое уравнение запишется в виде
ТрР-к р + с=0.
И 1
Корни характеристического уравнения будут иметь значения о
А.2
Л (6.28)
Все режимы электроэнергетической системы с такими параметрами
будут неустойчивыми. Это обусловлено тем, что: • = <
\2
• - оба корня будут комплексными с положи-
а) при с > 0 и -Ь-
TJ
тельными вещественными частями, и характер процесса будет иметь вид
все возрастающих амплитуд колебаний, как показано на рис. 6.7, а;
\2
- оба корня будут действительными
2Т,-
с\
б) при Cj > 0 и —
^ДЭ
2Т;
положительными и процесс будет иметь характер апериодического нару-
шения устойчивости (рис. 6.7, б);
в) при с < 0 — система неустойчива, так как оба корня действительные,
причем один корень всегда будет положителен, а другой - отрицателен и
процесс будет иметь характер, изображенный на рис. 6.7, в.
Таким образом, видим, что даже при положительном знаке синхрони-
зирующей мощности (с, > 0) может иметь место процесс нарушения ус-
тойчивости в виде колебаний, раскачивающих ротор синхронной машины.
Физическую картину процесса самораскачивания можно пояснить,
используя метод площадей. Предположим, характеристика синхронной
мощности изменилась с Р на Рп и режим с точки а перейдет в точку b
(рис. 6.8, а). Под действием избыточной мощности \Р0 движение ротора
228
Рис. 6.7. Протекание процесса в системе при значительном активном сопротивлении в цепи статора:
а - самораскачивание; б, в - апериодическое нарушение устойчивости т «
6.4. Самораскачивание и самовозбуждение в электроэнергетической система
Глава 6. Устойчивость сложных энергосистем
будет происходить не в соответствии с характеристикой Рп = Рс, а по кри-
вой bed, учитывающей эквивалентную дополнительную составляющую
мощности (В, - Kas). Эта кривая проходит ниже характеристики Рп, что вы-
зывает увеличение площадки ускорения до значения, ограничивающегося
кривыми abca, и соответственно изменение площадки торможения. Это при-
водит к увеличению размаха колебаний с 5 до §м2. Второй цикл качаний еще
Рис. 6.8. Характер процесса самораскачивания при отрицательном демпфировании:
а - на фазовой плоскости; б - во времени
230
6.4. Самораскачивание и самовозбуждение в электроэнергетической системе
увеличит амплитуду качаний. Таким образом, изображающая точка в коорди-
натах 8 и Р описывает раскручивающуюся спираль (см. рис. 6.8, а), а угол 8
характеризуется все возрастающей амплитудой колебаний (см. рис. 6.8, б).
Таким образом, при малом активном сопротивлении, когда кдэ ~ кл,
демпфирование уменьшало размах колебаний и вызывало их затухание
(см. рис. 6.6), а в случае, когда к. > к, происходит нарастание колебаний —
самораскачивание (см. рис. 6.8).
При применении продольной емкостной компенсации на линиях элек-
тропередачи соотношение г!х будет уменьшаться и соответственно увели-
чиваться составляющая к, что также может привести к эффекту отрица-
тельного демпфирования и, следовательно, к самораскачиванию.
Аналогичный эффект, приводящий к самораскачиванию, могут дать
регуляторы скорости или возбуждения. Покажем это на примере регулято-
ра, осуществляющего регулирование напряжения генератора (£7) по его
отклонению. В этом случае закон регулирования возбуждения можно пред-
ставить в виде
+ (6.29)
где Uo - уставка регулятора по напряжению;
- постоянная составляющая системы регулирования;
к - коэффициент усиления регулирования по отклонению напряжения.
Предположим, что исходный режим характеризуется активной мощ-
ностью Рв и углом 8fl. Примем, что в результате случайного возмущения
режим рассматриваемой системы стал характеризоваться углом 8] и актив-
ной мощностью Рх в точке а, находящейся на характеристике мощности, со-
ответствующей исходному току i и напряжению ufi возбуждения (рис. 6.9).
Поскольку мощность Pf < Рв, то и напряжение на шинах генерато-
ра U > U. Поэтому регулятор, в соответствии с законом регулирования
(6.29), начнет снижать напряжение возбуждения и и, следовательно, с не-
которым запаздыванием из-за большой индуктивности обмотки возбужде-
ния будет уменьшаться и ток возбуждения. Уменьшение тока возбуждения
if< i вызовет снижение ЭДС и соответственно угловой характеристики
мощности. Поэтому ускорение синхронной машины будет происходить не
по характеристике мощности, соответствующей исходному току возбуж-
дения (/р а по кривой ab, определяемой семейством характеристик при
if < i . В точке b наступает равенство мощностей турбины и генератора
Р=Р0- При этом заметим, что площадка ускорения, из-за уменьшения тока
возбуждения, значительно увеличилась на величину площади abca. Даль-
нейшее увеличение угла 8 и торможение машины происходит при токе if< i .
Однако поскольку при этом Рт > Р: и, следовательно, (7 < Uo, то регулятор
начнет увеличивать напряжение и соответственно ток возбуждения. Воз-
растание угла прекратится только в точке е, где наступает равенство
231
Глава 6. Устойчивость сложных энергосистем
Рис. 6.9. Самораскачивание при регулировании по отклонению напряжения
площадок торможения и ускорения. При этом угол отклонения §м] значи-
тельно больше возможного угла вылета, если бы процесс происходил по
характеристике, соответствующей i . Размах колебаний в дальнейшем еще
больше увеличится, поскольку торможение машины будет происходить по
кривой ekm, соответствующей семейству угловых характеристик мощнос-
ти при i> i . При этом отклонение угла §2 значительно больше начального §0.
Таким образом, имеет место процесс самораскачивания, аналогичный при-
веденному на рис. 6.8.
В действительности, если реализовать регулирование возбуждения по
закону (6.29) с небольшим запаздыванием, то самораскачивание будет прояв-
ляться в меньшей мере, чем показано на рис. 6.9, кроме того, развитию коле-
баний будет противодействовать демпферный момент, влияние которого здесь
не учитывалось. Хорошее демпфирование колебаний быстродействующие
регуляторы могут осуществить при регулировании по нескольким парамет-
рам или как в АРВ СД - по производным ряда параметров режима.
Известен и другой вид колебательной неустойчивости, который назы-
вается самовозбуждением. Под самовозбуждением понимается такой вид
электромагнитной неустойчивости синхронных машин, при которой про-
исходит самопроизвольный рост тока, напряжения в системе, когда полно-
стью теряется возможность управления установившимся режимом. При
этом в отдельных точках системы самопроизвольно могут устанавливать-
ся значения напряжений, опасные для изоляции оборудования. Нараста-
ние тока и напряжения в процессе самовозбуждения может быть либо апе-
риодическим (синхронное самовозбуждение), либо колебательным (асин-
232
6.4. Самораскачивание и самовозбуждение в электроэнергетической системе
хронное самовозбуждение). На рис. 6.10 приведен пример процесса само-
возбуждения. Асинхронное самовозбуждение является наиболее опасным
для электроэнергетических систем вследствие того, что колебания тока и
напряжения нарастают до максимального значения в течение нескольких
периодов, а существующие автоматические регуляторы возбуждения не в
состоянии приостановить этот быстроразвивающийся процесс. Амплиту-
да собственных колебаний ограничивается насыщением стали машин и
трансформаторов, что реально создает режимы заведомо недопустимые.
Самовозбуждение может возникнуть, если к синхронной машине ока-
жется подключенной большая емкость, например линия электропередачи
высокого напряжения, отключенная с противоположного конца. Тогда в
схеме образуется колебательный контур R-L-C. При постоянных значени-
ях этих параметров электрические колебания быстро затухли бы, но электро-
магнитные процессы, возникающие при качаниях, создают эффект перемен-
ной индуктивности и емкости. Это при некоторых условиях обеспечивает
возможность преобразования кинетической энергии вращения ротора в
Рис. 6.10. Процессы самовозбуждения синхронной машины:
а - схема замещения системы; 6- синхронное самовозбуждение;
в - асинхронное самовозбуждение
16. Зак. 2182
233
Глава 6. Устойчивость сложных энергосистем
электромагнитную энергию колебательного контура. Если потери в этом
контуре достаточно малы, то амплитуда колебаний может нарастать. Та-
ким образом, самовозбуждение может возникнуть при синхронной скоро-
сти вращения ротора без изменения угла 5. Физическая картина процесса
самовозбуждения объясняется и тем, что емкостной ток статора подмагни-
чивает цепь возбуждения синхронной машины, что приводит в свою оче-
редь к дальнейшему увеличению тока в цепи статора и т. д.
Точное определение условий, при которых возможно появление само-
возбуждения, следует выполнять путем анализа системы линеаризованных
дифференциальных уравнений для вращающейся машины и внешней сети,
содержащей емкость. При этом суждение о возможности возникновения
самовозбуждения можно сделать путем определения корней характерис-
тического уравнения или использования критериев устойчивости [1, 35].
Приближенная оценка возможности самовозбуждения синхронной
машины выполняется путем построения зон самовозбуждения в коорди-
натах хс и г (рис. 6.11). При этом г - это суммарное активное сопротивле-
ние в цепи статора, х - емкостное сопротивление линии. Эти зоны пред-
ставляют собой полуокружности с центрами на оси ординат, проходящие
через точки, соответствующие указанным суммарным индуктивным сопро-
тивлениям синхронных машин, трансформаторов и линий (х^., х , х^).
Зона I (см. рис. 6.11, а) является областью синхронного, а зона II -
асинхронного самовозбуждения явнополюсной синхронной машины. При
незначительном активном сопротивлении (г ~ 0) зона синхронного само-
возбуждения определяется значениями емкостного сопротивления внеш-
Рис. 6.11. Зоны самовозбуждения:
а - явнополюсной синхронной машины; б - турбогенератора;
I - зона синхронного самовозбуждения; II - зона асинхронного самовозбуждения
234
6.5. Критерий Гурвица дня оценки статической устойчивости
ней сети согласно неравенству
XqL<Xc<X^ С6'30)
а асинхронного самовозбуждения - соответствует неравенству
хл<хс<хчг (6-31)
Турбогенераторы, как магнитосимметричные машины, не имеют зоны
синхронного самовозбуждения Область асинхронного самовозбуждения
(рис. 6.11, б) расположена в пределах
х' < х <х~. (6.32)
Выявление условий самовозбуждения асинхронных машин изложено
в [18, 35].
Следует отметить, что явления самораскачивания и самовозбуждения
могут проявляться совместно. Тем не менее, проверку электроэнергети-
ческой системы на отсутствие самораскачивания и самовозбуждения про-
водят раздельно, так как при реальных постоянных инерции роторов ма-
шин начало развития самовозбуждения происходит практически при не-
изменной частоте вращения ротора.
6.5. КРИТЕРИЙ ГУРВИЦА
ДЛЯ ОЦЕНКИ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ
Алгебраический критерий Гурвица широко используется во многих
исследованиях устойчивости и базируется на анализе коэффициентов ха-
рактеристического уравнения и полученных на их основе соотношений
в виде неравенств.
Для оценки устойчивости из коэффициентов характеристического урав-
нения (6.9) составляется квадратная матрица Гурвица »-го порядка:
а1 аз а5 - 0 0
а0 а2 а4 ... ’ 0 0 ‘.-:ь
0 «1 а3 ... 0 0 (6.33)
0 0 0 ... ап~\ 0
0 0 0 ... ^-2 > .. ' ‘ •
Правило составления матрицы следующее: по главной диагонали
сверху и направо вниз записываются последовательно коэффициенты урав-
нения (6.9) в порядке их нумерации, начиная с а, до ап. Столбцы вверх от
главной диагонали дополняют коэффициентами характеристического
235
Глава 6. Устойчивость сложных энергосистем
уравнения с последовательно возрастающими индексами, а столбцы вниз -
с убывающими индексами. Все недостающие коэффициенты, т. е. коэффи-
циенты с индексами больше п или меньше нуля заменяются нулями.
Отчеркивая в матрице (6.33) диагональные миноры, получаем опреде-
лители Гурвица:
(6-34)
Как видим, последний определитель Ая включает в себя всю матрицу
Гурвица целиком. Если его раскрыть по элементам последнего столбца,
содержащего только коэффициент а, называемый обычно свободным чле-
ном характеристического уравнения, то можно записать Ая = о А^.
Номер определителя Гурвица соответствует номеру коэффициента по
диагонали, для которого составляют данный определитель. Критерий ус-
тойчивости Гурвица формулируется следующим образом: для того чтобы
система была устойчивой, необходимо и достаточно, чтобы все коэффициен-
ты характеристического уравнения системы и все определители Гурвица были
положительными, т. е. а0 > 0, а} > 0,..., ап > 0 и А, > О, А2 > 0,..., Ав > 0.
Гурвиц также показал, что если непрерывно изменять коэффициенты
характеристического уравнения, ухудшая устойчивость системы, то при
потере устойчивости в нуль обратится, прежде всего, определитель Ая. Если
при этом А > 0, то граница устойчивости определяется условием ап = 0.
Это — граница апериодической устойчивости, так как один действитель-
ный корень находится на мнимой оси плоскости корней. Если ап > 0, то в
нуль обращается определитель Ая что соответствует наличию на границе
пары чисто мнимых корней р, 2 = ±усо,. Это - граница колебательной ус-
тойчивости. При переходе через эту границу начинается самораскачива-
ние системы с частотой со,. Если и дальше продолжать изменять коэффи-
циенты, то могут стать отрицательными и другие определители Гурвица, а
At_j вновь может стать положительным. Поэтому положительность ап и Ая|,
а значит и А , еще не гарантирует устойчивости системы: должны быть
положительными также и остальные определители Гурвица.
Следует отметить, что, строго говоря, признаком устойчивости систе-
мы является факт наличия одного знака у коэффициентов характеристи-
ческого уравнения, однако обычно оговаривают положительный знак ко-
эффициентов, так как в случае их отрицательного знака его легко заменить
положительным путем умножения на минус единицу.
В качестве примера рассмотрим систему, описанную линейным диф-
ференциальным уравнением третьего порядка с постоянными коэффици-
236
6.6. Критерий устойчивости Рауса
ентами. Ему соответствует характеристическое уравнение
ajf + ajr + aj) + а3 = 0.
Определитель Гурвица имеет вид
Q1 а3
«о «2
0 Щ
Согласно критерию Гурвица эта система будет устойчивой, если а(; > 0;
Aj = at > 0; а2 > 0; а} > 0; Л2 = а,а2 - ава3 > 0; А3 = а3А, > 0.
Следовательно, кроме положительности всех коэффициентов харак-
теристического уравнения, для сохранения устойчивости необходимо вы-
полнение соотношения а а2 - ава3 > 0. Нарушение этого соотношения при-
ведет к самораскачиванию системы.
Следует отметить, что в случае положительности всех коэффициентов
характеристического уравнения, необходимые и достаточные условия ус-
тойчивости сводятся к тому, чтобы среди определителей Гурвица были
положительными все определители с четными или нечетными индексами.
Такой критерий носит название критерия Льенара - Шипара; он требует
раскрытия меньшего числа определителей, чем обычный критерий Гурви-
ца, а поэтому особенно удобен при исследовании систем по уравнениям
высокого порядка.
6.6. КРИТЕРИЙ УСТОЙЧИВОСТИ РАУСА
Для оценки устойчивости системы по данному критерию составляет-
ся специальная таблица Рауса (табл. 6.2). Элементами первой строки этой
таблицы служат коэффициенты характеристического уравнения (6.9) с чет-
ными индексами, начиная с а, а элементами второй строки - с нечетными
индексами. Элементы каждой последующей строки находятся по формуле
cki ~ck+\,i-2. ~ \-2ск+1, ;-b (6.35)
где к - номер столбца;
i - номер строки, i > 3;
X , = с, ; j/C] - коэффициент.
Элементы, записанные в табл. 6.2, получены преобразованием матри-
цы Гурвица (6.33). При этом использовано свойство, согласно которому
значение определителя не изменится, если из элементов любой его строки
вычесть элементы другой строки, умноженные на одно и то же число. Так
элементы третьей строки получаются из элементов первой вычитанием из
237
Глава 6. Устойчивость сложных энергосистем
Таблица 6.2
Таблица Рауса
Номер 1-Й строки Номер к-го столбца Коэффици ент Х,_2
1 2 3 4
1 С| 1 = «0 С2| =«2 С31 = 04 041 ~ Об —
2 Сц = О[ С22 = Оз с32 = а5 С42 ~ аз
3 св =аг~ /-1«з С23 = Од -Х1<75 Сзз = «6 - ?-1«7 С43 = Os- ?.1«9 — aja\
4 с14 ~ Оз ~ ^-2^*23 С?4 ~ Оз ~ “к?СзЗ £“34 — а-] — ХэС4з С44 = (79 ~ Х2С53 Х2 ~ О\!с\з
нее второй строки, умноженной на aQ/a} и сдвигом на один столбец влево.
Элементы каждой следующей строки образуются таким же способом из
двух предыдущих строк.
Критерий устойчивости Рауса формулируется следующим образом: для
того чтобы система была устойчивой, необходимо и достаточно, чтобы все
элементы первого столбца были положительными
с,1 > 0, с12 > 0, с13 > О,..., С1 я+1 > 0. (6.36)
Алгоритмическая форма записи критерия Рауса весьма удобна для
расчета устойчивости систем с помощью ЭВМ. Число перемен знака в первом
столбце таблицы Рауса указывает на число корней характеристического
уравнения, расположенных в правой полуплоскости. Поэтому если требу-
ется лишь оценить устойчивость системы, то составление таблицы Рауса
прекращается, как только элемент первого столбца какой-либо строки ста-
нет отрицательным. Это, согласно (6.36), свидетельствует о неустойчивос-
ти рассматриваемой системы.
6.7. КРИТЕРИЙ УСТОЙЧИВОСТИ МИХАЙЛОВА
г? Характеристическое уравнение (6.9) можно записать в виде полинома
D(p) = ацрп + а^рп~Х +... + ап. (6.37)
Если применительно к гармоническим колебаниям подставить в дан-
ное уравнение значениер = /а, то получим комплексный характеристичес-
кий полином
Р(7'и) = п0О’®)" + «10®)"’’ + - + ап = Х(и) + jY (и), (6.38)
где А7<в) = а - а м2 + а то4 + ...;
4 7 п п-2 л-4 ’
К(со) = ап / - ап 3&2 + ап ла5 + ... .
Если дальше задаться серией значений <в в пределах от 0 до +со, то
каждому из них будет соответствовать некоторое значение полинома (6.38),
238
6.7. Критерий устойчивости Михайлова
которое на комплексной плоскости определяет точку. Геометрическое мес-
то этих точек образует кривую, которая называется годографом характери-
стического многочлена или кривой Михайлова, по которой можно судить
об устойчивости системы.
Критерий устойчивости Михайлова можно записать в следующей фор-
мулировке: для того чтобы система была устойчивой, необходимо и доста-
точно, чтобы вектор кривой Михайлова при изменении от 0 до +°о
монотонно поворачивался против часовой стрелки на угол итг/2, где п - t
степень характеристического уравнения, или, что то же самое, чтобы кри-
вая Михайлова обходила только против часовой стрелки последовательно п
квадрантов координатной плоскости. При этом модуль кривой Михайлова
при всех значениях ю должен быть отличным от нуля, т. е. Ф 0.
Кривая Михайлова для устойчивых систем всегда имеет плавную спира-
левидную форму, проходит последовательно (без пропусков) все п квадран-
тов, причем конец ее уходит в бесконечность в том квадранте координатной
плоскости, номер которого равен степени характеристического уравнения.
На рис. 6.12 показаны типичные кривые Михайлова для устойчивых
систем, описываемых характеристическими уравнениями, начиная от пер-
вого (п = 1) до пятого (п = 5) порядка. Для удобства сравнения коэффици-
енты а во всех случаях приняты одинаковыми.
Признаками неустойчивости системы является нарушение числа и
последовательности пройденных кривой Михайлова квадрантов коорди-
натной плоскости, вследствие чего угол поворота вектора оказыва-
ется меньше, чем угол шг/2. , .
Рис. 6.12. Кривые Михайлова для устойчивых систем
239
Глава 6. Устойчивость сложных энергосистем
На рис. 6.13 показаны кривые Михайлова для неустойчивых систем.
Кривая I начинается на отрицательной вещественной полуоси, в кривой 2
нарушена последовательность прохождения квадрантов, а кривая 3 нахо-
дится вся в одном квадранте при степени уравнения п = 5.
По виду кривой Михайлова можно судить о нахождении системы на
границе устойчивости. При ап = 0, что соответствует границе апериоди-
ческой устойчивости, кривая Михайлова выходит из начала координат, сви-
детельствуя о наличии нулевого корня (рис. 6.14, а). При нахождении на
границе колебательной устойчивости кривая Михайлова при угловой скорос-
ти незатухающих колебаний со = соо проходит через начало координат, свиде-
тельствуя о наличии пары чисто мнимых корнейpt i+| = ±/'со0 (рис. 6.14, б).
Рис. 6.13. Кривые Михайлова для неустойчивых систем
Рис. 6.14. Кривые Михайлова на границе устойчивости:
а - апериодической; б - колебательной
240
6.8. Метод D-разбиения
Критерий Михайлова успешно применяется для оценки устойчивости
как простых схем с небольшим порядком характеристического уравнения,
так и сложных автоматизированных систем. В первом случае возможен
ручной расчет устойчивости. Оценка устойчивости сложных систем вы-
полняется на ЭВМ по специально разработанным программам.
6.8. МЕТОД .D-РАЗБИЕНИЯ Г
При проектировании и эксплуатации энергосистем в ряде случаев важ-
но не только оценить, устойчива система или нет, но и определить конст-
руктивные или настроечные параметры регуляторов, обеспечивающих ста-
тическую устойчивость с необходимым запасом. Поэтому на практике боль-
шое значение имеет построение областей устойчивости в плоскости одно-
го или нескольких параметров, влияние которых на устойчивость системы
исследуют, например постоянных времени системы возбуждения, коэф-
фициентов усиления различных регуляторов и т. д.
Границы областей устойчивости можно в принципе находить, пользу-
ясь любым критерием устойчивости. Однако чаще всего на практике при-
меняют наиболее общий метод построения областей устойчивости, кото-
рый был предложен Ю. И. Неймарком и назван им методом .О-разбиения.
Для выяснения общих подходов и понятий построения областей ус-
тойчивости рассмотрим метод О-разбиения по одному параметру. Если
возникнет необходимость исследования устойчивости по двум или даже
трем параметрам, то следует обратиться к другим источникам, например
[2, 36], где такие случаи подробно изложены.
Для построения области устойчивости по методу О-разбиения необ-
ходимо решить характеристическое уравнение относительно любого па-
раметра, например постоянной времени Т или коэффициента усиления К.
Обозначим его в общем случае через ц. Пусть, например, коэффициенты
характеристического уравнения (6.9) линейно зависят от параметра ц рас-
сматриваемой системы:
а = а, + а ,ц.
Тогда характеристическое уравнение (6.9) можно представить в виде
М» + цМ» = 0, , (6.39)
где М(р) - совокупность членов, не зависящих от щ
N(p) - совокупность членов, содержащих ц множитель.
Например, в характеристическом уравнении вида
р1 + + аг = О,
241
Глава 6. Устойчивость сложных энергосистем
М(р) =Р2 + а2; N(p) =р.
Если в (6.39) принять р = jo, то граница D-разбиения определяется
уравнением
M(jo) + д N(jo) = О,
откуда
д = = ц(со) + jT(co)- (6.40)
В общем случае расчета по (6.40) изменяемый параметр д будет комп-
лексной величиной, хотя фактически это вещественное число (коэффици-
ент усиления, постоянная времени и т. д.). Поэтому в дальнейшем комп-
лексную величину д будем отличать чертой снизу, чтобы отличить ее от
вещественного значения д.
Придавая ® значения от -да до +да, можно по (6.40) вычислить серию
значений д. Кривую, построенную по результатам такого расчета в комп-
лексной плоскости, называют границей D-разбиения плоскости рассмат-
риваемого параметра или D-кривой. На рис. 6.15 в качестве примера при-
ведена такая граница D-разбиения. При значениях параметра д, определя-
ющегося точкой на D-кривой, и только при этих значениях характеристи-
ческое уравнение имеет один мнимый корень. Поэтому говорят, что D-кри-
вая есть отображение мнимой оси комплексной плоскости корней на плос-
кость параметра д.
Построение кривой D-разбиения можно упростить, если учесть, что
часть ее, соответствующая значениям со от -да до 0, является зеркальным
отображением другой ее части, соответствующей значениям со от 0 до +да.
Поэтому достаточно построить ее для положительных значений со и затем
дополнить зеркальным отображением построенного участка относитель-
но действительной оси.
Рис. 6.15. Граница D-разбиения по одному параметру
242
6.8. Метод D-разбиения
Граница .D-разбиения разделяет плоскость параметра на области с оди-
наковым числом корней, имеющих положительные вещественные части.
Для выделения областей, имеющих одно и то же число таких корней, гра-
ница О-разбиения штрихуется по правилам: при перемещении по О-кри-
вой в направлении, соответствующем возрастанию и, штриховка наносит-
ся слева. Штриховка позволяет установить изменение числа корней с по-
ложительной вещественной частью при изменении ц. Если параметр ц,
изменяясь, пересекает границу О-разбиения с заштрихованной стороны
(стрелка 1, рис. 6.15), то один из корней характеристического уравнения
переходит из правой полуплоскости в левую. Пресечение О-кривой с не-
заштрихованной стороны (стрелка 2, рис. 6.15), наоборот, означает пере-
ход одного из корней из левой полуплоскости в правую.
Для определения наиболее вероятной устойчивой области необходи-
мо выбрать одну из областей и пометить ее буквой т. считая, что т есть
число корней в правой полуплоскости для данной области.
Переходя из этой области в соседнюю, пересекая при этом .О-кривую,
соседнюю область помечают как т + 1, если пересечение О-кривой проис-
ходит с заштрихованной стороны на незаштрихованную, или т - 1, если
пересечение О-кривой происходит с незаштрихованной стороны на зашт-
рихованную. Если штриховка двойная (например, в точке пересечения кри-
вых), то мнимую ось пересекают два корня, т. е. т + 2 или т - 2.
Претендентом на область устойчивости является область, внутрь ко-
торой направлена штриховка и которая имеет наименьшее число корней
характеристического уравнения в правой полуплоскости, т. е. такая область,
в которой число корней в правой полуплоскости равно нулю.
Чтобы установить, является ли эта область действительно областью
устойчивости, необходимо задаться каким-либо значением ц , находящимся
в этой области, и применить для оценки устойчивости этого режима лю-
бой критерий устойчивости. Если критерий выполняется, то действитель-
но рассматриваемый претендент является областью устойчивости. В про-
тивном случае области устойчивости нет и изменением только параметра
ц нельзя сделать систему устойчивой.
На рис. 6.15 показана разметка областей. Претендентом в рассмат-
риваемом случае является область, помеченная т - 2. Если в характе-
ристическое уравнение подставить значение ц, находящееся в этой об-
ласти, например, ц = ц и применить к полученному уравнению крите-
рий устойчивости, можно установить, является ли претендент облас-
тью устойчивости или нет.
Поскольку изменяемый параметр является вещественным числом, то
из полученной области устойчивости выделяют только отрезок устойчи-
вости, т. е. часть вещественной оси, лежащей в области устойчивости, на-
пример отрезок АБ на рис. 6.15.
243
Глава 6. Устойчивость сложных энергосистем
6.9. ОЦЕНКА СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ СИСТЕМЫ
ПРИ АВТОМАТИЧЕСКОМ РЕГУЛИРОВАНИИ
ВОЗБУЖДЕНИЯ ГЕНЕРАТОРОВ
Все мощные генераторы современных электроэнергетических систем
снабжены АРВ различного действия. Поэтому расчеты статической устой-
чивости системы следует проводить только при учете таких регуляторов.
В качестве примера выполним анализ системы с генератором, оснащен-
ным АРВ ПД по отклонению напряжения и работающим на шины неиз-
менного напряжения (рис. 6.16).
В этом случае характер относительного движения ротора генератора
определяется уравнением
Т^ = РО-РЭЛ=ДР. (6.41)
dr
Данное уравнение при малых отклонениях угла AS имеет вид
г/-«АР. (6.42)
7 dr
Электрическая мощность генератора, как известно, может быть выра-
жена через ЭДС Е , Е и напряжение U на его выводах:
4 “ EU г
РэЛ=~-
xdE
Е'и [j2
Лл=-г—sin8—7"'
Р иГи и2
Рэл =---smS——-
хс ~ xdY.X‘
Данные формулы в соответствии с методом малых колебаний позво-
ляют получить приращения мощности генераторов:
sin 5 = f(Eq,S)\
Xd- X-d sin 28 = /(£?, 8);
A/Ixrfl
sin 28 = f(Ur,8).
3P
AP = --^
38
3P
A8 _ Д£ = _c дз _ b, A A,;
3Egq q
Eq =const
AP = -^
38
£^=const
3P
AS _ AEa = ~c2 AS - b2 l\E;
3Eg 4 4
(6.43)
dP
hP = -^L
38
(7r=const
C -dP™
£?=const S3
3P
AS-----2A AC7r = -c3 AS - Z>3A{7,
3UT
где c, = —22-
1 38
, dP™ • h
O') =--0-1 =
3Eq 3Ut
244 4
с = дРЭ!\
£?=const 55
3P
;b}
U =const
Рис. 6.16. Принципиальная схема электрической системы с регулятором возбуждения генератора
6.9. Оценка статической устойчивости системы при автоматическом регулировании
Глава 6. Устойчивость сложных энергосистем
Уравнение (1.64) описывает переходный процесс в цепи возбуждения
генератора
dEa
TM—— + Eq=Eqe’
at
откуда
dEEo '
TM—^ + EEq=EEqe. (6.44)
dt
Переходный процесс в цепи возбуждения возбудителя описывается
уравнением [2]
dE
Т и I I? — /т1
е dt де др'
откуда при малом изменении режима
' dEEnp
Te-^ + bEqe=EEqp, ... ; , (6.45)
где ДЕ - приращение ЭДС, пропорциональное изменению напряжения
на обмотке возбуждения возбудителя (С/) под действием АРВ.
Предположим, что в рассматриваемой системе автоматическое регу-
лирование возбуждения осуществляется идеальным регулятором напряже-
ния пропорционального типа. Такой регулятор изменяет напряжение на
обмотке возбуждения возбудителя пропорционально отклонению напря-
жения генератора, причем осуществляет это мгновенно. Поэтому закон
регулирования идеального регулятора по отклонению напряжения АС/
может быть записан в форме уравнения
ЕЕ = -k-EU, (6А6)
цр Ои г’ х
где kOti - коэффициент усиления (регулирования) регулятора.
Следует отметить, что в реальных АРВ напряжение на выходе (АС/ = ЛЕ )
следует за напряжением на входе (АС/.) с некоторым запаздыванием, кото-
рое определяется структурой и постоянными времени цепей самого регу-
лятора. Это обстоятельство может быть отражено введением в уравнение
регулирования некоторой передаточной функции W(p). Поэтому в общем
случае
АЕ^ = W(p) ЕСЕ
Подставляя (6.46) в уравнение (6.45), получим
dEE„p
Те + АЕ?е = ~/()uAC/r. (6.47)
dt
246
6.9. Оценка статической устойчивости системы при автоматическом регулировании
На основе выражений (6.42), (6.43), (6.44) и (6.47) запишем систему
уравнений малых колебаний в виде
dt2
С[Л6 + b\AEq + АР = 0;
c2Ab + b2AE'q + АР = 0;
с3А5 + b3AUT + АР = 0;
(6.48)
А) 4 + АЕ - АЕ - 0;
dt 7
dAE
Te—~ + k^v+^Eqe=^
Полученная система шести линеаризованных уравнений, в которую
входят шесть переменных АЗ, А£?, АР, AE'q, At/, АЕ^, имеет характеристи-
ческий определитель вида
2^ Р TJ 0 -1 0 0 0
С1 Ь1 1 0 0 0
. А- с2 0 1 0 0 = 0.
Л с3 0 1 0 Е 0
' 'А ' О и 0 1 0 РЪо 0 -1
0 0 0 0 k()u
Раскрывая этот определитель, получаем характеристическое уравне-,
ние третьего порядка
p3Tj(Td +Te) + p2Tj(l + kOu) + p(Tecl + Г>2) + (П +4с3) = 0,(6.49)
= = VA-
Используя любой критерий устойчивости, применительно к данному
уравнению можно установить, будет ли устойчива рассматриваемая систе-
ма в различных режимах ее работы. Вместе с тем данное уравнение позво-
ляет установить некоторые общие условия, которым должны удовлетво-
рять режим и значение коэффициента усиления для того, чтобы обеспе-
чить устойчивость системы. Покажем это, приняв для упрощения Те = 0.
В этом случае из (6.49) имеем
247
Глава 6. Устойчивость сложных знергосистем
стр'' + ар? + а2р + «3 = О,
гДе «о = ТТ'а', а} = Г(1+^); щ = Т^с- ЕОису
Условия устойчивости, в соответствии с критерием Гурвица, сводятся
к выполнению требований
а0 > 0; at > 0; а2 > 0; а3 > 0;
(6.50, а)
Щ <23
«0 а2
А2 -
= <тр/2 - > 0-
(6.50, б)
Анализируя данные условия, можно установить:
1. Коэффициенты а0 и af всегда положительны, так как положительны
ТРТ>к0,
2. Положительность коэффициентов а2, а, а также возможность вы-
полнения условия А2 > 0 зависит в большей степени от значений и знаков
с,, С2 и су
На рис. 6.17 показаны три угловые характеристики активной мощнос-
ти генератора, построенные при постоянстве ЭДС Е, E'q, напряжения Ur и
значения коэффициентов с, с2, су являющихся фактически синхронизиру-
ющими мощностями в соответствии с выражениями (6.43). Из приведен-
ных зависимостей видно, что коэффициенты с, с2 и с3 и соответственно
синхронизирующие мощности положительны при углах 8 < 90°. При боль-
ших углах данные коэффициенты меняют свои значения и знак, причем при
8 > 90° становится вначале отрицательным ср а затем последовательно с2 и су
Таким образом, условие а2 = T'dc2 > 0 может выполняться только в
области, где значения с, положительны. Следовательно, это условие огра-
ничивает область углов 8, при которой возможна устойчивая работа систе-
мы, но значения этих углов превышают 90°. Отметим, что в нерегулируе-
мой системе, когда к = 0, предельный режим характеризуется углом 8 = 90°.
В этом случае а3 = с = 0.
