/
















































































































































































































Текст
С. Ф. КОЗУВОВСКИ й
А* КО** *ЦИ ЫЕ
ЭКСТ* МАЛ- ЫЕ
ч
С. Ф. КОЗУБОВСКИЙ
КОРРЕЛЯЦИОННЫЕ
ЭКСТРЕМАЛЬНЫЕ
СИСТЕМЫ
Справочник
Ответственный редактор
член-корреспондент АН УССР
Заслуженный деятель науки Украинской ССР
А. Г. ИВАХНЕНКО
«НАУКОВА ДУМКА»
КИЕВ —1973
6Ф(083)
К 59
УДК 62^506. 1
Авиация, металлургия, химия, энергетика, транспорт, гидроакустика,,
судовождение, радиолокация, космическая навигация — вот далеко не
полный перечень областей применения корреляционных экстремальных
систем (КЭС), используемых для автоматического измерения скоростей
движения различных объектов и сред, расходов различных веществ, для
измерения расстояния до движущихся объектов и направления на них,
для автоматической ориентации судов и летательных аппаратов, для
настройки радиоэлектронной аппаратуры и т. д.
В справочнике впервые обобщен и систематизирован обширный
материал по КЭС, опубликованный за последнее десятилетие п отечественной
и зарубежной литературе Рассматриваются основные принципы
построения КЭС различного назначения и конкретные примеры их реализации.
Рассчитан на широкий круг инженеров и техников, занимающихся
автоматизацией производственных процессов, технической кибернетикой,
автоматическим управлением, вычислительной и измерительной техникой,
а также на студентов указанных специальностей.
Рецензент доктор техн. наук В. 7\ Кулик
Редакция справочной литературы
Зав. редакцией Ю. Р* Абаниаа
' 0224 — 179
' М221(04)— 73 16°—73
Издательство «Наукова думка», 1973 г.
ВВЕДЕНИЕ
Ряд важных и перспективных направлений теории
автоматического управления связан с использованием вероятностных и
статистических методов [22, 48, 107, 168, 183, 222, 223, 238]. Прикладные методы
теории случайных функций и, в первую очередь, корреляционные
методы находят все более широкое применение при решении многих
весьма актуальных задач автоматического управления — от
определения динамических характеристик объектов регулирования и
построения самонастраивающихся систем до измерения параметров движения
различных объектов и распознавания образов [6, 9, 11, 19, 20, 39, 55,
120, 148, 166, 189, 201, 226, 229, 231, 235, 263, 292', 293]. Эти задачи
решаются с помощью весьма широкого класса автоматических систем
(включающих в .гбя подчас достаточно сложные вычислительные
устройства) — автоматических корреляционных систем. Основной
функцией этих систем является автоматическое вычисление
статистических характеристик случайных процессов (иногда с помощью ЭЦВМ)
и использование их для целей управления различными объектами [61,
85, 158, 159, 160, 241, 264, 291].
В течение последнего десятилетия особенно интенсивно начали
разрабатываться так называемые корреляционные экстремальные си*
стемы (КЭС), являющиеся наиболее важной частью этого класса
систем. В КЭС из входных сигналов формируются статистические
показатели (их взаимные корреляционные или автокорреляционные
функции), а затем автоматически поддерживается экстремальное
(максимальное или минимальное) значение последних.
Основными областями применения корреляционных
экстремальных систем являются автоматизация технологических процессов и
навигация. При автоматизации технологических процессов КЭС могут
быть использованы для измерения скоростей движения и расходов
различных материалов (прокатываемого металла, бумаги, пластмасс,
жидкостей, газов, многокомпонентных сухих или жидких смесей,
плазмы и т. д.) [120, 301, 304, 311, 313, 314, 319, 329, 376, 384, 397,
401, 403]. При решении навигационных задач КЭС используются для
определения положения движущихся объектов (корреляционные ориен-
таторы), для измерения параметров их движения — скорости, ускорения,
пройденного пути, направления на движущийся объект
(корреляционные пеленгаторы), расстояний до объектов (корреляционные
дальномеры) [11, 164, 183, 275].
КЭС для измерения параметров движения являются временными
системами, т. е. в этих системах указанные параметры определяются
S
путем измерения временных интервалов (относительного временнбго
сдвига) между двумя шумовыми или шумоподобными сигналами. С этой
целью вычисляется взаимная корреляционная функция указанных
сигналов и отслеживается перемещение ее экстремума вдоль оси
абсцисс. Процесс слежения осуществляется с помощью беспоисковых
систем экстремального регулирования [44, 120, 229]. Положение
экстремума корреляционной функции на оси абсцисс может быть
определено с высокой точностью.
С точки зрения техники измерения КЭС являются
компенсационными измерительными системами, т. е. в них измеряемая величина
(временной интервал) сравнивается с некоторой эталонной величиной
(временной задержкой). Компенсационный метод позволяет осуществить
измерение с очень высокой точностью. Так, большая часть
корреляционных измерительных систем дает методическую погрешность
измерения, равную долям процента.
При определении расстояния корреляционными методами
измеряется временной сдвиг между зондирующим и отраженным сигналами
[4, 120, 155, 243, 270, 377, 448, 460] или уровень взаимной
корреляционной функции зондирующего и отраженного сигналов при
фиксированном значении задержки зондирующего сигнала [125, 164, 430].
При определении направления на движущийся объект (его
угловых координат) корреляционным методом сравниваются расстояния
от объекта до двух разнесенных приемников, после чего по известным
сторонам треугольника определяются углы последнего и угловые
координаты объекта [212].
При определении скорости движения корреляционным методом
измеряется временной сдвиг между сигналами, снимаемыми с двух
точек движущейся поверхности, расположенных по направлению
движения [120].
КЭС могут быть использованы также для определения положения
движущихся объектов путем совмещения двумерной карты местности
с изображением местности на экране радиолокатора. Задача в этом
случае сводится к формированию пространственного показателя
(двумерной или многомерной взаимной корреляционной функции) и
отыскиванию его экстремума [183]. Данная задача является частным
случаем более общей задачи распознавания образов корреляционным
методом [45].
В последние годы за рубежом наиболее интенсивно
разрабатываются КЭС для измерения параметров движения и ориентации
движущихся объектов, что объясняется, в первую очередь, перспективностью
этих методов для решения задач радиолокации, гидролокации,
авиационной и космической навигации, слежения за спутниками и
космическими кораблями, для измерения скорости при мягкой посадке на
Луну и т. д. [4, 115, 120, 155, 184, 203, 212, 236, 273, 275, 326, 330, 335,
336, 344, 348, 358, 377, 389, 414, 426, 464, 470]. За последнее время
появился целый ряд работ по применению корреляционных методов в
новых областях — для измерения скоростей и расходов воздуха и воды
[301, 304, 314, 319, 329, 341, 384, 397, 403], гранулированных и
порошкообразных материалов [311, 313, 316], пульпы на рудообогатительных
фабриках, использующих процесс магнитной сепарации измельченной
руды [205], скорости бумажной полосы [394, 395, 396] или плазмы
в МГД-генераторах [30, 70, 73].
В принципе, корреляционные методы применимы для измерения
параметров движения любых поверхностей и сред, являющихся носите-
4
лями информации. Так, например, для измерения скорости
летательных аппаратов корреляционным методом могут быть использованы
сигналы видимого светового или инфракрасного диапазона или
радиолокационные шумовые сигналы. Ценным свойством корреляционных
измерителей параметров движения является то, что они могут быть
пассивными (не требуют излучения зондирующего сигнала, а
воспринимают сигнал, излучаемый движущимся носителем информации) или
пдлуактивными (воспринимают случайный сигнал, излученный
удаленным источником и отраженный движущимся объектом). Эти свойства
представляют интерес для использования в подвижных объектах
(самолетах и т д.) [11].
Необходимо отметить, что вычислительные алгоритмы, которые
могут быть использованы в КЭС, не ограничиваются классическим
вычислением корреляционных функций и спектральных плотностей
в аналоговой, дискретной или гибридной форме. В последнее время
начали разрабатываться такие новые направления прикладной теории
случайных функций, как быстрое преобразование Фурье, различные
методы вычисления корреляционных функций путем разложения на
ортогональные полиномы и др. [58, 321, 333, 339, 463]. Не исключено,
что некоторые из этих методов смогут оказаться полезными при
разработке новых КЭС*.
Область применения КЭС весьма широка, и в настоящее время
имеется большое количество соответствующих разработок,
представляющих несомненный интерес для инженеров самого различного
профиля. Данный справочник является первой попыткой обобщения
чрезвычайно обширного материала по КЭС, рассеянного в многочисленных,
главным образом зарубежных, публикациях последних лет, мало
доступных широкому кругу специалистов. В работе рассматриваются как
основные принципы построения КЭС, так и конкретные их схемы,
разработанные для использования в самых различных областях техники —
от металлургии до космической навигации. Приведены также
результаты работ автора в области КЭС, выполненных им в 1959—1967 гг.
в Институте электродинамики и Институте кибернетики АН УССР.
При изложении материала автор стремился по возможности
избегать привлечения сложного математического аппарата, ограничиваясь
описанием основных идей, используемых при построении КЭС,
предназначенных для решения конкретных задач, и кратким описанием
их принципиальных схем. Расчетные соотношения привлекались лишь
по мере необходимости. Более детальные сведения по каждой из
описываемых систем или по вопросам теории, положенной в их основу,
можно почерпнуть из литературы, список которой приведен в конце книги.
Читателю, не имеющему подготовки в области теории вероятностей,
можно рекомендовать предварительное ознакомление с
соответствующими разделами книги Е. С. Венцель. Теория вероятностей, «Наука»,
М., 1967.
В заключение автор выражает искреннюю признательность д-ру
техн. наук проф. Синицыну Б. С, д-ру техн. наук проф. Тарасенко В.П.,
д-ру техн. наук Чеголину П. М., канд. техн. наук Новикову А. К., канд.
техн. наук Домарацкому А. Н. и канд. техн. наук Котовой В. Г. за
переданные ему оттиски работ, использованные в этом справочнике,
а также проф. X. Ланге (ГДР), д-ру М. Беку (Англия), проф.
* В данном справочнике не рассматриваются вопросы
автоматизации вычисления корреляционных функций с помощью ЭЦВМ.
5
Т. Исобе, проф. М. Наито, д-ру X. Кашиваге (Япония), проф. Ф.Мешу
(ФРГ) за предоставленную возможность лично ознакомиться с их
работами в области КЭС.
Особую признательность автор выражает Заслуженному деятелю
науки Украинской ССР, чл.-кор. АН УССР А. Г. Ивахненко, под
непосредственным руководством которого с 1959 по 1968 гг. им был
выполнен целый ряд работ по автоматизации КЭС, а также
рецензенту д-ру техн. наук проф., Кулику В. Т., чьи замечания
способствовали улучшению содержания книги.
Предлагаемый вниманию читателей справочник по КЭС является
первой попыткой освещения данной темы и, естественно, не свободен
от недостатков. Автор заранее благодарен тем читателям, которые
пришлют свои замечания и пожелания по адресу: Киев, ул. Репина, 3,
«Наукова думка».
Автор
Часть I
МЕТОДЫ ПОСТРОЕНИЯ КОРРЕЛЯЦИОННЫХ
ЭКСТРЕМАЛЬНЫХ СИСТЕМ (КЭС)
Глава 1
ВЗАИМНО КОРРЕЛЯЦИОННЫЕ ИЗМЕРИТЕЛИ ПАРАМЕТРОВ
ДВИЖЕНИЯ (ОДНОМЕРНЫЕ КЭС)
Взаимно корреляционный метод измерения
скорости движения
Во многих отраслях техники часто возникает задача измерения
скорости движения без непосредственного контакта с движущейся
поверхностью. Эта задача особенно важна в тех случаях,когда
применение контактных методов полностью исключается, например, при
определении скорости самолета относительно поверхности земли или
скорости космического корабля относительно небесных тел, при
измерении скорости движения горячего проката и т. д.
В течение последних лет в СССР и за рубежом успешно
разрабатывается новый бесконтактный метод измерения скорости движения,
основанный на определении временного сдвига между двумя сигналами,
отраженными от двух точек движущейся поверхности. Временной сдвиг
определяется путем вычисления взаимной корреляционной функции
этих сигналов и отыскания ее максимума. Этот метод, получивший
название взаимно корреляционного, оказался весьма перспективным для
ряда отраслей техники (металлургии, химии, авиации, судовождения,
бумагоделательного производства и т. д.). Достоинствами
корреляционных измерителей скорости являются бесконтактность и высокая
точность. На их основе могут быть созданы автоматические измерительные
системы и системы автоматического регулирования [3'5, 120, 144, 155,
173, 184, 229, 326, 330, 338, 346, 348, 384, 464, 470].
Взаимно корреляционный метод измерения скорости движения
(далее для краткости будем называть его корреляционным) будет
проиллюстрирован ниже на примере измерения скорости движения металла
при прокатке. Следует, однако, подчеркнуть, что описываемые методы
и схемы применимы для автоматического измерения скорости движения
любых поверхностей и сред, являющихся носителями
информации (т. е. поверхностей и сред, различные участки которых
характеризуются какими-либо показателями, изменяющимися в направлении
движения — геометрическими, оптическими, электрическими,
магнитными и т. д.). Физический характер носителя информации не имеет
принципиального значения, важно лишь, чтобы информация могла
быть воспринята каким-либо датчиком.
Сущность корреляционного метода измерения скорости движения
проката состоит в следующем (рис. 1, а). На поверхность металла,
движущегося со скоростью и, от двух источников света (осветителей 01
и 02) с линейными нитями "накаливания через оптическую систему
проектируются два резких. световых штриха, перпендикулярных
направлению движения полосы. Штрихи расположены по направлению
прокатки на фиксированном расстоянии / один от другого.
7
г-Q.
$ Ьфэ, ^Ы
/ *ус
Ч
V
м
V
БРЗ
I
I
! г-н
tf
/W
14&J
©^
I /ч-^У л
Рис. 1. Взаимно корреляционный метод измерения скорости
движения металла при прокатке:
а —блок-схема корреляционного измерителя скорости проката: Ои 02 —
источники света с линейными нитями накаливания (осветители); ФЭь ФЭ2 —
фотоэлементы; ytt Ущ — усилители; БРЗ — блок регулируемой задержки; МУ —»
множительное устройство; Я— интегратор (сглаживающий фильтр); ИП —
измерительный прибор; ЭР — экстремальный регулятор; УС — указатель
скорости; б г— ft (t)t f2{t)*- входные сигналы коррелятора; в ~— R (т) — выходной
сигнал коррелятора.
Вследствие неоднородности поверхности металла, наличия на ней
трещин, пятен и окалины яркость штрихов изменяется. Изображения
штрихов воспринимаются приемной оптической системой и
проектируются на катоды двух фотоэлементов ФЭ^ и ФЭ2, с которых снимаются
сигналы fx(t) и f2(t), пропорциональные яркости каждого из световых
штрихов. Усилители yt и У2 усиливают выходные сигналы
фотодатчиков до уровня, достаточного для нормальной работы коррелятора,
состоящего из блока регулируемой задержки БРЗ, множительного
устройства МУ и интегратора (или сглаживающего фильтра) И.
Поскольку второй световой штрих смещен относительно первого
в направлении прокатки на расстояние /, то сигнал, снятый с выхода
первого фотоэлемента и характеризующий яркость первого штриха —
fi(t),— повторится на выходе второго фотоэлемента с некоторым
транспортным запаздыванием тт, прямо пропорциональным расстоянию
между штрихами / и обратно пропорциональным скорости движения
проката и:
I
(1.1)
Сигнал f2(f) от ФЭ2 по форме будет близок сигналу от Ф3$,
задержанному на интервал времени тт: /2(0 « fx(t— тт). При достаточно
малом расстоянии между штрихами и параллельности их осей, а также
при отсутствии поперечных смещений полосы и одинаковых
характеристиках усилителей Ух и У2 оба сигнала были бы совершенно идентич-
8
Рис. 2. Осциллограммы входных сигналов
коррелятора (фото с экрана электронного осциллографа).
ными. В реальных условиях сигналы, хотя и близки по форме, но все
же несколько отличаются друг от друга (рис. 1,6).
На рис. 2 приведены осциллограммы сигналов, полученных в
лабораторных условиях с поверхности холоднокатаного металла,
движущегося со скоростью 17,3 м/сек при / = 60 см (фото с экрана двухлуче-
вого электронного осциллографа). Аналогичные сигналы, записанные
с помощью магнитоэлектрического осциллографа Н-102, приведены
на рис. 3. На рис. 4 приведены осциллограммы сигналов, снятых с
поверхности горячего проката на одном из металлургических заводов.
В канал первого сигнала f^t) включен блок регулируемой задержки
БРЗ, который может быть выполнен, например, в виде магнитной ленты
или магнитного барабана с подвижной читающей головкой, установка
которой осуществляется при помощи ходового винта [84, 120, 133,
141, 239, 240, 375].
Рис. 3. Осциллограммы входных сигналов коррелятора,
записанные с помощью магнитоэлектрического осциллографа (отметка
времени — 1 кгц).
9
SVVVNyVv^^
Рис. 4. Осциллограммы сигналов, полученных при горячей
прокатке металла (размер светового штриха 15 X 2 мм;-
отметка времени —50 гц):
а -* скорость металла 2,9 м/сек. t *= 1100° С; б ^- скорость металла
0,6 м/сек, t >. 810° С.
Выходной сигнал коррелятора /?(т) (рис. 1, в) представляет собой
взаимную корреляционную функцию входных сигналов fi(f) и f2(t):
т т
«(x) = ~j/i(^-T)/2(0^ = ~j/i(^^)/i(^S)^ (1.2)
о о
-^ _]Как известно, взаимная корреляционная функция двух таких
стационарных сигналов на основании эргодического свойства может
быть описана одним из следующих выражений [48, 168, 223, 238]:
«М=М[М/-х)Ш= Нт
т)/2 (/)<*/ =
^h(t-^h(t) = h(t-^h{t-s)^A(z-Tr) = A(u)f (1.3)
где М — знак операции математического ожидания (усреднения по
множеству); чертой обозначено усреднение по времени; А(и) —
автокорреляционная функция сигнала fx(t)\ и = т — тт; Т — время
усреднения (интегрирования). Предполагаем, что оба входных сигнала
коррелятора идентичны по форме, т. е. /2(0 = Ш — %)-
Выходной сигнал коррелятора максимален при т = тт, т. е. при
равенстве введенной регулируемой задержки т транспортному
запаздыванию тт. Изменяя величину регулируемой задержки, добиваются
максимального показания измерительного прибора ЯЯ, чем обеспечивают
условие т = тт. Учитывая, что при фиксированном расстоянии между
штрихами / транспортное запаздывание т? однозначно связано со ско-
10
ростью v, можно по показанию шкалы БРЗ определить величину
регулируемой задержки и скорость движения металла, так как
Шкалу БРЗ, снабженную указателем скорости УС, можно проградуи-
ровать непосредственно в единицах измерения скорости.
Кроме описанной схемы, использующей для определения
корреляционной функции непрерывное перемножение входных сигналов,
возможно применение и других схем, например схемы, в которой
перемножение сигналов заменено их вычитанием (или суммированием) с
последующим возведением разности в квадрат. В этом случае вместо
множительного устройства МУ применяется вычитающее устройство
(или сумматор) и квадратор, после чего квадратор разности (суммы)
входных сигналов усредняется, как и в схеме с непосредственным
перемножением. Получаемая на выходе коррелятора функция является
средним квадратом разности (суммы) входных сигналов:
г
K(u)^^\[f1(t—z)±f2(t^^dt^K(z-zT). . (1.5)
Эта функция имеет максимум (в случае суммирования) или минимум
(в случае вычитания) при тех же значениях регулируемой задержки,
что и корреляционная функция, вычисленная путем перемножения.
От последней она отличается наличием некоторой постоянной
составляющей. Получаемая этим способом функция может быть использована
для определения регулируемой задержки, соответствующей
максимальной корреляции входных сигналов. Такой способ вычисления
максимума корреляционной функции был применен в корреляционном
измерителе скорости проката, разработанном Британской
металлургической ассоциацией (см. гл. 6) [35, 104, 338].
Независимо от способа вычисления вза имной корреляционной
функции входных сигналов она имеет четко выраженный максимум
при т = тт, поэтому коррелятор можно рассматривать как объект
регулирования с экстремальной характеристикой. Для получения
замкнутой схемы автоматического регулирования к выходу
коррелятора может быть подключен экстремальный регулятор ЭР, который,
воздействуя на БРЗ, будет изменять величину т так, чтобы
поддерживать максимальным значение взаимной корреляционной функции R(z).
Значение измеряемой скорости можно отсчитывать непосредственно по
шкале БРЗ. Таким образом, мы получаем простейшую корреляционную
экстремальную систему (КЭС) для автоматического измерения скорости
движения металла при прокате, которая будет автоматически
отслеживать изменения скорости движения проката, воздействуя
соответствующим образом на БРЗ.
Рассмотренный выше принцип автоматического измерения
временного сдвига двух сигналов лежит в основе большей части КЭС,
которые будут рассмотрены ниже. В некоторых системах (например,
корреляционных ориентаторах) компенсируется не временной, а
пространственный сдвиг двух изображений, однако принцип остается тем
же — автоматическое слежение за максимумом взаимной корреля-
II
ционной функции. Что же касается специфических методов
автоматизации, используемых при построении КЭС, то они будут рассмотрены
в гл. 4. Примеры практической реализации таких систем
рассматриваются в части II настоящего справочника.
Взаимно корреляционный метод измерения дальности
То, что КЭС позволяет измерять с высокой точностью
относительный сдвиг двух сигналов (т. е. измерять временной интервал), дает
возможность применять их для измерения дальности с использованием
основного принципа радиолокации: непосредственного или
косвенного измерения времени распространения радиоволн до цели и обратно.
Как известно [164, 227, 228, 287], при импульсных
радиолокационных методах измерения дальности передатчик излучает короткие
высокочастотные импульсные сигналы (зондирующие импульсы),
которые отражаются от цели и воспринимаются приемником (импульсы
цели). Зная скорость распространения радиоволн (с = 3 • 108 м/сек)
и время запаздывания отраженного сигнала (импульса цели) тц, можно
с помощью известного соотношения определить расстояние до цели
(дальность) D:
D = i!s.
D, км « 0,15тц, мксек.
(1.7)
(1.8)
Таким образом, задача измерения дальности (расстояния) сводится
к измерению временной задержки отраженного сигнала относительно
зондирующего.
Jfth
а
~и
i
i
-»»-
т*2п-/
-А2
i
/77
1
2т
t
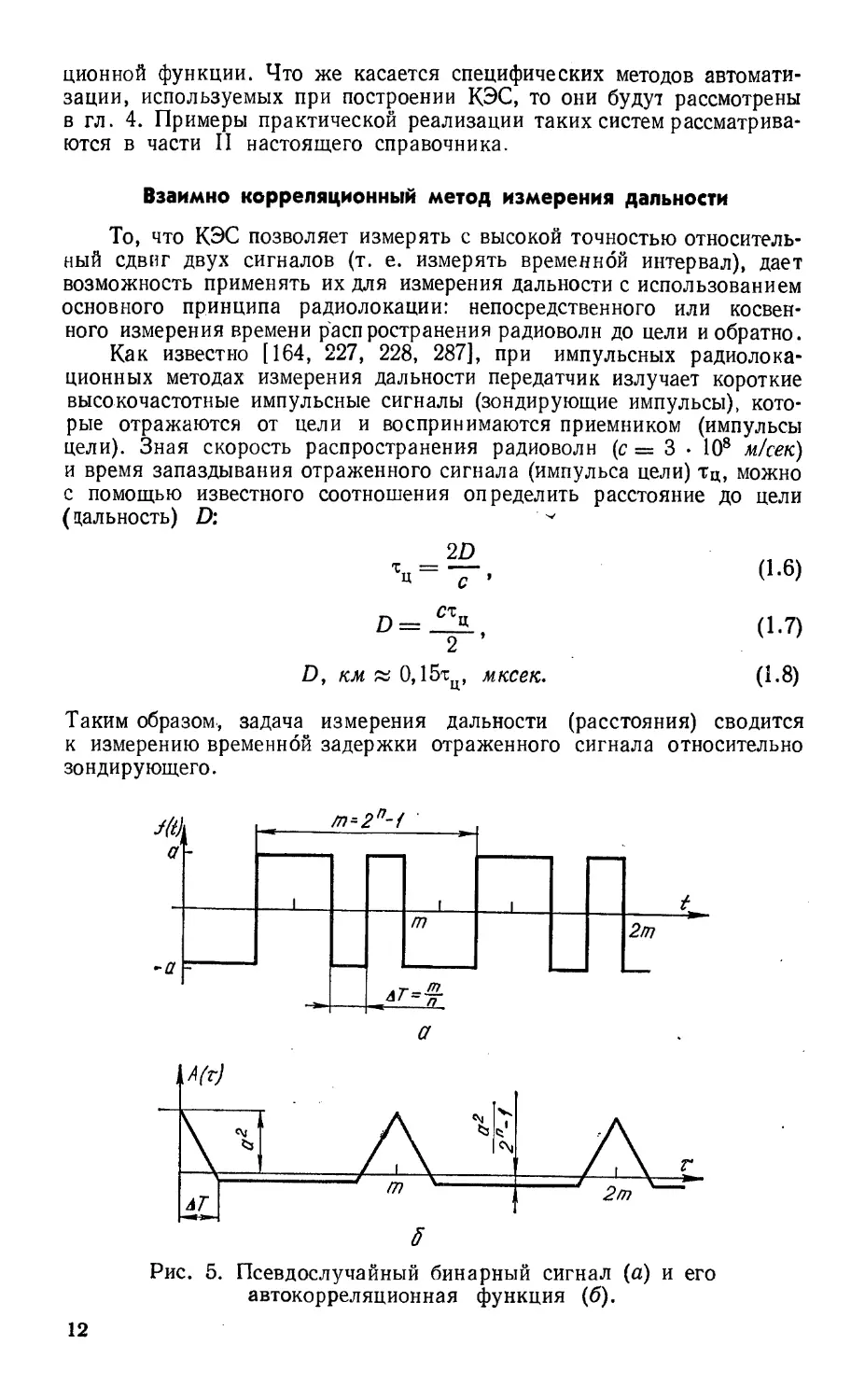
Рис. 5. Псевдослучайный бинарный сигнал (а) и его
автокорреляционная функция (б).
12
Для однозначного определения
дальности период повторения
импульсов должен быть не меньше времени
запаздывания отраженного сигнала,
соответствующего максимальному
расстоянию до цели. Длительность
импульсов должна быть достаточно малой
для получения удовлетворительной
разрешающей способности по
дальности. Ввиду этих ограничений
мощность излучения может быть повышена
только за счет резкого увеличения
мощности в импульсе. Это
накладывает ограничения на дальность действия
и точность определения расстояния
импульсных радиолокационных
станций. Кроме того, при импульсном
методе локации затруднено получение
сигналов доплеровской частоты,
характеризующих скорость движения цели.
Отмеченные недостатки, свойственные
импульсным радиолокаторам,
отсутствуют в локаторах с непрерывным
излучением и модуляцией несущей
частоты шумовыми или так
называемыми псевдослучайными сигналами
[275]. Путем соответствующего выбора
Модулирующих шумовых сигналов
удается получить хорошую разрешающую
способность по дальности. Это
достигается при использовании в качестве модулирующих сигналов
псевдослучайных последовательностей максимальной длительности, или т-по-
следовательностей. Эти m-последовательности представляют собой
периодические шумоподобные бинарные сигналы с амплитудой а (рис. 5, а),
генерируемые с помощью регистров сдвига, охваченных логическими
обратными связями. Обратная связь осуществляется путем сложения
по модулю 2 выходных напряжений двух (или более) каскадов и подачи
результирующего напряжения на вход первого каскада. Период
повторения (длительность) такой кодовой последовательности т « 2п—1,
где /г —число каскадов регистра сдвига [134, 214, 275].
Автокорреляционная функция таких сигналов имеет максимальное значение, рав-
а2
ное а2 при т = 0, и постоянную составляющую, равную — при
значениях т > АГ (рис. б, б). Такая форма автокорреляционной функции
делает эти сигналы удобными для использования в качестве
модулирующих в корреляционных радиолокаторах. В описанных в литературе
устройствах использовалась модуляция фазы высокочастотной
несущей [275].
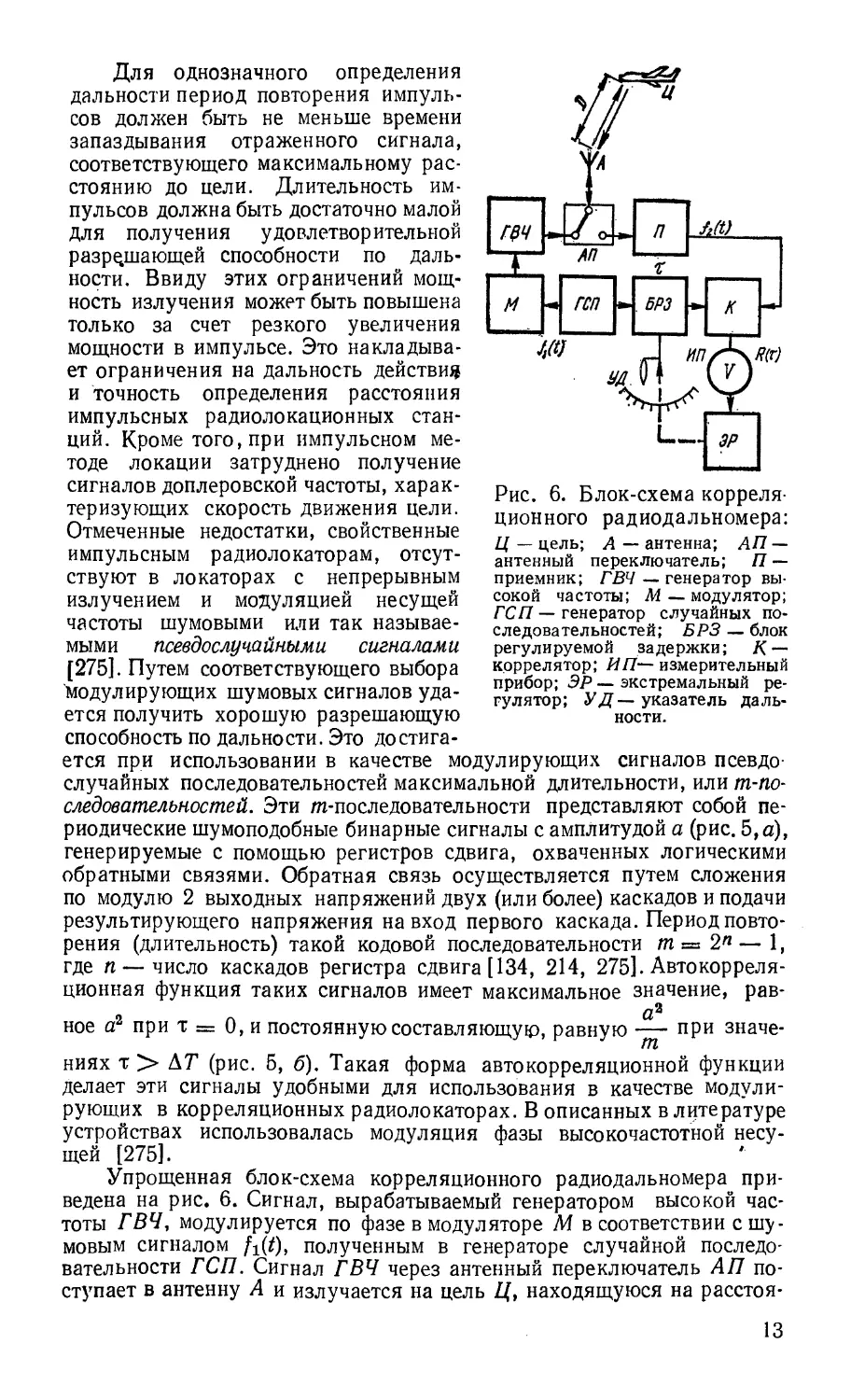
Упрощенная блок-схема корреляционного радиодальномера
приведена на рис. 6. Сигнал, вырабатываемый генератором высокой
частоты ГВЧ, модулируется по фазе в модуляторе М в соответствии с
шумовым сигналом f^t), полученным в генераторе случайной
последовательности ГСП. Сигнал ГВЧ через антенный переключатель АП
поступает в антенну А и излучается на цель Ц> находящуюся на расстоя-
\мч
Рп
м
АП
ГСП
Л
Г
. БРЗ
№
К
w
УД.
(гГ"®м
Vf^
i
эр
Рис. 6. Блок-схема
корреляционного радиодальномера:
Ц — цель; А — антенна; АП —
антенный переключатель; П —
приемник; ГВЧ — генератор
высокой частоты; М — модулятор;
ГСП — генератор случайных
последовательностей; БРЗ — блок
регулируемой задержки; /С—-
коррелятор; ИП— измерительный
прибор; ЭР — экстремальный
регулятор; УД— указатель
дальности.
13
г У
f(tj.r
1 6Ч—*"
-ПГ
»►
4Ш •
Sfi-r)
\УЩ
^1
,£Я?
—
0//У
*
1 ' "С
i
j
w
Рис. 7. Блок-схема корреляционного радиодальномера.
типа Н:
Си С2 — смесители; Г — гетеродин; УПЧи УПЧ.г —- усилители
промежуточной частоты; МУ — множительное устройство; БРЗ — блок
регулируемой задержки; ФНЧ — фильтр низких частот; ИП —.
измерительный прибор; УД—указатель дальности; ЭР —
экстремальный регулятор.
нии D от антенны. Отраженный от цели сигнал через антенну и
антенный переключатель поступает в приемник П и после соответствующей
обработки — на вход коррелятора /С. Этот сигнал после демодуляции
близок по форме сигналу f\(t), но сдвинут по отношению к нему на
тц, равное времени прохождения им удвоенного расстояния до цели
и определяемое выражением (1.6)
Для получения максимального показания измерительного
прибора ИП, соответствующего максимуму взаимной корреляционной
функции сигналов ft(i) и f2(t), экстремальный регулятор ЭР должен
выдать регулирующее воздействие на блок регулируемой задержки
БРЗ и сделать вводимую им задержку т равной тц. Указатель дальности
УД градуируется непосредственно в значениях дальности.
В зависимости от способа обработки сигналов различают
корреляционные дальномеры типа Н (с измерением на несущей, высокой,
частоте) и типа М (с измерением на частоте модуляции) [11].
Блок-схема приемной части корреляционного дальномера типа Н
приведена на рис. 7 (для простоты опущены входные цепи) [11].
Отраженный от цели и принятый антенной сигнал f(t — т ) поступает в
смеситель С2, который с помощью гетеродина Г понижает его частоту до
более низкой промежуточной частоты. Напряжение промежуточной
частоты, усиленное усилителем промежуточной частоты УПЧ2,
подается на один из входов умножителя МУ. На другой его вход подается
опорное напряжение /(/ — т), прошедшее такие же преобразования
и задержанное во времени р блоке регулируемой задержки БРЗ.
Полученное на выходе умножителя напряжение пропускается через фильтр
низкой частоты ФНЧ и значение вычисленной таким образом взаимной
корреляционной функции входных сигналов R(t) показывает
измерительный прибор ИП. Экстремальный регулятор ЭР, подключенный к
выходу фильтра низкой частоты, воздействует на БРЗ и поддерживает
т = т э что соответствует максимальному значению /?(т), Указатель
14
^ыд^щ
УНУ Л
ип
fit)
УЩ
УНЧ<
дРЗ
of
УН
JL
ЭР
гз
Рис. 8. Блок-схема корреляционного дальномера типа М:
УПЧи УПЧ2 — усилители промежуточной частоты; Ди Д2 —
детекторы; УНЧ1$ УНЧ2 — усилители низкой частоты; МУ —
множительное устройство; ФНЧ —- фильтр низких частот; ИП — измерительный
прибор; БРЗ — блок регулируемой задержки; УД — указатель
дальности; ЭР — экстремальный регулятор.
дальности УД, связанный с БРЗ, позволяет непосредственно
считывать измеренное значение дальности.
В корреляционном дальномере типа М измерение времени
задержки сигнала цели производится на частоте модуляции, поэтому
блок-схема такого дальномера содержит детекторы огибающей Дг и Д2
и усилители низкой частоты УНЧг и УНЧ2, включенные после
усилителей промежуточной частоты УПЧ1 и УПЧ2 (рис. 8). В остальном
схема корреляционного дальномера типа М подобна рассмотренной
выше схеме дальномера типа Н.
Приведенные блок-схемы являются весьма упрощенными и не
отражают достаточно сложных схемных решений, которые
используются для их реализации. Более подробно такие системы будут
рассмотрены в гл. 8.
Другой областью применения корреляционных дальномеров
является гидроакустика. В системах активного обнаружения подводных
целей находят широкое применение корреляционные гидролокаторы
с непрерывным излучением сигнала [4, 149, 201, 220, 221, 269, 430,
462]. Применяется два типа сигналов — частотно-модулированные
[149, 221] и широкополосные случайные сигналы [4, 462]. В качестве
последних часто используются псевдослучайные последовательности.
Скорость распространения акустических волн в воде (и 1,5 км/сек)
на несколько порядков отличается от скорости распространения
радиоволн (300 000 км/сек), в связи с чем приходится измерять намного
большие временные задержки сигналов цели, а, это, в свою очередь,
приводит к необходимости применять несколько иные аппаратурные
решения.
В последнее время при работе на широкополосных сигналах,
используемых в корреляционных дальномерных системах, начали
применять в отдельных случаях передачу цифровой информации по линии
дальномерного радиосопровождения цели. Такое совмещение
измерительного канала с информационным применяется в космических
радиотехнических комплексах [39, 208, 214, 270—272].
15
Взаимно корреляционный метод определения направления
(угловых координат)
Задачу измерения угловых координат объекта, как и задачу
измерения расстояния, можно свести к определению временного сдвига
между двумя коррелированными сигналами. Используемая идея
близка к той, которая лежит в основе радиотехнических методов слежения
за искусственными спутниками Земли и космическими кораблями
с помощью радиоинтерферометров (фазовых пеленгаторов) [164, 212,
270].
Упрощенная схема радиоинтерферэметра приведена на рис. 9.
Разнесенные на фиксированное расстояние S (измерительную базу)
антенны Лх и Л2 воспринимают радиосигнал от цели Ц. Угловая
координата цели О вычисляется по измеренной разности времени прихода
сигналов А/, по известной величине S и скорости распространения
радиоволн с. Угловая координата цели измеряется относительно точки,
находящейся в середине базовой линии, и определяется приближенным
соотношением
cosO« ^- . (1.10)
Б обычных фазовых радиоинтерферометрах измеряется разность фаз
приходящих сигналов, а в корреляционных радиоинтерферометрах —
их относительная временная задержка [39, 164, 212, 215, 270].
Упрощенная блок-схема КЭС, построенная на базе
корреляционного радиоинтерферометра, приведена на рис. 10.
Сигналы от цели Ц принимаются двумя антеннами Л± и А2,
разнесенными на фиксированное расстояние S. После домодуляции в
приемниках П-i и /72 сигналы поступают на коррелятор /С, состоящий из
множительного устройства М У, блока
регулируемой задержки БРЗ и
фильтра низких частот ФНЧ. Получаемая
на выходе коррелятора взаимно
корреляционная функция R{%) сигналов
/i(0 и /г(0 (измеряемая индикатором
ИП) имеет максимум при значении
введенного регулируемого
запаздывания т = ti — t2, где ti и t2 — время
прохождения сигналом расстояний от
цели до первой и второй антенн (Dd
и D2). Максимальное значение R(t)
поддерживается с помощью
экстремального регулятора ЭР,
воздействующего на блок регулируемой задержки
БРЗ. Шкала БРЗ (указатель угла У У)
градуируется непосредственно в
значениях угловой координаты цели
С_
—
COS4
Рис. 9. Упрощенная схема
радиоинтерферометра:
а — геометрические соотношения:
Лц А2 — антенны; Ц — цель;
б — блок-схема вычислительного
алгоритма.
О « arc cos -^- ,
(1.11)
где с — скорость распространения
радиоволн; т — введенная в первый
канал задержка сигнала,соответствующая
16
Рис. 10. Упрощенная схема корреляционного
радиоинтерферометра:
Ц — цель; At и Л2 — приемные антенны; Пи П2 — приемники; К —
коррелятор; БРЗ — блок регулируемой задержки; МУ —
множительное устройство; ФНЧ — фильтр низких частот; ИП —
измерительный прибор (индикатор значения корреляционной функции); УУ —
указатель угла 0; ЭР — экстремальный регулятор;
S—измерительная база.
максимуму взаимно корреляционной функции; S — база (расстояние
между приемными антеннами).
Практически в корреляционных радио интерферометр ах, как и в
корреляционных радиодальномерах, для модуляции высокочастотной
несущей частоты используются широкополосные псевдослучайные
бинарные последовательности, а для автоматической компенсации
задержек сигналов — схемы задержанной синхронизации [212].
Обычно при сопровождении цели производится одновременное
измерение расстояния и угловых координат, т. е. дальномерная система
объединяется с угломерной. При этом используется радиолокационная
станция с ретранслятором PJ1C, опорный сигнал с которой подается на
интерферометр ИФ (рис. И).
Антенна Лг используется в системе измерения дальности, антенны
Л2 и Л3 — в системе измерения угловых координат. Сигнал,
излучаемый антенной Аг, отражается целью Ц и затем принимается антеннами
Alt A2, А3. При этом вычисляются три взаимные корреляционные
функции — между тремя отраженными сигналами и сигналом PJ1C,
переданным па каналу связи на ИФ и используемым в качестве
опорного.
2 2-298
17
и
Рис. 11. Упрощенная схема сопровождения
цели по дальности и угловым координатам:
Ц «- цель; Аи А2, Л3 — антенны; РЛС —
радиолокационная станция; ИФ — интерферометр.
Более подробно особенности корреляционных интерферометри-
ческих систем и вопросы точности выполняемых с их помощью
измерений рассмотрены в [270].
Методы корреляционного пеленгования источников шумов широко
применяются также в гидроакустике [195, 201, 220, 221, 269]. Для этой
цели используются так называемые шумопеленгаторные устройства.
Известно, что, изменяя задержку на выходе пространственно
разнесенных приемников, можно обнаружить источник шума и определить
направление на него.
Взаимная корреляционная функция выходных сигналов двух
приемников, разнесенных на расстояние d друг от друга, зависит от
угла падения волны а относительно базы, т. е. имеет место то же
явление, которое использовалось в рассмотренных выше корреляционных
радио интерферометр ах. Эта зависимость описывается выражением [201]
ЯК «) = Р0ЮМ'-*) = *(*-^п)' (1.12)
где pQ(t) — звуковое давление шума (уровень сигнала) в месте приема;
а — угол падения звуковой волны относительно базы; с—скорость
распространения звука в воде («1,5 км/сек); d — база.
Получить максимальное значение корреляционной функции и
определить направление на источник шума можно двумя способами — либо
механическим, либо электрическим. При механическом сканировании
блок регулируемой задержки не используется, а вращается сама база
с приемниками. При электрическом сканировании в канал
опережающего сигнала вводится регулируемая задержка, соответствующая
максимуму корреляции. На рис. 12 приведены блок-схемы корреляционных
гидроакустических пеленгаторов с механическим (а) и электрическим
(б) сканированием. На рис. 12, в приведена характеристика
направленности корреляционного шумопеленгатора при электрическом сканиро-
16
вании. Выходной сигнал коррелятора R (a, d) максимален, когда
плоскость, в которой лежат приемники Ях и Я2, расположена
перпендикулярно направлению на источник шума. Указатель угла поворота
платформы У У показывает угловые координаты цели. В схеме с
электрическим сканированием угол а отсчитывается указателем введенной
регулируемой задержки т, который может быть проградуирован
непосредственно в значениях а.
В связи с тем, что гидроакустическое пеленгование производится
при наличии большого количества источников помех (шумы моря и
различных корабельных механизмов), большое значение имеет
повышение отношения сигнал/помеха на выходе станции по сравнению
с этим же отношением на входе. Отношение сигнал/помеха I — ]
ходе шумопеленгатора определяется выражением [201]
на вы-
1п/вых \р2с + р1
(1.13)
где Д/ — ширина полосы частот шума; RC — постоянная времени
интегратора; рс — средний квадрат звукового давления полезного
сигнала на входе; рп — средний квадрат звукового давления помех
на входе.
Из (1.13) следует, что для повышения помехоустойчивости
шумопеленгатора желательно расширение полосы частот принимаемых
сигналов и увеличение времени их интегрирования (или усреднения).
r-Ц (Т) -ф*7 I
а 5
Рис. 12. Корреляционные гидроакустические пеленгаторы:
а—блок-схема корреляционного пеленгатора с механическим
сканированием; б — блок-схема корреляционного пеленгатора с электрическим
сканированием; Пи /72 — приемники звука (гидрофоны); МУ — множительное
устройство; #-—интегратор; ИП — измерительный прибор; ЭР —
экстремальный регулятор; БРЗ — блок регулируемой задержки; УУ — указатель
угла поворота; Дв — двигатель поворота платформы; ВП — вращающаяся
платформа; в — характеристика направленности корреляционного
шумопеленгатора.
2*
19
Большое значение при
пеленгации шумов имеет
улучшение диаграммы направленности
пеленгатора. Для этой цели
приемники могут быть
объединены в сложные приемные
системы. Увеличение числа
приемников в п раз во столько же раз
повышает уровень сигнала на
выходе системы, тогда как
помехи при этом возрастают в ]/л
раз. Суммарная направленность
двух групп приемников,
расположенных на расстоянии d друг
от друга, каждая из которых
имеет направленность Фх (а),
описывается выражением
Ф(а) = ф2(а)Фк(а, d),
где Фк(сс, d) — направленность корреляционного шумопеленгатора
с двумя приемниками, разнесенными на расстояние d. Для обеспечения
синфазного сложения сигналов приемников, объединяемых в группы
I и II, каждый из приемников должен подключаться ко входукорреля-
тора через соответствующий элемент задержки (ть т2, т3),
компенсирующий пространственное запаздывание сигнала, принимаемого этим
приемником (рис. 13) [201].
Взаимно корреляционный метод измерения расходов
Во многих -областях техники необходимо измерение расходов
вещества, т. е. его количества, протекающего через определенное сечение
в единицу времени. Это могут быть жидкости, газы, порошкообразные
вещества, двухфазные и многофазные смеси и т. д. Техника измерения
расходов жидкостей и газов разработана достаточно хорошо [ПО, 191,
315]. В последнее время наиболее интенсивно разрабатываются
бесконтактные методы измерения расходов, так как резкое расширение
диапазона температур, давлений, физических и химических свойств
используемых в промышленности веществ ограничивает возможности
непосредственного контакта с контролируемым потоком
(высокоагрессивные, токсичные, взрывоопасные, охлажденные,
высокотемпературные вещества, плазменные потоки, загрязненные и многофазные
потоки, стационарные и пульсирующие потоки, скорости которых
изменяются в широких пределах, и т. д.).
Бесконтактные методы не вносят каких-либо нарушений в поток
и не требуют использования в расходомерах вращающихся и
подвижных элементов. В основе многих схем бесконтактного измерения
скоростей и расходов лежит так называемый метод меток потока [105,
ПО]. Под этим методом понимают создание или использование в потоке
определенных образований с физическими свойствами, отличными
от свойств самого потока, по скорости перемещения которых вместе
с потоком определяют расход. Расходомеры, основанные на методе
меток, разделяют на приборы с периодическим образованием меток,
1 \ К коррелятору ш
Рис. 13. Акустическая приемная
система корреляционного
шумопеленгатора с компенсационными
линиями задержки:
I, II — группы приемников; Пх — Пв —
приемники; xlt т2, т8 —
компенсационные линии задержки.
20
с нерегулярным образованием меток и с равномерно распределенными
в измеряемом потоке метками [105].
В расходомерах с периодическим образованием меток измеряется
либо время прохождения меток вместе с потоком между двумя
сечениями трубопровода, либо частота прохождения меток около
регистратора [105]. При этом используются соотношения
Q^SJ^ (1.14)
Q = Slf, (1.15)
где Q—расход; S — сечение трубопровода или струи потока; I —
расстояние между двумя детекторами метки (база); Д? — время
движения метки; /— частота формирования метки.
Так как скорость потока по его сечению распределена
неравномерно, в эти формулы вводятся соответствующие коэффициенты k,
точное значение которых не всегда удается установить аналитическим
или. графическим путем. Логическим развитием расходомеров с мет
ками явились корреляционные расходомеры, получающие все более
широкое распространение [105, ПО, 181,205, 301,304,311, 313,314, 319,
329, 403, 423, 445].
Принцип действия корреляционных расходомеров и измерителей
скорости, рассмотренных выше, одинаков: и те и другие фактически
являются измерителями скорости потока. Отличие состоит лишь в
датчиках и в наличии устройства ввода коэффициента kS, учитывающего
площадь сечения и закон распределения скорости по сечению, а также
формирователя псевдослучайных меток.
На рис. 14 приведена упрощенная блок-схема корреляционного
расходомера с периодическим образованием меток в потоке. Для
определенности примем, что это расходомер отходящих дымовых газов
мартеновской печи [105]. Метки создаются впрыскиванием в
трубопровод порций воды в виде псевдослучайных бинарных последовательностей.
Для этой цели предусмотрен формирователь меток ФМ Впрыснутые
в трубопровод водяные метки испаряются благодаря высокой
температуре дыма (600—800° С) и создают участки с местным понижением
температуры, которые перемещаются вместе с потоком мимо
малоинерционных датчиков температуры (термопар) Дх и Д2. Полученные на
выходе датчиков электрические сигналы Д(/) и f2{t) « /i(/ — т)
усиливаются усилителями Ух и У2 и подаются на коррелятор, состоящий из
блока регулируемой задержки БРЗ, включенного в канал
опережающего сигнала f\(t)t множительного устройства МУ и интегратора (или
сглаживающего фильтра) И. Полученная на выходе коррелятора
взаимная корреляционная функция входных сигналов
т
RW = -jr§fi(t)hV-*)dt (Мб)
о
имеет максимальное значение при равенстве введенной регулируемой
задержки т транспортному запаздыванию тт сигнала второго датчика
по отношению к сигналу первого датчика (Т — период интегрирования
21
У////М//////////////////////ЛЯ7777,
1
^t/.
"I
, - п - Л4 А
X
<«/
\
W
©*н
v
i
Ш \шы(*-г;
1
V
гП-пГ
\брз у-*Аму W
^я
//
ИП^О^(г)
Рис. 14. Блок-схема корреляционного расходомера:
ФМ — формирователь меток потока; Ди Д2 — датчики
(термопары); Уи У2 — усилители сигналов датчиков; МУ —
множительное устройство; И — интегратор; ИП — индикатор
уровня корреляционной функции; ЭР •— экстремальный
регулятор; БРЗ — блок регулируемой задержки; ИР — индикатор
расхода Q.
интегратора или постоянная времени сглаживающего фильтра, Т =
= RC)
*т=4- (1л7)
Экстремальный регулятор поддерживает значение /?(т) на
максимальном уровне, воздействуя на БРЗ. Шкала БРЗ градуируется
непосредственно в значениях расхода
Показания расхода отсчитываются с помощью измерителя расхода
ИР.
При увеличении скорости потока и постоянстве частоты выдачи
меток плотность меток уменьшается, что ведет к сужению спектра
сигналов датчиков, к расширению пика корреляционной функции,
а следовательно, к понижению точности измерения скорости и расхода.
Для компенсации этого явления необходимо при возрастании скорости
потока увеличить частоту выдачи меток. Это может быть осуществлено
путем введения самонастройки формирователя меток в соответствии
с сигналом БРЗ, зависящим от скорости потока. На рис. 14 эта связь
22
показана пунктирной линией. Такой самонастраивающийся
корреляционный расходомер поддерживает плотность меток постоянной в
широком диапазоне скоростей потока и обеспечивает более высокую
точность измерения скорости [105].
В зависимости от характера потока применяют самые различные
источники меток. Так, скорость воды можно измерять путем
впрыскивания порций концентрированного солевого раствора, резко
повышающего проводимость потока. В качестве датчиков входного сигнала
в этом случае используются измерители электропроводности в виде
двух электродов. Другими источниками меток в воде или другой
прозрачной жидкости могут быть красители, температурные флуктуации,
пузырьки воздуха [423]. При измерении скорости газа метки могут быть
образованы путем впрыскивания какого-либо другого газа
(отличающегося температурой, прозрачностью, химическими свойствами от
газа основного потока).
Задатчики псевдослучайных бинарных последовательностей для
формирования меток выполняются обычно либо в виде дисков с
масками из черных и белых полос, управляющих фотоэлектрическими
датчиками, либо в виде регистров сдвига, охваченных логическими
обратными связями и генерирующих m-по следователь ноет и [4, 102,
208, 214, 332, 364, 386, 397, 398, 460].
В турбулентных жидких среда'х в поле теплообмена имеет место
случайное распределение температур, поэтому возможно создание
корреляционного расходомера без формирователя меток,
воспринимающего перепады температур жидкости двумя разнесенными
малоинерционными термопарами [105,319]. Эти температурные перепады обычно
имеют амплитуду порядка 0,01—ГС и мало зависят от геометрии
трубопровода. Такие расходомеры могут быть использованы в случаях,
когда имеют место изгибы и небольшие изменения диаметра
трубопровода.
Известны работы по созданию корреляционных расходомеров для
двухфазных потоков, использующих естественные флуктуации свойств
потока. Они применяются при измерении расхода порошковых
материалов (например, муки), транспортируемых по трубопроводам
пневматически (в воздушных конвейерах). Флуктуационные сигналы потока
воспринимаются двумя разнесенными емкостными датчиками [312].
При измерении расхода суспензий аналогичным методом применяют
либо емкостные датчики, либо датчики электрической проводимости.
Точность измерения расходов таким методом по предварительным
экспериментальным данным составляет 1—3% [312]. Расход
высокотемпературного газа может быть измерен в широком диапазоне скоростей
(50—1600 м/сек) с помощью корреляционного расходомера,
использующего фотоэлектрические датчики [105, 181].
Корреляционные расходомеры при выборе достаточно малой базы
и соответствующей обработке сигналов позволяют измерять
пульсации скорости потока. При этом датчики входных сигналов должны
обладать достаточно высокими динамическими свойствами. Более
подробно вопросы измерения пульсаций скорости потока рассмотрены
в [73, 105]. —^
-Корреляционные расходомеры начали успешно применяться в
различных областях промышленности — энергетике (для измерения
скорости плазмы в МГД-генераторах [30, 70, 73]), атомной промышленности
(для измерения скорости охлаждающей воды в реакторах [319, 445]),
в химической и пищевой промышленностях (для измерения скорости
23
жидкостей, жидких, сыпучих и многокомпонентных смесей [301, 304,
312, 314, 315]) и т. д. Точность измерения расходов при этом достигает
1—3%. Появились сообщения об исследованиях применимости
корреляционных методов для измерения расхода таких материалов, как
шерсть (при транспортировке по воздухопроводам), для измерения
скорости тока крови в кровеносных сосудах и т. д.
Корреляционные расходомеры удовлетворяют высоким
требованиям, предъявляемым современной промышленностью к такого рода
приборам (высокая точность и широкий диапазон измерений;
наименьшие потери давления; независимость показаний расходомера от
параметров вещества — давления, температуры, плотности, вязкости;
высокая надежность в эксплуатации, благодаря отсутствию подвижных
элементов) [110].
Глава 2
АВТОКОРРЕЛЯЦИОННЫЕ И СПЕКТРАЛЬНЫЕ ИЗМЕРИТЕЛИ
ПАРАМЕТРОВ ДВИЖЕНИЯ
Автокорреляционные и спектральные методы измерения
скорости движения носителей информации
Взаимно корреляционный метод измерения скорости движения
сводится к определению временного сдвига сигналов, снимаемых с двух
фотодатчиков, расположенных на фиксированном расстоянии друг
от друга, путем вычисления взаимной корреляционной функции этих
сигналов и отыскания ее максимума. Взаимно корреляционный метод
является, по существу, разновидностью компенсационного метода —
неизвестное время транспортного запаздывания сигнала второго
фотодатчика с большой точностью уравновешивается эталонной задержкой
БРЗ, включенного в канал первого фото датчика. Момент равенства
двух временных задержек фиксируется по наличию максимума
взаимной корреляционной функции входных сигналов. Положение
максимума на оси абсцисс может быть определено очень точно, чем и
объясняется высокая точность этого метода.
Следует заметить, что скорость при взаимно корреляционном
методе в принципе может быть измерена не только путем слежения за
положением точки максимума взаимной корреляционной функции на
оси абсцисс (рис. 15, а), но также и путем отслеживания любой
другой заданной точки этой функции, например, удаленной по оси абсцисс
на фиксированное расстояние от максимума (рис 15, б) или
достигающей некоторого фиксированного уровня значений корреляционной
функции (рис. 15, в). Наиболее просто фиксация заданной точки может быть
осуществлена при помощи рассматриваемой в гл. 3 дифференциальной
схемы, позволяющей без поисковых колебаний удерживать систему
на заданном удалении от экстремума [118, 120, 129]. Фиксация точки
характеристики, находящейся на заданном уровне, может быть
получена, например, при помощи порогового устройства, настроенного на
этот уровень, путем изменения абсциссы от нуля до момента
срабатывания порогового устройства или при помощи нуль-индикатора,
включенного между источником фиксированного смещения и выходом
коррелятора. По-видимому, такой подход может оказаться полезным при
24
решении многих задач измерения,
если вместе с измерением
интересующего нас параметра смещается
или деформируется характеристика
контролируемого объекта.
Однако в ряде случаев
применение взаимно корреляционного
метода измерения скорости,
требующего наличия двух (или трех)
датчиков, может быть затруднено
тем, что конструктивные требования
не позволяют обеспечить достаточно
большое расстояние между
датчиками (базу измерения),
необходимое по соображениям точности. Это
может иметь место, например, при
очень малом расстоянии между
клетями непрерывного прокатного
стана (в случае измерения скорости Щ
движения проката) или при малых
геометрических размерах
движущегося объекта, скорость движения
которого относительно Земли
необходимо «измерить (малое базовое
расстояние при больших скоростях
приводит к значительным
погрешностям измерения скорости).
Предварительные исследования,
проведенные в Институте
кибернетики АН УССР, показали
принципиальную возможность
измерения скорости движения по
информации, полученной лишь с одной
точки движущейся поверхности
(например, с помощью одного
датчика). Для измерения
используется автокорреляционная
функция входного сигнала. Этот метод
Рис. 15. Фиксированные точки
корреляционной функции R (т),
положение которых может
отслеживаться при измерении
скорости корреляционным
методом:
а — экстремум корреляционной
функции; б — точка, смещенная от
экстремума на фиксированное расстояние
Дт; в — фиксированное значение
ординаты корреляционной функции И0
измерения скорости (назовем его
автокорреляционным) основан на следующем [125].
Как показал анализ осциллограмм, снятых при помощи фото
датчика с поверхности прокатываемого металла, движущегося с
переменной скоростью (от 0,6 м/сек до 17,3 м/сек), увеличение скорости
движения металла приводит к расширению спектра сигнала и соответственно
к изменению формы его автокорреляционной функции (рис. 16, 17).
Автокорреляционные функции (рис. 17) вычислялись путем замены
реализации случайного сигнала рядом из п его дискретных значений
при помощи выражения
Л(Т):
т
x(ti)x(t{+m\
(2.1)
26
.. I t M I I I 1 I I 1 I I I I ,11.) .U I I I I I I I M I I I 1 I I I I I I I I I II I I M I f I I I I I I I) I I, I l I, II t
11 J м/сек
^Aaav\a/n^^^^
5,85 м/сек
lllllnll MI.IIM.IIIIIII llll I llllllll
-J I I I I i I I I 1 I I 1 I I I I I 1 1 L_^J I I I L.
2,21м/сек
0,6м/сек
I I I I 1,1 I I I I I I I M I I V
I I I I I I I 11 11 I
Рис. 16. Осциллограммы сигналов, снятых с поверхности
движущегося металла при различных скоростях.
Отметки времени: 500 гц (о = 17,3 м/сек 11,7 м/сек, 5,85 м/сек) и 50 гц
(v = 2,21 м/сек, 0,6 м/сек).