Условие а3 = + к^с3 > 0 также показывает на принципиальную воз-
можность устойчивой работы при 8 > 90°, поскольку с3 > 0 и данное усло-
вие может выполняться, несмотря на отрицательное значение коэффици-
ента с . Однако для этого необходимо определенное значение СОи, которое
должно превышать некоторое минимальное значение, определяемое урав-
нением
!&'. •
С1 +'^Oumin’-'З — 0’ '''
откуда
^Oumin ~~С\!СУ
(6.51)
248
6.9. Оценка статической устойчивости системы при автоматическом регулировании
Рис. 6.17. Угловые характеристики мощности и зависимости
синхронизирующих мощностей
Подставив в (6.50, 6) выражения для коэффициентов характеристи-
ческого уравнения, получим
d:,;.!"' • . Cl -с2
. ^«<7—г- <6-52)
с2 с3
Данное неравенство свидетельствует о том, что рассматриваемая сис-
тема с генератором, снабженным АРВ, может устойчиво работать только в
том случае, когда коэффициент усиления не превосходит некоторого мак-
симального значения. Его предельная величина, согласно (6.52), определя-
ется выражением
^Ои max = (С1 — с2 )/(с2 — с3 ) (6-53)
Таким образом, для обеспечения устойчивости системы коэффициент
усиления АРВ генератора должен удовлетворять неравенству
Т. <к <к , (6.54)
Ou min Ou Ou max’ v 7
, — k ^3 . т —
где Kqu mjn — icqu mjn —, Kqu max — Kqu max —.
bl bi
На рис. 6.18 приведены кривые, определяющие граничные значения
коэффициента усиления. Следовательно, устойчивость системы будет со-
храняться только в том случае, когда значения кОи находятся внутри области,
249
Глава 6. Устойчивость сложных энергосистем
>'• - Рис. 6.18. Граничные значения коэффициентов усиления
ограниченной данными кривыми. При этом большим значениям угла 5 от-
вечают меньшие значения коэффициента усиления kQu.
Это обстоятельство ограничивает возможность АРВ ПД по повыше-
нию устойчивости, поскольку небольшие значения кди вызывают и неболь-
шие изменения напряжения на выходе регулятора Ue и соответственно ЭДС
Е. Следовательно, при увеличении угла 5 АРВ ПД обеспечивает лишь не-
большое увеличение ЭДС Е и поэтому незначительное увеличение мощ-
ности по сравнению с АРВ СД.
6.10. ВТОРОЙ МЕТОД ЛЯПУНОВА
ДЛЯ ОЦЕНКИ УСТОЙЧИВОСТИ СИСТЕМЫ
Одним из наиболее эффективных методов исследования устойчивос-
ти движения является второй метод Ляпунова, который часто еще называ-
ется прямым метод Ляпунова. Данный метод основывается на построении
специальных функций Ляпунова V, позволяющих решать задачу об устой-
чивости не только «в малом», но и «в большом». В его основе лежат две
теоремы Ляпунова.
Теорема 1. Если дифференциальные уравнения возмущенного движе-
ния таковы, что возможно найти знакоопределенную функцию V, произ-
водная которой W= dVIdt по времени в силу этих уравнений была бы зна-
копостояннной функцией противоположного с V знака, или тождественно
равна нулю, то невозмущенное движение устойчиво.
250
6.10. Второй метод Ляпунова для оценки устойчивости системы
Если, кроме того, W представляет знакоопределенную функцию про-
тивоположного с V знака, то невозмущенное движение устойчиво асимп-
тотически.
Теорема 2. Если дифференциальные уравнения возмущенного движе-
ния таковы, что возможно найти функцию V, производная которой W по
времени в силу этих уравнений была бы знакопостоянной функцией, знак
которой при некоторых значениях переменных, численно сколь угодно малых,
совпадал бы со знаком V, то невозмущенное движение неустойчиво.
Отметим, что знакопостоянной называют функцию, принимающую при
всех значениях своих аргументов только значения одного знака или нуле-
вое, а.знакоопределенной-знакопостоянную функцию, принимающую нуле-
вое значение только при нулевом значении всех ее аргументов, т. е. в начале
координат.
Таким образом, если рассматриваемая система описывается п диффе-
ренциальными уравнениями возмущенного движения
dx-
—- = F/(x1,x2 — г = 1,2... и,
dt
то для оценки устойчивости по второму методу Ляпунова необходимо найти
функцию
V = f(x{,x2 ...х„),
производная которой
dV dV dx, dV dx„
dt Sxj dt dxn dt
(6.55)
(6.56)
Далее необходимо выполнить анализ этих функций, их знаков и сде-
лать вывод об устойчивости или неустойчивости системы на основе тео-
рем Ляпунова.
В качестве примера рассмотрим систему, описываемую уравнениями
возмущенного движения
dx, . . х
- X2(Xj + х2) - Xj - х2, . ,
Т; , ; т , л, Д • ’ , !
— - -у- .V, -,v2). ..
Запишем функцию Ляпунова в виде квадратичной формы •
- ' Е=х(М\'7 .
и вычислим ее производную -' о-щи
»' Щ.эн dV 9V dx, dV dx. ' •»
... ,i.»i W=---=-------L +------- =
dt dxl dt ex. dt
Л . X,-, x. -Г.
= 2xj[x2(x; + x2) - хД + 2x2[x( -хДх] +х2)]^.-2х! .
251
Глава 6. Устойчивость сложных энергосистем
Функция Wявляется знакопостоянной, противоположного знака с фун-
кцией Ляпунова V, поэтому, согласно теореме 1, движение такой системы
устойчиво.
Уясним смысл функций Ляпунова и сформулированных в теоремах
условий устойчивости с помощью понятий фазового пространства. Если
V(x} ... хя)- знакоопределенная функция, то уравнение V(xt ...хп) = С = const
обычно определяет в фазовом пространстве {Xj ... хп} замкнутую поверх-
ность (сферу), охватывающую точку х. = 0 (начало координат). Если задать
ряд значений V=C Е= С ..., то получим несколько поверхностей, при-
чем если С} < С2, то поверхность V— С} находится внутри поверхности
V = С2. При приближении С к нулю поверхность стягивается в начало ко-
ординат (Xj = х2 = ... = хп = 0).
Для простоты возьмем п-2. Задав постоянное значение знакоопреде-
ленной функции, получим уравнение Е(хр х2) = С. Можно считать, что оно
в неявном виде определяет зависимость Xj отх2 и ее график представляет-
ся на плоскости {Xj х2} замкнутой кривой, окружающей начало координат
(рис. 6.19). Во время движения системы ее координаты х( и х2 изменяются,
принимая в каждый момент времени определенные значения. Если пере-
менные X], х2 считать координатами точки на плоскости, то движению сис-
темы будет соответствовать перемещение этой точки по плоскости. При
изменении времени t такая точка, называемая изображающей точкой, опи-
шет некоторую траекторию. Если в силу уравнений движения определенно
положительная функция V с течением времени только убывает, т. е. dV/dt
определенно отрицательная, то это означает, что с течением времени изоб-
ражающая точка переходит с верхних поверхностей (кривых) на внутрен-
ние, все время приближаясь к началу координат, которое в этом случае
является точкой асимптотически устойчивого равновесия. Если функция
V знакопостоянна и противоположного знака с dVldt, то изображающая
точка либо движется к началу координат, либо остается на какой-либо по-
верхности V = С, но никогда не достигает границ области V , что и означа-
ет устойчивость движения (см. рис. 6.19).
Итак, чтобы доказать устойчивость движения, достаточно найти фун-
кцию Ляпунова, удовлетворяющую условиям теоремы 1. В этом и состоит
суть второго метода Ляпунова.
При анализе устойчивости системы по второму методу Ляпунова твер-
дой уверенности в том, что точно найдена реальная область устойчивости,
у исследователя нет. Это связано с тем, что, построив какую-нибудь функ-
цию Ляпунова и получив с ее помощью область сходимости процессов к
состоянию равновесия, например область 3 на рис. 6.20, нельзя быть уве-
ренным в том, что определена граница устойчивости. Может оказаться,
что если подобрать в данной задаче другую функцию Ляпунова, то можно
определить с ее помощью более широкую область устойчивости, напри-
252
6.10. Второй метод Ляпунова для оценки устойчивости системы
Рис. 6.19. Линии уровня знакоопределенной функции двух переменных
и устойчивая траектория изображающей точки
мер 2 на рис. 6.20. Определение реальной области устойчивости (границы
устойчивости Fp) с помощью второго метода Ляпунова весьма сложно, а
иногда и невозможно. Для линейных систем функцию Ляпунова ищут, как
правило, в виде квадратичной формы, а для нелинейных систем функцию
Ляпунова во многих случаях удается построить в виде интеграла от нели-
нейности плюс квадратичная форма [3].
Основные достоинства второго метода в его применимости к исследова-
нию устойчивости электроэнергетических систем заключаются в следующем:
♦ возможность непосредственной оценки областей устойчивости;
♦ универсальность в отношении конфигурации схемы сети, количе-
ства генераторов, вида возмущений и т. д.;
Рис. 6.20. Области устойчивости системы: '
1 - реальная; 2 - при хорошей функции Ляпунова; 3 - при плохой функции Ляпунова
253
Глава 6. Устойчивость сложных энергосистем
♦ быстрота оценки устойчивости, по сравнению с расчетом переход-
ного процесса, путем численного интегрирования дифференциальных урав-
нений;
♦ определение запаса устойчивости по выражению
V - V
^у=^7Г-- (6.57) '
^гр
Однако практическое использование второго метода Ляпунова в энер-
госистемах связано с рядом трудностей. Первая из них связана с неконсер-
вативностью электроэнергетических систем, вызывающая необходимость
учета как естественного демпфирования (рассеяния энергии в элементах
системы), так и искусственного демпфирования, обусловленного действи-
ем регуляторов мощности, скорости и возбуждения. Для неконсерватив-
ных моделей систем отсутствуют способы построения функции Ляпуно-
ва. Вторая обусловлена короткими замыканиями и коммутационными из-
менениями в энергосистемах. Вместе с тем исследования, проводимые как
в странах СНГ, так и за рубежом, вселяют уверенность в том, что второй
метод Ляпунова найдет в будущем широкое применение в энергетике.
6.11. ОЦЕНКА ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ
СЛОЖНЫХ ЭНЕРГОСИСТЕМ
Расчеты устойчивости и оценка эффективности мероприятий по ее
обеспечению осуществляются при проектировании и эксплуатации совре-
менных энергосистем. Оценка динамической и статической устойчивости
выполняется при:
♦ выборе основной схемы энергосистемы и мест размещения элект-
ростанций и подстанций;
♦ формировании требований к основному оборудованию электростан-
ций и сети, релейной защите и автоматике;
♦ оценке допустимости рабочих режимов энергосистемы;
♦ выборе мероприятий по повышению устойчивости энергосистемы;
♦ определении параметров настройки средств ПА, систем регулиро-
вания и управления, релейной защиты, АПВ и т. д.
Основным показателем сохранения или нарушения динамической ус-
тойчивости являются зависимости углов 5 синхронных машин и скольже-
ния асинхронных двигателей от времени переходного процесса. В простых
схемах достаточно убедиться, что, например, угол 5, достигнув максималь-
ного значения, начинает уменьшаться. Это свидетельствует о сохранении
динамической устойчивости и позволяет прекратить расчет (см. рис. 3.11).
Такая оценка устойчивости называется «по первому вылету угла». В слож-
254
6.11. Оценка динамической устойчивости сложных энергосистем
ных энергосистемах возможны нарушения устойчивости после несколь-
ких качаний, и расчеты продолжаются до тех пор, пока не станут ясными
тенденции изменения всех углов 5 и скольжений двигателей.
Признаком нарушения динамической устойчивости является увеличе-
ние разности между углами 3 любых двух синхронных машин на 360° и
более, скольжения асинхронного двигателя больше предельного значения.
Это относится лишь к тем электрическим машинам, между которыми име-
ется электрическая связь. При разделении энергосистемы на части оценка
устойчивости выполняется по изменению углов и скольжений электричес-
ких машин в каждой из частей системы.
Из-за сложности современных энергосистем, оценка их динамичес-
кой устойчивости выполняется, как правило, по специальным программам
на ЭВМ. Для этого вначале рассчитывается исходный установившийся
режим. Методы и алгоритмы таких расчетов изложены в [36, 39]. При вы-
полнении большинства таких расчетов один из генераторных узлов пред-
ставляется как балансирующий. Весь небаланс между заданной генераци-
ей и потреблением покрывается мощностью балансирующего узла, кото-
рая вычисляется в процессе расчета режима. Обычно в качестве баланси-
рующего узла задается свернутая в один узел часть энергосистемы, распо-
лагающая мощностью значительно большей, чем мощности источников в
исследуемой части энергосистемы или шины наиболее мощной электро-
станции энергосистемы, которая электрически и территориально значи-
тельно удалена от места возмущения. Следовательно, такие расчеты вы-
полняются при неизменной частоте ® = const.
При необходимости выполнять расчеты установившихся режимов с не-
фиксированной частотой ® = var, то такие расчеты проводятся без баланси-
рующего узла и шин бесконечной мощности. Это, как правило, относится к
расчетам режимов, устанавливающихся после возмущений, в результате
которых в энергосистеме или в отделившейся ее части возникает дефицит
активной мощности, приводящий к таким понижениям частоты, при кото-
рых активные мощности генераторов, в соответствии с действиями регу-
ляторов скорости, могут существенно измениться по сравнению с исход-
ным режимом. Такие расчеты установившихся режимов выполняются
с учетом статических характеристик генераторов и нагрузки по частоте.
Для расчета электромеханического переходного процесса элементы
энергосистемы, в зависимости от поставленной перед исследователем за-
дачи, могут представляться различными математическими моделями.
Синхронные машины. В качестве расчетных моделей могут исполь-
зоваться:
♦ полные уравнения Парка - Горева;
♦ упрощенные уравнения Парка - Горева; , ,
♦ уравнения Лебедева - Жданова; v
255
Глава 6. Устойчивость сложных энергосистем
♦ упрощенная модель в виде постоянной переходной ЭДС, приложен-
ной за переходным сопротивлением.
Наиболее полные расчетные модели синхронных машин (уравнения
Парка - Горева) и учет динамики процессов в системе возбуждения, вклю-
чая АРВ и регуляторы скорости, рекомендуется применять в случае:
♦ расчета устойчивости одного или группы генераторов с детальным
учетом влияния многих факторов;
♦ расположения синхронных машин близко к месту возмущения (КЗ,
отключение связей, действие ПА и т. п.);
♦ учета генераторов наиболее мощных электростанций, переходные про-
цессы которых могут оказать значительное влияние на результаты расчетов;
♦ использования в синхронных машинах быстродействующих систем
регулирования возбуждения и скорости;
♦ исследования асинхронных режимов и условий ресинхронизации.
Упрощенное моделирование синхронных машин в виде неизменной
ЭДС Е' за сопротивлением x’d допустимо в учебных и ориентировочных
расчетах, а также в тех случаях, когда они значительно удалены от места
возмущения и изменение напряжения на их шинах не превышает 10 %.
Система возбуждения при расчетах динамической устойчивости мо-
делируется всегда, кроме случаев, когда синхронная машина представля-
ется постоянной ЭДС Е'. Основным требованием к модели системы воз-
буждения, включая АРВ, является правильность воспроизведения влияния
АРВ на переходные процессы в энергосистеме. Системы возбуждения и
АРВ при расчетах динамической устойчивости энергосистемы обычно
описываются двумя дифференциальными уравнениями для учета запаз-
дывания в АРВ и в возбудителе. Уравнения составляются таким образом,
чтобы в них были представлены основные каналы регулирования, харак-
терные для различных существующих систем возбуждения. Тогда, задавая
действительные коэффициенты усиления и постоянные времени, можно
получить нужную модель системы возбуждения с АРВ применяемого типа.
Например, в широко используемых программах расчета динамической ус-
тойчивости данные уравнения таковы [40, 41]:
dU.., 1
_JL = _L([/p_L7pB); (6.58)
^рв
dE 1
. ~^- =—(Eqe()-Eqe + UpB+U^); (6.59)
dU dEn
UP =^и^иеО-и^-к1и—~ + к^{Ед - Eqe())-kljj-—-— +
dl df (6-60)
+ ^0/(4 ~ + + ~/) + ^1/~ + ^доп’
256
6.11. Оценка динамической устойчивости сложных энергосистем
где U в - напряжение на выходе АРВ;
U - напряжение на входе АРВ;
Г - постоянная времени регулятора возбуждения;
Г - постоянная времени системы возбуждения;
J7 - сигнал, моделирующий форсировку или расфорсировку возбуж-
дения;
[7 - любой дополнительный сигнал в виде функции времени;
kOu, klu, к0/, ку, kolf kvf kQf, ^-коэффициенты регулирования (усиления)
по напряжению, току статора и ротора, отклонению частоты и их про-
изводным.
Кроме этих уравнений, учитываются ограничения на U и £^.
Система регулирования скорости вращения паровых и гидравличес-
ких турбин в расчетах динамической устойчивости описывается аперио-
дическим звеном первого порядка с введением ограничений
cZA 1 (
----=----- ГОтО —
dt I
Р <Р <Р
л ттш — 1 т — 1 ттах’
(6.61)
где Т - постоянная времени регулятора скорости.
Следует отметить, что если строго исследовать переходные процессы в
системе регулирования скорости, то необходимо пользоваться довольно слож-
ной системой уравнений [42]. Однако поскольку при исследовании переход-
ных процессов в энергосистеме небольшой длительности влияние регулято-
ров скорости на них обычно невелико, то вполне допустимо использовать
упрощенное моделирование по выражениям (6.61). В современных програм-
мах расчета динамической устойчивости предусмотрена также возможность
моделирования быстродействующей аварийной разгрузки турбин путем за-
дания изменения мощности турбины в виде функции времени.
Нагрузку при расчетах электромеханических переходных процессов
в энергосистемах можно учитывать:
♦ статическими характеристиками по напряжению и частоте;
♦ динамической моделью.
Нагрузка в расчетах динамической устойчивости может быть пред-
ставлена статической характеристикой только при небольших изменениях
напряжения (до 15 %) и удаленных КЗ. В других случаях, а также при оценке
устойчивости крупных узлов нагрузки, должна использоваться динамичес-
кая модель, включающая:
♦ уравнения асинхронных двигателей как с учетом, так и без учета
электромагнитных переходных процессов (см. параграф 1.2);
♦ математические модели синхронных двигателей, особенно если мощ-
ность, потребляемая ими в узле, значительна; ......
17. Зак. 2182
257
Глава 6. Устойчивость сложных энергосистем
♦ модель статической нагрузки, которая может быть представлена по-
стоянной проводимостью или статической характеристикой.
При выполнении расчетов переходных процессов, связанных с глубо-
кими снижениями напряжения (0,7 Uh и ниже), следует учитывать самоот-
ключения потребителей своими коммутационными аппаратами. Ориентиро-
вочная величинауменьшения двигательной нагрузки составляет 20-30 %, хотя
может достигать 50 % и более.
Модель автоматики и защиты, как правило, состоит из двух частей:
♦ модель условий работы автоматики, например Р > Ртах, 1> 7тах;
U < U и т. п.;
♦ модель действий, которые производятся при выполнении заданных
условий, например отключение генераторов, линий электропередачи, час-
ти нагрузки и т. п.
От возможностей моделирования действий ПА во многом зависит эф-
фективность расчетов переходных процессов и оценки динамической ус-
тойчивости.
Достоверность оценки динамической устойчивости во многом зави-
сит от той точности, с которой описаны основные элементы энергосисте-
мы. Прежде всего, это генераторы, их системы регулирования, нагрузка,
действия автоматики и защиты. При составлении расчетной схемы выбор
степени ее подробности осуществляется, исходя из предельных возмож-
ностей, обеспечиваемых используемой программой и особенностью ре-
шаемой задачи. При этом, как правило, следует руководствоваться следу-
ющим подходом: исследуемый район энергосистемы должен представлять-
ся наиболее подробно, а остальная часть энергосистемы - лишь в той мере,
в какой это необходимо для учета ее влияния на рассматриваемый рай-
он, т. е. получения правильных уровней напряжения и потокораспределе-
ния в этом районе.
Правильность расчетов динамической устойчивости во многом зави-
сит не только от используемых моделей, но и от эффективности метода,
которым осуществляется в программе интегрирование дифференциальных
уравнений. Это, прежде всего, методы Эйлера, Рунге-Кутта, Адамса и др.
Однако при любом методе численного интегрирования дифференциаль-
ных уравнений точность решения зависит от шага интегрирования. С умень-
шением Аг точность на шаге возрастает, но одновременно увеличивается
погрешность округления и время расчета. Выбор шага интегрирования
зависит от метода интегрирования и от самого решения уравнений: чем
быстрее изменяются во времени интегрируемые переменные, тем мень-
шим приходится выбрать шаг интегрирования.
Для выбора шага интегрирования, уточнения необходимой модели ге-
нераторов и нагрузок в основных расчетах динамической устойчивости
требуется проведение пробных расчетов для каждого конкретного случая
258
6. II. Оценка динамической устойчивости сложных энергосистем
с целью получения недостающей информации, например, о степени сни-
жения напряжения в узлах и изменении частоты в энергосистеме.
Длительность расчета переходного процесса выбирается, исходя из
условий достоверности оценки устойчивости и неустойчивости систе-
мы. Расчет переходного процесса без нарушения устойчивости будет до-
стоверным только тогда, когда его результаты ясно указывают, что амп-
литуда колебаний углов синхронных машин уменьшается, а их средние
значения не возрастают, скольжение асинхронных двигателей с течени-
ем времени уменьшается, напряжение во всех узлах не выходит за допу-
стимые значения. Длительность переходного процесса для оценки дина-
мической устойчивости обычно составляет 2-4 с. Она может быть и боль-
ше, однако при этом значительно возрастает погрешность расчетов в
основном из-за неточности моделирования систем регулирования воз-
буждения и скорости.
При выборе программ и оценке результатов расчета динамической
устойчивости, выполненных по ним, необходимо учитывать особенности
реализованных в программах алгоритмов и методик. Так, в широко ис-
пользуемых программах расчета динамической устойчивости [40, 41] в
странах СНГ вычисляются только токи и напряжения прямой последова-
тельности. Это позволяет упростить модели электрических машин,
трансформаторов, линий и ускорить расчеты. Однако при расчете не-
симметричных режимов (однофазных и двухфазных КЗ, однофазных
АПВ и т. д.) расчетные значения токов и напряжений по этим програм-
мам могут значительно отличаться от действительных. Вместе с тем на
оценку динамической устойчивости это практически не оказывает вли-
яния. Для наиболее полного соответствия расчетных и действительных
параметров аварийных режимов необходимо использовать трехфазные
модели элементов энергосистем.
На достоверность расчетов устойчивости энергосистем влияет много
факторов. По результатам расчета переходного процесса в большой энер-
госистеме весьма сложно, а иногда и невозможно судить о том, не допуще-
ны ли в расчете ошибки. Особенно опасны ошибки из-за неправильно вве-
денных исходных данных, которые иногда не слишком сильно искажают
качественную картину переходного процесса, иначе их сравнительно лег-
ко обнаружить, но приводят к количественно неверным результатам. По-
этому при выполнении расчетов переходных процессов должна быть пол-
ная уверенность как в достоверности их результатов, так и в оценке устой-
чивости энергосистемы. Это, как правило, приходит со временем по мере
приобретения практического опыта расчетов устойчивости. Начинающим
специалистам и студентам полезно вначале выполнять простые расчеты,
постепенно усложняя их, с тем чтобы выработать навыки детального ана-
лиза полученных результатов и оценки их правильности. Попытка сразу
259
Глава 6. Устойчивость сложных энергосистем
решать не учебные, а реальные задачи энергосистем приводит в конечном
счете к ошибкам и непониманию полученных результатов.
При выполнении расчетов устойчивости следует также учитывать, что
они дают не абсолютно точные, а приближенные результаты из-за погреш-
ности использованных методов, неточности исходной информации о пара-
метрах и режимах работы энергосистемы, округлении при вычислениях, а
также из-за вероятностного характера как параметров самого исходного
режима, так и параметров возмущения. Поэтому при получении результа-
тов, близких по устойчивости к предельно допустимым, нельзя делать окон-
чательные выводы о допустимости рассматриваемого режима, о необходи-
мости применения различных мероприятий для повышения устойчивости,
о выборе уставок устройств автоматики и защиты по результатам одного
расчета. Для получения более достоверных результатов анализа устойчиво-
сти энергосистемы в таких случаях необходимо оценить вероятность усло-
вий, принятых в расчете, возможные пределы их изменений и для них вы-
полнить серию расчетов для определения влияния на устойчивость вариа-
ций указанных условий, учете, казалось бы, второстепенных факторов.
Важнейшее значение для окончательного суждения об устойчивости
энергосистем, об эффективности мероприятий повышения устойчивости
имеет сочетание расчетов с натурными экспериментами в энергосистемах.
В конечном итоге проверка достоверности расчетов устойчивости и
переходных процессов должна базироваться на опыте эксплуатации, про-
веденных натурных экспериментах, выполненных исследованиях на фи-
зических моделях и параметрах, имевших место при авариях.
6.12. НОРМАТИВНЫЕ ТРЕБОВАНИЯ
УСТОЙЧИВОСТИ ЭНЕРГОСИСТЕМ
Требования устойчивости электроэнергетических систем формируются
в руководящих или методических указаниях, которые являются обязатель-
ными для предприятий и организаций, осуществляющих проектирование
и эксплуатацию энергосистем [43]. Как в руководящих указаниях, так и в
других документах по устойчивости часто вводится понятие перетоков в
сечениях. Под сечением понимается совокупность линий электропереда-
чи, характеризующая суммарную пропускную способность определенно-
го района электрической системы. Исходя из требований устойчивости
энергосистем перетоки мощности в сечениях в установившихся режимах
подразделяются на нормальные, вынужденные и утяжеленные.
Нормальный переток - это переток мощности в сечении при выпол-
нении всех требований устойчивости. При этом наибольший допустимый
переток называется максимально допустимым.
260
6.12. Нормативные требования устойчивости энергосистем
Вынужденные перетоки - допускаются только в эксплуатации для
предотвращения или уменьшения ограничения потребителей при небла-
гоприятном наложении плановых и аварийных ремонтов основного обо-
рудования электростанций и сети, при необходимости строгой экономии
отдельных видов энергоресурсов, при отсутствии необходимых резервов
мощности или топлива на электростанциях, а также в режимах минимума
нагрузки при невозможности уменьшения перетока из-за недостаточной
маневренности электростанций.
При проектировании утяжеленным считается переток, характеризу-
ющийся неблагоприятным сочетанием ремонтов основного оборудования
электростанций и сети, если общая продолжительность существования
таких режимов в течение года не превышает 10 %.
Возмущения, которые учитываются в требованиях к динамической
устойчивости энергосистем, называются расчетными или нормативными
возмущениями и подразделяются на три группы:
I группа. Отключение любого элемента сети напряжением 500 кВ и
ниже. Однофазное КЗ при работе основной защиты с успешным и неус-
пешным АПВ. Отключение одного генератора или блока генераторов с
общим выключателем, кроме наиболее мощных, имеющихся в энергосис-
теме. Набросы активной и реактивной мощности при включении или воз-
можных самозапусках двигателей крупных потребителей.
II группа. Отключение любого элемента в сети выше 500 кВ или од-
нофазное КЗ с неуспешным АПВ. Отключение элемента при многофазном
КЗ с успешным и неуспешным АПВ. Отключение сетевых элементов
110-220 кВ с действием устройств резервирования отказа выключателей
(УРОВ) при однофазном КЗ с отказом одного выключателя. Отключение
генератора наибольшей мощности или блока генераторов с общим выклю-
чателем в энергосистеме.
III группа. Одновременное отключение двух цепей или двух линий, иду-
щих по одной трассе более чем на половине длины более короткой линии
при возмущении I группы. Многофазное КЗ в сети 750 кВ и выше. Отключе-
ние элемента сети 330 кВ и выше действием УРОВ при однофазном КЗ с
отказом одного выключателя. Возмущение 1 и II групп с отключением эле-
мента сети или генератора, которые вследствие ремонта одного из выключа-
телей приводят к отключению другого элемента сети или генератора, под-
ключенного к тому же распределительному устройству. Отключение генера-
торов электростанции, подключенных к одной секции (системе) шин или
распределительному устройству одного напряжения электростанции.
Расчетная длительность КЗ принимается по фактическому максималь-
ному значению, соответствующему работе основной защиты. При проек-
тировании должны приниматься меры, обеспечивающие длительности КЗ,
не превышающие значений, указанных в табл. 6.3.
261
Глава 6. Устойчивость сложных знергосистем
Таблица 6.3
Предельные длительности коротких замыканий
Номинальное напряжение, кВ ПО 220 330 750
Время отключения КЗ, с 0,18 0,16 0,14 0,10
Наиболее легкими с точки зрения устойчивости являются возмуще-
ния I группы, наиболее тяжелыми - возмущения III группы. Возмущения,
входящие в I группу, являются и наиболее частыми — это однофазные КЗ на
линиях до 500 кВ включительно с успешными и неуспешными ОАПВ, а так-
же отключения этих линий без КЗ. На линиях 750 кВ и выше в этой группе
возмущений учитываются только однофазные КЗ с успешными ОАПВ.
Каждое из нормативных возмущений включает в себя большое количе-
ство вариантов: КЗ заданного вида на разных линиях электропередачи и на
разных удалениях от концов линий, отключение различных генераторов
и т. н. Обеспечение динамической устойчивости при данном возмущении оз-
начает обеспечение ее для всех возможных вариантов этого возмущения.
Нормативные документы требуют, чтобы установившиеся режимы
энергосистемы имели запас устойчивости. Это вызвано, прежде всего, тем,
что надежная работа энергосистемы вблизи или на границе области устой-
чивости невозможна. В этих режимах любые слабые возмущения в энер-
госистеме, колебания нагрузки будут приводить к нарушению устой-
чивости. Вторая причина, вызывающая необходимость запаса стати-
ческой устойчивости, связана с некоторой неопределенностью самой
границы области устойчивости. Это вызвано погрешностями расчетов
этой границы, обусловленными упрощением схем, неточными моделями
элементов систем, приближенностью задания параметров режима и эле-
ментов системы и пр.
Поэтому область допустимых режимов работы энергосистемы долж-
на задаваться с некоторым запасом по отношению к рассчитанной границе
устойчивости. Запас статической устойчивости характеризует удаленность
режима от границы устойчивости. Запас количественно характеризуется
коэффициентами запаса по активной мощности в сечениях энергосистемы
и по напряжению в узлах нагрузки.
Коэффициент запаса статической устойчивости по активной мощнос-
ти в сечении (fC) вычисляется по формуле
/’|П - Р - А/’нк
jr нр нк
Л п =—------------
р р
1 пр
где Рпр - предельный по статической устойчивости переток активной мощ-
ности в рассматриваемом сечении;
Р - переток активной мощности в рассматриваемом режиме, Р > 0;
Л7’нк - амплитуда нерегулярных колебаний активной мощности в этом
сечении.
(6.62)
262
6.12. Нормативные требования устойчивости энергосистем
Значение амплитуды нерегулярных колебаний активной мощности в
рассматриваемом сечении устанавливается по данным измерений. При
отсутствии данных расчетная амплитуда нерегулярных колебаний актив-
ной мощности, в МВт, может быть определена по выражению
' <“3)
V ' Н1 ' н2
где РкХ, Р - суммарные мощности нагрузки с каждой стороны рассматри-
ваемого сечения, МВт;
К-коэффициент, принимается равным 1,5VMBt при ручном регули-
ровании и 0,75-ч/мВт при автоматическом регулировании перетока мощ-
ности в сечении.
Определение предельного по статической устойчивости перетока в
сечении осуществляется утяжелением режима (увеличением перетока). При
этом рассматривается траектория утяжеления режима, представляющая
собой последовательность установившихся режимов, которые при изме-
нении некоторого параметра или группы параметров позволяют достичь
границы области статической устойчивости. Значение Рпр определяется по
траектории, которой соответствует наименьшая предельная мощность.
Для определения предельного перетока в сечении рекомендуется ис-
пользовать следующие способы утяжеления режима или их комбинации:
♦ перераспределение активных мощностей между электрическими
станциями;
♦ изменение нагрузки;
♦ снижение напряжения в узлах энергосистемы.
Если для реальных условий энергосистемы характерны другие спосо-
бы утяжеления режима, то они также должны быть рассмотрены.
При выборе траектории утяжеления режима необходимо учитывать,
насколько она вероятна в условиях рассматриваемой энергосистемы. Суж-
дение, хотя бы приблизительное, о вероятности реализации на практике
рассматриваемого способа утяжеления нужно для правильной оценки по-
лучаемых в расчетах значений предельных режимов и коэффициентов за-
пасов по устойчивости.
Для увеличения перетока в рассматриваемом сечении вначале реко-
мендуется загрузить генераторы с одной стороны сечения и разгрузить с
другой стороны. При достижении ограничений по максимальной или ми-
нимальной мощностц генераторов дальнейшее увеличение перетока ре-
комендуется осуществлять соответственно уменьшением или увеличе-
нием мощности нагрузки. Если нагрузка снижена до возможного мини-
мума в реальных условиях, то дальнейшее увеличение перетока следует
263
Глава б. Устойчивость сложных энергосистем
осуществлять путем перегрузки генераторов. При этом расчет утяже-
ленных режимов сопровождается проверкой их статической устойчивос-
ти. Если в каком-либо узле нагрузки нарушается условие U> U , то такой
режим необходимо считать апериодически неустойчивым.
Предельные по статической устойчивости перетоки определяются
с учетом перегрузок всего оборудования электростанций и сети, допу-
стимых в течение 20 мин. Большие перегрузки, допустимые в течение
меньшего времени, можно учитывать, если ликвидация таких перегру-
зок обеспечивается оперативным персоналом или автоматикой за до-
пустимое время.
Значения коэффициента запаса по напряжению относится к узлам на-
грузки и вычисляется по формуле (4.14).
Для определения критического напряжения необходимо использовать
следующие способы утяжеления исходного нормального режима или их
комбинации:
♦ снижение ЭДС источников питания;
♦ изменение схемы сети путем отключения некоторых элементов;
♦ увеличение мощности нагрузки в узле.
Если расчеты статической устойчивости нагрузки выполняются по
практическим критериям с использованием суммарных статических харак-
теристик узла нагрузки, нарушение устойчивости означает нарушение ус-
тойчивости узла целиком, без учета отдельных потребителей. Для иссле-
дования устойчивости наиболее ответственного электроприемника он дол-
жен быть представлен в расчетах отдельно своими характеристиками (па-
раметрами).
Особое внимание при расчетах устойчивости нагрузки необходимо
уделять узлам, где установлены значительные мощности конденсатор-
ных батарей для увеличения коэффициента мощности нагрузки. В этих
узлах коэффициенты запаса нагрузки по напряжению, как правило, за-
метно снижаются.
Критическое напряжение в узлах нагрузки энергосистемы при отсут-
ствии более точных данных следует принимать не меньшим, чем 0,7Uh и
0,15 U , где U - напряжение в рассматриваемом узле нагрузки при
нормальном установившемся режиме энергосистемы.
По условиям устойчивости энергосистем нормируются минимальные
коэффициенты запаса статической устойчивости по активной мощнос-
ти и по напряжению. Кроме того, устанавливаются группы возмущений,
при которых должны обеспечиваться как динамическая устойчивость, так
и нормируемые коэффициенты запаса статической устойчивости в после-
аварийных режимах.
Значения показателей устойчивости должны быть не ниже указанных
в табл. 6.4.
264
6 !2. Нормативные требования устойчивости энергосистем
Таблица 6.4
Нормируемые показатели устойчивости
Режим, ггереток в сечении Минимальные коэффициенты запаса по активной мощности Минимальные коэффициенты запаса по напряжению Группы возмущений, при которых должна обеспечиваться устойчивость энергосистемы
нормальная схема ремонтная схема
Нормальный 0.2 0,15 I, II, 111 I, II
Утяжеленный 0,2 0,15 I, II I
Вынужденный 0,08 0,10 - -
В области допустимых режимов не должно быть явлений самораска-
чивания и самовозбуждения. Если такие процессы проявляются, то необ-
ходимо принять меры по устранению причин их возникновения, а в усло-
виях эксплуатации необходимо оперативно разгрузить сечение, электро-
станцию для устранения колебаний.
В нормальной схеме и при нормальных перетоках устойчивость при
возникновениях I группы должна обеспечиваться без применения проти-
воаварийной автоматики (ПА), за исключением тех случаев, когда:
♦ в результате возмущения предел статической устойчивости в сече-
нии уменьшается более чем на 25 %;
♦ выполнение требований приводит к необходимости ограничения
потребителей и загрузки электростанций.
В указанных случаях, а также при возмущениях II и III групп возмож-
но применение ПА для обеспечения устойчивости, но без воздействия на
разгрузку АЭС. Объем нагрузки, отключаемой ПА, должен быть не более
10 % от нагрузки нормального режима приемной энергосистемы.
Послеаварийный режим после нормативных возмущений должен удов-
летворять следующим требованиям:
♦ коэффициент запаса по активной мощности должен быть не ме-
нее 0,08;
♦ коэффициент запаса по напряжению - не менее 0,1;
♦ токовые перегрузки не превышают допустимых значений для обо-
рудования электростанций и сети.
Следует отметить, что в нормативных документах не вводятся запасы
динамической устойчивости энергосистемы. Это связано с тем, что при
нормировании возмущений введения дополнительного запаса динамичес-
кой устойчивости не требуется, так как это означало бы изменение норма-
тивов. Однако при проектировании и эксплуатации энергосистемы весьма
полезно знать, насколько условия динамической устойчивости близки к
минимально требуемым. Запас динамической устойчивости может быть
определен по параметрам исходного режима или возмущения, например
по (3.9), (6.57) или путем расчета коэффициента
18 Зак. 2132
265
Глава 6. Устойчивость сложных энергосистем
(6.64)
где - предельное время отключения КЗ по условиям динамической ус-
тойчивости;
?н - фактическое время отключения КЗ при нормативных возмущениях.
Если запас динамической устойчивости незначительный, то необхо-
димо предъявить повышенные требования к точности расчетов и углуб-
ленно проработать перспективы изменения динамической устойчивости в
ближайшем будущем.
Устойчивость может не сохраняться в следующих случаях:
♦ при возмущениях, более тяжелых, чем нормативные, или в случаях
наложения аварии на аварию;
♦ при возмущении, приводящем к ослаблению сечения, когда предел
статической устойчивости по оставшимся в сечении связям не превышает
утроенной расчетной амплитуды нерегулярных колебаний мощности или
уменьшается более чем на 70 %;
♦ при увеличении мощности в сечении более 50 % от предела стати-
ческой устойчивости из-за аварийного небаланса мощности.
Нарушение устойчивости не должно приводить к каскадному разви-
тию аварии или погашению части энергосистемы при правильной работе
средств ПА.
На связях, по которым возможны асинхронные режимы, должны пре-
дусматриваться устройства предотвращения или ликвидации асинхронных
режимов. Предотвращение асинхронных режимов осуществляется, как
правило, воздействием на изменение мощности электростанций или на-
грузки, в том числе и на отключение части потребителей. Ликвидация асин-
хронных режимов осуществляется путем ресинхронизации или деления
энергосистемы. Ресинхронизация как с применением автоматических уст-
ройств, так и самопроизвольная должна резервироваться делением.
Допустимая деятельность асинхронного режима и способ его прекра-
щения устанавливается для каждого сечения с учетом предотвращения
повреждения оборудования энергосистемы, дополнительных нарушений
синхронизма и нарушений электроснабжения потребителей. При этом осо-
бое внимание следует уделять устойчивости электростанций и крупных
узлов нагрузки, вблизи которых может оказаться центр качания.
Работа с вынужденными перетоками не допускается, если нарушение
устойчивости в этом режиме при возмущениях I и II групп и правильном
функционировании ПА может привести к отключению потребителей от
АЧР и САОН, суммарной мощностью более чем в 10 раз превышающей
величину ограничения потребителей, которая требуется для обеспечения
нормативных показателей нормального перетока.
266
6.12. Нормативные требования устойчивости энергосистем
Нормативные требования могут быть изменены при соответствующем
технико-экономическом обосновании.
Пример 6.1. Гидрогенератор номинальной мощностью 5нг = 353 МВ-А
в блоке с трансформатором мощностью />нт = 417 MB-А предполагается
включить на линию электропередачи длиной 500 км, напряжением 500 кВ.
Параметры элементов:
генератор: [7 = 15,75 кВ, xd = 1,67, х = 1,01, x'd =0,47;
трансформатор: хт = 28,7 Ом, кт = 525/15,75;
линия: х0 = 0,29 Ом/км; г0 = 0,02 Ом/км, Ьо - 3,93-10’6 См/км.
Требуется проверить допустимость включения линии электропереда-
чи по условию самовозбуждения.
Решение. Определяем индуктивные сопротивления гидрогенератора в
именованных единицах, отнесенных к напряжению линии:
^Н,2 1А_15,752
Хл = Х/7-Лт ==1,6/----
d SHr т 353
772 ,2 , 15,752
Хл ~ ха-~к. = 1,01----(
q q Sw 353 15,75
= 0,47^(^2,367
a Sm 353 15,75
HJ
-^)2=1304
15,75
525 -)2 = 788,6
Ом;
Ом;
Ом.
Суммарные сопротивления генератора и трансформатора: г; *’
. ' xdT. = xd + хт ~ 1304 + 28,7 = 1332,7 Ом;
= хч +хт = 788,6 + 28,7 = 817,3 Ом;
, . : х^ = xd + хч = 367 + 28,7 = 395,7 Ом.
Определяем параметры линии электропередачи, представив ее П-об-
разной схемой замещения:
х = х-/= 0,29*500 = 145 Ом; "
г = г -I = 0.02-500 = 10 Ом;
л 0 ’
Ъ /2 = Ъ-1/2 = 3,93-10^-500/2 = 9,8-10"4 см.
•‘ л 0 ’ '
Сопрсйтгвйение емкостной ветви схемы замещения линии:
•^св
--------- = 1020,4 Ом.
9,8-10“4
2
267
Глава 6. Устойчивость сложных знергосистем________________________
Входное сопротивление линии электропередачи:
г-jxc = (гл + Ал -АсвХ-Асв) =
Гп ~ Асв ”” У-^СВ
= (Ю^145-у-1020,4)(-71020,4) = (2 ,_ у47ц о„.
10+ /145-/1020.4-/1020,4
Таким образом, реактивная составляющая входного сопротивления
линии электропередачи имеет емкостный характер.
В рассматриваемом случае синхронное самовозбуждение исключает-
ся, поскольку не выполняется условие (6.30), однако гидрогенератор нельзя
включать на линию электропередачи, так как возможно асинхронное са-
мовозбуждение, поскольку выполняется неравенство (6.31):
(xJL = 395,7) <(хс = 471)<(xgL = 817,3).
Для избежания самовозбуждения необходима установка реакторов на
линии электропередачи.
Пример 6.2. Характеристическое уравнение простейшей электричес-
кой системы при отсутствии регулирования возбуждения имеет вид [46]:
0,12/Г + 0,1/г + 1,72// + 0,5 = 0.
Требуется проверить устойчивость системы с помощью:
1. Критерия Михайлова.
2. Критерия Гурвица.
3. Критерия Рауса.
Решение. 1. Для определения устойчивости по критерию Михайлова
запишем уравнение характеристической кривой:
Dipy) — 0,12(/<в)3 + 0,1 (/со)2 + 1,72 jco + 0,5 =Х(<в) +/'К(<в),
где Х(ю) = 0,5 - 0,1 to2; У(со) = 1,72и - 0,12и3.
Задаваясь со = 0,1,..., оо получим значения Х(со) и К(со). Результаты вы-
числений сведены в табл. 6.5. При изменении со от 0 до со конец вектора в
комплексной плоскости Dijep прочертит характеристическую кривую, или
годограф, приведенную на рис. 6.21.
Данная кривая показывает, что рассматриваемая система устойчива,
поскольку вектор Dijep при возрастании со от 0 до со поворачивается на
о 71 о
угол 3—, где 3 - степень характеристического уравнения.
Таблица 6.5
Результаты расчетов составляющих характеристического полинома
СО Т(й) Г(ш)
0 0,5 0
1 0,4 1,6
268
0.1/. нормативные треоования устойчивости энергосистем
Продолжение табл. 6.5
2. Для проверки устойчивости системы с помощью критерия Гурвица
составляем матрицу:
0,1 0,5 0
0,12 1,72 0
0 0,1 0,5
и вычисляем Определители Гурвица:
Л] =0,1; Л2 =
0,1
0,12
0,5
1,72
= 0,112;
0,1
Л3 = 0,12
0,5 0
1,72 0
0,1 0,5
= 0,056.
0
Рассматриваемая система устойчива, поскольку все коэффициенты ха-
рактеристического уравнения и все определители Гурвица положительны.
3. Для определения устойчивости системы с помощью критерия Рауса
составляем таблицу Рауса:
0,12
0,1
1,12
0,5
1,72
0,5
0
0
:б9
Глава 6, Устойчивость сложных энергосистем
Таким образом, рассматриваемая система устойчива, так как все эле-
менты первого столбца Рауса положительны.
Контрольные вопросы
1. Когда система устойчива «в малом», «в большом» и «в целом»?
2. Какое движение системы называют невозмущенным?
3. Как сформулировал определение устойчивости движения А. М. Ляпунов?
4. Какое движение системы называют асимптотически устойчивым?
5. Какие уравнения называют линеаризованными?
6. Как можно получить характеристическое уравнение?
7. В чем суть двух основных теорем Ляпунова?
8. Как по расположению корней характеристического уравнения мож-
но определить вид переходного процесса?
9. С чем связан незатухающий характер колебаний в системе?
10. Как упрощенно учитываются демпферные свойства синхронной
машины?
11. Что понимается под самораскачиванием и самовозбуждением в
электроэнергетической системе?
12. Когда может возникнуть явление самораскачивания в электроэнер-
гетической системе?
13. Как можно пояснить физику процесса самораскачивания?
14. Когда может возникнуть явление самовозбуждения в электроэнер-
гетической системе?
15. Что представляют собой зоны самовозбуждения?
16. Как формулируется критерий Гурвица для оценки статической ус-
тойчивости?
17. Какими условиями определяются границы апериодической или
колебательной устойчивости?
18. Как формулируются критерии устойчивости Рауса, Михайлова?
19. Что представляет собой кривая Михайлова для устойчивых систем?
20. Как можно построить область устойчивости по методу 77-разбиения?
21. Как определяются максимальные и минимальные коэффициенты
усиления регулятора возбуждения?
: 22. В чем суть второго метода Ляпунова?
23. Как выполняется оценка динамической устойчивости сложных систем?
i ; 24. Какие возмущения называются нормативными?
25. Каким нормативным требованиям должны удовлетворять нормаль-
ные и послеаварийные режимы?
26. В каких случаях устойчивость электроэнергетических систем мо-
жет не сохраняться?
27. Как обеспечивается выполнение нормативных требований к ус-
тойчивости?
270
U J r
1*115 ₽ * .JAJa /- ’'IH'H/.I
Глава 7. НЕУСТОЙЧИВОСТЬ ЧАСТОТЫ
ЭНЕРГОСИСТЕМЫ
7.1. ОБЩАЯ ХАРАКТЕРИСТИКА ПРОБЛЕМЫ
При полном анализе устойчивости сложных энергосистем необходи-
мо рассматривать не только относительное движение роторов генераторов
электростанций, но и их общее перемещение, характеризуемое частотой
системы. При возникновении аварийных ситуаций, сопровождающихся
дефицитом активной мощности в энергосистеме, появляются монотонные
или колебательные изменения частоты, приводящие к ее неустойчивости,
обычно называемой в литературе как лавина частоты. Под лавиной часто-
ты понимается явление лавинообразного снижения частоты в энергосис-
теме, вызываемое нарастающим дефицитом активной мощности.
Основными причинами аварийного дефицита активной мощности
в энергосистеме являются:
1. Отключение части генерирующих источников.
2. Отделение части системы с дефицитом генерирующей мощности
из-за аварийного отключения линий электропередачи.
3. Нарушение статической или динамической устойчивости электростан-
ций с последующим отключением линий электропередачи и генераторов.
Появление лавины частоты в энергосистеме во многом зависит от:
♦ наличия резервов активной мощности;
♦ действия автоматических регуляторов скорости (АРС) турбин;
♦ поведения собственных нужд электростанций и нагрузки.
Появление неустойчивости частоты опасно тем, что она сопровожда-
ется весьма быстрым уменьшением частоты энергосистемы до нуля. По-
этому такие аварии приводят к полному нарушению функционирования
всей энергосистемы или части, в которой возник аварийный дефицит мощ-
ности. Последствия таких аварий катастрофические, так как вызывают
Глава 7. Неустойчивость частоты энергосистемы
полное расстройство производственных, транспортных, социально-быто-
вых функций многомиллионного населения, обслуживаемого данной энер-
госистемой.
Для изучения и предотвращения неустойчивости частоты вначале рас-
смотрим процессы, происходящие в системе при возникновении аварий-
ных дефицитов мощности.
7.2. ЛАВИНА ЧАСТОТЫ X
Статическая частотная характеристика генерации энергосистемы с
учетом АРС генераторов может быть представлена в виде
Pr=7>0+PHA//a, (1Л)
при этом
р >р >р ,
max г min’
где Ро, Рк - начальное и номинальное значения мощностей в установив-
шемся режиме энергосистемы;
Д/= (f0 - f)/f0 - относительное изменение частоты в системе;
/ - исходное значение частоты в системе;
ст - статизм системы АРС турбин;
Хах’ Хт ~ допустимые максимальное и минимальное значения гене-
рирующих мощностей системы.
При изменении частоты в энергосистеме изменяется и мощность по-
требителей. Наиболее часто электроприемники представляются статичес-
кими частотными характеристиками отдельных потребителей, узлов на-
грузки или нагрузки энергосистемы в целом:
Р =Р пК . (7.2)
н нО wf 4
где Рн0 - мощность электроприемников в нормальном режиме при/=f0;
K__f- коэффициент, учитывающий влияние частоты на величину мощ-
ности нагрузки.
В настоящее время предложено несколько подходов к определению
значения Кк/. На наш взгляд, наиболее подходящим вариантом является
нахождение его величины из полинома третьей степени по частоте
Knj- = <7q + Q\f* + + Дз/* > (7-3)
где/, =//0;
t/0, ц|5 а2, а3 - коэффициенты, определяющие долевое участие нагрузок
соответственно нулевой, первой, второй и третьей групп потребителей
в суммарной нагрузке Рм при исходной частоте/.
272
1.2. Лавина частоты
К нулевой группе относятся потребители, на потребляемую мощность
которых изменение частоты не оказывает непосредственного влияния. К
ним относятся: осветительная нагрузка, электропечи, выпрямительная и
значительная часть бытовой нагрузки.
К первой группе относятся потребители, потребляемая мощность
которых изменяется пропорционально первой степени частоты. К та-
ким потребителям можно отнести приводные механизмы синхронных
двигателей, металлорежущие станки, поршневые насосы, компрессо-
ры и т. д.
Ко второй группе относится нагрузка, мощность которой зависит от
частоты в квадрате. Механизмов, момент сопротивления которых линейно
зависит от частоты, как правило, нет. Своеобразным потребителем такого
типа во многих случаях являются потери в электрических сетях.
К третьей группе относятся механизмы с вентиляторным моментом,
потребляемая мощность которых пропорциональна кубу частоты. К таким
механизмам относятся центробежные вентиляторы и насосы (как прави-
ло, с приводом от крупных асинхронных двигателей). Потребителями с
такой частотной характеристикой являются собственные нужды тепловых
электрических станций.
Графически частотные характеристики генерации (Рл) и нагрузки (Рн)
в исходном установившемся режиме системы представлены на рис. 7.1.
Частота электрической сети определяется точкой 0 пересечения статических
273
характеристик, и ее установившееся значение характеризуется значением^,
где Рг = Рн.
При возникновении аварийного дефицита мощности, например АРг1
(см. рис. 7.1), частота в энергосистеме начнет снижаться, активная нагруз-
ка потребителей Р в соответствии со своими характеристиками будет
уменьшаться, а мощность генерации электростанций под действием АРС
увеличиваться. В точке 1 наступает равенство потребляемой и генерируе-
мой мощности, устанавливается новое значение частотыкоторое ниже
номинального.
Работа энергосистемы при пониженной частоте отрицательно ска-
зывается на работе как электростанций, так и потребителей электро-
энергии. Наиболее опасно снижение частоты для электроприемников,
обеспечивающих технологический процесс на электростанциях: меха-
низмы подготовки и подачи топлива, питания котлов водой, обеспечи-
вающие процесс горения топлива в топках котлов (вентиляторы), уда-
ляющие дымовые газы, образующиеся в процессе сгорания топлива
(дымососы), и т. д. Производительность механизмов собственных нужд
электростанций зависит от частоты энергосистемы f определяющей
скорости вращения электродвигателей (рис. 7.2). При глубоких сниже-
ниях частоты производительность их снижается. При этом производи-
тельность электрических питательных насосов (зависимость 2), рабо-
тающих на противодавлении, резко снижается, стремясь к нулю. Су-
274
т.2. Лавина частоты
щественно снижается производительность и остальных механизмов
(зависимость 1). Следствием снижения производительности механиз-
мов собственных нужд электростанций является уменьшение механичес-
кой мощности турбин и электрической мощности генераторов. При боль-
ших дефицитах мощности, например ДР., (см. рис. 7.1), вызывающих глу-
бокое снижение частоты, характеристика генерации деформируется (зави-
симость Рг2), и мощность генерации падает из-за снижения производитель-
ности или расстройства работы механизмов собственных нужд. При этом
характеристики генерации и нагрузки уже не пересекаются, а лишь сопри-
касаются в точке 2. Это критический режим по устойчивости частоты, со-
ответствующий значению частотыКритерий устойчивости по частоте
может быть записан в виде
где ДРгн = Р - Ри - разность мощностей генерации и нагрузки.
При возникновении еще большего аварийного дефицита, напри-
мер ДРг3 (см. рис. 7.1), характеристики генерации и нагрузки уже не
пересекаются, установившийся режим не возникает, а имеет место ла-
винообразный процесс снижения частоты, приводящий к полному на-
рушению устойчивости системы. Такой процесс завершается полной
остановкой электростанций и отключением всех потребителей дефи-
цитной части системы.
Таким образом, значительное снижение частоты может вызвать крупную
аварию - лавину частоты - вплоть до полного погашения электростанций и
электроприемников на больших территориях страны. Восстановление рабо-
ты электростанций требует подачи на каждую из них электроэнергии от
непогашенной части энергосистемы, что является при большом числе пол-
ностью остановившихся электростанций весьма трудоемкой задачей и за-
нимает, как правило, несколько часов.
Предотвращение понижения частоты до критических значений воз-
можно в случае:
1. Наличия и мобилизации достаточно большого вращающегося ре-
зерва мощности.
2. Отключения некоторой части нагрузки.
Лавина частоты возникает в условиях, когда полностью исчерпана
мощность электростанций. Поэтому единственной возможностью удержать
частоту на допустимом уровне является снижение мощности потребите-
лей электроэнергии, т. е. переход с характеристики Рн на характеристику
Р № (см. рис. 7.1). В этом случае характеристики мощности генерации и
нагрузки пересекаются (точка 3), возникает баланс мощности при аварий-
ном установившемся значении частоты
275
Глава 7. Неустойчивость частоты энергосистемы
7.3. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ЭНЕРГОСИСТЕМЫ ПО ЧАСТОТЕ
Под динамической характеристикой энергосистемы по частоте пони-
мают зависимость изменения частоты во времени/= <р(0 при возникнове-
нии небаланса мощности. Такая зависимость дает возможность оценить
характер переходного процесса, выявить влияние на него различных фак-
торов, оценить эффективность выбранных мероприятий по улучшению
качества протекания аварийного процесса и т. д.
Изменение частоты во времени при возникновении небаланса мощно-
сти определяется дифференциальным уравнением
dt Т ,с
где Г - постоянная механической инерции системы.
Постоянная механической инерции энергосистемы определяется
как сумма постоянных инерций отдельных агрегатов электростанций
(генераторов с турбинами) и нагрузки (двигателей с приводными ме-
ханизмами)
(7.5)
Тус Ттг£ + Тн’ (7-6)
где ттгУ - постоянная механической инерции агрегатов электростанций;
тн - постоянная механической инерции нагрузки.
Постоянная механической инерции отдельного агрегата электростан-
ции определяется по формуле [48]
2,74G£>2«2 -1(Г6
т -----------------
LTr п
(7.7)
, с,
г ном
где GD2 - момент инерции турбины и генератора, т-м2;
п - частота вращения ротора, об/мин;
Л ном ~ номинальная активная мощность агрегата, МВт.
Постоянная механической инерции всех агрегатов электростанции,
отнесенных к базовой мощности
Ут Р
Г НОМ
Ттг1 =----------
(7.8)
Т’нО
где Рн0 - мощность нагрузки в исходном нормальном режиме.
Постоянная механической инерции нагрузки определяется по извест-
ной формуле
^-(”^дв "^мех )7 дн ц0М
Т" - р
РнО
(7.9)
276
7.3. Динамические характеристики энергосистемы по частоте
где тдв, тмсх - постоянные механической инерции двигателя и приводного
механизма;
Р ном - номинальная активная мощность двигателя.
Мощность генераторов складывается из мощностей генераторов элек-
тростанций различных типов:
+ + (7.10)
где Р - мощность агрегатов тепловых электростанций (ТЭС);
Р - мощность генераторов гидроэлектростанций (ГЭС);
Рдзс - мощность генераторов атомных электростанций (АЭС).
Изменение мощностей генераторов в аварийных режимах изменения
частоты зависит от:
♦ типа электростанции;
♦ системы регулирования;
♦ наличия резерва мощности.
При возникновении больших аварийных дефицитов мощности, сопро-
вождающихся быстрым снижением частоты, гидравлические и атомные
электростанции в начале аварии практически не изменяют своей мощнос-
ти. На гидростанциях это связано с большой инерционностью регулирова-
ния турбин, когда даже при наличии вращающегося резерва агрегаты мо-
гут изменить свою мощность только через 15-20 с. Атомные электростан-
ции, как правило, в целях обеспечения безопасности их работы не уча-
ствуют в регулировании и поддержании частоты. Кроме того, АРС турбин
АЭС имеют зоны нечувствительности. Поэтому основное влияние на из-
менение частоты на начальной стадии аварии оказывают агрегаты ТЭС. В
свою очередь, из всех регуляторов, используемых на агрегатах ТЭС, в рас-
сматриваемых режимах следует обратить внимание на АРС, так как это
самый быстродействующий регулятор, воздействующий на мощность тур-
бины в соответствии со своими статическими и динамическими характе-
ристиками. Применяемые на электростанциях автоматические регулято-
ры частоты и главные регуляторы вступают в действие, как правило, не
сразу, а уже в условиях послеаварийной стабилизации частоты.
Мощность агрегатов ТЭС является суммой мощностей различных аг-
регатов тепловых электростанций
Р=Р . + р +р > (7-11)
ТЭС гк г оп г пд’ 4 7
где Рг к - мощность конденсационных агрегатов государственных район-
ных электростанций (ГРЭС);
Pv оп - мощность агрегатов ТЭЦ, оснащенных турбинами с промыш-
ленными и теплофикационными отборами пара;
Рг пд - мощность на агрегатах ТЭЦ, оснащенных турбинами с противо-
давлением.
277
Глава 7. Неустойчивость частоты энергосистемы
. ----------------------------—— ----------------------------------
Мощность конденсационного агрегата ГРЭС с учетом действия AF’C
может быть представлена двумя составляющими
’ = р + р
г. к ЧВД ЧНД’
(7.12)
где - мощность части высокого давления (ЧВД) турбины;
Лтд _ мощность части среднего и низкого давления (ЧНД) турбины.
Изменение мощности на конденсационных агрегатах ГРЭС под дей-
ствием АРС описывается двумя дифференциальными уравнениями перво-
го порядка:
^чвд ^чвд Г а/ р „ ,р
НГ. К ГГ. К “Г гог. к
dt Tz
dPe^JX _ (1 ~~ ^чвд) Л/
dt Тпа
НГ. К 1 Г. К “г 1 ог. к
(7-13)
при этом
Лпт.пЛчВД -Т'чвд -Лпах.пЛчВд!
T’min. гк (1 ~ ^ЧВД ) — Т’чНД — Ртах. гк (1 — ^ЧВД )
да
нт
где Рт к, Рг к, Р к - начальное, текущее и номинальное значения мощное*
тей конденсационного турбогенератора; Г'-
Р . , Р - минимальное и максимальное допустимые значения
мтощностиХгенератора;
Гпп - постоянная времени промперегрева;
£ - коэффициент, равный доле мощности ЧВД турбины в общей
мощности агрегата при установившемся режиме.
Изменение мощности на турбогенераторе ТЭЦ с промышленными и
теплофикационными отборами пара при действии АРС может быть описа-
но уравнением
При этом
dPy, on _ 1 А/ р р
~~ ГТ, 1 НГ. on ' Г г. оп 1 ог. оп
at Tz L ст
(7.14)
р <р <р
min г оп г. on max г. оп
где Р ,Р ,Р - начальное, номинальное и текущее значения мощно-
ог. оп’ НГ. оп’ г оп ’ J
стей генератора ТЭЦ с отборами пара;
Р , Р - минимальное и максимальное допустимые значения
мощности генератора ТЭЦ с отборами пара.
Автоматический регулятор скорости на турбинах с противодавлени-
ем, как правило, при снижении частоты не вступает в действие, так как
основной его задачей является регулирование давления пара перед турби-
278
7.3. Динамические характеристики энергосистемы по частоте
ной и в коллекторе. Поэтому мощность турбины с противодавлением при
снижении частоты остается практически неизменной: Рг пд = const.
Нагрузка в расчетах динамического переходного процесса с измене-
нием частоты может быть представлена уравнением (7.2).
На рис. 7.3 приведен пример динамических характеристик энергосис-
темы при возникновении аварийных небалансов мощности, соответству-
ющих рис. 7.1. Следует отметить, что ДРг1 < ДРг2 < ДРг3.
Расчет динамических характеристик сложных энергосистем выполня-
ется на ЭВМ по специально разработанным программам. При выполне-
нии упрощенных расчетов в условиях отсутствия резервов мощности из-
менение частоты системы после возникновения дефицита мощности ДР.
может быть определено из уравнения [42]
/ = Л-4йД(|-е ГО. ШЧ
'н(Лн
где кн - регулирующий эффект нагрузки;
Т
j fcH-l + Pr/PH
Рг, Рн - значения мощности генераторов и нагрузки после возникнове-
ния небаланса.
В установившемся режиме (t —> со) аварийное отклонение частоты,
Рис. 7.3. Динамические характеристики системы
при возникновении небалансов мощности:
1 - АР 2 - АР 3 - АР, - лавина частоты
г Р г2’ гЗ
279
Глава 7. Неустойчивость частоты энергосистемы
а аварийное значение частоты составит
/ав - /о “ Vуст - /о ~ р
'и(Ан
(7-17)
7.4. ОТКЛЮЧЕНИЕ ЧАСТИ ПОТРЕБИТЕЛЕЙ
ПРИ АВАРИЙНОМ СНИЖЕНИИ ЧАСТОТЫ
Частота энергосистемы по условиям устойчивости не должна снижать-
ся ниже предельно допустимого значения. Если в переходном процессе
после возникновения дефицита мощности отключить часть нагрузки АР*,
то снижение частоты окажется меньшим. Отключение части нагрузки
уменьшает величину дефицита до ДР - ДРн и соответственно величину
нагрузки энергосистемы - до Рк0 - АР*. В этом случае установившееся от-
клонение частоты, согласно (7.16), будет равно
уст
(АРГ - ДР„)/0
(PhO-APJV
(7.18)
а аварийное значение частоты, согласно (7.17), составит
( АР -АР У
Ав-fo l-^;; .. (7-19)
\ *hv нО н)J
Отсюда необходимый объем отключаемой нагрузки для предотвраще-
ния снижения частоты ниже минимального значения^ будет равен
г 7*140 0 /ш1пЛ/р)А
l-(l-/min//0)A
(7.20)
Процесс аварийного снижения частоты протекает весьма быстро, и
диспетчер энергосистемы, как правило, не успевает вмешаться в ход его
развития и отключить потребителей. Поэтому для предотвращения и огра-
ничения развития аварий со снижением частоты в энергосистемах приме-
няется комплекс средств противоаварийной автоматики.
Одним из них является АЧР. Основное назначение АЧР — отключением
части менее ответственных потребителей сохранить в работе электричес-
кие станции и обеспечить питание наиболее ответственных потреби-
телей. Сохранение в работе электростанций дает возможность после
ликвидации аварийной ситуации достаточно быстро восстановить пи-
тание потребителей.
Автоматическая частотная разгрузка имеет несколько категорий:
а) АЧР I - быстродействующая разгрузка, имеющая различные устав-
ки по частоте и минимальные выдержки времени, близкие к нулю. Целью
280
7.4. Отключение части потребителей при аварийном снижении частоты
АЧР I является прекращение снижения частоты после возникновения де-
фицита мощности;
б) АЧР II - медленнодействующая разгрузка с близкими уставками по
частоте и разными уставками по времени. На АЧР II возлагаются функции
подъема частоты до допустимого уровня;
в) дополнительная АЧР - действующая при больших дефицитах мощ-
ности и предназначенная для ускорения отключения потребителей и уве-
личения объема отключаемой нагрузки;
г) спецочередь АЧР - предназначена для предотвращения снижения
частоты в энергообъединении до верхних уставок АЧР II в случаях, когда в
напряженных режимах не удается реализовать оперативные ограничения
и отключения потребителей при возникновении дефицита мощности.
Для минимизации ущерба от действия АЧР в комплектах частотной авто-
матики используют иногда совмещение АЧР I и АЧР II, а также другие подхо-
ды [44]. При совмещении АЧР в качестве АЧР II по мере необходимости в
аварийных режимах используют комплекты, не сработавшие в качестве АЧР I.
Исключение составляют лишь первые очереди АЧР I, которые срабатывают
всегда и, следовательно, не могут быть использованы в качестве АЧР II.
Недостатком совмещенных АЧР является холостая работа (выпадение)
очередей с меньшими выдержками времени АЧР II при тяжелых авариях,
когда большая часть комплектов АЧР I срабатывает. Это приводит к срав-
нительно медленному восстановлению частоты до допустимого уровня.
Для ускорения повышения частоты обычно предусматривается несколько
отдельных устройств АЧР II со сравнительно небольшими выдержками
времени. Это уменьшает зависимость скорости восстановления частоты
от величины аварийного дефицита мощности.
На рис. 7.4 приведены характерные изменения частоты в аварийных
режимах при работе частотной разгрузки. Уровень снижения частоты за-
висит, как правило, от величины дефицита мощности: чем он больше, тем
ниже значение частоты в переходном режиме. При этом могут иметь место
две очень опасные ситуации. Одна из них может возникнуть при недоста-
точном объеме отключаемых потребителей, когда частота снижается до
уровня срабатывания делительной автоматики электростанций (ДАС). При
этом электростанции отделяются от энергосистемы и тем самым значи-
тельно усугубляют аварию. Во втором случае при излишнем отключении
нагрузки, что имеет место при больших дефицитах мощности, частота в
энергосистеме кратковременно, но стремительно повышается вплоть до
срабатывания автоматов безопасности (АБ) на электростанциях. При бла-
гоприятном действии АЧР в аварийных режимах частота восстанавливает-
ся, как правило, до значений 48,6-49,2 Гц. На этом задача АЧР заканчива-
ется и дальнейшая ликвидация аварии продолжается, как правило, уже
диспетчером энергосистемы.
281
Рис. 7.4. Изменение частоты в аварийных режимах при действии автоматической частотной разгрузки:
7, 2 - оптимальное действие АЧР; 3 - излишнее отключение нагрузки; 4 - недостаточное отключение нагрузки
Контрольные вопросы
Пример 7.1. Электроснабжение энергорайона осуществляется от элек-
тростанции, где установлены два турбогенератора ТВ-60-2, и по двум ли-
ниям электропередачи напряжением НО кВ. Генераторы электростанции
работают с номинальной мощностью РЛ = 120 МВт, вращающегося резер-
ва нет. Нагрузка энергорайона Рн0 = 143 МВт. В установившемся режиме
частота/^ = 50 Гц, регулирующий эффект нагрузки кн = 2,0.
Требуется определить:
1. Аварийное значение частоты f при отключении линий электропе-
редачи и отсутствии АЧР.
2. Необходимый объем отключаемой нагрузки устройствами АЧР для
восстановления частоты до 49,0 Гц.
Решение. При отключении линий электропередачи рассматриваемый
энергорайон выделяется на изолированную работу от энергосистемы с де-
фицитом мощности:
АР =Р ~Р= 143 - 120 = 23 МВт.
г нО гО
При отсутствии отключения нагрузки установившееся значение час-
тоты в таком режиме, согласно (7.17), составит:
23 • 50 ”
/ =50—±Д25 = 46,6 Гц.
ав 143-2
Для удержания частоты в аварийном режиме на уровне = 49,0 Гц
необходимо, согласно (7.20), отключить нагрузку в объеме:
ДЛ^37 143(1,,49.0/50? =|80МВт
1 - (1 - 49,0/50)2
Таким образом, отключение 12,5 % нагрузки позволяет обеспечить
подъем частоты с 46,6 Гц до 49,0 Гц. Следовательно, отключение части
нагрузки позволяет в аварийных режимах с дефицитом активной мощнос-
ти поддержать частоту на допустимом уровне и тем самым предотвратить
процесс неустойчивости частоты.
Контрольные вопросы
1. Что понимается под лавиной частоты?
2. Каковы основные причины возникновения аварийного дефицита
активной мощности в энергосистеме?
3. От каких факторов зависит появление лавины частоты в энергосистеме?
4. В чем опасность появления неустойчивости частоты?
5. Какой статической частотной характеристикой может быть представ-
лена нагрузка?