со
где x(ti) s= x(ti) — тх— центрированное значение сигнала x(t) на
м интервале; тх— — /*(*/)—математическое ожидание сигнала x(t)\
t=l
п — число интервалов квантования исходного сигнала; т — число
интервалов сдвига (т = т ДО-
Необходимое время интегрирования (усреднения) Т определяется
по методике, изложенной в [238], исходя из соотношения
£(Г-х)>^,
(2.2)
где Тн — период, соответствующий низшей частоте входного сигнала;
6А — относительная погрешность определения корреляционной
функции.
26
200
gj, рад/сек
Рис. 17. Автокорреляционные функции и спектральные
плотности сигнала, снятого с поверхности металла, движущегося
с различными скоростями:
а — автокорреляционные функции; б — спектральные плотности.
Анализу погрешности при вычислении корреляционной функции,
вызванной конечностью времени интегрирования (усреднения),
посвящено значительное число работ, например [66, 163, 282].
После аппроксимации автокорреляционных функций выражением
А(т) = Л (0) е~а i T[ cosffr и применения преобразования Фурье для
тех же значений скорости вычислены спектральные плотности
входного сигнала (рис. 17, б)
Л (0уа_ о)2 + ос2 + Р2
' (со2 — р2__а2) + 4а2а>2 *
S(«) =
(2.3)
Однозначная зависимость между скоростью движения металла и
ординатой автокорреляционной функции при некотором фиксированном
27
значении запаздывания %\ делает возможным измерение этой
скорости с помощью прибора, включенного на выход коррелятора и про-
градуированногс непосредственно в значениях скорости На рис. 18, а
изображена блок-схема простейшего автокорреляционного измерителя
скорости проката, на рис. 18, б — зависимость еыходного сигнала
коррелятора от скорости движения металла.
Другая возможная схема (использующая зависимость от скорости
абсциссы точки пересечения заданного уровня Н0 автокорреляционной
функцией) приведена на рис. 19. Плавно изменяя с помощью БРЗ
регулируемую задержку т, добиваются нулевого показания
измерительного прибора ИП (индикатора компенсации). Значение введенной
задержки (т1} т2, т3) при этом функционально связано со скоростью
движения металла (vlt v2, vs). Эта схема сложнее предыдущей, так как для
нее необходима плавно регулируемая, а не фиксированная задержка
сигнала.
Автокорреляционные методы измерения скорости движения
обладают рядом преимуществ по сравнению с взаимно корреляционным
методом:
1) необходим всего лишь один датчик, в связи с чем упрощается
установка измерителя скорости на объекте;
2) отсутствуют погрешности измерения скорости, связанные с
величиной базы (расстояния между датчиками), например погрешности,
обусловленные малой величиной базы, неточностью ее установки или
непараллельностью по отношению к траектории движения;
3) возможно создание многошкальных приборов на интересующие
нас диапазоны измерения скоростей. В таких приборах должна
скачкообразно изменяться величина постоянной задержки (для первой схемы)
или уровень фиксации ординаты (для второй схемы);
4) прибор, выполненный по схеме, изображенной на рис. 18, дает
выходной1 сигнал, непосредственно зависящий от скорости металла,
благодаря чему он может быть использован в качестве датчика в системе
автоматического регулирования.
Практическая реализация автокорреляционных методов, однако,
пока затруднена рядом существенных ограничений и недостатков.
Для успешного использования автокорреляционного измерителя
скорости движения наиболее важным является требование
стационарности входного сигнала и повторяемости формы автокорреляционных
функций для каждой заданной скорости движущейся поверхности
(металла). Так (в случае измерения скорости проката), изменение сорта
прокатываемого металла или смена валков в стане могут привести
к появлению погрешности измерения скорости и к необходимости
изменения градуировки прибора. Погрешность может быть вызвана также
расфокусировкой светового штриха или изменением его размеров
вследствие вспучивания полосы (при этом изменяется спектральный
состав входного сигнала и форма автокорреляционной функции). При
измерении скорости летательных аппаратов автокорреляционным
методом причиной возникновения погрешности может быть изменение
характера земной поверхности (море — горы — лес). В связи с этим
необходима периодическая корректировка шкалы прибора —
«установка нуля» (замыкание БРЗ и установка дисперсии на заданное
деление шкалы — вручную или автоматически).
Автокорреляционный измеритель скорости является обычной
разомкнутой измерительной схемой, и его погрешность равна сумме
погрешностей каждого из звеньев. Весьма существенной при этом яв-
28
об
ФЭ
БЛЗ\т,
МУ
X
И
5
A(rH(v) iV\nn
а
Рис.. 18. Автокорреляционный измеритель скорости проката:
а — блок-схема: О — осветитель; ФЭ — фотоэлемент; БПЗ — блок
постоянной (фиксированной) задержки сигнала; МУ—множительное устройство;
/7 — интегратор; ИП — измерительный прибор; б — форма сигналоз на
выходе коррелятора при различных скоростях движения металла {vlt v2$
А(т)1+ ип
ВУ 6?У(У)А(г)-Но~-0 • г/ т2 h
T*J(vJ 5
Рис. 19. Автокорреляционный измеритель скорости движения
проката с фиксацией уровня автокорреляционной функции:
а — блок-схема: О — осветитель; ФЭ — фотоэлемент; БРЗ — блок
регулируемой задержки: МУ —- множительное устройство; И — интегратор; ВУ —
вычитающее устройство; ИП — измерительный прибор (индикатор
компенсации); б—форма сигналов на выходе коррелятора
ляется погрешность вычисления ординаты автокорреляционной
функции, которая у известных типов корреляторов составляет не менее 1%.
Следовательно, возможная максимальная точность
автокорреляционного метода измерения скорости ограничена этим значением.
Погрешность измерения текущей автокорреляционной функции
т
Лг(т)==Т"1/ет/(^ + т)^ (2'4)
о
зависит от времени интегрирования Т и от спектра частот входного
сигнала/(О- Увеличение времени интегрирования находится в
противоречии с быстродействием корреляционного измерителя скорости.
Расширение полосы частот входного сигнала коррелятора в сторону
высоких частот должно уменьшить необходимое время интегрирования
и улучшить быстродействие прибора. Это может быть осуществлено,
например, путем выявления более мелких элементов поверхностей
структуры металла, уменьшения геометрических размеров светового
«читающего» штриха при одновременном обеспечении достаточно
широкой полосы пропускания всех элементов системы. Наличие более
высоких частот во входном сигнале коррелятора сузит автокорреляционную
функцию, сделает более крутыми ее склоны и, следовательно, растянет
шкалу измеряемых скоростей, т. е. повысит разрешающую способность
прибора по скорости.
Очевидно, что для использования в измерителе скорости
автокорреляционная функция должна быть нормирована. В связи с этим
целесообразно использование в автокорреляционном измерителе скорости
полярного (двойного релейного) коррелятора (гл. 4), который
обеспечивает вычисление нормированной корреляционной функции и
позволяет значительно упростить схемное решение отдельных узлов
прибора (БРЗ, множительного устройства). Возможность использования
вместо аналогового множительного устройства простой схемы
совпадения является значительным преимуществом полярного коррелятора,
так как создание широкополосного аналогового множительного
устройства сопряжено со значительными техническими трудностями
(а при автокорреляционном методе, как уже упоминалось, желательно
использовать возможно более высокочастотный входной сигнал).
Все перечисленные замечания ограничивают возможности
применения автокорреляционных измерителей скорости движения.
Интересная перспектива использования измерительных систем
с одним датчиком открывается также при анализе зависимости
спектральной плотности входного сигнала £(<о)от скорости. Как видно
из рис. 17, б, здесь имеет место однозначная зависимость межДу
положением максимума кривой спектральной плотности на оси абсцисс
и скоростью. При наличии автоматического спектрального анализатора
можно было создать замкнутую схему экстремального регулирования,
автоматически отслеживающую положение максимума S (со) на оси со,
с градуировкой шкалы со в значениях скорости. Экстремальный
регулятор автоматически отыскивал бы максимальное значение 5(сом),
воздействуя на спектральный анализатор СЛ (рис.^ 20).
Однако практическое осуществление такой схемы, по-видимому,.
сопряжено со значительными трудностями, обусловленными, прежде
всего, отсутствием разработанных простых схем автоматических спек-
30
sm
CJf CJ2 CJj
~~^r—
AC
vf
$(Ф*М (v)m
Рис. 20. Спектральные методы измерения скорости движения:
а — блок-схема измерителя скорости с отслеживанием экстремума
спектральной плотности! О — осветитель; ФЭ — фотоэлемент; ЭР —
экстремальный регулятор; АС — автоматический анализатор спектра; ИП —
измерительный прибор; УС — указатель скорости; б — кривые
спектральной плотности сигнала фото датчика при различных скоростях движения
металла: в — блок-схема измерителя скорости движения, измеряющего
уровень одной фиксированной составляющей щ частотного спектра;
е — кривые^ иллюстрирующие зависимость уровня выходного напряжения
анализатора спектра (avlf bv2t cvZt dvj на фиксированной частоте <at от
скорости движения металла (vti , . ., v4).
тральных анализаторов. Кроме того, работа экстремального
регулятора в такой системе происходила бы в условиях одновременного
дрейфа экстремума как в горизонтальном, так и вертикальном
направлении, так как из рис. 17, б видно, что при увеличении со ордината
максимума S (w) уменьшается.
Это последнее обстоятельство объясняется следующим. Площадь,
ограниченная кривой S (со) и равная дисперсии А (0) входного сигнала
[48], в нашем случае нормированной корреляционной функции,
постоянна:
00
Г S (со) do> = А (0) = const. (2.5)
— 00
В то же время с увеличением скорости движения металла расширяется
полоса частот. Это приводит к понижению максимума кривой
спектральной плотности.
Для автоматизации такой системы наиболее подходящей является
дифференциальная схема экстремального регулирования,
инвариантная по отношению к вертикальному дрейфу экстремума (см. гл. 3)
[43, 44].
Описанная замкнутая схема с экстремальным регулятором,
отслеживающим максимум спектральной плотности, является в какой-то
мере аналогом взаимно корреляционной схемы в частотной области.
Подобным образом может быть получена разомкнутая
спектральная схема измерения скорости, в частотной области аналогичная первой
автокорреляционной схеме во временной области.
Как видно из рис. 20, г, уровень какой-либо частотной
составляющей спектральной плотности S (со) (на определенной фиксированной
частоте сох) также характеризует скорость движения металла. Поэтому,
включив после фотодатчика ФЭ спектральный анализатор какой-либо
одной составляющей (или просто достаточно узкополосный фильтр
СА) и измеритель уровня этой составляющей #Я, мы получим простую
разомкнутую схему с одним входным датчиком для измерения скорости
движения спектральным методом (рис. 20, в). Фиксированная частота
со! должна быть выбрана таким образом, чтобы проведенная через
нее прямая, параллельная оси ординат, пересекала только восходящие
(или только нисходящие) ветви кривой S(co). Переключая в такой
схеме значения со1} можно изменять характер шкалы измеряемых
скоростей.
Спектральный аналог второй автокорреляционной схемы
измерения скорости приведен на рис. 21.
Как видно из изложенного выше, помимо взаимно
корреляционного метода для измерения скорости движения принципиально
возможно применение автокорреляционных методов, использующих
разомкнутые схемы измерения, а также трех аналогов этих методов в
спектральной области — одной замкнутой и двух разомкнутых схем.
Все эти методы основаны на использовании зависимости от скорости
определенных характеристик стационарных сигналов во временной
и частотной областях:
1) при взаимно корреляционной и замкнутой спектральной схемах
осуществляется слежение за положением максимума на оси абсцисс
(в первом случае — взаимной корреляционной функции, во утором —
спектральной плотности);
32
Рис. 21. Измеритель скорости движения проката с фиксацией уровня
спектральной плотности:
а —- блок-схема* О ** осветитель; ФЭ — фотоэлемент; АС —* анализатор спектра;
ВУ — вычитающее устройство; МП — измерительный прибор 'индикатор
компенсации); б — форма сигналов на выходе спектроанализатора при различных
скоростях движения.
2) принцип действия автокорреляционных и разомкнутых
спектральных схем основан на использовании сечений соответствующих
характеристик прямыми, параллельными осям абсцисс или ординат.
Поскольку в настоящее время аппаратурная реализация
вычисления корреляционной функции проще, чем в случае вычисления
спектральной плотности, автокорреляционные методы более близки к
практическому внедрению. В то же время дальнейшие исследования
спектральных методов измерения скорости представляют определенный
интерес [89, 153, 245, 267, 325].
В литературе, опубликованной в последние годы, описан ряд
методов измерения скорости, принципиально близких к спектральному
и основанных на измерении частотных составляющих сигнала,
снимаемого с движущейся поверхности. В ряде случаев для выделения
определенных частотных составляющих сигнала в этих системах
используются так называемые пространственные оптические фильтры (растровые
системы) [42, 305, 306, 356, 368, 399, 402, 433].
Применение автокорреляционных и спектральных методов
ограничено требованием стационарности сигнала, снимаемого с
движущегося носителя.
Взаимно корреляционные схемы измерения скорости движения
не предъявляют таких жестких требований к стационарности
используемых сигналов Они сохраняют работоспособность и при
медленном изменении статистических свойств сигналов при соблюдении
условия, что за время транспортного запаздывания сигнала второго
фотодатчика не будет происходить заметных их изменений.
3 2-298
33
Автокорреляционный метод измерения расстояний
Для измерения расстояний необходимо измерение времени
распространения зондирующего сигнала (времени его задержки при
движении до объекта и обратно). Для этой цели может быть применен
автокорреляционный метод. При этом генерируется шумовой сигнал с
определенным частотным спектром и устойчивой формой
автокорреляционной функции. В пределах интервала корреляции значение
автокорреляционной функции на выходе коррелятора позволяет оценить задержку
одного из входных сигналов [377].
Рассмотрим автокорреляционный метод измерения расстояния
на примере акустического эхолота для измерения малых глубин [430].
На рис. 22, а изображена блок-схема корреляционного
акустического эхолота. Шумовой сигнал x{t), генерируемый при помощи
генератора шума ГШ, подается на акустический излучатель А И и на один
из входов коррелятора (блок задержки БЗ). Отраженный от дна и
задержанный на время транспортного запаздывания т0 сигнал x(t — tJ
воспринимается приемником (гидрофоном) /7 и подается на усилитель
У коррелятора. Время задержки отраженного сигнала зависит от
глубины d и скорости распространения сигнала в воде с
*« = -г • (2-6)
Уровень выходного сигнала коррелятора (автокорреляционной
функции А(х)) зависит от транспортного запаздывания тв сигнала x(f),
т. е. от измеряемой глубины
т
Л(х
-т<)==М
х (t — т) х (t — tg) dt.
(2.7)
Рис. 22. Корреляционный акустический эхолот:
а — блок-схема» ГШ — генератор шумового сигнала; БЗ — блок
постоянной или регулируемой задержки сигнала; МУ — множительное
устройство; И — интегратор; У — усилитель; /7 — приемник (гидрофон);
ЛИ — акустический излучатель; ЭР — экстремальный регулятор; МП -**
измерительный прибор; б *=» зависимость выходного сигнала коррелятора
от глубины и задержки отраженного сигнала.
34
Для измерения глубины автокорреляционным методом можно
применить один из следующих способов:
воздействуя на блок задержки с помощью экстремального
регулятора ЭР, можно добиться максимального значения
автокорреляционной функции (см. пунктирную линию на рис. 22, а). Блок задержки
в этом случае должен быть регулируемым. При этом т = т^ и блок
задержки может быть проградуирован непосредственно в единицах
глубины. В данном случае мы получаем корреляционную
экстремальную систему со всеми преимуществами автоматизированного
компенсационного метода измерений:
мерой расстояния служит непосредственно значение выходного
сигнала коррелятора — автокорреляционной функции Л(т) Величина
введенной задержки х фиксирована и определяет начало отсчета
(рис. 22, б). Выбирая надлежащим образом спектр шумового сигнала
x(t), получаем нужную форму автокорреляционной функции,
обеспечивающую измерение задержки, которое соответствует интересующему
нас диапазону глубин. В этом случае используется так называемый
амплитудный метод измерения по разомкнутой схеме.
Выше был изложен лишь принцип, положенный в основу
автокорреляционного метода измерения глубины. Более подробно вопросы,
связанные с построением реальной системы такого типа, рассмотрены
в [430].
Аналогичный метод был использован в корреляционном
радиолокаторе, описанном в [164, 377]. При этом рассматривались как
амплитудная, так и частотная модуляция высокочастотного несущего сигнала.
Преимуществом частотной модуляции в этом случае оказалась
независимость метода от уровня отраженного сигнала. Особенностью системы
является использование для обработки сигналов не «классической»
автокорреляционной функции излучаемого x(t) и отраженного x(t — т)
сигналов, а среднего квадрата разности этих сигналов, названного
автором «антикорреляционной функцией» [377]:
г
н (т) = ¥ J [x {t)-x {t ~T)]2 dt (2-8)
о
Глава 3
АВТОМАТИЗАЦИЯ КОРРЕЛЯЦИОННЫХ
ЭКСТРЕМАЛЬНЫХ СИСТЕМ
Применение схем с синхронными детекторами
Выходной сигнал коррелятора Я(т) (взаимная корреляционная
функция сигналов /х(0 и f2(t)) имеет четко выраженный максимум при
т = тт, поэтому коррелятор можно рассматривать как объект с
экстремальной характеристикой. В корреляционных экстремальных системах
для получения замкнутой системы автоматического регулирования
экстремальный регулятор ЭР подключается к выходу коррелятора
(регулируемая величина) и воздействует на блок регулируемой задержки
БРЗ, изменяя величину^ (регулирующее воздействие) так, чтобы под-
3*
36
^L_
1 ^
/ ^ Г
ЭР
4z
V
4
БРз\т
i
/ '
Уг
ми
rh
#
V
, №
/Г
1
i
R(r)
Рис. 23. Блок-схема автоматизированной
корреляционной экстремальной системы для измерения
скорости движения проката:
0lf 0.L — осветители; ФЭи ФЭ± — фотоэлементы; Уь У2 —
усилители; БРЗ — блок регулируемой задержки; МУ
—множительное устройство; И — интегратор; ЭР — экстремальный
регулятор; УС — указатель скорости; К — коррелятор.
Ммш
^ ,
ил
1
.
ОР
V
У
i
'
РФ
**1
Рис. 24. Простейшая система экстремального регулирования
с модулирующим воздействием:
а _ структурная ехемж ОР — объект регулирования; РФ —
резонансный фильтр; У — усилитель; ИД — исполнительный фазочувстви-
тельный двигатель; 9 — регулируемая величина; ц.г - регулирующее
воздействие; \х.м — модулирующие колебания; б «- временная
диаграмма.
36
держивалось максимальное значение взаимной корреляционной
функции R(t). Значение скорости (в случае КЭС для измерения скорости)
отсчитывается непосредственно по шкале БРЗ (рис 23).
Экстремальную задачу автоматизации КЭС естественно
попытаться решить прежде всего обычными средствами техники
экстремального регулирования. Поэтому сначала рассмотрим схему
экстремального регулирования с модулирующим воздействием, которая, как
известно, обладает сравнительно высокой помехоустойчивостью [100,
117, 161, 162]. Простейшая схема такого типа работает следующим
образом (рис. 24, а). На вход объекта регулирования ОР подаются
регулирующее воздействие ja и непрерывные знакопеременные
модулирующие колебания от внешнего генератора fiM В корреляционном
измерителе скорости, где объектом регулирования является коррелятор,
регулирующее воздействие — это управляющее напряжение на входе
БРЗ, а модулирующее воздействие — накладываемое на него
знакопеременное напряжение небольшой амплитуды Если БРЗ выполнен
в виде устройства магнитной записи с подвижной читающей головкой,
то регулирующее воздействие определяется положением считывающей
головки, а модулирующее — дополнительными периодическими
колебаниями этой головки с частотой модуляции а>м.
Фаза переменной составляющей выходной величины объекта
регулирования ф зависит от того, с какой стороны от экстремума находится
система. При нахождении системы в области экстремума переменная
составляющая выходного сигнала минимальна, так как точка экстремума
характеризуется тем, что в ней частота модулирующих колебаний
удваивается и исчезают колебания основной частоты. Переменная
составляющая выходного сигнала используется в качестве сигнала ошибки,
который подается на фазочувствительный исполнительный двигатель
(ИД) и обеспечивает регулирующее воздействие, необходимое для
удержания системы на экстремуме. Однако такая упрощенная схема
обладает рядом недостатков. Более совершенная система — с синхронным
детектором была разработана в лаборатории автоматического
регулирования Института электротехники АН УССР [162].
Как впервые показано в работах чл.-кор. АН УССР А. Г. Ивах-
ненко [98, 100], значительное упрощение экстремальной системы с
модулирующим воздействием может быть получено при использовании
вместо обычной, пропорциональной корреляционной функции
т
о
так называемой релейной корреляционной функции
г
R* (т) = 1 f к (0 sgn [/2 (/ + т)] dU (3.2)
о
получаемой в результате квантования одного из перемножаемых
сигналов на два уровня. При этом вместо сложного множительного устройства
применяется синхронный детектор, а вместо интегратора —
сглаживающий фильтр [161, 162].
37
\&^Ю> 4<^Ъ*%
^
>d
V
yf
~ч\
~_Щ) A(t)
5РЗ
г
i
L=:=
г
#л
Z
ZKL
см
+1
к
1
1
1
ЭР |
Рис. 25. Блок-схема КЭС для
измерения скорости движения
проката, использующей
экстремальный регулятор с
синхронным детектором:
Оц Ог — осветители; ФЭ1г ФЭ2—
фотодатчики; У{, У2 — усилители;
К — коррелятор (объект
регулирования); ЭР — экстремальный регуля-
тор; БРЗ— блок регулируемой
задержки; МУ — множительное устройство
коррелятора; Ф4 — сглаживающий
фильтр коррелятора; СД —
синхронный детектор: Г — генератор
модулирующего воздействия; Ф2 —
сглаживающий фильтр регулятора; ИД—
испо нительный двигатель
Рассмотрим динамические
процессы в системе автоматического
измерения скорости с
использованием экстремального регулятора
с внешним модулирующим
воздействием и синхронным детектором.
Работа такого регулятора описана
в [98, 100, 161, 162]. Она сводится
к стабилизации выходного
напряжения фазового дискриминатора
(синхронного детектора) на
постоянном, близком к нулю, значении
Ф «0 (рис. 24, б). Составим
уравнения динамики элементов системы,
изображенной на рис. 25. На рис.
26 представлена схема замещения
объекта регулирования
(коррелятора) в виде двух звеньев
—нелинейного безынерционного звена НЗ
с экстремальной характеристикой
и линейного инерционного звена
ЛЗ Характеристику нелинейной
части объекта (корреляционную
функцию) аппроксимируем
квадратичной параболой. Уравнение
нелинейного элемента имеет вид:
* = -аэ0А + Х)2, (3.3)
где X — возмущающее
воздействие, которое смещает
экстремальную характеристику вдоль оси
абсцисс (изменение скорости
движения полосы металла); \х —
суммарное регулирующее воздействие,
поступающее на вход БРЗ; х~-
промежуточная переменная
(величина напряжения на входе
фильтра); аэ — коэффициент крутизны
экстремальной характеристики нелинейного элемента.
Воздействие, поступающее на вход БРЗ, равно
fx==fXM + fxp
(3.4)
где ц-м — модулирующее воздействие; |л —^регулирующее воздействие.
Уравнение динамики инерционной линейной части объекта (фильтра
Ф$) имеет вид
(ЧР + 1) <Р = 4*1 P^-fif'
(3.5)
где ф — напряжение на выходе фильтра, пропорциональное взаимной
корреляционной функции входных сигналов.
за
)
I
и 1
1 *■
1
1
L
- Г
1 нз
X
AJ
*tP*f
l
i *-.
i
t
_ J
Рис. 26 Схема замещения объекта регулирования
(коррелятора):
(х — регулирующее воздействие; х *- промежуточная перемен»
пая (величина напряжения на входе фильтра); <р *-•
регулируемая величина (напряжение на выходе фильтра,
пропорциональное взаимной корреляционной функции входных сигналов);
X — возмущающее воздействие (изменение скорости
прокатываемой полосы); НЗ — нелинейное звено; JI3 *» линейное
звено.
Для упрощения анализа принимаем в качестве модулирующего
воздействия периодический сигнал прямоугольной формы
аи sgn sin V>
(3.6)
где аи и сом — соответственно амплитуда и частота модулирующих
колебаний.
При этом предполагаем, что сдвиг фазы модулирующего колебания
в объекте- регулирования компенсируется фазосдвигающим звеном
в цепи управления синхронным детектором. Как показано в [161,
162], при отсутствии ф а зо сдвигающей цепочки между генератором
модулирующих воздействий и синхронным детектором должно быть
выдержано условие
где Т — период модулирующих колебаний; xj — постоянная времени
объекта регулирования.
Уравнения динамики отдельных элементов системы:
синхронного детектора СД (релейного умножителя)
9 = <РЯМ sgn sin coM/;
фильтра Ф2
(т2р+1)г = а20;
исполнительного двигателя ИД
(х9р + 1) /?fxp = а8г.
(3.7)
(3.8)
(3.9)
Из уравнений (3.3), (3.4) и (3.5) получим уравнение динамики
объекта регулирования:
(Ч Р + О <Р = -аЛ (|х£ + fx2p 4> *2 + 2fxMfxp + 2|лм\ + 2jxpX). (3.10)
39
Учитывая (3.6), получим:
(ЧР +.1) ? = -а1аэам ^п sin "J? * а1а^р - аЛХ2 —
- 2а1аэ^рХ — 2а1аэ^рам sSn sin °V — 2а1аэАам s2n sin V' (3*! J)
Из уравнений (3.11) и (3.7) имеем:
(Tip + 1)0 = —«i^ (sSn sin V)3 ~ а1аэ^рам • sSn sin \^ —
- ai«3X2flM sSn V — 2aiV ра2м (sSn sin ^м^)2 —
- 2а1а9Ха2м( sgn sin coM02 - (3.12)
- 2а1а^рХам sgn sin to J.
Ввиду того что на выходе синхронного детектора имеется фильтр
низкой частоты, который практически не должен пропускать
составляющую с частотой модуляции о>м и выше, при разложении в ряд
Фурье
sgn sin <&J = --. (^sin <*J + j sin 3o>M* + ~ sin 5a>M H J (3.13)
можно пренебречь высшими гармониками и считать, что
4
sgn sin osMt « — sin a>M*. (3.14)
Учитывая (3.14), а также то, что
(sgn sin a>02 = I, (3.15)
первыми четырьмя членами (3.12) можно пренебречь. Такое
упрощение допустимо при рассмотрении малых отклонений от точки
экстремума [161].
В результате получаем приближенное уравнение динамики
коррелятора К и множительного устройства МУ (рис. 25):
(чр + 1)да ~~2«1*эа1 (^ + X). (3.16)
Решая соответственно (3.8) и (3.16), найдем выражение для
величины на выходе фильтра
(ЧР + 1)(*«Р + 1)2 - - «р({хр + X), (3.17)
где ар = га^о^а*.
Из (3.17) и (3.9) после промежуточных преобразований получаем
уравнение динамики системы, линейное относительно регулирующего
воздействия, хотя сама система является нелинейной:
{ЧР + О (ЧР + 1) (ЧР + 1) №р = --«£«3 (|*р + X) (3.18)
или
[ЧЧЧР* + (ЧЧ + ЧЧ + ЧЧ) Р3 + (Ч + 4 + Ч) Р2 +
+ p + «P](V=--apb' (3.19)
где ap = apOt3,
40
Характеристическое уравнение имеет вид:
*1^зР4 + (^2 + т1*з + Ч^з) Р3 + (Ч + т2 + *з) Р2 + Р + «р = 0.
(3.20)
Для устойчивости такой системы четвертого порядка необходимо
выполнение условий Гурвица [101, 152]:
Ах = а, > 0,
Л* =
А, = .
аъ а2
а\ а0 0
а3 а2 аг
0 а4 аъ
at а0 0 0
а3 а2 o>i a
0 я4 fl3 а2
0 0 0 а4
= а^ — а0ав > О,
(3.21)
(3.22)
(3.23)
= я4 [as (flifl2 ~ ЯоЯз) — afol > 0» (3-24)
где
а0 = Х1т2т3, аг = TjTa + TjTg + х2т8,
^2 = Tl + Т2 + Ъ % = 1, 04 = V
Поскольку все коэффициенты уравнения положительны и ни один из
них не равен нулю, то проверку устойчивости данной системы 4-го
порядка можно произвести, пользуясь только одним неравенством
«1^2 — Я0 — а\а* > °* (3-25)
Следует заметить, что для исследования динамики таких систем
с множительными звеньями имеются более точные (но более сложные)
приемы, основанные на использовании методов шумовых функций
[190].
Рассмотрим переходные процессы в системе под действием
возмущения в виде мгновенного изменения скорости движения металла
(т. е. реакцию на единичный скачок). Для этого зададимся значениями
параметров, близкими к реальным.
Выбираем значения постоянных времени фильтров %х = 0,05 сек
и т2 = 1 сек, исполнительного двигателя т3 = 0,05 сек и коэффициент
усиления системы ар = 8. Постоянная времени сглаживающего фильтра
коррелятора Tj = 0,05 сек, как было показано выше, обеспечивает
достаточно хорошую степень сглаживания корреляционной функции
при заданном спектре входных сигналов, получаемых с прокатанной
полосы. Постоянная времени сглаживающего фильтра после
синхронного детектора т2 выбрана исходя из ориентировочной частоты
модулирующих колебаний [161].
Уравнение динамики системы в отклонениях при выбранных
значениях параметров можно записать в виде:
(0,0025/?* + 0,1025/?3 + \Лр2 + р + 8) р. = —8Х
(/?4 + 41/73 + 440/>2 + 400/? + 3200) j*
-3200Х.
(3.26)
41
Изображающее уравнение, соответствующее уравнению динамики
системы, имеет вид [79]:
*У (s) + cBssy (s) + c2s2y (s) + cxsy (s) + c0y (s) = / (s)
или
P(s)9(s) = f(s), (3.27)
где
p (S) = s4 + c3sz + c2s2 + cts + c0 = s* + 41s3 + 440s2 + 400s + 3200,
где s — комплексная переменная преобразования Лапласа:
00
о
f(s) = L{l(t)}.
Решению уравнения динамики соответствует изображение
y(s) = T(s)ns)' (3-28>
В качестве возмущения X(t) нами взят единичный скачок,
изображение которого
L{X(*)} = ±. (3.29)
Изображение решения (переходной функции) имеет вид:
п
^ = ^ = 7W--T + X^W '*=Ъ ' (3'30)
где p'(s)— производная многочлена p(s)\ а/—нули многочлена p(s).
Нули многочлена можно найти при помощи итерационного метода
О. М. Крыжановского [156]. При принятых нами значениях
коэффициентов они равны:
аи 2 = — 20,39 ±/2,91,
«з,4= ~"0,11 ±/2,91.
Воспользовавшись разложением Хевисайда
п
fi (/) = -i— + У L— е***, (3.31)
найдем оригинал решения, равный в фкончательном виде
fx if) = 1 — e-V1' (cos 2,75* — 0,285 sin 2,750 —
— *-Ч8* (0,0018 cos 2,91/ + 0,0017 sin 2,91*). (3.32)
Третьим членом этого выражения можно пренебречь ввиду быстрого
—.20 4Q/
затухания экспоненты е
42
Рис. 27. Переходные процессы в системе экстремального
регулирования (1 — при а = 8; 2—при ар = 2).
На рис. 27 построен график переходного процесса
М- (/) = 1 — e~°*nt (cos 2,75/ — 0,285 sin 2,750, (3.33)
соответствующий коэффициенту усиления системы а_ = 8 (кривая 1)
Приняв а а 2, получим кривую 2
^(0=1 — е-о,*9У (0,975 cos 1,336/ - 0,423 sin l ,336/) -
— 6?~2°И (15,8 . 1£Г3 . cos 1,493/ + 65,75 . 10"» sin 1,495/) (3.34)
(третьим членом выражения пренебрегаем).
Как видно из рис. 27, переходный процесс при скачкообразном
изменении скорости металла даже в наиболее благоприятном случае
занимает довольно значительное время, равное 5—10 сек. При этом
увеличение коэффициента усиления ар=в а4 (при сохранении тех же
значений постоянных времени Тц, т2, т3) ухудшает динамические свой
ства системы — в ней усиливаются колебательные процессы (см. 3.24)
Увеличение значений хи т3 и, особенно, т2 отрицательно влияет на
устойчивесть и быстродействие системы. В то же время уменьшить
т2 нельзя, так как это ухудшило бы фильтрацию модулирующих
колебаний на выходе синхронного детектора, частота которых, в свою
очередь, ограничена полосой пропускания регулируемого объекта.
Компромиссная настройка сглаживающего фильтра должна обеспечить
удовлетворительное качество переходного процесса при достаточной
помехоустойчивости [175, 176]. Как видно из изложенного выше,
динамические свойства экстремального регулятора с модулирующим
воздействием не могут вполне удовлетворить требованиям, возникающим при
построении быстродействующих КЭО.
Дифференциальные схемы автоматизации КЭС
Одним из основных требований, предъявляемых к КЭС, является
требование быстродействия, гак как экстремальная характеристика,
соетветствующая корреляционной функции, при изменении скорости
43
движения объекта быстро перемещается вдоль оси абсцисс, т. е. система
работает в режиме непрерывного горизонтального дрейфа экстремума.
Быстродействие системы прежде всего ограничено
инерционностью самого процесса вычисления корреляционной функции —
временем интегрирования или усреднения, т. е. постоянной времени
сглаживающего фильтра коррелятора
Еще более серьезное ограничение на быстродействие КЭС,
автоматизируемых при помощи обычных систем экстремального
регулирования, накладывает принципиальный недостаток, свойственный всем
этим системам,— наличие поисковых колебаний. Как известно, процесс
отыскания экстремума при помощи классических схем экстремальных
регуляторов (шагового типа, автоколебательных, с модулирующим
воздействием и т. д.) связан с поисковыми колебаниями (естественными
или искусственными). Время, необходимое для поиска, уменьшает
быстродействие системы. Например, регулятор шагового типа [100,
162] для выработки нужного регулирующего воздействия должен был
бы опробовать, по крайней мере, две точки характеристики объекта,
на что потребовалось бы дополнительное время В регуляторе с
модулирующим воздействием значительное ограничение на быстродействие
системы накладывает сглаживающий фильтр, включенный после
синхронного детектора. Следует также отметить, что все перечисленные
системы экстремального регулирования достаточно сложны
Весьма существенным недостатком поисковых экстремальных
систем является также их сравнительно низкая помехоустойчивость,
объясняющаяся тем, что закон регулирования таких систем
(управляющий сигнал, вырабатываемый регулятором) зависит не только от
рассогласования, т. е. удаления системы от экстремума, но и от помехи
(возмущения, смещающего экстремальную характеристику объекта
в вертикальном направлении) [43, 44].
Как показано в [43, 44], для решения некоторых экстремальных
задач (например, автоматизации процесса химической очистки воды)
могут быть созданы так называемые дифференциальные схемы,
обеспечивающие выход системы в область экстремума без поисковых
колебаний. Такие схемы приводят к существенному упрощению системы
в целом, повышают ее быстродействие и обладают рядом других
преимуществ. Применение дифференциальных схем особенно выгодно в тех
случаях, когда можно создать простую модель объекта регулирования.
Рассмотрим дифференциальную схему автоматизации
корреляционного измерителя скорости проката, использующую модель объекта
регулирования [118, 129] (рис. 28).
Система должна автоматически определять величину регулируемого
запаздывания т= тт, соответствующую максимуму взаимной
корреляционной функции сигналов fx(f) и /2(/ —тт).
Объектом регулирования является коррелятор, состоящий из
б лока регулируемого запаздывания БРЗ, множительного устройства
МУ2 и сглаживающего фильтра Ф2 На объект регулирования поступают
регулирующее воздействие ц (управляющее напряжением на входе
БРЗ) и возмущение К (изменение транспортного запаздывания тт
сигнала второго канала f2(t — тт) при изменении скорости металла).
Выходная величина объекта регулирования — это напряжение,
снимаемое с фильтра Ф2 и соответствующее взаимной корреляционной
функции #2(т).
44
Рис. 28. Дифференциальная схема автоматизации КЭС для
измерения скорости проката:
а — блок-схема; Ot, 02 — осветители ФЭи ФЭ —фотодатчики; Уи У2, Уь-
усилители; БРЗ — блок регулируемой задержки; БПЗ — блок постоянной
(фиксированной) задержки; МУХ МУ, — множительные устройства, Фь Ф2—
сглаживающие фильтры; ВУ — вычитающее устройство; б — эпюры напряжений
на входе и выходе вычитающего устройства: Rt (т> — характеристика модели
объекта регулирования; R2 (т) — характеристика объекта регулирования; U it)—
разностная характеристика (выходной сигнал вычитающего устройства).
Особенностью дифференциальной схемы является наличие
модели объекта регулирования — второго канала коррелятора (на рис. 28
модель обведена штрих-пунктирной линией). Сигнал f9(t) с выхода
БРЗ подается на блок постоянной задержки БПЗ> а затем вместе с
сигналом /а(*—* тт)"~ на множительное устройство МУг. Сигнал с
множительного устройства поступает на вход сглаживающего фильтра Ф^
с выхода которого снимается взаимная корреляционная функция
#i(T) — выходной сигнал модели.
Характеристика модели #х(т) имеет точно такой же вид, как и
характеристика объекта #2(т0» но сдвинута по оси т влево на величину
постоянной задержки Ах (рис. 28, б).
Выходные сигналы объекта и модели подаются на вычитающее
устройство ВУ, с выхода которого снимается сигнал ошибки, равный
их разности:
U(z)^R2(z)^.R1(x).
(3.35)
Усиленный сигнал ошибки воздействует на БРЗ, изменяя в нужную
сторону величину введенной регулируемой задержки т. Равновесие
Ат
в системе наступает при значении х = % —
соответствующем
абсциссе точки пересечения двух корреляционных функций —
характеристик объекта /?2(т) и модели /^(т). Эта точка всегда удалена от точки
Ат
экстремума на фиксированную величину -д-./
45
Для точного определения скорости движения металла нам нужно
Дт
знать не значение тт — — , а значение хт, равное транспортному
запаздыванию сигнала f2(t —- тт). Но поскольку значение Дт известно,
то оно просто учитывается при градуировке БРЗ в единицах скорости.
Необходимое значение может быть определено при конструировании
заданной системы на основании полученной экспериментальным путем
корреляционной функции.
Таким образом, дифференциальный регулятор обеспечивает работу
системы в режиме, соответствующем точке пересечения характеристик
объекта и модели. Сигнал ошибки вырабатывается непрерывно, без
поисковых колебаний.
Разностная характеристика U(t) в области равновесия системы
имеет значительно большую крутизну, чем характеристика объекта
в области экстремума, что определяет повышенную чувствительность
системы к регулирующему воздействию.
Схема может быть упрощена, если осуществить вычитание
выходных сигналов множительных устройств, а фильтр включить на выход
вычитающего устройства. На рис. 29 приведена блок-схема такой
упрощенной дифференциальной системы с одним сглаживающим
фильтром.
Если регулирующее воздействие на БРЗ осуществляется при
помощи серводвигателя (например, путем смещения читающей головки
в БРЗ с магнитной записью), то фильтр на выходе вычитающего
устройства не нужен, так как флуктуации выходного напряжения
сглаживаются самим серводвигателем.
Дальнейшее упрощение рассмотренной выше дифференциальной
схемы можно получить, если вычитание сигналов f3(t) и f^(t) произвести
до их перемножения, а полученный разностный сигнал у перемножить
с сигналом f2(t). Блок-схема упрощенной дифференциальной системы
с одним множительным устройством приведена на рис. 30.
Эквивалентность трех рассмотренных выше вариантов
дифференциальной схемы легко показать при помощи следующих несложных
Ш)
Н БРЗ
ш
Г At
\ш
БПЗ Н
<
Щ * W
Mt)
р
Ш0
ВРЗ [
! *>-
щ
г
6ПЗ
ВУ
~~UdJ
х\£
-Wf
щ м
У
й
z
МУ
\w
ф
1
J
Рис. 29. Блок-схема
дифференциальной системы с одним
сглаживающим фильтром
(обозначения те же, что и на
рис. 28).
Рис. 30. Блок-схема
упрощенной дифференциальной системы
с одним множительным
устройством (обозначения те же, что
и на рис. 28).
46
\рЪф*, ог®^Фз2
ирШгШ?)
Рис. 31. Дифференциальная КЭС с двумя моделями:
а ■«■ блок-схема! Ои 02 — осветители: ФЭХ, ФЭ2 — фото датчики; Ух, Уи Уз--
усилители; БРЗ<*~ блок регулируемой задержки; БПЗи БП32 — блоки постоянной
задержки; Фи Фг — фильтры; МУи МУ2 — множительные устройства; ВУ ~-
вычитающее устройство; б -^ эпюры напряжений на входе и выходе
вычитающего устройства.
преобразований. Разностную характеристику U(%) схемы,
изображенной на рис. 28, можно записать в виде:
U (х) - М [/2 (t) Ut)} - М [/2 (t) h № <3-36)
где М — знак операции математического ожидания. На основании
теоремы о сложении математических ожиданий [48] это выражение может
быть переписано в виде
U (*) = М [U (0 h (0 - /, (О U (О!- (3-37)
Этому выражению соответствует блок-схема, изображенная на
рис. 29. Преобразовав последнее выражение к виду
U(z) = M[f2(t){f3(t)-h(t)}], (3.38)
придем к блок-схеме, изображенной на рис. 30.
Следует заметить, что если в корреляционной экстремальной
системе по каким-либо причинам нежелательно отслеживать точку,
смещенную относительно экстремума, а нас интересует сама точка
экстремума, то может быть построена дифференциальная схема с двумя
моделями, изображенная на рис. 31. Характеристика каждой модели
смещена относительно экстремума на расстояние ±Ат. Разностный
сигнал U(t) в этом случае будет равен нулю при т= тт. Отрицательное
смещение — Ат характеристики второй модели БП32 осуществляется
введением соответствующей задержки в канал запаздывающего
сигнала f2(t — tx). Это может быть сделано, например, в том случае, если
сигнал f2(t — tx) также проходит через тракт магнитной записи для
приведения его формы в соответствие с сигналом fi(t).
47
Необходимость в непосредственном отслеживании точки
экстремума может возникнуть, например, при сглаженной форме
корреляционной функции, требующей больших значений Ат.
Динамика дифференциальной схемы автоматизации КЭС
Рассмотрим уравнение динамики первой дифференциальной схемы
автоматизации корреляционного измерителя скорости проката,
изображенной на рис. 29.
Как и при рассмотрении экстремальной системы с модулирующим
воздействием, будем считать, что статическая экстремальная
характеристика объекта регулирования (корреляционная функция #2(т))
Достаточно точно аппроксимируется параболой, а сам объект
регулирования (1-й канал коррелятора) может быть представлен схемой
замещения, состоящей из последовательно соединенных нелинейного
безынерционного и линейного иьерционного звеньев.
Уравнения звеньев объекта регулирования имеют вид:
х = — a (fx — X)2 + X' = —ае2 + К (3.39)
(*2Р+1)<Ра = «я*' (3.40)
где е = |Л — к; X = тт — возмущение, перемещающее экстремальную
характеристику объекта (корреляционную функцию) в горизонтальном
направлении; |х — регулирующее воздействие (регулируемое
запаздывание в БРЗ)\ X' — помеха, перемещающая экстремальную
характеристику в вертикальном направлении; а — коэффициент крутизны экстре*
мальной характеристики; ф2 = R2(t) — регулируемая величина
(корреляционная функция на выходе коррелятора); т2 — постоянная
времени фильтра коррелятора; х — промежуточная переменная
(напряжение на выходе множительного устройства); а2 — коэффициент
усиления коррелятора.
Соответственно, уравнения звеньев модели объекта регулирования
(второго канала коррелятора) можно записать в виде
у = -а (ц + А^х - X)2 + X' = -а (е + А(х)2 + X', (3.41)
(ЧР+ 1)<р2 = «i#> (3.42)
где у—выходная величина множительного устройства модели; фх =
= #i(T).— выходная величина модели; A^i = Дт — сдвиг
характеристик объекта и модели; тх — постоянная времени фильтра модели;
<Xi — коэффициент усиления модели.
Уравнения остальных звеньев:
вычитающее устройство (закон регулирования)
^ = ф2-<Р1, (3.43)
где U - С/(т);
блок регулируемой задержки (с усилителем и исполнительным
двигателем)
(T,p + l)W=asl/. (3.44)
Из (3.39) и (3.40) получаем уравнение объекта регулирования
Ф2- ^рт . (3.45)
48
Аналогично из (3.41) и (3.42) находим уравнение модели
' ' Рассмотрим работу системы в установившемся режиме. Учитывая,
что при этом р в= О (т. е. i= # = 0, <Pi » ф2 = 0), можем записать
выражение для закона регулирования:
U = <р2 — Фх = —ае2 («2 — ai) + йс^аД^е + с^аДр2 + X' (а2 — ах).
(3.47)
При равенстве коэффициентов усиления модели и объекта at а а2
это выражение упрощается:
U = 2й1аД|1г+ с^аДр1. (3.48)
Нетрудно видеть, что в закон регулирования не входит помеха
V, а управляющее воздействие U зависит лишь от величины
рассогласования е и от сдвига характеристик объекта и модели Д|Л (т. е. от
дополнительной постоянной задержки Дт в канале модели). Указанное
обстоятельство делает дифференциальную систему абсолютно
инвариантной к возмущениям, смещающим корреляционную функцию
в вертикальном направлении [43]. Такое свойство дифференциальной
схемы весьма ценно при работе в корреляционной измерительной
системе, в которой ординаты статической характеристики объекта
регулирования — корреляционной функции — в результате
ограниченного времени усреднения (сглаживания) подвержены флуктуациям.
Вычисление корреляционной функции в реальном масштабе времени
и необходимость повышения быстродействия устройства вынуждают
стремиться к возможному сокращению времени усреднения.
Учтя, что при равновесии системы 0= 0 и ф2=ф1, легко
определить абсциссу точки пересечения разностной характеристикой оси
абсцисс:
[* = Х-^. (3.49)
Ранее аналогичное выражение для абсциссы точки пересечения
характеристик объекта и модели было получено из геометрических
соображений:
* = тт--у. • (3.50)
Из выражения (3.47) нетрудно получить соотношение, связывающее
ошибку системы с параметрами последней при неравенстве
коэффициентов усиления (а3 Ф а2):
aiA(* ± Л/ а^гД^2 + — («г — ai)2
е = 1 —* (3.51)
4 2-298
49
Рассмотрим влияние изменения параметров системы на ее
статическую ошибку, для чего воспользуемся известными формулами теории
измерений:
Де = _ Да1 + _ Да2 + Ь яГ Аа„
daj '
да„
дал
(3.52)
Ае
(3.53)
где at, а2, ап—изменяемые параметры системы; Ае—абсолютная
ошибка; бе — относительная ошибка Соответствующие частные
производные могут быть выражены в виде:
де. ^ a2Af* [~ t Afx (04 -f а2)
да1
да..
(а,-а,)2
—а1А[А
(«2 — ai)2
да
'У а1<*2
Д^(а1 4- а2)
;]Л
а1)2
X'K-«i)
2а'
V
a^Af*2 f — (а,
at)2
Используя уравнения (3.62)—(3.55), можем записать:
д
As = M (a2Aat — aiAa2) + N -^Г,
где
М =
Se:
Ар
е
(a2 — «i):
2У г ае »
А[л(а1 + ctg)
fj/^
X' (сс2 — at)
V + ^(«2-«l)2
2]/"at
A«i
a2A(x2 + — (a2 —a^2
Aa2
Ba =
Aa
(3.54)
(3.55)
(3.56)
(3,57)
(3.58)
(3.59)
(3.60)
(3.61)
Как видно из формул (3.57) и (3.58), абсолютная и относительная
статические ошибки определяются абсолютными и относительными
отклонениями изменяющихся параметров (Ааь Аа9, Аа, ба, ба2, ба).
При равенстве относительных отклонений бс^ = ба2 ошибки в системе
не возникает (3.58). Поскольку относительная ошибка системы,
пропорциональна произведению коэффициентов усиления ага2У последние
следует выбирать не слишком большими. Крутизна параболы умень-
50
шает как абсолютную, так и статическую погрешность. Как видно из
приведенных выше формул, во всех случаях основным требованием для
уменьшения ошибки дифференциальной схемы КЭС является возможно
более точное равенство коэффициентов усиления объекта и модели
(обоих каналов коррелятора) аг = а2. При проектировании
дифференциальной схемы КЭС дополнительное постоянное запаздывание
второго канала коррелятора Ат должно быть достаточно малым (как видно
из формул (3.57)—(3.59) статическая ошибка системы пропорциональна
величине сдвига характеристик объема и модели А\х).
Для получения уравнения динамики рассмотренной выше
дифференциальной системы решим совместно уравнения (3.43)—(3.47).
Искомое уравнение относительно \х имеет вид:
1(ЧР + 1) (ZP +!)/*+ 2аа3аА(х] fi = 2аа3аДрХ -f аа3аД[х2. (3.62)
Как видим, система автоматического регулирования в этом случае
описывается линейным дифференциальным уравнением третьего
порядка, решение которого не представляет трудности Для выбора
варьируемых параметров системы можно применить известный метод
компромиссной настройки [101].
Это уравнение удобно рассматривать относительно координаты
U = ф2 — фх:
[р (ЧР + 1) (*Р + О + 2ая] U = p (х,р + 1) [2Х + ЛДр.], (3.63)
где k— aa, Д|ы.
Рассмотренная дифференциальная система автоматизации КЭС
отличается от известных экстремальных систем не только простотой,
но и рядом существенных преимуществ.
1. Для выхода на экстремум система не требует поисковых
колебаний.
2. При правильном выборе коэффициентов усиления обоих каналов
коррелятора {аг = а2) система инвариантна к возмущению,
смещающему корреляционную функцию в вертикальном направлении.
3. Быстродействие системы при отслеживании горизонтального
дрейфа экстремума ограничивается лишь скоростными возможностями
исполнительного механизма. Система не теряет работоспособности при
любых скоростях дрейфа экстремума (конечно, если не нарушаются
условия устойчивости обычной линейной следящей системы).
Схема КЭС с тремя датчиками
В дифференциальных схемах, описанных выше, управляющее
воздействие на БРЗ было получено путем, сравнения характеристик
объекта регулирования (коррелятора) и его модели (дополнительного
канала коррелятора с блоком постоянного запаздывания).
Сопоставление двух точек аналогичных характеристик позволило обойтись при
отыскании экстремума без поисковых колебаний.
Однако это не единственный способ создания дифференциальной
схемы При использовании третьего входного датчика можно также
получить два канала с аналогичными характеристиками, сравнение
которых дает сигнал рассогласования для управления блоком
регулируемой задержки Блок-схема корреляционного измерителя скорости
проката с тремя фотодатчиками приведена на рис. 32, а; на рис. 32, б
изображены ее характеристики. Выходные сигналы обоих каналов
4*
51
V(v)*R2M-№)
rj
\БРЗ
V
& pi
»»
ВУ \
Рис. 32. Корреляционные измерители скорости проката с тремя
датчиками:
а *— блок-схема g двумя множительными устройствами; 6 — эпюры напряжений
на входе и выходе вычитающего устройстьа; в — схема б одним сглаживающим
фильтром; а—схема с одним множительным устройством. 0Ь 02, 03
—осветители; ФЭ%, ФЭ2, ФЭц — фотодатчики; Фи Фг — сглаживающие фильтры; ВУ —
вычитающее устройство; МУи МУг — множительные устройства; У —
усилитель; БРЗ«~ блок регулируемой задержки.
/?i(x) и #2(т) и разностная характеристика U(%) = Я2(т) ~ #i(T) ничем
не отличаются от изображенных на рис. 28, б. Эта схема может быть
упрощена, если вычитание сигналов осуществлять после множительных
устройств (рис 32, в) или непосредственно после фотодатчиков
(рис. 32, г).
Временному сдвигу характеристик Дт схемы, изображенной на
рис. 28, соответствует сдвиг Дт/ = — в трехканальных схемах,
изображенных на рис. 32. Этот временной сдвиг зависит от расстояния
между «читающими» световыми штрихами Д/ и от скорости движения
металла v. Поэтому поправка Дт' не является постоянной и не может
быть учтена при градуировке БРЗ.
62
Для определения скорости движения металла и градуировки БРЗ
в схемах с тремя фотодатчиками используется соотношение
v = -f-, (3.64)
где /ср = i "Г 2 — среднее значение расстояния между
фотодатчиками.
Как видно из рис. 17, ширина пика корреляционной функции при
различных скоростях металла соответствует смещению читающего
штриха на расстояние от 1,5 до 60 мм. Поэтому световые штрихи,
воспринимаемые фотодатчиками ФЭ2 и ФЭ3, для получения нужной
крутизны разностной характеристики U(t) должны быть удалены друг от
друга не более, чем на несколько миллиметров. При этом должны быть
приняты меры к тому, чтобы каждый из фотодатчиков ФЭ2 и ФЭ3
воспринимал сигнал только от своего светового штриха. Фотодатчики
с длиннофокусной оптикой и щелевой диафрагмой в плоскости
изображения, разработанные в ИК АН УССР (рис. 62),обеспечивают
раздельное восприятие двух штрихов даже при соприкосновении последних.
Поэтому требование раздельного восприятия близко лежащих штрихов
не является препятствием для использования предложенной схемы.
Достоинством схемы является то, что для нее не нужен
дополнительный блок постоянного запаздывания, который необходимо было бы
выполнить в виде лишнего канала записи и воспроизведения на
магнитной ленте.
Схемы КЭС, вычисляющих производную корреляционной функции
В КЭС, предназначенных для измерения скорости
корреляционным методом, обычно используют два сигнала: f(t) и f(t — тт), где
тт= транспортное запаздывание второго сигнала. Коррелятор
вычисляет корреляционную функцию этих сигналов
R (х) = М If (t- т) / (t - Тт)] = /И [/ ft) f (t2)] = А («), (3.65)
где и = т — тт == t2 — tt.
Для точного измерения скорости нужно возможно точнее
определить значение регулируемого запаздывания тт, соответствующее
максимуму корреляционной функции. Однако в области максимума
корреляционная функция имеет очень малую крутизну и изменяется
незначительно при изменениях т (рис. 33, а). Гораздо более
благоприятной для поиска максимума является форма производной от корреля-
ционнои функции —~-^ . В точке т = тт (и = 0) производная имеет
значительную крутизну и, кроме того, меняет знак в зависимости от
положения относительно точки м=0, т. е. она по форме напоминает
разностную характеристику U(t) рассмотренной ранее дифференциальной
схемы Таким образом, отыскание максимума корреляционной функции
(максимальный принцип — экстремальная задача) заменяется
минимальным принципом измерения — стабилизацией нулевого значения
регулируемой величины. Этот принцип широко применяется в мостовых мето-
53
г
\f(t)
I
r*rr
1/
73
«г
tft-r,
-J
\ЩбРз\^
t^f
и
i
1 Lr^T^-l,
У
К
МЫ)
\ди
MQ
т
И
5
Г
4
&ю
Рис. 33. Схема автоматизации КЭС с дифференцированием
одного из входных'сигналов коррелятора:
а — корреляционная функция и ее производная; б—схема
получения производной от корреляционной функции и использования ее
в замкнутой системе регулирования; БРЗ — блок регулируемой
задержки; МУ — множительное устройство; Д — дифференциатор;
И — интегратор (сглаживающий фильтр); У — усилитель; ТЗ —
транспортное запаздывание сигнала второго датчика тт.
дах измерения, позволяя значительно повысить точность и
чувствительность измерителя. Метод измерения скорости по минимуму
производной корреляционной функции (прохождению через нуль), наряду
с высокой точностью и чувствительностью, обладает еще одним весьма
существенным преимуществом нулевого метода, а именно: амлитуда
входных сигналов и ее флуктуации не оказывают влияния на результат
измерений.
Производная —-^J может быть получена при помощи блок-схемы,
изображенной на рис. 33, б, которая отличается от обычной схемы
корреляционного измерителя скорости наличием дифференциатора
Д в канале второго сигнала. Нетрудно убедиться в том, что сигнал
на выходе такой схемы будет соответствовать производной от
корреляционной функции А(и).
Действительно, корреляционная функция Л(и) непрерывна при
любых значениях и, следовательно, она соответствует
дифференцируемому случайному процессу [231].
Пусть /(0 — любая дифференцируемая случайная функция, а
Тогда
yw=-affm-
R fy (* i, t2) = M{[f(tL)-mf][y (t2) - my] I
(3.66)
(3.67)
64
где m< и ttiy—математические ожидания соответственно функций
т и y(t).
Перейдя к центрированным величинам, можем записать:
Rty (tit L) = М I/ (h) у {t,j\ = M |) (tt) щ )(*f)] ■ (3.68)
о j
где f(tt) == f(ti) — m[t y(t2) = y(t2) — m^ — центрированные значения
функций f(t) и #(f).
Учитывая, что математическое ожидание производной от
случайной функции равно производной от ее математического ожидания [48],
и рассматривая tx как постоянную величину, получим
Для стационарной случайной функции [231]
ЩЛ (h, k)=^Ai(U-k)=^Al{u), (3.70)
где и = t2 — tt.
Таким образом, продифференцировав один из входных сигналов,
получим на выходе коррелятора знакопеременный сигнал с большой
крутизной в области максимума корреляционной функции, который
может быть использован для автоматического управления БРЗ, как
это показано на рис. 33, 6. Преимуществом такой схемы является
относительная простота получения нужного сигнала рассогласования, а
недостатком — необходимость выполнения операции дифференцирования,
связанной с некоторыми техническими затруднениями.
Эти затруднения могут быть обойдены при вычислении вместо
обычной корреляционной функции входных сигналов x(t) и z(t)
Т
««(*) = ^ J *(')«('-*)Л (3-71)
о
корреляционной функции Стилтьеса (см. гл. 4):
т
Rxz' М = -у j х {t)z'.(t""т) dt> (3'72)
0
где z'(t) — грубо квантованный (на m уровней, обычно на 3—5) входной
сигнал z(t).
Схема одного из вариантов коррелятора Стилтьеса (его так
называемой второй аналоговой формы) изображена на рис. 34 (в нее не входит
дифференциатор Д, обозначенный пунктиром). Дифференцирующая
цепочка RC служит для создания коротких импульсов б у в момент
перехода сигнала z{t) с одного уровня квантования на другой. Эти разно-
полярные импульсы подаются на схему совпадения вместе с сигналами
л.- с выхода интегратора.
65
: *&
t>
—0
fa№±MMi-r)dt
Рис. 34. Блок-схема коррелятора Стилтьеса:
Д — дифференциатор; Кб — квантователь; БРЗ — блок регулируемой
задержки: СС — схема совпадения; Ии И9 — интеграторы
Введение дифференциатора Д в канал сигнала x(t) дает возможность
вычислять с помощью коррелятора Стилтьеса производную
корреляционной функции — RX2(t). Но, как видно из рис. 34, при этом в схеме
образуется последовательное соединение дифференциатора Д и
интегратора #i, которые взаимно компенсируют друг друга и могут быть
исключены из схемы без ущерба для ее работы. В результате схема
существенно упростится, а технические затруднения, связанные с диф-
ферецированием сигнала x(t), будут устранены.
Таким образом, применение второй аналоговой формы
коррелятора Стилтьеса позволяет сравнительно просто реализовать схему
автоматизации КЭС, изображенную на рис.33. Вопросы, связанные с
обоснованием метода корреляции Стилтьеса и с его практическим
использованием, более подробно рассмотрены в [60, 126, 362, 363, 436, 469].
Следует, однако, заметить, что метод измерения скорости по
нулевому значению производной корреляционной функции, наряду с
перечисленными выше достоинствами, обладает также одним существенным
недостатком Дело в том, что крутизна кривой
АЛ (и)
ди
определяется
формой корреляционной функции А(и). В ряде случаев эта крутизна
может не быть максимальной в точке и =» 0, представляющей в нашем
случае наибольший интерес. При этом может резко снизиться точность
и чувствительность КЭС. Указанное обстоятельство, наряду с
конструктивными соображениями, послужило причиной того, что в качестве
основы при разработке КЭС часто выбирают дифференциальную схему
автоматизации, рассмотренную выше. Крутизна —^— разностной
характеристики ы(т) дифференциальной схемы (рис. 28, б) всегда макси-
/ Ат\
мальна в точке равновесия системы [при т = тт— -^-1,
существенным преимуществом этой схемы.
что является
66
В заключение можно упомянуть еще об одном методе слежения за
максимумом корреляционной функции, который в некоторых случаях
также может быть применен для автоматизации КЭС. Этот метод был
предложен в 1936 г. швейцарским ученым Г. Гванеллой для
акустического пеленгования самолетов [164, 366] Поиск максимума
симметричной автокорреляционной функции
т
ф (0) = lim -J* U W2 dt = <|/ (*)max (3.73)
-Т
предлагалось заменить поиском минимума так называемой
несимметричной корреляционной функции
т
^(т^Нг^-г ^x(t)x*(t + x)dt, (3.74)
которая образуется путем поворота на 90° фазы всех гармонических
составляющих одного из входных сигналов коррелятора. В отличие от
схемы с дифференцированием одного из сигналов, где амплитуда каждой
из составляющих изменяется пропорционально ее частоте (dsinW —
= wcosootf), при получении несимметричной корреляционной функции
предполагается наличие частотнонезависимого сдвига фаз составляю'
щих на 90° без изменения их амплитуды sin I at -f- -^ I = cosco/, в связи
*)■
с чем схема Гванеллы не дает резкого возрастания высокочастотных
помех и не ухудшает отношения сигнал/шум на входе коррелятора.
Недостатком схемы является то, что она требует наличия
широкополосного фазовращателя. Следует, однако, заметить, что в настоящее время
в технике однополосной радиосвязи разработаны широкополосные
фазовращатели, которые при относительной ширине полосы 10 : 1
(3000 — 300 гц) поворачивают фазы всех спектральных составляющих
на 90° с точностью до 2° [164]. Применимость метода Гванеллы
ограничена флуктуационными процессами, спектральная плотность которых
приближенно может быть описана выражением
S(g>)=S(0)* . (3.75)
В соответствии с теоремой Винера — Хинчина выражения для
симметричной и несимметричной корреляционных функций имеют вид:
и
♦'М—^ ^ПГ. (3-77)
т. е. эти функции связаны соотношением
ф*(т) = <|/(т)-1. (3.78)
67
Симметричная корреляционная функция случайного сигнала
получается из спектральной плотности последнего с помощью
косинус-преобразования Фурье, в то время как несимметричная — с помощью
синус-преобразования Фурье. Связь между этими функциями,
выраженная с помощью преобразования Гильберта, достаточно подробно
исследована в литературе [164].
Глава 4
УПРОЩЕННЫЕ АППАРАТУРНЫЕ МЕТОДЫ
КОРРЕЛЯЦИОННОГО АНАЛИЗА И ИХ ПРИМЕНЕНИЕ В КЭС
Релейные и полярные корреляционные функции
В одномерных КЭС (т. е. в КЭС, автоматически поддерживающих
экстремальное значение корреляционных функций одного аргумента)
чаще всего вычисляется взаимная корреляция функции двух сигналов:
x(t) и y(t). Она равна смешанному центральному моменту второго
порядка, который, по определению, равен среднему по множеству
реализаций [48, 223]:
00 00
Rxy(tb t2) = Rxy(z)= J J x(tx)y(t2)p(xt у, tb t2) dxdy, (4.1)
где x(t{) = x(t{j — mx\ y(t2)=y(t2) —m — центрированные значения
случайных функций x(t) и у{f) в моменты времени tt и t2; тх =
00 00
= \ х (0 р (х, t) dt; т = I у (t)p (у, t) dy — математические ожида-
— 00 00
ния этих функций; р(х, t), p(y, t) — одномерные плотности вероятности
случайных функций x(t) и y(t)\ p(x, у, tXt t2) — двумерная плотность
вероятности; т = tx — t2.
Во многих случаях практики (к которым относятся и случаи
применения КЭС) рассматриваются эргодические стационарные процессы
(как показано в [223], достаточным условием эргодичности стационарного
случайного процесса x(t) является требование, чтобы его
автокорреляционная функция | Ах\ -»• 0 при т -*- оо). Свойство эргодичности
позволяет при определении корреляционных функций перейти от усреднения
по множеству к усреднению по времени:
Т
"*"°° —г
Это выражение является основой практического алгоритма для
вычисления корреляционной функции, в котором используется ограниченное
68
время усреднения!
т
*хут М = 4" J * (0 £ (* + х) Л. (4.3)
о
Различные методы вычисления корреляционных функций и их
аппаратурная реализация описаны в обширной периодической
литературе. В ряде монографий сделан достаточно полный обзор
аппаратурных методов корреляционного анализа [9, 148, 164, 186, 201, 235, 238].
Большая часть описанных в приведенной литературе методов не
пригодна для работы в реальном масштабе времени (с непосредственным
вводом данных), а предназначена для статистической обработки
исследуемых процессов, записанных на различных носителях. Наиболее
подходящими для использования в КЭС до недавнего времени были
аналоговые корреляторы с магнитными линиями задержки [14, 91,
164, 186, 211, 235, 238]. Однако два основных узла таких корреляторов —
БРЗ и аналоговое множительное устройство МУ для заданной полосы
частот, отличаются сложностью, громоздкостью и низкой надежностью.
Это снижает точность и надежность устройства в целом. Кроме того,
осуществление более быстродействующей схемы параллельного
вычисления нескольких точек корреляционной функции (например, двух,
как это имеет место в рассмотренной выше дифференциальной схеме)
потребовало бы дублирования и без того сложных множительных
устройств и БРЗ и значительно усложнило бы корреляционную
экстремальную систему. Из вышеизложенного очевидна необходимость поиска
более простых 'аппаратурных методов вычисления корреляционной
функции.
Указанная задача несколько упрощается тем, что в КЭС нас
интересует, в конечном счете, не вычисление всех ординат корреляционной
функции; а лишь положение ее максимума на оси абсцисс. Поэтому
при вычислении ординат в данном случае допустимы значительно
большие погрешности, чем при решении вычислительных задач (особенно
для точек корреляционной функции, удаленных от ее максимума).
В двумерных КЭС (поддерживающих экстремальное значение
корреляционных функций двух переменных) задача сводится к
совмещению двух изображений; в этом случае хорошее техническое решение
дают оптические корреляторы [109, 183, 255, 256]. Однако в
подавляющем большинстве КЭС проблема упрощения схемных и аппаратурных
решений корреляторов стоит весьма остро, в связи с чем представляет
значительный интерес использование упрощенных методов
корреляционного анализа.
Широкие возможности упрощения аппаратуры КЭС возникают
при квантовании входных сигналов по уровню с их последующей
обработкой. Наибольший интерес для практического использования в
корреляционных экстремальных системах представляет квантование одного
или обоих входных сигналов на два уровня, т. е. вычисление так
называемых релейных и полярных корреляционных функций, обладающих
рядом существенных преимуществ [1, 46, 60, 63, 77, 87, 126, 407, 454,
467, 469].
В отличие от обычных корреляционных функций, при вычислении
которых используются непрерывные входные сигналы, в релейной
корреляционной функции один из перемножаемых непрерывных вход-
69
f I ! V I 1 VI/ I
I I I l v i.
H у
i—i 1—i 1——i . 1—f»
А**(г)*к2е~**м
j(v)-j)**(r)
Рис. 35. Клиппирование случайного сигнала:
а — случайный сигнал / (/); б — клиппированный сигнал sgn [f {t)]\
в, г — автокорреляционные функции этих сигналов; д — методическая
погрешность полярной корреляционной функции р (г) — р** (х)
ных сигналов заменяется клиппированным знакопеременным сигналом
постоянной амплитуды, знак которого соответствует знаку исходного
сигнала (рис. 35). В полярной корреляционной функции оба входных
сигнала коррелятора представляют собой сигнум-сигналы исходных
непрерывных сигналов. В этом случае коррелятор определяет степень
совпадения полярностей входных сигналов (полярную корреляцию).
Таким образом, если обычная автокорреляционная функция
стационарного сигнала x(t) описывается выражением
+т
А*0О
—т
(4.4)
то релейная автокорреляционная функция описывается выражением
Л* (т) = lim ^ \ х (t) sgn [x (t + т)] dtt (4.5)
а полярная автокорреляционная функция — выражением
Д** (х) = \ш\ ~г j sgn [*(*)] sgn [x (t + т)] dt. (4.6)
-г
60
Выражения для взаимных корреляционных функций сигналов
x(t) и y(t) аналогичны:
обычная взаимная корреляционная функция описывается выражением
+Т
Rxy (т) = Hm ^L J x (t) у (t + т) Л, (4.7)
релейная взаимная корреляционная функция — выражением
R% (т) = ton gf j * (0 sgn [у (* + т)] Л, (4.8) "
-г
а полярная взаимная корреляционная функция —
+т
R** (т) = lim gjr j sgn [ж (0] sgn [у (t + т)] £й. (4.9)
—г
Как видно из определения релейных корреляционных функций, их
применение позволяет упростить аппаратуру коррелятора, поскольку
в нем можно использовать более простое множительное устройство
релейного действия.
При использовании полярных корреляционных функций схема
еще более упрощается, так как множительное устройство заменяется
простой схемой совпадения. Значительно упрощается при этом и БРЗ,
так как вместо задержки сигнала произвольного вида его задача сводится
к задержке импульсных сигналов заданной формы, соответствующих
нулевым значениям исходного сигнала, что технически осуществить
значительно легче. Появляется возможность создания надежных
бесконтактных схем без подвижных деталей, которые при использовании
полупроводников и интегральных схем могут быть выполнены весьма
компактными. В качестве БРЗ, например, можно применить регистр
сдвига с регулируемой частотой следования продвигающих импульсов.
При этом задержка сигнала будет пропорциональна периоду следования
продвигающих импульсов. Отводы от последующих ячеек регистра
сдвига превращают последний в секционированную линию задержки,
с помощью которой достаточно просто осуществляется параллельное
(одновременное) вычисление нескольких точек корреляционной функции.
Наконец, очень важным является также и то, что полярный коррелятор
вычисляет нормированную корреляционную функцию, благодаря чему
отпадает необходимость в автоматической регулировке усиления
входных сигналов для стабилизации дисперсии последних [120, 132, 173,
184, 212, 243, 348, 460].
Переход от обычных корреляционных функций к релейным
приводит к появлению методической погрешности, вызванной заменой
непрерывного сигнала клиппированным. Этому вопросу посвящено
большое количество работ [50, 57, 60, 77, 126, 455, 467, 469], в которых
выводится соотношение между обычными и полярными
корреляционными функциями.
Рассмотрим зависимость между корреляционной функцией и
вероятностью сочетания знаков случайного сигнала x(t). Для этого наложим
61
на этот сигнал два ограничения, а именно: математическое ожидание
сигнала x(t) примем равным нулю, а распределение вероятностей его
мгновенных значений будем считать нормальным, т. е.
X2
тх=Ь РМ = 4==Г^, (4.10)
а у 2тс
где тх — математическое ожидание сигнала x(t)\ р(х) — плотность
распределения вероятностей мгновенных значений сигнала; о —
среднее квадратичное отклонение.
Допущение о нормальном законе распределения мгновенных
значений справедливо для многих достаточно широкополосных
случайных процессов, встречающихся в практике при достаточно длительном
времени их наблюдения (т. е. при Т > т, где т — интервал
корреляции). Как известно, случайные процессы, происходящие в результате
наложения большого числа независимых (или слабо зависимых)
случайных факторов, близки к нормальным. Теорема Ляпунова
устанавливает нормальный закон, как предельный для суммы независимых
равномерно малых случайных сигналов [48].
В случае КЭС для измерения скорости металла сигнал, получаемый
на выходе фотодатчика, определяется флуктуациями яркости светового
штриха, которая, в свою очередь, зависит от большого числа факторов:
от различной яркости структурных зерен металла, неровностей
поверхности металла (трещин, различных степеней шероховатости, различных
углов наклона отражающих поверхностей), размера поверхностных
вмятин, вызываемых технологическим оборудованием (неровности
поверхности валков), распределения пузырьков охлаждающей воды
на поверхности горячего проката и т. д. Указанные обстоятельства
позволяют принять допущение о нормальном законе распределения
мгновенных значений сигнала, снимаемого с поверхности движущегося
металла. Ана логичные соображения справедливы в случае КЭС для
измерения параметров движения других объектов.
При нормальной корреляции вероятность сочетания любых двух
значений сигналов x(t) и y(f) (двухмерная плотность вероятности)
определяется соотношением [48]:
р(х, */) = - ехр
2n^,V\—^"\ 2(1-г»)
2г (х — тх) (у — ту) , (у — myf
"х"у
+~—J-
(4.11)
}'
(OOj «
где г = ——У- — коэффициент корреляции (нормированный корреля-
QX°L,
О О! О О;
ционный момент) величин х и у; х = х — тх, у — у — ту —
центрированные мгновенные значения сигналов x(t) и y(t); охи оу —
среднеквадратичные отклонения величин х и у.
Для упрощения анализа примем y(t) = x(t + х); ох= оу= о;
0. Выражение (4.11) упрощается:
х*+у*—?гху
p(Xt у)= / 2а* (1-Г-) . (4.12)
2wx«/l-r»
62
Как известно, вероятность того, что амплитуда некоторого флук-
туационного процесса x(t) лежит в интервале, ограниченном
значениями xi и х2, равна
Р (Xi < х < х2) = J р (х) dx. (4.13)
Соответственно вероятность того, что амплитуда имеет величину,
большую, чем х0у будет [164]:
00
р (х > х0) = 2 f р (х) dx. (4.14)
Для случая двухмерного распределения (4.12) мы можем теперь
определить вероятность того, что знаки сигналов x(i) и y(t) одинаковы
(Р) или противоположны (Q), если проинтегрируем выражение (4.12)
по х и у в пределах от 0 до оо (для Р) или от 0 до оо и от —оо до О
(для Q).
Так, вероятность совпадения положительных знаков обоих
сигналов, равна
О О
= ~г[ 1 Н arc sin г). (4.15)
(В ходе промежуточных вычислений мы перешли к полярным
координатам х = рсоэв и у = psinB и соответственно этому изменили
пределы интегрирования.)
Ввиду симметричности нормального распределения вероятность
совпадения и положительных, и отрицательных знаков равна
Р = р { sgn [*(*)] = sgn \y (t)] } = 1 (l + | arc sin г) . (4.16)
Аналогично может быть выведена зависимость между
коэффициентом корреляции и вероятностью того, что x(t) и y(t) противоположны
по знаку [21]:
Q = р { sgn [х {t)] Ф sgn [у (/)]}= ' ! X
2тса2 |/ 1 — л2
с» 0 *a-f-z/2—2гдсгу
5 d*di/ = — arc cos r. (4.16')
О —00
Вероятность совпадения знаков сигналов x(f) и y(t) (P) и
вероятность несовпадения этих знаков (Q) связаны зависимостью
P + Q=l. (4.17)
63
Учитывая это, можем написать
P — Q
г = cos Qtc = sin—-—тс. (4.18)
Таким образом, существует однозначная связь между коэффициентом
корреляции и вероятностью сочетания знаков исследуемых случайных
сигналов, подчиняющихся нормальному закону распределения.
Полярная автокорреляционная функция является
автокорреляционной функцией знакопеременного клиппированного сигнала
Asgn[x(t)]t амплитуда А которого постоянна, а знак совпадает со знаком
исходного сигнала x(f), т. е.
+т
Л** (х) = £хп £ ] sgn [*(*)] sgn [x(t + z)]dt =
= Л2 sgn [x (/)] sgn [x (t + t)]. (4.19)
Получение клиппированного сигнала sgn[/(/)] для исходного
сигнала f(t) показано на рис. 35. Моменты смены знака (нули) исходного
сигнала и клиппированного сигнала совпадают.
Рассматриваемый в теории связи случайный телеграфный сигнал
[224] по своей форме аналогичен сигнум-сигналу. Как известно, для
случайного телеграфного сигнала вероятность появления в интервале
t, t -f- т числа нулей, равного k, подчиняется распределению
Пуассона:
p(k)=S^Le^, (4.20)
где |х — среднее количество нулей в единицу времени.
Полярная автокорреляционная функция может быть вычислена,
если учесть вероятности появления четного и нечетного числа нулей
на интервале т [224]:
Л** (х) = [Л2 х (вероятность четного числа нулей в интервале *»
* + т)] — И2 X (вероятность нечетного числа нулей в интервале/, t +
+*)] = А*е-Ы т *. (4.21)
Спектр, соответственно, имеет вид»
00
S («) = 4Д» j е-** cos tdx = п**£ .. (4.22)
О
Однако вероятность четного числа нулей в интервале t, ( + т
соответствует вероятности совпадения знаков перемножаемых сигналов
(Р) и, наоборот, вероятность нечетного числа нулей в интервалет
соответствует вероятности несовпадения знаков перемножаемых
сигналов (Q).
Приняв амплитуду сигнум-сигнала Л равной единице, мы можем
записать выражение для полярной корреляционной функции в виде
Л** (т) = Р - Q. (4.23)
64
Ранее мы видели, что значения обычной автокорреляционной
функции сигнала x(t) и вероятности совпадения (Р) и несовпадения
(Q) знаков этого сигнала связаны зависимостью
^ (т) = sin |-(P-Q). (4.24)
Принимая во внимание эту зависимость, можно написать
выражение, однозначно связывающее обычную и полярную
автокорреляционные функции, а именно:
^т)х=8т[^Л**(х)] (4.25)
или
Л** (х) = ~ arc sin Лх (х). (4.26)
На рис. 35, д приведена кривая абсолютной методической
погрешности, возникающей в результате определения обычной
нормированной корреляционной функции при помощи полярной корреляционной
функции, т. е.
е (х) = р (х) - р** (х) = iJiilL - Л** (т), (4.27)
где Ах(т) и Л**(т) определяются выражениями (4.4) и (4.6).
Как видно из рисунка, максимумы обеих функций совпадают
(при рх(т)=1 погрешность равна нулю). Это позволяет использовать
полярную корреляционную функцию для определения положения
максимума на оси задержек времени, что требуется в корреляционных
экстремальных системах. Более острый пик полярной корреляционной
функции обеспечивает большую точность определения расположения
максимума на оси т. При применении дифференциальной схемы для
автоматизации КЭС можно использовать еще одно преимущество полярной
корреляционной функции, заключающееся в том, что амплитуду клип-
пированного сигнала можно при желании изменять, регулируя тем
самым крутизну разностной харакеристики вычитающего устройства и
чувствительность всей схемы. Таким образом, в КЭС могут быть успешно
использованы преимущества полярных корреляционных функций.
Применение полярных корреляционных функций основано на
знании двухмерного закона распределения исследуемых стационарных
случайных процессов. Полученная выше однозначная связь между
ординатами полярной и обычной корреляционных функций относилась
к случайным функциям с нормальным (гауссовым) законом
распределения. Однако, как показано в работах [46, 323, 467], однозначная связь
между полярной и обычной корреляционными функциями сохраняется
при любых совместных законах распределения сигналов, если до клип-
п-ирования к ним добавляется специальный вспомогательный сигнал
с равномерной плотностью вероятности мгновенных значений. Таким
образом, даже при отклонении закона распределения сигналов
входных датчиков от нормального в КЭС может быть применено вычисление
полярной корреляции, так как положение максимума корреляционной
функции при этом не изменяет своего положения на оси т.
5 2-298
65
Следует отметить, что метод определения коэффициента
корреляции по вероятности совпадения знаков для акустических измерений
впервые был предложен в 1950 г. С. Г Гершман и Е. Л. Фейнбергом.
В настоящее время известен ряд устройств, использующих полярную
корреляцию (для вычисления корреляционных функций процессов,
заданных графически; для акустических измерений; для определения
характеристик систем автоматического регулирования [1, 7, 46, 87,
120, 298, 449, 454, 467] и др.).
Модификации метода полярной корреляции
Корреляция нулей клиппированного сигнала
Точность работы КЭС зависит в первую очередь от формы ее
статической характеристики, т. е. корреляционной функции входных
сигналов. В связи с этим вопросы формирования статических
характеристик КЭС имеют большое значение [81, 296]. Одним из перспективных
путей обеспечения предельной точности работы КЭС является
использование различных модификаций метода полярной корреляции, в
частности, определение корреляционной функции нулей клиппированного
сигнала.
Клиппированный сигнал sgn[f(/)] полностью определяется
моментами смены знака (нулями), поэтому он может быть заменен
эквивалентной последовательностью соответствующих этим нулям коротких
импульсов, имеющих фиксированную длительность и амплитуду (рис. 36).
Риг. 36. Форма корреляционной
к использованию корреляции
функции при переходе
нулевых импульсов.
66
Такая последовательность импульсов содержит всю необходимую
информацию о клиппированном сигнале (за исключением информации о его
амплитуде, не имеющей в данном случае существенного значения).
Представление клиппированного сигнала в форме случайной
последовательности стандартных «нулевых» импульсов удобно с
практической точки зрения, так как это облегчает осуществление задержки
сигнала в БРЗ и упрощает устройство последнего. Указанное
преимущество явилось причиной использования такого преобразования
сигнала в ряде схем КЭС [76, 120, 140—146, 246, 247].
Рассмотрим статистические характеристики случайной
последовательности нулевых импульсов. Задачи, связанные с исследованием
импульсных случайных процессов, возникают во многих областях
физики, радиотехники и электроники, в связи с чем имеется очень
большое количество отечественных и зарубежных работ, посвященных
различным сторонам этого вопроса. Ниже будут очень кратко рассмотрены
некоторые количественные результаты, полученные в этих работах
и представляющие интерес для нашего случая, а именно — для
последовательности неперекрывающихся импульсов с фиксированными
длительностью и амплитудой и случайными моментами появления.
К статистическим характеристикам случайной последовательности
идентичных импульсов относится прежде всего закон распределения
вероятностей интервалов между соседними импульсами или закон
распределения нулей по оси времени. Распределение нулей случайного
телеграфного сигнала подчинено закону Пуассона [48, 224, 233, 285], т. е.
вероятность попадания k нулей на произвольный участок оси времени
длиной т равна
/К*)--^ •"**". (4.28)
где (х — плотность нулей (среднее число нулей на единицу времени).
Вероятность того, что данный участок т окажется пустым (т. е. на
него не попадет ни один нуль) равна
р(0) = е"^\ (4.29)
Распределение Пуассона предполагает нули бесконечно малой
протяженности (точки). Импульсы же, соответствующие нулям
клиппированного сигнала, имеют вполне определенную длительность ти, причем
предполагается, что расстояние Т между двумя соседними импульсами
(между их передними фронтами) всегда больше ти, т. е. импульсы не
перекрываются. Поэтому предположение о пуассоновском распределении
нулевых импульсов в данном случае является некоторой идеализацией.
Следует также заметить, что клиппированный (усиленный и
ограниченный) гауссов сигнал, хотя и имеет ту же автокорреляционную
функцию, что и соответствующий случайный телеграфный сигнал, но его
моменты более высоких порядков отличаются от тех же моментов
клиппированного сигнала с пуассоновским распределением нулей [351]. В
работах [351, 352, 444] детально исследованы законы распределения
интервалов между нулями гауссовых сигналов. В дальнейшем, рассматривая
случайную последовательность нулевых импульсов, будем считать, что
она подчинена закону Пуассона, а моменты возникновения
последующих импульсов не зависят от того, когда появились предыдущие.
б*
67
В работе [285] такая последовательность названа абсолютно
хаотической последовательностью импульсов.
Автокорреляционная функция абсолютно хаотической
последовательности импульсов описывается выражением
4^„ — т2 — 4?! ^ ^ _
4(f-gs' Ти<х<2т»' (4.зо)
Л(т)
I
0, *>2*,
И»
где хи — длительность импульсов; а — амплитуда импульсов; Т —
математическое ожидание (среднее значение) величины интервала
между соседними импульсами рассматриваемой хаотической
импульсной последовательности.
График основной части (0 < т <; ти) такой автокорреляционной
функции близок к изображенной на рис. 36. Как видно из рисунка,
ширина пика корреляционной функции такой последовательности
импульсов равна удвоенной длительности импульса ти.
Аналогичный вывод получен в [165] при рассмотрении
импульсного случайного процесса, состоящего из последовательности взаимно
независимых импульсов одинаковой амплитуды и длительности со
случайным временем появления. При этом отклонение времени.появления
импульсов от среднего значения рассматривалось как стационарный
случайный процесс (модулирующий шум) с нулевым средним значением
и нормальным распределением. Автокорреляционная функция такого
импульсного процесса имеет периодическую и апериодическую части,
причем последняя также представляет собой пик с шириной, равной
двум длительностям импульса.
В [5] были получены общие формулы для автокорреляционных
функций как перекрывающихся, так и не перекрывающихся случайных
последовательностей импульсов. Так, для автокорреляционной
функции пуассоновских импульсов с перекрыванием получено выражение
рт.( 1-^1 + 1*2. M«v
А (т) - \ v и ' (4.31)
Н^и. I т I * V
где \i и ти — соответственно средняя частота следования и длительность
импульсов.
Как видно из (4.31), ширина пика корреляционной функции и в этом
случае оказалась равной удвоенной длительности «импульса.
В работах [233, 235] было найдено точное аналитическое решение
задачи о корреляционной функции случайной последовательности
импульсов в самой общей постановке (со случайными длительностями,
амплитудами и временами появления). При этом также рассматривалась задача
о совпадении во времени произвольного числа импульсов,
принадлежащих различным импульсным потокам. Среди других результатов было
получено выражение для автокорреляционной функции импульсной
последовательности с фиксированной длительностью импульсов и экспо-
68
ненциальным распределением длительностей пауз:
А (т) =- | и (4.32)
( 0, |х|>тн.
Несмотря на некоторое различие в постановке задачи (перекрытие
импульсов, закон распределения времени их появления и т. д.),
результаты всех рассмотренных выше работ показывают, что при |т| >ти
коррелятивные связи у рассмотренных импульсных
последовательностей отсутствуют. Этот вывод хорошо согласуется с общей теоремой
Мак Фаддена, показывающей, что протяженность линейного участка
автокорреляционной функции случайной последовательности
импульсов не может быть больше, чем длительность самого короткого импульса
этой последовательности. Если автокорреляционная функция А (т)
случайного бинарного процесса x(t) является линейной функцией |т| на
интервале 0 << |т|<^, то вероятность пересечения процессом x(t) оси t
на интервале 0 < | т | < t равна нулю [351].
Таким образом, форма автокорреляционной функции случайной
последовательности нулевых импульсов определяется длительностью
последних. При достаточно коротких нулевых импульсах ширина их
корреляционной функции может быть меньше, чем ширина
корреляционной функции исходного клиппированного сигнала (т. е. полярной
корреляционной функции). Это позволяет получить более точную фиксацию
Положения максимума корреляционной функции, а следовательно —
некоторый выигрыш в точности измерения параметров движения
корреляционным методом.
Аппаратурная реализация рассмотренной модификации не
претерпевает изменений по сравнению с классической схемой полярной
корреляции: применяется та же схема БРЗ; перемножение сигналов
по-прежнему осуществляется при помощи схемы совпадения. Таким
образом, вычисление корреляционной функции нулевых импульсов
без обратного превращения их в клиппированный сигнал приводит
к некоторому повышению точности метода полярной корреляции, что
также является положительным свойством такой модификации метода.
Следует, однако, заметить, что эта модификация допускает
использование лишь определенных классов импульсных БРЗ, например,
электромеханических БРЗ с движущимися магнитными носителями
(магнитная лента, магнитный барабан). Наличие движущихся
электромеханических узлов, низкая надежность и необходимость чрезвычайно
жесткой стабилизации скорости движения магнитного носителя делают
промышленное применение таких БРЗ мало перспективными.
Регулируемая задержка нулевых импульсов не может быть осуществлена
при помощи статических бесконтактных БРЗ, выполненных на основе
регистра сдвига с переменной частотой продвигающих импульсов, что
является существенным недостатком рассмотренного выше метода.
Корреляция выбросов исходного сигнала
за фиксированный уровень
Непрерывный случайный сигнал, снимаемый с входных датчиков
корреляционной экстремальной системы, может быть превращен в
последовательность импульсов, подобных рассмотренным выше нулевым
1
/
\
1 L
1 ,ki«
Рис. 37. Короткие импульсы, соответствующие выбросам
случайного сигнала и их корреляционная функция.
импульсам, при помощи порогового устройства, ограничивающего
этот сигнал на уровне х0, дифференциаторов и формирователей. В
данном случае различие заключается в том, что импульсы будут
возникать не в момент смены знака исходного сигнала x(t), а в момент
пересечения этим сигналом фиксированного уровня х0 (рис. 37). При этом
можно рассматривать пересечение уровня х0 как с положительной
производной (снизу вверх), так и с отрицательной (сверху вниз) [262].
Плотность ..вероятности появления выброса на уровне х0 в момент t>
согласно [165], равна
'W=¥r
2
2о»
(4.33)
где а2 — дисперсия сигнала x(f),
о)2 = — /?" (0), #"(0)>0.
При выполнении некоторых условий, сформулированных в [299],
последовательность импульсов выбросов будет пуассоновской.
Корреляционная функция такой последовательности, как уже указывалось,
имеет ширину, равную удвоенной длительности импульса (рис. 37).
Это позволяет использовать ее в системе измерения скорости
корреляционным методом при помощи рассмотренных вышеприемов (т. е.
путем задержки импульсных сигналов и перемножения их в схемах
совпадения) Такой метод определения максимальной корреляции двух
сигналов применен в одной из КЭС для измерения скорости движения
металла при прокатке. В качестве уровня ограничения принят уровень
собственных шумов фотодатчиков [140—146]. Путем корреляции
выбросов случайных сигналов можно несколько уменьшить методическую
погрешность КЭС.
70
Недостатком этого приема является его непригодность для
использования в статических бесконтактных БРЗ на регистрах сдвига, т. е.
необходимость применения малонадежных электромеханических БРЗ
с магнитной лентой или магнитным барабаном. При использовании этого
метода в КЭС для измерения скорости проявляется и другой
недостаток рассмотренного метода, который заключается в сильной
зависимости выходного напряжения коррелятора от скорости движения
объекта. Частотный спектр сигналов на выходе датчиков зависит в этом
случае от скорости движения. В такой же степени от скорости зависит
и средняя частота выбросов / = ~ , а следовательно, и скважность
Т
импульсов, соответствующих выбросам: Q = —^. Одновременно
ти
изменяется частота появления импульсов на выходе схемы совпадения.
Таким образом, при уменьшении измеряемой скорости движения
уменьшение коэффициента заполнения входных импульсов приводит к
снижению уровня выходного сигнала коррелятора, т. е. к понижению
чувствительности системы. При использовании обычной полярной корреляции
или ее модификации — совмещения нулей, чувствительность КЭС
в меньшей степени зависит от измеряемой скорости.
Дискретная полярная корреляция
' Дискретная полярная корреляция получается при квантовании
входных клиппированных сигналов полярного коррелятора по
времени с некоторой частотой квантования fK = ~ . В результате один
* к
или оба клиппированных сигнала превращаются в последовательность
прямоугольных импульсов с длительностью ти и периодом следования,
равным периоду квантования: Тс = Тк (Тк^ти). Полярность
квантованных импульсов соответствует полярности клиппированного
сигнала в соответствующие моменты времени. Квантованные сигналы
перемножаются с помощью двунаправленных схем совпадения и
интегрируются.
Статистические свойства бинарного случайного процесса,
возникающего на выходе схемы совпадения при квантовании по времени
клиппированного сигнала с пуассоновским распределением нулей, подробно
рассмотрены для весьма общего случая в [442] (например, квантование
нескольких клилпированных сигналов случайными
последовательностями импульсов с заданным законом распределения периодов
квантования, в частном случае — периодическими последовательностями).
В результате клиппирования и квантования по времени при
дискретной полярной корреляции имеет место некоторая потеря
информации, зависящая от ширины полосы частот исходного непрерывного
сигнала и частоты выборок (частоты квантования по времени). Для
уменьшения потери информации частота квантования должна быть
достаточно большой, во всяком случае, в несколько раз превышающей
наивысшую основную частоту исходного сигнала.
При наличии помех на входе коррелятора, работающего с
ограниченным временем усреднения, клиппирование и квантован переходного
сигнала по времени приводят к некоторому снижению отношения сиг-
71
нал/шум (yyt) на его выходе. Для узкополосных входных сигналов
это снижение достигает 1—4 $5, для широкополосных — оно может
достигать 10 дб [298].
Под отношением сигнал/шум при этом понимается отношение
постоянной составляющей к среднему квадрату флуктуационной
составляющей на выходе интегратора. Так, если интегрирование
осуществляется простой #С-цепочкой с импульсной переходной функцией
(функцией Beca)j
1 - *
W(t)=Ye Т ПРИ *>0'
W (0 = 0 при *<0, (4.34)
то средний квадрат выходного сигнала интегратора равен
00
*f = -yj AyWe""Td%9 (4.36)
о
где Ay(i) — автокорреляционная функция сигнала на выходе множи-,
тельного устройства (до интегратора). Отношение сигнал/шум на выходе
интегратора будет описываться выражением
(£) _- ^(-)г . , „.зе,
\ Ш / ВЫХ п — ^_
J lAy(x)-Av(oo)]g T dt
о
При вычислениях операции клиппирования, квантования по
времени и перемножения можно менять местами. Если принять, что в
дискретном полярном корреляторе квантование осуществляется после
схемы совпадения, то автокорреляционная функция выходного сигнала
схемы совпадения будет иметь вид:
00
V<*)"r S Ay(mTK)9p(x-mTK), (4.37)
где Ау(т) — автокорреляционная функция сигнала на выходе схемы
совпадения до квантования; р (т) — автокорреляционная функция
прямоугольного квантующего импульса:
LT'
т,
рр№=1—-г- при M<V
Рр(т) = 0 при |*|>V (4-38)
Учитывая, что постоянная составляющая на выходе при малых
значениях отношения сигнал/шум равна
) !• <4-39>
' вх "
72
где |г«] —отношение сигнал/шум на входе коррелятора, можем
получить выражение, определяющее отношение сигнал/шум на выходе
дискретного полярного коррелятора:
00
(ж)вь,х = (ж)2Вх2{т S [arcsinp(mTK)].r\ (4.40)
т=—со
Дискретная модификация метода полярной корреляции может
быть реализована, например, путем использования в качестве БРЗ
регистра сдвига с управляемой частотой продвигающих импульсов.
При этом задержанный клиппированный сигнал будет проквантован
по времени с частотой продвигающих импульсов. Время задержки
обратно пропорционально частоте продвигающих импульсов.
Корреляция Стилтьеса
В гл. 3 рассматривались упрдщенные методы вычнвления
корреляционных функций, основанные на предельно грубом квантовании по
уровню одного или обоих входных сигналов коррелятора. Эти сигналы
заменялись бинарными сигналами, знаки которых соответствовали
знакам исходных сигналов (квантование на два уровня). Такие
сигналы различными авторами называются клиппированными сигналами,
знаковыми функциями или релейными функциями. При замене одного
из входных сигналов коррелятора его клиппированным сигналом
вычисляется релейная корреляционная функция, при квантовании обоих
входных сигналов на два уровня — полярная корреляционная функция
(корреляция совпадения полярностей). Однако кроме этих крайних
случаев квантования по уровню возможен также промежуточный
случай, когда один из входных сигналов коррелятора сохраняется без
изменений, а другой — грубо квантуется на несколько уровней (обычно
на 3 или 4). Такой метод вычисления корреляционной функции был
впервые предложен Д. Уоттсом [469]. Получаемая в результате такого
преобразования сигнала корреляционная функция была названа им
корреляционной функцией Стилтьеса, так как при ее математическом
описании используется интеграл Стилтьеса.
Как и в случае обычных корреляционных функций эргодических
стационарных случайных процессов, для вычисления корреляционных
функций Стилтьеса вместо усреднения по множеству используется
усреднение по времени. При конечном времени усреднения вычисляются
так называемые оценки корреляционных функций Стилтьеса, которые
для автокорреляционной А'хх,(%) и взаимной корреляционной Rrxz^)
функций, соответственно, имеют вид:
Т
Alx>w = Y\xii)x'{i + z>>dt> (4,41)
Rx2>W = ±r\x{t)z'(t + ^)di, (4.42)
73
где x'(t + т) и z'(t + т) — значения случайных процессов x(f) и z(f),
грубо квантованных по уровню и задержанных на время т, т. е.
«'М-<
m0q при 0 « t < tif
mxq при /i«/</a,
mfl при */<*<f/+1,
mr<7 при *г «*<Г
(4.43)
(m — целое число; q — шаг квантования).
Выражения (4.41) и (4.42) могут быть представлены в виде
интегралов Стилтьеса:
т
Alx>(<z) = -~§x'(t + <z)dX(t),
о
„. т
(4.44)
(4.45)
где dX(t) та xdt.
Ниже для определенности будем рассматривать взаимные
корреляционные функции Стилтьеса.
Блок-схема коррелятора Стилтьеса, реализующего приведенный
выше алгоритм вычисления корреляционной функции, приведена на
рис. 38. Как видно из рисунка, коррелятор Стилтьеса осуществляет
&
№
Ж
Кб_ 63
004
>
н==0—*Ы
фХ-««»
К,№
Рис. 38. Блок-схема коррелятора Стилтьеса (первая
аналоговая форма):
Кб — квантователь; БЗ—блок задержки; CCit ... « CCm — схемы
совпадения; Я — интегратор.
74
№
+
-f?i -*
L
0
-i—*-
|? f |? ^ ^
Рис. 39. Характеристика
квантователя.
параллельное вычисление
нескольких точек корреляционной функции.
Отличительной особенностью его
является наличие блока квантования
(квантователя) Кв в канале
задерживаемого сигнала z(t).
Характеристика квантователя приведена на
рис. 39. Здесь для определенности
принято квантование сигнала z(t)
на три уровня, т. е. выходной
сигнал квантователя z'(0 может
принимать три значения: — q, О, +<? в
зависимости от того, в каком
интервале значений находится входной
сигнал. Как будет показано ниже, квантование всего на три уровня
уже обеспечивает достаточно высокую точность вычисления
корреляционной функции. Показанная на рис. 39 характеристика
квантователя симметрична и имеет равные интервалы квантования шириной
q = 2а. Коэффициент смещения характеристики по горизонтали (с)
равен нул'ю. Пунктиром показана такая же характеристика при с = -г-.
Пусть входной сигнал квантователя в интервале времени 0 <! tf << ^
принимает значения m0q, где q — шаг квантования; т0 — некоторое
число, т — п + с; п = 0; ±1, +2; с — коэффициент смещения
характеристики квантователя. В момент времени t± функция z(t) может войти
в следующий диапазон значений и z'(t) станет равной mxq и сохранит
это значение в течение интервала времени t\ «С /<< t2. При этом тг =
= то i !• В момент времени £2 < f< ts z'(0 станет равной m2q
и т. д. Квантованный сигнал является прерывистым сигналом, который
принимает постоянное значение в течение некоторого интервала
времени и может в любой момент времени измениться на -\-q или —q.
Ограничившись тремя уровнями квантования и учитывая задержку
сигнала на время т, можем записать уравнение (4.42) в виде
l==f [т° J *(')<*< + «! J *(0^+...
х (t) dt +
RXZ' W :
+ m.
+ mM
f «(0*1,
(4.46)
ч+*М
где *'(*)= m,?; /y</<//+1; /=0, 1 М.
Приведенная на рис. 38 блок-схема соответствует этому алгоритму.
Д. Уоттсом, автором этой схемы, она названа первой аналоговой
формой коррелятора Стилтьеса (126, 469].
Коррелятор, реализующий алгоритм (4.46), обладает рядом
положительных свойств. Так, в нем отпадает необходимость в сложных
аналоговых схемах умножения, которые заменяются простыми
схемами совпадения. При выполнении равенства z'(t) = mq, где т =
«в п -\- с, п = 0; il; ..., сигнал x(t) через схемы совпадения подается
одновременно на все п -f- с входов операционного усилителя (интегра-
75
тора). При необходимости может осуществляться параллельная работа
коррелятора, т. е. одновременное вычисление нескольких точек
корреляционной функции для нескольких значений т. Это позволяет вычислять
корреляционные функции Стилтьеса в реальном масштабе времени,
что важно для многих практических применений, в том числе и в
корреляционных экстремальных системах. При этом получаются простые
и экономичные аппаратурные решения. Весьма важным преимуществом
коррелятора Стилтьеса является возможность использования
дискретной техники для задержки сигнала, так как задерживается
квантованный, а не непрерывный сигнал. В частности, для этой цели с успехом
могут применяться БРЗ на основе регистров сдвига [331 % 362, 363,
436]. Наконец, снижаются требования к качеству (точности) входных
сигналов. При этом точность вычисления корреляционной функции
этим методом остается весьма высокой даже при очень грубом
квантовании входных сигналов. Так, при квантовании на три уровня
методическая погрешность составляет около 1%, а при квантовании на четыре
уровня — всего 0,02%, что намного превышает требования практики
[363]. В связи с этим при вычислении корреляционных функций
Стилтьеса ограничиваются тремя уровнями квантования [33, 126].
Высокая точность корреляторов Стилтьеса в сочетании с простотой
аппаратурной реализации делает весьма перспективным их применение
в тех КЭС, где требуется достаточно точное выявление формы
корреляционной функции.
Для некоторых специальных применений представляют интерес
и другие модификации коррелятора Стилтьеса.
Так, из (4.46) можно вывести выражение, описывающее алгоритм
работы второй аналоговой формы коррелятора Стилтьеса. Обозначив
Ху« f x(t)dt9 (4.47)
о
где t0 *= 0; tM+l = Т — т; / « 0; 1; ...; М + 1, уравнение (4.46)
приводим к виду
Rxz'(x) = -2rlm0(X1-X0) + m1(X2-X1)+... +
+ mf (X/+1 -*,) + ...+ /пм(Хм+1 - Хм)]. (4.48)
Но так как разность яь. \ — m-=n &ja.\, где б,, j = +1 или —1, мы
можем сгруппировать члены (4.48) в виде:
М
Rx/ (х) = -jr («лЛи+1 - m0X0 - YibiXi) • <4-49)
/=i
Уравнение (4.49) представляет собой формулу Стилтьесова
интегрирования по частям выражения 4.42.
Блок-схема коррелятора Стилтьеса, работающего по этому
алгоритму, приведена на рис. 40. Имеющееся в этом корреляторе устройство
С квантования по времени и получения коэффициента веса при
появлении управляющего импульса б At — т) выдает выходной импульс,
76
•£,(*)
CZH
о
#
Рис. 40. Блок-схема коррелятора Стилтьеса (вторая
аналоговая форма):
Кв — квантователь; Д — дифференцирующая цепочка; 53—блок
задержки; С — устройство квантования по времени и получения
коэффициента веса; Ии И2 — интеграторы.
Рис. 41. Блок-схема коррелятора, разработанного в Институте
электродинамики АН УССР:
Пх — переключатель знака аргумента взаимной корреляционной функции; Я2 —
переключатель вида корреляции (автокорреляция или взаимная корреляция);
Я8 — переключатель измерителя уровня входных сигналов; Уь У2 — входные
усилители; ИУ — измеритель уровня входных сигналов; ИП%1
ИП2—индикаторы перегрузок; /7СЬ ПС2 — пороговые схемы; ТГ — тактовый генератор;
КС — кольцевой счетчик; ЛЗ — линия задержки; Дь ... , Дп — дешифраторы;
Ки ••• » Кп— ключевые схемы; ОУ^, •••, ОУп — операционные усилители; ЯК-
выходной коммутатор; ВУИ — выходной усилитель индикации.
пропорциональный буХу. Вторая аналоговая форма коррелятора
Стилтьеса также может быть использована для вычисления
корреляционных функций в реальном масштабе времени, причем объем
используемого оборудования при этом еще меньше, чем в случае применения
первой аналоговой формы.
Представляет интерес использование второй аналоговой формы
коррелятора Стилтьеса в КЭС, отслеживающих нулевое значение
производной корреляционной функции. При этом отпадают трудности,
связанные с операцией дифференцирования входного сигнала
коррелятора.
J Кроме описанных выше разработан ряд других алгоритмов
вычисления корреляционных функций Стилтьеса. В [126, 469] приведены
описания так называемых импульсно-аналоговых форм коррелятора
Стилтьеса, полученных путем введения ключей (прерывателей) в его
цепи. Там же приводится методика вычисления корреляционных
функций Стилтьеса с помощью цифровых вычислительных машин.
В [33, 362, 363, 436] описаны примеры практической реализации
корреляторов Стилтьеса. Один из таких корреляторов был разработан
в Институте электродинамики АН УССР. Прибор сконструирован
для работы в реальном масштабе времени в диапазоне частот от 40 до
20000 гц. Для работы с более узкополосными сигналами рабочий
диапазон коррелятора разбит на три поддиапазона. В каждом из этих
поддиапазонов устанавливается свое максимальное 'время задержки,
определяемое наименьшей частотой входного сигнала. Кроме того,'в
приборе предусматривается сдвиг каждого поддиапазона влево до
соединения с предыдущим. Использование такого принципа построения
позволило охватить практически все возможные (в пределах рабочего
диапазона частот) случаи спектрального состава сигналов и сохранить
простоту и удобство регулировки задержки и отсчета времени
корреляции. В табл. 1 приведены данные, характеризующие разбиение
рабочего диапазона частот на поддиапазоны.
Таблица 1
№
поддиапазона
1
II
III
Частоты,
ВЦ
40—200
400—2000
4000—20000
*тах* сек
2,5.10-2
2,5-10~3
2,5.10~4
Дт, сек
Ы0~8
ыо~4
1.10—&
Число
вычисляемых
точек
корреляц.
функций
25
25
25
Коррелятор выполнен по параллельной многоканальной схеме,
позволяющей одновременно вычислять несколько точек
корреляционной функции в реальном масштабе времени. В качестве рабочего
алгоритма использовалась первая аналоговая форма коррелятора
Стилтьеса.
Блок-схема коррелятора приведена на рис. 41. Входные сигналы
через переключатель Пг поступают на входные устройства Ух и У2>
78
представляющие собой входные усилители с аттенюаторами и
индикаторами перегрузок ИП1г ИП2. Известно [148, 164], что для взаимной
корреляционной функции не выполняется соотношение R{t) = R(—т),
так как ее максимум может находиться либо при отрицательных, либо
при положительных значениях т, что имеет место при снятии сигналов,
связанных с распространением различного рода" возмущений в
пространстве (турбулентность, распространение радиоволн и т. д.). Для
вычисления ординат корреляционной функции, соответствующих
отрицательным значениям т, которые схемно не реализуются,
использовано соотношение
««(-*) = ««(*). (4.60)
В этом случае вначале вычисляются значения Rxz (т) для
положительных т, а затем с помощью переключателя Пх сигналы меняются местами
и вычисляются значения Rzx (т) согласно (4.50).
Входные усилители предназначены для усиления входных
сигналов до определенного уровня и имеют индикаторы перегрузок, которые
позволяют установить соответствие между динамическими
диапазонами входных сигналов и динамическим диапазоном прибора.
Коэффициент усиления усилителей k — около 400; частотная характеристика —
плоская в диапазоне 20—20000 гц с неравномерностью не более 3 дб\
входное сопротивление изменяется в диапазоне усиливаемых частот не
более, чем на 3 дб\ амплитудная характеристика линейна.
Усиленный до необходимого уровня входной сигнал подвергается
в одном из каналов коррелятора грубому квантованию на 3 уровня.
Общая теория квантования по уровню [126, 469] показывает
целесообразность квантования с равными интервалами. В этом случае ошибки
квантования могут быть учтены сравнительно простыми средствами.
Поэтому в данной схеме входной сигнал подвергается квантованию
с равными интервалами шириной q «= 2а. Характеристика квантователя
приведена на рис. 39 (сплошной линией). Для случая, когда входной
сигнал представляет собой нормальный случайный процессе нулевым
математическим ожиданием, характеристика, проведенная сплошной
линией, наиболее целесообразна, так как это упрощает схему
квантователя. Запишем выражение для характеристики квантователя в общем
случае;
dq + q [n — -j.) < х < dq + (n + у J q,
z=(n + c)r, д=0; ±1; ±2; ... (4.61)
Так как в нашем случае d и с равны нулю,, то напряжение на выходе
квантователя
г = пг при г = q, г = nqy (4.62)
откуда видно, что схема реально должна иметь два пороговых элемента,
соответствующих значениям я= -f-1 и п = — 1.
Для п = 0 пороговый элемент не нужен и этот уровень изэдальней-
шего рассмотрения выпадает.
Блок-схема входного преобразующего устройства и разбиение
сигнала по яонам показаны на рис. 42. Собственно квантователь
состоит из фазоинверсного каскада ФИ и двух пороговых элементов ПЭ^
79
Рис. 42. Входное преобразующее устройство:
а — блок-схема; ФИ — фазоинверсный каскад; ПЭи ПЭг —■ пороговые
элементы; MB — мультивибратор: Т — триггер; И — логические
схемы «#»; В — выходной каскад; ТГ —- тактовый генератор; б —
распределение сигнала по зонам в процессе квантования по уровню.
ПЭ2, в качестве которых использованы стандартные нуль-органы.
Наличие фазоинверсного каскада позволило выполнить оба пороговых
элемента одинаковыми, т. е. срабатывающими при одних и тех же
значениях напряжения на входе.
Если в какой-либо момент времени t на входе порогового элемента
ПЭх появилось отрицательное напряжение I ^BXI> lenopl» он
включается, а в это же время на входе порогового элемента ПЭ2 благодаря
фазоинвертору напряжение будет положительным. При изменении
полярности входного напряжения картина меняется на обратную:
пороговый элемент ПЭ2 включается, а элемент ПЭ-^ выключается и
остается выключенным. Изменение входного напряжения приводит
к тому, что на выходе квантователя генерируются две
последовательности прямоугольных импульсов. Длительность импульсов
соответствует времени пребывания входного сигнала в соответствующей зоне
(рис. 42, б), откуда видно, что корреляция между исследуемыми
сигналами определяется по значениям, лежащим за пределами
среднеквадратичного уклонения. Тем самым область наиболее вероятных
значений сигнала исключается из рассмотрения. Целесообразность такого
приема при измерении корреляции подчеркивалась, например,
в [186].
Полученные последовательности прямоугольных импульсов,
необходимые для управления подачей сигнала на входы решающих
усилителей, поступают в линию задержки ЛЗ (рис. 41), представляющую
собой обычный разомкнутый регистр сдвига на элементах с двумя ус-
80
я S
eg
<v
ЩИЙ !
Ю
ато- |
a,
o-e*
n*
rf«
a
£J
C-
Is.
О)
Bt
ct
К
CQ
2-298
тойчивыми состояниями. В качестве двоичных элементов для создания
регистра сдвига были использованы стандартные
феррит-транзисторные модули ФТМ. Общий вид линии задержки приведен на
рис. 43.
Линия задержки имеет 25 выходов (по числу точек вычисления
корреляционной функции), к каждому из которых подключена схема
дешифрации Д. В схеме дешифрации происходит разделение
последовательности импульсов на две последовательности, каждая из которых
дает информацию о состоянии какого-либо одного порогового элемента.
Схема дешифрации включает два триггера и диодно-транзисторную
логику. Каждый из триггеров находится во включенном состоянии
столько времени, сколько и соответствующая пороговая схема.
Положение этого интервала на оси времени оказывается задержанным
относительно входного сигнала на время т, пропорциональное номеру выхода
линии задержки. Кроме того, каждый из этих триггеров отрабатывает
управляющий сигнал для соответствующего ключа Къ •••> Кп>
стоящего на входе операционного усилителя 0ylt ..., 0Уп. На рис. 44
приведен общий вид дешифратора. Через переключатель Я2,
определяющий вид корреляции (авто- или взаимокорреляция), входной
сигнал поступает на ключевые схемы Къ ..., Кп, а затем на входы
операционных усилителей. Последние производят вычисление ординат
корреляционной функции в соответствии с выражением (4.45). Результат
вычисления через выходной кольцевой коммутатор В К и выходной
Рис. 45. Общий вид коррелятора, разработанного в ИЭД АН УССР.
82
Рис. 46. Тестовая коррелограмма.
усилитель индикации БУИ, осуществляющий интерполяцию, выводится
на регистрирующее устройство (осциллограф, самописец и т. д.).
Общий вид коррелятора ИЭД АН УССР приведен на рис. 45. На
рис. 46 приведена снятая с помощью коррелятора тестовая
коррелограмма.
Глава 5
АВТОМАТИЧЕСКИЕ КОРРЕЛЯЦИОННЫЕ КООРДИНАТОРЫ
(МНОГОМЕРНЫЕ КЭС)
Корреляционный метод совмещения изображений
Рассмотренные в гл. 1 КЭС основаны на автоматическом
вычислении корреляционной функции одного аргумента, в связи с чем они были
условно названы одномерными КЭС. Дальнейшим развитием одномерных
КЭС являются многомерные корреляционные экстремальные системы,
в которых вычисляются корреляционные функции, зависящие от двух
и более аргументов. Действие этих систем основано на совмещении двух
изображений путем автоматического отыскания экстремума их
взаимных корреляционных функций.
Пример экстремальной системы для совмещения двух
изображений приведен на рис. 47 [151, 152]. Какой-либо удаленный объект Af,
например, участок местности, при помощи объектива О проектируется
на фотопленку Ф/7, на которой заснят тот же участок местности.
Предполагается, что направления осей фотоаппарата и объектива одинаковы.
При равенстве масштабов изображения и снимка совмещение обоих
изображений (оптического изображения местности и ее фотографии)
может быть осуществлено изменением трех координат: продольным
смещением пленки Ах; боковым перемещением пленки Ау\ поворотом пленки
вокруг оптической оси объектива на угол Да.
6*
83
м
Рис. 47. Упрощенная схема экстремальной системы
совмещения изображений:
М — объект (участок местности); О — объектив. ФП — фотопленка
с изображением местности; ДПР — двигатель продольного
перемещения пленки; ДП — двигатель поперечного смещения
объектива; Дв — двигатель вращения изображения; БФ — блок
формирования сигналов отклонения от экстремума; ФЭ — фотоэлемент;
У — усилитель; К — конденсор фотоэлемента.
В устройстве, изображенном на рис. 47, продольное смещение
пленки выполняется при помощи лентопротяжного реверсивного
двигателя ДПР, поперечное смещение изображения осуществляется путем
смещения объектива О с помощью двигателя ДП, снабженного ходовым
винтом. Поворот изображения на пленке вокруг оптической оси
объектива выполняется при помощи двигателя Дв, поворачивающего всю
лентопротяжную систему. На все три координатных двигателя
поступают кроме управляющих сигналов колебания 6lf б2, б3 для отыскания
положения экстремума. Рабочие сигналы на двигатели,
пропорциональные отклонению от экстремума, вырабатываются блоком формирования
сигналов отклонения от экстремума БФ. На блок БФ подается сигнал,
пропорциональный смещению изображения, который вырабатывается
фотоэлементом ФЭ и усиливается усилителем У. Освещенность пленки
проектируется на фотоэлемент при помощи конденсора К.
Если масштабы изображения местности и фотографии неодинаковы,
го добавляется еще одна координата — масштаб изображения, который
может регулироваться изменением фокусного расстояния объектива.
Если на пленку нанесено позитивное изображение местности (т. е.
ярким участкам местности соответствуют прозрачные участки пленки),
го при полном совпадении изображений через пленку проходит
максимальный световой поток, что соответствует максимальному сигналу
фотоэлемента (рис. 48, а). Если изображение местности сравнивается
с негативным фотоснимком, то совмещению изображений соответ^
ствует минимальный световой поток через пленку и минимальный
сигнал фотоэлемента (рис. 48, б). Помимо главного экстремума
(минимума или максимума) сигнал фотоэлемента может иметь несколько
гтожных экстремумов.
Каждое из совмещаемых изображений можно рассматривать как
двухмерную реализацию некоторой стационарной случайной функции
(распределение коэффициента яркости или прозрачности F(x, у)).
Если в плоскости изображения ввести систему прямоугольных
координат (л:, у), то распределение яркости изображения будет функ-
84
цией этих координат F (х, у). При смещении изображения это
распределение описывается той же функцией F (х' ,у'), отнесенной к смещенной
и повернутой системе координат [151]
^2 (*'» У') = QF\ (х cos ^а + У s^n Аа-\- Аху cos Аа — х sin Да + Ау),
(5.1)
где а = const.
Общий световой поток, проходящий через пленки, и,
следовательно, сигнал фотоэлемента пропорциональны некоторой функции
смещения изображений
R (Ах, Ау, Аа) = а ^ Fx (x, у) F2 (x't y')dx dyt (5.2)
где интегрирование осуществляется по всей площади кадра S.
Функция смещения изображений (рис. 48), имеющая
экстремальный характер, может быть сформирована различным образом. В
частном случае она может быть вычислена как оценка взаимной
корреляционной функции двух изображений.
При неограниченном увеличении площади кадра и стационарности
функции распределения яркости F (х, у) функция R, поделенная на
площадь кадра S't стремится к корреляционной функции.
Возможно формирование экстремальной характеристики
смещения изображений путем вычитания яркостей последних (например,
путем сравнивания негативного и позитивного изображений). При
этом функция смещения изображений может иметь вид:
N
{Ах, Ay, Aa) = b^[FL(x, y)-F2(x'9 у')]2 dx dy.
(5.3)
Здесь F± (xf у) и F2 [xf, у') — функции, описывающие яркости
сравниваемых изображений, S — площадь последних, в—коэффициент
пропорциональности. Этой функции соответствует рис. 48, б.
В [183] показано, что алгоритм, реализующий вычисление взаимной
корреляционной функции совмещаемых изображений, является
оптимальным алгоритмом функционирования экстремальной системы авто-
Рис. 48. Характер-сигнала фотоэлемента при изменении одной
координаты (л:):
а — при совмещении двух позитивных (или негативных) изображений;
б — при совмещении одного негативного и одного позитивного
изображения
- 85
матического совмещения изображений (в смысле минимума
среднеквадратичной погрешности). Этот алгоритм положен в основу
известных в настоящее время двухмерных корреляционных экстремальных
систем.
Для вычисления взаимных корреляционных функций реализаций
случайных процессов, представленных в виде изображений, наиболее
удобными оказались оптические корреляторы [250, 255, 406, 420, 424,
447].
Существенным преимуществом оптических корреляторов является
не только то, что их подынтегральные функции могут быть заданы
непосредственно в виде изображений на плоскости, но и чрезвычайно
высокое быстродействие, обусловленное тем, что значения функции
корреляции одновременно вычисляются для всего множества ее
аргументов и аргументов подынтегральных функций [255].
Быстродействие оптических корреляторов намного превышает быстродействие
корреляторов электронных, как дискретных, так и аналоговых.
В них используется возможность применения оптических элементов
для вычисления интегралов типа свертки от одномерных и двухмерных
функций. Теория оптических вычислительных систем рассматривается
в большом количестве работ, к которым следует обратиться для более
глубокого ознакомления с данным вопросом [109, 194, 242, 255, 320,
372, 378, 406, 424, 425]. Детальный обзор оптических корреляторов
с точки зрения использования их в КЭС с совмещением изображений
выполнен в [255].
Следует отметить, что задача автоматического совмещения двух
изображений является частным случаем более общей проблемы
распознавания геометрических образов, точнее корреляционного метода
распознавания образов [45, 294]. Однако данная задача имеет свою
специфику и для ее решения не могут быть использованы те же методы,
которые, например, используются при распознавании печатных
символов (букв, цифр). Так, при распознавании букв число изображений
(букв), сравниваемых с эталонным, ограничено, тогда как число картин
местности практически бесконечно. При распознавании геометрических
образов используется только две градации яркости («черное» и «белое»),
тогда как изображение местности может включать в себя много
оттенков. Наиболее ответственные области применения КЭС с совмещением
изображений (ориентация движущихся объектов и управление
движением объектов по курсу) требуют высокого быстродействия и
помехоустойчивости используемых систем, в связи с чем примененные в этом
случае аппаратурные решения существенно отличаются от тех, которые
используются в «читающих» корреляционных автоматах, хотя в обоих
случаях используется один и тот же принцип — максимизация
взаимной корреляционной функции двух сравнительных изображений [99,
116, 183].
КЭС с совмещением изображений
КЭС для управления движением объекта
по заданному курсу
Корреляционный метод автоматического совмещения изображений
нашел применение в весьма важном и перспективном классе
многомерных КЭС, используемых для ориентации движущихся объектов и управ-
86 *
мс
т
i *
V
дмс
,
1
I
кзк
-Х=
УУ
ок
I ЙВ»
сек
I
1
i
ЛПМ
J
J
А
$(или его знак)
{(или его знак)
•
•
ссп
лес
Координаты
цели
-
координаты
f
вмц
самолета
С иг и а.л окончания работы
"" Сигнал начала работы \
'
UnnnfinfiUi/P и/г
конечном участке
траектории
Рис. 49. Блок-схема КЭС для управления движением объекта
по заданному курсу:
ОК — оптический коррелятор (очерчен штрих-пунктирной линией); МС -а
местность под самолетом; ДМС - бортовой датчик карты местности;
КЗК - карта заданного курса; ССК - система сравнения карт; А —
автопилот; ЛПМ - лентопротяжный механизм; ССП - система счисления
пройденного пути; УУ - устройство управления; ДСС - измеритель
динамических свойств самолета; БМЦ — блок определения момента
выхода на цель
ления движением этих объектов по курсу с помощью карт местности.