6. Как зависит производительность механизмов собственных нужд
электростанций от частоты?
Г
283
Глава 7. Неустойчивость частоты энергосистемы
7. Как может быть записан критерий устойчивости по частоте?
8. В каких случаях можно предотвратить понижение частоты до кри-
тических значений?
9. В каких условиях возникает лавина частоты?
10. Что понимается под динамической характеристикой энергосистемы?
11. Каким уравнением определяется изменение частоты во времени?
12. Какие электростанции в наибольшей степени оказывают влияние
на процесс аварийного снижения частоты?
13. Как определить необходимый объем отключаемой нагрузки для
предотвращения снижения частоты ниже минимального значения?
14. Каково основное назначение АЧР?
15. Какие категории имеет АЧР?
16. Зачем используется совмещение АЧР I и АЧР II?
17. Какие опасные ситуации могут иметь место при работе АЧР? .
‘ ' I . » . 1 ? А
i -1 « ... .
Глава 8. МЕРОПРИЯТИЯ
Г, ПО ПОВЫШЕНИЮ УСТОЙЧИВОСТИ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
Для обеспечения устойчивости электроэнергетических систем предус-
матривают различные мероприятия, реализуемые на стадии проектирова-
ния или вводимые дополнительно в процессе их эксплуатации.
Современная практика располагает разнообразными средствами, спо-
собствующими повышению уровня устойчивости. Обеспечение норматив-
ных требований к устойчивости электроэнергетических систем выполня-
ется в основном путем:
♦ выбора конструкции и типа турбин, генераторов, трансформаторов,
линий электропередачи и выключателей;
♦ усиления электрической сети;
♦ установки дополнительного оборудования: синхронных компенса-
торов, реакторов, батарей статических конденсаторов и т. д.;
♦ выбора и оптимальной настройки устройств автоматики и релейной
защиты;
♦ применения систем автоматического предотвращения нарушения
устойчивости;
♦ изменения режима работы системы.
Выбор мероприятий по обеспечению устойчивости должен решаться
на основе технико-экономических обоснований, так как достижение по-
ставленных целей, как правило, возможно различными средствами. При
этом необходимо стремиться к максимальному использованию возможно-
стей автоматического управления и регулирования. Как показывает прак-
тика, это приводит к сокращению затрат, направленных на обеспечение
требуемого уровня устойчивости.
Опыт реализации противоаварийных мероприятий, направленных на
повышение устойчивости работы потребителей электроэнергии в переход-
ных режимах, показывает, что их эффективность значительно повышается
285
Iлава 8. Мероприятия по повышению устойчивости электроэнергетических систем
при одновременном и взаимно увязанном внедрении различных средств
как во внешней, так и во внутренней частях системы электроснабже-
ния. Удовлетворение требований потребителей к надежности систем
электроснабжения только за счет мероприятий энергосистемы не все-
гда достаточно, экономично, а иногда по своей физической природе -
невозможно.
8.1. КЛАССИФИКАЦИЯ МЕРОПРИЯТИЙ, ПОВЫШАЮЩИХ
УСТОЙЧИВОСТЬ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
Несмотря на все разнообразие мероприятий, направленных на повы-
шение устойчивости электроэнергетических систем, их можно объединить
в четыре основные группы [48].
I. Конструктивное улучшение параметров основных элементов элек-
троэнергетической системы:
♦ снижение синхронного и переходного сопротивления синхронных
машин и сопротивления рассеяния асинхронных машин;
♦ увеличение постоянной механической инерции электрических машин;
♦ использование демпферных обмоток в синхронных машинах;
♦ применение асинхронизированных и синхронных машин с продоль-
но-поперечным возбуждением;
♦ повышение напряжения и снижение индуктивного сопротивления
линий электропередачи;
♦ применение управляемых и сверхпроводящих линий электропе-
редачи;
♦ уменьшение индуктивного сопротивления трансформаторов и зазем-
ление их нейтралей через активное и реактивное сопротивления;
♦ использование быстродействующих выключателей. :J = 'ч.>
II. Дополнительные средства повышения устойчивости:
♦ применение емкостной продольной компенсации индуктивного со-
противления электропередач батареями статических конденсаторов; '1
♦ использование вставок постоянного или переменного тока;
♦ установка на подстанциях синхронных и асинхронных компенсато-
ров, управляемых источников реактивной мощности;
♦ использование шунтирующих и токоограничивающих управляемых
реакторов;
♦ применение электрического или механического торможения гене-
раторов.
III. Повышение устойчивости средствами автоматики:
♦ применение автоматических регуляторов возбуждения синхронных ма-
шин (пропорционального или сильного действия, комбинированных и т. п.);
286
8.1. Классификация мероприятий, повышающих устойчивость систем
♦ использование быстродействующих защит и противоаварийной ав-
томатики;
♦ применение автоматического регулирования или аварийной разгруз-
ки турбин;
♦ использование форсировки возбуждения синхронных машин;
♦ использование трехфазного или пофазного автоматического повтор-
ного включения оборудования;
♦ применение автоматического ввода резерва генерирующей мощно-
сти и оборудования;
♦ использование устройств ресинхронизации синхронных машин.
IV. Мероприятия эксплуатационного характера:
♦ выбор схемы соединения и режима системы с учетом требований
устойчивости;
♦ обеспечение резервов активной и реактивной мощностей;
♦ управление переходными процессами с применением вычислитель-
ной техники;
♦ непрерывный диагностический контроль состояния оборудования
электроэнергетической системы;
♦ отключение части синхронных машин в аварийных режимах;
♦ регулирование перетоков мощности по линиям электропередачи;
♦ отключение части потребителей при возникновении аварийных де-
фицитов активной и реактивной мощности в системе;
♦ разделение системы на несинхронно работающие части и ресинх-
ронизация синхронных машин при возникновении асинхронного хода;
♦ использование самозапуска синхронных и асинхронных двигателей;
♦ регулирование коэффициента мощности синхронных машин;
♦ снижение напряжения у потребителей при возникновении дефици-
та активной и реактивной мощности;
♦ отделение электростанций или части генераторов в аварийных
режимах.
Мероприятия I группы осуществляются путем конструктивных изме-
нений параметров основных элементов, направленных на улучшение ус-
тойчивости и качества переходных процессов. Такие мероприятия долж-
ны быть предусмотрены на стадии проектирования новых элементов сис-
темы. После того как новые элементы системы разработаны и созданы,
данные мероприятия, как правило, уже не могут быть осуществлены.
Группа II мероприятий получила название «дополнительные», посколь-
ку они как бы дополняют основные элементы системы для обеспечения
устойчивости. Кроме того, они могут быть установлены дополнительно в
ходе эксплуатации энергосистем.
Рассмотрим некоторые мероприятия повышения устойчивости элект-
роэнергетических систем более подробно.
287
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
8.2. УМЕНЬШЕНИЕ ИНДУКТИВНЫХ СОПРОТИВЛЕНИЙ
ЭЛЕКТРИЧЕСКИХ МАШИН
Важнейшими элементами электроэнергетической системы с точки зре-
ния устойчивости являются синхронные генераторы и двигатели. При от-
сутствии АРВ или использовании регуляторов с зоной нечувствительнос-
ти на статическую устойчивость системы существенное влияние оказыва-
ет величина синхронного сопротивления Xj, на динамическую — переход-
ное сопротивление x'd синхронных машин.
Это прежде всего относится к синхронным двигателям, имеющим
именно такие виды регулирования возбуждения.
Генераторы современных электрических систем оснащены, как пра-
вило, АРВ, не имеющими зоны нечувствительности, поэтому на статичес-
кую и динамическую устойчивость оказывает влияние лишь переходное
индуктивное сопротивление х^, так как реакция якоря не успевает заметно
проявиться в начале переходного процесса.
Синхронное сопротивление электрических машин имеет преоблада-
ющее значение в суммарном сопротивлении системы электроснабжения.
На рис. 8.1 показано соотношение между индуктивными сопротивления-
ми отдельных элементов типовой системы электроснабжения с синхрон-
ными двигателями. Поэтому при отсутствии АРВ на синхронных двигате-
лях значение их индуктивных сопротивлений оказывает существенное вли-
яние на статическую устойчивость системы.
У турбогенераторов синхронное сопротивление в относительных едини-
цах, если за базисные величины принять номинальные значения напряжения
и мощности, обычно составляют 1,0-1,4, у гидрогенераторов оно увеличива-
ется и достигает 1,8-2,0, а у синхронных двигателей - 1,5-3 и больше.
Для рассматриваемой системы электроснабжения (см. рис. 8.1) влия-
ние уменьшения сопротивления электрических машин на статическую ус-
Рис. 8.1. Принципиальная схема и диаграмма относительных значений индуктивных
сопротивлений системы электроснабжения
288
8.2. Уменьшение индуктивных сопротивлений электрических машин
тойчивость очевидно из выражения предельной передаваемой мощности
х^ + хт1 + хл + хт2
На рис. 8.2 показан характер изменения Рпр при изменении xd и отсут-
ствии автоматических регуляторов на машинах. Как видно, чем меньше
сопротивление синхронных машин, тем лучше условия статической ус-
тойчивости системы электроснабжения. Синхронное сопротивление элек-
трической машины, определяемое двумя составляющими xd = xs+ xad, мож-
но уменьшить в основном за счет реактивного сопротивления реакции якоря
xaJ. Практически это можно сделать путем увеличения воздушного зазора
в машине. Однако при увеличении воздушного зазора приходится увели-
чивать ток и количество витков обмотки возбуждения. Это приводит к уве-
личению размеров и удорожанию синхронной машины.
При наличии АРВ ПД предельная передаваемая мощность /’пр по ус-
ловиям статической устойчивости, как известно, будет определяться пере-
ходной ЭДС Ej и переходным сопротивлением х'г Однако при этом харак-
тер зависимости Рпр =Ах'и) будет аналогичен рис. 8.2, но несколько более
пологий, так как значение xd в общем сопротивлении системы значительно
меньше, чем хг
Переходное индуктивное сопротивление синхронных машин невели-
ко, и для генераторов оно не превышает,обычно 0,2-0,3, для двигателей
0,2-0,5. Поскольку переходное индуктивное сопротивление является фак-
тически сопротивлением рассеяния, то его уменьшение связано с больши-
ми трудностями. Так, например, если уменьшение xd в два раза увеличива-
ет стоимость машины на 30 %, то такое же уменьшение переходного ин-
дуктивного сопротивления приводит к удорожанию более чем на 50 %.
Влияние уменьшения переходного сопротивления на динамическую
устойчивость сводится к повышению амплитуды мощности в переходном
режиме. Однако, как уже отмечалось, значение x'd в общем сопротивлении
системы (рис. 8.1, б) значительно меньше, чем xd. Поэтому, как видно из
рис. 8.3, уменьшение переходного сопротивления на 30 % не оказывает
существенного влияния на динамическую устойчивость. Причем эффек-
тивность снижения х^зависит от скорости отключения КЗ - чем быстрее
отключается КЗ, тем меньший эффект дает уменьшение х^(рис. 8.3).
Индуктивное сопротивление рассеяния асинхронного двигателя явля-
ется одним из важнейших параметров, определяющих степень его устой-
чивости. Напомним, что его значение оказывает влияние на величину мак-
симальной мощности и критического скольжения асинхронного двигателя
S
2х, р. .
19. Зак. 2182
289
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
‘Рйс.8.2. Зависимость предельной мощности от величины синхронного сопротивления
Рис. 8.3. Изменение предельной передаваемой по условиям динамической устойчивости
мощности от времени отключения КЗ и переходного сопротивления г-
Для повышения устойчивости асинхронных двигателей желательно
иметь как можно большие значения l\t и Этого можно добиться, умень-
шая xs. Однако снижение сопротивления рассеяния асинхронного двигате-
ля связано с техническими трудностями как и при снижении x'd синхрон-
ных машин, что приводит к удорожанию асинхронного двигателя.
8.3. УВЕЛИЧЕНИЕ ПОСТОЯННОЙ МЕХАНИЧЕСКОЙ ИНЕРЦИИ
ЭЛЕКТРИЧЕСКИХ МАШИН
Как известно, постоянная инерции Т не оказывает влияния на пре-
дельное значение угла отключения КЗ для синхронной машины и скольже-
ния для асинхронного двигателя. Однако от величины постоянной меха-
290
8.3. Увеличение постоянной механической инерции электрических машин
нической инерции зависит скорость изменения угла и скольжения элект-
рических машин. Чем больше постоянная инерции машины, тем медлен-
нее изменяется ее угол и скольжение в переходном процессе, а следова-
тельно, будет больше и предельное время отключения КЗ.
Влияние постоянной механической инерпии на время отключения
можно оценить, если рассмотреть режимы электрических машин при трех-
фазных коротких замыканиях на их шинах. В данном случае, как известно, t
предельное время отключения короткого замыкания для синхронной ма-
шины определяется уравнением (3.14, а), а для асинхронного двигателя -
уравнением (4.27).
Как следует из данных уравнений, увеличение постоянной инерции
увеличивает /пр, в течение которого достигается предельный угол 5 или
предельное скольжение 5пр. При этом для повышения в п раз предельного
времени отключения в рассматриваемом режиме постоянную инерции син-
хронной машины необходимо увеличить в п2 раз, а асинхронного двигате-
ля - в п раз.
Как видно из рис. 8.4, 8.5, увеличение постоянной инерции неявнопо-
люсной синхронной машины вдвое по сравнению с ее обычным значени-
ем повышает стоимость машины на 20 % и увеличивает предельное время
отключения на 45 %.
При изменении постоянной механической инерции машины обычно
изменяются и другие параметры электрических машин. Поэтому прак-
тически для повышения постоянной инерции электрических агрегатов
Рис. 8.4. Зависимость стоимости синхронной машины от величины постоянной инерции
291
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.5. Зависимость предельного времени отключения трехфазного короткого замыкания
от величины постоянной инерции синхронной машины
необходимо рекомендовать установку на вал машины или приводного ме-
ханизма специальных устройств - маховиков.
8.4. ПРИМЕНЕНИЕ АСИНХРОНИЗИРОВАННЫХ
И СИНХРОННЫХ МАШИН
С ПРОДОЛЬНО-ПОПЕРЕЧНЫМ ВОЗБУЖДЕНИЕМ
Устойчивость синхронной машины можно повысить, если на ее рото-
ре разместить не одну, а две обмотки в продольной и поперечной осях.
При подаче напряжения возбуждения на каждую из обмоток возникают
магнитные потоки, наводящие в обмотке статора соответствующие ЭДС
Е и Еи (рис. 8.6). Геометрическая сумма ЭДС Е^ и Ed представляет собой
результирующую ЭДС Е, наведенную суммарным потоком ротора в об-
мотке статора. Изменяя величину и направление ЭДС в каждой из об-
моток путем регулирования напряжения возбуждения, можно переме-
щать результирующий вектор ЭДС Е и устанавливать его в любое тре-
буемое положение. Это позволяет в аварийных режимах системы, при
опасном с точки зрения устойчивости увеличении скорости ротора, а
соответственно и угла 8, поворачивать вектор ЭДС Е в направлении,
обратном вращению ротора. Угол 8 при этом уменьшается, что способ-
ствует сохранению устойчивости. Для реализации требуемого поворота
вектора ЭДС Е ее отдельные составляющие необходимо изменять во вре-
мени по следующим законам:
Е = EcosS; Е = EsinS. (8.1)
ц 7 а 47
292
8.4. Применение асинхронизированных и синхронных машин
Недостатком такого вида регулирования возбуждения для обеспече-
ния устойчивости является недостаточное быстродействие изменения ЭДС,
особенно при больших динамических возмущениях в системе. Это обус-
ловлено относительно большой электромагнитной инерционностью обмо-
ток ротора.
Устойчивость электрической машины с продольно-поперечным воз-
буждением может быть обеспечена при любом значении угловой скорости
ротора (со ), отличной от синхронной (соД, если к его обмоткам подвести
переменное напряжение соответствующей амплитуды и частоты (рис. 8.7):
U. = U,cos сот; (8.2)
fii J ‘ v 7
U.. = U sin со/. (8.3)
Jq ч / v 7
где со/= сос - од - угловая скорость вектора напряжения возбуждения.
Машину, использующую такой принцип работы, принято называть
асинхронизированной синхронной. Поскольку, изменяя соответствующим
Рис. 8.6. Векторная диаграмма ЭДС синхронной машины
с продольно-поперечным возбуждением
Рис. 8.7. Упрощенная схема питания обмоток ротора
асинхронизированной синхронной машины
293
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
образом напряжение на обмотках возбуждения, можно удерживать ЭДС в
любом положении ротора, то в асинхронизированной синхронной машине
(АСМ) отпадает проблема обеспечения устойчивости по углу б. Однако
для АСМ приходится исследовать устойчивость по скорости, аналогично
как для обыкновенной асинхронной машины. АСМ, как правило, более
устойчива, чем асинхронная машина, поскольку условия ее обеспечения
определяются не только параметрами машины, но и системой возбужде-
ния. Основными параметрами системы возбуждения АСМ, определяющи-
ми ее устойчивость, являются величины потолочного значения напряже-
ния и частоты на обмотках ротора* .
8.5. ИЗМЕНЕНИЕ ПАРАМЕТРОВ ТРАНСФОРМАТОРОВ
И ВИДА ИХ НЕЙТРАЛЕЙ
Из параметров трансформаторов на устойчивость систем оказывает
влияние в основном реактивное сопротивление и вид заземления нейтра-
ли. Снижение реактивного сопротивления трансформаторов увеличивает
пропускную способность систем электропередачи по условиям как стати-
ческой, так и динамической устойчивости. Однако существенное уменьше-
ние реактивного сопротивления трансформаторов связано с техническими
трудностями, что приводит к повышению стоимости трансформаторов.
Вид заземления нейтрали трансформаторов оказывает значительное
влияние на динамическую устойчивость системы при несимметричных КЗ
на землю. В электрических системах с изолированной нейтралью одно-
фазное замыкание практически не влияет на режим работы электрических
машин, поскольку сопротивление нулевой последовательности при этом
равно бесконечности.
В высоковольтных сетях стран СНГ напряжением НО кВ и выше при-
нято глухое заземление нейтрали. Поэтому в таких сетях однофазное за-
мыкание на землю имеет характер КЗ, существенно влияющего на харак-
теристики электропередачи и динамическую устойчивость. Если нейтра-
ли трансформаторов заземлить через относительно небольшие реактив-
ные сопротивления (рис. 8.9), то условия работы изоляции в нейтрали
трансформатора практически не меняются, а устойчивость систем при не-
симметричных КЗ можно существенно повысить. Это связано с тем, что вклю-
чение в нейтрали трансформаторов сопротивлений приводит к увеличению
результирующего сопротивления нулевой последовательности (рис. 8.9. б, в),
а следовательно, и к увеличению сопротивления аварийного шунта в рас-
* Подробнее см.: Шакарян Ю. Г. Асинхроиизированные синхронные машины. - М.:
Энергоиздат. 1984. - 192 с.
294
8.5. Изменение параметров трансформаторов и вида их нейтралей
четной схеме при однофазном или двухфазном КЗ на землю (рис. 8.9, г, д).
Влияние заземления нейтрали через реактивные сопротивления на устой-
чивость системы при однофазном КЗ показано на рис. 8.10. Характеристи-
ки мощности в исходном режиме (7) и после отключения одной цепи ли-
нии (2) идентичны для системы с глухозаземленными и заземленными че-
рез реактивные сопротивления нейтралями трансформаторов. С возникнове-
нием однофазного КЗ (характеристика 3) в системе с трансформаторами с глу-
хозаземленными нейтралями происходит нарушение устойчивости, так как
площадка ускорения^ больше площадки торможения^ (рис. 8.10, а). Вклю-
чение реактивного сопротивления в нейтраль трансформатора приводит к
” Рис. 8.9. Заземление нейтрали трансформаторов через реактивные (х)
" или активные (гз) сопротивления:
а — принципиальная схема системы; б, в- схемы замещения нулевой последовательности;
г, д - схемы замещения системы при однофазном КЗ
295
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.10. Влияние заземления нейтрали трансформаторов
на динамическую устойчивость:
а - глухозаземленная нейтраль; б - заземление ней трали через реактивное сопротивление;
7 - исходная характеристика мощности;
2 - характеристика мощности в послеаварийном режиме; 3 - характеристика мощности
при однофазном КЗ при глухом заземлении нейтрали; 4 - характеристика мощности
при однофазном КЗ и заземлении нейтрали через реактивное сопротивление
увеличению характеристики мощности (4) в режиме однофазного КЗ. Это
способствует уменьшению площадки ускорения (// <f3) и сохранению ус-
тойчивости (рис. 8.10, б).
Заземление нейтралей трансформаторов через активные сопротивле-
ния, как правило, более эффективно, чем их заземление через реактивные.
При однофазных или двухфазных замыканиях на землю в активных со-
противлениях нулевой последовательности г30 (рис. 8.9, в) возникают до-
полнительные потери активной мощности, что увеличивает электричес-
кую мощность синхронной машины, тем самым способствуя сохранению
ее динамической устойчивости. При этом весьма важно выбрать оптималь-
ную величину активного сопротивления, включаемого в нейтраль транс-
форматора. Увеличение сопротивления может привести к возникновению
режима, когда при КЗ на генераторе происходит наброс мощности из-за
чрезвычайно больших потерь мощности в активных сопротивлениях ну-
левой последовательности. Поэтому угол 8 при возникновении КЗ начина-
ет уменьшаться (рис. 8.11), а не возрастать, как обычно. При отключении
поврежденной линии при угле 8отк (см. рис. 8.11) происходит сброс мощ-
ности, соответствующий характеристике мощности с одной оставшейся
линией электропередачи. Угол при этом продолжает по инерции умень-
шаться, пока не достигает своего минимального значения 8мин, определяе-
мого равенством площадок ускорения f и торможения/^.,. В последу-
ющем угол 8 начинает возрастать, поскольку электрическая мощность ге-
нератора меньше механической мощности Ра.
296
8.6. Изменение параметров линий электропередачи
Рис. 8.11. Процесс нарушения устойчивости при возникновении короткого замыкания из-
за заземления нейтрали трансформатора через активное сопротивление
Как легко убедиться из рис. 8.11, площадка ускорения/ при этом боль-
ше возможной площадки торможения/, что приведет к нарушению дина-
мической устойчивости рассматриваемой системы. Следует иметь в виду,
что оптимальная величина активных сопротивлений в нейтрали трансфор-
матора для повышения устойчивости значительно больше при двухфаз-
ных, чем при однофазных замыканиях на землю.
Заземление нейтрали через сопротивление не оказывает влияния на
условия обеспечения устойчивости системы при возникновении трехфаз-
ных КЗ. Это является одним из главных недостатков, препятствующих
широкому применения рассмотренного способа повышения устойчивос-
ти, поскольку обычно проблема сохранения устойчивости достаточно ост-
ро стоит именно при трехфазных КЗ.
8.6. ИЗМЕНЕНИЕ ПАРАМЕТРОВ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
Для систем электропередачи большой протяженности параметры ли-
ний являются определяющими в обеспечении устойчивости всей электро-
передачи. Применение АРВ СД на генераторах электростанций еще боль-
ше повысило влияние линий на условие устойчивости, так как в этом слу-
чае предельно передаваемая мощность определяется выражением
(8.4)
20. Зак. 2182
297
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Поскольку индуктивное сопротивление (х ) возрастает с увеличе-
нием длины линии (хл = х0 /), то значение предельной по условиям ста-
тической устойчивости передаваемой мощности существенно умень-
шается. Стоимость же линий с увеличением длины, наоборот, увели-
чивается и относительно быстро достигает экономического предела
дальности электропередачи. Поэтому проблема устойчивости являет-
ся одним из основных факторов, ограничивающих дальность передачи
энергии переменным током. Это заставляет уделять особое внимание
средствам повышения устойчивости систем электропередачи большой
протяженности.
В настоящее время для уменьшения реактивного сопротивления ли-
ний применяется расщепление ее фазы на несколько проводов. Особен-
но эффективно расщепление фазы на 2 и 3 провода (рис. 8.12). Даль-
нейшее расщепление не приводит к значительному снижению индук-
тивного сопротивления линий, однако для линий сверхвысокого напря-
жения оно применяется. Так, для линий электропередачи 1150 кВ при-
нято расщепление на 8 или 11 проводов. При этом удельное индуктив-
ное сопротивление составляет соответственно 0,26 и 0,19 Ом/км. Сле-
дует иметь в виду, что расщепление проводов применяется не только
для повышения устойчивости, а главным образом направлено на огра-
ничение короны.
Пропускная способность системы электропередачи в большой мере за-
висит от напряжения линии. Для выявления этой зависимости выразим реак-
тивные сопротивления трансформатора и линии в относительных единицах,
Рис. 8.12. Изменение индуктивного сопротивления линии 500 кВ
при расщеплении фазы на п проводов
298
8.6. Изменение параметров линий электропередачи
принимая за базисное напряжение номинальное напряжение линии U6 = U :
^К3%^б . v
100-5ТН’ л* л
S6
и* 2
и нл
Подставляя (8.5) в (8.4), получим
(8-5)
(8-6)
хт* + XjjSg /f7tuI
Как видно из данного уравнения, повышение номинального напряже-
ния линии будет приводить к увеличению пропускной способности систе-
мы электропередачи. На рис. 8.13 показано изменение Р при изменении
величины номинального напряжения линии. Построенные зависимости по-
казывают, что при длине линии 200 км повышение напряжения до 220 кВ
приводит к существенному увеличению пропускной способности электро-
передачи. Дальнейшее повышение напряжения является мало эффективным,
так как относительное сопротивление линии становится малым по сравне-
нию с сопротивлением трансформаторов. При большей длине линии эффек-
тивно большее увеличение напряжения линии (при I = 1000 км до 500 кВ).
Рис. 8.13. Зависимость предельной передаваемой мощности по условию устойчивости
от величины номинального напряжения системы электропередачи:
1 - при длине линии 220 км; 2 - при длине линии 1000 км
В настоящее время выполняются исследования и проектные работы
по использованию сверхпроводящих, управляемых и настроенных линий
электропередачи, имеющих повышенную пропускную способность по ус-
ловиям устойчивости* .
*1. Управляемые линии электропередачи / Ю. Н. Астахов, В. М. Посталатий, И. Т. Ко-
мендант, Г. В. Чалый. - Кишинев: Штиинца, 1984. - 119 с.
2. Электропередачи переменного тока повышенной мощности / В. Т. Федин, Ю. Д. Го-
ловач, Г. И. Селиверстов, М. С. Чернецкий. - Мн.: Навука i тэхшка, 1993. - 360 с.
299
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
8.7. ПРИМЕНЕНИЕ ЛИНИЙ И ВСТАВОК ПОСТОЯННОГО ТОКА
Для передачи энергии и объединения энергосистем используются ли-
нии не только переменного, но и постоянного тока. Функциональная схе-
ма такой линии, осуществляющей связь между двумя электроэнергетичес-
кими системами, приведена на рис. 8.14. В современных энергосистемах
генерация электрической энергии, ее распределение и потребление осу-
ществляются на переменном токе. Поэтому линии электропередачи посто-
янного тока используются лишь для транспорта электрической энергии из
одной системы в другую.
Рис. 8.14. Функциональная схема линии электропередачи постоянного тока
Для осуществления передачи электрической энергии постоянным то-
ком энергию переменного тока, вырабатываемую генераторами передаю-
щей системы, преобразуют в энергию постоянного тока.
В таком виде энергия передается по линии постоянного тока, на при-
емном конце она вновь преобразуется в энергию переменного тока и затем
поступает в энергосистему.
Преобразование электрической энергии осуществляется с помощью
преобразователей П1 и П2, расположенных по концам передачи и под-
ключенных к передающей и приемной системам. Один из этих преоб-
разователей является выпрямителем, другой - инвертором. В качестве
преобразователей для электропередач постоянного тока в настоящее
время применяют статические управляемые вентильные преобразова-
тели, обладающие свойством реверсивности. При изменении направ-
ления передачи мощности от ЭС2 к ЭС1 П2 становится выпрямителем,
а П1 - инвертором.
Процесс передачи электрической энергии по линии постоянного тока
(ЛПТ) имеет принципиально иной характер по сравнению с передачей по
линии переменного тока. В этом случае передача энергии не связана с вол-
новыми электромагнитными процессами и линия обладает только актив-
ным сопротивлением. Поэтому предел мощности, передаваемой по линии
постоянного тока, определяется лишь нагревом ее проводов и перепадом
напряжений. Благодаря этому, пропускная способность линии постоянно-
го тока оказывается значительно выше, чем линии переменного тока рав-
ной длины и того же класса напряжения. При этом, однако, необходимо
учитывать также и пропускную способность аппаратуры концевых под-
300
8.8. Быстродействующие выключатели и защита
станций, которая в конечном счете и будет определять пропускную спо-
собность всей передачи.
Характерной особенностью линии постоянного тока является то, что
возрастание передаваемой мощности по ней не сопровождается одновре-
менным увеличением угла сдвига между напряжениями по концам пере-
дачи, как для линий переменного тока. Благодаря этому, полностью снима-
ются проблемы статической и динамической устойчивости, присущие элек-
тропередачам переменного тока. Следует отметить, что при этом появля-
ются проблемы коммутации постоянного тока.
Применяемые в преобразователях вентили обладают свойствами уп-
равляемости, т. е. они могут открываться только при подаче на их управля-
ющий электрод определенного импульса тока. Изменяя момент подачи этого
импульса, можно в больших пределах регулировать параметры режима
(мощность, напряжение). При этом изменение режима может осуществ-
ляться практически безинерционно. Возможность быстродействующего
управления значением передаваемой мощности по линии постоянного тока
позволяет рассматривать ее как гибкое управляемое звено энергосистемы,
способствующее повышению ее устойчивости [1].
В ряде случаев энергетические системы располагаются рядом и для
их связи можно использовать электропередачу постоянного тока, у кото-
рой линия практически отсутствует, а выпрямитель и инвертор располо-
жены на одной подстанции. Такие электропередачи называют вставками
постоянного тока. Вставки постоянного тока имеют некоторые особеннос-
ти по сравнению с линиями электропередачи, однако основные их харак-
теристики и режимные возможности аналогичны ЛПТ.
8.8. БЫСТРОДЕЙСТВУЮЩИЕ ВЫКЛЮЧАТЕЛИ И ЗАЩИТА
Увеличение скорости отключения КЗ является одним из основных ме-
роприятий по повышению динамической устойчивости электроэнергети-
ческих систем. Уменьшение длительности КЗ позволяет:
♦ уменьшить разрушение оборудования, вызываемое электрической
дугой в месте КЗ;
♦ уменьшить опасность перебрасывания электрической дуги, возник-
шей при однофазном замыкании, на неповрежденные фазы и возникнове-
ния двухфазного или трехфазного замыкания на землю.
Влияние времени отключения трехфазного КЗ на коэффициент запаса
Динамической устойчивости показано на рис. 8.15. Увеличение длитель-
ности КЗ (с ?! до ?2) приводит к увеличению площади ускорения и соответ-
ствующему уменьшению площади торможения, что приводит к снижению
и нарушению динамической устойчивости.
301
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.15. Влияние продолжительности КЗ на динамическую устойчивость:
а - схема электропередачи; о - переходной процесс при отключении трехфазного КЗ за
время г,; в - переходной процесс при отключении КЗ за время г - зависимость угла 5отк
от длительности КЗ; д - зависимость коэффициента запаса /<ф от продолжительности КЗ
Время отключения КЗ оказывает значительное влияние на предель-
ную передаваемую мощность по условиям динамической устойчивости.
Каждому времени отключения КЗ соответствует предельно допустимая
передаваемая мощность. Как видно из рис. 8.16, увеличение времени от-
ключения уменьшает допустимое значение передаваемой мощности, осо-
бенно при трехфазном замыкании на землю.
302
8.8. Быстродействующие выключатели и защита
б
a
Рис. 8.16. Влияние продолжительности и вида КЗ
на предельную передаваемую мощность:
а - переходной процесс для предельной передаваемой мощности при двухфазном КЗ
длительностью tt; б - переходной процесс для предельной передаваемой мощности при
двухфазном КЗ длительностью t; в - зависимость угла 5 от времени КЗ для режимов а и б;
г - зависимость предельной передаваемой мощности от времени отключения КЗ; 7 -
однофазное КЗ; 2 - двухфазное КЗ; 3 - трехфазное КЗ
Время отключения КЗ складывается из времени, необходимого для
работы защиты, и собственного времени срабатывания выключателя. Ис-
пользуемые в настоящее время воздушные, элегазовые выключатели име-
ют время отключения 0,04-0,08 с. Время работы защиты оборудования
составляет 0,01-0,004 с. Поэтому время отключения КЗ в современных
электроэнергетических системах не превышает 0,12 с. Такой скорости от-
ключения в большинстве практических случаев достаточно для обеспече-
ния динамической устойчивости при возникновении КЗ.
303
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
В настоящее время разработаны и используются быстродействующие
вакуумные и тиристорные выключатели. Время отключения или включе-(
ния оборудования в этом случае значительно уменьшается.
8.9. ПРОДОЛЬНАЯ ЕМКОСТНАЯ КОМПЕНСАЦИЯ
Устойчивость энергосистем может быть значительно увеличена путем
последовательного включения в линию устройств продольной емкостной ком-
пенсации (УПК), выполненных в виде конденсаторных батарей (рис. 8.17).
Рис. 8.17. Схема электрической системы с продольной емкостной компенсацией
Если не учитывать потери и распределенность параметров линии, то
ее эквивалентное сопротивление с УПК определяется выражением
X = X —х = X (1 — к),
ЭЛ л с лх с'
(8-7)
где к = xjx - степень компенсации. \
При наличии на генераторе АРВ СД предельная мопШость рассматри-
ваемой системы электропередачи с УПК равна Ч ' х.
Таким образом, увеличение пропускной способности зависит от степе-
ни компенсации: чем она выше, тем больше амплитуда характеристики мощ-
ности. Однако увеличение степени компенсации может привести к значи-
тельному увеличению токов КЗ, усложнению защиты линий. Исходя из этих
условий, степень компенсации индуктивности линий не должна превышать
50-70 %.
При небольших длинах и номинальных напряжениях линии место ус-
тановки УПК практически не оказывает влияния на ее эффективность. Для
дальних линий электропередачи высокого напряжения эффективность УПК
по увеличению пропускной способности зависит от места расположения
компенсирующих устройств на линии, величины включенных в линию ре-
акторов и т. д.
Для повышения устойчивости систем электропередачи с УПК исполь-
зуется режим форсировки компенсации, т. е. автоматического уменьшения
общего индуктивного сопротивления линии в аварийных режимах. Так,
например, при отключении линии Л-1 форсировка УПК осуществляется
304
8.10. Переключательные пункты на линиях электропередачи
путем отключения части конденсаторов выключателем В1 (рис. 8.18, а)
или путем включения части конденсаторов, нормально зашунтированных
выключателем В2 (рис. 8.18, б). В обоих вариантах емкостное сопротивле-
ние х. УПК увеличивается, а эквивалентное сопротивление линии, равное
разности между реактивными сопротивлениями, уменьшается.