Первые сообщения о таких системах появились давно, однако они носили
весьма общий характер [115, 152, 203, 236, 335, 336, 358, 389]. В
настоящее время вышел целый ряд публикаций, в которых такие системы
описаны достаточно подробно [179, 180, 183, 252, 254, 256—258J.
Рассмотрим принцип действия одной из таких систем, описанной
в перечисленных выше источниках,— КЭС для управления движением
объекта по заданному курсу. Для определенности под движущимся
объектом будем подразумевать далее самолет, пролетающий над
местностью.
Действие системы основано на сравнении заранее заготовленной
карты местности, над которой пролегает маршрут самолета, с
фактическим изображением участка местности, над которым самолет
пролетает в данный момент. Следуя принятой в [183] терминологии, карту
местности вдоль заданного курса будем сокращенно обозначать адк
(карта заданного курса), а изображение местности под самолетом,
полученное, например, оптическим путем или на экране Радиолокатораi-
КМС (карта местности под самолетом). Для получения КМС могут быть
использованы самые различные источники информации [ 183]:
радиолокационное отражение местности; оптическое изображение местности
под самолетом (аэрофотоснимки); инфракрасное излучение поверхности
Земли; излучение волн сантиметрового диапазона с поверхности Земли
излучение небесных тел в различных частях спектра - видимой, инфра
^Ти^^иТИиспользуе«ой информации на борту самолета
устанавливается соответствующий датчик, преобразующий карту
местности в видимое изображение для ввода в оптический коррелятор.
87
Для получения КЗК используется предварительный пролет по курсу
или моделирование по топографическим картам [284].
На рис. 49 приведена блок-схема КЭС для управления движением
объекта (самолета) по заданному курсу, заимствованная из [255].
Изображение местности под самолетом МС воспринимается
бортовым датчиком карты местности ДМС и вводится в оптический
коррелятор ОК, где в системе сравнения карт ССК оно сравнивается с
картой заданного курса КЗК. Система сравнения карт выдает сигнал на
лентопротяжный механизм ЛПМ, осуществляющий продольное
перемещение КЗК, и сигнал Ц — на автопилот А для изменения направления
движения самолета. Остальные блоки служат для управления режимом
работы системы в полете к цели и определения момента выхода на цель
(БМЦ), для счисления пройденного пути (ССП) и управления
динамическими свойствами самолета (ДСС).
Теоретические и экспериментальные испытания этой системы
показали ее высокую точность и большую помехоустойчивость [183,
256].
КЭС для автоматической настройки
радиоаппаратуры
КЭС могут быть использованы не только для пространственного
совмещения идентичных (или сходных) изображений, но и для
согласования таких изображений по их конфигурации и качеству, т. е. для
приведения одного из подобных изображений в возможно более
близкое соответствие с другими. Такие КЭС изменяют (формируют)
характеристики одного изображения (яркость, контрастность, резкость,
искажение формы элементов изображения) в соответствии с
характеристиками другого, эталонного, изображения. При этом используется тот же
принцип максимизации взаимной корреляционной функции
согласуемых изображений [8, 179, 255].
Рис. 50. Упрощенная схема КЭС для автоматической на-
стройки телевизора по тестовой таблице:
Э— экран телевизора; О — объектив; ФП - фотопластинка с
эталонным изображением тестовой таблицы; К ~ конденсор; ФЭ —
фотоэлемент; УИО — устройство измерения отклонения от экстремума;
Иц ..- , Ип — интегрирующие звенья, выдающие сигналы на органы
настройки; 2«ь ... f bun — поисковые колебания,
88
Такие системы могут быть
использованы, например, для
автоматической настройки телевизора
по тестовой таблице с эталонным
изображением (рис. 50).
Изображение принимаемой
телевизором тестовой
(испытательной) таблицы, наблюдаемое на его
экране Э, при помощи объектива О
проектируется на фотопластинку
ФПу на которой
сфотографировано правильное (эталонное)
изображение этой таблицы. Яркость
пластинки, на которую
спроектировано изображение экрана
ЭЛТ, с помощью конденсора К
проектируется на фотоэлемент ФЭ.
Сигнал фотоэлемента,
пропорциональный взаимной
корреляционной функции двух изображений,
поступает на устройство измере-
ЁтК'
Щ
Ш
JjOff
ИЧХ
Н о/с
Н
]J/F
ЭР
Рис. 51. Блок-схема КЭС для
автоматической настройки
радиоаппаратуры на заданную
полосу пропускания:
О—объект настройки; ИЧХ —
индикатор частотных характеристик;
ОК — оптический коррелятор; ЭР —
экстремальный регулятор; ИУХ
ИУП — исполнительные устройства,
воздействующие на параметры
настраиваемой аппаратуры; alt -.,
ал—регулируемые параметры.
ния отклонения от экстремума
УИО, выходные сигналы которого через интегрирующие звенья Иъ
..., И/г воздействуют на соответствующие органы настройки так, чтобы
сделадъ сигнал фотоэлемента максимальным. При этом взаимная
корреляционная функция изображения на экране телевизора и эталонного
изображения тестовой таблицы максимальна, что соответствует
наилучшей настройке телевизора [151].
В [8, 255] описано применение этого метода в КЭС для
автоматической настройки радиоаппаратуры на заданную ширину полосы
пропускания.
Блок-схема этой системы приведена на рис. 51. Полоса
пропускания объекта настройки О с помощью индикатора частотных
характеристик ИЧХ воспроизводится на одном из входов оптического коррелятора
О/С, на другой вход которого подается эталонное изображение
идеальной полосы пропускания. Выходной сигнал коррелятора представляет
собой взаимную корреляционную функцию
R (Ах, Ay) = J Fi (x, у) F2 (х9, у') dxdy,
(5.4)
где Fi (х, у) — распределение яркости на экране индикатора частотных
характеристик; F2 (xf, у') — функция, описывающая эталонное
изображение полосы пропускания.
Преобразованное в электрический сигнал значение взаимной
корреляционной функции R (Ах, Ау) поступает на экстремальный
регулятор ЭР, выходные сигналы которого являются регулирующими
воздействиями для исполнительных устройств #У1} ..., ИУП>
настраивающих соответствующие параметры объекта настройки alt ..., ап.
Описанное устройство было реализовано и прошло успешные
испытания. При этом была получена высокая точность настройки и
возможность устрайять значительные расстройки независимо от вида
эталонного изображения [255].
89
От идеи корреляционного метода совмещения двух плоских
изображений путем отыскания экстремума двухмерной функции взаимной
корреляции этих изображений естественно перейти к идее совмещения
трехмерных изображений, являющихся эквивалентами случайных
полей различной физической природы. В этом случае экстремум
трехмерной взаимной корреляционной функции (которому трудно дать
наглядную геометрическую интерпретацию) может служить
показателем совмещения двух объемных картин, а КЭС, реализующие этот
принцип, могут быть использованы в качествеориентаторов в случайных
полях (температурных, гравитационных, магнитных, инфракрасных
и т. д.), аналогичных ориентаторам, описанным в [183, 256]. Входными
датчиками таких систем могут быть преобразователи соответствующих
параметров этих полей по трем координатам в электрические или
другие сигналы [111—113,170, 207]. При этом, например, могут вычисляться
взаимные корреляционные функции параметра по двум координатам,
для каждой пары координат, с отысканием экстремальных значений
для каждой пары, либо могут применяться различные методы
сканирования и преобразования полученных сигналов в оптические
изображения с последующей обработкой их в оптических корреляторах.
В этих случаях могут оказаться полезными голографические методы
обработки информации. Представляется перспективным также
применение для этих целей корреляторов 3-го порядка [194, 242, 451].
Часть II
ПРИМЕРЫ ПРАКТИЧЕСКОЙ РЕАЛИЗАЦИИ КЭС
Глава 6
АВТОМАТИЧЕСКИЕ КОРРЕЛЯЦИОННЫЕ ИЗМЕРИТЕЛИ
СКОРОСТИ ПРОКАТА
Автоматические корреляционные измерители скорости проката,
разработанные в Институте электродинамики АН УССР
В 1961—1963 гг. в Институте электродинамики АН УССР автором
были разработаны два лабораторных макета корреляционных
измерителей скорости проката, основанные на методе полярной корреляции
и использовании дифференциальной схемы [117, 118, 120, 129].
Схемы с электронным и магнитным БРЗ
Первый вариант дифференциальной схемы для измерения скорости
проката с целью устранения контактных элементов и исполнительного
двигателя был полностью выполнен на электронных лампах и собран
из бесконтактных ламповых блоков [76]. Разным скоростям металла
соответствовали различные напряжения в элементах схемы. Для
коррелятора был разработан специальный БРЗ, управляемый изменяющимся
напряжением [130].
Блок-схема измерителя приведена на рис. 52. Получаемые от
фотоэлементов ФЭг и ФЭ2 сигналы усиливаются усилителями У1 и У2
и подаются в формирующие (ФЯХ и ФП2) и преобразующую (П) цепи
для превращения входных сигналов в клиппированный сигнал
(сигнум-сигнал) и в короткие однополярные импульсы напряжения,
соответствующие нулевым значениям исходной функции (рис. 53). Эти
импульсы при помощи электронного БРЗ .задерживаются на время,
которое зависит от приложенного к БРЗ управляющего напряжения.
БРЗ включает в себя как элемент регулируемой задержки —
собственно БРЗ, так и элементы постоянных задержек БПЗЪ БП32, БПЗ%
(рис. 52). Задержанные импульсы при помощи триггеров —
формирователей 7\ и Т2 (триггеры со счетным входом) вновь превращаются
в прямоугольные импульсы (клиппированный сигнал) и подаются
на множительные устройства CCi и СС2 (схемы совпадения). Разность
задержек в элементах БП32 и БП33 определяет сдвиг характеристик
двух каналов дифференциальной схемы (выходных сигналов схем
совпадения ССг и СС2). Сигналы с выхода схем совпадения через
катодные повторители КПг и КП2 подаются на электронный ключ ЭК и через
устройство памяти УП воздействуют на блок регулируемой задержки.
В качестве формирующего каскада использована диодно-регене-
ративная схема с импульсным трансформатором. Блок задержки
обеспечивает задержку поступающих на него однополярных импульсов на
время, равное транспортному запаздыванию тт.
91
<W7/|
п\
БЩ
БРЗ
IE
i
1лг
i
г'
Л±
-ждо
111 JJL
(у) \—^ г—М—.п_
Л77,
ГЦ
LP
ЭК
УП
Рис 52. Блок-схема электронной КЭС для измерения
скорости движения проката:
Oi» 02 — осветители; ФЭи ФЭ2 — фотоумножители; Уи У г —
усилители входных сигналов; ФПи ФП2 — формирователи
прямоугольных импульсов (клиппированных сигналов); П —-
преобразователь клиппированного сигнала в импульсы, соответствующие
нулевым значениям входного сигнала; БПЗи БП32, БП33 — блоки
постоянной задержки; БРЗ — блок регулируемой задержки, Ти Т2 —
триггеры со счетным входом; CClt СС2 — схемы совпадения; КПи
КП2 — катодные повторители; Ж — электронный ключ; УП —
устройство памяти; ИП — измерительный прибор, проградуированный
в единицах скорости.
Элементами постоянной задержки служат одновибраторы, которые
соединяются последовательно для подбора нужного времени задержки.
Общее запаздывание является комбинацией предварительно
набранных постоянных задержек (т/, %г и т2) и переменной задержки т,
величина которой регулируется напряжением, поступающим на схему от
устройства памяти. Электронный БРЗ подробно описан в [130].
Схемы совпадения выполнены на двойных триодах с общими
катодными нагрузками.
С одной стороны на схемы совпадения поступают сигналы от
формирователя второго (по ходу движения полосы) канала — sgn[/(f — тт)],
а с другой стороны — сигналы первого канала, задержанные на время
т -|- Tj_ и т -\- т2 (для простоты принимаем т/ = 0). Если бы задержки
т -j- Tj и т -f- т^2 были равными и совпадали с временем транспортного
запаздывания тт, то выходные импульсы о^еих схем совпадения имели
бы одинаковую длительность. Но задержки отличаются друг от друга
на время Дт = тх — т2, поэтому при равенстве одной из них времени
транспортного запаздывания т , другая отличается от этого значения
92
на величину Ат и выходные сигналы
схем совпадения (длительности
выходных импульсов) различны. Равенство
выходных сигналов схем совпадения
наступает лишь в случае равновесия
системы, когда обе задержки — т -f- Tj
и т -(- т2 — отличаются от тт на величи-
Ат
ну у.
Импульсы, снятые с анодных
нагрузок схем совпадения, через
катодные повторители КПг и КП2,
подаются на электронный ключ Ж, в
схеме которого имеется конденсатор.
Среднее значение напряжения на
конденсаторе определяется разностью
длительностей этих импульсов и в
конечном счете — скоростью проката.
Это напряжение через катодный
повторитель, имеющийся в устройстве
памяти УП, подается на БРЗ и
управляет задержкой проходящих через него
сигналов. Это же напряжение через
другой катодный повторитель (на
схеме не показан) измеряется
вольтметром ИП, проградуированным в
значениях скорости проката.
При изменении скорости проката
время задержки перестает быть равным транспортному
запаздыванию, и длительность импульсов на входах схем совпадения будет
различной. В результате возникает управляющий сигнал, который,
будучи поданным на БРЗ, приводит систему в новое состояние
равновесия.
Следует отметить, что БРЗ является наиболее ответственным узлом
коррелятора, во многом определяющим качество работы всей системы.
Применение в описанной схеме электронного БРЗ обусловило
ограниченную полосу пропускания системы и, в связи с этим,— невысокую
точность измерения скорости из-за неблагоприятной формы
корреляционной функции, а также ограниченный диапазон измеряемых
скоростей .
Очевидно, что любой БРЗ, не имеющий устройства памяти,
принципиально не может осуществить задержку импульсного сигнала на время,
превышающее период следования импульсов. Поэтому в рассмотренной
схеме для получения нужной задержки пришлось ограничиться более
низкими частотами входных сигналов и соединить последовательно
несколько элементов запаздывания. Низкие рабочие частоты
отрицательно сказываются на форме корреляционной функции и делают
систему менее точной.
Наряду с электронным БРЗ для описанного выше макета была
разработана схема линии задержки импульсных сигналов на магнитных
элементах с подмагничиванием [91, 124].
Искусственные длинные линии на LC широко применяются в
радиотехнике для задержки сигналов на фиксированное время [274]. Время
sgnlfffl
*«),
ф
ky
-
^s
1
^7
t
J t
|| . pi
п h im ,
Рис. 53. Преобразование
входного сигнала корреля
тора в клиппированный
сигнал и импульсы,
соответствующие нулевым значениям
входного сигнала:
f (/) — сигнал на входе
фотодатчика; sgn [fit)] — клиппированный
сигнал на выходе формирующего
звена;
x(t)—продифференцированные импульсы; х0 (t) — выходной
сигнал преобразователя (однопо-
лярные импульсы,
соответствующие нулевым значениям входного
сигнала)
93
Рис. 54. Схема БРЗ в виде искусственной длинной
индуктивно-емкостной линии с переменной индуктивностью.
задержки сигнала такой линией определяется зависимостью
(6.1)
где т — время задержки; L и С — соответственно индуктивность^
емкость одной ячейки линии; п — число ячеек линии.
Изменяя число ячеек линии п при помощи переключателя или
плавно изменяя значения L и С, можно регулировать время задержки
сигнала в линии [7, 41, 94].
Однако при использовании переключателя дополнительный
монтаж от ячеек к переключателю вносит в линию неоднородности,
приводящие к появлению отражений и искажающие задерживаемый сигнал.
Плавное изменение емкости ячеек требует применения сложного
и дорогостоящего блока конденсаторов с числом секций, равным числу
ячеек.
* В [124] предложен бесконтактный способ плавного регулирования
задержки в линии при помощи дополнительных обмоток управления,
соединенных последовательно друг с другом и с источником
управляющего напряжения, путем изменения подмагничивающего тока,
протекающего по этим обмоткам (рис. 54).
БРЗ представляет собой искусственную длинную линию,
состоящую из индуктивно-емкостных звеньев (Лобразных LC-фильтров),
собранных на тороидальных сердечниках. На каждом сердечнике кроме
основной обмотки (L, ..., Ln) имеется дополнительная обмотка подмаг-
ничивания. Все подмагничивающие обмотки соединены последовательно
друг с другом и подключены к источнику управляющего напряжения
Ux. При изменении управляющего напряжения изменяется ток в под-
магничивающей обмотке и индуктивность сигнальной обмотки L, а
следовательно, и время задержки (пропорционально ]/ L). Известны схемы,
обеспечивающие стократное изменение индуктивности, поэтому от
такого БРЗ можно ожидать десятикратного изменения времени
запаздывания. Значительное изменение нежелательно, т. к. при этом
возможны искажения из-за работы на нелинейном участке
характеристики сердечника.
При изменении Ui меняется и волновое сопротивление линии
■/¥■
(6.2)
94
Поэтому одновременно с изменением управляющего напряжения для
поддержания согласования с линией необходимо корректировать
нагрузочное сопротивление RH. Поскольку время задержки т и
волновое сопротивление р изменяются по одинаковому закону,
корректировка сопротивления нагрузки может быть осуществлена при помощи
механической связи движка потенциометра Ux с сопротивлением
нагрузки (на рис. 54 обозначена пунктиром). Эта связь может быть
сделана и функциональной (например, управляющий потенциометр может
иметь профильный каркас или отдельные участки его могут быть зашун-
тированы специально подобранными сопротивлениями.
В качестве согласуемой волновой нагрузки на конце линии
параллельно ее выходу может быть включена лампа с малым внутренним
сопротивлением (например, 6Н5), управляемая синхронным напряжением
от того же источника, что и обмотки подмагничивания.
Конструктивно индуктивность каждой ячейки БРЗ можно
выполнить в виде двух идентичных катушек, а обмотки подмагничивания
каждой такой пары включать навстречу друг другу. При этом на
выходных зажимах обмотки подмагничивания будет отсутствовать первая
гармоника задерживаемого сигнала, что позволит снизить требования
к развязывающим цепям и уменьшить постоянную времени цепи
управления.
Однако такое упрощение развязывающих цепей достигается за
счет соответствующего увеличения числа элементов БРЗ и увеличения
веса и объема устройства, так как при выполнении индуктивного звена
линии задержки из двух одинаковых катушек число витков возрастает
в У% раз по сравнению с индуктивностью, выполненной на одном
сердечнике (индуктивность катушки связана с числом витков квадратичной
зависимостью). С точки зрения габаритов и веса предпочтительнее
выполнять ячейки без разделения на два индуктивных элемента. Для
уменьшения общего числа звеньев в БРЗ возможно применение ячеек
типа М [274].
Следует заметить, что в данном БРЗ при изменении L в
незначительных пределах будет изменяться полоса прозрачности
(пропускания)
1 (6.3)
пр
Vlc
Частота среза Г-образных полузвеньев равна резонансной частоте
контура
1 *2
-. (6.4)
Vlc ч '
Параметры линии задержки выбираются, исходя из того, что
частота среза должна быть вдвое выше верхей частоты задерживаемого
[274], т. е. задержка на одно звено должна быть
%х — — = ъ = . (6.5)
"о 2aW "них
95
Так как ширину спектра импульса в первом приближении можно
считать величиной, обратной длительности импульса
щтах J_ (б6)
'max 27с tu У '
задержка на одно звено равна
и
:2
(6.7)
LC=X2 = ^' (6-8)
Из требования равенства сопротивления нагрузки линии волновому
сопротивлению
*н = Р=У7Г
(6.9)
получаем соотношение
-jj- = Rl (6-Ю)
Из выражений для LC и -^- получаем расчетные формулы:
L—^ с = Дг- (6Л1>
Так, например, при сопротивлении нагрузки R^ = 103 ом и
длительности задерживаемых импульсов /и = 0,5 жсек
, _ 0,5 • Ю- . 10з = о>()8 ^ с _ од^ =0>08 ^.
6,28 ' ' 6,28- 10"3
ч = /LC = /80.К)-3- 80- 10~9 = 0,08 мсек.
Для задержки сигнала на 8 мсек необходимо 100 звеньев.
Недостатком такого БРЗ является относительная громоздкость
и сложность наладки.
Для плавного изменения индуктивности звеньев подмагничиваю-
щим током не обязательно создание отдельных обмоток. Ток
подмагничивания можно пропускать непосредственно через сигнальные обмотки,
для чего необходимы соответствующие развязывающие фильтры в цепи
подмагничивания, что усложнит устройство. Кроме того, инерционность
развязывающих цепей может заметно снизить быстродействие такого
БРЗ.
96
Схема с БРЗ, использующим магнитную запись
В связи с недостатками описанных выше бесконтактных
электронных и магнитных БРЗ в Отделе технической кибернетики Института
электротехники АН УССР в 1962—1963 гг. было разработано два
макета корреляционных измерителей скорости движения проката (КИСП)
с блоками регулируемой задержки, использующими магнитную запись
на ленте. Общий вид макета представлен на рис. 55. БРЗ на магнитной
ленте обеспечил устойчивую работу устройства в широком диапазоне
изменения задержек (т = 0 — 0,3 сек) при достаточно широкой полосе
пропускания сигнала (6—8 кгц) [120].
Блок-схема КИСП с БРЗ, использующим магнитную запись,
приведена на рис. 56. Снимаемый с фотодатчика ФЭг непрерывный
сигнал fi(t) усиливается предварительным усилителем Уг и подается
на вход усилителя записи УЗ. Нагрузкой усилителя записи являются две
записывающие головки для двухдорожечной записи ГЗХ и Г32,
соединенные параллельно. Считанный при помощи головок воспроизведения
ГВ± и ГВ2 сигнал усиливается усилителями воспроизведения УВг
и УВ2 и несколько раз подвергается поочередному усилению и
ограничению в усилителях-ограничителях УО± и У02 Для получения
сигнум-сигнала с большой крутизной фронта.
В описываемой схеме сигнал второго фотодатчика ФЭ2 усиливается
и ограничивается без предварительной записи на ленту. Однако в
последнем варианте схемы был предусмотрен дополнительный канал
записи и воспроизведения этого сигнала, делающий выходной сигнал
коррелятора более симметричным и позволяющий измерять более
высокие скорости проката. При отсутствии этого канала записи предельная
измеряемая скорость ограничивалась минимальным расстоянием между
головками записи и воспроизведения блока регулируемой задержки.
Изменение задержки осуществляется до формирования сигнум-
сигнала путем смещения блока читающих головок Б Г относительно
Рис. 55. Общий вид КЭС для измерения скорости движения проката,
использующей задержку сигналов на магнитной ленте.
7 2-298
97
T /*g Г^"^--'
уо3
\\\
ffi-rr)
sgn[f(HT)]
Рис. 56. Блок-схема корреляционного измерителя скорости
проката КИСП с блоком регулируемой задержки,
использующим магнитную запись сигнала:
01, ^г — осветители; ФЭи ФЭ2 — фотодатчики: Уи У2 — усилители
входных сигналов; УЗ — усилитель записи; У Ви УВ2 — усилители
воспроизведения; У01} УОг, УОэ — усилители — ограничители; Г ~
генератор высокой частоты для стирания и подмагничивания; ГС — стирающая
головка; Г31г Г32 —записывающие головки; БГ — блок головок
воспроизведения; FBt, ГВ2 — готовки воспроизведения; CClt CC2 — схемы
совпадения; ВУХ {РТ) — вы читающее устройство коррелятора (реле
точного поиска экстремума); Уя — сервоусилитель; ИД — исполнитель!ый
двигатель; Р — редуктор; ТГ — тахог^нератор; ВУ 2 — вычитающее
устройство реле) канала грубого поиска максимума; РВТ -—реле
выключения канала точного поиска; П — потенциометр канала грубого поиска
98
записывающих головок ГЗг и Г32 при помощи ходового винта.
Вращение ходового винта может производиться как вручную, так и при помощи
исполнительного двигателя ИД, который работает от сигнала
рассогласования двух каналов коррелятора, выполненного по
дифференциальной схеме.
Магнитная запись в БРЗ осуществляется одновременно на две
дорожки непрерывного кольца стандартной магнитной пленки (ширина
6,35 мм, тип 2), протягиваемой со скоростью 381 мм/сек (II вариант —
354 мм/сек). Применение двухдорожечной записи позволяет получить
небольшую дополнительную постоянную задержку Ат = т^ — т2,
необходимую для работы дифференциальной схемы. Предварительное
стирание записи на обеих дорожках производится одновременно при
помощи одной однодорожечной стирающей головки ГС, питаемой током
частотой 70 кгц. В одной из описанных схем удовлетворительное
стирание записи было получено при помощи цилиндрических постоянных
магнитов, одновременно служащих направляющими колонками для
магнитной ленты (рис. 57). Следует, однако, заметить, что при более
широкой полосе частот сигнала такой способ стирания сопровождался
появлением помех с частотами более 10 кгц.
Клиппированные сигналы обоих каналов коррелятора —
sgn[/(/ — тх)] и sgn[f(t — х2)], а также сигнал второго фотодатчика —
sgn [/(^-—тт)] подаются на схемы совпадения ССг и СС2. Разность
выходных сигналов схем совпадения, получаемая на выходе
вычитающего устройства В Ух, усиливается усилителем У3 и подается на
исполнительный двигатель ИД, вал которого через редуктор Р вращает ходовой
винт блока считывающих головок БГ до отыскания максимума
корреляционной функции и достижения равновесия схемы. После этого
скорость движения проката определяется по положению блока
считывающих головок при помощи линейки с нониусом (рис. 57). Протяжка
ленты осуществляется однофазным синхронно-реактивным
конденсаторным двигателем ДВС-У1.
Очень важно обеспечить равномерное движение ленты без
продольных колебаний. При скорости движения ленты 381 мм/сек одна
полуволна сигнала с частотой 2000 гц занимает по длине ленты
расстояние около 0,1 мм. Следовательно, на частоте 2000 гц продольные
колебания ленты с амплитудой 0,1 мм привели бы к тому, что вместо полного
совпадения положительных импульсов сигнум-сигнала и максимального
сигнала на выходе схемы совпадения был бы получен сигнал
минимального совпадения. В связи с этим при конструировании БРЗ было
уделено большое внимание стабилизации скорости ленты. Для
стабилизации скорости протягивания ленты были применены два маховика —
один на оси ведущего валика, другой — на оси направляющего
ролика. Для упрощения лентопротяжного тракта в одном из
последних вариантов макета число вращающихся направляющих роликов
было уменьшено до одного, объединенного с механическим
фильтром.
Общий вид лабораторного макета корреляционного измерителя
скорости проката показан на рис. 58. Первый вариант устройстга
позволял осуществлять запись на кассету емкостью 500 м (для
последующего исследования). В дальнейшем лентопротяжный тракт
коррелятора был существенно упрощен.
При лабораторных опытах световые штрихи проектировались на
диаметрально противоположные участки по краям стального диска,
7*
99
Рис. 57. Детали лентопротяжного тракта с постоянными
магнитами вместо стирающих головок и с нониусным от-
счетным устройством.
Рис. 58. Общий вид лабораторного макета КЭС для
измерения скорости проката.
Рис. 59. Имитатор движущегося металла в виде диска с
электроприводом и тахогенератором.
приводимого во вращение электродвигателем 2АСМ-400. Двигатель
был сочленен также с тахогенератором, выходное напряжение которого
использовалось для грубого поиска максимума корреляционной
функции и для приближенного определения линейной скорости движения
металла (рис. 59). Градуировочная кривая тахогенератора UTr= f(v\
строилась путем осцилографирования периодических сигналов,
соответствующих различным выходным напряжениям тахогенератора,
и последующего определения периода Т сигналов фотодатчика по
отметкам времени. Линейная скорость движения металла вычислялась
затем из простого геометрического соотношения
т
т
(6.12)
где D — расстояние между центрами световых штрихов (по диаметру
диска); /0 — длина траектории штриха за один оборот диска; Т — вре-
^AллvДvлчAЛvл^yVVv^
J 1 I L_
_1 I I I ,
Рис. 60. Осциллограммы сигналов, полученных с поверхности
стали, алюминия и меди при скорости движения 17,3 м/сек
(отметка времени —500 гц):
а — сталь, размер светового штриха 10 х 1,5 мм, б — сталь, размер
светового штриха 5 х 0,8 мм; в — алюминий, размер светового штриха б х
х 0,8 мм; г -=- алюминий, размер светового штриха 10 х 1,5 мм; д— медь,
размер светового штриха 15 х 2 мм
101
Рис. 61. Автокорреляционные функции сигналов, соответствующих
приведенным на рис. 60.
менной интервал между повторениями характерных точек
осциллограммы (период вращения диска).
В процессе исследований использовались диски, вырезанные из
холоднокатаной стали, алюминия, меди, а также из технической бумаги
и пластмассы. Исследовались осциллограммы, снятые при размерах
читающих световых штрихов от 0,8 X 5 мм до 2,4 X 15 мм.
На рис. 60 приведены осциллограммы сигналов, полученных с
поверхности стали, алюминия и меди при скорости движения металла
17 3 м/сек и разных размерах читающего светового штриха.
На рис. 61 приведены автокорреляционные функции, вычисленные
для этих сигналов. Уменьшение толщины штриха от 1,5 до 0,8 лш при-
102
вело к расширению высокочастотной части спектра сигнала и к
соответствующему сужению пика корреляционной функции. Для
поддержания постоянной амплитуды сигнала при сужении штриха необходимо
увеличивать усиление сигнала Увеличение длины светового штриха
не влияет на спектр снимаемого сигнала, но увеличивает его амплитуду.
Экспериментально были найдены следующие оптимальные размеры
светового штриха: ширина — 1—2 мм, длина — 10—20 мм.
Оптические блоки лабораторного макета (осветители, фотодатчики)
были выполнены в двух вариантах: с длиннофокусной и с
короткофокусной оптикой (рис. 62).
Длиннофокусная оптика -позволяет поместить оптический блок
на достаточном удалении от движущегося металла (что необходимо,
например, при работе с горячим прокатом). В этом случае тубусы
фотодатчиков снабжены щелевой диафрагмой в плоскости изображения (для
ограничения площади воспринимаемого светового штриха и защиты
фотоэлемента от теплового излучения металла, находящегося за
пределами штриха). Размер светового штриха на металле— 10 х 1,5 мм.
Короткофокусная оптика позволяет при испытаниях макета на
прокатном стане уменьшить габариты фотодатчиков для облегчения установки,
ввиду необходимости сокращения расстояния до металла. Поскольку
в этом случае испытания проводились на холодном металле, щелевая
диафрагма отсутствовала.
Фотодатчики помещались в зеркально отраженном луче
осветителей. Во время одного из опытов плоскость, проходящая через нить
накала осветителя, световой штрих и фотодатчик были
перпендикулярны направлению движения полосы проката, благодаря чему
уменьшалось влияние вертикальных колебаний прокатываемого листа на
расстояние между штрихами и резкость последних.
В качестве осветителя были применены лампы накаливания с
линейной нитью (12 в, 40 вт), в качестве фотодатчиков — фотоумножи-
Рис. 62, Оптический блок корреляционного измерителя скорости
движения проката.
103
тел и ФЭУ-2. Частотная характеристика ФЭУ-2 в области высоких
частот (более 4 кгц) имеет спад, поэтому для использования более
высоких частот спектра входных сигналов могут быть рекомендованы
фотоэлементы. Лабораторные исследования фототранзисторов ФТ-1
показали хорошие частотные свойства последних, но сильную
подверженность их температурным влияниям. Освещенность поверхности
катодов фотоумножителей при принятых осветителях и оптике составляла
около 1200 лк [93, 135, 185, 209, 237, 300].
В связи с тем, что пик корреляционной функции очень узок и при
значительном начальном рассогласовании система сама не смогла бы
его отыскать, в описанной схеме была предусмотрена система грубого
поиска экстремума, работающая от та хо генератор а ТГ (рис. 56),
связанного с валками прокатного стана [104, 338].
Выходное напряжение тахогенератора с точностью до нескольких
процентов соответствует скорости движущегося проката. Это
напряжение на вычитающем устройстве ВУ2 (поляризованное реле РТ)
сравнивается с напряжением, снимаемым с потенциометра Я, движок
которого механически связан с блоком воспроизводящих головок БГ.
Положение блока головок в уравновешенной схеме должно
соответствовать скорости металла. При значительном рассогласовании схемы,
превышающем зону нечувствительности канала грубого поиска
экстремума, исполнительный двигатель ИД через контакты трехпозицион-
ного поляризованного реле РГ (реле грубого поиска экстремума)
получает управляющий сигнал от канала грубого поиска (рис. 63.
При этом возбуждается последовательно включенное реле РВТ (реле
включения канала точного поиска) и отключает канал точного поиска
(реле точного поиска экстремума РТ). Когда схема грубого поиска
уравновешивается, то реле РВТ отпускает и начинает работать канал
точного поиска экстремума, который при помощи контактов реле РТ
управляет исполнительным двигателем ИД и окончательно устанавливает
блок головок в правильное положение.
Результаты лабораторных испытаний макета КИСП приведены на
рис. 64 и в табл. 2. Кривые были сняты с выхода одного из каналов
системы точного поиска максимума при ряде установившихся скоростей
движения металла. После автоматического уравновешивания системы
исполнительный двигатель отключался и при помощи прецизионной
ручной передачи задавался различный сдвиг относительно максимума.
Отсчет производился по нониусу.
Таблица 2
Действительная
скорость металла,
м/сек
15,65
13,7
11,65
9,8
8,6
Показания
нониуса, мм
12,5
14,3
16,8
20,25
22,8
Измеренная
^скорость,
м/сек
15,75
13,75
11,70
9,75
8,65
Погрешность,
%
0,6
0,4
0,4
0,5
0,6
104
-H0-
-0-
о
РВТ
РГ
г1
РГ\
—° | ь~а4-
г*
Л-
4 о { ft 0—
/v# Ф
Рис. 63. Схема включения каналов точного и грубого поиска
экстремума с исполнительным двигателем постоянного (а) и
переменного (б) тока:
ИД — исполнительный двигатель; РТ — контакты реле канала точного
поиска максимума; РГ — контакты реле канала грубого поиска; РВТ —
обмотка реле выключения канала точного поиска; KB — конечные
выключатели.
Щ
40
35
30
25
v~15,7м/сек 13J
10
9>8 о 8,5
15
aLmm
Рис. 64. График смещения корреляционной функции
при различных скоростях движения проката.
Рис. 65. Блок фотодатчиков, установленный на дрессиро-
вочном прокатном стане «1700» на заводе «Запорожсталь».
Каждое измерение скорости сопровождалось осциллографирова-
нием сигналов, снимаемых с фотодатчиков. При расположении
световых штрихов в диаметрально противоположных точках по краям
вращающегося металлического диска сдвиг между сигналами тт, равный
половине периода вращения диска и измеряемый по отметкам времени
на осциллограмме, связан со скоростью соотношением
/ иг
Тт = — =— • <6ЛЗ)
^л ^л
где г — половина расстояния между центрами штрихов (г = 176 мм);
ил — линейная скорость центров штрихов.
Зависимость между скоростью движения магнитной ленты в БРЗ
(vu — 354 мм/сек) и относительным сдвигом считывающей и
записывающей головок имеет вид
А/
тм = —. (6.14)
м
Учитывая, что при равновесии системы соблюдается равенство т = т'
получаем необходимые расчетные соотношения:
А/ кг п т
— = — • (6Л5>
м vn
%rvu
°л = -дГ. (6Л6)
используемые при градуировке БРЗ в единицах измерения скорости.
Описанный макет был испытан в промышленных условиях в цехе
холодной прокатки на заводе «Запорожсталь» на дрессировочном стане
«1700». На рис. 65 приведен монтаж блока фотодатчика, устновленного
на выходной стороне прокатного стана на рассстоянии 820 мм от
поверхности металла. На рис. 66 приведены образцы осциллограмм сигналов,
снятых с поверхности холоднокатаной стали.
j\^^/^
■ i _i i i i i i i i i i i i i t i i i i i i t i f i i i i i i i i i i ■ i ■ i i i i i i i i i i i
Рис, 66. Осциллограммы сигналов, снятых с поверхности
холоднокатаной стали на прокатном стане (отметка
времени— 100 гц).
107
В процессе испытаний макет устойчиво работал в диапазоне
скоростей движения металла от 1 до 10 м/сек. После отключения системы
грубого поиска максимума (при установившейся скорости движения
металла) система точного поиска устойчиво отслеживала дальнейшие
изменения скорости. При отключении системы точного поиска (путем
перекрывания светового потока фотодатчиков) изменения скорости
металла отслеживались системой грубого поиска.
Испытания показали работоспособность макета в промышленных
условиях. В то же время был выявлен ряд конструктивных
недостатков: большие размеры фотооптической системы; сложность настройки
и невозможность подстройки в процессе работы; отсутствие
антивибрационного монтажа; недостаточная надежность ввиду возможных
обрывов ленты.
Несколько лучше БРЗ с магнитным барабаном, однако возможность
его непрерывной эксплуатации в промышленных условиях также
затруднительна. Более перспективной является разработка дискретной схемы
с БРЗ на регистрах сдвига, которая не содержит движущихся частей
и обладает высокой надежностью. Из-за малой скорости движения
магнитной ленты в БРЗ (354 мм/сек) шкала измеряемых скоростей
оказалась сжатой и неудобной для отсчета. При использовании БРЗ с
магнитной записью необходимо увеличение скорости движения магнитного
носителя до 1—2 м/сек. Наличие в системе редуктора с большим
передаточным числом снижает скорость перемещения считывающих головок
в БРЗ и обусловливает появление динамической ошибки при быстрых
изменениях скорости движения металла. Максимальное ускорение,
при котором описанная система сохраняла работоспособность,
составляло около 0,5 м/сек2.
Дискретный автоматический корреляционный измеритель
скорости проката, разработанный в Институте
кибернетики АН УССР
В Институте кибернетики АН УССР в 1966—1968 гг. был
разработан корреляционный измеритель скорости с дискретным полярным
коррелятором, в котором в качестве БРЗ использован регистр сдвига
с переменной частотой продвигающих (тактовых) импульсов [132, 229].
Блок-схема устройства приведена на рис. 67. Снятые с
фотодатчиков ФЭЪ ФЭ2 сигналы /i(0 и f2(t) клиппируются (усиливаются и
ограничиваются) при помощи усилителей-ограничителей УО^ УО%. Сигнум-
сигналы sgn[/x(0] и sgn[/2(0l подаются на двухканальный полярный
коррелятор, собранный по дифференциальной схеме. Сигнал sgnf/^)]
поступает на вход регистра сдвига PC с переменной частотой тактовых
импульсов. В регистре этот сигнал квантуется повремени с частотой
тактовых импульсов /п= =- и задерживается на время, равное т = qTUt
' п
где q — число ячеек регистра сдвига, аГп — период следования
продвигающих импульсов. Задержанный сигнал fi(t) с выхода регистра
(ячейка q — 2) вместе с сигналом sgn[/i(0l подается на схему
совпадения ССг. Дополнительная постоянная задержка Ат, необходимая для
работы дифференциальной схемы (сдвиг характеристики модели объекта
регулирования — второго канала коррелятора), осуществляется
последними ячейками регистра (q, q — 1). Выходной сигнал с последней
ячейки регистра сдвига /3(0 вместе с сигналом sgn[/2(0] подается на схему
108
0rr
%=^
здпЩШ
Рис. 67. Блок-схема дискретного корреляционного измерителя
скорости с БРЗ на регистре сдвига:
01, Ог — осветители; ФЭ±, ФЭа — фотодатчики; УОи У02 — усилители-
ограничители; CClt ССг — схемы совпадения; Фь Ф2 — интеграторы
(сглаживающие фильтры); ВУ^, ВУ2 — вычитающие устройства; ГТИ —
генератор тактовых импульсов; С — счетчик; Ч — частотомер; ТГ —
тахогенератор.
совпадения второго канала коррелятора -г СС2. Сигналы, снимаемые
с выходов регистра, представляют собой серии импульсов, следующих
с частотой квантования. Полярность квантованных импульсных
сигналов соответствует полярности сигнум-сигнала sgn [f\(t)\. Выходные
сигналы схем совпадения СС± и СС2 после сглаживания в фильтрах
Фх и Ф2 подаются на вычитающее устройство ВУг. Разностный сигнал
U = U\ — U2 воздействует на генератор тактовых импульсов ГТИ,
управляя его частотой. Частота ГТИ определяет величину
регулируемой задержки т, введенной в канал первого сигнала f±(t). Поскольку
частота тактовых импульсов прямо пропорциональна измеряемой
скорости v, частотомер У, включенный на входе БРЗ, можно проградуи-
ровать непосредственно в единицах измерения скорости. Включенный
109
. параллельно ему счетчик импульсов С позволяет одновременно измерять
длину прокатанного металла.
В схеме предусмотрено также устройство грубого поиска
максимума, которое работает от тахогенератора ТГ соединенного с валками
прокатного стана. Выходной сигнал тахогенератора UTr,
приблизительно пропорциональный скорости движения металла в стане
подается на вычитающее устройство ВУ2, на которое также поступает
корректирующий сигнал системы точного поиска максимума U. Суммарный
сигнал с/вх управляет частотой генератора тактовых импульсов.
В схеме, описанной в [229], использован БРЗ с однотактным
регистром сдвига (рис. 68). Его основными элементами являются 80
полупроводниковых триггеров с реостатно-емкостными связями (R2C\t
RAC2 и т. д.) и такое же количество логических реостатно-емкостно-
диодных цепей (^CD-цепочек #6C3D1, R7C4D2 и т. д.) [132]. На рис. 68
для простоты изображено только два триггера. Триггеры собраны на
транзисторах П20, работающих в насыщенном режиме. Логические
tfCD-цепочки осуществляют сдвиг информации о состоянии предыдущих
триггеров в следующие триггеры при поступлении с выхода ГТИ через
мощный формирующий каскад продвигающих импульсов (рис. 67).
Клиппированный двоичный сигнал с формирователя УОг
подается на первую /^CD-цепочку на входе регистра сдвига. При этом, если
сигнал «1» и тактовый импульс поступают одновременно, сигнал сразу
поступит на первый триггер регистра сдвига и перебросит его в
положение «1». Если же сигнал «1» (импульс) поступает на вход регистра
сдвига^ в паузе между тактовыми импульсами, то он будет передан на
первый триггер только во время следующего тактового импульса, т. е.
возникает соответствующая погрешность квантования. Таким образом,
первая ^CD-цепочка БРЗ является импульсным элементом (ключом),
квантующим по времени положение передних фронтов сигнальных
Рис. 68. Схема двух ячеек регистра сдвига на транзисторах.
ПО
импульсов с периодом Тп = -— . Триггер запоминает сигнал «1» до тех
/ п
пор, пока одним из тактовых импульсов не будет зафиксирован задний
фронт сигнального импульса («О»).
Таким образом, первый триггер БРЗ представляет собой
формирователь с передаточной функцией
i _ ~ТпР
G(P) = —^- (6.17)
Ввиду того, что тактовые импульсы поступают на все триггеры регистра
сдвига синхронно, каждый триггер вносит запаздывание 71п. Чистое
запаздывание на всем регистре сдвига в установившемся режиме (/п =
s= const) будет равно
хр=(?-1)Гп = ^1, (6.18)
' П
где q— число ячеек регистра сдвига.
Сдвиг входного сигнала в регистре происходит следующим образом
(рис. 68). Допустим, что транзистор ТЗ заперт, а Т4 открыт. Тогда
коллектор ТЗ находится под потенциалом UK, а коллектор Т4 имеет
потенциал, близкий к нулю. При отсутствии тактовых импульсов базы
транзисторов 77 и ТЗ и их эмиттеры (проводник £), к которым
присоединены конденсаторы СЗ и С4, также имеют потенциал — UK.
Вследствие этого СЗ через сопротивление R6 заряжается до потенциала —UK,
а С4 — разряжается (так как обе его пластины находятся под потен,
циалом —UK). В результате проводник А будет иметь нулевой потен,
циал, а проводник Б — потенциал —UK относительно земли.
При подаче тактового импульса на базы транзисторов 77 и Т2
их потенциал, потенциалы эмиттеров и проводника В будут равны
нулю и диод Д1 откроется. Положительный потенциал будет приложен
к базе транзистора 77, и последний запрется (если он до этого не был
заперт), одновременно открывая через #С-цепочку связи транзистор
Т6. Таким образом, информация о состоянии триггера ТЗТ4 переносится
в триггер Т5Т6. После окончания тактового импульса проводник В
опять будет находиться под потенциалом —UK, диод Д1 запрется
и /^CD-цепочка разорвется (связь между триггерами 1 и 2 прекратится).
Если же триггер ТЗТ4 будет опрокинут предыдущей /^CD-цепочкой
(например, при изменении знака входного сигнала), то конденсатор
СЗ разрядится, а С4 зарядится. Постоянная времени /^CD-цепочки,
обеспечивающая полный перезаряд последней до возникновения
следующего тактового импульса
т' = R6C3 = R7C4 = 3,9 мк сек, (6.19)
выбрана значительно меньше длительности самого короткого периода
тактовых импульсов
Ти min = 20 мк сек (/п max ~ 50 ™Ч)-
Во время тактовых импульсов /^CD-цепочки связаны с
последующими триггерами через диоды Д/, Д2 и т. д., но развязаны от предыду-
111
Рис. 69. Общий вид монтажной платы регистра сдвига на восемь
ячеек.
щих триггеров сопротивлениями, равными 3,9 ком. Во время пауз,
между тактовыми импульсами ^CD-цепочки связаны с предыдущими
триггерами через сопротивления R6, R7, но развязаны от последующих
триггеров запертыми диодами. В паузах между тактовыми импульсами
информация о состоянии ячеек регистра запоминается триггерами
и ^CD-цепочками, а во время тактовых импульсов —только ^CD-
цепочками.
Конструктивно регистр сдвига выполнен в виде съемных плат
с печатным монтажом, содержащих по восемь ячеек каждая (рис. 69).
БРЗ может быть выполнен также на основе двухтактного феррит-
трио дного регистра сдвига. На рис. 70 приведена схема четырех ячеек
такого регистра, собранного на ферритовых кольцах марки ВТ-5
(диаметр — 2,5 мм) и транзисторах П16А. Разработанная схема феррит-
транзисторного регистра сдвига содержит всего 40 таких ячеек. Число
их определяется необходимой величиной задержки и частотой тактовых
импульсов, которая, в свою очередь, зависит от спектра входного
сигнала коррелятора.
Необходимой составной частью БРЗ дискретного коррелятора
является генератор тактовых импульсов ГТИ, управляемый
подаваемым на него напряжением [131, 132, 281, 302, 437]. Возможны два вида
управления генератором — прямо пропорциональное и обратно
пропорциональное. При прямо пропорциональном управлении тактовая
частота ГТИ пропорциональна управляющему напряжению £/упр.
/n = V
Упр И V
TD+AXD = -
ill1
fn
i
г—1
и
упр
1
(6.20)
' OviID + Л"
Упр
упр
^Г^упр
X
112
i+^ш
"упр
Ш
1 +
А£/
упр
Axp=V
при
упр
U
1 +
А£/
Упр
"упр
Упр
U
упр ^
упр
А(/
упр
р £/
УПР
U
«1.
упр
(6.21)
(6.22)
(6.23)
Передаточный коэффициент БРЗ, построенного на основе ГТИ прямо
пропорционального управления
т _ q— 1
пр и,
пр
упр
£/:
±-~F{U*\ (6.24)
упр
является квадратичной функцией приложенного управляющего
напряжения, т. е. он изменяется в пределах рабочего диапазона, что является
некоторым недостатком таких ГТИ.
На рис. 71 приведена принципиальная схема ГТИ с прямо
пропорциональным управлением, используемая в описываемом устройстве.
Генератор представляет собой несимметричный мультивибратор на
транзисторах типа П20 (Tlt T2), в котором ток разряда одной из
емкостей связи (С2) зависит от приложенного напряжения Uyup.
Управляющее напряжение подается через эмиттерный повторитель TS. Время
разряда емкости С2 определяет период следования импульсов
(приблизительно равный интервалу между ними). Время разряда емкости С1
Рис. -70. Схема четырех ячеек феррит-транзисторного регистра
сдвига:
Ф/, ... f Ф4«. ферритовые кольца; ТИ1, ТИ2 **- входные клеммы тактовых
импульсов.
8 2-298
ИЗ
C4
Uoto\
щ
Шк
f\fif R2Y\ M\\R4Y\ R5U
U470 22к\\ 6,2kUw\A f,2x\\
C25000
1M
ТЗ ПЮЭ
AY
^
i
kT\ -№ П20
-V
\Bxod
I
№U2k\ LR7
-I
HI—Я
Выход
*п*100гц-52кгц
-ft
Рис. 71. Схема ГТИ с прямо пропорциональным управлением.
определяет длительность прямоугольных импульсов, создаваемых
генератором. Потенциометр R8 служит для установки начальной частоты
ГТИ (100 гц).
ГТИ работает следующим образом. В конце тактового импульса
мультивибратор опрокидывается (транзистор 77 открывается, а Т2
закрывается). К этому времени С1 разряжен, С2— заряжен (примерно
до величины напряжения питания Uп). Затем С1 начинает заряжаться
через R5 и промежуток эмиттер — база Т1. После того как С1
зарядится, через R2 будет протекать небольшой ток базы транзистора 77
и последний останется открытым. Ввиду того, что при этом коллектор
77 находится под потенциалом Uu и С2 заряжен до этого же
потенциала, база Т2 будет находиться под потенциалом +2£/п, т. е. на нее
будет подано положительное смещение. Вследствие этого транзистор
77 будет заперт и током его базы можно пренебречь. Конденсатор С2
будет заряжаться только через транзистор ТЗ, представляющий собой
эмиттерный повторитель входного управляющего напряжения ^упр.
Это значит, что ток, протекающий через R4 (т. е. разрядный ток
конденсатора С2) зависит строго линейно от управляющего напряжения
!С2~
UR4 = ^упр '
• и.
э. б
R4
R4
(6.25)
где иэ б « const — падение напряжения на переходе эмиттер—база.
После того как С2 разрядится, смещение на базе Т2 станет
отрицательным, мультивибратор опрокинется и выдаст импульс. Таким
образом, время разряда С2 определяет длительность паузы (интервал между
импульсами).
114
При f/ynp= const длительность паузы Тиауш легко определить
по величине заряда С2:
3 = С2£/п=/сгГпаузЫ) (6-26)
где Un — напряжение питания.
Подставляя (6.25) в (6.26), получим:
паузы
C2Un
1С2
C2R4Un
^упр-^э.6'
(6.27)
Во время импульса С2 заряжается через R1 и промежуток
эмиттер — база транзистора Т2. После окончания заряда С2 протекающая
через ТЗ часть тока базы транзистора Т2 держит последний в открытом
состоянии. Одновременно во время импульса происходит разряд С1
через промежуток эмиттер — коллектор Т2 и диод Д1. Падение
напряжения на Д1 создает положительное смещение на базе Т1, запирающее
последний. После разряда С1 начинается его заряд с обратной
полярностью через R2 и Т2. В результате база 77 получит отрицательный
потенциал, Т1 открывается и тактовый импульс прекращается. Таким
образом, время разряда конденсатора С1 определяет длительность
импульса
Ти « ЗС1 (Дд1 + R3 бТ1) « 3.5.10-» (50 + 150) = 3 мксек, (6.28)
где /? j —прямое сопротивление диода Д1\ #эбг/— сопротивление
перехода эмиттер — база транзистора 77.
Если в выражение
!п 7
*ИМП ' * 1
подставить два предыдущих уравнения,
то получим выражение, определяющее
частоту тактовых имульсов ГТИ в
установившемся режиме
(6.29)
паузы
У/?*Щ
fn
и
упр
■и,
э. б
V,
упр
C2R4Un ~ C2R4Un '
(6.30)
Как видно из (6.30), частота ГТИ
прямо пропорциональна управляющему на-1
пряжению. Преимуществом
рассмотренной схемы является устойчивая работа
в очень широком диапазоне изменения
частот (от 1 : 500 до 1 : 2000) и хорошая
линейность характеристики (рис. 72).
В схемах с обратно
пропорциональным управлением частота ГТИ связана с
управляющим напряжением выражением
/п:
U
упр
Рис. 72. Характеристика
ГТИ с прямо
пропорциональным управлением.
8*
115
Рис. 73. Схемы ГТИ с обратно
пропорциональным управлением.
соответственно
Ip~ Ы ~ k
1
^vnn- (6.31)
уупр
Передаточный коэффициент БРЗ в
этом случае не изменяется по
диапазону
_ Дт
1
= const,
(6,32)
упр
что является положительным свойством таких схем.
На рис. 73 приведены принципиальные схемы ГТИ с обратно
пропорциональным управлением частотой. Изображенный на рис. 73, а
ГТИ без диодов Д1 и Д2 представлял бы собой обычный мультивибра-
тор Рассмотрим его работу в предположении, что транзистор Т2 только
что откоылся и его коллектор находится приблизительно под
потенциалом земли. Вследствие того, что 02 заряжен до напряжения УуПр,
база транзистора ТА имеет положительный потенциал и последний
заперт. С2 разрядится через сопротивление R2. В конце радряда С2
на базу 77 поступит отрицательный потенциал, 77 откроется и
опрокинет мультивибратор. Несмотря на то, что в это время Т2 заперт, его
коллектор находится вначале приблизительно под потенциалом земли,
так как С2 разряжен. Затем С2 начинает заряжаться через R4 и базу
77. Когда напряжение на С2 достигнет значения £/упр, Д2 откроется
и заряд С2 закончится; ток потечет через R4 и диод Д2. В таком
состоянии мультивибратор будет оставаться до тех пор, показе разрядится
СГ. После опрокидывания мультивибратора аналогичный процесс
пройдет в его левом плече
Такимобразом, разряд одного из конденсаторов определяет
длительность импульса, разряд другого — длительность паузы. Кондесаторы
С1 и С2 заряжаются соответственно через сопротивления R3 и R2. В на-
№
чале разряда к конденсаторам приложено управляющее напряжение
Uyup, полярность которого противоположна полярности напряжения
питания. Заряд прекращается, когда разностное напряжение на
конденсаторе становится равным нулю. Этот процесс описывается
выражением
Uc (0 = Un - (Un + Uynp) е~ Т. (6.33)
Из условий окончания заряда
t/c/(/i) = 0 и Uc2(t2) = 0 (6.34)
находим длительность паузы tx и длительность тактовых импульсов t2
;1 = х11п(1+-^-|х1«СШ,
t% = т2 In (1 + -jP") Ч я C2R2. (6.35)
Отсюда находим выражение, определяющее частоту тактовых
импульсов
'»(0в<ГПГ '/ uynp(t)r ^
(C1R3+C2R2) In (1 + у^р 1
'" Ввиду того, что t/ пр< Un, заряд происходит на линейном участке
показательной кривой, которая может быть аппроксимирована
линейным уравнением
1 ип ип 1
Г"®* (C1R3 + C2R2) ' (Уупр(0 =2^' 1/упр (/) ' (6*37)
где тс — постоянная времени цепочки связи с ГТИ. Недостатком
описанной выше схемы ГТИ (рис. 73, а) является ограниченный
диапазон управления частотой (1 :50) и переменная амплитуда выходных
импульсов.
Схема ГТИ, приведенная на рис. 73, б, работает следующим
образом. При запирании транзистора Т2 напряжение на его коллекторе
скачком увеличивается до — Uu и на выходе возникает передний фронт
импульса. Конденсатор С2 заряжается через R2 и #3, а С1 — через
R2 и базу 77. После окончания заряда С1 через сопротивление R1 будет
протекать ток базы транзистора 77 и последний останется открытым.
При этом напряжение на R3 снижается до величины £/упр. Когда
напряжение на С2 превысит падение напряжения на R4, Т2 откроется и его
коллектор окажется под напряжением Uy , соответствующем падению
напряжения на R4. На выходе возникает задний фронт тактового
импульса. Ввиду того, что С1 заряжен, на базу 77 поступит
положительный потенциал и транзистор запрется. Сейчас напряжение на R4
определяется напряжением на С2. Конденсатор С2 разряжается через R4
117
4-Я В
Рис. 74. Совмещенная схема совпадения, вычитания и
интегрирования.
и промежуток эмиттер — база Т2, а С1 — через R1 и R2. Когда
потенциал базы Т1 станет более отрицательным, чем потенциал базы Т2,
транзистор 77 откроется, а Т2— закроется, так как оба транзистора
имеют общее сопротивление цепи эмиттера R4, а Т1 потребляет весь
протекающий через него ток. Далее весь цикл повторяется.
В отличие от схемы 73,6, где оба транзистора включены
параллельно и связаны общим сопротивлением R4, в схеме ГТИ, приведенной
на рис. 73, ву транзисторы Т1 и Т2 включены последовательно. Режим
их работы аналогичен режиму работы в схеме 73, б, однако диапазон
модуляции шире. Общим преимуществом схем 73,6, в, по сравнению
со схемой 73, а, является более широкий частотный диапазон (1 : 100)
и стабильность амплитуды импульсов, а недостатком — отклонение
формы характеристики fn(U ) от требуемой.
В дифференциальную схему автоматического корреляционного
измерителя скорости входят также логические схемы совпадения,
вычитающее устройство и интеграторы (рис. 67). В описываемом макете
использована дифференциальная схема без сглаживающих фильтров
Фх и Ф2 после схем совпадения ССг и СС2, а лишь с одним интегратором
и совмещенной схемой совпадения и вычитания. Применение
совмещенной схемы совпадения и вычитания вызвано тем, что при одновременном
поступлении выходных сигналов от CCi и СС2 на схему вычитания ВУ±
на выходе последней напряжение будет равно нулю при строгом равен -
стве амплитуд выходных импульсов обеих схем совпадения.
Практически этого трудно добиться. Поэтому схемы совпадения ССХ и СС2
(рис. 67) были объединены с ВУХ в одной логической схеме с тремя
входами, соответствующими сигналам а = sgn[/2(/)]; в = f\(t) = sgn[ft(t^
- VJ; с - f3(t) = sgn\h(t - Тр - Дт)].
В этой схеме (рис. 74) вычитание амплитуд выходных импульсов схем
совпадения заменено логическими операциями. Схема собрана в виде
118
двух схем, одна из которых выдает только отрицательные импульсы
(а/\с/\Ь), а другая — только положительные (а/\Ь/\с), причем
положительные и отрицательные импульсы не могут выдаваться
одновременно. Обе схемы работают параллельно, и окончательное
суммирование обоих сигналов abc и асЪ производится в интеграторе, куда
последние подаются с разными знаками.
Выражение a/\bf\c реализуется с помощью цепи Д1Д2ДЗЩ,
а а/\Ь/\с — с помощью цепи Д4Д5Д6И2. Для получения окончательной
суммы инвертор 77 выдает сигнал асЪ. Интегратор собран на
конденсаторе С1 и зарядно-разрядных цепочках (зарядная — T2R7R5R6,
разрядная—T3R8R14R15). Сигнал с выхода интегратора дополнительно
усиливается усилителем Т6. Для согласования интегратора с
усилителем и усилителя е нагрузкой применены эмиттерные повторители Т4,
Т5, и 77; Д7 —стабилитрон.
Для отсчета частоты генератора тактовых импульсов
(пропорциональной измеряемой скорости) в схеме предусмотрен блок цифровой
индикации БЦИ на четыре декады. БЦИ осуществляет запоминание
импульсов, поступивших с управляемого ГТИ в счетчик в течение
фиксированного промежутка времени.
Для визуального отсчета выходных величин в цифровых системах
наиболее удобными являются цифровые указатели на газонаполненных
лампах (типа ИН-1, ИН-2, НИКСИ и др.) [34, 36, 37, 56, 121, 234,
295]. Однако использование цифровых ламп в транзисторных схемах
затруднено в связи с относительно высоким напряжением их
зажигания (в лампах типа ИН-1 —около 200 в). Непосредственная
коммутация цифровых ламп при помощи германиевых транзисторов почти
неизбежно приводит к пробою последних, так как их максимально
допустимое рабочее напряжение невысоко (например, у транзисторов П11
оно равно -f-20 в) [295]. Это препятствует применению транзисторных
схем с непосредственной коммутацией в серийной аппаратуре.
Предпринимаются попытки обойти эти трудности путем использования
высоковольтных транзисторов типа П26Б (допускающих максимальное
напряжение на коллекторе до 100 в), включаемых в схемы делителей
напряжений [56, 234]. Разработаны также довольно сложные схемы
управления цифровыми лампами ИН-1, содержащие питающие
устройства с большим числом блокинг-генераторов [36, 37].
В описываемом блоке цифровой индикации коммутация ламп
ИН-1 осуществляется при помощи тиратронов с холодным катодом
типа МТХ-90. Разработанная схема отличается простотой и
надежностью при значительном разбросе параметров тиратронов и питающих
напряжений.
Блок индикации предназначен для преобразования информации
из двоично-десятичного кода в десятичный, запоминания ее и
индикации в виде четырехразрядного числа. Число разрядов может быть при
необходимости увеличено.
Индикация и запоминание информации осуществляется при помощи
полистабильной триггерной схемы на тиратронах МТХ-90 с общим
анодным сопротивлением [56]. Упрощенная схема двух ее ячеек приведена
на рис. 75. Здесь #а — общее анодное сопротивление тиратронов;
R1 и R2—сопротивления, эквивалентные динамическому
сопротивлению промежутков анод— катод лампы ИН-1 (динамическое
сопротивление промежутка анод— катод после зажигания примерно посто-
119
ян но и равно 10—20 ком); Rc\ и #с2—
сопротивления в цепях сеток для
подготовки тиратронов к зажиганию.
Предположим, что тиратрон Л1
находится в незажженном состоянии,
а Л2 — в зажженном. Потенциал на
аноде Л2 при этом равен
напряжению горения Uv « 60 в, а потенциал
на аноде Л1 — Ua. Конденсаторы С1 и
С2 заряжаются до величины, равной
разности потенциалов Ua — Up. При
подаче положительного импульса (80—
85 в) на сетку тиратрона Л1 последний
зажигается, и потенциал на его аноде
скачкообразно уменьшается до
значения Ur. Напряжение заряженных
конденсаторов оказывается
включенным навстречу напряжению на
аноде Л2У уменьшая его до величины, меньшей напряжения горения,
в результате чего тиратрон Л2 тухнет. Конденсаторы перезаряжаются.
Новое состояние будет устойчивым до поступления на сетку Л2
следующего положительного импульса, который зажжет тиратрон и
изменит состояние схемы.
Вышеприведенные рассуждения справедливы для любого числа
ячеек. В данном случае каждая декада содержит по 10 ячеек (Л1, ...,
Л10 на рис. 76).
Лампа ИН-1 всегда будет надежно переключаться, несмотря на
возможный разброс значений напряжения зажигания для разных
промежутков анод — катод, достигающий 60 в. Перепад напряжений
на переключаемом тиратроне
Ьи = иа — игя 280 — 60 = 220 в
Упрощенная схема
двух коммутирующих ячеек
блока цифровой индикации
на тиратронах с холодным
катодом.
значительно превышает эту величину.
Положительные импульсы для зажигания тиратронов поступают
из устройства ввода и преобразования информации.
Данная схема используется для индикации показаний счетчика
(на рис. 76 не показан), получаемых в двоично-десятичном коде 1—2—
—4—2. Информация о состоянии четырех триггеров счетчика
поступает в каждую декаду схемы по четырем проводам (1> 2,3,4 — к счет-
чику). В каждом триггере счетчика в цепь эмиттер — земля одного
из двух транзисторов включен промежутком база — эмиттер
вспомогательный третий транзистор (на рис. 76 не показан). Коллекторы
вспомогательных транзисторов выведены в точки У, 2, 3, 4, которые
в зависимости от состояния этих транзисторов получают потенциал
земли или провода а. Транзисторы Т1 — Т4 инвертируют сигналы
и вместе с дополнительными транзисторами счетчиков управляют
диодной дешифраторной матрицей, которая превращает
двоично-десятичный код счетчика в десятичный и управляет зажиганием тиратронов.
Дешифраторная матрица работает в импульсном режиме. Нагрузка
матрицы (сеточные цепи тиратронов) — высокоомна, что позволило
применить для ее питания маломощную стабилизированную схему,
120
о Mf-MMM MH8 S,8k
%foi\Ri{ ft«o^iViv [У iv iy
ЛН0МТХ90 С/-/ООЖ
Переключающий импульс Ъ
О ип=+Ж-4508
Рис. 76. Схема одной декады блока цифровой индикации.
состоящую из последовательно соединенных тиратронов ЛИ и неоновой
лампочки Л12. Стабилизатор ЛИ используется для получения общего
потенциала смещения диодной матрицы и сеток всех тиратронов (UCM «
« 60 в). Неоновая лампа Л12 питает матрицу через транзистор Т5.
Для зажигания тиратрона необходимо, чтобы напряжение на
его сетке превысило 80 в [56]. Импульс управления открывает
транзистор Т5, и на одном из выходов матрицы появляется импульс
напряжения (£/имп = +70в)*, в результате чего на сетку тиратрона,
подключенного к этому выходу, действует напряжение Un„4- U„„„ = 130 в,
СМ ' ИМП
достаточное для зажигания тиратрона.
Матрица потребляет ток лишь во время импульса. Поэтому заряда
конденсатора С12, питаемого напряжением лампы Л12, достаточно
для импульсного питания пяти матриц (т. е. пяти цифровых ламп).
Вследствие неодновременного отпирания транзисторов 77 — Т4 на
выходе дешифратора могут возникать помехи. Для устранения послед-
* Обычно напряжение £/ИШ1 = 15 в> является достаточным, но
ввиду возможного разброса параметров тиратрона была принята
значительно большая величина.
121
Рис. 77. Общий вид блока цифровой индикации.
них предусмотрено сглаживание фронта питающего импульса
конденсатором С13. Известные транзисторные схемы управления цифровой
лампой ИН-1 при том же напряжении питания потребляют значительно
больший ток, так как в них из десяти коммутирующих транзисторов
девять всегда находятся в открытом состоянии. Это требует построения
более мощной матрицы.
Вся схема мало чувствительна к изменению питающего напряжения.
Номинальное напряжение питания равно 350 ± 100 в, но при
испытаниях схема устойчиво работает в диапазоне 220—600 в без каких-либо
регулировок. При соответствующем выборе сопротивления R23
(величина его определяется силой тока через ИН-1, которая должна составлять
3 ма) напряжение на аноде ИН-1 равно 200—210 в, что намного ниже
напряжения самопроизвольного пробоя тиратрона и одного из
промежутков анод — катод лампы ИН-1 (300 в),
В схеме используются транзисторы типа П25А (могут быть
применены также П16, П20, П42, П21, П26). Некритичность транзисторов
к высокому напряжению объясняется тем, что они работают в
импульсном режиме. Максимальная частота ввода информации — 150 гц. По
сравнению со схемой, описанной в [37], данная схема содержит меньше
деталей и сложных узлов, в связи с чем надежность ее работы выше.
Вместо схем с блокинг-генераторами для управления лампой
ИН-1 и запоминающих триггеров в данной схеме используются
тиратроны, которые одновременно осуществляют, и запоминание. Отпадает
также необходимость во входных устройствах, так как ключ питающего
напряжения Т5 работает в качестве формирователя управляющих
импульсов.
Внешний вид блока цифровой индикации приведен на рис, 77.
Детали каждой декады собраны на отдельных печатных платах, которые
122
Рис. 78. Схема фотодатчика на фототранзисторе.
1
А
№
) АС *с /
\ во! I
ab\J/
•—-isr
гсс
/=2,5К8Ц
Рис. 79. Схема снятия амплитудно-фазовой частотной
характеристики дискретной КЭС для измерения скорости:
ГСС—генератор синусоидального сигнала, f= 2,5кгц; ЛЗ — линия
задержки; PC — регистр сдвига; ССи СС2 — схемы совпадения; ВУ —
вычитающее устройство; ССВ — схема совпадения и вычитания (очерчена
штрих-пунктирной линией); И — интегратор; ПИ — генератор
тактовых импульсов с прямо пропорциональным управлением; ГНЧ —генератор
колебаний низкой частоты; ОСЦ — осци. лоскоп.
кги
W
\0,25
\0,5
\0J5
но
мО
100
100
100
100
100
Uab,
мв
500
230
/50
75
50
Щ
мб\
520\
250\
175
150 \
150
соединяются со схемой при помощи
штеккерных разъемов. Четыре
тумблера на боковой стенке прибора
служат для проверки его исправности
путем параллельного набора на всех
декадах цифр от 1 до 9 (в коде 1—2—
4—2). В рабочем режиме тумблеры
находятся в положении «выключено».
Для набора цифр нужные тумблеры
переводятся в положение «включено»,
заземляя соответствующие входы
каждой декады.
Фотодатчики для снятия сигнала
с движущейся поверхности
представляют собой комплекс
оптико-механических и электрических устройств.
Оптико-механическая система
используется для согласования оптических
характеристик движущейся
поверхности и фотопреобразователя.
Последний преобразовывает переменную
составляющую светового потока в
электрический сигнал нужной формы.
Фотопреобразователь, электрическая
схема которого представлена на рис. 78, состоит из преобразователя
светового потока в электрический сигнал, выполненного на
фототранзисторе 77; усилителя Т2\ формирователя сигнала Т2Т4.
Особенностью схемы является сопряжение фототранзистора с
усилителем. Усилитель на транзисторе Т2 усиливает непосредственно ток
фототранзистора TL Таким образом достигается увеличение к. п. д.
и уменьшение уровня шумов. С целью стабилизации работы усилителя
применена отрицательная обратная связь (R1C1T1). Дифференциальное
сопротивление ФТ-1 составляет 10—15 ком. Эмиттерный повторитель
на ТЗ согласует усилитель с формирователем, выполненным по схеме
триггера Шмитта. Парафазный выход берется с коллекторов
транзисторов Т4У Т5 триггера Шмитта.
Возможно также применение датчика с фотодиодом ФД-1. Его
положительными свойствами являются широкий частотный диапазон
(до 50 кгц), высокий коэффициент усиления и хорошая температурная
стабильность (от —30 до -j-80° С).
Рис. 80. Амп л иту
дно-фазовая частотная
характеристика устройства.
Рис. 81. Общий вид макета дискретного корреляционного
измерителя скорости с цифровой индикацией.
124
При работе в замкнутом контуре управления представляют большой
интерес динамические свойства корреляционного измерителя скорости.
Схема снятия характеристики приведена на рис. 79. На рис. 80
приведена полученная экспериментально амплитудно-фазовая частотная
характеристика разомкнутой схемы макета по каналу управления,
обладающая достаточно большим запасом устойчивости.
На рис. 81 приведен общий вид дискретного корреляционного
измерителя скорости с блоком питания и цифровой индикацией. Схема
устойчиво работает в диапазоне частот тактовых импульсов от 100 гц
до 80 кгц при колебаниях напряжений питания от 8 до 12 в.
Автоматический корреляционный измеритель скорости проката,
разработанный Британской металлургической ассоциацией
В Британской научно-исследовательской металлургической ассо"
циации (BISRA — British Iron and Steel Research Association), впервые
применившей корреляционный метод для измерения скорости проката,
была выполнена значительная работа по автоматизации этого метода
[35, 104, 338]. Для создания замкнутой системы автоматического
управления использована схема, по своей идее близкая к дифференциальной
схеме, разработанной в Институте электротехники АН УССР [118, 129].
В системе BISRA представляет интерес метод определения
корреляционной функции, а также схемное решение отдельных узлов. Система
была разработана достаточно детально и испытана в промышленных
условиях. Опубликовано достаточно подробное описание разработанной
схемы [104, 338].
Для определения максимума корреляционной функции в этой
схеме (рис. 82) используется не перемножение входных сигналов, а их
суммирование с последующим возведением в квадрат и осреднением
во времени, в соответствии с рыражением
М [{ ц« (0 + X/, (0 }2] = ^М [f{2 (t)) + X»Af [fl (/)] +
+ 2kiLMlf1'(t)ft(t)l (6.38)
где М — знак математического ожидания; \i и % — амплитуды входных
сигналов.
Эта функция изменяется аналогично взаимной корреляционной
функции сигналов f\(t) и /2(0> если два первых ее члена поддерживать
постоянными (например, при помощи устройства автоматической
регулировки усиления входных сигналов).
Приняв значения \i = 1 и Х= —1, получим вычитание сигналов,
а на выходе коррелятора — соответственно средний квадрат их
разности, т. е. M\{fi(t) — /г(0} ]• В этом случае максимальной
корреляции соответствует минимальный сигнал (провал) на выходе
коррелятора (рис. 83, а). В случае суммирования, а не вычитания, имел бы
место максимум (пик) выходного сигнала. Схема с вычитанием
предпочтительнее, так как она позволяет избежать насыщения электронного
квадратора (значение максимального выходного сигнала, равное сумме
M[fi*(t)] и М [/*(*)]» может быть выбрано меньшим, чем порог насыщения
квадратора, а появление провала в области сильной корреляции
уменьшит его еще больше).
Типовые выходные сигналы двух каналов коррелятора для этого
лучая приведены на рис. 83, а. Они даны в функции линейного сме-
125
Рис. 82. Схема корреляционного измерителя скорости проката BISRA:
Ои Ог— осветители; ФЭи ФЭг — фотоэлементы; Уи У2 — предварительные усилителе.'
АРУ и АРУ 2 — устройства автоматической регулировки усиления; У3 — усилитель
записи; У4 — усилитель; У5, Ув — усилители воспроизведения; У7 —усилитель сигнала
рассогласования системы грубого поиска экстремума; ЗГ — записывающая головка;
СГ — блок считывающих головок; ^ — сумматор системы точного поиска; Ki — двух-
квадрантный квадратор системы точного поиска; СУ — сервоусилитель; ДПТ —
исполнительный двигатель постоянного тока; ТГг — тахогенератор обратной связи по
напряжению; 7Т2 — тахогенератор системы грубого поиска экстремума; ФИУ — усилитель
с фазоинвертором; ^2 — сумматор канала включения грубого поиска; /С2 — квадратор
канала включения грубого поиска; ГСМ — грубый сигнал наличия минимума; ТШ —-
триггер Шмитта; nt — потенциометр грубого поиска экстремума; РЛБ — релейный
логический блок грубого поиска; ФЧТС — фазочувствительная триггерная схема
переменного тока; RiRa — потенциометр, движок которого соединен со считывающей головкой
(обратная связь по положению).
О О J /,р лт,мсек Ol 0j5_ 1tp АГ,мт
0 3 n 6 aI,mm 0 3 s 6 aI,mm
Рис. 83. Выходные сигналы коррелятора:
а — выходные сигналы каждого из двух каналов коррелятора; б — суммарный
выходной сигнал коррелятора (Z-сигнал); Дт — смещение считывающей головки;
д7 — эквивалентное смещение светового штриха на поверхности металла.
Рис. 84. Корреляционная функция сигнала с поверхности
холоднокатаной стали при скорости прокатки 2,5 м/сек;
А/ —смещение светового штриха по поверхности
металла.
щения воспроизводящей головки БРЗ Ат (или, в другом масштабе,—
в функции смещения световых Штрихов на металле Л/). Скорость
движения магнитной ленты — 381 мм/сек. Входные сигналы были получены
с алюминия, движущегося со скоростью около 2,3 м/сек. Для сравнения
на рис. 84 приведена вычисленная на цифровой вычислительной машине
взаимная корреляционная функция двух сигналов, полученных с
холодного стального проката при скорости 2,5 м/сек. Кривая
вычислена как функция смещения световых штрихов на поверхности
металла.
Слежение за максимумом корреляционной функции в измерителе
скорости проката BISRA осуществляется при помощи схемы,
аналогичной дифференциальной схеме ИЭ АН УССР, которая была
рассмотрена выше. Удачным техническим решением здесь является
использование спаренных двухканальных головок для стереофонической маг-
127
нитной записи [213]. В записывающей головке ЗГ (см. рис. 82) обе
обмотки соединены параллельно,благодаря чему на обеих дорожках ленты
записывается один и тот же сигнал. В считывающей головке СГ (см.
рис. 82) рабочие зазоры двух каналов взаимно смещены на 0,15 мм,
что при данной скорости ленты соответствует временному сдвигу
Ат = 400 мксек. Таким образом, с выхода считывающей головки
снимаются два сигнала:
FiW = h(t—t-%-) (6-39)
и
tf(0 = &(<-'+ •£■).. (6.40)
где т—среднее время задержки обоих каналов.
Разность взаимных корреляционных функций сигналов каждого
из каналов с сигналом f2(t) дает сигнал ошибки для автоматического
слежения за максимумом:
U{z) = M [F{ (0 /, (01 - М [F'i (t) ft (01 = M [h (t) { F[ (t) - /?(*)}].
(6.41)
В данной схеме, как указывалось выше, вместо умножения при
определении корреляционной функции применяется суммирование
и возведение в квадрат:
R W = м [{h Ю + fi (0- f i(t) р] = м [f\ (Щ +
+ M[{F{(t)-F"t(t)}*] + 2M[h(t){F[{t)-Fr{(t)}] =
= М [f\ (t) + F{* (t) + F'[\t) - 2F\ (t) FUt) +
+ 2/2 (t) Fi(t) - 2/2 (t) F'[ (/)]. (6.42)
Форма выходного сигнала коррелятора, полученного таким
методом, приведена на рис. 83, б. Выходной сигнал состоит из постоянной
(В) и переменной (Z) составляющих:
В=М[% (0 + F{2 (t) + F'C (t) - 2F{(t) Fl (*)], (6.43)
Z=2M[f,(t){Fl(t)-FUt)}h (6.44)
Для симметрии выходного сигнала амплитуда сигналов F[{t) и F"(t)
делается одинаковой.
Уровень постоянной составляющей В определяется амплитудой
членов второй степени [338]
|S| = X* + ^ + ^-|-fx2=XS + iv. (6.45)
где X — амплитуда сигнала ^(0- Она поддерживается постоянной при
помощи устройства автоматической регулировки усиления АРУ (см.
рис. 82).
128
Переменная Z-образная часть выходного сигнала коррелятора
изменяется в обе стороны по отношению к постоянной составляющей
на величину, равную примерно половине этой постоянной составляющей.
Величина Z-сигнала зависит от соотношения амплитуд входных
сигналов коррелятора:
|2|=Хц.
Отношение
имеем максимум
Ж = ± i/T
\В\ 2 V 4
при соотношении амплитуд
X Г 4
Как видно из рис. 84, время усреднения, равное 0,01 сек (А/ =
= 25 мм, v= 2,5 м/сек), уже обеспечивает достаточное сглаживание
вычисленной корреляционной функции. Статистическая погрешность
выходного сигнала коррелятора не превышает при этом 5%. Считая
эту величину максимально допустимой, можно время осреднения в
системе уменьшить до 0,01 сек. В связи с этим в рассматриваемой схеме
сглаживающий фильтр после сумматора 2Х и квадратора Ki отсутствует,
так как постоянная времени сервомотора ДПТ (см. рис. 82)
обеспечивает достаточное сглаживание.
N В рассматриваемой схеме представляет интерес также
дополнительный канал грубого поиска экстремума, изображенный на нижней
половине рис. 82. Как уже указывалось выше, пик корреляционной функции
очень узок, и при значительном начальном удалении от него без канала
грубого поиска система сама не смогла бы его отыскать. Для грубого
поиска экстремума используется сигнал тахогенератора 7Т2,
позволяющий определить скорость полосы с точностью до 5%. Напряжение
тахогенератора сравнивается с напряжением, снимаемым с
потенциометра Ri, который связан со считывающей головкой. Усиленный сигнал
рассогласования воздействует на фазочувствительную триггерную
схему ФЧТС, которая дает сигнал на релейный логический блок РЛБ.
Последний переключает контакты потенциометра грубого поиска П±,
связанного с сервомотором ДПТ.
Система грубого поиска экстремума включается или отключается
в зависимости от величины сигнала.
M[{h(t)-Fl(t)-F[(t))*\, (6.50)
который также имеет симметричный провал в области т = тт. Этот
грубый сигнал наличия минимума (ГСМ) управляет триггером Шмитта,
который в зависимости от наличия или отсутствия Z-сигнала
соответственно отключает или включает канал грубого поиска. При входе
читающей головки в 5%-ную зону, она начинает совершать периоди-
(6.46)
(6.47)
(6.48)
(6.49)
9 2-298
129
ческие поисковые колебания. После появления Z-сигнала триггер
Шмитта переключает управление на систему точного поиска.
Для фиксации постоянной составляющей выходного сигнала
коррелятора и предотвращения насыщения усилителей и квадраторов в канал
каждого входного сигнала включена схема автоматической регулировки
усиления АРУ Ввиду того, что уровни входных сигналов малы, схема
АРУ выполнена полностью на транзисторах,
В качестве квадратора применен диодный нелинейный
функциональный преобразователь, осуществляющий кусочную аппроксимацию
квадратичной зависимости тремя отрезками.
Усилители записи и воспроизведения имеют полосу пропускания
до 12,5 кгц, усилители прямого канала (У2 и У4) — Д° 40 кгц. Для
симметрирования корреляционной функции в прямой канал введен
фильтр с частотной характеристикой, соответствующей каналу записи.
В качестве осветителей в устройстве применены автомобильные
лампы. Размер световых штрихов — 9,5 х 1»6 мм\ расстояние между
ними — 381 лш. Для обеспечения требуемой точности системы
предусмотрена регулировка параллельности штрихов с точностью до
0,5°, а плоскости отражения света — с точностью до нескольких
минут.
Во время лабораторных испытаний при скорости движения металла,
равной 2,25 м/сек, система обеспечила разрешающую способность по
скорости не хуже ±0,02% {^ак видно из рис. 83, отклонение Z-сигнала
на 5% от среднего уровня соответствует смещению светового штриха
Д/ примерно на 0,08 мм. При расстоянии между штрихами / = 381 мм
это соответствует погрешности в определении скорости, равной± 0,02%.
Максимальная скорость, которую можно было измерить при помощи
этой системы, составляет 3,8 м/сек. Разрешающая способность в этом
случае равна 0,033%. Верхний предел измеряемой скорости был
ограничен максимально возможным сближением записывающей и
считывающей головок (3,8 см). При увеличении скорости движения магнитной
ленты он может быть увеличен. Испытания системы на дрессировочном
стане при максимальной скорости движения металла — 3,6 м/сек
показали погрешность порядка 0,1% [103].
Импульсная КЭС для измерения скорости проката
В 1961—1964 гг. в Институте автоматики Министерства
приборостроения, средств автоматизации и систем управления СССР (г. Киев)
был разработан и изготовлен опытно-промышленный образец
импульсной КЭС для измерения скорости движения металла при прокатке.
Система прошла успешные испытания в промышленных условиях
и была использована в качестве основы при разработке
автоматического измерителя скорости и длины движущегося металла для средне-
сортового стана «450» [133, 140—147]. Главными отличительными
особенностями этой системы, по сравнению с КЭС, описанными в
предыдущих разделах, являются:
1) преобразование случайных сигналов фото датчиков в
последовательности коротких импульсов, соответствующих выбросам
непрерывного сигнала за некоторый фиксированный уровень (в качестве
последнего принят уровень собственных шумов фотодатчиков) [140, 144,
146];
2) использование блока регулируемой задержки на магнитном
барабане [133, 141];
130
3) наличие реверсирующего
устройства, осуществляющего
необходимые переключения в схеме при
изменении направления движения
прокатываемого металла в
реверсивном стане;
4) наличие оригинальной
логической схемы, координирующей
работу систем грубого и точного
поиска максимума корреляционной
функции.
Блок-схема бесконтактного
измерителя скорости металла (БИСМ)
приведена на рис. 85.
Изображения нитей накала
двух осветителей 0\ и 02 с
помощью оптической системы
проектируются на поверхность
движущегося металла в виде двух
параллельных световых штрихов
(2x16 мм), расположенных на
расстоянии около 19 см друг от
друга по направлению
прокатки. Изображения световых
штрихов на поверхности металла через
собирательную линзу
воспринимаются двумя фотодатчиками ФЭ±
и ФЭ2. (фотоэлектронные
умножители типа ФЭУ-2). В усилителях
Ух и У2 сигналы фото датчиков f±(t) и
/г(^ — тт) усиливаются,
дифференцируются, и из них формируются
последовательности случайно
распределенных во времени коротких импульсов с фиксированной
длительностью и амплитудой Ux(t) и U2(t — тт). Эти импульсные
последовательности подобны, но сдвинуты относительно друг друга на время
т = l/v, где / — расстояние между читающими штрихами, a v — скорость
движения металла. Импульсы являются выбросами сигналов
фотодатчиков над уровнем фона последних. Последовательности импульсов
поступают на головки записи Г31 и Г32 блока регулируемой задержки
БРЗ, выполненного на магнитном барабане МБ. Считанные с помощью
считывающих головок ГСг и ГС2 сигналы усиливаются усилителями
У3 и У 4 и поступают на схемы совпадений ССХ и СС2. Выходные
сигналы схем совпадения максимальны при полном совпадении
сравниваемых импульсных потоков. Выходные сигналы схем совпадения
интегрируются в Их и И2, выходы которых подключены к
дифференциальному усилителю ДУ. Сигнал с усилителя У3 до подачи на схему
совпадения СС2 задерживается блоком постоянной задержки БПЗ на
фиксированное время Ат, необходимое для работы дифференциальной схемы
экстремального регулирования, образованной перечисленными выше
звеньями. Эта дифференциальная схема по принципу действия не
отличается от описанных в предыдущих разделах.
Выходной сигнал дифференциального усилителя подается на трех-
позиционный регулятор ТПР, выход которого соединен с входом логи-
Рис. 85. Блок-схема
импульсной КЭС для измерения
скорости движущегося металла с
Б'РЗ на магнитном барабане.
9*
131
ческого устройства «//У, на другие входы которого поступают 'сигналы
с выходов обеих схем совпадения и выходной сигнал грубого поиска
экстремума. Назначение логического устройства состоит в
согласовании работы систем грубого и точного поиска экстремума. Выходной
сигнал логического устройства управляет исполнительным механизмом
ИМt перемещающим считывающую головку ГСг до получения
наибольшего совпадения сравниваемых импульсных потоков.
Система грубого поиска экстремума состоит изтахогенератора ТГ,
функционального потенциометра ФП и двухпозиционного регулятора
ДПР, связанного через логическое устройство ЛУ с исполнительным
механизмом ИМ. Тахогенератор ТГ механически связан с валками
прокатного стана, и его напряжение с некоторой погрешностью
пропорционально скорости движения прокатываемого металла. Движок
функционального потенциометра ФП механически связан с подвижной
считывающей головкой ГСх блока регулируемой задержки, поэтому
выходное напряжение ФП пропорционально введенной задержке
сигнала f^t). Двухпозиционный регулятор ДПР под действием разницы
уровней сигналов тахогенератора и функционального потенциометра
через логическое устройство Л У включает исполнительный механизм
ИМ, который приводит в движение подвижную считывающую головку
ГСх в БРЗ. При прохождении этой головкой положения, точно
соответствующего скорости металла, логическое устройство включает систему
точного поиска экстремума, которая дальше будет отслеживать
положение экстремума кривой совпадения (корреляционной функции
импульсных потоков), выдавая соответствующие сигналы на ИМ. Если
почему-либо произойдет срыв слежения и сдвиг совмещаемых
импульсных потоков превысит интервал их корреляции (ширину пика их
взаимной корреляционной функции), то логическое устройство
включит схему грубого поиска экстремума, которая вновь
выведет систему в зону чувствительности схемы точного отслеживания
экстремума.
Скорость движения металла определяется по положению
считывающей головки ГСх, соответствующему регулируемому запаздыванию,
введенному в цепь опережающего сигнала. С головкой связана стрелка,
показывающая значение скорости на соответствующей шкале.
Авторами данной разработки этот метод определения временной
задержки сравниваемых импульсных потоков был назван методом
задержанных совпадений.
Как было показано в гл. 4, применение последовательностей
коротких стандартных импульсов, соответствующих выбросам исходного
сигнала за фиксированный уровень, позволяет обострить статическую
характеристику (корреляционную функцию) КЭС и повысить точность
работы последней. Ширина корреляционной функции в этом случае
равна удвоенной ширине импульсов, что при достаточно узких
импульсах позволяет ощутимо повысить разрешающую способность системы.
В то же время система становится весьма чувствительной к эффекту
декорреляции (к нарушению идентичности сравниваемых импульсных
потоков) [246, 247].
В [40, 147] приведены результаты статистического моделирования
метода задержанных совпадений на ЭЦВМ с помощью теории массового
обслуживания. Показано, что потенциальная относительная
погрешность определения скорости с помощью метода задержанных
совпадений в установившемся режиме лежит в пределах от 0,01% (для v =
= 2 м/сек) до 0,1% (для v = 20 м/сек).
132
г
1
]
71
А
Л
УВ
1 Канал и
\ *~
1_-
Г"" . уП
А//7
■ф
/а
0 Г^
ЗгН*.|Н
I
*.
L.
Н<£
—1 -Ф7-7—^
l
\ОтФЭг
Канал! I
U©_
Л
ЬИ
-J
Рис. 86. Блок-схема БРЗ на магнитной ленте:
01, °г, О», 04 — ограничители; Фь Ф2, Ф3, Ф4 — формирователи; £4 Вг —
выходные каскады; Уlf У8 — усилители; ГЗЬ Г32 — головки записи; ГВи
ГВг — головки воспроизведения; МЛ — магнитная лента; УЗи У32 —
усилители записи; УВ1} УВ2 — усилители воспроизведения.
В [133, 141, 145] описано схемное и конструктивное решение
основных узлов этой системы: блока регулируемой задержки и оптимизатора.
БРЗ был выполнен в двух вариантах — на магнитной ленте и на
магнитном барабане. Блок-схема БРЗ на магнитной ленте приведена на
рис. 86, а внешний вид этого БРЗ — на рис. 87 [133]. Скорость
движения магнитной ленты в БРЗ составляет 1 м/сек, диапазон вводимых
запаздываний — от 28 до 92 мсек, что при выбранном расстоянии меж-
Рис. 87. Общий вид БРЗ на магнитной ленте.
133
Рис. 88. Общий вид БРЗ на магнитном барабане.
ду фотодатчиками соответствует диапазону измеряемых скоростей
металла отЗ до 40 м/сек. Запаздывание изменяется путем перемещения
воспроизводящей головки, осуществляемого от ходового винта,
приводимого в движение реверсивным двигателем РД-09.
Воспроизводящая головка через реечную передачу также соединена с прецизионным
потенциометром ТП-5, при помощи которого снимается напряжение,
пропорциональное измеряемой скорости. Лента приводится в движение
прижимным резиновым роликом, связанным через фрикционную
передачу с приводным синхронным электродвигателем СД-09М. Запись
информации на ленту осуществляется с промежутками по двум
уровням: намагниченное состояние соответствует отсутствию сигнала,
размагниченное— наличию сигнала. При отсутствии сигнала
производится насыщение магнитного носителя в постоянном поле [133].
Сигналы от фото датчиков ФЭЪ ФЭ2 поступают в усилители записи
Ус?!, У32, состоящие из ограничителей (амплитудных дискриминаторов),
формирователей и выходных каскадов (см. рис. 86).
Усилитель воспроизведения состоит из трех каскадов усиления
напряжения, амплитудного дискриминатора, предназначенного для
отсечки напряжения шумов, снимаемых с магнитного носителя и
формирователя, обеспечивающего формирование импульсов длительностью
300 мксвк. В связи с упругой деформацией ленты в данном БРЗ не
удалось получить точность определения задержки более 1% [133].
Второй вариант БРЗ в описанной КЭС был выполнен на специально
сконструированном магнитном барабане с подвижной воспроизводящей
головкой (рис. 88). Угол поворота воспроизводящей головки
относительно записывающей может достигать 170°. Скорость движения
магнитного носителя, равная 3 м/сек, была выбрана из расчета на
максимальную частоту следования импульсов (б кгц) и плотность записи
(2 имп/мм). Барабан БРЗ выполнен в виде цилиндра высотой 50 мм
и диаметром 200 мм, собранного из отдельных латунных дисков и вра-
134
щающегося в прецизионных подшипниках. К точности изготовления
барабана предъявляются весьма высокие требования, так как для
измерения скорости с точностью 0,1 % необходимо, чтобы временной сдвиг
импульсов, воспроизводимых с барабана, не превышал 10 мксек [133].
Для перемещения воспроизводящей головки последняя укреплена
-на диске, вращающемся в прецизионных подшипниках относительно
оси барабана. Поворот диска осуществляется с помощью реверсивного
двигателя РД-09 через фрикционную передачу. Считывающие магнитные
головки неподвижно укреплены на стойках, допускающих регулировку
зазора между головками и поверхностью барабана. С подвижным
диском при помощи безлюфтовой зубчатой передачи связан
прецизионный потенциометр, используемый в схеме грубого поиска экстремума.
С дополнительного сопротивления, соединенного последовательно
с потенциометром, снимается сигнал, пропорциональный измеряемой
скорости движения металла
"i-"Tn%. (6-51)
где U — напряжение питания схемы; R — сопротивление,
соответствующее минимальному значению запаздывания; R ~|~ #д —
сопротивление, соответствующее измеряемой скорости металла.
Временная задержка т', вводимая БРЗ, определяется расстоянием
L между головками записи и воспроизведения и скоростью магнитного
носителя ин
х,== — • <6-52)
В то же время т' (в установившемся режиме работы КЭС) связана
со скоростью движения металла v и расстоянием между читающими
световыми штрихами / соотношением
x' = i, (6.53)
откуда
lv» A
I = —- = — . (6.54)
V V
Ввиду линейности характеристики прецизионного потенциометра
имеем
Я+Яд = р!. = -^. (6.55)
Тогда на основании (6.51) и (6.55) получаем:
U± = U -^ v = kvf (6.56)
где р, Л, k— константы.
Точность определения запаздывания БРЗ на магнитном барабане
при длительной работе составляет 0,5% [133].
135
Изменение скорости движения считывающей головки в режиме
точного и грубого поиска осуществляется путем переключения
напряжения питания электродвигателя привода головки с 127 на 24 в при
входе в зону точного поиска.
При работе в режиме грубого поиска экстремума подвижная
считывающая головка перемещается со скоростью 1,25 см/сек. При входз
в зону кривой совпадения (корреляционной функции) срабатывает
устройство переключения скоростей, и в режиме точного поиска
максимума считывающая головка перемещается с меньшей скоростью,
равной 0,43 см/сек.
Двухпозиционный регулятор схемы грубого поиска экстремума
выполнен в виде однокаскадного дифференциального усилителя, на сетки
которого подаются напряжения тахогенератора UTr и
функционального преобразователя (Уп. В анодные цепи усилителя включено
поляризованное реле типа РП-7. При неравенстве напряжений Un и (/тг
реле срабатывает и приводит в движение исполнительный механизм
подвижной головки. При Un = £/тг подвижная головка совершает
колебательные движения в зоне грубого поиска. Частота этих колебаний
определяется выражением
Р-5Г = **
(6.57)
где t — время прохождения магнитной головкой зоны грубого поиска
экстремума; v — скорость движения металла; k — коэффициент
пропорциональности.
Схема точного поиска экстремума представляет собой описанную
в гл. 3 дифференциальную схему автоматизации КЭС. Она содержит
схему постоянной задержки Ат, два формирователя импульсов, две
схемы совпадения, два интегратора и устройство вычитания
(дифференциальный усилитель). Постоянная задержка, дополнительно вводимая
во второй канал, необходима для создания дифференциальной схемы
автоматизации данной КЭС. Она равна длительности импульсов,
принятой в системе (250 мксек), т. е. половине ширины корреляционной
функции.
от CCf
отСС2
ПД
От схемы грубого поиска
АД
Т
ИМ
\ЦТГ От схемы точного поиска
УС
1ч
-Крегулятору
Рис. 89. Блок-схема логического устройства:
И — интегратор; АД —• амплитудный дискриминатор; Р —
реле; ИМ — исполнительный механизм привода подвижной
головки; УС «*- устройство сравнения схемы грубого поиска;
ПД >- схема автоматической установки порога срабатывания
дискриминатора.
136
В данной системе использовались
схемы совпадения на пентодах и диодные
интеграторы. В качестве вычитающего
устройства был использован двухкаскад-
ный дифференциальный усилитель
постоянного напряжения с анодными
нагрузками в виде обмоток поляризованного
реле РП-5. Последнее удерживало
воспроизводящую головку в положении,
соответствующем истинному значению
скорости движения металла (в пределах
некоторой зоны нечувствительности) [145].
На рис. 89 изображена блок-схема
логического устройства, переключающего
исполнительный механизм БРЗ с грубого
поиска на точный поиск при
приближении системы к экстремуму.
Последовательности импульсов с
выходов обеих схем совпадения подаются
на вход интегратора //, с выхода которого
снимается суммарное напряжение двух
сдвинутых кривых совпадения. Это
напряжение подается на вход амплитудного
дискриминатора ЛД, на другой вход
которого поступает напряжение со схемы
грубого поиска максимума. Реле Р в
обычном состоянии подключает
исполнительный механизм ИМ к схеме грубого
поиска максимума. При появлении на
входе дискриминатора напряжения,
соответствующего максимальному совпадению импульсных
последовательностей, дискриминатор срабатывает и подключает исполнительный
механизм к схеме точного поиска.
Ввиду того, что амплитуда максимума кривой совпадения зависит
от частоты следования импульсов, т. е. от скорости движения металла,
в логическом устройстве предусмотрена схема автоматической
подстройки уровня срабатывания дискриминатора ПД, изменяющая порог
срабатывания дискриминатора в зависимости от выходного напряжения
схемы сравнения устройства грубого поиска УС.
В качестве дискриминатора использован триггер Шмитта с двумя
состояниями, одно из которых устойчивое, а в другое триггер
опрокидывается, когда амплитуда входного сигнала превысит напряжение
срабатывания первой лампы. Интегратор лог"ического устройства
выполнен по диодно-емкостной схеме.
На рис. 90 приведены кривые, характеризующие зависимость
выходного напряжения схемы совпадения при максимальном (/) и
минимальном (3) совпадении импульсных потоков. Кривая 2 характеризует
порог срабатывания дискриминатора.
Описанное устройство было успешно испытано в лабораторных
и в промышленных условиях — на Новолипецком металлургическом
заводе на реверсивном стане холодный прокатки «1200». При этом
точность определения скорости составляла 0,5%, в диапазоне скоростей
3—20 м/сек. Время нахождения максимума кривой совпадения в зоне
грубого поиска составляло 0,6 сек.
Vt6
40
20
5 10 у,м/сек
Рис. 90. График
зависимости выходного
напряжения схемы совпадения
от скорости движущегося
металла (в диапазоне 3—
20 м/сек):
/ — уровень максимума кривой
совпадения; 2 — уровень
срабатывания дискриминатора;
3 — уровень напряжения при
несовмещенных импульсных
потоках.
137
Рис. 91. Блок фотодатчиков с водяным охлаждением
При промышленных испытаниях фотодатчики устанавливались
на расстоянии 135 см от поверхности движущегося металла на
специальных выносных кронштейнах. Оба фотодатчика выполнены в виде единого
узла. При работе с горячим прокатом система водяного охлаждения
защищает датчики от теплового излучения металла (рис. 91). Электронная
часть системы и БРЗ смонтированы в двух блоках, установленных на
подвижной тележке (рис. 92).
Каждый фотодатчик состоит из осветителя, проекционной и
воспринимающей оптики, фотоумножителя и предварительного усилителя
фототоков. В качестве осветителей использовались авиационные лампы-
фары с линейной нитью накаливания (24 в, 340 вт). Проекционная
оптика состояла из конденсора (/*= 12 мм, d= 70.мм), объектива «Ин-
дустар-51» (/= 210 мм) и оптической щели, размещенной в фокусе
конденсора. Для выбора оптимального размера светового штриха на
поверхности металла размер щели можно регулировать как по ширине,
так и по высоте. Конденсор находится в сопряженном фокусе
объектива, в заднем сопряженном фокусе которого расположена движущаяся
полоса металла.
Воспринимающая оптика состоит из собирательной линзы (/=
= 210 мм, d= 83 мм). В качестве воспринимающего элемента
фотодатчика в данной системе был использован фотоумножитель типа ФЭУ-2,
обладающий рядом положительных свойств (высокая интегральная
чувствительность —до 1000 мка/лм, линейная амплитудная и
равномерная частотная характеристики, практическая безынерционность).
Максимум спектральной характеристики этого фотоумножителя находится
в области световых волн длиной 0,4—0,5 мк, а к излучению с длиной
волны 0,7 мк и выше (к инфракрасным излучениям) он нечувствителен,
что удобно при использовании его на станах горячей прокатки.
138
Фотоумножитель снабжен предварительным усилителем фототоков,
собранным на лампах 6Ж1П и 6ЖЗП. Усилитель состоит из двух
катодных повторителей и двух усилительных секций на трех лампах 6ЖЗП
с межкаскадной отрицательной связью. Первый катодный
повторитель смонтирован непосредственно на фотодатчике, для получения
высокого отношения сигнал/шум. Коэффициент усиления равен 10000,
уровень собственных шумов на'выходе — «15 мкв. Частотная
характеристика равномерна в диапазоне 300 гц — 500 кгц. Уровень шумов,
обусловленных естественным дневным светом, попадающим на поверхность
металла, равен 100—500 мкв.
Конструктивное выполнение оптического блока фотодатчика
приведено на рис. 93. Для предохранения от пыли оптика датчиков заклю-
Рис. 92. Общий вид электронной части импульсной КЭС
для измерения скорости движения металла.
189
Рис. 93. Фотодатчики (общий вид).
чена в герметические дюралюминиевые корпусы. Настройка
оптической системы обеспечивается целым рядом регулировок, при помощи
которых может изменяться положение объектива и осветительной лампы
относительно конденсора и положение собирающей линзы относительно
фотоумножителя. Регулировка при помощи винтов позволяет изменять
размеры оптической щели по ширине и высоте.
Расстояние между фотодатчиками в данной системе было принято
равным 185 мм и определялось размерами выбранной оптики.
Чрезвычайно важной для нормальной работы системы является
регулировка, обеспечивающая размещение воспринимающей системы
в зеркально отраженном луче света, излучаемом проекционной
системой. Попарно скрепленные воспринимающие и проекционные системы
датчиков насажены на общую ось, связанную с массивным основанием,
чем обеспечивается параллельность оптических осей воспринимающих
и проекционных систем. Кроме того, пара воспринимающих и пара
проекционных систем снабжены подвижными шарнирами, связанными
между собой регулировочным винтом, на одной половине которого
нарезана правая, а на другой — левая резьба. При повороте винта
изменяется угол падения луча проекционной системы и одновременно —
угол наклона воспринимающей системы.
Все КЭС для измерения скорости движения проката чрезвычайно
чувствительны к настройке оптической части и требуют обеспечения
140
максимально возможной идентичности сигналов обоих фотодатчиков.
Как показали лабораторные и опытно-промышленные испытания таких
систем, для обеспечения этого условия следует рекомендовать
максимально возможное приближение фотодатчиков к поверхности
движущегося металла при использовании короткофокусной оптики.
Детальное описание импульсной КЭС для измерения скорости
проката приведено в [133, 140—147].
Глава 7
АВТОМАТИЧЕСКИЕ КОРРЕЛЯЦИОННЫЕ ИЗМЕРИТЕЛИ
СКОРОСТИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И РАСХОДОМЕРЫ
Корреляционный измеритель скорости и угла сноса самолетов,
разработанный фирмой «Дженерал Электрик»
Одной из наиболее важных и перспективных областей применения
корреляционных измерителей скорости является радионавигация на
самолетах и космических кораблях. Работы в этом направлении ведутся
в центре новой радиоэлектронной техники фирмы «Дженерал Электрик»
(г. Итака, США), где разработана корреляционная
радионавигационная система для самолета. В 1961 г. были опубликованы сведения [184,
346, 348] об успешных летных испытаниях корреляционного измерителя
скорости самолета по разомкнутой схеме (неавтоматизированного)
и о разработке замкнутой дискретной схемы для автоматического
измерения скорости и пройденного расстояния. Конечной целью этих работ
является создание корреляционной радионавигационной системы
для космических кораблей, способной измерять горизонтальную и
вертикальную составляющую скорости, угол сноса и пройденный путь.
Блок-схема корреляционного измерителя скорости самолета
приведена на рис. 94, а. Принцип действия его аналогичен принципу
действия корреляционного измерителя скорости проката, описанного
в гл. 1. Источником сигнала служит бортовой СВЧ-передатчик Я,
излучающая рупорная антенна которого X направлена
перпендикулярно поверхности земли 3. Земля и находящиеся на ней предметы
являются отражающей поверхностью [12, 88, 96, 218, 259, 268].
Отраженные в точке Z сигналы воспринимаются двумя приемными
рупорными антеннами Л и С, расположенными на расстоянии / друг от друга.
Диаграммы направленности передающей (2) и приемных (1, 3) антенн
представлены на рис. 94, б. Продетектирова-нные сигналы fA(t) и fc(t),
получаемые на выходе приемников передней и задней антенн (ППА
и ПЗЛ), идентичны по форме, по сдвинуты друг относительно друга
на время тт, равное времени пролета самолетом расстояния — . Сигнал,
отраженный от предмета Z, принимается передней антенной. При этом
антеньы занимают положение ЛХС. Сигнал, отраженный от Z при поло -
жении антенн А'Х'С будет принят задней антенной. Расстояние -^
между этими двумя положениями самолет пролетает за время тт, равное
запаздыванию сигнала задней антенны (рис. 95,а). Сигналы fA(t) и fc(t)
141
г
а\
х\
и
\ /
\/
F ЯГ 5
\т
БРЗ
i
п
МУ
Т
ПЗА
Ф\
ИП
Рис. 94. Корреляционный измеритель скорости
самолета:
а — блок-схема! А —- передняя приемная антенна;
С — задняя приемная антенна; X— антенна
передатчика; ППА — приемник передней антенны; П
—бортовой СВЧ-передатчик; ПЗА — приемник задней антенны;
БРЗ — блок регулируемой задержки; МУ —
множительное устройство; Ф — усреднитель (сглаживающий
фильтр); ИП — измерительный прибор; АХС —
начальное положение антенны; А'Х'С —положение антенны
через время т;б—диаграммы направленности главных
лепестков передающей (2) и приемных (/, 3) антенн.
подаются на коррелятор, состоящий из блока регулируемой задержки
БРЗ, множительного устройства МУ и усреднителя Ф. Регулируемую
задержку т изменяют до тех пор, пока она не станет равной
транспортному запаздыванию тт. Прит=тт взаимная корреляционная функция
R(t) сигналов fA(t) и fc(t) достигает максимума (рис. 95, б). Максимум
взаимной корреляционной функции определяют по показанию
выходного прибора ИП (рис. 94, а). После этого скорость самолета может
быть определена по соотношению
v =
2т
(7.1)
где / — расстояние между электрическими центрами антенн; т = тт —
регулируемая задержка, соответствующая максимуму корреляционной
функции.
Отыскание максимума корреляционной функции при ее
незначительной крутизне связано с погрешностями, поэтому в измерителе
скорости самолета применена схема, напоминающая
дифференциальную схему и обеспечивающая большую точность определения
максимума. В этой схеме используется система из четырех приемных и одной
передающей антенн (рис. 95, д). Сигнал, принятый передней антенной
Л, коррелируется с сигналами двух задних антенн С и £), в результате
чего получают корреляционную функцию ЯлЬ) (Рис- 95, в).
В свою очередь, корреляция сигналов передней антенны В и задних
антенн С и D дает кривую Rb(t). Попеременным подключением опре-
142
деляется разностный сигнал U(r) — Rb(t:) — #д(т), равный нулю при
значении регулируемой задержки т, соответствующем точке
пересечения корреляционных функций. Зная т, можно вычислить скорость
самолета по формуле: £/=—, где / — среднее расстояние между
центрами антенн (рис. 95, д).
Следует заметить, что при полетах над морем, характер
поверхности которого все время изменяется, уменьшается сходство между
сигналами, принимаемыми передними и задними антеннами. Этот
эффект декорреляции прямо пропорционален сдвигу во времени между
принимаемыми сигналами. Он приводит к притуплению
корреляционных функций, к сдвигу их максимумов влево и к появлению асимметрии
вследствие уменьшения крутизны правых ветвей кривых Ra(t:) и RB{t),
как это показано на рис. 95, в пунктиром. Однако точка пересечения
кривых Ra(t) и Rb(t) при этом не смещается, и погрешности при
определении т (следовательно, и скорости) не возникает. В этом
заключается еще одно преимущество дифференциальных схем.
Описанная система автоматизирована при помощи схемы,
изображенной на рис. 96. Отличием этой схемы является квантование по вре-
Рис. 95. Сигналы коррелятора и расположение антенн:
а — выходные сигналы переднего и заднего приемников; б —
взаимная корреляционная функция этих сигналов; в —
корреляционные функции сигналов, принятых передними антеннами А и В
и задними антеннами С и Д; г — разностная кривая U (т) =
« RB(r) — RA (т); д — расположение антенн; е — система
приемных антенн, позволяющая измерять вертикальную скорость; УС *-*
20-сантиметровый удлиняющий стержень.
143
мени сигнала передней антенны
fA{f) и применение в качестве блока
регулируемой задержки регистра
сдвига PC с регулируемой
частотой продвигающих импульсов.
Принятые передними и задними
антеннами сигналы детектируются,
усиливаются и ограничиваются по
амплитуде. Затем сигнал fA(t)
подается на регистр сдвига, который
осуществляет квантование этого
сигнала по времени и его задержку.
Время задержки квантованного
сигнала определяется частотой
продвигающих импульсов, подаваемых
на PC и являющихся
регулирующим воздействием. В то же время
частота продвигающих импульсов
является частотой квантования
задерживаемого сигнала. В связи
с тем, что от частоты квантования
зависит точность измерения
скорости (погрешность дискретности), эта
частота выбирается достаточно
высокой (в несколько раз выше, чем
основная частота входного сигнала). С выхода PC сигнал, импульс
за импульсом, подается вместе с сигналами задних антенн fc(t) на
полусумматор П (схему совпадения). Полусумматор дает выходной сигнал
в том случае, если полярности входных сигналов совпадают. Выходной
сигнал полусумматора поступает на интегратор Я, где осуществляется
его сглаживание и усреднение. При амплитуде напряжения выходных
импульсов полусумматора, равной £, уровень напряжения на выходе
коррелятора, в зависимости от степени совпадения (корреляции) вход-
ных сигналов, изменяется от Е (при максимальном совпадении) до —
(при минимальном). Сглаженный выходной сигнал полусумматора
используется как управляющий сигнал для схемы управления СУ,
которая регулирует частоту генератора тактовых (продвигающих)импульсов
и, следовательно, задержку сигнала fA(t) таким образом, чтобы
напряжение на выходе коррелятора соответствовало максимуму
корреляционной функции. При этом частота тактовых импульсов однозначно
связана со скоростью движения самолета, которая может быть
измерена по показаниям частотомера Ч. Счетчик тактовых импульсов С
позволяет определять расстояние, которое пролетел самолет.
В [184] указывалось, что наиболее точной оказалась схема
задержки, использующая два регистра сдвига. В соответствии с этой схемой
выходной сигнал интегратора управляет рециркуляционным регистром,
который, в свою очередь, управляет вторым регистром. Импульсы
переполнения второго регистра являются фактически тактовыми
импульсами и используются в качестве входного сигнала усилителя
продвигающих импульсов. Точность такой системы ограничивается
только числом ячеек, используемых в этих двух регистрах.
№
ЛМ
УПИ
л
PC
гти
JL
п
су\
Ьц
и
Рис. 96. Блок-схема
автоматической корреляционной системы
для измерения скорости и
расстояния:
PC —. регистр сдвига; УПИ —
усилитель продвигающих импульсов;
ГТИ — генератор тактовых
импульсов; СУ — управляющая схема; П —
полусу мматор; И — интегратор; С—
счетчик и измеритель расстояния;
Ч — частотомер и измеритель
скорости.
144
Навигационная система предусматривает также измерение угла
сноса самолета. Для определения угла сноса самолета сигналы двух
передних антенн А и В (рис. 95, в) поочередно коррелируются с'
сигналами каждой из задних антенн — С и D. При этом получается два
разностных сигнала, подобных U(i) (рис. 95, г). Сигнал разбаланса между
ними управляет следящей системой, поворачивающей блок антенн на
определенный угол, при котором разбаланс равен нулю. Угол сноса
определяется по положению антенн.
Для мягкой посадки космического корабля важно измерить
вертикальную составляющую скорости, что также может быть осуществлено
корреляционным методом при помощи системы приемных антенн
(рис. 95, е). Три антенны диэлектрического типа расположены в одной
плоскости по углам равностороннего треугольника, а четвертая
опущена вертикально из центра тяжести треугольника. Попарная взаимная
корреляция сигнала четвертой антенны с сигналами каждой из трех
остальных позволяет определить вертикальную составляющую
скорости. Корреляция сигналов трех антенн, расположенных ь
горизонтальной плоскости, дает возможность определить горизонтальную
составляющую скорости и угол сноса, как это было описано выше. Такая
антенная система при работе в диапазоне сантиметровых волн
оказывается достаточно малогабаритной.
Описываемый корреляционный измеритель скорости работает
в диапазоне волн 2,75—5,77 см. Рупорная антенна для этого диапазона
имеет раскрыв около 19,6 см2. При этом антенная система (рис. 95, д)
умещается в окружности диаметром 30 см.
Для точного измерения горизонтальной скорости и угла сноса
самолета важно, чтобы ось диаграммы направленности приемных антенн
была перпендикулярна поверхности земли. Однако оказалось, что,
несмотря на отклонения осей антенн от вертикали, которые
наблюдались на маневрах самолета, погрешность определения скорости
не превышает 0,5—1,0% даже без специальной стабилизации
антенн.
В [184] описаны результаты летных испытаний корреляционного
измерителя скорости, выполненного по разомкнутой схеме. Блок-схема
этого устройства приведена на рис. 97. Максимум корреляционной
функции определяется путем смещения приемных антенн (изменения
/) при фиксированной задержке сигнала т= 1,188 мсек.
Передатчик устройства мощностью 0,1 вт работает в диапазоне
2,75—5,77 см. Раскрыв рупорных антенн составляет 57 х 83 мм.
В качестве приемников применены синхронные детекторы и усилители
низкой частоты, с выхода которых сигналы подаются на коррелятор.
Фазовращатель (вращающийся трансформатор) применен для того,
чтобы на выходе множительного устройства получался сигнал с
частотой 60 гц, а не сигнал постоянного тока. Фильтры верхних частот
(порядка 200 гц) служат для устранения низкочастотных составляющих
звукового спектра, возникающих из-за просачивания энергии
передатчика, работающего в режиме непрерывного излучения. В схеме
приведена линия задержки с сосредоточенными параметрами.
На рис. 98, а приведена корреляционная функция, вычисленная
для v= 170 км, на рис. 98, б — экспериментальные кривые,
полученные в результате испытательных полетов вдоль калиброванной трассы
со скоростью 200 км/ч и 185 км/ч. Максимумы экспериментальных
кривых соответствуют расстояниям между центрами антенн S = 13,2 см
и S = 12,3 см, что хорошо согласуется с расчетом.
10 2-298
145
V
HDy
T
rL
\фвч
T
\ym
\бПЗ
1\Ьь
1
f
ФВЧ
X
УНЧ
г
h~\,
МУ
ф
У
/0-30гц
/0+JOeu
Фа
ттг
-с^ 1
а
©
X
ВФ№
Y
1
i
кг
Рис. 97. Блок-схема экспериментального
корреляционного измерителя скорости самолета, разработанного
фирмой «Дженерал Электрик»:
Л, В — приемные антенны; С — передающая антенна; КВС —
кристаллические балансные смесители; ФВ — фазовращатель;
НО — направленный ответви гель; ФВЧ—фильтры верхних
частот; УЦЧ —- усилители низкой частоты; БПЗ — блок
фиксированной задержки с сосредоточенными постоянными; МУ —
множительное устройство; Ф — полосовой фильтр на 60 гц\
У — усилитель; ВФНЧ —выпрямитель и фильтр низких частот;
СД — синхронный двигатель; КГ — клистронный генератор.
т=/,/88мсе/с 30
\/--170кфас
• 20
/0
ч=200кфюл
тЧМмсек
8 /2 16 20 1,ш 6 8
а
v485w/mc
i2 r 16 1,см
о
Рис. 98. Вычисленная корреляционная функция (а) и
экспериментальные кривые (б), полученные при летных
испытаниях системы, приведенной на рис. 97. Время задержки
г =1,118 м/сек\ I—расстояние между центрами антенн.
Погрешность измерения скорости данной системой определяется
выражением [184J
Ду . а 1Г а ,~ г*
Av
где относительная погрешность измерения скорости
(среднеквадратичное значение); а — раскрыв рупора антенны; S —
измерительная база (расстояние между центрами приемных антенн); D —
участок, пройденный самолетом за время усреднения; k—коэффициент,
примерно равный единице.
При а — 50 мм, S = 250 мм, А, = 2,25 см, D = 2,5 км (при v =
= 900 км/ч и времени усреднения, равном 10 сек) и k = 1
теоретическая точность равна 0,1%.
В [326, 330, 470] описаны системы для измерения корреляционным
методом путевой скорости и высоты полета самолета, использующие
не радиолокационные, а фотоэлектрические датчики. Система для
измерения скорости полета с использованием магнитометрических
датчиков описана в [464]. В принципе для этих целей могут быть
использованы и другие сигналы, отраженные от поверхности земли, например,
инфракрасного, миллиметрового или сантиметрового диапазона. Это
делает корреляционный метод измерения параметров движения весьма
перспективным для создания пассивных систем, не требующих
применения специальных излучателей [136, 154, 174, 177, 200].
Корреляционный измеритель скорости объекта,
движущегося в электромагнитном поле
В [173, 348] описаны корреляционные экстремальные системы для
измерения скорости объекта, движущегося в электромагнитном поле,
которое и служит источником информации о движении. Принцип
действия этих систем аналогичен используемому в ранее.описанных
корреляционных измерителях скорости.
Как известно, при падении плоской волны монохроматического
электромагнитного излучения на плоскую отражающую поверхность
возникает явление интерференции прямой и отраженной волн и в
пространстве над отражающей поверхностью устанавливается режим
стоячих*волн. Если отражающая поверхность не является плоскостью,
а имеет неправильную форму, или если на ней рассеяны какие-либо
отражатели, то поле стоячих волн будет иметь неправильную форму
во всех трех измерениях. При движении объекта с двумя разнесенными
антеннами в этом поле в антеннах будут наводиться сигналы,
одинаковые по форме, но сдвинутые во времени за счет транспортного
запаздывания
где d — расстояние между антеннами, v — скорость движения объекта.
Если сигнал, наведенный в первой антенне, задержать до полного
совпадения с сигналом, наведенным во второй антенне, то значение
взаимной корреляциончой.функции этих сигналов станет максимальным.
Этот принцип используется в корреляционном измерителе скорости
движения объекта в электромагнитном поле. На рис. 99, а приведена
10*
147
xxxx>
л
-Л\
~^\
й<
дг
Sl
£
у,
у*
Щ/х/
-Я
Щых2
шо\
\р
П\"3,4ш
Ы
%ш/
п п,.
^сЯУ
Щыхг \
Рис. 99. Схема, иллюстрирующая принцип измерения скорости
движения объекта в электромагнитном поле:
а — блок-схема измерителя; Л — лист дюралюминия; Г — клистронный
генератор сантиметрового диапазона (X = 3,4 см); At и А2 —■ приемные
антенны на объекте; Д1г Д2—- детекторы; Уь У2 — усилители; б — эпюры
напряжений в схеме.
схема установки, описанной в [173] и использующей этот принцип.
Объект, снабженный двумя приемными антеннами Ах и Л2, был
подвешен на нити длиной 5 м. Клистронный генератор сантиметрового
диапазона Г генерировал импульсы с частотой следования 1 кгц.
В результате интерференции прямой и отраженной от листа
дюралюминия Л волн у поверхности листа создается поле стоячих
электромагнитных волн. Точки, в которых амплитуда электромагнитных колебаний
максимальна, располагаются на гиперболоидах, общая ось которых
перпендикулярна поверхности отражателя. Расстояние между слоями
(гиперболоидами) — Х/2.
На рис. 99, ^приведены эпюры напряжений в схеме. При
неподвижных антеннах Ах и А2 на выходе приемников наблюдаются
синусоидальные немодулированные колебания UА и UА частотой 1 кгц, амплитуда
которых зависит от положения объекта в пространстве. При
колебательных движениях объекта синусоидальный сигнал на выходе
приемников будет промодулирован по амплитуде частотой, равной числу
слоев — гиперболоидов, пересекаемых антеннами за 1 сек. Если
расстояние между антеннами не равно половине длины волны, то
огибающие этих двух колебаний будут сдвинуты по фазе на время тт-
Блок-схема системы приведена на рис. 100, а. В качестве блока
регулируемого запаздывания здесь применен регистр сдвига PC на
феррит-транзисторных ячейках с управляемой частотой
продвигающих импульсов.
Ниже приводится описание работы схемы (см. рис. 100),
заимствованное из [173].
Незадержанный сигнал (кривая /) с помощью нормализатора Нх
квантуется на два уровня (кривая 3), после чего поступает на схему
совпадений СС. На вход 4 поступает непрерывная последовательность
импульсов (с периодом Т) от генератора формирования тактовых
импульсов (ФТИ). На выходе 5 информация о видеосигнале возникает в
i48
Вход 1
Вход 2
©I
!Ж
ее
a&j
тт
А?
тт
©L
\fl-A
М
®
Щ
IE
гг</
I
лз
Mil II
1L
©
©
©
©I
®,
©I
®П_Д
®
@
@
@
5?