В2
Рис. 8.18. Схемы форсировки устройств продольной компенсации путем:
а - отключения части конденсаторов; б - включения части конденсаторов
Более эффективным признан вариант, изображенный на рис. 8.18, а,
поскольку он требует меньшей мощности конденсаторов с учетом их пе-
регрузочной способности. Кроме того, его осуществление более быстро-
действующее, так как время отключения выключателя, как правило, мень-
ше времени его включения. Это способствует повышению устойчивости
энергосистем.
8.10. ПЕРЕКЛЮЧАТЕЛЬНЫЕ ПУНКТЫ НА ЛИНИЯХ
ЭЛЕКТРОПЕРЕДАЧИ
Из многообразия схем электропередач можно выделить две наиболее
типовые схемы: блочную (рис. 8.19, а) или связанную (рис. 8.19, б).
В блочной схеме электропередача построена по принципу блоков: ге-
нератор - трансформатор - линия. Число блоков равно числу цепей линий
электропередачи. При данной схеме возмущение на одном из блоков (на-
пример, КЗ на шинах генератора) не будет существенно сказываться на
работе других блоков и, следовательно, вопроса о сохранении устойчиво-
сти, как правило, на них не возникает.
Недостатком блочной схемы является проблема обеспечения динами-
ческой устойчивости блока и возможность потери части генераторной мощ-
ности при любом устойчивом повреждении в одном из элементов системы
электропередачи.
305
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.19. Схемы электропередач: а - блочная; б — связанная
При связанной схеме повреждение на каком-либо элементе сопровож-
дается отключением только одной из параллельных цепей линии, а по ос-
тальным цепям линии может передаваться вся мощность от электростан-
ции. Для повышения пропускной способности связанных электропередач
применяются переключательные пункты (рис. 8.20).
ПП
Рис. 8.20. Схема выполнения электропередачи с переключательным пунктом
При такой схеме в случае КЗ на линии отключается не вся цепь, а лишь
поврежденный участок. Это уменьшает сопротивление электропередачи и уве-
личивает предельную передаваемую мощность в последовательном режиме.
Вместе с тем схема электропередачи с переключательными пунктами (ПП) тре-
бует большого количества выключателей, что приводит к значительному уве-
личению стоимости электропередачи. Тем не менее именно эта схема наибо-
лее часто применяется в дальних электропередачах энергообьединений, так
как она позволяет иметь промежуточные подстанции, связанные с местными
энергосистемами, которые или потребляют мощность от электропередачи, или
выдают в нее часть избыточной мощности. Только для повышения устойчиво-
сти переключательные пункты на линиях, как правило, не сооружаются.
8.11. УСТАНОВКА СИНХРОННЫХ КОМПЕНСАТОРОВ
И УПРАВЛЯЕМЫХ ИСТОЧНИКОВ РЕАКТИВНОЙ МОЩНОСТИ
НА ПРОМЕЖУТОЧНЫХ ПОДСТАНЦИЯХ
Устойчивость систем электропередачи может быть значительно повы-
шена путем установки на промежуточных подстанциях синхронных ком-
пенсаторов (рис. 8.21).
306
8.11. Установка синхронных компенсаторов и управляемых источников мощности
Рис. 8.21. Система электропередачи с промежуточным синхронным компенсатором:
а - принципиальная схема; б - векторная диаграмма
Применение синхронных компенсаторов на промежуточной подстан-
ции, причем снабженных АРВ СД, обеспечивает поддержание напряже-
ния в месте присоединения к линии независимо от режима электропереда-
чи. Практически это означает, что в линии появляются шины неизменного
напряжения, разделяющие систему на две или более независимые части.
В таких схемах устойчивость каждого из участков определяется независи-
мо от другого. При этом пропускная способность и устойчивость системы
значительно увеличивается, так как устойчивая работа обеспечивается при
углах б больше 90° (рис. 8.21, б). Предел передаваемой мощности электро-
передачи при данной схеме определяется пределом мощности участка,
имеющего наименьшую пропускную способность.
Особенно эффективно применение синхронных компенсаторов при ос-
нащении их АРВ СД. В этом случае необходимая мощность синхронных ком-
пенсаторов для поддержания напряжения составляет величину 60-80 % от
передаваемой по линии мощности. Поэтому схемы с промежуточными синх-
ронными компенсаторами могут быть экономически эффективными и конку-
рентноспособными по отношению к другим средствам повышения устойчи-
вости, например, со схемами с продольной емкостной компенсацией.
При больших возмущениях в системе электропередачи синхронные
компенсаторы даже с АРВ СД не могут достаточно быстро обеспечить по-
стоянство напряжения из-за значительной электромагнитной инерции об-
мотки возбуждения. Это приводит к ограничению величины передавае-
мой мощности по условиям динамической устойчивости. В этом отноше-
нии продольная компенсация более эффективна, чем синхронные компен-
саторы, так как вступает в действие мгновенно, повышая как статическую,
так и динамическую устойчивость.
В настоящее время разработаны другие управляемые источники реак-
тивной мощности, способные заменить синхронные конденсаторы. К ним
307
Глава 8. Мероприятия по повышению устойчивости эле ктроэнергетических систем
прежде всего относятся быстродействующие управляемые тиристорные
источники реактивной мощности, содержащие конденсаторы. Изменяя с
помощью тиристоров ток, протекающий через конденсаторы, тем самым
изменяют и мощность, генерируемую установкой. Это позволяет осуще-
ствить быстрое регулирование режима реактивной мощности и поэтому
является хорошим средством улучшения устойчивости. |
8.12. ЭЛЕКТРИЧЕСКОЕ ТОРМОЖЕНИЕ ГЕНЕРАТОРОВ
Динамическую устойчивость генераторов при КЗ можно повысить
путем резкого увеличения их электрической мощности в переходном ре-
жиме. Это можно сделать путем кратковременного автоматического вклю-
чения в цепь генераторов специальных нагрузочных активных сопротив-
лений (НАС), увеличивающих тормозной электромагнитный момент. По-
этому такой способ повышения устойчивости обычно принято называть
электрическим торможением.
Нагрузочные сопротивления можно включать последовательно в ней-
траль или на входе генераторов (рис. 8.22, а), причем в нормальных режи-
мах они закорачиваются специальными выключателями. При КЗ эти вык-
лючатели отключаются и НАС оказываются включенными в цепь генера-
торов. Это приводит к повышению электрической мощности генератора
за счет протекания в НАС токов КЗ. После отключения КЗ ток в обмотке
статора генератора уменьшается, что приводит к значительному сниже-
нию тормозящего воздействия нагрузочных сопротивлений. Поскольку
включить НАС во время КЗ при малых временах его отключения практи-
чески невозможно, то наиболее эффективно включение активных сопро-
тивлений параллельно генераторам или повышающим трансформаторам
электростанций (рис. 8.22, б). В этом случае активные сопротивления на-
гружают генератор в основном после отключения КЗ.
Рис. 8.22. Принципиальная схема включения нагрузочных сопротивлений:
а - последовательное включение; б - параллельное включение
308
8.12. Электрическое торможение генераторов
Рассмотрим переходной процесс, происходящий при электрическом
торможении генератора. На рис. 8.23, а показаны характеристики мощно-
сти при КЗ на одной из линий системы электропередачи (см. рис. 8.22, б)
при отсутствии нагрузочных сопротивлений. Как видно из рис. 8.22, а, в
системе без нагрузочных сопротивлений происходит нарушение динами-
ческой устойчивости, так как площадка торможения меньше площадки
ускорения. Во втором случае, при применении НАС, переходной процесс
протекает вначале аналогично предыдущему. Однако в момент отключе-
ния КЗ происходит включение нагрузочного сопротивления выключате-
лем В (см. рис. 8.22, б).
Благодаря этому, электрическая мощность генератора резко увеличи-
вается (см. рис. 8.23, б). Поскольку мощность турбины остается неизмен-
ной, то площадка торможения увеличивается и динамическая устойчивость
системы обеспечивается. Следует отметить, что включение тормозного
сопротивления желательно было бы осуществлять во время КЗ, что спо-
собствовало бы уменьшению площадки ускорения. Однако в современных
электроэнергетических системах, где КЗ в высоковольтных сетях отклю-
чается за время 0,1-0,15 с, реальное время включения тормозных сопро-
тивлений практически совпадает по времени с отключением КЗ, а иногда
и превосходит его. В этих условиях электрическое торможение способно
реально лишь увеличить площадку торможения.
Анализируя процесс электрического торможения, следует обратить
внимание на важность момента отключения нагрузочных сопротивлений.
При большом времени включенного состояния нагрузочных сопротивле-
ний нарушение устойчивости может произойти после их отключений, во
а б
Рис. 8.23. Влияние электрического торможения
на устойчивость системы электропередачи:
а - характеристики мощности без нагрузочного сопротивления;
б - характеристики мощности при включении нагрузочных сопротивлений
309
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
втором цикле качаний, вследствие перетормаживания генераторов. Это являет-
ся одним из недостатков такого мероприятия по повышению устойчивости.
Электрическое торможение можно применять не только для сохране-
ния динамической устойчивости, но и для демпфирования качаний в пере-
ходных процессах энергосистем. Для этого используется многократное
кратковременное включение нагрузочных сопротивлений в соответствую-
щие моменты переходного режима.
Наиболее эффективно использование электрического торможения на
электростанциях, имеющих небольшую постоянную механической инер-
ции агрегатов. Вследствие этого предел динамической устойчивости зна-
чительно более низкий, чем предел статической устойчивости послеава-
рийного режима. Применение электрического торможения целесообразно
также на электростанциях, где условия надежности электроснабжения по-
требителей требуют сохранения динамической устойчивости при увели-
чении по каким-либо причинам времени отключения КЗ.
К настоящему времени разработаны два типа нагрузочных сопротивле-
ний в виде нихромовых резисторов, помещенных в фарфоровые кожухи, за-
литые маслом, а также так называемые бетэловые, т. е. изготовленные из спе-
циального электропроводящего бетона (бетэла). Для получения необходимо-
го сопротивления и потребляемой энергии отдельные сопротивления соби-
раются в последовательно-параллельные цепочки. Поэтому устройства элек-
трического торможения, как правило, большие по объему и дорогостоящие.
В основном устройства электрического торможения используются на гидро-
станциях, на ТЭС они широкого практического применения не получили.
8.13. ПРИМЕНЕНИЕ ШУНТИРУЮЩИХ
И ТОКООГРАНИЧИВАЮЩИХ РЕАКТОРОВ
Для потребления избыточной зарядной мощности линий высокого на-
пряжения, особенно в режимах минимальных нагрузок, на шины генера-
торного или высокого напряжения передающих электростанций подклю-
чают шунтирующие реакторы (рис. 8.24, а). Наличие шунтирующего ре-
актора (ШР) в схеме приводит к увеличению взаимного сопротивления
между электростанцией и приемной системой, что при отсутствии АРВ
отрицательно сказывается на устойчивости системы. Действительно, ха-
рактеристика мощности системы (характеристика 7, рис. 8.25) до включе-
ния реактора определялась выражением
EJJ
Р = —-—sin 5, (8.9)
гдеХс = х</ + хт+хл.
310
8.13. Применение шунтирующих и токоограничивающих реакторов
При подключении реактора характеристика мощности при постоян-
стве ЭДС описывается уравнением
EJJ
Р = ~^~ sm8, (8.10)
Лд2
(Х/ + х.|)хл (х^ -У
где Л12 = xd + хТ + хл + —--1—- = Xdy + —------1—- - взаимное со-
ХР ХР
противление электростанции и приемной системы;
хр - индуктивное сопротивление реактора.
Поскольку знаменатель в выражении (8.10) больше, чем в (8.9), то амп-
литуда характеристики мощности при включении ШР и сохранении посто-
янства ЭДС Е меньше, чем в режиме без ШР (характеристика 2, рис. 8.25).
Это приводит к ухудшению условий как статической, так и динамической
устойчивости. Однако включение ШР дает возможность генераторам элек-
тростанций работать с более высокой ЭДС. При подключении ШР напря-
жение на шинах генератора снижается и для его восстановления необхо-
димо увеличить ток возбуждения и соответственно ЭДС. Увеличение ЭДС Е
генератора приводит к росту амплитуды характеристики мощности. По-
скольку отрицательное влияние на характеристику мощности из-за увели-
чения взаимного сопротивления при наличии реактора обычно значитель-
но меньше, чем увеличение ЭДС, то в результате подключения шунтирующе-
го реактора амплитуда мощности увеличивается (характеристика 3, рис. 8.25)
и устойчивость системы повышается.
Рис. 8.24. Система электропередачи с шунтирующим реактором:
а - принципиальная схема; б - схема замещения
311
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.25. Влияние шунтирующего реактора на характеристики мощности:
"*' 1 - исходная без ШР; 2 - при включении ШР и = const;
’ 3 - при включении ШР и (7 = const; 4 - при отключении ШР в аварийных режимах
Для повышения динамической устойчивости может применяться от-
ключение части или всех шунтирующих реакторов в аварийном или пос-
леаварийном режиме. Отключение реактора при КЗ приведет к снижению
взаимного сопротивления системы, что сказывается на увеличении амп-
литуды характеристик мощности (характеристика 4, рис. 8.25). Поэтому
площадка торможения заметно увеличивается, что улучшает условия обес-
печения динамической устойчивости. При этом увеличивается и запас ста-
тической устойчивости в послеаварийном режиме. Однако при отключе-
нии реакторов в переходных режимах необходимо учитывать опасность
увеличения напряжения и необходимость их быстрого обратного включения
при восстановлении нормального режима электроэнергетической системы.
Для ограничения токов КЗ в электрических системах используют ре-
акторы, в том числе и управляемые (рис. 8.26, а). При этом сопротивление
токоограничивающего управляемого реактора (ТУР) определяется, как
правило, только режимом ограничения токов КЗ, поэтому хр в начале ава-
рии имеет максимальное значение, а после устранения КЗ при угле 8[
(рис. 8.26, б) его величина уменьшается практически до нуля и не оказы-
вает влияния на дальнейший переходный процесс в рассматриваемой сис-
теме. Между тем такое возмущение может вызвать длительные по време-
ни и большие по амплитуде качания роторов синхронных машин и, соот-
ветственно, мощности, напряжения в сети, что приводит иногда к само-
раскачиванию и нарушению устойчивости (рис. 8.26, г).
Избежать или уменьшить колебания в системе, вызванные короткими
замыканиями, можно, если в момент достижения углом 8 его максималь-
ного значения 8м (рис. 8.26, д) резко увеличить реактивное сопротивление
312
8.13. Применение шунтирующих и токоограничивающих реакторов
а
Рис. 8.26. Влияние управляемого реактора на устойчивость системы:
а - принципиальная схема системы; б - характеристика мощности при использовании
реактора для ограничения только токов КЗ; г - зависимость угла генератора и сопротивле-
ния реактора при ограничении токов КЗ; в - характеристики мощности при использования
реактора для ограничения токов КЗ и для демпферироваиия колебаний;
д - зависимость угла генератора и сопротивления реактора при ограничении токов КЗ
и демпферироваиия колебаний
б
реактора хр с целью уменьшения разности между электрической мощнос-
тью генератора и механической мощностью турбины до небольшой вели-
чины [49]. При этом эту величину во время торможения ротора необходи-
мо сохранять, так как изменение угла 8 вызывает соответствующее изме-
нение активной мощности генератора.
Для сохранения незначительной разности между электрической мощ-
ностью генератора и механической мощностью турбины (рис. 8.26, в) ре-
активное сопротивление реактора плавно увеличивают, если угол 8 больше
313
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
90°, или плавно уменьшают, если угол 8 меньше 90° (рис. 8.26, д). Это
позволяет значительно медленнее, почти по экспоненте, перевести ротор
генератора к точке равновесия мощностей турбины и генератора. Тем са-
мым устраняются глубокие и длительные колебания в системе, что благо-
приятно сказывается на устойчивости ее работы.
8.14. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ВОЗБУЖДЕНИЯ
СИНХРОННЫХ МАШИН
8.14.1. Общие сведения
Электродвижущая сила синхронной машины зависит от величины тока,
протекающего в обмотке возбуждения (рис. 8.27).
Рис. 8.27. Зависимость ЭДС от тока возбуждения синхронной машины
Ток в обмотке возбуждения и напряжение, которое к ней подводится,
называются током и напряжением возбуждения синхронной машины. К
системе возбуждения машины относятся обмотка ротора, источник посто-
янного напряжения - возбудитель, устройства ручного или автоматическо-
го регулирования, с помощью которых можно изменять напряжение и со-
ответственно ток возбуждения. В качестве возбудителей используются ге-
нераторы постоянного тока, генераторы переменного тока повышенной
частоты с выпрямителями, тиристорные выпрямители, преобразующие ток
различной частоты в постоянный. Наибольшие возможные напряжения и
ток ротора, которые может обеспечить возбудитель, называются потолком
возбуждения. Напряжение и ток ротора, при которых синхронная машина
работает с номинальными режимными параметрами (5н, Е7н), называются
номинальными. Изменение этих величин называется регулированием воз-
буждения, которое бывает ручным или автоматическим.
К системам возбуждения синхронных машин предъявляются высокие
требования. Они должна обеспечивать:
♦ надежное питание обмотки возбуждения в нормальных и аварий-
ных режимах;
314
8.14. Автоматическое регулирование возбуждения
♦ устойчивое регулирование тока возбуждения при изменении нагруз-
ки машины;
♦ определенную скорость нарастания тока ротора;
♦ кратность форсировки по напряжению не менее 2,0 в течение време-
ни, необходимого для восстановления режима после ликвидации аварии.
Рассмотрим основные системы возбуждения, используемые в элект-
роэнергетических системах, применительно к задаче обеспечения устой-
чивости.
8.14.2. Электромашинная система возбуждения
Наиболее распространенным типом системы возбуждения является
электромашинная (рис. 8.28), в которой возбудителем (В) является генера-
тор постоянного тока, соединенный с валом синхронной машины (СМ).
Возбудитель имеет две обмотки возбуждения: ОВ1 и ОВ2. Первая из них
через реостат (Р) подключена к якорю возбудителя и обеспечивает само-
возбуждение генератора постоянного тока. Ручное регулирование тока в
обмотке ротора синхронной машины осуществляется с помощью измене-
ния сопротивления реостата, управляющего током в обмотке возбуждения
возбудителя ОВ1. Автоматическое регулирование возбуждения осуществ-
ляется специальным устройством АРВ, управляющим током в обмотке ОВ2.
На вход АРВ подаются сигналы, пропорциональные напряжению и току
статора синхронной машины, от измерительных трансформаторов TH и
ТТ. Обычно ток в обмотке ОВ1 соответствует возбуждению при холостом
ходе синхронной машины, а следовательно, и определенному положению
реостата. Поэтому изменение тока в обмотке ротора СМ при ее работе под
нагрузкой и в переходных процессах осуществляется с помощью АРВ, из-
меняющего ток в обмотке ОВ2.
Основными преимуществами электромашинной системы возбуждения
является простота схем управления и автономность питания, т.к. ток воз-
буждения не зависит от напряжения питающей сети.
Рис. 8.28. Схема электромашинкой системы возбуждения синхронной машины
315
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Слабым звеном таких систем является коллектор, который в значитель-
ной степени снижает надежность синхронной машины. Кроме того, для
крупных генераторов возникают трудности с созданием машин постоян-
ного тока большой номинальной мощности, поскольку современные тур-
богенераторы мощностью 300-1200 МВт требуют мощности возбудите-
лей 0,4-0,6 % от номинальной мощности генераторов. К недостаткам элек-
тромашинных систем следует отнести также недостаточное ее быстродей-
ствие в ряде режимов для обеспечения устойчивой работы синхронных
машин, так как ее постоянная времени регулирования составляет 0,3-0,5 с.
8.14.3. Высокочастотная система возбуждения
Упрощенная схема системы высокочастотного возбуждения, которой обо-
рудуются турбогенераторы мощностью до 300 МВт, приведена на рис. 8.29.
В качестве возбудителя в ней используется высокочастотный (400 или 500 Гц)
индукторный генератор (ИГ), связанный непосредственно с валом синх-
ронной машины. Силовая обмотка и обмотки возбуждения (OBI, ОВ2, ОВЗ)
генератора переменного тока индукторного типа расположены на статоре.
Благодаря этому возбудитель не имеет коллектора, что повышает надеж-
ность его работы.
Рис. 8.29. Схема высокочастотного возбуждения синхронных машин
Силовая трехфазная обмотка переменного тока индукторной машины
соединена с неуправляемым выпрямителем (НВ), питающим обмотку ро-
тора синхронной машины. Индукторный генератор имеет три обмотки воз-
буждения. Основная обмотка ОВ1 включена по схеме последовательного
возбуждения непосредственно в цепь обмотки ротора синхронной маши-
ны. Управляющие обмотки ОВ2 и ОВЗ подключены к блоку АРВ. Обмотка
316
8.14. Автоматическое регулирование возбуждения
ОВЗ, как правило, используется для форсировки возбуждения. Высокочас-
тотная система возбуждения по быстродействию аналогична электрома-
шинной (0,4 с), но является более надежной и экономичной.
8.14.4. Тиристорная система возбуждения
На турбо- и гидрогенераторах мощностью 200 МВт и более, а также
на синхронных двигателях большой номинальной мощности в последние
годы широко используется тиристорная система возбуждения (рис. 8.30).
Рис. 8.30. Тиристорная система возбуждения синхронной машины
В этой системе питание обмотки ротора синхронной машины осуще-
ствляется от управляемого выпрямителя (УВ), основным элементом кото-
рого являются тиристоры. Путем управления работы тиристоров от АРВ
можно плавно и в широких пределах изменить значение выпрямленного
тока, поступающего в обмотку ротора СМ. Поскольку в контуре управле-
ния напряжением на обмотке ротора СМ отсутствует электрическая маши-
на, то тиристорная система возбуждения имеет наиболее высокое быстро-
действие. Ее постоянная времени составляет 0,02-0,04 с. В качестве ис-
точника питания (ИП) тиристорной системы возбуждения используют спе-
циальный синхронный генератор или трансформатор, присоединенный к
выводам синхронной машины.
8.14.5. Бесщеточная система возбуждения
Наличие контактных колец на роторе синхронной машины ограничи-
вает значение тока возбуждения синхронных машин, снабженных ранее
рассмотренными системами возбуждения. Поэтому для мощных турбоге-
нераторов разработана бесщеточная система возбуждения, не содержащая
вращающихся контактов (рис. 8.31). Источником питания обмотки ротора
СМ в этой системе является обращенный синхронный генератор (СГ), у
которого силовая обмотка переменного тока расположена на роторе, а об-
мотка возбуждения (ОВГ) размещена на его статоре. Ротор СГ механически
317
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.31. Схема бесщеточного возбуждения
соединен с валом ротора основной синхронной машины. Напряжение с
выхода СГ подается на выпрямитель (В), который конструктивно также
совмещен с валом ротора СМ и вращается вместе с ним. Поэтому обмотка
ротора СМ, выпрямитель В и обмотка ротора СГ могут быть жестко соеди-
нены проводниками между собой. Таким образом, питание обмотки рото-
ра СМ осуществляется без применения контактных колец.
Обмотка возбуждения СГ питается обычно от высокочастотного под-
возбудителя (ВЧП) через управляемый тиристорный выпрямитель (ТВ).
Регулирование возбуждения СГ, а следовательно, и СМ, производится пу-
тем управления выпрямителем ТВ с помощью АРВ.
К недостаткам бесщеточной системы возбуждения следует отнести
невозможность резервирования, трудности конструктивного характера при
выполнении такой системы, а также затруднения с измерением и контро-
лем тока и напряжения возбуждения.
В условиях эксплуатации имеются системы возбуждения, несколько
отличающиеся от рассмотренных. Однако каждая из них имеет основные
признаки одной из четырех приведенных систем возбуждения.
8.14.6. Назначение и типы
автоматических регуляторов возбуждения
На автоматические регуляторы возбуждения синхронных машин воз-
лагаются следующие функции:
♦ обеспечение поддержания требуемого уровня напряжения на зажимах
машин или реактивной мощности в установившемся режиме системы;
♦ повышение статической и динамической устойчивости при возму-
щениях в электроэнергетической системе;
318
8.14. Автоматическое регулирование возбуждения
♦ увеличение требуемого качества переходных процессов в электро-
энергетической системе.
Существующие устройства АРВ обычно подразделяются на 2 типа:
пропорционального или сильного действия.
Регуляторы пропорционального действия, как указывалось выше, из-
меняют ток возбуждения в зависимости от отклонения какого-либо пара-
метра режима (например, напряжения, тока).
АРВ СД регулируют возбуждение синхронных машин не только по
отклонению параметров режима, но также по скорости и ускорению их
изменений. Это позволяет в самом начале переходного процесса оказы-
вать на системы возбуждения машин более интенсивное воздействие, чем
АРВ ПД (отсюда термин «сильного действия»).
Упрощенные структурные схемы АРВ пропорционального и сильного
действия приведены на рис. 8.32. Рассмотрим АРВ ПД, осуществляющий
регулирование возбуждения по величине и знаку отклонения напряжения
на зажимах синхронной машины от заданного значения. Для этого от транс-
форматора напряжения (TH) подается напряжение, пропорциональное напря-
жению статора СМ (Ц. ), на вход блока напряжения (БН). Блок БН, включаю-
щий преобразовательный и измерительный элементы, выявляет отклонение
напряжения от заданной уставки АС/ = С/ - . Полученная разность AU
усиливается в усилителе (У) и подается на обмотку возбуждения ОВ2 возбу-
дителя синхронной машины (рис. 8.32, а). Такой регулятор, реагирующий на
отклонения напряжения, будет стремиться поддерживать напряжение на за-
жимах синхронной машины в соответствии с заданным значением U.
Если С/м = С/, то напряжение на выходе блока БН равно нулю и АРВ
не изменяет напряжение возбудителя. При снижении С/ величинаAUста-
новится положительной, что приводит к изменению тока на выходе усили-
теля и в ОВ2. При этом суммарный магнитный поток возбуждения возбу-
дителя возрастает, увеличивая тем самым ток в роторе синхронной маши-
ны, а следовательно, и напряжение С/м на ее зажимах. При увеличении Ucu
выше С/ величина AU становится отрицательной и регулятор уменьшает
ток возбудителя, а следовательно, и Цм. Такое регулирование, называемое
статическим, при изменении режима работы синхронной машины не обес-
печивает поддержания напряжения С/ , точно соответствующего заданно-
му [/, так как при этом А [7= 0 и АРВ не действует. Поэтому в синхронных
машинах с регуляторами АРВ ПД напряжение поддерживается с опреде-
ленной точностью, статизмом, которые зависят от коэффициента усиле-
ния (kv) усилителя У Вместе с тем регулирование 17м по отклонению на-
пряжения приводит к поддержанию неизменным напряжения внутри об-
мотки синхронной машины за некоторым его сопротивлением.
Обычно у регуляторов пропорционального действия выбирают та-
кой коэффициент усиления к(,, что Е' = const. Поэтому в расчетах
319
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.32. Структурные схемы автоматических регуляторов возбуждения:
а - пропорционального действия; б - сильного действия
электромеханических переходных процессов синхронную машину, име-
ющую АРВ ПД, можно представить в виде ЭДС Е' или Е', приложенной за
переходным сопротивлением х\ В АРВ СД различного исполнения исполь-
зуется несколько параметров, характеризующих режим работы системы:
отклонение напряжения AU и скорость U его изменения на зажимах синх-
ронной машины; скорость Г и ускорение Г' изменения тока в статоре син-
хронной машины или в линии электропередачи; отклонение угла А5 и ско-
рость 5' его изменения; отклонение А/частоты и скорость f ее изменения;
скорость изменения тока в роторе Г синхронной машины.
320
8.15. Форсировка возбуждения синхронных машин
Рассмотрим АРВ СД (рис. 8.32, б), осуществляющий регулирование
по Д(7, U', \f и/'. Напряжение статора синхронной машины (7 подводит-
ся от трансформатора напряжения TH к блоку напряжения БН и к блоку
частоты БЧ. Блок БН, аналогичный соответствующему блоку в АРВ ПД,
выявляет отклонение напряжения, а дифференцирующий элемент (Д1)
определяет скорость изменения напряжения U'. Блок БЧ выявляет откло-
нения частоты от нормального значения и формирует сигнал Д/ Одновре-
менно дифференцирующий элемент (Д2) определяет скорость изменения
частотыЗначение параметров Д[/, U, и/' подаются на суммирующий
усилитель (СУ). Сигнал с выхода СУ АРВ СД поступает, как правило, в
схему управления тиристорной или бесщеточной систем возбуждения.
Поскольку АРВ СД реагирует не только на отклонения значений регулиру-
емых параметров, но также и на скорость их изменения, то это позволяет с
опережением выявлять характер возникшего переходного процесса и ока-
зывать сильное воздействие на систему возбуждения синхронной машины
в самом начале изменения режима. Поэтому системы возбуждения с АРВ
СД могут поддерживать практически постоянное напряжение на шинах
синхронных машин во всех режимах ее работы при малых возмущениях.
Это позволяет в расчетах статической устойчивости синхронные машины
с АРВ СД представлять в виде значений х = 0, (7 = const. При возникно-
вении больших возмущений в энергосистеме возбуждения, оснащенные
даже АРВ СД, не могут поддерживать постоянство напряжения на шинах
синхронных машин. Поэтому в начале переходного процесса синхронная
машина с АРВ СД может быть представлена аналогично машине с АРВ ПД-
ЭДС 77 или Е' за переходным сопротивлением х).
8.15. ФОРСИРОВКА ВОЗБУЖДЕНИЯ СИНХРОННЫХ МАШИН
Для поддержания напряжения в аварийных режимах используют уст-
ройства форсировки возбуждения. Это один из самых первых, простых и
эффективных способов управления электромеханическим переходным
процессом. Устройства обеспечивают быстрое повышение напряжения
возбуждения до максимально возможного, называемого обычно пото-
лочным значением U", при значительных снижениях напряжения,
вызванных, главным образом, КЗ в электроэнергетической системе. Отно-
шение этого напряжения или тока ротора соответственно к номинальному
напряжению или току называют кратностью форсировки кф = U^IU^.
Устройство форсировки возбуждения (УФВ) обычно входит в состав
АРВ или выполняется отдельно. На рис. 8.33 приведена принципиаль-
ная схема релейного УФВ, состоящая из реле минимального напря-
жения PH, подключенного к трансформатору напряжения TH и
21. Зак. 2182 321
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
промежуточного реле РП. Уставка напряжения срабатывания реле ми-
нимального напряжения обычно составляет (0,8-0,85) U.
Устройство форсировки действует следующим образом. При сниже-
нии напряжения до уставки реле PH оно срабатывает и воздействует на
обмотку промежуточного реле РП, которое своими контактами шунтирует
реостат Р в цепи обмотки возбуждения возбудителя. При этом ток возбуж-
дения возбудителя увеличивается до максимально возможного значения, а
следовательно, и напряжение возбуждения на обмотке ротора синхронной
машины нарастает сравнительно быстро до значения U" по экспоненци-
альной зависимости
Uf =Uf (8.11)
где AU = - Uf0 - амплитуда изменения напряжения возбуждения;
Г в - постоянная времени системы возбуждения.
Если УФВ входит в состав АРВ, то при срабатывании реле PH на сум-
мирующий усилитель АРВ подает такой сигнал, что независимо от вели-
чины и знаков сигналов на выходах других каналов регулирования обес-
печивается быстрое повышение напряжения возбуждения до потолочного
значения (рис. 8.34, а).
Поскольку к обмотке ротора синхронной машины прикладывается
максимальное напряжение возбуждения, то ток в ее обмотке, а следова-
тельно, и вынужденная ЭДС синхронной машины, увеличиваются с наи-
большей скоростью (рис. 8.34, б).
Увеличение ЭДС синхронной машины при действии УФВ приводит к
соответствующему увеличению амплитуды характеристики мощности в
322
8.15. Форсировка возбуждения синхронных машин
Рис. 8.34. Изменение напряжения возбуждения (а) и вынужденной ЭДС (б)
при форсировке возбуждения
аварийном режиме (рис. 8.35). Это позволяет уменьшить площадку уско-
рения на величину и увеличить площадку торможения на величину AfT,
что приводит к повышению динамической устойчивости. При этом сте-
пень влияния форсировки возбуждения на динамическую устойчивость
зависит от скорости и величины изменения напряжения возбуждения, ко-
торые определяются действием систем возбуждения и максимально воз-
можным значением напряжения возбуждения. Как отмечалось ранее, посто-
янная времени Г электромашинной системы возбуждения равна 0,3-0,5 с,
для тиристорной системы Гв = 0,02-0,04 с. Однако следует иметь в виду,
что для обеспечения высокой скорости увеличения ЭДС все системы воз-
буждения обязательно должны иметь высокий потолок возбуждения, так
как для быстрого увеличения тока в роторе необходима не только высокая
скорость изменения напряжения, но и его значение. Это вызвано тем об-
стоятельством, что ток возбуждения синхронной машины из-за наличия
индуктивности обмотки ротора возрастает значительно медленнее, чем Ur
Поэтому в аварийных режимах желательно повышение напряжения воз-
буждения до значения 4-5-кратного от номинального (высокий потолок
возбуждения). На рис. 8.36 показана кривая изменения напряжения воз-
буждения на обмотке ротора синхронной машины при различных видах
систем возбуждения.
Таким образом, быстродействие системы возбуждения и потолочное
напряжение возбуждения при действии УФВ определяют значение тока в
роторе, а следовательно, и степень изменения синхронной и переходной
ЭДС в аварийном режиме. Величинами их изменения и определяется вли-
яние форсировки возбуждения на характеристики мощности и в конечном
итоге на динамическую устойчивость системы. Так, использование тирис-
торной системы возбуждения с постоянной времени Т в = 0,04 с и к = 4
323
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.35. Характеристики мощности в аварийном и послеаварийном режимах р и
при отсутствии (/) и действии (2) форсировки возбуждения .
Рис. 8.36. Изменение напряжения возбуждения при различных системах возбуждения:
1 - тиристорная; 2 - электромашинная
вместо электромашинкой системы с параметрами Т в = 0,5 с, кф = 4 приво-
дит к увеличению динамической устойчивости на 15-20 %.
Многолетний опыт эксплуатации УФВ показал, что они являются од-
ним из эффективных средств повышения динамической устойчивости.
Вместе с тем действие форсировки в ряде аварийных режимов не позволя-
ет использовать все возможности систем возбуждения с АРВ по улучше-
нию динамической устойчивости и повышению качества переходного элек-
тромеханического процесса в электроэнергетических системах.