Ш^/
д^
«}
!@
"Щ
КР
11
U LL1L
1111
ипммц^1^
©
и
III III И
///7
U LLLL
11
Q_Q
П Г
П П
П.П
Л
Z1 П Г
i_d a
и
п п с
д
m
л
и о
п. л
~^сг
АС,
®
СС2
Рис. 100. Схема автоматического корреляционного измерителя ско»
рости движения объекта в электромагнитном поле;
~ — блок-схема; Hlt И2 — нормализаторы входных сигналов; ФТИ —
формирователь тактовых импульсов; ГТЧ — генератор тактовой частоты; Ии Иг —
интеграторы; Р — реле; КР — контакты реле Р; МП — мультивибратор поиска;
СС, CClt CC2 — схемы совпадения; AClt АСг — схемы антисовпадения; 7\,
Гг — триггеры; ЛЗи ЛЗг — линии задержки; В — схема вычитания; PC ~
регистр сдвига; б «■ эпюры напряжений в схеме.
виде последовательности единиц и нулей. Эта последовательность
поступает на вход регистра сдвига PC и продвигается к его выходу со
скоростью, определяемой периодом продвигающих импульсов Т. С л-й
ячейки сигнал снимается с задержкой на время пТ. В процессе
автоматического регулирования величина пТ меняется (за счет изменения Т)
так, чтобы корреляция была максимальной. С (п — 1)-й и (п-\-\)-\{ ячеек
снимаются задержанные последовательности импульсов,
соответствующих единицам и нулям сигнала (кривые 6, 8). С помощью триггеров
Т± и Т2 формируются огибающие (кривые 10, 11), первая из которых
оказывается «недозадержаннои» относительно сигнала, изображаемого
кривой 9, который снимается с Я2 и имеет транспортное запаздывание.
Дальнейшие цепи построены по принципу, напоминающему
принцип автоматического сопровождения по дальности в радиолокационных
дальномерах. Сигнал 9 поступает на две схемы совпадений CCi и СС2,
где сравнивается по временному положению с сигналами 10 и 11.
Результаты совпадения 12 и 13 подаются на вычитающее устройство В,
откуда разностный сигнал 14 поступает на интегратор Их, напряжение
которого управляет частотой генератора тактовой частоты ГТЧ.
Если задержанный на время пТ сигнал 7 точно совпадает с
запаздывающим сигналом 9, то 10 и 11 симметричны относительно 9,
площади положительных и отрицательных импульсов /нравны, напряжение
интегратора остается неизменным, в результате неизменной остается
и тактовая частота (и ее период Т), что при постоянстве п обеспечивает
постоянство задержки. Если сигналы 10 и 11 несимметричны
относительно сигнала 9, то площади положительных и отрицательных
импульсов 14 не равны и возникающий сигнал ошибки меняет напряжение
на выходе интегратора и, соответственно, тактовую частоту ГТЧ до
устранения сигнала ошибки. Как и в любой системе с одним
интегратором, данная схема имеет память по отслеживаемому параметру
(исчезновение одного из сигналов не изменяет напряжения
интегратора, частоту и соответственно задержку), она имеет динамическую
ошибку, пропорциональную первой производной от измеряемого
параметра (для нашего случая — пропорциональную ускорению). Введение
второго интегратора позволило бы уменьшить динамическую ошибку
и обеспечить память по ускорению.
В системе предусмотрена схема поиска экстремума. В режиме
поиска (контакты реле КР в положении //) на интегратор #i подается
перепад напряжения от мультивибратора поиска МП, благодаря чему
выходное напряжение интегратора, частота и задержка Т меняются
линейно со скоростью, зависящей от постоянной времени
интегрирования. По мере приближения корреляции к максимуму возрастает
длительность совпадения в схеме СС2, и напряжение на выходе
интегратора #2 достигает порога срабатывания реле Р, контакты которого
КР перебрасываются в положение /, отключают вход интегратора Иг
от мультивибратора МП и подключают его к схеме вычитания В.
Сигнал от А2, задержанный на время транспортного запаздывания
(кривая 2), квантуется на два уровня в нормализаторе Я2, но
дискретизации не подвергается. Благодаря этому общая погрешность
уменьшается в "1^2 раза по сравнению с погрешностью в системе с двумя дискре-
тизированными сигналами.
Огибающая 10 создается с помощью логической схемы, состоящей
из схемы антисовпадений AClt триггера Тх и линии задержки ЛЗХ.
На начало серии импульсов схема не реагирует. Триггер срабатывает
150
|grj^-p^| r^nJlrj
rVFTr1^
Cm H_l Г ЧМГЬ+
2
Рис. 101. Функциональная схема
получения продвигающих
импульсов:
Г — опорный гетеродин; ЧМГ —
частотно-модулированный генератор;
См — смеситель; Ф — фильтр; О —
ограничитель; ДЦи ДЦ2, ДЦз —
дифференцирующие цепочки; Т ■—
триггер; БГ —"блокинг-генератор
от первого импульса серии 6, поя
вившегося в ячейке п — 1. Обрат
ное опрокидывание триггера (по
другому каналу) происходит при
прохождении последнего импульса
серии: схема АСХ выдает импульс е
момент, когда в точке б находится
последний импульс пачки
(единица), а в точке а—-нуль. Линия
задержки ЛЗХ задерживает
импульс так, чтобы его воздействию
на триггер не мешал противодей
ствующий импульс, подаваемый
с точки б на другое плечо. Огибаю
щая снимается в реальном
масштабе времени благодаря тому, что
одни и те же импульсы
используются и в качестве продвигающих
(с шагом Г), и для дискретизации.
При этом, если частота тактовых
импульсов выбрана в соответствии
с теоремой Котельникова для какой-либо одной скорости, то это
соответствие, благодаря автоматическому регулированию частоты, будет
соблюдаться при любой скорости.
Выбор числа ячеек определяется соотношением между измеряе
мой задержкой пТ и шириной функции корреляции: точки (п — 1) Т
и (/г -f- \)T должны находиться на крутых склонах функции корреляции.
При очень малых задержках пТ обе точки могут оказаться весьма
близко к вершине корреляционной функции, при очень больших —
спуститься с нее слишком низко. И в том и в другом случае точность
слежения понижается. Поэтому при широком диапазоне измеряемых
задержек желательно переключение поддиапазонов, например, путем
замены точек (п ± 1) на точки (п +2).
В описанной схеме используется регистр сдвига на двухтактных
ФТЯ. Для работы такого регистра необходимы две серии продвигаю
щих импульсов, сдвинутых одна относительно другой во времени.
Функциональная схема на рис. 101 поясняет принцип получения таких
импульсотз. На смеситель См подаются колебания, создаваемые гетеро
дином Г, и колебания от частотномодулированного генератора ЧМГ
С выхода фильтра Ф снимается сигнал разностной частоты,
пропорциональной управляющему напряжению Uу с выхода интегратора Их
Пусковые импульсы, получаемые после ограничителя О и
дифференциатора ДЦх, запускают триггер Т. Импульсы.с обоих плеч триггера
поступают на дифференцирующие цепочки ДЦ2 и ДЦ%. После
дифференцирования отрицательными импульсами запускаются
соответствующие блокинг-генераторы Б Г продвигающих импульсов. Таким образом,
получаются импульсы, сдвинутые на Т/2. Заполнение сигнала,
пропускаемого через регистр сдвига в схеме совпадений СС осуществляется
серией импульсов с выхода L Эта же серия является продвигающей для
четных ячеек регистра. Двухтактный регистр состоит из 21 ячейки,
выполненной на кольцах диаметром 3 мм типа ВТ-5, с использованием
транзисторов П16. На рис. 102, а показана схема такой ячейки, а на
рис. 102, б — схема генератора продвигающих импудьхов
(оконечный каскад).
151
Рис. 102. Элементы схемы рис. 101:
а— ячейка регистра сдвига: w'^=\5
витков; о>б = 7 виткоп; адк«» 12 витков;
wT = 5 витков; б *~ генератор
продвигающих импульсов (оконечный каскад)
.триггера
240пф
458
На рис. 103 приведена осциллограмма сигнала на выходе регистра.
Время развертки осциллографа соответствует задержке, создаваемой
20 ячейками. Описанный БРЗ обеспечивает достаточно широкий
диапазон задержек (от 400 мксек до 400 мсек). Для расширения диапазона
в сторону меньших задержек необходимо применение более
быстродействующих ячеек.
Аналогичное устройство, предназначенное для использования
в полуактивной радиолокационной КЭС для мягкого прилунения
космического корабля, описано в [348]. В этой системе предполагалось
облучать поверхность Луны при помощи передатчика, расположенного
на Земле, а на борту космического корабля установить легкий приемник.
Поверхность Луны действует как грубый рефлектор, перед которым
создается поле стоячих волн случайной конфигурации. Для
обеспечения напряженности поля, достаточной для работы корреляционной
системы измерения скорости, мощность передатчика может составлять
всего |10 кет при работе на частоте около 2390 Мгц. Диаметр следящей
антенны при этом должен быть около 25 м. Преимущества такой системы:
малые вес, размеры и потребляемая мощность; возможность работы на
большой высоте над лунной поверхностью (у допплеровских
радиолокаторов максимальная высота составляет около 15 км); малая
восприимчивость к действию факела ракетного двигателя.
В [348] приведено выражение для оценки погрешности, вызываемой
в таких КЭС статистическими флуктуациями:
— - JL Л/'
v ~~ 2S V
(7.4)
«ШМнншиь
lllll i.t|9f»
,HtlfltM.
Рис. 103. Осциллограмма
сигнала на выходе регистра
сдвига.
где Av—среднеквадратичное
отклонение скорости; v — скорость; X —
длина волны; S — расстояние между
антеннами; Г — время усреднения.
При S= 18 ел*, к « 3 см, 7=1 сек
и v и 3,75 м/сек погрешность равна,
примерно, 0,5%.
152
Корреляционный измеритель скорости речного судна
В некоторых случаях представляет интерес измерение скорости
судна относительно дна реки. Из-за течения она не равна скорости
судна относительно воды. В Институте электротехники АН УССР были
проведены предварительные исследования, которые показали, что
скорость судна относительно дна также может быть измерена
корреляционным методом [120]. На рис. 104, б приведены записи показаний
двух эхолотов, которые были установлены в носовой и кормовой частях
опытного теплохода АН УССР «Лаборатория». Расстояние между
эхолотами — 9,5 м. Как видно из графика, показания кормового эхолотя
с некоторым запаздыванием т повторяет показания носового эхолота.
В принципе возможно создание корреляционного измерителя скорости
речного судна относительно дна в соответствии с блок-схемой,
приведенной на рис. 104, а. Принцип действия его тот же, что и описанных выше
схем корреляционных измерителей скорости, однако очень низкие
20 40 60 80 ТОО 720 t^cek
б
Рис. 104. Корреляционный измеритель скорости речного судна:
а — блок-схема; ПЛ — носовой эхолот; ЗЛ — кормовой эхолот; БРЗ —.
блок регулируемой задержки; МУ — множительное устройство; Ф —
сглаживающий фильтр; ИП — измерительный прибор; б — записи
сигналов двух эхолотов, установленных на носу и нз корме судна: fu {t) —
показания носового эхолота; f3 (t) — показание кормовргд эхолота;
h — глубина, Mr
153
частоты входных сигналов требуют специальных схемных решений
некоторых узлов, например, блока регулируемой задержки.
В качестве датчиков при экспериментах были применены
малогабаритные полупроводниковые эхолоты, дающие возможность измерить
глубину от 0,5 до 5 м. Использование датчиков такого типа вызвало
ряд практических затруднений. В частности, эти эхолоты при
глубинах более 5 м уже не давали сигнала об изменениях глубины, и,
следовательно, не могли быть использованы. На работу кормового эхолота
при малых глубинах влияют пузырьки воздуха и песок, поднимающийся
от винта.
Корреляционный измеритель скорости ионизированной плазмы
В ходе исследований, связанных с созданием магнитогидродина"
мических генераторов, и в ряде других случаев возникает необходи"
мость измерения скорости высокотемпературной ионизированной
плазмы (/ = 2500—3000° С), достигающей 1000—2000 м/сек, а также
пульсаций этой скорости. Это важно, например, для управления
режимом МГД-генератора.
В стационарном плазменном потоке наряду с низкочастотными
пульсациями содержатся и высокочастотные (/ « 10 кгц). При
движении с околозвуковыми скоростями поток стремится сохранить
первоначальное распределение интенсивности колебаний [13]. Эта модуляция
плазменного потока может быть воспринята при помощи
соответствующих датчиков (например, при помощи фотоумножителей,
регистрирующих через коллиматорное отверстие яркость свечения потока) [70—73].
В Институте электродинамики АН УССР были проведены
эксперименты по получению сигналов с плазмы при помощи двух пар
токосъемников, установленных в двух точках камеры МГД-генератора
и смещенных на 380 мм друг относительно друга в направлении
движения плазмы. Каждая пара токосъемников соединялась со шлейфом
магнитоэлектрического осциллографа типа Н-102 (рис. 105, а). Осцил-
лографирование производилось при максимальной скорости движения
пленки (5000 мм/сек). Как показывают осциллограммы, имела место
хорошая повторяемость формы сигналов, снимаемых с каждой пары
токосъемников (рис. 105, б). Чрезвычайно большая скорость движения
плазмы (до 2000 м/сек) обусловила очень малый временной сдвиг между
сигналами
Т^Т^200=°'2ЖС^
При принятой скорости протяжки пленки (5 м/сек) это
соответствует линейному сдвигу сигналов на пленке
тл = 5000- 2 • Ю-4 = 1 мм.
Повторяемость формы электрических или фотоэлектрических
сигналов, снимаемых с двух точек плазменного потока, позволила
применить для измерения скорости корреляционный метод [30, 70—
73]. Возникающие при этом трудности связаны, в первую очередь,
с необходимостью измерения очень малых промежутков времени
запаздывания тт, т. е. со сложностью осуществления достаточно точного
БРЗ на соответствующий диапазон задержек. В связи с зт*до пока
трудно обеспечить достаточно высокую точность измерений.
154
\1*2000м/сек
Плазма
£=Blv
I „ Ш
Рис. 105. Схема снятия электрических сигналов с
плазменного потока при помощи токосъемников (а); осциллограммы
снятых сигналов (б).
СН4 КОН
г
I "с У
И
П
Зажигание
W W
Рис. 106. Блок-схема экспериментальной плазменной
установки:
КС — камера сгорания; К — канал с плазмой; Э — электроды
Корреляционный метод оказался применимым не только для изме.
рения скорости плазменных потоков, но и для измерения флуктуации
скорости [30, 70—72].
Эксперименты на потоках слабоионизированной плазмы показали,
что в токе, протекающем через плазму под действием постоянной
разности потенциалов, наблюдается переменная составляющая флуктуа-
ционного характера с амплитудой порядка 15—20% среднего значения
тока. Эти флуктуации отражают физические процессы в потоке плазмы
и содержат ценную информацию, в связи с чем их анализ представляет
значительный интерес.
На рис. 106 приведена схема экспериментальной установки, с
помощью которой снимались флуктуации тока, подвергнутые затем
корреляционному и спектральному анализу.
Плазма, образуемая в результате сгорания природного газа
(СН4) в атмосфере кислорода с ионизирующейся щелочной присадкой
(КОН) двигалась по каналу, на противоположных стенках которого
попарно располагались электроды. На каждую пару электродов
подавалось напряжение от источников питания. Флуктуации, возникавшие
в токе, фиксировались при помощи магнитофона и шлейфного
осциллографа Н-102.
Анализ осциллограмм показал, что зарегистрированный
случайный процесс x(f) можно считать стационарным, т. к. для него
выполняются условия
00
mx(t)=* [ х (t) f (x) dx = const, (7.6)
D[x(t)]= f lx{t) — mx(t)]*f(x)dx = const, (7.6)
-«■00
где f(x) — одномерный закон распределения mx(t)\ D [x(t)] —
математическое ожидание и дисперсия функции x(t).
Корреляционная функция является функцией разности моментов
времени tx и t2
со
Rxy (h. h) = \ [* (t) - тх (t)] [y(t)~ my (t)] x
X/(*, y/tlyt2)dxdyt (7.7)
где f(x, y/tlt t2) — двумерный закон распределения.
На рис. 107 приведены корреляционные функции полученных
реализаций (1 — автокорреляционная функция, 2 — взаимная
корреляционная функция сигналов, снятых с двух электродов, расположенных
на расстоянии / = Б см). Кривые показывают, что в потоке
слабоионизированной плазмы существует периодический процесс,
свидетельствующий о наличии источника периодических возмущений, энергия
которого пополняется за счет физических процессов в плазме. Получение
плазмы при сжигании природного газа в камере сгорания, как правило,
сопровождается появлением колебаний, обусловленных
неустойчивостью процесса горения. Частота таких колебаний определяется
параметрами камеры сгорания и режимом работы. С целью выявления
166
/-~fS208U
*o 2fo JJb Ц Ц &0 7f0 Ц/,гц
f0*220гц
б
Рис. 107. Статистические характеристики флуктуации плазменного
потока:
а — корреляционные функции; б — спектральная плотность энергии
колебаний в спектре флуктуации тока корреляционная функция
аппроксимировалась выражением
R (т) = <?-аТ+ £ COS Ла>0Т,
/2=1
(7.8)
где а= 2,32 . 103; <о0 = 2я/0 = 2л . 220.
Соответствующее преобразование Фурье выражения (7.8) дает
аналитическое выражение спектральной плотности энергии
исследуемых флуктуации
• S(<o) =
2а
к (а2 + а)2)
■ + 7 , & (ла)о — ш).
(7.9)
л=1
где 5(rtw0 — аз) = I ^ ^° ^ ® — дельта-функция Дирака; /г = 1,2.
Подстановка соответствующих коэффициентов дает кривую S(a>),
приведенную на рис. 107, б. Чтобы иметь возможность более наглядно
судить о частотных составляющих спектра, дельта-функции ограничены
пропорционально амплитудам соответствующих гармоник.
При проведении описанного эксперимента значение тт составило
0,125 м/сек, что при / = 5 см соответствует v = — = 400 м/сек.
хт
По вопросу исследования флуктуации скорости в плазменных
потоках корреляционным методом опубликован ряд работ [29, 30,
32, 70—73, 82, 192, 288, 342, 349, 357, 367, 376].
157
Другие области применения корреляционных измерителей скорости
Наиболее важными и перспективными областями применения
корреляционных измерителей скорости, по-видимому, следует считать
авиационную и космическую навигацию [11, 39, 120, 125, 155, 184, 212,
243, 270, 346, 348, 460, 464, 470]. В то же время универсальность
корреляционных методов измерения скорости открывает широкие
перспективы их использования в самых различных отраслях промышленности.
Представляет интерес применение корреляционного метода для
измерения скорости горячего проката (t = 800—1200° С), где
неприменимы ни контактные методы, ни те из бесконтактных методов, которые
могут быть использованы при холодной прокатке, как, например, метод
магнитных меток [25, 35, 89, 104, 267, 338].
Осциллограммы сигналов, получаемых фотоэлектрическим
способом с поверхности горячего проката при скоростях металла 0,6
и 2,9 м/сек имеют четкий и устойчивый характер, позволяющий без
труда вычислять их корреляционные функции (рис. 4). При измерении
скорости горячего проката целесообразно использование осветителей
с хорошо выраженной коротковолновой (голубой) частью спектра
светового излучения, а также светлоголубых светофильтров,
устраняющих влияние на фотоэлементы теплового излучения. В этом случае
следует применять фотоэлементы с сурьмяноцезиевыми фотокатодами,
мало чувствительными к инфракрасным лучам. При использовании
для получения сигналов естественного свечения поверхности металла
должны применяться фотоэлементы с кислородноцезиевыми катодами
и остронаправленные оптические системы со щелевыми диафрагмами
для ограничения размеров участка поверхности металла,
воспринимаемого фотоэлементом (что эквивалентно уменьшению читающего штриха).
Особые требования предъявляются к тепловой защите фотодатчиков
(применение водяного охлаждения и т. д.) (рис. 91).
Корреляционный метод измерения скорости не предъявляет
никаких требований к электрическим и магнитным свойствам движущейся
поверхности. Поэтому он может быть также использован для измерения
скорости движения цветных металлов. На рис. 60, д приведена
осциллограмма сигнала, полученного с поверхности меди, движущейся со ci о-
ростью 17,0 м/сек, а на рис. 61, (5—автокорреляционная функция
этого сигнала. На рис. 60, в, г и 61у в, г приведены такие же кривые
для алюминия Форма автокорреляционных функций показывает
возможность получения при измерении скоростей этих металлов точности
того же порядка, что и в случае стального проката.
Значительное внимание уделяется методам измерения
турбулентности потоков газов и жидкостей с использованием естественной
турбулентности и с введением различных меток [105, 182, 301, 304, 311, 313,
314, 319, 329, 384, 397, 403, 445].
Представляет интерес использование корреляционных методов
для измерения скорости движения полосы бумаги [338, 394—396, 423].
Формируемая в бумагоделательной машине бумага вначале имеет
очень высокий процент влажности и чрезвычайно малую прочность на
разрыв. Проходя через ряд каландров, она подвергается высушиванию,
что приводит к значительной продольной усадке. Поэтому необходимо
согласовывать скорости последующих каландров со степенью
усадки, в противном случае возможны обрывы бумажной полосы или
образование петель. В связи с этим для измерения скорости бумаги
(или отношения двух скоростей) может оказаться удобным бесконтакт-
158
Рис. 108. Акселерометр,
используемый при снятии сиг
налов, характеризующих
профиль дороги; Ш—шарик;
ТД — тензодатчик; К —
корпус.
ный корреляционный метод. В [394—
396] приведены результаты детального
исследования этого вопроса как в
теоретическом, так и в
экспериментальном плане.
В [396] описан макет
корреляционного измерителя скорости бумажной
полосы, использующей полярный
коррелятор и БРЗ на магнитной ленте.
В этом макете бумажная полоса
просвечивается осветителями со щелевой
диафрагмой, и возникающий при этом
световой сигнал воспринимается
расположенными с другой стороны
фотоэлементами (т. е. воспринимается
переменная прозрачность бумаги). В [394,
395] изложены теоретические основы
метода и описан макет КЭС для
измерения скорости бумажной полосы,
использующей в качестве БРЗ регистр
сдвига с управляемой частотой продвигающих импульсов. В качестве
фото датчиков использованы фототранзисторы. В данной системе
использован не отраженный, а просвечивающий луч от осветителя. Размер
светового штриха — 1 х 10 лш. При скорости движения бумаги около
70 см/сек ширина пика снятой экспериментально корреляционной
функции составляла около 3 мсек, амплитуда пика — около 5 в.
Корреляционный метод может быть применен также для измерения
скоростей различных эластичных и вязких материалов, например,
полосы резины, пластмассы, искусственной кожи и т. д.
Ряд объектов, на которых возможно применение корреляционных
методов измерения скорости движения, относится к транспорту, как
рельсовому, так и безрельсовому. Рассмотрим несколько примеров.
При движении автомашины ее колеса и оси повторяют профиль
дороги. При помощи датчика (динамометра или акселерометра),
установленного на передней оси и связанного с электрическим
преобразователем, можно получить электрический сигнал, определяемый профилем
дороги [327, 381, 391, 392, 440]. С задней оси можно снять аналогичный
сигнал, сдвинутый относительно первого на время транспортного
запаздывания
Ь = 7- (7Л0)
где /-—база (расстояние между передней, и задней осями);
v—скорость движения автомашины.
В [385] описаны эксперименты по снятию сигналов,
характеризующих профиль дороги. На легковой автомашине были установлены два
акселерометра на расстоянии /=2,84 м друг от друга. Акселерометры
были выполнены в виде прямоугольников из фосфористой бронзы
размером 20 х 20 мм и толщиной около 0,2 мм. В круглой выточке в верхней
части акселерометра перемещался шарик весом около 7 г. На торцевой
части корпуса был укреплен тензометрический датчик, включенный
в мостовую схему переменного тока (рис. 108). При движении
автомашины (v = 7—9 м/сек) сигналы акселерометра (пиковое значение около
0,5 в) записывались на регистратор, и затем вычислялась их корреля-
159
h^^^
Otf2 0,16 0,20 0,24 0,28 0,32 0,3$ ОАО ОМ т,сек
Рис. 109. Осциллограммы сигналов, снятых с одного
акселерометра (1); взаимная корреляционная функция сигналов двух
акселерометров (2); v = 8,73 м/сек; длина реализации—8 сел:.
ционная функция. Длина реализации соответствовала при этом
пройденному пути, равному 136,5 м.
На рис. 109 приведена взаимная корреляционная функция
сигналов, снятых при v = 8,73 м/сек и длине реализации — 8 сек. В табл. 3
проведено сравнение транспортного запаздывания т1} определенного
по скорости движения автомобиля и, и транспортного запаздывания
т2, определенного по взаимным корреляционным функциям снятых
сигналов, а также приведены полученные при этом погрешности 6 для
различных скоростей.
Относительно невысокая точность определения транспортного
запаздывания (а следовательно, и скорости) в этом случае объясняется
сравнительно ровным профилем дороги, на которой проводился
эксперимент (городская асфальтированная дорога), и характеристиками
датчика. Применение других датчиков (например, использующих
СВЧ-излучение), а также обострение корреляционной функции нулей
или выбросов сигнала (см. гл. 3) позволило бы повысить точность
системы. Достаточно точное интегрирование скорости позволило бы также
вычислять путь, пройденный машиной, что может быть использовано
при различных приближенных измерениях, для геодезических и
топографических съемок.
При разработке автоматизированной управляющей системы для
тепловозов или паровозов («Автомашинист») необходим точный
измеритель скорости движения (для скорости от 0,5 до 200 км/ч).
Погрешность, получаемая при измерении скорости с помощью тахогенератора
(3—5%), может сильно увеличиваться в результате пробуксовки
колесных пар (у тепловоза каждая ось — ведущая). В связи с этим может
оказаться полезным применение корреляционного измерителя скорости
движения. Световые штрихи фотодатчиков могут проектироваться,
например, на головку
Таблица 3 рельса [83, 188].
Особенно ценным
корреляционный метод
может оказаться для
измерения скорости
транспортных машин на
воздушной подушке [2, 167].
Корреляционные
измерители скорости звука
в различных средах
используются в акустике
v, м/сек
7,00
7,52
7,71
8,70
Tlt сек
0,407
0,378
0,368
0,325
т2, сек
0,400
0,392
0,360
0,320
К %
— 1,7
3,7
-2,2
-1,5
160
[382]. При этом применяется описанная выше техника КЭС, в
частности, генерирование псевдослучайных бинарных последовательностей
и отслеживание максимума корреляционной функции с помощью
дифференциальной схемы.
В различных аэродинамических исследованиях возникает
необходимость определения пространственной корреляции в пульсацион-
ных турбулентных следах за движущимися объектами. Здесь,
по-видимому, также лежит область возможных приложений КЭС [276].
Следует упомянуть еще об одном примере применения
корреляционного метода измерения скорости, который относится к исторически
наиболее ранним. Это измерение скорости так называемого
«ионосферного ветра», т. е. фединговых флуктуационных процессов в атмосфере
при распространении радиосигналов [164, 427]. При эксперименте,
который проводился в 1949 г., анализировались фединговые помехи
сигналов в диапазоне 2—6 Мгц с помощью трех приемников,
разнесенных на расстояние около 100 м и образующих прямоугольный
треугольник с катетами, направленными на север—юг и запад—восток.
Попарная корреляция сигналов, снимаемых с приемников, позволяла
определить составляющие скорости распространения фединговых
флуктуации по соответствующим транспортным запаздываниям. Эта
система явилась прообразом КЭС для измерения составляющих
путевой скорости самолета [164, 184, 346].
По-видимому можно ожидать, что корреляционные методы
определения скорости и направления найдут применение также в
метеорологии и сейсмологии при анализе распространения колебательных
и флуктуационных процессов [384].
Широким полем для применения корреляционных и спектральных
методов являются различные биомедицинские исследования [303, 308,
355, 360, 441]. В ряде случаев они связаны с анализом временных
запаздываний. Автоматизация этого процесса осуществляется с помощью
КЭС, в связи с чем можно ожидать внедрения корреляционных
экстремальных систем и в этой области [384].
В последнее время появились сообщения о разработке
корреляционных измерителей скорости движения крови в организме человека
(с использованием в качестве датчика, например, фотоэлемента,
укрепленного на просвечиваемой мочке уха).
Корреляционные расходомеры
Взаимно корреляционьый метод измерения расходов был кратко
описан в гл. 1. Рассмотрим несколько практически реализованных
систем.
Корреляционный измеритель расхода воды
В [105, 106, 384, 397] описана КЭС для измерения расхода воды в
трубопроводе с введением в поток случайных меток. Для создания
случайных меток потока в него впрыскивают порции концентрированного
солевого раствора в виде псевдослучайных импульсных
последовательностей. В качестве датчика в устройстве использован измеритель
электрической проводимости воды, представляющий собой два электрода
из нержавеющей стали диаметром 1 мм, погруженных в трубопровод
на глубину 10 мм. Электроды (за исключением их концов) йо крыты
П 2-298
161
сдп
ел
ФЭ<
шп
ФЭ2
\уф2
ги
СР
о
эп
\
н
УФ,
УМ
д
Ж-
-гГ^ЛЭ
Рис. ПО. Корреляционный измеритель расхода воды:
а — блок-схема; Т — трубопровод; И — инжектор; СР —
концентрированный солевой раствор; Н — насос; ЭП — электропривод (импульсный
двигатель); ДЭ — датчик электропроводности; К — коррелятор; УФи УФ2 —
усилители—формирователи; Д — дифференциатор; ДК — прозрачные диски
с кодирующими масками; ДП — дифференциальная передача; СД —
синхронный двигатель привода дифференциальной передачи; О -г- осветитель; СДУ—
светоделительное устройство; ФЭ^, ФЭ2 —• фотоэлементы; ГИ — генератор
импульсов; СС *- схема совпадения; УМ — усилитель мощности; СДП —
серводвигатель сателлита дифференциальной передачи; б — кодирующий
диск.
полихлорвиниловой изоляцией. Расстояние между парой электродов —
5 мм.
Блок-схема устройства приведена на рис. ПО, а. В трубопровод
Т с протекающей водой через вспрыскивающее устройство (игольчатый
клапан) И впрыскивается концентрированный солевой раствор,
нагнетаемый насосом Н с электроприводом ЭП На расстоянии / от
впрыскивающего устройства расположен датчик электропроводности ДЭ,
сигнал с которого поступает на один из входов коррелятора К. На
другой вход коррелятора через усилитель — формирователь УФ2
и дифференциатор Д поступает сигнал от измерительной системы,
состоящей из двух прозрачных дисков ДК, связанных между собой
дифференциальной передачей ДП и приводимых во вращение
синхронным двигателем СД. На края дисков ДК (рис. 110, б) нанесена
кодирующая маска, состоящая из черных и прозрачных участков, ширина
которых изменяется по закону псевдослучайной последовательности.
Световой луч от осветителя О в светоделительном устройстве СДУ
расщепляется на два луча, которые проходят через диски и освещают
фотодатчики ФЭ. При этом световые лучи модулируются в соответствии
с законом прозрачности кодирующих масок на дисках. Сигнал
фотоэлемента ФЭ2 усиливается в усилителе формирователя УФ2 и вместе
с сигналом от генератора импульсов ГИ поступает на схему совпадения
СС, выходной сигнал которой приводит в действие импульсный
двигатель привода впрыскивания ЭП. Сигнал фотоэлемента ФЭ1 через
усилитель — формирователь УФХ и дифференциатор Д поступает на
коррелятор. Коррелятор вычисляет производную взаимной
корреляционной функции входных сигналов —г—- (рис. 111). Выходной сигнал
ох
162
1
L/AT>^^
I
\ ^
1
'
v ЮОмсек
L »»
25J
440
800
Г.МСРК
Рис.
111. Выходной сигнал коррелятора (производная
взаимной корреляционной функции входных сигналов).
коррелятора через усилитель мощности УМ поступает на
серводвигатель сателлита СДП, приводящий в движение сателлит
дифференциального механизма ДП. Поскольку входные сигналы коррелятора
сдвинуты друг относительно друга на время транспортного запаздывания
тт = — (где / = 40 см — расстояние между впрыскивающим
устройством и датчиком проводимости; v — скорость движения потока воды),
то для получения максимального значения взаимной корреляционной
функции этих сигналов (или, при наличии дифференциатора в канале
одного из сигналов, нулевого значения производной корреляционной
функции) необходимо их совмещение во времени. Последнее
осуществляется дифференциальным механизмом (рис. 112), согласующим
взаимное положение дисков с транспортным запаздыванием
задержанного сигнала. В установившемся состоянии сдвиг дисков друг
относительно друга или угол поворота сателлита пропорциональны среднему
значению скорости воды.
Погрешность измерения данного корреляционного расходомера
составляет около 1%.
Как видно из блок-схемы, для
автоматизации этой КЭС
использовано вычисление производной
корреляционной функции и
стабилизация нулевого значения этой
производной.
Возможно использование
корреляционных расходомеров с
датчиками температурных
флуктуации потока жидкости
(термопарами).
Преимуществами
корреляционного расходомера являются
линейность шкалы в широком
диапазоне скоростей и высокая
точность,
Рис. 112.
механизм
Дифференциальный
измерительной
системы.
И*
163
Корреляционные расходомеры для
двухкомпонентных смесей
Использование емкостных датчиков и датчиков проводимости
позволяет получать сигналы, характеризующие потоки различных
двухкомпонентных смесей (взвесей твердых частиц в газах и жидкостях)
и сыпучих тел в трубопроводах (хлопок, мука и зерно в воздушных
конвейерах; отходящие газы, получаемые в процессе переработки стали
и в цементных обжигательных печах; потоки турбулентных взвесей
в кристаллизаторах, испарителях, мельницах и т. д.). Благодаря этому
открываются широкие возможности применения корреляционных
методов для измерения скоростей и расходов указанных веществ.
В [311, 312, 435, 458, 459] описан ряд экспериментальных устройств
для измерения скоростей и расходов двухкомпонентных смесей
корреляционным методом. Во всех этих устройствах входные датчики
воспринимают сигналы, обусловленные изменением концентрации
взвешенных твердых частиц, вызываемым турбулентностью (воздуха, газа
или жидкости). Изменения концентрации вызывают емкостные
флуктуации в электроде, связанном с емкостным преобразователем (в емкостных
датчиках) или изменения проводимости суспензий, которые
воспринимаются датчиками проводимости [316].
На рис. 113 представлен участок трубопровода пневматического
конвейера для транспортировки порошкообразных материалов.
Электрод Э, представляющий собой изолированную часть трубопровода,
соединен с преобразователем флуктуации емкости в напряжение П.
На схеме приведены приближенные размеры датчика,
использовавшегося в эксперименте. Возможны и другие варианты конструкции
датчика, например, датчик с несколькими электродами [316]. Емкостные
датчики такого типа в настоящее время выпускаются фирмой «Fielden
Electronics Ltd, Manchester 22» под названием «Flow tester Type E424».
Конструкция датчика делает его нечувствительным к медленным нз-
Рис. 113. Участок трубопровода воздушного конвейера
с емкостным датчиком:
Т — трубопровод пневматического конвейера; Э — электрод;
ЕС—емкостной сигнпл; Я — преобразователь емкостного
сигнала в напряжение; £/вых — выходной сигнал преобразователя.
164
1 1
щ\
т
Рис. 114. Осциллограммы сигналов емкостных датчиков при
различных значениях весового расхода порошка р в конвейере:
а — р = 363 кг/ч; б — р = 91,62 кг/ч; в — р — О (по трубопроводу идет
только воздух).
Р(т)
0,00849
0,0(/8
0,004
•О
-0,004
-0,008
1
1
7 1
#|
^ Ф Л
гМ д
TV '1
И М
i\/ I ».
р "&т,мсек
Рис. 115. Взаимная корреляционная функция сигналов двух
емкостных датчиков.
Лоток
порошка
Т
*(t] t
//
m(t)\
е-*~
кд
X
Кб
X
с
' .1. ''
J
\
9
Ю(м)ип
Рис. 116. Блок-схема
измерителя расхода порошка в
пневматическом конвейере с
постоянной скоростью воздуха:
Т — трубопровод; Э — электрод
емкостного датчика; П —
преобразователь емкостного сигнала в
напряжение: КД — компенсатор изменений
диэлектрической постоянной
порошка е (коэффициент усиления обратно
пропорционален е); Кв — квадратор;
С — сглаживающая цепь; ИП —
измеритель весового расхода.
менениям емкости, вызванным,
например, прилипанием порошка к
стенкам трубопровода, что
избавляет от необходимости производить
текущий уход или подстройку
градуировки. В описанных
экспериментах расстояние между
датчиками составляло около 60 см. На
рис. 114 приведены осциллограммы
сигналов, полученных с датчиков
при различных значениях весового
расхода порошка в конвейере. На
рис.115 приведена взаимная
корреляционная функция сигналов
двух емкостных датчиков,
вычисленная с помощью ЭВМ. Довольно
большое число боковых максимумов
вызвано грубым квантованием по
времени исходных данных
(реализация длительностью в 0,15 сек
проквантована в 300 точках),
однако основной максимум,
определяющий транспортное
запаздывание сигнала второго датчика, виден
вполне четко.
Эксперимент был проведен на
замкнутой конвейерной системе,
позволяющей проконтролировать
результат измерения путем
взвешивания израсходованного
вещества [311]. Измерялся расход
порошка с объемной плотностью около
0,7 кг/дм8 (размеры частиц — около
50 мкму диэлектрическая
постоянная— 4,6 при измерении на частоте 1600 г^, влажность — 12,5%).
Точность измерения расхода — около 3% .
Весовой расход твердого вещества М, г/сек равен произведению
скорости твердых частиц v, см/сек на величину удельной загрузки
конвейера твердой средой на единицу длины w, г/см:
М— vw, г/сек. (7.11)
Ввиду того, что скорость воздуха в воздухопроводе принимается
практически постоянной и определяется мощностью привода вентилятора,
а отношение скорости частиц порошка к скорости воздуха также почти
постоянно в широком диапазоне (^0,95), весовой расход может быть
определен по значению удельной загрузки. В [312] выведена
зависимость, связывающая весовой расход вещества с выходным сигналом
емкостного датчика
М-
/m*(t)\
(7.12)
где k -— калибровочная постоянная; m(f) — выходной сигнал
емкостного датчика; е — диэлектрическая постоянная вещества в конвейере;
166
< >—символ вычисления среднеквадратичного значения. Это
выражение реализуется в расходомере, осуществляющем измерение весового
расхода ^порошкообразных материалов в воздушных конвейерах с
постоянной скоростью воздуха. Блок-схема расходомера представлена
на рис. 116. Расходомер основан на принципе, близком
автокорреляционным и спектральным схемам, описанным в гл. 2. Его особенностью
является наличие компенсатора изменений диэлектрической постоянной
порошка КД, работающего от дополнительного емкостного датчика.
При измерении скоростей и расходов различных суспензий
(например, в системах автоматического регулирования кристаллизаторов,
испарителей, измельчительных мельниц и т. д.) для предотвращения
выпадения твердых частиц из жидкости поток поддерживается в
турбулентном состоянии. Использование датчиков электропроводности
позволяет и в этом случае применить взаимно корреляционный метод
для измерения скоростей и расходов. На рис. 117 приведена схема
входных цепей КЭС для измерения скорости и расхода суспензий
при помощи датчиков электропроводности [312]. Электродами
датчиков служат иглы из нержавеющей стали, введенные в
пластмассовую трубу (диаметр — около 1,25 см). Сигналы электродов
проходят через фильтр высоких частот ФВЧ (ослабление равно 3 дб
на частоте 10 гц) для устранения влияния медленных изменений
проводимости, обусловленных поляризацией и изменениями состава
несущей жидкости. Фильтры низких частот ФНЧ (ослабление равно
3 дб на частоте 70 гц) служат для устранения ложных сигналов,
вызываемых переходными процессами в близлежащем
электрооборудовании. Для согласования с сопротивлением электродов, обеспечива-
'306
m(t)4
К коррелятору
*§£-
n(t)
ФВЧ
ФНЧ
ж\
Рис. 117. Схема входных цепей КЭС для измерения
скорости и расхода суспензий при помощи датчиков
электропроводности:
Т — трубопровод с потоком суспензии; Э — электроды; ФЯУ—.
фильтр низких частот; ФВЧ — фильтр высоких частот; Rs — под-
строечные резисторы.
167
ющего максимальную чувствительность, введеныподстроечные
резисторы Rs. Амплитуда напряжения на электродах достигает 10 мв. Зазор
между концами одной пары электродов — около 3 мм (предполагается
доработка конструкции электродов с тем, чтобы они не выступали
внутрь трубопровода). Расстояние между парами электродов — от
2,5 до 16 см. Диапазон измеряемых скоростей — от 1,8 м/сек до
3,0 м/сек. Суспензией служила взвесь песка в воде.
Вычисленные по осциллограммам датчиков электропроводности
взаимные корреляционные функции имели четко выраженный пик
и давали погрешность измерения скорости в пределах от 0,7 до 5,6%.
Градуировочная кривая расходомера обладала достаточной
линейностью. Применение расходомера ограничивается возможными
пульсациями скорости потока. Уменьшения чувствительности к
пульсациям скорости можно достигнуть, используя в качестве датчиков
термопары [301]. При малом содержании твердых частиц в суспензии, не
обеспечивающем достаточных флуктуации напряжения датчиков, было
предложено вдувание в поток пузырьков воздуха (при этом трубопровод
должен быть горизонтальным, чтобы обеспечить равенство скоростей
воды и воздуха).
Трудной проблемой при разработке расходомеров является
измерение пульсирующих скоростей и расходов. В этом случае обычные
методы измерения оказываются неприменимыми ввиду нелинейной
зависимости между перепадом давления и скоростью потока.
Механические расходомеры в условиях пульсаций расхода быстро выходят
из строя.
В последнее время появились сообщения об успешном применении
корреляционных методов для измерения скоростей и расходов
пульсирующих потоков с помощью разнесенных термопар. При этом получена
хорошая линейность показаний приборов как в ламинарной (/?£<
< 2000), так и в турбулентной (Re > 3000) областях. Некоторая
нелинейность наблюдается в переходной области (2000 < Re> 3000).
Испытания, проведенные при установившихся скоростях и при пульсациях
скорости с частотами от 1 до 5 гц дали достаточно сходные градуи-
ровочные кривые. Градуировка в наиболее неблагоприятном случае
(полный пуск и остановка потока с частотой 5 гц) отличалась от
градуировки, соответствующей установившимся скоростям потока не более,
чем на 8%. Поток модулировался тепловыми возмущениями в виде
псевдослучайных последовательностей с помощью
электроподогревателя [301].
Рассмотренные выше корреляционные расходомеры начали весьма
интенсивно разрабатываться применительно как к измерению расходов
жидкостей и газов [105, 181, 182, 191, 301, 304, 313, 314, 319, 329, 384,
397, 403, 445], так и гранулированных, порошкообразных и
волокнистых материалов (хлопок, шерсть, мука ит. д.)[311, 313, 316],
многокомпонентных смесей и суспензий (например, пульпы) [205] и т. д.
Разработка таких устройств вызвана нуждами химической,
нефтеперерабатывающей, атомной, пищевой, текстильной и других отраслей
промышленности.
168
Глава 8
КОРРЕЛЯЦИОННЫЕ ИЗМЕРИТЕЛИ РАССТОЯНИЙ
Автокорреляционный эхолот
Одним из примеров практического применения корреляционных
методов измерения расстояния является акустический
автокорреляционный эхолот для измерения малых глубин (порядка 1 м) [430].
Принцип действия автокорреляционных измерителей расстояний кратко
был рассмотрен в гл. 1.
Упрощенная блок-схема автокорреляционного эхолота
представлена на рис. 118. Шумовой сигнал x(t), генерируемый генератором ГШ,
подается на один из входов коррелятора /С, состоящего из блока
задержки БЗ, звена умножения и интегрирования МИ и усилителя У.
Одновременно сигнал x(t) подается на акустический излучатель АН,
После отражения от дна на глубине d сигнал воспринимается
приемником П и, усиленный в усилителе У, подается на другой вход МИ.
Отраженный сигнал задерживается на время транспортного запаздывания
*т = ^, (8-1)
где d — расстояние до дна, с — скорость распространения, звука в
воде (с— 1500 м/сек).
■—-&—i
ГШ
т
63
xfy-т)
т\
! е№
АИ\
>
1 ми
J —I V«0
m
rfi-Ь) J
\
¥
X
'///////////////////////////////Л
1. g.| A
Рис. 118. Упрощенная схема автокорреляционного
акустического эхо.юта:
ГШ —генератор шумового сигнала к (t); БЗ — блок задержки
сигнала x(t); МИ — блок умножч ия и интегрирования
(усреднения); У — усилитель отраженного сигнала. АИ —
электроакустический излуч 1тель; Я — приемник (гидрофон-;
Д — дно; ИП — индикатор выходного сиг нала коррелятора;
ЭР — экстремальный регулятор.
169
Выходной сигнал коррелятора представляет собой взаимную
корреляционную функцию входных сигналов
т
Rxy (*= S) = -J J х (t - т) у (* - тт) dt. (8.2)
о
Уровень выходного сигнала зависит от разности транспортного
запаздывания тт и введенной в первый канал задержки т, т. е.
и = тт —т.
При постоянном значении т величина и, а следовательно, и взаимная
корреляционная функция R (и) зависят от измеряемой глубины. С
другой стороны, изменяя т, можно добиться максимального значения
R (и) (при т = тт) и определить по значению тт глубину d.
Возможны два способа измерения глубины автокорреляционным
методом.
1. При фиксированном времени задержки т выходной сигнал
коррелятора (взаимная корреляционная функция) может служить
мерой глубины, так как тт= — . Значение т при этом определяет
с
начало отсчета по шкале глубин. Выбрав соответствующим образом
спектр шумового сигнала x(t), мы можем получить нужную нам форму
корреляционной функции с интервалом корреляции, соответствующим
диапазону изменения задержек в пределах интересующих нас глубин
°<tt<W> Tmax>—— • <8'3)
Например, для измерения малых глубин и получения крутых пиков
корреляционной функции нужны широкополосные сигналы с коротким
интервалом корреляции.
В [430] выведены расчетные соотношения для выбора необходимой
полосы частот, обеспечивающей нужную форму корреляционной
функции. Так, для шума с полосой частот А/ = f2 — ft и dmax = 1 м
Ч--Г—??*-. (8-4)
xmax z amax
В этом случае необходимая ширина полосы частот для измерения
расстояния в воде (с = 1500 м/сек) составляет 750 гц, а в воздухе (с =
= 330 м/сек) — 165 гц. При этом корреляционная функция имеет
колебательный характер (частота колебаний соответствует средней частоте
f = '*• ~j~ ■ 1 . Максимумы корреляционной функции в этом случае
могут быть использованы для приведения в действие сигнализации о
приближении объекта (рис. 119, а).
В ряде случаев необходимо получение корреляционной функции,
изменяющейся по экспоненте, с использованием диапазона значений
170
ft sft$K8tl
fz =5,5кгц
z =574мксек
ъм
/,0 %м 0,5
f2 *!<5кгц
т =294 мксек
20 40- с/,ш
5
Рис. 119. Зависимость значения корреляционной функции
от глубины при использовании различных шумовых
сигналов и различных фиксированных задержек сигнала:
а — ft = 1,6 мгц\ f2 = 5,5 кгщ х = 574 мксек; б — ft = 0; f2 =*
= 1,6 кгц; х — 294 мксек; в — ft = 0; f2 = 500 гц\ х = 630 мксек.
0,1 <£""*< 1 (рис. 119, в). При использовании низкочастотного шума
/х = 0, верхняя частота полосы /2 равна
/•
^xmax "max
(8.5)
Для измерения dmax = 1 ж в воде А/ = 275 гц\ в водухе А/ =
в 60 гц.
Эти данные используются для обеспечения нужной формы
корреляционной функции.
2. Время задержки сигнала в первом канале делается
регулируемым, и путем его изменения мы добиваемся максимального значения
корреляционной функции. При этом
t = it, a d= —
(8.6)
Блок регулируемой задержки БРЗ может быть проградуирован
непосредственно в значениях измеряемой глубины. Схема может быть
автоматизирована с помощью экстремального регулятора ЭР,
воздействующего на БРЗ и автоматически поддерживающего
максимальное значение корреляционной функции (рис. 118). Таким образом,
может быть создана замкнутая автокорреляционная экстремальная
система.
В рассматриваемой работе был использован первый способ, т. е.
при фиксированной задержке сигнала в первом канале коррелятора
уровень корреляционной функции служил мерой измеряемой глубины.
171
ФВЦ ФНЦ ФФ
РУ Б/73
ЕНгНгКТЧЗЖг
*г 4 4 \ —
x(t-r)
ЛУ
Е
УР
>1
да©-—|
V 7*^
'"///////////У//////,
>8
МИ ИП
у(Ш)
w
лв
лв
ЭО
Рис. 120. Блок-схема автокорреляционного эхолота?
ГШ — генератор шума; ФВЧ — фильтр верхних частот; ФНЧ — фильтр низких
частот; ФФ — формирующий фильтр; УН — нормализующий усилитель; РУ —
регулятор уровня сигнала: БПЗ — блок фиксированной задержки; JJB —
ламповые вольтметры; СТ — согласующий трансформатор; ЛУ — линейный
усилитель; УР — усилитель с регулируемым коэффициентом усиления; МИ —
множительные и интегрирующие звенья коррелятора; ИП —измеритель значения
корреляционной функции; ЭО — электронные осциллографы; АИ — излучатель;
П — приемник; Д — дно.
Блок-схема автокорреляционного эхолота приведена на рис. 120.
Ряд узлов схемы контролируется при помощи ламповых вольтметров
Л В и электронных осциллографов ЭО. Полоса используемых частот
формируется с помощью фильтров ФВЧ, ФНЧ и ФФ из шумового
сигнала, создаваемого в генераторе шума ГШ. Для компенсации
ослабления отраженного сигнала в схеме предусмотрен усилитель с
регулируемым коэффициентом усиления УР. На приемник П действует не только
сигнал, отраженный от дна — уд{(, d), но и прямой сигнал излучателя
ya{t> а)- Время транспортного запаздывания прямого сигнала у = —.
Следовательно, на второй вход коррелятора поступает сигнал
y(t) = yd(t, d) + ya(tt a). (8.7)
Взаимная корреляционная функция содержит полезную
составляющую и помеху
Чху (', - ') - *«„ ('т - ') + *xu« (T - ')
^xvd
хуа
(8.8)
Вторая составляющая ввиду постоянства а при изменении глубины
остается неизменной. Величину т следует выбирать из условия т> у
с тем, чтобы исключить влияние второй составляющей.
В [430] проведен детальный анализ погрешностей данного метода,
в первую очередь, погрешностей интегрирования, которые
непосредственно сказываются на показаниях прибора. Приведены расчетные
значения для различных видов зондирующих шумовых сигналов. Так,
при экспоненциальном характере корреляционной функции и dmax =
172
^= 1 м абсолютная погрешность Ad при d= О составляет 17 см, а при
d.= 1 ж она равна 14,5 см. При <2max= Зи/ Ad = 8,6 сл« при d~3 м
и Ad г« 74 сл< при d = 0 м. Точность может быть повышена при
использовании более широкой полосы частот.
На рис. 119 приведены градуировочные кривые
автокорреляционного эхолота для различных полос частот шумовых сигналов и
фиксированных задержек т.
Взаимно корреляционный локатор повреждений трубопровода
На рис. 121, а приведена блок-схема взаимно корреляционного
акустического локатора повреждений трубопровода. В случае
повреждения трубопровода Т утечка жидкости сопровождается акустическим
шумом. Два микрофона Мх и М2, установленные на трубопроводе,
воспринимают этот шум. Усиленные микрофонными усилителями Уг и У2>
эти сигналы подаются на коррелятор К (очерчен пунктирной линией),
состоящий из множительного устройства МУ, блока регулируемой
задержки БРЗ и интегратора И. Сигнал от микрофона, удаленного
от места повреждения на большее расстояние r/^ — Tj), поступит на
коррелятор с задержкой Ат по отношению к сигналу от микрофона,
расположенного ближе — x(t — т2):
Ат = тг — т2. (8.9)
Изменяя величину регулируемого запаздывания, добиваются
максимального значения взаимной корреляционной функции
Т
R^) = y\ * Р — ti) * ('— т2) d*. (8.10)
Рис. 121. Блок-схема корреляционного локатора места утечки воды
в трубопроводе:
~~ трубопровод:- Ми М2 — микрофоны; Уи У2 — усилители; К —
коррелятор; МУ — множительное устройство; БрЗ — б*ок регулируемой задержки;
И — интегратор; ИП — измерительный прибор; ЭР — экстремальный регулятор.
173
При этом т== Ат, и расстояние до места повреждений может быть
найдено из простых геометрических соотношений с учетом того, что
Д/= сАт, где А/=/х —/2; /lf /2 — расстояния от микрофонов до
места повреждения.
Работа схемы может быть автоматизирована с помощью
экстремального регулятора ЭР, поддерживающего максимальное значение
корреляционной функции (рис. 121, б).
Автокорреляционный высотомер
Автокорреляционный высотомер исторически явился первым
примером практического применения автокорреляционных методов
измерения расстояния (корреляционной радиолокации) [164, 377].
В рассматриваемом ниже высотомере применены частотная модуляция
шумовым сигналом, используемым далее в корреляционной обработке
информации, а также ряд приемов, направленных на формирование
нужной корреляционной функции.
Упрощенная блок-схема автокорреляционного высотомера
приведена на рис. 122. Сигнал, генерируемый генератором шума ГШ,
проходит через частотный фильтр Ф (соответствующим образом
формирующий спектр шумового сигнала для получения нужной формы
автокорреляционной функции) и поступает в передатчик Я, где модулирует
несущую частоту последнего (о0. Излученный антенной А
высокочастотный сигнал о)0, промодулированный шумом со (/), после отражения от
поверхности земли, воспринимается приемной антенной ПА и поступает
в смеситель См, на выходе которого выделяется разностный сигнал
(о (/) — u(t — т). Этот сигнал подвергается усилению и ограничению
в УО и поступает в линейный дискриминатор ЛД, выходное напряжение
которого пропорционально средней частоте пересечений разностным
сигналом нулевого уровня. Усредненный таким образом разностный
сигнал подается на индикатор ИП, проградуированный в значениях
измеряемой высоты.
При увеличении высоты самолета увеличивается транспортное
запаздывание отраженного от земной поверхности сигнала и,
соответственно, уменьшается значение корреляционной функции излученного
и отраженного сигналов. Строго говоря, ввиду некоторого изменения
статистических свойств отраженного сигнала по сравнению с
излучаемым, в данном случае имеет место вычисление взаимной корреляционной
ИП
гш
Ф
УО
п
/
г
ьм .
U)c+Uft) n't
U Я
И Us
1 ПА
Рис. 122. Упрощенная блок-схема
автокорреляционного высотомера:
ГШ — генератор шумового сигнала; Ф — фильтр; П —
передатчик; А — передающая антенна; ПА — принимающая
антенна; См — смеситель; У О — усилитель — ограничитель;
ЛД — линейный дискриминатор; ИП — измеритель выходного
сигнала.
174
функции этих двух сигналов. Однако
выше мы говорили об
автокорреляционной функции, т. к. факт некоторого
изменения отраженного сигнала не
имеет существенного значения для
рассматриваемого метода.
Для обеспечения нужной формы
корреляционной функции необходимо
сформировать соответствующим
образом спектр шумового сигнала
генератора. В [377] проведено
исследование шумов с различным спектром и
показано, что при пропускании белого
на выходе последнего образуется сигнал
цией вида
R1
Вход л
RZ\
Ч*
Выход
—а
Рис. 123. Простой 7?С-фильтр
для формирования спектра
шумов с экспоненциально
затухающей
автокорреляционной функцией.
шума через фильтр (рис. 123)
с автокорреляционной функ-
Ax(z) = e
(8.11)
где Я:
R1R2C
— постоянная времени фильтра. Такая форма автокор-
R1+R2
реляционной функции наиболее удобна для использования в
высотомере. Постоянная времени определяется заданным диапазоном
измерения высоты (запаздыванием отраженного сигнала т). Для того чтобы
уровень выходного сигнала на высоте 30 м составлял Ах (т) = — ,
должно выполняться равенство X = т, т. е.
10~7
X = — «2
с
(8.12)
Особенностью рассматриваемого высотомера является то, что в нем
используется не обычная автокорреляционная функция шумового
сигнала
Ах (т) = lim -
Т-+оо 1
х (t) x (t — т) dU
(8.13)
а так называемая антикорреляционная функция [164, 377], равная
среднему квадрату разности зондирующего и отраженного сигналов,
Т
Я(т) = Шп 1 \ [x(t)-x(t-x)]*dt = 2lAx(0)-Ax(z)] =
= 2ЛХ(0)[1 —Px(x)]f
(8.14)
где Ах(0) — дисперсия сигнала x(t)\ р^т) — нормированная
автокорреляционная функция сигнала x(t).
При работе с обычной автокорреляционной функцией показания
выходного индикатора возрастали .бы с изменением высоты, тогда
как при использовании антикорреляционной функции они
пропорциональны измеряемой высоте, т. е. при малой высоте они равны нулю
и возрастают с ее увеличением. Другим положительным свойством
176
0%5 /,0 1,5 2,0 X/RC
Рис. 124. Теоретическая характеристика показаний
выходного индикатора высотомера.
антикорреляционкой функции является то, что чувствительность
измерения максимальна на малых высотах, что особенно важно при
слепой посадке самолета.
Антикорреляционная функция шумового сигнала,
сформированного рассмотренным выше #С-фильтром, описывается выражением
Н(г)=1-е-*'\ (8-15)
Если в проектируемом высотомере при высоте, равной 30 м, уровень
выходного сигнала должен быть равен
#(т)==1_± (т. е. т = Х), . (8.16)
то величина К в этом случае должна быть равна 2 • 10 7 сек.
При малых значениях х/К (малые высоты) Н(х) почти линейно
зависит от высоты.
Чувствительность системы при такой форме антикорреляционной
функции очень высока для т = 0, т. к.
е (8.17)
сЧт/Х)^,
Я (т) 1 - е~х/х
Это значит, что высотомер, использующий антикорреляционную
функцию такой формы, обладает наибольшей чувствительностью на малых
высотах.
На рис. 124 приведена теоретическая характеристика показаний
выходного индикатора высотомера при использовании
антикорреляционной функции рассмотренной выше формы.
Другой существенной особенностью высотомера, как видно из
его блок-схемы, является использование частотной модуляции сигнала
несущей частоты. Применение амплитудной модуляции для этой цели
привело бы к зависимости амплитуды отраженного сигнала от высоты
и, соответственно, к изменениям показаний прибора. Осуществить же
автоматическое нормирование сигнала технически весьма сложно.
176
Для модуляции передатчика использовался шум с граничной частотой
порядка 0,8 Мгц.
Погрешность измереьия высоты данным высотомером по
теоретической оценке автора составляет около 3% [164, 377].
Взаимно корреляционные радиолокаторы
В [275] описан радиолокатор с псевдослучайной модуляцией,
реализующий взаимно корреляционный метод измерения временной
задержки, при котором положение максимума корреляционной функции
на оси абсцисс характеризует измеряемую величину — время
запаздывания отраженного от цели сигнала. Строго говоря, термин взаимно
корреляционный радиолокатор в этом случае несколько условен,
так как, хотя отраженный сигнал и отличается от зондирующего,
но у них общий источник.
На рис. 125 приведена упрощенная блок-схема взаимно корреля
ционного радиолокатора с псевдослучайной модуляцией (для простоты
не рассматривается схема автоматического слежения за максимумом
взаимной корреляционной функции).
Модулирующим псевдослучайным сигналом служит семиэлемент-
ная кодовая последовательность, для генерирования которой
используется трехкаскадный регистр сдвига, охваченный логической обратной
связью,.и модулятор двоичного кода МДК- Напряжение на выходе
модулятора положительно, если оба входных напряжения имеют
одинаковую полярность. При различной полярности входных напряжений
оно отрицательно. Промодулированный сигнал генератора высокой
частоты ГВЧ через антенный переключатель АП поступает в антенну
А и излучается на цель. Отраженный от цели сигнал, задержанный на
удвоенное время распространения до цели и обратно, воспринимается
антенной и через антенный переключатель поступает на фазовый детек-
\гвч
Y1
АП
ФД
К/13
укс\
PC
\МДК
Рис. 125. Блок-схема взаимно корреляционного радиолокатора
с псевдослучайной модуляцией:
МДК — модулятор двоичного кода; PC — регистр сдзиг;:; ГТЧ —
генератор тактовой частоты; ГТИ — генератор тактовых импульсов; ГВЧ —
генератор высокой частоты; АП — антенный переключатель; А — антенна;
ФД — фазовый детектор; КЛЗ — корректирующая линия задержки;
У КС — усилитель кодированных сигналов; ДК — дешифратор кода;
ИД — индикатор дальности
12 у -298
177
Рис. 126. Эпюры сигналов для корреляционного
радиолокатора, изображенного на рис. 125:
а — неза.держанный псевдослучайный кодовый сигнал; б —
модулирующий сигнал; в — модуляция излучаемого сигнала; г — модуляция фазы
принимаемого (отраженного) сигнала; д—разность фаз; е. — сигнал
на выходе фазового детектора; ж—сигнал на выходе корректирующее
линии задержки: ч — сигнал на выходе дешифратора кода
тор ФД. Выходной сигнал фазового детектора через корректирующую
линию задержки КЛЗ и усилитель кодированных сигналов У КС
подается на один из входов каждого дешифратора кода ДК, на другой
вход которого поступает задержанный опорный сигнал. Для получения
задержанного сигнала в данной схеме используется семиэлементный
регистр сдвига PC.