324
8.16. Аварийное управление мощностью турбин электростанций
8.16. АВАРИЙНОЕ УПРАВЛЕНИЕ МОЩНОСТЬЮ ТУРБИН
ЭЛЕКТРО СТАНЦИЙ
Проблема обеспечения устойчивости энергосистем существует из-за
возникающего в аварийных режимах небаланса мощности на валу синх-
ронных машин, приводящему к недопустимому их ускорению или тормо-
жению, следствием которых является потеря синхронизма. Если бы меха-
ническая мощность агрегатов могла достаточно быстро и точно изменять-
ся в соответствии с изменениями электрической мощности, то небалансы
мощности были бы устранены и, следовательно, нарушения динамичес-
кой устойчивости в энергосистемах были бы исключены. Однако суще-
ствующие системы регулирования паровых турбин пока не могут решить
такую задачу. Более того, системы регулирования, обычно применяе-
мые в нормальном режиме, из-за наличия инерции, органов с зонами
нечувствительности практически не реагируют в начале переходного
процесса и мощности турбин почти не изменяются. Для обеспечения
динамической устойчивости требуется быстрое изменение мощности
турбины при возникновении возмущения в энергосистеме. Поэтому для
быстрого управления мощностью турбины в аварийных режимах она
оснащается специальным электрогидравлическим преобразователем
(ЭГП), который позволяет вводить в систему регулирования электри-
ческие сигналы (импульсы) и тем самым осуществить быстродейству-
ющее управление регулирующих клапанов турбины. При этом проис-
ходит относительно быстрое уменьшение механической мощности на
валу агрегата, необходимое для обеспечения устойчивости в случае
сброса электрической нагрузки генератором. Различные аварийные
ситуации требуют различной глубины разгрузки, но по возможности
наибольшей скорости ее осуществления. Скорость разгрузки турбины
не может быть сколь угодно большой и ограничивается в основном
быстродействием регулирующих клапанов и наличием парового объе-
ма между ними и турбиной. Поэтому мощность турбины снижается
постепенно и ее изменение зависит от амплитуды U, длительности Т
и величины остаточного (7с управляющего сигнала от ЭГП. Изменяя его,
можно получить различные изменения механической мощности во време-
ни, которые называют импульсными характеристиками турбин (рис. 8.37).
После снятия управляющего сигнала регулирующие клапаны открывают-
ся и мощности агрегатов восстанавливаются до заданного значения, опре-
деляемого условиями устойчивости (рис. 8.38).
Рассмотрим влияние аварийной разгрузки турбины (APT) на устойчи-
вость системы при возникновении КЗ. Для этого на диаграмме характери-
стик мощности (рис. 8.39) нанесем изменение механической мощности
турбины Рт в функции угла 8.
22. Зак. 2182
325
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.37. Импульсная характеристика (/) турбины и график (2) управляющего
сигнала от ЭГП
Рис. 8.38. Изменение мощности турбины по условиям обеспечения устойчивости:
1 - динамической; 2 - статической и динамической; 3 - статической
326
&,i%. Автоматический ввод резервов генераторной мощности и оборудования
Рис. 8.39. Влияние аварийной разгрузки турбин на динамическую устойчивость
Из приведенных зависимостей видно, что существенное уменьшение
Рт наступает после времени отключения КЗ, длительность которых для
современных систем электроснабжения составляет 0,1-0,2 с. Поэтому APT
практически не уменьшает площадку ускорения, и это было одним из пре-
пятствий для его применения. Однако в конце переходного процесса Рт
начинает уменьшаться, что приводит к увеличению площадки торможе-
ния и критического угла с 8кр до 8“, определяющего предел синхронной
динамической устойчивости генератора.
Таким образом, применение APT позволяет повысить динамическую
устойчивость и быстро восстановить режим электростанции в послеава-
рийном режиме. Это ее главное достоинство. К недостаткам следует отне-
сти задержку в ограничении механической мощности, что в ряде аварий-
ных режимов снижает ее эффективность, а также возможность нарушения
устойчивости во втором и последующих циклах качаний из-за высокой
скорости восстановления мощности турбины. > ,
8.17. АВТОМАТИЧЕСКИЙ ВВОД РЕЗЕРВОВ ГЕНЕРАТОРНОЙ
МОЩНОСТИ И ОБОРУДОВАНИЯ
Для обеспечения устойчивости и надежности работы электроэнерге-
тических систем необходимо иметь определенный резерв генерирующей
мощности на электростанциях, а также резерв основного оборудования в
питающих и распределительных сетях.
327
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
На характер электромеханических переходных процессов непосред-
ственное влияние оказывает величина оперативного вращающегося резерва
мощности на электростанциях, предназначенного для компенсации неба-
ланса между производством и потреблением мощности. Это, прежде всего,
необходимо при: а) внезапной потере генерирующего источника; б) резком
увеличении нагрузки; г) аварийном уменьшении пропускной способности
межсистемных связей, по которым принималась мощность. Поскольку пе-
реходный режим в системах быстротечен, то ввод оперативного резерва
осуществляется автоматически при изменении режимных параметров или
состава работающего оборудования (подробнее смотри параграф 7.3). На-
личие резерва активной мощности на генераторах обеспечивает их работу
при малых углах сдвига ротора 8. Наличие резерва по реактивной мощно-
сти позволяет за счет быстрого увеличения тока возбуждения увеличить
амплитуду характеристики мощности. Уменьшение угла 8 и увеличение
амплитуды характеристики мощности улучшает как статическую, так и
динамическую устойчивость электроэнергетических систем.
Питающие и распределительные сети электрических систем проекти-
руют, как правило, таким образов чтобы обеспечить питание потребите-
лей от двух и более источников питания (по разным линиям, трансформа-
торам). В этом случае аварийное отключение одного из них не приводит к
нарушению электроснабжения потребителей. Однако в настоящее время
электроснабжение большинства потребителей, имеющих два и более ис-
точника питания, осуществляется по разомкнутой схеме. Применение та-
кой схемы электроснабжения во многих случаях оказывается целесооб-
разным для снижения токов КЗ, упрощения защиты оборудования, созда-
ния необходимого перетока мощности и т. п.
На рис. 8.40 приведены две типовые схемы одностороннего питания
при наличии двух источников. Недостатком одностороннего питания яв-
ляется прекращение электроснабжения потребителей при аварийном отклю-
чении источника (например, отключение линии Л-1 или трансформатора 7'2).
Электроснабжение потребителей может быть восстановлено путем быст-
рого автоматического включения выключателя, с помощью которого осу-
ществлено разделение питающей сети (например, включение выключате-
ля СВ или ВЗ, рис. 8.40). Включение выключателя осуществляется специ-
альным устройством автоматического включения резерва (АВР).
Использование АВР является эффективным мероприятием, повыша-
ющим устойчивость и надежность электроснабжения, так как позволяет
достаточно быстро восстановить электроснабжение. На рис. 8.41 приве-
ден типовой график изменения напряжения на шинах потребителей при
возникновении КЗ в питающей сети и действии АВР. Время нарушения
электроснабжения при действии типовых устройств
Рис. 8.40. Схемы питания потребителей с устройством АВР
потерю питания, отключения выключателя поврежденного источника,
включения выключателя ввода резерва и составляет 0,4-2 с. Для большей
части нагрузки такое время восстановления питания является достаточ-
ным для обеспечения надежной ее работы. Однако для промышленных
предприятий с непрерывным технологическим циклом, где преобладают
двигатели, при бестоковой паузе 0,3-0,4 с устойчивость работы мощных и
сильнозагруженных двигателей, особенно синхронных, нарушается. Это
приводит к отключению двигателей и нарушению технологического про-
цесса. Для повышения эффективности АВР в таких случаях используют
сочетание АВР с автоматической ресинхронизацией синхронных двигате-
лей [50]. Если ресинхронизация синхронных двигателей оказывается не-
успешной или происходит нарушение устойчивости других двигателей, то
целесообразно использовать быстродействующие устройства АВР (БАВР),
уменьшающие или вообще устраняющие бестоковую паузу. Принцип ра-
боты БАВР заключается в быстром включении резервного источника, на-
пример включении секционного выключателя СВ (см. рис. 8.40, а). Для
этого в устройствах БАВР предусматриваются быстродействующие дат-
чики потери питания основного источника. Пусковой орган БАВР дает
команду на опережающее включение выключателя СВ (как правило, ваку-
умного или тиристорного), чтобы замыкание контактов выключателя про-
изошло при нулевом угле между векторами напряжений обеих секций. Этим
обеспечивается синфазная подача питания на обесточенную секцию. Посколь-
ку время срабатывания БАВР составляет 0,2-0,4 с, то при этом бестоковая
329
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.41. Изменение напряжения на шинах потребителей при действии АВР
пауза для потребителя отсутствует (рис. 8.42), что позволяет в большинстве
случаев сохранить устойчивость двигательной нагрузки.
Для особо ответственных потребителей может быть рекомендована
схема резервного питания секции с поврежденным источником питания
через электромеханический преобразователь частоты (ЭМПЧ), выполнен-
ный в виде двух электрических машин ЭМ1 и ЭМ2 переменного тока с
жестко соединенными валами, статорные обмотки которых подключены к
различным секциям шин [51]. Один из вариантов такой схемы приведен на
рис. 8.43. В нормальном режиме электроснабжение потребителей осуще-
ствляется раздельно от двух секций шин, секционный выключатель СВ
отключен. Электрические машины ЭМПЧ осуществляют регулирование
напряжения или реактивной мощности на секциях шин. При повреждении
на какой-либо питающей линии, например Л-1, напряжение на 1-й секции
шин снижается и АРВ ЭМ1 увеличивает напряжение возбуждения, что в
значительной степени позволяет скомпенсировать уменьшение уровня на-
пряжения на шинах потребителей. При отключении линии Л-1 частота на
Рис. 8.42. Изменение напряжения на шинах потребителей при действии БАВР
330
И. 1Я. Пыдор схемы соединений электроэнергетической системы
Рис. 8.43. Схема электроснабжения потребителей с ЭМПЧ
1-й секции шин начинает снижаться и ЭМ1 переходит в режим генератора,
а ЭМ2 - в режим двигателя. Это позволяет через электромеханический
преобразователь от 2-й секции шин питать потребителей 1 -й секции шин
без перерыва их питания при повреждениях на линии Л-1 или трансфор-
маторе Т1. Поскольку при этом между секциями нет электрической связи,
то параметры аварийного режима одной из секции практически не влияют
на режим работы потребителя другой секции шин. Это позволяет повы-
сить уровень устойчивости и надежности электроснабжения потребите-
лей из-за невозможности передачи в аварийных режимах возмущений с
одной секции шин на другую и обеспечить бесперебойное электроснабже-
ние потребителей при повреждении одного из источников питания.
8.18. ВЫБОР СХЕМЫ СОЕДИНЕНИЙ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ
На переходные процессы и устойчивость электроэнергетических сис-
тем существенное влияние оказывает схема соединений отдельных ее эле-
ментов. Поэтому при выборе схемы коммутации основной электрической
сети с учетом ремонтов оборудования обязательно необходимо учитывать
ограничения по условиям статической и динамической устойчивости.
При определении ограничений по статической устойчивости для выб-
ранного варианта сети решаются следующие задачи: оценка статической
устойчивости заданного режима; определение предельно допустимых ре-
жимов по статической устойчивости; определение области статической
устойчивости в пространстве регулируемых параметров и выбор оптималь-
ных их значений. л1,
331
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Проверка динамической устойчивости осуществляется на основе ана-
лиза электромеханических переходных процессов системы при расчетных
возмущениях. Если необходимый уровень динамической устойчивости не
обеспечивается, то принимается решение об изменении схемы или режи-
ма системы.
При выборе варианта схемы основным условием, как правило, явля-
ется обеспечение наибольшей ее полноты в периоды максимальных на-
грузок. Сроки ремонтных и профилактических работ смещаются по воз-
можности на периоды более низких нагрузок. При оценке схемы элек-
трической системы часто используют понятие «жесткости схемы», оп-
ределяющее уровень устойчивости. Жесткость системы для конкрет-
ного узла нагрузки характеризуется величиной изменения напряжения
при увеличении нагрузки. Жесткость схемы соединения будет наиболь-
шей при включении в работу всех основных ее элементов: генер’аторов
линий, трансформаторов и выключателей. Такая наиболее жесткая схе-
ма, как правило, создает благоприятные условия для обеспечения ста-
тической устойчивости. В то же время повышение жесткости схемы
приводит к увеличению токов КЗ, мощность которых может стать боль-
ше, чем мощность отключения выключателей, что является недопус-
тимым. Кроме того, жесткая схема может приводить к определенным
трудностям в обеспечении динамической устойчивости. Поэтому в
электроэнергетических системах часто используется секционирование
сети, уменьшающее жесткость системы. Это является вынужденным
решением при выборе варианта сети с учетом уровня токов КЗ и дина-
мической устойчивости. В любом случае выбор исходного режима ра-
боты и схемы соединений системы должен быть осуществлен с учетом
условий устойчивости на основе опыта эксплуатации или расчетов элект-
ромеханических переходных процессов. Рискованные решения с выводом
в ремонт нескольких системообразующих линий приводят к крупным сис-
темным авариям [52]. ”
8.19. ОТКЛЮЧЕНИЕ ЧАСТИ СИНХРОННЫХ МАШИН
В АВАРИЙНОМ РЕЖИМЕ
Устойчивость электроэнергетических систем может быть улучшена
путем отключения части синхронных машин в процессе аварии или в пос-
леаварийном режиме. Рассмотрим устойчивость системы, изображенной
на рис. 8.44, а, при КЗ на одной из линий с последующим ее отключением
устройствами защиты. Поскольку при этом площадка ускорения больше
площадки торможения, то происходит нарушение устойчивости (рис. 8.44, б). Если
одновременно с отключением КЗ, а желательно еще и раньше, отключить
332
a
Рис. 8.44. Влияние отключения синхронных машин на динамическую устойчивость:
а - принципиальная схема системы; б - переходной процесс без отключения синхронных машин;
в - переходной процесс при отключении части синхронных машин *
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
часть электрических машин, то это приведет к снижению эквивалентной
механической мощности. Для системы с электрическими машинами оди-
наковой номинальной мощности и нагрузки эквивалентная механическая
мощность при отключении т машин составит • ; ...
„отк _ р п - т
Смех ~Л)------’ • (8.12)
п
где п - общее число работающих электрических машин.
Отключение электрических машин сопровождается увеличением их
эквивалентного сопротивления, что приводит к снижению амплитуды ха-
рактеристики электрической мощности:
- 1 ... . . г,ОТК г> Х J ~
, Лм = Лм -------------— (8.13)
? С : xd :'п т)- Хс
Поскольку снижение характеристики электрической мощности значи-
тельно меньше, чем снижение механической мощности, то отключение
синхронных машин приводит к увеличению площадки торможения f° >f*
(рис. 8.44, в). Необходимо также учитывать, что при отключении части
синхронных машин теряется и соответствующая часть кинетической энер-
гии, запасенной роторами машин в процессе ускорения. Поэтому условие
устойчивости в данном случае может быть записано в виде
/у±^</т°. (8-14)
п
Таким образом, отключение части синхронных машин, увеличивая
площадку торможения и уменьшая действенную площадку ускорения, при-
водит к улучшению устойчивости оставшихся синхронных машин. Эф-
фективность отключения может быть повышена путем целенаправленно-
го распределения реактивной нагрузки между параллельно работающими
синхронными генераторами [53].
Отключение части синхронных машин в аварийных режимах нашло
широкое практическое применение. Преимущества его заключаются в про-
стоте и быстродействии реализации. Однако применение этого способа
менее желательно, чем применение других мероприятий. Отключение син-
хронных двигателей может привести к нарушению технологических про-
цессов у потребителей. Отключение генераторов приводит к снижению
передаваемой мощности и необходимости набора мощности на других элек-
тростанциях или отключению части нагрузки, так как время пуска турбо-
генераторов после их отключения составляет от 20 минут до 2 и более
часов. Кроме того, процесс отключения агрегатов ТЭС не является «безбо-
лезненным» и может приводить к повреждению парогенераторов или тур-
бин. Поэтому на блоках тепловых электростанций вместо отключения ге-
334
8.20. Регулирование режима реактивной мощности синхронных машин
нераторов целесообразно применять автоматическую кратковременную
разгрузку турбин.
8.20. РЕГУЛИРОВАНИЕ РЕЖИМА РЕАКТИВНОЙ МОЩНОСТИ
СИНХРОННЫХ МАШИН
Выбор величины потребляемой и генерируемой реактивной мощ-
ности, а соответственно, и коэффициента мощности синхронной ма-
шины в электроэнергетической системе производится, как правило, исходя
из требуемого режима напряжения или реактивной мощности на электро-
станции или в узле нагрузки. Вместе с тем значение коэффициента мощно-
сти является весьма важным с точки зрения обеспечения устойчивости син-
хронной машины. Рассмотрим условия потребления (аналогично и пере-
дачи) одной и той же активной мощности Ро при различных coscp синхрон-
ной машины, включенной по схеме, изображенной на рис. 8.45, а. Постро-
им векторную диаграмму (рис. 8.45, в) для трех режимов: режим потребле-
ния реактивной мощности (ср = (рр 7 = 7 ); режим потребления только актив-
ной мощности (ср = 0,1 = 0); режим выдачи реактивной мощности (ср = <р2,
7 = 7р2). Из диаграммы видно, что значение ЭДС Е уменьшается при увели-
чении coscp в режиме потребления реактивной мощности. Это приводит к
понижению амплитуды характеристики мощности Р* = EUlx и ухудшению
Рис. 8.45. Влияние коэффициента мощности синхронной машины на режим ЭДС
335
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.46. Изменение характеристик мощности
в зависимости от режима реактивной мощности
условий устойчивости. При увеличении потребления реактивной мощно-
сти значение ЭДС Е продолжает уменьшаться и при определенной ее вели-
чине достигается предел передаваемой мощности по условиям устойчиво-
сти (рис. 8.46). Поэтому практически осуществимые режимы потребления
реактивной мощности ограничиваются максимально допустимой величи-
ной по условиям статической или динамической устойчивости. Следова-
тельно, для повышения устойчивости синхронных машин следует созда-
вать режимы с максимально возможной величиной генерации реактивной
мощности.
8.21. РЕГУЛИРОВАНИЕ ПЕРЕТОКОВ МОЩНОСТИ
ПО ЛИНИЯМ ЭЛЕКТРОПЕРЕДАЧИ
Рассмотрим одну из простейших схем, содержащих двухцепную ли-
нию электропередачи, объединяющую две энергосистемы (рис. 8.47, а).
Одну из энергосистем, передающую часть своей генерируемой мощности
по линии электропередачи, называют передающей, а вторую энергосисте-
му- приемной. В упрощенной расчетной модели каждую из энергосистем
можно представить в виде эквивалентной ЭДС Ес за сопротивлением хс, а
каждую из цепей линии электропередачи сопротивлением хл (рис. 8.47, б).
Эта схема весьма удобна для анализа процессов регулирования перетоков
мощности по межсистемной связи, поскольку в конечном итоге может быть
представлена еще более простой - одномашинной схемой.
Уравнение движения каждой из систем при передаче мощности Рл из
первой системы во вторую описывается уравнениями:
336
8.21. Регулирование перетоков мощности по линиям электропередачи
а
ЭС-1
б Е,
Рл
ЭС-2
а
Рис. 8.47. Упрощенная схема объединения двух энергосистем:
а - принципиальная схема; б - расчетная схема
: тл^г = рм1-Рн1-Рл;
2 Т)2^ = РМ2~Р112+Рл,
dr
где Т., Tfl - эквивалентные постоянные механические инерции агрегатов
систем;
Р , Р„2 ~ суммарные механические мощности агрегатов первой и вто-
рой систем;
Р Рн2 - мощность потребителей каждой из систем.
Для рассматриваемой схемы мощность, передаваемая по линии элект-
ропередачи, определяется выражением
(8.15)
Ес\Ес2 • <•
Рл ---------Sind!2,
л12
где §)2 = 8( - §2 - взаимный угол сдвига между векторами ЭДС Ес, и
энергосистем;
^12 = Xcl + Хс2'
Из уравнений (8.15) после несложных преобразований можно полу-
чить уравнение движения объединения из двух энергосистем в виде
* - J> dt1 ~ ~ ’
(8.16)
(8.17)
где
т •
Т^х-Р^-Т^Р^ -Рн2)
(8.18)
TJ^TJ2
(8.19)
337
Глава Я. Мероприятия по повышению устойчивости электроэнергетических систем
Уравнение (8.17) подобно уравнению, характеризующему электроме-
ханический переходной процесс для простейшей системы. Следователь-
но, для рассматриваемой схемы можно использовать угловые характерис-
тики мощности, определяемые уравнением (8.16), что весьма наглядно при
анализе условий обеспечения устойчивости передачи мощности по меж-
системной связи.
Согласно (8.16), максимальная передаваемая мощность по межсистем-
ной линии 7’лтах = Е^Еа/Хп соответствует углу 8|2 = 90° и характеризует
предел статической устойчивости. Динамическая устойчивость объединен-
ной энергосистемы будет обеспечена, если выполняется условие <f\
Рассмотрим наиболее характерные аварийные ситуации в объединен-
ной энергосистеме, приводящие к изменению перетока мощности по меж-
системной линии электропередачи.
1. Возникновение избытка генерируемой мощности в передающей
энергосистеме. Это возможно при уменьшении электропотребления или
отключении линии электропередачи, питающей потребителей. В этих ус-
ловиях величина Р в соответствии с (8.19), увеличит свое значение, на-
пример, до Ров (рис. 8.48). Однако при этом не следует ожидать резкого
наброса мощности на межсистемную линию электропередачи. Величина
перетока мощности по линии в первый момент аварийного возмущения
равна исходной мощности Р„ = Ро. Возникновение резкого избытка мощ-
ности будет иметь место на генераторах передающей системы, роторы ко-
торых начнут разгоняться. При этом угол 8 начнет увеличиваться, а сле-
довательно, и переток мощности по линии будет достаточно быстро возра-
стать. В зависимости от параметров объединенной системы и величины
возникшего избытка мощности возможно возникновение трех характер-
ных режимов для межсистемной линии электропередачи:
а) устойчивый режим перетока мощности, так как условия статической и
динамической устойчивости выполняются: Рл = Р; < Р/'1’;/' <fT. (рис. 8.48, а).
При этом устойчивый динамический переход сопровождается лишь допу-
стимым повышением частоты, значение которой в дальнейшем будет скор-
ректировано регуляторами частоты;
б) режим передачи мощности, при котором не выполняются условия
динамической устойчивости (рис. 8.48, б);
в) режим передачи мощности, при котором не выполняются условия
как динамической, так и статической устойчивости (рис. 8.48, в).
Следует отметить, что выполненный выше анализ изменения перето-
ков мощности по межсистемной линии выполнен без учета регулирующе-
го эффекта нагрузки и частоты, частотных характеристик агрегатов элект-
ростанций и действия регуляторов частоты. При возникновении избытка
мощности частота в объединенной энергосистеме будет повышаться, что
приведет к увеличению потребления и уменьшению мощности генерации
338
8.21. Регулирование перетоков мощности по линиям электропередачи
Рис. 8.48. Характеристики режимов передаваемой мощности по линии электропередачи-! :
при возникновении избытка мощности в передающей энергосистеме:
а - устойчивый режим; б, в - неустойчивые режимы
в энергосистемах. Это приводит к уменьшению небаланса мощности в
передающей энергосистеме и, наоборот, к увеличению его в приемной энер-
госистеме. Результирующий эффект влияния повышения частоты на вели-
чину перетоков мощности по межсистемной линии зависит от соотноше-
ния мощностей энергосистем и их частотных характеристик.
2. Возникновение дефицита мощности в приемной энергосистеме. Это
возмущение возможно в результате аварийного отключения мощных гене-
раторов на электростанциях, отключения питающей линии или увеличе-
ния нагрузки потребителей.
Из уравнений (8.16, 8.17, 8.19) следует, что процесс изменения пере-
тока мощности по межсистемной линии при дефиците генерирующей мощ-
ности в приемной энергосистеме будет аналогичен процессу при ее из-
бытке в передающей энергосистеме. При этом только относительный угол
будет увеличиваться не за счет увеличения скорости роторов генераторов
339
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
передающей системы, а за счет торможения роторов генераторов прием-
ной системы. Частота в объединении при таком возмущении будет не уве-
личиваться, а уменьшаться. Следовательно, возникающие при этом режи-
мы перетока мощности по межсистемной линии будут аналогичны преды-
дущему возмущению и определяются ранее рассмотренными условиями.
3. Отключение одной цепи межсистемной линии электропередачи.
Такое возмущение возникает при ложной работе защиты или ошибочных
действиях эксплуатационного персонала (рис. 8.49, а), но наиболее часто
бывает следствием КЗ на линии (рис. 8.49, б).
Электромеханический переходной процесс, возникающий при отклю-
чении одной цепи межсистемной линии, определяется относительным дви-
жением роторов генераторов энергосистем. Поскольку в первый момент
при отключении цепи происходит уменьшение перетоков мощности по
линии электропередачи с Ро до Р, (рис. 8.49, а), то электрическая мощ-
ность на генераторах передающей системы также уменьшается, что при-
водит к их ускорению. На генераторах приемной системы, наоборот, про-
исходит мгновенный сброс мощности и они тормозятся. Это приводит к
достаточно быстрому увеличению угла 5 и соответствующему увеличе-
нию перетока мощности по оставшейся в работе линии электропередачи.
Характер электромеханического переходного процесса, возникающего в
этом случае, определяется выполнением условий статической и динами-
ческий устойчивости. При этом если отключению линии предшествовало КЗ,
то условия сохранения синхронной динамической устойчивости значитель-
но ухудшаются из-за увеличения площадки ускорения (рис. 8.49, б).
Для предотвращения нарушения устойчивости по линиям электропе-
редачи применяется автоматическая их разгрузка, уменьшающая генери-
руемую мощность в передающей энергосистеме и увеличивающая гене-
рируемую мощность или снижающая нагрузку в приемной энергосистеме.
Как показывает опыт эксплуатации, для обеспечения устойчивости наибо-
лее эффективно одновременное воздействие в обеих объединяемых энер-
госистемах, например снижение генерирующей мощности в передающей
системе и нагрузки в приемной системе.
Для уменьшения генерирующей мощности, с целью сохранения ус-
тойчивости при отключении или КЗ на линиях электропередачи, исполь-
зуется отключение части генераторов или автоматическая разгрузка тур-
бин. В приемной энергосистеме применяется автоматическая загрузка ре-
зервных генераторов и отключение части потребителей устройствами
САОН. При этом скорость набора нагрузки на резервных генераторах при-
нимается максимально возможной по условиям работы оборудования элек-
тростанций. Учитывая, что срабатывание САОН приводит к ущербу у по-
требителей, то этот вид регулирования перетоков мощности по линии элек-
тропередачи применяется только в том случае, когда предотвратить нару-
340
8.22. Отделение электростанций или части генераторов в аварийных режимах
> . Рис. 8.49. Характеристики режимов передаваемой мощности
j ; . по линии электропередачи при отключении одной цепи: ,
....... Рт - исходная характеристика с двумя цепями;
Д, - характеристика с одной линией; Рв - характеристика при КЗ;
’ а - без КЗ; 5-с КЗ ...
шение устойчивости другими способами не представляется возможным.
Выбор способа регулирования и величины его воздействия в энергосисте-
мах для обеспечения устойчивости перетока мощности по линиям элект-
ропередачи определяется на основании большого числа предварительно
проведенных расчетов электромеханических переходных процессов энер-
гообъединений или использования управляющих ЭВМ [24, 56].
8.22. ОТДЕЛЕНИЕ ЭЛЕКТРОСТАНЦИЙ ИЛИ ЧАСТИ
ГЕНЕРАТОРОВ В АВАРИЙНЫХ РЕЖИМАХ
Многолетний опыт эксплуатации энергосистем показывает, что ряд
системных аварий, сопровождающихся дефицитом мощности, несмотря
на наличие различных противоаварийных средств, заканчивается останов-
кой электростанций с потерей ими собственных нужд. Такие системные
аварии являются для потребителей одними из самых серьезных по своим
последствиям из-за вызываемого ими значительного времени перерыва
электроснабжения. Это время определяется необходимостью выполнения
операций по подаче напряжения и пуску электродвигателей собственных
нужд, постепенному набору нагрузки на тепловых электростанциях и со-
ставляет для современных энергосистем от 0,5 до 6 ч. Поэтому для сохра-
нения собственных нужд электростанций при возникновении аварийных
режимов с глубокими и длительными понижениями частоты и напряжения
применяется отделение от энергосистемы ряда генерирующих источников
341
Iлава 8. Мероприятия по повышению устойчивости электроэнергетических систем
с примерно сбалансированной нагрузкой собственных нужд и наиболее
ответственных потребителей. Это позволяет ускорить процесс восстанов-
ления нормальной работы тепловых электрических станций и потребите-
лей в послеаварийных режимах. Отделяться от энергосистемы могут, на-
пример, все или часть агрегатов, отдельные блоки электростанций [53, 54].
На рис. 8.50 приведена в качестве примера схема электрических свя-
зей электростанции небольшой мощности с энергосистемой ЭС.
При глубоких снижениях частоты, а также при одновременном и зна-
чительном уменьшении частоты и напряжения делительная автоматика
станции (ДАС) действует в зависимости от баланса мощности электро-
станции и нагрузки. Так, если мощность электростанции балансируется
с нагрузкой то ДАС действует на отключение выключателей В1 и В2.
Если же мощность электростанции балансируется с нагрузкой S + S, то
ДАС должна действовать на отключение выключателей В5 и В6. Возможны
также случаи, когда мощность электростанции не балансируется даже с на-
грузкой и S2. В этих случаях ДАС должна действовать на отключение вык-
лючателей в сети, например, В9. Однако в любом случае полного баланса
никогда достичь не удается. Это достигается действиями АРС генераторов
при избытке генерирующей мощности, при недостатке - действиями АЧР.
Следует отметить, что отделение генерирующего источника в особо
тяжелых, как правило, предварительно не предусмотренных аварийных
режимах является весьма важным противоаварийным мероприятием, так
как является фактически последней «линией обороны», позволяющей со-
хранить в работе тепловые электростанции и предотвратить погашение
части или всей энергосистемы. Однако необходимо учитывать, что исполь-
зование выделения генераторов в аварийных ситуациях, как правило, уве-
личивает возникший дефицит мощности в энергосистеме. Это объясняет-
ся тем, что при отделении электростанции или генераторов в аварийных
условиях не удается обеспечить баланс мощности в отделившемся районе,
и выделенная нагрузка, как правило, меньше располагаемой мощности ге-
нераторов. Поэтому мощность генераторов при отделении используется
несколько меньше, чем при их работе в энергосистеме.
Пример 8.1. Для увеличения пропускной способности электрической
системы, показанной на рис. 8.51, включается устройство продольной ком-
пенсации.
Параметры элементов системы в относительных единицах:
xd = 0,18; хт = 0,12; хл1 = 0,3; хупк = 0,2;
хл2 = 0,35; хАТ = 0,14; Е = 1,2;U = 1.
Требуется определить:
1. Изменение предельной передаваемой мощности системы по усло-
вию статической устойчивости при включении УПК.
342
Рис. 8.50. Принципиальная схема энергорайона с действием ДАС
8.22. Отделение этекшростанций или части генераторов в аварийных ре.
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
I
|
I
i
I
I
I
i
1
1
i
!
1
I
I
Рис. 8.51. Схемы электрической системы с УПК:
а - принципиальная; б - замещения
2. Степень компенсации индуктивного сопротивления линии электро-
передачи.
Решение. Найдем общее индуктивное сопротивление системы без УПК:
Предельная передаваемая мощность системы без УПК:
рпр = ^,1+1 = 1,,.
’ 1,09
Общее сопротивление системы с УПК: “ “* - - '
xdУПК = XPL ~ХУПК =1,09 — 0,2 = 0,89. .
Предельная передаваемая мощность системы с УПК:
УПК. EU _ 1,2 1
пр У 0 89 ’
лбУПК
Изменение предельной передаваемой мощности системы при включе-
нии УПК:
рУПК _ р 13S — 11
ДР = _!Ш------HL 100 % = ---У- 100 % = 22,7 %.
пр р И
1 пр 1,1
Степень компенсации:
. . k ±УПК=_9а_ = О,31.
с хл 0,3 + 0,35
Таким образом, при включении УПК, обеспечивающей степень ком-
пенсации = 0,31, предельная передаваемая мощность по условию стати-
ческой устойчивости увеличивается на 22,7 %.
Пример 8.2. Электростанция с пятью однотипными блоками (и = 5) свя-
зана с объединенной энергосистемой линиями электропередачи (рис. 8.52, а).
В качестве расчетного возмущения рассматривается отключение одной из
линий электропередачи при КЗ. Параметры режимов в относительных еди-
ницах:
34
344
8.22. Отделение электростанций или части генераторов в аварийных режимах
1. Амплитуды угловых характеристик мощности:
♦ в исходном режиме 1,55;
♦ в режиме КЗ PJ' = 0,2;
♦ при отключении линии PJ" =1,1.
2. Активная мощность станции в исходном режиме Ро = 1,0.
3. Исходный режим характеризуется углом 50 = 40°, отключение КЗ
происходит при 5отк = 70°.
Требуется:
1. Выполнить оценку динамической устойчивости генераторов элект-
ростанции при расчетном возмущении.
2. В качестве мероприятия для обеспечения устойчивости электростан-
ции рассмотреть отключение части синхронных машин. Определить ми-
нимально необходимое количество отключаемых блоков для сохранения
динамической устойчивости. При этом принять угол отключения генера-
торов равным углу отключения КЗ линии электропередачи.
Решение. Находим величину площадки ускорения при КЗ:
’-\отк
/у = И -sin5W5 = -^т-^о(5агк -5о) + (cos5OTK -cos50) = 3 4
-• 180
§0
3 14
= • 1' (70° - 40°) + 0,2 (cos 70° - cos 40°) = 0,44.
Величина критического угла при отключении линии электропередачи:
5КП = 180° - arcsin= 180° - arcsin — = 115°.
КР „ш I 1
•"м ’
Площадка торможения при отключении линии электропередачи:
8кр
/т = f(P™ sin 5-P0)d5 = -P®(cos5Kp -COS5OTK)--^-Р0(5кр - 50TK) =
S 180
^отк
3 14
= -1,1 • (cos 115° - cos 70°) — -1 • (115° - 70°) = 0,06.
180° .
Таким образом, динамическая устойчивость электростанции на-
рушается при расчетном возмущении, поскольку^ = 0,44 >Д = 0,06
(см. рис. 8.52, б). Поэтому для обеспечения устойчивости рассмотрим
вариант отключения части блоков электростанции. Поскольку их от-
ключение происходит одновременно с отключением КЗ, то величина
площадки ускорения не изменится. Величина площадки торможения
будет зависеть от количества отключаемых блоков. При отключении
одного блока (т = 1) механическая мощность электростанции опреде-
ляется согласно уравнению (8.12):
:23. Зак. 2182 345
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
Рис. 8.52. Оценка влияния отключения блоков электростанции
на динамическую устойчивость:
а - принципиальная схема электростанции; б - без отключения блоков;
в — отключение одного блока; г - отключение двух блоков
346
Контрольные вопросы
Р1=Ро^-^ = 1^-1 = О,8.
п 5
Величина критического угла при отключении одного блока электро-
станции:
Р\ 0 8 . -
5k.nI = 180° -arcsin—^— = 180° -arcsin— = 134°.
hPJ pH! ] 1
гм ’
Площадка торможения при отключении одного блока электростанции:
5кР1
/Т1 = j(P'n sin5-P\)db = -P',!(cos5Kpl-cos5OTK)/Жр1 -50тк) =
e 180
^отк
. T = -1,1 • (cos 134° - cos 70°) - • 0,8 (134° - 70°) = 0,24.
180°
Поскольку, согласно (8.14),^(4/5) = 0,35 >fTt =0,24 (см. рис. 8.52, s), то
динамическая устойчивость электростанции при расчетном возмущении
даже при отключении одного блока не сохранится. Поэтому рассмотрим
режим при отключении уже двух блоков. В этом случае механическая мощ-
ность электростанции согласно выражению (8.12):
5-2
Л=1--------= 0.6. V
•г "5
Критический угол при отключении двух блоков электростанции:
Зкп2 = 180°-arcsin-^- = 180°-arcsin— = 147°. .
к'1- рШ и -
гм 1
Площадка торможения при отключении двух блоков электростанции:
5кр2
/т2 = sin5-P2)<75 = (cos5Kp2 ~cos5OIK)------^Р2(3 * 5кР2 ~5отк) =
о 180
^отк
3 14
= -1,1 - (cos 147° - cos70°)---0.6 • (147° - 70°) = 0,5.
180°
Поскольку<f^ (см. рис. 8.52,0), то динамическая устойчивость элек-
тростанции при таком противоаварийном воздействии сохраняется. Сле-
довательно, для обеспечения устойчивости электростанции при рассмат-
риваемом возмущении необходимо отключить минимум два блока.
Контрольные вопросы
1. Каковы основные группы мероприятий по улучшению устойчивости?
2. Какие мероприятия основаны на улучшении параметров основных
элементов электроэнергетических систем?
347
Глава 8. Мероприятия по повышению устойчивости электроэнергетических систем
3. Как влияют индуктивные сопротивления электрических машин на
устойчивость?
4. Каково влияние постоянной механической инерции электрических
машин на динамическую и статическую устойчивость?
5. В чем заключается преимущество применения асинхрони-
зированных и синхронных машин с продольно-поперечным воз-
буждением?
6. Как влияет изменение параметров трансформаторов и вида их ней-
тралей на устойчивость?
7. Какими мероприятиями могут быть изменены параметры линий элек-
тропередачи?
8. Каково влияние применения линий и вставок постоянного тока на
устойчивость электроэнергетических систем?
9. Как влияет вид и длительность КЗ на предельную передаваемую
мощность?
10. Какие мероприятия относятся к дополнительным средствам повы-
шения устойчивости?
11. Почему продольная емкостная компенсация увеличивает устойчи-
вость систем?
12. Каково влияние синхронных компенсаторов на устойчивость элек-
трических систем?
13. Почему переключательные пункты на линиях электропередачи улуч-
шают условия устойчивости?
14. Что понимается под электрическим торможением?
15. В каких случаях применение реакторов приводит к повышению
устойчивости?
16. Какие средства автоматики наиболее эффективны для улучшения
устойчивости?
17. Каковы основные преимущества и недостатки систем возбужде-
ния синхронных машин?
18. Какие функции возлагаются на автоматические регуляторы воз-
буждения синхронных машин?
19. Каково принципиальное отличие АРВ пропорционального и силь-
ного действия?
20. Как форсировка возбуждения синхронных машин влияет на их ус-
тойчивость?
21. Как управлением мощностью турбин можно обеспечить устойчи-
вость системы?
22. Как изменяется напряжение на шинах потребителей при действии
быстродействующего АВР?
23. Какие мероприятия по улучшению устойчивости можно считать
эксплуатационными?
348
Контрольные вопросы
24. В каких случаях отключением части генераторов можно сохранить
устойчивость системы?
25. Как режим реактивной мощности синхронной машины влияет на
ее устойчивость?
26. Каковы наиболее характерные аварийные ситуации, приводящие к
изменению перетока мощности по межсистемным линиям электропередачи?
27. Какие мероприятия используются для регулирования перетоков
мощности в аварийных режимах?
28. Зачем от энергосистемы отделяются электростанции или части ге-
нераторов в аварийных режимах?
Приложение
ПРИЛОЖЕНИЕ
Примеры возникновения и развития системных аварий
с нарушением устойчивости
Электроэнергетическая система, как и любой другой технический объект, по
разным причинам может из нормального состояния перейти в ненормальное - ава-
рийное состояние. Такое состояние энергосистемы, называемое обычно аварией,
характеризуется недопустимыми параметрами режима: перетоками мощности,
напряжениями, частотой, токами и т. д. Если авария затрагивает только один или
несколько элементов в отдельном энергорайоне системы, то это - местная или ло-
кальная авария. Однако авария может захватить всю или значительную часть энер-
госистемы, т. е. превратится в системную аварию, которая является катастрофой в
жизни одной или даже нескольких стран. Это связано с тем, что большинство сис-
темных аварий заканчиваются полным погашением потребителей на огромных
территориях. При этом останавливаются производства, системы водоснабжения,
лифты, метро, железнодорожный транспорт, перестают работать аэропорты, связь
и т. д. Так, при аварии на северо-востоке США и Канады в 2003 году были погаше-
ны потребители мощностью 62 000 МВт. Без электроснабжения остались 50 мил-
лионов человек, проживающих на территории около 24 тысяч квадратных кило-
метров. При этом электроснабжение Нью-Йорка было восстановлено только за 24 ч,
а время подачи электропитания всем потребителям составило 44 ч.
Нарушение устойчивости является причиной развития многих системных ава-
рий [6, 52, 56]. Рассмотрим в качестве примеров несколько из них.
В энергосистеме Франции 19 декабря 1978 года в 8 ч 26 мин произошла тя-
желая системная авария, в результате которой было нарушено электроснабжение
промышленных и бытовых потребителей с общей нагрузкой около 30 млн кВт (при-
мерно 75 % суммарной нагрузки ЭС); недоотпуск электроэнергии оценивается в
100 млн кВт-ч. Режим, предшествующий аварии (8 ч 00 мин), характеризовался
следующими данными: суммарная нагрузка 37,3 млн кВт (на 1,4 тыс. МВт выше
прогноза); мощность электростанций Франции 33,8 тыс. МВт (на 700 МВт выше зна-
чения, заданного графиком); импорт мощности 3,4 млн кВт (на 340 МВт выше значе-
ния, заданного графиком); напряжения в сети 400 кВ были пониженными на 5-10 %
(обычно поддерживается уровень выше 400 кВ). Схема сети приведена на рис. П. 1.
Увеличение нагрузки объясняется в первую очередь очень холодной погодой,
установившейся в тот день на территории Франции. Большие перетоки мощности
из восточной и северо-восточной частей страны в ее центральную часть были выз-
ваны главным образом стремлением экономить воду на ГЭС (ввиду маловодности
предшествующего периода) за счет максимально возможной загрузки ТЭС и АЭС
и увеличения импорта электроэнергии. Следует также отметить чрезвычайно быс-
трый рост нагрузки в часы утреннего максимума - 4500 МВт с 7 до 8 ч (обычно до
3000 МВт) и 1200 МВт (с 37,3 тыс. МВт до 38,5 тыс. МВт) с 8 ч 00 мин до 8 ч 26 мин.
Вследствие этого был полностью использован регулировочный резерв активной
мощности. Одновременно с 8 ч 00 мин до 8 ч 23 мин на ТЭС центрального района
была потеряна по разным причинам мощность 720 МВт.
Дефицит мощности, возникший вследствие дополнительного роста нагрузки
и потери мощности на ТЭС, был покрыт за счет загрузки ГЭС в разных районах
Франции и увеличения импорта электроэнергии из Бельгии и ФРГ (150 МВт).
350
приложение
Рис. II. 1. Схема, поясняющая развитие и ликвидацию аварий в энергосистеме Франции
В режиме, предшествующем аварии, имела место перегрузка линий электро-
передачи, идущих с востока страны к центральному району EdF.
В 8 ч 00 мин оперативный персонал получил сигнал о срабатывании первой
ступени защиты от перегрузки по току одной из линий 150 кВ, а в 8 ч Об мин -
линии 400 кВ.
Для анализа развития аварии следует иметь в вид}', что все линии электропе-
редачи напряжением 150-400 кВ во Франции оснащены специальными токовыми
защитами от перегрузки, действующими на отключение линий с тремя устав-
ками: 20 мин - при перегрузке менее 20 % от номинального тока линии; 20 с -
при перегрузке, превышающей 20 %; 3 с - при перегрузках от 50 до 100 %.
Необходимость применения подобных защит в основной сети объясняется от-
сутствием в законодательстве каких-либо ограничений на сооружение зданий
непосредственно под воздушными линиями электропередачи, кроме оговари-
ваемой в каждом конкретном случае высоты постройки. Таким образом, на-
стройка токовых защит от перегрузки выбирается исходя из максимально допус-
тимой стрелы провеса провода.
351
Приложение
Для разгрузки перегруженных линий оперативным персоналом был пред-
принят ряд мер (разгрузка электростанций на северо-западе страны, измене-
ние схемы сети 220-500 кВ), но они были недостаточно эффективными. Вслед-
ствие увеличения перетока мощности произошло дальнейшее понижение на-
пряжения на шинах подстанций 400 кВ: Креней-до 342, Вьелмулэн-до 352,
Авелен - до 357 кВ и т. д.
В 8 ч 20 мин диспетчер национального диспетчерского центра дал указание
диспетчерам энергорайонов снизить напряжение у потребителей в центральном и
западном районах на 5 % для разгрузки линий электропередачи и восстановления
нормального напряжения в основной сети. Эта команда, однако, была оперативно
выполнена лишь в западном энергорайоне, оснащенном системой телеуправления
устройствами изменения коэффициента трансформации понижающих трансфор-
маторов распределительной сети. Следует отметить, что в сложившихся крайне
тяжелых условиях единственно правильной мерой было бы отключение нагрузки
в центральном районе, что позволило бы устранить перегрузку линий электропе-
редачи и повысить напряжение в основной сети.
В результате, после последовательного отключения нескольких линий элект-
ропередачи напряжением 150, 220, 400 кВ, произошло нарушение статической ус-
тойчивости, затем отделение энергосистемы ФРГ с восточной частью энергосис-
темы Франции. Одновременно произошло отделение энергосистемы Испании, а
также отключение ряда внутрисистемных линий 220 и 400 кВ. В основном (за не-
которыми исключениями) деление сети происходило в соответствии с програм-
мой, установленной EdF: на первом цикле асинхронного хода отделяются все вне-
шние связи; на втором происходит разделение основной сети Франции на семь
районов; на третьем выделяются парижский район и район крайнего юга. В отде-
лившихся районах произошло дальнейшее понижение напряжения.
Основной причиной последовательного развития аварии, приведшей к полно-
му прекращению электроснабжения потребителей в отделившихся районах, яви-
лась несогласованность действий АЧР и автоматики выделения энергоблоков ТЭС
на изолированную работу при снижениях частоты и напряжения в энергосистеме.
В частности, автоматикой от понижения напряжения ([7р = 0,7С7ном; Zcp = 3 с) в
парижском районе при частоте, близкой к 50 Гц, были отключены энергоблоки
суммарной мощностью 2500 МВт, что вызвало снижение частоты и развитие аварии.
После этого в течение 10 с были отключены еще девять блоков (из них три в
парижском районе), а также ряд линий. При этом действовали защиты от асинх-
ронного хода, минимального напряжения, а также первая очередь делительной ав-
томатики при понижении частоты до 47,8 Гц. В результате сеть разделилась на
четыре части: восток, Альпы и юго-восток; север, парижский район и Нормандия;
запад; юго-запад. При этом частота в парижском районе понизилась до 45 Гц.
В течение последующих 10 с оставшиеся в парижском районе агрегаты отклю-
чались от сети или выделялись на собственные нужды автоматикой, действующей
при понижении частоты. К концу этого периода, когда частота снизилась до 40 Гц,
произошло отделение парижского района от северного. Аналогичные процессы
происходили в западном и юго-западном районах, где частота при этом понизилась
до 35 и 30 Гц соответственно. В северном районе после его отделения действовала
АЧР, и оставшаяся в работе сеть 220 кВ продолжала работать с частотой 48 Гц.
352
приложение
Во время аварии в отдельных районах энергосистемы, выделившихся с дефи-
цитом активной мощности, действовали АЧР и автоматика деления основной сети
при снижении частоты, что, однако, не предотвратило полного прекращения элек-
троснабжения потребителей в парижском, южном и юго-западном районах. В ос-
тавшейся в работе основной сети (восточная и северо-восточная части, а также
линии Сен-Вюльба - Бэйе - Мармань — Эгюзон) восстановилось нормальное на-
пряжение около 410 кВ.
В 8 ч 27 мин операциями на подстанции Мармань началось восстановление
сети и нагрузки парижского района (см. рис. П.2). Северный район оставался связан-
ным с энергосистемой Бельгии. К 9 ч 05 мин была почти полностью восстановлена
сеть 400 кВ, питание собственных нужд электростанций парижского и западного
районов, в это же время происходило восстановление электропитания нагрузки.
Слишком быстрое восстановление электропитания центральных и западных
районов страны через транзит 400 кВ Сен-Вюльба - Бэйе - Мармань - Эгюзон
вызвало новое снижение напряжения в сети 400 кВ и перегрузку отдельных линий
400 и 220 кВ. В 9 ч 08 мин защита от перегрузки вновь отключила ряд линий 400 и
220 кВ, что задержало ликвидацию аварии. Повторное включение нагрузки произ-
водилось более осторожно от сетей разных районов энергосистемы: парижский
район - от восточного; область Рона - Альпы от района северных Альп; юго-запад -
от энергосистемы Испании и местных ГЭС. Схема основной сети была полностью
восстановлена к 12 ч дня.
Можно отметить следующие причины, приведшие к возникновению развития
аварии в энергосистеме Франции:
♦ недостаточность резервов реактивной мощности, что вызвало снижение
напряжения в основной сети до аварийного уровня;
♦ необоснованность применения на всех основных линиях электропередачи
Рис. П.2. График восстановления нагрузки в энергосистеме Франции
24. Зак. 2182
353
Приложение
♦ нечеткость действий оперативного персонала, который для ликвидации пе-
регрузки линий и восстановления нормального напряжения в основной сети дол-
жен был дать команду на отключение нагрузки в центральном районе;
♦ неудовлетворительная настройка устройств АЧР и несогласованность их
действия с автоматикой минимального напряжения, отключающей агрегаты, что
привело к полному обесточиванию ряда районов (парижского, западного и юго-
западного);
♦ неэффективное действие устройств АЧР, часть которых отказала из-за рез-
кого снижения напряжения;
♦ отсутствие автоматики, действующей на отключение нагрузки при опасном
понижении напряжения.
В Белорусской энергосистеме 31 мая 1979 года произошла системная ава-
рия, вызвавшая погашение крупных электростанций и потребителей суммарной
мощностью 1680 МВт. На рис. П. 3 приведена упрощенна схема основной сети
Белорусской энергосистемы, которая входила в состав ОЭС Северо-Запада ЕЭС
СССР (Литва, Латвия, Эстония и северо-западная часть России). В плановом ре-
монте находились ВЛ - 330 кВ Гродно - Алитус и Лукомльская ГРЭС - Северная.
Остальная основная сеть 110-220-330 кВ работала в нормальном режиме. Из-за
дефицита топлива частота в энергосистеме была равна 49,52 Гц. Стояла ясная, сол-
нечная погода и ничто не предвещало беды. На смене главной диспетчерской службы
(ГДС) дежурили старший диспетчер А. И. Тумаш и диспетчер В. И. Бируля.
Чернобыльская АЭС
..... Воздушные линии 220 кВ
। Воздушные лнини 330 кВ Ремонт воздушных линий
Рис. П.З. Схема основной электрической сети ОЭС Беларуси по состоянию на 1979 год
354
приложение
Авария развивалась следующим образом:
1. Из-за возмущений в ОЭС Северо-Запада в 8 ч 46 мин - 8 ч 48 мин отключи-
лись релейными защитами ВЛ - 750 кВ Ленинградская - Конаковская ГРЭС,
ВЛ - 330 кВ Акуловка — Бологое, ВЛ - 220 кВ Дорогобуж - Черепеть и практичес-
ки одновременно ВЛ - 330 кВ Витебск - Талашкино. В Белорусской энергосисте-
ме увеличилась нагрузка на всех транзитных линиях электропередачи 220 330 кВ:
по ВЛ -330 кВ Лукомльская ГРЭС-Восточная с 510 МВт до 780 МВт, по ВЛ-330 кВ
Гомель - Чернобыльская АЭС с 360 до 580 МВт. Частота в энергосистеме возросла
до 50,1 Гц, возникли синхронные качания.
В связи с отключением ВЛ-330 кВ Витебск-Талашкино на Лукомльской ГРЭС
от устройства АПН У отключился блок № 1 номинальной мощностью 300 МВт.
В 8 ч 54 мин от дифференциально-фазной защиты с неуспешным АПВ отключи-
лась ВЛ - 330 кВ Лукомльская ГРЭС - Северная, что привело к срабатыванию
устройств САПАХ и отключению ВЛ - 220 кВ Осиповичи - Колядичи, Солигорск -
Барановичи и Солигорск - ГРЭС-15.
При этом центральная и западная часть энергосистемы, включая Минскую
ТЭЦ-3, Березовскую ГРЭС (ГРЭС-15), Гродненскую ТЭЦ-2 (ТЭЦ-23) по ЛЭП 330 кВ
Вильнюс - Северная, выделилась на параллельную работу с ОЭС Северо-Запада, а
восточная часть - с ОЭС Украины.
2. В 9 ч 02 мин по команде диспетчера ГДС включена ВЛ - 330 кВ Лукомльс-
кая ГРЭС - Восточная, а затем - отключенные устройствами САПАХ ВЛ - 220 кВ.
Таким образом параллельная работа энергосистемы была восстановлена.
3. В 9 ч 24 мин защитой от повышения напряжения отключилась ВЛ - 330 кВ
Гомель - Чернобыльская АЭС. Нагрузка на ВЛ - 330 кВ Вильнюс - Северная воз-
росла до 600 МВт, а в отдельные моменты (при качаниях) до 750 МВт.
4. В 9 ч 39 мин от релейной защиты с неуспешным АПВ отключилась ВЛ 330 кВ
Вильнюс - Северная. Белорусская энергосистема выделилась на изолированную
работу', частота снизилась до 47,6 Гц, сработали устройства АЧР. За счет мобилиза-
ции внутренних генерирующих источников (Лукомльская ГРЭС за 6 мин форсиро-
ванно набрала нагрузку с 1200 до 1920 МВт) и работы АЧР частота в энергосисте-
ме увеличилась до 49,7 Гц.
5. В 9 ч 48 мин повторно отключилась ВЛ - 330 кВ Лукомльская ГРЭС - Вос-
точная с неуспешным ОАПВ и успешным трехфазным АПВ. При этом от устрой-
ства АПНУ на Лукомльской ГРЭС отключился блок № 3 номинальной мощностью
300 МВт. Автоматика по заложенному в него алгоритму сработала правильно, но в
данной аварийной ситуации в отключении блока не было необходимости, это лишь
увеличило дефицит генерирующей мощности и частота в энергосистеме снизи-
лась до 48,6 Гц.
6. В 9 ч 52 мин еще раз отключилась ВЛ - 330 кВ Лукомльская ГРЭС - Восточ-
ная. Устройствами САПАХ отключены ВЛ - 220 кВ Осиповичи - Колядичи, Соли-
горск - Барановичи и Солигорск - ГРЭС 15.
Белорусская энергосистема разделилась на две изолированно работающие
части. Восточная часть энергосистемы - с избытком мощности, а центральная и
западная часть - с дефицитом мощности 650 МВт. Устройствами АЧР отключены
потребители мощностью 568 МВт и частота снизилась до 46,9 Гц. В этой ситуации
диспетчером ГДС дана команда на отключение потребителей согласно графику
355
Приложение
аварийных отключений одновременно трех очередей. Частота кратковременно воз-
росла до 48,1 Гц, а затем снова начала снижаться до 46,2 и ниже. Из-за значитель-
ного снижения частоты произошло резкое уменьшение производительности пита-
тельных насосов электростанций.
7. В 9 ч 58 мин технологическими защитами по снижению уровня в барабанах
котлов и понижения давления масла в системе регулирования турбин закрылись
регулирующие, а затем и стопорные клапаны турбин Березовской ГРЭС и Минс-
кой ТЭЦ-3. Практически одновременно сработала делительная автоматика на Мин-
ской ТЭЦ-3, однако из-за опоздания эффекта повышения живучести станции не
последовало. Это привело к еще большему дефициту мощности, вызвавшему ла-
вину частоты и напряжения, погашению Березовской ГРЭС и Минской ТЭЦ с соб-
ственными нуждами, исчезновению напряжения на шинах подстанций 330 кВ Се-
верная и Восточная, всех подстанций 220,110 кВ в центральной и западной частях
энергосистемы. Гродненская ТЭЦ-2 отделилась от энергосистемы со сбалансиро-
ванной нагрузкой 90 МВт. Аналогично отделились Минская ТЭЦ-2 (26 МВт), Смо-
левичская ГРЭС (25 МВт), Барановичская ТЭЦ (9 МВт), Пинская ТЭЦ (3 МВт),
Лидская ТЭЦ (3 МВт). В результате аварии были полностью погашены города Брест,
Молодечно, а также Минск, Гродно, Барановичи, Лида, за исключением нагрузки
выделившихся ТЭЦ.
8. В этой сложной ситуации диспетчеры ГДС Белорусской энергосистемы по-
казали высокий профессионализм, оперативность и устойчивость работы. Для лик-
видации аварийной ситуации в 10 ч 05 мин по просьбе диспетчера ГДС включена
ВЛ - 330 кВ Вильнюс - Северная. Следует отметить, что это была непростая опе-
рация. При неоднократных попытках включить ее в начале со стороны Вильнюса
данная линия отключалась защитами. Однако при первичном включении ее со
стороны подстанции Северная, а затем подачи напряжения от подстанции Виль-
нюс данную линию удалось ввести в работу. Причина такого явления осталась
невыясненной.
В 10 ч 16 мин от подстанции Северная по линии ПО кВ подано напряжение на
шины Минской ТЭЦ-3 и подстанцию Колядичи.
9. В 10 ч 23 мин с синхронизацией включена ВЛ 330 кВ Лукомльская ГРЭС -
Восточная. Затем диспетчерами отдана команда на включение отключившихся ли-
ний 220 кВ, подачи напряжения и разворота собственных нужд Березовской ГРЭС.
10. В 11 ч 13 мин от дистанционной защиты отключилась ВЛ 220 кВ Соли-
горск - Мирадино. Это привело к снижению напряжения на шинах 220 кВ Бере-
зовской ГРЭС до 170 кВ. Для повышения напряжения на Березовской ГРЭС от-
ключены все линии 110 кВ и ВЛ 220 кВ Березовская ГРЭС - Пинск. В 11 ч 27 мин
после включения ВЛ 220 кВ Мирадино - Солигорск начат разворот блока № 2 Бе-
резовской ГРЭС и включены все ранее отключенные линии 110 и 220 кВ.
11. В 11 ч 55 мин включен в работу блок № 2 Березовской ГРЭС, однако из-за
повторного отключения защитами ВЛ - 220 кВ Мирадино - Солигорск напряже-
ние на шинах Березовской ГРЭС снизилось до 150 кВ и блок № 2 Березовской
ГРЭС был отключен. Причиной такого глубокого снижения напряжения была боль-
шая нагрузка, включенная по разрешению диспетчера.
12. Линия 220 кВ Солигорск-Мирадино неоднократно отключалась (в 12ч 11 мин,
12 ч 31 мин, 13 ч 22 мин, 13 ч 52 мин, 14 ч 30 мин), что затрудняло разворот соб-
356
приложение
ственных нужд Березовской ГРЭС. Для подачи устойчивого напряжения на шины
Березовской ГРЭС, по просьбе диспетчера ГДС, диспетчер ОДУ Северо-Запада дал
команду аварийно закончить работы на ВЛ - 330 кВ Гродно - Алитус и в 14 ч 37 мин
данная линия была включена. В 16 ч 35 мин электростанции и потребители вышли
на нормальный установившийся режим работы.
Основными причинами данной системной аварии являются:
♦ рискованное решение по выводу в ремонт одновременно двух системообра-
зующих линий электропередачи 330 кВ;
♦ отказ 38 комплектов АЧР с общей подключенной мощностью 308 МВт из-за
низкого напряжения на подстанциях с переменным оперативным током;
♦ погодные условия и несвоевременная расчистка трасс линий: температура
днем 29-32 °C без ветра привели к увеличению стрел провеса воздушных линий
электропередачи. При увеличении стрелы провеса на ВЛ - 330 кВ Лукомльская
ГРЭС - Восточная и ВЛ - 220 кВ Солигорск — Мирадино происходили неоднократ-
ные перекрытия на стоящие деревья под проводами данных линий;
♦ несовершенство алгоритмов работы устройства АПНУ Лукомльской ГРЭС;
♦ отсутствие делительной автоматики на Березовской ГРЭС и ее несовершен-
ство на Минской ТЭЦ-3.
Авария в энергосистеме Hydro Quebec (Канада), происшедшая 14 де-
кабря 1982 года в 13 ч 21 мин, сопровождалась полным погашением энергосистемы и
нарушением электроснабжения потребителей суммарной мощностью 15 500 МВт.
Через 5,5 ч было восстановлено 90 % нагрузки. Через 20 ч было подано пита-
ние почти всем потребителям. Однако до середины дня 15 декабря 1982 года без
напряжения оставалось И тыс. потребителей в окрестностях г. Квебека. Ущерб
энергокомпании от недовыработки электроэнергии составил 3 млн долл., не счи-
тая затрат на ремонт электрооборудования, оплату сверхурочных работ и др.
Основная сеть 735 кВ энергосистемы Hydro Quebec (рис. П. 4) представляет
две радиальные трехцепные электропередачи (протяженностью более 1000 км каж-
дая), по которым передается электроэнергия от крупных ГЭС к основным центрам
потребления - Квебеку и Монреалю.
В конце 1982 г. суммарная располагаемая мощность электростанций энерго-
системы составила 22 800 МВт, в том числе 15 946 МВт на четырех ГЭС большой
мощности.
Для предотвращения развития аварий в энергосистеме имеется АЧР. Посколь-
ку отключение нагрузки действием АЧР может вызвать опасное повышение напря-
жения в основной сети, предусмотрено одновременное отключение источников
реактивной мощности: при срабатывании первой очереди отключаются две ВЛ 735 кВ
общей протяженностью около 600 км, второй и третьей очередей - установки ста-
тических конденсаторов по 2200 Мвар. На электропередаче ГЭС La Grande - Мон-
реаль предусмотрена система автоматического телеотключения нагрузки по факту
аварийного отключения одной из ВЛ транзита с воздействием на исполнительные
цепи АЧР. Телеотключение производится 10 очередями до 500 МВт (полное время
действия автоматики - 150 мс).
В исходном режиме, предшествовавшем описываемой аварии, нагрузка по-
требителей энергосистемы Hydro Quebec составляла 15 473 МВт, в соседние
энергосистемы Канады и США экспортировалось 2691 МВт (как правило, в режиме
357
Приложение
выделенных генераторов или «островов» нагрузки). На электростанциях энерго-
системы генерировалось 12 900 МВт, 4230 МВт поступало от ГЭС Churchill Falls и
1034 МВт-от других соседних энергосистем. В энергосистеме Hydro Quebec имелся
вращающийся резерв 1800 МВт (в 2,5 раза больше нормативного значения).
Загрузка сети 735 кВ в доаварийном режиме характеризовалась следующими
данными: ГЭС Churchill Falls - ГЭС Manicouagan — 4270 МВт (87 %); ГЭС
Manicouagan - Квебек - 7240 МВт (78 %); Квебек - Монреаль - 4350 МВт (66 %);
ГЭС La Grande 2 - Монреаль - 4600 МВт (100 %). В скобках указан процент на-
грузки от максимально допустимого значения.
Причиной возникновения аварии послужило однофазное КЗ на одной из сис-
тем сборных шин 735 кВ подстанции Lewis (см. рис. П.4), вызванное взрывом транс-
форматора тока. Это повреждение было правильно отключено дифференциальной
защитой шин. Однако через 1,5 с возникло однофазное КЗ на второй системе шин
735 кВ той же подстанции, расположенной на расстоянии 15 м от первой системы
шин. Причиной второго КЗ послужило перекрытие воздушного промежутка, иони-
зированного пламенем пожара, возникшего в результате первого КЗ. Это повреж-
дение также было правильно отключено дифференциальной защитой шин.
В результате двух КЗ, происшедших с интервалом в 1,5 с, на подстанции Lewis
отключились ВЛ, связывающие ГЭС Manicouagan и Квебек. После этого произо-
шел наброс мощности до 6000 МВт на две оставшиеся в работе линии 735 кВ
транзита ГЭС Manicouagan - Квебек. Устойчивость параллельной работы была
нарушена, и через 1 с обе линии были отключены релейной защитой.
Из-за большого дефицита мощности в районе Монреаля нарушилась устой-
чивость по электропередаче ГЭС La Grande 2 - Монреаль, что сопровождалось рез-
ким снижением напряжения вблизи шин подстанций Монреальского кольца 735 кВ.
Сработали релейные защиты и отключили все линии связи с ГЭС La Grande 2. Это
Рис. П.4. Схема, поясняющая возникновение и развитие аварии в энергокомпании
Hydro Quebec (Канада)
358
приложение
произошло через 1 с после отключения ВЛ Manicouagan - Квебек. Таким образом,
спустя 2 с после возникновения на подстанции Lewis второго КЗ были отключены
все ВЛ 735 кВ, по которым в район Монреаль - Квебек от мощных ГЭС передава-
лась мощность более 10 000 МВт. Поскольку объем АЧР был недостаточен для
компенсации столь большого дефицита активной мощности, произошло полное
погашение энергосистемы. Линии электропередачи от ГЭС La Grande 2 и Churchill
Falls, выделившиеся на питание районов с ограниченной нагрузкой, отключались
защитами от повышения напряжения, значения которого достигали 160 180 %
номинального.
Планом восстановления энергосистемы Hydro Quebec предусматривалось
последовательное включение участков линий электропередачи 735 кВ от ГЭС
La Grande 2 и Churchill Falls с постепенным наращиванием нагрузки небольшими
блоками по 25-50 МВт. По причине наличия повреждений на подстанции Lewis, а
также ряда других элементов в сети 735 кВ, повредившихся в процессе восстанов-
ления нормальной схемы из-за повышения напряжения выше допустимых значе-
ний, восстановление энергосистемы затянулось.
В июне 2002 года в Азербайджанской энергосистеме произошла авария,
которая сопровождалась полным погашением электростанций и потребителей сум-
марной мощностью порядка 2400 МВт. Упрощенная схема сети энергосистемы
приведена на рис. П. 5. Характерной ее особенностью является выведение из «коль-
ца» 330 кВ двух линий электропередачи (6-я Мингечаурская и 4-я Али-Байрамлин-
ская) для обеспечения работы части Али-Байрамлы ГРЭС на энергосистему Ира-
на. Режим энергосистемы, предшествовавший аварии, был облегченным-2384 МВт,
что составляло 63 % зимнего максимума нагрузки. Основные высоковольтные ли-
нии были загружены на 40-60 %.
Авария началась 13. 07. 2002 года в 18 ч 30 мин из-за аварийного отключения
2-й Апшеронской ВЛ - 500 кВ (см. рис. П. 5). Причина - пожар под одной из опор
линии, вызвавший однофазное КЗ на землю. После неоднократного неуспешного
АПВ линия в 18 ч 38 мин была полностью отключена.
В результате действия оперативного дежурного персонала диспетчерских
служб нагрузка этой линии была перераспределена на другие линии, в том числе
на 1-ю Апшеронскую ВЛ - 330 кВ.
В 23 ч 05 мин в условиях отсутствия в работе 2-й Апшеронской ВЛ - 500 кВ
произошло однофазное КЗ на землю на 1 -й Апшеронской ВЛ - 330 кВ. Увеличение
нагрузки на этой линии в условиях значительного износа конструкции и высокой
температуры воздуха (по данным представленной справки, пропускная способность
линии была ниже нормативной на 40 % и более) привело к обрыву фазы. Линия
была также отключена.
В результате нагрузка двух основных линий 2-й Апшеронской ВЛ - 500 кВ и
1-й Апшеронской ВЛ - 330 кВ легла на оставшиеся две ВЛ - 220 кВ 1-го и 2-го
Мингечаурского сечения АзГРЭС - Апшерон (см. рис. 4.52).
Через 1,26 с после отключения 1-й Апшеронской ВЛ - 330 кВ от перегрузки
сгорел шлейф на 2-й Мингечаурской ВЛ - 220 кВ, а еще через 2,12 с система поте-
ряла динамическую устойчивость, начался асинхронный ход.
Автоматика ликвидации асинхронного режима сработала на 3-й Мингечаурс-
кой ВЛ - 330 кВ и 1-й Мингечаурской ВЛ - 220 кВ. В то же время АЛАР на
359
I
К ЕЭС
Приложение
Рис. П. 5. Упрощенная схема основной сети Азербайджанской энергосистемы
приложение
2-й Мингечаурской ВЛ - 220 кВ и Дербентской ВЛ - 330 кВ не сработали. Для
ликвидации асинхронного хода диспетчерами была отключена линия, связываю-
щая Азэнерго с энергосистемон России, и в этих условиях в 23 ч 07 мин на всех
электростанциях системы нагрузка упала до «0».
Исключение составили оставшиеся в работе блок № 7 ГРЭС Али-Байрамлы,
работающей на межсистемную связь Имишлы-Парсабад, а также питание части
нагрузки от Грузинской энергосистемы на западе республики.
Основными причинами рассмотренной аварии являются:
♦ снижение надежности системообразующей сети из-за вывода из «кольца»
двух линий электропередачи;
♦ распределение нагрузки между электростанциями производилось без учета
условий устойчивости. Расчетами установлено, что увеличение выдачи мощности
в энергосистему Али-Байрамлы ГРЭС свыше 370 МВт обеспечило бы сохранение
динамической устойчивости энергосистемы в рассматриваемой аварийной ситуации;
♦ изношенность и отсутствие надлежащего ремонта линий электропередачи.