На рис. 126 показана эпюра напряжений в схеме корреляционного
радиолокатора. Использование в качестве модулирующего сигнала
не коротких однополярных импульсов, а двуполярного симметричного
напряжения прямоугольной формы (эпюра а) позволяет повысить
178
энергию излучаемого сигнала. Так как сигнал на выходе модулятора
несколько искажен, модулирующий сигнал берется с первого каскада
регистра сдвига (эпюра б). Этот сигнал задержан на 1/2 периода тактовой
частоты по отношению к выходному сигналу модулятора, поэтому для
компенсации этой задержки в канал выходного сигнала включена
корректирующая линия задержки, компенсирующая это запаздывание.
Эпюры виг показывают фазы излучаемого и отраженного сигналов
(последний задержан на время прохождения трех тактовых импульсов).
На эпюре д показана разность фаз излучаемого и принимаемого
сигналов, а на е — ток на выходе фазового детектора. Если время задержки
корректирующей линии на выходе фазового детектора равно 1/2
периода следования тактовых импульсов, то сигнал на выходе зтой линии
(эпюра ж) будет иметь ту же форму, что и сигнал на выходе шестого
каскада регистра сдвига, отличаясь от него лишь скругленными
фронтами; На эпюре з показано напряжение дешифратора кода на выходе
шестого каскада регистра сдвига.
Если каждый каскад регистра сдвига представляет собой два
триггера на транзисторах, то в качестве дешифратора кода удобно
использовать кольцевой модулятор, состоящий из четырех диодов и
трансформатора с отводом о', средней точки (рис. 127). Кольцевой модулятор
соединяется с коллекторами триггеров. Такой модулятор кода имеет
большой динамический диапазон [275].
Дальность действия такого радиолокатора практически неогра-
ничена и определяется периодом кода. Разрешающая способность
может изменяться в широких пределах путем изменения тактовой
частоты.
В [275] приведены результаты испытания опытного макета
описываемого радиолокатора. В нем использован девяти каскадный регистр
сдвига с тактовой частотой 5 Мгц, что соответствует разрешающей
способности по дальности, равной 45 м. Передатчик собран на клистроне
типа V263, работающем на частоте около 9500 Мгц. Полоса
пропускания усилителя кода — от 5 до 6 Мгц. Коэффициент усиления — 50 дб.
В ходе лабораторных испытаний радиолокатора антенна заменялась
закороченным отрезком волновода длиной 75 м с ферритовым
фазовращателем на конце. Время двойного пробега сигнала в волноводе
составляло 0,8 мкеек. Движение цели имитировалось подачей на
фазовращатель сигнала низкой частоты (около 10 гц). Наличие модуляции
ферритрвого фазовращателя обнаруживалось приемником при
мощности клистрона — 10 мет и ослаблении сигнала при двойном пробеге
до 160 дб, что соответствует общей
чувствительности корреляционного
радиолокатора, равной 140 дбм.
Данный корреляционный радиолокатор
относится к типу М (с обработкой
сигнала на частоте модуляции). В[275]
приведено также описание более
сложной системы типа Н (с
корреляционной обработкой сигнала на несущей
частоте).
Корреляционные радиолокаторы
могут решать комбинированные задачи,
например, одновременно с сопровожде- Рис. 127. Схема дешифра-
нием цели по дальности определять ее тора кода с кольцевым мо-
угловые координаты (гл. 1). Одна из дулятором.
12*
179
таких систем описана в [212]. При измерении параметра движения
объекта с ретранслятором, находящегося на расстоянии 800 км и
двигающегося со скоростью 10 км/сек, теоретическая точность абсолютного
измерения расстояния равна 17 м, относительного —до 30 см. При этом
достаточна мощность излучения, равная 100 мет. Система выполнена
комбинированной: в ней использована грубая корреляционная система
с амплитудной модуляцией несущей низкочастотным шумом и точная
система, осуществляющая фазирование на несущей частоте. Схема
автоматического слежения за максимумом корреляционной функции,
реализованная в этой системе, была названа ее автором
дискриминатором с задержанной синхронизацией.
За последние годы взаимно корреляционный метод измерения
расстояния получил успешное развитие в целом ряде систем,
предназначенных для слежения за космическими кораблями [270—272].
Измерение больших расстояний при весьма малом отношении сигнал/шум
потребовало применения новых более сложных методов обработки
коррелируемых шумовых сигналов (шаговая корреляция, метод
последовательной оценки [272], инверсная модуляция псевдошумовой
последовательности [271] и т. д.). Усложненные схемные решения позволили
получить очень высокие показатели, характеризующие работу таких
КЭС. Так, описанная в [271] система обеспечивает измерение
расстояний до 3300 км с точностью ±1 м при средних уровнях отношения
сигнал/шум. При этом использование метода последовательной оценки
элементов псевдошумового сигнала позволило значительно повысить
быстродействие системы, сократив время синхронизации
корректирующего сигнала до 74 мсек при отношении сигнал/шум, равном 10 дб.
Эта система сохраняет работоспособность при снижении этого
отношения до 15 дб.
В [270] описана корреляционная дальномерная система для
измерения расстояний в дальнем космосе, предназначенная для
использования в космических кораблях типа Voyager, которые должны быть
запущены в районы Марса и Венеры. Максимальная дальность действия
системы— 2 . 108 км; мощность наземного передатчика на частоте
2113 Мгц, работающего в режиме непрерывного излучения,— 100 кет;
мощность бортового передатчика на частоте 2295 Мгц — 25 ет\
максимальная допустимая скорость изменения дальности—10 км/сек;
диаметр антенны наземной станции — 64 м; диаметр бортовой
передающей антенны — 3 м; точность измерения дальности ±1,2 м.
Генератор бинарной последовательности состоит из 20 каскадов,
обеспечивающих генерирование' последовательности длиной 1048575 дв. ед.
При тактовой частоте в 1328 кгц период повторения последовательности
равен 0,79 сек, что соответствует интервалу неоднозначности при
измерении дальности, равному 118 400 км.
Одновременно с измерением дальности система осуществляет
слежение за угловыми координатами космического корабля. Канал
сопровождения по дальности используется также для передачи
цифровой информации (командной и телеметрической) [270].
Полуактивный корреляционный радиолокатор
Выше был кратко рассмотрен принцип действия активного
радиолокатора, условно названного взаимно корреляционным, так как для
излучения и приема высокочастотного сигнала, промодулированного
псевдослучайной кодовой последовательностью, в нем была использо-
180
вана одна и та же антенна. Такие
системы с непрерывным излучением
обладают хорошей разрешающей
способностью и высокой чувствительностью.
Однако максимальная мощность
передатчика радиолокатора с непрерывным
излучением ограничена двумя
факторами: уровнем шумов передатчика и
возможностью управления
просачивающимся от передатчика сигналом.
Соответствующий выбор
высокочастотных составляющих при удачном
расположении радиолокатора позволяет
использовать мощности порядка тысяч
ватт [275].
Мощность излучения передатчика
может быть существенно повышена при
разнесении приемника и передатчика
на значительное расстояние и
использовании принципа полуактивной
радиолокации [448]. Упрощенная блок-
схема полуактивного корреляционного
радиолокатора приведена на рис.128.
Сигнал передатчика Я, промодулиро-
ванный шумовым сигналом генератора
шума ГШ, излучается антенной Ах
в направлении цели Ц.
Отраженный от цели сигнал воспринимается
антенной А2 и поступает в приемник ПРК, а с выхода последнего после
усиления и детектирования1— на один из входов множительного
устройства МУ коррелятора. На другой вход этого устройства через
линию связи ЛС и блок регулируемой задержки БРЗ поступает опорный
шумовой сигнал. По показаниям индикатора ИП величину введенной
регулируемой задержки делают равной запаздыванию отраженного
от цели сигнала. Расстояние до цели определяется по известному
расстоянию d между At и А2, задержке т и углу направления приемной
антенны на цель 0.
Для*облучения максимальной поверхности необходимо возможно
более высоко разместить антенны передатчика, например, на воздушном
шаре или на спутнике, находящемся в некотором неизменном
положении относительно цели (этому соответствует диаметр орбиты спутника
примерно равный 84 • 103 км) [448].
Упрощенная блок-схема корреляционного радиолокатора,
принимающего сигнал передатчика, размещенного на спутнике, приведена на
рис. 129. Локатор имеет две антенны Аг и А2, одна из которых (А2)
направлена на цель Ц, а другая (Ах) — на спутник. Сигнал, принятый
Ait является опорным. Для ускорения работы системы по отысканию
цели вместо блока регулируемой задержки в данной схеме используется
секционированная линия задержки ЛЗ. Отводы от каждой секции ЛЗ
подаются на входы множительных устройств МУг, МУ2, МУ3, на
вторые входы которых поступает сигнал с приемника I7PKJ отраженный
от цели. Каждое множительное устройство имеет свой выходной
индикатор И1% И21 #з> соответствующий дискретному значению дальности.
Ввиду того, что искомое расстояние до цели намного меньше, чем расстоя-
^'—t-jH
(7
Ж
—^»
БРЗ
'
\ГШ
ПРК\
pz
МУ
Ьц
и
ИП
&
Рис. 128. Блок-схема
полуактивного корреляционного
радиолокатора:
At — антенна передатчика, Л2 —
антенна приемника; Ц — цель;
П — передатчик; ГШ —
генератор модулирующего шума; ЛС —
линия связи; БРЗ — блок
регулируемой задержки; ПРК
—приемник; МУ — множительное
устройство; И — интегратор; ИП—
измерительный прибор
181
Рис. 129. Блок-схема полу активного корреляционного
радиолокатора, использующего облучение цели со
спутника:
Л„ А2 — антенны, ПРК — приемники, МУХ, МУ2, МУ8~
множительные устройства; Ии И2, Иъ — индикаторы; ЛЗ —
секционированная линия задержки; Ц — цель
ние до передатчика, установленного на спутнике, оно может быть
определено из выражения
1С
1 — cos (
(8.18)
где т — задержка сигнала в соответствующем отводе ЛЗ; с — скорость
света; О — угол между направлениями на излучатель (спутник) и на
цель.
Приближенные подсчеты, приведенные в 1448], показывают, что
при мощности передатчика, равной 100 em, и диаметре облучаемой
поверхности 11270 км на каждый квадратный метр придется мощность,
равная 10~~12 вт.
Если цель рассеивает энергию равномерно во всех направлениях,
то антенна площадью 1 м2, расположенная на расстоянии около 300 м
от цели, примет сигнал мощностью 10~9em. При уровне шумов
приемника 4 дб и полосе пропускания индикатора 1 гц отношение сигнал/шум
будет равно примерно 10/1. В связи с тем, что мощность облучения
постоянна, и на основании квадратичного закона зависимости уровня
сигнала от расстояния можно ожидать, что такое же отношение сигнал/
шум будет получено от цели площадью 100 м2 на расстоянии около
3000 м.
Преимуществами такой полуактивной системы является
отсутствие собственного излучения, которое могло бы демаскировать
локатор, а также возможность работы большого числа таких систем от
одного спутника без взаимных помех. В [448] сообщалось о разработке
такой системы в США для военных целей.
182
Глава 9
КОРРЕЛЯЦИОННЫЕ КООРДИНАТОРЫ
КЭС для управления движением объекта по заданному курсу
Принцип управления движением объекта по заданному курсу
с помощью карт местности был кратко рассмотрен в гл. 5. В последнее
время появились публикации, в которых достаточно подробно описан
ряд таких систем, разработанных под руководством проф. В. П. Тара-
сенко в Сибирском физико-техническом институте при Томском
университете [8, 183, 249—258]. В числе разработанных систем было два
лабораторных макета КЭС для управления движением самолета по
заданному курсу с помощью карт местности [183, 252].
При управлении движением объекта в результате сравнения карты
заданного курса КЗК и карты местности под самолетом КМ С
определялось три параметра: продольное отклонение объекта от заданной точки
курса (£); боковое отклонение объекта от курса (г]); курсовой угол (ф).
Описанные макеты реализовали два алгоритма управления
движением объекта: алгоритм, использующий информацию о знаке и величине
продольного (£) и бокового (г\) отклонений объекта; алгоритм,
использующий информацию лишь о знаке величин £ и г].
При рассмотрении работы указанных систем предполагалось, что
яркость точек на КМС описывается стационарной случайной функцией
Ft (х, г), а прозрачность пленки КЗ К — подобной функцией F2 (*',
г'), где координаты х, х', г и г' связаны соотношениями
х' = (х — £) cos ф + (г — у\) sin ф, (9.1)
г' = (г — т]) cos ф — (х — Е) sin ф. (9.2)
Взаимная корреляционная функция Fx (xt г) и F2 (x't z')
описывается выражением
Ф (Д?, ДЧ, Аф) = J- J Fx (*, г) F2 (*', г') dx dz, (9.3)
s
где 5 — площадь сравниваемых изображений; Д£ = £ —Е, Дт) =
= tj -^у|,дф = ф —ф; Е> Y), ф—константы для каждой пары
сравниваемых изображений; 5 , к\ , ф—переменные, по которым
максимизируется Ф (ДЕ, Дт], дф).
Рассматриваемая система управления представляет собой КЭС,
у которой статической характеристикой объекта является Ф (АЕ, Аг\,
Дф). Значение последьей величины поддерживается максимальным
путем воздействия на переменные 5 , гц и ф .
Блок-схема КЭС для управления движением объекта по заданному
курсу была приведена на рис. 49. Изображенная на этой блок-схеме
связь между автопилотом Л и бортовым датчиком ДМС включает в
себя несколько каналов (на рис. не приведены) — по углам тангажа
# , рыскания ф, крена у и по высоте полета /г, служащих для
стабилизации этих параметров и уменьшения погрешности системы.
Для реализации первого алгоритма управления объектом
используется вычислительная блок-схема, приведенная на рис. 130. Выходные
183
C,(x,z)
F2(xU9
вычисление
—»»
Определение
координат
фтах&гЦ!'Ф
\—^-
iqni
цп g
ш-
| ^
4-
1^.
^
Рис. 130. Блок-схема первого алгоритма получения
информации о знаке продольного и бокового отклонений объекта от
заданного курса (по значениям этих величин).
сигналы этой схемы содержат информацию о знаках продольного и
бокового отклонений объекта от заданной точки курса (sgn £ и sgn r\) В
соответствии с этой схемой работает первый из двух описанных в [183]
макетов.
В основу функционирования второго алгоритма управления
(непосредственное получение знака величин £ и ц) положены следующие
соображения.
Выражение, описывающее взаимную корреляционную функцию
Ф (Ac, At), Дф), может быть представлено в виде суммы четырех
интегралов 11 [252]:
Ф (AS, Ayj, Дф) -.
j[$Fil*.
г) F2(x', г') ds 4-
+
I FA».
z)M*'» z')ds +
JM*. *)F*(x'>
z')ds +
+ [ /i (*, z) U (*'. О dsj = J] /,, (9.4)
S i=\
где /i (x, z), /2 (x'f г') — функции, описывающие несовпадающие части
изображений КЗК и КМС, а
х' = (л: + ^ — g) cos ф + (z + tj7 — ■»]) sin ф,
г' = (г + yjt — ij) cos ф — (* -f- £т — 6) sin ф.
(9.5)
Интеграл /х при любом виде функции F (х, г) обладает следующими
свойствами [183]:
1) имеет в плоскости 5 , ri один наибольший максимум в точке
$т= е, пт = л;
2) если в плоскости £ , п ввести систему полярных координат
р, 0 с началом в точке наибольшего максимума функции /lf то будет
выполняться условие симметричности
Мр. в) = Л (р. в, ±«).
Алгоритм определения знаков £ и т] без определения значения этих
неличин включает в себя следующие операции:
184
а) вычисление функции
ф(^ *!*)= JM*, z)F2(x +
+ & г + ч) dx dz,
где?/=6т0 —5; Ъ
%
V^oX~
Рис. 131. Области интег
рирования для а,при вы-
наибольшие возможные смещения
изображений на картах;
б) вычисление четырех чисел
$/ = |ф(^-£, 47-4)<Vv (9"7)
i= l, 2, 3, 4.
Области интегрирования для а,-при веде- числении интегралов S/.
ны на рис. 131.
При отсутствии отличающихся участков изображений (т. е.
f\ (х> z) = /2 (*', z') = 0) приведенные выше уравнения для взаимной
корреляционной функции приобретают вид
Ф (5/ — 6, f[t — ,»l) = /i.
Ввиду несимметричности функции // [183] наибольшим является
интеграл от Ф (£^, %) по тому из квадрантов плоскости £ Otj , в котором
находится максимум подынтегрального выражения. Далее знаки £ и yj
определяются путем сравнения числа S/(t = 1, 2, 3, 4);
в) вычисление разностей
•Ai = (Si + S2)-(S3 + S4),
A2 = (S2 + S8)-(S1 + S4).
(9.8)
Знак £ совпадает со знаком Дь а знак г) — со знаком А2.
Блок-схема алгоритма, выполняющего эти вычисления, изображена
на рис. 132. Указанный алгоритм реализован во втором из
разработанных в Томском университете макете.
В описанных макетах для вычисления взаимной корреляционной
функции сравниваемых изображений использован модифицированный
коррелятЪр Ковашного — Армана [183, 255, 320, 406]. Схематически
он представлен на рис. 133. Если между L3 и L4 поместить полупро-
№)
%(№
*т |
вычисление \
St Г
Вычисление^
Вычисление\\
Вычисление]
Su Г
гт**
г£
L*
Вычисление
Вычисление
А2
чдпА,
адпЛ2
Рис. 132. Блок-схема второго алгоритма определения знаков ол
клонений сравнительных карт (без вычисления значений откло
нений).
185
Рис. 133. Модифицированный оптический коррелятор Ковашно-
го — Армана:
а — принципиальная схема; Lt ~ плоскость КМС; L2 — плоскость КЗК.',
L9 — линза; LA — плоскость корреляционного изображения (фокальная
плоскость линзы); б —• расположение элементов коррелятора в КЭС для
управления движением объекта по заданному курсу; L6 — полупрозрачное
зеркало; L, — линза; ФЭ —- фотоэлемент
зрачное зеркало Lb и сфокусировать с помощью линзы LQ отраженный
от него световой поток на катоде фотоэлемента ФЭ, то ток последнего
будет пропорционален взаимной корреляционной функции
совмещаемых изображений.
При использовании оптического коррелятора задача поиска
максимума взаимной корреляционной функции сводится к определению
координат наиболее освещенной точки корреляционного изображения.
Эта задача в описанных макетах решается при помощи экстремального
регулятора, осуществляющего слепой поиск по всей площади
изображения. Необходимость просмотра всего изображения вызвана тем, что
корреляционная функция может иметь несколько максимумов,
соответствующих увеличению освещенности, поэтому ищут координаты
главного максимума.
Для осуществления поиска площадь корреляционного
изображения подвергается сканированию (пространственно-временной
развертке изображения по элементам). Развернутый во времени построчный
сигнал яркости преобразуется в электрический сигнал.
Для развертки изображения (сканирования) могут применяться
как механические, так и электрические способы [65, 111, ИЗ, 419].
При механических способах сканирования вся поверхность
изображения последовательно поэлементно проектируется на фотоэлемент или
фотоумножитель. Возможно также создание многоэлементных матриц
из фотодиодов или фотосопротивлений, осуществляющих дискретную
развертку и преобразование светового сигнала в электрический с
помощью соответствующих коммутаторов. В этом случае напряжения
с выхода коммутатора подаются на индикатор наибол!. 'него напряжения,
отыскивающий максимальный сигнал и определяющий его координаты
[74].
186
На рис. 134, заимствованном из [183], изображе а блок-схема
макета КЭС сравнения карт, определяющей величину и знак hr|
Устройство состоит из оптического коррелятора, преобразователя
оптического изображения корреляционной функции в электрический сигнал
и системы поиска максимума взаимной корреляционной функции
совмещаемых изображений. Совмещаемые изображения представляли
собой диапозитивы. Преобразование оптического изображения в
электрический сигнал осуществлялось при помощи диска Нипкова и
фотоумножителя ФЭУ-19. В блоках выработки импульсов синхронизации
строчной и кадровой разверток использованы фотоэлементы ЦГ-1.
Разрешающая способность — 20 линий, скорость вращения диска
Нипкова — 10 об/мий.
Система поиска координат максимума корреляционной функции
моделировалась на аналоговой вычислительной машине МПТ-9 в виде
четырех блоков (схема запоминания максимума ЗМ1 и ЗМ2, схема
вычитания СВ и триггер Шмитта ТШ), которым управлял блок
управления БУ. Максимум отыскивался методом слепого поиска путем
двойного просмотра исследуемой области. Работа схемы подробно
описана в [183].
Второй из описанных в [183] макетов определял знак величин
5 и г], используя алгоритм вычисления и сравнения четырех интегралов
S/ (в соответствии с рис 134, 135). Функциональная схема вычисли-
Рис. 134. Блок-схема разработанного в СФТИ макета КЭС
для сравнения карт, определяющей величину и знак £ и tj:
БСИ — блок строчных импульсов; БЦИ — блок кадровых импульсов;
ФЭг, ФЭ2 — фотоэлементы типа ЦГ-1; ИС — источник света; М —
мотор; БУ — блок управления; ПИРС — плоский источник рассеянного
света; КМС — карта местности под самолетом; КЗК — карта заданного
курса; Л —линза; СП — светопровод; 3MJ, ЗМ2 — схемы
запоминания максимума; С В — схема вычитания; ТШ — триггер Шмитта; Т —
триггер с двумя входами; ИКу\, HKZ — интеграторы координат tj и $;
ФЭУ — фотоэлектронный умножитель типа <f>3V-19; Ki, К* — ключи
187
тельной части макета приведена на
рис. 135, а. На рис. 135, б
схематически показано устройство для
вычисления четырех интегралов по
соответствующим квадрантам плоскости
изображения функции корреляции с помощью
светопроводов и четырех
фотоумножителей. В этом устройстве использованы
фотоумножители типа ФЭУ-19
(интегральная чувствительность 50 а/лм,
Uа = 1100 в, диапазон выходного
напряжения 0—9 в).
Блок сравнения выполнен по
балансной мостовой схеме в виде двух
идентичных каналов (определение
знаков £ит]). Чувствительность
балансной схемы Д{/=0,1 в (правильно
определяется знак смещения
изображений КЗ К и /CMC, если Sk> St -f
+ AW Ф к))- Такая чувствительность
по электрическому сигналу
обеспечивала чувствительность макета к
линейному смещению изображения, равную
примерно 1 мм [183].
С помощью описанных макетов
было проделано большое число
экспериментов по исследованию работоспособности КЭС для
сравнения карт местности и их характеристик как в нормальных условиях,
так и при наличии различного рода возмущений. Были получены оценки
точности стабилизации самолета в пространстве при использовании
таких систем с учетом колебаний самолета по высоте полета и углу
рыскания, а также исследована зависимость допустимого смещения
изображения, допустимого угла рыскания и изменения высоты полета
самолета от структуры изображений на сравниваемых картах.
Исследовалась также помехоустойчивость системы.
Проводились эксперименты по сравнению радиолокационных
снимков местности, сделанных с экрана бортовой радиолокационной
станции при полете на трассе длиной 450 км ьа высоте 500 м со скоростью
300 км/ч. Интервалы между моментами съемки были равны 5 мин.
Подробные результаты экспериментального исследования описанных
выше КЭС приведены в [183].
К настоящему времени опубликовано значительное число работ,
посвященных применению метода совмещения изображений для
ориентации движущихся объектов [203, 320, 335, 336, 344, 358, 389, 411,
414, 426]. В последние годы появились публикации, описывающие
применение этого метода для ориентации космических аппаратов по
картам звездного неба (распознавание рисунка расположения звезд)
[115, 169, 236, 273, 369], При этом использовались различные методы
развертки изображения небесной сферы — применение вращающихся
оптических приборов и модуляторных дисков со щелями специальной
формы,электронная развертка с помощью телевизионных электроннооп-
тических преобразователей и т. д.
На рис. 136 приведена упрощенная схема одной из таких систем
астроориентации с электроннооптическим сканированием [236].
ув Xs£\ вс Н~7
^± sgn £
sgng
к
фотоумножителям
Рис. 135. Вычислительная
часть макета,
непосредственно определяющего знак ве
личин £ и y,:
а — функциональная схема
вычислительной части: ОК —
оптический коррелятор; У В —
устройство вычисления Si; БС — блок
сравнения Sf, б — схема
оптического устройства для вычисления
интегралов по четырем
квадрантам изображения функции
корреляции; Д — диафрагма в
плоскости изображения функции
корреляции
188
При использовании методов электронной развертки началом коор
динат является направление на одну из звезд (базовую). Захват
базовой звезды и слежение за ней осуществляется отдельной оптической
системой с узким полем зрения (около 1°). Используемая затем
спиральная развертка при помощи электроннооптического преобразователя
превращает распознаваемое изображение участка звездного неба во
временную последовательность импульсов. Эта последовательность
сравнивается с хранящимися в памяти вычислительного устройства
эталонными последовательностями, характеризующими рисунки
расположения звезд вокруг различных базовых звезд. В схеме применена
автоматическая регулировка чувствительности для ограничения числа
звезд в распознаваемом рисунке. При увеличении числа импульсов
в развернутом изображении выше заданного предела чувствительность
схемы уменьшается до возвращения к этому пределу.
В [236] приведены характеристики используемых в системе
вычислительного устройства и электроннооптического преобразователя с полем
зрения 30° и разрешающей способностью 0,5% поля зрения.
Вес всей системы составляет 11,3 /сг, объем — 0,028 ж3,
потребляемая мощность — 50 вт.
В [169, 203] описана другая система астроориентации,
разработанная фирмой «Контрол Дейта» (Control Data Corp) в США. Эта система
позволяет автоматически распознавать созвездия и отдельные звезды
при произвольной начальной ориентации трехкоординатного датчика
положения звезд. Система обеспечила точность слежения за звездами
с Земли, равную 30". Предполагается, что в условиях космического
пространства погрешность слежения не будет превышать 5 сек.
Ри 136. Система астроориентации с электронно-
оптическим сканированием:
ЗН — участок звездного неба; ПЗБ — поле зрения системы
слежения за базовой звездой; ПЗР — поле зрения системы
распознавания; О— оптическая система; ЗОЙ — электроннооп-
тический преобразователь; ЭС — электронная схема
электроннооптического преобразователя; ВУ — вычислительное
устройство; ВС — выходные сигналы для системы управления
ориентацией космического аппарата или для индикации при
ручном управлении.
189
Рис. 137. Схема сканирующей системы астроориентатора фирмы
«Контрол Дейта»:
ДУ — датчик угла; Д — двигатель; МД — модуляторный (сканирующий)
диск с двумя нерадиальными щелями; О — объектив; ВО — волоконная
оптика; Ш — солнечная шторка; К — коллектив; ФЭУ — фотоэлектронный
умножитель; РУ — усилитель и система регулировки чувствительности
(порога); ПК — полярные координаты звезд, определяемые с помощью
модулярного диска; Ь _ импульс считывания угла, при котором звезда
пересекает щель: а — закодированный угол, соответствующий моменту, при
котором звезда пересекает щель
Система состоит из грех координатного датчика ориентации ТДО,
неподвижно закрепленного на борту летательного аппарата, связанного
с бортовой ЭЦВМ навигации и наведения, которая воздействует на
систему управления космическим аппаратом. Основным узлом ТДО
является система сканирования изображения звездного неба, состоящая
из объектива, оптического модулятора (вращающегося диска с узкими
щелями специальной формы), фотоэлектронного умножителя и
электронной схемы, осуществляющей выделение и фильтрацию сигналов
звезд. Упрощенная схема одного из вариантов сканирующей системы
для случая стабилизированного положения космического аппарата
приведена на рис. 137 Развертка изображения осуществляется при
помощи вращающегося модуляторного диска МД с двумя
нерадиальными щелями. Расположение щелей, показанное на рисунке, позволяет
после соответствующей математической обработки получить полярные
координаты звезд. С модуляторным диском связана волоконная оптика
ВО, направляющая изображение от щели диска через солнечную шторку
Ш и коллектив К на катод ФЭУ. Выходной сигнал ФЭУ усиливается
усилителем РУ с управляемым порогом, который позволяет ограничить
число звезд, распознаваемых за период сканирования. Использование
такого модулятора с волоконной оптикой позволило получить точность
определения положения звезды не хуже 0,0001 от поля зрения (при
поле зрения 30° это составляет около 10").
Импульсные сигналы с выходов ТДО поступают в ЭЦВМ, в которой
решается задача распознавания полученной последовательности
импульсов. Полученные результаты используются для ориентации и
управления космическим кораблем [169, 273].
190
Корреляционный координатор для речных и морских судов
В [256] описан разработанный в Томском университете
корреляционный экстремальный координатор для речных и морских судов,
работающий на основе описанного выше метода сравнения карт и
определяющий следующие параметры траектории движения судна: величину
продольного (Q и бокового (т]) отклонений судна от заданной траектории,
величину угла между осью судна и заданным курсом (<|/) и величину
угла рыскания (ф) (угла поворота судна вокруг вертикальной оси).
Координатор предназначен для использования в системах
управления речными или морскими судами при движении в портах, каналах,
в узких местах или при движении вблизи берега (каботажное плава*
ние) [256].
В отличие от двухмерной КЭС для управления движением
самолета по заданному курсу, рассмотренной в предыдущем разделе, в
данном координаторе кроме бит] необходимо также вычисление координат
<Ь и ф. В связи с этим алгоритм функционирования координатора
включает следующие вычислительные операции:
1) вычисление взаимной корреляционной функции совмещаемых
изображений КЗК — Ft (*, у) и ИКМ (информационной карты
местности) — F2 (*', у')
(9.9)
Ф(Де, Дт,, Дер) = 1 j Ft (x, y)F2(x\ y^dtdrt
s
и определение координат ее главного максимума;
2) определение угла ф из условия максимума интеграла
Ж?) j Ф(де, дт], д<р)<ед, (9.10)
S'
где S' — площадь круга радиусом г с центром в точке 6, т];
3) определение угла <|/ по формуле
Вычисленные координаты т], £, ф и ф используются для управления
судном с помощью авторулевого и для перемещения карты заданного
курса при помощи исполнительных устройств.
Координатор содержит радиолокатор, преобразователь
радиолокационного изображения окружающей местности в контурное
(информационную карту честности — ИКЩ, индикатор кругового обзора
с запоминанием изображения, оптическай коррелятор, устройства
бокового и продольного смещений и поворота карты заданного курса
КЗК, устройство вычисления угла между направлением движения
судна и устройство синхронизации.
Блок-схема координатора приведена на рис. 138.
Функциональными узлами координатора (очерчены пунктирными линиями)
являются:
1) радиолокатор РЛК с индикатором на потенциалоскопе типа
«Фабрика». Потенциалоскоп преобразует однократные электрические
191
1
\рм
3.
зэ
?
г 1
_-. 1 /У
i
т
В
rM-rM
Т
Т
1 »j i
Система определение
1
f [-«"--1
~r~Fn
j \ИКМУ-\
1
1 Г~*"1
if
ц
)ч>
г
А \
4
1 *-
* ж
*Г^
1
Оптический ( """
оз%
коррелятор \
I ^ 1
~j £* 1^
^
Систем
ш определения
—1
Т
1 J
1 *#-*-;
, t
3
1 0#-rJ
I
T—r*"
J г "**
1
1 **
J A
J Cue
1 '4 г-
2-1\
^ i
ее
1
--^1
\ я I
\
~| i
Lr
3 U
Ф-тЫщ
тема вычисл
рм/а
угла ч>
A Lm ,
\
Рис. 138. Функциональная схема корреляционно-экстремального
координатора для речных и морских судов [256J:
РЛК — радиолокатор; И — индикатор «Фабрика»; ЗЭ — запоминание
экстремума R (<рм); ИКМ — информационная карта местности; КЗК.— карта
заданного курса; ФЭ — фотодатчик; 031 — определение знака £; 03г\ —
определение знака rj; 5 — блок вычисления; 3 — блок запоминания; Сх — сдвиг
по оси х: Су—сдвиг по оси у\ Т— триггер; Лср — поворот на угол ср;
СС — система синхронизации; А — авторулевой.
сигналы, поступающие на отклоняющие пластины, в видимое
изображение, которое может сохраняться в течение времени, необходимого
для вычисления координаты;
2) оптический коррелятор Берджера, описанный в [255, 320],
вычисляющий значение функции Ф (А£, Ayj, Аф). В состав коррелятора
входит также информационная карта местности (Я/СМ),
сформированная на экране потенциалоскопа, карта заданного курса (КЗК),
устройства для перемещения ее по координатам х'у у', ф', фотодатчики
и датчики координат б, т], и ф» связанные с КЗК\
3) система определения координат бит], реализующая второй
алгоритм вычисления знаков координат бит], рассмотренный в преды-
192
дущем параграфе. После вычисления знаков отклонения g и ц от начала
координат сигналы с полярностью, соответствующей этим знакам,воз-
действуют на исполнительные механизмы, сдвигающие КЗК в
нужном направлении, обеспечивая £ = т] = 0. Величины £ и т]
определяются по положению датчиков, измеряющих смещение КЗК по х' и у'\
4) система определения угла ф, являющаяся системой с
запоминанием экстремального значения R (<pmax), полученного с фотодатчика
коррелятора в процессе поиска. С помощью исполнительного
механизма, поворачивающего КЗК, обеспечивается условие
* (Trnax)-Ж?)>0.
(9.12)
Значение угла ф, на который нужно повернуть КЗК для обеспечения,
Дф= 0, получается с датчика, связанного с поворотным механизмом;
5) система определения угла отклонения от заданного курса ф,
выполняющая вычисление в соответствии с формулой (9.11);
6) устройство синхронизации, обеспечивающее необходимую
последовательность работы узлов координатора (запись изображения
на потенциалоскопе; поиск координат экстремума по £ и х\\ поиск
экстремума по ф; вычисление угла <(/; стирание изображения и протяжку
ленты КЗК на один кадр; новую запись изображения на
потенциалоскопе).
В [256] приведено детальное описание координатора и
принципиальная схема всех его узлов и блоков.
Конструкция оптического коррелятора, используемого в
корреляционном экстремальном координаторе, приведена на рис. 139. Все узлы
коррелятора размещены в светонепроницаемом кожухе СК, который
торцевым отверстием примыкает к потенциалоскопу Я, экран которого
представляет собой И КМ. Лента с КЗК перемещается в механической
каретке К, снабженной датчиками перемещения. Изображение КЗК
при помощи линзы ЛН проектируется на полупрозрачное зеркало
3. Часть светового потока при этом через диафрагму Д попадает.на
фотоэлемент ФЭ, а другая часть — на торцы четырех светопроводов С,
служащих для разделения и интегрирования корреляционной функции
по квадрантам. Световые потоки светопроводов воспринимаются
фотоумножителями ФЭУ, расположенными на подвижной платформе ПП,
Рис. 139. Оптический коррелятор
корреляционно-экстремального координатора [256]:
П — потенциалоскоп; Л — люк; ФЭ — фото датчик; Д —
диафрагма; 3 — полупрозрачное зеркало; С — светопроводы; ФЭУ—*
фотоумножитель (ФЭУ-17М); ПП — подвижная платформа; ЛН —
линза; К—механически я каретка КЗК с датчиком перемещений;
С/С — светонепроницаемый кожух.
13 2-294
193
Описанный корреляционный экстремальный координатор
обеспечивает точность определения координат по 6 и г], равную ±0,2 мм, по
ф = ±0,5° Время полного цикла определения координат не превышает
20 сек Кадр КЗК имеет форму круга диаметром МО мм. Возможные
смещения КЗ К по осям составляют: х' = +25 мм; у' = ±15 лш;
угловой поворот ф= ±40°. Соответственные скорости перемещения
составляют 8 мм/сек, 4 мм/сек и 15 град/сек [256].
КЭС для автоматической настройки радиоаппаратуры
В гл. 5 были кратко рассмотрены общие принципы, лежащие
в основе КЭС для автоматической настройки телевизоров и
радиоаппаратуры. Эти принципы были реализованы в разработанной в Томском
университете КЭС [8, 255].
При настройке радиоаппаратуры ищут совокупность параметров,
при которой изображение, характеризующее качество ее работы,
является наиболее близким к эталонному. Эталонным изображением (ЭИ)
могут быть, например, тестовые телевизионные таблицы, кривые
амплитудно-частотных характеристик каких-либо трактов, кривые
переходных процессов и т. д. Эталонное изображение характеристики и
реальное ее изображение (РИ), получаемое в процессе настройки, могут
рассматриваться как реализация двумерного стационарного
случайного процесса Ft (х, у) и F2 (x'f у'). Как показано в [8, 183, 255], при
достижении взаимной корреляционной функцией этих реализаций
ее максимального значения R (£, Ц)тах обеспечивается оптимальное
(в смысле минимума средней квадратичной ошибки) совмещение
указанных изображений.
На рис. 140 приведена блок-схема КЭС для автоматической
настройки радиоаппаратуры. Генератор стандартных сигналов ГСС
служит для формирования РИ путем периодической подачи на объект
настройки сигналов заданной формы (единичных сигналов, импульсов,
гармонических сигналов с переменной частотой и т. д.). В качестве РИ
служит изображение на экране
осциллографа, в качестве ЭИ —
фотография эталонной характеристики.
Для вычисления R (£, г))
используется оптический коррелятор,
обладающий высоким быстродействием
[255]. На рис. 141 приведена схема
возможного расположения
элементов оптического коррелятора для
использования в рассматриваемой
системе. В качестве оптимизатора
авторы работы [8] рекомендуют
применение экстремального
регулятора шагового типа, а в качестве
исполнительных устройств
оптимизатора — устройства типа отвертки
с электроприводом, Такой тип
исполнительного элемента удобен для
настройки потенциометров,
триммеров, настроечных конденсаторов,
сердечников, катушек и т. д.
194
Г"
Коррелятор
71
\гсс\
IE
РИ\
ЭИ '
он
№у9
VM
h°n
•АО
Вычисление
R*
J^EEF=-
Рис. 140. Блок-схема КЭС для
автоматической настройки
радиоаппаратуры:
ГСС — генератор стандартных
сигналов; ОН — объект настройки: АО —
автоматический оптимизатор; РИ —
реальное ичображение характеристи
ки объекта настройки; ЭИ — эталон
ное изображение характеристики
Светоизоляция
Рис. 141. Расположение элементов оптического
коррелятора в КЭС для настройки радиоаппаратуры (см.
рис. 140).
Алгоритм работы описанной КЭС исследовался путем
моделирования на АВМ типа МН-7. В качестве оптимизатора был использован
автоматический оптимизатор типа З-АО-11/5. Для вычисления R (£, г|)
был применен модифицированный вариант оптического коррелятора
Мейера-Эпплера [255, 424, 425].
Устройство использовалось авторами для настройки 8-каскадной
линейки УПЧ радиолокационного приемника, для настройки
телевизионного приемника и для настройки слаботочного микротрона
(малогабаритного усилителя электронов до энергии 5-—7 Мэв) [8]. В
последнем случае ГСС не использовался,
а на основе осциллографа ИО-4был
собран вариант оптического
коррелятора Ковашного—Армана f255,
406].
При настройке линейки УПЧ ъ
качестве источника РИ
использовался экран измерителя частотных
характеристик (ИЧХ) типа Х-1-10.
Для привода исполнительных
органов (механических отверток)
использовались реверсивные
двигатели типа ДИД-0,5, составляющие
вместе с редуктором и отверткой
одну конструкцию.
Всё настраиваемые параметры
телевизора, в зависимости от мето
дов настройки, разбиваются на
три группы:
настройка
осям х и у);
настройка
(исправление
изображения,
кадров);
настройка яркости и
контрастности изображения.
В процессе настройки
микротрона в зависимости от
напряжений накала и анода последнего
наблюдается изменение формы
0,8 1,2 1,6
Усиление по у
L
5,0 5,4
разбиваются
растра (сдвиг по
каналов усиления
искаженной формы
установка частоты
2,0 2,3
5,8 6,2 6,6 7,0
Смещение по х
j
2,5 2,7
Яркость
2,9 3,1
Рис.' 142. Зависимость
выходного напряжения усилителя,
установленного после ФЭУ
оптического коррелятора, от
смещения изображения на экране
осциллографа по осям х и у,
изменения яркости экрана,
изменения коэффициента
усиления вертикального усилителя
и изменения диаметра
диафрагмы перед ФЭУ.
13*
195
импульсов, поступающих на «кран осциллографа с магнитного датчика
микротрона.
В [8] описаны результаты экспериментального исследования этой
КЭС при осуществлении перечисленных выше настроек. На рис. 142
приведена зависимость выходного напряжения усилителя,
установленного после ФЭУ коррелятора, от смещений изображения на экране
осциллографа (РИ) по осям х и у, от изменения яркости экрана
осциллографа, от изменения усиления вертикального усилителя и изменения
диаметра диафрагмы, установленной перед ФЭУ. Отсчет аргументов
дан в делениях настройки осциллографа ИО-4. Усиленный сигнал
ФЭУ поступает на оптимизатор, который в описанной системе работает
по стратегии Гаусса — Зей дел я [8].
Описанная КЭС применима для автоматической настройки любого
радиотехнического устройства, характеристика которого может быть
представлена в виде изображения на прозрачном материале или в виде
трафарета.
ЛИТЕРАТУРА
1. Агеев М. Д. Электронный коррелятор для обработки
случайных процессов, заданных графически. — В кн.: Передовой
научно-технический и производственный опыт. ЦИТЭИН, тема 40,
№П-57—37/2, М., 1957.
2. Адасинский С. А. Транспортные машины на воздушной
подушке. «Наука», М., 1964.
3. А л е к с е е в А. И. и др. Теория и применение
псевдослучайных сигналов. «Наука», М., 1969.
4. Аллен В., Уэстерфилд Е. Цифровые корреляторы
со сжатием во времени и согласованные фильтры для активной
гидролокации.— Зарубежная радиоэлектроника, 1967, 12.
5. Амиантов И.Н., Тихонов В. И. Функция
корреляции случайной последовательности прямоугольных импульсов.—
Радиотехника, 1959, 4.
6. Андреев Н. И. Корреляционная теория статистически
оптимальных систем. «Наука», М., 1966.
7. Ауль Ф. Ф. Коррелятивный анализатор звукового диапазона
частот КА—ЗД.— В кн.: Передовой научно-технический и
производственный опыт. ЦИТЭИН, тема 36, вып. 8. М., 1961.
8. Афримзон А. Ф., Тарасенко В. П. Применение
корреляционно-экстремального метода автоматической настройки
радиоаппаратуры.— В кн.: Поиск экстремума. Изд-во Томского ун-та,
1969ч
9*. Балл Г. А. Аппаратурный анализ случайных процессов.
«Энергия», М., 1968.
10. Башаринов А. Е. О помехоустойчивости
корреляционного метода приема.— Радиотехника, 1956, 5.
11. Белавин О. В. Основы радионавигации. «Советское
радио», М., 1967.
12. Белавин О. В., Зерова М. В. Современные средства
радионавигации. «Советское радио», М., 1965.
13. Блекман В. X. Исследование стационарного магнито-
гидродинамического потока. — В кн.: Ионные, плазменные и
дуговые ракетные двигатели. Госатомиздат, М., 1961.
14. Белкен Й., Блэндхолл Е. К экспериментальному
определению статистических свойств сигналов и помех в системах
автоматического управления.— Тр. I Междунар. конгр. Междунар.
федерации по автоматич. управлению, 3. Изд-во АН СССР, М., 1961.
15. Белоглазов И. Н. Оптимальные алгоритмы записи
информации в цифровых корреляционных системах. Докл. на
197
IV Всесоюзном семинаре по теории и применению адаптивных систем,
Алма-Ата, 1971.
16 Белоглазов И. Н. Ликвидация больших начальных
отклонений в экстремальных корреляционных системах. Докл. на
III Всесоюзном симпозиуме по экстремальным задачам, Томск,
1967.
17. Б е л о г л а з о в И. Н. Нелинейные эффекты в
экстремальных корреляционных системах.— В кн.: Поиск экстремума. Тр.
III Всесоюзного симпозиума по экстремальным задачам. Изд-во
Томского ун-та, 1969.
18. Белоглазов И. Н. Проблема синтеза и анализа
корреляционно-экстремальных систем, П.— Тр. Всесоюзного семинара по
проблемам адаптивных систем. Изд-во Томского ун-та, 1969.
19. Бен дат Дж. Основы теории случайных шумов и ее
применение «Наука», М., 1965.
20. Бендат Дж. , Пирсол А. Измерение и анализ
случайных процессов. «Мир», М., 1971.
21.Бернштейн С. Н, Теория вероятностей Гостехтеор-
издат, М.— Л., 1946.
22. Б е с е к е р с к и й В. А., Попов Е. П. Теория систем
автоматического регулирования. «Наука», М., 1966.
23. Бианки В. Л., Полон ников Р. И. О возможности
использования некоторых закономерностей межполу шар ных
взаимоотношений в системах автоматического управления.— Вестник
Ленинградского ун-та, 21, 1966.
24. Бобнев М П. Генерирование случайных сигналов и
измерение их параметров. «Энергия», М.—Л., 1966.
25. Б о г а ч е в А. М., Лябах Р. В. Приборы
автоматического контроля размеров проката. Госэнергоиздат, М., 1962.
26. Богданов СЕ. Приближенный метод измерения
нормированных функций корреляции.— Тр. ЦНИИ связи, М-ва связи СССР,
вып. 2. М., 1957.
27. Богданов И. В. Автоматическое измерение частоты.
Оборонгиз, М., 1962.
28. Б о д н е р В. А., Тува ев В. А. Инерциально-корреля-
ционная система для определения угловых координат ИСЗ.—
Космические исследования, 1967, вып. 5.
29. Борблик Е. Л. Применение корреляционного анализа
для экспериментального исследования колебаний плазмы МГДГ.—
В кн.: Вопросы технической электродинамики. «Наукова думка»,
К., 1968.
30. Борблик Е. Л. и др.О некоторых результатах
корреляционного анализа флуктуации тока в плазме.— Автоматика, 1968, 4.
31. Борблик Е. Л. и др. Методы исследования флуктуации
в потоках слабоионизированной плазмы.— В кн.: Колебания и
волны в плазме. Тр. III Всесоюзной конференции по физике
низкотемпературной плазмы. «Наука и техника», Минск, 1971.
32. Борблик Е. Л., Ганефельд Р. В. Исследование
турбулентности слабоионизированной плазмы с током.— В сб.:
Вопросы технической электродинамики. «Наукова думка», К-, 1968.
33. Борблик Е. Л., Козубовский С. Ф. Коррелятор,
работающий в реальном масштабе времени.— Автоматика, 1972, 3.
34. Б р у ф м а н С. С. Цифровые индикаторы, «Энергия», М.—Л.,
1964.
198
35. Брэмли Н. и др. Некоторые направления
автоматизации прокатного производства.—Тр. I междунар. конгр. Междунар.
федерации по автоматич. управлению, 6« Изд-во АН СССР, М., 1961.
36. Б у т у с о в И. В., Си ромах а И. Ф. Цифровые
указатели на лампах ИН-1.—Автоматика и приборостроение, 1965, 4.
37. Бутусов И. В. Цифровые устройства для автоматического
контроля, измерения и управления. «Наука», Л., 1964.
38. Б ы к о в В. В. Цифровое моделирование в статистической
радиотехнике. «Советское радио», М., 1971.
39. Бычков С. И. и др. Космические радиотехнические
комплексы. «Советское радио», М., 1967.
40. Бусленко Н. П. Математическое моделирование
производственных процессов на цифровых вычислительных машинах.
«Наука», М., 1964.
41. В а ж е н к и н а 3. П. и др. Методы и схемы временной
задержки импульсных сигналов. «Советское радио», М., 1971.
42. В ал юс Н. А. Растровые оптические приборы.
«Машиностроение», М., 1966.
43. Васильев В. И. Дифференциальные системы
экстремального регулирования. Изд-во АН УССР, К-, 1963.
44. В а с и л ь е в В. И. Экстремальные системы без поисковых
колебаний. «Техника», К-, 1966.
45. В а с и л ь е в В. И. Распознающие системы. «Наукова
думка», К., 1968. v
46. Велтман В. П., Ван-ден-Бос А. Применение
релейного коррелятора и коррелятора совпадения знаков в
автоматическом регулировании.—Тр. II Меджунар. конгр. Междунар.
федерации по автоматическому управлению, I, M., 1965.
47. В е л и ч к и н А. И Корреляционная функция и
спектральная плотность квантованного процесса.— Радиотехника, 1962, 7.
48. Вентцель Е. С. Теория вероятностей. «Наука», М.,
1964.
49. Веселова Г. П., Грибанов Ю. И. Статистическая
погрешность оценки корреляционной функции нецентрированных
случайных процессов.— Автометрия, 1970, 1.
50. Веселова Г П., Грибанов Ю. И. О некоторых
погрешностях полярных корреляторов.— Автоматика и телемеханика,
1970,. 10.
51. Волкова Н. Н. О методической и инструментальной
погрешности квантованной временной задержки.— Изв. вузов.
Радиоэлектроника, 1969, 12.
52. Володин Б. Г. и др. Сборник задач по теории
вероятностей, математической статистике и теории случайных функций.
«Наука», М., 1965.
53. Вольф Си др. Коррелятор совпадения полярностей.—
Зарубежная радиоэлектроника, 1962, 11.
54. В о р о н о в А. А. Основы теории автоматического
управления. «Энергия», М., 1966.
55. Гельфандбейн Я- А. Методы кибернетической
диагностики динамических систем. «Зинатне», Рига, 1967.
56. Г е н и с А. А. и др. Приборы тлеющего разряда. Гостех-
издатУССР, К., 1963.
57. Гершман С.Г., Фейнберг Е.Л. Об измерении
коэффициента корреляции.-—Акустический журнал, 1955, ч. 1, вып. 4.
199
58. Горбацевич Е. Э. Коррелометры с аппроксимацией.
«Энергия», М., 1971.
59. Гофф К- Применение корреляционной методики к
некоторым акустическим измерениям.— В сб.: Проблемы современной
физики.— Гидроакустика, 1956, 8.
60. Грибанов Ю. И. и др. Автоматические цифровые
корреляторы. «Энергия», М., 1971.
61. Грубо в В. И. и др. Промышленная кибернетика. «Нау-
кова думка», Км 1966.
62. Губарев В. В. Погрешности непосредственного и
знаковых способов измерения корреляции по ограниченным данным.—
Автометрия, 1968, 4.
63. Губарев В. В. Сравнение непосредственного и релейного
методов измерения корреляции.— В сб.:Методы представления и
аппаратурный анализ случайных процессов и полей.—Тр. II Всесоюзного
симпозиума, II, Новосибирск, 1969.
64. Г у р в и ч Е. И., Щукин Л. Б. Ферротранзисторные
элементы и их применение в цифровых автоматических устройствах.
«Энергия», М., 1963.
65. Гуревич СБ. Физические процессы в передающих
телевизионных трубках. Гостехиздат, М., 1958.
66. Д а в е н п о р т В. Б. и др. Статистические ошибки при
измерении случайных функций времени.— В кн.: Определение
параметров случайных процессов. Гостехиздат УССР, К-, 1962.
67. Два метода реализации запаздывания с помощью цифровой
техники.— Экспресс-информация ВИНИТИ. Приборы и элементы
промышленной автоматики, 1962, 46.
68. Д е м и н Э. А., Чиненков Л. А. Регистры сдвига на
ферритовых сердечниках в радиотехнике. «Энергия», М., 1960.
69. Денисенко А. Н. Кратковременная функция
корреляции и кратковременный энергетический спектр случайного процесса.—
Радиотехника, 1968, 10.
70. Деревянко Н.Ф.О возможности измерения
турбулентности корреляционным методом.—ПМТФ, 1968, 2.
71. Деревянко Н.Ф.идр. Измерение турбулентности
газовых пбтоков оптическим методом.— ДАН СССР, 1968, 4.
72. Деревянко Н. Ф., Трохан A.M. Об исследовании
динамики течений оптическим корреляционным методом.— ПМТФ,
1969, 4.
73. Д е р е в я н к о Н. Ф., Трохан A.M. О применении
корреляционного метода для измерения скорости плазменных потоков.—
Измерительная техника, 1966, 10.
74. Дехтяренко П. И. Индикаторы наибольшего
напряжения. Изд-во АН УССР, К., 1963.
75. Дехтяренко П. И. Синхронное детектирование в
измерительной технике и автоматике. «Техника», К.» 1965.
76. Дехтяренко П. И. и др. Электронная
дифференциальная схема для автоматического измерения скорости проката.—
Автоматика, 1962, 2.
77. Дехтяренко П. И., Козубовский С. Ф. К
анализу погрешностей релейных корреляционных функций.— Автома-.
тика, 1962, 3.
78. Дехтяренко П. И., Пущаловский А. Д.
Фотоэлектрический корреляционный измеритель расхода жидкой стали.—
200
VIII Конференция по автоматическому контролю и методам
электрических измерений, тезисы доклада, Новосибирск, 1966.
79. Д е ч Г. Руководство к практическому применению
преобразования Лапласа. Физматгиз, М., 1958.
80. Деч Р. Нелинейные преобразования случайных процессов.
«Советское радио», М., 1965.
81. Джанджгава Г. И., К и ч и г и н Г. Г. Управление
статической характеристикой корреляционной СЭР.— В кн.: Поиск
экстремума.—Тр. III Всесоюзного симпозиума по экстремальным
задачам. Изд-во Томского ун-та, 1969.
82. Диагностика плазмы (сб. статей), вып. 2. Атомиздат, М.,
1968.
83. Дискретное устройство для обнаружения буксования
колесных пар паровоза.— В кн.: Системы управления и передачи
информации в электроэнергетике. «Наука», М., 1961.
84. Д о г а н о в с к и й С. А., Иванов В. А. Устройства
запаздывания и их применение в автоматических системах.
«Машиностроение», М., 1966.
85. Д о м а р а ц к и й А. Н. и др. Дискретная измерительная
корреляционная система. «Наука», Новосибирск, 1965.
86. Домарацкий А. Н. Квантование нормальных случайных
функций по амплитуде при вычислении их математических ожиданий.
Вопросы теории измерительных систем.— Тр. ИАЭ СО АН СССР,
1964, 11.
87. Домарацкий А. Н., Синицын Б. С. Полярные
корреляторы и их применение.— В кн.: Автоматический контроль
и методы электрических измерений.— Тр. IV Конференции, 2. РИО
СО АН СССР, Новосибирск, 1964.
88. Дудко, Г. К«, Резников Г. Б. Допплеровские
измерители скорости и угла сноса самолета. «Советское радио», М., 1964.
89. Егармин В.М., Трояновский В. А.
Автокорреляционный метод измерения скорости горячего проката.— В кн.:
Производство сварных и бесшовных труб, вып. 2. «Металлургия»,
1964.
90. Егоров Н. И. Расширение области прямого применения
метода полярной корреляции.— Автоматика и вычислительная
техника, 1968, 2.
91.Жовинский В. Н. Схемы запоминания напряжений
и блоки запаздывания. Госэнергоиздат, М., 1961.
92. Жовинский В.Н. Генерирование шумов для
исследования автоматических систем. «Энергия», М., 1968.
93. Зарезанков Г. X. Фотоэлектронные приборы
автоматического контроля размеров проката. Металлургиздат, М., 1962.
94. 3 а р у б и н а Э. Н. Электромагнитные спиральные линии
плавно регулируемой задержки с бесконтактным съемом напряжения,—
Передовой научно-технический опыт, тема 38, вып. 1, П—61—2/1,
1961.
95. Зима В., Кубин Б. Электронные методы измерения
малых интервалов времени. «Энергия», М., 1965.
96. 3 у б к о в и ч С. Г. Статистические характеристики
радиосигналов, отраженных от земной поверхности. «Советское радио», 1968.
97. Иванов-Муромский К. А., Заславский С. Я.
Применение ЭВМ для анализа электрограмм мозга. «Наукова думка»,
К., 1968.
201
98. И в а х н е н ко А. Г. Корреляционные методы в
кибернетических системах автоматического управления.— Автоматика, 1960, 2.
99. И в а х н е н ко А. Г. Самоорганизующиеся системы. Изд-во
АН УССР, К., 1963.
100. Ивахненко А. Г. Техническая кибернетика. Гостех-
издат УССР, К., 1959.
101. И в а х н е н к о А. Г. Электроавтоматика. Гостехиздат
УССР, К., 1957.
102. Изава Км Фурута К. Прибор для измерения
динамических характеристик. Доклад на III Междунар. конгр. Междунар.
федерации по автоматич. управлению, Лондон, 1966.
103. Измерение скорости движущейся поверхности.— Экспресс-
информация ВИНИТИ. Испытательные приборы и стенды, 1962, 32.
104. Измерение скорости движения полосы с помощью
корреляционных методов.— Экспресс-информация ВИНИТИ. Приборы и
элементы промышленной автоматики, 1961, 35.
105. И л ь и н с к и й В. М. Бесконтактное измерение расходов.
«Энергия», М., 1970.
106. Исобэ Т. и др. Определение импульсной характеристики
с помощью коррелятора, подключающегося непосредственно к объекту.
Доклад на III Междунар. конгр. Междунар. федерации по автоматич.
управлению, Лондон, 1966.
107. Казаков И. Е., Доступов Б. Г. Статистическая
динамика нелинейных автоматических систем. Физматгиз, М., 1962.
108. Касаткин А. С. Автоматическая обработка сигналов
частотных датчиков. «Энергия», М., 1966.
109. Катрона и др. Оптические системы фильтрации и
обработки сигналов.— Зарубежная радиоэлектроника, 1962, 10.
110. К а ты с Г. П. Система автоматического контроля полей,
скоростей и расходов. «Наука», М., 1965.
111. К а т ы с Г. П. Автоматический обзор и поиск в оптическом
диапазоне. «Наука», М., 1966.
112. К а ты с Г. П. Методы и системы автоматического
контроля нестационарных параметров и параметрических полей. Машгиз,
М., 1963.
113. К а ты с Г. П. Сканирующие фотоэлектрические устройства
поиска и слежения. «Наука», М., 1964.
114. Киндлман П., Хупер Е. Быстродействующий
коррелятор.— Приборы для научных исследований, 1968, 6.
115. К л ас Ф. Аппаратура для ориентации в космосе,
основанная на слежении за звездным полем.— Зарубежная радиоэлектроника,
1963, 3.
116. Ковалевский В. А. О корреляционном методе
распознавания.— В кн.; Читающие автоматы. «Наукова думка», К., 1965.
117. КозубовскийС. Ф. Автоматизация системы измерения
скорости горячего проката корреляционным методом.— Автоматика,
1961, 3.
118. К о з у б о в с к и й С. Ф. Автоматизация корреляционного
измерителя скорости проката при помощи дифференциальной схемы.—
Автоматика, 1962, 1.
119. Козубовский С. Ф. Автоматизация корреляционного
метода измерения скорости движения проката.— В кн.:
Автоматическое управление и вычислительная техника, вып. 6.
«Машиностроение», М., 1964.
202
120. Козубовский С. Ф. Автоматические корреляционные
измерители скорости. Изд-во АН УССР, К., 1963.
121. Козубовский С. Ф. и др. Блок цифровой индикации.—
Автоматика, 1966, 5.
122. Козубовский С. Ф. Вычислительное устройство для
автоматического бесконтактного определения скорости движущейся
поверхности. Авт. свид. № 171117,23. III 1964.-—Б юл. изобр., 1965,10.
123. Козубовский С. Ф. Корреляционный измеритель
скорости проката. Авт. свид. № 171161, 10. XII 1962.— Бюл. изобр.,
1965, 10.
124. Козубовский С. Ф. Линия задержки изменяющихся
во времени сигналов. Авт. свид. № 151112, 18. V 1961.— Бюл. изобр.,
1962, 20.
125. Козубовский С. Ф. Об автокорреляционных и
спектральных методах измерения скорости движения.— Автоматика,
1965, 4.
126. Козубовский С. Ф. Общая теория квантования по
уровню и ее применение для определения корреляции.— Автоматика,
1963, 1.