В Единой энергосистеме России 25 мая 2005 года произошла тяжелая сис-
темная авария, вызвавшая погашение ряда электростанций и потребителей сум-
марной мощностью порядка 3540 МВт в Московской, Тульской, Калужской, Рязан-
ской и Смоленской энергосистемах. Предпосылкой возникновения и развития дан-
ной аварии послужила авария на ПС 500 кВ «Чагино». В результате повреждения в
19 ч 57 мин 23. 05. 2005 г. трех фаз измерительного трансформатора тока воздуш-
ного выключателя ВВ 110 кВ I СШ АТ-2 и последующего развития аварии (разру-
шение ТТ СВ II СШ ПО кВ, 2-х фазное КЗ на СШ 220 кВ с обрывом шлейфа на
портале и потеря питания собственных нужд) в 21 ч 15 мин 24. 05. 2005 г. была
полностью погашена ПС 500/220/110 кВ «Чагино». При этом отключились все при-
соединения ПО, 220 и 500 кВ, два синхронных компрессора на подстанции, два
энергоблока и два турбогенератора ТЭЦ-22, работавших с суммарной нагрузкой
640 МВт на шины 220 кВ ПС «Чагино». В результате отключения трех ВЛ 500 кВ
произошел разрыв Московского кольца 500 кВ.
В связи со сложившимся режимом работы электрической сети Московской
энергосистемы были проведены оперативные расчеты режимов на период пред-
стоящего максимума нагрузки с учетом расчетных возмущений. С учетом погаше-
ния ПС 500 кВ «Чагино» диспетчерскому персоналу были выданы указания по:
♦ изменению схемы сети;
♦ включению резервных линий и автотрансформатора;
♦ выключению дополнительно по энергоблоку на трех электростанциях
(ГРЭС-5, ТЭЦ-25, ТЭЦ-26).
В течение ночи диспетчерский персонал ЦДУ и ОДУ центра предпринимал
усилия по замыканию Московского кольца 500 кВ. Однако по разным причинам
замкнуть кольцо не удалось.
В связи с ослаблением электрической сети и утреннего роста нагрузки, начи-
ная с 8 ч 15 мин 25. 05. 2005 г. диспетчеру Московского регионального диспетчер-
ского управления периодически стали поступать сообщения дежурных электри-
ческих сетей и подстанций о возникновении перегрузок линий электропередачи
НО и 220 кВ и о снижении напряжения (табл. П.1). В сложившихся условиях пре-
даварийной ситуации, эффективным средством предотвращения аварии было бы
361
Приложение
быстрое отключение потребителей средствами автоматики или дистанционно. Ав-
томатических устройств разгрузки электрической сети при снижении напряжения
и перегрузках линий электропередачи в Московской энергосистеме не было и не
существовало никогда ранее, и диспетчерский персонал Московской энергосисте-
мы попытался обойтись без радикальных действий, т. е. без отключения групп по-
требителей с питающих центров. Это привело к тому, что в период с 9 ч 15 мин до
10 ч 45 мин из-за провисания проводов и возникновения КЗ устройствами релей-
ной защиты с неуспешным АПВ отключились семь линий электропередачи 220 кВ.
Таблица П.1
Фактические напряжения на подстанциях 25. 05. 2005 г., кВ
Время Пахра НО Чертаново ПО Баскаково НО Баскаково 220 Лесная 220 Бугры 220
8.00 106,1 103,9 108.0 214.5 211,2 220,0
9.00 103,9 103,9 106,0 210,1 207.9 215,6
10.00 101.2 103,9 105,0 205,7 204.6 214,0
10.34 96,2 97,3 97,3 187,0 193.6 194,7
10.55 93,5 92,4 95,1 180,4 187,0 187.0
11.00 91.8 88,5 92.4 172,1 184,0 184.0
Из-за отключения линий электропередачи произошло еще большее снижение
напряжения в сети 110 кВ до 85 90 кВ (см. табл. П.1), приведшее к лавине напряже-
ния. Итогом лавины напряжения явилась полная или частичная потеря генерации
на ГЭС-1, ТЭЦ-8, 9, 11, 17, 20, 22, 26, ГРЭС-4 в Московской энергосистеме и на
Алешинской ТЭЦ, Новомосковской ГРЭС, Ефремовской ТЭЦ, Щекинской ГРЭС в
Тульской энергосистеме. В результате дальнейшего развития аварии (с 10 ч 53 мин
до 11 ч 14 мин отключились 21 линия электропередачи напряжением 110 и 220 кВ)
в Московской энергосистеме была отключена 321 подстанция 35-220 кВ. В резуль-
тате этого произошло погашение потребителей: , -г.'';/
♦ Московской энергосистемы - 2500 МВт; , ч ;
♦ Тульской энергосистемы - 900 МВт; к -.
♦ Калужской энергосистемы - 100 МВт;
♦ Рязанской энергосистемы - 27 МВт;
♦ Смоленской энергосистемы - 13 МВт.
Около 12 ч 30 мин развитие аварии было остановлено действием оперативно-
го персонала и устройствами автоматики. Все отключения, выполненные опера-
тивным персоналом и автоматикой, были осуществлены штатно и без поврежде-
ний. Несмотря на сложность режима в условиях развития аварии, сеть 500 кВ и
750 кВ ЕЭС России не была затронута аварийным процессом. Это позволило огра-
ничить масштаб аварии.
Для ликвидации аварии был создан оперативный штаб под руководством Пред-
седателя правления РАО «ЕЭС России», который организовал координацию дея-
тельности по восстановлению энергоснабжения. Это позволило уже к 21 ч включить
42 из 51 важнейших и социально значимых объектов г. Москвы. К 18 ч 26.05.2005 г.
последствия аварии полностью ликвидированы.
Основными причинами данной системной аварии являются:
♦ эксплуатация оборудования, выработавшего свой ресурс;
362
Рис. П.6. Схема подстанции Чагино:
ф- повреждение ТТ и ВВ 110 кВ I СШ АТ-2 в 19 ч 57 мин 23. 05. 2005 г.;@- повреждение ТТ и ОВВ 110 кВ в 19 ч 57 мин 23. 05. 2005 г.
ф - повреждение ТТ и ОВВ 110 кВ в 19 ч 57 мин 24. 05. 2005 г.;(4) - повреждение ВВ-2 АТ-1 в 20 ч 57 мин 24. 05. 2005 г.
ф- обрыв шлейфа и КЗ па I СШ в 21 ч 17 мин 24. 05. 2005 г. ;©- повреждение ВВ ПО кВ I СШ АТ-3 в 05 ч 31 мин 25. 05. 2005 г.
Приложение
♦ неудовлетворительная организация технического обслуживания и эксплуа-
тации оборудования подстанции;
♦ дефицит активной и реактивной мощности в Московской энергосистеме
(потеря 640 МВт генерации на ТЭЦ-22, отключение двух синхронных компенсато-
ров на ПС 500 «Чагино»);
♦ недостаточная наблюдаемость сети и режима оперативно-диспетчерским
персоналом;
♦ отсутствие автоматики разгрузки линий электропередачи при снижении на-
пряжения и перегрузке по току;
♦ высокая температура воздуха, приведшая к увеличению провеса проводов
и возникновению КЗ;
♦ недостаточно эффективные действия оперативно-диспетчерского персона-
ла по обеспечению и восстановлению допустимых уровней напряжения и устра-
нению перегрузок линий электропередачи.
Перечень сокращений
АБ - автомат безопасности
АВР - автоматический ввод резерва
АЛАР - автоматика ликвидации асинхронного режима
АПАХ - автоматика прекращения асинхронного хода
АПВ — автоматическое повторное включение
АПНУ - автоматическое предотвращение нарушения устойчивости
АРВ — автоматическое регулирование возбуждения
АРС — автоматический регулятор скорости
APT - аварийная разгрузка турбин
АСМ - асинхронизированная синхронная машина
АЧР - автоматическая частотная разгрузка
АЭС - атомная электростанция
БАВР - быстродействующий автоматический ввод резерва
где - главная диспетчерская служба
ГРЭС - государственная районная электростанция
ГЭС - гидроэлектростанция
ДАРН - дополнительная аварийная разгрузка по напряжению
ДАС — делительная автоматика электростанций
ЕЭС - единая энергетическая система
КЗ - короткое замыкание
лпт - линия постоянного тока
ЛЭП - линия электропередачи
НАС - нагрузочное активное сопротивление
ов - обмотка возбуждения
ОЭС - объединенная энергосистема
пв - подвозбудитель
САОН - специальная автоматика отключения нагрузки
САПАХ — селективная автоматика предотвращения асинхронного хода
СМ - синхронная машина
ТВ - тиристорный выпрямитель
ТЭС - тепловая электростанция
ТЭЦ — теплоэлектроцентраль
УВ -- управляемый выпрямитель
УПК -- устройство продольной емкостной компенсации
УРОВ - устройство резервирования отказа выключателя 1'
УФВ - устройство форсировки возбуждения
ЧВД -- часть высокого давления
ЧНД - часть низкого давления
ШР - шунтирующий реактор '
ЭГП - электрогидравлический преобразователь
ЭДС - электродвижущая сила
ЭС - электроэнергетическая система
ЭЦК - электрический центр качаний
365
Список условных обозначений
uf и ud ц - напряжение обмотки возбуждения синхронной маслины - напряжение, действующее значение, линейное напряжение - продольная составляющая напряжения ! ' ' - поперечная составляющая напряжения
E E4 - ЭДС, действующее значение - синхронная ЭДС, пропорциональная току обмотки возбужде-
Eq E4e ния синхронной машины - фиктивная синхронная ЭДС явнополюсной машины - вынужденная ЭДС, пропорциональная напряжению обмотки возбуждения синхронной машины
E\ - переходная ЭДС, пропорциональная продольному потоку об- мотки возбуждения синхронной машины
E' I ld I; k Ip V P P„ Pv Po P. P*. Q Q. Q» Q< QK s Kpu, Kpj - переходная ЭДС, пропорциональная полному потоку ротора - ток, действующее значение - продольная составляющая тока синхронной машины поперечная составляющая тока синхронной машины - активная составляющая тока - реактивная составляющая тока , . ц - потокосцепление „ - . , - активная мощность , з - амплитуда угловой характеристики мощности . , щ - мошность турбины / у - мощность первичного двигателя (постоянная) , • i, - синхронная активная мощность . fjp - асинхронная активная мощность и , и з - реактивная мощность .. - реактивная мощность рассеяния . , - реактивная мощность намагничивания , - синхронная реактивная мощность - асинхронная реактивная мощность - полная мощность - регулирующий эффект активной мощности нагрузки по напря- жению, частоте
Equ, Ер/ - регулирующий эффект реактивной мощности нагрузки по на- пряжению, частоте
kd MT M. Mac J 7 ^mn z„„ R,r X, x Xo Xd - коэффициент демпфирования - вращающий момент турбины - синхронный момент , у - асинхронный момент - момент инерции - взаимные сопротивления (т * и) , - - собственные сопротивления - - активное сопротивление - реактивное сопротивление - реактивное сопротивление на единицу длины - синхронное реактивное сопротивление синхронной машины по продольной оси
366
xq rwr. - синхронное реактивное сопротивление синхронной машины по поперечной оси
xd - переходное реактивное сопротивление синхронной машины по продольной оси
X4 - переходное реактивное сопротивление синхронной машины по поперечной оси
xd - сверхпереходное реактивное сопротивление синхронной ма- шины по продольной оси
*4 - сверхпереходное реактивное сопротивление синхронной ма- шины по поперечной оси
xs x<s - реактивное сопротивление рассеяния -реактивное сопротивление намагничивания < - реактивное сопротивление сети
xd£’xd£.’x<£. Ym„ V * mi g go b bo L d Ф t Nt f co j P тл - суммарные сопротивления системы - взаимная проводимость (тп ф п) — собственная проводимость - активная проводимость - активная проводимость на единицу длины - реактивная проводимость - реактивная проводимость на единицу длины - индуктивность обмотки синхронной машины - угол сдвига фаз ЭДС и напряжений - угол сдвига фаз между напряжением и током — время . ,1„> - интервал времени ь - частота ,, л' - синхронная угловая частота м - . . -скольжение t кн. - оператор дифференцирования по времени ( , . - постоянная времени обмотки возбуждения синхррнноймгипи- ны при разомкнутой обмотке статора
T\ W ft fy К, к - постоянная времени регулятора скорости - постоянная механической инерции - площадка торможения ' пД - площадка ускорения -коэффициент, коэффициент усиления
Предметный указатель
Авария
- локальная, 350
- системная, 350
Автоматический регулятор возбужде-
ния
- пропорционального действия, 96,
107,319
- сильного действия, 100, 107,320
Автоматическое повторное включение
- неуспешное, 131 ttt
-успешное, 132
Возмущение
— большое, 17
- малое17, 82
— нормативное, 261
Граница устойчивости
- апериодической, 236
- колебательной, 236
Движение
- возмущенное, 214
- невозмущенное, 214 1
Демпфирование, 223
Диаграмма векторная, 50, 78, 104
Интегрирование численное, 135, 172
Корни характеристического уравне-
ния, 216, 218, 221
Коэффициента запаса
- динамической устойчивости,
129, 254, 266
- по напряжению, 160
- статической устойчивости, 262
Критерий
- алгебраический, 219
- динамической устойчивости, 123
- статической устойчивости, 84
- устойчивости нагрузки, 158,
161, 162
- частотный, 219
Критическое напряжение, 149
Лавина
-напряжения, 166
- частоты, 272
Математическая модель
- линии электропередачи, 68
-нагрузки, 69 \Г:-
- трансформатора, 67
Метод 1
-Гурвица, 235
- Ляпунова, 214 ' V-
- малых колебаний, 219
- Михайлова, 238
— площадей, 126 ?
- Рауса, 237 , ;
- D-разбиения, 241 (
Мощность
- максимальная, 78
- предельная, 85
- синхронизирующая, 84
- электростанций, 277
Определитель Гурвица, 236
Отключение
- нагрузки, 171, 280
- синхронных машин, 332
Параметры
- режима, 15
-системы, 15
Переток
- вынужденный, 261
- нормальный, 260
- утяжеленный, 261
Механическая постоянная инерция,
39, 276
Предел мощности
- внутренний, 99
— действительный, 100
- идеальный, 80
Предельное время отключения, 133,138
Предельный угол отключения, 130
Пропускная способность, 17
Режим
< - аварийный, 16
-асинхронный, 190
-восстановительный, 16
- нормальный, 16
-переходный, 16
Ресинхронизация, 208
Самовозбуждение, 232
Самозапуск, 178
368
Самораскачивание, 227
Сечение, 260
Система
-электроснабжения, 147
-электроэнергетическая, 15
Сопротивление в нейтрали, 295
Сопротивление
- переходное, 50
- синхронное, 32
Торможение электрическое, 308
Турбины, управление аварийное, 325
Узлы нагрузки, 147
Уравнения
- Лебедева - Жданова, 48
- Парка - Горева, 24, 42
- упрощенные, 45
- характеристические, 216,220,228
Устойчивость
- абсолютная, 213
-динамическая, 17
- искусственная, 99
-нагрузки, 147
- результирующая, 211
-статическая, 17
Форсировка возбуждения, 321
Характеристика мощности
-двигателей, 149, 152
- синхронной машины, 78, 92,
98, 109
Характеристики
-динамические, 18
-статические, 18
Шины бесконечной мощности, 76
Шунт аварийный, 126
Электродвижущая сила
- переходная, 50
- сверпереходная, 54
- синхронная, 49
_ ЛННБ«Я1’Л. si:r
Литература 0)
1. Веников В. А. Переходные электромеханические процессы в электричес-
ких системах. - М.: Высшая школа, 1985. - 536 с.
2. Жданов П. С. Вопросы устойчивости электрических систем. - М.: Энергия,
1979.-456 с.
3. Меркни Д. Р. Введение в теорию устойчивости движения. - М.: Наука,
1976.-320 с.
4. Жданов П. С., Лебедев С. А. Устойчивость параллельной работы электри-
ческих систем. - М.-Л.: Госэнергоиздат, 1934. - 397 с.
5. Гуревич Ю. Е., Либова Л. Е., Окии А. А. Расчеты устойчивости и проти-
воаварийной автоматики в энергосистемах. - М.: Энергоатомиздат, 1990. - 390 с.
6. Калентионок Е. В., Прокопенко В. Г., Федин В. Т. Оперативное управле-
ние в энергосистемах. - Мн.: Вышэйшая школа, 2007. - 351 с.
7. Горев А. А. Переходные процессы синхронной машины. - М.-Л.: Госэнер-
гоиздат, 1950. - 551 с.
8. Важное А. И. Переходные процессы в машинах переменного тока. - Л.: Энер-
гия, 1980. - 256 с.
9. Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. -
М.: Госэнергоиздат, 1963. - 744 с.
10. Кимбарк Э. Синхронные машины и устойчивость электрических систем. -
М.: Госэнергоиздат, 1960. - 392 с.
11. Бернас С., Цяк Э. Математические модели элементов электроэнергети-
ческих систем. - М.: Энергоиздат, 1982. - 313 с.
12. Ульянов С. А. Электромагнитные переходные процессы в электрических
системах. - М.: Энергия, 1970. - 520 с.
13. Поспелов Г. Е., Федин В. Т., Лычев П. В. Электрические системы и сети. -
Мн.: УП “Технопринт”, 2004. - 720 с.
14. Калентионок Е. В., Файбисович В. А. Применение вычислительной тех-
ники для анализа электромеханических переходных процессов в системах элект-
роснабжения. - Мн.: БПИ, 1987. - 76 с.
15. Поспелов Г. Е., Федин В. Т. Передача энергии и электропередачи. Мн.:
Адукацыя i выхаванне, 2003. - 544 с.
16. Методические указания по определению устойчивости энергосистем.
4.1. - М.: СПО Союзтехэнерго, 1979. - 184 с.
17. Гуревич Ю. Е., Либова Л. Е., Хачатрян Э. А. Устойчивость нагрузки
электрических систем. - М.: Энергоиздат, 1981. - 208 с.
18. Переходные процессы в системах электроснабжения / Г. Г. Пивняк,
В. Н. Винославский, А. Я. Рыбалко, Л. И. Несен. - М.: Энергоатомиздат; Днеп-
ропетровск: Национальный горный университет, 2003. - 548 с.
19. Калентионок Е. В., Файбисович В. А. Нарушение устойчивости в узле
нагрузки с неидентичными параметрами двигателей // Электричество. - 1975. -
№ 12.-С. 58-59.
20. Калентионок Е. В., Файбисович В. А. Исследование устойчивости узлов
нагрузки при возмущениях в питающей сети с учетом действия противоаварийной
автоматики // Энергетика. Известия высш, учебных заведений СССР. - 1976. -№ 9. -
С. 109-112.
370
21. Андерсон П., Фуад А. Управление энергосистемой и устойчивость. - М.: Энер-
гия, 1980. - 568 с.
22. Пуго В. И. Электромеханические переходные процессы в электрических
системах: Конспект лекций. - Рига: РПИ, 1979. - 54 с.
23. Калентионок Е. В. Основы статической и динамической устойчивости
электрических систем. - Мн.: БГПА, 1998. - 72 с.
24. Портной М. Г., Рабинович Р. С. Управление энергосистемами для обес-
печения устойчивости. - М.: Энергия, 1978. - 352 с.
25. Сыромятников И. А. Режимы работы асинхронных и синхронных двига-
телей.-М.: Энергоатомиздат, 1985. 216 с.
26. Маркович И. М. Режимы энергетических систем. -М.: Энергия, 1969.-352 с.
27. Калентионок Е. В., Файбисович В. А. Способ разгрузки района электри-
ческой сети, дефицитной по реактивной мощности: Авт. свид. СССР № 610238. -
Опубликовано в БИ № 21, 1978.
28. Калентионок Е. В., Короткевич Г. П., Полягошко В. И., Файбисович В. А.
Устройство для выявления нарушения устойчивости узла нагрузки: Авт. свид. СССР
№ 542292. - Опубликовано в БИ № 1, 1977.
29. Калентионок Е. В., Файбисович В. А. Автоматическое управление режимом
энергосистемы по напряжению в условиях аварийного дефицита реактивной мощнос-
ти // Энергетика. Известия высш, учебных заведений СССР. - 1984. - № 5. - С. 44-46.
30. Экспериментальные исследования режимов энергосистем / Под ред.
С. А. Совалова. - М.: Энергоатомиздат, 1985. - 280 с.
31. Электрические системы. Управление переходными процессами элект-
роэнергетических систем / Под ред. В. А. Веникова. -М.: Высшая школа, 1982.-247 с.
32. Электроэнергетические системы в примерах и иллюстрациях / Под ред.
В. А. Веникова. - М.: - Энергоатомиздат, 1983. - 504 с.
33. Примеры анализа и расчетов электропередач, имеющих автомати-
ческое регулирование и управление / Под ред. В. А. Веникова. - М.: Высшая
школа, 1967. - 296 с.
34. Гамазин С. И., Стивцев В. А., Цирук С. А. Переходные процессы в сис-
темах промышленного электроснабжения, обусловленные электродвигательной
нагрузкой. - М.: МЭИ, 1997. - 424 с.
35. Самовозбуждение и самораскачивание в электрических системах / В. А. Вени-
ков, Н. Д. Анисимова, А. И. Долгинов и др. - М.: Высшая школа, 1964. - 198 с.
36. Электрические системы. Т. 1. Математические задачи энергетики / Под
ред. В. А. Веникова. -М.: Высшая школа, 1970. -336 с.
37. Барбашин Е. А. Функции Ляпунова. - М.: Наука, 1970. - 240 с.
38. Вайман М. Я. Исследование устойчивости электрических систем на пер-
сональных ЭВМ. - М.: Высшая школа, 1992. - 301 с.
39. Жуков Л. А., Стратан И. П. Установившиеся режимы сложных электри-
ческих сетей и систем. - М.: Энергия, 1979. - 416 с.
40. Лоханин Е. К., Васильева Г. В., Галактионов Ю. И. Математическая
модель энергосистемы для расчета и анализа переходных процессов и устойчиво-
сти // Труды ВНИИЭ. - 1976. Вып. 51, С. 3-28.
41. Совершенствование средств анализа переходных процессов для повы-
шения эффективности противоаварийного управления режимами энергосистем /
371
Ю. П. Первушин, В. П. Иванов, Ю. Е. Гуревич, Л. Е. Либова. - Рига: ЛатвНИИНТИ,
1985.-56 с.
42. Рабинович Р. С. Автоматическая частотная разгрузка энергосистем. - М.:
Энергоатомиздат, 1989. - 352 с.
43. Руководящие указания по устойчивости энергосистем. -Мн.: Белэнерго,
2005.- 19 с.
44. Калентионок Е. В. Способ автоматической частотной разгрузки энерго-
систем. Авт. свид. СССР № 1095305. - Опубл, в БИ № 20, 1984.
45. Хачатуров А. А. Несинхронные включения и ресинхронизация в энерго-
системах. - М.: Энергия, 1977. - 176 с.
46. Веников В. А., Литкенс И. В. Математические основы теории автомати-
ческого управления режимами энергосистем. - М.: Высшая школа, 1964. - 202 с.
47. Методика расчетов устойчивости автоматизированных электрических
систем / Под ред. В. А. Веникова. - М.: Высшая школа, 1966. - 248 с.
48. Калентионок Е. В. Повышение устойчивости и управляемости систем
электроснабжения. - Мн.: БПИ, 1989. - 74 с.
49. Калентионок Е. В. Способ управления переходным процессом в энерго-
системе: Авт. свид. СССР № 1020918. - Опубл, в БИ № 20, 1983.
50. Слодарж М. И. Режимы работы, релейная защита и автоматика синхрон-
ных двигателей. - М.: Энергия, 1977. - 216 с.
51. Калентионок Е. В. Устройство для электроснабжения потребителей: Авт.
свид. СССР № 1508308. - Опубл, в БИ № 34, 1989.
52. Управление мощными энергообъединениями / М. И. Воропай, В. В. Ер-
шевич, Я. Н. Лугинский и др. - М.: Энергоатомиздат, 1984. - 256 с.
53. Калентионок Е. В., Полягошко В. И., Файбисович В. А. Автоматичес-
кое выделение агрегатов блочных электростанций в аварийных условиях // Элект-
рические станции. - 1984. - № 4. - С. 47-49.
54. Файбисович В. А, Полягошко В. И., Калентионок Е. В. Способ предотв-
ращения потери собственных нужд электростанций: Авт. свид. СССР № 1192032. -
Опубл, в БИ № 42, 1985.
55. Переходные процессы электрических систем в примерах и иллюстраци-
ях. - М.: Госэнергоиздат, 1967. - 457 с.
56. Литкенс И. В., Пуго В. И. Колебательные свойства электрических сис-
тем. - М.: Энергоатомиздат, 1988. - 216 с.
57. Куликов Ю. А. Переходные процессы в электрических системах. - Новоси-
бирск: НГТУ, 2003.-283 с.
58. Совалов С. А., Семенов В. А. Противоаварийное управление в энергоси-
стемах. - М.: Энергоатомиздат, 1988. - 416 с.
59. Гуревич Ю. Е., Кабиков К. В. Особенности электроснабжения, ориентиро-
ванного на бесперебойную работу промышленного потребителя. - М.: ЭЛЕКС-КМ,
2005.-408 с.
60. Устойчивость электроэнергетических систем: сборник задач и приме-
ры их решения / Е. В. Калентионок, А. А. Волков, Е. В. Мышкина, В. М. Цыганков.
- Минск: Тех. лит. БИТУ, 2007. - 132 с.
372
СОДЕРЖАНИЕ
ПРЕДИСЛОВИЕ................................................................3
ВВЕДЕНИЕ...................................................................5
В.1. Характеристика курса и его место в обучении .......................5
В.2. Краткая история возникновения и развития проблемы устойчивости
электроэнергетических систем .........................................7
В.З. Сущность проблемы устойчивости электроэнергетических систем...... 12
В.4. Основные понятия и определения................................... 15
Контрольные вопросы...................................................... 18
Глава 1. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОСНОВНЫХ ЭЛЕМЕНТОВ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ..............................................19
1.1. Математические модели и схемы замещения синхронной машины........ 19
1.1.1. Трехфазная симметричная модель синхронной машины........... 19
1.1.2. Математическая модель синхронной машины по Парку - Гореву.. 24
1.1.2.1. Потокосцепления и сопротивления обмоток синхронной машины.. 29
1.1.2.2. Уравнения напряжений синхронной машины............... 35
1.1.2.3. Уравнение движения ротора............................ 38
1.1.2.4. Сводка уравнений синхронной машины по Парку - Гореву. 42
1.1.2.5. Уравнения синхронной машины с демпферной обмоткой.... 43
1.1.3. Упрощенные уравнения Парка - Горева.........................45
•1.1.4. Уравнения Лебедева - Жданова................................48
1.1.4.1. Векторная диаграмма синхронной машины................ 49
1.1.4.2. Дифференциальное уравнение переходных процессов в обмотке
возбу.ж дения машины.......................................... 52
1.1.5. Анализ переходных процессов в машинах с демпферными обмотками.54
1.1.6. Упрощенная модель синхронной машины.........................57
1.2. Математические модели асинхронного двигателя......................62
1.2.1. Математическая модель асинхронного двигателя по Парку - Гореву. 62
1.2.2. Упрощенные уравнения асинхронного двигателя................ 63
1.3. Математические модели и схемы замещения электрической сети....... 67
1.3.1. Математические модели трансформаторов...................... 67
1.3.2. Математические модели линий электропередачи................ 68
1.4. Математические модели нагрузки....................................69
1.4.1. Линейная модель нагрузки....................................70
1.4.2. Статические характеристики нагрузки........................ 71
Контрольные вопросы.......................................................74
Глава 2. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ
СИСТЕМ.............................................................76
2.1. Характеристика мощности простейшей электрической системы..........76
2.2. Физический смысл угла 5...........................................80
2.3. Понятие о статической устойчивости системы....................... 82
2.4. Характеристика мощности при сложной связи синхронной машины с
энергосистемой........................................................ 86
2.5. Влияние параметров схемы на характеристики мощности.............. 90
2.6. Характеристики мощности генераторов с автоматическими регуляторами воз-
буждения ........................................................... 94
2.7. Действительный предел мощности ................................. 100
2.8. Векторная диаграмма и основные уравнения простейшей системы..... 102
2.9. Упрощенное представление генераторов в расчетах статической устойчивости 106
2.10. Векторная диаграмма и характеристики мощности явнополюсных машин.... 108
Контрольные вопросы......................................................115
373
Глава 3. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ
СИСТЕМ...............................................................116
3.1. Понятие о динамической устойчивости системы.........................116
3.2. Основные допущения упрощенного анализа динамической устойчивости.... 120
3.3. Схемы замещения системы при коротком замыкании................ 124
3.4. Оценка динамической устойчивости системы методом площадей..... 126
3.5. Определение предельного угла отключения короткого замыкания... 129
3.6. Оценка эффективности АПВ линий электропередачи методом площадей..... 131
3.7. Аналитическое определение предельного времени отключения трехфазного
короткого замыкания............................................... 133
3.8. Численное решение уравнения движения ротора методом последовательных
интервалов........................................................ 135
3.9. Определение предельного времени отключения короткого замыкания...... 138
Контрольные вопросы................................................... 145
Глава 4. УСТОЙЧИВОСТЬ НАГРУЗКИ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ
СИСТЕМ..........................................................147
4.1. Общая характеристика узлов нагрузки .......................... 147
4.2. Характеристики синхронных двигателей.......................... 149
4.3. Характеристики асинхронных двигателей......................... 152
4.4. Оценка статической устойчивости асинхронных и синхронных двигателей. 157
4.5. Вторичные критерии устойчивости нагрузки...................... 161
4.6. Влияние конденсаторных батарейка устойчивость нагрузки........ 164
4.7. Лавина напряжения в узле нагрузки............................. 166
4.8. Влияние больших возмущений на режим работы нагрузки........... 171
4.9. Динамическая устойчивость двигателей при изменении напряжения. 173
4.10. Наброс нагрузки на двигатели................................ 177
4.11. Самозапуск двигателей........................................ 178
Контрольные вопросы................................................. 189
Глава 5. АСИНХРОННЫЕ РЕЖИМЫ В ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ
СИСТЕМАХ..............................................................190
5.1. Вопшкповение и общая характеристика асинхронных режимов....... 190
5.2. Параметры основных элементов электроэнергетических систем при асин-
хронных режимах.................................................... 192
5.3. Нарушение синхронизма и переход в асинхронный режим........... 195
5.4. Изменение режимных параметров энергосистемы при асинхронном холе.... 199
5.5. Последствия асинхронных режимов.............................. 204
5.6. Ресинхронизация и результирующая устойчивость..................208
Контрольные вопросы....................................................211
Глава 6. УСТОЙЧИВОСТЬ СЛОЖНЫХ ЭНЕРГОСИСТЕМ.............................213
6.1. Общий подход к анализу устойчивости............................213
6.2. Метод малых колебаний для оценки статпиеской устойчивости электроэнерге-
тической системы.................................................. 219
6.3. Анализ статической устойчивости системы с учетом демпфирования.223
6.4. Самораскачивание и самовозбуждение в электроэнергетической системе..227
6.5. Критерий Гурвица для оценки статической устойчивости.......... 235
6.6. Критерий устойчивости Рауса....................................237
6.7. Критерий устойчивости Михайлова................................238
6.8. Метод D-разбиения..............................................241
6.9. Оценка статической устойчивости системы при автоматическом регулирова-
нии возбуждения генераторов...................................... 244
6.10. Второй метод Ляпунова для оценки устойчивости системы........ 250
374
6.11. Оценка динамической устойчивости сложных энергосистем..........25
6.12. Нормативные требования устойчивости энергосистем...............26
Контрольные вопросы................................................... 27*
Глава 7. НЕУСТОЙЧИВОСТЬ ЧАСТОТЫ ЭНЕРГОСИСТЕМЫ...........................27
7.1. Общая характеристика проблемы................................. 27)
7.2. Лавина частоты.................................................27z
7.3. Динамические характеристики энергосистемы по частоте.......... 276
7.4. Отключение части потребителей при аварийном снижении частоты.. 280
Контрольные вопросы....................................................285
Глава 8. МЕРОПРИЯТИЯ ПО ПОВЫШЕНИЮ УСТОЙЧИВОСТИ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ...................................285
8.1. Классификация мероприятий, повышающих устойчивость электроэнергетичес-
ких систем........................................................ 286
8.2. Уменьшение индуктивных сопротивлений электрических машин.......288
8.3. Увеличение постоянной механической инерции электрических машин.290
8.4. Применение асиихронизированных и синхронных машин с продольно-попереч-
ным возбуждением...................................................292
8.5. Изменение параметров трансформаторов и вида их нейтралей.......294
8.6. Изменение параметров линий электропередачи.....................297
8.7. Применение линий и вставок постоянного тока....................300
8.8. Быстродействующие выключатели и зашита........................ 301
8.9. Продольная емкостная компенсация.............................. 304
8.10. Переключательные пункты на линиях электропередачи.............305
8.11. Установка синхронных компенсаторов и управляемых источников реактивной
мощности на промежуточных подстанциях............................. 306
8.12. Электрическое торможение генераторов......................... 308
8.13. Применение шунтирующих и токоограничивающих реакторов.........310
8.14. Автоматическое регулирование возбуждения синхронных машин.... 314
8.14.1. Общие сведения......................................... 314
8.14.2. Электромашинная система возбуждения.....................315
8.14.3. Высокочастотная система возбуждения ....................316
8.14.4. Тиристорная система возбуждения.........................317
8.14.5. Бесщеточная система возбуждения........................ 317
8.14.6. Назначение и типы автоматических регуляторов возбуждения..... 318
8.15. Форсировка возбуждения синхронных машин.......................321
8.16. Аварийное управление мощностью турбин электростанций......... 325
8.17. Автоматический ввод резервов генераторной мощности и оборудования..327
8.18. Выбор схемы соединений электроэнергетической системы......... 331
8.19. Отключение части синхронных машин в аварийном режиме..........332
8.20. Регулирование режима реактивной мощности синхронных машин.... 335
8.21. Регулирование перетоков мощности по линиям электропередачи ...336
8.22. Отделение электростанций или части генераторов в аварийных режимах. 341
Контрольные вопросы................................................... 347
ПРИЛОЖЕНИЕ.............................................................350
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ....................................................365
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ........................................... 366
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ.................................................. 368
ЛИТЕРАТУРА............................................................ 370
Учебное издание
Калентионок Евгений Васильевич
УСТОЙЧИВОСТЬ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
Учебное пособие
Ответственный за выпуск Г. П. Хаткевич
Редактор Е. И. Казачек
Компьютерная подготовка издания: Е. М. Земцова,
С. П. Широчин, Д. В. Влахов
Подписано в печать 06.09.2007 г. Формат 60x90 1/16.
Бумага офсетная. Гарнитура Таймс. Печать офсетная.
Усл. печ. л. 23,4. Уч.-изд. л. 22,3. Тираж 1000 экз. Заказ 2182
Закрытое акционерное общество «Техноперспектива».
ЛИ № 02330/0133345 от 29.06.2004.
220100, Минск, Сурганова 47, корпус 5. комната 12
Отпечатано с готовых диапозитивов заказчика
в РУП «Типография «Победа».
ЛП № 02330/0056832 от 30.04.2004.
222310, г. Молодечно, ул. Тавлая, 11