127. Козубовский С. Ф. Схемы экстремального
регулирования для автоматизации корреляционных измерителей скорости.—
В кн.: Самонастраивающиеся системы. «Наука», М., 1965.
128. Козубовский С. Ф. Устройство для измерения скорости
движения проката. Авт. свид. № 141017, 15.X 1960.— Бюл. изобр.,
1961, 17.
129. Козубовский С. Ф., Васильев В. И. Зависимое,
авт. свид. № 151129 на «Устройство для измерения скорости движения
проката», 22.V.1961.—Бюл. изобр., 1962, 20.
130. Козубовский С. Ф., Райхман СР. Электронный
блок регулируемой задержки.— Автоматизация и приборостроение,
1962, 3.
131. Козубовский С. Ф., Хартеброт X.
Управляемый генератор импульсов. Авт. свид. № 224920, 25.11 1967.— Бюл.
изобр., 1968, 26.
132. Козубовский С. Ф., Хартеброт X. Блок
регулируемого запаздывания для дискретных сигналов.— Автоматика,
1967, 1.
133. Колесниченко Л. Г. и др. Блок регулируемого
запаздывания.— Автоматика и приборостроение, 1964, 2.
134. Корн Г. Моделирование случайных процессов на
аналоговых и аналого-цифровых машинах. «Мир», М., 1968.
135. Корндорф С. Ф. Фотоэлектрические измерительные
устройства в машиностроении. «Машиностроение», М., 1965.
136. Коровин А. С. Инфракрасная техника. Воениздат, М.,
1963.
137. Корреляторы с квантованием по амплитуде.— Экспресс-
информация ВИНИТИ. Вычислительная техника, 1964, 34.
138. Косов Б. Ф., Константинова Г. С. Составление
карты овражности СССР.— Вестн. МГУ, сер. Географическая, 1970, 2.
139. Косякин А. А. Статистическая теория квантования по
уровню.— Автоматика и телемеханика, 1961, 6.
140. Котов а В. Г. Бесконтактный измеритель скорости
движущегося металла.— В кн.: Автоматизация и механизация
производства, 8. «Машиностроение», М., 1966.
203
141. Котова В. Г. Блок регулируемого запаздывания на
магнитном барабане.— В кн..-Системы и средства автоматизации
производства и управления. Научн. тр. Института автоматики, 2, K.t
1968.
142. Котова В. Г. Оптический датчик бесконтактного
измерения скорости.—В кн.: Приборы и средства автоматики. «Наукова
думка», К., 1972.
143. Котова В] Г. Следящие системы.— Энергетика и
электрификация, 1968, 3.
144. Котова В. Г., Нечаев Г. К. Импульсная система
устройства для бесконтактного определения скорости металла при
прокате.— В кн.: Приборы промышленного контроля и средств
автоматики.— Гостехиздат УССР, К., 1963.
145. Котова В. Г., Нечаев Г. К» Оптимизатор
бесконтактного измерения скорости проката.— Автоматика и
приборостроение, 1965, 1.
146. Котова В. Г., Нечаев Г. К-Бесконтактное измерение
скорости движущегося проката.— В кн.: Контрольно-измерительная
техника, 3. Изд-во Львовского ун-та, 1966.
147. Котова В. Г., Шарагина 3. И. Статистическое
моделирование импульсной системы бесконтактного измерения
скорости проката.— Изв. АН СССР, Техн. кибернетика, 1965, 5.
148. Кот юк А. Ф. и др. Методы и аппаратура для анализа
характеристик случайных процессов. «Энергия», М., 1967.
149. Крамер С. А. Допустимая расстройка скорости и
ускорения в высокочувствительных широкополосных корреляционных
гидролокаторах с линейной ЧМ.— Тр. Ин-та инженеров по
электротехнике и радиоэлектронике, 55, 1967.
150. Крамер Г., Лидбеттер И. М. Стационарные
случайные процессы, свойства выборочных функций и их приложения.
«Мир», М., 1965.
151. К р а с о в с к и й А. А. Динамика непрерывных
самонастраивающихся систем. Физматгиз, М., 1963.
152. К р а со в с к и й А. А., Поспелов Г. С. Основы
автоматики и технической кибернетики. Госэнергоиздат, М.— Л., 1962.
153. Криксунов В. Г. Автоматические анализаторы спектров
электрических сигналов. «Техника», К., 1965.
154. Криксунов Л. 3., Усольцев И. Ф.
Инфракрасные системы. «Советское радио», М., 1968.
155. Кронмиллер Д., Багдади Е. Основные принципы
построения и характеристики системы для точного измерения
расстояния и скорости.— Зарубежная радиоэлектроника, 1966, 10.
156. Крыжановский О. М. Об итерационном методе
определения приближенных значений корней уравнения.— Автоматика
и телемеханика, 1950, 5.
157. Кузнецов В. А. Корреляционный экстремальный
координатор для речных и морских судов. Тезисы докладов III Симпозиума
по экстремальным задачам. Изд-во Томского ун-та, 1966.
158. Кулик В. Т. Алгоритмизация объектов управления.
«Наукова думка», К-, 1968. !
159. Кулик В. Т. Принципы алгоритмизации и построения
управляющих машин. Гостехиздат УССР, Км 1968.
160. Кулик В. Т. Цифровое моделирование сложных систем.
Изд-во Киевского ун-та, 1964.
204
161. Куицевич В. М. Исследование систем экстремального
регулирования с синхронным детектором.— Автоматика, 1959, 3.
162. К У н це в и ч В. М. Системы экстремального управления.
Гостехиздат УССР, К., 1961.
163. Кутин Б. Н. О вычислении корреляционной функции
стационарного случайного процесса по эксперименталььым данным. —
Автоматика и телемеханика, 1957, 3.
164. Ланге Ф. Корреляционная электроника. Судпромгиз,
Л., 1963.
165. Левин Б. Р. Теория случайных процессов и ее применение
в радиотехнике. «Советское радио», М., 1957.
166. Левин Б. Р. Теоретические основы статистической
радиотехники. «Советское радио», М., 1966.
167. Летунов В. С. Суда на воздушной подушке. «Морской
транспорт», М., 1963.
168. Лившиц Н.А., Пугачев В. Н. Вероятностный анализ
систем автоматического управления. «Советское радио», М., 1963.
169. Лилистрэнд и др.—Автоматическая астронавигация,
Электроника, 1966, 7.
170. Л у г о в е н ко В. Н., Сорока А. И. Статистические
характеристики аномальных гравитационных и магнитных полей.—
В кн.: Геомагнетизм и аэрономия, X, вып. 3, М., 1970.
171.Лустберг Э. А., Лапушкин Н. С. Устройство
для построения и измерения функции взаимной корреляции. Авт.
свид. № 238895. Бюл. изобр., 1969, 10.
» 172. Лустберг Э. А., Лапушкин Н. С. Оптический
коррелятор.— Оптико-механич. пром., 1969, 7.
173. Маковецкий П. В. и др. Корреляционный измеритель
скорости движения объекта в электромагнитном поле.— Автоматика,
1967, 4.
174. Малышкин Е. А. Пассивная радиолокация. Воениздат,
М.,1961.
175. Мандровски й-С околов Б. Ю. О помехоустойчивости
системы экстремального регулирования с внешним модулирую-
ющим сигналом.— Автоматика, 1959, 4.
176. М а н д р о в с к и й - Со ко л о в Б. Ю., Туник А. А.
Системы экстремального управления при случайных возмущениях.
«Наукова думка», К., 1970.
177. Марков М. Н. Приемники инфракрасного излучения.
«Наука», М., 1968.
178. Map к юс Ж- Дискретизация и квантование. «Энергия»,
М., 1969.
179. Матушевский В. В., Тарясенко В. П.
Статистический анализ экстремальной системы совмещения двух
изображений.— В кн.: Синтез и анализ систем автоматического управления.
«Наука», М., 1968.
180. Матушевский В.В., Тарасенко В. П.
Моделирование экстремальной системы совмещения двух изображений на
УЦВМ.— В кн.: Адаптивные системы, большие системы. Тр. I Все-
сюзного симпозиума по статистическим проблемам технической
кибернетики. «Наука», М., 1971.
181. Матюкас А. А. Измерение скорости потока
фотоэлектронным методом.— В кн.,: Техника. Материалы научной
конференции, Вильнюс, 1967.
205
182. Маякин В. П., Донченко Э. Г. Электронные системы
для автоматического измерения характеристик потоков, жидкостей и
газов. «Энергия», М., 1970.
183. Медведев Г. А., Тарасенко В. П. Вероятностные
методы исследования экстремальных систем. «Наука», М., 1967.
184. МиллерР. Корреляционная радионавигационная система
для самолетов и космических кораблей.— Электроника, 1961, 50.
185. Мироненко А. В. Фотоэлектрические измерительные
системы. «Энергия», М., 1967.
186. Мирский Г. Я. Аппаратурное определение
характеристик случайных процессов. «Энергия», М., 1972.
187. Мирский Г. Я. Измерение временных интервалов.
«Энергия», М., 1964.
188. М и т ю ш е в СИ. Автоматическое измерение скорости
корреляционным методом.—Тр. Уральского электромеханического
института инженеров железнодорожного транспорта, вып. 13, Свердловск,
189. Мишкин Э., Браун Л. (ред.). Приспосабливающиеся
автоматические системы. ИЛ, М., 1963.
190. Молотков Г. П. Применение метода шумовых функций
для исследования нелинейной системы, имеющей множительное
звено.— Изв. АН СССР, ОТН. Техническая кибернетика, 1963, 2.
191. Монахов В. И. Измерение расхода и количества жидкости,
газа и пара. Госэнергоиздат, М., 1962.
192. Морозов-Ростовский Г. П. Методика
корреляционного анализа турбулентных пульсаций скорости в узкой полосе
частот.— Измерительная техника, 1967, 5.
193. Мэн л и Р. Анализ и обработка записей колебаний. Маш-
гиз, М., 1948.
194. Ней л Э. О. Введение в статистическую оптику. «Мир»,
М., 1966.
195. Некоторые проблемы обнаружения сигнала, маскируемого
флюктуационной помехой.— Сб. пер. с англ. под ред. И. И. Шнер.
«Советское радио», М., 1965.
196. Немировский А. С. Интеграторы измерительных
приборов. Стандартгиз, М., 1960.
197. Немировский А. С. Вероятностные методы в
измерительной технике. Стандартгиз, М., 1964.
198. Не стер у к Н. Ф., Порфирьева А. И. Об одном
методе определения корреляционной функции нормальных случайных
процессов. Изв. вузов, Приборостроение, б, 1962, 6.
199. Нетребенко К-А. Компенсационные схемы
амплитудных вольтметров и указателей экстремума. «Энергия», М., 1967.
200. Николаев А. Г., Перцов С. Ф. Радиотеплолока-
ция. «Советское радио», 1970.
201. Новиков А. К. Корреляционные измерения в
корабельной акустике. «Судостроение», Л., 1971.
202. Новиков А. К., Машарский Б. Н.
Корреляционный анализатор КА-1 на диапазон частот от 20 до 10000 гц.— В кн.:
Передовой научно-технический и производственный опыт. Приборы
для измерения акустических и оптических величин, вып. 3, тема 34,
№ П—60-20/3, ЦИТЭИН, 1960.
203. — Новости зарубежной радиоэлектроники, 1959, 4 (124).
206
204. Новые методы спектрального анализа сигналов. Обзор.—
Зарубежная радиоэлектроника, 1963, 8.
205. Носов Г. Р.и др. Измерение расхода пульпы |и суспензии
по параметрам случайного процесса распределения частиц твердого
в потоке.—В кн.: Обогащение полезных ископаемых, вып. 5.
«Техника», К., 1969.
206. Н э в э к с Э. Цифровая схема автоматического
сопровождения по дальности для радиолокатора.-— Электроника, 1961, 52.
207. Обухов А. М. Статистическое описание непрерывных
полей.— Тр. Геофизического ин-та АН СССР, 24, М., 1960.
208. О к у н е в Ю. Б., Яковлев Л. А. Широкополосные
системы связи с составными сигналами. «Связь», М., 1968.
209. О л е с к А. О. Фоторезисторы «Энергия», М., 1966.
210. Определение параметров случайных процессов. Сб. под ред.
В. И. Чайковского (пер. с англ.). Гостехиздат УССР, К., 1962.
211. Орлов Ю.М., У с ко в А. С. Специализированная
вычислительная машина для определения динамических характеристик
и коррекции систем автоматического регулирования.— В сб.:
Применение вычислительной техники для автоматизации производства,
М., 1961.
212. Осульван М. Системы сопровождения с
дискриминаторами с задержанной синхронизацией.— Зарубежная
радиоэлектроника, 1963, 6.
213. Пархоменко В. И. Магнитные головки. Госэнерго-
издат, М., 1960.
214. П ет р о в и ч Н. Т., Размах ин М. К. ^Системы связи
с шумоподобными сигналами. «Советское радио», М., 1969.
215. Пестряков В. Б. Фазовые радиотехнические системы.
«Советское радио», М., 1968.
216. Писаревский Н. Н. Электронный коррелограф для
акустических измерений.—В кн.: Промышленная аэродинамика.
Оборонгиз, М., 1960.
217. Питер сон У, Коды, исправляющие ошибки. «Мир»,
М., 1964.
218. П и й к . Теория радиолокационных отражений от земной
поверхности.—Зарубежная радиоэлектроника, 1960, 1.
219. Поплавский О. И. и др. Дифференциальный
оптический коррелятор. Авт. свид. № 188146, 12.11 1965.— Бюл. изобр.,
1966, 21.
220. Простаков А. Л. Гидроакустика и корабль.
«Судостроение», «П., 1967.
221. П р о с т а к о в А. Л, Гидроакустика в иностранных
флотах. «Судостроение», Л., 1964.
222. Пугачев В. С. Статистические методы в технической
кибернетике. «Советское радио», М., 1971.
223. Пугачев В. С. Теория случайных функций и ее приме-
нение к задачам автоматического управления. Физматгиз, М.,
1960.
224. Райе С. Теория флуктуационных шумов.— В кн.:
Теория передачи электрических сигналов при наличии помех. ИЛ, М,,
1953.
225. Рейхард А. Автокорреляция как принцип оценки
сенсорной информации центральной нервной системой.— В кн.: Теория
связи в сенсорных системах «Мир», М., 1964.
207
226. Ро ма н ен ко А. Ф., Сергеев Г. А. Вопросы
прикладного анализа случайных процессов. «Советское радио», М., 1968.
227. Сайбель А. Г. Основы радиодальнометрии. Оборонгиз,
М., 1960.
228. Сайбель А-Г. Основы радиолокации. «Советское радио»,
М., 1961.
229. Самонастраивающиеся системы.— Сб. под ред. П. И. Чинаева.
«Наукова думка», К., 1969.
230. Сафронов Г. С. Корреляционные функции и
спектральные плотности разности двух случайных функций, квантованных
по времени.—Автоматика и телемеханика, 1962, 6.
231. Свешников А. А. Прикладные методы теории
случайных функций. «Наука», М., 1968.
232. Седякин Н.М. Количественные соотношения при
совпадении импульсов. Научн. докл. высшей школы.— Радиотехника и
электроника, 1958, 1.
233. Седякин Н.М. Элементы теории случайных импульсных
потоков. «Советское радио», М., 1965.
234. Сериков И. С, Хризман С. С. Цифровой
десятичный счетчик на полупроводниках.— В кн.: Повышение точности и
автоматизация измерительных систем. «Наукова думка», К-, 1965.
235. С и н и цы н Б. С. Автоматические корреляторы и их
применение. Изд-во Сиб. отд. АН СССР, Новосибирск, 1964.
236. Система астроориентации, основанная на распознавании
рисунка расположения звезд.— Экспресс-информация ВИНИТИ.
Астронавтика и ракетодинамика, 1966, вып. 10.
237. Соболева Н. А. и др. Фотоэлектронные приборы.
«Наука», М., 1965.
238. Солодовников Вт В. Статистическая динамика
линейных систем автоматического управления. Физматгиз, М., 1960.
239. Со л о до в н и к о в В. В. и др. Вычислительная техника
в применении для статистических исследований и расчетов систем
автоматического управления. Машгиз, М., 1969.
240. Со л о до в н и ко в В. В., Матвеев П. С,
Бабурин В. М. Статистический метод и аппаратура для определения
динамических характеристик объектов управления.— В кн.:
Автоматическое управление и вычислительная техника, вып. 5. Машгиз,
М., 1962.
241. Со л о до в ни ков В. В., У с ко в А. С.
Статистический анализ объектов регулирования. Машгиз, М., 1960.
242. Сороко Л. М. Основы голографии и коггерентной
оптики. «Наука», М., 1971.
243. Спилке р Д., Мэджилл Д. Дискриминатор со
следящей задержкой — оптимальное следящее устройстве (пер. с англ.).—
Тр. ин-та радиоинженеров, 1961, 9..
244. Степаненко И.П. Основы теории транзисторов и
транзисторных схем. «Энергия», М., 1967.
245. Стопский СБ. Анализаторы спектра звуковых и инфра-
звуковых частот для- акустической спектроскопии. Госэнергоиздат.
М.—Л., 1962.
246. Сысин Г. В. Изменение среднего периода повторения
случайных импульсов электронными блоками регулируемого
запаздывания.— Автоматика, 1966, 1.
247. Сысин Г. В., Карпов Э. А. К вопросу построения
208
импульсных корреляционных систем для определения 'скорости
металла при прокатке.— Автоматика, 1967, 1.
248. Сытен ко Л. В. Управляемые генераторы случайной
последовательности импульсов.— В кн.: Автоматика и вычислительная
техника. Ин-т электроники и вычислительной техники АН
Латвийской ССР, 1965, 10. -
249. Тарасенко В. П. О системах автоматической
оптимизации, реализующих метод слепого поиска.— В кн.: Тр. СФТИ, вып. 42.
Изд-во Томского ун-та, 1963.
250. Т а р а с е н к о В. П. Применение оптических
функциональных преобразователей для целей опознавания двумерных
геометрических образов.— В кн.: Тр. СФТИ, вып. 44. Изд-во Томского ун-та,
1964.
251. Тарасенко В. П. Устройство для контроля полета
летательных аппаратов. Авт. свид. № 184179, 27/III 1961.—Бюл.
изобр., 1966, 15.
252. Тарасенко В. П. Экстремальная система управления
движением объекта по заданному курсу.— В кн.: Тр. III
Всесоюзного совещания по автоматическому управлению (техническая
кибернетика), «Наука», 1967.
253. Тарасенко В. П., Бирюлин П. П. Устройство
для контроля полета летательных аппаратов. Авт. свид. № 183625
17.III I960.— Бюл. изобр., 1966, 23.
254. Тарасенко В. П. и др. Исследование корреляционно-
экстремального алгоритма астроориентации. Сб. тр., посвященный
памяти А. А. Фельдбаума. «Наука», М., 1971.
255. Тарасенко В. П. и др. Оптические корреляторы и их
применение.— В кн.: Итоги исследований по кибернетике к 50-летию
Советской власти. Изд-во Томского ун-та, 1968.
256. Т а р а с е н к о В. П., Раводин О. М.
Корреляционно-экстремальный координатор для речных и морских судов.—В кн.:
Поиск экстремума. Тр. III Всесоюзного симпозиума по
экстремальным задачам. Изд-во Томского ун-та, 1969.
257. Тарасенко В. П., Раводин О. М.
Экспериментальное исследование корреляционно-экстремального координатора в
случае отсутствия помех.— Тр. ЦНИИ Министерства Морского
Флота, вып. 10. «Транспорт», М., 1969.
258.-Т а р а с е н ко В. П., Раводин О. М.
Экспериментальное исследование помехоустойчивости корреляционно-экстремального
координатора.—В кн.: Поиск экстремума. Изд-во Томского ун-та, 1969.
259. Тейлор Р. Измерение радиолокационного отражения от
земной поверхности на частотах; 5, 10, 15 и 35 Ггц.— Зарубежная
радиоэлектроника, 1960, 3.
260. Тетерич Н.М. Генераторы шума и измерение шумовых
характеристик. «Энергия», М., 1968.
261. Т и махов О. Н., Любченко В. К- Селекторы
импульсов. «Советское радио», М., 1966.
262. Тихонов В. И. Выбросы случайных процессов. «Советское
радио», М., 1966.
263. Тихонов В. И. Статистическая радиотехника.
«Советское радио», М., 1966.
264. Тихонов В. А. Система оперативного корреляционного
анализа.— В кн.: Методы математического моделирования и теория
электрических цепей. Тр. семинара, вып. 4, ИК АН УССР, К., 1967.
14 2-298
209
265. Т и х о н о в В. И., Гор я и нов В. Т. Детектирование
Случайных сигналов.— Радиотехника, 1966, 1.
266. Тищенко В. И. и др. Расчет и проектирование
импульсных устройств на транзисторах. Госэнергоиздат, М., 1963.
267. Трояновский В. А. О возможности измерения
скорости движения проката автокорреляционным методом.— В кн.:
Автоматический контроль и методы электрических измерений. Тр. VI
конференции, 1, «Наука», Новосибирск, 1966.
268. Тузов Г. И. Выделение и обработка информации в доп-
плеровских системах. «Советское радио», М., 1967.
269. Тюрин А. М. и др. Основы гидроакустики.
«Судостроение», Л., 1966.
270. У орд Р. Б. Применение корреляционного метода
радиолокации к задачам связи и слежения за объектами в дальнем космосе.—
Зарубежная радиоэлектроника, 1964, 12.
271. У о р д Р. Б. Передача цифровой информации по линии
сопровождения посредством инверсной модуляции псевдошумовой
последовательности.— Зарубежная радиоэлектроника, 1967, 10.
272. У орд Р. Б. Различение псевдошумовых сигналов
методом последовательной оценки.— Зарубежная радиоэлектроника,
1966, 8.
273. Фаррел Д. Б., Лиллестрэнд Р. Л.
Навигационная система для космических летательных аппаратов.— Электроника,
1966, 6.
274. Финкельштейн М.И. Искусственные линии. Оборон-
гиз, М., 1961.
275. Фишбейн В., Риттенбэч О. Е. Корреляционная
радиолокационная станция с псевдослучайной модуляцией.—
Зарубежная радиоэлектроника, 1965, 5.
276. Фокс Д. Измерения пространственной корреляции в пуль-
сационных турбулентных следах за снарядами.— Ракетная техника
и космонавтика, 1967, 2.
277. X ал фи н А. М. Электроннолучевой коррелятор
оптических изображений. Авт. свид. № 20003$, 11.IV 1966.— Бюл. изобр.,
1967, 16.
278. Харкевич А. А. Очерки общей теории связи. ГИТЛ, М.#
1955.
279. Харкевич А. А. Спектры и анализ. Физматгиз, М., 1962.
280. Хартеброт Г. Динамика бинарной корреляционной
системы со следящей задержкой.— Автоматика, 1967, 3, 4.
281. Хартеброт Г. Управляемый генератор частоты для
корреляционного измерения скорости.— Автоматика, 1965, 3.
282. X а р ы б и н А. Е Анализ ошибки в определении среднего
значения случайной величины и ее квадрата, связанных с конечностью
времени наблюдения.— Автоматика и телемеханика, 1957, 4.
283. Хомяков В А. Исследование и анализ некоторых
методов вычисления корреляционной функции и коэффициента
корреляции.—Автоматика и телемеханика, 1971, 1.
284 Хохлов А Ф. Теория и техническое применение
автоматических устройств Машгиз, М., 1959
285. X ургин Я И. Об одном классе импульсных случайных
процессов.— Радиотехника и электроника, 1957, вып. 4.
286 Цветков В. В., Карнаухов В. И. Флуктуацион-
ные ошибки корреляционных измерителей.— Радиотехника, 1965, 7.
210
287. Цивлин И. Н. Электронный дальномер с двумя
интеграторами. «Советское радио», М., 1964.
288. Цукисима Такасигэ. Корреляционные измерения
в плазме (на яп. яз.).— Какуюго Кэнкю, 1969, 6.
289. Чайковский В. И. Методы экспериментального
определения корреляционных функций.— Изв. вузов СССР, Радиотехника,
1960, 5.
290. Чеголин П.М. Автоматизация спектрального и
корреляционного анализа. «Энергия», М., 1969.
291. Чеголин П. М., Пойда В. Н. Методы, алгоритмы и
программы статистического анализа. «Наука и техника», Минск, 1971.
292. Чинаев П. И. Самонастраивающиеся системы. Машгиз,
М., 1963.
293. Чинаев П. И., Чугунов И. И. Бесконтактные
самонастраивающиеся системы на цифровых элементах. «Техника», К.,
1965.
294. Читающие автоматы и распознавание образов.
Республиканский межведомственный сборник. «Наукова думка», К., 1965.
295. Швецкий Б. И. Электронные измерительные приборы
с цифровым отсчетом. «Техника», К.» 1964.
296. Шелепе нь К-В., Шихер В. И. Некоторые вопросы
формирования статической характеристики корреляционной
системы экстремального регулирования.— В кн.: Поиск экстремума.
Тр. III Всесоюзного симпозиума по экстремальным задачам. Изд-во
Томского ун-та, 1969.
297. Шестов Н. С. Выделение оптических сигналов на фоне
случайных помех. «Советское радио», М., 1967.
298. Э к р и X. Коррелятор совпадения полярностей для
обнаружения источника слабых шумов.— Зарубежная радиоэлектроника,
1963, 10.
299. Яковлев В.П. Некоторые асимптотические свойства гаус-
совского случайного процесса.— Радиотехника и электроника, 1960, 10.
300. Якушенков Ю. Г. Оптические системы
фотоэлектрических устройств. «Машиностроение», М., 1966.
301. Abey se ker a S. A., Beck M. S. Cross-correlation
techniques applied to pulsating flow measurement. In: Computer control
of chemical processes (Course manual). University of Bradford, 1969.
302. Al e k s an d г о w i cz S. Modulatory, czestotliwosci dla
celow telemetrii i automatycznego sterowania.— Pomiary, automatyka,
kontrola, 1967, 3.
303. Angel a ko s E. Т., Shepherd G. M. Autocorrelation
of electrocardiographic activity during ventricular fibrillation.—
Circulation Research, 1967, 5.
304. A s h t о n M. W., В e n 11 e у Р. G. Design study for on-line
flow measurement by transit time analysis of temperature fluctuations.
In: IEE Conference Publication, No 43. London, 1968.
305. A tor J. T. Image-velocity sensing with parallel-slit
reticles.—Journ. of Optical Soc. of America, 1963, 12.
306. A tor J. T. Image-velocity sensing by optical correlation ."—
Applied Optics, 1968, 5—8.
307. Barker R. H. Group synchronizing of binary digital
systems. In: Communication theory, London, 1953.
308. Barlow J. S. Autocorrelation and crosscorrelation techni
ques in EEG analysis.— Suppl. No 20 to the EEG J. 1961, 1.
14*
211
309. В art els E. Praktische Systemanalyse mit Korrelation—
Verfahren.— Regelungstechnik, 1966, 2.
310. Beck M. S. et al. A new method of measuring the mass flow
of powder in a pneumatic conveyor using an on-line computer. In: IEE
Conference Publication No 43, Industrial measurement techniques for
on-line computers, London, 1968.
311. Beck M. S. et al. Particle velocity and mass flow
measurement in pneumatic conveyors.— Powder Technology, 1968/1969, 2.
312. Beck M. S. et al. Solids/fluid two phase flow measurement
using correlation techniques. — In: Computer Control of Chemical
Processes (Course Manual), University of Bradford, 1969.
313. Beck M. S., Plaskowsky A. How inherent flow noise
can be used to measure mass flow of granular materials.— Instrument
Review, 1967, 11.
314. Beck M.S., Plaskowski A. Inferential measurement
of fluid flow the cross-correlation of temperature flucluations in the
system.— Electronics Letters, 1967, 4.
315. Beck M. S., Wainwright N. Current industrial
methods of solid flow detection and measurement.— Powder Technology,
1968, 1969, 2.
316. Beck M. S., Wainwright N. Flow-failure detector
for powdered and granular materials.—Control, 1969, 1.
317. Becker C. I., Wait J. V. Two-level correlation on an
analog computer—In: IEE Trans, vol. EC—10, 1961, 12.
318. В e n n e t W. R. A machine for continuous display of short
term correlation,—«The Correlatograph».—Bell Syst. Techn. Journ.,
1953, 5.
319. В en tley P. G., Dawson D.J. Fluid flow
measurement by transit time analysis of temperature fluctuations.—
Transactions of the Society of Instrument Technology, 1966, 9.
320. Berger F. B. Optical cross-correlator. Patent U. S. A.
No 2787188, July, 31, 1953.
321. Bergland G. D. Fast Fourier transform hardware
implementation. A surway. — In: IEEE Trans, vol. AU—17, 1969, 2.
322. Bernard M. Detecting signals by polarity coincidence —
Electronics, 1960, 1.
323. Berndt H. Correlation function estimation by a
polarity method using stochastic reference signal. — In: IEEE Trans, vol.
IT—14, No. 6, 1968.
324. В e r t h i e r D. Dispositif de calcul automatique de functions
de correlation pour signauxacustiques.— B.I.S.T., Commissariat a l'Ener-
gie Atomique, No 108, Crenoble, 1966.
325. Blackman R. В., Tukey J. W.-~ The measurement
of power spectra. Dower Publications, Inc., N. Y., 1958.
326. Blackstone H. Optical scanner for determining velo-
city-aititute.-Patent U.S.A., No 2878713, March 24, 1959.
327. В о g d a n о f f J. L. et al. Introduction to a statistical theory,
of land locomotion.— Journal of Terrain Mechanics, Pergamon Press,
1965, 2, 3.
328. Bogner R. E. New relay correlation
method.—Electronics Letters, the IEE 1965, 1, 3.
329. В oo n s to p pel F. et al. The measurement of flow by
cross-correlation techniques.— In: IEE Conference Publication. No 43,
London, 1968.
212
330. В о s h С. Photoelectric speedometer, altimeter and course
indicator.—Patent U.S.A., No. 2944154, July 5, 1960.
331. Bo yell R. L.Olson Ch. W. Implementation of the
correlation process in the manner of a parallel digital computer.— In: IEE
Conv.Rev., 1961, pt. 9.
332. В г i g g s P. A. N. et al. Correlation analysis of process
dynamics using pseudo-random binary test perturbations.— Proc. Inst. Mech.
Engrs, 1965, 179, 3. H.
333. В r i g h a m E. D., M о г г о w R. E. The fast Fourier
transform.— IEEE Spectrum, 1967, 4, 12.
334. Brown R. F. Jr., An automatic multichannel correlator,—
J. Research NBS, 1963, 67C, 1.
335. В ur t he r R. L. Automatic azimuth matching apparatus,—
Patent U.S.A., No 3155967, November 3, 1964.
336. Burt her R. L. Electronic map matching apparatus.
Patent U.S.A., No 3178707, April 13, 1965.
337. Bussgang J. Crosscorrelation functions of amplitude-
distorted gaussian signals.— MIT Technical Report, 1952, 216.
338. B'u t t e г f i e 1 d M. N. et al. A new method of strip speed
measurements using random waveform correlation.— Transactions of
the Society of Instrument Technology, 1961, 13, 2.
339. Coch ram W. et al. What is fast Fourier transform?— In:
IEEE Trans, Vol. AU—15, No 2, 1967.
340. Cummins J. D A note of errors and signal-to-noise ratio
of binary cross-correlation measurements of system impulse response.—
Atomic Energy Establishment Winfrith Report No. 329 AEEW—R329
United Kingdom Atomic Energy Authority, 1964.
341. D a u с h e r H. H., Mesch F. Geschwindigkeitsmessung
mit Korrelationsverfahren.— Acta IMEKO, Paris, 1970.
342. Demetriades A., Da vies P. O. A. L. Correlation
measurement in the transit zone of a turbulent plasma jet.— AIAA
Journal, 1969,-7, 8.
343. D e u t s h S. A. A pseudo-random noise generator.— In: IEEE
Trans, Vol. AC—9, No 3, 1967.
344. Diamantides N. D. Quantization, statistics and
matching of maps and pictures.— In: IEEE Trans., Vol. ANE—11, No 3,
1964.
* 345. D i am an t i des N. D., МсСгау С. Е. Generating
random forcing functions for control system simulation.— Electronics,
1961, 43, 33.
346. Dickey F. R. The correlation aircraft navigator, a
vertically-beamed Doppler radar.— In: Proceedings of the National
Conference on Aeronautical Electronics, Dayton,'Ohio, 1958.
347. Dickey F. R. Doppler—Navigation mit Senkrecht—Strah-
lung.— Diskussionstagung, «C—W—Messverfahren, ihre Technik und
einige ihrer Anwendungen im Zusammenhang mit der Ortung», Band I,
Ausschuss fur Funkortung, Dusseldorf, 1959.
348. Di skey F. R. Velocity sensing for soft lunar landing by
correlation between spaced microwave receivers.— In: IEEE
International Convention Record, Part 5, 1961.
349. Dicks I. B. et al. Fluctuations in series connected open
cycle MHD generators. Proceedings of the Fifth International
Conference on MHD Electrical Power Generation, vol. I. FRG, Munich,
1971.
213
350. El spas B. The theory of autonomous linear sequential
networks. In: IRE Trans. Vol. CT—6, 1959, 1.
351. M с F a d d e n J. A. The correlation function of a sine wave
plus noise after extreme clipping.— In: Trans. IRE, PGIT, 1956, 2,4.
352. Mc Fadden J. A. The fourth product moment of
infinitely clipped noise.— In: IRE Trans., Vol. IT—4, 1958, 4.
353. Far hat N. H. A low-speed correlator.— In: IEEE Trans.,
Vol. IM—16, 1967, 1.
354. Far r el E. J., Zimmerman С D. Information limits
of scanning optical systems, In: Optical and Electro-optical Information
Processing, MIT Press, Cambridge, 1965.
355. Fa г vet A. G. * Caupto A. F. Evaluation of
autocorrelation techniques for detection of the fetii electroencephalogram.— In:
IEEE Trans., Vol. MBE-13, 1966.
356. Ferguson A.M. Measurement of ground speed with a
radial grating.—Journal of Scientific Instruments, 1966, 43, 1.
357. Fisher M. J., Da vies P.O. A. L. Correlation
measurement in a non-frozen pattern of turbulence.— Fluid mechanics, 1964,
18, 1.
358. Forbath F. P., et al. Correlation evaluator.— Patent
U. S. A., No 3054999, September, 1962.
359. Fowre A. J. Review of space-time correlation in turbulent
fluids.—J. Appl. Mech (Trans. ASME), 1965, 32.
360. Fukushima K. et al. A simple correlator for analysis
of motor-regulating mechanism in central nervous system.— Digest of
the 4th ICME, 1961, 107.
361. Gaster M. A new technique for the measuremen of low
fluid velocities.— Journal of Fluid Mechanics, 1964, 20, 2.
362. Gatland H. В., Paul R. J. A. A correlator based on
delta modulation techniques CoA Report, ESC, No 3, The College of
Aeronautics, Cranfield, 1964.
363. Gatland H. B,, Lovell B. W. A correlation function
computer using delta modulation techniques.—Journal of Scientific
Instruments, 1965, 42, 8.
364. Godfrey K- R. The theory of correlation method of
dynamic analysis and its application to industrial processes and nuclear
power plants.— In: Trans. Inst.M.C, vol.2, No5, 1969.
365. Green С R. Measurement of polarity coincidence
correlation functions using shift register elements.— NAVORD Report No 4396,
1956.
366. G u a n e 11 a G. Einige Anwendungen der Korrelations-
methode beim Schwingungsempfang.— Nachr. Techn. Fachber.—
(Beiheft der NTZ), 3 Informationstheorie, 1956.
367. Gunshor R. L. et al. Correlation measurement of ion
acoustic waves in a highly ionised plasma.— Phys. Fluids, II, 1968, 8.
368. Hair T. et al. An optical method of measuring transverse
surface velocity.— IMEKO— IV Proceedings, 1967.
369. Harmon et al. Optical trackers in space.— ISA Journal,
1962, 11.
370. Harris R., Z a doff S. A. The derivative correlator.—
IEEE Internat. Conv. Rec, 1965, 13, 4.
371.Hasegava H., Inoue T. Beruhrungslose Geschwin-
digkeitmessung mit Verfahren der Kennwertermittlung, Proceedings of
the 6th Conference of SICE, Tokyo Inst, of Technology, 1967.
214
372. Heil born H. Optische Analogrecher—eine neue
Generation von Rechengeraten fur Sonderzwecke.— Internationale Electr-
Rundschau, 1964, 18, 7.
373. Hogg J F A binary cross-correlation analyzer. — AEEW—
R400, Atomic Energy Establishment Winfrith, 1964.
374. Hogg J. F. Monitoring reactor dynamics on-line (stability
characteristics from pseudo—random perturbations).— Nuclear
Engineering, 1965, 1.
375. Holmes J. N., Dukes M. A. A spech-waveform
correlator with magnetic tape delay and electronic multiplication.— In: Proc.
IEE, part. III. No 72, 1954.
376. Hooper E. B. Correlation technigues in experimental
plasma physics.—Plasma Physics, 1971, 13, 1.
377. Horton В. М. Noise-modulated distance measuring
systems.— Proceedings of the IRE, 1959, 47, 5.
378. Howell B. J. Optical analog computers.— Journ. Optic.
Soc. Amer., 1959, 49, 10.
379. Huffman D. A. The generation of impulse-equivalent
pulse trains.— In: IR.E Trans.. Vol. IT—8, No 9, 1962.
380. Hughes M. Т., Noton A. The measurement of control
system characteristics by means of a cross-correlator.— In: IEEE Trans.,
Vol. IT—14, No 6, 1968.
381. Hveem F. N. Devices for recording and evaluating pavement
roughness.— Highway Research Board Bulletin 264, 1960.
382. Idogawa T. Sound velocity measurement by real time
correlation method.— In: Transactions of the Society of Instrument
and Control Engineers (Japan), vol. 4, No 1, 1968.
383. I s h i i Y. Correlation technique and its applications.—
Journal of the Japan Society of Precision Engineering, 1967, 33, 7.
384. I so be T. Correlation functions and spectra (Measurement
and applications).— Tokyo Press, 1968.
385. Isobe Т., Kashiwagi H. Measurement of the speed
of an automobile using correlation techniques.— Proceedings of the 5th
conference of Japanese Institute of Control Engineering, 1966.
386. Izawa K-, Furuta K. Application of correlation
technique for the measurement of transfer or transport lag.— Acta IMEKO
Part I, 1967.
387. J a cob son M. J. Analysis of a multiple receiver
correlation system.—Journ. Acoust. Soc. Amer., 1957, 29, 12.
388. Jamieson J.A.etal.— Infrared physics and engineering,
McGraw Hill, N. Y., 1963.
389. Jones J. B. Methods and apparatus for automatically
guiding an airoplane or the like.— Patent U.S»A., No 3, 155 969, Nov. 3,
1964.
390. Jones R. W. Pulse modulation in physiological systems,
phenomenological aspects. — In: IRE Trans. Vol. BME—8, No 1,
1961.
391. Kaneshige I. Measurement of power spectra of vehicle
vibration and vehicle road roughness.— Proceedings of the 10th N.C. T.
A. M., 1960.
392. Kaneshige I., Akaike H. Some estimation of
vehicle suspension system's frequency response by cross spectral method.—
Proceedings of the 12 th N. С. Т. А. М., 1962.
393. Kashiwagi H. Impulse response determination using
215
the derivative correlation.— Proceedings of the 8th Meeting of the So-
ciety of Instrument and Control Engineers, Japan, 1969.
394. Kashiwagi H. Paper strip speed measurement using
correlation technique.—Memoirs of the Faculty of Engineering, Kuma-
moto University, Japan, 1968, 15, 1.
395. Kashiwagi H. Paper strip speed measurement using
correlation technique.— Transactions of the Society of Instrument and
Control Engineers, Japan, 1968, 4, 3.
396. Kashiwagi H. etal. Speed measurement using
correlation technique.— Journal of the Society of Instrument and Control
Engineers, Japan, 1963, 2, 1.
397. Kashiwagi H., Isobe T. A method for determining
the velocity of flow by random tracer injection and correlation
technique.— Journal of the Society of Instrument and Control Engineers,
Japan, 1966, 5, 7.
398. К a sh i wagi H., Kataoka H. Speed measurement
using correlation techniques.— Acta IMECO—70, Paris, 1970.
399. Katayama Т., Enomoto H. The statistical theory
of noncontact speed measurement.— Journal of the Society of
Instrument and Control Engineers, Japan, 1968, 7, 6.
400. Kelner R. C, Glauber man M. N. Magnetic shift-
register correlator.— Electronics, 1956, 8.
401. К i t a i R., M a s u к о A. Digital instrument for
measurement of autocorrelation and moments.—Proc. IEEE, 1969, 116, 11.
402. Kobayashi A., Naitoo M. Narrow—band—pass
optimal spatial filter for measurement.- Collected papers of the Society
of Instrument and Control Engineers, Japan, 1969, 2.
403. Komiya K- Flow velocity measurement by using
correlation technique.— Bulletin of the National Research Laboratory of
Metrology, Japan, June 1966.
404. К о m i у a K. Messung der Stroemungsgeschwindigkeit mittels
Turbulenzkorrelation.—Vorabdruck B—607, IMEKO—V, Versailles,
1970.
405. Korn G. A. Hybrid—computer techniques for measuring
satatistics from quantized data.— Simulation, April, 1965.
406. Kovasznay L. S. G., Arman A. Optical autocorre-.
lation measurement of two—dimensional random patterns.— Rev. Scient.
Instr. 1957, 28, 10.
407 Krepler K-, Werner G. W. Korrelatoren mit Ampli-
tudenquantisierung.— Zeitschrift fur Messen, Steuern, Regeln, 1964,
7, 4.
408. Lampard D. G. A new method of determining correlation
functions of stationary time series.—Proc. IEE, Pt. С 1955, 102, 1.
409. Lampard D. G., Redman S. Y. Statistical
properties of the integral of a binary random process.— IEEE Trans., Vol.
CT—71, 1963, 3.
410. Lange F. H. Signale und Systeme, Band 3, Regellose Vor-
gange, VEB Verlag Technik, Berlin, 1971.
411. L о r e n s C. S. Aspects of theoretical and experimental map-
matching.—IEEE Trans. Vol. ANE—10, 1963, 2.
412. Lubow B. Correlation entering new fields with realtime
signal analysis.— Electronics, 1966, 39, 22.
413. L u n d t Y. A digital integrator for on-line signal processing.—
IEEE Trans., Vol. EC—12, 1963, 1.
216
414. ManeleyC. A., Langworthy R. E. Pilotless
aircraft navigaton system.—Patent U.S.A., No 3 193 822, June 6,
1965.
415. Marcus M. P. Cascaded binary counters with feedback.—
IEEE Trans., Vol. EC—12, 1963, 4.
416. Matthes W. et al. Measurement of the velocity of gas
bubbles in water by a correlation method.— Rev. Sci. Instr. 1970, 41, 6.
417. M a x J. Quantizing for minimum distortion.— In: IRE Trans,
vol. IT—6, No 1, 1960.
418. Mc Do n n el 1 J., Forrester J. Polarity coincidence
techniques for correlation function measurement and system responce
evaluation, IRE Conference on Digital Methods of Measurement,
Supplementary papers, Canterbury, 1969.
419. McFee R.H. Infrared search system design consideration.—
In: Proc. IRE, No 9, 1959.
420. McLachlan D. The role of optics in applying
correlation functions to pattern recognition.— J. Opt. Soc. Amer., 1962, 52, 4.
421. Measuring the speed of a moving surface.—Measuring and
Control, 1962, 1, 5.
422. Mesch F. Nichtideale Laufzeitglieder fur Korrelations-
messungen.— Regelungstechnik, 1966, 2.
423. Mesch F. et al. Geschwindigkeitsmessung mit Korrelations-
verfahren, Teile I und II.— Messtechnik, 1971, 7, 8.
424. Meyer-Eppler W. Die Autokorrelation von ebenen
zweidimensionalen Bildvorlagen.— Nachr. techn. Fachberichte (NTZ)
1956, 3.
425. M e у e r - E p pi e r W. Die technische Anwendung moderner
Korrelationsverfahren.—VDI—Zt., 1956, 13.
426. Mihelish J. B. Apparatus for comparing maps,— Patent
U. S. A. No 3 102 260, Aug. 27, 1963.
427. Mi tra S. N. A radio method of winds in the ionosphere.
In: Proc. IEE, vol. 96, Part III, 1949.
428. Mo n t о gom er у W., Broome P. Spatial filtering.—
J. O. S. A., 1962, 52, 11.
429. Muller W. Zur Fehlertheorie des Korrelators und Spek-
tralanalysators_bei_ Verwendung von statistischer Testsignalen. Wissen-
schaftliche Zeitschrift der Universitat Rostock, Mathematisch—Natur-
wissenschaftliche Reihe, Heft I, 1965.
430. Muller W. Т., Lange F. H. Beruhrungsfreie Abstand-
messung mittels statistischer Testsignale.— Zeitscrift fur Messen, Ste-
uern, Regeln (ZMSR), 1964, 12.
431. N a b es h i m a A. A method for the input equipment for
on-line real-time computer which processes the pulse time series (train).—
Proceedings of the Joint Conference of electric engineers (Japan), Rep!.
No 425, 1966.
432. Naito M. et al. Application of differential-type spatial
filter for measurement,— Proceedings of the 8th Meeting of the Society
of Instrument and Control Engineers (Japan), Rept. No 328, 1969.
433. Naito N. et al. Non-contact speed measurement using
spatial filter.— Journal of the Society of Instrument and Control Engineers
(Japan), 1968, 7, 11.
434. Optical data processing systems.— IEE Spectrum, 1964, 1, 10.
435. Parkinson M. J. Measurement of mass flow rate of
airborne powder material in a duct.— J. Sci. Instrum., 1968, 1, 2.
217
436. Paul R. J. A. Hybrid methods for function generation.—
CoA Report No 153, of the College of Aeronautics, Cranfield, 1961.
437. Paul S. A magnetic core voltage-to-frequency converter.
In: IEEE Trans., vol. SET—9, No 1, 1963.
438. P a v 1 i d i d s Т., Jury E. I. Analysis of a new class
of pulse frequency modulated feedback systems. — In: IEEE Trans.,
vol. AC—10, No 1, 1965.
439. P i t t er m a nn F., Schweizer G. Erzeugung und-
Verwendung von binarem Rauschen bei Flugversuchen.— Regelung-
stechnik, 1966, 2.
440. Press H. et al. Some measurements and power spectra of
runway roughness.— N. A. S. A. T. N. 3305, 1956.
441. Pressman G. L. et al. A transducer for the continuous,
external measurement of arterial blood pressure.— In: IEEE Trans.,
vol. BME-10, No 2, 1963.
442. Redman S. J., Lampard D. G. Stochastic sampling
ofa binary random process.—In: IEEE Trans., vol. CT—10, No 1,1963.
443. Rain all A. J. Sampling technique for generating
Gaussian noise.—Rev. Sci. Instrum., 1961, 32, 3.
444. Rainall A. J. Zero-crossing intervals of Gaussian process.—
In: IRE Trans., vol. IT—8, No 6, 1962.
445. Randall R. L. et al. Development of noise analysis
techniques for measuring reactor coolant velocities.— Atomics International,
NAA-SR—11193, 1966.
446. R а у С D.etal. Analysis of a frequency-swept one-bit digital
correlator.—Journ. of Appl. Phys., 1968, 39, 8.
447. Revesz G., Shen D. W. C. The application of electro-
optical filtering to object recognition.— In: IEEE Intern. Convent.
Record., vol. 12, No 1, 1964.
448. Rittenbach О. Е., Fishbein W. Semi-active
correlation radar employing satellite-born illumination.— In: IRE Trans.,
vol. MIL—4, No 2, 1960.
449. Ruchkin D. S. Error of correlation coefficient estimates
from polarity coincidences.— In: IEEE Trans., vol. IT—11, No 2, 1965.
450. Saper L. M. On-line auto-and cross-correlator realized with
hybrid techniques.—In: IEEE Inter. Convent. Rec, II, No 9, 1963.
451. Sato T. etal.Ona3rd order correlator.—Bulletin of the
Tokyo Institute of Technology, 1968, 89.
452. Sato Т., Kawarada H. Some notes on the correlator
using the random voltage method.— Bulletin of the Tokyo Institute
of Technology, 1964, 60.
453. S a t о s h i I m a i. A new correlator applying hybrid
analogue-digital technique.— Bulletin of the Tokyo Institute of
Technology, 1964, 60.
454. S с a n 1 о n W. W., Lieberman G. Naval ordnance and
electronics research.—Proc. IRE, 1959, 47, 5, Part I.
455. Schweizer G. Untersuchung der auftretenden Fehler bei
der Auswertung von statistischen Signalen.— A. E. U. 1962, 16, 5.
456. Simmons G. J. Two algorithsm for the direct
computation of binary correlation functions.— Proc. IEEE, 1967, 9.
457. Smith K-, Sedra A. Simple wideband linear voltage-to-
frequency converter.— Electronic Engineering, 1968, 3.
458. Solid velocity measurement in a pneumatic conveyor. — United
Kingdom patent No 40688/67.
218
459. Solid mass flow measurement in pneumatic conveyors.— United
Kingdom patent No 23583/68.
460. Spilker J. J. Delay-lock tracking of binary signals.—
In: IEEE Trans., vol. SET—9, No 1, 1963.
461. St eg en G., Von Atta С W. A technique for phase
speed measurements in turbulent flow.— Journal of fluid mechanics,
1970, 42, 4.
462. Stewart J. L. et al. Pseudorandom signal-correlation
method in underwater acoustic research. I. Principles, — JASA, 1965,
37, 6, 11. Instrumentation.—JASA, 1966, 37, 1.
463. Stockham T. G. High-speed convolution and
correlation,—In: Proc. of the Joint Computer Conference (AFIPS), vol. 28,
1966.
464. System of mesure de vitesse a magnetometres, Patent,
France, No 1407686, p. v. No 976620, B64d—GOlc—GOlp.
465. Thompson W. E. Measurements and power spectra of
runway roughness at airports in countries of the North Atlantic Treaty
Organization.— N. A. S. A. T. N. 4308, 1958.
466. Tsao S. H. Generation of delayed replicas of maximum-
length linear binary sequences.— In: Proc. IEE, vol. Ill, No 11, 1964.
467. Veltman B. P. Th., KwakernaakH. Theorie und
Technik der Polaritatskorrelation fur die dynamische Analyse nieder-
frequeter Signale und Systeme.—Regelungstechnik, 1961, 9.
468. Veltman B. P. Quantisierung, Abtastfrequenz und sta-
tistische Streunng bei Korrelationsmessungen.— Regelungstechnik,
1966, 4.
469. W a 11 s D. G. A general theory of amplitude quantization
with applications to correlation determination.— In: Proc. IEE, C109,
No 15, 1962.
470. Weiss M. Optical ground-speed meter.— Patent U. S. A.,
No 2967449, January, 1961.
471. W h i t e n h о s e H. Parallel digital delay-line correlator.—
In: Proc. IRE, No 51, 1.
472. Widrow B. A study of rough amplitude quantization by
means of Nyqist sampling theory.— In: Trans. IRE, vol. CT—3, No 4,
1956. ,
473. Widrow B. Statistical analysis of amplitude quantized
sample —data systems.—In: Trans. AIEE, Part II, Application and
Industry, 1961, January, No 32.
474. W i 11 e у F. G., T h. A. We stover. Aircraft velocity
altitude'ratio meter.— Patent U. S. A. No 3018555, Jan. 30, 1962.
475. Wilson H. Cross-correlation analyzer using a p. r. b. s.,—
Electronic Engineering, 1969, 5.
476. Young R. G. P. r. b. sequence correlator using integrated
circuits.— Electronic Engineering, 1969, 9.
477. Zierler N. Linear recuring sequences.—J. Soc. Industr.
Appl. Math., 1959, 7, 1.
478. Zilezer P. Space navigation by correlation.—Proc. Nat.
Telement. Conf., V, 1959.
ДОПОЛНИТЕЛЬНАЯ ЛИТЕРАТУРА
Белоглазов И. Н. Проблемы синтеза и анализа
корреляционно-экстремальных систем (II). — В кн.: Адаптивные
автоматические системы. «Советское радио», М., 1972.
219
БергландР. Руководство к быстрому преобразованию Фурье.
— Зарубежная радиоэлектроника, 1971, 3.
Боднер В. А., ТуваевВ. А. Инерциально-корреляцион-
ная система для определения угловых координат ИСЗ. —
Космические исследования, 1967, 5.
Бригхэм, Морроу. Быстрое преобразование Фурье. — Тр.
Института инженеров по электротехнике и радиоэлектронике (пер.
с англ.), 1967, 10.
БуйнявичусВ. А. и др. К вопросу корреляционного
анализа случайных процессов в реальном масштабе времени. — Вопросы
радиоэлектроники. Серия общетехническая, 1969, 17.
Винокуров В. И., В а к к е р Р. А. Вопросы обработки
сложных сигналов в корреляционных системах. «Советское радио», М., 1972.
Дженкинс Г., Ватте Д. Спектральный анализ и его
приложения. «Мир», М., 1971.
Зверев В. А., Орлов Е. Ф. Оптические анализаторы.
«Советское радио», М., 1971.
К у р о ч к и н С. С. Многоканальные счетные системы и
коррелометры. «Энергия», М. 1972.
Лонг е-Х и г г и и с М. С. Статистический анализ случайной
движущейся поверхности.— В кн.: Ветровые волны, М., 1960.
Новая система наведения снаряда «Хаунд Дог» .— Авиационная
и ракетная техника, 1966, 353.
Синглтон. Алгоритм быстрого вычисления преобразования
Фурье.—Экспресс-информация. Вычислительная техника, 1968, 5.
Тарасенко В. П. Проблемы синтеза и анализа
корреляционно-экстремальных систем (I). — В кн.: Адаптивные
автоматические системы. «Советское радио», М., 1972.
Т р о я н о в с к и й В. А. и др. Полярный способ
автокорреляционного измерения скорости движения металла. —В кн.: Производство
сварных и бесшовных труб, вып. 5. «Металлургия», М., 1965.
Челюсткин А. Б., Беленький А. А. Динамика
непрерывных автоматических оптимизаторов. — Автоматика и телемеханика,
1963, 3.
Челюсткин А. Б., Иванов В. И. Самонастраивающаяся
система автоматического управления режимом сварки на трубном стане.
— Электричество, 1960, 2.
Экспресс-информация ВИНИТИ. Астронавтика и ракетодинамика,
1966, 10.
Ю ш и н В. И. Оптимальные интервалы осреднения при измерении
статистических характеристик нестационарного процесса по одной
реализации. — Автометрия, 1966, 3.
Appollo ships to follow ocean-floor highway. — Control Eng., 12
1965, 19.
Berndt H., Cooper G. R. An optimum observation time
for estimates of time-varying correlation functions. — Trans. IEEE on
Inform Theory, 1965,4.
Bvron J. J. Methods and apparatus for automatically guiding
an airplane or the like. — Patent U. S. A. No 3 155 969, Nov. 3, 1964.
ChelustkinA. B. The design and application of correlation
control. — Automatic Control, 1958, 5.
Electronic navigation equipment.— Space Age News, 8, 1965, 10.
Forney R. G. et al. Mariner 4 maneuver and attitude control.
— Astronautics and Aeronautics, 1965, 10.
220
Green P. E. The output signal-to-noise ratio of correlation
detectors. — IRE Trans., Vol. IT—3, 1967, 3.
Hagan W. K., Manning G. G. Real time spectral analyser
and digital correlator for brain potentials. — IRE International
Convention Record, 1961, 9.
Hatcher N. M. Spacecraft attitude sensor — where we stand
today.—Astronautics and Aeronautics, Vol. 4, 1966, 12.
Houbolt J. C. Runway roughness studies in the aeronautical
field. — J. Air TransportDiv., Amer. Soc. Civ. Eng., 87, 1961, 11.
Jespers P. et al. A new method to compute correlation
functions. — IRE Trans., Vol. IT—8, 1962,5.
Mesch F., Kipphan H. Solids flow measurment by
correlation methods.—Opto-electronies, Vol. 4, 1972, 451—462.
Morishita J. New method for simplifying correlators. — Jo-
urn, of the Society of Instrum. and Control Engrs, 3, 1964, 4.
McNeil D. K. Estimating the covariance and spectral density
function from a clipped stationary time series. — Journ. Royal
Statist. Soc, 29 1967, 1.
Packard J. N. Electro-optical image matcher for space guidance
applications. — IEE Trans., Vol. ANE — 10, 1963, 3.
Rail R. Elektronische Ext rem wert best immung. — Telefunken Zei-
tung, 1962, 3.
Sato Т., NawaO. A. On an elektro-optical signal analyzer.
— Bulletin of the Tokyo Institute of Technology, No 92, March,
1969.
Tarasenko V. P., Ravodin О. М. Elaboration and research
of a correlative extremum system for automatic navigation of sea or
river vessels. — IEE Trans., Vol. AES—5, 1969, 9.
ОГЛАВЛЕНИЕ
Введение 3
Часть 1. Методы построения корреляционных экстремальных
систем (КЭС)
Глава 1. Взаимно корреляционные измерители параметров движения
(одномерные КЭС)
Взаимно корреляционный метод измерения скорости движения 7
Взаимно корреляционный метод измерения дальности ... 12
Взаимно корреляционный метод определения направления
(угловых координат) 16
Взаимно корреляционный метод измерения расходов .... 20
Глава 2. Автокорреляционные и спектральные измерители параметров
движения
Автокорреляционные и спектральные методы измерения
скорости движения носителей информации . 24
Автокорреляционный метод измерения расстояний .... 34
Глава 3. Автоматизация корреляционных экстремальных систем
Применение схем с синхронными детекторами 35
Дифференциальные схемы автоматизации КЭС 43
Динамика дифференциальной схемы автоматизации КЭС . 48
Схема КЭС с тремя датчиками 51
Схемы КЭС, вычисляющих производную корреляционной
функции . , 53
Глава 4. Упрощенные аппаратурные методы корреляционного анализа
и их применение в КЭС
Релейные и полярные корреляционные функции 58
Модификации метода полярной корреляции 66
Корреляция Стилтьеса 73
Глава 5. Автоматические корреляционные координаторы (многомерные КЭС)
Корреляционный метод совмещения изображений 83
КЭС с совмещением изображений 86
Часть П. Примеры практической реализации КЭС
Глава 6. Автоматические корреляционные измерители скорости проката
Автоматические корреляционные измерители скорости проката,
разработанные в Институте электродинамики АН УССР . . 91
222
Дискретный автоматический корреляционный измеритель
скорости проката, разработанный в Институте кибернетики АН
УССР 108
Автоматический корреляционный измеритель скорости проката,
разработанный Британской металлургической ассоциацией . 125
Импульсная КЭС для измерения скорости проката 130
Глава 7. Автоматические корреляционные измерители скооости движущихся
объектов и расходомеры
Корреляционный измеритель скорости и угла сноса самолетов,
разработанный фирмой «Дженерал Электрик» 141
Корреляционный измеритель скорости объекта, движущегося
в электромагнитном поле 147
Корреляционный измеритель скорости речного судна . . .153
Корреляционный измеритель скорости ионизированной плазмы 154
Другие области применения корреляционных измерителей
скорости 158
Корреляционные расходомеры 161
Глава 8. Корреляционные измерители расстояний
Автокорреляционный эхолот 169
Взаимно корреляционный локатор повреждений трубопровода 173
Автокорреляционный высотомер 174
Взаимно корреляционные радиолокаторы .177
Полуактивный корреляционный радиолокатор 180
Глава 9. Корреляционные координаторы
КЭС для управления движением объекта по заданному курсу 183
Корреляционный координатор для речных и морских судов . .191
КЭС для автоматической настройки радиоаппаратуры . . .194
Литература 197
223
Козубовский Святослав Федорович
Корреляционные экстремальные системы
Справочник
Редактор Е. А. Воронько. Художественный редактор В. М. Те п-
л я к о е. Оформление художника Г. М. Б а л ю н а. Технические
редакторы И. Р. Савицкая, А. М. Капустина. Корректор
Г. И. Ц ыб с н к о
Сдано в набор 19.IX 1972 г. Подписано к печати 29.III 1973 г. БФ 01230.
Зак. 2-298. Изд. № 411. Тираж 6500. Бумага № 2, 84х108732- Усл. печ.
листов 11,76. Учетно-изд. листов 15,08. Цена 99 коп.
Изд-во «Наукова думка», Киев, Репина, 3.
Отпечатано с матриц книжной фабрики им. М. В. Фрунзе
Государственного комитета Совета Министров УССР по делам издательств,
полиграфии и книжной торговли, Харьков, Донец-Захаржевская, 6/8, в
Киевской книжной типографии научной книги Республиканского
производственного объединения «Полиграфкнига». Киев, Репина, 4. Зак. 673.